






















































































































































































































































































































































































Author: Радзиевский В.Г.
Tags: военно-инженерное оборудование и работы по инженерному обеспечению пути сообщения противорадиолокационные средства военная топография радиолокация радио радиоэлектронная борьба
ISBN: 5-88070-082-8
Year: 2006




СОВРЕМЕННАЯ РАДИОЭЛЕКТРОННАЯ БОРЬБА
ВОПРОСЫ МЕТОДОЛОГИИ
Под редакцией заслуженного деятеля науки РФ
В. Г. Радзиевского
Москва «Радиотехника» 2006
УДК 623.62
Р15
ББК 32.95
Авторы:
А.А. Агафонов, С.Н. Артюх, В.И. Афанасьев, Е М. Афанасьева, И.П. Бостынец, В.В. Быков, А.А. Донцов, А.И. Ермаков, А.К. Калинков, А.Е. Каунов, Э.А. Кирсанов, И.В.Лаптев, К.Ю. Ложкин, Я.Л. Марек, В.А. Миронов, С.С. Нечаев, И.И, Новиков, Л.А. Овчаренко, С.М. Огреб, В.Н. Поддубный, В.А. Понькин, В.Г. Радзиевский, С.Н. Разиньков, А.Д. Романов, А.В. Рыжов, А.А. Сирота, В.В. Соловьев, Ю.А. Сорокин, Ю.С. Сухоруков, А.Ю. Телков, В.А. Уфаев, Т.В. Харченко, П.М. Юхно, С.Н. Яньшин
Р15 Современная радиоэлектронная борьба. Вопросы методологии /
Под ред. В.Г. Радзиевского. - М.: «Радиотехника», 2006. - 424 с.: ил.
ISBN 5-88070-082-8
Излагаются вопросы, связанные с развитием современной методологии радиоэлектронной борьбы в части радиоэлектронной (радио и радиотехнической) разведки, радиоэлектронного подавления систем радиолокации, радиоэлектронного подавления систем радиосвязи, оптико-электронного подавления оптико-локационных систем , оценки радиолокационной и оптической заметности объектов, планирования использования радиочастотного спектра.
Для инженеров и научных работников: может быть полезна студентам и преподавателям вузов радиотехнических специальностей.
ISBN 5-88070-082-8
УДК 623.62
ББК 32.95
©«Радиотехника»,2006 ©Авторы
Оглавление
Предисловие ...............................................7
Глава 1. Радиоэлектронная разведка .........................9
1.1. Базовые статистические модели процесса радиотехнической разведки в ходе противодействия радиолокационным средствам..........................9
1.2. Имитационная модель и статистические характеристики входного потока сигналов средств радиосвязи ........20
1.3. Влияние рассеяния радиоволн антенными системами пеленгаторов на точность измерения координат источников излучения .............................. 26
1.4. Оценка среднеквадратической ошибки пеленгования радиосигналов по измерениям в решетках вибраторного типа.................................. 33
1.5. Первичная обработка сигналов в цифровых панорамных обнаружителях-пеленгаторах......................... 43
1.6. Алгоритмы обнаружения и пеленгования совокупности частотно-неразделимых сигналов .................... 54
1.7. Особенности функционирования и основные характеристики многопозиционных систем определения координат радиоизлучающих объектов...... 62
1.8. Нейросетевые и статистически оптимальные алгоритмы оценки координат источников радиоизлучения в многопозиционных системах........................ 73
Глава 2. Радиоэлектронное подавление систем радиолокации ..............................................83
2.1. Универсальная классификация радиоэлектронных помех............................................... 83
2.2. Возможности современных радиолокационных систем в условиях совместного применения способов
типа «Стеле» и активных шумовых помех .......... 92
2.3. Эффективность радиоэлектронных систем при оптимальном противодействии с использованием заградительных помех.............................. 100
2.4. Точность радиолокационного самонаведения объектов в условиях блуждания центра излучения и маневра цели ................................... 104
2.5. Основные закономерности и эффективность функционирования радиолокационных систем с повышенной скрытностью излучения ............... 113
2.6. Статистические характеристики центра излучения произвольного числа частично когерентных источников........................................ 121
2.7. Упрощенный анализ условий существования «электромагнитного снаряда» ...................... 128
2.8. Влияние собственного шума приемника на точность радиолокационного самонаведения объектов ......................................... 133
2.9. Критерий и возможности массового заградительного радиоподавления радиоэлектронных систем в условиях высокой неопределенности их характеристик..................................... 140
2.10. Метод обоснования характеристик сигналоподобных излучений в конфликтной радиолокации ............. 144
Глава 3. Радиоэлектронное подавление систем радиосвязи ....................................... 154
3.1. Синтез и оценка эффективности преднамеренных помех приемникам дискретных сигналов методом индикаторов решений о переданных элементах......... 154
3.2. Эффективность некогерентного приема частотно-манипулированного сигнала на фоне импульсной частотно-манипулированной помехи........ 167
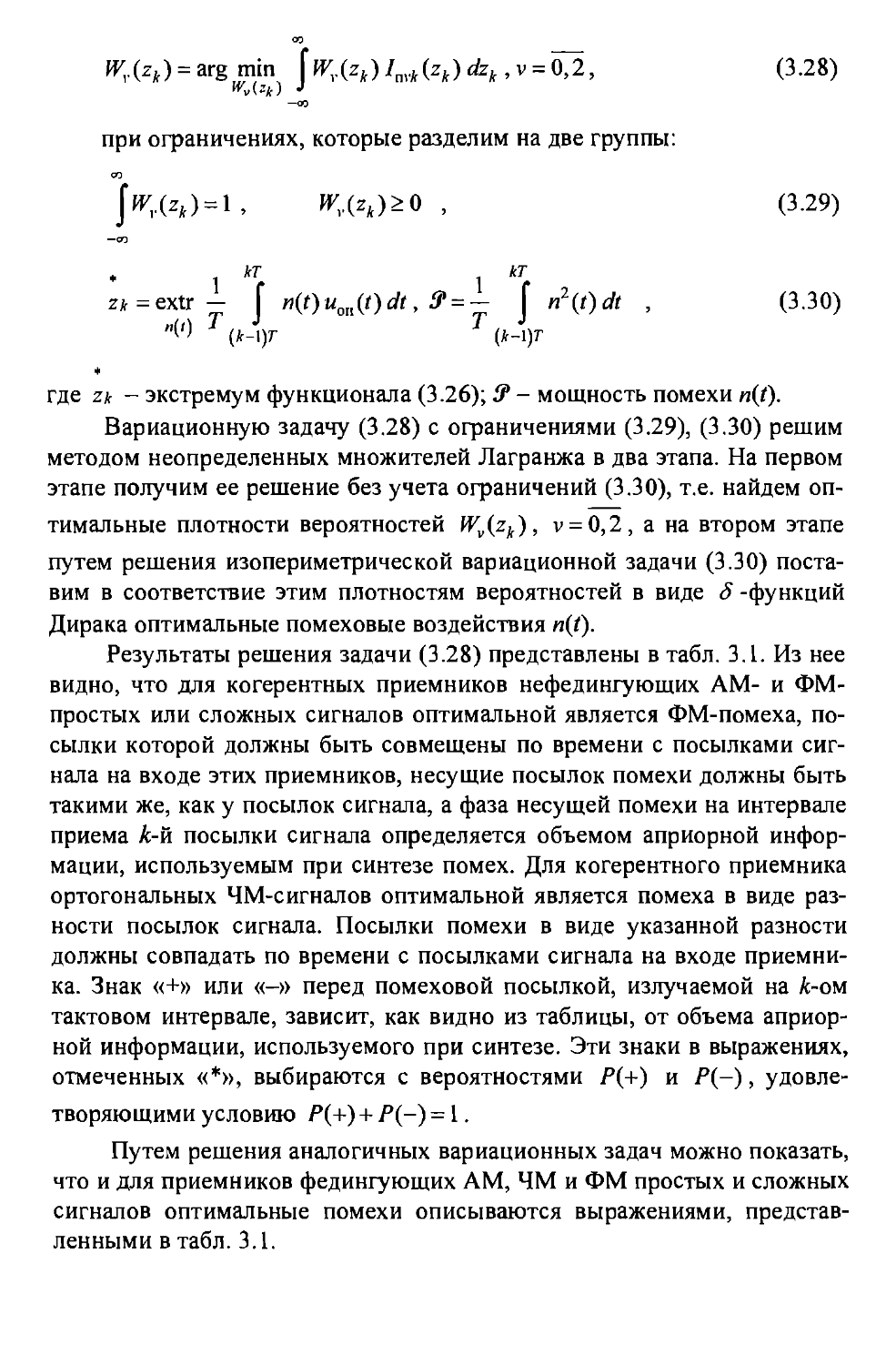
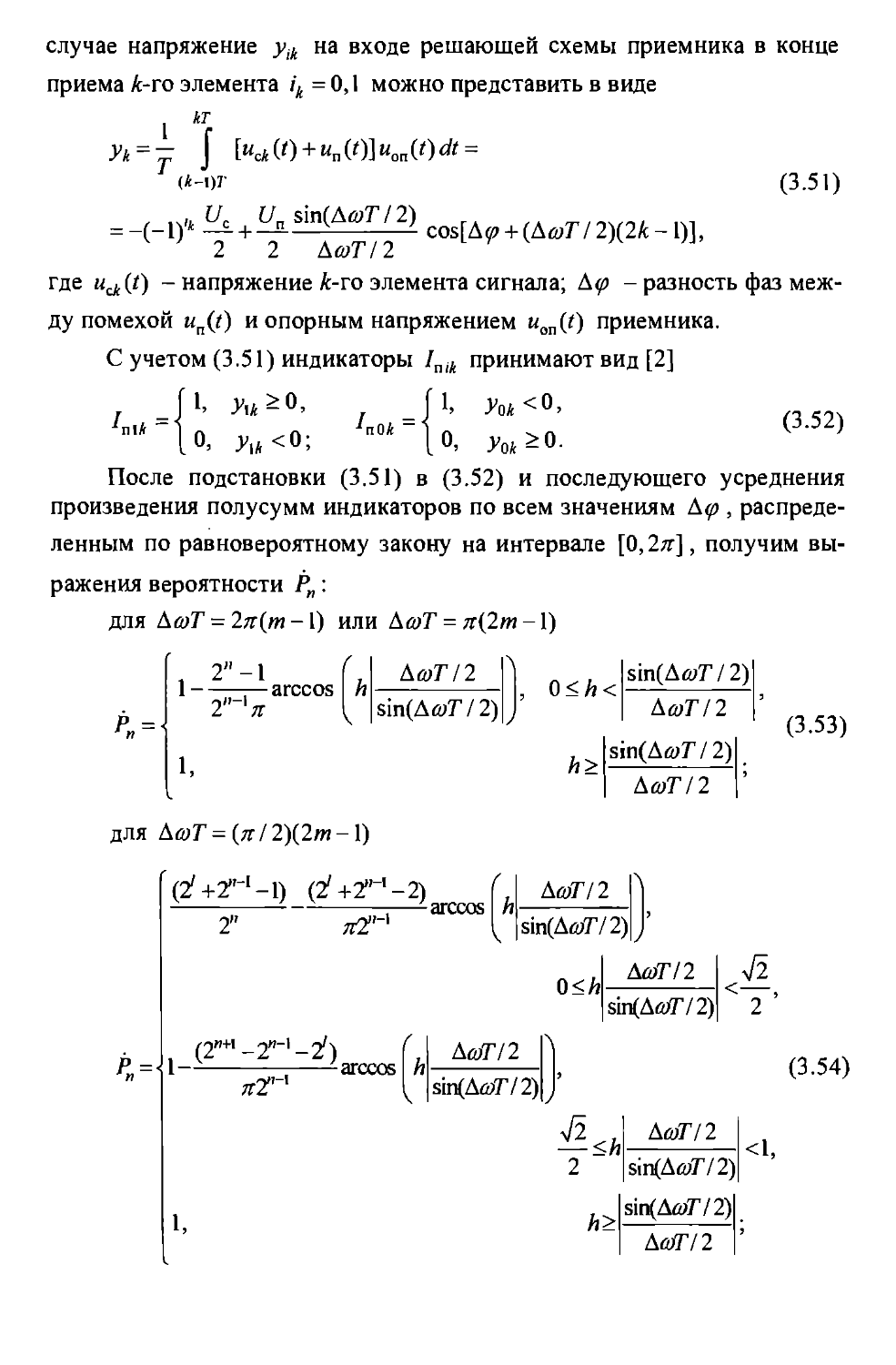
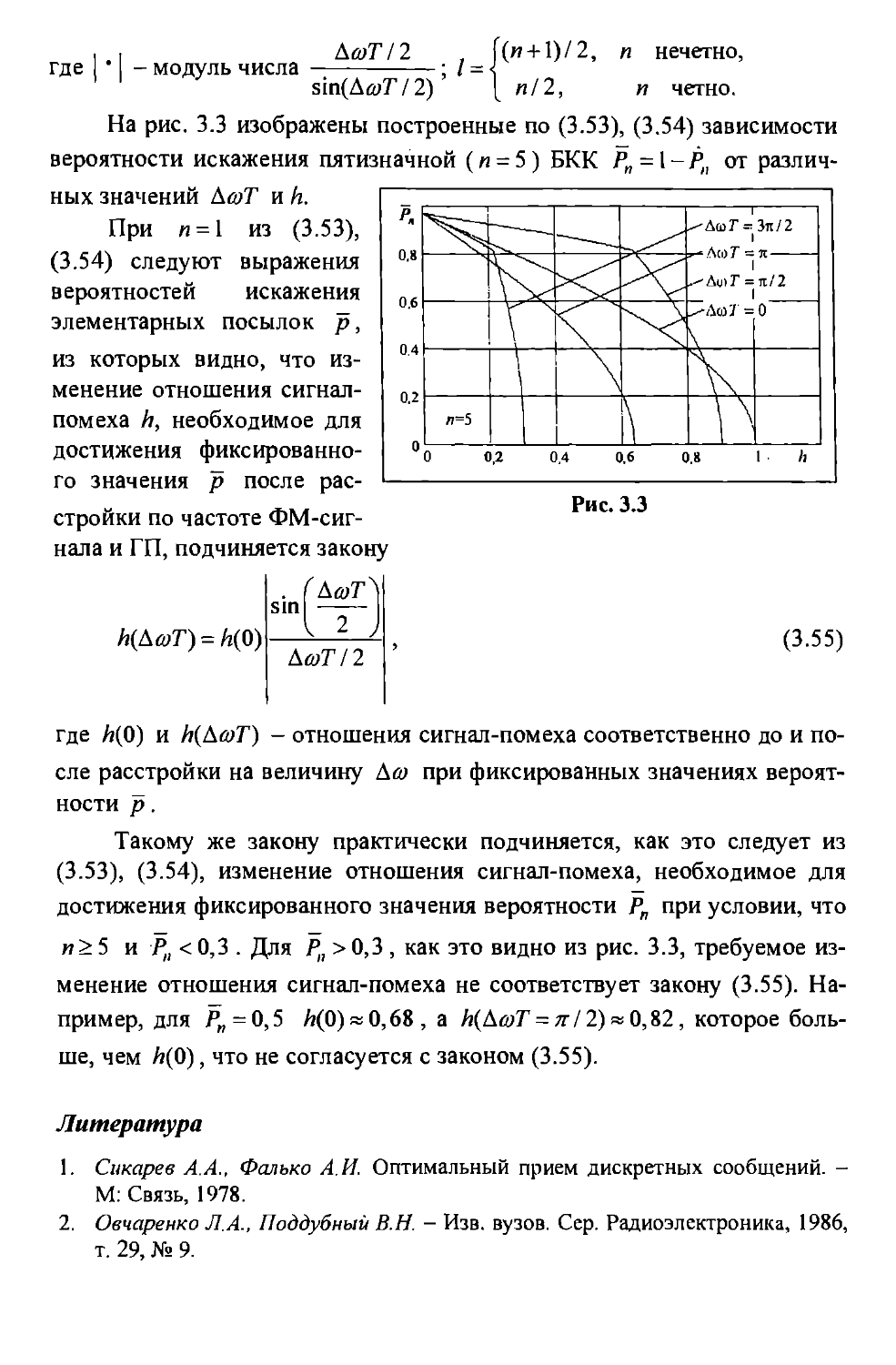
3.3. Влияние расстройки спектров фазоманипулиро-ванного сигнала и станционной помехи на вероятность искажения кодовой комбинации ..................... 175
3.4. Помехоустойчивость приема фазоманипулированных сигналов на фоне станционных помех................ 178
3.5. Помехоустойчивость приема частотно-манипулиро-ванных сигналов с минимальным сдвигом
на фоне гармонической помехи.................. 181
3.6. Помехоустойчивость приема сигналов с относительной фазовой манипуляцией на фоне расстроенной
по частоте станционной помехи ................ 189
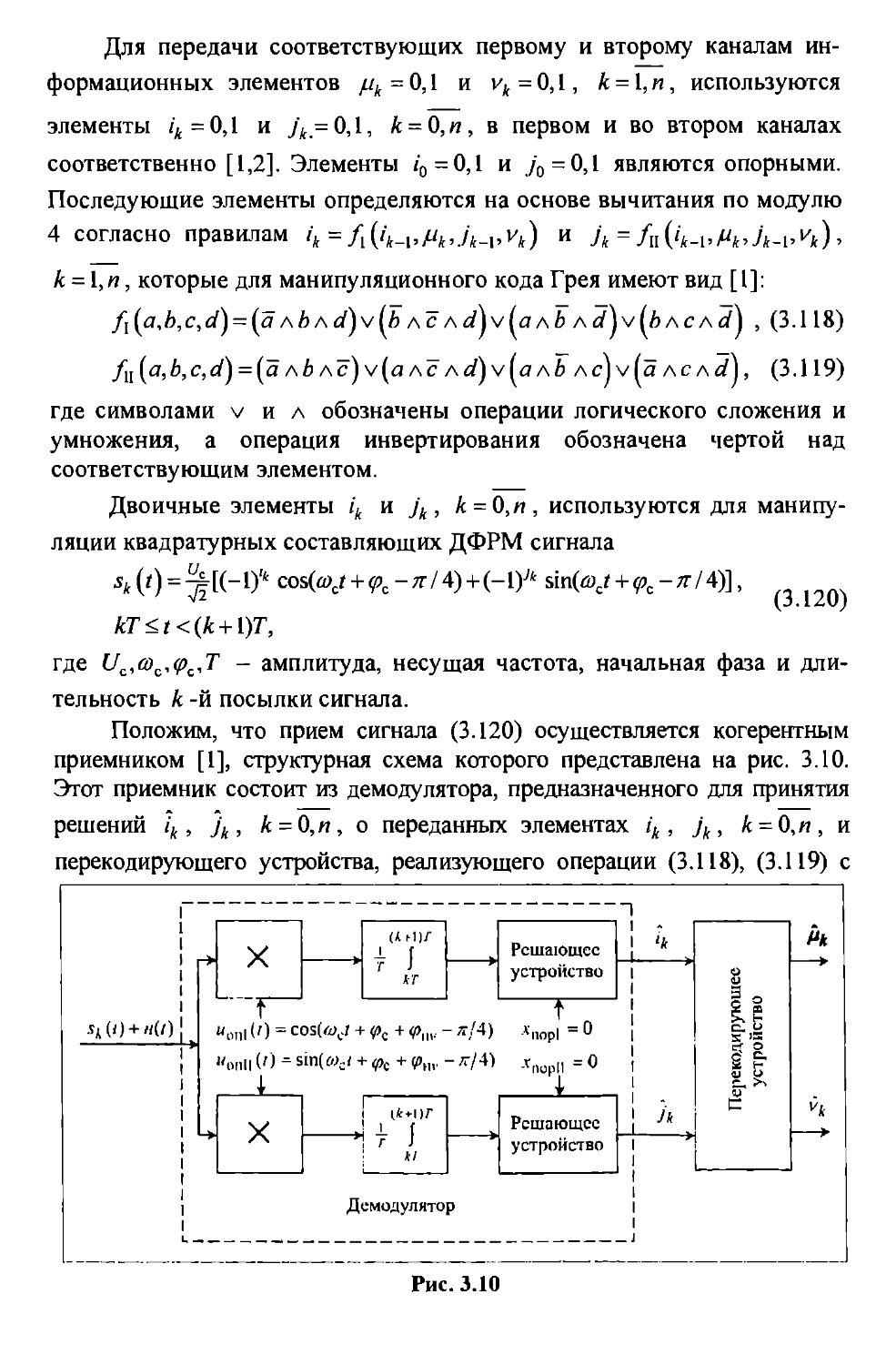
3.7. Синтез и оценка эффективности помех приемникам двукратных фазоманипулированных сигналов........... 197
3.8. Достоверность когерентного приема простых сигналов с двукратной фазоразностной манипуляцией на фоне помехи произвольной структуры............. 205
3.9. Помехозащищенность аппаратуры радиоинерциального навигационного комплекса с адаптивной антенной решеткой ......................................... 214
Глава 4. Оптико-электронное подавление оптико-локационных систем .................................221
4.1. Синтез маскирующей помехи корреляционно-экстремальным системам............... 221
4.2. Синтез помех пеленгаторам с растровыми анализаторами ....................................... 229
4.3. Форма объектов и качество их автоматического обнаружения и различения........................... 235
4.4. Определение вероятности увода следящих измерителей........................................ 244
4.5. Предельные возможности траекторно-спектральной фильтрации имитирующей помехи...................... 250
4.6. Контроль эффективности помех по траекторным признакам.......................................... 256
4.7. Синтез и анализ алгоритмов адаптивного управления помехами........................................... 262
4.8. Пространственно-угловые характеристики лазерного луча на выходе аэрозольного слоя .................. 269
4.9. Рассеяние лазерного луча аэрозольным слоем в направлении вперед и назад........................ 276
Глава 5. Оценка радиолокационной и оптической заметности объектов........................................285
5.1. Пространственно-временная обработка в системах измерения радиолокационных характеристик объектов .......................................... 285
5.2. Алгоритм обработки результатов радиоголографических измерений в условиях искажения облучающего поля элементами конструкции сканирующей системы ........ 296
5.3. Измерение радиолокационных характеристик объектов в неплоском поле с компенсацией реверберационных помех............................. 304
5.4. Применение теории обнаружения к задаче маскировочного окрашивания летательных аппаратов ......................................... 309
5.5. Оптическая заметность пространственно протяженных объектов в атмосфере Земли............. 318
5.6. Оценка оптической заметности объектов сложной формы в атмосфере Земли............................ 326
5.7. Оценка возможностей человека-оператора по различению пространственно протяженных объектов по их изображениям ....................... 332
5.8. Вопросы математического моделирования зрительного опознавания пространственно протяженных объектов в атмосфере Земли........................ 339
5.9. Оценка потенциальной точности измерений параметров волновых полей оптическими приборами и радиосистемами .................................. 347
Глава 6. Планирование использования радиочастотного спектра ..................................356
6.1. Комбинаторные алгоритмы оптимального присвоения частот в условиях взаимовлияния радиоэлектронных систем по основным и внеполосным каналам приема ..................... 356
6.2. Игровые алгоритмы оптимального присвоения частот............................................ 361
6.3. Оптимальное присвоение частот в телевизионных сетях............................................. 369
6.4. Универсальный алгоритм оптимального присвоения частот............................................ 375
6.5. Комплексное применение алгоритмов комбинаторной, игровой и поисковой оптимизаций в задачах присвоения частот................................. 381
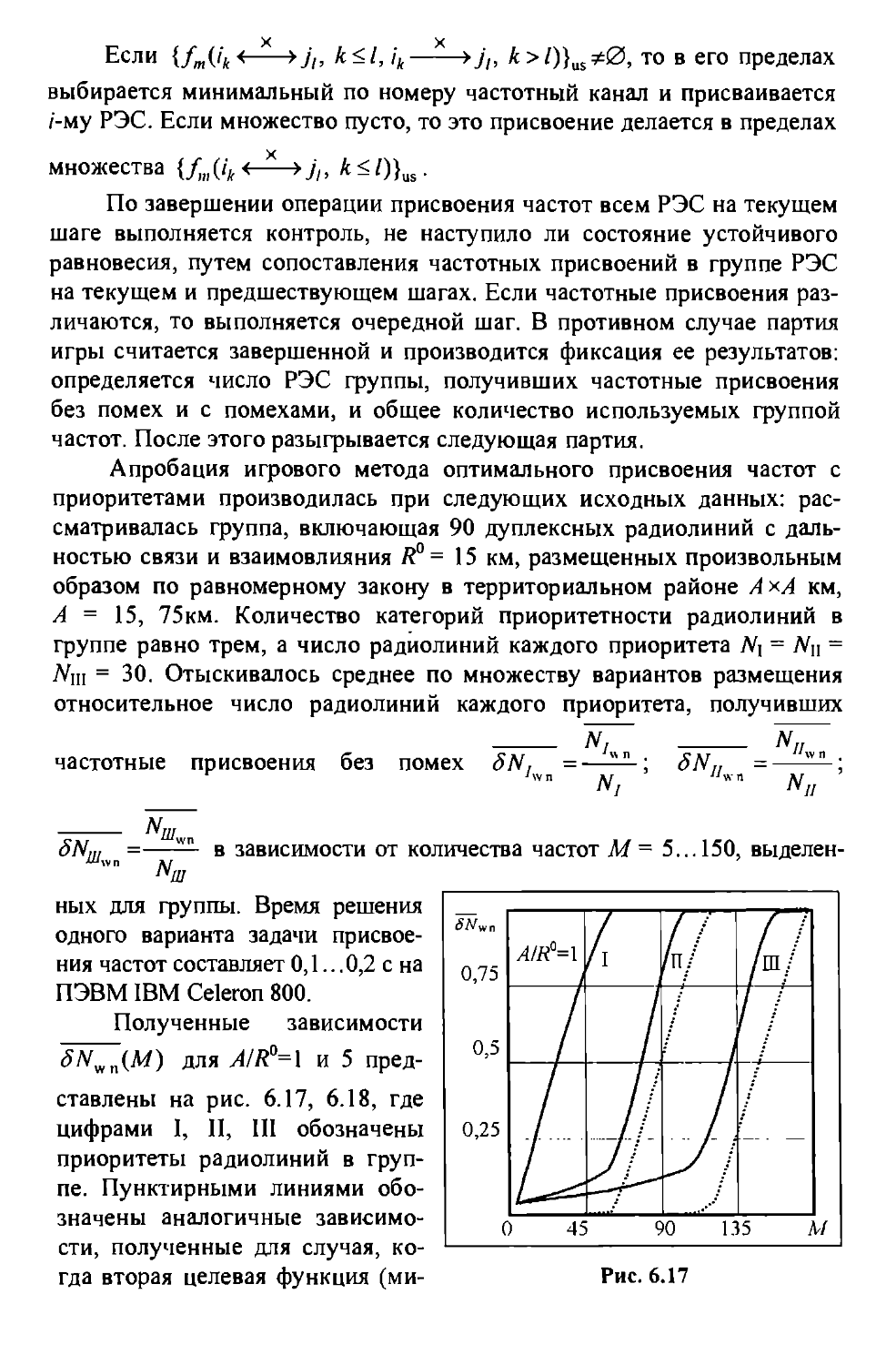
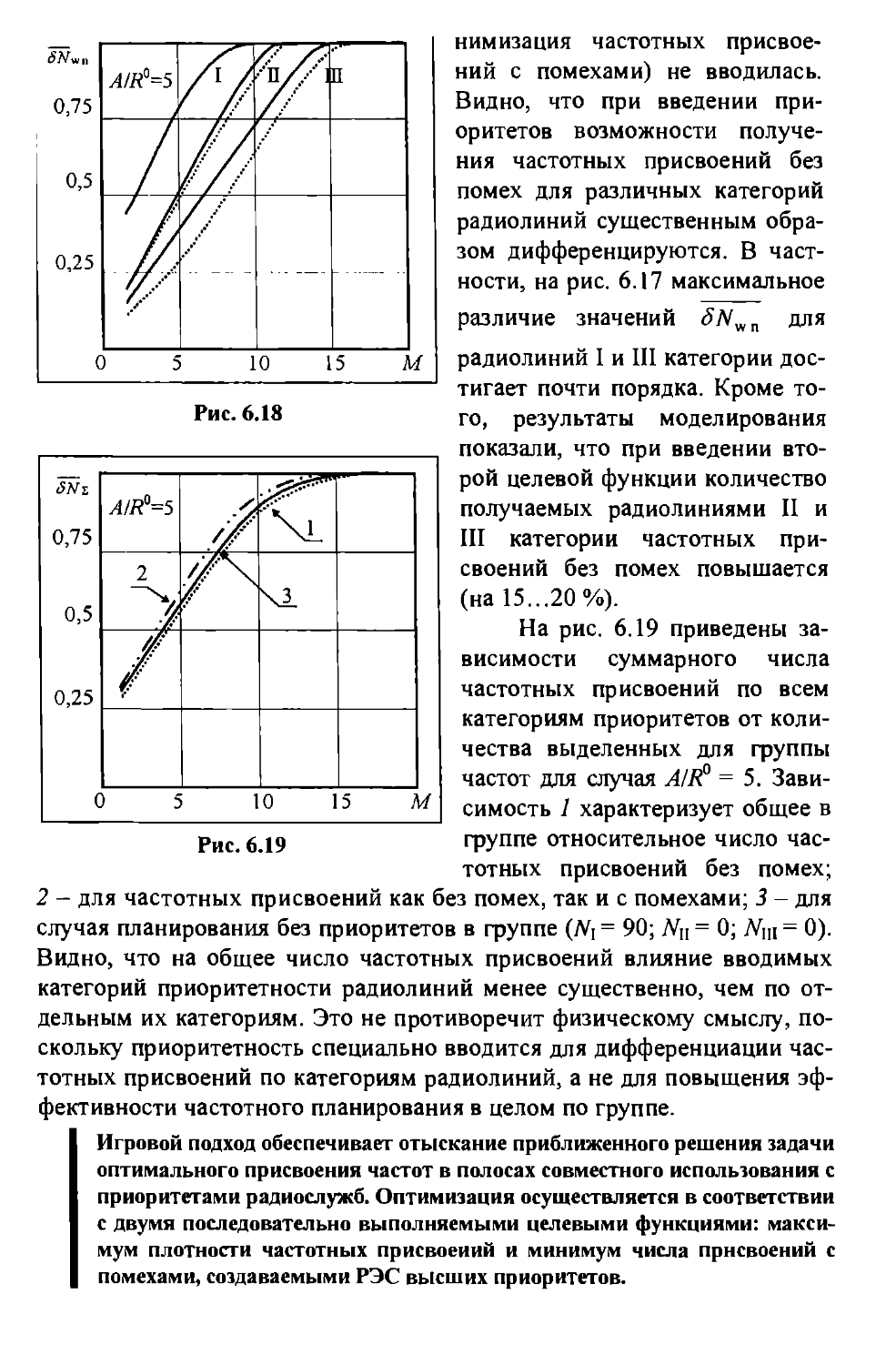
6.6. Оптимальное присвоение частот в полосах совместного использования с приоритетами радиослужб........... 389
6.7. Сравнительная эффективность планирования частот и адаптивного управления частотами в условиях изменяющейся обстановки........................... 395
6.8. Синтез системы сигналов при коллективном использовании частот.............................. 400
6.9. Динамическое присвоение частот сетям сотовой связи стандарта GSM .............................. 408
6.10. Оценка резерва ресурса при частотном планировании ..................................... 414
45-летию Федерального государственного научно-исследовательского ис-пытального центра радиоэлектронной борьбы и оценки эффективности снижения заметности посвящается
ПРЕДИСЛОВИЕ
Настоящая книга «Современная радиоэлектронная борьба. Вопросы методологии» включает в себя имеющие методологическое единство материалы, по разным причинам не вошедшие или вошедшие лишь частично в известные издания: С.А. Вакин, Л.Н. Шустов «Основы радиопротиводействия и радиотехнической разведки» (1968); В.В. Дружинин, Д.С. Конторов «Конфликтная радиолокация» (1982); В.И. Владимиров, А.Л. Докторов, Ф.В. Елизаров и др. «Электромагнитная совместимость радиоэлектронных средств и систем» / Под ред. Н.М Царькова (1985); Ван Брант Л.Б «Справочник по методам радиоэлектронного подавления и помехозащиты систем с радиолокационным управлением»: Пер. с англ. (1985); В.Г. Радзиевский, А.А. Сирота «Информационное обеспечение радиоэлектронных систем в условиях конфликта» (1-е изд., 2001) и «Теоретические основы радиоэлектронной разведки (2-е изд., 2004); Ю.М. Перунов, К.И. Фомичев, Л.М. Юдин «Радиоэлектронное подавление информационных каналов систем управления оружием» (2003); В.И. Владимиров, В.П. Лихачев, В.М. Шляхин «Антагонистический конфликт радиоэлектронных систем» / Под ред. В.М. Шляхина (2004); Ю.П. Мельников «Воздушная радиотехническая разведка (Методы оценки эффективности)» (2004); В.В. Соловьев «Методы оптимального присвоения частот» (2000); В.И. Кузнецов «Радиосвязь в условиях радиоэлектронной борьбы» (2002).
Материал, представлен по следующим шести основным разделам теории радиоэлектронной борьбы:
1) радиоэлектронная разведка;
2) радиоэлектронное подавление систем радиолокации;
3) радиоэлектронное подавление систем радиосвязи;
4) оптико-электронное подавление оптиколокационных систем; 5) оценка радиолокационной и оптической заметности объектов; 6) планирование использования радиочастотного спектра.
Фактическое содержание разделов определялось с учетом мнения руководителей действующих научных школ по соответствующим предметным областям РЭБ докторами технических наук, профессорами ВТ. Радзиевским, В.В. Быковым, В.Н. Поддубным, П.М. Юхно, В.А. Понькиным, В.В. Соловьевым.
По уровню изложения книга вполне доступна радиоинженерам и студентам старших курсов технических вузов. Принимая во внимание дополнительно рекомендуемую литературу, она может использоваться и как справочное пособие специалистами РЭБ. Авторы, стремясь к точности и математической строгости разрабатываемых положений, старались придерживаться характера изложения, когда прикладные инженерные решения не уходят на второй план. Не все высказанные идеи могут считаться одинаково устоявшимися, некоторые из них требуют более глубокой проработки и дальнейшего развития. Поэтому авторы заранее выражают благодарность всем, кто пожелает обсудить и высказать свои замечания по рассмотренным в книге вопросам.
ГЛАВА 1
Радиоэлектронная разведка
Радиоэлектронная (радио и радиотехническая) разведка является важной составляющей процесса информационного обеспечения радиоэлектронной борьбы, в значительной мере определяющая ее эффективность. В данной главе рассмотрен достаточно широкий круг вопросов, относящихся к современной методологии исследования радиоэлектронной разведки и включающих базовые статистические модели радиоэлектронной обстановки, определяющей поток сигналов на входе разведприемников, анализ особенностей первичной и вторичной обработки сигналов в условиях повышенной априорной неопределенности и мешающих воздействий. Учитывая тенденцию применения в средствах радиосвязи и радиолокации сложных видов сигналов, адаптивных и скрытных режимов работы, значительно снижающих информативность измеряемой совокупности сигнальных параметров и затрудняющих процесс принятия решений, особое внимание уделено проблеме высокоточного местоопределения источников радиоизлучения с помощью многопозиционных систем как наиболее устойчивого признака для разведки (идентификации) объектов
1.1. Базовые статистические модели процесса радиотехнической разведки в ходе противодействия радиолокационным средствам
Основная цель радиотехнической разведки (РТР) в условиях конфликта средств радиолокации и противодействия [1] - достоверное и оперативное извлечение информации о наличии и состояниях РЛС -объектов противодействия и происходящих в них изменениях путем анализа входного поля радиосигналов [2]. Решение задачи информационного синтеза и анализа (ИСА) для РТР, а также и для любых других радиоэлектронных систем, предполагает создание статистических моделей для формализации описания протекающих процессов. При этом должны быть раскрыты специфические особенности как поведения объектов противодействия, так и процесса обработки информации в ходе РТР. На качественном уровне необходимо выделить следующие объективно существующие особенности:
большое количество разнородных по структурным и количественным характеристикам излучений РЛС, составляющих входное поле ра-
Авторы: В.Г. Радзиевскнй, А.А. Сирота
диосигналов, причем эти характеристики имеют определенную иерархию описания объектов как в статистике, так и в динамике функционирования, что предполагает многоуровневый характер этих описаний;
соответственно многоальтернативный и многоуровневый характер решений, которые должны приниматься в ходе РТР, причем решения, принимаемые на нижних уровнях (т.е. при оценке соответствующих по уровню описаний параметров состояний объекта), не только обеспечивают процесс принятия решений на верхних уровнях, но имеют и самостоятельное значение;
наличие статистических связей между принимаемыми в процессе РТР решениями и изменениями, происходящими в состоянии объектов, подвергающихся после этого воздействию.
В соответствии с общей теорией радиосистем [3] проведение ИСА предполагает задание динамических моделей состояния (ДМС) и моделей наблюдений (МН) объектов РТР. Дадим их формализованное описание с учетом всех перечисленных особенностей исследуемого процесса.
Динамическая модель состояний является исходной информацией об объектах противодействия. Из-за сложности характера процесса функционирования объектов, построение ДМС должно проводиться путем последовательной стратификации на основе расширения пространства состояний. Для каждого объекта в качестве ДМС верхнего уровня (ДМС1) естественно рассмотреть вероятностно-временной сценарий смены режимов работы, выделяемых в соответствии с целевыми функциями РЛС (обнаружение, сопровождение цели и т.д.). Эти режимы будем называть основными состояниями процесса функционирования v(/), принимающего дискретный ряд значений
v(f) е vr = i = 1, A?r|.
Понятие режима работы предполагает задание совокупности его структурных свойств — перечня режимов излучения сигналов и их характеристик, реализуемых в рамках данного режима работы. Каждую такую совокупность данных из числа существующих обозначим
/„е/, i =
Назовем эти характеристики третичными параметрами (ТП), в число которых включим также параметры пространственного положения и перемещения РЛС. Таким образом, можно сказать, что ДМС1 описывает динамику изменения ТП. В соответствии с подходом [4] к описанию динамики ситуационного конфликта основные состояния должны рассматриваться в рамках состояния обшей динамической системы «средство противодействия - РЛС», т.е. как желаемые для каждой из сторон в ходе их конфликтного взаимодействия.
На рис. 1.1 непрерывными линиями представлен пример типового графа состояний такой системы, где Со - исходное состояние системы; Сь С2 - цель обнаружена соответственно при отсутствии и при создании помех; С3 - цель взята на сопровождение; С\ - цель передана на дальнейшее обслуживание; Cs - сопровождение сорвано до передачи цели на дальнейшее обслуживание.
Используя полумарковскую модель переходов в состояния, для плотности перехода во второй режим Pvr2(f) можно записать
уДО = П||1/Г(г) + П^у,.(f), П,2 = 1-Пи ;
pv r2(t) = Р(П, ,)PV,2(г/п,,)+P(n,2)Pv ,20/п12)=рСз (0=Р(П, ,)PC. з x t t
X |рСз (r>c2 3(r - r)Jr + Р(П12)РС| 3 jpcl(r>C| 3 (r - r)Jr, о 0
где Пи, П12 - случайные величины, принимающие значения 0 или 1 и обозначающие события, заключающиеся в том, что переход в С3 произошел из С2 и Ci соответственно; v]:2(t) - условные процессы смены режимов работы при Пи = 1 и П12 =1 соответственно; Pc.(f) плотности переходов (нормированные); Рс,_„ й>с,_,(г) - переходные вероятности и плотности вероятности времени переходов (Пн, П12 отражают результаты действий по РТР и противодействию, имея в виду, что цель противодействия первому режиму в полном объеме достигается только при Пп = 1).
Задание Рс,(г) любым из известных способов предполагает необходимость расширения пространства состояний при описании конфликта на основе рассмотрения эффектов, отображающих последовательность нарушений функционирования и восстановления работоспособности радиоэлектронных средств сторон. Другими словами, необходимо рассмотреть динамику процесса действий по РТР и противодействию, с одной стороны, и применения мер помехозашиты (ПЗ) как особых режимов излучения сигналов, позволяющих парировать воздействие помех, с другой стороны. Необходимо отличать меры ПЗ, применяемые безотносительно воздействия помех, и меры ПЗ, применяемые как реакция на воздействие
помех. На рис. 1.1 штриховыми линиями дан пример графа переходов в расширенном пространстве состояний для первого режима работы, где Со расширяется по числу мер ПЗ, применяемых безотносительно воздействию помех, состояние С23 описывает рефлексивный уход из-под воздействия помех и также может быть расширено по числу таких мер ПЗ. Соответственно расширяются состояния действий по разведке и созданию помех С21 и С22 применительно к различным режимам излучения. Возможности по использованию различных режимов излучения могут быть заданы для /-го режима работы совокупностью данных
Dlri ={р,г‘, 1 = ^ ; /Г/ , <;(г) , = , O,rjeDp Irlel ,
где Р/-' - вероятность применения l-й меры ПЗ безотносительно воздействию помех; Р^ , ю^'(г) - вероятностно-временные характеристики ухода из-под воздействия помех путем перехода к использованию /-го режима излучения (меры ПЗ) при использовании до этого к-го режима; D] - множество всевозможных видов таких моделей.
Проведенная таким образом декомпозиция основных состояний позволяет получить вероятностно-временной сценарий смены режимов работы на основе полумарковской модели процесса и использования интегральных уравнений известного вида. При этом дополнительно должны быть заданы вероятностно-временные характеристики эффективности деятельности сторон при реализации их целевых функций. Рассмотрение может быть существенно упрощено, если учесть, что для противодействия характерно задание детерминированных циклов - временных интервалов, отводимых на РТР и создание помех, т.е. осуществляется фиксация моментов перехода для соответствующих состояний. Это позволяет, в частности, снять трудности, связанные с параметрической зависимостью статистических характеристик переходов от времени по мере сближения сторон, так как в пределах интервала между соседними циклами ею можно пренебречь.
Таким образом, ДМС1 можно записать в виде совокупности данных = {и,,,/ = 1,Х,.}, иг,:Р^,(//П,1>2), ДпеД, Ir,el,
A,. =^(A,.,f), Pr(A,.(/0)), t0<t},
где A,. - вектор координат и скоростей перемещения объекта; Pr(J\.(t0) -начальный закон распределения.
Следующим этапом структуризации общей ДМС является рассмотрение более низких уровней, непосредственно описывающих динамику параметров излучаемых сигналов. Сначала для каждого /-го режима работы рассмотрим модель вторичных параметров (ВП) сигналов -ДМС2. Под ВП будем понимать непрерывнозначные параметры, такие
как среднее (центральное) значение частоты, период следования и т.д., т.е. характеризующие в целом конкретное излучение (последовательность сигналов), которые обозначим вектором Xs(г), а также дискретные параметры, описывающие реализуемый режим излучения, значения которых однозначно связаны с индексом режима излучения S,.,(r). Ин-
декс Sr, (г) принимает дискретный ряд значений Sril , г = 1,^.,, в соответствии с ДМС 1. Важной особенностью при этом является то, что размерность и физический смысл компонент Х'(г) однозначно определяется значением Srj(f). Разновидностью модели динамической системы со скачкообразным изменением структуры при переходе от одного режима излучения к другому и реализации того или иного способа ПЗ служит ДМС2. Анализ и обобщение этих способов, представляющих интерес для РТР, показывает, что в своем большинстве они осуществляются посредством псевдослучайной или рефлексивной перестройки параметров сигналов на определенном множестве значений. Характерная особенность процесса разведки - цикличность обращения к анализу радиоизлучений объекта, т.е. наблюдаемость на отрезках времени |^0у , 0у+Д0у] , 7 = 1, 2, ..., - циклах РТР, в пределах которых значения ВП постоянны. Поэтому уравнения изменения Х5(г) целесообразно записывать в дискретном времени. В качестве простейшего примера можно привести уравнение для одной компоненты, например, частоты излучения:
FJ+l = Г(0у+1)Гу + (1 - r(0y+,))(Foy + AF0/) ,
(1-1)
Л)(/+1) = > J = 2,
где Г(0у+|) - случайные коэффициенты, принимающие значения 0 или 1 в зависимости от значения процесса Sr,(r); Fy+1 - несущая частота излучения (или ее центральное значение при наличии режима быстрой перестройки от импульса к импульсу) в у + 1-м цикле (при Г(0/+[) = 1 излучение не имеет перестройки данного ВП, а при Г(07+[) = 0 осуществляется его перестройка от цикла к циклу; в последнем случае Foy -среднее значение ВП, a AF/ - его возмущение).
Как следует из анализа, проведенного при рассмотрении ДМС1, процесс смены режимов излучения определяется результатами действий по разведке и созданию помех на предыдущем цикле. Поэтому в общем случае процесс изменений ВП в рамках /-го режима работы
•"1 '"2
xft=£лл^;)(х(;\и7)), 2>y, = ij=i, 2,...; <i.2)
/=1 /=1
«'2
7’(Sr,(0z+1)/Sr,(0y)) = ^(7’(Sr/(0y+1)/4, , Sr,(QJ))p[AJI/Sr^J)) , 1=1
где Aji — величины, принимающие значения 0 или 1 и отражающие результаты действий по РТР и созданию помех; /^(X^.U^) - функционалы различных типов, определяющие закон изменения ВП при конкретных Aj/ =1, l = l,m2 ; X*f),U(j) - обобщенные векторы ВП и их возмущений, размерность которых меняется в зависимости от значений s,,(0y+1).
Обычно выделяют три вида результатов, описываемых величинами Aj,: Лу1 = 1 - разведка излучения РЛС произведена достоверно и правильно поставлены помехи; Лу 2=1 - определен факт наличия объекта, однако в целом разведка произведена недостоверно - имеются псевдооценки ВП и соответствующим образом поставлены помехи; А)3 =1 - наличие объекта не обнаружено и помехи не поставлены. Естественно, что круг описываемых ситуаций и количество вводимых величин Aj, могут быть расширены. В большинстве случаев уравнения изменения непрерывнозначных ВП в (1.2) представляются уравнениями 1-го (или приводимых к нему) порядка переменной структуры вида Nri
x^=2?,,(sf,(0j+1))x^ =
И=1 Nrl
= (Sf ,.(0]+1))[ф;.(Лн)х;+с;(лг,)1/;] = И=1
= Ф<’)(Лн ,1Г1)Х(р + ^\АГ1 ,/r()U<s) , / = 1, 2, ..., (1.3)
где J,Jsr;(0j+|) = Sf,,) = , т.е. размерность векторов и матриц может
изменяться от цикла к циклу соответственно конкретному значению S,.,(0j+1); Ап - вектор постоянных в рамках режима работы в общем случае непрерывнозначных ТП; lri - дискретный параметр - индекс статистической модели D!rj, определяющей начальные и переходные вероятности для процесса Sr,(0j+|).
Для получения ДМС2 в окончательном виде уравнения (1.3) должны быть дополнены статистическими характеристиками начального
вектора X*s) и вектора Ап , причем компоненты Х^ также могут быть включены в Ап и рассматриваться как постоянные параметры уравнения или ТП. Эти характеристики определяются множеством возможных значений ТП - QAf, и плотностями распределения Pr,(Ar,/rz). Кроме того, в (1.3) должны быть учтены плотности вида р(х'+1/Х' , sr,(6’7) = sr/,, = , которые для некоторых
компонент играют роль начальных плотностей при смене режима излучения.
Таким образом, ДМС2 записывается в виде совокупности данных П2и=|х%=Ф(/)(Аг/ ,7r,)X(;)+Gy)(Ar, ,Ir,)V(p ,j = l, 2, ...; sr,(07)es/r, ={\,, Г=1Х), fri(Ar' А,.,епЛН}, .
Наиболее низкий уровень занимает ДМСЗ первичных или поим-пульсных параметров (ПП), которая описывает изменения ПП отдельных импульсов последовательности в пределах единичного цикла. Дискретное время этой модели определяется временем г/, k =1, 2, ..., прихода очередного импульса внутри у-го цикла. Основой ДМСЗ являются уравнения состояний, простейшим примером которых могут быть уравнения для частоты импульса
/0^+1) = /04 ,
где /7 - случайные коэффициенты, принимающие значения 0 или 1 в зависимости от состояния процесса SH(0j) в данном цикле, при этом // = F0J при = 1 и f0\ = Fj при = 0 (все остальные обозначения совпадают по смыслу с введенными в (1.1)).
Учитывая принципиальную возможность поимпульсной РТР и создания помех, а в РЛС соответственно реализации режима быстрой адаптации к помеховой обстановке, в общем случае уравнения состояний ПП можно представить аналогично (1.2):
х^^я^^Ли^), ^ак1=[, (1.4)
i=\ i=i
где обозначения по смыслу соответствуют введенным в (1.2), однако в отличие от ДМС2 размерность вектора ПП xj/’ в уравнениях состояний не меняется, так как зависит от значений Sr/(6j), которые в пределах цикла считаются неизменными.
При конкретном значении Sri: = Srj(Q-) в большинстве случаев эти уравнения можно записать в более простом виде:
Л=1 И=1
= ^y)(Z',},sr,yjx(/)+g[y)^^,sr, JИр’, k = \, 2, ..., 7 = 1, 2, ...,
где обозначения по смыслу совпадают с введенными в (1.3); - по-
стоянные непрерывнозначные параметры уравнений, связанные с вектором ВП преобразованием вида Л(Г11 = Hjj’x'/’ (Н^’ - матрица соответствующей размерности).
Дополним эти уравнения заданием плотностей р*7у(Лг^,srj (включив в состав я!',} компоненты начального вектора х{5)) на множествах значений > имея в виду, что во всех предыдущих обозначениях размерность непрерывнозначных векторов определяется индексом (.v), т.е. конкретным значением sr/J.
Таким образом, ДМСЗ можно записать в виде совокупности данных £’зг,у={х(4)1=^у’й<^ ,sril)AJ) + ,Л = 1, 2, ...;
^’(X‘U,) , X’Je<,y} ,7 = 1, 2, .... / = 1Х
Второй базовой статистической моделью, которая должна быть записана в интересах ИСА, является модель наблюдений, описывающая процессы получения и прохождения информации на различных уровнях обработки. Обозначенные уровни распределяются в соответствии с задачами РТР, которые фактически адекватны задачам оценки ПП, ВП и ТП объекта противодействия. В отличие от ДМС рассмотрение МН должно проводиться «снизу-вверх». Причина заключается в том, что при составлении МН высших уровней существенное значение имеет учет особенностей действий над данными, которые осуществляются в соответствии с обработкой нижних уровней.
Исходным для РТР является процесс оценки ПП первичной обработки (ПО), который состоит из поимпульсных операций обнаружения сигналов, оценки параметров, селекции и, в некоторых случаях, поим-пульсного распознавания. При оценке параметров в ходе ПО вырабатывается вектор наблюдаемых ПП одинаковой для всех сигналов размерности и связанный с xi'1 преобразованием z. =/i!nx(./) + v., где v. -
вектор погрешностей измерения. В общем случае в j-м цикле может быть получена совокупность наблюдений различных источников zk , к = 1,М . Модель наблюдений ПП (МН 1) при РТР данного объекта должна описывать процесс получения наблюдений с учетом результатов частных информационных решений, получаемых при ПО, и множества альтернативных гипотез о значении вектора неизвестных параметров а = (Л!’,уравнения состояний aaril :а = а,„ n = l,Z.J, которые с некоторыми погрешностями задаются путем дискретизации или «завязки» в пределах значений исходных множеств . Распространенная форма записи МН1 в j-м цикле (далее индекс j для упрощения записи опустим) определяется совокупностью уравнений
3 ___
+Ьк„з(^)2к„1к„-1’ = Zk„/k„-l = hk„Xk„ik„-l ’ п = О-5)
/=1
где Xj । - условная (для гипотезы о„) оценка вектора ПП по всем предшествующим наблюдениям, определяющая центр динамического строба селекции (ДСС) zk /к }, формируемого в интересах ПО в виде некоторой траектории в пространстве наблюдений при а = а„; bk„,(a) принимают значения 0 или 1 и характеризуют решения, получаемые при ПО: />4"|(а) = 1 - вектор z.k=zk„ принадлежит сигналу объекта РТР с ВП а„; ^' 2(а) = 1 - вектор zk = zk„ является ложным, т.е. не принадлежит сигналу объекта или является псевдооценкой ВП; ^3(а) = 1 - в ДСС на данном шаге не попало ни одного наблюдения; а>к„ описывает отклонения ложного вектора от центра ДСС.
Уравнения (1.5) МН1 в совокупности с ДМСЗ представляют собой основу для синтеза алгоритма оценки ВП в цикле, т.е. алгоритма вторичной обработки. Однако при этом в общем случае необходимо задать вероятности значений наблюдаемых величин ак., описывающих в (1.4) реакцию РЛС на действия по разведке и противодействию, а также величин bk.(a), которые характеризуют результаты действий по разведке в ходе ПО. В случае, если результаты противодействия полностью предопределены результатами разведки, эти вероятности совпадают. Обозначим вероятности единичных значений для Ь^.(а) как рк.(а). Реали
зация алгоритма вторичной обработки основана на вычислении апостериорных вероятностей наличия объекта противодействия и значений а„, и = 1,£|. Пороги для апостериорных вероятностей, позволяющие отсечь маловероятные гипотезы, устанавливаются при выборе конкретного критерия принятия решения. Один из возможных примеров реализации алгоритма обработки для МН1 представлен в [5].
Следующим уровнем общей МН является модель наблюдений ВП (МН2). При ее обосновании следует исходить из того, что на вход поступает поток оценок ВП, полученных в различных циклах и состоящий из истинных и ложных оценок (псевдооценок). При этом каждая из истинных оценок непрерывной компоненты z*’1 = Ли* = + Kt(,), где
Р,(1) - погрешность оценки. В отличие от предыдущего случая наблюдения ВП будут сгруппированы по циклам, в каждом из которых можно получить Rj пар (Zy’), srjJ), sriJ eSriJ={srill , / = вероятных оценок. Поэтому МН2 в данном случае представляется в виде:
{zjs) . zy).„ = в^А^Н^Х^'" + Kf’’") + + Iff1’") +
+b;2(Z)Z<^„ £b£U) = 1 , SriJeSrij, п = й2] , (1.6)
/=i
где А = Ап, Iri - неизвестный наблюдающей стороне вектор ТП, для которого устанавливается дискретное множество альтернативных значений £1^Г1 = {О„:Л = Л„, я = 1,£2|- Все остальные обозначения в (1.6) по смыслу совпадают с введенными при описании (1.5).
Уравнения (1.6) МН2 в совокупности с ДМС2 являются основой для синтеза алгоритма оценки ТП по нескольким циклам, т.е. алгоритма третичной обработки. При этом также необходимо задание вероятностей значений величин Aj,, описывающих результаты РТР и воздействия помех на РЛС, и величин В^,(А), описывающих результаты действий по РТР в ходе вторичной обработки. Если результаты РТР полностью предопределяют результаты противодействия, то эти величины совпадают и описываются вероятностями единичных значений Ру>(Л).
Общую статистическую модель ИСА можно представить, как показано на рис. 1.2, состоящей из системы иерархически вложенных моделей состояний и наблюдений специального вида. Связь между ДМС различных уровней осуществляется передачей «сверху-вниз» априорных сведений, задающих начальные условия и структуру ДМС низших
уровней. Связь между МН осуществляется «сверху-вниз» передачей апостериорных сведений, отража-ющих результаты решений, принимаемых в ходе обработки на нижних уровнях. Штриховыми линиями на рисунке показано участие результатов действий по РТР на каждом уровне в рефлексивном изменении структуры соответствующей ДМС. Проведение ИСА для такой системы моделей требует задания вероятностных характеристик, описывающих качество принимаемых решений на каждом из уровней. При фиксированных критериях принятия решений они могут быть получены, если для каждого уровня МН описан соответствующий мешающий фон, который задается в диапазонах значений параметров общей ДМС.
Рис. 1.2
Литература
1. Дружинин В.В., Конторов Д.С. Конфликтная радиолокация. - М.: Радио и связь, 1982.
2. Вакин С.А., Шустов Л.И. Основы радиопротиводействия и радиотехнической разведки. - М.: Сов. радио, 1968.
3. Тихонов В.И. Оптимальный прием сигналов. - М.: Радио и связь, 1983.
4. Сухоруков Ю.С. - В кн.: Введение в теорию конфликта / В.В. Дружинин и др. - М.: Радио и связь, 1989.
5. Сирота А.А., Бочарников В.И. - Изв. вузов СССР. Сер. Радиоэлектроника, 1990, №4.
1.2. Имитационная модель и статистические характеристики входного потока сигналов средств радиосвязи
Система информационного обеспечения (СИО) конфликта в радиосвязи предназначена для оперативного получения достоверных сведений о динамическом состоянии радиоэлектронных средств (РЭС) путем приема и анализа их сигналов [1,2]. Оценка ее эффективности осуществляется на основе статистических характеристик обнаружения источников радиоизлучения (ИРИ), функционирующих одновременно и независимо в единых диапазонах частот, с учетом дисциплины радиообмена, интенсивности выхода в эфир, энергетической доступности, а также возможности изменения частот и режимов работы в процессе передачи сообщений. Для расчета указанных характеристик необходимо составить формализованное описание сигналов на входе СИО. Согласно [1], потоки сигналов в моменты времени, определенные дискретностью анализа радиоизлучений, могут быть сформированы с использованием имитационной модели радиоэлектронной обстановки (РЭО) в конфликте. Показателями эффективности СИО являются вероятность и время вскрытия частот ИРИ.
Представим имитационную модель РЭО диапазона 30...100 МГц применительно к двустороннему несимметричному конфликту «средства радиосвязи - СИО» [1] при наличии мешающих излучений, создаваемых источниками, не принадлежащими к числу вскрываемых объектов. Внешние помехи затрудняют обнаружение РЭС вследствие пропуска полезных сигналов при совпадении их частот на интервале наблюдения.
Полагаем, что источники сигналов и помех входят в состав двух различных группировок, размещенных в одном территориальном районе. Включение РЭС в состав группировки и назначение их координат осуществляется в соответствии с требованиями по электромагнитной совместимости приемопередающих устройств [3], пропускной способности и технической надежности линий связи. Группировка, обслуживаемая СИО, включает в себя No ИРИ, 30% которых в соответствии с требованиями рационального использования радиочастотного ресурса [3] работают в режиме быстрой (2 мс) или медленной (50 мс) программной перестройки рабочей частоты (ППРЧ); 2% РЭС передают телекодо-вые сообщения. Радиосвязь организуется между средствами, принадлежащими одному множеству, по симплексным и дуплексным радиосетям. В симплексной радиосети при передаче сообщения головной ра-
Авторы: В.Г. Радзиевский, В.И. Афанасьев, С.Н. Разиньков
диостанцией квитанцию, подтверждающую прием информации, передает одна из подчиненных радиостанций; при передаче сообщения подчиненной радиостанцией квитанцию передает главная радиостанция; при паузе в эфир выходит любая радиостанция в соответствии с вероятностью передачи сообщения каждым корреспондентом радиосети. В дуплексной радиосети при окончании сообщения корреспондент, принявший информацию, передает квитанцию, если он находится в состоянии паузы, или включает квитанцию в свое сообщение, если находится в режиме передачи. При этом происходит увеличение длительности сообщения на величину времени передачи квитанции. В качестве исходных данных при имитационном моделировании потока сигналов на входе СИО используем типовые статистические характеристики для радиосвязи диапазона 30... 100 МГц: длительность сообщения распределена по усеченному закону Пуассона в пределах 0,5...2,5 мин, длительность квитанции равна 5 с, коэффициент загрузки радиосети - 0,3. Помехи моделируются излучением Nn=l,5NQ РЭС с длительностью 0,3...2,0 мин на частотах, равномерно распределенных в диапазоне 30... 100 МГц при загрузке, обеспечивающей наличие на входе СИО суммарного потока сигналов заданной интенсивности (8...20 РЭС/МГц) в каждый момент времени при одновременном функционировании 40...45% мешающих РЭС, 30% которых работают в режиме ППРЧ.
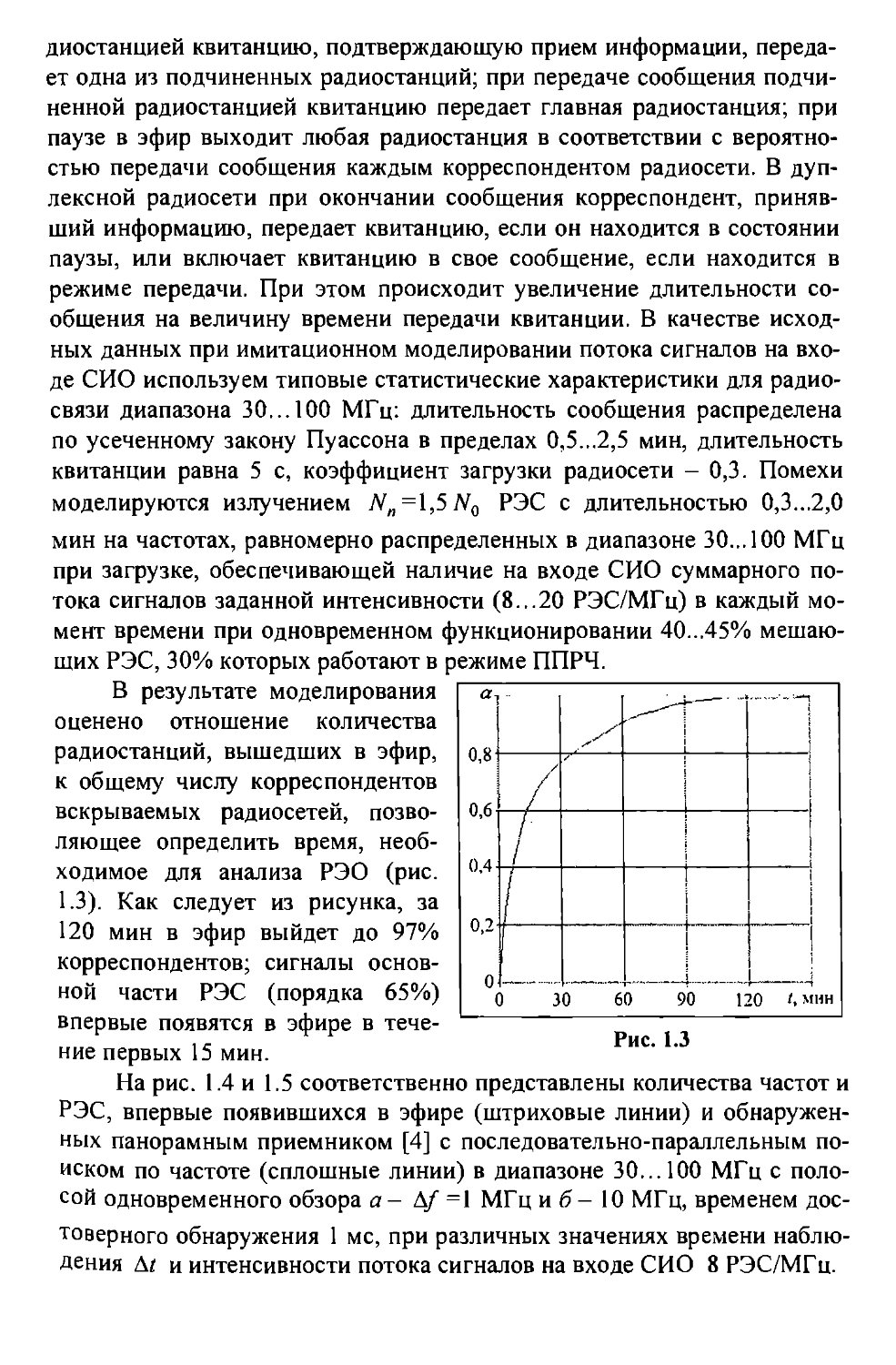
В результате моделирования оценено отношение количества радиостанций, вышедших в эфир, к общему числу корреспондентов вскрываемых радиосетей, позволяющее определить время, необходимое для анализа РЭО (рис. 1.3). Как следует из рисунка, за 120 мин в эфир выйдет до 97% корреспондентов; сигналы основной части РЭС (порядка 65%) впервые появятся в эфире в течение первых 15 мин.
На рис. 1.4 и 1.5 соответственно представлены количества частот и РЭС, впервые появившихся в эфире (штриховые линии) и обнаруженных панорамным приемником [4] с последовательно-параллельным поиском по частоте (сплошные линии) в диапазоне 30... 100 МГц с полосой одновременного обзора а - Л/ =1 МГц и б - 10 МГц, временем достоверного обнаружения 1 мс, при различных значениях времени наблюдения Az и интенсивности потока сигналов на входе СИО 8 РЭС/МГц.
Рис. 1.4
Рис. 1.5
Рис 1.6
\OONnc/N„ 1OOWP3C/A'O
Л<\
40- 30 50 мс 4V 1Л 50 мс
>\^к) мс i ли 20
20" ч i 10
10- г Д/~ 1 мс i 4 АГ - 1 мс
0 0 10 t, мни а) 0 б) 0 t, мин
Рис. 1.7
На рис. 1.6 и 1.7 соответственно приведены зависимости потоков частот и РЭС, вышедших в эфир (штриховые линии) и вскрытых СИО (сплошные линии), от времени ее работы при поступлении на вход приемника потока сигналов с плотностью 20 РЭС/МГц, а - Д/ = 1 МГц, б- 10 МГц.
Согласно полученным результатам, за время появления в эфире основной части корреспондентов в течение каждой минуты на входе приемника будет наблюдаться до 85% частот и порядка 70% РЭС. После 15 мин работы СИО потоки обнаруженных частот и РЭС приближаются к стационарным. Пропуск сигналов при поиске ИРИ по частоте происходит за счет недостаточной скорости обзора частотного диапазона и совпадения частот сигналов и помех на интервалах наблюдения, преимущественно за счет работы РЭС с ППРЧ.
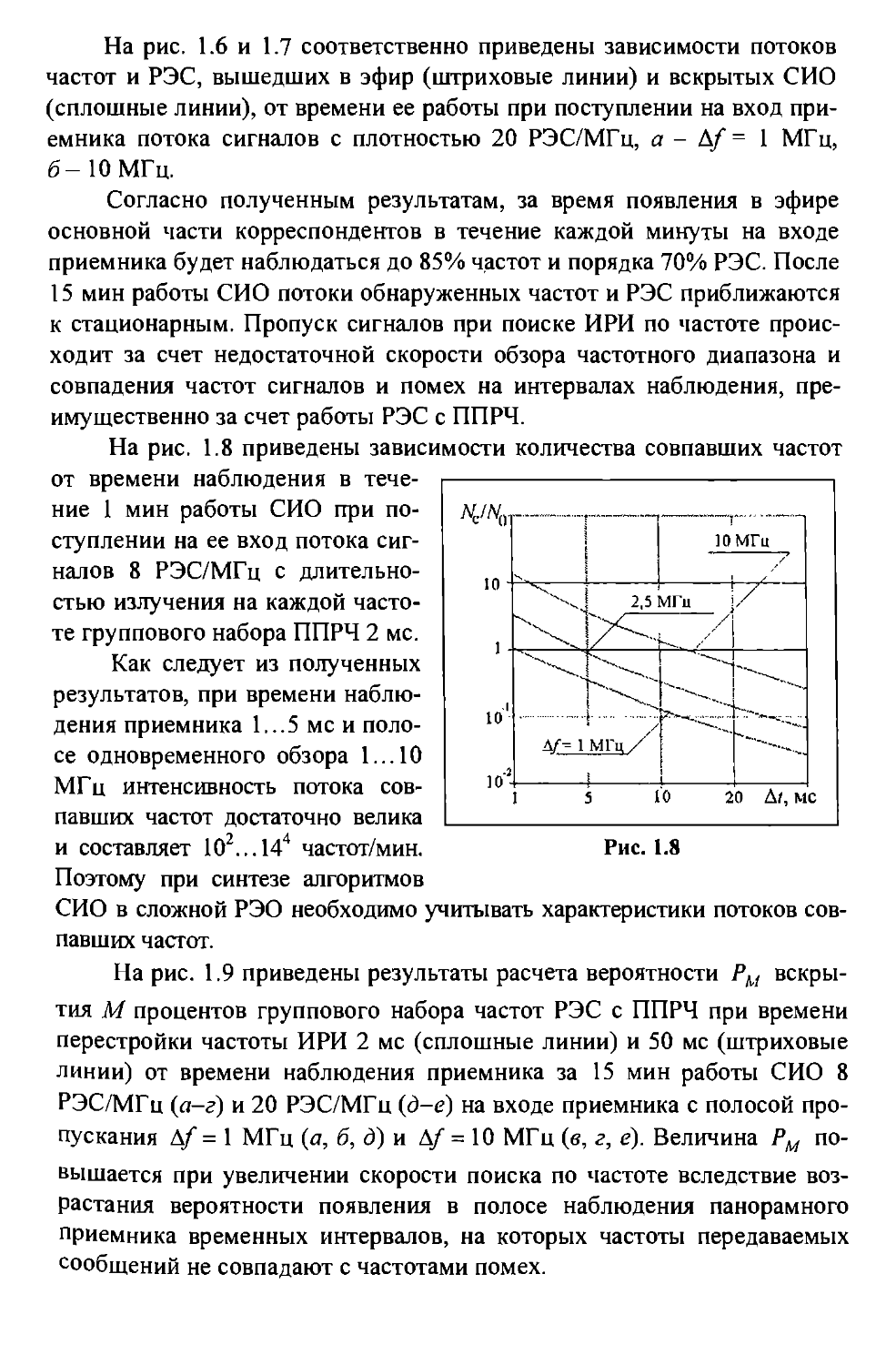
На рис. 1.8 приведены зависимости количества совпавших частот от времени наблюдения в течение 1 мин работы СИО при поступлении на ее вход потока сигналов 8 РЭС/МГц с длительностью излучения на каждой частоте группового набора ППРЧ 2 мс.
Как следует из полученных результатов, при времени наблюдения приемника 1...5 мс и полосе одновременного обзора 1...10 МГц интенсивность потока совпавших частот достаточно велика и составляет 102...144 частот/мин. Поэтому при синтезе алгоритмов
СИО в сложной РЭО необходимо учитывать характеристики потоков совпавших частот.
На рис. 1.9 приведены результаты расчета вероятности Рм вскрытия М процентов группового набора частот РЭС с ППРЧ при времени перестройки частоты ИРИ 2 мс (сплошные линии) и 50 мс (штриховые линии) от времени наблюдения приемника за 15 мин работы СИО 8 РЭС/МГц (а-г) и 20 РЭС/МГц (d-е) на входе приемника с полосой пропускания Д/ = 1 МГц {а, б, д) и Д/ = 10 МГц (в, г, е). Величина Рм повышается при увеличении скорости поиска по частоте вследствие возрастания вероятности появления в полосе наблюдения панорамного приемника временных интервалов, на которых частоты передаваемых сообщений не совпадают с частотами помех.
.. t = 1 мин рм t= 15 мин,
0.6-
• у / /
Xх - .
а 0 ) 0 Д/, м ( - 1 мин 0 б) о Az, мс
у ' '—
“ у
0,2
1 - 15 мин
р... ля. 5 10 в) ,0 АЛ мс Р, 0 г) 0 Д/т мс
t- 1 мин Z = 1 мни
л л Р 6П д
/ / / ' // LL
- -
00 / 0,2 /
/
0 Э) 0 Az. мс 5 0 е) .0 Д/, мс
Рис. 1.9
При вскрытии средств радиосвязи с традиционным режимом работы пропуск сигналов, как правило, обусловлен совпадением рабочих частот РЭС с частотами помех. За 15 мин в рассмотренном коалиционном конфликте может быть вскрыто до 90% рабочих частот радиостанций с традиционным режимом работы.
На рис. 1.10 приведены зависимости отношения числа вскрытых и работающих РЭС, передающих телекодовые сообщения, при наличии на входе СИО в каждый момент времени потока сигналов 8 РЭС/МГц (а, б) и 20 РЭС/МГц (в, г).
а) б)
Рис. 1.10
Согласно полученным результатам, телекодовые сигналы могут быть не обнаружены, в основном, за счет пропуска при перестройке приемника СИО; для повышения вероятности их вскрытия необходимо увеличивать скорость поиска ИРИ по частоте.
Таким образом, на основе имитационного моделирования конфликта «средства радиосвязи - СИО» получены статистические характеристики РЭО. Показано, что при использовании панорамного приемника с последовательно-параллельным поиском по частоте вероятность вскрытия радиостанций и их рабочих частот возрастает при увеличении скорости обзора частотного диапазона и времени работы СИО. За счет увеличения скорости перестройки приемника уменьшается вероятность пропуска сигналов; вследствие увеличения времени работы СИО снижается вероятность совпадения частот вскрываемых н мешающих источников в каждый момент времени при плотности потока сигналов 8 РЭС/МГц (я-г) и 20 РЭС/МГц (д-е) на входе приемника с полосой пропускания Д/= 1 Мгц (я, б, д) и Д/= 10 МГц (в, г, е).
Литература
'• Радзиевский В.Г, Сирота А.А. Информационное обеспечение радиоэлектронных систем в условиях конфликта, - М.:ИПРЖР, 2001.
2. Демин В.П., Куприянов А.И., Сахаров А.В. Радиоэлектронная разведка и радиомаскировка. - М.: МАИ, 1997.
3. Соловьев В.В. Методы оптимального присвоения частот. - М.:НПФ «Гейзер», 2000.
4. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М.: Сов. радио, 1968.
1.3. Влияние рассеяния радиоволн антенными системами пеленгаторов на точность измерения координат источников излучения
При оценке точности триангуляционных систем местоопределения ИРИ необходимо учитывать погрешности измерения направления на излучатель, обусловленные рассеянием электромагнитного поля антеннами пеленгаторов. Вследствие вторичного излучения радиоволн антенной системой формируется коррелированная по ее раскрыву помеха, вызывающая устойчивое отклонение пеленга от истинного направления прихода сигнала, и существенно снижается потенциальная точность вычисления угловых координат ИРИ. Для учета искажения пространственной структуры принимаемых электромагнитных волн распределение сигналов в каналах пеленгатора необходимо рассчитывать путем решения задачи дифракции поля на антенной системе.
Оценим погрешности измерения координат источников радиосигналов с известной несущей частотой триангуляционным методом на фоне коррелированных помех, формируемых при переотражении радиоволн в антенных системах пеленгаторов, в диапазоне 30... 1200 МГц.
Для определения местоположения объекта наблюдения в пространстве, связанного с декартовой системой координат, необходимо измерить значения азимутов и (%, а также угла места Д или из точек Л1(-£)/2; 0; 0) и Л2(£)/2; 0; 0), где D - база триангуляционной системы. Координаты ИРИ соответствуют координатам точки пересечения конуса с углом при вершине у= л- 2Д и плоскостей, ориентированных по азимуту под углами и Характеристикой погрешности местоопределения является разность значений истинных координат излучателя и их оценок, ее вычисление включает в себя три этапа:
1. По заданным координатам излучателя с использованием аналитических выражений [1], связывающих его местоположение и направление прихода радиосигнала, определяются истинные линии положения объекта из точек Л1(-О/2; 0; 0) и Л2(£)/2; 0; 0);
2. Находятся оценки угловых координат ИРИ путем добавления к вычисленным значениям его азимута и угла места систематических
Авторы: В. Г. Радзиевский, С. Н. Разиньков
ошибок пеленгования, обусловленных рассеянием поля антенными системами пеленгаторов;
3. По найденным значениям пеленгов находится реальное местоположение излучателя. Погрешность местоопределения объекта вычисляется как разность его истинных координат и их оценок, полученных с учетом систематической ошибки пеленгования.
Будем полагать, что сканирование пространства по азимуту осуществляется в пределах 360°, поэтому антенные системы пеленгаторов выполнены в виде решеток W несимметричных электрических вибраторов, размещенных равномерно на окружности радиусом /?о =---77----г, гДе ~ длина облучающей волны. При выбранном
4sin (л-/^)
значении 7?0 размер базы пеленгационных пар антенн не превышает Я/2 и антенная система имеет потенциальную разрешающую способность [2]. Считаем также, что решетки расположены в плоскости XOY непосредственно на бесконечной идеально проводящей поверхности, антенные нагрузки подключены в точке закрепления вибраторов на носителе (z = 0) для устранения набегов фаз радиоволн, отраженных от плоскости; сопротивления нагрузок комплексно сопряжены с входным сопротивлением одиночного вибратора ZBX [3]. Элементы решетки развязаны по электрическим цепям; приемные каналы пеленгаторов работают в линейном режиме и имеют одинаковые коэффициенты передачи, поэтому дополнительные набеги фаз всех сигналов в приемниках равны и фазы принимаемых радиосигналов соответствуют фазам токов в точках подключения антенных нагрузок. Поле решетки удовлетворяет условию излучения на бесконечности [3] и граничным условиям на поверхности системы параллельных вибраторов [4]. Направление прихода радиосигнала определяется фазовым методом, поскольку погрешность амплитудного метода в диапазоне 30... 1200 МГц с учетом октантных систематических ошибок достигает 3...5° [2] при размещении пеленгатора в свободном пространстве при отсутствии многолучевого распространения радиоволн. Если амплитудный пеленгатор расположен на носителе, то оценка направления прихода радиосигнала может смещаться на 5... 15° относительно истинного значения [2].
Систематическая погрешность пеленгования определяется путем сравнения истинных угловых координат ПРИ и их значений, вычисленных по фазовым задержкам принимаемых радиоволн при распространении к антеннам пеленгационных пар. Фазы сигналов вычисляются как аргументы комплексных токов в антенных нагрузках. Расчет плотности тока на поверхности антенной решетки осуществляется с использованием системы интегральных уравнений Халлена с регулярным точным ядром [4] для параллельных электрических вибраторов:
N 'о
X = Cni cos kz +
m=l -'о
+C„2sinA|z|-i^[/„(0)Z^sinA|z|-5„(z)]sin^, (1.7)
где
CO
^"(z~z')=i ^z'(k2-^
0
- ядро интегрального уравнения [4]; Cn) и C„2 ~ константы, определяемые из условия обращения в нуль тока на концах л-го вибратора (л = = 1 .../V); к = 2я7Л- волновое число;
4)
S„(2) = j\,,(2') sin(A(Z0 -|z- z'\))dz' к
- функция возбуждения л-го элемента решетки;
£„ (z) = exp(-iA(x„ sin 0 cos0+у„ sin 0sin 0 + z cos /?))
- комплексная амплитуда облучающей волны в месте расположения л-го вибратора; x„=7?0cos[2^(«-1)/jV], yn=/?osin[27r(«-l)/jV] - координаты л-го вибратора в плоскости раскрыва антенной решетки; а0 и /0 - радиус поперечного сечения и длина вибратора; Ио=12Ол - волновое сопротивление свободного пространства; amj=at)+ymldnm; d„„, - расстояние между антенными элементами; упт = \-8пт; Jo(...) - функция Бесселя первого рода 0-го порядка; Н^\-) ~ функция Ханкеля второго рода 0-го порядка; 8„„, — символ Кронекера; * - знак комплексного сопряжения. При размещении антенной решетки в свободном пространстве нижний предел интегрирования в (1.7) равен нулю вследствие отсутствия зеркального отражения волн от плоскости.
Для решения системы (1.7) методом Крылова-Боголюбова [3] амплитудно-фазовое распределение тока аппроксимировано конечной последовательностью кусочно-постоянных функций с весовыми коэффициентами I”' (р={...'1М, где М - число интервалов разбиения вибратора). При этом интегральные уравнения преобразуются в систему линейных алгебраических уравнений с матричным оператором Фредгольма:
{а™}-1“ =г“ , (1.8)
где | А™' | - матрица обобщенных импедансов, равная
a™ w)sin(*(z‘ - z”)) - aTsin(A(z?
J 'W = ZY nW -L 1 '
/1 Vp t* vp
sin(A|z!.-z(/M)|)
exp(-i^)
Qfi/p
4л
1
X'
Lvp Ш-уВур VvpLvpj
p
6
dm^P
i --% G^+i —br-+ —r';
'P 2 k2f>7'7 \ 2 ) \27
3
2 + 3AzJ(z;-z:)'
О- = Az„ dL + ---------
rpHUl _ 1
7k" 120
НП1
Г vp
rpnm _ _L
Г VP £ q nm bl 2>-
z — z
P____L
nm
P vp
-1
x2
3-30
nm
V vp
+ 35
_m n
Z — Z
P v nm P vp
x4
p
1 tep 40^2r™?
3
Gum _ i/p
i f „m _n A 1 p ~ v
4 2r^ J
Мят = —I ^Zp vp Цгг™,
5„(z‘)sin(^(z”-zy)) + 5„(zy)sin(^(z”-zL))
- вектор-столбец эквивалентных потенциалов.
В результате решения (1.8) вычислены комплексные токи в нагрузках, и с использованием полученных результатов рассчитана погрешность пеленгования ИРИ, обусловленная переотражением поля между антенными элементами. На рис. 1.11 приведена зависимость абсолютного значения систематической ошибки измерения азимута прихода облучающей волны от электрического радиуса решетки при /0=Я/4
и а0 = 2/40; на рис. 1.12 — зависимость ошибки пеленгования от электрической длины вибратора для случая, когда расстояние между ближайшими антеннами равно 2/2. В дальнейших расчетах длина и радиус поперечного сечения вибратора выбирались из условия обеспечения минимальной действующей высоты /?min антенного элемента, при которой решетка имеет наибольший коэффициент усиления и малую реактивную составляющую входного сопротивления в диапазоне рабочих частот пеленгатора. Согласно [2] в диапазоне
30... 100 МГц минимальная действующая высота вибратора должна составлять 110 мм, поэтому длина вибратора принимается равной 260 мм, а радиус поперечного сечения 10 мм; в диапазоне 100...400 МГц ^min=640 мм при /о=24О мм и ао=1О мм; в диапазоне 400... 1200 МГц Amin=800 мм при /0=145 мм и а0=1О мм. Зависимость систематической ошибки пеленгования от углового положения ИРИ представима функцией с периодом tc//V. Анализ показал, что в диапазоне 30...Ю0 МГц погрешность измерения направления прихода сигнала определяется, в основном, отражением падающих радиоволн от плоскости и лежит в пределах /?= (1,5...2)°. Максимальная ошибка оценки пеленга с учетом рассеяния поля на антенной решетке из 5... 16 элементов, расположенной в свободном пространстве, не превышает 1,5°. Увеличение погрешности пеленгования ИРИ при размещении антенной решетки на проводящей плоскости обусловлено возрастанием ошибки измерения разностей фаз принимаемых радиосигналов вследствие интерференции облучающего поля и электромагнитных волн, переизлученных плоскостью на антенные элементы. При наличии проводящей плоскости в диапазоне 100...400 МГц погрешность пеленгования достигает 4°, в диапазоне 400... 1200 МГц - (4,5...5)°; при размещении антенной решетки в свободном пространстве, систематические ошибки измерения линии положения излучателя снижаются соответственно до 3,5 и 4°.
Зависимости отношения погрешности местоопределения Дг0 ИРИ к дальности г0 от величины rrJD при различных угловых положениях вй в плоскости азимута при использовании решетки из пяти вибраторов
Рис. 1.13
Рис. 1.14
приведены на рис. 1.13 для диапазона 30...100 МГц, на рис. 1.14 - для диапазона 100...400 МГц, на рис. 1.15 -для диапазона 400... 1200 МГц. Угол отсчитывается из центра базы угломерной системы; сплошные линии на рис. 1.13-1.15 соответствуют в0=л/2, штриховые - 6,о=тт/3, штрихпунктирные - $)=л/4. Погрешность местоопределения ИРИ достигает минимального значения, когда \9\-0^ = n(2n+tyN, где п = = l...(7V-1), поскольку при этом ошибки пеленгования из точек Л](-£)/2; 0; 0) и Л2(£)/2; 0; 0) равны и при расчете координат частично компенсируют друг друга; если l#!-^ = ^(4и + 1)/2У , то ошибки измерения 0t и
02 имеют противоположные знаки, погрешность местоопределения объекта максимальна. Как следует из рис. 1.13-1.15, с увеличением частоты облучающего поля повышается максимальная систематическая ошибка триангуляционного способа измерения координат ИРИ. При этом увеличиваются осцилляции зависимости относительной погрешности ме-стопределения объекта от расстояния до базы угломерной системы
вследствие снижения точности измерения направления на излучатель за счет возрастания мощности коррелированных помех, обусловленных рассеянием радиоволн антеннами пеленгаторов, и искажения пространственной структуры принимаемого поля.
Полученные результаты можно рассматривать как объективно существующие ограничения на точность угломерного метода при определении направления на излучатель фазовым способом. Рассеяние поля корпусом объекта, на котором располагается пеленгатор, и другими от-
ражателями приводит к возрастанию систематической ошибки измерения координат. Точность местоопределения ИРИ может быть повышена путем калибровки пеленгатора, основанной на оценке линии положения известного излучателя [2], а также путем корреляционной обработки принятых сигналов при сравнении их с опорными сигналами, поступающими с определенных направлений, и вычислении наименьшего среднеквадратического отклонения линии положения пеленгуемого излучателя от фиксированных значений пеленгов [5]. При этом время пеленгования может существенно возрасти вследствие необходимости анализа массива опорных сигналов и соответствующих им направлений прихода.
На основе решения задачи дифракции поля на антенной системе пеленгатора показано, что вторичное излучение электромагнитных волн антенными элементами приводит к значительной систематической погрешности местоопределения ИРИ. Для устранения ошибок необходимо осуществлять по-слеантенную обработку сигналов с учетом коррелированных помеховых составляющих.
Литература
1. Кондратьев В.С., Котов А.Ф., Марков Л. Н. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986.
2. Саидов А.С., Тагилаев А.Р., Алиев Н.М., Асланов Г.К. Проектирование фазовых автоматических радиопеленгаторов. - М.: Радио и связь, 1997.
3. Справочник по антенной технике / Под ред. Л.Д. Бахраха и Е.Г. Зелкина. Т.1. -М.: ИПРЖР, 1997.
4. Бриккер А.М., Зернов Н.В., Мартынова Т.Е. - Радиотехника, 1999, №3.
5. Hedges, S. - Microwave System News, 1983, N5.
1.4. Оценка среднеквадратической ошибки пеленгования радиосигналов по измерениям в решетках вибраторного типа*
В пеленгационных комплексах диапазонов декаметровых, метровых и дециметровых волн применяются решетки вибраторного типа. При использовании многоэлементных антенных систем обеспечивается высокая чувствительность приемоанализирующих устройств; в результате одновременного подключения приемных каналов к различным
Авторы: ВТ Радзиевский, С Н. Разиньков
антенным элементам реализуются быстродействующие алгоритмы пеленгования [1]. Вместе с тем реально достижимая точность оценки направления на ИРИ ограничена искажениями принимаемых радиоволн вследствие рассеяния на решетке [2-Л]. При размещении антенн на подвижном объекте (автомобиль, вертолет и т.п.) или мачтовой опоре происходит дополнительное отклонение пеленга от истинного направления прихода сигнала за счет дифракции электромагнитного поля на носителях [3, 4].
На основе строгого решения краевых задач о возбуждении решеток вибраторов [2, 4] и статистического моделирования случайных процессов [5] в каналах пеленгаторов оценим точность измерения угловых координат излучателей по результатам пространственной обработки сигналов вибраторных антенных систем в диапазонах декаметровых, метровых и дециметровых волн.
Полагаем, что приемные устройства пеленгатора развязаны по управляющим электрическим цепям, имеют одинаковые коэффициенты передачи [1] и функционируют в линейном режиме. Их собственные шумы можно считать гауссовскими, некоррелированными в различных каналах, с одинаковой спектральной плотностью мощности. Принимаемые сигналы являются узкополосными [6] и при пространственной обработке могут быть заменены монохроматическими колебаниями с циклической частотой й>0. Пеленгуемый ИРИ расположен в дальней зоне [6, 7], поэтому падающая на раскрыв решетки волна считается плоской. Для определенности ее зависимость от времени на интервале наблюдения Ге [О, Г] зададим в виде exp(-i<z>or). Комплексные амплитуды сигналов в каналах приема находятся на основе статистического моделирования случайных процессов и соответствуют амплитудно-фазовому распределению токов и = 1, ЛГ, в антенных нагрузках, искаженному реализациями гауссовского шума. В качестве характеристики нагрузок используем импедансы Zo =50 Ом, включенные в осевые разрывы вибраторов. Токи вычисляются путем решения интегральных уравнений (ИУ) Фредгольма первого рода из граничных условий на поверхности решетки и носителя, а также условия излучения поля на бесконечности [7]. Вследствие некорректности поставленной краевой задачи ее решение выполним методом Крылова-Боголюбова [7], аппроксимируя токи последовательностями кусочнопостоянных базисных функций. При этом ИУ преобразуются в систему линейных алгебраических уравнений с матричным оператором Фредгольма, корни которой являются весовыми коэффициентами используемых последовательностей базисных функций. Аппроксимирующие последовательности сходятся к истинному распределению токов, удовлетворяющему ИУ; решение краевой задачи о возбуждении решетки является строгим.
Заметим, что предположение об узкополосности пеленгуемых сигналов сделано исключительно для упрощения явного вида приводимых далее ИУ. При определении направления прихода сигнала с произвольной шириной спектра в каналах пеленгатора осуществляется его преобразование Фурье с последующим синхронным пеленгованием каждой спектральной составляющей [8]. Для вычисления СКО измерения угловых координат ИРИ необходимо решать ИУ для каждого разрешаемого по частоте элемента на контролируемом участке диапазона.
Оценка СКО пеленгования с учетом рассеяния радиоволн на решетках вертикальных несимметричных вибраторов в диапазоне декаметровых волн. В пеленгационных комплексах диапазона декаметровых волн, как правило, используются решетки вертикальных несимметричных вибраторов, разворачиваемые на Земле; направление на ИРИ определяется фазовым методом [1].
В соответствии с указанными выше условиями при оценке углового положения ИРИ фазовые набеги радиоволн, принимаемых различными вибраторами, вычисляются как аргументы токов 1п в нагрузках. Для расчета 1п введем декартову систему координат, у которой ось Oz параллельна вибраторам. Нагрузки подключены в точках (x„,_vn,0), следовательно, 7„ = 1п (0). Поверхность Земли лежит в плоскости z = 0 . Длина вибратора L , радиус его поперечного сечения а и длина волны Лд в диапазоне функционирования пеленгатора удовлетворяют условию a«min(£, /Q . Подстилающую поверхность представим бесконечной плоскостью с диэлектрической проницаемостью и электрической
проводимостью <т01.
Краевая задача о возбуждении вертикальных вибраторов на плоскости записывается в виде системы ИУ
л i
X Р™ (z') G„„, (z, z') dz' = Cn cos (Az) +
w=l о
L
lvn (0) Zo sin (A |z|) - J4n) (z') exp (iA |z - z'|) 0
dz',
0<z<L, (1.9)
где jvn ( z) - искомое распределение токов;
exp[-iA^,„+[z-z']2 |
G„„, (z, z') = \ J + G°„ (z, z') (1.10)
- ядро ИУ; (z) = exp[iA(x„ sin#coso' + >’(1sin#sin« + zcos#)J — тангенциальная составляющая вектора напряженности падающего электрического поля на поверхности л-го вибратора; С„ - постоянная интегрирования, определяемая из условия обращения в нуль токов I„ (z) в точ-
(а, п = т ках z = L ; а и в - азимут и угол места ИРИ; апт = / ,
1<п> ntm dnm - расстояние между антенными элементами; к = - волновое
число; 1Т0 =120 л- - волновое сопротивление свободного пространства;
G„°m (z, z') = р0 (dnJ.) Л , (1.1!)
4л J Wo+m 7o
Jo(...) - функция Бесселя первого рода 0-го порядка; Л - переменная интегрирования Зоммерфельда [9, 10]; Т]о=\1л2 - к2 , rjl = у]л2 - к2£{ , е\ = +i <7°1 , £0 - электрическая постоянная. Выражение (1.11) полу-чено в [9] методом эквивалентной постоянной распространения [10] из импедансных граничных условий [7] для бесконечной плоскости с комплексной диэлектрической проницаемостью £[. Первое слагаемое в (1.10) представляет собой ядро ИУ для решетки в однородном изотропном бесконечном пространстве, а (1.11) характеризует влияние подстилающей поверхности на распределение токов (z).
На основе решения системы ИУ (1.9) вычислим токи в нагрузках 1п и исследуем реально достижимую точность пеленгования для эквидистантной кольцевой решетки с межэлементным расстоянием d„m = d, п, m = l, N, ntm, и решетки вибраторов, расположенных в вершинах равнобедренного прямоугольного треугольника с катетом d . Такие антенные системы используются при обзоре пространства в широких секторах углов с высоким коэффициентом направленного действия [3, 11]. Параметры подстилающей поверхности примем равными значениям диэлектрической проницаемости и электрической проводимости сухого (£,=4, <т01 = 10-3 См/м), влажного (^=10, <to1 = 10-3 См/м) и мокрого (£[ =30, <т0] =10-2 См/м) грунтов [10].
Установлено, что СКО пеленгования <та , усредненная по азимуту в пределах 360°, монотонно убывает при возрастании межэлементных
расстояний вследствие уменьшения систематической погрешности, обусловленной взаимным влиянием вибраторов, и возрастает по мере увеличения диэлектрической проницаемости и электрической проводимости грунта. При отношении сигнал-шум 30 дБ величина ста для эквидистантной кольцевой решетки размерами d/Ло = О, 25, £/t/ = 0,25 и а/L = 0,01, развернутой на сухом грунте, составляет 3,2°, а для решеток на влажном и мокром грунте - возрастает до 3,6 и 5,2° соответственно. Этот эффект обусловлен улучшением отражательной способности подстилающей поверхности, а следовательно, увеличением дифракционных искажений принимаемого поля за счет переотражения его от грунта на антенные элементы. При увеличении L/d от 0,25 до 0,75 и <7/Л0 = 0,25 CKO пеленгования для решетки на сухом грунте возрастает с 3,2 до 5,1°
Согласно [2], зависимость погрешности пеленгования от электрических размеров антенных элементов носит немонотонный характер; в ней присутствуют локальные экстремумы вблизи £/% =0,25, обусловленные резонансным возбуждением решетки. При d/A0 = 0,1...0,4 значения L/Aq , соответствующие резонансному возбуждению, на 5... 15% отличаются от резонансной длины одиночного вибратора, поскольку токи на антенной системе наводятся не только падающей волной, но и вторичными полями других элементов. Зависимость ошибки пеленгования для эквидистантной кольцевой решетки от углового положения ИРИ представима гармонической функцией с периодом л/N [2].
Для конфигурации решетки в виде прямоугольного равнобедренного треугольника, развернутой на сухом грунте, СКО пеленгования, усредненная по азимуту в пределах 360°, при d/A0 =0,25 , L/d = 0,25 и а/£ = 0,01 составляет 3°, а при £/с? = 0,75 - 6,3°. Величина <та при L/d = (S, 75 существенно превышает СКО для эквидистантной кольцевой решетки размерами <£/Л0 =0,25 и £/<7 = 0,75 за счет значительных систематических ошибок в направлениях катетов треугольника. Большая погрешность для указанных направлений обусловлена несимметричностью решетки, а следовательно, различной степенью искажения фазовых диаграмм элементов. При распространении волны в направлениях катетов максимальная погрешность пеленгования, обусловленная рассеянием поля на решетке, при <7/Л0 = 0,25 и £/</ = 0,25 составляет 4,6°, а при ь/с1 = а,'15 достигает 11,7°. Для эквидистантной кольцевой решетке максимальная ошибка пеленгования при четвертьволновой базе и £/</ = 0,25 не превышает 4,4°, а при L/d = Q,15 - 5,9°. Несколько
меньшее значение СКО для решетки из трех вибраторов, расположенных в вершинах прямоугольного треугольника (3°), при с//Яо=0,25 и £/<У = 0,25 по сравнению с <та =3,2° при <7/Яо = 0,25 и £/d = 0,25 обусловлена тем, что расстояние между вибраторами в вершинах при гипотенузе треугольника в Л раз превышает <//Я0, поэтому их фазовые диаграммы искажаются менее значительно.
Оценка СКО пеленгования с учетом рассеяния радиоволн на решетках вибраторного типа диапазона метровых волн. При исследовании точности пеленгования в диапазоне метровых волн проведем расчет СКО аа , реально достижимой для амплитудного и фазового методов. Рассмотрим два типовых варианта построения антенных систем:
1) кольцевые решетки вертикальных симметричных вибраторов на штыревых мачтовых опорах;
2) решетки вибраторного типа на мобильных носителях.
Кольцевые решетки вибраторов на штыревых мачтовых опорах. Системы ИУ для кольцевых вибраторных решеток, закрепленных идеально проводящими радиальными лучами на мачтовых опорах, получены в [12]. В результате их численного решения найдены токи в антенных нагрузках In, п = 1, N , на основе моделирования случайных процессов определены комплексные амплитуды сигналов в каналах приема и вычислены СКО угловых координат ИРИ.
На рис. 1.16 и 1.17 соответственно приведены зависимости аа от электрической длины интервала между соседними вибраторами d/Ло в трех- и четырехэлементных решетках для фазового и амплитудного способов пеленгования. При расчетах полагалось, что длина плеча вибратора £/Ло=0,34, радиус его поперечного сечения а/Ло=2,2-10-3, высота мачтовой опоры 1,3 Ад, а ее диаметр 4,7-10"3 ^°, радиусы радиальных лучей для крепления вибраторов 4,4-10-3 ; отношение сигнал-шум принималось равным 30 дБ. Сплошными линиями изображены зависи-
Рис. 1.16
Рис. 1.17
мости для решетки на идеально проводящей мачте, штрихпунктирны-ми - на диэлектрической опоре.
Как следует из приведенных зависимостей, при использовании фазового способа пеленгования величина <та убывает при увеличении б//Л0 вследствие уменьшения ошибок взаимного влияния антенных элементов, а при амплитудном способе возрастает за счет ошибок разноса [1]. При рассеянии радиоволн на радиальных лучах, являющихся источниками кроссполяризационного излучения [13], и мачте фазы принимаемых сигналов при габаритных размерах решеток, соответствующих значениям на рис. 1.17, приобретают дополнительные фазовые набеги порядка (80... 140)°. Поэтому СКО пеленгования фазовым методом достигает (4... 12)°; точность оценки направления на ИРИ по результатам амплитудных измерений снижается на (0,5...2,5)° в основном за счет уменьшения коэффициента усиления решетки на (1,3...2,1) дБ и ухудшения ее согласования с фидерным трактом вследствие появления дополнительных реактивных входных сопротивлений вибраторов.
Решетки вибраторов на поверхностях мобильных носителей. При теоретическом исследовании реально достижимой СКО мобильных пеленгационных комплексов [3] поверхности носителей их антенных систем представляются плоскими поверхностями, характерные размеры которых соответствуют резонансной области [6]. Поле решетки представляет собой суперпозицию полей антенных элементов и поверхности.
Использовав указанный подход, оценим величину аа , достижимую при пеленговании по фазовым и амплитудным измерениям в кольцевых решетках вертикальных симметричных вибраторов, размещенных на идеально проводящей полосе.
Полагаем, что полоса имеет ширину Ло и расположена в плоскости z =0 декартовой системы координат. По оси Оу она бесконечно протяженная, а по оси Ох ограничена линиями |х| = Л0/2. Вибраторы параллельны оси Oz и закреплены на полосе в точках (хп,уп, 0), их нагрузки подключены в плоскости z =0.
Токи решетки /то( z), возбуждаемые полем ИРИ, расположенным в плоскости азимута, определяются выражением
t(z)=/„H(z)f''(«,4=o, (1.12)
где 4» (z) - распределение токов несимметричных вибраторов на бесконечной идеально проводящей плоскости;
(«, 0) = Х„ ехр[ - iA^r] - Х„ ехр[ - i^2 ] + К («,в)>
%п = -С" sin(«-a„)cos/? + C2 cos в cos (a -a„) ,
%n = C"cos0 cos(«-d„) cos/? + C2sin («-«„), rf" = r” sin /? +[Л-Л0/2] sin в sin(«-a„), m = 1, 2,
cosSeosaf f . W„sin«_
aK ’ sin/? “ 7 “V 7 (l-^)sin/?
C "=---!— sin л ГD" + D2 1, C2” = —J— cos a„ ГD" - 4'
1 2sin/? "L 1 2J’ 2 2sin/? "L 1 2
Wn = V” sin a„ [l/2 - U0Ul exp (-ifa,)] exp^-iApf + 5г)] _
- K2"sin«„[Ц-[?0[/2exp(-iAs2)]exp[_*^(^2 +si)]’
Ц =ехр(1Аз,)ф(л/м^) , s, = Ao|_sin/? + (-!)'sin0cos<p\^ , f = 0,l,2, И; = ехр(^”)ф(^) , i"=sin/?[r„"+A0/2 + (-l)mA]; m = 1,2 , r "m= J[^0/2 + (-l)mA„] +Л2 , A„ = 7*И2+Л2 > «» = arctgf — |,
|-sin0, л + a„„ < a„ < 1л, I. ’ nm tn ’
a„m = arccos nm
A0/2 + (-l)wA„
2л , sin в sin a
«m= —+ (-l) arccos -----------——
m sin /?
q = exp(i2AA0sin/?)х(ф[^2А:Л0sin)?] j ,
sin2 /? = sin2 в cos2« + cos2 в ,
Ф[-. ] - интеграл Френеля [6]. Токи 7,.»(z) решетки на бесконечной идеально проводящей плоскости удовлетворяют системе ИУ Халлена [2], которая получается из (1.9) при замене нижнего предела интегрирования на -L в соответствии с методом зеркальных отображений [14] и обращении в нуль слагаемого G°m(z,z') в ядре (1.10).
С использованием (1.12) проведен расчет СКО пеленгования для эквидистантных кольцевых решеток из трех и четырех вибраторов следующих размеров: d/A0 = 0,25, L/d = 0,25 и a/L = 0,0} при ширине
полосы Ло = 1,2 Яд. Центр каждой решетки располагается на оси Оу. Одна из пеленгационных баз трехэлементной решетки параллельна ребру полосы. Для четырехэлементной антенной системы рассмотрены два варианта размещения:
противоположные стороны квадрата с вибраторами на вершинах параллельны ребру полосы (I вариант);
одна из диагоналей квадрата перпендикулярна ребру полосы (II вариант).
Погрешности пеленгования сга при отношении сигнал-шум в приемных каналах 30 дБ, усредненные по азимуту в пределах 360° по амплитудным и фазовым измерениям в кольцевых решетках на полосе шириной 1,2 Яд, приведены в табл. 1.1.
Таблица 1.1
Число антенных элементов Номер варианта Погрешность <та , град, при способе пеленгования
амплитудный фазовый
3 — 2,4 4,6
4 I 2,8 5,1
II 3,5 3,7
Из табл. 1.1 следует, что при амплитудном пеленговании СКО возрастает с увеличением расстояния от края полосы. Этот эффект обусловлен экранированием решетки полосой. Установлено, что при увеличении ширины полосы до 5 Яд значение сга возрастает до 4°, а при увеличении отношения L/d до 0,75 оно достигает 5,3°.
Точность фазового способа пеленгования повышается при удалении вибраторов от края полосы. В частности, за счет увеличения Ло с 1,2 Яд до 5 Яд значение сга для трехэлементной решетки снижается с 4,6 до 3,9°, а при увеличении L/d до 0,75 оно достигает 4,8°. Смещение оценки направления ИРИ относительно истинного значения за счет дифракции радиоволн на ребре полосы лежит в пределах (1,5...2,3)°.
Оценка СКО пеленгования с учетом рассеяния радиоволн на решетках вибраторного типа диапазона дециметровых волн. Оценим СКО пеленгования в диапазоне дециметровых волн по результатам фазовых и амплитудных измерений в решетке вертикальных несимметричных вибраторов на бесконечной идеально проводящей плоскости. Бесконечно протяженную плоскость можно рассматривать как фрагмент поверхности мобильного носителя антенной системы, поскольку в диапазоне дециметровых волн электрические размеры типовых носителей соответствуют ква-
зиоптической или оптической области [7, 14]. При удалении антенной системы от края поверхности носителя на величину порядка струк-
тура поля в раскрыве не претерпевает существенных искажений за счет дифракции поля на носителе.
Для расчета токов решетки введем декартову систему координат, ось Oz которой параллельна вибраторам, а плоскость z = О проходит через точки подключения нагрузок и совпадает с поверхностью носителя. Полагая, что длина вибратора значительно превосходит радиус его поперечного сечения, для расчета токов решетки используем систему ИУ Халлена.
На рис. 1.16 и 1.17 (пунктирные линии) приведены зависимости СКО пеленгования для решетки из трех вибраторов от отношения <7/Я0 при £/Яо=О,34 и а/Яо=2,2-10“3. Согласно представленным результатам, при увеличении межэлементного расстояния в пределах от 0,2 до 0,3 погрешность пеленгования амплитудным методом возрастает с 1 до 2,1° за счет ошибок разноса. Значение <за для четырехэлементной антенной системы при <7/2о=0,2 равно 2,3°. Для межэлементных расстояний сЦЯо=0,2 усредненная СКО достигает максимальной величины 3,8° при £/Яо=0,23 за счет резонансного возбуждения антенных элементов. Точность фазового способа пеленгования при б//Яо=0,2 составляет 5,3°, а при сЦЯо=0,5 она убывает до 3,9°. При этом следует отметить, что в диапазоне дециметровых волн пеленгование, как правило, осуществляется амплитудным методом, поскольку однозначные фазовые измерения угловых положений ИРИ затруднены вследствие малых пеленгационных баз [1].
На основе строгого решения краевых задач о возбуждении решеток вертикальных вибраторов и статистического моделирования случайных процессов оценена реально достижимая точность пеленгования ИРИ в диапазонах декаметровых, метровых и дециметровых волн. Исследованы СКО измерения направления прихода сигнала для типовых вариантов построения антенных систем и способов пеленгования. Проведен анализ зависимостей достижимой точности пеленгования от электрических размеров и конфигурации решеток, а также отражательных свойств поверхностей, на которых они расположены. Показано, что вследствие дифракции поля на решетке оценка направления прихода сигнала может смещаться относительно истинного значения на единицы градусов. Для компенсации этой погрешности требуется осуществлять амплитудно-фазовую корректировку сигналов в каналах приема с использованием алгоритмических средств первичной обработки. Способы реализации данной процедуры рассмотрены в [2-4, 8, 12].
Литература
1. КукесИ.С., СтарикМ.Е. Основы радиопеленгации. - М.: Сов. радио, 1964.
2. Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной разведки. -М.: Радиотехника, 2004.
3. Ашихмин А.В., Козьмин В.А., Литвинов Г.В. Коррекция радиодевиации в мобильных наземных пеленгационных комплексах. - Антенны, 2002, №7(62).
4. Разиньков С.И., Уфаев В.А. Исследование возможностей уменьшения систематических ошибок радиопеленгаторов при суммарно-разностной обработке сигналов. - Радиотехника, 2004, №11.
5. Быков В.В. Цифровое моделирование в статистической радиотехнике. - М.: Сов. радио, 1971.
6. Фалькович С.Е., Хомяков Э.Н. Статистическая теория измерительных радиосистем. - М.: Радио и связь, 1981.
7. Неганов В.А., Раевский С.Б., Яровой Г.П. Линейная макроскопическая электродинамика / Под ред. В.А. Неганова, С.Б. Раевского. - М.: Радио и связь, 2001, т. 1.
8. Радзиевский В.Г., Уфаев В.А. Первичная обработка сигналов в цифровых панорамных обнаружителях-пеленгаторах. - Радиотехника, 2003, №7.
9. Селин В. И. О решении задач излучения приземных антенн. - Радиотехника и электроника, 1996, т.41, №7.
10. Кинг Р., Смит Г. Антенны в материальных средах: В 2-х книгах: Пер. с англ. / Под ред. В.Б. Штейншлейгера - М.: Мир, 1984.
11. Юдин В.В. Максимально достижимый коэффициент усиления кольцевой антенной решетки неизотропного излучения. - Радиотехника. 2001, №9.
12. Афанасьев В.И, Разиньков С.Н., Уфаев В.А. Уменьшение систематических ошибок радиопеленгаторов при амплитудно-фазовой корректировке принимаемых сигналов. - Информационно-измерительные и управляющие системы, 2004, №6.
13. Винокурова Н.Н., Кузьменко Ю.В., Нечаев Ю.Б., Разиньков С.Н. Характеристики кольцевой решетки вертикальных несимметричных вибраторов с тонкими металлическими дисками на вершинах. - Антенны, 2002, №7 (62).
14. Справочник по антенной технике / Под ред. Л.Д. Бахраха, Е.Г. Зелкина. -М.:ИПРЖР, 1997, т. 1.
1.5. Первичная обработка сигналов
в цифровых панорамных обнаружителях-пеленгаторах
Современный этап развития техники радиоконтроля характеризуется совмещением функций панорамного обнаружения и пеленгования сигналов с реализацией их в единых технических устройствах - цифровых обнаружителях-пеленгаторах. Подобное стало возможным на основе выполнения в приемных каналах пеленгатора синхронного спек-
*
Авторы: В. Г. Радзиевский, В. А. Уфаев
трального анализа с применением цифровой обработки сигналов, в частности, быстрого преобразования Фурье [1].
По-видимому, впервые идея определения пеленгов каждой спектральной составляющей сигнала после его спектрального преобразования «проводя расчетные операции, аналогичные тем, которым подвергают в пеленгаторном приемнике выходные напряжения или напряжения, снимаемые с антенн после узкополосной фильтрации для получения угла пеленга, но, используя спектральные линии, выраженные в цифровой форме», изложена в [2].
Принцип аналогии, удобный на начальном этапе обоснования рациональных вариантов построения и алгоритмов обработки, в значительной мере исчерпал себя, поскольку из рассмотрения выпадают важные особенности, связанные именно с первичной обработкой смеси сигналов. Под первичной обработкой в данном случае понимается процесс преобразования электромагнитного поля (ЭМП) источников радиоизлучения в параметры контролируемых сигналов, основные из которых: частота, полоса частот, занимаемая сигналом, направление на источник (пеленг).
Рассмотрим особенности и алгоритмы первичной обработки сигналов в цифровых панорамных обнаружителях-пеленгаторах.
В состав обнаружителей-пеленгаторов входят: пеленгаторная антенно-фидерная система; аналоговый радиоприемный тракт; блок аналого-цифрового преобразования; процессоры быстрого преобразования Фурье; система цифровой обработки сигналов.
Тип, структура и состав антенно-фидерных систем (АФС) определяются решаемыми задачами и ограничениями. Особенностью является широкий, с коэффициентом перекрытия до величины порядка 20, диапазон частот, в котором должно обеспечиваться их функционирование.
Когда приоритетное значение имеют точность пеленгования и чувствительность, используют многоэлементные антенные системы с поочередным или одновременным их подключением к приемным каналам. Преимущество последнего варианта состоит в отсутствии антенных коммутаторов и, соответственно, связанных с их применением потерь мощности сигналов и искажениями. Эффективность данного класса антенных систем исследована, например, в [3].
При ограниченных ресурсах средств цифровой обработки сигналов или потребности обеспечения максимального быстродействия используют системы минимального состава с тремя антеннами амплитудного (скрещенная рамка и штырь) или фазового (разнесенные вибраторы) типа. В последнем случае для перекрытия требуемого диапазона частот образуют систему вибраторов с переключением антенн и уменьшением их взаимного удаления по мере увеличения частоты контролируемых сигналов. Актуальным в связи с этим является синтез пеленгаторных
АФС с подвижным фазовым центром, положение которого изменяется при изменении частоты принимаемых сигналов. Решение подобной задачи позволит исключить из состава системы антенный коммутатор и минимизировать ошибки пеленгования до уровня, характерного для систем с полуволновым разносом, когда выполняются условия однозначности фазовых измерений [4].
Возникающее из-за близкого расположения антенн взаимное влияние приводит к искажению структуры первичного ЭМП и погрешностям пеленгования [5]. Компенсация этих погрешностей может выполняться алгоритмическими приемами в системе цифровой обработки сигналов (ЦОС).
Аналоговые радиоприемные тракты стремятся реализовать с минимальным коэффициентом прямоугольности, для уменьшения нагрузки на последующую обработку, и максимально широкополосными (до единиц-десятков мегагерц). Вместе с тем максимальные значения полосы пропускания радиоприемных устройств ограничиваются параметрами аналого-цифровых преобразователей (АЦП), загрузкой частотного диапазона и требованиями к динамическому диапазону обнаружителей-пеленгаторов. Соответствующие рекомендации содержатся, например, в [6].
Особые требования к аналоговым трактам связаны с необходимостью обеспечения их высокой амплитудно-фазовой идентичности. Основными способами обеспечения идентичности (наряду с технологическими при проектировании и производстве) являются: выполнение калибровки тестовым сигналом; применение переключения каналов приема по циклическому закону [4].
При широкой полосе пропускания трактов может возникать их перегрузка сигналами большой амплитуды. Защита обычно обеспечивается введением аттенюаторов, управляемых на основе регистрации фактов перегрузки (в АЦП или системе ЦОС), что несколько замедляет процесс обзора частотного диапазона.
Процессы аналого-цифрового преобразования в радиоприемных трактах должны осуществляться синхронно с обеспечением фазовой идентичности порядка десятых долей градуса. Основные параметры АЦП, в значительной степени определяющие выходные характеристики обнаружителя-пеленгатора, - частота дискретизации, число разрядов квантования и время стробирования. Рекомендации по выбору параметров АЦП содержатся в [6].
Дискретное преобразование Фурье обеспечивает линейное взаимно однозначное преобразование принимаемой смеси из временной области в частотную и выполняется, как правило, на основе хорошо разработанного алгоритма БПФ:
1 2W“' Г 1
S1 =—У S'G ) exp^-i — hv>, (1-13)
" 2JV^ 1 2JV J
v=0 k J
где t - момент времени v-ro отсчета; п = 0,1,..., jV-1 - номер спектральной составляющей; / = 1,2,...,£ - номер приемного канала.
Целесообразность и необходимость выполнения преобразования (1.13) обусловлена компактностью описания узкополосных процессов, которые в случае неперекрытия спектров сигналов выражаются не перекрывающимися по частоте группами спектральных коэффициентов. Последнее утверждение - определенная идеализация, так как любой сигнал конечной длительности обладает бесконечным спектром. Однако такая идеализация допустима при существенных (в 3...5 раз и более) различиях уровней спектральных составляющих контролируемого и стороннего сигналов. Кроме того, выполнение БПФ цифровыми методами гарантирует идентичность преобразования в разных приемных каналах, необходимую для пеленгования, и имеет принципиальное преимущество перед другими техническими вариантами разложения сигналов в ряд Фурье.
Задача системы ЦОС состоит в выработке решений на основе результатов наблюдений. Содержательная часть обработки в известных источниках носит фрагментарный, отрывочный характер. Поэтому остановимся более подробно на возможных вариантах синтеза и анализа алгоритмов обработки сигналов.
В силу случайного характера наблюдаемых процессов теоретической основой может быть аппарат статистического синтеза в условиях неопределенности [7]. Технической средой, в которой реализуются соответствующие алгоритмы обработки, служит совокупность многопроцессорных систем, имеющая хотя и высокую, но ограниченную производительность. Поэтому именно данный фактор является серьезным ограничением при синтезе и выборе соответствующих алгоритмов обработки сигналов. Также ограничены, но в меньшей степени, другие ресурсы вычислительной среды, например, объем оперативных запоминающих устройств.
Общую задачу синтеза сформулируем следующим образом.
Пусть система наблюдения содержит L приемных каналов с диаграммами направленности G1 (в^ {I = 1, 2,..., £), и в полосе частот AF осуществляется прием смеси узкополосных радиосигналов Re(t/'"(r)j от М источников (т = 1, 2...И). Прием сигналов происходит на фоне аддитивного белого шума так что исходные наблюдаемые процессы можно представить в виде:
м
S1 (Г) = £ Г- Re(t7m (0G' (0,,,)) + (г), (1.14)
Ш=|
где Я'" - параметр наличия/отсутствия сигнала; И„ - направление на т-и источник.
Спектральная плотность шумов (внутренних и внешних), постоянная на интервале наблюдения и равномерная в полосе частот, занимаемых каждым из сигналов, может быть неодинаковой для различных участков частотного диапазона и изменяться во времени. Поэтому условия решения должны быть ориентированы на вариант приема сигналов на фоне шумов неизвестной интенсивности. В приемных каналах мощность шумов считаем одинаковой. Требуется обнаружить сигналы, оценить занимаемые ими полосы частот и направление прихода.
На интервале наблюдения [0,7] образуем выборку мгновенных отсчетов S?/), осуществляемых синхронно в каналах приема с частотой Котельникова 2AF, и представим наблюдаемые процессы коэффициентами дискретного преобразования Фурье (1.13). Считаем, что каждый из спектральных коэффициентов S'n формируется под воздействием сигнала одного источника. Данное условие отлично от принятого в [8], когда сигналы считают находящимися в одном элементе разрешения.
Поскольку прием сигналов происходит на фоне белого шума, мгновенные отсчеты 5/(С) на выходе приемных каналов будут нормальными некоррелированными случайными величинами с одинаковой дисперсией. Тогда и квадратурные составляющие коэффициентов ДПФ: %'= Re , У/^lmS/, в силу линейности преобразования, есть нормальные случайные независимые величины (при весовой обработке - с учетом прореживания). Математическое ожидание коэффициентов ДПФ взаимно однозначно связано с коэффициентами ДПФ сигналов А"‘ на входе антенной системы:
м
(1.15) ш=1
Здесь в обозначение диаграммы направленности введен индекс п для учета ее зависимости от частоты. Амплитуда и фаза коэффициентов каждого сигнала меняется случайно от реализации к реализации. Такое представление характеризуется тем, что не имеет явной связи с видом модуляции или способом кодирования и в то же время позволяет оценивать спектральный состав сигналов.
Относительно состояния системы наблюдения сформулируем счетную совокупность гипотез: Нк[ук, ук2, где к = 0, 1, 2,...,
^пах-1 - номер гипотезы; у* - состояние и-й спектральной составляющей для к-a гипотезы; Кт1а - общее число гипотез.
При условии неперекрытия спектров сигналов п-я спектральная составляющая может находиться в одном из у* состояний: ук = 0 - сигнал отсутствует; ук = 1 - присутствует сигнал первого источника; ук = 2 - присутствует сигнал второго источника;..., ук = п - присутствует сигнал и-го источника, удовлетворяющих условию: ук = 0 v у*_, <ук <п . Согласно методу проверки статистических гипотез [7] следует оценить неизвестные параметры сигналов и шумов для каждой из гипотез с последующей максимизацией взвешенного значения функций правдоподобия. Практическая реализация подобной стратегии наталкивается на трудности корректного определения функции потерь, резкого возрастания вычислительных затрат при увеличении размерности спектрального преобразования, когда число гипотез увеличивается по экспоненциальному закону KmiX —> e(W+1) |п2. Анализ показывает, что основным фактором, влияющим на принятие гипотез, является определение принадлежности близлежащих спектральных составляющих, в которых обнаружен сигнал, одному или различным источникам излучения (идентификация). Исходя из этого, возможен упрощенный алгоритм обработки, включающий: обнаружение сигналов раздельно в дискретных примыкающих полосах частот (бинах); идентификацию близлежащих обнаруженных сигналов; логическую обработку результатов идентификации. Частные задачи синтеза алгоритмов обнаружения-пеленгования и идентификации при этом существенно упрощаются и сводятся к отработанной процедуре проверки двухальтернативных гипотез.
При простой функции потерь результаты решения определяют взаимосвязанные правила оценивания направления на источники излучения и принятия гипотез, в основе которых функционалы вида
• /( у/2
Ч,(0)=£ад(0)/ 2|g'(^)|2 i / \ i
(1.16)
(1-17)
I представляют собой оценки соответственно комплексной амплитуды сигнала и энергии принятой смеси. В частности, при обнаружении-пеленговании определяется величина
2„(0) = Ц^>
(1-18)
где 0=argmax(p идентификации -
- оценка направления на источник, а при
Г(01г02,0) = -^---------->С, (1.19)
£е,-£|Мг(0)|2
Г=1 г
где 0r = argmax(|M,.($)|2 j, 0= argmax ^|.М,((9)|2 - оценки направле-\ г )
ний на источники в случае принятия гипотезы Н2 о принадлежности спектральных составляющих двум источникам и Н\ - одному источнику излучения.
Значения порогов принятия решений устанавливают по критерию Неймана-Пирсона, исходя из вероятности Fm ложной тревоги в (1.18) и вероятности DK правильной идентификации (принятии гипотезы Н\ при идентификации сигналов одного источника) в (1.19).
Формулу для квадрата амплитуды сигнала преобразуем к следующему виду:
|чМ =
(1.20)
где S'* = S'„ S„ - взаимный спектр.
В соответствии с (1.18)—(1.20) достаточной статистикой в решаемых задачах служит спектр мощности S'' и взаимный спектр сигналов в
каналах приема S'„k. Последний следует определять для всех возмож-
ных комбинаций пар антенн, что не всегда учитывается (например, в [9] используют оценки относительно одной антенны). В алгоритмах (1.18), (1.19) подразумевается, что принятию гипотез предшествует этап оценки направлений, усложняющий реализацию. Для антенных систем, образованных ненаправленными антеннами (например, кольцевых антен
ных решеток), диаграммы направленности приемных каналов могут
быть представлены в виде:
G'(6») = exp
где R - радиус
антенной системы; - длина волны излучения; <pt (0) - фазирующая функция, зависящая от конфигурации антенной решетки.
При больших отношениях сигнал-шум справедливо приближение
ReS*G*(0)»S«G*(0)=|s*|.
(1-21)
Тогда (1.18), (1.19) с учетом (1.21) преобразуются в алгоритмы, не
требующие нахождения оценок направления на источник:
(1-22)
где
2 L ( 2 L 2 '
p=ZZs"+7 P-OZZ5"-^ ZZ kl
, =1 1=1 L г=1 1=1 г=1 /<А J
/2 2 Л
e-jEZ •
I <р \ ' =1 г=1 7
Применимость алгоритма идентификации в (1.22) при этом ограничивается обычно выполняющимся в полосе приема условием Лп ® const.
При использовании двухканальных приемников с поочередным подключением каналов к L -элементной антенной системе и различающихся комплексными коэффициентами передачи каналов, используя (1.21), получим
Z
( L А2
у=1 7
1=1 1=1
Р12(2)-Р12(1)
Г ~ 7Л-Р2 - Р12(1) "
(1.23)
где S17S2J, - коэффициенты ДПФ первого и второго каналов приема;
P1 = Z Z< Р2 =£ 2^|2’ ^'^ZZ51'’ ^ = Z Z51'•
г=1 /=1 г=1 /=1 /=1 г=1 /=1 Г=\
На основе математического моделирования установлено, что решающие статистики (1.23) имеют /^-распределение. Примеры характеристик обнаружения и идентификации для двухканального панорамного фазометрического обнаружителя-пеленгатора с эквидистантной девятиэлементной кольцевой антенной решеткой приведены на рис. 1.18 и 1.19. На рис. 1.18 обозначено: р - отношение сигнал-шум, D - вероятность правильного обнаружения. На рис. 1.19 представлены зависимости вероятности Рр правильного разделения сигналов от направления на второй пеленгуемый излучатель ft. Отношение сигнал-шум для обоих сигналов равно 10, каналы приема различаются коэффициентами передачи
в 1,2 раза. Согласно полученным результатам характеристики идентификации сигналов, как и характеристики обнаружения, имеют пороговый характер. Возможности фазометрических пеленгаторов по разрешению сигналов определяются составом, структурой, электрическими размерами антенной системы и порядком переключения каналов, а также соотношением сигнал-шум на входе приемного устройства.
Оценка направления на источник излучения является наиболее трудоемкой операцией обработки. Свойства таких оценок исследованы, например, в [3]. В соответствии с (1.18), (1.19) оценивание направления включает максимизацию квадрата модуля комплексного углового спектра вида (1.16) по возможным углам прихода волны, в общем случае, в горизонтальной и вертикальной плоскостях. Для некоторых вариантов возможны аналитические решения. Так, в случае трехэлементной эквидистантной решетки
0 = arctg
'(Ду^-Д^Ь/Г
ч Д^1з+^12 ,
(1-24)
где \(рхк = arg(.S) -Sk) - разность фаз между сигналами антенн.
Как правило [10], такие антенные системы крепятся на центральной мачте, что приводит к погрешностям, обусловленным взаимным влияни
ем элементов АФС. Для компенсации погрешностей воспользуемся свойством симметрии. Преобразуем сигналы антенн в суммарно-разностные сигналы S„, путем вычитания сигнала опорной антенны из сигналов других антенн, суммирования полученных разностей сигналов в первом канале и вычитания во втором. Такое линейное преобразование сохраняет некоррелированность выходных процессов, при этом составляющие, обусловленные взаимным влиянием антенн и мачты, компенсируются. Синтез на основе полученных результатов приводит к необходимости максимизации модуля комплексного углового спектра вида
2 * Г 2 “I172
H#) = £smZ),,,(#)(2OT-l)/ ^|£>„(#)|2(2ш-1) , (1.25)
Ш=1 |_М=1
где т = 1,2 - номер суммарно-разностного канала; 0 - возможные зна-
Д(0) =
чения пеленга на источник;
a ,Q. . . (у/Зл-R .
Z)2(#) = isin -------sin#
l Я
Гл/Зл-Я . J (. 3xR cos ---sin# -exp i-cos#
U J J
диаграммы направленности суммарно
разностных каналов; Я - длина волны излучения; R - радиус решетки.
Положение максимума модуля комплексного углового спектра сигнала можно оценить относительно первичной оценки пеленга (1.24) введением поправки в виде:
- r(#~ + (?)-r(#~-J)
- _ (1.26)
у (ёг = У(е+3) + У[9-3)-2У(9),
Рис. 1.20
где 8 - константа, определяемая заданной точностью расчета. Для однозначного пеленгования погрешность первичной оценки не должна превышать ±л72.
Эффективность такого решения иллюстрируется рис. 1.20, где крестиками отмечены погрешности Д# первич
ной оценки (1.24), а кружками - результаты уточнения.
Применение алгоритмов обнаружения-пеленгования и идентификации позволяет завершить первичную обработку смеси сигналов с оценкой количества принятых сигналов, полосы занимаемых ими частот и направлений на источники. В частности, число принятых в серии последовательных решений по идентификации гипотез Н2 дает ответ на вопрос о количестве сигналов, а моменты переходов от гипотезы Н\ к гипотезе Н2 и обратно соответствуют нижней и верхней границам спектра сигнала
= =0)л(/„ = 1);
(r„-i = О л(/„ = 0).
Аналогичная схема предлагается в [9] на основе перебора возможных комбинаций пар обнаруженных сигналов и анализа №/2 возможных сочетаний.
Настоящий этап совершенствования алгоритмов первичной обработки выполняется в направлении синтеза алгоритмов по результатам многократного обзора частотного диапазона с регистрацией моментов появления и длительностей сигналов. Необходимы дальнейшие проработки общих вопросов синтеза, снимающие введенные эвристические процедуры определения числа принимаемых сигналов смеси, особенно в условиях перекрытия их спектров.
Литература
1. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. -М.: Мир, 1978.
2. G 01 S 3/14, № 2242790 (ФРГ).
3. Дзвонская А.Л., Дмитриенко А.Н., Кузьмин А.В. Эффективность измерения углов прихода сигнала радиопеленгатором на основе метода максимального правдоподобия. - Радиотехника и электроника, 2001, т. 46, № 10.
4. Кукес И. С., Старик М.Е. Основы радиопеленгации. -М.: Сов. радио, 1964.
5. Радзиевский В.Г., Сирота А.А. Информационное обеспечение радиоэлектронных систем в условиях конфликта. - М.: ИПРЖР, 2001.
6. Побережский Е.С. Цифровые радиоприемные устройства. - М.: Радио и связь, 1987.
7. Репин В.Г., Тартаковский Г.П. Статистический синтез при априорной неопределенности и адаптация информационных систем. - М.: Сов. радио, 1977.
8. Сычев М.И. Пространственно-временная обработка радиосигналов на основе параметрического спектрального анализа. - Антенны, 2001, вып. 1 (47).
9. Шевченко В.Н., Емельянов ГС, Вертоградов Г.Г. Способ обнаружения и определения двумерного пеленга и частоты источников радиоизлучения. Патент РФ № 2190236, G 01 S 5/04.
Ю. Multedo, G. Les technignes de interferometrie ufilisees dans les radiogoniometres a THOMSON-CFP. - REVUAR TECNIQUE THOMSON-CFP-VOL, 1987, v. 19, № 2, Juin.
1.6. Алгоритмы обнаружения и пеленгования совокупности частотно-неразделимых радиосигналов*
Одним из направлений повышения эффективности радиосистем является обеспечение возможности их функционирования в условиях многосигнального (на одной частоте) приема, например, при многолучевом распространении радиоволн, воздействии преднамеренных и непреднамеренных помех. Одноцелевые измерители - пеленгаторы в подобных условиях в лучшем случае обеспечивают пеленгование одного из источников излучения (переизлучения), а в худшем - образуют ложные пеленги или допускают пропуски цели [1]. Обнаружение и пеленгование каждого из источников излучения, сигналы которых не разрешаются по частоте и попадают в полосу пропускания пеленгатора, может рассматриваться как известная в статистической радиотехнике задача оценки числа и угловых координат источников излучения. Результаты статистического синтеза, например [2, 3], определяют необходимость многопараметрической максимизации решающих статистик по возможным угловым координатам совокупности источников излучений, что не позволяет реализовать соответствующие алгоритмы в реальном масштабе времени. Кроме того, в большинстве работ интенсивность шума считается заданной, а это не всегда соответствует условиям наблюдения в сложной сигнально-помеховой обстановке.
Решение задачи выполним применительно к приемной системе, содержащей антенную решетку из N идентичных антенных элементов, на выходе которых измеряются комплексные напряжения 5И,, где и = 0,1,...,7У-1- номер антенны, I = 0,1,...,Г-1 - номер временного отсчета при общем количестве Г. Полагаем, что прием радиосигналов осуществляют на фоне аддитивных белых шумов одинаковой во всех каналах интенсивности. В этом случае комплексные напряжения на выходе антенн определяются как сумма к
S„, + (1-28)
k=0
где К - число сигналов; ак, - комплексная амплитуда к-го сигнала в центре решетки в Г-й момент времени; ®к - угловые координаты к-го источника; Ь„к(®к) - амплитудно-фазовое распределение поля к-го источника в местах расположения антенн; - комплексное напряжение шума каналов приема в виде совокупности гауссовских, центрированных, независимых случайных величин с одинаковой дисперсией.
Авторы: В.Г. Радзиевский, В.А. Уфаев
Вариант к = 0 соответствует отсутствию источников, при этом а0, = 0. В последующем полагаем, что антенные элементы не только идентичные, но и изотропные, т.е. DHi(0t) = exp(ip (0J), где
^„Д®*) - набег фаз сигнала к-го источника в и-ом антенном элементе
относительно фазового центра решетки. Изотропность в горизонтальной плоскости свойственна, например, вертикальным вибраторам. Диаграммы направленности таких антенн в вертикальной плоскости отличны от
круговых, однако, учитывая их идентичность, соответствующие отклонения будем относить к изменению амплитуды сигнала.
Априорная неопределенность состоит в незнании числа радиосигналов, их комплексных амплитуд, углов прихода радиоволн в общем случае в горизонтальной и вертикальной плоскости, а также дисперсии шума ст2.
Задачу обнаружения - пеленгования источников излучения будем
рассматривать как адаптивную проверку совокупности статистических гипотез о наличии К =1, 2,... точечных источников излучения против альтернативы их отсутствия (£=0). Процедура вынесения решений при этом определяется отношением правдоподобия [4]
тах^(5и>,Р.)
4 (Р*, р0 )=—, max^0(S„,P0) ро
(1-29)
где WK(Snl |Р^) - функция правдоподобия К-й гипотезы; Рк - вектор
неизвестных параметров излучений при справедливости К-й гипотезы.
Для оговоренных условий функция правдоподобия, соответст-вуюшая наличию в полосе приема К источников излучения, описывается многомерным нормальным законом распределения
^i.o—,4.о ) =
1 у 2жт2 J
I 267 V , W
(1.30)
Согласно [4] функцию правдоподобия (1.30) следует максимизиро
вать по неизвестным параметрам распределения, указанным слева от вертикальной черты. Выполняя такую максимизацию последовательно по ак1 ио2, получаем
(1.31)
- энергия принятой смеси.
Числитель и знаменатель в круглых скобках (1.31) при их делении на NT представляют собой оценочные дисперсии шума для соответствующей гипотезы и альтернативы. Отношение правдоподобия монотонно зависит от отношения этих дисперсий
z/r(01,..,0/r) = -XX s".<~ 1 Е . k=Q
(1-32)
Оценки амплитуды сигналов , определяются при к 0 как ре
зультат решения системы линейных уравнений
J1=G4M. (1.33)
Элементы матриц G и М, входящих в (1.33), имеют вид
<L34>
(1-35)
И
где к,к' = 1,2,..., .К ; звездочка - знак комплексного сопряжения.
Отношение правдоподобия (1.31) формируется как отношение суммы квадратов напряжений антенн, скомпенсированных на оценочные значения сигналов от принимаемых источников, к энергии принятых процессов. В отсутствие сигнала статистики инвариантны к неизвестной интенсивности шума; для доказательства этого положения достаточно выполнить нормировку выборочных значений S„, на среднеквадратическое значение шума. Тогда, при любом изменении дисперсии шума, нормированные выборочные значения будут иметь нормальное центрированное распределение с единичной дисперсией. Поскольку статистические свойства результатов измерений при изменении величины дисперсии не меняются, не будет изменений и в достаточных статистиках.
Отношение правдоподобия (1.31) и оценочные значения комплексных амплитуд сигналов (1.33) являются функцией неизвестных угловых координат, по возможным значениям которых следует максимизировать отношение правдоподобия с включением оценок координат в результаты решения задачи. Вычислительные затраты при этом возрастают по потенциальному закону с увеличением числа источников излучения. Допустим, что между сигналами имеются такие пространственные и энергетические различия, при которых влиянием сигналов с меньшей амплитудой на положение максимума отношения правдоподобия и оценки соответствующих параметров сигнала с большей амплитудой можно пренебречь. Тогда при максимизации на каждом последующем шаге можно заменить неизвестные параметры их оценками, полученными на предшествующем шаге. В рамках такого подхода рассмотрим два основных варианта, различающихся затратами на реализацию и характеристиками точности.
Вариант 1. Замена неизвестных угловых координат и комплексных амплитуд их оценками, полученными на предшествующем шаге обработки
Соотношения для оценок амплитуд сигнала и угловых координат источника на первом шаге при гипотезе о наличии сигнала одного источника (£=1) получим непосредственно на основе (1.33) - (1.35):
Е^Д/0.)
«1Г=^------®i=arg max/,(©,). (1.36); (1.37)
Входящая в оценку угловых координат (1.37) достаточная стати
стика определяется соотношением
2
Е^лХ/0^
/I
п
а формула для отношения дисперсий преобразуется к виду 21(©1) = (1-У1(©1)).
(1.38)
(1-39)
На следующем шаге К=2 предварительно заменим в отношении правдоподобия (1.29) неизвестные d1( и 0j их оценками (1.36), (1.37),
полученными на предшествующем шаге. Завершая с учетом этого процесс максимизации, методом индукции приходим к следующей итерационной схеме:
®к = argmaxyJ<(01,..,0J<_1;0J<);
EW.A)
ак , = —-— ;
ЖнМ
( к
^(0„..,©*)= i-En(®j I *=i
(1.40)
(1-41)
(1.42)
(1-43)
(1.44)
при К= 1, 2,... и начальном условии = 5И ( , Ло,( = 0, £>и О(0О) = 0.
Числитель и знаменатель в (1.41), согласно неравенству
Коши-Буняковского,
взаимосвязаны соотношением
2
Соответственно отношение
п
(1.41) изменяется в пределах от 0 до 1 при любых изменениях параметров сигналов и шумов. В соответствии с (1.40) - (1.44) на каждом этапе выполняется компенсация сигнала источника, соответствующего предыдущему шагу оценивания (1.40), и однопараметрическая максимизация (1.42) по возможным угловым координатам очередного источника.
Вариант 2, Замена неизвестных угловых координат их оценками, полученными на предшествующем шаге обработки с переоценкой комплексных амплитуд сигналов.
Отличие от первого варианта состоит в том, что на втором и последующих шагах обработки осуществляется переоценивание комплексных амплитуд сигналов согласно (1.33) с заменой оценок предыдущего шага. Оценивание координат выполняется путем максимизации непосредственно отношения правдоподобия (1.31) или минимизации отношения дисперсий:
®к =argmin2A-(01,..,0A-_1;0A-). (1.45)
э*
Оценки комплексных амплитуд сигналов для первых трех этапов обработки определяются по формулам: этап оценки 1
= "»((®i);
этап оценки 2
det 2 L J
«2.Г = туг • [~т< (®1 )gf.2 (®1> ®2) + Ч (®2)] ’ det 2 L J
где det2=l-|g12(01,02)|2;
этап оценки 3
а,
/И,(01)-Р/И,(02) + 0/И,(03) ,
й2’‘ det3 _
=
-РХ(®1) + (1-|^1,з(®1>®з)|2)'«((®2)-2Ч(®з) > r^,(01)-Z4(02) + (l-|g1,2(®P®2)|2]4(®3)L
где
Р = £1.2 (® 1 ’®г)— &1,з(®ц®з)£г.з(®2’®з) >
Q = £1,2(®р®г)£г,з(®г>®з)— £1,.з(®1 >®з) >
Z = £г,з(®г>®з)_£1,г(®1 >®г)£1,з(®1’®з) >
det 3 = l-|gL2(01,02)|2-|g13(0„03)|2-
~|£г,з(®2> ®з)| +2Re(g) ,2(®!>®2)£2 ,з(®г>®з)£1 ,з(®1>©3))-
Формулы даны для варианта кольцевых эквидистантных антенных решеток и угловых координат ®к в виде составного вектора ®к =(0к, Рк) углов прихода радиоволн в горизонтальной 0к и вертикальной рк плоскостях. При этом амплитудно-фазовое распределение поля источника определяется соотношением
Ч.М) = expji^cos^Jcos^ >
где Я - длина волны излучения; R - радиус решетки.
Кроме того, введены нормировки на N:
(®t) = у X(®к) > Si,к'(®ъ®к') = -у X*(®*)D"-k'(® *') • п п
В обоих рассматриваемых вариантах отношение правдоподобия является неубывающей функцией числа сигналов Л<+1(®к+1)-Л<(®к) • Данное обстоятельство не позволяет применять для определения числа сигналов критерий максимального правдоподобия. Поэтому воспользуемся предложенным в [2] методом приращения вероятности в следующем варианте. Сформируем решающую статистику в виде отношения правдоподобия последующей и предыдущей гипотез в порядке возрастания номеров гипотез:
Лк = ^(®р-,®к) (146)
Хк-\ (®р--’®к-1)
Особенность данной решающей статистики состоит в том, что при увеличении ее порядка К сохраняется постоянство приращения количества неизвестных параметров. При увеличении порядка решающей статистики свыше количества принимаемых сигналов компенсация их энергии прекращается, значение решающей статистики возрастает и стабилизируется на уровне, соответствующем условию отсутствия сигналов в принимаемой смеси. Данное обстоятельство позволяет принимать решение о числе принятых сигналов путем сравнения с порогом решающих стати
стик по мере понижения их порядка до установления факта не превышения заданного порога. Порог принятия решения Л может устанавливаться, например, в соответствии с модернизированной процедурой Неймана-Пирсона равным среднему значению решающей статистики 1-го порядка [5] при минимально допустимом р отношении сигнал-шум:
, 2 ГЛГ-1У
р2+2< W )
(1.47)
В силу одномодального и близкого к симметричному характеру закона распределения решающей статистики вероятность правильного обнаружения при указанном отношении сигнал-шум составит величину около 0,5. Минимально допустимое отношение сигнал-шум определим, исходя из условия обеспечения требуемой точности пеленгования. Используя результаты [6], получаем
= Р~ Л
? N NT 2nR cos рств ’
(1.48)
где /?-значение угла прихода волны в вертикальной плоскости; сг^-заданная среднеквадратическая ошибка пеленгования в горизонтальной плоскости.
Разработанные алгоритмы исследовались методом моделирования на ЭВМ. Моделирование было выполнено для условий приема радиосигналов со случайной начальной фазой на фоне белого гауссовского шума. Кольцевая антенная решетка состоит из 16 элементов, радиус решетки 7?=ЗО м, длина волны излучения 15 м. Порог принятия решения установлен в соответствии с (1.47) и (1.48) из условия обеспечения при р = 0° среднеквадратической погрешности пеленгования не более СГ(7=1,3О. Максимизация достаточных статистик по угловым координатам осуществлялась в двух плоскостях в пределах O...36O0 по азимуту и О...9О0 по углу места. Количество экспериментов в каждой точке 50. Имитировался прием до трех сигналов от источников с угловыми координатами (угол места/азимут) 0/90°, 25/120°, 35/120°. Количество сигналов уменьшалось путем установки нулевого значения амплитуды последовательно третьего, второго и первого сигналов для вариантов наличия двух, одного сигналов и отсутствия сигналов. Отношение сигнал-шум при наличии соответствующих сигналов устанавливалось равным 200 - для первого, 3 - для второго и 2 - для третьего сигналов. Принятые при моделировании условия эквивалентны приему на фоне мощного сигнала с распространением земной волной (первый сигнал) двух относительно слабых радиосигналов одного источника радиоизлучения, отражающихся от разных слоев ионосферы (второй и третий сигналы).
В табл. 1.2 приведены оценки вероятности принятия гипотез о количестве принятых сигналов с указанием их истинного числа (в первой колонке по вертикали) и среднеквадратического значения погрешности определения углов места. В числителе дано значение вероятности принятия гипотезы, в знаменателе - поочередно для каждого из сигналов среднеквадратическое значение погрешности определения углов места в градусах (округленное до целых значений). Погрешности определения азимута каждого из обнаруженных сигналов в экспериментах не превышали 1,5°, ложной тревоги не зафиксировано (расчетное значение для принятых условий - МГ4).
Таблица 1.2
К Вариант 1 Вариант 2
К к
0 1 2 3 0 1 1 2 3
т=\
1 0 1.0 0 0 0 0 1,0 0 0 0
2 0 0 1.0 0; 1 0 0 0 1.0 0; 1 0
3 0 0.02 0 0.92 0; 6 0.06 0; 6; 8 0 0 0,72 0; 6 0,28 0;2; 11
Т=3
1 0 1.0 0 0 0 0 1.0 0 0 0
2 0 0 1.0 0; 1 0 0 0 1,0 0; 1 0
3 0 0 0,5 0; 3 0,5 0; 3; 12 0 0 0,16 0; 2 0.84 0;3;6
Анализ результатов моделирования свидетельствует о сравнительно высоких возможностях разработанных алгоритмов по обнаружению и пеленгованию совокупности радиосигналов, одновременно попадающих в полосу приема. Так, уже для объема временной выборки Г=3 во втором варианте достигается разрешение всех трех сигналов с вероятностью 0,84, при этом погрешность определения азимута не превышают 1,5°. Разрешение сигналов достигается даже при условии отсутствия такового по критерию Рэлея.
Лучшие вероятностные характеристики обеспечиваются при увеличении объема временной выборки и во втором варианте, когда вводится меньшее число приближений. Вместе с тем применение этого варианта сопряжено с увеличением вычислительных затрат (примерно в 3 раза относительно первого варианта) на переоценивание комплексных амплитуд каждого из сигналов на каждом этапе обработки.
Предложенный подход относительно варианта трехпараметрической максимизации, при дискретности квантования угловых координат по вертикальному и горизонтальному углу прихода 1° в диапазоне возможных значений соответственно 0...90* и 0...360®, обеспечивает существенное (в 3,5-10“) раз сокращение потребного числа расчетных операций. Сокращение объема вычислений обусловлено переходом от максимизации по шести независимым величинам (азимутальные и угломестные пеленги трех источников) к трем циклам максимизации по двум координатам (угломестному и азимутальному пеленгам) поочередно трех источников излучения.
Литература
1. Царьков Н.М. Многоканальные радиолокационные измерители. - М.: Сов. радио, 1980.
2. Трифонов А.П., Шинаков Ю.С. Совместное различение сигналов и оценка их параметров на фоне помех. - М.: Радио и связь, 1986.
3. Сычев М.Н. Пространственно-временная обработка радиосигналов на основе параметрического спектрального анализа. - Антенны, 2001, вып. 1(47).
4. Репин ВТ, Тартаковский Т.П. Статистический синтез при априорной неопределенности и адаптация информационных систем. - М.: Сов. радио, 1977.
5. Уфаев В.А. Обнаружение и пеленгация источника излучения в шуме неизвестной интенсивности. - Радиотехника, 1997, № 7.
6. Девонская А.Л., Дмитриенко А.Н., Кузьмин А.В. Эффективность измерения углов прихода сигнала радиопеленгатора на основе метода максимального правдоподобия. - Радиотехника и электроника, 2001, т.46, №10.
1.7. Особенности функционирования и основные характеристики многопозиционных систем определения координат радиоизлучающих объектов*
Одно из важных направлений совершенствования информационного обеспечения управления в гражданской и военной сферах - создание и использование многопозиционных систем (МС) сбора и обработки информации с целью всестороннего, оперативного и достоверного извлечения данных о состоянии радиоизлучаюших объектов внешней среды и происходящих в них изменениях. К числу таких МС относятся системы: пассивной радиолокации и радионавигации, радиотехнической и радиоразведки, мониторинга окружающей среды, охранные системы различного назначения [1-6]. Их основной особенностью является требование измерения широкого перечня частотно-временных и пространственных параметров источников радиоизлучения (ИРИ) в зоне ответ-
’ Авторы: В Г. Радзиевский, А.А. Сирота
ственности МС и, прежде всего, высокоточного определения координат ИРИ. Современные условия функционирования МС отличаются наличием сложной и насыщенной радиоэлектронной обстановки, порождаемой большим количеством разнородных ИРИ. Сигналы на входе МС могут быть различных видов. Среди них следует выделить: импульсные сигналы с быстрой или программной перестройкой частоты и периода следования; непрерывные и квазинепрерывные сигналы со сложными законами модуляции (манипуляции); хаотические импульсные и шумовые помехи естественного и искусственного происхождения. С учетом этого общая целесообразность использования МС, например, в интересах радио- и радиотехнической разведки [1-3], определяется возможностями повышения качества информационного обеспечения на основе:
комплексирования данных, получаемых по разнородным ИРИ (средства радиолокации и радиосвязи различного назначения) в разных диапазонах частот при идентификации объектов базирования;
обеспечения многофункциональности приемоанализирующей аппаратуры при обработке сигналов ИРИ, принимаемых в перекрывающихся по частоте и другим параметрам диапазонах значений;
получения высокоточных данных об ИРИ и, прежде всего, их координатах как информативного и инвариантного к применению в ИРИ мер помехозащиты и контрпротиводействия признака выделения объектов.
Работа такой МС может осуществляться в режимах общего освещения радиоэлектронной обстановки; непосредственной информационной поддержки управления с целью получения данных по конкретным группам типов ИРИ; информационно-запросном режиме по оценке отдельных экземпляров ИРИ.
Требование высокоточного измерения координат диктует [1,2] реализацию в МС разностно-дальномерного и разностно-доплеровского (по узкополосным непрерывным сигналам) способов местоопределения. Это связано с необходимостью ведения одновременного приема сигналов каждого ИРИ по боковому излучению с высокой чувствительностью разнесенными в пространстве первичными датчиками МС. В то же время повышение чувствительности приводит к появлению во входных каналах датчиков интенсивных потоков, представляющих смесь перекрывающихся по частотно-временным параметрам последовательностей сигналов и помех, порождаемых различными ИРИ. В этих условиях принципиально отсутствует возможность однозначной селекции и разделения входного потока и восприятия первичной измерительной информации по каждому ИРИ в отдельности. Проблема «разделения» приводит к появлению в каналах наблюдения МС пропусков полезных сигналов и образованию ложных оценок измеряемых параметров. Важно отметить, что при этом относительно маловероятно одновременное получение полезной информации от всех первичных датчиков и, наобо-
рот, типично получение противоречивых, т.е. неотождествляемых по тем или иным признакам данных [7]. Таким образом, при функционировании МС действуют достаточно сложные и неоднозначные закономерности, связывающие внешние условия, технические характеристики и результирующую эффективность системы, которые в известных работах рассмотрены недостаточно.
Структурно-функциональная декомпозиция МС. При реализации базовых вариантов разностно-дальномерного и разностно-допле-ровского способов местоопределения минимально необходимая структура МС имеет вид [1,2], представленный на рис. 1.21. Организационно МС состоит из трех разнесенных приемных пунктов на летно-подъем-ных средствах (ЛПС) и наземного или совмещенного с центральным ЛПС пункта сбора и обработки информации (ПСОИ), связанных радиолиниями передачи данных и команд управления. Основными являются подсистемы, реализующие уровни или этапы первичной обработки (ПО) сигналов, вторичной обработки (ВО) информации и третичной обработки, отвечающей за комплек-сирование данных.
Рис. 1.21
Функциональная декомпозиция первичной обработки [6-8] приведена на рис. 1.22,я. Подсистема ПО предназначена для обнаружения и измерения параметров сигналов входных потоков, поступающих по разнесенным каналам наблюдения, и формирования результирующего вектора наблюдений по результатам отождествления первичной измерительной информации. С целью прореживания потоков в каждом первичном датчике проводится предварительная частотно-временная селекция. При формировании результирующего вектора наблюдений выполняется пространственная селекция, позволяющая учесть принадлежность источника зоне ответственности МС. Прием сигналов осуществляется синхронно на всех ЛПС в полосе частот параллельного анализа OF|1 +F] и временном окне +Т], и = 1,2,....В перечень
измеряемых и передаваемых на ПСОИ параметров импульсных сигналов обычно входят частота f , время прихода t, длительность т , пеленг а и т.п. Для непрерывных сигналов может быть выделен специальный канал приема с последующей ретрансляцией на ПСОИ. Параметры /, г, а используются для селекции и отождествления. При этом параметр фактически дает грубую оценку координат. Если пеленг не измеряется, то для проведения пространственной селекции можно использовать значения взаимных задержек времени прихода сигналов на различные пункты приема [6]. В состав результирующего вектора на-
а) б)
Рис. 1.22
блюдений, подаваемого на дальнейшую обработку, обычно входят параметры z = (fl,f2,f3,Tl,T2,T3,tl,t2,t3y.
Основными характеристиками ПО являются вероятность непро-пуска полезных сигналов р0 при приеме по боковому излучению ИРИ и среднеквадратические ошибки измерения оу, ст,, стг,ста.
Цель вторичной обработки состоит в получении окончательных оценок параметров излучений и, прежде всего, координат ИРИ (X, У) по последовательностям наблюдений znl,/и = 1,2,..., полученным в ходе ПО. При синтезе алгоритмов ВО должны учитываться неизбежные потери, возникающие при обнаружении и измерении параметров сигналов, селекции и отождествлении первичной измерительной информации. Реализация ВО позволяет за счет накопления информации в определенном смысле «вытянуть» результирующую эффективность МС и парировать нежелательные эффекты, возникающие в ходе ПО и приводящие к появлению ложных засечек координат, если ограничиться однократными измерениями. Функциональная декомпозиция ВО [6-8] приведена на рис. 1.22,6. Она реализует известную иерархию многослойного процесса принятия сложных решений «генерация альтернатив - анализ - выбор». На первом слое обработки реализуется процедура «завязки» начальных гипотез, формирующая множество начальных оценок координат и других параметров ИРИ (уДо,:х'0/0, Pq/0, / = 1,АГ}, где х'0/0 - вектор начальной оценки; Pq/0 - ее матрица ковариации. Элементами являются как истинные, так и ложные, не отвечающие реальным ИРИ гипотезы. По мере формирования начальных гипотез разворачивается процесс их анализа на втором слое. Существо его состоит в формировании текущих оценок параметров ИРИ х'к/к методами динамической фильтрации и вычислении апостериорных вероятностей гипотез Р(О,/£',А), i = \,N, по наблюдениям £',к = (£,...,&), получаемым в процессе «сопровождения» гипотетических ИРИ в так называемых динамических стробах селекции (ДСС) [6]. Эти стробы представляют собой перемещающиеся от шага к шагу области в пространстве наблюдений <n',4 <zcoz, i-\,N . Задание центра /-го ДСС на А-ом шаге проводится одновременно и по результатам вычисления условной, т.е. порождаемой гипотезой О,:х'0/0, Pq/0 оценки х'к/к в виде экстраполированной на шаг вперед оценки вектора непрерывнозначных наблюдений ~ гДе zl = h,(x.) - оператор, связывающий ненаблю-
даемые параметры ИРИ с наблюдаемыми. Границы /-го ДСС на каждом шаге устанавливаются таким образом, чтобы исключить попадание в
него наблюдений, заведомо не удовлетворяющих гипотезе О, . Если в ,-й ДСС на к-ом шаге попадает N'k наблюдений, то проводится их идентификация и выбирается одно, наиболее информативное (например, по критерию минимума расстояния до центра ДСС) [8]. Таким образом, наблюдение описывается составным вектором = (z^,0'J, где -непрерывнозначный вектор размерности nz, а 0’к - дискретная компонента наблюдений, причем получение непрерывнозначной компоненты наблюдений в ДСС описывается уравнением вида [7, 8]
где хк - вектор текущих состояний ненаблюдаемых параметров в ИРИ, изменяющийся по закону xt+I = fkxk+gkuk (ик - шум возмущения); Ак(0к), Вк(0к), Ск(0к) - диагональные матрицы, элементы которых akrr, bk„, ckrr, akrr+bk„+ckrr = \, г=1,и2, принимают значения 0 или 1, отражая возможные результаты частных информационных решений ПО, т.е. ситуацию получения полезной (акгг =1) компоненты наблюдения от г-го первичного датчика, ложной (Ъкп. =1) и пропуска (ckrr = 1); vk - вектор ошибок измерения для полезного сигнала; w'k - вектор отклонения ложного наблюдения от центра ДСС.
Дискретная компонента 0к в (1.49) представляет определенным образом структурированную информацию, сопутствующую процессу получения непрерывнозначного наблюдения, и играет вспомогательную роль, в вероятном смысле влияя на предположения о неизвестных значениях элементов Ак(0к), Вк(0к). Конкретно 0к может характеризовать наличие пропусков в каналах наблюдения 0к ,...,cto и I [6] и соответствия или противоречия в данных, получаемых от разных первичных датчиков при отождествлении [7]; количество наблюдений в ДСС 0к = N'k, среди которых проводится выбор полезного [8].
В качестве примера ограничимся рассмотрением компоненты алгоритма ВО, отвечающей за оценку координат ИРИ разностнодальномерным способом по результатам обработки временных параметров сигналов z!k = (t'u,t'2k,t'3k')T (индекс i для упрощения записи далее опускаем). Тогда основные характеристики уравнений состояний и наблюдений можно записать в виде:
х*+1 = (*+1 тк = Ч +тк+зтк Тк 3t'2 3tk2 ’ Х0/0 - Чо т0 fio _Чо ~ 0 го_ У
0 А? 0 г21 -о, 12 0 0 Чк + dt'2
Pfl/О ~ 0 0 2<т2 2а2 ; 4 = Чк = Ч -Чк. tk+8t32 , (1-50)
где
3t'k2 = [^X-X})2 + (Y-Y} )2 -Jx2 + Y2 + r12]/c;
Л’2 = [yl(X-X3')2+(Y-Y3')2 -ylx2 + Y2 + r32]/c ;
tk - время прихода очередного сигнала сопровождаемой в рамках данной гипотезы последовательности на пункт № 2; Тк - регулярная составляющая периода следования, лежащая в диапазоне значений tfnin- rmaJ(7o=7min+A7'/2> = Tmw -Tmin); 8Тк - составляющая, опи-
сывающая быструю перестройку периода (М[8Тк] = 0, M[8Tk] = q2/l2) ; <5t12, St32 - относительные задержки времени прихода сигналов на пункт МС.
Задание вектора состояний в форме (1.50) определяет вариант алгоритма ВО [7], в котором в ходе фильтрации проводится сначала оценка взаимных задержек, а затем по окончании процесса накопления - оценка координат по известным [2] соотношениям, связывающим координаты и задержки. При этом оператор связи является, как следует из (1.50), линейным zkhk(xk) = hkxk. Другой вариант [6] предусматривает задание вектора состояний в виде х. = (tk,Tk,Xk,YkY, Xk+l = Хк = X, Yk+l = Yk = Y , т.е. предусматривает проведение оценки координат на каждом шаге. В этом случае оператор связи г'к=Ьк{хк~) нелинейный и начальные оценки х0/0, а также Ро/о могут быть получены на основе соотношений из [6].
Для рассмотренных моделей типа (1.49), (1.50) могут быть синтезированы различные классы фильтров, реализующих процедуру оценивания параметров. К ним относятся фильтры: линейные [7] (линеаризованные для нелинейной связи z'k = hk (хк) [6]), условно-линейные с использованием данных о дискретной компоненте наблюдений вк [7,9], а
также оптимальные нелинейные [9]. В практическом плане представляют интерес фильтры первых двух классов, как обеспечивающие рекуррентность процедуры оценивания.
Наконец, на верхнем слое схемы на рис. 1.22 реализуется процедура окончательного выбора гипотез. При равновероятных начальных гипотезах она может быть сведена [6] к проверке простой гипотезы ИРИ об истинности порождающей начальной гипотезы против альтернативы на основе решающих правил вида:
1’ =Р(^/О,)/РЙ'Л/О0)>1'0,
1‘ = р(е'’*/о; )/р(е'*/о0) > 1'0. (1.51)
Второе решающее правило реализует практически значимый, упрощенный вариант принятия решений только по дискретной компоненте наблюдений [6].
Важным принципом, реализуемым в схеме на рис. 1.22,а и обеспечивающим коррекцию действий на нижнем уровне по результатам обработки на верхних, является принцип сужения областей пространства наблюдений со., где производится «завязка» гипотез по мере накопления информации. Он формулируется следующим образом: любое новое наблюдение, попавшее хотя бы в один из ранее сформулированных ДСС, не порождает новой начальной гипотезы. Тем самым обеспечивается постепенный переход системы в стационарный режим сопровождения существующих ИРИ в пространстве наблюдений.
Характеристиками качества ВО являются вероятности ошибок 1- и 2-го родов при проверке начальной гипотезы 1 - Ро, /3 ; среднее количество выделенных ложных ИРИ (ложных засечек координат ИРИ), воспринятых как истинные N р; круговая ошибка местоопределения сг.
Закономерности эффективности МС. Наиболее мощный инструмент исследования МС как сложной системы - имитационное моделирование. В то же время с позиций анализа основных закономерностей, особенно в части межуровневых связей, описывающих влияние характеристик ПО на результирующие показатели ВО, представляет интерес получение простых аналитических оценок. При исследовании характеристик МС исходным может служить среднее количество выделяемых ложных ИРИ Np. Пусть на входы МС поступает смесь последовательностей сигналов ИРИ с псевдослучайной перестройкой частоты в полосе [ ] и периода в соответствии с (1.50). Результирующая
интенсивность ординарного потока принимаемых сигналов при заданной чувствительности на каждом ЛПС равна Я . Отождествление данных при формировании результирующего вектора проводится по часто-
те с допуском Sf = «F [7, 8]. Тогда при X»— для величины
jV„(t) среднего числа образуемых во времени ложных начальных оценок, используя результаты [8] для характеристик потока отождествленных наблюдений, можно записать
I
Na(t)= ]X(Z2), Q<t<T, M = 6tmax-6tmm, Pf = 6f/F-, о
0, 0<Г2 <t
зт^а-г,-^)2^, t< <4™;
0, t-St^<t2<t,
d\c2)=' (1-52)
З23 fPfbPdtv
^max —
0,
где dtmax определяют диапазоны значений взаимных задержек ‘Kin -fioзо _fzo -ПРИ заданной геометрии зоны ответственности [6].
Если при отождествлении еще используется и пеленг, то составляющая Аг в (1.52) позволяет учесть соответствующее сужение зоны при «завязке» до элементарной; при этом ее величина имеет порядок Ar = сг,а) /с, где - круговая ошибка местоопределения при пеленговании. В (1.52) не учитывается постепенное уменьшение интенсивностей порождающих потоков, связанное с исключением из процесса «завязки» наблюдений, попадающих в ранее сформированные ДСС. Это можно учесть, если оценить среднее время, затрачиваемое при Srmax <t на «завязку»:
СО
< Л,пах+£°, 57о(2и+ !)(!-р)рп = Лтах+О,5Го(1 + р)(1-р), и=0 (1-53)
Р = \-Рй-
Тогда для Np окончательно получим
Np=Nn(J3)p, = + (1.54)
Величины 1 - Ро, р рассчитываются по известным методикам при конкретизации решающих правил (1.51). Для простого и достаточно
эффективного решающего правила, сводящегося при О' =1:М>О;0'=О: N'k = 0 к подсчету числа пропусков к' за к шагов при получении результирующих наблюдений в ДСС и сравнению с порогом к' > к0, выражения для ошибок 1- и 2-го родов при проверке истинности начальной гипотезы с учетом результатов [8] имеют вид
1-Р0 =£^(1-^)*-'; Д = 1-^С^0(1-Рс0)‘-< (1.55)
i=ko J=ko
где Рс1<(1-ро)ехр(-3(2^)3р^); Рс0 < ехр(-3(/Ц)3р3); 8, - проекция ДСС на временную ось (8t < AT+ qT+ 6>/2<т().
В соответствии с (1.52)—(1.55) на рис. 1.23 представлены параметрические зависимости, полученные при следующих характеристиках геометрии МС (см. рис. 1.21): <7=6=100 км, </=10 км (при этом <5/m]n =60 мкс, =360 мкс), а также Гп=1000 мкс, АТ = 100 мкс, аг=100 мкс, ст, = 1 мкс. Основной вывод, который можно сделать из анализа этих зависимостей, заключается в том, что при наличии достаточно информативных признаков отождествления («1) реализация ВО позволяет во многом парировать нежелательные эффекты, связанные с возникновением ложных засечек координат при достаточно высокой вероятности выделения Ро реальных ИРИ.
Для получения точностных характеристик оценивания параметров в МС можно воспользоваться результатами [9], устанавливающими теоретические границы для дисперсий ошибок при использовании различных классов фильтров и, в частности, для круговой ошибки местоопределения ст3 за к шагов в виде
.2 -> Л2 ^г2 _2 ^г2
г,О - - °\,е - °\,а ~ аг,
(1-56)
где обозначены дисперсии ошибки, получаемой при однократном наблю-2 «
дении ог0 на основе начальной оценки х0/0 временных параметров в (1.50), а также в результате ВО на основе линейного фильтра <ггг, синтезируемого с учетом безусловных вероятностных характеристик получения полезной и ложной информации после ПО [7]; условно-линейного фильтра <т2в, синтезируемого с учетом условных по отношению к дискретной компоненте наблюдений вероятностных характеристик получения полезной и ложной информаций [7,9]; оптимального (калмановского) фильтра для идеальных условий, когда нет пропусков и ложных наблюдений. Величина <т2а дает нижнюю границу для дисперсии ошибки <т2 оптимального нелинейного фильтра [9], при этом в качестве верхней границы выступает дгг0, которая будет тем ближе к агг а , чем более информативна дискретная компонента наблюдений.
На рис. 1.24 представлены типовые зависимости ст2 / ст2 0 от ЛТ0 - среднего числа мешающих (для данного ИРИ) сигналов, приходящихся на один полезный. Эти зависимости позволяют определить влияние характеристик и условий ПО на резуль-
тирующую точность оценки параметров в МС. При их обосновании в [9] доказано следующее утверждение: ошибки оценивания в условиях поступления от первичных датчиков с определенными вероятностями ложных наблюдений всегда будут больше, чем в ситуации, когда вместо этих наблюдений с теми же вероятностями будут получены пропуски, « ~ - * 2
которые определяются нижнеи границей, равной а .
Таким образом, характеристики чувствительности приема ИРИ заданного класса должны выбираться согласованно, исходя из допустимого уровня вероятности ро так, чтобы обеспечить минимальную интенсивность потока мешающих сигналов. Их неоправданное завышение ведет к снижению результирующей точности оценки координат в ходе ВО. Это означает, что для обработки сигналов ИРИ с существенно различающимся уровнем мощности бокового излучения должны выделяться каналы приема, имеющие разные градации уровня чувствительности, или обеспечиваться адаптивный режим работы системы.
Литература
1. Саблин В.Н., Викулов О.В., Меркулов В.И. - Зарубежная радиоэлектроника, 1998, №9.
2. Кондратьев В.С., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы / Под. ред. В.В. Цветнова. - М.: Радио и связь, 1986.
3. Мельников Ю.П. - Радиотехника, 1996, № 10.
4. Мельников Ю.П. - Изв. вузов. Сер. Приборостроение, 1996, № 8-9.
5. Шелухин О.И. Радиосистемы ближнего действия. - М.: Радио и связь, 1989.
6. Радзиевкий В.Г., Сирота А.А., Борисов Ю.А. - Радиотехника (Журнал в журнале), 1996, № 6.
7. Сирота А.А., Борисов Ю.А. — Радиотехника (Журнал в журнале), 1997, № 6.
8. Сирота А.А. - Радиотехника (Журнал в журнале), 1998, № 6.
9. Сирота А.А., Борисов Ю.А. - Межвуз. сб. научи, трудов «Синтез, передача, прием сигналов управления и связи». - Воронеж, изд. ВГТУ, 1997.
1.8. Нейросетевые и статистически оптимальные алгоритмы оценки координат источников радиоизлучения в многопозиционных радиосистемах*
В последнее время наблюдается повышенный интерес к нейросетевым алгоритмам (НА) обработки сигналов и информации. Они успешно конкурируют с полученными в рамках теории статистических решений алгоритмами обнаружения и оценки параметров сигналов [1-3]. Достоинства НА, связанные с их возможностями аппроксимации функционалов принятия решений и высоким быстродействием, могут найти применение и при решении задач вторичной обработки информации [3], одной из которых является задача определения координат источников радиоизлучения (ИРИ) в многопозиционных радиосистемах (МРС). Здесь получение и использование оптимальных алгоритмов обработки
Авторы. В.И. Афанасьев, Э.А. Кирсанов, А.А. Сирота
затруднено вследствие нелинейного характера связи первичных (измеряемых) параметров сигналов и координат ИРИ. Поэтому на практике
применяются квазиоптимальные реализации оптимальных алгоритмов с
использованием различного рода итерационных процедур в рамках численных методов оптимизации [4]. К недостаткам последних относятся: большое число итераций до получения сходимости оценок; требование достаточно высокой точности начального приближения; возникновение случаев расходимости. Поэтому представляет интерес обоснование и сравнительный анализ нейросетевых и известных численных реализаций статистически оптимальных алгоритмов местоопределения.
Нейросетевой алгоритм вычисления координат ИРИ предлагается строить на основе наиболее часто используемой сети с прямыми связями, сигмоидальными передаточными функциями нейронов и обучением по методу обратного распространения ошибок [5-7]. Согласно [5], любая функция многих переменных может быть сколь угодно точно аппроксимирована многослойной нейронной сетью (НС) такого типа. Процедура построения НА заключается в выборе архитектуры НС, формировании обучающего множества и ее обучении.
Ограничимся рассмотрением случая вычисления координат ИРИ на плоскости. Для построения НА при этом должны быть заданы области допустимых значений координат ИРИ D, приемных пунктов (ПП) многопозиционной радиосистемы DP„ 1 < i < N, где N - общее число ПП, и среднеквадратических ошибок (СКО) равноточных измерений первичных параметров сигналов Da= {(стЦо^^ сг< сгтах} в МРС. Области допустимых значений координат ИРИ х =(Х, Y)T и ПП xPi = = (XPl, Ур,), 1< i <N, представляющие собой зону ответственности (30) МРС и зоны перемещения ПП, для определенности примем прямоугольной формы (рис. 1.25): D = {(У, nHU < X < Jfmax,
Упип — Y<< Утах} > Dpi ~ {(^А, Ул)|Лртмп X < <ХРтам Ур/тт< У УршихЬ 1 -
i < N, с расположением центров зон перемещения равномерно на полуокружности радиуса R.
Архитектура НС определяется количеством слоев ns и их размерностью mh 0 < i < ns, где нулевой индекс соответствует входному слою. Для каждого ненулевого слоя вводятся матрицы весов W(,) размером а также векторы-строки смещений S(,), входов Xw и выходов Y(,)
длиной, соответственно, /и„ /и,1 и /и„ 1 < z < ns. Будем строить нейросетевой алгоритм на основе трехслойной сети (рис. 1.26), что обычно обеспечивает упрощенный характер обучения НС и, в то же время, достаточно для решения любой нелинейной задачи. Размерность входного слоя сети для рассматриваемой задачи т0= п + 2W+1 определяется размерностью составного вектора входных воздействий (z ,u ), состоящего из и-мерного вектора измеряемых в ПП параметров сигналов г = (Z|,...,z„) и вектора управляющих параметров u = (xn,...,XpN, а)т, включающего координаты ПП и СКО измерения параметров сигналов. При этом
z = h(x) + v, (1-57)
где h(x) = (/zi(x),...,/z„(x)) - вектор-функция связи первичных параметров сигналов и координат ИРИ; v - вектор шумов измерения (A/[v] = О, jW[vvt] = R). Для рассматриваемого случая разностно-дальномерной МРС /z,(x) = c[r(x, Xpi)-r(x, Хр/+1)], 1 < z < и = ЛМ, где с - скорость света; г(х, хЛ) = [(Л'-Хр,)2+(У-Ур,)2]1/2; R = o2R0; а = а, - СКО измерения задержек времен прихода сигналов на ПП; Ro - матрица, диагональные элементы которой равны с2, а недиагональные с2/2.
Рис. 1.26
Размерность выходного слоя сети должна быть равна размерности оцениваемого вектора координат ИРИ (в данном случае т3 = 2). Для выбора размерности скрытых слоев существуют различные рекомендации [5-7]. С ее увеличением улучшается качество аппроксимации, но одновременно возрастает вероятность переобучения НС. Допустим, что скрытые слои содержат одинаковое количество нейронов = т2= L. Тогда число синаптических весов НС Lw= L2+ Цто+т-з). Решая уравнение, получим L = [((/Ио+/я3)2+4£и.)1/2-(/Ио+/Из)]/2. Входящее в это выражение число весов должно удовлетворять неравенству [5] zw3JVD/(l+log2^)< Lw < m3(N^т3+\)(тй+т3+\)+т3, где ND - число точек дискретизации 30. В результате модельных экспериментов было уста
новлено, что в качестве L достаточно выбирать значение, на единицу превышающее минимальное.
Формирование обучающей выборки сети предлагается проводить следующим образом. Осуществляется дискретизация областей D, DPi, 1 < i < N, и Da с заданными интервалами, в результате чего формируются наборы точек дискретизации, соответствующих центрам элементарных областей объемом ND, NP„ 1 < z < N, и Na. Затем для каждой точки дискретизации 30 при фиксированном наборе управляющих параметров в соответствии с (1.57) методом имитационного моделирования формируется заданное число наблюдений. При этом должно учитываться априорное распределение координат ИРИ внутри 30 МРС. При равномерном априорном распределении в каждой точке дискретизации области D для каждого фиксированного вектора управляющих параметров моделируется одинаковое число наблюдений N„. В результате формируется обучающее множество, включающее множества векторов наблюдений z„ соответствующих управляющих параметров и, и истинных координат ИРИ х„ 1 < z < No = NDNplx...xNPNNaN„. Чтобы сформированные обучающие данные попадали в область действия НС, дополнительно проводится их масштабирование:
(х) = у = х(утах- ynlill )/(xmax - Xmin ) + ymax - xmax (ymax - У™,) /(xmax - xmul) , где x, xinin, xmax - исходное значение переменной и границы ее изменения; у, ymin, ymax - новое значение переменной и границы ее изменения; О - операция масштабирования.
При этом векторы наблюдений и управляющих параметров масштабируются к диапазону [-1, 1], а координаты ИРИ, в соответствии с областью значений сигмоидальной функции, - к диапазону [О, 1]. Диапазоны изменения векторов наблюдений и координат должны задаваться, исходя из размеров 30 с учетом допуска на максимальные ошибки измерения первичных параметров и ошибки местоопределения.
После предварительной обработки сформированных таким образом обучающих данных проводится обучение НС [6, 7]. Для этого устанавливаются начальные значения весов и смещений слоев в соответствии с правилом Нгуена-Уидроу [7]. Случайным образом из обучающего множества выбирается пара наблюдений и управляющих параметров, которая подается на вход НС XU) = ((z() ,(u,)T), 1 < z < No, и осуществляется прямой проход:
Y(i)=O(Xli’W(i)+S(i)), Х1,+1) =Y(i) при z < ns, 1 < z < ns, (1.58) где O(S) - матричная активационная функция, применяемая последовательно к элементам вектора S: o(s,) = 1/(1+ехр(-з,)). Затем осуществляется обратный проход в НС:
В'"*’ =T-Y("'), В(,) =B(,+1)[W(,+I)]T, 1 <z<hs-1,
В? = В^‘\\- Y^), 1 <j < mh 1 < z < ns,
где B(,) - векторы-строки ошибок слоев длиной т,, 1 < z < ns, T = (x,) , 1 < z < No, - целевой выходной вектор сети, соответствующий паре векторов, поданных на ее вход. После этого осуществляется корректировка весов и смещений НС:
AW(,) = и0[Х(,)]тВ(,) + Л/AW1'1 , AS(,) = и0В(,) + Л/AS1" ,
W"> =wl,) + AW(" , S(,) = Sl" + AS1" , 1 <i<ns, где AW('* и AS(,) - матрицы и векторы-строки корректировок весов и смещений слоев размером соответственно т,лут, и т„ 1 < z < ns, до начала процесса обучения заполняемые нулями; п0 - норма обучения; Л/ -коэффициент инерции.
В результате цикла «прохода» сети в прямом и обратном направлениях по всему обучающему множеству вычисляется выборочная СКО оценивания целевого вектора е. Так как первичные параметры измеряются с ошибкой, то нет смысла требовать от НС обучаться до нулевого уровня ошибки е. Поэтому для остановки процесса обучения в работе предложено использовать значения разности СКО оценивания целевого вектора между z-й и z-1-й эпохами А^ = |е,-- При каждом непревы-шении разностью ошибки некоторого минимального значения AEmin сначала уменьшается коэффициент инерции, а затем норма обучения. Если при Ае/<А£^,п выполняется условие kj>Q, то устанавливаются значения А/ = А/- АЛ/ и Ае^,п = A£^in- A£^inb иначе, если п0 > 0, то п0 = n0-Nn0 и Af^in = Af^in-Af^inz, где АЛ/, Ал0, А^п1, Ае^1п2 - соответственно шаги изменения коэффициента инерции, нормы обучения и минимальной разности ошибки оценивания целевого вектора. При Ае; < Ае^ и Л/ = 0, п0 = О процесс обучения заканчивается. Выход обученной НС масштабируется к диапазону изменения координат.
Рассмотрим теперь кратко известные алгоритмы определения координат. Статистически оптимальные оценки координат ИРИ могут быть получены в рамках байесовского подхода [9, 10]. При простой функции потерь в качестве оценки выступает значение, соответствующее максимуму апостериорной плотности вероятности. Априорное распределение координат ИРИ внутри области D примем, как и ранее, равномерным. Тогда теоретически оптимальная оценка по критерию максимума апостериорной вероятности (ОМАВ) с учетом гауссовского характера шумов измерения параметров сигнала имеет вид
x = argmin(z-h(x))TR“'(z-h(x)). (1-59)
xeD
С использованием соотношения для нижней границы (НГ) матрицы ошибок ОМАВ [9, 10], можно показать, что при равноточных изме-
рениях первичных параметров потенциальная среднеквадратическая ошибка места для (1.59) равна
СТгОМАВ
tr
JIo(x)afo .(О)
(1.60)
где tr - след матрицы; I0(x) = HT(x)Ro-1H(x), H(x) = (H1(x),...,H„(x))T, H,(x) = [SZi,<x)]/6L¥, бй,(х)]/5У]; S» - площадь зоны ответственности МРС.
Для разностно-дальномерной МРС интегралы в (1.60) при прямоугольной 30 сводятся к неполным эллиптическим интегралам и в общем случае аналитически не берутся.
Естественным, хотя и весьма затратным в вычислительном отношении способом оценивания, является реализация переборного алгоритма (ПА), обеспечивающего поиск минимума в (1.59) полным перебором точек из области D с заданным шагом дискретизации. Для сокращения объема вычислений на практике используют другие численные методы. Классическая квазиоптимальная реализация ОМАВ может быть получена при аппроксимации априорного равномерного распределения нормальным с теми же математическим ожиданием х0 и матрицей ковариации Ро [9]. В этом случае реализуется итерационный алгоритм (ИА), основанный на линеаризации зависимости первичных параметров от координат в точке А-1-го приближения h(x)»h(xi_1) + H(xi_1)(x-xi_1), в виде [4]
хк = X*.! + (Ро-‘ + HT(xi_1)R-lH(xi_1))_| IT^JR-1^ - h(xi_1)), (1.61) где для прямоугольной 30 (см. рис. 1.25) Ро = diag{(ymax-X,in)2/12, (Knax-Knin)/12}. Заметим, что оценка (1.61), в отличие от (1.59), может лежать за пределами области D.
Помимо приведенных алгоритмов представляет интерес рассмотрение оценки, получаемой в рамках геометрического подхода. Для разностно-дальномерной МРС с числом ПП N = 3 геометрический алгоритм (ГА) предусматривает вычисление координат ИРИ как точки пересечения линий положения в виде гипербол [8].
В работе проведена оценка эффективности рассмотренных алгоритмов местоопределения в сравнении с нейросетевым. Она основывалась на статистическом моделировании результатов функционирования разностно-дальномерной МРС с различным числом ПП (см. рис. 1.25) при их размещении на полуокружности радиусом R = 5 км и границах 30 Xiin= -5 км, Хпах= 5 км, Ут1п = 5 км, Ктах = 15 км. При обучении НС использовались начальные значения А/= 0,9, п0= 0,9 и А£^ш = 10“5 при Af^ini = Ю“6, A£^i„2 = Ю~7. Сначала исследовался вариант обучения НС при фиксированных СКО измерения первичных параметров и координатах ПП. Обучающая выборка НС формировалась при интервале дискретизации 30 0,5 км со случайным разбросом А„=100 наблюдений для
каждой фиксированной точки плоскости. На рис. 1.27 приведены зависимости среднеквадратической ошибки места от СКО измерения времени задержки аг для N = 3, а на рис. 1.28 - аналогичные зависимости от числа ПП при ат= 1 мкс. Кривые 1 соответствуют теоретической НГ оптимальной оценки, вычисленной путем численного интегрирования (1.60); 2-5 - выборочным СКО места для ПА (1.59), ИА (1.61), НА (1.58) и ГА [8]. Оценка по критерию МАВ (1.59) вычислялась при интервале дискретизации 30 0,1 км; начальное приближение для ОМАВ (1.61) задавалось как центр 30. Анализ полученных результатов свидетельствует о том, что ближе всего к потенциально достижимой границе находится СКО места, обеспечиваемая нейросетевым алгоритмом. Несколько худшие выборочные результаты для переборной ОМАВ (1.59) являются следствием большого интервала дискретизации 30 при ее вычислении. Однако даже в этом случае требуется значительный объем вычислений. Итерационный кавзиоптимальный алгоритм (1.61) значительно уступает оценкам, получаемым на основе НА.
Далее исследовалось поведение НА при обучении НС в условиях изменяющихся управляющих параметров, т. е. для МРС с изменяющимися координатами ПП и СКО измерения первичных параметров сигналов. Зависимости на рис. 1.29 соответствуют случаю обучения НС при фиксированных ат и прямоугольных зонах перемещения ПП трехпозиционной МРС размером 1x1 км (см. рис. 1.25). При этом вектором управляющих параметров являются координаты ПП. При формировании контрольной выборки координаты ПП генерировались равновероятно внутри зон перемещения. Одновременно даются и результаты работы других алгоритмов, причем нумерация кривых на рис. 1.29 совпадает с рис. 1.27. Кривая 1 получена при усреднении подынтегрального выражения в (1.60) по зонам перемещения ПП. Как следует из рис. 1.29, НА и ПА
в рассматриваемом случае обеспечивают практически такую же точность местоопределения как и при фиксированных координатах ПП. При этом несколько лучшие результаты соответствуют НА. В то же время эффективность других алгоритмов понижается. Так, ошибка места для ГА [8] начинает резко увеличиваться уже при ат = 0,5 мкс (для фиксированных ПП это происходит при <jt> 0,6 мкс). Итерационная процедура ОМАВ для ошибок о><0,4 мкс при определенных расположениях ПП расходится.
Рис. 1.29 Рис. 1.30
На рис. 1.30 для трехпозиционной МРС приведены зависимости ошибки места при вариации СКО измерения времени задержки в ходе обучения НС в области Da с границами Олщ,, = 0,1 мкс, cr^ax = 1 мкс. Тестирование НС проводилось уже при фиксированных ошибках измерения времени задержки. Кривая 1, соответствующая поступлению на вход НС в качестве управляемого параметра реальной СКО измерения времени задержки и = сгг, свидетельствует о том, что в этом случае достигается такая же точность местоопределения, как и для случая обучения НС при фиксированном значении ат (см. рис. 1.27). Также проводилось исследование свойств робастности НС, т.е. изучалось ее поведение при отличии предполагаемой СКО измерения времени задержки от реальной. Кривые 2 и 3 соответствуют поступлению на вход НС в качестве управляющего параметра и = сг^п и и = сгт!М. Аналогичные исследования проводились и для других алгоритмов. Переборный алгоритм вычисления ОМАВ, как следует из (1.59), при R = a2R0 не зависит от предполагаемой СКО измерения времени задержки. Выборочные результаты для этого алгоритма как при предполагаемой ошибке almin, так и при сгппах аналогичны представленным на рис. 1.27 (кривая 3). Кривая 4 соответствует ИА при предполагаемой ошибке стплах- Видно, что в области малых ошибка местоопределения резко увеличивается. При предполагаемой ошибке сгтШ1 указанный алгоритм работоспособен
только в этой точке, а в остальных - расходится. 1 юэтому можно утверждать, что НА обладает большей робастностью по отношению к расхождению реальной и предполагаемой СКО измерения времени задержки, чем итерационный алгоритм, реализующий ОМАВ.
Показано, что нейросетевой алгоритм обеспечивает восстановление нелинейного функционала, связывающего измерения параметров сигналов с оценками координат источников радиоизлучения, с незначительно отличающейся от потенциально достижимой границы оценивания точностью. Использование нейросетевого алгоритма позволяет на 30...50 % уменьшить ошибку местоопределения по сравнению с известными квазиоптимальными реализациями алгоритма максимума апостериорной вероятности. При этом отмечается хорошая устойчивость нейросетевого алгоритма к неточности задания управляющих параметров и его высокое быстродействие.
Литература
1. Леров А.И., Соколов Г.Г.- Радиотехника (журнал в журнале), 2001, № 7.
2. Ефименко В.С., Харисов В.Н., Стребков Е.Г. - Радиотехника (журнал в журнале), 2000, № 7.
3. Радзиевский В.Г., Сирота А.А. Информационное обеспечение радиоэлектронных систем в условиях конфликта. - М.: ИПРЖР, 2001.
4. Сетевые спутниковые радионавигационные системы / Под ред. Л.Л. Дмитриева и В С. Шебшаевича. - М.: Радио и связь, 1982.
5. Пакет расширения по нейронным сетям. - В кн.: Дьяконов В., Круглов В. Математические пакеты расширения MATLAB. Специальный справочник. -СПб.: Питер, 2001.
6. Каллан Р. Основные концепции нейронных сетей. - М.: Издательский дом «Вильямс», 2001.
7. Осовский С. Нейронные сети для обработки информации. - М.: Финансы и статистика, 2002.
8. Кондратьев В С, Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. -М.: Радио и связь, 1986.
9. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств и систем. - М.: Радио и связь, 1991.
10. Степанов О.А. Применение теории нелинейной фильтрации в задачах обработки навигационной информации. - СПб: ГНЦ РФ - ЦНИИ «Электроприбор», 1998.
Дополнительная литература к главе 1
1. Бакут И.А., Жулина Ю.В., Иванчук Н.А. Обнаружение движущихся объектов. - М.: Сов.радио, 1980.
2. Борисов В.И., Зинчук В.М., Лимарев А.Е. и др. Помехозащищенность систем радиосвязи с расширением спектра сигналов методом псевдослучайной перестройки рабочей частоты. - М.: Радио и связь, 2000.
3. Борисов Ю.П., Цветное В.В. Математическое моделирование радиотехнических систем и устройств. - М.: Радио и связь, 1985.
4. Вартанесян В.А. Радиоэлектронная разведка. - М.: Воениздат, 1991.
5. Васильев В.И. Распознающие системы. Справочник. - Киев: Наукова думка, 1983.
6. Гольденберг Л.М., Матюшкин Б.Д., Поляк М.Н. Цифровая обработка сигналов. - М.: Радио и связь, 1990.
7. Гуткин Л.С. Проектирование радиосистем и радиоустройств. - М.: Радио и связь, 1986.
8. Демин В.П., Куприянов А.И., Сахаров А.В. Радиоэлектронная разведка и радиомаскировка. - М.: МАИ, 1997.
9. Жандаров А. М. Идентификация и фильтрация измерений состояния стохастических систем. - М.: Наука, 1979.
10. Крылов В.В., Никашов КЮ. Перспективы развития техники и технологии систем радиоэлектронной борьбы. - Зарубежная радиоэлектроника, 1988, №6.
11. Кузнецов А.С., Сохен М.Ю. Синтез гипотез поведения систем в радиоэлектронном конфликте. - Радиотехника, 1997, № 6.
12. Куликов Е.И., Трифонов А.П. Оценка параметров сигналов на фоне помех. -М.: Сов.радио, 1978.
13. Мартынов В.А., Селихов Ю.П. Панорамные приемники и анализаторы спектра. - М.: Сов.радио, 1964.
14. Мельников Ю.П. Методы оценки эффективности воздушной радиотехнической разведки. - Изд. МО РФ, 1996.
15. Месарович М., Мако Д., Такахара И. Теория многоуровневых иерархических систем. - М.: Мир, 1973.
16. Миленький А.В. Классификация сигналов в условиях неопределенности. -М.: Сов.радио, 1975.
17. Палий А.П. Радиоэлектронная борьба. - М.: Воениздат, 1989.
18. Партала А.Н., Волков В.В., Стефанович А.В. Методы обработки сигналов в пассивных радиолокационных системах. - Зарубежная радиоэлектроника, 1991, №6.
19. Патрик Э. Основы теории распознавания образов. - М.: Сов.радио, 1980.
20. Петров А.В., Яковлев А.А. Анализ и синтез радиотехнических комплексов. -М.: Радио и связь, 1984.
21. Радзиевский В.Г.. Сирота А.А. Теоретические основы радиоэлектронной разведки. - М.: Радиотехника, 2004.
22. Седякин Н.М. Элементы теории случайных импульсных потоков. - М.: Сов.радио, 1965.
23. Сейдж Э., Меле Дж. Теория оценивания и ее применение в связи и управлении.-М.: Связь, 1976.
24. Советов Б.Я., Яковлев С.А. Моделирование систем. - М.: Высш, шк., 1998.
25. Тихонов В.И. Статистическая радиотехника. - М.: Радио и связь, 1982.
26. Трифонов А.П., Шинаков ЮС. Совместное различение сигналов и оценка их параметров на фоне помех. - М.: Радио и связь, 1986.
27. Ту Дж., Гонсалес Р. Принципы распознавания образов. - М.: Мир, 1978.
28. Уоссермен Ф. Нейрокомпьютерная техника. Теория и практика. - М.: Мир, 1992.
29. Фукунага К. Введение в статистическую теорию распознавания образов: Пер. с англ. / Под ред. А.А. Дорофеюка. - М.: Наука, 1979.
30. Ширман Я.Д., Ман.жос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981.
31. Ярлыков М.С.. Швецов В.И. Оптимальное нелинейное оценивание гауссовских разделимых случайных полей в радиотехнических задачах. - Радиотехника, 1997, № 1.
ГЛАВА 2
Радиоэлектронное подавление систем радиолокации
Радиоподавление радиоэлектронных средств (РЭС) наряду с оптическим и гидроакустическим подавлением является важнейшей составляющей радиоэлектронной борьбы (РЭБ). Среди РЭС-объектов радиоподавления к наиболее приоритетным относятся системы радиолокации. Эго обусловлено, с одной стороны, важной ролью радиолокационных средств в комплексах управления войсками и оружием вследствие всепогодности, независимости от времени суток и возможностей реализации больших, вплоть до межконтинентальных, дальностей действия, а с другой стороны, возможностями их радиоподавления станциями активных помех с энергопотенциалами, на много порядков меньшими энергопотенциалов РЛС. Указанная энергетическая асимметрия вызвана тем, что РЛС используют отраженное от объектов наблюдения излучение, а станции активных помех - прямое излучение.
В данной главе рассматриваются актуальные вопросы комплексного радиоподавления радиолокационных средств разведки объектов и наведения на них высокоточного оружия (ВТО).
2.1. Универсальная классификация радиоэлектронных помех
Под помехами радиоэлектронным средствам принято понимать всевозможные излучения, дополнительные к рабочему излучению РЭС, наводки в цепях приемников и изменения рабочего излучения, снижающие качество (эффективность) функционирования РЭС или системы, элементом которой является РЭС. Предполагается, что негативные изменения характеристик рабочего излучения производятся различного рода воздействиями на источник излучения, среду его распространения, а также на приемник РЭС. В таком понимании радиоэлектронные помехи весьма разнообразны, это делает актуальной задачу их систематизации, одним из важных элементов которой является классификация. Предлагаемая классификация помех получена путем обобщения и развития известных в литературе классификаций [1-7], отражает все основные аспекты возникновения, формирования и применения помех и сводится к виду, представленному в табл. 2.1.
Автор: В.В. Быков
Таблица 2.1
Классификационный признак Классы и подклассы помех Примечания
1. Вид используемых волн 1.1. Электромагнитные помехи 1.2. Гидроакустические помехи
2. Диапазоны частот (длин волн) 2.1. Радиопомехи различных стандартизованных диапазонов частот, лежащих ниже частоты 3000 ГГц 2.2. Оптические помехи 2.2.1. Инфракрасного ближнего и дальнего диапазона волн 2.2.2. Видимого диапазона 2.2.3. Ультрафиолетового диапазона 2.2.4. Рентгеновского диапазона Применительно к электромагнитным волнам
3. Происхождение 3.1. Естественные помехи 3.1.1. Собственные шумы антенн и приемников РЭС 3.1.2. Излучения окружающей среды и космических объектов 3.1.3. Отражения рабочего излучения РЭС от земной поверхности, местных предметов, метеообразований, скоплений птиц и т.п. 3.1.4. Поглощающие (экранирующие) образования на трассе распространения рабочего излучения РЭС 3.1.5. Рассеивающие образования 3.1.6. Преломляющие образования 3.1.7. Деполяризующие образования 3.2. Искусственные помехи 3.2.1. Преднамеренные (от специальных средств и мер создания) 3.2.2. Непреднамеренные (от других РЭС, взаимные помехи) 3.2.3. Индустриальные (от электрооборудования и других установок) Образования по п.п. 3.1.4 и 3.1.5. обычно одни и те же
4. Путь проникновения в приемник РЭС 4.1. Наводимые в приемной антенне 4.2. Наводимые в цепях приемника через кожух, минуя антенну 4.3. Наводимые в цепях питания
5. Радиофизическая основа 5.1. Помехи-излучения, дополнительные к рабочему излучению РЭС 5.1.1. Генерированные, в том числе естественными источниками 5.1.2. Ретранслированные с усилением (с помощью активных ретрансляторов и ответчиков) 5.1.2.1. Без переноса частоты
Продолжение табл. 2.1
5.1.2.2. С переносом и последующим восстановлением частоты 5.1.3. Отраженные (ретранслированные пассивными ретрансляторами) 5.2. Помехи - ухудшения рабочего излучения РЭС за счет воздействий на среду распространения излучения 5.2.1. Применение поглощающих структур 5.2.2. Применение рассеивающих структур 5.2.3. Применение преломляющих структур 5.2.4. Применение модулирующих структур 5.3. Помехи - ухудшения отражательных характеристик объектов активной локации 5.3.1. Придание объектам малоотражаю-щей формы 5.3.2. Применение поглощающих материалов и покрытий 5.3.3. Применение импедансных структур 5.3.4. Применение модулирующих управляемых структур 5.4. Помехи - изменения излучений объектов пассивной локации и разведки 5.4.1. Применение мер и средств, ослабляющих излучение 5.4.2. Применение мер и средств, модулирующих излучение (с целью придания им повышенной скрытности) 5.5. Помехи - специальные воздействия на приемники РЭС 5.5.1. Вибрационные помехи 5.5.2. Помехи функционального подавления (обратимого функционального поражения)
6. Энергия, затрачиваемая на создание помехового излучения 6.1. Активные помехи 6.2. Пассивные помехи 6.3. Полуактивные (активно-пассивные) помехи
7.Объекты и задачи воздействия 7.1. Помехи средствам локации и навигации в различных режимах функционирования 7.1.1. Помехи обнаружению 7.1.2. Помехи захвату на сопровождение 7.1.2.1. По направлению (углу) 7.1.2.2. По дальности (времени задержки сигнала) 7.1.2.3. По скорости (частоте) 7.1.2.4. По совокупности координат 7.1.3. Помехи следящему измерению (сопровождению) и неследящему (разовому) измерению с физическими и алгоритмическими стробами Применительно в основном к преднамеренным помехам
Продолжение табл. 2.1
7.1.3.1. По направлению (углу) 7.1.3.2. По дальности (времени задержки) 7.1.3.3. По скорости (частоте) 7.1.3.4. По совокупности координат 7.1.4. Помехи распознаванию объектов 7.1.5. Помехи наведению средств поражения 7.1.6. Помехи пуску средств поражения 7.1.7. Помехи прицеливанию средств поражения 7.1.8. Помехи подрыву средств поражения воздействием на радиолокационные станции (РЛС) наведения 7.1.9. Помехи картографированию 7.1.10. Помехи высотометрии 7.1.11. Помехи доплеровскому измерению скорости 7.2. Помехи линиям связи в различных режимах функционирования 7.2.1. Помехи передаче сообщений 7.2.2. Помехи передаче служебных сообщений 7.2.3. Помехи вхождению в связь 7.2.4. Помехи синхронизации связи 7.3. Помехи радиоэлектронным взрывателям (средствам подрыва боевых частей средств поражения) 7.4. Помехи командным радиолиниям наведения объектов 7.5. Помехи средствам радиоэлектронного опознавания государственной принадлежности объектов 7.6. Помехи средствам разведки излучения РЭС 7.6.1. Помехи радиоразведке 7.6.2. Помехи радиотехнической разведке Алгоритмические стробы используются при сопровождении в процессе сканирования (на проходе)
8. Виды защиты объектов 8.1. Помехи для индивидуальной защиты (помехи самоприкрытия) 8.2. Помехи для взаимной (коллективной) защиты 8.3. Помехи для групповой защиты из строя (боевого порядка) 8.4. Помехи для зонной защиты (групповой защиты из удаленных от боевых порядков зон)
9. Характер взаимодействия с рабочим излучением РЭС 9.1. Аддитивные помехи 9.2. Мультипликативные (модулирующие) помехи 9.3. Аппликативные (аддитивно-мультипликативные) помехи
Продолжение табл. 2. J
10. Эффекты воздействия 10.1. Помехи скрывающие (маскирующие) сигнал 10.2. Помехи, ослабляющие сигнал 10.3. Помехи, имитирующие сигнал 10.3.1. Размножающие корреляционные пики (отметки целей) на выходе приемника РЭС 10.3.2. Смещающие отметки в пределах элемента разрешения 10.3.3. Уводящие (перенацеливающие) стробы слежения 10.3.3.1. С раздвоением отметок 10.3.3.2. С многократным ветвлением отметок 10.4. Искажающие характеристики тракта приема н обработки сигналов (аберрационные помехи)
11. Вид модулируемого параметра помехового или рабочего излучения (последнее при создании помех пассивной локации и разведке) 11.1. Амплитудно-модулированные, в том числе импульсно-модулированные и прерывистые 11.2. Частотно-модулированные 11.3. Фазово-модулнрованные 11.4. Поляризационно-модулированные 11.5. Модулированные по направлению излучения 11.6. Модулированные по положению фазового центра излучения (направлению прихода излучения) Несущее колебание может быть гармоническим и шумовым
12. Статистическая структура помехового излучения 12.1. Помехи в виде случайных процессов 12.1.1. Прямошумовые помехи 12.1.2. Модулированные шумом по одному или нескольким параметрам 12.1.3. Хаотические импульсные помехи 12.2. Помехи в виде колебаний со случайными параметрами 12.3. Детерминированные помехи
13. Число точек излучения помех 13.1. Одноточечные помехи 13.2. Многоточечные помехи
14. Пространственные положения источников помех относительно защищаемых объектов 14.1. Создаваемые с объекта (помехи са-моприкрытия) 14.2. Отделяемые от объекта 14.3. Вынесенные сопровождающие защищаемые объекты и образующие сгрон 14.3.1. Сомкнутые 14.3.2. Разомкнутые 14.3.3. Рассредоточенные 14.4. Вынесенные сопровождающие защищаемые объекты и отличающиеся направлением выноса
Продолжение табл. 2.1
14.4.1. Переднего прикрытия 14.4.2. Заднего прикрытия 14.4.3. Бокового (флангового) прикрыли 14.4.4. Верхнего прикрытия 14.4.5. Нижнего прикрытия 14.4.6. Окружающие защищаемые объекты 14.5. Несопровождающие защищаемые объекты, вынесенные в специальную зону, например, зону недосягаемости оружия, действующего по защищаемым объектам
15. Степень пространственной когерентности 15.1. Некогерентные 15.2. Частично когерентные 15.3. Когерентные
16. Степень прицельности по направлению, частоте, поляризации, времени и т.д. 16.1. Прицельные 16.1.1. Со следящей (запаздывающей) погоней за параметрами 16.1.2. С программной (упреждающей) погоней за параметрами 16.2. Заградительные помехи 16.2.1. Параллельно-заградительные 16.2.2. Последовательно-заградительные (скользящие или сканирующие) 16.3. Прицельно-заградительные помехи
17. Степень статистической связи с сигналом 17.1. Независимые от сигнала 17.2. Коррелированные с сигналом 17.3. Жестко связанные с сигналом
18. Способ формирования 18.1. Генерируемые по априорным данным о сигнале 18.2. Ответно-генерируемые по данным непосредственной разведки излучений подавляемых РЭС 18.3. Формируемые из рабочего излучения РЭС с использованием ретрансляторов 18.3.1. Помехи - копии сигнала 18.3.2. Помехи - преобразованные копии сигнала Обычно заградительные, создаваемые без разведки, помехи
19. Вид используемого канала приема излучений в подавляемых РЭС 19.1. Помехи по основным каналам приема излучений (по главному лепестку диаграммы направленности антенны (ДНА), на несущей частоте, по главному лепестку функции неопределенности сигнала (ФНС), на основной поляризации и т.п.) 19.2 Помехи по побочным каналам приема 19.2.1. Помехи по боковым лепесткам ДНА 19.2.2. Помехи по боковым лепесткам ФНС Для помех, проникающих через антенну
Продолжение табл. 2.1
19.2.3. Ортогонально-поляризованные помехи 19.2.4. Внеполосные помехи: по скатам АЧХ приемника, по зеркальному каналу, по промежуточной частоте, гетеродинные, иитермодуляционные и т.п. В основном взаимные помехи и некоторые преднамеренные помехи
20. Пропускная способность (количество одновременно или квазиодновременно обслуживаемых разночастотных РЭС) 20.1 Создаваемые одному РЭС 20.2. Создаваемые ограниченному ряду РЭС 20.3. Создаваемые неограниченному ряду РЭС
21. Вид уплотнения в многоканальных по частоте средствах создания активных помех 21.1. С временным уплотнением (частотно-дискретизированные помехи) 21.2. С частотным уплотнением (излучаемые одновременно на разных частотах)
22. Вид запретов излучений помех в интересах обеспечения ЭМС с собственной подсистемой разведки и другими своими РЭС 22.1. Помехи без запретов излучения 22.2. Помехи с временными запретами излучения 22.2.1. С быстрыми запретами с периодом повторения сигнала РЭС 22.2.2. С медленными запретами в общем цикле разведки-подавления 22.3. Помехи с частотными запретами
23. Характер трассы распространения помехового излучения 23.1 Помехи класса «воздух-поверхность» 23.2. Помехи класса «воздух-воздух» 23.3. Помехи класса «поверность-воздух» 23.4. Помехи класса «поверхность-поверхность» 23.5. Помехи класса «космос-поверхность» 23.6. Помехи класса «поверхность-кос-мос» 23.7. Помехи класса «космос-космос» Терминология заимствована из области управляемых ракет
24. Наблюдаемость помехи в подавляемых РЭС 24.1. Легко обнаруживаемые (видимые помехи) 24.2. Трудно обнаруживаемые (невидимые помехи)
25. Тип помехового ресурса 25.1. С неограниченным ресурсом (нерас-ходуемые помехи или помехи многоразового использования) 25.2. С ограниченным ресурсом (расходуемые помехи или помехи одноразового использования) Характерно для активных помех Характерно для пассивных сбрасываемых помех типа дипольных отражателей
Продолжение табл. 2.1
26. Характер функции эффективности 26.1 Помехи с неограниченной энергетической эффективностью, требующиеся для полного подавления РЭС: 26.1.1. Бесконечного ресурса 26.1.2. Конечного ресурса 26.2 . Помехи с ограниченной энергетической эффективностью 26.2.1. С конечной ненулевой гарантированной эффективностью 26.2.2. С нулевой гарантированной эффективностью Энергетическая эффективность - составляющая функции эффективности помехи, зависящая от отношения помеха-сигнал
27. Стойкость источника помехи к поражению по излучению 27.1. Помехи, уничтожаемые по излучению 27.2. Помехи, неуничтожаемые по излучению Вследствие недосягаемости, малых размеров, бронирования и т.п.
Данная классификация помех по всем признакам, начиная со второго, относится, в первую очередь, к электромагнитным помехам, хотя подавляющее большинство классов помех применимо и к области гидролокации и связи. Смысл помех в основном ясен из их названия. Поясним лишь некоторые из них.
Вибрационные помехи (п. 5.5.1) относятся к непреднамеренным помехам, возникающим на интенсивно вибрирующих объектах, например, на управляемых ракетах.
Помехи обратимого функционального поражения (п. 5.5.2) - это излучения (обычно короткоимпульсные с большой пиковой мощностью), которые действуют как обычные помехи и одновременно ухудшают характеристики приемника РЭС, не выводя его полностью из строя.
Полуактивные помехи (п. 6.3) создаются облучением активными помехами пассивных отражающих структур, например, подстилающей поверхности.
Под алгоритмическими стробами в п. 7.1.3 понимаются стробы, формируемые при вторичной обработке радиолокационной информации для исключения аномальных ошибок построения траекторий сопровождаемых целей.
Аппликативные помехи (п. 9.3) содержат в себе как аддитивную, так и мультипликативную компоненты. Примером могут служить оптические помехи в виде полупрозрачных масок, накладываемых на прикрываемые объекты.
Искажающие (аберрационные) помехи (п. 10.4) - это помехи, эффект воздействия которых нельзя отнести ни к маскировке, ни к имитации. Такими помехами являются в основном помехи по побочным каналам приема излучений, например, кроссполяризационная помеха, искажающая пеленгационные характеристики моноимпульсных РЛС.
К прицельно-заградительным помехам относятся, например, помехи РЭС с программной перестройкой рабочей частоты при известной сетке частот: помеха является прицельной по каждой из частот сетки, а в целом является заградительной, имеющей многополосный спектр в широком диапазоне частот.
Гетеродинные помехи (п. 19.2.3) - это внеполосные совпадающие по времени с сигналом помехи, мощность которых на входе смесителя приемника превышает мощность гетеродина. Как взаимные помехи они по эффекту воздействия относятся к блокирующим сигнал, а как преднамеренные - к искажающим и ослабляющим.
Под видимыми помехами (п. 24) понимаются помехи, наблюдаемые непосредственно на выходе приемника РЭС. К таковым относятся непрерывные шумовые маскирующие помехи локационным средствам. К «невидимым» (скрытным) помехам относятся: имитирующие помехи с высокой степенью подобия истинным целям по сигнальным и траекторным характеристикам; помехи угломерным каналам РЛС, совпадающие по времени с импульсным сигналом, например, ретранслированные без задержки ортогонально поляризованные помехи; ослабляющие сигнал пассивные и активные помехи (например, при мощной гетеродинной помехе на выход приемника не проходят ни полезный сигнал, ни помеха) и другие. Для обнаружения «невидимых» помех требуется принимать специальные меры.
Помехи (п.п. 7.3-7.6) не детализированы по двум причинам: детализация (п.п. 7.3 и 7.4) аналогична детализации (п.п. 7.1 и 7.2, соответственно), а детализация (п.п. 7.5 и 7.6) в настоящее время неизвестна.
Под функцией эффективности (п. 26) понимается зависимость показателя эффективности помехи от отношения помеха-сигнал (энергетическая компонента эффективности) и от других параметров помехи (структурная компонента эффективности). Гарантированная эффективность - эффективность помехи при воздействии на оптимальный в присутствии этой помехи приемник сигнала.
Указанные в табл. 2.1 классы помех в основном независимы. Исключением являются помехи (п.п. 5 и 6): помехи - дополнительные излучения, генерированные и ретранслированные с усилением, являются активными помехами, а помехи - дополнительные отраженные излучения и воздействия на источник излучения или среду распространения излучения являются пассивными помехами.
Представленная классификация, несмотря на сравнительно малую степень детализации, включает в себя 150 основных разновидностей помех. Возможных комбинированных помех, которые почти отсутствуют в таблице, неизмеримо больше. Это подтверждает тезис о большом многообразии радиоэлектронных помех и необходимости их систематизации, чему и служит предлагаемая классификация.
Литература
1. Атражев М.П., Ильин В.А., Марьин Н.П. Борьба с радиоэлектронными средствами. - М.: Воениздат, 1972.
2. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М.: Сов. радио, 1968.
3. Van Brunt, L.B. Applied ECM, Vol. 1, 2. E.W. Engineering, USA, 1978, 1982.
4. Палий А.И. Радиоэлектронная борьба. - M.: Воениздат, 1981.
5. Основы теории радиоэлектронной борьбы / Под ред. Н.Ф. Николенко. - М.: Воениздат, 1987.
6. ГОСТ 23611-79. Совместимость радиоэлектронных средств электромагнитная. Термины и определения. - М.: Госстандарт СССР, 1979.
7. ГОСТ 24375-80. Радиосвязь. Термины и определения. - М.: Госстандарт СССР, 1982.
2.2. Возможности современных радиолокационных систем в условиях совместного применения способов типа «Стеле» и активных шумовых помех
Дальность действия РЛС в зависимости от эффективной площади рассеяния (ЭПР) объектов и потребная степень ее снижения при отсутствии активных помех. Дальность действия РЛС при отсутствии активных помех, как известно, принципиально ограничивается величиной ЭПР обнаруживаемого объекта и уровнем естественных помех, к которым относятся, в первую очередь, шумы приемных трактов и отражения от подстилающей поверхности. Если помехи от Земли отсутствуют (обнаружение в свободном пространстве), то при оптимальной обработке сигналов характеристики обнаружения объектов слабо зависят от вида сигнала РЛС и определяются его энергией на интервале когерентного накопления. При действии помех от Земли, что особенно характерно для бортовых РЛС, на возможность обнаружения объектов существенно влияет вид сигнала и принципы его обработки.
В табл. 2.2 приведены зависимости дальности обнаружения объектов от их ЭПР <т в свободном пространстве и на фоне помех от Земли для шести основных типов современных РЛС. В таблице приняты обозначения: Рср - средняя мощность излучения РЛС на интервале накопления Ти; Ga, Sa - коэффициент направленного действия (КПД) передающей антенны и эквивалентная площадь приемной антенны РЛС; Лщо - спектральная плотность мощности собственных шумов приемника РЛС; Ко6р - коэффициент потерь мощности (энергии) сигнала при его об-
Автор: В.В. Быков
Таблица 2.2
Условия функционирования РЛС Тип РЛС Характер зависимости дальности обнаружения объектов от ЭПР Выражения для коэффициента пропорцион.ыьносгп |
Обнаружение (ХУьектов в свободном пространстве Любые однопоэицноиные РЛС с известным временем когерентного накопления сигналов R = A, Ч р‘> !
! Обнаружение наземных = (надводных) объектов : бортовыми РЛС Импульсные некогерентные РЛС, в том числе со сжатием импульсов R~A2 (7 л, = ' (2 2)
Когерентные импульсные РЛС с доплеровским сужением луча R = .4, а2 Д-1/(аП2Л<т02<') Г2.3Э
Когерентные импульсные РЛС с синтезированной апертурой Вероятность обнаружения не зависит от дальности Условие обнаружения объектов
I Обнаружение : летательных аппаратов в условиях помех от Земин < Fo) а) отражений по главному лепестку ДПА \ («пика Земли»); I б) фона Земли по боко-; вым лепесткам ДНА ; РЛС Когерентные непрерывные доплеровские РЛС R = 42cr1",H1'1 41 <2.5.г) i 4. =Чгм )] f2-56> j
Импульсно-доплеровские РЛС с высокой ЧПИ (2об>
Импульсио-доплеровскнс РЛС со средней ЧПИ А,, (2 7о) Лп-\ (2.76)
работке (при оптимальной обработке Ko6fl=\); qB ~ коэффициент различения сигнала на фоне помехи, равный отношению сигнал-помеха, необходимому для обнаружения сигнала с заданной вероятностью при соответствующем уровне ложной тревоги; 0Т 0В - разрешающая способность РЛС по направлению (ширина диаграммы направленности (ДН) в горизонтальной и вертикальной плоскостях, в радианах); А/? = сгн / 2 -разрешающая способность РЛС по дальности, определяемая длительностью сжатого импульса ти РЛС, где с - скорость распространения радиоволн; Я - длина рабочей волны РЛС; <т0 - удельная ЭПР подстилающей поверхности; /С6ср - коэффициент ослабления среднего уровня
боковых лепестков ДН антенны (ДНА) РЛС относительно главного; Ц -длина синтезированной апертуры РЛС; Д - угол места цели относительно горизонта; Vo -скорость полета носителя РЛС Кс - скорость сближения цели с носителем РЛС; AFCTp - ширина строба скорости непрерывных и импульсно-доплеровских РЛС, в герцах; S - скважность сигнала РЛС как отношение периода повторения импульсов Тп к длительности сжатого импульса; Н- высота полета носителя бортовой РЛС.
Формула (2.1) в табл. 2.2 - общеизвестна [1]. Формулы (2.2) - (2.4) получены из отношения мощности помехи, отраженной от поверхности Земли площадью, соответствующей элементу разрешения РЛС по дальности и азимуту, к мощности отраженного от цели сигнала. При этом в (2.2) учтено облучение поверхности Земли боковыми лепестками ДНА РЛС (второе слагаемое в круглых скобках). В этих выражениях не учитывалась возможность селекции движущихся целей (СДЦ). Можно учесть СДЦ делением £ на /Ссдц - коэффициент подпомеховой види
мости с помощью схем СДЦ.
Аналогично (2.2)-(2.4) получены (2.5)-(2.7), при этом учтено стробирование по скорости. Предполагалось, что носитель РЛС движется горизонтально со скоростью Ко на высоте Н от поверхности Земли, а РЛС подвержена помехам от Земли только тогда, когда скорость сближения носителя РЛС с целью меньше скорости носителя. В противном случае коэффициент подпомеховой видимости настолько велик, что можно пользоваться характеристиками обнаружения целей в свободном пространстве (характерно для когерентных доплеровских РЛС). Для расчета дальности в условиях влияния «пика Земли» справедливы (2.5а), (2.6а) и (2.7а) при Д> Дшп, где Дш1| составляет 3...5 град. При этом доплеровская частота «пика Земли» соответствует скорости V = K0cosacos/?, где а - текущий азимутальный угол оси ДНА РЛС
относительно направления перемещения РЛС. Легко показать, что ширина доплеровского спектра «пика Земли» в первом приближении
Fn 3 ® —-|Д sin а + Oleosa sin Д| . Л
(2.8)
При одинаковой ширине ДНА РЛС в горизонтальной и вертикальной плоскостях (Д = Д = в) из (2.8) следует, что
2К
AFn 3 ® —-#|sina + cosasin ft\ . Л
(2-9)
Для современных РЛС согласно (2.8), (2.9) ширина доплеровского спектра «пика Земли» лежит в пределах от сотен герц до нескольких килогерц. Анализ показывает, что мощность «пика Земли» настолько
велика, что обнаружение на его фоне летательных аппаратов доплеровскими РЛС практически невозможно, поэтому имеет смысл рассматривать только зону обнаружения РЛС вне «пика Земли» , для которой справедливы соотношения (2.56), (2.66), (2.76) в табл. 2.2. При выводе этих соотношений использовано три основных положения:
1) спектрально-энергетические характеристики помехи от Земли при непрерывном и импульсно-доплеровском режимах работы в полосе (—2И0 /Я, 2И0/Я) соответствуют изотропному боковому излучению антенны РЛС в нижней полусфере и изотропной подстилающей поверхности, имеющей постоянную, не зависящую от угла облучения элементов поверхности, величину удельной ЭПР;
2) спектральная плотность мощности этой помехи в импульснодоплеровском режиме после стробирования по дальности меньше спектральной плотности в непрерывном режиме в S раз;
3) уменьшение спектральной плотности мощности помехи с ростом S из-за эффекта наложения частот прекращается при частоте повторения импульсов
f; = 1/(Sth) = 4Г0/Я. (2.10)
Положения 2 и 3 определяют выгодность перехода к средней частоте повторения импульсов (ЧПИ) при обнаружении целей с малыми скоростям сближения: при Fn<F’, где F* задается (2.10), отношение сигнал-помеха максимально [2].
Оценим спектрально-энергетические характеристики помехи от Земли с использованием положения 1. Для этого аппроксимируем угловую зависимость удельной ЭПР (диаграмму рассеяния) подстилающей поверхности (ПП) в виде, <т0 (/) = <т0о sin" /, где / - отсчитываемый от горизонта вниз угол места облучаемого элемента поверхности (угол скольжения падающего излучения); <т0о - максимальное значение удельной ЭПР, наблюдаемое при облучении по вертикали (/ = л72); п - параметр, характеризующий ширину диаграммы рассеяния ПП.
Интересующий нас случай имеет место при и=0 (рассеяние по закону Эйлера); «=2 соответствует рассеянию по закону Ламберта. Изменяя и, можно учесть достаточно широкий класс зависимостей удельной ЭПР ПП.
При горизонтальном полете носителя РЛС непрерывного излучения и аппроксимации боковых лепестков ДНА постоянным уровнем энергетический спектр помехи от Земли.
f ГР G2’6T/o5a-'t (2-11)
где F - доплеровская частота; Р - мощность излучения РЛС; Ga5, 5 а,8 ~ КНД и эффективная площадь антенны РЛС в области боковых лепестков (нижняя полусфера); Я(х,у) = (н2 + х2 + у2\' - расстояние от РЛС
до точки подстилающей поверхности с координатами х, у (начало координат лежит на поверхности Земли под РЛС, ось X направлена горизонтально по курсу полета, ось У перпендикулярна оси X и также направлена горизонтально, ось Z - вертикальная, на ней расположен носитель РЛС на расстоянии Н от начала координат) <?(•) - дельта-функция.
Интеграл (2.11) сводится к табличному. В результате
[у ( f\= ? <~'а.6‘^а.6°~0о^п пфЛ ’ 16я2Н2Г0
(2.12)
где Го = 2К0/Я - верхняя частота спектра;
„ г dx z„
Вп~ L, (2' 3)
-со ^1 + X j
- коэффициент, зависящий от параметра п функции <т0 (у).
Начальные четыре значения интеграла (2.13) составляют: Во = 2, В, = л72, В2 = 4/3, В3 = Зя78.
Суммарная мощность помехи от Земли в полосе (-F0,F0)
(2.14)
-/•о \ /
Согласно (2.14) по суммарной мощности помеха от Земли эквивалентна наличию пассивного отражателя, расположенного в области боковых лепестков ДНА РЛС на расстоянии, равном высоте полета и имеющего ЭПР <тп = лН2<т0о / (1 + п / 2).
Средняя спектральная плотность мощности помехи в полосе (-^о^о)
= Рп.фз / (2Fo) = /’п.фэ /(4К0 / Я). (2.15)
Формулы (2.14) и (2.15) при и=0 легли в основу соотношений (2.56), (2.66) и (2.76) в табл. 2.2, причем (2.76) получено из (2.66) подстановкой скважности 5, удовлетворяющей (2.10).
Результаты расчетов требуемой степени снижения ЭПР объектов для обеспечения необнаружения их современными РЛС в типовых условиях, полученные с использованием табл. 2.2, приведены в табл. 2.3.
Таблица 2.3
Условия обнаружения объектов Параметры типовых условий обнаружения объектов Требуемая эффективность мер снижения ЭПР объектов Требуемая степень снижения ЭПР объектов
Обнаружение объектов в свободном пространстве Уменьшение дальности o6i |аружения объектов в 10 раз До величины порядка 0,001 м2 (для самолетов -на 40 дБ)
Обнаружение малоподвижных наземных объектов когерентными РЛС с синтезированной апертурой =4 * " II II II 11 н-:=;-— _ О ® о о ь-> 2 g Снижение ЭПР до уровня фона подстилающей поверхности До величины порядка 0,1 м2 (для наземных объектов типа танк и автомобиль -на 30 дБ, для надводных кораблей -на 40...50дБ)
Обнаружение ЛА импульснодоплеровскими РЛС со средней ЧПИ на фоне помех от Земли Самолетные РЛС дальнего обнаружения Н= 10 км, Ко = -200 м/с, л':=10‘', 5=30, АКстр^ОО Гц, =10, <7()=10’2 Уменьшение дальности обнаружения до 30 км До величины порядка 0,1 м2 (для самолетов -на 20 дБ)
Бортовые РЛС истребителей 77 = 10 км, К62 =107, АКс^ЮО Гц, гн = 1 мкс, q[ = 10 Уменьшение дальности обнаружения до 3 км До величины порядка 0,3 м2 (для самолетов -на 15 дБ)
Из табл. 2.3 видно, что требуемая степень снижения ЭПР объектов для обеспечения их низкой радиолокационной заметности в большинстве случаев составляет 30...40 дБ. Такой уровень ЭПР в настоящее и ближайшее время практически нельзя обеспечить. Действительно, в коротковолновой области, где размеры объекта гораздо больше длины волны и наиболее эффективны распространенные способы снижения ЭПР, основанные на применении радиопоглошаюших покрытий и материалов, среднюю величину ЭПР можно приближенно представить в виде о- = SM/?cpGo6 (Su - площадь миделя объекта при заданном угле наблюдения; /7ср - средний коэффициент отражения поверхности объекта
на данной длине волны; Go6 - коэффициент направленного действия объекта как вторичного излучателя).
Радиопоглащающие покрытия и материалы применяются для уменьшения величины рср, а форма объекта выбирается для уменьшения величины Go6. У объектов типа самолет без применения мер снижения ЭПР величины рср и Go6 близки к единице. Для снижения ЭПР таких объектов, например на 40 дБ, при равной эффективности указанных мер нужно выполнить условие рср = Go6 = -20 дБ , что в настоящее время встречает практически непреодолимые трудности. Выход следует искать в совместном применении мер снижения ЭПР и средств создания активных помех.
Снижение дальности действия РЛС при уменьшении ЭПР и создании активных шумовых помех. Как показывает анализ, при совместном применении различных помех существует четыре основных типа закономерностей объединения эффектов отдельного применения помех в общий эффект: простое аддитивное (сумма) или мультипликативное (произведение) объединение; объединение эффектов с усилением, когда общий эффект выше простой суммы или произведения эффектов; объединение с поглощением слабых эффектов одним наибольшим (доминирующим) эффектом; объединение со взаимным уничтожением эффектов. В зависимости от типа объединения можно говорить соответственно о хорошей совместимости, сверхсовместимости, условной совместимости и несовместимости помех.
Совместное применение мер снижения ЭПР и средств создания активных шумовых помех применительно к наиболее сложному случаю обнаружения объектов в свободном пространстве оказывается совместимым с усилением при самоприкрытии и прикрытии из строя [3,4], если в качестве критерия эффективности принять коэффициент снижения дальности обнаружения объектов. Действительно, используя (2.1) из табл. 2.2 и формулу радиоподавления [3,4], легко показать, что при самоприкрытии и прикрытии из строя, когда дальности до обнаруживаемых объектов и постановщиков помех практически совпадают, общий коэффициент снижения дальности обнаружения
K-r = Kr ашп^л эпр > (2-16)
где KR АШП, Л^эпр - коэффициенты снижения дальности обнаружения при автономном применении средств создания активных шумовых помех (АШП) и мер снижения ЭПР соответственно.
Формула (2.16) справедлива при /^ЛАШП >1, когда на максимальной дальности обнаружения без помех спектральная плотность мощно
сти АШП на входе приемника РЛС существенно превышает мощность собственных шумов приемника, что обычно имеет место.
Согласно (2.16), если автономное применение АШП снижает дальность обнаружения в 3 раза, а автономное применение мер снижает ЭПР в л/10 = 1,78 раза (снижение ЭПР объекта на 10 дБ), то совместное их применение снижает дальность обнаружения не в 5,3 раза, как это было бы при простом мультипликативном объединении эффектов, а в 9,5 раза. Это свидетельствует о целесообразности совместного применения мер снижения ЭПР и средств создания активных помех.
Точное выражение для KR согласно [5]
>nGnW Sac*c<7c У
где kt = KR АШП , А2 = KR ЭПР - коэффициенты, определенные выше;
к? - приближенное значение коэффициента kf , не учитывающее соб
ственные шумы приемника РЛС; PnGn - энергетический потенциал постановщика АШП; Д/п - ширина спектра шумовой помехи; Къ - коэффициент ослабления боковых лепестков ДНА РЛС относительно главного лепестка (при воздействии помехи по главному лепестку ДНА
= 1); PCGC - энергетический потенциал РЛС по средней мощности
излучения; 5ас - эквивалентная площадь приемной антенны РЛС; Кс -коэффициент потерь мощности сигнала РЛС при обработке; q[ - требуемое для нормальной работы РЛС отношение сигнал-шум; <тс - ЭПР
цели; Тс - время когерентного накопления сигнала; Ашс - спектральная плотность мощности собственного шума приемной системы РЛС.
Таким образом для обеспечения практической незаметности объектов требуемая степень снижения их ЭПР в зависимости от условий функционирования современных РЛС составляет 15...50 дБ, а в наиболее вероятных случаях 30...40 дБ.
При совместном применении средств снижения радиолокационной заметности и средств создания активных шумовых помех эффекты их отдельного применения складываются с усилением: общий коэффициент снижения дальности обнаружения равен коэффициенту снижения дальности от автономного применения активных помех, умноженному на квадрат коэффициента снижения дальности от автономного применения мер снижения заметности.
Литература
1, Справочник по радиолокации / Под ред. М. Сколника. - М.: Сов.радио, 1976,т.1.
2. РЛС AN/APG-63 истребителя F-15. - Радиоэлектроника за рубежом, 1975, вып. 21.
3. Вакин С.А., Шустов Л.И. Основы радиопротиводействия и радиотехнической разведки. -М.: Сов.радио, 1968.
4. Van Brunt, LB. - Applied ECM, 1978, v. 1, E.W. Engineering, USA.
5. Быков В. В. - Радиотехника, 2001, № 9.
2.3. Эффективность радиоэлектронных систем при оптимальном противодействии с использованием заградительных помех
При противодействии РЭС постановщик помех обычно имеет неполную информацию о параметрах излучений РЭС - объектов противодействия. При малой неопределенности этих параметров (несущей частоты, направления прихода излучения и т.п.) создаются прицельные, а при больщой - заградительные помехи [1].
Задача оценки гарантированной эффективности РЭС в условиях заградительных помех, когда постановщик помех оптимальным образом использует свой энергетический ресурс, насколько это известно, ставится впервые. Сформулируем ее математически.
Пусть а - неточно известный постановщику помех параметр излучения РЭС с априорной плотностью вероятности w(cr). Положим, что постановщик помех, зная w(a), имеет возможность формировать любое распределение G(cr) общей мощности помехи Р„ по параметру а. При 00
этом ^G(a)da = Рп . Типичной является ситуация, когда отношение по-—оО
меха-сигнал в приемном устройстве РЭС пропорционально G(a). В этих случаях эффективность функционирования РЭС при фиксированном а
Автор: В.В. Быков
и прочих равных условиях (F(cr) = F(G(cr), где F(«) - функция эффективности РЭС, т.е. зависимость качества функционирования РЭС (вероятности обнаружения цели, точности измерения координат и т.п.) от плотности мощности помехи G(cr). Функция F(«), как правило, монотонно убывающая - чем выше интенсивность помехи, тем ниже эффективность функционирования РЭС. В среднем эффективность РЭС
СП
W= |w(cr)F(G(cr))cta. Для получения гарантированной средней эф-
фективности Wo нужно решить оптимизационную задачу сП 00
G0(cr) = argmin |w(cr)F(G(cr))dcr, JG(a^da = Pn, (2.17)
l^(a)} -to -w
после чего искомая
fw(cr)F(G(cr))<ta. (2.18)
—сП
Для решения задачи (2.17) воспользуемся известным методом неопределенных множителей Лагранжа, согласно которому экстремум функционала (2.17) находится из системы уравнений:
w(cr)F^ (G(cr)) + 2 = О,
м, (2.19)
JG(«>/a = Pn,
—СП
где Fq (G(cr)) - производная функции F(G(cr)) по аргументу G.
Полученную из (2.19) экстремаль G0(cr), если она существует, необходимо проверить на соответствие минимуму функционала. Если экстремаль не существует или существует, но соответствует не минимуму, а максимуму функционала, то нужно переходить к другому методу решения вариационной задачи, например, к методу динамического программирования [2].
Рассмотрим подробно распространенный на практике вариант задачи (2.17), когда распределение вероятностей неизвестного параметра прицеливания а равномерно на интервале (а, Ь). Задача (2.17) и система (2.19) в этом случае сведутся к виду:
G0(cr) = argmin—-—[F(G(cr)Vcr, [ G(a)da = Рп; (2.20)
{«(“)} b~ar,
b
F'(G(a)) + 2 = 0, jG(a)rfcr = Pn. (2.21)
Из решения (2.21) следует, что экстремалью является равномерное на интервале (а, Ь) распределение плотности мощности помехи. Однако, как показывает дополнительный анализ, это распределение далеко не всегда соответствует минимуму функционала (2.20) (вид оптимального решения существенно зависит от характера функции эффективности F(«)). Оптимальное распределение Go(a), найденное с использованием упомянутого выше метода динамического программирования для четырех основных показанных на рис. 2.1 функций эффективности - с постоянной (кривая 0), с возрастающей (кривая 7), с убывающей
(кривая 2) и с возрастающе-убывающей, т.е. для функции логистического характера (кривая 3) скоростями убывания, имеет вид:
кривая 0 - Ge(a) произвольная функция, удовлетворяющая условию (2.20);
кривая 1 - Ga(a) = Рп<5(а-а0), аое(а, Ь) (где <^«) - дельта-функция), оптимальное решение соответствует максимальному сосредоточению мощности помехи в одной из точек области неопределенности параметра прицеливания а;
кривая 2 - Go(a) = Рп/(Ь-а), ае(а, Ь), оптимальное распределение мощности помехи равномерно на интервале (я, Ь)) - случай, когда экстремаль совпадает с минимумом функционала;
кривая 3 - G0(a) = Р^а„ а е (аь Z>|), ai е (а, Ь), Ь{ е (а, Ь), by-a\ = ai < b - а, т. е. оптимальным является равномерное распределение помехи в более узкой, чем область неопределенности параметра а, области шириной <Х\, при этом область распределения помехи может лежать в произвольном месте интервала (а, Ь).
Нетрудно показать, что в последнем случае оптимальная ширина at прикрываемой помехой области находится из условия
min
{ае(0,/>-а)}
f(—l + F(O)fl— b-а \ b-a)
(2.22)
Если функция F(x) дифференцируемая, то экстремальное значение ai, удовлетворяющее (2.22), находится из уравнения
f|^| = ^f;| ^-| + F(0). (2.23)
а, ) at < a, J
Возьмем в качестве функций эффективности типа 3 семейство функций
Г(*,М) = 7-------Г- (2-24)
(l+(h)")
где к - масштабный коэффициент; п— порядок функции (для обеспечения логистического характера функции (2.24) должно выполняться условие п > 1).
Подбором параметров к, п можно с помощью (2.24) аппроксимировать различные конкретные функции эффективности логистического типа.
Подставляя (2.24) и ее производную по аргументу х в (2.23), находим
«iopt = ^Я(«-1Г1/Я • (2-25)
Если согласно (2.25) окажется crlopt > (b-a), то необходимо положить crlopt = (b - а). Из (2.25) следует, что с уменьшением суммарной мощности помехи степень ее сосредоточенности должна увеличиваться.
Подставляя найденное оптимальное распределение мощности помехи в (2.18), получаем выражение для гарантированной эффективности РЭС:
ГГо=1_^(^)1-1/", Ь-а п
При полностью заградительной помехе, когда ее мощность равномерно распределена во всем интервале неопределенности параметра а, эффективность РЭС IV =-----5-----. Коэффициент снижения эф-
i+fi+^T
I Ь-а)
фективности за счет оптимизации степени сосредоточенности помехи
(1 + ^о (и-1))(1-Д(1-и-1))
где Д =—— ll-и'1) - оптимальная степень перекрытия помехой об-b-av '
ласти неопределенности параметра а, при этом 0<Д<1.
Согласно (2.26) Kw= 1 при Д= 0 и 1. Существует оптимальное значение Д, при котором выигрыш от оптимизации помехи максимальный. Анализ показывает, что при п= 2 и 4 выигрыш максимален при Д=1/3 и 1/2. В этих случаях Kw = 1,08 и 1,35 соответственно. В целом в зависимости от порядка функции эффективности и значения Д выигрыш в эффективности от оптимизации степени сосредоточенности помехи может составлять до 10 и более раз.
В большинстве случаев, в том числе и в случае, когда функция эффективности РЭС носит логистический характер, чисто заградительная помеха, накрывающая всю область неопределенности параметра РЭС, не является оптимальной. Более опасная для РЭС полузагради-тельная помеха с равномерным распределением мощности в полосе, оптимально суженной (сосредоточенной) по сравнению с интервалом неопределенности накрываемого помехой параметра излучения РЭС. Оптимальная степень сосредоточенности помехи и выигрыш в эффективности от оптимизации зависят от мощности помехи, вида н параметров функции эффективности. При этом, чем меньше мощность помехи, тем более она должна быть сосредоточенной. В рассмотренных примерах выигрыш в эффективности помехи от ее оптимизации составлял до 10 и более раз.
Литература
1. Вакин С. А., Шустов Л. Н. Основы радиопротиводействия и радиоразведки. -М.: Сов.радио, 1968.
2. Веллман Р., Дрейфус С. Прикладные задачи динамического программирования: Пер. с англ. / Под ред. А. А. Первозванского - М.: Наука. 1965.
2.4. Точность радиолокационного самонаведения объектов в условиях блужданий центра излучения и маневра цели*
Методы и результаты анализа точности систем самонаведения объектов (управляемых ракет, космических аппаратов и т.п.) при различных возмущающих воздействиях содержатся в ряде работ [1-3]. Однако известные работы ввиду разобщенности методических подходов и исходных предпосылок не дают ясного представления о точностных характеристиках систем самонаведения объектов (ССНО) при совместном воздействии двух возмущающих факторов: маневра и блужданий центра излучения цели. В особенности это относится к случаю, когда цель маневрирует и управляет блужданиями центра излучения преднамеренно, т.е. когда ССНО функционирует в условиях противодействия (конфликта).
Рассмотрим построение достаточно простой модели динамики типовых систем самонаведения, соответствующую этой модели аналитическую методику расчета точности самонаведения при наличии маневра и блужданий центра излучения цели и найдем закономерности, определяющие точность наведения при отсутствии и наличии противодействия.
Наиболее распространенным видом ССНО являются системы, реализующие метод усовершенствованной пропорциональной навигации с законом управления:
Авторы: В.В. Быков, IO.С.Сухоруков
а„ = КнУсф = Кнак/2, (2.27)
где а„ - нормальное (перпендикулярные линии визирования) ускорение объекта; - навигационная постоянная; Vz - скорость сближения объекта с целью; ф - текущая угловая скорость линии визирования цели относительно объекта; ак = 2Усф - кориолисово ускорение объекта при движении его со скоростью Ис вдоль вращающейся с угловой скоростью <р линии визирования цели.
При обычном (неусовершенствованном) методе пропорциональной навигации закон управления объектом имеет вид
ё = К^ф , (2.28)
где в - угловая скорость разворота вектора скорости объекта; Ки -навигационная постоянная.
Поскольку ан = У20, где И2 - скорость наводимого объекта, то навигационные постоянные в (2.27) и (2.28) связаны соотношением
^Н = ад/Ис . (2.29)
При наведении объектов на неподвижные цели, когда И2 = Йс, навигационные постоянные в (2.27) и (2.28) совпадают. При наведении на подвижные цели с использованием закона управления (2.27), как будет видно из дальнейшего, обеспечивается независимость динамических свойств ССНО от скорости цели и угла сближения с нею. Закон управления (2.28) такой инвариантностью не обладает. В этом состоит усовершенствование метода наведения.
Наиболее простая динамическая модель ССНО с законом управления (2.27) получается, если уравнения кинематической связи записывать в прямоугольной неподвижной, а не в
полярной, как это принято [1-3], сис- Рис. 2.2
теме координат, ориентированной продольной осью по линии визирования в начале наведения объекта О (рис. 2.2). Дополнительным условием упрощения является линеаризация этих уравнений на основе малости угла поворота линии визирования в процессе наведения объекта. При выполнении указанных условий для одной из плоскостей наведения можно записать НО=[^ (0 -У1 (01М(0=[л (0 _ я (0]/К - КО; Л (0=а» (0> <2-30)
где t - время, отсчитываемое от начала наведения; yt 2 (0 - текущие прямоугольные координаты цели и объекта; 7?(г) =f - текущее расстояние между объектом и целью; у2 (t) - вторая производная от у2 (t).
Согласно (2.30) уравнения кинематической связи свелись к двойному интегрированию и двум арифметическим операциям: вычитанию координат цели и объекта и делению разности на текущую линейно убывающую дальность до цели.
Объединяя (2.30) и (2.27), приходим к структурной схеме упрощенной динамической модели ССНО, представленной на рис. 2.3,а, где
Тн = Л,, / Ис - общее время наведения (от начала наведения до момента встречи объекта с целью); /70(р) - передаточная функция динамических звеньев ССНО. При составлении структурной схемы учтено, что дифференцирующее звено, преобразующее <р в ip, компенсирует одно из интегрирующих звеньев
кинематического уравнения, поэтому на рис. 2.3,а фигурирует только один интегратор. Отметим также, что в структурной схеме отсутствуют нелинейные звенья ССНО, в частности, ограничитель по располагаемой перегрузке объекта. Это делает модель ССНО пригодной для анализа только сравнительно малых возмущений, когда нелинейные свойства не проявляются. В рассматриваемых задачах такое условие в большинстве случаев выполняется.
Полученная динамическая система относится к классу линейных нестационарных систем. Ее импульсная характеристика g(f,£) - функция двух переменных: времени наблюдения отклика (аргумент t) и момента подачи на вход 8 -функции (аргумент 5,). Поскольку нас интересует лишь конечная ошибка наведения (промах) Ду = у1(Тн)-у2(Тн), нестационарную систему можно исследовать как стационарную по методу сопряженных систем [4]. Сопряженная импульсная характеристика системы g’(r) = g(TH,rH-T) в данном случае представляет собой зависимость отклика системы (координаты объекта наведения) в момент времени t=TH на 8 -функцию, поданную на вход в момент времени 8, = Тп - т , где т - время, оставшееся до встречи объекта с целью в момент подачи 8-функции.
Зная g* (г), можно найти координату объекта в момент встречи его с целью и ошибку наведения при произвольном входном воздействии У1 (г):
У2 (Гн) = Jy, (гн - т)g (т) dr, Ду = у, (Гн) - у2 (Гн). (2.31)
о
Найдем сопряженную передаточную функцию (ПФ) ССНО как передаточную функцию стационарной системы, соответствующую импульсной характеристике g*(r). Для этого воспользуемся методом инверсных систем [4], согласно которому для получения сопряженной импульсной характеристики нужно перейти от исходной к инверсной системе. Применив изложенные в [4] правила инверсии, получим структурную схему, представленную на рис. 2.3,6.
Из инверсной системы следует, что импульсная характеристика g' (т) удовлетворяет интегральному уравнению
((б (г) - g* (т)} ® h(г))/т - g' (т) = 0, (2.32)
где й(т) - импульсная характеристика стационарной части разомкнутой ССНО, имеющей передаточную функцию Н(р) = КиНй (р)/р ; ® -операция свертки функций.
Уравнение (2.32) с использованием свойства линейности операции свертки и фильтрующего свойства <5 -функции приводится к виду
h(r)/T - (g* (т) ® й(т))/ т - g’ (т) = 0. (2.33)
Применяя к (2.33) преобразование Лапласа и используя известную
СО
теорему деления, согласно которой jF(s)dy, где
р
СО
= |/(т)е ^dz - преобразование Лапласа от f (т), получаем о
интегральное уравнение относительно искомой передаточной функции
(s)ds - рГ (s) H (s)ds -G* (p) = 0. (2.34)
p p
После дифференцирования (2.34) по аргументу р перейдем к дифференциальному уравнению
G’(p)-G’(p)tf(p) + H(p) = 0, (2.35)
где G’(p) = —G’(p) - производная от G‘(p). dp
Непосредственной подстановкой в (2.35) можно убедиться, что искомое решение имеет вид
00
G*(p)=l-e р (2.36)
Полученное решение соответствует начальному условию
«
G"(0) = |g*(г)</г=1, которое физически означает, что ССНО дает нулевой о
промах при Ти —> оо в случае воздействия в виде единичного скачка.
Сопряженная передаточная функция ССНО вида (2.36) является передаточной функцией со входом по положению цели и выходом по положению объекта. Согласно (2.31) передаточная функция ССНО с тем же входом, но выходом по ошибке (промаху) имеет вид
00 00 / X.
-К„ -jH0(s)ds/s
G;(p) = l-G*(p) = e " = е ” = е . (2.37)
Входное воздействие на ССНО в дальнейшем представим в виде: (0 = Л(О + У1 (О’
где у, (г) - составляющая, характеризующая движение геометрического центра цели (сигнал); у^г) - переменная (флуктуационная) составляющая, связанная с блужданиями радиолокационного центра излучения цели (помеха). Тогда ошибка наведения Ду будет представлять со
бой сумму динамической Ду и флуктуационной Ду, ошибок, рассчитываемых согласно соотношениям:
7’ Т
Jn 'н
ДУ = pi (Г„-^(т)^г, Ду= О о
где g2(r), g’(r) - импульсные характеристики ССНО с выходом по промаху и по положению (обратные преобразования Лапласа от G2(p) и G’(p) соответственно).
В ССНО обычно имеется три основных последовательно соединенных динамических звена: контур углового сопровождения (КУС), фильтр команды (ФК) и контур стабилизации объекта (КСО) с передаточными функциями Якус(р), НфК(р), Яксо(р), так что входящая в (2.36) и (2.37)передаточная функция Н0(р)= ЯКУС(р) #ФК (р)яксо (/>)
Рассмотрим основные свойства ССНО на примере системы минимального порядка, когда КУС и КСО безынерционые, а фильтр команды - простое инерционное звено с НФК (р) = 1/(1 +Тфр). В этом случае
Я(р) = КЛо(р)/р = -Л-т^,,Р--г^~ • (2-38)
Р(1+Р^Ф) [Р х+ТфР)
Подставляя (2.38) как сумму простых дробей в (2.37), легко найдем
р^ф
G*(p) = l-
р7ф 1+P7i
(2.39)
Передаточные функции (2.39) рациональные только при целых Кл . В общем же случае они нерациональные. При целых Кн, как показывает анализ (2.39), можно сделать следующие основные выводы: ССНО как динамические системы эквивалентны в сопряженном смысле стационарным системам слежения за положением цели с астатизмом, равным навигационной постоянной Кн; импульсная характеристика ССНО, соответствующая ее передаточной функции по положению цели, носит колебательный характер с числом положительных и отрицательных участков, равным навигационной постоянной, что свидетельствует о резонансных свойствах ССНО.
Для подтверждения последнего были рассчитаны амплитудно-частотные характеристики ССНО с передаточной функцией G*(p) вида (2.38). При Кн = 2, 3, 4 максимум АЧХ имеет место на частотах 4УрТф =0,71; 1,33; 1,55 и равен 1,15; 1,28; 1,38 соответственно.
Аналогичными свойствами обладают ССНО с более высоким порядком передаточной функции разомкнутой части. При этом с ростом порядка степень колебательности при прочих равных условиях возрастает. Например, в случае, когда разомкнутая ССНО с учетом кинематического звена имеет ПФ вида
я(р)=-з-^—
Лг=1
где ак ^=Тк-\ ^ак=\,
/ /=1 А=1
Для сопряженной ПФ согласно (2.36) получим
5
(2.40)
Расчеты, проведенные с использованием (2.40) при Кп = 3 ... 4 и Т{ = 0,05с, Т2 = 0,1с, Д = 0,15с, Г4 = 0,07с, Т5 = 0,1 Зс показывают, что АЧХ системы на резонансной частоте имеет подъем до 3,0 ... 3,5. Это свидетельствует о значительной колебательности системы и возможностях ее резонансной раскачки, существенно снижающей точность наведения.
Полученные соотношения позволяют достаточно просто с помощью известных методов теории линейных стационарных систем рассчитывать динамические и флуктуационные ошибки наведения при заданных параметрах ССНО и характеристиках регулярных или случайных воздействий: сигнала, отображающего движение центра цели, и помехи в виде блужданий центра излучения цели. При этом случайные воздействия задаются своими корреляционно-спектральными характеристиками, а ошибки наведения - среднеквадратическими значениями.
Наряду с задачами анализа полученные соотношения можно использовать для решения задач синтеза ССНО по критерию минимума суммы динамических и флуктуационных ошибок наведения, в частности, на основе метода оптимальной линейной фильтрации Винера— Хопфа. При таком синтезе сначала получается оптимальная сопряженная передаточная функция системы G’pl(p). Для перехода к оптимальной передаточной функции стационарной части разомкнутой системы Яор, (р) следует использовать формулу, обратную (2.36):
-H(p) = G-(p)/[l-G-(/>)], (2-41)
где G*(p) = —G*(p) - производная сопряженной передаточной функции. dp
Если результатом синтеза является рациональная сопряженная ПФ ССНО G*pt (р), то преобразование (2.41) сохраняет эту рациональность. Однако полученная таким образом Яор1(р) может оказаться физически нереализуемой из-за возможной бесконечной полосы пропускания, когда степень числителя Яор, (р) равна или больше степени знаменателя. В таких случаях следует прибегать к аппроксимации строго оптимальной ПФ квазиоптимальной физически реализуемой ПФ.
Рассмотрим теперь вопросы точности ССНО в условиях противодействия. Возможны два основных варианта задач: 1) цель оптимизирует воздействия под фиксированные известные ей характеристики
ССНО; 2) осуществляется двусторонняя иш им пзацил воздействия для максимизации промаха и динамических характеристик ССНО для минимизации промаха (полный конфликт).
В первом случае основными ограничениями у цели являются располагаемое нормальное ускорение (перегрузка) и диапазон смещения центра излучения цели относительно ее геометрического центра (при некогерентном излучении принципиально возможно перемещение центра излучения лишь в пределах размеров цели [6]). Для максимизации динамических ошибок нужно, очевидно, маневрировать с максимально возможным нормальным ускорением днп1ах. При этом, поскольку ССНО при Кя > 3 обладает высоким астатизмом, обеспечивающим отсутствие динамических ошибок при длительном маневре в одну сторону, маневр должен быть знакопеременным по закону типа меандр с частотой й> = 2л77'м, обеспечивающей максимальную амплитуду динамической ошибки (Тм - период маневра). При указанном периодическом маневре координата цели как двойной интеграл от ускорения будет близка к синусоидальной с амплитудой
^=(4/я)антах/й>2. (2.42)
Множитель 4/л в (2.42) является отношением амплитуды первой гармоники меандра к амплитуде самого меандра.
Оптимальная частота маневра должна, очевидно, соответствовать максимуму АЧХ, получаемой из передаточной функции ССНО по промаху со входом по нормальному ускорению, т.е.
“о = arg тахкд (р)| | = arg max (р)|
W 1 1 М Р
(2.43)
Подставляя в (2.43) бДр) из рассмотренного выше примера (формула (2.40)), получаем
Кд (1й>) = ~5---------------
1 1 Т~Т / 2 2\я^"/2
, ак - Тк 1.
(2.44)
*=1
Расчеты по (2.44) при различных значениях постоянных времени Тк и Кн = 3 ... 4 показывают следующее:
5
оптимальная частота маневра а)0'^Т£1, где Т^=^^Тк -суммарная
к=1
постоянная времени звеньев разомкнутой ССНО;
величина максимума АЧХ
|G;A(i<)|«(25 ... 30)TCp , (2.45)
где Tcp=Tz/5 - средняя постоянная времени разомкнутой ССНО. Отсюда при Тср =0,1с, = 0,5с оптимальный период маневра имеег порядок
Тм 0 = 2л7 w0'« 3 с, а амплитуда динамического промаха =(4/тг)х (25 ... 30)Гс2р антах «(0,3 ... 0,4)а1|тах, т.е. около 3...4 м на единицу перегрузки цели.
Рассмотрим случай полного конфликта. Из соотношений (2.45) и (2.39) следует, что со стороны ССНО в условиях противодействия цели нужно в максимальной степени повышать быстродействие системы за счет уменьшения постоянных времени звеньев и их числа (понижение порядка системы). Кроме того, нужно понижать колебательность системы в сопряженном смысле за счет понижения порядка системы и рационального выбора навигационной постоянной.
В заключение отметим, что полученные результаты, справедливые для одной из плоскостей наведения, легко обобщаются на пространственный случай путем векторного сложения откликов ССНО во взаимно перпендикулярных плоскостях. При этом можно рассматривать системы с одинаковыми (симметричными ССНО) и различными (несимметричными ССНО) динамическими свойствами в двух плоскостях наведения. Анализ показывает, что переход к пространственному наведению может давать качественно иные результаты. В частности при винтовом маневре цели, когда она совершает синусоидальные колебания положения относительно опорной линии в двух взаимно перпендикулярных плоскостях со сдвигом по фазе на л II, а проекция цели на плоскость, перпендикулярную линии визирования (картинную плоскость), совершает круговые движения, пространственный промах в случае симметричной ССНО вместо переменного, изменяющегося по синусоидальному закону в зависимости от начальной фазы маневра, превратится в постоянный, равный максимальному значению промаха в одной из плоскостей. Поэтому с точки зрения противодействия наиболее выгодными являются винтовой маневр и вращение центра излучения по периметру цели в картинной плоскости.
Задачи анализа и синтеза ССНО, которые при малых возмущениях относятся к классу нестационарных линейных динамических систем, можно существенно упростить за счет сведения их к стационарным методом сопряженных систем при представлении кинематического звена двойным интегратором.
Сопряженная передаточная функция ССНО с законом управления по методу усовершенствованной пропорциональной навигации связана с передаточной функцией разомкнутой системы соотношениями (2.36) и
из которых следует, что ССНО в сопряженном смысле эквивалентны стационарным следящим системам с астатнзмом, равным навигационной постоянной, и ярко выраженными резонансными свойствами. Полученные соотношения позволяют сравнительно просто методами теории линейных стационарных систем рассчитывать динамические и флуктуационные ошибки наведения при заданных характеристиках ССНО и входных воздействий сигнала, описывающего движение геометрического центра объекта, и помехи в виде блужданий центра излучения цели. Кроме того, возможен оптимальный синтез ССНО по критерию минимума суммы динамических и флуктуационных ошибок, в частности, с использованием оптимальной винеровской фильтрации. Нанлучшимн для противодействия ССНО видами маневра и перемещений центра излучения цели являются вращения их в картинной плоскости с максимально возможными радиусами и частотой, совпадающей с резонансной частотой ССНО. Для зашиты от противодействия нужно в максимально возможной степени снижать инерционность ССНО, порядок ее передаточной функции и навигационную постоянную.
Литература
1. Гуткин Л.С., Борисов Ю.П. Радиоуправление реактивными снарядами и космическими аппаратами. - М. : Сов.радио, 1968.
2. Максимов М.В., Горгонов Г И. Радиоэлектронные системы самонаведения. -М. : Радио и связь, 1982
3. Кринецкий Е.И. Системы самонаведения. - М.: Машиностроение, 1970.
4. Солодовников А.В. Линейные системы автоматического управления с переменными параметрами. - М. : Физматгиз, 1962.
5. Справочник по радиолокации /Под ред. М. Сколника: Пер. с англ. / Под общей ред. К.Н.Трофимова. Т.1.-М. : Сов.радио, 1976.
6. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М.: Сов. радио, 1968.
2.5. Основные закономерности и эффективность функционирования радиолокационных систем с повышенной скрытностью излучения
Скрытность от разведки является важным показателем эффективности функционирования РЛС в условиях радиоэлектронного подавления [1,2].
Определим оптимальные стратегии сторон и оценим потенциальные возможности повышения эффективности РЛС за счет факторов скрытности излучения в конфликте с постановщиком ответных шумовых маскирующих помех.
Автор: В.В. Быков
Рассмотрим типичную ситуацию, когда РЛС функционирует вблизи поверхности Земли в условиях конфликта с постановщиком помех (ПП), создающим активные шумовые маскирующие помехи по результатам разведки излучения РЛС. Положим, что РЛС является бистатической, использует для обнаружения и сопровождения цели отраженный от нее сигнал и имеет обьгчные, без синтезирования апертуры, антенны. Пространственные соотношения для рассматриваемого конфликта показаны на рис. 2.4, где 1 -подстилающая поверхность; 2 - передающая позиция РЛС; 3 - диаграмма направленности (ДН) передающей антенны РЛС; 4 - обнаруживаемая или сопровождаемая цель; 5 - приемная позиция РЛС; 6 - ДН приемной антенны РЛС; 7 - постановщик помех; 8 - ДН приемной антенны ПП; -вектор дальности лока
ции цели на передачу с модулем Aci; - вектор дальности локации цели на прием с модулем Rc2, Rn - вектор дальности разведки излучения и подавления РЛС с модулем /?п; /гь h2 - высоты подъема передающей и приемной антенн РЛС над поверхностью Земли; /гс, hn - высоты подъема цели и ПП; а- угловое рассогласование между целью и ПП.
Предполагается, что ПП имеет разведприемник и излучает прицельную по частоте и ширине спектра шумовую помеху только при условии обнаружения и определения соответствующих параметров излучения РЛС. Мощность помехи считается достаточной для полного подавления накрытой помехой части сигнала РЛС.
Отношение сигнал-шум на выходе приемника РЛС при отсутствии помехи со стороны ПП и других внешних помех, как известно [3], вычисляется по формуле
, PcGcF2(7?c1/?iM)F2(7?c2/22M)o-XX^hc
<?2 =; с 2 , / 2 \ , = - <2-46) (4/г)2 R2clK (iQl&K ft2) Wu/c
где Рс - средняя мощность зондирующего сигнала РЛС; Gc - коэффициент усиления передающей антенны РЛС в направлении цели; Fcl2 = = F(Rci,2, h[2, К, Л) ~ интерференционный множитель по полю, учитывающий влияние Земли на распространение радиоволн в зависимости от дальности до цели Rc\,2, высот передающей антенны РЛС и цели hi2, hc и длины волны Л; <тс - эффективная площадь рассеяния (ЭПР) цели; 5ас -эффективная площадь приемной антенны РЛС в направлении цели; Т-
время когерентного (додетекторного) накопления сигнала в приемнике РЛС; Кнс - коэффициент некогерентного (последетекторного) накопления сигнала; А'(7?С1,2)=Ю^/?С|’2 - коэффициент потерь мощности сигнала в атмосфере в зависимости от дальности до цели Rc^2 (fl - коэффициент затухания, дБ/м); /€ус - коэффициент поляризационных потерь сигнала; /Сшс - коэффициент шума приемника РЛС; Ытй=кТтй - спектральная плотность мощности входных шумов приемника РЛС (А= 1,38-1023 Дж/К - постоянная Больцмана, Т=290 К - стандартная шумовая температура приемной антенны РЛС); Кс - коэффициент потерь мощности сигнала в тракте его обработки.
В (2.46) введены следующие агрегированные параметры: Р G
А1с =---у-с -1—- - освещенность цели излучением РЛС или передаю-
4лАЛ(Лс1)
щий потенциал РЛС у цели [Вт/м2]; Вс =--у-у—г - рассеивающий
4д-/?с2Л:(Лс2)
потенциал цели в точке приема (безразмерная величина); ЛС=Л1СВС - освещенность приемной антенны РЛС рассеянным целью излучением
[Вт/м2 ]; Sx = —----------приемный потенциал РЛС [м2/Вт].
Отношение сигнал-шум на выходе разведприемника ПП
2 _ PcGcF2(Rn,hl,ha,A)SmKm
" 4^Яп2К(Яп)Кшп^А:6(а)^пД/п 1П ЭП’
где £6(а) - коэффициент ослабления мощности излучения РЛС в сторону ПП по сравнению с мощностью излучения в сторону цели (если максимум ДН передающей антенны РЛС направлен в сторону цели, а ПП находится в боковом лепестке ДН, то А'б(а) - коэффициент ослабления этого бокового лепестка по сравнению с главным лепестком); Д/п - полоса пропускания разведприемника ПП в предположении, что Д/П>Д£ (Д/с - ширина спектра сигнала РЛС), что обычно и имеет место; остальные обозначения с индексом «п» совпадают с аналогичными обозначениями с индексом «с» в (2.46).
Агрегированными параметрами в (2.47) являются:
PG F1
R,=------, с с 11--- - освещенность приемной антенны ПП
4^K(Rn)Kb(a)
излучением РЛС; 5эп=>$аЖнп/(ЯУпА’ШгЛшоД/п) - приемный потенциал ПП.
Для обеспечения нормальной работы РЛС ее оптимальной стратегией в рассматриваемом конфликте с ПП является достижение достаточно высокого отношения сигнал-собственный шум при отсутствии
возможности излучения помехи со стороны ПП вследствие скрытности для него излучения РЛС. Это будет иметь место при выполнении двух условий:
?с2>?20, ?п2>?20, (2.48)
где д20, д20 - минимально необходимые (достаточны) отношения сигнал-шум в приемниках РЛС и ПП соответственно.
Условия (2.48) эквивалентны условиям
Л - Ло = ?с !Лс ’ Лп < 4|„о = <?по ; (2-49)
где Лс0, Д,о - чувствительности приемных систем РЛС и ПП, определяемые как пороговые (минимально необходимые для нормальной работы) освещенности приемных антенн РЛС и ПП соответствующими излучениями [Вт/м2].
Оптимальная стратегия ПП противоположна стратегии РЛС. Она сводится к всемерному повышению отношения сигнал-шум в развед-приемнике.
Оценим потенциальные возможности реализации своих оптимальных стратегий участвующими в конфликте сторонами в распространенном на практике случае свободного пространства с малыми потерями, когда интерференционные множители и коэффициенты затухания излучений в атмосфере близки к единице.
В этом случае согласно (2.46) минимально необходимая средняя мощность излучения РЛС
= (2.50)
O’c
При этом разведка излучения РЛС постановщиком помех будет осуществляться на дальностях, превышающих
_ 4я7?|:[Лс2Яс0 (251)
стЛб(«)Ло'
Согласно (2.51) скрытность РЛС с регулируемой по закону (2.50) мощностью излучения по мере приближения к цели передатчика или приемника улучшается. Для РЛС с нерегулируемой мощностью излучения в большинстве случаев, когда приближение передатчика РЛС к цели одновременно сопровождается приближением его к постановщику помех, закономерность обратна к указанной: приближение РЛС к цели ухудшает скрытность излучения.
Распространенным является ситуация, когда используется однопозиционная РЛС и постановщик помех либо совмещен с целью, либо на
ходится в непосредственной близости от нее. В этом случае Лс1= Rc2= =RC = Лп и вместо (2.50) и (2.51) получим
_(4^)2<Лс2240
^см^с »
О’с
л2>С =
£сЛо_а, / ч (а
4^со 4^ 5ап Кгс Кшс 4 К1т 6к
(2.52)
Согласно (2.52) РЛС будет скрытной и, следовательно, работоспособной на дальностях до цели, не превышающих минимальной дальности разведки Япм, квадрат которой пропорционален ЭПР цели, умноженной на отношение чувствительностей приемных систем ПП и РЛС и на коэффициент ослабления боковых лепестков ДН передающей системы РЛС.
Входящее в (2.51) отношение чувствительностей Лпо/ЛсО на практике достигает значений до 1010, что, как показывают расчеты, свидетельствует о возможности обеспечения скрытности РЛС в ряде случаев только регулировкой мощности излучения по законам вида (2.50) или (2.52). В особенности это относится к случаям действия РЛС по целям с большей ЭПР.
Рассмотрим потенциальные возможности обеспечения скрытности РЛС за счет оптимизации других, неэнергетических, параметров излучения.
Согласно (2.52) , чем больше площадь приемной антенны РЛС, тем, очевидно, больше скрытность ее излучения, и, наоборот, чем больше площадь приемной антенны ПП, тем меньше скрытность. Ограничения сверху на параметры Sac, San у сторон определяются условиями размещения и другими факторами. Ясно только, что в данном конфликте стороны должны стремиться к максимизации площадей апертур приемных антенн.
С точки зрения максимизации отношения коэффициентов поляризационных потерь /Суп / К./с в (2.52) излучение РЛС в сторону ПП должно, очевидно, иметь поляризацию, ортогональную поляризации антенн разведприемника. Это привело бы к уменьшению приемного потенциала ПП на 20...30 дБ. Защитной реакцией приемной системы ПП на такую меру повышения скрытности является полный поляризационный прием. Таким образом, максимином в отношении поляризационных характеристик антенн конфликтующих сторон является точка Куп / КуС~ 1.
Снижение среднего уровня бокового излучения передающей антенны РЛС в диапазоне возможных углов разведки Къ без изменения других
параметров, как это следует из (2.52), монотонно повышает скрытность излучения РЛС. Теоретического предела увеличения Къ не существует.
Практически достижимая величина К6 в настоящее время составляет 50...60 дБ. Снижение уровня бокового излучения антенн, как правило, сопровождается расширением главного лепестка ее ДН, что уменьшает коэффициент усиления антенны Gc, а это согласно (2.50) и (2.52) потребует увеличения мощности излучения. С учетом отмеченной взаимосвязи параметров существует оптимальная величина коэффициента
tf60=argmax[Gc(K6)K6], (2.53)
где GC(K6) - зависимость коэффициента усиления антенны от коэффициента ослабления среднего уровня боковых лепестков ДН антенны относительно главного лепестка.
Величина Къо определяется видом функции Gc(£6) ив каждом конкретном случае может быть найдена достаточно просто.
Со стороны ПП основной мерой обеспечения обнаружения излучения РЛС с низким уровнем боковых лепестков ДН антенны является такое расположение его в пространстве, чтобы он облучался главным лепестком ДН антенны одновременно с прикрываемой помехами целью или, по крайней мере, облучался главным лепестком ДН в принципе, т.е. находился в секторе обзора РЛС, работающей в режиме сканирования («на проходе»). В обоих случаях разведка РЛС может вестись по главному лепестку ДН антенны. Однако, если в первом случае применительно к РЛС с когерентным излучением, например, импульснодоплеровским РЛС, перестраивающим несущую частоту зондирующего сигнала с периодом, равным времени пребывания цели в главном лепестке ДН (от «пачки» к «пачке»), может быть создана прицельная помеха, то во втором случае применительно к такого рода РЛС - только заградительная по частоте помеха.
Значительные возможности повышения скрытности имеются у РЛС за счет выбора рациональной спектрально-временной структуры зондирующего сигнала. Согласно (2.51) этот сигнал, во-первых, должен быть максимально широкополосным, чтобы полоса пропускания приемника ПП была как можно большей (Д/п> Д/с), во-вторых, сигнал должен быть когерентным с максимально возможным временем накопления Тс, в-третьих, как нетрудно показать, сигнал должен иметь максимально возможный коэффициент заполнения (минимально возможную скважность) вплоть до непрерывного излучения, что максимизирует пороговое отношение q^0 в разведприемнике ПП.
Основными контрмерами приемника ПП в рассматриваемом аспекте конфликта являются оптимизация алгоритма обработки сигнала РЛС и максимально возможное увеличение времени его накопления.
Работая в условиях неопределенности о тонкой структуре сигнала РЛС, разведприемник, как правило, может вести только некогерентный прием. Близким к оптимальному в этих случаях, как нетрудно показать, является так называемый энергетический приемник [4], содержащий полосовой фильтр с шириной полосы, равной ширине спектра сигнала (Д/п=ДЛ)> квадратичный детектор, последетекторный накопитель в течение времени Гнп и пороговое устройство. Коэффициент накопления такого приемника
(2-54)
Подставляя (2.54) в (2.52) и полагая »1,
Кшп / ^шс “ 1 ’ ^нс = * > чт0 обычно имеет место, при условии Д/п=Д/с,
получаем
^=^Жл(а). (2.55)
San V Гнп
Для минимизации времени накопления сигнала в приемнике ПП в РЛС целесообразна перестройка несущей частоты зондирующего сигнала с периодом Гс , тогда будет выполняться условие Тт< ТОп «Та где ГОп - допустимое время задержки излучения помехи относительно начала излучения сигнала на данной несущей частоте. В этом случае (2.55)
примет вид
4^5aJ Kt ’
(2.56)
где Kx= Tlm/Tc - коэффициент использования длительности сигнала РЛС
для накопления в разведприемнике.
Коэффициент Кт не превышает величины Кхо=То„/Тс, где К,о - максимально допустимый коэффициент использования длительности сигнала для накопления. Величина Кт0 принципиально гораздо меньше единицы и имеет порядок 0,01...0,1, так как для эффективного подавления РЛС помеха должна накрывать подавляющую часть длительности сигнала Тс. Коэффициент Кт максимален и равен Кх0 в беспоисковых (многоканальных) по частоте и направлению разведприемниках ПП. В
случае поисковых по указанным параметрам разведприемников величина Кт имеет наименьшее значение и при мгновенной полосе обзора по
частоте Д/П=Д4, как нетрудно показать, оценивается как
Д/с Q _ д/с 42
Л_ —----------*'-тС\ —----------Л_п 5
Д/ОпИОп Д/0п5апО0п
(2-57)
где Д/Оп = /в - /н - диапазон разведываемых частот (fH, fB - нижняя и верхняя частоты диапазона); Qn = ЙП2/Дап - средний угловой размер ДН
антенны разведприемника в стерадианах (.$ап - площадь апертуры ан-
тенны, — средняя длина волны разведываемого диапазона); Qn0 -
сектор разведки в стерадианах.
Чтобы получить окончательное выражение для минимальной дальности разведки, оценим максимальный период Тс смены несущей частоты зондирующего сигнала РЛС. В беспоисковых РЛС (одноканальные РЛС сопровождения с остановкой луча на цели) этот период может принимать наибольшие значения, равные допустимому периоду обновления информации о цели ТОс, что обычно составляет 50... 100 мс (частота обновления информации 10...20 Гц). В поисковых по направлению и беспоисковых по другим параметрам РЛС (большинство РЛС обнаружения и сопровождения целей «на проходе») период равен времени нахождения цели в главном лепестке ДН антенны (времени остановки луча на цели), которое оценивается как
Tz= — ТОс=^^ТОс, (2.58)
QOc SA
где Qn = 2П2 / ,Sac - угловой размер ДН антенны РЛС в стерадианах; -средняя длина волны РЛС; 7ос - период обзора пространства РЛС, равный минимально допустимому периоду обновления информации о целях.
Подставляя (2.57) и (2.58) в (2.56), получаем: в случае конфликта беспоисковых систем
А2 1^ое,к /а\ (2.59)
в случае конфликта поисковых систем
~ j ^ас On A/*Jn^Qc к / А
~MSan Qc Кт0
Приближение в (2.60) основано на примерном равенстве средних длин волн Лс и Д,.
Выражения (2.59) и (2.60) дают фундаментальные пределы повышения скрытности РЛС в конфликте с постановщиком помех. Расчеты, проведенные с использованием полученных выражений при типичных значениях, входящих в (2.59) и (2.60) частотно-временных, апертурных и секторных параметрах сторон, показывают следующее. При прикрытии помехами среднеразмерных объектов с стс =1... 10 м2 и разведке по главному лепестку ДН антенны РЛС (АДа)»!) конфликт, как правило, выигрывает постановщик помех (Яп„ составляет едини
цы километров). В этих же условиях при прикрытии крупноразмерных объектов cot= 103....10'1 м2 (большие корабли и т.п.) конфликт выигрывает РЛС (минимальная дальность разведки составляет сот-ии километров). При разведке по боковым лепесткам ДН антенны РЛС в случае среднеразмериых объектов конфликт также выигрывает РЛС. Наконец, при разведке по боковым лепесткам в случае малоразмерных объектов с пониженной радиолокационной заметностью (<тс = 1О’2...1О’* м2) конфликт выигрывает постановщик помех.
При наличии влияния земной поверхности у РЛС имеются дополнительные возможности повышения скрытности излучения за счет адаптивного выбора длины волны или высоты подъема передающей антенны для обеспечения попадания постановщика помех в интерференционный минимум эквивалентной диаграммы направленности. Постановщик помех может отреагировать на это только изменением высоты подъема антенны разведприемника. Что касается использования затухания радиоволн в атмосфере для повышения скрытности, то этот фактор может быть полезен РЛС, очевидно, только в ситуациях, когда удвоенная дальность локации меньше дальности разведки, иначе затухание более выгодно постановщику помех.
Литература
1. Защита от радиопомех / Под ред. М.В.Максимова. - М.: Сов. радио, 1976.
2. Вакин С. А., Шустов Л.Н. Основы радиопротиводействия и радиоразведки. -М.: Сов. радио, 1968.
3. Справочник по радиолокации / Под ред. М.Сколника: Пер. с англ, в 4-х томах / Под общей ред. К. Н. Трофимова. Т. 1. Основы радио локации /Под ред. Я.С.Ицхоки. - М.: Сов. радио, 1976.
4. Левин Б. Р. Теоретические основы статистической радиотехники. Кн. 2. Изд. 2-е, переработанное и дополненное. - М.: Сов. радио, 1975.
2.6. Статистические характеристики центра излучения произвольного числа частично когерентных источников
Статистическая теория радиолокации протяженных целей развивается почти пятьдесят лет. Одной из первых работ по этой теме была работа Р.Делано [1]. Наиболее полное изложение достижений теории дано в монографии [2]. В известных работах рассмотрены различные модели протяженных целей: двухточечные, многоточечные и сплошные, когерентные и некогерентные. При этом главное внимание уделено двум крайним случаям, когда источники либо чисто когерентные и, как правило, двухточечные, либо некогерентные многоточечные. Из промежуточных случаев рассмотрен в основном случай одного когерентного источника на фоне многото-
Автор: В.В. Быков
чечных некогерентных [2]. Представляет интерес рассмотреть общий случай произвольного числа частично когерентных источников, которому в известной литературе уделено недостаточно внимания.
Для избежания серьезных математических трудностей, возникающих при решении поставленной задачи, примем следующие основные упрощающие предположения, не теряя адекватности моделей реальным условиям радиолокации протяженных целей.
Во-первых, оценим только первые два момента распределения вероятностей мгновенного центра излучения (МЦИ) - среднее значение, характеризующее систематическую ошибку пеленгации протяженных целей, и дисперсию, определяющую флуктуационную ошибку пеленгации. Поскольку ширина спектра флуктуаций МЦИ имеет тот же порядок, что и ширина спектра флуктуаций комплексных амплитуд источников, по известной дисперсии флуктуации можно приблизительно оценить спектральную плотность мощности флуктуации центра излучения, что обычно бывает достаточным для расчета флуктуационной ошибки сопровождения протяженной цели.
Во-вторых, в качестве пеленгатора, формирующего оценку МЦИ, рассмотрим моноимпульсный суммарно-разностный пеленгатор с линейной пеленгационной характеристикой. Это позволит проанализировать случай сравнительно малых угловых ошибок, представляющий наибольший интерес, и распространить результаты на другие типы моноимпульс-ных пеленгаторов, которые при таких условиях, как правило, инвариантны.
В-третьих, положим что система нормировки сигналов в пеленгаторе (система автоматической регулировки усиления (АРУ)) является достаточно инерционной, так что нормировка осуществляется делением не на мгновенную амплитуду суммарного сигнала, а на среднее значение амплитуды. Это предположение, кроме существенного уменьшения математических трудностей, позволит, с одной стороны, рассмотреть распространенный на практике метод снижения уровня углового шума протяженной цели применением инерционной системы АРУ, с другой, избежать физически нереализуемого случая отсутствия (ухода в бесконечность) дисперсии МЦИ, наблюдаемого при идеальной безынерционной нормировке, когда закон распределения вероятностей МЦИ имеет вид закона Стьюдента со слишком «тяжелыми хвостами» [2].
Дополнительным упрощающим предположением примем распространенное предположение о гауссовском законе распределения вероятностей флуктуаций комплексных амплитуд источников.
Пусть в пределах главного лепестка суммарной диаграммы направленности (ДН) антенны пеленгатора в линейной зоне его разностных диаграмм расположены N источников с угловыми координатами ак, рк и с комплексными амплитудами на входе приемника суммарного канала
Uk=ak+tk, k=\,N, (2.61)
где ak, к = \,N, - комплексные амплитуды регулярных (когерентных) компонент источников; £к, k = {,N, - комплексные амплитуды флуктуационных компонент источников, представляющие собой комплексные независимые между собой гауссовские случайные величины с ну-начает среднее значение случайной величины, звездочка - комплексносопряженную величину).
Не нарушая общности, положим крутизну разностных и значение суммарной ДН пеленгатора равными единице. Тогда при фиксированном положении равносигнального направления антенны а0, ком
плексные амплитуды источников на выходах приемников разностных каналов будут иметь вид
Uak = (ак - a0)Uk, 0рк = (Д - p.)Uk. (2.62)
Ввиду идентичности азимутальных и угломестных каналов пеленгатора дальнейшие соотношения будем записывать только для одного азимутального канала. При принятых предположениях на выходе пеленгатора сформируется угловое положение МЦИ протяженной цели отно
сительно равносигнального направления в виде
= SS(^-ao)Re[C?^]/ i=l m=l i=l
где R-e[-] - реальная часть числа.
(2-63)
Комплексная амплитуда U в (2.63) есть, очевидно, гауссовский вектор вида
N
\5 = а + К = ^ак+К, (2.64)
к=\
где а - сумма комплексных амплитуд когерентных компонент источников; £ - гауссовский вектор с нулевым средним и дисперсией N
0-2 = ^2 <7^, представляющий собой сумму дисперсий некогерентных
компонент источников.
Модуль вектора U распределен по обобщенному закону Рэлея [3], среднее значение этого модуля вычисляется как
где /0,1 ( ) - ФункЦии Бесселя 0- и 1-го порядков от мнимого аргумента; а = |а| - модуль вектора а .
Громоздкое выражение (2.65) с погрешностью в несколько процентов может быть аппроксимировано простейшим выражением
|ij| = ^|^o-2+a2 , (2.66)
являющимся точным в двух крайних случаях, когда а -> 0 или а —> 0. С максимальной погрешностью, наблюдаемой при а—>0 и равной 12,5%, (2.66) можно заменить еще более простой формулой
|й| » >/2о-2 + а2 , (2.67)
которой и будем пользоваться в дальнейшем.
Легко показать, что среднее значение входящего в (2.63) скалярного произведения векторов й^,и„,
Rkn, = Re[uX,] = cos(% -<рт) + 23ктакат , (2.68)
где Rkm - удвоенный корреляционный момент случайных векторов Ut, U,„; ак = |аА|, а„, = |ат| - модули векторов лк = аке'п, а,„ = ;
[1, к = т
<рк' Vm ~ Фазь| этт< векторов; 8кт = ( - символ Кронекера.
[О, к*т
С учетом (2.67) и (2.68) для среднего значения МЦИ источников получим следующее выражение:
= /(а2+2о-2)- (2.69)
к=1 т=1 /
Согласно (2.69) среднее значение МЦИ. будет нулевым, если равносигнальное направление пеленгатора установить равным
Qb=2L2L«A,/(a2 + 2<72) =
А=1 w=l /
(2.70)
Выражение (2.70) обобщает известные выражения для среднего значения МЦИ источников. При одном когерентном (of = о), некогерентном (а, = 0) или частично когерентном (а1; of о) источнике получим а0 = а. . При когерентных или N некогсрснтных источниках согласно (2.70) имеем
Выражение (2.71) совпадает с известным выражением для нормали к фазовому фронту N когерентных источников [2], а (2.72) - с известным выражением для энергетического центра некогерентных источников [4]. Выражение (2.70) позволяет найти математическое ожидание МЦИ смешанной группы источников по известным в отдельности МЦИ аа подгруппы когерентных источников и энергетическому центру некогерентных источников.
Найдем теперь выражение для дисперсии МЦИ, т.е. для величины
Обозначим скалярное произведение случайных векторов LJa, LJ как
Ua ® U= Re^Ua U’J. Тогда числитель в (2.73) можно представить в виде
Л = (иа®и)2=((ааЧа)®(аЧ))2,
w _ N _ (2.74)
^ = ^(ак-а0^к, к = 1 к=1
где аа, - когерентная и некогерентная компоненты вектора Ua; а, - определенные выше компоненты вектора U .
Случайный вектор является, очевидно, гауссовским вектором с нулевым средним значением и дисперсией
= ^(.ак~а0)2<Тк • (2-75)
А=1
Нетрудно показать, что удвоенный корреляционный момент случайных векторов ^а, £ выражается в виде .
______ N _ _ N
£а®£ = 2^(а*-ао)а\2=2ао-2, а = ^(ак-а0)ак/<т2, (2.76)
А=1 к=1
где а - энергетический центр некогерентных компонент источников. Используя (2.74) - (2.76) и проводя простые, но довольно громоздкие выкладки, можно получить следующее выражение для дисперсии МЦИ:
Л (а2 + 2<72)о-£ + я^ст2 + 2аоа^а2<т2 + 2а|ст4
2
(2.77)
где сте2 = ^а^2; a02tt =|a0J2; аОа = ^акак-, к=1
a? = sa*<T*2/0'2-
= (аОа ® а)/а2;
При полностью когерентных и полностью некогерентных никах из (2.77) с учетом (2.71) и (2.72) найдем
, , <т^+а)а2
1’2 • 2(7
Соответствие сгай физической сущности задачи и совпадение вы
источ-
(2.78)
ражения для <т2^ с известными выражениями подтверждает правильность обобщенного соотношения (2.77).
Выражения (2.73)-(2.78) в каждом конкретном случае, например, с использованием компьютера, позволяют вычислить дисперсию флуктуации МЦИ протяженной цели. Искомая дисперсия сложным образом зависит от параметров когерентных и некогерентных компонент источников и их расположения в пространстве.
Представляет интерес найти экстремальные значения статистических характеристик МЦИ. Поскольку в общем виде это сделать затруднительно, рассмотрим один частный случай, представляющий практический интерес [5, 6]. Пусть один некогерентный источник (цель), находящийся на равносигнальном направлении пеленгатора, прикрывается четырьмя когерентными источниками (помехой), расположенными симметрично относительно первого источника (рис. 2.5 слева). Задача состоит в определении условий, при которых смещение МЦИ за пределы геометрического центра цели максимально. Пусть е - полубаза источников помех (радиус протяженной цели), ак = аке'п, к = 1,4, - комплексные амплитуды источников, сг02 -дисперсия сигнала цели. Подставляя в (2.70) нулевые координаты цели и
координаты источников помехи («[,$) = (£,0), (а4,/?4) = (0,-г)
«о
Е
(а2,/?2) = (-£,0), (a3,/?3) = (0,f), находим
4 4
азХа"' C0S(^ " %)“ а4^а™ ЛГ=1 /71=1
(2.79)
А Е
Оптимальные фазовые соотношения между источниками помехи, как показывает анализ, должны соответствовать векторной диаграмме комплексных амплитуд, представленной на рис. 2.5 справа. При этом выражения для смещений МЦИ сведутся к виду.
— =---------2----------------т, ^ = ----------2---------------- (2.80)
£ (ai-a2) +(а3-а4) +2<70 £ (ai~a2) + (а3-а4) +2ст0
Согласно (2.80) при равенстве амплитуд источников помехи смещения МЦИ не происходит. Если ввести разбаланс амплитуд в виде а12 = а0±Аав/2, а3>4 = а0 + Да^ / 2 и обозначить - отноше-
ние сигнал-помеха, то из (2.80) получаем
— = --2АУ —, — = 2 2А2Л 2 , (2-81)
£ ^а+^р + Я £ &a+&p+q
где \а р = Даа р / а0 - относительный разбаланс амплитуд.
Согласно (2.81) максимальное смещение МЦИ имеет место при условии
Д2+Дд = <?2 (2.82)
и составляет в пространственном смысле относительную величину
д=7а02+Д2 = (2.83)
£
При малом отношении сигнал-помеха радиус смещения МЦИ во много раз больше радиуса протяженной цели, например, при q2 = 1О-2...1О"3 (отношение сигнал-помеха лежит в пределах -20...-30 дБ), радиус смещения МЦИ превышает радиус цели в 10...30 раз.
В соответствии с (2.81) - (2.83) при относительной модуляции амплитуд источников помехи по законам
а'~2 (f) = 1+ — cosai t, Й3,4 = 1 + —sinai t
ао 2 а0 2
МЦИ будет вращаться по окружности радиусом £0 = sq~] (рис. 2.5) с частотой со, что важно, например, с точки зрения противодействия системам радиолокационного наведения объектов [6].
I Полученные соотношения могут служить основой методик анализа таких конфликтных ситуаций, как объект с управляемым центром излучения против моноимпульсных РЛС сопровождения целей.
Литература
1. Делано Р. Теория мерцания цели и угловые ошибки при радиолокационном сопротивлении.- Вопросы радиолокационной техники, 1954, №1.
2. Островитянов Р. В., Басалов Ф. А. Статистическая теория радиолокации протяженных целей. - М.: Радио и связь, 1982.
3. Левин Б. Р. Теоретические основы статистической радиотехники. Кн. 1. - М.: Сов. радио, 1974.
4. Вакин С. А., Шустов Л. Н. Основы радиопротиводействия и радиотехнической разведки. - М.: Сов. радио, 1968.
5. Van Brunt, L. В. Applied. ECM, 1978, v 1, 2, 1982, E. W. Engineering, USA.
6. Быков В. В., Сухоруков Ю. С. Точность радиолокационного самонаведения объектов в условиях блужданий центра излучения и маневра цели. - В сб. Информационный конфликт в спектре электромагнитных волн (Приложение к журналу «Радиотехника»), 1994.
2.7. Упрощенный анализ условий существования «электромагнитного снаряда»
В последнее время появился ряд работ [1-6] по теории так называемого электромагнитного снаряда - импульсного излучения антенны, которое затухает медленнее, чем по закону обратного квадрата дальности. Сла-
Автор: В.В. Быков
i/c(x-u)2+(y-v)2 2z
бозатухающее излучение ашснпы гшилюд^! vn - ---
широкополосным, в частности, импульсным колебанием с интенсивными высокочастотными компонентами спектра.
Получим простые соотношения для расчета в приближении Кирхгофа плотности потока энергии осевого излучения апертурных антенн в зависимости от дальности при различных спектрально-корреляционных характеристиках поля на апертуре антенны и уточним условия и возможности реализации слабозатухающего излучения.
Теория апертурных антенн при гармоническом возбуждении базируется на известном дифракционном интеграле Френеля-Кирхгофа.
Для зоны Френеля, которая в основном будет интересовать нас в дальнейшем, этот интеграл за счет ряда упрощений [7] сводится к виду
F(x,y,z) =
i(l + cos0)e“,tz г-, , = - „ ИМехр
ZZ л J
5
где F(x,y,z) - комплексная амплитуда поля излучения определенной поляризации в точке пространства (x,y,z); R - расстояние от точки с координатами (x,y,z) до центра апертуры; к. = 2л/Л = <о/с - волновое число (Л - длина волны, а> — круговая частота, с — скорость света); в — угол между радиусом-вектором точки вычисления поля и осью z; £(u,v) - комплексная амплитуда поля определенной поляризации на плоской апертуре антенны S.
В (2.84) предполагается, что начало прямоугольной системы координат совмещено с центром апертуры, а ось z является осью излучения, нормальной к плоскости апертуры. Оно справедливо, очевидно, и для дальней зоны, хотя можно получить отдельную, не содержащую квадратичных членов аппроксимацию дифракционного интеграла для этой зоны. В дальнейшем в целях получения плавного перехода от зоны Френеля к дальней зоне будем пользоваться (2.84) для обеих из указанных зон.
Для получения общих закономерностей в наглядной форме максимально упростим задачу. Во-первых, вычислим поле только в осевом направлении, положив х=у=0. Во-вторых, рассмотрим только круглую синфазно и равномерно возбуждаемую апертуру. Наконец, не будем анализировать временную форму поля вдоль оси при заданной форме поля на апертуре, а найдем только плотность потока энергии (мощности) поля в функции дальности.
При указанных предположениях для гармонического поля на апертуре с амплитудой Д, из (2.84) легко можно найти зависимость квадрата амплитуды излученного поля от дальности R:
,( S }
= 2я A, 1-cos—— , Л ARJ
(2-85)
где d3,Sa = xd^/4— диаметр и площадь апертуры соответственно.
Зависимость |£(Л)|2 в общем случае носит колебательный харак-
S ,
тер. При больших R, когда £= —— «1, полагая cosr = l-r /2, из
AR
(2.85) получаем известное изменение мощности излучения антенны в дальней зоне по закону обратного квадрата дальности:
Ж12=^
Интересуясь только характером зависимости плотности потока мощности или энергии осевого излучения антенны от дальности, будем использовать коэффициент
К (R, а>) = = 1 - cos А- = 1 - cos
v 2л А^ AR 2лсК
При возбуждении антенны импульсом а (г) с комплексным спектром
(2.86)
(2.87)
Л(гу)= Ja(/)e '““dt, энергетическим спектром Е(tw) = |A(tw)|2 и функ
цией автокорреляции В(т) = у— $ Efcoje'^dco = -±- j£(&>)costyTc(tw =
t-rjdt энергетический спектр излученного импульса в соот
ветствии с (2.87) запишется в виде
Е(R,= Е (<у) К (R, = Е (ю)(1 - cos
Интегрируя (2.88) по частоте, получаем зависимость плотности потока энергии излученного импульса от дальности:
£(£) = — [E(/?,<w)cto= — fE(a)da-
2л > 2л J
(2.88)
do =
= Е 1-а
(2.89)
J co CO
где E = — |£(гу)<Угу = £(0) = J a2 (t)dt - плотность потока энергии -CO -00
излучения в каждой точке апертуры; а (г) = £ ~ " ноРмиРован"
ная автокорреляционная функция (АКФ) излучаемого импульса;
СО
Д(г) = 1-а(г) = £>(г)/(2£) = Г[а(г)-а(г-г)]2<л/(2£) - нормирован
ная структурная функция излучаемого импульса.
Выражение (2.89) дает весьма простую связь нормированной плотности потока энергии излучения и нормированной структурной функции излучаемого импульса (сигнала): искомая функция совпадает с нормированной структурной функцией от обратного аргумента.
Отметим, что включение в интеграл (2.89) всех частот спектра
сигнала от 0 до °о
некорректно. Частоты
т, ~ /
—^2лс (т, - число длин
R Л
волн, характеризующих протяженность ближней зоны, R - заданная дальность), строго говоря, должны быть исключены из спектра сигнала как не соответствующие условиям справедливости исходной формулы. Если излучаемый сигнал сам по себе не содержит низких (в том числе нулевых) частот, то (2.89) будет корректным. Однако, если даже излучаемый сигнал, например, прямоугольный видеоимпульс, не удовлетворяет этому требованию, то, как показывает анализ, использование (2.89) без режекции низкочастотных компонент спектра не влияет на условия существования электромагнитного снаряда; определяющим фактором является поведение спектра сигнала в области высоких частот.
Поскольку выражение (2.89) базируется на известном в теории линейных цепей принципе суперпозиции, оно допускает простое обобщение на случаи незатухающих периодических сигналов и стахостических сигналов в виде стационарных случайных процессов. Для периодических с периодом Т сигналов ат (г), имеющих дискретный комплексный
спектр Лг(л) = у Ja7 (t) О
е а,"”пЛ, энергетический спектр (спектр мощ
ностей) (и) = |Д (и)| и периодическую функцию автокорреляции
вт (г) = у рг (Фт - г)dt = S Рт W е‘2,Г"Г/Г ’ полУчаем о и=-00
Pr(R) = Pr
l-ar
Saco 2ncR J
- PyPT
Stco 2ttcR J ’
(2.90)
где ar (г) = Вг(г)/В7-(0), Д-(г) = 1-аг (r)— нормированные АКФ и структурная функция сигнала.
Применяя (2.90) к гармоническому колебанию частоты со, у которого ar (г) = cos (Г = 2я7со — период колебания), получаем
Л.(Л)= л/1-cos-^-l
V ’ Ч 2лсВ)
что соответствует исходной формуле (2.87) и, следовательно, подтверждает правильность (2.90).
Для стационарных случайных сигналов £(0 с энергетическим
спектром G^(a>)= ВДг)е~1а"<7г и автокорреляционной функцией
СО
ВД г) = М 4(0 - г)} = ± JG, (со) ^dco
—<Л
аналогично имеем
1-а^
S^co ~) 2tccR J
Вай) 2tccR J ’
(2.91)
где Л/{-} - математическое ожидание; <т| - дисперсия (мощность) излучаемого процесса; о-| (Л) - дисперсия излученного процесса на дальности Л; (г) = В^ (г)/В(0), ВДг) = 1-аДг) - нормированные АКФ и структурная функция излучаемого процесса.
Согласно (2.89)-(2.91) поведение зависимости излучаемой энергии или мощности от дальности в дальней зоне (Л -> оо) определяется поведением структурной функции излучаемого сигнала в окрестности нуля. При этом, если Д(г)~г1' при г—>0,то E(R)~R~V при Л—>оо,гдег-степень возрастания структурной функции при малых т . Для реальных непрерывных сигналов Д(г)=;г2 и, следовательно, плотность потока энергии этих сигналов затухает при достаточно больших R по обычному закону Л-2.
Таково асимптотическое поведение от расстояния R плотности потока энергии излучения. В промежуточных точках эта зависимость может вести себя различным образом, повторяя структурную функцию излучаемого сигнала от обратного аргумента. Она может носить колебательный и монотонный характер, может быть плавной и ломаной, со
держать участки различной протяженности с положительной, нулевой и отрицательной степенями v.
Нетрудно показать, что максимальный размах колебаний нормированной величины плотности потока энергии периодических сигналов может быть в пределах от 0 до 2.
Зависимость плотности потока энергии излучения любого вида вдоль оси антенны с круглой одновременно и равномерно возбужденной апертурой от дальности R в промежуточной и дальней зонах имеет форму обращенной по аргументу структурной функции излучаемого колебания.
Для физически реализуемых сигналов слабозатухающее излучение, например, по закону R~v, i><2, во всей дальней зоне антенны невозможно, однако за счет обогащения спектра излучаемого сигнала в области высоких частот путем уменьшения длительности сигнала, уменьшения длительности его фронтов и других мер увеличения скорости изменения излучаемого процесса имеется принципиальная возможность расширения зоны слабозатухающего распространения излучения.
Литература
1. Wu. Т.Т. - J. Appl. Phys, 1985, v.57, №7.
2. Myers, J.M. - SP1E, 1988, v.873.
3. Lee, H.-M. - Radio Sci., 1987, v.22, №6.
4. Wu, T.T., King, R.W., Shen, H.-M. - J.Appl. Phys., 1987, v.62. №10.
5. Shen, H.-M-SP1E, 1988, v.873.
6. Содин Л.Г. - Радиотехника и электроника, 1991, т.36, N5.
7. Борн М., Вольф Э. Основы оптики: Пер. с англ. / Под ред. Т.П. Мигуличева. -М.: Мир, 1970.
2.8. Влияние собственного шума приемника на точность радиолокационного самонаведения объектов
Одним из важных факторов, снижающих точность радиолокационного наведения объектов на цель, наряду с блужданием центра излучения (угловым шумом) и маневром цели [1] является собственный шум приемника головок самонаведения (ГСН). Традиционно считалось [2-5], что влияние собственного шума приемника на точность наведения пренебрежимо мало. Это было обусловлено выбором достаточно большого соотношения сигнал-шум в начале наведения, резким возрастанием сиг
Автор: В.В. Быков
нала по мере сближения наводимого объекта с целью и широкополосно-стью шума на выходе углового дискриминатора ГСН при непрерывном или дискретном облучении цели с высоким темпом. Для современных систем самонаведения объектов, функционирующих в условиях информационного конфликта, ввиду принятия мер по снижению радиолокационной заметности целей [б], минимизации мощности облучения цели для повышения скрытности излучения ГСН [7] и понижения темпа облучения цели для обеспечения многоцелевых режимов наведения характерна повышенная роль собственного шума приемника в снижении точности наведения, что требует более тщательного учета этого фактора. Кроме того, нуждается в развитии методология расчета точности наведения в части корректности учета нестационарности как самой системы самонаведения, так и приведенного ко входу эквивалентного шумового воздействия. Методики расчета на основе метода «замораживания коэффициентов» [2-5] здесь неприменимы, а строгая методика, разработанная на основе метода сопряженных систем [4], учитывает только не-стационарность системы самонаведения.
Получим соотношения для точного расчета дисперсии ошибок, вызываемых собственным шумом приемника в современных радиолокационных системах самонаведения объектов при типовых условиях их конфликтного функционирования, и выявим основные закономерности, связанные с этим фактором.
Упрощенная структурная схема контура самонаведения (КСН) объекта в одной плоскости с линеаризованным кинематическим звеном в виде двойного интегратора [1] показана на рис. 2.6, где обозначено: zu, z - прямоугольные координаты
цели и наводимого объекта; = R0~ Vt - текущая относительная дальность цели - начальная дальность, К - скорость сближения); Ки - навигационная постоянная в усовершенствованном методе пропорциональной навигации [1]; Я0(р) _ передаточная функция разомкнутого КСН, включающая в себя в качестве сомножителей передаточные функции контура углового сопровождения ГСН, фильтра команды и контура стабилизации объекта наведения; £ (г) - угловой шум цели, вызванный внутренним шумом приемника ГСН.
Полагая угловой шум настолько широкополосным, что он эквивалентен белому шуму, и пересчитывая его в линейный шум цели, получаем эквивалентные флуктуации координаты цели на входе КСН:
Ъ (?) = <т„ (г) AF"1/2^(?) (Г) = (Г), (2.92)
где <т?)(?) - среднеквадратическое значение углового шума, зависящее от текущего соотношения сигнал-внутренний шум по мощности д2 (?); AF - ширина спектра углового шума, равная полосе доплеровского фильтра \Fa в ГСН с непрерывным или квазинепрерывным излучением при непрерывном подсвете цели или величине, обратной периоду обновления угловой информации Тп в ГСН с дискретным подсветом цели; £Д?) - белый шум с единичной односторонней спектральной плотностью мощности; Af,(?) = cr2(?)AF ’я2(?) - спектральная плотность мощности шума (?) •
При достаточно большом отношении сигнал-шум q2 дисперсия, как известно, обратно пропорциональна q2 и прямо пропорциональна квадрату ширины диаграммы направленности антенны ГСН (в радианной мере):
_2/д_ Р0.5
где Кв - безразмерный коэффициент, зависящий от вида углового измерителя ГСН.
В типовых ситуациях параметр q2 (?) обратно пропорционален четной степени дальности, поэтому можно записать
’ K2q20I$bF
(2.93)
~1И
,2 *0
(2.94)
Л(?)=Ло(?)-Г?, л = 0,2,4,
где q% - отношение сигнал-шум в начале самонаведения (на дальности до цели ); и = 4 для активных, п = 2 для полуактивных и и = 0 для активных ГСН в режиме повышенной скрытности излучения [7].
При воздействии нестационарного белого шума со спектральной плотностью мощности, изменяющейся по произвольному закону (V(?), на нестационарную линейную систему с сопряженной импульсной характеристикой g,(?) в течение времени ?е(О,То), как нетрудно показать, используя фильтрующие свойства 8 -функции, дисперсия отклика системы в момент времени ? = То выразится в виде
л>
rf, = pv(7i-r)g.2(rpr.
О
(2.95)
Подставляя (2.94) в (2.95), для дисперсии ошибки самонаведения объекта получаем выражение
л2 уп+2
K2q2R^\F
То jr"+2g.2(r)rfr =
5К2г. (Г0,и) K2eq2,\F
(2.96)
1 ’'°
где Го = Ло/Ко - время наведения; Tt{Ta,n) = — jr"+2g2(r)rfr- эквива-Т° о
лентная шумовая постоянная.
Согласно [1, 4] входящая в (2.96) импульсная характеристика находится как обратное преобразование Лапласа от сопряженной передаточной функции G. (р):
g.(r) = L 4G.(p) = l-exp
р
(2.97)
В дальнейшем для сравнения потребуется дисперсия ошибки командного наведения объекта методом усовершенствованной пропорциональной навигации по данным наземной моноимпульсной РЛС сопровождения цели. В этом случае эквивалентный шум цели будет практически стационарным и в предположении, что его величина определяется только угловой ошибкой измерения координат цели (ошибками измерения дальности цели и координат объекта наведения пренебрежем), как легко показать, дисперсия ошибки находится по (2.96), если в нее подставить п = -2, а вместо R^ - величину /?( - дальность цели отно-
сительно РЛС в начале наведения (для приближающейся цели оценка дисперсии сверху) или в конце наведения (оценка дисперсии снизу):
<?h =
S/?2AFKCH (7q )
(2.98)
где в0 5 - ширина ДНА РЛС сопровождения цели; q2 - отношение сигнал-шум в приемнике РЛС при дальности до цели Rt;
Го
эквивалентная шумовая полоса пропускания КСН. о
Согласно (2.96) и (2.98) для расчета искомых дисперсий ошибок наведения нужно знать шесть простых и один интегральный
(г. (Т0,и) или AFKCH(r0)) параметр, определяемый динамическими свойствами КСН и представляющей собой четный момент порядка т = 0,2,4,6 квадрата сопряженной и усеченной в точке г=Г0 импульсной характеристики КСН. Вычисление указанных моментов в общем случае с учетом (2.97) является довольно сложной задачей, требующей численного интегрирования или компьютерного моделирования.
Для получения моментов импульсной характеристики в замкнутой форме рассмотрим простейший случай, когда КСН имеет минимальный порядок. Тогда согласно [1]
Н0(р) = -!-; G.(p) = l-f-^-| ", (2.99)
1 + pl (1 + рТ )
где Т-постоянная времени стационарной части разомкнутого КСН.
Прицелом Кн сопряженная передаточная функция G.(p) в (2.99) будет рациональной функцией. Дополнительно для упрощения примем То»Т, что позволит устремить верхний предел интегрирования в (2.96) и (2.98) в бесконечность. Выполняя обратное преобразование Лапласа от С,(р),при Л?н=3,4 получаем
х = £, £н = 3;
(2.100)
х = р Кн=4.
Вычисление моментов квадрата импульсной характеристики вида (2.100) сводится к взвешенной сумме интегралов типа
р'ехр(-2х>& = -^г.
о z
Результаты вычислений значений интегральных параметров КСН сведены в табл. 2.4, в которой обозначено: АГСН и ПА ГСН - активная и полуактивная ГСН; ПСР - повышенная скрытность работы. Из таблицы следует, что интегральные шумовые параметры КСН слабо зависят от навигационной постоянной и существенно зависят от режима работы и типа измерителя угловой информации. При То » Т параметры AFKCH и г.(Го,О) не зависят от времени наведения То, а параметры г,(Г0,2) иг.(Г0,4) уменьшаются обратно пропорционально второй и
четвертой степеням То, так что в обычных полуактивных и активных системах наведения увеличением времени наведения влияние собственного шума приемника ГСН при прочих равных условиях можно существенно уменьшить.
Таблица 2.4
Тип измерителя угловых координат цели Внешняя РЛС АГСН в режиме ПСР ПА ГСН АГСН
Значение целого параметра п в выражении для дисперсии ошибок -2 0 2 4
Д+ксн 11 II 66/32Т 93/327’ — — —
Го» Г к„=з Кн=4 97732 107732 36 Г /32 т2 Jo 39 Т3 /32 Г02 675 Т5 /32 т4 20 675 Т5 /32 *о
Для расчета типовых значений дисперсий ошибок наведения, вызванных собственным шумом ГСН или РЛС, найдем параметр Kg в (2.96) и (2.98). Используя принятый в [8] подход для суммарноразностного моноимпульсного пеленгатора с инерционной нормировкой сигнала и независимыми собственными шумами в разностном и суммарном каналах, можно получить следующую зависимость дисперсии угловой ошибки от отношения сигнал-шум при отсутствии систематической (динамической) ошибки:
2 ^0,5
8(1 + 0’
(2.101)
Формула (2.101) в отличие от обычно приводимых в литературе такого рода формул [4] справедлива при любом отношении сигнал-шум. Из нее следует, что искомый параметр Kg = 8. С учетом этого и коэффициентов пропорциональности из табл. 2.4 при минимальном времени самонаведения Го = 1ОГ дисперсия ошибки наведения в случаях АГСН ПСР, ПА ГСН и АГСН выразится в виде
^=4-10-24^; ^2=1,25-10-34^; о2. =2,5-10^^^^. (2.102)
Afq-o Д^Уо Д^о
В случае командного наведения с учетом того, что отношение сигнал-шум обратно пропорционально четвертой степени дальности, получим
г
= 3-10’3
&FTR?0 ’
(2.102)
где Л1о - дальность до цели, при которой отношение сигнал-шум в при
емнике РЛС составляет 20 дБ.
Если в качестве допустимой дисперсии ошибки наведения принять дисперсию 1 м2, то входящие в (2.101) и (2.102) параметры, при которых влиянием собственного шума приемника можно пренебречь, должны
удовлетворять условиям
д утУ2
°’5,,, <5; 28; 63 при АГСН ПСР, ПА ГСН,
AFl/2g0
в к
АГСН и -------------<18 при командном наведении по данным РЛС.
(агт)1/-я20
Например, при #0 5 =0,2 рад, Т= 0,25 с, V= 1500 м/с, AF = 10 Гц для систем самонаведения отношение сигнал-шум должно быть не менее 90; 3 и 1 соответственно, а для систем командного наведения при 0О 5 = 0,02, 7?10 =20 км, Т= 0,25 с, AF = 10 Гц дальность R\ должна составлять не более 8,3 км.
Полученные соотношения позволяют оценить вклад собственного шума приемника мононмпульсных угломерных координаторов в снижение точности систем самонаведения объектов для типовых условий радиоэлектронного конфликта. Они могут быть использованы также для контроля точности компьютерного моделирования указанных систем.
Литература
1. Быков В.В., Сухорукое Ю.С. - Информационный конфликт в спектре электромагнитных волн. - Приложение к журналу «Радиотехника», 1994.
2. Максимов М.В., Горгонов Г. И. Радиоуправление ракетами. - М.: Сов. радио, 1964.
3. Кривицкий Е. И. Системы самонаведения. - М.: Машиностроение, 1970.
4. Гуткин Л.С., Борисов Ю.П. Радиоуправление реактивными снарядами и космическими аппаратами. - М.: Сов. радио, 1968.
5. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. -М.: Радио и связь, 1982.
6. Быков В. В. - Радиотехника, 1992, №1-2.
7. Быков В. В. - Радиотехника (Журнал в журнале), 1996, №6.
8. Быков В.В. - Радиотехника (Журнал в журнале), 1997, №6.
2.9. Критерий и возможности массового заградительного радиоподавления
радиоэлектронных систем в условиях высокой неопределенности их характеристик
В последнее время и в перспективе традиционное избирательное радиоподавление (РП) наземных РЭС со своей территории, при котором выявляются и подавляются прицельными по частоте и пространственному положению помехами только опасные в данный момент времени РЭС, становится все менее эффективным. Это обусловлено трудностями выделения средствами непосредственной радио- и радиотехнической разведки опасных РЭС в общем потоке излучений, применением в подавляемых РЭС быстрой программной перестройки рабочей частоты и сложных шу-моподобных сигналов, кратковременностью работы РЭС в опасных состояниях, применением средств контр-РП, большими потерями мощности помех при распространении на трассе «Земля-Земля». Одним из путей повышения эффективности РП является применение средств массового заградительного подавления РЭС с воздушных и космических носителей.
Выбор критерия радиоподавления. Для оценки эффективности массового заградительного по пространству, частоте и времени подавления разнородных РЭС требуется критерий, максимально инвариантный к тактико-техническим характеристикам РЭС. Такому требованию, как показал анализ, удовлетворяет критерий снижения шумовой помехой реальной чувствительности приемников РЭС до заданного уровня. Этот критерий эквивалентен критерию повышения спектральной плотности мощности входных шумов приемников РЭС с номинального уровня tVUI0 до требуемого , определяемого как [1]
= Млвп + Мио > Мио ~ (^4 + М + (Ми _ О^о) > (2.103)
где /УШРП - помеховая компонента спектральной плотности мощности входного шума; Мпо ~ уровень естественных шумов в приемной системе, включающей антенну, приемный тракт и собственно приемник РЭС; к = 1,38-!0“23 Дж/К - постоянная Больцмана; ТА - естественная шумовая температура антенны в градусах Кельвина; TL - шумовая температура приемного тракта; KL - коэффициент потерь мощности в приемном тракте; - коэффициент шума приемника; То = 290 К - стандартная температура.
Автор: В. В. Быков
У современных РЭС с приемниками, не имеющими малошумящих усилителей радиочастоты (МШУРЧ), типичная суммарная спектральная плотность мощности собственных шумов в дециметровом и сантиметровом диапазонах волн составляет примерно Ушо = 10-20 Вт/Гц = = Ю"20Дж. Лучшие приемники с МШУРЧ имеют примерно на порядок меньшие значения Ушо, что в энергетическом смысле делает их более простыми объектами заградительного РП.
При наличии рассматриваемой помехи отношение сигнал-шум в любом приемнике независимо от его структуры, параметров и вида сигнала уменьшится в число раз, равное
д^2 = 1 + Ащрп я ^шрп
^шо ^шо
(2.104)
Во столько же раз, очевидно, увеличится мощность или энергия минимально обнаруживаемого сигнала. При этом коэффициент снижения максимальной дальности действия РЭС, работающих в свободном пространстве прямым излучением (РЭС связи, навигации и т.п.) и отраженным излучением при совмещенных приемопередатчиках (моноста-тические РЛС), составит соответственно
Хй1=Дд= 1+Лшрп ; Kr2 = ^= 1+^ЩРП
(2.105)
Если А/ШПР - пространственно-спектральная плотность мощности помехи (Вт/(Гц м2)) в точке расположения приемника подавляемого РЭС, то входящая в (2.103)—(2.105) величина УШПР может быть найдена по известной формуле:
где SA - эквивалентная площадь приемной антенны РЭС в направлении на источник помех при согласованной поляризации и отсутствии компенсаторов помехи; GA - коэффициент усиления приемной антенны при указанных условиях; Ку - коэффициент поляризационных потерь помехи; - коэффициент потерь помехи из-за компенсаторов; А. -длина рабочей волны РЭС.
Поскольку ориентация приемной антенны РЭС может быть различной, коэффициент усиления антенны GA в направлении на постановщика помех будет случайной величиной. В дальнейшем для приближенных оценок воспользуемся средним по всем направлениям GA,
которое для антенн без потерь и при точном согласовании сопротивлений излучения и нагрузки антенны, как известно, равно единице. Тогда
— Л2
У шрп = М ШРП , (2.107)
4л-л.хл.кп
где ДГшрп - средняя спектральная плотность мощности помехи на входе приемника подавляемого РЭС.
Принятый критерий требует минимума информации о подавляемых РЭС: если задаться типовыми значениями параметров Ушо , Ку и Укп, то об объектах РП не требуется вообще никакой информации.
Основные соотношения и оценки возможностей массового подавления РЭС. Согласно (2.104) и (2.107) требуемая для подавления РЭС пространственно-спектральная плотность мощности помехи в местах расположения РЭС определяется как
4^КкпУШ0(д<72-1) 4^УкпУш0(д<72-1)/2
мшрп =--------------------- =----------2---------->(2.1 °8)
Л с
где f - рабочая частота РЭС; с = 3 108 м/с - скорость распространения радиоволн.
Из (2.108) следует, что плотность мощности помехи /ИШРП должна быть равномерной по пространству (ввиду независимости Л/ШРП от координат РЭС - объектов РП) и неравномерной по частоте, растущей пропорционально квадрату частоты. При закрытии помехой диапазона частот от /н до /в требуемая пространственная плотность мощности помех /в .
Ущрп = j^mpn(/)# = TT^z ^кп ^шо (Д?2 _1)(/в3 “Л?) (2.109) Л С
Умножая 77ШРП на площадь района расположения РЭС Spn , получаем требуемую суммарную мощность помехи, падающую на этот район,
Ллрп = ^ШРИ^РП = ^2’^^КП^ШО‘^РП (а? _ 1) (/в ~ fн ) (2.110)
Кубический рост требуемой суммарной мощности помехи от величины верхней частоты закрываемого диапазона делает предпочтительным применение способа массового заградительного подавления РЭС в низкочастотных диапазонах. Для снижения требований к суммарной мощности помехи целесообразно применять меры нейтрализации схем поляризационной и угловой селекции помех в подавляемых РЭС. К таким мерам относятся хаотически поляризованное излучение помехи,
обеспечивающее Kv = 1...2, излучение помехи из многих точек, обеспечивающее Ккп «1 при числе точек излучения, превышающем число каналов компенсации, и другие подобные меры.
В табл. 2.5 даны рассчитанные согласно (2.110) при К„ = Ккп = 1, Ашо = Ю-20 Вт/Гц значения требуемой суммарной мощности помехи, падающей на район расположения РЭС площадью SPn = 109 м2 = 103 км2 и обеспечивающей снижение реальной чувствительности приемников РЭС в Д<?2 = 1О2..,1О3 раз (на 20...30 дБ) в зависимости от закрываемого помехой диапазона длин волн. Значения мощности в таблице округлены до ближайшего значения 10к,где К -целое число.
Таблица 2.5
Диапазоны волн Диапазон частот, МГц Требуемая /щРП, Вт
Декаметровый 3...30 10"3...10~2
Метровый 30...300 1...10
Дециметровый 300... 3000 1О3...1О4
Сантиметровый 3000...30000 1Об...1О7
Из таблицы следует, что в декаметровом диапазоне волн требуется равномерно рассеять на площади 1000 км2 всего лишь 1...10 мВт, а в метровом, дециметровом и сантиметровом диапазонах - столько же ватт, киловатт и мегаватт, соответственно. В миллиметровом диапазоне потребуются уже гигаватты суммарной мощности. Эта мощность настолько велика, что о практической ее реализации не может быть и речи. В декаметровом диапазоне, наоборот, требуемая суммарная мощность ничтожно мала с точки зрения практической реализации. В этом диапазоне мощностью 1 кВт можно подавить РЭС на площади целого континента, такого как Северная Америка.
Парадоксально малая мощность помехи в низкочастотных диапазонах волн объясняется рядом причин. Во-первых, абсолютное значение диапазона частот становится малым, например, в декаметровом диапазоне оно составляет всего 27 МГц. Во-вторых, фундаментальная формула SA = GA1, связывающая эффективную площадь приемной антенны с коэффициентом усиления и длиной волны, справедлива при идеальном согласовании антенны с пространством, что не всегда обеспечивается в декаметровом и более низкочастотных диапазонах, когда размеры антенны много меньше длины волны; в результате квадратичный рост SA с увеличением длины волны нарушается. В-третьих, в этих
диапазонах, наряду с тепловыми шумами, становится заметным влияние атмосферных, индустриальных и взаимных помех, что эквивалентно увеличению параметра /Ущо. Тем не менее полученные соотношения можно считать достаточно точными для большинства РЭС в диапазоне не ниже декаметрового, в частности, нет сомнений в формуле для SA , когда приемные антенны РЭС реализуются в виде полуволновых вибраторов [2].
Для снижения требований к суммарной мощности помех в высокочастотных диапазонах, во-первых, нужно уменьшать суммарную закрываемую помехой полосу частот путем сосредоточения помехи в диапазонах скопления РЭС, например, использовать естественное скопление РЭС миллиметрового диапазона в окнах прозрачности атмосферы, и, во-вторых, нужно уменьшать закрываемую помехой площадь путем сосредоточения помехи в местах территориального скопления РЭС. Дело в том, что взятая выше при расчетах в качестве опорной площадь размещения РЭС 1000 кв. км является довольно большой. Реальная занимаемая РЭС - объектами РП в боевых условиях площадь на 1...2 порядка меньше.
Таким образом, требуемая для закрытия стандартных диапазонов частот суммарная мощность заградительной шумовой помехи, падающей на район расположения РЭС при массовом их радиоподавлении, пропорциональна площади района и кубу верхней частоты диапазона. Величину требуемой суммарной мощности можно считать реализуемой во всех диапазонах волн, вплоть до сантиметрового и частично миллиметрового, например, в дециметровом диапазоне иа район 1000 кв. км должна падать мощность 1...10 кВт.
Литература
1. Справочник по радиолокации / Под ред. М. Сколника, т. 1. - М.: Сов. радио, 1976.
2. Драбкин А. Л., Зузенко В. Л. Антенно-фидерные устройства. - М.: Сов. радио, 1961.
2.10. Метод обоснования характеристик сигналоподобных излучений в конфликтной радиолокации
При создании сигналоподобных помех современным РЛС, входящим в состав систем управления различного назначения, могут иметь место два основных эффекта. Первый - дезинформация относительно числа, пространственного положения и динамики движения объектов
Автор: В. Г. Радзиевский
локации. При этом ложная информация должна восприниматься как близкая к истинной и способствовать принятию неверных информационных решений. Второй эффект связан с перегрузкой подсистем обработки информации, что, по-сути, мало отличается от информационных последствий при воздействии подавляющих помех маскирующих типов, поэтому при изучении данного вида конфликта необходимо определить зависимости между характеристиками сигналоподобных помех и ожидаемой эффективностью их воздействия на РЛС.
Получим аналитические выражения для допустимых рассогласований между истинными и имитируемыми сигналами, а также проведем исследование возможностей перегрузки РЛС обнаружения импульсного и импульсно-доплеровского типов с помощью сигналоподобных помех.
1. Сторона, генерирующая сигналоподобные помехи, в любом случае из-за возможностей параметрической селекции будет стремиться максимально приблизить вид создаваемого воздействия к виду отраженного от цели сигнала, наделяя его нужными свойствами (например, связанными с созданием ложных траекторий, представлениями о степени опасности и т.д.). Другая сторона должна пытаться в этих условиях применить наилучшую стратегию для выявления истинных объектов, для чего могут использоваться оптимальные или близкие к ним алгоритмы обработки сигналов. Если ориентироваться на подсистемы первичной обработки в РЛС, то обсуждаемую задачу следует отнести к задаче распознавания сигналов путем наблюдения выборочных значений случайных величин или реализаций случайных процессов. Учитывая стратегии сторон, можно считать, что истинный и ложный сигналы можно представить функциями заданных видов, зависящими от неизвестных параметров, а параметры принимают разные значения в зависимости от условий сигнально-помеховой обстановки.
Задачу обоснования допустимого рассогласования параметров истинных и ложных сигналов сформулируем следующим образом. Пусть на временном интервале /еТ и в пространственной области г &Q наблюдается реализация сигнала х(г,г), которая может иметь один из двух видов:
х(г, г) = s, (/, а„ р,, 1,, ) + и(/, г) (2.111)
либо
х(Г,г) = 52(Г,а2,р2,12,^2) + и(Г,г), (2.112)
где р[,р2 - векторы неизвестных параметров, связанные с направлением на объект и скоростью его изменения, по которым в РЛС ведется поиск; 1!,12 - векторы неизвестных параметров, связанные с начальной фазой принимаемых сигналов, дальностью и скоростью изменения дальности; ^,^2 - векторы дополнительных параметров сигналов, по ко-
торым поиск не выполняется, но которые могут отличаться из-за неточности воспроизведения ложных сигналов; а15а2 - несущественные параметры; - заданные функции временных и пространствен-
ных параметров, причем 5, соответствует истинному сигналу, s2 - ложному; n(t,r) - белый гауссовский шум со спектральной плотностью No.
Разделение информационных параметров пространственно-временных сигналов на три группы определяется исходя из следующего. Сигналоподобные помехи могут создаваться в направлениях основных и боковых лепестков диаграмм направленности антенн РЛС; при создании помех в направлениях, отличных от нахождения истинной цели, ослабление помехи может компенсироваться увеличением ее мощности, чем и достигается эффект дезинформации относительно углового положения. Кроме того, для наделения помех дезинформирующими свойствами используются такие параметры сигнала, как задержка, доплеровское смещение частоты и др. Указанные параметры сигналов (векторы р, 1) являются одними из наиболее информативных для РЛС на этапе первичной обработки и при разумном выборе интервалов их изменения вряд ли смогут использоваться при отбраковке ложных сигналов. В то же время в сигналах Sj(f,r) и .у2(7, г) имеются параметры, описываемые векторами (j, и ^рассогласование по которым будет приводить к повышению реальных возможностей РЛС по распознаванию ложных целей, т.е. к снижению качества дезинформации в ходе конфликта.
Эффективность распознавания, так же как и эффективность проверки любых гипотез, будем характеризовать условной вероятностью /’(.уАг) ошибки принятия решения о наличии истинной цели, когда имеется ложная. По физическому смыслу рассматриваемой задачи априорные вероятности появления истинного и ложного сигналов в пространственном элементе разрешения РЛС можно считать одинаковыми, а максимальное значение вероятности P(si/s2) при полном подобии этих сигналов, очевидно, не превышает 0,5. Считая, что отношение истинный (ложный) сигнал-шумовая составляющая помехи достаточно для уверенного обнаружения во всем диапазоне дальностей, будем ориентироваться на использование асимптотического алгоритма распознавания, справедливого при относительно больших отношениях сигнал-шум. В этом случае при определении показателя эффективности можно пренебречь поправками к распределению вероятностей по закону Га-усса [1], так как величины семиинвариантов, определяющие эти поправки, малы по сравнению с единицей. Можно убедиться, что искомая вероятность ошибки имеет вид
р(Д1/52) = 1-ф[ ъ (2113)
где Ф(х) = —J= f е ' ^dt - интеграл вероятностей;
<2л- J
^о($1 Л 2) = max y'u (Р1.11Л1 > р2 > 12 Л Ь
Р2.12
У/12(Р1>11Л1,р2>12Л2) = -7= [[ ^ J| J2 (П(0 - взаимные функции неопределенности истинного и ложного пространственно-временных сигналов; Э, = || s2(t,r~)dtdr - энергия сигнала;
та
h0 - порог распознавания; при использовании критерия идеального наблюдения ha={q2- q22) / 2, а в частном случае Э) = Э2, Ао = 0.
Если сигналы s,(f,r) и 52(г,г) имеют одинаковую форму и отличаются только значениями своих параметров, при этом параметры р,а являются неэнергетическими, то взаимная функция неопределенности совпадает с обобщенной функцией неопределенности «эталонного» сигнала, т.е.
^^(РМр^рРгЛгЛг) = ^(Pi _Рг»'1 “^г) •
В этом случае
И^1Л2) = тах^(р1,11Л ,р2,12Л2) = ^12(0,0Л,Л2) = p2i2
= ---------=____________________. (2.114)
Дж
Если же неэнергетическими являются параметры и ^2, то 7Э(^1)Э(^) = JJ 2(Г,Р, 1, Wtdr .
ГХб)
Переходя непосредственно к расчету вероятности P(S|/s2) для типовых радиолокационных сигналов, отметим, что максимизация по начальной фазе логарифма функционала отношения правдоподобия, пропорционального выходному сигналу приемника РЛС, приводит, как известно, к реализации квадратурной обработки, а максимум функции взаимной неопределенности достигается при выполнении условия тах^12 =|^12|. Максимум модуля функции неопределенности будет иметь место в случае, когда параметры р,^ ложных сигналов совпадают с ожидаемыми; в противном случае эти сигналы будут ослабляться. При расчете вероятности /*(s|/s2) далее будут использоваться выражения
для сигнальных функций типовых радиолокационных сигналов, полученные в [2].
Рассмотрим случай, когда при создании помех из-за ошибок измерения и воспроизведения имеет место рассогласование по несущей частоте. При условии равенства энергий сигнала и помехи вероятности ошибки можно представить в виде:
для сигналов с прямоугольной огибающей
/’пр(^/^2) = 1-Ф
1-cosa ^2
(2.115)
где а= (й>1 -<a2)ru, ти - длительность сигнала; <а,(/ = 1,2) - несущая частота; для сигналов с колокольной огибающей
/’КОл(^1/^) = 1-Ф
лК[1-ехр(-^-)] V Z. о
(2.116)
у = (<Wj -<а2)Д, 2/70 - длительность сигнала на уровне е 1 от максимума; = 2Э0а2ти//Vo; а- амплитуда истинного и ложного сигналов.
Пусть истинный и ложный сигналы отличаются по амплитуде и длительности, т.е. =(а1,т1),^2 = (а2,т2) и 9j = а^т[Э0,Э2 = а2т2Э0. Тогда для сигналов с прямоугольными и колокольными огибающими соответственно получаем:
(2.117)
y]230/N0 2
а2т2 - 1а1а2 тт(т1;г2)
^0Л(^2) = '-Ф
л/290/7У0 2
2 2 2>/2б2,622Г|Г2
14+«2^2—, J 2 2
(2.118)
Допустим, что истинный и ложный сигналы с ЛЧМ имеют прямоугольную огибающую и отличаются амплитудами и скоростью воспроизведения частоты Л. Вероятность принятия ложной цели за истинную определяется как
Р(5,/52)=1-ф 7a2 + a2 - 2a,(a„ Д, д2Л) > (2-119)
где
Ги
Ч ! у
jcos— (Д -A2)t1dt
I о
u -
jsin— (Д -A2)t1dt
= - Д/2)т„ ] + S2[7w, - Д/2)ти ]/ Vw, - Д/2)тц ;
Я = 2лД/ / ru; &ft - частотная девиация за время длительности импульса; C(w), S(w) - интегралы Френеля [3].
И, наконец, рассмотрим сложные дискретные сигналы, образуемые путем разбиения всей длительности на N посылок с длительностью г каждая. Из каждой позиции формируется колебание a;exp(i^), где at,<Pi - амплитуда и фаза колебания высокой частоты; для фазоманипу-
лированных сигналов а, = const, а (р, может принимать несколько значений. Тогда вероятность ошибки
V2-Эд / No
2
P(sx! з2) = \-Ф
(2.120)
N-2u
где ш,2 =---— = 1-2//IN - функция взаимной неопределенности при
несовпадении у истинного и ложного сигналов ц элементов кода из общего числа N.
Требования к точности воспроизведения параметров сигналов могут предъявляться таким образом, чтобы в результате распознавания в РЛС вероятность ошибки P(sxls2) была не меньше заданной, т.е. P{sxls2) > Р . Если с этих позиций проанализировать (2.115)—(2.120), то видно, что требования к точности воспроизведения параметров сигналов возрастают по мере увеличения отношения истинный и ложный сигнал-шумовая составляющая помехи. Отсюда следует, что шумовая составляющая активной помехи способна маскировать имеющиеся отличия в структуре распознаваемых сигналов, поэтому сочетание сигналоподобных и шумовых помех является наиболее рациональным. Ориентируясь на значение Р =0,4, несложно убедиться, что точность воспроизведения несущей частоты, длительности, девиации частоты ЛЧМ сигнала и кода ФКМ сигнала при отношении = 10...20 должна быть достаточно высокой и составлять единицы процентов. В этой связи может оказаться более предпочтительным вариант, когда сигналоподобные помехи создаются на основе ретрансляции излучаемых РЛС сигналов с дополнительным изменением соответствующих параметров, несущих информацию об отражательных и траекторных характеристиках целей.
2. При функционировании РЛС наряду с обнаружением и сопровождением целей выполняется оценка параметров траекторий на текущие и прогнозируемые рубежи наблюдения.
Рассмотрим этап вторичной обработки, осуществляемый в импульсной РЛС либо на пункте управления по данным первичной обработки информации в этих РЛС. Будем полагать, что сигналоподобные помехи обладают такими свойствами, благодаря которым селекция на этапе первичной обработки оказывается малоэффективной. Если рас
пределение ложных отметок в пределах зоны обзора равномерное, т.е. при создании сигналоподобных помех не реализуется алгоритм согласованного управления траекториями ложных целей, то в установившемся режиме работы на сопровождении находится среднее число ложных траекторий, определяемое как [4]:
(2Л21)
где q - вероятность попадания ложной отметки в строб сопровождения; N - среднее число передаваемых на сопровождение траекторий; к -величина, характеризующая критерий сброса по наличию к пропусков подряд.
Анализируя (2.121) при значениях параметров, характерных для типовых импульсных РЛС обнаружения, несложно убедиться, что при сравнительно невысокой плотности ложных отметок, величина которой определяется энергетическими возможностями и пропускной способностью средств их создания, среднее число траекторий в установившемся режиме с точностью до коэффициента q пропорционально среднему числу траекторий, передаваемых на сопровождение. В свою очередь, величина Алтр при относительно небольшом числе ложных отметок, поступающих в устройство автозахвата за период обзора (около нескольких сотен) при отличающихся друг от друга фильтрующих способностях критериев автозахвата, составит всего несколько десятков.
Таким образом, при случайном расположении в пространстве ложных отметок, число которых в реальных условиях будет ограниченным, уже на этапе вторичной обработки информации произойдет их эффективная селекция. В то же время, как показывают результаты математического моделирования, в установившемся режиме число сопровождаемых целей при использовании квазиоптимальных алгоритмов автозахвата и сопровождения начиная с седьмого-десятого обзора примерно равно количеству имитируемых целей с управляемыми траекториями движения. Однако рассчитывать на перегрузку импульсных РЛС, функционирующих как в децентрализованном, так и в централизованном режимах, за счет создания сигналоподобных помех при наличии современных высокопроизводительных средств цифровой обработки информации вряд ли приходится.
При воздействии сигналоподобных помех на импульснодоплеровские РЛС возникает ряд интересных особенностей. Действительно, измерение дальности в этих РЛС основано на использовании нескольких фиксированных частот повторения импульсов, при этом производится последовательное неоднозначное определение дальности на каждой частоте повторения с последующим сравнением результатов
измерения и устранением неоднозначности [5]. Если отраженные от целей сигналы попадают в один доплеровский фильтр, то вследствие возникновения многочисленных комбинаций измерение дальности за один обзор может быть выполнено с большими ошибками. Полное число возможных комбинаций, образующихся на основе сравнения результатов измерения дальности для т целей, например, по совпадениям, равняется /и", где п - число частот повторения импульсов. Для устранения ложных т(т"~1-\) комбинаций в смежных обзорах обычно используются различные наборы близких частот повторения импульсов. Однако при соответствующем выборе структуры, числа и временного положения сигналоподобных помех на одном интервале однозначного определения дальности потенциальные возможности системы обработки по устранению ложных комбинаций могут оказаться недостаточными. Очевидно, что перегрузка РЛС наступит, если число ложных отметок превысит предельное для захвата и сопровождения число, используемое при формировании траекторий целей.
Расчет количества устойчиво сопровождаемых траекторий имитируемых целей выполнялся на основе математического моделирования процесса вторичной обработки информации - автоматического захвата и сопровождения имитируемых целей по данным, получаемым в смежных обзорах на этапе первичной обработки информации. Предполагалось, что обнаружение ложных отметок уверенно производится на фоне внутренних шумов приемника. В качестве исходных данных задавалось количество N и конкретное местоположение Л,7 ложных отметок в интервале однозначного отсчета дальности. При этом номера ячеек 4* на
интервале однозначного отсчета в зависимости от конкретного местоположения ложных целей, номера z-й частоты повторения и скважности mkj зондирующих импульсов в к-м обзоре определялись как
4* =£
( 2Rh (2RuIct\
— ——\mki
I ст I тк, )
(2.122)
где Е(х) - целая часть числа, j = 1, 2,...,N - порядковый номер отметки ложной цели на интервале однозначного измерения дальности; г - длительность импульса; с - скорость света.
Кроме того, при расчетах было принято, что период одного обзора пространства составляет 10 с, длительность зондирующего импульса 1 мкс, минимальная и максимальная скорости сопровождаемых целей -0,028 и 0,5 км/с, скважности трех потоков зондирующих импульсов от обзора к обзору задавались следующими тройками взаимно простых чисел: 31, 32, 33; 33, 34, 35; 35, 36, 37; 37, 38, 39, повторяющимися через четыре смежных обзора.
На рис. 2.7 и 2.8 приведены зависимости среднего числа сопровождаемых траекторий ложных целей на одной доплеровской частоте от числа этих целей для двух фиксированных моментов времени, соответствующих неустановившемуся (6-й обзор) и установившемуся (12-й обзор) режимам сопровождения трасс, и для разных логик работы системы. Анализ зависимостей показывает, что при сопровождении в РЛС до 300 целей при логике захвата «3 из 4» и логике сброса «3 подряд» перегрузка наступает при наличии в интервале однозначного измерения дальности десяти имитируемых целей на одной доплеровской частоте в 12-м обзоре. При создании сигналоподобных помех одновременно на нескольких доплеровских частотах число имитируемых целей в интервале однозначной дальности может быть уменьшено. Так, при создании помех на пяти фиксированных частотах требуемое число отметок при той же логике захвата и сброса уменьшается до семи. Таким образом, использование когерентных сигналоподобных помех может привести к нарушению устойчивости функционирования импульсно-доплеровских РЛС в условиях информационного конфликта.
Найденные выражения (2.115)-(2.120) для вероятности принятия ложной цели за истинную могут быть использованы для определения требований к параметрам сигналоподобных помех. При создании таких помех импульсным РЛС обнаружения основным эффектом будет дезинформация относительно числа и пространственного положения целей; при воздействии на импульсно-доплеровские РЛС, наряду с этим эффектом, возможна перегрузка систем обработки информации станции.
Литература
1. Репин В Г., Тартаковский Г.П. Статистический синтез при априорной неопределенности и адаптация информационных систем. - М.: Сов.радио, 1977.
2. Куликов Е.И., Трифонов А.П. Оценка параметров сигналов на фоне помех. -М.: Сов. радио, 1978.
3. Янке Е., Эмде Ф., Леш Ф. Специальные функции: Пер.с нем./Под ред. Л. И. Седова. - М.: Наука, 1964.
4. Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов.радио, 1974.
5. Справочник по радиолокации: Пер. с англ. / Под общей ред. КН. Трофимова - М.: Сов. радио, 1979, т.З.
Дополнительная литература к главе 2
1. Быков В.В. Эффективность совместного применения средств снижения заметности, постановщиков шумовых помех и мер тактической маскировки объектов в конфликте с современными РЛС. - Радиотехника, 2001, № 6.
2. Быков В.В., Овчинников Г.Н., Бродский С.В. Точность и устойчивость углового сопровождения цели при воздействии многоточечных помех на моно-импульсные РЛС по дальним боковым лепесткам диаграммы направленности антенны. - Радиотехника, 2000, № 10.
3. Быков В.В. Оптимальные с учетом влияния на радиолокационную заметность размеры передающих антенн постановщиков прицельных по направлению помех при самоприкрытии объектов. - Радиотехника, 2002, № 10.
4. Быков В.В. Дифракционные пределы концентрации излучения при создании «электромагнитного снаряда» сфокусированной антенной с круглой апертурой, возбуждаемой широкополосным полем. - Радиотехника, 2004, № 5.
ГЛАВА 3 Радиоэлектронное подавление систем радиосвязи
Обоснование видов и параметров помех системам радиосвязи основано на синтезе оптимальных с точки зрения выбранного критерия воздействий и оценке их эффективности. На практике достаточно широко используются и более простые в реализации квазиоптимальные (неоптимальные) помехи.
В материалах главы с единых методических позиций, базирующихся на математическом методе индикаторов событий, излагается подход и приведены результаты непарамегрического синтеза и оценки эффективности преднамеренных и непреднамеренных помех. Существующий аппарат расчета вероятности искажения кодовых комбинаций гауссовскими помехами оказывается неприемлемым при наличии на входе приемника негауссовских преднамеренных помех из-за сложности учета специфического для этих помех эффекта группирования искажений принимаемых элементов. Здесь используются различные критерии синтеза, в том числе и вероятность искажения безызбыточной кодовой комбинации.
3.1. Синтез и оценка эффективности преднамеренных помех приемникам дискретных сигналов
методом индикаторов решений о переданных элементах
В настоящее время для оценки достоверности приема дискретных (цифровых) сигналов в условиях воздействия белого шума и гауссовских помех предложено несколько десятков моделей источников ошибок в каналах передачи дискретной информации. Для ряда указанных моделей разработаны методы расчета вероятностей искажения кодовых комбинаций безызбыточных и корректирующих кодов, передаваемых нефедингующими и федингующими сигналами [1, 2]. При нахождении вероятностей искажения кодовых комбинаций в каналах с федингующими сигналами наиболее распространен предложенный Л.М.Финком метод постоянного параметра [2]. Он заключается в усреднении вероятности искажения и-значной кодовой комбинации Pn(h) в канале с нефедингующими сигналами по всем возможным значениям отношения сигнал-помеха h, распределенным по дифференциальному закону IV (h), описывающему рассматриваемый канал радиосвязи.
Авторы: А. А. Агафонов, К. Ю. Ложкин, В. Н. Поддубный
Вероятность искажения элементов кодовых комбинаций, входящая в выражение вероятности Pn(Ji), определяется путем нахождения неравенств, описывающих правила принятия ошибочных (неправильных) решений об этих элементах, и последующего вычисления вероятностей выполнения указанных неравенств [2]. Многие задачи по вычислению вероятностей искажения элементов при рэлеевских замираниях сигнала можно решить значительно проще, чем такие же задачи при отсутствии замираний, на основе предложенного Н.П.Хворостенко [2, с.392] метода, базирующегося на преобразовании Карсона-Лапласа.
Перечисленные методы нахождения вероятностей искажения элементов (элементарных посылок) гауссовскими помехами применимы для любых видов преднамеренных и станционных помех, различных приемно-решающих устройств и всевозможных состояний каналов передачи сигналов и помех.
Однако упомянутый математический аппарат нахождения вероятностей искажения кодовых комбинаций безызбыточных и корректирующих кодов гауссовскими помехами и белым шумом оказывается в общем случае неприемлемым для определения указанных вероятностей при воздействии преднамеренных или станционных негауссовских помех из-за невозможности учета специфического для этих помех эффекта группирования искажений элементов кодовых комбинаций. Это объясняется существенным отличием указанных помех от белого шума и гауссовских помех спектральной, временной и вероятностной структурами.
Вместе с тем в настоящее время накоплен значительный опыт применения метода индикаторов событий [3] не только для определения вероятностей искажения элементарных посылок и безызбыточных кодовых комбинаций (БКК) различными преднамеренными и непреднамеренными помехами, но и для синтеза оптимальных помех приемникам дискретных сигналов [4-12].
Обобщим и проведем систематизацию методического аппарата и результатов синтеза оптимальных помех и оценки эффективности преднамеренных и станционных помех на основе метода индикаторов событий и используемых критериев и показателей в теории и практике радиосвязи и в ее подавлении.
Аппарат индикаторов событий и обобщенные выражения вероятностей искажения и-значных БКК и их элементов. Индикатором события А, связанного со случайной величиной х, называется дискретная случайная величина [3]
1, если А наступает (если х > х0), (3 1)
О, если А не наступает (если х > х0).
При разработке методологии синтеза и оценки эффективности помех воспользуемся следующими свойствами индикаторов событий [3]:
1) индикаторы противоположных событий Л и А связаны соотношением
= (3-2)
2) математическое ожидание Мх индикатора события А равно вероятности РА появления этого события:
Мх{1л(х)} = |о-И,(х)Л+ ^\ W(x) dx = РА , (3.3)
-и jt0
где 1К(х) - плотность вероятности случайной величины х;
3) если событие А есть пересечение (П) п элементарных событий Ак, то индикатор события А равен произведению (П ) индикаторов событий Ак, а вероятность появления события А в этом случае определяется с учетом (3.3) как математическое ожидание произведения индикаторов событий Ак:
PA=P(p\Ak) = Mx{IA(x)} = Mx{Y[lAk(x)} . (3.4)
*=1 *=1
Используя математический аппарат индикаторов событий, получим, следуя [4-12], выражения вероятностей правильного приема п-значных двоичных БКК.
Если через Aik обозначить событие, состоящее в правильном
приеме к-го по счету двоичного элемента ik, к = \,п, =0,1, то для
сигналов с абсолютными (прямыми) видами манипуляции обобщенное выражение вероятности правильного приема и-значной БКК принимает вид [6]
il=0 Jt=0 l„=0
M=i
k=i
(3.5)
где Р(/1;...,/„) = 1/2" - априорная вероятность передачи элементов БКК;
- вероятность правильного приема конкретной и-значной БКК;
Ar={x1,...,xJl,...,xn} - «-мерный вектор, к-я компонента которого является отсчетом напряжения на входе порогового устройства (ПУ) приемника;
4*(^)=^[Ч(х*)+/п14(^)] (3-6)
- полусумма индикаторов правильного приема элементов ik = 0,1;
j 1, если ik принят правильно,
* Шь \%к ) “ I Л
* [О, если ik искажен
(3-7)
- индикатор правильного приема двоичного элемента ik,
При п = 1 из (3.5) следует обобщенное выражение средней вероятности правильного приема к-го двоичного элемента БКК, передаваемого сигналами с абсолютными видами манипуляции
Абс = MXt (хк)]l = (рок + Д*). (3.8)
Для двоичных сигналов с относительными видами манипуляции правильный прием и-значной БКК обеспечивается в случае, если опорный и все п перекодированных элементов этой БКК приняты либо правильно, либо ошибочно [2, 4, 7, 8]. Если обозначить вероятности указанных событий соответственно через Рпр(и + 1) и P0IU(n + l), то обобщенное выражение вероятности правильного приема и-значной БКК принимает вид [4, 7, 8]:
А = Л1р(и + 1) + 7’Ош(и + 1) =
(3-9)
При п = 1 из (3.9) следует обобщенное выражение средней вероятности правильного приема элементов БКК, передаваемых двоичными сигналами с относительными видами манипуляции.
Вероятность искажения и-значной БКК определим на основании (3.5) и (3.9) как вероятность события, противоположного правильному приему:
Р„=1-А- (3-10)
Из соотношений (3.5), (3.9), (3.10) следует ряд полезных для практики выражений. Например, при независимых и одинаково распределенных компонентах хк вектора X приходим на основании (З.б)-(З.Ю) к полученному в [13] другим путем выражению вероятности Рп для
случая независимых искажений элементарных посылок сигналов с относительными видами манипуляции:
A = 1-[W {^(Xt)}]"+1-w {1-^UJ}]"+1 =
лк (311)
= 1-Ра6+с1-(1-Рабс)"+1.
При п= 1 из (3.11) вытекает формула средней вероятности правильного приема двоичных сигналов с относительной фазовой манипуляцией (ОФМ) А™ =1 - А™ =1 - 2Рабс0 - Рабе), полученная Н. П. Бобровым другим путем [2, 13].
При жестко зависимых (одинаковых) значениях компонент хк, к = \,п вектора X и-мерный интеграл (3.10) с учетом (3.5) на основе фильтрующих свойств 5 -функций [14] преобразуется к однократному интегралу
~Р„=\-М (3-12)
Л к
В ряде задач нахождения вероятностей искажения БКК в вектор X необходимо включать дополнительные параметры усреднения: несовпадение посылок помехи и сигнала по времени, частоте и фазе, отношение сигнал-помеха, закон распределения которого определяется федингами сигнала и помехи.
Таким образом, общая для широкого класса помех, сигналов, алгоритмов их приема и состояний каналов передачи сигналов и помех последовательность математических операций по определению вероятностей правильного приема и-значных БКК и их элементов заключается в нахождении правил принятия правильных и ошибочных решений о переданных элементах БКК, определении полусумм индикаторов указанных решений и нахождении математических ожиданий этих полусумм индикаторов. Эта последовательность составляет сущность метода индикаторов решений о переданных элементах [6].
Вероятности (3.5), (3.9), (3.10) можно представить для заданного сигнала и алгоритма его приема в виде функционала от структуры помехи либо в виде функции от параметров помехи известной структуры. В первом случае - это инструмент для синтеза оптимальных помех, а во втором - для оценки эффективности преднамеренных и непреднамеренных помех.
Далее подробно исследуем сущность решения задач синтеза и оценки эффективности помех на основе метода [6].
В работах [4-12] дана конкретизация обобщенных выражений (3.5), (3.9), (3.10) для нахождения инженерных формул вероятностей искажения и-значных БКК и их элементов оптимальными и неоптимальными помехами различной структуры в когерентных и некогерентных, линейных и нелинейных приемниках простых и сложных сигналов с абсолютными и относительными видами манипуляции с учетом различного объема априорной информации, дополнительных гауссовских шумов, федингов сигналов и помех и неточности их совмещения по времени и частоте.
Проиллюстрируем возможности метода индикаторов решений о переданных элементах для нахождения используемых далее выражений средних вероятностей правильного приема элементарных посылок простых и сложных амплитудно-манипулированных (AM) и фазоманипулированных (ФМ) сигналов в когерентных приемниках.
Полагаем, что на входе этих приемников действует аддитивная смесь соответствующего незамирающего простого или сложного сигна
ла s,k (г) и помехи n(f), а постановщику помех неизвестна информация о начальных фазах <рс посылок этих сигналов длительностью Т. В этом случае правила принятия правильных решений о переданных элементах ik принимают вид [15]:
-(-l)'*yt/c/2 + £Acos(&-pc) > О,
(3.13)
где параметр у = 0,5 для AM и у = 1 для ФМ-сигналов с амплитудой 1/с;
Ек = JAck +4к > А = arctg(Лк /Лк) >
(3.14)
1 кТ 1 кТ
Лк = ~ J HMM')**, Лк = ~ I" и(0йоп(0<*; (3-15)
i J i J
(k-l)T (k-i)T
иоп(г) и uon(0 - опорное напряжение приемника и преобразование
Гильберта этого напряжения [14].
Вводя обозначение vk =cos(J3k -<рс), полусумму индикаторов пра
вильных решений о переданных элементах запишем на основании (3.13)
в виде
Д1Л Aia(va)
1,
1/2,
(3.16)
Полная фаза /Зк-<р!,=<рк напряжения zk = Ек cos(^ -<pQ) неизвестна постановщику помех. У него остается единственная возможность исключить неэффективность создаваемой помехи n(t) путем реализации равномерного распределения фазы <рк на интервале [0,] за счет изменения фазы Рк.
Усредняя (3.16) по значению vk, распределенному в этом случае по закону [14] №r(vk) = 1/(^1-v^), |vj<l, получим выражение средней вероятности правильного приема элементов нефедингущих сложных или простых AM- и ФМ-сигналов на фоне помехи произвольной структуры и(г)
А= pnt(v*)fK(v*)</v* =
1/ 2 + (1/тг) arcsin
1,
2Ек
0<^, 2£* (3.17)
2£,
После усреднения (3.17) по амплитуде (7С, распределенной по рэлеевскому закону [14], получим выражение средней вероятности правильного приема федингующих сложных или простых AM- и ФМ-сиг-налов на фоне помехи и(/)
Л=^{1 + ехр[-£2/(уас)2]/0[£2/(уас)2]} , (3.18)
где ст2 - мощность федингующего сигнала; /0[] - модифицированная функция Бесселя нулевого порядка.
Вероятности (3.17), (3.18) являются функционалами от структуры помехи и(г), поскольку входящая в эти выражения амплитуда Ек (3.14)
напряжения zk является функционалом от и(/).
Методология и результаты синтеза оптимальных помех. В качестве целевых функций синтеза оптимальных помех и(/) приемникам дискретных сигналов с различными видами манипуляции используем следующие критерии:
1) вероятности искажения двоичных элементов ik
Рок = [~Рок’ Р\к=Х~Р\к > (319)
и среднюю вероятность искажения этих элементов
Рк = [-Рк^(Рок+Ри); (3-2°)
2) средний риск приема к-го элемента [15]
г*=Цпр+(Цош-Цпр)|(р0*+ри) , (3.21)
где Цпр и Цош - цены правильного и ошибочного приемов элемента;
3) вероятность искажения и-значной БКК
и 1
Р„=1-Рп = 1-Мг ’ <3-22)
. А=1 J
(123)
где компоненты zk вектора Z={zl,...z(S.,...zn} представляют собой отсчеты напряжения на входе ПУ приемника, вызванные воздействием помехи и(/);
4) мощность помехи кТ
^7 I
(*-1)7-
Следуя [9-12], синтез осуществим на основе критериев, обеспечивающих экстремум перечисленных целевых функций при заданном ресурсе помехи. Задачи синтеза разделим на три группы в зависимости от особенностей их решения и используемого при синтезе объема априорной информации о сигналах.
Задачи первой группы включают синтез помех приемникам нефе-дингующих и федингующих сигналов с абсолютными видами манипуляции на основе целевых функций (3.19)—(3.21) и учета следующей априорной информации о сигналах: постановщику помех либо известны значения передаваемых элементов и начальные фазы посылок сигнала на входе подавляемого приемника, либо известны только начальные фазы посылок сигнала.
Рассмотрим сущность и результаты решения задач первой группы на примере синтеза оптимальных помех когерентным приемникам не-федингующих AM, ФМ и частотно-манипулированных (ЧМ) простых и сложных сигналов.
В этом случае индикаторы и полусумма индикаторов правильных
решений о переданных элементах ik = 0,1, к = 1,и, принимают вид
1, 1, zk>-y^-,
1 'п,» Л <3-24)
0, 2к>у^-, 0,
1 2 2
1Л
К
4^*) = 4^*) = ; (3.25)
1/2, гк>У^-,
где t/c - амплитуда сигнала на входе приемника; параметр у = 0,5 для
AM, у = 1 для ЧМ- и ФМ-сигналов, а напряжение zA на входе ПУ приемника, вызванное воздействием помехи п (г), определяется выражением
zk=- J л(0«оп(0Л , (3.26)
7 (*-1)Т
в котором опорное напряжение uon(z) когерентного приемника любого из рассматриваемых сигналов равно разности напряжений двоичных посылок этого сигнала: и0П(Г) = иоп1(Г) - uon2(r) = Jljt (t) - sOj. (t).
С учетом (3.8), (3.19), (3.20), (3.24), (3.25) вероятности правильного приема элементарных посылок рОк, р1к, рк = р2к принимают вид
оо
prk =MZt {lmi[(zk)} = Jirv(zt)/n,,(zj dzk , (3.27)
где v = 0,2, IVv(zk) - плотность вероятности напряжения (3.26).
Эта задача синтеза при указанных ограничениях формулируется на основании (2.27) следующим образом. Необходимо найти помеху n(t), имеющую плотность вероятности
оо
Wv(zk) = arg rnin [Wr(zk) lmk(zk)dzk , v = 0,2,
Wv(zk) J
при ограничениях, которые разделим на две группы:
<п f^)=l,
—<п
(3.28)
(3.29)
^,(Zt)>0 ,
* I кт 1 кТ
z*=extr- [ n(t)umi(t)dt, 9 = - f n2(t)dt , (3.30)
"(') r(J)r r(J)r
*
где zk - экстремум функционала (3.26); ZP - мощность помехи n(f).
Вариационную задачу (3.28) с ограничениями (3.29), (3.30) решим методом неопределенных множителей Лагранжа в два этапа. На первом этапе получим ее решение без учета ограничений (3.30), т.е. найдем оптимальные плотности вероятностей Wv(zk), v = 0,2, а на втором этапе путем решения изопериметрической вариационной задачи (3.30) поставим в соответствие этим плотностям вероятностей в виде 8 -функций Дирака оптимальные помеховые воздействия n(t).
Результаты решения задачи (3.28) представлены в табл. 3.1. Из нее видно, что для когерентных приемников нефедингующих AM- и ФМ-простых или сложных сигналов оптимальной является ФМ-помеха, посылки которой должны быть совмещены по времени с посылками сигнала на входе этих приемников, несущие посылок помехи должны быть такими же, как у посылок сигнала, а фаза несущей помехи на интервале приема к-й посылки сигнала определяется объемом априорной информации, используемым при синтезе помех. Для когерентного приемника ортогональных ЧМ-сигналов оптимальной является помеха в виде разности посылок сигнала. Посылки помехи в виде указанной разности должны совпадать по времени с посылками сигнала на входе приемника. Знак «+» или «-» перед помеховой посылкой, излучаемой на /с-ом тактовом интервале, зависит, как видно из таблицы, от объема априорной информации, используемого при синтезе. Эти знаки в выражениях, отмеченных «*», выбираются с вероятностями Р(+) и Р(-), удовлетворяющими условию Р(+) + Р(-)=1.
Путем решения аналогичных вариационных задач можно показать, что и для приемников федингующих AM, ЧМ и ФМ простых и сложных сигналов оптимальные помехи описываются выражениями, представленными в табл. 3.1.
Таблица 3.1
Вид двоичного сигнала Объем априорной информации Искажаемые элементы Критерий синтеза Вид оптимальной помехи на интервале (k-\)T<t< кТ
АМ-и ФМ-сигналы Начальные фазы посылок сигнала и значение передаваемого элемента 4=1 min р1к = UQn(t)
4=0 min p,ik И(О =+V2^won(i)
Начальные фазы посылок сигнала 4=о или 4 = 1 min pk и(;)‘ = ±VZ/u0„(z)
ЧМ-сигнал Начальные фазы посылок сигнала и значение передаваемого элемента 4 = 1 min plk «0) = =^
4=0 min pak *t) = = ^К,(0 -«ono(0]
Начальные фазы посылок сигнала 4=0 или 4 = 1 min pk «(')’ = = ±^I“on|(')-«o„o(0]
Ко второй группе относятся задачи синтеза оптимальных помех когерентным приемникам нефедингующих и федингующих, простых и сложных сигналов с абсолютными видами манипуляции на основе целевых функций (3.20), (3.21) без учета информации о значениях передаваемых элементов и начальных фаз посылок двоичных сигналов на входе их приемников.
Рассмотрим сущность и результаты решения относящейся ко второй группе задачи синтеза помех, обеспечивающих при указанных ограничениях минимум средней вероятности правильного приема элементарных посылок (максимум среднего риска при их приеме) в когерентных приемниках простых и сложных AM и ФМ федингующих и нефедингующих сигналов. Для этого воспользуемся полученными выражениями вероятностей (3.17), (3.18), из которых видно, что с ростом функционала Ек эти вероятности уменьшаются, а средний риск (3.21) увеличивается. Отсюда возникает изопериметрическая вариационная задача по отысканию структуры помехи и(т), обеспечивающей максимум функционала (3.14) Ек = Ек[и(0] при ограничении на мощность помехи (3.23).
Из решения этой вариационной задачи методом неопределенных множителей Лагранжа следует, что оптимальная помеха когерентным
(3.31)
приемникам незамирающих и замирающих AM и ФМ простых и сложных сигналов, синтезированная без учета информации об их начальных фазах, представляет собой ФМ колебание со случайной начальной фазой рк и амплитудой Un = V2</ , несущая частота <г»п и длительность посылок Тп этого колебания совпадают с соответствующими параметрами й)с и Т сигнала, а тактовые моменты манипуляции помехи и сигнала на входе приемника совпадают по времени:
n(t) = (Jn b(t) cos(cz>cr - pk) , (k-iyr<t<kT ,
где b(t)~ закон расширения спектра сигнала; для простых сигналов b(t) = 1.
Несомненный практический интерес представляют относящиеся ко второй группе задачи поиска структуры помех, которые обеспечивают минимальную мощность помехи (3.23) при фиксированном значении выбранных показателей искажения элементов (3.20), (3.21).
Сущность решения этих задач рассмотрим на примере синтеза оптимальных помех когерентным приемникам простых и сложных AM и ФМ нефедингующих и федингующих сигналов при условии, что начальные фазы посылок сигнала не используются при синтезе помех.
Поскольку риск (3.21) монотонно зависит от вероятностей (3.17) и (3.18), а эти вероятности, в свою очередь, монотонно зависят от функционала (3.14), то общей является задача нахождения структуры помехи n(t), которая доставляет минимум функционалу (3.23) при ограничении (3.14):
1 кТ
n(t) = arg min — n’(t)dt,
"('> Г(*-1)т
при ограничении
>/4+4=^,
где функционалы А^к и Аск от n(t) определяются формулами (3.15).
Решая эту изопериметрическую вариационную задачу методом неопределенных множителей Лагранжа, получим, что искомая оптимальная помеха также описывается выражением (3.31), в котором амплитуда Un = 2Ек.
К третьей группе относятся задачи синтеза помех, обеспечивающих при заданной мощности помехи минимум вероятности правильного приема и-значных БКК, передаваемых сигналами с абсолютными видами манипуляции, или минимум вероятности правильного приема элементов БКК, передаваемых сигналами с относительными видами манипуляции [9-11].
Рассмотрим постановку и решение такого класса задач на примере синтеза помехи, обеспечивающей минимум вероятности правильного приема и-значной БКК в когерентном приемнике простых ФМ-сигналов при ограничении на мощность помехи (3.23). Если фаза сигнала не учи
ink(zk) =
тывается при синтезе оптимальной помехи, то вероятность правильного приема и-значной БКК представим в виде следующего функционала [9]:
п
л=лмП7п*(г*)} ’ (3-32)
к=\ в котором
к
\/2, £/с<Ы;
zk = 2Ек cos(i//A + <р{), огибающая Ек определяется формулой (3.14), фаза эд равномерно распределена на интервале [0,2л ], а набег фаз Ч'к=(Рк~ <Р\ является детерминированной величиной, неизвестной на этапе постановки задачи.
Задачу синтеза оптимальной помехи решим в два этапа. Вначале найдем такие параметры Ек и >рк, /с = 1,и, которые с учетом вытекающего из (3.23) ограничения 0<£t <£max, где £max - максимально возможное значение Ек, обеспечивают минимум вероятности (3.32). Этот минимум достигается при таких значениях Ек и ц/к, которые удовлетворяют условиям Куна-Таккера [9]:
dP„ /dEk+^ Ar dgr(Er)/dEk = О, к = 2^i, r=l
dP„ldyk=b, k = 2,n, )
8k(Ek) = Ek^Em^> k = \,n,
4(£*-£max) = °5 k=\,n,
Ak > 0, к = 1, n,
где Лк - к-й множитель Лагранжа.
Детализируя условия (3.33) путем дифференцирования (3.32) по параметрам Ек и >рк, получаем, что для достижения минимума вероятности (3.32) помеха nk(t), к = \,п, должна обеспечивать на входе ПУ приемника одинаковые и максимально возможные значения амплитуд (3.14) напряжения zk, а набег фаз эд* этого напряжения
^=^оР1 = (Л-1>/и либо = -^opt = -(^-l>/« • (3-34)
Тогда задачу поиска структуры оптимальной помехи сформулируем следующим образом. Необходимо найти множество помех пк (г),
к = 1,п, которые обеспечивают максимум функционала (3.14) Ек,
к=1,п, при ограничениях на фазу ^=^ор, (3.34) и среднюю мощность помехи 3?=^ (3.23).
Решая эту изопериметрическую вариационную задачу последовательно для к = 1,и, получаем искомое выражение оптимальной помехи nk(y) = JzP cos[®cf±^(A-l)/п-(р„\, (k-Y)T<t<kT, (3.35) где <рп - равномерно распределенная от 0 до 2л случайная величина, одна и та же для всех к = 1, п .
Из (3.35) при п = к = 1, (частный случай) следует структура помехи (3.31), обеспечивающая минимум вероятности правильного приема элементарных посылок простого ФМ-сигнала.
Таким образом, структура оптимальных помех не зависит от того, федингуют или не федингуют сигналы в линиях радиосвязи. Однако она существенно зависит от априорной информации, используемой при синтезе помех.
В рассмотренных задачах синтеза помех предполагали, что на входе приемника присутствует аддитивная смесь сигнала и синтезируемой помехи, а дополнительные гауссовские воздействия различного происхождения отсутствуют. Результаты синтеза помех, полученные в [15] с учетом и без учета этих воздействий, показывают, что они изменяют выражения целевых функций оптимизации, но не меняют структуру оптимальных помех.
Результаты проведенных исследований показывают, что метод индикаторов решений о переданных элементах является эффективным математическим аппаратом решения на единой методической основе задач синтеза оптимальных помех приемникам простых и сложных, федингующих и нефедингующих дискретных сигналов с абсолютными и относительными видами манипуляции и оценки эффективности воздействия широкого класса преднамеренных и непреднамеренных помех на эти приемники по различным критериям, полезным в теории и практике радиосвязи и создания помех.
Литература
1. Блох Э.Л. и др. Модели источника ошибок в каналах передачи дискретной информации. - М.: Связь, 1971
2. ФинкЛ.М. Теория передачи дискретных сообщений. - М.: Сов. радио, 1970.
3. Лоэв М. Теория вероятностей: Пер. с англ. / Под ред. Ю.В. Прохорова. -М.: ЦИЛ, 1962.
4. Овчаренко Л.А., Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1990, № 5, с. 19-23.
5. Овчаренко Л.А., Поддубный В.Н. - Радиотехника, 1989, № 4. с.10-12.
6. Овчаренко Л.А., Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1986, №9, с.12-18.
7. Гордей В.В., Поддубный В.Н. - Радиотехника, 1994, № 11, с. 17-20.
8. Агафонов А.А., Поддубный В.Н. - Радиотехника, 1998, № 1, с.3-7.
9. Овчаренко Л.А., Поддубный В.Н. Радиотехника, 1992, № 7-8, с.13-19.
10. Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1991, №8, с.14-19.
11. Гордей В.В., Овчаренко Л.А., Поддубный В.Н. - Информационный конфликт в спектре электромагнитных волн (приложение к журналу «Радиотехника»), 1994, с.73-79.
12. Ложкин К.Ю., Поддубный В.Н. - Радиотехника, 1997, № 3, с.69-73.
13. Поддубный В.Н. - Техника средств связи. Сер. Техника радиосвязи, 1977, № 3, с.83-88.
14. Тихонов В.Н. Статистическая радиотехника. - М.: Сов. радио, 1966.
15. Базыкин В.В., Бакин Е.Н., Поддубный В.Н. - Техника средств связи. Сер.
Техника радиосвязи, 1985, № 3, с. 14-22.
3.2. Эффективность некогерентного приема частотно-манипулированного сигнала на фоне импульсной частотно-манипулированной помехи
Различные задачи оценки эффективности конфликтного взаимодействия линий радиосвязи со средствами создания преднамеренных помех и с источниками станционных помех могут быть решены на основе использования методик расчета вероятностей искажения кодовых комбинаций непрерывными и импульсными (дискретизированными во времени) помехами.
В [1-4] разработаны методики оценки вероятностей искажения и-значных безызбыточных кодовых комбинаций (БКК) и их элементов непрерывными преднамеренными помехами в различных приемниках простых и сложных дискретных сигналов. Однако в настоящее время отсутствует аппарат оценки вероятностей искажения в таких приемниках кодовых комбинаций блочных кодов преднамеренными импульсными помехами.
Получим выражения для вероятностей искажения и-значных ББК и их элементов незамирающей импульсной частотно-манипулированной (ЧМн) помехой в некогерентном корреляционном приемнике двоичных незамирающих частотно-манипулированных сигналов.
Пусть импульсная ЧМн помеха представляет собой последовательность радиоимпульсов с постоянной амплитудой и начальной фазой, изменяющейся от радиоимпульса к радиоимпульсу независимо и
Авторы: К. Ю, Ложкин, В. Н Поддубный
равновероятно в интервале [- я, я ], а частота ее несущей от радиоимпульса к радиоимпульсу равновероятно принимает одно из двух значений, равных частотам сигнала.
Обозначим отношение длительностей радиоимпульса (импульса) помехи Ти и паузы tn между ее импульсами к длительности элемента сигнала Тс через г и а соответственно: Ти/Тс = г, tn! Тс= а . В этом случае скважность импульсной помехи (ИП) Q = (г + а) / г. Для простоты будем считать, что г и а натуральные числа.
Конкретная конфигурация ИП характеризуется несколькими вариантами ее временного расположения на входе подавляемого приемника относительно БКК. Каждый g-й вариант характеризуется длительностью интервала совпадения tr помехового импульса с первым из накрытых этим импульсом элементов БКК. Длительность интервала rg -случайная величина распределенная при любом g по закону
PK( )=1/Тс, 0<rg<Tc, g = l,(r +а) . (3.36)
Число вариантов воздействия ИП равно количеству элементов сигнала (г + а), укладывающихся на ее периоде. Очевидно, что все варианты воздействия ИП равновероятны:
pg=l/(r + a),g = l,(r + a) . (3.37)
На рис. 3.1 представлены эпюры напряжений ИП uR(t), g = l,4,
Рис. 3.1
с параметрами г =а=2, воздействующей на пятизначную БКК.
Всевозможные конфигурации ИП разделим в зависимости от соотношения параметров п, г, а на пять непересекаю-щихся групп так, что вероятности искажения БКК помехами из одной группы будут описываться одним и тем же выражением. Номер группы конфигураций ИП У запишем в виде
1, 7=0,
2, 0<7<nin{r,a},
Л^=(3, г<7]<а,
(3.38)
4, а<т)<г,
5, пвх.{г,а}<7]<г+а,
где
7 = n- s{r+a) (3.39)
- разность длительностей БКК и е полных периодов ИП, отнесенная к Тс;
„71 1 И Г zn
г= --------— = ----- (3.40)
(г + а)Тс Jr + aL
- целая часть ] [ от деления длительности БКК пТс на период ИП (г + а )Т\.
Обозначим вероятность правильного приема БКК на фоне g-ro варианта воздействия ИП через Png . В этом случае выражение вероятности правильного приема и-значной БКК Рп для любой группы конфигураций ИП вычислим с учетом (3.37) по формуле полной вероятности: г+а 1 г+а
= r + ' (3-41)
g=i g=i
Вероятности P получим методом индикаторов решений о переданных элементах [1], учитывая, что элементы БКК являются независимыми и принимают значение 0 или 1 равновероятно. Для этого найдем правило принятия решений о приеме элементов 4=0,1, А = 1,„, на его основе определим индикаторы I^k, Ig[k правильных решений о приеме этих элементов в условиях воздействия g-ro варианта ИП с последующим нахождением их полусумм Igk, g = l,(r + «), и вычислением мате-
матического ожидания произведения указанных полусумм:
(3-42)
где М{-} - символ математического ожидания; Igk = | (Igok+Iglk);
Г1, 4 принят правильно на фоне g - го варианта воздействия ИП, [0, ik принят неправильно (искажен).
В некогерентном корреляционном приемнике ЧМн сигналов решение о приеме элемента 4=0,1, к =1, п, принимается по правилу [5]
(3-43)
где j>gt(f) - принимаемая аддитивная смесь сигнала s,k(f) с амплитудой Va и g-ro варианта ИП ng(t) с амплитудой U„: ygk(t)=s,k(t)+ng(t),
(A-l)7'c< t<kTc\ ucl(t) и us,(t), (=0,1, - опорные напряжения приемника в трактах обработки элементов 4=0,1.
Полусуммы индикаторов /gi, определяемые из (3.43) методом индикаторов решений о переданных элементах [1], в зависимости от временного расположения элемента БКК и импульса помехи на входе приемника можно разделить на четыре группы: IA=IA(@),
где & = Tg/Tc - случайная величина, распределенная в соответствии с (3.36) по закону 1F(0) = 1, О<0<1. Полусуммы индикаторов 1А и 1С описывают ситуации, в которых импульс помехи накрывает соответственно конец и начало элемента БКК. Полусуммы индикаторов 1В и ID описывают ситуации, в которых элемент БКК полностью накрывается импульсом помехи и принимается в паузах между ее импульсами. Эти полусуммы индикаторов описываются формулами:
J / 1, Йс>®> J ( 1, Лс>1,
[1/2, 0<йс<О; [1/2, 0<йс<1;
/с = Р’ /о = 1;йс>0, (3.44)
[1/2, О<Лс<1-0;
где hz=UJUn - отношение сигнал-помеха на входе приемника.
Из рис. 3.1 видно, что в общем случае количество элементов БКК, накрытых импульсами помехи полностью, частично или не накрытых ее импульсами, изменяется от варианта к варианту воздействия ИП. Следовательно, количество полусумм индикаторов в произведении (3.42) также зависит от варианта воздействия ИП. Поэтому (3.42) с учетом (3.44) запишем в виде
Png=M@{l№llsIDDs}> (3.45)
где Ag, Bg, Cg и Dg- количество полусумм индикаторов каждого типа в произведении под знаком математического ожидания: Ag+Bg+Cg+Dg= п.
Из (3.45) с учетом (3.44) следует, что нахождения величины Dg, g = 1, (г + «), не требуется, поскольку при любом ее значении сомножитель = 1 и не изменяет значение произведения под знаком математического ожидания в (3.45). Процедура определения величин Ag, Bg и Cg, g = 1, (г + а), состоит в следующем.
1. Для заданных параметров сигнала и помехи п, г, а, по (3.38)-(3.40) определяются значение т] и номер группы конфигураций ИП N.
2. Все (г + «) вариантов воздействия ИП изображаются, как показано на рис. 3.1, путем последовательных сдвигов по оси времени эпюр напряжений помехи на величину Тс, начиная с первого варианта воздей
ствия, в котором импульс помехи накрывает окончание первого элемента БКК в течение времени 0< г <ТС.
3. Для каждого из (r+а) вариантов воздействия определяются численные значения величин Ag, Bg и Cg путем подсчета количества элементов БКК, полностью или частично накрытых импульсами помехи.
4. Если параметры п, г, а соответствуют первой группе конфигураций ИП, то величины Ag, Bg и Cg, g = \,(r + a), объединяются в одно подмножество, поскольку каждая из них имеет одно и то же значение для всех вариантов воздействия ИП. В ином случае, величины Ля, Bg и Cg, g = l,(r + a), разбиваются на четыре непересекающихся подмножества. К первым двум подмножествам относятся варианты воздействия ИП, в которых Ag=Cg, а каждая из величин Ag, Bg и Cg имеет одно и то же значение в пределах одного подмножества. К двум другим подмножествам относятся варианты воздействия ИП, в которых Ag<Cg и A^>Cg соответственно, причем в пределах любого из них величины Ag и Cg остаются постоянными, а значения Bg отличаются на единицу в смежных вариантах воздействия ИП.
5. Производится перенумерация величин Ag, BgnCgc заменой переменной g на j по следующему правилу: в первых двух подмножествах перенумерация выполняется в произвольном порядке, а в следующих двух подмножествах - в порядке возрастания Bg. Полученные численные значения величин Aj, Bj и С7 подчиняются представленным в табл. 3.2 зависимостям, на основании которых однозначно определяются номера подмножеств /?2, Rj, R4 для каждой группы конфигураций ИП и количество элементов в каждом подмножестве.
Таблица 3.2
Л’ Выражения величин А,. И, и С, для подмиожеста
Я. Rz
1 Aj Вг£(г-\), j=\,(r+a) - - -
2 Aj-Cj-s, Я/-£(л-1), Лу-Су-г, Bj~c(r 1 )i-rj, j^Xr-ni A,-ct 'l. 4e*+i> Bj^t.(r-V)+j - 1,
3 ArC/*e+\, Aj-t, C/’f+l, Aj-v । 1, Вг£(г-1} н7-1,7=й
4 1. Bj=c(r-\)-r)-a -1. a) Aj-Cj^e, At-:£, Bt=£(r-\} -q-a-]. Cj=e. &-€(/-]) +j +q-a -1, y-l,a
5 Aj-Cj = €~l, f. (r-1)+ Jj-a~ 1 I.O? - a} 4r( }-*+!, Л l,(n-Л Aj = e, a) Aj ~ ff+l, Cj-E, Bf-E(r-])+ j + q-a + \.
Искомые выражения вероятности Рп для всех групп конфигураций ИП получим путем подстановки в (3.45) полусумм индикаторов (3.44) и величин А„ В,, Cj из табл. 3.2, усреднения (3.45) по переменной 0 с последующей подстановкой полученных выражений вероятности Р„я в (3.41) с учетом замены переменной g наJ: для первой группы конфигураций ИП (#=1)
1/2Е(г+1)+[(2£+1-2)/2е(г+,)]/г(
Р„ = U2 - 2е)/ 2" + [(2е+| - 2)/ 2ег]Лс,
(3.46)
для второй группы конфигураций ИП (7V=2)
[2'' (а - г) + 2) + г - г) - 2] /[(г + a)2e(r+l)+,? ] +
+ (2е+1 - 2)[2^(а - 7 + 2) + г - т; - 2] + 2е (2"+1 - 2) _1_
(г + а)2е<'+1)+’ с’ с 2’
р = {[2’ (а - П + 4) + г - т] - 4](2 - 2е) - 2П+Х + 2} /[(г + а)2сг+"] +
। (2^1-2)[2'?(а-т;+4) + г-7;-4] + 2'?+|-2Л -<h <1
+ (г + а)2ег+'' с’ 2“Лс~
1,
лс>1;
(3-47)
для третьей группы конфигураций ИП (#=3)
[2'+>(а -q + 2) + q-r- 4]/[(г +а)2(с+1Хг+1)] +
(2e+1_2)[2,+1(g-?7+2)+?7-r-4]+2e+l(2f+1+?7-r-2) 1
(г+а)2(е+,)(''+1) с’ ^2’
{[2'(а - т; +4) + 2(т; - г-2)](2- 2е) - 2(2Г + 7] - г- 1)}/[(г+а)2(е+|,г] +
i(2c+'-2)[2\a-7]+4) + 2(7]-r-2)]+2(2r+7J-r-l) (г+а)2^г
hc>l;
(3.48)
для четвертой группы конфигураций ИП (7V=4)
[2° -1 (/? - « + 4) + г/? - 2] /[(r+сг)2г<г+|) ] +
. -2)^-\л-а+^ + г-Г1-2} + Г+\2а +г~т1-\'} 1
(г + а)2г<'+1>+" c’ c 2’
n
{[2a (rj - a + 2) + r - r] - 2](2 - 2£+1) + 2е (r - Tj) + 2“+1 - 2} /[(r+a)2"+" ] + (2г+2-2)[2а(7-а + 2) + г-7;-2]-2с+,(г-7;)-2д+1+2 1
+-------------------^2^------------------------~2SI^-'
лс>1;
(3.49)
для пятой группы конфигураций ИП (TV =5)
[2Г (rj - а+4) + 2"~“(rj - г - 4)] /[(г+а)2<г+1*г+1>+"-д ] +
(2г+2 - 2)[2Г (т; - а + 4) + 2''~а' (т; - г - 4)] - 2£+2(2' - 2’’~а)
+ (г+а)2(с+1)(г+1)+"‘а
[2r(?i - а + 2) + 2''-а(т; -г- 2)](2 - 2f+l) + 2r+1 - 2"’а+1 (г+а)2(г+1)г+"-а
(2С+2 - 2)[2Г (т; - а + 2) + 2’>~а (ту - г - 2)] - 2Г+1 + 2''~д+|
+ (г + а)2(г+1)г+"’а
hc>\.
(3-50)
Далее найдем вероятность искажения двоичного элемента БКК р.
При и=1, как следует из (3.38), всевозможные значения г и а принадлежат ко второй группе конфигураций ИП, в которой вероятность Рп определяется (3.47). Поэтому, подставляя в (3.47) п = 1, получаем
[(г + 1)/[2(г + а)]-/гс/(г + а), 0 < Лс < 1,
На рис. 3.2 изображены построенные по (3.46)-(3.50) зависимости вероятности искажения пятизначной (и=5) БКК Р„ = 1 -Рп от различных
параметров сигнала и ИП. Они носят пороговый характер: при hn= — <1
вероятность Рп = 0, а при h„ >1 она больше нуля. Из (3.46)-(3.50) следует, что вероятность Р„ является непрерывной функцией h„, если г=1, и претерпевает скачок при йп=1, если г > 1.
При ha -юо вероятность искажения БКК стремится к предельно достижимому значению Л,пах = 1 - aN, где aN -свободный член в выражении для вероятности Р„ для TV-й группы конфигураций ИП, соответствующем усло-________________________ h" вию 0 < Ис< 1/2
Рис. 3.2 При а>> ппг» п
согласно (3.39), (3.40) £ =0, т; =п, а ИП, как видно из (3.38), относится ко второй группе конфигураций помех, в которой вероятность Рп определяется (3.47), из которой
следует, что при п > 5, а » п, г » п и h„ -> оо значение Pnmax »1 / Q, что имеет ясный физический смысл: при указанных а, п и hn доля БКК, равная а /(г +а), искажается с вероятностью, равной нулю, а оставшаяся доля БКК, равная г/(г + а) - с вероятностью, практически равной единице; тогда по формуле полной вероятности получим Рп » 0 +1 = \/Q.
С ростом скважности излучения Q и фиксированных значениях п и Ип вероятность Рп уменьшается, а при увеличении п и фиксированных значениях Q и hn - возрастает. При фиксированной скважности Q и больших значениях hn эффективность ИП возрастает с уменьшением г и оказывается максимальной при г = 1. Это объясняется увеличением числа попадающих на БКК импульсов помехи. Для малых ha и фиксированной скважности Q эффективность ИП достигает максимума при оптимальном значении г = гопт >1, зависящем от л и hn.
I Полученные выражения вероятности искажения безызбыточных кодовых комбинаций и их злемеитов могут оказаться полезными специалистам, занимающимся оценкой помехоустойчивости радиосвязи и разработкой средств создания преднамеренных помех.
Литература
1. Овчаренко Л.А., Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1986, т.29. №9.
2. Овчаренко Л.А., Поддубный В.Н. - Радиотехника, 1989, №4.
3. Гордей В.В., Поддубный В.Н. - Радиотехника, 1994, №11.
4. Ложкин К.Ю., Поддубный В.Н. - Радиотехника, 1997, №3.
5. Тихонов В.Н. Оптимальный прием сигналов. - М.: Радио и связь, 1983.
3.3. Влияние расстройки спектров фазоманипулированного сигнала и станционной помехи на вероятность искажения кодовой комбинации
В [1] получены выражения вероятностей искажения элементарных посылок (элементов) двоичных сигналов станционными помехами в виде гармонического колебания со случайной начальной фазой. Однако формулы для расчета вероятности искажения кодовой комбинации двоичного сигнала гармонической помехой (ГП) с учетом расстройки по частоте спектров сигнала и помехи в литературе отсутствуют.
Здесь методом индикаторов решений о переданных элементах [2] получены выражения вероятностей правильного Рп и ошибочного Рп = 1 - Р„ приемов и-значной БКК фазоманипулированного (ФМ) незамирающего сигнала на фоне незамирающей ГП, которые учитывают расстройку по частоте Atu = фп-фс несущих ГП tun и сигнала tuc, а также отношение сигнал-помеха h = I Un, где Uc и Un - соответственно амплитуды сигнала и помехи на входе приемника.
Применяемый для решения этой задачи метод индикаторов решений о переданных элементах заключается в определении на основе правила обработки приемником смеси сигнала и помехи индикаторов правильных решений Inik о переданных элементах 4 =0,1; к = \,п, записи
полусумм этих индикаторов , Ini!l и последующем нахождении
вероятности Рп путем вычисления математического ожидания произве
дения этих полусумм Рп=М
В связи с тем, что определение вероятностей Р„ и Р„ для произвольных значений произведения расстройки Atu на длительность элементарной посылки Т наталкивается на непреодолимые трудности, поставленная задача решена для фиксированных значений \а>Т, принадлежащих множеству \а>Т = {2я(т-1), (л72)(2/и-1), л-(2/и-1)}, т = 1,2,3,....
Положим, что прием А-го двоичного элемента /*.=0,1; к = \,п, и-значной БКК ФМ-сигнала осуществляется оптимальным для белого шума когерентным приемником [1] на фоне аддитивной ГП. В этом
Авторы: Л А. Овчаренко, В. Н. Поддубный
случае напряжение yik на входе решающей схемы приемника в конце приема к-го элемента ih = 0,1 можно представить в виде
1 кТ
Ук = ~ f [Ис*(0 + ИП(0]Иоп(0^ =
(Л-07 (3.51)
= -(-1)'* ^ + Ит51П(Дй/Г/2) cos[A(j? + {\0}Т12)(2к-1)],
2 2 ДйХГ/2 V
где - напряжение к-го элемента сигнала; Д<з - разность фаз меж
ду помехой un(t) и опорным напряжением иоп(г) приемника.
С учетом (3.51) индикаторы 1П1к принимают вид [2]
nlA
1,
о,
1,
0,
Уок <°>
Уок
(3-52)
Ун, <°;
А1М -
После подстановки (3.51) в (3.52) и последующего усреднения произведения полусумм индикаторов по всем значениям Д<э , распреде
ленным по равновероятному закону на интервале [0,2тг], получим вы
ражения вероятности Р„:
для Аа>Т = 2тг(т -1) или \а>Т = тг{2т -1)
2" -1 (
1------:— arccos h
О”-1 „
2. 71 (
\nTI2 sin(AflXr / 2)
sin(A(zXr / 2) ~ДгуГ/2
sin(A а Т / 2) \aTI2
(3-53)
для ДгуГ = (л7 2)(2/и -1)
(2/+2"ч-1) (2/+2"-1-2) (,
------------ :—- arccos И 2”---------л2"-'
bojT/2 sin(Ary7V2)
0<Л
Дй>772 sin(A(z/r/2)
(2и+,-2"-1-2/) (,
1----------------- arccos И
тгГ-'
\aiTI2 sin(Affi'7’/2)
(3.54)
y/2<h \аТ/2
2 sin(A а>Т / 2)
sin(A®T 12)
Дй/Г/2
। । \aTI2 , Г(л + 1)/2, n нечетно,
где • - модуль числа --------------; / = (
sin(A<a7’/2) [ л/2, и четно.
На рис. 3.3 изображены построенные по (3.53), (3.54) зависимости вероятности искажения пятизначной (л = 5) БКК Р„ = \-Рп от различ-
ных значений Аа>Т и h.
При л = 1 из (3.53), (3.54) следуют выражения вероятностей искажения элементарных посылок р, из которых видно, что изменение отношения сигнал-помеха h, необходимое для достижения фиксированного значения р после расстройки по частоте ФМ-сиг-
Рис. 3.3
нала и ГП, подчиняется закону
И(ДюГ) = /г(0)
. (\аТ sin ---
I 2
\<оТ /2
(3.55)
где /г(0) и h(\a>T) - отношения сигнал-помеха соответственно до и после расстройки на величину \а> при фиксированных значениях вероятности р.
Такому же закону практически подчиняется, как это следует из (3.53), (3.54), изменение отношения сигнал-помеха, необходимое для достижения фиксированного значения вероятности Рп при условии, что л> 5 и Рп < 0,3 . Для Рп > 0,3 , как это видно из рис. 3.3, требуемое изменение отношения сигнал-помеха не соответствует закону (3.55). Например, для Р„ = 0,5 Л(0)~ 0,68, а Л(А(уГ = /г/2)»0,82, которое больше, чем /г(0), что не согласуется с законом (3.55).
Литература
1. Сикарев А.А., Фалько А.И. Оптимальный прием дискретных сообщений. -М: Связь, 1978.
2. Овчаренко Л.А., Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1986, т. 29, № 9.
3.4. Помехоустойчивость приема фазоманипулированных сигналов на фоне станционных помех
В [1] исследовано влияние расстройки несущих фазоманипулиро-ванного незамирающего сигнала и незамирающей гармонической помехи на вероятность искажения БКК.
Получим формулы для расчета вероятности искажения БКК незамирающего ФМ-сигнала станционной помехой в виде незамирающего ФМ-колебания.
Для определения вероятности правильного Рп и ошибочного Р„ = 1 - Р„ приемов и-значной БКК ФМ-сигнала на фоне ФМ-помехи воспользуемся методом индикаторов решений о переданных элементах [2]. Следуя этому методу, вероятность Рп равна математическому ожиданию произведения п полусумм индикаторов правильных решений /П,А о переданных элементах ik = 0,1, к = 1, п :
^=М П=м ГР-*
(3-56)
[4=1 .*=0
Двоичный ФМ-сигнал и ФМ-помеху на интервале приема А-й посылки сигнала ih = 0,1, к = 1,п, представим в виде
«с(0 = -(-1)'* Uc cos(av + <зс), (к - 1)ТС < t < кТс;
-(-1)41* Un cos(«V + <z>n), (к - 1)ТС < t < (к - 1)ТС + т, “п(') = ) ,
Un + рп), {к - 1)ТС + т < t < кТ,
«п(0 =
(3.57)
(3.58)
где Uc и Lfn, (pz и <рп, а)с и — соответственно амплитуды, несущие частоты и начальные фазы сигнала и помехи; и Лц - случайные параметры помехового воздействия, независимо принимающие на интервале приема к-й посылки сигнала значения 0 или 1; Тс - длительность элемента сигнала; т - момент изменения начальной фазы помехи на п на интервале приема к-й посылки сигнала, 0 < г < Тс.
Предположим, что = фп , т, и <рп - случайные величины, распределенные по равновероятному закону на интервалах ге[0,Тс] и 9%, <рп е[0,2тг], а прием ФМ-сигнала осуществляется оптимальным для белого шума когерентным приемником, состоящим из фазового детек-
Авторы: Л. А. Овчаренко, В. Н. Поддубный
тора и решающего устройства (РУ). В этом случае напряжение на входе РУ при приеме А-го элемента ФМ-сигнала (3.57) на фоне станционной помехи (3.58) [3]
ук =Uc+Un a cos, (3.59)
где
П, или ^=^=0;
а = {
[1- 2г/Тс, /11А = 1 и/1^ = 0 или Ък = 0 и = 1;
\<р - разность фаз между помехой и опорным гармоническим напряжением приемника.
Так как начальные фазы помехи и сигнала - случайные величины, распределенные по равновероятному закону, то и разность фаз \<р [4] распределена по равновероятному закону в интервале \<р е [0,2л].
По (3.59) получим выражения полусумм индикаторов правильных решений о переданных элементах ФМ-сигнала
1,
1/2,
Аа=Аа(дР>г) =
Л h
-j—l^cosA^^p-r;
н н
h h
cosA<p<~-—г или cosA^>-—г,
И н
(3.60)
где h = UJUn.
Полусуммы индикаторов (3.60) можно разделить на две группы. Группа 1, содержащаях одинаковых полусумм /пА(Д^,г), 0<х<и, характеризует прием элементов сигнала (3.57) на фоне помехи (3.58) с перескоком начальной фазы на п (Л,к = 1 и = 0 или \к = 0 и /^ = 1), а группа 2, содержащая n-х одинаковых полусумм /^(Д^), характеризует прием элементов сигнала (3.57) на фоне помехи (3.58) без перескока начальной фазы ( \к = = 1 или \к = = 0).
После усреднения произведения и указанных полусумм в соответствии с (3.56) и (3.60) по всем значениям т и \<р вероятность правильного приема и-значной БКК
I 2" -1 . , 2х -1 .,
— + —г- arcsm п + —г- n In 2М ПМ-1 -г пМ-1
2 71 2 71
(3.61)
h
Л>1.
Из (3.61) при х = 0 следует выражение [1, 2] вероятности правильного приема и-значной БКК на фоне гармонической помехи с а>п = ас , а
при х = п - на фоне ФМ-помехи, манипулированной периодической импульсной последовательностью с длительностью посылок Тп = Тс. Вероятность правильного приема и-значной БКК на фоне ФМ-помехи, манипулированной регулярной или случайной импульсной последовательностью с длительностью посылок Тп, кратной TQ, описывается (3.61) при 0 < х < п .
Наряду с (3.61) полезным для практики является выражение средней вероятности правильного приема БКК, полученное усреднением (3.61) по всем значениям х, подчиняющимся закону Р(х) = С* / 2", 0 < х < п,
С* = и!/[х!(и-х)!]:
и ср
1 2"-1 . , (3/2)"-1,,
— + —— arcsin h +1--------------h In
/)«-] — nrt-l —
2 2 П 2 П
0<й<1,
(3.62)
h
h>\.
При n = \, x = 0 или х = 1 из (3.61) и (3.62) вытекают выражения [1-3] вероятностей правильного, приема элемента ФМ-сигнала на фоне станционной помехи (3.58).
На рис. 3.4 приведены зависимости вероятностей искажения пятизначной (и = 5 ) БКК от отношения сигнал-помеха h. Непрерывными линиями изображены зависимости Р5 = 1 - Р5, построенные на основании (3.61), а штриховой линией - зависимость Р5 Ср = 1 - Р5 ср, построенная на основании (3.62).
Из рисунка видно, что наиболее неблагоприятной является гармоническая помеха (х = 0), а манипулированная периодической импульсной последовательностью ФМ-помеха (х = и) с длительностью посылок Тп = Тс искажает ФМ-сигнал в наименьшей степени.
Литература
1. Овчаренко Л.А., Поддубный В.Н. - Радиотехника, 1988, № 2.
2. Овчаренко Л.А., Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1986, т. 29, № 9.
3. Поддубный В.Н., Базыкин В.В. - Изв. вузов. Сер. Радиоэлектроника, 1980, т. 23, № 1.
4. Тихон ов В. И. Статистическая радиотехника. - М.: Радио и связь, 1982.
3.5. Помехоустойчивость приема частотно-манипулированных сигналов с минимальным сдвигом на фоне гармонической помехи
В [1] получено выражение вероятности искажения элементарных посылок (элементов),передаваемых частотно-манипулированными сигналами с минимальным сдвигом (ЧММС сигналами), помехой в виде гауссовского стационарного шума, а в [2] приведена зависимость вероятности ошибочного приема элементов ЧММС сигналов от нормированной расстройки несущих частот сигнала и гармонической помехи. Однако в литературе отсутствуют важные для теории и практики радиосвязи и создания помех выражения вероятностей искажения кодовых комбинаций в приемнике ЧММС сигнала гармонической помехой (ГП), которая широко используется в качестве модели станционной и преднамеренной помех. Эти вероятности являются не только самостоятельной мерой помехоустойчивости приемников, но, что более важно, с их помощью определяются основные показатели функционирования систем радиосвязи при воздействии рассматриваемых помех, такие как время задержки и время передачи информации в этих системах. Одна из трудностей нахождения указанных вероятностей заключается в поиске аппарата, адекватно учитывающего эффект группирования искажений элементов кодовой комбинации в приемнике.
Получим выражения для расчета вероятности искажения БКК равномерного и-значного двоичного кода в приемнике незамирающего ЧММС сигнала незамирающей ГП с учетом расстройки по частоте несущих сигнала и помехи.
Относительное перекодирование двоичной информации, широко применяемое в системах связи с ЧММС сигналами, в общем виде описано в [3]. Для передачи информационных элементов jk =0,1, к = 1, п, используется последовательность из т = п +1 элементов ik = 0,1, к = 0, п, состоящая из одного опорного и и перекодированных элементов. Перекодированную последовательность элементов ik передают ЧММС сигналом, который можно представить на частоте &>с в виде суммы двух квадратурных составляющих [3]
s(0 = ис (О coscos(f<V + <pz) + as(f) sinsin(«yc? + cpz) j, (3.63) где Uz,a)z,<pz - соответственно амплитуда, несущая частота и начальная фаза ЧММС сигнала; Т - длительность тактовых интервалов, связанная с длительностью Tz элементарных посылок ЧММС сигнала, Тс = 2Т.
' Авторы: А. А. Агафонов, В. Н. Поддубный
В зависимости от выбранного способа передачи БКК по квадратурным каналам элементы ik разбиваются на две группы (;ср и предназначенные для формирования соответственно косинусной (с) и синусной (s) квадратурных составляющих ЧММС сигнала (3.63) на /z -ом (/z = 1,2,3,...) временном интервале длительностью 7С. Функции zzc(z) и zzs(z) связаны с элементами /ср и / соотношениями
О
(2/z -1)7 < Z < (2/z +1)7, для других значений t;
»,«>- в-1’4 о
(2/z-2)7<z<2/z7,
для других значений Z.
Применение относительного перекодирования при использовании ЧММС сигналов позволяет реализовать два способа относительной передачи и приема информационных элементов по квадратурным каналам.
При первом способе для передаваемого элемента в качестве опорного берется ближайший предыдущий элемент, передаваемый в другом квадратурном канале. Структурная схема приемника ЧММС сигналов, синтезированная в [1] и реализующая этот способ приема, изображена на рис. 3.5. Схема содержит перемножители, интеграторы, пороговые устройства (ПУ] и ПУ2) с пороговыми напряжениями zzn = O, линии задержки на время г3 = 7 и коммутатор К, объединяющий принятые в разных квадратурных каналах элементы одной БКК. Опорные сигналы имеют вид
Для реализации этого способа v элементов БКК передаются по одному квадратурному каналу, а т - v элементов - по другому, где
Г (т +1) / 2, т - нечетное, v = 1 |?и/2, т -четное.
(3-64)
При втором способе для передаваемого элемента в качестве опорного берется ближайший предыдущий элемент в том же квадратурном канале. Структурная схема приемника ЧММС сигналов, реализующая этот способ приема, изображена на рис. 3.6. В ней используются линии задержки на время г3 = 27. Второй способ предполагает передачу БКК полностью по одному из квадратурных каналов, а коммутатор К объединяет переданные по обоим квадратурным каналам БКК в единый поток.
Выделенные пунктиром одинаковые части структурных схем на рис. 3.5 и 3.6 представляют собой приемник ЧММС сигналов, применяемый при передаче и приеме БКК без относительного перекодирования элементов [3]. Несовпадающие части структурных схем предназначены для выполнения обратного относительного перекодирования принимаемых элементов.
При относительном перекодировании элементов правильный прием БКК возможен, как показано в [4], если ПУ] и ПУ2 принимают либо правильные, либо ошибочные решения обо всех т элементах БКК. В соответствии с этим вероятность правильного приема т -значной (п = т -1) БКК Р„ при относительном перекодировании элементов является суммой вероятностей правильных (/и) и ошибочных Рош(/и) решений о всех т элементах этой БКК
Л = PnP(zw)+ рош(т) > (3-65)
а вероятность искажения этой БКК Рп представляет собой вероятность события, противоположного правильному приему:
P^-P^-P^-P'Jjn). (3.66)
Вероятность правильных решений P^fm) о передаваемых элементах БКК равна вероятности правильного приема /и-значной БКК Р„ при передаче и приеме элементов без относительного перекодирования.
Пусть на входах приемников действует аддитивная смесь незамирающего ЧММС сигнала (3.63) и ГП с частотой а>п, амплитудой Un и начальной фазой <ра:
= ХО + cos(«ynr + <ра) .
Если обозначить <рп - = \<р, тп - «ус = Да> , учесть что |Дй>|« «ус , то в этом случае правила принятия правильных решений о переданных элементах « и iSfl, которые выносят пороговые устройства в квадратур
ных каналах, имеют вид
L.. = О
7Г
—соз(Д«уТ) <
-(-!)'’" _с£ + 2L_------------соз[2/хДй>Т +цл+Ь<р\ 0,
2 ( л А -> -
(3-67)
U т тг C0S(^6U-^)
Ч- + ^7^-2-------cos
2 Iя! л 2
- - -Д«У
12Т)
(2р - 1)Д <оТ+ - - л + \<р
Так как начальная фаза помехи является случайной величиной, распределенной по равномерному закону в интервале [0,2л-], а начальная
фаза сигнала при когерентном приеме постоянна и известна, то и разность фаз \<р распределена в интервале [0,2л] по равномерному закону [6].
Первые слагаемые левых частей неравенств (3.67) описывают отклик квадратурных каналов приемников на ЧММС сигнал, а вторые - на ГП.
Из (3.67) видно, что при нормированных расстройках Д«уГ =
= ±(2лг + Зл/2), где r = 0,1,2,..., отклик на ГП в квадратурных каналах
приемника равен нулю. В этом случае искажения элементов i и iSfJ при приеме отсутствуют. При других значениях расстроек возможны искажения этих элементов.
В связи с тем что определение вероятностей (3.65) и (3.66) для произвольных значений нормированной расстройки по частоте несущих сигнала и помехи Д«уТ наталкивается на значительные трудности, поставленная задача решается для фиксированных значений Да>Т, принадлежащих множеству Д«уТе {±гл;±(2г + 1)л/2} , r = 0,1, 2,...
При определении вероятностей />пр(/и) и Рош(/и) учтем следующее: элементы БКК ik являются независимыми случайными величинами, равновероятно принимающими значения 0 или 1. Для нахождения указанных вероятностей воспользуемся методом индикаторов решений о переданных элементах [5], который заключается в определении индикаторов правильных решений /П14(Л^) о переданных элементах 4 = 0 и ik = 1, нахожде-
нии полусумм индикаторов правильных /пА.(Д^) = (/пМ(Д^) + /п1А(Д^))/2 и неправильных /нЛ(Д^) = 1-/пА(Д(з) решений об этих элементах и последующем вычислении математических ожиданий произведений этих полусумм индикаторов:
2тг
Рпр (ш) = J fj 1пк (Др) = f fl (Ар) ^(Ар) ,
(3.68)
U=o
о Л=0
Рош(ш) = Мд,,-
и 1 2я и
П7н*(Л^’= Г IKM ИЧДр)4/Др,
(3-69)
где IP(Ap) - плотность вероятности разности фаз Др .
Используя (3.67), получаем следующие выражения полусумм индикаторов (с индексами А для косинусного и Б для синусного квадратурных каналов), необходимые для определения вероятностей (3.68), (3.69):
для Д«у7 = +гтг , г = 0,1,2,... ,
WAp) = 7n4(Ap) = k/2
[1, /пь>(А<з) = /пЬ’(А<з) = (1/2
|соз(Д^)| < Р(\аТ), |соз(Др)| > р(\а>Т), |sin(Ap)| < |sin(Ap)| >
(3.70)
(3.71)
где
для ДйзГ =+(2r + 1)л7 2, r = 0,1,2,... ,
f 1, |cos(A p)l < B(\cdT),
P{\<oT) = — 7t
2
I -(Дй)7)2
СО5(Д<И7')
(3-73)
о I *=о
hz = UjUn - отношение сигнал-помеха на входе приемника.
При Д®Г = ±т /2 (3.73) имеет неопределенность вида 0/0, раскрывая которую, получаем 0(+л / 2) = Лс.
Полусуммы индикаторов неправильных решений о переданных элементах /нЯ(Д^) = /нЛ, /нВ(Д^) = /нЬ- связаны с полученными выше полусуммами индикаторов правильных решений /ш((Д^)=/п/;, WAP)= Ль- выражениями lllA = 1 - , /^ = 1 -
Далее оценим помехоустойчивость рассматриваемых способов передачи и приема БКК, для чего найдем вероятности (3.68), (3.69) и подставим их в (3.66). Вероятности (3.68), (3.69) определим путем графического построения зависимостей полусумм индикаторов (3.70)-(3.72) от переменной \<р, которые являются ступенчатыми функциями от этой переменной, последующего перемножения полусумм (ступенчатых функций), входящих в (3.68) и (3.69), и вычисления интегралов (3.68) и (3.69) путем их представления в виде суммы интегралов, в каждом из которых подынтегральные функции являются константой, равной произведению значения ступенчатой функции на плотность вероятности ГУ(Д^) = 1/2л- .
Помехоустойчивость первого способа передачи и приема БКК с относительным перекодированием элементов. Предположим, что v элементов БКК передаются по косинусному квадратурному каналу, a m-v - по синусному. Тогда для расстроек ЬсоТ = +гл, r = 0,1,2,... вероятности Р^ш) и Рош(/и) определяются на основе выражений (3.68)—(3.71):
pww=^(«’k)=
1m~v + 1V -1 2™-1' + 21'-2 1
--------------- arccos [ Д(Д«уТ)] , 0 < Д(Д«уТ) < -=, 2 Л 2-л/ 2
2",+1 + 2m-v -2|z 1 (3-74)
= 1 —---—-----arccos [ ft (Д «уТ)] , -т= < Р(\й)Т) < 1,
л 2' л/2
1, Д(Д«уТ)>1,
0< Д(Д«уТ)<4=, V2
Д(ДйХГ)>-^.
(3.75)
При расстройках \й)Т = +{2г + 1)л/2, r = 0,1,2,..., вероятности Р (да) и Рош(да) определим в соответствии с (3.68), (3.69) и (3.72), учи
тывая, что полусуммы индикаторов (3.72) для синусного и косинусного квадратурных каналов одинаковы для всех элементов БКК:
Рпр(^) = мдД С} = мЦс} =
_ i+^rrarcsin[^n], 0 < < I, (176)
“ Z Л 2
.1, ДДй>Г)>1;
—-arcsin[/?(A«yT)] 0</?(Д«уТ)< 1, (3.77)
= • тг2” \ 2 )
,0, Р(\й)Т) > 1.
Подставляя (3.74), (3.75) и (3.76), (3.77) в (3.66) и заменяя m на п + 1, получаем вероятность искажения и-значной БКК в приемнике ЧММС сигналов при первом способе передачи и приема БКК с относительным перекодированием элементов:
для \й)Т = +г7г , г = 0,1,2,... ,
Э"-1'и.?1'-1-1 Э"-1' + Э1'-1 - Э 1
1-------~п--------------------------агссоз[/?(Д«уГ)], 0<ДДй>Т)<-/=
г^И+2 __'уП—V+l _
------------------агссоз[/?(Д«уГ)], П2
1,
-}=</?(Дй>Г)<1, (3,78) \2
/?(Дй>Г)>1,
где v определяется (3.64);
для Д«уТ = ±(2г + 1)л7 2, r = 0,1,2,... ,
2" -1
—^у(агссоз[/?(Д«уТ)]), 0</?(Д«уТ)< 1,
(3-79)
0,
PlkaT) > 1.
Из (3.78) видно, что вероятность Рп не зависит от выбора квадратурных каналов для передачи v и (w +1) - v элементов, поскольку вид выражения (3.78) после замены в нем v на (w + l)-v остается неизменным.
Помехоустойчивость второго способа передачи и приема БКК с относительным перекодированием элементов. При этом способе все элементы одной БКК передаются по одному квадратурному каналу.
Вероятности Р^т) и Рош(/и) не зависят от выбора квадратурного канала для передачи БКК. Эти вероятности определяются для значений Д«у7 е (±гл-; ±(2г+1)л72), г = 0,1,2,„. подстановкой выражений (3.70)-(3.72) в (3.68) и (3.69):
2”' -1 л-2"'-1
1,
arcsin[/?(A«yT)],
0 < Р(\й)Т) < 1,
(3.80)
/?(Д<у7)>1;
Л>ш(«’)-мд„{/1п'} = мд4/™} =
1 । It 1
——г --агс51п[/?(ДбУ7)] , 0<ДДй>7)<1, it! \ 2 )
(3-81)
0,
ДДй>7)>1.
Вероятность искажения п -значной БКК в приемнике ЧММС сигналов при втором способе передачи и приема БКК с относительным перекодированием элементов находится для рассматриваемых расстроек путем подстановки (3.80),(3.81) в (3.66) и замены m на и + 1 :
2м — 1
—— (arccosf/?(Д&>?’)]), 0< Р(\соТ)< \,
0, Р(Ьй)Т}>\.
(3.82)
При и = 1 из (3.78), (3.79) и (3.82) непосредственно следуют выра
жения вероятности искажения информационных элементов БКК при использовании относительного перекодирования этих элементов.
На рис. 3.7 изображены построенные по (3.78), (3.79) и (3.82) зависимости вероятности искажения восьмизначной (и=8 ) Р8 БКК от от-ношения сигнал-помеха на входах приемников, изображенных на рис. 3.5 (непрерывные линии) и рис. 3.6 (штриховые линии). При \<оТ = ±л12 кривые Р8 для обоих приемников совпадают.
Из анализа приведенных зависимостей следует, что для обоих способов передачи БКК по квадратурным каналам с применением относительного перекодирования элементов наиболее неблагоприятной является ГП с нормированной расстройкой Да» Г = ±л72. По сравнению с первым способом передачи БКК второй способ обладает более высокой помехоустойчивостью при воздействии ГП. При расстройках Да)Т = ±(2лт + Зл7 2), г = 0,1,2,, искажение информации при воздействии ГП отсутствует для любых отношений сигнал-помеха.
Полученные выражения позволяют рассчитать вероятности искажения гармонической помехой передаваемых ЧММС сигналом информационных элементов и безызбыточных кодовых комбинаций как при использовании относительного перекодирования элементов, так и без него. Эти выражения, учитывающие расстройку несущих частот сигнала и помехи, могут найти применение при оценке помехоустойчивости различных систем радиосвязи, использующих ЧММС сигналы.
Литература
1. Белоусов Е.Л., Харисов В.Н. - Радиотехника и электроника, 1984, т.19, №3.
2. Аджемов С.С., Кастейянос Г.Ц., Смирнов Н.И. - Зарубежная радиоэлектроника, 1987, №9.
3. Банкет В.Л., Дорофеев В.М. Цифровые методы в спутниковой связи. - М.: Радио и связь, 1988.
4. Поддубный В.Н. - Техника средств связи. Сер. Техника радиосвязи, 1977, вып. 3.
5. Овчаренко Л.А., Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1986, т.29, №9.
6. Тихонов В.И. Статистическая радиотехника. - М.: Радио и связь, 1982.
3.6. Помехоустойчивость приема сигналов с относительной фазовой манипуляцией на фоне расстроенной по частоте станционной помехи
Сигналы с относительной фазовой манипуляцией (ОФМ-сигналы) широко применяются в линиях передачи дискретной информации, использующих приемники с идеальными полосовыми ограничителями (ИПО) или нелинейные ретрансляторы [1]. Такие приемники называются нелинейными. Основное влияние на помехоустойчивость приема ОФМ-сигналов в условиях одновременной и независимой работы большого числа средств радиосвязи оказывают станционные помехи. В ка-
Авторы: А. Е. Каунов, В. Н. Поддубный
честве модели такой помехи используют, как правило, гармоническое колебание со случайной начальной фазой.
В настоящее время известны формулы вероятностей искажения ГП элементарных посылок ОФМ-сигналов, полученные с учетом расстройки сигнала и помехи по частоте и влияния нелинейности тракта формирования опорного напряжения. Однако далеки от завершения исследования по нахождению вероятности искажения гармонической помехой элементарных посылок ОФМ-сигналов в когерентных нелинейных приемниках при условии одновременного учета расстройки сигнала и помехи по частоте, а также перераспределения мощностей между сигналом, помехой и их комбинационными составляющими в ограничителе нелинейного приемника. Наконец, в литературе отсутствуют формулы для расчета вероятностей искажения w-значных БКК в нелинейных приемниках ОФМ-сигналов гармонической помехой, расстроенной относительно сигнала по частоте (следует иметь ввиду, что передаваемая БКК ОФМ-сигнала содержит т информационных и один опорный элемент: п = т + 1).
Определим вероятности искажения т -значных БКК и их элементов в нелинейных приемниках простых двоичных ОФМ-сигналов гармонической помехой, расстроенной относительно сигнала по частоте.
Пусть поэлементный прием простого ОФМ-сигнала осуществляется методом сравнения полярностей. В этом случае нелинейный приемник содержит последовательно соединенные ИПО, фазовый детектор (ФД), решающее устройство (РУ), схему перекодирования элементов [1]. Правильный прием БКК в таком приемнике возможен в двух случаях [2]: РУ принимает либо правильные, либо ошибочные решения о всех п = т +1 передаваемых элементах БКК. В соответствии с этим вероятность Рт правильного приема т -значной БКК ОФМ-сигнала является суммой вероятностей правильных и ошибочных Рош решений о всех и передаваемых элементах БКК: Рт = Рпр + Рош, а вероятность искажения этой БКК Рт представляет собой вероятность противоположного правильному приему события:
Р„,=1-4=1-Рпр-РоШ- (3.83)
Вероятности Рпр и Рош найдем методом индикаторов решений о переданных элементах [3], который заключается в определении в соответствии с правилом обработки смеси сигнала и помехи индикаторов правильных решений 1пЛ о переданных элементах ik =0, 1, нахождении полусумм правильных /пА =(/п0Л+ 7пИ)/2 и неправильных 1ик=\-1пк
решений об этих элементах и последующем вычислении математических ожиданий М произведений этих полусумм индикаторов:
(и 1 (_п_
ПМ; ГЬ
Л=1 J к=1
(3.84)
Ал
В связи с тем, что определение аналитических выражений Рпр и Рош для произвольной расстройки помехи и сигнала по частоте наталкивается на ряд трудностей, решим поставленную задачу для расстроек Да> = {0; ± л7(2Г); ± л7 Г}, где Т - длительность элементарной посылки ОФМ-сигнала. Эти расстройки не превышают половины полосы пропускания приемника.
При определении вероятностей Рпр и P0UI будем учитывать, как и в [4], комбинационные составляющие на выходе ИПО до третьего порядка включительно, поскольку в этом случае получаются простые аналитические выражения для вероятностей (3.84), которые с погрешностью до 5... 10 % совпадают с вероятностями, рассчитываемыми с учетом составляющих более высоких порядков только численными методами.
При вычислении вероятности Рош воспользуемся приведенными в [4] выражениями для полусумм индикаторов правильных решений о переданных элементах 1пк, тогда с учетом того, что 1нк = 1 - 1пк, получим
°- (W) 1/2, в иных случаях,
где
У _ g[(4)l ~ Al) _ 7gl (4)1 ~ 4?1) +аг2-^12(^10 + а2^и) . (2 86)
4tZ2^12 4й?2 ^12
/? = со5[Д#> + (2&-1)Дй>Г/2]; =sin(/WTl2)l{j\coT/2), 7=1,2; /\<р -
разность начальных фаз помехи и опорного гармонического напряжения приемника, распределенная по равномерному закону в интервале [0, 2 л-], - амплитуда составляющей на выходе ИПО с частотой
| сбУс ±5бУп|; 6УС, 6УП - частоты сигнала и помехи соответственно.
При Да>=±л7Г в (3.86) возникает неопределенность вида 0/0, раскрывая которую, получаем
V — 4о/[2(4и ~ Ai)] •
Амплитуды составляющих на выходе ИПО равны нулю при четных значениях (с + j ), а при нечетных значениях (с + s) определяются рекуррентными выражениями [4]:
Г[(с + $)/2] — > a.(c,s,/L), «„>1; л-/^Г[(с-5)/2 + 1]Г[с + 1]^
ЛЖ) = . 2£0 4*"KV>*'2], „ (3 87) 7Г (С -S ) х>,сА ап<1, лА’5гк*-*)/2+1]ф+1]^ hj
где ha=UnIUl. - отношение амплитуды помехи Ua и сигнала Uc на входе приемника; Г[ ] - гамма-функция; Ео - порог ограничения;
d = (2z-2 + g + g)(2z-2 + g-g) z->j.
4z(z + g)w2
d0(g,q,w) = \ , g,q = {c,s} , w = {^,l/^}.
Подставляя (3.85) во второе выражение из (3.84) и усредняя произведение полусумм 1нк по всем значениям Д^>, получаем вероятность ошибочных решений о всех п элементах, переданных с помощью простого ОФМ-сигнала на фоне гармонической помехи:
при Дй)=0и \со = ±л/Т
р
1 ОШ
-J-j-arccosdKl), |И|<1;
П Z
О, |И|>1;
при Да) = ±л- /(2Г)
|Urarccos<l П)> I’' Z 7Г z
О- I
(3.88)
(3.89)
р
1 ОШ
Вероятность правильных решений о всех и элементах БКК, передаваемых с помощью простого ОФМ-сигнала на фоне ГП, совпадает с вероятностью правильного приема п -значной БКК ФМ-сигнала на фоне ГП, которая определена в [4].
Подставляя в (3.83) выражения (3.88) и (3.89) для Рош и вычисленные в [4] вероятности Р и учитывая, что п = т + 1, получаем искомую вероятность искажения т -значных БКК в нелинейном приемнике простого ОФМ-сигнала гармонической помехой, расстроенной относительно сигнала по частоте:
при Дй> =0 И Дй> = +л / Т
—^arccos(|K|), 7Г Z
о,
(3.90)
р„.=
при \а) = +тг/(2Т)
Р =( /я
1 2™+1-'-+2'--2 2' 2m+1 2>я+2 2w+br
л 2"'
0,
,ш+1-г у _4
--------------arccos!
— О™ 7Г 2.
/2
2 ’
arccos(|k|),
/2 2
где г = (т + 2)/2 причетных т; г = (т + \)/2 при нечетных т.
При вычислении вероятностей Рт по (3.90) и (3.91) для отношений помеха-сигнал Лп > 4 можно пользоваться упрощенным выражением для V, которое следует из (3.86) с учетом того, что при >4 амплитуды Л01, Л10, Л12 и Л21 с погрешностью не хуже 10-2 аппроксимируются, как это следует из (3.87), нулевыми членами степенных рядов. В этом случае
V*-(\+a2)/(2a2ha). (3.92)
Если в (3.90) положить Дй>=0, то получим выражение вероятности искажения w-значной БКК в нелинейном приемнике простого ОФМ-сигнала гармонической помехой, с частотой, равной частоте сигнала. Это выражение совпадает с полученным в [2] для сложного ОФМ-сигнала, если там принять базу В =1.
При Л12 = Л21=0 из (3.90) и (3.91) следуют, с учетом обозначения Z = Al0/(a^i) и раскрытия в (3.86) неопределенности вида 0/0, приближенные выражения вероятности искажения т -значных БКК в нелинейном приемнике простого ОФМ-сигнала гармонической помехой, расстроенной относительно сигнала по частоте, которые учитывают только перераспределение мощности между помехой и сигналом в нелинейном приемнике:
при Дгу =0 и Да> = +тг/Т
—^rarccos( Z), 7Г Z
о,
(3.93)
рт=\
при ДбУ = ±тг /(2Т)
2",+1“''+2'-2 2m+l
2ш+1-г+2г_4
Н-------------arccos(Z),
тг2
2>»+2 । 2ш+1~г
--------------arccos(Z), тг2
-~-<Z<l; (3.94)
О,
Z>1.
На рис. 3.8 сплошными линиями представлены зависимости вероятностей искажения 8-значной (ш=8) БКК Р8 от отношения поме
Рис. 3.8
линейных приемников для расстроек
ха-сигнал hn, построенные на основании (3.90) и (3.91), штриховыми линиями - зависимости вероятностей искажения той же БКК, построенные по формулам (3.93) и (3.94), которые учитывают только перераспределение мощности помехи и сигнала в ИПО. Из рисунка видно, что неучет комбинационных составляющих, возникающих на выходе ИПО, приводит к незначительным погрешностям при оценке помехоустойчивости не-Дй> = ±л7(27’) и ДбУ=±л-/7’ при
любых отношениях помеха-сигнал и в области малых отношений помеха-сигнал для расстройки Да> =0. В области больших отношений помеха-сигнал для расстройки Да>=0 неучет комбинационных составляющих приводит к существенным погрешностям при оценке помехоустойчивости нелинейных приемников (для Pt =0,7 при одинаковой мощно
сти сигнала из-за неучета комбинационных составляющих выигрыш по мощности помехи превышает 2 раза).
Построенные по (3.90) и (3.91) зависимости позволяют утвер-
ждать, что существует расстройка
при которой вероятность
искажения ш-значных БКК в нелинейном приемнике имеет наибольшее значение. Проведенный с помощью численных расчетов анализ зависимостей вероятности искажения т -значных БКК от расстройки по-
казал, что ее наибольшее значение наблюдается при Аа> = ±-------.
н (ш + 1)Т
Штрихпунктирной линией на рисунке приведена зависимость вероятности искажения 8-значной БКК гармонической помехой с расстройкой
относительно сигнала по частоте Лл> = ±—, при которой обеспечивает-
ся наибольшее значение вероятности Р8.
Вероятности искажения ш-значных БКК применительно к различным состояниям каналов передачи сигнала и помехи могут быть найдены предложенным JI. М. Финком методом постоянного параметра, заключающимся в усреднении полученных вероятностей искажения т -значных БКК Pm = Pm(hn) по всем возможным значениям отношения помеха-сигнал Ап , распределенным по закону IV (h*,):
00
РМ= (3.95)
о
где q - отношение помеха-сигнал для рассматриваемого состояния канала передачи сигнала и помехи.
Для нахождения вероятностей Pm(q) целесообразно использовать приведенные в [5] плотности вероятностей IV(Z^) и математические приемы вычисления интеграла (3.95).
При т=1 и г=1 из (3.90) и (3.91) непосредственно следуют формулы вероятности искажения в нелинейном приемнике элементов простого ОФМ-сигнала гармонической помехой, расстроенной относительно сигнала по частоте:
при Ай> =0 и Ай) = +л/Т
(l/7r)arccos(| V |), | V | < 1,
0, |к|>1;
при Лй) = ±тг/(2Г)
1/2,
Р = -
7.
(2/?r)arccos(| К|), — <|И|<1,
о, М>1-
(3.96)
(3.97)
Вероятности (3.96) и (3.97) одновременно учитывают, как это следует из (3.86) и (3.92), расстройку сигнала и помехи по частоте, а также перераспределение мощностей между помехой, сигналом и их комбинационными составляющими в ограничителе нелинейного приемника.
Приближенные выражения вероятности искажения гармонической помехой элементарных посылок ОФМ-сигнала в нелинейном приемнике, учитывающие расстройку по частоте и перераспределение мощностей только между помехой и сигналом в ограничителе приемника, следуют из (3.93) и (3.94) при т = 1 и г = 1:
при Лбу =0 и Дй> = ±л7 Т
_ (1 / л) arccos( | Z |),
~Р=[ о, при Д&) = ±л7(2Т)
1/2,
(3.98)
(3.99)
р = - (2//r)arccos( | Z |),
где аргумент Z = Л10 /(а,^,) •
Сравнивая (3.96) с результатами исследований [4], видим, что при Дбу =0 вероятности искажения гармонической помехой ОФМ- и ФМ-сигналов в их нелинейных приемниках оказываются одинаковыми. Причем, при ДбУ=0 аргумент Z при отношении помеха-сигнал /^>1 принимает в соответствии с (3.87) вид Z = А10 / «1/(2/^). В этом слу-
чае вероятность (3.98) для ОФМ-сигналов совпадает с полученным в [1, (12.9)] выражением вероятности искажения гармонической помехой элементарных посылок простого ФМ-сигнала и численно совпадает с приведенным в [6, (3.39)] выражением указанной вероятности.
Полученные выражения вероятностей искажения гармонической помехой ж-значных безызбыточных кодовых комбинаций в когерентном нелинейном приемнике ОФМ-сигналов учитывают расстройку сигнала и помехи по частоте, а также перераспределение мощностей помехи, сигнала и их комбинационных составляющих в ограничителе приемника.
Из полученных выражений непосредственно вытекают известные выражения вероятностей искажения гармонической помехой элементарных посылок ОФМ-сигнала в рассматриваемом приемнике. Их
I можно использовать при оценке помехоустойчивости приема дискретной информации на фоне станционных помех в линиях радиосвязи, использующих нелинейные приемники или линейные приемники с нелинейными ретрансляторами.
Литература
1. Варакин Л. Е. Системы связи с шумоподобными сигналами. - М.: Радио и связь, 1985.
2. Гордей В.В., Поддубный В.Н. - Радиотехника, 1994, № 11.
3. ОвчаренкоЛ.А., Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1986, т. 29. № 9.
4. Гордей В.В., Овчаренко Л.А., Поддубный В.Н. - Радиотехника, 1996, № 5.
5. Овчаренко Л.А., Поддубный В.Н. - Изв. вузов. Сер. Радиоэлектроника, 1986, №5.
6. Петрович НТ. Передача дискретной информации в каналах с фазовой манипуляцией. - М.: Сов. радио, 1965.
3.7. Синтез и оценка эффективности помех приемникам двукратных фазоманипулированных сигналов
В практике радиосвязи все чаще двукратные фазоманипулирован-ные (ДФМ) сигналы принимаются в условиях преднамеренных или станционных помех, характеризующихся большим разнообразием частотно-временных и статистических свойств и по-разному влияющих на достоверность приема этих сигналов. Поэтому возникает задача поиска помехи, обеспечивающей при заданной мощности наихудшую помехоустойчивость приема ДФМ-сигналов. Такую помеху назовем наиболее неблагоприятной.
Пусть на входе когерентного приемника ДФМ-сигналов [1], каждый квадратурный канал которого является приемником однократных фазоманипулированных (ФМ) сигналов, на интервале приема k-й посылки (к-\)Тс< t < кТс, содержащей информацию о двоичных элементах 4=0,1 и д=0,1, первого и второго каналов, действует аддитивная смесь ДФМ-сигнала
sk.(t) = (UJy/2)[-(-V)'k cos(6ycZ + ^c)-(-l)J‘ sin(6y/ + ^c)]
с амплитудой Uc, частотой a>c, начальной фазой <рс и наиболее неблагоприятной помехи (ННП) nk(t), структуру которой требуется найти.
Хотя квадратурные каналы приемника ДФМ-сигналов представляют собой приемники однократных ФМ-сигналов, критерий синтеза *
Авторы: К. Ю. Ложкин, В. Н. Поддубный
структуры помехи в виде вероятности правильного приема кодовой комбинации (КК) в одном канале неприемлем, поскольку он не учитывает совместную помехоустойчивость приема информации в обоих каналах. Этого недостатка лишен критерий в виде вероятности Рт правильного приема последовательности из т посылок сигнала, который характеризует правильный прием 2/и-значной КК в случае передачи одного потока информации по двум каналам, или одновременный правильный прием двух m-значных КК в случае передачи двух потоков информации по соответствующим каналам. Поэтому в качестве критерия синтеза структуры ННП выберем указанную вероятность Рт.
Положим, что для передачи информации используется безызбы-точный код. В этом случае вероятность Рп1 определим методом индикаторов решений о переданных элементах [2] как математическое ожидание (Л/) произведений полусумм индикаторов решений о переданных элементах 4=0,1 и д=0,1, к= 1, т :
III
Pm=M{Y[lAklEk}, (3.100)
где 1Ак, Ihk - полусуммы индикаторов IAik и Ibjk решений о переданных элементах ik njk: IAk = (IMk + /Ли)/2, /а = (Лок + 1в\кУ2-
Полусуммы индикаторов 1Ак и определим на основании правил принятия решений о переданных элементах ц и jk:
<*= д=|
< °’ -(-1)Л^+г« > °’ (3-Ю1)
»*=° 1к=й
где zAk = Ек cos ц/ к и гцк = Ек sin у/ к- реакции фазовых детекторов перво-
го и второго каналов на помеху, Ек и ц/ к- амплитуда и фаза напряжений zAk и гьк, представленных в гармонической форме:
L j nk(t) cos a)ct dt
C (k-l)Tc
j wt(r)sin<ycr dt . C(/r-l)Tc
>1/2
=Д2+^
Wk=<P^Pk, Pk=^ctg(Bk/AA, (3.102)
Обозначив <pk = y/k -y/\ = )3k- P\, запишем выражения для zAk и z^: zAk = Ekcos((pk+y/A, zbk = Eks\n{(pk +(/,). (3.103)
При синтезе ННП неизвестную и изменяющуюся, например, от сеанса к сеансу связи фазу у/ ] естественно считать равномерно распреде
ленной от 0 до 2 л- случайной величиной с плотностью вероятности fV( у/ i) = 1/(2 п), а амплитуды (3.102) £*, A=l,w, и разности фаз <Рк = V к~ V к^2,т, - детерминированными величинами. Причем на значения амплитуд (3.102) Ек, к=1,т , накладываются естественные ограничения 0 < Ек < Е, к=\,т , где Е - максимально возможное значение Ек, определяемое, как это видно из (3.102), не только структурой помехи, но и ее средней мощностью
f n2k(t)dt<^, (3.104)
*C *
а величины P и E связаны неизвестной до решения задачи синтеза ННП зависимостью E=f(^).
Обозначим множества {Е\,..,Ек,и <р к,-, <р т} через Ё и <р соответственно. Тогда на основании (3.101)—(3.103) полусуммы индикаторов 1Ак = lAk(zAk,Uc) и 1Бк = 1Бк{гБк,ис) определяются выражениями
1, 2^1 Щ, z fl, 2V2|z^|<tZc, l/2,2V2|2At|>t/c; с) [l/2,2V2|2a|>t/c,
а вероятность (3.100) правильного приема w-значной последовательно-
сти посылок ДФМ-сигнала принимает вид
(т
1 J Лк (ZAk ’ Бк (ZBk ’ ^с)
к=1
= |П7л*(2^с)7а(*ь»»<Л) ^(V'i) (3.106)
о *=1
Задачу синтеза структуры ННП сформулируем как задачу поиска такой помехи nk(t), к^\,т , которая при заданной средней мощности (3.104) обеспечивает минимум вероятности (3.106). Эту задачу решим в два этапа. На первом этапе найдем элементы множеств ё и <р, которые с учетом ог
раничений 0<£*<£, к=\,т, доставляют минимум (3.106). Множества, удовлетворяющие этому требованию, обозначим Ё opt={£i opu-Aopb-^opt} и <Р opi={ <р 2 opt,--, <Р iopt,-, <Р mopt}- На втором этапе определим структуру помехи nk[t), к=1,т, удовлетворяющую ограничениям (3.104)
к= 1, т , и полученным на первом этапе множествам Ё opt и <р opt.
Итак, на первом этапе найдем элементы множеств Ё и <р , которые обеспечивают
2я in
Л •••
min Рт = min А) A) W>)
U.P> U.p> J -*-*-
при ограничениях 0 < £t< E, k= 1, m .
Этот минимум достигается при таких значениях элементов множеств £ и <р, которые удовлетворяют условиям Куна-Таккера [3]:
dPm/dEk+^A,dgr(Er)/dEk=Q,
к = 1,т,
dPm/S<f>k=0, gk(Ek) = Ek<E, Xt[£t-£] = 0, Л>0,
к = 2,т, к = \,т, к = 1,т, к = 1, т,
(3.107)
где Л к - к-й множитель Лагранжа.
Конкретизируем условия (3.107). Вначале определим входящие в них производные дРт!дЕк и дРт!д<рк, для чего запишем (3.106) следующим образом:
Рт = Ая А)П7^ А) • (3.108)
г=1 г*к
Произведение 1^к(^лк,Ес) /и(ги,А) как функцию от аргумента ц/ i представим в виде суммы единичных ступенчатых функций от у/ После этого дифференцируя (3.108) по параметрам Ек и <рк и используя фильтрующее свойство 6 -функции Дирака, получаем производные дРт/дЕк и дРт/д<рк для0</4<1:
А(А+А)
2xEk^E2k-U2’
UACk+Dk) 7rEk^E2-U2’
(3.109)
(A-Q)/(2^),
0<Нк <—, к 2
(3.110)
(A-G)/^,
где
т т
Ск =П7^’^) Dk =П7яг(Лг^с) /ь-ДЛг^с),
Г=1 Г=1
г*к г*к
ylr = Er sin(</JA, - <рг + Д), ylr=Er сс&(<рк -(pr-&), y3r= Er cos(% - (рг + Д), ykr = Er sin(^ -<рг - А), Д = arccosНк, Нк=ис/(242Ек)
При Нк > 1 производные равны нулю, так как для этих значений Нк вероятность (3.106) Рт = 1 и не зависит от Нк, поскольку в этом случае полусуммы индикаторов (3.105) равны единице.
Так как 1Ак и !ьк (3.105) положительные функции, то дРт/дЕк (3.109) является отрицательной функцией, откуда с учетом равенства til
^^Ardgr(Er)/dEk=Ak r=l
для выполнения первого условия (3.107) получаем Л £> 0, к=\,т . Из четвертого условия (3.107) и положительности Лк следует, что минимум (3.106) достигается при Ек = Е, к= 1,т .
Согласно (3.110) второе условие (3.107) дРт1дсрк = 0 выполняется для множеств значений <рк, к=2,т, удовлетворяющих системе уравнений Dk - Ск = 0, к= 2, т. Численный расчет показывает, что указанная система имеет множество решений, одно из которых
Фк = %opt=(^-1)©opt, (3.111)
где 0opt = ± [%л /(2т) + хл / 2], % = 1, (т -1), х = 0,1,2,.., справедливо при любых H = Uc/(2y[2E) , удовлетворяющих условию 0 < Н < 1.
Итак, для достижения минимума вероятности (3.106) помеха nk(t), к=\,т, должна обеспечивать оптимальные значения разностей фаз (р к= <р *Opt (3-1Н) и одинаковые значения амплитуд Ек = Е, к=\,т, где Ек определяется (3.102).
На основании равенства Ек=Е, к=\,т , и зависимости E=f(P) ограничение на среднюю мощность помехи (3.104) Рк<Р, к=\,т, принимает вид <^= к=\,т .
С учетом (3.102) вероятность Рт (3.106) является функционалом структуры помехи nk(t). Причем, с ростом Ек (3.102), зависящего от вида помехи nk(t), производная (3.109) дР„,/дЕк, являющаяся отрицательной, стремится к нулю. Следовательно, при увеличении Ек (3.102), веро
ятность (3.106) уменьшается. Отсюда возникает изопериметрическая вариационная задача по отысканию структуры помехи «*(/), Л=1,т, обеспечивающей минимум вероятности Рт (3.106) или, что то же самое, максимум функционалу (3.102) Ек = Е, при ограничениях на фазу (3.111) и среднюю мощность (3.104)
Данную задачу, решаемую на втором этапе, запишем в виде:
«ДО = W0|£*=-E=max; <pir<pk opt=(/c l) © opt;
___
[ nk(t)dt }.
с (*-i)rc
Для решения этой задачи введем дополнительный функционал [4] Fk = Ек+ Л к^Р, где Я к - множитель Лагранжа. Определяя в соответствии с [4] для всех А=1,ш вариацию функционала, уравнение Эйлера, множитель Я к, получаем с учетом ограничений на фазу (3.111) выражение для ННП:
nk(t) = VD* cos[ I + Ч>п +(*-1)©opt ], (3.112)
где (рп - начальная фаза помехи - равномерно распределенная от 0 до 2 л случайная величина.
Таким образом, наиболее неблагоприятная помеха приемникам ДФМ-сигналов представляет собой фазоманипулированное колебание со случайной начальной фазой, несущая частота которого, длительность посылок и их тактовые моменты совпадают с соответствующими параметрами сигнала на входе приемника, а набег фазы между посылками равен 0 opt-
Далее оценим помехоустойчивость приема ДФМ-сигнала на фоне синтезированной помехи (3.112) и ряда других помех, часто встречающихся в практике радиосвязи.
В качестве показателя помехоустойчивости приема ДФМ-сигнала выберем вероятность Рт (3.106) правильного приема/и-значной последовательности посылок этого сигнала. Для вычисления Рт (3.106) в случае приема ДФМ-сигнала на фоне ННП на основании (3.102), (3.103) и (3.112) напряжения zAk и гБк принимают вид
ZAk = W2)cost -(Л-1) 0 opt], zEk = (t/n/2)sin[ А<д -(Л-1) 0 OpJ, (3.113) где Ua = 5/2^ - амплитуда помехи; = <рс - у>п = - разность фаз сигнала и помехи.
В случае приема ДФМ-сигнала на фоне гармонической помехи (ГП) со случайной начальной фазой <рт и расстройкой частоты помехи
ryn относительно частоты сигнала Д® = й>п-®с выражения для zAk и zKk на основании (3.102) и (3.103) принимают вид:
U sin(A®71/2) ГА А „ ,, ,ЧА
zAk ‘ cos[A<^n -д®гс/2-(А- 1)ДсоТс],
2 ЛбУ7с / 2
Z,ik = S1 Д^7/ 22) Sin[A^rn ~ Ай)Гс /2~(к~’
(З.И4)
где Д<рт-Дco TJ2 = <pz-<pm-S.co TJ2 = .
Подставляя (3.113) и (3.114) в (3.105), а (3.105) в (3.106), получаем путем численного интегрирования (3.106) зависимости вероятностей Рт
от отношения сигнал-помеха в квадратурном канале приемника h=UJ(42 Un) при воздействии соответственно ННП и ГП с расстройкой Дгу = +л /(2тТс), обеспечивающей, как будет показано, наихудшую помехоустойчивость приема ДФМ-сигнала на фоне ГП. Графики этих зависимостей при т=5 изображены на рис. 3.9 (кривая 1 - для ННП, 2 -для ГП с Д® = ±л /(2тТсУ).
Выражение вероятности Рт при воздействии ГП со случайной начальной фазой и нулевой расстройкой относительно сигнала по
частоте получим путем подстановки (3.114) при Д® = 0 в (3.105), а (3.105) - в (3.106), представления подынтегрального выражения (3.106) в виде суммы единичных ступенчатых функций от Д<рга и последующего интегрирования по Д<ргп:
1 / 22”' + [(2m -1) /(л-22"’-2)] arcsin h,
Р„, = (1 - 2"'"1)/ 2й"’ +[(2"’ -1)/(л-2"'"2)]arcsin h.
(З.Н5)
Наконец, оценим помехоустойчивость приема ДФМ-сигнала на фоне станционной ФМ-помехи, несущая частота ап которой совпадает
с несущей частотой ос сигнала. Эту помеху на интервале приема к-й
посылки сигнала, к= 1,/и , представим в виде
-(-l)Att/ncos(aV + pn),
-(-1/I 2*^пс05(<ясг + ^п),
<‘-or.S.<(A-i)7;+r, (31|6)
(к - 1)ТС + т < t < кТс,
где Un, <ра - амплитуда и случайная начальная фаза помехи; Аци Я 2г-случайные параметры помехового воздействия, независимо принимающие на интервале приема к-й посылки сигнала значения 0 или 1; г -момент возможной фазовой манипуляции помехи на л .
Для определения средней вероятности Рт правильного приема последовательности из т посылок ДФМ-сигнала на фоне станционной ФМ-помехи (3.116) получим выражения полусумм IM и 1ы индикаторов правильных решений о переданных элементах 4=0,1 и j*=0,1, к=1,т, и
усредним произведение этих полусумм по всем значениям г , разности фаз \<р =<рс -<рп и общему числу х перескоков фазы помехи на интерва
ле приема т посылок сигнала. При усреднении учтем, что г является равномерно распределенной от 0 до TQ случайной величиной, &<р изме-
няется случайным образом, например, от сеанса к сеансу связи и имеет плотность вероятностей lF(Ap) = 1/(2л), 0< А<р <2 л, а вероятность появления х перескоков подчиняется закону [5] Р(х) = т\/\х\(т-х)\2т}, 0<х<т. В результате усреднения имеем:
т
2»» — 1 3m —
arcsin h+—5—In л-23"-2
1 + (1-Л2)172 /т(2172 +1)
Г* In
1 +h
еШ ___QffJ
, ,Ып ;г23 2
(1 + /Q172 (21/2 +1X1 -Л)1/2
J2
2 ’ (3.117)
1
I 1 3m 2m
------Г-+ ------7 arcsin h + —;—T h In
2"‘~l л2т~2 л22"'-2
1 + (1-Л2)172 h
J2
2
h>\.
Графики зависимостей (3.115) и (3.117) от h для т=5 представлены на рис. 3.9 (кривые 3 и 4 соответственно).
Из рисунка видно, что наименьшая помехоустойчивость приема ДФМ сигнала, как и следовало ожидать, достигается при воздействии ННП (3.112). Практически эквивалентной ей по помехоустойчивости оказывается ГП с До = ±тг /(2/иГс). Это объясняется тем, что реакции (3.113) и (3.114) фазовых детекторов приемника на эти помехи для указанного значения До эквивалентны при увеличении амплитуды ГП с
расстройкой в (Ай» Tc/2)/[sin(А® Тс/2)] раз, что уже при т=5 составляет незначительную величину, не превышающую 1,004. Гармоническая помеха с Ай» =0 оказывается менее эффективной, чем ГП с расстройкой на Д® =±л’/(2/иГс), а станционная ФМ-помеха обеспечивает наименьший эффект искажения из всех рассмотренных помех.
Синтезированная структура наиболее неблагоприятной помехи когерентным приемникам ДФМ-сигналов и результаты сравнительной оценки вероятности правильного приема последовательности из ш посылок этого сигнала на фоне наиболее неблагоприятной, станционной ФМ-помехи и гармонической помехи с различными расстройками относительно сигнала по частоте могут найти применение при оценке помехоустойчивости приема информации на фоне станционных и преднамеренных помех, а также при выработке рекомендаций по частотно-территориальному разносу средств связи, работающих в единых диапазонах частот.
Литература
1. Банкет В.Л., Дорофеев В.М. Цифровые методы в спутниковой связи. -М.: Радио и связь, 1988.
2. Овчаренко Л.А., Поддубный В.Н. Изв. вузов СССР. Сер. Радиоэлектроника, 1986, т.29, №9.
3. Банди Б. Методы оптимизации. Вводный курс. - М.: Радио и связь, 1988.
4. Романовский ПИ. Общий курс математического анализа в сжатом изложении. -М.: Физматгиз, 1966.
5. Овчаренко Л.А., Поддубный В.Н. Радиотехника, 1989, № 9.
3.8. Достоверность когерентного приема простых сигналов с двукратной фазоразностной манипуляцией на фоне помехи произвольной структуры
В современных средствах радиосвязи широкое применение находят сигналы с двукратной фазоразностной манипуляцией (ДФРМ сигналы). При использовании этих сигналов возможны два способа передачи двоичных кодовых комбинаций по двум квадратурным каналам:
1) часть и-значных кодовых комбинаций, например, нечетные кодовые комбинации передаются по одному каналу, а другая часть - по другому каналу;
2) часть каждой 2и-значной кодовой комбинации, например, нечетные элементы передаются по одному каналу, а другая часть - по другому каналу.
*
Авторы: К. Ю. Ложкин, В. Н. Поддубный
Для передачи соответствующих первому и второму каналам информационных элементов = 0,1 и = 0,1, к = 1,п, используются элементы ik =0,1 и Jk = 0,1, к = 0, п, в первом и во втором каналах соответственно [1,2]. Элементы /о=О, 1 и /0 = 0,1 являются опорными. Последующие элементы определяются на основе вычитания по модулю 4 согласно правилам ik = {ik_vpk,jk^,vk) и Л =
к = 1,и, которые для манипуляционного кода Грея имеют вид [1]:
= aZ>A</)v^Z> АС Ай?)у^<7л/> Aflfjv^ACAflfj , (3.118)
fn(a,b,c,d) = (a A/>Ac)v(<JACAfi?)v(<7A/> Ac)v(flACA d), (3.119) где символами v и а обозначены операции логического сложения и умножения, а операция инвертирования обозначена чертой над соответствующим элементом.
Двоичные элементы ik и jk, к = 0,п, используются для манипуляции квадратурных составляющих ДФРМ сигнала
•s*(0=^K-1)'t cos(a>cz + ^-^/4)+(-l)7t sin(ocz + <рс -л74)], kT<t<(k + l)T,
где - амплитуда, несущая частота, начальная фаза и дли-
тельность к -й посылки сигнала.
Положим, что прием сигнала (3.120) осуществляется когерентным приемником [1], структурная схема которого представлена на рис. 3.10. Этот приемник состоит из демодулятора, предназначенного для принятия решений ik, Jk, к = 0,п, о переданных элементах ik, jk, к = 0,п, и перекодирующего устройства, реализующего операции (3.118), (3.119) с
целью получения решений А =./] (^1ЛЛ-1Л) и = /п(4-1Л>Л-1>Л) >
k = 1, п, об информационных элементах ик, vk, к = 1,и.
Перекодирующее устройство приводит к размножению ошибок, сложный механизм которого существенно затрудняет оценку достоверности приема ДФРМ сигнала (3.120). Поэтому выполненные ранее исследования ограничены оценкой указанной достоверности по показателю в виде вероятности правильного приема элементов и , передаваемых двумя посылками сигнала [1,2], или по показателю в виде вероятности правильного приема кодовой комбинации при условии независимости искажений элементов 1к, jk, к = 0,п [2]. Однако на практике все чаще ДФРМ сигналы принимаются в условиях станционных или преднамеренных помех, обусловливающих зависимость (группирование) искажений этих элементов.
Представим передаваемые БКК в виде векторов (последовательностей) M = (/z1,...,/z„) и N = (гр...,ги), а принятые БКК - в виде векторов М = (Д„... ,/}„) и N = (i/j,...,v„). Компонентами векторов А = (/о,.
В = (Л>-">Л)> А = (?0,..B = (j0,...J„), A = ((J,..Д) и B = (j0,...,j„) являются соответственно элементы ik, jk, ik, Jk, ik и jk, к = 0, n, причем элементы ik и jk инверсны элементам ik и Jk.
Учтем, что неоднозначность начальной фазы опорных колебаний izonI (г) и izon]I (г) демодулятора (рис. 3.10) на интервале приема г = и + 1 посылок сигнала (3.120) является случайной величиной, принимающей одно из четырех возможных значений [2]: ^н0 = О, <plA=n/'l, (рл1 = я, рн3=Зя/2. Благодаря наличию перекодирующего устройства неоднозначность фазы <рн,,, v = 0,3, не приводит к искажению информационных элементов [3], хотя переданные в отсутствие помех данные поступают с выходов демодулятора на перекодирующее устройство не только в неискаженном виде (при <рн0 = 0 А = А и В = В), но и в инверсном (при <зн2=тг А = А и В = В) или в перекрещенном между каналами виде (при <pKi = n/2 А = В и В = А, а при <ри3 = Зтг/2 А = В и В = А). Из этих рассуждений следует, что если воздействие помехи вызовет одну из четырех перечисленных конфигураций решений А и В о переданных векторах А и В, то векторы М и N будут приняты правильно. На основании изложенного получим следующее условие правильного приема одной 2и-значной или двух и-значных БКК, пере
даваемых г посылками сигнала (3.120), манипулированного по фазе конкретными последовательностями А = (/0,..и В = (j0,:
(M = M)A(N = N) =
= [(А=А)П(В = В)] U [(А = В)П(В = А)] U (3.121)
и [(А = А)П(В = В)1 и [(А = В) П (В = А)] ,
где П и U - символы пересечения и объединения событий.
Поскольку несовместные события (А = А) П (В = В), (А = В) П (В = А) , (А = А)П(В = В), (А = В)П(В = А) появляются только тогда, когда на к-м, к = 0,п, интервале приема сигнала (3.120) наступает одно из событий
?о,Л) = (4='*)А(Л=Л) , = (4=7*)А(Л = »*),
?2,*(4>Л) = (4 = 4)Г1Сл =Л) , ?зд('^Л) = (4=Л)П(Л = 4) , условие (3.121) представим в удобном для анализа виде
(M = M)A(N = N) = J [Q?^(4,A)] • w=0 k=Q
Так как условие (3.123) выполняется при любом из четырех возможных значений <рт, v = 0,3, то для определения средней вероятности Рг правильного приема одной 2л-значной или двух и-значных БКК, передаваемых г = п + 1 посылками сигнала (3.120), применим к (3.123) формулу полной вероятности [4], а затем усредним полученное выражение по всем возможным конфигурациям векторов А = (*о,.и В = (Уо,-. При усреднении учтем, что элементы рассматриваемых БКК цк, vk, к = 1, п, а следовательно и элементы ik, jk, к = 0,л , являются независимыми и принимают значения 0 или 1 равновероятно. В результате усреднения получим
Л = XX-
t ‘'“° И’=0 'о=°'"=0 (3.124)
'„=%=CI 1*=о
(3.122)
(3.123)
где р(<рю.) - вероятность v-ro значения неоднозначности начальной фазы опорных колебаний демодулятора; /?(/0,...,/„) = 1/2г и p(j0,...,j„) = l/2r -вероятности появления конкретных конфигураций векторов А =
И В = (;о,
- условная вероятность появле-
п
ния w -го события Q qwk (ik, jk )
_к=о
при данном значении <рн1..
Далее на основе метода индикаторов решений о переданных элементах [4,5] найдем входящие в (3.124) вероятности пересечения событий, для чего учтем, что вероятность появления события Z равна математическому ожиданию М{ 12} индикатора Iz этого события, а индика-
тор пересечения событий равен произведению индикаторов этих собы
тий. В этом случае
где I^k{ik,jk,<pav) - индикаторы событий (3.122) qWtk(ik,jk) при конкретном значении (рт. Указанные индикаторы определим на основе правил
принятия решений о переданных элементах ik, jk, к = 0,п, которые для представленного на рис. 3.10 приемника описываются неравенствами
4=о 4=о
< 0, *iit+Jii* < °> (3.126)
't =1 'к =1
где реакции фазовых детекторов первого (I) и второго (II) каналов демодулятора на сигнал (3.120) определяются выражениями
(-')'" ^C0S(?’m” V = ° V = 1 ИЛИ v = 2,
xik = или v = 3,
(-1)Л 2^2 C0S'?’H'” V = ° (-1)'* V = 1 или v = 2,
= или v = 3,
а реакции этих детекторов на помеху h(z) принимают вид
Ун = Ек C0S<M + ^hv) ’ У11* = Ек sinO* + ftn-) >
где амплитуда Ек и фаза напряжений у1к и у11к вычисляются следующим образом:
(*+1)Г
у j n(t) cosa)ct dt
кТ
(k+WT
j; j Z?(Osin®cZ<*
kT
2^2
= №+S2,
Ч'к = Ч’<;~+0к> 0k = arctg(s;/Ck).
Индикаторы событий (3.122) для (Зн0 = 0 (v = 0) представим на основании (3.126) и свойства индикаторов событий, заключающегося в том, что индикатор пересечения событий равен произведению индикаторов этих событий [4], следующим образом:
IqlJci'k’Jk’PHo) ~ (1 Art)O-Alrt)’
(3.127)
^зД'ьЛ’^но) ~
hik 0 hyk ) > (1 ~ Art) hljk ’
‘к = J к >
‘к * J к ’
где llik и llljk - индикаторы правильных решений о переданных элементах ik и jk, принятых в демодуляторе при (зн0 = 0, т.е. ik = ik и h= Jk-. k = 0,n.
Аналогичным путем можно получить индикаторы событий (3.122) для других значений неоднозначности фазы , v = 1,3 . Эти индикаторы выражаются через индикаторы (3.127) 7^..л(4,У*,(Зио) следующей зависимостью:
А/а.ДА’-А’^нг) A/w,fc (4 ’ А ’ ^нО ) >
(3.128)
где индекс а - результат суммирования индексов w и v по модулю 4:
а = (w + v)mod4, w = 0,3, v = 1,3 .
Подставляя (3.125) в (3.124), получаем с учетом (3.128) и очевид-з
ного равенства p((3m.) = 1 следующее выражение: v=0
а=Е XX -XX iMjfl
и.=о >0=0 Уо=о >„=о;„=о z U=o
(3.129)
Поскольку математическое ожидание суммы случайных величин равно сумме их математических ожиданий [4], с учетом независимости передачи двоичных элементов ik и Jk, к = 0,п, выражение (3.129) запишем следующим образом:
После подстановки (3.127) в (3.130) выражение вероятности Рг, спра-
ведливое для помехи произвольной структуры, принимает искомый вид
Л=м Пал* д=о
м По-^Х1-/.!*) +
,А=0 J
+ 2М
,a=ol .
(3.131)
1 1
где А*=|Х71'*’ /II*=^X7‘V‘ - полусуммы индикаторов 1ик и IllJk, 'к =° Л =0
к = 0,п , полученные на основании правил (3.126) при = 0 :
1, 2>/2|№|<t/c,
‘1 2>/2|^|>t7c;
1, 2V2|j!1a|<C/c,
1 2^2\ylVc\>Ue,
(3.132)
где | у | - модуль числа у .
Далее конкретизируем обобщенное выражение вероятности (3.131) для гауссовской и гармонической помех.
Если прием ДФРМ сигнала (3.120) осуществляется на фоне гауссовской помехи, то полусуммы индикаторов (3.132) в равноустойчивых к ее воздействию квадратурных каналах являются независимыми случайными величинами, математические ожидания которых равны между собой и, согласно [5], равны средней вероятности р правильного прие-
ма элемента 1к или jk: р = М^} = М{7Ш}, к = 0, п . В этом случае вероятность (3.131) преобразуется к известной формуле [2, с. 102-103]:
A=LPr + (i-m2, (3.133)
где г = п +1, вероятность р определяется с помощью функции Крампа Ф(/гс) по формуле [3] р = [1 + Ф(/?с)], hc - отношение сигнал-помеха по эффективным напряжениям на входе приемника.
При приеме сигнала (3.120) на фоне ГП с амплитудой Uc, начальной фазой <рп и расстройкой частоты помехи а>п относительно частоты сигнала <эс на величину Д<2>=«эп-«эс выражения (3.132) принимают вид
1, |cos((//0 - А;ДйХГ)| < /3(\а>Т), -i, |cos(y/0 - ЛДбУТ)! > ^(ДоТ), 1, |sin((z/g - ЛД«э7’)| < Р(\а>Т), |, |sm(^/0 - кАоГ)| > Р(ЬыТ),
(3.134)
где (//0 = (’с_ _ 4 ~ 2' - случайная величина, распределенная при
фиксированной расстройке \а> по общеизвестному закону = 1/(2я), 0 < ;z/0 < 2я ; Р(\а>Т) - функция, зависящая от отношения сигнал-помеха /?С=(7С/(7П и расстройки До:
h
Р(Ай)Г) = —£= V2
ДоТ/2 sin(AoT/2)
(3.135)
Так как получение аналитического выражения вероятности (3.131) для ГП с произвольной расстройкой До наталкивается на значительные трудности, то поставленную задачу решим для фиксированных значений расстроек До, принадлежащих множеству
До = {± Z'/r/T; ±(2^ + 1)я/(27’)}, £ = 0,1,2,.... Для этого графически построим зависимости полусумм индикаторов (3.134) от переменной (//0, которые являются ступенчатыми функциями от этой переменной. Затем перемножим ступенчатые функции, входящие в (3.131), и вычислим (3.131) путем представления каждого из его слагаемых в виде суммы интегралов с интервалами интегрирования, на которых подынтегральные функции не претерпевают скачков. В результате интегрирования получим следующую формулу вероятности Рг для указанных расстроек:
1 2Г — 2 г z \"i /\ч2
^+-^-агс51п[Д(Д<уТ)], 0<Д(ДоТ)<у,
1 + 2'22,~г22Г 2 ^<Д(ДоГ)<1,
1, Д(ДоТ)>1.
(3.136)
Для расстроек До = ± я ± л-/(2г)]/Т, £ = 0,1,2,..., вероятность Рг найдем по той же процедурной схеме, что и выражение (3.136). Однако при таких расстройках нахождение вероятности Рг сопряжено с громоздкими выкладками, обусловленными более сложной зависимостью произведений полусумм индикаторов (3.134) от переменной . После
интегрирования получим
^-¥?”7arcsin^zVyT’^
1/22г 2, 0</?(z\oT’)<sin[^(4r)],
/5 sin|yr/ (4r)J < <—,
J (3.137)
< /?(ДоГ) <sin[fl-(/-+l)/(4r)],
апж1п[/?(АдХГ)]|, sin[^(r +1)/(4г)]<Д(ДоТ)<1,
1, Д(ДоГ)>1,
где величина x равна целой части числа (4r/^)arcsin[/?(AoT’)].
На рис. 3.11 представлены графики зависимостей (3.133) (штриховая линия), (3.136) и (3.137) (сплошные линии) от hc для г = 6. Из рисунка видно, что воздействие ГП характеризуется пороговым эффектом (Pr < 1 при Р(\а>Т) < 1 и Pr = 1 при Р(\а>Т) > 1), а при воздействии гауссовской помехи этот эффект отсутст
вует. Поэтому при hc >1,4 гауссовская помеха обеспечивает наименьшую помехоустойчивость когерентного приема ДФРМ сигнала. При hc < 1,4 наименьшую помехоустойчивость приема рассматриваемого сигнала обеспечивает ГП с расстройками До = +л/{2гТ). Для представляющих практический интерес значений Рг > 0,02 помехоустойчивость когерентного приема сигнала (3.120) на фоне ГП с расстройками До, принадлежащими
множеству До = {0; ±я/(2Т); ± [я - я/(2г)]/Г; ±л/Т}, увеличивается с ростом абсолютной величины До из этого множества.
Полученное обобщенное выражение вероятности правильного приема двоичных БКК в когерентном приемнике ДФРМ сигналов на фоне помехи произвольной структуры может быть использовано для оценки помехоустойчивости рассматриваемых сигналов в условиях воздействия собственных шумов приемника, станционных или преднамеренных помех, а также для синтеза наиболее неблагоприятной помехи этому приемнику.
Литература
1. Окунев 10.Б. Цифровая передача информации фазомодулированными сигналами. - М.: Радио и связь, 1991.
2. Помехоустойчивость и эффективность систем передачи информации / Под ред. А.Г. Зюко. - М.: Радио и связь, 1985.
3. Банкет В.Л., Дорофеев В.М. Цифровые методы в спутниковой связи. - М.: Радио и связь, 1985.
4. Лоэв М. Теория вероятностей: Пер. с англ. / Под ред. Ю.В.Прохорова. - М.: ПИЛ, 1962.
5. Овчаренко Л.А., Поддубный В.И. - Изв. вузов. Сер. Радиоэлектроника, 1986, т.29, № 9.
3.9. Помехозащищенность аппаратуры радиоинерциального навигационного комплекса с адаптивной антенной решеткой
Непрерывное усложнение сигнально-помеховой обстановки вынуждает разработчиков радиоэлектронной аппаратуры особое внимание уделять вопросам повышения ее помехозащищенности. Одним из перспективных направлений повышения помехозащищенности радиоаппаратуры без ухудшения ее основных потребительских характеристик является пространственно-временная фильтрация помех с использованием адаптивных антенных решеток (ААР).
В ААР в составе радионавигационной аппаратуры, как правило, реализуются алгоритмы минимума среднеквадратической ошибки, требующие наличия опорного сигнала, который формируется в приемном устройстве из принимаемых навигационных сигналов. В [1] предложен алгоритм функционирования ААР, учитывающий флуктуации направлений прихода полезного и помеховых сигналов и случайные изменения положения опорного сигнала на оси времени, характерные для лета-
Авторы: В. А. Миронов, В. Г. Радзиевский
тельных аппаратов. Современная бортовая радионавигационная аппаратура в большинстве случаев комплексируется с инерциальной навигационной системой (ИНС). В навигационном комплексе (НК) осуществляется совместная обработка информации различных измерителей, позволяющая существенно повысить точность навигационных определений. Кроме повышения точности в НК производится коррекция положения гироплатформы ИНС и параметров измерителей аппаратуры радионавигационной системы (РНС), что приводит к повышению ее помехозащищенности. В свою очередь, это повышает точность воспроизведения опорного сигнала для адаптивного процессора и, соответственно, эффективность функционирования ААР.
В известной литературе описание оптимального алгоритма функционирования НК с ААР, в котором используется информация от ИНС для формирования опорного сигнала, отсутствует. Приведем основные
подходы к синтезу такого алгоритма и его результаты.
Воспользовавшись методом пространства состояний, представим в качестве сообщения составной вектор
Wopt(A)
Y(*) =-------
(3.138)
v(A)
где Wopt(A:) - оптимальный вектор весовых коэффициентов, обеспечивающий максимум отношения сигнал-помеха на выходе ААР; v(A) -начальная фаза (временное положение) навигационного сигнала; к -дискретное время.
Динамическую модель состояния можно записать в векторноматричном виде:
Y(A) = O>Y(A-l) + n(/c), (3.139)
Ф,Ф^,Г, Г„ - переходные матрицы
состояния и формирующих шумов для векторов весовых коэффициентов и начальной фазы сигнала соответственно; ^(А) = ||^,(А)^(А:)|| - составной вектор шумов возбуждения, причем cov|^+(/)x^(A)| = V^5(i-k); S(i-k) - дельта-символ Кронекера; + - знак эрмитова сопряжения матриц.
Аппаратура РНС, использующая ААР, позволяет оценивать все компоненты вектора состояния Y(A). Эту оценку можно представить в виде
Woptw
Р(Л)
wopl(*)+w;pt(*)
v(&) + v(£)
(3.140)
где lFopt(£), v(k) - ошибки оценки вектора весовых коэффициентов и
начальной фазы сигнала.
Инерциальная навигационная система в векторе состояния позволяет оценивать только начальную фазу полезного сигнала, пропорциональную текущей дальности. Поэтому такая оценка
0
0
^инс(^)_
(3.141)
^инс(^)
где £инс(Л)> *'инсД) _ оценка и ошибка оценки начальной фазы полезного сигнала измерителями ИНС.
Модель ошибок ИНС с достаточной для решения практических задач точностью аппроксимируется многомерным марковским процессом вида [2]
Ч,нс (*) = Фи ДМ -1) Vhhc (М1) + ги „(*)£,(*), (3.142)
где Фии(ЛД-1), ГИИ(Л) - переходные матрицы состояния и возмущающих шумов; £,(£) - вектор гауссовских белых возмущающих шумов.
При синтезе алгоритма будем полагать, как это обычно делается при решении задач оптимальной совместной обработки информации от разнородных измерителей, что оптимальная совместная оценка вектора состояния YE находится из выражения [3]
YeW = M{Y(A)} + ^{YhhcW}> (3-143)
где АД*} и ^г{*} - нелинейные операторы преобразования сигналов РНС и ИНС соответственно. Они определяются в явном виде, как правило, с использованием одного из двух критериев: минимума среднеквадратического значения суммы динамических и шумовых ошибок; минимума среднеквадратического значения шумовых ошибок при условии равенства нулю динамических ошибок.
Первый критерий можно использовать при любом числе измерителей вектора состояния, второй - при двух и более.
В практике синтеза НК наиболее широкое распространение получил второй критерий. Это связано с тем, что сам алгоритм оптимальной оценки и ошибки оценивания компонент вектора состояния при этом не зависят от точности априорного задания траектории движения потребителя.
В рассматриваемом случае компоненты вектора состояния Wopt(/c) оцениваются одним измерителем, a v(k) - двумя. Поэтому при обосно
вании алгоритма функционирования НК с ААР, использующей информацию ИНС, будем исходить из условия, что при оценке компонент вектора состояния 1Гор((£) должен использоваться первый критерий, а для компонент v(k) - второй. Иными словами, можно записать, что
var{[Y(£)- Ve(*)][Y(*)- VE(*)]} min , (3.144)
при
wop<(*)
^phc(^)
+N2
Wopt(*)
v(£)
(3.145)
0
H-ihc(^)
Выражение (3.145) представляет собой условие инвариантности, т.е. при выполнении этого условия ошибки совместной оценки компоненты v(k') не зависят от динамики движения потребителя или, что одно и то же, от закона изменения параметра v(k) во времени.
Для условий (3.138), (3.139), (3.144) и (3.145) алгоритм оптимальной оценки, полученный методом ортогонального проецирования, имеет вид
Y(£) = Y(£/*-l)-K(£)Z(£), (3.146)
где К(А) - матрица коэффициентов передачи фильтра; Z(k.) - невязка измерений; Y(A / к -1) = ФУ (к -1) - экстраполированная оценка вектора состояния.
Отличие полученного алгоритма от приведенного в [1] состоит в том, что в динамической модели вектора состояния (3.129) вместо компонент Фу и rv используются компоненты Ф„г и Гт динамической модели ошибок ИНС (3.142) соответственно.
Алгоритм (3.146) является частным случаем расширенного фильтра Калмана и обладает всеми свойствами последнего [4]. Функциональная схема НК, реализующая этот алгоритм, приведена на рис. 3.12.
Из рисунка видно, что выходной сигнал третьего вычитающего устройства можно записать в следующем виде:
О
V(A/A-1) = YMHC(A)-Y(A/A-1) =
Wopt(A/A-l)
^) + *ИНс(А)
^инс(^^ О
Wopt(A/A-l)
К*) + ’'инс (А)
Й-1НС (Л/Л-1)
Wopt(A/A-l)
у(А) + С'цнс(^)
(3.147)
где У(Л/Л —1) - оптимальная совместная оценка вектора состояния;
^инс(^) - ошибка оптимальной совместной оценки ошибок ИНС.
С учетом (3.146) невязку измерений можно записать как
Z(A) = Н(А)[Г(Л) - 'УСА / к -1)] + v(A) =
= Н(А)
Wopt(A)
Wopt(A/A-l)
> + v(A) = H(A)
и(А)
г’(А) + г'цнс(^)
Wopt(*)
ГИНС W
+ v(A),
(3.148)
где Н(А) - матрица наблюдений; v(A) - гауссовские шумы наблюдения с нулевым средним и дисперсией И,..
Из (3.147) следует, что компонента вектора состояния и(А) в процессе фильтрации не участвует; более того, если положить Р(А) = РИНС(А) = 0, то совместная оценка Р(А) становится тождественно равной у(А) независимо от того, каким образом эта составляющая из
меняется во времени. Следовательно, условие инвариантности в рассматриваемой схеме НК выполняется.
Из теории ошибок следящих систем известно, что их помехозащищенность зависит от возможности сужения эквивалентной шумовой полосы пропускания. Без комплексирования эта полоса определяется динамикой движения потребителя, с комплексированием - динамикой ошибок ИНС. Известно [2,3], что ширина спектра ошибок ИНС в десятки раз меньше ширины спектра флуктуаций начальной фазы полезного сигнала и(А), отслеживаемых РНС. Поэтому при комплексировании оценка Р(А) получается существенно более точной, а за счет уменьшения ошибок воспроизведения опорного сигнала повышается точность оценки FKopt(A).
Алгоритм функционирования радиоинерциального НК с ААР ис-:ледовался методом моделирования на ЭВМ. Моделировалась семиэле-лентная плоская ААР. Шесть элементов располагались в вершинах пра-шльного шестиугольника, а седьмой - в центре. Расстояние между эле-
ментами равнялось 2/2 (Л - длина волны сигнала). В качестве полезного сигнала воспроизводится гармонический сигнал, а в качестве помехи -гауссовский шум. Такт счета выбран 0,1 периода сигнала, отношение мощности сигнала к мощности собственных шумов на входе ААР и отношение мощности помехи к мощности сигнала в точке приема равнялось 20 дБ, число источников помех п = 4. Эти источники располагались равномерно по азимуту относительно плоскости раскрыва ААР. Угол визирования источников помех относительно плоскости раскрыва ААР составлял 20°.
Прирост помехозащищенности НК с ААР оценивался по величине выигрыша В = ах-а2, где а{, а2 [дБ] - отношение поме-ха+шум-сигнал на входе и выходе ААР соответственно. Результаты моделирования в виде зависимостей выигрыша В от времени к приведены на рис. 3.13. Зависимость 1 получена для случая, когда направление прихода полезного сигнала и помеховых, а также начальные фазы опорного и полезного сигналов флуктуируют. Информация от ИНС не поступает. Для расчетов использовались следующие исходные данные: дисперсия флуктуаций направлений 2°, ширина спектра 20 Гц; дисперсия флуктуаций начальной фазы 8° при ширине спектра 40 Гц. Зависимость 2 дополнительно учитывает комплексирование радионавигационной аппаратуры с ИНС.
При моделировании приняты следующие типовые параметры ИНС: скорость ухода 0,5 м/с, ширина спектра ошибок 6 Гц.
Анализ результатов моделирования позволяет сделать вывод о том, что разработанный алгоритм функционирования радиоинерциально-го НК с ААР позволяет повысить эффективность пространственно-временной обработки и, следовательно, помехозащищенность радионавигационной аппаратуры на 5...7 дБ за счет использования информации ИНС для формирования опорного сигнала в сложной помеховой обстановке.
Литература
1. Безмага В.М.. Миронов В.А. - Радиотехника, 1988, №2.
2. Ривкин С.С. Метод оптимальной фильтрации Калмана и его применение в инерциальных навигационных системах. - Л.: Судостроение, 1974.
3. Фролов В.С. Радиоинерциальные системы наведения. - М.: Сов. радио, 1976.
4. Сейдж Э., Меле Дж. Теория оценивания и ее применение в связи и управлении. - М.: Связь, 1976
Дополнительная литература к главе 3
1. Хаджи Б. А. Наиболее эффективная помеха в системе передачи двоичной информации. - Радиотехника и электроника, 1991, т. 36, № 2.
2. Хаджи Б. А. Наиболее эффективная сигналоподобная помеха при различении ортогональных сигналов. - Радиотехника и электроника, 1992, т. 37, № 11.
3. Гордей В. В., Поддубный В. Н. Помехоустойчивость приема сложных ФМ сигналов на фоне гармонической помехи с учетом замираний и неточности синхронизации. - Радиотехника, 1992, № 5-6.
4. Гордей В. В., Поддубный В. Н. Воздействие гармонической помехи на приемник фазоманипулированных сигналов с ограничителем на входе. - Изв. вузов. Сер. Радиоэлектроника, 1992, № 9.
5. Агафонов А. А., Поддубный В. Н. Влияние группирования ошибок на помехоустойчивость приема частотно-манипулированных сигналов с минимальным сдвигом. - Радиотехника, 1997, № 6.
6. Каунов А. Е., Поддубный В. Н. Оценка эффективности воздействия гауссовской дискретно-заградительной помехи на линию радиосвязи с программной перестройкой рабочей частоты, сложными сигналами и m-ичными блочными кодами. - Радиотехника, 2002, № 10.
ГЛАВА 4
Оптико-электронное подавление оптико-локационных систем
Оптико-электронное подавления (ОЭП) ведется в диапазонах видимых, инфракрасных и ультрафиолетовых длин волн и является составляющей радиоэлектронного подавления. Значение ОЭП определяется тем, что практически все комплексы управляемого оружия малой дальности и значительная часть комплексов средней и даже большой дальности имеют системы или каналы, использующие излучение в оптической части спектра электромагнитного излучения, причем подавляющее их большинство принадлежит к классу систем пассивной локации.
Две существенные особенности таких систем определили направления отбора материалов для настоящей главы. Это высокая угловая разрешающая способность оптико-локационных систем, обеспечивающая формирование в различных участках спектра изображений фоноцелевой и помеховой обстановки, а также чрезвычайно большое разнообразие способов построения пеленгационных устройств оптического диапазона. Эти особенности определили необходимость дальнейшего развития методов синтеза и анализа помех оптико-электронным системам с обработкой изображений и с растровыми анализаторами, а также принципов создания адаптивных помех с учетом потенциальных возможностей применяемых схем защиты. Широкое использование в практике ОЭП аэрозольных помеховых образований обусловило включение в эту главу материалов, связанных с исследованием характеристик рассеяния лазерного излучения локальным аэрозольным слоем.
4.1. Синтез маскирующей помехи корреляционноэкстремальным системам
В настоящее время для обнаружения и измерения относительных координат объектов широко используются корреляционно-экстремальные системы с формированием изображений в оптическом или радио диапазонах волн. К таким системам относятся телевизионные, тепловизионные и радиометрические корреляционно-экстремальные измерители координат пространственно протяженных целей, системы управления полетом по радиолокационным картам местности [1-3] и т.п. Наря-
Автор: П. М. Юхно
ду с прямой задачей обнаружения и измерения координат объектов практический интерес при исследовании качества работы корреляционно-экстремальных систем в условиях помех представляет и обратная задача синтеза оптимальной помехи таким системам. Решение задачи синтеза оптимальной имитирующей помехи получено в [4].
Рассмотрим задачу синтеза оптимальной маскирующей помехи корреляционно-экстремальным системам с формированием изображений.
Пусть наблюдаемому объекту соответствует полезный сигнал с нулевым средним значением s(x), существующий в некоторой области N вектора пространственных переменных х = (х,,х2).
Для обнаружения пространственно протяженного объекта необходимо иметь его опорное изображение (эталон). Полагаем, что эталон образован из фрагмента полезного сигнала, принадлежащего области М (Л/ с Д'). и равен нулю на множестве N\M.
Известно [2, 3] что при гауссовской статистике внутренних шумов оптимальное обнаружение и измерение относительных координат пространственно протяженного объекта основано на формировании корреляционного отклика
Г(1)= Jw(x)s(x-!)<&, (4.1)
N
где w(x) - принимаемая смесь полезного сигнала и помехи;
к = (Л j, 2 2) - вектор сдвига эталона относительно полезного сигнала.
Для упрощения анализа за счет исключения из рассмотрения краевых эффектов полагаем, что вектор к принадлежит некоторой области возможных сдвигов Л , такой, что (х -1) е N.
Решение о наличии объекта (об его обнаружении) принимается по превышению максимумом корреляционного отклика (4.1) некоторого порога. Заметим, что (4.1) достигает максимума в точке 1=0.
В общем случае аддитивно-мультипликативной смеси помехи и сигнала принимаемую смесь можно представить как
и(х) = s(x)-(s(x)-Z>)r(x), (4.2)
где b - максимальная интенсивность помехи; г(л) - подлежащая определению при синтезе функция прозрачности помехи, удовлетворяющая условию
0<ф)<1. (4.3)
Рассматриваемый случай можно интерпретировать как случай постановки помехи в виде экрана с изменяющимся по пространственным
координатам коэффициентом пропускания излучения г(х), имеющего максимальную собственную яркость b. Причем принимаемая смесь u(x) = s(x) при г(х) = 0 и = Ь при r(x) = 1.
Теперь задача синтеза оптимальной маскирующей помехи может быть сформулирована как задача отыскания г(х), минимизирующей функционал (4.1) в точке 1 = 0 при ограничении (4.3) и ограничении на ресурс помехи вида
Jr(x)o5c = I. (4.4)
N
Эта задача принадлежит к классу вырожденных вариационных задач с ограничениями и может быть решена путем сведения к тривиальной с помощью метода нелинейных преобразований [5]. Для этого с целью учета ограничений (4.3) введем дополнительную минимизирующую функцию ь>(х) согласно выражению 2r(x)-l = sinu(x). Тогда в соответствии с методом множителей Лагранжа задача минимизации функционала (4.1), в котором w(x) представлена в виде (4.2), при огра
ничениях на вида (4.3), (4.4) эквивалентна задаче минимизации по г(х), и(х) функции Лагранжа Ф(х) = (s(x)-(s(x)-6)r(x))s(x) + +/z(x)(2r(x)-l-sinL>(x))+ w(x), где р(х) и v = const - множители Лагранжа.
Из необходимых условий оптимальности Эйлера-Лагранжа дФ/дг = 0, дФ/ди = 0 следует
(4.5)
32Ф
Из условия минимальности Лежандра-Клебша —= > 0 имеем ди
/z(x)sinL>(x) = ((s(x)-6)s(x)- v)(2r(x)-1) > 0. (4.6)
Совместное решение (4.5) и (4.6) относительно г(х) приводит к выражению для искомой функции прозрачности оптимальной маскирующей помехи
U*) = l‘’ M-bW>V- (4.7)
[0, в остальных случаях.
Из (4.7) следует, что функция прозрачности принимает значение только 0 или 1, т.е. при оптимальном маскировании весь ресурс помехи должен быть израсходован на создание непрозрачного экрана. Порог v,
roptW =
фигурирующий в (4.7), должен выбираться так, чтобы выполнялось условие (4.4), и в общем случае может быть определен численным методом. Алгоритм его отыскания заключается в следующем:
1. Для произвольного начального значения v > 0 определяются с помощью (4.7) зоны на объекте, подлежащие прикрытию непрозрачным экраном;
2. Проверяется выполнение неравенства Jr(х)dx < /. В случае его N
невыполнения повторяется операция по п. 1, но с увеличенным v, в случае выполнения - с уменьшенным;
3. Итерации прекращаются при выполнении с требуемой точностью равенства (4.4), т.е. когда, исходя из существа задачи, можно согласиться с наличием остатка неиспользованного ресурса /.
С помощью аналогичных приведенным выше преобразований нетрудно показать, что в случае, когда помеха образует аддитивную смесь с сигналом вида н(х) = s(x) + br(x), функция прозрачности оптимальной маскирующей помехи при ограничениях (4.3), (4.4) принимает вид
1, -bs(x)>v,
О, в остальных случаях.
Следует отметить, что оптимальная помеха, синтезированная по критерию минимизации функцонала (4.1) в точке 1 = 0, в некоторых случаях может привести к возрастанию уровня боковых лепестков корреляционного отклика. В результате решение об обнаружении объекта может быть принято по превышению порога боковыми лепестками отклика (4.1). Поэтому возникает задача синтеза помехи, снижающей уровень как основного, так и боковых лепестков, т.е. минимизирующей неравномерность корреляционного отклика (см. (4.1)) в некоторой области А . Формально эту задачу можно свести к задаче минимизации функционала J-.
7(Т(1))= J(T(l)-a)X (4.8)
л
где а — некоторая заранее неизвестная константа, которая зависит от располагаемого ресурса / и которую также необходимо определить при решении исходной задачи.
Задача минимизации по г(х) функционала (4.8) для случая аддитивно-мультипликативной смеси помехи с сигналом (4.2) и при наличии ограничений (4.3), (4.4) является вариационной задачей, неклассический характер которой связан как с наличием в функционале заранее неизвестной константы а, так и с наличием квадратичного интегрального члена
2
j Jw(x)j(x-2)o5c
-2aJw(x)s(x-/l)<& + a2 dA. (4.9) N
л
Решим задачу минимизации (4.9) методом ее погружения в задачу минимизации для расширенного пространства независимых переменных х, z. Для этого перепишем (4.9), введя новую независимую переменную и представив квадратичный член в (4.9) в виде соответствующего двукратного интеграла:
A\W
(4.Ю)
-2а Ju(x)s(x-A) dx + a2 dA.
N
Введя функции P(x,z) = Js(x- A)s(z-A)dA, F(x) = $s(x-A)dA Л Л
для прямоугольных областей Л, N, (4.10) можно представить в виде • У Л
dxdz, (4.11)
N \ S” Sn j
где s„,52 - площади областей N и Л соответственно.
Если теперь определить искомую функцию прозрачности, входящую в w(x) (4.2), как функцию двух переменных r(x,z), удовлетворяющую условию r(x,z) = r(z,x), то для дальнейшего нахождения оптимальной r(x,z), минимизирующей (4.11), можно воспользоваться
подходом, аналогичным описанному выше.
После дополнения пространства минимизирующих функций функцией u(x,z) в соответствии с соотношением 2r(x,z)-l = sinu(x,z) и введения множителей Лагранжа д (x,z), v = const, исходная задача сводится к тривиальной задаче минимизации функции Ф(х,г):
Ф(х,г) =
= (s(x)-r(x,z)(s(x)-&))(s(z)-r(x,z)(s(z)-i>))P(x,z)-
- — (s(x)-r(x,z)(s(x)-i>))F(x)+^- +
SH SH
+/z (x, z)(2r (x, z) -1 - sin и (x, z)) + vr (x, z). (4-12)
Интерес представляет только функция г(х), являющаяся сечением r(x,z) при x = z (т.е. г(х) = г(х,х)). Ее можно найти, формально положив в (4.12) х = z . Тогда из необходимых условий экстремума Эйлера-Лагранжа ЗФ/дг = 0, дФ/до = 0 следует
Xz(x) = (s(x)-Z>)(s(x)-r(x)(s(x)-Z>))/’(x,x)-
-l(s(x)-Z>)F(x)-^, (4.13)
A(x)Jl-(2r(x)-l)2 = 0. (4.14)
Из условия минимальности Лежандра-Клебша имеем
д(х)(2г(х)-1)> 0, (4.15)
а из необходимого условия экстремума функционала (4.11)
а = — f^s(x)-r(x)(s(x)-Z>))F(x)a5c. (4.16)
N
При, /z(x)^0 (4.14), (4.15) выполняются, если r(x) = 1 при //(х)>0,либо г(х) = 0 при /z(x)<0. Отсюда с учетом (4.13) вытекают следующие искомые соотношения для определения гор1 (х):
'•ор.(*) =
1, (s(x)-Z,)Z,P(x)-^-(s(x)-Z>)F(x)>p (4J7)
0, (s(x)-Z>)s(x)P(x)-y-(s(x)-Z>)F(x)<^.
Sn Z
Поскольку разность А левых частей неравенства в (4.17) всегда меньше нуля (а = -(Ь2 +s2(x)j <о), области, в которых ropt(x) = 0 и ropl (х) = 1, не пересекаются. Значения ropt (х) в остальных областях удовлетворяют неравенству 0 < ropt (х) < 1, т.е. заданы в открытой области. Поэтому их можно определить путем минимизации (4.12) без учета слагаемого /z(x,z)(2r(x,z)-l-sint>(x,z)). Это эквивалентно условию /j. = 0, из которого следует, что в области, не удовлетворяющей неравенствам в (4.17),
''opt W =
(s(x)-Z>)s(x)P(x)--^-F(x)-^ (s(x)-Z>)2p(x)
(4-18)
Соотношения (4.16) - (4.18), (4.4) составляют систему нелинейных уравнений и неравенств, достаточную для определения неизвестных ropt(x), я = const. Ее решение может быть получено численными методами. Так, при использовании метода последовательных приближений основные этапы численного решения задачи состоят в следующем:
1. Для некоторого начального приближения я определяются ropt (х) и v по алгоритму, аналогичному описанному выше;
2. Подстановкой полученного приближения ropt(x) в (4.16) определяется новое приближение для я, после чего вычисления по п. 1 повторяются.
Анализ выражений (4.17), (4.18) показывает, что в отличие от оптимальной маскирующей помехи, определяемой (4.7), в рассматриваемом случае оптимальная помеха должна включать фрагменты полупрозрачных экранов с функцией прозрачности, удовлетворяющей (4.18).
В случае использования для маскирования только непрозрачных экранов при формальной постановке последней задачи синтеза ограничение (4.3) следует заменить на условие: г(х) может принимать только значения из конечного множества (0,1). Методом, аналогичным описанному выше, можно показать, что в этом случае ropt (х) = 1 только в области, определяемой первым неравенством в (4.17).
В связи с очевидными трудностями получения в общем виде аналитических оценок качества синтезированных оптимальных помеховых воздействий, оценка их эффективности выполнялась методом имитационного моделирования. При этом в качестве полезного сигнала s(x) использовались синтезированные на ЭВМ реализации гауссовского с параметрами (0,1) случайного поля с корреляционной функцией вида ехр(-а(|х]| + |х2|)). Применялось дискретное по пространству представление случайного поля размерности 64 х 64 элемента разрешения. Величина двустороннего интервала пространственной корреляции поля по уровню 0,1 выбиралась равной 12 элементам разрешения. Результаты расчетов усредненного по 50 реализациям отношения у величины главного максимума корреляционного отклика при оптимальной аддитивно-мультипликативной маскирующей помехе в соответствии с (4.7) к этой же величине при отсутствии помехи в зависимости от отноше
ния 8 площади сюжета, прикрытой помехой, к площади эталона приведены на рис. 4.1, 4.2.
Точками показаны конкретные значения этого отношения у наблюдавшиеся в конкретных реализациях s(x).
Получено решение задачи аналитического синтеза оптимальной маскирующей помехи корреляционно-экстремальным системам с формированием изображений при наличии ограничений типа (4.4) на пространственный ресурс помехи и ограничений типа (4.3) на ее энергетические характеристики.
В случае, когда точность предварительного целеуказания сравнима с шириной главного лепестка корреляционного отклика, оптимальную маскирующую помеху целесообразней синтезировать по критерию минимизации главного максимума этого отклика. Показано, что при этом для аддитивно-мультипликативной смеси помехи и сигнала весь пространственный ресурс помехи должен быть использован на создание фрагментов непрозрачного помехового экрана с максимальной яркостью излучения, закрывающего области маскируемого объекта, удовлетворяющие полученному неравенству. Такая помеха обеспечивает снижение на порядок величины главного максимума корреляционного отклика обнаружителя пространственно-протяженных объектов при суммарной площади экранирующего помехового образования, не превышающей (40 ... 50)% площади опорного изображения (эталона).
В случае, когда область предварительного целеуказания захватывает и зону боковых лепестков корреляционного отклика, синтез оптимальной помехи целесообразно выполнять по критерию типа (4.8), минимизирующему неравномерность корреляционного отклика в области основного и боковых лепестков. При этом оптимальная маскирующая помеха, образующая аддитивно-мультипликативную смесь с сигналом, включает фрагменты, где яркость помехи может и не принимать граничных значений.
Литература
1. Красовский А.А., Белоглазов И.Н., Чигин ГП. Теория корреляционно-экстремальных навигационных систем. - М.: Наука, 1979.
2. Баклицкий В.К, Юрьев А.И. Корреляционно-экстремальные методы навигации. - М.: Радио и связь, 1982.
3. Башарин ов А.Е., Тучков Л.Т.. Поляков В.М., Аманов Н.П. Измерение радиоте-пловых и плазменных излучений. - М.: Сов.радио, 1968.
4. Данилкина А. Ф., Юхно П.М. - Автоматика и телемеханика, 1987, № 8.
5. Воробьев Л.М., Воробьев Д.Т. Нелинейные преобразования в прикладных вариационных задачах. - М.: Энергия, 1972.
4.2. Синтез помех пеленгаторам с растровыми
анализаторами
При исследовании вопросов подавления систем, использующих модулирующие растры при пеленгации точечных источников, возникает задача определения законов модуляции, вызывающих максимальный помеховый эффект при ограниченной мощности источника помех. Определение оптимального закона модуляции помехи (в дальнейшем-оптимальной помехи) на основе решения вариационной задачи с учетом достаточно полной совокупности взаимодействующих факторов и даже формальная постановка такой задачи в общем случае наталкиваются на существенные трудности. Они становятся возможными при учете только основных особенностей процесса анализа и обработки изображений и при определенной идеализации роли или значений других факторов, например, работы системы автоматической нормировки сигналов, системы отработки ошибок рассогласования и т. п.
В вариационной постановке решим задачу синтеза оптимальной помехи оптико-электронным системам, использующим растровые анализаторы изображений с амплитудно-фазовой или частотно-фазовой модуляцией и с синхронным детектированием для выделения угловых координат точечного источника.
Воспользуемся общим подходом к решению вариационных задач синтеза оптимальных имитирующих и маскирующих помех, развитым ранее в [ 1, 2] применительно к оптико-электронным системам корреляционного типа. Представим модулирующую функцию растра при размещении источника помех в точке прицеливания в виде f(a)t,<p), где а>,<р - несущая частота и начальная фаза сигнала на выходе растра, t -текущее время. Синтезируем закон модуляции точечного помехового
Авторы: С.Н. Артюх, П.М. Юхно
излучателя, реализующий максимальную ошибку измерения направления на него. Пусть Pu(t) - подлежащий определению помеховый сигнал, причем
0<и(г)<1, (4.19)
Р - максимальная амплитуда помехи. Пусть также Q - круговая частота развертки изображения помехового излучателя по секторному растру (она же - опорная частота фазового детектора), которая в случае амплитудно-фазового анализатора может совпадать с со. Составляющая помехового сигнала на выходе фазового детектора, входящего в состав углового дискриминатора, по одной из координатных осей определяется выражением т
d = Р Jw(r)/(<yr,p)sinfif(/r, (4.20)
о
где Т - период развертки изображения. Пусть также имеется ограничение на энергетический ресурс помехи
т
P^u(f)dt = R. (4.21)
о
Задача формального синтеза помехи теперь может быть поставлена следующим образом. Требуется найти функцию w(r), доставляющую максимум функционалу (4.20) при ограничениях (4.19) и (4.21) на w(z).
Для учета при синтезе помех ограничения (4.19) введем вспомогательную функцию v(r), удовлетворяющую выражению [3]
l-2w(r) + sinv(r) = 0. (4.22)
Как нетрудно заметить, при любом значении v(r) функция w(f) будет удовлетворять неравенству (4.19), если она удовлетворяет равенству (4.22), т. е. использование при оптимизации (4.22) вместо (4.19) позволяет поставленную вариационную задачу с ограничениями трансформировать в классическую, когда на амплитуду функции w(r) не накладывается никаких ограничений. Для отыскания u(t) воспользуемся методом множителей Лагранжа. Функция Лагранжа, подлежащая оптимизации, имеет вид
Ф = Pu(t)f (cot,p)sinnt + /z(r)(l- 2w(Z) + sinv(Z)) + vu(t),
где /z(r)uv= const - неизвестные множители Лагранжа.
Из необходимых условий экстремума 5Ф/ди = 0, ЗФ/дг = 0 следует /z(r) = 0,5P/'(<yr,p)sinQr + 0,5 v; (4.23)
А (г) cosv (г) = 0 . (4.24)
Подставляя (4.23) в (4.24) и учитывая, что cos y(r) = -1)2 ,
получаем необходимое условие экстремума в следующем виде:
[0,<р) sin Q t + 0,5 у] -^/1 — (2ы(г) — I)2 = 0 .
(4-25)
На конечном множестве точек, в которых сомножитель, стоящий в квадратных скобках в (4.25), равен нулю, w(z) может принимать любые конечные значения, так как они не оказывают влияния на величину оптимизируемого функционала (4.20). За исключением этого конечного множества, (4.25) выполняется только тогда, когда и(г) принимает значения 0 либо 1. Для разделения областей, где и(?) = 0 или и(/) = 1, воспользуемся одним из необходимых условий максимума функционала Э2Ф /А
—— (0, которое в нашем случае можно представить как dv
sin y(z) = [-0,5P/(®t,^)sinfiz - 0,5 у] (2u(t) -1) < 0. (4.26)
При u(t) = 1 (4.26) выполняется только тогда, когда выражение в квадратных скобках принимает значения, меньшие нуля. Отсюда оптимальная помеха описывается следующим выражением:
1 при [/(<ar,<p)]sinQf) ц, 0 в остальных случаях,
(4.27)
где V! - некоторая постоянная (порог), в соответствии с (4.26), (4.27) V] =-v/P . Величина порога vt зависит от располагаемого энергетического ресурса помехи R (4.21) и может быть определена численным методом с помощью следующего итерационного алгоритма:
1. На первом шаге задается некоторое начальное значение
И = и (О;
2. С помощью (4.27) находится wopt(z) при = Vj(l);
3. С помощью (4.21) определяется величина израсходованного ресурса Л(1);
4. Порог Vj (2) для следующего шага итераций выбирается в соответствии с выражениями
У](1) + Ду, R(l)> R, уДР-Ду, /?(!)</?,
где Ду - некоторое достаточно малое приращение ц .
Далее повторяются вычисления по пункту 1 и т. д.
Рассмотрим в качестве примера систему с секторным растром, обеспечивающим частотно-фазовую модуляцию сигнала точечного ис
«opt(0 =
точника. Модулирующую функцию такого растра можно представить в виде: f (cot,ср) = 0,5(1 + sign(sin(«r + ср))).
Тогда (4.27) конкретизируется следующим образом:
1 при (l + sign(sin(<ar + ^)))sinfir)i/j,
(4.28) О в остальных случаях.
Анализ (4.28) показывает, что оптимальная помеха представляет собой пачку коротких импульсов, излучаемых на интервале времени, не превышающем полупериод развертки изображения по секторному растру. При этом помеховые импульсы должны излучаться в моменты, когда изображение помехового излучателя попадает на прозрачные участки растра. Выполнение последнего условия может быть обеспечено только тогда, когда известна начальная фаза ср сигнала на выходе секторного растра. Получение такой информации на стороне постановщика помех средствами оптической локации является трудно выполнимой задачей. Поэтому рассмотрим задачу синтеза оптимальной помехи для случая, когда информация о начальной фазе ср отсутствует. Найдем помеху, доставляющую максимум среднему значению d помехового сигнала на выходе фазового детектора (усреднение по случайной начальной фазе ср).
При неизвестной начальной фазе подлежащий оптимизации функционал приобретает вид
Т
d = 0,5Р J jw(f)(l + sign(sin®f + q>))sm(£M)w(cp)dt dtp . (4.29)
о о
Полагая закон распределения начальной фазы w(p) равномерным в интервале О...2тг, нетрудно получить
т
d = 0,5P 1и(Г) sin ntdt,
' (4.30)
1, sin£lr> Vj,
0, в остальных случаях,
т. е. в этом случае вместо пачки коротких импульсов должен излучаться один импульс с длительностью, равной длительности пачки. Модуляция этого импульса с частотой со , что необходимо для обеспечения его прохождения через частотно-избирательные элементы углового дискриминатора, будет осуществляться элементами секторного растра. При одинаковом эффекте подавления потребная средняя энергия такой по
«opt(0 =
мехи будет вдвое больше энергии помехи, определяемой (4.28), что является естественной платой за отсутствие необходимой информации.
Представляет практический интерес определение оптимальной помехи при отсутствии ограничения на ее ресурс вида (4.21) и наличии только ограничения на амплитуду помехи вида (4.19). Формально в этом случае при записи функции Лагранжа мы должны исключить из нее слагаемое вида vu(t). Выполнив после этого преобразования, аналогичные приведенным выше, получим окончательно
[1, sin fir )0,
«opt(0= n (4-31)
н [0, в остальных случаях.
Если имеется ограничение только на ресурс помехи, а ограничение на амплитуду (4.19) заменяется естественным ограничением и(г)>0 , то оптимальная помеха, как несложно убедиться, будет иметь вид
iropt(r) = —(J(r-argmaxsinflr), (4.32)
Р t
где <5(...) - <5-функция. На практике помеха (4.32) может быть реализована с помощью периодической последовательности коротких импульсов максимальной амплитуды с периодом повторения 2я/£1 и с энергией R. При этом, однако, отсутствие информации о начальной фазе (р может привести к тому, что помеховый импульс будет попадать на непрозрачную часть растра, вследствие чего помеха в ряде реализаций утратит эффективность. Для исключения этого вместо периодической последовательности одиночных импульсов можно создавать такую же последовательность парных импульсов, смещенных один относительно другого на тг/со.
Из приведенных выше выражений видно, что для реализации оптимальной помехи необходимо иметь информацию о частоте fl развертки изображения в подавляемом ИК координаторе. При этом информация о фазе развертки в общем случае несущественна для реализации оптимальных помех. Такая информация может понадобиться только тогда, когда требуется за счет создания помехи обеспечить ошибку измерения координаты точечного источника в некотором наперед заданном направлении, определяемом углом Т в картинной плоскости (Т отсчитывается от нулевой фазы развертки изображения по растру). При этом во всех полученных выше выражениях для оптимальной помехи необходимо аргумент fir заменить на (fir + Т).
В соответствии с видом оптимизируемого функционала (4.20) оптимальная помеха направлена, по существу, на искажение дискриминационной характеристики пеленгатора и на нарушение тем самым нормального режима функционирования включающих его замкнутых или
разомкнутых систем измерения координат. Оценим характер изменения дискриминационной характеристики при создании синтезированной помехи с помощью имитационной модели частотно-фазового пеленгатора, схема которой приведена на рис. 4.3. Особенность этой модели состоит в воспроизведении преобразования входного сигнала трехпоясным секторным растром с последующим учетом особенностей работы блоков нормировки, фильтрации сигнала и фазового детектирования при выделении угловой информации. Таким образом, в модели учитывается ряд дополнительных факторов, не фигурировавших в исходной постановке задачи синтеза помехи, что повышает достоверность результатов.
полосовой фильтр на частоту модуляции ш
sin Qt
Рис. 4.3
На рис. 4.4 приведены полученная на модели исходная дискриминационная характеристика пеленгатора при работе его по постоянному точечному излучателю (кривая 7) и дискриминационная характеристика при работе по излучателю синтезированной помехи (кривая 2). По осям отложены нормированные значения углового отклонения а излучателя помехи от оси пеленгатора и сигнала d на выходе фазового детектора. Сравнение этих кривых показывает, что синтезированная помеха трансформирует дискриминационную характеристику из симметричной биполярной в униполярную, что практически полностью исключает
возможность измерения координат точечного источника излучения.
Таким образом, в вариационной постановке с учетом ограничений на энергетические характеристики источника помех решена задача определения оптимальной помехи пеленгаторам точечных излучателей, использующим амплитудно-фазовые или частотно-фазовые растровые анализаторы. Синтезированная помеха пеленгатору с частотнофазовым анализатором приводит к трансформации дискриминационной характеристики из биполярной в униполярную и к нарушению, вследствие этого, его работоспособности при измерении координат точечных целей.
Литература
1. Данилкина А.Ф., ЮхноП.М. - Автоматика и телемеханика, 1987,№8.
2. Юхно П.М. - Радиотехника, 1994, № 7.
3. Воробьев Л.М. Воробьева Д.Т. Нелинейные преобразования в прикладных вариационных задачах. - М.: Энергия, 1972.
43. Форма объектов и качество их автоматического обнаружения и различения*
Широкий круг вопросов, составляющих содержание теории и практики информационного конфликта в оптическом диапазоне электромагнит-
Авторы: П. М. Юхно, С. М. Огреб, Я. Л. Марек
кого излучения, связан с необходимостью определения оптимальных алгоритмов обработки изображений и оценки их устойчивости в условиях помех. При этом особый интерес представляет задача разделения вкладов энергетических и структурных составляющих (формы) в показатели качества обнаружения и различения наблюдаемых объектов. Известно, что влияние формы временных сигналов на показатели качества принимаемых решений имеет место при наблюдении в условиях коррелированных помех [1]. В [2] на основе использования свойств собственных векторов корреляционной матрицы помех решена задача синтеза формы временного сигнала, оптимизирующего характеристики обнаружения. В задачах обработки изображений дополнительными факторами, определяющими зависимость характеристик обнаружения (различения) объектов от их формы помимо аддитивного коррелированного шума [3], являются также пространствен но-коррелированный фон, образующий аппликативную смесь с изображением объекта, угловая ориентация объекта при его наблюдении в условиях коррелированного фона или шума и деформация изображений, порождаемая конечной разрешающей способностью входных элементов оптико-электронных систем. Влияние последнего фактора на характеристики обнаружения пространственнопротяженных объектов по их изображениям исследовалось в [4].
Изложим основные положения подхода к описанию и оценке влияния формы изображений объектов на характеристики их обнаружения и различения в присутствии пространственно-коррелированных аддитивных шумов наблюдения. Ставится задача установить связь между детерминированными структурными составляющими формы и статистическими показателями качества алгоритмов обнаружения и различения, что должно позволить отдельно оценивать влияние энергетических и структурных свойств изображений на характеристики обнаружения и различения. Полагая, что марковское свойство шумов может существенно облегчить достижение поставленной задачи, ограничимся рассмотрением экспоненциально-коррелированных шумов наблюдения.
Для того чтобы выявить парциальный вклад только структурной составляющей изображения объекта в определяемые показатели, остановимся на рассмотрении случая обнаружения равнояркого объекта на равномерном фоне.
Использование известной процедуры [3] синтеза оптимального (в смысле критерия максимального правдоподобия) алгоритма обнаружения детерминированного дискретного изображения равнояркого объекта на равномерном фоне в аддитивной смеси с небелым гауссовским шумом с нулевым средним позволяет оценить качество принимаемых решений (вероятности правильного обнаружения Рпо и ложной тревоги Р„,т) с помощью так называемого параметра обнаружения
dl - X X X X SiJSl‘lK'jM ’
' J k 1 (4.33)
(/Л) = 1Х; (;,/) = где
„ po, V(/,j)e«o6
S"=|o, VGJ)^, «06U^ = n,^n^ = O;
So - энергетический (яркостной или какой-нибудь другой) контраст объекта по отношению к фону; П,<ао6,й>ф - области анализа, объекта и фона соответственно; Кук/ - массив коэффициентов межэлементной корреляции ад-дитивной шумовой компоненты изображения; -размеры изображения.
Очевидно, что на величину параметра d2 оказывают влияние как энергетические, так и структурные свойства сигнальной и шумовой компонент изображения. Однако при использовании представления (4.33) анализ влияния этих свойств может быть выполнен только численными методами, и поэтому результаты его будут носить частный характер.
Перейдем от двумерного способа задания изображений к одномерному путем прочтения исходного массива Sy последовательно по столбцам. При этом структура параметра обнаружения изменится несущественно, т. е.
</2=ХХ$;$’(к’)-1; = (4.34)
> j
где S,*(S*) - соответствующим образом сформированные одномерные массивы; К* - матрица коэффициентов корреляции, размерности (Nx xNy)2, структура которой обсуждается ниже.
Полагая
Kijkl = сг2ехр{-а|/-А;|-/?|/-/|}, (4.35)
где ст2 - дисперсия шумовой компоненты изображения, одинаковая для всех элементов; а,р - коэффициенты, характеризующие степень корреляции шумовой компоненты по строкам и столбцам соответственно, с учетом свойств прямого левого произведения матриц [3, с. 135-136], получаем
(К’)-‘ =
а2(1-р2)(1-р2)
мх м2 о ...
м2 л/3 м2 о ... о
о м2 м3 м2 о
м3 м2 о
о м2 м3 м2
о м2 мх
где Мх - Кс!р0ЛБ, М2 - АгКстолб> - (I+ Рх )^столб>
-р, О ....
(1 + р2) -ру ... о
-Ру (1 + Р^) •••
(4.36)
(4.37)
о
(1+р2)
-Ру
О
р
1
Рх = ехр{-а}, ру = ехр{-/?}.
Матрица КСт0ЛБ имеет размерность (A^x/Vy). Матрица (К*) 1
имеет блочно-трехдиагональную структуру, причем каждый из блоков -также трехдиагональная матрица.
Введем дополнительное легко выполнимое на практике ограничение - элементы изображения объекта не должны располагаться в крайних строках и столбцах зоны анализа. Характер «сцепления» элементов изображения объекта с элементами матриц (К*)-1 определяется выражением (4.34) и для конкретного варианта изображения объекта схематично показан на рис. 4.5, где а - вариант эталонного изображения объекта; б - схематичное представление векторов изображения объекта и структуры матрицы (К )-1).
Очевидно, что при выполнении введенного ограничения, независимо от формы изображения объекта и его местоположения в зоне анализа, в формировании значения параметра обнаружения участвуют только элементы матриц М2 и М3, не расположенные в крайних строках и столбцах. В свою очередь, поскольку М2 и М3 являются трехдиагональными (т. е. ненулевые элементы расположены только на главной и двух соседних с ней диагоналях), в параметр обнаружения могут входить только такие парные произведения элементов изображения объекта, индексы которых отличаются не более чем на единицу.
i 1 2 3 4 5
0 0 0 0 0
0 0 S32 0 0
0 S23 S33 S43 0
0 0 0 0 0
0 0 0 0 0
a)
I 0 10Ю1 0| 0101 01S2310|010|£з2|2зэ10|0|0|01S42|0|010| 0 |o ЮТоП
Рис. 4.5
Рассмотренные свойства параметра обнаружения позволяют ввести понятие «примитивов» -элементарных структурных единиц, с помощью которых можно
описать изображение объекта про- Рис. 4.6
извольной формы. Такими примитивами являются единичный элемент изображения и попарно связанные соседние элементы изображения, расположенные горизонтально, вертикально и диагонально (рис. 4.6).
Обозначим вклад каждого примитива в параметр обнаружения d0,d\,d2 и t/3 соответственно. Тогда
е/0 = (1 + р2)(1 + р2);
4 = А(1 + р2);б/2 = р/1 + р2); (4-38)
= РхРу
С учетом (4.38), выражение для параметра обнаружения примет вид d1 = aS02 [PQdQ + 2P3d3 - 2(Pldl + P/2)],
1 (4.39)
a2(l-p2)(l-p2)’
где Po - P3 — число примитивов соответствующего вида в изображении.
Таким образом, на «языке» введенных структурных единиц - примитивов - изображение объекта произвольной формы компактно описывается выражением вида (4.39). Причем данное описание устанавливает прямую связь между формой изображения объекта, определяемой числом соответствующих примитивов, и качеством его обнаружения при фиксированных энергетике изображения объекта и статистических свойствах шумовой компоненты.
Предлагаемый способ описания формы изображений и вычисления параметра обнаружения иллюстрирует табл. 4.1. Зависимости вероятности ложной тревоги Рл т от величины коэффициента р корреляции шу
мовой компоненты изображения (при р = ру- ру и Sq /ст2 = 1) для объектов различной формы (табл. 4.1) представлены на рис. 4.7. Вычисления производились по формуле:
Л.т = 1-Ф
2J
При этом, как известно, вероятности правильного обнаружения Рпо и необнаружения объектов Рн0 по критерию максималь
ного правдоподобия связаны с Рпт соотношениями Рп0=1-Рлл> Р =Р 1 Н.О 1 Л.Т‘
Таблица 4.1
№ Вид фигуры Ро Pi Р2 Рз d1
1 4 2 2 2 4oS0 (dQ + d3 — dx — d2)
2 4 3 0 0 4aS0 (dQ -~-dx) 4
3 4 2 1 2 4aS0 (dQ + di — di— — d2)
4 4 0 0 4 4aS^(d„ + 2d3)
Помимо задач, связанных с оценкой качества статистически-оптимальных алгоритмов обнаружения, соотношение (4.39) может быть использовано при решении различного вида оптимизационных задач.
Проиллюстрируем последнее элементарным примером. Как следует из (4.39), максимум параметра обнаружения, при варьировании только числа примитивов dt - d3 (т. е. при фиксированной энергетике изображения), достигается при условии
Pldi+P2d2=0, (4.40)
что эквивалентно ( при d} * 0 и d2 0) условию
Р|=Р2=0, (4.41)
т. е. отсутствию в изображении объекта парных горизонтальных и вертикальных связей между его элементами. Такими свойствами обладает изображение типа «шахматная доска». В области обработки временных сигналов аналогию этому результату можно найти в [2], где показано, что сигнал, оптимизирующий характеристики обнаружения, должен иметь максимальное число перемен знака. Минимальная вероятность обнаружения будет иметь место для фигур типа «квадрат» или «полоска», у которых диагональные связи между элементами либо отсутствуют, либо их влияние компенсируется влиянием горизонтальных и вертикальных связей.
Для сложных изображений предлагаемый способ описания формы объекта позволяет относительно легко рассчитывать вероятности правильных и ошибочных решений и оценивать влияние степени корреляции шумовой компоненты на эффективность обнаружения, в том числе
и в условиях деформации изображения. На рис. 4.8,а-г схематично представлены изображения боковой проекции объекта типа «автомобиль-фургон» (а) - Р0=34, Р,=27, Р2=25, Р3=44; б) - Ро=16, Р,=0, Р2=12, Рз=О; в) - Ро= 16, Р,=0, Р2=0, Р3=20; г) - Р0=16, Р,=3, Р2=4, Р3=8 ). На рис. 4.8,я дано неискаженное изображение объекта, а на рис. 4.8,б-г - с искажениями различных типов, которые могут быть реализованы, например, путем специальной окраски или с помощью затеняющих экранов. Деформация изображений на рис. 4.8,б,в выполнена в соответствии с правилами, вытекающими из предлагаемого представления параметра обнаружения (4.39). Деформация изображения, приведенного на рис. 4.8,г, выполнена произвольным образом, с сохранением общего числа неискаженных элементов таким же, как на рис. 4.8,б,в, т.е., для всех вариантов деформации остается неизменным общее число элементов объекта, контрастных по отношению к фону: Ро=16.
Рис. 4.8
На рис. 4.9,а-г представлены зависимости вероятности ложной тревоги Рл т при обнаружении объектов, представленных на рис. 4.8,«-г соответственно, от степени коррелированности шумовой компоненты по каждой координате (рх, р_,,). Зависимости даны в виде семейства линий равного уровня показателя Рлт. Все расчеты проведены для случая 52/<т2=0,2.
Отметим наиболее интересные, с нашей точки зрения, особенности, вытекающие из полученных зависимостей.
Сравнение графиков на рис. 4.9,а и в, показывает, что снижение общей «энергетики» изображения объекта (общего числа контрастных по отношению к фону элементов объекта) не обязательно ведет к ухудшению качества его обнаружения. Возможно даже улучшение качества (на рис. 4.9,а,в значения Р„т в диапазоне изменения рх, ру от 0,0 до 0,6).
в) г)
Рис. 4.9
Произвольная «камуфлирующая» окраска (рис. 4.8,г, 4.9,г) снижает общую «энергетику» объекта, однако качество обнаружения практически не ухудшается по сравнению с исходным изображением (рис. 4.8,а, 4.9,а) и наиболее «заметным» (рис. 4.8,в, 4.9,в).
Наличие информации о преобладающем направлении коррелиро-ванности шумов, например, в телевизионных системах с построчным сканированием, позволяет за счет той или иной «окраски» объекта (см. рис. 4.8,б-г) варьировать в широких пределах качество обнаружения.
Рассмотренный подход может без каких-либо затруднений использоваться и при оценке качества статистически-оптимального алгоритма различения изображений. При этом для вычисления параметра d2 в соответствии с выражением (4.39) число примитивов соответствующего вида необходимо определять не для каждого изображения, а для разностного, т. е. полученного путем вычитания одного из другого.
Таким образом, специфические свойства параметра обнаружения для случая аддитивной смеси изображения объекта с экспоненциальнокоррелированным гауссовским шумом позволяют описывать форму объекта с помощью примитивов —элементарных структурных единиц изображения. Качество обнаружения (различения) полностью определяется количеством примитивов соответствующих типов, и в этом смысле предложенное описание формы объекта обусловлено марковским характером пространственных шумов наблюдения и является исчерпывающим. Установленная связь между структурными свойствами формы объектов и качеством их обнаружения (различения) указывает пути целенаправленной модификации формы объектов в интересах оптимизации процессов их обнаружения и различения.
Литература
1. Ван Трис Г. Теория обнаружения, оценок и модуляции. Т.1. - М.: Сов. радио, 1972.
2. Нестерук В.Ф. Влияние формы сигнала на помехоустойчивость их приема на фоне коррелированных помех при ограничении пиковых значений. - Радиотехника и электроника, 1971, №6.
3. Прэтт У. Цифровая обработка изображений. Т.1,2. - М.: Мир, 1982.
4. Поветко В.Н., Понькин В.А. Оценка качества обнаружения пространственно протяженных объектов по их изображениям. - Радиотехника и электроника, 1993, №3.
4.4. Определение вероятности увода следящих измерителей
При воздействии на оптико-электронные или радиолокационные измерители имитирующей помехи с возрастающей отстройкой по измеряемой координате от полезного сигнала может иметь место увод измерителя, т.е. его перевод из режима слежения за полезным сигналом в режим слежения за имитирующей помехой. Эффект увода обусловлен тем, что все сле-
Автор: П.М. Юхно
дящие измерители имеют дискриминационную характеристику, отличную от нуля лишь в ограниченном диапазоне значений измеряемого параметра, т.е. являются существенно нелинейными системами со стробированием. Аналитическое исследование вероятностных характеристик процесса увода в известной автору литературе отсутствует.
Рассмотрим аналитическую методику оценки вероятности увода следящего измерителя имитирующей помехой.
В основу такой методики положим описание сигнала на выходе дискриминатора следящего измерителя с помощью метода статистических эквивалентов [1]. Тогда схема следящего измерителя при воздействии имитирующей помехи имеет вид, показанный на рис. 4.10, где х2 - значения отслеживаемых параметров (например, угла, задержки, частоты и т.п.) полезного сигнала и помехи соответственно; х - выходной сигнал измерителя; f, = х, - х, е2 = х2 - х - ошибки
слежения; £(г) - белый шум с единичной спектральной плотностью;
f2), D(ex, £2) - флуктуационная и дискриминационная характеристики измерителя; IV(р) - передаточная функция разомкнутой петли следящего измерителя. Как и в [1], под флуктуационной характеристикой понимается спектральная плотность в окрестности нулевой частоты сигнала на выходе дискриминатора при подаче на его вход полезного и помехового сигналов. В общем случае эта спектральная плотность является функцией ошибок слежения е{, е2. Под дискриминационной характеристикой понимается математическое ожидание сигнала на выходе дискриминатора в зависимости от г,, е2 .
На рис. 4.11 показан характер переходного процесса при уводе. Здесь /(/) = х2(г)-х1(г) -закон увода - монотонно возрастающая функция времени; А - ширина дискриминационной характеристики измерителя, определяющая его строби-
рующее свойство; tx,t2 моменты времени, в которые /(/,) = Д/2 и / (/2) = Д соответственно.
Поскольку при t > t2 либо полезный сигнал, либо помеха выйдут за пределы дискриминационной характеристики, вероятность увода Ри можно приближенно оценить с помощью выражения
= J (4.42)
где бу(х,Г2) - плотность распределения выходного сигнала измерителя в
момент t2 при воздействии полезного сигнала и имитирующей помехи. Эту плотность можно найти путем решения задачи Коши для соответствующего уравнения Фоккера-Планка-Колмогорова. Однако известные трудности получения нестационарного решения этого уравнения для нелинейных динамических систем высокого порядка требуют отыскания альтернативных приближенных способов определения гу(х,/2).
Как следует из [1, 2], дискриминационная характеристика во многих случаях хорошо аппроксимируется в пределах ±Д/2 линейной функцией, а флуктуационная характеристика при действии полезного сигнала и имитирующей помехи является функцией квадрата разности £•, -е2 = f(t), т.е. F(f1,£’2) = <y2(r). Тогда на интервале времени, на ко
тором |fi| < у и |f2|< следящий измеритель (см. рис. 4.10), можно рассматривать как линейную систему с нестационарным входным возмущением.
Нетрудно заметить (рис. 4.11), что при монотонном законе изменения х(г) на полуинтервале увода /j.../2 вероятность выхода ошибки
слежения |г,| за пределы Д/2 на интервале увода О.../2 (т.е. вероятность увода) у исходной системы равна вероятности того, что х(г) со
ответствующей линейной системе в момент времени t2 будет более чем на Д/2 отличаться от отслеживаемого параметра полезного сигнала х, (/). При этом на предшествующем полуинтервале увода 0.../, закон изменения х(/) может быть и немонотонным. Таким образом, для приближенной оценки вероятности увода следящего измерителя с помощью (4.42) можно воспользоваться плотностью распределения <у(х,/2),
соответствующей эквивалентной линейной системе с нестационарным входным возмущением. Точность такого подхода можно оценить по степени близости закона изменения х(г) к монотонному на полуинтер
вале увода для соответствующей линейной системы путем анализа числа пересечений нулевого уровня производной х(г).
Покажем возможности и особенности предлагаемого подхода на примере оценки вероятности увода системы автоподстройки частоты (АПЧ), дискриминационная и флуктуационная характеристики которой для случая воздействия уводящей помехи известны [2]. Пусть на вход системы АПЧ поступает флуктуирующий полезный сигнал с амплитудой, распределенной по закону Рэлея, и монохроматический сигнал имитирующей помехи, частота которого возрастает по линейному закону относительно центральной частоты спектра полезного сигнала. Введенные выше обозначения применительно к рассматриваемому примеру имеют следующий смысл: х - частота смесителя системы АПЧ; £ £ 2 - отстройка центральной частоты полезного и помехового сигналов от центральной частоты узкополосного фильтра системы АПЧ; £2 =£l+mt где т - скорость увода. Тогда в соответствии с [2] дискри
минационная характеристика системы АПЧ в диапазоне |г,|
может быть представлена в виде: f2) = Ае{ + Ве2,
(4.43)
где А = рехр(р)Е/(-р) + 1; B = l- A; - интегральная показательная функция; р — отношение помеха-сигнал по мощности на выходе узкополосного фильтра. Если огибающая корреляционной функции полезного сигнала R (г) имеет гауссовскую форму (я(т) = ехр (-/32 т2 /4)), то с помощью общих соотношений [2] флуктуационная характеристика системы АПЧ приводится к виду
Е(^, е2) = с(е1-е2)2 =c(mt)2,
где
у2л- 5^ 2 , г~
' Н=1
(4.44)
П 1 ( £+1 \
Система АПЧ с одним интегратором в замкнутой петле слежения (1К(р) = Л/р), эквивалентная схема которой соответствует приведенной на рис. 4.11, на линейном участке дискриминационной характеристики описывается нестационарным линейным стохастическим дифференциальным уравнением:
х = kmtB + kmtJc£(t)-kx. (4.45)
Опуская обычные промежуточные выкладки при определении статистических харектеристик процесса x(t), соответствующего (4.45), приведем окончательное выражение для искомой плотности распределения бу(х,г2) при t2=k/m:
) = )ехр((* “ 7/2<j2
°2 ^2) = тИ1 ” exP(“2/tA/w)) + (АА - w) V’ (4-46)
ц/с л
x(z2) = Д +—(ехр(-£Д/т)-1)
Теперь вероятность увода Ри легко рассчитывается с помощью выражений (4.42), (4.46), (4.44), (4.43). На рис. 4.12 приведены результаты расчетов вероятности увода Ра в зависимости от отношения помеха-сигнал для различных скоростей увода т . Расчеты выполнены при к=20 1/с и /7=38 1/с, что соответствует ширине спектра флуктуаций полезного сигнала 5 Гц.
Из рис. 4.12 следует, что при небольших скоростях увода с ростом отношения помеха-сигнал вероятность увода приближается к единице. Однако при возрастании скорости увода даже для больших отношений помеха-сигнал вероятность увода, близкая к единице, не достигается.
Оценим погрешность опреде-ления вероятности увода с помощью предложенной методики. Как было показано выше, для этого необходимо оценить степень близости закона изменения к монотонному на интервале tv..t2 Монотонность x(f) будем оценивать по среднему
Рис. 4.12
числу пересечений нулевого уровня производной х(г). Для упрощения дальнейшего анализа заменяем нестационарное случайное входное возмущение стационарным со спектральной плотностью, соответствующей максимальному значению спектральной плотности исходного нестационарного возмущения (Fmax(f ,,£• 2) = сД2), статистические характеристики х(г) будем определять применительно к установившемуся режиму. Заметим, что такая замена обеспечивает получение оценки сверху для среднего числа пересечений нулевого уровня производной х(г). Так как нас интересует поведение х(г) на втором полуинтервале увода, то, пренебрегая переходными процессами, нетрудно установить, что . Теперь для определения искомого среднего числа пересечений нулевого уровня Мможно воспользоваться соотношением [3]
М = ехр (-т2В2/2<т 2), 4л’тст1 ' '
где а 1,(Т 2 - среднеквадратические отклонения разности х(г)-х(г) и в установившемся режиме. Опуская промежуточные выкладки, приведем окончательные выражения применительно к рассматриваемому случаю:
о-i ^2Дл/л-2лЛ(1-Ф(£/Д))ехр(л2/Д2)
/ i2*2
сг, = I —-—(Дл/л -лЛ(1-Ф(А/6))ехр(л2 / Д2)} ,
где Ф (...) - интеграл вероятности.
При т = 10, р = 2 и прочих исходных данных, аналогичных приведенным выше, получим, что М & 0,05. Следовательно, из 20 реализаций процесса увода по крайней мере в 19 условие монотонности выполняется, а значит погрешность определения вероятности увода нелинейного следящего измерителя с помощью предложенной методики не превысит 5%.
I Таким образом, предложенная методика обеспечивает определение вероятности увода следящих измерителей имитирующей помехой с погрешностью порядка единиц процентов. Методика не налагает ограничений на порядок передаточной функции разомкнутой петли
следящего измерителя . Показано, что при малых скоростях увода с ростом отношения помеха-сигнал вероятность увода устремляется к единице. Однако с возрастанием скорости увода вероятность увода, близкая к единице, не достигается даже для больших отношений помеха-сигнал.
Литература
1. Бакут П.А. и др. Вопросы статистической теории радиолокации. Т. 2. - М.: Сов. радио, 1964.
2. Юхно П.М. - Радиотехника и электроника, 1971, т. XV, №1,5.
3. Левин Б.Р. Теоретические основы статистической радиотехники. - М.: Сов. радио, 1969.
4.5. Предельные возможности траекторно-спектральной фильтрации имитирующей помехи*
Для повышения помехозащищенности оптических локаторов от имитирующих помех типа естественной или преднамеренно поставленной ложной цели применяются различные схемы спектральной селекции [1]. При использовании априорной информации о траекториях движения истинной и ложной целей помехозащищенность оптических локаторов может быть дополнительно увеличена с помощью методов траекторной фильтрации. Разнообразие причин возникновения и параметров имитирующих помех, а также способов построения и параметров схем спектральной селекции и траекторной фильтрации приводит к большому разнообразию эффектов, в которых проявляется действие таких помех. В этих условиях значительный интерес представляет исследование предельных возможностей траекторно-спектральной фильтрации координат цели в оптических локаторах в присутствии имитирующей помехи. Выполним такие исследования на основе статистического синтеза алгоритма траекторно-спектральной фильтрации истинной цели в присутствии имитирующей помехи.
Ориентируясь на оценку предельных возможностей траекторноспектральной фильтрации, рассмотрим случай полной априорной информированности о характеристиках лоцируемой цели и помехи.
Синтез алгоритма фильтрации выполним применительно к пассивному оптическому локатору с четырехквадрантным двухспектральным измерителем координат. При этом предполагается, что цель и источник помех находятся в одном разрешаемом пространственном объеме. Для
Автор: П. М. Юхно
упрощения вывода и физической интерпретации конечных соотношений измерение координат цели рассматривается в одной плоскости.
Для сепарабельной модели сигналов цели и имитирующей помехи интенсивность сигнала, приведенная к плоскости фотоприемника,
n(x,H)=4s(x,A).?(i/)+^p(x,//)p(i/), (4.47)
где x,v - пространственный и спектральный аргументы соответственно; л(и),р(и) - спектральные характеристики излучения цели и помехи; Я, // - пространственные координаты цели и источника помех;
р(х,р) - функции, описывающие форму сигналов цели и помехи.
Будем полагать функции $(х,Я), р(х,р) нормированными по максимуму к единице.
Взаимное расположение сигналов цели, источника помех и двух площадок фотоприемника для любого из двух спектральных диапазонов показано на рис. 4.13, где Ь- линейный размер площадки фотоприемника, as, ар - полуширина сигналов цели и помехи $(х,Я), р(х,р) при использовании аппроксимации их формы прямоугольными импульсами. Отметим, что такая аппроксимация вполне допустима, когда для получения достаточной величины линейного участка пеленгационной характеристики фотоприемники смещают от фокальной плоскости оптической системы, формирующей изображение. Сигналы на выходе площадок работающего на линейном участке световой характеристики фотоприемника в первом спектральном диапазоне можно представить так:
О b оз
Zj = |и(х,и)Ф1 (v)rfv, z2 = pfr|к(х,и)Ф1(и)^и. (4.48)
-ft О 0 0
Сигналы на выходе площадок фотоприемника во втором спектральном диапазоне запишутся аналогично:
Рис. 4.13
z, = ^dx |и(х,у)Ф2(у)й?и, z4 = ^dx |и(х,у)Ф2(у)й?и, (4.49)
-b 0 0 0
где Ф[(у), Ф2(и) ~ спектральные характеристики фотоприемников первого и второго спектральных диапазонов.
Подставляя (4.47) в (4.48), (4.49) и учитывая наличие аддитивного временного шума измерений и, (г), сигналы, наблюдаемые на выходе каждой площадки фотоприемника, для случая точечной цели и источника помех (когда as = ар = а ) можно записать в виде:
Vi=zi(2, ^) + и1(г) = (Я + а)Р,1 + (^ + а)Рр1+и1(г),
v2=z2(A, /г) + и2(0 = (а-Я)Ря+(а-//)Рр1 + и2(0,
v3 = z3 (Я, fi) + «з (f) = (Я + a)Pj2 + (/z + а)Рр2 + и3 (г),
и4 = z4 (Я, //) + и4 (г) = (а - Я)Рд2 + (а - fi)Pp2 + и4 (г),
где Р,(=ЛД; Рр =Л^ ; S, = р(и)Ф, (и)б/и; Pt = ^(^ФДи)^; z?(r) -о о
гауссовские независимые процессы белого шума с двухсторонними спектральными плотностями N.
Пусть случайная траектория движения цели определяется стохастическим дифференциальным уравнением
A = ~+fa), (4.51)
где S, (г) - формирующий белый шум с двухсторонней спектральной плотностью 1VO. Если источник имитирующей помехи смещен относительно цели на некоторую постоянную, но заранее неизвестную величину f (т.е. fi(t) = Я(Г) +f), то fi(t) удовлетворяет дифференциальному уравнению
р = + (О’ (4-52)
в котором S, (г) - та же реализация белого шума, что и в (4.51).
Теперь исходная задача статистического синтеза алгоритма траекторно-спектральной фильтрации может быть сформулирована как задача отыскания алгоритма оптимальной оценки параметров Я, //, удовлетворяющих уравнениям (4.51), (4.52), при наличии измерений ,..., и4, задаваемых (4.50), т.е. как задача оптимальной линейной фильтрации [2].
Ее решение требует определения производной по времени логарифма функционала правдоподобия измерений и4, который в нашем случае имеет вид:
v)}2-
Первые и вторые производные F(t,A, /л) представляются следующим образом:
8F(t,A, р)
8А ~
8F(t,A,F}^ дц
‘'з
(4.53)
82F(t,A,p)_ 2
8A2 ~ N
82F(t,A, ц} _ 2
8p2 ~ N
82F(t,A, _ 2
8 A dp ~ N
A,
В,
С.
Теперь согласно [2] и с учетом (4.53) алгоритм оптимальной траекторно-спектральной фильтрации определяется системой дифференциальных уравнений относительно искомых оценок параметров А, р :
= • (у К - и) + :у (т - Из)-ЯЛ-/хА-
( р 3 (4.54)
(v2 - И) + -у (Ъ - ‘'з) - ЛС - ,
Д = -{yh - и) + (^4 - *>)- ЛА - /)cj -
При этом апостериорные центральные моменты 2-го порядка измеряемых параметров глл, гЛр, грр удовлетворяют системе уравнений
Ги = ^1 - ^яя + Аг2и + 2Сглиглл + ВгЛр,
% = Мт~^(глл + гЛр^ +АгллгЛр+с\гЛр+гллгЛр^ + ВгЛргрр, (4.55)
г»» = No\~ + 2СгЛргрр +
где N0i = N0/Tz, d = 2/T.
Слагаемые правых частей (4.54), содержащие фигурные скобки, определяют алгоритм работы дискриминатора положения со спектральной селекцией. Физический смысл процедуры обработки сигналов И! ,..., и4, задаваемый этими слагаемыми в (4.54), наиболее просто уяснить в случае измерения координат неманеврирующих целей и источника помех, когда вместо (4.51), (4.52) имеют место уравнения 2=0, fi = Q. Тогда при г->оо дифференциальные уравнения (4.54) преобразуются в два алгебраических уравнения относительно Л, р :
^(^2 - И) + "у (к» - ) - ЛЛ -//С = О,
“(и2-и) + ~г(и4 - из)-= О, совместное решение которых приводит к выражению, определяющему алгоритм обработки сигналов и4 в дискриминаторе:
H(^-h)-^4-^)]/[2(Ps2<7-Ps1)] (4.56)
где q = PpJPp2.
Анализ (4.56) показывает, что оптимальный дискриминатор положения со спектральной селекцией реализует принцип компенсации ошибки, обусловленной наличием помехи, путем использования второго спектрального диапазона. Этот вывод становится особенно наглядным, когда полоса пропускания приемника второго спектрального диапазона выбрана так, что на его выходе отсутствует сигнал цели (Pv2 = 0) и действует только помеховый сигнал.
Оценку ’предельных возможностей фильтрации траектории маневрирующей в соответствии с (4.51) цели выполним применительно к установившемуся режиму фильтрации, т.е. при г -> оо . В этом случае, при учете того, что уравнения (4.54) определяют несмещенные оценки параметров 2, //, а также при учете постоянного смещения f = const ис
точника помех относительно цели, получим равенства rw(oo) = r^(oo) = = г (оо) = г, и каждое из уравнений системы (4.55) приведем к виду
r = Nol -dr + gr2, (4.57)
где g = А + В + 2С.
Обычно d2 <к (-4Aog/T2). С учетом этого при г->оо из (4.57) следует квадратное уравнение А01 - dr + gr2 = 0 , имеющее приближенное решение
r«(-A0/T2g)1/2. (4.58)
Приведем (4.58) к более удобной для интерпретации форме. Если f3 = \/2Т - эффективная полоса фильтра (4.51), формирующего траекторию движения цели, а <т2 - дисперсия этой траектории в установившемся режиме, то No = ст2! f3. Аналогично, если /ш - эффективная шумовая полоса фотоприемника, ст2 - дисперсия шума на его выходе, то N = ст2 //ш . С учетом этого (4.58) преобразуется к виду
г«^(2А0А)1/2, (4.59)
где W = ((Psl +Рр1)2 +(Pj2 +Рр2)2)1/2 •
Переходя к относительным единицам, обозначим Е = г'2/2а -среднеквадратическое отклонение ошибки измерения координат цели, отнесенное к ее линейному размеру, Зл = <тл/2а - относительное среднеквадратическое отклонение случайной траектории цели, к-<7ш/Р -отношение шум-сигнал на выходе фотоприемника (здесь P = 2Wa = ((2aPsl + 2аРр])2 + (2aPs2 + 2аРр2)2)1'2).
Теперь (4.59) можно окончательно записать в виде:
£2=3Ак(2/3//ш)т. (4.60)
Из (4.60), в частности, следует, что если, например, <5, =10, А = 10-1, 2/э//ш = 2-104 , то е «1,210-1.
Таким образом, рассмотренный алгоритм траекторно-спектральной фильтрации обеспечивает измерение координаты цели в присутствии имитирующей помехи с минимальными ошибками, существенно меньшими линейного размера цели. При этом точность
измерения обратно пропорциональна суммарной мощности сигналов цели и помехи на выходе двух спектральных каналов фотоприемника и не зависит от спектрального состава сигналов цели и помехи. Последнее связано с принятым при анализе условием о фиксированном, но заранее неизвестном линейном смещении источника помех относительно цели. Высокие точности измерения координат цели в присутствии помехи обусловлены допущением о наличии полной априорной информации об амплитуде сигналов цели и помехи P,t, Ps2, Ppi, Рр2 на выходе каждого из спектральных каналов фотоприемника. На практике такую информацию можно получить, если имитирующая помеха не присутствует постоянно, а появляется, начиная с некоторого момента времени. При этом Psl, Psl, могут быть измерены до момента появления помехи, а Рр], Р г, могут быть восстановлены по скачку сигналов на выходе спектральных каналов фотоприемника в момент включения помехи.
Литература
1. Якушенков Ю.Г, Луканцев В.Н., Колосов М.П. Методы борьбы с помехами в оптико-электронных приборах. - М.: Радио и связь, 1981.
2. Тихонов В.И. Оптимальный прием сигналов. - М.: Радио и связь, 1983.
4.6. Контроль эффективности помех по траекторным признакам*
Типовая ситуация создания помех в оптическом диапазоне волн системам наведения управляемого оружия обычно характеризуется неопределенностью информации о принципах построения и характеристиках подавляемых оптико-электронных систем (ОЭС). Одним из наиболее перспективных способов парирования такой неопределенности является использование адаптивных способов подавления, базирующихся на прямой или косвенной идентификации параметров подавляемых ОЭС [1]. При этом в основе косвенной идентификации лежит задача контроля эффективности помех. Она заключается в оценке эффекта действия помехи, при отсутствии которого принимается решение на изменение параметров или смену вида помехи так, чтобы максимизировать в последующем, например, вероятность непопадания управляемой ракеты в цель. При этом хотя неизвестные характеристики объекта впрямую и не восстанавливаются, но обеспечивается выбор параметров или вида помехи, наилучшим образом согласованных с характеристиками ОЭС по эффекту подавления.
Авторы: А. К. Калмыков, П. М. Юхно
Проведем исследование возможностей контроля эффективности помех по траекторным признакам на основе использования математического аппарата фильтров Калмана-Бьюси.
Рассматривается случай воздействия на систему самонаведения преднамеренной помехи в виде ложной цели, смещенной от истинной на фиксированное расстояние. Задача контроля эффективности в этом случае заключается в определении факта наведения ракеты на истинную или перенацеливания на ложную цель по результатам измерения ее текущих пространственных координат с защищаемого объекта. Решение о факте наведения на истинную цель (или перенацеливания) может быть принято путем оценки текущих фазовых координат контура самонаведения с использованием аппарата фильтров Калмана-Бьюси и восстановления на этой основе положения точки прицеливания в картинной плоскости, в которую наводится ракета.
Для упрощения структуры решающего устройства, определяющего факт перенацеливания, его формальный синтез выполним для случая линеаризированного контура самонаведения, который может быть описан следующей системой нестационарных линейных дифференциальных уравнений:
А =
1 2е, 1 1 1 г
7] T2D(t) T2D(t) ^6i)
kb 1 2e2
*3=*4, X,= — X2--IX3--^X„
72 72 12
x5=x6, x6=x3, x7 = 0.
Здесь T2 ~ эквивалентные постоянные времени угломерного координатора и ракеты с автопилотом соответственно; - коэффициенты демпфирования этих же звеньев; к - навигационная постоянная контура самонаведения; £ - формирующий белый шум со спектральной плотностью их; Do - начальная дальность самонаведения; £>(г) = £>0 - bt; Ь -скорость сближения ракеты с целью.
Фазовые координаты системы (4.61) имеют следующий физический смысл: Xi, х2 - угол и угловая скорость поворота оптической оси головки самонаведения, х3 - текущее значение поперечного ускорения ракеты, х5 - текущий промах ракеты (текущий отлет ракеты от первоначального положения линии визирования), х7 - поперечное смещение ложной цели от истинной.
Система (4.61) в матричной форме имеет вид
х = A(/)x + F(/)^. (4.62)
матричное уравнение (4.62) образуют матрицы и векторы согласованных размерностей с нулевыми элементами на местах в соответствии с представлением (4.61).
Задача контроля эффективности помех может быть поставлена следующим образом. Пусть доступен наблюдению в шумах угол визирования ракеты со стороны защищаемого объекта
z5=— х5+£, (4.63)
5 D(t) 5 2
где - белый шум наблюдений со спектральной плотностью п = const. В матричной форме (4.63) представляется как
z = S(t)x + Ф^2, (4.64)
где z , х , ,8,Ф - соответствующие векторы и матрицы согласованной размерности.
Требуется синтезировать решающее устройство, обеспечивающее оценку по текущим наблюдениям z величины поперечного смещения от цели точки прицеливания х7, в которую наводится атакующая ракета. В соответствии, например, с [2] оптимальная по критерию минимума СКО оценка достигается решением следующей нелинейной системы дифференциальных уравнений 56-го порядка:
х0 = Ах0 + (SE)TN-1(z-Sx0); (4.65)
Ё = АЕ +ЕАТ+Q-(SE)TN-1(SE), (4.66)
где Q = FFT,N = «D«I>T, а нижним нулевым индексом обозначен вектор оптимальных оценок фазовых координат системы (4.61). При этом система (4.66) может быть решена автономно.
В качестве правила принятия решения о факте наведения ракеты на истинную или ложную цель будем использовать следующее:
Ы (4.67)
«2
где dob - линейный размер цели; Rh R2 - решение о том, что ракета наводится на истинную или ложную цель соответственно.
Оценку эффективности решающего устройства по вероятности P(Ri) правильного принятия решения /?1 выполним с использованием метода имитационного моделирования. При этом для набора статистики будем использовать более детальную модель контура самонаведения, учитывающую такие существенные нелинейности, как нелинейность пеленга
ционной характеристики, ограничение по перегрузке, а также нелинейную кинематику сближения:
1 A ,
Х1 = Х2> X2=-~X2+Y^X1’X6’-’X12)’
1 1
—Х9-----X, Хл=Хг
Т3 Т3 ’
X5=~^X4-^X5+^f2(X2^l Xfl=~X4- (4.68)
72 7 2 72 *г
= Krsin(x6), х8 = Vr cos(x6), А> = Xl 0 = Al = Х12 = О-
Здесь — нелинейная пеленгационная характеристика, сформированная по двухточечной (истиной и ложной) цели; /2(---) - нелинейность, описывающая ограничение по перегрузке; Иг - скорость ракеты.
Нелинейностии/2(-..) имеют следующий вид:
1 + q 4 + <7, 4 + 7* )
= arctgf ——= arctgf ——1, (4.69)
у-^Ю- Х8 J \Х12~Х8/
/з. |/з|^тах, т ( т \
Л(...)=- /з>^тах> /з=-^г — хг + 1 —- X, Г, 1 Т, ]
,-^п.ах. -/з>^тах, \ J \ 3 /
где q - отношение помеха-сигнал; ^Гтах - максимальное поперечное ускорение ракеты; 7з, Д - постоянные времени корректирующего фильтра; х9, хю - координаты истиной цели; хп, Х[2 - координаты ложной цели.
Набор статистики в модельном эксперименте с целью оценки показателей качества контроля за эффективностью выполнялся по следующей схеме. Определялось текущее значение угла визирования ракеты с защищаемого объекта по выходам модели контура самонаведения, описываемой (4.68), с помощью выражения
z(f) = arctgf^Z^L^(f). (4.70)
Наблюдаемое в каждой реализации значение z(r) подается на вход решающего устройства, описываемого (4.65)-(4.67). Набор статистики для оценки показателей качества контроля за эффективностью помех выполняется по выходу этого решающего устройства после многократной прогонки реализаций процесса самонаведения ракеты.
Расчеты проводились при дальности пуска О0 = 5000 м, скорости ракеты Vr =500м/с и спектральной плотности формирующего стационарного белого шума (шума наведения) пх = 0,16 м2 с по 50-и реализациям процессов наведения ракеты на ложную цель. При этом параметры контура самонаведения имели следующие значения: 1\ = 0,05с, Т2 = = 0,25 с, Г3= 0,06 с, 7;= 0,17 с, d = 0,85, е2 = 0,9, k = 3, k{ = 1,2, q = 20, 1Ктах = 100м2/с, D=Vr.
Результаты оценки по траекторным измерениям величины смещения от цели точки прицеливания, в которую наводится ракета, приведены на рис. 4.14, где показано изменение во времени, отсчитываемом от момента пуска ракеты, среднего (по множеству реализаций) значения %07 (кривые 1—3) и СКО Сда7 (кривая 4) ошибки оценки величины смещения точки прицеливания, полученных с выхода оптимального решающего устройства, т. е. по результатам решения системы (4.65), (4.66). При этом истинное смещение положения точки прицеливания х7(0) = 100 м, а спектральная плотность белого шума наблюдений п варьировалась (кривые 1-3 соответствуют п = 1,210'6 ; 1,2-10~5; 1,2 10^ рад2-с).
Результаты расчетов вероятности P(Ri) правильного решения R[ о том, что ракета наводится на цель, приведены на рис. 4.15-4.17. Кривые 1-4 на рис. 4.15 соответствуют размерам цели dob = 2; 5; 10; 20 м и получены для значений смещения ложной цели х7(0) = 40 м, и = 1,2 106 рад2 с. При расчете кривых 1-3 на рис. 4.16 варьировалось значение спектральной плотности шумов наблюдения п = 1,210“6; 1,2-10“5; 1,210^* рад2с при х7(0) = 100 м и dob = 20 м. Зависимости 1,2 на рис. 4.17 получены для значении х7(0) = 10; 40 м при dob= 10 м и п = 1,2-Ю-6 рад2 с.
Немонотонное поведение кривых на рис. 4.15-4.17 на начальном участке полета ракеты обусловлено, по-видимому, спецификой конкретных значений начальных условий при решении системы (4.66), общее правило по назначению которых, как известно, отсутствует.
Анализ графиков на рис. 4.15^4.17 показывает, что вероятность P(Rz) правильного решения о том, что ракета не наводится на цель (P(7?2) = 1-P(Ri)), большая 0,7, достигается при х7(0) = 40... 100 м (<4ь = = 10...20 м, п = 1,210-5... 1,2-10^ рад2 -с) начиная с 4. ..6 секунды после пуска ракеты, т. е. начиная с дальностей ракета-цель порядка 2,5...3 км и менее. При небольшом смешении точки прицеливания такая же вероятность достигается при сближении ракеты с целью до дальности порядка 1...2 км. При увеличении точности измерения угловых координат атакующей ракеты, т. е. при п = 1,2'10-6 рад2 с, значения этих вероятностей повышаются до P(Ri) = 0,9...0,99 (х7(0) = 40... 100 м) и P(Rz) = = 0,8...0,85 (х7(0) = Юм).
Таким образом, на основе использования математического аппарата фильтров Калмана-Бьюси обеспечивается решение задачи контроля эффективности помехи типа ложной цели по траекторным признакам. Принятие правильного с вероятностью 0,7...0,99 решения о факте перенацеливания ракеты на ложную цель может быть обеспечено через 4...6 с после пуска ракеты.
Литература
1. Козирацкий Ю.Л., Юхно П.М. - Радиотехника (Журнал в журнале), 2000, № 8.
2. Параев Ю Н. Введение в статистическую динамику процессов управления и фильтрации. -М.: Сов. радио, 1976.
4.7. Синтез и анализ алгоритмов адаптивного управления помехами
Созданию преднамеренных помех обычно сопутствует отсутствие необходимой априорной информации о характеристиках объекта противодействия. Одним из возможных способов преодоления недостаточной информированности может быть использование адаптивных способов противодействия на основе контроля эффективности помех и последующей косвенной идентификации недостающих характеристик [1].
Так, при создании помех системам самонаведения, принадлежащим к классу систем терминального управления, распространенными являются случаи отсутствия информации о типе атакующей головки самонаведения (ГСН) (например, телевизионной или тепловизионной, светоконтрастной или корреляционной), о варианте используемой в ней схемы помехозащиты (например, схемы временной селекции в лазерной головке самонаведения) и т. п. Адаптивный способ противодействия в этом случае может базироваться на реализации пробных помеховых воздействий, каждое из которых эффективно по крайней мере против одного из возможных вариантов технического облика ГСН. Контроль эффективности этих пробных воздействий позволяет получить информацию, необходимую для идентификации варианта технического облика подавляемой ГСН и последующего выбора на этой основе наиболее эффективной помехи на заключительном этапе процесса создания помех.
Возможности контроля эффективности помех по траекторным признакам на основе использования методов нестационарной линейной фильтрации (фильтров Калмана-Бьюси) рассмотрены в [2]. Однако при этом остаются открытыми вопросы построения собственно алгоритма адаптивного управления, позволяющего трансформировать результаты текущего контроля эффективности в алгоритм выбора помех на этапе пробных помеховых воздействий и на заключительном этапе подавления.
Предполагая использование результатов контроля эффективности помех по траекторным признакам, полученных в [2], при формальной постановке задачи будем ориентироваться на специфические особенности и допущения, адекватные случаю подавления систем самонаведения. Рассмотрим 7У-шаговый процесс подавления, в котором длительность каждого шага определяется временем затухания переходных процессов в системе самонаведения при воздействии каждой и-й помехи, принадлежащей допустимому (реализуемому в рассматриваемой ситуации) множеству помех размерности 1: и&(и\...и'. Здесь и ниже верхними индек-
Авторы: А.А. Донцов, П.М. Юхно
сами будем обозначать элементы соответствующих множеств, а нижними - номера шага. Ограничимся исследованием случая использования так называемых «сильных» по эффекту помех, характеризуемых тем, что множество состояний объекта противодействия после воздействия такой помехи можно считать состоящим их двух элементов: хе(/,х2), где х1, х2 - состояния, соответствующие эффективному и неэффективному действиям помехи. Примером таких помех может служить постановка ложной цели. Тогда х’ соответствует состоянию, когда перенацеливание ГСН на ложную цель состоялось, а х2 - не состоялось. Множество информационных решений, принимаемых по результатам контроля эффективности помех, в этом случае также будет состоять из двух элементов: у е (у1,у2), где у1, у2 - соответственно решения о том, что объект подавления находится в состояниях х1 и х2.
Пусть множество возможных вариантов технического облика объекта подавления включает М элементов: . В рамках
принятых допущений объект подавления можно рассматривать как объект без последействия, текущее состояние которого на любом шаге описывается матрицей вида
F = ||p(x*/ат,м')||. (4.71)
Здесь элементы матрицы размерности М х I задают условную вероятность того, что объект подавления с <У"-м техническим обликом при воздействии м'-й помехи попадет в состояние х*.
Пусть также заданы априорные вероятности Р0(ат), а функционирование информационного канала описывается матрицей условных вероятностей G размерности 2x2:
G=||P(y,/x,.)|, /,7 = 1,2. (4.72)
В общем случае выбор помехи на А-ом шаге происходит на основании совокупности наблюдений, задаваемых вектором =<У1У2,•••№)> и совокупности помех на предыдущих шагах, задаваемых вектором и4_, = = (г^,,Ы1,...,ы*-1) (см. систему обозначений, соответствующих TV-шаговому процессу подавления, схематично представленному на рис. 4.18).
Синтезируем оптимальную У-шаговую последовательность помех uw_b обеспечивающую максимальную финальную вероятность подавления объекта на последнем шаге. Ориентируясь на использование метода динамического программирования, предполагающего аддитивность оптимизируемого функционала J, и учитывая стохастический характер решаемой задачи, представим J в следующем виде:
J = E
К
_t=I
(4.73)
где E - символ математического ожидания; Wk отражает монотонно связанный с эффективностью помехи выигрыш на каждом шаге. В рассматриваемом случае максимизации вероятности подавления на последнем шаге можно положить
k = K,xN = x, (4.74)
[О, в остальных случаях.
Потальное 1-Пшаг 2-й шаг (Ы)шаг А-й шаг (А+1) шаг (Л-1) шаг ,V-й шаг
состояние ------> ______> ------► --------р- -------► -------►
О 1 2 ... к-2 к-l к 4+1 ........ ЛГ-1 N
•----1----ч-------1-----1----1-----1--------1----1—►
Помеховое воздействие ^0 «4-2 Нк-l ик UN-2 W.V-1 к
Состояние объекта *0 *1 *2 хк-1 Хк Хц.1 Хц
Результат контроля ^^фиктивности У1 Уг УкА Ук Ач J'.v
Рис. 4.18
Теперь задача синтеза оптимального адаптивного управления может быть сформулирована следующим образом.
Требуется определить оптимальную jV-шаговую последовательность помеховых воздействий = (Ко,к1*,...,м^_1) на объект подавления при неполной информации о его техническом облике а, максимизирующую функционал (4.73), т.е. обеспечивающую максимальную в среднем на множестве реализаций эффективность помехи на последнем TV-ном шаге:
11^.! = arg max Е WN. (4.75)
Uy-I
В терминах теории управления эта задача принадлежит к классу задач синтеза терминального управления стохастической системой без последействия с неизвестными параметрами и стохастическим каналом наблюдения. Методам и результатам решения задач этого типа для систем с дискретным временем и континуальным множеством состояний посвящена работа [3]. Ниже подходы, развитые в [3], используются для синтеза управления рассматриваемой системой с дискретным временем и дискретным множеством состояний.
В соответствии с процедурой динамического программирования начнем с определения оптимальной помехи иЛ,_[ на последнем У-ом шаге.
Пусть известны векторы yN_{ и ил-2, а осталось найти лишь помеховое воздействие uN_{ на последнем шаге, доставляющее максимум функционалу J:
J = E(W„ /yw_[,uw_|) = P{xN /yw_[,uw_|) =
м д (4.76)
= / , -^(д ! У N-\^N-2)'P(.xN ! а >иЛ-1)“/л(У Л-1>иЛ-1)’ m=l
Л
Здесь символ = вводит новое обозначение, а апостериорная вероятность значений неизвестного параметра а на любом n-ом шаге определяется по формуле
Р^ПР^^)
Л«"'/уп,ив-.) = ^---J=7-----------• (4-77)
^р0(а'")-яри/а'",ч_1) m=l '
Тогда вид оптимальной помехи на У-ом шаге u*N_{ определяется следующим образом:
4-i = arg max Y^y^.u^) = 4-1(Ул-1,ил-2). (4.78)
“Л-1
Кроме того, обозначим
/л =/л(Улч,Ил-2,4-1) = 4(Ул-1,“Л-2) • (4-79)
Из выражения (4.78) следует, что оптимальная помеха (управление) uN_t полностью задается результатами наблюдений у^ и значениями ил-2 на предыдущих шагах.
Перейдем к определению оптимальной помехи на (У-1)-м шаге.
При использовании на последнем шаге помехи Кл-1(Ул-|>ил-г) и с учетом (4.74) оптимизируемый функционал примет вид
^л/Ул-нилчЬ
# Д
= /, /м(Уи^3’и^г)=/w-i(y^2»и^з»и^г)- (4-80)
Учитывая (4.80) и применяя принцип оптимальности Веллмана [4], получаем
UN-2 ~
= arg max У yN (y N_u uw_3, uN_2) P (yN_x / uw_3, uN_2) = (4.81)
"У-2 ,, JW-I
= иЛ'-2(У,\'-2>иЛ'-з) •
Оптимальный выигрыш за два последних шага может быть представлен как
Yn-\ =Yn-\ (у = Yn-\ (у м-2’им-з) • (4-82)
По аналогии, в общем случае для произвольного к-го шага получаем
Л-i = arg max У у*к+1 (у к_{, ук, ut_2, ик_{) Р (ук / ut_2,ик_1) = ик~' л
= Л-1(У*-Р«*-2) > (4-83)
где
п = X(у*’иА-2’ и*к-1)р(л IЛ-2,Л-1)=/*‘ (у*-рut-2) • Л
Р (л ! Л-2, Л-1) = X Р(а ' У ’ U‘-2 ) Р (Хк 1 Я’ “*-1) Р (У к 1 Хк )• (4-84) а. Л
На первом шаге эти выражения принимают вид н* = argmax У/2 /н0),
"° >1
/i=X^U’Mo)PU/Mo)=>zi(Po(a))’ (4-85)
У1
P(>'i/Mo) = XPo(a)P(JCi/a’l'o)P(^/xi) • а.Х]
При этом (Ро (а)) есть не что иное, как вероятность подавления объекта противодействия при применении оптимального алгоритма управления, соответствующая исходной априорной информации, содержащейся в векторе Р0(а).
Вычислив рекуррентно функции y*k+i, найдем оптимальные управления в обратном порядке: u*N^,u*N_2,...,u*0. После того, как оптимальная стратегия построена, синтезированные управления (помехи) используются в порядке «прямого» хода времени и реализуются на каждом А-ом шаге в виде найденной функции и*к (yt,.
Проверка качества синтезированного оптимального алгоритма проводилась методом статистических испытаний при следующих исходных данных:
F =
Р, с с с Рх с с с Р{
^обн 1-^обн г J-P1
1_^обн ^обн 2
/’(а) = (0,33; 0,33; 0,34) .
Рис. 4.19
На рис. 4.19 приведены зависимости вероятности подавления Рпод объекта противодействия от числа шагов А при различных вероятностях эффективного действия помех полученные при реализации синтезированного оптимального алгоритма (Ро6н характеризует работу информационного канала в условиях помех). Из графиков видно, что вероятность подавления возрастает с
0,33 до 0,8 при осуществлении 3-х пробных помеховых воздействий (Pi>0,9), что говорит о достаточно высокой эффективности оптимального алгоритма. Вместе с тем синтез и реализация оптимального алгоритма возможны при наличии достаточного ресурса вычислительной техники. Так, табличное представление оптимального управления 1Ц, в А-шаговом процессе при использовании I управлений (помеховых воздействий) за-N нимает ^2'7' ячеек. /=0
В связи с этим представляет практический интерес задача отыскания более простых в реализации алгоритмов адаптивного управления и оценка их качества по сравнению с оптимальным. При выполнении такой оценки рассмотрим квазиоптимальные алгоритмы следующих видов.
1. Алгоритм, обеспечивающий оценку неизвестного параметра а на каждом шаге по максимуму апостериорной вероятности и выбор по этой оценке наиболее эффективного помехового воздействия на каждом шаге:
Ci = argmax[P(ai.1/yt_1,ut_2)],
ak~' (4.86)
«Г1 = arg max Г Р(х{ I a™,, )].
^-1 L J
2. Алгоритм, обеспечивающий чередование пробных помеховых воздействий на шагах идентификации и выбор на последнем шаге наиболее эффективной помехи по максимуму апостериорной вероятности. Правило выбора помех при реализации этого алгоритма имеет вид:
= argmax (/(лдм/Улы.’^-г)],
aN-\
(4-87)
= arg max ГP(xlN / ,
"Л/-1 L J
где иЛ, 2 - вектор чередующихся пробных помеховых воздействий.
3. Алгоритм, отличающийся от первого тем, что оценка неизвестного параметра а выполняется методом стохастической аппроксимации:
Рк(аЛ + Л(1 -Рк(а.)), ук=у},
Л+1(а,) = , <4-88)
|Д(а,)-ЯЛ(а,), ук=у2,
N
W ХА=о°>
W<-i=l
На рис. 4.20,а показаны зависимости вероятности подавления Рпоа объекта противодействия от числа шагов У при реализации оптимального алгоритма - о и квазиоптимальных алгоритмов - 1, 2 и 3 при Р1=0,9, Роб» = 0,9. Видно, что наиболее близок по эффективности к оптимальному первый алгоритм, обеспечивающий оценку апостериорной вероятности неизвестного параметра объекта противодействия на всех шагах адаптации. На рис. 4.20,6 показаны зависимости вероятности подавления Рпол объекта противодействия от числа шагов N при реализации алгоритмов о, 1, 2 и 3 для матрицы F вида:
Рис. 4.20
0,9
0,05
0,05
F =
0,2 0,35
0,6 0,35
0,2 0,3
Графики на рис. 4.20 подтверждают более высокую эффективность оптимального алгоритма по сравнению с квазиоптимальными. Причем выигрыш в эффективности оптимального алгоритма возрастает при увеличении разброса в эффективности пробных помеховых воздействий, т. е. при увеличении отличий матрицы F от симметрической. Вместе с тем этот выигрыш в случаях, иллюстрируемых рис. 4.20,а, не настолько существенен, чтобы исключить возможность использования на практике квазиоптимальных алгоритмов.
При реализации синтезированного оптимального алгоритма по результатам контроля за эффективностью помех уже на третьем шаге обеспечивается высокая (порядка 0,8) вероятность подавления. Сравнительная оценка оптимального и квазиоптимальных алгоритмов адаптивного управления показывает, что квазиоптимальный алгоритм, обеспечивающий оценку неизвестного параметра на каждом шаге по максимуму апостериорной вероятности, в ряде случаев несущественно проигрывает в эффективности оптимальному алгоритму и также может быть рекомендован для практического использования.
Литература
1. Козирацкий Ю.Л., Юхно П.М. Синтез оптических помех. - Радиотехника, 2000, № 8.
2. Калинков А.К., Юхно П.М. Контроль эффективности помех по траекторным признакам. - Радиотехника (Журнал в журнале), 2002, №11.
3. Аоки М. Оптимизация стохастических систем. - М.: Наука, 1971.
4. Беллман Р. Динамическое программирование. -М.: ИИЛ, 1960.
4.8. Пространственно-угловые характеристики лазерного луча на выходе аэрозольного слоя
При решении прикладных задач конфликтного взаимодействия лазерных измерительных и связных систем со средствами аэрозольной зашиты [1] возникает необходимость исследования характеристик узконаправленного лазерного пучка на выходе локального слоя аэрозольной среды. Такие исследования могут быть положены в основу модельного представления, необходимого для разработки методики косвенного измерения таких характеристик аэрозольных завес, как оптическая толща и параметры ус-*
Авторы: Я. Л. Марек, П.М. Юхно
редненной индикатрисы рассеяния отдельной частицы [2]. Особый интерес представляют задачи отыскания места локализации энергетического центра излучения узкого лазерного пучка внутри аэрозольного слоя и определения пространственно-угловой расходимости излучения на его выходе при варьировании оптической толщи слоя в широких пределах.
Рассмотрим геометрическую схему наблюдений (рис. 4.21, где система координат Op¥iK[Zi получена параллельным переносом системы координат 0XYZ, начало которой совмещено с центром узкого (с углом расходимости Ь2) лазерного луча на входе аэрозольного слоя с геометрической толщиной Z).
Достаточно точное представление о пространственноугловых характеристиках лазерного луча на выходе аэро
зольного слоя дает функция лучевой интенсивности J(r,t) [Вт/м2ср], где r(x,y,z) - вектор пространственных координат рассматриваемой точки аэрозольного слоя, 1(1,т,п) - вектор направляющих косинусов излучения.
Анализ случаев распространения лазерного пучка сквозь аэрозольный слой с большой оптической толщей требует учета многократного рассеяния излучения. На длине волны излучения Я = 1,06 мкм и менее для типовых аэрозолей с достаточной для практики точностью обычно выполняется условие вытянутости индикатрисы рассеяния отдельной 2лТ 1 / - Ч с
частицы р =---->1 (г - средний радиус частицы). Это позволяет в ка-
Я
честве удовлетворительного приближения для функции лучевой интенсивности использовать малоугловое приближение решения уравнения переноса излучения, учитывающее и эффекты многократного рассеяния. Согласно [3] малоугловое приближение функции лучевой интенсивности на выходе слоя соответствует диапазону углов рассеяния, для которых справедливо приближенное равенство п ~ 1 (рис. 4.21), и имеет вид
J(£,p,s) = F|F0(k,q + k£)K'(Z,k,q)j,
где
( L
X(£,k,q) = exp - J/0-l/4^'P(q + k(Z,-z)))t7z
(4.89)
(4.90)
F0(k,q) = F~' {J0(p,s)} ; P(q) = F~l {p(s)} ;
p = (x,j/); s = (/,m); k = (ki,k2); q = (^,?2); (4.91)
у[1/м] - показатель ослабления; J0(p,s) - функция лучевой интенсивности лазерного пучка на входе аэрозоля; p(s) - фазовая функция, характеризующая индикатрису рассеяния одной частицы и усредненная по размерам частиц; F{...}, F-l{...} - прямое и обратное преобразования Фурье.
Количественные расчеты J0(p,s) с помощью (4.89) сводятся к четырехкратному интегрированию и требуют больших затрат машинного времени. Однако основной практический интерес представляет не сама функция лучевой интенсивности, а некоторые ее интегральные характеристики и, в частности, суммарное угловое распределение интенсивности излучение со всего лазерного пятна на выходе аэрозольного слоя (сила излучения лазерного пятна) л
J(£,s)= jj(£,p,s)t/p. (4.92)
о
Из (4.89) с учетом известного свойства преобразования Фурье следует, что
J(£,s) = F{Fo(O,q)^(A,O,q)} . (4.93)
Определим J(L,s) для случая расходящегося гауссова лазерного
пучка, когда
Jo ( х2 + у2 12 + т2 •/°(p’s) = T±7exp—J----------------
ла о \ а о
(4.94)
где а и Ь характеризуют ширину пучка по линейной и угловой координатам соответственно.
Аппроксимируем фазовую функцию также гауссоидой [3]:
P(s) = 4аИ/0 ехр(-а(/2, (4-95)
где Ио - альбедо частицы.
После подстановки (4.94), (4.95) в (4.92), (4.93) получим
4л
со Z 7 7 I? / о
X _Ч. ^2 )» ^„р
J 4 I 4а
(4.96) cos (Zc/j + mq2) dq.dq2,
где - оптическая толща аэрозольного слоя.
Из (4.96) следует, что суммарное угловое распределение интенсивности зависит от оптической толщи yL, а при равенстве оптических путей - не зависит от геометрической толщины аэрозольного слоя. Функция является осесимметричной.
На рис. 4.22 приведены нормированные по максимуму к единице ее сечения при вариации значений оптического пути yL\ а - /6=12, *Лпах =0,14; б - yL=6, Jmax =0,83; в - rL=4, Jmax =3,27; г - yL=2, Jmm =18,85 при Л=24 м, 1=0, Jmax=J(A,0,0) [Вт/ср]. Расчеты выполнялись при следующих исходных данных: J0=l Вт, ^0=0,9, а=1 м, 6=0,05 рад, а=0,55~2, 5=0,2 рад. При этом учитывалось, что альбедо частиц аэрозолей на основе фосфорных составов близко к единице, принятое при расчете значение ^0=0,9 учитывает долю излучения, рассеянного частицей вперед. Графики на рис. 4.22 показывают, что при больших оптических толщах величина рассеянного аэрозольным облаком лазерного излучения спадает до 0,4.. .0,5 от максимального значения в секторе углов ±(30.. .40°) от направления оптической оси лазерного луча. При малых оптических толщах наблюдается узкий пик слабо рассеянного излучения.
Рис. 4.22
Для определения места локализации в аэрозоле энергетического центра излучения рассеянного луча рассмотрим случай визирования просвечиваемого лазером слоя аэрозоля с больших дальностей, когда можно полагать, что все участки лазерного пятна на выходе слоя визируются под одинаковыми углами. Учитывая осесимметричность функции лучевой интенсивности, для определения места расположения энергетического центра достаточно рассмотреть ее вид вдоль одной про
странственной оси X или Y при вариации углов излучения (а значит, и углов наблюдения) в плоскости, проходящей через эту ось, т.е интересующая нас интегральная функция лучевой интенсивности J(L,x,l) [Вт/ср м] может быть определена следующим образом:
J(L,x,l) = j J(L,x,y,l,m = O)dy. (4.97)
Из (4.97) с учетом известных свойств преобразования Фурье следует, что
J(L,x,I)=-^x (2^)3
м (4.98)
xJ J |соз(Л1х+?1/)Л1(Л1л=о,?1+л1д?2)л:(дл1,й2=о,^,^)^2(Л1^1.
С учетом (4.90), (4.91), (4.94), (4.95) подынтегральное выражение в
(4.98) принимает вид
.2
Го(„.) Д...) = Jo ехр(-/Л)ехр
4
X
Результаты расчетов J(L,x,l) с помощью (4.98), (4.99) при а=1 м и прочих исходных данных, приведенных выше, представлены на рис. 4.23 при Г=24 м: a - yL=i2; б - yL=6; в - yL=4.
Графики на рис. 4.23 указывают на смещение максимума функции J(L,x,l) в направлении /, с которого ведется наблюдение. При этом положение энергетического центра излучения на внешней кромке аэрозольного облака практически совпадает с точкой максимума интегральной функции J(L,x,l). Графики показывают также, что положение максимума J(L,x,[) не зависит от оптической толщины yL аэрозольного облака, а зависит только от направления наблюдения /. Смещение максимума функции J(L,x,l) относительно начала координат (см. рис. 4.21), которое совмещено с точкой выхода оси лазерного луча из аэрозольного облака, пропорционально геометрической толщине аэрозольного облака L (рис. 4.23,в).
-14 -12 -10 -8 -6 -4 -2 0 2 4 б 8 10 12 14 x, м
a)
6)
J(L,xJ)
Рис. 4.23
Представляется полезным определить место локализации энергетического центра излучения на оптической оси лазерного луча. Для этого положение энергетического центра выразим величиной его смещения по оси лазерного луча вглубь облака, отнесенной к геометрической толщине L облака,
e = = (4.100)
Соответствующая схема наблюдения, из которой следует (4.100), показана на рис. 4.24.
На рис. 4.25 приведены графики, иллюстрирующие относительное положение энергетического центра излучения на оси лазерного луча в зависимости от угла наблюдения / [рад]. Из рисунка, в частности, следует, что в секторе углов наблюдения 35...45° от направления оси лазерного луча энергетический центр располагается на удалении (0,35...0,45)Л от внешней кромки облака. При уменьшении угла наблюдения энергетический центр смещается вглубь облака. При одинаковой оптической толще аэро
зольного облака энергетический центр будет тем более удален от точки вхождения луча в облако, чем больше геометрическая толщина этого облака.
Пространственно-угловое распределение излучения, создаваемого узким лазерным лучом на выходе аэрозольного слоя, не зависит от геометрической толщины аэрозольного слоя и определяется только его оптической толщей.
Место локализации энергетического центра излучения на выходе аэрозольного слоя смешается относительно точки выхода оси лазерного луча из аэрозольного слоя в сторону направления, с которого ведется наблюдение, на величину, возрастающую при увеличении угла наблюдения. При одинаковой оптической толще аэрозольного слоя величина линейного смещения энергетического центра пропорциональна геометрической толщине аэрозольного слоя.
Литература
1. Якушенков Ю Г, Луканцев В.Н., Колосов М.П. Методы борьбы с помехами в оптико-электронных приборах. - М.: Радио и связь, 1981.
2. Ринкявичус Б.С. Лазерная анемометрия. - М.: Энергия, 1978.
3. Кенмару А. Распространение и рассеяние волн в случайно-неоднородных средах. Т. 1 - М.: Мир, 1981.
4.9. Рассеяние лазерного луча аэрозольным слоем
в направлении вперед и назад
При анализе эффективности функционирования лазерных связных и измерительных систем в условиях пассивных помех возникает задача определения характеристик лазерного луча, рассеянного локальным аэрозольным слоем. В [1] исследованы пространственно-угловые характеристики рассеянного вперед лазерного луча на выходе аэрозольного слоя. Однако при этом осталась не решенной более сложная в методическом отношении задача определения характеристик рассеяния назад, решение которой будет выполнено ниже. Как и в [1], проведенные исследования базируются на решении уравнения переноса излучения в малоугловом приближении.
Решение уравнения переноса излучения при наличии распределенного источника излучения. Задача определения характеристик рассеянного назад излучения отличается от исследования случая рассеяния вперед необходимостью дополнительного учета распределенного в аэрозольном слое источника излучения, происхождение которого обусловлено рассеянным вперед излучением [2].
Рассматривается геометрическая схема наблюдений (рис. 4.26), где система координат O^XiY^Zi получена параллельным переносом системы координат OXYZ, начало которой совмещено с центром узкого луча
Авторы: А. В. Рыжов, П. М. Юхно
(с углом расходимости Ь2) лазера на входе аэрозольного слоя с геометрической толщиной L. Достаточно полное представление о пространственно-угловых характеристиках рассеянного лазерного излучения дает функция лучевой интенсивности, которая в малоугловом приближении является функцией пяти переменных J(z,p,s) [Вт-м'2стер‘1], где р = (.х,у) -вектор двух декартовых координат рассматриваемой точки аэрозольного слоя; s = (1,т) - вектор направляющих косинусов излучения (рис. 4.26), причем полагается, что п ~ 1.
Как показано в [2], уравнение переноса излучения в малоугловом приближении может быть записано в виде
/ ~ X “
—-is-X + X /l(z,X,s)-y- [ [p(s-s')/i(z,X,s')Js-E(z,x,s) = O, (4.101)
\oz J w J J
где E(z, %, s) - фурье-образ по p от e(z, p, s); у = p„o, [1/м] - показатель ослабления (yL - оптическая толща аэрозольного слоя); р„ - концентрация частиц [м-3]; о, [1/м2] - полное сечение ослабления (рассеяния и поглощения); e(z,p,s) [Вт м"эср-1] - функция источника, характеризующая мощность излучения единицы объема слоя в единичный телесный угол в направлении s; P(s) - безразмерная фазовая функция, характеризующая индикатрису рассеяния одной частицы;
/L(z,x,s)= j/(z,p,s) exp(ixp)^p; (4.102)
—оо
Х= (Xi,Xz)_ пространственные частоты [1/м].
Решение (4.101) в интегральной форме получено в [2] в предположении, что £(z,p,s) = 0 и соответсвенно E(z,%,s) - 0. Воспользовавшись процедурой решения, аналогичной приведенной в [2], получим решение этого уравнения для общего случая, когда E(z,p,s) / 0. Обозначим:
lx X, s) = /2 (z, X, s) exp {(is • X - /) г);
(4.103)
P(q)= f p(s)exp(is q)«/s;;
(4.104)
^(z>x>q) = f p2(z’X>s)exp(is-qHs;
(4.105)
-00
00
£o(z’X>q)= J f£(z,X,s)exp(is q)Js ,
(4.106)
где q = (^,,92) - угловые частоты.
После подстановки (4.103)—(4.106) в (4.101) имеем
-у (zx q) -(q - x^R (z, х> q - х?) -az 4л*
-£o(z>X>q-Xz)exp(/z) = O.
Это - линейное, неоднородное дифференциальное уравнение 1-го порядка относительно независимой переменной z. Решение его [3] при известных граничных условиях /(z=0, р, s) = /0(р> s), определяющих исходные пространственно-угловые характеристики лазерного луча на входе аэрозольного слоя, нетрудно привести к следующему виду:
^(z,x>q) = e*p
\ о
fo(x.q)+ J£o(*,X,q-X.*)exp[;p- p(q-X,x')^' dx , (4.107)
где
Mx>q) = ^(o,x,q)= J k(p,s)exp(ix p + is-q)JpJs . (4.108)
С учетом (4.103) и (4.105) запишем
A , X'q) = ^ (x> q+x •z) exp (-/z).
(4.109)
278
Учитывая (4.102) и взяв обратное преобразование Фурье от (4.109), получим окончательно
/(z,O,s) =--гХ
(2я)4
(4.И0)
X Jexp(-ix P + (isX-r)zexp(-is q)F(z,x,q)«/X^q)-
Подставив (4.107) в (4.110), упростим (4.110), заменив в нем q на q' =q - %z и опустив в записи после этого штрих у q'. Тогда искомая функция лучевой интенсивности (4.110) запишется в виде
7(z,p,s) =
1 (2я)4
J J/l(z>x>q)exp(-i(xp+sq))rfx^q>
(4.1Н)
где
ф" о
/i(z>X.q) = exp
^o(x.q+xz)+
(*>x>q+x(z~*))exP
dx
(4.И2)
Выражения для рассеянного вперед и назад излучения. Выражения (4.111), (4.112) вполне достаточны для определения характеристик излучения, как рассеянного вперед, так и рассеянного назад. В соответствии с общим подходом, описанным в [2], для этого необходимо разделить лучевую интенсивность /(z,p,s) на прямую и обратную:
/+(z,p,s), sxz>0, /"(z,p,s), sxz<0
и дальше использовать итерационную процедуру, в соответствии с которой при расчете и-го приближения I„ (z,p,s) используется предыдущее приближение /„~(z,p,s) и наоборот.
При малых значениях коэффициента рассеяния одной частицы назад (когда интегральная мощность рассеяния назад не превышает <5=0,1 интегральной мощности рассеяния вперед) вполне достаточно ограничиться первым приближением при решении задачи как прямого, так и обратного рассеяния. Как легко заметить, относительные ошибки решения уравнения переноса будут при этом иметь значения порядка 52, т. е. не будут превосходить единиц процентов.
Первое приближение решения уравнения переноса в прямом направлении (точнее, фурье-образ этого приближения) может быть получено из (4.112) при E0(z,X,s)= 0;
A+(z,X,q) = exp
О J
^(x-q+x-4 (4 НЗ)
где Р+ (.) - преобразование Фурье фазовой функции рассеяния вперед.
Соответственно преобразование Фурье искомого первого приближения для обратной интенсивности может быть получено при подстановки в (4.112) выражения
£o(^x,q) = T^-А+ (z>x>q)-р (x,q)>
(4.114)
после чего (4.112) примет следующий вид: A’(zxq) =
= ехр
-х))х
р{1-^р’(ч+х(г-^,))|Л|
dx.
хР (q + x(?-x)) exp
(4.Н5)
В (4.115) проведена замена координат z}=L на z, т.е. для уравнения обратного рассеяния задача решается по координате z как бы в обратную сторону. Кроме того, в (4.114), (4.115) Р~(.) - преобразование Фурье фазовой функции рассеяния назад.
Теперь функции лучевой интенсивности на выходе слоя аэрозоля для случаев рассеяния вперед и назад окончательно записываются в виде
/+ (L,p,s) = F-' [/* (L,X,q)]; /-(0,p,s) = F-|[/1-(T,X,q)]> (4-116) где /г'[...] - обратное преобразование Фурье.
Расчет характеристик рассеянного излучения. Количественные расчеты функции лучевой интенсивности выполним для случая расходящегося гауссовского пучка:
г / \ ро ( х2 + у2 I2 + т2\ ..
/o(p’s) = TH72exp-----~г------72—’ (4-117)
лао I а о \
где PQ - полная мощность лазерного излучения; а и b - ширина луча по линейной и угловой координатам соответственно.
Подставив (4.117) в (4.118), получим
(/12+/г)а2
Мх,ч) = Роехр -И‘ . (4.118)
\
Если фазовые функции P+(s) и P“(s) аппроксимировать гауссои-дами, то можно записать
P+(s) = 4aAlT()exp(-aB|s|2^ ;
Р’ (s) = 4ан (1 - Wo) exp (-ан | s|2 j, (4.119)
где ав, аи - характеризующие ширину фазовой функции множители для направления рассеяния вперед и назад соответственно; JV0 - коэффициент, с помощью которого учитываются относительные доли рассеянного вперед и назад излучения. Тогда преобразование Фурье от (4.119) будет иметь вид:
/ 2 24
P+(<]},<h) = 4nW0exp -?1 +<?2 ;
(22 р' (?1>Яг) = М1 “)ехРI - ?14*?2
(4.120)
Подставив (4.118) и (4.120) в (4.113), получим выражение для /^(z^q), а потом подставив полученное выражение в (4.115) и учитывая (4.117) и (4.119), находим выражение для 7“i(z,x,q).
Окончательно выражение для лучевой интенсивности, рассеянной вперед и назад, можно получить с помощью преобразования (4.116).
Для нахождения представляющего наибольший практический интерес суммарного углового распределения интенсивности лазерного излучения, рассеянного облаком как вперед, так и назад, необходимо проинтегрировать функцию лучевой интенсивности по р=(х,у). В области спектров (с учетом свойства преобразования Фурье) это эквивалентно тому, чтобы принять в (4.116) х = 0. С учетом этого окончательно выражения для суммарного углового распределения излучения, рассеянного
вперед и назад, примут вид:
v ’ 4Я2
(?1+^)б2
4
-t-WJ/Lexp
4а.
(4.121) cos(/?i +mq^dqxdq2\
V 7 4л-2
“ ( ( 2 4- 2>\
x Г [exp yL (1-Wo)exp ——
2J ч
- 1-Woexp -
2 2
ЧГ+Чг
4“b
(exp (A/£)-l)
--------------cos (/?1 + mq2) dqtdq2;
(4.122)
( 2 4. 2A ( 2 4_ 2 ")
где Л = 2-И'0ехр —— -(l-lF0)exp .
V 4«B J V 4«H ;
Необходимо еще раз отметить, что (4.121) и (4.122) представляют собой не саму функцию лучевой интенсивности, а суммарное угловое распределение интенсивности излучения со всего лазерного пятна на выходе и входе аэрозольного облака соответственно, т.е. интеграл функции лучевой интенсивности по площади лазерного пятна.
Рис. 4.27
На рис. 4.27 представлены типовые зависимости, рассчитанные по (4.121) и (4.122) при следующих исходных данных: Ро = 1 Вт, IVO = = 0,995, Б = 0,05 рад, 0^= 0,55в"2, а„= 0,55„-2,5В = 0,3 рад, 5Н= 0,2 рад.
При расчетах параметры Wo, ав, ая выбирались на основе анализа экспериментальных данных по рассеянию лазерного излучения аэрозольными облаками, а также с учетом результатов аналитических расчетов параметров рассеяния полидисперстной системы частиц с использованием теории Ми. Кривые, приведенные на рис. 4.27, соответствуют случаю не поглощающих частиц с показателем преломления п = 1,33 и следующими значениям оптических толщ: 1 -у£=2; 2 -yL = 4; 3-yL= 8.
Таким образом, в результате выполненных исследований получены необходимые соотношения для расчета пространственно-угловых характеристик лазерного луча, рассеянного аэрозольным облаком как в направлении вперед (на просвет), так и в направлении назад (на отражение).
Выполненные количественные расчеты показывают, что в отличие от рассеяния вперед, когда вид функции лучевой интенсивности существенно зависит от значения оптической толщи аэрозольного облака, при рассеянии назад вид функции лучевой интенсивности почти не изменяется с изменением оптической толщи. Причем при значениях оптической толщи, больших 4, не только вид, но и абсолютное значение функции лучевой интенсивности рассеянного назад излучения изменяется незначительно.
Литература
1. Юхно П.М., Марек Я.Л. Пространственно-угловые характеристики лазерного луча на выходе аэрозольного слоя - Радиотехника (Журнал в журнале), 1999, №8.
2. Исимару А. Распространение и рассеяние волн в случайно-неоднородных средах. Т. 1,2. - М.: Мир, 1981.
3. Бронштейн И.Н, Семендяев КА. Справочник по математике. - М.: Наука, 1986.
Дополнительная литература к главе 4
1. Быков В.В., Сухоруков Ю.С. Точность радиолокационного самонаведения объектов в условиях блужданий центра излучения и маневра цели. - В настоящем сборнике.
2. Данилкина А.Ф., Юхно П.М. Потенциальная помехозащищенность корреляционно-экстремальных систем совмещения изображений. - Автоматика и телемеханика, 1987, №8.
3. Донцов А.А., Ильичев А.М., Козирацкий Ю.Л., Крутов Н.Г. Логико-вероятностная процедура формирования состава средств противодействия в условиях конфликтного взаимодействия сторон. - Радиотехника, 1999, № 8.
4. Егоров И.В., Юхно П.М. Влияние однородного коррелированного яркостного шума на ошибки совмещения изображений. - Автометрия, 1988, № 1.
5. Ильичев А.М., Козирацкий А.Ю., Лысиков В.Ф. Аналитическая модель информационного конфликта на этапе поиска и обнаружения. - Радиотехника, 1999, № 8.
6. Козирацкий Ю.Л., Юхно П.М. Синтез оптических помех. - Радиотехника, 2000, № 8.
7. Ларин А.М., Мазилов С.М., Огреб С.М., Юхно П.М. Исследование эффективности нейросетевых алгоритмов Хопфилда при распознавании изображений. - Радиотехника, 1999, № 8.
8. Лютин В.И. Алгоритм автоматического слежения при наблюдении объектов в различных физических полях. - Радиотехника, 2001, № 10.
9. Огреб С.М., Юхно П.М. Особенности обнаружения пространственных сигналов в присутствии пространственно-временного шума. - Радиотехника, 1998, №6.
10. Поветко В.Н. Приближенные характеристики качества обнаружения и различения сигналов на основе первых моментов логарифма отношения правдоподобия. - Радиотехника, 2000, № 10.
11. Понькин В.А., Юхно П.М. Энергетическая модель процесса формирования изображений оптической системой. - Радиотехника и электроника, 1983, № 6.
12. Прохоров С.Г, Тосенко В.М. Стохастическая модель наблюдения - дешифровки изображений. - Радиотехника, 1998, № 6.
13. Юхно П.М., Огреб С.М., МарекЯ.Л. Исследования особенностей визуального поиска в условиях временных ограничений и неопределенности относительно наличия объектов в зоне поиска. - Оптический журнал, 2002, № 5.
14. Юхно П.М., Ярмошевич Е.И. Пространственно-частотная характеристика канала формирования изображения при наличии локального слоя рассеивающей среды. - Изв. вузов. Сер. Радиоэлектроника, 1987, № 7.
15. Юхно П.М. Краевые эффекты в измерителях сдвигов изображений. - Радиотехника, 2001, № 10.
16. Юхно П.М. Особенности определения вероятности срыва слежения в радиолокационных измерителях. - Радиотехника и электроника, 1976, № 12.
17. Юхно П.М. Траекторно-пространственная фильтрация в корреляционноэкстремальных системах. - Автоматика и телемеханика, 1992, № 7.
ГЛАВА 5
Оценка радиолокационной и оптической заметности объектов
В настоящее время повышение информативности средств разведки и качественный рост возможностей средств поражения объектов приводят к необходимости расширения арсенала мер по их защите, в том числе за счет снижения заметности объектов. Снижение заметности объектов в свою очередь изменяет подход к их конструированию, при котором требования по основному целевому назначению дополняются требованиями к их радио -и оптическим характеристикам. Выполнение этих требований достигается за счет изменения конструкций объектов, применения специальных конструкционных материалов, покрытий и т.п. Решение большинства практических задач снижения заметности основано на применении экспериментальных и теоретических методов оценки заметности. В ходе экспериментальных исследований проводится оценка технических характеристик заметности вариантов построения объектов (макетов, составных частей и специальных средств) в заданных условиях наблюдения с целью установления эффективности проводимых мероприятий. Ввиду всегда существующих на практике ограничений на количество реально воспроизводимых вариантов построения объектов и условий их наблюдения возникает необходимость разработки теоретических методов для решения задач прогнозирования характеристик заметности на другие, реально невоспроизводимые варианты построения объектов и условия их наблюдения.
5.1. Пространственно-временная обработка в системах измерения радиолокационных характеристик объектов
В последнее время в связи с возросшей актуальностью задач разработки объектов с заданными радиолокационными характеристиками (РЛХ), а также радиолокационного распознавания существенно повысились требования к точности и детальности экспериментального определения РЛХ объектов. Введение понятий и установление физической реальности локальных центров рассеяния объектов [1—4] явились стимулом для развития радиолокационных измерительных систем (РИС)
Авторы: В. А. Понькин, А. Д Романов, Ю. А.Сорокин
для экспериментального определения их РЛХ. В настоящее время совершенствуются РИС традиционного типа, основанные на измерении РЛХ объектов в дальней зоне антенны радиолокационной станции (РЛС) [3], созданы и совершенствуются системы для измерения РЛХ объектов в квази- [5] и локально-плоском [6] полях, сформировался новый класс измерительных систем - компактные радиолокационные полигоны, в которых измерение РЛХ производится на расстояниях, соизмеримых с размерами объектов [7].
Для проведения сравнительных оценок информационных возможностей РИС, реализующих различные методы пространственной и временной обработок сигналов, необходим единый математический аппарат, основой которого является теория пространственно-временной обработки сигналов (ПВОС). В рамках этой теории получено большое количество используемых на практике результатов для оценок информационных возможностей систем измерения РЛХ объектов в дальней зоне. При измерении РЛХ объектов в дальней зоне рассеянный от объекта сигнал в пределах раскрыва приемной антенны имеет плоский волновой фронт. При этом информация о дальности расположения на объекте локальных центров рассеяния содержится во времени запаздывания отраженного сигнала, а информация об их угловых координатах - в положении плоского волнового фронта.
Особенность измерения в ближней зоне состоит в том, что появляется возможность использования информации, содержащейся в кривизне волнового фронта принимаемого сигнала как для выделения полезного сигнала на фоне мешающих, так и для измерения угловых координат и дальности локальных центров рассеяния. Результаты классической теории ПВОС, полученные в предположении плоских электромагнитных волн, в этом случае оказываются неприемлемыми и не могут служить единой основой для сравнительного анализа широкого класса РИС. Теория ПВОС, развитая в последние годы на случай использования нового информационного параметра - кривизны волнового фронта [5, 8-15], позволяет с единых позиций оценивать информационные возможности измерительных систем, реализующих различные методы исследования РЛХ объектов в ближней и дальних зонах.
Проанализируем потенциальные возможности РИС различных типов по выделению полезных сигналов на фоне мешающих и измерению угловых координат и дальности локальных центров рассеяния на основе обобщения и развития результатов работ [5, 8-15].
Алгоритмы обработки сигналов в РИС. При задании координат анализируемого локального центра рассеяния M0{x0,y0,z0] и положения плоскости регистрации рассеянных сигналов хОу (рис. 5.1) про
странственно-временной сигнал в ближней зоне приемной антенны описывается функцией пространственных координат ~р и времени t
S(Z,p) = Re{Sogo(p)/(p)ro’l(p)S[/-r(p),^o]} , (5.1)
где So - постоянный множитесь, характеризующий амплитуду сигнала; g0(p) - функция координат точки приема р(х,_у,0}, описывающая диаграмму локального центра рассеяния; /0(р) - комплексная функция, учитывающая расположение приемных элементов и заданную весовую простран
ственную обработку; г0(р) - расстояние от точки Мо до точки приема р ; S(Z) = C/(Z)e“B°' - зондирующий сигнал; т{р) - время запаздывания сигнала до приема р ; <р0 - начальная фаза; <о0 - несущая частота.
При облучении объекта сигналом с плоским волновым фронтом, параллельным координатной плоскости хОу, т(р) = т0+г0(р)/с где с -скорость света; г0 - постоянное запаздывание.
Представление полезного сигнала в виде (5.1) является достаточно общим и учитывает частные случаи. Так, в случае узкополосного изотропного пространственно-временного сигнала, когда интервал времени корреляции сигнала больше величины максимального времени запаздывания сигнала (разности времени распространения сигнала до различных точек приемной антенны), комплексную огибающую сигнала U(t) можно считать постоянной для всех точек приемной антенны, и полезный сигнал (5.1) принимает вид:
5(z,p) = Re^0elw’g0(p)/(p)r()"1(p)L/(z-2r0)}exp{i®0[r-r0(p)/c] }.
Особенность приема сигналов дискретными антенными системами учитывается соответствующим заданием вида апертурной функции м
приемной антенны: 1(р) = - pf), где ii - комплексный коэф-
;=1
фициент передачи /-го антенного элемента; р - координата центров приемных элементов; М- число приемных элементов.
Наряду с полезным сигналом на приемную антенну воздействуют мешающие сигналы n(t,p~), которые представляют собой аддитивную
смесь внешних мешающих сигналов, обусловленных отражениями от
окружающих предметов, а также вызванных влиянием других радиоэлектронных средств и внутренних шумов системы обработки, пересчитанных на вход антенны. В рамках теории ПВОС возможно учесть существенно различные свойства мешающих сигналов и провести анализ их влияния на функционирование измерительных систем.
Структура и алгоритм обработки сигналов в пространственной (Л) и временной (Т) областях определяются видом опорного сигнала. В частном случае оптимальной обработки узкополосного полезного сигнала и в присутствии одного источника внешних помех опорный сигнал имеет вид [15]
<r(t,p) = -^—U(t- г0)е^' | ехр [ -
[г0(Р) V с )
^ig.(p)
F10(®0)exp i®0
(5.2)
„ gXp)gj(P) . '}(/’)-<,(/’) 1,- . . тп
где R = 7,(р)7 ,(р) 7 ехрЬд>0 ----------1--- (dp, i,j = 0,1, -
•> r^p^ip) l c JJ
функция пространственной избирательности измерительной системы, зависящая от пространственного положения источников полезного и мешающего сигналов г0(р),г(р) (рис. 5.1); g,(p) - функция, описывающая диаграмму источника мешающего сигнала; No, Ni - спектральные плотности пространственно-временного белого шума и внешнего шумового источника.
В соответствии с (5.2) оптимальная (по критерию отношения правдоподобия) пространственно-временная обработка принимаемых сигналов заключается в формировании пространственных каналов приема полезного и мешающего сигналов и весового сложения их выходных сигналов для компенсации помех внешних источников. В общем случае для реализации такой ПВОС необходима многоканальная система не только по угловым координатам, как это имеет место в случае расположения источников полезных и мешающих сигналов в дальней зоне, но и по дальности.
Более простой для реализации является согласованная обработка. Особенность согласованной ПВОС в ближней зоне приемной антенны по сравнению с обработкой сигналов в дальней зоне состоит в фокусировании антенны на источник полезного сигнала, т.е. в компенсации в каждой точке приема фазового набега, зависящего от дальности до по-
лезного источника. При этом для мешающих сигналов, источники которых занимают другое положение в пространстве и имеют структуру волнового фронта, отличающуюся от заданной, когерентного суммирования не происходит. В результате достигается избирательность измерительных систем в ближней зоне приемной антенны.
Возможности РИС по выделению сигналов на фоне помех. Возможности выделения сигналов в условиях внешних и внутренних помех оцениваются качеством алгоритмов ПВОС. Количественно возможности выделения источников полезных сигналов на фоне мешающих принято оценивать по величине коэффициента использования энергии сигнала Ко,
характеризующего степень уменьшения отношения сигнал-шум при воздействии мешающих сигналов [5]. В случае узкополосного пространственного сигнала и одного внешнего источника помех
С помощью Ко можно оценивать качество работы и неоптимальных систем обработки пространственно-узкополосных сигналов. Так, в случае согласованной обработки пространственно-узкополосных сигналов
Г аМЛоН 1
к = 1+ 11 '0| .
МЛо J
Сравнивая Ко и Кс, можно судить об эффективности систем оптимальной и согласованной обработки сигналов. Для проведения расчетов необходимо знание значений функций которые изучены недостаточно. В частном случае прямоугольного раскрыва приемной антенны размеров Lx и Lv при постоянных функциях пространственного суммирования g,(p) в приближении Френеля [15] функции
И/ ~ Y,jxYilyg^g.i^l,
где Г:]ху . ст S(W) _
интегралы Френеля;
q ___
^1,2.х.у = -f== ± лДТ ’ Вх.у = (sin eix.y - sin 0ix, v) ,
VAj. A)
L2x v ( cos2 0jly cos2 0uy
2Д) Rjx.y Bix.y
ujx,t>iy,Kix v,Rjxy - полярные координаты источников полезного и мешающих сигналов в плоскости zOx.
Анализ полученных соотношений показывает, что использование информации, содержащейся в кривизне волновых фронтов принимаемых сигналов, позволяет выделить полезные сигналы, находящиеся на различных дальностях (рис. 5.2). При этом более простая в технической реализации согласованная ПВОС, уступая по эффективности оптимальной обработке, также обеспечивает пространственную избирательность измерительной системы.
Это создает реальные возможности измерения не только угловых координат локальных центров рассеяния, но и дальности при использовании непрерывных немодулированных сигналов.
Анализ точностных характеристик РИС. Исследование точностных характеристик измерительных систем базируется на анализе выходного эффекта систем в окрестностях истинных значений оцениваемых параметров Aq, который характеризуется комплексной нормированной функцией неопределенности пространственно-временного сигнала:
Т(Л0Л) = £5-' p(p)|24>r(ra,n)exp{i®0ra}^,
L
где L.x = j]/(p)|2 dp - эквивалентная площадь приемной антенны;
L
Ч\(га,П) - частотно-временная функция неопределенности сигнала; га(р) - запаздывание сигнала до точки р приемной антенны.
Дисперсии оценок дальности R и угла ® при совместной оценке их параметров определяются известными выражениями:
aR = ^00 ^(^ЛЯ^00 “ ^Я0^0/е)>
(5.3) ° в = &rr ~ ^я0^0/е)>
где
Bij = -2?o Re
d2
'VW + ^i'VW^'V*W’
(5-4)
q% - отношение сигнал-шум на выходе системы обработки.
Непосредственные вычисления по (5.3), (5.4) в предположении, что диапазон дальности до источника вторичного излучения превышает размеры антенны Ль приводят к следующим соотношениям для дисперсий совместных оценок дальности <т;2 * и углового положения <Tq [8]:
2 ~ е2 cos4^ Г 7/2 V 2
"Л ~ 2 2 1 Л „4 2 1 Ь4 ь2
9o®o 4/?о б)0 )
Пг, , л 2L> cos2 ва
+ Н-(4-----„2
<о0 Rq
(5.5)
где
2 с2 sin2 2$0 4^
\й>о )
(5-6)
П,=
||ю5(ю)|2 <to/|s(<o)|2
da
- квадрат эквивалентной ширины
спектра сигнала S(cd); Lk =L~' jp*|/(p)|2 dp - нормированные момен-L
ты апертурной функции приемной антенны.
Отметим, что соотношения (5.5), (5.6) в качестве частных случаев включают известные формулы для потенциальной точности измерения координат источников вторичного излучения в дальней зоне при До -> 00: = с2 !^Ч20Пэ), адд = Л2 /(4л-2?2£2 cos2 6»0).
Дисперсии оценок угловых координат Cq п00 и дальности <т% поо за счет пространственной обработки сигналов можно оценить с использованием соотношений, полученных для случая пассивной локации, когда время запаздывания сигнала неизвестно [11]:
2 4^с2 [Г /72 _ р Г*
qQaQ cos 6* Н <у0 J
при этом дисперсии ошибок измерения углового положения источников сигнала в пассивном и активном режимах практически совпадают и могут быть определены по (5.6).
Сравнительная оценка возможностей измерения дальности за счет запаздывания сигнала и кривизны волнового фронта может быть произведена по формуле
CT2R1I 1 + 5-1O'3^’2(£/Ao)4- 0, 16(£/7?o)2 '
(5.7)
Как следует из (5.7) и рис. 5.3, использование информации, содержащейся в кривизне фронта принимаемых колебаний, повышает точ
ность измерения дальности даже при приеме весьма широкополосных
При формировании реальных
сигналов (Р = П., /<у0 ® 10 2). Так, при отношении Rq/L порядка десяти в сантиметровом диапазоне длин волн использование информации о кривизне волновых фронтов способствует повышению точности измерения источников сигналов при ширине спектра обрабатываемых сигналов вплоть до 100 МГц.
или синтезированных раскрывов,
размеры которых соизмеримы с расстоянием до источников вторичного излучения, точность измерения дальности за счет пространственной обработки становится сравнимой с точностью измерения дальности, достигаемой в измерительных системах, использующих широкополосные сигналы. Однако для этого необходима реализация достаточно сложных алгоритмов обработки принимаемых сигналов, обеспечивающих одновременное фокусирование приемной антенной системы на все источники сигналов, находящиеся в зоне анализа. Поэтому практический инте
рес представляет анализ точностных характеристик измерительных систем при реализации в них субоптимальных алгоритмов ПВОС.
Анализ точностных характеристик РИС с радиоголографиче-ской обработкой сигналов. Ра-диоголографическая обработка сигналов позволяет реализовать оптимальную временную обработку (в процессе регистрации радиоголограммы) и пространственную (в процессе ее восстановления) [15]. Благодаря много-канальности голографической обработки при восстановлении радиоголограммы тождественно отображается реально существующая трехмерная целевая об
становка (рис. 5.4, где кривая 1 - р = 10 2, d = 4102; 2 - р=10 3, d= 2-102; 3-р= 10й, rf= ЗЮ2; 4-Р = 10“4,rf = 2102).
В процессе такого отображения осуществляется оптимальная пространственная и временная обработка узкополосных пространственно-временных сигналов [8] на фоне пространственно-временного белого шума одновременно во всем секторе углов зоны обзора без использования управляемых фазосдвигающих цепей. Однако применение радиоголо-графической обработки не обеспечивает компенсацию запаздывания огибающей принимаемого сигнала т1. Такая субоптимальная обработка сигналов приводит к увеличению ошибок измерения по сравнению с оптимальной. Кроме того, при практической реализации систем обработки сигналов дополнительно возникает частотное Q1 рассогласование устройства обработки и принимаемого сигнала из-за нестабильности параметров сигналов и аппаратуры, особенно при последовательной регистрации радиоголограмм.
Практический интерес представляет случай малых величин О, и Т], когда точностные характеристики измерительной системы снижаются незначительно. Результаты проведенного для этого случая расчета точностных характеристик измерительных систем содержатся в [12] и иллюстрируются рис. 5.5 и 5.6, на которых представлены отношения ошибок измерения систем с оптимальной и субоптимальной <tRc обработкой сигналов.
На рис. 5.5 кривые 1 соответствуют Р = 1(Г3, d= 4-Ю2; 2 - Р=10’4, б/=2Ю3; 3 - р=10Л б/=103. Анализ результатов показывает, что при приеме монохроматических сигналов (/7, = 0 ) и в условиях отсутствия расстройки по частоте (Q1 = 0 ) радиоголографическая обработка обес-
печивает достижение потенциальных точностей измерения угловых координат и дальности локальных центров рассеяния.
Радиоголографическая обработка сигналов, ширина спектра которых не равна нулю (Пэ > 0), не позволяет реализовать потенциальные точности измерения координат локальных центров рассеяния источников. Проигрыш в точности измерения координат при радиоголографи-
Рис. 5.5
ческой обработке зависит от положения центра рассеяния относительно приемной системы (Ro,Qo), параметров широкополосности сигнала р, относительной расстройки по частоте v = Тэ£\ и относительного разме
ра раскрыва приемной антенны d2 = L2 / Л2.
Так, например, в системе с субоптимальной обработкой и относительным размером апертуры аМ102 (рис. 5.5) точность измерения дальности источника, излучающего сигнал с относительной шириной спектра р=10’3 и расположенного под углом 90= 30°, снижается в 2,5 раза по сравнению с точностью, достигаемой при оптимальной обработке сигналов.
Влияние частотного рассогласования устройства обработки и принимаемого сигнала на точность измерения координат проявляется тем существеннее, чем больше относительная расстройка по частоте v = , ширина спектра сигнала и /7Э могут быть оценены с помощью
соотношений [12]:
.2 4^2c2
Л <7о®о
При использовании широкополосных сигналов ошибки измерения координат, обусловленные частотным рассогласованием, зависят также от величины коэффициента частотно-временной связи ошибок измерения р0. На рис. 5.6 приведены зависимости относительной ошибки измерения дальности от параметра v для систем с оптимальной и субоптимальной обработкой сигналов (кривая 1 - р=10-1, ро=О, опт. и согл. обработка; 2 - р=10”2, р0=1, опт. обработка; 3 - р=10-2, р0=1, субопт. обработка; 4 - р=10-1, ро= 1, опт. обработка; 5 - р= 10'1, ро=1, согл. обработка). Из рисунка следует, что для немоду-лированных сигналов (р0 = 0) частотное рассогласование приводит к одинаковым ошибкам при оптимальной и субоптимальной обработке. В случае широкополосных модулированных сигналов, например ЛЧМ-
сигналов, ошибки измерения дальности возрастают, причем в большой степени в системах с субоптимальной обработкой.
Важным направлением повышения информативности измерительных систем для исследования характеристик локальных центров рассеяния объектов является формирование больших реальных или синтезированных раскрывов приемных антенн, размеры которых соизмеримы с расстояниями до исследуемых объектов. В этом случае появляются дополнительные возможности использования для выделения сигналов локальных центров рассеяния информации, содержащейся в кривизне волновых фронтов принимаемых сигналов.
Реализация пространственной обработки сигналов в измерительных системах с большими реальными или сннтезированнымн раскрывами приемных антенн не исключает возможность использования широкополосных сигналов и методов их временной обработки. Количественная оценка информационных возможностей измерительных систем, использующих различные зондирующие сигналы и методы их пространственно-временной обработки, может быть произведена с помощью приведенных соотношений.
Литература
1. Глейзер Д. - ТИИЭР, 1989, т.77, № 5.
2. Астанин Л.Ю., Костылев Л.А. Основы сверхширокополосных радиолокационных измерений. - М.: Радио и связь, 198Л.
3. Радиолокационные характеристики летательных аппаратов / Под ред. Л.Т. Тучкова. - М.: Радио и связь, 1985.
4. Коростелев А.А. Пространственно-временная теория радиосистем. - М.: Радио и связь, 1987.
5. Пространственно-временная обработка сигналов / Под ред. И.Я. Кремера -М.: Радио и связь, 1984.
6. Стайнберг БД. и др. Экспериментальное определение ЭПО отдельных отражающих частей самолета. - ТИИЭР, 1989, т. 77, № 5.
7. Суитмен. Сооружение фирмой "Боинг" испытательной установки для определения радиолокационного сечения самолетов. - ТИИЭР, 1988, т. 76, № 6.
8. Кремер И.Я., Понькин В.А. - Радиотехника и электроника, 1975, т. 20, № 6.
9. Понькин В.А., Радзиевский В.Г. - Радиотехника и электроника, 1976, т. 21, №4.
10. Кремер И. Я., Понькин В. А,- Радиотехника и электроника, 1976, т. 21, № 4.
11. Кремер И.Я., Понькин В.А. - Радиотехника и электроника, 1977, т. 22, № 1.
12. Понькин В.А., Романов АД. - Радиотехника и электроника, 1981, т. 26, № 7.
13. Понькин В.А., Романов А.Д. - Радиотехника и электроника, 1983, т. 28, № 8.
14. Кремер И.Я., Понькин В.А., Романов А.Д. - Радиотехника и электроника, 1982, т. 27, № 10.
15. Понькин В.А. - Радиотехника и электроника, 1982, т. 27, № 10.
5.2. Алгоритм обработки результатов радиоголографических измерений в условиях искажения облучающего поля элементами конструкции сканирующей системы
Одной из проблем на пути создания высокоинформативных радиолокационных измерительных комплексов (РИК), реализующих радиоголо-графический метод измерения радиолокационных характеристик (РЛХ) объектов, является необходимость обеспечения плоского поля облучения [1]. В ряде случаев, несмотря на использование специальных устройств формирования плоского волнового фронта, запись информации о параметрах поля вторичного излучения объектов происходит с погрешностями, обусловленными искажающим воздействием на облучающее поле элементов конструкции системы регистрации [2]. Применительно к задаче восстановления радиолокационных изображений (РЛИ) объектов по синтезированным плоским радиоголограммам указанные погрешности возникают по причине искажения поля облучения системой планарного сканирования, осуществляющей перемещение регистрирующей антенны.
Рассмотрим вопросы синтеза алгоритма коррекции результатов измерений на основе известного приближенного соотношения, связывающего параметры поля облучения и поля вторичного излучения объектов через локальные коэффициенты отражения [3,4], и исследуем его возможности на математической модели процесса измерений и экспериментально.
Математическое описание процесса формирования радиоголограмм объектов. Пусть рассеивающие свойства объекта измерений 1 (рис. 5.7) задаются комплексной функцией q(%',у'), характеризующей значения локальных коэффициентов отражения во всех точках «картинной» [4] плоскости х’О'у'. Задача заключается в получении изображения Z>0(x',y') объекта, описывающего распределение комплексных амплитуд рассеянного поля в плоскости х’О'у’, соответствующего случаю облучения объекта плоской волной, распространяющейся в направлении оси Oz .
Искомое изображение в этом случае можно представить в виде
ьо(х'"У')^ч(х'-У')Еое'к7<' , (5-8)
где £0 - известное значение комплексной амплитуды плоской волны в плоскости хОу ; к = 2л/Л волновое число; Л - длина волны; z0 -расстояние между плоскостями хОу и х’О'у'.
Авторы: С. С. Нечаев, В. А. Понькин, А. Ю. Телков
С целью поиска возможных путей определения функции рассмотрим математическое описание процесса формирования радиоголограммы, содержащей исходные данные для решения задачи восстановления изображения.
Для определения значения рассеиваемого объектом поля в точке расположения точечной приемной антенны (зонда) с координатами хр,ур воспользуемся интегралом Кирхгофа [4, 5], который с учетом искажающего воздействия на поле облучения элементов конструкции сканирующей системы запишем в виде
со со
s(Wp) = f \f(xp>yP’x'’y')h(xp-x'>yp-y')dx'dy'> (5-9) —СО -СО
где f(xp,yp,x’,y') - амплитудно-фазовое распределение поля вторичного излучения в «картинной» плоскости объекта; h(xp -х\ ур -у) -импульсная характеристика участка свободного пространства протяженностью z0. С учетом рассеивающих свойств объекта
f(xP,yP,x\y') = Z(xP,yP,x'’y')q(x'’y'), (5-i°)
где %(хр ,ур,х\у'^ описывает амплитудно-фазовое распределение поля облучения в «картинной» плоскости объекта и определяется с помощью соотношения
£(хр>Ур>х',У') = f jV(V yP’ X’ y)h(x'~x’ y'-y^dxdy, (5.11) —03 -co
в котором ys(xp, yp, x, y^ задает амплитудно-фазовое распределение искаженного поля облучения в плоскости сканирования.
Для определения вида У'(хр, ур, х, у) воспользуемся моделью искажающего воздействия на плоское поле элементов конструкции сканирующей системы (рис. 5.7). Будем считать устройство перемещения 2 зонда 4 в горизонтальном направлении (балку) плоским «абсолютно черным телом» [6] шириной Ь, бесконечным в направлении оси Оу. Искажения, вносимые устройством перемещения 3 зонда в вертикальном направлении, не учитываем ввиду малости его геометрических размеров. При условии, что зонд вынесен относительно центра балки на расстояние а, выражение для поля облучения в плоскости сканирования запишется следующим образом:
УР, х, y) = w(x~xp) =
О,
Ео,
(5-12)
С учетом (5.12) выражение (5.11) примет вид ^(хр,ур,х',у') =
(5-13)
Будем использовать представление [5]
h(x'-x, у'- у} = — ---- ,
где А = ^(х'-х)2 +(у'-у)2 +z02 .Тогда
fh(x'-x,y’-y)dy =
(5.14)
= Г (х х) = 2 яр) Г aJ(x'-x)2+z02'| ,
V(x'-x) +zo V
Wp^ - функция Ханкеля первого рода 1-го порядка.
Подставим (5.14) в (5.13) и сделаем замену р = х-хр, после чего запишем
^(х/,,х',у') = ^(хр,х') =
“ ” (5.15)
= J^(P) ф'-(Р + хг))а'Р= J^(P) '((*'-—с/ —«30
Поскольку правая часть (5.15) представляет соб 4 свертку двух
функций и t (ххр), имеет место равенство
^(Л>’х') = ^(х'-хл)- (516)
Запишем (5.9) с учетом (5.16) и (5.10) в виде
s(V>>)= f yp~y')dx'dy' (5.17)
-СО —00
Частным случаем (5.17) является случай, когда рассеивающие свойства объекта не зависят от координаты у', т.е. д(х', у1) = д(х'). При этом (10) преобразуется к следующему виду:
СО
gW= f - х')б6с' > (5-18)
— 00
в котором функцию г][хр-х') = £(-(хр-x')j -л-') назовем им-
пульсной характеристикой измерительной системы.
Решения уравнений (5.17) и (5.18) представляют основу для синтеза алгоритмов коррекции, которые позволят минимизировать погрешности восстанавливаемых РЛИ объектов на этапе апостериорной обработки результатов измерений.
Восстановление изображений объектов. Рассмотрим способ решения уравнения (5.18). Поскольку в случае радиоголографических измерений число отсчетов в регистрируемой радиоголограмме соизмеримо с числом точек в восстанавливаемом изображении, существует возможность определения неизвестной функции q (х') по ее спектру в виде [7]:
СО
’) = -!- [е(Ат)е^Х= (5.19)
L71 J
где кх - пространственная частота; Q(kx) - спектр восстанавливаемого изображения, который с учетом существования погрешностей регистрации радиоголограммы g(x?) находится с помощью соотношения [7, 8]:
Q(kx) = G(kx)R(kx),
(5-20)
CO
где G(Ar)= g(x')e"'*lJ dx' - спектр (фурье-образ) регистрируемой ра-
диоголограммы: R(k) =------1—z——------- - передаточная функция вос-
ММ +a(kx)
станавливающего фильтра; * - знак сопряжения, а > 0 - параметр регуляризации, зависящий от погрешностей регистрации функции g(xp);
СО
Я(^) = j^(x')e-1*lJdx' - фурье-образ импульсной характеристики из
мерительной системы.
Этапы решения уравнения (5.17) аналогичны приведенным выше.
Моделирование процесса формирования радиоголограммы объекта сложной формы. Проверку работоспособности алгоритма восстановления изображений (5.19) выполним вначале методом математического моделирования. Для этого необходимо построить более строгую математическую модель процесса формирования радиоголограммы, учитывающую пространственную протяженность реальных объектов измерений в направлении оси О z . В качестве модели объекта возьмем два бесконечных, идеально проводящих параллельных круговых цилиндра (рис. 5.8). Процесс формирования радиоголограммы в этом случае можно описать с использованием строгого решения соответствующей задачи дифракции плоской электромагнитной волны [9] и представления поля облучения, искаженного балкой, через угловой спектр пространственных частот [5].
Этапы моделирования процесса измерений в целом будут выглядеть следующим образом:
1. В соответствии с (5.12) определяется вид ^(х);
2. Поле g(x, z) представляется через дискретный (в отличие от непрерывного [5, 10, 11]) угловой спектр пространственных частот, т. е.
£ (х, z) = у1 Atu, (х, z) , и, (х, z) = е'*ие ,
2тг
/ = 0,±1,..., k‘=—i,DH»b.
’ х D Н ин
1 dh/2
Коэффициенты Ai = K¥lTi, где Т, =---- Г у/(х)е~'*иа5с - спектр
Du J, н -он/2
1 °н/2
поля облучения в плоскости сканирования; 7] =------ j f(x)e-1*lJt</x -
Dfi -dh/2
частотная характеристика участка двумерного свободного пространства протяженностью z0;
3. Для каждой компоненты углового спектра численно решается задача дифракции плоской электромагнитной волны с комплексной ам-„ . „ . С к‘х
плитудои , распространяющейся под углом <pt - <рй - arcsin —
z'. Для Е-поляризации облучающей волны в результате’ решения электродинамической задачи находятся плотности s = ±l,
/ = 0,±1,..., поверхностных токов. Плотности s = ±l, токов, со-
ответствующие случаю облучения объекта квазиплоским полем £(х, z),
к оси
находятся согласно свойству линейности процесса рассеяния радиоволн [12] в виде =
i
4. Регистрируемое значение g(xp) рассчитывается по найденным распределениям s = ±l, с использованием интеграла Кирхго-
фа [9];
5. Пункты 1-4 повторяются для всех задаваемых положений хр приемного зонда, тем самым определяется амплитудно-фазовое распределение поля вторичного излучения объекта на голограмме;
6. Восстановление изображения производится согласно формулам (5.19), (5.20), при этом « = 0 ввиду отсутствия погрешностей регистрации радиоголограммы в модельной среде.
Результаты математического моделирования приведены на рис. 5.9, где показаны амплитудные зависимости локальных коэффициентов отражения объекта, образованного цилиндрами радиусами = а+[ = 0,52., с расстоянием между осями симметрий цилиндров / = 152 и углом <рй = zr/2. Функции восстановлены по радиоголограмме, длина которой DH = 322, расстояние z0 = 402, а шаг регистрации параметров поля вторичного излучения объекта выбирался равным 2/4. Параметры сканирующей системы определялись значениями b = 1ОЛ , п = 102. Кривая У соответствует классическому способу восстановления РЛИ с использованием интеграла Кирхгофа по результатам моделирования процесса формирования и регистрации радиоголограммы при облучении объекта плоской волной (идеальное РЛИ); кривая 2 - классическому способу восстановления РЛИ без использования алгоритма коррекции по радиоголограмме, сформированной с учетом искажений поля облучения балкой сканирующей системы; кривая 3 иллюстрирует эффективность предложенного алгоритма обработки результатов измерений. Она получена с использованием (12) и (13). Все зависимости нормированы на максимальное значение модуля функции локальных коэффициентов отражения объекта в поле плоской волны. Отметим, что восстановление изображений осуществлялось по амплитудно-фазовому распределению , на которое накладывалось весовое окно Кайзера [13].
Из рис. 5.9 видно, что использование классического способа восстановления РЛИ на РИК с планарным сканированием приводит к ошибкам определения параметров локальных источников поля вторичного излучения объекта. В приведенном случае искажающее воздействие элементов системы сканирования проявляется в уменьшении значения оценки функции ?(х') в точке, соответствующей оси симметрии цилиндра s = -l, на величину А к 50%. Использование предлагаемого алгоритма позволяет увеличить точность определения параметров локальных источников до А < 5%.
Экспериментальная проверка работоспособности предложенного алгоритма проводилась на радиоголографическом РИК, для которого Ь = 9,05Я, а = 14,06Я. На рис. 5.10,о и б приведены радиолокационные изображения макета ракеты, полученные классическим методом (о) и с помощью рассмотренного алгоритма (б), при этом размеры радиоголограммы составляли 32 Я. х32Я, го = 4ОЯ, Я = 0,032 м. Изображения восстановлены по результатам реальных измерений и представлены в виде линий равного уровня в диапазоне 15 дБ с шагом 3 дБ между уровнями.
Рис. 5.10
Результаты математического моделирования и экспериментальных исследований показывают, что применение предложенного алгоритма обработки данных радиоголографических измерений, полученных в условиях искажения облучающего поля элементами конструкции сканирующей системы, позволяет повысить точность измерений на 3...5дБ.
Литература
1. Дибдал Р.Б. Методы измерения эффективной площади отражения радиолокационных целей. - ТИИЭР, 1987, т. 75, №4.
2. Arthur D. Yaghjian. An Overview Of Near-Field Antenna Measurements. - IEEE Trans. Antennas Propagat., 1986, v. 34, №1, January.
3. Нечаев C.C., Понькин В.А., Сорокин Ю.А. Измерение радиолокационных характеристик объектов в неплоском поле с компенсацией реверберационных помех. - Радиотехника (Журнал в журнале), 1997, №6.
4. Сафронов Г.С., Сафронова А.П. Введение в радиоголографию. - М.: Сов. радио, 1973.
5. Зверев В.А. Радиооптика (преобразования сигналов в радио и оптике). - М.: Сов. радио, 1975.
6. Вольф Э., Борн М. Основы оптики: Пер. с англ. - М.: Наука, 1970.
7. Василенко Г.И., Тараторин А.М. Восстановление изображений. - М.: Радио и связь, 1986.
8. Тихонов А.Н. и др. Численные методы решения некорректных задач. - М.: Наука, 1990.
9. Иванов Е.А. Дифракция электромагнитных волн на двух телах. — Минск: Наука и техника, 1968, 584 с.
10. Johnson J.H. Wang. An examination of the theory and practices of planar near-field measurement. - IEEE Trans. Antennas Propagat., 1988, v. 36, №6, June.
11. Гудмен Дж. Введение в Фурье-оптику: Пер. с англ. - М.: Мир, 1970.
12. Штагер Е.А. Рассеяние радиоволн на телах сложной формы. - М.: Радио и связь, 1986.
13. Макс Ж. Методы и техника обработки сигналов при физических измерениях: В 2-х томах: Пер. с франц. - М.: Мир, 1983.
53. Измерение радиолокационных характеристик объектов в неплоском поле с компенсацией реверберационных помех*
К настоящему времени достаточно хорошо изучены вопросы компенсации реверберационных помех (мешающих отражений от элементов конструкции радиополигона: опорно-поворотного устройства, стен безэховой камеры и т.п.) при измерении интегральных РЛХ [1, 2]. Вместе с тем методы компенсации реверберационных помех применительно к современным измерительным радиополигонам (РП) с пространственно-временной обработкой сигналов изучены недостаточно. При создании РП с пространственной обработкой традиционно стремятся к созданию плоского поля облучения, несмотря на то, что в некоторых случаях возможна апостериорная коррекция результатов измерений РЛХ объектов в неплоском поле облучения.
Последующее рассмотрение ограничим случаем использования пространственных зондирующих сигналов, а процесс рассеяния электромагнитного излучения будем считать линейным. Полагаем также, что исследуемая радиолокационная характеристика отражения объекта линейно связывает параметры облучающего и рассеянного полей [3] и при изменении пространственного положения объекта остается неизменной.
Авторы: С. С. Нечаев, В. А. Понькин, Ю. А. Сорокин
Измерение РЛХ осуществляется в два этапа. На первом этапе при некотором /с-ом положении исследуемого объекта (/с = 1,2, в текущий момент времени Г/ (/=1,2,...,£) формируется /-й пространственный зондирующий сигнал S/ Рассеянное поле принимается Л/-канальной приемной системой с соответствующей каждому приемному каналу антенной с апертурной функцией 7„, (ти=1,2,...,Л4)- Таким образом, для каждого положения объекта выполняется серия измерений с использованием выбранного набора зондирующих сигналов 5^ = {S15 S2,..., 5/}, где т - знак транспонирования. На втором этапе массив принятых сигналов, описываемый составным вектором Гт ={ Г*, ..., 4}, используется в процессе обработки для отыскания оценки U исследуемой характеристики отражения U на фоне реверберационных помех N и коррекции результатов измерений в неплоском поле облучения.
Математическую модель наблюдения, описывающую процесс формирования массива Г, с учетом принятых допущений можно представить системой матричных уравнений:
A,U + N = T/ , / = 1, 2,...,Х, (5.21)
где А; - матрица, описывающая линейный процесс формирования части массива принятых сигналов Г, отраженных от исследуемого объекта, находящегося в /-ом положении; N - вектор, описывающий реверберационные помехи, характеристики которых считаются неизвестными.
Основной задачей исследований является решение системы уравнений наблюдения (5.21), обеспечивающее получение оператора W преобразования результатов измерения Г в оценку исследуемой характеристики U=Wr с минимальной ошибкой отклонения оценки U от истинного значения U:
£ = (U-U)T(U-U).
Для решения системы уравнений запишем (5.21) в стадартном виде
АХ=Г,
(5-22)
и
где Ат =
х=
- блочная матрица и составной вектор.
4
1
4
1
4
1
N
Для отыскания решения системы уравнений (5.22) воспользуемся оператором псевдообращения матрицы А, обеспечивающим получение искомой оценки U [4].
Наилучшее приближенное решение для переопределенной системы уравнений (5.22) (число компонент наблюдаемого вектора Г превышает число подлежащих оценке компонент вектора U) может быть получено с использованием обобщенной обратной матрицы вида [4]
А-=(ЛТЛГ*ЛТ. (5.23)
После несложных вычислений в соответствии с (5.23) можно получить выражение для оценки искомой характеристики к к
и = В^4тГ/-С^Г,, (5.24)
/=i i=i
где матрицы В и С не зависят от результатов измерений и определяются параметрами модели наблюдения;
к (к Л 1 к
(=1 \ 1=1 7 /=1
где I - единичная матрица.
Получаемая с использованием метода обобщенного обращения матриц (5.23) остаточная ошибка оценивания искомой характеристики
к к
минимальна и в соответствии с
[4] £ = ит 1-в£дт4-с£д
U .
Предложенный алгоритм обработки результатов измерений (5.24) позволяет получать оценки искомых РЛХ в условиях реверберационных помех. Однако, если в процессе измерений поле облучения объекта не было однородным и плоским, то найденная оценка (5.24) будет зависеть от структуры поля облучения. Ввиду принятого допущения о линейной связи параметров облучающего и рассеянного полей оценку (5.24) можно представить в виде
U = D(70, D-1U = L/0, (5.25)
где D - матрица, описывающая структуру поля облучения объекта; UQ -оценка РЛХ объекта в плоском поле облучения.
При известной структуре поля облучения, которая в ряде случаев определяется методом прямых измерений, линейный характер связи оценок позволяет проводить апостериорную коррекцию полученной оценки РЛХ в соответствии с (5.25). Это также позволяет решать другую, часто встречающуюся на практике задачу оценки влияния структуры поля облучения на исследуемые характеристики отражения объектов. В соответствии с (5.25) оценка РЛХ Ц в некотором заданном поле облучения, описываемом матрицей Db определяется как
(5.26)
Возможности предложенных алгоритмов обработки результатов многократных измерений РЛХ объектов в неплоском поле при наличии реверберационных помех были проверены на математической модели и экспериментально. На математической модели исследовались процессы записи и восстановления одномерного радиолокационного изображения (РЛИ) квадратной пластины размером примерно 10Я (рис. 5.11), наблюдаемой на неравномерном фоне с заданной характеристикой обратного рассеяния. В ходе исследований изменялись амплитудное и фазовое распределения поля облучения и уровень помех. Восстановленное РЛИ пластины в модельной среде с использованием методов радиоголографии показано на рис. 5.12. На рис. 5.13 и 5.14 представлены этапы восстановления РЛИ с применением алгоритма, компенсирующего влияние реверберационных помех (5.24), и алгоритма апостериорной коррекции
Рис. 5.14
Рис. 5.13
неплоского поля облучения с известной структурой (5.25). Итоговое РЛИ пластины иллюстрирует достаточно высокую эффективность предложенных алгоритмов.
Экспериментальная проверка возможностей предложенных алгоритмов проводилась на коллиматорном РИК с планарным сканированием приемного зонда при рабочей длине волны 3,2 см. Амплитуда и фаза рассеянного поля регистрировались на координатной сетке при 128x128 положениях зонда с дискретным шагом 0,8 см. Объектом измерений была металлическая пластина размером 49х49 см. Для воссоздания условий облучения пластины неплоским неоднородным полем она устанавливалась на краю рабочей зоны РИК. Полученное при восстановлении традиционным способом РЛИ пластины сильно зашумлено и искажено (форма линий равного уровня на рис. 5.15) вследствие имеющихся изменений фазы и спада амплитуды падающего поля на краю рабочей
зоны РИК. Радиолокационное изображение пластины, восстановленное с использованием предлагаемых алгоритмов (5.24) и (5.25), приведено соответственно на рис. 5.16 и 5,17. Качественное улучшение получаемых РЛИ подтверждает принципиальную возможность использования разработанных алгоритмов компенсации реверберационных помех и коррекции искажений волнового фронта облучающего поля и воздействия помех на измерительных комплексах с планар-
Рис. 5.15
ным сканированием.
Рис. 5.16
Рис. 5.17
Предварительный анализ полученных результатов показывает, что динамический диапазон значений сигналов в плоскости восстанавливаемого РЛИ увеличился в среднем в 1,5 раза, уровень наблюдаемых на РЛИ фоновых переотраженнй сместился на 15...20 дБ в сторону меньших значений и примерно на 2 порядка повысилась чувствительность РИК, размер рабочей зоны увеличился в 1,5 раза.
Литература
1. Фрич, Харт. Новый метод измерения малых эффективных отражающих поверхностей с помощью цифрового вычитания векторов поля. - ТИИЭР, 1964, т. 52, №5.
2. Халберитейи, Фрич. Исключение мешающих отражений от стен безэховых камер методом сдвига на А/2 и А/4. - ТИИЭР, 1964, т.52, №12.
3. Ваганов Р.Б., Каценеленбаум Б.З. Основы теории дифракции. - М.: Наука, 1982.
4. Прэтт У. Цифровая обработка изображений: Пер. с англ. - М.: Мир, 1982.
5.4. Применение теории обнаружения
к задаче маскировочного окрашивания летательных аппаратов*
В мировой практике для повышения живучести летательных аппаратов (ЛА) широко применяется маскировочное окрашивание (МО). Параметры рисунка (форма, цвет, характер расположения пятен на поверхности самолетов и вертолетов) задаются эвристически по результатам экспериментальных исследований в натурных условиях [1—4]. На результаты оказывают влияние большое число факторов, связанных с характеристиками средств наблюдения, свойствами поверхности ЛА, условиями освещения, характеристиками фона и др. Этим объясняется достаточно общий, а в ряде случаев и противоречивый характер имеющихся в литературе рекомендаций по маскировочному окрашиванию ЛА.
Рассмотрим принципы маскировочного окрашивания ЛА, базирующиеся на теории обнаружения пространственно протяженных объектов (ППО) человеком-оператором и закономерностях формирования контрастного образа ЛА в атмосфере Земли.
Критерии и показатели эффективности маскировочного окрашивания. В большинстве случаев оптико-электронные средства (ОЭС), используемые для наблюдения летательных аппаратов, лишь формируют изображения, а информационные решения по их обнаружению и распознаванию принимает человек-оператор. Достижения в об-
Авторы: Е. М. Афанасьева, В. А. Понькин
ласти психофизики открывают перспективы использования для оценки эффективности маскировочного окрашивания методов статистической теории обнаружения. Однако до последнего времени эта теория разрабатывалась для решения задач радиолокации, связи и радионавигации применительно к обнаружению сигналов сосредоточенных источников, элементы которых средствами наблюдения не разрешаются [5,6]. Поэтому для решения задач оценки эффективности маскировочного окрашивания ЛА необходимо дальнейшее развитие этой теории в направлении учета формы, текстуры и других характеристик двумерных сигналов, отсутствующих в одномерных сигналах, а также эффектов затенения фона обнаруживаемым ППО,
Входные изображения ППО могут быть описаны с помощью представления сигналов [7]. Для известной структуры пятнистого пространственно-протяженного экранирующего фон объекта, содержащего L пятен, входной результирующий сигнал можно записать как
L
У,ЯД (г) + Я£+1Ф(г) +W(r) при гипотезе Г, v )= ‘ /=1
<P(r) + W(r) при гипотезе Го,
где S(r), Ф(г), W(r) - векторы-столбцы изображения объекта, фона и аддитивного шума, заданные в A-мерной области D анализа входных сигналов; Sifr') - элементы объекта (пятна), положение которых задается координатными функциями Я( (i=l, L+1), удовлетворяющими соотношениям
i+i
Я, =(^.,...11,.£я,=1,
Здесь и,=£7,(г) - диагональная матрица порядка NxN координат отсчета сигнала S(r) при выбранном алгоритме просмотра области D, содержащая нули и единицы, причем последние соответствуют отсчетам, приходящимся на область, занятую /-ым пространственным элементом объекта; I - единичная матрица.
Для многих критериев оптимальная обработка результатов наблюдения Y(r) состоит в отыскании отношения правдоподобия
Г,
A(r) = [?(y)/ri/?(y)/ro]<A0,
представляющего собой отношение условных плотностей вероятности Р(У)/Г, входного массива и в сравнении этого отношения с порогом Ло. Для оценки эффективности маскировочного окрашивания JIA можно воспользоваться приближенными выражениями, полученными в соответствии с указанной выше процедурой для некогерентного излучения и малого контраста изображения объекта на равномерном фоне (при этом истинный контраст объекта может быть произвольно большим). В этом случае условные вероятности правильного обнаружения Ро6н и ложной тревоги Рл т
46н=^{<? + ^'(4т)}’
где
F(x) = — j exp{-r2/2pr, (5.27)
-оо
92=C|{c2^3 +4} ' J |[/(м,^/Г1)-/(и,й>/Г0)]2 duda . —ОЭ
Здесь С], с2, с3 - коэффициенты, зависящие от закона распределения сигналов объекта и фона; - интегральная интенсивность фона, усредненная по пространственной области реальной сцены; /ш - интенсивность шума; - интенсивность изображения реальной сце-
ны при гипотезе Г). Параметр обнаружения q, имеющий смысл отношения сигнал-шум, при наблюдении ЛА с высоким разрешением пропорционален сумме произведения квадратов контрастов пятен изображения ЛА на площади соответствующих участков S/ изображения ЛА:
м
(5.28) /=1
где М- число видимых пятен на изображении ЛА с контрастом
А:(и,й>) = [/(и,й>/Г1)-/(и,й)/Г0)]/(и,ео/Г01)“1.
Критерий (5.28) однозначно связывает характеристики ЛА, обусловленные свойствами его поверхности и условиями наблюдения, с показателем эффективности маскировочного окрашивания (вероятностью или дальностью обнаружения).
В соответствии с этим критерием задача обоснования рисунка МО ЛА включает оценку величины различно окрашенных ЛА и выбор варианта окрашивания с минимальным значением 5\ф с учетом закономерностей формирования изображения ЛА в рассматриваемых условиях.
Оценка истинного контраста и обоснование оптических характеристик покрытий. Истинный контраст элемента поверхности ЛА в атмосфере Земли зависит от его освещенности, отражательных характеристик поверхности, яркости фона наблюдения в месте нахождения элемента и для диффузно отражающей поверхности определяется как
р (Я.)7 л (0, <р, Л) cos 0dco
\ / О)
-'ф(0н><М)
где 1(0,<р,А) - суммарная (прямая и рассеянная) интенсивность излучения, освещающего элемент поверхности на длине волны Л; 0, <р- зенитный и азимутальный углы направления распространения излучения; /ф(0н,рн,Я) _ спектральная яркость фона в направлении наблюдения 0н,^н;р(Я) - спектральный коэффициент отражения элемента поверхности ЛА; со - телесный угол, в пределах которого освещается элемент.
Для достижения нулевого контраста элемента поверхности ЛА необходимо выполнение условия рй^Л^ = л1^(0п,срк,Л^1 ^1(0,р,Л)со80Лсо,
(О
где рсЛЛ) - оптимальный коэффициент отражения покрытия, обеспечивающий нулевой истинный контраст элемента поверхности, находящегося в заданных условиях наблюдения.
Освещенность элементов поверхности ЛА с учетом многократности и анизотропии рассеянного света, а также характеристик отражения подстилающей поверхности, можно определить с использованием приближенного метода решения уравнения переноса излучения в рассеивающей среде путем учета новых граничных условий для слоев, расположенных выше и ниже ЛА [8]. При этом усреднялись индикатрисы рассеяния в каждом из указанных слоев и использовалась известная высотная стратификация оптических характеристик атмосферы.
Большой массив исходных данных обрабатывался на основе анализа функции углового распределения рассеянного излучения Iv(0,cp,hi) на различных высотах й,, численно равной интенсивности облученности элемента поверхности ЛА рассеянным и отраженным от Земли излучением.
В качестве примера на рис. 5.18 приведены значения /pf0jB виде нисходящего I 4- (0),^О < 0 и восходящего из-
лучений на Я=О,55 мкм для высоты полета 0,5 (рис. 5.18,а) и 10 км (рис. 5.18,6). Состояние атмосферы характеризуется метеорологической дальностью видимости 5м=10 км и вертикальной оптической толщиной
всего слоя атмосферы го=О,5, зенитное расстояние солнца /=40°. Значения / i (0) и 7 Т (0) одновременно характеризуют яркости фона дневного неба и подстилающей поверхности со слоем атмосферы для выбранного вк.
Рис. 5.18
В табл. 5.1 приведены рассчитанные для этих же метеоусловий значения для нижней и боковой поверхностей ЛА, наблюдаемых на фоне ясного неба, для различных высот полета.
Таблица 5.1
Высота. h Значения коэффициента отражения Ро(Л) для различных поверхностей
Нижняя Боковая
^=0° (солнце перед наблюдателем) «’„=180° (солнце за наблюдателем) <А, = 0° (солнце перед наблюдателем) рн=180° (солнце за наблюдателем)
бн=10° б„=8№ бн = 10° бн=80° бн = 10° 0„ = 80° б„ = 10° б„ = 80°
0,5 1,3 2,8 0,6 1,25 1,5 3,4 0,13 0,28
5 0,15 0,65 0,1 0,5 0.2 1,1 0,03 0,15
10 0,09 0,4 0,07 0,3 0,2 0,74 0,02 0,08
Анализ высотного и углового распределений нисходящего и восходящего излучений и значений требуемых коэффициентов отражения позволяет установить следующее.
На малых высотах интенсивность облучения 7? нижнего горизонтального элемента поверхности ЛА значительно меньше фона дневного неба /4-, особенно при больших 0. Этим объясняется наблюдаемый на практике отрицательный контраст нижних затененных поверхностей ЛА на малых высотах полета. В этом случае оптические свойства по
верхности ЛА, необходимые для достижения нулевого значения истинного контраста, не могут быть обеспечены обычными лакокрасочными материалами. Для устранения дефицита освещенности требуются покрытия со значениями рь(Я) > 1, т.е. активные или самосветящиеся.
Вертикальные элементы поверхности ЛА в этих же условиях могут наблюдаться с положительным контрастом, если они освещены прямыми солнечными лучами, и с отрицательным, если находятся в тени.
Для обеспечения нулевого контраста освещенных солнцем поверхностей требуются покрытия с рь(Я) < 1, а для затененных - с р^Х) > 1 (табл. 5.1).
С увеличением высоты интенсивность Z-L, т.е. фон дневного неба, уменьшается за счет уменьшения слоя атмосферы, расположенного выше ЛА, а интенсивность 7? незначительно возрастает. Дефицит освещенности уменьшается, и на высоте, например, 5 км нижние поверхности ЛА наблюдаются с положительным контрастом, а значения ро (Л) изменяются от 0,1 до 0,65 в зависимости от 0.
При дальнейшем увеличении высоты (10 км и более) интенсивность /4- уменьшается практически до нуля (рис. 5.18,6), что обусловливает положительный контраст наблюдаемых снизу элементов поверхности ЛА. Для устранения избытка освещенности наблюдаемых снизу нижних и боковых поверхностей ЛА требуются покрытия практически черного цвета (табл. 5.1).
Расчет в соответствии с (5.27) применительно к условиям наблюдения ЛА на фоне Земли позволил выявить зависимости ро(Х) от 0 uh. При наблюдении верхних поверхностей ЛА на фоне Земли под углами, близкими к горизонту (0«80...85°), и полете ЛА на средних и больших высотах требуемые коэффициенты отражения больше коэффициентов отражения земной поверхности (рф) для летних условий и меньше - для зимних. Так, при /1=10 км и 0 =80° рь=0,35 (при рф=0,2) и рь=0,5 (при /?ф=0,8) на длине волны Я=0,55 мкм. Для более коротких длин волн различие между рь(Я) и рф будет еще больше, а с ростом Я оно уменьшается и практически исчезает в ближней инфракрасной области спектра. Это обусловлено тем, что слой атмосферы, расположенный ниже ЛА, увеличивает яркость фона Земли за счет рассеивания, если земная поверхность имеет сравнительно малую отражательную способность, и уменьшает яркость фона при высокой отражательной способности земной поверхности.
В качестве примера на рис. 5.19 приведены требуемые значения покрытий для МО верхних поверхностей ЛА, наблюдаемых под малыми углами к горизонту на фоне бурых почв при полете на малых (кривая 2) и средних (кривая 1) высотах.
Влияние условий наблюдения (высот полета, углов наблюдения, характеристик фона и др.) на оптимальные характеристики покрытий различных элементов поверхности ЛА обусловливают необходимость выявления наиболее значимых из них.
Оценка влияния факторов на контраст элементов поверхности ЛА. Степень влияния факторов на контраст элементов поверхности ЛА можно оценить методом случайного баланса [9] путем расчета среднего по условиям оптимального коэффициента отражения поверхности ЛА при изменении исследуемого фактора от минимальной до максимальной величины. В качестве иллюстрации на рис. 5.20 представлены диаграммы рассея-
Рис. 5.20
ния значений оптимальных коэффициентов отражения для нижних поверхностей ЛА, наблюдаемых на фоне ясного неба (рис. 5.20,а) и боковых поверхностях ЛА, наблюдаемых на фонах неба и Земли (рис. 5.20,6).
На диаграммах представлена зависимость р0 от следующих факторов: высоты полета ЛА h, зенитного угла наблюдения 0И, альбедо подстилающей поверхности Ао, азимутального угла наблюдения ^>н, зенитного расстояния солнца /.
Из диаграммы рассеяния рь Для боковых поверхностей ЛА следует, что наиболее значимыми факторами являются: азимутальный угол наблюдения относительно солнца (т.е. факт освещенности поверхности прямыми лучами солнца), фон наблюдения и альбедо подстилающей поверхности. Так, в зависимости от того, освещена боковая поверхность прямым солнечным светом, или находится в тени, значение центра распределения рь изменяется от 0,1 до 1,5. Наиболее значимыми факторами для нижних поверхностей ЛА являются: высота, зенитный угол наблюдения и альбедо подстилающей поверхности. Влияние факторов на показатель 5Эф иллюстрируется на рис. 5.21, где показана его зависимость от параметра полета самолета Р для Л=0,5 (кривая 1) и 5 км (кривая 2). При расчетах принято, что площадь нижней поверхности составляет 40 м2, боковой - 25 м2, воздухозаборников - 0,8 м2 и контраст возду
хозаборников на фоне дневного неба составляет - 1.
Степень изменения контраста уменьшается, если сузить диапазон изменения существенных факторов при заданных оптических характеристиках поверхности ЛА. Это свидетельствует о целесообразности применения специализированных схем МО (для конкретных условий) и, следовательно, их перекраски в ходе эксплуатации, либо разработки и применения покрытий и других средств с управляемыми оптическими характеристиками.
Предложения по маскировочному окрашиванию ЛА. Реализация схем МО с использованием лакокрасочных покрытий с неизменяю-щимися оптическими характеристиками предполагает различную степень адаптации: по сезону, географическому району применения, времени суток и др.
В табл. 5.2 приведены максимальные значения так называемого остаточного контраста, обусловленного изменчивостью факторов, не учитываемых при рассматриваемом способе адаптации, а также относи
тельное снижение дальностей обнаружения ЛА при использовании различных способов адаптации по сравнению с дальностью обнаружения ЛА со штатной окраской.
Таблица 5.2
Показатель Способ адаптации
Сезонная перекраска Перекраска на устойчивые погодные условия Перспективные средства типа «хамелеон»
ясно пасмурно
Остаточный контраст: в тени на солнце -0,9 1,5 -0,8 1,0 0,5 0,5 0,1...0,2 0,1...0,2
Относительное снижение дальности обнаружения, % 10...15 20...30 40... 60
Как видно из таблицы, перспективы повышения МО связаны с применением средств типа «хамелеон».
К физическим явлениям, представляющим интерес для создания средств маскировочного окрашивания ЛА, относятся фото-, электро-, магнитохромизмы и другие эффекты, на основе которых могут быть предложены перспективные средства маскировки ЛА.
В соответствии со значимостью факторов, влияющих на контраст различно ориентированных поверхностей ЛА (см. рис. 5.20), перспективные средства маскировки для нижней, боковой и верхней поверхностей ЛА должны иметь отличительные конструктивные особенности.
Обоснование состава и характеристик комплекса средств маскировочного окрашивания ЛА. должно быть индивидуальным для различных типов ЛА с учетом их конструктивных особенностей и условий применения.
Литература
1. Константинов Я. Камуфляжная окраска авиационной техники. - Зарубежное военное обозрение, 1988, №1.
2. Jane's all the worcraft. 1983—84.
3. Naval Aerospace Medical Research LAB. SR 79-1, August, 1978.
4. Пат. 1595615 (Великобритания).
5. Ван Трис Г. Теория обнаружения, оценок и модуляции: Пер. с англ. / Под ред. В.Н. Тихонова. - М.: Сов. радио, 1972.
6. Кремер И.Я., Понькин В.А. и др. Пространственно-временная обработка сигналов / Под ред. И.Я. Кремера. - М.: Радио и связь, 1984.
7. Прэтт У. Цифровая обработка изображений: Пер. с англ. - М.: Мир, 1982, кн. 1,2.
8. Соболев В.В. Перенос лучистой энергии в атмосферах звезд и планет. - М.: Г остехиздат, 1956.
9. Налимов В.В., Голикова Т.Н. Логические основания планирования. - М.: Металлургия, 1981.
5.5. Оптическая заметность пространственно протяженных объектов в атмосфере Земли
Вопросы оптической заметности объектов в атмосфере Земли имеют важное практическое значение для различных областей науки и техники, и их рассмотрению посвящено большое количество работ [1]. Вместе с тем закономерности проявления оптической заметности объектов в зависимости от их формы, размеров, оптических свойств и условий наблюдения (состояния атмосферы, положения Солнца, высоты расположения объекта над поверхностью Земли и др.) изучены недостаточно.
Установим основные закономерности проявления оптической заметности объектов выпуклой формы в атмосфере Земли в зависимости от геометрических и оптических характеристик объектов, состояния атмосферы и условия наблюдения.
Постановка задачи. В соответствии с результатами [2-4] в качестве показателя оптической заметности пространственно протяженных объектов по отношению к системам наблюдения с высокой угловой разрешающей способностью может быть принята величина, имеющая смысл эффективной площади объекта
q^rfSi, (5.29)
i=i
где к, и Si - истинный контраст и площадь z-го элемента поверхности объекта в плоскости наблюдения; N - количество видимых элементов поверхности объекта.
Из анализа (5.29) следует, что величина показателя оптической заметности q в атмосфере Земли зависит от освещенности различных элементов поверхности объекта, отражательных характеристик поверхности, яркости фона в направлении наблюдения, а также от размеров, формы объекта и его ориентации в пространстве. Для получения количественных оценок величины q необходима разработка математической
Авторы: Е. М. Афанасьева, И. П. Бостынец, В. А. Понькин
модели освещения объекта и оптической модели объекта, учитывающей его размеры, форму и ориентацию в пространстве. Поэтому далее коротко остановимся на их описании.
Модель освещения объекта наблюдения. Освещенность элементов поверхности объекта с учетом многократности и анизотропии рассеяния света, а также характеристик отражения подстилающей поверхности можно определить с использованием приближенного метода решения уравнения переноса излучения в рассеивающей среде, приняв во внимание граничные условия для слоев, расположенных выше и ниже объекта [5]. Расчеты с учетом усреднения индикатрисы рассеяния в каждом из указанных слоев в соответствии с известной стратификацией оптических характеристик атмосферы позволяют получить численные значения интенсивностей нисходящего / 4-(0,^,й,Я) и
восходящего /Т(0,^,й,Я) ^у<0<тт) излучений. Определенные таким образом интенсивности /4- и 1 ? характеризуют освещенность объекта с верхней и нижней полусферы при заданных значениях зенитного в и азимутального <р углов направления распространения излучения, высоты расположения объекта h и заданной длины волны излучения Я [6].
Большой массив получаемых при этом данных можно представить функциями пространственной освещенности объекта, описывающими угловое распределение рассеянного излучения ур(^,Я,Л) на различных высотах h, численно равному облученности элемента поверхности рассеянным в атмосфере солнечным и отраженным от Земли излучением.
На рис. 5.22 приведены значения функции пространственной освещенности объекта рассеянным излучением, рассчитанные на длине
Рис. 5.22
волны Я =0,55 мкм при высоте расположения объекта h = 0,1 км (а), 1 км (б) и 10 км (в). Состояние атмосферы характеризовалось метеорологической дальностью видимости S,„=4 км и вертикальной оптической толщиной всего слоя атмосферы г0 =0,5. Зенитное расстояние Солнца /=30°, альбедо Земли Ло=О,2. Функция пространственной освещенности также определяет яркость фона для различных углов наблюдения 0И.
Воспользуемся дискретным представлением функции пространственной освещенности. Для этого разобьем полный телесный угол на W равных по величине элементов и поставим в соответствие каждому возможному направлению наблюдения значение функции освещенности, т.е. /) = , 1=1,N. Будем считать также, что каждое направ-
ление задается соответствующим ортом вектора направления наблюдения , 1=1,N.
Модель объекта наблюдения. Описание формы поверхности. Известно, что поверхность объектов выпуклой формы сколь угодно точно может быть описана касательными плоскостями. Ограничимся приближенным заданием поверхности любых рассматриваемых объектов N касательными плоскостями (по числу выбранных дискретных представлений функции освещения). Причем при задании касательных плоскостей будем исходить из условия, что нормали плоскостей совпадают с выбранными направлениями функции пространственной освещенности. Следует отметить, что увеличение N позволяет повысить точность задания функции пространственной освещенности и точность описания поверхности объектов выпуклой формы. Таким образом, каждый объект описывается многогранником с числом граней, равным N, причем их форма и размеры различны.
Описание оптических свойств поверхности. Заметим, что при выбранных дискретных направлениях , 1=1,N, при описании любых объектов положение граней в пространстве остается неизменным, изменяются лишь значения площадей граней, т.е. каждый объект представляется рядом значений площадей соответствующих граней. Ввиду постоянного положения граней в пространстве их освещенность, уровень соответствующего фона, а следовательно, и истинный контраст остаются постоянными. Контраст выбранной грани будет изменяться только при изменении оптических свойств объекта или условий наблюдения в соответствии с выражением
Кк1 = ---------'---, cos(h?,h")> 0 , k,i=l,N, (5.30)
где Ku ~ контраст к-го элемента поверхности (грани) объекта при наблюдении в направлении п°; рк - коэффициент диффузного отражения к-й грани объекта; is - яркость излучения на верхней границе атмосферы в рассматриваемом диапазоне длин волн (солнечная постоянная).
Введение контраста в виде (5.30) обеспечивает, с одной стороны, его функциональную связь с традиционно используемыми выражениями контраста Ki = (/оКз = 2(/0-/„)/(/<>+/„), К4 = 1п(/0//р), где /0, - яркости объекта и фона соответственно; а с
другой, - позволяет исключить из рассмотрения неопределенность в задании контраста абсолютно черного Кг и белого Ki объектов при 0 , а также не подтверждающееся на практике положение о максимальной заметности абсолютно черного объекта при малых интенсивностях фона. В дальнейшем будем считать, что при пятнистой окраске объекта с целью обеспечения его минимальной и максимальной заметности каждая грань раскрашивается в один цвет (тон). Если пятнистое окрашивание не применяется, то коэффициент отражения для каждой из граней является постоянной величиной.
Описание ориентации объекта. Считаем, что изменение ориентации объекта происходит дискретно в соответствии с выбранной дискретизацией отсчетов функции освещенности. При таком описании изменения ориентации объекта площади граней остаются постоянными, изменяется лишь их пространственное положение по ранее выбранным направлениям п°, 1=1,N.
Показатель заметности объекта выпуклой формы. В соответствии с принятыми моделями освещения и объекта наблюдения показатель заметности (5.29) для тела выпуклой формы с учетом (5.30), можно представить в виде
w
?/ = ^A’w5tCOs(«?,^), cos(^,„f)>0 . (5.31)
к=1
В (5.31) суммирование производится по М (M<N~) видимым с направления п°, граням объекта, и в силу симметричного разбиения про-
странства, как правило, выполняется соотношение М ® . Из анализа
(5.31) следует ряд частных, используемых далее положений. Если в (5.31) положить Ku = const, то сумма становится равной площади проекции видимой части поверхности объекта на плоскость наблюдения. В частности, для сферы радиусом R
^S^cos[n°:n°)~^R2, (5.32)
к
где ASjy - площадь одной грани при описании поверхности сферы N касательными плоскостями (l±SN = 4n2 R2/N). С учетом этого из (5.32) следует
1 Nl2 1
~£cos(«) = -.
С использованием полученных выражений оценим заметность объекта выпуклой формы в частных случаях.
Заметность абсолютно черного и белого объектов. Для пассивных покрытий, отражающих без усиления интенсивности падающего излучения, коэффициент отражения абсолютно черного и белого объектов р = 0 и р = 1 соответственно. При этом контраст Л-го элемента поверхности (5/30) в направлении п° черного и белого объектов принимает вид
Кк! черн — К, черп — — III 1 s » Кkl бел “ ( — I/)/Is •
Контраст белого элемента поверхности в зависимости от соотношения величин 70 и h может принимать й положительное, и отрицательное значения. Контраст черного объекта всегда отрицательный, причем для всех элементов его поверхности имеет одинаковое значение. Поэтому значение показателя заметности абсолютно черного объекта при наблюдении его в направлении п°
м
<7/черн — /чеин^ ',Sк&^\пк>П1) — К( черн^пр I > i=l
где 5пр I ~ площадь проекции поверхности объекта на плоскость наблюдения. Оценка показателя заметности белого объекта проводится по (5.31).
Наиболее и наименее заметный объект с заданного направления наблюдения. Задача формирования рисунка, обеспечивающего максимальную и минимальную заметность объекта, состоит в выборе для каждой грани оптимального значения коэффициента отражения из интервала 0<р,<1, i=\,N. Можно предложить достаточно простой алгоритм получения рисунка окрашивания объекта, обеспечивающего его максимальную и минимальную заметность при наблюдении в заданном направлении .
1. Определим яркость видимых в направлении и° элементов поверхности белого объекта jOk.
2. Если грани аппроксимирующей поверхности объекта, для которых выполняется условие
бел| > черн| ИЛИ IQk > 27/, (5.33)
покрасить в белый цвет (р = 1), а оставшиеся грани - в черный (р = 0), то заметность такого объекта будет максимальна.
3. Для формирования варианта окрашивания, обеспечивающего минимальную заметность объекта в заданных условиях наблюдения, необходимо для k, k=\,N, граней, для которых выполняется условие /ок > j,, подобрать краску с оптимальным значением коэффициента отражения рк = popt
Poptlok - Il-0, 0 < popt < 1 ,
(5-34)
а остальные элементы поверхности объекта (грани) окрасить в белый цвет (р = 1).
Исходя из анализа значений функции пространственной освещенности, можно утверждать, что при наблюдении объекта с поверхности Земли в зависимости от высоты положения объекта рисунки окрашивания для обеспечения его максимальной и минимальной оптической заметности существенно различаются: для обеспечения максимальной заметности объектов, находящихся на малых высотах (й<0,1 км), необходимо окрашивать в черный цвет элементы поверхности, не освещаемые прямым солнечным излучением, а освещаемые - в белый цвет в соответствии с условием (5.33). Для обеспечения максимальной заметности объектов, находящихся на больших высотах (й>10 км), все элементы поверхности объекта должны быть окрашены в белый цвет.
Для обеспечения минимальной заметности объектов, находящихся на малых высотах, необходима окраска почти всех элементов поверхности объекта в белый цвет, хотя и при таком окрашивании они рицательный контраст на фоне интенсивного рассеянного лежащим выше слоем атмосферы. На средних и больших высотах при заданном направлении наблюдения п° для каждого элемента может быть подобрана оптимальная окраска (5.34), обеспечивающая нулевой контраст. В качестве примера на рис. 5.23 дано изображение белой сферы с выделенными на ее поверхности областями Д, и Д2, для которых при заданных условиях наблюдения:
имеют от-излучения
Рис. 5.23
S„, = 4 км; h = 0,1 км; Ao = 0,2; 0„ = = 100°; <p„ = 30°; i0 = 30°; R = 5 м, выполняются неравенства
I ок > hi к&Дс,
Iоь > 211, к^Дг-
На рис. 5.24 приведены варианты окрашивания сферы, обеспечивающие минимальную (а) и максимальную (б) ее оптическую заметность в этих условиях. Для этих же условий на рис. 5.25 приведена зависимость показателя заметности от азимутального угла наблюдения (gH Для идеально белой сферы (кривая 7), абсолютно черной сферы (диска) (кривая 2), белого диска (кривая 3) и для сферы
риантами окрашивания, обеспечивающими ее максимальную и ми-альную заметности (кривые 4 и 5 соответственно). Вид кривой 3 для шетра обнаружения белого диска хорошо согласуется с известной [симостью дальности обнаружения белого диска от направления в эсфере Земли [7].
Заметность случайно ориентированных объектов выпуклой мы в атмосфере Земли. Интересные конструктивные результаты
;но получить для случая, когда преимущественного направления ентации объекта в пространстве не существует. Поэтому ниже оста-имся на рассмотрении только этого случая. Для принятой модели екта наблюдения можно считать, что значения вероятности каждой 1и объекта занять некоторое фиксированное положение (из числа N устимых) /?, одинаковы и равны /?, =1/N. Представим показатель оп-еской заметности объекта (5.31) в виде
м
<7/ = > Яи = Klskcos(n°k,nf) . (5.35)
к=1
В соответствии с (5.35) показатель оптической заметности объекта, людаемого в данном направлении , аддитивно складывается из азателей заметности отдельных видимых граней qkl, к=\,М. Найдем знее значение показателя заметности А-й видимой грани, зафиксиро
ванной в пространстве по положению, с учетом того, что ее место может равновероятно занять любая грань объекта:
1 N 1
qki = Kucos[n0k,n^—^sk = —K1klcos[nk,n°)so , (5.36)
" k=l N
где So ~ общая площадь поверхности объекта выпуклой формы.
При записи (5.36) предполагалось, что коэффициенты отражения всех граней одинаковые рк = р (A=l,/V), поэтому при изменении ориентации объекта контраст любого элемента его поверхности, попадающего в зафиксированное в пространстве место, соответствующее направлению нормали п°, не изменяется, как и значение угла С уче-
том (5.36) среднее значение показателя заметности объекта можно записать в виде
м
= <5-37) /V к=1
Поскольку сфера является выпуклым объектом, в соответствии с (5.37), для оценки ее показателя заметности запишем
1 м
?сф = 4^Я2—(5.38)
Л к=1
Сравнивая (5.37) и (5.38), можно сделать вывод, что среднее значение показателя оптической заметности любого выпуклого случайно ориентированного объекта в заданных условиях наблюдения равно показателю заметности сферы, наблюдаемой в тех же условиях и имеющей площадь поверхности, равную площади поверхности объекта.
Важность полученного вывода подтверждается, по крайней мере, двумя обстоятельствами. Во-первых, для получения численных значений показателя оптической заметности случайно ориентированных выпуклых объектов любых размеров и формы достаточно изучить для тех же условий наблюдения заметность сферы. Во-вторых, в соответствии с (5.37), достаточно просто провести сравнительную оценку заметности по величине среднего значения эффективной поверхности различных случайно ориентированных объектов выпуклой формы.
На основе проведенных оценок уровней заметности абсолютно черного и белого объектов, а также объектов с вариантами окрашивания, обеспечивающими их максимальную и минимальную заметность, установлено соответствие между средним значением показателя оптической заметности любого выпуклого случайно ориентированного объекта и показателем заметности сферы, наблюдаемой в тех же условиях.
lumepamypa
1. Ковалев В.А. Видимость в атмосфере и ее определение. - Л.: Гидрометеоиз-дат, 1988.
2. Поветко В.Н., Понькин В.А. - Радиотехника и электроника, 1993, т.38, № 4.
3. Понькин В.А., Зуев И.М. — Радиотехника, 1992, № 12.
4. Бычков А.А., Понькин В.А. - Автометрия, 1992, № 4.
5. Соболев В.В. Перенос лучистой энергии в атмосферах звезд и планет. - М.: Гостехиздат, 1956.
6. Афанасьева Е.М., Понькин В.А. - Информационный конфликт в спектре электромагнитных волн. - Приложение к журналу «Радиотехника», 1994.
7. Оптика в военном деле. Сборник статей / Под ред. С.И. Вавилова. - М.: Изд. АН СССР, 1945.
5.6. Оценка оптической заметности объектов сложной формы в атмосфере Земли*
В [1] рассмотрена задача оценки оптической заметности объектов выпуклой формы в атмосфере Земли. Оптическая заметность объектов сложной формы может быть оценена по их компьютерным изображениям, синтезированным для заданных условий их наблюдения. Описанные в литературе модели компьютерного синтезирования изображений наблюдаемых сцен [2-5] разработаны с целью создания рекламных и художественных фильмов, использования в видеотренажерах и для визуализации проектов в САПР, поэтому в этих моделях реализовано упрощенное описание источника освещения наблюдаемой сцены и даны приближенные, достаточно грубые алгоритмы расчета яркостей элементов поверхности, составляющих сцену объектов и фона.
Рассмотрим математическую модель для оценки оптической заметности объектов сложной формы на основе компьютерного синтезирования фотометрических (физически точных [2]) изображений диффузно отражающих объектов сложной формы в атмосфере Земли.
При синтезировании изображения объекта сложной формы необходимо учитывать то обстоятельство, что элементарные участки его поверхности оптически связаны между собой. Каждый участок освещается суммарным потоком, одна часть которого излучается непосредственно земной атмосферой и Солнцем (при этом остальные элементы играют экранирующую роль), другая часть формируется в результате многократного переотражения лучистого потока соседними участками поверхности объекта.
Авторы: Е. М. Афанасьева, И. П. Бостынец, В. А. Понькин
Модель наблюдаемой сцены. Поверхность объекта аппроксимирована системой плоских многоугольных диффузно отражающих элементов, в качестве которых выбраны треугольники, являющиеся геометрически «жесткими» фигурами. Учет оптической связи элементов поверхности объекта осуществляется на основе использования коэффициентов оптической связи в системе многократно отражающих поверхностей [6].
Модель освещения. В реальных условиях объект освещается прямым и многократно рассеянным солнечным излучением [7]. Плотность потока излучения с длиной волны X зависит от направления освещения, определяемого углами 0 и <р (рис. 5.26), и описывается функцией пространственной освещенности 1(0,<р,Х). Ее расчет, основанный на приближенном решении уравнений Соболева с использованием высотной стратификации атмосферы Шифрина-Минина, проводится по методике, предложенной в [8].
Исходные данные, необходимые для синтезирования на ЭВМ изображения объекта. Поверхность объекта задается двумя списками. Список ее узловых точек имеет вид (i,xnyi>z,), i~ 1,2,..., р0, где /- номер точки; (x„y,,z,) - ее координаты в декартовой системе координат объекта (x,y,z); р0 - общее количество узловых точек. Список тре
угольных элементов разбиения поверхности - {к, р\, pkv рк, р^, к = = 1,2,...,Ко, где к- номер треугольника; ^Р1,рк,р^ - номера узловых точек, образующих его вершины, отсчитываемые против часовой стрелки со стороны внешней нормали к поверхности объекта; рк - коэффициент диффузного отражения Л-го треугольника; - общее количество треугольных элементов. Кроме этого задаются следующие параметры оптико-геометрической модели объекта и модели освещения (рис. 5.26): Sm -метеорологическая дальность видимости в километрах; г0 - оптическая толщина атмосферы; Ло - альбедо земной поверхности; /0 и <р0 - угловое положение и азимут Солнца в градусах; Я - длина волны оптического излучения (ОИ) в микрометрах; 0Н и (ри - угловое положение и азимут наблюдателя в градусах; h - высота объекта над поверхностью Земли в километрах. Система координат объекта (x,y,z) повернута относительно земной системы координат (X,Y,Z) последовательно на углы у, р и а. (В авиации они называются углами крена, тангажа и курса летательного аппарата [9]).
Синтез изображения объекта. Величины освещающих элементарные участки поверхности объекта полных потоков ОИ Ф4, установившихся в результате многократного переотражения, определяются по известной формуле теоретической фотометрии [6]:
Хо
Ф* = Ф£ + ^^ИР/Ф/Д = 1, -Ло, (5.39)
/=1 М
где Ко - количество элементов разбиения поверхности объекта; Ф°к -поток ОИ, падающий на к-й элемент непосредственно от источника освещения; pi - коэффициент отражения /-го элемента поверхности объекта; <ykJ - коэффициент связи /-го и к-го элементов [6].
Систему уравнений (5.39) для расчета полных освещающих потоков ОИ Ф4 можно переписать в матричном виде:
' 1 пР\ V,21Z?2 1 1 -WkjPk* * £ ф / = "ф?' ф°
1 Ф°Ко,
(5.40)
Для обеспечения возможности численного интегрирования потоков ОИ полный телесный угол 4^ разбивается на Lo равных по величине элементов, им соответствуют Lo дискретных направлений в пространстве [1].
Величины потоков ОИ Ф“, попадающих непосредственно от источника освещения на элементы поверхности объекта, с учетом эффекта их взаимного затенения, определяются как
А О
Ф»=5*ДЯДП^/,^, (5.41)
/=1
где St ~ площадь к-го элемента разбиения поверхности объекта в квадратных метрах; ЛЯ - ширина спектрального диапазона ОИ в окрестности рассматриваемой длины волны Л в микрометрах; ДО = 4я/Lo - величина элементарного телесного угла, ср; - значение функции пространственной освещенности, соответствующее /-му направлению в пространстве (Вт/(м2-ср мкм)); wk - весовой коэффициент, учитывающий вклад в освещенность к-го участка поверхности объекта элементарного потока излучения, приходящего с l-го направления. Коэффициент равен косинусу угла падения l-го освещающего потока на к-й элемент поверхности объекта, если он не экранирован соседними элементами с этого направления, в противном случае wk =0.
Расчет коэффициентов оптической связи у/к/ и у//к для к-го и 1-го элементов разбиения поверхности объекта проводится по методике [6], при этом проверяется, не закрыты ли они друг от друга какими-либо другими элементами поверхности (в этом случае у/к/ = у/1к = 0).
После расчета значений констант Ф£ и у/к/, входящих в (5.40), из него определяются величины полных освещающих потоков ОИ фк. Матрица уравнения (5.40) имеет большую размерность, что затрудняет применение для ее решения прямых методов (например, метода Гаусса). Кроме того, данная матрица характеризуется диагональным преобладанием [3]. Поэтому используется обеспечивающий хорошую сходимость итерационный метод [10] решения (5.40).
Яркости элементарных площадок поверхности объекта
Bk = Ej^,lc=l,2,...,K0. (5.42)-
^Sk
После этого синтезированное изображение полигонально описанной [5] поверхности объекта формируется стандартным в компьютерной графике способом с использованием алгоритма заполнения Z-бу-фера [2-5].
Описанный выше алгоритм обеспечивает синтезирование изображения объекта на одной выбранной длине волны излучения Я . Для получения многоспектрального фотометрического изображения объекта данный алгоритм многократно повторяется применительно к заранее выбранной сетке длин волн Л1,Л2,...,ЛЫ .
Точность синтезированных фотометрических изображений. Ее можно оценить на основе анализа точности используемых методов расчета характеристик ОИ объектов сложной формы.
В соответствии с проведенными в [8] оценками, расчет пространственного распределения освещающих потоков на основе приближенного метода решения уравнения переноса излучения (метод Соболева В.В.) обеспечивает точность не хуже 15...20 %. Методы теоретической фотометрии обеспечивают точность вычислений яркости элементов поверхности объектов с учетом их оптической связи около 5... 10 %. Таким образом, результирующая точность синтезированных изображений составляет 20...25 %, которую при учете большого числа факторов можно считать вполне приемлемой для получения количественных оценок при решении задач оценки оптической заметности объектов сложной формы в атмосфере Земли.
Оценка оптической заметности объектов сложной формы в атмосфере Земли. В [1] для количественного расчета заметности объекта с /-го направления предложен показатель qj, имеющий смысл эффективной площади поверхности объекта. Величина q? вычисляется как
К°
S{, (5.43)
k=l
где Sk - площадь проекции k-го элемента поверхности объекта на плоскость наблюдения; Кк - истинный контраст k-го элемента с /-го направления наблюдения, определяемый выражением [1]
Вф - яркость фона при наблюдении объекта с /-го направления в пространстве; - спектральная яркость излучения на верхней границе атмосферы (солнечная постоянная).
Определение показателя заметности объекта сложной формы в виде (5.43) позволяет по синтезированному изображению объекта при заданных оптических характеристиках элементов его поверхности рк оценить его оптическую заметность.
Если для каждого элемента разбиения поверхности объекта сложной формы установлен диапазон возможных значений коэффициента диффузного отражения рк к=\,..,К0, то можно реализовать
итерационный алгоритм расчета ^„-мерных векторов и , определяющих оптимальные варианты окрашивания поверхности объекта сложной формы, при которых достигается его минимальная и максимальная оптическая заметность в заданных условиях наблюдения.
На рис. 5.27 приведены примеры синтезированных изображений самолета, окрашенного белой краской и с вариантами окрашивания, обеспечивающими его минимальную и максимальную оптическую заметность с заданного направления наблюдения (в этом случае принято, что цвет всех элементов поверхности объекта может изменяться от абсолютно черного до идеально белого, т.е. рк е [0;1], А=1,..Л0 в условиях, описываемых параметрами: Sm = 4 км; т0= 0,5; h = 1 км; Ао = 0,2; /0 = 60°; X = 0,55 мкм; а = 90°; р = 0°; у = 0°; 0Н = 60°; <рн = 190°. Для повышения четкости изображений выделены контуры самолета. Значения показателя оптической заметности самолета при различных вариантах окраски его поверхности следующие: а) белого - (^)&1=3,3 м2; б) минимально заметного с заданного направления - (^2)m,n = 0,07 м2; в) максимально заметного с заданного направления - (^) =4,1 м . В рассмотренных усло-
виях наблюдения удачно подобранная окраска поверхности самолета позволяет снизить в 47 раз (повысить в 1,24 раза) его эффективную поверхность по сравнению с самолетом, окрашенным в однотонный белый цвет.
Рис. 5.27
Разработано алгоритмическое и программное обеспечение решения задачи компьютерного синтезирования фотометрических изображений объектов сложной формы, находящихся в естественных условиях освещения в атмосфере Земли. Данная модель позволяет проводить исследование влияния на заметность объектов их положения и ориентации в пространстве, формы и оптических свойств их поверхности. При помощи этой модели также могут быть рассчитаны для заданных условий наблюдения объекта потенциально достижимые минимальный и максимальный уровни его оптической заметности.
Литература
1. Афанасьева Е.М., Бостынец И.П., Понькин В.А. Оптическая заметность пространственно-протяженных объектов в атмосфере Земли. - Радиотехника, 1997, №10.
2. Иванов В.П., Батраков А.С. Трехмерная компьютерная графика. - М.: Радио и связь, 1995.
3. Шикин А.В., Боресков А.В. Компьютерная графика. Динамика, реалистические изображения. - М.: Диалог-МИФИ, 1996.
4. Роджерс Д. Алгоритмические основы машинной графики. - М.: Мир, 1989.
5. Гилой В. Интерактивная машинная графика. - М.: Мир, 1982.
6. Сапожников Р.А. Теоретическая фотометрия. - М.: Энергия, 1977.
7. Соболев В.В. Перенос лучистой энергии в атмосферах звезд и планет. - М.: Гостехиздат, 1956.
8. Афанасьева Е.М., Понькин В.А. Применение теории обнаружения к задаче маскировочного окрашивания летательных аппаратов. - Информационный конфликт в спектре электромагнитных волн. Приложение к журналу «Радиотехника», 1994.
9. Корн Г., Корн Т. Справочник по математике для научных работников и инженеров. - М.: Наука, 1984.
10. Турчак Л.И. Основы численных методов. - М.: Наука, 1987.
5.7. Оценка возможностей человека-оператора по различению пространственно протяженных объектов по их изображениям
Разработке математических моделей, описывающих возможности человека-оператора по различению пространственно протяженных объектов (ППО) по их изображениям, посвящено большое количество работ, достаточно полный обзор которых приведен в [1]. Однако эта задача, как отмечается и в [1], окончательного разрешения до настоящего времени не получила. Известные эмпирические выражения [2] для расчета качественных показателей решения задачи удовлетворительно описывают закономерности процесса различения изображений ППО человеком-оператором лишь в отдельных случаях. Причем границы применимости эмпирических выражений не определены. Известны примеры, когда эти выражения дают оценки вероятности различения, противоречащие результатам экспериментальных исследований [1].
Другой подход к оценке возможностей человека-опрератора по различению ППО по их изображениям базируется на методах теории обнаружения [3-7]. В рамках этого подхода применительно к реалистическим моделям случайных изображений задача различения достаточно
Авторы: В. А. Понькин, И. В. Лаптев
строго решена только в предположении высокой разрешающей способности средств наблюдения (СН) [6]. Поэтому полученные на основе методов теории обнаружения выражения для расчета вероятности различения ППО по их изображениям, по существу, не учитывают влияние конечной разрешающей способности СН.
На основе методов теории обнаружения получим приближенные выражения для расчета вероятности различения ППО по их изображениям с учетом ограниченной разрешающей способности СН и оценим их применимость для прогнозирования возможностей человека-оператора.
При использовании физически обоснованных моделей оптических изображений полагают, что поле в картинной плоскости объекта описывается случайным, обычно гауссовским, процессом е(г,Г) = Re{E(r,f)}, некоррелированным по пространственной координате г и времени t [3, 4]. В предположении линейности процесса формирования изображений амплитуда поля Eu(p,t) в плоскости р формирования изображений также является гауссовским процессом. Трудность использования этой модели связана с тем, что большинство оптических приборов, в том числе и глаз человека, являются энергочувствительными, т. е. решения по различению ППО принимаются на основе анализа усредненной на интервале наблюдения Т интегральной интенсивности изображения
5(р) = (1/7’)2! Eu{p,tK{p,t)dt, (5.45)
о
которая не является гауссовским полем. Отмеченные обстоятельства не позволяют достаточно строго получить формулу для расчета вероятности различения случайных изображений ППО с учетом ограниченной разрешающей способности средств наблюдения. Поэтому для практически важных случаев, когда интервал времени наблюдения Тзначительно превышает интервал корреляции тк поля (Т » гк), воспользуемся упрощенной моделью входных изображений ППО. Предлагается использовать модель усредненных на интервале наблюдения Т изображений, описываемых детерминированными функциями £,(/?), 1 = 1,2, наблюдаемыми по гипотезам Я,, i = 1,2, в смеси У(р) с аддитивным пространственным гауссовским шумом W(p) с корреляционной функцией r(Pi,P2) = о-2^(А ~Р2), W я2 ~
Y^S^ + ^p), peDQ,
Здесь
5;(р) = —И С{а)О^у,<0)Тъ 2,71 -ео
спектральная плотность шума:
/ = 1,2. (5.46)
2xcR
------V,O)
CD
ехр-^ -12я — pv>dvda)
- усредненные на интервале наблюдения изображения ППО [8];
Л
0^,(0) = Fv = f Ji(r,(o)e~l2’rr'dr - фурье-преобразование про-
-00
странственного распределения спектральной интенсивности излучения ППО в картинной плоскости на частоте (о ; С(<у) - энергетиче
ский множитель; Тг(у,а>) - результирующая оптическая передаточная
функция (ОПФ) среды, СП и человека-оператора; R, R, - расстояния до
картинной плоскости и сопряженной плоскости формирования изображений ППО; с - скорость света; v - векторная координата в спектральной плоскости.
В соответствии с известными результатами теории обнаружения [5] задача различения (5.45) сводится к задаче обнаружения разностного изображения. При равновероятных гипотезах вероятность различения изображений ППО имеет вид:
п 1 Г
Р = —j= j exp л/2л о
(5.47)
где квадрат параметра различения / с использованием равенства Пар-
севаля можно представить в виде
Г2=\ [|Ги{51(р)-52(р)}|2Л. (5.48)
<т J
Поскольку 5,(р) в (5.46) с точностью до масштабного коэффициента R/R{ является фурье-образом изображений пространственного распределения интенсивности излучения объектов, в предложении слабой частотной зависимости J(r,<y) и Тг(у,(о) выражение (5.48) можно
записать в виде
2 Л
г2 = J|0i(V) - o2(v) |2| Tt(ARv) I2 dv,
(5-49)
где Co = — | C(to)d(o ; A = —.
—00
При высокой разрешающей способности СН у примет вид
х2 = С2|Г£(0)|2 ||О1(и)_О2(у)|2^ ' (5 50)
<т J
Отношение параметров различения у / у ъ характеризирует влияние ограниченной разрешающей способности СН на различение ППО, которое назовем параметром формы Q. В общем случае
f| O,(v)-O2(v)|2| rL(A7?v)|2 dv
q^Y --------------------------------
У “r
“ 17^(0)I2 J|O1(v)-O2(v)|2 dv
(5.51)
В случае равноярких ППО (J;(r) = J2(r) = Л) одинаковой площади So, отличающихся только по форме, ув определяется выражением
г2 _ Л2С2|Г£(0)|2^
/в 2 ’
<Т
где 5Д - площадь разностного изображения.
Тогда с учетом (5.49) и (5.52) параметр формы
«О
J| Oi(v)-O2(v)|2|7'l(A7?v)|2 dv
Q ~ |7i(0)|2J2SA
Следует отметить, что выражение (5.52) совпадает с известным [6], если при расчетах вероятности различения воспользоваться (5.47), а параметр различения вычислять по (5.52).
Таким образом, приближенное решение задачи оценки вероятности различения Р с учетом ограниченной разрешающей способности СН и формы ППО может быть получено с использованием (5.47), в которой в соответствии с (5.51) параметр различения
у = ув(?, (5.54)
а в случае ППО, отличающихся только по форме,
у2=е2у25д/50, (5.55)
где уэ = JqCq 17^(0) |2 S0/a2 - энергетический коэффициент.
Рассмотрим применимость соотношений (5.47), (5.49)-(5.55) для оценки возможностей человека-оператора по различению ППО по их изображениям. Для этого сравним результаты расчетов вероятности различения ППО по (5.47), (5.49)-(5.55) с экспериментальными данными [9, 10].
В [9] исследовалась способность человека-оператора по различению равноярких объектов простой формы с одинаковой площадью, расположенных на однородном фоне в условиях наличия аддитивного нормального шума. Результаты экспериментов представлялись в виде зависимости вероятности перепутывания от 5Д / So. При проведении расчетов рассматривался алфавит из четырех фигур: квадрата, круга, тре
угольника, креста, положение и ориентация которых при минимальной 5Д очевидны.
В соответствии с [9] площадь фигур 50 выбиралась равной 1,96-Ю-4 м2, интенсивность фона 7ф - 0,1 Вт/м2, контраст - 0,02, расстояние наблюдения R = 10 м. За результирующую ОПФ при-
нималась ОПФ зрительной системы, аппроксимируемая гауссоидой ((2) в [И]), параметры которой приведены в табл. 5.3 [12]. Параметры, определяющие , в [9] содержатся не полностью, поэтому этот коэффициент подбирался методом последовательных приближений из условия наилучшего совпадения экспериментальных и расчетных данных.
Расчеты проводились с использованием ранее разработанной цифровой модели формирования изображений ППО [10], теоретической модели человека-оператора [7, 12] и исходных данных [9]. Результаты расчетов и экспериментов представлены на рис. 5.28, где даны зависимости вероятностей перепутывания фигур ^,ер.экс. (кружочки) И Террас (сплошная линия) от произведения параметра формы разностного изображения Q2 и его относительной площади 5д / So для различных пар фигур, и в табл. 5.3.
Таблица 5.3
Номер зависимости Пары фигур •$дХ$о Q1 VW р 1 пср.экс. Р пср.рас.
1 Квадратхкруг 0,092 0,008 0,21 0,23
2 Круг* крест 0,155 0,11 0,017 0,17 0,164
3 Круг*треугольник 0,18 0,19 0,034 0,095 0,09
4 Квадрат*треугольник 0,2 0,196 0,039 0,085 0,08
5 Квадрат*крест 0,25 0,16 0,04 0,082 0,075
6 Треугольник*крест 0,227 0,19 0,043 0,06 0,07
Как следует из рис. 2 в [9], зависимость Рпер от параметра 5Д/5О не монотонна, что не всегда объясняет закономерность изменения веро
ятности перепутывания. Использование параметра 5Д/5О £?2 (см. (5.47), (5.55)) приводит к монотонности зависимости и устраняет это несоответствие (рис. 5.28).
В [10] экспериментально исследовалась зависимость вероятности опознавания Роп человеком-оператором объектов, отличающихся только по форме, от разрешающей способности оптико-электронного прибора N [штр/мм], приведенной к приемнику. Кроме того, в [10] подробно описана экспериментальная установка и указаны ее оптические и геометрические характеристики.
Теоретически вероятность опознавания /-го объекта Р0П1 оценивается минимальной вероятностью различения Р:] /-го объекта с у-ми представителями рассматриваемого алфавита [6]:
Рош=пйп(^). (5.56)
j
При этом параметр у (5.47) для ансамбля из шести объектов в соответствии с [6] рассчитывался как
у = 0,6уэДе-1- (5.57)
\ о0
При проведении расчетов учитывалось, что разрешающая способность прибора, приведенная к приемнику N [штр/м], связана с его характеристиками следующим выражением [13]:
N = ^-, 1,22AF
(5.58)
где F — фокусное расстояние в метрах; а — радиус входной оптики в метрах; Я - длина волны в метрах; коэффициент 10'3 имеет размерность метр/миллиметр.
Параметр Со рассчитывался с учетом (5) из [11] и исходных данных [10]. Суммарная ОПФ T^ARv) вычислялась как произведение ОПФ прибора и ОПФ человека-оператора, которые аппроксимировались га-уссоидами вида (2) из [11] с параметрами, указанными в [10] и табл. 1 из [12]. Шумы прибора и зрительного анализатора не учитывались. Расстояние наблюдения R принималось равным 0,25 м, фокусное расстояние прибора F - 0,065 м. Изменение разрешающей способности СН моделировалось изменением радиуса его входной оптики.
На рис. 5.29 представлены экспериментальные зависимости вероятности опознавания объектов (сплошные линии) и их теоретические оценки (пунктир) от разрешающей способности прибора при угловом размере фигур - 20'; яркости фона - 0,024 кд/м2; времени предъявления - 0,2 с;
контрасте объекта с фоном - 3,7 (/ - круг; 2 - квадрат; 3 - треугольник; 4 — объект Т-образной формы; 5 - квадрат, круг; 6 - треугольник, объект Т-образной формы).
Из сравнения результатов эксперимента и проведенных расчетов следует, что вероятность опознавания круга и квадрата, а также треугольника и объекта Т-образной формы попарно примерно одинакова. При этом теоретические и экспериментальные кривые совпадают между собой с максимальной
ошибкой порядка 10% в областях низкой разрешающей способности. Эта ошибка и несколько другой наклон кривых 5, 6 объясняются высоким контрастом объектов относительно фона при проведении экспериментов, тогда как используемое в предложенной модели человека-оператора выражение (5.47) получено в предположении малых контра-
стов.
Полученные аналитические выражения для оценки возможностей человека-оператора по различению ППО, в отличии от известных [1, 2, 6], применимы в широком диапазоне изменения условий наблюдения и характеристик объектов, а также учитывают ограниченную разрешающую способность СН. Расчеты по предложенным аналитическим соотношениям хорошо согласуются с известными экспериментальными исследованиями.
Литература
1. Аксютюв Л. Н. Прогнозирование вероятности распознавания объектов по космическим снимкам - Исследование Земли из космоса, 1995, № 2.
2. Живичин А. И., Соколов В. С. Дешифрирование фотографических изображений - М.: Недра, 1980.
3. Бакут П. А и др. Теория когерентных изображений - М.: Радио и связь, 1987.
4. Фалькович С. Е. Оценка параметров сигналов - М.: Сов. радио, 1970.
5. Ван Трис Г. Теория обнаружения, оценок и модуляции, т. 1. - М.: Сов. радио, 1972. у
6. Красильников Н. Н. Теория передачи и восприятия изображений. - М.: Радио и связь, 1986.
7. Поветко В. Н., Понькин В. А. Оценка качества обнаружения пространственно-протяженных объектов по их изображениям. - Радиотехника и электроника, 1993, т.48, №4.
8. Понькин В. А., Юхно П. М. Энергетическая модель процесса формирования изображения оптической системой. - Радиотехника и электроника, 1983, т 38, № 6.
9. Воронин Ю. М.. Павлов Н. И. Вероятность распознавания объектов на экране монитора оптико-электронной системы наблюдения. - Оптический журнал, 1994, №7.
10. Когцавцев Н. Ф. и др. Связь вероятности опознавания объектов простейшей формы с параметрами прибора наблюдения. - М.: Труды МЭИ. Сер. Светотехника, 1979, вып. 123.
И. Понькин В. А., Лаптев И. В. Цифровая энергетическая модель "объект-среда-ОЭС" для исследования процесса обнаружения пространственно протяженных объектов. - Оборонная техника, 1995, № 12.
12. Поветко В. Н. Единая функциональная модель зрения для информационных систем обнаружения. - Радиотехника, 1996, №6.
13. Борн М., Вольф Э. Основы оптики. - М.: Наука, 1973.
5.8. Вопросы математического моделирования зрительного опознавания пространственно протяженных объектов в атмосфере Земли
Зрение человека исторически является одним из интенсивно исследуемых объектов в анатомическом, физиологическом, психологическом, нейрофизиологическом, информационном, кибернетическом и др. направлениях. Для многих областей деятельности человека, связанных с созданием и применением различных технических средств получения, передачи и обработки изображений, а также с изменением свойств заметности объектов (реперы, маяки и т.п.), значительный практический интерес представляет проблема количественной оценки информационных возможностей зрения по обнаружению и распознаванию объектов. Решению этой проблемы посвящено большое количество работ, достаточно полный обзор которых приведен в [1, 2]. Однако, как отмечается в R], удовлетворительного разрешения проблема до настоящего времени не получила. Современные теоретические модели и широко используемые на практике эмпирические соотношения для оценки информационных возможностей зрения обладают крайне низкими прогностическими возможностями. Создавшееся положение объясняется большой сложностью процесса зрительного восприятия объектов не только с точки зрения его предсказания, но и измерения [3]. Нарастающий поток новых методов оценки информационных возможностей зрения, разработанных на основе современных теорий информации, самоорганиза-
Автор: В. А. Понькин
ции, распознавания образов, оптимального обнаружения и др., существенно не изменяет положения. По-видимому, назрела необходимость обсуждения и корректировки общих методических подходов и путей решения проблемы в свете современных представлений о процессе наблюдения в целом [4, 5].
Состояние исследований в области математического моделирования зрительного восприятия. Развитие этого направления исследований зрения человека связано с идеями академика С. И. Вавилова «О неоспоримом родстве глаза и Солнца» и А. В. Луизова «О целесообразности устройства глаза», в соответствии с которым «границу способностям зрения ставят только основные законы природы: первое и второе начала термодинамики, волновая и квантовая природа света».
С разработкой и распространением идей теории связи Н. Н. Красильников высказал и экспериментально подтвердил гипотезу о целесообразности устройства глаза с позиций теории оптимального обнаружения [6]. В дальнейшем представления о процессе зрительного восприятия, основанные на теории оптимального обнаружения, явились основой направления математического моделирования зрения (ММ3) [7-9 и др.]. В те годы сомнение вызывала не гипотеза об оптимальном устройстве глаза с позиций статистической теории принятия решений, а недостаточный уровень развития самой теории оптимального обнаружения пространственно-временных сигналов [10]. По крайней мере следует отметить три аспекта в развитии теории оптимального обнаружения в интересах ее применения для построения ММ3.
Во-первых, в интересах решения задач радиолокации и связи была хорошо разработана теория обнаружения сигналов сосредоточенных излучателей, находящихся в дальней зоне приемной системы, т.е. системы, сфокусированной на бесконечность. Для информационных систем оптического диапазона характерными условиями работы является фокусирование на объект наблюдения, т.е. прием сигналов в зоне Френеля приемной системы. В случае приема сигналов в зоне Френеля появляется возможность использования дополнительной информации, содержащейся в кривизне волнового фронта принимаемых сигналов. В связи с этим известные в то время результаты классической теории оптимального обнаружения, полученные в предположении плоских волновых фронтов принимаемых сигналов, оказываются непригодными для оценки информационных возможностей оптимальных систем в зоне Френеля [10]. К началу решения этой задачи в известной литературе были рассмотрены только вопросы разрешения источников, расположенных в зоне Френеля [11]. В результате выполненных исследований теория обнаружения сигналов, источники которых расположены в дальней зоне приемной системы, развита на общий случай расположения источников
сигналов и помех как в дальней, так и в зоне Френеля приемной системы [12 - 14 и др.]. Впоследствии полученные результаты были обобщены в [10]. Синтезированные оптимальные алгоритмы и результаты их анализа явились основой для совершенствования математических моделей оценки информационных возможностей зрения. В частности, теория указывает на физическую основу восприятия глубины сцены А/? при монокулярном зрении в соответствии с зависимостью ДЛ « АЛ2 / d1, где А - длина волны; R - дальность; d - диаметр зрачка. Однако на пути практического их применения стояли другие обсуждаемые ниже нерешенные вопросы.
Во-вторых, для зрения человека и технических систем наблюдения оптического диапазона длин волн характерными условиями работы является пространственная протяженность источников принимаемых сигналов, поэтому важной задачей являлось развитие теории оптимального обнаружения на случай приема и анализа сигналов пространственно протяженных объектов (ППО) с учетом всегда присутствующего эффекта затенения объектом фона. Известные модели аддитивного и мультипликативного взаимодействия полезного и мешающего сигналов, разработанные применительно к точечным источникам сигналов, не описывают эффекты затенения и не объясняют проявляющиеся на практике особенности обнаружения сигналов ППО. Так, в случае затенения фона ППО изменяется понятие слабого сигнала, поскольку даже слабый по интенсивности сигнал ППО на ярком фоне хорошо обнаруживается по перепадам интенсивности участков фона затененных и незатененных ППО.
В развитие теории оптимального обнаружения сигналов пространственно протяженных источников была продолжена разработка аппли-кативной модели входных сигналов ППО [15]. С использованием этой модели проведен синтез и анализ оптимальных алгоритмов обработки сигналов ППО и установлены подтверждающиеся на практике закономерности их обнаружения и различения [16, 17].
В третьих, для оценки информационных возможностей зрения по обнаружению и распознаванию ППО необходим совместный анализ процессов формирования изображений оптической системой, их обработки и принятия информационных решений. В широко используемых моделях оптических изображений полагают, что поле в картинной плоскости объекта описывается случайным, обычно гауссовским, процессом e(r,/)=Re{£(r,/)}, некоррелированным по пространственной координате г и времени t [18]. В предположении линейности процесса формирования изображений амплитуда поля EK(p,t) в плоскости р формирования изображений также является гауссовским процессом. Однако ввиду ограниченной угловой разрешающей способности оптической сис
темы формирования изображений EK(p,t} является коррелированным по пространственной координате р. Кроме того, трудности использования этой модели связаны с тем, что большинство оптических приборов, в том числе и глаз человека, являются энергочувствительными, т.е. решения по обнаружению и различению ППО принимаются на основе анализа усредненной на интервале наблюдения Т интегральной интенсивности изобра-т
жения S{p) = (\/T)|Еи(р,/)Е*(р,/)бЙ , которая не является гауссовским о
полем. Эти обстоятельства не позволяют достаточно строго получить необходимые расчетные соотношения для определения вероятности обнаружения и различения изображений ППО с учетом ограниченной разрешающей способности средств наблюдения [18, 19].
Развиваемый подход к оценке информационных возможностей зрения по обнаружению и распознаванию ППО включал следующие два этапа. На первом этапе процессы формирования изображений ППО оптической системой, их обработки и принятия решений по изображениям ППО оптимальными системами с учетом аппликативного взаимодействия изображений объектов с фоном изучались независимо друг от друга [15, 17, 20]. Совместный их анализ производился на втором этапе с использованием упрощенной модели входных изображений, учитывающей для практически важных случаев ограниченную угловую разрешающую способность средств наблюдения и глаза [16, 21, 22].
В результате проведенных исследований была разработана единая математическая модель визуального поиска и зрительного восприятия ахроматических и цветных объектов [23, 24]. В разработанной модели возможности зрения ограничиваются характеристиками глаза, которые по физическому смыслу совпадают с характеристиками технических систем зрения (угловая разрешающая способность, квантовая эффективность, инерционность, уровень, внутреннего шума и т.п.). При этом не делается каких-либо дополнительных предположений относительно алгоритмов преобразования сигналов нейронами глаза и мозгом человека, кроме тех, которые вытекают из последовательного применения для оценки информационных возможностей зрения методов теории оптимального обнаружения и различения сигналов с учетом отмеченных результатов ее развития. Полученные аналитические выражения обобщают существующие ранее математические модели зрения и согласуются с известными экспериментально полученными закономерностями обнаружения и различения геометрических фигур на плоскости. Однако предпринятые попытки по использованию данного подхода для разработки математических моделей оценки информационных возможностей зрения по различению объемных объектов с различными оптическими свой
ствами их поверхностей не дали желаемых результатов. Вместе с тем в результате выполненных исследований возникла идея о необходимости корректировки самого подхода к ММ3 объемных объектов в соответствии с высказыванием Ю. П. Леонова о том, что «восприятие сложных образов происходит по вполне детерминированным законам». Для пояснения такого подхода к ММ3 объемных объектов кратко рассмотрим современные методы обработки экспериментальных данных, используемые в различных областях практической деятельности человека.
Современные методы обработки экспериментальных данных. Реально происходящие физические процессы сложны и многообразны, однако независимо от физической природы процессы определенного класса изучаются на основе весьма ограниченного количества общих подходов и математических методов. В последние десятилетия, в связи с успешной разработкой достаточно строгого и эффективного детерминистического метода решения обратных задач [4, 25], математическую задачу обработки экспериментальных данных с целью определения искомых свойств х исследуемого объекта стали рассматривать как обратную, заключающуюся в решении некоторого уравнения
F(x) = u, (5.59)
где F - оператор связи хси.
Наиболее общие подходы к решению (5.59) состоят в отыскании обратного оператора , в построении параметрической модели оператора связи и в оценке неизвестных значений параметров по экспериментальным данным [4]. На практике задача обработки экспериментальных данных во многих случаях решается поэтапно (например [26]), представляется обратная задача (5.59) в виде двух последовательно решаемых обратных задач
/=](/) = «, F2„(x) = y. (5-60)
На первом этапе «предварительной обработки» осуществляется коррекция экспериментальных данных, которая состоит в устранении искажений в содержании экспериментальных данных, вызванных несовершенством средства измерения и влиянием внешних и внутренних помех, а также в нормализации данных по отношению к изменяющимся внешним условиям наблюдения.
На втором этапе «тематической обработки» скорректированные экспериментальные данные у используются для решения основной информационной задачи по определению искомых свойств х исследуемого объекта.
Эволюционный переход к двухэтапной процедуре обработки экспериментальных данных в различных областях деятельности человека, по-видимому, связан со следующими обстоятельствами:
1. Идеальные средства измерений создать весьма затруднительно, дорого и практически невозможно;
2. Несовершенство средств измерения может быть алгоритмически устранено на этапе предварительной обработки экспериментальных данных;
3. Разумно заложенное «несовершенство» средств измерения создает дополнительные возможности для реализации более эффективных алгоритмов коррекции экспериментальных данных в условиях внешних и внутренних помех;
4. Обработка на втором этапе скорректированных экспериментальных данных существенно упрощается ввиду возможности использования алгоритмов, инвариантных к изменяющимся внешним условиям и обучающихся в отсутствие помех.
Возможно эти достоинства двухэтапной процедуры обработки исходных данных и использованы природой при конструировании зрительной системы человека.
Перспективы совершенствования ММ3 в свете современных методов обработки экспериментальных данных. С учетом отмеченных в п. 2 обстоятельств в основу дальнейшего развития ММ3 может быть положена интенсивно разрабатываемая в последнее время [27, 28] известная гипотеза гештальтпсихологии об объективном (независимо от воли и сознания) действии механизмов восстановления по видимому изображению целостного образа реальной обстановки с использованием (осознанным или подсознательным) физических законов формирования изображений. При этом в обеспечение возможности ММ3 объемных объектов в атмосфере Земли предлагается зрительную систему человека представить «серым ящиком», осуществляющим двухэтапную обработку видимых изображений: их коррекцию и последующее восстановление наиболее вероятной реальной обстановки с использованием законов формирования видимого изображения в атмосфере Земли [27, 29, 26]. Вытекающие из этого частные положения, раскрывающие пути ММ3, состоят в следующем.
На первом этапе обработки действительно зрительная система обладает определенными адаптационными свойствами, например, по отношению к смещению (привыкание к перевернутому изображению [30]). Однако она не способна адаптироваться к изменениям оптических свойств хрусталика глаза (близорукость и дальнозоркость), поэтому при разработке ММ3, несущественно занижая возможности зрения, можно ориентироваться на информационное ограничение скорректированного видимого изображения характеристиками глаза (разрешающая способность, квантовая эффективность и т.п.).
Видимое изображение воспринимается человеком как образ реальной действительности. «Эффект понимания» видимого изображения
достигается на основе моделирования реально происходящих физических процессов его формирования в окружающем трехмерном мире в атмосфере Земли и сравнения результатов моделирования с априорной информацией (генетической и приобретенной в результате предыдущего опыта). Подтверждением этого положения являются известные психологические факторы объемного зрения, которые всегда имеют место на практике независимо от характера решаемой зрительной задачи: является ли она информационной или связана с эстетической потребностью человека. К числу психологических факторов объемного зрения относят [31]: восприятие объема при монокулярном зрении, возникновение эффекта объема при нанесении на плоские геометрические фигуры распределения светотеней в соответствии с возможными случаями его возникновения в реальной действительности (диск, сфера); восприятие объектов, изображения которых размыты и не содержат мелких деталей, как удаленных и наблюдаемых в условиях действия воздушной дымки и низкой разрешающей способности и т.п.
При этом эффекты преобразования круга в сферу путем распределения светотеней могут рассматриваться как результат проявления механизма восприятия картинки в качестве образа реально существующей действительности и восстановление ее по картинке.
Таким образом, на втором этапе обработки видимого изображения объекта решается обратная задача по восстановлению окружающей обстановки, т.е. целостного образа объекта: формы, оптических свойств поверхности, а также условий освещения. В справедливости этого положения несложно убедиться при взгляде даже на незнакомые объекты.
Предложенная ранее гипотеза о возможности ММ3 на основе методов теории оптимального обнаружения при таком подходе к построению ММ3 не отвергается, а используется для формализованного описания «эффекта понимания» исследуемой окружающей обстановки.
В представлении ММ3 как об обратной задаче восстановления целостного образа объекта и условий его наблюдения, ограничивается круг задач, решаемых методами ММ3, только случаями, когда они имеют смысл в возможных образах реальной действительности. Кроме того, изменяется значимость моделирования ахроматического и цветового зрения, формы, оптических свойств поверхности объекта и условий его наблюдения и возникает необходимость классификации задач ММ3 по обнаружению и распознаванию геометрических фигур на плоскости и ММ3 объектов, находящихся в земной атмосфере.
Таким образом, предполагается, что подход к ММ3 иа основе совместного применения методов решения обратных задач и теории статистических решений позволит разработать более совершенные математические модели зрения человека объемных объектов в атмосфере Земли.
Литература
1. Красильников Н.Н., Шелепин Ю.Е., Красильникова О.И. Применение принципов оптимального наблюдения при моделировании зрительной системы человека. - Оптический журнал, 1999, т. 66, № 9.
2. Аксютов Л.Н. Прогнозирование вероятности распознавания объектов по космическим снимкам. - Исследование Земли из космоса, 1995, № 2.
3. Ллойд Дж. Системы тепловидения: Пер. с англ. - М.: Мир, 1978.
4. Обратные задачи в оптике/Под ред. ГП. Болтса: Пер. с англ. В.И. Платонова /Под ред. А.Г.Свешникова, П.П.Пашинина. - М.: Машиностроение, 1984.
5. Фалькович С.Е., Пономарев В.И., Шкварко Ю.В. Оптимальный прием пространственно-временных сигналов в радиоканалах с рассеянием / Под ред. С.ЕФальковича. - М.: Радио и связь, 1989.
6. Красильников Н.Н. Влияние шумов на контрастную чувствительность и разрешающую способность приемной телевизионной трубки. - Техника телевидения, 1958, вып. 25.
7. Красильников Н.Н. Теория передачи и восприятия изображений. - М.: Радио и связь, 1986.
8. Леонов Ю.П. Теория статистических решений и психофизика. - М.: Наука, 1977.
9. Бардин К.В. Проблема порога чувствительности и психофизические методы. - М.: Наука, 1976.
10. Кремер И.Я., Кремер А.И. и др. Пространственно-временная обработка сиг-налов/Под ред. И.Я. Кремера - М.: Радио и связь, 1984.
11. Ширман Я.Д. Разрешение и сжатие сигналов. - М.: Сов. радио, 1974.
12. Понькин В.А., Кремер И.Я. О потенциальной точности определения местоположения цели при пространственно-временной обработке сигналов в общем случае. - Радиотехника и электроника, 1975, т. 20, № 6.
13. Понькин В.А., Кремер И.Я. Пространственно-временная обработка сигналов в зоне Френеля. - Радиотехника и электроника, 1977, т. 22, №1.
14. Понькин В.А. Об анализе алгоритмов пространственно-временной обработки сигналов в условиях помех. - Радиотехника и электроника, 1982, т. 27, № 10.
15. Бычков А.А., Понькин В.А. Обнаружение изображений пространственнопротяженных затеняющих фон объектов. - Автометрия, 1992, № 4.
16. Поветко В.Н, Понькин В.А. Оценка качества обнаружения пространственно-протяженных объектов по их изображениям. - Радиотехника и электроника, 1993, т. 38, № 4.
17. Бычков А.А., Поветко В.Н., Понькин В.А. Эффективность обнаружения изображений пространственно-протяженных объектов на фонах пятнистой структуры. - Оптика атмосферы и океана, 1992, № 8.
18. Бакут П.А., Мандросов В.И., Матвеев Н.Н. Теория когерентных изображе-ний/Под ред. Н.Д. Устинова - М.: Радио и связь, 1987.
19. Троицкий И.Н., Устинов Н.Д. Статистическая теория голографии. - М.: Радио и связь, 1981.
20. Понькин В.А., Юхно П.М. Энергетическая модель процесса формирования изображения оптической системой. - Радиотехника и электроника, 1983, т. 38, № 6.
21. Понькин В.А., Лаптев И.В. Цифровая энергетическая модель «объект-сре-да-ОЭС» для исследования процесса обнаружения пространственнопротяженных объектов. - Оборонная техника, 1995, № 12.
22. Афанасьева Е.М., Понькин В.А. Совместная оценка влияния ОПФ атмосферы и оптической системы на характеристики обнаружения пространственных объектов. - Оптика атмосферы и океана, 1992, № 8.
23. Поветко В.Н. Единая функциональная модель зрения для информационных систем обнаружения. - Радиотехника (Журнал в журнале), 1996, № 6.
24. Понькин В.А., Лаптев И.В. - Оценка возможностей человека-оператора по различению пространственно-протяженных объектов по их изображениям. - Радиотехника (Журнал в журнале), 1999, № 8.
25. Тихонов А.Н., Арсенин В.Я. Методы решения некорректных задач. - М.: Наука, 1974.
26. Бостынец И.П., Наместников А.М., Понькин В.А. Оценка геометрических параметров удаленных объектов по их изображениям. - Оборонная техника, 1995, № 12.
27. Марр Д. Зрение. Информационный подход к изучению представления и обработки зрительных образов: Пер. с англ. - М.: Радио и связь, 1987.
28. Хорн Б.К.П. Зрение роботов: Пер. с англ. - М.: Мир. 1989.
29. Афанасьева Е.М., Бостынег) И.П., Понькин В.А. Оптическая заметность пространственно-протяженных объектов в атмосфере Земли. - Радиотехника, 1997, № 10.
30. Распознавание образов. Исследование живых и автоматических распознающих систем: Пер. с англ. Л.И. Титолшра. - М.: Мир, 1970.
31. Афанасьева Е.М., Бостынец И.П., Понькин В.А. Оценка оптической заметности объектов сложной формы в атмосфере Земли. - Радиотехника (Журнал в журнале), 1997, № 10.
32. Афанасьева Е.М., Понькин В.А. Применение теории обнаружения к задаче маскировочного окрашивания летательных аппаратов. - Информационный конфликт в спектре электромагнитных волн. - Приложение к журналу «Радиотехника», 1994.
5.9. Оценка потенциальной точности измерений параметров волновых полей оптическими приборами
и радиосистемами
Достаточно полное представление о потенциальных возможностях измерительных систем различных типов и назначения дают расчеты теоретически предельной (потенциальной) точности оценки параметров
Автор: В.А. Понькин
пространственно-временных сигналов - электромагнитных полей [1]. Вместе с тем в случаях, когда пространственно-временная обработка разделяется на две независимо выполняемые (временную и пространственную), становится актуальной задача расчета потенциальной точности оценки параметров временных и пространственных сигналов. Общность теории оптимального приема сигналов различной физической природы позволяет существенно упростить эту задачу, используя общие закономерности оценки параметров временных и пространственных сигналов в статистически эквивалентных условиях. Однако в большинстве случаев пользуются лишь общей процедурой расчета потенциальной точности оценки параметров, которая применительно к неплоским волновым полям и приемным антеннам, имеющим криволинейные поверхности, разработана недостаточно.
Получим расчетные соотношения для оценки потенциальных возможностей оптических приборов и радиосистем по измерению параметров волновых полей и координат их источников.
Подход основан на использовании общих закономерностей оценки соответствующих параметров временных и пространственных сигналов в статистически эквивалентных условиях. Для пояснения существа подхода воспользуемся результатами решения известной задачи измерения частоты f временного сигнала, наблюдаемого на интервале Т в смеси с помехой n(f) в виде белого шума
t<(r) = Jcos(2fl-/z + ^0) + n(r), teT. (5.61)
В этом случае теоретически предельная среднеквадратическая погрешность измерения частоты Д/ не зависит от начальной фазы <ро и при Т»7о (То = l/f- период сигнала) определяется как [ 1]
1 4\2 1 1 .....
= —г=------к~1=-----, (5.62)
424 2дТ 4^4 2Г
где q = A2T/2Nq - энергетическое отношение сигнал-шум (No - спектральная интенсивность шума; А - амплитуда сигнала) (<у » 1).
Применяя понятие дифференциала функции у = fix) к оценке погрешности формул [2]
|Ду|«|/'(х)||Ах| (5.63)
и используя (5.62), можно оценить погрешность измерения любого функционально связанного с частотой параметра сигнала в тех же статистических условиях наблюдения. Например, погрешность измерения периода сигнала
ДТ0=(1//)'Д/= ’ X (5.64)
^2q 2Т
Сравнивая (5.62) и (5.64), можно заметить, что относительные по
грешности измерения частоты и периода сигнала равны
= 1 То
f То Т ’ ^2'
(5-65)
Исходя из вида (5.65), величину ДТ далее предлагается назвать погрешностью использования интервала наблюдения, которая в соответствии с (5.65) не зависит от длительности самого интервала наблюдения Т и равна произведению энергетического коэффициента l/j2q на полпериода принимаемого сигнала Т0/2.
Эта закономерность, очевидно, будет выполняться и в случае приема плоского волнового поля непрерывной линейной антенной, протяженностью L, в смеси с помехой в виде пространственного белого шума:
w(x) = ^cos(2^vx + ^0) + h(x), xeZ.(Z.»2), (5.66)
где v= sino/2 — пространственная частота, и соответственно
lL=Al$ma (5-67)
- пространственный период принимаемого пространственного сигнала на
раскрыве приемной антенны (рис. 5.30); а -
угол между направлением распространения поля и нормалью к антенне; 2-длина волны. Применяя (5.65) к пространственному
сигналу, можно получить выражения
Д v Al, AL 1 I,
—=—-=—; Д£=-;=-—, v lL L y[2q 2
(5.68)
которые позволяют оценивать потенциальные точности измерения Ду, Д/д и другие, функционально связанные с ними параметры. Например, учитывая функциональную связь угла а и пространственного периода (5.67), получаем
(2/sina) Да t (2/si„a)
2/sina yf2q 2
(5-69)
После очевидных преобразований из (5.69) следует известное выражение для оценки теоретически предельной погрешности измерения направления распространения плоского волнового поля (углового положения источника) [1]
Да=-Д=-------—. (5.70)
yl2q 2£cosa
К такому же результату приводит несколько иной порядок рассуждений. Заметим, что (5.68) оказываются справедливыми при произвольном выборе направления наблюдения. Например, в направлении распространения поля линейная приемная антенна длиной L «перехватывает» цуг волн, укладывающийся на интервале наблюдения h (рис. 5.30). Причем для плоского волнового поля в этом направлении пространственный период поля равен Я, а погрешность использования интервала наблюдения в соответствии с (5.65) равна произведению энергетического коэффициента l/i/2g на полпериода принимаемого сигнала Я/2. В общем случае эти рассуждения приводят к выражениям вида
lh h y[2q 2
(5.71)
где I), - пространственный период волнового поля на эффективном интервале наблюдения h.
Достоинства (5.71) по сравнению с (5.68) состоят в том, что устраняются трудности применения (5.68) в случаях, когда пространственный период lL на раскрыве приемной антенны является переменной величиной, например, при использовании антенн, имеющих криволинейную поверхность, или при приеме неплоского волнового поля в зоне Френеля.
Таким образом, решение практических задач, связанных с расчетом потенциальной точности оценки параметров волновых полей и их источников, сводится, по существу, к отысканию величины h и расчету потенциальной погрешности измерения искомого параметра по (5.63) и (5.71).
Вместе с тем (5.71) получены применительно к случаю плоского волнового поля и линейной приемной антенны. Возможность применения (5.71) в случаях неплоских волновых полей и приемных антенн, имеющих криволинейную поверхность, не очевидна и доказать это теоретически не удается. Поэтому проверим (5.71) на примерах, применительно к которым найдены теоретически предельные точности оценки параметров с использованием строгих методов.
Измерение углового положения источника излучения в зоне Френеля. Из рассмотрения треугольников ОАС и ОВС (рис. 5.31) следует
Рис. 5.31
Л22 = R2 + (Z./2)2 - 2R(L/2)cos(90° + a), (5.72)
Rf = R2 + (L/2)2 - 2R(£/2)cos(90°-a). (5.73)
Вычитая (5.73) из (5.72), получаем
R.2 - R2 = 2RL sin а или (T?2 - R, )(R2 + Rt) = 2RLsina .
Поскольку пространственный период волнового поля на интервале наблюдения равен Л, (Л2 + Rl')^2R, a (R2-Rj является интервалом наблюдения h, в соответствии с (5.63), (5.71) имеем
А
A(£sina) = Д(Л2- ^i) > Aalcosa = Ай, Aa = -j=--------, (5.74)
>j2q 2L cos a
что совпадает с известным результатом, полученным с использованием классической процедуры расчета потенциальной точности оценки [3].
Измерение дальности до источника излучении по кривизне волнового фронта. В рассматриваемом случае (рис. 5.32) пространственный период волнового поля в направлении его распространения
также равен Я, а интервал наблюдения h можно определить из решения
треугольника О АС:
2R/i = £2/4-/i2 . (5.75)
При R»h из (5.75) получим приближенное выражение для определения дальности R до источника излучения по кривизне волнового фронта
R~l3/%h (й = £2/8л),(5.76)
а из (5.63), (5.71) - выражение для расчета погрешности измерения дальности
АЯ=^ЛЛ, AR«^|.(5.77) 8Й2
Соответствующие этому слу
чаю результаты, полученные с ис-
пользованием методов теории оценок для непрерывной приемной антенны с равномерной апертурной функцией, можно представить в виде [3]
1 27 R2A
R~ Jlq 2л L2
(5-78)
Измерение дальности до двухточечного источника излучении. В рассматриваемом случае результирующее поле двухточечного когерентного источника описывается семейством гипербол (рис. 5.33). При небольшом отношении L/R расстояние между гиперболами в месте расположения приемной антенны можно считать примерно постоянным,
т.е. результирующее поле имеет периодическую структуру с пространственным периодом [4]
/^ЯЛ/рсоБб1), (5.79)
где R,6 - полярные координаты центра приемной антенны; d - расстояние между источниками.
Эффективный интервал наблюдения h при расположении приемной антенны под углом а к пространственной структуре поля определяется выражением
h = L cos а. (5.80)
Используя (5.79), (5.63) и (5.71) и учитывая (5.80), получаем формулу, совпадающую с приведенной в [5],
*, 1 4 1 я2л
ДЛ =-/=•—, Л ------- = ~г=—-----z-----,
•j2q 2h \dcosQ) ^2q2Ld2 cos2 Q cos a
AR =
AR2 j2q2Ld cos Q cos a
(5-81)
Как показали проведенные расчеты, выражения (5.71) могут использоваться в различных условиях приема неплоских волновых полей линейными антеннами. В силу симметрии задач, (5.71) остаются справедливыми и при приеме плоских волновых полей антеннами, имеющими выпуклую апертуру. Поэтому можно предположить, что (5.71) могут применяться для расчета потенциальной точности оценки параметров и в общем случае неплоских волновых полей и использования приемных антенн, имеющих криволинейные поверхности.
В качестве примера рассмотрим применение (5.71) для оценки потенциальных возможностей оптических спектральных приборов. Непосредственно из (5.71) следует, что плоская дифракционная решетка длиной L обеспечивает теоретически предельную точность измерения
длины волны спектральной линии ЛА = —р=-------= —р=, где ЗА - раз-
д/2<7 2L ^2q
решающая способность дифракционной решетки длиной L по критерию Рэлея [4]. Причем спектральная интенсивность шума No здесь равна сумме спектральной интенсивности реально присутствующего пространственно некоррелированного фона и фона, эквивалентного по воздействию внутренних шумов регистрирующей аппаратуры, ограничивающих ее чувствительность.
Оценить потенциальные возможности выпуклых дифракционных решеток достаточно просто можно с помощью (5.72)-(5.74), приведенных при рассмотрении первого примера. Формулы третьего примера могут быть использованы для оценки потенциальных возможностей измерения длины волны спектральной линии при двух когерентных источниках. Возможность применения (5.71) к оценке потенциальных возможностей радиосистем по измерению параметров волновых полей и координат их источников продемонстрирована рассмотренными примерами.
Таким образом, известная (5.63) и полученные (5.71) формулы могут быть использованы для решения широкого круга задач, связанных с оценкой потенциальных возможностей оптических приборов и радиосистем по измерению параметров плоских и неплоских волновых полей, принимаемых антеннами, имеющими плоскую и криволинейную поверхности.
Литература
1. Фалькович С. Е, Хомяков Э. Н. Статистическая теория измерительных радиосистем. - М.: Радио и связь, 1981.
2. Выгодский М. Я. Справочник По высшей математике. - М.: Наука, 1966.
3. ПонькинВ. А., Романов А. Д. - Радиотехника и электроника, 1983, т. 28, №8.
4. Ландсберг Г. С. Оптика. - М.: Наука, 1976.
5. Трифонов А. П„ Лукин А. Н. - Радиотехника и электроника, 1986, т. 31, №5.
Дополнительная литература к главе 5
1. Патент на изобретение №2210789. Способ измерения эффективной поверхности рассеяния объектов/ О.Е. Кирьянов, НА. Мартынов, В.А. Понькин.
2. Патент на изобретение № 2221209. Способ самоконтроля визуальной заметности летательных аппаратов / Е.М. Афанасьева, Э.В. Петещенков, В.А. Понькин.
3. Гатилова И.Ю., Понькин В.А., Ужахов Т.С. Определение пространственной структуры локальных отражателей на поверхности объекта по амплитудной диаграмме обратного рассеяния. - Радиотехника (Журнал в журнале), 2000, №7.
4. Зубков С.В., Кирьянов О.Е., Мартынов Н.А., Понькин В.А. Компенсационный метод повышения информативности измерений параметров поля с использованием круговых радиоголограмм. - Радиотехника (Журнал в журнале), 2004, № 13.
5. Мартынов Н.А., Мироненко ГН. Особенности моделирования радиолокационных характеристик объекта сложной формы в приближении методов физической оптики и физической теории дифракции. - Радиотехника, 2003, № 10.
6. Ковалев Г.С., Лаптев И.В., Понькин В.А. Потенциальные возможности обнаружения и маскирования движущихся объектов на неравномерных фонах. - Информационно-измерительные и управляющие системы, 2003, № 4.
7. Понькин В.А., Мартынов Н.А., Добрынин Д.Л. Матричный метод измерения радиолокационных характеристик рассеяния объектов. - Сб. докл. X Международной конференции по спиновой электронике и гировекторной электродинамике, 16-18 ноября. - Москва, 2001.
8. Понькин В.А., Мартынов Н.А., Ужахов Т.С., Преображенский А.П. Восстановление параметров источников локальных отражений на поверхности объектов по измеренным диаграммам обратного рассеяния. - Сб. докл. X Международной конференции по спиновой электронике и гировекторной электродинамике, 16-18 ноября. - Москва, 2001.
9. Понькин В.А., Емельянов С.В., Мартынов Н.А. и др. Разработка нетрадиционного направления модернизации существующих и создания перспективных высокоинформативных комплексов для измерения радиолокационных характеристик объектов. - Сб. докл. X Международной конференции по спиновой электронике и гировекторной электродинамике, 16-18 ноября. -Москва, 2001.
10. Понькин В.А., Афанасьева Е.М., Бостынец И.П., Семенякин А.Ю. Компьютерное синтезирование фотометрических изображений фоно-целевой обстановки для оценки оптической заметности объектов. - Сб. докл. X Международной конференции по спиновой электроники и гировекторной электродинамике, 16-18 ноября. - Москва, 2001.
11. Понькин В.А., Телков А.Ю. Измерение радиолокационных характеристик рассеяния объектов в квазиплоском поле облучения. - Сб. докл. X Международной конференции по спиновой электронике и гировекторной электродинамике, (X International conference on spinelectronics and gyrovector electrodynamics), Publisher UNS-1 MPEI (TU). - Москва, 2001.
12. Понькин B.A., Телков A.Ю., Нечаев С.С. Восстановление распределения эквивалентных источников на поверхности рассеивающего объекта в поле плоской волны по измерениям в квазиплоском поле облучения. - Радиотехника и электроника, 2002, т. 47, № 2, с. 204-209.
13. Понькин В.А., Зубков. С.В. Оценка параметров вторичных источников излучения на измерительной трассе радиополигонов открытого типа. - Телекоммуникации, 2002, № 6.
14. Понькин В.А., Зубков С.В. Точность определения местоположения вторичных источников излучения с помощью пробных отражателей, движущихся
по кругу и-no спирали. - Материалы VIII Международной НТК «Радиолокация, навигация и связь». - Воронеж, 2002.
15. Понькин В.А., Ковалев ГС. Модель визуального обнаружения движущихся ППО на неравномерных фонах. - Телекоммуникации, 2003, № 5, с. 24-33.
16. Понькин В.А., Мартынов Н.А., Мироненко Г.Н. Расчетно-экспериментальная оценка радиофизических параметров поглощающих покрытий, нанесенных на участки поверхности объекта сложной формы. - Сб. трудов IX Международной НТК «Радиолокация, навигация, связь», 22-24 апреля. -Воронеж, 2003 .
17. Понькин В.А., Кирьянов О.Е., Мартынов Н А. Расчетно-экспериментальный метод определения амплитудно-фазовых параметров поля излучения антенн радиолокационных измерительных комплексов. - Антенны, 2003, № 2.
18. Понькин В.А., Кирьянов О.Е., Мартынов Н.А. Перспективное направление создания высокоинформативных измерительных комплексов для исследования радиолокационных характеристик объектов. - Сб. трудов IX Международной НТК «Радиолокация, навигация и связь», 22-24 апреля. - Воронеж, 2003.
ГЛАВА 6
Планирование использования радиочастотного спектра
При планировании радиочастотного спектра на различных этапах жизненного цикла РЭС задача присвоения частот в процессе эксплуатации является завершающей и потому наиболее ответственной с точки зрения обеспечения ЭМС РЭС, поскольку предшествующие процедуры распределения полос частот радиослужбам и выделения полос частот разрабатываемым (закупаемым за границей) типам РЭС проводятся при значительно большей неопределенности исходных данных о характеристиках и условиях эксплуатации средств. В условиях изменяющейся обстановки для гарантированного обеспечения ЭМС используется переприсвоение (динамическое присвоение) частот, в результате чего задачи частотного планирования смыкаются с задачами управления использованием частот в процессе функционирования РЭС. Это обусловливает актуальность совместных исследований по совершенствованию методов присвоения частот и методов управления частотами. При рассмотрении этих вопросов в данной главе особое внимание уделено обоснованию возможностей применения различньсх алгоритмов оптимизации при решении задач присвоения частот и управления ими.
6.1. Комбинаторные алгоритмы оптимального присвоения частот в условиях взаимовлияния радиоэлектронных систем по основным
и внеполосным каналам приема
Задача оптимального присвоения частот в данном случае формулируется следующим образом. Задано размещение некоторой группы из N однотипных одновременно работающих РЭС фиксированной службы (например, средств радиосвязи) в виде матрицы взаимных удалений [|R,j||, i,j = =1,2,... Д. Условия взаимовлияния РЭС в дуэльных ситуациях определяются функцией частотно-территориального разноса, которая при рассмотрении только основных и внеполосных характеристик излучения и приема представляет собой монотонно убывающую функцию минимально допустимой расстройки рабочих частот передатчика и приемника РЭС Sfy от их взаимного удаления 7?у:
Авторы: А.И. Ермаков, В.В. Соловьев
(6.1)
Каждому РЭС требуется присвоить рабочую частоту/, /=1,2,... Д так, чтобы при отсутствии взаимовлияния необходимая им полоса частот
AF = max / - min / (6.2)
l£i£NJl v 7
была минимальной, а ее среднее значение соответствовало бы заданной частоте Д,:
^(тах/- min/] = / . (6.3)
2\iniNJ' is<sNJl I jQp v 7
По известной матрице взаимных удалений ||Rvj| и заданной функции частотно-территориального разноса (6.1) условия совместного использования РЭС общей полосы можно записать в виде матрицы минимально допустимых частотных расстроек между РЭС ||д^||, элементы которой ограничивают выбор рабочих частот РЭС в соответствии с соотношением:
|Л -фЧ , Af/z = g(Ry) ;у=1,2,...Д; i*j. (6.4)
Матрице ||AfJ| может быть поставлен в соответствие полный взвешенный граф, вершины которого отображают РЭС заданной группы, а веса ребер - минимально допустимые частотные расстройки ДГу.
Математическую формулировку рассматриваемой задачи можно представить следующим образом. В области, определяемой ограничениями (6.3), (6.4), найти такие значения переменных /, i = = 1,2,...Д при которых целевая функция (6.2) принимает наименьшее значение. По своему существу эта задача может быть определена как задача числовой маркировки вершин взвешенного графа значениями номиналов частот /.
В простейшем случае, когда при частотном планировании учитывается лишь взаимовлияние РЭС по основному каналу приема, функцию частотно-территориального разноса (6.1) можно аппроксимировать рэлейной функцией вида
О, R > R ,
а задачу (6.2)-(6.4), как это впервые было предложено в [1], можно интерпретировать как задачу отыскания минимального числа частотных каналов, которая, в свою очередь, эквивалентна задаче раскраски графа и определения его хроматического числа /. В задаче раскраски, которую можно рассматривать как частный случай задачи числовой маркировки графа, требуется промаркировать вершины графа номерами кра
сок так, чтобы никакие смежные вершины не были окрашены в одинаковый цвет, а необходимое число красок было минимальным (хроматическое число). Матрице ||fy|| в данном случае ставится в соответствие простой реберный граф, у которого i- и j-я вершины (z^z) соединены ребром только тогда, когда расстояние между соответствующими экземплярами РЭС Rjj меньше R . При этом минимальная полоса частот AFmjn, необходимая группе РЭС, вычисляется по формуле
AFmin=(Z-l)A/‘. (6.6)
Эффективные комбинаторные алгоритмы раскраски и определения хроматического числа произвольного реберного графа приведены в [2]. Практика их использования показала, что решение задачи оптимального присвоения частот для группы, включающей до 1000 РЭС, требует не более единиц секунд машинного времени на современных ПЭВМ. Кроме того, в теории графов получены многочисленные предельные оценки хроматического числа произвольного графа, позволяющие приближенно оценивать необходимое для группы РЭС число частотных каналов. Для этого используются различные инварианты графа: максимальная степень вершин, вершинное число независимости, хроматическое число дополнительного графа и др.
В случае, когда функцию частотно-территориального разноса (6.1) нельзя представить в виде (6.5), задача оптимального присвоения частот не сводится к известной задаче раскраски в теории графов [3]. В [4] утверждается, что задача (6.2)-(6.4) в этом случае эквивалентна открытой задаче коммивояжера (отыскание кратчайшей гамильтоновской цепи в полном взвешенном графе). Однако это положение верно лишь тогда, когда матрица допустимых частотных расстроек Цд^Ц удовлетворяет неравенству треугольника
Af/4+Af4/>A^,zj^=l,...A, (6.7)
выполнение которого в задачах частотного планирования в большинстве случаев никак не гарантировано.
Действительно, как показывает рассматриваемый ниже пример, непосредственное применение алгоритма решения задачи коммивояжера к задаче с матрицей допустимых частотных расстроек
' * 4,424 4,424 * 1,615 4,424 0 1,615 0 ' 0
1,615 4,424 * 4,424 1,615 (6.8)
0 1,615 4,424 * 4,424
< о 0 1,615 4,424 *
не удовлетворяющей соотношениям (6.7), приводит к присвоению частот: = (0; 3,230; 1,615; 4,845; 3,230), для которого условия
(6.4) оказываются невыполненными при i=l, 2, 3, 4; /=/+1. В связи с этим, использование оптимальных маршрутов коммивояжера применительно к рассматриваемой задаче в общем случае неправомерно. Кроме того, трудоемкость используемого в [4] метода ветвей и границ растет с увеличением N (числа экземпляров РЭС) не медленнее, чем экспоненциально [5], что исключает его применение для решения задач большой размерности (N > 25).
Ниже предлагаются комбинаторные алгоритмы решения задачи минимизации необходимой полосы частот для группы РЭС в условиях их взаимовлияния по основным и внеполосным каналам приема, основанные на использовании метода локальной оптимизации — одного из приближенных методов дискретного программирования. В данном случае условием локальной оптимальности является то, что присваиваемая очередному экземпляру РЭС рабочая частота должна быть ближайшей к присвоенной на предыдущем шаге частоте при условии выполнения соотношений (6.4).
Существо одного из предлагаемых алгоритмов решения задачи (алгоритм S) заключается в следующем. Пусть в результате выполнения к шагов присвоения частот (1 < к < N-V) имеем следующее распределение частот: 0 =/ <fV2 <...<fVk, где - номера экземпляров РЭС, ко
торым присвоены частоты fv , I = \,...,к. Тогда в соответствии с условием локальной оптимальности номер и4+1 очередного экземпляра РЭС на (к + 1)-м шаге алгоритма определяется с использованием операции
v*+1=+ Л'} ’ (6-9)
<*И.vk
а его положение на частотной оси — из соотношения
4+.=4 (610)
-Ук
В качестве начальной точки и, выбирается произвольный номер
экземпляра РЭС. Для выполнения условия (6.3) задачи оптимизации полосы частот необходимо все полученные частоты увеличить на
- /
что не нарушит выполнение соотношений (6.4).
Если матрица минимально необходимых частотных расстроек ||Af,|| удовлетворяет неравенству треугольника (6.7), то алгоритм вырождается в алгоритм ближайшего соседа решения открытой задачи коммивояжера [5].
Для повышения точности решения рассматриваемой задачи был предложен второй алгоритм (алгоритм SN), заключающийся в применении алгоритма S Npa3, начиная с различных стартовых положений: и, = = 1, 2, N. Решением считается наименьшая полоса частот из всех полученных. Для оценки эффективности алгоритмов S и SN решения задачи (6.2)-(6.4) был произведен вычислительный эксперимент на ЭВМ, заключающийся в следующем. Для заданной равномерной плотности размещения РЭС на местности р [экз/км2] и изменяющегося общего числа N РЭС в группе с помощью алгоритмов S и SN определялась минимальная необходимая полоса частот. Для получения в каждой реализации матриц взаимных удалений предварительно осуществлялась генерация координат РЭС х,,у, с помощью датчика равномерно распределенных на отрезке [0, / р ] случайных чисел, <=1,....N. Расстояние между i-м и
J-ми экземплярами РЭС определялось из формулы
Ry = ^-Xjf+tyt-yj)2 ,i*j. (6.11)
Матрицы минимально необходимых частотных расстроек формировались с помощью полученных таким образом матриц ||rJ| и функ-
ции частотно-территориального разноса в виде
90,
0<Я<л/0,05,
Л > 10.
(6-12)
На рис. 6.1 и 6. 2 приведены усредненные по 20 реализациям мат-
Рис. 6.1
Рис. 6.2
риц взаимных расположений РЭС на местности результаты оценки эффективности алгоритмов 5 и SN при р = 0,125 [экз/км2], характеризующиеся величинами: — зависимость среднего времени решения за-
дачи по алгоритму SN и XFS(N), AFsn(N)—зависимости средних значений полос частот, найденных с помощью алгоритмов 5 и SN соответственно, от числа экземпляров РЭС.
Среднее время решения задачи t^N) по алгоритму 5 связано с функцией tSN(N) соотношением = и поэтому не приво-
дится. Зависимость tsu(N) приведенная из рис. 6.1, с достаточной точностью аппроксимируется выражением (А) = 5,6 • 10"7 А3.
Алгоритмы 5 и 5А требуют не более О(А2) и О(№) операций соответственно, что позволяет отнести их к классу полиномиальных алгоритмов. Алгоритм 5А дает более точное решение, чем алгоритм S: для отдельных реализаций матрицы взаимных расстояний РЭС на местности алгоритм 5А по сравнению с алгоритмом 5 позволил получить полосу частот в 1,5 раза меньшую. При фиксированной плотности размещения РЭС на местности скорость возрастания минимальной необходимой полосы частот с ростом числа РЭС уменьшается.
Литература
1. Metzger, В.Н. Spectrum management technique presented at the 38-th National ORSA Meeting, Detroit, MI, Fall, 1970.
2. Кристофидес H. Теория графов. Алгоритмический подход. - М.: Мир, 1978. 3. Хэйл У.К. Присвоение частот: теория и приложения. - ТИИЭР, 1980, №12.
4. Бабанов Ю.Н., Силин А.В. Введение в проблему электромагнитной совместимости РТС. - Горький: Изд-во Горьковского университета, 1977.
5. Финкельштейн Ю.Ю. Приближенные методы и прикладные задачи дискретного программирования. - М.: Наука, 1976.
6.2. Игровые алгоритмы оптимального присвоения частот
В формализованной постановке задача оптимального присвоения частот в группе РЭС в общем случае является задачей математического программирования, требующей оптимизации некоторой целевой функции многих переменных при заданной системе ограничений [1]. Боль-
Авторы: А. И. Ермаков, В. В. Соловьев
шое количество РЭС в группе и многообразие сложных физических факторов их взаимовлияния [2] при совместной работе в общей полосе частот обусловливают многомерность, нелинейность и многоэкстре-мальность задачи оптимального присвоения частот. Область допустимых решений не может рассматриваться как выпуклая и связная, что не позволяет использовать методы целенаправленного поиска оптимума. Полный перебор чрезвычайно большого множества возможных вариантов присвоения частот невозможен в связи с возникающей проблемой вычислительной сложности. Как отмечается в [3, 4], единственный практически возможный метод приближенного решения такого класса задач математического программирования - редукция размерности тем или иным способом, и, в частности, - многошаговая схема редукции, в соответствии с которой оптимизация целевой функции в многомерной области сводится к последовательному на каждом шаге итерационному решению одномерных оптимизационных задач с локальными целевыми функциями (метод локальной оптимизации Гаусса-Зайделя, покоординатного спуска). Итерационная процедура производится до тех пор, пока не будет достигнуто равновесное состояние (равновесие по Нэшу [5]), когда с точки зрения всех локальных целевых функций решение является оптимальным. Такой итерационной процедуре эквивалентна многошаговая бескоалиционная игра нескольких лиц с непротивоположен-ными интересами и полной информацией [5].
В задачах оптимального присвоения частот в соответствии с этой схемой каждое РЭС последовательно принимает решение о выборе наилучшей частоты с учетом имеющих место частотных ограничений и локальной целевой функции, которая состоит в максимизации повторного использования частот. При этом каждое РЭС условно наделяется способностью к адаптивному выбору частоты и на имитационной математической модели воспроизводится процесс коллективного поведения частотно-адаптивных РЭС до достижения состояния устойчивого равновесия. Номиналы частот в состоянии устойчивого равновесия принимаются за искомое решение задачи. Дадим сравнительную оценку эффективности различных алгоритмов оптимального присвоения частот, использующих изложенный выше игровой подход.
Пусть группа РЭС (в общем случае разнородная) {7V,}, / = 1... N , размещена в территориальном районе АхА произвольным образом. Множество частот, в пределах которого производятся частотные присвоения, задано в виде сетки частотных каналов {/„,},/и = 1...Л/, шаг сетки Д/с. Множество доступных для различных РЭС частот {/„,}*, /и = 1...Л/д,, / = 1...Л\ Множество априорно заданных частотных присвоений для отдельных
следующим образом. Передатчик у-го РЭС, рабо-
РЭС группы {/„,}* = = Условия взаимовлияния РЭС в
группе определены
тающий на частоте f, создает помеху приемнику z-го РЭС, работающего на частоте
и находящегося на удалении , с мощностью:
ДОП/ „2
R-J
0,5Д/
(6.13)
где Рдоп у - допустимая мощность помехи оту-го РЭС на входе приемника z-го РЭС, соответствующая требуемому качеству его функционирования (первый пороговый уровень качества функционирования); Яоч - параметр функции частотно-территориального разноса, определяющий максимальную дальность допустимого воздействияу-го РЭС на z-е РЭС; А/ - ширина полосы пропускания приемника /-го РЭС на уровне -3 дБ; д - коэффициент прямоугольное™ амплитудно-частотной характеристики приемника /-го РЭС. Соотаошение (6.13) учитывает только основные и внеполосные характеристики излучения и приема.
Считаем, что непреднамеренные помехи, создаваемые передатчиками различных РЭС группы на входе приемника /-го РЭС, аддитивны, а совокупная помеха представляет собой нормальный случайный процесс с мощностью:
(6.14)
Условием недопустимого группового воздействия на z-е РЭС, работающее на частоте /т;, является:
ДОП i ’
(6.15)
где 7^оп/ - допустимая мощность совокупной помехи на входе приемника /-го РЭС.
Требуется произвести присвоение частот для РЭС заданной группы таким образом, чтобы для каждого РЭС выполнялось условие (6.15), а необходимое для группы число частотных каналов Л7нсо6х было минимальным, либо (если для всех N РЭС заданного числа М частотных каналов недостаточно) максимальным было число РЭС TVy, получив
ших частотные присвоения.
для решения задачи в игровой постановке методом статистических испытаний полагаем, что каждое /-е адаптивное РЭС группы (кроме РЭС, имеющих априорные частоты присвоения) располагает информацией о размещении и текущих частотных присвоениях всех РЭС группы. На основе этих данных в каждом такте перестройки частот в соответствии с соотношениями (6.13) и (6.14) в имитационной математической модели частотной адаптации производится расчет мощности совокупной помехи Pi(fnii) на входе приемника для каждой из частот множества {/„,}д,т = 1.../Ид, . Значения /’(/„,,) для всех частот этого множества сравниваются с допустимой мощностью помехи Рлоп, и по результатам сравнения /-е РЭС в данном такте выбирает ту минимальную по номеру частоту/,,;, для которой Р,(/"я„)<РдОП,.
Если это неравенство не выполняется ни для одной из частот множества {/„,}д, то отыскивается частота, на которой мощность 7?(/т() минимальна - 7?min (/„„)• Значение ^min сравнивается с величиной мощности помех Р, на той частоте /яя, которую i-e РЭС выбрало в предшествующем такте:
^)предш > s, , (6 д 6)
Pf f 1
/предш
где <5, - коэффициент «жадности» алгоритма, характеризующий величину выигрыша по мощности помех, при котором перестройка частоты целесообразна.
Кроме того, значение /^rain сравнивается с максимально допустимой мощностью помех на входе приемника Рдоп1гпах = ^доп; > соответствующей уровню неприемлемого качества функционирования /-го РЭС (коэффициент г, > 1 характеризует диапазон изменения мощности помех от допустимого уровня до неприемлемого, т.е. степень пороговости приемника к уровню помех):
^доп i < Pjrnin(/m ) < ^доп;max • (6-17)
Если неравенства (6.16) и (6.17) выполняются, то ье РЭС производит выбор частоты fmi, на которой уровень мощности совокупной помехи минимален (f‘min). В противном случае перестройка частоты z-м РЭС не производится (сохраняется частота, выбранная в предшествующем такте). Изложенный алгоритм частотной адаптации назовем алгоритмом Ах.
В случае, если fjmjn > Рдоп,тах, может быть избран альтернативный вариант действий (алгоритм А2), предусматривающий в этой ситуации не отказ от перестройки частоты, а переход РЭС в режим ожидания по причине невозможности в текущем такте выбора частоты с приемлемым уровнем помех. В следующем такте выбор частоты этим РЭС будет производиться вновь. Процесс адаптации будет протекать до достижения состояния устойчивого равновесия, в котором РЭС, осуществившие выбор частоты, прекратят перестройку, а РЭС, находящиеся в состоянии ожидания, не будут иметь возможности выбора частоты с приемлемым уровнем помех. В случае недостижимости состояния равновесия процесс перестройки будет протекать сколь угодно долго с циклическими повторениями («зацикливание»).
В случае, если в группе РЭС введена упорядоченная система приоритетов и РЭС располагают информацией о ситуациях недопустимого воздействия помех на РЭС более высокого приоритета, то частоты этих РЭС в текущем такте исключаются из доступных частот для менее приоритетных РЭС (алгоритм А2). В остальном алгоритм А3 совпадает с алгоритмом А2.
Исследовался также алгоритм А^, отличающийся от алгоритмов А2 и А3 тем, что в случае fjra,n > Лоттах >'е РЭС не переходит в режим ожидания, а занимает частоту с уровнем мощности 7?^ , если j-e РЭС , занимающее эту частоту, имеет более низкий приоритет (/ < z). Смысл такой операции состоит в том, что j-e РЭС (как менее приоритетное) в том же такте само освободит эту частоту, поскольку более приоритетное i-e РЭС на этой частоте испытывает недопустимое воздействие помех. Фактически эта процедура в алгоритме частотной адаптации реализует право приоритетных РЭС на первоочередное использование частот.
Для сравнительной оценки эффективности описанных алгоритмов Л1-Л4 при решении задачи присвоения частот игровым методом проводился вычислительный эксперимент на имитационной математической модели процесса коллективного поведения частотно-адаптивных РЭС. В модели с помощью датчиков равномерно распределенных на отрезках [О,А] и [(1 - Я) Ад, (1 + Я)Rq] случайных чисел осуществлялась генерация координат расположения РЭС группы в территориальном районе А у. А и параметра функции частотно-территориального разноса R^, используемого при расчете мощности Р> в соотношении (6.13). Коэффи-
У {Jim >Jmj J
циент 0 < Я < 1 введен как характеристика степени разнородности РЭС в группе (и тем самым разброса значений 7?о,; относительно среднего зна
чения А,,). Для каждого варианта размещения РЭС вычислялась матрица взаимных удалений |Ry|| и в соответствии с приведенными выше алго-
ритмами А\-А^ воспроизводился процесс коллективного поведения группы частотно-адаптивных РЭС до достижения состояния устойчивого равновесия либо до фиксации ситуации «зацикливания». В качестве искомых величин в результате статистических испытаний определялись следующие показатели: - среднее число РЭС, получивших частотные при-
своения и работающих с приоритетным качеством функционирования
Рис. 6.3
(^ (/«/)<’'Лии); «о - среднее число тактов, необходимое для достижения устойчивого равновесия; Ра - вероятность зацикливания процесса адаптации. При решении задачи были приняты следующие значения исходных данных: М= 5; А = 10 км; Ао= 10 км; 8;= 0,1; ц= 2; \f,= 4 МГц; д= 2; i = 1,...,У. Полученные результаты в виде зависимостей Nf,non Рц от W для однородных (Я = 0) групп РЭС представлены на рис. 6.3-6.5.
Рис. 6.4
Рис. 6.5
Анализ этих зависимостей позволяет сделать следующие выводы. Алгоритм А{ обладает наилучшими показателями сходимости (необходимое число тактов перестройки до состояния равновесия минимально, ситуации «зацикливания» отсутствуют). Однако он обладает тем недостатком, что при большой плотности размещения РЭС (7V>10) уменьшается число РЭС, работающих с приемлемым качеством функционирования Nf . Наилучшим с точки зрения показателя N, является алгоритм Л2. Алгоритмы А3 и А^ по этому показателю занимают промежуточное положение. Попадание в состояние «зацикливания» наиболее характерно для алгоритма А4. Основное преимущество этого алгоритма заключается в том, что повышается вероятность приемлемого качества функционирования РЭС с повышением его приоритета.
Для разнородных групп РЭС (Я = 0,9), как показал вычислительный эксперимент, семейство зависимостей Nj- (N) мало отличается от приведенных на рис. 6.3 зависимостей для однородных групп РЭС. Возрастают лишь на 20...30% значения Nj- для алгоритмов Л2 иЛ3 при больших группах РЭС (N > 40). Более существенно (в сторону ухудшения) меняются в разнородных группах РЭС показатели сходимости процесса адаптации. Как следует из рис. 6.6 и 6.7, на которых представлены зависимости п0 и Рц от N, среднее число тактов до достижения состояния равновесия в наибольшей степени возрастает для алгоритмов А1 и А2 (примерно в 20 раз при N = 40) и в меньшей степени для алгоритма Л4. Существенно также возрастает вероятность «зацикливания»
Рис. 6.7
Рис. 6.6
процесса адаптации при использовании алгоритмов А2 иЛ3 (до уровня 0,4...0,5 при7У>20).
Исследования показали, что для устранения «зацикливания» может использоваться способ случайного переприсвоения частот, который в 60% случаев выводит процесс из «зацикливания» (достигается состояние равновесия).
Проводилось также исследование устойчивости игровых алгоритмов присвоения частот к изменению исходных данных и, в частности, коэффициента «жадности» алгоритма (£,), коэффициента н,, характеризующего для приемника /-го РЭС диапазон изменения мощности помех от допустимого уровня до неприемлемого, а также шага сетки частот Д/с. На рис. 6.8 и 6.9 применительно к алгоритму Ах представлены зависимости среднего значения числа тактов до достижения состояния равновесия п0 от 8i = 8, vt = v и а> = Д/с/Д/ .
Как следует из этих зависимостей среднее число тактов до состояния равновесия снижается с увеличением 8 и а), что вполне согласуется с логикой работы алгоритма At, так как при увеличении 8 возможности перестройки частоты уменьшаются, а при увеличении а) уменьшается взаимовлияние РЭС по соседним частотным каналам Также согласуется с логикой работы алгоритма А{ замедление процесса достижения состояния равновесия со снижением пороговости приемника (с увеличением н), поскольку при этом возможности перестройки частоты увеличиваются.
Полученные результаты подтверждают целесообразность игровой постановки задачи присвоения частот. По сравнению с методами комбинаторной оптимизации, учитывающими только условия дуэльной совместимости РЭС, игровые методы могут учитывать все возможные физические факторы, обусловливающие взаимовлияние РЭС и прежде всего эффект группового воздействия помех, вероятность проявления которого велика при большом коэффициенте повторяемости частот.
Литература
1. Хэйл У.К. Присвоение частот: теория и приложения. - ТИИЭР, 1980, № 12.
2. Электромагнитная совместимость радиоэлектронных средств и систем / Под ред. Н.М. Царькова. - М.: Радио и связь, 1985.
3. Современное состояние теории исследования операций / Под ред. Н.Н. Моисеева. - М.: Наука, 1979.
4. Итеративные методы в теории игр и программировании / Под общ. ред. В. 3. Беленького и В. А. Волконского. - М.: Наука, 1974.
5. Гермейер Ю. Б. Игры с непротивоположнными интересами. - М.: Наука, 1976.
6.3. Оптимальное присвоение частот в телевизионных сетях
Присвоение частот в телевизионных сетях органы радиочастотной службы обычно осуществляют исходя из критерия обеспечения максимальной зоны обслуживания станций и непревышения норм на допустимые уровни помех [1]. Однако перегруженность полос частот, отведенных для телевидения, в настоящее время требует оптимизации сложившихся частотных планов для телевизионных сетей по критерию минимума необходимого числа каналов с тем, чтобы изыскать возможность присвоения частот новым станциям. Известные методы решения подобных задач для РЭС наземных служб основываются на данных о взаимовлиянии станций в дуэльных ситуациях. Условия взаимовлияния отображаются в виде графа и далее решение сводится к той или иной задаче комбинаторной оптимизации. Так, в [2, 3] использованы алгоритмы решения задач раскраски и коммивояжера в теории графов, позволяющие учесть помехи по совмещенным и соседним каналам. Однако при частотном планировании в телевизионных сетях должны быть учтены также помехи по побочным (зеркальным) и гетеродинным каналам [1]. Предложенное в [2] обобщение задачи раскраски графа учиты-
Автор: В. В.Соловьев
вает побочные каналы приема, но лишь в предпосылке, что запрещенные частотные разносы должны быть представлены разностью номеров присвоенных частотных каналов, что не всегда выполнимо, так как существуют ограничения на абсолютные значения номеров каналов. Кроме того, этим способом не могут быть представлены помехи по гетеродинным каналам. Рассмотрим общий метод оптимального присвоения частот в телевизионных сетях, позволяющий учесть все реально существующие каналы взаимовлияния станций в дуэльных ситуациях и, кроме того, наличие априорно заданных частотных присвоений и ограничений по доступу станций к частотным каналам.
Пусть задана совокупность региональных телевизионных сетей, включающая множество станций {N,}, i= l,...^Vc координатами (х,, излучаемыми мощностями передатчиков Ризл, (дБ/кВт) и эффективными высотами передающих антенн Н3^ (м). Задан приоритетный ряд , в соответствии с которым будет производится присвоение частот станциям. Задано множество телевизионных каналов {Л//}, I = в пределах которого каждая станция имеет определенное подмножество доступных ей каналов ,/ = . Для ряда станций
{Ni}(a\i = 1,...,У, Na<N-l, априорно заданы частотные присвоения {A/;}Ja), которые не подлежат изменению. Частотные ограничения в виде доступных и априорно заданных частотных присвоений обусловлены необходимостью рассмотрения группы разнородных передающих станций, работающих в частично перекрывающихся диапазонах, а также необходимостью осуществлять частотное планирование в регионе с учетом станций соседних региональных сетей. Заданы, кроме того, нормированные значения используемой напряженности поля в зонах обслуживания станций и значения защитных отношений сигнал-помеха для телевизионных приемников при работе станций на совмещенных, соседних и зеркальных каналах [1].
Требуется спланировать частотные присвоения телевизионным сетям таким образом, чтобы уровни помех в зонах обслуживания станций не превышали допустимых, выполнялись указанные частотные ограничения, а количество присвоенных частотных каналов было минимальным.
В тех случаях, когда кроме помех по совмещенным и соседним каналам учитываются также помехи по побочным и гетеродинным каналам, при заданной частоте приемника /-го РЭС / имеет место несколько (А) частотных полос, запрещенных для присвоения частоты передатчику у-го РЭС. В связи с этим в каталоге норм частотно-территориального разноса данные о зависимости допустимой частотной расстройки от
взаимоудаления РЭС приводятся для нескольких (А) помехоопасных соотношений частот = akj\ + bk, где ак и Ьк - параметры опасного соотношения частот. Допустимая частотная расстройка определяется как отклонение частоты передатчика у-го РЭС /у от '
В частном случае (к = 1) при я, = 1, = 0 /ул0 = /, = /у - /,
т.е. имеет место воздействие основного излучения по основному и соседнему каналам приема. Графическим отображением этих условий является взвешенный граф, в котором каждая пара вершин соединена одним ребром с весом Д/^о) • В общем случае при нескольких помехоопасных соотношениях частот графическое отображение условий взаимовлияния РЭС требует использования нескольких (А) ребер для каждой пары вершин графа. Такой граф называется мультиграфом. При этом ребра мультиграфа в общем случае, когда группа РЭС неоднородна, являются ориентированными, поскольку взаимовлияние разнородных РЭС асимметрично. Весами ребер мультиграфа по аналогии со случаем к = 1 могли бы быть значения допустимых частотных расстроек при соответствующем помехоопасном соотношении частот - А/у"', которые приводятся в каталоге норм частотнотерриториального разноса. Однако, поскольку при решении задачи присвоения частот искомыми являются абсолютные значения номиналов частот, использование величины Д/^ в качестве веса ребер мультиграфа некорректно. Целесообразно пересчитать ее к абсолютным значениям частот, ограничивающим полосу запрещенных частотных расстроек
f^^akf+bk±\f^,i,r\...N; А=1,2..„ (6.18)
а в качестве веса ребер мультиграфа, отображающего условия взаимовлияния РЭС в группе, использовать сами функциональные соотношения (6.18), позволяющие по заданной частоте приемника г-го РЭС вычислять области запрещенных частот передатчика у-го РЭС. Запишем соотношение (6.18) в виде = '¥^)(k~)(fi,ak,bk,RiJ) с тем, чтобы символ 'P^y^j указывать на ребрах мультиграфа в качестве весовой функции. Наиболее удобным является использование соотношения в качестве веса ребер мультиграфа в случае, когда задана дискретная сетка частотных каналов, поскольку эти соотношения будут определять сразу номер запрещенного частотного канала для передатчика у-го РЭС по номеру частотного канала приемника Z-го РЭС. В частности, для се-
тей телевизионного вещания эти соотношения будут иметь вид [1]: для совмещенного канала т/ = mt; для соседних (верхнего и нижнего) каналов 1, nij = /и, -1 при mi > 2 , для зеркальных (верхнего и ниж-
него) каналов = /и, + 9, nij = т, + 8 при т, > 29; для гетеродинных каналов rrij = mi + 4, mJ = 2/и, + 3 при т, < 29 и mj = Зт, + 24 при т, < 29.
Следовательно, при необходимости учесть при частном планировании воздействие помех по основным, соседним, побочным и гетеродинным каналам условия взаимовлияния РЭС в группе должны отображаться функционально взвешенным ориентированным мультиграфом . Для иллюстрации его структуры на рис. 6.10 представлен фрагмент этого мультиграфа. В частных случаях, когда взаимовлияние РЭС имеет место только на совпадающих каналах или на совпадающих и соседних, мультиграф сводится к простому реберному графу или, соответственно, к взвешенному графу.
Таким образом, разработка оптимального частотного плана для телевизионных сетей в регионе включает две основные задачи: подготовительную и оптимизационную. При решении первой задачи на основе исходных данных о телевизионных сетях определяется множество функционально взвешенных ориентированных ребер мультиграфа. В этом случае для каждой пары станций с пересекающими зонами обслуживания рассчитываются наименьшие в зонах значения отношений сиг
нал-помеха, которые сравниваются со значениями защитных отношений (33 дБ по совмещенному каналу, 4 дБ по соседним каналам, 13 дБ по верхнему и -9 дБ по нижнему зеркальным каналам [1]). Наличие взаимовлияния станций по гетеродинным каналам определяется по факту пересечения их зон обслуживания. Функциональные соотношения, используемые в качестве веса ребер мультиграфа для телевизионных сетей, были приведены выше.
Вторая задача, как задача комбинаторной оптимизации в формализованном виде, формулируется следующим образом. Задан ориентированный мультиграф, ребрам которого в качестве веса поставлены в соответствие функции, устанавливающие запрещенные соотношения номеров частотных каналов, которые необходимо присвоить вершинам графа. Присвоение частотных каналов из заданного множества необходимо произвести так, чтобы, во-первых, для каждой пары вершин были исключены все запрещенные соотношения номеров каналов, во-вторых, - использовались только допустимые для каждой из вершин номера и, в-третьих, - суммарное количество присвоенных номеров было минимальным либо (если для всех -вершин графа заданного количества каналов оказалось недостаточно) было максимальным число вершин, которым номера частотных каналов были присвоены. В известной математической литературе по теории графов и комбинаторной оптимизации сформулированная задача не рассматривалась. В [2] был сформулирован один из частных случаев этой задачи, когда весовые функции являются простыми
разностными (по терминологии [2] - задача обобщенной раскраски графа). Более точно сформулированную здесь задачу можно определить как задачу числовой маркировки вершин мультиграфа, обобщающую задачу раскраски графа. К задаче раскраски она сводится при т, = т,.
Для решения этой задачи воспользуемся следующим алгоритмом числовой маркировки функционально взвешенного ориентированного мультиграфа. При присвоении номера канала каждой очередной вершине на основе функциональных соотношений, определяющих запрещенные частотные каналы, формируется множество разрешенных (относительно уже маркированных вершин) и доступных номеров каналов. В этом множестве выделяется подмножество уже присваивавшихся номеров и из них выбирается минимальный номер чаЬтотного канала. Если множество разрешенных каналов, присваивавшихся ранее, пусто, то для рассматриваемой вершины из множества разрешенных и доступных выбирается минимальный по номеру свободный канал. Если и это множество оказывается пустым, то фиксируется, что данная вершина не может быть маркирована, т.е. ей не может быть выделено частотное присвоение.
Рис. 6.11
С целью апробации изложенного метода решалась задача присвоения частот в гипотетической ситуации для группы телевизионных станций дециметрового диапазона (N = 25, мощность передатчиков -1 дБ/кВт, эффективная высота передающих антенн - 100 м, доступные для станций телевизионные каналы - 35...60). Станции располагались равномерно в общем территориальном районе А*А в узлах квадратной сетки с шагом Д, величина которого варьировалась (линейный размер территориального района Л = 4Д). Отыскивалась зависимость относительного числа станций, получивших частотные присвоения (N4n/N) и коэффициента повторения частот (Af) от размера территориального района размещения станций (Я = 4Д), нормированного величиной радиуса зоны обслуживания каждой станции •/?обсл- Результаты решения задачи представлены на рис. 6.11.
Они показывают, что присвоение частот всем станциям группы (/V4n/N = 1) достигается при А1И^Я> 3. Коэффициент повторения частот при этом kf > 4 . С уменьшением размеров района размещения относительное число станций, получивших частотные присвоения резко падает. В частности, когда в зоне обслуживания одной станции размещаются все станции (Л/Яо6сл =2), частотные присвоения могут получить лишь 40% станций, при этом к{ »1,2 • • • 1,4. Если условно принять, что защитные отношения сигнал-помеха по соседним, зеркальным и гетеродинным каналам пренебрежимо малы (не более - 30 дБ) и тем самым считать, что взаимовлияние станций имеет место только на совмещенных каналах, граничное значение Я/Яо6сл , при котором частотные присвоения могут получить все 25 станций, сушественно снижается (с 4 до 1,8). Это означает, что в 4 раза (по площади) сокращается территориальный район, в котором можно разместить все 25 телевизионных станций дециметрового диапазона и всем им обеспечить частотные присвоения, если исключить взаимовлияние станций по соседним, зеркальным и гетеродинным каналам.
Полученные результаты проверки предложенного метода оптимального присвоения частот в телевизионных сетях не противоречат известным данным и свидетельствуют о широких возможностях этого метода. Он может быть применен также и в полосах частот других радиослужб, для которых при частотном планировании невозможно пренебречь побочными каналами излучения и приема.
Литература
1. Сети телевизионного и звукового ОВЧ ЧМ вещания. Справочник. - М.: Радио и связь, 1988.
2. Лэйл УК -ТИИЭР, 1980, №12.
3. Ермаков А.И., Соловьев В.В. - Радиотехника, 1983, №3.
4. Корбут А.А., Финкельштейн Ю.Ю. - Современное состояние теории исследования операций. - М.: Наука, 1979.
6.4. Универсальный алгоритм оптимального присвоения частот
Для решения задач оптимального присвоения частот большое распространение получили методы комбинаторной оптимизации [1-3], учитывающие в дуэльных ситуациях характеристики нежелательного излучения и неосновных каналов приема. В ряде случаев при частотном планировании существенными являются также эффекты интермодуляции и группового воздействия помех. Для учета взаимовлияния РЭС в групповых ситуациях в [4] было предложено использовать методы теории игр с непротивоположными интересами. Однако случай, когда необходимо учитывать различные комбинации физических факторов, обусловливающих взаимовлияние РЭС, в [4] не рассмотрен. Кроме того, не была использована возможность оптимизации присвоения частот по множеству партий игры.
Рассмотрим универсальный алгоритм оптимального присвоения частот, учитывающего взаимовлияние РЭС как в дуэльных, так и в групповых ситуациях, основанный на применении комбинации методов теории игр и случайного поиска.
Пусть задана группа W разнородных РЭС, размещенных в определенном территориальном районе с произвольными координатами их местоположения. Радиоэлектронным системам в группе присвоены порядковые номера (п = 1...N) по убыванию их приоритета на присвоение частоты. Задано множество частотных каналов F = {fm, т=\...М} и для
*
Авторы: И. И. Новиков, В. В. Соловьев
каждого и-го РЭС установлено множество F„ (F„ с F) доступных каналов. Частотный план всей группы РЭС представим в виде матрицы V = = ||vnт|| , w = 1...Л/; п = каждый элемент которой vHi„, = 1, если и-му РЭС присвоена ти-я частота, и v„,„ = 0, если и-му РЭС ти-я частота не присвоена. Предполагается, что каждому РЭС может быть присвоено не более одной частоты и, следовательно, У v„ п, < 1. Случай, когда
т
У уЯ)Я = 0 означает, что и-е РЭС в данном частотном плане не имеет т
частотного присвоения. Равенство У v„ m = 0 означает, что ти-й час-
И
тотный канал не присвоен ни одному РЭС группы, а если У м >1, то
п
т-й частотный канал используется несколькими РЭС. Число РЭС группы, получивших частотные присвоения, определяется соотношением
= <619) н т
а число используемых частотных каналов
My=^Q(m), (6.20)
т
где функция Q(m) = 1, если У уя ,,, > 0, Q(m) = 0, если У уям = 0.
и п
Считается, что наличие недопустимого воздействия /-го РЭС на п-
Р„
е РЭС в дуэльной ситуации определяется условием ---- < qie{ nj, где
^n.j
Ps„ - мощность сигнала на входе приемника и-го РЭС; Pmj = = Ф(Р,Ч, Rnj, fun, fmj) - мощность помехи, создаваемой /-м РЭС в основной полосе пропускания приемника и-го РЭС; Ptry - мощность излучения передатчика и-го РЭС; Rnj - взаимоудаление передатчика /-го РЭС и приемника п -го РЭС;/,т f„j - частоты, присвоенные и-му и /-му РЭС; <7dcf „j ~ защитное отношение сигнал-помеха в дуэльной ситуации. Также считаем, что наличие недопустимого воздействия на приемник и-го РЭС суммарной помехи, создаваемой всеми РЭС группы, в основной
Ps„
полосе пропускания приемника имеет место, если - < qn„, где Д » =
Phn
= У Рь и,у; Qnn~ защитное отношение сигнал-шум для приемника и-го ./
РЭС в предположении нормализации суммарной помехи для случая, ко
гда в дуэльных ситуациях недопустимое воздействие помех отсутствует. Проявление эффекта интермодуляции в приемнике и-го РЭС под воздействием помех от у-го и А-го РЭС имеет место при выполнении следующих частотных и энергетических условий: „ =//, fmj + цк f„,k, Pin nJ s-Pin n,k > Рин n , ГДе Цр — i 1, i2, PU1 ,Pm n k — МОЩНОСТИ П0М6Х, создаваемыху-м и А-м РЭС на входе приемника и-го РЭС в полосе входных фильтров; Рин „ - динамический диапазон приемника п -го РЭС по интермодуляции (дБ). Для любого заданного частотного плана У наличие либо отсутствие недопустимого воздействия на приемник и-го РЭС помех, возникающих в силу возможного проявления какого-либо из указанных выше физических факторов, отображается функцией К„(Р) таким образом, что К„(Р) = 1, если условия недопустимого воздействия помех не выполняются, и K„(V) = 0 - в противном случае. Очевидно, что частотный план К является удовлетворительным по ЭМС, если справедливо равенство
(6.21) п пт
поскольку при этом все РЭС, получившие частотные присвоения, не испытывают недопустимого воздействия помех.
Требуется сформировать такой удовлетворительный по ЭМС частотный план, который бы содержал частотные присвоения максимально возможному числу РЭС группы (Ny —> max), а количество использованных при этом частотных каналов было минимальным (Л/,/—> min).
В соответствии с [5] оптимизационные задачи для больших систем, объекты которых достаточно сложным образом взаимодействуют между собой, могут рассматриваться не только в рамках теории исследования операций, но и рамках теории оптимального управления. В данном случае, полагая, что число РЭС в группе велико, достаточно сложными являются условия их взаимовлияния. При централизованном управлении задачи оптимального управления в больших системах рассматриваются как задачи математического программирования, а при децентрализованном - как игровые. Условно наделяя каждое РЭС группы способностью к децентрализованному управлению (адаптивному выбору частоты) в соответствии со своей целевой функцией, изложенную выше задачу оптимального присвоения частот можно рассматривать как бескоалиционную игру нескольких лиц с непротивоположными интересами и полной информацией. Вначале на первом шаге игры частотный план V формируется случайно по закону равновероятного выбора частоты для каждого РЭС. В дальнейшем на последующих шагах процесса адаптации каждое РЭС стремится к улучшению своего частотного присвоения. Выбор частот на каждом шаге РЭС производят последовательно, им известны все частотные присвоения и они могут анализировать
воздействие помех. В соответствии с этими допущениями создается имитационная математическая модель, которая воспроизводит процесс коллективного поведения частотно-адаптивных РЭС до достижения на Г-м шаге состояния устойчивого равновесия, когда ни одному РЭС не будет выгодно изменять свое частотное присвоение (оптимальность по Нэшу [5]). Это устанавливается по факту отсутствия изменения варианта частотного плана Vh полученного на шаге t, от варианта К(.ь полученного на (г-1)-м шаге. Целевая функция каждого РЭС при выборе частоты учитывает, прежде всего, необходимость исключения недопустимого воздействия помех, а при достижении этой цели - необходимость минимизации количества используемых группой частот Му путем стремления к увеличению коэффициента повторяемости частот NylMyR соответствии с этим алгоритм выбора частот каждым РЭС в процессе адаптации будет включать следующие процедуры. Используя операцию разности множеств, формируется множество частот, при применении которых «-е РЭС не испытывает помех от других РЭС в дуэльных и групповых ситуациях:
{А,„}эмс = {fm, т = \ ...M}\{fm,
где №,„(«<—/), У=1 №} - множество частот, на которых «-е РЭС испытывает помехи отj-го РЭС (j>n) либо создает помехи приемнику этого РЭС в дуэльной ситуации; {/,,.„(««—Sv)} - множество частот, на которых «-е РЭС испытывает групповое воздействие помех, выявляемое для тех частот, на которых отсутствуют помехи в дуэльных ситуациях;
п, } - множество частот, на которых для «-го РЭС
выполняются условия проявления эффекта интермодуляции.
Если множество эмс не пустое, то в нем определяется подмножество предпочтительных для присвоения w-му РЭС частот как пересечение множеств эмс.исп“ {/т,и}эмс {^л}исп, где {/га}Исп множество уже используемых (присвоенных) частот другими РЭС. Если множество эмс.исп не пустое, то выбор частот для «-го РЭС производится из этого множества по максимуму коэффициента повторения. В противном случае частота выбирается из множества {/"гая}эмс-
Достижение состояния равновесия означает завершение партии игры и получение варианта частотного плана V. Многократное повторение партий игры при случайных исходных вариантах присвоения частот позволяет получить случайную выборку частотных планов {V/, I = 1...L}, и на ее основе методом ненаправленного случайного поиска определить оптимальный частотный план Copt, в котором частоты присвоены максимальному числу РЭС группы, а используемое при этом число частотных каналов минимально. С этой целью, используя (6.19), из последователь-
ности {К;, 1= 1...L } формируется последовательность значений числа РЭС, получавших частотные присвоения в каждой l-й партии игры {Nyj, I = 1...L}. После каждой очередной партии игры в последовательности {Ni'.i, l= 1...L } определяется ее максимальное значение, которое может быть представлено как не убывающая функция Из последова-
тельности { У,, 1= 1...L } отбираются те частотные планы V*, для которых Nv= и из множества V* этих планов, используя (6.20), на-
ходится один из возможных вариантов Гор(,/, в котором количество использованных частот минимально - Решение о том, на какой
партии L игры случайный поиск может быть остановлен, принимается по результатам статистической обработки последовательности {Nvj, I = 1...L }, для которой в ходе ее формирования строится гистограмма Р * (W|/,max)- С ростом I контролируется изменение этой гистограммы по максимальной разности Др*(Д/), образующейся для значений при увеличении выборки на Д/. Когда Др*(Д/) станет меньше некоторой величины Padm, поиск прекращается. При этом можно утверждать, что с вероятностью более чем 1 - Padm найденное значение Nv,max не будет превышено, если поиск будет продолжен.
Работоспособность изложенного здесь алгоритма проверялась на примере решения задачи присвоения частот системе сотовой связи стандарта GSM диапазона 900 МГц в г. Воронеже (оператор «Билайн»), включающей в 2001 г. 12 базовых станций (21 трансивер). Рассматривался также вариант расширения сети до 20 базовых станций (42 трансивера) с тем, чтобы в большей мере мог проявиться эффект группового воздействия помех. Для проявления эффекта интермодуляции в состав рассматриваемой группировки РЭС были включены станции радиолокационных постов Аэрофлота типа МРЛ, П-30, П-30. Для них номиналы частот были априорно заданы таким образом, чтобы выполнялись частотные условия возникновения эффекта интермодуляции для абонентов сотовой сети связи (1372, 2310, 3247 МГц). Предполагалось, что все частотные каналы для рассматриваемой системы сотовой связи выделены без ограничений (сквозные каналы). В качестве защитных отношений сигнал-помеха использовались следующие значения, приведенные в [6]: при работе на совпадающих частотных каналах qnf=q= 12дБ, на соседних каналах - 8дБ, через канал - 38дБ. Значение защитного отношения сигнал-шум было принято равным ЮдБ. Трансиверам одной базовой станции частотные присвоения разносились не менее чем на три канала. Отыскивались зависимости числа базовых станций, которым присвоены частоты Ni-, количество используемых частот Mv и максимального номера используемой частоты Л7тах от числа выделенных частот М для
различных режимов решения задачи, различающихся количеством учитываемых факторов взаимовлияния станций. На рис. 6.12 эти зависимости представлены для системы сотовой связи, включающей 12 базовых станций (21 трансивер), на рис. 6.13 - для системы с 20 базовыми станциями (42 трансивера). Сплошными линиями обозначены указанные зависимости для случая, когда при решении задачи учитывался только фактор дуэльного взаимовлияния станций. Пунктиром на рис. 6.13 обозначены зависимости для случая, когда учитывались факторы как дуэльного, так и группового взаимовлияния. Время решения одного варианта задачи на ПЭВМ с тактовой частотой процессора 750 МГц и оперативной памятью 256 Мбайт не превышает 1 мин при числе партий игры - до 300.
Анализ полученных результатов частотного планирования показывает (рис. 6.12), что они достаточно близки к планам эксплуатации реальной сети связи, что позволяет сделать положительный вывод о работоспособности предложенного алгоритма. Эффект от учета фактора группового воздействия помех при выбранных исходных данных проявляется, как следует из рис. 6.13, только в варианте сети, содержащей 20 базовых станций (42 трансивера). Количественно влияние этого фактора на минимально необходимое число частотных каналов невелико (не более 5... 10 %). Это объясняется малым размером рассматриваемой сети, для которой коэффициент повторения частот не превышает 1,5. Можно ожидать, что для больших сетей сотовой связи, например, для сети в г. Москве, включающей сотни базовых станций и имеющей коэффициент повторения частот более 30, эффект от учета фактора группового воздействия помех при частотном планировании окажется более существенным. В практических работах при частотном планировании в настоящее время учет этого фактора обеспечивается искусственным завышением значения защитного отношения сигнал-помеха с 12 до 17дБ
[6]. При использовании предлагаемого алгоритма необходимость в таком завышении отпадает, в результате чего требуемое для сети число частотных каналов может быть снижено.
Применение при частотном планировании универсального алгоритма оптимального присвоения частот, разработанного на основе комбинации методов теории игр и случайного поиска, обеспечивает учет всех существенных физических факторов взаимовлияния РЭС в дуэльных и групповых ситуациях. Учет взаимовлияния РЭС в групповых ситуациях целесообразен в практике частотного планировании для достаточно больших (сто и более РЭС) группировок.
Литература
1. Справочник по управлению использованием спектра на национальном уровне. - МСЭ, Бюро радиосвязи, Женева, 1995.
2. Хейл У.К. Присвоение частот, теория и практика. - ТИИЭР, 1980, № 12.
3. Соловьев В.В. Методы оптимального присвоения частот. - М.: Гейзер, 2000.
4. Ермаков А.И., Соловьев В.В. - Радиотехника, 1996, № 6.
5. Современное состояние теории исследования операций/ Под ред. Н.Н. Моисеева. - М.: Наука, 1979.
6. Милованов Д.А., Сушков В С. - Вестник связи, 1998, № 3.
6.5. Комплексное применение алгоритмов комбинаторной, игровой и поисковой оптимизаций в задачах присвоения частот
Для повышения точности решения задач оптимального присвоения частот в условиях проявления всех возможных физических факторов взаимовлияния РЭС, включая эффекты интермодуляции и группового воздействия помех, в [1] предложено использовать комбинацию методов теории игр и случайного поиска. На практике, однако, чаще приходится сталкиваться с дуэльным взаимовлиянием РЭС и, прежде всего -на совпадающих и соседних каналах. В этих условиях, как известно, в большинстве случаев ограничиваются квазиоптимальным решением задачи оптимального присвоения частот методами комбинаторной оптимизации (задачи раскраски графа, коммивояжера, числовой маркировки [2, 3]). Для получения оптимального решения задачи в этом случае целесообразно было бы рассмотреть вопрос о комплексировании комбинаторных алгоритмов с игровыми и поисковыми алгоритмами оптимизации. Дадим обоснование последовательности применения этих алго-
Авторы: В. В. Соловьев, Т. В. Харченко
ритмов и оценим их совместную эффективность в условиях дуэльного взаимовлияния РЭС на совпадающих и соседних каналах.
Рассмотрим множество РЭС {и}, n=l...N, размещенных в определенном территориальном районе произвольным образом. Матрицу их взаимоудалений обозначим , п, k=\...N. Будем считать, что частотное планирование для этих РЭС производится на множестве дискретных частотных каналов {/и}, т=\...М, M>N. Условия взаимовлияния РЭС в дуэльных ситуациях на совпадающих и соседних каналах отображаются монотонно убывающей функцией частотно-территориального разноса \m^k = vV(Rnk), где Д/и^ - минимально допустимый разнос частотных каналов для и-го и к-го РЭС при их взаимоудалении R„k. Характерными значениями этой функции являются минимально допустимый частотный разнос Д»^о при R„k=0 (размещение на одном объекте) и минимально допустимый территориальный разнос Ro при \тпк =0 (работа на совпадающих частотах). В иллюстративных примерах для простоты будем использовать линейную функцию частотно-территориального разноса
\т*к = Д/и^о| 1--^-1, n,k = \...N, п±к . (6.21)
На основе \m^k = 'V{Rnk) матрице взаимоудалений может быть поставлена в соответствие матрица допустимых частотных разносов ||д<||, п, k=\...N, nfik, элементы которой принимают значения в пределах от 0 до Д/и®ло • Матрица ||zVw^ || может быть отображена полным У-вершинным взвешенным графом, в котором веса ребер суть значения Д/и,^, п, k=l...N. Обобщая понятие степени вершины простого реберного графа [4], под степенью и-й вершины полного взвешенного графа будем понимать сумму весов исходящих из нее ребер:
А=ХЛ/И'*’ п*к' (6-22)
к-1
Задача оптимального присвоения частот в указанных условиях сводится к задаче комбинаторной оптимизации, а именно к задаче числовой маркировки вершин полного взвешенного графа номерами частотных каналов. Существо задачи состоит в том, чтобы для каждой пары вершин разности номеров частотных каналов были не меньше веса соединяющего эти вершины ребра, т.е. не меньше минимально допустимого частотного разноса (Д/ии4 > Дт^), а количество присвоенных
частотных каналов было минимальным (Л/пр—>min). По вычислительной сложности эта задача наряду с задачами раскраски и коммивояжера является ^-полной [5], т.е. такой, в которой при использовании точных алгоритмов время решения растет экспоненциально с увеличением числа вершин, что вынуждает применять приближенные алгоритмы при числе вершин более 20...25. В качестве простого в реализации, универсального и достаточно эффективного приближенного алгоритма для ее решения обычно применяются алгоритмы локальной (пошаговой) оптимизации [6], в которых поиск точного оптимума по совокупности решений заменяется оптимизацией решений на каждом шаге. В данном случае можно принять, что оптимальным локальным решением является присвоение уже используемого частотного канала из числа тех, которые удовлетворяют частотным ограничениям.
Для аргументации этого утверждения частотный план представим в виде матрицы V=||v„m||, т=\...М, n=l...N, элементы которой иига=1, если и-му РЭС присвоен /и-й частотный канал, либо v„„, =0, если и-му РЭС /и-й частотный канал не присвоен. Будем считать, что в качестве исходного (начального) плана используется нулевой (Ио) частотный план. В нулевом плане ЕЕ v„„, =0. Допустим также, что при планиро-п т
вании каждому РЭС присваивается один частотный канал и, следовательно, <1. Случай, когда =0 означает, что и-е РЭС в дан-
т т
ном частотном плане не получило частотного присвоения. Равенство гпш =0 означает, что w-й частотный канал не присвоен ни одному Л
РЭС, а неравенство у„и, >1 - что /и-й частотный канал присвоен не-
Л
скольким РЭС. Величину = назовем коэффициентом повтор-п
ного использования /и-го частотного канала. Число РЭС, получивших частотные присвоения, определяется соотношением
<6-23>
п т
а количество присвоенных частотных каналов - соотношением Л/1ф=^0(/и), ('6'24'*
/п
где функция 2(/и)=1, если у„и, >0, и Q(m)=Q, если v„,„ =0. Оче-
п п
видно, что при фиксированных значениях N и М повышение на каждом
шаге принятия локальных решений коэффициента повторного использования частотных каналов //,„ приводит к снижению Л/пр. Это аргументирует утверждение, что оптимальным локальным решением является повторное присвоение частотного канала из тех, которые удовлетворяют частотным ограничениям.
В формализованном виде процедура числовой маркировки вершин графа заключается в следующем. Прежде всего для и-й вершины на основе значений весов исходящих из нее ребер формируются подмножества запрещенных частотных каналов {/и^"р|, элементы которых удовлетворяют условию |/и-/и4|<Д/ид4, где тк - присвоенный номер частотного канала к-й вершине графа. Если вершина к не имеет частотного присвоения, то пусто. Используя операцию объединения множеств, формируется подмножество всех запрещенных для п-й вершины частотных каналов:
(^anp)=U(^p)’^- <6-25>
к
При этом подмножество разрешенных для присвоения n-й вершине каналов определяется на основе операции вычитания множеств:
{<зр} = {т}\{ш“пр}. (6.26)
Если подмножество |/иразр} пусто, то частотное присвоение п-й вершине на данном шаге невозможно (переход в режим ожидания). В противном случае из подмножества |/иразр| п-й вершине присваивается частотный канал из тех каналов, которые уже были присвоены какой-либо другой вершине. Для этого на основе операции пересечения множеств формируется подмножество предпочтительных частот для присвоения п-й вершине на данном шаге:
(/ияпредп) = {/иприсв} Q |<зр}. (6.27)
Если предпочтительных частотных каналов окажется несколько, то п-й вершине присваивается любой из них путем случайного выбора. Если |/и"редп| пусто, то п-й вершине присваивается любой из разрешенных каналов подмножества {/иразр| •
Далее описанная выше процедура выполняется для (и+1)-й вершины. После присвоения частоты N-й вершине процедура числовой маркировки графа завершается. Результатом является сформированный
частотный план, который следует рассматривать как один из множества возможных квазиоптимальных планов, поскольку был использован комбинаторный алгоритм локальной оптимизации, даюший приближенное решение.
При многократном повторении процедуры числовой маркировки наличие фактора случайного выбора частотного канала в процессе локальной оптимизации позволяет получить множество вариантов квазиоптимальных частотных планов количество присвоенных час-
тот в которых будет представлять собой статистическую выборку независимых случайных величин ЛУПр|...ЛУпр|... с неизвестным распределением. Из полученной статистической выборки методом случайного поиска можно выявить наилучший план с минимальным количеством присвоенных частот. Однако при большом числе РЭС (до ста и более) множество вариантов квазиоптимальных частотных планов, полученных при многократном решении задачи числовой маркировки, велико (десятки, сотни тысяч вариантов). Процедура случайного поиска в таком множестве вариантов требует большого объема статистической выборки. Для ее сокращения целесообразно из множества квазиоптимальных частотных планов предварительно выделить подмножество относительно лучших планов, количество которых будет существенно меньше.
С этой целью можно применить следующий игровой итерационный алгоритм. В процедуре числовой маркировки вершины графа будем рассматривать как совокупность игроков, каждый из которых при своем ходе контролирует выполнение ограничений, установленных весовыми коэффициентами на ребрах графа, и стремится оптимизировать локальную целевую функцию - минимум присвоенных частот. Эта процедура адекватна бескоалиционной игре нескольких лиц с непротивоположными интересами и полной информацией. Многократное повторение игровой процедуры производится так, что каждая следующая итерация (партия игры) использует в качестве исходного частотный план, полученный в предыдущей партии. Остановка игры происходит на некоторой i-й партии по достижении состояния устойчивого равновесия (по Нэшу), когда ни одному РЭС не выгодно изменять свое частотное присвоение. Улучшение частотного плана в ходе игры происходит в связи с тем, что в каждой последующей партии игровой алгоритм, не нарушая частотных ограничений, реализует новые появляющиеся возможности повторного присвоения частот. Тем самым после многократного применения игровой процедуры объем множества квазиоптимальных частотных планов, получаемых при числовой маркировке, снижается.
Для выявления наилучшего частотного плана из множества квазиоптимальных частотных планов может быть использован следующий алгоритм случайного поиска. Количество присвоенных частот в частот-
ном плане по завершении каждой игровой партии (Л/пр|) сравнивается с числом частот в наилучшем (по совокупности предшествующих партий) частотном плане (A/min(,.|)). Если Мпр1< то наилучшим час-
тотным планом признается план, полученный в i-й партии. В противном случае поиск продолжается. Остановка процесса поиска производится на той партии игры, на которой вероятность улучшения наилучшего (по совокупности предшествующих партий) частотного плана Рул снижается ниже некоторой малой вероятности Р . Для вычисления вероятности Рул/ после каждой /-Й партии игры формируется гистограмма значений относительного числа квазиоптимальных частотных планов, формируемых данным алгоритмом с различным количеством присвоенных частот
С ростом статистики (числа партий) эта гистограмма стремится к функции плотности распределения количества присвоенных частот в частотных планах. Аппроксимируя в области
Л/Пр < Мпр линейной функцией L^M^, вычисляется значение вероятности ^“^(A/np^A/miiKi-i))- Если Рул1< Р , то дальнейший поиск прекращается и в качестве оптимального частотного плана принимается план с Л/mind-i) присвоенных частотных каналов.
Комплексирование комбинаторного алгоритма с алгоритмами игровой и поисковой оптимизации обеспечивает сужение функции плотности распределения количества присвоенных частот в частотных планах. Тем самым облегчается отыскание множества оптимальных частотных планов, в которых количество присвоенных частот минимально.
Апробация комплексного применения трех различных алгоритмов оптимизации производилась на математической модели, воспроизводящей описанные выше комбинаторную, игровую и поисковую процедуры присвоения частот в группе РЭС (W = 16, 25, 36, 49, 64, 100), размещенных равномерно в узлах сетки с интервалом А/?=0,2; 0,3; О,5/?о- Условия взаимовлияния РЭС задавались функцией частотнотерриториального разноса (6.21) с параметром А/Иц =3, 5, 10. Частотное планирование производилось на множестве дискретных частотных каналов {/и}, т= 1 ...М, M<N.
Предварительно для отладки математической модели исследовалась эффективность алгоритма числовой маркировки при обходе вершин графа по убыванию и возрастанию их степени р. По статистической выборке объемом 500 определялось количество неповторяющихся квазиоптимальных частотных планов с различным числом присвоенных частот, на основе чего строились функции плотности распределения ЗК(М ). На рис. 6.14 представлены полученные функции распределе
ния при А=100. Д/ир =4, ДЛ//?о=0,2, которые, как и следовало ожидать [4], наглядно показывают, что алгоритм числовой маркировки по убыванию степени вершин (гистограмма /) существенно эффективнее алгоритма с обходом по возрастанию степени вершин (гистограмма 2). Минимальное значение количества присвоенных частот в наилучшем частотном плане в первом случае Л/ппп пр =20 при Мпр = 30, а во втором случае iWminnp =33 при среднем значении Mnf = 39. Ширина гистограмм (ЛЛпах пр ~Итип пр)в обоих случаях примерно одинакова и достигает 15.
Анализ приведенных на рис. 6.14 гистограмм показывает также, что общее количество сформированных с помощью алгоритма числовой маркировки различных квазиоптимальных частотных планов в обоих случаях соответствует объему статистической выборки (повторяющихся планов не выявлено). Это подтверждает утверждение о большом объеме множества квазиоптимальных частотных планов, формируемых с помощью алгоритма комбинаторной оптимизации.
На рис. 6.15 для А=100 при объеме статистической выборки 500 для сравнения представлены плотности распределения количества присвоенных частот в частотных планах, получаемых при совместном использовании алгоритмов комбинаторной и игровой оптимизации (гистограмма 7) и при использовании только алгоритма комбинаторной оптимизации (гистограмма 2). Их анализ показывает, что значение Л/1П1П Пр в наилучших частотных планах в обоих случаях одинаково. Однако среднее значение Л7пр в первом случае равно 23, во втором - 30, а ширина гистограмм соответственно 5 и 16. Следовательно, при совместном использовании алгоритмов комбинаторной и игровой оптимизации функция плотности распределения количества присвоенных частот сужается, поэтому отыскание наилучшего частотного плана с минимальным коли
чеством присвоенных частот при заданном объеме статистической выборки более вероятно. Это подтверждают представленные на рис. 6.16 зависимости Л/тш пр(У) при Д/Mq =4, &R/R0= 0,2. Значения Л/т1П пр в случае совместного применения только алгоритмов комбинаторной и поисковой оптимизации (кривая 7) на 15...20% выше, чем в случае совместного применения комбинаторного, игрового и поискового алгоритмов (кривая 2) при статистической выборке 500 в широком диапазоне изменения объема группы РЭС (N = 20...200).
Разработанная математическая модель, воспроизводящая процедуры комбинаторной, игровой и поисковой оптимизации при частотном планировании, реализована с использованием языка программирования Pascal на ПЭВМ типа Celeron-1700 (ОЗУ - 256МЬ). Время получения функции плотности распределения количества присвоенных частот в частотных планах для группы из 100 РЭС при совместном применении комбинаторного и игрового алгоритмов по статистической выборке 500 не превышает 15 мин.
Для отыскания оптимального решения задачи присвоения частот нз множества квазиоптимальных решений, получаемых с помощью приближенных алгоритмов комбинаторной оптимизации, необходимо их комплекснрованне с алгоритмами игровой и поисковой оптимизации.
В качестве статистической характеристики множества формируемых частотных планов целесообразно использовать функцию плотности распределения количества присвоенных в них частот.
Литература
1. Новиков НИ., Соловьев В.В. Универсальный алгоритм оптимального присвоения частот. - Радиотехника, 2002, №11.
2. Хейл У К. Присвоение частот: теория и приложения. -ТИИЭР, 1980. №2.
3. Соловьев В.В. Методы оптимального присвоения частот. - М.: Гейзер. 2000.
4. Кристофидес Н. Теория графов (алгоритмический подход). - М.: Мир, 1978.
5. Пападимитру X.. Стайглиц К. Комбинаторная оптимизация (алгоритмы и сложности). - М.: Мир, 1985.
6. Современное состояние теории исследования операций / Под ред. НН.Моисеева. - М.: Наука, 1979.
6.6. Оптимальное присвоение частот в полосах совместного использования с приоритетами радиослужб
Обеспечение ЭМС РЭС различных радиослужб при совместной работе в обшей полосе частот требует применения специальных организационных и технических мер. В качестве одной из таких мер Регламентом радиосвязи [1] предусмотрена система категорирования приоритетности служб, определяющая условия совместного использования частот на первичной, разрешенной и вторичной основах. Станции первичных и разрешенных служб пользуются равными правами, но при частотном планировании станциям первичной службы предоставляется приоритетное право выбора частот. Станции вторичной службы не должны создавать помех станциям первичной и разрешенной служб, но не могут требовать зашиты от помех, создаваемых этими станциями. Известные методы оптимального присвоения частот [2^4] не учитывают фактор приоритетности станций в том виде, в котором он установлен Регламентом радиосвязи. Вместе с тем этот фактор является достаточно важным, поскольку сушественно изменяет исходные условия задачи частотного планирования.
Для обшности постановки задачи установленный Регламентом радиосвязи способ совместного использования частот с тремя категория-
Авгор: С Н. Яньшин
ми приоритетов целесообразно распространить на случай произвольного числа категорий приоритетности. При этом можно принять, что для РЭС к-й, к= 1, и, категории приоритетности (кроме к = и) органы радиочастотной службы обязаны обеспечить исключение помех от РЭС низших категорий; помехи от РЭС более высокой категории считаются допустимыми.
Пусть задана группа {JV }, ik=\,Nk ,к = 1,и, включаюшая N разнородных РЭС с несколькими (и) категориями приоритета использова-п
ния частот; при этом N = Nk . Группа размещается в территориаль-*=i
ном районе А*А. Задано множество частотных каналов т=1,М, которые доступны для всех РЭС группы. Будем считать, что воздействие помех между РЭС в дуэльных ситуациях может возникать только на совпадающих частотных каналах при удалении R < . Допусти-
мыми при этом являются ситуации, в которых источником помех являются РЭС более высокого приоритета.
Прежде чем сформулировать задачу оптимального присвоения частот в этих условиях, необходимо указать на особенности выбора целевой функции присвоения частот с приоритетами. Известно [2-4], что в тех случаях, когда присвоение частот производится при условии исключения взаимовлияния РЭС, достаточно иметь одну целевую функцию, предусматривающую минимизацию используемого числа частот либо максимизацию числа РЭС группы, получивших частотные присвоения. В данном случае, когда при совместном использовании частот с приоритетами помехи от РЭС более высокого приоритета считаются допустимыми, одной целевой функции недостаточно. Кроме максимизации числа РЭС, получивших частотные присвоения, целесообразна также минимизация числа частотных присвоений с помехами. Поэтому задача оптимального присвоения частот в полосе совместного использования с приоритетами может быть сформулирована как оптимизационная задача с двумя последовательно выполняемыми целевыми функциями: требуется составить частотный план для заданной группы РЭС с приоритетами так, чтобы частоты были присвоены максимальному числу РЭС в порядке их приоритета и при этом число частотных присвоений с помехами было бы минимальным.
Известны два основных методических подхода к решению задач оптимального присвоения частот: комбинаторный и игровой [3]. Задачи комбинаторной оптимизации (например, задачи раскраски графа, коммивояжера) решаются в большинстве своем приближенно методом локальной (пошаговой, последовательной) оптимизации. Вторая целевая
функция (минимум частотных присвоений с помехами) при использовании методов комбинаторной оптимизации не может быть учтена в полной мере, так как на каждом промежуточном шаге частоты присвоены лишь части РЭС группы.
Целесообразным является использование игрового подхода к решению задачи, в соответствии с которым процедура присвоения частот определяется как многошаговая бескоалиционная игра нескольких лиц с непротивоположными интересами и точной информацией [3]. Каждое РЭС группы условно наделяется способностью к адаптивному выбору частот и на имитационной математической модели воспроизводится процесс коллективного поведения частотно-адаптивных РЭС. На первом шаге частоты всем РЭС группы устанавливаются случайным образом. В процессе адаптации частотные присвоения постепенно улучшут-ся в соответствии с установленными целевыми функциями. Процесс перестройки продолжается до достижения состояния устойчивого равновесия, когда ни одному РЭС группы не выгодно будет производить изменение частоты (оптимальность по Нэшу). По достижении состояния равновесия партия игры завершается. Многократное повторение игры позволяет получить статистическую выборку вариантов присвоения частот. Селекция вариантов этой выборки в соответствии с целевыми функциями обеспечивает отыскание наилучшего присвоения частот.
Реализация игрового подхода к решению задачи оптимального присвоения частот с приоритетами требует разработки имитационной математической модели, воспроизводящей коллективное поведение рассматриваемой группы частотно-адаптивных РЭС. Основой для работы модели является матрица взаимовлияния РЭС ||^л||> 4 = , Ji =
= \,N/ , к, I = 1,и, определяемая, исходя из матрицы взаимоудаления РЭС в группе ||я,Н/||, в соответствии с соотношением
1, R <R° ,
К ‘kJI (6.28)
' О, R >R° . 'HI 'HI
На начальном шаге множество используемых частот {/„,}us группой РЭС формируется случайно по равномерному закону на базе искомого множества частотных каналов {/,,}, т= . Далее, на каждом последующем шаге для каждого РЭС последовательно (в порядке приоритета) предпринимается попытка улучшения частотного присвоения, руководствуясь заданными целевыми функциями: сначала отыскивается множество наилучших решений по одной целевой функции, а затем в пределах этого множества отыскивается наилучшее решение по второй
целевой функции. Предварительно исключаются частотные присвоения, при выборе которых имеет место недопустимое взаимовлияние. Множе-
ство допустимых частотных присвоений {/„,(4—-—>jh к<1)}, где
символ ——> обозначает отсутствие воздействия помех z'-ro РЭС к-го приоритета на J-e РЭС /-го приоритета, определяется путем исключения из множества частот {/„}, на которых z-e РЭС создает помехи РЭС высшего или равного приоритета {/„(/Л -> у,, к < /)}:
k<l)} = {fm}-{f„,(ik^jl, к<1)}, (6.29)
где символ -> обозначает наличие воздействия помех. Если
{f„,(ik—Ji> к<1)}=0, то это означает, что на данном шаге z-e РЭС не имеет возможности осуществить частотное присвоение и переходит в режим ожидания до следующего шага, где попытка получить частотное присвоение будет повторена. В противном случае в пределах этого множества выделяется множество предпочтительных частотных присвоений, на которых z-e РЭС не испытывает помех от РЭС более высокого или равного приоритета:
= {/,,('*к</)} -{fm(Jk ^j„k</)} • (6.30)
В случае, если {/„,(/* <——> у,, к < 1)} *0, то в соответствии с первой целевой функцией в его пределах отыскиваются используемые частоты на основе операции пересечения с множеством используемых частот:
{f,Ah j„k< /)}us = {/„,(4 J„ к < /)} n {/„,}us. (6.31)
В противном случае, когда при выполнении операции (6.30) множество {/„,(zt < Х >у„ к<1)} =0, операция (6.31) производится с ис-
пользованием множества {/„(z4——>У), к<1)}. Далее, в соответствии со второй целевой функцией в пределах {f„,(ik < Х > jt, k<l)}us выделяется множество частот, на которых z-e РЭС не создает помех РЭС низшего приоритета:
Ji’^< I, ik —У/, к > /)}и$ =
= к </)}us -{fm(ik -+j„ к>1)}. (6.32)
Если {fm(ik < * >У/; к < I, ik ——>у,, к > /)}us ^0, то в его пределах выбирается минимальный по номеру частотный канал и присваивается /-му РЭС. Если множество пусто, то это присвоение делается в пределах множества {/„(^<-^7/. A^0}us-
По завершении операции присвоения частот всем РЭС на текущем шаге выполняется контроль, не наступило ли состояние устойчивого равновесия, путем сопоставления частотных присвоений в группе РЭС на текущем и предшествующем шагах. Если частотные присвоения различаются, то выполняется очередной шаг. В противном случае партия игры считается завершенной и производится фиксация ее результатов: определяется число РЭС группы, получивших частотные присвоения без помех и с помехами, и общее количество используемых группой частот. После этого разыгрывается следующая партия.
Апробация игрового метода оптимального присвоения частот с приоритетами производилась при следующих исходных данных: рассматривалась группа, включающая 90 дуплексных радиолиний с дальностью связи и взаимовлияния 7?°= 15 км, размещенных произвольным образом по равномерному закону в территориальном районе А*А км, А = 15, 75км. Количество категорий приоритетности радиолиний в группе равно трем, а число радиолиний каждого приоритета = ЛГш = 30. Отыскивалось среднее по множеству вариантов размещения относительное число радиолиний каждого приоритета, получивших
------
частотные присвоения без помех 3N, =——; 8N„ =——;
N, wn N„
Рис. 6.17
8МШ =—— в зависимости от количества частот М= 5... 150, выделения/
ных для группы. Время решения одного варианта задачи присвоения частот составляет 0,1... 0,2 с на ПЭВМ IBM Celeron 800.
Полученные зависимости J/Vwn(A7) для Л//?°=1 и 5 представлены на рис. 6.17, 6.18, где цифрами 1, II, III обозначены приоритеты радиолиний в группе. Пунктирными линиями обозначены аналогичные зависимости, полученные для случая, когда вторая целевая функция (ми-
Рис. 6.18
нимизация частотных присвоений с помехами) не вводилась. Видно, что при введении приоритетов возможности получения частотных присвоений без помех для различных категорий радиолиний существенным образом дифференцируются. В частности, на рис. 6.17 максимальное различие значений dNwn для радиолиний I и III категории достигает почти порядка. Кроме того, результаты моделирования
показали, что при введении второй целевой функции количество получаемых радиолиниями II и III категории частотных присвоений без помех повышается (на 15...20 %).
На рис. 6.19 приведены зависимости суммарного числа частотных присвоений по всем категориям приоритетов от количества выделенных для группы частот для случая Л/Л° = 5. Зависимость 1 характеризует общее в группе относительное число частотных присвоений без помех;
2 - для частотных присвоений как без помех, так и с помехами; 3 - для случая планирования без приоритетов в группе (Л^ = 90; Уп = 0; Ущ = 0). Видно, что на общее число частотных присвоений влияние вводимых категорий приоритетности радиолиний менее существенно, чем по отдельным их категориям. Это не противоречит физическому смыслу, поскольку приоритетность специально вводится для дифференциации частотных присвоений по категориям радиолиний, а не для повышения эффективности частотного планирования в целом по группе.
Игровой подход обеспечивает отыскание приближенного решения задачи оптимального присвоения частот в полосах совместного использования с приоритетами радиослужб. Оптимизация осуществляется в соответствии с двумя последовательно выполняемыми целевыми функциями: максимум плотности частотных присвоений и минимум числа присвоений с помехами, создаваемыми РЭС высших приоритетов.
Литература
1. Регламент радиосвязи. - Международный союз электросвязи, 1990.
2. Хеш У.К. - ТИИЭР, 1980, №12.
3. Соловьев В.В. Методы оптимального присвоения частот. - М.: Гейзер, 2000.
4. Справочник по управлению использованием спектра на национальном уровне. - МСЭ, Бюро радиосвязи, Женева, 1995.
6.7. Сравнительная эффективность планирования частот и адаптивного управления частотами в условиях изменяющейся обстановки
Для повышения эффективности использования спектра радиочастотные органы постоянное внимание уделяют совершенствованию методов планирования (прежде всего - присвоения, назначения) радиочастот. Развитию этих методов посвящено большое число отечественных и зарубежных работ, сложилось также новое научное направление — теория присвоения частот [1-3]. Однако при планировании радиочастот наибольшая эффективность обеспечивается лишь в условиях полной определенности радиообстановки и взаимовлияния РЭС. В действительности же эти факторы всегда имеют некоторую априорную неопределенность. Так, РЭС подвижных служб в процессе работы изменяют свое местоположение. Время работы РЭС на излучение как подвижных, так и стационарных служб в большинстве случаев зависит от ряда случайных факторов текущей обстановки, изменения трафика и условий распространения радиоволн. Все это требует при планировании ориентации на «худший случай», что вынуждает выделять избыточный частотный ресурс и тем самым снижать эффективность его использования.
Альтернатива в условиях априорной неопределенности - адаптивное (централизованное или децентрализованное) управление использованием частот в соответствии с реально изменяющейся обстановкой. Актуальной является сравнительная оценка эффективности планирования частот и адаптивного управления частотами в зависимости от степени априорной неопределенности обстановки. Эту задачу решим для случая централизованного адаптивного управления использованием частот РЭС подвижных служб (перепланирования) при допущении, что неопределенность обстановки обусловливается случайным местоположением РЭС и случайным временем работы на излучение.
Пусть задана группа из N однотипных РЭС, размещенных на территории размерами А*А. Рассматриваем максимальную степень неопре-
Авторы: А. И. Ермаков, В. В. Соловьев
деленности местоположения РЭС, соответствующую случаю, когда координаты размещения каждого РЭС — независимые равномерно распределенные на отрезке [О, А] случайные величины. Кроме того, предполагаем, что каждое РЭС в любой заданный момент времени работает на излучение независимо от других РЭС с вероятностью р. Условия взаимовлияния РЭС в группе определяются функцией частотнотерриториального разноса, которая при рассмотрении только основных и внеполоспых характеристик излучения и приема может быть представлена монотонно убывающей функцией минимально необходимой частотной расстройки Д/у ij = l...N, от их взаимного удаления 7?,/
A4=W- (б.зз)
Тогда условия обеспечения ЭМС РЭС для каждой случайной к-й реализации их размещения можно записать в виде матрицы минимально необходимых частотных расстроек РЭС > элемен™ которой ограничивают выбор рабочих частот РЭС:
i,jeLk;i*j, (6.34)
где Д/J*1 =g(R^); - расстояние между ;-м и j-м РЭС в к-й реали-
зации радиообстановки; Lk — множество экземпляров РЭС, работающих на излучение в к-й реализации радиообстановки.
При перепланировании частот в реальном масштабе времени изменения обстановки матрице может быть поставлена в соответствие минимальная полоса частот полученная методом оптимального присвоения рабочих частот РЭС, предложенным, например, в [3]. Выделение этой полосы частот данной группе РЭС гарантирует обеспечение условий их ЭМС для к-й реализации радиообстановки. Для К независимых реализаций обстановки можно получить случайную выборку минимальных полос частот: .Тогда для за-
данной допустимой вероятности обеспечения ЭМС РЭС Ряоп полоса частот &Fy, которую необходимо выделить в случае управления частотами РЭС в реальном масштабе времени, определяется как квантиль полученной выборки порядка Рдоп (выборочная квантиль). Ее можно вычислить как r-ю порядковую статистику этой выборки, где г = [Рдоп,X] .
Когда осуществляется планирование частот (отсутствует управление частотами в реальном масштабе времени), необходимая по условиям ЭМС выделяемая полоса частот AFnn с учетом изменяющейся обстановки может быть найдена следующим образом. Очевидно, что ввиду одно
родности расположения однотипных РЭС на местности рабочие частоты их должны образовывать равномерную сетку с некоторым шагом Д/ , так что /= /0 + (z-l)A/,z = 1,2,..., У. В этом случае ЭМС РЭС для определенной таким образом сетки частот будет обеспечена, если выполняется соотношение -/у| = |z-j|A/>eLk;i* 1. Отсюда следует, что для нахождения шага сетки рабочих частот Д/ необходимо для каждой к-й реализации радиообстановки сформировать матрицу допустимых частотных расстроек , определить для этой реализации минимальный шаг сетки:
дЛ*’
= min , (6.35)
а затем по случайной выборке полученных величин Д/(4) найти квантиль этой выборки Д/ порядка Рдоп. Это позволяет считать, что в полосе частот ЛРПЯ = (А -1) Af ЭМС данной группы РЭС будет обеспечена с заданной вероятностью Рдоп.
На ЭВМ была проведена сравнительная оценка эффективности планирования частот и адаптивного управления частотами в условиях изменяющейся радиообстановки. С помощью датчиков равномерно распределенных на отрезках [0,1] и [0,А] случайных чисел осуществлялась соответственно генерация признаков работы РЭС на излучение, позволяющая сформировать множество и генерация координат расположения РЭС (х/*\у1/*’) на территории площадью Ах A(ieLk) Для каждой полученной реализации радиообстановки вычислялись расстояния
между z-м и J-м экземплярами РЭС:
7?^ = J^x^^1-^)2, z, j е Lk,z * 1, (6.36)
а затем по функции частотно-территориального разноса (6.33) определялись элементы матрицы допустимых частотных расстроек РЭС: А//’ = eLk,i^l. Далее по изложенной выше схеме вычисля-
лись значения AF^ и A/w, и эксперимент повторялся заданное число раз (К). По полученным случайным выборкам (Д/^'^Д/^2),..., Д/^А)) и (A/(,),A/(2),...,A/(t)) определялись их квантили порядка Ртп = 0,95, являющиеся исходными данными для проведения оценки эффективности
осматриваемых алгоритмов планирования и управления частотами в зеальном масштабе времени изменения обстановки.
Использование в данном вычислительном эксперименте достаточ-ю большого объема реализаций (/С=1000) позволило с доверительной зероятностью /?=0,99 ожидать, что относительная ошибка от замены квантилей рассматриваемых случайных величин точечными оцен-
ками zP , полученными по случайным выборкам, не превзойдет 3...5 %.
Данное утверждение следует из соотношения [4]: д f(£P доп*7 ^гдоп
Вер
k I
| .доп Дгдоп I
azp
= 2Ф’ д
#доо(1-^доо)
-1 = А
(6.37)
zp гдоп
которое может быть использовано, исходя из того факта, что распределение каждой выборочной квантили zP асимптотически нормально с центром £Рдоп и дисперсией рдоп(1- Рд0П)/[^/2(^Д0п)] . В (6.37) Ф*(х) -нормальная функция распределения; /(£;>) - значение плотности вероятности случайной величины в точке х = , которое приближенно
можно вычислить с помощью определения значения гистограммы выборки в точке х = zP.
В качестве примера рассмотрим группу РЭС подвижной службы УКВ радиосвязи с пространственной плотностью размещения станций порядка 0,05...0,5 ед/км2. Передатчики станций мощностью порядка единиц ватт обеспечивают дальность связи до 25 км. В качестве функции частотно-территориального разноса используем функцию вида
100, О <R <0,2 [км],
ДДкГц] = 2х/100//?2-1, 0,2 < R < 10 [км],
(6.38)
7? > 10 [км],
0,
которая ограничивает максимальную дальность взаимовлияния величиной 7?вз= 10 км.
На рис. 6.20 и 6.21 приведены полученные зависимости ДГу, и ДГщ, от числа РЭС в группе для различных значений параметров р и у = A-jliR^ Результаты расчетов показывают, что
зависимости AFy от А являются линейными, начиная с некоторого количества экземпляров средств, а асимптотой для зависимостей
от N является прямая линия AF^ = 100(А -1) соответствующая случаю у < 1.
На рис. 6.22 и 6.23 для различных значений параметров р и у приведены зависимости выигрыша р = / AF;, от N. Анализ полу-
ченных зависимостей показывает,
что выигрыш ц в необходимой полосе частот при адаптивном управлении частотами в изменяющейся радиообстановке по сравнению со случаем планирования частот возрастает с увеличением N, уменьшением радиуса взаимовлияния РЭС (с увеличением /) и уменьшением времени работы РЭС на излучение (р). Требуемая полоса частот при имеющих практический смысл значениях А~100,у-1...2 и р~0,1...0.2
снижается с 1...2 МГц до 100 кГц (выигрыш в 15...20 раз).
Предложенный алгоритм централизованного адаптивного управления использованием частот (перепланирования) может быть применен для оценки потенциальных возможностей децентрализованного адаптивного управления частотами, реализация которого с практической точки зрения более целесообразна.
Литература
1. .Тэйл У.К. - ТИИЭР, 1980, № 12
2. Павлова В.А., Прусс Е.С., Рубинштейн Г.Р., Тигин Л. В. - Труды НИИР, 1984, № 4.
3. Ермаков А.И., Соловьев В.В. - Радиотехника, 1983, № 3.
4. Крамер Г. Математические методы статистики. - М.: Мир, 1975.
6.8. Синтез системы сигналов при коллективном использовании частот
Под системой сигналов [1] понимается совокупность сигналов некоторого класса, объединяемых единым алгоритмом построения и удовлетворяющих определенным требованиям к их свойствам. Задача синтеза системы сигналов с позиции [1] состоит в получении максимального числа квазиортогональных (при асинхронной работе РЭС) сигналов в выделенном объеме спектра. Основное допущение теории систем сигналов заключается в том, что все сигналы в системе идентичны по длительности и занимаемой полосе частот (ПЧ), а уровни сигналов одинаковы. На практике это выполняется лишь в линейных многоканальных системах передачи информации (в системах радиотелеметрии, радиорелейной связи). В радиальных системах (в системах подвижной связи, командного управления) и, тем более, в группах разнородных РЭС с коллективным использованием частот это допущение не выполняется. Уровни сигналов на входе приемников РЭС в этих случаях могут существенно различаться, что приводит к необходимости управления параметрами (а в общем случае - формой) сигналов каждого РЭС в процессе работы для минимизации уровня помех. Однако в [1] эта задача не включена в число задач синтеза системы сигналов. При частотной селекции сигналов эта задача обычно решается либо как задача планирования (присвоения) частот, либо как задача адаптивного управления частотами в процессе работы РЭС. В общем случае (при кодовой селекции сигналов) задача управления сигналами каждого РЭС в группе не может быть вычленена из задачи синтеза системы сигналов.
Покажем, что при коллективной работе РЭС в общей ПЧ синтез системы сигналов необходимо рассматривать во взаимосвязи с управлением использованием сигналов и считать их задачами единой теории систем сигналов.
Рассмотрим группу из N РЭС, работающих в общей ПЧ Fa при условии, что относительная ПЧ каждого i-го РЭС yi = Fj/F может варьироваться в пределах -^ < /, < 1. В случае /, = / = , / = 1..JV, ПЧ отдельных РЭС не перекрываются (сигналы узкополосные), а в случае /;=/ = 1, i = 1... N, имеет место полное перекрытие ПЧ всех РЭС группы (широкополосные сигналы). При управлении параметрами сигналов в данной ситуации возникает задача выбора наилучшего значения у. Рассмотрим ее с точки зрения пропускной способности канала связи по Шеннону.
Автор: В. В. Соловьев
Пусть мощность полезного сигнала на входе приемника Рс, мощность каждого из мешающих сигналов аРс, а< 1 . Спектральная плотность мощности внешних шумовых помех Лш. Суммарный уровень помех на входе каждого приемника Р^ = РшуЕ0 + -\)аРс, где <5 - от-
носительное время работы РЭС на излучение. Тогда для пропускной способности каждого канала по Шеннону можно записать
С = 144yF0 In [1 +1 /(у1 q + 5(Ny - £ta)], (6.39)
где q = Pc / FqRVlI . На основе (6.39) можно показать, что пропускная способность каналов с широкополосными сигналами при некотором произвольном значении у превышает пропускную способность канала с узкополосными сигналами (у = 1/7V) при условии
(6-40)
откуда следует вывод, что целесообразная ширина ПЧ РЭС группы в пределах общей полосы частот зависит от степени взаимовлияния РЭС а, относительного времени работы на излучение <5, числа РЭС N и уровня внешних помех /?ш. Так, при g = 1, W = 10 широкополосные сигналы (у= 1) обеспечивают большую пропускную способность, чем узкополосные (у = 1/ 7V), при условии а < 1, т.е. в достаточно широком диапазоне значений <5 и а.
Оценим справедливость этого вывода с позиций теории оптимального приема сигналов. Рассмотрим влияние ширины занимаемой ПЧ каждым РЭС у,= y,i = \,...,N, на отношение сигнал-помеха на выходе оптимального приемника с учетом воздействия взаимных и сосредоточенных по спектру сигнала преднамеренных помех. Расширение полосы частот каждого РЭС группы (у>-^-) имеет смысл в том случае, если при этом снижается среднее значение спектральной плотности мощности помех в занимаемой ПЧ и тем самым повышается отношение сигнал-помеха q. Это утверждение справедливо при допущении, что при достаточно больших /V и у суммарный процесс взаимных помех нормализуется и что сосредоточенные по спектру сигнала преднамеренные помехи являются шумовы*ми. Будем рассматривать случай, когда преднамеренные помехи создаются любому РЭС группы (число излучателей помех N„ = N). Примем также допущение, что уровни взаимных помех от передатчика /-го РЭС на входе приемника любого /-го РЭС (а,7Рс) одинаковы (atpa). Точно так же будем считать одинаковыми уровни преднамеренных помех на входе приемника: для сосредоточенных по спектру сигнала помех РцРа = рРа, для попутных преднамеренных помех /ЗцРп = РаРа , где Рп - мощность излучателей помех.
Тогда для средней спектральной плотности мощности помех (естественных шумовых, взаимных и преднамеренных) на входе приемника каждого из РЭС группы при некотором произвольном значении /можно
записать
„ =„ рРа , РЛ^у-\)з У “ ?F0 yF0
aPc(Ny-V)8 yF0
(6-41)
где - спектральная плотность мощности естественных шумовых помех; Ny -1 - множитель, аппроксимирующий возрастание суммарной взаимной помехи с увеличением ширины полосы сигналов F=yFa.
Е 1
Для отношения значений q = при широкополосных (/ > —) и
узкополосных сигналах (/ = — ), исходя из (6.41), получаем
N
у = + ^У/ЗРа----------- 42)
+ рра + Pa8{Ny - У)Ра + - 1)РС
откуда следует, что преимущество широкополосных сигналов при работе РЭС в общей полосе частот достигается при условии v>l , т. е. при
Ра ; «8
Рс Р~8ра
Преобразовав (6.43), получим pPn>(J3nPn+aPJ8,
(6.43)
(6.44)
Из (6.44) следует, что преимущество широкополосных сигналов при работе группы РЭС в общей ПЧ имеет место в случае, если на входе приемника мощность сосредоточенной по спектру сигнала преднамеренной помехи превышает суммарную мощность попутной преднамеренной и взаимной помех.
В частном случае из (6.42) следует, что при Дп=0, а=0, Яш=0 (т.е. воздействуют только сосредоточенные по спектру сигнала преднамеренные помехи) v=Ny. Максимальный выигрыш широкополосных сигналов v=N достигается при у=1 (полное перекрытие сигналов в общей
1 +yR F !{РР ) полосе). Если R^O, то выигрыш снижается в -—5——— раз.
1+ад/(ад)
Если на РЭС воздействуют как сосредоточенные по спектру сигнала преднамеренные, так и попутные преднамеренные помехи, а взаимные и естественные шумовые отсутствуют (а=0, /?ш=0), то выигрыш широкополосных сигналов будет равен
v = Ny
(6.45)
(6.46)
Величина выигрыша снижается от v = Ny до 1 при изменении 8/За/ /3 от 0 до 1, т. е. при выравнивании мощностей сосредоточенных по спектру сигнала преднамеренных и попутных преднамеренных помех.
Если преднамеренные помехи отсутствуют (Рп = 0), то, как следует из (6.42), выигрыш равен
1
V j t <?а(ЛГ/- 1)РС
откуда следует, что в присутствии только взаимных и естественных шумовых помех широкополосные сигналы (— < у < 1) проигрывают уз-
N
кополосным (у = \/N). Проигрыш (v < 1) тем больше, чем больше превышение мощности взаимных помех над мощностью естественных шумовых помех. При равенстве этих мощностей v=0,5.
Снимем принятое выше допущение ач=а и /?,/=/? и покажем, что при произвольных значениях элементов матриц ау и ру и различном числе станций помех предпочтительная ширина ПЧ для каждого из РЭС группы может оказаться неодинаковой (от F/N до Fo). Пусть в начальный момент преднамеренные помехи отсутствуют. Тогда все N РЭС группы предпочтут узкую ПЧ у = 1/N, так как в ней спектральная плотность мощности помех равна Яш, а во всех других участках общей ПЧ -Лш +a,jPcNi Fa. При появлении к излучателей преднамеренных помех РЭС, которым помехи создаются, в своих ПЧ будут иметь спектральную плотность мощности Ящ + /J^N/ Fo .Сравнивая эти значения со спектральной плотностью мощности в тех участках, которые занимают оставшиеся (N-k) РЭС, можно установить, что для некоторых участков частот РуРп >а^Рс. В этом случае РЭС, подверженные воздействию преднамеренных помех, будут расширять занимаемую ПЧ за счет этих участков и тем самым снижать среднюю спектральную плотность мощности помех, т.е (N - к) РЭС, которым преднамеренные помехи не создаются, могут лишь сменить занимаемые ПЧ (минимизируя плотность мощности помех), но не расширять их (в соответствии с (6.46)). Затем перестройка занимаемых ПЧ у всех РЭС может циклически повториться несколько раз, после чего процесс остановится.
Таким образом, часть РЭС группы могут использовать широкополосные сигналы, а другая часть - узкополосные. Анализаторы загрузки общей ПЧ, входящие в состав приемной аппаратуры каждого РЭС, будут в общем случае давать различную картину загрузки, в соответствии с которой устройства, принимающие решения, выберут различные предпочтительные для работы участки общей ПЧ. В частности, если
эбщая ПЧ Fo разбита на У частотных каналов, то данные об их загрузке взаимными помехами анализаторы могут выдать в виде некоторой ранжированной последовательности значений спектральной плотности
Rk >Rj при к>1. Если кроме взаимных помех на входе приемника г-го РЭС присутствуют преднамеренные помехи мощностью Рш, то устройство, принимающее решение, должно решать задачу об оптимальном выборе числа (>и,) частотных каналов, для которых средняя спектральная плотность мощности суммарной помехи минимальна:
у я,
р ы
Ri = Rm+-^— + —---->min. (6.47)
w,F0
Если последовательность аппроксимируется арифметической прогрессией, то (6.47) можно представить в виде
^ = ^.+^+Лш(^ + 1) • (6-48)
2
Решая задачу на экстремум, находим, что Лтт достигается, если бу-/ xl/2
I 2РЛ I R дет взято оптимальное число каналов mi t = —°— . В частности,
wopt=V7V, если Рп = RmF0/2, т.е. мощность преднамеренной помехи равна половине мощности естественных шумовых помех в общей ПЧ Fo.
Рассмотрим вопрос о целесообразности управления шириной занимаемой каждым РЭС ПЧ в зависимости от текущей помеховой обстановки применительно к конкретному виду сложных сигналов - дискретным частотным сигналам. Этот вид сигналов при коллективном использовании частот имеет существенные преимущества перед другими сложными сигналами, поскольку обладает большей помехоустойчивостью в отношении взаимных помех и позволяет проще реализовать адаптацию по базе сигнала. Рассмотрим полученную в [2] на основе теории чисел систему дискретных сигналов, кодовые последовательности а,(к) которых образуются в соответствии с алгоритмом
at(k) = CoaJ+k (mod М + 1), (6.49)
где j — номер сигнала в системе, / = 0,...,Л/-1; М - длина кодовой последовательности и число дискретных частот; к - номер элемента в кодовой последовательности, к = 0,...,Л/-1; Со - коэффициент С0=1,...,М; а - первообразный корень по модулю простого числа М+1. Объем системы сигналов, получаемой в соответствии с алгоритмом (6.49), равен
числу элементов кодовой последовательности М, а минимальный уровень взаимокорреляционной функции 1/А/, база сигналов Л/ .
Пусть для группы из N РЭС выделено Мо частот и каждое РЭС использует М = уМ0, 1 / N < у < 1, частот, формируя сигнал в соответствии с алгоритмом (6.49). Запишем выражение для отношения сигнал-помеха на выходе согласованного фильтра для случая, когда на входе присутствуют естественные шумовые взаимные и преднамеренные помехи,
q = V2/PaL = Р3(ГМ)2 / РпХ = ЕГМ/(ТЭР^ , (6.50)
где V - максимальное значение сигнала на выходе согласованного фильтра в момент его окончания; PnZ - суммарная мощность помех на выходе фильтра; Р3 - мощность одного элемента сигнала; Т3 - длительность элемента сигнала.
Выражая PnL через параметры помеховой обстановки, получим следующее соотношение для отношения сигнал-помеха на выходе согласованного фильтра:
q =--------------------(Е1Т^МГ-------------т-------, (6.51)
РшЕ3уМ0 + рРп + pn8Pa{Ny - \) + [a8EIT3rYMQ\E{N7 -1)
где е - число совпадений элементов кодовых последовательностей дискретного частотного сигнала при произвольном их сдвиге.
Исходя из (6.51), для отношения значений q при у> Х/N и у = 1/N получим
(6.52)
________ Ищ^уМ0 + Nr0Pn_________________________
RwF3rM0 + /?РП + pn8(Nr - 1)РП + a(JVy - l)E<fc /(ТэуМ0)'
Из (6.52) следует, что увеличение базы дискретных частотных сигналов (уМ02) при совместной работе в общей ПЧ (на общем «пучке» частот) нескольких РЭС за счет их взаимного перекрытия дает выигрыш в помехоустойчивости (v > 1) при условии
---5-----= (6.53)
Е/ТоГМо Рс р-8рп
или, записывая (6.53) иначе, при условии
Ррп > Р^РП + “7 • (6-54)
Т3уМ
Из (6.54) следует, что увеличение базы дискретных частотных сиг-
залов (/Мо ) при коллективной работе группы РЭС в общей ПЧ целе-
:ообразно в случае, если мощность сосредоточенной по спектру пред-замеренной помехи превышает суммарную мощность попутных пред-замеренных и взаимных помех. Этот вывод качественно совпадает с зыводом, полученным на основе соотношения (6.44) относительно це-зесообразности применения широкополосных сигналов по сравнению с /зкополосными. Конкретизация вида сложных сигналов привела лишь к изменению слагаемого в (6.41), определяющего мощность взаимной помехи. В системе сигналов, определяемой (6.49), следует принять £=1. Максимальное значение выигрыша по отношению сигнал-помеха пропорционально корню квадратному из базы сигнала и численно равно N, как и в общем случае (6.42). Выигрыш v = N достигается в условиях воздействия сосредоточенных по спектру преднамеренных помех (попутные преднамеренные и взаимные помехи отсутствуют). Во всех других случаях выигрыш определяется конкретными значениями параметров помеховой обстановки. При отсутствии преднамеренных помех v < 1 (увеличение базы сигнала приводит к проигрышу).
Известные алгоритмы построения оптимальных дискретных частотных сигналов предполагают построение системы сигналов с неизменной базой. В интересах обеспечения автономного изменения величины базы каждого сигнала можно предложить два способа формирования системы сигналов: усечение в полной частотно-временной матрице ||а;(А:)|| размером М0*М0 соответствующей строки путем выделения
сегмента уМ0 (образование произвольных сегментов сигналов) и формирование системы сигналов по единому алгоритму (например, по алгоритму (6.49)), но с изменением числа элементов уМ0 каждого сигнала (переформирование строки с изменением ее длины).
В обоих случаях автокорреляционная функция Ву(Х) с уменьшением уМ0 по структуре не изменяется. Изменяется лишь основное пиковое значение
В,(А) =
/Мо, я = о, о, л*о,
(6.55)
где Л - интервал сдвига элементов кода. Взаимокорреляционная функция Ву(Л) сегментного сигнала уМ0 и полного сигнала Мо с уменьшением уМ0 в первом случае не ухудшается за счет появления нулевых совпадений частот (е=0). В оптимальной системе дискретных частотных сигналов взаимокорреляционная функция будет иметь (1 - у) нулевых и у единичных элементов из уМ0. Среднее значение выбросов взаимокорре-ляционной функции Ду(А) = ЁЦуМ) = 1/М .
(6.56)
Рис. 6.24
Взаимокорреляционная функция двух сегментных сигналов одинаковой длины уМ0 будет В,7(Л) = ёКуМ) = 1/М , но значение ё вычисляется как среднее число совпадающих частот:
1 ( 1 л ( 1 VW(I'2
-1,1 2 , 1 / Мо[ мо) мЧ Мо) М0 °
Взаимокорреляционная функция В,Д) во втором случае с уменьшением уМ0 может ухудшаться за счет появления более чем единичных совпадений частот (г > 2), хотя одновременно за счет разноса используемых РЭС различных частот могут появляться и нулевые совпадения (г = 0). Оценка среднего значения е в этом случае требует проведения расчетов на ЭВМ. На рис. 6.24 i среднего числа совпадений частот е сигнала длительностью уМ0 с сигналом длительностью Мо при условии, что они формируются на основе единого алгоритма (6.49), но автономно. Здесь 1 - алгоритм
ajM = Jv + Со (mod М), v{CQ =
= 0...ЛТ-1; j = 1..JW —1, 2 -алгоритм = Jv1 + Q v + Со (mod М),
v1Co,C1=O...M-l, j = 1..jW-1.
Из рисунка следует, что в достаточно широком диапазоне значений у и Мо взаимокорреля-
ционные свойства системы дискретных частотных сигналов, образуемых путем автономного изменения каждым РЭС длины кода, не хуже взаимокорреляционных свойств сигналов равной длины.
При коллективном использовании частот известные задачи синтеза системы квазиортогоиальных сигналов с максимальным объемом или минимальной взаимокорреляцией смыкаются с задачами управления параметрами сигналов в процессе изменения текущей помеховой обстановки. Осуществляя формирование сигнала децентрализованно (по установленному алгоритму), каждое РЭС в общем случае должно оптимизировать не только положение занимаемой ПЧ в обшей полосе, ио и ее величину (а следовательно и базу сигнала).
Литература
1. Варакин Л. Е. Теория систем сигналов. — М.: Сов. радио, 1978.
2. Власов В.И., Варакин Л.Е. - Радиотехника и электроника, 1972, № 5.
6.9. Динамическое присвоение частот сетям сотовой связи стандарта GSM
При проектировании сотовых сетей связи статистически устойчивые различия трафика в разных зонах района развертывания обеспечиваются установкой соответствующего числа базовых станций, выбором угловых размеров секторов, величины их взаимного перекрытия и числа трансиверов в каждом секторе. Все эти меры, в конечном счете, обусловливают необходимость увеличения числа выделяемых для постоянного использования частотных каналов в зонах с повышенной интенсивностью трафика. Однако в ряде случаев повышение интенсивности трафика имеет эпизодический характер, что может быть обусловлено, например, проведением массовых общественно-политических либо спортивных мероприятий. Рациональным в этих случаях было бы адаптивное (динамическое) подключение дополнительных трансиверов с присвоением им соответствующих частотных каналов в тех секторах, в которых интенсивность трафика превысила номинальный уровень. При ее снижении дополнительные трансиверы автоматически отключаются, а частотные каналы освобождаются и могут использоваться при необходимости другими базовыми станциями. Представляет интерес задача оценки необходимого числа дополнительных частотных каналов для сотовой системы связи с адаптацией к изменению интенсивности трафика. Известные системы автоматизированного проектирования (САПР) сетей сотовой связи [1] не предусматривают решения этой задачи. Предлагае-ся методика ее решения, основанная на использовании имитационной математической модели, воспроизводящей процессы эпизодического изменения трафика в сети и осуществляющей частотное планирование в реальном масштабе времени методом комбинаторной оптимизации. Количественные расчеты проведены применительно к сети сотовой связи стандарта GSM 900 «КБ Импульс» в Москве и Московской области (на период 2000-2001 гг.).
Рассматриваемый вариант этой сети включает 161 базовую станцию и 427 секторов, большая часть которых (421) имеют по одному трансиверу. Для сети выделено 50 частотных каналов (с 24 по 74), присвоение которых базовым станциям осуществляется с учетом частотных ограничений, установленных органами радиочастотной службы. Число частотных каналов, использование которых ограничено, для различных базовых станций составляет от 2 до 41. Будем считать, что для реализации способа адаптивного подключения дополнительных частотных каналов в тех секторах, в которых интенсивность трафика Я эпизодически может превышать номи-
Авторы: В.В. Соловьев, С.Н. Яньшин
нальный уровень Л,ом, установлены резервные трансиверы. Число работающих трансиверов (а следовательно, и число присваиваемых частотных каналов) в том или ином секторе (/) в каждый момент времени определяется относительной интенсивностью трафика в зоне размещения соответствующей базовой станции р^Л/ДюмПредполагается, что величина р, в каждом секторе автоматически контролируется. Данные контроля передаются в центр коммутации, где на их основе оперативно решается задача присвоения дополнительных частотных каналов.
Процесс эпизодического повышения интенсивности трафика в зоне отдельных базовых станций (или группы базовых станций) воспроизводился с помощью специально разработанной имитационной математической модели, обеспечивающей выбор базовых станций, в зоне которых повышается трафик. В модели эти зоны определяются на основе заданных распределений вероятности повышения интенсивности трафика для различных базовых станций ф(р,) и величины этого повышения При задании дХр,) предполагалось, что наиболее вероятным является повышение трафика в зонах отдельных базовых станций: №1 (Манеж), №21 (Шереметьево), №30 (Динамо), №20 (Химки). Рассматривался также случай превышения трафика одновременно в зонах базовых станций Садового кольца (№1, 2, 3, 25, 71, 125). Распределение было принято равномерным в пределах р = 1... 10.
Задача присвоения частот в рассматриваемой сети сотовой связи решается в два этапа. В начале рассчитывается матрица попарного взаимовлияния секторов базовых станций, затем на основе этой матрицы решается задача оптимального присвоения частот, обеспечивающая определение минимально необходимого для сотовой сети числа частотных каналов. При расчете матрицы попарного взаимовлияния секторов базовых станций в качестве защитного отношения сигнал-помеха при определении возможности работы трансиверов на совмещенном канале использовано значение 12 дБ, которое должно выполняться в наихудшей (по величине отношения сигнал-помеха) точке размещения абонента в секторе [1]. При определении возможности работы трансиверов на соседних каналах (и через один) указанные защитные отношения снижались на 18 (50) дБ соответственно [1]. Трансиверам, работающим в секторах одной базовой станции, устанавливаются частотные разносы не менее, чем на три канала [1].
Таким образом, для каждой пары трансиверов i,j в матрице попарного взаимовлияния рассматриваются четыре условия частотного разноса каналов М, и Mj, при которых имеет место их взаимовлияние: совмещенные при минимальном отношении сигнал-помеха <12 дБ, смежные при qminiJ <~6 дБ, соседние через один канал при <-38 дБ
и соседние менее, чем через три канала для трансиверов одной базовой станции. В общем случае запрещенные сочетания частотных каналов различных секторов удобно отобразить функциональным соотношением Л/упор=Ф(И Ист), где Mj пор - номер частотного канала /-го сектора, в зоне которого приемники будут поражены помехами, М, ист - номер частотного канала /-го сектора, передатчик которого является источником помех. В рассматриваемом случае функциональные соотношения, устанавливающие запрещенные сочетания частотных каналов различных секторов, представлены в табл. 6.1.
Таблица 6.1
Частотные каналы, по которым возможно воздействие помех Функциональное соотношение номеров каналов Mj „Ор=Ф(М, ист) Обозначение
Совмещенный Mj пор- Л// ист А
Смежные Верхний Mj пор= м, „ст+1, М, исг< 74 В
Нижний Л// пор- ИСТ 1 ’ ист^ 24 С
Соседние через один канал Верхний Mj пор= М, исг+2, Л< исг< 74 D
Нижний Mj пор= М, исг-2, М, 11ст> 24 Е
Соседние менее, чем через три канала 1 Mj пор - М, исг 1 <3, 24< Mj исг <7 4 F
Рис. 6.25
Матрице попарного взаимовлияния может быть поставлен в соответствие функционально взвешенный ориентированный мультиграф [2], в котором вершины i и j соединяют столько ребер, сколько окажется выполнено указанных выше условий частотного разноса. Каждое из ребер маркируется соответствующим функциональным соотношением между Mj и Mj (вес ребра), буквенное обозначение которого приведено в табл. 6.1. Фрагмент рассматри
ваемого мультиграфа представлен на рис. 6.25, где в вершинах указывается номер базовой станции и сектора сотовой сети.
Для формирования функционально взвешенного ориентированного мультиграфа, отображающего условия взаимовлияния секторов базо-
вых станций в сети, разработан алгоритм, с помощью которого в каждом секторе, разграниченном с соседними секторами линией handover, методом статистических испытаний отыскивается точка, в которой отношение сигнал-помеха Цц минимально. Выражение для расчета q,j получено на основе методических рекомендаций [ 1 ] в виде
= P,+G, + l 3,821g , - (45 - 6,551g Л>ф,) 1g Ясиг -
-Pj-Gj-13,82^ +(45-6,551ёАэфу)1ёЛП0М , (6.57)
где Pt, Pj- мощности излучения трансиверов i и /; G,, G, - коэффициенты усиления передающих антенн; /гэф,, /г,ф7 - эффективные высоты фазовых центров антенн.
Определенное в результате статистических испытаний значение <7min ij сравнивается с указанными выше значениями защитных отношений, на основе чего для секторов I и j в формируемом мультиграфе устанавливается соответствующее ребро. Формирование функционально взвешенного ориентированного мультиграфа взаимовлияния секторов для рассматриваемой сотовой сети на ПЭВМ с процессором Pentium-166 требует не более 2 мин времени.
Полученный мультиграф взаимовлияния секторов базовых станций является исходным для решения задачи оптимального присвоения частот. Учитываются также данные о частотных ограничениях, а точнее - о номерах частотных каналов, рекомендуемых органами радиочастотной службы для использования конкретными базовыми станциями сети, а также данные о частотных присвоениях в тех секторах, в которых трафик остается неизменным. Требуется произвести присвоение частотных каналов из заданного их множества всем трансиверами сети, исключая взаимовлияние секторов и минимизируя при этом необходимое для сети суммарное число частотных каналов. В терминах теории графов эта задача комбинаторной оптимизации может быть определена как задача числовой маркировки вершин функционально взвешенного ориентированного мультиграфа, обобщающая известные задачи раскраски и коммивояжера, которые использовались при решении задач оптимального присвоения частот при взаимовлиянии РЭС только по совмещенным и соседним каналам [3,4].
Для решения этой задачи применен метод локальной оптимизации, в соответствии с которым числовая маркировка вершин мультиграфа производится последовательно (по шагам) и на каждом шаге решение о присвоении частоты трансиверу очередного сектора принимается исходя из целевой функции - минимума присвоенных номеров частотных каналов. Последовательность немаркированных вершин мультиграфа упорядочивается в соответствии с убыванием количества частотных ограничений базовым станциям, а при их равенстве - по убыванию степени вершины.
На каждом шаге на основе соотношений, определяющих помехоопасные номера каналов, формируется множество таких доступных номеров частотных каналов, на которых отсутствует взаимовлияние трансиверов, уже получивших частотные присвоения. В этом множестве выделяется подмножество ранее присваивавшихся номеров каналов и из них выбирается минимальный. Если это подмножество пусто, то для рассматриваемой вершины из множества доступных номеров каналов, на которых отсутствует взаимовлияние трансиверов, выбирается минимальный свободный номер частотного канала. Если и это множество пусто, то фиксируется, что данная вершина мультиграфа не может быть маркирована (не может быть произведено частотное присвоение соответствующему трансиверу базовой станции). Решение задачи присвоения частот для всей рассматриваемой сети сотовой связи на ПЭВМ с процессором Pentium-166 требует не более одной минуты времени.
На основе изложенной методики исследовались зависимости требуемого числа частотных каналов для рассматриваемой сотовой сети и максимального номера используемого частотного канала Л/так от степени превышения интенсивности номинального трафика р в зоне отдельных базовых станций (БС4 - Манеж, БС20 - Химки, БС21 - Шереметьево), а также в зоне одновременно шести базовых станций Садового кольца (БС12>3>25 71 [25 - Манеж, Толмачевский пер., Земляной вал, Сивцев вражек, Большая садовая, Сухаревская пл.).
На рис. 6.26 и 6.27 указанные зависимости представлены для гипотетического случая, когда частотные ограничения для базовых станций отсутствуют (сквозные частотные каналы), а общее количество выделенных каналов - 100 (недоступны лишь 24 канала из 124, которые используются для управления). Результаты показывают, что метод динамического присвоения частот дополнительно подключаемым (при возрастания трафика) трансиверам в зоне указанных выше отдельных базовых станций, а также в
Рис. 6.26
Рис. 6.27
группе станций Садового кольца обеспечивает обслуживание трафика с интенсивностью р, в 6... 10 раз превышающей номинальную, при общем требуемом для сети числе частотных каналов Л/ф<40...50. Максимально используемый номер частотного канала при этом превосходит 100 (ограничивается общим числом каналов сетей GSM 900).
На рис. 6.28 и 6.29 приведены зависимости Л/тах(р) для случая, когда выполняются действующие частотные ограничения, установленные для рассматриваемой сети органами радиочастотной службы. Результаты показывают, что в этих условиях метод динамического присвоения частот обеспечивает обслуживание трафика с интенсивностью, не более, чем в 2...3 раза превышающей номинальную, при -не более 20. Это определяется в значительной степени тем, что установлено ограничение на максимально используемый номер частотного канала (№74). Если это ограничение исключить, а оставить лишь ограничение на общее число используемых сетью частотных каналов и ограничения на выбор каналов для отдельных базовых станций, то, как по-
Рис. 6.31
Рис. 6.30
называют приведенные на рис. 6.30 и 6.31 зависимости М^(р) и Л/тах(р), эффективность метода динамического присвоения частот существенно увеличивается, поскольку обеспечивается обслуживание трафика с интенсивностью, в 5...6 раз превышающей номинальную, при требуемом для сети числе каналов 30...40.
Проведенные исследования позволяют рекомендовать органам радиочастотной службы распределять частотные каналы сетям сотовой связи GSM 900 между операторами не в виде подряд следующих номеров, а с перекрытием таким образом, чтобы каждый из операторов, ограниченный общим числом выделенных каналов, имел возможность присвоения каналов в широком диапазоне изменения их номеров. Это позволит им использовать метод динамического присвоения частот при эпизодическом превышении (в пределах до 10 раз) номинального трафика в зонах отдельных базовых станций или их групп.
Литература
1. Милованов Д.А., Сугиков В С. - Вестник связи, 1998, №3.
2. Соловьев В.В. Оптимальное присвоение частот в телевизионных сетях. - Радиотехника (Журнал в журнале), 1999, №6.
3. Хеш У.К. - ТИИЭР, 1980, №12.
4. Ермаков А.И., Соловьев В.В. - Радиотехника, 1987, №3.
6.10. Оценка резерва ресурса при частотном планировании
Оценка резерва ресурса при частотном планировании необходима для контроля органами радиочастотной службы состояния использования различных полос частот в том или ином территориальном районе. В [1, 2] с этой целью предложен показатель интегральной загрузки в виде отношения минимально необходимой полосы (числа) частот для работы заданной группы РЭС с минимально допустимым уровнем взаимовлияния к величине выделенной полосы (числа) частот. Утверждается, что предложенный показатель позволяет судить о величине резерва частотного ресурса, который может быть предоставлен в будущем новым РЭС. При этом данные о новых РЭС в расчетах не используются. Такой подход к оценке резерва частотного ресурса является некорректным, поскольку возможность совместной работы в общей полосе частот и, следовательно, возможность частотных присвоений новым РЭС определяется обоюдно как существующими, так и новыми РЭС [3]. При использова
Авторы: В.В. Соловьев, С.Н. Яньшин
нии лишь данных о существующих РЭС резерв частотного ресурса объективно можно оценить только по возможности улучшения качества функционирования этих РЭС за счет резерва частот. Для этого следует выразить искомый резерв через какой-либо показатель качества функционирования существующих РЭС и сравнить полученное значение этого показателя с максимально возможным его значением в ситуации, когда заданный частотный ресурс используется группой РЭС полностью.
Для оценки резерва радиочастотного ресурса по данным о существующих РЭС предлагается использовать показатель, характеризующий предельно достижимое при частотном планировании снижение степени взаимовлияния существующих РЭС в территориальном районе. Предел такого снижения определяется путем последовательного увеличения при планировании значений защитных отношений сигнал-помеха, превосходящих минимально допустимые значения, до такой величины, при которой присвоение частот в пределах выделенного ресурса одновременно всем РЭС заданной группы становится невозможным. Максимально допустимое относительное увеличение значений защитных отношений сигнал-помеха (используем термин - коэффициент запаса по ЭМС) можно рассматривать как численную меру резерва ресурса частотного плана, рассчитанного при минимально допустимых значениях защитных отношений.
Рассмотрим задачу присвоения частот сети сотовой связи стандарта GSM. Задана сеть, включающая множество №С) = {«,}, i = 1 ...N, базовых станций и обеспечивающая необходимую зону покрытия в определенном территориальном районе. Указано их размещение (х„ у,), число секторов («,), высоты антенн (/г,), мощности излучения каждого трансивера (Pjj, i = Множество всех трансиверов обозначим
У(Т) = |n,(T)|,z = l.../VT. Задано множество выделенных для сети частотных каналов F = {fm, т = и для каждой базовой станции установлено множество Ft= (fim, i = т = 1...Л/,} доступных частотных каналов. Трансиверам одной станции частотные присвоения должны быть разнесены не менее, чем на три канала [4]. Заданы минимальные значения защитных отношений сигнал-помеха при работе трансиверов на совпадающих частотных каналах <7^ = 12дБ, на соседних каналах Я™, = 4mm -18дБ, через канал = 4mm " 5°ДБ- Требуется, чтобы частотный план для сети связи был представлен в виде матрицы V=||v,„,||, т = 1 ...Л/, i =l...Nj , каждый элемент которой vim = 1, если z-му трансиверу присвоена т-я частота, и и, m = 0, если такого присвоения нет. Очевид-
но, что У v, т = 1 либо 0, при этом У vi m = 0 означает, что <-й трансивер т т
в частотном плане V присвоения не имеет. В случае, если У v, = 0 , еле-/
дует считать, что w-й частотный канал не присвоен ни одному трансиверу, а при условии У и, т > 1 - /и-й частотный канал используется нескольки-i
ми трансиверами. Количество трансиверов, получивших частотные присвоения, определяется соотношением /У*,Г) = У У у, , а число исполь-
I т
зуемых частотных каналов Mv = . где Qm= 1, если у vim > О, Q„,=
т I
О, если У и, т = 0 . Для любого частотного плана V наличие либо отсутст-I
вие недопустимого воздействия на ;- й трансивер помех отображается функцией К, (К), которая принимает значение К,(У) = 1, если имеет место недопустимое воздействие помех, и Kt(К) = 0 - в противном случае. Частотный план V является удовлетворительным по ЭМС, если выполняется равенство К= v, т = /V^T), поскольку при этом все трансиве-
i i т
ры, получившие частотные присвоения, не испытывают недопустимого воздействия помех.
Частотный план для заданной сети должен быть удовлетворительным по ЭМС, содержать частотные присвоения всем трансиверам, а количество использованных при этом частотных каналов должно быть минимальным (Л/к—>min). Требуется оценить имеющийся резерв ресурса в сформированном частотном плане, определив для него коэффициент запаса по ЭМС путем последовательного увеличения значения ?(0)=^)п+Л?(0) Д° такой величины =^’„, при которой присвоение частот всем трансиверам заданной сети становится невозможным. Полученное значение Д^ах (дБ) будет являться искомым коэффициентом запаса по ЭМС.
Для решения задачи частотного планирования воспользуемся изложенным в разделе 6.3 методом числовой маркировки, позволяющим учитывать взаимовлияние трансиверов по основным, соседним и побочным каналам излучения и приема. Задача решается в два этапа. Вначале для заданной сети рассчитывается матрица попарного взаимовлияния трансиверов Цп^ у||, элементами которой являются функциональные соотношения т^т,), устанавливающие по заданному номеру частотного
канала приемника z-ro трансивера (/„„) номер запрещенного частотного канала передатчика /-го трансивера f„4. Для расчета этой матрицы используются исходные данные о размещении базовых станций, ориентации их секторов, высотах антенн и значениях защитных отношений сигнал-помеха при различных частотных расстройках. Применительно к условиям данной задачи элементами матрицы могут быть следующие соотношения: mt = т„ т} = т,± 1, /и;=/и,±2, w,-3 < т,< т,+3, Чем большие значения защитных отношений сигнал-помеха будут установлены, тем большее число запрещенных соотношений частот будет фигурировать в матрице для различных пар трансиверов. Более подробно алгоритм расчета матрицы ||ш( ;|| изложен в разделе 6.9.
Полученной матрице ||ш, 7|| может быть поставлен в соответствие функционально взвешенный ориентированный мультиграф G(/w,;), который является исходным для второго этапа решения задачи присвоения частот, а именно задачи числовой маркировки: присвоить вершинам мультиграфа G(mv) номера частотных каналов с учетом их доступности для соответствующих трансиверов таким образом, чтобы для всех пар вершин были исключены запрещенные соотношения номеров каналов т/т,), а общее число использованных частотных каналов было минимальным.
Простейшим методом решения этой задачи является метод локальной оптимизации, в соответствии с которым маркировка вершин производится последовательно в порядке убывания количества частотных ограничений. Принцип оптимизации локальных решений предполагает для каждой очередной вершины отыскание наилучшего с точки зрения целевой функции номера частотного канала. Для этого на основе соотношений т}(т,), определяющих запрещенные номера каналов, формируется множество разрешенных и доступных каналов. В этом множестве выделяется подмножество ранее присваивавшихся номеров и из них выбирается тот, который присваивался наибольшее число раз. Если указанное множество пусто, то из множества разрешенных и доступных номеров выбирается наименьший. Если и оно пусто, то фиксируется, что данная вершина не может быть маркирована (отказ в присвоении соответствующему трансиверу частотного канала).
Для решения задачи присвоения частот сети сотовой связи в соответствии с изложенным методическим подходом были разработаны две математические модели: первая - для формирования функционально взвешенного ориентированного мультиграфа, отображающего запрещенные соотношения номеров частотных каналов для каждой пары трансиверов сети, вторая - для числовой маркировки этого графа. Решение задачи присвоения частот осуществлялось применительно к ре-
Рис. 6.32
альной (действующей в Москве в 2000г.) сети сотовой связи стандарта GSM (оператор КБ «Импульс»), включающей 161 базовую станцию и 427 трансиверов. Для сети решением Россвязьнадзора было выделено 48 частотных каналов (с 24-го по 72-й). Все эти каналы в данном примере считались доступными для всех базовых станций сети («сквозные» каналы). При различных значениях <7(0) >^п = 12дБ определялось минимально необходимое для сети число используемых частотных каналов Л/исп, число трансиверов, получивших частотные присвоения #г(чп) , максимальный номер присвоенного частотного канала /итах.
Полученные зависимости представлены на рис. 6.32-6.34. Они позволяют установить, что для заданной сети сотовой связи присвоение частот всем 427-и трансиверам обеспечивается при увеличении значений защитных отношений сигнал-помеха в пределах от минимально допустимого <7^=12дБ до максимально возможного
Рис. 6.33
Рис. 6.34
= 44дБ , при котором используемое число частотных каналов достигает 35 (при 48 выделенных каналах), а максимальный используемый номер канала -69-й (максимальный выделенный номер - 72-й). При с/0) >44дБ запас ресурса для данной сети следует считать исчерпанным, поскольку присвоение частот одновременно всем трансиверам становится невозможным. Таким образом, коэффициент запаса по ЭМС, характеризующий резерв ресурса частотного плана при «сквозном» использовании каналов, составляет А^°а\ = 32дБ. Это означает, что с целью обеспечения минимально возможного взаимовлияния трансиверов сети допустимое значение защитного отношения сигнал-помеха при частотном планировании в пределах 48 выделенных каналов может быть увеличено до 44 дБ.
Следует отметить, что при использовании предложенного в [1, 2] показателя интегральной загрузки частот в условиях выявленной здесь предельной ситуации загрузка составляет лишь 35/48 = 73 %.
Оценку резерва частотного ресурса в заданной полосе по данным о существующих РЭС территориальной группировки целесообразно производить по показателю, характеризующему предельно достижимое снижение степени взаимовлияния РЭС и выражающему относительную степень возможного увеличения при частотном планировании используемых значений защитных отношений сигнал-помеха (коэффициент запаса по ЭМС).
Литература
1. Ковтунова И.Г., Цветков С.А., Якименко В.С. Методика оценки загрузки радиочастотного спектра в территориальном районе. - Радиотехника, 1999, № 6.
2. Ковтунова И.Г., Пастух С.Ю., Цветков С.А., Якименко В.С. Совершенство вание автоматизации деятельности радиочастотных органов по управленик РЧС. - Электросвязь, 2000, №11.
3. Справочник по управлению использованием спектра на национальном уров не. - Женева: МСЭ, Бюро радиосвязи, 1995.
4. Милованов ДА., Сушков В.С. Автоматизация проектирования систем сотово! радиотелефонной связи. - Вестник связи, 1998, № 3.
Дополнительная литература к главе 6
1. Короткий А.А. Об одном эвристическом методе оптимизации совместимо сти в больших системах. - Труды математического факультета ВГУ, 1971 №5.
2. Круглов В.П. Постановка задачи выбора рабочих частот в системе радиосвя зи средств. - Ученые записки ГГУ, 1973, вып. 170.
3. Данилов В.И., Васенкова Л.В. Выбор радиосовместимых каналов по взаи момодуляционным помехам. - Электросвязь, 1974, №4.
4. Бабанов Ю.Н., Силин А.В. Введение в проблему ЭМС РТС. — Горький: Из; ГГУ, 1977.
5. Круглов В.П.,Силин А.В. Задача оптимального выбора рабочих частот группе взаимодействующих радиолиний. - ТСС. Сер. Техника радиосвяз! 1978, №9.
6. Соловьёв В.В., Шурупова ДЕ. Анализ эффективности функционировани группы частотно-адаптивных радиолиний, как системы массового обслуж; вания. - Радиотехника, 1979, №3.
7. Круглов В.П., Знаменская В.В. Оптимальное распределение частот ради< средств дуплексного и симплексного каналов радиосвязи. - ТСС. Сер. Тез ника радиосвязи, 1979, №9.
8. МеттусЛ.С. Методы назначения частот. -Л.: Изд. ЛЭТИ, вып. 253, 1979.
9. Москалев Э.С., Тигин Л.В. Некоторые алгоритмы присвоения частот радиостанциям с учетом ЭМС. - Труды НИИР, 1983, №4.
10. Бабанов ЮН.. Родионов Я.Г. О некоторых игровых алгоритмах смены рабочих частот. - Сб. Электромагнитная совмесгимость РЭС. - Горький: Изд. ГГУ, 1983.
11. Кременицкий С.Д. и др. Модифицированный метод поиска с возвращением в задаче присвоения частот РЭС для обеспечения ЭМС радиотехнического комплекса. - Радиотехника, 1983, №10.
12. Строгович Ю.Н., Талызин В.Н. Метод рационального распределения частот для диспетчерской системы ОВЧ радиосвязи. - Труды НИИР, 1984, №4.
13. Павлова В.Л., Прусс Е.С. Современные тенденции в области назначения частот (обзор). - Труды НИИР, 1984, №4.
14. Москалев Э.С., Тигин Л.В. Оценка качества распределения частот между радиостанциями с учетом ЭМС. - Труды НИИР, 1984, №4.
15. Дятлов Ю.Ф. Оптимизация рабочих частот радиостанций подвижной связи. - ТСС. Сер. Техника радиосвязи, 1984, вып. 10.
16. Бессонов А.П. Об эффективности «пожирающих» алгоритмов в задачах назначения частот. - Труды НИИР, 1985, №4.
17. Бессонов А.П., Каганер М.Б., Рубинштейн Г.Р. Алгоритм минимизации полосы частот по заданной матрице частотных расстроек на основе статистической локальной оптимизации. - Труды 8-го Брацлавского симпозиума по ЭМС, ч. 111, 1986.
18. Белецкий Р.И., Калужский А.Д., Мовшович М.Е. Выбор рабочих частот для средств радиосвязи с помощью мультимикропроцессорной системы. - Радиотехника, 1986, №12.
19. Бессонов А.П., Тигин Л.В., Швецова Н.Ю. Алгоритм для оценки минимально необходимого числа каналов сети передатчике. - Труды 9-го Вроцлавского симпозиума по ЭМС, ч. 111, 1988.
20. Бессонов А.П., Кокурин И. В., Тигин Л. В., Швецова Н.Ю. «Пожирающий» алгоритм минимизации числа каналов, присваиваемых группировке РЭС по заданной матрице частотных расстроек. - Труды НИИР. 1988, №4.
21. Жидков М.Г., Клышенко Б.А. Эффективный алгоритм разработки частотных планов при фиксированном ресурсе частот. - Труды НИИР, 1988, №4.
22. Карпов А Л. Сравнительная оценка эффективности некоторых эвристических алгоритмов частотного планирования. - Труды НИИР, 1988, №4.
23. Ермаков А.И., Соловьёв В.В. Эффективность адаптивного управления частотами в условиях изменяющейся обстановки. - Радиотехника, 1988, №7.
24. Ермаков А.И., Соловьёв В.В. Эффективность децентрализованного адаптивного управления частотами в группе РЭС подвижных служб. - Радиотехника, 1989, №8.
25. Дотолев В.Г. Алгоритм назначения частот в радиосети. - Труды НИИР, 1991, №2.
26. Жидков М.Г., Стоянова ТВ. Методы выбора частот, свободных от интермодуляции. - Электросвязь, 1991, №7.
27. Бессонов А.П., Филимонов Ю.Л., Гайсин А.М. Метод итеративного понижения размерности на основе статистической локальной оптимизации для минимизации ширины полосы частот, используемой РЭС. - Международный симпозиум по ЭМС. - Санкт-Петербург, 1993.
28. Боровков В.Ф., Пастух С.К)., Соловьёв В.В. Эффективность динамического управления совместным использованием частот загоризонтными РЛС и РЭС КВ радиосвязи. - Приложение к журналу «Радиотехника» «Информационный конфликт в спектре электромагнитных волн», 1994.
29. Ермаков А.И., Соловьёв В.В., Шурупова Д.Е. Обеспечение устойчивости децентрализованного управления совместным использованием частот при различных алгоритмах перестройки частот. - Электросвязь, 1994, №7.
30. Ермаков А.И., Соловьёв В.В. Устойчивость децентрализованного управления частотами в группе РЭС с коллективным доступом. - Радиотехника, 1995, № 1-2.
31. Бессонов А.П., Филимонов Ю.Л. Адаптивный алгоритм статистической локальной оптимизации для минимизации присваиваемой полосы частот. -Международный симпозиум по ЭМС. - Санкт-Петербург, 1995.
32. Богатырёв М.В., Ермаков А.И., Соловьёв В.В. Схема независимых испытаний в задачах групповой оценки ЭМС РЭС. - Радиотехника, 1997, №6.
33. Ермаков А.И., Ковтунова ИГ, Соловьёв В.В. Оптимальное назначение частот при неопределённости размещения РЭС. - Радиотехника, 1998, №6.
34. Дубровин А С. Обобщение алгоритма числовой маркировки графа в задачах оптимального присвоения частот на случай непрерывных множеств исходных полос частот. - Радиотехника, 2001, №6.
35. Соловьёв В.В., Яньшин С.Н. Минимизация переприсвоенных частот базовым станциям при введении временных частотных ограничений в сетях сотовой связи. - Телекоммуникации, 2002, №6.
36. Яньшин С.Н., Харченко ТВ., Володин Д.В., Сорокин С.А. Эффективность различных алгоритмов раскраски графа в задачах оптимального присвоения частот. - Электросвязь, 2004, №1.
37. Сорокин С.А., Яншин С.Н. Оптимизация частотных присвоений в сетях радиорелейных станций. - Радиотехника (Журнал в журнале), 2005, №7.
38. Соловьёв В.В, Харченко Т.В., Володин Т.В. Частотное планирование для сетей УКВ-радиосвязи с псевдослучайной перестройкой частот. - Электросвязь. 2005, № 4.