














































































































































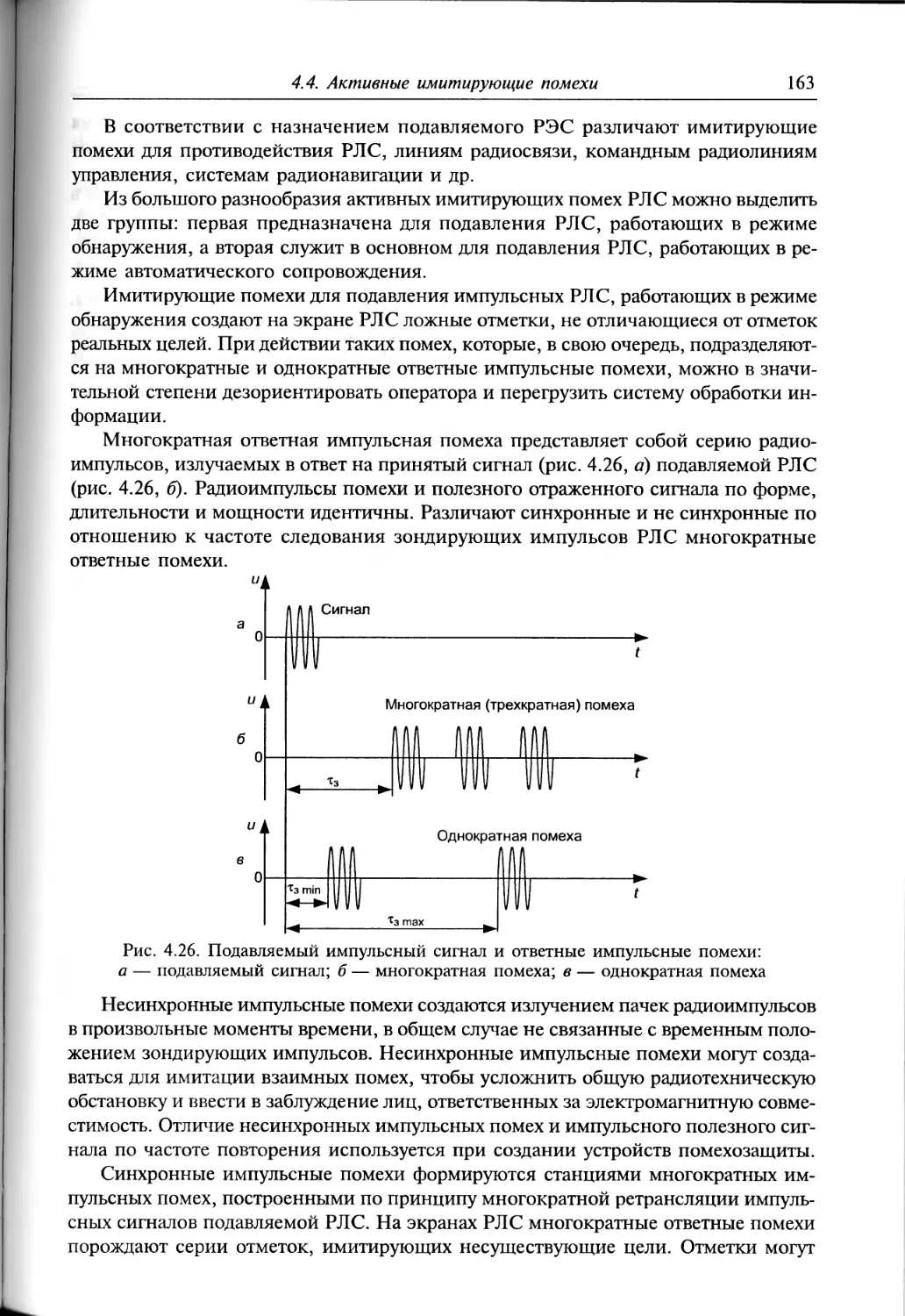








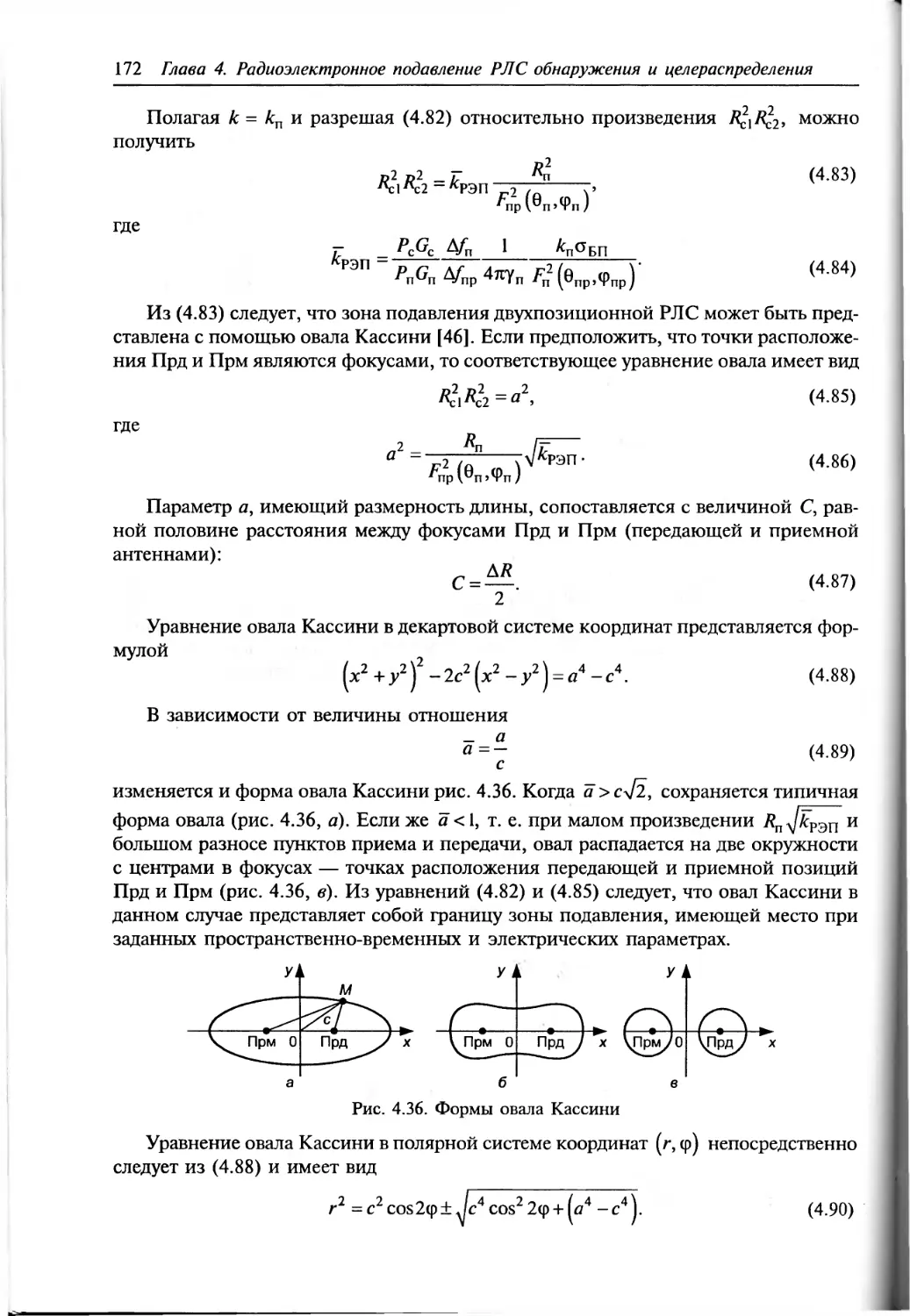






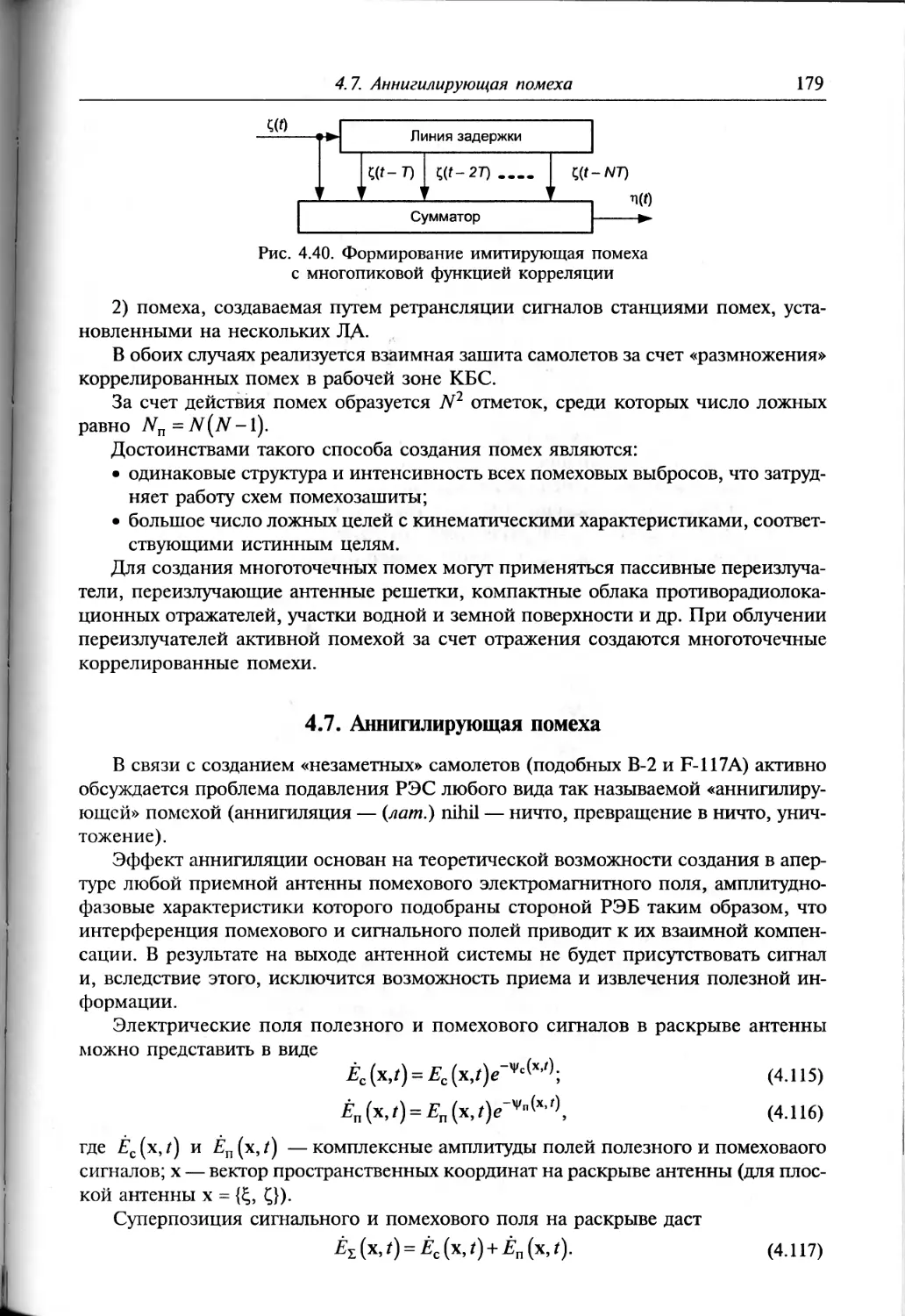















































































































































































































































































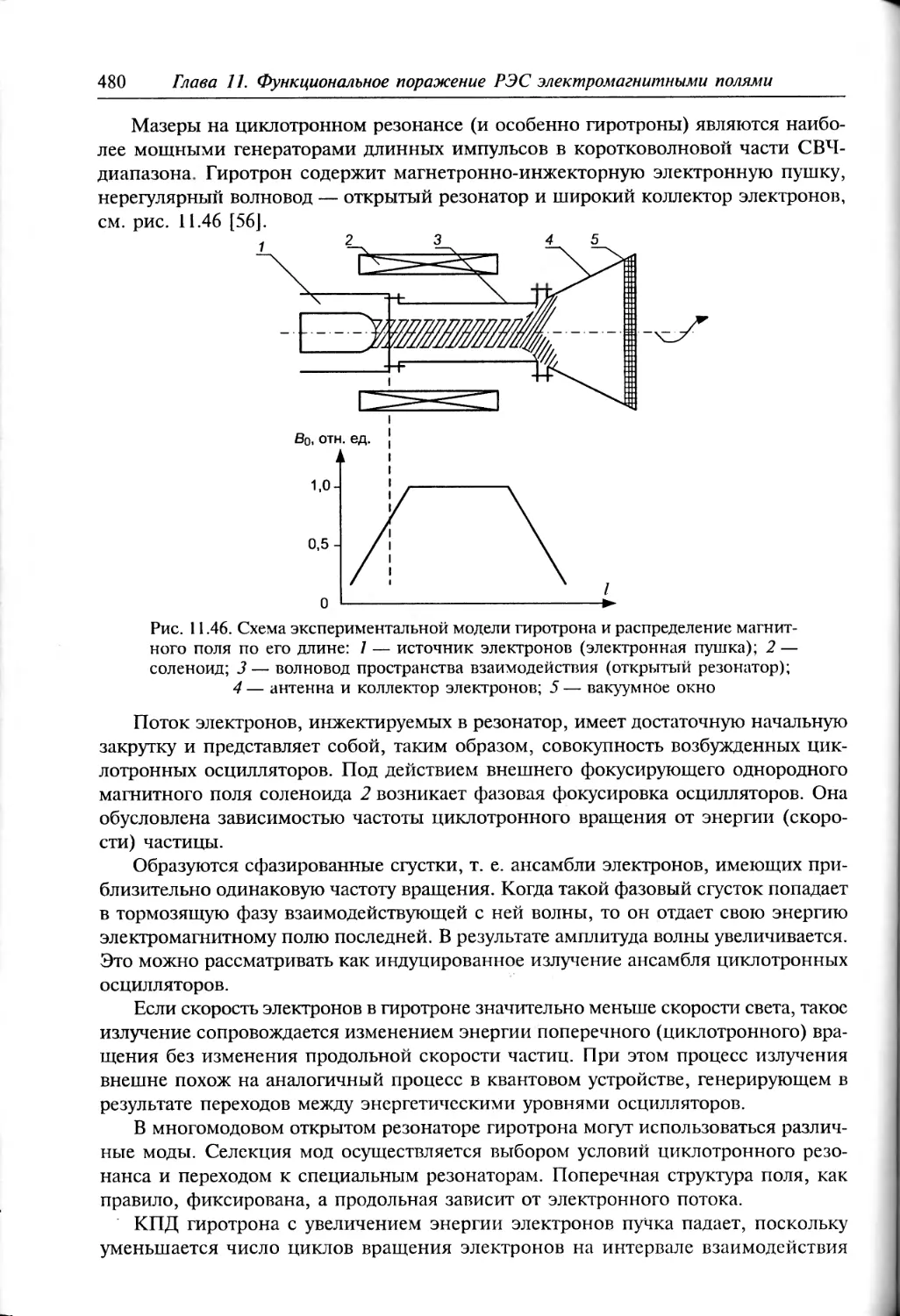









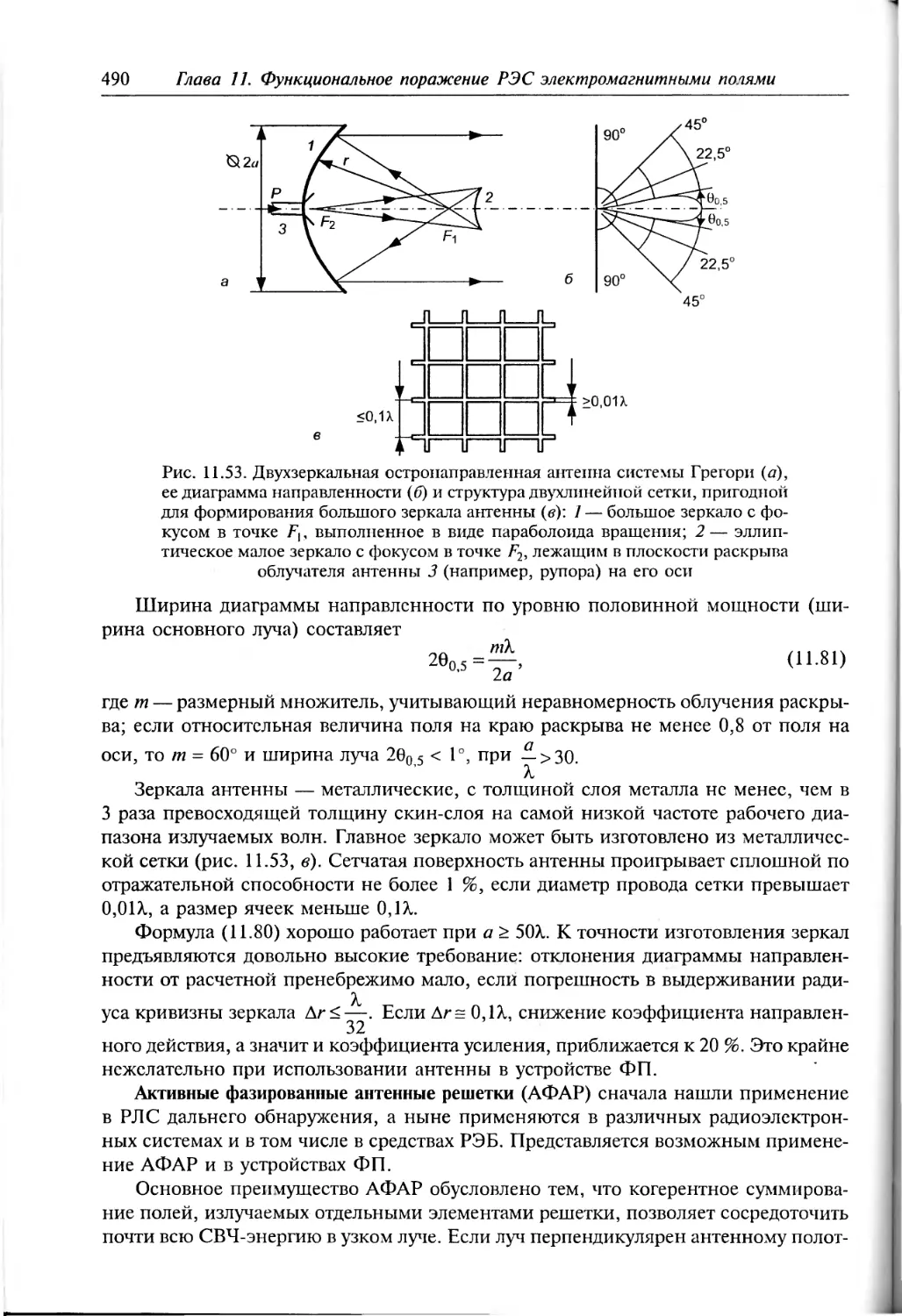



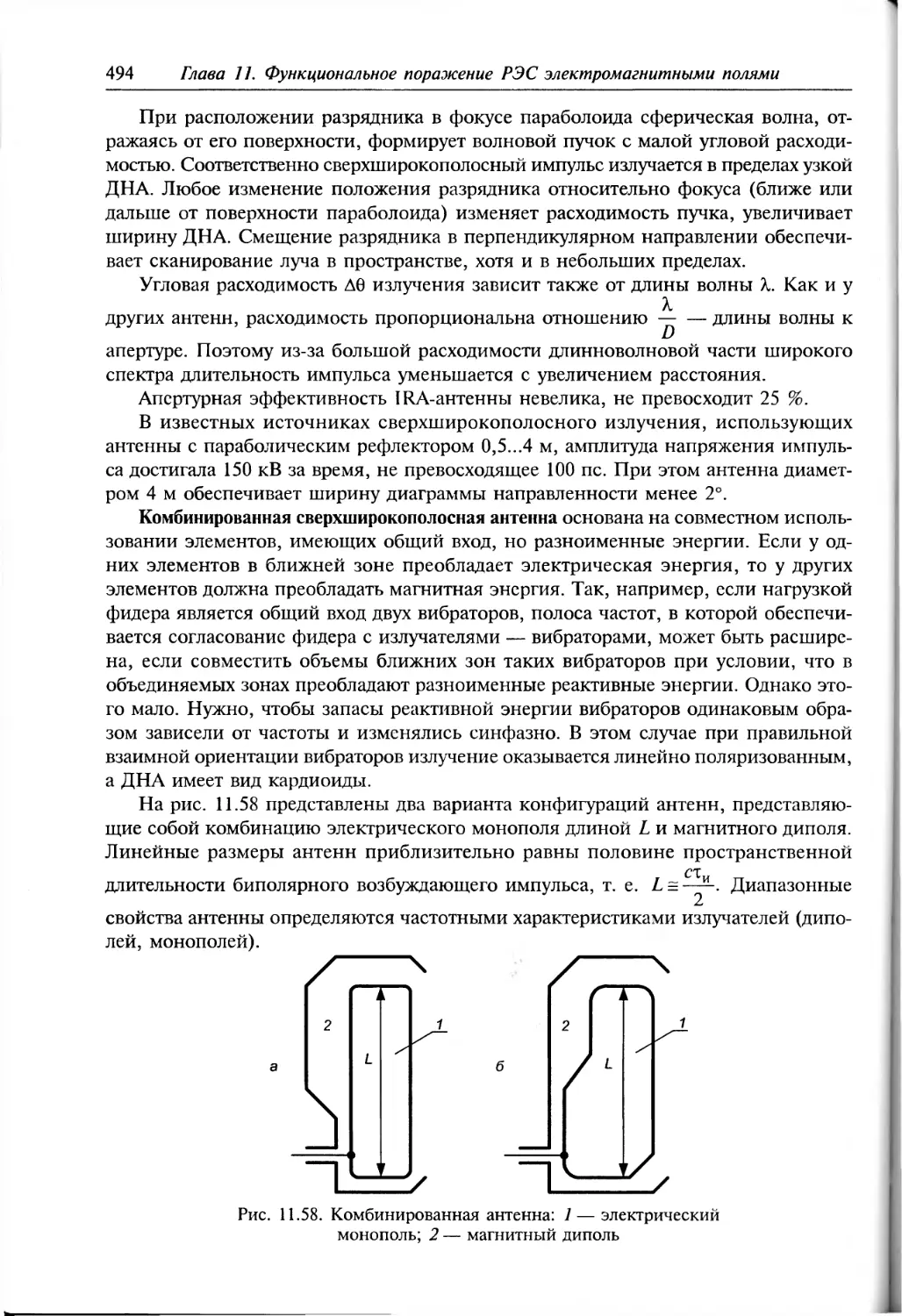

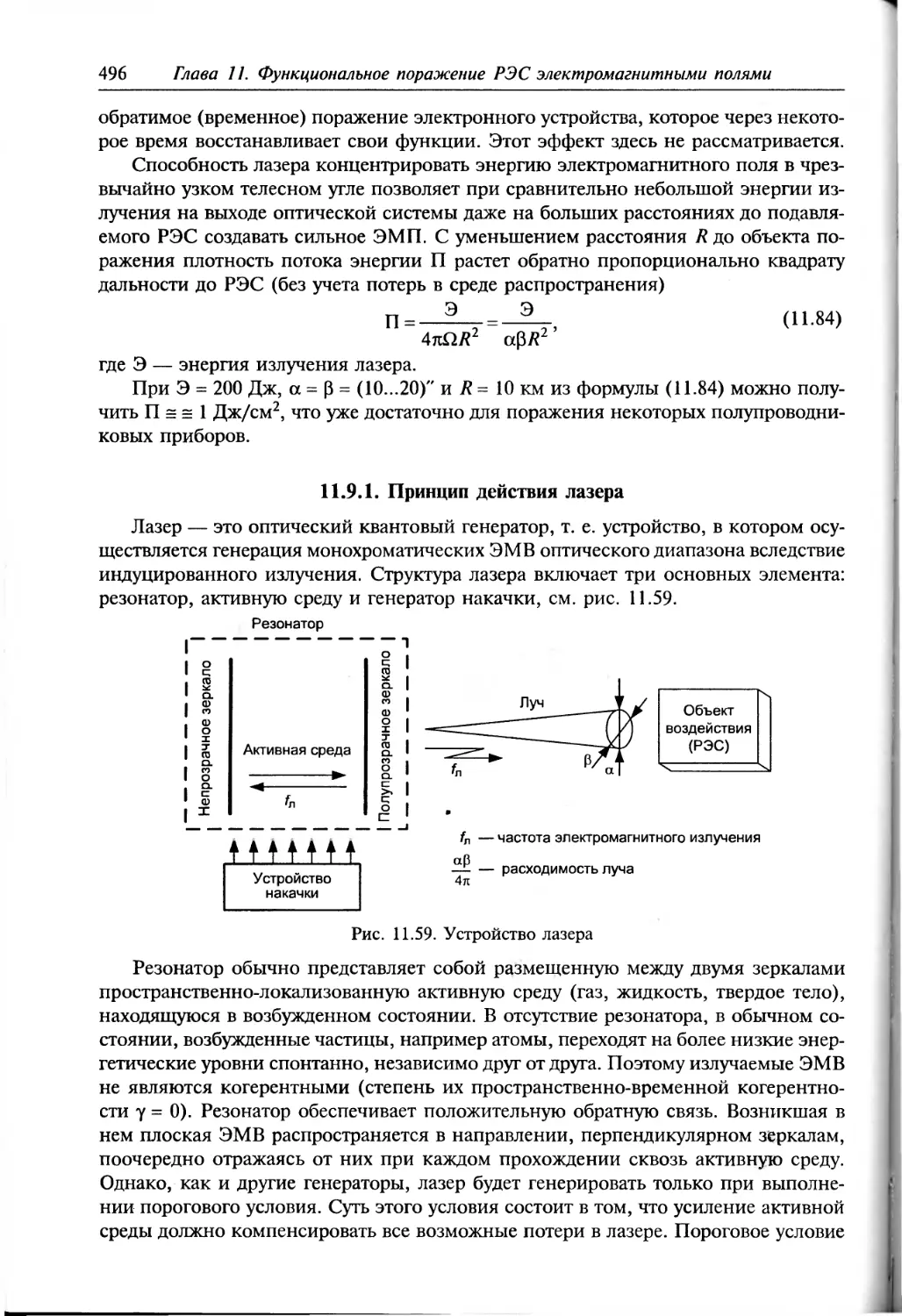



















































































































































































































































































Author: Куприянов А.И. Шустов Л.Н.
Tags: военно-инженерное оборудование и работы по инженерному обеспечению пути сообщения противорадиолокационные средства военная топография электротехника общая радиотехника радиотехника информационные технологии информационная безопасность радиоэлектроника
ISBN: 978-5-9502-0444-9
Year: 2011




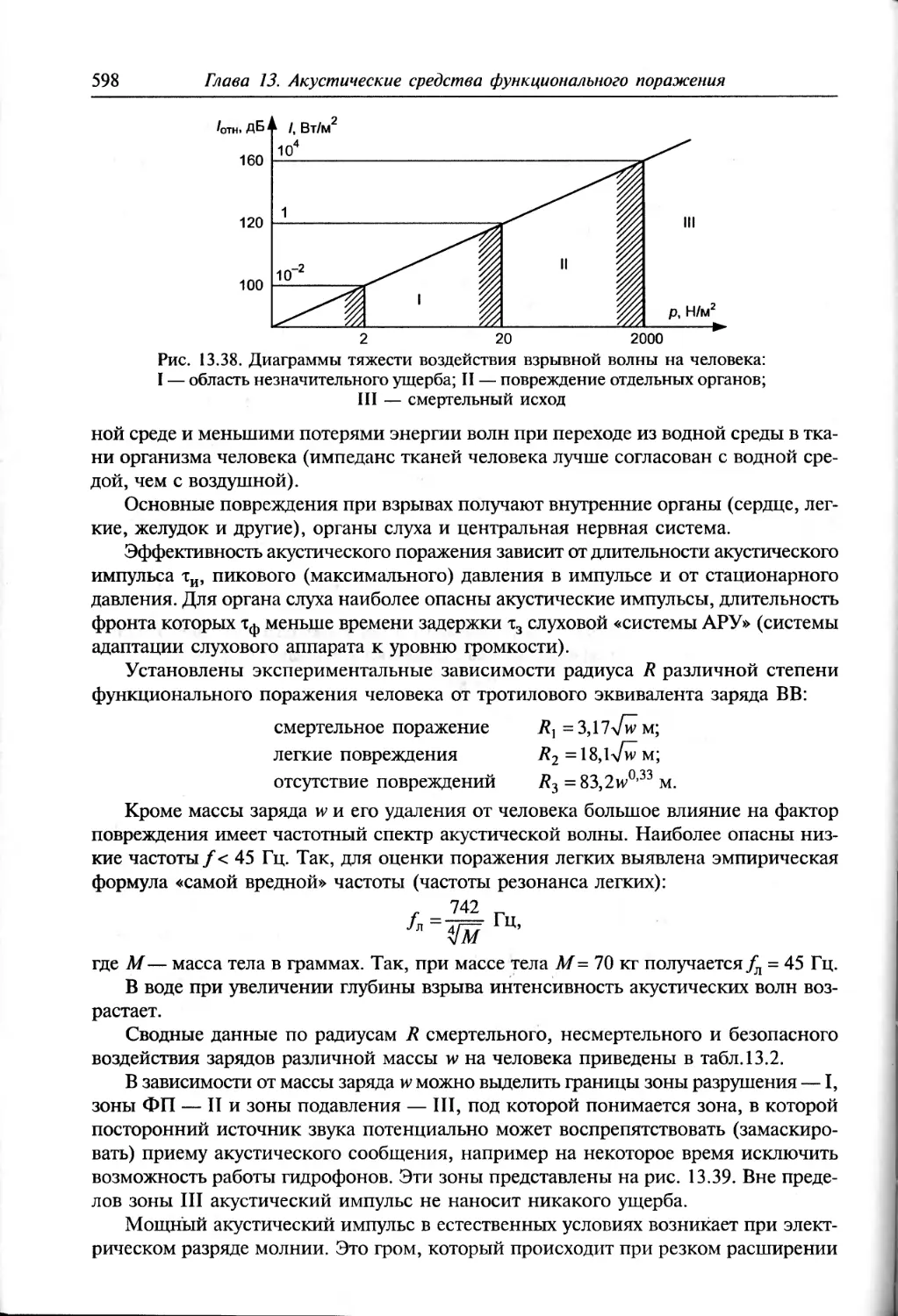
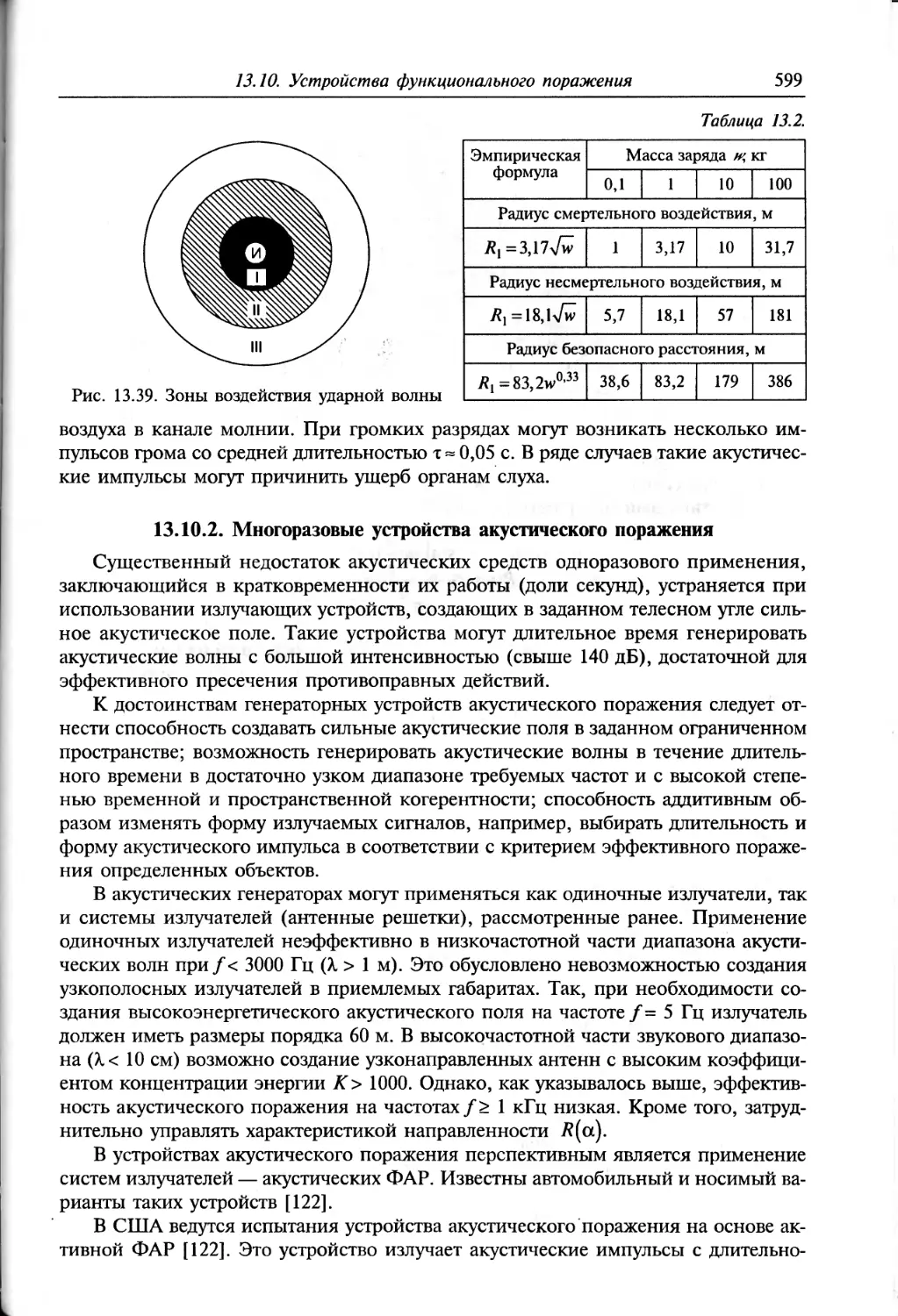
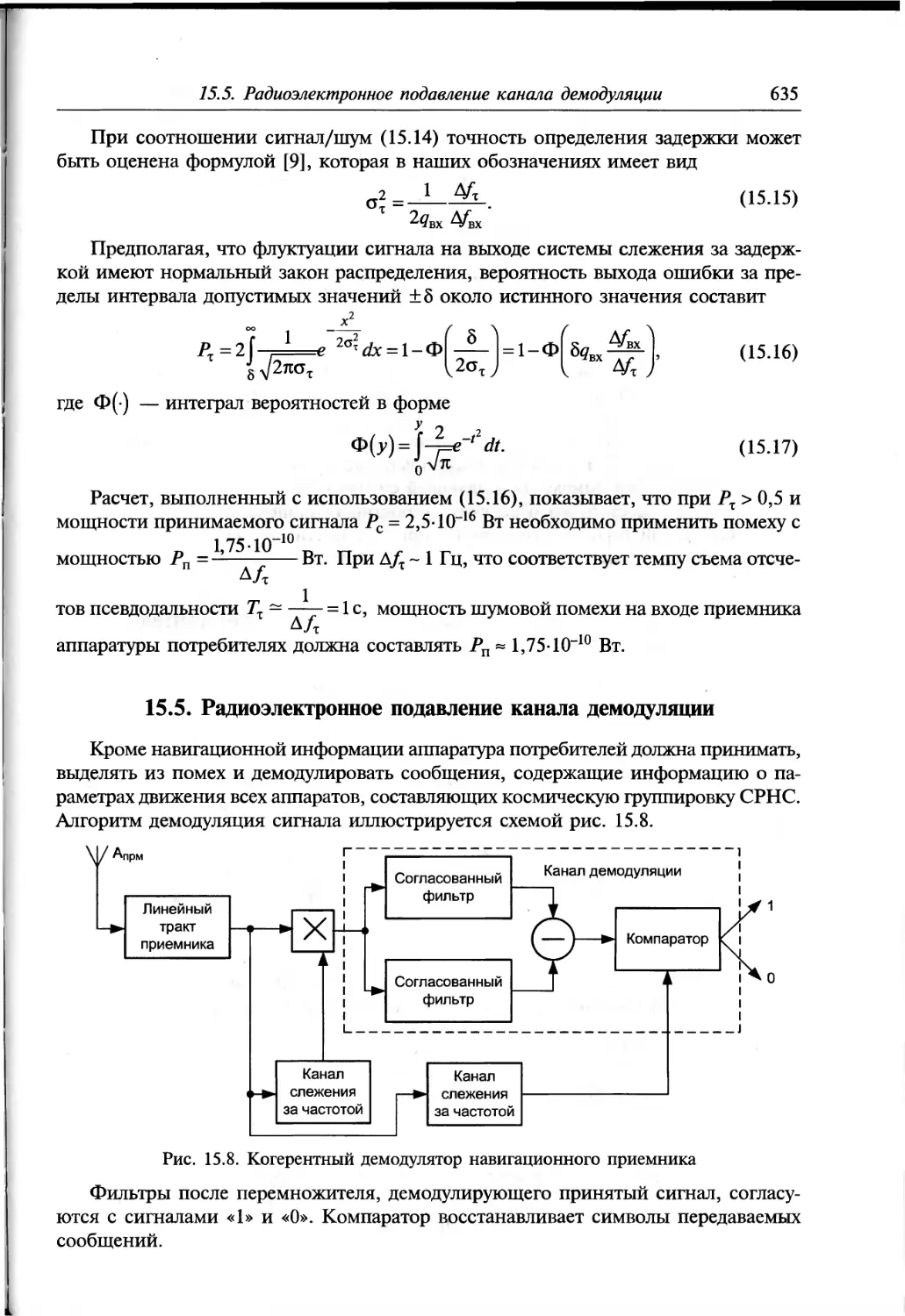
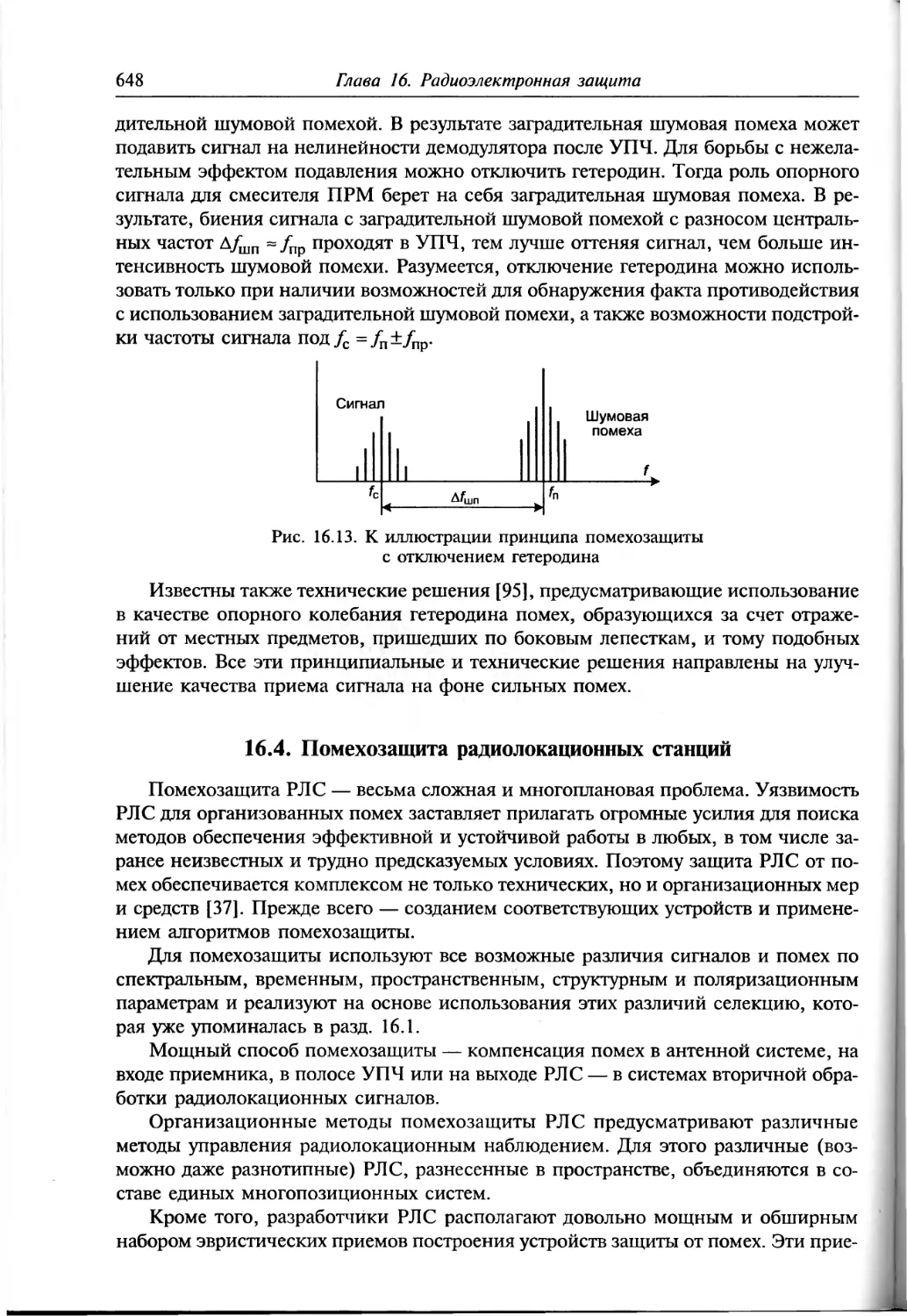
Где высоко стоит наука,
стоит высоко человек.
А. И. Полежаев
А. И. КУПРИЯНОВ, Л. Н. ШУСТОВ
РАДИОЭЛЕКТРОННАЯ
БОРЬБА
Основы теории
А. И. КУПРИЯНОВ, Л. Н. ШУСТОВ
РАДИОЭЛЕКТРОННАЯ
БОРЬБА
Основы теории
Москва
«Вузовская книга»
2011
УДК 623.61:621.391
ББК 32.84
К92
Рецензенты:
кафедра радиоэлектронной и информационной борьбы
Военной академии РВСН им. Петра Великого
д-р техн, наук, проф. А. А. Хорев;
ОАО «Концерн Радиоэлектронные технологии»
д-р техн, наук, ст. науч. сотр. Ю. М. Шабатура
Куприянов А. И.
К92 Радиоэлектронная борьба. Основы теории / А. И. Куприянов, Л. Н. Шу-
стов. — М.: Вузовская книга, 2011. — 800 с.: ил.
ISBN 978-5-9502-0444-9
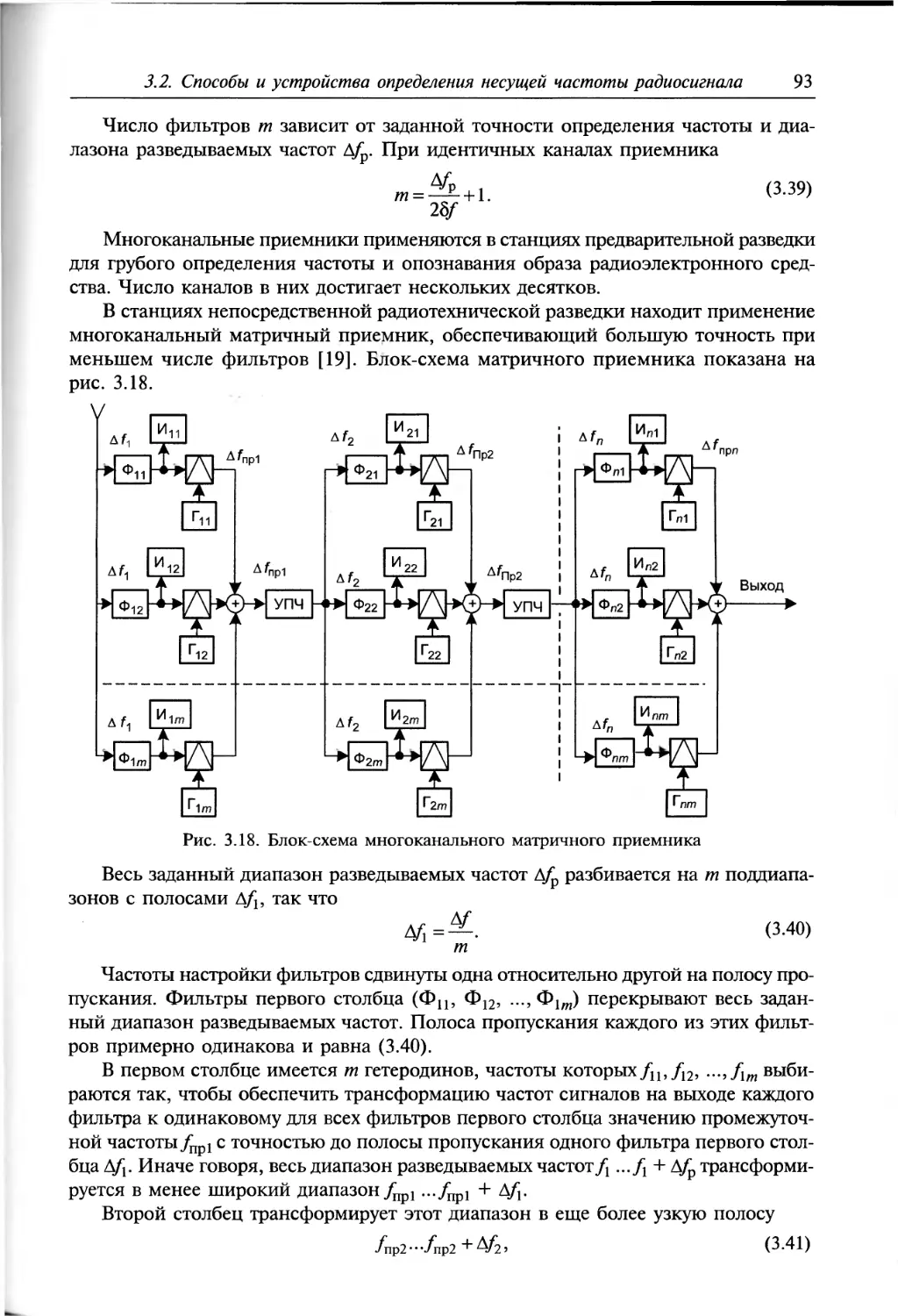
В наиболее полном объеме рассматриваются радиоэлектронные системы и сред-
ства, функционирующие в условиях информационного противоборства и борьбы с
информационным терроризмом, когда ведется радиоэлектронная разведка, органи-
зуется радиопротиводействие, применяется радиомаскировка и защита от специаль-
но организованных радиопомех.
Для студентов и аспирантов радиотехнических специальностей вузов, а также для
специалистов в области радиоэлектронной борьбы.
УДК 623.61:621.391
ББК 32.84
ISBN 978-5-9502-0444-9
© Куприянов А. И., Шустов Л. Н., 2009
© ЗАО «Издательское предприятие
«Вузовская книга», 2011
ПРЕДИСЛОВИЕ
Человек (и человечество) существует в информационном пространстве. Это
утверждение, справедливое на всех прошлых этапах развития цивилизации, особенно
актуально в настоящее время . На всех этапах существования систем, обслуживаю-
щих информационные потребности человечества, их функционирование протекало
в конфликтных условиях. Именно информационный конфликт, диалектический по
своей природе, всегда был основным фактором и главной движущей силой развития
систем передачи, извлечения, хранения и обработки информации. Наиболее вы-
пукло и отчетливо это конфликтное взаимодействие проявляется в форме борьбы
систем, которые в процессе взаимодействия используют сигналы, содержащие и
переносящие информацию, и систем разрушения информации, создающих помехи
взаимодействию информационных систем.
Самый распространенный, традиционный вид помех имеет естественное, при-
родное происхождение. Но природа, по меткому афористичному замечанию А. Эйн-
штейна, «изощренна, но не злонамеренна». Она довольно слабо сопротивляется кол-
лективному техническому интеллекту инженеров — создателей информационных
систем. Во всяком случае, инженеры располагают основательным опытом и мощ-
ным конструктивным теоретическим аппаратом, позволяющим прогнозировать и
парировать негативное и деструктивное воздействие природных факторов на инфор-
мационные системы.
В наше время это положение изменилось. Сейчас информационным системам
все чаще противостоит изощренный разум человека. Точнее, коллективный разум
противника в информационном конфликте. Именно такая ситуация определяет осо-
бенности современного конфликтного взаимодействия информационных и, в част-
ности, радиоэлектронных систем.
Вообще говоря, противоборство радиоэлектронных систем не всегда носит анта-
гонистический характер и не всегда целенаправленно на нарушение помехами ра-
боты других, не собственных радиосистем. Мощный пласт помех обязан своим про-
исхождением нарушениям электромагнитной совместимости радиоустройств и
радиосредств (РЭС) в условиях использования ими общего ресурса (частотного, вре-
менного, пространственного). Тем не менее, антропогенные и техногенные факторы,
влияющие на эффективность и даже на работоспособность радиосистем и радио-
средств, в настоящее время приобрели определяющее значение. Именно эти факторы
являются основным объектом рассмотрения в предметной области, именуемой ра-
диоэлектронной борьбой (РЭБ) и именно они обсуждаются в предлагаемой чита-
телю книге.
Термин РЭБ, хоть он и обозначает обширную предметную область, довольно
конкретен и позволяет дистанцироваться от обсуждения и описания разнообразных
не технических аспектов Конфликтов в информационном пространстве. Главная цель
книги виделась авторам в попытке систематизировать сведения, с которыми опери-
рует теория и техника РЭБ, рассмотреть содержание и направления РЭБ, принципы
построения и технические решения, используемые при создании систем и средств
4
Предисловие
РЭБ, эффективность функционирования радиоэлектронных систем в условиях РЭБ.
Вторая цель, жестко связанная с первой, — иллюстрировать конкретными приме-
рами влияние технических решений и идей на эффективность средств и способов
РЭБ в разных ситуациях, складывающихся как в военное, так и в мирное время.
В силу целого ряда известных причин, доступной литературы по вопросам ра-
диоэлектронной борьбы не много. Во всяком случае, много меньше, чем нужно,
исходя из современных общественных потребностей. Авторы надеются, что предла-
гаемая книга в какой-то мере восполнит этот пробел. Материал книги целиком осно-
вывается на монографической и учебной литературе, на публикациях в научной пе-
риодике. Значительный объем в книге занимают материалы учебных курсов, которые
авторы вели в некоторых российских вузах.
Специфика сложной комплексной проблемы РЭБ такова, что далеко не все ее
аспекты могут излагаться с одинаковой степенью подробности в общедоступной
литературе. Разумеется, в настоящее время в силу изменений известных политиче-
ских, экономических и социальных факторов многие проблемы, задачи и техниче-
ские решения с области РЭБ открылись (или скорее «приоткрылись»). Многое стало
обсуждаться в расширившихся кругах специалистов и вообще заинтересованных лиц.
Но, тем не менее, в целом предметная область РЭБ содержит еще очень много дели-
катных тем, которые не могут рассматриваться с одинаковой степенью подробности
в книге, адресованной широкому кругу читателей. Авторы надеются, что бла-
госклонный читатель найдет это обстоятельство извинительным и не будет сурово
осуждать книгу за неполноту и непоследовательность.
Авторы считают своим приятным долгом поблагодарить уважаемых рецензен-
тов профессора А. А. Хорева и профессора Ю. М. Шабатуру. Отдельная благодар-
ность всем, кто принял участие на разных этапах подготовки предлагаемой читате-
лю книги и способствовал улучшению качества ее формы и содержания.
При подготовке книги авторы использовали открытые материалы по РЭБ и
собственный опыт работы в некоторых научных и учебных учреждениях. При этом
авторы стремились к тому, чтобы книга по своему научно-методическому содержа-
нию соответствовала требованиям к учебным пособиям. Некоторые повторы и
пояснения приведены для облегчения понимания и усвоения материала специали-
стами, которые стремятся ознакомиться лишь с отдельными проблемами РЭБ. При
этом авторы не претендуют на всеобъемлющее изложение всех разделов РЭБ — этой
молодой, многообразной, бурно развивающейся отрасли научного знания и техни-
ческих возможностей.
СПИСОК СОКРАЩЕНИИ
АД
АЗ
АМШ
АП
АР
АРК
АРУ
АСД
АСН
АСОД
АСС
АСУ
АСУ-Н
АСУ-РЭБ
АФАР
АФМ
АЦП
АЧТ
АЧХ
ББКО
БВТД
БКО
БП
БПФ
БХАД
БЦВМ
ВВ
ВВС
ВИМ
ВМГ
ВС
Г
ГАР
ГВШ
ГЛИН
глц
гми
гон
ГПФ
ген
гч
ДНА
ДОР
дос
ДПЛА
ДПФ
ДРЛОУ
дто
дч
— амплитудной детектор
— аэрозольные завесы
— амплитудно-модулированная шумовая помеха
— аппаратура потребителя абонентский пункт
— акустическая разведка
— авиационные ракетные комплексы
— автоматическая регулировка усиления
— автоматическое сопровождение по дальности
— автоматическое сопровождение по направлению
— автоматизированная система обработки данных
— автоматическое сопровождение по скорости
— автоматизированная система управления
— АСУ наземными комплексами РЭБ
— АСУ комплексами РЭБ
— активная фазированная антенная решетка
— амплитудно-фазовая модуляция
— аналогово-цифровой преобразователь
— абсолютно черное тело
— амплитудно-частотная характеристика
— базовый бортовой комплекс обороны
— блок выдачи текущих данных
— бортовой комплекс обороны
— боевой порядок
— быстрое преобразование Фурье
— блок хранения априорных данных
— бортовая цифровая вычислительная машина
— взрывчатое вещество
— военно-воздушные силы
— времяимпульсная модуляция
— взрывомагнитный генератор
— временная селекция
— генератор, гетеродин
— гидроакустическая разведка
— генератор видеошума
— генератор линейно изменяющегося напряжения
— генератор ложных целей
— генератор мощных видеоимпульсов
— генератор опорного напряжения
— генератор помеховых функций
— головка самонаведения
— головная часть ракеты
— диаграмма направленности антенны
— диаграмма обратного рассеяния
— диаграммообразующая схема
— беспилотный дистанционноуправляемый летательный аппарат
— дискретное преобразование Фурье
— [самолеты] дальнего радиолокационного обнаружения и управления
— данные о текущей обстановке
— делитель частоты
6
Список сокращений
ЗАК — зенитно-артиллерийские комплексы
ЗРК — зенитные ракетные комплексы
ЗСУ — зенитные самоходные установки
ЗУР — зенитные управляемые ракеты
ИА — истребительная авиация
ИВО — индивидуально-взаимная оборона
ИВС — информационно-вычислительная система
ИК — инфракрасная
ИКГС — инфракрасная головка самонаведения
И КО — индикатор кругового обзора
ИО — индивидуальная оборона
ИП — источник питания
ИСЗ — искусственный спутник Земли
КА — космический аппарат
КВ — короткие волны
КИМ — кодово-импульсная модуляция
КН И — квазинепрерывное излучение
КР — компьютерная разведка
КРЛ — командная радиолиния
КРУ — командное радиоуправление
ЛА —летательный аппарат
ЛБВ — лампа бегущей волны
Л ГС — лазерная головка самонаведения
ЛЗ —линия задержки
ЛЛ — лазерный локатор
ЛОВ — лампа обратной волны
ЛПД — линия передачи данных
ЛЧМ — линейная частотная модуляция
МАР — многолучевая антенная решетка
МААР — многолучевая активная антенная решетка
МБР — межконтинентальная баллистическая ракета
МИЧ — приемник мгновенного измерения частоты
МККР — международный консультативный комитет по радиочастотам
ММР — магнитометрическая разведка
МОД — модулятор
НИСЗ — навигационный ИСЗ
НО — направленный ответвитель
НСД — несанкционированный доступ
ОГ — опорный генератор (гетеродин)
ОД ПФ — обратное дискретное преобразование Фурье
ОЗУ — оперативное запоминающее устройство
ОИП — ответные имитационные помехи
ОНЦ — обнаружение, наведение и целераспределение
ОР — устройство распознавания сигналов
ОРЭБ — объекты радиоэлектронной борьбы
ОС — операционная система
ОУ — оконечный усилитель
ОЭП — оптико-электронное подавление
ОЭР — оптико-электронная разведка
ОЭС — оптико-электронные системы (средства)
ПАВ — поверхностные акустические волны
ПВО — противовоздушная оборона
ПВРД — прямоточный двигатель
ПВС — пространственно-временная селекция
ПЗ — помехозащищенность
ПЗРК — переносные зенитные ракетные комплексы
ПНВ — приборы ночного видения
Список сокращений
7
ПОАРИ — процессор анализа и обработки разведывательной информации
ПОД — передатчик помех одноразового действия
ПП — постановщик помех
ППРЧ — псевдослучайная перестройка частоты
ПРД — передатчик
ПРЛО — противорадиолокационный отражатель
ПРМ — приемник
ПРО — противоракетная оборона
ПРР — противорадиолокационная ракета
ПС — пространственная селекция
ПсО — психологические операции
ПУ — предварительный усилитель
ПУ-Н — пункт управления наземными комплексами
ПЭМ ИН — побочные электромагнитные излучения и наводки
РГС — радиолокационные головки самонаведения
РДР — радиационная разведка
РК — ретрансляционный канал
РЛ — радиолокационная ловушка
РЛР — радиолокационная разведка
РЛС — радиолокационная система (станция)
РПГ — радиопоглощающее покрытие
РР — радиоразведка
РРТР — радио- и радиотехническая разведки
РСА — радиолокационная станция с синтезированной антенной
РСН — равносигнальное направление
РСПИ — радиосистема передачи информации
РТЛС —радиотеплолокационная станция
РТР — радиотехническая разведка
РУК —разведывательно-ударный комплекс
РЭА — радиоэлектронная аппаратура
РЭБ — радиоэлектронная борьба
РЭЗ — радиоэлектронная защита
РЭК — радиоэлектронный комплекс
РЭП — радиоэлектронное подавление (противодействие)
РЭПр — радиоэлектронное поражение
РЭР — радиоэлектронная разведка
РЭС — радиоэлектронная система (средство)
САП — станция формирования активных помех
САР — самофокусирующая (самонастраивающаяся) антенная решетка
СВН — средство воздушного нападения
СВЧ — сверхвысокая частота
СВЧО — СВЧ-оружие
СД — синхронный детектор
СДУС — измеритель с датчиком угловых скоростей
СДЦ — селекция движущихся целей
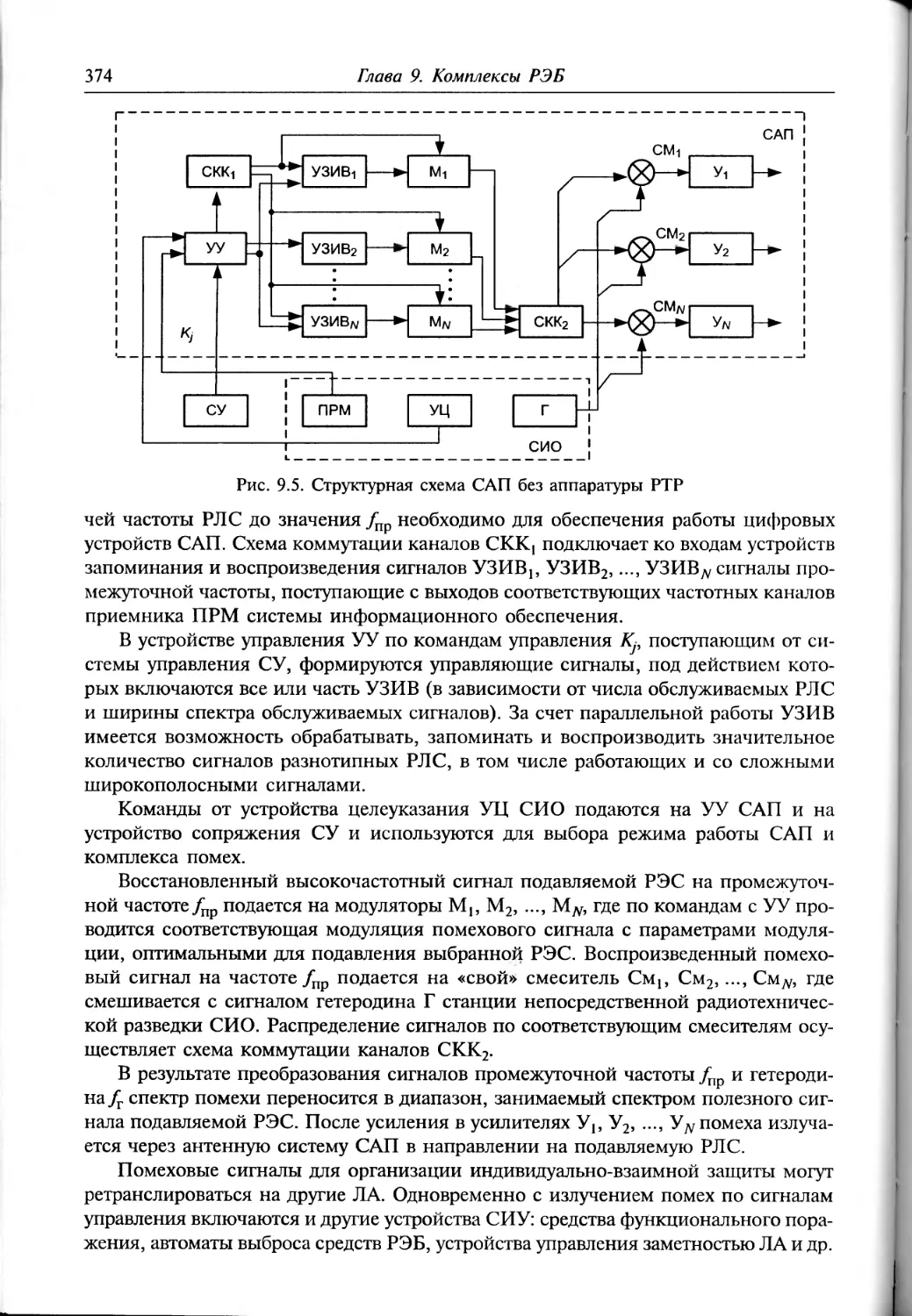
СИО — система информационного обеспечения
СИУ — система исполнительных устройств
СКТС — система контроля технического состояния (и боевой эффективности БКО)
СМ О — система массового обслуживания
СНРТР — станция непосредственной радиотехнической разведки
СНРЭР — станция непосредственной радиоэлектронной разведки
СП — станция помех
СР — сейсмическая разведка
СРТР — станция радиотехнической разведки
ССК — схема коммутации каналов
ССРНС — сетевая спутниковая радионавигационная система
СУ — система управления
СУБД — система управления базой данных
8
Список сокращений
СУР — система управления ракетой
СЭУ — сильноточный электронный ускоритель
ТВГС —телевизионная головка самонаведения
ТВД — театр военных действий
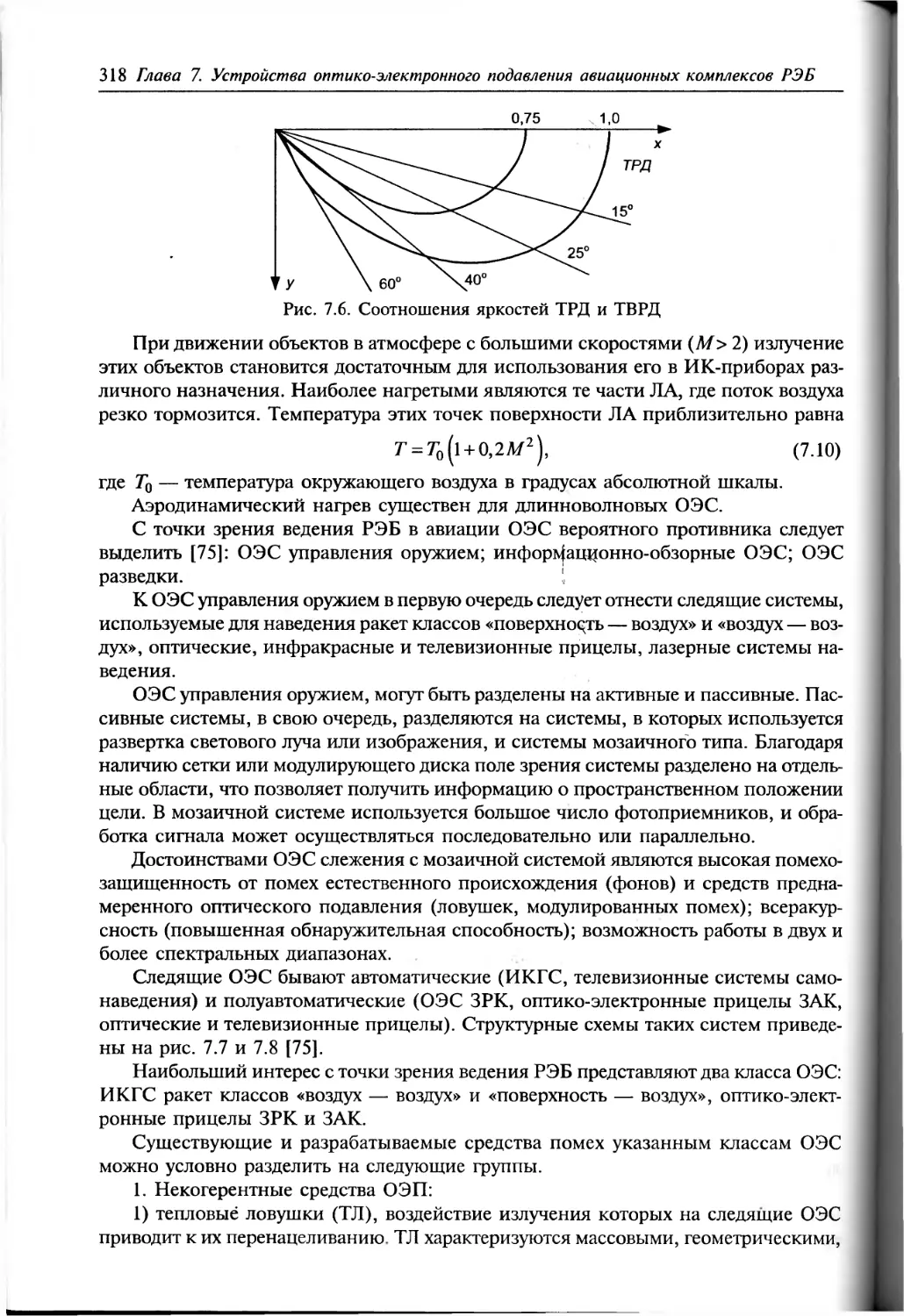
ТВРД — турбовентиляторный двигатель
ТГС —тепловая головка самонаведения
ТКС — типовые комплексы связи
ТЛ — тепловая ловушка
ТЛЦ — тепловая ложная цель
ТП — теплопеленгаторы
ТРД — турбореактивный двигатель
ГГГ — тактико-технические требования
ТТХ —тактико-технические характеристики
УАД — устройство анализа данных
УВ — устройство выброса
УВКА — устройство выдачи команд антенне
УВКГ — устройство выдачи команд генератору
УВТД — устройство выработки тактики действий
УЗ —управление задержкой
УЗВА —устройство запоминания и воспроизведения амплитуды
УЗВС — устройства запоминания и воспроизведения сигналов
УЗП — устройство задания параметров
УЗЧ — устройство запоминания частоты принятого сигнала
УКВ — ультракороткие волны
У ПР — устройство принятия решений
УПЧ — усилитель промежуточной частоты
УУ — устройство управления
ФАР — фазированная антенная решетка
ФД — фазовый детектор
ФКМ — фазокодовая модуляция
ФМШ — фазомодулированная шумовая помеха
ФНЧ — фильтр нижних частот
ФОФ — фильтр — ограничитель — фильтр
ФП — функциональное поражение
ФЦУ — формуляр целеуказания
ФЧХ — фазочастотная характеристика
ХИП —хаотические импульсные помехи
ХР —химическая разведка
ЦВМ — цифровая вычислительная машина
ЦОС — цифровая обработка сигналов
ЦУЗВС — цифровое устройство запоминания и воспроизведения сигнала
ЧМ — частотная модуляция
ЧМШ — частотно-модулированная шумовая помеха
ЧПК — череспериодная компенсация
ШОУ — широкополосный усилитель — ограничитель — узкополосный усилитель
ШПИ — ширина полосы излучения
ШУ — широкополосный усилитель
ЭДС — электродинамическая структура
ЭМБ — электромагнитный боеприпас
ЭМИ — электромагнитное излучение, электромагнитный импульс
ЭМО — электромагнитное оружие
ЭМП — электромагнитное поле
ЭМС — электромагнитная совместимость
ЭПР — эффективная поверхность рассеяния
ЭС — электронное средство
ВВЕДЕНИЕ
Изобретение радио и внедрение в вооруженные силы в начале XX в. радиоэлект-
роники стимулировали разработку и внедрение способов и средств их радиоразведки
и подавления радиопомехами. Применение радиопомех потребовало защиты РЭС,
т. е. создания средств и методов радиоэлектронной защиты. Так как вначале из всего
многообразия РЭС применялись исключительно средства радиосвязи прежде всего
в военно-морском флоте, то впервые радиоразведка и радиопомехи были применены
в боевых действиях на море экипажами русских военных кораблей в 1904 г. во вре-
мя Русско-японской войны. 15 апреля 1904 г. боевые японские корабли предприняли
артиллерийский обстрел внутреннего рейда Порт-Артура и самого города, а разведы-
вательный корабль японцев «Таракаро», стоявший в пределах прямой видимости
результатов стрельбы, вел по радиотелеграфу корректировку этой стрельбы. В про-
цессе обстрела работа японского корректировщика огня была подавлена нашими
средствами радиопомех. В официальной истории Русско-японской войны этот факт
нашел такое отражение: командовавший эскадрой контр-адмирал Ухтомский прика-
зал броненосцу «Победа» и береговому посту «Золотая гора» «перебивать телеграммы
(радиограммы) большой искрой, что и исполнено было с большим успехом, так как
из японских источников известно, что с трудом удавалось корректировать попада-
ния снарядов с крейсера «Таракаро» [4]. Контр-адмирал Ухтомский в своем докладе
командованию писал: «Неприятелем выпущено более 60 снарядов большого калибра.
Попаданий в суда не было».
Но были и примеры противоположного отношения к РЭБ. Адмирал 3. П. Рожест-
венский, командовавший Второй и Третьей Тихоокеанскими эскадрами з Цусим-
ском сражении, запретил использование радиопомех в ситуациях, когда их необхо-
димость была очевидной для многих офицеров российского флота. Сразу после окон-
чания Русско-японской войны причины и обстоятельства Цусимской трагедии стали
предметом особого рассмотрения специальной комиссии под председательством ад-
мирала А. В. Колчака, созданной при Главном морском штабе. Выводы комиссии
были совершенно конкретны: «Адмиралу Рожественскому надлежало, как только
он был открыт японцами, сделать все возможное, чтобы нарушить радиотелеграфную
связь между отрядами противника. Японцы, дабы не упустить нашей эскадры, были
принуждены рассеять свои силы по большому пространству, и радиотелеграфная
связь являлась существеннейшим элементом их сил. Нарушение этой связи радио-
станциями нашей эскадры, шедшей соединенно и потому не столь нуждающейся в
радиотелеграфе, было тем преимуществом нашей эскадры, которым грех было не
воспользоваться. Несколько мощных, умело примененных радиотелеграфных стан-
ций на русской эскадре, нарушив связь между отрядами, сделали бы больше, чем
десяток пушек» [5].
Современная история создания отечественной техники РЭБ начинается с двух
крупных событий. Первое — это подписанное И. В. Сталиным Постановление
Государственного Комитета Обороны (ГКО) от 16 декабря 1942 г. № ГОКО 2633сс
«Об организации в Красной Армии специальной службы по забивке немецких ра-
диостанций, действующих на поле боя» [6]. И второе событие — Постановление
10
Введение
ГКО от 7 июля 1943 г. об образовании Совета по радиолокации, в компетенцию
которого входили вопросы разработки техники радиопротиводействия (РПД) [7].
В том же году был основан центр по разработке средств РПД (по современной
терминологии — средств радиоэлектронной борьбы) — Всесоюзный научно-исследо-
вательский институт № 108 (ныне ГосЦНИРТИ — Государственный центральный
научно-исследовательский радиотехнический институт).
В локальных войнах и конфликтах в Корее, во Вьетнаме и на Ближнем Востоке
радиоэлектронная борьба велась всеми видами вооруженных сил воюющих стран,
но наиболее интенсивно — ВВС и ПВО (достаточно сказать, что в США до 70 % мате-
риальных ресурсов, предназначенных для развития и совершенствования РЭБ, по-
ступают в авиацию [!’]). Благодаря эффективной РЭБ потери в самолетах снизились
в 3...7 раз [9]. Опыт локальных войн свидетельствует: вкладывать деньги в развитие
средств РЭБ сегодня очень выгодно. По подсчетам специалистов на каждый доллар,
вложенный в информационную войну, можно ожидать 10 долларов прибыли.
Не вдаваясь в подробности, следует отметить, что во время двух войн США в
Ираке (операции «Буря в пустыне» в 1991 г. и «Шок и трепет» в 2003 г.) силы и
средства РЭБ до начала удара создавали сильные помехи радиоэлектронным средст-
вам Ирака, прежде всего РЭС системы ПВО. Под прикрытием радиопомех, предва-
ряя удары самолетов из эшелона прорыва ПВО, были нанесены удары крылатыми
ракетами (КР) морского базирования со стороны Персидского залива и Красного
моря. Прорыв системы ПВО Ирака был обеспечен широким применением высоко-
точных КР «Томагавк» и большого числа управляемых ракет «воздух — РЛС» в со-
четании с сильными радиопомехами радиоэлектронным средствам. В 1991 г. во
время операции «Буря в пустыне» американское командование применило в Ира-
ке и некоторые новые средства РЭБ. Так, с целью повышения эффективности
информационной войны, ведущейся в интересах идеологической обработки граж-
данского населения, для подавления телевизионных передач в Багдаде в район рас-
положения телецентра была сброшена так называемая «электронная бомба», явля-
ющаяся оружием функционального поражения радиоэлектронных систем. В резуль-
тате взрыва специального заряда этой бомбы образовался мощный
электромагнитный импульс, действие которого нарушило работу телецентра. Во
время этой же операции ВМС США для подавления радиоэлектронных систем уп-
равления и связи Ирака использовали в нескольких из 116 запущенных ракет «То-
магавк» боевые части (БЧ), создающие мощный электромагнитный импульс. При-
мененная в ракете БЧ при взрыве излучала СВЧ-сигнал мощностью 5 МВт [10].
Будущее техники РЭБ в значительной степени определяется двумя взаимосвя-
занными научно-технологическими направлениями развития элементной базы
современной радиоэлектроники: созданием разнообразных схем с использовани-
ем нанотехнологий и расширением возможностей цифровой обработки сигналов
(ЦОС), обеспечивших преобразование совокупности средств РЭБ по существу в
цифровые системы.
В 70-х гг. прошлого века самолет, летящий на высоте 12 000 м, облучался при-
мерно 40 тыс. импульсами в секунду. В 80-х гг. плотность облучения возросла до
1...2 млн импульсов в секунду, а в начале нынешнего века прогнозируется
увеличение этой плотности до 10...20 млн импульсов в секунду [3]. Справиться с
селекцией, фильтрацией и анализом поступающей информации в этих условиях
может только специализированный процессор. Для примера укажем, что САП са-
молетов F-15 различных модификаций ALQ-135 (V) имеет 20 параллельно работа-
ющих процессоров. В начале 90-х гг. прошлого века фирма «Вестингауз» разрабо-
Введение
11
тала сигнальный процессор, размещаемый в стандартном блоке 14,6x16,0x1,5 см3
и имеющий быстродействие 3,3 млрд операций в секунду [14]. Такое быстродействие
способно обеспечить адекватную реакцию средств и систем РЭБ на быстро меня-
ющуюся радиоэлектронную обстановку на театре военных действий (ТВД).
Современная РЭБ требует создания помех, прицельных по частоте, но с упреж-
дением по времени. Применяемые в качестве упреждающих широкополосные загра-
дительные шумовые помехи являются энергетически невыгодными. Однако с этим
приходится мириться, так как только обеспечив упреждение, можно рассчитывать
на исключение преимуществ, которые имеют РЛС от изменения несущей частоты
от импульса к импульсу или от пачки импульсов к пачке.
Принципиальная возможность создания энергетически выгодных упреждающих
прицельных по частоте помех появилась только после внедрения в системы РЭБ
цифровых устройств запоминания частоты перехватываемых сигналов на длительное
время. Такие устройства позволяют вместо заградительной шумовой помехи фор-
мировать «гребенку» прицельных по частоте маскирующих шумовых помех. Спектр
каждого «зубца» гребенки сосредоточен в пределах минимально необходимой полосы
около частоты, соответствующей одной из множества дискретных составляющих
запомненных, а затем воспроизведенных частот РЛС. При этом перестройка час-
тоты, осуществляемая РЛС путем перехода скачком на одну из конечного множе-
ства фиксированных частот, не защищает РЛС от такой помехи.
Важно подчеркнуть, что цифровые устройства обеспечивают запоминание не
только частоты, но и сигнала РЛС в целом. Это позволяет решить проблему фор-
мирования сигналоподобных помех в ответ на каждый импульс когерентным РЛС
(импульсно-доплеровским и со сжатием импульсов).
В запоминающее устройство ЭВМ системы РЭБ вводится библиотека параметров
всех известных РЛС и режимов их работы. Эта ЭВМ выявляет тип и степень угрозы,
определяет приоритеты и стратегию радиоэлектронного подавления, вид и мощность
помехи на каждую цель в порядке снижающейся приоритетности. Аналоговая ЭВМ
с таким объемом задач и такой степенью быстродействия справиться не в состоянии.
Формирование (синтезирование) помех полностью цифровым способом посредством
коммутируемой матричной логической структуры позволяет перепрограммировать
весь процесс радиоэлектронного подавления, включая пространственно-временную
модуляцию помеховых сигналов, настройку по частоте, калибровку по мощности и
момент излучения помехи. А это значит, что по мере совершенствования средств
ПВО и авиации потенциального противника нет необходимости создавать новую ап-
паратуру РЭБ; достаточно изменять (обновлять) ее математическое обеспечение.
Комплекс РЭБ должен практически мгновенно реагировать на внезапно возни-
кающие угрозы. Реакция комплекса на угрозу не должна превышать 0,05...0,1 с.
Такую реакцию способна обеспечить только цифровая техника. Только цифровые
ЭВМ с высоким быстродействием и большим объемом памяти способны управлять
ресурсами комплексов РЭБ, включающими:
• совокупность станций активных помех;
• расходуемые средства создания помех (буксируемые активные ловушки; про-
тиворадиолокационные управляемые ракеты; передатчики помех одноразового
действия; дипольные отражатели, подсвечиваемые помеховым сигналом; сна-
ряды с электромагнитной боевой частью);
• набор видов помех и способов их боевого применения;
• средства функционального поражения РЭС (СВЧ- и лазерное оружие функ-
ционального поражения);
12
Введение
• распределение энергетического потенциала станций активных помех для од-
новременного подавления нескольких РЭС;
• способность быстрого изменения ориентации и ширины лучей диаграммы
направленности антенн (фазированных антенных решеток) станций активных
помех в заданных секторах пространства;
• способность управления последовательностью временных интервалов созда-
ния помех нескольким РЭС одной ведущей станцией активных помех.
Существует тенденция объединения многочисленных радиотехнических и оп-
тико-электронных средств на одном летательном аппарате (средств радиолокации,
РЭБ, госопознавания, радионавигации, передачи данных, лазерных, инфракрасных
и других датчиков информации) в единый интегрированный радиоэлектронный
комплекс (ИРЭК). Такое объединение возможно только при наличии централизо-
ванного управления с помощью цифровой ЭВМ с большими ресурсами быстро-
действия и памяти.
Значительный рост возможностей, интенсивности и влияния РЭБ на боевые
действия, на все виды боевой работы информационной техники и оружия требует
глубокого изучения и учета исторического опыта, условий возникновения разви-
тия РЭБ, ее влияния на современные войны и вооруженные конфликты.
В мирное время все элементы РЭБ не утрачивают своего значения. Нападение
и защита всегда были неразрывными составными частями информационного обще-
ства. В примитивно организованном обществе большую роль в информационном
противодействии играют колдуны, шаманы, оракулы. При формировании общности
людей в государства начинают применяться технические средства РЭБ. Во многих
исторических документах, не исключая Библию, отмечаются случаи применения
световых и звуковых сигналов для передачи различных сообщений, в том числе лож-
ных и пугающих.
Информационная борьба ведется на политическом, экономическом, военном
и даже на бытовом уровне. Средства информационной борьбы используют акустиче-
ские и электромагнитные поля всех освоенных техникой диапазонов. Угонщики
автомобилей применяют электронную разведывательную аппаратуру для
определения кодов противоугонных устройств, а органы охраны правопорядка
используют средства радиотехнической разведки и РЭП для борьбы с ними.
Радиотехнические устройства применяются для слежения за перемещениями под-
надзорных лиц. Акустические средства используют для борьбы с пиратами, терро-
ристами и толпами экстремистов. Имеются сообщения о разработке электронной
аппаратуры для воздействия на психику людей, не говоря уже о технических сред-
ствах, используемых для промышленного шпионажа и совершения экономических
преступлений.
Непредвзятый анализ современного состояния РЭБ свидетельствует о состояв-
шемся переломе качественной оценки влияния РЭБ на все стратегические направле-
ния развития современного общества. Техника РЭБ бурно развивается, используя,
с одной стороны, все новейшие достижения науки, а с другой — способствует разви-
тию наукоемких отраслей.
Организация РЭБ требует устойчивых знаний современной информационной
техники, высокого интеллекта и широкой системной эрудиции.
ГЛАВА 1
ОСНОВЫ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
1.1. Радиоэлектронная борьба — составная часть
информационного конфликта
Человечество вступило в XXI в. на волне бурного, опережающего развития ин-
формационных систем. Основной движущей силой этого развития было и остается
конфликтное взаимодействие радиоэлектронных систем и средств, являющихся
основными элементами информационной среды прошлого и нынешнего столетия,
с противодействующими факторами и явлениями. Наиболее очевидны проявления
конфликта информационных систем с природой. Именно природа ограничивает
скорость и помехоустойчивость передачи информации по каналам связи, произво-
дительность источников информации, емкость хранилищ информационного ресурса.
Но природа, как афористично заметил А. Эйнштейн, изощренна, но не злонамеренна.
В соревновании коллективного инженерного интеллекта создателей информацион-
ных систем с природой чаще всего побеждают инженеры. Другое дело — конфликт
информационных систем с противодействующими системами антропогенной при-
роды, когда сталкиваются интересы разных людей (групп, коалиций). Исход этого
конфликта совсем не так однозначен, как результат конфликтного взаимодействия
с природой. Формы проявления информационного конфликта развиваются и изме-
няются. Также меняются и термины, в которых он описывается. Но самое устойчи-
вое название для конфликтного взаимодействия информационных систем — «радио-
электронная борьба» (РЭБ).
Зарождение и развитие РЭБ вызвано объективными процессами, обусловленны-
ми диалектическим противоречием средств нападения и защиты. Наиболее выпукло
это противоречие проявляется в среде функционирования систем и средств, сопро-
вождающих и обеспечивающих вооруженную борьбу. История развития вооружен-
ной борьбы показывает, что появление любого нового оружия и боевой техники
неизбежно приводило к созданию средств и способов борьбы с ними. Так случилось
и при внедрении в вооруженные силы средств радиоэлектроники. Методы и средства
РЭБ создавались в скрытой от посторонних взглядов среде проектных институтов
и промышленных предприятий, но становились доступными участникам вооружен-
ной борьбы после применения в военных действиях. Поэтому именно войны и во-
оруженные конфликты отмечают последовательные вехи развития техники и тактики
РЭБ. Соответственно, историю РЭБ как историю развития технической и тактиче-
ской мысли, как событийную цепь появления и проявления новых взглядов, подхо-
дов, технических и тактических решений легче и удобнее всего прослеживать в про-
екции на цепь войн и вооруженных конфликтов, которыми, к величайшему сожале-
нию, так богат XX в.
Особо следует подчеркнуть, что средства РЭБ в настоящее время рассматривают-
ся как оружие ведения боевых действий, а мероприятия по ведению РЭБ из обеспечи-
вающих переходят в категорию одного из элементов содержания боевых действий
и операций. Операция РЭБ может рассматриваться (в сочетании с другими one-
14
Глава 1. Основы радиоэлектронной борьбы
циями) как самостоятельное звено в решении задач стратегического замысла. В тече-
ние всей операции РЭБ будет сохраняться высокая спектральная плотность мощ-
ности преднамеренных помех всех видов, создаваемых высокоорганизованными
группировками РЭБ на земле, в воздухе, на море и в космосе. Это существенно
затруднит возможности использования потенциальным противником РЛС, средств
связи, управления, навигации и других радиоэлектронных средств и систем во всех
частотных диапазонах [11].
Нельзя не отметить возрастающую роль радиоэлектронной борьбы с радио- и
оптико-электронными средствами гражданского назначения в мирное время. Радио-
и оптико-электронная разведка используются террористами и бандитами для получе-
ния информации о предполагаемых объектах нападения и степени их защиты [12,13].
Вскрываются секретные банки данных правительственных учреждений и различных
частных фирм. Созданы устройства радиоподавления линий связи федеральных
служб. В частности, в настоящее время бандитские группировки применяют предна-
меренные помехи для подавления радионавигационных систем (например, систем
поиска угнанных автомобилей). Мобильные радиотелефоны используются для под-
рыва боеприпасов. Активно ведутся поиски путей создания психотропного оружия.
В качестве контрмер антитеррористические подразделения вынуждены приме-
нять специальные станции контрпомех. Разработаны и прошли испытания техниче-
ские средства, создающие сверхмощные электромагнитные и звуковые поля, дей-
ствующие на органы чувств нападающих людей и вызывающие у них чувство страха,
припадки и даже кому [13, 14]. Все это свидетельствует о необходимости глубокого
и системного изучения всех многоликих проблем РЭБ для обеспечения эффектив-
ной борьбы с бандитскими и террористическими группировками.
Таким образом, суть РЭБ — это конфликтное взаимодействие информационных
систем, проявление конфликта в информационном пространстве. Специфичность
форм и методов проявления информационного конфликта позволяет в последнее
время говорить об «информационной борьбе», «информационном оружии» и об «ин-
формационных войнах» как о дальнейшем естественном развитии и трансформации
методов РЭБ [2, 3].
1.2. Цели и задачи радиоэлектронной борьбы
Военный энциклопедический словарь [1] определяет радиоэлектронную борь-
бу как совокупность взаимосвязанных по цели, задачам, месту и времени меро-
приятий, действий, направленных на выявление радиоэлектронных средств и сис-
тем противника, их подавления. Также под радиоэлектронной борьбой понимают
радиоэлектронную защиту своих радиоэлектронных систем и средств от средств РЭБ
противника.
Радиоэлектронное подавление (РЭП) — действия, выполняемые с целью предот-
вращения или уменьшения эффективности использования противником электро-
магнитного спектра.
Защита от помех (ПЗ) — действия, предпринимаемые для того, чтобы, не-
смотря на использование противником электромагнитного спектра для ведения
РЭБ, обеспечить эффективное использование электромагнитного спектра своими
радиоэлектронными средствами.
Радиоэлектронные средства непосредственной поддержки РЭБ — приводят дей-
ствия, направленные на поиск, перехват, определение местоположения, регистрацию
1.2. Цели и задачи РЭБ
15
и анализ излучаемой средствами противника электромагнитной энергии с целью
использования полученной информации для поддержки своих военных операций.
Эти средства создают источник информации, необходимой для функциониро-
вания систем РЭП, защиты РЭС от помех, обнаружение РЛС и предупреждения
экипажа самолета об облучении и сопровождения самолета РЛС, а также наведе-
нии на него управляемого радиоэлектронными средствами оружия.
Электромагнитная совместимость (ЭМС) — действия, направленные на обес-
печение способности своей радиоэлектронной аппаратуры систем связи и управле-
ния оружием функционировать в определенных условиях без заметного ухудшения
качества работы вследствие непреднамеренного электромагнитного излучения.
Между перечисленными подобластями существует взаимодействие и происхо-
дит непрерывное состязание в части совершенствования средств радиоэлектронной
борьбы.
Чтобы представить взаимодействие средств РЭП и помехозащиты, а также ос-
новные закономерности этого взаимодействия, необходимо прежде всего предпо-
ложить, что все развитые страны имеют примерно одинаковую научно-техническую
и технологическую базу и что всякий раз, когда в одной стране изобретается новый
принцип построения радиоэлектронной системы, то же самое и в то же время может
быть сделано в других странах. Поэтому, как только новый тип радиолокатора раз-
рабатывается и поступает на вооружение или для использования в мирных целях,
можно предположить, что немедленно будут предприняты попытки создать проти-
водействие радиолокаторам этого типа. Виды средств РЭП, которые могут быть при
этом использованы, определяются на основе сведений о противнике, включая его
тактику и стратегию, аппаратуру, рабочие диапазоны, технологию и т. д.
В соответствии с этим успешная разработка средств РЭП требует наличия данных
о РЭС вероятного противника. Эти данные получают с помощью радиоразведки, для
чего соответственно оборудованные наземные станции, корабли, самолеты и искусст-
венные спутники перехватывают сигналы РЭС, измеряют рабочую частоту и другие
параметры радиосигналов. Для получения информации также используется шпио-
наж, аварии военных самолетов, изменение политической обстановки при экспорте
военной техники, а в военное время — захват радиоэлектронных средств противника.
Целями радиоэлектронной борьбы являются:
• вскрытие (выявление) радиоэлектронной обстановки, т. е. радиоэлектронная
разведка;
• радиоэлектронное поражение систем и средств управления войсками и ору-
жием противника, а также его средств разведки и РЭБ;
• уничтожение и (или) внесение искажений в программное обеспечение инфор-
мационных систем и средств противника, его автоматизированных систем уп-
равления (АСУ);
• снижение эффективности применения противником средств радиоэлектрон-
ного поражения — радиоэлектронную защиту;
• обеспечение электромагнитной совместимости радиоэлектронных систем и
средств.
Таким образом, емкое синтетическое понятие РЭБ объединяет радиоэлектрон-
ную разведку (РЭР), радиоэлектронное поражение (РЭПр), радиоэлектронную за-
щиту (РЭЗ).
В свою очередь РЭР включает в себя радиотехническую (РТР), радиоразведку
(РР), радиолокационную (РЛР), радиотепловую (тепловизионную), инфракрасную
16
Глава 1. Основы радиоэлектронной борьбы
(ИКР), и оптико-электронную (ОЭР), акустическую и гидроакустическую развед-
ки. РТР осуществляет поиск, обнаружение и идентификацию, а также определе-
ние параметров сигналов РЭС противника. Радиоразведка, кроме того, перехваты-
вает сообщения, циркулирующие в системах и сетях передачи информации. Радио-
локационная разведка добывает сведения об объектах (целях) противника, используя
для этого средства радиолокации. Радиотепловая и инфракрасная разведки обна-
руживают цели по их собственному электромагнитному излучению в разных диа-
пазонах волн. Средства оптико-электронной разведки обнаруживают, распознают
и определяют координаты объектов, используя их собственное или отраженное
излучение диапазона оптических волн. Для акустической и гидроакустической раз-
ведок информативны сигналы, переносимые полями упругих деформаций в газо-
вых, твердых и жидких средах.
Радиоэлектронное поражение (РЭПр) предусматривает воздействие на радио-
электронные системы противника средствами радиоэлектронного противодействия
(РЭП), функционального поражения (ФП), предусматривающего изменение харак-
теристик и свойств РЭС вследствие воздействия на них мощных электромагнит-
ных и (или) акустических излучений; поражение высокоточным оружием, самона-
водящимся на источники электромагнитного излучения, а также модификацией
свойств среды распространения электромагнитных и акустических волн.
Радиоэлектронная защита (РЭЗ) — это совокупность мер по уменьшению нега-
тивного воздействия средств РЭПр противника на собственные радиоэлектронные
системы и средства, а также снижение информативности средств его РЭР. РЭЗ объ-
единяет защиту от помех, создаваемых средствами РЭП, защиту от средств функ-
ционального поражения и поражения самонаводящимся оружием. РЭЗ предусмат-
ривает также меры по обеспечению электромагнитной совместимости (ЭМС) соб-
ственных РЭС различной структуры и функционального назначения.
Структура проблемы РЭБ и взаимодействие ее перечисленных составных час-
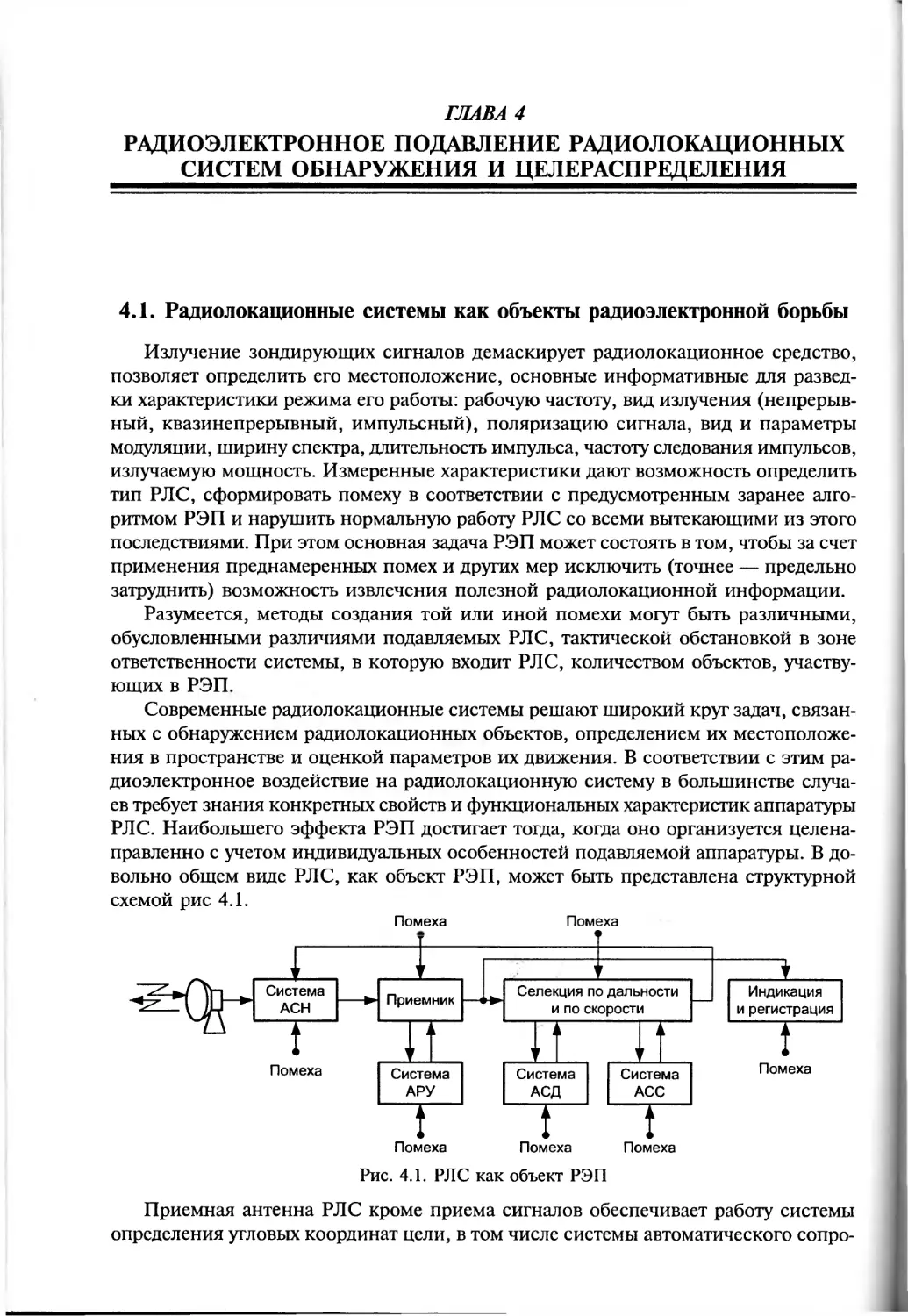
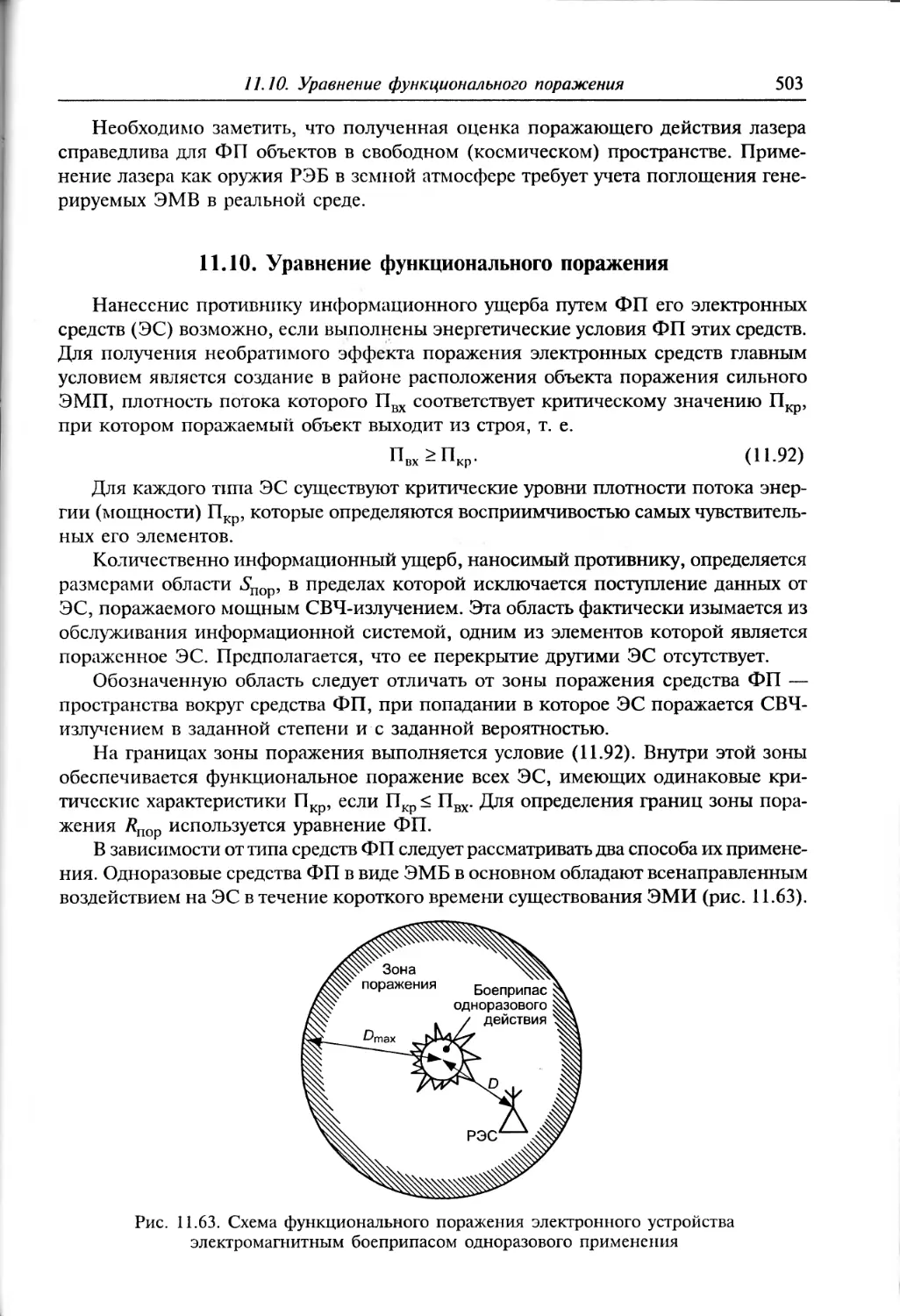
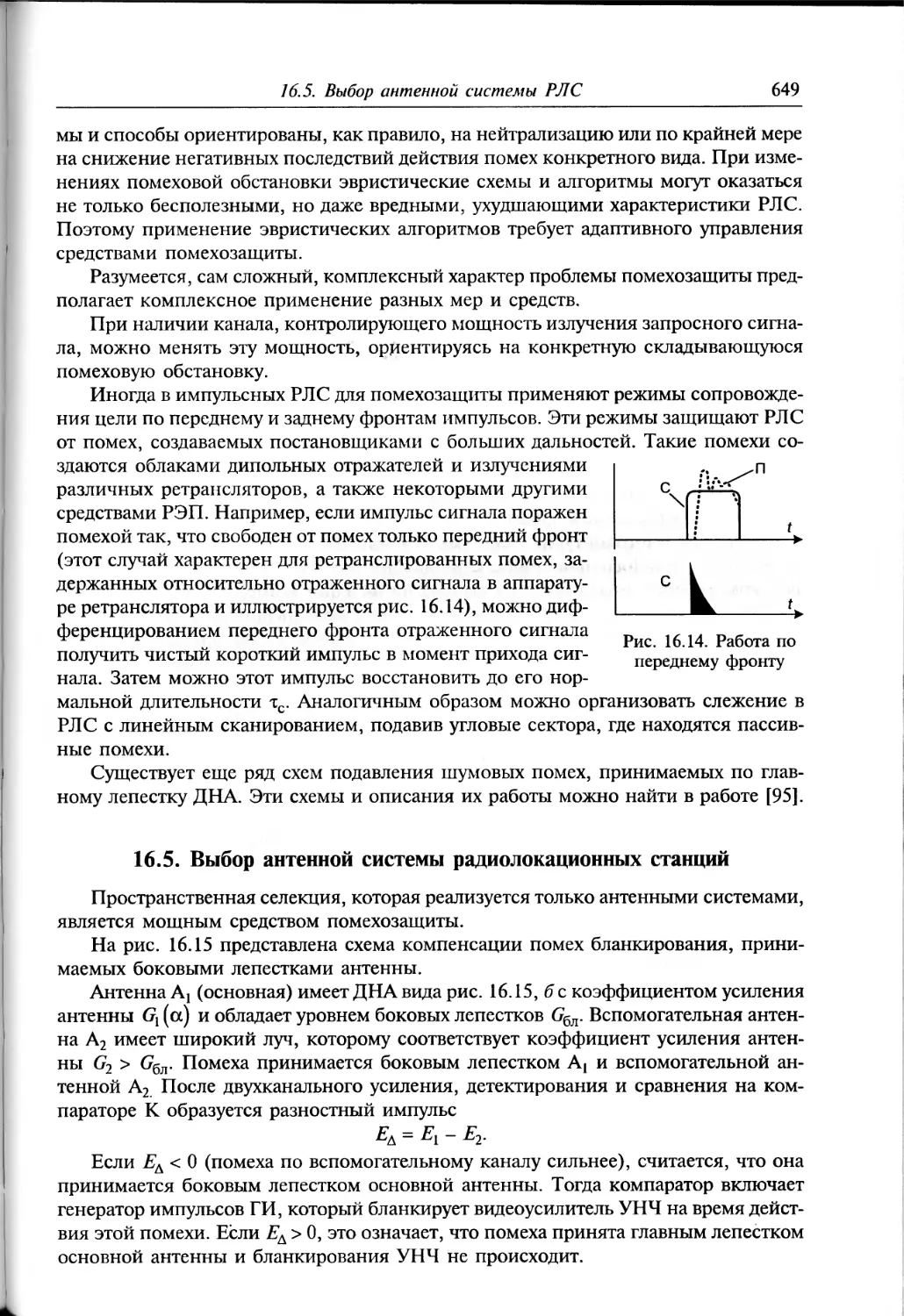
тей иллюстрируется на рис. 1.1.
Для разработки средств РЭП имеют значение многие характеристики, свойства
и параметры средств вооружения и военной техники, а именно:
• диапазон рабочих частот;
• тип сигнала — импульсный с малой или большой скважностью, непрерыв-
ный, непрерывный с частотной модуляцией (ЧМ) и т. д.;
• вид внутриимпульсной модуляции сигналов — линейная частотная (ЛЧМ),
фазокодовая (ФКМ) или иная;
• использование скачкообразной перестройки несущей частоты РЛС или рабо-
та на разнесенных частотах;
• эффективная излучаемая мощность передатчика РЛС;
• длительность импульса, модуляция длительности импульсов, использование
групп импульсов;
• период повторения радиоимпульсов, модуляция периода повторения;
• характеристики диаграмм направленности антенн в главном луче и в боко-
вых лепестках;
• модуляция сигнала из-за сканирования антенного луча;
• поляризационные характеристики антенной системы РЭС;
• способ сопровождения цели по угловым координатам;
• способность работать в пассивном режиме по импульсным и непрерывным
сигналам;
1.2. Цели и задачи РЭБ
17
Рис. 1.1. Структура проблемы РЭБ
• способ наведения ракет;
• характеристики неконтактных взрывателей;
• способы взаимодействия с другими системами оружия и их носителями;
• число, местоположение, максимальная дальность действия и другая инфор-
мация;
• имеющиеся сведения о назначении РЭС;
• используемые способы защиты от воздействия помех и их характеристики.
Среди возможных способов защиты РЭС от воздействия помех представляют
интерес для РЭП следующие сведения [15]:
• способы селекции движущихся целей (СДЦ);
• принцип и особенности работы системы автоматического регулирования уси-
ления (АРУ) приемника;
• способы накопления сигнала в приемнике;
• наличие схемы, состоящей из широкополосного усиления, ограничителя и
узкополосного усилителя (ШОУ);
• способ поддержания в приемнике постоянного уровня ложных тревог;
• применение корреляционных методов;
• алгоритм обработки сигнала в приемнике;
• наличие сторожевых стробов в каналах автосопровождения;
• обработка сигнала в фазированной антенной системе РЛС;
• способы подавления приема сигналов помех, воздействующих через боковые
лепестки;
18
Глава 1. Основы радиоэлектронной борьбы
• способы пассивного определения дальности;
• другие меры защиты РЛС от диполей, помех по дальности, скорости и угло-
вым координатам.
На определенном этапе РЭП может быть достаточно эффективным для подавле-
ния РЛС, но разработка средств защиты РЛС вновь восстанавливает баланс, отбрасы-
вая радиоэлектронное подавление назад, т. е. сводя к нулю его эффективность. В це-
лом данная ситуация имеет вид цепной реакции: радиолокационная аппаратура —
средства РЭП-РЛС со средствами защиты — модернизированные средства РЭП —
усовершенствованная радиолокационная аппаратура — усовершенствованные сред-
ства РЭП и т. д. до бесконечности. Поскольку все факторы равноценны, соперни-
чество может продолжаться долгие годы. Можно видеть, что средства РЛС и РЭП
развиваются параллельно и каждое их взаимодействие приводит к ответной реакции
другой стороны и появлению все новых и новых технических решений и средств. Для
того чтобы выстоять или одержать верх в таком соперничестве, необходимо знать сла-
бые места в системе радиоэлектронных средств противника, с тем, чтобы при необ-
ходимости оказать им эффективное противодействие. Сюда относится создание
помех РЛС противника, вывод из строя средств и линий связи, создание помех для
систем наведения его самолетов и ракет, а также ухудшение условий для оптического
наблюдения.
На основании накопленного опыта можно сделать вывод, что наиболее эффек-
тивный способ сохранения преимущества в области РЭБ заключается в комбиниро-
ванном применении всех существующих методов ведения РЭБ. Сочетание чрезвы-
чайно сложных технических средств и строго согласованных тактических способов
их применения может обеспечить успех только в случае комплексного применения
и полного использования всех имеющихся возможностей РЭБ. Это предполагает
наличие большого количества самой разнообразной по назначению аппаратуры
РЭП, а также средств доставки, чтобы они, включенные в виде составных частей в
системы оружия, могли найти оптимальное применение в любых условиях боевой
обстановки на суше, море, в воздухе и космосе.
Все способы ведения боевых действий с применением средств РЭП должны
учитывать то обстоятельство, что пренебрежение какой-то технической или тактиче-
ской возможностью может привести в ходе РЭБ к образованию уязвимого звена в
обороне. Поэтому при разработке и создании систем оружия и средств РЭП необ-
ходимо учитывать все технические возможности и то, что ни одна страна не оста-
новится перед необходимостью даже крупных затрат, чтобы удержать приоритет в
этой области. Важной отличительной чертой вновь создаваемых систем радиоэлект-
ронной борьбы должна быть их минимальная уязвимость к потенциальной угрозе,
создаваемой новыми и усовершенствованными радиоэлектронными средствами
противника.
Техника РЭП представляет собой очень обширную область, которая включает
разнообразные методы, технические решения и тактические приемы и находится в
постоянной эволюции. В связи с этим можно дать только первоначальную ориен-
тацию относительно методов, которые используются в РЭП. Если попытаться пред-
ставить в общем аспекте характеристику методов и техники РЭП, то можно обна-
ружить почти полное отсутствие общих решений для большинства проблем и, наобо-
рот, наибольшая эффективность достигается обычно при использовании аппаратуры
помех, в максимальной степени адаптированной к индивидуальным характеристи-
кам подавляемого РЭС.
1.3. Характеристика комплексов и средств РЭБ
19
При организации РЭП необходимо учитывать, что любая система управления
оружием выполняет все или, по крайней мере большинство, функций из следующего
набора:
• поиск и обнаружение нарушителя;
• опознавание государственной принадлежности («свой — чужой»);
• передача по линии связи информации об обстановке в зоне ответственности;
• обработка этой информации;
• выработка команд управления;
• передача команд управления по линии связи;
• наведение оружия и открытие огня по нарушителю.
В соответствии с этим усилия при организации РЭП должны быть направлены на:
1) ухудшение радиолокационной видимости цели с помощью радиопоглощаю-
щих материалов и других мер, снижающих эффективную поверхность рассеяния
(ЭПР) цели;
2) ухудшение условий радиолокационной видимости цели путем создания мас-
кирующих активных или пассивных помех;
3) дезинформацию системы опознавания относительно государственной при-
надлежности цели путем создания ей имитационных помех;
4) нарушение работы каналов передачи информации и команд управления пу-
тем создания им соответствующих преднамеренных помех.
1.3. Характеристика комплексов и средств радиоэлектронной борьбы
В зависимости от степени интеграции отдельных элементов аппаратуры РЭБ в
различные объединения и группы целесообразно выделить и определить несколько
категорий таких объединений и групп, как устройства, средства, подсистемы, комп-
лексы и системы РЭБ.
Устройство — это совокупность элементов (модулей), решающих простейшие
задачи. Примером устройства служат схема запоминания частоты сигнала в станциях
создания активных помех, антенна станции РТР и многие другие.
Средство РЭБ представляет собой совокупность отдельных устройств РЭБ.
Средство РЭБ предназначено для выполнения нескольких простых задач. Напри-
мер, средством РЭБ является станция формирования активных помех (САП). Сред-
ства РЭБ могут быть автономными и неавтономными. Первая группа средств пред-
назначена для решения самостоятельных задач (например, забрасываемые передат-
чики помех), тогда как вторая — для решения простых задач в составе комплексов
РЭБ (например, устройства выброса средств РЭБ).
Средства РЭБ, находящиеся на вооружении, в зависимости от решаемых задач
подразделяются на индивидуальные и групповые.
Индивидуальные средства РЭБ предназначены для зашиты самолетов, верто-
летов, кораблей и других объектов от обнаружения и поражения огневыми средст-
вами противника. Индивидуальные средства РЭБ нарушают работу (точнее — сни-
жают эффективность функционирования) РЭС управления оружием противника.
В состав индивидуальных средств РЭБ могут входить станции непосредственной
радиоэлектронной разведки (СНРЭР), радиотехнической разведки (РТР); аппара-
тура предупреждения о радиолокационном облучении, пуске ракет; станции и пе-
редатчики активных помех РЭС управления оружием (в том числе инфракрасные
и лазерные) устройства выброса средств РЭБ (противорадиолокационных, проти-
20
Глава 1. Основы радиоэлектронной борьбы
воинфракрасных снарядов, ловушек различного назначения); устройства управле-
ния заметностью ЛА; аппаратура управления, контроля и индикации.
Объектами воздействия индивидуальных средств РЭБ являются РЛС зенитно-
ракетных комплексов (ЗРК), зенитно-артиллерийских комплексов (ЗАК), бортовые
РЛС самолетов, вертолетов и кораблей; оптические, инфракрасные и лазерные при-
целы зенитных средств и бортового оружия, головки самонаведения управляемых
ракет, радиовзрыватели и оптические взрыватели средств поражения.
Групповые средства РЭБ предназначены для обеспечения прорыва (преодоле-
ния) обороны противника путем подавления помехами радиоэлектронных систем
и средств управления войсками и оружием , а также его технических средств разведки.
Групповые средства РЭБ устанавливаются на специальных самолетах, вертолетах
РЭБ, дистанционно пилотируемых ЛА, автоматических аэростатах, а также на зем-
ных объектах и кораблях.
В состав групповых средств РЭБ могут входить станция непосредственной радио-
технической разведки (СНРТР); аппаратура предупреждения об облучении и анализа
радиоэлектронной обстановки; станции и передатчики активных помех РЭС управле-
ния войсками и оружием; станции активных помех линиям радиоуправления и ра-
диосвязи; устройства выброса (выстреливания) расходуемых средств РЭБ; ложные
цели; устройства создания аэрозольных (дымовых) завес; забрасываемые станции и
передатчики помех; устройства управления заметностью ЛА, ракеты «воздух — РЛС»;
аппаратура управления, контроля и индикации.
Объектами групповых средств РЭБ являются РЛС обнаружения, определения
высоты, опознавания, наведения истребителей и целеуказания ЗРК и ЗАК; радио-
линии органов управления ПВО и наведения авиации; РЛС управления оружием
ПВО; головки самонаведения управляемых ракет; пассивные РЭС обнаружения и
сопровождения постановщиков активных помех; радиовзрыватели средств пораже-
ния; средства радиоэлектронной разведки и радиоэлектронной борьбы; радиоэлект-
ронные средства разведывательно-ударных комплексов (РУК).
Подсистема объединяет несколько видов взаимосвязанных устройств и средств.
Подсистемы предназначены для решения однородной задачи в составе комплекса
РЭБ. Примером подсистем РЭБ может служить система информационного обеспе-
чения БКО, принимающая и обрабатывающая информацию о радиоэлектронной
обстановке. В подсистему информационного обеспечения входят различные средст-
ва: станции непосредственной РТР, пеленгаторы, станции разведки в инфракрасном
диапазоне и другие средства.
Индивидуальные и групповые средства РЭБ объединяются в комплексы и си-
стемы РЭБ.
Комплекс РЭБ — это совокупность средств огневого и функционального пора-
жения, а также радиоэлектронного подавления РЭС, средств разведки, управления
и контроля, функционально связанных и совместно используемых для решения за-
дач РЭБ.
Системой РЭБ называется совокупность комплексов и средств РЭБ, расположен-
ных на нескольких объектах, объединенных единым управлением (единой автома-
тизированной системой управления — АСУ) для решения задач РЭБ. Так в систе-
му РЭБ могут входить как средства и комплексы РЭБ различных летательных ап-
паратов, так и наземные комплексы и средства РЭБ.
Назначение и состав комплекса РЭБ определяются боевыми задачами, способа-
ми боевых действий и боевыми возможностями системы вооружения, использующей
1.4. Основные функции комплексов РЭБ
21
комплекс РЭБ. Базовый принцип построения комплексов РЭБ означает, что стаци-
онарная часть (основа) комплекса, решает определенный минимум задач РЭБ. Комп-
лекс РЭБ может наращиваться за счет включения в его состав различных устройств
РЭБ (станций помех, отдельных модулей станций разведки, устройств выброса
средств РЭБ и других).
Наращивание комплекса РЭБ позволяет значительно расширить задачи, реша-
емые комплексом, и увеличить его эффективность. Однако следует иметь в виду,
что усиление боевых возможностей комплекса РЭБ может происходить только за
счет расхода ограниченного ресурса. Так, например, для авиационного комплекса
РЭБ усиление боевых возможностей происходит за счет уменьшения запаса топли-
ва и вооружения. Поэтому в каждом конкретном случае необходимо проводить
оптимизацию удельного веса комплекса РЭБ в общей системе вооружения.
Базовый принцип построения бортовых комплексов РЭБ значительно сокращает
объем работ по их модернизации, отвечает требованиям стандартизации и унифи-
кации авиационного радиоэлектронного оборудования, позволяет быстро реагиро-
вать на изменение вооружения и тактики противника.
Комплексы РЭБ ударных самолетов и самолетов-постановщиков помех отлича-
ются как по составу средств РЭБ, так и по решаемым задачам. Комплекс РЭБ удар-
ных самолетов включает, как правило, индивидуальные средства РЭБ на каждом
самолете. В некоторых случаях на ударных самолетах могут размещаться групповые
средства РЭБ, решающие задачи коллективно-групповой защиты (подавление РЭС
управления оружием и войсками).
Специальные вертолеты и самолеты-постановщики помех оснащаются комплек-
сами групповых и индивидуальных средств РЭБ. Групповые средства РЭБ этих
самолетов решают задачи коллективно-групповой защиты при борьбе с РЭС управ-
ления войсками и оружием противника. Индивидуальные средства РЭБ в основном
подавляют РЭС управления оружием. Однако они могут быть использованы и для
борьбы с РЭС управления войсками.
1.4. Основные функции комплексов радиоэлектронной борьбы
Современный комплекс РЭБ осуществляет сбор информации о радиоэлектрон-
ной обстановке, а также информации о состоянии собственных сил и средств РЭБ;
производит обработку этой информации и отображает ее на соответствующих инди-
каторах; принимает решение по выбору РЭС, подлежащих огневому поражению или
радиоэлектронному подавлению, и определяет целесообразные виды маневра и спо-
собы применения средств РЭБ; управляет средствами РЭБ; контролирует эффектив-
ность и работоспособность комплекса РЭБ.
В соответствии с выполняемыми задачами комплекс РЭБ имеет несколько функ-
ционально связанных систем (подсистем), см. рис. 1.2, а именно — систему инфор-
мационного обеспечения (СИО), представляющую собой совокупность средств
электронной разведки; систему управления (СУ), основу которой составляют БЦВМ;
систему исполнительных устройств (СИУ), состоящую из совокупности средств по-
ражения РЭС, средств РЭП и устройств управления заметностью; систему конт-
роля (СК), состоящую из устройств контроля работоспособности и боевой эффек-
тивности комплекса РЭБ.
Различают несколько способов интеграции различных устройств комплекса РЭБ.
Так в самолетах первого и второго поколений применялся принцип раздельного
22
Глава 1. Основы радиоэлектронной борьбы
Рис. 1.2. Структура комплекса РЭБ
(автономного) размещения и функционирования средств РЭБ. Каждое средство
решало свою ограниченную группу задач. Объединение средств РЭБ осуществля-
лось оператором РЭБ. Такой принцип интеграции породил сложную проблему сбора,
отображения информации и принятия решения.
Прогрессивным является построение единого комплекса РЭБ на основе цент-
рализованной, иерархической или гибридной интеграции различных устройств.
Централизованный принцип характеризуется наличием единой системы обра-
ботки информации и управления на базе ЦВМ.
Иерархический принцип заключается в построении ряда подчиненных друг другу
устройств, систем, комплексов так, что задачи устройств, систем, комплексов низше-
го ранга определяются задачами устройств, систем, комплексов более высокого ран-
га. В иерархической системе каждый из подчиненных комплексов управляется соб-
ственной системой управления в соответствии с поставленной задачей. Такой прин-
цип закладывается, когда невозможно организовать сбор информации и управление
из одного центра. Недостаток иерархической системы состоит в трудностях ее адап-
тации и в значительном времени прохождения команд.
В гибридных системах предусматривается как подчиненность комплексов и
взаимный обмен информацией снизу вверх и сверху вниз, так и возможность цен-
трализованного сбора информации и управления подчиненными звеньями. Гибрид-
ный принцип наиболее часто используется при построении современных и пер-
спективных комплексов и систем РЭБ (комплексы РЭБ самолетов третьего и чет-
вертого поколений).
Различные составные части комплексов и систем РЭБ (подсистемы СИО, СУ,
СИУ, СК; авиационные, вертолетные и другие комплексы РЭБ) могут размещаться
на разнотипных летательных аппаратах, на кораблях и на земле. При этом их объеди-
нение в комплекс или систему РЭБ происходит на этапе выполнения боевой зада-
чи. Примером такого объединения может служить расстановка самолетов-постанов-
щиков помех в едином боевом порядке с самолетами-носителями управляемого
оружия, предназначенного для уничтожения РЭС.
Показательна история технических решений, принимавшихся при создании
авиационных средств РЭБ. Средства РЭБ самолетов первых поколений не были
функционально связаны с другими бортовыми радиоэлектронными средствами. Для
самолетов третьего и последующих поколений характерным является наличие раз-
ветвленной функциональной связи комплекса РЭБ с другими бортовыми комп-
лексами и с радиоэлектронным комплексом (РЭК) в целом. В РЭК перспективных
летательных аппаратов специального комплекса РЭБ может и не быть. Различные
устройства РЭБ могут использоваться в интересах решения задач навигации, связи,
управления оружием и т. д. В свою очередь, ряд устройств и систем РЭК может при-
влекаться для решения задач РЭБ. Например, передающие устройства РЛС и система
ФАР могут применяться для целей РЭБ на этапе прорыва ПВО, а при нанесении
удара передатчики САП могут использоваться для решения задач управления ору-
жием или наращивания энергетического потенциала РЛС.
1.4. Основные функции комплексов РЭБ 23
Степень взаимосвязи бортовых и наземных систем и комплексов РЭБ опреде-
ляется боевой задачей и радиоэлектронной обстановкой в зоне боевых действий.
В некоторых случаях наземные и бортовые системы и комплексы РЭБ могут функ-
ционировать независимо друг от друга. Например, при действии самолетов дальней
авиации в глубоком тылу противника характерным является автономная работа бор-
товых комплексов РЭБ.
Структурная схема объединенной системы РЭБ представлена на рис. 1.3. Она
состоит из воздушной и наземной систем РЭБ, в состав которых входят бортовые
комплексы РЭБ (БК РЭБ); АСУ бортовыми комплексами (АСУ-Б) и пункт управ-
ления бортовыми комплексами (ПУ-Б); наземные комплексы РЭБ (НК РЭБ), АСУ
наземными комплексами РЭБ (АСУ-Н) и пункт управления наземными комплекса-
ми (ПУ-Н).
Рис. 1.3. Структурная схема большой объединенной системы РЭБ
Управление большой автоматизированной системой РЭБ осуществляется с на-
земного или воздушного пункта управления (ПУ-РЭБ) с помощью автоматизиро-
ванной системы управления бортовыми и наземными комплексами РЭБ (АСУ-РЭБ).
Автоматизированное управление силами и средствами РЭБ предусматривается
во всех звеньях: фронтовом, армейском, дивизионном, полковом, включая автома-
тизированное управление комплексами РЭБ авиационных эскадрилий, звеньев и
отдельных ЛА. В связи со сложностью решения задач РЭБ и большим влиянием
результатов РЭБ на ход и исход боевых действий управление силами и средствами
РЭБ является сугубо творческим процессом и осуществляется соответствующим
должностным лицом РЭБ под руководством авиационных командиров.
Данные о своих силах и средствах РЭБ, о радиоэлектронной обстановке обоб-
щаются на КП объединений, соединений и частей ВВС. Управление силами и сред-
ствами РЭБ производится с наземных или воздушных командных пунктов, где пре-
дусмотрено специальное рабочее место начальника РЭБ (пункт управления РЭБ)
с устройствами отображения информации, управления, ЭВМ и каналами связи.
24
Глава L Основы радиоэлектронной борьбы
Основное управление комплексами РЭБ в воздухе предусматривается с помощью
аппаратуры управления в типовых комплексах связи (ТКС) ведущих самолетов групп.
В процессе предварительной подготовки в память БЦВМ ведущих самолетов закла-
дываются исходные данные о ПВО противника, полученные в процессе ведения всех
видов разведки. В полете с помощью бортовой аппаратуры радиоэлектронной раз-
ведки и систем информационного обеспечения ведется непосредственная разведка
РЭС противника, производится анализ радиоэлектронной обстановки, определяются
типы РЭС и объекты РЭБ, выбираются способы и средства РЭБ из состава комплек-
сов групповых и индивидуальных средств РЭБ, вырабатываются команды управле-
ния исполнительными системами, оценивается эффективность ведения РЭБ.
В процессе выполнения разведки выявляются ранее неизвестные РЭС против-
ника. Одновременно с подавлением РЭС разведданные о них и состоянии комп-
лексов РЭБ передаются на наземные и воздушные КП, где они используются для
пополнения сведений о противнике, для принятия мер по РЭЗ своих РЭС, а также
для оценки эффективности проводимых мероприятий по РЭБ.
Жизненный цикл комплекса РЭБ, состоящий из этапов НИР, ОКР, испыта-
ний, производства и эксплуатации, определяется условиями быстро меняющейся
радиоэлектронной обстановки. Основное требование на стадиях НИР, ОКР и про-
изводства — выполнение ТТТ в заданные сроки с минимальными затратами. Цикл
эксплуатации должен иметь наибольшую продолжительность.
Нормативной базой для сокращения сроков разработки и выпуска большой
серии комплексов РЭБ при заданных материальных ресурсах и обеспечении взаимо-
заменяемости элементов и узлов комплексов различных видов и родов авиации
является стандартизация техники РЭБ. Здесь под стандартизацией понимается уста-
новление и упорядочение соответствующих современному уровню развития норм
и требований к характеристикам средств РЭБ и их составным частям с целью со-
кращения времени разработки и максимальной экономии материальных затрат при
обеспечении функционирования требований по боевой эффективности.
Разбиение средств РЭБ на функциональные узлы и блоки и выделение наиболее
общих функциональных связей между ними позволяют упорядочить технические
решения по построению комплексов РЭБ — унифицировать схему функциональ-
но-блочного построения и перейти на функционально-блочный принцип констру-
ирования средств на этапах ОКР. Применение функционально-блочного принци-
па конструирования позволяет увеличить серийность выпуска блоков (модулей) и
приводит к снижению стоимости комплексов на 20...30 % и сокращению сроков
разработки на 40...60 %. За основу комплексов РЭБ могут быть взяты базовые эле-
менты САП, средств управления и серийные ЕЦВМ. Базовые элементы разрабаты-
ваются для одного или нескольких видов Вооруженных сил.
1.5. Критерии эффективности комплексов радиоэлектронной борьбы
При разработке, эксплуатации и боевом применении средств и комплексов РЭБ
первостепенное значение придается выбору критериев их эффективности. Правиль-
ный выбор критерия эффективности определяет глубину и качество исследований,
проектирования и испытаний средств РЭБ. Особое значение имеет выбор соответст-
вующего критерия при планировании боевого применения средств РЭБ. В этом слу-
чае выбранный в качестве критерия тот или иной показатель эффективности средств
РЭБ в значительной степени может оказать влияние на выполнение боевой задачи.
1.5. Критерии эффективности комплексов РЭБ
25
По общепринятому определению критерий (от греч. kriteriori) представляет со-
бой средство суждения, мерило для оценки какого-либо явления или предмета.
Практикой установлено, что в качестве критерия эффективности средств и комп-
лексов РЭБ должен быть выбран такой показатель, который удовлетворяет следую-
щим основным требованиям [16—18]:
• показатель должен соответствовать цели исследования (проектирования, ис-
пытания, эксплуатации, боевого применения) и отражать основное назначе-
ние изучаемого комплекса или средства РЭБ;
• показатель должен быть функционально связан с характеристиками (парамет-
рами) комплекса или средства РЭБ и чувствителен к изменениям этих харак-
теристик;
• показатель должен быть наглядным и в максимальной степени простым.
Можно определить две группы критериев эффективности средств и комплек-
сов РЭБ.
Первая группа критериев, называемых ниже критериями боевой и технической
эффективности, определяет степень выполнения комплексом или средством РЭБ
стоящих перед ним задач в заданное время.
Вторая группа критериев, называемых экономическими критериями, характери-
зует затраты на создание и эксплуатацию комплекса РЭБ.
В качестве критериев боевой эффективности применяются оперативно-тактиче-
ские критерии [19]: вероятность прорыва ПВО, число атак истребителей, число сби-
тых самолетов (потери), вероятность поражения самолета, промах ракеты, среднее
число подавленных радиопомехами РЛС и др.
Оперативно-тактические критерии являются определяющими при разработке
концепции РЭБ на определенном этапе развития ВВС. С помощью оперативно-
тактических критериев формируются исходные положения для разработки новых
комплексов РЭБ, оцениваются мероприятия по организации РЭБ и боевым дей-
ствиям ВВС.
Критерии технической эффективности позволяют оценивать качество отдельных
технических решений, проводить сравнение различных средств РЭБ, определять ра-
циональные технические характеристики и оценивать степень совершенства эксплуа-
тационных характеристик комплексов РЭБ. Нашли применение различные техни-
ческие критерии: информационные, используемые для оценки качества помеховых
сигналов; энергетические, определяющие различные энергетические характеристики
средств РЭБ; эксплуатационные, используемые при эксплуатации средств РЭБ.
Такие экономические критерии как абсолютная или относительная стоимость
средств РЭБ, применяется при оценке деятельности предприятий промышленности.
Эти критерии позволяют оценить экономические показатели различной техники РЭБ
при ее эксплуатации и боевом применении. Они является одними из основных кри-
териев при принятии решения о разработке комплексов РЭБ.
На практике возникает необходимость оценить эффективность того или иного
комплекса РЭБ по некоторому обобщающему критерию, учитывающему как его
боевую (техническую) эффективность, так и стоимость. Такая потребность связана
с поиском оптимальной структуры комплекса РЭБ или способов его применения,
которые позволяют выполнять поставленные задачи при наименьших затратах на
разработку, эксплуатацию и боевое применение комплекса РЭБ.
Обобщающим критерием, учитывающим боевую (техническую) и экономиче-
скую эффективность комплекса РЭБ может служить отношение показателя боевой
26
Глава 1. Основы радиоэлектронной борьбы
(технической) эффективности Рб(Т) к затратам С на создание (эксплуатацию, при-
менение) комплекса [15]:
3 = -^-. (1.1)
с
Критерий (1.1) получил название «эффективность — стоимость». Возможно
применение и другой разновидности обобщающего критерия «эффективность —
стоимость», который представляет собой разность показателей Рб<Т) и С:
ЭР = /б(т)~С'- (1.2)
Однако критерий (1.2) не в полной мере отвечает третьему требованию, а именно,
он не является наглядным, а определение его не является простым вследствие необ-
ходимости выражения показателей и С в стоимостном виде (например, в руб-
лях). Показатель эффективности (1.1) удовлетворяет всем трем требованиям, предъ-
являемым к обобщающим критериям. Этим показателем удобно пользоваться при
сравнительной оценке однотипных средств и комплексов РЭБ. Сравнение эффек-
тивности однотипных средств РЭБ производится с помощью «критерия относи-
тельной эффективности — стоимости»:
Эотн—, U-3)
э2
где
э, =^-; э2 =^; (1.4)
Ч Ч
Рб1, Q, Рб2, С2 — показатели боевой эффективности и стоимости, относящиеся к
исследуемому первому или второму средству (комплексу) РЭБ или соответственно
к различным условиям эксплуатации (боевого применения) одного и того же средст-
ва (комплекса) РЭБ.
Если имеется большое число исследуемых средств РЭБ, то удобно оценивать их
эффективность путем сравнения с эффективностью некоторого эталонного средства:
Ээт=~, (1-5)
Чт
где Рбэт, СЭТ — соответственно боевая эффективность и стоимость эталонного сред-
ства РЭБ. За эталонное средство можно принимать какое-либо простейшее сред-
ство, эффективность которого может быть просто и достоверно определена. Одна-
ко показатель Ээт должен быть функционально связан с теми параметрами средства,
которые изучаются в рассматриваемой задаче.
При использовании эталонного показателя Ээт критерий относительной эффек-
тивности — стоимости для у-го исследуемого средства РЭБ записывается в виде
Э ^бо ^эт (1.6)
OTHJ хпг р
гб эт
При сравнении эффективности различных способов боевого применения оди-
наковых средств РЭБ часто можно полагать экономический показатель (стоимость)
всех используемых средств одинаковым. Поэтому относительная эффективность
оцениваемых способов РЭБ оценивается выражением
3 (1.7)
^ОТН Jp
*6 эт
1.5. Критерии эффективности комплексов РЭБ
27
Для проведения исследований по оценке эффективности средств (комплексов
РЭБ) на различных этапах жизненного цикла (разработка, изготовление опытного
или серийного образца, испытания, эксплуатация, боевое применение) необходи-
мо установить функциональные зависимости Рб и С от технических и оперативно-
тактических характеристик исследуемого средства.
Под техническими характеристиками понимается совокупность параметров ве-
личин а = (аь а2, •••» ап)» описывающих схемные, конструктивные, энергетические,
информационные и другие особенности средства. Вид и значения технических хара-
ктеристик зависят от состояния элементной базы, уровня профессиональной подго-
товки разработчиков и заказчиков. К техническим характеристикам комплекса РЭБ
можно отнести энергетический потенциал станции помех, силу излучения тепло-
вой ложной цели, чувствительность разведывательного приемника, рабочий диапа-
зон частот САП, массу, надежность и др.
Оперативно-тактические характеристики Р = (Pi, Р2»•••» Р/и) определяют способы
и условия боевого применения средств, комплексов и систем РЭБ. Примерами таких
характеристик являются: варианты комплекса РЭБ, число САП в комплексе или
системе РЭБ, пропускная способность комплекса, виды помеховых сигналов, пара-
метры боевых порядков самолетов и, возможно, некоторые другие.
Оперативно-тактические и технические характеристики взаимосвязаны. Так, про-
пускная способность комплекса зависит от таких технических характеристик, как
быстродействие ЭВМ, чувствительность разведывательных приемников, энергетиче-
ские возможности передатчиков и др.
Учитывая зависимость боевой эффективности и стоимости j-го средства (комп-
лекса, системы) РЭБ от технических и оперативно-тактических характеристик, мож-
но записать показатель «эффективность — стоимость» в виде
/ ^б(а,Р)
Э(а,р) = —..-7, (1.8)
k С(а,р)
где а = (а1?а2,...,аЛ)— вектор технических признаков средства РЭБ;
Р = (Р1,Р2,...,Р/Л) — вектор оперативно-тактических признаков средства РЭБ.
Определение зависимостей вида (1.8) дает возможность приступить к решению
различных задач, связанных с исследованием эффективности средств, комплексов
и систем РЭБ. Можно сформулировать несколько таких задач:
1) синтез средства, комплекса или системы РЭБ;
2) оптимизация отдельных характеристик средства РЭБ;
3) оценка эффективности применения комплексов РЭБ при решении конкрет-
ных боевых задач;
4) поиск и определение рациональных путей совершенствования комплексов
РЭБ;
5) определение новых способов боевого применения комплексов РЭБ.
Как следует из (1.8), для определения аналитической зависимости показателя
эффективности Э от параметров аир необходимо выявить аналогичные зависи-
мости для критериев боевой и технической эффективности Рб, а также стоимости
комплексов РЭБ.
Подробно содержание критериев обсуждается в заключительной гл. 18.
ГЛАВА 2
ОБЪЕКТЫ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
2.1. Общая характеристика объектов
радиоэлектронной борьбы
Объекты радиоэлектронной борьбы (ОРЭБ) — это различные системы управ-
ления (СУ) силами (войсками), оружием, техникой, отдельные радиоэлектронные
средства извлечения, передачи и обработки информации, входящие в состав сис-
тем управления, а также энергетические подсистемы, входящие в состав любых
информационных систем.
Системы управления силами как объекты радиоэлектронной борьбы в зависимо-
сти от важности решаемых задач подразделяют на системы стратегического, опера-
тивно-стратегического, оперативного, оперативно-тактического и тактического уров-
ней. К ОРЭБ стратегического назначения могут относиться системы государствен-
ного и военного управления, СУ вооруженными силами и их отдельными видами.
Объекты РЭБ оперативно-стратегического уровня — это СУ оперативно-стратегиче-
скими объединениями. На оперативном уровне объектами РЭБ выступают СУ кора-
бельными оперативными соединениями, военно-воздушными силами флотов и дру-
гие. Примерами ОРЭБ оперативно-тактического уровня являются СУ авианосными
ударными соединениями, оперативными эскадрами, военно-морскими базами. На
тактическом уровне к ним относятся СУ отдельными дивизиями, корабельными
тактическими соединениями, тактическими группами, надводными кораблями,
подводными лодками, самолетами.
Системы управления оружием (боевыми средствами) как ОРЭБ классифици-
руют на СУ ударным ракетным, зенитно-ракетным, артиллерийским, торпедным и
другим оружием, средствами РЭБ. Надводные корабли и наземные объекты осна-
щаются зенитно-ракетным оружием большой, средней и малой дальности с соот-
ветствующими СУ. Системы управления торпедным оружием, как правило, харак-
терны для подводных лодок и надводных кораблей.
К СУ специального назначения как ОРЭБ относят системы управления косми-
ческими, воздушными, наземными, корабельными средствами наблюдения, радио-
электронными средствами передачи, обработки радиолокационной, гидроакусти-
ческой, радиотехнической и другой информации. В качестве радиоэлектронных
средств добывания информации выступают активные и пассивные радио-, оптико-
электронные и гидроакустические комплексы, станции, устройства. Средства пере-
дачи информации как ОРЭБ — это средства радио-, оптической, гидроакустиче-
ской, кабельной и радиорелейной связи. К системам и средствам обработки ин-
формации как ОРЭБ относятся различные электронно-вычислительные системы и
устройства, вычислительные сети, вычислительные центры, боевые информационно-
управляющие системы, отдельные вычислительные машины, микроконтроллеры и
иные микропроцессорные устройства.
Пример обобщенной структуры системы управления как объекта РЭБ приве-
ден на рис. 2.1.
2.1. Общая характеристика объектов РЭБ
29
Рис. 2.1. Обобщенная структура системы управления как объекта РЭБ. Стрелками
обозначены потоки информации, циркулирующие в СУ, а также внешнее воздействие
Объекты и способы действий РЭБ во многом определяются конкретными ус-
ловиями радиоэлектронной обстановки и характером решаемых задач. Способы
действий РЭБ могут носить как наступательный, так и оборонительный характер.
Наступательные действия предусматривают, в первую очередь, применение средств
радиоэлектронного подавления и средств поражения, самонаводящихся на источ-
ники излучения. Оба этих наступательных способа действий применяются как для
подавления (поражения) РЭС управления войсками и оружием противника, так и
для защиты своих РЭС от технической разведки и средств создания преднамерен-
ных помех. В первом случае объектами действия преднамеренных помех являются
приемные устройства средств радиолокации, радиосвязи, радионавигации. Во вто-
ром случае — приемники радио- и радиотехнической разведки (РРТР), электрон-
но-вычислительные системы комплекса РЭБ.
К оборонительным действиям РЭБ относится защита соответствующего сред-
ства от помех и от технической разведки. Такая защита предусматривает увеличе-
ние эквивалентного удельного энергетического потенциала, изменение временных,
частотных, пространственных и иных характеристик, повышение скрытности (при-
менение маскировки и имитации) защищаемых РЭС.
Как правило, радикальная защита от преднамеренных помех достигается при
сочетании оборонительных действий с наступательными. Конкретно — уничтоже-
нием постановщиков помех или радиоэлектронным подавлением средств радиотех-
нической разведки и управления станциями активных помех. Таким образом, РЭБ
должна рассматриваться как системная совокупность средств и способов как РЭП,
так и РТР.
Сказанное можно иллюстрировать и другими соображениями. В оперативно-так-
тическом плане, по современным взглядам, РЭП представляется элементом содержа-
ния операций и боевых действий, тогда как оборонительные мероприятия РЭБ (защи-
та от помех и технической разведки) являются видом оперативного (боевого) обеспе-
чения. На тактическом уровне определение РЭП как элемента боя может быть
подтверждено примером ведения боевых действий подразделениями фронтовой авиа-
ции с зенитно-ракетными комплексами (ЗРК) ПВО. Прикрытие боевых порядков
30 Глава 2. Объекты радиоэлектронной борьбы
авиации средствами РЭП позволяет ей наносить удары по позициям ЗРК, не неся
значительных потерь. Авиационные средства РЭП в данном случае являются неотъем-
лемым элементом боя. Они непосредственно участвуют в нанесении материально-
го ущерба, предварительно нанося радиоэлектронным системам управления ЗРК
информационный ущерб. Мерой такого ущерба может, в частности, служить размер
участка, изъятого в динамике РЭБ из зоны (области пространства), в которой подав-
ляемое РЭС добывало информацию, работая в штатном режиме. Следовательно,
средства РЭП представляют собой оружие, а не средство обеспечения.
На оперативном уровне утверждение о средствах РЭП как об оружии подтвержда-
ется примером боевых действий в оборонительной операции по отражению ударов
противника, осуществляющего наступательную воздушно-наземную операцию. На
средства РЭП в данном случае может возлагаться решение задачи срыва массирован-
ного удара высокоточным оружием. Путем нанесения информационного ущерба
радиолокационным станциям с синтезированной антенной (РСА), станциям радио-
технической разведки разведывательно-ударных комплексов, средствам высокоточ-
ной радионавигации средства РЭП существенно снижают вероятности поражения
авиационной и ракетной группировок, средств ПВО и других объектов обороняю-
щейся стороны. Тем самым, значительно увеличивается среднее время их боевой
работы. В данном случае средства РЭП предотвращают материальный ущерб, кото-
рый мог бы нанести противник, и создают условия для ответного удара. Для этого
средства РЭП наносят информационный ущерб РЭС, работающим в контуре управ-
ления войсками и оружием противника.
2.2. Радиоэлектронные системы управления войсками
как объекты радиоэлектронной борьбы
Особенности систем управления войсками как объектов РЭБ иллюстрируются
схемой рис. 2.2. Система управления войсками включает органы управления, пун-
кты управления, систему связи, систему разведки, систему навигации и позицио-
нирования, автоматизированную систему подготовки и принятия управляющих
решений (АСУ) и другие специальные системы [1].
В качестве простейшей математической модели, отражающей в первом прибли-
жении наиболее существенные элементы функционирования АСУ войсками (си-
лами) ПВО, может быть принята многоканальная система массового обслуживания
с отказами [19]. Система рассматриваемого вида ориентирована на предписанный
ей вид обслуживания случайного потока заявок, поступающих с заданной интенсив-
ностью. Она включает в себя определенное число независимых каналов, каждый из
которых может осуществлять обслуживание только одной заявки, и систему управле-
ния, распределяющую поступающие заявки между свободными каналами. Послед-
нее достигается с помощью соответствующих средств информационного обеспече-
ния, позволяющих выявлять как новые заявки, так и свободные каналы. Предпо-
лагается, что любая заявка данного класса будет принята на обслуживание, если в
системе имеется хотя бы один свободный канал. В противном случае, имеет место
отказ, заявка уходит необслуженной.
Полный цикл обслуживания в системе ПВО реализуется в два этапа. На пер-
вом (управление войсками) решаются задачи обнаружения и распознавания воз-
душных целей и их распределения по свободным огневым канал акт. Второй этап
2.2. Радиоэлектронные системы управления войсками как объекты РЭБ
31
Рис. 2.2. Схема системы управления войсками как объекта РЭБ
обслуживания (индивидуальное наведение) обеспечивается системами управления
боевыми средствами (оружием).
В рассматриваемых условиях в зависимости от уровня противостоящих груп-
пировок (оперативного, тактического) элементы потока заявок и каналы системы
обслуживания определяются по-разному. В группировках оперативного уровня в
качестве исходной единицы потока заявок может быть полк (эскадрилья), а каналом
обслуживания — батарея (дивизион) ЗРК, центр управления и оповещения (ЦУО),
осуществляющий наведение истребителей ПВО. В группировках тактического уров-
ня (авиационная дивизия (полк), дивизион (батарея) ЗРК, ЦУО тактической авиа-
ции) входной поток образуют отдельные самолеты или другие летательные аппара-
ты, преодолевающие (прорывающие) систему ПВО. Каналами обслуживания яв-
ляются огневые секции ЗРК, каналы наведения истребителей, зенитные самоходные
установки (ЗСУ) и другие каналы управления боевыми средствами ПВО. Техни-
ческую основу систем информационного обеспечения группировок, как оператив-
ного так и тактического уровня ПВО, составляют РЛС обнаружения, наведения,
целераспределения (ОНЦ). Но и сами эти РЛС, в свою очередь, также могут рас-
сматриваться как объекты радиоэлектронного подавления группировкой станций
активных помех, представляемой своей математической моделью как многоканаль-
ная система массового обслуживания с отказами [19].
' Математическая модель многоканальной системы массового обслуживания
(СМО) с отказами и централизованным управлением, представляющая собой сис-
32
Глава 2. Объекты радиоэлектронной борьбы
тему дифференциальных уравнений для вероятностей состояний, может быть по-
строена при следующих допущениях. Случайный поток входных заявок пуассонов-
ский, время обслуживания заявки распределено по экспоненциальному закону, все п
каналов идентичны. Каждый из них может обслужить любую из поступающих зая-
вок. Система может находиться с определенной вероятностью в любом из п + 1 со-
стояний %0, Xh ..., Хп.
Случайные процессы в системе с дискретными состояниями удобно иллюстриро-
вать с помощью ориентированных графов. Графы — это множества вершин и ребер.
Каждая вершина соответствует определенному состоянию системы, каждое из ребер
со стрелкой определяет направление возможного перехода в смежное состояние.
Ориентированный граф, приведенный на рис. 2.3, отображает динамику изменения
состояний в л-канальной системе массового обслуживания с отказами, на вход ко-
торой поступает поток заявок. Поток имеет интенсивность X. Каждый из каналов
обслуживает поступающие заявки с интенсивностью ц. Когда функционируют все
п каналов, система обслуживает в единицу времени иц заявок. Если заявки отсут-
ствуют, система находится в состоянии Уо. Время пребывания заявки в системе
обслуживания предполагается много большим, чем среднее время обслуживания.
Рис. 2.3. Граф изменения состояний в л-канальной
системе массового обслуживания
Реальные случайные процессы могут быть отнесены к пуассоновским, если
удовлетворяются два условия: ординарности и независимости (отсутствие послед-
ствий). Если выполнено еще третье условие — стационарности, то поток называет-
ся простейшим. Опираясь только на эти три условия, можно получить аналитичес-
кое выражение для одномерного пуассоновского распределения, не пользуясь асим-
птотическим переходом от биномиального распределения, как это обычно делается
в учебниках по теории вероятностей. Условие ординарности позволяет утверждать,
что в течение достаточно малого интервала времени Д/ вероятность поступления
только одной заявки с точностью до бесконечно малых более высокого порядка равна
АД/. Вследствие условия независимости (отсутствие последствия), вероятность прихо-
да заявки в течение некоторого интервала времени не зависит от того, сколько раз
и как приходили заявки в предшествующие моменты времени. Предполагая, что
все три условия выполнены, определим вероятность Рл(/ + Д/) прихода ровно п
заявок в течение времени (/ + Д/). Наступление такого события может иметь место
вследствие двух несовместных событий, а именно: за интервал времени t поступи-
ло ровно п заявок, а за &t не поступило ни одной; за время t поступила п - 1 заявка,
а за Д/ еще одна. Вероятность наступления первого события Рп (/)(!- АД/), вероят-
ность второго события Р(/)АД/, следовательно
Р„ (1 + А/) = Р„ (/)(! + Щ + Рй_, (/)АА/. (2.1)
После очевидных преобразований и перехода к пределу при Д/ —> О можно по-
лучить исходное для решения поставленной задачи дифференциальное уравнение
-^ = _ХРп^ + ХРп_^. (2.2)
2.2. Радиоэлектронные системы управления войсками как объекты РЭБ
33
В случае п = 0 уравнение (2.2) преобразуется к виду
JP0 (')
——=-ХР0(/). (2.3)
Решение уравнения (2.3) при начальном условии t= О, Ро(/) = 1 имеет вид
/>о(0 = е’Х'- (2-4)
Формула (2.4) определяет вероятность непоступления за время / ни одной заявки
при средней плотности потока X. Используя решение (2.4), уравнение (2.3) и последо-
вательно увеличивая п, получим искомую формулу пуассоновского распределения:
Р(А = ^-е-ь. (2.5)
п\
Для последующего анализа необходимо определить среднее время между
смежными заявками в простейшем потоке со средней интенсивностью X. В соот-
ветствии с определением математического ожидания случайной величины
=]//>(/) Л, (2.6)
о
где р(/) — плотность вероятности рассматриваемых временных интервалов; плот-
ность вероятности р(/), в свою очередь, может быть определена с помощью функции
распределения £(/) указанных временных интервалов. По определению
F(/) = P(T</), (2.7)
где Р(Т </) — вероятность того, что интервал между смежными заявками будет
меньше t. Эта вероятность вместе с вероятностью противоположного события, т. е.
непоступления за время t ни одной заявки, образует полную группу событий, т. е.
Р(Т</) + Р(Т>/) = 1. (2.8)
Вероятность Р(Т</) для простейшего потока определяется формулой (2.4), сле-
довательно
Р(т</) = 1-/’0(/) = 1-е’Хт. (2.9)
Искомая плотность вероятности /?(/) будет равна
= = (210)
т. е. случайные интервалы между смежными заявками в простейшем потоке рас-
пределены по экспоненциальному закону. В соответствии с (2.6) и (2.10)
ik=p (211)
Л
Поскольку время обслуживания в каналах также подчиняется экспоненциаль-
ному закону, время обслуживания и средняя плотность потока обслуженных за-
явок р связаны соотношением, аналогичным (2.11):
1=-. (2.12)
И
Для вывода дифференциальных уравнений вероятностей состояний системы
массового обслуживания, представленной на рис. 2.3, ограничимся вначале случаем
34
Глава 2. Объекты радиоэлектронной борьбы
одноканальной системы (л = 1), в которой могут быть только два состояния XQ и
Х{, соответственно с вероятностями Ро и Р}:
PQ+P{=1. (2.13)
Pq (г + Аг) — это вероятность того, что в момент времени (г + Аг) одноканальная си-
стема массового обслуживания с отказами будет находиться в состоянии JV0. В рас-
сматриваемых условиях это может иметь место вследствие наступления двух несов-
местных событий: в момент времени t система была свободна и за время А/ не
поступило ни одной заявки; в момент времени t + АГ система была занята обслужи-
ванием (находилась в состоянии Xt), и за время АГ канал освободился. В соответ-
ствии со сказанным
Ро (/ + Д/) = Ро (/)(1 - АД/) + Р, (1)цА/. (2.14)
После алгебраических преобразований и перехода к пределу при АГ 0 можно
получить дифференциальное уравнение для вероятности Р0(г):
^ = -ХР„(() + мШ (215)
at
Аналогичным образом можно получить дифференциальное уравнение для Р} (г):
Р{ (г + А/) = Рх (г)(1 - рАг) + Ро (г)ХАГ. (2.16)
В результате предельного перехода
+ХОД. (2.17)
at
Уравнения (2.15) и (2.17) иллюстрируют известное мнемоническое правило
составления дифференциальных уравнений для вероятностей состояний и-каналь-
ной системы [34]. В соответствии с этим правилом производная по времени от ве-
роятности данного состояния равна алгебраической сумме вероятностей, число
членов которой равно числу ребер, входящих и выходящих из рассматриваемой
вершины графа. Члены, соответствующие выходящим ребрам, имеют отрицатель-
ный знаки, равны произведению вероятностей состояний на интенсивности пото-
ков, переводящих систему в смежные состояния. Входящим ребрам соответствуют
положительные слагаемые, представляющие собой произведения вероятностей
смежных состояний на интенсивности потоков, обусловливающих переход в дан-
ное состояние. Число входных и выходных ребер одинаково. Опираясь на мнемо-
ническое правило и исходный ориентированный граф, запишем искомую систему
дифференциальных уравнений для вероятностей состояний и-канальной системы
массового обслуживания с отказами (рис. 2.3):
^1 = -ХР0(/) + ИР1(/);
^7^ = -(X+/g) Р{ (/) + (/) + (/ + 1)ц^+1 (/); (2.18)
^Л(г) , . ..
Система уравнений (2.18) решается при начальных условиях
Ро(О) = 1; (0) = 0;(/= о7л). (2.19)
2.2. Радиоэлектронные системы управления войсками как объекты РЭБ
35
Кроме того, должны удовлетворяться условия нормировки
Х^(/) = 1. (2.20)
/=0
В данном случае рассматривается математическая модель массового обслужи-
вания, отражающая в первом приближении функционирование автоматизированной
системы распределения целей между огневыми каналами. Под X понимается средняя
интенсивность потока самолетов (вертолетов, крылатых ракет), входящих в зону
ответственности. Параметр р определяет среднюю плотность потока обстрелянных
самолетов в том случае, когда централизованное управление огневыми средствами
не нарушено. Боевые возможности АСУ определяются ее пропускной способностью,
вероятностью обслуживания каждой из заявок входного потока, средним числом
каналов, осуществляющим обслуживание. Определим эти показатели для АСУ, ра-
ботающей в установившемся режиме. В этом случае производные от вероятностей
состояний обращаются в нуль и система уравнений преобразуется к виду
О = ХРо+цР1;
0 = -(Х+ц)Р1 +2цР2;
............................................... (2.21)
0 = -ицР„+ХР„_1.
С помощью системы алгебраических уравнений (2.21) можно выразить вероят-
ности состояний Pt через Ро:
2
э — р • р — р •
1 ц °’^2’ 2! °’
> _ «3 р. р _ «'р.
з -’7Г/0’ -ч “ТЛ),
(2.22)
где
X
а = —
Н
Вероятность Ро можно определить, используя условие нормировки (2.20):
п ,4 1
(2.23)
/=0
0 п I
Syr
|=о '•
(2.24)
Следовательно,
az
> = i\
/=0 '
i = 0: п.
(2.25)
Обслуживание самолета состоится, если во время его полета в зоне ответственно-
сти АСУ хотя бы один из огневых каналов будет свободен. Вероятность обслужива-
ния Робс соответственно будет равна
г> = 1 - р
1 обе 1 J п ’
(2.26)
36
Глава 2. Объекты радиоэлектронной борьбы
где
п
(2.27)
а"
TL
Ет
/=0 ь
В соответствии с (2.26) при централизованном управлении
St
п — /=1
'обе п i •
St
/=0
Вероятность обслуживания Робс можно также определить и непосредственно,
как отношение плотности потока обслуженных заявок Хо к плотности входного
1 п
потока —. В свою очередь
(2.28)
(2.29)
где К — среднее число каналов, занятых обслуживанием. Знание К необходимо
при оценке эффективности системы массового обслуживания по оперативно-так-
тическим показателям:
п
(2.30)
1=0
По определению, а также с учетом (2.29)
(2.31)
(2.32)
гобс л л
л л а
/Г — осРОбС.
Чтобы увязать функционирование АСУ с рассмотренными ранее моделями РЭС,
являющимися непосредственными объектами РЭБ, необходимо уточнить, в чем
состоит обслуживание на данном этапе функционирования системы ПВО.
Как уже отмечалось ранее, на рассматриваемом этапе управления войсками (си-
лами) решаются задачи обнаружения (разведки) целей, целераспределения между ог-
невыми каналами, слежения за траекториями взятых на сопровождение целей. В си-
стемах управления истребительной авиацией этот этап назывался дальним наведе-
нием. Качество (достоверность) обслуживания в полном объеме на данном этапе не
оценивается. Радиоэлектронное подавление РЛС обнаружения, наведения и целерас-
пределения (целеуказания) (ОНЦ), входящих в АСУ, приводит лишь к различной
степени нарушения централизованного управления.
В качестве варианта функционирования СМО при нарушенном централизован-
ном управлении можно рассмотреть случай, когда АСУ практически нет и каждый
огневой канал осуществляет наведение средств поражения на воздушные цели только
в пределах своей достаточно ограниченной по размерам зоны ответственности, а
заявки на обслуживание (воздушные цели) распределяются между огневыми кана-
лами равновероятно вне зависимости от того, занят ли данный канал обслуживанием
(наведением средств поражения) или нет [35]. Соответствующий ориентированный
граф представлен на рис. 2.4. Если / каналов из п заняты обслуживанием, то при
общей средней плотности входного потока целей X средняя плотность потока целей,
2.2. Радиоэлектронные системы управления войсками как объекты РЭБ
31
Рис. 2.4. Граф установившегося процесса обслуживания
при нарушенном управлении
поступающих на оставшиеся свободными п - i каналов, будет равна . Цели,
п
попадающие в зону ответственности занятых каналов, оказываются необслуженны-
ми. Предполагая процесс обслуживания установившимся, в соответствии с графом,
представленным на рис. 2.4, и изложенным ранее правилом, запишем сразу систе-
му алгебраических уравнений для вероятностей состояний />.,/ = 0:л:
О = -ХРо+цР1;
О = -ХРо
(2.33)
О— Рп-1
п
Начальные условия: Ро (0) = 1; Pj (0) = 0, i = 1: п.
С помощью системы уравнений (2.33) можно вероятности состояний (о) =
= 0, i = 1: п выразить через Ро [35]:
или
где Сп
(2.35)
nl п
————, а Ро определяется из условия нормировки =1, поэтому
i \[n-i)\ i=Q
п п
= Р0 = Р0 (1+%)" = 1. (2.36)
/=0 /=0
X _ а
иц п
(2.37)
(2.38)
Среднее число занятых обслуживанием каналов в данном случае будет равно
п п /=0 /-0 (2.39)
С учетом (2.37) _ Д „ к=—-—-УУх'сй, (1+х)"ЭхЙх (2.40)
38
Глава 2. Объекты радиоэлектронной борьбы
откуда, после преобразований:
К=-^. (2.41)
1 + Х
Вероятность обслуживания заявки Р^5с по аналогии с (2.31) будет равна
Р' _ 1 (2.42)
обс X X 1+х 1+V
На рис. 2.5 показаны зависимости вероятностей обслуживания Робс и Р°бс от
числа огневых каналов п и величины а — отношения средних плотностей потоков
входных (X) и обслуженных заявок (воздушных целей) (ц). Расчеты проводились
по формулам (2.38) и (2.42). Наибольшее снижение вероятности обслуживания
вследствие децентрализации управления имеет место для средних значений парамет-
X
ра а = —, а= 8,20 и числа каналов п = 6,..., 24. В зависимости от конкретных
Ц
условий это снижение составляет примерно 15...40 %. В обоих случаях обслуживание
предполагалось достоверным.
Рис. 2.5. Зависимость вероятности обслуживания Робс от числа огневых каналов
Рассматриваемая система ПВО осуществляет обслуживание в условиях конф-
ликта. Вследствие ответных действий авиации оно не является достоверным. Гово-
рить об успешном обслуживании, завершающимся поражением цели, можно лишь
с определенной вероятностью. Представляется целесообразным это обстоятельство
количественно учесть, введя среднюю плотность потока успешно обслуженных са-
молетов р, под которой следует понимать среднюю плотность потока обслужива-
емых самолетов без учета ответных действий ц, умноженную на вероятность успеш-
ного обслуживания /уо:
Й = НЛ-о- (2.43)
В данном случае просматривается аналогия с известным понятием средней
плотности потока успешных выстрелов Л, под которой понимается произведение
средней плотности потока выстрелов X на среднюю вероятность поражения цели
в каждом выстреле Рпор [34]:
Л = ХРпор. (2.44)
Вероятность успешного обслуживания Руо во многом зависит от количествен-
ных и качественных показателей эффективности мероприятий по РЭБ, осуществ-
ляемых авиацией. В частности, в условиях преднамеренных помех РЭС автомата-
2.3. Системы управления оружием как объекты РЭБ
39
зированной системе управления войсками ПВО может иметь место децентрализа-
ция управления, один из вариантов которого был рассмотрен выше (срыв автома-
тического сопровождения целей в системе целераспределения). Преднамеренные
помехи, воздействуя на РЭС управления оружием, могут привести, как и в рассмот-
ренном случае (АСУ), к срыву слежения или к значительному увеличению диспер-
сий ошибок в определении координат целей следящими измерителями. Все это в
конечном счете определяет вероятность успешного обслуживания Руо. Приведен-
ные соображения показывают, что в процессе РЭБ вероятности обслуживания АСУ
управления войсками ПВО Робс и Р^бс должны определяться с учетом Руо, т. е.
средней плотностью потока успешных обслуживаний ц. Последнее требует оце-
нок качества функционирования РЭС непосредственного управления боевыми сред-
ствами (оружием) ПВО.
Аналогичные проблемы имеют место и при рассмотрении моделей многоканаль-
ной СМО, отражающих динамику радиоэлектронного подавления РЛС типа ОНЦ
группировкой станций активных помех.
2.3. Системы управления оружием как объекты
радиоэлектронной борьбы
Для управления ударным ракетным, авиационным, противолодочным, ракетным,
зенитно-ракетным, артиллерийским, торпедным и другим оружием применяются
системы, существенно отличающиеся друг от друга. Для всех этих систем как объек-
тов РЭБ характерны свои особенности. Но есть и общие черты.
Динамика функционирования автоматизированных систем управления боевыми
средствами (оружием) ПВО, в принципе, может быть описана канонической сис-
темой дифференциальных стохастических уравнений состояния и наблюдения. Далее
рассматриваются отдельные частные вопросы, связанные прежде всего с радиоуправ-
ляемыми средствами поражения, применяемыми в системах ПВО. Поэтому основ-
ные модели систем управления как объектов РЭБ рассматриваются в виде обобщен-
ных структурных схем систем управления ракетами; законов наведения ракет; при-
ближенных методов оценки качества линеаризованных систем управления ракетами
и их боевой эффективности. На такой основе удается в первом приближении оце-
нивать возможности систем управления как объектов РЭБ при воздействии поме-
ховых сигналов ограниченной интенсивности и определять пороговые значения
параметров преднамеренных помех.
На рис. 2.6, 2.7 и 2.8 в качестве примеров приведены обобщенные структурные
схемы систем самонаведения и командного наведения ракет [19].
Системы самонаведения ракет являются автоматическими. Параметры относи-
тельного движения ракеты и цели измеряются радиолокационными или оптико-
электронными средствами, размещенными непосредственно на ракете. Бортовые
измерительные системы ракет называются головками самонаведения (ГСН). В за-
висимости от принципа построения и диапазона излучений различают радиолока-
ционные (РГС), телевизионные (ТВГС), тепловые или инфракрасные (ТГС или
ИКГС) и лазерные (ЛГС) ГСН. С выхода ГСН сигналы подаются в систему управле-
ния ракеты (СУР), которая включает в себя датчики информации о параметрах соб-
ственного движения ракеты, а также вычислительное и управляющее устройства,
которые используются для формирования сигналов траекторного управления ра-
кетой и обеспечения ее стабилизации.
40
Глава 2. Объекты радиоэлектронной борьбы
Рис. 2.6. Структурная схема системы командного радиоуправления
истребителем-перехватчиком
Рис. 2.7. Структурная схема системы командного радиоуправления первого вида
Рис. 2.8. Структурная схема системы командного радиоуправления второго вида
Системы командного управления ракетами могут быть двух видов. В системах
первого вида (рис. 2.7) следящие измерители параметров относительного движе-
ния цели и ракеты размещаются на пункте управления (неподвижном или подвиж-
ном). Устройство формирования сигналов траекторного управления оценивает
параметры движения ракеты и цели относительно пункта управления и вырабаты-
вает параметры рассогласования для всех каналов управления. Устройство формиро-
вания команд осуществляет преобразование входных сигналов в требуемые команды
управления. С помощью командной радиолинии (КРЛ) они передаются в систему
управления ракетой (СУР). Последняя выполняет те же функции, что и в системах
самонаведения. Возможен вариант, когда на пункте управления могут формиро-
2.3. Системы управления оружием как объекты РЭБ
41
ваться заданные значения параметров движения ракеты, которые на ее борту, в СУР,
сравниваются с фактическими параметрами движения, в результате определяется
сигнал рассогласования. При неавтоматическом управлении информационная под-
система содержит дополнительный индикатор (например, телевизионный, тепло-
визионный), позволяющий оператору с помощью датчика команд осуществлять
коррекцию траектории ракеты.
Структурная схема системы командного радиоуправления второго вида приведе-
на на рис. 2.8. Ее отличительная особенность состоит в том, что первичные источни-
ки информации о параметрах относительного движения цели находятся на ракете,
а их выходные сигналы передаются на пункт управления, где они используются
оператором для выработки команд управления.
В современных зенитно-ракетных комплексах на разных участках траектории
полета применяются системы командного наведения обоих видов. Как правило, на
среднем участке применяется система первого вида, а на конечном участке — вто-
рого (наведение через ракету).
В общем случае пространственное движение ракет характеризуется достаточно
сложной системой нелинейных дифференциальных уравнений с переменными ко-
эффициентами. Исследования в полном объеме на их основе практически возможны
только с помощью современных ЭВМ. Задача существенно упрощается, если про-
странственное движение ракеты представлять как сумму двух независимых плоских
движений — продольного и бокового. Основанием для такого представления явля-
ется практически реализуемые системы, в которых управление движением ракеты
осуществляется независимо по курсу и тангажу (высоте). Соответственно рассмат-
риваются раздельно два независимых канала управления продольным и боковым
движением ракеты [36].
Ракеты, применяемые в системе ПВО, являются, как правило, осесимметричны-
ми (обладают осевой аэродинамической симметрией). Поэтому для таких ракет урав-
нения продольного и бокового движения совпадают по форме. Последнее обстоя-
тельство позволяет ограничиваться рассмотрением движения только в одной плоско-
сти с последующим пересчетом полученных результатов на ортогональную плоскость.
Для траекторного управления самонаводящимися ракетами ПВО («земля —
воздух» и «воздух — земля») по курсу и тангажу применяется метод пропорциональ-
ного наведения. Командное наведение первого вида (рис. 2.7) осуществляется ча-
сто по методу совмещения, называемого также методом трех точек. В системах
командного управления второго вида (рис. 2.8) реализуется тот же закон пропор-
ционального наведения, что и в случае самонаведения. Метод пропорционального
наведения может быть реализован и в трехточечном варианте [36].
В системах управления ракетой по методу пропорционального наведения, на-
зываемому также методом пропорциональной навигации, нормальная составляющая
ускорения ун наводимой ракеты пропорциональна угловой скорости линии визиро-
вания цели со. Соответственно, уравнение рассогласования Д, определяющее алго-
ритм траекторного управления ракетой, записывается в следующих двух эквивален-
тных друг другу вариантах:
Д = ^со-ун, (2.45)
Д = JVoKc6co-JH, (2.46)
где N и /V() — коэффициенты пропорциональности; Исб — скорость сближения ра-
кеты с целью (самолетом).
42
Глава 2. Объекты радиоэлектронной борьбы
На рис. 2.9 показана кинематическая схема относительного движения самона-
водящейся ракеты Р при наведении на цель (самолет) С в одной плоскости. Нача-
ло системы координат совмещено с центром масс самолета — точкой С. Коорди-
наты ракеты и цели зафиксированы в некоторый момент времени /, которому со-
ответствуют векторы скорости сближения Vc6, векторы скоростей цели и ракеты
Vc и Vp, расстояние между ними Z), углы е и у, отсчитываемые от некоторого фик-
сированного (гиростабилизированного) направления АА и определяющие ориента-
цию линии визирования цели PC и вектора скорости Vp, 0 — курсовой угол раке-
ты. Вектор относительной скорости ракеты V0TH, в системе координат с началом в
точке Р будет равен разности векторов скоростей ракеты Vp u Vc.
Рис. 2.9. Кинематическая схема движения ракеты
при самонаведении в одной плоскости
В качестве показателя эффективности системы наведения ракет (и других средств
поражения воздушных целей) используют минимальную ошибку наведения Л, име-
ющую место в данный момент времени и называемую обычно промахом (мгновен-
ным промахом). Промах определяется в картинной плоскости, т. е. в плоскости,
перпендикулярной линии визирования цели. Под промахом ракеты понимается
минимальное расстояние Л(/), на котором ракета пролетит от цели, если, начиная с
данного момента времени /, ракета и цель будут двигаться равномерно и прямоли-
нейно. В картинной плоскости рассматриваются две ортогональные проекции векто-
ра промаха hx и hy на оси координат Сх и Су (по курсу и тангажу) с началом коорди-
нат в точке С:
h2 =h2+h2. {2 Al)
Значение промаха Л(/) для фиксированного момента времени / в соответствии
с рис. 2.9 будет равно
Действительно,
/? = Z)sinof., (2.49)
РР
sina = —(2.50)
V
г отн
2.3. Системы управления оружием как объекты РЭБ
43
Вектор РРХ представляет собой трансверсальную (поперечную) составляющую
относительной скорости Иотн. По определению
Ип=Ао = ПЁ, (2.51)
где Ё = со — угловая скорость линии визирования цели.
Из (2.49), (2.50) и (2.51) непосредственно следует (2.48).
Уравнения (2.45) и (2.48) показывают, что качество функционирования угло-
мерного канала ГСП во многом определяет боевые возможности ракеты как огне-
вого средства ПВО. Это позволяет рассматривать угломерный канал ГСН как ос-
новной и непосредственный объект РЭП, осуществляемого с помощью соответству-
ющих помеховых сигналов. Следует иметь ввиду, что в тех случаях, когда реализуется
оптимальный алгоритм траекторного управления ракетами, то наряду с измерени-
ями углов (угловых скоростей) цели требуется знание дальности D до цели, а также
скорости сближения с целью Ксб [36].
Радиоэлектронное подавление каналов автоматического сопровождения по даль-
ности и скорости (АСД и АСС) представляет значительно меньшие трудности, чем
подавление угломерного канала. При подавлении каналов АСД и АСС процесс
самонаведения ракеты может иметь место, если функционирует канал автомати-
ческого сопровождения по направлению (АСН). Это обстоятельство еще раз под-
тверждает высказанный ранее тезис о первоочередной необходимости подавления
угломерных каналов в современных системах управления ракетами ПВО.
Достаточно полные количественные оценки эффективности преднамеренных
помех могут быть получены при рассмотрении их воздействия на замкнутые сле-
дящие системы управления ракетой, учитывающие ее кинематические и динамиче-
ские звенья.
Элемент, отражающий кинематику относительного движения ракеты при само-
наведении (наведении) на цель (самолет, вертолет), принято называть кинемати-
ческим звеном [36]. В случае самонаведения кинематическое звено отражает изме-
нение во времени вектора дальности ракета-цель. В качестве примера определим
параметры кинематического звена при относительном движении ракеты в одной
плоскости (рис. 2.10).
Рис. 2.10. К определению кинематического звена при самонаведении
Положение вектора дальности PC в относительном движении характеризуется
двумя уравнениями, отражающими поступательное и вращательное движение цент-
ров масс ракеты и цели. Оба уравнения непосредственно следуют из геометрических
44
Глава 2. Объекты радиоэлектронной борьбы
построений рис. 2.10. Поступательному относительному движению, соответствует
уравнение, определяющее скорость сближения Исб =-R :
R = VC cos(e - \|/с) - Ир cos(e - \|/). (2.52)
Вращательному относительному движению соответствует уравнение, определя-
ющее трансверсальную составляющую скорости
ЛЁ = Гр sin(e - Vc) - К sin (е - v)- (2.53)
Кинематические уравнения (2.52) и (2.53) нелинейные. Их линеаризация воз-
можна на курсах близких к догонному и встречному. В этих случаях разности углов
(е-\|/) и (е“’М/с) оказываются достаточно малыми и уравнения (2.52) и (2.53) преоб-
разовываются к следующему виду:
л=гс-кр,
Rt-Rz = Ис\|/С - Vp V-
(2.54)
Предположив, что скорости Ир и Кс постоянны и продифференцировав (2.54)
по /, можно получить
-2Исбё + Лё = Исх|/с - Исv. (2.55)
В рассматриваемом случае линеаризации трансверсальные и нормальные состав-
ляющие ускорений ракеты и самолета достаточно близки, что позволяет записать
(2.55) следующим образом:
. 2Кс6 1 , . .
IX IX
(2.56)
где jHC и jH — нормальные составляющие ускорений цели (самолета) и ракеты; со = Ё.
Уравнение (2.56) в операторной форме имеет вид
(2.57)
где р — символ дифференцирования.
По определению [36] передаточная функция кинематического звена W(pt] мо-
жет быть определена как отношение угловой скорости линии визирования со(/) к
разности нормальных составляющих ускорений цели и ракеты A/(f) = 7НС - jH.
Поэтому
(2.58)
С учетом (2.56)
1 _ Кк>
Rp-2Vc6~ Т^р-1’
(2.59)
где
1
2Ксб
— коэффициент передачи кинематического звена; Ткз
R
2Гсб
— по-
стоянная времени кинематического звена.
Кинематическое звено является, в принципе, нестационарным вследствие изме-
нения в динамике наведения дальности Л = Л(/). Звено, представленное переда-
точной функцией (2.59), можно рассматривать как квазистатическое и представить
в виде интегратора, охваченного положительной обратной связью (рис. 2.11).
2.3. Системы управления оружием как объекты РЭБ
45
Рис. 2.11. Кинематическое звено
Действительно, в соответствии с правилами преобразования динамических зве-
ньев передаточная функция замкнутого звена приведенного вида с положительной
обратной связью будет равна
1 1 1
Rp = 2Исб
2Кб 1 ТкзР^
R Р
(2-60)
что совпадает с (2.59). Вследствие указанной положительной обратной связи кинема-
тическое звено является неустойчивым. За счет введения в модель цепи отрицатель-
ной обратной связи положительная обратная связь может быть нейтрализована. Цепь
отрицательной обратной связи содержит динамические звенья ракеты и ее системы
управления. При самонаведении по закону пропорциональной навигации, когда
формируется сигнал, линейно зависящий от Исб, система сохраняет устойчивость
для всех ракурсов атаки [37].
Динамическими звеньями в системе траекторного управления самонаведением
ракеты, определяющими величину ее промаха на всех этапах наведения в условиях
РЭБ, являются измерители углов и угловых скоростей линии визирования. Как
правило, они представляют собой следящую систему, включающую пеленгатор, уси-
литель мощности, привод и датчики корректирующих сигналов. Пеленгаторы могут
быть радиолокационными, тепловыми, телевизионными и лазерными. В последу-
ющем большее внимание будет уделено радиолокационным пеленгаторам и соответ-
ственно радиолокационным угломерам. Обязательным элементом измерителей углов
и угловых скоростей на ракете (самолете, вертолете) являются гироскопические при-
боры, обеспечивающие требуемую коррекцию измерителей и их стабилизацию в
пространстве. Различают позиционную и скоростную коррекцию. Позиционная кор-
рекция связывается с измерительными индикаторами углов, скоростная — с изме-
рителями (датчиками) угловых скоростей (СДУС) [37].
Приближенные методы оценки качества систем управления могут быть получены
из линеаризованных моделей угломеров и других следящих измерителей. Ниже рас-
сматриваются, в качестве примеров, некоторые конкретные варианты соответствую-
щих динамических звеньев, позволяющие количественно оценивать динамические
и флуктуационные ошибки угломерных каналов.
Глава 2. Объекты радиоэлектронной борьбы
На рис. 2.12 показаны геометрические соотношения, иллюстрирующие процесс
самонаведения истребителя в упрежденную точку встречи [37].
Рис. 2.12. Геометрические соотношения при самонаведении
На рис. 2.12 ИС — линия визирования цели; г — требуемый угол упреждения;
еи — измеренное в данный момент значение угла упреждения; РСН — мгновен-
ное положение равносигнального направления антенны бортовой РЛС истребителя;
Их — направление продольной оси истребителя. Упрощенная структурная схема
автоматического угломерного устройства со скоростной коррекцией и индикатор-
ной стабилизацией, обеспечивающей указанное самонаведение истребителя по
курсу, приведена на рис. 2.13.
Рис. 2.13. Структурная схема угломера со скоростной стабилизацией
Здесь 1Р|(/?),И^(р)и Wi(p) — передаточные функции пеленгатора, привода
антенны бортовой РЛС совместно с усилителем мощности, а также датчика угло-
вой скорости (ДУС). Предполагается, что контур стабилизации обеспечивает вы-
сокую степень развязки движения антенны РЛС и рысканий истребителя, что по-
зволяет исключить из рассмотрения угол рыскания.
Мгновенная динамическая ошибка
Де = е-еи, (2.61)
где еи=Ф1(р)Де; Ф^р) — функция передачи замкнутого контура пеленгатора,
включающего ^i(p) и И^.т(/?). В соответствии с рис. 2.13
, / ч И/1(р)Фст(р)
ф„ (р)=—^4—
1+^2(р)ж3
(2.62)
где
(2.63)
— передаточная функция замкнутого контура стабилизации антенн РЛС.
Можно полагать [37]:
(ТПР^У ^(р) = ^УсА (2.64)
'пуР + 1 /^Гпр/> + 1)
2.3. Системы управления оружием как объекты РЭБ
47
где Тщ и Гпр — постоянные времени пеленгатора и привода антенны; /fnp,
Кус — коэффициенты передачи пеленгационного устройства, выходом которого
является инерционный усилитель постоянного тока, привода антенны РЛС вместе
с усилителем мощности, а также датчика угловой скорости, являющегося в данном
случае дифференцирующим звеном. Используя принятые значения передаточных
функций и полагая 7"11у »--—---, с помощью (2.62) и (2.61) можно получить:
1+^пр^ус
Фст (р) =
пр______
ТпрР
(2.65)
пр'хус
где
К' к
_ 74 пу 74 пр
V"l+tfny*np
(2.66)
— коэффициент передачи по угловой скорости для рассматриваемого варианта угло-
мерного канала.
Необходимо отметить, что выражение (2.65) для функции передачи замкнутого
контура пеленгатора Ф| (р) является общим и справедливо в случае иных вариан-
тов угломеров. Формула (2.66), определяющая Kv, относится к пеленгатору рассмот-
ренного вида. Например, если в угломере осуществляется позиционная коррекция
и силовая стабилизация, то [37]
К^К^КуК^, (2.67)
где К[1у — коэффициент передачи пеленгатора, который предполагается безынер-
ционным; Ку — коэффициент передачи усилителя мощности; Кш — коэффициент
передачи гиропривода.
Важными параметрами пеленгатора как объекта РЭБ являются его амплитудно-
частотная характеристика и эффективная полоса пропускания ДТ^ф. Последняя мо-
жет быть определена, если известна амплитудно-частотная характеристика Ф| (/со).
Чтобы ее найти, необходимо в (2.65) заменить р на усо:
|ф1(усо)| =~-------v—2-----• (2.68)
т;рсо2) +со2
Соответственно
1 °°
Д^эф = — J ф1(л°) <*со. <2-69)
2п о
Из (2.68) и (2.69) следует, что
(2-70)
Эф д
На рис. 2.14 приведены амплитудно-частотные характеристики следящего уг-
ломера, построенные в соответствии с (2.68) для разных значений Kv и 7^.
Обращает на себя внимание зависимость (Jco) от указанных параметров. Это
открывает, в частности, возможность-снижения качества слежения по углу путем
преднамеренного изменения коэффициента передачи угломерного канала по угловой
48
Глава 2. Объекты радиоэлектронной борьбы
Рис. 2.14. Амплитудно-частотные характеристики следящего угломера
скорости линии визирования Kv помеховыми воздействиями, создаваемыми про-
странственно распределенными источниками излучения.
Величина мгновенной динамической ошибки Ас в соответствии с (2.61), (2.62)
и (2.63) в операторном виде определяется формулой
М1-Ф,Ш= е. (2.71)
ТпуР +P + KV
Установившееся значение динамической ошибки Аеу определяется передаточ-
ной функцией
+ Р^гту )
Т^р1 + p + Kv
(2.72)
и входным воздействием е, представляемыми в виде соответствующих рядов. В рас-
сматриваемом варианте автоматического угломера [37]
ДЕу =-М £0 -T-+rnA l+V^’ <2’73)
у у у J ** у
где ё0 и ё0 — угловая скорость и угловое ускорение линии визирования при / = 0.
Мгновенная динамическая ошибка Асо измерения угловой скорости линии ви-
зирования в соответствии с рис. 2.12 и структурной схемой на рис. 2.13 определя-
ется из равенства
Асо = со-сои, (2.74)
где со = £ и сои = Ёи — входное и измеренное значения угловой скорости линии ви-
зирования:
ё„ =Ф1(т’)ре = Ф|(р)е;
„ <, р(1+Л,) <2-75>
Дсо = (1 - Ф, (р))<о = \ ' СО.
^пу Р Р + Ку
Установившееся значение динамической ошибки Асоу = АЁу определяется по
аналогии с Агу. Это непосредственно вытекает из сравнения (2.71) и (2.75):
Дсо (2.76)
Из (2.73) и (2.74) следует, что установившиеся значения динамических оши-
бок Абу и А(Оу обратно пропорциональны Kv.
Эффективная полоса пропускания ААЭф следящей системы, у которой входным
сигналом является угол е, а выходным — угловая скорость соп = £п, определяется
2.3. Системы управления оружием как объекты РЭБ
49
из (2.75) передаточной функцией Ф](р)р = Ф2(р) после перехода к комплексному
коэффициенту передачи Ф2 (усо)|2. В отличие от ранее рассмотренного случая амп-
литудно-частотной характеристики Ф! (/со)2 эквивалентную прямоугольную ампли-
тудно-частотную характеристику с полосой Л/^ф нормируют не на единицу, а по мак-
симальному значению |ф2 (усо)|2, равному Kv [37]:
AF3(b = —“т! Ф2 (7 ю)2 = ——
2пКгЭ0 U ’ 4Гпу
Максимальное значение |ф2 (усо)12 сдвинуто по оси частот относительно начала
координат на величину
(2.77)
2
(2.78)
2
,2 2
+ С0
(2.79)
* у
пу
£
2
V ' nyw
В соответствии с (2.79) рассчитаны и на рис. 2.15 приведены амплитудно-частот-
ные характеристики следящего измерителя угловой скорости линии визирования
Ф2 (/со)2 для различных значений Kv. Как и в случае угломера, изменения Kv приво-
дят к деформации амплитудно-частотной характеристики, что может снизить качест-
во измерения угловой скорости линии визирования цели.
Рис. 2.15. Амплитудно-частотные характеристики следящего
измерителя угловой скорости линии визирования
Принципиальная возможность преднамеренного изменения Kv обусловливается
его зависимостью от коэффициента передачи пеленгационного устройства Кпу, кото-
рый в свою очередь непосредственно связан с крутизной пеленгационной характери-
стики угломера Ка:
К =К К' (2.80) .
где К'^у — учитывает коэффициенты передачи других элементов АСН.
50
Глава 2. Объекты радиоэлектронной борьбы
Крутизна пеленгационной характеристики определяется нормированной диа-
граммой направленности антенны (ДНА) пеленгатора 1>гс (ф,0); ср и 0 — углы в сфе-
рической системе координат. Если пеленгация осуществляется в одной плоскости, то
JF(0)
J0
^(е)
О’
(2.81)
где 0О — угол, соответствующий равносигнальному направлению.
Формула (2.81) предполагает обычно, что ДНА определяется по одному точеч-
ному источнику излучения. Если источник излучения не один или он не является
точечным, то форма ДНА и соответственно пеленгационной характеристики дефор-
мируется, что в конечном счете приводит к изменениям Kv.
Проведенное рассмотрение угломерных каналов бортовых РЛС и РГС дает воз-
можность оценивать, в основном, детерминированные воздействия. Рассмотрим в
линейном приближении методы определения флуктуационных ошибок следящих
угломеров.
Флуктуационные ошибки могут иметь место вследствие воздействия на пелен-
гатор совокупности случайных во времени и пространстве источников излучения.
Их воздействие на пеленгатор можно рассматривать как пространственно-времен-
ной шум. В последующем чаще будет использоваться термин «угловой шум».
При воздействии углового шума угол е (рис. 2.12) будет изменяться по случай-
ному закону. Как следует из структурной схемы, представленной на рис. 2.13, мгно-
венная угловая ошибки Де будет также изменяться по случайному закону и опреде-
ляться функцией передачи замкнутого контура пеленгатора Ф1 (р):
Де(г)=Ф,(р)е(/). (2.82)
Если е(/) представляет собой случайный процесс со спектральной плотностью
Scn (®), то дисперсия De угла Де в линейном приближении находится из равенства
А =2- Лф1 С/со)2 Sen (2.83)
2710
где |Ф1(у®)| определяется в данном случае формулой (2.68).
Если 5СП (со) = const, то из (2.83) и (2.68) следует, что
A=Scn(co)-^. (2-84)
Дисперсия флуктуаций угловой скорости линии визирования Асо также мо-
жет быть определена на основании структурной схемы, представленной на рис. 2.13.
Из нее, в частности, следует, что
Д£о = Ф1(/>)Ж3(р)е = рФ](р)е. (2.85)
Флуктуации е порождают флуктуации и Де. Если SE (со) спектральная плотность
входного углового шума, то дисперсия D(} в линейном приближении будет равна
17 2
А=тН фг(>) Д£(со)Ло, (2.86)
2л о
где |ф2 (со)! определяется формулой (2.79).
2.4. Радиоэлектронные средства разведки как объекты РЭБ
51
Если 5£ (со) = const, то с учетом (2.77) можно получить
Л£=5£(со)—
t t \ / дгр
(2.87)
Для рассматриваемой динамической структуры оптимальный переходный про-
цесс реализуется, если
Vv=L (2.88)
Из (2.86) и (2.87) с учетом (2.88) следует, что среднеквадратические ошибки
и а£ связаны между собой линейной зависимостью
= KV°V <2-89)
где ош = ТдГ, о£ = •
Существует оптимальное значение Kv, которому соответствует минимальное
значение итоговой ошибки, равной сумме квадратов динамической и флуктуацион-
ной ошибок.
2.4. Радиоэлектронные средства разведки как объекты
радиоэлектронной борьбы
Современные технические средства разведки используют для добывания ин-
формации практически все известные к настоящему времени физические поля [38].
И все технические средства применяют радиоэлектронные системы для обработки
сигналов.
Техническая разведка (ТР) классифицируется по видам, по решаемым задачам
и по физическим полям, создаваемым источниками разведывательной информа-
ции — объектами разведки.
По видам ТР подразделяется на космическую, воздушную, морскую и назем-
ную. Этот классификационный признак связан, очевидно, с местом размещения
разведывательной аппаратуры.
По решаемым задачам и по оперативности представления результатов различа-
ют стратегическую, оперативную и тактическую ТР.
В основу классификации ТР по виду используемых информационных физиче-
ских полей положены физические принципы построения разведывательной аппа-
ратуры. По этому признаку различают оптическую (ОР), оптико-электронную (ОЭР),
радиоэлектронную (РЭР), гидроакустическую (ГАР), акустическую (АР), химичес-
кую (ХР), радиационную (РДР), сейсмическую (СР), магнитометрическую (ММР)
и компьютерную разведку (КР).
На рис. 2.16 представлена классификационная схема возможных источников
информации о скрываемых объектах и разновидностей ТР, добывающей (извлека-
ющей) информацию.
Оптическая разведка (ОР) добывает информацию, принимая и обрабатывая сиг-
налы электромагнитных колебаний инфракрасного, видимого и ультрафиолетово-
го диапазонов, излученных или отраженных объектами и местными предметами.
При этом оптическая разведка обнаруживает и выявляет военные и военно-промыш-
ленные объекты (ВиВПО), определяет их пространственные координаты, назначе-
ние, ведомственную принадлежность и другие характеристики; осуществляет конт-
роль выполнения принятых обязательств (договоров, соглашений) по ограничению
52
Глава 2. Объекты радиоэлектронной борьбы
Техническая разведка
Оптическая
Фотографическая
Визуально-оптическая
Оптико-электронная
Т ел евизионная
Лазерная
Инфракрасная
Радиоэлектронная
Радиоразведка
Радиотехническая
Радиолокационная
Радиотепловая разведка
Разведка ПЭМИН
Акустическая
Речевая
Сигнальная
Г идроакустическая
Г идролокационная
Г идроакустическая
Звукоинформационные связи
Радиационная
Химическая
М агнитометричсская
Сейсмическая
Компьютерная
Рис. 2.16. Классификация технической разведки
по используемым физическим полям
вооружений; наблюдает за коммуникациями и вскрывает перемещения военных гру-
зов и техники; производит съемку территории для картографирования местности.
Воздушное наблюдение с передачей данных по радиоканалам считается наибо-
лее оперативным способом разведки, который позволяет получать необходимые
разведывательные сведения о войсках и их действиях на большую глубину и в крат-
чайшие сроки.
Наземное наблюдение ведется с наблюдательных пунктов (постов) в любой
обстановке и является важным способом добывания разведданных.
Визуальное наблюдение является также одним из основных способов ведения
разведки при действиях диверсионно-разведывательных и террористических групп.
При ведении визуального наблюдения широко используются оптические при-
боры, позволяющие улучшить видимость объектов разведки и увеличить дальность
их обнаружения. Чтобы повысить видимость объекта до величины, когда его мож-
но обнаружить и опознать, оптические приборы должны уменьшать величину по-
рогового контраста и увеличивать контраст объекта на окружающем фоне. Для этого
применяются специальные меры [75].
Фотографическая разведка (ФР) обладает существенными преимуществами перед
другими способами разведки: она позволяет получать детальные оптические изобра-
жения объектов. Изучение фотографических изображений дает наибольшее количе-
2.4. Радиоэлектронные средства разведки как объекты РЭБ
53
ство информации по сравнению с визуальным, телевизионным или радиолокаци-
онным наблюдением. Данные фоторазведки позволяют обнаруживать и идентифи-
цировать объекты.
Средства фотографической разведки широко используются при ведении кос-
мической, воздушной, морской и наземной разведки.
Для противодействия работе ОР и ФР средства РЭБ должны воздействовать на
среду распространения, снижая контраст наблюдаемых и регистрируемых оптичес-
ких излучений объектов разведки.
Оптико-электронная разведка (ОЭР) добывает информацию с помощью средств,
включающих входную оптическую систему с фотоприемником и электронные схемы
обработки электрического сигнала, которые обеспечивают прием электромагнитных
волн видимого и инфракрасного диапазонов, излученных или отраженных объектами
и местностью. ОЭР выявляет военные и военно-промышленные объекты; опреде-
ляет их характеристики, в том числе и боеготовность; вскрывает характер и объем
выпускаемой ВПО продукции; производит съемку территорий при картографиро-
вании местности.
Аппаратура ОЭР устанавливается на космических и воздушных носителях, а так-
же может применяться в наземных условиях, например, при ведении технической
разведки на территории России.
Работа аппаратуры ОЭР основана на приеме и анализе собственного излучения
объектов и фона или отраженного ими излучения Солнца, Луны. Аппаратура ОЭР
позволяет отличать объект от фона при условии, что яркость объекта превышает
яркость фона. Соответственно аппаратура ОЭР подразделяется на пассивную и ак-
тивную. Активная аппаратура разведки использует для подсвета местности собствен-
ные излучатели. Зондирующее излучение рассеивается объектами, местными пред-
метами и местностью и часть этого излучения поступает на вход оптической системы
аппаратуры разведки с последующим его преобразованием, обработкой и индикаци-
ей. Аппаратура пассивной ОЭР подразделяется на телевизионную, инфракрасную
и аппаратуру разведки лазерных излучений. К аппаратуре ИКР относятся теплови-
зоры, телепеленгаторы, радиометры и приборы ночного видения. Аппаратура раз-
ведки лазерных излучений предназначена для обнаружения, определения местополо-
жения и распознавания средств вооружения и военной техники, в состав которых
входят лазерные излучатели.
Аппаратура активной ОЭР подразделяется на лазерную со сканированием зон-
дирующего светового луча и инфракрасную с использованием ИК излучателя для
подсвета местности.
Для оценки предельных возможностей фотоприемников аппаратуры ОЭР по ре-
гистрации ЭМИ используются характеристики пороговой чувствительности: мини-
мальной мощности светового потока, еще воспринимаемого на фоне помехового
излучения, а также разрешающей способности, которая определяется способностью
передавать и воспроизводить мелкие детали изображения с заданным контрастом.
Разрешающая способность зависит как от параметров оптической системы аппара-
туры, так и от характеристик используемых фотоприемников и окружающих усло-
вий функционирования аппаратуры разведки.
Средства РЭБ, противостоящие ОРЭ, должны не только воздействовать на сре-
ду распространения полей оптических сигналов, но активно поражать электронные
элементы фотоприемников.
54
Глава 2. Объекты радиоэлектронной борьбы
Инфракрасная разведка (ИКР) получает информацию, принимая и анализируя
сигналы электромагнитных полей ИК-диапазона, излученных или отраженных
объектами и предметами окружающей местности. Средства ИКР — это приборы
ночного видения (ПНВ), тепловизоры, теплопеленгаторы, радиометры.
ПНВ могут быть активными, пассивными и полуактивными, работающими с
подсветом местности специальным излучателем.
Пассивные средства тепловой разведки — тепловизоры — предназначены для
получения визуального изображения земной поверхности и наземных объектов,
имеющих различную температуру или излучательную способность. Теплопеленга-
торы позволяют определить направление на источник ИК-излучения и определить
его температурный контраст по отношению к окружающему фону.
Радиометры используются для измерения распределения температур по иссле-
дуемым участкам поверхности земли или объектов.
Тепловая разведка может проводиться в любое время суток, но она более эф-
фективна ночью, когда наземные объекты не отражают солнечного света.
Приборы тепловой разведки могут обнаруживать объекты, температура кото-
рых отличается от фона на десятые доли градуса.
Лазерная разведка и разведка лазерных излучений решает те же задачи, что и
фоторазведка, но по сравнению с ней обеспечивает возможность скрытного веде-
ния разведки в ночных условиях; оперативную обработку и передачу разведыватель-
ной информации на пункт сбора и обработки данных. Поэтому противодействие
работе средств лазерной разведки в принципе может организовываться также, как
и для фоторазведки.
Изображение местности в лазерных системах разведки может регистрировать-
ся на фотопленку, воспроизводиться на дисплее, сохраняться в файлах данных.
Возможна также передача данных лазерной разведки на землю по радиоканалу.
Радиоэлектронная разведка (РЭР) — это процесс получения информации в ре-
зультате приема и анализа электромагнитных излучений (ЭМИ) радиодиапазона,
создаваемых работающими РЭС.
ЭМИ, создаваемые объектами разведки, могут быть первичными (собственны-
ми) или вторичными (отраженными, рассеянными). Прежде всего, для РЭР инфор-
мативны основные, собственные излучения, обеспечивающие функционирование
РЭС по предназначению. Но, наряду с основными, работу передатчиков РЭС со-
провождают и неосновные, побочные электромагнитные излучения, которые лежат
вне пределов полосы частот, отведенной для передачи информации, и создаются
боковыми лепестками диаграмм направленности антенн. Поля этих излучений также
информативны для средств разведки.
Вторичные ЭМИ — это излучения, возникающие в результате отражения (рас-
сеяния) электромагнитных волн (ЭМВ), облучающих объект. Вторичные излучения
реальных объектов разведки (самолетов, кораблей, другой военной техники) зависят
как от параметров зондирующих сигналов, так и от отражательной способности,
геометрической формы и размеров объекта, поляризации падающей волны, взаим-
ной ориентации источника излучения и облучаемого объекта и, наконец, от пара-
метров их относительного движения.
Средства РЭР обнаруживают объекты, определяют их типы и принадлежность,
назначение, местоположение и параметры движения, перехватывают передаваемую
по каналам связи информацию.
2.4. Радиоэлектронные средства разведки как объекты РЭБ
55
РЭР охватывает большие районы, пределы которых определяются особенно-
стями распространения ЭМВ; функционирует непрерывно в любое время года и
суток и при любых метеоусловиях; действует без непосредственного контакта с
объектами разведки, обеспечивает получение достоверной информации, исходящей
непосредственно от объекта разведки.
Средства РЭР устанавливаются на космических, воздушных, морских платфор-
мах, наземных постах.
Обычно термин «радиоэлектронная разведка» объединяет радиоразведку (РР),
радиотехническую разведку (РТР), радиолокационную разведку (РЛР) — видовую
и параметрическую; радиотепловую разведку; разведку побочных электромагнит-
ных излучений и наводок (ПЭМИН).
Радиоразведка (РР) — пассивная разновидность РЭР, имеющая целью получе-
ние данных о противнике путем поиска, пеленгования и анализа излучений, пере-
хвата сообщений его РЭС передачи информации (связи, передачи данных).
Радиотехническая разведка (РТР) — также пассивная разновидность РЭР, обес-
печивающая получение сведений о противнике, на основе обнаружения и анализа
сигналов, излучаемых РЭС локации, навигации, управления и средств РЭБ, а также
радиоизлучений технических устройств и технологического оборудования, не связан-
ного с передачей информации (электрогенераторов и электродвигателей, ВЧ-гене-
раторов и других излучающих устройств).
Средства РТР используются для определения назначения, типа и местоположе-
ния РЭС по данным измерений параметров принятых сигналов; вскрытия дисло-
кации и назначения объектов ВиВПО; определения состава группировок и деятель-
ности вооруженных сил; вскрытия систем радиотехнического обеспечения проти-
вовоздушной, противоракетной и противокосмической обороны; определения
состояния и перспектив развития радиоэлектронного вооружения.
Как объекты РЭБ средства РР и РТР могут подвергаться помеховым воздействи-
ям и дезинформации. Но организация активного противодействия работе средств
РР и РТР помехами имеет ряд особенностей по сравнению с подавлением РЭС про-
тивника: маскируя помехами работу собственных РЭС, средства РЭБ неизбежно
будут мешать и им самим. Поэтому средства РР и РТР как объекты РЭБ выдвига-
ют специальные требования по развязке излучений помех и собственных излучений
защищаемых РЭС.
Радиолокационная разведка (РЛР) — разновидность РЭР, обеспечивающая извле-
чение информации из электромагнитных полей, рассеянных объектами разведки.
РЛР делится на видовую и параметрическую. Видовая РЛР добывает информа-
цию, содержащуюся в радиолокационных изображениях различных объектов и
окружающей их местности, а параметрическая РЛР связана с получением инфор-
мации о пространственных, скоростных и отражательных характеристиках подвиж-
ных объектов (космических, воздушных, наземных и морских).
Для ведения РЛР применяются в основном шесть типов РЛС: РЛС бокового
обзора космического и воздушного базирования; наземные загоризонтные РЛС дека-
метрового диапазона; РЛС контроля космического пространства; РЛС разведки дви-
жущихся наземных целей и засечки артиллерийских и минометных позиций по
траектории полета снаряда; РЛС разведки метеоусловий.
Применение РЛС для ведения разведки обусловлено рядом преимуществ радио-
локационного наблюдения перед наблюдением в других диапазонах ЭМВ. Прежде
56 Глава 2. Объекты радиоэлектронной борьбы
всего РЛР обеспечивает возможность ведения разведки в любых условиях погоды
и освещенности (дымка, облака, туман, дождь, пыль, снег, дым). Также средства
РЛР позволяют наблюдать объекты, замаскированные от оптической разведки,
селектировать движущиеся объекты на фоне неподвижных местных предметов.
Основные характеристики качества РЛС — это надежность обнаружения и рас-
познавания целей, а также точность определения параметров их движения. С пока-
зателями точности и надежности связаны и другие характеристики. Это дальность
или зона действия, в пределах которой обеспечивается требуемые точность измере-
ния и надежность обнаружения. Помехоустойчивость и помехозащищенность опре-
деляется тем пороговым уровнем помех, ниже которого уже не обеспечивается точ-
ность и надежность. Другие важные характеристики РЛС, такие как стоимость, масса
и габариты, безотказность функционирования и способность восстанавливаться
после отказов, также связываются с точностью.
Как объекты РЭБ средства радиолокационной разведки могут подавляться по-
мехами и поражаться противорадиолокационными ракетами. При этом разведка
параметров сигналов РЛС РЛР, необходимая для создания прицельных помех, об-
легчается известным фактом: эффективность РЛС, определяемая мощностью при-
нимаемого сигнала, обратно пропорциональна четвертой степени расстояния (7?),
а эффективность радиотехнической разведки оперативной поддержки РЭБ пропор-
циональна R~2. Выбор структуры и основных характеристик помех, используемых
для подавления средств радиолокационной разведки, ничем не отличается от тех,
которые применяются при РЭБ с РЛС.
Значительный прогресс в области ведения РЛР был достигнут в последнее вре-
мя благодаря изобретению радиолокаторов с синтезированной апертурой антенны
(РЛС с РСА), применяющих цифровую обработку радиоголограмм [52]. Такие си-
стемы открыли возможность для получения радиолокационных изображений, про-
странственная информативность которых почти не уступает изображениям, фор-
мируемым оптическими приборами. За этим новым направлением РЛР закрепи-
лось название «радиовидение» [52].
Радиотепловая разведка обнаруживает и определяет местоположение наземных,
морских, воздушных и космических объектов по их тепловому излучению в радио-
диапазоне. Характеристики радиотеплового излучения, такие как интенсивность и
спектральный состав, зависят от физических свойств вещества и температуры объек-
та. Разведка ведется с помощью радиотеплолокационных станций (РТЛС), устанав-
ливаемых на воздушных и космических платформах. Радиотепловая разведка воз-
можна только при наличии контрастности теплового излучения объектов и фона
(земной поверхности, неба и т. д.). Контрастность объекта и окружающего фона
оказывает существенное влияние на дальность действия РТЛС.
Радиотепловое излучение представляет собой непрерывный шум с очень ши-
роким сплошным спектром, простирающимся от метрового до миллиметрового
диапазона волн. Спектральная плотность радиотеплового шума весьма мала.
Существенными преимуществами радиотепловой разведки являются абсолютная
скрытность ее ведения и независимость от метеоусловий. Скрытность обусловлена
пассивным режимом работы РТЛС, а всепогодность работой в диапазонах санти-
метровых и миллиметровых волн. Зависимость условий распространения от состоя-
ния среды в этих диапазонах не столь значительна по сравнению с ИК-диапазоном.
Разведка побочных ЭМИ и наводок (ПЭМИН) ведется путем извлечения инфор-
мации из сигналов, непреднамеренно излучаемых техническими средствами обра-
2.4. Радиоэлектронные средства разведки как объекты РЭБ
57
ботки информации. Такие излучения сопровождают формирование, обработку, ото-
бражение и передачу телефонных, телеграфных, телеметрических и других сооб-
щений. Средства перехвата ПЭМИН используют радиоэлектронную аппаратуру,
регистрирующую ЭМИ и электрические сигналы, наводимые первичными ЭМИ в
токопроводящих цепях различных технических устройств и конструкциях зданий.
Технические средства разведки ПЕМИН как объекты РЭБ могут быть подавле-
ны активными помехами. Разумеется, параметры таких помех должны быть согла-
сованы с параметрами прикрываемых излучений. Кроме того, естественным спо-
собом снижения эффективности средств разведки ПЭМИН является снижение
уровня опасных излучений за счет специальных приемов разработки и конструиро-
вания технических средств обработки информации и экранирования непреднаме-
ренных электромагнитных излучений.
Акустическая разведка (АР) получает информацию, переносимую упругими
колебаниями воздушной среды и вибрационными колебаниями строительных кон-
струкций. При этом принимаются и анализируются акустические сигналы инфра-
звукового, звукового и ультразвукового диапазонов.
АР обеспечивает получение информации, содержащейся непосредственно в
произносимой, либо воспроизводимой речи (акустическая речевая разведка), а также
в параметрах акустических сигналов, сопутствующих работе средств вооружения и
военной техники, механических устройств оргтехники и других технических сис-
тем (акустическая сигнальная разведка). АР обеспечивает дистанционный перехват
смысловой речевой информации; определение технических и тактических характе-
ристик вооружения и военной техники (оценку мощности взрывов боеприпасов и
взрывчатых веществ при их испытаниях, определение параметров авиационных и
ракетных двигателей при их стендовых испытаниях и т. д.), определение характера
и направленности работ на военно-промышленных объектах. Для решения пере-
численных задач АР использует портативную аппаратуру приема и регистрации
акустических сигналов и стационарную аппаратуру их анализа и обработки.
Работа аппаратуры АР основана на использовании свойств среды передавать
звуковые колебания. Акустические приборы обеспечивают получение самой раз-
нообразной информации (секретная речевая информация, акустические сигналы
и шумы, создаваемые различными видами техники).
Информационная ценность извлеченной разведкой речевой информации зависит
от ее качества, которое определяется соотношением физических характеристик речи
и шума в месте приема.
Полоса частот, занимаемая речевым сигналом, лежит в пределах от 100 до
10000 Гц и имеет максимум спектральной мощности в области 300...500 Гц (440 Гц
соответствует тону «ля» второй октавы). В телефонии используется полоса от 300 до
3400 Гц, что достаточно для безошибочного восприятия речи и распознавания голоса
говорящего.
Дальность действия акустических приборов лежит в пределах от нескольких
десятков метров до нескольких километров и зависит от мощности источника аку-
стических сигналов и от состояния среды распространения.
В качестве акустических разведывательных приборов используются: измеритель-
ные микрофоны, перекрывающие инфразвуковой, звуковой и ультразвуковой ди-
апазоны, прецизионные шумомеры, позволяющие с большой точностью измерять
уровни шумов, звука и вибраций в широком диапазоне частот (в комплекте с анали-
заторами спектра акустических сигналов), геофонные датчики, измеряющие сейсми-
58
Глава 2. Объекты радиоэлектронной борьбы
ческие волны; частотные анализаторы и спектрометры, обеспечивающие определе-
ние АЧХ источников акустических шумов. Обработка и анализ принятых акустиче-
ских сигналов может потребовать реализации сложных вычислительных процедур,
реализуемых с использованием ЭВМ.
Для противодействия перехвату акустической информации используют ослаб-
ление интенсивности информативных для разведки акустических полей. Этой цели
служат специальные конструктивные решения и различные звукопоглощающие ма-
териалы. РЭБ со средствами акустической разведки предусматривает и создание ак-
тивных помех перехвату акустических сигналов.
Гидроакустическая разведка (ГАР) получает информацию, принимая и анали-
зируя упругие колебания водной среды в инфразвуковом, звуковом и ультразвуко-
вом диапазонах.
ГАР предусматривает разведку гидроакустических шумовых полей, создаваемых
работающими гребными винтами, различными двигателями и механизмами надвод-
ных кораблей и подводных лодок, гидролокационную видовую разведку, обеспечива-
ющую добывание информации о рельефе дна. Также ГАР обеспечивает гидролокаци-
онную параметрическую разведку информации, которая содержится в пространст-
венных, скоростных и других характеристиках объектов, разведку гидроакустических
сигналов, создаваемых различными работающими средствами гидроакустического
вооружения надводных кораблей и подводных лодок. Осуществляется также пере-
хват сигналов звукоподводной связи для выделения сообщений (информационных
потоков), а также определение тактических и технических характеристик систем
звукоподводной связи. По принципу использования энергии акустического излу-
чения средства ГАР делятся на активные (гидролокаторы) и пассивные. Гидролока-
тор работает на принципе излучения в водной среде зондирующих акустических
сигналов с последующим приемом и анализом отраженных от объектов и морского
дна эхо-сигналов.
При ведении пассивной ГАР используются шумопеленгаторы, которые прини-
мают и анализируют шумовые акустические излучения в водной среде, возникаю-
щие при работе двигателей, гребных валов, машин и механизмов различных агрега-
тов надводных кораблей (НК), подводных лодок (ПЛ) и других плавсредств, а также
средства разведки, предназначенные для приема и анализа акустических сигналов,
создаваемых гидролокаторами, эхолотами, системами гидроакустической связи и
другим гидроакустическим вооружением НК, ПЛ, иных судов.
Основными характеристиками аппаратуры ГАР являются: диапазон рабочих
частот, акустическая мощность, ширина диаграммы направленности акустической
антенны, чувствительность акустических приемников. По сути, эти характеристи-
ки не отличаются от соответствующих характеристик РЛС.
Среда распространения гидроакустических сигналов существенно неоднород-
на. Поэтому при оценке возможностей средств ГАР важную роль играют простран-
ственно-временные характеристики среды распространения: распределение темпе-
ратуры и солености воды; гидростатическое давление; отражающие свойства мор-
ской поверхности и дна. Кроме того, на дальность действия аппаратуры ГАР влияет
отражающая способность цели (сила цели), уровень создаваемого объектом шумо-
вого излучения, взаимное расположение аппаратуры разведки и цели.
Большую, а в некоторых случаях и решающую роль играет уровень акустических
помех на входе приемного устройства.
2.4. Радиоэлектронные средства разведки как объекты РЭБ
59
Компьютерная разведка (КР) — это деятельность, направленная на получение
информации из электронных баз данных ЭВМ, включенных в компьютерные сети,
а также информации об особенностях их построения и функционирования. Компью-
терная разведка добывает сведения о предмете, конечных результатах, формах и спо-
собах деятельности субъектов, являющихся пользователями информационно-вычи-
слительной сети, используемом аппаратурном и программном обеспечении, про-
токолах управления и информационного взаимодействия и используемых средствах
и методах защиты информации.
Появление компьютерной разведки связано с развитием в современной военной
науке концепции информационной войны. Так, в США выпущены два полевых уста-
ва FM-100-S и FM-100-6, в которых излагаются концептуальные основы информа-
ционной войны и информационной операции.
Важнейшая роль в достижении информационного господства отводится развед-
ке, ведущейся в информационных потоках. Такие потоки огромной интенсивности
создаются государственными и частными структурами, частными лицами и поддер-
живаются вычислительными системами и средами. Поэтому компьютерная разведка
представляет собой целый комплекс взаимосвязанных действий оперативного и тех-
нического характера.
Компьютерную разведку разделяют на добывающую и обрабатывающую. В по-
левом уставе США FM-100-6 приводится иерархия ситуационной осведомленности,
представляющая собой пирамиду, в основании которой лежат данные. На втором
уровне находится информация, получаемая путем обработки данных. Изучение
информации приводит к формированию знаний (следующий уровень осведомлен-
ности), а знания посредством суждения способствуют пониманию (верхний уро-
вень). Задача добывающей разведки состоит в получении данных, а обрабатываю-
щей — в преобразовании данных в информацию и приведение ее в форму, удобную
для пользователя.
Цели предварительной разведки достигаются в результате добывания открытых
и закрытых сведений. К открытым сведениям можно отнести данные о характере и
режиме работы автоматизированных систем обработки данных (АСОД) объекта
разведки; квалификации его персонала; составе и структуре самой АСОД, используе-
мом программном обеспечении; протоколах управления и взаимодействия; средствах
и методах защиты информации, используемых в АСОД. Для получения этих сведе-
ний нет необходимости прибегать к приемам оперативной работы (подкупу персона-
ла, краже документации и т. п.). Эти сведения, как правило, не являются закрытыми
и могут быть получены при перехвате сетевого трафика интересующей АСОД либо
при попытке установить сетевое соединение непосредственно с самой АСОД, ког-
да по характеру получаемого отклика можно сделать соответствующие выводы.
Установление первичного контакта с АСОД противника, как правило, еще не
дает доступа к интересующей информации. Для этого необходимо получить допол-
нительные сведения закрытого характера. К таким сведениям относятся пароли,
коды доступа, информация о принятых в АСОД правилах разграничения доступа,
сетевые адреса вычислительных средств противника. Для получения подобных све-
дений создаются разнообразные деструктивные программные средства.
На стадии непосредственной разведки, как и на всех остальных, добываются не
только закрытые, но также и открытые сведения. Роль открытых сведений в достиже-
нии общей ситуационной осведомленности о противнике достаточно велика.
60
Глава 2. Объекты радиоэлектронной борьбы
Важнейшим достоинством перехвата открытых сведений при ведении компью-
терной разведки является то, что эти сведения могут быть получены без наруше-
ния принятых в АСОД правил разграничения доступа к информации.
Добывание закрытых сведений всегда связано с несанкционированным досту-
пом к информации противника и имеет своим следствием утечку информации.
Получение закрытых сведений осуществляется как в самой АСОД объекта, так и в
информационно-вычислительных сетях, внешних по отношению к АСОД.
Новизна проблем, решаемых средствами компьютерной разведки, обостряет РЭБ
в вычислительных системах и средах.
2.5. Системы связи и командного управления
как объекты радиоэлектронной борьбы
Передача информации имеет большое значение для всех областей современной
жизни. Успешное управление войсками и оружием в современной войне также
предусматривает эффективное применение систем связи и передачи данных раз-
личной структуры и функционального назначения. Поэтому в сфере действия ра-
диосистем передачи информации существует и развивается конфликтное взаимо-
действие со средствами РЭБ.
Радиосистемы передачи информации используют все диапазоны электромагнит-
ных волн. Сверхдлинноволновой диапазон 3...30 кГц используется для связи с погру-
женными подводными лодками. В длинноволновом 30...300 кГц условия распростра-
нения сигналов практически не зависят от состояния ионосферы, и следовательно,
от влияния на нее ядерных взрывов. Средневолновый — 300...3000 кГц. Для гло-
бальной связи используется декаметровый (коротковолновый) диапазон 3...30 МГц.
В тактическом звене управления и связи с кораблями, самолетами, вертолетами,
подвижными наземными объектами применяют системы метрового (ультракоротко-
волнового) диапазона, работающие на частотах 3...30 МГц в пределах прямой види-
мости, но с весьма высокой пропускной способностью. В дециметровом диапазоне
(30...300 МГц), для волн которого прозрачна ионосфера Земли, работают косми-
ческие системы связи и передачи данных. В этом же очень емком диапазоне рабо-
тают сотовые системы мобильной связи. Постоянно расширяются области приме-
нения для связи и передачи данных более коротковолновых диапазонов — санти-
метрового и миллиметрового.
Широта применения, а также важность роли радиолиний связи и передачи
команд обуславливает актуальность проблемы повышения эффективности. Преж-
де всего — помехозащищенности.
В самом общем случае под помехозащищенностью РЭС понимают их способ-
ность функционировать с заданным качеством в условиях применения РЭП. Ко-
личественно помехозащищенность РЭС оценивается степенью выполнения РТС
поставленных перед ней задач. Поскольку любая РТС всегда является информаци-
онной системой, помехозащищенность количественно характеризуется вероятностью
успешного выделения полезной информации в условиях действия помех. Так, для
систем радиосвязи и радиоуправления адекватным показателем помехозащищен-
ности может служить средняя вероятность ошибок при различении сигналов.
Очень часто, помехозащищенность оценивается энергетическим критерием —
отношением средней мощности (или энергии) сигнала к средней мощности (или
2.5. Системы связи и командного управления как объекты РЭБ
61
спектральной плотности) помехи, т. е. по критерию максимума отношения сигнал/
помеха [24]. Это достаточно универсальным критерий, но он не достаточно точно
отражает цель функционирования систем передачи связной и командной инфор-
мации. В общем случае нельзя утверждать, что максимизация отношения сигнал/
помеха обеспечивает извлечение наибольшего количества информации о полезном
сигнале. Действительно, приемник сигнала системы связи может собрать его энер-
гию за некоторое время, обеспечив значительное превышение этой энергии над
спектральной плотностью шума, но разрушив при этом внутреннюю, временную
структуру сигнала,
В общем случае процесс РЭП предусматривает две основные последовательно
выполняемые операции: радиотехническую разведку сигнала системы передачи
информации и радиопротиводействие ее работе. При этом помехозащищенность
(ПЗ) следует оценивать вероятностью
^ПЗ — 1 ~~ ^орг ^ПД » (2.90)
где Рорг — вероятность того, что радиопротиводействие вообще будет организова-
но; РП — вероятность того, что спектр помех при РЭП перекроет спектр подавля-
емого сигнала и попадет в полосу приемного устройства РЭС; Рщ — вероятность
подавления РЭС, т. е. вероятность того, что мощность помехи РЭП на входе при-
емного устройства РЭС будет превышать пороговое значение, достаточное для
нарушения его работы.
Прицельная по частоте помеха может быть организована только при условии
разведки параметров сигнала. Если параметры сигнала, прежде всего его несущая
частота и ширина спектра, скрыты от разведки, организация РЭП путем постанов-
ки прицельной помехи, перекрывающей спектр сигнала, невозможна. Поэтому
вероятность организации прицельной помехи, очевидно, связана с показателем
скрытности РЭС
-1- Лжр- (2.91)
С учетом (2.91), вероятность Рпз в (2.90) можно записать в развернутом виде
орг»
(2.92)
связывающем основные составляющие вероятностного показателя помехозащи-
щенности.
Из (2.92) ясно, что помехозащищенность радиосистем связи и передачи данных,
прежде всего командной информации, определяется скрытностью, количественной
мерой которой является вероятность Рскр, помехоустойчивостью, количественно
определяемой вероятностью Р^, а также вероятностью организации радиопроти-
водействия Рорг. Но вероятность Рорг зависит от того, как организована радиотех-
ническая разведка, насколько надежно она обнаруживает сигнал РТС и определяет
параметры этого сигнала. Поэтому помехозащищенность имеет две составляющие:
скрытность и помехоустойчивость.
При анализе конфликтного взаимодействия систем передачи информации и
средств РЭП обычно оперируют со схемой рис. 2.17.
Показанная на рис. 2.17 подсистема радиотехнической разведки РТР для опе-
ративной поддержки РЭБ содержит аппаратуру обнаружения и определения парамет-
ров радиосигнала (пространственных координат, рабочей частоты, ширины спектра
и, возможно, других). На основании данных оперативной радиотехнической развед-
ки формируются помехи w(r) и воздействия, модифицирующие среду распростра-
62
Глава 2. Объекты радиоэлектронной борьбы
Трасса
Рис. 2.17. Структурная схема системы передачи информации,
работающей в условиях РЭП
нения радиосигнала v(f). В результате изменений свойств среды создаются мульти-
пликативные (модулирующие) помехи. В совокупности подсистемы разведки, по-
становки помех и модификации среды составляют систему РЭП.
Источник информации на передающей стороне радиолинии выдает сообщения
на вход шифратора. Шифрация сообщений практически не увеличивает избыточ-
ности сообщений, разве что незначительно, за счет вставок аутентификаторов.
Сигналы 5, (/) на временных интервалах te [0; тс] соответствуют символам переда-
ваемых сообщений. Множество возможных символов составляет алфавит А. Мощ-
ность этого множества — полное число возможных символов — равна N, ie 1 ...N.
Обычно рассматривают двоичные коды, при которых N= 2. Таким сигналам обычно
присваиваются противоположные значения логической переменной, т. е. «0» и «1».
Сообщения образуются как кодовые последовательности символов и моделируют
несущее колебание. Особенности многоканальных линий и многоступенчатых видов
модуляции не меняют дела.
Модулированные радиосигналы усиливаются по мощности и излучаются. Пе-
редатчик (ПРД), вообще говоря, может изменять структуру кодированных сигналов.
Например, расширяя их спектр за счет дополнительной модуляции амплитуды, фазы
или частоты. Типичный и широко распространенный случай — скачкообразная
псевдослучайная перестройка частоты (ППРЧ).
На приемной стороне сигналы усиливаются, фильтруются и демодулируются в
приемнике (ПРМ), декодируются и дешифруются.
При длине кодовой последовательности (значности кода) равной п > 1 и без-
ызбыточном кодировании мощность множества передаваемых сообщений равна
М = Nn. При кодировании с коррекцией ошибок мощность этого множества мень-
ше М = Nk < Nn, поскольку число избыточных символов к < п.
Излучаемые радиосигналы можно представить в виде модулированных по ам-
плитуде и/или по фазе (частоте) гармонических колебаний:
= a(f)cos[co0f + <р(/) + <р0 ], (2.93)
2.5. Системы связи и командного управления как объекты РЭБ
63
где изменяющаяся под действием модулирующего сигнала 5, (/) фаза модулиро-
ванного колебания равна
при фазовой модуляции (ФМ);
при частотной модуляции (ЧМ).
(2.94)
В (2.94) cpw — это максимальное отклонение фазы, т. е. индекс фазовой модуля-
ции, а (Од — амплитуда отклонения частоты, т. е. девиация частоты при частотной
модуляции.
В условиях РЭП прием сигнала (2.93) будет сопровождаться действием естествен-
ных аддитивных и(/) и мультипликативных (модулирующих) помех v(/). Поэтому
на входе приемника радиолинии передачи информации будет присутствовать коле-
бание
x(z)=v(z)s(/)+w(z). (2.95)
Средства РЭБ могут уменьшить мощность принимаемого сигнала Рправ за счет
такой модификации среды, которая приводит к увеличению затухания и рассеяния
сигнала, а также создает аддитивную помеху. В результате уменьшается соотноше-
ние сигнал/шум Я = ~£~ в полосе приемника РСПИ. От этого соотношения зави-
Лл
сит вероятность правильного приема сигнала
прав
ош»
(2.96)
где Рош — вероятность ошибки приема каждого символа сигнала.
Зависимость вероятности правильного приема от соотношения сигнал/шум
всегда монотонно неубывающая. Поэтому уменьшение сигнал/шум всегда снижа-
ет вероятность правильного приема вплоть до пороговой величины, количествен-
но измеряемой вероятностью Р^.
Радиосистема передачи информации может, вообще говоря, парировать действия
средства РЭП, применяя помехоустойчивое кодирование. Такое кодирование всегда
связано со снижением скорости с передачи информации. Действительно, как следует
из известной формулы К. Шеннона [39],
с —A/"log2 (1 + д) = A/~log2( l+^-i = A/~log2[ 1+ *
I \ Мш ЦТ J
(2.97)
где А/ — ширина спектра сигнала и соответственно полоса пропускания радиоси-
стемы передачи информации (РСПИ); Т — длительность сигнала, т. е. В-Д/Г —
база сигнала; Q — энергия сигнала, имеющего длительность Т; NU1 — спектральная
плотность шумовой помехи.
Создаваемые средствами РЭП помехи за счет увеличения спектральной плот-
ности помехи Ащ уменьшают пропускную способность РСПИ. Но, как следует из
(2.97), можно компенсировать снижение пропускной способности, увеличивая энер-
гию сигнала Q или ширину его спектра А/ И тот и другой способ увеличения про-
пускной способности предполагает введение в состав сигнала избыточных элементов
(символов).
Объектами РЭП могут быть все виды систем связи и передачи данных, такие как
линии подвижной и фиксированной связи, радиорелейные линии, спутниковые си-
стемы связи и передачи данных, системы сотовой связи. Также объектами РЭП могут
64 Глава 2. Объекты радиоэлектронной борьбы
быть и сети стационарной кабельной (проводной) связи. С переходом на програм-
мно-управляемые коммутационные станции резко возросла уязвимость этих стан-
ций от блокирования базовой телефонной станции преднамеренными помехами,
дезорганизующими работу многих пользователей сети на длительное время.
2.6. Электронно-вычислительные системы
как объекты радиоэлектронной борьбы
К одним из основных объектов РЭБ относят также системы обработки инфор-
мации, основу которых составляют вычислительные системы и среды (ВС). Это раз-
личные локальные и глобальные вычислительные сети, боевые информационно-
управляющие системы, отдельные вычислительные машины, микропроцессорные
устройства и микроконтроллеры, сигнальные процессоры радиоэлектронных ин-
формационных систем и еще многое другое.
В системах управления силами различных уровней с помощью ВС обрабатыва-
ется, сохраняется, распределяется и отображается информация о противнике, о
взаимодействующих и своих силах. Решаются различные задачи планирования,
оперативного управления и боевого применения сил и средств.
Быстродействие мощных вычислительных систем достигает порядка 109...10и
операций в секунду. Объем оперативной памяти ЭВМ находится в пределах от сотен
килобайт до сотен мегабайт. Емкость внешних запоминающих устройств может
исчисляться терабайтами. Существующие операционные системы позволяют под-
держивать как однозадачные, так и многозадачные режимы работы ЭВМ, обеспе-
чивать работу в вычислительной сети. Состав и характеристики используемого
специального программного обеспечения ВС определяются задачами, возлагаемы-
ми на системы. Современные вычислительные сети могут объединять сотни, тыся-
чи и даже миллионы ЭВМ.
ВС могут иметь различную структуру. На рис. 2.18 приведен пример распреде-
ленной ВС, входящей в СУ силами на море [40]. Распределенная ВС базируется на
системе автоматизированной радиосвязи, включающей космический, наземный ста-
ционарный и мобильный сегменты.
На рис. 2.18 показана система программного подавления ВС (иногда ее называют
системой программно-технического воздействия).
Несмотря на все меры защиты, ВС уязвимы для преднамеренных воздействий.
Это обусловлено рядом слабых сторон ВС как объектов РЭБ. К ним относятся:
открытость ВС, как для полезных внешних, так и для преднамеренных вредных
воздействий; несовершенство организационно-технических и логических структур
ВС; несовершенство систем защиты ВС от преднамеренных деструктивных воздей-
ствий; длительное существование негативных и деструктивных программ в памяти
ВС; возможность размножения программных помех в ВС и реализации ими раз-
личных деструктивных функций; принципиальная возможность функционального
поражения (вывода из строя элементов ВС) за счет воздействия на них мощными
электромагнитными импульсами.
Разумеется, угрозам нормальному функционированию противостоят меры защи-
ты. Такие меры предусматривают жесткие требования к системам идентификации
законного пользователя ВС и установления компетентности пользователей; конт-
роль для обнаружения и нейтрализации нештатных действий программного обес-
2.7. Энергетические системы и сети как объекты РЭБ
65
Рис. 2.18. Пример распределенной ВС
печения; каналы передачи данных должны быть защищены от ошибок и отказов,
от несанкционированного доступа к данным, опасного нарушением конфиденци-
альности и возможностью дезинформации.
2.7. Энергетические системы и сети как
объекты радиоэлектронной борьбы
Энергетические системы (энергосистемы, ЭС) — это совокупность электростан-
ций, линий электропередачи, подстанций и распределительных сетей, связанных
вследствие непрерывности процесса производства и потребления электрической
энергии в единое целое общим режимом. Нарушение работы ЭС приводит к сбою
или прерыванию обеспечиваемого процесса управления силами, оружием и други-
ми объектами. Как правило, непосредственным объектом РЭБ выступает только
часть энергосистемы — электрическая система. Она состоит из генераторов, рас-
пределительных устройств, электрических сетей (подстанций и линий электропе-
редачи различных напряжений) и потребителей энергии.
Потоки электроэнергии, передаваемые в разных ступенях электрической системы
от электростанций к потребителям, различны и определяются числом, мощностью
и удаленностью потребителей от источников питания. Для снижения потерь пере-
дачи электроэнергии с увеличением мощности и дальности передачи применяют
более высокие напряжения, вплоть до сотен киловольт. Применяемые номиналы
напряжений и частоты стандартизованы.
66
Глава 2. Объекты радиоэлектронной борьбы
Многие внешние и внутренние условия функционирования энергетических си-
стем обуславливают их высокую уязвимость от перенапряжений. В лучшем случае
перенапряжения вызывают срабатывание систем защиты электротехнического обо-
рудования и отключение электропитания. Но возможен также пробой (физическое
разрушение) изоляционных материалов, диэлектрических сред, выгорание контак-
тов, обмоток трансформаторов, линий электропитания, выход из строя целых под-
станций и устройств потребления электрической энергии. Все эти аварийные си-
туации могут привести к дезорганизации систем управления войсками (силами) и
оружием, в интересах которых используются поражаемые системы электропитания.
К непреднамеренным внешним и внутренним перенапряжениям в электричес-
ких системах относятся грозовые, которые возникают при ударе молнии в элект-
рическую установку или вблизи нее в землю, и перенапряжения от различных нор-
мальных или аварийных коммутаций, а также от неумышленных повреждений.
Преднамеренные внешние перенапряжения могут быть вызваны специальны-
ми сверхмощными источниками электромагнитной энергии.
Внутренние преднамеренные перенапряжения могут быть вызваны применением
против воздушных линий электропередачи и открытых электрических подстанций
электропроводящих материалов. Например, графитовых бомб, металлических или
металлизированных лент.
ГЛАВА 3
РАДИОЭЛЕКТРОННАЯ РАЗВЕДКА
3.1. Назначение и задачи радиоэлектронной разведки
Радиоэлектронная разведка, добывая сведения о противнике в информацион-
ном конфликте, использует физические поля различной природы. Чаще всего —
электромагнитные поля разных частотных диапазонов. Но общим является исполь-
зование радиоэлектронных средств для выделения и обработки информации.
Постоянное развитие и совершенствование средств вооруженной борьбы (в част-
ности, увеличение дальности их действия, поражающей способности и скорости
доставки к цели), динамичность и скоротечность боевых действий обусловливают
повышение требований к разведке. Все большую важность приобретают своевремен-
ность и достоверность разведки, ее непрерывность и скрытность. Практически сняты
ограничения на внешние условия разведки — она должна проводиться в любое время
года и суток, при любых метеоусловиях и при различном характере боевых действий.
Объекты доступны разведке с применением технических средств (радио- и оп-
тико-электронных, акустических, оптических и др.) постольку, поскольку они об-
ладают демаскирующими признаками. К этим признакам объектов относят внешний
вид, форму, цвет, геометрические размеры и физические поля, сопровождающие
работу объектов разведки. Это электромагнитные, электрические, магнитные, теп-
ловые, сейсмические, акустические поля. Многообразны и демаскирующие при-
знаки действий противника. Так, при подготовке наступления таковыми являют-
ся: сосредоточение группировок войск и военной техники на возможных направ-
лениях наступления, увеличение количества огневых средств на огневых позициях,
повышение активности всех видов разведки и интенсивности функционирования
радиоэлектронных средств. В свою очередь, действиям противника при переходе к
обороне свойственны такие признаки, как отвод части сил в глубину, усиление
инженерного оборудования в тылу.
На основании анализа демаскирующих признаков объектов и действий против-
ника возможно опознавание объектов, определение их типов и образцов, предназ-
начения, вскрытие замысла противника по подготовке боевых действий.
Одним из существенных демаскирующих признаков, присущих всем без исклю-
чения объектам, являются электромагнитные излучения. Природа их возникновения
различна. Они могут быть естественного (природного) или искусственного проис-
хождения, первичными (собственными) или вторичными (отраженными). К собст-
венным относятся тепловые (температурные) излучения объектов и излучения ра-
дио- и оптико-электронных средств (РЭС и ОЭС).
Тепловое излучение — электромагнитное излучение, испускаемое объектами,
температура которых отлична от абсолютного нуля. Собственное тепловое излуче-
ние отличается от искусственно генерируемых излучений тем, что по своей времен-
ной структуре имеет случайный, шумоподобный характер и занимает очень широ-
кий диапазон длин волн (от ультрафиолетового до СВЧ). Спектр теплового излуче-
ния сплошной, но распределение энергии по частотам неравномерно. Спектральная
68
Глава 3. Радиоэлектронная разведка
плотность излучения зависит от частоты и температуры. Она достигает максималь-
ных значений на определенных частотах, уменьшаясь с повышением и понижени-
ем частоты. С повышением температуры излучающей поверхности спектральная
плотность излучения на всех частотах возрастает, а значит, увеличивается и общая
энергия излучения объекта. Максимум спектральной плотности смещается при этом
в область более коротких волн (закон смещения Вина). Полная энергия излучения
единицы поверхности во всем диапазоне электромагнитных волн пропорциональ-
на четвертой степени абсолютной температуры излучающей поверхности. Это за-
кон Стефана — Больцмана (см. гл. 7).
Излучения РЭС и ОЭС — это прежде всего основные (преднамеренные) коле-
бания, сопровождающие функционирование средств разведки, связи, управления,
локации, навигации, радиоэлектронного подавления. Особенность основных излу-
чений — наличие закономерностей в их пространственной, временной и спектраль-
ной структуре. Регулярны диаграммы направленности излучений, длительность и
период следования излучаемых импульсов, несущая частота, вид амплитудного и
фазочастотных спектра и др. Наряду с основными, при работе передатчиков РЭС
и ОЭС имеются и неосновные (паразитные и непреднамеренные) излучения, т. е.
излучения вне пределов полосы частот, необходимой для передачи информации или
создания помех.
Вторичные электромагнитные излучения — излучения, возникающие за счет
отражения (рассеяния) электромагнитных волн, облучающих объект. Падающие на
объект электромагнитные волны рассеиваются им во всех направлениях, в том числе
и в направлении на источник излучения. Для вторичного излучения реальных объек-
тов (средств вооружения и военной техники, других объектов) характерна зависи-
мость параметров (интенсивности, спектра, поляризации, наклона фазового фронта)
от отражательной способности, геометрической формы и размеров объекта, поляри-
зации падающей волны, взаимной ориентации источника облучения и объекта и,
наконец, от параметров их относительного движения.
Первичные и вторичные электромагнитные излучения могут быть обнаружены
и проанализированы. По результатам анализа делаются выводы об объекте развед-
ки или намерениях противника. Иными словами, электромагнитные излучения
позволяют вести разведку объектов и их распознавание.
3.1.1. Назначение, задачи и особенности радиоэлектронной разведки
Радиоэлектронная разведка (РЭР) предназначена для добывания данных о про-
тивнике с помощью РЭС и ОЭС путем приема и анализа электромагнитных излу-
чений объектов разведки. В качестве последних могут быть различные военные
объекты, среди них РЭС и ОЭС систем управления войсками и оружием, систем
разведки и радиоэлектронной борьбы (РЭБ). В зависимости от применяемых прин-
ципов и технических средств РЭР подразделяется на радио-, радиотехническую,
радиолокационную, радиотепловую и оптико-электронную разведки.
РЭР обнаруживает объекты, определяет их местоположение и параметры движе-
ния; определяет параметры объектов (в том числе РЭС и ОЭС) и характер их изме-
нения во времени; определяет предназначение объектов разведки и их типы — опо-
знает их образы. Для решения перечисленных задач применяются станции радио-
и радиотехнической разведки, радиолокационные и радиотеплолокационные стан-
ции (РЛС, РТЛС), оптико-электронные средства (тепловизоры, оптические локато-
3.1, Назначение и задачи РЭР
69
ры, телевизионные станции). Средства РЭР работают в активном или пассивном
режиме (с излучением или без излучения электромагнитных волн), в широком ди-
апазоне спектра — от оптического до сверхдлинноволнового. Они базируются на
земле, на море, в воздухе и в космосе, позволяют вести соответственно наземную,
морскую, воздушную и космическую РЭР. Как никакой другой вид разведки, РЭР
добывает наиболее полные данные о наземных, морских, воздушных и космических
объектах противника. Средства РЭР работают в широком диапазоне дальностей от
нескольких километров до нескольких тысяч километров; в высотном диапазоне от
нескольких метров до нескольких сот и тысяч километров; в простых и сложных ме-
теоусловиях, днем и ночью, в мирное и военное время, в наступлении и в обороне.
При этом информацию о большом количестве объектов, расположенных на обшир-
ной территории и на больших дальностях, получают практически мгновенно, так как
скорость распространения электромагнитных волн-переносчиков информации равна
скорости распространения света. РЭР может проводиться без непосредственного
контакта с объектом разведки. Поэтому она малоуязвима для противника [38, 41].
При ведении РЭР имеется возможность существенно ослабить зависимость
результатов разведки от внешних условий выбором средств РЭР и диапазона элек-
тромагнитных волн. Так, например, ночью, в сложных метеоусловиях (дождь, плот-
ная облачность) исключаются визуальное наблюдение и фотографирование объек-
тов разведки. В таких условиях применяются средства радио-, радиотехнической,
радиолокационной и радиотепловой разведки.
РЭР может проводиться скрытно от противника, так как многие ее средства
работают в пассивном режиме по собственным излучениям объектов разведки.
Высокая скорость изменения характера боевых действий требует значительного
уменьшения времени реакции системы разведки. В такой обстановке средства РЭР,
особенно при их комплексном применении, невозможно заменить никакими други-
ми техническими средствами, поскольку информация о противнике добывается в
кратчайшие сроки и обычно в реальном масштабе времени. Действительно, время,
необходимое для получения разведданных об объекте и передачи этих данных в за-
интересованные инстанции, практически значительно меньше времени, затрачива-
емого средством разведки на обнаружение, определение координат и параметров
объекта разведки.
На основании анализа результатов РЭР, особенно результатов разведки РЭС и
ОЭС, получают сведения о численном составе войск противника, их дислокации,
характере действий, определяют наиболее уязвимые места в системе управления
силами и средствами ПВО противника и т. д. Знание уязвимых мест позволяет пла-
нировать и проводить различные мероприятия, в том числе и мероприятия по подав-
лению систем управления войсками и оружием с применением средств поражения
или средств РЭП.
3.1.2. Характеристика видов радиоэлектронной разведки
Эффективность ведения РЭР в значительной степени зависит от выбранного
вида разведки и используемых технических средств, так как каждому из них свой-
ственны свои возможности и особенности, преимущества и недостатки. Рассмот-
рим отдельно каждый из видов РЭР.
Радиоразведка добывает данные о противнике путем поиска, перехвата, пелен-
гования и анализа излучений его РЭС связи (радиостанций). Радиоразведка осу-
70
Глава 3. Радиоэлектронная разведка
ществляется с помощью специальных радиоразведывательных станций, радиопе-
ленгаторов и радиоразведывательных комплексов.
В результате разведки определяются: содержание передаваемой информации,
ТТХ радиостанций, интенсивность их работы за некоторый интервал времени, си-
стема расположения радиостанций и плотность их размещения в определенном
районе. Анализ данных разведки дает возможность установить состав и местона-
хождение сил и средств противника, расположение его штабов и пунктов управле-
ния, вскрыть намерения противника.
Радиотехническая разведка (РТР) добывает сведения о противнике, обнаружи-
вая и анализируя сигналы, излучаемые РЭС локации, навигации, управления и
средствами РЭБ.
РТР ведется с помощью специальных станций радиотехнической разведки. По
данным РТР определяются назначение, тип и местоположение РЭС.
Как видно, между радио- и радиотехнической разведками (РРТР) больше общего,
чем различного.
РРТР занимают ведущее место среди других видов РЭР. Широкое применение
РРТР связано с насыщенностью войск РЭС различного назначения. Имея дальность
действия, превышающую дальность действия разведуемого РЭС, РРТР способны
как в мирное, так и в военное время получать практически одновременно инфор-
мацию о большом количестве РЭС.
Радиолокационная разведка обеспечивает обнаружение, определение координат
и параметров движения наземных, надводных, воздушных и космических объек-
тов противника в широком диапазоне дальностей и высот. В основу радиолокаци-
онной разведки положены принципы активной радиолокации.
Широкое применение РЛС для ведения разведки объектов противника обуслов-
лено преимуществами радиолокационного наблюдения объектов. Так, в отличие от
визуального наблюдения и фотографирования РЛС позволяют вести наблюдение
объектов при любых метеоусловиях (наличие дымки, облачности, тумана, дождя).
Качество радиолокационного изображения при этом не зависит от степени осве-
щенности объектов. Преимуществом радиолокационной разведки является также
то, что РЛС способны обнаруживать объекты на больших расстояниях — сотни и
тысячи километров.
Для ведения воздушной радиолокационной разведки наземных объектов при-
меняются панорамные РЛС кругового обзора и РЛС бокового обзора (РЛС БО).
Одной из существенно важных характеристик РЛС разведки является их разре-
шающая способность по дальности и угловым координатам, определяющая деталь-
ность радиолокационного изображения. Повышение разрешающей способности
РЛС достигается уменьшением длительности импульса, сужением диаграмм направ-
ленности антенн, а также использованием специальных способов преобразований
сигналов в РЛС.
Основной недостаток панорамных РЛС — это низкая линейная разрешающая
способность по азимуту.
Созданные в конце 50-х годов специальные РЛС БО с синтезированной апер-
турой (РСА) имеют существенно более высокую разрешающую способность по ази-
муту, что позволяет получать радиолокационные изображения земной поверхно-
сти и объектов, по детальности сравнимые с аэрофотоснимками. Достоинством РЛС
БО является также то, что самолеты-разведчики при ведении разведки могут осу-
ществлять полеты над своей территорией. При этом представляется возможным
3.7. Назначение и задачи РЭР
71
вести радиолокационное наблюдение объектов, находящихся на больших расстоя-
ниях от самолета-носителя средства разведки и замаскированных от наблюдения в
оптическом и ИК диапазонах.
РЛС БО подразделяют на РЛС с вдольфюзеляжной антенной и РЛС с синтези-
рованной (искусственной) апертурой антенны. Названные РЛС отличаются по
принципу действия и тактико-техническим характеристикам.
В РЛС с вдольфюзеляжной антенной повышение разрешающей способности по
азимуту достигается увеличением горизонтального размера (до 7... 15 м) приемопе-
редающей антенны. При таких размерах антенны ширина ее диаграммы направ-
ленности составляет доли градусов, а линейная разрешающая способность РЛС в
азимутальной плоскости — десятки метров. В вертикальной плоскости антенна РЛС
формирует широкую диаграмму направленности, обеспечивающую облучение зем-
ной поверхности в некотором диапазоне наклонных дальностей (от нескольких
километров до нескольких десятков километров) до наземных объектов. Обзор зем-
ной поверхности производится за счет перемещения летательного аппарата. При
этом просматривается боковая полоса поверхности. РЛС БО с вдольфюзеляжной
антенной позволяют получать детальные радиолокационные изображения только
на относительно небольших дальностях до объектов (от нескольких километров до
10-30 км). С увеличением наклонной дальности линейная разрешающая способ-
ность по азимуту ухудшается. Так, при длине антенны, равной 10 м, и длине волны
РЛС Х= 3 см линейная разрешающая способность по азимуту при изменении даль-
ности до объектов от 5 до 50 км ухудшается с 16 до 150 м.
Высокую угловую и линейную разрешающую способность по азимуту на боль-
ших дальностях от самолета-разведчика имеют РЛС БО с искусственной (синтези-
рованной) апертурой антенны при малых физических (реальных) ее размерах. Со-
здание эквивалентных апертур с увеличенной эффективной длиной достигается
благодаря когерентному суммированию отраженных сигналов, принимаемых на
определенном прямолинейном отрезке пути, пролетаемом самолетом. Синтезиро-
вание апертуры позволяет увеличить разрешающую способность РЛС по азимуту в
100 и более раз по сравнению с панорамными РЛС кругового обзора.
К недостаткам РЛС БО относятся необходимость точного выдерживания гори-
зонтального и прямолинейного полета и зависимость качества радиолокационного
изображения от пространственных флюктуаций траектории полета летательного
аппарата-носителя РЛС.
Радиотепловая разведка основана на обнаружении и определении местополо-
жения наземных, морских, воздушных и космических объектов по их тепловому
излучению в радиодиапазоне. Характеристики радиотеплового излучения (интен-
сивность, спектральный состав, спектральная плотность) зависят от физических
свойств вещества и температуры излучающего объекта.
Радиотепловая разведка ведется с помощью радиотеплолокационных станций
(РТЛС), устанавливаемых на ЛА. Известны применения РТЛС для ведения воздуш-
ной и космической разведки, работающих в диапазонах 0,4; 0,8; 1,25; 2 и 3,2 см.
Радиотепловая разведка возможна только при наличии контрастности интенсивно-
стей теплового излучения объектов и фона (земной поверхности, неба и др.), на
котором осуществляется наблюдение. Контрастность объекта и фона оказывает
существенное влияние на дальность действия РТЛС.
Реальный радиотепловой сигнал, излучаемый объектом разведки, представляет
собой непрерывный шум с очень широким сплошным спектром (от метрового до
72
Глава 3. Радиоэлектронная разведка
миллиметрового диапазона волн) и низкой спектральной плотностью. Интенсив-
ность радиотеплового излучения объектов составляет (сотые и десятые доли про-
цента) от общей интенсивности теплового излучения в миллиметровых и субмил-
лиметровых диапазонах, а в сантиметровом и дециметровом диапазонах — сотые и
тысячные доли процента. Поэтому для увеличения мощности принимаемого сиг-
нала применяются приемные устройства с очень широкой полосой пропускания
по высокой частоте — сотни и тысячи мегагерц. Благодаря этому мощность излу-
чения, принимаемого РТЛС, может достигать величины 1О“10 Вт.
Отсутствие априорных данных о структуре сигналов объектов и наличие иска-
жений, обусловленных параметрами носителя и РТЛС, затрудняет (в отличие, на-
пример, от активных РЛС) применение оптимальных схем приемных устройств.
Несогласование структур сигнала и приемного устройства приводит к дополнитель-
ным искажениям реального радиотеплового сигнала.
Кроме того, в приемных устройствах РТЛС невозможно применение времен-
ной селекции сигналов и повышение благодаря этому помехоустойчивости сред-
ства разведки при воздействии нескольких сигналов. РТЛС уступают РЛС и по
разрешающей способности.
Несмотря на отмеченные недостатки, радиотепловая разведка позволяет решать
задачи, неразрешимые при применении средств радиолокационной разведки. Суще-
ственными преимуществами радиотепловой разведки являются абсолютная скрыт-
ность ее ведения и независимость от метеоусловий. Скрытность обусловлена пас-
сивным режимом работы средств разведки. Она затрудняет противнику разведку
параметров РТЛС и организацию ее радиоэлектронного подавления. Всепогодность
радиотепловой разведки обеспечивается за счет работы в диапазонах сантиметро-
вых и миллиметровых волн. Зависимость условий распространения от состояния
среды в этих диапазонах не столь значительна по сравнению с ИК-диапазоном.
Оптико-электронная разведка (ОЭР) предназначена для обнаружения и опозна-
вания объектов путем приема, преобразования и анализа их собственного или от-
раженного электромагнитного излучения оптического диапазона волн. Она подразде-
ляется на тепловую, оптико-локационную и телевизионную.
Тепловая разведка, как и радиотепловая, обнаруживает объекты противника по
их собственному тепловому излучению, но в инфракрасном (ИК) диапазоне элек-
тромагнитных волн. Тепловое излучение в ИК-диапазоне в отличие от радиотепло-
вого имеет более высокую интенсивность. В качестве средств тепловой разведки
применяются пассивные ИК разведывательные системы, прежде всего тепловизо-
ры. Для ведения тепловой разведки используются преимущественно диапазоны длин
волн от 3 до 5 мкм и от 8 до 15 мкм. Объясняется это тем, что электромагнитные
излучения этих диапазонов менее всего поглощаются и рассеиваются в атмосфере.
Кроме того, в указанных диапазонах сравнительно высокая интенсивность тепло-
вого излучения разведуемых объектов. Применяемые для ведения разведки тепло-
визоры устанавливаются на ЛА. Они обеспечивают круглосуточное скрытное веде-
ние разведки объектов противника, в том числе замаскированных и укрытых от
фотографирования, визуального и радиолокационного наблюдения.
В основе построения тепловизоров лежит регистрация контраста тепловых излу-
чений объектов и окружающего фона. Для получения изображения теплового конт-
раста объектов (тепловой карты местности) производится сканирование оптической
системы тепловизора в пределах заданного диапазона углов. Тепловое излучение
объектов, принимаемое тепловизором, преобразуется на выходе его приемника
3.1. Назначение и задачи РЭР
73
в электрические сигналы. Эти сигналы могут быть использованы для управления
интенсивностью луча света (при записи изображения на фотопленку) или интен-
сивностью электронного луча телевизионной трубки при визуальном наблюдении.
Пассивные ИК-системы имеют высокую чувствительность к разности темпера-
тур (температурная разрешающая способность) объектов или отдельных элементов
объекта — десятые и сотые доли градуса Цельсия и высокую угловую разрешаю-
щую способность 0,5...2 мрад.
Изображение теплового контраста объектов может записываться на любой но-
ситель данных, а также передаваться в реальном масштабе времени по радиокана-
лам на наземные командные пункты. Передача информации в значительной степе-
ни повышает оперативность разведки.
Воздушная тепловая разведка возможна (в отличие, например, от визуального
наблюдения и фотографирования) в любое время суток без искусственного подсвета
объектов. Дальность разведки даже при осадках, тумане и дымке в несколько раз
превышает дальность визуального наблюдения. Тепловая разведка, кроме того, по-
зволяет опознавать военную технику (авиационную, бронетанковую и другую) и
определять степень ее готовности к боевым действиям по отличительным призна-
кам теплового излучения объектов в различных состояниях (включенный или выклю-
ченный реактивный или поршневой двигатель, степень его нагрева, наличие вых-
лопных газов и т. д.).
Основным недостатком тепловой разведки является зависимость ее эффектив-
ности (вероятности обнаружения и опознавания объектов, дальности разведки) от
метеоусловий и интенсивности излучения фона местности.
Оптико-локационная разведка использует обнаружение, опознавание и опреде-
ление местоположения объектов по отраженным от них электромагнитным излу-
чениям оптического диапазона. Для обнаружения и определения местоположения
объектов используются принципы и устройства радиолокации и теплопеленгации.
Оптический локатор, как и радиолокатор, облучает наземные объекты электромаг-
нитными волнами, принимает отраженные излучения и преобразует их в электри-
ческие сигналы, а затем в видимое изображение.
В качестве средств разведки находят применение активные некогерентные и ко-
герентные разведывательные системы ИК-диапазона электромагнитных волн. В со-
став некогерентной разведывательной системы входят: аппаратура подсвета мест-
ности (набор ламп-вспышек с ИК-фильтрами), специальные системы линз и ИК-
фильтров. Система линз и ИК-фильтров предназначена для приема отраженного
от земной поверхности ИК-излучения и передачи его для регистрации в аэрофото-
аппараты.
Основным составным элементом аппаратуры подсвета когерентных разведыва-
тельных систем являются лазеры, работающие в широком диапазоне длин волн. При-
менение лазеров в существенной степени повышает возможности разведки: точность
определения координат и разрешение объектов разведки. Так, точность измерения
дальности может составлять ±1 м (в РЛС — 20...50 м), точность определения угловых
координат 1... 1,5' (в РЛС — порядка 30'). Высокая разрешающая способность обеспе-
чивает получение изображения местности при ведении воздушной разведки в ночных
условиях, качество которого не уступает аэрофотосъемкам в дневных условиях.
Телевизионная разведка позволяет получать видимые, изображения объектов, в
том числе ночью при низком уровне освещенности местности. Она основана на пре-
образованиях видимого изображения объекта — пространственного распределения
74
Глава 3. Радиоэлектронная разведка
освещенности на наблюдаемом объекте — во временную последовательность элект-
рических сигналов (видеосигналов). Указанное преобразование производится с по-
мощью построчно сканирующей оптической системы и фоточувствительного пре-
образователя.
Для ведения телевизионной разведки необходимо иметь передающую телеви-
зионную станцию, располагаемую в районе объектов разведки, и приемник телевизи-
онных сигналов, находящийся на наземном пункте сбора и обработки разведы-
вательной информации. Телевизионные станции устанавливаются на земле и ЛА.
Дальность устойчивой передачи телевизионных сигналов может составлять 50 и более
километров.
Телевизионная разведка обеспечивает: высокую оперативность и достоверность
разведывательной информации; детальность изображений наблюдаемых объектов;
возможность обнаружения объектов, не обладающих радиолокационной контра-
стностью. Наконец, телевизионная разведка дает возможность наблюдения объек-
тов в инфракрасном и ультрафиолетовом диапазонах электромагнитных волн, т. е.
объектов, невидимых при визуальном наблюдении. Ограничения, накладываемые
на использование средств телевизионной разведки, обусловливаются зависимостью
эффективности разведки от метеоусловий и освещенности объектов.
3.1.3. Разведка радиоэлектронных средств
РЭС, входящие в системы управления войсками и оружием, в системы РЭБ,
являются важнейшими объектами разведки. На основании анализа данных о РЭС
противника (их местоположении, тактико-технических характеристиках) могут быть
сделаны выводы о группировке сил и средств, дана оценка его возможным замыслам
на предстоящие боевые действия, выявлены слабые (уязвимые) элементы систем
управления, принято решение на проведение комплекса мер и действий по уничто-
жению группировок сил и средств, подавлению систем управления и т. д.
Как и любой объект разведки, РЭС имеет присущие ему демаскирующие (опозна-
вательные) признаки. К демаскирующим признакам РЭС относятся внешний вид
как единого целого, внешний вид отдельных элементов (прежде всего антенных
устройств). Но основным демаскирующим признаком РЭС, как уже отмечалось,
являются его собственные электромагнитные излучения. Поэтому для разведки РЭС
могут быть использованы практически все известные способы и средства анализа
и фиксации электромагнитных полей: визуальное наблюдение, фотографирование,
разведка с помощью РЭС. Так, например, при визуальном наблюдении, фотографи-
ровании, оптико-электронной и телевизионной разведке можно получить важные
данные о местоположении и внешнем виде РЭС. По внешнему виду РЭС можно
судить о назначении, типе РЭС и его некоторых технических характеристиках, о
системах управления, в состав которых входят эти РЭС. Дополнйтельную инфор-
мацию о РЭС можно получить при ведении радиотепловой и тепловой, радио- и
оптико-локационной разведок. Действительно, РЭС любого назначения как объект,
обладающий температурным контрастом с окружающей средой, имеет свои особен-
ности собственного теплового излучения. В зависимости от режима работы РЭС
(выключено, включены источники питания, включен передатчик и т. д.) характе-
ристики теплового излучения будут меняться. При облучении (подсвете) РЭС от-
раженный сигнал способен нести информацию о РЭС, в особенности — о его
антенном устройстве.
3.1. Назначение и задачи РЭР
75
Наиболее важные и достоверные данные о РЭС (режимах работы, принципах
и особенностях функционирования, параметрах средств и параметрах сигналов, их
назначении и типе) можно получить при ведении РТР. С помощью ее средств опре-
деляется направление на РЭС как на источник электромагнитного излучения; про-
странственные координаты местоположения РЭС; несущая частота закон изме-
нения несущей частоты во времени /(/); вид амплитудно-частотного спектра 5(/)
сигнала; временные параметры сигналов — длительность ти и период следования
Тп импульсов, длительность импульсной кодовой посылки и временные интерва-
лы между импульсами посылки; время облучения Гобл станции разведки (время
воздействия сигнала РЭС); временной интервал между облучениями; поляризация
электромагнитных волн, излучаемых РЭС; форма диаграммы направленности ан-
тенны РЭС; режим работы РЭС (импульсный или непрерывный режим излучения
передатчика, режим обзора пространства или режим автоматического сопровожде-
ния цели по направлению и т. д.).
На основании анализа тонкой структуры сигнала и диаграммы направленности
антенны можно опознать (идентифицировать) конкретное РЭС. Применительно к
мобильным РЭС это означает, например, то, что по их передвижениям можно судить
о передислокации сил и средств противника, о характере проводимых им меро-
приятий.
Каждое РЭС любого класса (локация, управление, навигация, разведка) обла-
дает определенной совокупностью параметров из перечисленного выше набора.
Совокупность параметров и диапазоны их значений являются разведывательными
(отличительными) признаками РЭС определенного класса и типа. На основании
анализа этой совокупности определяются назначение, тип, принцип функциони-
рования и упрощенная структурная схема РЭС. Определив в результате разведки
назначение, типы, местоположение и особенности расположения на местности РЭС,
можно установить предназначение и местоположение органов управления, состав
сил и средств противника.
Для определения параметров РЭС и параметров его сигналов используются раз-
личные методы и устройства. Эти параметры сигналов, действующих на входе при-
емного устройства станции разведки, могут в существенной степени отличаться от
параметров сигналов, излучаемых разведываемым РЭС. На форму и длительность
сигналов на входе приемника оказывают влияние чувствительность приемника: при
одной и той же мощности сигнала РЭС в зависимости от чувствительности возмо-
жен прием сигналов только по основному лепестку или вкруговую по основному,
боковым и задним лепесткам диаграммы направленности антенны. Влияет также
ширина диаграммы направленности антенны РЭС и антенны станции разведки,
скорость вращения (сканирования) этих антенн и взаимные пространственные пе-
ремещения объекта разведки и средства разведки. Очевидно, что чем больше раз-
личия сигналов, тем меньше достоверность разведданных, тем выше вероятность
принятия ошибочного решения об образе РЭС. Уменьшить эти различия можно
только согласованием пространственно-временных и частотных характеристик сред-
ства разведки с параметрами разведываемого РЭС.
Следует отметить, что возможности РТР в некоторых случаях ограничены, так
как переносчиком информации о разведываемом объекте (РЭС) являются излуча-
емые им сигналы. В частности, получение разведданных невозможно при выключен-
ном РЭС или его работе в пассивном режиме. Эффективность и достоверность раз-
ведки снижаются при принятии противником мер, направленных на скрытие как
If)
Глава 3. Радиоэлектронная разведка
самих излучений, так и их параметров (применение остронаправленных передающих
антенн, снижение уровня боковых лепестков диаграмм направленности антенн, со-
кращение времени излучения, маскировка излучений ложными излучениями и т. д.).
Наиболее достоверные данные о РЭС противника можно получить только при
комплексном использовании различных способов и технических средств разведки.
3.1.4. Упрощенная структурная схема станции
радиотехнической разведки
В соответствии с задачами, решаемыми РТР, станции РТР должны обеспечи-
вать прием сигналов РЭС в заданных диапазонах частот и направлений, обнаруже-
ние сигналов и пеленгацию их источников, анализ и определение параметров при-
нятых сигналов, регистрацию и документирование разведданных. Кроме того, мо-
жет быть предусмотрена передача полученных сведений на пункт сбора и обработки
информации. Указанные функции в станции РТР (рис. 3.1) выполняют: антенная
система, приемное устройство (приемник), анализатор параметров сигналов, уст-
ройства измерения параметров и регистрации разведданных.
Рис. 3.1. Обобщенная структурная схема станции РТР
Антенная система осуществляет пространственную селекцию (разделение) сиг-
налов, излучаемых разведываемыми РЭС. Она должна обеспечивать прием сигна-
лов в широком диапазоне несущих частот. Для определения направления на ис-
точники сигналов (пеленгации РЭС) применяют антенны с узкой диаграммой на-
правленности. Пеленгация нескольких РЭС производится путем одновременного
(беспоискового) или последовательного (поискового) пространственного разделе-
ния сигналов. Перспективны многолучевые ФАР с цифровой обработкой сигналов.
Одновременное разделение возможно при приеме сигналов РЭС с разных на-
правлений на несколько остронаправленных идентичных антенн, диаграммы на-
правленности которых смещены друг относительно друга на ширину основного
лепестка одиночной антенны. Суммарная диаграмма направленности всех антенн
перекрывает заданный диапазон направлений разведки.
Пространственная селекция сигналов осуществляется одной антенной, прини-
мающей сигналы в пределах основного лепестка диаграммы направленности. При-
ем сигналов нескольких РЭС в заданном диапазоне направлений разведки осуще-
ствляется за счет последовательного изменения во времени пространственного
положения диаграмм направленности антенны или применения многолучевых ФАР.
Приемное устройство производит прием и селекцию сигналов РЭС по несущей
частоте. Частотное разделение сигналов, так же как и пространственное, может быть
одновременным (беспоисковым) или последовательным (поисковым).
При одновременном разделении сигналы нескольких РЭС, имеющие различ-
ные частоты, принимаются независимо несколькими приемными устройствами; их
амплитудно-частотные характеристики разнесены на ширину полосы пропускания
3.1. Назначение и задачи РЭР
77
одиночного устройства. В этом случае приемное устройство станции разведки на-
зывают многоканальным. Приемное устройство одного канала может быть пост-
роено, в частности, по схеме приемника прямого усиления.
Сигналы разделяются по частоте при изменении частоты настройки приемника
в заданном диапазоне несущих частот сигналов РЭС. Приемное устройство станции
разведки в этом случае одноканальное. Для последовательного разделения могут
быть применены супергетеродинные приемники с перестраиваемым по частоте
гетеродином и узкополосным УПЧ.
К основными характеристиками приемных устройств станций РТР относят
чувствительность (минимальную мощность разведываемого сигнала, при котором
обеспечивается его обнаружение с заданными значениями вероятностей правиль-
ного обнаружения и ложной тревоги); перекрываемый диапазон несущих частот
разведываемых сигналов; точность измерения параметров принимаемых сигналов;
разрешающая способность по измеряемым параметрам сигнала.
Для определения направления (угловых координат) на РЭС применяются амп-
литудные, фазовые и частотные методы пеленгации. По угловым координатам
определяется местоположение РЭС.
Основными характеристиками пеленгационных устройств различного типа яв-
ляются точность измерения угловых координат РЭС и разрешающая способность
по угловым координатам.
Устройство анализа параметров сигналов предназначено для определения вре-
менных (длительность и период следования импульсов, длительность импульсных
посылок и временные интервалы между ними) и спектральных (спектр принимае-
мого сигнала и спектр модулирующей функции) параметров сигналов РЭС.
Основными характеристиками анализатора являются: количество измеряемых
параметров сигналов, диапазон значений измеряемых параметров, точность изме-
рения каждого параметра и разрешающая способность по каждому параметру. Для
измерения значений параметров сигналов применяются различные методы и устрой-
ства. Некоторые из них будут рассмотрены ниже.
Устройство регистрации разведданных служит для автоматической регистрации
параметров принятых сигналов в виде, удобном для анализа и документирования.
В качестве регистрирующих устройств применяются дисплеи, магнитная лента ви-
деомагнитофонов, фотопленка, устройства памяти ЭЦВМ. Данные разведки с по-
мощью устройства передачи данных (УПД) могут быть переданы на пункт сбора и
обработки информации. При этом повышается оперативность ведения разведки.
При организации и ведении разведки возникает необходимость решения задач по
оценке возможностей имеющихся средств разведки или применению таких средств,
которые обеспечивали бы выполнение определенных требований в процессе раз-
ведки. К этим задачам относятся так называемые прямая и обратная задачи РТР.
Прямая задача ставится так: определить максимально возможное количество
разведываемых РЭС с помощью имеющегося средства (станции) разведки с извест-
ной пропускной способностью сигналов.
В свою очередь, обратная задача формулируется следующим образом: опреде-
лить минимально необходимое число каналов разведки и максимальное значение
среднего времени разведки сигнала в одном канале при заданных параметрах дей-
ствующего на входе системы разведки потока сигналов и заданной вероятности раз-
ведки. Решение указанных задач возможно с применением математического аппа-
рата теории массового обслуживания.
78
Глава 3. Радиоэлектронная разведка
3.1.5. Радиоэлектронная разведка радиоэлектронных систем
в интересах организации и ведения радиоэлектронной борьбы
Организация и ведение РЭБ возможны только при наличии данных о РЭС
противника, их местоположении, предназначении и типах, тактико-технических
характеристиках, принципах функционирования и структуре построения приемных
устройств, видах используемых сигналов. Указанные данные позволяют спланиро-
вать и организовать радиоэлектронное подавление (РЭП) или уничтожение РЭС
противника (РЭС управления войсками и оружием, РЭС разведки и РЭБ), реали-
зовать мероприятия по защите собственных РЭС и мероприятия по снижению
эффективности применения противником средств разведки.
Наиболее надежные и полные сведения о РЭС противника в интересах РЭБ
получают при ведении РЭР и прежде всего РТР. Особенностью последней является
то, что добываемые ею данные предоставляют возможность: проанализировать и
оценить радиоэлектронную обстановку; принять решение на организацию и ведение
РЭБ; определить необходимость РЭП или уничтожения РЭС противника; опреде-
лить потребное для ведения РЭБ количество сил и средств; установить режимы
работы средств создания помех. Эффективность РЭБ при этом будет в значитель-
ной степени зависеть от точности определения местоположения РЭС, количества
разведанных параметров сигналов и точности определения их значений, от досто-
верности данных о принципах функционирования РЭС и их уязвимых местах.
Разведка РЭС в интересах РЭБ может быть предварительной (до выполнения
поставленной задачи) или исполнительной (в ходе выполнения поставленной за-
дачи). При ведении предварительной разведки получают данные как о заранее из-
вестных РЭС, так и о новых РЭС с неизвестными принципами функционирова-
ния и используемыми видами сигналов. Результаты предварительной разведки ис-
пользуются при принятии решения на организацию РЭП или уничтожение РЭС.
При ведении исполнительной (непосредственной) разведки получают дополни-
тельные данные о РЭС. Эти данные используются для предупреждения экипажей
об облучении самолетов бортовыми РЛС истребителей-перехватчиков, РЛС ЗРК и
ЗА, для радиоэлектронного подавления или поражения РЭС.
3.2. Способы и устройства определения несущей
частоты радиосигнала
Определение и запоминание несущей частоты разведываемого радиоэлектронно-
го устройства — одна из наиболее важных функций станции радиотехнической раз-
ведки. Применяемые в радиотехнической разведке способы определения и запоми-
нания частоты являются специфическими. Специфичность методов определения
и запоминания несущей частоты обусловлена, с одной стороны, ограниченностью
времени разведки и, с другой стороны, широким диапазоном разведываемых частот.
Принципиально применяются два основных способа определения частоты: бес-
поисковый и поисковый.
Беспоисковый способ позволяет определять несущую частоту практически мгно-
венно, в то время как поисковые способы определения частоты требуют некоторого
времени в связи с необходимостью перестройки приемника. Данный способ опре-
деления частоты позволяет значительно сократить время разведки, однако сокра-
щение времени разведки дается ценой либо ухудшения точности и разрешающей
способности измерений, либо увеличением объема аппаратуры.
3.2. Способы и устройства определения несущей частоты радиосигнала
79
Поисковые способы, напротив, при значительном времени разведки позволя-
ют измерять несущую частоту с большой точностью и обеспечивают высокую раз-
решающую способность.
3.2.1. Поисковые способы определения частоты
Поисковый способ определения частоты обычно реализуется в так называемом
панорамном приемнике, блок-схема которого приведена на рис. 3.2.
Панорамный приемник в простейшем случае представляет собой супергетеро-
дин, перестраиваемый автоматически или вручную в полосе разведываемых частот.
Рис. 3.2. Блок-схема панорамного приемника
В процессе поиска частоты перестройка приемника осуществляется по програм-
ме, определяющей частоту выходного сигнала синтезатора.
Принятый сигнал после усиления в УПЧ и детектирования подается на инди-
катор вместе с отметкой о мгновенной частоте синтезатора, определяющей значе-
ние частоты настройки приемника.
Важной характеристикой панорамного приемника является время поиска не-
сущей частоты (время разведки).
Обычно просмотр всего рабочего частотного диапазона производится периоди-
чески с периодом Гп по пилообразному закону (рис. 3.3). Поэтому при разведке
несущей частоты непрерывного сигнала максимальное время поиска не превыша-
ет Гп. Более сложным является определение несущей частоты кратковременно дейст-
вующих сигналов. Наглядное представление об этом дает частотно-временная диа-
грамма поиска частоты.
Как видно из рисунка, непрерывный сигнал частоты/^ обнаруживается с веро-
ятностью, равной единице, в то время как обнаружение (а следовательно, и изме-
рение частоты) импульсного сигнала не всегда возможно.
В общем случае процесс обнаружения и измерения частоты импульсного сигнала
носит вероятностный характер. В зависимости от соотношения периода перестройки
и длительности сигнала разведываемого устройства различают три поисковых спо-
соба определения частоты:
• медленный поиск;
• быстрый поиск;
• поиск со средней скоростью.
80
Глава 3. Радиоэлектронная разведка
Рис. 3.3. Частотно-временная диаграмма, иллюстрирующая
поисковые способы определения частоты
При медленном поиске время перестройки приемника Тпр на ширину его полосы
пропускания больше периода следования импульсов Ти (рис. 3.3), т. е. Тпр > Ти.
Если определение частоты можно произвести по одному импульсу, то медлен-
ный поиск обеспечивает вероятность обнаружения периодического импульсного
сигнала Р= 1 за время перестройки Тп. Серьезным недостатком медленного поиска
является большое время обслуживания, малая пропускная способность и соответ-
ственно малая вероятность разведки кратковременно работающих радиоэлектрон-
ных средств.
Для уменьшения времени разведки при заданных диапазоне и скорости пере-
стройки необходимо расширять полосу пропускания приемника. Поэтому панорам-
ные приемники с медленным поиском, как правило, являются широкополосными.
Ширина полосы пропускания таких приемников примерно равна
дгпр=(о,1...о,О1))д/р, (3.1)
где Л/р — диапазон перестройки (диапазон разведываемых частот).
Точность определения несущей частоты с помощью таких приемников невелика.
Примерно она составляет половину ширины полосы пропускания приемника, т. е.
5/тах = 0,5Д/пр = (0,05...0,005)Д/р. (3.2)
Чувствительность приемных устройств с медленным поиском вследствие значи-
тельной полосы пропускания не может быть высокой. Часто эти приемники выпол-
няются также по схеме прямого усиления с перестраивающимися входными цепями.
Время гарантированного обнаружения при медленном поиске определяется пери-
одом перестройки = Тп.
При быстром поиске время перестройки приемника во всем рабочем диапазо-
не Д/р меньше длительности принимаемого сигнала (рис. 3.3), т. е. Тп < ти.
Скорости перестройки в этом случае чрезвычайно большие (сотни и тысячи ме-
гагерц в микросекунду). Такие скорости могут быть обеспечены только электрон-
ными способами [19].
Скорость перестройки ограничивается допустимыми пределами снижений чув-
ствительности, точности и разрешающей способности при определении частоты,
которые, в свою очередь, зависят от длительности переходных процессов в инерци-
онных резонансных устройствах.
3.2. Способы и устройства определения несущей частоты радиосигнала
81
Резонансные устройства, находящиеся под воздействием сигналов с изменяю-
щейся частотой, характеризуются динамической частотной характеристикой, под
которой понимают зависимость отношения выходного напряжения ко входному от
расстройки относительно собственной резонансной частоты системы при фикси-
рованной скорости перестройки.
Динамическая характеристика зависит как от параметров резонансной системы
(прежде всего от ширины статической полосы пропускания), так и от скорости пе-
рестройки или скорости изменения частоты внешнего сигнала. На рис. 3.4 для иллю-
страции изображено семейство частотных характеристик одиночного колебатель-
ного контура [42].
одиночного колебательного контура
Параметром семейства является коэффициент равный
где у = —--скорость изменения частоты воздействующего напряжения (скорость
dt
перестройки); A/Iip — ширина статической характеристики колебательного контура
на уровне 0,707.
Значению £ = <*> соответствует статическая амплитудно-частотная характеристика
одиночного колебательного контура.
Из анализа приведенных частотных характеристик можно сделать следующие
выводы:
1) с ростом скорости перестройки максимум характеристики сдвигается в сто-
рону изменения частоты (в данном случае в сторону увеличения), а величина вы-
ходного напряжения уменьшается;
2) ширина полосы пропускания на уровне 0,707 также увеличивается с ростом
скорости перестройки;
3) появляются дополнительные максимумы частотных характеристик.
Перечисленные особенности являются причиной ухудшения характеристик раз-
ведывательного приемника рассматриваемого класса, поскольку они: уменьшают
чувствительность приемника; ухудшают точность и разрешающую способность; огра-
ничивают скорость перестройки, а следовательно, и время разведки; искажают пара-
метры разведываемого сигнала (форму, длительность).
У панорамных приемников с быстрой перестройкой существует взаимосвязь меж-
ду полосой пропускания резонансной системы и скоростью перестройки; увеличение
82
Глава 3. Радиоэлектронная разведка
скорости перестройки ведет к потере точности измерения несущей частоты и сни-
жению чувствительности. Действительно, оптимальная полоса пропускания A/^p
радиоприемника и длительность импульса т, образующегося на выходе в результате
быстрой перестройки, в случае аппроксимации формы импульса и частотной харак-
теристики приемника прямоугольниками, связаны в первом приближении соотно-
шением
А/пр — “• (3.4)
Длительность импульса при заданных скорости перестройки у и полосе пропус-
кания АЛП равна т = . Отсюда следует, что
У г-
Wnv-Jb (3-5)
Более точные исследования [42] показывают, что в случае колоколообразной
частотной характеристики
4/пр“-7=>/Т- (3-6)
Таким образом, каждой скорости перестройки соответствует своя оптимальная
полоса. Сокращая время поиска, мы проигрываем в точности определения частоты
и, наоборот, увеличивая точность определения частоты, одновременно должны уве-
личить время разведки. Так, например, если A/^p = 1 кГц, то максимально допускается
скорость перестройки Углах
= л-106
МГц
с
Потери чувствительности в зависимости от скорости поиска по частоте у могут
быть оценены с помощью выражения [19]:
а =
-1/4
(3.7)
где а — потери чувствительности по отношению к приемнику с нулевой скоростью
поиска по частоте (в децибелах); АЛ — диапазон разведываемых частот; Т — период
кг
поиска частоты; Л/11р — полоса пропускания приемника; у = —— скорость поиска.
Дня уменьшения динамического эффекта необходимо при неизменной скорости
перестройки у увеличивать полосу пропускания резонансной системы, но это, в свою
очередь, ведет к уменьшению чувствительности приемника и точности измерений.
Одновременное обеспечение значительной скорости перестройки и высокой
разрешающей способности по частоте может быть успешно достигнуто в приемни-
ке со сжатием импульсов [19]. Здесь, по сути дела, используется тот же принцип
увеличения разрешающей способности, что и в широкополосных РЛС с внутриим-
пульсной модуляцией.
На рис. 3.5 изображены временные диаграммы импульсов на выходе УПЧ, пояс-
няющие возможность улучшения разрешающей способности по частоте в прием-
нике со сжатием импульсов.
Если на разведывательный приемник воздействуют два непрерывных сигнала с
различными частотами и/2, то при перестройке гетеродина на выходе УПЧ с по-
лосой пропускания А4р образуются частотно-модулированные импульсы длительно-
стью тк. При суммировании этих импульсов в обычном панорамном приемнике
3.2. Способы и устройства определения несущей частоты радиосигнала
83
Рис. 3.5. Временные диаграммы, поясняющие возможность улучшения разрешающей
способности по частоте в разведывательном приемнике со сжатием импульсов
образуется один импульс длительностью ти, и нет возможности разрешить прини-
маемые сигналы по частоте.
В приемнике со сжатием импульсов сигналы с выхода УПЧ поступают на дис-
персионный фильтр, в котором импульсные сигналы укорачиваются до длительно-
стей т'. В результате сигналы разрешаются по длительности, а следовательно, и по
частоте.
Таким образом, разрешающая способность по частоте увеличивается. Установле-
но, что это увеличение пропорционально корню квадратному из коэффициента сжа-
тия (компрессии). Например, приемник со сжатием импульсов, перестраивающийся
в частотном диапазоне со скоростью у = 100 МГц/мкс и обладающий коэффициен-
том сжатия 100, имеет разрешающую способность по частоте, равную 1 МГц, т. е. в
10 раз более высокую, чем разрешающая способность типовых панорамных прием-
ников, имеющих ту же скорость перестройки. Блок-схема, иллюстрирующая рабо-
ту разведывательного приемника со сжатием импульсов, представлена на рис. 3.6.
Воздействующий сигнал усиливается широкополосным усилителем высокой
частоты и поступает на смеситель, куда подается также напряжение гетеродина,
периодически перестраиваемого по частоте. Изменение частоты гетеродина (син-
тезатора частот) производится с помощью схемы программной перестройки, кото-
рая управляет также схемой формирования частотной развертки. В результате пре-
образования сигналов в смесителе на входе УПЧ получаются сигналы с линейно
изменяющейся по времени частотой. %
Для преобразования импульсов с линейно-изменяющейся частотой в сигналы с
меньшей длительностью и большей амплитудой в приемнике применяется схема
сжатия (дисперсионный фильтр), представляющая собой высокочастотную линию
задержки с отводами, в каждый из отводов включен полосовой фильтр. После схемы
сжатия сигнал детектируется, усиливается и подается на вертикально отклоняющие
84
Глава 3. Радиоэлектронная разведка
Рис. 3.6. Блок-схема разведывательного приемника
со сжатием импульсов
пластины электроннолучевой трубки. Частота сигналов определяется по положе-
нию импульса на частотной развертке. Измерение задержки импульсов может про-
изводиться специальными цифровыми процессорами.
Как уже было отмечено выше, быстрый поиск приводит к ухудшению характери-
стик разведывательного приемника. Осуществление быстрого поиска требует зна-
чительного усложнения оборудования.
Кроме медленного и быстрого, возможно применение и вероятностного поиска
(поиска со средней скоростью), обеспечивающего лучшие условия для компромисса
между скоростью перестройки и точностью определения частоты при заданной
вероятности радиотехнической разведки.
Поиск со средней скоростью по частоте наиболее характерен для радиотехниче-
ской разведки. Время перестройки разведывательного приемника Т'р на ширину его
полосы пропускания при поиске со средней скоростью определяется соотношением
кТс>Тпр>гс, (3.8)
где Тс — период следования импульсов; тс — длительность разведуемых импуль-
сов; k- 1, 2, 3. Отличительной особенностью поиска со средней скоростью является
отсутствие гарантированного обнаружения работы импульсной РЛС в течение од-
ного периода перестройки разведывательного приемника. Иными словами, веро-
ятность обнаружения разведуемого сигнала, в рассматриваемом случае, в принци-
пе всегда меньше единицы (Робн < 1). По этой причине поиск со средней скоростью
иногда называют вероятностным поиском.
Анализ поиска со средней скоростью удобно проводить с помощью теории
случайных импульсных потоков. В рассматриваемом случае имеется два потока им-
пульсов (рис. 3.7). Первый характеризует поток импульсов разведываемого устрой-
ства с длительностью тс и периодом следования Тс. Второй характеризует готовность
разведывательного приемника обслужить поток сигналов; параметрами этого потока
являются период перестройки 7П и время перестройки приемника 7^р на величину,
равную полосе пропускания.
Обнаружение происходит в моменты «зацепления» потоков. Если длительность
«зацепления» 8 достаточна для надежной работы разведывательного приемника, то
одновременно с обнаружением может быть определена и частота разведуемого уст-
ройства.
3.2. Способы и устройства определения несущей частоты радиосигнала
85
Рис. 3.7. Частотно-временные диаграммы, иллюстрирующие
поиск частоты со средней скоростью
Теория случайных импульсных потоков дает следующие формулы для средней
частоты следования F и математического ожидания длительности импульсов потока
совпадений т5 [19]:
с " <3.9)
— _ тс^пр
Ts - 1 +Т' ’
vc ~1 пр
где ^(З) — средняя частота следования импульсов на выходе разведывательного
приемника, длительность которых не менее 8.
Вероятность «зацепления» независимых потоков на длительность 8 в течение
одного периода следования импульсов Тс определяется формулой
, ^тс+г;р-28
3 гр
* с
(3.10)
Если 8 — длительность минимально необходимого для осуществления разведки
импульса, то Р3 определяет вероятность обнаружения РЛС за один период Тс. Учи-
тывая, что
н,, _ А/пр _ А/пр гр
пр — ~ “ А ^П’
(3.11)
для вероятности обнаружения РЛС за время перестройки приемника получим
тс+^Тп-25
Л>бн(И =-------------- (312>
С
Если считать, что тс«Тпр, 8~0, формула (3.12) упрощается:
D (чЛ ^пр ^п
86
Глава 3. Радиоэлектронная разведка
Вероятность обнаружения сигнала за время /р >ТС может быть оценена выра-
жением
Р = 1 - ехр
А/пр гп
Vp К
(3.14)
3.2.2. Беспоисковые способы определения частоты
При беспоисковых способах определения частоты разведка ведется одновремен-
но во всех участках рабочего диапазона.
Приемные устройства, использующие беспоисковые способы определения часто-
ты, обеспечивают одновременный прием в широком диапазоне рабочих частот без
перестройки гетеродинов или фильтров. Время разведки частоты при беспоисковых
способах может быть очень малым, так как все составляющие спектра принимае-
мого сигнала выявляются одновременно и практически мгновенно. Для беспоиско-
вого определения частоты используются способы разведки с применением частот-
ных различителей; функциональные (интерференционные) способы; способы раз-
ведки с помощью многоканальных приемников.
Частотные различители преобразуют отклонения частоты принимаемого сигна-
ла от заданного значения в напряжение, пропорциональное этому отклонению, как
на рис. 3.8.
Рис. 3.8. Частотный дискриминатор приемника РРТР
А ^вых
Простейщими устройствами определения частоты могут служить обычные час-
тотные дискриминаторы. Однако для целей разведки лучше применять несколько
иные схемы. Это связано с особенностями их интеграции с приемными и индика-
торными устройствами разведывательной станции.
На рис. 3.9 представлена схема пассивного частотного различителя, выполнен-
ного на отрезках длинных линий.
Сигнал разведываемого устройства поступает в середину линии и распростра-
няется по этой линии в разные стороны (влево и вправо). Правые и левые плечи
линии равны по длине = L2) и имеют одинаковые волновые сопротивления IV
и сопротивления нагрузки Ао= W. Кроме того, отрезки линии имеют соответственно
разомкнутый и замкнутый шлейфы. Длина шлейфов выбирается равной четверти
максимально измеряемой длины волны Хтах, соответствующей наименьшей изме-
ряемой частоте У^йг
Учитывая, что входные сопротивления четвертьволнового короткозамкнутого
и разомкнутого шлейфов составляют соответственно
;K3 = H/tg^^L Zpa3=^ctg^
A 4 A 4
(3.15)
3.2. Способы и устройства определения несущей частоты радиосигнала
87
Рис. 3.9. Схема пассивного частотного различителя,
выполненного на отрезках длинных линий
для напряжений U{ и U2 можно записать
Щ = /qMtgy COS (со/ <рА), U2 = ~fc2MCtg^- ^*х cos (со? + <р2 )• (3.16)
Если правое и левое плечи линии идентичны, то можно полагать к{ = к2, a cpj = <р2.
Тогда отношение напряжений
K(X) = -^ = -tg2-^- (3.17)
t/2 2 4 к
определяет частоту входного сигнала:
^вых ^UCOSlnft. (3.18)
На рис. 3.10 представлена зависимость, определяемая функцией (3.17).
Рис. 3.10. Зависимость нормированного выходного напряжения пассивного
частотного различителя от длины волны входного сигнала
Диапазон частот, в пределах которого возможно однозначное измерение часто-
ты, определяется размерами короткозамкнутого и разомкнутого шлейфов. Для чет-
вертьволновых шлейфов отношение K(f} = UJU2 будет однозначным примерно в
пределах одной октавы. На более высоких частотах, где применение двухпровод-
ной линии невозможно, используют пассивные частотные различители, выполнен-
ные на отрезках волноводов с включением шлейфов в узкие и широкие стенки.
Приемники с частотными различителями являются перспективными. С их по-
мощью возможно определение частоты в широком диапазоне с относительно вы-
сокой точностью.
В основу интерференционного способа определения несущей частоты положена
известная зависимость сдвига фаз от длины пути и частоты [19]. Принцип построе-
ния разведывательных приемников, в которых используется интерференционный
способ измерения частоты, иллюстрируется схемой рис. 3.11.
88
Глава 3. Радиоэлектронная разведка
Рис. 3.11. Функциональная схема интерференционного
измерителя частоты
Принятые колебания распространяются в общем волноводе. В сечении I-I вол-
новод разветвляется, и сигнал распространяется по различным волноводам а и б.
Длина волновода б больше длины волновода а на некоторую величину Д£. В сече-
нии П-П поля, поступающие из волноводов а и б, геометрически складываются.
Фазы суммируемых полей будут отличаться на величину
Д<р=-----, (3.19)
ГФ
где Гф — фазовая скорость распространения электромагнитной волны в волноводе.
В сечении I-I (до разветвления)
мвх = cos(°^ + Фо )• (3.20)
На выходах волноводов а и б соответственно
и2
= kUcos со t4-
(3.21)
где L — длина волновода а\ L + Д£ — длина волновода б; к — постоянный коэффи-
циент.
Результирующее напряжение будет равно
Мд вх = «! + «2 = £2t/0 COS 032^ COS (со/ + Cpg ),
2 Уф
где
, соД/ соп£
Фо=Фо+—+ —
2уФ
(3.22)
(3.23)
После детектирования во втором детекторе формируется напряжение
Мвых2 =k2Ucos^, (3.24)
2гф
где £д — постоянный коэффициент. Следовательно, выходное напряжение мвых2
является функцией частоты.
На рис. 3.12 изображена зависимость выходного напряжения мвых2 от частоты
воздействующего сигнала.
Диапазон частот Д/р, в пределах которого возможно однозначное измерение,
определяется разностью Д£ длин волноводов а и б.
3.2. Способы и устройства определения несущей частоты радиосигнала
89
Рис. 3.12. Зависимость выходного напряжения
интерференционного измерителя от частоты
Из формулы (3.24) следует, что это будет в пределах любой полуволны косинусо-
иды, когда ее аргумент приобретает значения от mt до [п +1) л. Отсюда минимальная
и максимальная разведываемые частоты определяются следующими равенствами:
(3.25)
(3.26)
где п = 1, 2, 3,....
Совместное решение (3.25) и (3.26) дает
г _ f п +
max ~ /min
И
(3.27)
Если п= 1, то однозначное определение частоты возможно в пределах
Алах ~ ^Лпт • (3.28)
Выходное напряжение ивых2 само по себе не может быть использовано непо-
средственно для измерения частоты, так как его величина зависит от интенсивно-
сти принимаемого сигнала. Для исключения этой зависимости производится нор-
мировка напряжения ивых2 относительно амплитуды входного сигнала. Входной
сигнал детектируется до разветвления волновода и нормируется к напряжению wBbIxl.
В результате получается отношение
^(/) = ]fBb!x2. = ^cos^£> (3.29)
^вых! 2 Уф
зависящее только от частоты.
Более совершенным является интерференционный измеритель частоты, исполь-
зующий в качестве основного элемента фазовый детектор на двойном волновод-
ном тройнике (рис. 3.13).
Рис. 3.13. Функциональная схема устройства определения
частоты на двойном волноводном тройнике
90
Глава 3. Радиоэлектронная разведка
Воздействующий сигнал мвх поступает в плечи Е и Н двойного волноводного
тройника от антенны по волноводу, который разветвляется в точке В на два отрез-
ка а и б разной длины. Последние, в свою очередь, соответственно подсоединяют-
ся к плечам двойного тройника. Электрические длины участков а и б отличаются
на некоторую величину Д/э, которая эквивалентна разнице в геометрических дли-
нах путей на Д£. На детекторы огибающей, включенные в плечи моста, соответ-
ственно воздействуют суммарное и разностные поля. С выходов детекторов сигна-
лы поступают на усилители низкой частоты УНЧД и УНЧЕ, после чего подаются
на фазовый детектор.
Операцию нормировки по амплитуде выполняет схема АРУ по суммарному
сигналу. Предполагая идентичность функционирования всей схемы (согласование
детекторов с волноводом, идентичность усилителей УНЧД и УНЧЕ, идеальность АРУ
и других элементов) можно описать работу схемы следующим образом.
Монохроматический сигнал на входе
wBX =J7cos(co/ + <p0). (3.30)
В плечах волноводного тройника
Mgxi =£^cos(co/ + <p0 +ср);
/ х (3.31)
^x2=f/cos(wZ + «Po)>
где
соД£
Уф — фазовая скорость волны в волноводе:
у
2(7
На входе суммарного и разностного каналов действуют напряжения
u^-U cos((D/ + (p0) + cos((DZ + (p0+ср) ;
д/д = t/[cos(co/ + (p0)-cos(co/ + (p0 + ф) ,
(3.32)
(3.33)
(3.34)
(3.35)
поэтому на выходах цепей, состоящих из детекторов огибающих и усилителей,
и^=2к^Ки cos~j
MM=2^^siny>
где Ад — коэффициент передачи детекторов, а К — коэффициент усиления УНЧ,
одинаковый для обоих параллельных ветвей.
При выборе параметров АРУ так, чтобы выполнялось условие
к=-----------------------------,
ф
2k п cos—
Л 2
после перемножения сигналов в фазовом детекторе на его выходе получается напря-
жение
(3.36)
Ф
2’
^вых
(3.37)
однозначно связанное с несущей частотой входного сигнала в довольно широком
диапазоне длин волн (рис. 3.14).
3.2. Способы и устройства определения несущей частоты радиосигнала
91
Рис. 3.14. Зависимость напряжения на выходе
фазового детектора от приращения длины волны
В принципе можно было бы получить искомую зависимость напряжения от
частоты непосредственно на выходе УНЧД. Применение же фазового детектора ФД
позволяет расширить диапазон частот, разведываемых таким устройством.
Другая разновидность измерителя для мгновенной беспоисковой оценки часто-
ты, близкая по принципу работы к интерференционному, — корреляционный из-
меритель.
Корреляционные измерители несущей частоты строятся по схеме рис. 3.15.
Рис. 3.15. Корреляционный измеритель частоты
Сигнал с выхода широкополосного усилителя подается на перемножитель вме-
сте со своей копией, задержанной в линии задержки (ЛЗ). Усредненное фильтром
нижних частот напряжение с выхода перемножителя пропорционально значению
автокорреляционной функции входного процесса для аргумента т = т3.
Задержка входного разведываемого сигнала на т3 эквивалентна сдвигу его фазы
на <р = сот3. Перемножение прямого и задержанного сигнала дает (с точностью до
быстропеременной составляющей, усредняемой фильтром нижних частот) на вы-
ходе коррелятора
ас
= Л—coscot, (3.38)
DDlA 2
где к — коэффициент пропорциональности; а — амплитуда входного сигнала.
Как следует из (3.38), выходное напряжение коррелятора зависит от частоты
сигнала со, а также от его мощности а2/2. Зависимость от частоты используется
измерителем, а зависимость от мощности компенсируется сигналом с выхода квад-
ратичного детектора.
Как и интерференционный, измеритель корреляционный обеспечивает одно-
значные измерения только в пределах одной октавы, т. е. диапазона, для которого
отношение верхней и нижней частот равно 2.
92
Глава 3. Радиоэлектронная разведка
Интерференционные измерители частоты обладают существенными преимуще-
ствами: предельно малым временем разведки частоты; сравнительно широким раз-
ведываемым диапазоном частот; малым объемом аппаратуры.
Следует отметить и недостатки функциональных измерителей: относительно
низкая чувствительность приемных устройств; снижение точности и разрешающей
способности при расширении диапазона разведки в одном устройстве; необходи-
мость усложнения аппаратуры для определения частоты нескольких одновременно
воздействующих сигналов.
Малая чувствительность функциональных измерителей объясняется тем, что
полоса пропускания разведывательного приемника с функциональным измерите-
лем очень широкая. Она равна всему разведываемому диапазону частот.
Разведка несущей частоты с помощью селективных приемников прямого усиле-
ния использует, в основном, приемники двух типов: одноканальные широкополос-
ные приемники; многоканальные приемники.
Простейший одноканальный широкополосный приемник прямого усиления (апе-
риодический приемник) состоит из антенны, детектора, видеоусилителя и индика-
тора, см. рис. 3.16.
V
> Усилитель
Индикатор
Рис. 3.16. Схема одноканального широкополосного приемника
Достоинством этого приемника является возможность полностью воспроизво-
дить информацию, заключенную в принимаемом сигнале. Однако чувствительность
такого приемника весьма мала, а точность измерения частоты низка. Точность опре-
деляется примерно половиной ширины полосы пропускания антенны или входно-
го фильтра.
Одноканальные широкополосные приемники прямого усиления могут приме-
няться лишь для обнаружения самого факта облучения.
Многоканальные приемники обеспечивают большую точность и разрешающую
способность. В этом случае весь диапазон разведываемых частот разделяется сис-
темой фильтров на ряд поддиапазонов (рис. 3.17, а). Полосы прозрачности филь-
тров примыкают друг к другу так, как показано на рис. 3.17, б.
Рис. 3.17. Многоканальный приемник РРТР
Ширина полосы прозрачности А/ каждого фильтра выбирается из условия по-
лучения заданной точности определения частоты А/ = 25/
3.2. Способы и устройства определения несущей частоты радиосигнала
93
Число фильтров т зависит от заданной точности определения частоты и диа-
лазона разведываемых частот Д/р. При идентичных каналах приемника
т = ^2-+1. (3-39)
26/
Многоканальные приемники применяются в станциях предварительной разведки
для грубого определения частоты и опознавания образа радиоэлектронного сред-
ства. Число каналов в них достигает нескольких десятков.
В станциях непосредственной радиотехнической разведки находит применение
многоканальный матричный приемник, обеспечивающий большую точность при
меньшем числе фильтров [19]. Блок-схема матричного приемника показана на
рис. 3.18.
Рис. 3.18. Блок-схема многоканального матричного приемника
Весь заданный диапазон разведываемых частот Д/р разбивается на т поддиапа-
зонов с полосами Д/15 так что
А/
т
(3.40)
Частоты настройки фильтров сдвинуты одна относительно другой на полосу про-
пускания. Фильтры первого столбца (Oj 1? Ф12> •••» Ф1/и) перекрывают весь задан-
ный диапазон разведываемых частот. Полоса пропускания каждого из этих фильт-
ров примерно одинакова и равна (3.40).
В первом столбце имеется т гетеродинов, частоты которых—>f\m выби-
раются так, чтобы обеспечить трансформацию частот сигналов на выходе каждого
фильтра к одинаковому для всех фильтров первого столбца значению промежуточ-
ной частоты с точностью до полосы пропускания одного фильтра первого стол-
бца Д/Р Иначе говоря, весь диапазон разведываемых частот ...j\ + Д/J, трансформи-
руется в менее широкий диапазону^ .../пр1 + Д/j.
Второй столбец трансформирует этот диапазон в еще более узкую полосу
2»
(3.41)
94
Глава 3. Радиоэлектронная разведка
где
т т~
(3.42)
Если в приемнике используются п столбцов фильтров, то, очевидно,
д/„
т
(3.43)
Полосы прозрачности фильтров образуют своеобразную матрицу, с помощью
которой можно определить частоту воздействующего на входе сигнала.
Так при срабатывании, например, индикаторов Ип, И22 и И13 формируется окон-
чательная оценка несущей частоты
/1 - fc - fi + Д/1’
fi+bf2<.fc<fi+2!tf2, (3'44)
Л + д/2 < /с < fi + д/j, +46-
Точность измерения частоты в таком приемнике определяется полосой прозрач-
ности фильтров третьего столбца Д/з- В общем случае использования т строк и п
столбцов точность определения частоты составит
¥тах= —= —- <3-45>
тах 2 2тп
т. е. будет определяться полосой пропускания фильтра последнего столбца.
Одним из главных параметров многоканальных приемников является объем ап-
паратуры, оцениваемый в данном случае количеством избирательных фильтров N.
Для многоканального приемника с независимыми каналами (рис. 3.17, а) ко-
личество избирательных фильтров равно
ДЛ
(3.46)
А/
Для многоканального матричного приемника (рис. 3.18), обеспечивающего ту
же точность определения несущей частоты,
N2 = тп. (3.47)
Причем Д/ = Д/л и, как следует из (3.45) и (3.47),
(3.48)
Сравнивая (3.46) и (3.48), можно найти выигрыш в количестве избирательных
фильтров за счет применения матричного приемника:
М = Ч 1
N2 [Afp
Н"——
W„
л-1
1 f Д/р р~
(3.49)
Матричный приемник обеспечивает лучшую чувствительность и разрешающую
способность по частоте по сравнению с обычными многоканальными приемника-
ми. Однако время разведки (время обслуживания) у такого приемника несколько
больше, чем у обычного многоканального приемника.
Например, если число столбцов п = 3, a 1000, то выигрыш в количе-
стве фильтров оценивается числом £ = 33.
3.2. Способы и устройства определения несущей частоты радиосигнала 95
Матричные приемники представляют собой достаточно сложные устройства.
Наибольшие трудности при разработке и настройке многоканальных матричных
приемников могут возникать из-за взаимного влияния между каналами, порождаю-
щего неоднозначность измерений. Эта трудность преодолевается с помощью специ-
альных схем устранения неоднозначности, отделяющих нужные сигналы от помех,
а также усовершенствованием полосовых фильтров и применением специальных
развязывающих схем.
Современная микроэлектроника и микросхемотехника позволяют создавать
беспоисковые устройства практически мгновенного измерения несущей частоты
радиосигналов с высокой точностью (с погрешностями всего в несколько герц) во
всем радиодиапазоне. Такие устройства получили название приемников мгновен-
ного измерения частоты (МИЧ-приемников). В простейшем варианте подобные
приемники выполняются по многоканальной схеме, каждый из параллельных ка-
налов которой представляет собой узкополосный усилитель (фильтр), настроенный
на определенную частоту. Вполне понятно, что требование перекрытия широкого
диапазона частот и узости полосы пропускания предполагает, что МИЧ-приемни-
ки должны иметь сотни тысяч параллельных каналов, что технически нереализуе-
мо. Для снижения числа каналов в МИЧ-приемниках сочетают автокорреляцион-
ный прием с цифровой обработкой сигналов (ЦОС).
На рис. 3.19 представлена структурная схема одноканального МИЧ-приемника.
Рис. 3.19 Структурная схема одноканального МИЧ-приемника
Принятый сигнал (/) после усиления в широкополосном усилителе ШУ и
ограничении по уровню разветвляется и поступает на входы перемножителя: один
непосредственно, как wBX(r), а второй — с задержкой на время т3, как МвХ(/-т3).
При идеальном ограничении входного сигнала перемножитель можно выполнить
на логических элементах, как сумматор по mod 2 (полусумматор). Использование
цифровой обработки выходного сигнала предусматривает использование АЦП на
выходе. Линия задержки может быть выполнена в виде отрезка длинной линии. При
гармоническом сигнале на входе
MBxW = t/ocos“oz (3.50)
на выходе, с точностью до спектральных составляющих в окрестности двойной ча-
стоты 2соо,
wbhx (0 — wbx (0Wbx ~~ Тз) = ^COSC00T3, (3.51)
где К — несущественный коэффициент.
Соотношение (3.51) описывает дискриминационную характеристику корреляци-
онного измерительного приемника. Эта характеристика, очевидно, периодическая,
см. рис. 3.20.
96
Глава 3. Радиоэлектронная разведка
Рис. 3.20. Периодическая дискриминационная
характеристика коррелятора МИЧ-приемника
Частота входного сигнала может измеряться лишь на участках дискриминаци-
онной характеристики с отрицательной крутизной (рис. 3.20), когда
пп<сот3 <(л + 1)л; л = 1,2,... (3.52)
или, для циклической частоты,
и<2/т3<и + 1; л = 1,2,... . (3.53)
Диапазон однозначного измерения частоты лежит между верхними fmax =----
1 2 Тз
г П 1 „
и нижними /min =----границами соответствующих участков дискриминационной
2 т3
характеристики. Протяженность этого диапазона, как следует из (3.52), равна
п + 1 1 п 1 _ 1
2 т3 2т3 2т3 ’
(3.54)
а середина приходится на частоту
f + f •
f — ^max ^rnm _ (з 55)
Jcp~ 2 ~4t3'
Одиночный МИЧ-приемник способен измерять частоту сигнала в диапазоне
=--- (3.54). Но станции РРТР работают в широком диапазоне частот bf » \f.
2т3 р
Поэтому на практике применяют многоканальные МИЧ-приемники [106]. Схема
такого приемника представлена на рис. 3.21.
Рис. 3.21. Структурная схема многоканального МИЧ-приемника
Число каналов МИЧ-приемника определяется выражением
N=-^~, iel:N, (3-56)
IX
Z=1
АГ 1
где A/z- =- — полоса разведки z-ro канала.
2т3/
3.3. Цифровые измерители частоты
97
Недостатком МИЧ-приемников является неправильное определение частоты
сигнала при поступлении на вход нескольких (двух и более) перекрывающихся по
времени радиоимпульсов. Вероятность такого совпадения («зацепления») импуль-
сов в современной радиоэлектронной обстановке весьма высока и возрастает с
увеличением А/. Поэтому рабочий диапазон Д/J- каждого из каналов приходится
уменьшать, что приводит к необходимости увеличения общего числа каналов N.
Современные цифровые МИЧ-приемники работают в диапазоне частот 0,5... 18 ГГц
и имеют пропускную способность 106 имп./с при числе каналов 1600 [106].
3.3. Цифровые измерители частоты
Значительный прогресс в области теории и техники цифровой обработки сиг-
налов позволил создавать весьма совершенные приемники и измерители сигналь-
ных параметров. По сути дела, многие устройства приема и обработки радиосигна-
лов в настоящее время превратились в сигнальные процессоры. Эти тенденции со-
вершенствования средств и методов обработки сигналов на основе использования
цифровых технологий проявились и в технике разведывательных приемников.
В цифровых приемниках сигналы в широкой полосе (в предельном случае —
во всей полосе разведки А/p) с выхода УПЧ преобразуются в цифровую форму и
дальше обрабатываются (фильтруются, обнаруживаются, демодулируются) с исполь-
зованием алгоритмов, реализуемых специальными цифровыми сигнальными про-
цессорами. Преимущества цифровых методов обработки общеизвестны. Это высо-
кая точность и стабильность характеристик аппаратуры, возможность запоминания,
хранения и воспроизведения сигнала, что очень важно для систем РТР непосред-
ственной поддержки РЭП. Недостатки цифровых методов — зависимость ширины
частотного диапазона разведки от быстродействия цифровых схем, наличие допол-
нительных погрешностей, обусловленных шумами вычислений, аналого-цифровы-
ми и цифроаналоговыми преобразованиями, с лихвой компенсируются преимуще-
ствами цифровых приемников.
Аналого-цифровое преобразование, необходимое при переходе к цифровой
обработке, предусматривает дискретизацию сигнала по времени и квантование по
уровню. Подвергающийся преобразованию входной сигнал s(t) — это аддитивная
смесь сигналов разведываемых РЭС, сигналов неинформативных для разведки
излучений и помех — прежде всего собственных тепловых шумов приемника n(t\
Используя известное представление процесса 5(z) в виде огибающей и фазы или
через две квадратурные компоненты [28] можно получить
s(t) = S (z)cos[co0Z - ф(^)] = X (/)cosco0Z + Y (z) sin со0/,
(3.57)
где и ф(^) соответственно огибающая и фаза процесса s(t)9 a Jf(z) = 5(/)cosco0Z
и К(/) = 5,(/)sinco0zt — квадратурные компоненты, однозначно связанные с огибаю-
щей и фазой соотношениями
5(г) = д/аг2(/) + У2(/); 9(z) = arctg
(3.58)
Из (3.57) и (3.58) следует, что процесс на выходе линейной части разведыва-
тельного приемника однозначно определяется парами процессов: огибающей и
фазой {5(z) и ф(^)} или квадратурными компонентами и K(z)}. Поэтому для
такого преобразования процесса s(t) в цифровую форму, которое сохраняет всю
98
Глава 3. Радиоэлектронная разведка
информацию о нем, достаточно сформировать цифровые выборки двух процессов:
либо огибающей и фазы, либо квадратурных компонент.
Цифровая обработка сигнала позволяет для реализации многоканального прием-
ника применить процедуру вычисления дискретного преобразования Фурье. Дей-
ствительно, для вычисления преобразования Фурье сигнала $(/), наблюдаемого на
интервале времени /е
2’2 ’
7/2
5(со)= J 5(/)exp{-/co/}J/
—Т/2
(3.59)
нужно диапазон частот 2л8/ё[сот,п; сотах] разбить на N интервалов шириной 2лД/=
= а?™ах—(°т1П , таких, что А/> —, ив точках сол = n&nf, пе l:N вычислить
7/2 Т/2 Т/2
5(соЛ)= j 5(/)exp{-ycow/}Jz = j .y(/)cos{cowz}Jr-7 J 5(/)sin{con/}Jz, (3.60)
-Т/2 -Т/2 -Т/2
где 5(сол) — значение спектральной плотности амплитуд сигнала на частотах сол.
Если сигнал представляет собой синусоиду с частотой cog [comin; comax] и ампли-
тудой ас,
из (3.60) можно найти
2ас . f(co-co„)7’>
-----—-—sin 2--------'—
(w-con)T 2 J
(3.61)
т. е. величина 5 (сол) равна ас при со=сол и убывает с увеличением модуля расстройки
sin-----------------
Q = |со - сол| как — . Зависимость
ы 1
ЛГ((О-©„) =
sin
(3-62)
можно считать эквивалентом частотной характеристики некоторого фильтра, наст-
роенного на частоту сол. В этом смысле процедура вычисления преобразования Фурье
в Nдискретных по частоте точках эквивалентна преобразованию сигнала в N парал-
лельных фильтрах. Кстати, считая полосой пропускания каждого фильтра частот-
ный интервал AQ между ближайшими точками обращения в нуль величины
из (3.62) можно определить
= (3.63)
Самая распространенная процедура вычисления (3.61) — алгоритм быстрого
преобразования Фурье (БПФ).
Цифровые способы измерения частоты обеспечивают высокую точность и хо-
рошо сопрягаются с вычислительными устройствами последующей обработки сиг-
нала [11]. Для измерения частоты применяют схемы, реализующие различные мо-
дификации двух основных методов. Это методы цифрового частотомера и цифро-
вого периодомера. Работа цифрового частотомера иллюстрируется схемой рис. 3.22.
3.3. Цифровые измерители частоты
99
Рис. 3.22. Цифровой частотомер
Входной формирователь создает узкие импульсы в моменты перехода сигналом
через нулевой уровень снизу-вверх (с положительной производной). Эти импульсы
через схему совпадений, открываемую стробом на время измерения Тизм, попадают
на счетчик. Результат подсчета числа импульсов за время Гизм выводятся в качест-
ве оценки частоты
(3.64)
изм
где N — число в счетчике.
Ошибка дискрета измерений по методу частотомера соответствует ошибке в один
счетный импульс, т. е. один период входного сигнала за время измерения:
5
(3.65)
* изм
Для уменьшения ошибки дискрета цифрового измерения частоты используют
метод периодомера. Основная схема измерения по этому методу представлена на
рис. 3.23.
Рис. 3.23. Цифровой периодомер
Периодомер подсчитывает число импульсов частоты»fc за время Гсч = пТс =
л f
-—, т. е. N = fC4TC4 = п-^- (п — коэффициент деления в счетчике-делителе), а
fc fC
частота сигнала может быть оценена как
_ п
J с ~ Jc4 ~Г1
(3.66)
(3.67)
Ошибка дискрета в один счетный импульс A7V = 1 (один период колебаний часто-
ты /сч) соответствует ошибке в оценивании частоты:
п \ f2 If
¥_ f _ 1 Jc _ 1 Jc
“/сч ~ т r *
TV Л /сч ^изм fc4
Ошибка дискрета тем меньше, чем больше fC4 по сравнению с fc.
Аналогичные схемы применяются средствами РТР для определения парамет-
ров импульсных сигналов РЛС и систем передачи информации: длительностей
импульсов и периодов (или частот) их повторения.
100
Глава 3. Радиоэлектронная разведка
Применение цифровых методов измерения частоты обеспечивает весьма высо-
кую точность измерения частоты сигнала, вплоть до потенциально достижимой.
Г Т
Если разведываемый сигнал s(t}, te —;
имеющий несущую частоту^, на-
L 2 2_
блюдается приемником РРТР на фоне аддитивного нормального шума и(/) с посто-
янной в полосе наблюдения спектральной плотностью 7УШ, т. е. если на входе раз-
ведывательного приемника действует колебание
x(z) = .s(z) + fl(z),
(3.68)
дисперсия оценки частоты не может быть меньше потенциально достижимой, со-
ставляющей [43]
А'ш d2g(/)
Ес Э/2
где 7УШ — спектральная плотность шумовой помехи; Ес =
гнала; #(/) — сигнальная функция
Т/2
_Т/2
(3.69)
Т/2
j s2 (t)dt — энергия си-
(3.70)
Так для синусоидального сигнала (точнее, радиоимпульса с прямоугольной
огибающей длительностью Г) из (3.70) и (3.69) следует, что
_2 = 3 1
f 2л2 Ес Т2
(3.71)
Рассмотренные выше схемы цифрового частотомера и периодомера далеки от
оптимальных. Дисперсии формируемых ими оценок обратно пропорциональны
первой степени времени измерения, т. е. Г-1. И, кроме того, оказываются смещенны-
ми: число нулей суммы сигнала с шумом на интервале длительностью Т всегда боль-
ше числа периодов сигнала на этом интервале. Причем это смещение оценки тем
больше, чем шире спектр сигнала.
3.4. Запоминание частоты сигнала
Результаты измерения частоты нужно запоминать. В зависимости от задач, ре-
шаемых средством РТР, различают способы кратковременного и долговременного
запоминания частоты.
Способы кратковременного запоминания позволяют сохранять значение час-
тоты обнаруженного сигнала на время, необходимое для настройки передатчика
помех, т. е. кратковременное запоминание используется средствами разведки опе-
ративной поддержки РЭП. Одна из распространенных схем кратковременного за-
поминания частоты — управляемый рециркулятор (рис. 3.24).
Из сигнала с выхода приемника ключом & вырезается прямоугольный импульс
длительностью т3. Этот импульс усиливается и подается на выходной ключ и на ЛЗ.
Задержанный на т3 импульс снова подается на вход усилителя. Этот импульс начина-
ется в момент окончания предыдущего импульса. До тех пор пока открыт выходной
ключ, на выходе будет существовать последовательность вплотную примыкающих
друг к другу радиоимпульсов частоты сигнала. Основным условием поддержания
3.5. Измерение временных параметров сигнала
101
Рис. 3.24. Рециркулятор для запоминания частоты
незатухающих колебаний на выходе является баланс амплитуд: коэффициент уси-
ления по петле рециркуляции, содержащей усилитель, ЛЗ, сумматор и ответвитель
сигнала в цепь обратной связи, должен быть не меньше единицы. При очевидной
простоте построения схема запоминания с рециркулятором имеет существенный
недостаток: выходной сигнал не сохраняет когерентность входному, поскольку в
моменты коммутации происходит разрыв фазы.
Другой способ запоминания частоты предусматривает синхронизацию подстра-
иваемого генератора (рис. 3.25).
Рис. 3.25. Запоминание частоты синхронизируемым генератором
Сигнал с выхода приемника стробируется ключом & и подается на импульсно-
фазовый детектор (ИФД), формирующий за время т3 напряжение, пропорциональ-
ное разности фаз, и запоминающий это напряжение после окончания строба. Это
напряжение подается на управляющий элемент (УЭ) и перестраиваемый генератор
(ПГ). Выходное колебание генератора подстраивается под частоту и фазу входного
сигнала. После окончания входного сигнала параметры выходного колебания со-
храняются на теоретически сколь угодно длительное время. Но практически время
хранения ограничивается стабильностью параметров перестраиваемого генератора.
При использовании многоканальных приемников, в том числе и приемников с
цифровым анализом спектра разведываемого сигнала, запоминание частоты сво-
дится к запоминанию номера фильтра, в котором обнаруживается сигнал. Точно
также запоминание результата цифрового измерения частоты это запоминание
числа, формируемого счетчиком. Некоторые схемы устройств запоминания частоты
радиосигналов приведены в разд. 5.6. Эти устройства используются в комплексах
РЭБ при создании перспективных сигналоподобных помех.
3.5. Измерение временных параметров сигнала
Временные параметры импульсного сигнала — это период следования, задержка
и длительность импульсов. Для измерения временных параметров используют метод
подсчета стандартных импульсов эталонной частоты. Работа таких измерителей
иллюстрируется блок-схемой рис. 3.26. Различаются измерители способами форми-
рования импульса, стробирующего ключ &.
102
Глава 3. Радиоэлектронная разведка
|< и
; ГГГТТТП /
Рис. 3.26. Блок-схема цифрового измерителя временных параметров сигнала
При измерениях длительности импульса формирователь содержит усилитель-
ограничитель (рис. 3.27, а). При измерениях периода повторения строб-импульс фор-
мируется СТ-триггером (рис. 3.27, б), запускаемым в начале периода измерений и
сбрасываемым в конце. Так же и при измерении задержки, с той лишь разницей, что
RS-триггер запускается эталонным импульсом начала отсчета времени и сбрасыва-
ется рабочим импульсом, временное положение которого измеряется (рис. 3.27, в).
Начало
измерения
Рис. 3.27. Схемы формирования строб-импульса
при оценке временных параметров сигнала
Временные параметры сигнала относятся к группе неэнергетических. Поэтому
для оценки дисперсии результата их оптимального измерения пригодна формула,
аналогичная (3.69) [43]:
, (3.72)
т-тс
_2 АГШ Э29(т)
где
j 772
д(т) = —- J s(t,i)s(t,x0)df, (3.73)
-Т/2
т0 — истинное значение измеряемого параметра сигнала.
3.6. Пеленгация и определение местоположения РЭС
103
Используя (3.72) и (3.73) можно оценить дисперсию оценки временного поло-
жения импульса:
=6,5
(3.74)
Дисперсия оценки длительности и периода следования импульсов будет в 2 раза
больше, поскольку она обусловлена флуктуациями двух временных положений:
начала и конца импульса или двух импульсов, между которыми измеряется период
следования.
З.б. Пеленгация и определение местоположения
радиоэлектронных систем
Пеленгаторы служит для определения пространственных координат объектов раз-
ведки. Все пеленгаторы (радиотехнические измерители угловых координат объектов,
излучающих или отражающих радиоволны) и радиосистемы углового сопровождения
отождествляют направление прихода сигнала с направлением нормали к фронту вол-
ны, созданной источником излучения. Различие методов пеленгования и типов пелен-
гаторов сводится к техническим особенностям построения ориентации этой нормали.
К пеленгаторам предъявляются высокие требования по быстродействию (возмож-
ность измерения пеленга по максимально короткой реализации сигнала, в пределе —
по одному импульсу), по точности пеленгации, по разрешающей способности.
3.6.1. Способы пеленгации объектов разведки
Исторически самым первым был амплитудный способ радиопеленгации [19].
Амплитудный способ, как следует из самого названия, основан на анализе амплитуд-
ного распределения поля, создаваемого пеленгуемым сигналом, на раскрыве прием-
ной антенны. Уровень сигнала максимален в том случае, когда раскрыв антенны па-
раллелен фронту падающей волны. Известны три разновидности амплитудного спо-
соба: пеленгование по максимуму, по минимуму и пеленгование на основе
сравнения.
Способ максимума, в принципе, может применяться средствами РРТР, работа-
ющими с остронаправленными антеннами. Диаграмма направленности (ДНА)
Г(ср,0) такой антенны показана на рис. 3.28, где обозначены: фа — угол ориента-
ции максимума ДНА; фи — угол между заданным направлением и направлением
на источник излучения (истинный пеленг источника); ф — угол между направле-
нием максимума ДНА и направлением на источник излучения (измеренный пе-
ленг).
При пеленговании пространственное положение ДНА изменяется и направле-
ние максимума совмещается с направлением на источник излучения. По угловому
положению ДНА отсчитывается пеленг. При использовании метода максимума ДНА
обеспечивается большая дальность пеленгации, поскольку средство РРТИ работа-
ет с большим уровнем сигнала. Но точность пеленгации невысока, поскольку она
определяется крутизной ДНА в окрестности максимума и составляет, как считает-
ся, несколько процентов от ширины ДНА по уровню половинной мощности.
Способ минимума применяется, когда можно сформировать ДНА с ярко выра-
женным минимумом приема (рис. 3.29). Для пеленгования ДНА поворачивается
104
Глава 3. Радиоэлектронная разведка
Рис. 3.28. Пеленгация
по максимуму
Рис. 3.29. Пеленгация
по минимуму
до положения, при котором уровень сигнала на выходе приемника имеет мини-
мальное значение.
Пеленгация по способу минимума обеспечивает более высокую точность из-
мерения, поскольку в окрестности минимума ДНА имеет большую крутизну
aF(<p)
зависимости ——. Но дальность действия пеленгаторов по минимуму меньше,
Эф
чем пеленгаторов по способу максимума: уровень принимаемого сигнала при этом
ниже.
Как уже говорилось, угловые координаты определяются при ориентации ДНА
пеленгатора на объект разведки. Чаще всего (но не всегда) угловое положение ДНА
изменяется за счет механического поворота антенной системы. Структурная схема
амплитудного радиопеленгатора, работающего по способу максимума или мини-
мума, представлена на рис. 3.30.
Рис. 3.30. Следящий пеленгатор РРТР
Сущность амплитудного метода пеленгования по способу сравнения иллюст-
рируется рис. 3.31.
ДНА такого пеленгатора имеет два одинаковых главных лепестка, соответственно
(ф) и Р2 (ф), максимумы которых развернуты в пространстве на углы ± ф0 отно-
сительно некоторого среднего направления ф = 0. При ф = 0 Fx (0) = F2 (0) ив этом
смысле направление ф = 0 называется равносигнальным (РСН). Амплитуды сигналов,
принимаемых лепестками ДНА такой антенны с некоторого направления ф соста-
вят соответственно значениям ДНА Ех = KXEFX (ф) и Е2 = K2EF2 (ф). По физическо-
му смыслу Кх и К2 — это коэффициенты усиления принимаемого сигнала, имею-
щего амплитуду Е. Представив функции Fx (ф) и F2 (ф) в окрестности ф = 0 их
степенными и удерживая два члена разложения, можно получить
Ex=KxEFx(<p)~KxE
, ч ^Л(О)
fi 0 +-7ГФ
цф
£2=/Г2££2(<р)^2£ £2(0) +
^(0)ф
dtp
(3.75)
3.6. Пеленгация и определение местоположения РЭС
105
Рис. 3.31. ДНА при равносигнальной пеленгации
Но по условию Fx (О) = Г2 (0), а производные ДНА в окрестности РСН равны по
абсолютной величине и имеют разный знак
dF^) =
dtp dtp
Поэтому, решая (3.75) как систему уравнений относительно пеленга ф, можно уста-
новить, что
^1^1(<p)-Ar2JF2(<p)
Ф (*l + tf2)F'(0) ’
(3.76)
а если удается выдержать равенство коэффициентов усиления К{ = К2 = К, то
оказывается, что пеленг
_ (ф)~ ^2 (ф) _ ^1 ~ F2 /3 уу\
Ф 2F'(0) 2XF'(0)
линейно связан с разностью уровней сигнала, принимаемых антеннами с диаграмма-
ми направленности ^](<р) и F2 (<р). Измеряя эту разность можно определять пе-
ленг. Разумеется, соотношение (3.77), устанавливающее эту линейную связь,
справедливо только в некоторой небольшой окрестности ф= 0. Интервал значений
Ф, в пределах которого имеет место линейная связь разности амплитуд Е{ - Е2 с
пеленгом, может составлять величину порядка ф0. Примерный вид этой зависимо-
сти — дискриминационной характеристики амплитудного пеленгатора — представ-
лен на рис. 3.32.
ф(Е“| - Е2)
Рис. 3.32. Дискриминационная характеристика
амплитудного пеленгатора
Технически амплитудный пеленгатор, реализующий метод РСН для измерения
угловой координаты в одной плоскости, может использовать одну антенну, макси-
мум ДНА которой изменяет свое пространственное положение (сканирует) в пре-
делах ±ф около РСН, или две антенны с ДНА, развернутыми на ±ф относительно
того же равносигнального направления.
Пеленгатор со сканирующей антенной осуществляет последовательное сравне-
ние амплитуд сигналов, принятых при разных ориентациях ДНА. Для определе-
106
Глава 3. Радиоэлектронная разведка
ния угловых координат источника излучения в двух направлениях антенна пелен-
гатора должна совершать эволюции в двух плоскостях. Легче всего эволюции осу-
ществить за счет вращения ДНА вокруг равносигнального направления. Такого вра-
щения, при котором ось ДНА описывает коническую поверхность (рис. 3.33). Пеленг
источника О характеризует угол е.
При малом угле е амплитуда принятого сканирующей антенной сигнала E(z) бу-
дет меняться во времени:
E(z) = E0[1 + &ecos(Qck/-\|/) = Ех + Еу, (3.78)
где Eg — средняя амплитуда за период сканирования; к — крутизна дискримина-
ционной характеристики пеленгатора, равная
к= э(<р)
Э(£, - Е2)’
(3.79)
£ — угловое рассогласование направления прихода падающей на антенну волны и
РСН; QCK — угловая скорость вращения ДНА при коническом сканировании; у —
фаза огибающей принятого модулированного по амплитуде сигнала; ey игу — орто-
гональные проекции составляющие угловой ошибки е.
Как следует из (3.78), амплитуды двух ортогональных составляющих огибаю-
щей принятого сканирующей антенной сигнала
(3.80)
Еу (z) = кёу Eq sinQCKZ
Ех (Z) = ksxEG cosQ
содержат информацию об угловых рассогласованиях направления на излучающий
объект и РСН. Выделяя эти амплитуды фазовыми детекторами, можно измерить
составляющие угловой ошибки ey и гу. Если оси Ох и Оу на рис. 3.33 ориентирова-
Рис. 3.33. Пеленгование при
коническом сканировании ДНА
ны соответственно в горизонтальном и вертикаль-
ном направлениях, ортогональные составляющие
углового рассогласования е будут соответственно
ошибками пеленга по азимуту и по углу места.
Пеленгаторы, использующие последовательное
сравнение амплитуд сигнала, принимаемого одной
сканирующей антенной в разные моменты време-
ни, обладают существенными недостатками. Преж-
де всего — они весьма чувствительны к таким ко-
лебаниям уровня принимаемого сигнала, которые
искажают информативную для них огибающую сиг-
нала. Поэтому в настоящее время, в основном, ис-
пользуют измерители угловых координат с одно-
временным сравнением сигналов принятых неско-
лькими антеннами. Поскольку такие системы не
разворачивают во времени процесс анализа ориен-
тации фронта волны, падающей на раскрыв антен-
ной системы, их иначе называют пеленгаторами с
мгновенным РСН или моноимпульсными (способными определять пеленг мгно-
венно, по одному принятому импульсу, а не по огибающей, которую можно выя-
вить только приняв и обработав некоторую пачку импульсов). В моноимпульсных
пеленгаторах применяют амплитудное, фазовое или смешанное амплитудно-фазо-
3.6. Пеленгация и определение местоположения РЭС
107
вое сравнение сигналов, принятых разными антеннами. Усложнение пеленгатора
с одновременным сравнением за счет замены одной антенны системой из несколь-
ких и соответствующий переход к многоканальному приемному устройству — это
плата за улучшение качества: точности пеленгации и устойчивости пеленгации к
помехам, в том числе и специально организованным.
Амплитудная обработка сигнала в моноимпульсных пеленгаторах основывается
на использовании уже упомянутых систем из нескольких антенных (минимум двух
для пеленгации в одной плоскости). Амплитуды сигналов, принятых двумя антен-
нами, оси диаграмм направленности которых развернуты на угол <р0 относительно
равносигнального направления ф= 0 представляются теми же соотношениями (3.75),
а работа моноимпульсного пеленгатора с амплитудной обработкой иллюстрируется
схемой рис. 3.34, а.
Рис. 3.34. Моноимпульсный пеленгатор с амплитудной обработкой сигнала
При одинаковых формах ДНА и точно равных коэффициентах усиления при-
емников (ПРМ на рис. 3.34) отношение амплитуд, вычисляемое схемой сравнения,
составит
Е2 Г2(<р) ^(О)-^'(О)Ф
(3.81)
Приближение в (3.81) оправдано постольку, поскольку fj(0) = F2(0) = E(0),
77(0) = -F2'(0)=F'(0) и
<р«1. Если так, то —- = 1.
Е2
Дискриминационная характеристика моноимпульсного пеленгатора с амплитуд-
ной обработкой изображена на рис. 3.34, б.
Для вычисления отношения (3.81) УПЧ идентичных приемников обоих каналов
пеленгатора охватываются цепями автоматической регулировки усиления, причем
регулирующее напряжение в приемнике первого канала выбирается из условия по-
стоянства амплитуды на выходе приемника второго канала Е2 = const. Это возможно
в том случае, когда коэффициент усиления УПЧ второго канала обратно пропор-
ционален амплитуде сигнала на его входе, т. е. иАру -кК2 = ^° , где KQ — коэф-
Евх 2
фициент пропорциональности. Используя wAPy для регулировки усиления в УПЧ
первого канала, так что кК{ = wAPy, можно получить на его выходе
Ei = ! = Ко <3-82>
Ет2
Сравнение амплитуд Ех и Е2 облегчается, если в обоих каналах — в обоих прием-
никах — использовать УПЧ с логарифмическими характеристиками, а схему срав-
нения выполнить как устройство вычитания. Действительно, разность логарифмов
108
Глава 3. Радиоэлектронная разведка
амплитуд эквивалентна монотонной функции их отношения — логарифму. При этом
дискриминационная характеристика оказывается равной
«(ф) = l°S^- = log Л (ф) — log/s (ф) (3.83)
^2
и проходит через нуль при (<р) = F2 (ср), т. е. при ориентации РСН на направление
прихода волны от источника излучения.
Суммарно-разностная обработка сигнала в моноимпульсных пеленгаторах су-
щественно снижает требования к идентичности амплитудных и фазовых характе-
ристик усиления в разных каналах. Для получения суммарных и разностных сиг-
налов выходы антенн моноимпульсного пеленгатора подключаются к волноводно-
му мосту (двойному волноводному тройнику), как на рис. 3.35.
Рис. 3.35. Моноимпульсный пеленгатор с суммарно-разностной обработкой
Если фронт волны, созданной источником излучения, образует с базой антен-
ной системы моноимпульсного пеленгатора угол ср, то сигналы на входах антенн
оказываются сдвинутыми по фазе относительно фазы сигнала в центре базы на
величину
Y = ±n-sin<p, (3.84)
А
где d— размер базы — расстояние между фазовыми центрами антенн, а X — длина
волны принимаемого сигнала.
Разностный и суммарный сигнал при этом оказываются равными
«д (г) = Ео cos (cor - у) - Eq + \|/) = Eq sin v sin co/,
mz (r) = Eq cos (cor - v) + Eq cos (cor + \|/) = EQ cosy cos cor.
Амплитуды сигналов на выходе приемников разностного и суммарного кана-
лов будут соответственно пропорциональны Е& = Ео sin\|/ и = Ео cosy, а их отно-
шение, с учетом (3.84):
ЕЛ sinw ( • d .
—— =----— = tg л—sin ср
Еъ cos\|/ \ А
(3.86)
В пределах малых отклонений пеленга на источник излучения от равносигналь-
ного направления, когда тангенс примерно равен своему аргументу, дискримина-
ционная характеристика пеленгатора будет определяться соотношением, следую-
щим из (3.86):
7.2^
Jid Еъ>
ср = arcsin
(3.87)
Фазовый способ пеленгования основан на использовании зависимости разно-
сти фаз сигналов, принимаемых двумя одинаковыми антеннами, которые разнесе-
ны в пространстве (А1 и А2 на рис. 3.36) на некоторое расстояние (базу протяжен-
3.6. Пеленгация и определение местоположения РЭС 109
ностью d). Если объект разведки удален от середины базы пеленгатора на очень
большое расстояние R» d, фронт излученной им волны около антенной системы
пеленгатора можно считать плоским. Различие длин трасс распространения сигна-
ла от источника излучения до двух антенн пеленгатора А1 и А2 А = d sin ср (рис. 3.36)
приведет к тому, что принятые этими антеннами сигналы 5] (/) и s2 (/) будут раз-
личаться по фазам. Разность фаз сигналов на несущей частоте w0 при истинном
пеленге j определяется очевидным соотношением
. , . A соо J . d оох
Аф - со0 Ат = (о0 — = —— sin ср = 2л—sin ф, (З.ов)
с с X
А
где Ат =----временная задержка прихода сигналов на разнесенные антенны; с —
с
скорость света; X — длина волны излучения объекта разведки.
Рис. 3.36. Фазовый пеленгатор
Из (3.88) следует, что пеленг на источник излучения определяется как:
ф =arcsin-^^-. (3.89)
cooJ
Как видно из (3.89), для определения пеленга на РЭС необходимо измерить
частоту со0 и разность фаз Аф принимаемых сигналов в разнесенных точках приема.
Но частоту можно и не измерять, если сделать пеленгатор следящим, способным
поворачивать базу, ориентируя ее параллельно фронту падающей волны. В случае,
когда база касательна к фронту падающей волны (нормальной к направлению при-
хода волны от источника излучения), 5Шфи = Аф = 0 независимо от частоты сигнала.
Функция arcsin(-) в правой части соотношения (3.89) неоднозначная. Поэтому
разным значениям измененной разности фаз Аф могут соответствовать разные пе-
ленги на источник излучения. Для исключения неоднозначности отсчета пеленга
используют антенную систему с несколькими различными по величине базами.
Иногда от пеленгаторов не требуется вычисления угла ф, а достаточно измере-
ния значения некоторой функции от этого угла, например, направляющего коси-
нуса, т. е. косинуса угла между базой пеленгатора и направлением на источник из-
лучения. Этот угол дополняет ф до 90° и потому, как следует из (3.89),
cos(90° - ф) = £^2.. (3.90)
cooJ
Метод использования базы для измерений пеленга получил дальнейшее разви-
тие при построении автоматических двухканальных пеленгаторов с вращающимися
110
Глава 3. Радиоэлектронная разведка
антеннами [41]. В современных системах радио- и радиотехнической разведки та-
кие пеленгаторы широко используются и называются доплеровскими. Пеленгато-
ры работают в диапазонах КВ и УКВ. Основная упрощенная схема доплеровского
пеленгатора иллюстрируется рис. 3.37.
Рис. 3.37. Доплеровский пеленгатор
На рис. 3.38 представлена функциональная схема доплеровского пеленгатора.
Рис. 3.38. Функциональная схема доплеровского пеленгатора
Две антенны, ненаправленные в горизонтальной плоскости (например, верти-
кальные штыри А} и A i), расположены симметрично относительно оси и вращают-
ся мотором М с угловой скоростью О, описывая цилиндрическую поверхность ра-
диуса R.
Если РЭС излучает сигнал s(/) на частоте св0, сигналы на выходах вращающихся
таким образом антеннах составят:
Sj (г) = tzcos[(o0/ - ф, (/)
52(/) = acos (Оо^ + ФгИ
= a cos соо
= а cos соо
(3.91)
где ф(/) — фаза сигнала, изменяющаяся во времени в силу взаимного движения
антенны и источника излучения; VR (/) — радиальная скорость этого движения —
проекция вектора линейной скорости движения антенны на направление прихода
сигнала, равная
ИЛ(/) = Исо8а(/) = ОЛсо8а(/) = О/?со5(О/ + ф); , (3.92)
а(/) — мгновенное значение угла между направлениями на источник излучения
(пеленгом разведываемого РЭС фи) и вектором линейной скорости вращающейся
антенны V.
В (3.91) учтено, что вторая антенна вращается в противоположную сторону и
сдвиг фаз сигнала в этой антенне имеет при той же абсолютной величине другой
3.6. Пеленгация и определение местоположения РЭС
111
знак. Приемники пеленгатора перемножают колебания с выходов двух симметрич-
ных антенн. Результат перемножения, с точностью до усредняемых в фильтрах
осциллирующих составляющих на частотах 2со0, дает
о « • L Vr 1
5 = 5^=—sin 2(00——t ,
2 V с J
(3.93)
или с учетом (3.92)
2
S = —cos
2
^^-Q/?sin(Q/ + (p) .
Это колебание с периодической угловой модуляцией. Спектр колебания содер-
жит гармоники известной частоты О вращения антенны:
G)
2—Q7? sin(2w + 1)(Q/ + (ри),
/у 2я+1
2 п-0
(3-95)
co
где Jk (m) — функция Бесселя порядка к аргумента т = 2—Ш? = 4лХ2—.
с X
Фильтром низких частот после перемножителя (рис. 3.38) всегда можно выде-
лить первую гармонику этого напряжения
—Jj 2——£IR sin(Q/ + (pH)
2 I c J
(3.96)
2
и, используя формируемые генератором опорного напряжения (ГОН) колебания,
синхронные и синфазные с вращением антенны, вычислить оценку пеленга (р* как
* Y 5^sinQr sin<p„
(р* = arctg— = arctg—---= arctg---= (ри. (3.97)
х 5(1)cosQr cos<Pn
Приближение в (3.97) означает, что величины Хи У формируются в результате
усреднения напряжений на выходах соответствующих фазовых детекторов (пере-
множителей). При усреднении можно пренебречь колебаниями с двойной часто-
той 2Q.
Можно не вычислять ср* как arctg—, а просто подать эти напряжения соответ-
ственно на горизонтальные и вертикальные отклоняющие пластины осциллогра-
фической электронно-лучевой трубки. При этом аргумент светящейся точки на
экране будет как раз равен ср* и, следовательно, пеленгу источника излучения.
Технически в доплеровских пеленгаторах не вращают антенну, а используют
кольцевую решетку неподвижных антенн, расположенных по образующим цилиндра
радиуса R, и периодически подключаемых парами ко входу приемника. Скорость
коммутации антенн выбирается равной Q. Если в составе пеленгатора использует-
ся многоканальный приемник, то с его помощью можно определять направления
на разные РЭС, работающие на разных несущих частотах. Современные доплеров-
ские пеленгаторы работают в диапазоне 20 МГц...2 ГГц и обеспечивают при этом
точность пеленгования не хуже скр<2° [41].Точность пеленгования определяется
как мощностью сигнала РЭС, так и базой пеленгатора 2R (вернее, величиной 2А/Х).
Точность определения направления и оперативность получения информации
о пеленге на РЭС объекта разведки в значительной степени зависят от способа
обзора пространства. В РРТР используются беспоисковый (одновременный) и по-
исковый (последовательный) способы определения направления на источник элек-
тромагнитного излучения.
112
Глава 3. Радиоэлектронная разведка
Сущность беспоискового способа обзора пространства состоит в одновременном
приеме сигнала несколькими антеннами с разных направлений. Антенны при этом
должны иметь узкие и развернутые в пространстве диаграммы направленности [41].
Перспективным являются применение цифровых многоканальных ФАР [53].
Беспоисковые пеленгаторы применяются в диапазоне средних, коротких и метро-
вых волн и служат для оповещения об облучении летательного аппарата в станци-
ях оперативной радиотехнической разведки для непосредственной поддержки РЭП.
При поисковых способах определения направления на источник излучения
применяются сканирующие антенны [41].
3.6.2. Системы местоопределения в радио- и радиотехнической разведке
Пространственные координаты расположения объектов разведки определяют-
ся многопозиционными системами РРТР. Чаще всего средства РРТР для местооп-
ределения источников излучения используют триангуляционные методы. Но нахо-
дят применение и иные методы, например, взаимокорреляционные, основанные
на разностно-дальномерных измерениях. Возможно применение комбинированных
методов местоопределения.
Принцип триангуляционного местоопределения основан на пеленгации источника
излучения — измерении азимута и угла места.
Линией положения — геометрическим местом точек, которым соответствуют
постоянные значения измеренного азимута а* = const и угла места р* = const является
прямая. Поэтому точка положения излучающего объекта в пространстве может быть
определена на пересечении двух таких прямых, т. е. по двум парам оценок (а*; р*),
измеренных в двух точках, разнесенным в пространстве. Местоопределение на пло-
скости на основе измерений азимута иллюстрируется чертежом рис. 3.39.
Рис. 3.39. Триангуляционное местоопределение
Пеленгаторы расположены на поверхности Земли в точках П1 и П2 на рассто-
янии d друг от друга. С пеленгаторами связаны декартовы топоцентрические сис-
темы координат соответственно [Под и П2лу>2-
Если в качестве базовой системы принять систему Шод = Оху, то координа-
ты объекта разведки (х, у) в этой системе можно оценить на основе очевидных из
рис. 3.39 геометрических построений
, costti sina9
x = d—T-±--------Ъ
sin(a2
, sina. cosa9
T = -----t.
Sin(«2 ”al)
(3.98)
Как видно из (3.98), определение координат невозможно когда sin(a2 - ос,) = О,
т. е. при нахождении объекта разведки на продолжении базы триангуляционной
системы (на координатной оси Ох рис. 3.39). Для исключения таких вырожденных
3.6. Пеленгация и определение местоположения РЭС
113
случаев, триангуляционные системы местоопределения оснащают тремя пеленга-
торами, расположенными в трех точках, не лежащих на одной прямой.
Из формулы (3.98) видно также, что координаты объекта разведки можно вы-
числить и на основе измерений не азимутов и а2, а функций от них, например,
направляющих косинусов cosaj и cosa2. При этом алгоритм и трудоемкость вычис-
лений может оказаться проще.
Триангуляция применима и для определения пространственных координат объ-
ектов в трехмерном пространстве Oxyz. Такие измерения формируются двухкоорди-
натными пеленгаторами, измеряющими кроме азимута еще и угол места объекта
разведки. Для определения трех пространственных координат объекта разведки в
принципе достаточно трех независимых измерений. В четырех измерениях (двух
азимутов и двух углов места) содержится избыточность. Но практически, число
измерений для местоопределения не только не уменьшают, но даже увеличивают
за счет применения большего числа пеленгаторов: при двух пеленгаторах возможны
такие ситуации, когда по крайней мере две из трех пространственных координат
не определяются.
Для обеспечения точного местоопределения объектов, удаленных на очень боль-
шие расстояния, приходится применять триангуляционные системы с базами в де-
сятки и сотни километров. Для таких систем приходится пользоваться не формула-
ми (3.98), а более точными соотношениями, учитывающими кривизну земной по-
верхности и исходящими из моделей сферической геометрии.
Триангуляционный метод с использованием фазового пеленгатора, оценивающе-
го направляющие косинусы, иллюстрируется чертежом рис. 3.40.
Рис. 3.40. Триангуляция при измерениях направляющих косинусов
Пусть в четырех разнесенных точках приема — точках расположения антенн —
Ар.^ (рис. 3.40) с базами разнесения А^2 = А3А4 = J установлены четыре независи-
мых радиопеленгатора. Каждый из пеленгаторов измеряет направляющие косинусы
пеленгов объекта разведки (ОР)
coscp, = т),- и cosOz = E,z; i е 1:4. (3.99)
По измерениям направляющих косинусов определяется местоположение ОР в
системе координат Ozxy, т. е. декартовы координаты х, у, z источника излучения.
Из рис. 3.39 и рис. 3.40 следуют геометрические соотношения
д2 И2
R2 = R2 +xd+—; Т?2 +;
42 2 (3.100)
R^ - R2 + ydR% = R2-yd+^-.
114
Глава 3. Радиоэлектронная разведка
С учетом соотношений
d
х + —= 1
2
у=Л2^2; х = Т?з^з = /?Д4;
у = А|Г]| =/?2t|2; У + ^ = Л3г|з; У-^ = ^4,
*z=R^r
42
(3.101)
«4=^з"
из (3.100) и (3.101) следует
2х=л, ^+$2—;
V М
R^=R&2+d\
2j> = 7?3 Пз+Пд-г- >
Л3П3 =Л4Г|4+J.
(3.102)
Отсюда следуют соотношения для вычисления дальностей до объекта развед-
ки, что часто бывает необходимо в системах РРТР:
Rid~l
П1
П2,
Ryd *= Пз+Щт1
(3.103)
Rid~x
_П1
П1
р — ^3 „ . „ Ьз
Л4“ -— Пз+т14Т“
а для вычисления двух декартовых координат можно получить соотношения
2х
d
П1
7 —
(3.104)
2у_.
d
d2
Так как 2R2 = R2 + R2
разведки:
2R
Пз+П47^
, из (3.104) и (3.100) получается дальность до объекта
2г
П1
<П2>
Hi
(3.105)
2
Совершенно аналогично можно найти соотношения для определения третьей
координаты — высоты объекта разведки над поверхностью Земли. Действительно,
из (3.101) и (3.105) можно вычислить
(3.106)
При необходимости можно, пользуясь соотношениями (3.101), вычислить ази-
мут а и угол места р объекта разведки:
tga= CQS(P _ Л. cosp = д/cos2 0 +cos2 ф =/f— + —1 . (3.107)
cosO R \RJ
При всей простоте и удобстве использования триангуляционные системы для
местоопределения на основе независимых угловых измерений обладают существен-
ным недостатком: они размножают цели. Этот эффект поясняется рис. 3.41.
3.6. Пеленгация и определение местоположения РЭС
115
Рис. 3.41. Эффект размножения целей при пеленгации
Антенны пеленгаторов, расположенных в точках П1 и П2 , обладают конечной
шириной диаграммы направленности. Если в пределах этой ширины наблюдаются
несколько источников излучения (например, как на рис. 3.41 два источника ОР1 и
ОР2) по азимутам, соответственно, ан, а12 и а21, а22, то триангуляционная система
кроме истинных координат (x^J и (х2у2) будет определять ложные координаты
(х^) и (х2у2). Соответствующие этим координатам ложные отметки местоположе-
ния объектов разведки (ЛЦ1 и ЛЦ2 на рис. 3.41) находятся на пересечении линий
пеленгов.
Для устранения нежелательного эффекта размножения целей приходится исполь-
зовать дополнительную информацию о положении и количестве объектов разведки.
Самый эффективный способ учета дополнительной информации — корреляцион-
ная обработка сигналов, принимаемых в пространственно разнесенных точках.
Для триангуляционного определения пространственных координат объекта
разведки вовсе не обязательно использовать неподвижные пеленгаторы, как на
рис. 3.40. Пеленгаторы могут перемещаться в пространстве, но при этом нужно,
чтобы законы их движения (траектории) были бы известны и временные зависи-
мости собственных мгновенных координат {х(Г), у (Г), z(T)} учитывались бы при
обработке. Так, на рис. 3.42, а иллюстрируется местоопределение наземного объекта
по пеленгам с борта самолета радиотехнической разведки, а на рис. 3.42, б —
с орбиты разведывательного ИСЗ.
Рис. 3.42. Триангуляция при подвижном пеленгаторе
Измеряя пеленги на источник излучения в разных точках, которые последова-
тельно занимает разведывательный летательный аппарат при движении по траек-
тории (рис. 3.42, а) или по орбите (рис. 3.42, б), и, зная координаты этих точек,
можно вычислить неизвестные координаты неподвижного излучающего объекта.
Триангуляционная система местоопределения поддерживается измерениями пе-
ленгов (или направляющих косинусов) объекта разведки. В совокупности оценок
116
Глава 3. Радиоэлектронная разведка
пеленгов из разных точек пространства разрушена значительная часть информа-
ции о принимаемом сигнале. В частности, о взаимной корреляции принимаемых
в этих точках сигналах разведываемого объекта. Учет такой информации может су-
щественно повысить точность местоопределения. Взаимную корреляцию сигналов
в разных разнесенных точках используют разностно-дальномерные методы место-
определения. Геометрические соотношения, иллюстрирующие применение метода
разностно-дальномерного местоопределения, иллюстрируются рис. 3.43.
Рис. 3.43. К принципу разностно-дальномерного
способа местоопределения
Местоположение источника излучения на плоскости определяется в результате
измерения разности моментов времени приема сигнала в двух точках, разнесенных
на величину базы d. Геометрическое место точек, соответствующих измеренной
разности дальностей (х,у)-Я2 (х,у) = A/?f2 = const, это гипербола. Положение ис-
точника излучения находится как точка пересечения двух гипербол, для построе-
ния которых нужно измерить две разности дальностей A7?f2 и АЛ23 на двух базах
Ji2 и d23. Для определения трех пространственных координат нужно, соответствен-
но, получать три независимых измерения на трех базах.
Разности дальностей до объекта разведки определяются взаимокорреляционными
измерителями. Структура взаимокорреляционного измерителя приведена на рис. 3.44.
Рис. 3.44. Взаимокорреляционный пеленгатор
3.6. Пеленгация и определение местоположения РЭС
117
Эта структура подобна схеме фазового пеленгатора и содержит двухканальное
радиоприемное устройство с общим гетеродином (Г) на оба канала, измерительную
линию задержки (ЛЗ), собственно измеритель, состоящий из перемножителя и
интегратора, системы управления (СУ), синхронно управляющей линиями задержки.
В этом следящем измерителе сигналы с выходов обоих каналов перемножаются,
результат перемножения усредняется и управляет задержкой в измерительной линии
(ЛЗ), устанавливая задержку Ат*, при которой максимизируется выходной эффект
измерителя z(T). Оценка Ат* — это формируемый схемой выходной отсчет.
На выходе измерителя функции взаимной корреляции включена дифференциру-
ющая цепь d/dt для формирования нечетной дискриминационной характеристики.
Направление прихода волны от источника излучения составляет угол ср с нор-
малью к базе d. Поскольку расстояние до источника излучения очень велико и Rx =
= R2 » dR, лучи, приходящие на каждую антенну, приблизительно параллельны. При
этих условиях в точках 1 и 2 на выходах антенн создаются напряжения
U!W = RC{E1We*}; (3108)
Wj (/) = и2 (t - А/) = Re< Ёх (t - А/)е7“0^'д^},
где
AR Ri R2 1
А/ = = —------ = t{-t2 (3.109)
с с
— измеряемая взаимокореляционным измерителем разность задержек когерентных
сигналов, связанная с пеленгом соотношением
А7?12 = JcosO = сА/. (3.110)
Общий гетеродин в точке 3 создает напряжение
w(/) = Re{4«y“r'} = Re|£'re^“u+“,,₽^ •.
При идеально идентичных комплексных коэффициентах передачи приемников
Къ в точках 4 и 5 формируются напряжения
t/2(0 = ^Re{4(/)£y“"₽'}; (3 Ш)
Ux (/) = Къ Re{£0 (/ - А/) £деУ“п₽'е“7"°л'
Высокочастотная взаимокорреляционная функция принимаемого сигнала равна
^о('1) = (мо(Пмо(^ + ^)) =
г 1 (3.112)
= J «о W«o (z + т)л = г Re{7^ (т)ехр(у<оот)},
о 2
где
т
Ro^) = iE0(t)E0(t + x)dt (3.113)
о
— огибающая корреляционной функции A'q(t) (рис. 3.45).
Иногда удобно представить wo(/) = wo(Oexp[-y(po(/)]. Тогда (3.112) дает решение
^0 W = M(-t)cosco0T + JV(T)sin®0T =
= (t)cos[co0t - Фо (т)],
118
Глава 3. Радиоэлектронная разведка
где
(3.115)
(3.116)
N
т
о
Выходной эффект измерителя в точке 8 на схеме рис. 3.41 имеет вид
Z(t) = 2К Jщ(t - t)w2(t - At*)dt -
о
= XrRe<
E0(t-At-т)Ё0(/-Дт*)е">оД/е”7’“п₽(/”Ат‘)Л >.
ю
Сравнивая (3.117) с (3.112) можно установить, что полезный выходной эффект
измерителя с точностью до несущественного коэффициента пропорциональности К
совпадает со смещенной автокорреляционной функцией принимаемого сигнала
(3.114):
-Дт))
где Къ — полный коэффициент передачи измерителя.
Выходной эффект (3.117) измерителя взаимокорреляционной функции в точ-
ке 8 воспроизведен на рис. 3.45.
*
“0=«Пр
(3.118)
Рис. 3.45. Взаимокорреляционная функция сигналов в пространственно разнесенных
точках и ее огибающая (о), выходной эффект корреляционного измерителя (б)
Полученное решение (3.117) позволяет сделать следующие выводы.
Выходной эффект взаимокорреляционного измерителя соответствует смещен-
ной на
Дт*-Д/ = Дти (3.119)
автокорреляционной функции KQ (т) принимаемого радиосигнала с отличием лишь
частоты заполнения (сопр вместо со0). При установке измерительной линии задерж-
ки на величину задержки
(3.120)
d
Дт* = Д/ =— sin <р
с
Z(t) совмещается с А"0(т) по методу максимума.
Для повышения точности измерителя система, следящая за задержкой Дт, фор-
мирует производную dK^{i)dT.
3.6. Пеленгация и определение местоположения РЭС
119
Измерения взаимокорреляционной функции можно проводить по максимуму
огибающей выходного эффекта R^[T-(Ат*-А/)], показанной на рис. 3.45 пункти-
ром, но точность отсчета задержки при этом будет ниже.
Структура цифрового измерителя разности задержек сигнала на основе системы
слежения за максимумом взаимокорреляционной функции представлена на рис. 3.46.
Для преобразования сигналов с выхода измерителя рис. 3.46 (Z(7") в точке 8)
в цифровую форму служат два синхронных детектора СД с ортогональными опор-
ными напряжениями: wonJ (Г) = Re|fr(Г)ехр[усопр (Г) } в точке 11 и ^оп2(Г) =
= 1т|£'г(Г)ехр Усопр(Г) } в точке 12. В результате на выходе СД! и СД2 формиру-
ются аналоговые напряжения
^! \ (т) = Z/! \ [Ат - (Ат * -А/)] = KR^ [т - (Ат * -А/)] х
I2J 2
(3.121)
( cos^
X
\sin>
{<опр (Ат * -А/) + Фо [т - (Ат * -А/)]}.
Перестройка ЛЗ
Рис. 3.46. Цифровой измеритель задержки
по максимуму взаимной корреляции
В аналогово-цифровом преобразователе (АЦП) эти напряжения квантуются по
х
уровню и дискретизуются по переменной т с шагом —— = п. В результате форми-
А/о
руются две последовательности
Zp Jn] = Zpx([«]|AT * - А?) = {[л] - (Ат * -А/)} х
U U (3.122)
(ЛТ * + фо[и]}-
Здесь параметр Ати = Ат* - АГ считается фиксированным. В точке 14 выделяется
огибающая
J^[n] = y/Z^[n] + Z^[n], (3.123)
а в точке 15 фаза
Г Z
y0[n] = arctg 1^-г =(опр(Дт*-Д/) + Ф0(И). (3.124)
Дифференцирующая цепь (ДЦ) формирует сигнал так, что в точке 16 получается
^l = ZBbIXW, (3.125)
an
что соответствует нечетной дискриминационной характеристике рис. 3.47 с нулем
в точке Ати = Ат*-АГ = 0.
120
Глава 3. Радиоэлектронная разведка
^о(т)
дт Ат
Рис. 3.47. Характеристика дискриминатора
Управляя задержкой сигнала в измерительной линии для поиска по Ат*, мож-
но по достижению нуля выходного эффекта в точке 16 ZBblx [л] 0 сформировать
грубый отсчет пеленга по огибающей взаимокорреляционной функции
(3.126)
Более точный отсчет можно получить с помощью (3.125).
Точность взаимокорреляционного измерителя зависит от протяженности ба-
зы d. Действительно, из (3.126) следует, что при наличии ошибки измерения задерж-
ки оДт, ошибка определения пеленга <р* или (coscp)* составит
Следовательно, для повышения точности местоопределения нужно увеличивать
базу. Но организация работы измерителя с очень большой базой требует преодоления
значительных технических трудностей. Прежде всего, в таком измерителе придется
транслировать сигналы, принятые удаленными антеннами А1 и А2 в точках 1 и 2
на рис. 3.44 на большие расстояния без искажения фазы. Для этой цели придется
использовать широкополосные линии передачи (радио, радиорелейные, волоконно-
оптические). Кроме того, из (3.127) следует, что даже при точных измерениях за-
держки (сравнительно малых оДт), хорошие измерения е* или (coscp)* можно полу-
чить только вблизи нормали к базе, когда coscp максимален. При |<р| —> — измере-
ния сопровождаются очень большими ошибками. Поэтому взаимокорреляционный
измеритель должен иметь несколько непараллельных баз.
3.7. Опознавание типов и различение образцов
радиоэлектронных средств
Любое РЭС характеризуется некоторым множеством независимых признаков
(параметров), например, несущей частотой, длительностью импульсов ти и другими.
Совокупность этих параметров — вектор Ху = « Х^, Х^,...Х^ .
Индекс j указы-
вает на принадлежность вектора X у-му РЭС. Иначе вектор Ху- называется собствен-
ным вектором РЭС у-го класса. Первая координата Х^ может характеризовать,
например, несущую частоту сигнала РЭС, Х^ — длительность импульсов и т. д.
У реальных РЭС каждый из признаков-координат собственного вектора пред-
ставляет собой случайную величину, которая может принимать значение из неко-
торого множества.
3.7. Опознавание типов и различение образцов РЭС
121
В понятие опознавания типа РЭС вкладывается следующий смысл. В пространст-
ве наблюдения каждому у-му РЭС ставится в соответствие собственный вектор Ху.
Все пространство наблюдения разбивается на непересекающиеся области SRy, соот-
ветствующие рассматриваемым классам (типам) РЭС. Решающее правило состоит
в установлении факта принадлежности наблюдаемого вектора Ху той или иной обла-
сти пространства наблюдения. Если в процессе измерений все компоненты векто-
ра Ху находятся в пределах области SRy, то наблюдаемое РЭС идентифицируется как
принадлежащее у-му типу.
Достоверное опознавание возможно только в тех случаях, когда собственные
области SRy радиоэлектронных средству-го типа не пересекаются. На рис. 3.48 сплош-
ными линиями представлены собственные области двух классов РЭС: область SRy
характеризует собственные признаки РЭС у-го класса, область — РЭС р-го клас-
са. Пространство наблюдения в данном случае представлено координатами «несу-
щая частота f— длительность импульса ти». Как видно из рис. 3.48, после оценки
векторов Ху и Хр имеется возможность идентифицировать обнаруженные сигналы,
т. е. отнести их соответственно ку-му и р-му типам. Измеренный вектор X* некого
неизвестного РЭС не позволяет провести опознавание принятого сигнала, так как
вектору X* не может быть приведена в соответствие ни одна из собственных обла-
стей каталога РЭС.
Рис. 3.48. Собственные области двух классов РЭС
При реальных измерениях оценка вектора X* носит случайный характер, по-
этому границы измеренных собственных областей РЭС размываются. Пересечение
собственных областей вносит в процесс опознавания неопределенность.
В теории распознавания оптимальные решения принимаются на основании бай-
есовой процедуры, согласно которой решение о принадлежности принятого сигна-
ла у-му классу РЭС принимается на основании анализа отношения правдоподобия
\у распределений вероятностей значений признаков /-го и у-го классов РЭС [109].
Вероятность опознавания типа РЭС зависит от числа измеряемых признаков и
точности их измерения. На рис. 3.49 изображена зависимость вероятности опозна-
вания типа РЭС от числа измеряемых параметров п и точности их измерения. Эти
кривые получены на основании моделирования радиолокационной обстановки и
опознавания большого числа типов РЛС с помощью реальных средств РТР.
На рис. 3.49 РТ— вероятность опознавания типа РЭС при измерении периода
следования импульсов; PjT— вероятность опознавания при измерении несущей ча-
стоты/и периода Т следования импульсов; Р^т— вероятность определения типа
122
Глава 3. Радиоэлектронная разведка
РЛС при измерении несущей частоты /, длительности импульсов т и периода сле-
дования импульсов Т. Графики получены при условии, что несущая частота f и
длительность
Рис. 3.49. Зависимость вероятности опознавания типа РЭС
импульсов т измерялись безошибочно, а измерение Т проводилось с ошибками.
В предельном случае, когда ошибки измерения стремятся к нулю, вероятность опоз-
навания РЛС по параметрам /, ти, Т близка к Р = 0,96.
3.8. Акустическая разведка
Акустическая разведка извлекает информацию, переносимую акустическими
полями инфразвукового, звукового и ультразвукового диапазонов.
Акустические поля распространяются и переносят энергию (и информацию) в
упругих средах. Если на каком-либо участке сплошной среды, например, в слое воз-
духа или жидкости, возбудить простое гармоническое движение, то оно будет пере-
Рис. 3.50. Колебания
мембраны и возникнове-
ние акустической волны
даваться соседним участкам, от них в свою очередь к дру-
гим участкам и т. д. В результате возмущение от источника
будет распространяться в среде с некоторой скоростью г.
Результирующее движение будет бегущей волной. Так пло-
ская тонкая пластинка (мембрана) площадью 5 (рис. 3.50)
колеблется вправо и влево, совершая простое гармониче-
ское движение с амплитудой х0 и частотой f= со/2л, воз-
буждает бегущую волну в окружающем воздухе. Пластин-
ка передает энергию слою воздуха массой dm, как пока-
зано на том же рис. 3.50.
Максимальная кинетическая энергия этого слоя воз-
духа составляет
dmv2 _ dm(d2XQ
2 2 ’
dQ = —(р&/х)со2%о, (3.129)
гдер — плотность воздуха; для нормальных атмосферных условий р= 1,225 кг/м3.
Поскольку при простом гармоническом движении средняя потенциальная энер-
гия равна средней кинетической энергии, соотношение (3.129) описывает запас
энергии в слое воздуха площадью 5 и толщиной dx. Если колебания начинаются в
момент времени /= 0, то они распространяются в воздухе (вправо на рис. 3.50) со
3.8. Акустическая разведка
123
скоростью v = dx/dt, где dx— расстояние, на которое возмущение распространяет-
ся за время dt. Разделив (3.129) на dt, можно определить скорость передачи энергии
каждому следующему слою толщиной dx.
dQ 1 r>dx ? 2 /о 1
— = -р5—со2 Ха . (3.130)
dt 2Н dt 0
Таким образом, мощность Р, излучаемая колеблющейся пластинкой в положи-
тельном направлении оси х, можно представить в виде
Р = ^-p5co2XoV. (3.131)
Плотность потока мощности П переносимой любой бегущей волной определя-
ется как мощность, приходящаяся на единицу площади. Из (3.131) плотность по-
тока звуковой волны равна
n = |pco2xjv (3.132)
в джоулях в секунду через поперечное сечение площадью 1 м2.
Скорость распространения звуковых волн в воздухе, как и вообще в газе, опре-
деляется соотношением [54]
С= &= /у/?Г, (3.133)
V Р V И
где у = —---адиабатическая постоянная, равная отношению теплоемкостей при
Ск
постоянном объеме и давлении (на уровне моря у = 1,41); р0 — статическое атмосфер-
ное давление; R—универсальная газовая постоянная; ц — молекулярная масса газа.
При уже упомянутых нормальных атмосферных условиях (когда температура
t° = +20°С, атмосферное давление р0= 10,1325-Ю2 мбар) скорость звука в воздухе
составляет v=343 м/с.
При прохождении звуковой волны элементарные объемы среды совершают ко-
лебания около своего положения равновесия. Скорость этих колебаний зависит от
звукового давления. В отличие от скорости распространения звука она называется
колебательной скоростью у.
Поверхность, на которой расположены частицы, совершающие синфазные коле-
бания, называется фронтом волны. В зависимости от формы этой поверхности раз-
личают плоские, цилиндрические и сферические волны. Направление распростране-
ния звука перпендикулярно фронту волны, поэтому распространение звука можно
описывать с помощью звуковых лучей, которые во всех точках перпендикулярны
фронту звуковых волн. Звуковое давление вдоль луча периодически меняется, напри-
мер, по синусоидальному закону. Расстояние между двумя ближайшими фронтами
волны с одинаковой фазой колебаний называется, как и для электромагнитного
поля, длиной волны X. Длина волны обратно пропорциональна частоте и существен-
но зависит от свойств звукопроводящей среды — ее плотности и упругости. Так
длина волны звукового колебания в газах меньше, чем в жидкостях, а в жидкостях,
как правило, меньше, чем в твердых телах, для которых справедливо соотношение
х = £ = (3.134)
где Е — модуль упругости (модуль Юнга).
124
Глава 3. Радиоэлектронная разведка
Звуковые волны при распространении в свободной атмосфере благодаря тепло-
проводности и вязкости воздуха поглощаются тем сильнее, чем выше частота звука
и чем меньше плотность атмосферы. Поэтому резкие вблизи звуки выстрелов или
взрывов на больших расстояниях становятся глухими, а колокольный звон — более
гулким. Неслышимые звуки очень низких частот (инфразвук) периодами от несколь-
ких секунд до нескольких минут затухают мало, могут распространяться на тысячи
километров и даже несколько раз огибать земной шар. Это дает возможность, напри-
мер, обнаруживать ядерные взрывы, являющиеся мощным источником таких волн.
Температура и плотность атмосферы уменьшаются с увеличением высоты, но
на больших высотах температура снова возрастает. На эти регулярные неоднород-
ности накладываются зависящие от метеорологических условий изменения темпе-
ратуры и скорости ветра, а также их случайные турбулентные пульсации различ-
ных масштабов. Все перечисленные неоднородности сильно влияют на распро-
странение звука: возникает искривление звукового луча — рефракция, в результате
которой наклонный звуковой луч может вернуться к земной поверхности, образуя
акустические зоны слышимости и зоны молчания; происходит рассеяние и ослаб-
ление звука на турбулентных неоднородностях, сильное поглощение звука на боль-
ших высотах и т. д.
Если атмосферные условия благоприятствуют фокусировке ударных волн, воз-
никающих при движении сверхзвуковых реактивных самолетов, у земной поверх-
ности звуковое давление может достичь значений, опасных для сооружений и здо-
ровья людей. Полярные сияния, магнитные бури, землетрясения, ураганы, морские
волнения являются источниками звуковых и особенно инфразвуковых волн.
Распространение звуковых волн в водной среде изучает гидроакустика. Особен-
ность подводных звуков — их слабое затухание, вследствие чего под водой звук может
распространяться на значительно большие расстояния, чем в воздухе. Так, в диа-
пазоне частот 500...2000 Гц дальность распространения под водой звука средней
интенсивности достигает 15...20 км, а в диапазоне ультразвуковых частот — 3...5 км.
Звук мог бы распространяться и на значительно большие расстояния, однако в
естественных условиях, кроме затухания, обусловленного вязкостью воды, ослаб-
ление звука происходит за счет рефракции и его рассеяния и поглощения различ-
ными неоднородностями среды. Рефракция звука вызывается неоднородностью
свойств воды, главным образом по вертикали, вследствие изменения с глубиной
гидростатического давления, солености и температуры в результате неодинакового
прогрева массы воды солнечными лучами. Скорость распространения звука изме-
няется с глубиной, причем закон изменения зависит от времени года, времени дня,
глубины водоема и ряда других причин. Так, например, зимой дальность распро-
странения звука больше, чем летом. Из-за рефракции образуются зоны тени, т. е.
области, расположенные недалеко от источника, в которых интенсивность звука
очень мала и слышимость отсутствует.
Рефракция, однако, может приводить не только к уменьшению, но и к увеличе-
нию дальности распространения звука, обуславливая явление сверхдальнего распро-
странения звука под водой. На некоторой глубине под поверхностью воды находится
слой, в котором звук распространяется с наименьшей скоростью; выше скорость
звука увеличивается из-за повышения температуры, а ниже — вследствие увеличения
гидростатического давления с глубиной. Этот слой представляет собой своеобраз-
ный подводный звуковой канал. Луч, отклонившийся от оси канала вверх или вниз,
вследствие рефракции возвращается в него обратно, как показано на рис. 3.51.
3.8. Акустическая разведка
125
Скорость звука
Воздух
Рис. 3.51. Распространение звука в водной среде
Если поместить источник и приемник звука в этом слое, то даже звук средней
интенсивности (например, звуки взрыва небольших зарядов массой 1...2 кг) может
быть зарегистрирован на расстояниях в сотни и тысячи км.
На распространение звука высокой частоты, в частности ультразвука, у кото-
рого длины волн очень малы, оказывают влияние мелкие неоднородности. Такие
неоднородности обычно имеются в естественных водоемах. Это микроорганизмы,
пузырьки газов и т. д., которые поглощают и рассеивают энергию звуковых волн.
В результате с повышением частоты звуковых колебаний дальность их распростра-
нения сокращается. Особенно сильно этот эффект заметен в поверхностном слое
воды, где больше всего неоднородностей. Рассеяние звука неоднородностями, а
также неровностями поверхности воды и дна вызывает явление подводной ревербе-
рации, которая может стать значительной помехой для ряда практических примене-
ний гидроакустики. Пределы дальности распространения подводного звука лими-
тируются также собственными шумами приемников и моря. Шум моря возникает
от ударов волн на поверхности воды, от морского прибоя, от шума перекатываемой
гальки ит. п., создается морской фауной.
Гидроакустика получила широкое практическое применение в частности и в тех-
нической разведке постольку, поскольку никакие виды электромагнитных волн,
включая и световые, не распространяются в воде (вследствие ее большой электропро-
водности) на сколько-нибудь значительные расстояния. Только звук может служить
единственным возможным средством получения информации и средством связи под
водой. Для этих целей пользуются как звуковыми частотами от 300 до 16 000 Гц,
так и ультразвуковыми от 16 кГц и выше. Наиболее широко в гидроакустической
разведке применяются эхолоты и гидролокаторы, которыми пользуются для поиско-
вых работ, для обнаружения морских и подводных целей. Также используются шу-
мопеленгаторы, определяющие направление на источник акустических колебаний
звуковых и инфразвуковых частот.
Для средств акустической разведки информативен прежде всего речевой сигнал.
Естественно, что спектральные и энергетические характеристики речевого сигнала
весьма индивидуальны и нестационарны. Тем не менее, при проектировании техни-
ческих средств перехвата речевой информации в акустическом канале и при органи-
зации работ по защите этой информации, используются стандартные усредненные
характеристики.
Простейшими являются волны, в которых давление р изменяется по синусо-
идальному закону:
p(t) = Ро+ pmsinctf, (3.135)
где р0 — статическое давление среды (атмосферное давление), а рт — амплиту-
да переменной составляющей давления, которая именуется звуковым давлением.
126
Глава 3. Радиоэлектронная разведка
Эффективное значение звукового давления в случае синусоидальных колебаний
меньше амплитудного в у/2 раз.
Среднее значение потока энергии за один период звукового колебания называ-
ют интенсивностью или силой звука J:
1 Т 2
J = —\ndt——-pcv2, (3-136)
Ч Рс
где ри v — эффективные значения звукового давления и колебательной скорости;
рс =413—— — волновое или удельное акустическое сопротивление.
м2с
Интенсивность слышимых звуков может меняться в очень широких пределах.
Так, например, вблизи самолета с работающими двигателями звуковое давление шу-
ма достигает 20 Па и более. В то же время ухо способно различать шепот на расстоя-
нии 0,5 м. При этом звуковое давление составляет всего 2Л0-4 Па. Для оценки
интенсивности звука широкое применение получило понятие уровня, т. е. логариф-
мической меры относительной интенсивности:
L = 101g— = 201g Д (3-137)
Л) Ръ
где Jo и р0 примерно соответствуют порогу слухового восприятия. Принято, что
Jo = 10"12 Вт-M"2; р0 = 2 10"5 Па.
За единицу уровня громкости принята логарифмическая величина — децибел.
Приращению уровня на 1 дБ соответствует увеличение звукового давления на 12 %,
а интенсивности звука на 26 %. Это приращение уровня находится на пределе раз-
личения слухом.
Сравнительные уровни громкости различных акустических сигналов, прежде
всего случайных, шумовых, приведены в таблице [37].
Уровни громкости различных источников акустического шума
Источник шума и место его измерения Уровень громкости, дБ
Громкий автомобильный гудок на расстоянии 8 м 95...100
Электропоезд на эстакаде на расстоянии 6 м 90
Шум в поезде метро во время движения 85...90
Автобус (полный ход) на расстоянии 5 м 85...88
Трамвай на расстоянии 10...20 м 80...85
Троллейбус на расстоянии 5 м 77
Грузовой автомобиль на расстоянии 5...20 м 60...75
Легковой автомобиль на расстоянии 5...20 м 50...65
Шумная улица без трамвайного движения 60...75
Обычный средний шум на улице 55...60
То же, в момент затишья днем 40
Исследование свойств слуха человека показало, что ощущение громкости зависит
как от частоты, так и от интенсивности звука. Наиболее слабый слышимый звук на-
зывается порогом слышимости. Если увеличивать интенсивность звука, то при не-
котором значении наступает ощущение боли в ушах. Соответствующее значение
уровня называется порогом болевого ощущения. Ухо способно воспринимать зву-
ки, частота которых лежит в пределах от 20 до 20 000 Гц, и сравнивать по громкости
звуки различной частоты. Это позволяет построить так называемые кривые равной
3.8. Акустическая разведка
127
громкости (изофоны), приведенные на рис. 3.52. В тех же координатах f-L пунктир-
ной кривой ограничена область, занятая звуками речи, т. е. теми акустическими
колебаниями, которые способен создавать голосовой аппарат человека.
Рис. 3.52. Кривые равной громкости; в верхней части рисунка
представлен классический звуковой (нотный) ряд
Как видно из рис. 3.52, в зависимости от частоты звуки равной громкости имеют
различный уровень Z, поэтому для оценки субъективного ощущения введено поня-
тие уровня громкости Lr. Под уровнем громкости понимают уровень звукового дав-
ления равногромкого звука частотой 1000 Гц. Для того чтобы отличить уровни гром-
кости от уровней звукового давления, ввели новое наименование единиц уровня
громкости — фон. Как видно из кривых рис. 3.52, на низших частотах уровень
громкости много ниже уровня звукового давления. Ослабление относительного уров-
ня на низших частотах при общем снижении громкости ведет к искажению звучания.
Человек воспринимает на слух колебания сложной формы, как музыкальные
звуки, имеющие определенную высоту. Чем больше основная частота звука, тем
больше интенсивность или громкость ощущаемого звука. Чувствительность уха к
небольшим изменениям высоты очень велика. Она максимальна в диапазоне от 500
до 4000 Гц, где человек способен различать разницу по частоте всего на 0,35 %.
В то же время при определении высоты тона раздельно звучащих звуков возможны
большие погрешности. На частотах выше 3000 Гц ощущение приращения высоты
тона намного меньше фактического изменения частоты звука.
Изофоны (рис. 3.52) определены для чистых тонов в условиях практически
полной тишины. Наличие мешающих звуков приводит к увеличению порога слыши-
мости. Это явление называется маскировкой. Разность между порогом слышимости
маскируемого звука в присутствии мешающего сигнала и в тишине является ме-
128
Глава 3. Радиоэлектронная разведка
рой маскировки. Наибольшее маскирующее действие оказывают звуки, близкие по
частоте к маскируемым. При маскировке чистым тоном существенно, лежит ли его
частота выше или ниже частоты маскируемого тона. В последнем случае маскирую-
щее действие значительно больше. При маскировке тонального сигнала шумами
маскирующее действие оказывают только те составляющие шумов, частоты которых
лежат в пределах соответствующей критической полосы слуха. Под критическими
полосами слуха понимают интервалы частот, в пределах которых должны находиться
составляющие сложного звука для того, чтобы их интенсивности суммировались.
Явление маскировки широко используется для активной защиты информации
от утечки в акустическом канале.
Слуховое восприятие зависит от длительности воздействия звука. Для правиль-
ного восприятия высоты тонального сигнала нужно, чтобы его длительность была
не менее 20...30 мс. При увеличении длительности воздействия такого сигнала ра-
стет ощущение громкости. При длительности воздействия 150...200 мс это ощуще-
ние становится максимальным. Дальнейшее увеличение длительности воздействия
приводит к постепенному уменьшению ощущения громкости (адаптация).
Важным свойством слуха является бинауральный эффект. В зависимости от угла
прихода звуковой волны сигналы, воздействующие на правое и левое ухо, могут в
большей или меньшей степени отличаться как по фазе, так и по амплитуде. Слуховой
анализатор позволяет человеку определять направление на источник звука. Наиболь-
шая точность локализации получается на средних частотах. Если источник нахо-
дится впереди слушателей, то точность локализации в горизонтальной плоскости
достигает (2...4)°. При изменении направления на 180° точность локализации резко
падает. В области высших звуковых частот локализации помогает изменение спектра,
вызываемого экранирующим действием головы. Поэтому способность локализации
сохраняется, несмотря на то, что сравнение по фазе становится невозможным.
Средства акустической разведки в качестве приемников и преобразователей
акустических сигналов в электрические используют микрофоны. К основным ха-
рактеристикам микрофонов относятся: чувствительность, частотная характеристика,
характеристика направленности (коэффициент направленности) и уровень собствен-
ного шума.
Чувствительность — это отношение напряжения U на выходе микрофона к зву-
ковому давлению Р, действующему на микрофон [44]:
U
Е = ~£- (3.138)
Чувствительность определяется или по напряжению холостого хода, или по
напряжению на номинальной нагрузке, за которую обычно принимают внутрен-
нее сопротивление микрофона на частоте 1000 Гц.
Чувствительность микрофона зависит от частоты, поэтому вводится понятие
средней чувствительности — среднеквадратическое значение в номинальном диа-
пазоне частот. Причем усредняют чувствительность, измеренную на частотах, рас-
пределенных равномерно в логарифмическом масштабе [44]. Чувствительность,
выраженная в децибелах относительно величины 1 B/Па, называется уровнем чув-
ствительности.
Стандартным уровнем чувствительности считается выраженное в децибелах
отношение напряжения С7Н, развиваемого на номинальном сопротивлении нагруз-
ки Лн при звуковом давлении 1 Па, к напряжению, соответствующему мощности
Ро = 1 мВт [44].
3.8. Акустическая разведка
129
Зависимость уровня чувствительности от частоты — это частотная характерис-
тика микрофона. Ее неравномерность определяют в номинальном частотном диа-
пазоне для данного типа микрофона.
Характеристика (диаграмма) направленности — это зависимость чувствительно-
сти микрофона в свободном поле от угла между рабочей осью микрофона (направ-
лением, по которому микрофон имеет наибольшую чувствительность) и направле-
нием на источник звука. Характеристику направленности определяют на нескольких
частотах или в полосе частот. Обычно приводят нормированную характеристику
направленности, т. е. зависимость отношения чувствительности Ее, измеренной под
углом 0, к осевой чувствительности £0 [44]:
я(е)=ф-. (3.139)
^0
Большинство микрофонов имеет осевую симметрию. По характеристике направ-
ленности микрофоны, используемые для ведения акустической разведки, делятся
на ненаправленные (односторонне направленные) и остронаправленные. Графичес-
кое представление характеристик направленности (обычно — в полярных коорди-
натах) называют диаграммой направленности. Для учета величины уменьшения чув-
ствительности под различными углами относительно осевого направления вводит-
ся коэффициент направленности G— отношение квадрата осевой чувствительности
микрофона в свободном поле £0 к среднему из квадратов чувствительности по всем
радиальным направлениям EQs [44]:
_ £0
G = —(3.140)
Коэфициент направленности определяют на ряде частот или для полосы частот.
Даже в отсутствии какого-либо акустического сигнала около микрофона напряже-
ние на его выходе не равно нулю. Наличие напряжения является следствием флюк-
туации частиц в окружающей среде, а также тепловых шумов сопротивлений в элект-
рической части микрофона.
Уровень собственного шума микрофона Z, приведенный к акустическому входу,
определяют как уровень эквивалентного звукового давления Рш, при воздействии
которого на микрофон получилось бы выходное напряжение, равное выходному на-
пряжению микрофона иш, развиваемому им в отсутствии звуковых колебаний [44]:
£ = 201g
(3.141)
где Ро =210-5Па.
Микрофоны по принципу электромеханического преобразования делятся на
электродинамические, электростатические, электромагнитные и релейные [44].
Электродинамические микрофоны по конструкции механической системы могут
быть катушечнми (динамические) и ленточные. Среди электростатических микро-
фонов различаются конденсаторные, в том числе и электретные, и пьезомикрофоны.
Электромагнитные микрофоны могут быть односторонними и дифференцирован-
ные. Релейные — угольными и транзисторными.
В средствах акустической разведки наиболее широко применяются электроди-
намические, конденсаторные и пьезомикрофоны.
У электродинамического микрофона катушка с намотанным на нее проводом,
находящаяся в радиальном магнитном поле и жестко соединенная с диафрагмой,
130
Глава 3. Радиоэлектронная разведка
колеблется под действием звукового давления, пересекая силовые линии. Вслед-
ствие этого в ней индуцируется электродвижущая сила (ЭДС) [44], повторяющая
изменения звукового давления. Для создания магнитного поля обычно использу-
ют кольцевой магнит. Диафрагму изготовляют из легких, но прочных материалов.
Конденсаторный микрофон представляет собой две обкладки, из которых одна —
массивная и инерционная, а другая — тонкая натянутая мембрана [44]. На конден-
сатор подается поляризующее диэлектрик напряжение Up через высокоомное сопро-
тивление 7?н. Источник поляризующего напряжения не расходует энергии, так как
постоянной составляющей тока нет. При колебаниях мембраны емкость конденса-
тора Со изменяется, а так как заряд q остается постоянным (конденсатор не успевает
перезаряжаться из-за большой постоянной времени т= 7?НСО), то изменяется напря-
жение на нем. Это дополнительное напряжение Ud и является ЭДС, вызванной
действием звукового давления на мембрану. Напряжение, получаемое на нагрузке,
несколько меньше ЭДС из-за падения напряжения на емкости конденсатора.
В электретном микрофоне, в отличие от конденсаторного, поляризующее напря-
жение образовано предварительной электризацией одного из электродов, изготовля-
емого из полимеров или керамических поляризующихся материалов. Такой электрод
имеет металлическое покрытие, которое по существу и является электродом конден-
сатора, а электрет служит лишь источником поляризующего напряжения. Поля-
ризация электрета постепенно уменьшается и через несколько лет требуется или его
замена, или повторная поляризация. В этом недостаток электретного микрофона по
сравнению с конденсаторным, но и достоинство, так как для него не требуется ис-
точника напряжения. По механическим, акустическим характеристикам, а также по
конструкции электретный микрофон ничем не отличается от конденсаторного [44].
В пьезомикрофонах используется явление пьезоэффекта [44]: при деформации
пластинки, вырезанной из кварца, сегнетовой соли или других кристаллов, а так-
же пьезокерамика (титана, бария и др.), происходит ее поляризация, т. е. появле-
ние электрических зарядов на противоположных плоскостях. Если пластину выре-
зать под определенным углом к оси кристалла, то можно получить поляризацию
при деформации пластинки от ее поперечного изгиба. При наклеивании металли-
ческих электродов на две противоположные грани пластинки между ними получа-
ют разность потенциалов, пропорциональную величине деформации пластинки от
поперечного изгиба. Для получения небольшого механического сопротивления при
изгибе пластинку берут очень тонкой, а для получения наибольшего электрическо-
го сопротивления длину и ширину пластинки выбирают сравнительно большими.
Пьезомикрофоны относятся к электростатическому типу микрофонов, поскольку
основные соотношения, управляющие процессами преобразования колебаний,
сходны с происходящими в электростатических преобразователях, например, типа
электретных. Разница между ними заключается в том, что пьезоэлектрические
преобразователи не требуют электрической поляризации: электрический заряд у них
образуется при деформации. У электретных преобразователей имеющийся заряд как
бы пульсирует в такт изменению емкости преобразователя, вызываемой деформа-
цией электрета [44].
В случаях, когда для акустической разведки информативны вибрационные коле-
бания механических систем, используются электронные стетоскопы, которые преоб-
разуют акустические колебания в твердых телах (стенах, потолках, полах и т. д.) в
электрические.
3.8. Акустическая разведка
131
Современные электронные стетоскопы имеют коэффициент усиления поряд-
ка 80...90 дБ (20 000...30 000 раз) и способны улавливать даже очень слабые звуко-
вые колебания через бетонные стены толщиной до 50... 100 см, а также двери и окон-
ные рамы с двойными стеклами [45]. Съем информации может осуществляться не
только непосредственно со стен, потолков, стекол, но и металлоконструкций зда-
ний, труб систем отопления и водоснабжения и т. д.
Применяются различные варианты стетоскопов от простейших портативных
малогабаритных до сложных электронных систем с внутренними сигнальными
процессорами [45].
Гидроакустическая разведка получает информацию, принимая и анализируя аку-
стические сигналы инфразвукового, звукового и ультразвукового диапазонов, рас-
пространяющиеся в водной среде от надводных и подводных объектов.
Гидроакустическая разведка предусматривает:
• разведку гидроакустических шумовых полей, создаваемых работающими греб-
ными винтами, различными двигателями и механизмами надводных кораб-
лей и подводных лодок;
• гидролокационную видовую разведку, которая добывает информацию, содер-
жащуюся в изображениях морского дна и различных объектов;
• гидролокационную параметрическую разведку, обеспечивающую получение
информации о пространственных, скоростных и других характеристиках объек-
тов из принимаемых отраженных сигналов;
• разведку гидроакустических сигналов, создаваемых различными работающи-
ми средствами гидроакустического вооружения надводных кораблей и под-
водных лодок;
• разведку звукоподводной связи, перехват информационных потоков, цирку-
лирующих в каналах этой связи, а также определение тактических и техни-
ческих характеристик систем звукоподводной связи.
Средства гидроакустической разведки могут быть активными (гидролокаторы)
и пассивными. Гидролокаторы излучают зондирующие акустические сигналы в
водную среду, принимают и анализируют эхо-сигналы, отраженные от объектов и
морского дна.
При ведении пассивной гидроакустической разведки используются шумопелен-
гаторы (гидрофоны), которые принимают и анализируют шумовые акустические
излучения, распространяющиеся в водной среде. По результатам анализа обнару-
живают, идентифицируют цели, определяют их пространственные координаты и
параметры движения.
Основными параметрами аппаратуры гидроакустической разведки являются:
рабочая частота; акустическая чувствительность; ширина диаграммы направленности
акустической антенны; диапазон рабочих частот. Существо перечисленных харак-
теристик не отличается от соответствующих характеристик средств РТР.
При оценке возможностей средств гидроакустической разведки важную роль
играют пространственно-временные характеристики среды распространения: рас-
пределение температуры и солености воды; гидростатическое давление; отражаю-
щие свойства морской поверхности и дна. Кроме того, на дальность действия средств
гидроакустической разведки влияют: отражающая способность цели (сила цели);
уровень создаваемого объектом шумового излучения; взаимное расположение ап-
паратуры разведки и цели.
132
Глава 3. Радиоэлектронная разведка
По принципу действия, структуре и алгоритмам обработки сигналов гидроаку-
стические и радиоэлектронные средства имеют много общего. Но, естественно,
различаются в основном входными и выходными устройствами — антеннами.
Гидроакустическая антенна — это устройство, обеспечивающее пространствен-
но-избирательный прием или излучение звука в водной среде.
Функциональными элементами гидроакустической антенны являются электро-
акустические преобразователи, акустические экраны и линии сигнальных комму-
никаций [38].
По способу обеспечения пространственной избирательности антенны делятся
на интерференционные (непрерывные и дискретные), фокусирующие, рупорные и
параметрические [38].
Интерференционными называют антенны, поле излучения которых формиру-
ется в результате интерференции акустических колебаний, вызванных в точке на-
блюдения различными участками колеблющейся активной поверхности антенны.
Непрерывными называют антенны, у которых нормальная составляющая коле-
бательной скорости активной поверхности меняется непрерывно от точки к точке.
Антенные решетки состоят из отдельных преобразователей. Даже когда преобразо-
ватели расположены почти вплотную (с минимальными зазорами), нормальная
составляющая колебательной скорости на активной поверхности дискретной ан-
тенны претерпевает разрывы. Конструктивно непрерывная антенна может быть
выполнена и из дискретных преобразователей, если их излучающие поверхности
соприкасаются с водой, например через общую металлическую накладку. Параметры
дискретных антенн при малых относительных расстояниях между центрами преоб-
разователей могут рассчитываться по формулам, справедливым для антенн непре-
рывных.
И непрерывные и дискретные антенны могут иметь различную конфигурацию.
Используются линейные антенны в виде отрезка, дуги, окружности и поверхност-
ные — плоские, цилиндрические, сферические, а также конформные, повторяю-
щие обводы поверхности, на которой они располагаются.
Формирование пространственно-избирательных свойств рупорных антенн, как
и рефлекторных, осуществляется с помощью отражающих поверхностей. Однако в
рупорной антенне не происходит деформации фронта волны, и роль отражающих
стенок рупора сводится к канализации акустической энергии в некотором простран-
ственном угле.
Диаграммой направленности гидроакустической антенны, как и радиоантенны
в режиме приема, называется зависимость напряжения на выходе антенны при при-
еме сигнала от пеленга излучателя, расположенного на направлении 0, нормиро-
ванного к максимальному уровню сигнала.
Гидроакустический преобразователь — непременный элемент гидроакустичес-
кой антенны — представляет собой колебательную систему, предназначенную для
излучения и/или приема акустических сигналов в водной среде.
По назначению гидроакустические преобразователи делят на излучатели, при-
емники и обратимые преобразователи. По принципу преобразования энергии гид-
роакустические преобразователи, как и микрофоны, бывают пьезоэлектрические,
магнитострикционные, электродинамические, электромагнитные и электростати-
ческие. По структуре колебательной системы преобразователи делят на стержне-
вые, пластинчатые, цилиндрические, сферические. По конструктивному выполне-
нию подразделяют на силовые и компенсированные.
3.8. Акустическая разведка
133
Преобразователи-излучатели оцениваются следующими качественными пока-
зателями:
• акустической мощностью Ра — количеством звуковой энергии, излучаемой
преобразователем в единицу времени. Величина Ра, отнесенная к единице пло-
щади излучающей поверхности, называется удельной акустической мощно-
стью Рауд или интенсивностью излучения J, Вт/м2. Эффективность излучате-
ля в диапазоне частот характеризуется частотной зависимостью акустической
мощности;
• электроакустическим КПД т|эа — отношением излучаемой акустической мощ-
ности к активной электрической мощности Рэ, потребляемой преобразовате-
лем от генератора возбуждения;
• входным электрическим сопротивлением Z— отношением приложенного на-
пряжения U к току I в цепи излучателя;
• характеристикой направленности, оценивающей пространственное распреде-
ление акустического поля;
• коэффициентом концентрации ЛГ0 — отношением интенсивности звука, со-
здаваемой излучателем по направлению главного максимума в точке дальне-
го поля, к интенсивности ненаправленного излучателя с такой же излучаемой
мощностью на том же расстоянии.
Преобразователи-приемники характеризуются несколько иными параметрами,
а именно:
• чувствительностью М, определяющей значение напряжения холостого хода на
выходе преобразователя при воздействии на него в свободном неискаженном
поле плоской волны звукового давления, равного 1 Па;
• электрическим сопротивлением Z, устанавливающим соотношение между на-
пряжением, развиваемым на выходе приемника, и током в его цепи;
• диаграммой направленности приемника;
• коэффициентом концентрации KQ — отношением квадрата чувствительности
к звуковому давлению в максимальном направлении к среднему квадрату чув-
ствительности во всех направлениях.
Для обратимых преобразователей коэффициенты концентрации в режиме из-
лучения и приема численно равны.
Все перечисленные параметры зависят от рабочей частоты гидроакустического
преобразователя.
ГЛАВА 4
РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ РАДИОЛОКАЦИОННЫХ
СИСТЕМ ОБНАРУЖЕНИЯ И ЦЕЛЕРАСПРЕДЕЛЕНИЯ
4.1. Радиолокационные системы как объекты радиоэлектронной борьбы
Излучение зондирующих сигналов демаскирует радиолокационное средство,
позволяет определить его местоположение, основные информативные для развед-
ки характеристики режима его работы: рабочую частоту, вид излучения (непрерыв-
ный, квазинепрерывный, импульсный), поляризацию сигнала, вид и параметры
модуляции, ширину спектра, длительность импульса, частоту следования импульсов,
излучаемую мощность. Измеренные характеристики дают возможность определить
тип РЛС, сформировать помеху в соответствии с предусмотренным заранее алго-
ритмом РЭП и нарушить нормальную работу РЛС со всеми вытекающими из этого
последствиями. При этом основная задача РЭП может состоять в том, чтобы за счет
применения преднамеренных помех и других мер исключить (точнее — предельно
затруднить) возможность извлечения полезной радиолокационной информации.
Разумеется, методы создания той или иной помехи могут быть различными,
обусловленными различиями подавляемых РЛС, тактической обстановкой в зоне
ответственности системы, в которую входит РЛС, количеством объектов, участву-
ющих в РЭП.
Современные радиолокационные системы решают широкий круг задач, связан-
ных с обнаружением радиолокационных объектов, определением их местоположе-
ния в пространстве и оценкой параметров их движения. В соответствии с этим ра-
диоэлектронное воздействие на радиолокационную систему в большинстве случа-
ев требует знания конкретных свойств и функциональных характеристик аппаратуры
РЛС. Наибольшего эффекта РЭП достигает тогда, когда оно организуется целена-
правленно с учетом индивидуальных особенностей подавляемой аппаратуры. В до-
вольно общем виде РЛС, как объект РЭП, может быть представлена структурной
схемой рис 4.1.
Приемная антенна РЛС кроме приема сигналов обеспечивает работу системы
определения угловых координат цели, в том числе системы автоматического сопро-
4.J, РЛС как объекты РЭБ
135
вождения цели по направлению (АСН). Сигналы, принятые антенной от цели, уси-
ливаются и селектируются по частоте в приемном устройстве (ПРМ). Приемник
снабжается системой автоматической регулировки усиления (АРУ), позволяющей
обеспечивать требуемый динамический диапазон и устранять амплитудные искаже-
ния принимаемых сигналов, способных существенно нарушить точность работы дру-
гих подсистем. С выхода ПРМ сигналы поступают на индикатор.
За приемником обычно следуют подсистемы селекции по дальности и скорости,
обеспечивающие измерение дальности и скорости выбранной цели и работу систем
автоматического сопровождения выбранных целей по дальности (АСД) и скорости
(АСС). С выхода системы селекции целей сигналы поступают на угломерную сис-
тему, обеспечивающую работу системы АСН.
Каждое из перечисленных устройств и подсистем может быть объектом РЭП.
Так, воздействие помех на антенную систему в совокупности с системой АСН может
быть направлено на срыв режима автосопровождения по направлению или суще-
ственное искажение угловых координат цели. Известен большой набор средств РЭП
угломерным системам. Часть из них рассчитана на подавление конкретных типов
угломерных систем. При создании таких помех обычно требуется информация о
принципах и параметрах системы АСН подавляемой РЛС. Но наряду с такими по-
мехами известны и применяются помехи более универсального характера, поража-
ющие угломерные каналы радиолокационных систем различных типов и не требу-
ющие при своей реализации знаний принципов и параметров работы подавляемых
РЛС. К таким видам помех относятся: поляризационные, когерентные, мерцающие
помехи; помехи, воздействующие по боковым лепесткам ДНА; перенацеливающие
на подстилающую поверхность, на активные или пассивные ловушки (выбрасыва-
емые и буксируемые), на дискретные дипольные образования. Но незнание конк-
ретных свойств и параметров подавляемых РЛС компенсируется повышением мощ-
ности угловых помех.
Приемное устройство РЛС можно рассматривать как объект воздействия поме-
хи по зеркальному каналу и двухчастотной помехи. В первом случае помеха созда-
ется на частоте, сдвинутой относительно несущей частоты РЛС на удвоенную ве-
личину промежуточной частоты приемника подавляемой РЛС. Формируемая по
сигналу зеркальной частоты пеленгационная характеристика неустойчива в направ-
лении на источник помехи. Двухчастотная помеха — это совокупность двух поме-
ховых сигналов, разнесенных по частоте на величину промежуточной частоты по-
давляемого приемника. Механизм воздействия такой помехи связан с ее детекти-
рованием в преобразователе частоты и формированием искаженной пеленгационной
характеристики, исключающей возможность определения угловых координат цели.
Система АРУ может являться объектом воздействия прерывистой помехи с
изменяющимся коэффициентом заполнения. При большом уровне мощности та-
кая помеха может ввести приемник в режим насыщения и нарушить передачу ам-
плитудных соотношений принимаемых сигналов, что отрицательно скажется на
работе угломерной системы, особенно моноимпульсного типа, поскольку наруша-
ется амплитудно-фазовый баланс каналов.
Системы АСД и АСС предназначены для обеспечения слежения за выбранны-
ми целями по дальности и скорости. Работа этих систем неразрывно связана с
операциями селекции интересующих целей. В соответствии с этим РЭП может быть
направлено на создание как маскирующих, так и имитационных (дезинформиру-
ющих) помех. Особую роль при РЭП АСД и АСС играют имитационные (уводя-
136 Глава 4, Радиоэлектронное подавление РЛС обнаружения и целераспределения
щие) помехи, способные вызвать срыв режима автосопровождения цели по даль-
ности и/или скорости и перевод систем АСД и АСС в режим сопровождения цели
по помехе. В этом случае существенно облегчается создание угловых помех. Ана-
лиз показывает, что большинство известных помех системе АСН требует значитель-
ного повышения мощности по сравнению с помехами другим системам РЛС. Ком-
бинирование данных помех с уводящими помехами по дальности и скорости при-
водит к снижению требуемой для их реализации мощности до уровня мощности,
необходимой при создании эффективной помехи системам АСД и АСС. В соот-
ветствии с этим значение помех системам АСД и АСС следует оценивать не изо-
лированно от помех другим системам РЛС.
Подсистема индикации и регистрации обеспечивает получение и вывод инфор-
мации о радиолокационной обстановке в пространстве, составляющем зону ответ-
ственности радиолокационной системы. Поэтому основная цель применения
средств РЭП в отношении данного структурного устройства РЛС состоит в том,
чтобы нарушить возможность наблюдения за обстановкой или исказить реальную
картину этой обстановки. Первая цель может быть достигнута с помощью актив-
ных и пассивных маскирующих помех, вторая цель — с помощью имитационных
и комбинированных помех.
Проведенное рассмотрение РЛС как объекта РЭП свидетельствует о необходи-
мости комплексного, системного подхода к оценке возможностей и эффективнос-
ти радиоэлектронного подавления. Изолированное рассмотрение функциональных
систем, входящих в РЛС, не позволяет в полной мере оценить эффективность РЭП.
Так, например, подавление только систем АСД и АСС еще не решает задачи РЭП:
если работоспособность угломерной системы не нарушена, РЛС может выполнить
боевую задачу, обеспечивая полуактивное наведение ракет.
4.2. Оценка информационного ущерба, наносимого
радиолокационным станциям средствами
радиоэлектронной борьбы
Радиолокационные станции (РЛС), работающие в режиме обзора, составляют
основу системы информационного обеспечения контуров целераспределения. Они
же обеспечивают информацией контуры дальнего наведения. Обычно РЛС, работа-
ющие в режиме обзора, территориально объединяются в системы и подсистемы,
называемые иногда радиолокационным полем. В большинстве случаев РЛС рас-
сматриваемого типа работают в импульсном режиме. Обнаружение целей на ма-
лых высотах может обеспечиваться РЛС, работающими в режиме непрерывного
излучения.
Выше было указано, что эффективность помех зависит от соотношений мощ-
ностей помехи и сигнала, т. е. помеха может наносить заданный информационный
ущерб лишь при условии
(4.1)
V С /вх
где кп — коэффициент подавления данного радиоэлектронного устройства задан-
ным видом помехи; к — отношение мощности помехи Рп и сигнала Рс на входе
приемника.
Не следует смешивать коэффициенты к и кП. Первый из них определяет вели-
чину отношения мощности помехи к мощности сигнала, получающуюся для задан-
4.2. Оценка информационного ущерба, наносимого РЛС средствами РЭБ 137
ного расстояния между передатчиком помех и подавляемой РЛС. Второй же коэф-
фициент определяет минимально необходимую величину этого отношения, обес-
печивающую определенный информационный ущерб.
Коэффициент к является функцией параметров станции помех и подавляемого
радиоэлектронного устройства, взаимного их расположения и т. д.
Для оценки эффективности помех необходимо установить зависимость отно-
шения мощности помехи к мощности сигнала (коэффициента к) от параметров
станции помех и подавляемого устройства.
Будем считать, что два самолета (постановщик помех ПП и прикрываемый само-
лет-цель) преодолевают ПВО противника (в данном случае одну РЛС), см. рис. 4.2.
Рис. 4.2. Вариант создания активных помех
Рис. 4.3. Координаты
постановщика помех ПП
в картинной плоскости
Параметры, характеризующие систему, создающую помехи: Рпрдп — мощность
передатчика помех; (7П — максимальный коэффициент направленного действия
антенны передатчика помех с учетом КПД фидера; AFn — эффективная ширина
спектра помехи; уп — коэффициент, учитывающий различие поляризаций антенн
передатчика помех и подавляемой РЛС; оц — эффектив-
ная площадь рассеяния прикрываемого самолета (цели);
/?и, 0П, <рп — полярные координаты постановщика помех.
Углы 0П, <рп отсчитываются в соответствующих плоско-
стях от максимума диаграммы направленности антенны
подавляемой РЛС (рис. 4.3); Rc — дальность до прикры-
ваемого объекта.
Параметры, характеризующие подавляемое устрой-
ство: Рс — мощность подавляемой РЛС; Gc — максималь-
ный коэффициент направленного действия антенны по-
давляемой РЛС (PCGC часто называют энергетическим
потенциалом станции); АД1р — ширина полосы пропус-
кания линейной части приемника подавляемой РЛС
(предполагается, что AFn> А^р); F(0,ср) — функция, описывающая нормированную
диаграмму направленности антенны подавляемой РЛС по полю; Аг — эквивален-
тная поверхность поглощения (поглощающая поверхность) антенны подавляемой
РЛС, определяемая формулой
(4.2)
А
г 4л
Зависимость коэффициента к от перечисленных параметров может быть опре-
делена следующим образом.
138 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Плотность потока мощности помехового сигнала на входе антенны подавляе-
мой РЛС определяется формулой
j Q-O,loc/?n
4л/?п
(4.3)
где а — коэффициент, учитывающий затухание в атмосфере (дБ/км) при прохож-
дении сигнала только в одну сторону.
Мощность на входе приемника подавляемой РЛС
рп =ппАГ2(еп,<Рп)Уп + /’ш, (4.4)
где Рш — мощность собственных шумов приемного устройства в полосе пропускания
линейной части приемника A4ip:
Рш=к^шД/пр (4.5)
где к = 1,38’Ю-23 Вт/градТц — постоянная Больцмана; Т — абсолютная темпера-
тура; ДГШ — коэффициент шума приемника.
Обычно мощность помехового сигнала значительно превышает мощность соб-
ственных шумов приемника. Поэтому в большинстве случаев со вторым слагаемым
в (4.4) можно не считаться, т. е.
^П-ПпЛ^ (^П»Фп)/Уп* (4.6)
Однако при подсчете снижения дальности действия РЛС в условиях шумовых
помех необходимо учитывать собственные шумы приемника.
В приемник попадает только часть мощности помех, определяемая соотноше-
нием ширины спектра помехи А^т и полосы пропускания приемника подавляемой
РЛС. В предположении прямоугольной аппроксимации спектра помехи и ампли-
тудно-частотной характеристики линейной части приемника подавляемого устрой-
ства мощность помехи на входе приемника в пределах полосы пропускания его
линейной части определяется следующим образом:
Л1ВХ =пплг2(еп,Фп)7п^р =
А/п (4.7)
4лА„ Д/п
Аналогичным образом для мощности полезного сигнала на входе приемника
подавляемой РЛС можно записать:
n °ц д । р-0,2а^.
свх 4д^2 4л^2 г
(4.8)
Подставляя (4.7) и (4.8) в (4.1), можно найти искомое выражение для отноше-
ния мощности помехи к мощности сигнала на входе приемника — коэффициент к:
А^ПР у j Q—0Л<х(/?п“2^с)
А/п
1с = -2-
вх
(4.9)
Выражение (4.9) позволяет найти отношение мощности помехи к мощности
сигнала (коэффициент к) в зависимости от параметров подавляемой РЛС, станции
помех и их взаимного расположения.
На рис. 4.4 представлена качественная картина зависимости коэффициента к
от Rc и параметров 7?п, PnGn.
4.2. Оценка информационного ущерба, наносимого РЛС средствами РЭБ 139
Рис. 4.4. Зависимость отношения помеха/сигнал (к)
от дальности до прикрываемого самолета (/?с)
Как следует из приведенных графиков, при заданном энергетическом потен-
циале станции помех PUGU и постоянном расстоянии до постановщика помех Яп
отношение помеха/сигнал на входе приемника РЛС уменьшается с уменьшением
расстояния до прикрываемого самолета-цели.
На некотором определенном удалении самолета-цели от подавляемой РЛС отно-
шение к уменьшится настолько, что помеха перестанет действовать. Граница, при
приближении к которой помеха становится неэффективной, определяется равен-
ством
к кп.
(4.10)
Уравнение (4.10) с учетом (4.9) называется уравнением радиолокационного
подавления РЛС активными помехами. Оно позволяет оценить информационный
ущерб, наносимый РЛС станцией помех.
Область, в пределах которой к = кп (помеха является эффективной), называет-
ся зоной подавления.
Зона подавления может быть найдена графически (рис. 4.5). Для этого на оси
ординат необходимо отложить величину кп и провести прямую, параллельную оси
абсцисс. Точка пересечения этой прямой с кривой к = и определяет границу
зоны подавления по одной из координат (дальности).
Рис. 4.5. Зона подавления РЛС активными помехами
Как следует из (4.9), коэффициент к, а следовательно, и границы зоны подав-
ления в значительной степени определяются диаграммой направленности подав-
ляемой РЛС. Если передатчик помех действует по основному лепестку диаграммы
направленности, то, очевидно, зона подавления будет иметь большую протяжен-
ность, чем в случае подавления по боковому лепестку.
На рис. 4.6 в полярной системе изображены координат зоны подавления РЛС
с заданной диаграммой направленности.
Из рисунка видно, что при заданных энергетическом потенциале и расположе-
нии постановщика помех ПП относительно РЛС прикрываемый самолет ПС1 мо-
жет приблизиться (без опасности обнаружения) в створе с постановщиком помех
140 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Рис. 4.6. Зоны подавления РЛС передатчиком помех
в полярной системе координат
(помехи действуют по основному лепестку диаграммы направленности) гораздо бли-
же, чем в случае, если бы ПС2 летел к РЛС не в створе с постановщиком помех
ПП (помехи действуют по боковым лепесткам). Другими словами, дальность обнару-
жения первого прикрываемого самолета ПС1 будет меньше дальности обнаружения
второго самолета ПС2 (Rc < Rc min2); однако в обоих случаях она меньше табель-
ной дальности действия РЛС (Rc minl < Rc min2 < Rc max).
Увеличение энергетического потенциала станции помех приводит к смещению
границы зоны подавления в сторону к РЛС.
При проведении практических расчетов по определению границ зон подавле-
ния важно знать уровень боковых лепестков по отношению к основному лепестку
диаграммы направленности. Уровень боковых лепестков и их тонкая структура
являются индивидуальной характеристикой РЛС и зависят от местоположения ан-
тенны. Для ориентировочных расчетов можно приближенно принять уровни первого
и второго боковых лепестков соответственно на 20 и 30 дБ ниже уровня основного
лепестка диаграммы направленности [46]. При совмещении передатчика помех с
прикрываемым самолетом формула (4.9) упрощается и принимает вид (7?п= Rc = R):
^,= 100,1аЯ„
РсСсОц ДУп
(4.П)
Если пренебречь поглощением электромагнитных волн в атмосфере (а= 0), то
из (4.11) можно найти формулу для минимальной дальности подавления, подста-
вив в нее k = к^:
"™" j4rfnGnTnVnp' (412)
Иногда (4.12) называется формулой дальности действия передатчиков помех.
Минимальная дальность подавления в общем случае может быть найдена из
формулы (4.9).
По мере приближения передатчика помех к РЛС эффективность помех падает
(отношение помеха/сигнал уменьшается). Это объясняется тем, что в процессе
приближения самолета с передатчиком помех к РЛС мощность сигнала, отражен-
4.2. Оценка информационного ущерба, наносимого РЛС средствами РЭБ 141
ного от самолета, возрастает быстрее, чем мощность помехи на входе приемника
РЛС. Действительно, мощность сигнала, отраженного от самолета, обратно про-
порциональна Я*, а мощность помехового сигнала — R^.
Формулы (4.9) и (4.12) справедливы, если приемник не перегружается помехой.
Реальные приемники и индикаторные устройства имеют ограниченный дина-
мический диапазон, так что обычно существует некоторое значение мощности
помехи Рп тах, при которой наступает перегрузка приемника, после чего он теряет
возможность выполнять свои функции по выделению поступающей информации.
На рис. 4.7 изображены два случая усиления смеси сигнала и помехи. Случай а
соответствует такому уровню помехи Рп, при котором перегрузки приемника нет.
Сигнал уверенно наблюдается на фоне помех. Случай б соответствует перегрузке
приемника помехами большой интенсивности. И хотя мощность сигнала значитель-
но больше мощности помехи, сигнал на выходе приемника не наблюдается.
Рис. 4.7. Перегрузка приемника помехами большой интенсивности: wn — напряжение
помехи; wc — напряжение сигнала; а — случай неперегруженного помехой приемника;
б — случай, когда приемник перегружен помехой
На рис. 4.8 изображены зависимости абсолютных значений мощностей поме-
хи Рп и сигнала Рс, а также их отношение к от дальности R^ =)1^т. На оси орди-
нат отложено значение коэффициента подавления кп и, кроме того, величина мак-
симальной мощности Рп тах, при которой происходит перегрузка приемника. Кри-
вые рис. 4.8 соответствуют случаю, когда перегрузка приемника наступает при
мощности помехи Рп тах, большей той, которая необходима для подавления при
заданном коэффициенте подавления к^.
Поэтому в интервале дальностей РП1 и Рп2 приемник не будет подавлен, однако,
начиная с дальности Рп2 и до нулевых дальностей, он вновь будет подавлен, но уже
за счет перегрузки приемно-индикаторного устройства. В принципе может быть
случай, когда Pn2>PnJ, тогда эффективность помех на малых дальностях будет
больше, чем на больших.
В настоящее время в РЛС принимаются меры для ослабления действия сильных
помех (ограничение, мгновенная автоматическая регулировка усиления и т. д. [11]),
поэтому при определении минимальной дальности подавления Rn min не следует осо-
бенно рассчитывать на эффект перегрузки приемного устройства РЛС.
142 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Рис. 4.8. Зоны подавления активными помехами РЛС
с ограниченным динамическим диапазоном приемника
Понятие «зона подавления» относится к одной РЛС. Оно вводится для оценки
действия активных помех в статике. В действительности же при преодолении ПВО
информация о координатах цели поступает в центры управления (наведения) от
нескольких РЛС, расположенных в различных местах. Информация о целях и по-
становщиках помех в центрах управления обрабатывается, данные одной РЛС до-
полняются и уточняются с помощью данных от других РЛС. Поэтому в динамике
боя область действия помех (область, прикрытая помехами), вообще говоря, не будет
соответствовать зоне подавления.
Например, если данные о координатах постановщика помех (ПП) поступают
от двух РЛС (рис. 4.9), то в результате их сопоставления (обработки) можно опре-
делить положение ПП с большей точностью, чем в случае одной РЛС (при нали-
чии двух РЛС может быть применен базовый метод измерения дальности).
Рис. 4.9. Область неопределенности, образующаяся
вокруг постановщика помех
Для каждой из двух РЛС имеются зоны подавления, определяемые соответствен-
но площадями секторов и Сопоставление этих зон кроме решения задачи
измерения дальности позволяет в значительной мере увеличить разрешающую спо-
собность системы радиолокационных станций в условиях помех.
Точность определения координат постановщика помех и прикрываемых им са-
молетов зависит от величины секторов S2 и величины запаздывания в поступле-
нии информации от различных РЛС. При обработке данных от двух РЛС точность
определения координат ПП увеличится, но останется все же меньшей, чем в случае
работы без помех. Таким образом, наличие помех приводит к образованию вокруг
постановщика помех некоторой области 5Н, называемой областью неопределенно-
сти. Размеры ее определяют разрешающую способность и точность системы РЛС в
условиях помех.
4.3. Маскирующие активные помехи
143
Очевидно, что при наличии нескольких РЛС
< *$!» ^2» •••» *Sr
В частном случае одной РЛС область неопределенности совпадает с зоной по-
давления, т. е.
5Н=5.
Размеры областей неопределенности весьма приближенно могут быть найдены
с помощью (4.9), (4.12) и кривых, приведенных на рис. 4.5, 4.6, 4.8. Зная размеры
областей неопределенности и характер их изменения во времени, можно решать
некоторые задачи радиопротиводействия, а именно: определять минимальные даль-
ности подавления; находить безопасные участки маршрута в зоне ПВО; произво-
дить расчет нарядов сил и средств радиопротиводействия, необходимых для подав-
ления данной системы РЛС.
4.3. Маскирующие активные помехи
Активными помехами называются радиосигналы, создаваемые специальными
радиопередатчиками и предназначенные для ухудшения или исключения нормаль-
ной работы радиоэлектронных средств (РЭС) противника. Активные маскирующие
помехи создают на входе приемника подавляемого РЭС фон, который затрудняет
обнаружение полезных сигналов, их распознавание и определение параметров. Как
правило, маскирующие помехи линейно суммируются с сигналом на входе приемни-
ка и поэтому называются аддитивными.
Активные маскирующие помехи можно разделить на три группы: непрерывные
шумовые помехи, хаотические импульсные помехи и последовательности детермини-
рованных импульсных сигналов. Использование маскирующих помех любого типа
приводит к уменьшению вероятности правильного обнаружения полезного сигнала,
увеличению вероятности ложной тревоги и снижению точности измерения его харак-
теристик. Так, в панорамной импульсной РЛС с электронно-лучевым индикатором
в качестве выходного устройства при приеме сигналов от одной цели и отсутствии
помех на экране электронно-лучевой трубки образуется одна отметка (рис. 4.10, а).
Помеха вызывает образование вдоль всей развертки дальности мерцающих (флук-
туирующих) отметок, которые затрудняют обнаружение сигнала (рис. 4.10, б).
Рис. 4.10. Отметки на экране РЛС: а — при отсутствии помех;
б — засветка экрана помехой
При использовании в РЛС системы автоматического слежения за целью по даль-
ности положение следящих импульсов дальномера однозначно определяется место-
нахождением импульсных сигналов на временной оси. Наличие шумовой помехи
нарушает нормальную работу этой системы, так как случайное изменение амплитуды
импульсных сигналов по всей шкале дальности делает невозможным устойчивое
расположение следящих импульсов дальномера в определенном положении.
144 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Аналогичная картина имеет место при воздействии помехи на канал передачи
радиотелеграфных или радиотелефонных сигналов. Помеха, складываясь с полезны-
ми сигналами, искажает последние на выходе приемника, что снижает вероятность
правильного распознавания переданных сигналов.
Эффективность маскирующих помех зависит от многих факторов и, в первую
очередь, от временной и частотной структуры как помехи, так и сигнала, а также
от энергетического соотношения помехи и сигнала на входе приемника подавляе-
мого РЭС.
4.3.1. Прямошумовая помеха
Идеальная шумовая помеха с точки зрения информационного критерия, долж-
на иметь нормальную (гауссовую) плотность распределения мгновенных значений
и равномерный энергетический спектр в заданной полосе частот [19]. В наи-
большей степени к такой помехе приближается прямошумовая помеха, которая
получается за счет прямого усиления шума первичного источника высокочастот-
ного шума (например, шумящего генератора) либо за счет переноса спектра шума,
создаваемого источником низкочастотного шума в заданную высокочастотную об-
ласть диапазона радиоволн. Такой шум напоминает гармонический сигнал, случайно
модулированный по амплитуде и фазе:
«п (') = (')cos[con/ + Фп (')]> (4.13)
где 170(/) и Ф (0 — медленно меняющиеся функции по сравнению с cosco0r.
Реальные станции помех первого поколения содержали различные нелинейные
устройства, которые снижают качество помехи. Значительное влияние на маскиру-
ющие свойства прямошумовой помехи оказывают ограничители, применяемые в
САП в целях повышения КПД выходных усилителей.
Двустороннее ограничение шумов ухудшает как энтропийный, так и спектраль-
ный коэффициенты качества помех.
На рис. 4.11, а представлена осциллограмма неограниченных (пунктирная линия)
и ограниченных на уровне h шумов (сплошная линия). В случае предельного ограни-
чения, когда эффективное напряжение помехи оп существенно больше порога огра-
ничения Л(ап » Л), помеха вырождается в меандровое напряжение, частота которо-
го совпадает со средней частотой исходной (неограниченной) помехи (рис. 4.11, б).
Wn(0 л оп < Ь
Рис. 4.11. Ограничение шумов по уровню h
Ограничение наиболее сильно влияет на энтропийный коэффициент качества
помехи, так как при этом искажается плотность вероятности мгновенных значе-
ний помехи. На рис. 4.12 показан характер искажения плотности распределения
4.3. Маскирующие активные помехи
145
Рис. 4.12. Изменения плотности вероятностей прямошумовой
помехи при изменении уровня ограничения
о » h
выходного напряжения ограничителя р(«Вых) для трех характерных значений эффек-
тивного напряжения входного шума «^(/).
Для случая оп « h плотность распределения р(«вЫХ) почти не искажается и вы-
ходной процесс для гауссового входного шума имеет энтропию
вых 1.
(4.14)
При дальнейшем росте эффективного напряжения оп искажение плотности
распределения проявляется сильнее и при оп » h форма рх (мвых) не имеет никако-
го сходства с гауссовой кривой. Плотность распределения ) вырождается в
две симметрично расположенные 5-функции, что говорит об отсутствии случайно-
го изменения напряжения помехи (рис. 4.12). Такая помеха практически не обла-
дает маскирующими свойствами, так как она вырождается в импульсный сигнал
меандрового типа.
Изучение зависимости энтропии выходного процесса от параметра позво-
А р-
ляет установить экстремальное значение мвых тах, которое имеет место при оп = <2 h
(рис. 4.13).
Рис. 4.13. Зависимость энтропии шумовой помехи от параметра
£п
h
При оп « h рост эффективного значения входного шумового напряжения, как
это следует из (4.14), приводит к увеличению Явых. При оп из рис. 4.13 следует, что
плотность распределения р(«вЬ1Х) начинает заметно искажаться. Поэтому рост энтро-
пии помехи прекращается. Когда наступает предельное ограничение помехи оп » А,
процесс становится неслучайным и энтропия резко уменьшается.
146 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Таким образом, с учетом нелинейности выходного усилителя, прямошумовая
помеха ии (/) имеет наилучшую маскирующую способность (по энтропийному кри-
терию) при условии
Опопт-^А. (4.15)
Ограничение входного процесса и^х (/) выгодно также и с точки зрения повы-
шения КПД передатчика помех. Если поставить задачу неискаженного усиления
исходных шумов (/), то необходимо параметры усилительного тракта выбирать
так, чтобы порог ограничения h не был бы меньше пиковых значений wBX(z). Это
условие может быть записано в виде
Зоп<Л, _____ (4.16)
где оп — эффективное значение входных шумов (оп = д/^вых (*))•
Неравенство (4.16) эквивалентно соотношению
*пик=^<3, (4.17)
где £пик — коэффициент, носящий название пик-фактора.
Из равенства (4.17) следует, что неограниченная прямошумовая помеха имеет
пик-факгор, примерно равный А:пик==3.
Если выполняются соотношения (4.16) и (4.17), то это значит, что ограничива-
ются лишь крайне редкие выбросы входного воздействия wBX (/), вероятность появ-
ления которых
р( ^вых (О — Зоп) — 0,0027. (4.18)
= 0,8. Следовательно, только около
) искажается несущественно.
Поэтому с полным основанием можно считать, что при выполнении условий
(4.16) и (4.17) усиление шумов происходит без искажений. Однако КПД усилите-
лей будет очень низким. Об этом свидетельствует хотя бы тот факт, что выбросы
входного шума |мвых(z)|-2оп появляются с вероятностью p^u^UK{t) >2оп) = 0,04.
Благоприятный энергетический режим передатчика прямошумовых помех созда-
ется при условии (4.15), когда />(|^вых (/) < 2оп) = ~ .
20 % выбросов ограничиваются оконечным усилителем. В то же время, как это сле-
дует из рис. 4.12, плотность распределения р(мвых
Ограничение шумов ивх (/) ведет к еще одному неприятному эффекту, связанно-
му с искажением спектральной плотности помехи 5ПШ (/). На рис. 4.14 изображены
спектры прямошумовой помехи на выходе первичного источника шума (рис. 4.14, а),
спектр ограниченных прямошумовых помех (рис. 4.14, б) и спектр ограниченных
амплитудно-модулированных шумов (рис. 4.14, в).
При отсутствии ограничения [ Ь = —
\
му с шириной FM и нормированной спектральной плотностью *Упштах (/) = 1. Ог-
раничение исходного процесса приводит к двум эффектам. Во-первых, появляют-
ся побочные излучения («хвосты») вблизи эффективной полосы шума. Во-вторых,
часть энергии помехи после ограничения распределяется на гармониках. В случае
l h
b =----> 0 на гар-
спектр имеет прямоугольную фор-
предельного ограничения амплитудно-модулированнои помехи
мониках теряется около 19 % полной мощности излучаемой помехи. Зависимость
доли мощности РТ, теряемой на гармониках, от уровня ограничения приведена на
р
рис. 4.15, б (зависимость отношения —, где Рп — полная мощность помехи).
п
4.3. Маскирующие активные помехи
147
Рис. 4.14. Искажение спектральной плотности помехи при ограничении
Рис. 4.15. Зависимость доли мощности Рг, теряемой
на гармониках, от уровня ограничения
Мощность помехи, приходящаяся на каждую из гармоник 3/п, 5/п, 7/п, рас-
пределяется точно так же, как и для детерминированного меандрового колебания:
8л2 8л2 8л2
~9~" ~25’ "49~’””
Кроме того, при b = 0 дБ на побочные излучения («хвосты»)
расходуется 12 % всей мощности передатчика помех. Итоговые предельные потери
составляют около 31 % (рис. 4.15, кривая а).
Если в передатчике прямошумовых помех выдержан оптимальный ограничитель-
, h 1 -
ныи режим Ь - — = то потери на побочные и внеполосные излучения будут не-
большими (около 3 %), что также имеет большое значение при решении задач ЭМС.
148 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
При разработке САП большое значение имеет пиковая мощность помехи Рпик =
= Wn max • Ограничение заметно улучшает эффективность работы выходных устройств.
Об этом говорит зависимость отношения эффективной мощности помехи к пико-
вой мощности —— от параметра b (рис. 4.15, кривая в). Здесь под эффективной
^пик
мощностью понимается мощность помехи в пределах ширины спектра. При опти-
мальном уровне ограничения b = пиковая мощность лишь примерно в 1,5 раза
V2
больше эффективной мощности помехи.
Энтропийный коэффициент качества прямошумовой ограниченной помехи со-
ставляет
Г|эн —О,7...О,8. (4.19)
Спектральный коэффициент качества т|сп определяется с помощью рис 4.14, б.
ЛсП 1
V - V
ипш max ипш min
V 4- V
ипш max пш min
= 0,96.
(4.20)
Здесь учтена неравномерность спектра помехи лишь в пределах эффективной
F F
ширины спектра /п —— < /п < /п +—.
2
Из соотношений (4.19) и (4.20) можно получить результирующий коэффици-
ент качества
П = ПЭнПсп==о>7-°>8- (4-21)
Следовательно, выбор оптимального уровня ограничения приводит к сравни-
тельно небольшому снижению качества помехи (всего на 20...30 %). Однако КПД
станции помех значительно возрастает (в несколько раз), а внеполосные и побоч-
ные излучения имеют низкий уровень (порядка 3 %).
4.3.2. Непрерывные шумовые помехи
Радиолокационным станциям, работающим в режиме обзора, в принципе мо-
гут быть созданы непрерывные шумовые помехи и/или импульсные помехи.
На рис. 4.16 показан примерный вид экранов РЛС в случае воздействия на них
шумовых и импульсных помех.
Рис. 4.16. Вид экранов индикатора кругового обзора РЛС при воздействии
активных помех: а — слабые непрерывные шумовые помехи; б — непрерывные
помехи средней интенсивности: в — непрерывные сильные помехи; г — действие
непрерывных шумовых и импульсных помех
Рис. 4.16, а соответствует воздействию на РЛС слабой непрерывной шумовой
помехи. Наличие нескольких ярких лучей на экране объясняется воздействием
активных помех по боковым лепесткам диаграммы направленности данной РЛС.
4.3. Маскирующие активные помехи
149
Увеличение мощности помехи на входе приемника приводит к расширению
засвеченных секторов (рис. 4.16, б). Очень интенсивные помехи приводят к пере-
грузке индикаторного устройства, в результате чего засвечивается почти весь эк-
ран индикатора РЛС (рис. 4.16, в). В пределах засвеченных секторов достаточно
мощные помеховые сигналы исключают возможность радиолокационного наблю-
дения целей.
Непосредственным результатом действия непрерывных шумовых помех является
маскировка полезных сигналов в некотором телесном угле и соответствующем ин-
тервале дальности. Вследствие этого существенно ухудшается разрешающая способ-
ность и снижается точность определения направления на цель. Измерение дальности
с помощью РЛС может быть вообще исключено в течение длительного времени.
Шумовые помеховые сигналы являются наиболее универсальными среди изве-
стных к настоящему времени помеховых сигналов. Они обеспечивают принципи-
альную возможность маскировки полезных сигналов любой структуры и формы.
Если помеховый сигнал представляет собой белый гауссов шум, то вероятность
правильного обнаружения полезного сигнала в шумах на выходе оптимального
приемника определяется только отношением энергии сигнала Е к спектральной
плотности шума С и не зависит от формы сигнала. Более того, как показывает тео-
рия обнаружения сигналов в шумах, пороговое соотношение (£/G)nop, соответству-
ющее заданной вероятности обнаружения при некоторой вероятности ложной тре-
воги, не зависит и от реализованного способа оптимальной обработки сигнала.
Поэтому для создания эффективных шумовых помех необходимо и достаточно
обеспечить лишь определенное значение отношения E/G, соответствующее допус-
тимому по условиям преодоления ПВО значению вероятности правильного обна-
ружения полезного сигнала в шумах и заданной вероятности ложной тревоги.
Под коэффициентом подавления шумовым помеховым сигналом импульсной
РЛС, работающей в режиме обзора, понимается такое значение отношения мощ-
ности помехового сигнала Рп, в пределах полосы пропускания линейной части А/^,
к мощности полезного сигнала Рс на входе оптимального приемника, при котором
вероятность правильного обнаружения пачки из п импульсов равна Рправ = 0,5 при
вероятности ложной тревоги Рлт = 10“5.
4.3.3. Модулированные шумовые помехи
Амплитудно-модулированная шумовая (АМШ) помеха применялась в самых пер-
вых САП. Для АМШ-помехи характерным является изменение амплитуды сигнала
по случайному закону
Л(/) = 1/о+Д^(/),
где С/о и АС/— среднее значение и девиация амплитуды; — модулирующая слу-
чайная функция со спектром 5^ (со).
Мгновенное значение АМШ-помехи определяется выражением
мам (/) = Л (г) cos cor = Uo [ 1 + т (г)] cos со/,
где ?и(г) = ^^(г) — случайный коэффициент модуляции, значение которого при
^0
неискаженной модуляции (при отсутствии перемодуляции) изменяется в преде-
лах-1 </и(/)<1.
150 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Одномерная плотность вероятности АМШ-помехи определяется по формуле [28]
/ ч 17 p(A\dA . .
Р Нам =~J / , <Л- <4-22>
""ам
При гауссовой плотности вероятности модулирующего процесса выраже-
ние (4.22) преобразуется к виду [28]
(г-1)2
НИ
1 7 е 2°1 ,
—7=— I / dz’
лл/2ло0 Z.ylA2 -V2
°Е. иям Е
где о0 = —; у=z=—
0 и о и и о
К>0; V < г < °°; G — эффективное значение модули-
рующих шумов
На рис. 4.17 представлена плотность распределения p{V}. Там же для сравнения
пунктиром изображена плотность распределения мгновенных значений квазигар-
монического гауссовского процесса p(Q (прямошумовой помехи). Условия норми-
ровки соблюдены.
Рис. 4.17. Плотность распределения АМШ-помехи
Из рис. 4.17 следует, что АМШ-помеха не является гауссовой, так как ее одно-
мерная плотность р(У) двумодальная. Так как плотность распределения мгновенных
значений амплитудно-модулированной шумовой помехи не является гауссовой, то
маскирующие способности помехи ниже, чем прямошумовой. Энтропийный коэф-
фициент качества помехи низкий и равен
Л™ = 0,3.
Вследствие наличия в реализации АМШ-помехи редких, но значительных выбро-
сов (пиков) неэффективно используются энергетические возможности выходных
каскадов САП. Из рис. 4.17 можно найти пиковое и эффективное значения случай-
ной величины И:
Кпик = 2; °v = иэф = о,б8.
v
Пик-фактор АМШ-помехи равен &пик = —пик- = 2,94, что говорит об эквивалент-
^эф
ности неограниченных прямошумовой и АМШ-помех по эффективности исполь-
зования выходных каскадов САП. Ограничение помех снижает &пик, однако одно-
временно ухудшается энтропийный коэффициент качества помехи цэн ам.
Спектр амплитудно-модулированной помехи зависит от спектральных характе-
ристик модулирующего шума Если модулирующий шум является гауссовым
процессом с равномерной спектральной плотностью в диапазоне частот O...FM, то
4.3. Маскирующие активные помехи
151
ширина спектра излучаемой помехи Д/п в два раза превышает ширину спектра
модулирующих шумов
A/b=2Fm.
Особенностью высокочастотного спектра амплитудно-модулированных помех яв-
ляется присутствие в нем дискретной составляющей на несущей частоте (рис. 4.14, в).
Мощность Рп генератора помех распределяется между несущей и боковыми состав-
ляющими неравномерно, а именно:
р _ р ц- р Л- k Р
1 П “ 1 Н 1 бок Н’
где Рн, Рбок — мощности несущей и боковых составляющих; &нб ----------коэф-
фициент, учитывающий неравномерность спектра (рис. 4.14, в).
Присутствие в спектре амплитудно-модулированных помех несущей значительно
ухудшает маскирующие свойства шумов, так как сама несущая маскирующим свой-
ством не обладает, а отбирает на себя большую часть излучаемой мощности.
Если модулирующие шумы не ограничены, то результирующий помеховый сиг-
нал имеет небольшую среднюю глубину модуляции, из-за чего мощность несущей
значительно превышает мощность боковых составляющих (/снб« 1). Единственным
путем увеличения мощности боковых составляющих за счет мощности несущей явля-
ется ограничение модулирующих шумов. Однако ограничение, как и любое нелиней-
ное преобразование, ухудшает маскирующие свойства модулирующего шума (огиба-
ющей), поэтому существует оптимальное соотношение уровня ограничения h эффек-
тивного значения модулирующего шума с^, при котором достигается наилучшее
качество помехи.
Отношение мощности боковых составляющих спектра к мощности несущей
пропорционально квадрату эффективного коэффициента модуляции тиЭф:
*нб = • (4.23)
*н
При модуляции неограниченными шумами для исключения явления перемо-
дуляции выбирают
^шах “ 3/Иэф < 1.
Поэтому в данном случае боковые составляющие имеют мощность Рбок ~ Рп, что
приводит к снижению качества АМШ-помехи. Ограничение шумов на оптималь-
ном уровне позволяет получить = 0,7 ... 0,8.
Энергетический спектр АМШ-помехи имеет дискретную составляющую на час-
тоте с бесконечной спектральной плотностью. Поэтому для оценки спектраль-
ного коэффициента качества т|сп ам применять формулу (4.20) нельзя.
Так как в маскировке сигнала участвуют только спектральные составляющие
помехи, то несущую можно считать «вредной», с точки зрения РЭП, составляю-
щей помехи, которую в принципе противник может легко устранить (например, с
помощью режекторного фильтра). Однако на несущую расходуется значительная
мощность передатчика помех. Поэтому оценка т|сп ам может быть проведена путем
сравнения мощности боковых составляющих с полной мощностью помехи:
П — ~ _ ^бок _ ^зф (Л
’1спам р р 1 1 2 ’ '
4l 1
Спектральный коэффициент неограниченных шумов очень низок (т|сп ам = 0,1),
так как тэф ~ 0,3.
152 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Ограничение модулирующих шумов на оптимальном уровне (о—позволя-
ет получить лИэф-0,7, чему соответствует т|сп ам « 0,4.
Из-за малых значений энтропийного коэффициента качества т|эн ам = 0,3 и спек-
трального коэффициента качества цсп ам = 0,3 результирующий коэффициент каче-
ства АМШ-помехи имеет весьма низкое значение:
Лам “ Лсп амЛэн ам ~ >
вследствие чего АМШ-помеха не может считаться перспективной.
Улучшить качество АМШ-помехи возможно путем выбора экстремального за-
кона плотности распределения модулирующих шумов.
Оптимизационная задача получения на выходе модулятора помехового сигнала
цД/) с заданной плотностью распределения p(wn) за счет выбора закона распреде-
ления модулирующей функции может быть решена следующим образом.
Огибающая помехового сигнала представляется в виде
л(/) = 4,+^).
Если под коэффициентом амплитудной модуляции т понимать т = —то
АМШ-помеха представляется в виде
иП (t) = Ао [1 + #?(/)] cos со/.
В общем случае при известном распределении p(wn) можно определить плот-
ность распределения амплитуды [27]
-^^ = Je1(x)J0(Ax)t/x, (4-25)
А о
ОС
где 0i(x)= J p(u)eJx“ndun —характеристическая функция; —функция Бес-
селя нулевого порядка.
Зная р(А), можно определить закон распределения плотности распределения
модулирующей функции или ти(/).
В соответствии с процедурой преобразования законов распределения
р(т) = 4Ао6р (?и)][й'6р (т)], (4.26)
где Лобр(Л) — обратная функция преобразования:
Аобр (™) = Л = 4) (1+т), /4Р (т) = 4).
Для получения нормального выходного процесса ип (/) решение (4.25) приводит
к релеевскому распределению амплитуды
А2
р(А) = -^г-е 2°2 приЛ>0. (4.27)
о2
Используя (4.26) и (4.27), можно получить
р(т)=^^1е 2в2 . (4.28)
о
Таким образом, искомое распределение модулирующего процесса ти(/) не явля-
ется ни нормальным, ни релеевским (рис. 4.18). Это распределение асимметрич-
но. Асимметрия тем выше, чем меньше значение Особенностью данного рас-
4
пределения является то, что относительное значение m(t) не может принимать зна-
чения т<-1. Этому соответствует условие отсутствия перемодуляции.
4.3. Маскирующие активные помехи
153
Рис. 4.18. Экстремальный закон р(т) при ограничении
модулирующих шумов снизу
Если модуляция осуществляется нормальными шумами, то наилучшим образом
можно удовлетворить условию получения экстремального закона p(ni) при ограни-
чении модулирующих шумов снизу. При этом плотность распределения ограничен-
ных снизу шумов близка к экстремальной. Ограничение снизу более эффективно,
чем двустороннее ограничение. Это объясняется тем, что при двустороннем ограни-
чении в моменты времени, соответствующие ограничению сверху, передатчик по-
мех излучает помеховый сигнал регулярной структуры, не обладающий маскирую-
щими свойствами. Маскирующие свойства ограниченных снизу шумов приближают-
ся к характеристикам квазигармонических шумов.
Фазомодулированная шумовая (ФМШ) помеха — это высокочастотное колеба-
ние со случайной фазой, модулированной шумом
«<t>(0 = tzoCos[(on/ + v(/) + Yn], (4.29)
где соп — несущая частота;
vW=M(z)’
где ^(/) — модулирующий процесс с нулевым средним значением £(г) = 0 и дис-
персией к^ — крутизна модуляционной характеристики.
В комплексной форме ФМШ-помеха представляется в виде
(4.30)
Среднее значение ФМШ-помехи
= (4.31)
Для стационарного и гауссовского процесс х(/) праведливо соотношение [41]
_/£«\
/ел('Л = е ' 2 (4.32)
Используя (4.32) для среднего значения Пф(/)из (4.31) следует, что при Vo = O
(«ф(')) = 1/ог 2 (4.33)
где Оф = kyS^ — эффективный индекс фазовой модуляции.
Из формулы (4:33) следует, что среднее значение (иф(/)) зависит от времени.
Поэтому ФМШ-помеха является нестационарным случайным процессом.
154 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
При исследовании нестационарных процессов в рамках корреляционной тео-
рии применяют двойное усреднение — по множеству и по времени. Для рассмат-
риваемого случая корреляционная функция ФМШ-помехи
W— (О^Ф W)’ (4.34)
где черта сверху означает усреднение по времени, а угловые скобки — усреднение
по ансамблю.
Подставляя в (4.34) выражения для £/ф(/) и ^/ф(г) из (4.29) и учитывая (4.32),
можно получить
£ф (0 = Рфе’о^1’лад1е-'“"т, (4.35)
где р^=и$ —полная мощность ФМШ-помехи; 7----—коэффи-
циент корреляции модулирующего процесса.
Из уравнения (4.35) следует, что в общем случае энергетический спектр ФМШ-
помехи не является равномерным.
Мощность несущей составляющей
2
Л.=Мт^0) = /Фе *• (4.36)
Мощность боковых составляющих
По формуле (4.37) спектральный коэффициент качества помехи определяется
при РП=РФ:
ZT2
ПС11фм=1-е"°*. (4-38)
Из (4.38) следует, что при оф« 1 вследствие значительной неравномерности
спектра т|сп фм ФМШ-помеха имеет низкие маскирующие свойства. С ростом ин-
декса фазовой модуляции спектр расширяется, а мощность боковых составляющих
спектра повышается за счет «перекачки» энергии несущей в боковые полосы. При
Оф » 1 можно считать цсп фм = 1. Это является одним из достоинств ФМШ-помехи.
На рис. 4.19 представлен спектр ФМШ-помехи для оф« 1 и сф» 1. В данном
случае модулирующий процесс получен путем пропускания белого шума через низ-
Форма спектра при оф « 1 аналогична спектру АМШ-помехи с эффективным
коэффициентом модуляции /лэф< 1. Ширина спектра ФМШ-помехи при оф»1
равна Д/Пфм = 2FU.
При Оф» 1 ширина спектра ФМШ-помехи зависит от значения оф:
Д/ф=1,45/’маф. (4.39)
4.3. Маскирующие активные помехи
155
Для определения энтропийного коэффициента качества ФМШ-помехи необ-
ходимо установить зависимость плотности распределения мгновенных значений по-
мехи от параметров модуляции. Одномерные плотности распределения помехи для
сигнала со смешанной амплитудной и фазовой модуляциями
Ифа (/) = Uq [1 + т cos Or] cos [ со п/ + v(0]’ (4.40)
где v(/) — стационарный нормальный процесс с нулевым средним и дисперсией
Оф, представлены на рис. 4.20.
Рис. 4.20. Плотность распределения р(«фа)при разных QZ
Вследствие нестационарности функции Ифа(/) распределения зависят
от времени (рис. 4.20) и меняются от штриховой (Q/ = 0) до штрих-пунктирной
(£2г = л) кривой. Функция р(ифа) является многомодальной. Степень искажения
/?(мфа) с уменьшением т увеличивается, и при т = 0 плотность распределения
р(мфа) становится такой же, как у гармонического колебания со случайной фазой:
при |«ф|>г70;
при |Мф|<1/0.
(4.41)
Из рис. 4.20 видно, что р(«фа) значительно отличается от гауссовой кривой. По-
этому энтропийный коэффициент качества ФМШ-помехи получается весьма низ-
ким — Лспфм «0,1...0,2. Итоговый коэффициент качества ФМШ-помехи имеет
значение ПСпфм = °Л-
Несмотря на низкий коэффициент качества г|сп фМ, фазомодулированная шумо-
вая помеха находит практическое применение вследствие простоты реализации на
СВЧ-приборах (ЛБВ) и возможности получения достаточно равномерного спектра.
При частотной модуляции приращение несущей частоты помехового сигнала
пропорционально модулирующему процессу £(/):
со(/) = (Оп+ЛчкЛ(')> (4.42)
где К1М — крутизна модуляционной характеристики, Гц/В.
/
Мгновенное значение фазы равно v(/) = Jco(O)d0, поэтому реализация частот-
о
но-модулированной шумовой (ЧМШ) помехи записывается в виде
^чм
1
(/) = [70cos “^ + *4mJ^(0)^ + Vo
О
(4.43)
156 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Начальная фаза, как и в предыдущих случаях, предполагается случайной и рас-
пределенной на интервале (-л, л].
ЧМШ-помеху можно рассматривать как ФМШ-помеху, если считать, что моду-
ляция по фазе осуществляется процессом £(/), пропущенным через интегратор. Эта
особенность приводит к значительным отличиям статистических и спектральных
характеристик ЧМШ-помехи по сравнению с аналогичными характеристиками
ФМШ-помехи.
Корреляционная функция ЧМШ-помехи находится по формуле
где
^чм
(t) = Uoexplj mnt +
t
^4MJ^(e)^e + Vo ’•
o J.
(4.44)
(4.45)
Подставляя (4.45) в (4.44), после статистического усреднения получается [28]:
*чм (V) = Рчм ехр{-^чм°^ [Лч/ (М - Rv (V)]}e-/“°T, (4.46)
где
1 /" \ I /" \
Яу (°-') = —(//^(x)^y)dxdy ) = —\ (* - y)dxdy );
\о о / \о о /
/Г/+т \ /tt+x
Лч<(/>'с) = —\ J f ^(x)^y)dxdy\ = — (j j R^x-yjdxdy
\o 0 / \0 0
Из (4.46) следует, что &чм(/,т) характеризует нестационарность изучаемой
ЧМШ-помехи. Интегрирование в показателе экспоненты значительно усложняет
исследование.
Для определения энергетического спектра используют преобразование Фурье
корреляционной функции с последующим усреднением по времени:
^пчм(®) J ^чм тЛ.
(4.47)
Подробный анализ выражения (4.47) проведен в книге [55].
Характеристики энергетического спектра 5П чм зависят главным образом от ин-
декса частотной модуляции £чм, плотности распределения мгновенных значений
модулирующего процесса и спектральной плотности 5(/м).
1. Малый индекс частотной модуляции
'W4M=Y’<<1’ (4-48)
7м
где Д/д — эффективное значение девиации; /м — среднее значение частоты моду-
лирующего процесса.
При /ичм « 1 форма спектра зависит от спектра модулирующего процесса 5^ (/м).
Если спектр ^(/м) имеет провал в области нулевых частот (рис. 4.21) и условие
(4.48) выполняется для всех спектральных составляющих, то для каждой j-й спект-
ральной составляющей Ц- = 2л/^ помеховый сигнал может быть представлен в виде
«чм (') = ио cosfcOn/ + /ЯчМ sinQ t =
(4.49)
= (70cos сопм
coslcon
п 2
4.3. Маскирующие активные помехи
157
О Fmin
Рис. 4.21. Спектр модулирующего процесса £(/)
Наибольшую мощность имеет составляющая на несущей частоте — , боковые
же составляющие выражены слабо: Рбок = —~~Uq. Форма энергетического спектра
аналогична спектру амплитудно-модулированного колебания. Для других спект-
ральных составляющих модулирующего процесса £(/) можно сделать аналогичные
выводы.
Следовательно, при тичм« 1 и форме спектра 5^(7^), представленной на рис. 4.21,
спектр ЧМШ-помехи 5’чмш(/) имеет ярко выраженную спектральную составляю-
щую на частоте /п, а форма боковых составляющих определяется спектром модули-
рующего процесса 5^(/м), рис. 4.22.
Рис. 4.22. Спектр ЧМШ-помехи \мш(/) при w4M« 1
при форме спектра модулирующего процесса рис. 4.21
Ширина спектра ЧМШ-помехи равна А/чм ш = 2Fmax.
Спектральный коэффициент качества ЧМШ-помехи определяется по аналогии
с (4.37), значение его весьма низкое:
2
т» =——«1 т «1 F • >0 (4.50)
11сп чмп „ э ч "*чм 1л mm '
Для модулирующего процесса {;(/), имеющего равномерную спектральную плот-
ность 5^(/м) в области нулевых частот (рис. 4.23), предыдущие рассуждения неспра-
ведливы, так как для области «нулевых» частот/м индекс частотной модуляции /лчм=
АЛ
=---»1. С уменьшением частоты составляющей /м при модуляции возрастает чи-
сло комбинационных составляющих спектра, образованных биениями несущей с
колебаниями спектра модулирующей функции /м •. За счет перекачки энергии несу-
щей в область частот боковых составляющих получается более широкий и интен-
сивный спектр.
0 Fmax
Рис. 4.23. Спектральная плотность модулирующего
процесса 5^(/м) в области нулевых частот
158 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
При неизменной мощности ЧМШ-помехи увеличение мощности боковых со-
ставляющих и одновременное расширение спектра (при/^ -э 0) может происходить
только за счет перекачки мощности несущей в боковые полосы. Благодаря этому
эффекту мощность составляющей на несущей ослабляется, а спектр в некоторой
степени выравнивается. При частотной модуляции нормальным шумом с малым
индексом частотной модуляции, когда энергетический спектр модулирующего про-
цесса простирается до нулевой частоты (рис. 4.23), спектр ЧМШ-помехи имеет га-
уссовую форму (см. рис. 4.24) независимо от конкретного вида спектра для
частот, отличающихся от несущей меньше чем на ширину спектра модулирующего
процесса [27].
Рис. 4.24. Гауссовая форма спектра ЧМШ-помехи
тт г г Л/п Г г Л/п
На частотах f > /п и / < /п —вид спектРа по мере удаления от /п все
больше и больше зависит от формы В этом случае ширина спектра ЧМШ-
помехи равна
4/n^2Fmax.
Так как интенсивность спектра при f >/п ±—снижается наполовину, то спект-
ральный коэффициент качества ЧМШ-помехи в этом случае равен
Лспчмш 0,7, «1, /nin >0. (4.51)
Существенно, что при фазовой модуляции на несущей всегда имеется конеч-
ная составляющая, тогда как при частотной модуляции дискретная составляющая
на несущей полностью исчезает (когда FM mjn = 0).
2. Большой индекс частотной модуляции
АЛ
™чм=~»1 (4.52)
Jм
соответствует медленному изменению частоты ЧМШ-помехи около частоты несу-
щей. В отличие от предыдущего случая (л?чм« 1) здесь можно считать, что мгновен-
ная частота ЧМШ-помехи изменяется пропорционально модулирующей функции
в соответствии с законом (4.49). Поэтому для стационарных процессов ^(г)
плотность вероятности мгновенного значения частоты ЧМШ-помехи пропорцио-
нальна плотности вероятности мгновенных значении модулирующего шума:
р(/)=
Физический смысл вероятности, применительно к случайным процессам пред-
ставляет собой относительное время пребывания случайной величины на заданном
уровне. Следовательно, спектральная плотность ЧМШ-помехи Ачмш(/) пропорци-
ональна времени пребывания частоты на заданном уровне. Отсюда вытекает важный
4.3. Маскирующие активные помехи
159
вывод о форме спектра ЧМШ-помехи: при частотной модуляции несущей стацио-
нарным процессом с достаточно медленными изменениями частоты около несу-
щей энергетический спектр ЧМШ-помехи пропорционален плотности вероятнос-
ти модулирующего процесса:
\мш(/) = И^)- (4.53)
где к — коэффициент пропорциональности.
Таким образом, при /ячм » 1 форма энергетического спектра ЧМШ-помехи не
зависит от спектральных характеристик модулирующего процесса, а определяется
только формой плотности распределения модулирующего процесса р(^). Если
является гауссовским процессом, то и спектр будет иметь гауссовскую
форму. Любые деформации приводят к аналогичным изменениям функции
•Учмш(/)-
При /лчм » 1 ширина спектра ЧМШ-помехи примерно равна
А/чМ Ш ^ЧМ >3.
(4.54)
Путем подбора формы функции можно получить достаточно равномер-
ный спектр ЧМШ-помехи и высокий спектральный коэффициент качества. Одна-
ко цэн чмш= 0,1, что объясняется (как и для ФМШ-помех) отсутствием случайности
в распределении мгновенных значений помехи (рис. 4.20).
Смешанная амплитудно-частотная модуляция не улучшает качества помех, так
как в спектре помехи появляется дискретная составляющая на частоте несущей.
Кроме того, спектр помехи искажается и становится неравномерным.
Отметим достоинства и недостатки частотно- и фазомодулированных помех,
получивших название помех с угловой модуляцией.
Достоинствами ЧМШ-, ФМШ-помех можно считать:
• возможность получения достаточно равномерного спектра при /ичм» 1 и Оф» 1
(спектральный коэффициент качества имеет высокое значение г|сп = 0,8...0,9);
• простоту технической реализации в САП на СВЧ-приборах типа ЛБВ;
• возможность использования потенциальных возможностей СВЧ-усилителей
по динамическому диапазону вследствие минимального значения пик-факто-
ра Лпик=^ = 2.
^эф
К недостаткам ЧМШ- и ФМШ-помех следует отнести:
• негауссовый характер помех, вследствие чего энтропийный коэффициент каче-
ства помех имеет весьма малое значение (г|эн ~ 0,1), что свидетельствует о пло-
хой их устойчивости к контрмерам противника;
• значительное влияние нелинейности модуляционных характеристик на фор-
му спектра (особенно для ЧМШ-помех при тчул» 1.
Как уже отмечалось, особенностью ЧМШ- и ФМШ-помех является их неста-
ционарность. Это свойство помех с угловой модуляцией может быть использовано
для повышения устойчивости помех к контрмерам. Однако из-за отсутствия иссле-
дований в этой области преждевременно делать какие-либо выводы.
Характеристики хаотических импульсных помех (ХИП) можно представить как
последовательность радиоимпульсов с заданной частотой заполнения, амплитуды
и длительности которых, а также интервалы между соседними импульсами изме-
няются случайным образом. Практическая реализация таких помех затруднитель-
на. Значительно проще реализовать последовательность радиоимпульсов, имеющих
160 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
постоянную амплитуду и характеризующихся случайным изменением длительнос-
ти импульсов и временных интервалов между ними. Принцип создания такой по-
Рис. 4.25. Принцип генерации хаотической импульсной помехи
Генерация высокочастотных колебаний заданной частоты происходит только в
те моменты времени, когда напряжение %(/), поступающее от генератора шума,
превышает порог t/0. Например, для управления высокочастотными колебаниями
может быть использована триггерная схема, которая переводится в одно устойчи-
вое состояние при пересечении шумовым напряжением порогового уровня снизу
вверх и возвращается в первоначальное состояние при пересечении этого уровня
сверху вниз. Если плотность вероятности мгновенных значений шума подчинена
нормальному закону со средним значением, равным нулю, то средние значения
длительности импульсов Мт, паузы между ними Л/д и числа пересечений 7Vcp поро-
гового уровня в единицу времени могут быть определены с помощью следующих
формул [28]:
ш
о
Мд
ш
ехр
2о?,
__2
>/2о
ехр
^0
2ог.
(4.55)
ш
Л^ср
—ехр
О
— интеграл вероятности; Пщ — дисперсия шума, создавае-
(4.56)
где Ф(у) = -^(е *
Л/Л 0
мого генератором.
Так, например, для широкополосного шумового напряжения, имеющего равно-
мерный частотный спектр в пределах диапазона ДГШ = Fmax - Fmin, коэффициент
корреляции равен
sin^rA^j)
Изменяя t/0, можно подбирать желаемое соотношение между и Л/д. Среднее
значение частоты следования помеховых импульсов определяется шириной спек-
тра модулирующего шума.
Выбором порогового уровня Uq значения Мх и Л/д можно уравнять, т. е. сде-
лать среднюю скважность импульсов равной двум. При этом условии считается [28],
что плотности вероятностей для т и А определяются экспоненциальным законом:
(4-57)
4.3. Маскирующие активные помехи
161
Спектральная плотность G(Q) и функция корреляции 7?(т) стационарной
последовательности независимых импульсов прямоугольной формы с постоянной
амплитудой t/orp и Мх= равны
Я2 Р (4.58)
Я СО = |^огр exp(-2Wcp |т|).
Время корреляции тк, однозначно связанное с шириной спектра процесса, со-
1
ставляет т=------.
2N
^У¥ср
Могут быть созданы радиоимпульсы с заданной частотой заполнения, постоян-
ными амплитудой и длительностью, но со случайно меняющимся интервалом между
импульсами. В принципе для решения указанной задачи достаточно фиксировать
с помощью компаратора каждое пересечение шумовым напряжением порогового
уровня t/orp снизу вверх. После каждого такого пересечения компаратор выдает
импульс напряжения с определенными значениями амплитуды и длительности,
который используется для управления высокочастотными колебаниями.
Относительно высокочастотного заполнения импульсов хаотических импульсных
помех (ХИП) следует заметить, что имеются реальные возможности создания коге-
рентных последовательностей помеховых импульсов при использовании схем дли-
тельного запоминания частоты разведанного сигнала [19].
ХИП оказывают эффективное воздействие на командные радиолинии управле-
ния (КРУ), линии радиосвязи, а также на некоторые типы радиолокационных стан-
ций. Применительно к работе КРУ хаотические импульсные помехи являются заг-
радительными по коду. Они вызывают полное или частичное подавление переда-
ваемых команд, изменение значений параметров модуляции поднесущих колебаний
и образование ложных команд. При оценке влияния помех, заградительных по коду,
на работу КРУ одним из важнейших показателей является среднее число помехо-
вых импульсов, поступающих на вход приемника в единицу времени (O,57VCp).
Оптимальное значение Ncp зависит от вида полезного сигнала. Кроме этого, суще-
ственное значение имеет и отношение импульсных мощностей помехи и сигнала.
При подавлении цифровых линий связи и передачи данных для повышения
эффективности ХИП также необходимо оптимальным образом подбирать средние
значения длительностей помеховых импульсов и пауз между ними. Так, например,
для подавления линии телефонной радиосвязи, исходя из энергетического спектра
русской речи, целесообразно иметь среднее значение частоты следования импуль-
сов помехи 300...400 Гц при скважности, равной двум [19].
ХИП могут отличаться от полезных сигналов по ряду показателей. Различия
могут быть во временной структуре. Так, например, ХИП используются для подав-
ления каналов радиосвязи, которые в ряде случаев характеризуются непрерывным
сигналом, в то время как помеха носит явно выраженный импульсный характер.
Могут иметь место различия в ширине спектра сигнала и помехи. При организации
защиты от помех одним из важных факторов является то, что значения средней
частоты помехи и сигнала всегда различны. При создании активных помех мини-
мальная ошибка настройки передатчиков помех сопоставима с полосой пропуска-
ния приемника подавляемой РЭС. Если в приемнике применяется, например,
когерентная обработка сигналов, то различие частот сигнала и помехи может спо-
собствовать существенному снижению эффективности помех.
162 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Большое значение для защиты от ХИП может иметь также случайность положе-
ния помеховых импульсов на временной оси: применение, например, схем черес-
периодного суммирования может существенно улучшить отношение сигнал/помеха.
Примером помех, сформированных как последовательности детерминирован-
ных импульсных радиосигналов, являются многократные синхронные импульсные
помехи, представляющие собой серию радиоимпульсов, излучаемых в ответ на сиг-
нал, принятый устройством радиопротиводействия от радиолокационной станции.
Импульсы помехи по форме и длительности соответствуют полезному сигналу. Су-
щественным обстоятельством является синхронность огибающих помеховых импуль-
сов относительно начала отсчета времени в РЛС. В то же время помеха имеет ряд
отличий от полезных сигналов. Как правило, имеет место существенное превышение
помехи над сигналом по амплитуде (мощности). Следовательно, большое значение
для защиты от помех приобретает амплитудная селекция.
Импульсы помехи часто могут характеризоваться постоянством амплитуды и
периода следования, что указывает на возможность применения для борьбы с по-
мехой, например, схем череспериодной компенсации (ЧПК).
При борьбе с помехами рассматриваемого типа очень важно обеспечивать разли-
чие частот сигнала и помехи; при использовании, например, когерентной обработки
частота помехи после фазового детектора может оказаться далеко за пределами
полосы пропускания его фильтра.
Существенное значение для ослабления эффективности помехи имеет измене-
ние в РЛС от периода к периоду частоты следования импульсов или высокой час-
тоты сигналов. При выполнении указанных условий помеха может маскировать лишь
те области, которые удалены от радиолокационной станции на расстояние, превы-
шающее расстояние до источника помех.
4.4. Активные имитирующие помехи
4.4.1. ОСицие сведения
Активные имитирующие помехи обычно предназначаются для внесения ложной
информации в подавляемое радиоэлектронное устройство. Иногда под действием
имитирующей помехи происходит перегрузка соответствующих информационных
каналов. В последнем случае помехи приводят к тому, что радиоэлектронное устрой-
ство работает на пределе пропускной способности, или, более того, аппаратурная
пропускная способность канала становится недостаточной для передачи необходи-
мой информации.
Чтобы исключить возможность фильтрации, помеховый имитирующий сигнал
не должен значительно отличаться от имитируемого сигнала по несущественным
(сопутствующим) параметрам. Например, при имитации ложной цели, находящейся
на одном пеленге с действительной целью, но на иной дальности, помеховый сигнал
должен иметь по крайней мере одинаковую с полезным сигналом поляризацию и
несущую частоту. Однако по информационному параметру он отличается от полез-
ного, т. е. помеховые сигналы излучаются по отношению к полезным с некоторой
задержкой.
Информационные и сопутствующие параметры помехового и полезного сигна-
лов имеют между собой статистическую связь, которая в ряде случаев может пере-
ходить в функциональную зависимость.
4.4. Активные имитирующие помехи
163
В соответствии с назначением подавляемого РЭС различают имитирующие
помехи для противодействия РЛС, линиям радиосвязи, командным радиолиниям
управления, системам радионавигации и др.
Из большого разнообразия активных имитирующих помех РЛС можно выделить
две группы: первая предназначена для подавления РЛС, работающих в режиме
обнаружения, а вторая служит в основном для подавления РЛС, работающих в ре-
жиме автоматического сопровождения.
Имитирующие помехи для подавления импульсных РЛС, работающих в режиме
обнаружения создают на экране РЛС ложные отметки, не отличающиеся от отметок
реальных целей. При действии таких помех, которые, в свою очередь, подразделяют-
ся на многократные и однократные ответные импульсные помехи, можно в значи-
тельной степени дезориентировать оператора и перегрузить систему обработки ин-
формации.
Многократная ответная импульсная помеха представляет собой серию радио-
импульсов, излучаемых в ответ на принятый сигнал (рис. 4.26, а) подавляемой РЛС
(рис. 4.26, б). Радиоимпульсы помехи и полезного отраженного сигнала по форме,
длительности и мощности идентичны. Различают синхронные и не синхронные по
отношению к частоте следования зондирующих импульсов РЛС многократные
Рис. 4.26. Подавляемый импульсный сигнал и ответные импульсные помехи:
а — подавляемый сигнал; б — многократная помеха; в — однократная помеха
Несинхронные импульсные помехи создаются излучением пачек радиоимпульсов
в произвольные моменты времени, в общем случае не связанные с временным поло-
жением зондирующих импульсов. Несинхронные импульсные помехи могут созда-
ваться для имитации взаимных помех, чтобы усложнить общую радиотехническую
обстановку и ввести в заблуждение лиц, ответственных за электромагнитную совме-
стимость. Отличие несинхронных импульсных помех и импульсного полезного сиг-
нала по частоте повторения используется при создании устройств помехозащиты.
Синхронные импульсные помехи формируются станциями многократных им-
пульсных помех, построенными по принципу многократной ретрансляции импуль-
сных сигналов подавляемой РЛС. На экранах РЛС многократные ответные помехи
порождают серии отметок, имитирующих несуществующие цели. Отметки могут
164 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
быть впереди или сзади реальной цели. Для создания упреждающих отметок время
задержки помеховых импульсов имеет порядок периода следования зондирующих
импульсов.
Однократная ответная помеха (рис. 4.26, в) — это радиоимпульс, излучаемый в
ответ на принятый сигнал подавляемой РЛС с некоторой задержкой т3, изменяющей-
ся в диапазоне T3min ... тзтах, рис. 4.26, в. Время задержки обычно изменяется так,
чтобы создать на экране РЛС имитацию реально движущейся цели. Скорость изме-
рз - /
нения задержки —- соответствует скорости движения имитируемои цели (танка,
dt
корабля, самолета). При достаточно большой мощности передатчика помех за счет
воздействия через боковые лепестки диаграммы направленности антенны на экране
РЛС создается несколько ложных отметок, движущихся с определенной скоростью,
что значительно осложняет работу оператора или вычислительной машины.
4.4.2. Создание пространственно-временных помех
При подавлении РЛС, как и любых других РЭС, стремятся синтезировать такие
помеховые сигналы, которые способны нанести противнику максимальный инфор-
мационный ущерб при минимальных затратах энергии источника помех. Эти два
требования противоречивы и поэтому на практике часто несовместимы. Простым
примером некой «универсальной» помехи может служить пространственно-времен-
ная помеха, создаваемая многочисленными источниками белого шума, размещен-
ными в каждом пространственном объеме разрешения. Такая помеха решает первую
проблему — нанесение РЛС максимального информационного ущерба, так как про-
странственно-временная энтропия этой помехи имеет максимальное значение. Од-
нако создание такой «универсальной» помехи требует значительных организацион-
ных и энергетических затрат. Кроме того, возможность размещения многочислен-
ных источников белого шума в значительных телесных углах весьма проблематична.
Примером малоэффективной пространственно-временной помехи может слу-
жить традиционная пассивная помеха, создаваемая большим числом противоради-
олокационных отражателей (например, диполей). Такая помеха хорошо маскирует
цель в пространственной области, однако она обладает малой устойчивостью к
контрмерам противника, так как может быть устранена узкополосными частотными
фильтрами.
Настоящим свойством универсальности обладает сигналоподобная простран-
ственно-временная помеха, структура которой подобна структуре полезного отра-
женного сигнала, а информационные параметры — временная задержка т, допле-
ровская частота Гд, угловые координаты 0 и ср — необходимым образом изменены.
С энергетической точки зрения сигналоподобная помеха является оптимальной, так
как оптимальный приемник РЛС не может ее селектировать ни по одному из измеря-
емых параметров (разумеется при условии отсутствия достоверной априорной инфор-
мации). Создание универсальной пространственно-временной помехи предъявляет
особые требования к цифровым устройствам запоминания и воспроизведения сиг-
нала и электромагнитного поля.
Любое РЭС извлекает полезную информацию путем обработки информацион-
ных параметров. Применительно к РЛС наиболее информативными параметрами
являются: амплитуда, частота, фаза (временная задержка) радиосигнала, а также
угловые координаты. Поляризационные параметры, как правило, являются сопут-
ствующими и не используются для извлечения информации о цели.
4.4. Активные имитирующие помехи
165
Процедура измерения (оценки) информационных параметров радиосигнала в
РЛС может быть разбита на два этапа.
На первом этапе производится глобальная (грубая) оценка параметров, для чего
информационное пространство представляется в виде совокупности (матрицы)
ячеек. Размеры каждой из ячеек определяются разрешающей способностью изме-
рителя того или иного параметра. При измерении только двух параметров: временной
СТ
задержки т3 (дальности /?ц = —-) и пеленга цели 0Ц — информационное поле разби-
2 СТ
вается на прямоугольные ячейки размером 5 (ти — длительность импульса;
0О 5 — ширина луча антенны РЛС, рис. 4.27).
м R
вр,5
Рис. 4.27. Информационное поле РЛС при
глобальной (грубой) оценке параметров т3 и 0
При измерении трех координат т3, 0Ц, (F^ — доплеровская частота цели)
информационное пространство состоит из множества ячеек, представляющих собой
прямоугольные параллелепипеды рис. 4.28. На рис. 4.28 — ширина полосы про-
пускания доплеровского фильтра. Ячейка информационного поля рис. 4.27 в которой
наблюдается отклик полезного (отраженного) сигнала, ниже называется сигналь-
ной ячейкой.
Рис. 4.28. Элементарная информационная ячейка
На втором этапе производится локализация (уточнение) координат в пределах
выбранной ячейки и определяется локальная ошибка.
В процессе обработки возникают ошибки двух родов:
• на первом этапе измерения возникают ошибки решения (ложные тревоги) из-
за неправильного выбора ячейки (процедура обнаружения);
• на втором этапе измерения возникают ошибки, значения которых не выхо-
дят за пределы выбранной ячейки.
Локальные ошибки измерения параметров сигнала могут повлиять лишь на про-
цесс сопровождения цели по какой-либо координате и в целом незначительно сказы-
ваются на эффективности функционирования РЛС.
166 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Больший информационный ущерб будет нанесен подавляемой стороне при на-
рушении процесса глобальной оценки параметров, следствием которого является
неправильный выбор сигнальной ячейки. Помеховые сигналы, вызывающие гло-
бальные ошибки, наносят подавляемой стороне значительный информационный
ущерб и, как следствие, негативно влияют на принятие решения о способе боевых
действий (применение оружия). Поэтому ниже рассматриваются помеховые сигна-
лы, нарушающие работу РЛС в режиме глобального оценивания (в режиме приня-
тия решения о наличии полезного отклика — цели — в той или иной информа-
ционной ячейке).
Рис. 4.29. Отклик на выходе пространственно-временного приемника
РЛС при воздействии маскирующих сигналоподобных помех
Целесообразно подразделять сигналоподобные помехи на маскирующие и имити-
рующие. Маскирующие помехи порождают отклики в каждой ячейке некоторого
информационного пространства [49] рис. 4.29, а имитирующие помехи — только в
некоторых ячейках, удаленных от сигнальной ячейки на заранее выбранное расстоя-
ние. Например, на рис. 4.30 изображен полезный отклик (выходной эффект) /(0, т),
наблюдаемый в центральной сигнальной ячейке, и три помеховых отклика, порож-
денных сигналоподобной имитирующей помехой. Для реализации различных комп-
лексов помех (например, перенацеливающей помехи) величины 0П и тп могут изме-
няться во времени.
Рис. 4.30. Отклики на выходе приемника РЛС
при создании имитирующих помех
4.4. Активные имитирующие помехи
167
Пространственно-временная помеха, маскирующая полезный отклик (цель) в
заданном угловом секторе Д0М (рис. 4.31), может быть создана пространственно-
Рис. 4.31. Пространственно-временная помеха,
маскирующая полезный отклик (цель) в секторе Д0М
Чтобы подавляемая РЛС не могла выделить сигнальную ячейку (0 = 0Ц), откли-
ки во всех других ячейках должны иметь одинаковую интенсивность, для чего про-
изводится пространственная модуляция помехового поля, создаваемого системой
пространственно-распределенных САП на основе МАР, рис. 4.32.
Рис. 4.32. Система САП, создающих негативную
(инверсную) пространственно-временную помеху
Система САП
Система
управления
При подавлении РЛС помеховое поле, создаваемое системой САП, негативным
образом повторяет структуру сигнального поля (например, в направлении главно-
го лепестка ДНА РЛС помеха не создается) в соответствии с формой ДНА РЛС.
Поэтому такая пространственно-временная маскирующая помеха называется нега-
тивной или инверсной [19]. При подавлении РЛС со сканирующей антенной нега-
тивная помеха может быть создана из одной точки пространства. Помеховый сиг-
нал, излучаемый САП, изменяет свою интенсивность негативным образом по от-
ношению к интенсивности принимаемого полезного сигнала.
Определим оптимальный закон пространственной модуляции помехового поля
при создании негативной помехи однопозиционной РЛС. Пространственно-времен-
ной отклик в данной РЛС формируется в плоскости изображения % антенной систе-
мы, имеющей линейный размер ZA (рис. 4.33).
Апертурная функция антенны имеет вид
С(х) = W (х) = Со (x)exp(zco^x), (4.59)
168 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
ыхА
Рис. 4.33. Формирование пространственного отклика РЛС
где С0(х) — «замороженное» распределение поля (тока); сохА = солА (/) — простран-
ственная частота настройки антенны, изменяющаяся по закону сохА (/).
В общем случае С0(х) также меняется во времени. Например, в самонастра-
ивающихся ФАР
Q (^) Со (х, (•*> С’ (4.60)
где Cq (х, t) — множитель, учитывающий распределение целей и их структуру;
См (*, 0 — модулирующая помеха, возникающая за счет нестационарного процесса
самонастройки.
Аналогичная картина имеет место и в антенных устройствах с компенсаторами
боковых лепестков. В дальнейшем будем считать Со (х) «замороженным» на время
обработки сигнала Т. При входном распределении (х) поле в плоскости изоб-
ражения описывается выражением
$а (®ХА>')= J (x,/)exp(jcoJtAx)J2x. (4 61)
Здесь, как и прежде, пределы интегрирования распространены на бесконечность,
так как С0(х) обладает «обрезающими» свойствами.
Дифференциал d2x представляет собой элемент площади в прямоугольных
координатах на плоскости раскрыва антенны с началом координат в центре рас-
крыва, а вектор х изображает текущую точку раскрыва; сохА — двумерная простран-
ственная частота, соответствующая максимуму ДНА (углу 0А).
Поля в плоскости антенны 5ВХ (х) = (х) и в плоскости источника 5^ ) связа-
ны выражением вида [45, 53]
5ВХ (х) = (х) = 5^ (х) ® й(х), (4.62)
где й(х) — импульсная характеристика радиолокационного канала.
Поэтому из (4.60) и (4.62) следует выражение для интенсивности отклика:
со со со ос
= J J J jQ(xi)Co(x2)r^12(^, ^2)^(г3-т)й(^1,х1)й*(^2,х2)х
—оо —сю —со —ОС
(4.63)
х exp(zcoJtA, х, )ехр(-/(охА, х2) J2^1J2^2d2x1 J2x2
4.4. Активные имитирующие помехи
169
где сохА =—sinOA— «настройка» антенны; /Г(т3 — т)— корреляционная функция
X
временного сигнала; т3 — задержка за счет распространения сигнала в радиолока-
ционном канале; * — знак сопряжения; Г^12 (•) — функция пространственно-времен-
ной когерентности (ФПВК) принимаемого поля [53].
Индексом (^) отмечена принадлежность ФПВК Г12 плоскости Далее будем
считать -т) = ^(т), что допустимо при небольших размерах антенн и источ-
с
ников и при ----« £А (с — скорость света). Выражение (4.63) представляет собой
А/п
искомое уравнение связи /(сохА) и Дальнейшая задача состоит в уп-
рощении этого уравнения.
После преобразования получим
J оо оо оо
—И J Г Гх12(<Ох1,СОх2,й))Я((Ох1)Я*((Вх2)7:'л(®х1-(Ох2)^’(о)х1-СОх2)х
(2л) ДДД
х К2 (zcoxl )ехр(/сот) J2coxl J2cox2f/2co.
Здесь преобразования Фурье от ФПВК, импульсной характеристики радиолокаци-
онного канала и «замороженного» распределения поля в раскрыве записаны в виде
Ц12(сох1,®х2,со) 4 Г^12(^,^2,т); (4.65)
П12((ох1,(ох2,(о) => П12(^Л2,т); (4.66)
(4.67)
(4.68)
где
где
2^(сох) — диаграмма направленности антенны РЛС.
Если сигнал создается пространственно-когерентным источником, то из (4.65)
П12 (°>х!> Юх2) = (®Х1)^2 (сох2), (4.69)
5^(сох) — пространственный спектр источника.
При этом
2
1
\2
J S (со*) Н (оох) (со% >
(4.70)
где
А”Вых (т) — корреляционная функция выходного сигнала.
Точечный источник описывается спектральной характеристикой [53]
5(сох) = ехр(/сох^0) (4.71)
и, следовательно, имеет бесконечно широкий пространственный спектр. Теперь
имеется возможность проинтегрировать (4.70) методом стационарной фазы, что дает,
с точностью до несущественной постоянной С:
7(солА,т) = С^(т)ГА2
Выражение (4.72) описывает интенсивность отклика /(со^т) РЛС, работающей
в пассивном режиме (только на прием). Для случая активной радиолокации
,4^71^А (sin0-sin0A) ,
(4.72)
--®хА •
7с(0,т) = /стаЛ(^А
(4.73)
170 Глава 4, Радиоэлектронное подавление РЛС обнаружения и целераспределения
где: /стах— максимальное значение сигнального отклика (при т- 0 и 6 = 6А), опре-
деляемое из уравнения радиолокации [50]:
PcGcAcn
Т ссц . . _ . ч
стах _ (4л)2Л4 ’ (4’74)
где А — эффективная площадь антенны РЛС; оц — эффективная площадь рассея-
ния цели; R = Zq — расстояние между целью и РЛС.
При радиоподавлении РЛС в случае самоприкрытия помеховый отклик можно
определить с помощью (4.73):
,? 2л£
(4.75)
где Ск — несущественный постоянный коэффициент:
С - •
к 4 л/?2’
(4.76)
П = РПСП — энергетический потенциал САП (системы САП), здесь Рп — мощность
передатчика помех; Gn — коэффициент усиления передающей антенны САП.
Суммарный отклик (выходной эффект) РЛС
7Х (0) = 1С (0) + /п (0) = К (т)[ Ic тах ГА4 (0,0А)+ПпС* ГА2 (0,0А)]. (4.77)
Чтобы интенсивность откликов была одинаковой во всех прикрываемых поме-
хой ячейках информационного поля (рис. 4.31), необходимо выполнить условие
h (6) = 4 max = cOnSt- (4'78>
Из (4.77) с учетом (4.78) получим оптимальный закон пространственной моду-
ляции энергопотенциала САП (при т= 0):
Пп(е)=/стах[1 ^(е)1 (4.79)
ск Ъ (е)
На рис. 4.34 изображена качественная зависимость пространственной (угловой)
модуляции энергопотенциала САП при создании негативной пространственно-вре-
менной помехи однопозиционной РЛС со сканирующей антенной, диаграмма на-
правленности которой описывается функцией £(б).
Рис. 4.34. Закон пространственной модуляции энергопотенциала САП при
создании негативной пространственно-временной помехи однопозиционной РЛС
При создании негативной сигналоподобной помехи системой САП, состоящей
из N станций помех (рис. 4.32), управление включением лучей МАР каждой САП,
4.5. Радиоэлектронное подавление многопозиционных РЛС 171
осуществляемое системой управления СУ, должно соответствовать закону простран-
ственной модуляции Пп (б), представленному на рис. 4.34. Необходимо отметить,
что в направлении главного луча антенны подавляемой РЛС помеховый сигнал у-й
ЦСАП не излучается. При создании негативной помехи одной САП (случай само-
прикрытия) энергетический потенциал Пп изменяется во времени в соответствии
с законом сканирования ДНА РЛС 77[0(/)] негативным образом.
Рассмотренные здесь примеры создания адаптивных пространственно-времен-
ных помех демонстрируют широкие возможности применения ЦУЗВЭВ в комплек-
сах РЭБ. Основное достоинство цифровых САП заключается в возможности прак-
тически мгновенного воспроизведения пространственно-временной структуры при-
нятого электромагнитного поля и одновременной деформации этой структуры в
соответствии с законами, задаваемыми подсистемой управления комплекса РЭБ.
4.5. Радиоэлектронное подавление многопозиционных
радиолокационных систем
Многопозиционные радиолокационные системы (МПРЛС) могут объединять
однопозиционные, пассивные и двухпозиционные РЛС, расположенные в разных
точках пространства (на разных' позициях).
Вариант реализации двухпозиционной РЛС приведен на рис. 4.35. Передающая
(Прд) и приемная (Прм) части РЛС разнесены на расстояние ДЯ. Излучаемые ра-
диолокационные сигналы после отражения от самолетов боевого порядка БП при-
нимаются в пункте Прм, являющемся объектом РЭП. В соответствии с рис. 4.35
уравнение РЭП выводится в результате следующей последовательности процедур:
к =
вх
^пр
А/п
1
• -2
п п л F2 (в сп )
. ^пр'пр п’Фп )
(^с)вх =4_п2 а8пд_п2 "ПР’
Рп^п А/пр (епр>
А/п °БпЛ1
Л2Л22С(0п>Фп);
(4.80)
(4.81)
(4.82)
Рис. 4.35. Двухпозиционная РЛС
172 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Полагая к = ки и разрешая (4.82) относительно произведения можно
получить
^cl^c2 -^РЭП
Л?р(9п»Фп)’
(4.83)
где
А/п 1_______^п°БП
4/пр 4луп /’п(0пр)фпр)
(4.84)
Из (4.83) следует, что зона подавления двухпозиционной РЛС может быть пред-
ставлена с помощью овала Кассини [46]. Если предположить, что точки расположе-
ния Прд и Прм являются фокусами, то соответствующее уравнение овала имеет вид
/£Яс22=л2, (4.85)
где
а2 - Rn /Г
~F2(fl m )^ рэп' (4 86)
*пр »Фп /
Параметр а, имеющий размерность длины, сопоставляется с величиной С, рав-
ной половине расстояния между фокусами Прд и Прм (передающей и приемной
антеннами):
С = —. (4.87)
2
Уравнение овала Кассини в декартовой системе координат представляется фор-
мулой
/ 2 । 2 \ ,,2 \ _4 4 /а оо\
lx +у I —2с 1х —у 1 = а —с . (4.8б)
В зависимости от величины отношения
_ а
а=- (4.89)
изменяется и форма овала Кассини рис. 4.36. Когда а > с\[2, сохраняется типичная
форма овала (рис. 4.36, а). Если же а< 1, т. е. при малом произведении 7?п ^к?эи и
большом разносе пунктов приема и передачи, овал распадается на две окружности
с центрами в фокусах — точках расположения передающей и приемной позиций
Прд и Прм (рис. 4.36, в). Из уравнений (4.82) и (4.85) следует, что овал Кассини в
данном случае представляет собой границу зоны подавления, имеющей место при
заданных пространственно-временных и электрических параметрах.
Рис. 4.36. Формы овала Кассини
Уравнение овала Кассини в полярной системе координат (г, ср) непосредственно
следует из (4.88) и имеет вид
г2 =c2cos2cp± Jc4 cos2 2(р + (а4 - с4
(4.90)
4.5. Радиоэлектронное подавление многопозиционных РЛС
173
В приведенной полярной системе координат, в которой г = ср и а = —, уравне-
с
ние (4.90) представляется следующим выражением [46]:
(р2+1) - 4р2 cos2 ф = а 4. (4.91)
Если помехи создаются индивидуальными средствами самолета или постанов-
щиком помех из достаточно плотного боевого порядка, то Т?с2 = и форма зоны
подавления определяется в соответствии с уравнением
^(0п?Фп ) ~ min Л: (®п»Фп)-
(4.92)
В то же время необходимо иметь в виду, что при подавлении ракет с полуак-
гивными головками самонаведения из рассредоточенных боевых порядков может
возникнуть необходимость учета изменения формы зоны подавления, представля-
емой овалом Кассини.
Минимальная дальность подавления двухпозиционной РЛС определяется из
(4.83), если в ней положить ^1р(0п»Фп)=::^- Тогда, в соответствии с (4.85) и (4.86)
min^c2 \ ^РЭП •
(4.93)
Анализ (4.93) и рис. 4.36 показывает, что вследствие разноса передающей и
приемной частей двухпозиционной РЛС ее подавление активными помехами из зон
может быть реализовано лишь с определенных направлений, допускающих возмож-
ность выполнения ряда условий, непосредственно связанных с ДНА передающей
и приемной антенн. Речь идет об обеспечении условий запуска передатчика помех
и достижении требуемой степени подавления приемного устройства.
Таким образом, прежде чем принимать решение о конкретной реализации спо-
соба создания помех двухпозиционной РЛС из зоны необходимо убедиться, что на
всех этапах реализации выбранного маршрута указанные условия выполняются.
Практически эти условия выполняются при создании помех из боевых порядков.
Уравнение РЭП в случае создания активных помех из боевых порядков само-
летов радиолокационной головке ракеты с полуактивным самонаведением может
быть получено на основе следующих рассуждений.
На рис. 4.37 показан вариант создания преднамеренных активных помех РГС
Рис. 4.37. Создание преднамеренных активных
помех РГС ракеты класса «земля — воздух»
РЛС подсвета цели облучает основным лепестком ДНА боевой порядок само-
летов БП. Отраженные сигналы поступают на РГС ракеты, самонаводящейся на
БП. На нее же воздействуют помеховые сигналы, создаваемые средствами РЭП
174 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
(4.94)
боевого порядка самолетов. Определим отношение мощностей помехи и сигнала
на входе РГС, отнесенное к полосе пропускания ее линейной части А/РГС:
(рп)вх =-^-яРГСгР2Гс(еп,фп)уп^,
4л/\ррс 2Л/п
(п\ PcGc 1
( с^вх 4л^аБП4л^гс РГС’
Предполагается, что боевой порядок достаточно плотный. Это позволяет счи-
тать ГР2гс(0п,<рп) = 1.
Тогда
(4.95)
п
РГ Д. „ -^С^гс(бп,фп)-
V'cVbxPPC rcuc Wn °БП
Полагая К= Кп, вводя обозначение ХрЭП и разрешая (4.95) относительно
^^ргс (®п ’Фп)> можно получить запись уравнения РЭП в виде
^РГС (®п >Фп ) =
(4.96)
рэп »
где
pcGc А/п ^n^sn
рэп PnG„ А/пр 4луп
Минимальная дальность подавления min будет равна
min V ^РЭП *
(4.97)
(4.98)
Таким образом, в рассматриваемом случае отношение мощностей помехового
и полезного сигналов на входе РГС определяется, кроме всего прочего, удалением
боевого порядка от РЛС подсвета цели и не зависит от дальности БП до РГС.
4.6. Подавление взаимокорреляционных радиолокационных систем
Многопозиционные РЛС применяются для определения местоположения по-
становщиков (станций) активных помех. Для определения координат САП внача-
ле использовались триангуляционные методы, сущность которых заключается в
пассивном пеленговании источника помех несколькими пространственно-разнесен-
ными РЛС. Триангуляционные методы дают хорошие результаты при пеленгова-
нии одной САП. При наличии же нескольких САП образуются ложные пеленги.
Если число действующих САЛ равно N, то при двухпозиционном триангуляцион-
ном методе определения координат САП образуется большое число ложных пере-
сечений (ложных тревог):
N„=N2-N = N(N-1). (4.99)
При большом числе N возможно значительное число ложных тревог N = N2.
Это является существенным недостатком триангуляционного метода.
Число ложных отметок Ал может быть снижено при корреляционной простран-
ственной обработке сигналов. Такой вид обработки сигналов используется в мно-
гопозиционных активно-пассивных корреляционных системах.
Принцип действия активно-пассивных корреляционных систем основан на
определении местоположения постановщика помех разностно-дальномерным Ш
угломерно-дальномерным способом. Главной особенностью этих систем валяется
4.6. Подавление взаимокорреляционных радиолокационных систем
175
измерение разности времени запаздывания помеховых сигналов, принимаемых
разнесенными приемниками (рис. 4.38).
Рис. 4.38. Прием сигналов разнесенными приемниками
многопозиционной системы
Время запаздывания сигналов их (/) и и2 (г), принимаемых антеннами А1 и А2,
определяется специальным измерителем-коррелятором. Относительная задержка
I Z ,
сигналов т3 = — зависит от временного положения максимума (выброса) корреля-
с
ционной функции
«вых (*Лз) = («1 (' +)«2 (/ +*з))• (4.100)
Расстояние £б между точками приема А1 и А2 называется базой. Реализованы
активно-пассивные и пассивные корреляционные системы двух видов: с большой
и малой базами. В первом случае £б имеет значение десятков — сотен километров,
во втором — от десятков метров до нескольких километров. В дальнейшем для
сокращения все разновидности рассматриваемых многопозиционных РЛС назовем
корреляционно-базовыми системами (КБС).
Корреляционно-базовые системы могут быть подавлены маскирующими и ими-
тирующими помехами, создаваемыми с борта одного или нескольких ЛА. Маски-
рующие помехи затрудняют обнаружение истинного выброса корреляционной
функции, а имитирующие порождают большое количество ложных отметок.
Маскирующие помехи могут быть созданы путем излучения пространственно-
некоррелированных помеховых сигналов. На ЛА устанавливаются несколько САП,
излучающих некоррелированные помехи в разных секторах (рис. 4.38). Число сек-
торов N может быть различным от N= 2 до N= 50. Если на антенны А1 и А2 поме-
хи поступают от разных передатчиков по разным лепесткам ДНА, то корреляцион-
ная обработка помеховых сигналов приводит к появлению шумового маскирующе-
го фона.
Если всего имеется N САП, то на выходе корреляционного обнаружителя КБС
формируется корреляционная функция
^(т) = (и1(/)ы2(/ + т3)), (4.101)
176 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
где щ (t - т3) и иэ (/) — помеховые сигналы на выходе антенн А1 и А2 КБС; т3 = -—
с
временная задержка помехового сигнала в антенне А1 относительно помехи, при-
нимаемой антенной А2. В общем случае помеховые колебания на выходах антенн
А1 и А2 представляют собой аддитивные смеси высокочастотных сигналов, излу-
чаемых передающими самолетными антеннами An, nel:N:
N
(/ + т3) — (/ + т3/, ф/), (4.102)
/=1
и2 (t + т) = X unj (t + Ч > Фу )> (4.103)
7=1
где ип. — помеховые сигналы в антеннах А1 или А2 от элементарных самолетных
источников помех (/, уе1:ЛГ); ф — случайная фаза, распределенная на интервале
[-л; л].
Подставив формулы (4.102) и (4.103) в (4.101), можно получить
n N
k (Т> % ) = £ £\“ni + тз. Ф,)% (' + Тз > фу )/• (4-104)
'=17=1
Для прямошумовой помехи
u„(f)=u„(r)F(e) cos[co0r + ф (/)], (4.105)
где Un(t) —огибающая помехового колебания; F(0) —диаграмма направленнос-
ти z-й или j-й антенны.
Из выражений (4.104) и (4.105) следует, что
x££(cos[co0/ + ЮоТз,- + ф,- (1 + T3,)]cOS
*('с>ь) = />пЛ('с-т3,)х
N N .
^ + C00b/+(P/(Z + T3j)
/=1у=1 ’
(4.106)
где Рп — мощность помехи на выходе коррелятора; Я(т) — нормированная корре-
ляционная функция огибающей помехи.
Так как пространственный разнос источников помех незначительный (он не
может быть больше габаритных размеров ЛА), то огибающая корреляционной функ-
ции на входе обнаружителя для всех /-х или j-х принимаемых помеховых сигналов
будет одинаковой. Вследствие независимости высокочастотных фаз ф,- (/) и фу (/) по-
сле статистического усреднения, проводимого под знаком суммы в выражении
(4.106), получается
k(i,l3) = 0. (4.107)
Следовательно, рассматриваемый способ создания активных помех затрудняет
выделение полезного выброса (пика) корреляционной функции. При действии на
КБС помех вида (4.106) на выходе коррелятора образуется маскирующий фон, дейст-
вие которого приводит к снижению вероятности правильного обнаружения полез-
ного пика корреляционной функции (при заданной вероятности ложных тревог).
Значительно уменьшить интенсивность полезного выброса функции корреля-
ции на выходе корреляционного обнаружителя можно за счет быстрого подключе-
ния выхода одного передатчика помех последовательно ко входу разных бортовых
антенн. Такой вид помех получил название «помехи с перемещающимся фазовым
центром», что связано с истинным перемещением фазового центра антенной ре-
шетки, составленной из множества бортовых антенн A{...AN. Если цикл перемещения
4.6. Подавление взаимокорреляционных радиолокационных систем
177
фазового центра от антенны Aj до антенны AN проводится за время 7ф, меньшее
времени интегрирования сигналов в интеграторе коррелятора Т^Тф <7), то по эф-
фекту воздействия рассматриваемая помеха эквивалентна пространственно-некор-
релированной помехе, создаваемой из N точек.
Имитирующие помехи могут быть созданы с борта одного или нескольких ЛА.
В результате корреляционно-базовой обработки имитирующих помеховых сигналов
на выходе коррелятора образуется несколько ложных выбросов. Эффективность воз-
действия имитирующих помех зависит от степени подобия ложных и истинных вы-
бросов корреляционной функции.
Известно два видов имитирующих помех:
1) одноточечная помеха с многопиковой функцией корреляции;
2) многоточечная помеха с многопиковой функцией корреляции.
В первом случае помеха формируется САП, установленной на одном ЛА, а во
втором — САП, размещенными на нескольких летательных аппаратах.
Одноточечная помеха с многопиковой функцией корреляции создается помеховы-
ми излучениями с периодической структурой. Перспективными следует считать
имитирующие помехи, которые создаются путем строго периодической линейной
частотной модуляции квазигармонического шума или путем суммирования квази-
гармонического шума, пропущенного через несколько линий задержки.
При линейной частотной модуляции (ЛЧМ) приращение частоты помехи ме-
няется по закону
при t<kT, k = \, 2, ...;
при t = T,
(4.108)
где £чм — крутизна ЛЧМ в полосе частот Д/п.
Под действием ЛЧМ-помехи на выходе приемников Прм1 и Прм2 (рис. 4.38),
имеющих полосу пропускания А/пр, образуются последовательности импульсов с
Д/пр т
длительностью ти =—-Т и периодом 7, см. рис. 4.39.
Д/п
Рис. 4.39. ЛЧМ-помеха многопозиционным системам
178 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
На выходе приемника образуется пачка импульсов, корреляционная функция
которых имеет вид
1 । Л/—1 1 Л/—1
(4109)
7V N 7=1 7=1
Т
где N = -~» — число импульсов; Го — время действия помехи (или время обработ-
ки помехового сигнала в КБС); Т — период частотной модуляции; (т) — корре-
ляционная функция одиночного импульса. Корреляционная функция помехи на
выходе приемников имеет (2N- 1) пиков (рис. 4.39). Интенсивность ьго пика (при
числе импульсов N) равна
где Р— интенсивность (пиковая мощность) «нулевого» пика (/ = 0); ze 1:7V- 1.
Анализ выражения (4.109) и рис. 4.39 позволяет выявить следующие недостат-
ки рассматриваемой помехи:
1) совпадение «нулевого» выброса (т-0) с координатами постановщика помех
(т. е. постановщик помех «подсвечивает» себя самым мощным импульсом);
2) уменьшение интенсивности ложных выбросов с ростом номера ложной цели.
Если считать допустимым снижение интенсивности граничного (наиболее уда-
ленного) ьго пика примерно в два раза по сравнению с «нулевым», то необходимое
число периодов изменения частоты iH за время Т находится из соотношения
Р N-i 1
Ll = —= 1 (4.111)
Р N 2
Т
Так как N = —, то из соотношения (4.111) получается
. N_=7± (4л12)
С другой стороны, период изменения частоты Тдолжен удовлетворять условию
cT = d, (4.113)
где d — интервал между имитируемыми ложными целями.
Из (4.112) и (4.113) при заданных значениях d и /н можно определить период
частотной модуляции
(4.114)
С
Имитирующая помеха с многопиковой функцией корреляции может быть соз-
дана с помощью суммирующего устройства с многоотводной линией задержки. На
вход линии задержки рис. 4.40 подается шумовая помеха с корреляционной
функцией ^(т). Выходной сигнал т|(/) имеет корреляционную функцию £л(т),
описываемую выражением (4.109). Отклик обнаружителя КБС имеет вид такой же,
как и в случае воздействия ЛЧМ-помехи (рис. 4.39). Отличие состоит лишь в оги-
бающих отдельных выбросов, которые определяются видом корреляционной фун-
кции исходного шума.
Многоточечные имитирующие помехи могут быть двух видов:
1) помеха с тождественной модуляцией, создаваемая с различных самолетов пу-
тем излучения высокочастотных сигналов, модулированных по амплитуде одним и
тем же шумом;
4.7. Аннигилирующая помеха
179
Рис. 4.40. Формирование имитирующая помеха
с многопиковой функцией корреляции
2) помеха, создаваемая путем ретрансляции сигналов станциями помех, уста-
новленными на нескольких ЛД.
В обоих случаях реализуется взаимная зашита самолетов за счет «размножения»
коррелированных помех в рабочей зоне КБС.
За счет действия помех образуется А2 отметок, среди которых число ложных
равно 7Vn = #(#-1).
Достоинствами такого способа создания помех являются:
• одинаковые структура и интенсивность всех помеховых выбросов, что затруд-
няет работу схем помехозашиты;
• большое число ложных целей с кинематическими характеристиками, соответ-
ствующими истинным целям.
Для создания многоточечных помех могут применяться пассивные переизлуча-
тели, переизлучающие антенные решетки, компактные облака противорадиолока-
ционных отражателей, участки водной и земной поверхности и др. При облучении
переизлучателей активной помехой за счет отражения создаются многоточечные
коррелированные помехи.
4.7. Аннигилирующая помеха
В связи с созданием «незаметных» самолетов (подобных В-2 и F-117A) активно
обсуждается проблема подавления РЭС любого вида так называемой «аннигилиру-
ющей» помехой (аннигиляция — (лат.) nihil — ничто, превращение в ничто, унич-
тожение).
Эффект аннигиляции основан на теоретической возможности создания в апер-
туре любой приемной антенны помехового электромагнитного поля, амплитудно-
фазовые характеристики которого подобраны стороной РЭБ таким образом, что
интерференция помехового и сигнального полей приводит к их взаимной компен-
сации. В результате на выходе антенной системы не будет присутствовать сигнал
и, вследствие этого, исключится возможность приема и извлечения полезной ин-
формации.
Электрические поля полезного и помехового сигналов в раскрыве антенны
можно представить в виде
Ёс (х,/) = Ес (4.115)
Ёп (х, /) = Еп (х, (4.116)
где Ёс (х, г) и Ёп (х, /) — комплексные амплитуды полей полезного и помеховаого
сигналов; х — вектор пространственных координат на раскрыве антенны (для плос-
кой антенны х = {£, £}).
Суперпозиция сигнального и помехового поля на раскрыве даст
ЁЕ(х,/) = £'с(х,/) + £’п(х,/). (4.117)
180 Глава 4. Радиоэлектронное подавление РЛС обнаружения и целераспределения
Для получения эффекта аннигиляции необходимо выполнить два условия. Во-
первых, сформировать в апертуре приемной антенны Апр помеховое поле с ампли-
тудой £п(х, г), равной амплитуде полезного сигнала:
£n(x,/) = £c(x,z); (4.118)
Во-вторых, обеспечить противофазность сигнального и помехового полей:
Vn(x>0 = -Vc(x>/)- (4.119)
При реализации условий (4.118) и (4.119) основополагающим требованием яв-
ляется учет пространственно-временных характеристик ЭПР о(х, /) самолета, при-
крываемого помехой. Выполнить условия (4.118) и (4.119) для самолетов, постро-
енных с использованием традиционных технологий, таких, например, как F-15 и
др., практически невозможно. Это обусловлено многолепестковостью диаграммы
переизлучения зондирующего сигнала РЛС. Отраженный сигнал порождается де-
сятками «блестящих» точек, взаимное расположение которых меняется со вре-
менем. Результат — нестационарность ЭПР о(х, /), примерная реализация кото-
рой для одного момента времени приведена на рис. 4.41, а. Даже при незначитель-
ном изменении угла наблюдения (на доли градуса) интенсивность отраженного
сигнала может изменяться в 100 раз и более. Отслеживать и компенсировать такие
изменения невозможно даже если априори известно распределение o(x,z).
Рис. 4.41. Эффективная поверхность рассеяния
«традиционного» (а) и «незаметного» (б) самолетов
Иное положение складывается при создании комплекса РЭБ, предназначенного
для защиты «незаметного» самолета. Подобные самолеты представляют собой, как
радиолокационные цели, объекты, близкие к монорассеивающим — телам простой
формы вроде уголкового отражателя. Их принципиальной особенностью является
простая и устойчивая к изменению ракурса цели характеристика амплитудно-фа-
зового распределения поля отраженного сигнала (рис. 4.41, б). Формы объектов,
создаваемых в соответствии с требованиями технологии Stealth таковы, что ампли-
тудно-фазовое распределение поля отраженного сигнала можно описать аналити-
чески. Параметры аналитической модели можно контролировать и регистрировать
в ходе реализации проекта. Известные параметры модели АФАР можно заложить
в память комплекса РЭБ и использовать при синтезе аннигилирующей помехи. Но
это в принципе. Практически, формирование подавляющего аннигилирующего
сигнала требует поиска принципиально новых технологических и конструктивных
решений.
Система информационного обеспечения комплекса РЭБ должна выполнять вы-
сокочастотные измерения параметров электромагнитного поля в широком диапазоне
4.7. Аннигилирующая помеха
181
частот и приводить помеховое излучение в соответствие (негативным образом) с
изменяющейся ЭПР. Формирование помехи с точностью до фазы, как требует усло-
вие (4.119), предусматривает дискретизацию напряженности поля с тактом порядка
наносекунд. Шаг дискретизации по пространственным переменным должен состав-
лять несколько сантиметров.
Для изучения особенностей создания аннигилирующей помехи следует рассмот-
реть уравнение РЭП для случая самоприкрытия:
РГ = (4120)
где о(ф, t) — ЭПР защищаемого объекта; — дальность до РЛС, потенциал
которой PCGC.
Из (4.120) вытекают требования к закону изменения энергопотенциала САП:
PG = PcGc (4.121)
п " 4л Я2(Г)‘
Выражение (4.121) свидетельствует о трудностях управления энергопотенциа-
лом САП, так как надо учитывать изменение дальности до цели R(t) и, что осо-
бенно важно, изменение ЭПР объекта РЭБ от ф и t.
Энергопотенциал PnGn за время полета должен изменяться в пределах 30...40 дБ
со средней периодичностью порядка нескольких секунд.
Но и это еще не все. Основополагающей и более сложной является адаптация
фазовой характеристики ф(0) помехового поля в апертуре антенны радиолокацион-
ной станции (РЛС) в соответствии с законом аннигиляции (4.119). Кроме того, не-
обходимо учитывать поляризационные характеристики ЭМВ Еп и Ес.
Если проблема создания аннигиляционной помехи будет решена, коренным
образом будет изменен и весь облик бортовых систем РЭБ. По мнению иностран-
ных специалистов, технология Stealth заставит отказаться от бортовой многоцеле-
вой микроволновой ФАР поиска, сопровождения, подсветки целей и решения других
задач. Технология Stealth исключает использование активных помех индивидуаль-
ной защиты в общепринятом понимании. Большие многоцелевые САП уйдут в про-
шлое. Это связано с эффектом маяка, который присущ любому постановщику ак-
тивных помех. Интеграция систем ПВО со средствами РТР будет способна нейтра-
лизовать действие средств РЭП.
Одним из важных элементов разрабатываемой системы РЭБ самолетов Stealth
типа В-2 является исключение эффекта маяка за счет нового варианта построения
системы РЭБ, в равной степени относящегося и к мерам РЭП, и к технологии Stealth.
Он заключается в своеобразной аннигиляции отраженного радиолокационного сиг-
нала посредством формирования в направлении на подавляемую РЛС второго (пред-
намеренно подавляющего) сигнала, равного по амплитуде отраженному и склады-
вающегося с ним в точке приема в противофазе.
Однако практическая реализация идеи аннигиляции весьма призрачна и в обо-
зримом будущем объекты вооружения и военной техники по-прежнему будут при-
менять разработанные и освоенные производством средства РЭБ. Впрочем, исто-
рия развития техники убедительно демонстрирует, как проекты, казавшиеся совре-
менникам фантастическими, со временем реализовывались.
ГЛАВА 5
РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ РАДИОЭЛЕКТРОННЫХ
СИСТЕМ УПРАВЛЕНИЯ ОРУЖИЕМ
5.1. Радиоэлектронные системы управления
оружием как объект радиоэлектронного подавления
В комплексах управления оружием используются РЭС разных классов и раз-
личного функционального назначения. Весьма важное значение для этих комплек-
сов имеют РЛС разнообразных типов: импульсные, непрерывные и импульсно-
доплеровские.
Принцип действия импульсной РЛС известен: передающая антенна излучает в
пространство высокочастотные импульсы сигналов с периодом повторения, согласо-
ванным с максимальной дальностью обнаружения. Электромагнитное поле, создан-
ное этим излучением, взаимодействует с целью. Отраженный от цели сигнал со-
держит информацию о наличии цели, о ее пространственных координатах и парамет-
рах движения, а в некоторых случаях и о некоторых иных свойствах (размерах,
назначении и других). После соответствующей обработки в приемнике отклик ин-
дицируется на экране индикатора и/или фиксируется автоматическим устройством
обнаружения и сопровождения цели.
Непрерывные РЛС (точнее РЛС с непрерывными сигналами) используют коге-
рентный высокочастотный передатчик и высокостабильный гетеродин в приемнике.
Сравнение излученного и принятого сигналов позволяет определить доплеровский
сдвиг между их частотами, обеспечив за счет этой операции обнаружение, селек-
цию движущихся целей и измерение их скоростей. Для того чтобы при этом можно
было бы измерять дальность, частоту передатчика модулируют по периодическому
закону. Чаще всего — треугольной или синусоидальной формы.
У импульсно-доплеровских РЛС точность и разрешающая способность по даль-
ности такая же, как и у импульсных, а по скорости — заметно выше. Но за счет
использования высокой частоты следования импульсов зондирующего сигнала воз-
никают проблемы неоднозначности измерения дальности. Эти проблемы обычно
разрешаются за счет модуляции или переключения нескольких (чаще всего трех)
сменных частот следования импульсов.
5.2. Радиоэлектронное подавление радиоэлектронных
систем со сложными сигналами
Увеличение разрешающей способности по дальности и точности измерения
дальности РЛС в принципе может быть достигнуто двумя способами.
Первый способ основан на уменьшении длительности зондирующего импуль-
са ти. Однако при этом для сохранения дальности действия РЛС при уменьшении ти
необходимо увеличивать импульсную мощность РЛС Ри. Увеличение импульсной
5.2. Радиоэлектронное подавление РЭС со сложными сигналами
183
мощности связано с принципиальными и техническими трудностями. В настоящее
время пределом импульсной мощности является Ри порядка нескольких десятков
мегаватт.
Второй способ увеличения разрешающей способности основан на использова-
нии специальной внутриимпульсной модуляции излучаемого импульса относительно
большой длительности тк и соответствующей (оптимальной) обработки принимае-
мого сигнала в приемном устройстве РЛС. Оптимальная обработка обеспечивает
сжатие этого импульса до длительности тик« тк, см. рис. 5.1.
А/-1 N
Рис. 5.1. Импульсы на входе (тк)и выходе (тик) оптимального
приемника РЛС с кодированием сигналов
В системе со сжатием импульсов генерируется и излучается кодированный им-
пульс, имеющий длительность тк и ширину спектра частот Д^, причем ткД/к > 1.
После соответствующей обработки в приемнике формируются короткие импульсы
длительностью тик = —— « тк.
44
Импульс длительностью тик на выходе приемника определяет разрешающую
способность РЛС. Энергия сигнала определяется импульсной мощностью излуча-
емого сигнала и его длительностью тк. Таким образом увеличивается энергия сиг-
нала за счет увеличения длительности импульса ти без ухудшения разрешающей
способности по дальности,
т
Отношение N =---- носит название коэффициента компрессии (сжатия).
^ик
Следует иметь в виду, что при заданной средней мощности передатчика РЛС
второй способ увеличения разрешающей способности РЛС (кодирование) не при-
водит к каким-либо особым энергетическим выигрышам по сравнению с первым
(пропорциональное увеличение мощности с уменьшением длительности импульса).
Более того, вследствие потерь при компрессии во втором случае будет иметь место
некоторый энергетический проигрыш по сравнению с прямым методом — увеличе-
нием энергии импульсного сигнала. Однако за счет возможности значительного рас-
ширения спектра и увеличения средней мощности широкополосные РЛС имеют
более высокую помехозащищенность.
Примером подобного рода устройств может служить система с внутриимпуль-
сной линейной частотной модуляцией. В этой системе несущая частота излучаемо-
го импульса длительности тк изменяется по линейному закону в некотором диапа-
зоне частот/1-У2 (рис. 5.2). На приемной стороне сигнал пропускается через опти-
мальный фильтр, обладающий дисперсионными свойствами. У дисперсионного
фильтра групповая скорость распространения волны зависит от частоты.
Приведенная на рис. 5.2, б дисперсионная характеристика фильтра обеспечи-
вает более быстрое прохождение (меньшее время запаздывания) высоких частот
184
Глава 5. Радиоэлектронное подавление РЭС управления оружием
спектра сигнала. В сочетании с законом изменения несущей частоты генерируемо-
го импульса, показанным на рис. 5.2, а, это дает в принципе возможность сжатия
(компрессии) импульса на выходе фильтра (линии) до некоторой длительности
Рис. 5.2. Закон изменения несущей частоты зондирующего
импульса (я) и дисперсионная характеристика оптимального
фильтра РЛС с внугриимпульсной модуляцией (б)
При заданной спектральной плотности шумового помехового сигнала отноше-
ние мощности полезного сигнала к мощности шума на выходе линейной части
приемника остается одинаковым для обычной импульсной РЛС и широкополос-
ной РЛС с кодированием, если их средние мощности одинаковы и одинаковы раз-
решающие способности.
Другой способ внугриимпульсной модуляции — изменение фазы несущего
колебания импульсного сигнала, см. рис. 5.3, а. Если сигнал с амплитудой ик, мани-
пулированный по фазе так, как показано на рис. 5.3, а. подать на линию задержки
с 7У= 7 отводами, в некоторые из которых (4, 5 и 7) включены инверторы, то в силу
когерентности сигналов и их синфазности только в течение времени на выходе
N
сумматора рис. 5.3, б, подключенного к этим отводам, в первом приближении Полу-
'Х ;—
чим импульс длительностью тик =-^- и с амплитудой ик =>JN. После сумматора
свернутый импульс поступает на вход оптимального для данного импульса фильтра.
Таким образом, в результате рассмотренного преобразования энергия свернутого
импульса на сопротивлении 1 Ом равна энергии
wktk
входного сигнала:
(5.1)
2
Мощность в свернутом импульсе равна Рс вых
l^N ТЛ
% . Импульс точно такой же
мощности и длительности, т. е. такой же энергии, можно получить при заданной
средней мощности непосредственно путем увеличения скважности РЛС в ТУраз за
счет соответствующего уменьшения длительности импульса и увеличения его амп-
литуды. Длительность импульса необходимо уменьшить в N, а его амплитуду уве-
личить в y[N раз.
5.2. Радиоэлектронное подавление РЭС со сложными сигналами
185
Фазоманипулированный
радиоимпульс
а
б
Рис. 5.3. Схема процесса обработки импульсов в оптимальном
приемном устройстве (а) и функциональная схема устройства для сжатия (б)
Таким образом, и в том и в другом случае на вход оптимального фильтра, вклю-
ченного после сумматора, поступают импульсы одинаковой длительности. Посколь-
ку полоса оптимального фильтра в обоих случаях одна и та же, то в силу некоге-
рентного сложения будут одинаковыми мощности шумов и отношения мощностей
сигналов к мощностям шумов на выходах фильтров. Отсюда непосредственно сле-
дует вывод об энергетической эквивалентности в отношении подавления шумовы-
ми помехами РЛС с кодированием и обычных импульсных РЛС, если они имеют
одинаковые средние мощности, оптимальную обработку сигналов в приемно-ин-
дикаторном тракте и одинаковое время облучения цели. Необходимо отметить, что
этот вывод является прямым следствием теории обнаружения.
Приведенные рассуждения позволяют произвести оценку коэффициента подав-
ления шумовыми помехами РЛС, использующих внутриимпульсное кодирование
для расширения спектра зондирующего сигнала. Согласно данному ранее опреде-
лению под коэффициентом подавления понимается минимально необходимое от-
ношение мощности помехи к мощности сигнала в пределах полосы пропускания
линейной части приемного устройства, в данном случае оптимального фильтра.
Мощность сигнала на входе РЛС с кодированием будет определяться мощностью
186
Глава 5. Радиоэлектронное подавление РЭС управления оружием
несвернутого импульса амплитуды мк. Поскольку мощность несвернутого (длин-
ного) импульса в Араз меньше мощности свернутого (короткого) импульса, в силу
установленной ранее энергетической эквивалентности коэффициент подавления
широкополосной РЛС с кодированием будет в Араз больше, чем обычной импуль-
сной РЛС с той же средней мощностью и с той же разрешающей способностью.
Практически в силу неидеальности операции сворачивания импульса коэффици-
ент подавления будет всего в (0,6...0,8)Араз больше, чем коэффициент подавле-
ния соответствующей импульсной РЛС.
Потребный же энергетический потенциал передатчика шумовых помех останется
неизменным, если не изменяется средняя мощность РЛС при кодировании и спект-
ральная плотность шума постоянна. Действительно, отношение мощности помехи
к мощности сигнала на входе РЛС с кодированием равно
_ 4ТС п2 А/пр
Г> г- ~ ЛП кг 'П’
'*ск^7с ^БП А/п
где Рск — мощность в импульсе РЛС с кодированием.
Поскольку
р _ ^сп
СК А ’
(5.2)
(5.3)
где Рск — мощность эквивалентной импульсной РЛС, то К будет в Араз больше,
чем отношение мощности помехи к мощности сигнала на входе эквивалентной
импульсной РЛС:
nfir 4ТС р2 А/пр
» А /. J П •
(5.4)
Однако ввиду меньшего в N раз коэффициента подавления обычной импульс-
ной РЛС потребный энергетический потенциал передатчика помех PnGn при про-
чих равных условиях в обоих случаях останется неизменным.
В том случае, когда равны импульсные мощности РЛС с кодированием и обыч-
ной импульсной РЛС с такой же разрешающей способностью, потребный для по-
давления РЛС с кодированием энергетический потенциал передатчика помех уве-
личивается в Араз или, более точно, в (0,6...0,8) А раз.
5.3. Коэффициент подавления
Коэффициент подавления кп — это количественная характеристика энергети-
ческой эффективности подавления заданного радиоэлектронного средства каким-
либо помеховым сигналом [19].
Уже в самый начальный период применения кп в качестве энергетического кри-
терия возникли своеобразные парадоксы при оценке эффективности подавления
некоторых типов РЛС одним и тем же помеховым сигналом. Так оказалось, что при
подавлении эквивалентных по энергии зондирующего сигнала и разрешающей спо-
собности обычной импульсной некогерентной РЛС и РЛС, работающей со сложным
сигналом, значение коэффициента подавления оказывается разным. А именно, для
РЛС со сложными сигналами ки оказывается в коэффициент сжатия к^ раз боль-
ше, чем для импульсной некогерентной РЛС:
СЛ ~ ^П^СЖ ’ (5.5)
где &сж — коэффициент сжатия, численно равный базе сигнала, &сж = В.
5.3. Коэффициент подавления
187
Сложности и недоразумения теоретической оценки кп в особой степени про-
явились в связи с появлением РЛС нового поколения — импульсно-когерентных,
голографических и других. Возникла практическая необходимость объективного
анализа достоинств и недостатков применения кп в качестве энергетического кри-
терия эффективности РЭП. Необходимо также выявить возможные ошибочные
направления теоретического и практического определения к^. Кроме того, перво-
очередной задачей является определение правил использования кп в практических
расчетах, связанных с использованием уравнения РЭП.
Основные соотношения, определяющие коэффициент подавления, могут быть
получены на основе следующих соображений.
Пусть требуется определить коэффициент подавления, обеспечивающий ми-
нимальное соотношение мощностей помехи Рп и сигнала Рс в полосе приемника
когерентной РЛС. Аддитивная к сигналу помеха — непрерывная гауссовая прямо-
шумовая с постоянной спектральной плотностью 7УШ в полосе приемника Д/пр.
Когерентные РЛС используют зондирующие радиоимпульсные сигналы, у ко-
торых фаза меняется от импульса к импульсу по известному закону. Если есть длин-
ная синусоида, то нарезанные из нее импульсы длительностью ти, следующие с пе-
риодом Ги, могут служить примером когерентной пачки зондирующих сигналов.
На рис. 5.4 приведена структурная схема приемного устройства, предназначен-
ного для оптимальной обработки пачки когерентных высокочастотных радиолока-
ционных импульсов (со случайной начальной фазой первого импульса).
Рис. 5.4. Структурная схема приемника РЛС
Приемник состоит из согласованного фильтра, детектора выходного сигнала и
порогового устройства. Согласованный фильтр в случае обнаружения сигнала на
фоне шума с равномерной в полосе спектра сигнала имеет амплитудно-частотную
характеристику Кс (/со), форма которой полностью определяется амплитудно-ча-
стотным спектром полезного сигнала.
Детектор выделяет огибающую напряжения на выходе согласованного фильтра:
^вых W — |к W
(5.6)
Это напряжение далее на компараторе сравнивается с порогом упор, уровень
которого определяется заданным значением вероятности ложной тревоги Рт.
Когерентные РЛС имеют два основных достоинства перед некогерентными. Во-
первых, они позволяют получить, при всех других одинаковых условиях, значитель-
ное увеличение отношения сигнал/шум на выходе оптимального приемника по
сравнению со случаем некогерентной обработки того же сигнала. Во-вторых, они
имеют лучшую разрешающую способность по доплеровской частоте, что связано с
возможностью полного использования информации, заложенной в изменении фазы
отраженного целью и принимаемого сигнала (в некогерентных РЛС эта информа-
ция в принципе не может быть использована).
188
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Принимаемый сигнал, представляющий собой пачку из М когерентных импуль-
сов, может быть записан в виде
Л/-1
4') = -тТп (5.7)
/п=0
где Um — амплитуда /и-го импульса в пачке из Мимпульсов (т е 0: М -1); £7И — огиба-
ющая импульсов; сос — несущая частота.
Примерный вид осциллограммы когерентной пачки импульсов принимаемого
полезного сигнала .$(/) изображен на рис. 5.5, а. Для простоты принято, что началь-
ная фаза первого и последующих импульсов равны нулю(ф,„ =0; ди е 0: Л/ -1). Ам-
плитудный спектр такого сигнала
|5С (/со)
Л/-1 00
/И=0 —оо
(5-8)
Спектр некоторого т-го импульса
5т(/ш) = 50(/ш)е'“7т,
где 50 (со) — спектр одиночного импульса (ди = 0).
(5.9)
Рис. 5.5. Осциллограмма и спектр пачки когерентных радиоимпульсов
Из (5.8) и (5.8) следует, что для прямоугольных импульсов
М-1
V (йл\ = V. (;т\ V TI
т=0
Но так как
м-i
5^ ei(^mTu
m=0
при Um = 1, применяя формулу Эйлера, можно получить
МТН, '
---— (со — СО- )
2 v с> „ ч
sin
(5.Ю)
(5.Н)
(5.12)
in
2
5.3. Коэффициент подавления
189
Примерный вид спектра пачки импульсов представлен на рис. 5.5, б.
Частотная характеристика фильтра, согласованного с пачкой когерентных им-
пульсов, должна иметь такой же вид, как и амплитудный спектр сигнала рис. 5.5, б.
Иначе говоря, оптимальный приемник когерентной РЛС должен содержать гребен-
чатый фильтр. Полоса пропускания каждого парциального фильтра, входящего в
гребенку, должна составлять
Afip т ~ мт ’ (5.13)
и
а всего таких фильтров в гребенке должно быть
7^ = 2- (5.14)
Эквивалентная полоса пропускания гребенчатого фильтра, а следовательно и
всего оптимального приемника когерентной РЛС, в Q раз больше, т. е. равна
ip ~ Q^f ip т = ’ (5.15)
где М, как и прежде, число накапливаемых импульсов в когерентной пачке, с ко-
торой согласован гребенчатый фильтр приемника РЛС.
Можно считать, что РЛС будет подавлена при некотором пороговом значении
отношения энергии сигнала Ес к спектральной плотности прямошумовой помехи Nn:
2ЕС _
кг ~ ^порк(л/)* (5.16)
'vn
Значение %орк(д/) определяется заданным эффектом подавления. Например,
можно считать РЛС неработоспособной при вероятности правильного обнаруже-
ния цели Рпо= 0,1 и вероятности ложной тревоги Рлт = 10"5. Подстрочный индекс
(М) указывает на обработку пачки из М когерентных радиоимпульсов.
Вероятность правильного обнаружения связана с соотношением сигнал/шум
рабочими характеристиками РЛС, см. рис. 5.6.
Рис. 5.6. Кривые обнаружения
С помощью кривых обнаружения (рис. 5.6) для заданных Рпо и Р^ определяет-
ся пороговое значение соотношения сигнал/шум <7пор.
Энергия полезного сигнала
F = Мт Р
И 1 С ВХ 5
(5.17)
где Рс вх — мощность сигнала на входе приемника.
Спектральная плотность помехи
(5.18)
190
Глава 5. Радиоэлектронное подавление РЭС управления оружием
где Рп — полная мощность помехи на входе приемника; А/п — ширина спектра
помехи.
Из (5.16), (5.17) и (5.18) следует, что
(2F Л 2Л/т Р
„ — с _ Hi' с вх /с iq\
^порк(Л/) кт ~ р
V п /пор к (Л/) ----—
^4ip к(Л/)
Используя определение коэффициента подавления, можно найти
= РПВХ = 2Д/тиА/Прк(Л/)
ПК р
'с вх ^пор к(Л/)
Подставив в (5.20) выражение (5.15), можно определить
£ =______?____
к
^пор к(Л/)
(5.20)
(5.21)
Следовательно, применительно к когерентной РЛС ки определяется только
^порк(л/) и Для Данной РЛС зависит лишь от заданных из условий подавления РЛС
значений Рпо и Рлт.
Для практических расчетов удобно пользоваться также выражением, связываю-
щим пороговое значение <7пор ) с заданными из условий подавления вероятностя-
ми правильного обнаружения и ложной тревоги Рпо и Рт. Такое выражение полу-
чается в результате аппроксимации рабочих характеристик РЛС, обрабатывающей
полезный сигнал, флуктуирующий по амплитуде и фазе, в виде
1
1 + —
р =Р (5.22)
' ПО ' ЛТ ’
где
(5.23)
Т — время обработки (накопления) сигнала.
Из (5.22) и (5.23) следует, что
k _ 2^по
(5-24)
В некогерентных РЛС информация о фазовых характеристиках принимаемых
сигналов не используется. Структурная схема оптимального приемника некогерент-
ной РЛС представлена на рис 5.7.
Рис. 5.7. Структурная схема оптимального приемника некогерентной РЛС
5.3. Коэффициент подавления
191
При обработке пачки из М импульсов амплитудно-частотная характеристика
фильтра, согласованного с радиоимпульсом, имеет вид, представленный на рис. 5.8, а.
На рис. 5.8, б изображена амплитудно-частотная характеристика видеоинтегра-
тора— \КС (/со).
Рис. 5.8. Амплитудно-частотная характеристика фильтра, согласован-
ного с радиоимпульсом (с?) и амплитудно-частотная характеристика
видеоинтегратора (б)
При некогерентной обработке обнаружение сигнала требует, по сравнению со
случаем когерентного приема, большего отношения сигнал/помеха на входе при-
емника. Это связано с потерями энергии полезного сигнала при обнаружении це-
лей. Эти потери главным образом обусловлены особенностями детектирования смеси
сигнала и шума.
Амплитудный детектор, как нелинейное устройство, ухудшает отношение сиг-
нал/шум. Так соотношение сигнал/шум на выходе детектора связано с соотноше-
нием на входе [51]:
JL _ RBX
двых 1+2£вх ’
(5.25)
где &вх — отношение мощностей сигнала и шума на входе амплитудного детектора
(на выходе линейной части приемника).
Как следует из (5.25), присутствие помехи приводит к ухудшению отношения
сигнал/помеха на выходе детектора. Особенно существенно это явление проявляется
при малых соотношениях сигнал/помеха kBX< 1 и является основной причиной энер-
гетических потерь.
Следует отметить, что приведенные выше рассуждения могут рассматриваться
лишь как качественные (иллюстративные).
Потери в детекторе принято учитывать коэффициентом потерь, определение
которого производится согласно следующей методике.
Для идеальной когерентно-импульсной РЛС пороговое значение <7порк опре-
деляется по кривым обнаружения с учетом вида обрабатываемого сигнала (полно-
стью известный сигнал, сигнал со случайной начальной фазой, сигнал с флуктуи-
рующей амплитудой и начальной фазой). Для пачки из М когерентных импульсов
с суммарной энергией Е из графиков рис 5.6 находится ^порк(л/)-
Так как
2£\
^порк(л/) “ дт ’ (5.26)
Е = Е}Мп = РИтИМп,
(5.27)
192
Глава 5. Радиоэлектронное подавление РЭС управления оружием
где Ех — энергия одного импульса в пачке, то пороговое значение параметра <7пор к(1),
отнесенное к одному импульсу (в данной пачке из М импульсов), будет значитель-
но меньше.
Из (5.27) не следует делать вывод о том, что для обнаружения одного (одиноч-
ного) импульса с энергией Е, требуется в М раз меньшее отношение сигнал/помеха.
Выражение (5.27) свидетельствует лишь о том, что если для обнаружения Л/коге-
рентных импульсов требуется пороговое отношение сигнал/помеха <7ПОрк(Л/)> то это
отношение для одного импульса, т. е. (/пор кц), будет в М раз меньше.
Если некогерентная РЛС обрабатывает один импульс с длительностью Ги и энер-
гией £ь то вследствие энергетических потерь для его обнаружения требуется боль-
шее, чем дает формула (5.26), отношение сигнал/помеха
^порк(1) — ^д!^пор к(|)’ (5.28)
где ад1 — коэффициент энергетических потерь для одного импульса (ад1 > 1).
При обработке пачки из М импульсов коэффициент энергетических потерь
увеличивается. Это связано со следующими обстоятельствами.
При обработке в некогерентной РЛС одного импульса с энергией Е{ и пачки
импульсов, суммарная энергия которых равна Е (5.27), мгновенная мощность при-
нимаемого колебания будет выглядеть примерно как на рис. 5.9, а и б.
Рп вх(0 И Рсвх(1)(0
Мгновенные мощности сигнала и помехи
на входе детектора (М = 1)
Рп вх(0
в
М Рс ВЫХ(М)(0
На выходе детектора
= 5’ ад = ад(М) > “д(1))
Рп вых(0
г
Рис. 5.9. Мощности сигнала и помехи на входе
и выходе детектора приемника некогерентной РЛС
5.3. Коэффициент подавления
193
При «разложении» импульса с энергией Е на М импульсов, имеющих ту же
суммарную энергию, мощность каждого импульса Рс вх(Л/) уменьшается в М раз,
см. рис. 5.9, в, г, а мощность помехи РП вх остается неизменной. Следовательно,
энергетические потери возрастают, так как уменьшается отношение сигнал/помеха.
Коэффициент энергетических потерь зависит от числа интегрируемых импуль-
сов М. С ростом М коэффициент ад возрастает. Этот коэффициент также зависит
и от значения лппп
Если <7пор к
мало, то при 7Vn = const(/) это эквивалентно
малой энергии сигналов. Подавление сигнала помехой в детекторе будет ощущать-
ся сильнее, что приведет к росту коэффициента ад. (Здесь, как и прежде, <?пор к —
пороговое значение сигнал/помеха, определенное для идеального (когерентного)
приемника.)
На рис. 5.10 представлена зависимость коэффициента потерь ад от размера М
обрабатываемой пачки импульсов. Параметром семейства кривых является поро-
говое соотношение сигнал/шум.
j L «д(М), дБ
10 100
Рис. 5.10. Зависимость коэффициента потерь ад
от размера обрабатываемой пачки импульсов
Пороговое значение отношения сигнал/помеха #пор нек(л/) некогерентной РЛС
находится по формуле
^порнек(ЛУ) ^д(Л/)^порк(Л/)’ (5*29)
где </пор к(Л/) — отношение сигнал/помеха, при котором считается подавленной экви-
валентная идеальная когерентно-импульсная РЛС. Например, если считать, что иде-
альная когерентно-импульсная РЛС теряет работоспособность при дпор = 9 дБ,
то при обработке М = 100 импульсов из рис. 5.10 находится коэффициент потерь
ад= 15 дБ. Следовательно пороговое значение отношения сигнал/помеха для неко-
герентной РЛС равно <7ПОрнек(Л/=оо) = 24 дБ.
Получив пороговое значение ^Порнек(Л/)> можно приступить к определению коэф-
фициента подавления некогерентной РЛС.
Аналогично формуле (5.20) можно найти выражение для коэффициента подав-
ления некогерентной РЛС:
JC _ Лтвх _ 2МтиД/прнек /с
нек р » \ • /
'с вх ^пор нек(Л/)
где Д/пр нек — полоса пропускания приемника некогерентной РПС.
Линейный приемный тракт (от выхода антенны до амплитудного детектора)
имеет частотную характеристику, согласованную со спектром одиночного импульса.
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Поэтому в первом приближении можно считать, что полоса пропускания А/1р нек
равна
Л/прнек^— (5-31)
Ти
Из (5.30) и (5.31) следует, что
2 Л/
*пнек = 777^--------• (5-32)
( А/)^орнек(Л/)
Для определения кП нек в (5.32) необходимо подставить значение <7пор k Л/>, которое
находится с помощью кривых обнаружения рис. 5.6. Значение ад (Л/) находится по
графикам рис. 5.10.
Сравнение формул (5.21) и (5.32) показывает, что коэффициент подавления не-
М
когерентной РЛС в —-—- раз больше коэффициента подавления когерентной
ал(М)
РЛС, т. е.
V = *пнек = ——— (5 33)
/спк ад(Л/)’ ( }
На рис. 5.11 представлена зависимость v = v^A/, tfnopK(jn))-
Как следует из рис. 5.11, значение коэффициента v увеличивается с ростом числа
импульсов М в пачке.
На первый взгляд, возникает своеобразный парадокс: коэффициент подавления
несовершенной некогерентной РЛС значительно больше коэффициента подавления
когерентной РЛС, которая является оптимальной системой, работающей без энерге-
тических потерь. Парадокс связан только с особенностями определения коэффици-
рентной Д/прК
ента подавления.
Предположим, что обе РЛС подавляются прямошумовой помехой, спектраль-
ная плотность которой постоянна и равна Аш.
На рис. 5.12 а, б изображены частотные характеристики приемных устройств
некогерентной и когерентной РЛС. Обе РЛС, эквивалентные в энергетическом смы-
сле, подавляются прямошумовой помехой со спектральной плотностью Аш.
Из рис. 5.12, а также из соотношений (5.15) и (5.31) следует, что эквивалентная
полоса пропускания когерентной РЛС существенно (в Мраз) меньше, чем некоге-
А/пр нек
м
. Поэтому мощность помехи, проходящей через приемник
5.3. Коэффициент подавления
195
Рис. 5.12. Амплитудно-частотные характеристики приемных
устройств некогерентной (а) и когерентной (б) РЛС
некогерентной РЛС в Мраз больше. С учетом же энергетических потерь, имеющих
место в некогерентной РЛС, в соответствии с (5.33) коэффициент подавления неко-
ей
герентной РЛС в —-—- больше, чем когерентной РЛС. Однако энергетический
ад(А/)
потенциал САП, потребный для подавления некогерентной РЛС, будет меньше, чем
при подавлении когерентной РЛС с теми же энергетическими параметрами.
Энергетический потенциал, потребный для подавления когерентной РЛС, мо-
жет быть найден из уравнения РЭП:
(РпСп)ког=^кА^. (5.34)
А/пр к
где В — несущественный для нашего случая коэффициент.
Из (5.15), (5.21) и (5.34) следует, что
)ког = В 2М Д/п-Сп • (5.35)
Чпор к(А/)
Для некогерентной РЛС потребный энергетический потенциал определяется с
помощью (5.34) и (5.35):
(^п^п)нек=^ (л/)д А/птп- (5.36)
°^Д Х™ )^порк(Л/)
Из (5.35) и (5.36) следует выражение для отношения энергетических потенциа-
лов (РпСп)неки (РпСп)ког.
(Ai^n)HeK 1
Л = = ““ЛИ* (5.37)
(Аз)ког ад (^)
Так как ад(Л/)>1, то из (5.37) получается
(РпСп)нек<(ДпСп)ког. (5.38)
Следовательно, для подавления некогерентной РЛС требуется меньший энер-
гетический потенциал САП, чем при подавлении РЛС с когерентной обработкой.
Это свидетельствует о том, что, как и следовало ожидать, подавить когерентную
РЛС труднее, чем некогерентную.
196
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Таким образом, сравнительное исследование эффективности воздействия по-
мех на РЛС, продемонстрировало следующее.
1. Коэффициент подавления не может быть принят в качестве обобщенного энер-
гетического критерия, способного оценивать качество маскирующего и имитиру-
ющего сигнала по подавлению РЛС различного назначения. Нельзя по значению ки
однозначно определять степень помехозащищенности РЛС. Иными словами, если
для одного типа РЛС коэффициент подавления окажется больше, чем для РЛС дру-
гого типа, то при одной и той же помехе это еще не значит, что РЛС первого типа
имеет большую степень помехозащиты.
2. Для заданной пары «РЛС — САП» с помощью коэффициента подавления воз-
можно определение оптимальных параметров помех (ширины полосы пропускания,
индекса частотной модуляции и др.) по критерию «минимум коэффициента подав-
ления». Однако следует отметить, что оптимальные параметры помехи, определен-
ные для одного РЭС, могут быть неоптимальными для подавления другого РЭС.
5.4. Имитирующие активные помехи радиолокационным системам
5.4.1. Ответные имитационные помехи
Имитационные (имитирующие) помехи вносят ложную информацию в сигналы,
с которыми оперируют РЭС противника. Поэтому такие помехи иначе называются
дезинформирующими. Поскольку имитирующие помехи не должны селектироваться
приемником РЭС на фоне полезного сигнала, их также называют сигналоподобны-
ми. С помощью имитирующих помех создают такую сигнальную обстановку, в кото-
рой истинный сигнал перепутывается с ложным, а информационные системы про-
тивника совершают аномальные ошибки. Иначе говоря, имитирующие помехи наде-
ляют принимаемое противником колебание ложным информационным параметром
Хп(/), отличающимся от значения Хс(/) информативного для РЭС параметра полез-
ного сигнала, и тем самым создают ситуацию, приводящую к появлению ошибок.
Целенаправленно (по выбранному закону) изменяя параметр Хп (/), можно увести
следящую систему РЭС от истинного значения измеряемого параметра Хс (f) (уводя-
щие помехи) или перенацелить РЭС с Хс (/) на ложное Хп (/) (перенацеливающие
помехи). Как видно, цель у всех перечисленных действий одна — дезинформация
противника. Но тактические методы и технические средства для достижения этой
цели различаются.
К ответным имитационным помехам иногда причисляют непрерывные или
импульсные переизлученные маскирующие шумовые помехи. Очень эффективны
комбинированные ответные импульсно-шумовые помехи, обладающие наивысшей
эффективностью.
Ответные имитационные помехи (ОИП), в отличие от шумовых, не являются
универсальными. Они предназначаются для борьбы с РЭС определенного типа и
назначения — РЛС, радиосистем передачи информации (РСПИ).
Имитационные помехи применяются в виде сосредоточенных по пространству
(излучаемых из одной точки пространства) и пространственноразнесенных помех.
Все многообразие ответных имитационных помех можно классифицировать в
зависимости от назначения.
Так ретрансляционные ответные имитационные помехи, по существу, генери-
руют ложные сигналы, ретранслируя запросные сигналы РЛС. Такие помехи наделя-
5.4. Имитирующие активные помехи РЛС
197
ются модуляцией, чтобы имитировать флуктуации и регулярные изменения пара-
метров сигналов, отраженных протяженными и движущимися целями. Однократ-
ные ответные имитационные помехи состоят из одного ложного импульса, подоб-
ного импульсу отраженного сигнала РЛС, навязывая следящим системам РЛС
двухцелевую ситуацию. Если параметры (частота, задержка) такого помехового им-
пульса изменяются, то помехи называются уводящими. Многократные ОИП в ответ
на сигнальный импульс создают несколько ответных сигналоподобных импульсов.
В результате складывается ложная многоцелевая ситуация, иногда с синхронным
уводом всей пачки ответных импульсов радиолокационного сигнала. Перенацелива-
ющие ОИП одновременно срывают слежение за полезным параметром Хс (/) и при-
нудительно навязывают сигнал с ложным параметром Хп (/). Такие помехи могут
быть однократными и многократными. Одноточечные совмещенные помехи пред-
назначены для подавления однопозиционных РЭС. Для этого помехи воздействуют
на каналы обнаружения, различения и распознавания, канал дальности, канал скоро-
сти, угломерные каналы с линейным и коническим сканированием, а также угло-
мерные каналы моноимпульсного типа. Воздействуя на радиосистемы передачи
информации, такие помехи могут поражать как информационный канал, так и канал
синхронизации радиосистем связи и передачи данных. Многоточечные помехи
предназначены для подавления угломерных каналов, многопозиционных РЛС актив-
ного и пассивного типов, взаимокорреляционных систем.
5.4.2. Эффективность ответных имитационных помех
Типовая структурная схема станции формирования ответных имитационных
помех показана на рис. 5.13.
Рис. 5.13. Типовая структурная схема станции
формирования ответных имитационных помех
Схема подобна тем, которые формируют ответные шумовые помехи. Но имеет-
ся несколько отличий. Во-первых, в этой схеме сильно развита подсистема опера-
тивной радиотехнической разведки (ОРТР) с устройством распознавания сигналов
(ОР): именно она служит для запоминания частоты принятого сигнала (УЗЧ), де-
модуляции (ДМД) и определения его параметров для выбора вида ответной поме-
хи, формирования исходных данных для работы системы управления (СУ) поме-
хой. Во-вторых, схема использует регулируемые законы изменения модулирующих
функций. Эти законы FAM (/) и F4M (/) формируются генератором помеховых фун-
кций (ГПФ) под управлением СУ и подаются на амплитудный (МОД1) и фазовый
(МОД2) модуляторы, а также на выходной усилитель мощности. В-третьих, в схеме
198
Глава 5. Радиоэлектронное подавление РЭС управления оружием
станции формирования ответных имитационных помех всегда имеется устройство
управления задержкой (УЗ) помехи на тп (/). Переменная задержка нужна для фор-
мирования уводящих по дальности помехи.
Сколько-нибудь подробные аналитические исследования эффективности ОИП
для подавления различных следящих РЭС затруднительны, а доступные результа-
ты таких исследований ограничены. Поэтому судить об эффективности ОИП луч-
ше всего по результатам имитационного моделирования или натурного экспери-
мента. Таким путем удается получить конкретные данные о вероятностях срыва,
захвата, перенацеливания РЭС, функционирующих в конфликте со средствами РЭП.
Энергетический потенциал ОИП для сигнала ип (/) не может служить показа-
телем эффективности. Напротив, обычно стараются создать ОИП с мощностью,
сравнимой с мощностью сигнала: мощность или амплитуда — такой же параметр
помехи, как и любой другой, а имитирующая помеха должна быть подобна сигналу
по всем параметрам, в том числе и по амплитуде.
5.4.3. Генераторы ложных сигналов — ретрансляционных
ответных помех
Схема, поясняющая принцип работы и применения генератора ответных им-
пульсных помех, приведена на рис. 5.14, а. ПРД РЛС обнаружения в точке 1 созда-
ет и излучает зондирующий сигнал частоты fQ. Этот сигнал достигает ЛА (цели) и
отражается от него (импульс D на рис. 5.14, б). Амплитуда отраженного импульса
I- / ч (Z)
£ц ~ ’ заДеРжка тц v) =--а частота отличается отУд на величину доплеров-
Д.
ского сдвига К =—. Значительно более слабый сигнал В падает на ложную цель
X ___
(ЛЦ) и отражается от нее с амплитудой £лц ~ ^олц, где о — эффективная поверх-
ность рассеяния.
Рис. 5.14. Применение ответных импульсных помех
Пришедшие на ПРМ РЛС в точке 2 сигналы имеют собственные задержки и
доплеровские сдвиги частоты, а их амплитуды различны. Такое различие по пара-
метрам позволяет, в принципе, различить (распознать) ложную цель на фоне ис-
тинной. Чтобы избежать этого, на ложную цель устанавливается генератор помех,
излучающий ответный импульс помехи с амплитудой, примерно равной £ц. В ре-
зультате в точку 2 на вход РПМ РЛС рис. 5.14, в приходят от истинной цели и от
5.4. Имитирующие активные помехи РЛС
199
ложной цели импульсы, мало различимые по амплитуде. Этот эффект затрудняет
селекцию ложной цели от истинной и дезинформирует РЛС, создавая эффект раз-
множения строя летательных аппаратов. Но создавая ложные сигналы надо при-
нять меры, чтобы импульсы от истинной и ложной целей (рис. 5.14, в) были не
только подобны по своим параметрам, но и имели одинаковые флуктуации, обуслов-
ленные отражением сигнала от протяженной цели (ЛА). Проще всего ГЛЦ выпол-
нить по схеме ретранслятора с дополнительным усилением и модуляцией переиз-
лученного запросного сигнала РЛС. Существует несколько способов создания рет-
ранслированных помех. Схема однократного ГЛЦ приведена на рис. 5.15.
Схема работает с общим гетеродином (Г), с усилением на промежуточной час-
тоте Лр=Л“Л и с восстановлением несущей^ =Лр + А во втором смесителе (См2).
Иногда тактика РЭП требует отвечать на одиночный импульсный сигнал либо
расширенным по сравнению с ним импульсом помехи, либо пачкой помеховых
импульсов. В схеме рис. 5.16 для генерации пачки ответных импульсов предназна-
чена цепь обратной связи с управляемой линией задержки (УЛЗ) и двумя преобра-
зователями частоты/пр «-> fn. Делитель частоты (ДЧ) задает промежуточную частоту
/пр = —, на которой работает цепь обратной связи.
Рис. 5.16. Схема создания пачки импульсов помехи
Специальные генераторы ложных сигналов создаются для РЭП РЛС со слож-
ными сигналами (ЛЧМ, ФКМ), а также для РЛС со скачкообразно меняющейся от
импульса к импульсу несущей частотой.
На рис. 5.17, а показана схема ГЛЦ, отвечающая помехой на ЛЧМ-импульс.
Схема снабжает излученную ответную помеху дополнительной частотной внутри-
импульсной модуляцией. Осциллограммы, которые иллюстрируют работу схемы,
показаны на рис. 5.17, б. На выходе схемы ответная помеха в течение несжатого
зондирующего импульса сигнала излучается как последовательность импульсов дли-
тельностью Дт = тнссж/л с периодом Гп. При этом несущая частота импульсной поме-
хи равна /п (/) = /.(/) + Д/п. Необходимая частотная модуляция помехового сигнала
производится с помощью генераторов линейно изменяющихся напряжений ГЛИН
рис. 5.17 а, в.
200
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Рис. 5.17. Средство РЭП РЛС с ЛЧМ-сигналом
Существуют схемы генераторов ложных целей для ФКМ-сигналов с быстро
перестраиваемой частотой, но для обеспечения работы этих схем необходимо апри-
орное знание кода, управляющего фазой несущего колебания.
5.4.4. Помехи каналу дальности
Ответные имитационные помехи РЛС, измеряющей дальность и сопровожда-
ющей цель по дальности, используются при реализации разных способов РЭП.
Такие помехи создают ложную информацию о радиолокационных целях и навязы-
вают эту информацию соответствующим подсистемам РЛС. В результате помехо-
вого воздействия система автосопровождения по дальности захватывает помеху и
уводит строб на ложную дальность. Закон, по которому помеха уводит строб даль-
ности, определяется тактическими соображениями. Наиболее распространены три
вида ответных импульсных помех каналам дальности РЛС. Это однократные и мно-
гократные ответные уводящие помехи, а также ответные импульсные помехи в со-
четании с шумовыми.
Принцип действия ответных импульсных помех, уводящих по дальности, иллю-
стрируется рис. 5.18. В ответ на импульсы сигнала с параметрами тс, Tc,fc создаются
помеховые импульсы, дезинформирующие РЛС о дальности до цели (рис. 5.18, а).
Помеховые импульсы имеют примерно те же параметры, что и сигнальные тпмс,
Гп =ГС, fn~ Помеху формирует генератор ложных целей, выполненный по схе-
мам, не отличающимся от описанных в разд. 5.4.3.
Мощность импульсов помехи Рп должна превышать мощность отраженного от
цели сигнала Рс. Соответствующие видеоимпульсы сигнала и помехи представлены
на рис. 5.18, б. Пусть для начала система автосопровождения по дальности находится
в режиме поиска, так что строб дальности движется по оси времени справа — налево,
как на рис. 5.18, б. Если помеха мощнее сигнала, строб дальности захватит более
сильную помеху. Этому будет способствовать схема АРУ приемника РЛС, благода-
ря действию которой сильная помеха ослабит и без того более слабый сигнал. После
захвата задержка импульса помехи Атп (/) изменяется и вместе с ней изменяется
положение строба дальности (помехи осуществляют увод по дальности). Очень важно
выбрать закон изменения задержки Атп (/). Для имитации равномерного движения
ложной цели Атп (/) меняется по кусочно-линейному (пилообразному) закону с пе-
риодом Ту (рис. 5.18,- г). Чтобы помеха имитировала медленно движущуюся цель,
Атс (/) меняется медленно за много периодов Тс. Период Ту должен быть выбран
5.4. Имитирующие активные помехи РЛС
201
из расчета Ту» Тс. Для имитации движения ложной цели с постоянной скоростью
используют параболический закон изменения задержки Дтп (г) = kt2. Одновременно
с уводом меняют мощность помехи Рп (/), имитируя изменение интенсивности сиг-
нала по мере его приближения или удаления от РЛС (рис. 5.18, в).
Рис. 5.18. Принцип действия однократных ответных
импульсных помех, уводящих по дальности
Для создания многократных ответных импульсных помех, уводящих по даль-
ности, в ответ на каждый импульс сигнала излучается пачка в п импульсов с пери-
одом 7П (рис. 5.19, а). При этом вся пачка синхронно смещается во времени по
кусочно-линейному периодическому (пилообразному) закону (рис. 5.19, б) при
выполнении того же условия Рп > Рс. Система автосопровождения по дальности за-
хватывает один из п импульсов и следит за перемещающейся пачкой.
Рис. 5.19. Многократные импульсные помехи, уводящие по дальности
Ответные импульсные помехи могут сочетаться с шумовыми. Шумовые поме-
хи накрывают и маскируют импульс сигнала, исключая возможность синхрониза-
ции положения строба дальности и сигнального импульса. Так называемый «разум-
ный» шум накрывает полезный импульс, чтобы исказить его и предотвратить воз-
можность сопровождения импульса по переднему фронту. Кроме того, шум,
наложенный на полезный сигнал, затрудняет распознавание помехи.
202
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Следует отметить, что ответная импульсная помеха может быть создана только с
некоторой временной задержкой относительно импульса сигнала. Аппаратура стан-
ций формирования активных помех обычно обеспечивает величину этой задерж-
ки А/ в интервале до 0,15 мкс. Поэтому для надежного накрытия маскируемого им-
пульса сигнала ответный шумовой импульс должен упреждать его по времени. Для
этого шумовой импульс, сформированный в ответ на принятый импульс сигнала
РЛС, задерживается на время несколько меньшее периода повторения зондирующего
сигнала. Такая помеха надежно накроет импульс сигнала в следующем периоде.
Широко распространенная в технике РЭП схема формирования таких ответ-
ных импульсных помех для увода систем автосопровождения по дальности приве-
дена на рис. 5.20.
Рис. 5.20. Формирование ответного импульса помехи
с задержкой на период повторения сигнала
В соответствии с этой схемой перестраиваемая линия задержки (ЛЗ) на Дтп (/)
управляется генератором линейно изменяющегося напряжения (ГЛИН). С помощью
управляемого усилителя меняется мощность помехи на выходе Pu(t\ Устройство
запоминания частоты (УЗЧ) оценивает несущую сигнала /с* и создает условия для
излучения задержанного импульса на той же несущей, что и у принятого импульса.
В ряде случаев устройство запоминания частоты совмещается с приемником
поиска и захвата сигнала, а управление задержкой — с программным устройством,
управляемым специальным контроллером рис. 5.21.
Апрм
о-
Сигнал от
РЛС
Рис. 5.21. Программное управление уводом по дальности
В настоящее время в станциях уводящих сигналоподобных помех широкое
применение нашли модули различного назначения (цифровые устройства запоми-
нания и воспроизведения сигнала, программируемые устройства для изменения
параметров сигнала и другие).
В системах автосопровождения по дальности может применяться схема помехо-
защиты, работа которой основана на том, что при одновременном наблюдении не-
скольких сигналов захватывается самый слабый из них — тот, у которого Рс = min.
Для противодействия в условиях такой помехозащиты эффективна уводящая помеха
со специальным законом изменения Рп (/) (рис. 5.22).
5.4. Имитирующие активные помехи РЛС
203
Рис. 5.22. Уводящая помеха с изменением мощности
На участке 1, где нет увода, помеха имитирует цель, выставляя импульс с уров-
нем ———< 1. Тогда в системе автосопровождения по дальности со схемой помехо-
min
защиты с селекцией минимального сигнала произойдет захват помехи (как самого
слабого из всех одновременно наблюдаемых импульсов). По мере увода строб даль-
ности смещается на участок 2, где > 1. Но система автосопровождения по даль-
не
ности все равно следит за помехой, а не за сигналом.
5.4.5. Помехи каналу скорости
При формировании помех каналу скорости производится управление не вре-
менными задержками, а сдвигами частоты. Принцип действия наиболее распро-
страненных помех каналам измерения и сопровождения скорости иллюстрируется
рис. 5.23. На рис. 5.23, а воспроизведена помеха, уводящая по скорости. Разность
частот /пМ-/с = ¥п(0-
Рис. 5.23. Принцип организации уводящих помех
каналу сопровождения по скорости
На рис. 5.23, б приведена многократная помеха по скорости. Эта помеха пред-
ставляет собой пачку спектральных гармоник с синхронным изменением частот всех
составляющих пачки. Наконец, на рис. 5.23, в показана случайная помеха, имеющая
расширенный шумовой спектр, центральная частота которого также может уводиться
по закону /хл (/).
204
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Для увода по скорости чаще всего применяют схему с фазовой модуляцией ЛБВ
на рис. 5.24.
a
Рис. 5.24. Увод по скорости посредством модуляции ЛБВ (а); формирование
помех каналу скорости при произвольной модуляции несущей (б)
В соответствии с этой схемой с помощью генератора линейно изменяющегося
(пилообразного) напряжения производится фазовая модуляция колебания на вы-
ходе ЛБВ (р (/) = kt. Такому изменению фазы соответствует частотный сдвиг усили-
ваемого сигнала:
/п(/)=^)=А. (5.39)
п v 7 dt 2л
Изменяя по командам от системы управления (СУ) крутизну пилообразного
модулирующего напряжения к, можно осуществить увод по скорости как вперед
(Д/п растет), так и назад (A/JT уменьшается со временем). Генератор помеховой функ-
ции (ГПФ) совместно с модулятором (МОД) формирует структуру ответной помехи.
Схема рис. 5.24, а может работать при любых (не только гармонических) сигна-
лах, в частности при создании помех ЛЧМ-, ФКМ-сигналам. Если надо создавать
паузы в помеховых излучениях, то в схему рис. 5.24, а добавляют электронные ключи
и коммутаторы, прерывающие работу станции формирования активных помех.
Существует несколько методов создания многократных помех, уводящих по
скорости. Обычно такие схемы создают сложные помеховые колебания, спектр
которых содержит п составляющих на разных частотах Fh i= 1: п. Сетку таких час-
тот с шагом FM создает ЧМ-модулятор в схеме рис. 5.24, 5.вОграничитель ОГР вы-
равнивает интенсивности колебаний на частотах /у
Схема формирования доплеровского шума в канале скорости представлена на
рис. 5.25.
Рис. 5.25. Схема формирования случайной уводящей
помехи каналу скорости
5.4. Имитирующие активные помехи РЛС 205
В соответствии со схемой рис. 5.25 в модуляторе происходит амплитудная моду-
ляция принятого и усиленного сигнала видеошумом £,(/) и фазовая модуляция ви-
деошумом т|(г). Увод по частоте Д/п(/) производится за счет фазовой модуляции
по закону <р(7) = Ar(/)z, т. е. по пилообразному закону с изменяющейся крутизной
А;(г) = 2лД/пЛ Помеха на выходе в ответ на сигнал w0(/) = Re[£0(r)exp(j(o0z)j создает
колебание
«о (0 = £о (')П + '”а£>(')]cos{2л[7о + ЛДФ “ w<J>n(O - Фо (0} =
= Re{£0 (r)£M (/)exp(;oj0/)}, (5’40)
где Ём (/) = [l + /иА£(/)]ехр[/2лД/(/)/ - /иФп(/)]-
Фазовая и амплитудная модуляции напряжениями видеошумов ц(/), ^(z) созда-
ет шумовое колебание со спектром (рис. 5.23, в), где центральная частота
= /о + Д/п (0 изменяется в соответствии с заданным законом увода по частоте (скоро-
сти). Полоса помехи обычно составляет МиП (z) примерно 7...20 кГц (рис. 5.23, в),
период увода — до 10 с, Д/п (/) = 0...200кГц. Вместо генератора видеошума (ГВШ)
могут использоваться генераторы псевдослучайного сигнала (ГПС), а в качестве
фазового модулятора — балансный модулятор, подавляющий несущую на выходе.
Как и при постановке помех каналу дальности, имеются многопрограммные
станции активных помех каналу скорости. В этих станциях одновременно излуча-
ются помехи разных частот, каждая из которых уводится по своему закону. В неко-
торых станциях активных помех адаптивно меняется цикл увода Ty(z). Часто по-
мехи каналу дальности и скорости формируются одной станцией активных помех.
При этом скорость изменения частоты и закон изменения задержки (дальности)
должны согласовываться.
В современных САП для запоминания и воспроизведения сигналов использу-
ют цифровые устройства. Схемы построения таких устройств используют сигналь-
ные процессоры, а алгоритмы работы предусматривают адаптивное управление
фазой и частотой помеховых сигналов [53].
5.4.6. Совмещенные помехи измерителям угловых координат
Выше, в гл. 1, уже говорилось о том, что пеленгаторы любого типа определяют
угловые координаты источника излучения по положению нормали к фронту волны
приходящего от этого источника сигнала. Совмещенные помехи излучаются из той
же точки пространства, что и сигнал. Поэтому совмещенные помехи не могут ис-
казить форму фронта волны на раскрыве приемной антенны подавляемого пелен-
гатора и тем самым вызвать ошибки пеленгования. Более того, совмещенные помехи
облегчают работу моноимпульсного пеленгатора [52]. Но из этого общего правила
есть довольно существенные для практики исключения. Прежде всего исключения
распространяются на пеленгаторы последовательного действия, формирующие ин-
формацию об угловых координатах в результате обработки огибающей принятого
антенной сигнала. Искажение этой огибающей амплитудно-модулированной поме-
хой обязательно приведет к ошибке пеленгования. Так, если амплитуда помехи
изменяется с частотой сканирования, пеленгатор с качающейся или со сканирующей
антенной выделит модулирующую функцию вместе с полезным сигналом. Изме-
нение амплитуды и фазы суммарного колебания во времени приведет к блужданию
оси антенной системы около истинного направления на источник излучения.
206
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Пеленгатор с мгновенным равносигнальным направлением (моноимпульсный)
по принципу действия оказывается нечувствительным к флуктуациям амплитуды
и фазы огибающей принимаемого сигнала, если только все каналы многоканального
приемного тракта такого пеленгатора одинаковы по амплитудно-фазовым характе-
ристикам. Неидентичность каналов, характерная для любой практической реали-
зации приемника моноимпульсного пеленгатора, конечно же снижает устойчивость
против помех. В том числе и помех, пространственно совмещенных с сигналом.
Но известны способы создания совмещенных помех, вредных даже и для идеально
реализованной аппаратуры моноимпульсных пеленгаторов. Это двухчастотные по-
мехи и помехи на кроссполяризации.
Принцип радиопротиводействия пеленгаторам при помощи двухчастотной по-
мехи сводится к следующему. Если помеха состоит из двух гармонических колеба-
ний, разнесенных по частоте примерно на величину промежуточной частоты при-
емника радиопеленгатора то в результате биений этих двух помеховых колеба-
ний в смесителе радиоприемного устройства образуется колебание, которое попадает
в полосу УПЧ на частоте f« fup. Но это колебание будет отличаться от полезного
сигнала как по амплитуде, так и по фазе. Совместное действие помехового колеба-
ния и сигнала создает условия, приводящие к ошибке в определении пеленга. Это
утверждение можно иллюстрировать, рассмотрев фрагмент схемы любого моноим-
пульсного радиопеленгатора в виде двухканального приемного устройства. Эффект
от действия двухчастотной помехи может проявляться в нарушении работы угломер-
ного координатора за счет искажения пеленгационной характеристики. Анализ
показывает, что пеленгационная характеристика, нечетная относительно равносиг-
нального направления в отсутствии помех, оказывается четной, а равносигнальное
направление приходится на область неустойчивого состояния [11]. Равносигналь-
ное направление пеленгатора отклоняется от направления на источник излучения
и происходит срыв автосопровождения. Кроме того, при достаточной мощности
двухчастотная помеха может вызвать перегрузку приемника и подавление слабого
информативного сигнала на нелинейностях приемного тракта.
Помехи на кроссполяризации облучают приемные антенны подавляемых пелен-
гаторов на рабочей частоте, но с ортогональной поляризацией. Такие помехи исполь-
зуют различие направленных свойств антенн для сигналов разной поляризации. Как
известно [19], практически у всякой антенны ДНА на основной и ортогональной
поляризации сильно отличаются. Обычно, конструируя антенну, стремятся обеспе-
чить минимальную чувствительность к помехам на ортогональной поляризации. Но
если коэффициент усиления антенны по направлению максимума ДНА по основной
поляризации имеет максимум, то для иных направлений он может быть меньше
соответствующего значения на кроссполяризации.
На рис. 5.26, а в декартовых координатах представлены ДНА основной антен-
ны Aq с острым максимумом и низкими по уровню боковыми лепестками (БЛ) на
основной (согласованной) поляризации принимаемого сигнала F^ (а).
В то же время эта же антенна А^ на ортогональной поляризации имеет совершен-
но другую ДНА F_> (а) с минимумом при а = 0, со смещенными максимумами и
высоким уровнем боковых лепестков. Практически уровни максимумов ДНА на ос-
новной и ортогональной поляризации отличаются на К- 30...40 дБ. Сигнал с ампли-
тудой /70, пройдя Aq на согласованной поляризации, приобретет амплитуду (ос) Ео.
Приходящая на вход А{) помеха с амплитудой Еи, но на ортогональной поляризации,
5.4. Имитирующие активные помехи РЛС
207
будет иметь амплитуду на входе приемника 7^(а)£п. Отношение помеха/сигнал
Рис. 5.26. ДНА на основной и на ортогональной поляризации
Если станция активных помех обеспечивает » К, то на выходе Aq помеха
будет превышать полезный сигнал, а ДНА антенны будет практически совпадать с
(а). Иначе говоря, ДНА будет иметь провал при а= 0, смещенные на Да макси-
мумы и очень высокие уровни боковых лепестков, а дискриминационная характе-
ристика изменит форму с I на 2 (рис. 5.26, в). Моноимпульсный радиопеленгатор
при такой антенне будет работать с угловой ошибкой Да или даже больше при за-
хвате сигнала боковыми лепестками ДНА. Условие эффективности поляризацион-
ной помехи — превышение ею уровня сигнала порядка 30...40 дБ и более в точке
приема сигнала антеннами подавляемой РЛС.
При организации РЭП применяются два типа поляризационных помех: с на-
стройкой поляризации данной антенны и с двумя антеннами, жестко настроенны-
ми на ортогональные линейные поляризации.
На рис. 5.27 представлена схема первого типа. На входе применяется три антен-
ны, работающие с различной (вертикальной Т, горизонтальной -> или круговой 0)
поляризацией. ГПФ — это генератор помеховых функций.
Тип поляризации приходящего сигнала определяется в измерителе поляриза-
ции по откликам антенн Al, А2, АЗ. Измеритель поляризации настраивает (через
схему управления) единственную передающую антенну станции активных помех А4
на ортогональную поляризацию. Переключатель пропускает один из трех сигналов
на модулятор. Недостаток схемы — некоторая инерционность из-за задержки в опре-
делении нужной поляризации.
208
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Анализатор
поляризации
Рис. 5.27. Формирование помех с настройкой поляризации
Схемы второго типа — с двумя антеннами на ортогональные поляризации —
при линейной поляризации всегда имеют два канала, но зато обладают малой инер-
ционностью. На рис. 5.28 представлена схема подобного типа.
Апрд2 |
Рис. 5.28. Автоматическая настройка поляризации помехи
В этой схеме антенны Апрм1, Апрм2 настроены на вертикальную и горизонталь-
ную поляризацию соответственно, а передающие антенны Апрд1, Апрд2 — на орто-
гональные поляризации.
Сигнал, пришедший на антенну Апрм_>, пройдет через нижний ретрансляцион-
ный канал (РК) и будет излучен через Апрд| на ортогональной поляризации. Анало-
гично действует верхний по схеме канал. Так как принцип РЭП при помощи поляри-
зационных помех требует излучения очень мощных помеховых колебаний, в схеме
нужно использовать выходные каскады с очень большим усилением К- 40...50 дБ
и с маленькой задержкой, чтобы излучаемые импульсы помех практически совпа-
дали по времени с импульсами подавляемых сигналов. Но при этом возникает се-
рьезная проблема развязки каналов приема и передачи.
Поляризационная помеха может создаваться и пассивным ретранслятором,
выполненным в виде антенной решетки Ван-Атта. Принцип действия такой решетки
аналогичен тому, который использует САП, представленная схемой рис. 5.28.
5.4.7. Некогерентные пространственноразнесенные
помехи угломерным системам
Пространственноразнесенные или, иначе, многоточечные помехи наиболее
эффективны для РЭП угломерным системам, хотя могут применяться для проти-
водействия и другим радиоэлектронным системам, трудно подавляемым совмещен-
ными помехами.
Физическая причина эффективности пространственноразнесенных помех про-
тив моноимпульсных и других угломерных систем состоит в том, что помехи, излу-
5.4, Имитирующие активные помехи РЛС
209
чаемые из разных точек пространства, изменяют ориентацию фронта электромаг-
нитной волны, падающей на антенну радиопеленгатора.
В качестве носителей (платформ) постановщиков вынесенных излучателей по-
мех используются: пилотируемые постановщики помех; беспилотные дистанционно-
управляемые летательные аппараты (ДПЛА); любые медленно опускающиеся лета-
тельные аппараты (парашюты, автожиры, летающие крылья, аэростаты и т. п.) с
активными передатчиками помех одноразового действия (ПОД); буксируемые ра-
диолокационные ловушки (БРЛ); отстреливаемые снаряды и ракеты, несущие пе-
редатчики перенацеливающих на себя помех (радиолокационные ловушки — РЛ).
При этом один и тот же носитель может применяться для различных целей. Так,
шумовые помехи, как правило, применяются для прикрытия целей. Однако, рас-
полагаясь на ракетах, они могут служить перенацеливающими радиолокационны-
ми ловушками. Имитационные помехи используются для создания некогерентных
помех, важными вариантами которых являются мерцающие помехи. Вообще, так-
тика использования пространственноразнесенных помех, в зависимости от исполь-
зуемых носителей, очень разнообразна.
Применение некогерентной помехи для противодействия определению угловой
координаты радиолокационной цели иллюстрируется рис. 5.29. Подобные вынесен-
ные помехи могут быть как шумовыми (генераторными или ответными), так и
имитационными.
Рис. 5.29. Применение некогерентной помехи из одной вынесенной точки
Моноимпульсный пеленгатор, входящий в состав РЛС, принимает вместе с
помехой отраженный от цели сигнал. Пространственное разнесение точек отраже-
ния сигнала и излучения помехи задается вектором d(x,z), модуль которого
рп (')l = - (')Г + [з'ц (0 - Jn (О]2 +|\ W - гп W]2 > (5.42)
где {хц, уц, гц} — координаты точки излучения цели, а {Хд, уп, zn} — координаты
точки излучения помехи.
Задача заключается в том, чтобы выбирать положение (траекторию) точки из-
лучения помехи так, чтобы она вместе с истинной целью всегда находилась в глав-
210
Глава 5. Радиоэлектронное подавление РЭС управления оружием
ном лепестке ДНА антенны радиопеленгатора. Для этого нужно управлять разно-
стным вектором dn(/), заданным своими проекциями
Дх = (хц - хп); Ду = (уц - ); Az = (z„ - z„), (5.43)
и при этом обеспечивать превышение помехи над сигналом в точке расположения
радиопеленгатора
( р А
Н/ >^пор’ (5,44)
V С 'входрпг
Принимая одновременно отраженный сигнал и активную помеху из вынесенной
точки, радиопеленгатор будет совершать ошибку. Оценить величину этой ошибки
и, соответственно, эффективность радипротиводействия пеленгатору, можно на ос-
нове следующих соображений.
Для произвольной точки в пространстве чертежа (рис. 5.29) с угловыми коор-
динатами 6, ф (и направляющими косинусами cos0, созф) или 0 (угол места) и а
(азимут) справедливы соотношения
cos0 = cosacosp; cos9 = sinacosp; cos0 = ^cos2 0 + cos2 ф. (5.45)
Тогда, при аппроксимации диаграммы направленности антенны РЛС зависи-
sinx
мостью вида
, можно получить
(5.46)
где Ла — размер раскрыва антенны.
Но cos0=—;
R
(5.47)
При этом декартовы координаты точки излучения помехи и истинной цели
определяются с учетом того, что
Яп (/) = 7^ (') + хи ]2 +1 Mz) + З'ц ]2 + [ Дг(<)+гц ]2,
Лц (') = Vxu+J'u + 2u>
(5.48)
а пеленги помехи и цели различаются как:
0П 0ц — А0, фп — фц — Аф,
(5.49)
где
А0 =
sin 0С 1 + 2cos0ц + Т] cos<рц + - cos2 0Ц - cos2 <рц
nJ(£2+n2K2)
Дф =---------------!-------- -
(5.50)
СО5фц +
5.4. Имитирующие активные помехи РЛС
211
Ьх Ду
Az
(5.51)
Рис. 5.30. Геометрические
соотношения для оценки
ошибки пеленгования,
вносимой некогерентной
помехой
Соотношения (5.50) и (5.51) определяют угловой разнос истинной и ложной це-
лей и одновременно ошибку пеленгования в случае полного перенацеливания радио-
пеленгатора с истинной на ложную цель.
Если источники сигнала и некогерентной помехи не разрешаются пеленгатором,
т. е. если угловое рассогласование источников сигнала и помехи не превышает про-
тяженности линейного участка дискриминационной ха-
рактеристики (рис. 5.26), который примерно равен ши-
рине диаграмм направленности антенн пеленгатора, все
равно пространственноразнесенная помеха вызовет
ошибку пеленгования. Для оценки величины этой ошиб-
ки можно принять следующие допущения. Пусть два ле-
тательных аппарата с некогерентными излучателями, как
на рис. 5.30, двигаются навстречу моноимпульсному ра-
диопеленгатору суммарно-разностного типа. Истинные
пеленги источников излучения соответственно ф! и ф2.
Плоскость чертежа на рис. 5.30 совпадает с плоскостью
углов ф.
Излучаемые источниками колебания щ (/) и и2 (/)
имеют простейшую структуру — они создают на входе
приемника пеленгатора гармонические колебания
w1(r) = Ref£1e;c°1Z);
Lr < (5.52)
и2 (f) = Re{E2eyc°2 j,
где Ё. = Е.ехр(-у\|/.) —комплексные огибающие.
По принципу работы моноимпульсный, как и всякий
другой пеленгатор, в качестве оценки угловой коорди-
наты цели примет такое значение ф*, которому соответ-
ствует направление нормали к фронту волны, падающей на раскрыв антенной си-
стемы. Конкретно для моноимпульсного пеленгатора с амплитудной обработкой
этому направлению соответствует равенство амплитуд сигналов, принятых двумя
антеннами:
Анализ рассматриваемой двухцелевой ситуации работы моноимпульсного ра-
диопеленгатора показывает, что, с учетом (5.52),
«л1 (0=«i (О Л (<Р1)+«2 (0 л (<р2); (5 54)
иА2 (О = «1(0 Л> (ф2 ) + «2 (0 ?2 (Ф2 )>
где Е.(ф.) — значение ДНА соответствующей антенны для направления ф! или ф2.
Определив в соответствии с (5.54) амплитуды колебаний в антеннах пленгатора
Ли |=7(ы12 (0) Л2 (Ф1)+(«г (0)л2 (фг);
1^421 = ^(«l2 (О)^22 (Ф1) + («£ (0) Л2 (Ф2 )> (5’55)
212
Глава 5. Радиоэлектронное подавление РЭС управления оружием
где \u2(tyj означает усреднение по времени, можно получить условие, определяю-
щее равносильное направлении (5.53):
Л2 (<Р1) - Fl (<Pi)] - Р2 [ Л2 (<Pi) - Fl (<р2)] = О,
(5 56)
Едп
где Р = —- — отношение амплитуд сигналов (5.55), приходящих на антенны пе-
^А1
ленгатора из разнесенных в пространстве точек ЛА1 и ЛА2 (рис. 5.30).
Трансцендентное уравнение (5.56) можно решить относительно оценки пелен-
га парной цели, если конкретизировать вид ДНА антенн 17(ф). Но, поскольку ДНА
пеленгатора представляют собою гладкие функции, их можно представить степен-
ными рядами в окрестности точки ф = ф0 и ограничиться двумя первыми членами
такого разложения. Тогда
F.(<p.) = F((p0)± Т7'.(ф0)(<р0 - <р.), (5.57)
где знак «+» или «-» выбирается в зависимости от того, на каком скате ДНА — пра-
вом или левом — располагается точка ф = ф0.
С учетом (5.57) уравнение (5.56) линеаризуется и приводится к виду
(фо - <Р1) + ₽2 (фо - <р2) = 0, (5.58)
откуда следует, что формируемая пеленгатором оценка угловой координаты нераз-
решимой пары источников излучения будет
,=b±fe (5 59)
1+р2
Из (5.59) следует, что если р 0, ф* фь — РСН пеленгатора ориентируется
на первую цель (ЛА1), излучающую колебание Wj(z). Если интенсивность излуче-
ния от первой цели пренебрежимо мала по сравнению с излучением второй, р
Ф* ф2. В промежуточных случаях 0 < р < <*> РСН пеленгатора ориентируется в не-
которую промежуточную точку на базе парного источника излучения ЛА1-ЛА2.
Аналогичная картина наблюдается и при работе по парной цели моноимпуль-
сного пеленгатора с фазовой обработкой сигналов, принятых разнесенными антен-
нами. И в этом случае равносигнальное направление ориентируется в энергетичес-
кий центр тяжести гантели, образованной парой некогерентных излучателей.
5.4.8. Когерентные помехи
Иначе, чем при использовании для РЭП независимых постановщиков помех,
обстоит дело, если разнесенные в пространстве источники помех создают когерент-
ные излучения [2]. Фазовый фронт волны, создаваемой несколькими (более, чем
одним) источниками когерентного излучения имеет довольно сложную форму и
нормаль к этому фронту, направление которой идентифицируется пеленгатором с
направлением на цель, может ориентироваться в точку за пределами базы источ-
ника излучения.
Геометрические соотношения, характеризующие изменение формы фазового
фронта электромагнитной волны от парной цели с когерентными помехами, пока-
заны на рис. 5.31.
Излучатели, расположенные в точках 1 и 2 на рис. 5.31, создают гармоничес-
кие колебания одной частоты со со сдвигами фаз на ±ф:
щ (/) = Ке^Л"^ }; и2 (z) = Re{E2ej<*‘e+Jv }. (5.60)
5.4. Имитирующие активные помехи РЛС
213
фазовый фронт Rrq = const
Рис. 5.31. Фазовый фронт волны от парной цели
В точке приема О на входе антенной системы радиопеленгатора сформируется
суммарное колебание
л I (
z--M+m2 /
с ) V
(5.61)
С ,
= Ref E.e~Jkr> ej™ ) + Ref ) = Ref Еъе~^° ejv>’),
11 I I X II I 7
где r. — дальности от соответствующего источника излучения до антенны (до точ-
, 2л w
ки О), а к = — =-----модуль волнового вектора (пространственная частота).
X с
В содержательных терминах запись (5.61) означает, что некоторый виртуальный
источник, излучающий колебание £^, установлен в точке А (рис. 5.31) на удале-
нии г0 от радиопеленгатора. Из рис. 5.31 следует
Eye-Jkr° = E{e~jkr'e^ +Е,е~]кг^\
(5.62)
причем амплитуда и фаза суммарного поля, образующегося как суперпозиция пар-
циальных полей, формируемых источниками 1 и 2 на рис 5.31, равна
Еъ = Еу 4- £2 4- 2ЕхЕ2 cos(кДг + 2у),
О z = arctg
Ех sin (kt\ - \|/) + Е2 sin(Ar2 4- \|/)
-----------------------------------
Ej cos(X/j - \|/) 4- E2 cos(At2 + V)
(5.63)
где Ar = Г] - r2.
Таким образом, фаза <pE суммарной волны отличается от фазы принятого излу-
чения как от первого источника (кг^, так и от второго (кг2):
-Л)
= arctg
R Е2
гДе ₽ = -/•
Е\
fJsin (кДг 4- 2 \|/)
14-Pcos(A:Ar4-2\|/)
(5.64)
*(г0
Если излучает лишь первая цель р 0, то г0 гх и пеленгуется тоже лишь первая
цель. При р -» оо (излучает вторая цель), k(r0 -t\)~k(r{ -/2) и г0 —— в качестве
пеленга определяется направление на вторую цель.
Но в общем случае равносигнальное направление смещено относительно цент-
ра базы между целями на величину угловой ошибки. Действительно, из (5.64) еле-
214
Глава 5. Радиоэлектронное подавление РЭС управления оружием
дует уравнение, описывающее зависимость фазового фронта волны от аргумента
точки А (рис. 5.31):
13(ф) = arctg
( nd . )
Zg — 51Пф ,
(5.65)
где d—линейное расстояние (база) между источниками излучения 1 и 2 (рис. 5.31).
Пеленг парной цели, состоящей из двух неразрешимых источников когерентного
излучения, — это нормаль к фазовому фронту (5.65). Уравнение этой нормали —
это уравнение прямой, проходящей через точку О с угловым коэффициентом (тан-
ЭО(ф)
генсом угла наклона) а =-—Поэтому формируемая пеленгатором оценка угло-
Эф
вой координаты гантели, образованной парой когерентных излучателей:
2 А
ф* = arctg
б/со5ф 1-р~
2r0 14-2pcos\|/4-l
= arctg
Аф
2 1 + 2р cos \|/ +1 j
(5.66)
где Дф = 2л— — угловой размер (параллакс) парного источника излучения.
d
Для малых углов Аф« 1, что соответствует условию неразрешимости двух ис-
точников излучения с позиции установки пеленгатора, из (5.66) следует прибли-
женное равенство
2 ^14-2pcos\|/4-p2)
Если когерентные помехи синфазны (Дф = 0), то из (5.67) следует
Ф
2 (1 + ₽J
(5.68)
Иначе говоря, при р = 1 пеленгатор следит за центром базы (амплитудным цент-
ром тяжести гантели, образованной двумя источниками одинаковых по амплитуде
помех). При р ф 1 равносигнальное направление пеленгатора следит за некоторой
точкой А внутри базы. Если когерентные помехи противофазны (у = л), то из (5.67)
получается что
(5-69)
т. е. ошибка пеленга резко возрастает при р 1 и может превзойти угловой размер
базы, на которую разнесены излучатели когерентных помех (однако ф* обычно не-
велик).
Для объяснения этого эффекта можно рассмотреть структуру фазового фронта
электромагнитной волны, формируемой парным излучателем когерентных поме-
ховых колебаний. На рис. 5.32 показаны два излучателя (1 и 2) противофазных ко-
герентных помех.
В произвольной точке приема В на оси х = s эти колебания будут наблюдаться
с комплексными амплитудами
£, = £1e-7<₽1 e~jk г' и Ё2 = -Е2е^- e~jk , (5.70)
где Дг = r2 - Fj — разность хода лучей.
Суммарная амплитуда электромагнитной волны в произвольной точке приема
равна
Ё^ = Ez(<?)e~J,fs = Ё1 + Ё2 = Е1е~'^е~'кг'(1-^ечк&г\, (5.71)
5.4. Имитирующие активные помехи РЛС
215
Рис. 5.32. Фаза сигналов, создаваемых когерентными излучателями
о ^2 h I ^Л ®
где, как и прежде, р = —, |к| = — = — — модуль волнового вектора (пространствен-
£| л с
ная частота когерентных помех).
2л
Как только Аг возрастает на X, а фаза кДг = — Дг возрастает на 2л, при р = 1
интенсивность суммарного поля Еъ обращается в нуль. В промежутках между точ-
ками обращения в нуль Еъ изменяется вдоль оси Ох, как на рис. 5.32, т. е. имеет
периодический характер. При переходе от лепестка к лепестку Е^ происходит сме-
на фазы i3z на л. Из рис. 5.32 видно, что расстояние 5 между нулями (ширина лепе-
стка £z) для случая большого удаления r0 » d излучателей помех от радиопеленга-
тора равно
. Л Л X
5 ~ Го Sin 0 ~ Го0 ~ Гц
(5.72)
Например, при г0 = 20 км, X = 5 см, d = 5 м, тогда 5 = 200 м, так как апертуры
приемных антенн DA«s, антенны радиопеленгатора находятся в пределах одного
лепестка интерференционной картины £5[х = /(ф)].
Если интерференционную картину, развернутую на рис. 5.32 вдоль оси х изоб-
разить в полярных координатах, как на рис. 5.33, можно более наглядно наблюдать
амплитудную и фазовую характеристики суммарного поля когерентных противо-
фазных помех. На рис. 5.33 наглядно показаны скачки фазы на л по мере перехода
от одного лепестка к другому.
Рис. 5.33. Фазовый фронт волны от когерентных излучателей
При Р ф 1 фазовая характеристика на границе лепестков не имеет разрыва, а плав-
но изменяется от значения ф к значению ф ± л в интервале углов Дф конечной ши-
рины [19]. На этих интервалах (в областях фазовой инверсии), тоже складываются
216
Глава 5. Радиоэлектронное подавление РЭС управления оружием
условия, приводящие к ошибкам пеленгования. Угол между касательными к сфе-
рическому фазовому фронту волны единственного источника излучения и фрон-
та, созданного парой когерентных излучателей, равен углу между РСН и направлени-
ем на середину базы. Этот угол можно найти на основе следующих рассуждений.
При синфазных когерентных помехах комплексная огибающая и фаза суммы
полей обоих источников в точке приема О в соответствии с (5.71) может быть пред-
ставлена зависимостями (рис. 5.31)
/ (2л ]
Ех(ф) = Ех Jl + 2pcos —б/sin (р +
0£(<р) = arctg
(1-р) (nd .
---— tg —sincp
Зависимость изменений амплитуды и фазы от истинного пеленга середи-
ны базы парного источника в окрестности областей фазовой инверсии представле-
ны на рис. 5.34, а и б соответственно. Ошибка пеленгатора |ф*-<р| при этом будет
определяться соотношением (5.67).
А £Е(ф)
Рис. 5.34. Амплитуда Ет(ф) (а) и фаза $Е(ф) (б) волны
от пары излучателей в окрестности точки ЕЕ(ф) = пмп
Зависимость ошибки пеленга в случае, когда для РЭП используется когерент-
ная помеха, показана на рис. 5.35. Из графиков видно, что по мере приближения
Дф—> 180°, при [3-1,0 ошибка пеленгования резко возрастает (в 40 раз), т. е. радио-
пеленгатор дает ошибку, уводящую пеленг за базу источников излучения.
Рис. 5.35. Ошибка пеленга парной когерентной цели
Проведенный анализ исходил из того, что когерентные помехи — гармонические
колебания. Совершенно аналогичные результаты имеют место для амплитудно- и
фазомодулированных узкополосных когерентных помех.
5.4. Имитирующие активные помехи РЛС
217
Анализ показывает также, что когерентные помехи при условии r2^ r0, р = 1
и Д\|/ = л являются эффективным средством увода равносигнального направления
радиопеленгаторов любых типов, в частности — моноимпульсных радиопеленгато-
ров, за базу источников сигналов d, т. е. средством создания очень большой ошиб-
ки слежения за любой из двух целей, создающих помеховые излучения. Разумеет-
ся, для эффективности противодействия при помощи такой помехи нужно, чтобы
оба источника излучения — и сигнального, и помехового — не разрешались бы
пеленгатором, т. е. чтобы оба источника находились в главном лепестке ДНА ра-
диопеленгатора. В противном случае, есть большая вероятность разрешения радио-
пеленгатором обеих целей по отдельности и сопровождения одной из целей.
5.4.9. Помехи, мерцающие в разнесенных по пространству точках
Мерцающие помехи — некогерентные или когерентные двухточечные с глубо-
кой амплитудной модуляцией при некоторых условиях тоже могут оказать эффек-
тивное противодействие пеленгаторам. Рис. 5.36, а иллюстрирует принцип созда-
ния синхронных (рис. 5.36, 6) и несинхронных (рис. 5.36, в) мерцающих помех.
Радиопеленгатор
Рис. 5.36. Мерцающие помехи радиопеленгаторам
В первом случае оба летательных аппарата, попеременно излучающие помеху,
обмениваются информацией о частоте и фазе меандра, манипулирующего ампли-
туду сигнала для создания мерцаний
Гы =7~- (5.74)
Длительность излучения с каждой цели
Во втором случае такой синхронизации нет. Кроме того, различают мерцаю-
щие помехи с малой базой, когда мерцающие излучатели находятся в пределах одной
позиции (например, на концах крыльев одного самолета). Если излучающие точки
находятся на разных позициях, говорят о мерцающих помехах с большой базой. На
малой базе помехи могут быть когерентными: на одном самолете нет технических
трудностей для их создания. На большой базе вынужденно применяют, как прави-
ло, некогерентные помехи. Иначе для и их создания необходимо применять радио-
линию обмена информацией о сигнале управления мерцаниями.
218
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Известно несколько способов создания мерцающих помех на большой базе.
Первый способ состоит в том, что один из самолетов считается ведущим, а вто-
рой — ведомым. Ведущий самолет излучает свою мерцающую (манипулированную
меандром по амплитуде) помеху независимо и навязывает дистанционно излучение
с синхронным и синфазным мерцанием ведомому ЛА. По второму способу оба са-
молета — ведомые, а синхронное мерцание навязывается извне с третьего самолета.
Третий способ состоит в том, что в паре самолетов мерцает сигнал, излучаемый
только с одного борта. Второй борт излучает непрерывную шумовую помеху. Четвер-
тый способ предусматривает использование для синхронизации электронных часов,
навязывающих фазу генераторам меандра, манипулирующего амплитудой мерца-
ющей помехи.
По мере сближения радиопеленгатора с парной целью, излучающей синхронные
мерцающие помехи, наблюдаются следующие явления. Поскольку Гм обычно вели-
ко, любой радиопеленгатор следящего типа с точностью до переходных процессов
повторяет картину смены пеленгов от <р1 до <р2 с размахом Дер, как на рис. 5.37, до
Рис. 5.37. Изменение пеленга при мерцании помехи
тех пор, пока не наступит разрешение целей, т. е. пока Д<р меньше угла (рр при кото-
ром наступает разрешение целей и парная мерцающая цель находится в главном
лепестке ДНА.
5.4.10. Пространственноразнесенные помехи
радиосистемам самонаведения
Методы противодействия измерению пеленга и сопровождению излучающих
целей по направлению очень важны для организации РЭП системам самонаведе-
ния противорадиолокационных ракет [56]. Бортовые информационные системы
таких ракет определяют угловые координаты излучающих целей, сопровождают эти
цели по направлению и обеспечивают работу системы управления для реализации
требуемого закона наведения ракеты. Если радиопеленгатор установлен на ракете,
наводимой на парную цель (рис. 5.38), до тех пор, пока Д<р< срр, РСН головки само-
наведения ракеты ориентируется на энергетический центр базы целей, имея мгно-
венное значение промаха по каждой цели:
d
дп =-cos<p.
(5.75)
Начиная с того момента времени, когда наступит разрешение цели и разнесен-
ного с ней в пространстве постановщика помехи, т. е. когда д<р = Дфр, ракета пойдет
в сторону одной из целей с максимальной поперечной перегрузкой утах и за время
= (5.76)
*отн
5.4. Имитирующие активные помехи РЛС
219
Ракета
Рис. 5.38. Наведение на парную цель
успеет из промаха Дп выбрать еще величину
1 1 (г У
Л = — 7 Л/2 = — 7 'Omin
^0 q ./max4-*1 л ^max у »
\ *отн >
(5.77)
(5.78)
причем на больших расстояниях r( » d справедливо
_ dcoscp
'Omin ~ 7 •
АфР
Объединив решения (5.77) и (5.78), можно получить результирующий промах
по второй цели за время Д/ < :
. d 1 . J2cos2(p
h-— coso— /тяу-----——L = Лп -An.
2 2Утах п 0
Эта зависимость (5.79) представлена на графиках рис. 5.39.
(5.79)
Рис. 5.39. Зависимость промаха от базы разноса мерцающих помех
Из рис. 5.39 видно, что существует оптимальный размер базы JonT:
1 АфрИ0ТН
Q =-------------
“опт ~ . >
2 Vmax COS ф
(5.80)
для которого промах в конце процесса наведения (терминальный промах) h = йтах —
максимален:
_ Афр^ОТЯ
iax •
°Jmax
(5.81)
Так, например, при Дсрр = 6°, Иотн = 1000 м/с и/тах = 9gиз (5.81) следует: йтах = 100 м.
Более точное решение относительно оценки <р*(г) * для следящего радиопеленгато-
ра под влиянием мерцающей помехи можно получить методом гармонической или
220
Глава 5. Радиоэлектронное подавление РЭС управления оружием
статистической линеаризации пеленгационной характеристики [19], но смысл реше-
ния и оценки величины промаха по парной цели не изменится. Точно также не да-
ет принципиальных отличий случай когерентных и некогерентных мерцающих по-
мех. Хотя принципиально эффективность когерентных помех будет несколько выше.
5.4.11. Подавление помехами взаимокорреляционных систем
Взаимокорреляционные РЭС, к которым относятся радиопеленгаторы с корре-
ляционной обработкой сигналов, разностно-дальномерные и суммарно-дальномер-
ные системы местоопределения, а также и некоторые другие радиосистемы извлече-
ния информации, составляют важный класс радиоэлектронных систем. Подобные
РЭС оказываются очень устойчивыми против сосредоточенных по пространству
помех. Однако известны и применяются методы радиопротиводействия взаимокорре-
ляционным системам. Помехи, при помощи которых реализуются эти методы РЭП,
относятся к специальным пространственноразнесенным (многоточечным) помехам.
Высокой эффективностью для РЭП взаимокорреляционным системам обладают
повторяющиеся шумовые помехи. На рис. 5.40, а показаны осциллограммы, иллю-
стрирующие способ формирования одноточечной совмещенной шумовой помехи,
сформированной станцией активных шумовых помех в виде последовательности
<5-82)
/=-оо
достаточно длинных шумовых импульсов £(/) со спектральной плотностью (/)
(рис. 5.40, б) и автокорреляционной функцией А^(т) (рис. 5.40, в).
<------------►
Рис. 5.40. Повторяющаяся шумовая помеха
Эффективная ширина спектра Д/щП и интервал корреляции Дтэ связаны простой
зависимостью
(5.83)
5.4. Имитирующие активные помехи РЛС
221
Повторяющаяся шумовая помеха (5.82) будет иметь повторяющуюся автокор-
реляционную функцию, как на рис. 5.40, г\
Ч W = (т - 'т)} = ZK (* - 'T)cos<o0 (т - /Т)}. (5.84)
/ /
Введенные обозначения позволяют исследовать реакцию взаимокорреляцион-
ного радиопеленгатора рис. 5.40 на повторяющиеся шумовые помехи. Напряжение
на выходе интегратора в блоке взаимокорреляционной обработки
т
z(At*) = J £,(/ — Ат*)^(/ - At)dt = А^(Ат * — А/) =
° , . (5.85)
= (^T * _/A/)cos(Onp(AT * -i&t) >
i
имеет форму, как на рис. 5.40, г. Как видно, выходной эффект радиопеленгатора при
совмещенной повторяющейся шумовой помехе имеет многопиковый отклик, вну-
три которого нет возможности выбрать истинный максимум ^7^(At*)cos(co0At*)
i
и по нему точно измерить пеленг цели <р*. Ошибочный захват одного из ложных
пиков, отстоящих на кТ относительно истинного, даст ошибку пеленга
<р*=-Л7’> (5.86)
d
и вероятность такого ошибочного захвата весьма высока.
Разумеется, пачка принимаемых пеленгатором шумовых импульсов не может
иметь бесконечную длительность (пачка не может содержать бесконечное число им-
пульсов). Конечная длительность пачки приводит к тому, что пики оцененной авто-
корреляционной функции будут убывать с ростом номера / в формуле (5.85). Поэтому
принципиально можно избежать ложного захвата некоторого бокового пика вместо
самого большого центрального. Но шум, на фоне которого взаимокорреляционный
пеленгатор наблюдает сигнал, препятствует различению пиков автокорреляцион-
ной функции.
Для противодействия взаимокорреляционному пеленгатору (рис. 5.41) может
быть поставлена парная коррелированная шумовая помеха.
Пеленгатор
с взаимокорреляционной обработкой
Рис. 5.41. Действие пары шумовых помех на пеленгатор
с взаимокорреляционной обработкой
222
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Считая фронты волн от обоих излучателей плоскими, можно представить сум-
марные колебания на выходах антенн Аь А2, как
и1(г) = ^(/)+^(/-Д/2); ы2(/) = £(/-Д/) + ^-Д/2-Д/), (5.87)
С с
Выходной эффект взаимокорреляционного измерителя радиопеленгатора в та-
кой ситуации:
т
г(Ат*) = |[^(/--Д/ + Дт*) + {;(/-Д/2 - Д/ + Ат*) £(/) + - ДГ2) dt. (5.88)
о
Если £(/) — неповторяющаяся шумовая помеха с однопиковой автокорреляци-
онной функцией Аг^(т) = ^(г)^(/ + т)^ = А^(т)со8сопрт, то выходной эффект г(дт*)
будет равен
г(Дт *) = 2К^ (Ат * — Д/) + (Ат * —А/ - Д/2) + (Ат * -А/ - Д/2). (5.89)
Как следует из (5.89), основной пик выходного эффекта z^At* - Af j всегда вдвое
больше любого бокового пика и это различие позволяет пеленгатору их селектиро-
вать. Для выравнивания пиков нужно принимать специальные меры, формируя
помехи разного уровня.
Если помехи (/) и £>2 (/) (см. рис. 5.41) — некоррелированные шумы, для ко-
торых /Г12 (<)=&№(')) = 0, то используя в составе схемы пеленгатора перестра-
иваемую измерительную линию задержки для формирования оценки Дт* в цепи вто-
рого канала приемника, радиопеленгатор может сформировать выходной эффект
т
z( Дт *) = (/)^2 (t)dt = К12 (Дт * -Д/ - Д/2) + Кп (Дт * -Д/ - Д/2). (5.90)
о
Как видно, парное некогерентное излучение помех из разнесенных в простран-
стве точек дает двухпиковый выходной эффект на выходе взаимокорреляционного
пеленгатора. Уровни этих пиков одинаковы, если равны мощности помех и ^2.
Временные сдвиги пиков таковы, что
/1-/2 = А^12- (5.91)
Изменяя ДГ12 со временем, помеху делают уводящей. Приемник подавляемого
пеленгатора не может достоверно, с вероятностью единица, выделить из двух пи-
ков истинный, не зная априори Д/j и Д/2.
Если цели отражают запросные сигналы РЛС (радиопеленгатор — часть актив-
ной РЛС), то эти сигналы также сформируют полезный сигнальный выходной
эффект zc(At). Заградительные шумовые помехи и £,2 всегда будут накрывать от-
клик zc (Ат - А/) при любых вариациях переменной А/2. Поэтому такая шумовая по-
меха может надежно подавить радиопеленгатор, если выполнено условие
4^>гс(д4 (5.92)
Следует учесть, что (т) пропорциональна мощности шумовой помехи
Рш =^i(0- Таким образом, мощная (вернее — обладающая большим энергетиче-
ским потенциалом) некогерентная помеха или £,2 подавляет пеленгатор радиолока-
ционной станции.
5.4. Имитирующие активные помехи РЛС
223
5.4.12. Помехи многопозиционным радиолокационным системам
Современные многопозиционные системы осуществляют двухэтапную обработку
сигнала. Этот принцип иллюстрируется рис. 5.42.
Антенная Линии Измерители
система ретрансляции линий положения
Рис. 5.42. Двухэтапная обработка сигнала в многопозиционных РЭС
Если требуется измерить местоположение R* излучающего объекта, то прежде
всего измеряют дальности, радиальные скорости, угловые координаты, разности или
суммы расстояний, т. е. пространственные параметры X*-. Затем результаты этих
измерений транслируются на центральный пункт обработки информации (ЦПОИ),
где реализуются алгоритмы вторичной обработки (второй этап обработки) для оп-
ределения оценки координат объекта R* = 77(Х* j.
Первичными измерителями могут быть радиодальномеры, пеленгаторы, изме-
рители взаимной корреляции. Тот или иной конкретный состав измерителей со-
ставляет специфику каждой системы местоопределения. В триангуляционной сис-
теме в качестве первичных измерителей используются пеленгаторы (в том числе
моноимпульсные) в трех разнесенных точках приема. В разностно-дальномерных
и суммарно-дальномерных системах используются взаимокорреляционные измери-
тели. В радиолокационных активных системах используются радиодальномеры,
пеленгаторы и измерители скорости сближения с целью. В активно-пассивных
радиолокационных измерителях добавляется взаимокорреляционный измеритель
разности расстояний.
Обобщенные координаты объектов R= {х0, у0, Zq} в трехмерном декартовом про-
странстве связаны с пространственно-временными параметрами сигналов парамет-
рическими уравнениями
х0 = М> Mli Л) = ИМ’ М» МзВ ~ ИМ’ М> МП (5.93)
где Xz, i= 1...3 — три параметра, соответствующие трем линиям положения (трех
поверхностей), точкой пересечения которых и будет истинное положение цели.
Использование менее трех независимых радиотехнических параметров делает сис-
тему уравнений (5.93) неопределенной, а более трех — избыточной.
Известны два основных варианта применения помех против многопозицион-
ных систем местоопределения.
Первый вариант основывается на применении дезинформирующих помех. С по-
мощью пространственноразнесенных помех, связанных с целью, всегда можно вне-
сти ошибку в показания первичных измерителей Xz + AXZ, z = 1...3 любого типа. Для
этого достаточно знать конкретные типы радиотехнических измерителей, применя-
224
Глава 5. Радиоэлектронное подавление РЭС управления оружием
емых в подавляемой многопозиционной системе, и применить самую эффектив-
ную против нее помеху. В этих условиях, в соответствии с уравнениями (5.93),
многопозиционная система будет давать ложные координаты
х = х0 + Ах = Fx (Xl + AXj ;Х2 4-ДХ2 Д3 4-ДХ3);
у = у0 +Ду = 4-ДХ|;Х2 +ДХ2;Х3 +ДХ3); >
z = Zq 4" Дг — F- (Xj 4- ДХ,рХ2 4- ДХ2;Х,3 4- ДХ3),
(5.94)
т. е. определять местоположение ложной цели. Такое противодействие равносиль-
но перенацеливанию (по пространственным координатам) измерителей с истинной
цели на ложную. Если дезинформирующая помеха обладает возможностью синх-
ронно управлять ошибками ДЛ^; ДХ2; ДХ3, она может помещать ложную цель в лю-
бую заданную точку пространства {хл; ул; гл}. Если управление ошибками со сторо-
ны постановщика помех невозможно, координаты ложной цели будут случайными,
неопределенными для подавляемой системы.
Второй вариант предполагает применение маскирующей помехи. Если применя-
ются такие пространственноразнесенные помехи, которые подавляют (срывают сле-
жение или измерения) в первичных радиотехнических измерителях, вычисления в
соответствии с уравнениями (5.93) становятся невозможными, т. е. многопозици-
онная система подавляется полностью. А если в качестве первичных радиотехни-
ческих измерителей применяются радиодальномеры, измерители скорости, пелен-
гаторы со сканированием, подавление этих измерителей, в частности, и многопо-
зиционных систем вообще, возможно осуществить с помощью совмещенных помех.
В целом ряде случаев помехи создают в радиотехнических измерителях случай-
ные ошибки ДХ/, i = 1...3. Тогда в соответствии с (5.94) и координаты ложных целей
будут случайными.
Пример воздействия помех на двумерную триангуляционную систему, работа-
ющую в плоскости Оху, иллюстрируется рис. 5.43.
Рис. 5.43. Пример воздействия помех на двумерную
триангуляционную систему
5.4. Имитирующие активные помехи РЛС
225
В отсутствии помех в точках с координатами х = 0, х = d (у = 0) измеряются пелен-
ги цели:
Xi =(cos<p!)*; Х2 = (cos<p2 )*• (5.95)
По отсчетам определяются истинные пространственные координаты цели —
4(0,0),Л2(0,</):
,_J(sin<p2) (coscpj
х° ” / . г
(вшфг-ф!)
* _ ^(втфгУ^тф!)*
Уо-—Г F-
(втфг-ф^
(5.96)
При необходимости могут быть определены дальности до цели:
=Vr°) +Н°) ’ ro='\l{d-xo) + (%) • ру/;
Воздействуя на пеленгаторы, помехи вызывают ошибки измерения пеленгов Xj
и X*. Эти ошибки приводят к ошибкам определения пространственных координат.
Используя (5.96) и (5.97) можно вычислить ошибку местоположения, например,
по координате х:
Дх = х-х0 =----------jfsincp! sin<p2A<Pi + со8ф1со8ф2Дф2], (5.98)
где Д<Р12 — ошибки измерения пеленгов.
Если ошибки измерений случайные взаимно независимые с одинаковой дис-
персией
оФ1=аФ2=(дФ?)=:(дФ?), (5.99)
то среднеквадратическая ошибка измерения координаты х равна
=--7----гд/sin2 (p! sin2 Ф2 + cos2 cos2 Ф2 . (5.100)
COS^-^J
Рис. 5.44. Ошибка местоопределения
(5.101)
Из этого решения видно, что относительная ошибка измерения координаты х:
^ = Оф (5-102)
a v
не зависит от пеленга, но возрастает с ростом ошибки пеленгования оф.
226
Глава 5. Радиоэлектронное подавление РЭС управления оружием
5.5. Сигналоподобные помехи
Для наиболее успешной и эффективной дезинформации противника создают
помехи, совпадающие с информативным сигналом по большинству параметров.
Такие помехи, в максимальной степени подобные сигналу, называют сигналопо-
добными. В процессе формирования сигналоподобных помех принимаемый сиг-
нал подавляемого РЭС запоминают и воспроизводят результат запоминания, из-
меняя значения некоторых параметров.
Устройства запоминания и воспроизведения сигналов (УЗВС) являются состав-
ной частью систем информационного обеспечения современных многофункциональ-
ных комплексов различного назначения. Они предназначены для запоминания
частотно-временной и пространственной структуры принимаемых радиосигналов;
выдачи данных в системы измерения и анализа параметров этих сигналов; воспро-
изведения в необходимые промежутки времени запомненных сигналов.
К частотно-временным характеристикам сигнала относятся: несущая частота,
форма, длительность и период следования импульсов, форма и ширина спектра
сигнала, параметры амплитудной, фазовой и частотной модуляции, моменты при-
ема сигналов. К пространственным характеристикам радиосигнала относятся: на-
правление его прихода, параметры продольной и поперечной функций простран-
ственно-временной когерентности электромагнитного поля и параметры эллипса
поляризации радиосигнала в раскрыве приемной антенны.
Можно выделить три основных случая, когда запоминание и воспроизведение
радиосигнала оказывается необходимым [53]. Во-первых, при отсутствии возмож-
ности обработки сигнала в реальном масштабе времени с целью изучения его тонкой
пространственно-временной и спектральной структуры. Во-вторых, при создании
РЭС, работа которых основана на оптимальной обработке когерентных и кодиро-
ванных импульсных последовательностей (когерентно-импульсных РЛС, спутнико-
вых радионавигационных систем и др.). В третьих, при разработке систем радио-
электронной разведки и радиоэлектронного подавления.
Для запоминания радиосигналов могут быть использованы различные физичес-
кие принципы, основными из которых являются запоминание с использованием
магнитной записи (на магнитной ленте, диске); запоминание на устройствах элект-
ростатической записи (например, на электронно-лучевых трубках с мозаичным
экраном); запоминание с помощью многоканальных (матричных) усилительно-ге-
нераторных устройств; запоминание на высокочастотных и ультразвуковых лини-
ях задержки (рециркуляторах); дискретно-аналоговое запоминание на приборах с
переносом зарядов; цифровое запоминание.
Из всех перечисленных физических принципов, на основе которых могут быть
созданы УЗВС, современным требованиям удовлетворяет лишь запоминание сиг-
налов, представленных в цифровой форме [53].
Значительные достижения микроэлектроники и микросхемотехники привели к
созданию принципиально нового типа устройств первичной обработки радиосиг-
налов — цифровых устройств запоминания и воспроизведения (восстановления)
радиосигналов и электромагнитных волн. С их появлением решена задача созда-
ния и хранения цифровых образов (копий) радиосигналов в течение практически
неограниченного времени. При этом реализуются возможности воспроизведения
сигналов в нужный момент для анализа или извлечения информации, для иденти-
фикации источников сигналов, для использования хранящихся в памяти копий
5.5. Сигналоподобные помехи
227
сигналов в качестве опорных колебаний при реализации оптимальной обработки,
для синтезирования разнообразных преднамеренных помех и т. п. Цифровые уст-
ройства запоминания и воспроизведения сигналов (ЦУЗВС) существенно расши-
рили набор функций различных РЭС и улучшили показатели эффективности их
функционирования. Так, изобретение ЦУЗВС позволило повысить эффективность
радиоподавления РЭС за счет создания сигналоподобных помех, наиболее стойких
к применяемым мерам помехозащиты.
Нельзя, однако, считать, что создание ЦУЗВС является единственным направ-
лением повышения эффективности работы РЭС. Устройства запоминания и вос-
произведения сигналов, действующие на иных физических принципах, чем циф-
ровые, небезуспешно применяются и разрабатываются в настоящее время.
5.5.1. Аналоговые устройства запоминания
и воспроизведения параметров сигналов
Разработка УЗВС всегда считалась с научно-технической точки зрения весьма
трудной задачей. Вплоть до недавнего времени для запоминания и воспроизведения
высокочастотных сигналов РЭС (точнее, частоты этих сигналов) использовались
аналоговые устройства. В САП в середине 60-х гг. XX в. практическое применение
находили два типа аналоговых устройств запоминания (УЗ): многоканальные УЗ
частоты на основе матричных приемников (устройства длительного запоминания
частоты) и одноканальные УЗ частоты, использующие принцип построения гене-
ратора с запаздывающей обратной связью — рециркулятора (устройства кратков-
ременного запоминания частоты). Структура и принцип работы матричного при-
емника рассматривались выше, в гл. 1.
На рис. 5.45 изображена простейшая схема рециркулятора. Сигнал 5С(/) с не-
сущей частотой Ус поступает на вход широкополосного усилителя ШУ и усиливает-
ся в нем. С выхода усилителя часть сигнала через направленный ответвитель НО
подается на высокочастотную линию задержки ЛЗ, где задерживается на время т3,
а затем снова поступает на вход широкополосного усилителя ШУ.
Рис. 5.45. Простейшая схема рециркулятора
В зависимости от длительности тс принимаемого сигнала и его задержки т3 на
ЛЗ могут иметь место два режима работы этого устройства:
1) длительность сигнала тс меньше времени запаздывания (тс <т3), рис. 5.46, а\
2) длительность сигнала тс больше времени запаздывания (тс >т3), рис. 5.46, в.
В первом случае (тс < т3) на выходе устройства запоминания частоты в ответ
на каждый входной импульс сигнала РЭС sc (/) образуется последовательность им-
пульсов, представляющая собой пачку копий входного сигнала sc (г):
N
mbW = £ = 0,1,2,..., jV, (5.103)
к=0
где к — номер копии в последовательности, a N— число копий в пачке.
228
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Рис. 5.46. Элементы канала восстановления частоты принимаемого сигнала
Число N задается устройством управления САП с учетом того, чтобы к прихо-
ду очередного импульса РЭС устройство было готово к его запоминанию и вос-
произведению. Для этого через интервал времени, несколько меньший периода по-
вторения импульсов подавляемого РЭС, производится принудительное прерыва-
ние текущей последовательности копий.
Период следования высокочастотных импульсов длительности тс в пачке равен
времени задержки. Амплитуда импульсов определяется амплитудой импульса, посту-
пившего на вход ЛЗ с НО, потерями в ЛЗ и коэффициентом усиления ШУ (рис. 5.46).
Практическая реализация этого устройства встречает значительные трудности в связи
с необходимостью применения высокочастотных линий, позволяющих обеспечить
задержку радиоимпульса на необходимую величину. Так, при использовании коак-
сиальных линий задержки, в которых радиосигнал распространяется с фазовой
скоростью Иф ~2-108м/с, задержка сигнала на т3= 1 мкс обеспечивается линией,
длина которой / = КфТ3 « 200 м. При использовании спиральных линий задержки
удается снизить длину линии на порядок.
Таким образом, в режиме 1 устройство работает как обычный усилитель ра-
диоимпульсов, циркулирующих в цепи: вход ШУ — выход ШУ — НО — линия
задержки — вход ШУ. Большая часть мощности импульсов с выхода ШУ посту-
пает в усилитель-модулятор, где наделяется помеховой модуляцией. После усиле-
ния в усилителе мощности помеховые импульсы излучаются передающей антен-
ной САП в направлении подавляемого РЭС.
Обратим внимание на то, что в таком режиме устройство выполняет функции
запоминания и воспроизведения коротких импульсных сигналов, а не только их
несущей частоты.
Во втором случае (тс > т3) усилитель переходит в режим автогенерации и за-
поминание сигнала (его частоты) возможно на длительное время, если выполни-
5.5. Сигналоподобные помехи
229
ются условия баланса амплитуд и фаз (рис. 5.46, г). На выходе УЗВС в этом случае
образуется непрерывный высокочастотный сигнал
; к = 0,1,2,..., N.
где <ов = 2л/в = 2л /с ±—
\ 2т
Условие баланса фаз будет выполнено, если время задержки т3 кратно периоду
высокочастотных колебании 7В = —:
т3=кТв, или Тв =—
./в
(5.104)
3’ 2 ’ 3 п
Отсюда следует многочастотность рассматриваемого УЗВС. Теоретически авто-
колебания в устройстве могут возникать на собственных частотах генерации
Л=—. (5.105)
Т3
Практически из-за неравномерности амплитудно-частотной характеристики
усилителя ШУ, в установившемся режиме автоколебания возникают и поддержи-
ваются преимущественно на одной или нескольких частотах, соответствующих
наибольшим значениям коэффициента усиления ШУ. В качестве ШУ может ис-
пользоваться ЛБВ, амплитудно-частотная характеристика А"(/) которой обычно не-
равномерна (рис. 5.47). Сразу после прихода запоминаемого импульса возбужде-
ние УЗВС происходит непосредственно на несущей частоте fc этого импульса. За-
тем наблюдается постепенный уход частоты («сваливание») на ближайшую к fc
собственную частоту генерации устройства с запаздывающей обратной связью.
Рис. 5.47. Амплитудно-частотная характеристика усилителя на ЛБВ
Таким образом, в случаях, когда на входе ШУ текущий запаздывающий сигнал
накладывается во времени на принятый или на предшествующий ему запомнен-
ный сигнал, частота выходного сигнала ШУ в процессе рециркуляции будет стре-
миться к одной из соседних с fc собственных частот и после нескольких циклов
станет равной этой частоте. На какой конкретно частоте произойдет запоминание
зависит от ее близости к fc и от неравномерности АЧХ УЗВС в целом.
На рис. 5.47 кружками со стрелкой обозначены те участки частотного диапазо-
на, где возможно запоминание частоты в течение длительного времени. Чтобы
обеспечить длительное запоминание сигнала на частоте fB, близкой к частоте вход-
ного сигнала, необходимо иметь ЛБВ с равномерной амплитудно-частотной харак-
теристикой.
Из выражений (5.104) и результатов экспериментов следует, что точность запо-
минания частоты равна
3/ = 4~- (5.Ю6)
230
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Следовательно, для достижения высокой точности воспроизведения необходимо
иметь высокочастотные линии задержки, обеспечивающие значительную величи-
ну^. Так, если необходимо получить 8/ = 1000 Гц, то задержка должна быть т3 = 10~3 с.
Для получения значительных задержек радиосигналов (десятки, сотни мкс) могут
быть использованы линии задержки на поверхностных акустических волнах (ПАВ)
или световоды. В таких линиях радиосигнал в соответствующих преобразователях
преобразуется в звуковую или световую волну, затем задерживается в линии задерж-
ки, после чего обратным преобразованием «свет — радиоволна» или «звук — ра-
диоволна» восстанавливается высокочастотный сигнал.
Еще раз обратим внимание на то, что в режиме 2 устройство осуществляет за-
поминание только частоты входного сигнала, а не самого сигнала.
Выше говорилось о необходимости выполнения в данном режиме условий ба-
ланса фаз и амплитуд. Как было установлено, условие баланса фаз определяет ли-
ния задержки. Для обеспечения баланса амплитуд в цепь обратной связи включа-
ют усилитель, столь же широкополосный, как и ШУ. Обычно в качестве обоих
усилителей выбирают ЛБВ. Усилитель в цепи обратной связи должен обеспечивать
компенсацию потерь в ответвителе НО и в линии задержки. Уравнение баланса
амплитуд записывается в виде
Кл (t/,co). Кос (со) = 1, (5.107)
где Кл (t7, со) — коэффициент усиления (передачи) линии, включающей ШУ, НО и
линию задержки, как функция амплитуды входного сигнала и частоты; Кос (со) —
коэффициент усиления усилителя в цепи обратной связи.
Смысл этого соотношения сводится к тому, что запаздывающий сигнал, посту-
пающий на вход ШУ из цепи обратной связи должен быть по амплитуде равен
породившему его принятому сигналу РЭС.
Схема рециркулятора, в котором практически в любых условиях обеспечивает-
ся условие баланса амплитуд, приведена на рис. 5.48. Это достигается с помощью
ЛБВ в цепи обратной связи.
Рис. 5.48. Схема рециркулятора, обеспечивающего
условие баланса амплитуд
5.5.2. Цифровые устройства запоминания
и воспроизведения радиосигналов
Недостатки аналоговых устройств запоминания и воспроизведения сигналов в
значительной мере преодолены в цифровых устройствах запоминания и воспроиз-
ведения. Однако внедрение ЦОС в РЭС не исключает применения аналоговой тех-
ники. Не утратили своего значения такие широко применяемые высокочастотные
усилители, как ЛБВ, которые широко применяются в САП для осуществления раз-
нообразной амплитудно-фазовой модуляции. Нельзя обойтись также без аналого-
вых элементов при разработке приемных антенных и других устройств. Но тем не
5.5. Сигналоподобные помехи
231
менее, наиболее перспективными в настоящее время считаются ЦУЗВС. Находят
применение три способа цифрового запоминания и воспроизведения сигналов [53].
Первый способ основан на запоминании последовательности дискретизирован-
ных по времени и квантованных по уровню отсчетов мгновенных значений радио-
сигнала $(/). Цифровой образ радиосигнала запоминается и затем, при необходи-
мости, воспроизводится цифро-аналоговым преобразователем.
Второй способ — амплитудно-фазовый. Способ предполагает цифровое пред-
ставление амплитуды (огибающей) 5С(/) и фазы (рс(/) радиосигнала. Запомина-
ние отсчетов амплитуды S^t) и фазы (рсд(/) производится в оперативном запоми-
нающем устройстве (ОЗУ). Воспроизведение аналоговой копии сигнала (/) проис-
ходит путем амплитудной и фазовой модуляции высокочастотного сигнала местного
высокостабильного гетеродина. Законы амплитудной и фазовой модуляции фор-
мируются в соответствии с цифровыми кодами амплитуды и фазы, считываемыми
из ОЗУ.
Третий способ — спектральный. Этот способ предполагает представление вход-
ного сигнала sc (/) в виде его спектрального образа 5С (со) и дальнейшую его циф-
ровую обработку. При этом широко используются алгоритмы быстрого прямого и
обратного преобразования Фурье. В отличие от двух предыдущих способов, в па-
мять ОЗУ записываются цифровые образы спектральной плотности 5СД (со) сигна-
ла, а восстановление аналоговой копии входного сигнала осуществляется устрой-
ством обратного БПФ (ОБПФ).
В САП применяются одноканальные и двухканальные однобитовые ЦУЗВС.
Одноканальные однобитовые ЦУЗВС просты в разработке и дешевы в производ-
стве. Однако известные технические решения таких устройств имеют ряд недостат-
ков, главным из которых является заметное искажение аналоговой копии восстанов-
ленного сигнала, что связано с влиянием различных шумов и паразитных излуче-
ний на эффективность функционирования ЦУЗВС. Более устойчивы к воздействию
помех двухканальные ЦУЗВС квадратурного типа, в которых реализуется квазиоп-
тимальная цифровая обработка сигналов.
Процесс обработки принятого сигнала в ЦУЗВС можно представить в виде трех
основных этапов. Во-первых, прием и дискретизация входных сигналов. Во-вторых,
хранение в памяти цифровых образов этих сигналов. В-третьих, списывание циф-
ровых образов из памяти и воспроизведение сигналов в аналоговой форме.
Обобщенная структурная схема ЦУЗВС представлена на рис. 5.49.
Рис. 5.49. Обобщенная структурная схема ЦУЗВС
232
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Радиосигнал sc(/), принятый приемником Прм, поступает на смеситель Смь
куда также подается сигнал ц, (/) внутреннего гетеродина Г, частота которого сог (/)
близка к средней частоте сос принятого сигнала sc(t). Частота сигнала понижается
до значения сопрс = сос -сог, обеспечивающего работу цифрового устройства. Если
быстродействие цифровых блоков ЦУЗВС реализует обработку сигналов на часто-
те сос, то понижение частоты необязательно.
АЦП производит цифровое кодирование аналогового сигнала scnp(/) или его
спектральной плотности 5С (со) После очищения цифровой копии сигнала от пара-
зитных гармоник в цифровом фильтре ЦФ цифровой образ сигнала $сц (/) или его
спектральной плотности 5СЦ (со) запоминается в ОЗУ. Цифровые слова 5СЦ (/) или
•Усц (со), списываемые из ячеек ОЗУ, преобразуются в ЦАП в аналоговый сигнал
$прВ (0- Средняя частота восстановленного сигнала лпрв (z) равна сопр, поэтому для
восстановления точной копии входного радиосигнала sc (z) с помощью смесителя
См2 и местного гетеродина Г спектр низкочастотного сигнала 5пр в (z) смещается
на частоту сос = сог + сопр. Аналоговый фильтр Ф устраняет паразитные гармоники,
порожденные смесителем См2. В результате на его выходе формируется копия (z)
исходного сигнала sc(t).
Работу АЦП, ОЗУ и ЦАП координирует специализированное устройство управ-
ления УУ.
5.5.3. Устройства запоминания и воспроизведения амплитуды
Узкополосный радиосигнал удобно представлять в виде квазигармонического
колебания
sc (/) - 5С (/)cos[<oc/ + <рс (/)],
где 5c(z) и Фс(О — функции, медленно меняющиеся по сравнению с coscocZ.
Устройство запоминания и воспроизведения амплитуды (УЗ В А) предназначе-
но для выделения огибающей 5С (/) с целью определения закона амплитудной мо-
дуляции, запоминания ее в цифровой форме и воспроизведения в аналоговой фор-
ме этой огибающей. Знание закона амплитудной модуляции позволяет проводить
идентификацию сигналов различных РЭС, что имеет большое значение для фор-
мирования так называемого формуляра целеуказания (ФЦУ). ФЦУ используется в
комплексах РЭБ САП для назначения порядка подавления РЭС и выбора соответ-
ствующих помеховых сигналов. Информация о законе амплитудной модуляции
особенно важна при ведении радио- и радиотехнической разведки и в случаях со-
здания негативных помех РЛС, помех ГСН с открытой частотой сканирования, а
также приемникам радиоканалов, по которым ведется обмен информацией с ис-
пользованием амплитудно-модулированных радиосигналов.
При амплитудной модуляции модулированное колебание принимает вид
5с (0 = ^ам Е1 + w/(r)]cos((0c/ + <РО ) = Sc (z)cos(<0cr + ф0),
где 5’ам — амплитуда сигнала; /(z) — модулирующая функция, определяемая так,
чтобы |/(z)|<l; 5С (г) = 5ам [1 + — огибающая радиосигнала; т — коэффици-
ент модуляции (0 < т < 1).
Структурная схема УЗВА приведена на рис. 5.50.
Огибающая радиосигнала 5c(z) выделяется на выходе амплитудного детекто-
ра АД. В АЦП проводятся квантование и дискретизация 5С (/). Как правило, огибаю-
5.5. Сигналоподобные помехи
233
Рис. 5.50. Структурная схема УЗВА
щая 5С(/) представляет собой низкочастотный процесс. Наивысшая частота огиба-
ющей 5С (/) мала по сравнению со средней частотой спектра сигнала «сос, по-
этому к АЦП не предъявляются высокие требования по быстродействию. Однако
все же для передачи структуры 5С (z) без искажений применяются АЦП, способ-
ные формировать цифровую копию 5ц (/) кодовыми числами со значительным ко-
личеством двоичных разрядов. Это связано с большим динамическим диапазоном
изменения амплитуды принимаемого радиолокационного сигнала и необходимостью
измерения этой амплитуды с высокой точностью при создании «интеллектуальных»
помех, к числу которых относятся, например, негативные (инверсные) помехи.
В ОЗУ записывается цифровая копия огибающей принятого сигнала 5Ц(/). По
сигналам управления, поступающим из устройства управления УУ, цифровые сло-
ва 5Ц (/) списываются из ОЗУ и поступают в устройство формирования огибаю-
щей помехи УФОП, где в цифровом виде формируется модулирующая функция
5ПЦ (г) помехового сигнала. Огибающая помехового сигнала 5П (/) в аналоговой
форме образуется на выходе ЦАП и после фильтрации в фильтре Ф поступает в
модуляторы САП, которые формируют высокочастотный помеховый сигнал на
несущей частоте подавляемой РЛС.
Для подавления каналов РЛС часто используется шумовая помеха. Обычно эта
помеха применяется в сочетании с другими видами помех: уводящих, прерывис-
тых (мерцающих), имитирующих, сигналоподобных и некоторых других. При со-
здании сигналоподобных помех САП излучает аддитивную смесь, состоящую из
имитирующей помехи $и(/) и маскирующей составляющей sM(/):
М') = 5и(')+5м(')- (5.108)
Такая помеха получила название комбинированной имитирующей и маскиру-
ющей помехи (КИМ-помеха).
Маскирующая составляющая sM(/) в виде шума добавляется в сигнал (5.108)
для затруднения распознавания имитирующей помехи на приемной стороне, т. е. в
подавляемой РЛС. Это связано с тем, что при формировании имитирующей помехи
не всегда возможно достоверно подделать полезный сигнал. Поэтому в структуру
помехи включается еще шумовая составляющая, которая затрудняет работу устройств
распознавания и селекции имитирующей помехи. Доля маскирующей добавки 5М (/)
небольшая и строго дозируется. Это нужно для того, чтобы предотвратить возмож-
ность переключения системы автоматического сопровождения по направлению
(АСН), например, на сопровождение источника шумовой помехи.
Формирование имитирующей составляющей КИМ-помехи происходит в САП
посредством амплитудной, фазовой или частотной модуляции восстановленного
234
Глава 5. Радиоэлектронное подавление РЭС управления оружием
сигнала РЛС. Для получения максимального эффекта от воздействия КИМ-поме-
хи огибающая шумовой составляющей, которая может формироваться также с ис-
пользованием восстановленного сигнала, должна обеспечивать создание маскиру-
ющей помехи, обладающей наибольшими маскирующими свойствами в простран-
стве информационного параметра сигнала подавляемой РЛС. В случаях, когда таким
параметром является амплитуда, наибольшая неопределенность обеспечивается
преднамеренной помехой типа белого или квазигармонического шума:
Ум (') = (/)cos[<oc/ + (/)],
огибающая которого имеет релеевский закон одномерной плотности распределения
/’(5'м) = пгехР
о
(5.109)
где 5М > 0, а — среднеквадратичное значение амплитуды сигнала.
Следовательно, УФОП должно формировать цифровой образ огибающей 5МЦ (z)
в виде последовательности чисел, значения которых подчиняются закону (5.109).
В ЦУЗВА распределение (5.109) может быть реализовано с помощью генератора
случайных чисел.
Так как имитирующая помеха излучается из одной строго фиксированной точ-
ки, в которой расположена антенна САП, распределение огибающей маскирующего
шума по закону (5.109) способствует, кроме маскировки имитирующей помехи,
созданию эффекта переотражения сигнала совокупностью большого числа блестя-
щих точек. Такая совокупность служит хорошей статистической моделью описания
эффективной поверхности рассеяния сложной цели, используемой в алгоритмах
обработки современных РЛС для обнаружения и распознавания сигналов.
5.5.4. Одноканальное однобитовое фазовое устройство
запоминания и воспроизведения сигналов
На рис. 5.51 представлена упрощенная структурная схема УЗВС, способного
запоминать и воспроизводить радиосигналы, подвергая их жесткому, почти
идеальному ограничению. Принятые приемным устройством Прм радиосигналы
5С(/) достаточно сильно ограничиваются в усилителе-ограничителе УО, который
преобразует квазигармонический (узкополосный) радиосигнал в биполярное напря-
жение прямоугольной формы, т. е. в жестко ограниченный — клиппированный
сигнал (рис. 5.52).
См2
Рис. 5.51. Структурная схема УЗВС с двухуровневом
квантованием сигнала
5.5. Сигналоподобные помехи
235
Рис. 5.52. Идеально ограниченный сигнал
Сигнал (рис. 5.52, а) после ограничения принимает лишь два значения + С7пор,
~^пор (Рис. 5.52, б). Он поступают на смеситель Cmj преобразователя частоты, кото-
рый с помощью гетеродина Г понижает среднюю частоту до полосы рабочего диапа-
зона УЗВС со значением fnp. Сигналы с выхода смесителя Cmj каждый со своей
промежуточной частотой с поступают на вход фильтра нижних частот Фь име-
ющего полосу пропускания 0...2 Это делается для того, чтобы исключить гар-
моники высшего порядка и другие паразитные сигналы, возникающие при огра-
ничении сигнала и взаимодействии в Cmj гармоник ограниченного сигнала и сиг-
нала гетеродина Ur(t).
После преобразования к промежуточной частоте ограниченный входной сиг-
нал мпр(/), близкий по форме к прямоугольному (рис. 5.52, б), управляет срабаты-
ванием триггера задержки. Триггер срабатывает по фронтам и срезам прямоуголь-
ных импульсов, чем обеспечивает перевод их амплитуд в рабочий диапазон компа-
ратора К. Компаратор обеспечивает сравнение измеряемой величины с эталоном
и формирует напряжение некоторого стандартного уровня UK, если эталонный порог
выходным импульсом триггера достигнут, и нулевого уровня, если этого не про-
изошло. Таким образом компаратор действует подобно одноразрядному (одноби-
товому) АЦП.
Вырабатываемое компаратором напряжение стробируется тактовыми импуль-
сами (рис. 5.52, в), поступающими из устройства управления (УУ). Эти импульсы
играют роль импульсов дискретизации по времени. В результате такого стробиро-
вания образуются продукты интермодуляции между каждой из гармоник меандро-
образной последовательности и спектральными составляющими последовательно-
сти тактовых импульсов.
Последовательность отсчетов (выборок), сформированная под воздействием так-
товых импульсов, с выхода компаратора поступает на ОЗУ, представляющее собой
сдвигающий регистр. Под воздействием управляющих импульсов записи УИ, посту-
пающих с периодом 7"уи из устройства управления УУ, в память ОЗУ записывается
последовательность выборочных значений сигнала 0 и 1. Длительность каждого им-
пульса выборки равна тд, а длительность промежутков между импульсами (Гд -тд).
236
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Частота следования этих импульсов равна частоте следования тактовых импульсов,
т. е. удвоенной промежуточной частоте устройства F& =fup. Тем самым удовлетво-
ряется условия дискретизации, вытекающие из теоремы отсчетов.
Воспроизведение аналогового сигнала wnp (?) производится путем считывания
информации из ОЗУ с частотой /д. Сигналы из ОЗУ поступают в усилитель-сумма-
тор У-С. В фильтре Ф2 с полосой пропускания 0.../^ отфильтровываются паразит-
ные гармоники. С помощью второго смесителя См2 и того же гетеродина Г восста-
навливается сигнал лв (/) на частоте, примерно равной сос. Вследствие значительного
ограничения входного сигнала на входе УЗВС информация о структуре огибающей
5С (/) в выходном сигнале $в (/) утрачивается. Полосовой фильтр Ф3 проводит окон-
чательную очистку высокочастотного сигнала лв (г) от нежелательных гармоник.
Необходимая структура помехового сигнала ип (/) формируется в оконечном уси-
лителе ОУ путем соответствующей модуляции восстановленного сигнала лв (/). Мо-
дулирующая функция ди(/) формируется на выходе модулятора М. Восстановлен-
ный сигнал 5В (z) может модулироваться как по амплитуде, так и по фазе. Чаще
всего в качестве ОУ используется ЛБВ.
Кроме недостатка однобитовых УЗВС, связанного с искажением спектра вос-
становленного сигнала лп (z), крупным недостатком этого устройства является зна-
чительная его чувствительность к воздействию внутренних и внешних шумов. Эти
шумы искажают сигнал на выходе компаратора К, что приводит к случайному блуж-
данию передних и задних фронтов входного меандрообразного сигнала и даже к
его дроблению (рис. 5.52, б). Такие блуждания являются причиной заметного иска-
жения восстановленного сигнала. Восстановление принимаемого сигнала с мень-
шими искажениями производится в двухканальных цифровых УЗВС квадратурно-
го и амплитудно-фазового типа, а также в устройствах, использующих двойную би-
нарную технику.
Уровень паразитных составляющих в спектре восстановленного сигнала умень-
шается при использовании мультибитового АЦП. Однако применение таких АЦП
сопровождается, при прочих равных условиях, сужением мгновенной ширины
полосы рабочих частот ЦУЗВС и необходимостью увеличения требований к памя-
ти. Это связано с тем, что увеличение разрядности АЦП требует соответствующего
увеличения количества ячеек памяти и быстродействия при вводе и считывании
информации, а также ведет к увеличению длины кодового слова. Поскольку все
операции по формированию кодового слова, описывающего текущий отсчет, долж-
ны быть закончены до поступления следующего отсчета, увеличение длины кодо-
вого слова ограничивает возможность повышения частоты дискретизации. Эта
частота и мгновенная ширина рабочей полосы частот Д4у АЦП (и ЦУЗВС в целом)
связаны соотношением Д^у < 0,97^, т. е. ограничение, накладываемое на есть
ограничение и для Д/зу.
Однако совершенствование техники цифрового запоминания и воспроизведе-
ния сигналов все же идет по пути создания двухканальных мультибитовых устройств.
Главное, что достигается на этом пути, — существенное повышение качества и точ-
ности воспроизведения сигналов. Ограничение только одно: приобретенные пре-
имущества не должны достигаться слишком высокой ценой.
Значительные усовершенствования как в отношении точности воспроизведения
частот, так и по уровню паразитных помех, были достигнуты в результате перехода
к ЦУЗВС на базе «двойной бинарной техники».
5.5. Сигналоподобные помехи
237
5.5.5. Двухканальное фазовое устройство запоминания
и воспроизведения сигналов
Рассмотренное выше одноканальное фазовое устройство запоминания и вос-
произведения высокочастотного сигнала имеет недостатки. Основным недостатком
являются значительное искажение фазовой структуры воспроизводимого сигнала
при малых отношениях сигнал/шум, возникающее за счет энергетических потерь в
неоптимальном одноканальном однобитовом устройстве ЦОС. Существенно сни-
жает качество такого устройства и большой уровень паразитных составляющих в
спектре восстановленного сигнала; малая точность воспроизведения частоты (фазы).
Эти недостатки обусловлены, главным образом, неоптимальностъю обработки
принятого сигнала РЭС в ЦУЗВС и малоэффективным амплитудным кодированием
обрабатываемого сигнала. Отказ от амплитудной однобитовой модуляции и переход
к фазовым методам модуляции при кодировании сигнала позволяет весьма суще-
ственно повысить качественные показатели функционирования фазовых ЦУЗВС.
На рис. 5.53 представлена структурная схема фазового ЦУЗВС, запоминающе-
го и воспроизводящего фазу (частоту) высокочастотного сигнала с постоянной
амплитудой [53].
ифдКО щ (О МО
ИфД2(0 1/2(0 Uu2(0 МО
Рис. 5.53. Структурная схема фазового ЦУЗВС
На вход поступает сигнал промежуточной частоты сопр:
% (0 = •S'c cos[<onpr + <рс (г)],
где сопр = сос-юг;сос — частота сигнала РЭС на выходе приемной антенны САП;
(ог — частота сигнала гетеродина приемника САП; <рс (/) — функция, отображаю-
щая закон фазовой (частотной) модуляции принятого сигнала РЭС.
Сигнал snp(z) поступает на входы двух квадратурных фазовых детекторов ФД!
и ФД2, в которых в качестве опорных сигналов используются напряжения стабиль-
ного опорного гетеродина ОГ. Частота сигнала ОГ практически совпадает с проме-
жуточной частотой сигналов, обрабатываемых ЦУЗВС. В рассматриваемой схеме
(опр = 3 МГц.
Опорные сигналы, поступающие на ФД! и ФД2, сдвинуты относительно друг
друга на л/2 (рис. 5.53):
^onl (^) —
^оп2 (0 “ СОог^ ~ ЗГ •
к 2 7
238
Глава 5. Радиоэлектронное подавление РЭС управления оружием
При различии между частотой сопр и соог
(Офд — £2 — (0Пр — соог Ф О,
и на выходе ФД[ и ФД2 образуются напряжения
«ФД1 (') = 5пр (0МОП1 (') = tfocos|A + <Рс (')];
--------------- тс
«ФД2 (') = 5пр (')Ыоп2 0) = О COS П/ + фс (/) --
где чертой сверху обозначена операция усреднения (фильтрации).
Далее эти сигналы сильно ограничиваются в Огр! и Огр2 и преобразуются (на-
пример, с помощью триггеров) в однополярные меандровые низкочастотные на-
пряжения и w2(z) (рис. 5.54, би в), также сдвинутые относительно друг друга
на л/2.
Рис. 5.54. Сигналы в фазовом ЦУЗВС
Важно обратить внимание на следующее. В общем случае длительности прямо-
угольных импульсов W| (/), w2 (/) и периоды их следования зависят не только от зна-
чения Q = сопр -соог, но и от изменений частоты, обусловленных изменением фазы
принятого сигнала РЭС, т. е. от
^Фс (t)
dt
= Фс (0-
Именно этот факт обеспечивает запоминание фазовой структуры сигнала РЭС.
Если бы сохранилась зависимость временных параметров сигналов щ (/) и и2 (/)
только от Q, то речь можно было бы вести только о запоминании и воспроизведе-
5.5. Сигналоподобные помехи
239
нии несущей частоты сопр этого сигнала snp (/). Ясно, что о воспроизведении высоко-
частотного образа принятого сигнала можно было бы говорить только условно. Сле-
довательно, в рассматриваемом фазовом ЦУЗВС при обработке сложного сигнала
5пр(/) частота меандровых напряжений Wj(f) и u2(t) реально изменяется по закону
Я + <р(/)
Г.. —-------------------------------------.
т. е. фактически на выходе ограничителей образуются фазоманипулированные сиг-
налы. Далее для простоты рассуждений полагается ф(/) = 0.
Ограничение напряжений с выходов ФД! и ФД2 можно трактовать как кванто-
вание их амплитуд по уровню (двухуровневое квантование). Далее в АЦП происхо-
дит дискретизация напряжений (/) и и2 (/) по времени и цифровое однобитовое
кодирование отсчетов. Цифровые сигналы //ц] (/) и мц2 (О в виДе последовательности
однобитовых кодовых чисел поступают в ОЗУ! и ОЗУ2 (рис. 5.53), в регистры кото-
рых записывается информация о фазах сигналов щ (/) и и2 (/). Работой ОЗУ управ-
ляет генератор тактовых импульсов ГТИ, совмещенный с устройством управления
(рис. 5.53). Частота следования тактовых импульсов обычно равна частоте дискре-
тизации и в данном устройстве равна F^. Воспроизведение аналоговой копии вход-
ного сигнала s(t) производится по командам управляющего устройства УУ.
С выхода ОЗУ! и ОЗУ2 цифровые сигналы (/) и иц2 (z) вида 01 или 10 посту-
пают на цифроаналоговые преобразователи ЦАП1 и ЦАП2, на выходе которых вос-
станавливаются аналоговые копии wBi(/) и ^(0 фазоманипулированного сигнала
(рис. 5.54, г и d). ЦАП! и ЦАП2 выполнены в виде ключей (схемы «И»), на вход
которых подаются цифровые сигналы (/) и Мц2 (/) и высокочастотные сигналы
wonl(/) и won2 (0 опорного гетеродина ОГ. Цифровые сигналы Мц|(/) и мц2(/) преоб-
разуются в соответствующие напряжения, открывающие ключи для пропускания
сигналов стабильного опорного генератора ОГ в нужное время. Ключ ЦАП2 нижнего
канала открывается с задержкой, соответствующей сдвигу фаз тг/2, так что на вы-
ходе ЦАП2 формируется сигнал противофазный напряжению (/). В сум-
маторе Е оба этих сигнала объединяются и в результате на выходе Е образуется фа-
зоманипулированное колебание и* (/) (рис. 5.53 и 5.54, е), которое может быть пред-
ставлено в виде
M0 = 5Bcos[®or'+Y(')], (5.110)
где \|/ (/) — закон фазовой манипуляции, соответствующий закону изменения фазы
сигнала нД/):
v(') =
Vmax
при 0 < t <
(5.111)
Vmax
М’
2
здесь ymax — значение девиации фазы.
На рис. 5.55 изображен закон изменения фазы \|/(/).
1 'J1 max “ л/2
-Тм/2 0 Тм/2 t
Рис. 5.55. Закон изменения фазы \|/(/)
240
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Фазоманипулированный сигнал (5.110) с законом модуляции (5.111) может быть
представлен разложением в ряд Фурье
'osVmax COS(Onp/ +
cos (cor 4- Q) t - cos (cOZ - Q) z]
2 .
+-sinyniax
71
2 г
+—sin\|/max cos(coz + 3Q)/-cos(coZ-3Q)z +
3л L J
2
+—sinvj/max cos(coz + 5Q)z-cos(coZ -35)t] + ...}.
В рассматриваемом случае \|/max = л/2, поэтому (5.112) упрощается:
wB (z) = “~^"|^cos(coZ + Q)z - cos(coZ - Q)z] +
Л
(5.112)
5L ' 7
Спектр этого сигнала представлен на рис. 5.56.
2SB 2SB
2SB Зл л л 1 2SB 3л
(Oqc ~ ЗГ2 ^or — -O C0q(- (Oqj- —
«ог = +ЗГ2 w
Рис. 5.56. Спектр фазомодулированного сигнала
Необходимо отметить две важные особенности этого спектра: в модулирован-
ном сигнале (z) отсутствует составляющая на несущей частоте соог; восстанов-
ленное колебание наряду с информативной составляющей на частоте соог + £1 содер-
жит значительное количество паразитных колебаний на комбинационных частотах
соог - О, соог ± 3£1, coor ± 5Q и т. д.
Наличие в выходном сигнале ив (z) паразитных гармоник ведет к усложнению
ЦУЗВС. Паразитные гармоники устраняются фильтром Ф (рис. 5.53), настроенным
на частоту соог== сопр и имеющим полосу пропускания, обеспечивающую неискажен-
ную передачу спектра принятого фазомодулированного сигнала РЛС.
5.5.6. Двухканальные квадратурные цифровые устройства
запоминания и воспроизведения сигналов
Высокая степень помехозащищенности современных РЭС различного назначе-
ния достигается прежде всего применением радиосигналов со сложной частотной
и фазовой модуляцией в сочетании с адаптивным управлением мощностью излуча-
емых сигналов. Ярким примером таких сигналов являются сложные частотно-моду-
лированные и фазоманипулированные сигналы, применяемые в радиолокационных,
радионавигационных и связных устройствах для повышения скрытности работы.
Применение радиосигналов со сложной модуляцией, особенно таких, как псевдо-
случайные последовательности импульсов, весьма заметно снизили эффективность
5.5. Сигналоподобные помехи
241
подавления РЭС традиционными шумовыми и простыми импульсными помехами.
Это дало толчок для разработки нового направления подавления РЭС, основанно-
го на применении сигналоподобных помех. Отличительная особенность таких по-
мех состоит в том, что их фазочастотно-временная, пространственная и поляриза-
ционная структура практически неотличима от аналогичной структуры даже самых
сложных радиосигналов подавляемых РЭС.
Непременным условием создания высокоэффективных сигналоподобных помех
является детальная разведка тонкой структуры сигналов РЭС, запоминание их
информационных и сопутствующих параметров с целью последующего воспроизве-
дения на заданных временных интервалах соответствующих копий исходных радио-
сигналов, наделенных необходимой помеховой модуляцией. В современных САП
эта сложная задача наиболее эффективно решается с помощью двухканальных ам-
плитудно-фазовых цифровых устройств запоминания и воспроизведения сигналов.
Эти устройства позволяют с заданной точностью запоминать тонкую структуру лю-
бых радиосигналов и с высокой степенью достоверности воспроизводить ее в нужное
время, независимо от вида и уровней сложности законов амплитудной и фазовой
модуляции исходного сигнала.
Несмотря на использование так называемых широкополосных видов модуляции,
применяемые в настоящее время радиосигналы в основном являются все же узко-
полосными, т. е. квазигармоническими. Их математическая форма записи имеет
вид
*с (/) = 5С (г )cos[ (0J - <рс (/)], (5.114)
где (/) и <рс (/) — огибающая и фаза сигнала; сос — несущая (средняя) частота
сигнала.
Узкополосные сигналы sc(f) имеют спектр 5с((о), ширина которого Д(ос суще-
ственно меньше сос:
Асос «сос,
поскольку огибающая 5С (/) и фаза <рс (/) являются медленно меняющимися по срав-
нению с coscoc(/).
При решении различных радиотехнических задач широко применяется пред-
ставление сигнала в комплексном виде (в виде аналитического сигнала)
sc(t) = Sc(t)+fyt) = Sc(t)eJ^, (5.115)
Г
где 5С (?) — функция, сопряженная по Гильберту с функцией sc (/) и описываю-
щая в общем случае действительный случайный процесс:
(5.П6)
71 До
Sc (/) — комплексная огибающая аналитического сигнала:
5С (/) = (5.117)
Модуль комплексной огибающей sc(z) = 5С(/) определяет закон амплитудной
модуляции сигнала sc (/), а аргумент фс (/) — закон фазовой (частотной) модуляции.
Огибающая 5С (г) в действительной форме может быть представлена в виде
Sj/) = J?(/)+sc2(f). (5.118)
242
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Радиосигнал, имеющий спектральную плотность огибающей Sc (со), может быть
записан с помощью представления через интеграл Фурье в виде
(5.119)
2л J
Это выражение преобразуется к виду
5с(/) = — coscocrRe|5c(co)e 7CO/Jco +jsincocrlm|5c(co)e 7W/c/co =
L о о
о
|5^co)cosco/£Zco + sincoc/j5ccosco/J^ .
coscoc/
о о
Представим выражение (5.120) в виде двух слагаемых:
(') = (')cosciV + S'» (f)sinev.
В соответствии с (5.120)
1 7
(0 = —Re] i’c ( (o)coscotafco,
71 о
(5.120)
(5.121)
(5.122)
(5.123)
Так как спектральная плотность огибающей комплексная, то, записав ее в виде
5с(<о) = Л(со)+j5(m)
и подставив в (5.123) и в (5.122), можно получить
(5.124)
17Г ( л^ ( лУ]
= — >4((o)cos со/— -jB(co)sin со/— с/со;
л Q _ \ 2/ \ 2 J
1 °°
sU')= —J[^(co)cosco/-l?(co)sinco/]jco.
71 о
(5.125)
Сравнивая (5.124) и (5.125), можно убедиться, что отличается от
тем, что ее спектральные составляющие сдвинуты по фазе на л/2. Для образования
(/) необходимо пропустить сигнал 5С5 (/) через фазовращатель, изменяющий фазу
на л/2.
Таким образом, узкополосный сигнал может быть представлен в виде суммы
двух квадратурных составляющих:
sc(0 = s„(')+M')> (5.126)
где
%(/) = 5„(/)cos(o0/;
^(/) = 5'SJ(/)sinioo/.
(5.127)
(5.128)
На практике в ЦУЗВС выделение квадратурных составляющих scs (/) и (/)
производится в процессе переноса спектра входного радиосигнала sc (/) в низкоча-
стотную область — в интервал частот/= ±125 МГц при теоретическом рассмотрении
л
5.5. Сигналоподобные помехи
243
или в полосу 0...250 МГц — реально. Для такого переноса используются два баланс-
ных смесителя (умножителя), на которые подаются взаимно ортогональные — сдви-
нутые по фазе на л/2 опорные колебания высокой частоты сОр «со0.
Так как принятый сигнал sc (/) является высокочастотным и узкополосным, то
он, кроме представления (5.126), может быть записан также в виде
Jc(z) = ‘S'c(/)cosVc(0> (5.129)
где 5С (z) и \|/с (/) — в общем случае случайные функции времени, описывающие
огибающую и высокочастотную фазу сигнала:
5t(') = 7«(') + 4(>); VeW = ar«sMv- <513О>
^CS v /
Две формы записи сигнала (5.126) и (5.129) позволяют предложить две схемы
их цифровой обработки [53]. Для представления (5.126) при цифровой обработке
необходимо параллельно формировать и обрабатывать дискретные выборки двух
квадратурных составляющих scs (/) и (z). Структурная схема ЦУЗВС с обработкой
двух квадратурных составляющих может быть представлена в виде рис 5.53 при
условии исключения ограничителей Orpj Огр2. Амплитудно-фазовое ЦУЗВС преду-
сматривает в соответствии с (5.129) и дискретизацию как огибающей Sc(t), так и
фазы ус (г). Таким образом, при дискретизации узкополосных радиосигналов для
последующей их цифровой обработки можно в каждой отсчетной точке временной
шкалы брать две выборки. Отсюда вытекает возможность двухканальной обработки.
Дискретизация непрерывных процессов scs (/), sss (/), 5С (/), cosi|/c (/) по времени
и квантование по уровню осуществляется в АЦП. При этом каждая выборка (отсчет)
процесса преобразуется в кодовое слово — двоичное число, составленное из р раз-
рядов, каждый из которых представлен нулем или единицей (паузой или стандарт-
ным импульсом, противофазными импульсами). Частота (период) дискретизации
Гд = 1/TJj зависит от значения максимальной частоты^ в спектре обрабатываемого
сигнала после переноса его в область нулевых частот.
Необходимость переноса спектра разведываемого и запоминаемого радиосиг-
нала в область нулевых частот определяется возможностями современных АЦП,
ширина рабочей полосы частот которых равна АДПц= 250...500 МГц. Если из обла-
сти высоких несущих радиочастот, лежащих в диапазоне 2... 16 ГГц, с помощью филь-
тров выбирается мгновенная полоса разведываемых частот шириной Afp = 500 МГц
(при этом ДДпц= 500 МГц), то после смещения соответствующих этой полосе спект-
ров радиосигналов в диапазон рабочих частот АЦП в качестве максимальной (верх-
ней) частоты в спектре обрабатываемого сигнала следует принять^ = 500 МГц.
Поэтому в соответствии с теоремой отсчетов для неискаженной обработки любого
сигнала, спектр которого попадает в мгновенную полосу разведываемых частот, до-
статочно выполнить условие
^2/в. (5.131)
Выше было показано, что два возможных представления сигнала sc (/), в виде
двух квадратурных составляющих scs (?) и sss (/) или огибающей 5С (/) и высокоча-
стотной фазы \|/с (/), являются двумерными. Поэтому в общем случае частоты дис-
кретизации Гд каждой одномерной составляющей в принципе могут быть выбраны
различными.
Если используется представление сигнала sc (z) в виде квадратурных составля-
ющих scs[t] и sss(t\ то выборки все же следует проводить через одинаковые интер-
244
Глава 5. Радиоэлектронное подавление РЭС управления оружием
валы времени ТД< 1/2 fB, Для простого импульсного сигнала длительности ти име-
ем /в = 1/ти. Для широкополосного сигнала с базой Ви длительностью Ги получа-
, В 1
ем /в = — = —, если ти — длительность сжатого импульса.
ги
Однако во всех случаях при обработке сигналов, смещенных на промежуточ-
ную частоту /пр » 0, необходимо принимать во внимание условие (5.131), которое
на практике, когда требуется надежно обеспечить высокую точность восстановле-
ния, записывается в виде ГД = (2,5...4)/в.
При представлении сигнала sc (г) в виде огибающей 5С (г) и высокочастотной
фазы \|/с (/) оптимальные частоты дискретизации этих процессов могут оказаться
неодинаковыми. Однозначное представление частотно-модулированного сигнала с
девиацией частоты AF может быть реализовано при частоте дискретизации фазы
Vc (О’ Удовлетворяющей условию FS(p>AF, при этом частота дискретизации оги-
2
бающей 5с(г) может быть выбрана равной ГД =—. Некоторые виды двухканаль-
ных ЦУЗВС рассмотрены в [53].
Следует заметить, что из рассмотренных здесь двух разновидностей ЦУЗВС
оптимальным является двухканальное ЦУЗВС квадратурного вида. Это устройство
способно наилучшим образом выделять сигнал sc (/) на фоне шумов. Наличие двух
каналов снижает вероятность потери полезного сигнала (с точки зрения создающего
помехи). Если из-за шумов сигнал sc (/) не создает ощутимого эффекта в первом
канале, то за счет сдвига по фазе на л/2 (относительно опорного) он скорее всего
даст должный эффект во втором квадратурном канале.
В то же время и в этих устройствах квадратурные компоненты выделяются с
нелинейными искажениями. Каналы имеют несколько отличающиеся друг от дру-
га коэффициенты передачи. При 10 %-ном отличии этих коэффициентов относи-
тельный уровень наибольшей паразитной гармоники по отношению к основной
достигает -17 дБ, а для того чтобы этот уровень снизился до -40 дБ, отклонение
коэффициентов не должно превышать 1 %. К аналогичным искажениям и ложным
сигналам приводит также отклонение разности фаз опорных колебаний от 90°.
5.5.7. Спектральное устройство запоминания
и воспроизведения сигналов
Название «спектральное ЦУЗВС», используемое здесь чисто условно, означает,
что цифровая обработка сигналов в САП проводится, главным образом, в спект-
ральной области. Достоинствами спектральной цифровой обработки спектров сигна-
лов заключается в возможности оперативного анализа спектров радиосигналов РЭС
различного вида; практически неограниченной возможности синтеза любых помехо-
вых сигналов способом цифровой быстрой свертки; значительном сокращении объ-
ема вычислений.
Все эти достоинства обязаны внедрению в ЦОС различных вариантов алгоритма
быстрого преобразования Фурье (БПФ). Преимущества переноса обработки приня-
тых радиосигналов из временной области в спектральную обусловлены возможно-
стями аппарата быстрой свертки.
В линейных аналоговых радиосистемах процесс формирования помехового сиг-
нала путем модуляций принятого сигнала 5С (/) колебанием m(t) может быть опи-
сан интегралом свертки, определяющим аналоговый помеховый сигнал
5.5. Сигналоподобные помехи
245
т
5п(/) = рс(т) m(t-x)dt, (5.132)
О
где предполагается, что входной сигнал 5С (/) начинается при /= 0, а /и(/) = 0 при t< 0.
В соответствии с известными свойствами преобразования Фурье, спектральная
плотность процесса sn (/) равна произведению спектральных плотностей его состав-
ляющих:
5п(со) = 5с(со)5/и(со), (5.133)
где 5п(<о) = фп(/)] — спектральная плотность помехового сигнала; 5с(со) =
= F[sc(/)] —спектральная плотность принятого сигнала; Sm (со) = F[/rc(z)] —спект-
ральная плотность модулирующего колебания; Л] = J 4'К — прямое пре-
образование Фурье функции -<*>
Выражение (5.133) указывает на возможность синтезировать любой помеховый
сигнал.
Если задана спектральная плотность 5П (со) помехи, наносящей необходимый
информационный ущерб подавляемой РЛС, то из (5.133) определяется спектраль-
ная плотность 5т(со) искомой модулирующей функции m(t\.
<5лз4>
*-*С
Временной образ модулирующего колебания находится с помощью обратного
преобразования Фурье
7и(/) = /”1[5т(ю)] = ^- J 5т(т)е7“'Ло, (5.135)
u Z7C J
где Г”1!*] — символ обратного преобразования Фурье.
В цифровых САП при обработке сигнала используется дискретное представление
спектральных плотностей 5д(со). Для сигналов sc(/) с ограниченной длительно-
стью 0 < t < Т= ]УТЛ дискретизация спектральной плотности проводится по формуле
т n-\
5д((о) = 5с((о) = Рс(/)е-7“'Л= Х^с(«7’д)^Ю"Гд) (5.136)
0 я=0
где Тд — период дискретизации; п = 0, 1, 2,..., N- 1; N- Т/Т^.
Для восстановления функции 5Д (со) ограниченного по времени сигнала 5С (/) в
соответствии с теоремой отсчетов достаточно вычислить значение функции 5Д (со)
для дискретных частот с интервалом соу < 2л/Т:
N—1 -/'2л£л—
^л(Лсо/)=Х5с(«7’д)е т, (5.137)
л-0
где к = 0, 1, 2,..., и- 1.
2л
Функция 5Д (со) является периодической с периодом —. Поэтому для прове-
дя
дения практических расчетов достаточно вычислить ее значения только на одном
периоде. С учетом этого выражение (5.137) можно записать в виде
N-\ -j—nk
sAk®f)=^s^nT’de N (5-138)
л=0
246
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Функция носит название решетчатой функции. Спектральная плот-
ность 5д(&со^) представляется в виде дискретных спектральных составляющих,
см. рис. 5.57.
Соотношение (5.138) соответствует положениям теоремы отсчетов в частотной
области, являющейся аналогом теоремы отсчетов во временной области.
Число отсчетов N равно
Т 2л
а=—; t = nt- т<—,
Т* д’ д сов
где сов — ширина спектра 5С (со) в области радиочастот.
Обычно в выражении (5.138) интервалы дискретизации опускают, а сам аргу-
мент выносят в индекс:
-j—nk
Sk = ^scne N (5-139)
л=0
Соотношения (5.138) и (5.137) определяют дискретное преобразование Фурье
(ДПФ) сигнала sc (и ТЛ) = sc (и) = sc„.
Выражение для обратного дискретного преобразования Фурье (ОДПФ) имеет ввд
, ЛГ-1 . )^пк
sc(n) = scn= — ^Ske N .
k=0
Процедуры ДПФ и ОДПФ находят широкое применение при цифровой обработ-
ке сигналов в спектральной области. Применяемые в настоящее время алгоритмы
ДПФ и ОДПФ позволили значительно сократить объем и время вычислений. Не
вдаваясь в подробности быстрых алгоритмов спектрального анализа, отметим только,
что выигрыш в объеме вычислений при использовании БПФ получается за счет
разбиения ^точечного ДПФ на дискретные преобразования более «коротких» ДПФ.
Спектральная обработка сигналов с использованием алгоритмов БПФ, ОБПФ и
способа быстрой свертки проводится, например, в цифровых радиолокационных ста-
нциях с синтезированной апертурой антенны В первую очередь преимущества ис-
пользования алгоритмов БПФ и способа быстрой свертки выявляются при разработке
ЦУЗВС и реализации устройств, синтезирующих оптимальные помеховые сигналы.
САП с цифровым синтезатором помех, использующим алгоритмы БПФ, ОБПФ
и быстрой свертки, может быть построена по схеме, приведенной на рис. 5.58.
Принятый сигнал sc (/) дискретизируется в АЦП. Дискретный спектр сигнала
sc(n) формируется путем использования БПФ. На выходе блока БПФ образуется
цифровой образ спектра 5СЦ (со) принятого сигнала.
Синтез оптимального помехового сигнала sn (z) проводится в соответствии с ал-
горитмом быстрой свертки путем умножения спектра 5СЦ (со) на спектр (со) мо-
дулирующей функции m(t):
^пц (ю) — (^)' *^сц (®)*
5.6. Радиолокационные ловушки
247
Sc(n) 5Сц(со) Sny(co) $пц(0
Рис. 5.58. САП с цифровым синтезатором помех
Спектр модулирующей функции (со) извлекается из памяти библиотеки
спектров помехи БСП по командам, поступающим из устройства управления УУ.
Спектр Smix (со) модулирующей функции /и(/) может быть получен для аналогово-
го модулирующего сигнала с помощью алгоритма БПФ или путем прямой за-
писи в память БСП необходимых цифровых образов Л/(со) = |5/иц(со)|.
Дискретный спектр помехи 5пц(со) преобразуется в цифровой образ помехи
5ПЦ (*) с помощью блока ОБПФ. Аналоговый помеховый сигнал sn (/) формирует
ЦАП. Ослабление паразитных составляющих сформированного помехового сигнала
5П (/) производится системой цифровых и аналоговых фильтров, которые на рис. 5.58
не показаны.
Современные САП в сложной радиоэлектронной обстановке должны создавать
целый комплекс различных помех. Поэтому в библиотеке спектров помехи хранится
большое количество цифровых образов спектров Smu (со) модулирующих функций
m(t), которые используются в зависимости от обстановки по командам, поступаю-
щим из устройства управления УУ, где принимается решение о подавлении опасных
РЭС оптимальными помехами sn (/).
5.6. Радиолокационные ловушки
Одним из способов нарушения информационной устойчивости радиоэлектрон-
ных и оптико-электронных систем в динамике РЭБ является применение ложных
радиолокационных целей, радиолокационных ловушек, тепловых ловушек (ТЛ),
сбрасываемых источников помехового излучения и других одноразовых средств.
Ложные радиолокационные цели, применяемые, для противодействия РЛС
автоматизированных систем управления средствами ПВО, имитируя реальные ле-
тательные аппараты, увеличивают тем самым плотность потока всех истинных и
ложных целей X, что при постоянной плотности потока обслуженных целей ц сни-
жает вероятность обслуживания целей. В частности, при нарушении централизо-
ванного управления вероятность обслуживания Р^с будет равна
(5.140)
р, - 1
*обе п ’
1+-
П
X
где а = —; п — число огневых каналов, обслуживаемых данной АСУ.
И
Ложные радиолокационные цели могут с успехом применяться в интересах при-
крытия самолетов и других авиационных объектов на аэродромах, в частности пе-
ренацеливая на себя удар высокоточного оружия, без обязательного использования
макетов ЛА.
248
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Радиолокационные и тепловые ловушки применяются для противодействия
функционированию следящих измерителей, входящих в систему управления боевы-
ми средствами. Сброшенная ловушка должна перенацелить на себя следящий изме-
ритель, например, соответствующей радиолокационной или тепловой головки само-
наведения ракеты.
Вероятность перенацеливания определяется качеством имитации и вероятнос-
тью распознавания ловушки.
В последнее время в качестве одноразовых средств применяются передатчики
помех, сбрасываемые с самолетов или запускаемые с кораблей. Имитируя поста-
новщик помех, они могут использоваться как в интересах перенацеливания на себя
следящих измерителей, так и преднамеренного воздействия на РЛС типа ОНЦ,
входящие в АСУ ПВО.
Таким образом, задача состоит в том, чтобы во всех рассматриваемых случаях
обеспечить качество имитации основных признаков имитируемых объектов.
Непосредственно имитируемыми в данном случае являются отраженные радио-
локационные сигналы, которые несут информацию об имитируемом объекте. Со-
ответственно необходимо имитировать характеристики как информационных, так
и сопутствующих параметров радиолокационных ловушек сигналов (в том числе и
их статистические характеристики). Кроме того, может потребоваться имитация ха-
рактерных признаков, свойственных имитируемому объекту (например, турбинный
эффект и др.).
Имитация целей на экранах РЛС первых поколений обеспечивалась предна-
меренным воспроизведением огибающей отраженных импульсов. Практически это
достигалось с помощью передатчиков многократных импульсных помех или при-
менением отражателей, имеющих ту же величину ЭПР, что и имитируемый объект.
По мере повышения информационной устойчивости РЛС начали учитывать
флуктуационные характеристики отраженного от самолета сигнала, в частности,
плотность вероятности и спектральную плотность огибающей, что потребовало
соответствующих корректив и в имитируемых сигналах. В радиолокационных сле-
дящих измерителях когерентный сигнал формируется как совокупность отражений
от ряда блестящих точек, в результате чего образуется угловой шум, имеющий спе-
цифические статистические характеристики.
Одним из весьма информативных признаков, которые используются при радио-
локационном распознавании, является поляризационная матрица рассеяния. В ра-
диолокационных сигналах, отраженных от участков поверхности самолета с двойной
кривизной, имеет место деполяризация электрического вектора, обусловленная из-
менением направления электрического тока при протекании по искривленной по-
верхности. Степень деполяризации может быть разной в зависимости от угла при-
хода волны и величины радиуса кривизны поверхности. Количественно поляриза-
ционные характеристики представляются в виде соответствующих матриц рассеяния
самолета (ракеты, вертолета), полученных для различных курсовых углов. На их
основе могут быть определены и другие поляризационные характеристики, в част-
ности, параметры эллипса поляризации. Элементами поляризационной матрицы
рассеяния являются комплексные коэффициенты отражения, имеющие место при
облучении плоской волной летательного аппарата (или другого объекта). Поскольку
поляризация плоской волны определяется двумя ортогональными электрическими
векторами, например, £ф и Е$, образующими поляризационный базис в сферической
5.6. Радиолокационные ловушки
249
системе координат, поляризационная матрица рассеяния состоит из четырех комп-
лексных коэффициентов отражения 5, определяемых для ортогональных составляю-
щих поляризаций падающей Ег и отраженной Es волн.
В общем случае ортогональные составляющие поляризации отраженной плос-
кой волны ESq, и Е& выражаются через ортогональные составляющие падающей
волны ЕГу и Егв следующими линейными комбинациями:
^<$’ф ~ ^Гф ^0ф ^Ф ’
ф (5.141)
^50 ~ ^6ф *" ^06 ^Гф •
Индексы (р и 0 определяют пару ортогональных составляющих поляризаций,
соответствующих каждому из коэффициентов отражения. Каждый из них, в свою
очередь, определяется модулем и фазой коэффициента отражения, с необходимыми
индексами. В соответствии со сказанным поляризационная матрица рассеяния S в
данном случае определяется следующим выражением:
/о
у мффс
yj '->ф04'
[Л
(5.142)
где оф(р — ЭПР объекта, облучаемого плоской волной, поляризация электрическо-
го вектора ЕГ(р которой коллинеарна с вектором Е5(р при условии, что отраженный
сигнал принимается антенной с такой же поляризацией; — фаза коэффици-
ента отражения, соответствующая условиям, определяющим ow. Смысл других ко-
эффициентов отражения с различными комбинациями индексов <р и 0 аналогичен.
С помощью матрицы (5.142) линейная форма (5.141) может быть записана сле-
дующим образом:
Es=5Er. (5.143)
Поляризационная матрица рассеяния ложной радиолокационной цели или
ловушки должна определяться по результатам статистической обработки данных
измерений матриц рассеяния достаточно большой группы имитируемых летатель-
ных аппаратов. Измерения должны проводиться в различных частотных диапазо-
нах, соответствующих РЛС ПВО, рассматриваемых как объекты подавления, при
различных курсовых углах.
Наряду с имитацией характерных параметров отраженных РЛ сигналов необ-
ходимо учитывать специфические изменения сигнала, которые порождаются тех-
нологическими особенностями функционирования данного объекта. Одним из них,
например, является турбинный эффект, следствием которого является дополнитель-
ная амплитудная и частотная модуляция сигналов, отраженных от самолетов с тур-
бореактивными двигателями. Имеют место и другие сопутствующие эффекты.
Изложенное свидетельствует о значительных трудностях разработки ложных
РЛ-целей и РЛ-ловушек для летательных аппаратов в интересах преодоления ПВО.
Практически задача решается, если для имитации достаточно обеспечить энергети-
ческое подавление РЛС. Это достигается, если в качестве ложной цели применяется
летательный аппарат с одноразовым передатчиком активных помех, воздействую-
щим на РЛС типа ОНЦ. Аналогичное имеет место при сбрасывании одноразовых
передатчиков помех и тепловых ловушек в интересах индивидуальной защиты ЛА.
Задача упрощается, когда преднамеренно имитируются ЛА или другие объекты
на аэродроме или в иных местах авиационного базирования. В этом случае отпадают
250
Глава 5. Радиоэлектронное подавление РЭС управления оружием
проблемы, обусловленные движением, и качественные результаты могут быть до-
стигнуты путем имитации лишь ключевых признаков. Каждый раз это решается в
соответствии с радиоэлектронной обстановкой и поставленными задачами. Как
правило, требуется обеспечить соответствие статистических характеристик ЭПР
имитирующего и осредненной ЭПР имитируемого объектов. Показателем качества
имитации статистических характеристик является разность энтропий распределе-
ний вероятностей, определенных на реализациях случайных процессов. Эти про-
цессы — случайные изменения во времени параметров истинной и ложной целей.
Техническая реализация усилителей-ретрансляторов не вызывает принципиаль-
ных затруднений. На рис. 5.59 представлена структурная схема простейшего ре-
транслятора.
Рис. 5.59. Структурная схема ретранслятора
Сигналы подавляемых РЛС принимаются антенной А1? усиливаются в предва-
рительном усилителе ПУ и поступают на вход оконечного усилителя мощности ОУ.
В усилителе мощности сигналы модулируются шумовым напряжением, формируе-
мым модулятором М. Последняя процедура имеет целью обеспечение качества ими-
тации. После соответствующего усиления в оконечном усилителе ОУ сигнал излу-
чается антенной А2. Обычно в качестве усилителей используются лампы бегущей
волны, имеющие широкую полосу пропускания и высокий коэффициент усиления.
Требуемый коэффициент усиления ретранслятора, обеспечивающий необходи-
мые значения мощности помехового сигнала на входе заданной РЛС с учетом раз-
вязки, может быть определен на основе следующих рассуждений. Тактическая кар-
тина, иллюстрирующая применение ложной радиолокационной цели, приведена на
рис. 5.60.
Мощность сигнала РЛС подсвета на входе приемной антенны ретранслятора
(ловушки) равна
Рвх =7Г^с2(<Рр,ер)/р2 (<Р^сИ1. (5.144)
4яЯсл
где PCGC — энергетический потенциал подавляемой РЛС; Fc (ср, 6) — функция, опи-
сывающая нормированную диаграмму направленности передающей антенны РЛС
подсвета по полю; /^(ср, 0) — функция, описывающая нормированную диаграмму
направленности приемной антенны ретранслятора по полю; <рр, 0р — угловые коор-
динаты ретранслятора (ловушки), отсчитываемые от максимума диаграммы направ-
ленности антенны РЛС; <рр,0р — угловые координаты подавляемой РЛС, отсчи-
тываемые от максимума диаграммы направленности приемной антенны ретрансля-
тора; АЛ — максимальная эквивалентная площадь поглощения приемной антенны
ретранслятора; Асл — расстояние между ретранслятором (ловушкой) и подавляе-
мой РЛС.
Мощность, излучаемая передающей антенной ретранслятора в направлении,
определяемом углами ср и 0, равна
Лых р = Ахр^рОД? (5.145)
5.6. Радиолокационные ловушки
251
Рис. 5.60. Применение ложной радиолокационной цели (ловушки)
где Ар — коэффициент усиления усилителя ретранслятора по мощности; G2 — мак-
симальный коэффициент направленного действия передающей антенны ретрансля-
тора; Гр2 (ср, 0) — функция, описывающая нормированную диаграмму направленно-
сти передающей антенны ретранслятора по полю.
В дальнейшем для простоты принято, что
Fp = FpI - Гр2 (<р, 6); G2 = G„. (5.146)
Между приемной и передающей антеннами ретранслятора необходимо обеспе-
чить соответствующую развязку, по крайней мере, не меньшую, чем в Кр раз по
мощности. Во всяком случае, Ар не может превышать К развязки.
Мощности помехового и полезного сигналов на входе приемника подавляемой
РЛС ракеты соответственно равны
^пвх = t'o22 СЛ (фрЛ)^2(<р;ХИр, (5-147)
4я/?сл 4я7?л ' '
= (5.148)
4л/с 4л/с
где суц — эффективная площадь рассеяния прикрываемого самолета; Ас, Фс,®с —
полярные координаты прикрываемого самолета (цели); углы Фс и 0' отсчитыва-
ются от максимума диаграммы направленности подавляемой РЛС; Аг2 — макси-
мальная эквивалентная площадь поглощения антенны подавляемой РЛС; ср, 0 —
полярные координаты ложной цели.
Из выражений (5.147) и (5,148) имеем, что отношение помеха/сигнал на входе
подавляемого приемника РЛС рагно
fл/.1<7п^с2(<Рр,ор)^с4(<р,е)/^
Vc2(<WK
(5.149)
252
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Отсюда, полагая К = КП, легко получается выражение для необходимого значе-
ния коэффициента усиления ретранслятора
К ________^п°ц^с (фс>вс)______fSISCh
р лг1с?пгс2(<рр,ер)гр4(фс,0с) }
В частном случае, когда расстояние между ловушкой и прикрываемым самоле-
том мало по сравнению с расстоянием между самолетом и подавляемой РЛС выра-
жение (5.150) упрощается:
:п 4-1 Gn ’
р
где Сп = С2 — коэффициент направленного действия приемной антенны ретранс-
лятора.
В частном случае ретранслятор может представлять собой сбрасываемый пере-
датчик маскирующих помех.
Возможность увеличения эффективной площади рассеяния ловушек с помощью
пассивных переизлучателей основана на особенностях рассеяния падающей плос-
кой волны проводящими телами. ЭПР любого тела для данного направления опре-
деляется известной формулой
g = s2G, (5.152)
где s2 = -^- — отношение мощности, (Р2), рассеянной данным телом, к плотности
потока мощности (П) электромагнитной волны, падающей на переизлучатель; G—
коэффициент направленного действия переизлучателя в данном направлении (в на-
правлении на точку наблюдения).
Для плоских тел, а также некоторых других тел, близких по своим переизлуча-
ющим свойствам к плоским, величина s2 эквивалентна площади поглощения Аг
некоторой антенны:
A =s2=——. (5.153)
4л
Подставляя Сиз (5.153) в (5.152), можно получить
_ 4Л52
^шах ~ - э ’
1
(5-154)
где 5 — площадь пластины.
По мере изменения ориентации пластины величина отраженной энергии быст-
ро меняется. На рис. 5.61 показана диаграмма переизлучения металлической пласти-
ны, размеры которой намного больше длины волны. Вследствие очень острой диа-
граммы переизлучения металлическая пластина непригодна для повышения ЭПР
летательных аппаратов.
11111
Рис. 5.61. Диаграмма переизлучения металлической пластины
5.6. Радиолокационные ловушки
253
Переизлучатели, имитирующие летательные аппараты, должны иметь большую
ЭПР при возможно меньших габаритах и массе, а также обладать достаточно ши-
рокой диаграммой переизлучения.
Таким требованиям в известной мере отвечают так называемые уголковые от-
ражатели различных типов (рис. 5.62), переизлучатели в виде линз Люнеберга и от-
ветчики Ван-Атта.
Рис. 5.62. Уголковые отражатели
Уголковый отражатель представляет собой жесткую конструкцию, состоящую
чаще всего из трех взаимно перпендикулярных граней, электрически соединенных
между собой. В зависимости от формы граней различают треугольные (а), прямо-
угольные (6) и круглые (в) уголковые отражатели. Их максимальные ЭПР соответ-
ственно равны
Л 4 4 4
4л а а а
^=--7, оо=12я—у, оо=2л-7,
3 X X X
(5.155)
Рис. 5.63. Уголковый от-
ражатель с практически
изотропной диаграммой
переизлучения
где а — длина ребра отражателя.
Уголковые отражатели с малыми размерами дают высокую ЭПР. Так, при X = 3 см
и а = 50 см qd= 2500 м2.
Сектор переизлучения уголковых отражателей на уровне половинной мощно-
сти составляет примерно (40...50)°. Для того чтобы увеличить сектор переизлучения,
применяют несколько уголковых отражателей, по-разному
ориентированных в пространстве Например, уголковый
отражатель, изображенный на рис. 5.63, создает практиче-
ски всенаправленное переизлучение.
Величина максимальной ЭПР уголковых отражателей
существенно зависит от точности выдерживания прямых
углов между гранями отражателя. Неточность выдержива-
ния угла всего в 1° приводит к уменьшению максимально-
го значения ЭПР уголкового отражателя в 2...5 раз.
Радиопротиводействие с помощью уголков РЛС, имею-
щим антенну с круговой поляризацией, может оказаться
неэффективным. Это объясняется тем, что от проводящих
граней уголкового отражателя волна отражается нечетное
число раз, вследствие чего направление вращения вектора
электрического поля отраженного сигнала меняется на обратное (рис. 5.64, а). Изме-
нение поляризации отраженных волн, имеющее место в уголковых отражателях,
можно исключить, если одну из его граней покрыть слоем диэлектрика (рис. 5.64, б).
Одним из существенных недостатков уголковых отражателей является малая
ширина диаграммы переизлучения на уровне половинной мощности. Достаточно
широкой диаграммой переизлучения обладают переизлучатели, выполненные на
основе линз Люнеберга.
254
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Рис. 5.64. Изменение поляризации падающей волны уголковым отражателем
Линза Люнеберга представляет собой диэлектрический шар. Коэффициент
преломления диэлектрика п в идеальной линзе Люнеберга зависит только от отно-
шения текущего радиуса линзы г к наружному радиусу линзы R :
(5.156)
На рис. 5.65, а изображены траектории лучей в линзе Люнеберга.
а
Рис. 5.65. Линза Люнеберга (а) и ее диаграмма обратного рассеяния (6)
Центральный луч АО не испытывает преломлений в линзе, в то время как тра-
ектории остальных лучей искривляются. В результате все лучи фокусируются в точ-
ке О на внутренней стороне сферы, покрытой металлической пленкой, Точка О,
являясь источником вторичных электромагнитных волн, будет создавать на выхо-
де линзы синфазное распределение поля, так что максимум диаграммы переизлу-
чения будет совпадать с направлением прихода падающей волны.
Максимальная эффективная площадь рассеяния линзы Люнеберга может быть
найдена путем подстановки в (5.154) 5 = nR2, т. е.
R^
^=47t3-y. (5.157)
Л
Ширина диаграммы переизлучения линзы Люнеберга зависит от размеров эк-
ранирующей (металлической) поверхности сферы. Так, для экранирующей повер-
хности размером в четверть поверхности сферы ширина диаграммы переизлучения
на уровне половинной мощности составляет около 90° (рис. 5.65, б).
Линза Люнеберга не обеспечивает переизлучения в круговую. Последнее может
быть достигнуто на базе этой же линзы, если окружить часть ее сферы металлическим
кольцом, как на рис. 5.66.
На рис. 5.66, а изображена всенаправленная в азимутальной плоскости линза
Люнеберга с центрированным относительно экватора отражающим кольцом. Поло-
жение металличского кольца определяет направление максимума переизлучения.
Так, для центрированного относительно экватора кольца максимум будет распола-
5.6. Радиолокационные ловушки
255
Рис. 5.66. Изменение диаграммы направленности линзы Люнеберга
гаться в экваториальной плоскости (рис. 5.66, а). Если же кольцо смещено, лепесток
диаграммы переизлучения отклоняется от экваториальной плоскости (рис. 5.66, б).
Максимальное значение ЭПР определяется формулой
/ 9 \2
[nR2-2RL]
G max — 4 Л , (5.158)
К
где R — радиус сферы; L — ширина металлического кольца.
Линза в виде диэлектрического шара с металлическим кольцом имеет несколь-
ко меньшую эффективность, чем ранее рассмотренная линза Люнеберга с рефлек-
тором. Сравнение формул (5.157) и (5.158) дает
ок < 2L\
т)= — = 1----
ол V HR)
(5.159)
Например, если L/R = 0,2, то р ~ 0,9. Следовательно, уменьшение ЭПР ок по
сравнению с обычной линзой незначительно.
Увеличение ширины металлического кольца приводит к расширению диаграм-
мы переизлучения, но одновременно уменьшается и ЭПР линзы. Это противоречие
хорошо разрешается в линзе Люнеберга с кольцом в виде решетки из параллельных
проволок, навитых под углом 45° сферы (рис. 5.67, а и б). Такая линза иногда назы-
вается гелисферой.
Ортогональные
Проволочное проволочные кольца
Рис. 5.67. Линзы Люнеберга с проволочными кольцами (гелисферы)
Падающая под углом 45° на гелисферу электромагнитная волна с линейной
поляризацией проходит через фронтальную часть кольца и отражается от противо-
положной части кольца. Для иных поляризаций (вертикальная, горизонтальная,
круговая) будут поляризационные потери, максимум которых (при двукратном про-
хождении) составляет 6 дБ.
256
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Для получения изотропной диаграммы применяют гелисферы с двумя ортого-
нальными проволочными решетками. Подбором ширины (а иногда и конфигура-
ции) колец можно добиться относительно малой неоднородности диаграммы пере-
излучения.
Принципиально возможно создание идеальной линзы без металлических колец
с изотропным переизлучением (линза Итона — Липмана). Для этого коэффициент
диэлектрического заполнителя должен меняться по закону
„ = J—-1, (5.160)
V г
где г — текущий радиус.
Траектории лучей в линзе с круговым переизлучением изображены на рис. 5.68.
।
1
/ Л________\
_ I____________L. _
Рис. 5.68. Траектории лучей в линзе с круговым переизлучением
Диэлектрические гелисферические линзы довольно тяжелы. Они трудно реа-
лизуемы из-за необходимости ввода в центральную часть (г= 0) диэлектрика с очень
большим коэффициентом преломления. Существенно меньший вес имеют так
называемые полые гелисферические отражатели (рис. 5.69, а).
Рис. 5.69. Полые гелисферические отражатели
Отражающее кольцо выполнено из металла и представляет собой шаровой сег-
мент. Проволочная решетка и металлическое кольцо расположены ортогонально.
ЭПР такого отражателя на 10 дБ меньше ЭПР идеальной линзы Люнеберга. Ход
лучей падающей и отраженной волн показан на рис. 5.69, б.
На рис. 5.70 приведены зависимости ЭПР различных отражателей, нормиро-
ванные относительно ЭПР металлического шара того же диаметра D = 2R от пара-
11
метра —.
А,
По оси ординат отложена величина
a = 101g—, (5.161)
°о
где о0 — ЭПР металлического шара; о — ЭПР линзы.
5.6. Радиолокационные ловушки
257
Графики соответствуют: 1 — идеальной линзе Люнеберга; 2 — гелисфере с коль-
цом внутри (рис. 5.69); 3 — полой гелисфере (линейная поляризация); 4 — полой
гелисфере (круговая поляризация).
^3 ' ^4
0,1 1 ю 100 1000 D/X
Рис. 5.70. ЭПР различных отражателей в зависимости
от относительных линейных размеров
Ответчик Ван-Атта является, по сути дела, антенной решеткой, выполненной
из большого количества диполей, спиралей или других излучателей (см. рис. 5.71).
Диполи находятся на равном удалении от оси симметрии ответчика и попарно
соединены коаксиальным кабелем одинаковой длины. Электромагнитная волна,
принимаемая диполем 1, переизлучается диполем 6. В свою очередь, диполь 1 пе-
реизлучает волну, принимаемую диполем 6. Электрические длины фидерной сис-
темы 1-6, также как и других попарно соединенных диполей, одинаковы. Сигна-
лы, принятые и переизлучаемые диполями, проходят одинаковый путь, Поэтому
направление максимума диаграммы переизлучения будет совпадать с направлени-
ем прихода падающей волны.
Решетки рассчитываются на отражение волн с любой поляризацией. Для этого
диполи располагают над металлическим экраном под различными углами (как
правило, каждая пара под углом 90° к соседней).
Эффективная площадь рассеяния ответчика, образованного п полуволновыми
диполями, расположенными на расстоянии Х/2 друг от друга и на расстоянии Х/4
от отражающего экрана, может быть найдена по формуле
л S
о = 4л—
Р
—sin0
\2 )
где в — угол падения; 5 — площадь раскрыва решетки.
(5.162)
258
Глава 5. Радиоэлектронное подавление РЭС управления оружием
Учитывая, что 5 =--, можно получить выражение для максимальной ЭПР
решетки Ван-Атта:
(5.163)
Переизлучаемый сигнал может быть промодулирован по амплитуде. Для этого
в фидерные линии, соединяющие вибраторы, включают фазовращатели. Соответ-
ствующим изменением сдвига фаз можно добиться необходимого закона амплитуд-
ной модуляции переизлучаемого сигнала. С помощью фазовращателей и других
элементов может быть осуществлена необходимая рандомизация параметров излу-
чения в интересах обеспечения требуемого качества имитации.
Переизлучатель Ван-Атта может быть выполнен и в активном варианте, как ре-
транслятор, когда принимаемый сигнал усиливается в каждом канале и переизлу-
чается (рис. 5.72).
Усилитель
Модулирующее
напряжение
Рис. 5.72. Ретранслятор на решетке Ван-Атта
Основная трудность создания переизлучателя такого типа состоит в развязке
приемных и передающих трактов. Недостатком ответчика Ван-Атта является также
его относительно малая диапазонность.
Рассмотренные различные переизлучатели не исчерпывают всего многообразия
средств и способов увеличения ЭПР ложных целей. Например, ведутся работы по
исследованию возможности увеличения ЭПР летательных аппаратов за счет иониза-
ции пространства около ложной цели" в частности ионизации струи реактивного
двигателя ракеты-ловушки путем добавления (впрыскивания) в состав топлива легко-
ионизирующихся элементов.
В принципе по аналогичной схеме может обеспечиваться требуемое качество
имитации и в случае применения уголковых отражателей, и линз Люнеберга. С этой
целью необходимо отраженный сигнал формировать с применением комплекта раз-
несенных в пространстве отражателей, образующих единую систему, в высокочастот-
ный тракт которой включаются элементы, обеспечивающие возможность модуля-
ции и рандомизации имитирующего сигнала. Переизлучаемый сигнал должен также
обеспечивать идентичность его поляризационной матрицы рассеяния, соответству-
ющей матрице полезного сигнала. Перспективными в этом плане могут явиться
управляемые импедансные покрытия и структуры, которые появились в радиолока-
ционной технике в последнее время в связи с проблемой управления рассеянием
электромагнитных волн [11].
Ложные цели могут использоваться на буксируемых ловушках. Буксируемые
ловушки могут применяться для противодействия в контурах наведения и самонаве-
дения. Их эффективность будет высокой, если в начальный момент наведения ра-
кеты (или истребителя) прикрываемый самолет и ловушка представляются как одна
цель, т. е. не-разрешаются по углам, дальности и доплеровским частотам. Приме-
нение буксируемых ловушек имеет ряд своих особенностей.
5.6. Радиолокационные ловушки
259
Удаление буксируемой ловушки от самолета в основном определяется разре-
шающей способностью подавляемой системы по скорости и углу. Это условие можно
определить из геометрических построений рис. 5.73 и представить в виде
Д0оЯ
£< —
S1H0
(5.164)
где Д0р — разрешающая способность подавляемой РЛС по углу; R — расстояние до
подавляемой РЛС; 0 — ракурс ловушки.
Рис. 5.73. Условие неразрешимости самолета и ловушки по углу
Условие неразрешения самолета и ловушки по доплеровским частотам определя-
ется шириной полосы пропускания строба скорости &F и разностью доплеровских
частот ловушки и самолета Д/:
Af<AF, (5.165)
где
(5-166)
гЦр и глр — соответственно радиальные скорости сближения атакующей ракеты с
прикрываемым самолетом и ловушкой (рис. 5.73).
Условия (5.165) и (5.166) определяют максимально допустимое удаление ловушки
от прикрываемого самолета.
На рис. 5.74 показаны зоны разрешения буксируемой ловушки и самолета по
углу I и разности радиальных скоростей (доплеровских частот) II. На этом же рисунке
показана зона затенения самолетом ловушки III. Самолет затеняет ловушку, если
атакующая ракета находится внутри конуса, угол при вершине которого равен
а = arcsin-^-^-, (5.167)
L
где R — радиус поражения ракеты; к' — коэффициент запаса.
Рис. 5.74. Зоны разрешения буксируемой ловушки и самолета
по углу I и разности радиальных скоростей (доплеровских частот) II
260 Глава 5. Радиоэлектронное подавление РЭС управления оружием
Величина зоны III имеет существенное значение при атаках с передней полу-
сферы. Сбрасываемые ловушки служат для защиты самолета от атакующей ракеты
(истребителя). Эти ловушки не имеют двигателей и представляют собой активные
или пассивные переизлучатели, обладающие большей эффективной площадью рас-
сеяния, чем прикрываемый самолет, подвергающийся атаке. Ловушкой может слу-
жить уголковый отражатель или пачка дипольных отражателей, горящий пиротех-
нический состав.
Сбрасываемая ловушка может быть захвачена следящей системой ракеты (ис-
требителя), если эффективная площадь рассеяния ловушки больше ЭПР прикры-
ваемого самолета и время воздействия сигналов ложной цели больше или равно
постоянной времени следящих систем по углу, скорости и дальности.
Второе условие накладывает довольно жесткие требования на конструкцию
сбрасываемой ловушки.
Продолжительность воздействия сигналов от ловушки на систему самонаведения
для импульсных систем определяется временем пребывания ловушки в импульсном
объеме, а для непрерывных РЛС — временем пребывания радиальной составляю-
щей относительной скорости ловушки в пределах полосы пропускания следящей
системы по скорости, а также временем пребывания ловушки в пределах диаграм-
мы направленности антенны подавляемой РЛС. Для тепловой ловушки это время
пребывания в пределах поля зрения приемника инфракрасного излучения.
Чтобы определить время пребывания ловушки и цели в одном и том же импуль-
сном объеме, необходимо провести расчет траектории ложной цели, сбрасываемой
с самолета, при ее свободном падении. Траектория свободного падения определяется
характеристическим временем 0, высотой и скоростью полета самолета, с которого
производится сбрасывание ловушки. Характеристическим временем падения назы-
вается время падения тела с высоты 2000 м в условиях стандартной атмосферы.
На рис. 5.75 приведены примерные траектории падения ловушки в подвижной
системе координат, связанной с бомбардировщиком, для различных значений ха-
рактеристического времени падения 01>02>0j.
Рис. 5.75. Примерные траектории падения ловушки
Как видно из рис. 5.75, характеристическое время падения оказывает существен-
ное влияние на время пребывания самолета и ловушки в импульсном объеме. При
0 = 02 время пребывания ловушки в объеме шара с R = const больше, чем при 0 = 0Р
Характеристическое время падения ловушки определяется известной из балли-
стики формулой
6 = 20,2+^-103, (5.168)
5.6. Радиолокационные ловушки
261
ID2
цу з
где ---10 — баллистический коэффициент; z — коэффициент формы ловушки;
GCX
D — диаметр ловушки; G — масса ловушки; С — аэродинамический коэффициент.
Из формулы (5.168) и рис. 5.75 следует, что для увеличения времени пребыва-
ния ловушки в импульсном объеме надо стремиться уменьшать ее характеристи-
ческое время падения 0.
В связи с тем, что габариты ловушки определяются размерами устанавливае-
мых на ней переизлучателей, уменьшение характеристического времени 0 достига-
ется увеличением массы ловушек. Так для ловушки, представляющей собой линзу
Люнеберга диаметром D = 0,5 м при i =8, Сх = 0,2, потребная масса сбрасываемых
ловушек составит примерно G ~ 500 кг, если 0 = 25 с.
Приведенный пример показывает, что сбрасываемые ловушки должны иметь
значительную массу.
Чтобы увеличить время пребывания сбрасываемой ловушки (при малой массе)
в достаточно малой окрестности около цели, необходимо задать ей начальную ско-
рость в направлении движения летательного аппарата, т. е. оборудовать ловушку
стартовым двигателем. Соответственно ее траектории в подвижной системе коор-
динат, связанной с бомбардировщиком, резко изменяются. На рис. 5.76 приведена
траектория ловушки, оборудованной стартовым двигателем. Там же штрихпункти-
ром отмечена траектория ловушки, не имеющей двигателя.
Без стартового
‘ двигателя
Со стартовым
двигателем
Рис. 5.76. Траектория ловушки, оборудованной стартовым двигателем
Применение ловушек для контуров наведения, представляющих собой следя-
щую систему импульсного типа, имеет существенные особенности. Эти особенно-
сти касаются, в основном, максимальной скорости отрыва ловушки от прикрыва-
емого самолета, которая в последнем случае определяется дискретностью поступ-
ления информации о координатах цели.
В простейшем контуре наведения импульсного типа данные о координатах цели
поступают с некоторой скважностью, величина которой зависит от скорости вра-
щения антенны РЛС (обычно РЛС кругового обзора). Период поступления инфор-
мации в современных системах оценивается величиной порядка нескольких секунд.
Выпуская ловушку в момент облучения прикрываемого самолета, необходимо
обеспечить условия (начальную скорость, среднюю скорость за период обзора РЛС),
при которых выпущенная ловушка за один цикл обзора не могла бы выйти за пре-
делы области около прикрываемого самолета, каждая точка которой достижима этим
самолетом по условиям перегрузок и возможностям силовой установки за указан-
ное время. Абсолютное значение начальной скорости в данном случае особого
262
Глава 5. Радиоэлектронное подавление РЭС управления оружием
значения не имеет. Важно, чтобы средняя скорость за период обзора подавляемой
РЛС была бы ниже некоторого значения.
В зависимости от складывающейся радиоэлектронной обстановки сбрасывание
ловушек осуществляется либо непрерывно с некоторым фиксированным средним
темпом, либо производится одноразовое сбрасывание в соответствии с информа-
цией, поступающей от приборов, фиксирующих пуск или угрозу пуска противни-
ком ракеты или применения другого средства поражения прикрываемого летатель-
ного аппарата. В первом случае речь идет прежде всего о сбрасывании тепловых
ловушек в зоне повышенной угрозы поражения летательного аппарата переносными
зенитно-ракетными комплексами (ПЗРК) и другими ЗРК с тепловыми головками
самонаведения. Темп сбрасывания выбирается в соответствии со средней продолжи-
тельностью цикла стрельбы ПЗРК. Во втором случае, ловушка, в том числе и тепло-
вая или одноразовый передатчик помех, сбрасывается в соответствии с информа-
цией, поступающей от бортовых приборов оповещения экипажа об угрозе пуска
или пуске средства поражения атакующим противником.
Информация об угрозе летательному аппарату обычно формируется на основа-
нии наблюдения за изменением параметров сигналов РЭС противника. Обычно
фиксируется интенсивность сигнала и характер его изменения, угол прихода излу-
чения (пеленг, несущая частота, длительность и частота следования импульсов).
Могут наблюдаться и измеряться другие параметры сигналов, в том числе и стати-
стические характеристики.
Результаты измерений (наблюдений) сравниваются с соответствующими значе-
ниями параметров, априори имеющихся в базе данных ЭВМ бортовой системы
информационного обеспечения и управления. По результатам сравнения прини-
мается решение о сбрасывании ловушки или одноразового передатчика помех.
Автоматизированные схемы принятия решения подобного рода имеют ограни-
ченный уровень информационной устойчивости. Они ориентированы на относи-
тельно простые варианты радиоэлектронной обстановки, уязвимы по отношению
к простейшим контрмерам противника, например, имитации пуска ракеты, ини-
циирующей преждевременный сброс ловушки.
Информационная устойчивость может быть повышена за счет ввода в автома-
тизированную систему управления экспертных элементов, т. е. путем перехода к
интеллектуальным системам автоматизированного управления. Это позволяет го-
ворить об автоматизированных системах управления с искусственным интеллектом.
Практически интеллектуальные системы реализуются путем создания в бортовых
ЭВМ баз знаний. Процесс формирования таких баз знаний достаточно трудоемок.
Он предусматривает обобщение результатов имитационного моделирования типо-
вых боевых эпизодов, в том числе и результатов опытных учений.
В качестве вариантов определения процедур, связанных с выбором момента
сбрасывания одноразового средства РЭП (ОЭП), могут быть использованы простей-
шие модели динамики поведения сторон в конфликте. Одним из таких примеров
является эпизод, когда на атакуемом ЛА имеется одна ловушка, а у атакующего одна
ракета. Атакующий противник определяет оптимальный момент пуска ракеты, а
атакуемый — оптимальный момент сбрасывания ловушки. Показатель эффектив-
ности — вероятность поражения летательного аппарата или математическое ожи-
дание потерь. Задача может быть сведена к матричной игре с нулевой суммой, если
динамику конфликта, протекающего в течение времени Т, рассматривать через
дискретные моменты времени А/ [60].
5.6. Радиолокационные ловушки
263
Обозначим через А^ = /9т) и Bj(j = 1,т) чистые стратегии атакуемой и ата-
кующей сторон. Стратегия Л,- означает, что атакуемый сбрасывает ловушку в мо-
мент времени Z, = /А/. Стратегия Bj соответственно означает, что пуск ракеты осу-
ществлен в момент времени tj = jAt. Функцией платежа в данном случае является
вероятность поражения Ру одной ракетой атакуемого ЛА.
В соответствии со сказанным, рассматриваемая матрица игры может быть за-
писана следующим образом:
Р(Л|В) = ||/<||; / = 1:/я; (5.169)
где Т — время развития конфликта; Ру — вероятность поражения ЛА ракетой,
выпущенной противником в момент времени tj-если атакуемый выпустил ло-
вушку в момент времени tt = i&t
^.=[1-Рпц(/,;)]РпораЖ1 (5.170)
где Рпц (/, у) — вероятность перенацеливания ракеты на ловушку (или одноразо-
вый передатчик помех) в рассматриваемой ситуации; Рпораж — вероятность пора-
жения ЛА одной ракетой в штатных условиях.
Вариант, представленный матрицей (5.169), является простейшим, и оптималь-
ные значения th и /у, могут быть определены для одного эпизода. Практически
оптимальное решение, даже для простейшей ситуации, может быть получено по
результатам рассмотрения ряда вариантов конфликта. В данном случае это выпол-
нение атак под разными курсовыми углами с различными интервалами располага-
емого времени Т.
В общем случае следует иметь в виду, что каждая из сторон конфликта плани-
рует и реализует мероприятия, снижающие информационную устойчивость проти-
воположной стороны. Число ракет и ловушек может быть разным. Это число зави-
сит от параметров боевого порядка. Могут быть и другие особенности боевого
применения. Все это обусловливает необходимость разработки математических
моделей проведения моделирования для широкого диапазона вариантов и условий
боевых действий. Базу знаний (процедур) составляют обобщенные оценки и реко-
мендации, получаемые экспертами на основании как логического изучения резуль-
татов моделирования, так и обобщения опытных и командно-штабных учений.
ГЛАВА 6
ПАССИВНЫЕ И ПАССИВНО-АКТИВНЫЕ ПОМЕХИ
6.1. Общая характеристика пассивных помех
Пассивные помехи образуются на входах подавляемых радиоэлектронных уст-
ройств в результате изменений условий распространения электромагнитных волн
искусственно созданными объектами, применяемыми в массовых количествах.
Такими объектами могут быть противорадиолокационные отражатели (ПРЛО),
рассеивающие электромагнитные волны, аэрозольные облака, средства ионизации
локальных областей пространства.
Особенностью ПРЛО, применяемых для создания пассивных помех, являются
их малые габариты и массы. Для подавления РЛС требуется огромное число отра-
жателей. Число отражателей в одном облаке может достигать Ю10...Ю15 штук при
концентрации от десятых долей до десятков отражателей в кубическом метре.
В качестве ПРЛО широко применяются длинные металлизированные провода
или небольшие тонкие диполи, длина которых имеет порядок половины длины
волны подавляемой РЛС (см. рис. 6.1). Толщина ПРЛО очень мала — около одно-
го микрона. Вследствие малой массы и небольших габаритов имеется возможность
размещать на борту ЛА значительные запасы ПРЛО.
Рис. 6.1. Образцы пачек пассивных дипольных отражателей
Основными характеристиками отражателей, применяемых для создания пассив-
ных помех, являются эффективная площадь рассеяния (ЭПР), ширина спектра сиг-
нала, переизлученного облаком отражателей, временные параметры: время разверты-
вания облака, время снижения отражателей.
ЭПР дипольных отражателей зависит от их размеров, ориентации относительно
передающей и приемной антенн РЛС и поляризационных характеристик антенн РЛС.
Максимальное значение ЭПР равно
отах=0,86Х2. (6.1)
6.1. Общая характеристика пассивных помех
265
Среднее значение ЭПР полуволновых отражателей, случайным образом ори-
ентированных в пространстве, определяется следующим образом. При подавлении
однопозиционных РЛС
Оц=0,17Х2; (6.2)
при подавлении двухпозиционных РЛС
=^- = 0,06Х2. (6.3)
Снижение ЭПР диполей в последнем случае объясняется значительным влия-
нием на среднюю ЭПР диаграммы переизлучения отражателя. Для двухпозицион-
ных радиолокационных систем вероятность направления нуля диаграммы переиз-
лучения отражателя на приемную или передающую антенны РЛС значительно воз-
растает по сравнению со случаем подавления однопозиционной РЛС.
ЭПР длинных проводов равна [57]
4л/2
°пр ” г 1 V ’ (6.4)
2 . А
где / — длина провода; а — радиус сечения провода; X — длина волны (для частот,
кратных резонансной частоте провода).
Из (6.4) следует, что при увеличении длины провода его ЭПР возрастает. В ре-
альной атмосфере длинные провода скручиваются, поэтому использование форму-
лы (6.4) для определения ЭПР приводит к ошибкам. На практике ЭПР длинных про-
водов определяется экспериментально.
Клубки, образованные из спутанных длинных проводов, имеют изрезанную мно-
голепестковую диаграмму переизлучения с шириной лепестка
0л=урад, (6.5)
где L — средний размер поперечника клубка. ЭПР такого клубка примерно равна
лА2
(6.6)
Подбором L и числа витков можно получить диаграмму переизлучения, форма
которой близка к диаграмме переизлучения прикрываемого ЛА. Это свойство клуб-
ков может быть использовано для создания ложных целей. Однако следует иметь в
виду невозможность получения кинематического подобия ЛЦ и имитируемых ЛА
вследствие малой скорости движения клубков в атмосфере.
Дипольные отражатели и длинные провода укладываются в различные упаковки:
патроны, пачки, коробки, катушки, бандероли. Каждый тип упаковки имеет свою
маркировку. Для него приводится среднее значение ЭПР.
Ширина спектра сигнала, отраженного облаком диполей, зависит от типа ПРЛО
и метеофакторов. Ориентировочно ширина спектра равна
Д/пп-^> (6.7)
л
где ov — среднеквадратический разброс радиальных скоростей движения ПРЛО
относительно РЛС.
Время развертывания облака имеет порядок /разв = 1...5 с. Время жизни облака
определяется скоростью снижения отражателей, которая примерно равна v ~ 1 м/с.
266
Глава 6. Пассивные и пассивно-активные помехи
При проведении оперативно-тактических расчетов используется уравнение РЭП,
которое для случая создания пассивных маскирующих помех записывается в виде
Ор—(6.8)
где ор — ЭПР отражателей, заполняющих объем разрешения подавляемой РЛС Ир;
Оц — ЭПР летательных аппаратов (группы ЛА), находящихся в объеме разреше-
ния Ир; кп —коэффициент подавления РЛС пассивными помехами.
Объем разрешения РЛС определяется линейной разрешающей способностью
РЛС в азимутальной и угломестной плоскостях и по дальности:
ст
Гр=-^ЯОо>5Я<ро>5, (6.9)
где ти — длительность импульса (для сложных сигналов под ти понимается длитель-
ность «сжатого» импульса); R — дальность от РЛС до рассматриваемого элемен-
тарного объема разрешения; 0О5 и ср0 5 — ширина луча диаграммы направленности
антенны подавляемой РЛС в азимутальной и угломестной плоскостях (для РЛС с
синтезированной антенной под 0О 5 и <р0 5 понимается ширина луча синтезирован-
ной ДНА в соответствующих плоскостях).
Объем разрешения РЛС с непрерывным излучением примерно равен объему
четырехугольной пирамиды с высотой, равной дальности действия РЛС Ярде» и
сторонами основания /?0О 5 и 7?ф0 5:
г=|л3е057?<р0,5- <61°)
ЭПР ПРЛО, находящихся в объеме разрешения, вычисляется по формуле
(6.П)
где п — средняя концентрация диполей, м~3; Gj — среднее значение ЭПР одного
диполя; Ипп — объем облака отражателей, попадающих в объем разрешения РЛС:
(6.12)
где Ио — полный объем облака; Ф — символ, обозначающий операцию пересече-
ния областей Ио и Ур.
Коэффициент подавления РЛС пассивными помехами £пп определяется как
минимальное отношение мощности пассивной помехи Рпп к мощности сигнала Рс
на входе приемника подавляемой РЛС в пределах полосы пропускания линейной
части приемника, при котором имеет место заданный эффект подавления. Значе-
ние кпп может быть выражено через коэффициент подавления РЛС белым шумом
/сп0 с помощью следующего соотношения:
Лпп=—, (6.13)
Т)пп
где Ллп = ПэнппЛсппп — коэффициент качества пассивной помехи; т|эн пп — энтро-
пийный коэффициент качества пассивной помехи; цсппп — спектральный коэф-
фициент качества пассивной помехи.
Энтропийный коэффициент качества пассивной помехи, как известно, зависит
от степени приближения плотности распределения мгновенных значений помехи
Рпп (мпп) к гауссовой плотности распределения.
Суммарный помеховый сигнал, образованный за счет отражения зондирующе-
го сигнала РЛС от большого числа отражателей (п » 1), перемещающихся в про-
странстве случайным образом, можно записать в виде
6.1. Общая характеристика пассивных помех 267
«ш (0 = cos (со/ + (ру). (6.14)
7=1
Так как пассивная помеха иПП (/) образуется как результат сложения большого
числа элементарных сигналов вида t7ycos(co/ + cpy), то для определения плотности
распределения Рпп (мпп) можно использовать центральную предельную теорему те-
ории вероятностей, согласно которой при п > 20 можно считать, что случайная ве-
личина подчиняется нормальному закону распределения. Следовательно,
п =1 (6.15)
Чэнпп v 7
Спектральный коэффициент качества пассивной помехи т|сп пп зависит от фор-
мы спектра зондирующих сигналов РЛС, скорости относительного перемещения
облака помех и РЛС и разброса доплеровских частот сигналов, отраженных от от-
ражателей. Каждая спектральная линия зондирующего сигнала подвергается сле-
дующим изменениям, см. рис. 6.2:
1) сдвигается на доплеровскую частоту Гдп, определяемую средней относитель-
ной скоростью перемещения ПРЛО;
2) расширяется за счет хаотического движения отражателей, движения РЛС и
других факторов.
Рис. 6.2. Изменение спектра зондирующего сигнала
Расширение спектральных линий 50(/) полезного сигнала характеризуют шири-
ной спектра пассивной помехи Д/^, определяемой из (6.7). Спектр пассивных помех
5Г1П (/) ПРИ импульсном зондирующем сигнале является неравномерным (рис. 6.2).
Он состоит из элементарных спектров (гребенок), сдвинутых относительно спект-
ральных линий полезного сигнала на частоту Д/^п. Так как в сантиметровом диа-
пазоне Д/пп == ЮО Гц, ДГдп « 10000 Гц, то пассивная помеха имеет незначительную
устойчивость к частотным методам борьбы с ней. Применение в РЛС схем СДЦ и
оптимальная пространственно-частотная обработка сигналов практически полно-
стью исключают воздействие пассивных помех.
268
Глава 6. Пассивные и пассивно-активные помехи
Спектральный коэффициент качества может быть определен по формуле
Лсппп-^ОСЛ’ (6.16)
где &осл — коэффициент ослабления пассивных помех в РЛС.
В современных РЛС коэффициент ослабления &осл весьма мал (&осл = 10-3...10~5),
поэтому г|осл « 10~3...10~5. Следовательно, результирующий коэффициент качества
пассивных помех можно полагать равным нулю:
Ппп — ЛэНГТпЛсГТПП — 0- (6-17)
Исключительно низкое значение коэффициента качества пассивных помех сви-
детельствует о необходимости пересмотра традиционных способов создания пас-
сивных помех РЛС нового поколения. Повышение эффективности применения
ПРЛО может быть достигнуто за счет использования экранирующего эффекта об-
лаков с высокой концентрацией отражателей и использования ПРЛО в качестве
вторичных источников активных помех (активно-пассивные помехи). Эффектив-
ность пассивных помех может быть повышена за счет специальных маневров ЛА.
Перечислим основные достоинства пассивных помех.
1. Для создания пассивных помех не требуется расхода энергии специальных
передатчиков.
2. Отношение помеха/сигнал на входе приемника подавляемой РЛС зависит от
дальности в меньшей степени, чем в случае создания активных помех. Для облаков
отражателей небольших размеров, попадающих в объем разрешения РЛС, отноше-
ние помеха/сигнал не зависит от дальности, а определяется только концентрацией
отражателей.
3. Энергетический потенциал РЛС не влияет на степень подавления РЛС пас-
сивными помехами.
4. Для применения пассивных помех не требуется высокоточной разведки несу-
щих частот РЛС и определения других параметров их сигналов. Это связано с боль-
шой широкополосностью ПРЛО, достигающей 10...20 % от несущей, что составляет
в сантиметровом диапазоне 100... 1000 МГц. Пассивные помехи являются прицель-
ными во всем рабочем диапазоне РЛС. Пассивные помехи могут быть эффектив-
ными при подавлении РЛС с перестройкой несущей частоты от импульса к импульсу.
5. Простота и дешевизна отражателей способствуют накоплению больших за-
пасов различных ПРЛО, которые следует рассматривать как средство РЭБ быстро-
го реагирования на неожиданное появление новых РЭС с высокой степенью поме-
хозащиты от активных помех.
Можно также отметить недостатки пассивных помех.
1. Низкое значение коэффициента качества пассивных помех (т|пп « 0) свиде-
тельствует о незначительной устойчивости к контрмерам. Традиционные приемы
применения пассивных помех требуют критического анализа.
2. ПРЛО являются расходуемыми средствами и для создания пассивных помех
необходим определенный запас отражателей, который в процессе выполнения бо-
евого задания не пополняется.
3. Облака (полосы) отражателей за счет снижения последних существуют огра-
ниченное время. Местоположение их постоянно изменяется. Это накладывает до-
статочно жесткие ограничения на способы применения пассивных помех.
4. За счет ограниченного размера облаков (полос) ПРЛО области маскировки
целей имеют локальный характер. Самолеты, находящиеся вне облаков ПРЛО, не
прикрываются.
6.2. Противорадиолокационные отражатели
269
6.2. Противорадиолокационные отражатели
Исторически дипольные помехи (станиолевые ленты) — это самые первые сред-
ства, которые начали использоваться для радиоэлектронной маскировки. Тем не
D « kk
менее, их с успехом применяют до сих пор. В настоящее время диполи длиной —
2
(к — целое число) изготавливают из диэлектрика с проводящим покрытием. Но воз-
можно применение и поглощающих («черных») диполей с графитовым покрытием.
Диполи разных длин собираются в пачки и рассеиваются в пространстве, где рас-
пространяются сигналы. Облака рассеянных диполей отражают сигналы в широкой
полосе частот — = 5... 15 %. Для поддержания большой эффективной отражающей
/о
поверхности (ЭПР) развернутой пачки (одо>> ола), их сбрасывают достаточно часто
с небольшим разносом по времени. Полученные дипольные облака (рис. 6.3) создают
яркие засвеченные секторы на экранах индикаторов РЛС и долго висят в среде
распространения радиолокационного сигнала, создавая помехи как РЛС обнаруже-
ния, так и РЛС комплексов управления оружием. Толщина диполей обычно мала
(десятки микрон), при ее выборе учитывают лишь поверхностный эффект и механи-
ческую прочность.
Рис. 6.3. Развертывание пачки диполей
Очень важен для тактики применения пассивных дипольных помех вопрос о
динамике развертывания дипольного облака. Летательный аппарат (рис. 6.3, а)
выбрасывает по ходу полета пачку диполей. Процесс развертывания пачки в спутной
струе двигателя ЛА является нестационарным случайным процессом. Ширина облака
по оси х(/) является случайной величиной с плотностью вероятности Р(х |Т). Эф-
фективная ширина плотности распределения /(Г), естественно, зависит от времени.
На рис. 6.4 представлено изображение экрана ИКО импульсной РЛС, подавля-
емой пассивными помехами.
Полосы пассивных помех, создаваемых двумя самолетами, имеют протяженность
более 50 км.
На рис. 6.5 изображен тот же индикатор при воздействии дискретных пассив-
ных помех, создающих эффект имитации множества ложных целей.
Во времени облако диполей постоянно расширяется, размер /(Т) увеличивает-
ся, пока не достигнет величины 4 в конце развертывания всей пачки. Парциаль-
ные скорости каждого диполя Vo случайны, так как диполи тормозятся встречным
потоком воздуха. В результате скорость AVZ = Vz - Vo, в среднем V, со временем
уменьшается и, как правило, к концу развертывания пачки А Твеличина V - V = AV
достигает наибольших величин.
270
Глава 6. Пассивные и пассивно-активные помехи
Рис. 6.4. Экран ИКО импульсной РЛС, подавляемой
пассивными помехами
Рис. 6.5. Экран ИКО импульсной РЛС, подавляемой
дискретными пассивными помехами
Общее число N диполей, попадающих в единичный объем пространства v = 1
при рассеянии пачки из Nx со временем меняется. В результате к окончанию мо-
мента времени Д Тпространственная плотность диполей пк (у) в облаке будет различ-
ной (рис. 6.2, а).
Теория дипольных помех [19] оперирует с ЭПР одиночного полуволнового
диполя (рис. 6.6):
(0) = olmax cos4 0 = 0,86Х2 cos4 0. (6.18)
Для определения среднего значения ЭПР диполя (gj ) в единице объема надо
учесть элемент поверхности (рис. 6.7).
Поляризация всех отражений от диполей одинакова. Вероятность того, что
диполь очутится в пределах элементарного угла dQ:
p(fd)da = —. (6.19)
4л
6.2. Противорадиолокационные отражатели
271
Рис. 6.6. Полуволновой
дипольный отражатель
Рис. 6.7. К расчету ЭПР
дипольного облака
Среднее значение ЭПР одного диполя, положение и ориентация которого слу-
чайны и равновероятны, определится усреднением:
л 2л . 1
Ы = J о, (е) Хе) do.=J J о! (е)^^==о, i п2. (6.20)
£2 О О 4Л 5
Если в пачке содержится Nz диполей, их полная ЭПР в объеме vE после полного
развертывания составит
oz=^z(oi) = 0,17X27Vz. (6.21)
Обычно учитывают КПД диполей (часть диполей слипаются, ломаются) так, что
oz =0,17X2tVVz. (6.22)
Иногда требуется знать ЭПР диполя для случая пространственного разнесения
точек излучения и приема сигнала (рис. 6.8).
Рис. 6.8. К расчету ЭПР диполя при разнесении
точек приема и передачи
В работе [19] указано, что эта величина равна
ai (v) = 0Д7А,2 cos2 \|/ + 0,1 IX2 sin2 у; |у| < —. (6.23)
2
Максимальная мощность рассеивания соответствует углам у = 0иу = л, а ми-
нимальная — при v = л/2 и v = Зл/2 примерно составит 0,65о1тах. При у « я ЭПР
диполей существенно возрастает [19]. Чтобы подсчитать ЭПР диполей в объеме v(/)
в момент времени t, надо знать количество (в процентах от полного количества Nz)
диполей в единичных объемах в различное время.
Как уже отмечалось, парциальная скорость диполя Vt — величина случайная и
зависит от ряда причин: от турбулентности атмосферы; от аэродинамических харак-
теристик диполей; от особенностей движения под воздействием ветра; от скорости
снижения диполей под влиянием силы тяжести; от влияния спутной струи двига-
теля ЛА.
272
Глава 6. Пассивные и пассивно-активные помехи
Кроме того, флюктуации отраженного сигнала вызываются собственным враще-
нием диполей, неравномерностью диаграммы направленности антенн РЛС, а также
рядом других причин. При этом различают «быстрые» и «медленные» диполи, враща-
ющиеся при снижении, как на рис. 6.9. Вследствие этого эффекта функция рас-
пределения скоростей р(У) оказывается двухмодальной, и ее график имеет вид при-
мерно как на рис. 6.10.
Рис. 6.9. Быстрые
и медленные диполи
Рис. 6.10. Двухмодальное
распределение скоростей
диполей
Медленные диполи стремятся сориентироваться горизонтально. В быструю груп-
пу собираются дефектные диполи, имеющие зазубрины и деформации, которые де-
лают их похожими на аэродинамические рули с вертикальной ориентацией. Опыт-
ные данные свидетельствуют о преимущественной горизонтальной ориентации
диполей.
Изучение спектра флюктуации гармонических сигналов [19], отраженных от ди-
польного облака, показывает, что спектр хорошо описывается гауссовой кривой
(квадратичной экспонентой), показанной на рис. 6.11:
G(/7) = exp -л
= ехр -л
(6.24)
где | V| — модуль полной скорости движения диполя, имеющей своими составля-
ющими скорость снижения под действием силы тяжести, а также скорость переме-
щения под действием ветра и турбулентностей.
Рис. 6.11. Ширина спектра флуктуации сигналов, отраженных диполями
Эффективная ширина спектра флуктуации из (6.24)
Д/g =2^, Гц, (6.25)
А
Для длины волны X = 3 см расширение спектра составляет примерно 70 Гц.
6.2. Противорадиолокационные отражатели
273
Если считать, что элементарный объем облака площадью S = 1 м2 и толщиной dx
рассеивает энергию пропорционально своей эффективной отражающей поверхности:
= (6.26)
где Р— мощность сигнала, падающего на элементарный объем; (оэ0) — удельная
ЭПР диполей, распределенных в единице объема, имеющая размерность [м2/м3*м-1],
можно показать [19], что коэффициент ослабления электромагнитной волны
р = 0,73Х2л, (6.27)
где п — среднее число диполей в единице объема.
Таким образом, мощность электромагнитной волны, прошедшей через облако
толщиной х, в одном направлении, составит
Р = Ро1ОЧ)’1^ (6.28)
Если предположить, что дипольное облако является экраном для сигнала РЛС,
ослабляя мощность электромагнитной волны в 10 раз, можно подсчитать требуе-
мую для этого концентрацию диполей. Так, для облака толщиной х = 1 км требует-
ся п ~ 15 диполей/м3. Это очень большая концентрация диполей.
Основной эффект от применения дипольных отражателей состоит в маскиров-
ке, экранировании, когда облако, располагаясь между целью и РЛС, ослабляет
проходящие через него зондирующие и отраженные сигналы. Вследствие этого
эффекта РЛС, обнаруживающая цель и измеряющая дальность и пеленг, лишается
возможности наблюдать сигнал за облаком. Условием эффективности применения
дипольных отражателей является создание должной концентрации диполей в еди-
нице объема, т. е. в итоге определяется числом сброшенных пачек. Импульсный
объем РЛС (рис. 6.12) определяется соотношением
у ~ (6 29)
2
где Д6а и Дфа — эффективные ширины луча ДНА РЛС; ти — длительность импуль-
са РЛС.
Рис. 6.12. Импульсный объем РЛС
В этом объеме должно оказаться столько диполей л, чтобы ЭПР объема со-
ставила
Ov = Йу(О1) = Й7?Д0аАфау(а1) = ^поц, (6.30)
где (ci) = 0,17Х2 cos40 — усредненная ЭПР одного диполя; кп — коэффициент по-
давления; Оц — ЭПР цели.
Эффективность дипольных отражателей будет достаточной, если av>> оц. В про-
цессе динамического развертывания облака av постоянно меняется. Это надо учиты-
вать при расчетах. Рассматривая задачу обнаружения точечной цели на фоне диполь-
ного облака, сигнал, рассеянный и переотраженный облаком, уподобляют внеш-
нему гауссовскому небелому шуму со спектральной плотностью ^(Т7) (рис. 6.11).
274
Глава 6. Пассивные и пассивно-активные помехи
Поэтому теория обнаружения цели среди дипольных отражателей не отличается от
классической теории обнаружения точечной цели на фоне небелого шума.
На основе теории обнаружения можно подсчитать эффективную ширину £э
маскируемой дипольной помехой области [19]. На рис. 6.13 показано соотношение
мощности помех (отраженных от дипольных отражателей) и мощности сигнала РЛС
в зависимости от пеленга 0 цели.
Рис. 6.13. Сигналы и помехи, отраженные диполями
Случай 1 (высокая концентрация диполей в облаке) дает эффективную шири-
ну маскируемой области £э1, т. е. линейное расстояние, внутри которого сигнал не
виден ни при каком пеленге. Для облака с меньшей концентрацией (случай 2) эта
область Д2 меньше. Размер маскируемой области подсчитывается по формуле [19]
Д =ЯД0а+7пэ, (6.31)
где /пэ — эффективная ширина облака дипольных отражателей.
Современные РЛС с непрерывным сигналом когерентного типа непосредственно
измеряют скорость движения цели и следят за изменениями этой скорости с по-
мощью автоматических систем сопровождения по скорости АСС. Поскольку облака
дипольных отражателей быстро тормозятся встречным потоком ветра, они, несмотря
на большой отраженный сигнал (ЭПР облака много больше ЭПР цели), быстро ухо-
дят из следящего строба АСС, и пассивные помехи от диполей быстро теряют эффек-
тивность. Поэтому применение дипольных отражателей против РЛС с непрерыв-
ным излучением малоэффективно, если не применяются специальные виды маневра.
Отражения от диполей имеют резонансный характер, так что ЭПР диполя в
зависимости от длины имеет вид, как на рис. 6.14.
Рис. 6.14. Резонансы диполей
На величину ЭПР диполя, сброшенного с самолета, влияет множество случайных
факторов: эффект слипания и перемешивания диполей; динамика их развертыва-
ния; поляризация падающей волны; методы рассеяния дипольных отражателей;
6.2. Противорадиолокационные отражатели
275
влияние окружающей атмосферы; экранирующий эффект; скорость падения ди-
полей и т. д. Поэтому многие методы расчета, изложенные выше, дают лишь при-
ближенные данные для планирования мероприятий РЭП с применением диполь-
ных отражателей.
Пачки диполей разбрасываются с таким темпом, чтобы расстояние между ди-
польными отражателями соседних пачек было меньше разрешающей способности
РЛС по дальности 8R и по углу 89. При постановке облаков дипольных отражателей
надо рассчитывать количество пачек, приходящихся на импульсный объем РЛС.
Обычно отношение мощностей, отраженных от цели и от облака внутри импульсно-
го объема РЛС, больше 3 дБ. При расчетах надо учитывать, что только 30 % дипо-
лей в пачке участвуют в образовании ЭПР. При развертывании диполей следует
учитывать полное время развития облака из пачки от десятых долей секунды до
нескольких секунд, в зависимости от типа диполей и атмосферных условий (в вер-
хних слоях атмосферы развитие происходит быстрее). В среднем время падения
диполей составляет примерно 75 м/мин (для тонких диполей ленточного типа).
Обычно в одну пачку умещается много сотен тысяч диполей из металлической
фольги или миллионы диполей на диэлектрической основе. Совокупность несколь-
ких развернутых пачек диполей называется облаком, а последовательность пере-
крывающихся облаков — полосами длиной в несколько километров.
Следует учитывать, что помимо эффекта слипания диполей («гнездования»)
наблюдается эффект экранирования, когда более отдаленные от РЛС диполи отра-
жают слабее, ибо на них падает меньше энергии электромагнитной волны. Для
усиления экранирующего эффекта дипольных отражателей (увеличение коэффи-
циента затухания в облаке р) могут применяться специальные диполи из других
материалов, поглощающих электромагнитные волны.
При развертывании облака диполей с летательного аппарата (рис. 6.15) шири-
на полос в горизонтальной Lr (рис. 6.15, а) и вертикальной LB (рис. 6.15, б) плос-
костях составляет -(400... 1000) м. Поперечное сечение облака (рис. 6.15, в) имеет
колокольную форму.
Для расчета объемной плотности развернутой пачки D (м2/км3) существует
эмпирическая формула:
D = 60Рстп (6 32)
W
где р — количество сбрасываемых пачек за 1 мин; V — скорость самолета, выбра-
сывающего диполи; £г и £в — соответственно ширины полос дипольных отража-
телей (рис. 6.15); оп — ЭПР облака, образуемого из одной пачки диполей.
Например, если р = 30 пачек/мин, оп=100 м2, К=750 км/ч, £г= 0,360 км,
£в= 0,93 км, имеем D - 720 м2/км3. Таким образом, для создания полосы длиной
186 км самолет за 15 мин должен сбросить 450 пачек.
276
Глава 6. Пассивные и пассивно-активные помехи
Существует несколько методов разбрасывания дипольных отражателей: рассея-
ние путем ввода пачек в обтекающий воздушный поток из бункера на транспортер-
ную ленту; рассеяние путем инжекции диполей в дымовую трубу корабля; рассеяние
воздушным потоком диполей, уложенных на бумагу, свернутую в рулон; нарезка
диполей непосредственно перед рассеянием; отстреливание с помощью пиропатро-
нов, выстреливаемых из пневматической установки; отстреливание с помощью ракет
с диполями, запускаемых в переднюю полусферу; сбрасывание с помощью авиацион-
ных бомб; отстреливание с помощью минометов и артиллерийских снарядов и т. д.
Обычно количество выбрасываемых дипольных отражателей тщательно рассчи-
тывается и планируется. Дипольные облака и полосы ставят, обычно, по направле-
нию ветра, с таким расчетом, чтобы ударные летательные аппараты все время находи-
лись под их экранирующим действием. Типовой размер полос /г= 500 м, £в= 1,5 км.
Протяженность полос от единиц километров до 100 км. Диапазон частот при по-
давлении РЛС обнаружения должен составлять 250...8000 МГц.
Дипольные помехи могут применяться для маскировки головных частей балли-
стических ракет (БР), преодолевающих рубежи ПРО [58]. Примерная схема пре-
одоления ПРО с использованием дипольных отражателей для модификации свойств
среды распространения радиолокационного сигнала вдоль траектории МБР пока-
зана на рис. 6.16.
Рис. 6.16. Защита диполями головных частей МБР на траектории
Облако дипольных отражателей может накрывать одну или несколько головных
частей, а также ложных целей, маскирующих МБР от обнаружения и сопровожде-
ния средствами ПРО.
Полагая, что ширина луча РЛС а = р = 1,2°, длительность сжатого импульса
ти = 1 мкс, размеры облака составляют 370 и 900 км (диполи распределены равно-
мерно), a (oJ^OJm2 (при длине диполя 40 см), то в соответствии с формулой
(6.30) в импульсном объеме РЛС на расстоянии 1300 км, соответствующем мини-
мальной дальности порыва антиракет, будет содержаться примерно 80 дипольных
отражателей с общей ЭПР 0,8 м2. Для средней ЭПР головной части со стороны носа
0,001 м2 соотношение сигнал/помеха составит -30 дБ, что делает невозмож-
ным распознавание головных частей радиолокационными станциями в составе
комплексов противоракетной обороны.
Первоначально конструкции дипольных отражателей были очень просты. Они
представляли собой металлические или металлизированные полуволновые вибра-
6.2. Противорадиолокационные отражатели
277
торы, комплектуемые в пачки и выбрасываемые в огромных количествах для фор-
мирования облаков или протяженных завес.
Интенсивное развитие методов и средств постановки пассивных помех привело
к созданию дипольных отражателей более сложных и оригинальных конструкций,
придающих этим средствам радиомаскировки новые качества. Во-первых, диполи
стали делать из тонких, прочных и упругих нитей (стекловолокна, майлара, углепла-
стика), покрытых слоем металла. Такие нити плотнее упаковываются в пачки и мень-
ше спутываются и рвутся. В результате каждая пачка может создать облако с большей
ЭПР, чем пачка станиолевых полосок. Во-вторых, были разработаны специальные
формы и конструкции, позволяющие диполям дольше плавать в атмосфере. Для
этого созданы диполи из очень тонких (диаметром порядка 1 мм) металлизированных
трубок, наполненных легким газом. Трубка герметизирована, а ее длина примерно
равна половине рабочей длины волны РЛС. При нормальном атмосферном давлении
дипольный элемент частично сложен. На высоте, где его вес равен весу вытесняе-
мого им воздуха, он полностью раздувается давлением газа внутри трубки. Исполь-
зуя это техническое решение, можно создавать диполи, остающиеся во взвешенном
состоянии на различной высоте над землей в условиях стандартной атмосферы. Были
также созданы диполи, которые медленнее опускаются за счет авторотации. Кон-
струкция таких диполей представлена на рис. 6.17.
Диполь выполняется из тонкой металлизированной пленки. Два стабилизатора,
размещенные на конце диполя, отогнуты относительно друг друга на 45°. При
выбросе диполей с ЛА в больших количествах каждый отдельный диполь будет вра-
щаться относительно своей центральной оси. Малая масса отдельных диполей в
сочетании с вращательным движением позволяет им оставаться практически на
одной и той же высоте в течение относительно большого ин-
тервала времени. Кроме того, вращение стабилизирует верти-
кальную ориентацию диполя в любой момент времени и спо-
собствует доплеровскому расширению спектра отраженного
сигнала, препятствуя селекции движущейся цели на фоне от-
ражений от дипольных облаков.
Дипольные отражатели, используемые для прикрытия голов-
ных частей баллистических ракет, должны работать в услови-
ях гиперзвуковых скоростей, не разрушаться на участке спуска
в атмосфере вплоть до очень малых высот и двигаться в атмо-
сфере по траектории, подобной траектории спуска головной
части МБР. Кроме того, диполи должны ориентироваться по-
перек луча РЛС. Необходимые аэродинамические, баллистичес-
кие и электродинамические характеристики обеспечиваются у
Рис. 6.17. Вращаю-
щийся диполь
диполей, выполненных в виде плоских конструкций с клиновидными концами, один
из которых длиннее другого. Это позволяет сместить центр тяжести диполя впе-
ред. У задней кромки делают отверстие, чтобы сместить центр тяжести относительно
центра приложения аэродинамических сил. Диполи могут иметь различную толщину
по длине. Тонкая удлиненная конфигурация обеспечивает низкое сопротивление
и высокий баллистический коэффициент. Изменяя угол атаки, под которым отдель-
ные диполи будут стабилизироваться в полете, можно задать высоту, на которой
они изменят ориентацию. Изменение углов атаки обеспечивается отогнутыми час-
тями с разными углами и площадью отгиба. Эти конструктивные приемы иллюст-
рируются рис. 6.18.
278
Глава 6. Пассивные и пассивно-активные помехи
Рис. 6.18. Специальные формы самостабилизирующихся
и самоориентирующихся дипольных отражателей
Таким образом, конструкции, материалы, технологические схемы изготовления
и тактические приемы применения дипольных отражателей — старейшего вида
пассивных помех — постоянно совершенствуются.
6.3. Аэрозоли
Аэрозольная маскировка — это способ снижения величины контраста ярко-
сти (KQ) объекта маскировки ниже уровня минимальной контрастной чувствитель-
ности зрительного анализатора (порога контраста яркости объекта £0 = (£nOpmin)
за счет создания искусственного замутнения среды на «линии визирования» между
объектом обнаружения и наблюдателем.
В известных исследованиях в области радиолокации и РЭП практически не
рассматривается замечательное свойство локальных аэрозольных образований,
которое заключается в их способности при определенных условиях усиливать по-
меховый сигнал, если САП подсвечивает аэрозольное образование.
Контрастная чувствительность зрительного анализатора характеризуется способ-
ностью анализатора лучистой энергии обнаруживать малые различия яркости объек-
тов-источников излучения отраженного или испускаемого света.
Нейтральные аэрозоли могут применяться в виде маскирующих аэрозольных
завес [59]. Боевое применение маскирующих аэрозолей заключается в образовании
в воздухе искусственных завес, представляющих собой коллоидно-химические си-
стемы: дымы, пыли и туманы, образованные из мельчайших, свободно плавающих
в воздухе твердых и жидких частиц.
Применение маскирующих аэрозолей позволяет во многих случаях осуществить
один из важнейших принципов военного боя — внезапность и неожиданность
нападения, а также способно деморализовать противника. Маскирующие аэрозо-
ли являются средством лишь снижающим на некоторое время эффективность огня
противника. После рассеяния аэрозольной завесы противник целиком восстанав-
ливает свою боеспособность. Как показывает опыт войн, маскирующие аэрозоли
являются в основном средством наступательного боя, защиты наземных и надвод-
ных объектов фронта и тыла.
Задача маскирующих аэрозолей в наступлении заключается прежде всего в
снижении до минимума эффективности огня или исключении возможности его
ведения обороняющимся противником.
Исключительно важное значение имеет возможность применение аэрозолей для
защиты бронетанковой техники от противотанковых средств как наземного, так и
воздушного противника, а для авиации — возможность ослепления зенитных ком-
плексов ПВО малой дальности как на маршруте полета над территорией против-
6.3. Аэрозоли 279
ника, так и у объекта поражения. Заблаговременно обнаружить и своевременно
подавить огневые точки противника противотанковой и противовоздушной оборо-
ны является делом весьма трудным, а порой и невозможным из-за неопределенно-
сти их местоположения (координат), ибо рассматриваемые средства не ведут огня
до появления объектов поражения на эффективной дальности; между тем как маски-
рующие завесы, ослепляя системы наведения и управления оружием противника,
маскируют объекты (танки, боевые машины пехоты, самолеты, вертолеты и т. д.),
создают условия, мешающие ведению прицельной стрельбы, и резко снижают эф-
фективность огня противника.
Кроме наступления, аэрозоли применяются при выходе из боя и переправе через
водные преграды (препятствия). Однако постановка маскирующей завесы перед
передним краем обороны невыгодна (за исключением индивидуальной защиты),
так как она мешая наблюдению, ослабляет и дезориентирует обороняющегося, обес-
печивая тем самым противнику беспрепятственное наступление. Маскирующие
аэрозольные завесы для целей обороны могут быть использованы в период артпод-
готовки и подхода боевого порядка противника для ослепления его воздушных и
наземных наблюдательных пунктов и батарей, а также во время борьбы внутри
оборонительной полосы для прикрытия контрудара своих частей.
В морском бою аэрозольные завесы широко применяются для обеспечения
тактического маневра и нанесения коротких ударов противнику.
Маскирующие аэрозольные завесы применяются для защиты тыловых объектов
(железнодорожных узлов и станций, военных и военно-промышленных объектов,
аэродромов) от ударов авиации противника. Здесь необходимо заметить, что жела-
емого эффекта можно достигнуть лишь при создании крупномасштабной маскирую-
щей завесы, если же цель будет прикрыта малой завесой, то последняя будет служить
только ориентиром для воздушного противника и принесет больше вреда, чем пользы.
Таким образом, свойство нейтральных аэрозолей проявляется через пассивное
средство защиты объекта, воздействующее на уровень информационности оптико-
визуальных, оптоэлектронных и других средств разведки, наблюдения и наведения
оружия противника с целью снижения эффективности их применения.
Поскольку аэрозольная завеса является пассивным средством защиты, то ее
маскирующее и ослепляющее свойства следует рассматривать одновременным яв-
лением по отношению как к объекту маскировки, так и к наблюдателю (противни-
ку). Это обстоятельство можно объяснить следующим образом: аэрозольная заве-
са, обеспечивающая эффективную маскировку объекта, в одно и то же время мо-
жет стать ослепляющей, если она скрывает атакующего противника от наблюдения
собственными средствами обороны (например, в процессе атаки воздушным про-
тивником наземной цели). В случае же постановки аэрозольной завесы в районе
расположения противника — ослепляет средства обороны и маскирует объект по-
ражения, тем самым может исключить эффективное применение собственного
оружия, но обеспечивает условия маскировки. В обоих случаях, если не принимать
определенных тактических мер по постановке завес для обеспечения наиболее бла-
гоприятных для себя условий ведения боевых действий, она становится маскирую-
щей как для защищающегося объекта, так и для противника, но это не всегда воз-
можно. Поэтому при рассмотрении оптоэлектрических свойств аэрозольных завес
целесообразно говорить о них все же как о маскирующих, так как при постановке
завес для скрытия своих объектов и в районе расположения противника ее прояв-
ление осуществляется посредством действия пассивной маскирующей помехи.
280
Глава 6. Пассивные и пассивно-активные помехи
Вместе с тем при решении конкретной задачи с использованием аэрозольных
завес следует различать и определять конкретное ее предназначение. При этом
следует использовать термины «маскирующая» либо «ослепляющая» и рассматри-
вать ее положение только относительно того, кто ставит завесу. По мнению зару-
бежных специалистов [19], следует различать маскирующие и ослепляющие завесы.
Маскирующие (защитные) завесы предназначены для прикрытия действий сво-
их войск (на земле, в воздухе и на море) или для маскировки наземных целей.
Детализируя основные задачи, решаемые с применением аэрозолей, следует
отметить следующие частные цели их применения:
• маскировка фронта наступления и прикрытие наступающих подразделений и
частей с флангов от эффективного огня обороняющегося противника;
• прикрытие войск при выходе из боя;
• скрытие путей следования и районов сосредоточения и развертывания подраз-
делений и частей;
• защита ЛА в зонах действия ПВО малой дальности, на маршруте полета и в
районе цели;
• защита ЛА, кораблей и наземных целей от эффективного огня воздушного про-
тивника.
Маскирующие завесы, поставленные с учетом метеоусловий, подстилающей
поверхности и рельефа местности, лишают противника возможности вести разведку
и исключают эффективное применение оружия. Маскирующие завесы могут быть
«подвижными» и «неподвижными» в зависимости от способа их постановки.
Подвижная завеса прикрывает перемещающиеся объекты и производится аэро-
зольными средствами, находящимися в движении, согласованном с движением ма-
скируемого объекта. В целях обеспечения эффективной маскировки объектов такие
завесы должны создаваться с упреждением по времени с фронта или с флангов отно-
сительно движения объекта либо группы объектов, например, самолетов, кораблей
и наземных целей.
Неподвижная завеса производится с одного или последовательно с нескольких
неподвижных рубежей и прикрывает преимущественно неподвижные объекты, хотя
в некоторых случаях ее можно использовать и для прикрытия перемещающихся
(движущихся) объектов.
По своему положению относительно линии фронта, состоянию объекта или их
группы маскирующая завеса может быть:
• фронтальной вертикальной (отсечной), если она находится перед фронтом под-
разделения, части, соединения своих войск и прикрывает от огня противника
с фронта;
• фланговой вертикальной (отсечной), когда она находится на фланге (или на
флангах) боевого порядка и прикрывает его от флангового огня и наблюде-
ния противника;
• площадной горизонтальной (приподнятой над землей, водой), если она нахо-
дится над подразделениями, соединениями своих войск, наземными (надвод-
ными) объектами тыла и фронта и прикрывает их от огня и разведки воздуш-
ного противника. Такие завесы могут быть сплошными или очаговыми;
• упреждающей площадной горизонтальной, если она находится под боевым по-
рядком подразделения (например, боевой порядок ЛА в зоне действия войско-
вой ПВО малой дальности) и устанавливается с упреждением в целях прикры-
тия его от фронтального и флангового огня наземного противника.
6.3. Аэрозоли
281
Такого рода завесы могут устанавливаться перед боевыми порядками авиации
как сплошными, так и с разрывами (интервалами), обеспечивающими эффективное
применение ЛА в зависимости от времени реакции зенитных комплексов ПВО и
ряда других факторов.
Аэрозольные завесы (АЗ) могут с успехом применяться для защиты баллисти-
ческих объектов.
Ослепляющие завесы имеют целью оказать непосредственное помеховое воздей-
ствие на визуальные и оптоэлектронные каналы информации огневых точек и на-
блюдательных пунктов противника.
Исторически сложившийся термин «ослепляющая завеса» не вполне соответ-
ствует физике (смыслу) процесса ослепления, как такового.
Ослепление с точки зрения оптического явления — это способ создания помехи
в эффективном поле зрения наблюдателя или в угловом размере поля поиска опто-
электронной системы по мощности светового излучения, превосходящего макси-
мальный порог световой чувствительности зрительного анализатора или приемного
устройства системы лучистой энергии.
Что же касается АЗ, то она сама по себе, без специального подсвета, не способ-
на излучать свет такой силы.
Сущность постановки ослепляющей АЗ сводится к тому, что аэрозолеобразу-
ющее вещество (состав) с помощью специального устройства (технического средства)
перебрасывается к противнику. Аэрозольная завеса в этом случае образуется или в
самом расположении противника, или непосредственно перед его фронтом. Обра-
зовавшаяся завеса, покрывая расположение противника и его огневые точки, «ослеп-
ляет» его, лишает возможности наблюдения и снижает эффективность его огня.
Общий термин «аэрозоль» был предложен профессором Доннаном в конце пер-
вой мировой войны для образования тонких аэродисперсных систем, таких как ядо-
витые дымы фенилхлорсилана, которые начали применять в то время. Независимо
от Доннана этим термином начал пользоваться Гаусс, которому принадлежит и пер-
вая статья, где было упомянуто слово «аэрозоль».
Разнообразные системы, состоящие из мельчайших частиц, взвешенных в газо-
вой среде, носят название аэродисперсных систем, или аэрозолей. К аэрозолям
относятся, помимо маскирующих аэрозолей: гидрометеориты, т. е. естественные ту-
маны и облака, все продукты загрязнения атмосферы, атмосферная пыль, газовые
ионы, космическая пыль, дымы, полученные в результате неполного сгорания топли-
ва на фабриках, заводах, моторном транспорте, отходящие газы, выделяющиеся при
химических процессах, пыль, образующаяся при механической обработке матери-
алов в каменоломнях и т. п., словом, все то, что называется туманом, дымом, пылью,
копотью, облаком, мглой и т. д.
Строго говоря, аэродисперсной системой является и сам атмосферный воздух,
всегда содержащий некоторое количество пыли, газовых ионов и гидрометеоров.
Аэродисперсные системы являются коллоидно-химическими системами, в кото-
рых дисперсионной средой является воздух, а дисперсной фазой — твердые и жидкие
частицы.
В основу классификации аэрозолей положено два принципа: величина частиц
и агрегатное состояние дисперсной фазы.
Прежде всего, аэрозоли делятся на дымы и туманы, являющиеся истинными кол-
лоидными системами с частицами, меньшими 10"3 см (10 мкм), и пыли, или грубые
суспензии, частицы которых больше 10“3 см.
282
Глава 6. Пассивные и пассивно-активные помехи
Дальнейшее деление в области истинных коллоидно-химических систем осно-
вано уже на агрегатном состоянии.
Дымами называются истинные коллоидно-химические аэрозоли с твердой дис-
персной фазой, а туманами — аэрозоли, дисперсная фаза которых состоит из капе-
лек жидкости.
Классификация аэрозолей по агрегатному состоянию не всегда возможна, ибо
аэрозольные системы могут являться смесью твердых и жидких частиц. Кроме того,
поведение истинно коллоидных аэрозольных систем во многом определяется не агре-
гатным состоянием дисперсной фазы, а размерами аэрозольных частиц. Последнее
обстоятельство играет весьма существенную роль особенно для маскирующих аэро-
золей. От размера частиц зависят маскирующие свойства завес — способность от-
ражать (рассеивать) и поглощать электромагнитное излучение определенной длины
волны. И наконец, от радиуса частиц зависит важнейшее свойство аэрозольных обра-
зований — их устойчивость в приземном слое атмосферы, подверженном наиболь-
шей турбулентности. Время эффективного существования маскирующих завес (пе-
риод времени с момента образования аэрозольной завесы, в течение которого она
сохраняет свои маскирующие свойства) является одним из определяющих показа-
телей эффективности маскирующего действия аэрозолей. Следовательно, соответ-
ствующим образом выбрав радиус частиц, можно разделить аэрозоли на стабильные
системы, не разрушающиеся в течение продолжительного времени, и системы, в
которых частицы дисперсной фазы оседают под действием силы притяжения. Исходя
из всего этого дымами называют коллоидно-химические аэрозоли с размерами час-
тиц от 10"5 до 10"7 см, а туманами — аэрозоли, оседающие с размерами частиц от
10"3 до 10"5 см, лежащие между пылью и дымом. Помимо того, в английской терми-
нологии сохранились названия: аэрозоли, полученные путем химической реакции,
редкий водяной туман, густой водяной туман.
Следовательно, вещества, служащие для образования аэрозоля, называются
аэрозолеобразующими составами (АОС), а происходящие при этом процессы — про-
цессами аэрозолеобразования. Искусственно созданные коллоидно-химические си-
стемы в процессе ведения боя — маскирующие АЗ.
Одной из задач исследования аэрозолей является выяснение свойств отдельных
частиц, другой задачей — изучение свойств аэрозолей как систем.
Исследование свойств индивидуальных частиц дало много ценных данных, осо-
бенно для понимания процессов образования аэрозолей, их движения, диффузии —
оптических и электрических свойств. Однако нередко аэрозоли приходится рассмат-
ривать как системы, аналогичные газам, особенно при изучении атмосферных аэро-
золей и турбулентной диффузии аэрозолей. Объектами исследования оптических
свойств аэрозолей, например, при маскировке объектов аэрозольными завесами,
также служат не только отдельные частицы, но и целые системы частиц.
Образование аэрозолей при конденсации паров и в результате газовых химиче-
ских реакций — примеры процессов, к которым были успешно применены основные
физико-химические законы. Это относится и к испарению капель, и к росту гигро-
скопических частиц за счет поглощения ими пара; для достаточно мелких частиц
нужно также учитывать эффекты крутизны поверхности частиц и их заряда.
Переход твердого или жидкого вещества в аэрозольное состояние сопровождается
некоторым изменением его свойств. Причиной этих изменений является, прежде все-
го то, что в аэрозольном состоянии материя, находясь в виде огромного числа отделы
6.3. Аэрозоли
283
ных мелких частиц, обладает большей удельной поверхностью. Представление об
этой поверхности может дать следующий расчет Гиббса [59]. Суммарная или удель-
ная поверхность одного кубического сантиметра вещества равна 6 см2. Если его раз-
делить на 1000 кубиков объемом 1 мм3, то поверхность каждого вновь образованно-
го кубика равняется 6 мм2, а суммарная поверхность вещества — 60 см2. Если далее
каждый кубический миллиметр разделить на 1000 кубиков с ребром в 0,1 мм, то
суммарная поверхность будет равна 600 см2. После трех подобных дроблений полу-
чается 10 частиц размером около 10 см и суммарной поверхностью в 600000 см2.
Благодаря столь большей площади огромное число молекул диспергированно-
го вещества находится во внешнем поверхностном слое, что вызывает повышение
химической активности вещества и ускорение физических процессов.
Скорость реакций в аэрозольном состоянии приближается к скорости газовых
реакций. Ряд реакций, протекающих в обычных условиях достаточно медленно, в
аэрозольном состоянии заканчивается весьма быстро. Этим объясняется взрывча-
тость зажженной тонкой пыли сахара, крахмала, угля и других веществ; самопро-
извольное воспламенение мелко раздробленных свинца и железа, а также быстрое
наступление равновесного состояния между дисперсной фазой аэрозолей, представ-
ляющих собой растворы кислот, и парами воды.
Обладая большой удельной поверхностью, аэрозоли поглощают некоторое ко-
личество газовых ионов и молекул, образующих на поверхности частиц абсорбиро-
ванную пленку.
Следующим, не менее важным обстоятельством, является дисперсность или ве-
личина аэрозольных частиц. Вполне понятно, что свойства частиц, приближающихся
по своим размерам к размерам молекулы, окажутся иными, чем свойства большого
агрегата материи. Обладая рядом особенностей, как вещества в твердом или жидком
состоянии, с одной стороны, так и свойствами индивидуальных молекул — с другой,
аэрозольные частицы вместе с тем имеют и ряд своих, специфических особенностей.
Благодаря соизмеримости с размерами газовых молекул аэрозольные частицы,
подвергаясь ударам молекул, совершают непрерывное беспорядочное движение во
всех направлениях, известное под названием броуновского движения.
Соизмеримость размеров аэрозольных частиц с длиной волны электромагнит-
ного излучения (видимого света, ИК-излучения и т. п.) в сочетании с огромной
удельной поверхностью аэрозольной системы (облака, аэрозольной завесы) явля-
ется причиной ряда оптических явлений, в результате которых аэрозольное облако
приобретает маскирующие свойства.
Особенность оптических свойств коллоидных систем определяется их основны-
ми признаками: гетерогенностью и дисперсностью.
Гетерогенность, или наличие межфазной поверхности, обусловливает изменение
направления (отражение, преломление) световых, электронных, ионных и других
лучей на границе раздела фаз и неодинаковое поглощение (пропускание) этих лучей
сопряженными фазами. Лучи (лучистая энергия), направленные на микрогетероген-
ные и грубодисперсные системы, падают на поверхность частиц, отражаются и пре-
ломляются под разными углами, что обусловливает выход лучей из системы в разных
направлениях. Прямому прохождению лучей через дисперсную систему препятству-
ют также их многократные отражения и преломления при переходах от частицы к
частице. Очевидно, что даже при отсутствии поглощения интенсивность лучей, вы-
ходящих из дисперсной системы, будет меньше первоначальной. Уменьшение интен-
284
Глава 6. Пассивные и пассивно-активные помехи
сивности лучей в направлении их падения тем больше, чем больше неоднородность
и объем системы, выше дисперсность и концентрация дисперсной фазы. Увели-
чение дисперсности приводит к дифракционному рассеянию лучей (опалесценции).
Специфические особенности аэрозольного состояния приводят к тому, что в
отличие от макроскопических гетерогенных систем, для характеристики аэрозоль-
ных образований, так же как и остальных коллоидных систем, не применяется пра-
вило фаз Гиббса.
Как известно, в правиле фаз Гиббса в качестве независимых переменных, опре-
деляющих свойства гетерогенной системы, рассматриваются температура, давле-
ние, химический состав или концентрация. В макроскопических гетерогенных си-
стемах сознательно исключают действие сил тяжести, влияние электрических по-
лей, величину поверхностной энергии и т. п., как не оказывающих какого-либо
заметного влияния на равновесие, существующее между различными фазами.
В отличие от макроскопических систем, характеристика аэрозольного образо-
вания не может быть однозначно определена температурой, давлением и концент-
рацией дисперсной фазы. При соблюдении всех этих трех условий можно получить
аэрозольные образования, обладающие совершенно различными маскирующими
свойствами, неодинаковой устойчивостью и т. п. Для характеристики аэрозольных
образований необходимо кроме концентрации, температуры и давления принимать
во внимание размер и электрические свойства частиц дисперсной фазы. Так, на-
пример, упругость высоко дисперсного водяного тумана зависит, помимо давле-
ния и температуры, от размеров частиц и величины их электрического заряда.
Степень дисперсности определяет и важнейшее свойство аэрозольных образований
— скорость их разрушения.
Однако в ряде случаев для полной характеристики аэрозольного образования
недостаточно и знание степени дисперсности. Особенно это относится к маскиру-
ющим свойствам и характеру устойчивости аэрозольного образования. Поэтому
более правильной является характеристика аэрозольного образования вместо кон-
центрации и размеров частиц более широким понятием — физическая структура.
Это концентрация, форма, плотность и структура частиц дисперсной фазы, а также
процентное содержание частиц определенных размеров в общем количестве.
Физическая структура аэрозольного образования зависит как от химического
состава дисперсной фазы, так и от способов образования самого аэрозоля. Варьируя
способы образования, можно легко получить аэродисперсные системы, обладаю-
щие неодинаковыми свойствами и различной физической структурой. Помимо хи-
мического состава дисперсной фазы, физическая структура аэрозольного облака
определяется природой дисперсной среды. В маскирующем аэрозолеобразовании,
когда воздух является дисперсной средой, влияние природы последней на образо-
вание аэрозоля не будет сказываться. Однако ряд свойств дисперсной среды, в
частности степень ее загрязнения и ионизации, все же повлияют как на физическую
структуру аэрозольного образования, так и на характер ее изменения.
Аэрозольные образования могут применяться для имитации целей при подав-
лении оптико-электронных систем.
Аэрозольные образования, которые создаются путем впрыскивания жидких
смесей в реактивную струю самолета, могут с успехом применяться для противо-
действия оптико-электронным системам управления оружием (например — ПЗРК).
6.4. Уравнение радиоэлектронного подавления РЛС пассивными помехами
285
6.4. Уравнение радиоэлектронного подавления
радиолокационных систем пассивными помехами
Лучшими маскирующими свойствами обладают неизвестные противнику поме-
хи, т. е. случайные колебания, обладающие высокой энтропией. В рассматриваемом
случае помеховый сигнал образуется отражателями, попадающими в элемент раз-
решения подавляемой РЛС. Помеховый сигнал будет пропорционален ЭПР дипо-
лей этого элемента оио. В свою очередь оио определяется импульсным объемом
(объемом элемента разрешения) Кио и удельной ЭПР отражателей о. ЭПР диполь-
ных отражателей, находящихся в любом произвольном выбранном элементе
разрешения подавляемой РЛС представляет собой случайную величину, с гауссо-
вой плотностью вероятности р(у, z).
Приведенные соображения дают основание рассматривать в фиксированный
момент времени ЭПР элементов разрешения оио0 подавляемой РЛС, в данном об-
лаке отражателей, как совокупность гауссовых некоррелированных случайных ве-
личин. Иными словами, потенциально облако отражателей обладает информаци-
онно устойчивыми к контрмерам маскирующими свойствами.
Потребное количество отражателей, обеспечивающее заданную степень подав-
ления РЛС, определяется на основании уравнения РЭП, связывающего отношения
мощностей помехового и полезного сигнала с критериальными нормами, а также
параметрами РЛС прикрываемого объекта и средства подавления.
По аналогии с активными помехами уравнение РЭП можно записать следую-
щим образом:
К„, (6.33)
\ с Ах
где (Рп) и (Рс)вх — мощности помехового и полезного сигналов на входе прием-
ника подавляемой РЛС; Кп — коэффициент подавления.
В соответствии с рис. 6.19
(Рп)вх=4^°ио4^[Лр’ (6-34)
(Рс)вх=4^ас4^ГЛр- (6.35)
Таким образом, в случае пассивных помех уравнение РЭП может быть записа-
но в виде
Оио^пОс- (6.36)
В качестве поясняющего примера выводится уравнение РЭП для случая, когда
/ф = 4тэу и /е = 4тэу и объектом подавления является РЛС, находящиеся в створе с
постановщиком помех ПП и прикрываемым боевым порядком БП. Как следует из
(6.30), удельная ЭПР ov, в рассматриваемых условиях, будет определяться элемен-
ст
том разрешения Zt = -^-, где тс — длительность импульса. Соответственно
(6.37)
(6.38)
И1ПТп
286
Глава 6. Пассивные и пассивно-активные помехи
Рис. 6.19. ЭПР дипольных отражателей в импульсном
объеме разрешения РЛС
Уравнение (6.36) преобразуется к виду
-^-/T>tfnogn, (6.39)
кППтп
где о5п — средняя ЭПР боевого порядка самолетов, прикрываемых помехами.
Зная о5п и Кп, из (6.39) можно определить с каким интервалом тп и какое ко-
личество пачек отражателей пП необходимо сбрасывать, чтобы обеспечить условия
подавления, рассматриваемой РЛС.
Соотношение (6.39), в частности, показывает, что потребное количество диполь-
ных отражателей увеличивается обратно пропорционально длительности импульса
подавляемой РЛС. Отсюда следует, что при прочих равных условиях, требуемая
степень подавления широкополосной РЛС, база сигнала которой равна В, будет
достигнута, если удельная ЭПР исходной полосы отражателей о5п будет увеличена
не менее, чем В раз. Под исходной в данном случае понимается полоса дипольных
отражателей, ЭПР которой была достаточна для подавления сигнала с базой В = 1.
В первом приближении коэффициент подавления Кп может быть определен на
основании только энергетических соотношений без учета тонкой структуры сигнала,
отраженного от летательного аппарата. Такой подход справедлив для некогерент-
ных РЛС, не имеющих схем селекции движущихся целей. Опираясь на результаты
первого приближения, можно определить коэффициент подавления Кп и в более
общем случае [19]. Исходя из энергетических соотношений, решение об обнаруже-
нии полезного сигнала может быть принято в соответствии с критерием Нейма-
на — Пирсона путем сопоставления отношения правдоподобия с некоторым поро-
говым значением Ао. Основанием для такой постановки вопроса является установ-
ленная возможность представления ЭПР элемента разрешения оио в виде гауссовой
случайной величины, плотность вероятности которой р(оИ0) зависит от того, ка-
кая из двух альтернативных гипотез имеет место, а именно: гипотеза Яо — в эле-
менте разрешения только дипольные отражатели; гипотеза — в элементе разре-
шения наряду с дипольными отражателями имеется некоторый объект с ЭПР оБП
6.4. Уравнение радиоэлектронного подавления РЛС пассивными помехами
287
Гипотеза Д соответствует плотность вероятности
1
exp
ИО \
“Ж
(6.40)
2
где Д — дисперсия случайной величины о.
Гипотезе Д соответствует плотность вероятности
/ /X \2 "
ИО
(6.41)
В последующем предполагается, что оио — случайная величина с математическим
ожиданием (<5И0), если имеет место гипотеза Д, и (пИо) + аБП в случае справедли-
вости гипотезы Д, ЭПР боевого порядка сио предполагается постоянной и извест-
ной величиной.
Отношение правдоподобия
(6.42)
преобразуется к следующему виду:
2
л _руП2аио°БП +СТБП
(6.43)
2 Д,
Решение об обнаружении в данном элементе разрешения боевого порядка (БП)
принимается на основе сравнения Л с некоторым пороговым значением отноше-
ния правдоподобия Ло.
Если Л > Ло, принимается решение об обнаружении БП; в противном случае
Л < Ло, и полагается, что в элементе разрешения имеются только дипольные отра-
жатели. Выражение (6.43) достаточно сложно. Учитывая свойства экспоненциаль-
ной функции, вместо отношения правдоподобия Л можно использовать взаимно
однозначно связанную с ней достаточную статистику
^ = аиоаБП (6.44)
и принимать решение на основании сравнения G с некоторой пороговой статистикой
(?0=/)о1пЛ0-|о^. (6.45)
Как следует из (6.44), статистика G является гауссовой случайной величиной и
полностью определяется двумя первыми моментами распределения Л/(<7) и Dc.
В случае гипотезы Д
M(G) = 0, DG=a2EnD,
Если справедлива гипотеза Д, то
Л/((7) = (т|п> (6-47)
Плотности вероятностей, соответствующие гипотезам Н{ и Д, записываются
следующим образом:
(6.46)
/’°(е)=-7т=ехр
yj2.TiDG
2<*бпДт_
2
(6.48)
(G-Обп)
2аБП^о
(6.49)
й(с)=тж“р
2^а
288
Глава 6. Пассивные и пассивно-активные помехи
Задаваясь пороговым значением (70, можно определить вероятности ложной тре-
воги Рлт и правильного обнаружения Робн:
^0
аБПаио
(6.50)
обн 2
°БП
0“
°ио /
(6-51)
При фиксированном уровне ложной тревоги Рлт из (6.51) определяется коэффи-
циент подавления КП, равный отношению Сио , при котором вероятность правиль-
аБП
ного обнаружения Робн не превышает заданного значения.
В качестве примера определим коэффициент подавления РЛС пассивными
помехами, при котором вероятность правильного обнаружения не превышает 0,1.
Вероятность ложной тревоги фиксируется на уровне Рлт = Ю’3. Из (6.50) находится
Хо = 3,1. Полагая в (6.51) Робн = 0,10, можно получить ^IL = 0,77. Коэффициент
Q ^И°
подавления Кп =—— = 1,3. Необходимо подчеркнуть, что это значение получено
аБП
без учета спектрального коэффициента качества помехи г|сп « 1.
Полученные в первом приближении энергетические критериальные нормы подав-
ления пассивными помехами некогерентных РЛС не учитывают возможности ослаб-
ления помехового воздействия при обработке принятых сигналов. Ослабление поме-
хового воздействия достигают, используя различие в детерминированных параметрах
сигналов и помех. В частности, можно использовать детерминированное изменение
во времени фазы отраженного сигнала, обусловленное движением летательного аппа-
рата. Селекция сигнала от движущихся объектов на фоне отражений от малоподвиж-
ных дипольных отражателей применяется в импульсно-когерентных РЛС.
Известны три основных вида импульсно-когерентных РЛС, а именно — с низ-
кой, высокой и средней частотой следования импульсов.
Импульсно-когерентные РЛС с низкой частотой следования импульсов явля-
ются широкополосными. Селекция движущихся целей (СДЦ) в них осуществляет-
ся путем череспериодной компенсации (ЧПК) помеховых сигналов, отраженных
от неподвижных и малоподвижных объектов.
Импульсно-когерентные РЛС со средней и высокой частотой следования импуль-
сов являются узкополосными. Селекция целей осуществляется в них за счет фильтра-
ции доплеровских частот сигналов, отраженных от движущихся объектов. Послед-
нее дает основание называть эти РЛС импульсно-доплеровскими или РЛС с квази-
непрерывным излучением (КНИ). Путем фильтрации доплеровских частот полезных
сигналов помеховое воздействие, порождаемое дипольными отражателями, ослаб-
ляется на много десятков децибел. И это, по существу, исключает возможность
подавления импульсно-доплеровских РЛС пассивными помехами, применяемыми
традиционными методами. Практически, пассивными помехами могут быть подав-
лены широкополосные импульсно-когерентные РЛС. Потребная степень увеличе-
ния объемной плотности дипольных отражателей может быть определена путем
количественной оценки степени ослабления помехового воздействия в схеме ЧПК.
На рис. 6.20 приведена упрощенная схема импульсно-когерентной РЛС с од-
нократным череспериодным вычитанием.
6.4. Уравнение радиоэлектронного подавления РЛС пассивными помехами
289
Рис. 6.20. Блок-схема импульсно-когерентной РЛС
с однократным череспериодным вычитанием
Модулятор формирует короткие импульсы для управления высокочастотным
генератором передатчика (ПРД) и длинные импульсы для запуска когерентного гете-
родина на время Т, несколько меньшее периода следования импульсов зондирующего
сигнала. Длительность Т выбирается несколько меньше периода, чтобы дать воз-
можность затухнуть собственным колебаниям когерентного гетеродина к началу оче-
редного цикла работы. Когерентный гетеродин синхронизируется по фазе высоко-
частотным импульсом генератора передатчика. Этим обеспечивается когерентность
сигнала гетеродина и излученного сигнала на время, примерно равное Т.
Следующий новый высокочастотный импульс вновь осуществляет фазирование
когерентного гетеродина. Вследствие большой скважности, широкополосности и
малого времени когерентности рассматриваемый вариант импульсно-когерентных
РЛС называют псевдо- или квазикогерентными.
Отраженный (полезный) сигнал и сигнал когерентного гетеродина после пре-
образования в смесителях 1 и 2, на которые также подаются сигналы от местного
гетеродина, поступают на усилители промежуточной частоты УПЧ 1 и УПЧ 2 и далее
на фазовый детектор ФД. С выхода фазового детектора импульсные сигналы пода-
ются на схему ЧПК, включающую линию задержки ЛЗ со временем задержки Т и
схему вычитания (компенсации).
Результирующий сигнал на выходе идеально работающей квазикогерентной РЛС
wBwx будет равен нулю, если отражающий объект неподвижен, и отличен от нуля,
если объект движется с радиальной скоростью, не совпадающей с так называемой
слепой скоростью. При слепой скорости движущегося объекта за время, равное пе-
риоду следования импульсов 7, он (объект) пройдет в направлении на РЛС путь,
равный половине длины волны РЛС. Эффект компенсации можно иллюстрировать
примерами.
290
Глава 6. Пассивные и пассивно-активные помехи
Предположим, что на вход подавляемого приемника воздействуют полезный и
помеховый сигналы. Отношение их мощностей на входе
X с /вх
(6.52)
Помеховый сигнал на входе приемника в данном случае на ограниченном интер-
вале времени можно представить в виде квазигармонического колебания
«П (?) = ип (0cos[(00Z + <рп (/)], (6.53)
где Un (/) и (рп (/) — огибающая и начальная фаза — медленно меняющиеся по срав-
нению с cosco0Z случайные процессы; со0 — частота несущего колебания.
Средняя мощность (дисперсия) помехового сигнала по определению равна
(^п)вх=Ш (6-54)
Соответственно, полезный сигнал на входе представляется в виде гармонического
колебания, начальная фаза которого изменяется во времени, вследствие поступатель-
ного движения самолета или другого объекта:
Mc(Z) = f/ccos[®0/ + <Pc(Z)]’ <6’55)
где
Фс (^ ) — — 2л t,
Л
(6.56)
2v.
Лд=2л-^
— доплеровский сдвиг частоты принятого сигнала относительно частоты
излученного; vp — радиальная составляющая скорости объекта (самолета) относи-
тельно антенны подавляемой PJIC; X — длина волны зондирующего сигнала РЛС;
Uc — огибающая полезного сигнала.
По определению мощность полезного сигнала на входе и его амплитуда связаны
соотношением
^с)вх'
(6.57)
Можно записать следующие выражения для напряжений полезного и помехо-
вого сигналов на выходе фазового детектора.
Полезный сигнал:
Uс фд (О ~ *пр^с C°S(pc (О» (6.58)
где Апр — коэффициент передачи всей схемы обработки.
Помеховый сигнал:
Ц) фд (О ~ (О — -^пр^п СО5Фп (О' (6.59)
Оба колебания — и сигнальное, и помеховое — являются импульсными. На-
блюдаемой реализации (пачке) из п импульсов соответствует временной интервал
ТП=пТ, (6.60)
где Т — период следования импульсов.
Напряжения ДС7с(/) полезного сигнала на выходе ЧПК, имеющие место при
прохождении (п - 1)-го и л-го импульсов, будут
А^с(и-1)(0 ^пр^с {cos[Qa (п 0^] СОБ^ОдЛТ^} —
пр
2t/csin-^
с 2
sin £2д
(6.61)
6.4. Уравнение радиоэлектронного подавления РЛС пассивными помехами 291
Таким образом, напряжение полезного сигнала на выходе ЧПК представляет
ОдТ
собой гармоническое колебание с частотой и огибающей, равной 2£/csin-------.
2
Соответственно мощность полезного сигнала на выходе ЧПК (Рс)вых с учетом (6.57)
и (6.61) может быть представлена следующим образом:
<6И)
С помощью (6.61) можно уточнить определение слепой скорости движущегося
объекта относительно конкретной РЛС с ЧПК. Огибающая в (6.61) или мощность
в (6.62) будет равна нулю при условиях
Q Т
—= /ля, т = 0; 1; .... (6.63)
С учетом (6.56) из (6.63) следует, что
vpr=7w- (6.64)
Полезный сигнал на выходе ЧПК равен нулю, если за период следования им-
пульсов Т обнаруживаемый объект в направлении РЛС пройдет путь vpT, кратный
целому числу полуволн.
Процесс турбулентной диффузии атмосферы развивается сравнительно медлен-
но, и в течение времени, равном периоду следования импульсов РЛС, облако отра-
жателей можно считать стационарным. Это позволяет с учетом (6.59) помеховый
сигнал на выходе однократной ЧПК представить в следующем виде:
A f/' (/) = *пр [tZ' (/) -U^t + Т)]. (6.65)
Мощность помехового сигнала на выходе ЧПК при однократном вычитании
определяется выражением
('nU =[^w]2=2^р(Рп).>[1---(П]ф. (6.66)
где (Рп)вх —мощность помехового сигнала на входе приемника; г(Г) —нормиро-
ванная корреляционная функция огибающей помехового сигнала, вычисленная для
значения т = Т.
При этом в формуле (6.66) учитывалось, что
[f/n(O]2=[f/;(/)]2. (6-67)
В силу стационарности помехового сигнала нормированную корреляционную
функцию можно представить следующим образом:
, ч uJt\uJt+x\
r(t) = < (6.68)
^п(')
Черта сверху означает операцию усреднения по времени. С помощью формул
(6.66) и (6.62) искомое отношение мощностей помехового и полезного сигналов оп-
ределяется как
U1) _ )вых _ (Лт)вх
вых (А) (А) о -2^7” (6 69)
\ п/вх \ с/вх 7<г1гг —-—
2
292
Глава 6. Пассивные и пассивно-активные помехи
Пусть = Кв min — минимально необходимое отношение мощностей поме-
хового и полезного сигналов на входе индикаторного устройства, при котором
достигается требуемая степень подавления РЛС. Этой величине КВт[п соответству-
(Рп)
ет некоторое значение отношения помеха/сигнал на входе К = -—которое при
\ с /вх
этих условиях будет также минимально необходимым для подавления РЛС. Следо-
вательно, для РЛС с однократным вычитанием коэффициент подавления опреде-
ляется выражением
п
2 sin 2——
_________2
В min ! (гг,\
\-г(Т)
(6.70)
Д'
1 (^—<1 — спектральный коэффициент качества
2sin2
В (6.70) величина т|сп
пассивной помехи.
Минимально необходимое отношение помеха/сигнал на выходе подавляемого
приемника в случае некогерентной РЛС практически равно ее коэффициенту по-
давления пассивными помехами определяемому заданными значениями веро-
ятностей ложной тревоги и правильного обнаружения. Сказанное позволяет запи-
сать выражение (6.62) в виде
2 sin2——
= г ______2_
п п0 1-г(Т)
(6-71)
Применение в РЛС двукратного вычитания несколько повышает потребные
нормы расхода дипольных отражателей. Мощность помехового сигнала на выходе
схемы двукратного вычитания будет равна
В силу принципа функционирования схемы двукратного вычитания
следовательно
I = 2Р'
п вых
вых
(6.72)
(6.73)
(6-74)
Отсюда по аналогии с (6.66)
(^2)) =4Рпвых[1-г(7’)]Г1-/2)(Т)1 (6.75)
\ /вых L J
где /2)(Г) — нормированная функция корреляции случайного процесса Д^нп(г),
вычисленная для значения т = Т.
Соответственно при /и-кратном вычитании выходная мощность (Р^) равна
\ /вых
№ вых = 4Р" в- А m "" = 2"'Р" вых П 1 - (Г) • (6.76)
у=1
• Нормированная корреляционная функция в схемах с двукратным вычитанием
/2)(Т) может быть вычислена на основании сравнения выражений (6.74) и (6.75).
6.4. Уравнение радиоэлектронного подавления РЛС пассивными помехами
293
Непосредственное вычисление корреляционной функции случайного процесса
д^«п(0’ дает___________________
A(m)Mn G)A(m)Mn ('+*) = Л вых [2г(т) - г (т - Т)+г (т+Т)], (6.77)
откуда следует, что
г^(П^2г(Г)~г(2Г)~1
2[1-г(7)]
(6.78)
С помощью формул (6.76) и (6.78), можно определить
=2Рпвх[3-4г(7’)+г(2Т)]. (6.79)
В схеме СДЦ с двукратным вычитанием полезного сигнала выходное напряже-
ние определится как разность
(6.80)
С помощью (6.61) из (6.80) можно получить
(п) = 4Knriuc (w)sin2 —-—coshQ„7.
V \ / lip и \ / 2 Д
(п) = 4Fnnwc (п)si
V \ / lip V \ /
Амплитуда колебания на выходе схемы двукратного вычитания равна
Д(2)ис (п) = 4Л'прыс (n)sin2
(6.81)
Д(2)нс (л) = 4^пр«с («)si
Соответственно при ди-кратном вычитании амплитуда колебаний на выходе ЧПК
составит:
(6.82)
(6.83)
т Д
2
Отношение мощностей помехового и полезного сигналов на выходе схемы с
двукратным вычитанием равно
Д’
ис(и) = 2т ,АГпрмс (n)sin
21 вых
вых
(6.84)
вх 8sin4 —
2
п
Коэффициент подавления РЛС с двукратным вычитанием равен
о .
8 sin -
1С — к __________-_____
п п0 3-4г(7’) + г(2Г)
(6.85)
Нормированная корреляционная функция, входящая в (6.71) и (6.85), может быть
определена по известной спектральной плотности 5(F) как обратное преобразо-
вание Фурье:
F(t) = j5(F)cos(27lFt)Jt, F>0, (6.86)
о
где
5(F) = exp
0,84F
< A),5
(6.87)
После подстановки (6.87) в (6.86) получается:
Л(т) = exp(-l,437t2T2F02
1,00 х
(6.88)
294
Глава 6. Пассивные и пассивно-активные помехи
Значение нормированной корреляционной функции в момент т = Т после нор-
мировки и соответствующей подстановки:
г(Т) = ехр -14(F057’)2 .
(6.89)
Формулы (6.71) и (6.85) определяют величину коэффициента подавления в пред-
положении идеальной работы схемы селекции движущихся целей. В действитель-
ности на качество работы схемы СДЦ в существенной мере сказываются нестабиль-
ности частоты когерентного и местного гетеродинов, частоты импульсов, собствен-
ное движение антенны. Все это вместе взятое может быть, в известной мере, учтено
эквивалентным расширением спектра помехового сигнала примерно в 1,5...2 раза.
С учетом сказанного для оценок первого приближения можно полагать
r(T) = exp -SOf^r)2
(6.90)
В современных импульсно-когерентных РЛС для устранения слепых скоростей
частота следования импульсов и период следования меняются в пределах одной
пачки импульсов. При подавлении системы РЛС, входящих в АСУ войсками ПВО,
курсовые углы подавляемых объектов меняются широких пределах. Это позволяет
за исключением отдельных специальных случаев при определении Ки в формуле
(6.71) ориентироваться на усредненное значение sin ——, равное 0,5. Как уже
отмечалось ранее, можно полагать примерно равным 1. Сказанное позволяет
выражение (6.71) записать в следующем виде:
1
*
1-е
Если ширина спектра помехового сигнала Fo 5 мала и 50(705Г)
но определять по приближенной формуле
(6.91)
кп = , ,2- (6.92)
5О(Го,5Г)
Например, если 7=2 мс, Го5 = 25 Гц, то Ки = 8.
Формулы (6.91) и (6.92) справедливы, если спектральная плотность флуктуации
огибающей помеховых сигналов может быть аппроксимирована кривой Гаусса (6.87).
Одним из основных способов преднамеренного снижения коэффициента подав-
ления пассивными помехами является расширение спектра помехового сигнала пу-
тем увеличения эффективной ширины полосы диполей в вертикальной плоскости
(по углу места в пределах 0О5) > ПРИ одновременном обеспечении достаточного уровня
удельной ЭПР облака диполей ov. В этом случае расширение спектра помехового
сигнала имеет место вследствие градиента скоростей ветра по высоте. В предположе-
нии ее линейного изменения в пределах данного диапазона высот АН максимальная
разность скоростей диполей, переносимых ветром как единое целое, Дун будет со-
ставлять [60]:
ЛУн=3Жм/с’ (6 93)
где Р — коэффициент изменчивости скорости ветра по высоте, который равен из-
Ду
менению скорости ветра на участке ДЯ = 100 м: p = -j^.
6.4. Уравнение радиоэлектронного подавления РЛС пассивными помехами 295
Спектр огибающей помехового сигнала будет определяться доплеровской час-
тотой
л г
Ыл=—г-
(6.94)
где AvHJC — усредненная составляющая разности скоростей ветра в направлении X.
Расширение спектра огибающей помехового сигнала в данном случае обусловле-
но не турбулентной диффузией атмосферы, а наличием перемещений с различными
скоростями компактных группировок отражателей с достаточно высокими ЭПР в
пределах элемента разрешения (импульсного объема) РЛС. Чтобы определить ко-
эффициент подавления, в данном случае необходимо ориентироваться на формулу
(6.70) и величину г(Г) находить с помощью выражений (6.65) и (6.66), понимая
под напряжением на выходе фазового детектора величину
^фдп = (0 = ^пр^п (^)сО5^£2д/ + ф(/)]. (6.95)
Соответственно по аналогии с (6.68) можно получить
Un (z)cosFq^ + ф(/)]{7п (/ + T)cosFqk (г + Т) + ф(/ + Т)
Г (t) =-----------------------------Ь-----------------=>
{tfn(')cos[fV + <p(z)]}
Полагая <рп (/) ~ <рп (f + Т), можно определить искомые величины:
(6.96)
/ \
f(T)-cos —-
1-COS
(6.97)
п
£> = 2л
д X
Ширина спектра огибающей отраженного сигнала, обусловленная только тур-
булентной диффузией атмосферы Fo 5В, в соответствии с проведенными измерени-
ями [19] определяется формулой
Л),5В
^вх
4Х
(6.98)
где vBX — усредненная составляющая скорости ветра в пределах элемента разреше-
ния РЛС в направлении луча ее антенны.
На рис 6.21 приведена нормированная спектральная плотность огибающей
помехового сигнала при различных значениях осредненных скоростей ветра в эле-
менте разрешения подавляемой РЛС.
Рис. 6.21. Нормированная спектральная плотность
огибающей помехового сигнала
Полученные методы расчета коэффициента подавления являются приближен-
ными. Тем не менее, для практических целей их точность может быть достаточной,
296
Глава 6. Пассивные и пассивно-активные помехи
поскольку исходные данные не всегда достоверны. ЭПР пачек отражателей может
заметно отличаться от номинала. ЭПР самолета существенно различается в зави-
симости от курсового угла подавляемой РЛС, приближенными являются метеодан-
ные. Предлагаемые формулы позволяют сделать оценки первого приближения. Во
многих случаях этого бывает достаточно для принятия решения.
6.5. Эффект усиления электромагнитного
сигнала в аэрозольном облаке
Аэрозоли могут применяться для повышения эффективности традиционных
активных помех, создаваемых в оптическом и миллиметровом диапазонах электро-
магнитных волн. В радиодиапазоне как эквивалент аэрозолей могут выступать
противорадиолокационные отражатели (диполи, клубки длинных проводов и дру-
гие проводники).
Если на пути распространения ЭМВ находится аэрозольное облако, как на
рис. 6.22, то при определенных условиях, которые будут сформулированы ниже, на-
блюдается значительное увеличение плотности потока мощности в прямом направ-
лении распространения, т. е. в направлении на подавляемую РЛС.
Рис. 6.22. Рассеяние ЭМВ на облаке аэрозолей:
L = 2а — размер облака; 1 и 2 — частицы аэрозолей
Эффект усиления наблюдается и в случае приема эхо-сигнала, если цель нахо-
дится в облаке аэрозолей.
Усиление ЭМВ обусловлено двумя факторами.
Во-первых, интенсивность ЭМВ, рассеянных одиночной частицей в направле-
нии падения волн, во много раз превышает интенсивность волн, рассеянных в других
направлениях. Явление значительного увеличения ЭПР частицы в направлении
падения волн называется эффектом Ми [102].
Во-вторых, при оптимальных размерах облака за счет использования эффекта
когерентного рассеяния волн частицами, находящимися в так называемой доми-
нантной области, может быть получено значительное усиление помехового сигна-
ла в десятки и сотни раз.
Оба эти эффекта необходимо учитывать при проведении энергетических рас-
четов и организации операций с учетом применения активных и пассивных средств
РЭБ. Но для такого учета требуется:
• определить зависимость ЭПР (0) одиночной частицы применяемых аэро-
золей от угла падения 0;
• определить число когерентно рассеивающих частиц 7VKOI. и ЭПР облака соб (0).
6.5. Эффект усиления электромагнитного сигнала в аэрозольном облаке
297
Зависимость (0), называемая индикатрисой рассеяния, определяется путем
решения задачи дифракции ЭМВ на частицах, размер которых а соизмерим с длиной
волны X. Эта задача весьма сложна, поэтому, отказавшись от строгого решения, в
дальнейшем ограничимся качественными рассуждениями, приводящими к некото-
рым наиболее характерным оценкам (0) для сферических (каплеобразных) рас-
сеивающих частиц.
Форма и параметры индикатрисы рассеяния ЭМВ на инородных частицах за-
висят от размеров частиц а и направления падения облучающей волны (ориента-
ции вектора Пойнтинга П). Небольшие частицы, для которых а «X, переизлучают
волны в соответствии с законом Релея (рис. 6.23).
Рис. 6.23. Индикатриса рассеяния ЭМВ на аэрозольных частицах
При увеличении размеров аэрозольной частицы а индикатриса рассеяния вытя-
гивается вдоль направления падения волны, и эффективная поверхность рассеяния
частицы (0 = 0) увеличивается в К> 1 раз по сравнению с ее значением, соответст-
вующим обратному распространению (0 = 0)» (0 = 180°).
В табл. 6.1. приведены значения нормированной интенсивности волн /н (0), рас-
сеянных диэлектрическими сферами с коэффициентом преломления п = 1,25, от па-
раметра — [102]. Нормировка проведена по отношению к интенсивности обратного
X
рассеяния (0 = 180°) при а = Верхняя строка таблицы характеризует относитель-
ный размер частицы.
Таблица 6.1
6, град. 1,6-10~3 1,6-10~2 8-Ю"2 0,16 0,32 0,80 1,30
0 5-10~14 5-КГ8 1,2-10-3 0,25 4,3 980 7500
90 2,5-10“14 2,5-10-14 5-10-14 0,036 0,25 2,70 7,10
180 5-10-14 5-1014 4,9-10“3 0,019 0,02 1,30 0,90
Из таблицы видно, что наблюдается очень быстрый рост интенсивности пере-
отраженных волн с увеличением размеров а частицы в прямом направлении (0 = 0°)
Особенно быстрый рост происходит, когда размер частиц становится соизмеримым
с длиной волны (я » X). Так, сравнение величины интенсивности в первом (а « X)
и последнем [а ~ X) рядах иллюстрирует рост интенсивности на несколько порядков.
Интенсивность обратного излучения соответственно на несколько порядков ниже.
Интенсивность рассеиваемой энергии достигает максимума в направлении, сов-
падающем с направлением падающей волны, и имеет минимум в плоскости симмет-
рии (0 = 90°). Когда а > X индикатриса рассеяния становится многолепестковой. При
некотором значении а излучение в обратном направлении (0 = 180°) может отсут-
ствовать вовсе. Все эти особенности необходимо учитывать при создании активно-
пассивных помех.
Усиление полезного сигнала, прошедшего через облако (рис. 6.22), определяет-
ся числом когерентно рассеивающих частиц 7VKor. Общее число частиц в облаке
^об = ^ког + Nнек > (6.99)
298
Глава 6. Пассивные и пассивно-активные помехи
где JVo6 = nV\ п — концентрация частиц, м-3; V— объем облака, м3; JVHeK — число
некогерентно рассеивающих частиц.
Практический интерес представляет такой сценарий РЭП, при котором в ре-
зультате подсвета облака активной помехой достигается наиболее выгодное соот-
ношение
^об ~ ^КОГ’ (6.100)
а интегральная ЭПР переизлучающего облака составляет
Ооб(б) = ^к2ог(0)0|(е). (6.Ю1)
В первом приближении (без учета вторичного излучения) рассеянное поле в
апертуре антенны подавляемой РЛС представляется в виде
N
E = El'£e~j<"'m, (6.102)
т=1
где Ej — поле, рассеянное одной частицей, расположенной в центре облака; гт —
• 0
случайная координата /и-и частицы; q = 2ksm— — пространственно-волновой па-
, со 2л
раметр; к = — = — — модуль волнового вектора (волновое число); 0 — угол между
с л
направлением падения и рассеяния волн.
Усредняя (6.102) по положению частиц, можно получить среднее значение поля,
рассеянного всеми частицами:
/ N \
Es (r) = ( e~jqrm ) = EiN Je~j4r^i = ЕМ (?)> (6.103)
\ /«=1 / V
где J\ (</) — характеристическая функция одночастичного распределения:
fx (?) = EtN J e~jqrWx (r)d3r; (6.104)
(r) — одночастичная плотность вероятности случайной величины г.
Интенсивность когерентной составляющей
/ког = я2
(6.105)
Когерентная составляющая, характеризующая усиление поля, отличается от
интенсивности |Ej2 поля, рассеянного одной частицей, множителем У|/| (#)| .По-
этому величину N21/ (#)2 можно назвать эффективным числом когерентно рассеи-
вающих частиц
/ N
e~jqrm
т-1
^ког = АГ|Л (<7)| = £
(6.106)
Для равномерного распределения частиц в объеме шарового облака радиуса а
плотность распределения (г) равна
Ж(г) = 1 = Г-™3>1 • (6.Ю7)
Используя (6.104) в (6.107) с помощью (6.106) можно получить [91]
^ког = 7~rlsinfl^ - O0.coso?|. (6.108)
(««)
6.5. Эффект усиления электромагнитного сигнала в аэрозольном облаке
299
При рассеянии вперед (0 = 0), после раскрытия неопределенности в (6.108), по-
лучается AKOr = N, т. е. когерентно переизлучают все частицы облака.
При рассеянии под углом 0 > 0 величина NKor резко уменьшается, поскольку
характеристическая функция сравнима с единицей только при дг~0, или, что то
А,
же, при углах рассеяния 0, лежащих внутри конуса 0< — «1. В этом случае Аког
-2
убывает пропорционально (од) .
При гауссовом распределении частиц в облаке характеристическая функция
равна
= ехр
(6.109)
Для равномерного распределения
fl (q) = sinc(7W?).
(6.110)
Следовательно, при рассеянии назад, когда 0 = л, q = 2k, следует NK0T = 0, и эф-
фект когерентного рассеяния исчезает.
Можно достаточно наглядно пояснить, почему при рассеянии назад число ко-
герентно рассеивающих частиц уменьшается с ростом а/k, а ЭПР облака равна
0об ^обО1 •
В тонком слое облака толщиной /«1 все частицы переизлучают волны некоге-
рентно. Однако для каждого такого слоя можно подобрать другой такой же слой,
переизлучающий волну в противофазе и гасящий в точке приема волну от первого
слоя. Такие парциальные волны складываются некогерентно, в результате 7VKor = О,
а = ^нек-
X
Анализ выражения (6.108) показывает, что при aq» 1, т. е. при 0>—, величи-
а
на Аког убывает пропорционально а1 (при 0 = const). Практический интерес пред-
ставляет определение предельного размера облака Lmax = 2лтах, при котором коге-
рентное рассеяние преобладает над некогерентным, т. е. Аког > 7VHeK. Определить
Zmax можно, исходя из следующих простых рассуждений.
Пусть аэрозольное облако находится в зоне Фраунгофера, поэтому можно счи-
тать, что облако облучается плоской волной (рис. 6.22). Поперечный размер обла-
ка L = 2а. Можно полагать, что степень когерентности ЭМВ, переизлучаемых обла-
ком, достигает вполне приемлемых значений, если электрические векторы Et и Е2
поля, порождаемого центральной и периферийной частицами 1 и 2, сдвинуты по
фазе на величину Дф = т. е.
Дф = —д/ = -, (6.111)
А 2
где Д/ = D2 - Dc — разность расстояний между РЛС и отражателем 2 рис. 6.22.
Так как /« Dc, можно принять
(6.112)
После подстановки (6.112) в (6.111) можно получить
Алах — •
(6.113)
300
Глава 6. Пассивные и пассивно-активные помехи
Выражение (6.113) определяет максимально допустимый поперечный размер
облака £тах, при котором еще реализуется усиление активной помехи, что необхо-
димо учитывать при организации РЭБ.
Предельные размеры когерентно рассеивающего аэрозольного облака опреде-
ляются геометрией доминантной области [103]. Эта область имеет форму эллипсо-
ида вращения с фокусами в точках расположения источника помех Ап и подавля-
емой РЛС Ас.
На рис. 6.24 представлена форма сечения этого тела в декартовой системе ко-
ординат
Рис. 6.24. Доминантная область радиолинии: Ас, Ап — фокусы
В пределах доминантной области (эллипсоида) фронт волны плоский, а амп-
литуда по фронту волны практически не меняется.
Облако аэрозолей рассеивает ЭМВ когерентно, если оно вписывается в границы
доминантной области. Следовательно, продольный размер облака £пр ограничивает-
ся расстоянием /?(£пр ~ В}- Существенной при этом является зависимость допусти-
мого максимального поперечного сечения облака = yfkR. В пределе наиболь-
ший эффект усиления помехового сигнала достигается, если аэрозольное облако
заполняет всю доминантную область.
В оптическом диапазоне за счет острой (игольчатой) направленности луча лазера
доминантная область может создаваться даже в весьма протяженных облаках (по-
лосах) аэрозолей, если выполняется условие
Ra<yfkR, (6.116)
X j z ч
где а =----расходимость луча лазера; а — размер апертуры (антенны) источника
ЭМВ. d
Луч лазера «вырезает» в облаке доминантную область с поперечным размером
L = aR.
(6.117)
Предельное удаление 7?тах аэрозольного облака от САП определяется из соот-
ношения
^тах ^тах л/^^тах ’
(6.118)
6.6. Эффективность подавления РЛС пассивными помехами
301
откуда
^ax=V’ <6119>
Л
Из (6.119) хорошо видно, что максимальное удаление 7?тах облака с минималь-
ным сечением £тах = 7^Лпах в сильной степени зависит от размеров d выход-
ной оптической системы (антенны). Так, при d = 4 см, X = 1 мкм получается, что
Лщах =1,6 км. В длинноволновом диапазоне (X > 1 мкм) при малом сечении луча
лазера d реализация преимуществ активно-пассивной помехи затруднительна.
При локации целей в замутненной атмосфере может наблюдаться эффект уси-
ления эхо-сигнала по сравнению с тем, что наблюдается в однородной среде [104].
Для моностатической локации, когда приемная и передающая антенны совме-
щены в пространстве, эффект усиления эхо-сигнала наблюдается, если на пути
распространения волны располагается облако инородных частиц искусственного
или естественного происхождения (пары воды, пыль). В монографии [104] указыва-
ется на усиление интенсивности эхо-сигнала более, чем в 2 раза. Такое усиление
происходит при локации целей, находящихся в замутненной атмосфере.
6.6. Эффективность подавления радиолокационных
систем пассивными помехами
Основными показателями эффективности подавления РЛС пассивными поме-
хами являются наносимый ими информационный ущерб системе РЛС, а также
потребное количество отражателей, обеспечивающее достижение требуемой по
оперативно-тактическим соображениям степени подавления.
В зависимости от решаемых задач, а также применяемых способов и тактичес-
ких приемов, степень подавления и потребное количество дипольных отражателей
могут быть различными. Одним из основных способов применения пассивных помех
является создание значительных по протяженности полос отражателей. Такие по-
лосы исключают возможность радиолокационного обнаружения боевых порядков
самолетов, вертолетов, кораблей и иных объектов.
Чтобы определить потребное количество отражателей, необходимо знать про-
тяженность маршрутов, на которых требуется прикрыть пассивными помехами
необходимую по условиям навигационного обеспечения ширину полосы отража-
телей, а также потребное количество постановщиков помех.
Определение потребного количества дипольных отражателей может быть про-
ведено в следующей последовательности. Первоначально определяется удельный
расход дипольных отражателей, измеряемый количеством пачек, расходуемых на
километр пути (лпу пачек/км) при подавлении РЛС, требующей, при прочих рав-
ных условиях для достижения заданной степени подавления, наибольшего расхода
отражателей. Как правило, такими объектами подавления являются РЛС, находя-
щиеся в створе с постановщиком помех и прикрываемым боевым порядком.
Размеры элемента разрешения РЛС, в данном случае, определяются длитель-
ностью импульса. Если лп количество пачек отражателей, сбрасываемых в элемент
ст
разрешения /т =—,
2
то удельное количество пачек определяется в первом прибли-
жении из выражения
1000 пачек
^пу — t
/т КМ
(6.120)
302
Глава 6. Пассивные и пассивно-активные помехи
Количество пачек лп1, расходуемых одним постановщиком помех на весь мар-
шрут протяженностью 7?м, будет равно
= Лм«пу пачек. (6.121)
Суммарный расход дипольных отражателей составит
~ ^пп^п! ~ пп^пу^м* 6.122)
Повышение информационной устойчивости (уровня радиоэлектронной защиты)
современных импульсно-когерентных РЛС требует значительного увеличения удель-
ного расхода отражателей ипу, что далеко не всегда реализуемо. Применение пас-
сивных помех традиционными способами в интересах подавления импульсно-допле-
ровских РЛС фактически не эффективно. К настоящему времени определилось три
направления, обеспечивающих сохранение, а в ряде случаев и повышение эффек-
тивности как пассивных, так и активных помех. К ним относятся: дискретное сбра-
сывание дипольных, отражателей, создание облаков отражателей с высокой удель-
ной ЭПР ov для ослабления плотности потока излучения РЛС, вследствие его рас-
сеяния в полосе отражателей, сочетание активных и пассивных помех.
Приоритетными объектами подавления, в случае дискретного сбрасывания
дипольных отражателей, являются импульсно-когерентные РЛС с череспериодной
компенсацией (ЧПК) помех. Основная идея дискретного способа сбрасывания
сводится к обеспечению условий подавления РЛС при ограниченном количестве
отражателей путем значительного увеличения удельной плотности диполей, сбра-
сываемых в отдельных дискретных областях пространства с одновременной рандо-
мизацией временных интервалов между сбрасываниями. Фотография экрана ИКО
РЛС, подавляемой дискретно сбрасываемыми отражателями, представлена выше,
на рис. 6.4. Некоторое снижение маскирующих свойств дискретной полосы отра-
жателей компенсируется увеличением количества постановщиков помех. Количе-
ство одномоментно сбрасываемых дипольных отражателей выбирается с таким
расчетом, чтобы обеспечить преодоление помеховым сигналом, отраженным от
облака диполей, схемы ЧПК. В рассматриваемых условиях наибольшая неопреде-
ленность помеховой обстановки имеет место при равномерной плотности вероят-
ности временных интервалов сбрасываниями отражателей. Средний интервал сбра-
сывания Гср в этом случае может быть определен из анализа рис. 6.25.
Рис. 6.25. К определению средних интервалов сбрасывания пачек диполей
6.6. Эффективность подавления РЛС пассивными помехами
303
На рис. 6.25 Tmin и 7тах — максимальный и минимальный интервалы сбрасы-
вания. Средний интервал сбрасывания в этом случае равен
Т + Т
у _ max 1 min
ср " 2
При достаточно большой численности постановщиков помех (ПП) дискретное
сбрасывание может оказаться не менее эффективным, чем непрерывное, и может
привести к нарушению централизованного управления силами ПВО вследствие сры-
ва радиолокационного слежения за траекториями как боевых порядков, так и отдель-
ных самолетов.
Потребное количество отражателей, сбрасываемых одновременно в один эле-
мент разрешения (импульсный объем) подавляемой РЛС, может быть определено
из уравнения РЭП, записанного в виде выражения (6.39). Коэффициент подавле-
ния РЛС с однократным череспериодным вычитанием в зависимости от реализуе-
мой схемы формирования дискретных полос отражателей определяется по форму-
ле (6.91), если не предусмотрено эшелонирование дискретных полос по высоте, или
по формуле (6.92), если такое эшелонирование предусмотрено.
Определенные особенности имеют место в случае дискретного сбрасывания отра-
жателей в интересах индивидуальной защиты самолетов (вертолетов) [19]. Основная
задача здесь состоит в том, чтобы облако сброшенных диполей сформировалось на
достаточно малом расстоянии от прикрываемого объекта. Это расстояние должно
быть соизмеримым с элементом разрешения объекта подавления.
Дискретное сбрасывание отражателей особенно эффективно в сочетании с ма-
невром прикрываемых целей.
Ослабление плотности потока радиоизлучения р в полосе дипольных отражателей
обусловлено рассеянием излучения отражателями. Можно считать, что рассеяние
излучения диполем изотропно и пропорционально его осредненной ЭПР. Рассе-
янные диполями поля некогерентны и плотность потока мощности суммарного
рассеянного поля равна сумме потоков мощностей отдельных переизлучателей.
В соответствии со сказанным величина Др пропорциональна плотности потока
мощности приходящей волны р(х), а также суммарной ЭПР диполей элементар-
ного объема толщиной Дх, равной
лО|Дх = оиДх, (6.123)
где ои— осредненная удельная ЭПР облака отражателей; Gj — осредненная ЭПР
произвольно ориентированного диполя.
Следовательно,
Др = р(х)огАх. (6.124)
После перехода к пределу получим следующее дифференциальное уравнение для
определения искомой степени ослабления плотности потока мощности в полосе
отражателей протяженностью Ln:
— = -<svdx. (6.125)
Р
Граничное условие: 0, Р(О) = Ро. Интегрируя уравнение (6.125), получим
P = PoexP(-°K4Iv)-
(6.126)
Степень ослабления плотности потока мощности в децибелах определяется вы-
ражением, непосредственно вытекающим из (6.126):
р = ро1О^'а”^, (6.127)
304
Глава 6. Пассивные и пассивно-активные помехи
ап=4,3ог—. <6128)
м
Если пассивные помехи непосредственно применять для снижения дальности
обнаружения РЛС, то требуемая степень ослабления в децибелах плотности потока
мощности может быть определена из формул (6.127) после увеличения в два раза £п.
В качестве примера определим потребную объемную плотность и протяженность
полосы дипольных отражателей, при которых имеет место снижение дальности дей-
ствия трехсантиметровой РЛС в 10 раз. Соответственно степень ослабления плот-
ности потока мощности сигнала РЛС должна составить -40дБ. Используя выраже-
ние (6.126) с учетом необходимости удвоения получим уравнение, определяющее
потребное значение произведения ау£п:
40 = 8,60^1^,
или
Если £п = 104 м, то потребная удельная ЭПР составит
= 4,6 10-4
м
(6.129)
(6.130)
(6.131)
Такая удельная ЭПР в трехсантиметровом диапазоне имеет место, если объем-
ная плотность отражателей составит 3 диполя/м3. Это достаточно высокая и труд-
но реализуемая концентрация. Подавление в той же степени РЛС десятисантимет-
рового диапазона требует значительно меньшую, примерно на порядок, объемную
плотность, но и такую плотность трудно реализовать. Возможности силового по-
давления РЛС возрастают в случае сочетания активных и пассивных помех.
6.7. Активно-пассивные помехи
Активно-пассивной помехой называется радиоэлектронная помеха, создаваемая
энергией радиоэлектронного средства и энергией, внешней по отношению к ис-
точнику активно-пассивной помехи. На практике активно-пассивная помеха созда-
ется путем облучения облаков ПРЛО, подстилающих поверхностей и других неодно-
родностей электромагнитным полем станции активных помех. Активно-пассивная
помеха сочетает в себе достоинства активной и пассивной помех.
Источник активно-пассивной помехи (например, облако ПРЛО, подсвеченное
САП) порождает случайное электромагнитное поле, воздействующее на РЛС как
пространственно-временная помеха. По информационному критерию простран-
ственно-временная помеха имеет наилучшую маскирующую способность и наибо-
лее устойчива к контрмерам противника. Чтобы установить достоинства активно-
пассивной помехи по сравнению с активной или пассивной помехами, воспользу-
емся информационным описанием помеховых сигналов.
В соответствии с теоремой отсчетов любой сигнал, спектр которого не содер-
жит составляющих с частотой выше может быть определен на интервале вре-
мени Т конечным числом отсчетных значений
^=1 + 2/тах7’ = 2/тахГ (6.132)
При сравнении высокочастотных узкополосных сигналов, имеющих одинаковые
несущие частоты и представленных в комплексной форме, достаточно определить
6.7. Активно-пассивные помехи
305
характеристики огибающих (амплитуд). Если ширина спектра сигнала Д/^, то мож-
но определить необходимое число точек отсчета для воспроизведения огибающей
Nt=tfcT. (6.133)
Распространяя теорему отсчетов на пространственно-временной сигнал, созда-
ваемый пространственно-протяженным источником случайного электромагнитно-
го поля, можно показать, что для описания реализации случайного электромагнит-
ного поля необходимое число пространственно-временных отсчетов равно
(6.134)
IV -jvrivnp,
где 7Vnp — число пространственных отсчетов, равное
(6.135)
Zvmax» /rmax — максимальные пространственные частоты источника электромагнит-
ного поля в ортогональных азимутальной и угломестной плоскостях; X, Y — протя-
женность источника электромагнитного поля в ортогональных плоскостях.
Если необходимо учитывать и поляризационные характеристики поля, то чис-
ло отсчетов возрастает.
Максимальные пространственные частоты Дтах и /Ктах определяются наимень-
шими размерами деталей (неоднородностей) источника активно-пассивной помехи.
Если наименьший размер деталей (неоднородностей) равен Дх и Ду, то
(6.136)
max
max А
Ду
Подавляемая РЛС не может выявить неоднородности, размеры которых мень-
ше ее линейной разрешающей способности 8х, 8у в соответствующих ортогональ-
ных плоскостях. Поэтому необходимо принять Дх = 8х, Ду = 8у и записать (6.136) в
виде
max
Y max о •
5У
С учетом (6.133), (6.135) и (6.137) выражение (6.134) запишется в виде
( тх
N = tfcT 1+—
ov
2Y
8„
(6.137)
(6.138)
При удалении источника активно-пассивной помехи от РЛС на расстояние R
8х=^фо,5; 8у = /?е0,5- (6.139)
Подставляя (6.139) в (6.138), получаем
2Дф
2де
0п ч
(6.140)
где Дф и ДО — размеры источника помех Дф = — >ф0?5;
R
0,5
Обычно -^-»1 и -^-»1, поэтому выражение (6.140) упрощается:
Фо,5 %,5
7V = 4Vc^—
Фо,5 %,5
(6.141)
Число N можно назвать информационной емкостью пространственно-времен-
ного сигнала.
306
Глава 6. Пассивные и пассивно-активные помехи
Полезный сигнал, порождаемый реальными источниками (самолетами, верто-
летами), имеет следующие информационные характеристики: Л/с = А/пр; А<р = <р0 5;
де = е0 5. Время наблюдения Т равно времени накопления (обработки) сигнала
в РЛС: Т = TQ. Поэтому из (6.141) информационная емкость полезного сигнала вы-
ражается в виде
^=4А/сТ0=4А/прГ0. (6.142)
Рассуждая подобным образом, можно найти информационную емкость актив-
ной помехи
^п=4А/пТ0. (6.143)
Пассивная помеха, создаваемая облаком отражателей с угловыми размерами
Аф = фип; А0 = 0ПП, имеет информационную емкость
2Депп
%,5 >
Информационная емкость активно-пассивной помехи, создаваемой путем об-
лучения того же облака отражателей активной помехой, равна
2АфпП
ПП
(6.144)
2АфпП
2деПп
%,5 >
Определим пространственно-временную маскирующую способность различных
помех, как отношение информационной емкости помехи Nan, Nnn или 7Vann к ин-
формационной емкости полезного сигнала Nc с учетом качества временной реали-
зации помех пяп, т|пп или Т|яптт:
' loll7 ’Illi 1 al 111
апп “4/п^ 1 +
,z А^ап А/п
Д/ = -и —аЦ. = у» —±Д_-
Jr/an Чап жт Чап А г ’
Ne А/пр
ап _ _ Афпп А®
т Лпп Д(р015 де0>5 ’
А/п Афпп А9пп
ПП .
N
^апп ~ Лапп 77 ~ Лапп А г А А Q
Nc A/пр Д<Р0,5 Д0О,5
(6.145)
(6.146)
(6.147)
(6.148)
Мпп ЛпП
J ’ с
Потенциальные маскирующие возможности активных, пассивных и активно-
пассивных помех могут быть выявлены путем сравнения коэффициентов Мап, Мии,
А/апп. С помощью (6.146)—(6.148) можно получить
^апп _ Лапп А<Рпп Д9ПП 1; (6.149)
^ап Лап ДФо,5 Д^0,5
^апп _ Лапп А/п
А^ап Лпп Д/пр
(6.150)
Соотношения (6.149) и (6.150) указывают на значительные преимущества актив-
но-пассивных помех перед всеми другими при решении задач маскировки целей.
Ограниченные возможности активных и пассивных помех, значительные пре-
имущества активно-пассивных помех можно показать на примере маскировки полез-
ного сигнала в пространстве с координатами «частота — угол 0». Схема подавле-
ния РЛС представлена на рис. 6.26.
6.8. Энергетические соотношения при создании активно-пассивных помех
307
Рис. 6.26. Схема подавления РЛС
Для пассивных помех потенциальная область маскировки A/Jin определяется
шириной спектра пассивных помех 5ПП(/) и угловым размером облака отражате-
лей ДО (рис. 6.27). Площадь маскировки равна 5ПП = A/J^AO.
Рис. 6.27. Потенциальная область маскировки пассивными помехами
Активная помеха с шириной спектра Д/дП маскирует область 5ап = Д^ДЭ. В дан-
ном случае считается, что облако отражателей отсутствует.
Вследствие малых значений А/пп (сотни герц) и 0О 5 (градус, несколько граду-
сов) области маскировки 5ПП, 5ап имеют малые площади.
Активно-пассивная помеха, создаваемая облаком ПРЛО, подсвеченным стан-
цией активных помех САП, способна маскировать цели в области 5апп, площадь
которой значительно превышает 5ап и -5’пп(-5’апп »^ап» ^апп >>j^nn)-
6.8. Энергетические соотношения при создании
активно-пассивных помех
При подавлении РЛС активно-пассивными помехами на входе подавляемого
приемника образуются следующие сигналы (см. рис. 6.28): полезный сигнал мощ-
ностью Рс; пассивная помеха мощностью Рпп, порожденная переотражением зон-
дирующего сигнала РЛС облаком ПРЛО; активная помеха мощностью Рап, действу-
ющая в прямом направлении САП — РЛС; активно-пассивная помеха мощностью
Рапп, образованная за счет подсвета облака отражателей станцией активных помех;
активно-пассивная помеха мощностью Рапц, образованная за счет подсвета цели Ц
(например, прикрываемого самолета) станцией активных помех.
308
Глава 6. Пассивные и пассивно-активные помехи
Рис. 6.28. Подавление РЛС активно-пассивными помехами
Для схемы радиоподавления, изображенной на рис. 6.26, отношение помеха/
сигнал на входе подавляемого приемника равно [16]
где
(6.151)
Р = к, Л.. ^с^с<7п1 Ap~ncSlL-
*пп ЛСАП , ч2 ’
(4^)
Лп =A^u^^YnF2(e,<p)
4лАп ДГП
(6.152)
(6.153)
_ °п11 д ^np -nanL.
4nR2 4пАц2 ¥п Уп ’
_ ^nll j ^пр v -иОцL.
’ 4яЯ2 4яЯц2 Vn Yn ’
(6.154)
(6.155)
(6.156)
где PCGC — энергетический потенциал РЛС; РПСП — энергетический потенциал САП;
оп1, опп — ЭПР отражающего объема облака отражателей при однопозиционном и
двухпозиционном рассеянии; ОрОц — средняя ЭПР одного диполя при однопо-
зиционном и двухпозиционном рассеянии; оц1, оц11 — ЭПР прикрываемого само-
лета Ц при однопозиционном и двухпозиционном рассеянии; Rw 7?п, R — рассто-
яния цель Ц — РЛС, САП — РЛС, САП — цель Ц; L = 2г—диаметр облака ПРЛО;
F(0, ф) — диаграмма направленности антенны РЛС; £Сдц — коэффициент ослаб-
ления пассивной помехи схемами СДЦ:
£пп — коэффициент подавления РЛС пассивной помехой; £по — коэффициент
подавления РЛС белым шумом.
Определим условия, при которых активно-пассивная помеха энергетически вы-
годнее активной и пассивной помех.
GulH
6.8. Энергетические соотношения при создании активно-пассивных помех 309
При подавлении импульсно-когерентных РЛС коэффициент ослабления пас-
сивных помех весьма мал: &сдц ~ Ю”3- Кроме того, необходимо учесть, что реально
ОцП « оц1. Поэтому в правой части выражения (6.151) можно пренебречь первым и
четвертым слагаемыми. В результате имеем
= ^ап । ^апп (6.157)
Л
Активно-пассивная помеха будет более эффективна, чем активная помеха, если
л ап
Из формул (6.154) и (6.155) следует, что
ь =-----£пп^------e-ncnL (6 J 59)
4лА27?2 F2 (0,<р)
При достаточно широкой ДНА передатчика САП, когда подсвечивается все обла-
ко отражателей, ЭПР отражающего объема равна (рис. 6.28):
°п11 ~ ^ц0О,5Фо,5лаП’ (6.160)
где 0, фд,5 — ширина луча ДНА РЛС в угломестной и азимутальной плоскостях.
Выражение (6.159) с учетом (6.160) преобразуется к виду
= £/^gn«eos<p0i5 ^nL 616
4nR2R2 F2 (е,ф)
Отношение b = апп имеет максимум при некоторой оптимальной концентра-
„ ^ап
ции отражателей
<6Л62>
Подставляя (6.162) в (6.161), можно получить
_ ^п%,5Фо,5
^тпах ~ л 'у \ •
kneBrF2 (0,ф)
(6.163)
Из (6.162) следует, что для рассматриваемой схемы создания помех рис. 6.28
оптимальная концентрация отражателей зависит только от размеров облака L и сред-
ней ЭПР одного диполя. Подставляя в (6.162) значение оп из (6.3), можно найти
иопт =---т диполей/м3.
6ZX2
(6.164)
Если 1 = 10 см и L = 1О3...1О4 м, то концентрации ПРЛО получаются практичес-
ки приемлемыми иоггг = 0Д...1 диполей/м3.
Преимущества активно-пассивных помех по сравнению с активными помехами
иллюстрируются графиком рис. 6.29, где представлены зависимости Z>max = ^а11П
z V ^ап /max
(R Г
от отношения — .
R
Вследствие того, что по тактическим соображениям — = 1...10, активно-пассив-
R
ная помеха имеет энергетические преимущества перед активной помехой (Z>max > 1)
только в случаях подавления РЛС с антенными системами, имеющими ДНА с низ-
310
Глава 6. Пассивные и пассивно-активные помехи
кими уровнями боковых лепестков Л2(б,ф)~10 3...10 5. Такими являются практи-
чески все современнные РЛС. При подавлении активно-пассивными помехами РЛС
(R У
по боковым лепесткам при —10 можно получить энергетический выигрыш
на один-два порядка.
Рис. 6.29. Область эффективности активно-пассивных
помех по сравнению с активными
При создании активных помех по главному лучу F2(0,cp) = l антенны РЛС ак-
тивно-пассивная помеха в энергетическом смысле проигрывает в 100...1000 раз.
Для определения требований к энергетическому потенциалу САП, осуществля-
ющей подсвет облака ПРЛО, необходимо исходить из уравнения РЭП
= (6.165)
Из (6.165) с учетом (6.154), (6.156) и (6.160) определяется значение энергети-
ческого потенциала САП
ои1А/пА2
=knPcGc------------------
^0,5Ф0,5^п4/прТЛц
(6.166)
При оптимальной концентрации отражателей в облаке выполняется соотноше-
ние (6.164), поэтому
(^n^n)mjn ~vknPcGc, (6.167)
где
v = дщА/пА2
6о,5Фо,5ЛОпД/прТ^ц
(6.168)
Для типовых примеров v = 1О“6...1О-8, поэтому реализация активно-пассивных
помех не вызывает трудностей.
Благоприятным случаем подавления РЛС является подсвет облака ПРЛО в на-
правлениях, близких к прямому. На рис. 6.28 этому случаю соответствует угол 0! ~
~ 180°. При подсвете облаков ПРЛО в прямом направлении двухпозиционная ЭПР
отражателей оп увеличивается во много раз [55]. Кроме того, эффективность ак-
тивных помех возрастает за счет эффекта когерентного (коллективного) рассеяния
электромагнитного поля в направлении на РЛС. При широконаправленной антен-
не САП из формулы (6.168) вытекает рекомендация размещать САП как можно бли-
же к облаку ПРЛО.
6.9. Устройства создания пассивных помех
311
6.9. Устройства создания пассивных помех
Современные устройства выброса средств РЭБ универсальны. Они использу-
ются не только для создания облаков и полос ПРЛО, но и для выбрасывания теп-
ловых ловушек и передатчиков активных помех одноразового применения. Устрой-
ства выброса (УВ) устанавливаются на всех типах ЛА: самолетах, вертолетах, аэро-
статах, беспилотных самолетах, ракетах. Применяются они и для защиты военных
объектов в других видах Вооруженных сил (на кораблях, танках и др.).
Для создания локальных образований ПРЛО (облаков, полос) применяются У В
различного типа: пневматические, механические и пиротехнические. Широкое
распространение получили пиротехнические УВ, работа которых основана на от-
стреле специальных патронов, снаряженных либо противорадиолокационными
отражателями, либо тепловыми ловушками.
Перспективные устройства выброса имеют модульную конструкцию, что позво-
ляет включать их в состав комплексов РЭБ различных ЛА. Структурная схема уни-
версального многофункционального устройства выброса средств РЭБ представле-
на на рис. 6.30.
Рис. 6.30. Структурная схема универсального многофункционального
устройства выброса средств РЭБ
Блок сопряжения обеспечивает связь системы управления комплекса РЭБ с
устройством выброса, входящим в систему исполнительных устройств. В автома-
тическом режиме работы решение о программе отстрела и параметрах программы
принимается в СУ после анализа радиоэлектронной обстановки и наличия расхо-
дуемых средств РЭБ.
Блок формирования программ предназначен для изменения программы работы
УВ в соответствии с управляющими командами, поступающими из СУ в блок сопря-
жения в виде цифровых кодов. Блок формирования программ устанавливается в
кабине или в доступном месте специального отсека. Параметры программы могут
изменяться на земле или в полете.
Команды на отстрел патронов в соответствии с выбранной программой посту-
пают в блок переключений, который на каждую команду формирует последователь-
ность импульсов. Серия импульсов с помощью коммутаторов распределяется по
соответствующим контактам кассет, входящим в состав блока выброса.
Блок выброса состоит из кассетного держателя и набора кассет с гнездами для
патронов. Общее число блоков на борту ЛА может быть различным. Даже на одном
312
Глава 6. Пассивные и пассивно-активные помехи
типе ЛА могут устанавливаться различные блоки выброса, чем достигается адаптация
комплекса РЭБ в соответствии с боевой задачей.
Кассеты позволяют устанавливать в них как противорадиолокационные патро-
ны (ПРЛП), так и тепловые ловушки (ТЛ). Прогрессивным является выполнение
кассет в виде прямоугольных сотовых конструкций. При этом достигается сущест-
венная экономия места, число патронов в кассете увеличивается.
Пульт управления и другие органы управления УВ размещаются в удобном для
летчика месте. Кнопки отстрела патронов могут устанавливаться на ручке или штур-
вале управления ЛА. С помощью пульта управления можно экстренно изменить
режим работы устройства выброса и выбрать тип отстреливаемых патронов.
Устройство выброса может работать в автоматическом и ручном режимах. При
переводе в ручной режим работы программа автоматического выброса прерывается
до тех пор, пока программа ручного управления не будет выполнена. Блок формиро-
вания программ обеспечивает работу УВ по приоритетам. Высшим приоритетом
обладают команды на одиночный или залповый отстрелы, затем идут отстрел патро-
нов по программе в ручном режиме и отстрел патронов по программе в автоматиче-
ском режиме.
Основными параметрами программы отстрела патронов являются (рис. 6.31):
временной интервал между последовательно отстреливаемыми патронами в очере-
ди (7J); продолжительность серии (Гс); интервал между сериями (Г2); число оче-
редей в серии (ли); число патронов в очереди N.
Очереди
Рис. 6.31. Программа отстрела патронов
Противорадиолокационный патрон может иметь форму цилиндра или паралле-
лепипеда. На вооружении ЛА имеется несколько типов цилиндрических патронов,
отличающихся калибром и массой. Американские ПРЛП имеют форму параллелепи-
педа с габаритными размерами 25x25x210 мм и массой около 150 г.
Противорадиолокационный патрон может быть сложным или простым. Сложный
патрон состоит из нескольких галет отражателей разной длины. Вышибной заряд вос-
пламеняется при подаче напряжения на электрический капсюльный воспламенитель.
После выброса отражателей образуется облако, имеющее ЭПР порядка о = 50...500 м2
в значительном диапазоне частот.
Простой противорадиолокационный патрон имеет одну галету с отражателя-
ми одной длины. Достоинством такого патрона является возможность получения
облаков отражателей с высокой концентрацией. Недостаток простого патрона —
низкая эффективность в широком диапазоне частот из-за использования одина-
ковых отражателей.
ГЛАВА 7
УСТРОЙСТВА ОПТИКО ЭЛЕКТРОННОГО
ПОДАВЛЕНИЯ АВИАЦИОННЫХ КОМПЛЕКСОВ
РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
7.1. Краткая характеристика оптико-электронных устройств
Устройства оптико-электронного подавления (ОЭП) служат для дезорганиза-
ции работы инфракрасных, телевизионных, лазерных и оптико-визуальных систем
и средств разведки, наблюдения, связи и управления оружием противника. ОЭП
производится путем воздействия на оптико-электронные средства помехами, при-
менения ложных целей, тепловых и оптических ловушек, аэрозолей, а также выво-
дом из строя электромагнитными излучениями оптических и фоточувствительных
элементов этих систем и средств. Устройства ОЭП входят в состав комплексов
групповых и индивидуальных средств РЭБ.
В современной ПВО применяется большое количество разнообразных оптико-
электронных средств (ОЭС). В последнее время ОЭС управления оружием в больших
количествах поступают на вооружение армий всех стран и широко используются в
ограниченных конфликтах. Распространению ОЭС способствует их высокая эффек-
тивность и надежность, а также дешевизна и весьма хорошие массогабаритные
характеристики. Особую опасность ОЭС управления оружием представляют для всех
типов ЛА вследствие их значительной заметности в оптическом диапазоне электро-
магнитных волн.
В локальных войнах последних лет довольно успешно применяются перенос-
ные зенитно-ракетные комплексы (ПЗРК) с оптико-электронными системами на-
ведения. Применяют ПЗРК и террористы. Широкое распространение ПЗРК полу-
чили по двум причинам. Во-первых, они сравнительно дешевы. Во-вторых, их при-
менение не требует ни особого интеллекта, ни длительной специальной подготовки.
К настоящему времени промышленность разных стран произвела десятки тысяч
ПЗРК различных типов. Вид ПЗРК «Игла» иллюстрируется рис. 7.1.
Рис. 7.1. Ракета «Игла»
Игла-М
314 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Основные характеристики ПЗРК различных типов приведены в табл. 7.1.
Таблица 7.1.
Тип ПЗР «Стингер», США «Стрела», Россия «Игла», Россия «Мистраль», Франция
Максимальная дальность пуска, км 5,5 3,4 5,2 6
Максимальная высота цели, км 3 1,5 2,5 3
Максимальная скорость цели, м/с 700 700 700 700
Масса ПЗР, кг 15 20
Стартовая масса ракеты, кг -10 10 10,8 17
Масса боевой части, кг -1 -1 -1 3
Диапазон волн ИК ИК ИК
Поле зрения ИКГС -2° -2° -2°
Год выпуска 1972 1968 1983 1986
В системах управления оружием ПВО и истребителей применяются разнооб-
разные типы ОЭС:
• инфракрасные головки самонаведения (ИКГС) ракет класса «воздух — воз-
дух» и «земля — воздух» («Сайдвиндер», «Мажик», «Ред-Ай», «Стингер», «Ча-
парел», «Роланд-2», «Мистраль», «Игла», «Стрела»);
• теплопеленгаторы, лазерные, оптические и телевизионные прицелы бортовой
системы управления оружием современных истребителей типа F-15, F-18;
• теплопеленгаторы, лазерные, оптические и телевизионные прицелы ЗРК типа
«Роланд-1», «Индиго», RBS -70, «ADATS», «Блоупайп» и др.; теплопеленгато-
ры для определения момента пуска ракет в комплексах РЭБ.
Классификацию различных ОЭС иллюстрирует рис. 7.2.
ОЭС управления
оружием
Средства обзора
и прицеливания
Системы целеуказания
Дальномеры
Теплопеленгаторы
Системы наведения
Системы теленаведения
Системы самонаведения
Тепловые
Т е л евизионные
Тепловизионные
Комбинированные
Рис. 7.2. Виды ОЭС
В оптико-электронных приборах информация о наблюдаемом или отслеживае-
мом объекте переносится оптическим излучением, а ее первичная обработка сопро-
вождается преобразованием энергии излучения в электрическую энергию. В состав
таких приборов входят как оптические, так и электронные элементы. Одна из воз-
можных обобщенных схем функционирования ОЭС представлена на рис. 7.3 [75].
Существуют оптико-электронные устройства диапазона видимого излучения
(оптические прицелы, телевизионные прицелы и визиры, телевизионные головки
7./. Краткая характеристика оптико-электронных устройств
315
Рис. 7.3. Обобщенная схема функционирования ОЭС
самонаведения), инфракрасного диапазона (ИКГС, теплопеленгаторы, тепловизи-
онные головки самонаведения) и лазерные устройства (лазерные локаторы, даль-
номеры, системы подсвета целей).
ОЭС используют диапазон электромагнитных излучений, занимающий область
длин волн 0,0135...500 мкм. Хорошо освоена видимая (А, = 0,4...0,75 мкм), инфракра-
сная (А = 0,75...15 мкм) и активно осваивается ультрафиолетовая (Х = 0,25...0,4 мкм)
области спектра. Работа на этих длинах волн обусловливает более высокую разре-
шающую способность ОЭС по сравнению с радиоэлектронными средствами, прак-
тически полное отсутствие боковых лепестков и высокую точность пеленгации.
Мощными тепловыми излучателями являются летательные аппараты. В оптиче-
ском диапазоне необходимо учитывать такие их характеристики, как собственное
излучение двигателей и обшивки ЛА, излучение струи выхлопных газов (факела),
отраженное излучение Солнца, а также положительный или отрицательный конт-
раст с фоном.
Основным источником излучения ЛА является его двигатель. В зависимости от
конструктивных особенностей двигателя, принципа его работы, высоты полета ЛА
меняется и сила его излучения. Основными двигателями в авиации являются тур-
бореактивные (ТРД), турбовентиляторные (ТВРД), прямоточные (ПВРД).
ТРД имеет два ярко выраженных источника излучения — раскаленную метал-
лическую удлинительную трубу и струю выхлопных газов (факел). В бесфорсаж-
ном режиме излучение в заднюю полусферу от трубы немного больше, чем от факела.
В форсажном режиме доминирующим источником излучения становится факел.
Для характеристики двигателя ЛА как излучателя пользуются энергетической
силой излучения, которая описывается зависимостью [74]
/д»=Мдв—Вт/ср, (7.1)
л
где — суммарная плотность излучения абсолютно черного тела (АЧТ), температу-
ра которого равна температуре излучающей части двигателя, Вт/см2; Адв — площадь
излучающей части двигателя, см , = =— =у---спектральный коэффициент.
ИМХчт
316 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Спектральная плотность излучения абсолютно черного тела (АЧТ) зависит толь-
ко от его температуры и определяется законом Планка [73]:
= —------------- (7-2)
где Т — абсолютная температура тела; Ci = 3,74-10“4 —=---i С2 = 14380 мкм К;
Л см2 • мкм
Л,— длина волны, мкм.
В ИКГС производится селекция излучения по длине волны, поэтому плотность
излучения, приходящаяся на некоторый спектральный интервал Хр..^, равна
к
к
где о = 5,673-10 12 Вт/см2-град4;
_ о
/ъ2
км
Z
(7.3)
о
'кт — длина волны, соответствующая максимуму плотности излучения, определя-
ется законом Вина:
1 г
кт =— мкм, (7.4)
где е(Х) — спектральный (поправочный) коэффициент.
Каждой волне можно поставить в соответствие один гармонический осцилля-
тор. Средняя энергия каждого осциллятора равна кТ. Поэтому для классического
осциллятора вся энергия составит
Q(f)dn = nv{Q)J^tvkT, <7-5)
а спектральная плотность излучения, очевидно, будет
е(/) ^2кт (7.6)
V С3 ’
Это закон Релея — Джинса. При низких частотах он согласуется с эксперимен-
тальными данными. С увеличением f функция м(/, Т), как видно из (7.6), должна
неограниченно возрастать вплоть до бесконечности. Этот парадокс получил название
ультрафиолетовой катастрофы. Он противоречит экспериментальным данным и
здравому смыслу. Суть парадокса в том, что средняя энергия излучения классическо-
го осциллятора на всех частотах одинакова. Правильный результат получится, если
в (7.6) использовать среднюю энергию не классического, а квантового осциллятора:
(0(/))=—Л
ехр —
Тогда из (7.6) с учетом (7.7) следует, что
, ч 8л/3Л 1 8л/гс
u(f,T)=—--------
с
ехр
(7.7)
(7.8)
1
ехр
7. /. Краткая характеристика оптико-электронных устройств
317
Это закон излучения Планка. Кривые, отображающие закон излучения Планка,
и построенные в соответствии с формулой (7.8), приведены на рис. 7.4.
Рис. 7.4. Спектральная плотность излучения абсолютно
черного тела (закон излучения Планка)
Яркость факела зависит от температуры и числа молекул газа в нем. Эти вели-
чины определяются расходом топлива и высотой полета. На высоте 10000 м яркость
факела приблизительно в два раза меньше, чем на уровне моря. Яркость факела
оценивается формулой
7ф ~ J ачтб/Х, (7.9)
71А
где е(^) — спектральный коэффициент излучения факела.
Энергетическая сила излучения современных ЛА колеблется от нескольких
киловатт до нескольких сотен киловатт.
Излучение ТРД и факела обладает ярко выраженной индикатрисой излучения
(рис. 7.5). Вклад факела в суммарную яркость на бесфорсажном режиме поряд-
ка 10 %. ТВРД характеризуются более низкими температурами как удлинительной
трубы, так и факела.
Пу
Рис. 7.5. Индикатриса излучения ТРД и факела
На рис. 7.6 приведены графики зависимостей, показывающие соотношения
яркостей ТРД и ТВРД при равных тягах.
ТВРД по своим характеристикам излучения близок к ТРД с учетом лишь того,
что выхлопные газы имеют несколько более низкую температуру, а удлинительная
труба более горячая (-1600°C).
318 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Рис. 7.6. Соотношения яркостей ТРД и ТВРД
При движении объектов в атмосфере с большими скоростями (М> 2) излучение
этих объектов становится достаточным для использования его в ИК-приборах раз-
личного назначения. Наиболее нагретыми являются те части ЛА, где поток воздуха
резко тормозится. Температура этих точек поверхности ЛА приблизительно равна
7’ = 7’о(1 + О,2Л/2), (7.10)
где То — температура окружающего воздуха в градусах абсолютной шкалы.
Аэродинамический нагрев существен для длинноволновых ОЭС.
С точки зрения ведения РЭБ в авиации ОЭС вероятного противника следует
выделить [75]: ОЭС управления оружием; инфор^аодюнно-обзорные ОЭС; ОЭС
разведки.
К ОЭС управления оружием в первую очередь следует отнести следящие системы,
используемые для наведения ракет классов «поверхность — воздух» и «воздух — воз-
дух», оптические, инфракрасные и телевизионные прицелы, лазерные системы на-
ведения.
ОЭС управления оружием, могут быть разделены на активные и пассивные. Пас-
сивные системы, в свою очередь, разделяются на системы, в которых используется
развертка светового луча или изображения, и системы мозаичного типа. Благодаря
наличию сетки или модулирующего диска поле зрения системы разделено на отдель-
ные области, что позволяет получить информацию о пространственном положении
цели. В мозаичной системе используется большое число фотоприемников, и обра-
ботка сигнала может осуществляться последовательно или параллельно.
Достоинствами ОЭС слежения с мозаичной системой являются высокая помехо-
защищенность от помех естественного происхождения (фонов) и средств предна-
меренного оптического подавления (ловушек, модулированных помех); всеракур-
сность (повышенная обнаружительная способность); возможность работы в двух и
более спектральных диапазонах.
Следящие ОЭС бывают автоматические (ИКГС, телевизионные системы само-
наведения) и полуавтоматические (ОЭС ЗРК, оптико-электронные прицелы ЗАК,
оптические и телевизионные прицелы). Структурные схемы таких систем приведе-
ны на рис. 7.7 и 7.8 [75].
Наибольший интерес с точки зрения ведения РЭБ представляют два класса ОЭС:
ИКГС ракет классов «воздух — воздух» и «поверхность — воздух», оптико-элект-
ронные прицелы ЗРК и ЗАК.
Существующие и разрабатываемые средства помех указанным классам ОЭС
можно условно разделить на следующие группы.
1. Некогерентные средства ОЭП:
1) тепловые ловушки (ТЛ), воздействие излучения которых на следящие ОЭС
приводит к их перенацеливанию. ТЛ характеризуются массовыми, геометрическими,
7. /. Краткая характеристика оптико-электронных устройств
319
Рис. 7.7. Автоматическая следящая оптико-электронная система
Рис. 7.8. Полуавтоматическая следящая оптико-электронная система
энергетическими параметрами, конструктивными особенностями и составом горю-
чей смеси. По способу применения ТЛ могут подразделяться на свободно падающие
(отстреливаемые, выбрасываемые), снаряды и ракеты, буксируемые, топливно-
выливаемые;
2) станции активных некогерентных помех, представляющие собой модулиро-
ванные источники излучения, выполненные на основе электронагревательных эле-
ментов и газоразрядных ламп.
320 Глава 7. Устройства оптико электронного подавления авиационных комплексов РЭБ
2. Когерентные средства ОЭП:
1) непрерывные лазеры с модуляцией излучения;
2) импульсные лазеры, изучение которых воздействует на нелинейные элемен-
ты электронных схем ОЭС;
3) мощные лазерные источники, излучение которых приводит к разрушению
оптических элементов ОЭС.
3. Пассивные средства ОЭП. К ним относятся устройства по снижению замет-
ности ЛА и устройства создания аэрозольных маскирующих образований.
7.2. Принципы действия оптических приборов обнаружения
и автосопровождения целей
Оптические приборы обнаружения и автосопровождения используются в опти-
ческих локаторах и пеленгаторах, в оптических и тепловых головках самонаведе-
ния ракет.
Тепловая головка самонаведения (ТГС) ракеты предназначена для обнаруже-
ния, автоматического сопровождения тепловых точечных целей по угловым коор-
динатам и получения управляющих ракетой сигналов, пропорциональных угловой
скорости линии визирования цели в двух взаимно перпендикулярных плоскостях.
Так как помехоустойчивость ТГС практически не зависит от ее конструкции, а
в основном определяется значениями ряда параметров (полосой пропускания при-
емника лучистой энергии, размером угла зрения и т. д.), здесь будет рассмотрена
ее простейшая конструкция [75].
На рис. 7.9 показан разрез оптической системы ТГС.
Рис. 7.9. Разрез оптической системы ТГС
Поток тепловой энергии Ф через обтекатель 1 попадает на фокусирующее зерка-
ло 2, отражается от него, еще раз отражается от плоского зеркала 3, проходит через
отверстие в диафрагме 4, помещенной между плоским зеркалом и модулирующим
диском 6, часто именуемым «растром». Для того чтобы уменьшить уровень приема
энергии источников, находящихся вне поля зрения ТГС, плоское зеркало закрыто
зачерненной блендой 5, а отверстие в зачерненной диафрагме выбирают равным
размеру модулирующего диска. Модулирующий диск помещен в фокусе зеркала,
поэтому на него падает поток лучистой энергии, сфокусированный в пятно. Размеры
пятна из-за аберрации всегда, даже при пеленговании точечной цели, конечны.
Часть потока энергии, прошедшая через модулирующий диск, фокусируется
линзой 7 на поверхности фотоприемника 8 (например — на фоторезисторе или фото-
7.2. Принципы действия оптических приборов обнаружения...
321
диоде). Линза одновременно является фильтром, исключающим попадание на фото-
резистор энергии в видимом и верхнем ИК-диапазонах (Х< 2 мкм), предохраняя
его от разрушения.
При изменении положения фронта волны относительно оси оптической систе-
мы меняется и положение пятна П (рис. 7.10) на модулирующем диске. При этом
величина отклонения цели от оси оптической системы срц приводит к перемеще-
нию пятна П по плоскости модулирующего диска.
Рис. 7.10. Работа амплитудно-фазового пеленгатора: а — структура диска;
б — напряжение ГОН; в — напряжение на нагрузке фотоприемника
^фр , L
Величина отклонения цели от оси оптической системы срц приводит к переме-
щению пятна от центра к периферии диска, а направление отклонения отображается
углом ДО, отсчитываемым от фиксированного направления (в данном случае — от
оси х). Амплитуда 17м напряжения С/фр на выходе фоторезистора 8 пропорциональ-
на угловому отклонению <рц цели от оптической оси, а фаза ДО — полярному углу.
Диск, как и вся оптическая система, двигателем сканирования ДС вращается с
угловой скоростью QCK, вызывая (при фиксированном положении пятна П на дис-
ке) периодическую модуляцию потока лучистой энергии, а вместе с ним и тока,
протекающего через фоторезистор 8 по цепи 9 (рис. 7.9). На выходе фотоприемни-
ка образуется напряжение С/вых, амплитудно-частотные характеристики которого
несут информацию об ошибке пеленга цели.
К настоящему времени предложено множество различных типов растров, обеспе-
чивающих модуляцию лучистой энергии по закону, в параметрах которого закоди-
рована информация, отображающая значение модуля угла срц и направление этого
отклонения угла Д0. В зависимости от параметра, в котором закодирована указанная
информация, различают пеленгаторы: амплитудно-фазовые, частотно-фазовые, ам-
плитудно-частотные и т. д. Однако вне зависимости от закона, по которому прерыва-
ется диском поток, последний модулируется прежде всего по интенсивности, т. е.
по принятой в радиотехнике классификации все пеленгаторы ИК-диапазона явля-
ются амплитудными. Это положение играет решающую роль при оценке эффек-
тивности таких помех работе ТГС, которые создаются путем прерывания потока
лучистой энергии источника помех по закону, приводящему к появлению ошибки
сопровождения этого источника. Такие помехи называют модулированными.
Принцип кодирования информации растром можно пояснить на примере ампли-
тудно-фазового пеленгатора. В данном случае модулирующий диск разбит на две
равные части. Нижняя его часть полупрозрачна в ИК-диапазоне, а верхняя представ-
ляет собой чередование секторов и колец, зачерненных и прозрачных для потока
лучистой энергии. Размеры «окон» выбраны так, что если цель отклонится от оси
322 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
оптической системы и пятно П (при точечной цели) уйдет на периферию диска,
оно точно уложится в размеры «окна». Благодаря этому перемещение цели в пре-
делах угла зрения ТГС меняет глубину модуляции потока ИК-энергии от т = 0 (цель
на оси оптической системы) до т = 1 при выходе цели на границу угла зрения ТГС.
Выход пятна за периферию диска приводит к исчезновению сигнала. Много-
клеточная «черно-белая» структура верхней половины диска необходима для сни-
жения влияния крупноразмерных объектов на работу ТГС.
Как нетрудно увидеть, для сопровождения цели достаточно было бы иметь че-
редующиеся зачерненные и прозрачные секторы.
Если на диск будет сфокусировано излучение крупноразмерного объекта, пят-
но будет большим. Оно накроет несколько колец, и глубина модуляции потока
независимо от положения этого пятна на площади диска будет близка к нулю.
Поскольку по мере удаления от центра диска к его периферии число линий воз-
растает, растет и число импульсов в пачке, т. е. несущая частота. Таким образом, в
сигнале ФР величина угла <рц будет отражаться частотой сигнала. Фаза огибающей,
как и в амплитудно-фазовом пеленгаторе, будет отображать направление отклоне-
ния, т. е. угол Д0. Такие пеленгаторы можно назвать амплитудно-частотно-фазовы-
ми. Но для краткости их просто называют частотно-фазовыми. Существует множе-
ство других типов растров. Но ни один из них не обеспечивает получения абсолют-
ных преимуществ ни по чувствительности, ни по помехоустойчивости по сравнению
с другими. Амплитудно-фазовый пеленгатор требует наиболее простых преобразо-
ваний сигнала рассогласования в ТГС, поэтому целесообразно начать рассмотре-
ние с амплитудно-фазовых пеленгаторов.
Структура растра, показанная на рис. 7.10, о, является далеко не единствен-
ной. Предложены и другие ее типы. Так, например, верхняя половина диска может
быть заштрихована расположенными на равных расстояниях прозрачными и непро-
зрачными линиями, идущими от периферии к центру экрана, как это показано на
рис. 7.11. При вращении растра с угловой скоростью Пск на нагрузке фоторези-
стора будут выделяться пачки видеоимпульсов, число которых будет определяться
числом пересечений пятном прозрачных полос, имеющихся на данном расстоянии
от центра диска.
Рис. 7.11. Структура растра амплитудно-частотно-фазового пеленгатора
В процессе полета на ракету действуют возмущения, приводящие к быстрым
колебаниям ее продольной оси относительно направления на цель. Чтобы облег-
чить сопровождение цели по углам, оптическая система устанавливается на гироско-
пе, а часто просто является его частью, вращаясь вместе с ротором гироскопа. Дви-
гатель сканирования вращает ротор двухканального генератора опорных напряже-
ний — ГОН.
7.2. Принципы действия оптических приборов обнаружения...
323
Два напряжения ГОН (синусоидальной или прямоугольной формы) сдвинуты
на Тск/4 друг относительно друга. Иначе говоря, первые гармоники этих напряже-
ний по фазе отличаются на 90°. Эти напряжения, как и в РЛС, служат для преоб-
разования сигнала рассогласования из полярной в прямоугольную систему коор-
динат, в которой работает система управления ракетой.
Сигнал на выходе мостовой схемы, в одно из плеч которой включен ФР, пока-
зан на рис. 7.10, в. Спектр этого сигнала содержит несущее колебание на частоте f0
и гармоники на частотах ± kFCK, где k = 1, 3, 5. После детектирования на входе
селективного усилителя образуется сигнал
ЫС (') = итОтТ [1 + sin (QCKZ + Ae)]sin (cooZ + <p0), (7.11)
где mx = mx (<рц) — глубина модуляции потока лучистой энергии, пропорциональ-
ная отклонению цели от оптической оси оптической системы, т. е. тх = kmxqu.
В последнем выражении ктх — коэффициент, определяемый углом зрения ТГС.
Если он равен ф0 (а при фц = ф0/2 имеем тх = 1), то, очевидно, ктх =
Строго говоря, тх для рассматриваемого растра является осциллирующей функ-
цией фц. Дело в том, что при выходе пятна на раздел между двумя кольцами растра
(рис. 7.10, а), где показано такое положение пятна П', глубина модуляции равна
нулю, поскольку половина пятна находится на одном кольце, а вторая половина —
на другом и ток ФР при вращении диска не меняется.
Но в условиях полета ракеты оптическая система из-за неидеальности работы
гиростабилизатора быстро колеблется, хотя и с малой амплитудой. В результате
осцилляции усредняются и реально действующие напряжения пеленгатора оказы-
ваются пропорциональными фц без осцилляции.
Если в РЛС носителями информации об угловом рассогласовании является
глубина модуляций сигнала на выходе антенны, то в ТГС глубина модуляции сиг-
нала ис (/) частотой сканирования всегда равна единице, а носитель этой инфор-
мации — амплитуда сигнала Umc = Umtfnx. Это обстоятельство является важным с
точки зрения оценки помехоустойчивости ТГС. Оно накладывает ограничения и
на выбор параметров электрической схемы ТГС, структурная схема которой при-
ведена на рис. 7.12.
Рис. 7.12. Структурная схема амплитудно-фазового пеленгатора ТГС
Прежде всего это касается выбора параметров схемы АРУ. Усиленный сигнал
(7.11) поступает на амплитудный детектор. Постоянная составляющая этого сигна-
ла при коэффициенте передачи детектора, равном Ад,
324 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
используется в качестве регулирующего сигнала в устройстве автоматического ре-
гулирования усиления (АРУ) усилителя fQ. Переменная составляющая
wco(Z) = -^wtsin(ncK/-A<p), (7ЛЗ>
л
где 2/л — коэффициент разложения в ряд Фурье, является сигналом ошибки.
Выделенная огибающая (7.11) после фильтрации в узкополосном усилителе сиг-
нала частоты £2СК подается на фазовые детекторы ФДх и ФДу, где перемножается с
опорным напряжением ГОН, усредняется и поступает на привод оптической систе-
мы. Отметим, что в ТГС, как правило, в качестве привода используются гироскопы
стабилизации.
Если на вход системы коррекции гироскопа подать постоянное напряжение, его
ось начнет прецессировать с постоянной скоростью. Следовательно, по отношению
к напряжениям на выходах фазовых детекторов ФДх и ФДу:
wx = Мх = Мц sin А8;
(7.14)
иу = knyq>y = кпу(ри cos А0,
гироскоп является интегрирующим устройством.
Отсюда следует, что ошибки сопровождения Дфх и Деру, а вместе с тем и напря-
жения их и иу, пропорциональны угловой скорости линии визирования цели в со-
ответствующей плоскости. При подаче их и иу на автопилот будет реализован ме-
тод пропорционального наведения.
Для оценки воздействия искусственных помех на ТГС необходимо более под-
робно остановиться на выборе параметров АРУ.
Необходимость включения АРУ очевидна — она позволяет избегать перегрузки
усилителя при приближении ракеты к цели.
Известно, что амплитуда сигнала на выходе усилителя с АРУ определяется вы-
ражением
Um вых =------------, (7.15)
т выл 1 । 7 '
1 + КАРУКуитвх
где ку и Лдру — коэффициенты усиления усилителя и цепи АРУ соответственно.
Подставляя в выражение (7.15) значение амплитуды из выражения (7.13), можно
получить
^ЛиО^у^т
итвы, =^2----------• <7-16)
1 ч Uт.кут
л
2
В системах АСН РЛС стремятся выбирать —итцк„тх »1, приближая тем самым
л
амплитудную характеристику приемника к виду, показанному на рис. 7.13, о (зависи-
мость 1). Поэтому характеристику усилителя с АРУ в ТГС (зависимость 2) выбирают
промежуточной между линейной (без АРУ) — кривая 3 и идеальной. Соответственно
с этим деформируется и пеленгационная характеристика (см. рис. 7.13, б).
Зависимость амплитуды сигнала ТГС амплитудно-фазового типа от угла рассо-
гласования Дфц затрудняет применение в них автоматов захвата целей. В самом деле,
если ТГС будет сопровождать цель с ошибкой Дфц = 0, сигнал на выходе усилителя
исчезнет и автомат сбросит цель. Пуск ракеты летчик или стрелок-оператор ЗУР с
ТГС производит с заарретированной системой стабилизации, когда Дфц = 0. После
7.2. Принципы действия оптических приборов обнаружения...
325
Рис. 7.13. Работа АРУ в ТГС
пуска гироскоп разарретируется и исчезновение сигнала на выходе усилителя сви-
детельствует о том, что цель сопровождается без ошибки.
Использование «нежесткой» АРУ является несомненным недостатком рассмат-
риваемых пеленгаторов, так как система АСН будет иметь переменный, зависящий
от интенсивности входного сигнала коэффициент передачи.
В пеленгаторах, в которых угол рассогласования Афц пропорционален частоте
прерывания потока, амплитуда сигнала для всех значений Афц (в пределах угла зре-
ния) остается постоянной. Поэтому здесь вместо «жесткой» АРУ применяется сим-
метричный ограничитель и благодаря этому стабилизируется коэффициент пере-
дачи системы АСН.
Конструктивные и технологические сложности построения модуляторов свето-
вого потока преодолеваются при использовании четырехэлементных координатных
фотоприемников [105]. По выходному сигналу таких приемников можно опреде-
лить координаты светового пятна на фоточувствительной поверхности, не прибе-
гая к использованию механических модуляторов светового потока. Известны ко-
ординатные фотоприемники на основе фотодиодов, фоторезисторов, фототранзи-
сторов и приборов других типов. Простейшим и самым распространенным типом
такого приемника служит четырехплощадной (разрезной) фотодиод. Он представ-
ляет собой пластинку, на которой создан р-п переход, разделенный на четыре час-
ти (квадранта), см. рис. 7.14, а.
Четырехквадрантный фотодиод изготавливается с использованием методов
фотолитографии, позволяющей сделать промежутки очень малыми (/7— 0,001 мм и
менее рис. 7.14, а).
Оптический пеленгатор должен определять координаты (х, у) светового пятна
на поверхности координатного приемника (рис. 7.14, в). Ток фотодиода /пропорцио-
нален освещаемой площади S его поверхности. Поэтому выходное напряжение пары
идентичных фотодиодов, включенных по схеме рис. 7.14, б, составит при R{ = R2 = R
ивъа =и. -и2=1^-I2R2=KR^^ = KR^-, (7.17)
О о
где К — размерный коэффициент пропорциональности, представляющий собой
крутизну вольтамперной характеристики фотодиода при заданном значении свето-
вого потока; S — площадь поверхности каждого из четырех фотодиодов; 5i и S2 —
площади световых пятен на поверхностях каждого их фотодиодов, включенных в
схему рис. 7.14, б.
Линейная зависимость С7ВЬ1Х (А5) справедлива, пока освещенная площадка не вы-
ходит за пределы поверхности фотодиода. Эта зависимость и будет пеленгацион-
ной характеристикой оптического пеленгатора.
326 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Материал р-типа
Контактные поверхности,
прозрачные для излучения
Материал л-типа
Проводящая подложка _
(кристаллодержатель)
Рис. 7.14. Координатный фотоприемник на основе четырехквадрантного
фотодиода: а — устройство; б — электрическая схема включения
по одной из осей; в — способ освещения
a
Для усиления медленно меняющегося дифференциального напряжения £/вых на
выходе фотодиодной пары используют балансную модуляцию этим напряжением
вспомогательной поднесущей импульсной последовательности. Тогда информация
о величине смещения центра светового пятна относительно центра четырехквад-
рантного светодиода будет содержаться в амплитуде £/вых.
Другим широко используемым типом ИК-приборов являются теплопеленгато-
ры [75].
Теплопеленгаторы (ТП) воздушных целей, используемые в системах управления
оружием ПВО, например на истребителях, строятся как обзорные системы. Угол
зрения ТП, сформированный оптической системой, осуществляет пространственное
сканирование по тому или иному закону, подобно тому, как это делается в РЛС,
работающих в режиме обзора. Угловые координаты целей, находящихся в поле
зрения ТП, определяются путем измерения временного сдвига импульса цели отно-
сительно опорного момента времени. Для наиболее часто используемого построчно-
го обзора пространства начало отсчета по азимуту соответствует моменту начала
строки, по углу места — началу кадра, а точнее, определяется номером строки, на
которой обнаружена цель, как это показано на рис. 7.15.
7.3. Тепловые ложные цели
Выход
Рис. 7.15. Работа теплопеленгатора обзорного типа
Сканирующее устройство через механическую связь осуществляет перемещение
угла зрения шириной <р0 по полю обзора, характеризуемого углами срл и qy Образу-
ющийся на входе усилителя сигнал от тепловой цели преобразуется в сигналы,
определяющие ее угловые координаты в используемой в прицеле системе отсчета.
Эти координаты отображаются на отдельном индикаторе или, чаще, преобразован-
ные в двоичные сигналы поступают в ЦВМ. Рассмотренный ТП имеет один фото-
резистор, т. е. является одноканальным. Для увеличения скорости обзора чувстви-
тельные элементы могут выполняться в виде мозаики, собранной из Nx и Ny фото-
резисторов, размещенных рядами. В ТП могут использоваться #= NxNy ФР и столько
же усилителей или может осуществляться поочередное подключение элементов
мозаики к одному усилителю, т. е. электрическое сканирование, подобно тому, как
это делается в телевизионных системах.
При использовании мозаики из ФР пятно цели будет неподвижным, что позволя-
ет использовать тот или иной метод накопления сигналов в приемниках и тем самым
повысить чувствительность теплопеленгатора. Несмотря на огромное разнообразие
структур ТГС и ТП, по видам помех, которые могут использоваться для их подав-
ления, они мало отличаются, что позволяет провести рассмотрение процесса воз-
действия помех на примере ТГС с растром, показанным на рис. 7.10, а, рассмотре-
ние ТП — на примере устройства с построчным последовательным обзором.
7.3. Тепловые ложные цели
7.3.1. Виды тепловых ложных целей и их характеристики
Инфракрасные, или тепловые, головки самонаведения (ИГС, или ТГС) управля-
емых ракет могут подавляться как маскирующими, так и имитирующими помехами.
Цели заметны благодаря контрасту на фоне окружающей среды. Поэтому маски-
ровка должна предусматривать либо ослабление собственного теплового излучения
объекта (самолета, танка, другой цели), либо .увеличение яркости фона за счет со-
здания пространственно-распределенного облака, имеющего достаточно интенсив-
ное тепловое или световое излучение. Для имитации цели создаются тепловые
ложные цели (ТЛЦ), действие которых подобно действию имитирующих помех,
создаваемых для противодействия РЛС управления оружием (гл. 5). Особая цен-
ность ТЛЦ состоит в том, что они могут использоваться для обороны, срывая ата-
ку самостоятельно, без привлечения других средств.
По способу применения ТЛЦ условно можно разделить на аэродинамические
и баллистические.
328 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Аэродинамические ТЛЦ представляют собой небольшие ЛА, оснащенные пиро-
техническими устройствами и создающие мощное ИК-излучение. Интенсивность
и спектр излучения определяются подбором состава и свойствами горючих веществ,
используемых пиротехническими устройствами. Подобные ТЛЦ в виде выстрелива-
емых пиропатронов применялись во Вьетнаме для защиты самолетов В-52 и F-l 11А
(автоматы выброса ALE-27 и 29А). На вооружении некоторых стран находятся не-
управляемые снаряды массой около 1 кг, боевые части которых содержат пиротехни-
ческие вещества. Такие снаряды на некотором удалении от ЛА (как правило, впе-
реди) создают яркую локально-светящуюся область — ТЛЦ, баллистические харак-
теристики которой близки к аналогичным характеристикам прикрываемого ЛА.
Время горения таких ТЛЦ -10 с, что достаточно для перенацеливания УР. Кроме
того, подобные ракеты могут поражать атакующие объекты. Но поражающий эф-
фект от применения такого оружия невелик.
Баллистические ТЛЦ выбрасываются или выстреливаются из специальных пус-
ковых устройств. Эти ловушки выполняются в виде трассирующих пушечных сна-
рядов калибра 20...30 мм. Такими снарядами можно стрелять поочередно с боевы-
ми и снарядами, начиненными дипольными или оптическими противолазерными
отражателями (небольшими сферами). Это, безусловно, достоинство баллистичес-
ких ТЛЦ. Недостатки баллистических ТЛЦ состоят в малой интенсивности излу-
чения (около 1 кВт/ср), малом времени горения (около 2 с), низкой эффективно-
сти при защите скоростных ЛА.
В отличие от аэродинамических ТЛЦ противоинфракрасные снаряды расходу-
ют пиротехнический состав из головной части для создания более мощного излу-
чения (рис. 7.16).
Рис. 7.16. Пиротехнический снаряд (а) и индикатриса его излучения I (ср) (б)
На тихоходных самолетах и вертолетах возможно применение ТЛЦ, сбрасыва-
емых на парашютах и буксируемых (рис. 7.17). Локальные светящиеся облака мо-
гут создаваться за счет впрыскивания специальных легкоионизируемых веществ в
струю отходящих газов. Эффективность применения ТЛЦ зависит от силы излуче-
ния / (Вт/ср), которая оценивается выражением
П
(7.18)
где о — постоянная Стефана — Больцмана; Т — температура горения; 5— площадь
поверхности горения; с — коэффициент излучения (обычно е = 1).
7.3. Тепловые ложные цели
329
Рис. 7.17. Применение ТЛЦ (аэродинамической, парашютируемой,
буксируемой, впрыскиваемой)
Из (7.18) видно, что сила излучения в наибольшей степени зависит от темпе-
ратуры в четвертой степени и лишь линейно увеличивается с ростом площади го-
рения S. Кроме того, температура влияет на спектральную плотность излучения
1(Вт/м2ср). Максимум спектральной характеристики J(X) смещается в сторону
меньших длин волн (рис. 7.4) в соответствии с законом Вина:
„ 3000
Ьтах “ -=~ мкм
(7.19)
что в большинстве случаев неблагоприятно сказывается на КПД ТЛЦ. Этот эффект
обусловлен тем, что максимальная спектральная плотность Jm.dX выходит за преде-
лы полосы пропускания ДХ оптической системы подавляемой ТГС.
Эффективность ТЛЦ зависит от динамических характеристик горения пиро-
технического состава, от этого зависит время горения ТЛЦ, т. е. время эффектив-
ного воздействия на ТГС.
На выбор оптимальной длительности горения /гор влияет тип подавляемой ТГС,
характеристики прикрываемого ЛА и атакующей ракеты, ракурса атаки, состояния
атмосферы и другие факторы. Продолжительность /гор должна обеспечивать гаран-
тированное перенацеливание управляемой ракеты на ТЛЦ и оценивается величиной
2 < /гор < 7 с. Если /[ор < 2 с, ракета не успеет перенацелиться на ТЛЦ. Если же время
горения велико (больше 7 с), то после перенацеливания горение не нужно, излишне.
Горение — это быстро протекающий процесс образования плазмы из горючего
вещества, находящегося в агрегатном состоянии. Процесс горения можно разде-
лить на три фазы (рис. 7.18).
Рис. 7.18. Динамика горения ТЛЦ
330 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Быстрота возгорания обеспечивается выбором формы ТЛЦ. Принудительное
воспламенение всей поверхности горючего вещества (а не только торца заряда ци-
линдрической формы) уменьшает время возгорания до значения < 0,2 с.
Динамические характеристики процесса горения зависят от скорости обдува Коб
набегающим потоком воздуха. На рис. 7.18 пунктирная кривая характеризует зави-
симость силы излучения от времени при скорости обтекания Коб ~ 300 м/с. Увели-
чение скорости обтекания увеличивает время возгорания и снижает силу излуче-
ния ТЛЦ.
Время возгорания должно быть очень малым, таким, чтобы ТЛЦ не успела
выйти за пределы угла зрения бср оптической системы головки самонаведения. Если
относительная скорость отставания ТЛЦ ЛА равна Иотн, то при удалении ЛА от управ-
ляемой ракеты на расстояние 7?р (рис. 7.19), время возгорания приближенно опре-
деляется выражением.
,, (7.20)
1 Г/ ’
г отн
где q — ракурс атаки.
Рис. 7.19. Перенацеливание управляемой ракеты на ТЛЦ
Если принять 8ф = 10"2 рад, q = 30°, R = 1 км, Иотн = 30 м/с, то оказывается, что
время, необходимое для возгорания, составляет < 0,2 с.
Скорость обтекания Еоб ТЛЦ набегающим потоком заметно влияет на силу
излучения, что иллюстрируется рис. 7.20.
Рис. 7.20. Зависимость интенсивности излучения от скорости Иоб
Вследствие большой отдачи тепловой энергии в набегающий поток воздуха
эффективность вбрасываемых (баллистических) ТЛЦ резко уменьшается. Поэтому
для обороны скоростных ЛА от ракет с тепловыми головками самонаведения необ-
ходимо применять аэродинамические или буксируемые ТЛЦ.
ТЛЦ могут применяться в сочетании с постановкой маскирующих аэрозольных
облаков вблизи ЛА, как на рис. 7.21.
В этом случае аэрозольное облако ослабляет полезный сигнал на входе ТГС,
уменьшая тем самым требования к энергетическим характеристикам ТЛЦ
По массовым, габаритным и энергетическим характеристикам ТЛ условно под-
разделяют на легкие, средние и тяжелые. Легкие ТЛ — это ТЛ с массой 0,1... 1 кг
7.3. Тепловые ложные цели
331
Рис. 7.21. Комбинированное применение ТЛЦ и маскирующих помех
УР
и силой излучения до 5 кВт/ср, средние ТЛ имеют массу более 1 кг и силу излучения
до 15 кВт/ср, тяжелые ТЛ имеют массу в десятки кг и силу излучения 50...60 кВт/ср.
Основными показателями, определяющими эффективность боевого примене-
ния ТЛ, являются спектральная сила излучения и баллистические характеристики
(коэффициент лобового сопротивления и скорость отстрела).
Баллистика ТЛ определяется начальной скоростью их отстрела, скоростью ЛА,
лобовым сопротивлением и законами свободного падения.
7.3.2. Уравнение оптико-электронного подавления для тепловых ложных целей
Эффективность подавления ТГС по энергетическому критерию оценивает-
ся коэффициентом подавления Ки. Под коэффициентом подавления в этом слу-
чае понимается минимально необходимое отношение плотности потока мощно-
сти рп вх, Вт/м2, помехового сигнала к плотности потока мощности рс вх излуче-
ния цели, при котором происходит перенацеливание ракеты на ТЛЦ. Плотности
Рпвх и Рсвх измеряются на входе фотоприемника ТГС (рис. 7.9) в пределах полосы
пропускания приемника ДХпр, определяемой частотной избирательностью среды
распространения ЭМВ (атмосферы) и оптической системы ТГС.
Плотности потоков мощности /;пвх и рсвх, воспринимаемые приемником ТГС,
определяются соотношениями
оо
^пвх -/Алц(^)ф(^)Т(^)^’ (7.21)
о
оо
Рсвх = f 4 (Х)ф(Х)т(Х) (7.22)
О
где /тлц (X) и 7Ц (X) — спектральные плотности излучения ТЛЦ и прикрываемой
цели (Вт/мкм-см2); <р(Х) и т(Х) —характеристики избирательности оптической
системы и атмосферы.
С помощью (7.21) и (7.22) можно представить искомое уравнение оптико-элек-
тронного подавления ОЭП в виде
Рсвх
или с учетом (7.21) и (7.22):
J/тлц (Х)ф(Х)т(Х)с?Х
. (7.24)
|/ц(Х)ф(Х)т(Х)г/Х
о
Здесь Кв — коэффициент подавления.
332 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
На рис. 7.22 представлены типичные зависимости спектральных плотностей
излучения самолета-цели /Ц(Х) и ТЛЦ /тдц(Х), а также эквивалентная характерис-
тика избирательности Кк = ср(Х)т(Х) системы «атмосфера — оптика» ТГС.
Рис. 7.22. Энергетические характеристики цели и ТГС
Эффективная часть лучевых потоков рцщ вх и рс вх на рис. 7.22 выделена. Анализ
зависимостей рис. 7.22 показывает, что атмосфера и оптическая система сильно
ослабляют действие помехового излучения ТЛЦ. Это связано со смещением наиболее
мощного излучения ТЛЦ влево, в сторону меньших длин волн, вследствие большей
температуры пламени ТЛК (Т~ 3000 К). Уменьшение температуры горения Тхотя
и может сместить спектральную характеристику ТЛЦ в область полосы пропуска-
ния ДХпр подавляемой ТГС, однако при этом в значительной степени (приблизи-
тельно в Т4 раз) снизит и эффективность ТЛЦ.
В практике ОЭП часто используют понятие энергетического коэффициента по-
лезного действия излучателя г)э, понимая под этим коэффициентом отношение плот-
ности мощности потока излучения рвх в пределах полосы пропускания А^пр к суммар-
ной (полной) плотности потока излучения нагретого тела р% в ИК-диапазоне:
Пэ=—> (7.25)
P-L
где
оо
/Ъ = р(Х)Л.. (7.26)
О
Соответственно для ТЛЦ и ЛА-цели получается, что
ЛгЛЦвх . Рсвх /П
Птлц =------> т1ц=----• (7.27)
РТЛЦЕ РсЕ
Ориентировочно можно считать, что КПД ТЛЦ и реактивного самолета (точ-
нее, двигателя самолета) равны г|ТЛц «0,1; т|ц = 0,4.
Выражая коэффициент подавления Кп через КПД излучателей (цели и ТЛЦ)
можно получить значение коэффициента подавления:
К„=—-4. (7.28)
Лтлц
Следует отметить, что величина оптического коэффициента подавления Кп
является лишь энергетическим показателем эффективности ОЭП и не определяет
эффективность применения ТЛЦ в целом. Интегральным показателем эффектив-
ности в данном случае является промах управляемой ракеты или вероятность по-
ражения ЛА ракетой с ИК-головкой самонаведения.
7.3. Тепловые ложные цели
333
7.3.3. Подавление головок самонаведения с амплитудно-фазовой модуляцией
Если в качестве анализатора изображения используется модулирующий диск,
половина которого полупрозрачна, а вторая половина выполнена в виде прозрач-
ных и непрозрачных секторов, то лучистый поток источника излучения модулиру-
ется по амплитуде и фазе. Модуль комплексной амплитуды сигнала, снимаемого с
приемника излучения, может быть представлен в виде
t/=|t7| = /rFM(e)|e|, (7.29)
где К— коэффициент усиления анализатора изображения; Гм (0) — модуляционная
характеристика (рис. 7.23); 0| — модуль среднего значения углового рассогласования,
определяемого положением цели относительно оси следящего координатора ИКГС.
Рис. 7.23. Модуляционная характеристика Гм(0)
Нелинейная функция описывается выражением
0 при
Л.(е)=- е-е, 0 —02 при
1 при 02|<|0|<|е3|,
0 к при 0|>|03|;
(7.30)
где 0Ь 02, 03 показаны на рис. 7.23. Следует отметить, что зона нечувствительности
01 < 02 < 0з-
С приемника излучения модулированный сигнал, амплитуда которого зависит
от мощности излучения источника и величины утла рассогласования, а фаза — от
положения цели в картинной плоскости, подается на вход резонансного усилителя,
настроенного на частоту со. Частоту со часто называют несущей частотой.
Мгновенное значение этого сигнала
и = 17(1 + wsin co0/)sin со/, (7.31)
где со0 — частота огибающей.
При наличии в поле зрения ИКГС цели и ТЛ сигналы на выходе можно пред-
ставить в виде
uu=UV[ 1+ ти sin (соо/ + срц) sin со/;
'ц
'и
Мп = Un [1 + /ип sin (соо/ + срп )]sin со/,
(7.32)
где тц и /ип — коэффициенты модуляции сигналов от цели и помехи; <рц и <рп —
фазы сигналов от цели и ТЛ; и Un — модули комплексных амплитуд, зависящие
от мощности излучения цели и ТЛ в спектральном диапазоне приемника излуче-
ния, передаточных функций анализаторов изображения и глубины модуляции лу-
чистого потока.
334 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Суммарный сигнал от цели и ТЛ на входе в усилительный тракт описывается
выражением
и = иц sin со/ + Un sin со/ + ицтц sin(coo/ + <рц) sin со/ + Unmn sin(co0/ + срп) sin со/. (7.33)
Тогда амплитуда и фаза суммарного сигнала
у cos(cpu Фп)’
фс = arctg
8Шфц + 5Шфп
СО8фц + СО8фп
а сигнал на выходе усилительного тракта ИКГС
Ис (?) = £7С Sin((OoZ+ фс).
(7.34)
(7.35)
(7.36)
Выражения (7.34)-(7.36) позволяют выявить особенности ОЭП ИКГС с помо-
щью ТЛ.
Исследуем выходные сигналы ИКГС при наличии в ее поле зрения цели и ТЛ.
Пусть фц= 0, тогда (7.35) и (7.34) примут вид
Uc = аА + ос2р2 + 2а0со8фп;
аВ8Шфл
фг = arctg— -——,
1 + аРсо8фп
(7.37)
(7.38)
где a = -JL; р = -Х
t/ц
Исходя из вида модуляционной характеристики (рис. 7.23) проанализируем
выражения (7.37) и (7.38) для трех возможных вариантов нахождения цели и ТЛ на
различных участках характеристики (т. е. при различных угловых координатах в поле
зрения ИКГС). Это позволит выяснить, от каких основных параметров цели и
помехи зависит выходной сигнал ИКГС.
Интерес представляет важный практический случай, когда изображения помехи
и цели находятся на участке ограничения модуляционной характеристики (02 < 0ц<©з
и 02 < % < ез) — участок I рис. 7.23. В этом случае тц = 1, тп = 1, р = 1,
Uc Г-. 2 ~ ОС81Пфп
—- = д/1 + сх + 2а cos фп; фс = arctg---——.
Un 1 + асо8фп
(7.39)
Амплитуда и фаза суммарного сигнала ИКГС определяются только отношением
амплитуд помехового и полезного сигналов и фазой помехового сигнала (рис. 7.24).
Вследствие действия помехи ИКГС отслеживает мнимую цель (рис. 7.25, б), место-
положение которой соответствует энергетическому центру Оэ, расположенному
между целью и ТЛ.
Например, в точке 1 рис. 7.24, 7.25, а при а = —— = 1, фп= 90° фаза выходного
сигнала фс= 45°, суммарное напряжение превышает напряжение от цели в 1,4 раза.
В точке 2 — Uc = фс = 60°, хотя нами в начале принято фц = 0. Так как при полете
ТЛ фаза фп не меняется в широких пределах 0 < фп < 2л, то анализ зависимостей
рис. 7.24 позволяет сделать вывод о том, что ИКГС сопровождает эффективный
центр Оэ (рис. 7.25, б). Эта ошибка может быть оценена выражением [107]
АЧ л ос
^ош = ’ (7.40)
1 + а '
где 203 — угол зрения ИКГС.
7.3. Тепловые ложные цели
335
Рис. 7.25. Фаза суммы сигнала с помехой
Амплитуда и фаза суммарного сигнала на выходе ИКГС с АФМ эквивалентны
амплитуде и фазе сигнала от некоторой мнимой цели. Для ИКГС, работающих без
ограничений по амплитуде входного сигнала, мнимая цель является энергетическим
центром цели и помехи (случай 2). Если изображения цели и ТЛ находятся на участ-
ке I (случай 1) и а= 1, то мнимая цель находится в геометрическом центре цели и
ТЛ. В остальных случаях амплитуда и фаза суммарного сигнала зависят как от си-
лы излучения цели и ТЛ, их фаз, так и от глубины модуляции сигнала от цели тц
и ТЛ тп. Проведенный анализ позволяет для эффективного подавления таких ИКГС
выбрать ТЛ с требуемыми характеристиками (например по времени возгорания).
7.3.4. Подавление ИК-головок самонаведения с времяимпульсной
модуляцией изображения цели
В ИКГС с времяимпульсной модуляцией (ВИМ) лучистого потока от цели сиг-
нал ошибки на выходе угломерного устройства зависит от длительности интерва-
лов между импульсами, принимаемыми линейным фотоприемником, выполненным
в виде креста или полукреста. Приемник в виде симметричного креста (рис. 7.26)
обеспечивает лучшую защиту от помех.
При отсутствии рассогласования, когда (рц = 0, траекторией сканирования (пе-
ремещения) изображения цели Ц по плоскости фотоприемника является окруж-
ность, центр которой совпадает с центром креста, состоящего из двух плеч х1-х2 и
У1~у2. Радиус г0 окружности — траектории сканирования — определяется углом на-
чального наклона нормали сканирующего элемента (зеркала) к оптической оси ТГС.
336 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Рис. 7.26. Формирование изображения цели и сигналов на выходах
фотоприемников при отсутствии ошибки сопровождения фц=0 {а, б)
и при сопровождении с ошибкой Фц О (в, г)
При фц = 0 пятно изображения цели пересекает плечи креста фотоприемника
через одинаковые интервалы времени т0, равные четверти периода сканирования
2п
Т = — (рис. 7.26, а, б). На выходе фотоприемника образуется напряжение
со
представляющее собой поток импульсов с постоянным периодом тп =—.
2со
При угловой ошибке сопровождения цели фц ф 0 центр сканирования сме-
щается относительно центра креста О на угловую величину фц = ООЦ (рис. 7.26, в).
Составляющие угла фц в декартовой системе координат имеют соответственно ве-
личины фх и фу. На выходе анализирующей оптической системы образуется поток
импульсов uz(t) (рис. 7.26, г), интервалы между которыми функционально связа-
ны с угловой ошибкой фц. На рис. 7.26, б и г импульсы от горизонтальной линейки
креста затемнены.
В работе [107] показано, что фх и фу функционально связаны с временными ин-
тервалами Tj и т2:
(7.41)
(7.42)
где Кх и Ку — постоянные коэффициенты.
Управляющие сигналы их и иу каналов азимута и угла места, пропорциональ-
ные угловым координатам фх и фу:
— Kx<pxi Uy — Куфу, (7.43)
определяют пеленгационную характеристику (точнее, ее линейный участок).
7.3. Тепловые ложные цели
337
Система, работающая с уравнениями (7.41) и (7.42), удобна для практической
реализации. Технически не сложно измерять интервалы Т! и т2 между соответству-
ющими импульсами, формируемыми в моменты пересечения пятном изображения
цели крестообразно расположенных фотоприемников на рис. 7.26.
Крестообразный приемник состоит из четырех самостоятельных трактов обра-
ботки сигналов, см. рис. 7.27. Сигналы с выходов плеч Х|-х2 и У1-У2 креста поступа-
ют в приемники Прм-х1з Прм-х2, Прм-у1? Прм-у2. В результате суммирования вы-
ходных сигналов этих приемников на выходе Прм-Z образуется поток импульсов
их (/) и иу (t) (рис. 7.26, г), несущий информацию об угловой ошибке <рц сопровож-
дения цели. Далее этот поток обрабатывается в сигнальном процессоре СП, который
формирует управляющие напряжения их (фц) и иу (фц) каналов азимута и угла места.
Для выравнивания амплитуд импульсов, поступающих на вход приемника, слу-
жит устройство АРУ. Для этой же цели в приемниках могут применяться ограни-
чители и логарифмические усилители.
Высокая помехоустойчивость ТГС с ВИМ достигается за счет того, что, во-пер-
вых, для защиты от ТЛЦ предусматривается селекция по частоте следования импуль-
сов и, во-вторых, для защиты от амплитудно-модулированных помех применяется
глубокое ограничение входных сигналов.
Рис. 7.27. Электронно-оптическая система обработки сигналов в ТГС с ВИМ
В последних модификациях ТГС применяются новые виды двухцветной селек-
ции помехового излучения и кинематическая селекция.
Двухцветные ТГС имеют два приемника. Один работает в ближнем диапазоне
волн ДХб= Х2- Х1} а второй — в дальнем ДХд = Х4- Х3. Ближний диапазон волн может
находиться в ультрафиолетовой области ~ 1...0,4 мкм, а дальний — в окне прозрач-
ности атмосферы 3,3...4,2 мкм. Частотные каналы ДХб и АХД выбираются в зависи-
мости от силы излучения цели ТЛЦ в полосах пропускания оптических фильтров.
Кинематическая селекция использует измерение относительной скорости Иотн
отрыва ТЛЦ от ЛА. Если эта скорость превышает некоторое пороговое значение
Р^ор, происходит перенацеливание ТГС с ТЛЦ на истинную цель.
Все виды имитационных помех ТГС с ВИМ, создаваемых из одной точки про-
странства для самоприкрытия ЛА, малоэффективны. Это объясняется особенностя-
ми пространственно-временной обработки сигнала в ТГС с ВИМ. Управляющие
напряжения угломерных каналов их и иу несут информацию об угловой ошибке со-
провождения цели фц = + ф;„ заложенную в соответствии с формулами (7.41) и
(7.42) во временных интервалах Tj и т2 импульсных потоков на выходах фотопри-
емников рис. 7.26.
338 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
Поскольку их и иу зависят только от взаимного расположения креста фотопри-
емников и цели, любая модуляция светового потока, создаваемая источником по-
мех, не вызовет разрушения полезной информации. На рис. 7.28 для примера пред-
ставлен поток импульсов управляющего напряжения порождаемый помеховым
источником в случае самоприкрытия.
Рис. 7.28. Управляющие сигналы ТГС с ВИМ при создании АМ
помехи с прикрываемого ЛА (а), при отстреле ТЛЦ (б)
Амплитудная модуляция не приводит к изменению интервалов Tj и т2. Однако
в некоторых случаях принудительное прерывание весьма мощного помехового из-
лучения может сорвать самонаведение УР, головка самонаведения которой исполь-
зует приемники с АРУ.
При наличии в поле зрения оптической системы ложной цели на выходе Прм-Е
рис. 7.27 средняя частота Fcp потока импульсов управляющего сигнала uL удваива-
ется за счет действия помехи.
Если плотность потока мощности помехи рп вх на входе оптического приемни-
ка удовлетворяет уравнению ОЭП (7.23), то сопровождение ЛА будет сорвано. Учи-
тывая особенности обработки сигнала в ТГС с ВИМ, можно определить величину
коэффициента подавления: Кп= 1.
Эффективность применения ТЛЦ зависит от расположения их изображения
(пятна) на плоскости креста рис. 7.26. Для максимизации вероятности срыва сле-
жения ТГС необходимо отстреливать ТЛЦ в каждый квадрант плоскости, нормаль-
ной к направлению на атакующую ракету. При этом изображение цели и ТЛЦ бу-
дут наблюдаться в разных квадрантах креста фотоприемника. При таких условиях
сопровождение ЛА становится невозможным. Буксируемые ТЛЦ в виде светящих-
ся гирлянд также создают пространственно-распределенную помеху. Если эти ТЛЦ
мерцают, то и помеховое воздействие усиливается, особенно, если частота мерца-
ния FM выбрана оптимальным образом.
Мерцающие помехи могут создаваться с помощью огнеметных устройств. Та-
кие устройства впрыскивают горючее вещество (например — углеводородное топ-
ливо) в газовую струю двигателя и поджигают образовавшуюся смесь в разное вре-
мя. Достоинство такого способа состоит в возможности использования штатного
топлива для создания большого излучающего объема пламени с благоприятным
спектром излучения, соответствующим Т~ 1000... 1300°. Недостаток — малое вре-
мя горения (секунды), а также ограничения как по высоте, так и по скорости.
Маскировать ЛА можно, создавая протяженные светящиеся области или ослаб-
ляя собственное излучение, окружая маскируемый объект поглощающими аэро-
7.3. Тепловые ложные цели
339
зольными облаками и завесами. Первый путь малоперспективен. Его реализация *
связана со значительными техническими трудностями создания объемных излучаю-
щих объектов с температурой, значительно превышающей температуру атмосферы
(Т~ 300 К). Второй путь, предусматривающий создание аэрозольных облаков и завес,
предпочтительнее [59].
Маскирующие облака и завесы создаются специальными аэрозольными боепри-
пасами (бомбами, снарядами) и аэрозольными выливными приборами (АВП). По-
сле сброса аэрозольной авиабомбы на некотором удалении от маскируемого объекта
срабатывает взрыватель и горючий состав (например, фосфорные смеси) воспламе-
няется. Фосфор, сгорая, вступает в реакцию с продуктами оболочки и атмосферными
газами. Облако разрастается, достигая размеров в десятки метров. Недостатки такого
метода маскировки — малое время жизни облака. Снаряды, образующие аэрозоль-
ные облака, применяются для защиты кораблей, наземных подвижных и неподвиж-
ных объектов.
Аэрозольные поглощающие завесы большой протяженности создаются авиаци-
онными выливными приборами. Все виды АВП заправляются аэрозолеобразующими
смесями, состоящими из аэрозолеобразователя, горючего и окислителя. Механизм
образования аэрозольной завесы зависит от типа ЛА, АВП и состояния атмосфе-
ры. Такая завеса имеет конусообразную форму (рис. 7.29).
Рис. 7.29. Маскирующая аэрозольная завеса
За счет воздействия атмосферы (естественной и вынужденной турбулентности)
шлейф завесы удлиняется и расширяется. В зоне боевых действий маскирующая
завеса может быть поставлена любыми ЛА, в том числе беспилотными самолетами
и аэростатами.
Маскирующая завеса значительно ослабляет энергию проникающего через него
светового потока. Коэффициент ослабления оценивается величиной
*осл=е’“£, (7.44)
где а, м-1 — коэффициент, зависящий от состава выливаемой жидкости (=0,01...0,05);
L — эффективная протяженность облака.
При £эф = 100 м ослабление эффективности излучения ЛА на выходе ТГС до-
стигает значительной величины (10 и более дБ), что делает невозможным приме-
нение ПЗРК.
Одновременная маскировка и имитация ЛА достигается применением комбини-
рованных ТЛЦ подогревно-пиротехнического типа. Горение смеси в таких ловуш-
ках происходит внутри замкнутого объема с выходом газов в окружающее простран-
ство (рис. 7.30).
340 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
I
Рис. 7.30. Комбинированная пиротехническая ТЛЦ
Этим достигается более полная реакция горения в полости, где давление пре-
вышает атмосферное. Излучение создается догорающими на выходе частицами
горючей смеси и корпуса ловушки.
7.3.5. Станции активных модулированных помех
Значительная часть ракет «воздух — воздух», принятых на вооружение большин-
ством современных армий, снабжена ИКГС с АФМ лучистого потока, восприни-
маемого от цели.
При воздействии на вход селективных звеньев ИКГС помехового и полезного
сигналов выходные сигналы ИКГС будут искажены. Выбором соотношения между
частотами и амплитудами полезного сигнала и помехи можно добиться срыва сле-
жения ИКГС за целью или сильного искажения выходных сигналов ИКГС, приво-
дящего к большим промахам ракеты.
Различают прицельные и заградительные по частоте сканирования помехи. Если
частота сканирования ИКГС известна с точностью до полосы пропускания систе-
мы АСН, то создаются прицельные по частоте сканирования помехи. Заградитель-
ная помеха создается во всех случаях, когда известно только ориентировочное зна-
чение частоты сканирования.
Средствами для создания таких помех могут быть некогерентные и когерент-
ные источники. Основными недостатками некогерентных источников помех явля-
ются: чрезвычайная сложность получения 100 % модуляции и требуемого пиково-
го превышения помеха/сигнал в полосе пропускания АСН.
7.3.6. Помехи, прицельные по частоте сканирования
Информация об угловых координатах цели содержится в огибающей амплитудно-
модулированного сигнала. Глубина модуляции определяет значение угла рассогла-
сования 0, а фаза огибающей <рс указывает направление рассогласования.
Помеха, прицельная по частоте сканирования, представляет собой амплитуд-
но-модулированный сигнал. Частота модулирующего напряжения Оп совпадает с
частотой сканирования Ос или отличается от Ос на некоторую величину
ДО = |ОП--Ос | < ДО, (7.45)
где ДОАСН — полоса пропускания системы АСН.
Такая помеха создается с прикрываемого ЛА для самоприкрытия.
7.3. Тепловые ложные цели
341
Если на вход ИКГС поступает аддитивная смесь полезного и помехового сиг-
налов, то за счет модуляции этих сигналов на выходе резонансного усилителя ИКГС
напряжение может быть записано в виде
му(/) = [«с(/) + «п (')] =
= и с {1+тс cos(Qcr + <рс) + Z>[1 + ffin cos(QnZ + <рп )]}cos(0Hr, (7.46)
где b — —°-; Un, Uc — амплитуда помехового и полезного сигналов; сон — частота
несущей, равная п£1, п — число незатемненных или затемненных участков растра;
тс — коэффициент полезной амплитудной модуляции; тП — коэффициент ампли-
тудной модуляции помехового сигнала; Qc, Qn — частота сканирования и частота
помеховой модуляции; <рс, <рп — фаза огибающей полезного сигнала и фаза огиба-
ющей помехи.
На выходе детектора огибающей получим
ыд (') = каис {1 + тс eos(QcZ + <рс) + Ф + /Ип cos(Qnf + <Рп )]}. (7.47)
где Ад — коэффициент передачи детектора огибающей.
После детектирования сигнал С/д (/) поступает на усилитель огибающей, настро-
енный на частоту сканирования Qc На выходе этого усилителя, имеющего узкую
(несколько герц) полосу пропускания, получим с учетом Qn ~ Qc:
wyo (0 = кЛкуоис [WC eos(Qc/ + <pc) + bm^ cos(Qnf + <Pn)] (7.48)
где /<уо — коэффициент усиления усилителя огибающей.
На выходе фазового детектора, осуществляющего перемножение сигнала UyG (/)
с опорным сигналом cosQc/ (или sinQcr) и усреднение полученного произведения,
получим напряжения сигналов ошибки для каналов азимута и наклона:
их (г) = wyo (/)cosQcZ = /J тс cos<pc cos
Л b .
= к\тс sin<pr +----т„ sin
I с 'lit I
(7-49)
(7.50)
где k=—kakyoU(l + b).
Эффективность помехи в существенной мере зависит от разности частот поме-
ховой модуляции Qn и сканирования Qc:
AQ = |Qn
(7.51)
Практический интерес представляют два случая подавления системы АСН:
l)AQ = |Qn =Qc| = 0; (7.52)
2) 0 < AQ < £2асн •
При Qn = Qc и фп ф <рс из (7.49) и (7.50) получается:
и
( b
(t) = k mccos<pc+-—-WnCostpn ;
(7-53)
(7.54)
/ ч Л . Ь )
иЛч^к тс sin(Pc +7—7 sin(Pn •?
(7.55)
342 Глава 7. Устройства оптико электронного подавления авиационных комплексов РЭБ
Анализ выражений (7.54) и (7.55) показывает, что помеха по своему действию
эквивалентна появлению некоторой фиктивной цели.
Положение оптической оси ИКГС зависит от фазового сдвига фп, отношения
помеха/сигнал b и значения коэффициента помеховой модуляции тП.
Если |<рс- фп| = 2nk, к = 0,1, 2, ..., то помеха играет роль полезного сигнала. Сле-
довательно, такая помеха неэффективна.
Если |фс- фп| = (2к- 1)л, к= 1, 2, 3,..., то оптическая ось ориентируется в «центр
тяжести» парной цели, расположенной на прямой «истинная цель — фиктивная
цель».
Поясним динамику поведения системы АСН, подверженной воздействию поме-
хи, с помощью семейства пеленгационных характеристик. Система АСН функци-
онирует так, что в стационарном режиме при неподвижной цели напряжение мпу (/)
на выходе пеленгационного устройства равно нулю. Предположим, что в момент
включения помехи мпу (/) = 0 и пеленгационная характеристика имеет вид, изобра-
женный на рис. 7.31 (зависимость 1).
^пу(б) i I
Рис. 7.31. Пеленгационная характеристика при действии помехи
Форма пеленгационной характеристики и (0) определяются зависимостью
коэффициента модуляции от угла рассогласования:
wny(e)=/cwc(e)cos<pc.
(7.56)
Действие помехи (<рп = <рс - л) вызывает деформацию пеленгационной харак-
теристики, которая в данном случае с помощью (7.54) записывается в виде
«пу(е) = ^ Wc(0)eos<pc+mn—-eos(<pc-л)
(7.57)
Если предположить, что в момент включения САП фс= 0, то из выражения (7.57)
получается:
= к мДе)-/^——
\ 1 + Р
(7-58)
Анализ (7.58) показывает, что при возрастании тп и b пеленгационная характе-
ристика смещается вниз (рис. 7.31, зависимость 2). Точка устойчивого состояния
равновесия смещается вправо на угол 0ОШ, который равен угловой ошибке сопро-
вождения цели. Ошибка 0О1П может быть найдена из выражения (7.31):
(®ош
(7.59)
7.3. Тепловые ложные цели
343
откуда
wc (6ош ) = Т-т'Ип • (7-60)
Выражение (7.60) может быть использовано для оценки ошибки сопровожде-
ния цели и для определения условий срыва слежения за целью.
Для ТГС с АФМ, используя методику, изложенную в [25], можно получить
выражение для максимальной ошибки 0ОШ. При b > 10... 12 ошибка практически не
у
увеличивается: 0ОШ = 0,7—, где у— мгновенное поле зрения). При <рп= 0 помеховый
сигнал (даже при отсутствии полезного сигнала, когда b —> оо) несет информацию
об истинных угловых координатах прикрываемого объекта, так как в данном слу-
чае станция помех установлена на этом объекте (самолете). Под действием помехи
оптическая ось ИКГС отклоняется от источника помех. За счет сканирующего растра
осуществляется полезная модуляция помехи, которая порождает полезный управ-
ляющий сигнал, компенсирующий помеховое возмущение.
Таким образом, при действии помехи, прицельной по частоте сканирования, и
<рп= <рс± 180° ИКГС сопровождает цель с постоянной угловой ошибкой, которая
достигает максимума при тхх = 1.
Приведенные рассуждения не учитывают динамики поведения системы АСН,
подверженной действию помехи, прицельной по частоте сканирования. Исследо-
вание динамических свойств системы АСН, подверженной действию помехи, при-
цельной по частоте сканирования, показывает, что при некоторых критических
значениях параметров помехи b и тп может быть нарушен режим автоматического
сопровождения цели.
Причиной срыва слежения является уменьшение ширины одного из главных
лепестков пеленгационной характеристики, наблюдающееся при действии помех
(рис. 7.31).
При некоторых значениях ти и b ширина главного лепестка пеленгационной
характеристики может уменьшиться настолько, что при наличии перерегулирова-
ния в переходном режиме система АСН перейдет из устойчивого состояния в точ-
ке Oj в неустойчивую область (выход цели из мгновенного поля зрения). Если Ь» 1
и тп = 1, то происходит срыв слежения за целью с вероятностью, равной единице,
так как пеленгационная характеристика в этом случае не имеет ни одной точки ус-
тойчивого состояния равновесия (рис. 7.14, зависимость 3).
Практика показывает, что коэффициент передачи пеленгационного устройства
изменяется под действием помехи. Следовательно, помеха влияет и на динамические
свойства системы АСН. Увеличение тп и b приводит к уменьшению коэффициента
передачи пеленгационного устройства Киу, динамические ошибки увеличиваются
и теряется запас устойчивости. Коэффициент передачи пеленгационного устрой-
ства ПУ в точках устойчивого равновесия (точки О, Оь рис. 7.31) Лгпу = duny/d§.
В работе [70] установлено, что система АСН становится неустойчивой при умень-
шении коэффициента передачи в 8... 10 раз. Поэтому, используя зависимость Кпу
от отношения помеха/сигнал Ь, можно найти критическое значение 6кр = 100, при
котором автоматическое сопровождение цели по направлению невозможно.
Следовательно, для обеспечения срыва слежения за целью по направлению
требуются значительные превышения мощности помехи над мощностью сигнала.
Помеха, прицельная по частоте сканирования, при <рп = срс± 180° не является
эффективной в случае подавления ТГС ракет, использующих в качестве сигнала
344 Глава 7. Устройства оптико электронного подавления авиационных комплексов РЭБ
управления производную угловой ошибки 0ОЦ1, так как при постоянном значении
угловой ошибки в системе наведения ракеты не возникают помеховые возмуще-
ния (0ОШ = 0). Поэтому при излучении помехового сигнала производится сдвиг оги-
бающей на некоторый угол Дф, то есть <рп = фс ± Дф. Обычно 90° < Дф < 180°. Нали-
чие фазового сдвига Дф вызывает вращение оптической оси ИКГС вокруг направ-
ления на цель, в результате чего 0ОШ Ф 0.
Рассмотрим случай прицельной по частоте сканирования помехи, когда Qn * Qc.
Сигнал на выходе пеленгаторного устройства, например азимутального канала,
записывается аналогично (7.49):
wnyx (О wcx
(^) + wnx
(0)сО8фс 4
mccos[(Qn-Qc)l + <pcb. (7.61)
Если систему АСН представить в виде схемы на рис. 7.32, то из нее видно, что
0=0вх-9ВыХ; "с=^пу0; 0„„х = и/(р)«пу’ (7-62)
где — передаточная функция исполнительного устройства ИУ.
Рис. 7.32. Функциональная схема системы АСН
Тогда ошибка сопровождения цели 0 равна
л _ ввх________^пу^(р) иП
1 + Хпу^(р) 14-^ИрК/
где (/) — выходное напряжение пеленгационного устройства, являющееся фун-
кцией угла между направлением на цель 0ВХ и направлением оптической оси (рав-
носигнального направления) 0ВЫХ.
Первое слагаемое в (7.63) определяет динамическую ошибку, и при медленном
изменении входного воздействия им можно пренебречь. Тогда
е==Ф(Р)-^-, (7.64)
^пу
Ф(/>) =-ПУ (7.65)
Так как помеховое воздействие имеет частоту, равную ДП = Qn - Qc, то значе-
ние ошибки 0 зависит от величины ДП. Вид зависимости 0 = 0(Д0) с точностью до
постоянного коэффициента К(] определяется частотной характеристикой замкнутой
системы АСН:
|0ош|=^оФ(7Ч)’
где
Qp=AQ=|Qn-Qc|;
' Р7 1+К11уИфЯр)
(7.66)
(7.67)
(7.68)
7.3. Тепловые ложные цели
345
и
На рис. 7.33 представлены зависимости ошибки 0ОШ от разности частот AF =
Рис. 7.33. Зависимости ошибки 0ОШ от разности частот &F
AQ
2л
Графики показывают, что при A/V 0 оптическая ось, отклонившись от направ-
ления на цель Ц на угол 0ОШ, под воздействием помехи вращается с частотой, оп-
ределяемой значением А/’и динамическими характеристиками системы АСН. Мак-
симум ошибки сопровождения 0ОШ = 0тах имеет место при AF= Fpe3, где F$e3 — ре-
зонансная частота системы АСН.
При \F> АГасн порождаемые помехой ошибки 0ОШ и 0ОШ оказываются незначи-
тельными и помеха становится неэффективной. Следовательно, надежное подав-
ление системы АСН прицельной по частоте сканирования помехой возможно при
априорном знании частоты сканирования растра подавляемой ИКГС с погрешно-
стью порядка 1...5 Гц.
7.3.7. Заградительные помехи
Если значение частоты сканирования известно с ошибкой, во много раз пре-
вышающей полосу пропускания системы АСН АГасн, то применяют заградитель-
ные по частоте сканирования помехи.
Способ формирования такой помехи заключается в амплитудной модуляции не-
сущего колебания напряжением, частота которого периодически изменяется в ди-
апазоне возможных частот сканирования АГП = AFC (скользящая по частоте скани-
рования помеха).
Рассматриваемая помеха может быть создана путем быстрой или медленной пе-
рестройки по определенному закону управляющего генератора, создающего модули-
рующее напряжение. В моменты времени, когда частота помеховой модуляции £2
совпадает с частотой сканирования растра (с точностью до значения AQACH), сис-
тема АСН испытывает помеховые возмущения. Угловая ошибка сопровождения цели
зависит от времени А/Эф эффективного действия помехи на систему АСН.
Время эффективного воздействия помехи зависит от скорости перестройки
модулирующего генератора Fn:
Д'Эф=^- (7-69)
F
При медленной перестройке скорость изменения частоты помеховой модуляции
выбирается из условия
Д/эф=^Р^ЗтАСН, (7.70)
F
346 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
где тАСН — постоянная времени системы АСН, примерно равная
1
ТАСН = Т7 •
А^АСН
Тогда из (7.70) и (7.71) получается
1
ТАСН =Тг ’
Д^АСН
(7.71)
(7.72)
Желательно, чтобы при медленной перестройке за время воздействия помехи
Д/Эф обеспечивалось выбивание системы АСН из режима слежения.
При быстрой перестройке помеховые возмущения следуют друг за другом с ма-
лым периодом (Тп = Тдсн)» однако продолжительность этих возмущений незначитель-
но (^<<tach)- При большой скорости перестройки (^ » AFach) на систему АСН
воздействуют кратковременные возмущения в виде дельта-функций, переходные
процессы в системе АСН не успевают закончиться и угловые ошибки 0 не достигают
максимальных значений.
Средний эффект от действия такой помехи зависит от отношения
А^асн _ А^эф (7 73)
Тп ‘
Таким образом, в тех случаях, когда частота сканирования подавляемой ИКГС
известна с точностью до 1...3 полос пропускания системы АСН, помехи на частоте
сканирования являются эффективными при подавлении ОЭС управления оружием.
Эффективность этих помех падает по мере уменьшения априорных знаний о значе-
нии частоты сканирования.
Станции активных модулированных помех могут применяться и для подавле-
ния ИКГС с другими видами модуляции лучистого потока от цели. Однако загра-
дительный режим помех не всегда является эффективным для определенного клас-
са ИКГС, а прицельный трудно создать в связи с широкой номенклатурой ракет с
ИКГС и различными видами модуляции.
7.3.8. Прерывистая помеха
Прерывистая помеха — это периодическая или случайная последовательность
мощных импульсов, создаваемых либо прикрываемым объектом, либо вынесенным
источником излучения (рис. 7.34). Действие прерывистой помехи на ТГС любого
типа основано на использовании переходных процессов, протекающих в приемни-
ках с регулируемым коэффициентом усиления. Мощные импульсные сигналы воз-
действуют на систему АРУ приемников.
В нормальном состоянии система АРУ стремится поддерживать амплитуду
выходного сигнала постоянной, автоматически устанавливая необходимый коэф-
фициент усиления в зависимости от амплитуды входного сигнала. При действии
на приемник помехи (рис. 7.34, а) система АРУ работает в динамическом режиме.
Коэффициент усиления приемника при ступенчатом сигнале UBX = Uc + Un зависит
от времени и от амплитуды входного воздействия (рис. 7.34, б) [19].
л- = /Го1±М£^1, (7.74)
1 + ц
где Kq — коэффициент усиления приемника в момент начала действия помехи;
ц0 — постоянный коэффициент; ц= g0FBX — коэффициент передачи цепи обрат-
ной связи АРУ.
7.3. Тепловые ложные цели
347
Рис. 7.34. Действие прерывистой помехи на приемник с АРУ
Переходный процесс в системе АРУ характеризует зависимость К (z), представ-
ленная на рис. 7.35.
Рис. 7.35. Переходный процесс в системе с АРУ
Система АРУ рассматривается как динамическая система с переменным коэф-
фициентом ц(^вх), а ее динамическая постоянная времени Тд зависит от интен-
сивности входного воздействия Z7BX:
д
(7.75)
где Т — постоянная времени инерционной цепи обратной связи АРУ.
Важно подчеркнуть, что динамическая постоянная времени Гд уменьшается с
ростом амплитуды входного сигнала:
Тд = Те~°^и™, (7.76)
где а — постоянная величина для заданной систем АРУ.
При воздействии прерывистой помехи коэффициент усиления уменьшается в
соответствии с (7.74) и рис. 7.35. Если входной сигнал модулирован по амплитуде,
что характерно для головок самонаведения с АФМ, то в течение времени
(рис. 7.34) амплитудная модуляция «срезается» вследствие ограничения уровня вход-
ного сигнала (уровень UBX выходит за верхний порог Z7orp тах усилителя). В ТГС с
ВИМ воздействие такой перегрузки на приемник не приводит к потере информа-
ции о пространственных координатах цели.
348 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
После окончания помехового импульса усиление приемника останется мини-
мальным, так что в течение некоторого времени т2 слабый полезный сигнал не прой-
дет на выход приемника. Система АСН при этом разомкнется на время т2. Это время
определяется длительностью нарастания усиления приемника (рис. 7.34, б)
до некоторого уровня Xr(f) = Arnop, обеспечивающего уверенный прием полезного
сигнала амплитуды Uc.
Под действием прерывистой помехи на ТГС с АФМ система АСН размыкается
дважды. Первый раз — на время за счет срезания полезной амплитудной моду-
ляции помехового сигнала в перегруженном приемном устройстве (верхний порог
ограничения). Второй раз, на время т2, за счет отсутствия приема слабого полезно-
го сигнала приемником с малым коэффициентом усиления К < К(] (нижний порог
ограничения).
При действии прерывистой помехи на ТГС с ВИМ система АСН может размы-
каться только в интервале т2. В промежутке времени информация об ошибке
сопровождения цели <рц сохраняется, поскольку она заключена во временных па-
раметрах импульсного потока входного сигнала и не поражается прерывистой по-
мехой, накладываемой только на амплитуду.
Величины интервалов Т] и т2, в течение которых система АСН разомкнута, зави-
сят как от параметров системы АРУ, так и от характеристик помехи. В обычных
условиях при отсутствии помех угловой ошибке сопровождения цели срц сопутствует
определенная величина управляющего напряжения Uy (/) на выходе пеленгатора
системы АСН. Действие помехи приводит к уменьшению среднего значения это-
го напряжения, ибо оно становится прерывистым со скважностью Q. Это эквива-
лентно уменьшению коэффициента передачи Киу пеленгационного устройства. На
рис. 7.36 изображена качественная зависимость коэффициента от отношения
длительности импульса помехи тп к постоянной времени Т системы АРУ, для по-
стоянных значений периода следования импульсов помехи Тп и амплитуды Un вх.
Рис. 7.36. Зависимость коэффициента системы
АСН от параметров помехи
Зависимость рис. 7.36 имеет спадающие участки и при
достигает ми-
нимального значения. Зависимость от параметров помехи тп, Тп и Un вх влияет
на динамику функционирования ТГС.
Динамика работы ТГС, находящейся под воздействием прерывистых возмуще-
ний, исследуется путем анализа амплитудно-фазовых характеристик (АФХ) системы
АСН. Это система автоматического регулирования высокого порядка (обычно —
выше третьего). Такие системы могут терять устойчивость в двух случаях: когда
коэффициент передачи оказывается больше некоторого критического значения
7.4. Перспективные способы ОЭП
349
Кпу> Ктах и когда Кщ меньше минимального значения Апу< Amin. Для анализа дей-
ствия активных прерывистых помех, снижающих коэффициент усиления в конту-
ре АСН, интересен второй случай. Из графика рис. 7.36 следует, что система АСН
потеряет устойчивость при q = —
= <70ПТ и это приведет к срыву слежения.
Уменьшение или увеличение длительности импульса помехи тп или периода Тп
относительно оптимальных значений приведет к снижению эффективности поме-
хи. В первом случае этот эффект обусловлен тем, что система АРУ не будет успе-
вать реагировать на каждый импульс помехи и установит усиление приемника в
соответствии с интенсивностью входного сигнала (/) = ис (/) + (/). При этом не
будет срезания амплитудной модуляции и подавления полезных сигналов. Во вто-
ром случае, когда тп > топт, система АРУ, напротив, будет успевать следить за меня-
ющейся интенсивностью входного прерывистого сигнала (/), что в конечном
итоге приводит к снижению эффективности помехи.
Среднее значение коэффициента передачи Апу определяется выражением [19]
(7.77)
где Адуо — коэффициент передачи при отсутствии помех.
Прерывистая помеха может быть создана путем механической или электронной
модуляции источника ИК-излучения. В американских станциях ОЭП типа ALQ-107,
ALQ-132 прерывистая помеха создается цилиндром с прозрачными прорезями. Мощ-
ную прерывистую помеху может создавать лазерный комплекс ОЭП «Немезис».
7.4. Перспективные способы оптико-электронного поражения
В ТГС современных ракет применяются различные методы борьбы с преднаме-
ренными помехами. Так в ТГС ЗРК «Стингер» реализованы угловая и кинемати-
ческая виды селекции, что значительно повысило их помехозащищенность. Двух-
цветная спектральная селекция осуществляется в ТГС ракеты. Этот вид селекции
предназначен для борьбы с непреднамеренными и преднамеренными оптически-
ми помехами. В ТГС ракеты «ASRAAM» предусматривается реализация спектраль-
ной, пространственной, кинематической и других видов селекции за счет преиму-
ществ матричной структуры фотоприемников, что значительно затрудняет их ОЭП.
Все это приводит к снижению эффективности существующих средств противодей-
ствия, таких как тепловые ловушки и некогерентные источники помех.
Эффективность ОЭП может быть значительно повышена при использовании
когерентных САП на основе лазеров, так как они позволяют генерировать помехи
с высокой плотностью энергии. Воздействие когерентных лазерных помех на ТГС
вызывает значительные ошибки измерения информационных параметров, а при
большой плотности энергии может привести к выводу из строя различных элемен-
тов ТГС.
Можно отметить следующие основные способы подавления ОЭС противника [69]:
• механическое повреждение элементов ТГС;
• создание плазмы на обтекателе ракеты;
• засветка (ослепление) приемника излучения ТГС;
• воздействие на систему АРУ ТГС.
350 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
7.5. Механическое повреждение элементов
тепловых головок самонаведения
Воздействие лазерного излучения с большими плотностями энергии на элементы
ТГС приводит к их механическому повреждению. Наиболее уязвимыми элемента-
ми при этом являются модулирующие диски, фотоприемники и спектральные
фильтры [69, 70].
Процесс взаимодействия лучистой энергии с элементами ТГС можно разделить
на следующие этапы:
1) поглощение лучистой энергии и переход ее в тепло;
2) нагрев материала до температуры, при которой происходит разрушение;
3) разрушение материала и разлет продуктов разрушения;
4) остывание материала после окончания действия лазерного излучения.
Одним из элементов ТГС, подвергающихся лазерному излучению, является
фотоприемник. Рассмотрение воздействия излучения большой мощности на фото-
приемники основывается на процессах взаимодействия лазерного излучения с по-
лупроводниками, из которых изготавливают приемники излучения ТГС [53].
Экспериментальные исследования показали [53], что при плотности энергии
лазерного излучения W > (5...10)10-3 Дж/см2 и длительности импульсов т>0,3 с
температура наружной поверхности фильтра на площади, куда попало излучение,
превышает 1273 К — температуру плавления его поверхностного слоя. При плот-
ностях энергии импульсного лазерного излучения на входном зрачке ИКГС порядка
10"2 Дж/см2 происходит быстрый нагрев до высокой температуры приемника излу-
чения. Такие уровни облучения могут быть созданы лазерным источником с энер-
гией излучения в импульсе 200-300 Дж на дальностях 5 км.
В табл. 7.3 приведены ориентировочные значения минимальной плотности
энергии, необходимой для механического повреждения элементов зеркально-лин-
зовой системы ИКГС ракет и приемников излучения.
Таблица 7.3
Элемент И/ Дж/см2
Сферическое зеркало 15
Модулирующий диск ракеты Р-ЗС 3
Модулирующий диск ракеты Р-8МТ 9
Фоторезисторы 4,5
Германиевый фильтр 15
Фоторезистор ФСД-1 9
Как видно из таблицы, разрушение элементов ИКГС требует создания лазеров
с большой мощностью излучения, что приводит к увеличению массы и габаритов
устройства создания помех.
7.6. Помехи тепловым головкам самонаведения, создаваемые плазмой,
образованной лазерным излучением
При облучении обтекателей управляемых ракет с ИКГС лазерным излучением
с плотностью мощности порядка 10 Вт/см2 вблизи поверхности обтекателя возникает
мощное плазменное образование, являющееся источником некогерентного оптиче-
7.6. Помехи ТГС, создаваемые плазмой, образованной лазерным излучением
351
ского излучения. При использовании импульсного лазера, обеспечивающего попада-
ние на приемник излучения ИКГС от плазмы энергии порядка 2...4 Дж в диапазо-
не 2...5 мкм, может происходить нарушение работоспособности ИКГС.
Влияние таких энергий на приемники излучения (поликристаллические фото-
резисторы на основе PbS с германиевыми фильтрами и монокристаллические фо-
торезисторы на основе InSb с кремниевыми фильтрами) исследовалось экспери-
ментально Под влиянием излучения плазмы сопротивление фотореэисторов на
основе PbS увеличивается примерно на порядок, а сопротивление фоторезистора
на основе InSb уменьшается в 10...100 раз. Такое изменение сопротивления приво-
дит к резкому уменьшению коэффициента передачи входного каскада ИКГС, а при
попадании на приемник излучения лучистой энергии порядка 3 Дж — к полному
его «ослеплению».
Процесс изменения сопротивления фоторезисторов, как подтвердили экспери-
менты, является обратимым. Но восстановление свойств фоторезисторов происхо-
дит через десятки секунд и более, что с точки зрения наведения ракеты на цель
можно интерпретировать как выход ИКГС из строя.
Помимо так называемого «силового» воздействия, для которого требуется боль-
шая энергия излучения, с помощью лазеров можно вводить помеховые сигналы в
контур управления ракеты и обеспечить срыв слежения ИКГС за защищаемым
объектом. Характерными помеховыми воздействиями для подавления ИКГС с
помощью импульсных лазеров являются: создание помех на частоте сканирования
(прицельные и заградительные); возбуждение переходных процессов в контуре
слежения ИКГС; нарушение работоспособности вследствие воздействия прерыви-
стых помех на АРУ (для ИКГС с АФМ).
Наименьшие требования к мощности лазера, обеспечивающего введение поме-
хового сигнала в контур управления ракеты, предъявляются в том случае, когда длина
волны излучения лазера попадает в область спектральной чувствительности при-
емника излучения ТГС. В настоящее время для этих целей разработаны твердотель-
ные и газовые химические лазеры на молекулах водорода, фтора, дейтерия и хлора
(HF, DF, НС1).
Эффективность воздействия помеховых сигналов на ИКГС в сильной степени
зависит от соотношения между мощностью собственного излучения ЛА и лазера,
обеспечивающего ввод помеховых сигналов. Для обеспечения срыва слежения ИКГС
с амплитудно-фазовым и частотным принципом выделения информации о цели
мощность излучения лазера должна превышать мощность собственного излучения
защищаемого объекта не менее чем в 103 раз. Срыв слежения практически всех сов-
ременных ИКГС происходит при частотах следования помеховых импульсов порядка
200...250 Гц и длительностях импульсов (например, эрбиевого лазера) -200 мкс.
Энергия лазерного излучения, без учета затухания в атмосфере, должна быть не менее
0,6 Дж, а средняя мощность излучения лазера 150...200 Вт при среднеквадратиче-
ской ошибке в определении направления на ракету о = 30'.
С помощью импульсного лазера может быть осуществлена засветка («ослепле-
ние») перспективных многоканальных (матричных) приемников излучения ИКГС
ракет типа «Мажик-2», «ASRAAM» и др. В многоканальных ИКГС приемники лучи-
стой энергии размещаются в плоскости изображения целей и положение каждого
соответствует дискретному значению угловой координаты цели. Такие многоканаль-
ные следящие системы формируют пеленгационную характеристику типа «насыще-
ние» или «дискриминационная характеристика». Воздействие на такой матричный
352 Глава 7. Устройства оптико-электронного подавления авиационных комплексов РЭБ
приемник импульсного лазерного излучения с плотностью мощности на входе опти-
ческой системы, в 10 раз большей, чем плотность мощности от цели, приводит к
«засветке» всего поля приемной матрицы. Это порождает ошибки в определении
координат цели и промаха ракеты А > /?п (7?п — радиус поражения ракеты). Матрич-
ные фотоприемники могут быть поражены лазерным излучением комплекса ОЭП.
7.7. Пассивные средства оптико-электронного поражения
Пассивное противодействие ОЭС управления оружием ПВО, в том числе ИКГС
ракет и теплопеленгаторам, основано на искусственном изменении свойств среды
распространения лучистой энергии и уменьшении теплового излучения цели.
Существуют два основных физических явления, которые могут быть использо-
ваны для увеличения затухания электромагнитной энергии в воздухе: рассеяние
энергии молекулами газов, твердыми и жидкими частицами, находящимися в воз-
духе; поглощение энергии молекулами газов и частицами.
Рассеяние энергии приводит к изменению направления распространения не-
которой доли лучистой энергии за счет наличия в среде распространения жидких
или твердых частиц, а также за счет изменения плотности среды распространения
(числа молекул или микрочастиц в единице объема). Поглощение вызывает ослаб-
ление потока за счет преобразования части электромагнитной энергии в другие виды
энергии, например, в тепловое движение молекул, перехода атомов в возбужден-
ное состояние и т. д.
При расчетах поглощения и рассеяния используется ослабление — обобщен-
ное понятие суммарного эффекта снижения плотности потока энергии.
Ослабление подчиняется закону [26]
Ф(Х,Л) = Фоехр[-ц(Х)Л], (7.78)
где ц(Х), — удельное ослабление на волне X, имеющее размерность 1/м; R — дли-
на трассы распространения параллельного пучка электромагнитной энергии, м.
Ослабление электромагнитной энергии определяется соотношением диаметра
частицы (дыма, аэрозоли) d и длины волны X. Если X » J, то рассеяние электро-
магнитных волн подчиняется закону Рэлея
И(*)=4> (7.79)
А
где А — постоянная величина для данного вида частиц.
При 1 < d рассеяние оказывается не зависящим от d. Наибольшее рассеяние имеет
место при X = d. В связи с этим затухание лучистой энергии в ИК-диапазоне при
дымке (диаметр частиц d = 0,5 мкм) составляет 0,00013 на расстоянии R = 10 км.
В тумане или неперегретом паре максимум распределения радиусов капелек воды
составляет примерно 5 мкм, что обусловливает интенсивное поглощение лучистой
энергии вплоть до X = 14 мкм. Поэтому в качестве среды, снижающей видимость
целей во всем ИК-диапазоне длин волн, наиболее часто рассматривают искусствен-
ные аэрозольные облака, создаваемые путем периодического или эпизодического
впрыскивания в сопло двигателя самолета (вертолета) воды. Наряду со снижением
температуры сопла и истекающих газов вода, преобразуясь в пар, экранирует на-
гретые части самолета.
7.7. Пассивные средства ОЭП
353
К пассивным методам противодействия ИК-приборам следует отнести и
меры по снижению теплового излучения целей или изменению индикатрисы из-
лучения за счет совершенствования форм и конструкций ЛА, применение специ-
альных материалов и покрытий, снижающих контраст элементов поверхности
самолета (вертолета).
Для уменьшения интенсивности теплового излучения ЛА в секторах наиболее
вероятных атак ракетами с ТГС применяют экранные устройства (ЭУ) (рис. 7.37).
Рис. 7.37. Изменение эфективности поверхности
рассеяния экранным устройством
Принцип действия ЭУ основан на том, что защитный экран закрывает от на-
блюдения удлинительную трубу двигателя, а охлаждение самого экрана происхо-
дит за счет набегающего воздушного потока. В результате индикатриса излучения
деформируется в пользу защищаемого ЛА.
ГЛАВА 8
РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ РАДИОСИСТЕМ
ПЕРЕДАЧИ ИНФОРМАЦИИ
8.1. Подавление радиолиний связи и командного радиоуправления
Командным радиолиниям управления и связи могут создаваться преднамерен-
ные активные помехи двух видов, Во-первых, маскирующие непрерывные шумовые
и импульсные помехи, снижающие качество приема сигнала. Во-вторых, имитиру-
ющие помехи, дезинформирующие получателя сообщений. Во всяком случае, по-
мехи радиолиниям передачи информации снижают скорость передачи информации,
вплоть до предельных значений, близких к нулю. При нулевой скорости передачи
информации (пропускной способности) говорят, что канал связи размыкается.
Применяемый набор маскирующих помех достаточно велик. Это и AM-, ЧМ-
шумовые помехи, ХИП и другие. Имитирующие помехи подобны полезным сигна-
лам, но несут ложную информацию. Эти помехи называют дезинформирующими
и, иногда, диверсионными.
Подавление радиолиний управления и связи имеет ряд особенностей по срав-
нению с подавлением РЛС:
• приемники радиолиний в отличие от приемников РЛС используют прямой
сигнал передатчика;
• диаграммы направленности передающих в приемных антенн радиолиний яв-
ляются, как правило, малонаправленными;
• применяется широкий набор мер помехозащиты (кодирование, кратковремен-
ность работы и др.).
Эти особенности необходимо учитывать при разработке САП и способов их
боевого применения. Прежде всего, сказанное относится к особенностям уравне-
ния РЭП для случая подавления радиосистем передачи информации (РСПИ), объ-
единяющим радиолинии управления и связи.
Рис. 8.1 иллюстрирует общий случай радиоэлектронного подавления РСПИ,
когда прикрываемый самолет (цель Ц) и самолет-постановщик помех (ПП) не со-
вмещены в пространстве. Помехами подавляется приемник командной радиолинии
управления ракетой.
Передатчик РСПИ (П), имеющий антенну с ДНА (0, ср), находится на удале-
нии Ас от подавляемого приемника. Пользуясь рис. 8.1, можно составить уравне-
ние РЭП в соответствии с правилами и приемами, изложенными в разд. 4.2:
(8.1)
где PCGC — энергетический потенциал приемника радиолинии; РП(7П — энергети-
ческий потенциал САП; F(0, <р) — ДНА подавляемого приемника, установленно-
го на самолете или ракете.
При выводе уравнения (8.1) предполагалось, что максимумы ДНА передатчи-
ков командной радиолинии и САП направлены на объект подавления — ракету.
8.1. Подавление радиолиний связи и командного радиоуправления
355
Рис. 8.1. Радиоэлектронное подавление РСПИ
Для прицельной по частоте и поляризации помехи, когда уп = 1; Д/^р = А/п> из
(8.1) следует выражение для оценки потребного энергетического потенциала САП:
(к V 1
ПСЛп = — —т2--------• (8.2)
елп п п с р2^
Для линий радиосвязи можно считать антенну подавляемого приемника нена-
правленной, т. е. F2 (0, ср) = 1, поэтому потенциал САП, предназначенной для подав-
ления линий радиосвязи, равен
При подавлении командных радиолиний управления ракетами следует рассчи-
тывать на воздействие помех через боковые лепестки ДНА, поэтому необходимо
принять F2(0, ф) = 10-2. Тогда из (8.1) следует, что
ПСАП = Ю2 PCGC (-^1 . (8-4)
1 С v ту
\^П J
Сравнение выражений (8.3) и (8.4) показывает, что при одинаковых энергетиче-
ских потенциалах передатчиков линий связи и КРУ подавление бортовых приемни-
ков КРУ требует увеличения на два порядка энергетического потенциала САП (при
одинаковом отношении Rn/Rc). Подавление линий радиосвязи, КРУ и систем ближ-
ней радионавигации имеет много общего, т. к. они используют прямой, а не отражен-
ный, как в РЛС, сигнал. Границы зоны подавления для случая подавления радио-
приемника, расположенного на ракете противника, определяются из рис. 8.1. Пере-
датчик подавляемой радиолинии находится в точке расположения станции управ-
ления ракетой П, являющейся началом декартовой системы координат Oxyz (рис. 8.2).
Проекция подавляемого приемника на земную поверхность S имеет координа-
ты {х, у}. Расстояние между передатчиком радиолинии П и постановщиком помех
ПП равно L. С помощью рис. 8.1 и 8.2 можно записать уравнение РЭП (8.1) в виде
(8-5)
где
AgcA/n cos2 Р
^п^пД/пр^2 (0>ф)?п cos2 а
(8.6)
356
Глава 8. Радиоэлектронное подавление радиосистем передачи информации
Рис. 8.2. Зоны подавления приемника КРУ на ракете
Так как R£ =х2 +у2', R^ =х2 +(y-L)2, то из (8.6) следует уравнение для опре-
деления границы зоны подавления:
Полезно рассмотреть три случая, соответствующие значениям Кс>1; Кс< 1;
Кс = 1. При Кс> 1 анализ уравнения (8.7) показывает, что граница зоны подавления
представляет собой окружность с радиусом
R
A'c-l
Смещение окружности, относительно начала координат:
(8.9)
Ас 1
Зона подавления при KQ < 1 представляет собой всю поверхность за исключением
части плоскости 5П внутри окружности радиуса Rx (рис. 8.2). При Кс > 1 зона подав-
ления 5ЗП представляет собой круг радиусом
1-^с
Центр круга смещен относительно точки местоположения передатчика помех на
расстояние
d = —(8.11)
1-^с
При Кс = 1 окружность вырождается в прямую, проводящую через центр базы L
и перпендикулярную оси у.
Анализ уравнения (8.7) и рис. 8.2 позволяют установить следующее. Во-первых,
при малом энергопотенциале САП, когда KQ > 1, зона подавления располагается во-
круг САП, поэтому прикрытие своих объектов (например, самолетов от ракет с ко-
мандным наведением) возможно только при их расположении внутри области *Snn.
Во-вторых, при большом энергопотенциале САП, когда Кс < 1, прикрытие возмож-
но во всем прилегающем к постановщику помех пространстве, за исключением зоны
неподавления 5П, находящейся вблизи передатчика П подавляемой радиолинии.
8.2. Станции активных помех радиолиниям командного радиоуправления 357
8.2. Станции активных помех радиолиниям
командного радиоуправления
Объектом воздействия помех, создаваемых КРУ, является приемное устройство,
установленное на борту ракеты или какого-либо ЛА. Активные помехи могут при-
водить к подавлению передаваемых команд или к созданию ложных команд, вызы-
вающих существенные ошибки наведения.
Различают два вида преднамеренных помех КРУ. Во-первых, это помехи, загра-
дительные по коду. Во-вторых — помехи, прицельные по коду.
Помеховые сигналы первого рода представляют собой непрерывные шумовые
сигналы (прямошумовые, АМ-, ЧМ-, ФМ-помехи) или хаотические импульсные
помехи (ХИП). Во втором случае помеховые сигналы имеют структуру, подобную
полезным, и создаются, как правило, путем ретрансляции полезного сигнала с
соответствующей модуляцией.
Помехи, заградительные по коду, могут вызывать полное или частичное подав-
ление передаваемых команд; изменение параметров модуляции поднесущих коле-
баний (например, случайные отклонения моментов возникновения импульсов при-
нимаемого кода); образование ложных кодов.
В зависимости от интенсивности воздействующих помеховых сигналов различа-
ют помехи малого и большого уровней. Помехи малого уровня вызывает только не-
существенные изменения параметров модуляции поднесущих колебаний (кодов),
что не может привести к заметным ошибкам наведения. Помехи большего уровня,
р
для которых —п-— > 1 вызывают не только искажение команд на выходе линии
Чс вх
командного радиоуправления, но и ухудшение других характеристик КРУ, в част-
р
ности, уменьшение коэффициента передачи. При пвх > КП коэффициент переда-
че вх
чи линии А^ру уменьшается настолько, что линия как динамическое звено конту-
ра наведения размыкается.
В зависимости от вида помехи, вида и способа модуляции сигнала, структуры
кода команд и особенностей построения системы КРУ, воздействие помех может
приводить к двум качественно различным случаям проявления эффекта размыкания
контура наведения. Так, при симметричной линии ее размыкание означает установку
управляемых агрегатов (например рулей ракеты) в нейтральное положение. Если
же линия несимметрична, то при ее размыкании управляемые агрегаты устанавли-
ваются в крайнее положение. Установка рулей ракеты на упоры в крайние положения
вызовет движение ракеты по криволинейной траектории минимального радиуса,
т. е. с максимально допустимой перегрузкой.
Существенным недостатком помех, заградительных по коду, является значитель-
ная величина потребной средней мощности передатчика помех. Этот недостаток
ограничивает практическое применение рассмотренных помех.
Помехи, прицельные по коду, в принципе позволяют получить некоторый энер-
гетический выигрыш по сравнению с заградительными помехами.
Принцип создания помех КРУ иллюстрируется схемой рис. 8.3.
Сигналы управления командной радиолинии управления принимаются прием-
ной антенной станции помех АП1 и поступают на приемное устройство станции по-
мех ПРМ САП и в схему запоминания частоты, которая может быть многоканальной.
После усиления и детектирования сигналы кодов команды подаются на вход устрой-
358
Глава 8. Радиоэлектронное подавление радиосистем передачи информации
Рис. 8.3. Создание помех системе командного радиоуправления
ства управления, которое преобразует принятые коды, так что на каждую посылку
сигнального кода формируется посылка помехи (или помехового кода). Полученная
последовательность помеховых сигналов задерживается на время т3 и используется
далее для модуляции высокочастотных колебаний в усилителе. После усиления в око-
нечном усилителе ПРД САП помеховый сигнал излучается передающей антенной Ап2.
В результате воздействия помехи происходят ложные срабатывания дешифра-
тора команд.
Необходимыми условиями создания прицельных по коду помех являются развед-
ка кодов, их параметров, порядка и периода следования кодированных команд, а
также формирование подобных помеховых кодов и их излучение в соответствую-
щем порядке.
8.3. Станции активных помех радиолиниям передачи информации
Подавление связных радиоприемников возможно маскирующими и имитиру-
ющими помехами. К маскирующим помехам относятся AM-, ЧМ- и ФМ-шумовые
помехи и ХИП. Имитирующие помехи создаются путем излучения ложного сообще-
ния корреспондентам противника. К этим помехам предъявляются весьма жесткие
требования к соблюдению принципа подобия помехи и полезного сигнала по инфор-
мационным и сопутствующим параметрам.
Структурная схема САП радиолиниям УКВ-радиосвязи представлена на рис. 8.4.
Основными устройствами САП являются разведывательный приемник, устрой-
ство определения частоты подавляемого канала связи и настройки высокочастот-
ного генератора, пульты управления, блок управления, усилитель мощности, мо-
дулятор помех и блок защиты.
Высокочастотные сигналы УКВ-радиостаниий поступают через приемную ан-
тенну Aj в разведывательный приемник, где производится их предварительная
селекция и усиление. Разведывательный приемник осуществляет поиск сигналов
в заданном участке диапазона. Несущая частота и вид модуляции определяются в
устройстве определения частоты, которое имеет панорамный индикатор.
Несущая частота сигнала fc запоминается и на нее автоматически настраивает-
ся высокочастотный генератор с ошибкой 8/ не более нескольких килогерц.
8.4. Радиоэлектронное подавление цифровых линий связи и передачи данных
359
Рис. 8.4. Структурная схема САП радиолиниям УКВ-радиосвязи
Высокочастотный сигнал с несущей частотой ± 8/поступает в блок управ-
ления, где модулируется по амплитуде или частоте низкочастотным шумом. После
усиления в оконечном усилителе помеха излучается через передающую антенну А2.
С помощью пульта управления и блока управления устанавливаются различ-
ные режимы работы приемопередающей и анализирующей аппаратуры САП.
В состав САП входит блок защиты, предназначенный для обеспечения элект-
ромагнитной совместимости (ЭМС) собственных РЭС. В САП для ЭМС развязки
каналов приема и передачи применяется частотно-временной принцип блокиров-
ки излучения помехи.
Управление САП может производиться как автономно, так и дистанционно с
вынесенного пункта управления. Возможны следующие основные режимы работы
САП: разведка, создание непрерывной шумовой помехи, создание ответной шумо-
вой помехи.
В режиме «разведка» ведется только обнаружение сигналов УКВ-радиостанций
и определение их параметров.
В режиме создания непрерывной шумовой помехи при включении передатчи-
ка помех мгновенно создается помеха на частоте любой первой радиостанции,
обнаруженной при панорамном поиске разведывательным приемником. Время
излучения помехи 7ИЗЛ может изменяться в соответствии с заданной программой.
В режиме создания ответной помехи САП подавляет шумовой помехой только
те радиостанции, которые назначены для подавления. Помеха представляет собой
шумовые импульсы с изменяемой длительностью Гизл. Шумовые импульсы накры-
вают сообщения противника в течение времени Тц, определяемого заданным цик-
лом работы.
8.4. Радиоэлектронное подавление цифровых
линий связи и передачи данных
Цифровые системы передачи информации (связи и передачи данных) исполь-
зуют ограниченный набор стандартных сигналов, отображающих информационные
символы Вся совокупность возможных используемых сигналов составляет алфа-
вит. Полное количество используемых символов, т. е. мощность множества, состав-
360 Глава 8. Радиоэлектронное подавление радиосистем передачи информации
ляющсго алфавит, равно т. Количество информации по Шеннону связано с усло-
вием выбора конкретного символа из алфавита s^S, /€1: пг.
Р (5)
I = log-^Ц = logp^ (,)-logPpr (5), (8.12)
*pr (5)
где Ppr(Si) —априорная вероятность передачи символа a Pps{si') —апостериор-
ная вероятность того, что принятый сигнал соответствует именно тому символу sh
который был передан. Если сообщение при передаче не искажено, то Pps (5) = 1 и
/ = -logPpr(z).
Источник информации может формировать различные сообщения, которым со-
ответствуют цепочки из разных символов, у которых могут отличаться априорные
вероятности. Поэтому кроме величины количества информации /(8.12) рассматри-
вается среднее количество информации на один символ, формируемый источником
сообщений:
ff = -^Ppr(si)\ogPpr(si), <813>
/=1
где т — объем алфавита символов sr
Величина Н (8.13) называется энтропией источника информации и полностью
определяется априорным распределением вероятностей на множестве символов,
используемых источником. Как видно, энтропия (8.13) — это математическое ожи-
дание величины logP^sJ. Чем больше энтропия источника, тем больше, в сред-
нем, степень априорной неопределенности формируемого им сообщения.
После приема сообщения неопределенность уменьшается (во всяком случае —
не увеличивается). Поэтому количество информации (8.12) может трактоваться как
мера уменьшения неопределенности. Энтропия, как следует из (8.13), неотрицатель-
на, но равна нулю только для вырожденного ансамбля, содержащего только одно
сообщение, такое, что /^(5) = !. Кроме того, энтропия аддитивна — для совокуп-
ности источников энтропия равна сумме энтропии каждого:
N N т
HN=^JHn=-'rjLPPr{SniYO^Pl,,XS,A <814)
Л=1 л=1/=1
Энтропия имеет ту же размерность, что и количество информации. Эта размер-
ность зависит от выбора основания логарифма в формулах (8.12) и (8.13). Если ло-
гарифм берется по основанию 2, информация и энтропия измеряются в двоичных
единицах, или битах (Binary digIT). Один бит — это количество информации, со-
держащееся в неискаженном при передаче сообщении, которое априори может при-
нимать два равновероятных значения Ррг (s0) = Ррг ) = 0,5. Действительно, из (8.12):
/ = —iog2 0,5. Кратные одному биту величины количества информации: 1 байт = 23 =
= 8 бит, 1 Кбайт = 210 байт = 213 бит и т. д.
Другая важная для оценки информативности сообщений величина — взаимная
информация. Это информация, которую содержит один ансамбль относительно
другого. Например — ансамбль принятых сообщений относительно ансамбля со-
общений переданных. Или ансамбль шифрованных сообщений относительно поро-
дившего его ансамбля сообщений открытых. Пусть имеется два ансамбля А и В ди-
скретных сообщений акеА и £zeB. Совместная вероятность сообщений аки bt —
это Р2 [ak,bl\ А совместная энтропия ансамблей А и В будет, по определению, мате-
матическим ожиданием логарифма совместного распределения:
Я(А,В) = -Л/{1оёР2(^,/>,)}. (8.15)
8.4. Радиоэлектронное подавление цифровых линий связи и передачи данных 361
Для условного распределения аналогичным образом можно определить услов-
ную энтропию:
//(A|B) = -M{log/’(a,|ft/)} = -££P(^|Z>/)logP(«JZ>/). (8.16)
k=ll=l
Используя теорему Байеса
P(aJ>) = P(a)P(b\a) = P(b)P(a\b), (8.17)
для (8.16) можно установить, что
Я(А,В) = Я(А)Я(В|А)+Я(В)Я(А|В). (8.18)
Нетрудно также установить, что
0<Я(А|В)<#(А). (8.19)
Равенство 7/(а|В) = 0 выполняется тогда, когда ансамбль В содержит всю ин-
формацию об ансамбле А. В другом крайнем случае Я(А|в) = Я(А) означает, что
ансамбли А и В содержат независимые сообщения, т. е. В не содержит информа-
ции об А.
Поскольку, как видно из (8.19), условная энтропия Я(А|В) никогда не бывает
больше Я (А), можно утверждать, что знание В уменьшает (в среднем) априорную
неопределенность относительно А. Поэтому разность
Я(А)-Я(А|В) = /(А,В) (8.20)
называется количеством взаимной информации, содержащейся в ансамбле В отно-
сительно А.
Используя определения энтропии (8.15), (8.16) и (8.20), нетрудно установить, что
I (А,В) = -М [log[/’(aA.)]} + М {log[/’(flA.|Z>/)]} =
М\ log
(8.21)
РЫ
Если — условная вероятность передачи символа ак при условии, что
принят символ bh а Р(ак) — априорная вероятность события с^еА то, /(А,В) по-
казывает, сколько в среднем информации передается по каналу, воспроизводяще-
му на выходе сообщение из ансамбля В.
Обозначив величиной Т среднее время передачи одного сообщения, можно
оценить скорость передачи информации от А к В:
(8.22)
С такой скоростью сообщения передаются по информационному каналу. Эта
скорость зависит как от свойств источника информации, так и от свойств самого
канала. Максимально достижимая скорость при заданном качестве передачи ин-
формации с = max R (А, В) называется пропускной способностью канала передачи
и является важнейшей характеристикой информационной системы. Радиоэлектрон-
ное подавление системы передачи информации означает создание таких условий,
при которых скорость передачи информации стремится к нулю или во всяком случае
опускается ниже некоторого нижнего предела.
Для оценки пропускной способности можно привести следующие рассуждения.
Пусть по дискретному каналу передаются сигналы, содержащие по п символов
каждый, и пусть эти символы выбираются из алфавита, который содержит т симво-
лов (имеет объем т). Каждый такой сигнал может принимать А разных значений
362
Глава 8. Радиоэлектронное подавление радиосистем передачи информации
и, соответственно, способен переносить информацию об N разных сообщениях.
Естественно, что
при п = 1 N = т,
при п = 2 N = т2,
при п N = mn.
(8.23)
Если все сигналы в информационной системе независимы (канал без памяти),
равновероятны
и принимаются без искажений (Pps = 1), а длительность
передачи каждого сигнала Т = лтс равна сумме длительностей составляющих его
символов, то скорость передачи информации
I 1 Pps log2 1
R = c = — =---log— =---------= —log2 m.
T птс Ppr птс tc
(8.24)
Для передачи символа (элементарного сигнала) длительностью тс канал передачи
1 т,
данных должен иметь ширину полосы пропускания w = —. Именно такую полосу
частот занимает сигнал, длительностью тс. Поэтому для дискретного канала без
памяти соотношение (8.24) позволяет утверждать, что
c = wlog2M. (8.25)
Если условие неискаженной передачи не выполняется, в канале действуют
помехи и вследствие этого происходят ошибки с вероятностью Р, то апостериорная
вероятность при приеме каждого символа будет равна уже не единице, а
прияА=/>/;
при ak bh
(8.26)
а входящая в формулу (8.24) величина количества информации должна определяться
согласно (8.26) с учетом того, что Я (А) — энтропия источника сообщений — не
зависит от свойств канала, а условная энтропия
н (В| А) = - M{log2 {bk ,а,)} = -Plog2
(1-P)log2(l-P).
Используя выражения (8.24), (8.26) и (8.27) можно получить
т-\ -
(8.27)
(8.28)
Для важного частного случая двоичного симметричного канала, когда т = 2, а
искажения противоположных по значению символов при передаче равновероятны,
что иллюстрируется графом на рис. 8.5, пропускная способность выражается соот-
ношением
с = w[l + Plog2 Р + (1 - P)log2 (1 - Р)]. (8.29)
Зависимость удельной пропускной способности, нормированной к соотноше-
нию сигнал/шум в двоичном симметричном канале, от вероятности искажения
символа представлена на рис. 8.6.
Как видно из (8.29) и графика рис. 8.6, при Р= 0,5 пропускная способность
с = 0. В содержательных терминах это означает, что при такой вероятности ошиб-
8.4. Радиоэлектронное подавление цифровых линий связи и передачи данных
363
(1-Р)
Рис. 8.5. Граф изменений
символов в двоичном
симметричном канале
Рис. 8.6. Нормированная пропускная
способность двоичного симметричного
информационного канала
ки сообщение можно и не передавать. Получателю сообщения можно просто выби-
рать его с равной вероятностью из двух возможных. Иначе говоря, с = 0 соответ-
ствует обрыву канала передачи информации. Такая ситуация возможна при
использовании для РЭП шумовой помехи достаточно большой мощности.
Но скорость передачи информации по каналу максимальна, с = max, не только
при Р= 0, что вполне естественно, но и при Р= 1. Ситуация Р= 1 характерна для
применения имитирующей помехи, дезинформирующей получателя информации
о передаваемых сообщениях, когда все символы при передаче меняются на проти-
воположные. Такой зеркально отраженный сигнал содержит всю ту же информа-
цию, что и исходный, нс искаженный.
В обоих крайних экстремальных случаях, Р= 0 и Р= 1, максимум пропускной
способности (измеренной в бодах, 1 бод = 1 бит/с) не превосходит численного зна-
чения ширины полосы пропускания информационной системы (в герцах).
Вероятность ошибки приема символа Р зависит как от вида и мощности помехи,
так и от способа передачи символов. Для оценки потенциально достижимой вероят-
ности ошибки можно принять следующие предположения и допущения относитель-
но сигнала объекта разведки [11].
1. Подавляемая система использует сигнал с кодово-импульсной модуляцией
(КИМ). Сигнал подавляемой системы передачи информации представляет собой
поток из статистически независимых равновероятных двоичных символов s0 (/) и
(/) (логические значения символов «О» и «1»); мощность сигнала Рс, длительность
символа тс, энергия символа Qc = Рстс.
2. Средство РЭП использует помеху в виде нормального стационарного шу-
ма n(ty.
x(t) = s(t) + n(t); (8.30)
спектральная плотность шума — 7V0.
Оптимальный алгоритм работы приемника при сделанных предположениях
сводится к вычислению корреляционного интеграла от произведения принятого
колебания с опорным напряжением и сравнение значения этого интеграла с
пороговым уровнем для принятия решения о сигнале по каждому принятому сим-
волу [11]. Работу приемника в соответствии с таким алгоритмом можно иллюстри-
ровать структурной схемой рис. 8.7.
364
Глава 8. Радиоэлектронное подавление радиосистем передачи информации
Рис. 8.7. Демодулятор сигнала с КИМ
Для сигнала с пассивной паузой (КИМ с амплитудной модуляцией несущего
колебания)
у «1»
= j*G)WOnopH (0^ < Q • (8.31)
о «о»
Если выполняется верхнее неравенство, принимается решение о наличии на
входе сигнала ^(z), если нижнее — 50(/).
Для сигнала с активной паузой, что характерно при фазовой или частотной
модуляции несущего колебания сигналом с кодово-импульсной модуляцией:
у «1»
= J-*(0wonopH (0^ < 0* (8.32)
0 «о»
Ошибки при этом случаются тогда, когда нормальная случайная величина
оказывается выше порога при наличии на входе приемника сигнала 50(z) и тогда,
когда £ меньше порога, а на входе колебание х(/) содержит сигнал (z). Вероят-
ность ошибки, определенная на основе этих соображений, составляет
(8.33)
где Ф( ) — интеграл вероятностей в форме ф(х) = -—Ге 1 dr, р5 е[-1;1] — коэф-
>/л 0
фициент взаимной корреляции сигналов (г) и s0 (/):
1 Тс
Р,=77р0(')5|('И (8.34)
& о
Для сигналов с пассивной паузой и для сигналов с КИМ-ЧМ р5= 0 (ортогональ-
ные сигналы Sj(z) и 50(z)), а для сигналов с КИМ-ФМ р5= coscp, где ср — индекс
фазовой модуляции.
4 л
Таким образом, р5 = -1 для противоположных сигналов, когда <р = —.
В формуле (8.34) нужно учитывать, что при равновероятных символах
ь формуле (о.34) нужно учитывать, что при равновероятных символах и
50(z) средняя мощность сигнала с пассивной паузой в два раза меньше, чем у сиг-
нала с активной паузой.
С учетом сказанного, на основании выражений (8.33) и (8.34) можно получить
зависимости вероятностей ошибок оптимального приема символов сигнала с ко-
дово-импульсной модуляцией от соотношения сигнал/шум [11]. Эти зависимости
воспроизведены на рис. 8.8.
Разумеется, потенциальные оценки качества приема сигнала дают не больше
чем ориентировочную нижнюю границу вероятности ошибки на символ, поскольку
они определяются для некоторых идеальных моделей сигналов, шумов и способов
8.4. Радиоэлектронное подавление цифровых линий связи и передачи данных 365
Рис. 8.8. Вероятность ошибки приема символа
построения приемника. Реально в приемниках средств подавляемых радиосистем
передачи информации применяются методы обработки, которые могут отличаться
от оптимальных. Поэтому и ошибка приема символа, навязанная системе переда-
чи информации средством РЭП, будет не меньше Р.
Зависимости вида, показанного на рис. 8.8, могут использоваться для опре-
деления коэффициента подавления цифровых линий связи. Так, например, для
КИМ-АМ, принимая пороговое значение вероятности ошибки на символ Рош = 0,05,
получается Кп ~ 5. Однако опыт показывает, что даже специальные цифровые ли-
нии связи и передачи данных, использующие серьезные меры помехозащиты, мо-
гут считаться подавленными при больших вероятностях ошибки.
ГЛАВА 9
КОМПЛЕКСЫ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
9.1. Назначение и функциональная схема комплексов
индивидуальных средств радиоэлектронной борьбы
Индивидуальные средства РЭБ и бортовые комплексы обороны (БКО) исполь-
зуются главным образом для обороны (защиты) ЛА от поражения активными сред-
ствами ПВО. Принято различать три основных уровня обороны ЛА от атак актив-
ными средствами ПВО. Во-первых, индивидуальная оборона (ИО), осуществляе-
мая экипажем ЛА при ведении одиночного оборонительного боя с применением
бортовых средств РЭБ и оружия. Во-вторых, индивидуально-взаимная оборона
(ИВО), осуществляемая экипажами ЛА тактических групп при ведении группового
оборонительного боя на основе совместного и согласованного применения БКО ЛА,
объединенных в тактическую группу. В-третьих, коллективно-групповая оборона
(КГО), осуществляемая совместными действиями экипажей ЛА боевого порядка и
специальных ЛА радиоэлектронной борьбы (постановщиков помех) с применени-
ем оружия и комплексов индивидуальных и групповых средств РЭБ.
Индивидуальная оборона предусматривает эффективное применение БКО на
основе информации о радиоэлектронной обстановке, получаемой всеми информа-
ционными системами РЭК обороняющегося ЛА. Проведение индивидуально-вза-
имной обороны требует интенсивного обмена информацией о радиоэлектронной
обстановке между РЭК ЛА, входящих в тактическую группу. Коллективно-группо-
вая оборона предполагает усиление тактической группы путем включения в ее со-
став специальных ЛА РЭБ и (или) наращивание БКО линейных самолетов группо-
выми средствами РЭБ. Коллективно-групповая оборона позволяет авиационным
соединениям, частям и подразделениям осуществлять действия не только по отра-
жению атак огневых средств ПВО, но и по их предотвращению.
Оборона самолетов и вертолетов от поражения зенитными управляемыми ра-
кетами, зенитной артиллерией и бортовым оружием истребителей при преодоле-
нии ПВО требует размещения на самолетах и вертолетах различных средств РЭБ,
объединенных в единый комплекс, решающий задачу обеспечения прорыва ПВО
противника с учетом априорной и текущей информации о боевой обстановке, состо-
янии собственных сил и средств РЭБ, тактических приемах противника и эффек-
тивности принятых мер по обороне летательного аппарата. Объединение различных
средств обороны в единый комплекс с адаптивным алгоритмом работы дает возмож-
ность при отказе одного из средств БКО оперативно с помощью системы управле-
ния осуществлять замену одного средства РЭБ на другое, одного комплекса помех
на другой. Это повышает надежность комплекса и сохраняет высокую его эффек-
тивность при выходе из строя отдельных устройств БКО.
При создании современных комплексов РЭБ используют базовый принцип их
построения, сущность которого заключается в использовании при разработке ряда
комплексов РЭБ базовой конструкции и постоянной составляющей (стационарной
части) в составе базового комплекса РЭБ. Комплексы индивидуальных средств РЭБ,
9.2. Система информационного обеспечения
367
разработанные для размещения на определенных типах ЛА, получили название
базовых бортовых комплексов обороны (ББКО). Состав ББКО определяется типом
ЛА и его назначением. Как правило, ББКО состоит из стационарной и наращивае-
мой частей. За счет наращиваемой части задачи ББКО могут быть значительно рас-
ширены. Однако при этом следует иметь в виду, что усиление БКО может проводить-
ся только за счет сокращения вооружения и топлива. Поэтому в каждом конкрет-
ном случае необходимо проводить оптимизацию состава ББКО.
При наличии ББКО на ЛА необходимые модернизация и комплектование БКО
значительно упрощаются, а объем работ сокращается за счет снижения количества
элементов, подлежащих замене или доработке.
Так, модернизация логики управления проводится простой сменой алгоритмов
БЦВМ, введением новых команд и связей. Базовый принцип построения комплексов
индивидуальных средств РЭБ полностью отвечает требованиям стандартизации и
унификации и позволяет быстро реагировать на изменения вооружения и тактики
противника.
Стационарная часть комплекса индивидуальных средств РЭБ состоит из станций
непосредственной радиоэлектронной разведки, специальных РЛС, аппаратуры уп-
равления, индикаторных устройств, станций активных помех, работающих в различ-
ных диапазонах ЭМВ, устройств выброса расходуемых средств РЭБ устройств уп-
равления заметностью ЛА в различных диапазонах ЭМВ.
Наращивание комплекса РЭБ может происходить за счет станции активных
помех в контейнерном исполнении, устройств выброса расходуемых средств РЭБ,
средств функционального и огневого поражения РЭС противника, дополнитель-
ных устройств информационного обеспечения.
Комплекс индивидуальных средств РЭБ применяется в сочетании с различными
видами маневра и огнем. Средства БКО в основном предназначены для подавле-
ния РЭС управления оружием. Однако в некоторых случаях возможно их исполь-
зование для радиоэлектронного подавления РЭС управления войсками.
Комплексы индивидуальных средств РЭБ кроме оборонительных задач решают
и наступательные задачи. В оборонительных и наступательных операциях примене-
ние БКО существенно снижает боевые потери. Наиболее эффективным является
совместное применение комплексов групповых и индивидуальных средств РЭБ в
самом начале оборонительных действий, когда за счет применения станций помех
имеется возможность практически мгновенно ответить на агрессию противника.
Основные системы (точнее — подсистемы) БКО — это система информацион-
ного обеспечения (СИО), система управления (СУ), система исполнительных уст-
ройств (СИУ), система контроля технического состояния и боевой эффективности
БКО (СКТС).
9.2. Система информационного обеспечения
Система информационного обеспечения служит для определения радиоэлект-
ронной обстановки и состояния собственных средств РЭБ. СИО решает следую-
щие задачи:
• производит обнаружение сигналов облучающих РЭС;
• измеряет параметры сигналов;
• определяет тип обнаруженных РЭС;
• определяет степень опасности облучающих РЭС;
368
Глава 9. Комплексы РЭБ
• определяет местоположение обнаруженных РЭС;
• определяет факт атаки, тип и координаты атакующих объектов;
• определяет фазу атаки и момент пуска атакующей ракеты;
• определяет формуляр целеуказания (ФЦУ), содержащий пространственные и
частотно-временные характеристики обнаруженных РЭС;
• выдает необходимую информацию на индикатор боевой обстановки и другие
индикаторы или пульты управления.
СИО обеспечивает информацией все остальные системы РЭБ. Эта информа-
ция используется:
• для обеспечения рационального управления всеми устройствами системы ис-
полнительных устройств;
• для целеуказания противорадиолокационным ракетам и средствам функцио-
нального поражения;
• для выполнения необходимого противоракетного, противозенитного или про-
тиворадиолокационного маневра;
• для организации мероприятий по индивидуальной, индивидуально-взаимной,
взаимной и групповой защитам;
• для оценки эффективности мероприятий по РЭБ.
Информация о радиоэлектронной обстановке поступает в БКО не только от соб-
ственных средств радиоэлектронной разведки, но и по каналам ТКС от средств раз-
ведки других самолетов боевого порядка, а также наземных командных пунктов.
СИО может включать в свой состав аппаратуру оповещения об облучении, стан-
цию непосредственной радиотехнической разведки, станции разведки и пеленга-
торы, работающие в оптическом и ИК-диапазонах волн. Кроме того, в состав СИО
могут входить разведывательные устройства САП и специализированные РЛС.
На индикаторные устройства БКО выдается информация о радиоэлектронной
обстановке, об атакующих средствах противника, степени их опасности, состоянии
и режимах работы устройств БКО (об исправности систем, о запасе расходуемых
средств, о подаче электропитания и т. д.).
9.3. Система управления бортовым комплексом обороны
На основании данных, полученных от всех видов разведки, информация о си-
лах и средствах ПВО противника на маршруте полета заносится в запоминающие
устройства БКО. В память ЭВМ БКО заносится также информация о своих РЭС и
о состоянии БКО. В соответствии с поставленной задачей определяется предвари-
тельный алгоритм работы. Намеченный алгоритм управления устройствами и сис-
темами БКО уточняется в процессе полета на основании информации, поступаю-
щей от СИО, командных пунктов и других самолетов боевого порядка.
Во время преодоления ПВО система управления решает следующие задачи:
• принимает решение о способах РЭБ (обход или оборона);
• определяет главные и опасные цели (РЭС);
• осуществляет выбор алгоритма работы исполнительной системы и комплек-
са радиопомех в зависимости от ракурса атаки, типа атакующего средства,
скорости и высоты полета;
• выдает целеуказание ИК-пеленгатору для определения момента пуска ракет;
• выдает целеуказание передающим антенным системам САП;
9.3. Система управления БКО
369
• вырабатывает команду на противоракетный или противозенитный маневр;
• перестраивает алгоритмы работы при отказах и выходах из строя различных
устройств БКО;
• вырабатывает команды на отстрел расходуемых средств РЭБ и пуск ловушек;
• выдает команды на управление заметностью ЛА;
• обеспечивает ЭМС БКО и РЭК.
Частным критерием опасности атакующих средств ПВО может быть отноше-
ние текущей дальности R до атакующего средства к радиусу поражения /?п:
*оп (9.1)
Ал
При сравнении двух атакующих средств опасным считается то, для которого
&оп имеет минимальное значение. Для оценки степени опасности могут применяться
отношения скоростей сближения обороняемого самолета с атакующими истреби-
телями. Интегральный критерий опасности может быть разработан только с уче-
том совокупности различных пространственно-временных и энергетических харак-
теристик принимаемых сигналов, кинематических характеристик атакующих объек-
тов, высоты полета и др.
Могут быть две схемы обороны ЛА: маневр и (или) РЭП.
Маневр может быть обходным, противоракетным, противозенитным или проти-
ворадиолокационным. Обходной маневр возможен лишь в том случае, когда боевое
задание, боевая обстановка, информация о местоположении средств ПВО против-
ника позволяют его рассчитать и произвести. При определении возможности обхода
ЗРК анализируется расстановка средств ПВО противника на маршруте полета по
данным СИО и предварительным разведданным, получаемым с КП.
Противоракетный, противозенитный и противорадиолокационный маневры
могут эффективно применяться как самостоятельно, так и в сочетании с различ-
ными комплексами радиопомех. Все виды маневра и обход могут быть единствен-
но возможными мероприятиями по РЭБ при полном отказе БКО. Логическая схема
принятия решения на оборону, обход и маневр приведена на рис. 9.1.
Обход + оборона + маневр Маневр
Рис. 9.1. Логическая схема принятия решения на оборону, обход и маневр
Структурная схема перспективной системы управления приведена на рис. 9.2.
370
Глава 9. Комплексы РЭБ
Рис. 9.2. Структурная схема перспективной системы управления
Информация от СИО в виде формуляра целеуказаний (ФЦУ) поступает через
устройство сопряжения УС и диспетчер ДР Диспетчер Дь который может входить
в состав специализированного процессора СП, принимает ФЦУ в виде заявок на
обслуживание и размещает их в порядке приоритетов в БЗУ. В ячейках БЗУ обра-
зуется очередь заявок Зь 32, 3N.
Диспетчер Д2 предназначен для выбора из очереди заявок Зь 32, ..., 3N перво-
очередной заявки 3j на обслуживание и вызова соответствующей программы Пу для
обслуживания этой заявки. Специализированный процессор СП проводит необхо-
димые вычисления по программе Пу и формирует команды Kj для работы испол-
нительной системы и других устройств БКО. САП настраивается на нужную час-
тоту и в соответствии с полученной командой Kj создает назначенный комплекс
помех. Устройства функционального поражения и выброса средств РЭБ начинают
работать по заданной программе. Летчику (оператору) дается информация о необ-
ходимом маневре.
Команды Kj при организации индивидуально-взаимной защиты передаются по
каналам телекодовой связи ТКС на другие самолеты. Формуляры целеуказания ФЦУ,
заявки Зь 32,..., 3N, команды К{, К2,..., Ад,передаются по информационным шинам
во внешнее запоминающее устройство ВЗУ и в устройство документирования УД.
Оперативное запоминающее устройство ОЗУ предназначено для хранения про-
межуточных результатов вычислений и команд Kj,
В постоянном запоминающем устройстве ПЗУ хранится неизменяемая часть
программы работы системы управления БКО. Перепрограммируемое запоминаю-
щее устройство ППЗУ служит для хранения изменяемой части программы. Эта часть
программы может изменяться при предварительной подготовке ЛА или даже во
время выполнения боевого задания. ПЗУ и ППЗУ формируют алгоритмы работы
БКО на всех этапах выполнения боевого задания.
При автоматическом управлении в основу алгоритма может быть положен про-
граммный или адаптивный принцип управления.
Программный принцип управления закладывается в БКО на этапе проектирова-
ния. Изменения в программе могут производиться в процессе эксплуатации и бое-
вого применения комплекса РЭБ. В полете с помощью СИО производится опозна-
9.3. Система управления БКО
371
вание типа атакующего средства и выбирается последовательность помех (комп-
лекс помех) по матрице соответствий: тип атакующего средства — комплекс по-
мех. Недостатками программного способа управления являются жесткость алгоритма
и неполное использование возможностей исполнительной системы при знании про-
странственно-временных характеристик атакующих средств.
Адаптивный алгоритм управления БКО позволяет наиболее полно использовать
потенциальные возможности БКО. Однако он требует достоверного опознавания
типа атакующего средства ПВО и его пространственно-временных координат. Ис-
пользование адаптивного алгоритма в БКО является перспективным.
Предусматривается адаптация на двух уровнях: «быстрая» адаптация со сменой
алгоритмов в полете с помощью пультов управления БКО и медленная адаптация,
предусматривающая смену алгоритмов, обновление библиотеки РЭС противни-
ка и своих РЭС, модернизацию отдельных устройств и узлов БКО в процессе экс-
плуатации.
В автоматизированном режиме управление БКО производит БЦВМ, в оператив-
ную память которой закладывается необходимая информация. СУ обеспечивает
автоматическую смену программ работы БКО в зависимости от сложившейся такти-
ческой обстановки без вмешательства экипажа. На индикатор БКО выдается сле-
дующая информация: факт облучения, пространственное положение РЭС и ата-
кующего средства ПВО, фаза атаки, тип средства, степень опасности средства, те-
кущее расстояние до атакующего объекта, момент пуска ракеты, момент вхождения
ЛА в опасную зону, траектория движения ракеты, состояние средств РЭБ. При не-
обходимости экипажу выдается команда на проведение маневра и его параметры.
По окончании действия выбранного комплекса помех производится контроль
эффективности по срыву сопровождения, для чего СИО проводит доразведку и
выдает информацию в БЦВМ, где проверяется соответствие параметров принято-
го сигнала с прежними. При соответствии производится повторный цикл создания
помех данной РЛС с тем же или другим комплексом помех. При срыве атаки цикл
создания помех прерывается. БКО переходит в режим ожидания и готовности со-
здания помех новому РЭС противника.
В ручном режиме предполагается установка необходимых органов управления
БКО по данным СИО. Управление в данном случае включает:
• наведение ИК-пеленгаторов на объекты ПВО, местоположение которых пред-
варительно определяется СИО и другими информационными средствами РЭК;
• наведение на РЭС ПВО лучей приемных и передающих антенн СНРТР и САП;
• применение средств функционального поражения;
• контроль за техническим состоянием БКО, эффективностью БКО, ЭМС БКО
и РЭК.
Схема управления БКО при сочетании ручного и автоматизированного режи-
мов приведена на рис. 9.3 Сочетание ручного и автоматизированного режимов
работы БКО позволяет более полно использовать потенциальные возможности
комплекса с учетом уровня подготовки летчика или оператора.
БКО обеспечивает необходимой информацией РЭК и получает управляющие
сигналы от старшего по иерархии управляющего уровня. Связь БКО и РЭК обес-
печивает решение следующих задач:
• выдачу информации о радиоэлектронной обстановке и состоянии всех систем
бко;
• обеспечение ЭМС;
372
Глава 9. Комплексы РЭБ
Рис. 9.3. Схема управления БКО при сочетании ручного
и автоматизированного режимов
• получение дополнительной информации от различных систем РЭК в интере-
сах РЭБ;
• обеспечение тренажного режима работы БКО и РЭК для обучения экипажа
работе в сложной радиоэлектронной обстановке в условиях сильных предна-
меренных и взаимных помех.
9.4. Система исполнительных устройств
Система исполнительных устройств предназначена для решения задач радио- и
оптико-электронного подавления РЭС; радиоэлектронной зашиты бортовых РЭС;
противодействия техническим средствам разведки противника.
В состав СИУ входят:
• управляемые и неуправляемые средства поражения РЭС противника;
• средства функционального поражения РЭС;
• станции активных помех, создаваемых в различных диапазонах электромаг-
нитных волн (в радио-, оптическом, ИК-диапазонах);
• устройства выброса средств РЭБ;
• устройства управления заметностью ЛА;
• устройства, предназначенные для РЭЗ бортовых РЭС;
• устройства, предназначенные для противодействия техническим средствам раз-
ведки противника.
Основу СИУ современных и перспективных БКО составляют станции актив-
ных помех. Различный принцип построения РЭС УО, большое их разнообразие,
применение специальных схем и способов помехозащиты требуют от перспектив-
ных САП создания комплексов различных помех обнаружительным и измеритель-
ным каналам РЭС.
САП, используемые в БКО, могут иметь или не иметь разведывательные уст-
ройства. САЛ первого типа (с собственной разведывательной аппаратурой) способны
функционировать автономно или по командам, поступающим от СУ БКО. Стан-
ции активных помех второго типа (не имеющие разведывательной аппаратуры) могут
осуществлять подавление РЭС только при управлении со стороны СУ БКО и при
поступлении соответствующей информации от СИ О.
САП должна создавать эффективные помехи РЛС УО с импульсными, непрерыв-
ными и квазинепрерывными сигналами. Значительное увеличение энергетического
потенциала РЛС, применение широкополосных сигналов привело к необходимости
9.4. Система исполнительных устройств
373
существенного увеличения энергетического потенциала САП. Современное состо-
яние элементной базы дает лишь один путь значительного повышения энергети-
ческого потенциала — только за счет роста КНД передающих антенн. Последнее в
условиях размещения САП на ЛА может быть достигнуто, если в качестве антен-
ных систем будут использованы различные типы фазированных антенных решеток
(ФАР). Особенности построения САП на ФАР рассматриваются ниже, в разд. 9.6.
Так как увеличение КНД достигается путем сужения диаграммы направленно-
сти антенн, то это, в свою очередь, требует повышения точности пеленгования РЭС
с ошибкой порядка 1...3° и управления диаграммами направленности приемопере-
дающих антенн.
Структурная схема перспективной САП, имеющей повышенный энергопотен-
циал, представлена на рис. 9.4.
Рис. 9.4. Структурная схема САП с повышенным энергопотенциалом
Сигналы РЛС принимаются антенной с широкой диаграммой направленности
(ШНА) и узконаправленной приемной антенной А,, служащей вместе с пеленгато-
ром для определения угловых координат работающих РЛС.
Передающая антенна А2 также узконаправленная. Она может быть активной или
пассивной ФАР. Система анализа и управления САУ определяет тип и степень опас-
ности РЛС и наводит с помощью диаграммообразующей схемы ДОС луч передаю-
щей антенны на подавляемую РЛС. Сигналы, поступающие с предварительного
усилителя У,, используются в устройстве запоминания и воспроизведения сигна-
лов УЗИВ для формирования высокочастотного образа помехи. В САП может быть
несколько УЗИВ, что дает возможность повысить пропускную способность САП.
Модуляторы наделяют помеховый сигнал соответствующим видом помеховой мо-
дуляции. Параметры модулирующих сигналов задаются САУ. Усилители У2 служат
для усиления помехового сигнала до необходимого уровня. В качестве усилителей
используются ЛБВ или твердотельные СВЧ-приборы. САП имеет информационные
и управляющие связи со всеми системами БКО. Комплексы помех (виды, наборы
помех) могут выбираться автоматически или вручную.
Достоинством САП со встроенной аппаратурой РТР является возможность
работы как в автономном режиме, так и в составе БКО. Это повышает живучесть
БКО, однако приводит к усложнению аппаратуры и к излишнему дублированию
информационных функций.
Структурная схема САП, в состав которой аппаратура РТР не входит, представ-
лена на рис. 9.5.
Высокочастотный сигнал РЛС, принятой на обслуживание, на промежуточной
частоте fnp поступает в САП на схему коммутации каналов СККР Понижение рабо-
374
Глава 9. Комплексы РЭБ
Рис. 9.5. Структурная схема САП без аппаратуры РТР
чей частоты РЛС до значения fnp необходимо для обеспечения работы цифровых
устройств САП. Схема коммутации каналов СКК, подключает ко входам устройств
запоминания и воспроизведения сигналов УЗИВЬ УЗИВ2,..., УЗИВЛ сигналы про-
межуточной частоты, поступающие с выходов соответствующих частотных каналов
приемника ПРМ системы информационного обеспечения.
В устройстве управления УУ по командам управления Kj, поступающим от си-
стемы управления СУ, формируются управляющие сигналы, под действием кото-
рых включаются все или часть УЗИВ (в зависимости от числа обслуживаемых РЛС
и ширины спектра обслуживаемых сигналов). За счет параллельной работы УЗИВ
имеется возможность обрабатывать, запоминать и воспроизводить значительное
количество сигналов разнотипных РЛС, в том числе работающих и со сложными
широкополосными сигналами.
Команды от устройства целеуказания УЦ СИО подаются на УУ САП и на
устройство сопряжения СУ и используются для выбора режима работы САП и
комплекса помех.
Восстановленный высокочастотный сигнал подавляемой РЭС на промежуточ-
ной частоте /пр подается на модуляторы Мь М2, ..., М^, где по командам с УУ про-
водится соответствующая модуляция помехового сигнала с параметрами модуля-
ции, оптимальными для подавления выбранной РЭС. Воспроизведенный помехо-
вый сигнал на частоте подается на «свой» смеситель Смь См2,..., См^, где
смешивается с сигналом гетеродина Г станции непосредственной радиотехничес-
кой разведки СИО. Распределение сигналов по соответствующим смесителям осу-
ществляет схема коммутации каналов СКК2.
В результате преобразования сигналов промежуточной частоты fup и гетероди-
на fT спектр помехи переносится в диапазон, занимаемый спектром полезного сиг-
нала подавляемой РЭС. После усиления в усилителях У1? У2, ..., VN помеха излуча-
ется через антенную систему САП в направлении на подавляемую РЛС.
Помеховые сигналы для организации индивидуально-взаимной защиты могут
ретранслироваться на другие ЛА. Одновременно с излучением помех по сигналам
управления включаются и другие устройства СИУ: средства функционального пора-
жения, автоматы выброса средств РЭБ, устройства управления заметностью ЛА и др.
9.5. Система контроля
375
9.5. Система контроля
Система контроля БКО контролирует состояние и боевую эффективность всех
систем и устройств БКО в целом.
Под состоянием БКО понимается степень соответствия требованиям или пара-
метрам, устанавливаемым нормативно-технической документацией БКО. В основ-
ном состояние БКО определяется степенью его работоспособности.
Контроль состояния БКО обеспечивается так называемой системой встроенного
контроля ВСК. Функциональные узлы ВСК размещены в составе БКО совместно
с контролируемыми устройствами. Перспективным является дискретно-аналоговый
принцип построения ВСК, согласно которому работа одной части функциональ-
ных устройств ВСК обеспечивается дискретными кодами, а другой части — непре-
рывными (аналоговыми) электрическими или радиосигналами.
Измерительная информация в ВСК в цифровом или аналоговом виде поступа-
ет в устройства количественно-качественной оценки измеряемого параметра, срав-
нивается с эталонами и поступает в СУ и в устройства регистрации (печатающие,
самопишущие, магнитные и др.). В СУ измерительная информация используется
для принятия решения на способы РЭБ с учетом выявленных отказов некоторых
устройств БКО. Кроме того, эта информация поступает на индикаторные устройства
БКО для оповещения операторов обо всех видах отказов аппаратуры РЭБ.
ВСК кроме задачи контроля может быть использована для поиска отказавших
элементов, прогнозирования состояния, автоматической коррекции параметров,
определения надежности, коэффициента готовности. Отдельные устройства ВСК
обеспечивают работу БКО в тренажном режиме.
Оценка боевой эффективности БКО проводится системой контроля по критери-
ям боевой и технической эффективности, определенным в гл. 1. При выполнении
боевого задания СК выполняет задачу обратной связи, контролируя эффективность
проводимых мероприятий по РЭБ.
С помощью СНРТР, специализированной РЛС, ИК-пеленгаторов и оптико-
электронных разведывательных устройств СИО формирует в виде цифровых кодов
сигналы, несущие информацию об эффективности БКО. Эти сигналы несут инфор-
мацию о текущем промахе ракеты, об ошибках наведения антенн и некоторую
другую. На основании этой информации вычислительные устройства СК опреде-
ляют значение показателя эффективности по принятому критерию. Вычисленное
значение показателя эффективности сравнивают с пороговым. Если эффективность
БКО меньше допустимого значения, УУ изменяет режимы работы и параметры БКО
в соответствии со сложившейся обстановкой.
9.6. Станции активных помех на основе
фазированных антенных решеток
Проблема увеличения энергетического потенциала САП в настоящее время
практически может быть решена лишь путем увеличения коэффициента усиления
передающей антенны, что, естественно, влечет за собой уменьшение ширины луча.
Это в свою очередь требует разработки системы наведения луча передающей ан-
тенны САП на подавляемое РЭС.
Антенные системы с сосредоточенной апертурой (зеркальные, рупорные и др.)
позволяют получать необходимые значения коэффициентов усиления при больших
376
Глава 9. Комплексы РЭБ
размерах. Размещение таких антенн на ЛА и управление ими связано с значитель-
ными трудностями. Кроме того, применение антенн с сосредоточенной апертурой
исключает возможность одновременного подавления нескольких РЛС, разнесенных
в пространстве на углы, превышающие ширину луча передающей антенны.
В наибольшей степени требованию увеличения энергетического потенциала САП
удовлетворяют ФАР.
Преимущества ФАР известны:
• относительная простота размещения на поверхностях различной кривизны;
• получение высокого энергетического потенциала САП за счет когерентного
суммирования помеховых сигналов, создаваемых большим числом излучателей;
• повышение эффективности использования бортового радиоэлектронного обо-
рудования за счет применения многофункциональной распределенной ФАР;
• возможность одновременного подавления нескольких РЭС за счет мгновен-
ного формирования многолучевой диаграммы направленности;
• высокая степень быстродействия при сканировании и сопровождении подав-
ляемых РЭС;
• широкие возможности сопряжения ФАР с ЭВМ;
• высокая степень живучести и надежности.
ФАР, применяемые в комплексах РЭБ, имеют ряд существенных особенностей
по сравнению с антенными решетками, применяемыми в других устройствах:
• необходимость перекрытия широкого диапазона частот;
• широкий сектор защиты (сканирования);
• одновременное формирование нескольких лучей для приема сигналов от РЭС
и их подавления;
• сравнительно большая ширина парциальных лучей;
• небольшое число элементов ФАР;
• высокая мощность помехи, проходящей через элемент ФАР;
• простота управления поляризацией излучаемых сигналов.
В САП применяются пассивные и активные ФАР. Пассивные ФАР не содер-
жат усилителей или генераторов помеховых сигналов. В состав активных ФАР обя-
зательно входят активные элементы (усилители, управляемые высокочастотные
генераторы), выполняемые часто в виде единого блока с управляемыми пассивны-
ми элементами (фазовращателями, направленными ответвителями, аттенюаторами
и некоторыми другими элементами).
Различают проходные и отражательные пассивные ФАР, назначением которых
в САП является формирование заданной ДНА. Источником помехового сигнала
является один передатчик. На рис. 9.6 изображена упрощенная схема станции по-
мех с пассивной ФАР проходного типа.
ФАР не имеет активных элементов и состоит из основного излучателя А, антен-
ной решетки АР и диаграммообразующей схемы ДОС. Каждый элемент ДОС пред-
ставляет собой последовательно соединенные входное устройство ВУ, управляемый
фазовращатель ФВ и излучатель И (рис. 9.7).
Широкое применение нашли пассивные ФАР на основе линзовых ДОС (линз
Люнеберга и др.).
Для наведения луча передающей антенны на подавляемое РЭС в состав САП
должен входить пеленгатор, определяющий координаты РЭС. Сигналы с пеленга-
тора подаются на ЭВМ (процессор), которая совместно с ДОС формирует необхо-
димое амплитудно-фазовое распределение поля в раскрыве ФАР.
9.6. Станции активных помех на основе ФАР
377
Антенная решетка
Рис. 9.6. Схема станции помех с пассивной ФАР проходного типа
Рис. 9.7. Элемент диаграммообразующей схемы
На рис. 9.8 представлена ФАР отражательного типа. Необходимая ДНА фор-
мируется за счет облучения, параболического зеркала системой излучателей Аь
А2,..., Адг- Особенностью этой ФАР является возможность формирования веера лу-
чей. Число одновременно формируемых лучей определяется количеством излуча-
телей Ау, в качестве которых могут применяться вибраторы, щелевые и уголковые
антенны, рупоры, спирали и, возможно, элементарные антенны других типов.
Рис. 9.8. ФАР отражательного типа
Упрощенная структурная схема САП с пассивными ФАР изображена на рис. 9.9.
Рис. 9.9. Структурная схема САП с пассивными ФАР
Первая ФАР1 и пеленгатор служат для определения угловых координат подавля-
емой РЛС. Управляющий сигнал с выхода пеленгатора используется в диаграммо-
образующей схеме ДОС для формирования с помощью ФАР2 нужной диаграммы
направленности на передачу. В ДОС широко применяются быстродействующие и
малогабаритные процессоры.
378
Глава 9. Комплексы РЭБ
Широконаправленная антенна А, разведывательный приемник РП и анализа-
тор определяют несущую частоту РЛС и временные параметры принимаемых сиг-
налов. Высокочастотный образ сигнала запоминается и воспроизводится в УЗИВ.
Высокочастотный помеховый сигнал, воспроизведенный УЗИВ, модулируется
модулятором М и излучается в направлении подавляемой РЛС с помощью ФАР2.
В состав САП могут входить несколько УЗИВ, приемных и передающих ФАР.
Энергетический потенциал САП с пассивной ФАР определяется выражением
П = С7ФарР, (9.2)
где Р — мощность передатчика помех; 6фАР — коэффициент усиления передаю-
щей ФАР, равный
бфАР=М^; (9.3)
GN— коэффициент усиления отдельного излучателя; N— число элементов решетки.
Из (9.2) и (9.3) следует, что
YI = NPGn. (9.4)
Коэффициент усиления отдельного излучателя при синфазном распределении
поля в его раскрыве равен
25000
где 0О 5 и (р0 5 — ширина ДНА элементарного излучателя в азимутальной и угломсст-
ной плоскостях.
С учетом формул (9.4) и (9.5) можно получить
25000
^О.5Фо,5
PN.
(9.6)
Ширина луча 90 5 и <р0 5 выбирается из условия необходимости подавления раз-
личных РЭС в рабочем секторе врх<рр, где Д0р и А(рр — угловые размеры рабочего
сектора САП по азимуту и углу места. Наиболее часто выполняются соотношения
^0,5 ~ Фо,5 ~ Афр’
К классу пассивных ФАР относятся переизлучающие решетки, представляющие
собой систему типа «антенна-ретранслятор». Такие антенные системы переизлучают
принимаемый сигнал в направлении его прихода. Но с их помощью можно ретранс-
лировать сигналы РЭС и в направлениях, не совпадающих с направлением приема.
Повышенный интерес к пассивным переизлучающим антенным решеткам объяс-
няется целым рядом их достоинств. Так, они могут переизлучать падающую волну
в любом заданном направлении. Обладают возможностью амплитудной, фазовой
и частотной модуляции переизлучаемых сигналов. С их помощью можно управлять
поляризацией переизлучаемых сигналов. Пассивные решетки довольно просты
и дешевы, их можно изготавливать с использованием техники печатного монтажа.
Недостатком пассивных ФАР является невозможность увеличения энергетичес-
кого потенциала САП на несколько порядков из-за ограничений на мощность
выходного устройства Р и число излучателей N. Значительный прирост энергети-
ческого потенциала САП может быть достигнут при использовании активных ФАР.
Энергетический потенциал САП с активной ФАР может быть определен по
формуле (9.2), если в ней положить
P = NP[,
где Р{ — мощность активного элемента ФАР.
9.6. Станции активных помех на основе ФАР
Из формул (9.2) и (9.6) следует, что
n = N2GNPi. (9.7)
Наличие в формуле (9.7) множителя N2 свидетельствует о возможности полу-
чения значительного потенциала при небольшом значении Р}. Так, при Р}= 10 Вт,
N- 100, Gn= 10 получается П = 106 Вт.
В перспективных САП могут применяться управляемые ФАР, самофокусирую-
щиеся (самонастраивающиеся) ФАР, многолучевые антенные решетки (МАР).
Управляемые ФАР представляют собой систему излучателей, осуществляющую
перемещение луча в пространстве за счет изменения амплитудно-фазового распре-
деления поля в раскрыве решетки. Каждый элемент ФАР рис. 9.10 состоит из вход-
ного согласующего устройства СУ2, фазовращателя Ф, усилителя У (активного эле-
мента), согласующего устройства СУ2 и излучателя А2. В качестве усилителей могут
применяться ЛБВ, туннельные диоды, транзисторы и другие усилители СВЧ.
Рис. 9.10. Схема элемента ФАР
Самофокусирующиеся (самонастраивающиеся) антенные решетки (САР) отли-
чаются от управляемых ФАР тем, что для формирования луча не требуется авто-
номного пеленгатора. Согласование направления излучения с направлением при-
хода радиоволн производится путем непосредственного измерения фазы падающей
волны (пилот-сигнала) и определения на основании этих измерений требуемого
направления излучения волны.
САР представляет собой набор одинаковых модулей с индивидуальными и неза-
висимыми для каждого модуля цепями автоматической фазировки, формирующими
заданную ДНА. Различие между САР и управляемыми ФАР состоит в том, что в САР
каждый элемент, выполненный в виде модуля, фазируется самостоятельно, в то вре-
мя как в других решетках элементы фазируются все сразу (или группами) управля-
ющими сигналами, поступающими с ДОС. Каждому элементу в САР соответствует
свой фазовращатель, к которому предъявляются нестрогие требования в отношении
нелинейности фазовой характеристики, температурной нестабильности, зависимости
фазы от рабочей частоты, так как наличие фазовой автоподстройки компенсирует
все паразитные изменения фаз.
На рис. 9.11 представлена типовая схема станции помех с САР. Сигнал подав-
ляемой РЛС запоминается и воспроизводится в УЗИВ и после усиления в предва-
рительном усилителе Yj подается на САР, которая самостоятельно формирует ДНА,
главный луч которой наводится на подавляемую РЛС. В состав САР входят усили-
тели и элементы самофазирования ДОС.
Элемент (модуль) САР выполняется по схеме, изображенной на рис. 9.12.
Сигнал управления tzynp формируется фазовым детектором, на один вход кото-
рого подается напряжение, несущее информацию о фазе принимаемого сигнала, а
на второй — через переключатель П3 помеховый сигнал с произвольной фазой. Под
действием сигнала управления мупр фаза помехового сигнала изменяется в фазо-
вращателе так, чтобы в каждом антенном элементе А2 высокочастотный сигнал имел
фазу, соответствующую фазовому распределению падающего поля.
380
Глава 9. Комплексы РЭБ
Рис. 9.11. Схема станции помех с самофокусирующейся антенной решеткой
2 3
Рис. 9.12. Элемент (модуль) станции помех
с самофокусирующейся антенной решеткой
Фазовый детектор, устройство управления, управляемый фазовращатель в режи-
ме самонастройки выполняют задачу ФАПЧ. При этом переключатели П1? П2и П3
находятся в положениях 3. В режиме передачи переключатели Пь П2 и П3 перево-
дятся в положение 2. Фазовращатели не меняют значения фазовых сдвигов, и в со-
ответствии с принципом взаимности максимум ДНА антенной решетки в режиме
передачи направляется на подавляемую РЛС. Скорость фазирования, определяемая
динамическими свойствами системы ФАПЧ, должна быть достаточной для компен-
сации нестабильностей, вызванных движением цели и другими причинами.
К самонастраивающимся антенным решеткам относятся активные переизлуча-
ющие решетки, которые отличаются от пассивных наличием усилителей в соеди-
нительных линиях рис. 9.13. Антенна А станции помех имеет широкую диаграмму
направленности. Разведывательный приемник РП распознает сигналы РЭС и управ-
ляет соответствующими модуляторами, входящими в состав устройства управления,
наделяя переизлучаемые сигналы необходимой помеховой модуляцией.
Рис. 9.13. Самонастраивающаяся активная переизлучающая решетка
Значение коэффициента усиления цепи ретрансляции ограничено взаимной
связью между излучателями и их неполным согласованием. Неполное согласова-
9.6. Станции активных помех на основе ФАР
381
ние излучателей вызывает фазовую ошибку фош, значение которой может быть оп-
ределено из выражения [24]
Фош = агс*ё
к2 к2
отрус
1/1 -ЛЗт
Ух отр
(9.8)
где куС — коэффициент усиления тракта ретрансляции; /сотр — коэффициент отра-
жения:
> =ксв-1 (99)
01р КСВ + 1
Недостаточная развязка в циркуляторах также накладывает ограничение на уси-
ление. Максимальный коэффициент усиления, обусловленный этой причиной, свя-
зан с развязкой циркулятора следующим выражением:
к
''ус шах
дБ,
(9.Ю)
*^лДёфош max
где (р'ош тах — максимальная фазовая ошибка, обусловленная несовершенством раз-
вязки циркулятора; J— развязка между соседними элементами антенной решетки.
Так, если ф'оштах = 0,5 рад и J = 0,1 (развязка по напряжению J = 20 дБ), то
коэффициент усиления не должен превышать к?с тах = 17 дБ.
Вследствие трудности реализации значительных развязок между элементами в
решетках с двухсторонними усилителями и циркуляторами (рис. 9.13) применяют
активные переизлучающие решетки с раздельными антеннами и односторонними
усилителями, см. рис. 9.14.
Приемная АР Передающая АР
Рис. 9.14. Переизлучающая решетка с раздельными
антеннами и усилителями
Потребное усиление и развязка /между приемными и передающими антеннами
определяются из уравнения РЭП. Для получения значительных развязок (/< 50 дБ)
приемную и передающую подрешетки разносят на большие расстояния и приме-
няют развязывающие устройства из высокочастотных дросселей и экранов.
Для обеспечения максимально возможных развязок | /|тах коэффициент усиления
ретранслятора оптимизируется [63]. Алгоритм оптимизации приведен на рис. 9.15.
В соответствии с этим алгоритмом оптимизация коэффициента усиления прово-
дится следующим образом.
Вначале, на первом шаге оптимизации, производится проверка наличия самовоз-
буждения тракта ретрансляции. Если самовозбуждения нет, то коэффициент усиле-
ния куС увеличивается дискретно на А децибел. На рис. 9.15 этому соответствует
ветвь алгоритма «нет».
В момент возникновения автогенерации происходит уменьшение к?с на А деци-
бел (ветвь «да» алгоритма на рис. 9.15). Значение коэффициента усиления, получа-
382
Глава 9. Комплексы РЭБ
Рис. 9.15. Алгоритм оптимизации коэффициента
усиления ретранслятора
емое после первого же шага снижения на дискрет А, соответствует максимально
достижимому значению усиления /сус тах. Достоинством рассмотренного алгоритма
являются его простота и возможность адаптации при изменении внешних и внутрен-
них условий работы (размещение антенн, изменение температуры и других внешних
факторов).
Большие перспективы имеет применение в САП многолучевых антенных реше-
ток (МАР). МАР — это антенные решетки с несколькими независимыми входами,
каждому из которых соответствует своя парциальная диаграмма направленности.
МАР состоит из ряда излучателей АР..АМ диаграммообразующей схемы ДОС и
набора генераторов Гр.Ту (рис. 9.16).
Kn
Ai Аг
Рис. 9.16. Многолучевая антенная решетка
Особенность ДОС состоит в том, что она формирует в раскрыве решетки с излу-
чателями такое амплитудно-фазовое распределение поля, при котором каждому из
А входов соответствует свой парциальный луч. Так, при подключении к клемме 2
генератора Г2, формируется луч 2 независимо от того, имеются ли сигналы на дру-
гих N- 1 клеммах. Энергия в такой схеме с любого входа распределяется на все излу-
чатели, а длина пути, который проходит волна от различных входов до выходов,
оказывается разной. Параметры ДОС выбираются так, что сдвиги фаз токов в излу-
чателях пропорциональны номеру входа, а коэффициент пропорциональности (на-
клон фазового фронта) зависит от номера входа, через который поступает энергия.
МАР перекрывает заданный рабочий сектор Д6 веером независимых диаграмм
направленности /}(0,ср), где Ze 1: N.
9.6. Станции активных помех на основе ФАР
383
ДОС многолучевых решеток осуществляет преобразование Фурье входного рас-
пределения поля Еъх, следовательно
£вых J Ет{х)е JW*xdx,
—сю
2л . Л
где = —— sin0 = y — пространственная частота; 0 — угол между направлением
Л
излучения волны и нормалью к решетке; х — координата входной апертуры ДОС
(точки подключения генератора Гь Г2,VN).
Наиболее наглядно этот эффект проявляется в ДОС оптического типа (рис. 9.17).
Рис. 9.17. ДОС оптического типа
Ширина спектра пространственных частот ограничена пространственной час-
тотой МАР
<9!1)
Л
где
sinO^ =9^-;
(9.12)
d — размер элементарного излучателя.
Ширина парциального луча равна =— (L — размер решетки). Уровень пе-
ресечения соседних лучей -4 дБ.
Структурная схема САП с МАР изображена на рис. 9.18.
Рис. 9.18. Структурная схема САП с МАР
В САП могут применяться ДОС оптического и матричного типов. Входная и
выходная ДОС формируют веер лучей. При попадании сигнала РЛС в р-й прием-
384
Глава 9. Комплексы РЭБ
ный луч на р-м выходе схемы выбора каналов образуется высокочастотный сигнал
с несущей частотой облучающей РЛС. После усиления и соответствующей обра-
ботки он наделяется помеховой модуляцией и поступает на р-й вход выходной ДОС,
которая формирует на выходе необходимое амплитудно-фазовое распределение.
Поле, образующееся на выходе ДОС, усиливается системой выходных усилителей.
Если выходные усилители не вносят искажений в амплитудно-фазовое распределе-
ние поля на их входах, то система выходных излучателей А2 формирует ДНА, луч
которой совпадает с р-м приемным лучом. САП «отвечает» излучением помехи в
направлении на облучаемую РЛС. В общем случае пространственные положения
приемных и передающих лучей могут не совпадать. При создании помех импульс-
ным РЛС в состав САП входит УЗИВ.
В качестве ДОС в самонастраивающихся МАР, работающих в сантиметровом
диапазоне, могут применяться оптические ДОС (зеркального или линзового типа).
Оптические ДОС просты в конструктивном отношении. Однако размещение этого
типа ДОС на ЛА вызывает ряд трудностей, особенно если размер ДОС велик.
Существенным преимуществами в длинноволновом участке сантиметрового
диапазона, в дециметровом и метровом диапазонах обладают матричные ДОС па-
раллельного или последовательного типа. Матричные ДОС сравнительно просто
размещаются на криволинейных поверхностях ЛА.
Параллельные матричные ДОС (схемы Батлера) позволяют формировать веер
ортогональных лучей, положение которых смещается на угол 80 в зависимости от
изменения длины волны на величину ДА:
8O = tg6^, (9.13)
А
где 0 — угол, отсчитываемый от нормали к решетке (0 < 70°).
Следует заметить, что в этой схеме частотное качание лучей является принци-
пиальным свойством схемы и имеет место даже при использовании в ДОС частот-
но независимых ответвителей и фазовращателей. Изменение частоты приводит к
неоднозначности отсчета пеленга. Однако для ретрансляционной схемы (рис. 9.18),
когда пеленг РЛС определяется адекватной приемной МАР, частотное качание луча
не сказывается на эффективности подавления, так как при этом не имеет значения
по какому приемному лучу осуществляется прием сигналов. Веер приемных и пе-
редающих лучей поворачивается синхронно.
Матричные схемы ДОС последовательного типа (матрицы Бласса) формируют
веер ортогональных частотно независимых лучей. Изменение частоты сказывается
лишь на ширине парциальных лучей. Элементы решетки могут размещаться на про-
извольных поверхностях (конформные решетки). Рассматриваемые ДОС имеют
большие энергетические потери, так как часть энергии тратится на согласованных
нагрузках ДОС.
9.7. Устройства запоминания и воспроизведения
сигналов радиоэлектронной системы
Назначением устройств запоминания и воспроизведения сигналов (УЗИВ) РЭС
является запоминание частотно-временной структуры сигналов РЭС; воспроизве-
дение в необходимые промежутки времени запомненных сигналов; синтез радио-
помех, наносящих наибольший информационный ущерб подавляемым РЭС.
9.7. Устройства запоминания и воспроизведения сигналов РЭС
385
Разработка УЗИВ всегда считалась, с научно-технической точки зрения, наи-
более трудной задачей. До недавнего времени проблема запоминания и воспроиз-
ведения высокочастотных сигналов РЭС решалась на базе аналоговых устройств.
В САП практическое применение нашли два типа аналоговых УЗИВ: многоканаль-
ные УЗИВ на основе матричных приемников определения частоты сигналов и од-
ноканальные УЗИВ, использующие принцип генератора с запаздывающей обрат-
ной связью (см. разд. 5.6).
Матричные многоканальные УЗИВ, применяемые в современных САП для
длительного запоминания несущей частоты высокочастотных сигналов РЭС, исполь-
зуют для определения частоты — матричные приемники, для запоминания — триг-
герные схемы, а для воспроизведения — набор гетеродинов. Основными недостат-
ками матричных многоканальных УЗИВ являются:
1) невозможность запоминания и воспроизведения всех частотно-временных па-
раметров сигнала РЭС (определяется и воспроизводится только несущая частота
РЭС) и низкая точность измерения и воспроизведения частоты, равная
у А/пр m (9.14)
J 2 ’
где Д/пр т — полоса пропускания фильтра последнего столбца матричного прием-
ника (для современных матричных многоканальных УЗИВ Д/= 1...10 МГц);
2) большое число высокочастотных элементов (избирательных фильтров, гете-
родинов, смесителей) [19]
(9.15)
V 8/
где п — число столбцов в приемнике; Д/р — рабочий диапазон частот САП; при
п = 3, Д/р = 109 Гц и Д/= 103 Гц имеем
3) трудности обеспечения ЭМС из-за наличия большого числа гетеродинов и
смесителей;
4) плохая РЭЗ, обусловленная генерацией сигналов в разных нерабочих диапазо-
нах частот при одновременном воздействии на приемник нескольких сигналов РЭС
противника с разными несущими частотами;
5) значительные масса и габариты.
Одноканальные УЗИВ, как правило, используют усилитель (ЛБВ), охваченный
запаздывающей на время т3 обратной связью.
Достоинством одноканального УЗИВ является возможность неискаженного вос-
произведения входного сигнала ис (/), если его длительность тс не превышает време-
ни задержки тс < т3 — на выходе УЗИВ образуется сигнал, представляющий собой
пачку копий входных сигналов ис (/):
У
MnW=ZMc(/-^3)> (9.16)
к=0
где к = 0, ..., N.
При тс т3 УЗИВ переходит в режим генерации и на его выходе образуется
сигнал
ц,(/) = V cos 2nfnt, (9.17)
386
Глава 9. Комплексы РЭБ
где
к
^3
(9.18)
здесь fc — несущая частота сигнала РЭС; fn — несущая частота помехи.
Одноканальное УЗИВ, работающее в режиме генерации, воспроизводит часто-
ту РЭС с большой ошибкой. Из (9.18) следует, что точность воспроизведения равна
5/ = —. (9.19)
Следовательно, для обеспечения точности воспроизведения, например, 8/ =
= 10-3 Гц необходимо иметь высокочастотные линии задержки, обеспечивающие
т3 = 10"3 с. Если линия задержки выполнена на волноводе, то его длина должна со-
ставлять I = ст3 = 3-105 м, что явно нереально.
Для получения значительных задержек в десятки и сотни миросекунд могут быть
использованы ЛЗ на поверхностных акустических волноводах (ПАВ) или волокон-
ных световодах. Пример построения УЗИВ с линиями задержки на ПАВ или све-
товодах показан на рис. 9.19.
Рис. 9.19. УЗИВ с линиями задержки на ПАВ или световодах
Сигнал uQ (/) после усиления преобразуется в преобразователе Пвх в акустичес-
кие или электромагнитные волны оптического диапазона, задерживается на время
т31,..., тзУУи после обратного преобразования в радиосигнал поступает вновь на вход
усилителя. В результате происходит размножение сигнала РЭС.
Структура входного сигнала может быть искажена путем переключения выхо-
дов линии задержки по соответствующему закону.
Недостатками одноканального УЗИВ являются ограниченное время запомина-
ния сигнала, необходимость использования большого числа высокочастотных эле-
ментов и трудности изменения алгоритмов их работы.
В последнее время разработаны цифровые устройства запоминания и воспро-
изведения сигналов (ЦУЗИВ). Их внедрение в САП стало возможным благодаря
бурному развитию цифровой обработки сигналов и ЦВМ. Большим достоинством
ЦУЗИВ является возможность высокоточного измерения параметров радиосигна-
лов и запоминание их структуры на неограниченное время. Однако цифровые УЗИВ
имеют и свои недостатки, связанные с ограничением по широкополосности и по
стоимости. Поэтому аналоговые УЗИВ не потеряли своего значения. Особенности
построения ЦУЗВС рассмотрены в разд. 5.5.
9.8. Возможные контрмеры противника по снижению эффективности БКО 387
9.8. Возможные контрмеры противника, направленные
на снижение эффективности бортового комплекса обороны
Наметились два направления борьбы с помехами. Во-первых, уменьшение эф-
фективности помех пассивными способами за счет улучшения помехоустойчивости
систем (применение специальных сигналов и оптимальной их обработки, простран-
ственной, временной, частотной селекции сигналов и помех, других мер улучшения
помехозащиты). Во-вторых, применение активных способов противодействия сред-
ствам РЭБ путем создания помех станциям непосредственной радиотехнической
разведки, аппаратуре СИО и САП (помехи этого вида могут быть названы контр-
помехами).
Рассмотрим более подробно последнее направление. Мощность помехи на вы-
ходе приемного устройства подавляемой РЛС равна
рп=рп(/)^2(/)#,
о
(9.20)
где
^п=-%Л5пп(/)Г2(е,<р);
(9.21)
Gn, /’(Ojtp) — максимальный КНД передающей антенны САП и ее диаграмма на-
правленности; А — эффективная площадь антенны РЛС; R — дальность до поста-
новщика помех; 5ПП(/) — спектральная плотность помехи (на входе передающей
антенны САП); ^(/) — амплитудно-частотная характеристика приемника РЛС.
Основная задача активных контрмер состоит в снижении спектральной плотно-
сти помехового сигнала 5П (/) на входе приемника РЛС в пределах его полосы про-
пускания.
Из (9.21) следует, что уменьшение 5(/) возможно двумя способами: за счет де-
формации спектра помехи рис. 9.20 или за счет деформации диаграммы направ-
ленности передающей антенны САП рис. 9.21.
j L Snn(0
i k Snn(0
Рис. 9.20. Деформация спектра помехи
Деформация 5П(/) возможна при использовании противником недостатков
станций помех ретрансляционного типа, связанных с особенностями их работы при
воздействии на САЛ нескольких сигналов разной мощности.
Изменение диаграммы направленности передающей антенны САП может быть
произведено в самонастраивающихся САЛ с ФАР или в САП с пеленгаторами путем
388
Глава 9. Комплексы РЭБ
Рис. 9.21. Деформация диаграммы направленности передающей антенны САП
создания противником пространственнокогерентных контрпомех, деформирующих
необходимым образом (с пользой для противника) амплитудно-фазовое распреде-
ление в раскрыве приемных антенных систем САП.
В современных и перспективных САП широко применяются ЛБВ, которые
являются нелинейными усилителями. Типичная амплитудная характеристика ЛБВ
приведена на рис. 9.22. Амплитудной характеристикой РВЫХ(РВХ) называется зави-
симость выходной мощности ЛБВ от мощности сигнала на входе ЛБВ.
Амплитудная характеристика имеет три участка. Участок I характеризует линей-
ную зависимость Рвых от Рвх, участок II — насыщение, участок III имеет отрица-
тельную производную. Характерными для реальных условий работы являются уча-
стки I и II.
Пусть на входе тракта ретрансляции ЛБВ действуют два сигнала:
щ (/) = t/Bxl cos св!/; и2 (г) = t/Bx2 cosco/. (9.22)
Обозначив Q = coj - со2 и учитывая, что
cosco2/ = cos(cot +Q)/ = cosQ/cosco/ -sinQ/sin со/, (9.23)
и Q « co15 сумма W = wi W + w2(*) может быть представлена в виде биений
«вх (') = ^вх (/)cos[®i/ + у(/)], (9.24)
где
ВХ1
, 2CZbx2 Г^вхг)
1 + —— cosQ/+ — 2
^BXl >
^вх2 sin £2/
у(/) = arctg ^BXl-----. (9.25)
1ч——cos £2/
^вх!
Огибающая имеет максимальное значение {/вх1 + ^4x2, и минимальное UBXl - UBx2
(рис. 9.23).
9.8. Возможные контрмеры противника по снижению эффективности БКО 389
Рис. 9.23. Пороговое значение входного сигнала, соответствующее насыщению ЛБВ
Влияние нелинейности ЛБВ сказывается при
вх 1 — ^вх2 > ^пор ’
(9.26)
где Ц1ор ~ Рпор — пороговое значение входного сигнала, соответствующее насыще-
нию ЛБВ (рис. 9.26).
Выходное напряжение представляет собой колебание с постоянной амплитудой,
модулированное по фазе:
«вых (') = ^вых cosfov + v(/)]. (9.27)
При условии £/вх1 »иъх2 из (9.25) следует, что
= (9.28)
^ВХ1
индекс фазовой модуляции \|/тах = 1 очень мал и спектр выходного напря-
^ВХ1
жения
= arctg
^вых (^) ^вых cos [со,/ + Vmax sinQ/j
(9.29)
состоит из трех составляющих на частотах со,, со2 = со, + Q, со3 = со, -Q (рис. 9.24).
Вход ЛБВ
со
Выход ЛБВ
(О
о>1 со2 = (01 + Q
(Оз = (Оз — О (01 (02 = (01 + О
Рис. 9.24. Спектры входного и выходного сигналов
Анализ (9.29) и рис. 9.24 показывают, что особенностью прохождения двух сиг-
налов через ЛБВ являются подавление (ослабление) слабого сигнала и изменение
спектра — появление составляющей на частоте со3 = cd1 - Q = 2со, - со-
предельное подавление слабого сигнала иъх (/) сильным (/) происходит при
^вх 1 » ^вх2 •
Соотношение амплитуд спектральных составляющих на выходе составляет К{2/2,
в то время как на входе оно было в два раза больше. В общем случае коэффици-
ент ослабления К = -^вых-
^вых2 ^вх2
рис. 9.25 приведен график Косл.
зависит от входного соотношения амплитуд. На
390
Глава 9. Комплексы РЭБ
О 0,2 0,4 0,6 0,8 1,0
Рис. 9.25. График
Мощность выходного сигнала ЛБВ, работающей в режиме насыщения, посто-
янна и равна
/’вых = /’1+Л + А-
(9.30)
где
Л =^ых; Рг = = К.зрх- Р3 = А^<Хых = KJ\-
(9.31)
К3 - ^осл^\2 — коэффициент использования энергии ЛБВ, характеризующий рас-
пределение энергии (мощности) излучаемого сигнала по спектру (рис. 9.25). Коэф-
фициент К^с1 находится из графика рис. 9.25. Коэффициент К?2 характеризует
входное соотношение мощностей:
^22=^-. (9.32)
Из (9.31) следует оценка выходной мощности
Лзых = Р{+КЭР1 + КЭР{.
Отсюда мощность помехи на частоте (Oj
р
р _ f вых
П1 “ 1+2АГ/
(9.33)
(9.34)
Мощность помехи на частоте со2
Л12 =
----—рх
1+2/Сэ 1
(9.35)
Пример. Пусть энергетические потенциалы подавляемых РЛС отличаются в
10 раз, т. е. Ку2 = 0,1. Из графика рис. 9.25 находится А^сл =0,25. Следовательно,
Кэ = 0,025 и мощность помехи, предназначенной для подавления РЛС с меньшим
энергетическим потенциалом, равна Рп2 = 2,4-10~2 Рвых, т. е. в 40 раз меньше мощно-
сти помехи, излучаемой на частоте (Ор
Проведенный анализ показывает, что специальными контрмерами противник мо-
жет вызвать переход САП в нелинейный режим работы, соответствующий насыще-
нию тракта ретрансляции (участок II амплитудной характеристики ЛБВ на рис. 9.22).
В качестве таких контрмер могут быть применены специальные блокирующие пере-
датчики, однотипные РЛС с различным энергетическим потенциалом. Эти контр-
меры приводят к значительному перераспределению энергии помехи по спектру.
Для ослабления этого эффекта необходимо обеспечить работу САП на линей-
ном участке амплитудной характеристики тракта ретрансляции.
При планировании мероприятий по РЭБ необходимо учитывать возможность
применения противником указанных контрмер. Зоны подавления РЛС противника
необходимо рассчитывать для двух случаев.
9.9. БКО как система массового обслуживания
391
1. Когда Рп вых = Рп вх1 + вх2 < Люр» то мощность излучаемых помех равна
^п1 — Vn вх1’ ^п2 = АрРп вх2>
где Хр — коэффициент усиления тракта ретрансляции.
2. Когда Рп вх = Рп ВХ1 + Рп вх2 > Рпор, то энергетический потенциал станции по-
мех определяется с учетом выражений (9.34) и (9.35).
9.9. Бортовой комплекс обороны как система
массового обслуживания
При эксплуатации и боевом применении систем, комплексов и средств РЭБ по-
лезно представление модели БКО в виде системы массового обслуживания (СМО).
Модель БКО может рассматриваться как одноканальная СМО, если любое из воз-
можных РЭС противника обслуживается (в смысле РЭБ) в порядке единой очереди
в соответствии с приоритетом ФЦУ. Даже при многоканальной радиотехнической
разведке во всем рабочем диапазоне частот бортовой комплекс РЭБ как СМО, не
является еще многоканальным, так как одновременно в любой части диапазона
сигналы РЛС не могут быть приняты, обработаны и каждой РЛС не могут быть
созданы помехи. БКО в соответствии с положениями теории массового обслужива-
ния является многоканальным, если любой сигнал РЛС может быть принят на об-
служивание (хотя бы и в порядке очереди) сразу же при поступлении на вход разве-
дывательных приемников.
Важнейшей характеристикой БКО, предназначенного для обслуживания (в смы-
сле РЭБ) большого числа РЛС противника, является вероятность обслуживания
заявки р0. Процедура определения вероятности зависит от выбранной модели
потока заявок. Практика показывает, что поток заявок удовлетворительно аппрокси-
мируется простейшим или стационарным пуассоновским потоком. Такое представле-
ние потока заявок для современных РЭС оправдывается тем, что простейшие по-
токи являются наиболее «трудными» для обслуживания СМО. Система массового
обслуживания, спроектированная для обслуживания простейших потоков, оказы-
вается способной работать в более сложных условиях с непростейшими потоками,
имеющими одинаковую интенсивность.
Простейший поток характеризуется экспоненциальным законом распределения
длительности интервала Т между поступающими заявками:
p(Z.) = Xe-xr, (9.36)
где Х = 1/7ср плотность потока заявок, равная среднему числу РЛС, облучающих
ЛА в единицу времени; Тср — средний интервал между заявками. Среднее число
облучающих РЭС равно
7VP3C=Xr, (9.37)
где Т — время работы БКО.
Вероятность р0 зависит от быстродействия БКО, под которым понимается вре-
мя отсчитываемое от момента поступления на вход СИО сигнала РЛС до момента
начала создания помех этой РЛС. Быстродействие БКО, определяемое главным об-
разом быстродействием СУ, при одноканальной схеме обслуживания является слу-
чайной величиной. Плотность распределения вероятности при выбранной мо-
дели потока заявок описывается экспоненциальным законом
(9.38)
392
Глава 9. Комплексы РЭБ
где Ц = —
* ср
— интенсивность (частота) обслуживания заявок; Тср — среднее время
обслуживания (среднее быстродействие СУ или БКО).
Вероятность обслуживания заявки (ФЦУ) через время / равна
Ц
Ро =7------
Л, + ц
е-(х+м)'
(9.39)
В установившемся режиме, когда t» Гср
Ц
Ро=7---•
X + ц
(9.40)
Из уравнения (9.40) следует, что р0 « 1 только при ц » X, т. е. при условии
Гб « Тср, хотя из интуитивных соображений представляется, что при одинаковой
плотности заявок и интенсивности обслуживания (X = ц) должно быть р0 = 1. Од-
нако из (9.40) следует, что р = 0,5 (заявка может быть обслужена или не обслужена
с одинаковой вероятностью). Следовательно, для получения достаточно высокой
вероятности обслуживания р - 0,90...0,95 необходимо проектировать СУ со значи-
тельным запасом по параметру ц.
Из (9.40) находится среднее быстродействие (среднее время обслуживания) БКО
(9.41)
Vo
(9.42)
Пропускная способность БКО — это число одновременно подавляемых РЭС
противника. Средняя пропускная способность БКО равна
^БКО -^Ро*
Подставляя в (9.42) значение р0 из (9.40), можно получить
^ько= •
1 L Г1
(9.43)
Величина К3 = — — может быть названа коэффициентом загрузки БКО. Рацио-
Л,
нальное использование вычислительных ресурсов СИО и СУ имеет место при мак-
симальном значении коэффициента загрузки К3, что достигается разряжением по-
тока заявок за счет снятия с очереди ложных и второстепенных ФЦУ.
9.10. Влияние коэффициента усиления передающей антенны станции
формирования активных помех на эффективность радиоэлектронного
подавления радиолокационных станций
Эффективность радиоэлектронного подавления РЛС зависит от энергетичес-
кого потенциала САП. Сложилось не совсем правильное мнение о возможности
чуть ли не безграничного увеличения энергетического потенциала САП за счет ис-
пользования высоконаправленных антенн (например, ФАР с большим числом
элементов и большой апертурой). Однако существуют ограничения на коэффици-
ент усиления передающей антенны САП. Эти ограничения связаны с влиянием
размеров антенн САП на радиолокационную заметность прикрываемого самолета.
При увеличении коэффициента усиления передающей антенны (7П, как извест-
но, происходит увеличение энергетического потенциала САП. Однако рост (7П явля-
9.10. Влияние коэффициента усиления передающей антенны САП...
393
ется следствием возрастания размеров антенны, что, в свою очередь, вызывает
увеличение радиолокационной заметности самолета за счет возрастания вклада ЭПР
антенны оА в суммарную ЭПР самолета оц.
Когда эквивалентная ЭПР антенны оА становится соизмеримой с ЭПР самолета
оц = оА, дальнейшее увеличение энергетического потенциала САП за счет роста
коэффициента усиления передающей антенны не приводит к увеличению эффек-
тивности РЭП. Более того, эффективность РЭП при слишком большом значении (7П
может быть существенно снижена.
Оптимальное значение коэффициента усиления передающей антенны Сопт оп-
ределяется с использованием уравнения РЭП для случая самоприкрытия:
К = 4я
(9.44)
где Рп — мощность передатчика помех; (7П — коэффициент усиления передающей
антенны; Рс — мощность передатчика РЛС; (7С — коэффициент усиления переда-
ющей антенны РЛС; Аи — расстояние между РЛС и САП; оцЕ — суммарная ЭПР
самолета.
Суммарная ЭПР самолета, на котором установлена САП, может быть опреде-
лена как
ОцЕ=сц+(5а, (9.45)
где оц — ЭПР самолета без учета установки на нем антенной системы САП; оА —
ЭПР антенной системы САП.
Эффективная площадь рассеяния самолета оц зависит от типа самолета и опре-
деляется, как правило, экспериментально. ЭПР антенной системы САП оА зави-
сит от эффективной площади антенны А и степени согласования ее со свободным
пространством и нагрузкой.
В соответствии с теоремой взаимности передающая антенна, имеющая аперту-
ру 5А, может быть заменена соответствующей приемной антенной, нагруженной в
общем случае на комплексную нагрузку ZH (рис. 9.26).
Рис. 9.26. Приемная антенна, нагруженная
на комплексную нагрузку ZH
При падении на антенну плоской волны с напряженностью поля Е мощность
поля, принимаемого антенной, равна
РА=рА, (9.46)
(lE|2)
где р = ---- — плотность потока мощности падающей волны; А — эффективная
240л
площадь раскрыва антенны; ^|Е|2^ — среднее значение квадрата напряженности
электрического поля.
394
Глава 9. Комплексы РЭБ
Эффективная площадь раскрыва антенны связана с коэффициентом усиления
антенны:
X2
A = ~rGn- (9.47)
Мощность, отдаваемая в нагрузку, равна
(9.48)
где
;=, 4ЛЛ,2; Za=R.+jXa- ZK=Rn+jXn- (9.49)
Ин +^а|
7?н, — активные сопротивления нагрузки и антенны; Хн, — реактивные со-
противления нагрузки и антенны. Мощность, рассеиваемая антенной, распределя-
ется между собственно антенной и нагрузкой:
PDac =Л + (9.50)
раС а. г! х z
С другой стороны, рассеиваемая мощность Ррас связана с полной мощностью,
перехватываемой антенной, соотношением
Л>ас=РЛ> (9-51)
где р — коэффициент отражения, характеризующий долю мощности поля, переиз-
лучаемого антенной в свободное пространство.
Из уравнений (9.46)—(9.45) следует, что
р = 1-<; = 1
4кад
(Хн+^а)2+(Лн+^)2‘
(9.52)
Отражения от антенны отсутствуют при идеальном ее согласовании с нагруз-
кой, когда выполняются условия
*а=-*н; *н=Л- (9.53)
Однако на практике условия (9.53) не выполняются и для реальных антенн ко-
эффициент отражения принимает значение р = 0,1...0,7 в зависимости от поляриза-
ции, частоты и направления падения электромагнитной волны.
В работе [67] рассмотрены зависимости коэффициента отражения р от некоторых
параметров падающей волны для антенной системы, представляющей собой антен-
ную решетку, состоящую из согласованных металлодиэлектрических волноводов
(рис. 9.26).
Рис. 9.26. Антенная решетка из согласованных
металлодиэлектрических волноводов
9.10. Влияние коэффициента усиления передающей антенны САП...
395
На рис. 9.27 представлена типичная зависимость коэффициента отражения р от
угла падения волны 0 для решетки с параметрами а/к = 0,22; d/k - 0,55; //X = 0,2;
£i/e2 = 6. Зависимости получены для частоты^, при которой имеет место наилучшее
согласование антенны со свободным пространством. При расстройке Д/ = |/-Уо1
наблюдается квадратичная зависимость приращения р от Д/:
кА) 7
где р0 — коэффициент отражения при f - fQ.
отражения р от угла падения волны 0
Антенна САП может быть заменена эквивалентной пластиной, имеющей отра-
жающую площадь S, пропорциональную эффективной поглощающей площади
антенны А:
S = pA. (9.55)
ЭПР такой пластины при однопозиционном рассеянии равна
4л52
а = —
X2
Подставляя (9.55) в (9.56), можно получить
4к 2 л 2
СТА =тур А .
Л
Из (9.47) и (9.57) следует, что
2а2
р Л
О а =“---
А 4л
(9.56)
(9.57)
(9.58)
Учитывая (9.44), (9.45) и (9.57), можно представить уравнение РЭП в другой
форме, а именно: .
К = 4П^---------(9.59)
Рс6с р2^2^п
ц 4л
На рис. 9.28 изображена зависимость приведенного отношения помеха/сигнал на
входе приемника КП„ от коэффициента усиления антенны Gn при Xj = 3 см, = 10 см
и Х3 = 30 см. Приведенное отношение помеха/сигнал Л'™ равно
_ К Gn
пр 4лРпЯп D2X2
1+-*——g2
4лс?ц
(9.60)
396
Глава 9, Комплексы РЭБ
Рис. 9.28. Зависимость приведенного отношения помеха/сигнал
на входе приемника от коэффициента усиления антенны (7П
Из рис. 9.28 следует, что в сантиметровом диапазоне при увеличении коэффи-
циента усиления передающей антенны до значений (7П1 = 100 отношение помеха/
сигнал на входе подавляемого приемника растет линейно. При Gn > Gnl начинают
проявляться существенные отличия в зависимостях от 6'11 для разных длин волн.
Из (9.59) может быть найдено оптимальное значение 6П0ГГГ, при котором К- Кт^.
п тах" рХ
(9.61)
Выражение (9.61) позволяет обосновать требования к значению коэффициента
усиления передающей антенны САП. Как следует из (9.61), наиболее существенно
максимально допустимое усиление антенны (7П опт зависит от степени ее согласо-
вания со свободным пространством р и от длины волны X. В меньшей степени (про-
порционально 7^7) <7П0ПТ зависит от ЭПР самолета.
ЭПР оптимальной антенной системы САП с учетом (9.58) и (9.61) равна
^Аопт “ <*ц- (9.62)
Подставляя (9.61) в (9.62), можно найти максимальное значение отношения
помеха/сигнал на входе подавляемого приемника РЛС:
max
XpPcGc
(9.63)
Приравнивая правую часть соотношения (9.63) коэффициенту подавления, мож-
но определить минимальное значение мощности передатчика САП РП min, потреб-
ной для подавления РЛС до заданной минимальной дальности подавления 7?п min.
Выражение (9.63) дает возможность реализовать идею адаптивного управления
мощностью передатчика помех. Если имеются априорные зависимости коэффици-
ента р и ЭПР цели от направления на подавляемую РЛС и от длины волны X, т. е.
р = р(о), оц=оц(е), (9.64)
то закон управления мощностью передатчика помех имеет вид
п min ^|р(®>ф)^®ц (®>ф)>
(9.65)
(9.66)
где
K{PCGCX
4лл/л/?п mjn
9.11. Облик современной цифровой станции активных помех
397
Проведенный анализ влияния параметров передающей антенной системы САП
на эффективность РЭП показал, что при разработке антенных систем САП необ-
ходимо обращать внимание на их согласование со свободным пространством. При
плохом согласовании р = 0,5...0,9 невозможно добиться высокого энергетического
потенциала САП за счет простого увеличения коэффициента усиления антенны.
9.11. Облик современной цифровой станции активных помех
На рис. 9.29 изображена структурная схема современной самолетной станции
активных помех индивидуальной защиты [7]. Опишем функционирование этой
станции, сделав акцент на особенностях работы ее цифровых элементов.
Рис. 9.29. Структурная схема современной самолетной станции активных помех инди-
видуальной защиты: 1 — приемная антенна; 2 — направленный ответвитель; 3 —
сдвигающий регистр с линейной обратной связью; 4 — устройство линейно-фазовой
модуляции («серодин»); 5 — генератор доплеровского шума; 6 — схема формирования
модулирующих по частоте и фазе помеховых сигналов; 7 — элементы схемы частотно-
фазовой модуляции; 8 — предварительный усилитель; 9 — цифровой фазовращатель;
10 — возбудитель; 11 — амплитудный модулятор; 12 — формирователь переднего
фронта импульса; 13 — смеситель; 14 — ЦУЗВС; 15 — детектор; 16 — схема хранения
программы считывания; 17 — управляющий вентиль; 18 — сумматор помеховых
сигналов; 19 — аттенюатор; 20 — схема управления лучом антенны; 21 — оконечный
усилитель мощности; 22 — передающая антенна; 23 — контроллер; 24 — генератор
шумового сигнала; 25 — генератор гармонического сигнала
Прежде всего обратим внимание на то, что одна станция имеет четыре самосто-
ятельных канала формирования помех: канал ретрансляции (на схеме он обозначен
как «повторитель»), канал работы станции в генераторном режиме («ответчик») и
два канала генерации шумовых помех («генератор шумовых помех» и «ответный шу-
мовой импульс»).
398
Глава 9. Комплексы РЭБ
Помеховые сигналы, формируемые четырьмя каналами, складываются в сум-
маторе 18. Канал ретрансляции включает элементы 7, 9, 10, 11 и 12. Важнейший
элемент этого канала — цифровой фазовращатель 9 (обычно пятиразрядный), под-
ключенный к выходу предварительного усилителя 8. Фазовращатель выполняет роль
многофункционального фазового и частотного модулятора, управляемого через
возбудитель 10, осуществляющий функции развязки и разделения сигналов. Фазо-
вращатель управляется тремя каскадами управления помех.
Первый каскад — это сдвигающий регистр 3 с линейной обратной связью,
формирующий заградительные и уводящие по скорости (доплеровской частоте)
помехи доплеровским РЛС непрерывного излучения. Он представляет собой двух-
фазный циклически работающий цифровой генератор, устанавливающий в фазо-
вращателе фазу принятого сигнала по закону псевдослучайных чисел: 0 или 180°.
Буквой С обозначен компаратор обратной связи регистра, определяющий закон
следования этих чисел, количество которых в цикле определяется числом ячеек
регистра (для пятиразрядного регистра оно равно 32 - 1 = 31). В результате двухфаз-
ной модуляции на выходе фазовращателя образуется равномерный спектр ложных
сигналов, разнесенных по частотной шкале в зависимости от тактовой частоты
регистра и длительности его цикла. В свою очередь тактовая частота меняется в
зависимости от разноса частот ложных сигналов.
Второй каскад — это генератор сигнала 4, линейно модулированного по фазе
по пилообразному закону, и генератор доплеровского шума 5. Ширина спектра этого
шума выбирается из тактических соображений и определяется диапазоном скоро-
стей сближения атакующего и защищаемого помехами объектов.
На фазовращатель подается либо фазомодулированный сигнал, либо доплеров-
ский шум. Использование режима ретрансляции, когда помеховые импульсы излу-
чаются синхронно с зондирующими импульсами РЛС или активной ГСН, затруд-
няет возможность самонаведения управляемой ракеты на источник помех.
Третий каскад представляет собой схему формирования модулирующих по часто-
те и фазе помеховых сигналов 6. Эти же сигналы через другой возбудитель 10 воздей-
ствуют на схему 11, где производится амплитудная модуляция сигнала, дополняющая
модуляцию по доплеровской частоте. Амплитудная модуляция обеспечивает подав-
ление угломерных каналов РЛС, например, при создании негативной помехи РЛС,
осуществляющим сканирование диаграммы направленности антенны, т. е. работа-
ющим в режиме поиска целей или в режиме их сопровождения «на проходе».
Вышеперечисленные три каскада 3, 4, и 6, обведенные на рис. 9.29 пунктирной
линией и имеющие номер 7, создают все виды помех, модулирующих ретрансли-
рованный высокочастотный сигнал по фазе и частоте (кроме амплитуды).
Канал работы станции в генераторном режиме включает элементы схемы 13, 14,
15, 16, 25 и элементы, аналогичные используемым в ретрансляторе, а именно 7, 9
и 10. Здесь большую роль играет ЦУЗВС 14, на которое подаются сигналы от смеси-
теля 13 и с выхода схемы хранения программы считывания 16, управляемой детек-
тором 15. Элементы 7, 9 и 10 выполняют такие же функции, как в ретрансляторе.
Однако здесь за счет ЦУЗВС на выходе цифрового фазовращателя 9 возможно одно-
временное формирование помехи, уводящей как по скорости, так и по дальности.
В правой верхней части рис. 9.29 приведена схема третьего канала — генера-
ции шумовой маскирующей помехи, создаваемой генераторами 24. Три генерато-
ра, перекрывая каждый соответствующий диапазон частот, обеспечивают создание
заградительной помехи.
9.11. Облик современной цифровой станции активных помех
399
Четвертый канал САП также создает шумовую помеху, но ее формирование про-
исходит по специальному алгоритму. Детектор 15 управляет каналом импульсно-
шумовой («накрывающей») помехи (noise cover pulse), формируя шумовой сигнал от
переднего до заднего фронта импульса. Управляющий вентиль 17 имеет р-/-л-диод,
пропускающий сигнал генератора шума во время действия каждого принимаемого
импульса РЛС и не пропускающий его в течение остального периода повторения
импульсов. Эта помеха называется «разумным шумом».
РЛС со сжатием импульса в качестве схемы защиты применяют дифференциро-
вание импульса помехи с целью выделения его переднего фронта и последующей
селекции. Чтобы нейтрализовать эту схему, в каналах импульсно-шумовой («накры-
вающей») помехи и «повторителя» (канал ретрансляции) используют так называе-
мый, формирователь переднего фронта импульса 12. Основная его роль заключается
в том, чтобы растянуть фронт излучаемого импульса помехи в 5... 10 раз и за счет
этого исключить возможность его дифференцирования схемой защиты. Отметим,
что стоящий особняком на рис. 9.29 контроллер помех 23 предусматривает управле-
ние программируемым генератором вида помехи и является своеобразным синте-
затором помехи. Он представляет собой устройство программируемой памяти
(PROM — Programmable Read Only Memories), в которой записаны цифровые коды
всего набора видов модулирующих помеховых сигналов (обычно несколько десят-
ков видов).
Такие достоинства станции, как всеракурсное подавление РЭС противника и
величина мощности помехи, способная обеспечить необходимое превышение ее
над полезным сигналом для подавления информационных каналов РЭС, оборачи-
ваются недостатками при защите летательных аппаратов, изготовленных по техно-
логии Stelth. Всеракурсность и большая мощность помехового сигнала являются
демаскирующими признаками самолетов, играя роль своеобразных «маяков» для
радиоэлектронных средств обнаружения и перечеркивая тем самым достоинства
«невидимых» ЛА. Это не значит, что малозаметные ЛА не нуждаются в комплексе
РЭБ (обязательное присутствие подсистемы информационного обеспечения на
таких ЛА не вызывает сомнений). Скорее всего, акцент будет сделан на другие
способы и средства создания помех. В частности, повысится роль ложных целей,
оборудованных активными и пассивными ретрансляторами сигналов РЛС, облу-
чающих малозаметные ЛА. Шире станет область применения радиолокационных
ловушек — управляемых, буксируемых и сбрасываемых, а также забрасываемых пе-
редатчиков помех одноразового применения [82, 87]. В любом случае, источники
излучения помеховых сигналов, обеспечивающие защиту малозаметных ЛА, долж-
ны находиться вне защищаемых объектов. В концепцию защиты вписывается ис-
пользование пассивных помех, создаваемых путем выбрасывания в больших коли-
чествах дипольных отражателей и тепловых ловушек. Разрабатываются принципи-
ально новые способы создания помех.
Второе замечание касается вопросов боевого применения комплексов РЭБ. Из-
вестно, что эффективность радиоэлектронного подавления РЭС противника зависит
нс только от технических характеристик САП. Большое значение имеет тактика
преодоления ПВО и воздушного боя, которая определяет как выбор видов и пара-
метров помех, так и способ их постановки. При наличии одних и тех же средств
индивидуальной и групповой защиты выбор рациональной тактики РЭБ может
существенно повысить эффективность этой борьбы. Реализация же разработанных
тактических приемов ведения РЭБ невозможна без использования самых совре-
менных принципов и технологий построения цифровых комплексов и систем РЭБ.
400
Глава 9. Комплексы РЭБ
9.12. Энергетический потенциал многолучевой
станции помех
Диаграммообразующая схема (ДОС) многолучевой активной антенной решет-
ки (МААР) рис. 9.30 может быть выполнена на основе схемы Люнеберга или дис-
кретных устройств — матриц Батлера или Бласса. Энергетический потенциал САП
при подавлении одной РЛС (по одному /-му лучу) определяется очевидным соот-
ношением
^сап - Л^САП»
(9.67)
где Р{ — мощность помехи на выходе z-го усилителя; ССАП — коэффициент направ-
ленного действия (КНД) антенной решетки (АР) Аь А2, ..., Ал, который определя-
ется из нижеследующих соображений.
Рис. 9.30. Активная передающая ФАР многолучевой САП
В точке Л/поле Ем (0) суммарного помехового колебания, излучаемого всеми п
элементами АР по направления 0 составит
п
Ем exp[y(/-l)Wsin0], (9.68)
/=1
где Е{ — амплитуда электрического поля, порождаемого каждым излучателем; d —
2л
расстояние между излучателями; к =-----волновой коэффициент.
Л
Суммируя (9.68) как геометрическую прогрессию со знаменателем
<7 = exp(jfcdsin0),
можно получить
м
exp(y>/Az7sin0)-l
exp(jta/sin0)-l ’
откуда, после применения формулы Эйлера, можно получить
. z?A:r/sin0
sin--------------------------------------
(9.69)
(9.70)
’ __2
м 1 . A^ZsinO
л sin----------------’
2
9.12. Энергетический потенциал многолучевой станции помех
401
ДНА системы излучателей (точнее, множитель решетки) составит
. flAz/sinO
sin-------
F(e)=£M. =------2 . (9.71)
v ' Е, . /cdsinO
1 A7S111-----
2
Искомое поле колебания помехи в точке М равно
Ем = ExnF(Q), (9.72)
а поле, создаваемое каждым элементарным излучателем А,-,
Е^Е^, (9.73)
где Ео — электрическое поле гипотетической ненаправленной антенны в точке Л/;
Gj — КНД реальной элементарной антенны Aj (Gj > 1).
Из (9.72) и (9.73) следует, что
Eu = Eoy[Gxn. (9.74)
Плотность потока мощности помехового поля в точке М (при 0 = 0)
Е2м = E2Gxn2
W 120л ’
где W= 120л — волновое сопротивление свободного пространства (вакуума).
Для ненаправленно!I антенны
р _ ЕО
Рм~Ё2^- (976)
В соответствии с определением КНД из (9.75) и (9.76) окончательно для МААР
получается, что
_О/ _ /^
^САП •
(9.77)
Следовательно, энергетический потенциал многолучевой САП равен
Псап = Л^сап = EjGjH2. (9.78)
Для корректного сравнения энергопотенциала САП с пассивной и активной
ФАР, т. е. с МАР и МААР, следует полагать, что усилители У\..Уп в схеме с МААР
(рис. 9.30) и выходной усилитель в схеме с МАР имеют одинаковые коэффициенты
усиления, так что помеховые сигналы на выходах усилителей имеют одинаковые
мощности Рвых = Р{.
В связи с тем, что выходная мощность усилителя с пассивной МАР распреде-
ляется равномерно между всеми элементарными антеннами Ар-.А^, помеховый
сигнал, излучаемый каждой антенной, имеет мощность
Pi=— • (9.79)
Поэтому энергопотенциал САП с пассивной МАР в соответствии с (9.67) равен
П' = Р1'=ОСАП = №" (9.80)
Сравнение выражений (9.78) и (9.80) показывает, что энергетический выигрыш
при использовании САП с МААР оценивается величиной
П= —= «. • (9.81)
402
Глава 9. Комплексы РЭБ
Это указывает на большие перспективы применения МААР в САП. В современ-
ных САП в качестве выходных усилителей применяются мини-ЛБВ с выходной
мощностью Рх = 100 Вт. При использовании элементарных антенн с КНД = 10
и п = 8 в соответствии с (9.78) получается, что П = PxGxn2 = 64 кВт.
До сих пор рассматривалась дуэльная ситуация, когда САП подавляла одну РЛС,
т. е. многолучевая приемо-передающая система использовала для подавления все-
го один луч (на прием и на передачу). На практике возникает необходимость одно-
временного подавления нескольких (т) РЛС. Если предположить, что каждая ья
РЛС обслуживается своим лучом САП, то вследствие ограниченной выходной
мощности усилителей мощность помехового сигнала, предназначенного для подав-
ления всех т РЛС, делится между ними поровну. Поэтому
РЛпг) = —. (9.82)
т
С учетом (9.82) из формулы (9.78) следует, что за оценочное значение энерго-
потенциала САП с МААР, одновременно подавляющей т РЛС, следует принять
П(д?? | /?) — (m)Gxn2 - — —1/7 . (9.83)
т
При подавлении импульсных РЛС, если мала вероятность совпадения импуль-
сных потоков сигналов, поступающих на вход приемной МАР, можно пользовать-
ся формулой (9.78). При этом необходимо учитывать быстродействие САП.
Применение МАР в САП создало ряд проблем. Одна из них заключается в нере-
шенной задаче определения эквивалентного энергопотенциала САП при подавлении
нескольких РЛС, работающих с сигналами на близких несущих частотахи/2. Обра-
ботка сигналов разной интенсивности — одного мощного на частоте fx и другого сла-
бого на частоте f2 при определенных условиях происходит в нелинейном режиме
работы различных схем САП (усилителей, смесителей, схем запоминания и воспро-
изведения сигналов и других устройств). Нелинейный режим работы приводит к ис-
кажению и даже подавлению слабого сигнала частоты fx и сильного —/2- При этом
САП не реагирует на слабые сигналы РЛС на частоте fx. Кроме того, число при-
нимаемых сигналов РЛС (интенсивный поток сигналов) может вызвать перегрузку
входных усилителей МААР. Перегруженные усилители будут работать в нелинейном
режиме, что приведет к искажению спектра излучаемых помеховых сигналов, что в
свою очередь приведет к существенному снижению эффективности подавления.
Имеются и другие проблемы, сопровождающие организацию контрпротиводей-
ствия САП с МАР. Так, вполне возможно применение для этих целей когерентных
контрпомех, искажающих фазовый фронт ЭМВ в апертуре приемной МАР. В ре-
зультате действия таких помех передающая МААР будет излучать помехи в другом
луче. Принципиально возможно создание противником аннигилирующих контр-
помех, в результате действия которых в апертуре приемной МАР будет «погашено»
интерференционное поле опасной РЛС и определение ее местоположения станет не-
возможным.
ГЛАВА 10
СНИЖЕНИЕ РАДИОЛОКАЦИОННОЙ ЗАМЕТНОСТИ
10.1. Снижение эффективной поверхности рассеяния
за счет выбора малоотражающей формы объекта
Заметность объектов для средств радиолокационной разведки принято оцени-
вать величиной эффективной поверхности рассеяния (ЭПР) [7]:
Оо=^гр =^(«Жрас =|yF(ct>p)^ (10.1)
где с,е [0; 1] — коэффициент деполяризации рассеянного целью поля (£); Ротр —
мощность отраженного, а Ррас — полная мощность рассеянного радиолокационной
целью сигнала; ГЦ — плотность потока мощности радиолокационного сигнала в
окрестности точки расположения цели; F(a, р) — значение диаграммы обратного
рассеяния (ДОР) цели в направлении на радиолокатор; S— полная площадь рассея-
ния цели.
Физически ЭПР представляет собой размерный коэффициент пропорциональ-
ности между мощностью отраженного радиолокационной целью сигнала и плотно-
стью потока мощности электромагнитного поля, созданного антенной радиолокатора
в точке расположения цели. Очевидно, что о0 имеет размерность м2 и зависит от
формы, размеров и электрических свойств материала поверхности цели. Объекты
радиолокационной разведки — радиолокационные цели — имеют весьма сложную
форму и рассеивают электромагнитные волны не изотропно. Значения ЭПР для
каждого конкретного направления (а, Р) могут сильно различаться.
Решить электродинамическую задачу рассеяния электромагнитного поля на
реальных телах очень трудно. Но такая задача решается для многих тел несложной
формы. Некоторые результаты решений представлены в табл. 10.1 [11], где указа-
ны значения ЭПР простейших поверхностей, из которых формируются сложные
поверхности летательных аппаратов и других технических объектов.
Как видно из табл. 10.1, плоские поверхности имеют большую ЭПР только при
направлениях облучения, близких к нормали. По всем другим направлениям ЭПР
плоских поверхностей гораздо меньше. То же справедливо и для цилиндрических
поверхностей, если они облучаются с направления, нормального к образующей.
Малоотражающими формами являются клин и конус при облучении со стороны
вершины. При одинаковых размерах наибольшими значениями ЭПР обладают
трехгранные уголковые отражатели с углом при вершине 90°.
Из-за того, что реальные рассеивающие объекты имеют сложную форму, в точке
приема наблюдается интерференционная картина парциальных сигналов, отражен-
ных от различных частей, разными элементарными отражателями. Сравнение вели-
чины ЭПР различных элементарных отражателей, имеющих примерно равные значе-
ния площадей проекций на плоскость, нормальную направлению наблюдения, по-
казывает, что их ЭПР может отличаться на 30...40 дБ, а ширина главного лепестка
ДОР изменяться в большом диапазоне. Поэтому ЭПР реальных сложных объектов
404
Глава 10. Снижение радиолокационной заметности
Таблица 10.1
Вид цели Форма цели ЭПР цели
Металлический шар г» 2Х; г « 2Х _5 „6 2 i Л л Я г а0 = пг ; о0 = 144 ; Л <*0 — °0 max — °0
Плоский лист
4л(л£>
° X2 . (2па . У . (2пЬ . .~Л sin ——sina sin —— snip у X ) у X J
Z V ZZ X '1L J 2па . 2nb . г, £1И ГУ £1П К
ь
' a * X rv — Л тг _ х <7/>)2
'-’Omax '
Диск \ ° 1 \ г 4л2г4 лт — (4л А — rsinO 1 X J 2 cos2 6;
° X2 ^Отах “ 4 Я 4л . _ — г sin 6 X г4 Х2‘
Выпуклая поверхность с радиусами кривизны Pi ир2 °0 max “ ЛР102
Уголковый отражатель с прямоугольными гранями °4 ^Отах —42л . X
a
✓
✓
Конус (вдоль оси) °о .пах = na2tg2a
Цилиндр у j lr 4л2г/2 • (4к/ • sm sin 6 к > 4л/ . Л —— sin 6 X 72 Г -12 sin 6;
° X ^Отах “
Поверхность оживальной формы >2 Л . 4м ^Отах — 1 tg 0q 16л
10.1. Снижение ЭПР за счет выбора малоотражающей формы объекта 405
существенно зависит от формы их наружной поверхности, образованной набором
элементарных отражателей. Зависимость ЭПР от габаритных размеров выражена
гораздо слабее. Кроме того, большое влияние на ЭПР оказывает угловое расположе-
ние элементарных отражателей и направление облучения. Так, при облучении диска
под углом 10° к нормали его ЭПР на 28 дБ меньше ЭПР трехгранного отражателя,
а при нормальном падении волны на диск его ЭПР на 3 дБ больше, чем у того же
уголкового отражателя.
ДОР отдельных элементов поверхности объекта существенным образом влияет
на формирование результирующей ДОР. Например, если в образовании суммар-
ного отраженного сигнала участвуют элементы с широкими ДОР, то результирую-
щая ДОР будут иметь большее число и большую ширину лепестков, чем в том слу-
чае, когда отдельные элементов имеют узкие ДОР. Объяснить этот эффект можно
тем, что при изменении взаимного расположения элементов относительно прием-
ной антенны изменяются не только фазы сигналов. При формировании совокуп-
ности элементов с узкими ДОР резче изменяются амплитуды парциальных сигна-
лов. Кроме того, в последнем случае результирующая интерференционная картина
вторичного поля формируется в более узком угловом секторе пространства. Таким
образом, исключение широконаправленных отражателей из архитектуры объекта
приведет к увеличению дисперсии величины ЭПР, что, в свою очередь, уменьшит
вероятность обнаружения отраженного сигнала и соответственно улучшит радиоло-
кационную незаметность объекта. Если же число элементов с узкими ДОР окажется
настолько большим, что их диаграммы будут совмещаться, то при любом угловом
положении объекта всегда найдутся такие элементы, сигналы от которых будут скла-
дываться. Действительно, за счет интерференции сигналов от двух одинаковых эле-
ментарных отражателей с ЭПР о у каждого, суммарная ЭПР будет в пределах от 0
до 4о, имея в среднем значение 2о. Таким образом, наличие элементов с одинако-
вой ЭПР увеличивают радиолокационную заметность.
На основе приведенных соображений можно сформулировать ряд принципов,
которым нужно следовать при создании облика малоотражающего объекта.
1. Для уменьшения радиолокационной заметности объекты нужно компоновать
из элементов с минимальной шириной ДОР.
2. При создании малозаметных для РЛС объектов следует использовать элементы
с минимальными значениями ЭПР и минимизировать число этих отражателей.
Прежде всего, следует избегать использования взаимно перпендикулярных поверх-
ностей, которые образуют уголковые отражатели.
406
Глава 10. Снижение радиолокационной заметности
3. При взаимном расположении элементов, из которых создается сложный
объект, необходимо минимизировать число направлений, на которых могут совме-
щаться главные лепестки этих элементов. А если такого совмещения избежать не
удается, нужно минимизировать ЭПР элементов по этим направлениям.
Для иллюстрации практического применения этих принципов на рис. 10.1 при-
ведена компоновочная схема одной из модификаций малозаметного высотного
самолета воздушной разведки SR-71.
Рис. 10.1. Малозаметный для РЛР самолет
На рис. 10.1 видно, что нижняя поверхность планера делается максимально
плоской. Поэтому самолет будет иметь значительную ЭПР только относительно РЛС,
расположенных непосредственно под ним. Хвостовое оперение не имеет ортого-
нальных друг другу поверхностей. Для этого применяют два отклоненных от вер-
тикали стабилизатора. Такая конфигурация создает заметную ЭПР только со сто-
роны РЛС, расположенных выше плоскости траектории полета. Резкие изломы
поверхности и кромки, имеющие большие ЭПР, в основном располагаются так,
чтобы они экранировались фюзеляжем от излучений РЛС, расположенных ниже
самолета. Носовая часть самолета близка к конической с малым углом при верши-
не. Очень большой вклад в ЭПР дают резкие переходы и изломы поверхностей в
узлах крепления наружных подвесных контейнеров и средств вооружения. Для
улучшения радиолокационной незаметности избегают использовать подвесные
элементы на пилонах и стремятся к внутрифюзеляжному расположению всего до-
полнительного оборудования.
Головным частям (ГЧ) баллистических ракет придают малоотражающие фор-
мы вроде тех, что изображены на рис. 10.2 [21].
Рис. 10.2. Малоотражающие формы ГЧ МБР
10.2. Применение противорадиолокационных покрытий
407
Основная задача при выборе формы ГЧ — добиться малой ЭПР на тех ракур-
сах, под которыми могут располагаться радиолокационные средства противоракет-
ной обороны. Для этого поверхности ГЧ придают форму, объединяющую несколь-
ко поверхностей вращения. Носик ГЧ имеет форму конуса или полусферы (кони-
ческое или оживальное окончание). При этом уменьшается вторичное излучение,
обусловленное дифракцией на заостренном конце поверхности объекта. Коничес-
кая боковая обечайка может сопрягаться с другими коническими или цилиндри-
ческими поверхностями. Торцевая (донная) часть может иметь форму сегмента,
сфероида, полусферы или усеченного конуса. Форма головных частей в донной части
определяется необходимостью установки двигателей. ГЧ обычно стабилизируют на
траектории, чтобы она ориентировалась на РЛС минимальной ЭПР.
При изменении ориентации объекта относительно РЛС его заметность тоже
изменяется вместе с изменением ЭПР. При этом удобно считать, что мощность
сигнала, отраженного объектом, флюктуирует случайным образом. Но вероятность
правильного обнаружения флюктуирующего сигнала меньше, чем вероятность об-
наружения детерминированного сигнала при той же средней мощности. Значит, для
увеличения незаметности следует не только снижать среднее значение ЭПР радио-
локационных целей, но и увеличивать дисперсию ее флюктуаций. Иначе говоря,
ДОР малозаметного объекта должна иметь многолепестковую форму с большим
различием между уровнями лепестков.
10.2. Применение противорадиолокационных покрытий
Применение радиопоглощающих (РПГ) материалов и покрытий — мощный
резерв снижения радиолокационной заметности. При взаимодействии электромаг-
нитного поля с материалом, покрывающим поверхность радиолокационной цели,
наблюдается поглощение, рассеяние и интерференция волн. Поглощение ослабля-
ет поле падающей волны за счет перехода электромагнитной энергии в тепло вслед-
ствие диэлектрических и магнитных потерь. Рассеяние происходит в результате
преобразования распространяющегося в материале потока электромагнитной энер-
гии определенного направления в потоки по различным направлениям, в том чис-
ле и по таким, которые не достигнут приемных антенн средств разведки. Интерфе-
ренция падающих на поверхность цели и отраженных радиоволн характеризует
отражательную способность радиопоглощающего материала защитного покрытия
в направлении наибольшего вторичного излучения от его поверхности.
По конструктивному применению обычно различают радиопоглощающие ма-
териалы, которые наносятся на поверхность защищаемого объекта (противорадио-
локационные покрытия), и радиопоглощающие конструкционные материалы, ис-
пользуемые для создания малозаметных объектов. Независимо от типа, радиопогло-
щающие материалы должны обеспечивать минимальное отражение радиоволн от
защищаемой поверхности, максимальное поглощение электромагнитных волн, ши-
рокий частотный диапазон поглощаемой энергии. Они также должны иметь высокую
прочность, способность работать в широком интервале механических и темпера-
турных воздействий, стойкость к агрессивным средам, надежность и долговечность,
возможно меньший удельный вес и стоимость.
В интерференционных покрытиях создаются такие условия, при которых падаю-
щая и отраженная волны взаимно компенсируют друг друга. Материал поглощающих
408
Глава 10. Снижение радиолокационной заметности
покрытий выбирается из условия максимального преобразования в нем падающей
электромагнитной энергии в тепловую за счет наведения вихревых токов, магнитно-
гистерезисных и (или) высокочастотных диэлектрических потерь.
И, наконец, в зависимости от электрических и магнитных свойств радиопоглоща-
ющие материалы можно разделить на диэлектрические и магнитодиэлектрические.
Маскирующее действие радиопоглощающих материалов эффективно лишь в
случаях, когда линейные размеры плоских поверхностей защищаемых объектов или
же радиусы кривизны их поверхностей значительно превышают длину волны в
материале покрытия:
^s»\, (10.2)
где S — площадь поперечного сечения объекта.
Если длина волны превышает максимальный размер объекта, наблюдается реле-
евское рассеяние примерно одинаковое у объектов с конечной и с бесконечной про-
водимостью. Вследствие этого покрытие с конечной проводимостью ведет себя как
идеальный проводник, и падающая электромагнитная энергия им не поглощается.
Поглощающий материал соответствует своему назначению в том случае, когда
в нем отсутствует отражение электромагнитной волны от внешней кромки поверх-
ности, а энергия, проникающая внутрь материала, полностью им поглощается.
Выполнение этих условий достигается соответствующим подбором электрических
свойств материала, в первую очередь комплексной диэлектрической проницаемо-
сти и комплексной магнитной проницаемости.
Отражение электромагнитной волны от бесконечной идеально проводящей
поверхности, покрытой радиопоглощающим веществом, иллюстрируется рис. 10.3.
t у
£0. ЦО
Рис. 10.3. Радиопоглощающее покрытие
Комплексный коэффициент отражения плоской волны от границы раздела двух
сред — свободного пространства и поверхности покрытия — зависит от различия
волновых сопротивлений и равен [39]
^ = Zn-Z0 = (Ю.З)
+ ^0 >/е7н' +1
где Zq = —= 12011 — волновое сопротивление свободного пространства;
V ео
7 К
Zn =— — волновое сопротивление материала покрытия;
V
, е / Ц
£ =— и р =— — относительные значения соответственно диэлектриче-
£о Ио
ской и магнитной проницаемости материала покрытия.
10.2. Применение противорадиолокационных покрытий
409
Для того чтобы покрытие полностью поглощало энергию падающих на него ра-
диоволн, нужно выполнить условие К= 0. Материал с такими свойствами, как сле-
дует из (10.3), должен иметь e' = pz. Таким условиям удовлетворяют покрытия, в
состав которых входят вещества с достаточно большими потерями. Структуру таких
покрытий образуют частицы ферромагнетика, сцементированные изоляционным
материалом из немагнитного диэлектрика. Однослойные покрытия этого типа доста-
точно эффективны в диапазоне метровых и дециметровых волн. Эффективность
действия покрытия повышается, если оно неоднородно и его коэффициент поглоще-
ния постепенно увеличивается от наружной поверхности покрытия к поверхности
защищаемого объекта.
Для поглощения волн сантиметрового диапазона используют многослойные
покрытия с изменяющимися от слоя к слою параметрами, так что проницаемость
диэлектрика е' возрастает от наружной поверхности вглубь. Каждый слой таких
покрытий образуется компаундом на основе пенополистирола или каучука, а погло-
тителем служит углерод (графит или сажа). Концентрация поглотителя от слоя к
слою меняется. Для согласования покрытия с внешним (свободным) пространством
относительная диэлектрическая проницаемость должна равняться единице, т. е.
е' = е0 , а мнимая составляющая (тангенс угла диэлектрических потерь) должна быть
близкой к нулю. Резкое изменение параметров е и ц от слоя к слою недопустимо,
поскольку это приводит к увеличению коэффициента отражения от границы раз-
дела двух слоев.
Для уменьшения остаточного отражения применяют покрытия, наружная по-
верхность которых представляет собой рельефную геометрическую неоднородность,
состоящую из периодически повторяющихся неровностей в виде пирамидальных
или конических шипов (рис. 10.4).
Чтобы увеличить число отражений между шипами и, следовательно, снизить от-
ражение от поверхности покрытия, угол при вершине 0 выгодно делать небольшим.
Рис. 10.4. Рельефная поглощающая поверхность
Если в поглощающих покрытиях большая часть энергии превращается в тепло
прежде чем электромагнитные волны достигнут отражающей поверхности защища-
емого объекта, то в интерференционных покрытиях уменьшение отражения от
маскируемого объекта происходит в результате интерференции двух радиоволн:
отразившейся от поверхности объекта и от поверхности покрытия (рис. 10.5).
410
Глава 10. Снижение радиолокационной заметности
Рис. 10.5. Интерференционное защитное покрытие
Падающая волна многократно отражается от границы раздела двух сред «по-
крытие — объект» и поглощается в веществе покрытия. Естественно, что при этом
расстояние между отражающими поверхностями (толщина покрытия) должно быть
таким, чтобы обеспечивалось сложение радиоволн в противофазе.
Отсутствие отражения от интерференционного покрытия достигается при ус-
ловии
п
ЕОТр=^Е,.=0 (10.4)
1=1
где Е/— составляющая отраженной волны от границы раздела «свободное простран-
ство — покрытие» и «покрытие — объект».
Напряженность поля, отраженного в направлении источника падающей волны,
равна нулю, если выполняются условия
Р = 1п1 / = / = 1,2,..., (10.5)
г I 4
где р — коэффициент затухания волны за одно прохождение поглощающего по-
крытия в прямом и в обратном направлениях; | г | — модуль коэффициента отраже-
ния покрытия; / — общая толщина покрытия; Хп — длина волны в веществе по-
Л хо -
крытия с параметрами еиц: лп = ; Ло — резонансная длина волны.
уф
Интерференционные покрытия тоньше поглощающих. Однако как следует из
принципа их действия, они более узкополосны, и это зачастую ограничивает воз-
можности их применения. По-видимому наиболее перспективными являются ком-
бинированные многослойные покрытия.
Чтобы интерференционное покрытие обладало еще и поглощающими свойства-
ми, в его состав вводят ферромагнетики и компаунды на основе различных пласт-
масс или каучука с примесями сажи или порошка графита в качестве поглотителя.
Достоинством интерференционных покрытий является их значительная механичес-
кая прочность, гибкость, сравнительно малая толщина и небольшая масса.
Эффективность действия интерференционных покрытий зависит также от угла
падения электромагнитной энергии на их поверхность. Минимальное отражение
достигается при нормальном падении радиоволн. При других углах падения коэф-
фициент отражения резко возрастает. Таким образом, покрытие интерференционно-
го типа представляет собой резонансный поглотитель, состоящий из слоя диэлект-
рика, наложенного на защищаемый металл. Толщина слоя диэлектрика, его диэлект-
рическая постоянная и тангенс угла диэлектрических потерь могут быть выбраны
такими, что коэффициент отражения на некоторой, наиболее вероятной длине вол-
10.3. Уменьшение радиолокационной заметности антенных систем
411
ны, будет равен нулю. При этом наибольшее отклонение частоты падающей вол-
ны от резонансной частоты поглощаемого излучения не должно превышать ±5 %.
Иначе значительно понижается эффективность поглощения энергии падающего
электромагнитного поля. Для того чтобы покрытия сохраняли эффективность в
более широкой полосе частот и соответственно были бы более универсальными,
их делают многослойными.
Поглощающая способность многослойных интерференционных покрытий и их
диапазонность существенно зависят от количества и толщины слоев, а также от
электрических параметров используемых материалов. При соответствующем под-
боре значений проводимости и диэлектрической проницаемости можно считать,
что каждый слой согласован с колебаниями в узкой полосе около одной частоты,
а несколько слоев обеспечивают малое значение коэффициента отражения в ши-
роком диапазоне.
С использованием современных материалов удается снизить коэффициент от-
ражения на величину до 20 дБ и более в широкой полосе (до 30 % от средней рабо-
чей частоты).
Малоподвижные или стационарные объекты и сооружения для радиолокаци-
онной маскировки могут покрываться специальными накидками из поглощающих
материалов, работающих по тем же принципам, что и радиопоглощающие матери-
алы покрытия летательных аппаратов. Для уменьшения ЭПР зданий и сооружений
используются специальные объемно поглощающие строительные материалы (бе-
тоны с примесями порошков проводящих материалов и ферромагнетиков).
10.3. Уменьшение радиолокационной заметности антенных систем
Значительный вклад в радиолокационную заметность объектов, содержащих и
использующих РЭС, вносят антенные системы. Так, самолет в зависимости от типа
и назначения может нести на своем борту до 100 и более антенн бортового радио-
электронного комплекса. В состав комплекса входят радиолокационный прицел,
радиолокатор бокового обзора, автономные средства радионавигации (радиовысо-
томеры, доплеровский измеритель скорости и угла сноса) и средства ближней, даль-
ней и спутниковой радионавигации, системы передачи информации и связи, радио-
локационный визир, средства радио- и радиотехнической разведки, активные сред-
ства радиопротиводействия. На борту ракет могут работать системы
радиоуправления и радиосистемы автономной навигации, радиовзрыватели, радио-
телеметрические системы. В еще большей степени радиоэлектронными средства-
ми насыщены морские корабли, а также наземные мобильные и стационарные
объекты. Все эти средства и системы используют как передающие, так и прием-
ные антенны. А антенны увеличивают радиолокационную заметность. По имею-
щимся оценкам вклад антенн бортовых радиоэлектронных комплексов в ЭПР са-
молетов составляет от 10...20 % до 40...50 %. У ракет с головками самонаведения в
наиболее опасном секторе углов облучения в передней полусфере ЭПР антенны
составляет примерно от 30 до 90 % общей ЭПР. У крылатых ракет этот показатель
составляет 50...60 %. При этом вклад различных типов антенн в общую ЭПР лета-
тельного аппарата неодинаков: наибольшую ЭПР имеют зеркальные антенны боль-
шой апертуры (антенны радиолокационного прицела, радиолокационного визира
и т. п.), а также плоские антенные решетки. Однако такие антенны имеют узкую
412
Глава 10. Снижение радиолокационной заметности
диаграмму обратного рассеяния. Подобных антенн с большой ЭПР на борту ЛА
немного, как правило, — единицы (1...5). Остальные антенны имеют в основном
небольшую ЭПР (от 0,01 до 1 м2), но обладают большой (до 360°) шириной ДОР.
Относительный вклад антенных систем в заметность наземных и морских объ-
ектов меньше, чем у летательных аппаратов. Тем не менее и для них возникает насу-
щная проблема разработки методов и средств уменьшения радиолокационной замет-
ности антенн. В настоящее время известны три основные направления исследова-
ний и разработок, направленных на уменьшения радиолокационной заметности
антенн.
Первое направление предусматривает такие комплексные подходы к проекти-
рованию радиоэлектронных средств, согласно которым минимизируется общее
число антенн, используемых радиоэлектронными средствами различного функци-
онального назначения и структуры. Этого можно достичь, используя на борту ЛА
универсальные многофункциональные антенные решетки, которые одновременно
могут обслуживать радиолокационные средства, средства радиоэлектронного про-
тиводействия, средства предупреждения о нападении ракет противника, опознава-
ния «свой — чужой», радиосвязи и передачи данных и т. п. Уменьшить общее чис-
ло антенн при сохранении объема необходимой текущей информации, получаемой
на борту ЛА, можно и в том случае, когда такая информация поступает от других
источников, например, от спутниковых навигационных систем и систем обнару-
жения, распознавания и сопровождения целей, разведывательно-ударных комплек-
сов и комплексов дальнего радиолокационного обнаружения. При этом приемные
антенны можно размещать в местах, удобных для приема поступающей информа-
ции (например, с ориентацией ДНА в верхнюю полусферу для приема сигналов,
поступающих от спутниковых систем). В результате эти антенны не будут влиять
на ЭПР ЛА в нижней полусфере, наиболее опасной при наблюдении ЛА наземны-
ми и воздушными радиолокационными системами.
Второе направление связано с разработкой методов и средств уменьшения за-
метности каждой из антенн радиоэлектронного комплекса.
Поле, рассеянное антенной, по характеру своего возникновения разделяется на
две составляющие. Первая из них появляется в результате приема и последующего
переизлучения энергии падающего электромагнитного поля. Вторая составляющая
не связана с антенной спецификой и появляется в результате дифракции падаю-
щей волны на внешних элементах антенны. Обе составляющие существуют одно-
временно, но в направлении главного лепестка ДОР и вблизи него второй состав-
ляющей можно пренебречь. В направлениях, значительно отклоняющихся от мак-
симума главного лепестка, пренебрежимо малой становится первая составляющая.
Применение радиопоглощающих материалов и покрытий для снижения радио-
локационной заметности антенн невозможно: поглощая электромагнитное излуче-
ние РЛС противника, такие покрытия одновременно нарушают нормальное функ-
ционирование антенн в их рабочих диапазонах длин волн.
Возможные методы и средства уменьшения ЭПР антенн можно условно разде-
лить на три основные группы. Во-первых, непосредственно в антеннах использу-
ются частотно-селективные и поляризационно-селективные структуры с неизменя-
емыми во времени параметрами. Такие структуры радиопрозрачны или отражают,
как металл, на рабочих частотах и поляризациях антенны и непрозрачны или силь-
но поглощают на всех других частотах и поляризациях. Во-вторых, ЭПР антенн
уменьшают за счет ухудшения характеристик антенн в нерабочие промежутки време-
10.4. Комплексное применение методов противорадиолокационной маскировки 413
ни (между излучением и приемом сигналов РЛС или в то время, когда не работают
системы передачи информации). Для изменения характеристик антенн использу-
ются электрически управляемые во времени среды или электрически поворачива-
емые металлические экраны. В рабочие промежутки времени характеристики ан-
тенн восстанавливаются. В-третьих, невидимые для РЛС зеркальные антенны по-
лучаются, если раскрыв антенны прикрыть экраном, отражающим падающую на
него из внешнего пространства волну в направлениях, не совпадающих с направ-
лением прихода. Такие экраны создаются на основе радиопрозрачных плоскосло-
истых сред, образованных прилегающими друг к другу слоями диэлектрических
материалов. Исследования показывают, что использование таких селективных эк-
ранов способно уменьшить ЭПР зеркальной антенны на 10...30 дБ.
Для управления радионезаметностью линейных антенн КВ- и УКВ-диапазонов
на металлические стержни, из которых изготавливается антенна, наносится слой
радиопоглощающего материала, несильно ослабляющего сигнал на рабочей часто-
те. Слой поглотителя увеличивает поперечное сечение проводника, что приводит к
увеличению ЭПР антенны, но одновременно уменьшает его длину, необходимую
для обеспечения резонанса на рабочей частоте. При этом в сантиметровом радиоло-
кационном диапазоне ЭПР таких антенн становится заметно меньше (примерно
на 15 дБ).
Требования сохранения рабочих характеристик на основной частоте и мини-
мальной радиолокационной заметности противоречат друг другу. В общем случае
для разрешения противоречия между этими требованиями конструкцию антенн
приходится оптимизировать по комплексному критерию, учитывающему и эффек-
тивность работы антенны, и ее радиолокационную заметность.
Третья группа методов уменьшения заметности предусматривает миниатюри-
зацию антенн при сохранении их основных рабочих характеристик. Естественно,
что за счет уменьшения габаритов антенн мощность вторичного излучения суще-
ственно уменьшается. Исторически миниатюризация была обусловлена не потреб-
ностями уменьшения радиолокационной заметности, а необходимостью уменьше-
ния габаритных размеров антенных систем. Первым техническим решением по этому
направлению было создание ферромагнитных антенн. При той же действующей
высоте ферритовые приемные антенны имеют на рабочей частоте в цд раз мень-
шую площадь, где цд — действующая проницаемость ферромагнетика. При умень-
шении длины волны действующая проницаемость магнитопровода падает, а поте-
ри в нем растут. Поэтому магнитные антенны в сантиметровом диапазоне имеют
существенно меньшие значения ЭПР, чем антенны других типов, при заданной
действующей высоте.
Известны и другие инженерные методы уменьшения ЭПР антенн.
10.4. Комплексное применение методов
противорадиолокационной маскировки
В последние годы комплексные исследования и разработки методов снижения
вероятности обнаружения объектов вооружения и военной техники именуются соби-
рательным термином «технология Stealth». Прежде всего программа Stealth объеди-
нила исследовательские, конструкторские и технологические направления, ставя-
щие целью снижение радиолокационной и тепловой заметности объектов за счет
414
Глава 10. Снижение радиолокационной заметности
совершенствования форм их наружной поверхности, устранения блестящих точек
и применения специальных конструкционных материалов.
Снижение радиолокационной заметности прямо связано с уменьшением ЭПР
объекта. В рамках программы Stealth была поставлена задача снизить ЭПР самоле-
тов до 0,001...0,01 м2. При этом имеются теоретические и практические основания
для достижения такого уровня ЭПР. А это позволяет создать самолет, практически
невидимый для моностатических РЛС. Кроме того, технология Stealth может ре-
шить проблему создания аннигилирующей помехи (разд. 4.8).
Принципы компоновки малоотражающего объекта, на которых основывается
технология Stealth, вкратце сводятся к следующим.
1. Для существенного снижения ЭПР уголковых отражателей, образуемых пе-
ресекающимися аэродинамическими и другими поверхностями летательного аппа-
рата, подбирают соответствующие утлы и материалы радиопоглощающего покры-
тия; на разных поверхностях используют покрытия с разными импедансами, при-
чем стремятся использовать тупые утлы пересечения поверхностей, при которых
не возникают отражения высоких порядков (выход в обратном направлении мно-
гократно переотраженных волн).
2. Для наилучшего использования противорадиолокационных покрытий выде-
ляют основные, доминирующие механизмы рассеяния и подбирают соответствую-
щие поверхностные сопротивления в требуемом угловом секторе.
3. Основные компоновочные решения и применение покрытий взаимно допол-
няют друг друга, и это позволяет весьма существенно снизить ЭПР не только от-
дельных элементов конструкции, но и всего объекта в целом.
Применение сформулированных конструктивных принципов иллюстрируется
Рис. 10.6. Самолет, выполненный по технологии Stealth: 1 — экранирующая сетка воз-
духозаборника; 2 — кили с наклоном внутрь; 3 — внешняя конструкция, разделенная
на грани для уменьшения отражений; 4 — защищенное от отражений электро-
магнитных волн сопло двигателя; 5 — центральный киль для рассеивания горячих
выхлопных газов двигателя; 6 — задняя кромка крыла с обратной стреловидностью
10.4. Комплексное применение методов противорадиолокационной маскировки 415
Для уменьшения вклада, вносимого антеннами в ЭПР маскируемого объекта,
технология Stealth предусматривает применение антенн, малоотражающих в глав-
ных лепестках диаграммы направленности. Предусматриваются также выдвижные
антенные системы.
Основные технические проблемы, которые решаются в процессе проектирова-
ния и компоновки самолетов по технологии Stealth: размещение двигателей внутри
элементов конструкции самолета; уменьшение площади поперечного сечения само-
лета; внутренняя подвеска оружия; ликвидация вертикального оперения; создание
адаптивной многофункциональной антенной системы с управляемым минимумом
диаграммы направленности. При этом единая антенная система должна совмещать
несколько функций: работать в составе глобальной системы навигации, объединен-
ной системы распределения тактической информации, радиолокационных систем,
средств РЭБ и системы опознавания «свой — чужой».
Усредненная по разным ракурсам ЭПР самолета, внешний вид которого изоб-
ражен на рис. 10.6, составляет примерно 0,001...0,01 м2.
Совершенно иная идеология программы Stealth используется при построении
малоотражающих надводных кораблей. Морские корабли невозможно сделать не-
видимыми для средств радиолокационной разведки. Поэтому их радиолокацион-
ную заметность стремятся снизить до такого уровня, чтобы обеспечивалась доста-
точная маскировка искусственно создаваемыми помехами и надежная зашита от
оружия, оснащенного радиосистемами самонаведения.
При проектировании современных кораблей на основе технологии Stealth ис-
пользуются низкосидящие корпуса выпуклой формы. Надстройкам придают фор-
му простых архитектурных образований (усеченные пирамиды с наклоном стенок
8... 10°, конусы и т. п.). Вооружение встраивают под обводы корпуса и надстроек.
Применяют многофункциональные информационные системы, оснащенные фра-
зированными антенными решетками. Избегают использовать уголковые образова-
ния на переходах от плоских к криволинейным поверхностям, фокусирующим вто-
ричное излучение в узких секторах и в заданных направлениях. Широко применя-
ются как стационарные, так и съемные радиопоглощающие материалы и покрытия.
Все эти принципы и приемы в совокупности позволяют снизить ЭПР «незаметно-
го» для РЛС корабля на порядок по сравнению с обычными надводными корабля-
ми аналогичных классов.
В конструкциях межконтинентальных баллистических ракет также учитываются
приведенные выше принципы и приемы снижения радиозаметности. В значительной
степени боевые блоки ракет последнего поколения изменили свои геометрические
очертания (рис. 10.2), что позволило в комплексе с другими новыми достижениями
в области РЭБ успешно решать проблему преодоления противоракетной обороны.
ГЛАВА 11
ФУНКЦИОНАЛЬНОЕ ПОРАЖЕНИЕ РАДИОЭЛЕКТРОННОЙ
СИСТЕМЫ ЭЛЕКТРОМАГНИТНЫМИ ПОЛЯМИ
11.1. Принцип действия и применения оружия
функционального поражения
Нарушение работы электронных средств различного назначения (радио- и опти-
ко-электронных средств, компьютеров, взрывателей боеприпасов и др.) может быть
осуществлено тремя способами:
1) путем создания им преднамеренных помех во всем диапазоне ЭМВ;
2) путем физического их поражения оружием с обычным взрывчатым вещест-
вом (ВВ);
3) функциональным поражением сильными ЭМП.
Первые два способа РЭБ применяются многие десятилетия. Технические и так-
тические принципы применения этих способов РЭБ хорошо изучены. Достижения
науки и техники в области радиоэлектроники и в военном деле привели к созда-
нию нового наступательного вида РЭБ, использующего электромагнитное оружие
(ЭМО). Такое оружие выводит из строя электронные средства противника, пора-
жая их чувствительные элементы сильными ЭМП. При этом физические разруше-
ния объектов поражения практически отсутствуют [56].
Эффективность применения ЭМО против оснащенных современной техникой
армий может значительно превышать эффективность действия обычных фугасных
и осколочных боеприпасов аналогичного калибра. Разумеется, уничтожить элект-
ронное средство можно и обычным боеприпасом. Однако он должен с высокой
точностью попасть в цель, чтобы поразить ее осколками или ударной волной. Это
требование для ЭМО вовсе не обязательно.
Существенный недостаток современных электронных средств состоит в том, что
они не имеют надежной защиты от воздействия сильных ЭМП. Незащищенные
электронные цепи достаточно легко выводятся из строя «прожиганием» импульсом
наведенного тока весьма чувствительных полупроводниковых элементов, самым
уязвимым местом которых являются р-п переходы толщиной всего несколько микрон
и менее. Возможность необратимого поражения полупроводниковых приборов воз-
растает вследствие исключительно высокой и непрерывно увеличивающейся плотно-
стью их интеграции в микросхемах — чипах. Электромагнитный импульс (ЭМИ),
создаваемый ЭМО, сравнительно легко проходит не только через полимерные защит-
ные материалы, но и сквозь металлические экраны, за счет щелей, люков, техноло-
гических отверстий в защитных кожухах приборов, через разъемы и цепи питания.
Конструкционные углеродистые материалы также не являются препятствием для
проникновения ЭМИ в электронные приборы. Измерения электрического поля
внутри фюзеляжа ЛА, облучаемого мощным СВЧ-излучением, показали, что самое
низкое значение эффективности экранирования испытываемых ЛА составило око-
ло 40 дБ. А в ЛА с фюзеляжем из непроводящих материалов наблюдался эффект
повышения напряженности поля за счет отражений и резонансов [56].
11.2. Физические основы функционального поражения электронных средств 417
Электромагнитный боеприпас (ЭМБ) даже небольшого калибра создает излу-
чение с энергией Э = 20...40 Дж в ЭМИ длительностью тэми ~ 1 мкс. Пиковая плот-
ность потока мощности ЭМИ вблизи эпицентра взрыва имеет порядок мегаватт на
квадратный метр, что делает ЭМБ эффективным в радиусе нескольких десятков
метров [61].
При взрыве ЭМБ даже малых калибров 100... 120 мм электронным целям могут
быть нанесены следующие повреждения [61]:
• на удалении 7?м = 6...10 м от цели искусственно инициируется подрыв детона-
тора обычных ВВ;
• на удалении /?м = 30 м выводится из строя система опознавания целей и бло-
кируется пуск зенитных управляемых ракет (ЗУР) переносных зенитных ра-
кетных комплексов (ПЗРК);
• на удалении 7?м = 50 м выводятся из строя противотанковые магнитные мины.
В составе ЭМО могут применяться релятивистские СВЧ-генераторы, ВМГ,
лазеры и другие источники излучения. Для понимания особенностей функциональ-
ного поражения (подавления) (ФП) электронных средств необходимо кратко оста-
новиться на описании физических процессов, протекающих в разных веществах при
воздействии сильных ЭМП.
Эффект воздействия средств ФП на объекты, содержащие электронные компо-
ненты, основан на возможностях изменения физико-химических свойств электро-
радиоматериалов при облучении их сильными ЭМП. Необратимые изменения
свойств вещества, приводящие к качественно новым образованиям с иной струк-
турой, происходят при значительной энергии воздействующего ЭМП. Плотность
потока энергии П, при которой надежно поражаются современные электронные
объекты, на 8... 10 порядков выше соответствующих энергетических показателей
традиционных преднамеренных помех, создаваемых даже самыми мощными само-
летными (вертолетными) и наземными станциями. Таким образом, основным от-
личием ФП от РЭП являются физические принципы нанесения ущерба противнику.
При ФП ущерб причиняется путем необратимого (катастрофического) или длитель-
ного обратимого (восстанавливаемого) изменения физико-химической структуры
(в первом случае — разрушения) элементов электронных систем вследствие воздей-
ствия ЭМП на радио- и конструкционные материалы, входящие в состав электрон-
ных и полупроводниковых приборов, а также и других компонентов этих систем.
В отличии от РЭП, предусматривающего нанесение информационного ущерба, ФП
причиняет физический ущерб.
11.2. Физические основы функционального поражения
электронных средств
В физике свойства и структуру любого вещества принято описывать фазовым
состоянием. Фазовое состояние вещества определяется характером взаимного рас-
положения атомов в молекуле. В частном случае под фазовым состоянием веще-
ства могут пониматься агрегатные состояния: газ, жидкость, твердое тело. При
исследовании воздействия сильных ЭМП на электронные устройства наибольший
интерес представляют фазовые состояния, характеризующие электромагнитные
свойства диэлектриков, ферро-, пара- и диамагнетиков, полупроводников. Для ха-
рактеристики изменений свойств радиоматериалов, находящихся в разных фазо-
вых состояниях, вводится понятие фазовых превращений.
418 Глава 11, Функциональное поражение РЭС электромагнитными полями
Фазовые превращения — это переходы вещества из одной фазы в другую, на-
пример, полупроводника в проводник или проводника в сверхпроводник. При дей-
ствии сильного ЭМП первоначальное равновесное фазовое состояние (например,
полупроводника) нарушается с ростом плотности потока энергии П (Дж/м2) и в
некоторой критической точке П = Пкр происходит лавинообразное формирование
новой устойчивой фазы (например, проводника).
На рис. 11.1 представлена качественная картина фазового перехода диэлектрика
в проводник при воздействии на вещество электрического поля. Степень фазового
превращения характеризуется значением удельной электропроводности о (Ом-1см-1).
Лавинообразное необратимое фазовое превращение диэлектрика в проводник
наблюдается в критической точке Е = Екр ~ 107 В/см, когда происходит пробой
(электрический или тепловой) диэлектрика. Вследствие фазового перехода (про-
боя) необратимо изменяется на много порядков проводимость вещества — от Oj
~ КГ11 до оП1 ~ 105 (Ом-1см-1).
Один из лучших диэлектриков — кварц — имеет Oj ~ 10-11 (Ом-1 см-1), а провод-
ник — медь — о1П ~ 71(Р (Ом-|см-1).
Условием фазового перехода является не только критическая напряженность
электрического поля £кр, но и время воздействия ЭМП т, которое должно быть
более 10"7с [62].
Рис. 11.1. Фазовое превращение диэлектрика (I)
в проводник (III); II — переходная фаза
Причиной фазового превращения может быть не только воздействие сильного
ЭМП, но и высокие или сверхнизкие температуры, высокое давление, другие фи-
зические воздействия. Время фазового перехода из состояния I (диэлектрик) в со-
стояние III (проводник) характеризуется временем существования переходной фазы
и составляет тп ~ 10-9...10“8 с.
11.3. Воздействие мощного импульсного электромагнитного
излучения на элементы радиоэлектронной системы
ФП РЭС является результатом взаимодействия мощного ЭМП с веществом
поражаемых элементов. Это взаимодействие порождает ряд процессов, классифи-
цируемых как нелинейные явления в средах (веществах). В отличие от хорошо
разработанной линейной теории волн нелинейная теория еще далека от заверше-
ния. Поэтому выявление закономерностей функционального поражения (подавле-
ния) РЭС представляет фундаментальную проблему исследований.
11.3. Воздействие мощного импульсного ЭМИ на элементы РЭС
419
Основной элементной базой современных РЭС служат твердотельные прибо-
ры, в состав которых входят металлы, диэлектрики и полупроводники. Наиболее
стойкими к воздействию сильных ЭМП являются металлы и диэлектрики. В полу-
проводниках фазовые превращения происходят при сравнительно небольших крити-
ческих значениях плотности потока энергии Пкр < 10-6 Дж/см2. Главным фактором
фазовых превращений является поглощение энергии ЭМВ. При этом происходит
переход энергии электромагнитных волн в другие виды энергии.
11.3.1. Воздействие электромагнитного поля на металлы
Основной особенностью металлов, типичными представителями которых явля-
ются медь (Си) и серебро (Ag), является малая поглощающая способность. При
падении электромагнитных волн на металлическую поверхность большая часть
энергии (более 99 %) отражается в широком диапазоне частот (в радио- и оптичес-
ком диапазонах). Именно этот эффект обуславливает характерный металлический
блеск. Волна затухает в тонком слое (скин-слое) толщиной 10...20 мкм вследствие
наличия в металлах большого количества свободных электронов (-1023 см-3), слабо
связанных с атомами. Под влиянием падающего на поверхность металла ЭМП эти
электроны возбуждаются и излучают вторичные волны, которые, складываясь, по-
рождают электромагнитную волну. Взаимодействие этой внутренней волны с кри-
сталлической решеткой металла влечет за собой передачу ей лишь небольшой части
энергии падающей волны и быстрое ее затухание. Большая часть энергии ЭМП пе-
реходит в отраженную волну. При увеличении частоты ЭМВ начинают играть за-
метную роль квантовые эффекты, в первую очередь фотоэффект. При длине волны
с
Х = у<0,4 мкм (ультрафиолетовая область) наблюдается фазовый переход типа
«металл — диэлектрик». В этом случае резко уменьшается коэффициент отраже-
ния (Астр ~ 10'2), и металл становится для этих волн «прозрачным».
Металлы имеют малое удельное сопротивление руд ~ 10-2 Ом-мм2/м и соответ-
ственно большую удельную проводимость о ~107 Ом-1*м-1. При сверхнизких тем-
пературах, близких к абсолютному нулю (Г-0 К), коэффициент поглощения пада-
ет до нуля и металлы становятся сверхпроводниками (руд ~0, о -> °о). Для справки:
медь при температуре Г-4 К имеет удельную проводимость о = 1021 Ом-1-м-1, что
на ~14 порядков выше ее проводимости при температуре Т = 300 К.
Теоретически рассматривая воздействие средств ФП на металлические элементы
радиоустройств, можно рассчитывать на фазовый (агрегатный) переход типа «твердое
тело — жидкость», т. е. на тепловое разрушение (плавление) металла. В принципе,
изменение агрегатного состояния металла может привести к необратимым отказам
электровакуумных приборов за счет теплового повреждения электродов (например,
может расплавиться спираль приемно-усилительной ЛБВ). Однако для этого плот-
ность потока энергии электромагнитной волны должна быть чрезвычайно высокой.
Например, учитывая критическую температуру плавления спирали ЛБВ 3000 К
и используя закон Стефана — Больцмана, можно определить необходимую плот-
ность потока энергии ЭМП при ФП в соответствии с формулой
П = о7-Т’4, (11.1)
где вт= 5,7• 10-12 Втсм~2град'4 — постоянная Стефана — Больцмана, Т — абсолют-
ная Температура.
При Т = Гкр = 3000 К из (11.1) следует, что Пкр « 460 Дж/см2.
420
Глава 11. Функциональное поражение РЭС электромагнитными полями
Полученное таким образом критическое значение Пкр на несколько порядков
выше возможностей современных и перспективных источников сильных ЭМП.
Однако нельзя исключить создание в будущем таких сверхмощных источников
электромагнитных волн. И тогда следует иметь в виду возможность возврата к «лам-
повой» концепции построения важнейших узлов РЭС в качестве контрмеры, направ-
ленной на защиту радиоэлектронных средств от электромагнитного оружия.
11.3.2. Воздействие электромагнитного поля на диэлектрики
Диэлектрики широко применяются в радиотехнических и оптико-электронных
устройствах (в антеннах, линиях передачи, оптических элементах и т. п.). На основе
диэлектриков создают в первую очередь изоляционные материалы с весьма низкой
электропроводностью (о ~ 1О-9...1О-10 Ом-1см-1). Диэлектрическими свойствами об-
ладают также и полупроводники. В диэлектриках может существовать весьма сильное
электрическое поле (Е~106 В/см и выше). Диэлектриками могут быть вещества, на-
ходящиеся в трех различных фазовых состояниях: газообразном, жидком и твердом.
Фазовый переход, характерный для эффективного воздействия сильного ЭМП,
связан с явлением пробоя диэлектрика, когда он теряет свои диэлектрические свой-
ства и переходит в месте пробоя в новое фазовое состояние проводника (рис. 11.2).
Рис. 11.2. Пробой в диэлектрике: I— ток в диэлектрике (А);
р — удельное сопротивление (Ом-см); Т — температура
Механизмы пробоя в твердых телах, жидких и газообразных диэлектриках свя-
заны с образованием проводящих каналов (шнуров). Электропроводность диэлект-
риков при пробое резко возрастает (на много порядков) и достигает значений
о ~105...106 Ом"1-см"1. Критическое значение напряженности поля Екр, при кото-
ром происходит пробой (фазовый переход) называется электрической прочностью
диэлектрика. Для твердых диэлектриков величина Екр = 107...108 В/см. В силь-
ных ЭМП ток /, проходящий через диэлектрик, не подчиняется закону Ома. В сла-
бых полях с ростом напряженности электрического поля Е ток / вначале растет,
а затем при Е> Е^, когда наступает пробой диэлектрика, ток увеличивается скачком
(см. рис. 11.2).
В твердых диэлектриках могут наблюдаться две формы пробоя — тепловая и
электрическая.
Тепловой пробой обусловлен повышением количества тепла в объеме диэлектри-
ка при росте напряженности поля Е. Вместе с ростом Е увеличивается и температура
11.3. Воздействие мощного импульсного ЭМИ на элементы РЭС
421
диэлектрика Т. Для диэлектриков при слабых ЭМП (Е < повышение напря-
женности поля Е влечет за собой рост электропроводности материала. Удельное со-
противление р (Омсм) уменьшается по экспоненциальному закону (рис. 11.2) [62]:
Р = Ро* ЬТ
(И.2)
где Т — температура в градусах Цельсия; b — постоянный коэффициент; р0 —
удельное сопротивление диэлектрика при Т = О °C (фазовое состояние I).
Так как удельное сопротивление диэлектрика с ростом напряженности ЭМП
уменьшается (проводимость возрастает), ток / растет.
Стационарное фазовое состояние I возможно до тех пор, пока тепловыделение
не превышает скорости отвода тепла. При Е= Е^ ~107 В/см температура диэлектрика
достигает критического значения Т = Т^, при котором диэлектрик разрушается и
переходит в новое фазовое состояние III, которое характеризует его как проводник
с весьма малым удельным сопротивлением рпр ~ 10-5 Ом см. Тепловой пробой может
наступить в любом диэлектрике независимо от его удельного сопротивления р0.
В отличие от теплового пробоя электрический пробой не является следствием
нарушения теплового равновесия диэлектрика. Электрический пробой порождает
нарушения стационарного (равновесного) состояния вещества. Причиной этого
является туннельный переход носителей электрического заряда из валентной зоны
в зону проводимости кристалла или ударная ионизация атомов свободными (возбуж-
денными) электронами. В основном, электрический пробой происходит при лавино-
образном нарастании концентрации электронов (ударная ионизация) и наблюда-
ется в чистых диэлектриках, тогда как туннельный эффект характерен для диэлект-
риков с посторонними примесями.
При Е < Ек? в диэлектрике наблюдается стационарное фазовое состояние I, так
как процесс ионизации уравновешивается процессами рекомбинации. При Е = Е^
ударная ионизация приводит к резкому, лавинообразному, увеличению концентра-
ции электрических зарядов в зоне проводимости и наступает электрический про-
бой, для которого характерным является скачкообразное нарастание температуры
диэлектрика. В некоторых случаях при снятии напряжения свойства диэлектрика
могут восстанавливаться, т. е. наблюдается обратное фазовое превращение вида «про-
водник — диэлектрик». При тепловом пробое, как правило, обратное превраще-
ние не наблюдается. Продолжительность переходной фазы пробоя II (рис. 11.2) со-
ставляет тп ~ 10-7 с. Это время определяет минимальную длительность ЭМИ тэми
при функциональном поражении электронных средств кратковременным излучени-
ем. Поражение будет надежным при соблюдении двух условий: Е > Е^ и тэми > тп.
При функциональном поражении в процессе фазового перехода диэлектрика
(I) в проводник (III) при воздействии сильного ЭМП решающую роль играет элек-
трическая составляющая поля £, ибо диэлектрики не восприимчивы к магнитному
полю Н. При различных энергетических расчетах напряженность магнитного поля
Яне учитывается, и плотность потока энергии ЭМП, под действием которого про-
исходят фазовые превращения, определяется по формуле
нитная и диэлектрическая проницаемости вещества.
422 Глава 11. Функциональное поражение РЭС электромагнитными полями
Для диэлектрика относительная магнитная проницаемость равна ц = 1, поэто-
му ц = цгц0 = 1,257-10-6 Гн/м. Ориентировочное значение диэлектрической прони-
цаемости диэлектрика е = еге0 = 5-8,654-Ю-12 = 4,44,10-11 Ф/м.
Волновое сопротивление свободного пространства равно
Жд = и/0
Яо. = 12Ол Ом.
Veo
(П.4)
Так как усредненное значение относительных диэлектрической и магнитной про-
ницаемостей диэлектрических материалов равны е,. = 5 и 1, то волновое сопротив-
ление диэлектрика равно
11.3.3. Воздействие сильных электромагнитных полей на полупроводники
Особый вид радиоматериалов представляют собой полупроводники. Именно
внедрение полупроводников в электронную технику позволило совершить револю-
ционный переворот, который в последние десятилетия наблюдается во всех направ-
лениях развития информационных систем. Этот переворот связан в первую очередь
с созданием высокопроизводительных цифровых вычислительных устройств, раз-
личных сверхвысокочастотных радиотехнических устройств (ФАР, линий переда-
чи СВЧ-сигналов, генераторов, усилителей и других устройств), оптико-электрон-
ных и лазерных устройств. Полупроводниковые приборы и интегральные схемы (ИС)
практически вытеснили из радиотехнических устройств электровакуумные прибо-
ры и изменили весь облик РЭС. Удельный вес полупроводниковых элементов в со-
временных РЭС составляет более 80 %. Поэтому изучение возможностей ФП полу-
проводниковых устройств сильными ЭМП приобрело в настоящее время особый
интерес как с точки зрения качественного повышения эффективности действия
электромагнитного оружия РЭБ, так и изыскания способов защиты от ФП.
Полупроводники обладают как магнитными, так и электрическими свойства-
ми, основными из которых, интересными с точки зрения воздействия на них силь-
ных ЭМП, являются [56]:
• весьма высокая чувствительность к внешним воздействиям (нагреву, облуче-
ниям ЭМП и др.);
• отрицательные температурные коэффициенты электропроводности при нагре-
ве (при росте температуры удельное сопротивление полупроводника падает);
• весьма широкий разброс электронной проводимости даже при стандартной
(комнатной) температуре (удельное сопротивление различных полупроводни-
ковых материалов может принимать значения в интервале от 10-3 до 106 Ом-см).
На основе полупроводниковых материалов создают полупроводниковые при-
боры — диоды, транзисторы, монолитные и гибридные (пленочные) интегральные
микросхемы, иные приборы. Существует большое разнообразие конструкций по-
лупроводниковых приборов и широкий спектр технологических приемов их изго-
товления. Устойчивость РЭС против функционального поражения определяется в
конце концов стойкостью против разрушения электрических переходов полупро-
водниковых элементов.
Работа всех полупроводниковых приборов основана на использовании электрон-
но-дырочного перехода, гетероперехода или перехода, образованного в результате
контакта между металлом и полупроводником (перехода Шотки).
11.3. Воздействие мощного импульсного ЭМИ на элементы РЭС
423
В диоде с р-п переходом или с гетеропереходом кроме выпрямляющего перехо-
да имеются два омических перехода, через которые р- и /7-области диода соедине-
ны с выводами. В диоде с выпрямляющим электрическим переходом в виде кон-
такта между металлом и полупроводником всего один омический переход.
Обычно полупроводниковые диоды имеют несимметричные р-п переходы. По-
этому при прямой полярности внешнего напряжения, когда происходит пониже-
ние потенциального барьера в р-п переходе, т. е. при прямом направлении для р-п
перехода, количество носителей заряда, инжектированных из сильнолегированной
в слаболегированную область, значительно больше, чем количество носителей,
проходящих в противоположном направлении. В соответствии с общим определе-
нием область полупроводника, в которую происходит инжекция неосновных для
этой области носителей заряда, называют базой. В диоде базовой областью являет-
ся слаболегированная область, которая может оказывать существенное влияние на
его характеристики и параметры.
Полупроводниковые р-п переходы изготавливаются на полупроводниковой пла-
стине. При этом в исходном полупроводниковом материале создаются зоны с разным
характером проводимости. На основе р-п переходов создают транзисторы и диоды.
Емкости запертых р-п переходов используются как конденсаторы. Резисторами
служат слаболегированные области полупроводника, имеющие сравнительно боль-
шое удельное сопротивление. На одной круглой пластине диаметром 90...НО мм
изготавливается одновременно несколько десятков схем.
Процесс изготовления состоит из эпитаксиального наращивания, окисления,
фотолитографии, диффузии и металлизации на подложке из монокристаллического
кремния. Подложка служит для отвода тепла, электрической изоляции и придания
схеме необходимой механической прочности. На пластине подложки наращивается
эпитаксиальный слой кремния с проводимостью /7-типа. Этот слой служит для обра-
зования коллекторных областей транзисторов. Эпитаксиальное наращивание — это
получение монокристалла из атомов. Атомы осаждаются на поверхность монокри-
сталлической подложки таким образом, что кристаллическая решетка наращивае-
мого слоя является точным продолжением кристаллической решетки подложки.
Затем проводятся несколько диффузионных циклов, в ходе которых образуется
изоляция между различными элементами будущей интегральной схемы, формиру-
ются на поверхности эпитаксиальной пленки области с p-типом проводимости,
служащие базами транзисторов и резисторами, формируются эмиттерные области
с проводимостью /7-типа. В диффузионный процесс входят операции окисления,
фотолитографии и собственно диффузии примеси. Сначала пластина нагревается
в атмосфере, обогащенной кислородом. На поверхности эпитаксиального слоя
образуется слой двуокиси кремния. Затем двуокись кремния удаляется с тех участ-
ков, через поверхность которых будет диффундировать примесь p-типа. Чтобы уда-
лить двуокись кремния, на ее поверхность наносят равномерный слой фотоэмуль-
сии, которую засвечивают через маску (шаблон) с прорезями, образующими нуж-
ный рисунок. Незасвеченные участки фотоэмульсии удаляются при проявлении.
Когда пластина подвергается травлению в растворе, содержащем плавиковую кис-
лоту, двуокись кремния разрушается на незасвеченных участках, обнажаются те
участки поверхности пластины, где требуется сформировать р-области.
Следующий технологический этап заключается в создании, где это необходимо,
электрических соединений между компонентами будущей интегральной схемы. Для
этого в слое двуокиси кремния вытравливается новый комплект окон на тех местах,
424 Глава 11. Функциональное поражение РЭС электромагнитными полями
где должны быть сформированы контакты с компонентами. На всю поверхность
схемы напыляют тонкий слой металла (чаще всего — алюминия), на котором мето-
дом фотолитографии получают рисунок межсоединений. Если в одном слое металла
нельзя организовать все соединения (когда необходимо прокладывать пересекающи-
еся проводники), этот слой покрывается слоем стекла (окиси кремния), поверх ко-
торого наносится еще один слой проводников и т. д.
Разрез кремниевой пластины, на которой в результате применения техноло-
гии эпитаксиального наращивания получены интегральные схемы, иллюстрируется
рис. 11.3.
р (коллектор)
п (коллектор)
п (база)
р+ (эмиттер)
р (база)
п (эмиттер)
р Si02 р AI
Рис. 11.3. Элементы монолитных интегральных схем
Последняя операция по обработке пластины — разрезание ее на отдельные
схемы (скрайбирование). Полученные кристаллы («чипы» от англ, chip — осколок)
ИС оформляют как компоненты больших электронных систем. Для этого к крис-
таллу приваривают выводы в виде тонких металлических проволок.
Современная технология, использующая описанные процессы, позволяет по-
лучать кристаллы ИС площадью от долей до единиц квадратных миллиметров с
количеством элементов 103 и более (при этом достигается плотность расположе-
ния компонентов порядка 103 мм-2). Кристалл с выводами может быть смонтиро-
ван в отдельном корпусе, обеспечивающем необходимую герметизацию, теплоот-
вод, а также возможность установки и электрического соединения ИС с другими
элементами электронной системы или устройства на плате печатного монтажа.
Гибридные ИМС появились несколько раньше монолитных. Для их изготовле-
ния на подложку из изоляционного материала (керамики или стекла) напыляются
тонкие металлические пленки, образующие резисторы и соединительные провод-
ники. Для пленочных резисторов выбираются материалы с высоким удельным со-
противлением, а для проводников — с низким. Пленки напыляют через специальные
маски-трафареты. Обычно напыляют сразу несколько одинаковых схем на одной
общей большой подложке. После окончания всех требуемых циклов напыления
пластину разрезают (скрайбируют) на части, соответствующие подложкам отдель-
ных схем. К специальным контактным площадкам на пассивных пленочных компо-
нентах будущей схемы приклеивают активные элементы — диоды, транзисторы и
монолитные ИС в микроминиатюрном бескорпусном исполнении.
Толщина пленок, образующих проводники и легированные полупроводящие
области очень мала, порядка нескольких микрон и даже долей микрона. Вследствие
11.3. Воздействие мощного импульсного ЭМИ на элементы РЭС 425
незначительной толщины слоев легированных полупроводящих п- и p-областей фа-
зовые превращения полупроводника в проводник (пробой) происходят при очень
малых значениях напряженности поля Екр, что делает микросхемы исключительно
слабозащищенными против воздействия оружия ФП.
Ток в полупроводнике при пробое увеличивается лавинообразно и плотность
тока быстро стремится к насыщению. Типичная кривая зависимости плотности то-
ка J от напряженности электрического поля Е в германии (Ge) при Т = 4,2 К при-
ведена на рис. 11.4.
Рис. 11.4. Зависимость плотности тока от напряженности
электрического поля в германии при Т = 4,2 К
52
(11.6)
120л
%
см~
Пробой наступает при Екр = 5 В/см. При этом ток в диэлектрике сразу возра-
стает на десять порядков. В данном случае при низкой температуре имеет место
электрический пробой, не связанный со сколько-нибудь значительным нарушени-
ем теплового равновесия в веществе.
Время рекомбинации носителей зарядов (время переходных процессов) т ~ 10-9 с.
Критическое значение плотности потока энергии в рассмотренном примере может
быть определено с помощью (11.3). Подставляя в (11.3) соотношение (11.5) можно
получить
Е1
П =-^~
Р
Обобщенные данные критических значений плотности потока энергии для раз-
личных полупроводниковых приборов свидетельствуют об очень низкой электриче-
ской прочности полупроводниковых компонентов, применяемых в антенных решет-
ках, приемных устройствах, СВЧ-линиях передачи сигналов, вычислительных уст-
ройствах и других электронных приборах.
В отличие от диэлектриков и металлов, полупроводниковые материалы обладают
значительной поглощающей способностью. Поглощение сильных ЭМП является
главной причиной фазовых превращений полупроводников.
При воздействии сильных ЭМП температура р-п перехода возрастает. А ток,
текущий через переход, вследствие термогенерации увеличивается. Возникает теп-
ловой пробой и полупроводник переходит в новое фазовое состояние — становит-
ся проводником. Происходит необратимый отказ электромагнитного прибора.
Поглощения электромагнитных волн при распространении их в полупроводнике
происходит в результате взаимодействия ЭМП с веществом. В результате такого
426
Глава 1L Функциональное поражение РЭС электромагнитными полями
взаимодействия энергия ЭМП преобразуется в другие ее виды. Амплитуда плос-
ких электромагнитных волн в веществе затухает экспоненциально в зависимости
от глубины проникновения х:
Е(х)=Еое~ах, (11.7)
где Ео — напряженность поля на поверхности кристалла полупроводника; а —
коэффициент затухания: а-1 — имеет смысл длины, на которой интенсивность элект-
ромагнитных волн затухает в е раз.
Коэффициент затухания а зависит как от свойств вещества, так и от частоты
электромагнитных волн. Вклад в значение а дают различные механизмы поглоще-
ния, каждый из которых существенней в определенном диапазоне волн. Можно
выделить следующие основные процессы, ответственные за поглощение электро-
магнитных волн на частотах /> 1012 Гц:
• поглощение при переходе носителей зарядов (электронов и дырок) на различ-
ные энергетические уровни;
• поглощение колебаниями решетки;
• поглощение примесями.
Поглощение может приводить к нагреву вещества или вызывать вторичное (инду-
цированное) излучение. Основным эффектом, проявляющимся при нагреве, являет-
ся тепловой пробой среды.
Наиболее сильно в полупроводниках поглощаются волны оптического диапа-
зона 1О-2...1О2 мкм. Электромагнитные волны радиодиапазона (миллиметрового и
сантиметрового) поглощаются в основном за счет нелинейного преобразования спек-
тра падающих волн различными микро- и макронеоднородностями полупроводни-
ковых материалов. Существенный вклад в фазовые превращения вносят эффекты
прямого детектирования мощных электромагнитных волн различными полупровод-
никовыми приборами (транзисторами, смесительными диодами, ключевыми эле-
ментами и др.). Эти эффекты вызывают в полупроводниковых приборах сильные
токи, которые разрушают тонкие пленочные слои полупроводниковых материалов,
образующих р-п переходы.
В оптическом диапазоне волн основной вклад в механизм поглощения вносят
составляющие спектра инфракрасного и видимого диапазонов. Поглощение волн
с длиной X > 1 мкм незначительно, и тонкие полупроводниковые пластинки стано-
вятся прозрачными. На рис. 11.5 для кремниевого полупроводника (Si) схематич-
но показаны те области длин волн X, для которых действуют различные указанные
выше механизмы поглощения [63].
Из рисунка видно, что преобладающим является первый механизм, связанный
с поглощением энергии фотонов свободными носителями заряда.
При нагревании полупроводника, происходящем под воздействием сильного
ЭМП, выделяется энергия. Спектральная плотность мощности излучения абсолютно
черного тела (как тепловой модели полупроводника) описывается законом излуче-
ния Планка (в единичном интервале частот):
-----7Т7--ч Дж/м2’ (1L8)
с I hf 1 1
где h = 1,054-Ю-34 Дж-с = 1,054 10-27 Эрг-с — постоянная Планка; с— скорость света;
f— частота, Гц; k = 1,38-10-23 Дж/град = 1,38-10-16 Дж/град — постоянная Больцма-
на; Т — температура, К.
11.3. Воздействие мощного импульсного ЭМИ на элементы РЭС
427
Рис. 11.5. Поглощение в Si в разных диапазонах электромагнитных волн:
1 — поглощение свободными носителями; 2 — кристаллической решеткой;
3 — поглощение примесями
Величина П(/) в (11.8) рассматривается как отношение спектральной плот-
ности излучения любого нагретого тела к его коэффициенту поглощения (закон
излучения Кирхгофа), поэтому закон (11.8) с точностью до постоянного коэффи-
циента представляет зависимость плотности излучения от температуры Т и часто-
ты f для любого нагретого полупроводника.
Для радиочастот, когда hf« кТ, из (11.8) следует, что
n(f)~f2kT.
с
В оптическом диапазоне при hf» кТ справедлив закон Вина:
z X 2л 2 ( hf\
П(/) = —/ ехр-------.
V ' с2 I кТ)
Из (11.10) следует, что в оптическом диапазоне имеет место резонансная зави-
1 С тт
симость плотности потока энергии от длины волны к = —. Для каждого значения
температуры Т существует максимальное значение П(Х = с//) =Пгпах (Хтах), кото-
рому однозначно соответствует значение длины волны
ч _ 3000 /11 11 \
^•тах — гг, МКМ. ( • )
(11-9)
(11.10)
Из (11.11) следует, например, что при Т = 500...400 К основное излучение про-
исходит в ИК-диапазоне на частотах Х = 4...8 мкм. Анализ (11.8) позволяет также
сделать вывод о необходимости выбора оптимальной частоты электромагнитных
волн для ФП полупроводниковых приборов. В дальнейшем будут отдельно рассмот-
рены устройства ФП, основу которых составляют оптические квантовые генерато-
ры (лазеры), позволяющие получать мощные ЭМП в оптическом диапазоне.
Представленные зависимости вида (11.8) дают также возможность решения об-
ратной задачи: при заданной критической температуре полупроводника Т^, при
которой происходит пробой р-п перехода, предъявить требования к плотности по-
тока сильного ЭМП, при которой достигается эффект ФП. Так при температуре
Ткр = 500 К необходимо создать в районе полупроводникового прибора критическое
значение плотности потока энергии Пкр - 20 Дж/см2. Длину же волны генератора
следует выбирать в пределах к = 4...8 мкм. Такой вариант оптического квантового
генератора наиболее рационален. Требования к выходной энергии луча могут быть
определены из уравнения ФП.
428
Глава 11. Функциональное поражение РЭС электромагнитными полями
11.4. Критические энергетические уровни функционального
поражения электронных устройств
Обычно значение Пкр находится одним из двух способов.
1. Теоретически определяется Экр по типовым моделям функционального по-
ражения, из которых наиболее распространенной и заслуживающей доверия явля-
ется модель Вунша — Белла.
2. Экспериментально для конкретного элемента входных устройств радиоэлект-
ронной аппаратуры (РЭА) определяется Экр.
В различных работах приводятся значения Пкр, при котором выходят из строя
различные приборы. Эти значения лежат в пределах Пкр = 10 8...102 Дж/см2. Такой
разброс значений вызывает сомнения в их справедливости. Поэтому предлагается
косвенный подход к определению Пкр. Этот подход опирается на результаты прак-
тических наблюдений за работой РЛС при локации объектов с очень большой ЭПР
(о > 103 м2) при малых дальностях. Опытом установлено, что входные приемные
элементы (полупроводниковые смесители, фазовращатели) не выходят из строя в
тяжелых условиях работы РЛС. Поэтому интегральные оценочные значения Пкр
получают, увеличивая на 30...40 дБ входные значения плотности энергии сигнала
Пкр, наблюдаемого в апертуре антенны РЛС при работе в тяжелых условиях.
В простейшей ситуации работа РЛС иллюстрируется рис. 11.7.
Рис. 11.7. Работа РЛС в простейшей ситуации
Для определения Пкр необходимо найти значение плотности энергии отражен-
ного сигнала при работе РЛС в «тяжелом» режиме и, умножив его на коэффициент
запаса ЛГфП, получить искомое значение Пкр:
Пкр = АГфППтах, (11.12)
где Птах — максимальная плотность энергии полезного сигнала, при которой еще
не наблюдается перегрузка приемника (верхний уровень динамического диапазо-
на); /ГФП = 103... 104 — коэффициент ФП, определяющий необходимый уровень пре-
вышения плотности энергии помехи Пкр над максимальной плотностью энергии
сигнала Птах.
Плотность потока мощности сигнала, отраженного целью, удаленной на рас-
стояние R, в апертуре антенны (рис. 11.7) составит
Рс<?с D / 2
Р = ~ ч2 4° ВТ/М • (11.13)
(4л)2 R4
При обработке N импульсов с длительностью ти плотность потока энергии в
апертуре антенны
П = Утир=—<тУти Дж/м2. (11.14)
(4л) D4
Критическая плотность энергии Экр = А"фпЭтах.
11.5. Источники сильных электромагнитных полей
429
Для ориентировочных расчетов принимается PCGC = 1О10 Вт; о = 103 м2; N= 102;
ти = 10"6 с; R = 103 м; /Гфп = 103.
Из (11.12) и (11.14) следует, что Пкра 510-3 Дж/м2 = 510“6 Дж/см2.
В литературе [46] приводится Пкр = 0,1... 1 мкДж/см2. Результаты практически
совпадают.
В соответствии со вторым способом критическое значение Пкр можно опреде-
лить, если известен динамический диапазон поражаемого приемника
(11-15)
'min
где Pmin — чувствительность приемника; Ртах — максимальная мощность принима-
емого сигнала, при которой приемник с заданным качеством обрабатывает сигнал.
Из (11.15) следует максимально допустимое значение энергии
®тах “ ^4i^rnax “ ^дин ^rnin (11.16)
Критическое значение Пкр определяется из (11.12) и (11.16)
пкр = *фППтах = дж/м2, (11.17)
А
где А =-------эффективная площадь антенны; G— коэффициент усиления антен-
4л
ны; X — длина волны.
Или
Пкр = --^ин^|ЛТи Дж/м2. (11.18)
GX"
Пусть Л-фп = 103; = IO10; Pmin = КГ12 Вт; 100 = 102; ти = КГ6 с; G= 103;
Л, = З Ю-2 м. Тогда Пкр = 10~2 Дж/м2 = 10~6 Дж/см2. Иначе говоря, Пкр = 1 мкДж/см2.
11.5. Источники сильных электромагнитных полей
Поражение радиотехнических устройств мощными радиоволнами происходит,
главным образом за счет прямого детектирования радиосигналов полупроводнико-
выми приборами, воспринимающими радиосигналы как элементарные антенны.
Эффективное ФП РЭС может быть достигнуто воздействием на отдельные элект-
ронные компоненты (смесители, усилители, фазовращатели и др.). Станции актив-
ных помех (САП) могут создавать помехи с ограниченной мощностью излучения,
что связано с низким КПД выходных усилителей передатчиков помех и непригод-
ны для решения задач ФП РЭС.
Для мощных выходных СВЧ-приборов энергетически наиболее выгодна работа
в импульсном режиме, когда развивается мощность Ри ~ 106 Вт при длительности
излучаемых сигналов т - 10... 100 мкс и скважности Q ~ 10... 100. В непрерывном ре-
жиме современные выходные устройства передатчиков помех создают излучения с
мощностью Рп ~ 103 Вт. Необходимость работы передатчиков в импульсном режи-
ме является вынужденной и вызвана, кроме обеспечения выполнения РЭС своих
функций, трудностями теплоотвода, возникающими при непрерывной работе. Осо-
бенно велики тепловые потери на очень высоких частотах (/> Ю10 Гц), где КПД
приборов весьма мал. При переходе к высоким частотам трудности теплоотвода зна-
чительно возрастают, так как в геометрически подобных радиоустройствах мощность
430
Глава 11. Функциональное поражение РЭС электромагнитными полями
теплового излучения прибора Р~ X2. Этот эффект обусловлен тем, что при уменьше-
нии длины волны X, при заданном значении выходной мощности Рвых = const умень-
шаются геометрические размеры прибора и, следовательно, возрастает степень его
нагрева. Но достаточна ли эта мощность для поражения РЭС? Для ответа нужно
оценить потенциал станции ФП, необходимый для поражения элементов РЭС.
Ориентировочно можно считать, что надежное ФП РЭС происходит при кри-
тическом значении плотности потока энергии Пкр = 0,1...1 Дж/см2. Получить такие
плотности энергии в районе расположения поражаемого элемента (например, полу-
проводникового фазовращателя ФАР РЭС) в радиодиапазоне можно лишь при
длительном воздействии на объект достаточно мощного излучения (рис. 11.8), либо
при кратком воздействии на объект, но очень мощного излучения.
Источник
СВЧ-излучения
Поражаемое
РЭС
Рис. 11.8. Условие ФП РЭС СВЧ-излучением: максимум луча источника
СВЧ-излучения должен быть направлен на поражаемое РЭС
Плотность потока мощности СВЧ-излучения в апертуре антенны РЭС, без уче-
та затухания, определяется по формуле
(11-19)
где Рп — мощность передатчика помех; 6П — коэффициент усиления антенны; R—
удаление источника излучения от поражаемого РЭС.
Из тактических соображений желательно, чтобы передатчик ФП обеспечивал по-
ражение РЭС на расстоянии 7?мин > 10 км. Если известна плотность потока Пкр энер-
гии, обеспечивающей поражение РЭС, то, подставляя в (11.19) значение Л = ЛМИН
и переходя от плотности потока мощности к плотности потока энергии, можно опре-
делить требования к энергетическому потенциалу передатчика по формуле
Р G = 4nR2
* IIV7n
(11.20)
где Пкр — критическое (необходимое для поражения) значение потока энергии; тп —
время воздействия поражающего СВЧ-излучения на РЭС.
Подставляя в (11.20) значения Пкр = 0,1...1 Дж/см2, тп = 10-6с, 7?мип = 104 м,
можно получить оценку необходимого энергетического потенциала СВЧ-излучателя,
обеспечивающего ФП:
P„G„ ^1,310|8...1,31019 Вт
Следовательно, простой прикидочный расчет показывает, что имеются значи-
тельные трудности создания и практического применения средств ФП в радподиа-
пазоне. Главные и наиболее существенные трудности связаны с созданием мощно-
го источника СВЧ-излучения с очень большим энергетическим потенциалом с
, с выводом этого источника в район расположения поражаемого
РЭС, чтобы расстояние между ними было Лтах < 10 км, с решением проблемы защи-
ты СВЧ-устройства ФП от поражения оружием противника.
11.6. СВЧ-оружие функционального поражения многоразового применения 431
Эти трудности исключают применение традиционных СВЧ-генераторов и вы-
ходных усилителей для целей ФП РЭС. Применение их, в частных случаях, воз-
можно при ведении антитеррористических операций на ограниченных и контро-
лируемых территориях. Несколько смягчить проблему «энергетического голода»
традиционных САП может применение активных ФАР, но при этом возникает новая
проблема, связанная с наведением узкого луча антенны САП на поражаемое РЭС.
Однако генераторы на новых физических принципах делают проблему ФП РЭС не
столь безнадежной. К тому же в прикидочных расчетах использовано значение Пкр,
характерное для ФП наиболее устойчивых к воздействию СВЧ-излучений элемен-
тов, применяемых в РЭА. Для того, чтобы подчеркнуть трудности создания устрой-
ства ФП, сознательно не учтено влияние усилительных свойств приемной антен-
ны облучаемого РЭС.
11.6. СВЧ-оружие функционального поражения
многоразового применения
Установки СВЧ-оружия (СВЧО) многоразового применения могут размещать-
ся на разных платформах: на космических аппаратах, самолетах, вертолетах, кораб-
лях, танках и иных транспортных средствах. Эффективным представляется исполь-
зование такого оружия с борта боевых дистанционно пилотируемых летательных
аппаратов (ДПЛА), наводимых на цели самолетами дальнего радиолокационного
обнаружения и управления (ДРЛОУ) или с наземных командных пунктов. Также
возможно применение СВЧО разведывательно-ударными комплексами (РУК).
По оценкам специалистов [56], производительность одного боевого ДПЛА с
СВЧО на борту составит примерно 105 импульсов за полет. Чтобы гарантированно
поразить радиоэлектронную систему, СВЧО должно генерировать серию импуль-
сов. Если предположить, что каждая цель будет облучаться тысячью импульсов, то
ДПЛА мог бы успешно воздействовать на 100 целей за один полет.
В качестве базы для создания СВЧО функционального поражения целесообразно
использовать такие генераторы, которые обеспечат максимум удельной мощности
(мощности на единицу массы генераторной установки).
В качестве таких генераторов применение получили виркаторы — триоды с
виртуальным катодом. Могут также использоваться многоволновые черепковские
генераторы (МВЧГ). Массогабаритные показатели МВЧГ хуже, чем у виркаторов,
но их конструкция и технология изготовления хорошо отработаны, поскольку они
известны довольно давно [56].
По состоянию на сегодняшний день максимальная дальность функционального
поражения СВЧО невелика и составляет ~ 10 км (если исключить из рассмотрения
многотонные «экзотические» установки). Поэтому объектами поражения будут об-
разцы вооружений и военной техники, которые действуют в ближнем бою, т. е. ра-
диотехнические и инфракрасные головки самонаведения управляемых ракет, радио-
визиры целей и ракет, бортовая аппаратура командного радиоуправления, терминалы
потребителей информации спутниковых навигационных систем.
Для СВЧО многоразового применения прежде всего необходимо обеспечить
ориентацию основного луча ДНА СВЧО на поражаемое РЭС. Амплитудно-фазо-
вое распределение поля в раскрыве поражаемого РЭС может быть таким, что уро-
вень первых боковых лепестков ДНА достигает -40 дБ. Это значит, что для функ-
432
Глава 11. Функциональное поражение РЭС электромагнитными полями
ционального поражения таких средств по боковым лепесткам требуется в 104 раз
более высокая мощность, чем для ФП по основному лучу. Поэтому излучение СВЧ-
импульсов желательно производить в те интервалы времени, когда имеет место
соосность основных лучей антенн СВЧО и поражаемого РЭС.
Например, при относительных ошибках взаимной ориентации лучей ДНА 0/0ФП
и 0/0рэс» выраженных в единицах ширины лучей средства ФП 0ФП и поражаемого
РЭС 0рэс» ПРИ Равномерном амплитудном распределении поля на раскрывах обе-
их антенн, когда диаграммы направленности имеют вид
( 0
sin 2,78—
Ае)=—(Ц.21)
2,78—
6о
ожидаемые значения потерь мощности излучения приведены в табл. 11.1. Значения
потерь в децибелах указаны в местах пересечения соответствующих строк и столбцов.
Таблица 11.1
Ошибка ориентации луча антенны СВЧО Ошибка определения направления луча антенны РЭС
-А_=о 0₽ЭС —^— = 0,5 0РЭС -®-=1 0рэс
-°- = 0 0фП 0 3 17
—^— = 0,5 0фП 3 6 20
-°-=1 0фП 17 20 34
Из табл. 11.1 следует, что предельно допустимыми можно считать ошибки оп-
ределения ориентации лучей, равные ±О,50РЭС и ±О,50ФП. В этом случае ослабле-
ние плотности потока мощности СВЧ-излучения, эффективно действующего в пре-
делах апертуры антенны РЭС, не превышает 6 дБ. С увеличением различия несу-
щих частот РЭС и мощного СВЧ-излучения ДНА антенны сглаживается и влияние
эффекта направленности приемной антенны уменьшается. Однако платой за сни-
жение требований к взаимной ориентации лучей антенн будет повышение уровня
мощности (энергии), необходимой для ФП.
Приведенный пример показывает, что в состав оружия ФП должна входить
подсистема, способная непрерывно отслеживать направление на поражаемый объект
и управлять ориентацией луча антенны СВЧО.
Длительность мощных СВЧ-импульсов должна быть такой, чтобы не успевали
срабатывать устройства защиты приемников РЭС от воздействия мощных ЭМИ.
Применение таких устройств будет неизбежным для защиты от ФП. Вся энергия
излучения должна быть сконцентрирована в импульсе с крутыми фронтами, а об-
щая его длительность ти не должна превышать времени срабатывания ту самых
быстродействующих устройств защиты приемников: ти < ту = 70...90 нс. Использо-
вание таких коротких импульсов важно еще и потому, что с ними связан механизм
малоэнергоемкого ФП РЭС, что позволяет при одинаковой энергии излучения уве-
личить дальность ФП.
11.7. СВЧ-оружие функционального поражения одноразового применения 433
Максимальная импульсная мощность, излучаемая СВЧ-генератором в простран-
ство, ограничивается пробойными характеристиками атмосферы (ее ионизацией).
При большой мощности СВЧ-излучения более длинные импульсы скорее осу-
ществят пробой воздуха. Кроме того, пробойное значение напряженности элект-
рического поля зависит от диапазона несущих частот, давления (высоты луча над
земной поверхностью) и влажности воздуха.
СВЧО многоразового применения дороже одноразового СВЧО, поскольку оно
требует существенно большего энергетического потенциала. Поэтому применение
СВЧО ФП многоразового применения будет эффективно и экономически оправдано
при защите важнейших объектов инфраструктуры и жизнеобеспечения, таких как
атомные электростанции и гидроэлектростанции, ядерные арсеналы, крупные транс-
портные узлы, предприятия, добывающие, хранящие и перерабатывающие энергоно-
сители и т. п.
СВЧО многоразового применения способно воздействовать в пределах объемной
зоны поражения одновременно на несколько ракет и обеспечивать защиту охраня-
емого объекта одновременно с нескольких направлений за счет быстрого перенаце-
ливания луча ФАР. Таким образом, СВЧО многоразового применения имеет пре-
имущества по сравнению с аналогичным оружием одноразового применения по про-
пускной способности, быстродействию, управляемости и многократности боевого
применения.
11.7. СВЧ-оружие функционального поражения
одноразового применения
Устройства СВЧО одноразового применения могут размещаться на ракетах
класса «поверхность — поверхность», «воздух — поверхность», «поверхность —
воздух», «воздух — воздух», в управляемых авиационных бомбах, боевых кассетах,
неуправляемых снарядах. Все эти управляемые и неуправляемые средства пораже-
ния, оснащенные источниками мощного СВЧ-излучения, принято называть элект-
ромагнитными боеприпасами (ЭМБ).
Первое упоминание о боевом применении ЭМБ относится к 1991 г. Во время
первой войны с Ираком США использовали новый класс секретных боеголовок,
несущих мощные источники ЭМИ. Этими боеголовками комплектовались ракеты
«Томагавк» [4].
Во время второй войны с Ираком 26 марта 2003 г. также были применены ЭМБ
для поражения иракских объектов боевого управления, насыщенных электронной
техникой, электротехническим оборудованием и кабельными сетями [4].
Успехи в создании одноразовых генераторов мощного СВЧ-излучения позво-
ляют предсказать грядущий качественный скачок в боевом применении СВЧО ФП.
Мощный СВЧ-излучатель будет применяться не вместо боевой части ракеты (бомбы,
снаряда), а вместе с ней. При этом за счет отбора части энергии взрыва боевой части
(БЧ) на излучение зона поражения целей осколками будет меньше, чем у обычно-
го боеприпаса, но зато в несколько раз возрастет радиус поражения электронной
аппаратуры объектов-целей [65].
Следует особо подчеркнуть, что стратегические управляемые авиационные сред-
ства поражения, не излучая электромагнитные сигналы, имеют минимум демаски-
рующих признаков. Для их наведения на цели применяют инерциальные и корре-
ляционно-экстремальные системы управления. Уход лазерных и пьезоэлектрических
434
Глава 11. Функциональное поражение РЭС электромагнитными полями
гироскопов — датчиков угловой скорости — в инерциальных навигационных систе-
мах составляет 0,01 ...0,05 град/ч. Используется также навигационное поле, форми-
руемое сетевыми спутниковыми системами. Такие системы управления не подверже-
ны воздействию традиционных активных помех, но могут быть подавлены или вооб-
ще выведены из строя СВЧО ФП. Так, например, корреляционно-экстремальные
системы используют цифровые карты рельефа местности, которые вводятся в конк-
ретные полетные задания оперативно перед пуском ракеты или даже в процессе ее
полета. Стереть или хотя бы исказить эти карты радиопомехи не могут. Но мощ-
ное СВЧ-излучение способно на деструктивное воздействие с таким эффектом.
Дальнейшее повышение мощности и энергии излучения лимитируется возмож-
ностями системы электропитания СВЧ-генераторов, в качестве которых обычно
используются емкостные накопители энергии. Эти накопители представляют со-
бой сложные, громоздкие и дорогостоящие инженерные сооружения. В мегаджоу-
левом диапазоне энергий реальной альтернативой емкостным накопителям могут
служить взрывомагнитные генераторы [64].
На рис. 11.9. представлена схема СВЧО функционального поражения однора-
зового применения.
г------------------------------------------п
Рис. 11.9. Упрощенная схема СВЧО одноразового применения
По линии 1 передаются сигналы, переносящие информацию о поражаемых объ-
ектах (целях). Информация о целях обрабатывается до момента применения ЭМБ.
По линии 3 осуществляется информационный обмен между системами информаци-
онного обеспечения и автоматического управления. Эта информация необходима
для наведения ЭМБ. Линия 4 — это канал обмена информацией между комплексом
традиционных средств РЭБ, если таковой имеется, и системой информационного
обеспечения СВЧО.
Необходимость информационного обмена по линии 4 обусловлена требованием
максимального снижения вероятности поражения защищаемого объекта (носите-
ля СВЧО) управляемой ракетой, когда головка самонаведения этой ракеты уже пора-
жена («ослеплена») и ее полет осуществляется по памяти.
11.7.1. Взрывомагнитные генераторы
Взрывомагнитные генераторы (ВМГ) — это устройства одноразового действия,
способные генерировать мощные ЭМИ. Удельная плотность генерируемой элект-
рической энергии в ВМГ может достигать —100 Дж/г, а удельная мощность —
1013...1014 Вт/м3. Удельные параметры всей системы электропитания на основе ВМГ
11.7. СВЧ-оружие функционального поражения одноразового применения 435
(с системой запуска и первичным источником начального тока) примерно на по-
рядок ниже [64]. ВМГ работает по принципу пространственного сжатия магнитно-
го потока под действием сверхвысоких давлений, образующихся при детонации кон-
денсированных ВВ. Среди всех типов генераторов импульсов ВМГ имеют наилуч-
шие массогабаритные показатели и наивысшие значения мощности.
ВМГ успешно применяются для питания генераторов мощного СВЧ-излучения
(например, виркаторов), источников сильноточных пучков электронов и протонов
для ускорителей, источников питания мощных лазеров.
Пространственное сжатие ЭМП реализуется в лазерах, которые концентриру-
ют энергию в весьма тонком шнуре. Лазер способен формировать высокоэнергети-
ческий луч электромагнитного излучения шириной всего -10 угловых секунд, что
при удалении объекта поражения на 100 м, позволяет получить на его поверхности
поражающее пятно площадью менее 0,19 см2, а на удалении 500 м — менее 4,7 см2.
Это пятно с плотностью энергии П = 10...30 Дж/см2 прожигает электронные при-
боры и выводит их из строя. Крупным недостатком лазера является необходимость
точного наведения луча на цель (ошибка наведения не должна превосходить не-
скольких угловых секунд), что требует включения в состав комплекса СВЧО ФП
весьма совершенной и дорогой подсистемы информационного обеспечения.
Широкое использование ВМГ в составе СВЧО ФП объясняется по крайней мере
четырьмя причинами. Они наилучшим образом согласованы с высокоимпедансными
нагрузками, например, с виркатором или мощным лазером [56]. В составе элект-
ромагнитных боеприпасов (ЭМБ) ВМГ удовлетворяют требованиям обеспечения
электромагнитной совместимости, не поражая собственные электронные устрой-
ства. По той же причине не наносят вреда личному составу (обслуживающему персо-
налу). Кроме того, ВМГ значительно дешевле, чем генераторы СВЧ-излучения мно-
горазового применения.
ВМГ обладает замечательным свойством длительное время хранить энергию маг-
нитного поля в устойчивой форме и в нужный момент (в момент подрыва ВВ) быстро
превращать ее в качественно новую форму — в высоковольтный импульс, которым
можно запитать мощный СВЧ-излучатель.
Обычный высокоточный боеприпас калибра 100 кг имеет радиус зоны сплош-
ного поражения около 40 м. ЭМБ того же калибра имеет минимальный радиус
поражения электронных датчиков информации приблизительно 200 м [56].
11.7.2. Физические принципы получения высокоэнергетических
электромагнитных полей
Принципы получения высокоэнергетических ЭМП на основе сверхсильных то-
ков предложены в 1951 г. академиком А. Д. Сахаровым [56]. Эти принципы основаны
на создании в замкнутом пространстве большим электрическим током сильного
магнитного поля, сохранении (аккумуляции) его на заданное время в энергетически
изолированном объеме и сверхбыстром превращении энергии магнитного поля в
энергию ЭМП при взрывном деформировании (сжатии) контура с током. В ча-
стности, при кумулятивном схлопывании при срабатывании ВВ в полых металли-
ческих цилиндрах с током.
Возможность генерации сверхмощных ЭМП базируется на основных положени-
ях электродинамики. Наиболее полно и физически наглядно процессы, протекаю-
щие в ВМГ, могут быть описаны уравнениями Максвелла. Для понимания сути
436
Глава 11. Функциональное поражение РЭС электромагнитными полями
физических явлений, порождаемых работой ВМГ, достаточно воспользоваться вто-
рым уравнением Максвелла, записанным в дифференциальной форме
rotE = -—. (11.22)
Эг
где Е = Е(х, у, z, t) — напряженность электрического поля в пространственно-вре-
менном представлении, в координатах х, у, z, t; В = В(х, у, z, /) = рН(х, у, z, t) —
магнитная индукция; Н — напряженность магнитного поля; ц = цгц0 — абсолютная
магнитная проницаемость вещества; ц0 = 1.257 10"6 Гн/м — магнитная постоянная
(магнитная проницаемость вакуума); — относительная магнитная проницаемость.
В вакууме = 1, у диэлектриков pr < 1, в парамагнетиках > 1, у ферромагнетиков
Hr » 1 •
В правой части выражения (11.22) стоит производная, отражающая скорость из-
менения во времени магнитной индукции В (напряженности магнитного поля Н),
а в левой части под знаком дифференциального оператора rot содержатся только
пространственные производные компонентов вектора напряженности электрическо-
го поля Е: *0 Уо zo
д Э Э
rot Е = Эх Эу Эг > (11.23)
Ех Еу Е<
где х0, у0, z0 — единичные векторы координатных осей.
Уравнение (11.23) отображает важную физическую связь магнитного поля и
электрического поля: любые пространственные изменения электрического поля Е
вызывают временные изменения поля магнитного В = pH, и, наоборот, простран-
ственные изменения поля В влекут за собой изменения напряженности поля Е.
Последнее утверждение вытекает из первого уравнения Максвелла:
Т¥ 3D .
rotH = — + j, (11.24)
где j — плотность тока, D — электрическая индукция (электрическое смещение).
Оба фундаментальных уравнения электродинамики (11.23) и (11.24) взаимосвя-
заны. В дальнейшем к изучению явлений, протекающих в ВМГ, привлекается лишь
уравнение электродинамики (11.22) только из соображений более ясных физичес-
ких представлений об изучаемых процессах. Из (11.24) следует, что если электри-
ческое поле отсутствует, т. е. Е = 0 и поэтому rotE = 0, то это значит, что магнитное
поле В = цН (в отсутствие электрического) может быть только постоянным, так как
—=0. (11.25)
Э/
Однако всякое изменение магнитного поля во времени, когда —0, нсизбеж-
dt
но вызывает возникновение электрического поля, так как в этом случае левая часть
уравнения (11.25) отлична от нуля.
Вполне удовлетворительные качественно-количественные характеристики ЭМП,
генерируемого ВМГ, могут быть получены при анализе второго уравнения элект-
родинамики (11.25), записанного в интегральной форме:
$Edl = -—[Bds,
l dtJ
О
где S — поверхность, ограниченная контуром L.
(11.26)
11.7. СВЧ-оружие функционального поражения одноразового применения 437
В такой форме второе уравнение Максвелла совпадает с законом электромаг-
нитной индукции Фарадея.
Поток вектора В через поверхность S называется магнитным потоком
<I> = $Bds, (11.27)
где векторный дифференциал ds понимается как произведение обычного (скаляр-
ного) дифференциала поверхности ds на единичный вектор нормали п0, т. е.
ds = n0Js. (11.28)
ЭДС, наводимая в контуре L (рис. 11.10), связана со скоростью изменения маг-
нитного потока ---- соотношением
dt 9
поэтому закон Фарадея (11.26) математически может быть записан в другой форме:
$Edl = -^ = £. (11.30)
Знак минус в формулах (11.29) и (11.30) имеет важный физический смысл, ко-
торый необходимо пояснить.
Ток индукции I, наводимый в контуре L переменным магнитным полем В, равен
(изо
к
где R — сопротивление металлического контура L.
Этот ток, в свою очередь, вызывает магнитное поле В, противодействующее изме-
нению магнитного потока Ф через контур L. Эффект, возникающий при первичной
электромагнитной индукции, противодействует причине, которая его вызывает. Этот
вывод, называемый правилом Ленца, для наших рассуждений важен, так как он
указывает на стремление сохранить неизменным магнитный поток Ф, проходящий
через кольцо L, при любом изменении напряженности магнитного поля Н = В/ц.
Правило Ленца соответствует принципу «противодействие равно действию».
Рис. 11.10. К закону Фарадея: контур L (проволочное кольцо)
в переменном магнитном поле Н
Если ----= const, то £ = const, ток I = — = const, и никакой электромагнитной
dt & d<I>
волны не будет. Для формирования ЭМВ необходимо, чтобы -------= var. Именно
dt
ЭМП, воздействуя на электронные устройства, может вызвать их ФП.
438
Глава 11. Функциональное поражение РЭС электромагнитными полями
Из формулы (11.30) следует, что изменение магнитного потока, приводящее к
возникновению ЭМП, может быть вызвано следующими причинами:
1) движением или деформацией контура L в магнитном поле, при котором обес-
б/Ф
печивается --* const;
dt
2) изменением во времени или в пространстве напряженности электрического
или магнитного поля
— = В, Ф(/) = jB(/)ds; (11.32)
3) одновременным изменением всех перечисленных факторов.
В нашем случае наиболее важной является возможность формирования силь-
ного ЭМП за счет сжатия контура L. Именно этот принцип лежит в основе созда-
ния ВМГ.
Для этого необходимо сначала в замкнутом объеме Vсоздать магнитное поле с
напряженностью Н и затем очень быстро сжать объем V до минимальных разме-
ров. При быстром сжатии Vв соответствии с правилом Ленца в сжимаемом объеме
магнитный поток Ф стремится сохраниться неизменным. Следовательно, напряжен-
ность магнитного поля Н (плотность силовых линий магнитного поля) быстро уве-
личивается, а это в соответствии с (11.30) приводит к лавинообразному нараста-
нию тока в контуре L. Контур £, таким образом, становится мощным генератором
ЭМП (своего рода передающей антенной).
В самом простом варианте ВМГ может быть выполнен в виде проволочного
кольца, через которое с большой скоростью v проскакивает обыкновенный магнит,
как на рис. 11.11.
Рис. 11.11. Простейший ВМГ на основе постоянного магнита: а — магнит входит
в контур, магнитный поток нарастает, d<X>/dt > 0; б — магнит покидает контур,
магнитный поток убывает, d<b/dt < 0
За счет быстрого изменения магнитного потока (^- Ф 0) в кольце L наводится
dt
ток / и вокруг кольца возникает ЭМП. При движении магнита вверх (рис. 11.11, а)
вначале магнитный поток, пронизывающий кольцо Z, возрастает (^-^ > 0), ЭДС ин-
dt
11.7. СВЧ-оружие функционального поражения одноразового применения 439
дукции отрицательна {£ < 0). Она создает индукционный ток /, магнитное поле ко-
торого препятствует нарастанию магнитного потока. Когда магнит покидает контур
(рис. 11.11,6), магнитный поток убывает < 0), индукция положительна и индук-
dt
ционный ток /возбуждает магнитное поле Н, поддерживающее магнитный поток Ф.
Энергия ЭМП, излучаемая контуром £, зависит от степени намагниченности
постоянного магнита и от скорости его движения v. Сильные магниты могут созда-
вать в кольце L магнитное поле с напряженностью Н~ 103 Э (для сравнения: поле
Земли имеет в среднем Н3 ~0,5 Э: возле магнитных полюсов 0,65, а на экваторе 0,35).
Воздействие такого подвижного поля на контур L может инициировать ЭМИ с энер-
гией Э ~ 0,1 Дж, что явно недостаточно для поражения любого электронного устрой-
ства. Рассмотренный пример построения ВМГ надо расценивать только как простей-
шую иллюстрацию принципа формирования ЭМИ.
Академик А. Д. Сахаров предложил получать сверхсильные ЭМП путем сверх-
быстрого (взрывного) деформирования (схлопывания) металлических контуров с
током. Металлический контур, например соленоид, за счет пропускания через него
большого постоянного тока /> 103 А может за короткое время накопить значитель-
ный запас энергии магнитного поля Эм Дж. Затем при быстром кумулятивном схло-
пывании контура (соленоида) запасенное магнитное поле Н вытесняется из солено-
ида и сжимается стенками специального коаксиального цилиндра. Внутри цилиндра
создается магнитное поле с индукцией В -25-Ю6 Гс. Запасенная энергия Эм в ре-
зультате взрыва переходит в энергию, выделяемую на нагрузке. Такой ВМГ, как
указывалось выше, может быть источником питания для вакуумных приборов,
сильноточных пучков электронов, систем питания мощных лазеров и других уст-
ройств, генерирующих мощные ЭМИ, используемые для ФП РЭС.
1L7.3. Преобразование энергии электромагнитного
поля при взрывном сжатии
26 марта 2003 г. в ходе войны в Ираке США применили новый вид оружия для
поражения иракских объектов боевого управления, насыщенных электронной техни-
кой, энергетическим оборудованием и кабельными сетями. Для крылатых ракет и
управляемых авиационных бомб был разработан специальный боеприпас, испуска-
ющий при взрыве мощный ЭМИ [56]. Этот ЭМБ построен на основе ВМГ. Его
параметры не сообщаются, однако известно, что уже сейчас построены ВМГ, у
которых ток в индуктивной нагрузке составляет ~ 108 А, мощность выделения энер-
гии ~ 1012... 1013 Вт, коэффициент преобразования химической энергии ВВ в энергию
ЭМИ ~ 20 %, удельные характеристики на тонну конструкции составляют 100 МДж
и 1012 Вт [64].
Стремление улучшить массогабаритные характеристики системы генерации силь-
ноточных наносекундных импульсов привело к использованию ВМГ с индуктивным
накопителем энергии в виде соленоидной катушки. В такой схеме эффективным
оказывается использование электровзрывных преобразователей (ЭВП), которые яв-
ляются усилителями мощности электрического импульса и позволяют повысить на-
пряжение в электрической цепи примерно в 10 раз [64].
Для анализа и определения потенциальных возможностей накопления и исполь-
зования энергии магнитного поля Эм в интересах ФП РЭС можно выделить некото-
рую замкнутую область И, ограниченную прочной внешней оболочкой, см. рис. 11.12.
440
Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.12. Схема накопления и использования энергии магнитного поля в ВМГ:
L — катушка соленоида с током /; ВВ — взрывчатое вещество; V, Ивн — внутренняя
и внешняя области; 5 — внутренняя оболочка; О — внешняя защитная оболоч-
ка; / — усредненный линейный размер внутреннего объема; F — сила давления
продуктов взрыва; Kq и К2 — ключи; И — источник постоянного тока
В выделенную область V помещен соленоид Z, который с помощью ключа К2
(ключ Kt нормально разомкнут) подключен к источнику постоянного тока И. Через
некоторое время ключ К2 размыкается, а ключ Kt замыкает соленоид L накоротко.
В результате в соленоиде начинает циркулировать постоянный ток I. Постоянный
ток в цепи не способен вызвать электромагнитного излучения, и поэтому всю за-
пасенную в объеме V энергию содержит магнитное поле
Э = Эм=-|цЯ2</И, (11.33)
где Н — напряженность соленоидального (внутри соленоида £) магнитного поля.
Пусть в момент t энергия, заключенная в объеме V, равна Э(/). При этом воз-
можны две ситуации:
dd(t) dd(t)
—— <0 или —— >0. (11.34)
dt dt
J3(r)
При —> 0 энергия в области возрастает, что может быть связано с прито-
ком энергии извне. В нашем случае приток энергии прекращается и при / = 0 в объ-
еме V оказывается накопленной энергия
Э(/ = 0) = Эм. (11.35)
Взрыв боеприпаса ВВ в области Ивн, ограниченной прочной стенкой О, приво-
дит к воздействию на внутреннюю поверхность 5 силы взрыва F. Под действием
этой силы внутренний контур 5 сжимается, густота силовых линий магнитного поля
увеличивается, ток I в катушке L растет, и после разрыва внутреннего контура 5
J3(/)
энергия 3 в объеме V убывает —— < 0. А это означает, что область V начинает
dt
работать в режиме отдачи, излучая волны в окружающее пространство.
11.7. СВЧ-оружие функционального поражения одноразового применения 441
Энергия, запасенная в объеме V, уменьшается со скоростью уэ, соответствую-
щей скорости распространения ударной волны ууд, которая, в свою очередь, зави-
сит от мощности взрыва, определяемой тротиловым эквивалентом. Скорость ууд
больше скорости звука и изменяется в пределах ууд = 1...10 км/с [33].
Так как модуль вектора Умова — Пойнтинга р по определению равен энергии
ДЭ, проходящей через площадку ДА в единицу времени, то можно записать:
г . ДЭ
р= lim 1-------,
Л5->о АЛЛ/
дг->о
(11.36)
где j — единичный вектор, указывающий направление движения энергии.
Если известна скорость движения энергии ЭМП уэ, то можно определить век-
тор Умова — Пойнтинга [66]:
|р| = уэЖ = |уэцЯ2, (11.37)
где —цЯ2 = W — объемная плотность энергии в пространстве, Дж/м3.
2.
Необходимо отметить, что входящая в (11.37) величина уэ — это скорость дви-
жения энергии ЭМП, вызванного взрывной волной. Скорость уэ существенно мень-
ше скорости распространения электромагнитной волны уэ « с = 34О8 м/с.
Знание вектора Умова — Пойнтинга и энергии как функции координат позво-
ляет найти скорость ее движения в любой точке пространства, а также и длитель-
ность ЭМИ, порожденного взрывным схлопыванием заряженного объема V. Есте-
ственно предположить, что сразу после взрыва заряда ВВ во внешней области Квн
уменьшение энергии Э во внутренней области в течение малого интервала време-
ни dt пропорционально длительности этого интервала, скорости истечения энер-
гии и самой энергии
d3 = -av39d/, (11.38)
где а — коэффициент пропорциональности, за который можно принять величину,
обратную среднему линейному размеру / внутреннего объема ВМГ (рис. 11.13):
а = -. (11.39)
/
После разделения переменных и подстановки (11.39) в (11.38) это уравнение
приводится к виду
dS
— = -av3dt. (11.40)
Э
Интегрирование (11.40) при начальных условиях Э = Эм при t = 0 дает
Э(/) = Эме’“,'э'. (11.41)
Решение (11.41) показывает, что запас энергии, накопленный во внутреннем
объеме V (в соленоиде), является убывающей функцией времени (рис. 11.23).
Длительность ЭМИ, образованного при взрыве ВВ, можно определить из (11.41)
на уровне
^(z = тэми) _ 1.
Эм ~ е '
тЭми=/- (11-42)
lv3
442 Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.13. ЭМИ при различной скорости ударной волны,
распространяющейся после взрыва ВВ в ВМГ (гэ1 > гэ2)
При ориентировочных линейных размерах внутренней области V (рис. 11.13)
1- 1 м коэффициент а равен а = - = 1 м-1.
Если принять скорость взрывной волны тэа 1...10 км/с, то предельная длитель-
ность излучаемого ЭМИ примерно равна тэми = ОД—1 мкс.
Следует заметить, что полученное значение тэми лишь оценивает возможность
существования импульса, определяемого скоростью движения энергии гэ. Реаль-
ная длительность излучаемого радиоимпульса ти, сформированного в результате
взрыва, может быть гораздо меньше, т. е. ти«тэми, поскольку она зависит от скоро-
сти изменения тока dl/dt в обломках соленоида, разлетающихся во все стороны и
являющихся излучателями (антеннами) ЭМВ или определяется параметрами СВЧ-
генератора, для которого ВМГ служит источником питания. Величина тэми харак-
теризует лишь потенциально возможную максимальную длительность излучения,
которая может состоять из серии коротких импульсов. На рис. 11.14 представлена
осциллограмма ЭМИ, полученного в результате взрыва ВМГ совместно с СВЧ-из-
лучателем [56]. На осциллограмме, называемой на жаргоне разработчиков «рыбой»,
хорошо видно, как изменяется интенсивность ЭМИ. Во многом форма ЭМИ со-
впадает с законом, определяемым соотношением (11.41). Метки времени соответ-
ствуют тд - 2-10-6 с.
М Е(Г)
'Сэми ~ 10 с
Тд = 2'10-6с
Рис. 11.14. Осциллограмма ЭМИ, полученного при взрыве ВМГ
Из рис. 11.14 видно, что радиосигнал имеет ярко выраженную частотную модуля-
цию. Можно предположить, что рост мгновенной частоты излучения объясняется
равноускоренным движением осколков соленоида после взрыва.
11.7. СВЧ-оружие функционального поражения одноразового применения 443
11.7.4. Энергетические характеристики взрывомагнитного генератора
Ориентировочная оценка энергетических возможностей ВМГ по нанесению про-
тивнику необратимого информационного ущерба может быть получена на основе
следующих соображений. Пусть основу ВМГ представляет соленоид с тороидаль-
ным ферромагнитным сердечником, см. рис. 11.15.
Рис. 11.15. Тороидальный соленоид с ферромагнитным
сердечником F и катушкой с током I
В соленоиде, представляющем собой катушку L с N витками провода с током
/, формируется сильное однородное магнитное поле Нвнутр и сравнительно слабое
поле Нвнешп вне соленоида. Внутри замкнутой области И в общем случае энергия
может сосредотачиваться как в магнитном, так и в электрическом поле. Полная
энергия ЭМП, заключенного в области V, равна [64]
Э = -ДеЕ2+цЯ2)</К = Ээ+Эм, (И-43)
2и
где Ээ= — — энергия электрического поля; Эм=—— энергия
2и
магнитного поля.
В связи с тем, что электрическое и магнитное поля могут существовать в обла-
сти V независимо друг от друга, имеется возможность запасать впрок как электри-
ческую, так и магнитную энергию. Чисто электрическая энергия Ээ может храниться
в заряженном конденсаторе, а магнитная Эм — в катушке индуктивности с посто-
янным током. Для переменного ЭМП, существующего в области К, объективно
сохраняется баланс энергии
Э(/) =—J е£’2(/) + цЯ2(/) dK = const. (11.44)
2 к
Выражение (11.44) показывает, что хотя запас энергии в области V остается
постоянным, соотношение энергий, запасенных электрическим и магнитным по-
лем, непрерывно меняется. Существуют моменты, когда энергия системы является
чисто электрической (77 = 0), а также моменты, когда она чисто магнитная (Е = 0).
Однако никогда в изолированной области не может быть Э = 0 — всегда Э = const.
Современные устройства позволяют накапливать очень большую энергию в магнит-
ной или электрической форме. В дальнейшем рассматривается возможность накоп-
ления, хранения и использования энергии магнитного поля Эм в интересах ФП.
Сильные и сверхсильные магнитные поля были получены в так называемых кон-
центраторах соленоидального поля [64]. На практике были реализованы солено-
444
Глава 11. Функциональное поражение РЭС электромагнитными полями
идальные хранилища с напряженностью Н> 107 Э, что на много порядков больше
напряженности магнитного поля любого известного постоянного магнита.
На рис. 11.15 представлена конструкция концентратора в виде тороидального
соленоида с ферритовым сердечником F. Такое накопительное устройство позво-
ляет получить замкнутые магнитные потоки со сверхбольшой величиной Н.
Если на тороид прямоугольного сердечника намотано N витков хорошо прово-
дящего провода и через катушку с индуктивностью L пропущен постоянный ток Z,
то через каждый из витков проходит магнитный поток [64]
л \iNIhdr
Ф, =рА] Hdr = ^——\ —
J 2л J г
Ai Ai
(И.45)
(11.46)
NI
где Н =--- ; h — линейный размер сердечника; R{ и Л2 соответственно внутрен-
2лг
ний и внешний радиусы тороида (рис. 11.15); г— текущее расстояние от оси торо-
ида до любой точки магнитопровода F.
Интегрируя (11.45), можно получить
\iNIh А R2
Ф, =-----1п—.
1 2л R{
Поток, проходящий сквозь все витки в N раз больше:
zis atztx ycN2Ih. R2
ф = туф = £----in-А
1 2л Rv
(П-47)
Индуктивность всего рассматриваемого накопителя по определению равна
Ф |17V2A R2 „
— = -------In— Гн.
I 2л R{
Запасенная в магнитном накопителе энергия равна
.1 2_VLN2I2h R2
— J-^JL — 111 «
2 2л 7?!
(11.48)
(11.49)
Соотношение (11.49) указывает на исключительно большие возможности созда-
ния сильных и сверхсильных полей в тороидальных накопителях за счет использо-
вания совершенных магнетиков с большой магнитной проницаемостью (ц » 1) и
особенно за счет «закачивания» в соленоид сильных токов I > 103 А (энергия Эм
находится в квадратичной зависимости от тока /).
Особо следует подчеркнуть следующее обстоятельство. Последние достижения
в области высокотемпературной сверхпроводимости позволяют создавать сверхпро-
водящие обмотки соленоида, в котором однажды «закаченный» очень большой ток,
сохраняясь достаточно долго, образует «вечное» сверхсильное магнитное поле Н.
На сегодня сверхпроводимость реализуется путем погружения соленоида в жидкость,
охлажденную до весьма низких температур.
Основные токопроводящие металлы в сверхпроводящем фазовом состоянии
уменьшают свое удельное сопротивление на много порядков. Удельное сопротив-
ление алюминия при критической температуре Ткр = 1,2 К уменьшается до величи-
ны р0 ~10-23 Омсм, в то время как в нормальных условиях (Т- 300 К) рн -10-6 Омсм.
В сверхпроводящем фазовом состоянии в обмотке соленоида может циркулировать
ток I = 104 А без опасности разрушения соленоида.
11.7. СВЧ-оружие функционального поражения одноразового применения 445
Оценка возможной величины запасенной энергии с определенной степенью
осторожности должна исходить из следующих значений физических величин, вхо-
дящих в (11.49): абсолютная магнитная проницаемость ферромагнитного сердеч-
ника р. = цгце = 104 • 1,3 • 10-6 = 1,3- 10“2Гн/м; ток в соленоиде /= 103 А; число витков
катушки N = 30; геометрические размеры тороидального соленоида (рис. 11.15)
h = 2-I0-* м; -^- = е = 2,7.
Подставив эти значения в (11.49), можно получить оценку запасенной энергии
Эм а 104 Дж. Это весьма значительная энергия. ЭМП с такой энергией способно
необратимо поразить электронные средства на дальностях /?тах = 100...300 м при
критической плотности потока энергии Пэ = 0,1...1 Дж/м2.
Сверхсильные магнитные поля могут быть получены путем высокой концент-
рации магнитного потока Ф в замкнутом (изолированном) объеме.
Для концентрации магнитного потока применяют быстрое (почти мгновенное)
его сжатие замкнутым металлическим контуром 5 (рис. 11.12). Поверхность S под
действием силы взрыва F быстро сокращаются, соответственно лавинообразно воз-
растает напряженность магнитного поля И:
(11.50)
dS
Напряженность Ясж в середине сжимаемого контура изменяется обратно про-
порционально его сечению. При сжатии диаметра контура 5 в 10 раз при началь-
ном значении //0 = 195 Э можно получить Ясж ~ 107 Э. В экспериментах при взрыв-
ном сжатии были получены Нсж = 1,4-107 Э ( ~ 4,5-109 А/м) при длительности ЭМИ
ти = 2 мкс [64].
11.7.5. Электромагнитное оружие на основе взрывомагнитного генератора
ВМГ может служить основой для создания оружия РЭБ одноразового приме-
нения. Главное, что отличает это оружие от традиционных средств поражения
фугасного или осколочного действия, — это незначительное, почти незаметное
воздействие на элементы конструкции поражаемых объектов. Взрыв ВМГ не при-
водит к заметным физическим разрушениям. Основное назначение ВМГ, как ору-
жия РЭБ, состоит в нанесении информационного ущерба электронным устройствам
противника путем ФП его элементов и модулей, восприимчивых к воздействию
сильных ЭМП. Процесс функционирования ВМГ целесообразно представить в виде
трех последовательно выполняемых циклов, см. рис. 11.16.
Цикл первый — загрузка (рис. 11.16, а). Ключ Kt разомкнут, ключ К2 — замкнут.
Внешний источник постоянного тока И подключается к катушке соленоида С, нахо-
дящейся во внутреннем объеме Кв оболочке 5. Источником тока И может служить
аккумулятор, заряжающий конденсатор большой емкости. Он находится вне ВМГ
и подключается к нему с помощью ключа К2. Источник И должен иметь малое вну-
треннее сопротивление и задавать ток I ~ 103 А. Загрузка ВМГ происходит в тече-
ние короткого времени, определяемого постоянной времени тк контура:
Тк=4 (11.51)
к
где L — индуктивность катушки соленоида (Л ~ 0,1 Гн); R — сопротивление це-
пи (Л ~ 1 Ом).
446
Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.16. Циклы функционирования ВМГ: загрузка энергии (а); хранение
энергии (б); взрыв — формирование ЭМИ (первая стадия) (в); ВВ — взрывчатое
вещество; С — соленоид; И — источник постоянного тока; Kq и К2 — ключи;
V, S— объем и поверхность внутренней области, в которой находятся соленоид
с запасом энергии Эм; О — внутренняя оболочка ВМГ
Ориентировочное время загрузки составляет Тзагр = Зтк< 1 с. По истечении вре-
мени Гзагр ключ К2 размыкается, а ключ К| замыкается. Процесс загрузки закон-
чен, и во внутренней области V запасается энергия магнитного поля
LI2
Эм=—. (11.52)
2
Цикл второй — хранение энергии (рис. 11.16, б). После завершения цикла за-
грузки внешний источник И убирается, во внутреннем электрическом контуре начи-
нает циркулировать ток /, поддерживающий энергию Эм, запасенную в первом цик-
ле (11.52). ВМГ готов к боевому применению.
Энергия магнитного поля Эм в объеме V может сохраняться долго, во всяком
случае в течение времени доставки снаряженного ЭМБ в район расположения объек-
та поражения (цели). Если внутри накопительного объема И была создана темпера-
тура, близкая к абсолютному нулю, то запас магнитной энергии Эм сохранится
теоретически бесконечно долго.
Цикл третий — взрыв (рис. 11.16, в). ЭМБ выполняется в виде бомбы, ракеты,
снаряда или мины. Носитель ЭМБ, например самолет, направляет его на цель, ис-
пользуя прицельные системы. ЭМБ может быть доставлен к объекту поражения (ра-
диолокатору, узлу связи, телецентру, радиостанции и т. п.) и диверсионной группой.
В момент взрыва на первой стадии внутренняя оболочка ВМГ сжимается, эле-
менты соленоида и оболочки разлетаются во все стороны. Радиус разлета продук-
тов взрыва равен [64]
R = Rl/c, (11.53)
где R — приведенное расстояние; с — тротиловый эквивалент заряда ВВ.
Из-за малой мощности заряда радиус разлета R- 10 м, а энергия ударной волны
мала. Поэтому степень физических разрушений незначительна, в то время как элект-
ронный объект необратимо теряет свое информационное назначение даже при
больших промахах ЭМБ, от 100 до 1000 м.
При взрыве ВМГ на второй стадии вокруг эпицентра образуются металлические
осколки (обрывки проволоки, элементы оболочки и другие), в которых в самый
11.7. СВЧ-оружие функционального поражения одноразового применения 447
начальный момент содержится большой ток (до 107 А). Эти осколки в самом пер-
вом приближении могут быть представлены элементарными магнитными излуча-
телями (рамками) и диполями Герца (рис. 11.17).
Рис. 11.17. Образование продуктов взрыва ВМГ в виде большого числа элемен-
тарных диполей с током: С — разрушенный соленоид; р — вектор Умова —
Пойнтинга; ЭМИ — электромагнитный импульс, ЭД — элементарный диполь
Так как при взрыве линии тока проводимости /в катушке соленоида внезапно
разрываются, то в соответствии с законами электродинамики появляется сторон-
ний ток /стор (ток смещения), который изменяется со скоростью v в элементарном
диполе. Каждый диполь становится элементарным излучателем ЭМП.
Другие источники ЭМП (магнитные диполи и рамки, отрезки проводов и т. п.)
также вносят свой вклад в общее суммарное поле, которое в итоге может рассматри-
ваться в пространственно-временном смысле как частично когерентное (у< 1) [67].
Поэтому точное описание ЭМП может быть произведено только в рамках теории
пространственно-временной когерентности поля.
Полное и адекватное исследование процессов, происходящих в результате взрыва
ВМГ, требует привлечения теории взаимодействия заранее заряженных магнитных
накопителей с плазмой и продуктами химических реакций, происходящих при взры-
ве. Развитая максвелловская теория электромагнетизма в данном случае не дает
достаточно правильных решений, т. к. она предполагает стационарность однород-
ных процессов и не учитывает взаимосвязи всех видов материи, возникающей при
взрыве ВМГ. Полное описание процессов, происходящих в ВМГ, ждет дальнейших
исследований.
Конструктивно принципы формирования ЭМИ ВМГ могут быть реализованы
по разному. Но практически во всех конструкциях основными элементами явля-
ются два схлопывающихся проводника. В спиральных ВМГ (рис. 11.18) такими эле-
ментами служат неподвижная спираль и концентрический с ней цилиндрический
металлический лайнер.
Лайнер расширяется при разлете продуктов детонации кумулятивного взрыв-
чатого вещества (КВВ), инициируемого с торца прибора, и поочередно замыкает
витки спирали. Вытеснение магнитного потока в нагрузку происходит вдоль вит-
ков спирали. По сравнению с остальными конструкциями, спиральный ВМГ обла-
дает наибольшей начальной индуктивностью, что позволяет усиливать начальную
энергию на несколько порядков.
• В плоском ВМГ (рис. 11.19) сжатие и перемещение магнитного потока происхо-
дит между плоскими токонесущими шинами.
448
Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.18. Конструкция спирального ВМГ
Рис. 11.19. Конструкция плоского ВМГ
Геометрически плоский генератор можно представить как «развернутый» и
вытянутый в одну линию спиральный генератор.
Конструкция коаксиального ВМГ представляет собой два концентрических ци-
линдра, внутренний из которых заполнен КВВ. Известны два режима работы такого
генератора: режим скользящей детонации (рис. 11.20), в котором он работает анало-
гично плоскому и спиральному, и режим осевого инициирования (рис. 11.21), когда
КВВ инициируется одновременно по всей оси генератора, а сжатие потока произ-
водится сразу всей поверхностью лайнера. Второй режим позволяет существенно
снизить время компрессии потока и сформировать импульс тока с более коротким
временем нарастания.
Рис. 11.20. Коаксиальный ВМГ со скользящей детонацией
Рис. 11.21. Коаксиальный ВМГ в режиме осевого инициирования
11.8. Многоразовые СВЧ-средства функционального поражения
449
Из известных других конструкций быстродействующих ВМГ на рис. 11.22 изоб-
ражен дисковый ВМГ, в котором поток сжимается двумя соосными дисками, пе-
ремещаясь от центра к внешней окружности дисков.
ВМГ являются уникальными устройствами для получения сверхсильных маг-
нитных полей.
11.8. Многоразовые СВЧ-средства функционального поражения
Многоразовые СВЧ-средства ФП могут предназначаться для защиты своих войск,
боевой техники и важных объектов от ударов управляемого оружия противника и
нанесения ущерба путем электромагнитных ударов по его радио- и оптико-электрон-
ным средствам информационного обеспечения, а также живой силе. В рамках сво-
его предназначения многоразовые средства ФП должны решать следующие задачи.
1. На малых дальностях в пределах заданной области пространства — необра-
тимо выводить из строя чувствительные элементы РЭС различного назначения,
временно ослеплять операторов зенитно-ракетных комплексов, установок малока-
либерной зенитной артиллерии и других средств ближнего боя.
2. На средних дальностях в пределах заданных угловых секторов — вызывать
ложные срабатывания устройств автоматики и вычислительных средств РЭС (прежде
всего РЭС ГСН управляемых ракет), обеспечивать отказы и сбои чувствительных
элементов радио- и оптико-электронных систем автосопровождения целей.
3. На больших дальностях снижать чувствительность приемных устройств.
Основным объектом ФП для многоразовых средств является РЭА, составляю-
щая основу всевозможных информационно-управляющих систем военного назна-
чения и управляемых средств поражения. Но наряду с этим нельзя исключить воз-
можность использования средств ФП для нейтрализации взрывателей мин, снаря-
дов и других боеприпасов, приводимых в действие по радио- или проводным
каналам. Сказанное относится также и к дистанционным взрывателям боеголовок
управляемых ракет.
Роль и место многоразовых средств ФП в системе РЭБ определяется с учетом
двух обстоятельств. Во-первых, наличия ситуаций, в которых применение таких
средств дает заметный дополнительный эффект. Во-вторых, наличия новых возмож-
ностей, которые привносят средства ФП в РЭБ.
Имеется много ситуаций, в которых наряду с традиционными средствами РЭП
могут быть использованы многоразовые средства ФП. Прежде всего, это ситуации,
в которых предусматривается защита от ударов радиоуправляемого оружия. Кроме
того, средства ФП незаменимы при подрыве дистанционно управляемых'боепри-
пасов. Так, например, в авиации наиболее часто возникают ситуации отражения
450 Глава 11. Функциональное поражение РЭС электромагнитными полями
атак истребителей и ЗРК. Управляемые ракеты «воздух — воздух» и «земля — воз-
дух» на такие цели, как самолеты, могут наводиться только при наличии текущей
информации об атакуемом объекте. Необходимая информация может поступать в
бортовой комплекс управления либо от внешнего, либо от собственного датчика.
Но в любом случае данные добываются и передаются с использованием приборов
и оборудования, чувствительного к деструктивному воздействию мощных СВЧ-
импульсов, т. е. подверженного опасности ФП.
Аналогично обстоит дело и при защите наземных объектов. Здесь можно выде-
лить три зоны: зону гарантированного ФП, зону ФП с приемлемой эффективностью
(вероятностью), зону функционального подавления (см. рис. 11.23).
Рис. 11.23. Зоны действия многоразового средства ФП:
УФП — установка ФП; О — объект функционального поражения
Первая зона ограничивается дальностями порядка от сотен метров до одного
километра от многоразового средства ФП.
Вторая зона перекрывает интервалы от одного до десяти километров в зависи-
мости от стойкости поражаемого объекта и заданной вероятности поражения.
Зона функционального подавления может простираться до нескольких десятков
километров. Здесь могут наблюдаться сбои в работе систем автосопровождения целей
и вычислительных систем. Известно, что для ЭВМ, обрабатывающих данные в ре-
альном масштабе времени, недопустимы даже кратковременные сбои. Такие сбои
могут привести к полной потере эффективности функционирования и непредсказу-
емым последствиям.
11.8.1. Возможности многоразовых средств функционального поражения
Естественная причина высокой вероятности включения многоразовых средств
ФП в состав комплексов РЭБ заключается в том, что они практически полностью
свободны от недостатков традиционных средств радиоэлектронного подавления.
1. Для средств ФП характерно проявление эффекта малых дальностей. Этот
эффект состоит в том, что по мере сближения прикрываемого активными помехами
объекта с подавляемой РЛС отношение мощностей помехи и сигнала на входе при-
емника РЛС меняется в пользу сигнала. Скорость такого изменения зависит от того,
как создается помеха. При самоприкрытии объекта, когда станция активных помех
11.8. Многоразовые СВЧ-средства функционального поражения
451
находится на самом прикрываемом объекте, указанное отношение уменьшается
пропорционально квадрату уменьшения дальности. В случае создания помех из
неподвижной зоны увеличение отношения сигнал/помеха будет пропорционально
четвертой степени уменьшения дальности от РЛС до прикрываемого помехами
объекта. В результате при неизменном энергетическом потенциале станции актив-
ных помех, начиная с некоторой дальности между объектом и РЛС, помеха пере-
стает обеспечивать прикрытие объекта. Этот эффект иллюстрируется графиками на
рис. 11.24 и рис. 11.25.
Таблица 11.2
Рис. 11.24. Изменение мощности полезного сигнала Рс nY и помехи Рп RY,
С DA 11 JjA7
а также отношения k/ku на входе приемника подавляемой РЛС по мере
приближения цели — постановщика помех к РЛС
Расчетные значения к рис. 11.24
R, км р с вх р п вх
100 1 12 4
90 1,52 14,8 3,25
80 2,44 18,75 2,56
70 4,16 24,5 1,96
60 7,72 зз,з 1,44
50 16 48 1
40 39,1 75 0,64
30 123,5 133,3 0,36
20 625 300 0,16
10 ю4 1200 0,04
Зависимости на рис. 11.24 рассчитаны для случая самоприкрытия. На удалени-
ях цели от РЛС А < 50 км активная помеха неэффективна. На таких дальностях
текущее отношение помеха/сигнал к- —
становится меньше коэффициента
вх
подавления данной РЛС кп = 3. Таким образом, диапазон дальностей слева от вер-
тикальной штриховой линии определяет область неподавления РЛС. Справа от этой
линии лежит область подавления, где помеха эффективна. Расчетные значения к
рис. 11.24 приведены в табл. 11.2.
Ход кривых Рс вх и Рп вх указывает на то, что на некоторой дальности они пере-
секаются, а при дальнейшем уменьшении дальности Рс вх превышает Рп вх.
На рис. 11.25 приведены зависимости тех же параметров от дальности для слу-
чая прикрытия цели постановщиком помех из неподвижной зоны. Расчетные зна-
чения, приведенные в табл. 11.3, получены для следующих исходных данных. При
дальности до цели Яц = 100 км на входе приемника РЛС отношение мощностей
помехи и сигнала составляет к = 20. При коэффициенте подавления ки = 3 помеха
становится неэффективной, начиная с удаления 7?ц = 62,2 км и ближе к РЛС.
2. Ориентация каждого конкретного образца средства РЭП на создание помех
(подавление) только РЭС определенного класса и в сравнительно узком диапазоне
частот крайне затруднит, а практически сделает невозможным создание сколько-
нибудь универсального комплекса РЭБ, способного противостоять любому из воз-
можных средств противника.
452 Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.25. Изменение мощности Рс nv и РП а также отношения k/k„
V DA 11 DAJ • 11
при прикрытии цели помехами, создаваемыми постановщиком активных
помех (ПАП) из неподвижной зоны
Таблица 11.3
Расчетные значения к рис. 11.25
/?ц, КМ Р п вх Р с вх
100 20 1 6,7
90 20 1,52 4,4
80 20 2,44 2,73
70 20 4,16 1,6
62,2 20 6,68 1
60 20 7,72 0,86
50 20 16 0,42
40 20 39,1 0,17
35 20 66,64 0,10
30 20 123,5 0,05
3. Для борьбы с активными помехами в РЭС широко применяются разнооб-
разные устройства, средства и способы помехозащиты. При совместном примене-
нии в одном РЭС они способны многократно уменьшить энергию помехи (на де-
сятки децибел). Эффект от применения мер помехозащиты может быть снижен.
Однако для этого необходимо постоянно сменять виды создаваемых помех, выби-
рать параметры помеховых сигналов с учетом возможной защиты от них, избегать
шаблонных подходов к организации РЭБ.
4. Четвертый, но во многих ситуациях первый по важности недостаток связан
с неизбежным, начиная с некоторой дальности, разрешением по угловым коорди-
натам разнесенных в пространстве источников помех. Такая ситуация характерна,
например, для случая, когда управляемая ракета с радиолокационной ГСН атакует
пару самолетов, создающих мерцающую помеху. В процессе сближения на некото-
рой дальности угловой разнос мерцающих источников оказывается больше разре-
шающей способности РЛС. В результате один из самолетов-носителей такого ис-
точника помех атакуется как одиночная цель с высокой вероятностью поражения.
Перечисленные недостатки средств РЭП практически полностью компенсиру-
ются при наличии средств ФП. Такая возможность связана со следующими осо-
бенностями воздействия средств ФП на объекты.
1. Плотность потока мощности СВЧ-импульса, облучающего объект, увеличи-
вается пропорционально квадрату уменьшения дальности от средства ФП до объекта.
Поэтому возможен подбор такого соотношения мощностей (энергетических потен-
циалов) средства РЭП и средства ФП, при котором недопустимое снижение эффек-
тивности средств РЭП, наступающее на известной дальности в процессе сближения
его с подавляемым РЭС, компенсируется высокой эффективностью средства ФП.
Можно утверждать, что имеется такой интервал дальностей, в пределах которо-
го сохраняется эффективность средств РЭП и одновременно существенным является
воздействие мощных СВЧ-импульсов, которое проявляется в виде импульсных по-
мех, функциональных сбоев, повышения уровня шума.
2. Средства ФП способны деструктивно воздействовать на любые объекты, в
которых имеются элементы и устройства, чувствительные к мощному СВЧ-излуче-
J 1.8. Многоразовые СВЧ-средства функционального поражения
453
нию. Они универсальны в том смысле, что могут поражать РЭС независимо от их
назначения, рабочего состояния, диапазона частот, вида и параметров используемых
сигналов.
3. Средства ФП могут воздействовать и на такие объекты, которые не подверже-
ны воздействию помех, создаваемых средствами РЭП. К подобным объектам отно-
сятся передатчики, антенные устройства, блоки питания, приборы инерциальной
навигации, вычислительные средства и т. п. Не составляют исключений устройства и
схемы помехозащиты РЭС. Более того, включение таких средств помехозащиты, как
компенсаторы боковых лепестков, способствует прохождению дополнительной мощ-
ности СВЧ-импульса к чувствительным элементам по приемным каналам средств
помехозащиты. Таким образом, складывается обстановка, при которой включение
средств помехозащиты способствует повышению эффективности средств ФП.
4. Средство ФП способно исключить снижение эффекта воздействия простран-
ственно-разнесенных помех.
Таким образом, налицо не противостояние традиционных средств РЭП и много-
разовых средств ФП, а напротив, их способность существенно дополнять друг друга
в рамках решения одной и той же задачи надежного подавления и даже поражения
РЭС противника. Поэтому есть все основания вести речь о комплексировании раз-
ных средств радиоэлектронного подавления.
Можно предположить, что многоразовые средства ФП со временем равноправно
войдут в арсенал средств РЭБ.
11.8.2. Состав многоразовых СВЧ-средств функционального поражения
Для успешной реализации потенциальных возможностей многоразовые СВЧ-
средства ФП должны иметь в своем составе установку генерации мощного СВЧ-
излучения, подсистему информационного обеспечения, устройство управления
параметрами излучения и наведения антенны на поражаемый объект. На рис. 11.26
показаны основные элементы, которыми должны оснащаться многоразовые сред-
ства ФП для обеспечения их эффективного функционирования.
Такими элементами являются: источник питания (ИП), генератор мощных одно-
полярных видеоимпульсов (ГМИ), сильноточный электронный ускоритель (СЭУ),
электродинамическая структура (ЭДС), устройство задания параметров СВЧ-импуль-
сов (УЗП СВЧ), антенна (А), устройство ориентации луча антенны в заданном на-
правлении (УОА), устройство выдачи команд генератору (УВКГ), устройство выдачи
команд антенне (УВКА), устройство анализа данных (УАД), блок хранения априор-
ных данных (БХАД), устройство принятия решений (УПР), устройство выработки
тактики действий (УВТД), блок выдачи текущих данных (БВТД), процессор анализа и
обработки разведывательной информации (ПОАРИ), станция радиотехнической раз-
ведки (РТР), лазерный локатор (ЛЛ). Кроме того, в средстве ФП желательна инфор-
мация, поступающая в виде данных о текущей обстановке (ДТО) по линиям пере-
дачи данных (ЛПД) из центра управления, от РЛС и средств ИК-разведки, если та-
ковые имеются. Информация об объекте О, назначенном для поражения, добывается
станцией РТР и лазерным локатором подсистемы информационного обеспечения,
а также, возможно, РЛС и средством ИК-разведки. Целевая обстановка с учетом всей
поступающей информации оценивается в блоке оценки целевой обстановки (БОЦО).
Ниже подробно рассматривается только устройство и функционирование гене-
раторов СВЧ-импульсов и антенн. Что касается устройств управления и подсистем
454
Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.26. Состав и основные связи элементов многоразового
средства функционального поражения
информационного обеспечения, то о них приводятся лишь сведения общего харак-
тера, указывающие на их роль в обеспечении функционирования средств ФП.
Используемая в многоразовом средстве ФП установка мощного СВЧ-излуче-
ния должна иметь в своем составе генератор сверхмощных СВЧ-импульсов и ан-
тенную систему с подсистемой управления ориентацией луча.
Одной из трудноразрешимых технических проблем является согласование вы-
хода сверхмощного генератора со средой распространения СВЧ-импульса на пути
11.8. Многоразовые СВЧ-средства функционального поражения 455
к поражаемому объекту. При этом требуется концентрация выведенной из генера-
тора энергии в направлении на облучаемый объект в предельно узком телесном угле.
Судя по опыту разработок экспериментальных установок сверхмощного СВЧ-из-
лучения, для установок ФП генератор СВЧ-импульсов и антенная система должны
создаваться как единое, функционально неразделимое устройство. Пока что тако-
го устройства получить не удалось. По имеющимся сведениям [27] реально фикси-
руемые потери при выводе СВЧ-энергии из сверхмощных СВЧ-генераторов суще-
ственно превышают минимально возможные.
Следует признать, что даже задача выбора конкретного типа антенны, обеспе-
чивающей достаточно высокие показатели работы совместно со сверхмощным СВЧ-
генератором, параметры которого полностью известны, однозначно не решена. Нет
устоявшихся представлений и о наиболее приемлемых технических решениях, наи-
более подходящих для использования в средствах ФП. Особенно труден выбор типа
СВЧ-генератора для многоразового средства, размещаемого на мобильном носителе.
Ниже рассматриваются физические механизмы, обеспечивающие генерирование
сверхмощных СВЧ-импульсов в наиболее перспективных типах генераторов, приво-
дятся сведения о потенциально возможных и реально достигнутых параметрах СВЧ-
излучения, отмечаются конструктивные и технологические ограничения, влияющие
на возможности и перспективы совершенствования характеристик средств ФП.
11.8.3. Генераторы сверхмощных СВЧ-импульсов
Наиболее перспективными для систем ФП представляются релятивистские
СВЧ-генераторы на сильноточных релятивистских пучках. В вакуумной релятиви-
стской СВЧ-электронике к настоящему времени достигнута импульсная мощность
15 ГВт в трехсантиметровом диапазоне волн и 4 ГВт в диапазоне волн порядка
одного сантиметра. Эти результаты получены на пучках с энергией 2 МэВ при токе
10...15 кА [27].
Впервые сильноточные релятивистские пучки, генерируемые взрывоэмиссион-
ными диодами с магнитной изоляцией и высокой эффективностью, когда свыше
50 % энергии, накопленной батареей конденсаторов, трансформируется в почти
моноэнергстический поток электронов, были получены в начале 70-х гг. прошлого
века. Внимание специалистов сразу привлекли те уникальные возможности, кото-
рые открывались использованием этих пучков в различных областях науки и тех-
ники. Не оказались в стороне и разработчики источников мощного СВЧ-излуче-
ния. Можно констатировать, что, хотя на сегодняшний день разработчики доби-
лись впечатляющих результатов, до предела еще далеко.
Для оценки предельно достижимых мощностей релятивистских импульсных
СВЧ-генераторов в сантиметровом диапазоне волн (с точностью не хуже 20 %) можно
воспользоваться следующими зависимостями:
109V, Вт при одномодовом режиме;
ЛФ = н 9 (11.54)
310 V, Вт при многомодовом режиме.
Теоретический предел мощности генераторов непрерывных колебаний, выпол-
ненных на традиционных электровакуумных приборах определяется зависимостью
Р11=107Х2 Вт. (11.55)
В формулах (11.54) и (11.55) X заданы в сантиметрах.
456 Глава 11. Функциональное поражение РЭС электромагнитными полями
Мощность генерации конкретного электровакуумного СВЧ-прибора может быть
оценена по формуле
Р = т|ПрС/2’5, (11.56)
где т| — коэффициент полезного действия; Пр — первеанс (проводимость элект-
ронного прибора при насыщении; у обычного клистрона Пр — (1... 1,1)• 10-6 А • В-1,5);
U— напряжение, ускоряющее пучок электронов.
Следует отметить, что при U> 105 В пучок электронов становится сильно реляти-
вистским и пользоваться формулой (11.56) нельзя.
Если зависимости (11.54) справедливы в диапазоне волн менее одного сантимет-
ра, то предельно достижимыми в диапазонах субмиллиметровых и миллиметровых
волн оказываются импульсные мощности от 2,5-106 Вт (X -0,5 мм) до 6,4-108 Вт
(X ~ 8 мм) в одномодовом режиме работы генератора и соответственно от 2,5-108 до
6,4-1010 Вт — в многомодовом.
У обычных электровакуумных генераторных приборов в указанных поддиапазо-
нах выходная мощность сильно уменьшается, поскольку размеры систем становится
сравнимыми с длиной волны. Поэтому такие мощности для них недостижимы.
На рис. 11.27 приведены оценки мощности, характерной для современных СВЧ-
генераторов и лазеров в разных частотных диапазонах.
Рис. 11.27. Мощность генераторов когерентного электромагнитного
излучения в различных частотных диапазонах------импульсный
режим;------непрерывный режим: 1 — обычные приборы; 2— лазеры;
3 — сильноточные релятивистские генераторы [56]
Сильноточные релятивистские генераторы бывают двух видов: вакуумные и
плазменные. В настоящее время наибольший интерес разработчиков привлекают
плазменные СВЧ-генераторы. Наличие плазмы в электродинамической структуре
генератора — канале транспортировки пучка — обеспечивает зарядовую нейтрали-
зацию его электронов. Следствием является улучшение качества пучка по сравне-
нию с пучком в вакууме при одинаковом токе. Плазма позволяет транспортиро-
вать пучок с большим током при том же качестве, что и у пучка с существенно
меньшим током в вакууме. Так, например, в результате частичной компенсации
J 1.8. Многоразовые СВЧ-средства функционального поражения
457
пространственного заряда пучка в экспериментальной установке удалось в 2,7 раза
увеличить ток пучка и в 4 раза поднять мощность генерации по сравнению с опти-
мальным по своим характеристикам вакуумным гиротроном. При этом КПД изме-
нился с Идо 15...20 %.
К вакуумным и плазменным генераторам предъявляются сходные требования.
Они должны обеспечивать генерацию СВЧ-импульсов максимальной, предельно
достижимой мощности при выдерживании заданных параметров их формы и дли-
тельности. Электронные пучки, на основе которых в настоящее время создаются
генераторы, формируются сильноточными электронными ускорителями (СЭУ).
Только они способны генерировать пучки релятивистских электронов мощностью
109...1013 Вт в виде импульсов наносекундной длительности [68].
При наличии соответствующих пучков СВЧ-излучение формируется в специаль-
ных замкнутых объемах — электродинамических структурах. Излучение зарождает-
ся и развивается в процессе взаимодействия введенных в объем электронов пучка с
собственными волнами структуры. Развитие может закончиться выводом энергии
излучения из объема только при выполнении определенных условий. Основные фак-
торы, влияющие на процесс формирования СВЧ-излучения, сводятся к следующему.
1. С учетом всевозможных ограничений, нестабильностей и потерь для генерации
мощных и сверхмощных СВЧ-импульсов требуются высоковольтные импульсные
генераторы напряжения с мощностями порядка 0,01...100 ТВт (Ю10...Ю14 Вт). Только
при таких мощностях возможно получение сильноточных релятивистских пучков,
обеспечивающих генерацию СВЧ-колебаний с мощностью порядка 1 ГВт и выше.
2. Работа с сильноточными потоками электронов обусловила необходимость
перехода в СВЧ-генераторах к пространственно развитым электродинамическим
структурам. А это немедленно сказалось на изменении процессов генерации СВЧ-
излучения. Поэтому разработчики генераторов вынуждены изначально учитывать
тесную связь сильноточного релятивистского пучка электронов с процессами фор-
мирования излучения в заданной (выбранной) электродинамической структуре.
3. Формирование сильноточного пучка возможно только при оптимальной связи
первичного устройства накопления и передачи энергии с нагрузкой — диодом силь-
ноточного электронного ускорителя.
Фактически в сильноточных релятивистских СВЧ-приборах процессы фор-
мирования импульсов электромагнитной энергии и преобразования ее в энергию
СВЧ-импульсов происходят в едином устройстве. Поэтому очень важен выбор и
согласование связей всех элементов генератора СВЧ-импульсов. Тем не менее при
анализе допустимо раздельное рассмотрение способов получения первичных импуль-
сов напряжения, устройств их дальнейшего преобразования и передачи в нагруз-
ку, формирования электронных пучков, преобразования энергии пучка в когерент-
ную СВЧ-волну и излучения волны в заданном направлении в пределах малого те-
лесного угла [27].
11.8.4. Сильноточные электронные ускорители
Совокупностью элементов, из которых состоит сильноточный ускоритель элек-
тронов, обеспечивается решение следующих задач.
1. Генерация коротких высокочастотных импульсов. Их форма по возможности
должна быть близкой к прямоугольной. Реально, на практике, удается сформировать
импульсы напряжения £/(/), форма которых сходна с изображенной на рис. 11.28.
458 Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.28. Форма высоковольтного импульса напряжения, подаваемого на
сильноточный диод (такой форма принимается в расчетах). У реального им-
пульса возможен спад амплитуды, показанный на рисунке штриховой линией
Типичные значения временных параметров таких импульсов: длительность
нарастания импульса (длительность переднего фронта) Тф! = 5... 10 нс; длительность
спада (длительность заднего фронта) Тф?= 5... 15 нс; длительность постоянного зна-
чения (длительность плоской части) т= 30 нс...1 мкс (иногда до 10 мкс). С увели-
чением амплитуды импульса длительность фронта, как правило, уменьшается.
2. Получение плотной электронной плазмы 1017... 101 см-3 в тонком слое около
поверхности специального катода — источника электронов. Большие плотности тока
эмиссии электронов из катода достигаются благодаря тому, что внешнее поле,
приложенное к плазменному слою, сосредотачивается на самом катоде и прилега-
ющей к нему области, толщиной порядка дебаевского радиуса
I кт
K=---------(П.57)
у
где к— постоянная Больцмана; Т — абсолютная температура плазмы; п$е — кон-
центрация электронов в плазме, е — заряд электрона.
Величина дебаевского радиуса гд определяет глубину проникновения статическо-
го поля в плазму. Соответственно плазма экранирует поле катода от внешнего про-
странства, начиная с расстояния порядка дебаевского радиуса (расстояние отсчиты-
вается от катода).
3. Формирование из электронов плазмы сильноточного релятивистского пучка
с энергией электронов 0,5... 1 МэВ и током пучка 2... 10 кА.
Максимальный ток электронного пучка обычно ограничен внутренним сопро-
тивлением источника высоковольтного импульсного напряжения. Это сопротивле-
ние составляет I... 100 Ом. Поэтому такой источник при напряжении на катоде диода
1 МВ может создавать ток до 1 МА (внутренним сопротивлением диода можно
пренебречь). Однако в релятивистской электронике эффективно использовать такой
ток не удастся из-за неблагоприятного влияния собственного заряда пучка. В резуль-
тате, например, при энергии электронов 1 МэВ ток пучка не превосходит 10 кА.
4. Инжектирование релятивистского электронного пучка в дрейфовое простран-
ство, которое в некоторых приборах совмещено с электродинамической структурой.
Эта задача возникает в связи с ограничением, накладываемым на максимально
допустимый ток электронного пучка, который можно пропустить через заданное
дрейфовое пространство. Ограничение диктуется следующими причинами:
11.8. Многоразовые СВЧ-средства функционального поражения
459
1) при некотором предельном токе формируется потенциальный барьер типа
виртуального катода, если пространство представляет собой эквипотенциальную
дрейфовую камеру;
2) когда объемный заряд электронов в дрейфовой камере нейтрализован иона-
ми, наблюдается электростатическая неустойчивость; в камере возникает флуктуа-
ционный потенциал (флуктуационный виртуальный катод), превышающий энер-
гию электронов пучка и способный полностью затормозить пучок, т. е. привести к
срыву пучка;
3) поперечная неоднородность плотности электронов в пучке (в частности, труб-
чатые пучки всегда неоднородны по плотности) либо направленная скорость пучка
обуславливают конвективные неустойчивости, проявляющиеся в реальных магнит-
ных полях, напряженность которых всегда конечна.
Конструктивно сильноточный ускоритель электронов (СЭУ) оформляется в виде
электронной пушки, схема которой приведена на рис. 11.29 [56].
В пушку входят высоковольтный источник напряжения 7, коаксиальный диод
и металлическая труба 4, организующая дрейфовое пространство совместно с элек-
тродинамической структурой.
Рис. 11.29. Схема электронной пушки с анодной сеткой: 1 — источник высоко-
вольтного напряжения; 2 — катод; 3 — анодная сетка; 4 — металлическая труба
(вакуумная камера); 5—дрейфовое пространство; 6—коллектор; 7—электронный
пучок; 8 — изолятор
Включение пушки в работу производится импульсным напряжением, которое
от источника 1 прикладывается к катоду 2 и аноду 5, размещенным внутри цилин-
дрической металлической вакуумной камеры 4.
Катод, анод и вакуумная камера образуют коаксиальный диод. Анод диода
выполнен в виде сетки, электрически соединенной с металлической камерой (из-
вестны и другие конструкции).
Электроны эмитируются катодом 2, ускоряются в промежутке катод 2— анод 3
и инжектируются в дрейфовое пространство 5, в котором они продолжают движение
по инерции. В конце пути электроны оседают на коллекторе 6. Вакуумная камера
и дрейфовая труба помещены в сильное магнитное поле с индукцией Под дей-
ствием этого поля электронный пучок 7 на всем протяжении от катода до коллек-
тора имеет постоянный диаметр, приблизительно равный диаметру катода.
В релятивистских электронных пушках используются холодные катоды, дейст-
вие которых основано на эффекте взрывной эмиссии. В пушках с взрывоэмиссион-
ными катодами ток пучка ограничен только собственным пространственным заря-
дом, а его величина определяется приложенным напряжением и геометрией диода.
Ясно, что этот ток всегда меньше, чем максимально возможный ток высоковольт-
ного источника.
460
Глава 11. Функциональное поражение РЭС электромагнитными полями
В современных конструкциях электронных пушек анодная сетка практически
не используется. Применяется другая схема диода: магнитоизолированный диод.
Конструкция диода иллюстрируется рис. 11.30, а\ качественная картина распределе-
ния силовых линии электрического поля собственного заряда пучка в дрейфовой
камере 4 (на входе в нее, в самой камере и в области коллектора) — на рис. 11.30, б.
Боковая поверхность и торец сплошного цилиндра катода 2 изготавливаются
из металла или графита, реже — из металлодиэлектрика. Наибольшее применение
в релятивистской высокочастотной электронике нашли трубчатые катоды.
Рис. 11.30. Устройство СЭУ на основе магнитоизолированного диода:
1 — источник высоковольтного напряжения; 2 — катод; 3 — метал-
лическая труба (камера) большого диаметра; 4 — метгылическая труба
(камера) малого диаметра; 5 — коллектор; 6 — электронный поток
Катод расположен по оси металлической камеры 3, имеющей радиус и дли-
ну L{» R{. Здесь катод является внутренним электродом. Однако в некоторых при-
борах используются также конструкции диодов, в которых внутренним электродом
служит анод (обращенные диоды). Тем не менее импульс отрицательной полярно-
сти всегда подается на катод.
Камера 3 переходит в металлическую камеру 4 с меньшим радиусом Т?2. Эта
камера относится к СВЧ-источнику. Обе камеры вакуумные; они находятся в одно-
родном магнитном поле, создаваемом внешним (по отношению к камерам) соле-
ноидом. Силовые линии поля направлены вдоль оси камер. Металлические камеры
заземлены, а на катод, как уже говорилось, подается отрицательное напряжение.
Электронный пучок зарождается на катоде и движется под действием внешних
электрического и магнитного полей вдоль оси камер.
Ток пучка определяется внешним электрическим полем, ускоряющим электро-
ны, и полем собственного заряда пучка, тормозящим электроны. В результате про-
тивоположного действия этих полей при заданном потенциале катода должны на-
ступать ограничения тока, даже если эмиссия электронов с катода имеет бесконеч-
ную плотность.
Процесс в ускорителе (рис. 11.30) развивается так, что с увеличением тока пуч-
ка отрицательный потенциал на оси пучка растет быстрее, чем на его внешней по-
верхности. Наступает момент, когда потенциал на оси сравнивается с потенциа-
лом катода. Ускоряющее электрическое поле для электронов на оси становится рав-
11.8. Многоразовые СВЧ-средства функционального поражения 461
ным нулю, и они останавливаются. Образуется своего рода локальный виртуаль-
ный катод. Но внешние электроны по-прежнему продолжают движение. Вследствие
такого неравномерного по сечению распределения скоростей пучок электронов пре-
вращается в трубчатый, даже если электроны эмитированы со всей поверхности ци-
линдрического катода.
Для того чтобы электронная пушка сформировала пучок, соответствующий за-
данным требованиям, на диод должен быть подан высоковольтный импульс доста-
точной мощности. Такие импульсы в электронной пушке вырабатываются специ-
альным генератором импульсов 1 (рис. 11.29 и 11.30).
11.8.5. Генераторы мощных импульсов
В настоящее время используется несколько схем формирования импульсов,
питающих диод СЭУ. В любой из них реализуется принцип медленного накопления
электрической или магнитной энергии с последующей трансформацией ее в энер-
гию существенно более короткого по сравнению с временем накопления импульса.
Желательная форма импульсов — прямоугольная. Соответственно в генераторе долж-
ны быть устройства, обеспечивающие накопление энергии, генерирование питающе-
го высоковольтного импульса, компрессию (сжатие во времени) импульсов, форми-
рование мощного прямоугольного рабочего импульса, передачу рабочего импульса
на нагрузку. Указанные операции выполняются элементами, соединенными в со-
ответствии со схемой рис. 11.31 [56].
Рис. 11.31. Блок-схема генератора мощного импульса, питающего диод СЭУ:
ГВИ — генератор высоковольтных импульсов; ПН — промежуточный нако-
питель; К — коммутатор; ФЛ — формирующая линия; ВР — выходной
разрядник; ПЛ — передающая линия; ИП — первичный источник питания
Первичный источник питания ИП прежде всего обеспечивает энергией гене-
ратор высоковольтных импульсов ГВИ. Импульс высокого напряжения от ГВИ
заряжает промежуточный накопитель ПН с характерным временем накопления по-
рядка 1 мкс. В момент, когда напряжение на ПН достигает максимального значе-
ния, срабатывает коммутатор К и промежуточный накопитель разряжается на фор-
мирующую линию ФЛ, заряжая ее до амплитудного напряжения за более короткое
время (порядка 100 нс). В момент, когда напряжение на ФЛ достигает максимума,
срабатывает выходной разрядник ВР и энергия из ФЛ переключается в передаю-
щую линию ПЛ за время ~ 10 нс. Формирующийся при этом прямоугольный им-
пульс напряжения транспортируется по передающей линии ПЛ к диоду СЭУ.
Генераторы высоковольтных импульсов с амплитудой Uиз напряжения первич-
ного источника t/0 « Uформируют импульсы с использованием накопителя энергии.
В качестве накопительных элементов используются конденсаторы, катушки индук-
тивности, отрезки длинных линий и другие устройства, обладающие сильно выра-
женными емкостными или индуктивными свойствами. Емкостные накопители
формируют импульс за счет разряда конденсатора емкостью С, заряженного до
462
Глава 11. Функциональное поражение РЭС электромагнитными полями
напряжения ~170, на нагрузку с сопротивлением Лн, как на рис. 11.32. Индуктив-
ные накопители для этого размыкают цепи с индуктивностью £, через которую
протекал начальный ток /0 (рис. 11.33).
Рис. 11.33. Индуктивная схема
накопления и формирования
импульса
Рис. 11.32. Емкостная схема
накопления и формирования
импульса
В схеме рис. 11.32 при замкнутом ключе Kj и разомкнутом К2 конденсатор С
заряжается от источника питания до напряжения ~ t/0 через сопротивление R »RU.
К моменту окончания заряда в конденсаторе накопится энергия
Э = £^о_ (11.58)
с 2
После этого производится отключение конденсатора от источника ключом К!
и подключение к нагрузке ЯИ ключом К2. Поскольку постоянная времени цепи
разряда тр = /?н С очень мала, в процессе разряда формируется короткий импульс с
энергией (11.58). Ток смещения в цепи разряда емкости равен
у _CdU^ О1-59)
С dt
Поэтому чем выше скорость изменения напряжения на конденсаторе тем
больше падение напряжения на нагрузке. Т. е. с уменьшением постоянной време-
ни цепи разряда тр = Ан С возрастает амплитуда импульса на нагрузке и сокращает-
ся его длительность.
Предельные возможности накопления энергии определяются электрической про-
чностью диэлектрика в конденсаторе. Современные материалы длительно выдер-
живают электростатическое поле с напряженностью до 106 В/см.
В схеме рис. 11.33 энергия накапливается в индуктивности. При замкнутом клю-
че Ki и разомкнутом К2 через катушку течет ток
(11.60)
ГДе Тз=^
К
— постоянная времени цепи заряда.
При размыкании ключа Ki и замыкании К2 в момент /= /п энергия, запасенная
индуктивностью, выделится на сопротивлении нагрузки:
Lil 1 , U%
п =—т 1-ехр
п 2 2 R1
*п
Т,
(11.61)
В результате генератор с индуктивным накопителем формирует на сопротивле-
нии нагрузки импульсы, амплитуда которых значительно превышает напряжение
источника питания. Импульсы имеют экспоненциальную форму и большую пико-
вую мощность.
11.8. Многоразовые СВЧ-средства функционального поражения
463
Получение импульсов напряжения с амплитудой 1О5...1О7 В с помощью емкост-
ных и индуктивных накопителей невозможно. Поэтому используются схемы умно-
жения напряжения.
Генератор Маркса [56] содержит А конденсаторов емкостью С каждый, соединен-
ных как на рис. 11.34.
Рис. 11.34. Принципиальная схема умножения
напряжения Маркса с компенсирующей емкостью Ск
При разомкнутых ключах К все конденсаторы соединены параллельно и заряжа-
ются от источника через сопротивления 7?! и R до напряжения t/0. При одновремен-
ном замыкании всех ключей К конденсаторы соединяются последовательно. Их об-
щая емкость становится равной С/N, а заряд остается равным Q = NCUq. Разность
потенциалов между верхней обкладкой первого конденсатора и нижней — послед-
него Много при этом U = NUq. При замкнутом ключе К! батарея конденсаторов
разряжается на сопротивление нагрузки Лн, формируя импульс амплитуды, пример-
R С
но равной U = NUq, и длительностью по уровню половины амплитуды ти — 0,7——.
А
Для этого должно выполняться условие
-^-«1. (11.62)
NR
В качестве ключей чаще всего используются искровые разрядники.
В схеме рис. 11.34 коэффициент умножения напряжения равен (точнее — пря-
мо пропорционален) числу конденсаторов N. Известна схема более эффективного
умножения напряжения, предложенная Г. А. Месяцем. В ней коэффициент умно-
жения с помощью А каскадов LС колебательных контуров близок к 2N [70].
Различные модификации схемы генератора Маркса применяют как зарядные
устройства накопительных линий более высоковольтных генераторов и как само-
стоятельные генераторы высоковольтных импульсов. Как зарядное устройство гене-
ратор Маркса выдает в накопительную линию импульсы микросекундной длитель-
ности. А накопительные линии, разряжаясь, формируют наносекундные импульсы
с амплитудами до десяти мегавольт. Как самостоятельный формирователь мощных
импульсов генератор Маркса может выдавать в нагрузку импульсы длительностью
10-8...10~9 с при амплитуде, как правило, не превышающей 1 МВ.
Для формирования фронта импульса порядка 10~9 с необходимо, чтобы собствен-
ная индуктивность контура L численно не превышала 10~9 Ан (при 7?н = 100 Ом
индуктивность не должна быть больше 107 Гн). Чтобы уменьшить индуктивность
до таких уровней, применяют специальные меры. В частности, в качестве накопи-
тельных устройств используют специальные коаксиальные линии.
Мощные наносекундные импульсы получают, заряжая емкостный накопитель
СВЧ-генератора от параллельно включенных секций генераторов Маркса. Такое
включение повышает мощность импульса и снижает индуктивность разрядного кон-
тура, но требует точной синхронизации моментов разряда.
464
Глава 11, Функциональное поражение РЭС электромагнитными полями
Плотность энергии, запасаемой в генераторах Маркса, не превышает 5 кДж/м3
при выходном напряжении 2...2,5 МВ. Плотность энергии снижается примерно
пропорционально квадрату увеличения напряжения.
Трансформаторные схемы генераторов периодических импульсных пучков нано-
секундной длительности с высокой частотой повторения используют зарядку форми-
рующей линии с распределенными параметрами. Такая линия обеспечивает быстрое
накопление энергии, а в сочетании с быстродействующими коммутаторами — ее
компрессию в короткий импульс. Для уменьшения числа этапов компрессии им-
пульса применяются гибридные емкостно-индуктивные накопители. Выгода опреде-
ляется тем, что индуктивный накопитель способен запасти большую энергию: плот-
ность ее в магнитном поле неразрушаемых соленоидов достигает 40... 100 МДж/м3.
Соответственно в тысячи раз можно уменьшить объем гибридного устройства по
сравнению с чисто емкостным, особенно если энергия вводится в индуктивный
накопитель прямо от генератора Маркса.
В качестве зарядных устройств для формирующих линий широко применяют-
ся импульсные трансформаторы. Импульсный трансформатор может работать не
только совместно с формирующей линией, но и самостоятельно. Обычно исполь-
зуются трансформаторы Тесла, линейные трансформаторы, обычные импульсные
трансформаторы и автотрансформаторы. Трансформаторные схемы компактнее и
надежнее генераторов Маркса, способны работать в импульсно-периодическом
режиме и больше подходят для реализации в многоразовых средствах ФП.
Трансформаторы Тесла содержат два колебательных контура LXCX и L2C2 с ин-
дуктивной связью (рис. 11.35). [70].
Ci f-i< > ^-2 Сг
Рис. 11.35. Схема трансформатора Тесла
После замыкания ключа К в контуре возникают свободные колебания,
которые передаются в контур L2C2. В качестве емкости С2 обычно используется
емкость формирующей линии. Передача максимальной энергии из первого конту-
ра во второй происходит при равенстве частот собственных колебаний контуров,
т. е. когда
(11.63)
Максимально возможное значение напряжения U2 на емкости С2
^2мах
(11.64)
Следовательно, при Сх = п2С2 можно рассчитывать на умножение, близкое к п.
Реальное максимальное значение U2 (/) достигается при выполнении условия
•\/1 + к 4- "х/1 — к
= л,
(11.65)
11.8. Многоразовые СВЧ-средства функционального поражения
465
где п — целое нечетное число;
*= м
М— коэффициент взаимной индукции между контурами. При п = 1; 3; 5 опти-
мальными являются значения k = 1; 0,6; 0,385.
В современных конструкциях мощных импульсных генераторов трансформа-
тор Тесла совмещен с формирующей коаксиальной линией, см. рис. 11.36.
Рис. 11.36. Конструктивная схема ускорителя с трансформатором Тесла, встроенным в
коаксиальную линию 7 — трансформатор Тесла (а — первичная обмотка; б— вторичная
обмотка; в и г — соответственно центральный и наружный электроды формирующей
линии); 2— формирующая линия (трансформатор Тесла встроен в коаксиальную ли-
нию); 3— газовый разрядник; 4— генератор запускающих импульсов; 5— передающая
линия; 6 — вакуумный диод; 7 — соленоид; 8 — электродинамическая структура
Одновитковая первичная обмотка трансформатора размещена на внутренней по-
верхности внешнего проводника линии. Вторичная обмотка трансформатора разме-
щена на диэлектрическом полом конусе и соединена с внутренним проводником
линии. Обеспечивается коэффициент трансформации 2-Ю3. Высоковольтный им-
пульс формируется при разряде формирующей линии на вход передающей линии.
К недостаткам трансформаторов Тесла следует отнести трудности в получении
импульсов напряжения с амплитудой в несколько мегавольт.
Существенно большими возможностями в этом отношении обладает линейный
импульсный трансформатор.
Линейный импульсный трансформатор состоит из N одновитковых трансформа-
торов с единой вторичной обмоткой. В качестве вторичной обмотки используется
металлический стержень, на который надеты тороидальные индукторы с первичной
обмоткой [70]. Электрическая схема линейного импульсного трансформатора приве-
дена на рис. 11.37. На схеме Q — емкость накопительного конденсатора; Ux = 2 UQ,
Uq — зарядное напряжение; — суммарная индуктивность конденсаторов, раз-
рядников, кабелей первичного контура; Сн — емкость нагрузки; Z2 — индуктив-
ность вторичной обмотки. Поскольку вторичные контуры одновитковых трансфор-
маторов соединены последовательно, напряжения, индуцированные первичными
обмотками на металлическом стержне, суммируются.
Напряжение на емкости нагрузки Сн (на емкости накопительной линии) опре-
деляется выражением (без учета возможных потерь)
ип =—1(1-COSCO/), (11.66)
I 2 т ктт
где круговая частота со= ----, a L^-NI^-v L^.
466 Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.37. Электрическая схема линейного импульсного трансформатора
Если задано необходимое время т зарядки формирующей линии, то индуктив-
ность линейного импульсного трансформатора должна удовлетворять условию
(11.67)
При известной энергии Эн, которую надо передать в нагрузку, это же условие
можно записать в виде
л2Эн
(11.68)
Линейные импульсные трансформаторы обеспечивают получение импульсов ме-
гавольтного диапазона микросекундной длительности с энергией до 106 Дж и более.
Резонаторные схемы генерации мощных СВЧ-импульсов. Наибольшее распро-
странение получили сильноточные ускорители на линиях с распределенными пара-
метрами. В этих ускорителях линии используются в качестве быстродействующих
емкостных накопителей, а многокаскадное сжатие импульса обеспечивают силь-
ноточные коммутаторы.
Формирование мощных наносекундных импульсов может также осуществляться
за счет временной компрессии высокочастотной энергии, накопленной в объемах
высокодобротных резонаторов [68]. В таких объемах энергия, поступающая от пи-
тающего источника СВЧ-колебаний (например, от магнетрона с мегаваттной мощ-
ностью в импульсах микросекундной длительности), накапливается в течение дли-
тельного времени. Накопленная СВЧ-энергия с помощью коммутаторов выдается
в формирующую линию за время, существенно меньшее постоянной времени резо-
натора накопителя.
11.8. Многоразовые СВЧ-средства функционального поражения
467
Накопление может производиться в резонаторах стоячей волны и в резонаторах
бегущей волны. Хотя различие между этими резонаторами несущественное, обеспе-
чить эффективную работу резонаторов бегущих волн на практике труднее, чем резо-
наторов стоячих волн.
В резонаторе запасается энергия, равная
э - P°Q° (11.69)
3 2л/0 ’
где Pq — мощность, поступающая в резонатор; Qo — собственная добротность ре-
зонатора; Уо — резонансная частота.
Время установления колебаний в резонаторе до уровня примерно 2/3 от стаци-
онарного значения напряженности составляет
т =-----------
5 9о V
“кЛК v гр
(11.70)
«nV
где игр = 2 х~" — групповая скорость волны в резонаторе; Лв — длина волны в
В ти юо
волноводе, по которому СВЧ-энергия поступает в резонатор; ак =----посто-
^Со^гр
янная затухания волны при одном прохождении по кольцу обратной связи в резо-
наторе бегущей волны.
11.8.6. Диоды с взрывной эмиссией электронов
Источником сильноточного электронного пучка, инжектируемого в электроди-
намическую структуру СВЧ-генератора, может служить диод со взрывной эмисси-
ей электронов, металлодиэлектрический катод или фотокатод, стимулируемый лазер-
ным излучением. Основное общее свойство перечисленных устройств состоит в том,
что они способны за короткий промежуток времени отдавать такие большие токи,
которые невозможно получить с использованием других известных устройств ана-
логичного назначения.
Плоский диод с взрывной эмиссией электронов с холодного катода представ-
лен чертежом рис. 11.38 [69]. Такой диод используется наиболее часто.
Рис. 11.38. Схематическое изображение плоского сильноточного диода
с взрывной эмиссией; Ф — потенциал (анода или катода соответственно)
На металлический катод К плоского диода по передающей линии подается вы-
соковольтный импульс U(t). Сеточный, или изготовленный из фольги, анод А за-
землен. Он почти прозрачен для высокоскоростных электронов.
Высоковольтный импульс !/(/) нарастает в течение времени тф1 = 5... 10 нс, по-
том сохраняет постоянное значение в течение т~ 30... 100 нс (вплоть до 1 мкс) и
после этого спадает до нулевого значения за время тф2 = тф1 = 5... 10 нс.
468
Глава 11. Функциональное поражение РЭС электромагнитными полями
Катоды с взрывной эмиссией электронов имеют существенно неоднородную
поверхность. На заостренных неоднородностях электрическое поле, создаваемое
высоковольтным импульсом на катоде, усиливается в сотни раз. После поступле-
ния импульса в течение первых нескольких наносекунд происходит автоэлектрон-
ная эмиссия с катодных микроострий, приводящая к взрыву и образованию при-
катодной плазмы. С этого момента электронная эмиссия переходит во взрывную
со свободной, т. е. обращенной к аноду поверхности образовавшейся плазмы. Плазма
расширяется со скоростью порядка voa 1...3 106 см/с и в некоторый момент пере-
крывает промежуток «катод — анод». Вплоть до этого момента под действием разно-
сти потенциалов анода и отрицательного заряда плазменного образования, численно
равной приложенному к катоду напряжению, происходит ускорение электронов.
При этом ускоряются практически только электроны слоя, образующего указан-
ную поверхность плазмы. Следующие за ними электроны лишь перемещаются со
скоростью v0, так как для них анод экранирован электронами поверхности.
Как только плазма полностью перекрывает промежуток «катод — анод», уско-
рение электронов прекращается. Поэтому длительность импульса электронного тока
пучка (длительность пучка ускоренных электронов) будет порядка
где J(0) — расстояние между катодом и анодом в диоде.
Пучок электронов такой длительности инжектируется в дрейфовую трубку гене-
ратора.
При более детальном рассмотрении процесс взрывной эмиссии с катода про-
исходит следующим образом.
С поступлением на диод высоковольтного импульса локальная напряженность
электрического поля на катоде может превысить 100 МВ/см. В столь сильном поле
с микронеоднородностей, всегда имеющихся на поверхности катода, вырываются
электроны, а сами микронеоднородности быстро разогреваются за счет таких элект-
ронов и при некоторой температуре процесс эмиссии переходит во взрывообразное
испарение. Время от момента подачи импульса напряжения до начала испарения
острия, т. е. время запаздывания взрыва острия т3, связано с плотностью предвзрыв-
ного эмиссионного тока Je, характерного для данного катода, так что произведение
есть величина постоянная, зависящая только от теплофизических характери-
стик материала катода. Теплофизические характеристики — это теплоемкость,
плотность вещества, коэффициент теплопроводности, коэффициент температуро-
проводности.
Плотность электронного токаув в диоде, пока в нем протекает процесс перекры-
тия плазмой пространства между катодом и анодом, определяется при еС/0» тес2
(в ультрарелятивистском случае) соотношением [69]
где d(t) = J(O)-voZ, т. е. обозначает расстояние от свободной поверхности расши-
ряющейся плазмы до анода в момент времени /, отсчитываемый от начала образо-
вания прикатодной плазмы.
Плотность тока je в плоском диоде ограничена действием пространственного
заряда электронов. Потенциальная эмиссионная способность катода со взрывной
11.8. Многоразовые СВЧ-средства функционального поражения
469
эмиссией существенно выше. Поэтому имеется возможность увеличения тока в силь-
ноточных электронных пучках путем нейтрализации заряда электронов в диоде.
Формула (11.72) с использованием релятивистского фактора электронов пучка
Y=_ ! =i+£^. (П.73)
fv? тес
.11- -
V
может быть представлена в виде
з
_тес у (11.74)
е 2nd2 (Г)
На величину термоэмиссионного тока при достижении им плотности порядка
109 А/см2 накладываются и другие ограничения, вызываемые объемным зарядом
электронов в области эмиттера. В частности, время задержки взрыва начинает за-
висеть от напряженности Е внешнего электрического поля пропорционально Е~3,
то есть т3 ~ Е~\
Формирование поверхности эмиттера происходит следующим образом. При
подаче на диод высоковольтного импульса первыми взрываются микроострия,
поскольку напряженность на них наибольшая. Испарившиеся частицы материала
катода и других продуктов в сильном электрическом поле ионизируются, образуя
плазменные сгустки (катодные факелы). Температура электронов плазмы катодных
факелов kTe = 1...5 эВ; их концентрация, в зависимости от плотности тока, равна
п = 1О18...1О20 см-3 на расстоянии гк< 0,1 мм от поверхности катода и уменьшается
до п = 1О13...1О14 см-3 на расстоянии гк порядка миллиметров.
Возникнув, катодные факелы расширяются в окружающее катод вакуумное
пространство со скоростью 1...3-104 м/с. При расширении они сливаются друг с
другом и образуют в непосредственной близости от катода сравнительно однород-
ную эмитирующую плазменную поверхность. В ее формировании существенна роль
эффекта экранировки (ослабления) внешнего электрического поля, сосредоточен-
ного вблизи катода, электронами, эмитированными катодными факелами.
Ослабление напряженности поля увеличивает время запаздывания взрыва ос-
тавшихся микроострий. Но для повышения однородности плазмы в прикатодном
пространстве желательно увеличивать число катодных факелов (число испарившихся
микроострий). Противоречие преодолевается за счет увеличения крутизны фронта
высоковольтного импульса, т. е. за счет увеличения dE/dt.
При большом значении dE/dt взрывная напряженность электрического поля
достигается почти одновременно для большого числа микроострий. Малого про-
межутка времени не хватает для появления столь же большого количества электро-
нов вблизи катода, порожденных ионизацией катодных факелов, а значит, эффект
экранировки оказывается слабым.
Катодные факелы способствуют как возникновению новых эмиссионных цен-
тров на катоде под плазмой, так и новых микроострий. Этим, в частности, обеспе-
чивается большой ресурс работы катодов.
Электронный поток формируется из электронов, эмитированных фронтом рас-
ширяющейся катодной плазмы. В свою очередь, в плазму электроны поставляются
из катода. Их источниками на катоде являются области эмиссионных центров (обла-
сти сработавших микроострий). Поперечные размеры таких центров измеряются
единицами микрометров. Каждый центр представляет собой фазовый переход «мате-
470 Глава 11. Функциональное поражение РЭС электромагнитными полями
риал катода — плазма». Вылетевшие в вакуум электроны ускоряются приложенным
к диоду напряжением в направлении к аноду, который они бомбардируют. В ре-
зультате такой бомбардировки десорбируется (покидает поверхность анода) газ,
испаряется материал анода и образуется анодная плазма, которая расширяется в
сторону катода. Ускоренные тем же полем ионы способствуют образованию плаз-
мы на катоде, чем усиливают ток пучка электронов в диоде.
Для использования по своему назначению пучок выводится из диода в трубу
дрейфа путем инжектирования (ввода) электронов, например через анодную фоль-
гу. Фольга рассеивает электроны, чем увеличивает поперечные составляющие их
скорости.
Рассмотрев принципы и закономерности формирования и развития импульса
в диоде, можно сформулировать следующие выводы.
1. Длительность импульса тока пучка в рассмотренном диоде ограничивается
интервалом времени от момента подачи высоковольтного импульса до момента
перемыкания ускоряющего промежутка движущейся во встречных направлениях
катодной и анодной плазмой.
2. Высокая эффективность катода достигается при высокой однородности плаз-
мы на нем. В случае, когда межэлектродный зазор (размер промежутка «катод —
анод») задан, для повышения однородности плазмы стремятся использовать мате-
риалы с малым временем запаздывания, конструкции катода с большим усилени-
ем электрического поля микронеровностями, импульсы напряжения с высокой
амплитудой и коротким передним фронтом.
3. Наиболее слабым элементом рассмотренного вакуумного диода — источни-
ка мощного пучка электронов — является анодная фольга инжектора пучка, кото-
рая к тому же увеличивает поперечный разлет электронов.
Избавиться от фольги удается в коаксиальных диодах с магнитной изоляцией,
созданных на основе тех же катодов с взрывной электронной эмиссией. Трубчатый
пучок электронов формируется в них в сходящемся неоднородном магнитном поле.
Поскольку нас интересует только потенциальная возможность формирования
сильноточных пучков электронов и их энергетические характеристики, каких-либо
сведений об особенностях конструкции конкретных диодов и формирования в них
пучков нужной формы и качества здесь не приводится. Такие сведения можно найти,
например, в работах [27, 55, 56].
Цилиндрические диоды используются при реальных экспериментах в плазмен-
ной релятивистской СВЧ-электронике. Схема такого диода с магнитной изоляцией
изображена на рис. 11.39.
Во
Рис. 11.39. Схематическое изображение цилиндрического
сильноточного диода с взрывной эмиссией
Этот диод генерирует тонкостенный трубчатый пучок электронов. В сильном
магнитном поле с напряженностью Во расширением пучка поперек поля можно пре-
11.8. Многоразовые СВЧ-средства функционального поражения 471
небречь, поскольку в реальных условиях оно происходит более чем на порядок
медленнее, чем его продольное расплывание.
r
Согласно оценке [69] для пучка с энергией 100 кэВ и In— = 1 ток /ф = 400 А, а
гъ
при энергии 500 кэВ, т. е. при у = 2 ток /ф = 3 кА. Практически это федосовские
предельные токи для соответствующих цилиндрических взрывоэмисионных диодов
с магнитной изоляцией.
Формируемый диодом сильноточный релятивистский пучок должен быть ин-
жектирован в электродинамическую структуру, которая предназначена для преоб-
разования энергии пучка в энергию СВЧ-излучения.
11.8.7. Электродинамические системы
После того как сильноточный релятивистский поток электронов с энергией при-
близительно 1...10 МэВ сформирован и выведен из диода, требуется преобразовать
его энергию в энергию СВЧ-излучения. Такое преобразование осуществляется в спе-
циальной электродинамической структуре (системе). Преобразование происходит
в результате взаимодействия полей зарядов структуры с ЭМП электронного пучка.
В момент инжекции пучка в электродинамическую структуру неизбежны неста-
ционарные переходные процессы. Эти процессы представляют собой индуцирован-
ные фронтом пучка в материале электродинамической структуры и среде, запол-
няющей ее полость (например плазме), ЭМП, заряды и токи. Эти токи, в свою оче-
редь, воздействуют в соответствии с законом электромагнитной индукции на пучок.
Согласно этому закону, поверхность полости структуры и заполняющая ее среда
стремятся погасить возмущение, вносимое в них пучком.
При инжекции в вакуумное дрейфовое пространство электронного пучка, ког-
да действует сильное продольное магнитное поле, противодействие структуры ока-
зывается таким, что через нее не проходит ток, превышающий некоторое предель-
ное значение: пучок запирается полем своего пространственного заряда или про-
исходит закручивание электронов в собственном магнитном поле тока.
Энергия пучка — это та предельная энергия, которая потенциально может быть
преобразована в СВЧ-энергию. Из-за потерь лишь часть ее переходит в энергию
СВЧ-излучения. Эта часть определяет электронный КПД генератора, который мо-
жет быть достаточно высоким, до 80...90 %.
В СВЧ-генераторах используются электродинамические системы с различными
пространственными структурами. В сильноточных релятивистских СВЧ-генерато-
рах электродинамические системы конструируются на основе отрезков волноводов
с поперечными размерами, во много раз превышающими длину волны. Внутрен-
няя структура отрезков волноводов может быть как гладкой, так и содержать замед-
ляющую систему в виде линии передачи с периодически повторяющимися неодно-
родностями. Линии изготавливаются в виде спирали, гребенки и т. п. В плазменных
релятивистских СВЧ-генераторах роль замедляющей системы выполняет плазмен-
ная среда. Для всех подобных структур характерен многоволновый режим работы.
Энергетические возможности сильноточного электронного ускорителя исполь-
зуются эффективно, если СВЧ-излучение формируется в процессе взаимодействия
сильноточного релятивистского потока с несколькими собственными ЭМВ и элек-
тродинамической структуры. Эти волны имеют одну и ту же частоту, но отличают-
ся либо направлением распространения, либо пространственной структурой поля.
472
Глава 11. Функциональное поражение РЭС электромагнитными полями
11.8.8. Вакуумные сверхмощные СВЧ-генераторы
В сверхмощных релятивистских СВЧ-генераторах используются только широ-
кие трубчатые сильноточные пучки релятивистских электронов и сверхразмерные
волноводы с диаметром DB = 2R » X. В вакуумных СВЧ-генераторах с волноводны-
ми секциями круглой формы эффективный способ взаимодействия обусловлен
связью медленных волн потока электронов с полями собственных аксиально-сим-
метричных колебаний периодических волноводных секций электродинамической
структуры на частотах
<о(А'г) = Хгге±л2лу-, « = 1,2,3,..., (11.75)
при одночастичном механизме вынужденного излучения электронов пучка в пери-
одически неоднородных системах;
(o(ATj=Ar7ve±w2n-^±nB , « = 1,2,3,..., (11.76)
при вынужденном коллективном черенковском (рамановском) излучении пучка в
периодической системе.
В выражениях (11.75), (11.76) использованы следующие обозначения: Lc — по-
стоянная, определяющая пространственный период неоднородностей замедляющей
системы; Пв — частота плазменных колебаний пучка электронов. В случае простей-
шего релятивистского пучка (однородного в поперечном направлении) = со^у-3.
В первом приближении таким условиям отвечают излучения электронов пуч-
ка, равномерно движущихся со скоростью ve в электродинамической системе, пе-
риодически неоднородной с периодом £с в направлении движения пучка.
В генераторах с сильноточными пучками одночастичнос излучение практически
не проявляется. Здесь преобладающими являются коллективные механизмы вынуж-
денного излучения.
При релятивистских энергиях и больших токах электронных пучков направлен-
ные излучения сгустков электронов вызывают характерные многоволновые процес-
сы. Для их развития требуется известный синхронизм пучковых волн потока элек-
тронов и собственных волн электродинамической структуры.
Синхронное поле собственной волны определяется параметрами электродинами-
ческой структуры, через которую транспортируется пучок. Поэтому излучение элект-
ронов можно считать черенковским, а сами источники СВЧ-излучения — череп-
ковскими. Такое излучение стало основой работы разных СВЧ-генераторов. Разли-
чие между ними заключается в параметрах пучка и электродинамической структуры.
Но основное различие — в величинах тока пучка и ускоряющего напряжения.
11.8.9. Черепковские генераторы
Принципы построения черенковских СВЧ-генераторов основаны на идеях
С. И. Вавилова и П. А. Черенкова, объяснивших природу излучения ЭМВ, возни-
кающего при движении заряженных частиц (электронов) в вешестве в том случае,
когда скорость v этих частиц превышает фазовую скорость света:
v>v(f)=-, (11.77)
п
где Уф — фазовая скорость света в среде; с — скорость света в вакууме; п — коэф-
фициент преломления среды распространения ЭМВ.
11.8. Многоразовые СВЧ-средства функционального поражения 473
В результате взаимодействия заряженных частиц и среды, играющей роль за-
медляющей структуры, образуется тонкий пучок электронов, порождающий на
выходе генератора (в антенне) мощное СВЧ-излучение.
Вакуумные черенковские генераторы сверхбольшой мощности — это одночастот-
ные пространственно-когерентные источники СВЧ-излучения, функционирование
которых основано на синхронизме электронов и ЭМП периодической структуры.
При этом структура поля зависит от электронного потока, поскольку определяется
его излучением. Черенковские генераторы обычно имеют секционированную элект-
родинамическую структуру. В реальных сверхразмерных электродинамических систе-
мах (волноводах) структура поля излучения в первой (длинной) секции является
сложной, поскольку взаимодействие потока и поля сопровождается излучением всех
элементов секции и неоднородностей самого потока. Структура собственной волны
системы тем не менее сходна со структурой поверхностной волны волновода систе-
мы. Фаза поля этой волны почти постоянна вдоль радиуса, а продольная компонента
напряженности электрического поля в области потока имеет минимум. Наличие
минимума указывает на то, что поток увлекает поле поверхностной волны и перено-
сит его в следующую, короткую, секцию. В короткой секции происходит формиро-
вание основной излучаемой волны.
Даже в однородной волноводной структуре в процессе равномерного движения
заряженной частицы со скоростью ve > Уф вблизи пространственно-периодической
поверхности в волноводе возникает черенковское излучение вихревых ЭМВ. Коге-
рентное излучение при многомодовом излучении образуется вследствие коллектив-
ного возбуждения нескольких мод ЭМВ одной частоты. Если электродинамическая
структура осесимметрична, то спектр волн, с которыми взаимодействуют электроны,
дискретный. Это свойство обусловлено тем, что электроны взаимодействуют с несим-
метричными собственными волнами (модами) структуры. В реальной структуре из-
за ее конечности, неоднородности тока пучка, а также и по некоторым другим
причинам, спектр взаимодействия (и излучения) становится непрерывным. Но лишь
для некоторых из мод, вносящих вклад в одну и ту же спектральную составляющую,
выполняются в полной мере условия усиления соответствующих им вихревых полей
в процессе взаимодействия с электронами пучка. Во многих СВЧ-приборах таковыми
являются моды поверхностных волн.
В отличие от генераторов поверхностной волны в МВЧГ поверхностная волна
не устанавливается, и в результате электронный пучок взаимодействует с неодно-
родным спектром как поверхностных, так и объемных волн структуры.
Непременным элементом современных многоволновых СВЧ-генераторов явля-
ется одна или несколько волноводных секций. Волновод в секции — сверхразмер-
ный. Он может быть гладким или иметь периодическую структуру. Секции волно-
вода возбуждаются релятивистским электронным пучком трубчатой формы. Усло-
вие генерирования многоволнового СВЧ-прибора, как и СВЧ-генераторов других
типов, — обеспечение и поддержание синхронизма электронного потока и ЭМП
собственной волны системы. Особенность та, что синхронизм здесь может выпол-
няться одновременно для нескольких волн вихревого ЭМП волновода, которые при
наличии соответствующего устройства (антенны), согласующего выход генератора
со средой распространения волн, будут излучаться в заданном направлении.
Черенковское излучение возникает при наличии соответствующей среды и вы-
полнении условия
= (11.78)
474 Глава 11. Функциональное поражение РЭС электромагнитными полями
где ve =|vj = const — скорость электронов пучка; со — частота черенковского излу-
чения;
— продольная относительно ve составляющая волнового вектора
черенковского излучения; Гф — фазовая скорость волны черенковского излучения
в направлении скорости vc.
Электромагнитные поля электронов, движущихся относительно электродинами-
ческой структуры, возбуждают спонтанное излучение. Взаимодействие спонтанно
излученных волн на частотах, удовлетворяющих условию (11.78), и электронного пуч-
ка обеспечивает формирование СВЧ-излучения, которое выводится из генератора.
На рис. 11.40 представлена схема, содержащая основные элементы вакуумного
МВГЧ [56].
Рис. 11.40. Экспериментальный многоволновый черепковский СВЧ-гснсратор:
U— напряжение, подаваемое на катод с высоковольтного генератора импульсов;
/ — катододержатель; 2 — отражатель; 3 — катод; 4 — коллимирующая диа-
фрагма; 5— замедляющая структура первой секции волновода; 6 — дрейфовая
труба; 7 — замедляющая структура второй секции волновода; 8 — соленоид с
катушками коррекции; 9— несимметричный магнит; 10—рупорная антенна;
И — выходное окно; 12 — излучаемая электромагнитная волна
Электродинамическая структура МВГЧ состоит из двух секций свсрхразмсрно-
го (—»1) диафрагмированного волновода с одинаковыми периодами замедляю-
X
щей структуры (£с = £С1 = £с2). Секции соединяются трубой дрейфа того же диа-
метра DB.
Трубчатые электронные пучки диаметром 2гв = 5... 11 см и током /в = 6...35 кА
формировались в коаксиальном диоде с магнитной изоляцией катода и взрывной
эмиссией электронов. Диод помещен в неоднородное магнитное поле с напряжен-
ностью Bq = 7...31,5 кГс при напряжении на катоде U- 0,8...2,5 МВ. Длительность
импульса напряжения на катоде диода 1 мкс при длительности переднего фронта
0,3...0,15 мкс. Давление остаточного газа в электродинамической структуре нс пре-
вышало 7-10-3 Па.
В ходе эксперимента с МВГЧ использовались трубчатые графитовые катоды
толщиной 1 мм и металлические катоды толщиной 0,1 мм. Обратный ток катодной
плазмы устранялся магнитным полем, конфигурация которого выбиралась с уче-
том прохождения его силовой линии ниже вершины отражателя 2.
На выходе из электродинамической структуры пучок электронов расширяется
в неоднородном магнитном поле, и они поступают на конический коллектор боль-
шой площади.
11.8. Многоразовые СВЧ-средстпва функционального поражения
475
Для вывода мощного СВЧ-излучения из генератора в атмосферу используется
рупорная антенна 10 с углом раскрыва 60°. Выходное окно 77 диаметром 120 см
выполнено из плоской полиэтиленовой пластины. От разрушения электронами, не
осевшими на коллектор, окно предохраняет несимметричный магнит 9.
Излучательные свойства антенны исследовались при возбуждении рупора вол-
ной Е01 круглого волновода. При напряженности электрического поля СВЧ-про-
боя 30...50 кВ/см антенна позволяет выводить из генератора в атмосферу СВЧ-из-
лучение мощностью 10...20 ГВт с диаграммой направленности, соответствующей
волне Е01. Потери в антенне составляли около 50 % от мощности генератора [27].
В МВГЧ используется взаимодействие пучка с полем неустанавливающейся из-
за малой длины секций поверхностной волны, частота которой близка к частоте
низшей полосы прозрачности.
В первой секции реализуется режим лампы обратной волны (ЛОВ) и осуществ-
ляется модуляция электронов пучка по скорости. Такая модуляция приводит к груп-
пированию электронов в сгустки за время пролета пространства дрейфа. Во второй
секции реализуется режим лампы бегущей волны (ЛБВ) с передачей энергии сгуст-
ков ЭМП структуры секции. Описанное разделение функций условно, так как выде-
ляет только преобладающие эффекты в секции. На самом деле модуляция электро-
нов в первой секции сопровождается обменом энергиями модулирующего поля и
электронов, а энергоотбор во второй секции ведет к изменению параметров сгруппи-
рованных сгустков электронного потока.
За счет энергии сгустков во второй секции возбуждается многоволновое излуче-
ние. Часть энергии этого излучения попадает в первую секцию, чем обеспечивается
обязательная для генераторов обратная связь. Генерация излучения в одной отдельно
взятой секции невозможна.
Предельный по мощности режим генерации обеспечивается за счет оптимизации
длин секций и трубы дрейфа, расстояния между пучком и структурой, величины
магнитного поля, плотности тока пучка, согласования входа и выхода структуры с
граничными средами.
Черенковский генератор оказался эффективным источником СВЧ-излучения.
Следствием сверхразмерности электродинамической структуры является формирова-
ние во второй секции направленного излучения с диаграммой направленности, ха-
рактерной для антенн бегущей волны. Этот эффект иллюстрируется рис. 11.41 [56].
Безусловное достоинство многоволнового черенковского СВЧ-генератора состоит
в простоте фиксации частоты и формы диаграммы направленности его излучения.
Рис. 11.41. Угловое распределение логарифма мощности излучения
в зоне Фраунгофера: а — плоскость Н; б — плоскость Е
476 Глава 11. Функциональное поражение РЭС электромагнитными полями
Известный по описанию в литературе [56] экспериментальный многоволновый
черенковский СВЧ-генератор трехсантиметрового диапазона (X = 3,15 ±0,1 см) обла-
дал следующими параметрами и характеристиками режима работы: диаметр структу-
ры Z)B= 14 см; период структуры Lc = 1,5 см; полная длина структуры £0 = 48,6 см;
радиус диафрагм г0 = 0,3 см; ток пучка /в ~ 15 кА; напряжение на диоде U= 2,1 МВ.
Длительность излучаемого таким генератором импульса составляла т = 60 нс.
КПД генератора — около 50 %.
Мощность поддерживалась максимальной в сравнительно узком диапазоне па-
раметров пучка. В частности, уменьшение напряжения на диоде и тока пучка при-
близительно на 10 % приводило к уменьшению мощности вдвое. То же происходи-
ло и при изменении диаметра пучка относительно оптимального.
Основные результаты исследования многоволнового черенковского СВЧ-ге-
нератора в режиме получения максимальной мощности (15 ГВт) представлены на
рис. 11.42 и рис. 11.43.
Рис. 11.42. Диаграмма направленности излучения многоволнового черенковского
СВЧ-генератора: 1 — в вертикальной плоскости; 2 — в горизонтальной плоскости;
U= 2,1 МВ, /н = 15 кА, = 24,5 кГс
Диаграмма направленности указывает на присутствие в излучении составляю-
щих как с вертикальной, так и с горизонтальной поляризацией. Распределение в
пространстве мощности излучения с вертикальной поляризацией оказывается близ-
ким к распределению, соответствующему моде круглого волновода.
По-видимому, наличие двух видов поляризации электрического поля и большой
разброс мощности, регистрируемой в центре диаграммы направленности, обуслов-
лены нарушением аксиальной симметрии электронного пучка в процессе излуче-
ния [56].
Приведенный на рис. 11.43 спектр получен на основе усреднения суммарных
результатов измерений спектральных характеристик излучения МВГЧ генератора
для разных направлений в пределах основного луча диаграммы направленности и
двух поляризаций.
Основная излучаемая мощность сосредоточена в пределах главного лепестка
диаграммы направленности и в окрестности единственной моды излучения. Опти-
мальный энергообмен обеспечивается при минимальной добротности электроди-
намической системы. Это характерное свойство МВГЧ.
11.8. Многоразовые СВЧ-средства функционального поражения
МП
Рис. 11.43. Спектр излучения многоволнового черенковского СВЧ-генератора
Приведенные диаграммы направленности и спектр излучения многоволнового
черенковского СВЧ-генератора в режиме максимальной мощности были получены
для напряжения на диоде, тока коллектора и импульса СВЧ-излучения, формы
которых представлены на рис. 11.44.
Генерирование сверхмощных гигаваттных импульсов СВЧ-излучения трехсан-
тиметрового диапазона черенковским генератором сопровождается образованием
Рис. 11.44. Характерные осциллограммы напряжения на диоде (я), тока
коллектора (б) и СВЧ-излучения (в) в режиме максимальной мощности (Р= 15 ГВт)
478
Глава 11. Функциональное поражение РЭС электромагнитными полями
плазмы на поверхности электродинамической структуры и эрозией материала этой
структуры, генерацией длинноволнового излучения и другими нежелательными
эффектами. Все это затрудняет использование такого варианта многоволнового
черенковского СВЧ-генератора в качестве многоразового устройства ФП.
При экспериментальном исследовании миллиметрового многоволнового черен-
ковского СВЧ-генератора с ——13 использовалась двухсекционная структура с
X
диаметром Z)B = 11,8 см и периодом Lc = 4 мм. Напряжение на диоде регулирова-
лось в пределах U = 0,9...2,1 МВ, а ток пучка — в пределах /в = 7...15 кА. Коллими-
рующая диафрагма была сменной: полугор с радиусом г0 = 1 мм и г0 = 1,2 мм, усе-
ченный полутор с высотой Ло = 0,8 мм.
Взаимодействие пучка и поля в режимах ЛБВ было реализовано в двухсекци-
онных структурах с диафрагмами r0 = 1 мм и г0 = 1,2 мм. Для структуры с r0 = 1 мм
максимальная мощность 1,8 ГВт достигнута на волне Ха 9,2 мм (Хка 8,8 мм)
при U = 1,7 МВ, /в = 10 кА и КПД ц = 10 %. Длительность СВЧ-импульсов состав-
ляла т= 60...70 нс (по нулевому уровню).
Для структуры с г0= 1,2 мм максимальная мощность составляла 3 ГВт на вол-
не Ха 9,72 мм (Хла 9,1 мм) и была достигнута при U = 1,2 МВ, /в = 12 кА и КПД
ц а 20 % при той же длительности импульса та 60...70 нс по нулевому уровню. Эк-
спериментально определенный спектр излучения представлен на рис. 11.45, а, а диа-
грамма направленности излучения — на рис. 11.45, б. В результате эксперимента
Рис. 11.45. Спектр излучения черенковского генератора в режиме ЛБВ (а); диа-
грамма направленности в вертикальной (1) и горизонтальной (2) плоскостях (6);
зависимость мощности излучения (1) и КПД (2) от длины волны при неизменной
геометрии электродинамической структуры (в)
11.8. Многоразовые СВЧ-средства функционального поражения
479
подтверждена также возможность перестройки частоты генератора за счет изменения
напряжения на диоде: длина волны излучения изменялась от 9,20 до 9,73 мм при
изменении напряжения в пределах 0,9...1,3 МВ. Однако отклонения напряжения
от оптимального, равного 1,2 МВ, при неизменных геометрических параметрах
прибора вели к существенному уменьшению мощности излучения. В эксперимен-
те увеличение напряжения на диоде до 1,3 МВ приводило к увеличению длины волны
на ~ 0,015 мм и снижению мощности в два раза, как показано на рис. 11.45, в.
Черенковский генератор миллиметрового диапазона испытывался также в режиме
ЛОВ — ЛБВ. При напряжении на диоде £/= 1,1 МВ, токе пучка 7В = 10 кА и диа-
фрагмах почти прямоугольной формы было получено излучение на волне X = 8,62 мм
(Хла 8,62 мм) с мощностью 1,5 ГВт в импульсе длительностью та 60...70 нс по ну-
А/
левому уровню. Относительная широкополосность излучения составляла — а 0,2 %,
Л
что соизмеримо с погрешностью измерений. Тот факт, что измеренная по уров-
ню 0,5 ширина спектральной линии излучения (0,2 %) оказалась близкой к величи-
не, обратной длительности генерируемого импульса (0,1 % от средней частоты), ука-
зывает на высокую степень когерентности излучения многоволнового черенковского
СВЧ-генератора при
X*
В режиме ЛОВ — ЛБВ требуется более тщательная настройка, чем в режиме
ЛБВ. Отличие длин волн секций и диаметра пучка от оптимальных величин вело к
генерации в широком спектре частот, а диаграмма излучения представляла собой
хаотично расположенные пятна (в картинной плоскости). При этом мощность падала
до 0,5... 1 ГВт.
11.8.10. Гиротроны
Генерирование СВЧ-колебаний в гиротроне основано на использовании вынуж-
денных осцилляций электронов, вращающихся в однородном постоянном магнит-
ном поле. Электроны инжектируются в электродинамическую структуру — резона-
тор — под некоторым углом к его оси, вдоль которой направлены силовые линии
внешнего магнитного поля. Резонатором может служить, например, круглый вол-
новод. Электроны начинают двигаться по спиральным (винтовым) траекториям с
продольной Уц и поперечной v± скоростями так, что при наблюдении с торца вол-
новода их движение происходит по окружности, радиус которой
rL=\ (11.79)
L Q
где Q — циклотронная частота.
Для того чтобы генерация стала возможной, электроны пучка должны быть
релятивистскими. Только у таких электронов проявляется релятивистский эффект
зависимости циклотронной частоты от энергии. Эффект приводит к тому, что в
процессе взаимодействия электронов с СВЧ-полем они, обмениваясь с полем энер-
гией, начинают вращаться с разными циклотронными частотами. При этом элек-
троны, смещаясь по радиусу и по азимуту, собираются в сгустки.
Гиротрон можно рассматривать как разновидность мазера на циклотронном
резонансе, поскольку в гиротроне, как и в мазере, электроны взаимодействуют с
ЭМП резонатора в условиях, когда фазовая скорость волны больше скорости света
в вакууме.
480
Глава 11. Функциональное поражение РЭС электромагнитными полями
Мазеры на циклотронном резонансе (и особенно гиротроны) являются наибо-
лее мощными генераторами длинных импульсов в коротковолновой части СВЧ-
диапазона. Гиротрон содержит магнетронно-инжекторную электронную пушку,
нерегулярный волновод — открытый резонатор и широкий коллектор электронов,
см. рис. 11.46 [56J.
Рис. 11.46. Схема экспериментальной модели гиротрона и распределение магнит-
ного поля по его длине: 7 — источник электронов (электронная пушка); 2 —
соленоид; 3 — волновод пространства взаимодействия (открытый резонатор);
4 — антенна и коллектор электронов; 5 — вакуумное окно
Поток электронов, инжектируемых в резонатор, имеет достаточную начальную
закрутку и представляет собой, таким образом, совокупность возбужденных цик-
лотронных осцилляторов. Под действием внешнего фокусирующего однородного
магнитного поля соленоида 2 возникает фазовая фокусировка осцилляторов. Она
обусловлена зависимостью частоты циклотронного вращения от энергии (скоро-
сти) частицы.
Образуются сфазированные сгустки, т. е. ансамбли электронов, имеющих при-
близительно одинаковую частоту вращения. Когда такой фазовый сгусток попадает
в тормозящую фазу взаимодействующей с ней волны, то он отдает свою энергию
электромагнитному полю последней. В результате амплитуда волны увеличивается.
Это можно рассматривать как индуцированное излучение ансамбля циклотронных
осцилляторов.
Если скорость электронов в гиротроне значительно меньше скорости света, такое
излучение сопровождается изменением энергии поперечного (циклотронного) вра-
щения без изменения продольной скорости частиц. При этом процесс излучения
внешне похож на аналогичный процесс в квантовом устройстве, генерирующем в
результате переходов между энергетическими уровнями осцилляторов.
В многомодовом открытом резонаторе гиротрона могут использоваться различ-
ные моды. Селекция мод осуществляется выбором условий циклотронного резо-
нанса и переходом к специальным резонаторам. Поперечная структура поля, как
правило, фиксирована, а продольная зависит от электронного потока.
КПД гиротрона с увеличением энергии электронов пучка падает, поскольку
уменьшается число циклов вращения электронов на интервале взаимодействия
11,8, Многоразовые СВЧ-средства функционального поражения
481
с волной. Хотя в гиротронах с волноводами большого диаметра отмечались случаи
самовозбуждения на модах с фазовыми скоростями, близкими к скорости света,
доплеровское преобразование частоты в них не происходит.
Кроме гиротрона (однорезонаторного генератора) известны работающие на том
же принципе многорезонаторные гироклистроны, гиро-ЛБВ и другие устройства.
Во всех этих устройствах, как и в гиротроне, фазовая скорость волн близка к беско-
нечности и происходит усиление колебаний на частотах, близких к критическим
частотам волновода. При таких фазовых скоростях и частотах меньше всего сказыва-
ется неизбежный разброс поперечных и продольных скоростей электронов. В част-
ности, любой электрон, смещающийся относительно основной группы из-за раз-
броса скоростей вдоль оси резонатора, не выпадает из резонанса.
Среди упомянутых выше мазеров на циклотронном резонансе особый интерес
представляют приборы со слабоускоренными бегущими волнами (Уф > с). В таких
мазерах (в отличии от гиротрона) волны излучаются под малыми углами к оси
симметрии резонатора. Самосогласованное взаимодействие поля слабоускоренной
бегущей волны и потока осцилляторов (вращающихся электронов) приводит к уси-
лению такой попутной волны с высоким КПД.
В отличие от гиротронов здесь электроны потока передают полю волны пре-
имущественно энергию своего продольного, а не вращательного движения. Это
типично не только для мазеров, но и для лазеров на свободных электронах.
С увеличением энергии электронов пучка возрастает роль коллективного соб-
ственного излучения их фазовых сгустков, так как усиливается влияние эффектов
когерентности зарядов. В ансамбле слаборелятивистских электронов эффекты ко-
герентности приводят к самофокусировке осцилляторов и даже могут вызвать са-
мовозбуждение достаточно малого объема нелинейной активной среды без какой-
либо внешней электродинамической системы.
В релятивистском потоке осцилляторов (вращающихся электронов), как в дви-
жущейся среде, эффекты когерентности обеспечивают фазовую самофокусировку
электронов, взаимодействующих через излучение в пределах конуса направленно-
го синхротронного излучения.
Уровень мощности выходного излучения до 2,5 ГВт при КПД ~ 30 % был до-
стигнут на гиротроне с попутной волной. Схема этого генератора и распределение
внешнего магнитного поля по его длине изображены на рис. 11.46. Пучок электро-
нов в гиротроне инжектируется в круглый волновод диаметром 9 см через титано-
вую фольгу толщиной 50 мкм, помещенную в области нарастающего магнитного
поля, где индукция составляет 40 % от индукции постоянной части поля, равной
0,3 Тл. Волновод заканчивается рупором, перекрытым фторопластовым вакуумно-
плотным диском. Исследования гиртрона проводились при энергиях электронов
0,9 и 1,2 МэВ, токе пучка до 8 кА и диаметре пучка 4 см. Начальные поперечные
осцилляции электронов связаны с их кулоновским расталкиванием, рассеиванием
фольгой и усилением в нарастающем магнитном поле.
Зависимость выходной мощности СВЧ-излучения от индукции магнитного поля
имеет резонансный характер. Генерация происходила на волне Нп с частотой
3100 ±100 МГц при фазовой скорости волны, превосходящей скорость света. Все
свидетельствует о том, что основное взаимодействие осуществляется с поперечны-
ми электрическими составляющими высокочастотного поля при циклотронном
резонансе. Мощность СВЧ-излучения достигала 1,5 ГВт при энергии электронов
пучка 0,9 МэВ и 2,5 ГВт при энергии электронов пучка 1,2 МэВ.
482
Глава 1L Функциональное поражение РЭС электромагнитными полями
11.8.11. Плазменные сверхмощные СВЧ-генераторы
Плазма — это ионизованный газ с очень высокой концентрацией заряженных
частиц. Возможность генерации весьма мощных СВЧ-волн основана на использо-
вании свойств черенковского возбуждения ЭМВ в замедляющих структурах (вол-
новодах) при взаимодействии плазменного пучка со сторонним магнитным полем.
В плазмонаполненных электродинамических системах мотуг транспортироваться
большие токи электронных пучков, недопустимые в вакуумных системах. Допус-
тимые токи мотуг отличаться в 2...3 и более раз. Такая возможность обеспечивает-
ся зарядовой нейтрализацией электронного пучка плазмой. Следствием может стать
существенное (в четыре и более раз) повышение мощности СВЧ-импульса, фор-
мируемого плазменным генератором по сравнению с аналогичным вакуумным.
Возможна перестройка плазменных генераторов в очень широкой полосе час-
тот, когда отношение крайних частот диапазона перестройки составляет 5...7 за счет
изменения плотности плазмы. Такая возможность обеспечивается тем, что от кон-
центрации плазмы, органически входящей в состав электродинамической структу-
ры, зависит набор мод собственных волн структуры. Для таких мод наилучшим
образом выполняются условия синхронизма с пучковыми волнами различных час-
тот. Параметры релятивистского электронного пучка при этом остаются неизмен-
ными, т. е. потребность в электронной перестройке частоты исключается.
Плазменная перестройка частоты может происходить с очень высокой скоро-
стью: время перестройки в полосе, характеризуемой коэффициентом перекрытия
kj = 7, составляет порядка 30 мкс. Такие скорости принципиально недостижимы в
вакуумных релятивистских СВЧ-генераторах.
Плазменные СВЧ-генераторы на сильноточных релятивистских электронных
пучках являются принципиально импульсными. Они способны генерировать импуль-
сы длительностью порядка 10... 100 нс. Работа короткими импульсами позволяет избе-
жать проблем, связанных с появлением нежелательных низкочастотных неустой-
чивостей плазмы в электродинамической системе (в основном за счет образования
«паразитной» плазмы в процессе бомбардировки электронами коллектора, при СВЧ-
пробоях в электродинамической структуре, из-за появления плазмы на стенках
структуры под ударами электронов, покинувших пучок и других причин).
Задача эффективного вывода СВЧ-излучения из электродинамической систе-
мы сверхмощного СВЧ-генератора удовлетворительно решается только в рамках
плазменной СВЧ-электроники.
Принцип действия плазменных релятивистских СВЧ-приборов основан на че-
ренковском возбуждении собственных мод плазменного волновода. В известных к
настоящему времени экспериментальных плазменных СВЧ-установках используются
сильноточные релятивистские электронные пучки с энергией электронов 0,5... 1 МэВ.
Электроны совершают движение строго вдоль линий сильного магнитного поля.
Электронный пучок взаимодействует с прямой медленной плазменной волной, так
чтобы частота, излученная генератором, была в 2...3 раза меньше плазменной часто-
ты. При этом, так же как и во многих других сверхмощных СВЧ-генераторах, возбуж-
дение электродинамической системы возникает за счет резкого изменения электри-
ческого поля в системе в момент перехода передним фронтом электронного пучка
границы (плоскости z - 0 на рис. 11.48, с. 484) между сильноточным электронным
ускорителем и электродинамической структурой. Быстрое изменение поля индуци-
рует спонтанное излучение плазмы и различных образований структуры. Спон-
11.8. Многоразовые СВЧ-средства функционального поражения
483
тайные излучения, в свою очередь, вызывают появление в плазме локальных плаз-
менных колебаний: среди них всегда есть и такие, у которых фазовые скорости
близки к скорости электронов пучка, причем соответствующие волны движутся
попутно с пучком. В момент пересечения границы z = L (входа в волновод —
рис. 11.48, с. 484) попутные плазменные волны частично отражаются, трансфор-
мируясь во встречную потоку волну. Достигнув границы z = 0, эта волна полно-
стью отражается, снова становясь попутной, и т. д. С каждым проходом по длине
системы за счет поступления энергии от электронов пучка (в процессе вынужденного
черенковского излучения) вызванная фронтом пучка локальная плазменная волна
нарастает по амплитуде и расширяется в пространстве. Когда возмущение, связан-
ное с плазменной волной, заполняет по длине весь волновод, длина участка резонан-
сного взаимодействия попутной плазменной волны и электронного пучка стано-
вится максимально возможной. После этого требуется всего несколько проходов
волны между входом и выходом электродинамической системы (от г = 0дог=£)
для того, чтобы установился квазистационарный уровень излучаемой мощности.
Таким образом, генератор не сразу включается в режим излучения мощности
заданного уровня. Для этого требуется некоторое конечное время, именуемое вре-
менем включения генератора. В сильноточных генераторах время включения со-
ставляет около 10 нс, а при малых токах доходит до 60 нс.
Описанный процесс самовозбуждения генератора возможен только в том слу-
чае, когда ток пучка /в не меньше так называемого стартового тока, составляюще-
го ~ О,26/о, где /0 — предельно допустимый вакуумный ток данной электродинами-
ческой структуры, т. е. в отсутствии плазмы. На рис. 11.47 приведена зависимость
КПД генерации СВЧ-излучения при разных токах /в, вернее, при разных отноше-
ниях —. Как видно, излучение отсутствует до значения -у- - 0,26, после чего рез-
/о Л)
ко, скачком, эффективность возрастает до т| — 0,17. Этот факт указывает на начало
генерации.
0,2 0,3 0,4 0,5 0,6 0,7 0,8 zb//0
Рис. 11.47. Зависимость эффективности выхода
/в
излучения из генератора т| от отношения — [69]
zo
При токе порядка 7в-О,45/о выходное СВЧ-излучение достигает максималь-
ного уровня. Дальнейшее увеличение тока /в ведет к снижению эффективности из-
лучения из-за отклонений от оптимальных условий генерации.
Первый успешный эксперимент с плазменным релятивистским СВЧ-генерато-
ром, схема которого приведена на рис. 11.48, был предпринят в 1983 г. [89].
Импульс высокого напряжения от высоковольтного источника 9 подается на
взрывоэмиссионный металлический катод 1 диода-ускорителя с полым цилиндри-
484
Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.48. Схема плазменного релятивистского СВЧ-генератора: 1 — катод уско-
рителя электронов; 2—релятивистский электронный пучок; 3— металлический
волновод; 4—плазма; 5— коллектор релятивистского электронного пучка (торец
центрального проводника волновода); 6— коаксиальный вакуумный волновод;
7— рупор; 8— анод; 9— генератор высоковольтных импульсов; 10— катушка
индуктивности соленоид); 11 — вакуумный изолятор
ческим анодом 8. Дуюл формирует тонкий трубчатый релятивистский электронный
пучок 2 со средним радиусом гъ = 6 мм и толщиной Дв а 1 мм. Пучок 2 инжектиру-
ется вдоль оси круглого металлического волновода 5, предварительно, т. е. еще до
введения в него пучка, заполненного трубчатой плазмой 4. Пучок и плазма находятся
в однородном магнитном поле Во = 2,5 Тл, формируемом катушкой индуктивно-
сти 10. Таким образом, в генераторе применен магнитоизолированный диод.
Электроны пучка имеют только продольную составляющую скорости ve. В конце
пути электроны поглощаются торцом 5 центрального проводника коаксиального
выходного излучающего устройства 6. Проводник, таким образом, служит коллек-
тором релятивистского электронного пучка и электронного пучка, заблаговременно
создающего плазму. Коллектор электрически соединен с волноводом 3 (соедине-
ние на чертеже не показано).
СВЧ-волна генерируется в плазменном волноводе 4, распространяется по вакуум-
ному коаксиальному волноводу 6 и излучается рупором 7. Трубчатая плазма, обра-
зующая плазменный волновод, создается следующим образом. За внешней поверх-
ностью анода имеется электронная пушка, выдающая в течение десятков микросе-
кунд электрический пучок с энергией около 0,6 кэВ и током до 100 А. Электронный
пучок, проходя через газ (к примеру, ксенон) при давлении ~ 10"3 мм ртутного столба,
ионизирует его. Плотность плазмы составляет ~ 5-1014 см-3. Эксперименты проводи-
лись в распадающейся плазме при ее плотностях от 1012 см-3 до 5-1014 см-3. При
изменении плотности плазмы в этих пределах частота излучения изменялась в ин-
тервале 5-1O10 </< 2-Ю11 Гц. Толщина плазменного слоя Др= 1 мм, а его средний
радиус варьировался в интервале 7 < гр < 10 мм. Изменение гр приводило к измене-
нию коэффициента связи поля излучения с РЭП и соответственно к изменению
механизма вынужденного излучения от томсоновского (одночастичного) к рама-
новскому (коллективному черенковскому) с увеличением зазора между плазменным
слоем и трубчатым релятивистским электронным пучком.
В рассмотренную схему заложены следующие основные идеи [69].
11.8. Многоразовые СВЧ-средства функционального поражения
485
1. Диаметр трубчатой плазмы больше диаметра пучка, и поэтому она не попадает
в диод сильноточного ускорителя. Ранее для разделения плазмы и диода использо-
вались тонкая металлическая фольга, прозрачная для релятивистских электронов,
но тем не менее ухудшавшая характеристики генератора и к тому же быстро выхо-
дившая из строя.
2. Селекцию мод можно осуществлять, подбирая радиусы трубчатой плазмы и
трубчатого релятивистского электронного пучка.
3. Поперечные размеры пучка, плазмы, волновода, а также плотность плазмы и
пучка, индукция магнитного поля постоянны вдоль длины генератора. Постоянство
сильного магнитного поля вдоль всей электродинамической структуры обеспечивает
отсутствие резонансного поглощающего слоя. В рассмотренных выше вакуумных че-
ренковских СВЧ-генераторах электронный пучок проходит электродинамическую
структуру в сильном однородном магнитном поле и затем осаждается на боковые
стенки волновода в области ослабленного магнитного поля. Такая схема коллектор-
ной области в плазменном релятивистском генераторе неприменима, так как в об-
ласти уменьшенной индукции магнитного поля возникает резонансное поглощение
СВЧ-волны на внешнем радиусе плазменной трубки в слое с малой плотностью.
4. Поскольку возбуждается поверхностная плазменная волна, значительная ее
часть энергии содержится не в плазме, а в вакуумном пространстве между плазмой
и стенкой волновода. Эта часть плазменной волны имеет структуру, близкую к струк-
туре ТЕМ-волны коаксиального излучающего устройства. В сочетании с высокой
фазовой скоростью, близкой к скорости света, это обеспечивает высокую эффек-
тивность вывода энергии медленной плазменной волны в коаксиальный излучатель.
5. Применение выходного коаксиального излучающего устройства обеспечива-
ет возможность эффективного вывода излучения в широкой полосе частот.
Экспериментально установлено, что, хотя плазма позволяет транспортировать
токи /в > /0, в плазменных генераторах, как и в вакуумных, сохраняется проблема
использования больших токов сильноточных ускорителей при заданной энергии
электронов.
В целом характеристики плазменных установок пока отстают от соответствую-
щих показателей вакуумных СВЧ-генераторов. У них сравнительно низкая эффек-
тивность (ниже КПД), а энергия излучаемого СВЧ-импульса размыта в очень ши-
рокой полосе частот, составляющей 20...30 % от средней частоты.
11.8.12. Виркатор
Виркатор — общее название СВЧ-приборов с виртуальным катодом. Виртуаль-
ный катод (ВК) возникает при наличии положительного (относительно потенциа-
ла катода) прозрачного (сетчатого) анода и большого объемного заряда. Среди раз-
личных типов приборов, способных генерировать импульсы гигаваттной мощности,
виркаторы являются наиболее простыми и технологичными.
Для формирования большого объемного заряда, способного выполнять роль
виртуального катода, необходимо, чтобы в дрейфовое пространство прибора из
реального катода инжектировался электронный пучок с током выше некоторого
критического.
Работа виркатора основана на использовании для генерации СВЧ-волн собствен-
ного электрического поля зарядов сильноточных ускорителей. Конструктивно вирка-
торы создаются в трех модификациях. Во-первых, собственно виркаторы, в которых
486 Глава 11. Функциональное поражение РЭС электромагнитными полями
отрицательный импульс подается на катод, а анод заземляется, как на рис. 11.49, а.
Во-вторых, в виде рефлексного триода (рис. 11.49, б), в котором импульс положи-
тельной полярности подается на анод, а катод заземляется. В-третьих, в виде ре-
дитрона, отличающегося от собственно виркатора тем, что в нем вместо сетчато-
го используется массивный анод с прорезью (рис. 11.49, в).
Рис. 11.49. Модификации виркатора: а — собственно виркатор; б— виркатор типа
рефлексного триода; в — редитрон; А — анод; К — катод; ВК — виртуальный
катод; 1 — изолятор; 2 — сетка анода; 3 — окно для вывода СВЧ-излучения.
Стрелками указано направление СВЧ-излучения
В зависимости от характера обратной связи, принципиально необходимой для
возникновения колебаний, виркаторы разделяются на две группы:
1) генераторы с электродинамической обратной связью доанодного (досеточ-
ного) и послеанодного (послесеточного) пространств;
2) генераторы без электродинамической обратной связи.
На рис. 11.49 показаны схемы виркаторов без электродинамической обратной свя-
зи. Схема виркатора с электродинамической обратной связью показана на рис. 11.50.
По сравнению с другими релятивистскими генераторами виркаторы обладают
целым рядом достоинств:
• у виркаторов отсутствует замедляющая система, а конструкция их предусмат-
ривает использование довольно простой камеры волноводного типа;
• высокие пробойные напряженности;
• виркаторы работают без фокусирующего магнитного поля, и это позволяет
снизить массу и энергопотребление установки;
• у виркаторов соизмеримы длины области взаимодействия потока частиц и вы-
сокочастотного поля в резонаторе с длиной волны излучения;
• виркаторы хорошо сопрягаются с ВМГ как с источником запитывающего им-
пульса высокого напряжения;
11.8. Многоразовые СВЧ-средства функционального поражения
487
Рис. 11.50. Виркатор с электродинамической обратной связью доанодного (досе-
точного) и послеанодного (послесеточного) пространств: А — сеточный анод;
К — катод; ВК — виртуальный катод; 1 — короткозамыкающие поршни; 2 — моду-
лирующий зазор в доанодном пространстве; 3 — отверстие связи доанодного и
послеанодного пространств
• возможность высокочастотного управления;
• простота геометрии;
• допустимы запредельные токи.
К непосредственным следствиям перечисленных преимуществ относится воз-
можность изменения частоты генерируемых колебаний в очень широких преде-
лах (регулированием ускоряющего напряжения частоту можно изменять в преде-
лах до О,4/о); простота конструкции, обеспечивающая простоту изготовления и эк-
сплуатации; компактность приборов, что особенно важно при генерировании
излучения в длинноволновой части СВЧ-диапазона.
На катод виркатора с генератора импульсов подается высоковольтный импульс
отрицательной полярности. Во время его действия с поверхности катода происхо-
дит взрывная эмиссия электронов. Поток эмитированных электронов устремляет-
ся к положительно заряженному сетчатому аноду. Поле анода ускоряет электроны
вплоть до момента пролета ими анодной сетки. К этому моменту каждый из прохо-
дящих сквозь сетку электронов приобретает максимальную кинетическую энергию,
которую способно сообщить ему ускоряющее поле анода.
При пролете сетки примерно десятая часть электронов оседает на ней, обуслав-
ливая анодный ток. Остальные электроны продолжают движение в пространстве
за анодом. Но теперь поле анода превращается для электронов в тормозящее. Под
его воздействием электроны, прошедшие анодную сетку первыми, тормозятся. К ним
присоединяются последующие электроны, которые приобрели практически ту же
кинетическую энергию, что и первые, но далее двигались в более слабом тормозя-
щем анодном поле (на аноде оседает новая порция электронов). В результате избытка
кинетической энергии вполне может хватить для преодоления кулоновских сил от-
талкивания уже остановившихся электронов. Значит, будет формироваться плотное
электронное облако — виртуальный катод.
В некоторый момент времени осевшие на сетке и находящиеся в непосредствен-
ной близости по обе стороны от нее (уже прошедшие сетку и подходящие к ней)
электроны нейтрализуют внешнее поле анода. Эмитированные в это время катодом
электроны не будут ускоряться полем анода и начнут образовывать свое облако около
катода. Анод соответственно снова окажется положительным по отношению к такому
облаку, и электроны облака перейдут к ускоренному движению в направлении
анодной сетки. В направлении сетки сдвинутся и электроны сформировавшегося
виртуального катода. Электрическое поле объемного заряда виртуального катода
начнет тормозить набегающие электроны до полной их остановки и даже разворота
их в сторону движения к аноду. Такое относительно медленное смещение старого
488
Глава 11. Функциональное поражение РЭС электромагнитными полями
виртуального катода будет продолжаться до тех пор, пока новый сгусток электронов
не минует анод и, продолжая движение, не преодолеет барьер, созданный старым
виртуальным катодом, и не образует новый виртуальный катод на месте предшест-
вующего. В дальнейшем этот процесс повторяется.
В результате устанавливается сложный колебательный процесс, объединяющий
не только периодические изменения плотности электронов около анодной сетки, но
и колебания виртуального катода как целостного образования. Такого рода колеба-
ния невозможны без ускоренного движения электронов, т. е. без электромагнитного
излучения. Это излучение, в свою очередь, взаимодействует с движущимися элект-
ронами, чем вносит свой вклад в формирование генерируемого виркатором излуче-
ния. В частности, необходимая для устойчивой генерации обратная связь в виркаторе
осуществляется за счет взаимодействия распространяющихся в камере (резонато-
ре) ЭМВ, излученных колеблющимися относительно анода отдельными электро-
нами и виртуальным катодом, с электрическими полями разнонаправленных пото-
ков электронов в пространстве «катод — виртуальный катод». Таким образом, про-
цесс формирования СВЧ-излучения в виркаторе оказывается самосогласованным.
Такой представляется качественная картина генерации виркатором СВЧ-излу-
чения. В работе [57] изложена строгая теория работы виркатора. Физические про-
цессы в виркаторе оказываются весьма сложными. Теория развита применительно
к схеме системы с виртуальным катодом, представленной на рис. 11.51.
Рис. 11.51. Схема виркатора
Согласно строгой теории, в виркаторе действуют два механизма генерации ЭМВ.
Первый связан с отражением электронов от виртуального катода. Многократно
отражаясь, они совершают колебательные движения в пространстве «катод — вир-
туальный катод». Второй — с колебаниями виртуального катода как целого в на-
правлении к аноду и обратно к месту первоначального формирования. Виртуаль-
ный катод начинает осциллировать при токах пучка электронов, больших некото-
рого критического значения, определяемого конфигурацией данной структуры.
Применительно к первому механизму колебания виртуального катода можно
рассматривать как источник изменяющейся по величине и по направлению вынуж-
дающей силы, воздействующей на электроны в пространстве «катод — виртуаль-
ный катод». Под действием этой силы скорости электронов изменяются от нуля до
околосветового значения. Период изменения скорости равен периоду Т колебаний
виртуального катода. Одновременно с таким же периодом модулируется плотность
электронного потока. Фактически колебания виртуального катода вносят в систему
возмущения, определяющие параметрические резонансы в камере, т. е. в волновод-
ном резонаторе.
Поскольку колебания виртуального катода выполняют роль возмущающей силы,
которая вызывает параметрические резонансы, виркатор оказывается широкополо-
11.8. Многоразовые СВЧ-средства функционального поражения
489
сным параметрическим прибором. Перестройку частоты в виркаторе можно осущест-
влять либо за счет изменения напряжения в промежутке «анод — катод», либо длины
самого промежутка, причем без нарушения условий параметрического резонанса.
Частота колебаний, генерируемых виркатором, зависит от величины тока пуч-
ка электронов. Такая зависимость представлена на рис. 11.52.
7
j l f, ГГц
5
3
1
/, кА
—►
10 30 50 70 90 100
Рис. 11.52. Зависимость частоты генерируемых
колебаний виркатора от тока пучка
Характерное время развития неустойчивости в реальных виркаторах тну =
= 0,5...5 нс. Следствием неустойчивости является укорочение тока на 0,5...5 нс.
11.8.13. Антенные системы сверхмощных генераторов
Антенная система, обеспечивающая излучение сверхмощного ЭМП, должна в
максимальной степени отвечать специфическим требованиям, предъявляемым к
системам ФП. Широко используемые в экспериментальных установках рупорные
антенны этим условиям не отвечают. Специфичность требований к антеннам уст-
ройств ФП видна уже из следующего перечня основных решаемых ими задач.
1. Антенна должна излучать энергию СВЧ-импульса в пределах как можно бо-
лее узкого углового сектора (узким лучом).
2. Транспортировать по фидерному тракту к излучателю импульсы с очень
высокой пиковой мощностью при приемлемом КПД.
3. Излучать импульсы наносекундной и даже более короткой длительности без
существенного ограничения их спектра.
4. Обеспечивать быстрое переключение луча в пределах выбранного рабочего
сектора.
Параболическая антенна — одна из конструкций зеркальных антенн, примене-
ние которых в устройствах ФП представляется наиболее приемлемым. Антенна пред-
ставляет собой параболоид вращения с круглым раскрывом и формирует луч иголь-
чатой формы.
Диаграмма направленности двухзеркальной передающей антенны системы Гре-
гори (рис. 11.53) описывается соотношением (для одной плоскости):
F(6) =
«^(ZcosinO)
ka sin 0
(1 + COS0),
(11.80)
где 0 — угол отклонения от оси симметрии антенны (в любой проходящей через
эту ось плоскости); «Л(0) — функция Бесселя первого порядка; к = — = — —
X с
модуль волнового вектора излучаемой СВЧ-волны длиной X; а — радиус раскрыва
большого зеркала.
490
Глава 11. Функциональное поражение РЭС электромагнитными поаями
Рис. 11.53. Двухзеркальная остронаправленная антенна системы Грегори {а),
ее диаграмма направленности (б) и структура двухлинейной сетки, пригодной
для формирования большого зеркала антенны (в): 1 — большое зеркало с фо-
кусом в точке FL, выполненное в виде параболоида вращения; 2— эллип-
тическое малое зеркало с фокусом в точке Г2, лежащим в плоскости раскрыва
облучателя антенны 3 (например, рупора) на его оси
Ширина диаграммы направленности по уровню половинной мощности (ши-
рина основного луча) составляет
2е0,5~. (11.81)
2а
где т — размерный множитель, учитывающий неравномерность облучения раскры-
ва; если относительная величина поля на краю раскрыва не менее 0,8 от поля на
оси, то т = 60° и ширина луча 20О 5 < 1°, при — >30.
А
Зеркала антенны — металлические, с толщиной слоя металла нс менее, чем в
3 раза превосходящей толщину скин-слоя на самой низкой частоте рабочего диа-
пазона излучаемых волн. Главное зеркало может быть изготовлено из металличес-
кой сетки (рис. 11.53, в). Сетчатая поверхность антенны проигрывает сплошной по
отражательной способности не более 1 %, если диаметр провода сетки превышает
0,01 А, а размер ячеек меньше ОДА.
Формула (11.80) хорошо работает при а > 50А. К точности изготовления зеркал
предъявляются довольно высокие требование: отклонения диаграммы направлен-
ности от расчетной пренебрежимо мало, если погрешность в выдерживании ради-
А
уса кривизны зеркала Аг <—. Если Ага ОДА, снижение коэффициента направлен-
ного действия, а значит и коэффициента усиления, приближается к 20 %. Это крайне
нежелательно при использовании антенны в устройстве ФП.
Активные фазированные антенные решетки (АФАР) сначала нашли применение
в РЛС дальнего обнаружения, а ныне применяются в различных радиоэлектрон-
ных системах и в том числе в средствах РЭБ. Представляется возможным примене-
ние АФАР и в устройствах ФП.
Основное преимущество АФАР обусловлено тем, что когерентное суммирова-
ние полей, излучаемых отдельными элементами решетки, позволяет сосредоточить
почти всю СВЧ-энергию в узком луче. Если луч перпендикулярен антенному полот-
11.8. Многоразовые СВЧ-средства функционального поражения
491
ну, ширина его минимальна. За счет изменения фаз колебаний, излучаемых элемен-
тами решетки, возможно изменение ориентации луча относительно нормали к ан-
тенному полотну. Но такое изменение ориентации луча приводит к его расширению.
В АФАР, используемых на практике, применяются оба способа переориентации
углового положения максимума диаграммы направленности излучения: как механи-
ческое изменение положения плоскости решетки, так и электронное управление
фазами колебаний, питающих элементы решетки.
Во многих современных информационных системах ФАР запитываются от одно-
го источника высокочастотных колебаний. А управление положением диаграммы
направленности выполняется при помощи фазовращателей, включенных в цепи по-
дачи высокочастотных колебаний на элементы решетки. Для устройств ФП такое
техническое решение неприемлемо: слишком большой мощностью нужно управлять
в фазовращателях. По-видимому, модули АФАР устройств ФП должны представ-
лять собой СВЧ-генераторы большой мощности, каждый из которых нагружается
на собственный излучатель. Из электродинамических систем мощных генераторов
излучение выводится, как правило, вакуумными прямоугольными или коаксиаль-
ными волноводами. Поэтому представляется естественным использование в качестве
излучателей АФАР систем ФП именно рупорных антенн.
Рупорные антенны могут использоваться как основные излучатели в устройствах
ФП. В будущих устройствах ФП за рупорами скорее всего сохранятся функции со-
гласования между выходом СВЧ-генераторов и передающими антеннами. Необхо-
димость в согласовании вызывается тем, что мощность излучения на выходе элек-
тродинамической системы в пространстве распределена крайне неравномерно. Но
и рупор без дополнительных устройств не всегда может обеспечить требуемое со-
гласование.
Особенностью одиночной рупорной антенны является малая чувствительность
к изменению длины волны колебания, пока такие изменения не выходят за преде-
лы полосы пропускания волноводного тракта. Это свойство особенно важно при
А/
излучении широкополосных колебаний, когда — — 0,1...0,5, например, коротких
/о
импульсов с длительностью ти < 10-9 с или длинных импульсов с широкополосной
внугриимпульсной модуляцией. Диапазонные свойства рупорной антенны харак-
теризует график на рис. 11.54.
Рис. 11.54. Изменение коэффициента направленного действия пира-
мидальных и конических рупоров при отклонении частоты f от fQ,
на которой рупор имеет оптимальный КНД
Оптимальный рупор имеет максимальный КНД при заданной длине. Увеличе-
ние длины рупора незначительно увеличивает КНД [71].
492
Глава 11. Функциональное поражение РЭС электромагнитными полями
Достоинство рупора состоит прежде всего в простоте конструкции (рис. 11.55).
Рис. 11.55. Пирамидальный (а) и конический (б) рупоры: R — длина ру-
пора; cL — диаметр раскрыва конического рупора; ао — ширина раскрыва
* Jr
Пр
(в оптимальном рупоре = -у)
Пирамидальный рупор получается при расширении прямоугольного волново-
да сразу в двух плоскостях. Конический рупор образуется расширяющимся круг-
лым волноводом.
Недостатки рупорных антенн — низкая направленность и значительные габа-
риты (большая длина). Если рупоры и будут применяться в качестве антенн уст-
ройств ФП, то только в составе многоэлементных антенн с коррекцией фазовых
искажений на раскрыве.
Антенны сверхширокополосных излучателей конструируются в виде ТЕМ-антенн,
IRA-антенн (с параболическим рефлектором) и некоторых других.
ТЕМ-антенна схематично изображена на рис. 11.56 [71].
Антенна возбуждается импульсом тока, поступающим от генератора по фиде-
ру, выполненному в виде полосковой или коаксиальной линии. При использова-
нии коаксиальной линии требуется согласование ее с антенной. С этой целью между
линией и антенной устанавливается коаксиально-полосковый переход.
Если частота следования импульсов тока не превышает 100 Гц, а длительность
каждого из них меньше 0,3 нс, заполнять антенно-фидерный переход диэлектри-
ком не обязательно. В этом случае оказывается достаточной электрическая проч-
ность воздуха, достигающая при ти < 0,3 нс значения порядка 150 кВ/см. Когда дли-
тельность возбуждающего импульса превышает 0,3 нс, переход должен быть запол-
нен диэлектриком.
Ширина ДНА в вертикальной и горизонтальной плоскостях растет с увеличением
угла раскрыва металлической пластины ср и угла между пластинами 0 (рис. 11.56).
11.8. Многоразовые СВЧ-средства функционального поражения 493
Известны два недостатка ТЕМ-антенны. Во-первых, большая длина по сравне-
нию с пространственной протяженностью излучаемого импульса. Во-вторых, зави-
симость положения фазового центра от частоты.
Первый недостаток связан с тем, что антенна должна обеспечивать согласование
между фидером, имеющим волновое сопротивление (около 50 Ом), и свободным
пространством Zq = 120л = 377 Ом. Для лучшего согласования длину антенны L
выбирают в несколько раз большей, чем пространственная длина возбуждающего
биполярного импульса. Обычно L> (2...3)сти. В случае возбуждения монополярным
L
импульсом отношение-----должно быть еще больше, так как основная часть энер-
сти
гии такого импульса сосредоточена в области низких частот. Известно, что антен-
ны, размеры которых значительно меньше длины волны возбуждающего колеба-
ния, — это плохие излучатели.
Зависимость положения фазового центра от частоты приводит к дополнитель-
ному искажению излучаемого импульса. При высоких амплитудах возбуждающих
импульсов тока бороться с этим недостатком практически невозможно. А такие
амплитуды в устройствах ФП действительно велики: на вход подобной антенны уже
подавались импульсы мощностью 10 ГВт.
Схема антенны с параболическим рефлектором (IRA-антенны), используемой
для формирования сверхширокополосного излучения, представлена на рис. 11.57.
Рис. 11.57. IRA-антенна: 1 — фидер, 2 — разрядник; 3—диэлектрическая
линза; 4 — пластины передающей линии; 5 — параболический отражающий
диск: 6 — резисторы
Возбуждающий импульс подводится к антенне по фидеру. Под воздействием
этого импульса замыкается газовый разрядник, заполненный водородом под дав-
лением 100 атм и расположенный внутри диэлектрической линзы. Срабатывание
разрядника замыкает цепь емкостного накопителя энергии. Фактически антенна
переводится в режим излучения коротким, не продолжительнее 100 пс, фронтом
импульса разрядного тока емкостного накопителя. Длительность самого этого им-
пульса примерно на два порядка больше длительности его фронта, а значит и дли-
тельности излучаемого импульса. Результатом такого соотношения длительностей
является низкая энергетическая эффективность IRA-антенны. Более того, продол-
жительное протекание большого тока через разрядник приводит к сильному разог-
реву газа и эрозии электродов. 11а практике это ограничивает допустимую частоту
повторения излучаемых импульсов и снижает долговечность разрядника.
Во время протекания тока разрядного импульса диэлектрическая линза 3 фор-
мирует сферическую ТЕМ-волну. Эта волна имеет постоянный фазовый центр. Две
V-образных антенны 4 направляют волну к параболическому отражающему диску 5.
V-образные антенны соединены с отражающим диском через резисторы 6.
494 Глава 11. Функциональное поражение РЭС электромагнитными полями
При расположении разрядника в фокусе параболоида сферическая волна, от-
ражаясь от его поверхности, формирует волновой пучок с малой угловой расходи-
мостью. Соответственно сверхширокополосный импульс излучается в пределах узкой
ДНА. Любое изменение положения разрядника относительно фокуса (ближе или
дальше от поверхности параболоида) изменяет расходимость пучка, увеличивает
ширину ДНА. Смещение разрядника в перпендикулярном направлении обеспечи-
вает сканирование луча в пространстве, хотя и в небольших пределах.
Угловая расходимость Д0 излучения зависит также от длины волны X. Как и у
X
других антенн, расходимость пропорциональна отношению----длины волны к
апертуре. Поэтому из-за большой расходимости длинноволновой части широкого
спектра длительность импульса уменьшается с увеличением расстояния.
Апертурная эффективность IRA-антенны невелика, не превосходит 25 %.
В известных источниках сверхширокополосного излучения, использующих
антенны с параболическим рефлектором 0,5...4 м, амплитуда напряжения импуль-
са достигала 150 кВ за время, не превосходящее 100 пс. При этом антенна диамет-
ром 4 м обеспечивает ширину диаграммы направленности менее 2°.
Комбинированная сверхширокополосная антенна основана на совместном исполь-
зовании элементов, имеющих общий вход, но разноименные энергии. Если у од-
них элементов в ближней зоне преобладает электрическая энергия, то у других
элементов должна преобладать магнитная энергия. Так, например, если нагрузкой
фидера является общий вход двух вибраторов, полоса частот, в которой обеспечи-
вается согласование фидера с излучателями — вибраторами, может быть расшире-
на, если совместить объемы ближних зон таких вибраторов при условии, что в
объединяемых зонах преобладают разноименные реактивные энергии. Однако это-
го мало. Нужно, чтобы запасы реактивной энергии вибраторов одинаковым обра-
зом зависели от частоты и изменялись синфазно. В этом случае при правильной
взаимной ориентации вибраторов излучение оказывается линейно поляризованным,
а ДНА имеет вид кардиоиды.
На рис. 11.58 представлены два варианта конфигураций антенн, представляю-
щие собой комбинацию электрического монополя длиной L и магнитного диполя.
Линейные размеры антенн приблизительно равны половине пространственной
СТ
длительности биполярного возбуждающего импульса, т. е. Г = ——. Диапазонные
свойства антенны определяются частотными характеристиками излучателей (дипо-
лей, монополей).
Рис. 11.58. Комбинированная антенна: 1 — электрический
монополь; 2 — магнитный диполь
11.9. Лазерные средства функционального поражения
495
11 .9. Лазерные средства функционального поражения
Лазер, являющийся оптическим квантовым генератором ЭМВ, способен фор-
мировать в весьма узком телесном угле сильное ЭМП с высокой плотностью энер-
гии. Свойство очень узкой направленности луча и высокая энергетическая плот-
ность излучения позволяют в принципе применять лазер в качестве средства ФП
радио- и оптоэлектронных средств управления войсками и оружием [72].
Лазеры способны генерировать ЭМВ в широком оптическом диапазоне, одна-
ко, как средства ФП, практический интерес представляют оптические квантовые
генераторы, работающие в так называемых «окнах прозрачности» атмосферы, ко-
торым соответствуют волны оптического диапазона Ха 0,5...2 мкм, за исключени-
ем «непрозрачных» участков Ха 0,95; 1,15; 1,3...1,5 мкм.
Сформированное лазером ЭМП обладает высокой степенью пространственно-
временной когерентности.
Временная когерентность поля достигает значения тког - 0,1 с, благодаря чему
удается получить сигнал с узким спектром (Д/~ 10 Гц). Практическая монохрома-
тичность излучения обеспечивается двумя обстоятельствами:
1) усиливаться и излучаться может только ЭМВ с частотой Jq, удовлетворяю-
щей равенству
(E2-Ej (11.82)
п
где h = 6,6252-10"34 Вт-с2 — постоянная Планка; (Е2- Е{) — энергия, уносимая
испускаемым фотоном при переходе атома активной среды с более высокого энер-
гетического уровня 2 на более низкий уровень 1;
2) генерация может возникнуть только на резонансных частотах резонатора вы-
сокой добротности, образуемого, например, двумя зеркалами.
Именно это последнее обстоятельство является причиной того, что ширина
спектральной линии лазерного излучения оказывается существенно более узкой
(приблизительно на 5...6 порядков), чем ширина линии излучения при спонтанном
переходе с уровня 2 на уровень 1.
Высокая степень пространственной когерентности позволяет с помощью про-
стых оптических устройств концентрировать энергию поля в весьма узком телесном
угле. Расходимость луча определяется выражением
(11.83)
4л
где аир — угловые размеры луча (ширина луча) в ортогональных плоскостях.
Для современных лазеров угловые размеры луча оцениваются величиной
а = р= 10...20 угловых секунд, поэтому пространственная расходимость луча имеет
величину Qal,9- 1О“10...7,5-Ю"10. Величина Q является эквивалентом энергетического
коэффициента усиления <7П антенны станции активных помех. Обычно Gn < 103... 104.
Можно отметить два механизма ФП радио- и оптико-электронных средств ла-
зерным оружием:
1) непосредственное поражение электронных приборов путем прямого воздей-
ствия сильного узконаправленного лазерного излучения;
2) выведение из строя объекта за счет вторичного индуцированного излучения
плазмы, порождаемой взаимодействием сильного электромагнитного поля и твердо-
го вещества (например, материала обтекателя антенны). В таком случае возможно
496
Глава 11. Функциональное поражение РЭС электромагнитными полями
обратимое (временное) поражение электронного устройства, которое через некото-
рое время восстанавливает свои функции. Этот эффект здесь не рассматривается.
Способность лазера концентрировать энергию электромагнитного поля в чрез-
вычайно узком телесном угле позволяет при сравнительно небольшой энергии из-
лучения на выходе оптической системы даже на больших расстояниях до подавля-
емого РЭС создавать сильное ЭМП. С уменьшением расстояния R до объекта по-
ражения плотность потока энергии П растет обратно пропорционально квадрату
дальности до РЭС (без учета потерь в среде распространения)
П = —?— = -*— (11.84)
4лйЛ2 «р/?2
где Э — энергия излучения лазера.
При Э = 200 Дж, а = р = (10...20)" и R = 10 км из формулы (11.84) можно полу-
чить П = = 1 Дж/см2, что уже достаточно для поражения некоторых полупроводни-
ковых приборов.
11.9.1. Принцип действия лазера
Лазер — это оптический квантовый генератор, т. е. устройство, в котором осу-
ществляется генерация монохроматических ЭМВ оптического диапазона вследствие
индуцированного излучения. Структура лазера включает три основных элемента:
резонатор, активную среду и генератор накачки, см. рис. 11.59.
Резонатор
Активная среда
Устройство
накачки
ар
— — расходимость луча
4л
Рис. 11.59. Устройство лазера
Резонатор обычно представляет собой размещенную между двумя зеркалами
пространственно-локализованную активную среду (газ, жидкость, твердое тело),
находящуюся в возбужденном состоянии. В отсутствие резонатора, в обычном со-
стоянии, возбужденные частицы, например атомы, переходят на более низкие энер-
гетические уровни спонтанно, независимо друг от друга. Поэтому излучаемые ЭМВ
не являются когерентными (степень их пространственно-временной когерентно-
сти у = 0). Резонатор обеспечивает положительную обратную связь. Возникшая в
нем плоская ЭМВ распространяется в направлении, перпендикулярном зеркалам,
поочередно отражаясь от них при каждом прохождении сквозь активную среду.
Однако, как и другие генераторы, лазер будет генерировать только при выполне-
нии порогового условия. Суть этого условия состоит в том, что усиление активной
среды должно компенсировать все возможные потери в лазере. Пороговое условие
/1.9. Лазерные средства функционального поражения
497
начинает выполняться, как только достигается значение критической инверсии,
определяемое выражением [74]
(У2-У.) =_1п^°трЛотр2\ <1185>
V 2 1/кр 2о/
где W2 и — населенности среды, т. е. количество атомов в единице объема ак-
тивной среды, находящихся соответственно на верхнем 2 и на нижнем 1 энергети-
ческих уровнях, которые определяют излучение лазера; А"отр1 и Котр2 — коэффици-
енты отражения зеркал по интенсивности (одно из зеркал полупрозрачное); / —
протяженность активной среды; о — характерная площадь (сечение перехода с энер-
гетического уровня 1 на энергетический уровень 2 и наоборот).
Как только достигнута критическая интенсивность, генерация разовьется даже
из спонтанного излучения.
При включении устройства накачки, например газоразрядной лампы, атомы в
резонаторе совершают переходы на одинаковые более высокие энергетические
уровни уже не спонтанно, а упорядоченно. Эти переходы фазируются за счет внеш-
него излучения устройства накачки и наличия резонатора с очень высоким каче-
ством, которое обеспечивается высокотехнологичными приемами изготовления
отражательных зеркал резонатора (рис. 11.59). Любой квант света, возникающий в
результате спонтанного или вынужденного перехода частиц с верхнего уровня на
нижний, будет размножен индуцированным излучением других возбужденных ато-
мов на той же частоте. Так образуется лавина фотонов, что дает мощное излучение
очень высокой степени когерентности (почти монохроматическое). Роль резонатора
сводится к тому, что он из всего возможного спектра колебаний 5(/) выделяет толь-
ко те типы (моды), на которые он настроен. Одно из зеркал (непрозрачное) имеет
коэффициент отражения Котр = 1, а второе — полупрозрачное с Котр < 1 служит для
вывода во внешнее пространство сформированного лазерного луча.
Спектр лазерного излучения дискретный. Он содержит большое число N спект-
ральных линий. Так, для твердотельных лазеров число типов колебаний (мод)
N- 100, средняя частота= 3-1014 Гц, интервал между соседними типами колебаний
Д/п ~ 1,7108 Гц, а ширина спектра каждой линии составляет примерно Д/~ 1...10 Гц.
Обобщенные характеристики лазерных устройств приведены в табл. 11.4.
Таблица 11.4
Активная среда Длина волны, мкм Энергия импульса, Дж Длительность импульса, с Диаметр луча на выходе, мм
Рубин 0,69 300 io-3 6
Стекло с ниодимом 1,06 150 КГ3 6
Полупроводник 0,84 кг1 — —
Газовая He+Ne 1,15 21 О*2 Непрерывный режим 10
11.9.2. Особенности применения лазера
Лазер как оружие ФП способен формировать ЭМИ с большой плотностью
энергии П. Настолько большой, что ее достаточно для поражения некоторых опто-
и радиоэлектронных устройств на значительных расстояниях (около 10 км). Однако
вследствие весьма малого сечения луча (0,2...0,8 м2) на расстоянии R = 20 км воз-
никает проблема точного его наведения на поражаемый объект или, тем более, на
элемент этого объекта (например, на фотоприемник ИК-головки самонаведения
498
Глава 11. Функциональное поражение РЭС электромагнитными полями
ракеты), который тоже имеет весьма малые размеры. Поэтому в состав лазерного
комплекса поражения входит устройство оптоэлектронной разведки и наведения
луча лазера на объект поражения. На рис. 11.60 представлена структурная схема
комплекса оптоэлектронного поражения типа «Немезис» [56].
ОУО
Рис. 11.60. Структурная схема комплекса оптоэлектронного подавления: ОУО — опти-
ческое устройство обнаружения пуска ракеты; ОУС — оптическое устройство
сопровождения ракеты
Этот комплекс разработан фирмой «Нортроп Грумман» и предназначен для
борьбы с управляемыми ракетами (УР) класса «земля — воздух» и «воздух — воздух»
с ИК-головками самонаведения. Комплекс оптоэлектронного поражения (КОЭП)
размещается на самолетах и вертолетах. Основу его составляет лазер и подсистема
информационного обеспечения. Всеракурсная оборона ЛА обеспечивается разме-
щением его на подвижной платформе турельного типа (рис. 11.61).
Сигналы тревоги от датчиков, работающих в ультрафиолетовом (а возможно, и
в инфракрасном) диапазоне, поступают в приемник, который фиксирует факт пуска
Рис. 11.61. Схема ФП управляемой ракеты лазерным оружием. КОЭП — комплекс
оптоэлектронного поражения; 1 — лазер; 2 — оптическое устройство; 3 — головка
самонаведения управляемой ракеты
J 1.9. Лазерные средства функционального поражения
499
ракеты и грубо определяет сектор атаки. Уточнение угловых координат УР произ-
водится прецизионным пеленгатором, в состав которого входит оптическое устрой-
ство точного сопровождения и приемник детальной разведки. Сигналы приемников
обнаружения и детальной разведки поступают в устройство обработки информа-
ции, в котором определяются типы целей, их приоритеты и точные пространствен-
ные координаты. Эта информация в виде формуляров целеуказания (ФЦУ) посту-
пает в устройство управления, принимающее решение о необходимости пораже-
ния наиболее опасной цели. Стратегия обороны (ФП, маневр или применение других
средств) в виде команд К передается на устройство наведения луча лазера на объект
поражения ОП. Для наведения луча лазера на ОП используются сигналы точного
целеуказания, поступающие от пеленгатора (приемника детальной разведки и целе-
указания). На индикаторе летчика формируются символы, несущие информацию
о воздушной обстановке, принятой стратегии обороны и т. п. Команды К, определя-
ющие стратегию обороны, подаются из устройства выбора стратегии обороны на
устройства выброса ложных целей, на станции некогерентных активных помех, на
устройства управления заметностью летательного аппарата и, возможно, на некото-
рые другие.
Точность целеуказания определяется оптическим устройством сопровождения
ракеты, которое представляет собой матричный фотоприемник с матрицей 28х28
(256x256) и цифровой обработкой сигналов. Точность сопровождения состав-
ляет о = 0,2°. Однако даже такая высокая точность не обеспечивает прицельного
наведения луча лазера с шириной а = р = 10...20 угловых секунд на весьма малога-
баритный поражаемый элемент оптического устройства головки самонаведения.
Например, современные матричные фотоприемники ИК ГСН имеют угловые раз-
меры, не превышающие угловых секунд. Если радиус апертуры такого приемника
г = 25 см, то ее угловой размер при наблюдении с дистанции R = 10 км будет при-
мерно равен 10". В этом случае вероятность облучения ГСН составит величину
порядка 10^...4-1СИ. Поэтому некоторого увеличения вероятности ФП фотоприем-
ников ГСН можно ожидать за счет сканирования луча лазера в выбранном с помо-
щью устройства целеуказания телесном угле. Такое сканирование луча лазера может
происходить естественным образом из-за случайных перемещений УР и ЛА, на ко-
тором установлен КОЭП. Но и в этом случае вероятность облучения ГСН лучом
лазера не превысит 10“3...2-10“3.
Лазерные пучки воздействуют на поверхностный слой материала мишени. По-
этому они разрушают тонкостенные оболочки тепловым или ударным воздействием.
Атмосфера прозрачна для лазерного излучения в диапазоне длин волн 0,3...1 мкм.
Это несколько шире видимой области. В ИК-диапазоне тоже есть окна прозрачно-
сти, где отсутствуют линии молекулярного поглощения различных атмосферных
газов и аэрозольных примесей. Для длин волн менее 0,3 мкм атмосфера абсолютно
непрозрачна. Но даже и в диапазоне прозрачности атмосферы лазерный луч рассе-
ивается в облаках, в тумане, на аэрозолях и пылинках.
11.9.3. Оценка поражающего действия лазера
Плотность энергии в пучке лазерного излучения, нужная для того, чтобы про-
жечь алюминиевую обечайку ракеты с эффективной толщиной 1 г/см2, составляет
около 1 кДж/см2. Для магниевых сплавов — примерно столько же; для титановых —
в 1,5 раза больше.
500
Глава 11. Функциональное поражение РЭС электромагнитными полями
Термодинамические характеристики и параметры некоторых материалов ракет-
ной техники (точнее, некоторых веществ, на основе которых эти материалы дела-
ются) приводятся в табл. 11.5.
Таблица 11.5
Материал Температура плавления, °C Теплота плавления, Дж/г Температура кипения, °C Теплота испарения, Дж/г
Алюминий 660 1060 2500 12 000
Магний 650 1090 1095 6000
Титан 1670 1500 3300 10 000
Кремний 1415 2760 3250 16 000
Углерод 59 250
Для характеристики поглощения энергии лазерного излучения в тонком поверх-
ностном слое материала обечайки важна длительность воздействия (длительность
импульса излучения) и температуропроводность материала %. Если температуро-
проводность велика, материал за время действия импульса облучения прогреется
на большую толщину. При низкой температуропроводности можно расплавить или
даже испарить вещество малого участка поверхностного слоя мишени, причем ос-
тальная конструкция даже и не нагреется. Коэффициент температуропроводности
X имеет размерность см2/с и показывает, за какое время Т прогревается слой мате-
риала толщиной А: э
Т = — (11.86)
X
или обратно — на какую глубину проникнет тепло при импульсном (с длительно-
стью т) нагреве поверхности:
Л = 7хТ (11.87)
Коэффициент % — величина, производная от плотности, теплопроводности и
теплоемкости материала:
Х = 7ф (11.88)
где Xf — коэффициент теплопроводности; Ср — удельная теплоемкость; р — плот-
ность материала поражаемого объекта.
Для некоторых веществ, входящих в материалы ракетной и авиационной тех-
ники, параметры температуропроводности приведены в табл. 11.6.
Таблица 11.6
Материал Плотность р, г/см3 Удельная теплоемкость Ср, Дж/град К Коэффициент теплопроводности лт, Дж/см-С Коэффициент температуропроводности, X, см2/с
Алюминий 2,7 0,9 2 0,830
Магний 1,74 1,0 1,0 0,57
Титан 4,5 0,5 0,2 0,86
Медь 8,9 0,83 4,0 1,15
Углерод 2,25 0,71 1,0 0,625
Если длительность лазерного импульса т » Т, то происходит нагрев, если же
т « Т, то имеет место импульсный удар.
11.9. Лазерные средства функционального поражения
501
Итак, пусть эффективная толщина поглощения энергии в материале обечай-
ки, подвергающейся воздействию лазерного облучения, Э г/см2, а плотность пото-
ка падающей энергии Q Дж/см2 достаточно большая, так что удельный энерговклад
<7 = ^Дж/г (11.89)
существенно выше теплоты испарения.
Созданный в результате испарения вещества газовый слой распространяется в
окружающем пространстве, передавая поверхности ракеты удельный импульс
(11.90)
В результате материал обечайки приобретает некоторую скорость.
Допустимая скорость (не превосходящая порога разрушения) должна состав-
лять малую часть скорости звука в веществе материала (предел 1 %). Пусть у
импульсного лазера т ~ 10-8с (10 нс). Тогда эффективная толщина зоны поглоще-
ния лазерного излучения 8 = Для алюминия это 310-4 г/см2. Для других мате-
риалов — примерно столько же. Скорость распространения звука в алюминии
[Ё з
Изв = —«640 м/с (здесь Е— модуль упругости, р — плотность).
V Р
Для эффективной толщины обечайки 8=1 г/см2 предел ударной прочности со-
ставляет примерно 10 кДж/см2. Удельный энерговклад q такого импульса сущест-
венно выше теплоты испарения (для того же алюминия 12 кДж/г).
Если положить т « 10~6 с (1 мкс), то порог поражения снизится до 1 кДж/см2,
но при этом удельный энерговклад уже близок к теплоте возгонки материала. Иначе
говоря, порог ударного поражения поверхности ракеты, ДПЛА или самолета мощ-
ным лазерным импульсом не ниже порога теплового поражения. Порог теплового
поражения можно существенно повысить, если покрыть поверхность объекта веще-
ством с низкой температуропроводностью (абляционное покрытие). Такими свойст-
вами, кстати, должны обладать антирадиолокационные покрытия. С учетом влия-
ния покрытия обычно считается, что пороговая величина теплового поражения
лазерным излучением равна Qq ~ 20 кДж/см2. Для эффективности поражения ору-
жие должно обеспечивать Q > Qo. Это энергетические требования.
Но существуют еще физические ограничения на параллельность пучка лазер-
ного излучения. Минимально достижимая расходимость луча определяется извест-
ным дифракционным пределом Q = — (отношение длины волны излучения к апер-
туре излучателя, которая равна диаметру фокусирующего зеркала D). Т. е., если луч
фокусируется в точку на поверхности мишени, то вместо точки в фокальной плос-
кости образуется пятно с поперечным размером <р = —, где R— фокусное рассто-
яние зеркальной системы.
Самый крайний благоприятный для атакующей стороны случай — когда размер
пятна минимален, т. е. расстояние до мишени равно фокусному расстоянию зер-
кальной системы. При расфокусировании размер пятна может только возрастать:
<р2 =
R
(П.91)
где — степень расфокусировки; AR — глубина резкости.
R
502
Глава 11. Функциональное поражение РЭС электромагнитными полями
Если не менять фокусное расстояние (не фокусировать луч на мишень), то
нельзя сделать диаметр пятна на поверхности мишени меньше минимального рас-
четного. Кроме того желательно, чтобы размер пятна был не больше размера фо-
кусирующего зеркала. Но при очень маленьком зеркале тепловые нагрузки и им-
пульсные удары по зеркалу очень скоро его разрушат. Учитывая эти обстоятель-
ства и полагая ф = Z), можно получить
Z)2=M,
D2
что определяет предельно возможную дальность (радиус) поражения /?тах =-ла-
X
зерного оружия данного типа (с данной длиной волны излучения X) независимо от
его мощности. Зависимость требуемого диаметра зеркала от заданной дальности по-
ражения представлена на графике рис. 11.62. Параметром семейства характеристик
на рис. 11.62 служит длина волны лазерного излучения.
Рис. 11.62. Связь диаметра зеркала и дальности поражения
Но указанная предельная дальность действия — это лишь геометрически наи-
более выгодное условие для обеспечения эффективности поражения. В реальных
условиях работы для действительного поражения требуется, чтобы плотность энергии
на поверхности мишени была бы не ниже некоторой пороговой. Плотность энер-
гии в районе расположения мишени
2л2 ’
где Р— мощность источника излучения; т — длительность импульса (выстрела);
R — расстояние до мишени; 0 — угол расходимости пучка лазерного излучения
(0 =а = Р).
Пусть Q = Qo (энергетический порог поражения). Тогда
В
R2 ’
лтах
где В —яркость лазера, т. е. энергия, выделяемая источником излучения в еди-
нице телесного угла.
Таким образом, для того чтобы лазер разрушил (прожег) металлическую защит-
ную поверхность корпуса цели на дальности /?п1ах, т. е. на наиболее выгодной для
лазера дальности, его яркость должна удовлетворять условию
Z? = Q07^ax,
где Qo ~ 2104 Дж/см2.
IL 10. Уравнение функционального поражения
503
Необходимо заметить, что полученная оценка поражающего действия лазера
справедлива для ФП объектов в свободном (космическом) пространстве. Приме-
нение лазера как оружия РЭБ в земной атмосфере требует учета поглощения гене-
рируемых ЭМВ в реальной среде.
11.10. Уравнение функционального поражения
Нанесение противнику информационного ущерба путем ФП его электронных
средств (ЭС) возможно, если выполнены энергетические условия ФП этих средств.
Для получения необратимого эффекта поражения электронных средств главным
условием является создание в районе расположения объекта поражения сильного
ЭМП, плотность потока которого Пвх соответствует критическому значению Пкр,
при котором поражаемый объект выходит из строя, т. е.
Пвх>Пкр. (11.92)
Для каждого типа ЭС существуют критические уровни плотности потока энер-
гии (мощности) Пкр, которые определяются восприимчивостью самых чувствитель-
ных его элементов.
Количественно информационный ущерб, наносимый противнику, определяется
размерами области 5пор, в пределах которой исключается поступление данных от
ЭС, поражаемого мощным СВЧ-излучением. Эта область фактически изымается из
обслуживания информационной системой, одним из элементов которой является
пораженное ЭС. Предполагается, что ее перекрытие другими ЭС отсутствует.
Обозначенную область следует отличать от зоны поражения средства ФП —
пространства вокруг средства ФП, при попадании в которое ЭС поражается СВЧ-
излучением в заданной степени и с заданной вероятностью.
На границах зоны поражения выполняется условие (11.92). Внутри этой зоны
обеспечивается функциональное поражение всех ЭС, имеющих одинаковые кри-
тические характеристики Пкр, если Пкр < Пвх. Для определения границ зоны пора-
жения /?пор используется уравнение ФП.
В зависимости от типа средств ФП следует рассматривать два способа их примене-
ния. Одноразовые средства ФП в виде ЭМБ в основном обладают всенаправленным
воздействием на ЭС в течение короткого времени существования ЭМИ (рис. 11.63).
Рис. 11.63. Схема функционального поражения электронного устройства
электромагнитным боеприпасом одноразового применения
504
Глава 11. Функциональное поражение РЭС электромагнитными полями
Особенностью их функционирования является отсутствие избирательного воз-
действия на ЭС. Иными словами, при попадании в зону поражения любых ЭС (своих
или противника) они могут быть поражены, если только выполнено условие (11.92).
Средства ФП многократного использования (лазеры, мощные СВЧ-установки)
поражают ЭС узконаправленным лучом и действуют на объект избирательно, не
причиняя вреда собственным ЭС (рис. 11.64).
Оптическое или антенно-
Рис. 11.64. Схема функционального поражения электронного
устройства источником сильного узконаправленного ЭМП
Под уравнением функционального поражения (подавления) понимается ана-
литически выраженная зависимость максимальной дальности (радиуса зоны) фун-
кционального поражения (подавления) заданного РЭС от совокупности энергети-
ческих, частотных и пространственно-временных характеристик СВЧ-излучения
оружия ФП и критической плотности потока энергии (мощности) такого излуче-
ния, поражающей (подавляющей) ЭС.
Можно надеяться, что со временем критическую плотность потока энергии (мощ-
ности) в уравнении ФП удастся заменить на параметры ЭС, характеризующие его
восприимчивость к СВЧ-излучениям.
Ниже приводится вывод уравнения ФП для случая поражения ЭС средствами
ФП направленного действия (рис. 11.64). Особенности применения уравнения ФП
в других случаях оговариваются отдельно.
Устройство ФП (лазер или мощный СВЧ-излучатель) удалено от объекта пора-
жения на дальность R. Сильное электромагнитное поле, сконцентрированное в узком
телесном угле осхр, воздействует на приемник или на элементы входных устройств
(оптических, антенно-фидерных). Если поражаются элементы входных устройств,
то плотность потока энергии в месте их расположения определяется в соответствии
с соотношением
Пвх - ^осл Д*/М2, (11.93)
где Эизл — энергия ЭМП на выходе излучающего устройства средства ФП;
= г т
изл ' изл иизл
Дж;
(11.94)
Ризл — мощность источника ЭМП, Вт; тизл — длительность излучения, с; Q = осхр —
телесный угол расходимости луча; ос, р — ширина луча во взаимно ортогональных
плоскостях (радиан); KOCJl< 1 — коэффициент ослабления энергии ЭМП при рас-
пространении по трассе длиной R.
В радиодиапазоне выражение (11.93) может быть записано в виде
ПВх = ?тУ ^осл. (11.95)
11.10. Уравнение функционального поражения
505
где G — коэффициент усиления антенны мощного СВЧ-устройства:
4тс4
"V"’
(11.96)
здесь А — эффективная площадь антенны.
Когда для ФП используется СВЧ-излучатель на основе ВМГ, вследствие нена-
правленное™ излучения в формуле (11.93) следует принять Q= 1.
Поражение ЭС произойдет при выполнении условия
*иПвх=Пкр, (11.97)
где П^ — критическое значение плотности энергии в плоскости размещения по-
ражаемого элемента, при котором ЭС безвозвратно выходит из строя; КИ — ко-
эффициент использования ЭМП, учитывающий возможность поражения ЭС эле-
ктромагнитным излучением, спектр которого не совпадает с рабочим частотным
диапазоном ЭС (диапазоном восприимчивости). При ФП РЭС сильным ЭМП,
спектр которого не перекрывается с рабочим диапазоном РЭС, необходимо опреде-
лять КИ с учетом влияния на ослабление поля пространственно-временных харак-
теристик антенно-фидерного тракта, диаграммы направленности антенны, частот-
ных и поляризационных характеристик.
С помощью формулы (11.97) и с учетом выражений (11.93), (11.94) и (11.95) мож-
но получить уравнение ФП ЭС:
для средства ФП оптического диапазона
*и1т7*осл=Пкр; (11.98)
для радиотехнических средств
(П99)
AnR
Оба эти уравнения (11.98) и (11.99) могут быть представлены в виде единого
уравнения функционального поражения, совпадающего с (11.98), если в нем при-
4я
нять Q = ар — для оптического диапазона или Q =------для радиодиапазона.
G
Уравнения (11.98) и (11.99) позволяют, как и традиционные уравнения РЭП,
определять границы зоны поражения и энергетический потенциал устройства ФП,
необходимый для поражения различных объектов на заданных дальностях R.
Граница зоны поражения определяется максимальной дальностью поражения
Дпах ПРИ заданной критической плотности потока энергии Пкр, которая должна
быть известна для каждого конкретного ЭС. Из уравнения ФП (11.98) следует, что
П = РнзЛосА . (11.100)
max V Пкр£2
Так, например, максимальная дальность ФП оптической ГСН управляемой ра-
кеты американским лазерным комплексом ФП «Нимироз» (рис. 11.65 и рис. 11.66),
может быть определена на основе следующих рассуждений.
Усредненное значение критической плотности потока энергии, при котором
происходит разрушение оптических деталей ГСН, Пкр = 50 Дж/см2 [56]. Примем
Эизл = 200 Дж; Q = 10-9; КИ = Аосл = 1. Тогда из (11.100) получается ^тах= 630 м.
Зона подавления представляет собой конус, в вершине которого находится сред-
ство ФП (рис. 11.65). Длина образующей конуса равна 1?тах. Если комплекс ФП
506
Глава 11. Функциональное поражение РЭС электромагнитными полями
Рис. 11.65. Зона поражения
оптико-электронных
средств ФП
Рис. 11.66. ФП ГСН управляемой
ракеты, наводящейся на защищаемое
электронное средство ЭМБ
способен надежно сопровождать ГСН УР узким лучом, то зона подавления на пло-
скости может быть представлена в виде круга с радиусом R - Лтах (пунктирная ли-
ния на рис. 11.65).
Средства ФП одноразового применения в качестве источника сильного ЭМП
используют ВМГ, который доставляется к цели либо ракетой, либо миной, либо
другим носителем. Зона поражения представляет собой круг радиуса R = 7?тах, см.
рис. 11.66.
При защите собственных ЭС от ракет, самонаводящихся на источник излуче-
ния, следует учитывать возможность функционального поражения своих средств
собственным электромагнитным оружием. Защищаемые ЭС не должны находить-
ся в зоне функционального поражения (рис. 11.66). Подрыв ЭМБ должен быть
произведен на расстоянии от собственного ЭС RQ min, превышающем максималь-
ную дальность поражения 7?тах (7?с min > 7?тах). Дальность подрыва Rc min рассчиты-
вается на основании (11.100) с учетом критического значения Пкр, характерного
для действия ЭМБ на защищаемое ЭС.
При разработке комплексов ФП возникает задача определения энергетического
потенциала Эфп средства ФП, обеспечивающего поражение ЭС на заданной даль-
ности. Искомый энергопотенциал определяется из уравнения (11.98) и (11.99) как
Эфп=^ПкрШ)32ад- (11.101)
Лосл
Из (11.101) следует, что потребный энергопотенциал Эфп устройства функци-
онального поражения находится в сильной зависимости от заданной дальности по-
ражения
11.11. Воздействие на радиоэлектронную систему излучений
высокопотенциальных радиолокационных станций
Поражающее воздействие на РЭС СВЧ-излучения было обнаружено практически
сразу после появления мощных импульсных РЛС. Более того, в процессе эксплуа-
тации таких РЛС выяснилось, что зондирующие импульсы вызывают в близко
расположенных объектах следующие эффекты [56]:
• выгорание кристаллических смесителей в приемниках;
• воздействие продетектированных наводок на устройства анализа полезных сиг-
налов и данных в РЭС;
11.11. Воздействие на РЭС излучений высокопотенциалъных РЛС
507
• сильные помехи на выходе приемника;
• срабатывание электро- и радиовзрывателей боеприпасов;
• возгорание паров топлива и смазочных материалов;
• повреждение глаз, перегрев тела и повреждение кожных покровов.
Перечень РЭС различного назначения, подверженных воздействию мощных
зондирующих импульсов РЛС достаточно обширен, поскольку широк диапазон
рабочих частот современных РЛС, а спектры их излучений занимают полосы час-
тот от единиц — десятков, до тысячи и более мегагерц (у РЛС со сверхширокопо-
лосными сигналами).
Другими источниками мощных СВЧ-излучений являются высокопотенциаль-
ные РЭС различного назначения, отличного от назначения РЛС, и промышленные
установки с источниками мощного электромагнитного излучения. Что касается
характера воздействия сигналов названных РЭС на объекты, то он практически
ничем не отличается от характера воздействия сигнала РЛС.
Естественно, что для РЭС особую опасность представляют излучения, прони-
кающие в приемники через антенно-фидерные тракты. При этом наблюдается сле-
дующее.
1. Сигналы среднего уровня (однако превышающего максимальный уровень по-
лезного сигнала) обычно воздействуют на внутренние цепи приемника, достаточно
удаленные от его входных цепей. Под их воздействием повреждения или изменения
режимов работы возникают в трактах промежуточной или видеочастоты и в следую-
щих за ними устройствах.
2. Мощные одиночные импульсы, как правило, вызывают ухудшение парамет-
ров или выгорание кристаллических смесителей и детекторов на входе приемника.
К такому же эффекту может привести последовательность нескольких менее мощ-
ных импульсов. Но уровень их мощности должен быть всего лишь на 10...15 % ниже
мощности поражающего одиночного импульса.
3. Для обеспечения выгорания кристаллических смесителей и детекторов от СВЧ-
импульсов требуется наименьшая энергия, если их длительность не превышает 10 нс.
При такой длительности на поражение элемента затрачивается вся (полная) энергия
воздействующего импульса, поскольку процесс воздействия будет адиабатическим,
т. е. таким, который происходит без теплообмена с окружающей средой. В нашем
случае происходит только нагрев за счет энергии СВЧ-импульса, а отдачи тепла
окружающему пространству нет. Так при воздействии СВЧ-импульсов с длитель-
ностью ти< 10 нс на полупроводниковые приборы установлено, что приборы диа-
пазона 1...10 ГГц, выгорали, если энергия импульса составляла 0,1...1 мкДж. При-
боры более высокочастотные выгорали при энергиях порядка 0,01...0,1 мкДж. Для
обеспечения той же степени воздействия одиночные СВЧ-импульсы с длительно-
стью ти > 10 нс, но с мощностью несколько меньшей, чем у более коротких пора-
жающих импульсов, должны иметь энергию больше, чем импульсы длительности
ти < 10 нс: начинают сказываться потери на теплообмен. Основным поражающим
фактором в этом случае становится не мощность, а энергия импульса. Энергия
должна быть такой, чтобы ее хватило на постепенный разогрев подвергаемого воздей-
ствию прибора, вплоть до его полного выгорания, а также на компенсацию тепло-
вых потерь. Дело в том, что не исключено установление термодинамического процес-
са, при котором вся вновь поступающая энергия СВЧ-импульса целиком уходит
только на компенсацию тепловых потерь, а прибор продолжает нормально рабо-
тать при некоторой постоянной, хотя и высокой температуре. Увеличение длительно-
508
Глава 11. Функциональное поражение РЭС электромагнитными полями
сти импульса, а значит и его энергии, здесь ничего не дает. В этой ситуации
к выгоранию прибора может привести только повышение скорости поступления
энергии, т. е. повышение мощности импульса.
4. Под воздействием одиночных СВЧ-импульсов с длительностями ти > 10 нс
полупроводниковые приборы, работающие на частотах ниже 10 Ггц, обычно пора-
жаются при импульсной (пиковой) мощности, превышающей 5 Вт, а более вы-
сокочастотные приборы выходят из строя при импульсной мощности, превышаю-
щей 0,5 Вт.
5. Ухудшение свойств, возникающее под действием последовательности импуль-
сов, происходит при существенно более низком уровне их мощности, чем в случае
одиночного импульса. Типичный уровень мощности поражающей последователь-
ности импульсов составляет 1 % от мощности одиночного импульса, опасного в
той же степени [56].
К приведенному утверждению, однако, следует отнестись критически. Во-пер-
вых, не сообщается, о каком ухудшении свойств, при какой частоте следования и
при каком числе импульсов в пачке идет речь. Вряд ли здесь имеются в виду помехи
и сбои в функционировании прибора во время действия последовательности им-
пульсов. Ведь в таком случае сравнение с последствиями воздействия одиночного
импульса оказываются некорректными. Во-вторых, ни при проведении исследова-
ний воздействия последовательностей типа ЭМИ ядерных взрывов, ни при экспери-
ментах с последовательностями СВЧ-импульсов такого существенного (на два по-
рядка) выигрыша в мощности поражающих импульсов за счет перехода к облучению
объекта-цели пачкой импульсов не выявлено. Выигрыш имеется, но гораздо более
скромный. Оценки такого выигрыша приводятся в соответствующих разделах.
6. Известны многочисленные случаи детектирования радиолокационных сиг-
налов в других приборах, в том числе и в нерадиотехнических. На мощные радио-
сигналы реагируют электрические музыкальные инструменты, в частности органы,
системы звукозаписи, фотоэлектрические устройства управления, другие аудио- и
видеоустройства. Суть в следующем: радиочастотная энергия большого уровня
наводится в проводящих материалах, распространяется до ближайшего по цепи
нелинейного элемента и детектируется им. Если это происходит в звуковом устрой-
стве, то эффект проявляется в виде звукового фона с частотой повторения импуль-
сов РЛС на звуковом выходе устройства. Степень воздействия зависит от многих
факторов, но слабо зависит от рабочей частоты РЛС, за исключением тех случаев,
когда в детектирующих цепях имеются резонансные узлы.
По результатам единичных испытаний в 60-х гг. XX в. были установлены сле-
дующие пороговые значения плотности потока мощности Пд сигналов РЛС, при
которых проявлялся (возникал) эффект случайного детектирования этих сигналов
в приборах различного назначения: для приборов звуковой частоты (предваритель-
ный усилитель низкой частоты для высококачественного воспроизведения речи и
музыки, усилитель звуковой трансляции) Пд = 10... 100 мВт/м2; для приборов ра-
диочастотного диапазона (ламповый настольный радиоприемник AM, любитель-
ская радиостанция AM, радиолокационный приемник, военный связной прием-
ник, приемник системы тропосферной связи) Пд = 0,10... 10 Вт/м2; для усилителя
промежуточной частоты Пд = 0,10... 10 Вт/м2; для приборов видеочастоты (индика-
тор кругового обзора) Пд = 1...30 Вт/м2.
Приведенные данные имеют весьма ограниченное значение. Их следует рас-
сматривать только как ориентировочные.
11.12. Учет показателей и критериев
509
Представляется, что подобного рода воздействия будут наблюдаться и в случае
применения ЭМО. При этом большее сходство будет иметь место в случае исполь-
зования устройств ФП многоразового действия, излучающих последовательности
импульсов.
7. Установлено, что при пиковой мощности СВЧ-импульса от 5 Вт/см2 и выше
возможно возгорание паров топлива и смазочных материалов.
8. Энергии токов, наводимых импульсом мощной РЛС в монтажных проводах
электро- и радиовзрывателей, может оказаться достаточно для подрыва боеприпаса.
Существуют нормы на предельно допустимые плотности потоков мощности СВЧ-
излучений, исключающие возможность случайного срабатывания названных взрыва-
телей. Однако воспользоваться такими нормами для оценки возможности подрыва
электро- и радиовзрывателей чаще всего невозможно. Ведь при выполнении расче-
тов надо учесть длины проводников, их ориентацию в поле СВЧ-импульса, сопро-
тивление проводников, наличие и характеристики поглощающей среды. Данные о
них практически всегда отсутствуют либо являются весьма приблизительными.
11.12. Учет показателей и критериев
Среди характеристик РЭА всегда можно выделить те, которые непосредствен-
но определяют качество функционирования аппаратуры. Предельные (граничные)
значения таких характеристик, при которых РЭА еще работает с приемлемым ка-
чеством, но в случае небольшого превышения практически сразу отказывает, целе-
сообразно принять в качестве показателей стойкости. К таким показателям можно
отнести, например, отсутствие ложных сигналов и сбоев, продолжительность вре-
мени потери работоспособности, не оказывающую заметного влияния на решение
задачи, возложенной на РЭА.
Применительно к выбранным показателям разрабатываются критерии оценки
стойкости. Они указывают порядок (условия и последовательность выполнения)
вычислений ожидаемых максимальных, как правило, значений напряженностей
электрической и магнитной составляющих поля ЭМИ ядерного взрыва, наведен-
ных этими составляющими токов в электрических цепях РЭА и порядок оценки на
основе результатов указанных вычислений изменений соответствующих характери-
стик. Затем в соответствии с критерием производится сопоставление ожидаемого
измененного значения характеристики с ее же показателем. Если показатель не
превышен, то РЭА признается стойкой к воздействию данного конкретного ЭМИ
ядерного взрыва.
Используются также и вероятностные критерии стойкости. Они представляются
значениями вероятностей, с которыми не превышаются все указанные выше пока-
затели. Необходимым условием нахождения вероятностных показателей является
наличие статистических данных о поведении выбранных характеристик РЭА (изме-
нении значений параметров, условий появления сбоев в работе и т. п.) при воздейст-
вии ЭМИ ядерного взрыва с разными характеристиками ЭМП. Такие данные зача-
стую отсутствуют. Однако и при использовании параметрических критериев на прак-
тике сталкиваются с необходимостью выполнения крайне сложных вычислений.
Простого и универсального критерия для оценки стойкости РЭА к воздействию
ЭМИ ядерного взрыва не существует. Но даже если бы такой критерий был, ис-
пользовать его напрямую для оценки эффективности применения ЭМО было бы
510
Глава 11, Функциональное поражение РЭС электромагнитными полями
нельзя. При оценках эффективности применения ЭМО требуются иные критерии,
чем в случаях оценки стойкости РЭА к воздействию ЭМИ ядерного взрыва. Прин-
ципиальное отличие заключается в том, что в случае применения электромагнит-
ного оружия основной интерес представляет не стойкость РЭА, а наоборот, ее уязви-
мость. Поэтому критерии для ЭМО должны основываться на показателях, дости-
жение и превышение которых гарантирует наступление заданной степени поражения
РЭА. Сходство же в том, что и здесь критерии могут быть параметрическими и
вероятностными. Наиболее полным и корректным (в связи с высокой неопреде-
ленностью) считается статистическое описание уязвимости РЭА при воздействии
ЭМО, равно как и при воздействии ЭМИ ядерного взрыва.
Критерия стойкости, общего для любой РЭА независимо от ее особенностей и
назначения, нет. В принципе им могла бы быть вероятность полного прекращения
функционирования РЭА (в смысле невозможности решения возложенных на нее
задач) после воздействия ЭМИ ядерного взрыва. Однако в такое состояние разная
РЭА переходит под влиянием разных причин. Поэтому указать единый подход к
оценке их вклада в выход из строя самых разных радиосредств пока что не удается.
Ясно, однако, что общий критерий стойкости РЭА к воздействию ЭМИ ядерного
взрыва, если его разработают, будет связан с полным выходом РЭА из строя, а
основан на использовании самых общих физических принципов функционирова-
ния РЭА.
Критические уровни Пкр ФП электронных устройств и отдельных элементов
зависят от многих факторов. Нельзя привести какое-то среднее значение Пкр, ибо
эта величина в зависимости от стойкости электронных устройств к воздействию
сильных ЭМП изменяется в очень широких пределах (1...10-6 Дж/см2). Подробно
проблема выбора Пкр обсуждается в монографии [56]. Некоторые оценки Пкр при-
ведены в разд. 11.3 и 11.4.
ГЛАВА 12
ВЫСОКОТОЧНОЕ ОРУЖИЕ ПРОТИВ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ
Работа радиоэлектронных систем и средств сопровождается излучением элект-
ромагнитных полей. Причем эти поля создают не только передающие антенны.
Непреднамеренно излучают передающие устройства, элементы фидерных трактов,
гетеродины приемников, вычислительные и многие другие устройства. И работе
передающих антенн сопутствуют побочные излучения в направлениях, отличных
от направления главного лепестка диаграммы направленности. Все эти излучения,
как основные, так и побочные и непреднамеренные, могут использоваться для
огневого поражения РЭС противника оружием, прежде всего — ракетным. В комп-
лексах (системах) таких ракет для наведения и самонаведения используются бор-
товые радиоэлектронные средства. В контурах управления высокоточными ракетами,
наводящимися на источники радиоизлучения, используются специальные системы
определения координат целей. Традиционно такие системы — радиокоординато-
ры — именуются головками самонаведения.
Исторически первыми объектами, против которых были применены самонаводя-
щиеся ракеты с пассивными радиоголовками, были РЛС в составе зенитно-ракетных
комплексов. Видимо поэтому за таким оружием закрепилось название «противора-
диолокационные ракеты» (ПРР). Но нет сомнения, что отработанные конструктив-
ные и схемотехнические решения, методы наведения противорадиолокационных
ракет инвариантны относительно функционального назначения объектов пораже-
ния. Лишь бы эти объекты излучали в радиодиапазоне, а приемники головок само-
наведения обладали достаточной чувствительностью для приема этого излучения.
Основной поражающий фактор ПРР — ударная волна и осколки, которые вы-
водят из строя прежде всего антенное и кабельное хозяйство РЭС. Именно эти уст-
ройства в составе РЭС наиболее уязвимы и именно их труднее всего защитить от
поражения: антенны нельзя поместить в подземные укрытия или закрыть броне-
колпаками, а кабели вынужденно имеют немалую протяженность. Рис. 12.1 иллюст-
рирует результат применения ПРР [56].
Рис. 12.1. Антенная кабина РЛС до ракетной атаки и после применения ПРР
512
Глава 12. Высокоточное оружие против радиоэлектронных систем
Первое известное из публикаций применение ПРР относится к 1966 г., когда
американцы воевали во Вьетнаме и совершали воздушные налеты на ДРВ. После
ощутимых потерь, которые понесли ВВС США от зенитно-ракетных комплексов
(ЗРК) С-75 Северного Вьетнама, на вооружение американской авиации поступили
ПРР AGM-45 «Shrike». Крестокрылая ракета, имеющая массу 177 кг, выполнена по
аэродинамической схеме «поворотное крыло». Общий вид ракеты AGM-45 «Shrike»
и представление о ее компоновке иллюстрируется рис. 12.2.
Рис. 12.2. Габариты ракеты AGM-45 «Shrike»
Ракета оснащалась твердотопливным двигателем весом около 75 кг. Суммар-
ный импульс около 10000 кг/с. В блоке системы управления, находящемся в цен-
тральной части ракеты «Shrike», расположены пороховой генератор, приводы ру-
лей и термобатареи.
Тактика борьбы с ракетными батареями С-75 с помощью ракеты «Shrike», своди-
лась к следующим действиям. Ударная группа в составе от двух до четырех двухме-
стных самолетов, обычно F-105 «Thunderchief» или F-4 «Phantom», имела на борту
каждого самолета оператора РЭБ. Задачей оператора было обнаружение и опреде-
ление местоположения батарей С-75. С помощью бортовой системы предупрежде-
ния о радиолокационном облучении (СПО) он пеленговал РЛС и наводил летчика
до момента входа в зону пуска «Shrike». Начиная с этого момента РЛС ЗРК могли
быть поражены с весьма значительной вероятностью.
Эта тактика была названа «Wild Weasel». Она принесла значительные изменения
в противоборстве американских ВВС и ПВО Вьетнама. При поддержке самолетов
«Wild Weasel» ВВС США получили возможность для организации бомбардировок
объектов в Северном Вьетнаме. Но вскоре против тактики «Wild Weasel» и приме-
нения Shrike были найдены эффективные меры противодействия. Меры пассивной
защиты сводились к тому, что при обнаружении пусков «Shrike» операторы РЛС
ЗРК выключали излучение. В результате пропадал сигнал на входе приемника ра-
диоголовки самонаведения, контур управления движением ракеты размыкался и ра-
кетная атака на РЛС срывалась. Активные методы противодействия предусматри-
вали использование очень простой, но эффективной электронной «ловушки» для
бомбардировщиков В-52. Эти самолеты базировались на острове Гуам, посередине
Тихого океана, т. е. практически на максимальном радиусе действия. Поэтому они
имели мало шансов менять маршрут при налетах на Ханой и Хайфон. Зная этот
маршрут, северовьетнамцы расположили вдоль него простые передатчики для ими-
тации излучения РЛС ЗРК С-75. Передатчики включались при подлете американ-
ских бомбардировщиков, вынуждая их эскорт запускать противорадиолокационные
ракеты. Этот способ дезинформации оказался весьма эффектным: американцы рас-
ходовали против ложных целей весь свой запас ПРР, что делало бомбардировщики
уязвимыми для атак зенитными ракетами комплекса С-75 над целью и на маршруте
возвращения на базу.
Глава 12. Высокоточное оружие против радиоэлектронных систем 513
Вторая боевая операция с применением ПРР была проведена 15-16 апреля
1986 г., когда США нанесли серию воздушных ударов по наземным целям в Ливии.
Операция получила наименование «Эльдорадо Каньон».
Ударным самолетам ВВС США были назначены пять целей в Ливии: казармы
Азизьях, военные объекты в международном аэропорту Триполи, база Сайд Билал,
казармы Джамахирии в Бенгази, также идентифицированные как штаб управления
террористами; авиабаза Бенина, к востоку от Бенгази. Все цели прикрывались с
авиабазы Бенина, поэтому по Бенину был нанесен удар для нейтрализации истре-
бителей ливийской ПВО.
Авиационному удару предшествовала атака позиций РЛС зенитно-ракетных
комплексов системы ПВО на северном побережье Ливии. При осуществлении
этой атаки самолеты А-7Е и F/A-18 над Средиземным морем, с дистанции порядка
75...80 км, превосходящей дальность полета зенитных ракет, произвели пуск 48 про-
тиворадиолокационных ракет «Shrike» и HARM (High-speed Anti-Radiation Missile).
Тем самым была практически полностью нейтрализована ПВО Ливии.
В 1983 г. на вооружение авиации ВВС и ВМС США была принята новая про-
тиворадиолокационная ракета HARM. В отличие от ракет «Shrike» и «Standard-ARM»,
кроме наземных и корабельных РЛС систем управления зенитным оружием, она
способна поражать радиолокационные станции раннего обнаружения в комплек-
сах наведения истребителей. По американским данным ракета способна поражать
РЛС как с непрерывным, так и с импульсным излучением, а также РЛС, работаю-
щие в режимах с перестройкой частоты.
Ракета HARM AGM-88 имеет аэродинамическую схему «с поворотным крылом».
Крестообразное крыло, имеющее четыре консоли, расположено в центральной,
а четырехперый стабилизатор — в хвостовой части ракеты (рис. 12.3). Масса раке-
ты 354 кг.
4200
Рис. 12.3. Габариты ракеты AGM-88 HARM
Ракета оснащена твердотопливным двигателем (Thiokol-780), работающим в двух
режимах — стартовом и маршевом. Двигатель массой 127 кг снаряжается топли-
вом со сниженной дымностью для снижения вероятности обнаружения ракеты
оптическими системами. С таким двигателем ракета способна развивать скорость
2280 км/ч. Дальность полета порядка 50 км.
Осколочно-фугасная боевая часть массой 70 кг имеет неконтактный лазерный
взрыватель.
Головка самонаведения ракеты наводится на источники радиоизлучения в ди-
апазонах волн 3; 5; 10 и 25 см. В памяти бортового компьютера головки самонаве-
дения хранятся сигнатуры радиолокационных сигналов — данные, необходимые для
распознавания РЛС по структуре и параметрам их сигналов. Принятый сигнал
сравнивается с сигнатурой, это позволяет быстро идентифицировать цель. В одном
блоке с головкой самонаведения размещается также бесплатформенная инерциаль-
514
Глава 12. Высокоточное оружие против радиоэлектронных систем
ная система, обеспечивающая достаточно высокую точность наведения ракеты в
случае пропадания сигнала (например, при выключении РЛС цели).
Предусматривается несколько способов применения ракет HARM. Если заранее
известны тип РЛС и район расположения ее позиции, летчик с помощью бортовой
станции радиотехнической разведки производит поиск и обнаружение цели. После
захвата цели головкой самонаведения осуществляется пуск ракеты. Кроме того, воз-
можна стрельба по РЛС, позиция которой заранее не разведана и обнаруживается
в процессе полета. Совершенная инерциальная система наведения и большая даль-
ность стрельбы ракеты HARM AGM-88 позволяют использовать ее и по предвари-
тельно разведанной цели без захвата головкой самонаведения до пуска ракеты.
В этом случае цель захватывается головкой в процессе полета при достижении такой
дальности, при которой уровень сигнала становится достаточным для обнаружения
и захвата. Если же цель не обнаружена, происходит самоликвидация ракеты.
ПРР применялись во время операции НАТО в Югославии. И хотя некоторые
из ракет HARM, выпущенных по позициям РЛС в Сербии, упали в Болгарии и в
Македонии, в целом они показали вполне приемлемую эффективность.
В настоящее время на вооружении армий разных стран имеются десятки раз-
ных видов ПРР.
12.1. Алгоритм управления движением
противорадиолокационной ракеты
Оптимальный алгоритм управления движением ПРР по траектории должен удов-
летворять целому ряду противоречивых требований. Но прежде всего оптимальный
алгоритм управления должен минимизировать промах ПРР. Требование миниму-
ма промаха совершенно естественно для оружия вообще и для высокоточного ору-
жия в особенности. Но конкретное значение промаха обуславливается множеством
не поддающихся учету факторов. Поэтому он должен считаться случайным, а в силу
центральной предельной теоремы — нормальным. При таких условиях достаточно
минимизировать среднеквадратическое значение промаха ол (/к) в момент време-
ни /к окончания самонаведения.
Другим существенно важным требованием к наилучшему алгоритму управления
движением по траектории служит условие минимума интеграла от квадрата нормаль-
ного ускорения Wn на всем участке самонаведения. В содержательных терминах ми-
нимизация J W^dt означает минимизацию затрат энергии на управление движением
ракеты по траектории. Энергетические затраты на управление компенсируются в
конечном счете за счет мощности маршевого двигателя ракеты. Поэтому миними-
зация расхода энергии означает увеличение длительности этапа самонаведения, т. е.
увеличение дальности ПРР. Это очень важно, поскольку ПРР должны применяться
с максимально больших дальностей, превосходящих радиус зоны ответственности
системы ПВО, в составе которой используются радиолокаторы — цели ПРР.
Таким образом, оптимизация алгоритма траекторного управления при наведе-
нии ПРР должна исходить из условия минимума функционала
zk
О* ('к ) + J
zo
(12.1)
12.1. Алгоритм управления движением ПРР
515
Промах самонаводящейся ракеты вычисляется с учетом допущения о том, что
в течение некоторого сравнительно короткого времени, когда расстояние между
целью и ракетой равно гк, управление невозможно. Например, за счет наличия мерт-
вой зоны у ГСН. При этом скорость полета ракеты остается неизменной по величине
и по направлению, а цель не успевает выполнить какой-либо маневр. Чаще всего
предполагается, что при г < гк, т. е. после момента t = tK рули ракеты остаются в
нейтральном положении и ее нормальное и боковое ускорения равны нулю.
Для нахождения промаха, соответствующего минимальному расстоянию, на
котором ракета пролетает мимо цели, рассматривается текущий промах. Текущий
промах — это минимальное расстояние между ракетой и целью в плоскости рассе-
ивания, которое имело бы место при условии, что начиная с момента времени tK
процесс самонаведения прекращается. Плоскость рассеивания проходит через центр
масс цели и располагается перпендикулярно к вектору относительной скорости
движения ракеты и цели.
Обозначая /?(г) и /^(г) текущий и конечный промахи ракеты в одной из плоско-
стей управления, следует считать, что
A('k) = A(')L> (12-2)
'— 'к
где tK — момент времени окончания самонаведения, когда г = гк.
На рис. 12.4 точками Р и Ц определяются положения ракеты и цели в подвиж-
ной земной системы координат для текущего момента времени t.
Рис. 12.4. К выводу кинематической модели взаимного перемещения ПРР и цели
Скорости ракеты и цели на рис. 12.4 обозначены векторами Vp и Уц. Если при-
нять, что начиная с момента времени / цель и ракета движутся равномерно и пря-
молинейно, то ракета в относительном движении будет перемещаться по направ-
лению вектора Vo = Vp - Уц и пройдет на минимальном расстоянии й(/) от цели. Из
рис. 12.4 следует, что
/?(г) = rsinjLt. (12.3)
Но угловая скорость вращения линии визирования цели из точки мгновенного
расположения цели равна
(12.4)
Г
Поэтому мгновенный промах на момент t равен
Л(/)=^-. (12.5)
516
Глава 12. Высокоточное оружие против радиоэлектронных систем
Пассивная радиоголовка самонаведения по принципу действия лишена воз-
можности сколько-нибудь точно измерять дальность до цели |г| и относительную
скорость сближения Vo. Поэтому для минимизации промаха нужно уменьшать
(стремить к нулю) угловую скорость вращения линии визирования сов = ё. А для
минимизации среднего квадрата случайного мгновенного промаха система управ-
ления движением ракеты должна минимизировать среднеквадратическое значе-
ние оценки угловой скорости вращения линии визирования цели, поскольку, как
следует из (12.5),
<4 (12.6)
<*й =
Взаимное движение ракеты и цели в системе координат, изображенной на
рис. 12.4, определяется системой кинематических уравнений
r = Vu cos(e - Фи) - Kn cos(e - Фп);
, \ (12.7)
ГЁ = -Кц sin^E - Фц) 4- Kp sin(£ - Фр).
Первое уравнение системы (12.7) определяет скорость сближения ракеты с це-
лью, а второе связывает с параметрами движения ракеты и цели угловую скорость
сов = Ё вращения линии визирования.
Кинематические уравнения (12.7) нелинейные. Но при малых значениях угловых
рассогласований (е-Ф.), когда со8(е-Фр) = cos(e-Фц) ~ 1, а 8т(£-Фр) = (Е-Фр) и
sin(£-Фц) = (е-Фц), из (12.7) следует, что
гЁ-г£ = ИцФц-ИрФр. (12.8)
Продифференцировав (12.8) по времени и учитывая, что нормальные ускоре-
ния ракеты И^р=КрФр и цели И^ц = ИцФц в скоростной системе координат, которые
в сделанных предположениях о малости величин (е - Ф.) практически совпадают с
трансверсальными ускорениями, можно получить
ГЕ + 2гё + ГЕ = №нц - Жнр + Йцфц - КрФр, (12.9)
откуда для постоянных скоростей движения цели и ракеты с учетом принятого выше
обозначения сов = ё следует дифференциальное уравнение для угловой скорости ли-
нии визирования:
=;(и;ц -^нц). (12.10)
Если ракета считается материальной точкой, перемещающейся со скоростью
Vp = const, а цель движется равномерно и прямолинейно (в частности, может быть
и неподвижной в инерциальной системе координат, как наземный радиолокатор),
то из (12.10) получается, что
2г W
6R-—со =-^. (12.11)
Учитывая зависимость промаха ракеты от скорости вращения линии визирова-
ния (12.6) и связь этой скорости с нормальным ускорением создаваемым в
процессе управления движением ракеты по траектории (12.11), можно найти зави-
симость И^нропт = доставляющую искомый минимум функционалу (12.6).
В работе [76] показано, что оптимальное в смысле минимума (12.6) управление
ракетой обеспечивается при
1Ецр — Згсов.
(12.12)
12.2. Структура и состав аппаратуры головки самонаведения ПРР 517
Иначе говоря, оптимальный способ управления ракетой предусматривает со-
здание нормальных ускорений, пропорциональных угловой скорости вращения
линии визирования цели головкой самонаведения ракеты. Коэффициент пропор-
циональности равен Зг. Это способ пропорционального наведения (пропорциональ-
ной навигации) [76]. При этом существенно, что ни строительная ось ракеты, ни
направление ее полета (ориентация вектора скорости) не совпадают с направлени-
ем на цель, а система самонаведения должна использовать для создания управляю-
щего воздействия информацию о скорости вращения линии визирования цели. Это
значит, что головка самонаведения ПРР должна иметь платформу, подвижную
относительно строительных осей ракеты и обеспечивающую сопровождение цели
по угловым координатам, а также систему для определения угловой скорости пере-
мещения этой платформы в процессе автосопровождения цели.
Если цель маневрирует ф о), но модуль ее скорости остается постоянным,
требуемое значение нормального ускорения, минимизирующее сумму мгновенно-
го промаха и энергию, расходуемую на управление движением по траектории [76],
И/нп=Згсов+-|3-—(12.13)
нр 2\ г ) вд
где а = — — размерный коэффициент пропорциональности, обратный времени
корреляции случайного нормального ускорения цели И^ц.
Если же цель маневрирует с неизменным во времени нормальным ускорением
^нц = const> что соответствует а = 0, оптимальное нормальное ускорение будет [76]
И;р=3гсов+1,5И;Ц (12.14)
и при этом не нужно знать дальности г.
Это случай пропорционального наведения со смещением. Но, как видно из выра-
жений (12.13) и (12.14), при маневрирующей цели нормальное ускорение ракеты так-
же должно линейно зависеть от нормального ускорения цели. Но и в этом случае го-
ловка самонаведения должна измерять скорость вращения линии визирования цели.
Этот вывод важен при решении задач РЭП и РЭЗ. Кроме того, для выбора ме-
тодов и планирования действий по защите РЭС от высокоточного оружия и, в част-
ности, от ПРР, нужно рассмотреть методы построения систем самонаведения ракет.
12.2. Структура и состав аппаратуры головки самонаведения
противорадиолокационной ракеты
В радиотехнических системах самонаведения могут применяться различные
способы измерения составляющих угловой скорости линии визирования в плоско-
стях управления. Наиболее типичные способы основываются на применении ста-
билизированной антенны, антенной системы со следящим гироприводом, автосле-
дящей антенны, установленной на корпусе ракеты, и гироскопических датчиков
угловых скоростей. Основной параметр движения, используемый для управления
ПРР (впрочем, как и других управляемых ракет разных классов), угловая скорость
линии визирования. В ГСН ПРР используются приборные аналоги пеленгов и угло-
вой скорости, т. е. напряжения, пропорциональные угловой ошибке О и ее произ-
водной v=—. Если измерение угловой ошибки О необходимо, в основном, на
dt
первом этапе наведения, то измерение угловой скорости тЗ является основной зада-
518
Глава 12. Высокоточное оружие против радиоэлектронных систем
чей ГСН на втором этапе — самонаведении ПРР на цель. Это особенно важно при
наведении на маневрирующий объект, например, на самолетную РЛС. Функцио-
нальная схема ПРР со стабилизированной антенной изображена на рис. 12.5.
Рис. 12.5. Функциональная схема ПРР со стабилизированной антенной
Антенная система радиокоординатора установлена на стабилизированной плат-
форме таким образом, что ось ха равносигнальной зоны антенной системы может
поворачиваться относительно этой платформы моторами начальной установки М.
На рис. 12.5 и далее для большей наглядности равносигнальная зона изображается
с помощью двух лепестков А1 и А2 диаграмм направленности антенной системы А.
Перед началом самонаведения переключатели П1 и П2 находятся в положе-
ниях 1 и на моторы М поступают команды начальной установки, направляющие
ось ха равносигнальной зоны на цель Ц, т. е. обеспечивается равенство нулю угла О.
Эти команды поступают от системы управления оружием.
Антенная система, являющаяся неотъемлемой частью всякого радиокоордина-
тора (пеленгатора), изображена на рис. 12.5 в виде отдельного блока лишь для боль-
шей наглядности.
После окончания процесса начальной установки переключатель Ш переводит-
ся в положение 2 и на моторы М подается управляющее напряжение с выхода ко-
ординатора.
При малых значениях угла О это напряжение является достаточным точным
приборным аналогом этого угла, т. е.
«вых = КО, (12.15)
где К — коэффициент пропорциональности.
Так как отклонение О имеет две составляющие, формируемые при пеленгации
цели в двух ортогональных плоскостях, то и напряжение ивых имеет две составляю-
щие нвых х и wBbIX у, т. е.
^ВЫХХ — ^Х^Х* ^BbTXJ — (12.16)
Физически напряжения мвыхх(^) и иВЬ1ХД^) образуются на выходах двух кана-
лов пеленгатора, предназначенных соответственно для измерения двух составляю-
щих 0х и Оу пространственного углового отклонения цели.
Под действием управляющих напряжений моторы М поворачивают ось ха
равносигнальной зоны до тех пор, пока не выполнятся условия
Ывыхх0) = 0> Мвыху(') = 0 (12.17)
и ось равносигнальной зоны будет направлена на цель.
12.2. Структура и состав аппаратуры головки самонаведения ПРР 519
Так как переключатель Ш остается в положении 2, то моторы М оказываются
обесточенными и в дальнейшем антенная система оказывается жестко связанной
со стабилизированной платформой. Очевидно, тем самым оказывается стабилизи-
рованной в пространстве и система координат, осью ха которой является равносиг-
нальная зона пеленгатора. Строго говоря, для стабилизации этой системы коорди-
нат не всегда требуется стабилизировать всю механическую конструкцию антенно-
фидерной системы, но в дальнейшем для краткости слова «стабилизация системы
координат, связанной с равносигнальной зоной антенной системы» заменяются
словами «стабилизация антенны».
Итак, после перехода переключателя П2 в положение 2 и в дальнейшем антен-
на пеленгатора оказывается стабилизированной, а его выход подключенным к ав-
топилоту. С этого момента ракета начинает управляться сигналами, поступающи-
ми с выхода антенной системы, т. е. начинается процесс самонаведения.
В процессе самонаведения линия визирования цели г поворачивается (если
ракета летит не точно в упрежденную точку) и, следовательно, появляются некото-
рые составляющие (/) и (/) пеленга цели. При этом на выходе пеленгатора
появляются соответствующие управляющие напряжения, определяемые соотноше-
ниями (12.16).
Дифференцирование этих напряжений позволяет получить сигналы
(12.18)
пропорциональные угловым скоростям сох и вращения линии визирования це-
ли г в стабилизированной системе координат, и, следовательно, могущие быть
использованными для образования команд на рулевые органы ракеты. Так как при
дифференцировании подчеркиваются высокие частоты, то во избежание резкого
ухудшения помехоустойчивости необходимо на выходе дифференцирующего звена
ставить фильтр нижних частот с возможно более узкой полосой пропускания. Предел
сужения полосы этого фильтра ставится допустимым значением инерционности
управления.
Таким образом, система управления, функциональная схема которой изобра-
жена на рис. 12.5, действительно позволяет осуществить самонаведение по методу
пропорционального наведения.
Основных недостатков у такой системы два. Во-первых, конструктивная слож-
ность создания антенной системы (или ее части), установленной на стабилизиро-
ванной платформе и допускающей возможность поворотов относительно этой плат-
формы (при начальной установке). Во-вторых, необходимость сравнительно широ-
кого угла зрения бортового радиокоординатора ПРР. Этот недостаток существенно
ухудшает помехоустойчивость головки самонаведения и позволяет создавать для нее
весьма эффективную помеху.
Для того чтобы избежать использования широконаправленных антенн головок
самонаведения ПРР, реализующих кинематический метод пропорционального на-
ведения, нужно применять следящую антенну, как на рис. 12.6.
На этом рисунке изображен плоский случай. Принято, что цель движется пря-
молинейно. Скорости Иц и Ир постоянны. В момент начала самонаведения (/ = 0)
цель находится в точке ЦО, а ракета — в точке Р0. В этот момент вектор скорости
520
Глава 12. Высокоточное оружие против радиоэлектронных систем
Рис. 12.6. Кинематическая схема наведения ПРР со стабилизированной антенной
ракеты направлен не точно в упрежденную точку А, а с некоторой начальной ошиб-
кой упреждения
ДА = ДО0. (12.19)
При этом линия цели г в процессе полета ракеты поворачивается с угловой
скоростью
V
—(12.20)
dt г
и с помощью рулей ракеты создается поперечное ускорение
ЗК2
Ж =—?-Д0. (12.21)
г
Вследствие этого ракета движется по кривой с некоторым радиусом кривизны
V2
р = -^. (12.22)
При этом, как видно из рис. 12.6, ошибка упреждения ДО непрерывно умень-
шается, а следовательно, в соответствии с (12.21) уменьшается ускорение и
увеличивается радиус кривизны траектории ракеты. В некоторой точке Р1, соот-
ветствующей моменту времени Гь ошибка упреждения делается равной нулю, уско-
рение также становится равным нулю, и в дальнейшем ракета летит прямоли-
нейно вплоть до встречи с целью в точке Ц.
Так как в течение интервала времени [0; /] ошибка упреждения уменьшается от
ДО до нуля, угловая скорость сов линии г уменьшается в соответствии с (12.20) от
КДОо
некоторой величины —------- до нуля, как на рис. 12.6. Такому изменению произ-
го
~ dtp ^(Д'О)
водной —L =-------- соответствует изменение угла <р ориентации оси диаграммы на-
dt dt
12.2. Структура и состав аппаратуры головки самонаведения ПРР
521
правленности антенны пеленгатора в скоростной связанной системе координат до
некоторого максимального значения (ршах (рис. 12.7).
Рис. 12.7. Изменение скорости вращения линии визирования и угла
ориентации оси антенны пеленгатора в процессе наведения ПРР
Таким образом, в рассмотренном случае угол О между стабилизированной
осью ха антенной системы и направлением на цель изменяется в процессе самона-
ведения от нуля до некоторого установившегося значения Фуст = t>max. Для того
чтобы при этом бортовой радиокоординатор не потерял цель, необходимо, чтобы
его угол зрения удовлетворял условию О < i3max. Здесь и далее под полезным углом
зрения понимается такой угол ориентации оси диаграммы направленности антен-
ной системы, в пределах которого сохраняется достаточно надежное измерение
угловых отклонений от оси равносигнальной зоны локатора ха.
Как показано в 176], величина i3max может определяться как (в наших обозначе-
ниях):
(12.23)
4г0
где г0 — расстояние от ракеты до цели в момент начала самонаведения; гОкр — кри-
тическое, т. е. минимальное, значение этого расстояния, при котором ракета успе-
вает до встречи с целью уменьшить ошибку до нуля.
Величина r(1vn примерно равна
гОкр—2р0ДА, (12.24)
где
V2
р
Ро=7^-- (12.25)
ггрм
Соотношение (12.23) справедливо при г0> 2г0кр. Поэтому из (12.23) получается,
что
fl =-^5- (12.26)
м max g * х 7
Отсюда следует, что величина i3max может достигать нескольких градусов и не
может считаться пренебрежимо малой. Кроме того, нужно иметь в виду, что соотно-
шение (12.23) получено без учета возможных маневров цели, непостоянства отно-
522 Глава 12. Высокоточное оружие против радиоэлектронных систем
шения скоростей Р^/Ир, инерционности управления и других факторов. При учете
всех этих факторов величина 0тах может достигать в неблагоприятных случаях
(5... 10)° и даже более. При этом потребуется слишком широкий угол зрения борто-
вого радиокоординатора. Расширение же угла зрения приводит к целому ряду отри-
цательных последствий:
• к увеличению ширины диаграммы направленности антенной системы и соот-
ветствующему уменьшению усиления антенны, а значит, и к уменьшению даль-
ности действия системы самонаведения;
• к уменьшению точности пеленгования цели;
• к ухудшению пространственной избирательности, а следовательно, и ухуд-
шению разрешающей способности и помехоустойчивости системы самонаве-
дения.
Наиболее радикальным путем, позволяющим применить узкий угол зрения О
радиокоординатора, является отказ от применения стабилизированной антенны и
переход к применению автоследящей антенны, т. е. антенны, ось равносигнальной
зоны которой в процессе самонаведения следит за целью.
Функциональная схема системы самонаведения со следящим гироприводом изо-
бражена на рис. 12.8.
Рис. 12.8. Функциональная схема системы самонаведения со следящим гироприводом
Антенная система головки самонаведения со следящим гироприводом устанав-
ливается жестко на стабилизированной платформе. Повороты антенны, необходи-
мые для направления оси ха ее равносигнальной зоны на цель, осуществляются путем
поворотов стабилизированной платформы, а для поворотов платформы использу-
ется явление прецессии гироскопов. Упрощенная схема, поясняющая принцип
действия рассматриваемой системы, изображена на рис. 12.9.
Если приложить момент Мг к внешней рамке 1 гироскопа (рис. 12.9), то внут-
ренняя рамка 2, а следовательно, и ось хг начнут поворачиваться вокруг оси CD с
угловой скоростью 0.и, пропорциональной приложенному моменту:
0а£
(12.27)
Аналогично, если приложить момент к внутренней рамке 2, то ось хг гиро-
скопа начнет прецессировать в плоскости, перпендикулярной оси АВ, с угловой ско-
ростью
0а,=^Му. (12.28)
12.2. Структура и состав аппаратуры головки самонаведения ПРР
523
Рис. 12.9. Стабилизация антенны позиционным гироскопом
Антенная система А жестко связана с внутренней рамкой гироскопа и ось ха ее
равносигнальной зоны все время совпадает с осью хг гироскопа. Поэтому моменты
Мг и Му вызывают повороты оси хг = ла в плоскостях, перпендикулярных соответ-
ственно осям CD и АВ с угловыми скоростями 0аги 0aj.
В соответствии с изложенным принципом моментные моторы (точнее — устрой-
ства создания момента — задатчики моментов), создающие моменты Мг и Му во-
круг двух ортогональных осей, заставляют стабилизированную платформу с антен-
ной системой прецессировать также вокруг двух перпендикулярных осей с угловы-
ми скоростями 6аг и пропорциональными приложенным моментам.
Перед началом самонаведения переключатель П2 разомкнут, а П1 находится в
положении 1. При этом команды целеуказаний поступают на моментные моторы
и заставляют платформу прецессировать до тех пор, пока ось ха антенной системы
совпадет с направлением на цель. После этого переключатель П1 переходит в по-
ложение 2, и устанавливается процесс автослежения радиокоординатора за целью.
Затем замыкается переключатель П2, и начинается процесс самонаведения ракеты.
Следящая система, состоящая из стабилизированной платформы, моментных
моторов и усилителя, называется гироприводом: производимые ею повороты ан-
тенной системы происходят за счет прецессии гироскопов.
Для малых отклонений углового положения равносигнального направления ха
от направления линии визирования систему самонаведения со следящим гиропри-
водом можно приближенно считать линейной, действующей в соответствии со струк-
турной схемой рис. 12.10.
Рис. 12.10. Структурная схема системы самонаведения
со следящим гироприводом
Систему, изображенную на рис. 12.10, можно характеризовать операторными
коэффициентами передачи ^(р) и Аггп(/?) соответственно, т. е. полагать, что
"Bb.x(') = *n(/^(') (12.29)
И
G) — ~^гп (/О^вых М’ (12.30)
524 Глава 12. Высокоточное оружие против радиоэлектронных систем
где /ГГ[1 (р) = аКм (р) Ку (р); р = Км (р) и Ку (р) — коэффициенты передачи мо-
ментного мотора и усилителя соответственно.
Из рис. 12.10 следует, что
ДО = ^-'Оа. (12.31)
С учетом (12.31) в соответствии со структурной схемой рис. 12.10, а также со-
отношений (12.29) и (12.30) можно установить, что
<12 32>
Если измеряемая угловая скорость постоянна, т. е.
= (12.33)
где Qo = const, то значения мвых (/) и О(/) в установившемся режиме (при /-»«>)
могут быть найдены из (12.32), если в них положить d(/) = Q0 и р = 0. Поэтому ус-
тановившиеся значения равны
выху " (0) (12-34)
и
''i.ftiijsi' (1235)
где ATni(O) и ^п(0) —значения коэффициентов передачи А"гп(р) и Л"п(р)прир= 0,
т. е. при нулевой частоте.
Из формулы (12.34) следует, что в установившемся режиме напряжение на вы-
ходе радиокоординатора головки самонаведения оказывается пропорциональным
угловой скорости Qo вращения линии визирования цели г в инерциальной системе
координат. Поэтому оно может быть использовано для образования команд, управ-
ляющих рулями ракеты.
Если из-за движения ракеты и под действием различных дестабилизирующих
, dfi
факторов измеряемая угловая скорость — изменяется во времени, выходное на-
dt
пряжение ивых (/) будет отличаться от этой угловой скорости на величину динами-
ческой ошибки. Но динамические ошибки возникают и при других способах изме-
рения угловой скорости. Поэтому наличие этой ошибки нельзя считать специфи-
ческим недостатком системы со следящим гироприводом.
Из формулы (12.35) следует, что ось равносигнальной зоны ха направлена на
цель не точно, а с ошибкой, установившееся значение которой тем больше, чем
больше измеряемая угловая скорость Qo и чем меньше произведение коэффициен-
тов передачи Лггп(р)Лгп(р). Для того чтобы иметь возможность осуществлять на-
дежное сопровождение цели по угловым координатам при достаточно малом угле
зрения радиокоординатора, необходимо, чтобы ошибка (р и, в частности, ее уста-
новившееся значение фу были малы. Для этого, как следует из (12.32) нужно пра-
вильно выбирать произведение Кги (р)Ки (р) передаточных функций пеленгатора
и гиропривода и, в частности, обеспечить достаточно большое значение этого про-
изведения при р = 0, т. е. при нулевой частоте. Поэтому объектами РЭБ могут быть
как радиосистема наведения оружия, так и пеленгатор ГСН. Пеленгатор может быть
подавлен эффективными «угловыми» помехами.
12.2. Структура и состав аппаратуры головки самонаведения ПРР
525
Функциональная схема системы самонаведения с автоследящей антенной и
скоростной коррекцией изображена на рис. 12.11.
Силовой
привод
I
1
Корпус ракеты
Рис. 12.11. Функциональная схема системы самонаведения со скоростной коррекцией
Антенна устанавливается на корпусе ракеты таким образом, чтобы ось ха ее рав-
носигнальной зоны могла поворачиваться в пространстве следящими моторами М.
Перед началом процесса самонаведения переключатель П1 находится в поло-
жении 1, а ключи П2 и ПЗ разомкнуты. При этом команды целеуказаний устанав-
ливают ось ха в направлении на цель, т. е. обеспечивают грубое выполнение усло-
вия О = 0. После этого переключатель П1 переводится в положение 2 и устанавли-
вается режим автослежения пеленгатора за угловыми координатами цели. Затем
замыкаются контакты П2 и ПЗ и начинается самонаведение ракеты. При этом на
вход автопилота поступают напряжения ивых1 и ивых2 от гироскопического датчика
угловых скоростей (скоростного гироскопа) и от пеленгатора соответственно.
Датчиками угловых скоростей служат прецессионные (скоростные) гироскопы,
жестко связанные с антенной А рис. 12.12.
Рис. 12.12. Скоростной гироскоп — датчик угловой скорости
При вращении рамки гироскопа вокруг оси у возникает момент, вращающий
рамку вокруг оси г, так, чтобы кратчайшим путем установить ось ротора х парал-
лельно оси у и чтобы скорости со и Ф складывались.
Величина этого момента М пропорциональна угловой скорости
Mz=lb (12.36)
где I — момент инерции гироскопа относительно оси х.
526
Глава 12. Высокоточное оружие против радиоэлектронных систем
Если уравновесить момент Mz моментом пары сил упругости пружин, прикреп-
ленных к рамке, то по величине упругой деформации этих пружин можно судить
об угловой скорости вращения рамки. С этими пружинами связаны потенциомет-
рические датчики, которые позволяют измерить величину упругой деформации,
пропорциональную моменту Mz, и следовательно, угловой скорости вращения линии
визирования
При поворотах антенны они выдают напряжения пропорциональные О:
at
где —- — как и прежде, угловые скорости вращения антенны в инерциальнои
dt
(гироскопической) системе координат; Кд — константы.
Напряжение ивых2 при точной работе пеленгатора пропорционально ошибке
сопровождения цели, т. е.
«ВЫХ2=КЛ- (12-38)
Из рис. 12.11 следует, что ф = фа + Ф и ф = фа +Ф. Поэтому для получения на-
пряжения, пропорционального угловой скорости —, в автопилоте производится
dt
дифференцирование напряжения ивых2 и последующее суммирование с напряже-
нием ивых1, т. е. образуется сигнал
и = нВь1Х1+^^- (12.39)
Если выполняется условие Кл = Кд, то из (12.37), (12.38) и (12.39) получается
u-К (12-40)
д dt ’
т. е. полученное в автопилоте результирующее напряжение и действительно оказы-
db
вается пропорциональным угловой скорости —— линии визирования цели в инер-
dt
циальной системе координат, несмотря на наличие ошибки автослежения ф.
Преимуществом системы со скоростной коррекцией по сравнению со всеми
рассмотренными ранее является установка антенны на корпусе ракеты, а не на ста-
билизированной платформе. Благодаря этому конструкция системы значительно
упрощается. Однако при установке антенны на корпусе возникает весьма существен-
ный недостаток вследствие появления паразитной обратной связи через корпус
ракеты.
Если под действием рулей или по каким-либо иным причинам произошел по-
ворот корпуса ракеты, то в силу инерционности следящих моторов М, произойдет
поворот корпуса антенны, а значит, и оси ха на некоторый угол А. При этом, как
следует из рис. 12.12, углы фаи О получают приращения, равные по величине и
обратные по знаку, т. е. примут значения
Фа=Фа+А И $а=Фа+Д. (12.41)
Поэтому напряжения иВЬ1Х1 и иВЬ1х2 будут
ивых1 = Кд (рфа + рД) и ивых2 = кд (•& - Д), (12.42)
а результирующее напряжение и окажется равным
и = (Кд/хра + рКпе) + (КдрДа - рКпд). (12.43)
12.3. Пеленгаторы пассивных радиоголовок самонаведения 527
Если условие Кп = (условие компенсации ошибки автослежения ср) выпол-
няется точно, то слагаемое за вторыми скобками в (12.43) равна нулю, т. е. появ-
ление отклонения А не сказывается на величине результирующего выходного сиг-
нала и и, следовательно, не вызывает никакого дополнительного отклонения ру-
лей ракеты. Однако в действительности это условие идеально точно выполняться
не будет и отклонение А вызовет изменение и, образуемого в автопилоте, а следо-
вательно, и некоторое отклонение рулей. Но отклонение рулей вызовет новый
поворот корпуса ракеты, т. е. цепь обратной связи замкнется.
Следовательно, в системе имеется паразитная обратная связь, замыкающаяся
через корпус ракеты. Это затрудняет обеспечение устойчивости управления раке-
той и понижает точность управления.
В описанных выше системах самонаведения связь через корпус ракеты практи-
чески отсутствует вследствие того, что корпус ракеты развязан относительно кор-
пуса антенны стабилизированной платформой. В системе на рис. 12.11, как пока-
зано, такая развязка может быть практически достигнута лишь при достаточно точ-
ном выполнении условия компенсации Кп = Ка.
Из приведенного ранее описания трех способов измерения угловой скорости
вращения линии визирования следует, что каждый из этих способов имеет как
достоинства, так и недостатки. При небольших габаритах стабилизируемой части
антенно-фидерной системы предпочтение отдается антенне со следящим гиропри-
водом, а при больших габаритах может оказаться целесообразным применение
автоследящей антенны, установленной на корпусе ракеты.
12.3. Пеленгаторы пассивных радиоголовок самонаведения
Компоновочная схема, дающая представление об общем виде и составе борто-
вых агрегатов современной ракеты класса «воздух — поверхность», специально пред-
назначенной для поражения радиоэлектронных систем и средств, представлена на
рис. 12.13.
Головка Отрывной Блок Электромеханический Электромеханический
самонаведения Автопилот разъем предохранения взрыватель рулевой привод
Боевая часть
фугасного типа
Т вердотопливный
двигатель
Антенный Аккумуляторная Неконтактный
блок ГСН батарея радиооптический
взрыватель
Рис. 12.13. Компоновка противорадиолокационной ракеты
Датчики угловых координат и угловых скоростей целей, входящие в состав радио-
координаторов головок самонаведения, реализуют равносигнальные методы пеленга-
ции. Вообще говоря, радиопеленгаторы могут быть построены на принципах после-
довательного и одновременного (моноимпульсного) сравнения принимаемых сиг-
налов. Все современные радиоголовки самонаведения используют пеленгаторы с
мгновенным равносигнальным направлением (моноимпульсные пеленгаторы). Они
по принципу действия весьма устойчивы к помехам, излучаемым из точки распо-
528
Глава 12. Высокоточное оружие против радиоэлектронных систем
ложения цели (пространственно совмещенным с целью). А пространственно раз-
несенные помехи такими пеленгаторами селектируются за счет соответствующего
выбора характеристик направленности антенных подсистем. Поэтому именно мо-
ноимпульсные пеленгаторы используются во всех современных головках самона-
ведения ПРР. Принцип использования моноимпульсных пеленгаторов ракетами с
радиоголовками самонаведения иллюстрируется рис. 12.14.
Рис. 12.14. Радиоголовка самонаведения с моноимпульсным пеленгатором
Обобщенная структурная схема такого пеленгатора при амплитудном и фазовом
методах пеленгации представлена на рис. 12.15. Антенная подсистема пеленгатора
состоит из четырех элементов — AI, АП, AIII, AIV, взаимное расположение которых
условно показано на рис. 12.15, а ориентация ДНА иллюстрируется рис. 12.16, а
для моноимпульсных пеленгаторов с амплитудной обработкой и рис. 12.16, б для
фазовой обработки принимаемого сигнала.
Рис. 12.15. Схема моноимпульсного пеленгатора
В зависимости от положения парциальных диаграмм направленности в такой
схеме может быть реализована либо амплитудная, либо фазовая пеленгация цели.
При амплитудной пеленгации фазовые центры отдельных элементов антенны рас-
12.3. Пеленгаторы пассивных радиоголовок самонаведения
529
полагаются достаточно близко друг от друга, а максимумы диаграмм их направлен-
ности смещаются относительно оси антенной системы (равносигнального направ-
ления) на некоторый угол 0О (рис. 12.16, а).
Рис. 12.16. Ориентация парциальных диаграмм направленности
антенн моноимпульсного пеленгатора
При фазовой пеленгации фазовые центры отдельных элементов антенной сис-
темы разнесены на расстояние d, а максимумы их диаграмм направленности ори-
ентированы вдоль оси антенны (рис. 12.16, б). Кроме того, опорное напряжение,
подаваемое на фазовые детекторы с выхода суммарного канала, отличается на л/2
от опорного напряжения в амплитудном пеленгаторе.
В состав антенной системы моноимпульсного пеленгатора (рис. 12.15) кроме
собственно антенн AI...AIV входят четыре высокочастотные суммарно-разностные
схемы. В современных антенных системах суммарно-разностные схемы образуют с
антеннами единую компактную конструкцию.
На выходе суммарно-разностных устройств формируются три ВЧ-сигнала: два
разностных, несущих информацию об угловом отклонении цели от равносигналь-
ного направления (РСН) в плоскостях курса (мДк)и тангажа (мДт), и суммарный
(опорный) сигнал
Тремя идентичными смесителями, работающими с общим гетеродином, эти сиг-
налы переносятся на промежуточную частоту, усиливаются соответствующими УПЧ
и подаются на фазовые детекторы каналов курса и тангажа. На выходах фазовых
детекторов при работе пеленгатора с непрерывным сигналом формируются постоян-
ные или медленно меняющиеся с изменением пеленга напряжения. При импульс-
ном сигнале на входе пеленгатора фазовые детекторы будут формировать последо-
вательности видеоимпульсов, огибающая которых содержит ту же информацию об
угловых ошибках слежения за целью, что и постоянное напряжение при непрерыв-
ном входном сигнале. Уровни напряжений на выходах фазовых детекторов харак-
теризуют угловые отклонения цели от равносигнального направления в соответству-
ющих плоскостях, а полярность определяется направлением отклонения.
Если повернуть антенную систему пеленгатора так, чтобы напряжения на вы-
ходах ФДк и ФДт были бы равны нулю, то ось антенной системы укажет направ-
ление на цель. Таким способом осуществляется определение угловых координат цели
в угломерах с механическим смещением равносигнального направления антенны.
Нормировка выходного напряжения, т. е. устранение влияния изменений ин-
тенсивности принимаемого сигнала на крутизну пеленгационной характеристики,
в схеме рис. 12.15 осуществляется с помощью автоматической регулировки усиле-
ния (АРУ) приемника. Наряду с этим в амплитудных пеленгаторах применяется нор-
530
Глава 12. Высокоточное оружие против радиоэлектронных систем
мировка с помощью логарифмических УПЧ, а в фазовых — путем использованием
схем ограничения уровня сигнала. При любом варианте выполнения нормировки
ее применение позволяет получить на выходах ФДк и ФДт напряжения, пропор-
^Ак ^Ат
циональные отношениям и разностных и суммарного сигналов.
В идеальном пеленгаторе при полной идентичности амплитудно- и фазочастот-
ных характеристик каналов
«д. = - е0 )cos(ov + q>) - F(Q + е0 )cos(oV - ф)],
иъ = ^C7[77(0-0o)cos(co/ + (p) + 77(0-i-0o)cos(co/-(p) ,
где U — амплитуда сигнала в антеннах (одинаковая для всех четырех антенн); К—
коэффициент усиления, одинаковый (в идеальных условиях) для всех каналов схе-
мы рис. 12.15; /’(О) — нормированная диаграмма направленности антенн; 0О — уг-
ловое смещение максимумов диаграммы направленности относительно равносиг-
Az/sin0
нального направления; со — частота принимаемого сигнала; ср = — --фазовый
сдвиг сигнала в антеннах, обусловленный смещением цели на угол 0 относительно
. 2л
равносигнального направления; к =-----модуль волнового вектора принимаемо-
X
го сигнала (пространственная частота); 2d — расстояние между фазовыми центра-
ми антенн (рис. 12.16, б); и^ — может быть напряжением в любом разностном кана-
ле — и курса, и тангажа.
Кроме того, в суммарном канале для реализации фазовой обработки может
, л
присутствовать фазовращатель на V = “•
Фазовые детекторы перемножают сигналы, поданные на входы. Поэтому
^фд • ~ «Д &
jF2(0-0o)-772(0 + 0o) cos\|/ +
+2JF(0-0o)77(0 + 0o)sin2(psin\|/}.
(12.45)
На основании (12.44) можно найти соотношения для пеленгационных характе-
ристик ГСН.
При амплитудной обработке сигнала в моноимпульсном пеленгаторе <р = 0 и у = 0,
поэтому из (12.45) следует, что
/ ) . ,Л(е~ео)-^(е + ео)
I фд)а F(e-e0)+F(e+e0)’
(12.46)
или, представляя ДНА усеченным степенным рядом в окрестности максимума,
F(e±e0)=F(e0)+F''(e0)e. <12.47>
Из (12.46) и (12.47) следует, что
Ы s‘m)6, <12-48)
и крутизна пеленгационной характеристики в окрестности точки 0 = 0 (при точном
слежении за целью по углам) составляет
dMa
je F(e0)
е=о
и увеличивается с ростом «остроты» диаграммы направленности антенны
(12.49)
Г"(6).
12.4. Антенны головок самонаведения противорадиолокационных ракет
531
При фазовой обработке в пеленгаторе 0О = 0 и \|/ = — и, как следует из (12.45),
)ТШ тш
A=*tg ^-sinQ =Atg —0 ,
Ф Л J Л
(12.50)
где d — база антенной системы (рис. 12.16).
Крутизна пеленгационной характеристики при точном слежении за целью по
углам
(ЦФд)ф
J0
-A; sec2
е=о
kJ
т<<:
(12.51)
(ndy
тем больше, чем больше база пеленгатора J. Вернее, крутизна монотонно растет с
d
увеличением масштаба антенной системы —.
2
Предельная точность оптимального пеленгатора характеризуется дисперсией ое
ошибки измерения углового рассогласования 0, которая выражается через крутизну
пеленгационной характеристики и связана с шириной диаграммы направленности
антенны, а также с соотношением сигнал/шум q в полосе приемника головки само-
наведения.
На основании выражений (12.50) и (12.51) можно получить линеаризованные
модели пеленгаторов для анализа динамических свойств контура самонаведения.
Кроме того, соотношения (12.50) и (12.51) позволяют оценивать ошибки пеленго-
вания при действии различных помех.
12.4. Антенны головок самонаведения противорадиолокационных ракет
Для универсальности головки самонаведения антенные системы ПРР должны
иметь весьма высокую широкополосность, принимать сигналы любых поляриза-
ций и обеспечивать работу моноимпульсного пеленгатора, определяющего угловые
координаты цели и обеспечивающего сопровождение излучающей цели по направ-
лению. Диапазон рабочих частот РЭС вообще и РЛС в частности имеет тенденцию
к расширению в сторону все большего значения несущих и все более широкой
полосы сигнала. Поэтому конструкция антенны должна обеспечивать постоянство
(точнее — сохранение в допустимых пределах) электрических свойств в максимально
широком диапазоне частот при любых поляризациях. В этом состоит существен-
ное и главное отличие антенн головок самонаведения от антенн других РЭС.
При проектировании антенн приходится делать различие между полосой час-
тот и частотным диапазоном. Под полосой частот понимается частотный интервал,
который используется РЭС и в котором сосредоточена основная мощность излуча-
емого РЭС сигнала. Частотный диапазон — это множество всех частот, на которых
могут работать РЭС, назначаемые целями ПРР.
В диапазоне СВЧ электрические свойства антенн даже и в широкой полосе
нетрудно поддерживать в известной мере постоянными. Иное дело — обеспечивать
работу в расширенном диапазоне частот. При этом иногда требуется получить от-
ношение граничных частот диапазона от 1:10 и вплоть до 1:20. В пределах этого
диапазона электрические свойства антенны, т. е. характеристики направленности,
усиление и согласование с линией отвода сигнала, должны или оставаться посто-
янными, или изменяться в допустимых пределах.
532
Глава 12. Высокоточное оружие против радиоэлектронных систем
Последующее изложение относится к антеннам, по принципу своей конструк-
ции имеющим возможность работать в широком диапазоне частот. При этом важную
роль играют те формы антенн, которые могут быть получены из идеальных частотно
независимых структур и у которых все электрические свойства в рабочем диапазоне
приблизительно постоянны.
Для направленных антенн СВЧ, например зеркальных, существуют две основные
возможности для обеспечения широкополосности. Можно потребовать, во-первых,
постоянства характеристики направленности и усиления антенны в рассматривае-
мом частотном диапазоне и, во-вторых, постоянства действующей поверхности
антенны, т. е. усиления, возрастающего с частотой по квадратичному закону. Для
зеркальной антенны второе требование хорошо выполняется и эффективная поверх-
ность S примерно равна геометрической. Но при этом для коэффициента усиле-
ния справедливо соотношение
С = 4лДр (12.52)
Иначе говоря, требования постоянства усиления и постоянства характеристи-
ки направленности зеркальной антенны не могут быть выполнены независимо. Для
выполнения этих требований освещаемая область зеркала должна быть пропорци-
ональна квадрату длины волны при сохранении амплитудно-фазового распределе-
ния поля на поверхности антенны. Это условие приближенно выполняется, если
антенна удовлетворяет первому названному требованию, т. е. если се эффективная
поверхность постоянна, так как в этом случае поперечное сечение основного лепе-
стка первичного излучения пропорционально квадрату длины волны. При реали-
зации широкополосных антенн должны быть выполнены, кроме того, другие тре-
бования, в частности, относительно уровня боковых лепестков излучения.
12.4.1. Принципы конструирования широкополосных антенн
Теоретически можно найти и указать антенные структуры, электрические свой-
ства которых не зависят от частоты. Эти структуры могут быть сконструированы
на основе следующих простых принципов.
Если металлическая конструкция, состоящая из нескольких, минимум — двух
отдельных частей, используется в качестве антенны, то характеристика направлен-
ности такой конструкции и согласования с линией отвода сигнала зависят от гео-
метрической формы конструкции и от отношения ее линейных размеров к длине
волны. Если размеры антенны увеличиваются или уменьшаются пропорционально
длине волны, то ее электрические свойства не меняются. Если же абсолютные раз-
меры антенны несравнимы с длиной волны, то очевидно, что ее свойства не будут
зависеть от частоты — антенна станет частотно независимой.
Подобная конструкция, осуществимая, строго говоря, лишь теоретически, долж-
на обладать следующими свойствами:
• конструкция должна иметь бесконечные размеры, в противном случае она бу-
дет обладать резонансными свойствами и эти свойства определятся максималь-
ным размером;
• точки, от которых отводится энергия, должны бесконечно близко прилегать
одна к другой; в противном случае появился бы минимальный размер, кото-
рый опять определил бы резонансные свойства всей системы;
12.4. Антенны головок самонаведения противорадиолокационных ракет
533
• конструкция должна определяться только заданием углов; уместно отметить,
что это свойство включает в себя оба предыдущих.
Можно указать довольно много структур, удовлетворяющих сформулированным
требованиям. Но для практической реализации особенно важны поверхностные и
прежде всего плоские антенные системы.
Применительно к плоским антеннам класс кривых, ограничивающих бесконеч-
ные структуры и определяемых только угловыми размерами, может быть выделен
следующим образом. Введя полярную систему координат р, (р, а также потребовав,
чтобы ограничивающая форму плоской антенны кривая р(ф) переходила бы сама
в себя при изменении масштаба по р и отличалась от первоначальной лишь пово-
ротом на некоторый угол ф = у, можно получить уравнение кривой в виде [71]
Ар(<р) = р(фу), (12.53)
где к — коэффициент изменения масштаба; у — угол поворота всей первоначаль-
ной кривой, соответствующий такому изменению масштаба. Понятно, что угол у
должен зависеть от к, однако ни к, ни у не должны зависеть от р и ф. Это приводит
к следующим условиям:
г/у dy
4>(<P+y) (12.54)
dip dip
причем, кроме того, должно выполняться равенство
<Ф(ф + т) = Ф(ф+т) = ^р(ф-ьт) (12 55)
dy </(ф + у) dip
Из формулы (12.54) с учетом (12.55) следует дифференциальное уравнение для
функции р(ф):
, ,dk ,<Ф(ф) <Ф(ф) „,..х
р(ф)— =к или = °Р> (12.56)
dy dip dip
1 dk
где a =----является некоторой новой постоянной.
к dy
Решение уравнения (12.56) представляет собой логарифмическую спираль:
р(ф) = Лехр{о(<р + <р0)}. (12.57)
В формуле (12.57) А и ф0 — постоянные величины, определяющие масштаб по
координате р и первоначальный угол поворота витка. Параметр а равен котангенсу
угла 0 между радиусом р и касательной к спирали.
Таким образом, форма плоских частотно независимых бесконечных антенн долж-
на быть ограничена логарифмическими спиралями, имеющими одинаковую вели-
чину параметра а. Последнее необходимо для отсутствия перекрытия отдельных
частей антенны в начале координат, где должен осуществляться отвод энергии.
Пример бесконечной эквиугловой структуры, образованной парой спиральных плеч,
показан на рис. 12.17.
Максимумы диаграммы направленности таких антенн ориентированы перпен-
дикулярно к плоскости спиралей в обоих направлениях и при идеальных условиях
ДНА обладает круговой поляризацией. На рис. 12.18 показаны типичные ДНА в
главных плоскостях [71].
534
Глава 12. Высокоточное оружие против радиоэлектронных систем
Рис. 12.17. Принцип построения равноугольной
широкополосной спиральной антенны
Рис. 12.18. Типичные диаграммы направленности
логарифмической спиральной антенны
Спиральная антенна считается частотно независимой в том смысле, что от ча-
стоты принимаемого сигнала не зависит форма, но не ширина диаграммы ее на-
правленности. Так расчеты показывают, что при изменении частоты принимаемо-
го сигнала от 1 до 12 ГГц, ширина диаграммы направленности изменяется с НО до
60°. При изменении частоты происходит также поворот диаграммы направленно-
сти вокруг оси антенной системы.
Аналогичный анализ по выделению класса частотно независимых бесконечных
структур может быть проведен и в трехмерном пространстве в сферических коор-
динатах R, О, ср, исходя из условия
¥0>,ф) = /(*>',ф')’ (12.58)
где /"(д) —первоначальная форма антенны; /(д', <р') соответствует такому пово-
роту антенны в пространстве, который эквивалентен изменению размеров в к раз.
Условию (12.58) удовлетворяет решение вида
К(д,ф) = ехр{а(ф + ф0)}/’(д), (12.59)
где /(0,<р) представляет собой любую функцию, а ось изменения масштаба совпа-
дает с осью z сферической системы координат.
Уравнение (12.59) выделяет целый класс пространственных, так называемых
эквиугловых, спиралей, которые могут ограничивать форму частотно независимых
антенн.
На рис. 12.19 приведен пример пространственной системы. Эта коническая
структура обладает хорошими электрическими и конструктивными свойствами. Если
плоскую систему спроектировать на конус, то получится аналогичная конструкция
с симметричным питанием. Как правило, коаксиальный кабель подводится к точке
питания в вершине конуса вдоль ветви, а для сохранения симметрии соответству-
12.4. Антенны головок самонаведения противорадиолокационных ракет 535
ЮЩИЙ кабель Прокладывается И ПО другой ветви. Пи- Направление излучения
тание осуществляется так же, как и в случае плоской k
системы. Максимум приема ориентирован в направ-
лении вершины конуса. Такая антенна, так же как и
плоская, обладает круговой поляризацией.
Частотно независимые свойства спиральных ан-
тенн можно качественно объяснить, если предполо-
жить, что при средней длине спирали, равной при-
близительно длине волны, появляется резонансный
эффект, который обуславливает высокий уровень при-
нимаемого сигнала. Опыт показал, что в случае наи-
более употребительных форм антенн диаграмма на- Рис* пРостРанственная
J г 'г г г логарифмическая спиральная
правленности в этом смысле практически определяет- антенна
ся лишь приемом сигнала в области первого резонан-
са. С помощью системы, состоящей более чем из двух ветвей с соответствующим
питанием, можно получить конический лепесток диаграммы направленности, при-
чем прием в осевом направлении будет отсутствовать.
Кроме логарифмической спиральной антенны, исследовались другие типы спи-
ральных антенн, которые обладают подобными же свойствами. Например, антен-
на в виде спирали Архимеда, границы которой для плоского случая определяются
уравнениями вида
р = лср + 6. (12.60)
Несмотря на то, что при конечных размерах такой антенны не может быть и
речи о частотно независимой структуре в прямом смысле этого слова, на практике
она обладает довольно хорошими широкополосными свойствами, которые сравнимы
со свойствами логарифмической спиральной антенны. В частности, при правиль-
ном выборе размеров внешний диаметр в этом случае также приблизительно ра-
вен половине максимальной длины волны рабочего диапазона.
Замечательной особенностью как плоских, так и пространственных эквиугло-
вых спиральных структур является своеобразная автоматическая «отсечка» излуча-
ющих токов. Это явление состоит в том, что амплитуды токов, возникающих в
плечах спирали и создающих колебание в центре структуры, резко уменьшаются
(в 100 раз и более) после прохождения того витка спирали, периметр которого при-
мерно равен длине волны. Остающаяся невозбужденной внешняя часть структуры
может быть обрезана, и это почти не сказывается на характеристике диаграммы
направленности и входном импедансе остающейся части. Явление отсечки токов
впервые было обнаружено экспериментально и впоследствии подтверждено с по-
мощью электродинамических расчетов.
Благодаря отсечке токов в формировании диаграммы направленности эквиугло-
вой спиральной структуры конечных размеров участвует только центральная часть
с диаметром, примерно равным одной трети длины волны (так называемая актив-
ная область). При изменении частоты электрические размеры активной области
остаются постоянными и в результате возможно создание антенн с достаточно по-
стоянным входным импедансом и почти неизменной характеристикой направленно-
сти в двадцатикратном и даже большем диапазоне частот. Нижняя граница рабочего
диапазона определяется из условия равенства длины волны периметру последнего
витка структуры. Верхняя граница рабочего диапазона определяется соизмеримостью
536
Глава 12. Высокоточное оружие против радиоэлектронных систем
с длиной волны области возбуждения антенны, где геометрия спиральных линий
оказывается нарушенной из-за наличия соединения с фидерной линией.
При создании плоских спиральных эквиугловых структур, а также в ряде дру-
гих случаев определенное значение имеет также еще одно обстоятельство, связан-
ное с принципом двойственности. Дело в том, что плоская структура, определяе-
мая угловыми размерами, может одновременно трактоваться и как электрическая
(вибраторная), и как магнитная (щелевая) излучающая система. Обозначив абсо-
лютный входной импеданс структуры через Zx можно отметить, что согласно прин-
ципу двойственности при взаимной замене металлической и щелевой частей струк-
туры ее импеданс изменяется и принимает величину Z2, определяемую, согласно
работе [71], соотношением
z7 = _^о_=(60я) (12.61)
' 4Z, Z, ’
где Wq - 120л Ом — волновое сопротивление свободного пространства.
При совпадении форм электрической и дополнительной магнитной частей струк-
туры имеет место равенство - Z2 и входной импеданс структуры оказывается
равным
Z{ =Z2 =60л Ом (12.62)
на любой частоте в широкой полосе частот.
Таким образом, в случае реальных антенн с повышенной полосой пропускания
добавляются другие факторы, которые при известных обстоятельствах могут иметь
большее значение, чем основные теоретические принципы. Можно было бы думать,
что отклонения от положенных в основу идеальных принципов, неизбежные при
реализации, влекут за собой такие радикальные изменения в частотной характери-
стике, которые исключают возможность получения полосы пропускания, превы-
шающей полосу пропускания обычных антенн. Но это не совсем так. Тем не менее
оказалось, что во многих случаях практически можно лучше достигнуть цели, если
с самого начала учесть эффекты, обусловленные конечными размерами.
12.4.2. Антенные системы противорадиолокационных ракет
Антенные системы ПРР должны обеспечивать работу моноимпульсного пелен-
гатора. Поэтому антенный блок должен состоять, как минимум, из четырех антенн.
Кроме того, антенная система должна работать в двух режимах. В режиме поиска
и обнаружения для антенной системы предпочтительна широкая диаграмма направ-
ленности, перекрывающая всю область неопределенности углового положения из-
лучающей цели. В пределе — область, совпадающую со всей передней полусферой
ПРР. В режиме сопровождения по углам диаграмма направленности бортовой антен-
ны ПРР должна быть узкой. Чем уже, тем точнее пеленг. Но сужение диаграммы
направленности сужает и область слежения за целью. Кроме того, на выбор шири-
ны и формы диаграммы направленности оказывают влияние чисто технические
ограничения: размеры антенн, лимитируемые размерами корпуса ракеты, а также
длина волны, которая выбирается не произвольно, а определяется рабочим диапа-
зоном РЛС, являющейся целью ПРР. Отсюда очевидно наличие некоего оптимума
ширины ДНА.
Специфика применения антенн в комплексе управления наведением ПРР требу-
ет также, чтобы антенный блок был подвижным, следящим за меняющимся в процес-
се полета направлением на цель и позволяющим определять угловую скорость вра-
12.4. Антенны головок самонаведения противорадиолокационных ракет
537
щения линии визирования. Знание угловой скорости перемещения линии визиро-
вания необходимо для реализации метода параллельного сближения ракеты (или
метода пропорциональной навигации, что практически более актуально).
Большинство решений в технике антенн современных ПРР имеют в своей ос-
нове логарифмические спиральные конструкции,
Примерный вид антенного блока на основе плос-
ких широкополосных спиральных антенн приве-
ден на рис. 12.20.
Спиральные антенны на верхнем основании
усеченного конуса используются в режиме слеже-
ния за целью. На работу с антеннами, располо-
женными по боковым поверхностям, головка пе-
реключается при потере сигнала от цели и пере-
ходе в режим поиска.
Конструкция антенного блока ПРР на осно-
ве объемных логарифмических спиралей иллюс-
трируется чертежом рис. 12.21.
Существенно важная подсистема антенных си-
стем ПРР — это антенный обтекатель. Назначение
обтекателей — защита антенн радиоголовки само-
наведения от воздействий внешней среды. К ра-
диопрозрачным антенный обтекателям предъявля-
ется сложный комплекс противоречивых требова-
ний — электродинамических, аэродинамических,
конструктивных и технологических [77]. Сверхзву-
ковые скорости полета современных ПРР опреде-
ляют многие особенности работы обтекателей и
диктуют требования к их свойствам.
Аэродинамический нагрев внешней поверхно-
сти стенок обтекателя предопределяет примене-
ние термостойких конструкционных материалов
и требует использования только гладких внешних
поверхностей. С увеличением скорости темпера-
тура растет: на вершине носового обтекателя сов-
ременного самолета температура может достигать
1400... 1500°C. При резком изменении темпера-
туры пограничного слоя большой градиент темпе-
ратуры внутри стенки может привести к разруше-
нию обтекателя. Поэтому для обтекателей прихо-
дится применять жаростойкие материалы с элект-
рическими параметрами, стабильными в
широком температурном диапазоне.
При больших скоростях полета сквозь полосу
осадков за счет ударов капель дождя, частиц сне-
га и града происходит эрозия поверхности обте-
кателя. Поэтому материал обтекателя должен об-
ладать высокой износоустойчивостью. Поскольку
ПРР обычно подвешиваются под крыльями, они
плоские и пространственные.
Равносигнальное
направление
Рис. 12.20. Антенная подсисте-
ма ПРР на основе плоских
логарифмических спиралей
Равносигнальное направление
Рис. 12.21. Моноимпульсный
пеленгатор с коническими
спиральными антеннами
538
Глава 12. Высокоточное оружие против радиоэлектронных систем
подвержены воздействию пыли и ударам мелких камней при взлете самолета-но-
сителя. Поэтому обтекатели должны иметь высокую ударопрочность. Вершина об-
текателя значительно больше подвержена эрозии, чем боковые поверхности и по-
этому должна защищаться в первую очередь специальным покрытием, металличес-
ким наконечником и т. п. Но такая конструкция приводит к неоднородности
электрических свойств конструкции обтекателя.
Поверхность обтекателя даже при сравнительно небольших скоростях полета
электризуется вследствие трения и этот эффект может привести к импульсным разря-
дам и образованию электрической короны. Для отвода заряда от диэлектрика на
металлический корпус необходимо использовать специальные меры и конструктив-
ные приемы, которые тем не менее не должны заметно ухудшать радиопрозрачность
обтекателей.
Для реализации методов параллельного сближения или пропорциональной нави-
гации антенны ПРР должны иметь управляемые (сканирующие) диаграммы направ-
ленности. Угол падения электромагнитной волны на стенку обтекателя в процессе
работы антенны изменяется. И это изменение не должно приводить к изменению
формы диаграммы. Кроме амплитудных и фазовых искажений падающей волны
при прохождении ее через стенки обтекателя, возникают искажения диаграмм на-
правленности за счет возбуждения вторичных волн на участках с резким наруше-
нием регулярности его поверхности. Более того, искажения фронта волны, прохо-
дящей через обтекатель, становятся причиной появления угловых ошибок в опре-
делении пеленга цели.
Ошибки пеленга — угловые ошибки Дер появляются вследствие смещения равно-
сигнального направления (все современные радиоголовки самонаведения исполь-
зуют моноимпульсные методы пеленгования источников излучения) и отрицательно
сказываются на характеристиках всего контура самонаведения. Величина угловой
ошибки зависит от формы и материала обтекателя, а также, что еще более сущест-
венно, от частоты принимаемого сигнала и от самого пеленга ср. Поэтому при исполь-
зовании обтекателей в головках самонаведения важно учитывать градиент угловой
Э(Дср)
ошибки —— — скорость изменения Дф при изменении положения антенны под
Эср
обтекателем.
Антенны современных ПРР, закрытые обтекателями, должны работать в широ-
кой полосе частот или на нескольких разнесенных частотах. Поэтому обтекатели
должны обеспечивать в широком рабочем диапазоне частот хорошее согласование
внутреннего и внешнего пространства (уменьшение искажения амплитудного и
фазового распределения поля) при прохождении электромагнитной энергии через
его стенку под различными углами падения.
Форма обтекателя ЛА определяется почти исключительно требованиями мини-
мального аэродинамического сопротивления.
Скорости, с которыми движутся современные противорадиолокационные ра-
кеты, заставляют использовать обтекатели соответствующих аэродинамических
форм. Но хорошие с точки зрения аэродинамики формы обтекателей обуславлива-
ют, как правило, невыгодные условия для распространения сквозь них электромаг-
нитных полей, создаваемых источниками радиоизлучения. Возникающие при этом
искажения волнового фронта и, следовательно, диаграммы направленности — при-
чина появления угловых ошибок. Характер и степень этих искажений определяется
формой обтекателя, радиотехническими параметрами его стенок, характером диа-
12.4. Антенны головок самонаведения противорадиолокационных ракет 539
граммы направленности, конструктивными особенностями антенны устройства и
ее размещением относительно радиопрозрачной части обтекателя.
При моноимпульсной пеленгации искажения характеристик угловых ошибок
происходят главным образом за счет изменения пространственной ориентации и
уровня одного из лепестков сканирующей диаграммы по сравнению с другим ле-
пестком или же за счет искажения формы этих лепестков, образующих мгновен-
ное равносигнальное направление.
В основном для ПРР используются обтекатели оживальной формы (рис. 12.22).
Рис. 12.22. Оживальная форма носовой
части ракеты (радиопрозрачного обтекателя)
Такая форма обтекателя может быть представлена телом вращения кривой, ко-
торая описывается степенной функцией
У = кхп (12.63)
вокруг строительной оси ракеты х. При п = 0,5 — это параболоид, при п = 1 — конус.
Величина п = 0,6...0,75 соответствует формам с наименьшим аэродинамическим со-
противлением на сверхзвуковых скоростях.
Но оживальные формы оказываются не самыми лучшими с точки зрения оши-
бок пеленга, вносимых обтекателем. Так крутизна угловой ошибки (ее градиент)
при оживальной форме обтекателя зависит от его удлинения и от длины волны. На
рис. 12.23 приведена зависимость крутизны угловой ошибки от удлинения обтека-
теля оживальной формы [77] (рис. 12.23).
L 1
При удлинении = соответствующем полусферической форме обтекателя,
крутизна угловой ошибки равна нулю. С увеличением удлинения крутизна ошибок
растет. Приведенная зависимость соответствует ожидаемой крутизне угловых ошибок
на одной частоте. При работе в полосе частот крутизна зависимости на рис. 12.23
меняется, монотонно возрастая с увеличением относительной широкополосно-
V
сти —.
Рис. 12.23. Зависимость крутизны угловой ошибки от формы обтекателя
540
Глава 12. Высокоточное оружие против радиоэлектронных систем
Материал обтекателя должен удовлетворять сложному комплексу перечислен-
ных выше требований. В наибольшей степени им отвечают стеклокристаллические
материалы. Они весьма однородны и дают меньший разброс параметров. Керами-
ческие материалы (ситаллы) используются для малогабаритных обтекателей ЛА. Ди-
электрическая постоянная этих материалов — ег = 5,5...9,3, а активные потери весьма
малы — tgS < 10"3. Обтекатели из ситалла и подобной керамики могут успешно
применяться при сверхвысоких скоростях и работать в условиях жесткого термо-
удара (с темпом нагрева до 250...300 °C в секунду). Эти свойства позволяют делать
достаточно прочные обтекатели с тонкими стенками. Из-за малой толщины сте-
нок они мало искажают характеристики антенны.
Стенки обтекателей имеют довольно сложный профиль, который определяется,
главным образом, исходя из требований к радиокоординатору головки самонаве-
дения. Выбором соответствующей конструкции и материала стенок осуществляется
достижение необходимой радиопрозрачности, а также допустимого градиента угло-
вой ошибки обтекателя в заданном диапазоне волн и секторе углов возможной ори-
ентации антенн. Влияние обтекателя на ДНА характеризуется также коэффициен-
том прохождения 7(0) электромагнитной волны через стенки.
Коэффициент прохождения является функцией угла падения волны на поверх-
ность обтекателя и может быть выражен через коэффициент отражения Г(0). Если
пренебречь потерями в стенках,
|r(e)|2 = i-|r(e)|2.
В общем случае, при наличии в обтекателях участков с малыми радиусами кри-
визны (соизмеримыми с длиной волны) определение комплексных коэффициен-
тов 7(0) и Г(0) оказывается весьма сложной задачей. Один из наиболее распрост-
раненных методов ее решения сводится к представлению стенки обтекателя в виде
эквивалентной ступенчатой линии, состоящей из отрезков с разными волновыми
сопротивлениями и геометрическими длинами. Геометрическая длина каждой ступе-
ни равна толщине одного слоя при многослойном профиле стенки обтекателя, а
волновое сопротивление эквивалентного отрезка линии равно волновому сопротив-
лению соответствующей среды и, как известно, зависит от поляризации падающей
волны и угла ее падения.
На практике допустимое значение коэффициента прохождения должно прибли-
зительно удовлетворять условию 7(0)2 > 0,75.
Зная коэффициент прохождения Т электромагнитной волны через стенки обте-
кателя, сечение ДНА в окрестности максимума, с учетом влияния обтекателя, мож-
но определить ДНА в соответствии с соотношением [77]
1
/(б) = j Es |T(0,y)|exp{/Aysin0}exp{/T(0,y)}dy, (12.64)
-1
где Es — амплитудное распределение поля на раскрыве антенны без обтекателя;
7(0, у) — коэффициент прохождения, зависящий от угла 0 и текущей координа-
ты у раскрыва антенны, отсчитываемой от его середины; Т(0, у) — набег фазы вол-
ны, прошедшей через обтекатель, зависящий от тех же переменных.
При отсутствии отклонения луча антенны (0 = 0) смещения максимума диаграм-
мы направленности не наблюдается.
Большой практический интерес представляет расчет конструкции стенок и выбор
материала по заданным амплитудно-фазовым характеристикам обтекателей, т. е.
решение задачи синтеза обтекателя.
12.4. Антенны головок самонаведения противорадиолокационных ракет
541
зоны, минимальное значение модуля градиента угловой ошибки
В качестве критериев оптимизации могут выбираться минимум искажений
амплитудно-фазового распределения проходящей волны в рабочей полосе частот
и требуемом секторе сканирования, минимальные отклонения равносигнальной
э(де)
эе
Электромагнитное поле — векторное, и поэтому радиотехнические параметры
обтекателей существенно зависят от поляризационных характеристик антенн и пада-
ющей волны. Для одних и тех же обтекателей и антенн характеристики угловой
ошибки Д0 = /у (0) и коэффициента прохождения |Г|2 = fn (0) при перпендикуляр-
ной и параллельной ориентации вектора поляризации (вектора Е) относительно
плоскости пеленга цели различны. Эти характеристики изменяются также и при
переходе к круговой или наклонной поляризациям относительно плоскости пеленга.
Поэтому при проектировании и оценке качества обтекателей принимается во внима-
ние характер поляризационных характеристик антенны и поля.
При создании остроконечных обтекателей с малыми угловыми ошибками их ко-
эффициент прохождения в большинстве случаев не является определяющим пара-
метром, и им в разумных пределах можно пожертвовать за счет улучшения харак-
теристик угловых ошибок. Вероятно, предельным значением коэффициента про-
хождения для современных обтекателей с удлинением 2,5...3,0, с которым еще можно
мириться, является 0,7...0,8 [77]. При этом удается получить возможно более рав-
номерную зависимость коэффициента прохождения обтекателей от угла пеленга.
Действительно, изменение коэффициента прохождения через обтекатель в за-
висимости от углов отклонения оси антенны ха от направления строительной оси
ракеты Хр (рис. 12.8) приводит к искажениям основного лепестка ДНА, что, в свою
очередь, является причиной смещения ее максимума и/или равносигнального на-
правления. Приближенная зависимость между крутизной характеристики коэффи-
. Э|г|2
циента прохождения обтекателя , пространственным смещением лучей диа-
Э0
граммы 2у при моноимпульсном пеленговании с амплитудной обработкой и вели-
чиной соответствующей угловой ошибки Дф определяется соотношением [77]:
d|7l2
Дф = 2Y-LJ-.
о U
э|т|2
Например, при крутизне характеристики ' * = 0,02 град"1 и 2у= 4° величина
Э0
угловой ошибки Дф составляет примерно 5 угловых минут, что для большинства
используемых систем является существенной величиной, которую необходимо учи-
тывать. Приведенный пример, соответствующий реальной ситуации, подтвержда-
ет необходимость тщательного радиотехнического расчета при проектировании
обтекателей с уменьшенными угловыми ошибками.
Необходимо отметить, что векторный характер ЭМП обусловливает появление
еще одного вида угловых отклонений ДНА (угловых ошибок), а именно угловых
отклонений в плоскости, перпендикулярной плоскости пеленга, даже при полной
геометрической симметрии системы «антенна — обтекатель» в этой плоскости. Эти
ошибки, получившие название «кросс-ошибок», являются следствием различных
поляризационных искажений фронта прошедшей волны в областях пространства,
лежащих снизу и сверху плоскости пеленга и возникающих в связи с этим фазовыми
искажениями.
(12.65)
542
Глава 12. Высокоточное оружие против радиоэлектронных систем
Анализ показывает [77], что величина кросс-ошибок для остроконечных обте-
кателей оказывается иногда соизмеримой с угловыми ошибками в плоскости пе-
ленга, доходя до 0,1...0,3 их величины. Поэтому для уменьшения величины кросс-
ошибок (уменьшения поляризационных искажений) необходимо выбирать такие
толщины и профили радиопрозрачных стенок обтекателей, которые обеспечивают
близкие по модулю и фазе коэффициенты прохождения для обеих составляющих
падающего поля (поляризованных параллельно и перпендикулярно плоскости па-
дения) в каждой точке поверхности обтекателя.
Величина кросс-ошибок зависит также от качества изготовления обтекателей
(от допусков), от величины диэлектрической проницаемости материала, т. е. от всех
тех факторов, которые влияют также и на угловые ошибки в плоскости пеленга.
Поэтому уменьшение угловых ошибок пеленга сопровождается уменьшением кросс-
ошибок. Справедлива и обратная закономерность: уменьшение поляризационных
искажений прошедшего поля, т. е. уменьшение кросс-ошибок, приводит к умень-
шению угловых ошибок пеленга.
Один из самых старых и традиционных способов защиты от ПРР, не потерявших
актуальность и поныне, — выключение СВЧ-излучения при обнаружении ракетной
атаки. Именно так защищали от ПРР «Shrike» стрельбовые локаторы ЗРК С-75 во
Вьетнаме. Но если атакуется РЛС, имеющая АФАР, против способа защиты, осно-
ванного на прерывании сеанса работы с излучением, существует очевидная контр-
мера. Дело в том, что КПД модулей, составляющих АФАР, невелик и не превосхо-
дит нескольких процентов. Остальная мощность уносится системой охлаждения.
И если даже выключить радиоизлучение, тепловое излучение все равно мгновенно
прекратить нельзя. Поэтому фазированная антенная решетка и после прекращения
работы на излучение в течении длительного времени будет иметь весьма значитель-
ный тепловой контраст с окружающей средой. Настолько значительный, что на
АФАР можно наводить головку с инфракрасным координатором. Мощным источ-
ником ИК-излучения является также подсистема электропитания РЭС.
Головка самонаведения, в которой комплексированы ИК- и радиотехнический
координатор, должна захватить цель по ее радиоизлучению, а сопровождать, объе-
диняя информацию от обоих датчиков.
Антенные обтекатели для двухдиапазонных инфракрасных и радиолокационных
координаторов должны обладать достаточно хорошей прозрачностью на ИК- и
радиолокационных волнах и не должны вносить существенных искажений в ДНА
радиодиапазона и в изображение цели — на ИК-волнах. Основные трудности со-
здания таких обтекателей заключаются в том, что большинство существующих
материалов, в конструктивном отношении пригодных для обтекателей рассматри-
ваемого типа (например, специальные стекла), обладают в диапазоне ИК-волн (от
0,5 до 6...7 mkmJ существенными потерями. Потери приводят к резкому снижению
прозрачности при толщинах стенок более 3,0...4,0 мм. Ограничение толщины, в свою
очередь, во-первых, сужает круг пригодных к использованию материалов из-за
недостаточной их механической прочности и, во вторых, не позволяет применять
полуволновые (т. е. оптимальные по толщине) стенки, удовлетворительные с точ-
ки зрения прозрачности на волнах радиодиапазона. Даже для волн сантиметрово-
го диапазона эта толщина должна быть ~ (4,0...4,5) мм.
Требования к качеству изображения цели на волнах ИК-диапазона являются
определяющими при выборе формы обтекателя. Поэтому могут использоваться
12.4. Антенны головок самонаведения противорадиолокационных ракет
543
только сферические или пирамидальные обтекатели, так как при всех положениях
сканирующей антенны лишь для них изображение цели (т. е. тепловое пятно на
поверхности ИК-приемника) остается неискаженным. Все другие формы (в том
числе и коническая) приводят к недопустимо большим искажениям теплового пятна.
Для скоростных объектов предпочтительными являются пирамидальные обтекате-
ли с 8... 10 гранями и углом при вершине не более 40°. При этом допускаются до-
полнительные изломы по образующей, дающие возможность аппроксимировать
обводы оживальной формой. Для предотвращения искажений изображения цели
грани обтекателей должны быть плоскопараллельными и иметь поверхности, обра-
ботанные с оптической чистотой и точностью [77].
При разработке обтекателей на совмещенные ИК- и радиоволны перед конст-
руктором встают две достаточно обособленные группы вопросов.
1. Выбор (или разработка) технологичного, механически прочного и термоус-
тойчивого материала, прозрачного для волн ИК-диапазона и имеющего относитель-
но малые активные потери на радиочастотах; разработка технологии изготовления
обтекателя из этого материала.
2. «Просветление» обтекателя на требуемых волнах радиодиапазона, так как
оптимальная толщина стенок обтекателей для ИК-волн, как правило, далека от
оптимальной для рабочих волн радиодиапазона.
Первая группа вопросов относится к компетенции технологов, химиков и оп-
тиков. В настоящее время известно достаточное количество различных материа-
лов, пригодных для работы в ИК-диапазоне (фтористый литий, сапфир, кварц, ма-
териалы типа иртран и т. п.). В последнее время находят широкое применение спе-
циальные маски стекол, прозрачных на ИК-волнах в достаточно широком диапазоне.
Вероятно, эти материалы можно признать наиболее перспективными, так как на
их основе можно конструировать достаточно большие по габаритам обтекатели.
Имеющиеся в литературе данные показывают, что толщина стенок пирамидаль-
ного обтекателя среднего размера (в диаметре у основания 200...300 мм), выпол-
ненного из наиболее приемлемого стекловидного материала, должна быть не ме-
нее 2 мм (из условия удовлетворения требованиям механической прочности) и не
более 3,0...3,5 мм (из условия получения заданной прозрачности в ИК-диапазоне).
Однако такие толщины стенок обтекателя не обеспечивают нужного уровня про-
зрачности в радиодиапазоне и их необходимо «просветлить». Для этих целей целе-
сообразно использовать реактивные решетки, наносимые на поверхность стенок
обтекателя с двух сторон.
Так как решетка из тонких металлических проволок представляет для проходя-
щей электромагнитной волны индуктивное сопротивление, диэлектрический слой
с нанесенными на его поверхности решетками может рассматриваться как трех-
слойная стенка с реактивными оболочками. Индуктивные решетки позволяют по-
лучить хорошее согласование на радиодиапазоне при постоянной прозрачности об-
текателя на ИК-волнах, так как шаг решеток значительно больше длины ИК-волн.
Нанесение решеток на поверхности может осуществляться гальваническим
способом, вакуумным распылением, фотолитографией, методом вжигания и т. п.
Обтекатели при соответствующем выборе материала могут стать заметным пре-
пятствием для поражающего ГСН мощного излучения электромагнитного оружия.
Однако в литературе отсутствуют сведения о критических значениях ЭМИ, причи-
няющих существенное поражение радиоголовкам.
544
Глава 12. Высокоточное оружие против радиоэлектронных систем
12.5. Приемники радиоголовок противорадиолокационных ракет
В головках самонаведения ПРР могут использоваться узкополосные и широ-
кополосные приемники. Ракеты с узкополосными приемниками, например «Shrike»,
применяются для поражения РЛС, работающих на постоянной и известной несу-
щей частоте излучения. В этом случае приемник перед полетом или перед пуском
ПРР настраивается на фиксированную частоту сигнала поражаемого РЭС. Узкопо-
лосные приемники обладают более высокой избирательностью и чувствительностью.
Однако они имеют и существенный недостаток — необходимо точно знать частоту
РЛС-цели, на разведку которой должны выделяться соответствующие силы и сред-
ства. Обычно перед вылетом летчику ставится задача поражения определенных РЛС,
сообщаются их характеристики и координаты.
Противорадиолокационные ракеты с широкополосными приемниками, напри-
мер HARM, Alarm, используется для поражения РЛС, значение частоты которых
априори неизвестно или известно весьма неточно Чувствительность и избиратель-
ность такого приемника ниже, чем у узкополосных. Поэтому такие приемники
наделяют характеристиками, свойствами и возможностями средств радиотехничес-
кой разведки и используют для определения параметров и координат РЛС, а также
для идентификации излучающих в радиодиапазоне средств. Такие технические
решения в значительной степени компенсируют недостатки приемников ГСН.
Для иллюстрации принципов построения и основных технических решений при
построении приемных устройств ГСН ПРР на рис. 12.24 приведена упрощенная
структурная схема приемника для ГСН современной ПРР типа HARM с высоким
значением промежуточной частоты /пр ~ 1,6...2 ГГц [78].
Использование двойного (и даже тройного) преобразования частоты позволяет
обеспечить требуемую высокую чувствительность и избирательность приема по
соседнему и зеркальному каналам, а также по промежуточной частоте.
В таком приемнике при обработке сигналов от РЛС с модулированным по ча-
стоте излучением используется сжатие сигналов с помощью согласованного филь-
тра на дисперсионной линии задержки. В приемнике имеется перестраиваемый ге-
теродин, а вместо перестраиваемого преселектора используется набор коммутиру-
емых фильтров до преобразователя частоты. Такая схема приемника ГСН позволяет
обеспечить беспоисковую настройку на частоту одной из априорно известных по-
давляемых РЛС.
Процессор формирования режима работы управляет всеми устройствами и
подсистемами приемника ГСН и координирует их взаимодействие.
Полосу частот, свободной от паразитных комбинационных составляющих, вы-
бирают примерно равной ~10 % от средней частоты принимаемых сигналов. Именно
таким требованиям отвечают приемники с двойным или тройным преобразовани-
ем частоты и высокой ПЧ ПРР «Shrike» и HARM, разработанные фирмой Texas
Instruments.
Известно использование менее сложных приемников в ГСН с низким значением
промежуточной частоты (100...300 МГц) и с однократным преобразованием часто-
ты. Такие приемники не используют предварительного широкополосного усилите-
ля радиочастоты рис. 12.25, фильтры предварительной селекции и второго преоб-
разователя частоты.
Возможно также использование (для обработки сигналов РЛС с непрерывным
излучением) гетеродина с быстрой линейной частотной модуляцией (ЛЧМ) и узкопо-
Сигнал управления по тангажу Сигнал управления по курсу
Рис. 12.24. Широкополосный приемник с двойным преобразованием частоты радиоголовки самонаведения
12.5. Приемники радиоголовок ПРР
546
Глава 12. Высокоточное оружие против радиоэлектронных систем
Сигнал управления
по тангажу
Сигнал управления
по курсу
Рис. 12.25. Узкополосный приемник ПРР
лосного фильтра. Такой приемник с однократным преобразованием частоты про-
ще и дешевле и при его изготовлении используется не самая современная элемент-
ная база.
Приемник рис. 12.25 применим в условиях, где не требуются высокая избира-
тельность и подавление сигналов в побочных и зеркальных каналах, т. е. при отно-
сительно небольшом числе подавляемых РЛС (например, при боевых действиях на
море [78]).
Весьма широкий диапазон частот, в которых работают РЛС-цели, порождает про-
блему создания широкополосных ГСН, обладающих притом достаточными точно-
стными характеристиками по угловым координатам при наведении ПРР. Одним из
возможных путей решения этой проблемы является использование нелинейного
эффекта [78]. Вследствие нелинейности характеристик элементов подавляемых РЛС,
прежде всего — мощных выходных каскадов передатчиков, в спектре их излучения
помимо основных частотно присутствуют составляющие на гармониках 2f{), и т. д.
Основным объектом для подавления ПРР являются РЛС сопровождения и подсвета
12.5. Приемники радиоголовок ПРР 547
целей, работающие на более высоких частотах, чем обзорные РЛС, которые являются
второстепенным объектом для ПРР. Разработчики ПРР, как показал опыт боевых
действий, стремятся обеспечить наведение ПРР на РЛС сопровождения и обзора.
Таким образом, если обзорная РЛС работает в диапазоне частот 300...600 МГц,
то второй и третьей гармоникам будут соответствовать частоты 2f0 = 600... 1200 МГц
иЗ/0 = 900... 1800 МГц. Наведение ПРР на РЛС-цель, работающую на частотах 2/0 и
З/о, позволит уменьшить ширину диапазона частот для ГСН и применять ее против
как РЛС сопровождения, так и обзора. Таким образом, используя излучения гармо-
ник, можно, в принципе, расширить возможности ПРР. Одна и та же ГСН может
быть использована в относительно широком диапазоне частот; при больших мощно-
стях подавляемых РЛС использование колебаний высших гармоник достаточно для
высокочувствительных ГСН ПРР и это позволяет уменьшить ширину ДНА систе-
мы РТР или ГСН ПРР, т. е. улучшить разрешающую способность последних.
Существенно, что при наведении на наземные РЛС приемники РГСН ПРР
вынуждены работать в условиях многолучевого распространения сигналов, обус-
ловленного отражениями от земной поверхности и местных предметов, окружаю-
щих РЛС-цель. В этих условиях для выделения зондирующего импульсного сигна-
ла РЛС, пришедшего по прямой траектории, используется селекция по длительно-
сти и по времени прихода. Считается, что импульс сигнала, прошедшего по прямой
траектории имеет самую короткую длительность и для его выделения использует-
ся контур слежения за фронтом импульса.
Удовлетворительное качество работы моноимпульсных пеленгаторов, постро-
енных по трехканальной схеме рис. 12.15, достигается лишь при высокой степени
идентичности амплитудных и фазовых характеристик каналов приемника. Неиден-
тичность этих характеристик до суммарно-разностных преобразований приводит к
смещению нуля пеленгационной характеристики, а после этих преобразований —
к уменьшению ее крутизны. Сравнительно нетрудно обеспечить идентичность ка-
налов до суммарно-разностных схем, так как эти схемы часто входят в конструк-
цию облучателя антенны. Существенно сложнее добиться идентичности каналов
УПЧ, особенно при действии на угломерное устройство таких дестабилизирующих
факторов, как перепады температуры и влажности, наличие вибраций и т. д. По-
этому схема рис. 12.15 является скорее теоретической идеализацией моноимпуль-
сного пеленгатора, которую чрезвычайно трудно реализовать на практике.
Практически для устранения неблагоприятных последствий, вызванных неиден-
тичностью каналов приема, используют различные технические решения: перио-
дическое переключение каналов, выравнивание характеристик по эталонному сиг-
налу, применение схем частотного и временного уплотнения каналов и т. д.
Для угломеров, работающих с непрерывным и квазинепрерывным сигналами,
типовой является схема пеленгатора с фазовым или частотным уплотнением кана-
лов, см. рис. 12.26, с. 548 [79].
В схему рис. 12.26 включены элементы системы селекции сигналов цели по
доплеровской частоте. Антенна и суммарно-разностные преобразователи форми-
руют два разностных радиосигнала wAK, и wAT, а также один суммарный радио-
сигнал. В смесителях СмДк1, СмЕ1 и СмДт1 они преобразуются в напряжения
первой промежуточной частоты, которые усиливаются в предварительных УПЧ
(ПУПЧДк, ПУПЧДт, ПУПЧЕ). Смесители СмДк2, СмЕ2 и СмДт2 выделяют допле-
ровские частоты. На вторые входы этих смесителей подаются сигнал когерентного
гетеродина или сигнал с приемника канала синхронизации РГС. Фильтры допле-
ровских частот УПЧДк, УПЧДт, УПЧЕ, настроенных на вторую промежуточную
Глава 12. Высокоточное оружие против радиоэлектронных систем
12.5. Приемники радиоголовок ПРР
549
частоту, производят селекцию сигналов. На выходах УПЧ устанавливается схема
частотного уплотнения. Эта схема содержит балансные модуляторы БМк, БМт, низ-
кочастотный генератор ГНЧ и сумматор Е. Низкочастотный генератор вырабаты-
вает модулирующие напряжения wM1 и им2, либо одной частоты FM, либо двух раз-
ных частот FM, и Fm2. В первом случае для обеспечения ортогональности колеба-
ний wM1 и мм2 их фазы различаются на 90°. В балансных модуляторах производится
амплитудная модуляция разностных сигналов с подавлением несущих частот. В сум-
маторе напряжение суммарного канала и сигналы с выходов балансных модулято-
ров складываются. В результате сложения этих сигналов при использовании одной
модулирующей частоты на выходе сумматора образуется амплитудно-модулиро-
ванное (АМ) колебание. Глубина модуляции определяется величиной угла откло-
нения цели от равносигнального направления, а фаза огибающей, отсчитываемая
от фазы сигнала ГНЧ, указывает на сторону отклонения цели. Модулированное на-
пряжение поступает на основной усилитель пеленгатора. Этот усилитель настроен
на вторую промежуточную частоту. В нем осуществляется основное усиление при-
нимаемого сигнала. Полоса пропускания усилителя выбирается так, чтобы обес-
печить неискаженную передачу боковых частот AM-сигнала. При двух частотах
модуляции FM1 и Fm2 это условие относится к большей частоте.
Для нормировки выходного сигнала пеленгатора применяется система АРУ. Вы-
ходной сигнал основного усилителя детектируется в амплитудном детекторе АД и
после прохождения через разделительные фильтры Ф1 и Ф2, настроенные соответст-
венно на частоты модуляции FM1 и Fm2, поступает на фазовые детекторы ФДк, ФДт.
Если применяется одна модулирующая частота FM, то оба фильтра настраиваются
на эту частоту. Тогда разделение сигналов осуществляется в фазовых детекторах, так
как сигналы wM1 и wm2 находятся в квадратуре. В качестве опорных сигналов для
фазовых детекторов используются напряжения wM1 и ым2 генератора низкой частоты.
Структура пеленгатора, изображенного на рис. 12.26, такова, что в его много-
канальной части усиление принимаемых сигналов сравнительно невелико, и обеспе-
чить идентичность характеристик каналов приема несложно. Особенностью рас-
смотренной схемы является многократное преобразование частоты, в результате
которого последовательно снижается частота усиливаемого сигнала с уровня ра-
диочастоты до первой промежуточной а затем до второй промежуточной /и?2.
Соответственно сокращаются полосы пропускания усилительных трактов. Обыч-
но выполняется условие fnp2 « Арь поэтому несложно обеспечить узкополосную
фильтрацию (частотную селекцию) принимаемых сигналов в УПЧ даже при невысо-
кой добротности избирательных контуров в каскадах этого усилителя. К недостаткам
такой схемы следует отнести большое число элементов, связанных с многократ-
ным преобразованием частоты, а также появление дополнительных шумовых со-
ставляющих в выходном сигнале за счет неизбежных нелинейностей в преобразо-
вателях, предшествующих узкополосной фильтрации. Последнее явление сказы-
вается особенно заметно при действии помеховых сигналов, отраженных от
подстилающей поверхности, уровень которых может быть значительным.
Частичное устранение отмеченных недостатков достигается в пеленгационных
устройствах, реализующих принцип инверсного или обращенного приема сигна-
ла [79]. Суть этого принципа состоит в том, что цепи узкополосной частотной селек-
ции выносятся по возможности ближе ко входу приемного устройства. Реализация
указанного принципа стала возможной благодаря разработке новых комплектующих
550 Глава 12. Высокоточное оружие против радиоэлектронных систем
элементов, таких, как стабильные твердотельные гетеродины и высокодобротные
кварцевые фильтры сосредоточенной селекции. Дальнейшее развитие идеи инвер-
сного приема приводит к установке высокодобротных фильтров в цепях радиочас-
тоты. Такие фильтры наряду с селекцией сигнала на фоне помех являются эффек-
тивным средством борьбы с приемом помехи по зеркальному каналу. Реализуются
эти высокочастотные фильтры в виде объемных перестраиваемых резонаторов,
выполненных на основе железо-иттриевого граната.
Для импульсных радиолокационных угломеров с низкой частотой повторения
импульсов характерным является применение пеленгаторов с временным уплотнени-
ем каналов или широко известных схем с коммутацией каналов и логарифмической
нормировкой.
Вне зависимости от вида применяемых схем, радиовизир как элемент системы
автоматического измерения угловых координат при пеленгации цели характери-
зуется коэффициентом передачи £пу, связывающим выходное напряжение wny с
утлом Д0 отклонения цели от РСН. Таким образом, уравнение пеленгационного
устройства, используемое при составлении динамических структурных схем
угломеров, имеет вид
wny =^пуле- (12.66)
Коэффициент /спу определяет крутизну пеленгационной характеристики в ее
линейной части, которая обычно составляет ±(0,2...0,3) от ширины ДНА. При эф-
фективно действующей системе нормировки кпу практически не зависит от интен-
сивности принимаемого сигнала.
12.6. Пролонгаторы пассивных радиолокационных
головок самонаведения
Один из самых распространенных и едва ли не самый эффективный способ
защиты от ПРР — прекращение работы на излучение при обнаружении ракетной
атаки РЛС. Кроме того, временное прекращение приема сигнала возможно и вслед-
ствие других причин. Например — при атаке РЛС, работающих в режиме обзора и
с очень малым уровнем паразитного и непреднамеренного излучения, когда чувст-
вительности приемника РГС не хватает для надежного обнаружения сигнала и фор-
мирования команд управления движением по необходимой траектории. В этих
условиях РГС противорадиолокационной ракеты должна экстраполировать поло-
жение ракеты на время отсутствия сигнала и формировать необходимые команды
управления, такие, чтобы попадание в прогнозируемую точку гарантировало пора-
жение РЛС-цели.
Устройства экстраполяции угловых координат, входящие в состав комплексов
бортовой аппаратуры головок самонаведения ПРР, традиционно называются про-
лонгаторами.
Прежде всего пролонгатор обеспечивает перемещение оси антенны для удер-
жания цели в пределах диаграммы направленности в тех случаях, когда в РГС про-
исходит срыв слежения за сигналами цели. Благодаря этому осуществляется авто-
номный полет ракеты по траектории, близкой к непрерывной, которую имела бы
ракета при непрерывном сопровождении сигналов цели РГС.
Принципы формирования команд в двух ортогональных плоскостях управления
движением ракеты совершенно аналогичны. Поэтому ниже рассматривается работа
12.6. Пролонгаторы пассивных РГС 551
пролонгатора по экстраполяции закона движения ракеты в вертикальной плоско-
сти. Именно в плоскости тангажа наиболее интенсивно изменяется угол визирова-
ния цели радиоголовкой самонаведения.
В пролонгаторах используется априорное знание закона изменения угла визиро-
вания 0Т (/) во времени. Для ракет «воздух — поверхность», наводящихся на непод-
вижные или малоподвижные цели, обычно используют полиномиальную модель из-
менения угловой координаты и ограничиваются первым порядком этого полинома:
е(/)=е0+ёг (12.67)
Совместная работа следящей системы пеленгатора РГС и пролонгатора сводится
к тому, что в процессе автосопровождения цели головка оценивает параметры за-
кона изменения угла 0(f), t< f0, т. е. коэффициенты полинома (12.67). При пропа-
дании сигналов от цели в момент времени f = f0 на их основе формирует экстрапо-
лированное значение угла 0(f) для t > f0 вплоть до появление сообщения об обна-
ружении сигнала от автомата захвата. Основными показателями качества работы
угломера с пролонгатором являются точность прогнозирования (ошибки опреде-
ления коэффициентов полинома (12.67)) и время памяти.
Структурная схема угломера пассивной РГС с пролонгатором представлена на
рис. 12.27 [80]. В состав комплекса входят следящий угломер, устройство с позици-
онной коррекцией и силовой стабилизацией, гироскоп, измеряющий угол тангажа
0(f), и пролонгатор, содержащий два интегратора и форсирующее звено в каче-
стве корректирующей цепи.
Угломер работает в двух сменяющих друг друга режимах — сопровождения и
памяти (пролонгации).
Рис. 12.27. РГС с пролонгатором
В режиме сопровождения сигналов, поступающих от радиоизлучающей цели,
ключи Кл 1 и Кл 3 замкнуты, а ключ Кл 2 разомкнут. При отклонении цели от рав-
носигнального направления (которое при точном слежении должно совпадать с осью
ДНА) пеленгатор вырабатывает управляющие напряжения, под действием которых
ось антенны совмещается с линией визирования. Для этого выходные сигналы
пеленгатора усиливаются в усилителе мощности УМ и далее подаются на задатчи-
552
Глава 12. Высокоточное оружие против радиоэлектронных систем
ки моментов (моментные двигатели) М гиростабилизированной платформы. В ус-
тановившемся режиме сигнал, управляющий положением гиростабилизированной
антенны, wynp, пропорционален угловой скорости перемещения линии визирова-
ния. Угловое положение гиростабилизатора характеризуется углом 0а, в идеальном
случае совпадающим с углом визирования 0Ц. Выходные сигналы датчиков поло-
жения антенны и усилителя мощности поступают в автопилот, где используются
для выработки сигналов траекторного управления ракетой в соответствии с избран-
ным кинематическим методом наведения.
При суммировании измеренных значений углов пеленга 0а (/) и тангажа 0Т (/),
снимаемых соответственно с датчиков положения антенны и гироскопа, образует-
ся измеренное значение угла визирования 0В (/), совпадающее с точностью до оши-
бок измерения углов пеленга и тангажа с истинным значением угловой координа-
ты цели 0Ц(/). С сумматора значение приборного аналога угла визирования посту-
пает на вход пролонгатора, представляющего собой следящую систему с астатизмом
второго порядка. В качестве устройства стабилизации, обеспечивающего структур-
ную устойчивость пролонгатора, используется форсирующее корректирующее звено.
На выходе пролонгатора, отрабатывающего входное воздействие 0u(f), форми-
руется выходной сигнал, пропорциональный 0П (/). Пролонгатор имеет астатизм
второго порядка, поэтому выходной сигнал определяется как значением входной
переменной в момент t = /0, так и ее первой производной.
Если входное воздействие изменяется с постоянной скоростью 0 (12.67), то в
установившемся режиме динамическая ошибка равна нулю и выходной сигнал 0П (/)
равен входному 0Ц(/). Если 0ц(г) изменяется с постоянной второй производной,
то в установившемся режиме будет иметь место динамическая ошибка по ускорению:
48.=^, <>2 68)
dt
где Kd — коэффициент передачи пролонгатора по ускорению, равный произведению
коэффициентов передачи первого и второго интеграторов и корректирующего звена.
В случае потери сигналов цели в РГС угломер переходит в режим управления
на основе экстраполяции. При этом ключи Кл 1 и Кл 3 размыкаются, ключ Кл 2
замыкается и вход первого интегратора обнуляется. Пролонгатор, запоминая вход-
ную величину и ее первую производную в момент прекращения автосопровожде-
ния сигнала цели, будет продолжать формировать выходной сигнал по закону
M0=M'o)+M'o)('-'O), (12.69)
где, как и прежде, /0 — момент пропадания сигналов цели.
В режиме памяти внешним воздействием для угломера является угол 0П(/), зна-
чение которого должно теперь отслеживаться антенной. На двигатели, управляю-
щие положением гиростабилизированной платформы, поступает сигнал, равный
разности между углом 0П (/), выдаваемым пролонгатором, и углом 0В(Г), поступаю-
щим с сумматора. В результате двигатели поворачивают антенну таким образом,
чтобы разность углов 0П (/) -• 0В (/) стремилась к нулю. При этом ось антенны про-
должает сопровождать прогнозируемую точку расположения излучающей цели, ис-
пользуя экстраполируемые значения линии визирования «ракета — цель». В резуль-
тате ось антенны совпадает с прогнозируемым положением линии визирования, ко-
торое в значительной степени адаптировано к конкретным условиям пуска и полета
ракеты. С датчика положения антенны сигналы поступают в автопилот для управле-
12.6. Пролонгаторы пассивных РГС
553
ния ракетой. Входной сигнал этих датчиков в установившемся режиме пропорци-
онален прогнозируемому значению угловой скорости линии визирования.
Характерной особенностью схемы пролонгатора рис. 12.28 в режиме памяти
является компенсация ошибок гироскопа в случае, если они постоянны или меняют-
ся по линейному закону. Это утверждение может иллюстрироваться структурной
схемой пеленгатора в режиме памяти при совместной работе гиростабилизатора по-
ложения антенны и пролонгатора (рис. 12.28). Для простоты в качестве модели ги-
ростабилизатора используется интегрирующее звено с коэффициентом передачи К^.
Рис. 12.28. Структурная схема пеленгатора РГС в режиме памяти
Если ошибку A0(z) гироскопа можно аппроксимировать полиномом первой
степени от t, пролонгатор в режиме сопровождения отрабатывает ее без искаже-
ний. Следовательно, выходной сигнал пролонгатора в установившемся режиме
можно представить в виде
еп(г)=еп0(/)-де(/), (12.70)
где 0пО (/) — выходной сигнал пролонгатора при пренебрежении ошибками изме-
рения угла тангажа.
При переходе РГС из режима сопровождения в режим памяти пролонгатор
формирует сигнал Оп(0’ равный сумме экстраполированного положения 0nO(z) угла
ориентации линии визирования и оценки А0(/) ошибки ее прогнозируемого поло-
жения. На основании анализа структурной схемы рис. 12.28 можно заключить, что
в режиме памяти при формировании сигнала управления положением гиростаби-
лизированной платформы 0П (f)-0B (/) ошибка гироскопа вычитается из отслежен-
ной пролонгатором ошибки гироскопа. Отсюда следует, что ошибка гироскопа не
влияет на значения пеленга и угловой скорости линии визирования, поступающих
из угломера в режиме памяти в автопилот ракеты.
Действительно, так как следящая система линейная и, следовательно, справед-
лив принцип суперпозиции, то на основании рис. 12.28 можно записать выраже-
ние для измеренного значения пеленга в режиме памяти:
Фв =— ев ——ец -^-е. <12.71)
в 7р + 1 в 7р + 1 11 7> + 1
где р — оператор дифференцирования, а Т = —----постоянная времени следящей
^гс
системы угломера в режиме памяти.
В выражении (12.71) первое слагаемое обусловлено выходным сигналом пролон-
гатора, второе — сигналом с гироскопа, а третье — углом тангажа. Подставляя в
(12.71) значения угла (12.70) и измеренное значение угла тангажа можно получить
фв (епо +А0)----------—9ц-----—& (12.72)
Yb Tp + i\ пО ) Тр + 1 ц Тр + 1 \ /
554
Глава 12. Высокоточное оружие против радиоэлектронных систем
Таким образом, если в режиме сопровождения постоянная или нарастающая
по линейному закону ошибка гироскопа отслеживалась пролонгатором без оши-
бок, то в режиме памяти ошибка гироскопа компенсируется.
Аналогичные соотношения можно получить и для угловой скорости линии ви-
зирования.
С появлением сигналов цели угломер переходит в режим сопровождения.
Разумеется, угол визирования цели может в процессе полета изменяться по за-
кону, отличающемуся от линейного (12.67). Например, по закону, для описания
которого больше подходит полином второй степени от t. В этом случае в режиме
сопровождения будет иметь место динамическая ошибка при формировании про-
лонгатором угла 0П(/). Отсутствие в системе пролонгатора с двумя интеграторами
памяти по ускорению приведет к тому, что в режиме памяти разность между экст-
раполируемым значением угла пеленга и его истинным значением будет нарастать.
В результате цель может выйти из основного лепестка диаграммы направленности
антенны РГС.
Возможны различные варианты устранения этого недостатка. В частности, в
режиме памяти целесообразно на вход первого интегратора пролонгатора подавать
сигнал программного изменения углового ускорения, зависящего от дальности до
цели, высоты полета и других факторов.
ГЛАВА 13
АКУСТИЧЕСКИЕ СРЕДСТВА
ФУНКЦИОНАЛЬНОГО ПОРАЖЕНИЯ
13.1. Акустическое оружие
Издавна человечество обращало внимание на возможность воздействовать зву-
ком на различные объекты: на людей, животных, на естественные и искусственные
сооружения. Это воздействие может носить как положительный, позитивный, так и
негативный характер.
Задолго до наших дней люди сталкивались с разрушительным действием звука.
Только этим можно объяснить сообщение Библии (в книге Ветхого Завета) об об-
рушении крепостной стены города Иерихона «...до своего основания...» от громо-
гласных звуков семи труб. В Книге Судей того же исторического документа гово-
рится, что при осаде города мадиамитян Господь «...разделил 300 человек и дал им
всем трубы, и затрубили все...», в результате враги обратились в бегство. Спустя
несколько тысячелетий, в наше время, приходится слышать об активном примене-
нии акустических средств как в интересах нападения, так и обороны. Так, по сооб-
щению радио «Би-Би-Си» в ноябре 2005 г. у побережья Сомали команда крупного
американского круизного лайнера применила мощные акустические орудия про-
тив нападавших пиратов. «Моряки оглушили нападавших мощным звуковым уда-
ром и затем оторвались от преследования» (сайт www/bbcrussian.com).
Известны и другие примеры применения мощных направленных лучей акусти-
ческих волн для использования их в качестве оружия. Появились сведения об ак-
тивизации разработок оружия коммерческого и бытового терроризма, направлен-
ного на то, чтобы лишить конкурентов способности принимать разумные решения
или принуждать их к «добровольным» действиям в ущерб себе.
В современной военной акустической технике применяются волны очень широ-
кого диапазона: от долей герц до 109... 1014 Гц. Условия распространения таких волн
и степень их воздействия на живые организмы и неживые объекты сильно разли-
чаются. Поэтому в классической физике принято подразделять акустические волны
на ряд поддиапазонов в зависимости от частоты колебаний f (длины волны X). Раз-
биение на поддиапазоны проводится так, что внутри каждого природные условия
распространения волн и эффекты их взаимодействия с веществом остаются едино-
образными. Поэтому для каждого диапазона можно указать на главные особенно-
сти волн и на преобладающие физические факторы.
В настоящее время выделяются три диапазона волн, которые могут быть исполь-
зованы для создания акустического оружия. Шкала акустических волн приведена
на рис. 13.1.
1. Инфразвук — упругие колебания среды, аналогичные иным звуковым коле-
баниям, но имеющие частоты ниже, чем у слышимых звуков. Обычно за верхнюю
границу инфразвукового диапазона принимают частоту/- 16...20 Гц. Нижняя грани-
ца инфразвука не определена. Источниками инфразвука служат взрывы, грозовые
разряды, землетрясения и другие процессы, способные вызывать колебания воздуха.
556
Глава 13. Акустические средства функционального поражения
Инфразвук Слышимый звук
Ультразвук
Гц
Рис. 13.1. Шкала акустических волн
Инфразвуковые системы используют некоторые морские животные для защиты от
нападения. Для борьбы с терроризмом разработаны устройства инфразвукового по-
ражения [84].
Для инфразвука характерно малое поглощение, вследствие чего инфразвуковые
волны могут распространяться на очень далекие расстояния (сверхдальнее распро-
странение). Волны с частотами f ~ 0,1... 10 Гц весьма вредно влияют на человека.
2. Слышимые звуковые волны имеют частоту от 16 до 20 кГц. Верхний и нижний
пороги весьма условны и определяются многими психофизиологическими фактора-
ми, в частности, зависят от физического состояния человека и от его возраста. Слы-
шимый звук в зависимости от его интенсивности и спектра может приносить как
пользу, так и вред. В век бурного развития техники звук все больше приносит чело-
веку вред из-за непрерывно повышающейся «шумности» окружающего мира. Разра-
ботчики оружия внимательно изучают возможности создания звукового оружия.
3. Ультразвук также представляет собой упругие колебания среды. Частотный
диапазон ультразвука подразделяется на три поддиапазона:
низкие ультразвуковые частоты /= 1,5-104... 105 Гц;
средние частоты /= 105...107 Гц;
высокие частоты /= 107...109 Гц.
Отдельно выделяют гиперзвук — упругие волны с частотами f = 109...1013 Гц.
Ультразвуковые волны благодаря малой длине X < 1 см распространяются в виде
узконаправленных пучков, поперечный размер которых сохраняется близким к
размеру излучателя. В этом смысле они имеют некоторую схожесть с лазерными
лучами. Ультразвуковые устройства с успехом применяются в радиолокации, вычис-
лительной технике, в технике физического и химического эксперимента. Высокие
энергетические показатели ультразвуковых устройств дают возможность использо-
вать их не только в информационных системах (гидролокаторах, системах подвод-
ной связи, медицинской диагностике и др.), но и для целенаправленного изменения
свойств вещества, происходящего при воздействии на него мощного ультразвукового
поля. Например, при ультразвуковой резке и сварке металлов, приготовлении эмуль-
сий, измельчении материалов, а также и в системах функционального поражения.
В быту такие системы уже применяются для отпугивания животных (собак, крыс).
Все виды акустических волн подчиняются одинаковым законам. Однако име-
ются и отличия, о которых речь пойдет ниже.
Обычно считается, что оружие — это всякое средство, приспособленное для
нападения или для защиты. В этом смысле техническое средство, которое использует
для нападения или для защиты намеренно создаваемое акустическое поле, также
следует отнести к разряду оружия. Пока в массовом количестве, как, например,
огнестрельное оружие, излучатели акустических волн не применяются для нанесения
урона живой силе противника или для разрушения военных объектов, но приведен-
ные выше примеры уже свидетельствуют о создании и использовании первых аку-
стических установок для борьбы с нападающей военизированной толпой.
13.2. Акустические волны
557
История имеет массу примеров того, как все новое вначале появлялось в единич-
ных, уникальных, опытных экземплярах и при этом, как правило, отвергалось с по-
зиций консервативного мышления военных и ученых. Но далеко не все отвергнутое
не пробивало себе дорогу в практику будущего. Поэтому авторы данной книги с
некоторой долей осторожности определяют акустические средства как оружие, требу-
ющее тщательного изучения и анализа с разных позиций (физических, физиологи-
ческих, технических, тактических и, возможно, иных, авторам еще не открывшихся).
13.2. Акустические волны
Все волновые явления (излучение, дифракция, интерференция и др.) подчиня-
ются общим для волновых процессов законам [67]. Существует аналогия между
акустическими (механическими) и электромагнитными системами, поэтому изло-
жение теории этих систем ведется на основе общих математических моделей. Разу-
меется, имеются и различия в представлении электромагнитных и акустических
процессов, главным из которых является неприменимость полной системы урав-
нений Максвелла при описании поведения акустических волн.
Важнейшими свойствами любого волнового поля является подчинение всех его
свойств одной общей закономерности, заключающейся в том, что передача взаи-
модействия материи (например, энергии ЭМВ или звукового давления) происходит
не мгновенно, а с некоторой конечной скоростью с. Если в некоторый момент вре-
мени /0 произошло изменение поля в точке Рпо закону/(/), то это изменение будет
замечено в точке Q на расстоянии z и выразится некоторой функцией f(tQ-z/c),
которая устанавливает связь возмущений при t = /0 и t = /0 - z/с. Если возмущение
в точке Р, порождаемое неким физическим процессом, происходит по гармониче-
скому закону, т. е. /(/) = Jcoscor, то процесс в точке Q будет описываться функцией
= Лсо8 со
, со
где к =-----волновое число.
Лсо8[сог-&г],
(13.1)
с
В дальнейшем изучение свойств акустических волн целесообразно начать с про-
стейшего случая плоских одномерных скалярных волн, распространяющихся со ско-
ростью с в однородной и изотропной среде. В линейных средах (где справедлив прин-
цип суперпозиции волн) плоская негармоническая волна распространяется без ис-
кажения.
Любая сложная волна при определенных ограничениях может быть представлена
в виде совокупности плоских волн, бегущих в разных направлениях и с неодинако-
выми скоростями. Поверхности, на которых фаза данной волны имеет одно и то же
значение (при «замороженном» в данный момент времени акустическом поле) на-
зывают фронтом волны. Для сферических волн эти поверхности — сферы; для пло-
ских — плоскости. Для волн сложной формы поверхности равных фаз не укладыва-
ются в названные элементарные модели. Например, вблизи акустического излуча-
теля рупорного типа, в так называемой неволновой зоне, фронт плоский, а на
большом расстоянии, в дальней зоне, он приобретает сферическую форму (рис. 13.2).
Акустическая плоская квазигармоническая волна состоит из достаточно боль-
шого числа парциальных плоских волн, каждая из которых создает в среде распро-
странения участки сжатия и разрежения с синусоидальным распределением поля
вдоль оси г распространения волн. Эта синусоида представляет собой как бы мгно-
558
Глава 13. Акустические средства функционального поражения
венный снимок процесса p(z) (рис. 13.3). На рис. 13.3 видно, что перемещение
волны в направлении z со скоростью с неотличимо от перемещения в направле-
нии д со скоростью c/cos6.
Рис. 13.3. Двумерный профиль давлений р в плоской
акустической синусоидальной волне
Период этой пространственной синусоиды X = 2л//с называется длиной волны.
Скорость смещения синусоиды по оси z равна с - ы/k, где к — волновое число.
Сложная плоская волна, состоящая из нескольких гармоник с частотами со15 со2,
..., сол, представляется набором плоских парциальных волн, показанных на рис. 13.4.
При локальном возмущении среды (например при взрыве) в ней возникают
акустические волны. Вокруг источника формируется волновое акустическое поле.
Процесс распространения возмущений в газах, жидкостях и твердых телах описы-
вается уравнением [25, 67, 76, 88]
1 д2 р
= (13.2)
с“ Э/
или
Эх2 Эу2 Эг2 с2 Э/2
(13.3)
13.2. Акустические волны
559
Дальняя зона
Рис. 13.4. Система фронтов бегущего «замороженного»
пакета плоских квазигармонических волн
где р = р(х, у, z, /) — избыточное давление акустических волн (по отношению к не
входящему явно в уравнения (13.2) и (13.3) невозмущенному давлению среды р0;
с — скорость продольных волн в среде; Д — оператор Лапласа [103].
Выражение (13.3) является классическим волновым уравнением второго порядка
в частных производных. Это уравнение описывает волновые процессы в однород-
ной изотропной неподвижной среде при малых возмущениях р, не вызывающих
нелинейных эффектов. При исследованиях волновых процессов в нелинейных и
анизотропных средах использование уравнения (13.2) неправомерно [72].
Для одномерной акустической волны волновое уравнение (13.2) упрощается и
приводится к форме
А д2р 1 д2р
Др =—Т = —Г-
Эг2 с2 Э/2
Общее решение одномерного волнового уравнения (13.4) имеет вид [67, 85, 116]
(13.4)
(13.5)
£
Решение p(z, /) представляет собой любую функцию A t —
и
от
аргумента /± —
характеризующую бегущую волну: первая (Л) — бегущую напра-
во, вторая (2?) — бегущую налево. Таким образом, решение уравнения (13.4) сво-
дится к сумме двух плоских волн произвольной формы, бегущих навстречу друг другу
со скоростью с. На практике обычно рассматривают одну их составляющих, а именно
( / \
A t— . Функция A(z, и характеризует моду, под которой здесь понимается про-
k с/
стейшее частное решение уравнения (13.4), например одномерная плоская гармо-
ническая волна. В общем случае понятия «мода» Л (г, t) характеризует как собствен-
ные частоты со, так и пространственную конфигурацию волны.
Каждая парциальная акустическая волна (мода) в отдельности перемещается в
направлении положительной (или отрицательной) оси z как твердая частица со
скоростью с. Скорость распространения акустической волны с является идеализи-
рованной («опорной») величиной, характеризующей скорость распространения
возмущений. Например, областей сгущения вещества, из которого состоит среда
распространения волны, при малых сжатиях. Другими словами, величина с в урав-
нении (13.4) есть скорость перемещения продольных волн бесконечно малой амп-
литуды А/р0 « 1, где р0 — давление в невозмущенной среде (рис. 13.5).
В средах, для которых справедливо уравнение (13.4), плоская волна любой часто-
ты распространяется без искажения, и для волн сложной формы справедлив принцип
суперпозиции.
560
Глава 13. Акустические средства функционального поражения
Рис. 13.5. Распределение давления р при распространении
акустической волны вдоль оси z
Скорость звука в газе равна [85]
| Ро
с = <7— (13.6)
V Ро
где у — термодинамическая постоянная (величина табулирована); р0 — нормаль-
ное давление для невозмущенного газа; р0 — плотность среды, кг/м3.
Скорость распространения акустических колебаний в жидких и твердых средах
определяется по формуле [54]
(13.7)
где Е — модуль Юнга, определяющий степень упругости среды (табулированная
постоянная, Н2/м2).
Пример.
1. Скорость звука в воздухе. При нормальных условиях: р0 = 1,3 кг/м3; у0 = 1,4;
р0 = 1 Па. По формуле (13.6) можно найти св = 330 м/с.
2. Скорость звука в стекле, для которого Е ~ 5,1018 Н2/м2; р0 = 2,5-103 кг/м3, по
формуле (13.7) находится св = 5100 м/с.
В табл. 13.1 для справки приведены осредненные значения скорости звука в
некоторых веществах (газах, жидкостях и твердых телах) [82, 147].
Таблица 13.1.
Тип вещества Скорость звука, м/с Тип вещества Скорость звука, м/с
Воздух 331 Железо 5900
Водород 1284 Стекло 5100...6120
Вода (при 20 °C) 1490 Рубин 11 240
Спирт 1180 Алмаз 18 000
Ртуть 1453 Каучук 54
Золото 3200 Кирпич 3600
Скорость звука в основном зависит от характеристик среды (р, Е) и темпера-
туры Г. Диапазон изменения скорости звука весьма широк. Так, если в воздухе ско-
рость распространения акустических колебаний равна св ~ 330 м/с, то в алмазе —
св~ 18 000 м/с, что значительно превышает вторую (11200 м/с) и третью (16 500 м/с)
космические скорости.
Скорость распространения акустических волн определяется соотношениями фор-
мулами (13.7) и (13.6) только в тех условиях, когда справедливы решения уравне-
13.2. Акустические волны
561
ний (13.4) и (13.3), а именно при соблюдении следующих условий: амплитуда ко-
лебаний акустического давления мала (отсутствуют нелинейные явления); среда, в
которой распространяются продольные (или поперечные) волны, изотропная и имеет
бесконечные размеры.
В реальных средах часто наблюдается зависимость скорости распространения
гармонических волн от частоты со0. Это явление называется дисперсией волн. По-
этому квазимонохроматическая волна, состоящая из пакета гармонических волн с
частотами соь со2, ...,сол, в процессе распространения меняет свою форму вслед-
ствие изменения соотношений между фазами ее парциальных волн (из-за разных
скоростей Сф).
Дисперсия скорости звука может быть обусловлена физическими свойствами
среды, присутствием в ней посторонних примесей, невыполнением условия безгра-
ничности и большими амплитудами давления. Дисперсия волн приводит к измене-
нию фазовой скорости волны Сф и, как следствие, к искажению формы первона-
чальных колебаний.
При рассмотрении особенностей акустического поражения различных объек-
тов важным видом дисперсии скорости звука является дисперсия нормальных волн,
распространяющихся в естественных волноводах. Нормальные волны — гармони-
ческие волны, распространяющиеся в волноводе без искажения формы. Волново-
ды, обычно естественного происхождения, представляют собой какой-либо одно-
родный слой в слоисто-неоднородной среде. Примером акустического волновода
может служить слой воды, ограниченный поверхностями с резко отличающимися
акустическими свойствами: дном и поверхностью водоема.
В слое воды толщиной Л нормальная волна с номером п при значении волново-
го числа к = 2л/Х > nn/h распространяется с фазовой скоростью [82]
(13.8)
1-
kh;
где с — скорость звука в невозмутимой среде.
Значению п = 1 соответствует простейшая волна, фазовая скорость которой равна
(13.9)
1-
где Хкр = 2h — критическая длина волны звука, которая еще может распространять-
ся в волноводе; X = — = — длина первородной волны; со = — — критическая
f со 1 h
круговая частота для нормальной волны номера п = 1.
„ . пп
При к < — волна данного номера п не может распространяться в волноводе:
она превращается в синфазное колебание, интенсивность которого быстро (по экс-
поненциальному закону) убывает вдоль слоя. При Х<Хкр (со>сокр) с повышением
частоты со фазовая скорость уменьшается, стремясь к скорости звука с в неограни-
ченной среде.
Групповая скорость сгр (скорость огибающей профиля квазигармонической вол-
ны) характеризует скорость переноса энергии группового пакета гармонических
562
Глава 13. Акустические средства функционального поражения
волн. Она в отличие от фазовой скорости Сф может быть измерена соответствую-
щими приборами. Групповая скорость вычисляется по формуле
^кр
СО
- с
с — с 1 —
гр \
(13.10)
кр 7
В слоистой среде (в волноводе) групповая и фазовая скорости связаны соотно-
шением
Л» Л» =
грф •
Групповая скорость нормальной волны номера п равна нулю на своей кри-
тической частоте
«кр— (13.12)
h
и монотонно растет, стремясь к скорости с при увеличении частоты со (рис. 13.6, а).
Рис. 13.6. Дисперсионный характер волновода: а — зависимости фазовой
Сф и групповой Cjp скоростей от частоты со; б — зависимость коэффициента
затухания &зат от частоты о
Напротив, фазовая скорость Сф при со —* сокр и монотонно уменьшается в
соответствии с (13.9), стремясь в пределе к с при увеличении частоты со.
Групповая скорость в волноводе всегда меньше с, поэтому внезапно возникаю-
щее возмущение (например, сигнал) не может распространяться со скоростью, пре-
вышающей с. Стоит указать, что фазовая скорость Сф может быть больше с (Сф > с)
в той же, но открытой среде. Этот кажущийся парадокс связан с определением
фазовой скорости как скорости изменения разности фаз между установившимися
гармоническими колебаниями движущейся (колеблющейся) частицы (например
молекулы) в положении и другой движущейся (колеблющейся) частицы в поло-
жении г2- Иначе говоря, фазовая скорость, это скорость, с которой перемещается
2л
некоторая фаза бесконечной синусоидальной волны, частота которой со = — по-
13.2. Акустические волны
563
стоянна (Т= const), а длина волны меняется от Xmin до X =«> (при со = оокр). В реаль-
ных ситуациях имеют дело с волнами конечной протяженности с ограниченным
временным и пространственным спектром. Совокупность таких волн (мод) состав-
ляет волновой пакет, распространяющийся в среде с измеряемой скоростью сгр.
В идеализированной среде даже при отсутствии поглощения при со < сокр, когда
нарушаются нормальные условия распространения волн, при уменьшении часто-
ты ниже критической происходит быстрое монотонное затухание волн по закону
Р ^0 ^зат ’
(13.13)
где Ао — амплитуда волны (Па) на «входе» среды при со> сокр; Хзат =ехр(—oez) —
коэффициент; а — показатель затухания.
/с0 — постоянный коэффициент, зависящий от свойств среды.
График зависимости коэффициента затухания Хзат от частоты сопри z= Zq пред-
ставлен на рис. 13.6, б.
Зависимость фазовой скорости Сф от параметров волновода Л и от частоты ко-
лебаний со является весьма важной характеристикой при определении свойств аку-
стических волн, предназначенных для функционального поражения объектов, рас-
положенных в волноводе. Учет зависимости (13.8) позволяет создавать в волново-
де акустические поля с локальными сгустками энергии, которые принято называть
каустиками*. При определенных условиях использование дисперсионных свойств
волноводных сред позволяет создавать каустики в определенных локальных обла-
стях среды и управлять местоположением этих каустик. Принципиально такая воз-
можность создавать сгустки энергии в области расположения поражаемого объекта
реализуема за счет излучения источником пакета волн (мод) с различной часто-
той со. В этом случае на некоторых удалениях z от источника И в волноводе форми-
руются каустики Qh Q2, ..., Qnc высокой локальной интенсивностью волн /, Вт/м2
(рис. 13.7).
Рис. 13.7. Распространение пучка акустических волн в естественном волноводе
Для фокусирования энергии акустических волн в локальных областях могут
применяться акустические волноводные линзы, которые используют свойства вол-
новода для фокусирования (синфазного сложения волн) в заранее заданной локаль-
ной области.
* Каустик — греч. kaustikos — жгучий, едкий.
564
Глава 13. Акустические средства функционального поражения
13.3. Энергетические характеристики акустических волн
В акустике в качестве меры взаимодействия энергий среды и волны используется
величина объемной плотности энергии Е, под которой понимается предел отноше-
ния энергии ДЕ, заключенной в элементарном объеме ДК, к величине этого объема
при стремлении объема к нулю:
ЛЕ
Е = lim ---. (13.15)
ди->оДИ
Плотность акустической энергии Е— это добавочная энергия среды, вносимая
в среду распространяющимися в ней акустическими волнами. Плотность энергии
волны Е измеряется в Дж/м3.
Плотность энергии акустической волны представляет собой сумму плотностей
кинетической Екин и потенциальной Епот энергий:
Е = Ект + ЕП0Т, (13.16)
где
г, рг2
^кин=—; (13.17)
£[1ОТ=~; (13.18)
р — плотность вещества среды (кг/м3); v — колебательная скорость частиц среды
(м/с); р — звуковое давление (Н/м2); р — сжимаемость среды.
Для бегущей плоской волны
E = pv2=pp2. (13.19)
Давление плоской бегущей гармонической волны представляется в виде
р = p0cos((D/-&z-(p), (13.20)
где <р — начальная фаза.
Плотность энергии, согласно (13.19) равна
Е = Ppg cos2 (со/ - kz - ф) - pv2 cos2 (со/ -fe-ф). (13.21)
Из (13.21) следует, что плотность энергии в волне осциллирует в направлении
распространения волны z с частотой £1 = 2со и изменяется в пределах O...Ppg =ру2
Рис. 13.8. Изменение плотности энергии Е при
распространении плоской волны
В бегущей гармонической волне (при усреднении по времени и по простран-
ственной переменной)
Ё = ^-. (13.22)
2
13.3. Энергетические характеристики акустических волн
565
Суммарная плотность энергии двух плоских волн, бегущих под углом 6 друг к
другу, равна
Е = Е{ + Е2 +^£^2 cosG. (13.23)
Для когерентных волн (cdj = со2) плотности энергии не аддитивны. Например,
при синфазном сложении двух волн одинаковой интенсивности (1{ = /2) плотность
энергии учетверяется:
£ког =(Е, + Е2)2 = 4Е. (13.24)
Таким образом, к плотности энергии в общем случае принцип суперпозиции
не применим.
К энергетической характеристике относится интенсивность I акустической
волны (сила звука). Интенсивность бегущих волн определяется как энергия, пере-
носимая колебаниями среды в единицу времени через единичную площадку, пер-
пендикулярную к направлению распространения волны:
/==t|U (13.25)
где Э — средняя по времени энергия (Дж), переносимая в течение времени Тчерез
площадку Д5.
Для плоской синусоидальной бегущей волны интенсивность выражается фор-
мулой 2
/ = т~- (13.26)
В сферической бегущей волне интенсивность / обратно пропорциональна квад-
рату расстояния R от источника И с мощностью Ро:
4лЯ2
(13.27)
В стоячей волне энергия не переносится, поэтому /ст = 0.
В акустике широко применяется сравнительная оценка уровней интенсивностей
в децибелах
/ = 101g
(13.28)
где / — интенсивность исследуемой акустической волны; /0 — эталонная интен-
сивность, под которой понимают пороговую чувствительность человеческого уха:
70 =10-12 Вт/м2. (13.29)
Иногда на практике уровень интенсивности измеряют в децибелах путем срав-
нения данной волны с эталонным давлением
/>о=2-1О’5 H/м2. (13.30)
Так как давление волны не является энергетической характеристикой, то в этом
случае уровень интенсивности определяется формулой
/ = 201g
(13.31)
где ро — уровень давления на пороге слышимости.
На практике уровень интенсивности оценивают в специфических единицах —
фонах. За уровень громкости звука в один фон принимают звук на частоте/= 1000 Гц,
относительная интенсивность которого равна /отн = 1 дБ.
566 Глава 13. Акустические средства функционального поражения
В акустике исследуются волны с очень большим разбросом уровней интенсивно-
сти: от 150 до 1 дБ. Например, шепот, улавливаемый человеком, имеет интенсив-
ность /ш = 1 дБ, а уровень интенсивности шума реактивного двигателя /д = 120 дБ,
что уже создает риск повреждения слуха.
Для оценки эффективности акустического поражения важной характеристикой
являются критические значения интенсивности волн, при которых наступает задан-
ная степень поражения (смерть людей, механические повреждения строений и др.).
Величина /кр зависит от частоты волн, характеристик среды и других параметров. Зна-
чения /кр для различных условий акустического поражения будут приведены ниже.
13.4. Ослабление акустических волн
Распространению акустических волн в любой среде непременно сопутствует
ослабление их интенсивности, которое обусловлено в основном двумя причина-
ми. Во-первых, затуханием (рассеянием) волн, вызванным сферическим расхожде-
нием волн, т. е. процессом преобразования излученной волны во множество плоских
волн, распространяющихся по всевозможным направлениям. Во-вторых, поглоще-
нием волн вследствие внутреннего трения частиц (вязких потерь) и теплопроводно-
сти среды.
Затухание волн вследствие их пространственного расхождения происходит по
степенному закону. Интенсивность волн / (Вт/м2) уменьшается обратно пропор-
ционально квадрату расстояния z от источника:
где Ри — мощность излучателя.
Поглощение волн происходит по экспоненциальному закону: на одинаковых
отрезках пути распространения волны dz (в однородной среде) поглощается всегда
одна и та же энергия. Поэтому в первом приближении амплитуда давления р умень-
шается при прохождении участка пути dz пропорционально его длине и самой
плотности давления р (рис. 13.9, а), т. е.
—dp = up[z)dz, (13.33)
Рис. 13.9. Поглощение акустической волны в однородной (а) и слоистой (6) средах
13.4. Ослабление акустических волн
567
Интегрирование дифференциального уравнения (13.33)
dp
— = -a dz
Р
с очевидным начальным условием p(z = 0) = р0 дает решение
(13.34)
(13.36)
погл
Из (13.35) следует, что коэффициент поглощения энергии акустической волны
средой распространения составляет
К = — = e~az
лхПОГЛ с
Ро
При определении ослабления плоской волны, проходящей через разные слои
среды с показателями поглощения а1? а2, ал, итоговый коэффициент поглоще-
ния определяется в соответствии с рис. 13.9, б:
= ехр/-£а/?/- (13.37)
I /=1
Коэффициент а в показателе степени (13.36) и (13.37) называют пространствен-
ным показателем поглощения. В однородной среде показатель поглощения а оп-
ределяется экспериментально, на основе измерения звукового давления в двух точках
на трассе распространения волны:
1 ,
а =------In
(13.38)
Показатель поглощения волны по интенсивности I (мощности) равен а7 = 2а,
т. к. коэффициент поглощения волны по интенсивности составляет
К,= — = [е-(К\2 =e~2az. (13.39)
Показатель поглощения акустической волны а пропорционален квадрату цикли-
ческой частоты и зависит от физических свойств среды и температуры. Эта зависи-
мость качественно определяется формулой
а = п<о2, (13-40)
где т| — коэффициент, определяемый видом среды и условием распространения
волны.
Для иллюстрации в табл. 13.2 приведены расстояния, на которых интенсивность
звука уменьшается вдвое [83].
Таблица 13.2
Среда Частота, кГц
10 100 500 1000
Воздух 220 м 220 см 4,8 см 2,2 см
Вода 400 км 4 км 160 м 40 м
Практически для всех сред (газов, жидких и твердых веществ) имеются таблицы,
определяющие показатели поглощения с учетом частоты колебаний, образующих
волны. Из формулы (13.40) и табл. 13.2 следует, что пространственный показатель
поглощения зависит прежде всего от квадрата частоты и (не так сильно) от харак-
теристик среды [67, 85, 126]. Значение а может изменяться на много порядков. Так,
в воде 4,3 1/м на частоте звука f - 1 кГц. В инфразвуковом диапазоне а« 1,
568
Глава 13. Акустические средства функционального поражения
поэтому раз возникшие инфразвуковые колебания без заметного ослабления мо-
гут опоясывать земной шар.
Плоская монохроматическая волна с учетом ее затухания в среде может быть
представлена аналитической моделью
р = Ро ехр{-усо/ + jkz - аг},
где р0 — давление в начальной точке г = Zb-
Мгновенное значение интенсивности волны в точке z
/(z) = —^e"2<^cos(&z-cof), (13.41)
где Ри — мощность излучателя, находящегося в точке = 0.
На рис. 13.10 представлена качественная зависимость ослабления интенсивно-
сти I акустических волн от расстояния г, учитывающая эффекты затухания и по-
глощения. Акустическое поражение объекта достигается при /> /кр, где /кр — кри-
тическая величина интенсивности, при которой наступает функциональное пора-
жение (для уха, например, /кр = 1...10 Вт/м2). Поэтому зона акустического поражения
имеет границу, соответствующую удалению D от источника, равному D = гкр.
Рис. 13.10. Зависимость ослабления интенсивности / акустических волн
от расстояния z до излучателя; / — среднее значение интенсивности
Мгновенное (или среднеквадратическое) значение интенсивности в точке z опре-
деляется также степенью когерентности звукового поля в точке г. Определение сте-
пени когерентности поля и влияние когерентности на интенсивность волн, восприни-
маемых распределенными объектами, рассматривается в следующем параграфе.
13.5. Когерентность акустических волн
Характеризуя эффективность устройств акустического поражения, необходимо
учитывать степень когерентности излучаемых пакетов волн. От их взаимной коге-
рентности зависит направленность излучения, т. е. способность излучающей сис-
темы концентрировать энергию волн в узком заданном телесном угле. Когерент-
ность — свойство двух (или большего числа) пространственно-временных процес-
сов a(z,/), р2(м), вообще говоря, случайных, характеризующее их способность
взаимно усиливать или ослаблять суммарную интенсивность в фиксированной точке
z и в определенный момент времени /.
Если излучения от двух монополей сохраняют постоянное фазовое соотноше-
ние, можно говорить об их взаимной когерентности. Протяженный источник, напри-
мер, рупор или громкоговоритель, является когерентным если сохраняется разность
13.5. Когерентность акустических волн
569
фаз колебаний между всеми его точками. Поэтому понятие когерентности соот-
ветствует понятиям «согласование», «корреляция» [127].
Рассмотрим две плоские звуковые волны Pifat) с одинаковыми амп-
литудами и частотами coj = со2 = со, но разными фазами. Пусть в некоторой точке z
измерена результирующая интенсивность /, усредненная за время наблюдения Г:
1 \ 2
/ = 71к1(г’Л<Р1) + /’2(г>Лф2)| dt, (13.42)
1 о
где
A (z, t, <р) = Ро exp{j(kz - 2nft + (рх)}; (13.43)
Рг (z, t, <р) = Ро ехр{ j (kz - 2 л// + <p2)}. (13.44)
В дальнейшем операция усреднения обозначается как
1 = \]pi (z,t,<p) + р2 (г,Лф)|2 )• (13.45)
Время усреднения Т » у определяется приемником — объектом акустического
поражения.
Используя (13.43) и (13.44), из (13.45) получим
/ = 2ро[1 + (с°5(ф2-ф1))]. (13.46)
Если фазы cpj и ср2 или хотя бы их разность со временем не меняются, т. е.
Дф = <р2 - ф1 = const, то
4or =2p02(l + cosA<p). (13.47)
Результирующая интенсивность I существенно зависит от разности фаз Дф и
изменяется от 1= 0 до /тах =4рд (рис. 13.11).
Рис. 13.11. Интенсивность когерентного и некогерентного излучений
—, так что (со8Дф) = 0, из (13.46)
Соотношение (13.47) описывает случай идеальной (полной) когерентности из-
лучения.
При полной некогерентности, когда разность фаз Дф изменяется случайным об-
разом и имеет плотность распределения W (Дф) =
следует, что /тах =2рд = const.
Следовательно, интенсивность некогерентного излучения может быть в 2 раза
ниже интенсивности излучения, образованного сложением двух когерентных ко-
лебаний при условии Дф = ф2- ф! = 0 (рис. 13.11).
В общем случае, всегда наблюдаемом на практике; излучения когерентны лишь
частично. Поэтому необходимо учитывать уровень акустической когерентности.
570
Глава 13. Акустические средства функционального поражения
При обработке случайных акустических пространственно-временных волн не-
обходимо привлекать аппарат вероятностного описания всех производимых пре-
образований. Протяженный источник И излучает акустическую волну, представ-
ленную на удалении z = Zq в виде (рис. 13.12)
р(х,ь() = Л(х,(13.48)
где Рв(х,у,1) — начальное давление в точке у(х,у,/) — фаза поля, создавае-
мого источником И в плоскости хОу.
Рис. 13.12. Формирование поля плоских акустических
волн протяженным источником И
В большинстве практических задач приемлемо допущение о пространственной
однородности, изотропности и стационарности акустических полей. Для характе-
ристики таких полей и эффектов, порождаемых ими при воздействии на различ-
ные объекты, пользуются развитым аппаратом корреляционного анализа и опери-
руют со вторым моментом
Г12(х1,х2,/1,/2) = (р(х1,/1)/>*(х2,/2)). (13.49)
В (13.49) угловые скобки означают усреднение по ансамблю реализаций, Xi и
х2 — радиус-векторы точек 1 и 2; * — символ комплексного сопряжения.
Функция Г12 (к,, х2, tx, t2) имеет размерность Вт/м2 и называется функцией про-
странственно-временной когерентности (ФПВК). При Xj = х2 = х и = t2 функция
Г12 (х[, х2, ,6) характеризует интенсивность излучения в точке х. Если источник И
акустического поля имеет малые размеры и Lr]« (j% — расстоя-
ние до точки наблюдения), то такой источник можно считать точечным. Точечный
источник, расположенный в точке £0, генерирует колебание чистого тона (создает
спектральночистое поле), ФПВК которого представляется в виде
Г12(х1,х2Д1,Г2) = 8(х1-х0)8(х2-х0)ЛТ(г1,Г2), (13.50)
где К—корреляционная функция излучаемого временного сигнала; 8(х) —
дельта-функция Дирака.
В частном случае, когда источник генерирует детерминированное гармоничес-
кое колебание (чистый тон), ФПВК равна
Г12(х1,х2,т) = /08(х1 -х0)8(х2 -х0)ехр(;со0т), (13.51)
где /0 — интенсивность акустического поля в точке x0(Q)> т = ^ -t2.
Внутренние шумы приемника и естественные помехи обычно с приемлемой
точностью описываются белым пространственно-временным шумом с ФПВК:
Г12 (х„х2,т) = /п8(х( - х2)8(т). (13.52)
Знание когерентности имеет большое значение при оценке поражающих свойств
излучаемого акустического поля.
13.5. Когерентность акустических волн
571
Y12 (х1> х2>т)
Степень когерентности определяется как
Г12 (xi j х2’
Г12(х1 = х2,т = 0)
(13.53)
Степень пространственной когерентности, которая определяет когерентность
отдельных пучков (мод) лучей, измеряется при т = 0 и меняется в пределах 0 < у12 < 1.
При у12 = 0 акустическое поле считается некогерентным, а при у12< 1 наблюдаются
энергетические потери акустических волн. Коэффициент у12 можно расценивать как
своеобразный КПД источников акустических полей.
Для определения степени когерентности акустического поля в районе поража-
емого объекта производят измерение составляющих акустического поля и
/?(х2) в точках %! и х2 (в данном случае jq и х2 — скалярные величины), перемно-
жение и усреднение полученного произведения по ансамблю выборочных функций
(рис. 13.13).
Рис. 13.13. К определению степени пространственной
когерентности акустической волны
При частично когерентном акустическом поле зависимость Г12 от разности ко-
ординат Ах = х2 - %! имеет вид, представленный на рис. 13.14.
Рис. 13.14. Функция пространственной когерентности акустической волны
Степень когерентности в соответствии с (13.53) определяется как
^12 max ^12 min
Г1П +Г1П
* 12 max 1 1 12 min
(13.54)
Для источника гармонических волн r12min = 0, поэтому у12 = 1. Для некогерент-
ных случайных полей (например для уличного шума) Г12 = Г12 тах, поэтому у12 = 0.
Значение Ах = х2-хь ПРИ котором у12 = 0,5, принято называть интервалом простран-
ственной акустической когерентности.
572
Глава 13. Акустические средства функционального поражения
Для характеристики спектральной чистоты акустических волн, создаваемых то-
чечным источником (монополем), используется нормированная автокорреляцион-
ная функция, которая в соответствии с (13.53) для стационарного эргодического
процесса представляется в виде
где т = - /2.
Интервал временной когерентности (время корреляции) т определяется шири-
ной спектра излучаемых акустических волн. Для волнового пакета (цуга), имеющего
ширину спектра А/, интервал временной корреляции равен
т~—
V
(13.56)
В предельном (но нереальном) случае полной когерентности, когда А/= О, время
корреляции т оо.
Акустические волны с высокой степенью когерентности, при которой у12 -» 1,
способны наносить наибольший информационный ущерб. Это связано с возмож-
ностью получения акустических полей, обладающих высокой интенсивностью в
заданном телесном угле. Характерным бытовым примером таких волн является
свист, который имеет у12 ~ 1.
При акустическом поражении объектов необходимо учитывать как временную,
так и пространственную когерентность излучаемых волн. Величина пространствен-
ной когерентности акустического поля может изменяться в пространстве в интерва-
ле 0 <упр< 1. При этом упр зависит от типа излучателя, характеристик среды распро-
странения и длины акустической волны. Так, некогерентный протяженный источ-
ник И, представляющий собой круг радиуса р (рис. 13.12), может создавать волновое
акустическое поле со степенью когерентности 0 <упр < 1. Для такого дискового из-
лучателя [74]
2/t (v)
Ynp(v) »
р v
где A(v) — функция Бесселя первого рода первого порядка:
2яр|х|
(13.57)
(13.58)
|х| = 5/х2 + у2.
(13.59)
На рис. 13.15 изображена зависимость упр от v. Из рисунка видно, что только
при малых углах v акустическое поле обладает высокой степенью когерентности.
Так, акустическое поле можно считать пространственно когерентным при у « 0,88,
что соответствует условию
-Ы- = 0,16-. (13.60)
К р
Таким образом, когерентность акустического поля обеспечивается в угловом
секторе
|tgp| = -^< 0,16, при Х = р.
Л)
(13.61)
13.6. Акустические излучатели
573
Рис. 13.15. Степень пространственной когерентности
кругового источника акустического излучения радиусом р
Соотношение (13.60) характеризует условие когерентности протяженного ис-
точника И на рис. 13.12. Так, если принять среднюю длину волны слышимого
звука Х= 3 см (f=10 кГц), то для дискового излучателя радиусом р = 3 см поле можно
считать когерентным в угловых пределах ±9° по р. Этот вывод имеет определенное
практическое значение для случая, когда человек испытывает дискомфорт от зву-
ков, исходящих из одного излучателя.
13.6. Акустические излучатели
Акустические излучатели предназначены для возбуждения упругих волн в газо-
образных, жидких и твердых средах. Излучатели создают в окружающем их про-
странстве волновое поле, т. е. пространственно-временное распределение давления
р(х, У, Z,t)- Акустические излучатели аналогичны передающим антеннам радиоси-
стем. Широкое применение нашли не только одиночные, но и распределенные в
пространстве системы излучателей.
13.6.1. Одиночные излучатели
В связи с использованием в акустике волн длиной от десятков тысяч метров до
долей микрона, применяются различные типы излучателей. Принципы действия
акустических излучателей весьма разнообразны и основаны на использовании самых
различных механизмов превращения практически всех известных видов энергии в
энергию акустических колебаний (волн). С точки зрения акустического поражения
интерес представляют мощные и сверхмощные излучатели. Наибольшие перспективы
имеют электроакустические, газоструйные и гидродинамические преобразователи.
Электроакустические излучатели преобразуют энергию электрических сигналов
в энергию колебаний некоторой механической системы (пластины, мембраны,
цилиндра, диафрагмы и т. д.). Упрощенная структурная схема электромеханичес-
кого излучателя представлена на рис. 13.16.
Рис. 13.16. Схема электромеханического излучателя
574
Глава 13. Акустические средства функционального поражения
Генератор электрических сигналов ГЭС формирует сигнал w(/) с заданным ви-
дом спектра S(со). Этот сигнал усиливается усилителем У и подается на электро-
механический преобразователь ЭМП, который нагружен на выходную антенну А
(например, громкоговоритель), излучающую акустические волны в окружающее про-
странство. Применяются различные виды ЭМП: пьезоэлектрические, магнитострик-
ционные, электродинамические и другие.
Основными характеристиками излучателей являются: рабочий частотный диа-
пазон /тпп.-./тах; мощность излучения РИ; направленность излучения; коэффици-
ент полезного действия.
Направленность характеризует способность излучателя концентрировать акус-
тические волны в узком телесном угле (рис. 13.17).
Рис. 13.17. Зона поражения объектов акустическим
устройством многоразового применения
Количественно направленность излучения Л(и) определяется отношением дав-
лений волны, создаваемой в волновой зоне (зоне Фраунгофера) на одном и том же
расстоянии г от центра излучателя И в направлении, определяемом единичным
вектором и, и в некотором фиксированном направлении и0, т. е.
/ к д(и)
ZMll) = —;—> ПрИ r- Const. (13.62)
Р(«о)
Обычно направление и0 выбирают так, чтобы оно совпадало с направлением
максимума излучения (рис. 13.17).
Направленность излучателя — комплексная функция
2)(и) = Л(и)Гу<₽,(и), (13.63)
где /?(u) = |D(u)| —амплитудная характеристика направленности, а ф(и) —фазо-
вая характеристика.
Амплитудную характеристику направленности Л (и) в сечении некоторой пло-
скостью, проходящей через направление максимума излучения и0, представляют в
полярной (рис. 13.18, а) или декартовой (рис. 13.18, б) системах координат [82].
В этом случае аргументом характеристики обычно является угол а или р. Эти углы
отсчитываются от направления максимума излучения и0.
Характеристика направленности Л(а), как и в электродинамике, часто называ-
ется диаграммой направленности излучателя. Характеристика Л(а) в большинстве
практических случаев является многолепестковой. Уровень вредных боковых лепест-
ков стремятся минимизировать разными способами.
13.6. Акустические излучатели
575
Рис. 13.18. Типичный вид характеристики направленности
в а — полярной и б — декартовой системах координат
Важными параметрами Л (а) являются ширина главного лепестка по уровню
нуля ос0 и ширина главного лепестка по уровню -~- = 0,707-а0 707, определяющие
уровень половинной интенсивности /излучаемых волн; чаще всего на практике поль-
зуются энергетической угловой шириной /?(а):
I2
= —Вт/м2. (13.64)
Алах
а-а0,707
max
a=ct0,5
Уровень «паразитных» боковых лепестков по отношению к главному обозначает-
ся символом о (для первого бокового лепестка о< 1, для дальних лепестков од « 1).
При энергетических расчетах, связанных с оценкой возможностей акустичес-
кого поражения объектов, важным является определение коэффициента концент-
рации энергии волн К. Мерой коэффициента концентрации служит отношение
интенсивности волн /(а = 0), излучаемых анализируемыми излучателями И в на-
правлении главного максимума и0, к интенсивности гипотетического ненаправлен-
ного (изотропного) излучателя (монополя) с такой же излучаемой мощностью /и
на одном и том же расстоянии г » X, т. е.
/и(а) 4л (13.65)
Iq J/?2(a)Ja’
О
где Q — полный телесный угол, занимаемый главным лепестком диаграммы направ-
ленности излучателя (рис. 13.17). Для монополя К= 1.
Величина К — энергетическая характеристика, показывающая относительный
выигрыш в интенсивности (мощности) направленного излучателя по сравнению с
ненаправленными при сохранении неизменного сигнала в точке приема. Направ-
ленность К применима не только к излучателям, но и к акустическим приемникам.
При известных значениях ширины главного луча в ортогональных плоскостях
а0 5 и р0 5 направленность излучателя можно определить по формуле
К = а , (13.66)
а0,5Р0,5
где а = 0,5...0,8 — коэффициент использования апертуры излучателя, зависящий
от его конструкции.
576
Глава 13. Акустические средства функционального поражения
При размерах излучающей поверхности больших длины волны X, коэффици-
ент концентрации поршневых излучателей, заключенных в экран (трубу), равен
где 5— площадь излучающей поверхности (апертура).
В табл. 13.3 приведены характеристики простейших излучателей акустических
волн. Можно видеть, что параметр Oj зависит от формы излучателя [147].
Таблица 13.3
Тип излучателя R(a) a^/2
Название Внешг [ИЙ вид
Отрезок прямой . 1,38Х arcsin nd X arcsin — d 0,22
◄ d ► sinx X _ d v- — Этг г 5
П рямоугольный поршень в экране а/
А Л. — oil L кА X
d
Круглый поршень в экране а / 2Jj (х) 1,62Х arcsin nd . 3,42X arcsin nd 0,15
d X
Окружность а / И W| 1.12X arcsin nd . 2,22X arcsin nd 0,40
d
Для работы в газовых средах широко применяются электроакустические излу-
чатели рупорного типа, представляющие собой отрезок трубы с монотонно изме-
няющимся поперечным сечением 5, как на рис. 13.19.
Рис. 13.19. Экспоненциальный рупорный излучатель
Вследствие ряда преимуществ, на практике применяется так называемый экс-
поненциальный рупор, в котором сечение изменяется по закону
= (13.68)
где а — постоянная величина (показатель расширения).
13.6. Акустические излучатели
577
Акустическое давление излучаемой волны определяется формулой [102]
где
p{z,t}= poe°'5az
(13.69)
COS со
(13.70)
При со > О,5асо волна распространяется вдоль оси Oz со скоростью с. При
со < О,5асо рупор не может работать как излучатель. Следовательно, экспоненциаль-
ный рупор обладает свойством фильтра нижних частот. Полоса пропускания тако-
го своеобразного фильтра определяется нижней критической частотой (рис. 13.20)
Рис. 13.20. Частотная характеристика экспоненциального
рупорного излучателя
(13.71)
Из (13.71) следует, что частоту излучения можно сделать сколь угодно малой,
уменьшая а. Это особенно важно при необходимости излучения низких и инфра-
низких частот. Однако важно отметить, что размер рупора должен быть большим,
что следует из (13.67). Излучатели рупорного типа используются для создания аку-
стических полей в жидких средах.
Недостатками излучателей рупорного типа являются небольшая мощность (де-
сятки ватт) и низкий КПД (порядка 10 %).
Газоструйные излучатели используют эффекты преобразования кинетической
энергии струи газа (или жидкости) в энергию акустических колебаний. Такое пре-
образование может происходить либо при периодическом прерывании струи (из-
лучатели-сирены), либо при взаимодействии струи с неподвижными и твердыми
препятствиями (излучатели-свистки).
Сирены позволяют создавать весьма мощные акустические колебания за счет
периодического прерывания весьма интенсивных струй газа, с большой скоростью
вытекающего из специального отверстия. Прерывание струй в сиренах осуществ-
ляется вращающимся диском-ротором с отверстиями или зубцами (рис. 13.21).
Ротор вращается с помощью электромотора или воздушной турбины (по прин-
ципу реактивного двигателя). Сирены формируют весьма узкополосное направлен-
ное излучение. Частота гармонических колебаний определяется числом отверстий
Ав роторе (или в статоре) и скоростью вращения ротора:
v = nN, (13.72)
где п — число оборотов ротора в секунду.
578
Глава 13. Акустические средства функционального поражения
Рис. 13.21. Схема осевой сирены: 1 — ротор, 2— статор,
3 — электродвигатель, 4 — рупор, 5 — камера высокого давления
Рабочий диапазон частот сирен лежит в пределах 200 Гц...500 кГц. Акустиче-
ская мощность сирен может достигать 100...10 000 Вт, а КПД достаточно велик и
составляет ~ 50...89 %.
Свистки — механические устройства, в которых отсутствуют движущиеся час-
ти. Акустические волны в них создаются за счет автоколебаний в струе протекаю-
щего газа при ее взаимодействии с препятствием в виде острой кромки клина или
резонирующей полости.
Распространение получили вихревые или резонансные свистки. В вихревых
свистках газ под большим давлением подается в цилиндрическую камеру, где об-
разуется вихревой поток, который потом частично выбрасывается через тонкую
трубку в окружающее пространство.
Вихревые свистки маломощны. Излучаемые волны имеют акустическую мощ-
ность порядка нескольких ватт, поэтому для целей акустического поражения они
не пригодны.
Перспективны свистки резонансного типа, способные излучать мощные акус-
тические волны за счет использования эффекта усиления колебаний, возбуждае-
мых в специальных резонаторах.
На рис. 13.22 представлена конструкция свистка Левассера [82], содержащая
тороидальные резонаторы 2, 3 с продольными прорезями. Воздух, подаваемый на
вход конусообразного сопла 7, поступает в резонаторные камеры 2 и 3, усиливает-
ся и излучается выходными рупорами 4.
Частота акустических волн, излучаемых свистком, определяется размером ре-
зонатора d и средним диаметром тороида D. Кроме того, частота волн зависит от
перепада давлений газа на входе и выходе свистка:
1 + (13.73)
где А — коэффициент, зависящий от конструкции свистка.
Для свистка Левассера А = 7,03 м/с. Если d = 1 м, то f ~ 7 Гц. Следовательно,
свистки могут применяться в инфразвуковом диапазоне.
В зависимости от конструкции свистка мощность звука может достигать 500 Вт,
а КПД составляет порядка 20 %. Свистки эффективны в диапазоне 1...30 кГц. На
низких частотах свистки должны иметь значительные габариты. Так, при f = 6 Гц
13.6. Акустические излучатели
579
Рис. 13.22. Разрез свистка Левассера: 1— сопло, 2— основной (тороидальный)
резонатор, 3 — вторичный (тороидальный) резонатор, D — средний диаметр тороида
(X = 50 м) размер всей конструкции свистка должен быть очень большим. Коэффи-
циент концентрации энергии свистка может быть оценен формулой
(13.74)
X2
где L — диаметр выходного отверстия.
На низких частотах X > L свистки как концентраторы акустических волн мало-
эффективны. Однако для акустического поражения большим достоинством излу-
чателей-свистков является узкополосность излучения (почти чистый тон).
Рассмотренные выше одиночные излучатели не всегда могут обеспечивать вы-
сокую степень концентрации энергии волн в направлении на поражаемый объект.
В этом отношении, особенно в области инфранизких частот, большие возможнос-
ти имеют распределенные акустические излучатели. Ниже они именуются систе-
мами излучателей (или антенными решетками акустических излучателей).
13.6.2. Системы излучателей
Высокая направленность излучения К достигается применением системы эле-
ментарных излучателей, расположенных в определенном порядке на плоскости или
какой-либо поверхности (рис. 13.23).
При большом числе когерентных излучателей формируется узкая характеристика
направленности R(а, 0) и коэффициент концентрации может принимать значение
К= 102...103.
Для исследования основных свойств системы излучателей в качестве элементар-
ного излучателя используют пульсирующую сферу, излучающую волну строго чис-
того тона. Такой простейший акустический излучатель называется монополем. Он
580
Глава 13. Акустические средства функционального поражения
Рис. 13.23. Амплитудная характеристика направленности 7?(а,Р) излучателя
создает в среде ненаправленное (изотропное) излучение: его акустическое поле
симметрично, т. е. одинаково по всем направлениям. Для создания направленного
излучения создают систему, объединяя несколько излучателей, разнесенных на
некоторое расстояние друг от друга (рис. 13.24).
Для исследования основных свойств системы излучателей в качестве элементар-
ного излучателя используют пульсирующую сферу, излучающую волну строго чи-
стого тона. Такой простейший акустический излучатель называется монополем. Он
создает в среде ненаправленное (изотропное) излучение: его акустическое поле
симметрично, т. е. одинаково по всем направлениям. Для создания направленного
излучения создают систему, объединяя несколько излучателей, разнесенных на
некоторое расстояние друг от друга (рис. 13.24).
Рис. 13.24. Система из п синфазных монополей
Интерференция отдельных парциальных излучений создает в некоторых направ-
лениях усиленное поле с высокой интенсивностью. В других направлениях, вычита-
ясь, поля отдельных излучателей ослабляют интенсивность суммарного поля. В ре-
зультате получается определенная угловая направленность R(а, (3) излучаемых волн.
Поскольку направленность Л(а, р) результирующего поля создается в резуль-
тате интерференции волн, излучаемых отдельными излучателями, в основе теории
направленности систем излучателей лежит задача о совместной работе нескольких
монополей (в простейшем случае — двух). Пусть система состоит из двух синфаз-
ных монополей, разнесенных на расстояние L [85]. Поле, создаваемое такой систе-
мой в некоторой точке Л/, равно, как следует из рис. 13.25,
1
A eJkr\
и
(13.75)
13.6. Акустические излучатели
581
Рис. 13.25. Поле, создаваемое системой из двух монополей
Постоянный коэффициент А, имеющий размерность Н/м, для дальнейшего рас-
смотрения не существенен.
Из рис. 13.25 следует, что
r' = \lr2 -2£rcos0 + /2.
(13.76)
Поэтому (13.75) можно представить в виде
(13.77)
При условии —«1 знаменатель в формуле (13.77) можно положить равным
г
единице. Кроме того, можно представить показатель степени экспоненты в числи-
теле степенным рядом
2£ n L2
—cosO + —
1*
1
-1 ~ JkLcosQ+—Jk—sin2 0.
2 г
kl}
В зоне Фраунгофера при выполнении условия -«1 давление р в точке М
г
можно принять независимым от расстояния. В результате упрощения получается,
(13.78)
что
(kL
Л ч jkL _ (kL Л
р = А]ехр jkr-cosO cos —cosO ,
2 12;
(13.79)
где Ar — новая несущественная постоянная.
Выражение (13.79) определяет амплитудно-фазовую характеристику направлен-
ности двух когерентных монополей:
Z>(0) = 7?(0)ехр[ /ф(0)], (13.80)
где
kL
—cosO (13.81)
2 ;
— амплитудная, а ф(0) — фазовая характеристики.
Комплексная функция Ф(о) = е7ф^ зависит от двух действительных аргумен-
тов 0 и г. Она позволяет представлять в графической форме (в виде кривых в поляр-
2?(0) = cos
582
Глава 13. Акустические средства функционального поражения
ных координатах) фазовые фронты волн, формируемых как отдельным монополем,
так и системой монополей. Для одиночного монополя фазовый фронт описывается
уравнением
г* = ф(0) = ре-'*'’, (13.82)
где v = v(r,0) — действительная переменная; р — радиус окружности с центром в
начале координат.
Уравнение (13.82) задает окружность. Именно такую форму имеет фазовый фронт
волны, создаваемой одиночным изотропным источником (рис. 13.26).
Для двух синфазных монополей фазовый фронт, оп-
ределяемый формулами типа (13.82), уже не будет сфе-
рическим в силу достаточно сложной функции показа-
теля степени:
i r kL п 2л
<р(г,0) = 2л-----cos0 = —
А, 2 А,
Рис. 13.26. Фазовый фронт
волны, формируемой
одним монополем
(13.83)
— COS0 .
2 J
В зоне Фраунгофера (Z » г) расстояние до точки
приема М и угол наблюдения а = 9О°-0 можно отсчиты-
вать как от первого излучателя, так и от центра базы L.
Характеристику направленности удобно изображать как
изрезанную шаровую поверхность, длина радиуса кото-
рой равна значению Л (а). При а = 0° (0 = 90°) направ-
ленность R = Лтах = 1, если монополи синфазны. Ха-
рактеристика одиночного монополя R(а, р) — сфера единичного радиуса. Для двух
синфазных монополей эта характеристика представляет собой поверхность враще-
ния вокруг оси х.
В полярных координатах (плоскость zOy на рис. 13.27, а) амплитудная характери-
стика А(а) имеет многолепестковую форму. На рис. 13.27, б представлено поле
звукового давления, полученное методом визуализации пространственного распре-
деления интенсивности звуковых волн, излучаемых синфазно возбуждаемыми элект-
родинамическими излучателями (частота f= 9 кГц) [54].
Рис. 13.27. Многолепестковая характеристика направленности системы двух когерент-
ных монополей Ох и О2. а — расчетная (£ = 1,5 X); б — экспериментально полученная
методом визуализации поля звукового давления двух синфазных излучателей
13.6. Акустические излучатели
583
(13.84)
При kL » 1 число лепестков характеристики направленности системы двух ко-
герентных монополей О{ и О2 в диапазоне значений осе [0; л] равно
2kL 4L
П =---?4 ГУ
Л Л
Минимальное расстояние Z, при котором имеется еще один целый лепесток,
равно L = —. Единственный лепесток имеет в этом случае вид тора с нулевым просве-
том в области оси у, а амплитудная характеристика представляется в виде
Я(а) = сО8|^*'|. (1385)
\ 2 7
X
При L < — акустическое поле не исчезает ни в каком направлении и при kL -> О
характеристика стремится принять форму сферы. Амплитуда поля (волны) во всех
направлениях делается равной двойной амплитуде волны, создаваемой одним источ-
ником. Фазовая характеристика описывает фронт расходящейся сферической волны.
Фазовая характеристика (13.83) определяет пространственное положение фронта
акустических волн, излучаемых системой монополей. Задаваясь постоянной фазой
результирующего поля, с помощью выражения (13.83) можно установить соотно-
шение между г и а = 90°- 0, представляющее собой уравнение фазового фронта:
(13.86)
/ ч 2л f Zsina А _
<р(«)=УГ-----=с’
Л \ z у
где С — постоянная величина, которая принимает значение, кратное л.
Фаза ф(а) гармонической акустической волны в пределах одного лепестка ам-
плитудной диаграммы R (а) остается постоянной (при условии идентичности мо-
нополей). Однако при переходе от лепестка к лепестку при г = const она изменяет-
ся на л. Поэтому для четных и нечетных лепестков уравнение фазового фронта при-
нимает вид
(13.87)
(13.88)
Zsina
г-------= пл, п = 0,1,2,...
2<
Zsina 2и + 1 п , „
г-------=-------Л, 77 = 0,1,2,
2 2
Уравнения (13.87) и (13.88) с учетом комплексной функции действительного
аргумента вида (13.82) позволяют построить изображение фазовых фронтов волн,
генерируемых двумя когерентными монополями. На рис. 13.28 представлены расчет-
ное и полученное экспериментально изображения фазовых фронтов рассматривае-
мой системы монополей.
Экспериментальная картина фазового фронта получена путем визуализации
звукового поля в водяной ванне.
с
С учетом того, что Х = —, амплитудную характеристику (13.81) можно предста-
вить в виде
7?(a) = cos л sin
(13.89)
Из (13.89) видно, что форма 7?(а) существенно зависит от частоты f излучае-
мой волны. Этот факт имеет особое значение в акустике, ибо частота излучаемых
колебаний может изменяться в пределах нескольких декад. Поэтому при излучении
584
Глава 13. Акустические средства функционального поражения
а б
Рис. 13.28. Расчетное (а) и экспериментальное (б) изображения
фазовых фронтов системы двух монополей
колебаний, имеющих сложный спектр, системы излучателей вообще могут не иметь
определенной характеристики направленности. Если представить излучаемый па-
кет волн разложением в ряд Фурье по гармоникам частоты f :
оо
р(0 = У, Pm cos(»i2n/? - <pm), (13.90)
т=1
где рт, — соответственно амплитуда и фаза, а т — номер гармоники, то характе-
ристики направленности /?w(a,y^) парциальной волны частоты^ будут различать-
ся. При широком спектре частот излучаемых колебаний амплитудная характери-
стика направленности распадается на пространственно независимые составляющие.
В результате лепестки /?(а) разрушаются, а поля источников складываются неко-
герентно. Из (13.81) следует, что для получения более острых лепестков (большей
направленности К) требуется увеличивать размеры системы L. Отличительной
особенностью акустики является возможность получения больших значений на-
правленности К в системах монопольных излучателей при большом их числе (п > 2)
даже при неизменных размерах L. Например, два близко расположенных монополя
(kL « 1) при синфазной работе излучают не вдвое, а вчетверо большую мощность,
чем каждый излучатель в отдельности. Аналогично п синфазных одинаковых моно-
полей, расположенных в малой по сравнению с длиной волны области, излучают
волны с энергией не в п, а в п2 большей, чем каждый излучатель в отдельности.
Направленность системы из п синфазно пульсирующих излучателей, равноуда-
ленных друг от друга на расстояние d (рис. 13.24), может быть определена на осно-
ве следующих соображений.
Давление акустической волны в произвольном направлении, образующем неко-
торый угол а с нормалью к линии расположения монополей, равно
P = £Poe*p[j(i-l)Arfsina], (13.91)
<=i
где р0 — амплитуда волны, порождаемой каждым монополем (/= 1:л).
Суммируя выражение (13.91), как геометрическую прогрессию со знаменателем
q = ехр(/Ы sin а), можно получить
exp(/nA;sin«a)
р=р«—тЧ~<13-92>
exp(j«Ksina)-l
13.6. Акустические излучатели
585
После простых преобразований с учетом формулы Эйлера окончательно мож-
но определить абсолютную величину суммарного акустического давления:
( nkds\ncC\
Р = Ро
<Wsina>
I 2 )
(13.93)
Амплитудная характеристика направленности равна
sin
*(«)—
«Ро
r nkdsina^
I 2 ;
«sin
</cJsina>
< 2 >
(13.94)
2
= п2.
Коэффициент направленности может быть получен из (13.93) при ос= О, после
раскрытия неопределенности типа 0/0:
к=±-
Ро
(13.95)
Так как амплитуда суммарного поля возрастает в п раз, то интенсивность уве-
э
личивается в п раз.
Амплитудные характеристики направленности Л (а), рассчитанные по формуле
(13.94) для d = ~ ПРИ л = 8 и и = 16, приведены на рис. 13.29 [71].
Ширина главного луча по уровню нулей (на рис. 13.29 этот угол обозначен 2а0)
определяется из соотношения
sina0 = — = —. (13.96)
nd L
Рис. 13.29. Амплитудная характеристика направленности
системы когерентных излучателей: а — п = 8; б — п = 16
Обычно при проведении практических расчетов ширину луча оценивают по
уровню половинной мощности, т. е. как а0 7. Этот уровень соответствует где
586
Глава 13. Акустические средства функционального поражения
Ртах — амплитуда давления, соответствующая направлению максимума излучения.
Можно показать, что
а07 ==0,88у = О,88ао. (13.98)
Если приведены характеристики направленности, то отсчет углов а0 7 или сх0
производится относительно того направления, по которому R - jRmax = 1.
Уровень максимума первого бокового лепестка составляет
(13.99)
э71
Общая формула для относительных уровней максимумов боковых лепестков
представляется в виде [71]
где z — номер бокового лепестка.
Формула для коэффициента направленности (13.95) получена в предположении
об идеальности системы когерентных излучателей, когда у12 = 1. Реально вследствие
конечной ширины спектра излучаемых колебаний и недостатков конструкции си-
стемы излучателей степень когерентности сформированного этой системой поля
акустических волн у12< 1. В этом случае коэффициент направленности системы
излучателей определяется по формуле
ЛГ = «[1-у12(1-и)]. (13.101)
Для когерентной системы у12 = 1, поэтому
^Ког=«2- (13.102)
Для некогерентных излучателей, когда у12 = 0,
*неког="- (13-103)
Реальная система излучателей частично когерентна, поэтому КК0Г > К > К^К0Т.
На практике иногда направленность частично когерентных излучателей опре-
деляют по формуле
& = иа,
где а = 1,3...1,4.
Так, акустическая система, предназначенная для борьбы с террористами и опи-
санная в [84], имеет
Такое значительное снижение направленности (по сравнению с К = л2) объяс-
няется, по-видимому, широким спектром излучаемых волн и не совсем удачной
конструкцией системы излучателей.
13.7. Инфразвуковые волны
К инфразвуковым относят акустические колебания, не слышимые людьми.
Отдельные, уникальные, люди воспринимают звуки с частотами менее /пах= 15 Гц.
Однако тональность этих звуков и их интенсивность существенно теряются.
В изотропной однородной среде лучи прямолинейны и, выходя из монополя
(по образующим конуса), расходятся по мере удаления от источника излучения.
В неоднородной среде расширение лучевых трубок, образуемых криволинейными
13,7. Инфразвуковые волны
587
лучами, определяется не только расстоянием от источника, но изменяется, имея
почти синусоидальный характер (рис. 13.30). В этой лучевой картине распростране-
ния звука в волноводе каждый луч соответствует определенному углу наклона [85].
Рис. 13.30. Лучевая картина, наблюдаемая при взрыве на малой высоте (Я= 10 км)
Из рис. 13.30 видно, что вдали от монополя И в каждую точку среды приходит
сразу несколько лучей волн разной длины. В силу принципа суперпозиции резуль-
тирующее акустическое поле равно сумме полей, создаваемых каждым парциаль-
ным лучом. Примечательно, что в среде происходит изменение направления рас-
пространения луча. Это изменение подчиняется закону Снеллиуса. Закон связыва-
ет угол падения 0! с углом преломления 02 соотношением
sin©! _ sin02
(13.104)
где q и c2 — скорости звука в соседних слоях среды.
В подводном волноводе при отклонении от осей волновода скорость звука из-
меняется, поэтому вследствие рефракции луч изгибается в сторону того слоя, ско-
рость звука в которой меньше (вследствие меньшей плотности следы). В результа-
те лучи, исходящие из излучателя И под меньшими углами наклона к горизонту,
распространяются в волноводе без отражения от дна и поверхности воды. Тем са-
мым исключается возможность поглощения звука при отражении его от дна и рас-
сеянии на неровностях дна и поверхности воды.
Затухание инфразвуковых волн в самой воде характеризуют коэффициентом
поглощения. Выраженный в децибелах на километр, этот коэффициент равен
а = 0,036/3/2, (13.105)
где f — частота в килогерцах.
Из (13.105) следует, что на частоте/= 50 Гц = 5-10“2 кГц интенсивность звуко-
вой волны из-за поглощения в воде уменьшается всего в 10 раз на удалении от
источника z = 25 000 км.
В водяном волноводе вблизи его поверхностей луч, выходящий под малым уг-
лом к горизонту, будет изгибаться то вверх, то вниз, не удаляясь от оси волновода.
Дисперсия скорости звука в волноводе равна
C2(z) = (2O,l)2|r(zo)-T(z)| м2/с2, (13.106)
588 Глава 13. Акустические средства функционального поражения
где Г(^) — абсолютная температура слоев воды для средних частот волн в интер-
вале волноводного слоя 2Н = 1500...2000 м. Изменение скорости звука на глубине
составляет всего несколько процентов от средней скорости звука. Однако такая
неоднородность приводит к весьма неравномерному распределению звукового поля.
Способность инфразвуковых волн распространяться на большие расстояния в
воде и в атмосфере обусловлена наличием в этих средах природных волноводов,
называемых также звуковыми каналами. Природные волноводы возникают вслед-
ствие специфической зависимости скорости звука от высоты. На рис. 13.31 пред-
ставлена зависимость скорости звуковых волн от глубины z для умеренных широт
в океане [73]. Наиболее благоприятные условия распространения складываются при
расположении источника вблизи оси волновода на глубине Zq^ 1500 м, совпадаю-
щей с уровнем минимальной скорости звука cmin = 1465 м/с (f = 20...50 Гц).
Рис. 13.31. Изменение скорости звука в подводном волноводе
В связи с изменением скорости звука в атмосфере по вертикали z почти сим-
метрично относительно оси z = Zq, в направлении распространения волны наблю-
дается рефракция — изменение направления луча. Явление изменения скорости
звука по вертикали обусловлено вертикальным градиентом температуры. График
зависимости температуры от высоты, полученный путем обработки большого ко-
личества экспериментальных данных [73], приведен на рис. 13.32.
Эмпирическая кривая рис. 13.32 хорошо аппроксимируется зависимостью для
скорости звука
<?(г) = 20,1>/7’(г) м/с, (13.107)
где T(z) — абсолютная температура воздуха на высоте г.
Как видно из рис. 13.32, в атмосфере имеются два минимума температуры: на
высотах /7=15кмиЯ<80 км. На этих же высотах наблюдаются два минимума
скорости звука, обуславливающие наличие двух акустических волноводов. Если
источник звука (например взрыв) находится на высотах z < 50 км, то для наблюда-
теля, расположенного на поверхности земли (z = 0), основную роль будет играть
нижний волновод с границами 0 < г < 50 км. Лучевая картина в этом случае будет
иметь вид, представленный на рис. 13.30. Лучи концентрируются в пределах высо-
ты Н — 3...40 км. Однако лучи, захваченные волноводом, не все доходят до земной
поверхности. Здесь также можно отметить область акустической тени.
13.7. Инфразвуковые волны
589
Рис. 13.32. Температурная кри-
вая: зависимость абсолютной
температуры Т атмосферы
Земли от высоты
Периоды колебаний давления в волнах, возбуж-
денных мощными взрывами или извержениями вул-
канов, на расстояниях в несколько тысяч километ-
ров оказываются значительными (от долей до десят-
ков минут), а длины акустических волн составляют
X = 1...50 км. Следовательно, уже на расстояниях,
равных одной длине волны, свойства атмосферы
(прежде всего коэффициент преломления п = cjc^)
изменяются весьма существенно. Кроме того, на ус-
ловия распространения волн влияют перемещения
воздушных масс. Все эти факторы сильно услож-
няют анализ эффектов, порождаемых взрывами при
Z > 5 м, так как классическое волновое уравнение
в этом случае неприемлемо: зависимость становится
нелинейной.
Инфразвук с уровнем относительной интенсив-
ности > 120 дБ оказывает вредное влияние на чело-
веческий организм. Еще более вредными являются
импульсные инфразвуковые воздействия с длитель-
ностью «акустической пули» т < 10 мс и частотой
следования Fn = 1...100 Гц. При их воздействии мо-
гут возникать опасные резонансные явления в от-
дельных органах и тканях организма.
Части тела, согласно заключению французско-
го исследователя В. Гавро (он исследовал влияние
инфразвуковых колебаний на организм человека),
являются своего рода живыми резонаторами, настроенными на определенную часто-
ту собственных колебаний. Так, сердце настроено на «шум» с частотой около 6 Гц,
глаза — 40...100 Гц, голова — 20...30 Гц, руки — 2...5 Гц, вестибулярный аппарат —
2...5 Гц и т. д.
Точно так же как и механический резонатор, орган человека очень чувствите-
лен к колебаниям резонансных частот. Инфразвук с частотой, попадающей в по-
лосу пропускания того или иного органа человека, воздействует на орган таким
образом, что амплитуда его собственных колебаний резко увеличивается. В резуль-
тате появляются болевые ощущения и другие негативные последствия. Например,
инфразвук может своим воздействием дезориентировать войска противника, вы-
зывать приступы рвоты и спазмы желудка. Все указанные проявления сразу же
прекращаются с выключением источника инфразвука без заметного ущерба чело-
веку и без ущерба окружающей среде.
Безотчетное чувство страха и панику в толпе могут вызывать инфразвуки с ма-
лыми уровнями мощности, если их частоты попадают в соответствующий интервал
частот. При больших уровнях мощности на определенных частотах инфразвук при-
водит к нарушению психомоторных функций человека или к состоянию, предше-
ствующему эпилептическому припадку (судорожному припадку с потерей сознания).
Инфразвук может быть использован как на поле боя, так и для борьбы с уличны-
ми беспорядками. При этом способность инфразвука проходить сквозь кирпичные,
бетонные и металлические преграды позволяет воздействовать даже на укрытую
живую силу.
590
Глава 13. Акустические средства функционального поражения
Известно, что уже с начала 90-х гг. XX в. в США предпринимались усилия,
подкрепленные соответствующим финансированием, направленные на разработ-
ку высокомощного инфразвукового оружия. В частности, разрабатывался проект
создания остронаправленной акустической «пули», излучаемой антенной диамет-
ром 1...2 м в виде пачки импульсов акустических волн. Узкая направленность по-
требовалась для уменьшения влияния дифракции на распространение акустичес-
ких волн в приземном слое атмосферы. Предполагалось, что при достаточной мощ-
ности излучаемых импульсов такая «пуля» будет вызывать временную потерю
дееспособности личного состава войск противника [72].
Естественными источниками инфразвука являются метеорологические, сейсми-
ческие и вулканические явления. Генераторами инфразвуковых волн могут быть
резкие перепады атмосферного и океанического давления, ветер, морские волны,
водопады, изгибные колебания поверхности океана, растрескивание ледового по-
крова, землетрясения, обвалы в горах, извержения вулканов, полярные сияния,
грозовые разряды, цунами.
Человеческая деятельность также сопровождается образованием инфразвуковых
колебаний и волн. Излучение инфразвука исходит даже в процессе речеобразова-
ния. Всякий очень громкий звук несет с собой почти всегда и инфразвуковую энер-
гию. Наиболее сильными источниками инфразвуков являются взрывы, выстрелы
орудий, ударные волны при переходе звукового барьера самолетами, удары копров,
рев реактивных двигателей. Инфразвуки присутствуют в шуме двигателей, винтов
кораблей, возникают при обтекании ветром крупных сооружений и т. п.
Создание специальных излучателей инфразвуковых волн представляет собой
очень сложную задачу. Установки получаются громоздкими и малоэффективными.
При исследованиях прием инфразвуков осуществляют с помощью микрофонов,
гидрофонов и геофонов. Их конструкции модифицированы с учетом необходимо-
сти приема колебаний с большими амплитудами и низкими частотами, а усили-
тельные электронные схемы согласованы с большими выходными сопротивления-
ми приемных элементов. Могут применяться для приема также и другие устрой-
ства, работающие на иных физических принципах. Перспективны генераторы звука
высоких частот, излучающие, к примеру, на частотах = 40 Гц и = 46 Гц. Эти
частоты образуют биения, которые детектируются определенными функциональ-
ными органами и наносят ощутимый функциональный ущерб (в данном случае —
сердцу на частоте биений = 6 Гц [117]).
13.8. Слышимый звук
Принято считать, что диапазон слышимых звуков охватывает частоты в преде-
лах 16 Гц < f < 20 кГц. Звуковой аппарат представителей животного мира чрезвы-
чайно развит. Но при этом диапазон слышимого звука индивидуален для каждого
животного и зависит от его возраста. Человек здесь во многом отстает. Животные,
находящиеся на значительно более низком уровне развития, имеют значительно
более развитый слуховой аппарат, утраченный человеком в процессе эволюции.
Дельфины, летучие мыши, ночные бабочки, практически не имея зрения, великолеп-
но ориентируются в темном мире и обладают высокой степенью помехозащиты от
естественных и организованных помех, создаваемых другими животными [49, 83].
Орган слуха человека как объект ФП имеет свои достоинства и недостатки. К не-
достаткам следует отнести его неспособность эффективно адаптироваться и извле-
13.8. Слышимый звук
591
кать полезную информацию в сложной акустической обстановке. Его чувствитель-
ность не хуже чувствительности современного радиолокатора, так как ухо способно
улавливать звук на частоте /= 400 Гц с очень малой интенсивностью 1~ 10“12 Вт/м2
и нормально функционировать в колоссальном динамическом диапазоне интенсив-
ностей, составляющем 120 дБ.
Орган слуха снабжен своеобразной системой автоматической регулировки интен-
сивности восприятия слышимого звука, что позволяет во многих случаях избегать
акустических травм, которые могут вызываться воздействием звуковых волн с боль-
шими и резкими перепадами интенсивности (например, звуки взрыва или выстрела).
Область слышимых звуков характеризуют обобщенные графики, представлен-
ные на рис. 13.33 [116].
Рис. 13.33. Область слышимых звуков для человека
Порог слышимости звуков определяется минимальным звуковым давлением
р = 2-Ю-5 Н/м2 = 10“12 Вт/м2), что соответствует относительному уровню 0 дБ.
Болевые ощущения наступают при превышении нулевого порога на уровне 120 дБ.
Действие акустических волн может повлиять на слух тремя способами:
1) вызвать повреждение слуха или глухоту при относительном уровне интенсив-
ности /отн >120 дБ;
2) при длительном воздействии звука с интенсивностью 80 < /отн < 120 дБ резко
понизить чувствительность слуха на ограниченное время (минуты, недели, меся-
цы), после чего слух может восстанавливаться;
3) привести к маскировке звуков определенных тонов и понизить способность
извлечения полезной звуковой информации при /отн > 60 дБ.
Первые две ситуации позволяют говорить о безвозвратном и восстанавливае-
мом ФП органа слуха. В третьем случае происходит маскировка звукового сообще-
ния, которую называют акустическим подавлением органа слуха (в отличие от пер-
вых двух ситуаций, которые вызывают функциональное поражение органа слуха).
Маскировка звукового сообщения происходит вследствие существенного недо-
статка уха, который заключается в том, что в присутствии чистого тона определенной
частоты (например/= 1000 Гц) орган слуха не воспринимает звуки близких частот.
Рис. 13.34 иллюстрирует явление маскировки звуков в диапазоне 1</<10кГц
чистым тоном частоты f - 1 кГц с относительной интенсивностью = 80 дБ.
592
Глава 13. Акустические средства функционального поражения
Рис. 13.34. Маскирующее действие чистого тона
Звуковая гармоника частоты f - 1 кГц маскирует звуковые сигналы в широком
диапазоне частот, шириной А/ ~ 10 кГц. Тем самым исключается возможность ре-
чевого общения между людьми. Это явление, называемое маскировкой, имеет ме-
сто не только при чистых тонах, но и любых звуках. Впрочем, иногда маскировка
чрезвычайно удобна: например, в тех случаях, когда желательно чтобы какой-то
разговор не был слышен посторонним, часто значительно проще ввести дополни-
тельный звук, чем понизить звуковой уровень речи.
Интенсивность типичных звуков приведена в табл. 13.4.
Таблица 13.4.
Источник звука и расстояние до него Относительный уровень звукового давления, (Фон, дБ)
Порог слышимости 2-10-5 Н/м, 2 дБ, 0 Фон
Шепот, 0,3 м 1
Громкая речь, 1 м 30
Комната в тихой квартире 40
Кабина грузового автомобиля 70
Метро, трактор 90
Фортиссимо оркестра 100
Реактивный двигатель самолета (вблизи) 120
Повреждение органа слуха 135
Примечание: 1 фон = 201g(p/p0) = 101g(7/70); pQ = 210 5 Н/м2; /0 = 10"12 Вт/м2.
Из табл. 13.4 видно, что бытовые шумы могут быть опасны для слуха. Такие
«вредные» шумы создают, например, поезда метро, выстрелы, взрывы или грозо-
вые разряды.
Порог восприятия звука в воздухе совершенно иной, чем в водной среде. В диа-
пазоне частот 20 Гц...20 кГц наилучшее восприятие звука в воздухе происходит на
частотах 800...2000 Гц. В воде же во всем слышимом диапазоне восприятие звука
резко ослаблено, при этом разница в восприятии минимальна на низких частотах
(/<2 кГц) и прогрессивно возрастает с 20 до 70 дБ на частоте f = 80 Гц [120].
Опасным для уха считается предельное давление pmax = 104 Н/м2 на частотах
/= 30...50 Гц. Особенно опасны для человека звуковые волны, имеющие импульс-
13.8. Слышимый звук
593
ный, прерывистый характер. Опасность связана с тем, что орган слуха человека име-
ет защитную систему, предохраняющую ухо от вредных сильных звуков. Эта сис-
тема, которую можно назвать своеобразной системой регулировки усиления (АРУ),
имеет крупный недостаток, заключающийся во временной задержке. При воздей-
ствии сильных звуков с интенсивностью /отн > 90 дБ определенные устройства уха
автоматически (рефлекторно) начинают снижать чувствительность к воз-
действующему звуку, но слуховой аппарат человека «включает» систему АРУ с за-
держкой т3« 10 мс (рис. 13.35, а).
Рис. 13.35. Воздействие на орган слуха акустических волн разной длительности т:
а — длительность входного воздействия т больше времени задержки т3 системы
управления чувствительностью уха (т > т3); б — т < т3; т3 ~ 10 мс; и — амплитудная
характеристика уха; /н — начало работы «системы АРУ»
С учетом этой особенности слухового аппарата мощные и кратковременные
импульсные звуки (т < т3) в слуховом канале не ослабляются, и элементы среднего
и внутреннего уха подвергаются значительным механическим воздействиям (виб-
рациям), что может привести к необратимым последствиям. Полная утрата слуха
происходит мгновенно при воздействии коротких акустических импульсов с отно-
сительной интенсивностью /тах > 90 дБ (рис. 13.35, б).
Короткие мощные звуковые удары (т < 10 мс) почти не встречаются в природе,
они порождаются деятельностью человека. Именно поэтому в ходе эволюции при-
рода еще не ликвидировала временную задержку «системы АРУ» слухового аппа-
рата. Этот крупный недостаток слухового аппарата человека используется в зару-
бежных опытных образцах акустического оружия, излучающего мощные и корот-
кие звуковые сигналы — «акустические пули» [121].
В повседневной деятельности человек может получить акустическую травму при
работе с ударными инструментами, взрыве боеприпаса, в результате прохождения
ударной волны, порожденной низколетящим сверхзвуковым самолетом (рис. 13.36).
Если положить скорость распространения ударной волны Vc — 300 м/с, то при сред-
нем расстоянии между ушами h ~ 20 см человек испытает сильнейший импульс-
ный акустический удар в течение времени т < 1 мс. На такой короткий удар ухо не
успеет отреагировать («включить АРУ»), и человек может получить акустическую
травму.
594
Глава 13. Акустические средства функционального поражения
Рис. 13.36. Воздействие ударной акустической волны, порожденной движением
сверхзвукового самолета, на орган слуха: Vc — скорость самолета; L — расстояние
между ушами; I — интенсивность звука; т — длительность «хлопка»
13.9. Ультразвук
Ультразвуковые волны создаются такими упругими колебаниями среды, часто-
та которых превышает 15...20 кГц. Однако в некоторых источниках под ультразву-
ком понимают волны с частотой f < 15 кГц, если эти волны не применяются для
передачи звуковой информации слуховой системе человека. В зависимости от дли-
ны волны (или от частоты) ультразвук обладает специфическими особенностями
излучения, распространения и воздействия на различные объекты. Поэтому ультра-
звук обычно подразделяют на три поддиапазона: низкие ультразвуковые частоты
(/= 1,5 1О4...1О5 Гц), средние (/= 105...107 Гц) и высокие (f= 107...109 Гц). Волны с
частотами/= 1О9...1О13 Гц принято называть гиперзвуком.
Ультразвуковые волны по своей природе не отличаются от инфразвуковых и
других акустических волн с частотой f< 20 кГц. В газах и жидкостях распространя-
ются только неполяризованные волны, а в твердых телах — продольные и попереч-
ные (сдвиговые).
Для ультразвуковых колебаний характерна малая длина волны X = 10“2...10“5 см,
что объясняет лучевой характер их распространения. Даже при относительно не-
больших размерах источника ультразвука так называемый дифракционный пара-
где г — расстояние до точки наблюдения, D — размер
метр Р невелик (Р =
источника). Поэтому вблизи излучателя ультразвуковые волны распространяются
в виде пучков, поперечный размер которых сохраняется близким к размеру излуча-
теля. Так же как и в радиотехнических антенных устройствах, в ультразвуковом диа-
пазоне применяются различные фокусирующие устройства (линзы, зеркала и дру-
гие), позволяющие путем сужения луча получать на объектах высокие интенсивно-
сти звука, порядка I = 106 Вт/см2. Мощность излучателя может изменяться в пре-
13.9. Ультразвук
595
делах 1... 10000 Вт. Объединение отдельных когерентных излучателей в системы (фа-
зированные антенные решетки) рассматривается как перспективное направление
создания компактных устройств акустического поражения [68].
Ультразвуковые волны затухают значительно сильнее волн более низких час-
тотных диапазонов. При f> 20 кГц показатель поглощения пропорционален квад-
рату частоты:
а = ₽Лг, (13.108)
ре
где р — плотность среды; с — скорость звука.
Размерный коэффициент р зависит от вязкости, теплоемкости и теплопровод-
ности среды. В общем случае коэффициент р зависит и от со, но при низких часто-
тах эта зависимость весьма слабая. На рис 13.37 приведена зависимость показателя
поглощения звука в воздухе от относительной влажности при комнатной темпера-
туре на различных частотах.
Из графиков рис. 13.37 следует, что в области слышимых частот при влажно-
сти 50 % показатель поглощения составляет а = 10-3 см-1, в то время как на частоте
ультразвука/= 100 кГц а~ 10~2 см-1. Следовательно, с повышением частоты интен-
сивность волны уменьшается очень сильно. Уменьшение интенсивности с рассто-
янием z происходит по экспоненциальному закону I = 70ехр(—2осг).
Рис 13.37. Зависимость показателя поглощения
звука в воздухе от относительной влажности
Если на частоте f = 30 кГц принять для воздуха а ~ 10"3 см-1, то на удалении
Z = 50 м от источника интенсивность звука ослабляется примерно в 22 000 раз (на
43 дБ). Такое ослабление интенсивности может быть скомпенсировано только уве-
личением направленности излучения или мощности излучателей. Еще одна важ-
ная особенность ультразвука связана с малой длиной волны (X = 10-2...10“5 см), что
позволяет создавать малогабаритные высокоэнергетические системы излучателей
596
Глава 13. Акустические средства функционального поражения
с очень большой интенсивностью. При малой апертуре в габаритах обычного кей-
са свободно можно поместить п = 10 х 10 излучателей. Коэффициент направленности
такой системы излучателей оценивается как К = п2. Так, при п = 100 получается,
что К= 104, т. е. даже при не очень мощных излучателях открывается возможность
для создания остронаправленного акустического излучения с высокой интен-
сивностью 1= 1О2...1О4 Вт/м2.
Высокая степень направленности системы излучателей требует использования
системы слежения за поражаемым объектом. Однако как положительную характе-
ристику рассматриваемой системы следует отметить возможность исключения воз-
действия собственного мощного акустического поля на обслуживающий персонал
этого типа акустического оружия.
Для ультразвуковых волн с высокой интенсивностью характерны проявления
законов нелинейной акустики. Дело в том, что распространение акустических волн
в реальных средах (особенно в областях их границ) не может быть адекватно описано
классическими волновыми уравнениями. При распространении интенсивных волн
(/> 1 Вт/см2) в твердых и жидких веществах (в воде, в крови, в тканях живых организ-
мов и т. п.) проявляются нелинейные эффекты, приводящие к изменению формы
волны. Причинами этого являются: изменение скорости профиля волны, де-
тектирование акустических колебаний [122].
В воде или крови, например, интенсивная синусоидальная волна преобразует-
ся в пилообразную на расстоянии нескольких десятков или даже единиц длин волн.
При f = 100 кГц эта длина составляет 1...10 см.
Акустическое детектирование, рассмотренное в работе [85], вызывается взаи-
модействием волн в среде с микронеоднородностями, размер которых соизмерим
с длиной волны. Акустическое детектирование нарушает принцип суперпозиции
волн, справедливый для линейного случая и приводит к искажению спектра. В ча-
стности, нелинейное взаимодействие двух гармонических волн с частотами и со2
вызывает появление в спектре результирующего колебания комбинационных час-
тот (02 - (Of И Ю2 + (О].
Особенности нелинейных преобразований сильных акустических волн позво-
ляют создать инфразвуковой излучатель малых размеров.
В результате нелинейного преобразования двух мощных ультразвуковых волн
на частотах^ и/ь разность которых равна f2- ~ 10 Гц, в веществе объекта ФП
(например в голове) образуются мощные биения на частоте F6 = f2 - Д с высокой
интенсивностью инфразвука. Эти биения способны причинить непоправимый вред
организму человека.
13.10. Устройства функционального поражения
Различают устройства акустического поражения одноразового и многоразового
применения. Одноразовые устройства рассчитаны на «одномоментное» поражение
объектов путем применения специфических мощных источников акустических волн,
генерирующих кратковременный пакет упругих колебаний весьма высокой интен-
сивности. Одноразовые источники доставляются в район поражаемого объекта спе-
циальными носителями (бомбами, ракетами, террористами). Основу устройств
многоразового применения составляют мощные одиночные излучатели или системы
излучателей, создающих высокоэнергетическое акустическое поле в заданном телес-
ном угле (см. разд. 13.6).
13.10. Устройства функционального поражения
597
13.10.1. Одноразовые устройства акустического поражения
Этот вид акустического оружия использует внезапное и кратковременное из-
менение фазового состояния вещества, превращая, например, твердое вещество в
газ или жидкость. Происходить такое превращение может при взрывах, столкнове-
ниях тел, искровых разрядах и других физических процессах.
В качестве оружия уже давно применяются различные взрывные устройства
(бомбы, мины, снаряды). Взрыв сопровождается очень быстрым выделением энер-
гии, которое приводит к разогреву, движению или сжатию продуктов взрыва. При
взрыве исходная потенциальная энергия ВВ превращается в кинетическую энер-
гию движения (сжатия) среды. Часть энергии переходит в тепловую энергию газов.
Другая, ббльшая, часть превращается в энергию акустического импульса (ударной
волны), действие которого приводит к механическим разрушениям и функциональ-
ному поражению различных объектов. Акустический импульс представляет собой
бегущую акустическую волну малой длительности ти. Спектр такого импульса сплош-
ной с максимумом в области частот /е[0; 1/ти].
При распространении в среде (в воде, в воздухе) среднее значение звукового
давления для любого конечного объема V равно нулю, так как каждый такой им-
пульс содержит области повышенного и пониженного давления, т. е.
= lim jp(ty}dtdV =
y~*°vr
(13.109)
Следует различать эффекты разрушающего и поражающего действия. Количе-
ственно разрушительный эффект взрыва оценивают площадью разрушения
5 = лЛр2, (13.110)
где 7?р — радиус разрушения, на котором интенсивность волн достигает определен-
ного критического значения
/(Л = Лр) = 7кр. (13.111)
Согласно [123] радиус разрушения равен
Rp=Ry/w, (13.112)
где w — тротиловый эквивалент ВВ (кг); R = 1...50 м — приведенное расстояние.
Приведенное расстояние R, зависящее от степени разрушения, типа объекта и
среды, определяется опытным путем.
По тяжести воздействия поражающих факторов взрыва на человека выделяют
три группы эффектов воздействия, см. рис. 13.38 [124]:
1) опасные для жизни, способные причинить смерть или необратимые тяже-
лые последствия при критическом давлении ркр > 1000 Н/м2 (относительный кри-
тический уровень интенсивности волны /отн кр 160 дБ);
2) не опасные для жизни, в частности повреждение уха при ркр = 20 Н/м2
(/отн кр~ 120 дБ),
3) обуславливающие обратимые последствия (в частности, незначительные пси-
хические расстройства) при ркр =10 Н/м2 (/отн кр ~ 100 дБ при времени действия
около минуты).
Приведенные количественные характеристики уровней звука являются усред-
ненными, и их следует воспринимать как ориентировочные.
Взрывы в воде при равных тротиловых эквивалентах более эффективны по срав-
нению со взрывами в воздухе. Этот эффект связан с меньшим затуханием волн в вод-
598
Глава 13. Акустические средства функционального поражения
Рис. 13.38. Диаграммы тяжести воздействия взрывной волны на человека:
I — область незначительного ущерба; II — повреждение отдельных органов;
III — смертельный исход
ной среде и меньшими потерями энергии волн при переходе из водной среды в тка-
ни организма человека (импеданс тканей человека лучше согласован с водной сре-
дой, чем с воздушной).
Основные повреждения при взрывах получают внутренние органы (сердце, лег-
кие, желудок и другие), органы слуха и центральная нервная система.
Эффективность акустического поражения зависит от длительности акустического
импульса ти, пикового (максимального) давления в импульсе и от стационарного
давления. Для органа слуха наиболее опасны акустические импульсы, длительность
фронта которых Тф меньше времени задержки т3 слуховой «системы АРУ» (системы
адаптации слухового аппарата к уровню громкости).
Установлены экспериментальные зависимости радиуса R различной степени
функционального поражения человека от тротилового эквивалента заряда ВВ:
смертельное поражение
легкие повреждения
отсутствие повреждений
Rx = 3,17a/w м;
R2 =18,1Vw м;
R3 = 83,2 w0,33 м.
Кроме массы заряда w и его удаления от человека большое влияние на фактор
повреждения имеет частотный спектр акустической волны. Наиболее опасны низ-
кие частоты f < 45 Гц. Так, для оценки поражения легких выявлена эмпирическая
формула «самой вредной» частоты (частоты резонанса легких):
/л
742
Ум
Гц,
где М— масса тела в граммах. Так, при массе тела М= 70 кг получается^ = 45 Гц.
В воде при увеличении глубины взрыва интенсивность акустических волн воз-
растает.
Сводные данные по радиусам R смертельного, несмертельного и безопасного
воздействия зарядов различной массы w на человека приведены в табл. 13.2.
В зависимости от массы заряда w можно выделить границы зоны разрушения — I,
зоны ФП — II и зоны подавления — III, под которой понимается зона, в которой
посторонний источник звука потенциально может воспрепятствовать (замаскиро-
вать) приему акустического сообщения, например на некоторое время исключить
возможность работы гидрофонов. Эти зоны представлены на рис. 13.39. Вне преде-
лов зоны III акустический импульс не наносит никакого ущерба.
Мощный акустический импульс в естественных условиях возникает при элект-
рическом разряде молнии. Это гром, который происходит при резком расширении
13.10. Устройства функционального поражения
599
Рис. 13.39. Зоны воздействия ударной волны
Таблица 13.2.
Эмпирическая формула Масса заряда кг
0,1 1 10 100
Радиус смертельного воздействия, м
/J|=3,17>/w 1 3,17 10 31,7
Радиус несмертельного воздействия, м
Я, = 18,1V»V 5,7 18,1 57 181
Радиус безопасного расстояния, м
Я, =83,2w0,33 38,6 83,2 179 386
воздуха в канале молнии. При громких разрядах могут возникать несколько им-
пульсов грома со средней длительностью 0,05 с. В ряде случаев такие акустичес-
кие импульсы могут причинить ущерб органам слуха.
13.10.2. Многоразовые устройства акустического поражения
Существенный недостаток акустических средств одноразового применения,
заключающийся в кратковременности их работы (доли секунд), устраняется при
использовании излучающих устройств, создающих в заданном телесном угле силь-
ное акустическое поле. Такие устройства могут длительное время генерировать
акустические волны с большой интенсивностью (свыше 140 дБ), достаточной для
эффективного пресечения противоправных действий.
К достоинствам генераторных устройств акустического поражения следует от-
нести способность создавать сильные акустические поля в заданном ограниченном
пространстве; возможность генерировать акустические волны в течение длитель-
ного времени в достаточно узком диапазоне требуемых частот и с высокой степе-
нью временной и пространственной когерентности; способность аддитивным об-
разом изменять форму излучаемых сигналов, например, выбирать длительность и
форму акустического импульса в соответствии с критерием эффективного пораже-
ния определенных объектов.
В акустических генераторах могут применяться как одиночные излучатели, так
и системы излучателей (антенные решетки), рассмотренные ранее. Применение
одиночных излучателей неэффективно в низкочастотной части диапазона акусти-
ческих волн при f < 3000 Гц (X > 1 м). Это обусловлено невозможностью создания
узкополосных излучателей в приемлемых габаритах. Так, при необходимости со-
здания высокоэнергетического акустического поля на частоте f- 5 Гц излучатель
должен иметь размеры порядка 60 м. В высокочастотной части звукового диапазо-
на (Х< 10 см) возможно создание узконаправленных антенн с высоким коэффици-
ентом концентрации энергии К > 1000. Однако, как указывалось выше, эффектив-
ность акустического поражения на частотах f> 1 кГц низкая. Кроме того, затруд-
нительно управлять характеристикой направленности Я(а).
В устройствах акустического поражения перспективным является применение
систем излучателей — акустических ФАР. Известны автомобильный и носимый ва-
рианты таких устройств [122].
В США ведутся испытания устройства акустического поражения на основе ак-
тивной ФАР [122]. Это устройство излучает акустические импульсы с длительно-
600
Глава 13. Акустические средства функционального поражения
стью ти = 1...2 мс и длительностью переднего фронта Хф = 10...20 мкс (рис. 13.13).
Результат воздействия мощных акустических импульсов на человека зависит не
только от пикового давления рпик во фронте звуковой волны, но и от длительности
импульсов ти, длительности их передних фронтов Тф, периода следования Т. Влия-
ние длительности переднего фронта импульса на эффективность ФП имеет поро-
говый эффект — он достигается для тех импульсов, у которых передний фронт
короче, чем время его прохождения через объект (Тф< 100 мкс). Необходимая дли-
тельность импульса варьируется в пределах ти = 1...10 мс, что отвечает условиям
согласования акустических волн с воздушной средой.
Акустические волны с частотами f < 2000 Гц энергетически предпочтительнее,
так как при f > 2000 Гц волны быстро затухают за счет молекулярного рассеяния:
коэффициент поглощения а пропорционален /2 (13.108). Практически акустичес-
кий импульс сли~1 мс при f > 2000 Гц представляет собой короткую ударную вол-
ну, сплошной спектр которой имеет максимум на частоте fnrdX ~ 1/ти.
В низкочастотной области звуковых волн, особенно в инфразвуковом диапазо-
не, система излучателей акустических ФАР представляется набором п монополей,
характеристика направленности которго определяется как
. ( d А
sin лиг—а
Л(а) = ——k (13.113)
лиг—а
X
Коэффициент направленности акустических ФАР, состоящей из п монополей,
зависит от степени пространственной когерентности у12 формируемого акустическо-
го поля:
ЛГ = л[1-у12(1-и)]. (13.114)
Эквивалентная мощность акустических волн, излучаемых устройством на ос-
нове акустических ФАР, определяется по формуле
Рй=Р1Я[1-у12(1-Л)], (13.115)
где Рх — мощность одного излучателя.
Опытный образец устройства акустического поражения на основе акустических
ФАР состоит из 20...30 излучателей, которые могут работать как индивидуально,
так и в любой совокупности. На рис. 13.40 изображена ФАР из четырех импульс-
ных акустических излучателей.
При работе в режиме акустической ФАР мощность излучения составляет
Д, =Р\П*/3 <Р{п2, (13.116)
что объясняется неидеальностью конструкции ФАР, генерирующей поле с недоста-
точной пространственно-временной когерентностью у < 1.
Рассматриваемый генератор формирует акустические импульсы с относительной
интенсивностью до 145 дБ на расстоянии 100 м (на меньшем расстоянии — 165 дБ),
что достаточно для пресечения массовых противоправных действий.
Акустический генератор может быть использован как для недопущения против-
ника в запретную зону, так и для воздействия на отдельные малоразмерные цели.
Здесь имеется в виду возможность изменения пространственной зоны поражения
в зависимости от режима работы акустической ФАР. Генератор достаточно компак-
тен, что позволяет размещать его на автомобиле. Он обслуживается одним челове-
13.10. Устройства функционального поражения
601
Рис. 13.40. ФАР из четырех импульсных акустических излучателей
ком. В качестве первичных источников акустических волн могут использоваться
гудки, свистки, сирены, устройства, формирующие электрические разряды.
В инфразвуковом диапазоне волн (< 10 Гц) имеются принципиальные трудности
создания АФАР с узкой характеристикой направленности R(а) (большим коэффи-
циентом направленности К» 1). Эти трудности сводятся прежде всего к следующим:
• громоздкие излучатели, размеры которых обусловлены большой длиной вол-
ны инфразвуковых колебаний;
• необходимость придания большой амплитуды вибраций излучающему элемен-
ту для получения необходимой интенсивности волн, что требует большой затра-
ты энергии (при малом КПД);
• невозможность получения острой направленности излучения с целью акусти-
ческого поражения конкретного объекта и эффективной экранировки обслу-
живающего персонала;
• малая дальность действия.
Эти трудности могут быть преодолены при использовании эффекта наложения
(суперпозиции) двух когерентных ультразвуковых излучений, частоты которых j\
и /2 отличаются друг от друга на небольшую величину F = f2- f\ = 1...15 Гц.
При правильном выборе частот оэх и со2 ультразвуковых волн может быть до-
стигнут такой же эффект ФП, как и при прямом воздействии инфразвука с разно-
стной частотой Q6 = ю2 —(Ор Однако в рассматриваемом случае использование ульт-
развуковых колебаний с частотой f > 30 кГц дает возможность получения остро-
направленного луча волн с высокой направленностью. Известно [125], что на этом
принципе возможно создание боевого малогабаритного излучателя ультраинфра-
звуковой волны. Размеры такого излучателя позволяют монтировать его в кейсе, а
масса не превышает 5 кг. Предполагается, что устройство будет состоять из двух
моноблоков ультразвуковых генераторов, формирующих остронаправленные излу-
чатели волн с частотами, различающимися на 5...15 Гц. Два электродинамических
излучателя, встроенные в кейс, способны, фокусировать когерентные волны в луч
с угловой расходимостью всего в несколько градусов. Применение такого индиви-
дуального оружия будет пригодно для самозащиты, охраны жилища и других объек-
тов. Подобные устройства могут найти применение в качестве контрмер против
бытового акустического терроризма, создавая в нужном объеме анигилирующее аку-
стическое поле (антизвук), уничтожающее вредное акустическое поле в результате
деструктивной интерференции с ним.
602
Глава 13. Акустические средства функционального поражения
13.11. Эффективность акустического поражения
Заданная степень акустического поражения достигается, если в месте располо-
жения объекта интенсивность акустических волн будет не меньше некоторого кри-
тического значения L&, т. е.
7>/кр. (13.117)
Критическое значение интенсивности для каждого объекта определяется, как
правило, экспериментально.
Для взрывных источников волн условие поражения может быть записано в виде
4лг2
кр’
(13.118)
где Рв — мощность акустического импульса, порожденного взрывом; г — расстоя-
ние до объекта поражения; оспр — пространственный показатель поглощения, име-
ющий размерность м-1.
Уравнение (13.118) называется уравнением акустического поражения.
Радиус зоны поражения определяется как корень трансцендентного уравнения
(13.118). Значение этого радиуса гпор всегда больше радиуса зоны физического раз-
рушения (рис 13.39).
Зона поражения объектов устройствами акустического многоразового приме-
нения определяется с помощью рис. 13.17. В произвольной точке В, находящейся
на расстоянии г(акр) от излучателя И, интенсивность акустической волны равна
= Ри7Ж2(а)^_2апр^ (13.119)
в 4лг2
где РИ — мощность источника излучения; К — коэффициент направленности из-
лучателя; А(а) — амплитудная характеристика направленности излучателя; оспр —
пространственный показатель поглощения.
Уравнение кривой, определяющей границу зоны поражения, представляется в
виде
кр
(а)с-2апрг
4лг2(акр)
(13.120)
В инфразвуковом диапазоне можно положить апр = 0, поэтому уравнение аку-
стического поражения (13.120) упрощается и приводится к виду
-%^?2(а) = /кр. (13.121)
4лг
Из (13.121) определяется гпор:
^пор — ^тах^(^)’ (13.122)
[рИк
где гтах = ——— — максимальная дальность поражения, которая достигается при
V кр
a = 0.
Из (13.122) следует, что при заданных характеристиках излучателя и поражае-
мого объекта форма зоны поражения определяется только амплитудной характери-
стикой направленности А (а).
Уравнение акустического поражения (13.118) имеет важное практическое зна-
чение. С его помощью определяются требования к энергетическим характеристи-
кам устройств акустического поражения, а при заданных устройстве и объекте
поражения определяется зона поражения.
13.12. Маскировка звуковых сигналов
603
13.12. Маскировка звуковых сигналов
Акустические волны используются прежде всего для информационного обме-
на между объектами естественного и искусственного происхождения. В животном
мире звук самого различного происхождения позволяет передавать и принимать
смысловую информацию и сигналы опасности, определять направление на источ-
ник волн и решать другие задачи. Технические устройства применяются для обра-
ботки акустических сигналов управления или воздействия на вещество.
Большая группа акустических методов, применяемых для получения различной
информации, основана на использовании эффектов отражения и рассеяния волн
на границах раздела сред с различными характеристиками. Подобные методы при-
меняются в гидролокации, в медицине и других приложениях [54, 82, 126]. Эхоло-
ты, гидролокаторы, гидрофонные системы используют в навигации, в военно-мор-
ском деле, в рыбном промысле. Гидролокаторы могут работать в активном режи-
ме, излучая зондирующий акустический сигнал, или в пассивном, только принимая
акустические сигналы, создаваемые независимыми внешними источниками в ис-
следуемых средах.
Для маскировки акустических сигналов могут применяться специальные гене-
раторы, создающие в окрестности расположения приемных устройств (органов слуха,
гидрофонов и других приемников звуковых сигналов) акустическое поле с такой
интенсивностью, которая позволяет наносить информационный ущерб за счет со-
здания помех приему полезного сообщения. Величина критического значения ин-
тенсивности маскирующего акустического поля помехи в этом случае может иметь
значительно меньшее значение /п, чем в случае ФП (/п < /кр). Поэтому при инфор-
мационном подавлении мощность излучающих систем на несколько порядков ниже
той, которая требуется для ФП.
Для определения зоны подавления информационных акустических систем не-
обходимо пользоваться уравнением акустического подавления. В общем случае
акустического подавления приемника сигнала С источник полезного сообщения И
не совмещен с источником маскирующей помехи П (рис. 13.41).
Рис. 13.41. Зоны акустического подавления информационного канала
604
Глава 13. Акустические средства функционального поражения
В точке приема С акустическое поле, создаваемое излучателем И монопольно-
го типа, имеет интенсивность
г __ И ~ 2схпр/^
С ~ Л 2 е
4лл
(13.123)
где Ри — мощность излучателя полезного сигнала; гс — расстояние между излуча-
телем И и приемником С (рис. 13.41).
Интенсивность помехового сигнала
7П =:51^7?2(а)е“2апр\ (13.124)
4лгп
где Рп — мощность источника помех; Ад, Ап (а) — коэффициент направленности
и амплитудная характеристика излучателя П; гп — расстояние до источника помех.
Акустический информационный канал будет подавлен при условии
= (13.125)
где £ап — коэффициент акустического подавления, равный отношению интенсив-
ностей помехового и полезного сигналов (полей) в точке приема С, при котором
нарушается извлечение полезной информации (при использовании в качестве мас-
кирующей помехи звука чистого тона f = 2000 Гц коэффициент £ап « 1...3).
С помощью (13.123), (13.124) и (13.125) можно получить уравнение акустичес-
кого подавления
2
—К^ (a)^re“2otnp(r"“''c) = £ап. (13.126)
ри г2
При подавлении акустических информационных каналов, работающих в инф-
развуковом диапазоне, можно положить Кп =Ап(а)= 1 и апр = 0. При этих услови-
ях уравнение (13.126) упрощается:
=КС, (13.127)
V п 7
где Кс=^^-.
Л
Так как
rc2 = x2+y2;r2 = x2+(y-L)2, (13.128)
то с помощью (13.127) можно получить уравнение для определения границы зоны
подавления
Полезно рассмотреть три случая, соответствующие значениям Кс < 1; Кс > 1 и
Кс = 1.
При Кс < 1 анализ (13.129) показывает, что граница зоны подавления представ-
ляет собой окружность с радиусом
(13.130)
1 Ас
Смещение центра окружности относительно начала координат
(13.131)
1 1-К„
13.12. Маскировка звуковых сигналов
605
Зона акустического подавления при Кс < 1 представляет собой плоскость хОу
за исключением части плоскости 50, заключенной внутри окружности радиуса /?1
(рис. 13.41).
При Кс > 1 зона подавления — круг радиуса
lJk~c
R2=k~^' (13132)
Центр круга смещен вправо на расстояние
d, = . (13.133)
Кс - L
При Кс = 1 окружность вырождается в прямую, проходящую через центр базы L.
Зона подавления находится справа.
На рис. 13.41 показана причина образования зоны подавления в районе источ-
ника помех П и излучателя полезного сигнала И. Кривые /п характеризуют зави-
симость интенсивности помехи на подавляемом объекте С от дальности гс, а кри-
вые 1С — зависимость интенсивности акустического поля полезного сигнала на входе
того же приемника С от дальности гс. Сплошные кривые соответствуют Кс < 1 (при
/сап = 1), а пунктирные — Кс > 1.
Анализ уравнения (13.129) и рис. 13.41 позволяет сделать следующие выводы.
1. При малой мощности генератора помех П, когда Кс > 1, зона подавления рас-
полагается вокруг П (эта зона на рис. 13.41 заштрихована), поэтому прикрытие своих
объектов возможно только при их расположении внутри областей П.
2. При большой мощности источника помех П, когда Кс < 1, прикрытие воз-
можно во всем прилегающем пространстве, за исключением зоны неподавления 50
(незаштрихована), находящейся вблизи источника полезного сигнала И.
ГЛАВА 14
ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ
Любое радиоэлектронное средство работает в условиях воздействия на него раз-
личных радиоэлектронных помех. В зависимости от природы возникновения при-
нято подразделять радиопомехи на преднамеренные и непреднамеренные. Предна-
меренные помехи создаются специально разработанными устройствами, предназ-
наченными для целенаправленного подавления того или иного радиоэлектронного
средства. Непреднамеренные помехи не создаются специально для подавления конк-
ретных РЭС. Они возникают, как правило, вследствие несовершенства отдельных
радио- и электротехнических устройств и неучета объективных закономерностей
функционирования РЭС как элементов сложных систем. Интенсивность непредна-
меренных помех в последние годы непрерывно возрастает вследствие значительно-
го роста количества эксплуатируемых РЭС.
В развитых странах число эксплуатируемых РЭС примерно удваивается за каж-
дые 5 лет [87]. Количество же источников непреднамеренных помех растет еще бы-
стрее. Значительно увеличилась плотность источников помех, создаваемых средства-
ми военного назначения. Так, на современном самолете устанавливается 25...30 от-
дельных РЭС. Не менее плотно сгруппированы радиоэлектронные средства на борту
морского судна. На поле боя на одном квадратном километре площади может быть
несколько десятков РЭС [72, 87].
Большое количество РЭС породило «тесноту в эфире», усугубляющую непред-
намеренные помехи. Любое современное РЭС работает в сложной помеховой об-
становке, так как освоенный радиочастотный диапазон в настоящее время загру-
жен настолько, что без принятия специальных мер никакое РЭС не может обеспе-
чить функционирование с заданной на этапе проектирования надежностью.
Высокая концентрация РЭС и их несовершенство породили проблему электро-
магнитной совместимости (ЭМС), под которой понимается способность РЭС одно-
временно функционировать в реальных условиях эксплуатации с требуемым качест-
вом при воздействии на них непреднамеренных помех и не создавать недопустимых
радиопомех другим радиоэлектронным средствам.
Обеспечение электромагнитной совместимости РЭС — важная составляющая
общей проблемы РЭБ. Без устойчивой работы собственных РЭС нельзя добыть
победу в информационном противоборстве. Но до сих пор наблюдается недооценка
роли ЭМС в решении задач РЭБ. Примером пренебрежительного отношения к ЭМС,
и даже игнорирования основных требований ЭМС может служить эпизод, имевший
место 4 мая 1982 г., во время конфликта у Фолклендских островов, когда аргентин-
ской управляемой противокорабельной ракетой был потоплен английский эсминец
«Шеффилд». Корабельные РЛС эсминца были выключены и по этой причине не
обнаружили атаки аргентинских самолетов. Приказ на выключение РЛС последовал
вследствие сильного влияния взаимных помех со стороны РЛС на работу линий
радиосвязи.
14.1. Непреднамеренные помехи и проблема электромагнитной совместимости РЭС 607
В работе [87] электромагнитная совместимость определяется как совокупность
таких свойств РЭС (и их составных частей) и условий работы, при которых не воз-
никают нежелательные электромагнитные связи (недопустимые непреднамеренные
радиопомехи), нарушающие работу других РЭС и в то же время обеспечивается функ-
ционирование РЭС в условиях эксплуатации с требуемым качеством.
Электромагнитная совместимость является составным элементом радиоэлект-
ронной защиты (РЭЗ) — комплекса мероприятий по обеспечению устойчивой ра-
боты радиоэлектронных средств и систем в условиях ведения противником РЭБ и
взаимного влияния РЭС. Радиоэлектронная защита является составной частью РЭБ.
Она включает защиту РЭС от радиоэлектронного подавления противника, пораже-
ния самонаводящимся на источник излучения оружием, воздействия ионизирую-
щих и электромагнитных излучений ядерного и других видов оружия, а также обес-
печение электромагнитной совместимости радиоэлектронных средств.
Количественно эффективность мероприятий по РЭЗ может быть оценена веро-
ятностью ррэз выполнения радиоэлектронными средствами (или комплексом РЭС)
своих задач в условиях создания преднамеренных и непреднамеренных помех [24]:
РРЭЗ = Рп Pl + (1 - Рп ) Р2 > (141)
где рП — вероятность воздействия на РЭС преднамеренных помех; р{, р2 — вероят-
ности успешного решения своих задач рассматриваемым РЭС при условии, что на
него наряду с полезными сигналами воздействуют преднамеренные и непреднаме-
ренные помехи или только непреднамеренные помехи.
Приведенное выражение (14.1) показывает, что эффективность РЭЗ характери-
зуется помехозащищенностью, которая, в свою очередь, является количественным
показателем помехоустойчивости РЭС (при отсутствии и наличии преднамеренных
помех) а также скрытности работы РЭС и эффективности работы средств РТР
противника.
Ниже рассматриваются некоторые технические и организационные пути реше-
ния проблемы ЭМС применительно к непреднамеренным помехам, создаваемым
только радиотехническими устройствами.
14.1. Непреднамеренные помехи и проблема электромагнитной
совместимости радиоэлектронных систем
Непреднамеренные помехи подразделяются на взаимные, индустриальные и кон-
тактные.
Взаимные помехи связаны с излучением радиосигналов не только в рабочей по-
лосе частот, но и на других частотах вне рабочего диапазона РЭС — источника помех.
Термин «взаимные помехи» подчеркивает возможность взаимного влияния одного
РЭС на другое. Однако в силу сложившейся традиции этот термин применяется и
в тех случаях, когда имеет место одностороннее («вентильное») воздействие одного
РЭС на другое.
Индустриальные помехи создаются различными электрическими устройствами,
входящими в состав любого оборудования военного или гражданского предназна-
чения. Мощными источниками индустриальных помех являются различные генера-
торы, двигатели, линии электропередач и т. д.
Контактные помехи порождаются нелинейными и нестационарными нагрузка-
ми за счет взаимодействия в них электромагнитных полей, создаваемых излучате-
608 Глава 14. Электромагнитная совместимость радиоэлектронных средств
лями различного типа. Так, при облучении электромагнитным полем металлических
предметов, на поверхности которых имеются окислы металлов, спектр переизлучае-
мого поля обогащается за счет нелинейного преобразования исходного поля (при-
мерно так же, как это имеет место в кристаллических смесителях). Интенсивность
контактных помех возрастает при движении носителя РЭС.
Каждое РЭС (в том числе и приемное устройство) при своей работе может со-
здавать непреднамеренные помехи другим РЭС. Практика показывает, что основ-
ное влияние на степень ЭМС различных РЭС оказывают взаимные помехи, поэто-
му ниже индустриальные и контактные помехи не рассматриваются.
Важнейшими задачами, решаемыми в интересах ЭМС, являются:
• изучение причин возникновения взаимных помех;
• определение восприимчивости к помехам РЭС на любом «жизненном» цикле
их развития (на стадиях НИР, ОКР, разработки серийных образцов, эксплу-
атации и боевого применения);
• прогнозирование ЭМС радиоэлектронных средств;
• разработка эффективных методов защиты РЭС от взаимных помех;
• разработка норм и ограничений на технические характеристики РЭС по ЭМС;
• разработка организационных мероприятий обеспечения ЭМС радиоэлектрон-
ных средств;
• контроль за соблюдением норм и ограничений на технические характеристи-
ки РЭС по ЭМС.
Анализ ЭМС может проводиться на трех различных структурных уровнях:
1) низшем, в звене единичное «обособленное РЭС»;
2) среднем, в звене «многофункциональный комплекс летательного аппарата»;
3) высшем, в сложной системе РЭС группы самолетов (или совокупности РЭС)
на конкретном ТВД.
При последовательном рассмотрении проблемы ЭМС в низшем, среднем и
высшем звеньях объем задач ЭМС значительно возрастает. Наиболее сложно ре-
шаются задачи ЭМС в высшем звене, когда приходится изучать совместимость сотен
и тысяч РЭС раз личного назначения.
В качестве низшего звена структуры РЭС, исследуемой на электромагнитную
совместимость, может быть рассмотрена станция активных помех [86]. На рис. 14.1
пунктирными линиями показаны возможные пути воздействия взаимных помех,
порождаемых отдельными устройствами САП.
Рис. 14.1. Станция активных помех — низшее звено
структуры РЭС, исследуемой на электромагнитную совместимость
14.1. Непреднамеренные помехи и проблема электромагнитной совместимости РЭС 609
Наиболее вредное влияние на функционирование приемной и анализирующей
аппаратуры САП оказывают модуляторы, схема запоминания частоты, высокочас-
тотные усилители и передающая антенна. Паразитные внутрисистемные связи
вызывают много трудностей при решении проблемы размещения аппаратуры РЭБ
на летательном аппарате.
На рис. 14.2 и 14.3 схематично и упрощенно представлены возможные источ-
ники взаимных помех и пути их воздействия в среднем и высшем звеньях структуры
РЭС: в многофункциональном радиоэлектронном комплексе летательного аппарата
(рис. 14.2) и в системе РЭС авиационной и наземной группировок войск (рис. 14.3).
Рис. 14.2. Возможные источники взаимных
помех в среднем звене структуры РЭС
Проблема ЭМС обусловлена рядом различных причин, к числу которых следу-
ет отнести большую плотность РЭС на местности, перегрузку частотного диапазо-
на, увеличение энергетического потенциала передатчиков РЭС и чувствительно-
сти приемников, а также неоптимальность (несовершенство) структуры РЭС.
Техническое несовершенство РЭС в отношении ЭМС связано прежде всего с
нежелательным излучением передатчиков в широком диапазоне частот за пределами
необходимой рабочей полосы частот и вне минимально необходимого значения теле-
Группа самолетов № 1
РЛС управления РЛС Радионавигационный Станция
оружием обнаружения центр активных помех
Рис. 14.3. Пути воздействия помех в различных звеньях структуры РЭС
610 Глава 14. Электромагнитная совместимость радиоэлектронных средств
сного угла. Неоптимальность структуры приемных устройств приводит к тому, что
прием сигналов ведется вне основной полосы пропускания приемника, определен-
ной в соответствии с критериями оптимального приема тех или иных радиосигналов.
14.2. Технические характеристики радиоэлектронных систем
и проблема электромагнитной совместимости
Рассмотрим технические характеристики передающих и приемных устройств,
влияющие на ЭМС РЭС.
Спектральный состав радиосигналов, генерируемых передающими устройства-
ми, весьма богат различными составляющими. Принято считать, что излучение
передатчика делится на основное и неосновное, см. рис. 14.4. Мощность современ-
ных передатчиков распределяется между основными и неосновными спектральными
составляющими сигнала.
Рис. 14.4. Распределение излучения передатчиков
Основное излучение характеризуется шириной спектра частот Д/оСн (Рис- 14.5),
необходимой для обеспечения передачи информации с заданным качеством и скоро-
стью передачи. Основное излучение — это лишь доля (не всегда большая) всего
излучения, которое согласно рекомендации Международного консультативного ко-
митета по радио (МККР) характеризуется шириной полосы излучения (ШПИ) [86].
Шириной полосы излучения &F называется такая часть частотного диапазо-
на, в пределах которой сосредоточено (100 — р) процентов излучаемой мощности
(рис. 14.6).
Значение параметра р имеет порядок 1 % и может изменяться в зависимости от
конкретного вида излучения. При определении ШПИ предполагают, что 0,5р мощ-
ности излучаемого сигнала приходится на полосу частот, лежащих выше верхней
границы ШПИ, а 0,5р — на полосу частот, расположенных ниже нижней грани-
цы ШПИ.
14.2. Технические характеристики РЭС и проблема ЭМС
611
Рис. 14.5. Спектр излучения передатчика
Рис. 14.6. Ширина полосы излучения передатчика
Если ШПИ равна ширине спектра частот основного излучения А/^сн (Af = Д/осн)
то такое распределение спектра называется совершенным. Любое другое распреде-
ление спектра — несовершенное.
Все излучения на частотах, расположенных за пределами полосы частот основ-
ного излучения, называются неосновными, которые, в свою очередь, подразделя-
ются на внеполосные и побочные (рис. 14.4).
Внеполосные излучения характеризуются спектром частот, примыкающим к
полосе частот основного излучения. Структура внеполосного излучения определя-
ется главным образом типом модуляции передающего устройства и видом модули-
рующей функции.
Большую долю неосновного излучения составляют так называемые побочные
излучения. Основными видами побочного излучения являются (рис. 14.4, 14.5):
• излучения на гармониках основной частоты;
• излучения на субгармониках основной частоты;
• комбинационные излучения;
• интермодуляционные излучения;
• межгармонические излучения;
• паразитные излучения.
612 Глава 14. Электромагнитная совместимость радиоэлектронных средств
Излучения на гармониках основной частоты fG имеют ярко выраженные спект-
ральные составляющие на частотах, кратных несущей частоте:/.ар = mfo ~ 2> 3, ...).
Побочные излучения на частотах возникают из-за нелинейных явлений, проте-
кающих в генераторах СВЧ. Реально генерируются сигналы, форма которых отлична
от синусоидальной. Спектр таких колебаний обогащен составляющими на часто-
тах, кратных основной (несущей) частоте.
Излучения на субгармониках основной частоты характеризуются значительными
спектральными плотностями в полосах частот, примыкающих к частотам
Излучения на субгармониках особенно велики, если в передатчике используются
умножители частот.
Комбинационные излучения на частотах возникают в тех передающих уст-
ройствах, где для формирования основного сигнала применяются нелинейные
преобразователи сигналов от двух и более вспомогательных генераторов. Так, если
в передатчике основное излучение на частоте формируется за счет преобразова-
ния трех вспомогательных сигналов на частотахто комбинационные состав-
ляющие спектра могут возникнуть на частотах
Лом =rnfl+nf2+kf3,
где т = 0, 1, 2,...; п = 0, 1, 2, ...; к = 0, 1, 2,....
Интермодуляционные излучения образуются при работе разнотипных передатчи-
ков на одну общую антенну, а также в тех случаях, когда передающие антенны
различных РЭС расположена весьма близко друг от друга и не приняты эффектив-
ные меры по их развязке. Мощный сигнал частоты одного из передатчиков, про-
никая через антенную систему (или общие фидерные линии) в выходные каскады
другого передатчика, взаимодействует в нелинейных элементах передатчика с ге-
нерируемым сигналом частоты/2- В результате такого нелинейного взаимодействия
образуется интермодуляционное излучение на частоте
Лнт=?и/1± nfl-
Межгармоническими излучениями называются такие, спектр которых располо-
жен в участках диапазона, находящихся вне характерных отрезков диапазона, за-
нятых излучениями на гармониках.
Паразитными излучениями считаются все те излучения, которые нельзя отнести
к перечисленным выше неосновным. К паразитным излучениям относятся также
случайным образом возникающие излучения за счет резких изменений питающих
напряжений, электрических пробоев в высокочастотных приборах, изменений ре-
жимов работы, различных переключений и др.
Все неосновные излучения обусловлены несовершенством передающих уст-
ройств. Они не используются для передачи полезной информации и являются вред-
ными. Мощность неосновных излучений может быть значительной, поэтому эти
излучения являются одной из главных причин электромагнитной несовместимости
РЭС при рассмотрении проблемы ЭМС на всех уровнях.
При изучении вредных (нежелательных) излучений РЭС нельзя не отметить
излучения гетеродинов приемных устройств. Гетеродин — это маломощный источ-
ник взаимных помех. Вредное излучение гетеродинов проникает в приемники через
близкорасположенные элементы антенно-фидерного тракта, металлические конст-
рукции блоков питания и коммутации. Излучение гетеродина имеет особую опа-
сность из-за огромного числа работающих приемников. Если гетеродин одного рабо-
тающего приемника порождает взаимную помеху с незначительной, часто ничтожно
14.2. Технические характеристики РЭС и проблема ЭМС
613
малой мощностью, то многие тысячи приемников являются источниками весьма
интенсивных помех, с которыми нельзя не считаться.
Остановимся теперь на технических характеристиках приемных устройств, ко-
торые влияют на ЭМС радиоэлектронных средств.
Важнейшими характеристиками любого приемника являются чувствительность,
избирательность, полоса пропускания и рабочий диапазон частот. Однако для оцен-
ки степени ухудшения работы приемника при воздействии взаимных помех этих
характеристик становится недостаточно. Например, чувствительность приемника
характеризует некоторое пороговое значение мощности (напряженности поля)
сигнала на входе основного канала приемника, при которой обеспечивается заданное
качество воспроизведения информации (в соответствии с определенным критерием).
Чувствительность не может достаточно полно характеризовать работу прием-
ника в условиях непреднамеренных помех, которые в большинстве случаев не яв-
ляются белым шумом. Внешние помехи любого вида могут изменять качество при-
ема полезного сигнала, но они не могут изменить важнейший показатель качества
функционирования приемника — его чувствительность, т. е. способность прини-
мать слабый полезный сигнал при отсутствии внешних помех.
Поэтому для анализа ЭМС пользуются характеристикой восприимчивости при-
емника [87].
Под восприимчивостью приемника понимается способность приемника выпол-
нять свои функции при определенной интенсивности помех в заданной полосе
частот Д/
При решении задач ЭМС с помощью специальных измерительных приемни-
ков и контрольных (эталонных) источников помех получают зависимости воспри-
имчивости Ро(/) и мощности помехи Рп(/) (в дБ/Вт) от частоты (рис. 14.7). Из-
мерения мощностей Ро и Рп проводятся в полосе частот, которая выбирается из ус-
ловия Д = ДЛП-
Рис. 14.7. Частотная зависимость восприимчивости приемника
При измерении восприимчивости Ро на вход приемника подается полезный
сигнал, мощность которого Р фиксируется на уровне чувствительности приемни-
ка. На вход приемника подается также помеха от контрольного (эталонного) ис-
точника помех, перестраиваемого в широком диапазоне частот /llin < Мощ-
ность помехи Рп изменяется, и восприимчивость Ро(/) на частоте f определяется
как пороговое значение мощности помехи Рп на входе приемника, при котором при-
емник еще выполняет свои функции с заданной эффективностью.
Анализ зависимости восприимчивости приемника от частоты /о(/) позволяет
выявить опасные участки диапазона, где наблюдается воздействие взаимных помех.
614 Глава 14. Электромагнитная совместимость радиоэлектронных средств
С помощью зависимости (/) определяются основные и неосновные каналы при-
ема. Так, в соответствии с рис. 14.7 опасным является участок диапазона, примы-
кающий к частоте^- Определяющим электромагнитную несовместимость каналом
служит неосновной канал приема № 4. Основной канал для данной помехи имеет
восприимчивость Ро min, лучшую, чем канал № 4. Однако, как следует из рис. 14.7,
помеха через основной канал не воздействует, так как Рп(/ = 7i)<^0min-
Основной канал приема предназначен для приема полезных сигналов в полосе
частот Д^тр, примыкающей к несущей частоте полезного сигнала fQ. Частотная ха-
рактеристика основного канала, как правило, согласована со спектром основного
излучения своего передатчика, см. рис. 14.8.
Рис. 14.8. Частотная характеристика основного канала приема
Наряду с основным каналом каждый приемник имеет несколько неосновных
каналов приема. Их число и характеристики зависят от несовершенства применя-
емых высокочастотных фильтров, гетеродинов, усилителей, смесителей и других
элементов приемника. Наибольшее влияние на восприимчивость приемника по
неосновным каналам оказывают различные нелинейные устройства. Современные
приемники могут иметь несколько десятков неосновных каналов приема. Принято
подразделять неосновные каналы приема на соседние и побочные.
Соседний канал имеет полосу приема, примыкающую к полосе пропускания
основного канала. Образование этого канала связано с недостаточной избиратель-
ностью фильтров и резонансных усилителей, формирующих основной канал при-
ема, а также с различными нелинейностями приемного устройства.
Побочные каналы приема делятся на комбинационные, интермодуляционные и
паразитные. Настройка этих каналов иногда значительно отличается от настройки
основного канала. Побочный канал приема может находиться даже в другом диа-
пазоне частот приемника (по отношению к используемому в данный момент).
Комбинационные каналы приема образуются за счет взаимодействия взаимных
помех и сигнала гетеродина в смесителе приемного устройства. При воздействии
на приемник одного помехового сигнала комбинационный канал будет существо-
вать, если выполняется следующее равенство:
где /п — частота взаимной помехи; р — частота гетеродина; /г — средняя частота
настройки УПЧ (промежуточная частота); т = 1, 2, 3,..., п = 0, 1, 2, ....
14.2. Технические характеристики РЭС и проблема ЭМС
615
На рис. 14.8 комбинационные каналы имеют настройку
У’ Г ГН, f f -f
n — /к ’ /п “ /к ’ /п — j ’ /пр ~ /упч •
Из комбинационных каналов особенно опасными являются так называемые со-
седние каналы, имеющие сравнительно небольшую расстройку относительно основ-
ного канала. Соседние каналы возникают, если в уравнении выполняются условия:
т = п = \\ (14.3)
т = п = 2;
(14.4)
>и = 1;и = 0. (14.5)
Условия (14.3), (14.4) и (14.5) определяют образование следующих каналов:
зеркального =f3, полузеркального А = Аз» А = А" и канала приема на промежу-
точной частоте fn = fnp. Большая роль зеркального и полузеркального каналов по
сравнению с другими побочными каналами объясняется тем, что их настройка
близка к резонансной частоте основного канала. Поэтому помехи, проникающие
через данные каналы, ослабляются преселектором в недостаточной степени. В со-
ответствии с (14.3), (14.4) и (14.5) рассматриваемые каналы имеют следующую на-
стройку:
(14.6)
(14.7)
(14.8)
При воздействии на приемник нескольких помеховых сигналов за счет взаимо-
действия их с сигналом гетеродина и между собой образуются так называемые
интермодуляционные каналы. Частоты настройки^ интермодуляционных каналов
определяются из уравнения
|"Vnl ±mlfn2 ±-±»Wn«| = /упч, (14.9)
где и = 0, 1, 2,....
В данном случае предполагается воздействие п помеховых сигналов.
Из (14.9) получим частоту настройки j-го интермодуляционного канала
А/ “ г|./упч — ^1А1 — ••• — шуАп — ^А •
mjl у
Наиболее опасными взаимными помехами считаются интермодуляционные по-
мехи, частоты которыхУп2 и fni удовлетворяют следующим соотношениям (рис. 14.9
и рис. 14.10):
|/п1±/п2|=/с; (14.Ю)
|/il — /12I = /упч’ (14.11)
|2/п1±/п2| = /с; (14.12)
|/ni±/n2|=/3; (14.13)
|/п1-/п2| = /с- (14.14)
Здесь fc и А — частоты настройки основного и зеркального каналов.
616
Глава 14. Электромагнитная совместимость радиоэлектронных средств
Рис. 14.9. Интермодуляционные
помехи на частотах
Рис. 14.10. Интермодуляционные
помехи на частотах/^
Паразитные каналы не связаны с каким-либо взаимодействием помеховых сигна-
лов друг с другом и сигналом гетеродина. Они образуются за счет паразитных излуче-
ний самовозбуждающихся усилителей и других не рассмотренных здесь причин.
14.3. Оценка электромагнитной совместимости радиоэлектронной
системы. Уравнение электромагнитной совместимости
Можно отметить следующие основные пути воздействия взаимных помех на РЭС:
• воздействие основного и неосновного излучений через главный лепесток ди-
аграммы направленности антенны (ДНА) источника взаимных помех и через
главный лепесток ДНА приемной антенны на основной или неосновной ка-
нал приема;
• воздействие основного излучения источника помех через боковые лепестки
ДНА передатчика и через главный лепесток приемной антенны на основной
канал приема;
• воздействие основного излучения через главный лепесток ДНА источника по-
мех и через боковые лепестки ДНА на основной канал приема;
• воздействие основного излучения через главный лепесток ДНА источника по-
мех и через главный лепесток кроссполяризационной диаграммы направлен-
ности приемной антенны на основной канал приема;
• воздействие основного излучения через боковые лепестки ДНА источника по-
мех и через главный лепесток кроссполяризационной диаграммы направлен-
ности приемной антенны на основной канал приема.
Условно рассмотренные ситуации воздействия взаимных помех изображены на
рис. 14.11.
Наиболее просто задачи ЭМС решаются для дуэльных ситуаций, когда изуча-
ется возможность работы двух РЭС, называемых ниже РЭС1 и РЭС2 без взаимных
помех. В данном случае решаются две основные задачи:
1) оценивается ЭМС РЭС1 и РЭС2 при известных характеристиках этих РЭС,
расположении на местности и заданных ограничениях на характеристики и режи-
мы работы РЭС, обусловленные особенностями боевого применения;
2) определяются характеристики пространственно-частотного (или простран-
ственно-частотно-временного) разноса РЭС1 и РЭС2, при которых обеспечивается
их нормальное функционирование.
При решении этих задач ЭМС необходимо знать мощность взаимных помех на
входе приемного устройства РЭС.
J4.3. Оценка электромагнитной совместимости РЭС. Уравнение ЭМС
617
Рис. 14.11. Ситуации воздействия взаимных помех
Рассмотрим ситуацию одностороннего воздействия на РЭС2 взаимной помехи,
создаваемой РЭС1 рис. 14.12. Определим энергетический спектр взаимной помехи
на выходе приемной антенны РЭС2 (влиянием внутренних шумов пренебрежем).
Рис. 14.12. Одностороннее воздействие на РЭС2 взаимной помехи, создаваемой РЭС1
Если энергетический спектр взаимной помехи на входе передающей антенны
РЭС1 характеризуется функцией (/,/)), то на выходе приемной антенны РЭС2
(на входе приемника) получим
N2 (/1, /о) = (/)Л (/)Л2 (61,Ф1/)^2 (02,Ф2/)ТХ, (14.15)
4лл~
где R — расстояние между РЭС1 и РЭС2; — несущая частота сигнала, излучае-
мого передатчиком РЭС1; Gj (/) — значение коэффициента усиления передающей
антенны РЭС1 на частоте /; A2(f) — эффективная площадь антенны РЭС2, опре-
деляемая формулой
Л (/)(/)> <1416>
4л 4т/
где G2(/) — значение коэффициента усиления приемной антенны на частоте/,
с — скорость света; ^(врФр/), ^(02’^2»/) —функции, описывающие нормиро-
ванные диаграммы направленности антенн РЭС1 и РЭС2 по полю на частоте/, 015
Ф1 02, ^2 — угловые координаты РЭС1 и РЭС2 (углы отсчитываются в соответ-
ствующих ортогональных плоскостях от максимума диаграммы направленности ан-
тенны РЭС1 и РЭС2 и характеризуют угловое положение РЭС1 или РЭС2 отно-
сительно максимума ДНА); у — поляризационный коэффициент, учитывающий
несоответствие поляризационных характеристик передающей и приемной антенн;
618 Глава 14. Электромагнитная совместимость радиоэлектронных средств
, й), — коэффициент, учитывающий ослабление интенсивности помехи
при распространении помеховой волны в реальной среде, он зависит от дально-
сти R, частоты / высоты подъема передающей и приемной антенн h{ и h2, а также
и других факторов (для свободного пространства % = 1); значение коэффициента
может быть определено с помощью специальных графиков или таблиц, приводимых
в учебниках и учебных пособиях по радиолокации и распространению радиоволн.
Мощность помехи на выходе приемника РЭС2 равна
РП вых (/о > Л ) = J ^2 (/. /о ) * (Л /с ) (14.17)
О
где = |А'прм (у2л/)|2 : |ЛГпрм (72л/)| — амплитудно-частотная характеристика
приемника в широкой полосе частот (с учетом неосновных каналов приема);/; —
частота настройки основного канала приемника РЭС2 (запись [Я^/,/)| означает
возможную зависимость формы амплитудно-частотной характеристики приемни-
ка от частоты настройки/.); РЭС1 и РЭС2 считаются совместимыми, если выпол-
няется следующее условие:
ВЫХ — ^ппор» (14.18)
где Рп пор — пороговое (максимально допустимое) значение мощности взаимной
помехи на выходе приемника, при котором еще не нарушается нормальное функ-
ционирование радиоэлектронного средства (в соответствии с заданным критерием).
Значение Рп пор определяется для каждого типа приемного устройства и зависит
от вида полезного сигнала и взаимной помехи. Как правило, Рп пор определяется
опытным путем. Величина может быть пересчитана ко входу приемника. Порого-
вое значение мощности помехи на входе приемника, при котором еще обеспечива-
ется электромагнитная совместимость РЭС1 и РЭС2, называется допустимой вход-
ной мощностью помехи и обозначается Рп доп.
При определении пороговых значений мощности помехи на входе или выходе
приемника Ри доп и Рп пор необходимо всегда задаваться полосой частот, в которой
проводятся измерения.
С помощью (14.15)—(14.18) запишем предельные условия электромагнитной
совместимости пары радиоэлектронных средств:
7^1 (/, /с)(?! (f)G2 (/) F2 (0!, Ф,, /) X
(4лЯ) 0 /
хг22(е2,Ф2,/)у(/)х(/И
пор •
Или в другой форме:
----£------у- (fjF2 (0|, ф(, х
(4лЯ) Рп ПОр о j
(14.19)
(14.20)
хГ22(02,Ф2,/)у(/)х(/Х = 1.
Здесь для упрощения не указана зависимость коэффициента х от параметров йь й2.
Уравнение (14.20) называется уравнением электромагнитной совместимости двух
радиоэлектронных средств (РЭС1 и РЭС2). Иногда (14.20) называют односторонним
уравнением ЭМС, имея в виду то, что не учитывается воздействие РЭС2 на РЭС1.
14.3. Оценка электромагнитной совместимости РЭС. Уравнение ЭМС
619
Как следует из (14.20), задача определении ЭМС двух радиоэлектронных средств
сводится к решению интегрального уравнения. Это решение может быть найдено,
если заданы некоторые функции, стоящие под знаком интеграла.
Задача оценки ЭМС двух радиоэлектронных средств может быть сформулиро-
вана следующим образом. Дано:
• функция Л^(/,/о), описывающая распределение спектра помехи в рассматри-
ваемой полосе (диапазоне) частот Д/^;
• частотная характеристика приемника А"(/) в полосе частот Д/^;
• значения коэффициентов усиления передающей и приемной антенн РЭС1,
РЭС2 и зависимости их от частоты (/) и G2(/);
• функции /](0, Ф, /) и F2(G, Ф,/), описывающие нормированные диаграммы
направленности антенн РЭС1 и РЭС2 учитывающие изменение формы диаг-
раммы направленности в диапазоне частот Д^;
• зависимость поляризационного коэффициента у от частоты у(/);
• зависимость коэффициента % от частоты и дальности %(/,/?);
• пороговое (допустимое) значение мощности взаимной помехи на входе или
выходе приемника в рассматриваемой полосе частот Рп доп или Рп пор.
Требуется определить:
• нормы частотного разноса РЭС1 и РЭС2, т. е. необходимую частотную рас-
стройку Д/эмс при которой обеспечивается устойчивая работа РЭС2;
• нормы пространственного разноса РЭС1 и РЭС2 — 7?эмс, т. е. удаление РЭС1
от РЭС2, при котором обеспечивается устойчивая работа РЭС2;
• пространственное расположение и размеры рабочих телесных углов сканиро-
вания (ориентации) антенн РЭС1 и РЭС2, при которых они совместимы
(положение и размеры рабочих телесных углов характеризуются параметра-
ми 015 Фь 02, Ф2.
Как следует из постановки задачи ЭМС, даже при всех известных характеристи-
ках РЭС1 и РЭС2 ее решение связано с решением интегрального уравнения (14.20),
содержащего шесть неизвестных: Д/, R, 0Ь Фь Ф2, 02. Поэтому для определения
искомых параметров необходимо задавать пять из них и, варьируя их значениями,
находить допустимые границы (нормы) области изменения одного из исследуемых
параметров.
Например, задают параметры 015 Фь 02, Ф2 и при изменении R в интервале
7?min< R < RmSLX определяют границы изменения расстройки в пределах
которых РЭС1 и РЭС2 совместимы.
Во многих случаях решения практических задач ЭМС уравнение (14.20) мож-
но существенно упростить, вводя соответствующие аппроксимации функций, вхо-
дящих в подынтегральное выражение. Рассмотрим возможные аппроксимации и
упрощения.
Спектральная плотность взаимной помехи TVj (/, f$) и частотная характеристика
приемника К , fc) аппроксимируются в широкой полосе частот отрезками прямых
линий, которые на рис. 14.13 показаны пунктиром.
Анализ зависимостей и K(j\/с), приведенных на рис. 14.13, позво-
ляет установить опасные значения расстройки д/=^-^,5 при которых имеет место
несовместимость РЭС1 и РЭС2.
Так как полосы пропускания основного и неосновного приемных каналов (Д/пр,
А/пр1> •••> Д/прл) имеют значения, не превышающие десятков мегагерц, то в уравне-
620 Глава 14. Электромагнитная совместимость радиоэлектронных средств
Рис. 14.13. Спектральная плотность взаимной помехи
и частотная характеристика приемника /f(/,/)
нии (14.20) можно полагать функции G, (/), G2 (/), F{ (01? Фь /), F2 (02,ф2> /)> ?(/)>
х(/), не зависящими от параметра интегрирования f и равными (в пределах поло-
сы пропускания /го канала):
Gj (/)» Ь (4); G2 (/)= G2 (д. ) = G2; (14.21)
Л (0,Ф,/) = F} (е^ФрЛу) = Ъ (в^Ф,); (14.22)
7^(02,Ф2,/)= ^(02’^2»Л/) = ^(®2»Ф2)- (14.23)
Здесь fcj—частота настройки/го приемного канала, влияние которого на ЭМС
в данном случае изучается.
Аппроксимации N|(/,/o) и приведенные на рис. 14.13, позволяют
записать спектральную плотность помехи и частотную характеристику приемника
в виде
(/,/)) = max^O (/,/)), (14.24)
^(Л/о) = ^тах^о(Л/оЬ (14.25)
где 7Vlmax — максимальное значение спектральной плотности взаимной помехи, ко-
торой соответствует частота/); Л^тах — максимальное значение коэффициента усиле-
ния приемника по мощности на частоте/.; 7V0 (/) — нормированная (относительно
максимального значения ^тах) зависимость спектральной плотности помехи от
частоты:
лг0(/)=-^А (14.26)
Чтах
Ао(/) — нормированная (относительно максимального значения Л^) частотная
характеристика приемника:
^о(/)=4^- (14-27)
max
14.3. Оценка электромагнитной совместимости РЭС. Уравнение ЭМС
621
При оценке электромагнитной совместимости РЭС в диапазоне частот А/= f$-fc
поступают следующим образом:
• фиксируют частоту и изменяют настройку приемника fc;
• определяют относительное расположение характеристик ^(/)и K(f) на
рис. 14.13, при котором наблюдается потенциальная возможность воздействия
помехи на какой-либо у-й канал приема (на рис. 14.13 этот канал помечен
стрелкой);
• устанавливают пределы интегрирования в соотношении (14.20):
f. _ < /•</•. + А^пр> (14.28)
Jcj 2 -J - Jcj^ 2 ,
где fcj — частота настройки соответствующего «опасного» у-го канала приема, под-
верженного воздействию помехи; AfUVj—полоса пропусканияу-го канала (рис. 14.14);
• находят другие «опасные» приемные каналы и определяют пределы интегри-
рования аналогично (14.28);
• решают уравнение (14.20) с учетом упрощающих предположений (14.21)—(14.23).
Рис. 14.14. Определение «опасных» каналов приема
Если «опасных» приемных каналов несколько (у = 1, и), то с помощью соотно-
шений (14.21)—(14.28) уравнение (14.20) можно записать в виде
-—3--------тах^А/;2(е1,Ф1 №(е2>Ф2)тх(^)х
(4Рп доп
п ” 2 '
XL J ЛГ0(/-/о)^о(/-/о-4А)#=1.
1~ 1 /. 4/пр
Лу- 2
Так как в пределах интегрирования величины NQ (/, fQ), KQ (/, А/) постоян-
ны, то (14.29) упрощается:
. —л2 (61,Ф1 )F2 (62,Ф2X
(4 л/?) РПдоп
„ (14.30)
XX^o(/cy ~fo - АА)А/пру
7=1
В уравнении (14.30) в соответствии с постановкой задачи все характеристики и
параметры кроме R и А/известны. Поэтому решение уравнения (14.30) позволяет
622 Глава 14. Электромагнитная совместимость радиоэлектронных средств
найти искомые зависимости 7? = 7?(А/') или А/ = А/(А), с помощью которых уста-
навливаются нормы пространственно-частотного разноса РЭС1 и РЭС2.
На практике довольно часто имеется возможность ограничиться анализом воз-
действия одного пика спектральной плотности помехи N{ (/) на какой-либо один
канал приема (рис. 14.13 и рис. 14.14). Тогда уравнение (14.20) преобразуется и
принимает вид, который приводится в руководствах по обеспечению ЭМС:
х2с.б!,я2(е1,Ф|)г72(е2,Ф2) / \ / \ /1ЛЭ1Ч
— ';' , „ -Ж(л,-л-v)=1- <14-31)
A/pj (4л7?) Рпдоп
Здесь учтено, что
#1гпах=-^-, (14.32)
А/п
где Рп — мощность передатчика РЭС; А/^ — эквивалентная ширина спектра помехи:
JV1 max о
Уравнение (14.31) использовано в некоторых каталогах норм разноса частотно-
территориального радиоэлектронных средств для построения номограмм частотно-
территориального разноса потенциально несовместимых РЭС.
14.4. Способы обеспечения электромагнитной
совместимости радиоэлектронных систем
Обеспечение ЭМС радиоэлектронных средств различного назначения является
составной частью мероприятий по радиоэлектронной защите своих РЭС управле-
ния войсками и оружием (в том числе и средств РЭБ). Различают технические и
организационные способы обеспечения ЭМС.
Технические мероприятия обеспечения ЭМС проводятся на всех жизненных
этапах разработки и эксплуатации РЭС: на этапах научно-исследовательских работ,
разработки опытных и серийных образцов, эксплуатации и боевого применения.
На этапе разработки РЭС определяющее значение имеет задание тактико-тех-
нических требований по ЭМС с учетом безусловного выполнения норм и стандар-
тов по ЭМС. В настоящее время такие стандарты разработаны для ряда техничес-
ких характеристик передатчиков, приемников и антенн РЭС. К числу подлежащих
нормированию характеристик относятся:
• стабильность частоты передатчика;
• ширина полосы излучения на определенных уровнях;
• интенсивность побочных излучений;
• чувствительность основного канала приема;
• чувствительность внеполосных и побочных каналов;
• полоса пропускания УПЧ и УВЧ на различных уровнях;
• относительная нестабильность частоты гетеродина;
• уровни боковых лепестков ДНА.
Для обеспечения ЭМС радиоэлектронных средств большое значение имеют
технические мероприятия, проводимые в интересах повышения помехоустойчиво-
сти РЭС.
14.5. Особенности обеспечения ЭМС комплексов РЭБ...
623
Все методы повышения помехоустойчивости РЭС основаны на различии струк-
туры полезного и помехового сигналов. Это отличие проявляется в статистических
характеристиках информационных и сопутствующих параметров сигналов и помех,
рассматриваемых как функции пространственных координат и времени. Полное
знание характеристик полезного сигнала и взаимной помехи в принципе позволя-
ет освободиться от помехового воздействия.
Радиоэлектронная зашита РЭС от взаимных помех достигается компенсацией
радиопомех, адаптацией, первичной, вторичной и функциональной селекцией,
предотвращением перегрузки приемников, а также комплексным использованием
информации от различных РЭС [24].
Ослабление влияния взаимных помех на работу РЭС за счет адаптации приемо-
передающих устройств предусматривает изменение структуры РЭС, подверженно-
го воздействию помех. В процессе адаптации происходит измерение основных ха-
рактеристик воздействующих помех. Параметры и структура передатчика и прием-
ников РЭС изменяются так, чтобы максимальным образом ослабить воздействие
помехи и повысить качество функционирования РЭС. Примером адаптивных РЭС
могут служить линии радиосвязи с автоматической регулировкой интервала кван-
тования передаваемых сообщений по уровню и коэффициента передачи измерите-
лей в зависимости от интенсивности действующих помех.
Первичная селекция полезного сигнала предусматривает использование разли-
чий основных параметров полезного и помехового электромагнитных полей: амп-
литуды, фазы, поляризации, частоты и направления прихода радиоволн. Первич-
ная селекция подразделяется на амплитудную, частотную, фазовую, поляризаци-
онную и пространственную.
Вторичная селекция полезного сигнала (сообщения) производится за счет ис-
пользования неинформационных (сопутствующих) параметров сигнала, которыми
полезный сигнал наделяется на передающей стороне специально для повышения
помехоустойчивости РЭС. Например, в радиолинии связи излучаемые передатчи-
ком сигналы кодируются с таким расчетом, чтобы числовые коды имели информа-
ционную избыточность, которая используется для исправления ошибок, возника-
ющих при действии помех.
14.5. Особенности обеспечения электромагнитной совместимости
комплексов радиоэлектронной борьбы с радиоэлектронными
комплексами и средствами другого назначения
Обеспечение ЭМС комплексов РЭБ с радиоэлектронными комплексами и сред-
ствами другого назначения видов Вооруженных сил и гражданских ведомств явля-
ется сложной проблемой.
Основными причинами взаимных помех являются:
• использование нами и противником одних и тех же диапазонов частот для ра-
диоэлектронных средств, что приводит к непреднамеренным помехам со сторо-
ны комплексов РЭБ (КРЭБ) при решении задач радиоэлектронной борьбы;
• ограниченный частотный ресурс используемых диапазонов и вытекающая из
этого необходимость размешать в одних и тех же полосах частот РЭС связи,
навигации, прицеливания, разведки и средства РЭБ;
• техническое несовершенство РЭС.
624 Глава 14. Электромагнитная совместимость радиоэлектронных средств
Организационные способы ЭМС делятся на две группы.
К первой группе относятся организационные способы, проводимые на этапах
разработки КРЭБ и РЭС. Это — планирование использования РЧС (радиочастот-
ный спектр), разработка норм частотно-территориального разноса, стандартизация
технических характеристик, определяющих электромагнитную совместимость РЭС.
Ко второй группе относятся организационные способы обеспечения ЭМС,
проводимые при боевом применении и эксплуатации РЭС.
Основные организационные способы обеспечения ЭМС радиоэлектронных
средств сводятся к следующим:
1. Рациональное распределение и назначение рабочих радиочастот. Способ обес-
печения ЭМС — оперативный, однако из-за высокой насыщенности РЭС на не-
большой площади разносы между рабочими частотами необходимо брать больши-
ми, до 20... 100 МГц, что приводит к сокращению частотного ресурса.
2. Применение частотно-территориального разноса. Способ наиболее эффектив-
ный и часто реализуется в войсках. Правильное размещение ударных самолетов
(вертолетов) и постановщиков помех в боевых порядках с учетом норм частотно-
территориального разноса позволяет исключить взаимное влияние РЭС. Нормы
частотно-территориального разноса разрабатываются и доводятся до исполнителей
в виде Каталогов норм. Однако недостатком способа является противоречие с опе-
ративно-тактическими требованиями и требованиями эффективного применения
комплексов РЭБ.
3. Временной разнос. Способ реализуется введением и строгим соблюдением
временных ограничений на работу РЭС. Так, для авиационных РЭС этот способ
предусматривает:
• выключение РЭС летательного аппарата после выхода из зоны действия тех
наземных систем, с которыми осуществляется взаимодействие;
• включение РЭС для работы на излучение только в тех случаях, когда это необ-
ходимо и на строго ограниченное время, отводимое для выполнения задачи;
• работа комплексов РЭБ на излучение только после выхода на рубеж обнару-
жения РЛС ПВО противника;
• использование временной регламентации работы комплекса РЭБ и бортовых
РЭС по заранее разработанной программе.
На основе временной регламентации разработаны и действуют рекомендации
по применению потенциально несовместимых средств РЭБ и РЭО. Рекомендации
предусматривают временное регламентирование работы всех РЭС в том числе и
средств РЭБ на этапах выполнения боевого полета.
4. Пространственный разнос. Применение пространственного разноса предпола-
гает регламентацию направлений секторов работы передающих устройств комплексов
РЭБ и накладывает ограничение на использование комплексов в боевом порядке.
5. Строгое соблюдение установленных режимов работы РЭС. Способ является
эффективным и не позволяет возникать новым источникам непреднамеренных
помех в ходе боевой подготовки и выполнения боевых задач.
Однако организационные способы обеспечения электромагнитной совместимо-
сти не позволяют в полной мере максимально использовать возможности бортово-
го прицельно-навигационного, разведывательного и связного оборудования и ком-
плексов РЭБ при их совместном применении в ходе боевых действий.
Для повышения эффективности организационных способов обеспечения элект-
ромагнитной совместимости РЭС большое значение имеет правильная техническая
14.6. Контроль выполнения технических и организационных мероприятий... 625
политика, проводимая при создании комплексов РЭБ и РЭС летательных аппара-
тов, обеспечение точности и достоверности расчетов Норм частотно-территориаль-
ного разноса и соблюдение систем стандартных требований к характеристикам РЭС,
влияющих на электромагнитную совместимость.
14.6. Контроль выполнения технических и организационных
мероприятий по обеспечению электромагнитной совместимости
комплексов радиоэлектронной борьбы с радиоэлектронными
комплексами и средствами другого назначения
Контроль за работой РЭС с целью обеспечения их электромагнитной совмес-
тимости представляет собой комплекс мероприятий и действий, направленных на
обеспечение выполнения штабами и войсками установленного порядка использо-
вания РЭС и предусмотренных для них частотных, пространственных и временных
режимов работы, а также для установления фактов воздействия на РЭС непредна-
меренных помех, оперативного выявления источников и устранения причин воз-
никновения этих помех.
Основными задачами контроля являются:
• контроль соблюдения частотных назначений для РЭС;
• пресечение нарушений мер защиты РЭС от непреднамеренных помех, уста-
новленных руководящими документами;
• контроль выполнения временных запретов (ограничений) на использование
РЭС при проведении особо важных работ и мероприятий, вводимых Генераль-
ным штабом.
Порядок контроля за выполнением мероприятий по обеспечению ЭМС РЭС
предусматривает плановые и внеплановые проверки, а также проверки по опера-
тивным заявкам в связи с проведением особо важных мероприятий и выявлением
источников непреднамеренных помех РЭС.
Контроль выполняется документальными и инструментальными методами с
использованием технических средств контроля.
В ходе осуществления контроля проверяются:
• знание и выполнение личным составом, осуществляющим планирование и
эксплуатацию средств связи и РТО, прицельно-навигационных и разведыва-
тельных комплексов, комплексов РЭБ, ограничений в работе РЭС в мирное
и военное время;
• соблюдение частотных назначений, соответствие режимов работы, видов излу-
чения и его параметров техническим условиям, установленным на каждое РЭС;
• порядок учета сведений о дислокации и условиях обеспечения ЭМС радио-
электронных средств;
• порядок учета и обобщение случаев непреднамеренных помех РЭС и приня-
тие мер по их исключению.
Результаты контроля, перечень вскрытых нарушений и предложения по их уст-
ранению (принятые меры) докладываются по подчиненности.
ГЛАВА 15
РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
15.1. Сетевые спутниковые радионавигационные системы
как объект радиоэлектронного подавления
Навигационные системы, с помощью которых потребители получают данные о
координатах местоположения и параметрах движения, используют разные физиче-
ские поля и широкий спектр алгоритмов обработки сигналов. Но наиболее широкое
применение получили глобальные сетевые спутниковые радионавигационные систе-
мы (ССРНС), обеспечивающие получение высокоточной навигационной инфор-
мации вне зависимости от географического района, метеоусловий и времени суток.
В ближайшем будущем монопольное положение ССРНС может только укрепиться.
ССРНС объединяют три основные комплекса (три сегмента) — сегмент управ-
ления (СУ), космическую группировку навигационных ИСЗ (ИСЗЬ ..., ИСЗ,, ...,
ИС324) и сегмент потребителей навигационной информации (АП) (рис. 15.1).
Рис. 15.1. Структура СРНС
Сегмент управления обеспечивает определение параметров движения навига-
ционных ИСЗ и закладывает в память бортовых радиокомплексов эфемеридную
информацию — данные о прогнозируемых положениях космических аппаратов;
формирует единое системное время и синхронизирует бортовые часы; контроли-
рует и управляет функционированием космической группировки.
Космический сегмент ССРНС, как существующих — GPS и «Глонас», так и
разрабатываемых — европейской «Галилео» и китайской «Компас», при полном
развертывании должен содержать группировку активных навигационных ИСЗ на
нескольких орбитах (рис. 15.1). Конфигурация сети навигационных ИСЗ выби-
рается из соображений обеспечения заданной кратности глобального покрытия
зонами видимости, требуемой точности местоопределения и некоторыми други-
ми соображениями. Наивыгоднейшей конфигурацией считается система из 24 ИСЗ
(система GPS), размещенных равномерно в шести круговых орбитах высотой
20000 км с наклонением 55° к экваториальной плоскости и разнесенных по дол-
готе на 60°. Каждый ИСЗ такой сети дважды в сутки пересекает экваториальную
15.1. Сетевые спутниковые радионавигационные системы...
627
плоскость в направлении с юга на север. При этом точки пересечения орбит с
экваториальной плоскостью (узлы) сдвинуты на 180°. Подспутниковая точка пе-
ремещается по замкнутой кривой, две волны которой охватывают все долготы.
Спутники в каждой плоскости следуют с интервалом в 1,5 ч, следы их орбит пе-
ресекают экватор со сдвигом по долготе на 22,5°.
Все ИСЗ сети излучают сигналы одинаковой структуры, по которым потреби-
тели определяют дальность и радиальную скорость. Индивидуальным для каждого
ИСЗ является содержание передаваемой им служебной информации. В различных
ССРНС применяются различные способы доступа к используемым сигналам.
В ССРНС GPS предусмотрено применение двух различающихся кодированных
сигналов: P-кода (precision — точный) и С/4-кода (clear acquisition — легко обнару-
живаемый). Эти сигналы обладают двойной ортогональностью. Ортогональность
разных сигналов в группе позволяет разделять на приеме сигналы от разных нави-
гационных КА. Ортогональность сдвигу (узкая автокорреляционная функция) обес-
печивает точное и однозначное измерение дальности (точнее — псевдодальности)
от КА до приемника потребителя навигационной информации.
P-код образуется псевдослучайной последовательностью с тактовой частотой
10,23 МГц и периодом повторения 7 суток. С/Л-код формируется как псевдошумо-
вая последовательность Голда. Он имеет тактовую частоту 1,023 МГц и период
повторения 0,001 с. Кроме того, для передачи служебной информации применяет-
ся двоичный код D (date — данные). Содержанием служебной информации явля-
ются поправка временной шкалы данного ИСЗ и его эфемериды и иная информа-
ция, повышающая точность и надежность навигационных измерений. Вся эта ин-
формация компонуется определенным образом в кадре.
Бортовые передатчики навигационных ИСЗ непрерывно излучают сигналы на
двух несущих частотах Z-диапазона: Z1 = 1575,42 МГц (длина волны Xj = 19 см) и
Z2 = 1227,6 МГц (Х2 = 24,4 см). Несущие колебания когерентны: они образуются
умножением частоты бортового задающего генератора f - 10,23 МГц на 154 для
формирования частоты Z1 и на 115 для формирования Z2.
Сигнал на частоте Z1 состоит из двух квадратурных компонент, фазовый сдвиг
между которыми равен л/2. Первая модулируется сложенными по модулю 2 по-
следовательностями Рн D кодов P&D. Вторая — аналогичным образом сформиро-
ванной последовательностью C/A®D. Таким образом, на несущей частоте Z1 пере-
даются оба дальномерных кода, а также сигналы системы передачи данных. На не-
сущей Z2 передается дальномерный сигнал P®D. Использование двух несущих
позволяет при совместной обработке принятых сигналов исключить ионосферную
ошибку. Таким образом, спектр сигнала, излученного с борта каждого навигацион-
ного ИСЗ, выглядит, примерно, как на рис. 15.2.
Для исключения ионосферной ошибки применяется двухчастотный способ из-
мерений. В связи с этим наряду с сигналом на частоте предусмотрен когерентный
ему сигнал на частоте f2, которая также модулируется точным измерительным ко-
дом Р и кодом служебной информации D.
Рис. 15.2. Спектр сигнала навигационного ИСЗ
628
Глава 15. Радиоэлектронное подавление радионавигационных систем
Принимая сигнал z-го навигационного ИСЗ, приемник потребителя по задер-
жке сигнала определяет дальность до этого КА (точнее — псевдодальность, по-
скольку задержка измеряется относительно неизвестного момента излучения сиг-
нала бортовым передатчиком навигационного ИСЗ):
Ri = с('п/ - 4 ) = 7(Х ‘ Х' )2 + " yi )2 + (г ’ Zi )2 ’ / = 1’2’ 3> 4> (15.1)
где /с — неизвестный потребителю момент времени излучения сигнала передатчиком
навигационного спутника; znZ— момент приема сигнала с борта /-го ИСЗ; {х, у, z} —
искомые пространственные координаты потребителя навигационной информации;
{xz, yz, Zjl — координаты /-го навигационного ИСЗ на момент времени /с; с — ско-
рость света.
Как следует из (15.1), измеряемая дальность определяется четырьмя неизвестны-
ми — тремя пространственными координатами потребителя навигационной инфор-
мации {х, у, z} и моментом времени излучения сигнала /с. Для определения этих
неизвестных нужно совместно решить систему из четырех уравнений типа (15.1).
Левые части уравнений такой системы — псевдодальности до четырех навигацион-
ных ИСЗ, образующих созвездие, по которым координаты потребителя навигацион-
ной информации {х, у, z} определяются наилучшим образом, с максимальной дости-
жимой точностью. Одновременно с координатами потребитель информации полу-
чает возможность для определения четвертой переменной — системного времени /с.
Решение системы четырех уравнений для неизвестных {х, у, г, /с} зависит от па-
раметров — координат навигационного ИСЗ {xz, yz, zz}. Эти параметры сообщаются
потребителю по системе передачи данных с борта навигационного ИСЗ в инфор-
мационном блоке D. Точнее, по линии передачи данных сообщаются начальные
условия для интегрирования дифференциальных уравнений движения ИСЗ и, уже в
результате интегрирования, определения параметров системы (15.1) {xz, yz, zz}, /е 1:4.
Совершенно аналогично определяются компоненты вектора скорости потреби-
теля навигационной информации по четырем результатам беззапросных измерений
радиальной скорости относительно четырех навигационных ИСЗ:
r=^L^F± (15-2)
dt Jo
где То — несущая частота сигнала, излучаемого навигационным ИСЗ, — изме-
ряемый приемником потребителя доплеровский сдвиг частоты принимаемого сиг-
нала; с — скорость света.
Совместно решая четыре уравнения вида (15.2), можно определить не только
три компоненты вектора скорости потребителя навигационной информации, но и
частоту системного эталона частоты То, с которым когерентны сигналы, излучае-
мые всеми навигационными ИСЗ.
Сегмент потребителей включает в себя комплекты аппаратуры потребителей
навигационной информации (АП) и самих пользователей. АП принимает сигналы
от нескольких КА, входящих в созвездие ССРНС, обрабатывает их, выделяет на-
вигационные параметры, функционально связанные с псевдодальностями и псев-
доскоростями, определяет на их основе координаты, составляющие скорости в гео-
центрической системе координат, поправку к местной шкале времени относитель-
но системного времени, а затем пересчитывает результаты в систему геодезических
координат; Поступающие на вход АП навигационные сигналы имеют довольно
низкий уровень по сравнению с собственными шумами приемников и для их вы-
15.1. Сетевые спутниковые радионавигационные системы...
629
деления используются сложные алгоритмы. Эти алгоритмы распадаются на алго-
ритмами первичной и вторичной обработки информации. Поэтому структура АП
может быть представлена схемой рис. 15.3 [112].
Рис. 15.3. Структура аппаратуры потребителя навигационной информации
Для обеспечения работоспособности системы независимо от пространственного
положения ИСЗ во время сеанса позиционирования АП использует ненаправлен-
ную антенну Апрм с линейной поляризацией.
Сумма спутниковых сигналов от антенны подается на вход преобразователя ча-
стоты для преобразования на промежуточную частоту. Затем суммарный сигнал
фильтруется обычно в полосовом фильтре на поверхностных акустических волнах
(ПАВ). После этого возможно повторное гетеродинирование и низкочастотная филь-
трация. Далее осуществляется аналогово-цифровое двух-, трех- или четырехуровневое
преобразование (АЦП). Дискретные выборочные значения сигнала с частотой дис-
кретизации^ подаются на вход многоканального цифрового коррелятора (МЦК).
Вместе с сигнальным процессором (СП) МЦК образует подсистемы слежения
за фазами сигналов промежуточных частот и фазами модулирующих кодов всех от-
слеживаемых спутников.
Линейный тракт приемника обеспечивает частотную селекцию и нормировку
уровня навигационного сигнала.
Устройство первичной обработки информации осуществляет поиск и обнаруже-
ние сигналов; оценивание их информативных параметров (временного сдвига оги-
бающей и доплеровского смещения частоты); демодуляцию и декодирование нави-
гационных сообщений, содержащих данные для решения системы уравнений (15.1).
Соответственно, в состав устройства первичной обработки информации входят: ка-
нал поиска и обнаружения, канал слежения за частотой, канал слежения за задер-
жкой и канал демодуляции. Для повышения быстродействия АП при одновремен-
ной обработке сигналов от нескольких КА тракты первичной обработки делаются
многоканальными. Для повышения помехоустойчивости используется когерентная
обработка принимаемых сигналов.
В устройстве вторичной обработки информации, которое реализуется на осно-
ве использования специализированных процессоров, производится расчет коорди-
нат КА на момент сеанса позиционирования; определение координат и вектора
скорости потребителя; прокладка выбранных маршрутов перемещения потребителя;
контроль работоспособности отдельных устройств и АП в целом.
Сигнал с выхода устройства вторичной обработки может быть использован как
средствами позиционирования, так и системами управления оружием. Например —
крылатыми ракетами.
630 Глава 15. Радиоэлектронное подавление радионавигационных систем
Индикатор отображает состояние КА, находящихся в зоне видимости АП, из-
меренные координаты и составляющие скорости потребителя. Он с большой точ-
ностью определяет координаты потребителя на земном эллипсоиде.
Таким образом, вычислительные устройства, входящие в состав аппаратуры по-
требителя, реализуют операции обнаружения сигналов ИСЗ, а также слежения за ча-
стотой и задержкой принятых и обнаруженных сигналов. Подсистемы обнаружения
и автосопровождения сигналов называются, обычно, каналами соответственно обна-
ружения и слежения за частотой и задержкой принимаемых сигналов. Поэтому радио-
электронное подавление приемника потребителя навигационной информации может
быть направлено на подавление канала обнаружения, канала слежения за частотой
и задержкой, канала демодуляции сигналов, несущих навигационные сообщения.
15.2. Радиоэлектронное подавление
канала обнаружения
Первичная обработка информации в приемнике аппаратуры потребителя начи-
нается в канале обнаружения, предназначенном для поиска навигационных сигна-
лов на фоне гауссовой стационарной помехи л(/) и помех от других навигацион-
ных ИСЗ.
Типовая структура канала обнаружения приведена на рис. 15.4.
Рис. 15.4. Канал обнаружения приемника аппаратуры потребителя
Структура рис. 15.4. реализует циклический параллельно-последовательный
поиск навигационных сигналов. Параллельный поиск производится по частоте
навигационных сигналов, а последовательный — по задержке огибающей навигаци-
онных сигналов. На выходе линейной части приемника присутствует аддитивная
смесь сигналов всех навигационных ИСЗ, собственного шума приемника и, в слу-
чае применения РЭП, активной помехи П(г):
*М=5л(')+л(')+п(/)> (15-3)
где I— количество ИСЗ, находящихся в зоне видимости.
15.2. Радиоэлектронное подавление канала обнаружения
631
Таким образом, обнаружение и прием каждого /-го навигационного сигнала
происходит не только на фоне помех п(/) + П(/), но и перекрывающихся с ним по
спектру навигационных сигналов. Эти сигналы являются в данном случае взаим-
ными помехами.
На первом этапе решения задачи обнаружения применяется корреляционно-
фильтровая обработка, обеспечивающая свертку спектра принимаемого колебания с
/-м опорным сигналом, формируемым генератором опорных сигналов в приемнике:
t
= (15.4)
о
где ^(/) — процесс на выходе коррелятора; Е,оп/ — опорный сигнал, соот-
ветствующий лму навигационному сигналу и имеющий скользящую по времени
огибающую; т(/) — временной сдвиг огибающей опорного сигнала, изменяющий-
ся в процессе поиска по задержке.
В процессе поиска по задержке наступает момент совпадения принятого сигнала
с опорным. При этом корреляция /-го принятого сигнала с опорным максимальна,
а остальные (/-1) сигналы, в силу взаимной ортогональности, дают, в среднем,
нулевые отклики. Поэтому на втором этапе обнаружения используется квадратур-
ная обработка процессов.
Процессы £(/) на выходе корреляторов образуются вследствие линейного инер-
ционного преобразования детерминированного сигнала с неизвестными параметра-
ми, наблюдаемого на фоне аддитивной нормальной случайной помехи. Помеха об-
разуется как сумма собственного шума приемника и помехи, используемой для РЭП.
Поэтому на втором этапе решения задачи обнаружения используется многоканаль-
ный некогерентный обнаружитель. При этом на вход решающего устройства посту-
пает сигнал
2
ГТ
> , (15.5)
который сравнивается с порогом
Сигнал обнаружен
л» <15-6>
Сигнал не обнаружен
выбранным по критерию Неймана — Пирсона, т. е. так, чтобы минимизировать
вероятность пропуска сигнала при заданной вероятности ложной тревоги.
Для сигналов с флуктуирующей амплитудой и неизвестной фазой вероятности
ошибок обнаружителя, использующего критерий Неймана—Пирсона, известны [11]:
(15.7)
(15.8)
где Рлт и Рпр — вероятности соответственно ложной тревоги и пропуска сигнала;
Q — энергия ьго сигнала; NQ — спектральная плотность помехи на входе приемника;
Ло — пороговый уровень обнаружения, определяемый из уравнения (15.7) для задан-
ного уровня ложной тревоги.
632
Глава 15. Радиоэлектронное подавление радионавигационных систем
Энергия сигнала собирается в канале обнаружения за время интегрирования Т
в устройстве квадратурной обработки и в полосе фильтра Д/, входящего в состав
коррелятора. Поэтому
Qi = PciT, (15.9)
где Рс/- — мощность z-го сигнала в полосе линейного тракта навигационного прием-
ника. Помеха на входе решающего устройства складывается из двух составляющих:
собственного шума приемника и помехи, организованной для подавления навига-
ционного приемника. Поэтому спектральная плотность помехи
м = (15.10)
А/ Д/
Приближение в (15.10) учитывает, что мощность помехи Ри существенно пре-
восходит мощность собственного шума приемника Рш в его линейной части.
Учитывая (15.9) и (15.10), можно представить энергетическое соотношение через
соотношение мощностей сигнала и помехи в полосе линейной части приемника Д/:
^- = ^fT = q^fT, (15.11)
М) Л
где — соотношение сигнал/шум по мощности для сигнала /-го навигационно-
го ИСЗ.
Уравнения (15.7) и (15.8) совместно определяют рабочие характеристики обна-
ружителя — зависимости вероятности правильного обнаружения Рправ = 1-Рпр от
соотношения сигнал/шум при Рт в качестве параметра. Для примера на рис. 15.5
приведены рабочие характеристики обнаружителя некогерентного сигнала [11].
Рис. 15.5. Рабочие характеристики обнаружителя
Зависимости рис. 15.5 позволяют определить коэффициент подавления КП по
методике, изложенной в гл. 3.
Мощность помехи, обеспечивающей требуемый уровень вероятности подавле-
ния навигационного приемника, можно выбрать из графиков рис. 15.5, учтя пара-
метры обнаружителя Л/Т.
В работе [88] показано, что энергетический потенциал станции шумовых помех,
срывающей обнаружение сигнала в навигационном приемнике, должен составлять
P„G„ = 4,4Ю5о2Л2, (15.12)
15.3. Подавление канала слежения за частотой принимаемого сигнала... 633
где — дисперсия шумовой помехи; R — расстояние между станцией помех и
подавляемым приемником.
Примерно такое же действие, как и шумовая, может оказывать узкополосная
помеха. В корреляторе рис. 15.4 такая помеха, некоррелированная с сигналом, а
следовательно и с опорным напряжением, будет разворачиваться в широкополосный
случайный процесс, способный срывать процесс обнаружения сигнала в навигаци-
онном приемнике.
15.3. Подавление канала слежения за частотой
принимаемого сигнала и измерения скорости
Канал слежения за частотой принимаемого сигнала содержит коррелятор и
систему фазовой автоподстройки частоты. Структура канала слежения за частотой
иллюстрируется рис. 15.6.
Рис. 15.6. Канал слежения за частотой сигнала, принимаемого
потребителем навигационной информации
На корреляторе происходит свертка принятого навигационного сигнала с вос-
становленной его модулирующей функцией. В результате формируется колебание
промежуточной частоты, подаваемое на систему фазовой автоподстройки (ФАПЧ).
Система ФАПЧ обеспечивает поиск, захват и слежение за средней частотой при-
нимаемого навигационного сигнала. Выходной сигнал управляемого генератора
используется для формирования копии модулирующей функции принятого сигна-
ла в генераторе опорных сигналов и для измерения частоты принятого сигнала, по
которой определяется скорость движения потребителя навигационной информации.
Этим же сигналом синхронизируются часы потребителя с эталоном системного
времени СРНС.
Действие шумовой помехи на входе приемника приводит к тому, что фаза ко-
лебания, создаваемого управляемым генератором, будет флуктуировать. Дисперсия
фазовой флуктуации составляет [90]
2 __ 1 +^шп)А./ш
Q
(15.13)
с
где Nu — спектральная плотность помехи, создаваемой средством РЭП на входе
навигационного приемника; Ашп — спектральная плотность собственного шума
приемника; А/И1 — шумовая полоса системы ФАПЧ.
Срыв слежения в системе ФАПЧ наступает при больших интенсивностях фазо-
вых флуктуаций, соизмеримых с протяженностью линейного участка дискримина-
ционной характеристики фазового детектора. Например, при Оф ~ 1 рад. Соотно-
634
Глава 15. Радиоэлектронное подавление радионавигационных систем
шение (15.13) позволяет оценить требуемую спектральную плотность шумовой
помехи, которая способна сорвать слежение за частотой принимаемого сигнала.
Расчет, приведенный в работе [88], показывает, что при приеме навигационных сиг-
налов с ожидаемым уровнем мощности на входе приемника Рс« 2,5-10~16 Вт мощ-
ность шумовой помехи и коэффициент подавления при Д/щ = 250 Гц должны со-
ставлять Рп = 2-10"12 Вт и Кп = 2,5-10^ а при Д/щ = 5 Гц Рп = Ю"10 Вт.
15.4. Подавление канала слежения за задержкой навигационного
сигнала и измерения псевдодальности
В канале слежения за задержкой оценивается временной сдвиг огибающей на-
вигационного сигнала Тг для последующего расчета псевдодальности между нави-
гационным спутником и аппаратурой потребителя. Структура канала слежения за
задержкой иллюстрируется рис. 15.7.
Рис. 15.7. Канал слежения за задержкой сигнала, принимаемого
потребителем навигационной информации
Эффективность системы слежения за задержкой можно оценить вероятностью
срыва слежения Рт и среднеквадратичной погрешностью оценивания задержки от
между принимаемым навигационным сигналом s(t) и опорным напряжением, сдвиг
фазы которого формируется генератором кода.
При радиоэлектронном подавлении системы слежения за задержкой выбор энер-
гетического потенциала постановщика помех PnGn должен обеспечить существенное
увеличение погрешности слежения за задержкой до порогового уровня отпор, при
котором вероятность срыва слежения за задержкой превосходит допустимый уровень
Рт > Рт пор и использование навигационных измерений становится невозможным.
При шумовой помехе, превосходящей по ширине спектра полосу пропускания
приемника, соотношение сигнал/шум на выходе канала слежения за задержкой (на
выходе разностного коррелятора) составит
^=^77^, (15.14)
^7вх
где <?вх и Д4х — соотношение сигнал/шум на входе приемника и полоса пропуска-
ния его линейной части; Л/. — эквивалентная полоса пропускания системы слеже-
ния за задержкой, определяемая инерционностью следящей системы.
15.5. Радиоэлектронное подавление канала демодуляции
635
При соотношении сигнал/шум (15.14) точность определения задержки может
быть оценена формулой [9], которая в наших обозначениях имеет вид
<£ = 1 . (15.15)
2?вхД4х
Предполагая, что флуктуации сигнала на выходе системы слежения за задерж-
кой имеют нормальный закон распределения, вероятность выхода ошибки за пре-
делы интервала допустимых значений ±8 около истинного значения составит
х2
~ 1 —2 ( 8 ( ЛГ А
Pt=2J е 2°т^ = 1~ф 7Z- =1~ф 8<7вх^ , (15.16)
где Ф(-) — интеграл вероятностей в форме
г 2 2
ф(у) = ]-=£-' dt. (15.17)
Расчет, выполненный с использованием (15.16), показывает, что при Рт > 0,5 и
мощности принимаемого сигнала Рс = 2,5-10-16 Вт необходимо применить помеху с
1,75-1О"10
мощностью Рп =—---------Вт. При Д/т ~ 1 Гц, что соответствует темпу съема отсче-
А/т
т ~ 1 1
тов псевдодальности Гт —---= 1 с, мощность шумовой помехи на входе приемника
А Ут
аппаратуры потребителях должна составлять Рп « 1,75-10-10 Вт.
15.5. Радиоэлектронное подавление канала демодуляции
Кроме навигационной информации аппаратура потребителей должна принимать,
выделять из помех и демодулировать сообщения, содержащие информацию о па-
раметрах движения всех аппаратов, составляющих космическую группировку СРНС.
Алгоритм демодуляция сигнала иллюстрируется схемой рис. 15.8.
Рис. 15.8. Когерентный демодулятор навигационного приемника
Фильтры после перемножителя, демодулирующего принятый сигнал, согласу-
ются с сигналами «1» и «0». Компаратор восстанавливает символы передаваемых
сообщений.
636
Глава 15. Радиоэлектронное подавление радионавигационных систем
Эффективность канала демодуляции характеризуется вероятностью ошибочных
решений приема каждого символа сообщения Рош1.
Для радиоэлектронного подавления канала демодуляции необходимо, чтобы
энергетический потенциал помехи PnGn обеспечивал уменьшение энергетического
соотношения сигнал/шум до уровня, при котором значительна вероятность ошиб-
ки приема каждого символа информационного сообщения.
Вероятность ошибки приема символа в такой схеме составит
(15.18)
где q — соотношение сигнал/шум на входе приемника для сигнала навигационно-
го ИСЗ, В— база сигнала; Ф(-) — интеграл вероятностей (15.17).
В штатном режиме функционирования СРНС при наличии только шумов естест-
венного происхождения прием навигационного сигнала с минимальным ожидаемым
уровнем Ps ~ 2,5-10-16 Вт обеспечивает очень малые вероятности ошибок. При
постановке шумовой помехи, подавляющей сигнал в канале демодуляции переда-
ваемых данных, достаточно обеспечить вероятность ошибки на символ порядка
Рош1 ~ 0,1. Такой вероятности ошибки при мощности сигнала Ps ~ 2,5-10-16 Вт
отвечает мощность шумовой помехи Рш = ЗЛО-11 Вт.
15.6. Радиоэлектронное подавление приемника потребителя
навигационной информации узкополосной помехой
Как было показано, широкополосные сигналы навигационных спутников при-
нимаются и обрабатываются корреляторами, которые сворачивают спектр сигналов,
приводя их к синусоиде, по которой работает подсистема слежения за частотой.
Если совместно с широкополосным сигналом действует некоторый набор узкопо-
лосных помех, то коррелятор преобразует их в широкополосные с шириной спект-
ра того же порядка, что и у подавляемого навигационного сигнала. Иначе говоря,
узкополосные помехи превращаются коррелятором в широкополосный шум. Разу-
меется, для борьбы с такими помехами в линейной части навигационного прием-
ника могут использоваться режекторные фильтры. Но адаптация таких фильтров к
априори неизвестным параметрам узкополосных помех представляет собой довольно
сложную техническую задачу.
15.7. Радиоэлектронное подавление аппаратуры потребителей
навигационной информации имитирующими помехами
Имитирующие помехи, подобные сигналам и дезинформирующие потребите-
лей навигационной информации, могут быть прицельными и заградительными.
Прицельные имитирующие помехи по форме повторяют сигнал f-го навигаци-
онного спутника, отличаясь от сигнала временным и частотным сдвигом:
п„,- =а,л(Л-Д/, (15.19)
где А/-—частотное рассогласование, не выходящее из интервала допустимых частот-
ных расстроек |А/| < Ат — временной сдвиг, не превосходящий некоторого
допустимого | Дт | < Ттах; ос, — коэффициент, учитывающий различие уровней /-го
навигационного сигнала и имитирующей его помехи.
г
15.8. Уравнение РЭП для потребителей СР НС
637
Заградительная шумовая помеха имитирует набор навигационных сигналов
П„ = (4 Mj). (15.20)
Прицельная сигналоподобнаяУпомеха, как показано в книге [91], эффективнее
заградительной. Но ее применение связано с необходимостью получения и исполь-
зования целеуказаний для установки задержки и частотного сдвига в пределах до-
пустимых значений. Заградительная помеха не требует целеуказаний, т. е. данных
о пространственных координатах и скорости движения подавляемого абонента се-
тевой спутниковой радионавигационной системы. Но для обеспечения такой же
эффективности, как у прицельной, естественно, требуется большая мощность.
Как и шумовые, имитирующие помехи способны затруднять обнаружение на-
вигационных сигналов, срывать слежение за частотой и задержкой принимаемого
сигнала, препятствовать демодуляции навигационных сообщений. Эффективность
РЭП при использовании помех того и другого типа можно оценивать как вероят-
ностью достижения цели (подавления систем обнаружения, срыва слежения и вне-
сения ошибок демодуляции), так и пороговой мощностью помехи, обеспечиваю-
щей требуемую эффективность РЭП. Результаты детального сравнительного ана-
лиза эффективности РЭП аппаратуры потребителя представлены в табл. 15.1 [88].
Таблица 15.1
Подсистема навигационного преемника аппара- туры потребителя Тип помехи Вероятность РЭПРп Энергетический потенциал поста- новщика помех PnGn (дБ-Вт)
Подсистема обнаружения Широкополосная шумовая помеха 0,5 8,5
Узкополосная помеха 0,5 8,5
Заградительная сигналоподобная помеха 0,67 -9,5
Канал слежения за частотой Широкополосная шумовая помеха 0,32 19,5
Узкополосная помеха 0,32 24,4
Канал слежения за задержкой Широкополосная шумовая помеха 0,5 10,4
Узкополосная помеха 0,5 54
Заградительная сигналоподобная помеха 0,67 -9,5
Подсистема демодуляции Широкополосная шумовая помеха 0,1 18,7
Узкополосная помеха 0,1 18,7
Как следует из данных, приведенных в табл. 15.1, среди рассматриваемых помех
наименьшего энергетического потенциала требует заградительная сигналоподобная
помеха. Таким образом, для подавления аппаратуры потребителей навигационной
информации целесообразен переход от шумовых помех к помехам сигналоподобным,
дезинформирующим аппаратуру потребителей навигационной информации.
15.8. Уравнение радиоэлектронного подавления для потребителей
спутниковых радионавигационных систем
Уравнение РЭП абонентам СРНС аналогично соответствующему уравнению для
случая подавления радиолиний линий связи и передачи информации (рис. 8.2):
п»
(15.21)
638
Глава 15. Радиоэлектронное подавление радионавигационных систем
где 7^-20000 км = 2-107 м — удаление приемника потребителя навигационной ин-
формации от ИСЗ (дальность до ИСЗ в зените R^= 19100 км, до пригоризонтного
ИСЗ — 24000 км); 7?п — дальность «САП — приемник потребителя»; Ки — коэф-
фициент подавления.
Особенностями подавления потребителя навигационной информации в СРНС
является большая дальность Ас и малая мощность сигнала, излучаемого с борта ИСЗ,
а также очень большая база сигнала. Принимая значение мощности бортового
передатчика Рп = 15 Вт, а коэффициент усиления бортовой антенны навигационного
ИСЗ Gn = 10 дБ [89], можно оценить требуемый энергопотенциал САП, удаленной
от потребителя на ~ 100 км, величиной
=§ад*п - 0,8-10-3КП.
%
(15.22)
Даже если принять Кп = 100 из (15.22) следует, что энергопотенциал должен со-
ставлять всего лишь
PnGn — 0,08 Вт, (15.23)
т. е. никак не более 0,1 Вт.
Зона подавления наземных потребителей представляет собой, в первом прибли-
жении, полусферу радиуса, равного дальности прямой видимости. Качественная
картина зоны подавления навигационного приемника бортовой системы управле-
ния крылатой ракеты (КР) представлена на рис. 15.9.
Рис. 15.9. Подавление навигационного приемника на борту крылатой ракеты
На рис. 15.9 САП расположена в начале декартовой системы координат. При
малой высоте полета крылатой ракеты Н~ 50... 100 м радиус полусферы зоны подав-
ления ограничивается дальностью прямой видимости
Лпах =4,12^\//Z + \l~hj км,
где Н и h — соответственно высота полета КР и высота антенны САП в метрах.
В первом приближении 50 км. Если объект подавления находится на поверхно-
сти Земли, при Н = 0, 7?тах = 4,12л/й. При размещении САП на автомобиле h ~ 2...3 м,
поэтому 7?тах= 6...7 км.
ГЛАВА 16
РАДИОЭЛЕКТРОННАЯ ЗАЩИТА
16.1. Виды помех радиоприему и методы помехозащиты
Современная радиотехника накопила значительный опыт создания и эксплуа-
тации РЭС в условиях действия помех. Изучены причины возникновения и источ-
ники помех, созданы модели для анализа воздействия помех и проектирования
помехоустойчивых РЭС. Проблемам борьбы с негативным действием помех — про-
блемам обеспечения помехоустойчивости — посвящены многочисленные фунда-
ментальные труды отечественных и зарубежных ученых [92-94 и др.].
Традиционно помехи делят на естественные (природного происхождения) и ис-
кусственные, обязанные своим происхождением деятельности человека. Помехи, обу-
словленные антропогенными факторами, могут быть как непреднамеренными, так
и создаваемыми специально. Известно много причин происхождения непреднаме-
ренных помех радиоприему. К непреднамеренным помехам относятся атмосферные,
космические, внутренние шумы, помехи из-за нарушения электромагнитной совме-
стимости (ЭМС), а также многочисленные индустриальные помехи, создаваемые
промышленными установками и вообще агрегатами, не предназначенными для ра-
боты с излучением, но создающими высокочастотные электромагнитные поля из-
за электрических разрядов, искрения контактов и т. п. К активным преднамеренным
помехам относятся шумовые и имитационные помехи, создаваемые средствами РЭБ.
В условиях действия радиопомех ответной мерой является радиоэлектронная
защита (РЭЗ). РЭЗ охватывает все методы и средства, которыми располагает радио-
электроника, включая мероприятия по обеспечению скрытности действия радиоси-
стем и средств, методы комплексирования и дублирования, специальные методы
помехоустойчивой обработки сигналов. Мерой качества РЭЗ служат показатели по-
мехозащищенности.
Помехозащищенность радиосистемы характеризует ее способность обеспечивать
требуемые точность воспроизведения сообщений и пропускную способность (бы-
стродействие) с учетом действия возможных помех. В общем случае помехозащи-
щенность системы обеспечивается помехоустойчивостью и скрытностью ее действия.
Скрытность действия затрудняет возможному противнику обнаружение факта функ-
ционирования радиосистемы и определение характеристик излучаемых ею радиосиг-
налов с целью создания эффективных преднамеренных радиопомех. Помехоустойчи-
вость обеспечивает нормальное функционирование системы в условиях действия
определенной совокупности непреднамеренных и преднамеренных (организован-
ных) помех [19].
Классификация методов помехозащиты показана на рис. 16.1. Различают три
основные группы методов.
Во-первых, для защиты от перегрузок, приводящих к нелинейным эффектам
и, как следствие, к ухудшению частотной избирательности по побочным каналам
приема, применяют линеаризацию широкополосного высокочастотного тракта при-
емника.
640
Глава 16. Радиоэлектронная защита
Методы помехозащиты РПУ
Защита от перегрузок
Селекция от помех
Пространственно- временная
Пространственная
Временная
Частотная
Поляризационная
Функциональная
Оптимальный прием
Структурная селекция
Адаптация
Компенсация помех Многоканальный прием
Рис. 16.1. Классификация методов помехозащиты
Во-вторых, селекция предусматривает отстройку сигнала от помех, за счет ис-
пользования различия в их свойствах и параметрах. Такая отстройка в конечном
итоге приводит к резкому ослаблению восприимчивости приемника (ПРМ) по по-
бочным каналам приема. Различают пространственно-временную селекцию (ПВС),
функциональную селекцию (ФС) и адаптацию.
В третьих, применяют компенсацию помех.
Пространственно-временная селекция разделяется на пространственную (ПС) и
временную (ВС). Пространственную селекцию осуществляет антенная система, с
помощью которой формируют необходимые диаграммы направленности. Такие ДНА
обеспечивают максимальный уровень полезного сигнала и возможно более низкий
уровень мешающего, когда ДНА ориентируются минимумами на источники помех.
Временная селекция осуществляется лишь приемным устройством с использова-
нием всех имеющихся различий сигналов и помех. Различия могут быть по ампли-
туде и их используют для амплитудной селекции.
Временная и частотная селекции используют различие сигналов и помех по их
спектральным и временным свойствам. Частотная селекция основана на различии
спектров сигналов и помех. Спектры могут отличаться несущими частотами и
шириной занимаемой полосой частот. За счет разницы в ширине спектров можно
режектировать узкополосные помехи в приемниках широкополосных сигналов и
фильтровать узкополосные сигналы на фоне широкополосных помех. Частотная
селекция рассматривается как очень мощное средство помехозащиты от преднаме-
ренных активных и пассивных помех. Для повышения эффективности частотной
селекции применяют управление частотными свойствами зондирующего сигнала.
Такое управление затрудняет постановку помех, близких к сигналу по спектраль-
ным свойствам. Чаще всего для управления частотными свойствами используют:
изменения (чаще по случайному закону) несущей частоты, например, изменение
частоты от импульса к импульсу; изменение частоты повторения импульсов (иног-
да такую частотную модуляцию называют вобуляцией); многочастотное излучение.
Поляризационная селекция, использующая различие в поляризации приходящих
волн сигналов и помех, осуществляется с помощью специальных поляризационных
фильтров, совмещаемых с антенной системой.
16.1. Виды помех радиоприему и методы помехозащиты
641
Функциональная селекция предусматривает выделение сигналов с помощью не-
скольких независимых каналов приема с последующей совместной обработкой всей
их совокупности [94]. Для функциональной селекции используется широкий комп-
лекс мероприятий, требующий специальных методов построения трактов приема
и обработки радиосигналов. Так, оптимальный приемник, предусматривающий
построение наилучшей схемы для данного конкретного сигнала и известного вида
помех, является, по сути, реализацией схемы функциональной селекции этого сигна-
ла от помехи.
Структурная селекция позволяет разделять помехи с сигналом, которому при фор-
мировании на передающей стороне придана известная приемнику форма (структура).
Для осуществления структурной селекции сигналы кодируют, причем используе-
мые для этой цели коды делают сигналы максимально отличающимися от любых
возможных помех. Применение таких кодов всегда расширяет базу сигнала
Многоканальный прием использует пространственную и временную взаимную
когерентность сигналов, пришедших к приемнику по разным трассам и потому
наблюдаемых на разных временных интервалах. Такой способ селекции позволяет
уменьшить влияние помех, действующих на сигналы только на некоторых (возмож-
но, заранее и неизвестных) трассах распространения и за счет этого существенно
повысить помехоустойчивость радиоприемных устройств.
Адаптация (приспособление к внешним условиям) предусматривает изменение
структуры и параметров защищаемых РЭС при изменении помеховой обстановки.
Цель адаптации — оптимизировать характеристики помехоустойчивости в заранее
неизвестных условиях работы.
Компенсация помех (обычно на выходе УПЧ) применяется как последний ре-
зерв помехозащиты, когда все остальные методы не смогли предотвратить проса-
чивание радиопомех на выход устройств приема и обработки сигнала. Компенса-
цию осуществляют специальные схемы подавления сигналов, принятых боковыми
лепестками ДНА. Известны многочисленные методы и технические решения, ис-
пользующие для компенсации помех их частотные, временные и корреляционные
отличия от сигналов.
Средства и алгоритмы помехозащиты, работа которых основывается на исполь-
зовании перечисленных методов, весьма многообразны и многочисленны.
Для уменьшения уровня комбинационных помех и для исключения помех, вы-
званных взаимодействием полезного сигнала с собственным шумом приемника,
необходимо создать приемный тракт с максимально линейной амплитудной харак-
теристикой. Средства линеаризации амплитудных характеристик применяются
прежде всего на высокочастотных участках тракта радиоприемных устройств: в
усилителях радиочастоты (УРЧ), преобразователях частоты (ПЧ), усилителях про-
межуточной частоты (УПЧ).
В УПЧ также производят компенсацию помех и амплитудную селекцию сигналов
на фоне помех. Для этого применяют различные схемы автоматической регулировки
усиления (АРУ). Для компенсации помех в УПЧ применяют дополнительные коге-
рентные каналы, череспериодные импульсные компенсаторы и другие схемы. В каче-
стве схем помехозащиты в УПЧ применяют также согласованные с сигналом фильт-
ры и схемы специальной нелинейной обработки: логарифмические УПЧ, схемы с
амплитудным ограничением и фильтрацией (ФОФ — «фильтр — ограничитель —
фильтр»). Различные схемы автоподстройки частоты гетеродинов также служат улуч-
шению помехозащиты.
642
Глава 16. Радиоэлектронная защита
Помехозащита демодуляторов предусматривает применение оптимальных ме-
тодов выделения модулирующих функций сигнала, а также разнообразных других
схем из большого набора эвристических технических решений, позволяющих бо-
роться с помехами конкретного вида.
16.2. Помехозащита радиоприемников
При действии на РЭС интенсивных помех возникает перегрузка, вследствие
которой приемник перестает реагировать на изменения входного сигнала. Разумеет-
ся, при этом приемник не может воспроизводить сообщения. Перегрузки могут воз-
никать в любой части приемника: во входных и выходных усилительных каскадах,
в УПЧ, в демодуляторах.
Один из самых распространенных способов борьбы с перегрузками — автома-
тическая регулировка усиления (АРУ) [94].
При работе АРУ амплитуда напряжения на выходе УПЧ определяется при по-
мощи детектора АРУ, на который подается еще и напряжение задержки U3. Напря-
жение с выхода детектора усиливается и усредняется фильтром нижних частот
(ФНЧ). Выходное регулирующее напряжение Up управляет коэффициентом усиле-
ния УПЧ приемника Купч =K(Up} с тем, чтобы поддерживать сигнал на выходе
демодулятора на постоянном приемлемом уровне £7ВЫХ = 7^(t/p)t/BX при £7ВЫХ >U3.
Таким образом, задержка срабатывания U3 — это пороговый уровень входного
сигнала, по превышению которого амплитудой входного сигнала, срабатывает си-
стема АРУ.
=*(ц.) с тем, чтобы поддерживать сигнал на выходе
— *(^рК при £/вых
Разнообразные устройства помехозащиты используют принцип автоматической
регулировки усиления (АРУ) приемного устройства.
АРУ «вперед». Это эффективный метод защиты от помех, имеющих большую
длительность, чем импульсы сигнала (тг >тс). Структурная схема такой системы
АРУ показана на рис. 16.2. Здесь постоянная времени тАРУ=:——> тс. В тот мо-
мент времени, когда приходит импульс сигнала длительностью тс, коэффициент уси-
ления видеоусилителя К (Е2)= max, а при приходе длинного импульса помехи тп > тс
резко уменьшается и помеха на выходе ослабляется.
Рис. 16.2. АРУ «вперед»
АРУ «по ближним шумам». Это быстрая автоматическая регулировка усиления
(БАРУ) по шумовой помехе, предшествующей появлению сигнала. Работа АРУ «по
ближним шумам» иллюстрируется осциллограммой рис. 16.3.
Здесь, если принят сильный сигнал (q = — > 1), а усиление Кр пм (Рш) установи-
ли
лось по шумовой помехе относительно более низкого уровня, сигнальный импульс
16.2. Помехозащита радиоприемников
643
С + ШП
Рис. 16.3. АРУ по ближним шумам
пройдет на выход. Если в аналогичной ситуации принят слабый сигнал (q < 1), этот
импульс будет практически подавлен, т. е. за счет работы схемы АРУ отрезок шумо-
вой помехи, предшествующий и последующий импульсу сигнала, вырезается, под-
черкивая при этом полезный сигнал при q > 1.
АРУ с поиском провала в спектре помехи. Если спектр помехи на входе радио-
приемного устройства неравномерный, как на рис. 16.4, а спектр сигнала сосредо-
точен недалеко от провала в спектре помехи, поиском по частоте (перестройкой
частоты) гетеродина fT при постоянной полосе приемника можно добиться мак-
симального отношения сигнал/шум. Такая схема АРУ сочетает в себе как свойства
системы регулировки усиления, так и системы автоматической подстройки часто-
ты. Но подстройки не под какую-то спектральную составляющую сигнала, а под
частоту, на которой помеха имеет минимальную спектральную плотность. Подстрой-
ка под провал в спектре помехи адаптирует ПРМ к помеховой обстановке.
Рис. 16.4. АРУ с поиском провала в спектре помехи
Мгновенная АРУ (МАРУ) имеет постоянную времени Тдру «тс. При таком усло-
вии импульс сигнала с меняющейся за время тс амплитудой Ес (/с), t е [0, тс] поддер-
живается на выходе постоянным. Это защищает приемник от мощных импульсных
помех. Схема работает и при тп > тс, т. е. защищает приемник от длинных помехо-
вых импульсов (например, создаваемых облаками дипольных отражателей).
АРУ с многократными стробами обеспечивает получение постоянного уровня
выходного сигнала приемника Ес вых = const в широком диапазоне амплитуд вход-
ных сигналов от Ес вых min до Ес вых тах. Для этого управляющий сигнал выбирают
ступенчатым UAPy = £л£/ару, k = var и регулировки усиления проводятся либо до
прихода импульса сигнала, либо во время действия этого импульса, а также на
максимальной дальности работы РЛС.
Детектор с обратным смещением — это такой вариант АРУ, который обеспечи-
вает постоянство амплитуды выходного сигнала приемника Ес вых = const при лю-
бом входном амплитудно-модулированном сигнале. Схема ослабляет импульсные
644
Глава 16. Радиоэлектронная защита
помехи с большой длительностью, когда тп » тс (помехи от облаков дипольных
отражателей), вплоть до непрерывных шумовых помех.
Другой способ снижения риска перегрузок помехами — применение ограничи-
телей.
Ограничители сигнала — весьма специфические нелинейные устройства. Они
почти не дают подавления сигнала шумом, но при этом позволяют успешно бороться
с импульсными помехами. Известно очень много разновидностей схем, использу-
ющих ограничители для уменьшения влияния помех. Ниже очень кратко и без
детального анализа рассматриваются лишь некоторые схемы из этого класса.
Ограничение сверху. Для борьбы с мощными импульсными помехами, когда
амплитуда помехи значительно превосходит амплитуду сигнала, £п » £с, приме-
няют ограничение сверху по уровню Ес. Вследствие такого преобразования суммы
сигнала с помехой мощные импульсы помехи на выход схемы ограничителя не
проходят.
Двухпороговое ограничение применяется для помехозащиты канала обнаружения
(рис. 16.5).
Рис. 16.5. Двухпороговое ограничение
Сначала работает каскад ограничения с первым пороговым уровнем Такой
селектор пропускает сигнал с амплитудой Ес и отсекает импульсы с £с' <ЕС. На
выходе схемы первого ограничителя можно подсчитать число импульсов, превысив-
ших порог hx за интервал Т (это т импульсов из п принятых). Второй порог h2 —
классическая схема т из п. Цель считается обнаруженной, если не менее т импульсов
из п превысят оба порога hx и h2.
Ограничение снизу может применяться для подавления слабых помех. У ограни-
чителей снизу (рис. 16.6) на выход проходят сигналы с Ес > hQ, а более слабые шу-
мовые импульсные помехи х < подавляются.
Рис. 16.6. Ограничение снизу
Амплитудно-частотная селекция с помощью схем ФОФ или ШОУ. Схемы ФОФ
(фильтр — ограничитель — фильтр) или ШОУ (широкополосная — ограничитель
— узкополосная) (рис. 16.7).
Первое назначение ФОФ — помехозащита приемников от мощных коротких
импульсных помех. Полосы усилителей выбираются так, чтобы Д^~ Д/.; Л/ш =
k » 1. Если на вход схемы ФОФ действует импульс сигнала длительности тс и помехи
с длительностью тп « тс при разных уровнях хп » хс, то через входной усилитель
16.2. Помехозащита радиоприемников
645
ШФ О УФ
Рис. 16.7. Амплитудно-частотная селекция с помощью схем ФОФ (ШОУ)
с широкой полосой оба импульса пройдут без искажений. После ограничения (уро-
вень ограничения у0) импульсная помеха будет уменьшена по амплитуде до уровня
уп = Л- Фильтр с узкой полосой, согласованной с шириной спектра сигнала, им-
пульс сигнала не исказит, а импульс помехи расширит, уменьшив при этом его по
амплитуде примерно в к раз. Таким образом, отношение сигнал/шум на выходе ста-
нет ?вых = (£)“2 = (д/у / Д/ш) » •
Второе назначение ФОФ — помехозащита приемников сигналов с угловой
модуляцией от шумовых и других широкополосных помех. Третье — стабилизация
вероятности ложных тревог Рлт на выходе.
Ограничение — не единственный способ нелинейного преобразования, защища-
ющего от перегрузок. Среди нелинейных устройств подавления радиопомех широко
распространены различные модификации приемников с логарифмическими ампли-
тудными характеристиками усилителей промежуточной частоты [94] (рис. 16.8).
Поскольку в области UBX < 1 характеристика вида t7BbIX = logflt7BX при любом а > 1
нереализуема (при t/BX -» 0, £/вых для логарифмических усилителей выбира-
ют характеристику, аппроксимируемую функцией log10(l + Точке UBX= 0 на та-
Рис. 16.8. Логарифмическая характеристика приемника
Логарифмический приемник с малой постоянной времени стабилизирует ве-
роятности ложных тревог Рлт и ограничивает по протяженности длинные помехи
тп » тс. Структурная схема такого приемника показана на рис. 16.9. Особенностью
схемы рис. 16.9 является применение на выходе логарифмического усилителя диф-
ференцирующей цепочки, укорачивающей выходной импульс сигнала и длинной
помехи, когда тп » тс. Практически не измененные дифференцирующей цепочкой
импульсы сигнала и сильно укороченные ею импульсы помехи усиливаются вы-
ходным видеоусилителем (ВУ).
Рис. 16.9. Логарифмический приемник с малой постоянной времени
646
Глава 16. Радиоэлектронная защита
Одна из модификаций логарифмического усилителя — линейно-логарифмиче-
ский. В таком приемном устройстве для слабых сигналов приемник линейный —
t/BbK = kUBX, а для сильных — логарифмический — = log UBX. На линейном участке
амплитудной характеристики #вых = <7ВХ, а на логарифмическом — двых > qBX (силь-
ный сигнал подавляет помеху).
16.3. Специальные схемы подавления различных
преднамеренных помех
Известно много рецептов борьбы с конкретными видами организованных по-
мех. Еще больше известно технических решений и конкретных схем построения
приемников, защищенных от помех определенного конкретного вида. Ниже при-
водятся несколько схемных решений, используемых для РЭЗ от наиболее распро-
страненных видов помех.
В приемниках РЛС со сжатием импульсов для помехозащиты применяется метод
«охватывающего импульса» [95]. Схема, иллюстрирующая работу приемника в со-
ответствии с этим методом, приведена на рис. 16.10.
Рис. 16.10. Использование для помехозащиты «охватывающих импульсов»
Основной выход соответствует приемнику с согласованным фильтром СФ, сжи-
мающим импульс с внугриимпульсной ЛЧМ или ФКМ. Когда появляется совме-
щенная шумовая импульсная помеха (например, в случае самоприкрытия лета-
тельного аппарата бортовой САП), может возникнуть подавление несжатого ЛЧМ-
р
импульса, так как при этом нередко q = -—->15 дБ. Но в этом случае логическая
схема Л обнаруживает появление помехи и включает формирователь охватываю-
щего импульса ОИ. В этом состоянии приемник переходит в режим слежения за
огибающей помехового импульса. ОИ — это огибающая помехового импульса. Если
ОИ очень мощный, по огибающей РЛС определяет и дальность, и пеленг не хуже,
чем по сигнальному импульсу, сжатому согласованным с ним фильтром.
Для подавления прицельных шумовых помех в приемниках применяют схему
мгновенного (точнее — быстрого) измерения частоты и режекции помехи по ре-
зультатам измерений. Соответствующая схема приемника представлена на рис. 16.11.
Рис. 16.11. Режекция помехи по частоте
16.3. Специальные схемы подавления различных преднамеренных помех
647
Если вместе с сигналом в полосе входного усилителя сигнала радиочастоты УРЧ
наблюдается помеха с шириной спектра А/щП « Л/с, анализатор помеховой обста-
новки фиксирует эту ситуацию, определяет несущую частоту помехи и с помощью
системы управления СУ настраивает режекторный фильтр на частоту, пораженную
помехой. В результате таких действий приемник адаптируется к мгновенной сигналь-
ной обстановке, не пропуская прицельную по частоте шумовую помеху на выход
приемника.
Для обнаружения импульсов шумовых помех в импульсных радиоприемных
устройствах с последующим применением бланкирования этих импульсов при-
меняются сторожевые стробы. Одна из таких схем с двумя сторожевыми стробами
приведена на рис. 16.12.
В схеме имеются два канала приема — основной на частоте с полосой А/и
канал помехозащиты (нижний по схеме). Последний состоит из трех фильтров —
основного на частоте^ и двух сторожевых на частоте/„pi <Лр иЛр2 >ЛР с одинако-
выми полосами А/ Канал помехозащиты образуют схемы ФОФ с двумя узкопо-
лосными фильтрами на выходе. После квадратичных детекторов в компараторе К
сравнивается разность постоянных составляющих продетектированных шумов
А = (г)^ - (0)’ пропорциональная разности мощностей, а при одинаковых А/—
и спектральных плотностей шумов в полосах фильтров, настроенных на частоты
Лтр1 и Лтр2- По этой разности можно судить о расположении спектра шумовой поме-
хи относительно несущей сигнала: если А > 0, шумовая помеха сосредоточена на
частотах ниже частоты сигнала, если А < 0 — выше.
В литературе [95] приведены и другие схемы приемных устройств со сторожевы-
ми стробами.
Для защиты от пространственносовмещенных с сигналом мощных помех воз-
можно применение способов помехозащиты, основанных на взаимодействии сиг-
нала и помехи. Так, при q = — »1 вполне можно перейти к слежению за помехой
с измерением дальности по переднему фронту помехового импульса, а скорости —
по средней или несущей частоте помехи.
Для борьбы с заградительными шумовыми помехами, разнесенными по спект-
ру с сигналом, могут использоваться схемы, превращающие помеху из противника
в союзника. Одна из таких схем предусматривает работу приемника с отключени-
ем гетеродина [95]. Принцип работы приемника сводится к следующему. На входе
смесителя действует сигнал с несущей fc и заградительная шумовая на частоте в
окрестности fn помеха (рис. 16.13). Эти частоты разнесены по частоте на А/шп. При
обычном приеме сигнал, проходящий на УПЧ, содержит слабые биения колебания
гетеродина с принятым сигналом и сильные биения колебания гетеродина с загра-
648
Глава 16. Радиоэлектронная защита
дительной шумовой помехой. В результате заградительная шумовая помеха может
подавить сигнал на нелинейности демодулятора после УПЧ. Для борьбы с нежела-
тельным эффектом подавления можно отключить гетеродин. Тогда роль опорного
сигнала для смесителя ПРМ берет на себя заградительная шумовая помеха. В ре-
зультате, биения сигнала с заградительной шумовой помехой с разносом централь-
ных частот Д/шП =Упр проходят в УПЧ, тем лучше оттеняя сигнал, чем больше ин-
тенсивность шумовой помехи. Разумеется, отключение гетеродина можно исполь-
зовать только при наличии возможностей для обнаружения факта противодействия
с использованием заградительной шумовой помехи, а также возможности подстрой-
ки частоты сигнала под Л = /п±Лп-
V “'ll •'1ILJ
Рис. 16.13. К иллюстрации принципа помехозащиты
с отключением гетеродина
Известны также технические решения [95], предусматривающие использование
в качестве опорного колебания гетеродина помех, образующихся за счет отраже-
ний от местных предметов, пришедших по боковым лепесткам, и тому подобных
эффектов. Все эти принципиальные и технические решения направлены на улуч-
шение качества приема сигнала на фоне сильных помех.
16.4. Помехозащита радиолокационных станций
Помехозащита РЛС — весьма сложная и многоплановая проблема. Уязвимость
РЛС для организованных помех заставляет прилагать огромные усилия для поиска
методов обеспечения эффективной и устойчивой работы в любых, в том числе за-
ранее неизвестных и трудно предсказуемых условиях. Поэтому защита РЛС от по-
мех обеспечивается комплексом не только технических, но и организационных мер
и средств [37]. Прежде всего — созданием соответствующих устройств и примене-
нием алгоритмов помехозащиты.
Для помехозащиты используют все возможные различия сигналов и помех по
спектральным, временным, пространственным, структурным и поляризационным
параметрам и реализуют на основе использования этих различий селекцию, кото-
рая уже упоминалась в разд. 16.1.
Мощный способ помехозащиты — компенсация помех в антенной системе, на
входе приемника, в полосе УПЧ или на выходе РЛС — в системах вторичной обра-
ботки радиолокационных сигналов.
Организационные методы помехозащиты РЛС предусматривают различные
методы управления радиолокационным наблюдением. Для этого различные (воз-
можно даже разнотипные) РЛС, разнесенные в пространстве, объединяются в со-
ставе единых многопозиционных систем.
Кроме того, разработчики РЛС располагают довольно мощным и обширным
набором эвристических приемов построения устройств защиты от помех. Эти прие-
16.5. Выбор антенной системы РЛС
649
мы и способы ориентированы, как правило, на нейтрализацию или по крайней мере
на снижение негативных последствий действия помех конкретного вида. При изме-
нениях помеховой обстановки эвристические схемы и алгоритмы могут оказаться
не только бесполезными, но даже вредными, ухудшающими характеристики РЛС.
Поэтому применение эвристических алгоритмов требует адаптивного управления
средствами помехозащиты.
Разумеется, сам сложный, комплексный характер проблемы помехозащиты пред-
полагает комплексное применение разных мер и средств.
При наличии канала, контролирующего мощность излучения запросного сигна-
ла, можно менять эту мощность, ориентируясь на конкретную складывающуюся
помеховую обстановку.
Иногда в импульсных РЛС для помехозащиты применяют режимы сопровожде-
ния цели по переднему и заднему фронтам импульсов. Эти режимы защищают РЛС
от помех, создаваемых постановщиками с больших дальностей. Такие помехи со-
здаются облаками дипольных отражателей и излучениями
различных ретрансляторов, а также некоторыми другими
средствами РЭП. Например, если импульс сигнала поражен
помехой так, что свободен от помех только передний фронт
(этот случай характерен для ретранслированных помех, за-
держанных относительно отраженного сигнала в аппарату-
ре ретранслятора и иллюстрируется рис. 16.14), можно диф-
ференцированием переднего фронта отраженного сигнала
получить чистый короткий импульс в момент прихода сиг-
нала. Затем можно этот импульс восстановить до его нор-
мальной длительности тс. Аналогичным образом можно организовать слежение в
РЛС с линейным сканированием, подавив угловые сектора, где находятся пассив-
ные помехи.
Существует еще ряд схем подавления шумовых помех, принимаемых по глав-
ному лепестку ДНА. Эти схемы и описания их работы можно найти в работе [95].
Рис. 16.14. Работа по
переднему фронту
16.5. Выбор антенной системы радиолокационных станций
Пространственная селекция, которая реализуется только антенными системами,
является мощным средством помехозащиты.
На рис. 16.15 представлена схема компенсации помех бланкирования, прини-
маемых боковыми лепестками антенны.
Антенна Aj (основная) имеет ДНА вида рис. 16.15, б с коэффициентом усиления
антенны Gj (а) и обладает уровнем боковых лепестков G6jI. Вспомогательная антен-
на А2 имеет широкий луч, которому соответствует коэффициент усиления антен-
ны G2 > G6jl. Помеха принимается боковым лепестком А{ и вспомогательной ан-
тенной А2 После двухканального усиления, детектирования и сравнения на ком-
параторе К образуется разностный импульс
= Д - Ег.
Если £д < О (помеха по вспомогательному каналу сильнее), считается, что она
принимается боковым лепестком основной антенны. Тогда компаратор включает
генератор импульсов ГИ, который бланкирует видеоусилитель УНЧ на время дейст-
вия этой помехи. Если £д > 0, это означает, что помеха принята главным лепестком
основной антенны и бланкирования УНЧ не происходит.
650
Глава 16. Радиоэлектронная защита
Gi(a)
Рис. 16.15. Схема бланкирования боковых лепестков ДНА
F2(a)
Ai
А2
Компенсацию боковых лепестков можно производить на промежуточной час-
тоте (когерентная компенсация).
Известны многоконтурные системы с компенсацией боковых лепестков для
нескольких постановщиков помех. Совершенно аналогичная схема с одним конту-
ром компенсации может быть выполнена по низкой частоте, в видеополосе [95].
Многоэлементные антенны позволяют компенсировать помеху за счет формиро-
вания такой ДНА, которая имеет минимумы в направлении на источники помехо-
вого излучения. Так в схеме рис. 16.16 две антенны —
основная Aj с ДНА Fx (а) и А2 с ДНА F2 (а) образуют
антенную решетку. ДНА этой решетки FZ(a), есте-
ственно, отличается от соответствующих диаграмм каж-
дой из антенн.
Fz(a) = /[(a) + WT2(a). (16.1)
Если осп — угловая координата источника помехи,
то для компенсации помехи нужно выполнить условие
Fz(an) = 0, откуда с учетом рис. 16.16:
При воздействии помехи от нескольких точечных ис-
точников следует увеличивать число компенсационных
антенн. Для подавления помех от N источников необходимо N компенсационных
антенн. Следовательно, решетка должна состоять из и А+ 1 антенн. Многочислен-
ные устройства компенсации пространственных помех рассмотрены в работе [94].
Fi(a)
Рис. 16.16. Формирование
провала ДНА
16.6. Анализ и индикация помеховой обстановки
Для определения наилучших способов работы РЛС в условиях радиопротиво-
действия и для выбора оптимальных методов помехозащиты необходимо основы-
ваться на сведениях о помеховой обстановке. Оперативные данные о помеховой
обстановке использовуют для адаптации как в автоматическом режиме, так и в авто-
матизированном, когда работой РЛС управляет оператор.
16.7. Защита от помех, уводящих по дальности и по скорости
651
Для оператора прежде всего нужен индикатор с отображением помеховой об-
становки и зоны подавления РЛС помехой. В РЛС с индикаторами кругового обзо-
ра (ИКО) для оператора индицируется дальность и азимут Оц цели, как на рис. 16.17.
Большая
интенсивность помех
Рис. 16.17. Помехи и сигналы на ИКО
Обнаруженные шумовые помехи создают на ИКО засвеченные секторы с ин-
формацией лишь об азимуте помехи ап. Это не полная информация о цели, при-
крываемой помехами. Но и этой информации бывает достаточно для решения не-
которых задач, например — для пуска и наведения ракеты на постановщик помех.
Существует много способов (в основном триангуляционных) косвенного грубого
измерения дальности Rn до постановщика помех. Применяя эти способы, можно
наводить управляемые ракеты на постановщик помех с использованием информа-
ции о дальности. Иногда на ИКО отображается информация об интенсивности
помех. Иногда по изображению на ИКО удобно индицировать мощность и направ-
ление воздействия шумовой помехи.
Работа в условиях действия организованных помех предъявляет некоторые спе-
цифические требования к эргономическим характеристикам радиолокационных
индикаторов.
Для анализа возможной помеховой обстановки станция активных помех может
запрашиваться со стороны РЛС пробными сигналами, имитирующими запросный
сигнал. На основе анализа помех, созданных и излученных в ответ на такое стимули-
рующее воздействие, выбирается стратегия и алгоритмы помехозащиты РЛС. В ка-
честве анализатора помех годится любой приемник оперативной радиотехнической
разведки. Наиболее применимы два типа анализаторов помеховой обстановки: ана-
лизаторы спектра, индикаторы типа А и панорамные многофункциональные инди-
каторы-анализаторы.
16.7. Защита от помех, уводящих по дальности и по скорости
Для защиты подсистем РЛС, сопровождающих цели по дальности и по скоро-
сти, от уводящих помех нужно прежде всего обнаружить сам факт такого противо-
действия. Эта задача решается с использованием всей доступной информации о
различиях собственных полезных сигналов РЛС и вредных имитационных помех.
Детальный анализ принципов работы систем защиты от уводящих помех и основ-
ные технические решения, используемые при построении систем защиты, можно
найти в работах [19] и [95].
652
Глава 16. Радиоэлектронная защита
Универсальный способ защиты РЛС от помех, уводящих по дальности, — ис-
пользование в автоматической системе сопровождения по дальности (АСД) поми-
мо основного следящего строба дальности двух дополнительных сторожевых стро-
бов. Эти стробы располагаются слева и справа от основного строба (на меньших и
на больших дальностях), см. рис. 16.18.
Помеха
Рис. 16.18. Сторожевые стробы для защиты от уводящих помех
При работе АСД в отсутствие помех в сторожевом стробе сигнала нет. Как только
будет поставлена уводящая помеха, основной строб дальности будет смещаться, а
сторожевые — нет. Но при этом через некоторое время в сторожевом стробе (пра-
вом или левом в зависимости от направления увода) обнаружится импульс сигнала.
По факту обнаружения алгоритм помехозащиты может вернуть основной строб на
место положения истинного сигнала и возобновить слежение за ним.
Импульсно-доплеровские РЛС могут одновременно использовать сторожевые
стробы как по скорости, так и по дальности.
Один из важных признаков, по которому можно идентифицировать уводящую
помеху, это зависимость между дальностью и скоростью: помеха с изменяющейся
дальностью должна иметь несущую частоту с доплеровским смещением. Поэтому
если одновременно оценивать скорость по доплеровскому смещению R* (/) при по-
мощи автоматической системы сопровождения по скорости (АСС) и косвенные из-
(г)
мерения скорости по производной от измеряемой дальности --— в АСД, а по-
dt
том сравнивать полученные оценки, можно обнаружить уводящую помеху по не-
*dR*(t)
согласованности оценок, если R (/) Ф-
7 dt
Целый ряд мер помехозащиты от уводящих по дальности помех можно найти в
работе [95]. Приемы борьбы с помехами, уводящими по скорости, мало отличают-
ся от способов борьбы с уводящими по дальности помехами. Специфические ме-
тоды помехозащиты от уводящих по скорости помех и практические схемы, реали-
зующие эти методы, можно также найти в работе [95].
16.8. Схемы защиты от поляризационных помех
Для компенсации помех на ортогональной поляризации используется допол-
нительная антенна с коэффициентом усиления С?а2, как на рис. 16.19.
РЛС излучает зондирующий сигнал с вертикальной поляризацией С±. Такой же
отраженный сигнал, принятый второй антенной, приходит в точку 2. Сильная поме-
ха, создаваемая станцией активных помех (САЛ), совмещенной с целью, излучает-
ся на ортогональной поляризации П(. Эта помеха принимается как основной ан-
тенной РЛС с коэффициентом усиления (7а1, так и вспомогательной антенной с Са2,
т. е. помеха поступает в точки 1 и в 2 на схеме рис. 16.19. Выровняв амплитуду Еп
16.8. Схемы защиты от поляризационных помех
653
и фазу фп помехи Пн при помощи цепи автоподстройки с дискриминатором Д,
можно, в принципе, ее в значительной мере компенсировать, так что на выход в
блок обработки информации БОИ поступит лишь полезный сигнал С±.
Цель
Рис. 16.19. Компенсация помех на ортогональной поляризации
Компенсация поляризационной помехи возможна и после демодулятора несу-
щей, в видеополосе. Схема такого приемника с компенсацией в видеополосе пока-
зана на рис. 16.20.
Рис. 16.20. Компенсация помех на ортогональной поляризации в видеополосе
В схеме две антенны Ai и А2 расчитаны на прием сигналов с разными, ортого-
нальными друг другу поляризациями. Пусть от цели приходит отраженный сигнал
С± с вертикальной поляризацией, как и принято обычно в РПД РЛС. Такой сиг-
нал будет обработан лишь в верхнем по схеме канале и пройдет на выход с мини-
мальным ослаблением. Если принимается мощная помеха на горизонтальной по-
ляризации Пч, она пройдет через оба канала. При правильном подборе задержек
Д/и Д/2 и ослаблений в аттенюаторах, помехи компенсируются на выходе схемы вы-
числения разности. В приемнике применены логарифмические УПЧ вместо цепей
АРУ. Другие варианты схем защиты от кроссполяризационных помех можно най-
ти в работе [95].
Эффективность воздействия поляризационной помехи в значительной мере
снижают пространственные поляризационные фильтры, встроенные в обтекатели
антенн. Такие фильтры выполняются в виде тонких металлических полосок.
654
Глава 16. Радиоэлектронная защита
16.9. Помехоустойчивость и помехозащищенность
систем передачи информации
Помехозащищенность РЭС уже определялась как некоторое синтетическое
понятие, учитывающее как скрытность, так и помехоустойчивость. Подобные общие
для всех РЭС соображения справедливы и для конкретного рассматриваемого класса
радиосистем передачи информации (РСПИ). На скрытность сигналов РСПИ сказы-
ваются все те же факторы, которые определяют скрытность РЭС других классов.
А помехоустойчивость РСПИ как способность противостоять негативному влия-
нию помех определяется рядом специфических причин. Иногда анализ помехоустой-
чивости проводят независимо от анализа причины появления помехи на входе РЭС.
При этом считают, что поскольку помехоустойчивость зависит от ряда случайных
причин, то ее количественной мерой может быть вероятность нарушения функци-
онирования РСПИ. Эта вероятность всегда является монотонной функцией отно-
шения сигнал/помеха на входе приемника. Поэтому вместо вероятности нарушения
функционирования РЭС достаточно рассматривать некоторого пороговое (крити-
ческое) соотношение сигнал/помеха: если соотношение сигнал/помеха станет мень-
ше порогового, работа РСПИ считается нарушенной помехой (РСПИ подавлена).
Помехоустойчивость, а следовательно и помехозащищенность, РСПИ зависит
от сочетания большого числа факторов — вида помехи и полезного сигнала, ин-
тенсивности помехи, структуры приемника и алгоритма обработки принимаемого
сигнала, формы диаграммы направленности антенны, применяемых в приемнике
способов борьбы с помехами и т. д. Каждый из этих факторов по отдельности и все
они в совокупности должны учитываться при исследовании помехоустойчивости.
Но ниже в этом разделе рассматриваются энергетические показатели помехоустой-
чивости приема. Такие характеристики являются полными и достаточными в случае,
когда сигналы и помехи различаются по форме, а приемник согласован с сигналом
при флюктуационной помехе. Это согласование в реальных условиях всегда имеет
место и не нарушает общности анализа. Рассмотрение энергетических характерис-
тик и показателей помехоустойчивости позволяет выявить ряд полезных закономер-
ностей, а также предъявить требования к сигналам РСПИ, которые обеспечивают
повышение устойчивости против помех.
Известно [96], что максимальное отношение сигнала к шуму на выходе опти-
мального приемника не зависит от формы сигнала:
(16.3)
9 N ’
*’ш
где Q= РСТ — энергия сигнала, а Рс — его средняя за время Тмощность.
Следовательно, если наблюдение сигнала происходит на фоне только внутрен-
них шумов приемника и внешних шумовых помех, помехоустойчивость приемни-
ков, согласованных с сигналами любой формы, будет одинаковой. Если же помеха
создается внешним источником и отличается по структуре от нормального стацио-
нарного шума, удобно представить Q в виде отношения мощностей сигнала и по-
мехи. Для помехи с постоянной в полосе спектра сигнала Д/спектральной плотно-
стью 7УП
(16.4)
q Nn
где Рп = Nn&.f — мощность помехи, сосредоточенная в полосе спектра сигнала.
16.9. Помехоустойчивость и помехозащищенность систем передачи информации 655
Соотношение (16.4) будет справедливо и при действии совместно с сигналом
узкополосной помехи мощностью Рп. Действительно, если представить оптималь-
ный приемник в виде коррелятора [96], то на выходе перемножителя коррелятора
произойдет расширение спектра этой помехи до значения полосы сигнала А/, а через
интегратор с временем интегрирования Т пройдет лишь малая часть спектральных
составляющих помехи. В результате мощности помехи и сигнала на выходе корре-
Рп
лятора составят соответственно —— и Рс, а их отношение будет как в (16.4). Если
А/Г
на вход приемника будут совместно действовать широкополосная и узкополосная
помехи с мощностями Рпш и соответственно, то
(16.5)
q =-------
Лш + Лгу
Имитационная помеха обязательно подобна сигналу. Поэтому на выходе прием-
ника, согласованного с сигналом, она даст отклик большей мощности. Следуя ра-
боте [16], можно считать, что увеличение мощности отклика приемника на имита-
ционную помеху пропорционально коэффициенту взаимной корреляции сигнала
и помехи рсп.
Условие энергетического подавления радиолинии передачи информации с уче-
том сказанного о пороговом соотношении сигнал/шум и о критическом значении
вероятности нарушения функционирования можно определить неравенством
пор
(16.6)
где а
v 11 ^min
— критическое соотношение сигнал/шум, при котором обеспечива-
\ п min
ется заданное качество работы РСПИ; а> 1 — некоторый коэффициент запаса, учи-
тывающий энергетические потери при обработке принятого сигнала в реальной ра-
диолинии по сравнению с идеальными условиями приема.
Учитывая, что при работе в условиях РЭП основная мощность помех опреде-
ляется не собственными шумами приемника, а организованной в процессе РЭП
помехой, можно найти спектральную плотность помехи на выходе:
(16.7)
дг _ * пер п^пер п^пр п
п " 4лЯ2А/4 ’
где Рпер п — мощность передатчика постановщика помехи; (7пер п и (7пр п — соот-
ветственно коэффициенты усиления антенн постановщика помех и приемника
РСПИ в направлении друг на друга; £п — коэффициент ослабления мощности по-
мехи на трассе распространения от передающей антенны до приемной.
Мощность полезного сигнала на выходе приемника РСПИ будет
(16.8)
р _ пер^пер^пр
с " 4 л/?2 £с
С учетом (16.5) и (16.6) условие обеспечения помехоустойчивости (16.4) можно
представить в виде
пре
(16.9)
а
min_
656 Глава 16. Радиоэлектронная защита
где /’перепер и Лерп^перп — величины эффективной мощности передатчиков сиг-
нала и помехи соответственно; бпрс/^прп — характеристики антенны приемника,
т. е. отношение коэффициента усиления сигнала к коэффициенту усиления помехи;
Ln/Lc — относительные потери на трассе распространения помех; a(0/TVG)min —
критическое отношение сигнал/помеха; Д/Т = В — характеристика сигнала РСПИ:
В — база сигнала РСПИ.
Входящая в (16.9) величина &fT/pCTi зависит от структуры и вида модуляции
сигнала. Как видно, для повышения помехозащищенности РСПИ нужно приме-
нять сигналы с большой базой В = Л/Т» 1 и наделять их специальными свойства-
ми, чтобы затруднить для системы РЭП создание помехи, подобной сигналу, т. е.
имитирующей помехи, для которой коэффициент взаимной корреляции помехи и
сигнала рсп достаточно высок. Оба этих требования выполняются при использова-
нии в РСПИ кодирования сигналов.
16.10. Кодирование в помехозащищенных системах
передачи информации
Для сохранения достоверности передачи информации в условиях действия по-
мех применяют специальные меры, уменьшающие вероятность появления ошибок.
Одной из таких мер, едва ли не самой действенной, является применение помехо-
устойчивого кодирования. Кодирование дает возможность увеличивать помехоус-
тойчивость передачи информации в обмен на увеличение избыточности и, соот-
ветственно, скорости передачи сообщений. Но избыточность при кодировании
может вводиться и использоваться по-разному. Во-первых, за счет избыточности
можно создавать коды, способные при приеме и декодировании обнаруживать и
исправлять (корректировать) ошибки, обусловленные действием помех. Это кор-
ректирующие коды. Во-вторых, избыточные символы могут использоваться для
создания сигналов, максимально отличающихся друг от друга. Такие сигналы пред-
назначаются для приема «в целом». В более сложных случаях информационную
избыточность дополняют аппаратурной избыточностью, организуя передачу инфор-
мации с обратной связью от получателя сообщений к их источнику.
При построении корректирующих кодов из 7V0 возможных комбинаций по N
символов применяется лишь некоторая часть N < NQ. Используемые при переда-
че N комбинаций символов обычно называются разрешенными кодовыми комбина-
циями, а остальные 7V0- N— запрещенными. Вполне понятно, что если под дейст-
вием помехи передаваемая кодовая комбинация переходит в запрещенную, то такую
ошибку можно обнаружить.
Способность корректирующих кодов обнаруживать и исправлять ошибки мож-
но пояснить следующими рассуждениями. Множество запрещенных кодовых ком-
бинаций всегда можно разбить на N подмножеств Ni9 /е 1:2V и каждому подмноже-
ству поставить в соответствие разрешенную кодовую комбинацию В^ Если при-
нятая кодовая комбинация Д* принадлежит подмножеству Nh то принимается
решение в пользу кодовой комбинации Bt. Очевидно, что при таком правиле при-
ема будут исправляться все те ошибки, которые не выводят передаваемую кодовую
комбинацию за пределы принадлежащего ей подмножества 7V,-. Если бы избыточно-
сти не было (N= Nq), то каждое подмножество 7VZ содержало бы по одной кодовой
комбинации Bj и любые ошибки приема символов неизбежно переводили бы В* в
другую разрешенную кодовую комбинацию Bj, j ф i.
16.10. Кодирование в помехозащищенных системах передачи информации 657
При построении корректирующего кода основной задачей является разбиение
множества запрещенных кодовых комбинаций на N подмножеств и выработка
правила сопоставления их с разрешенными кодовыми комбинациями. Именно по
способу такого разбиения различают коды и дают им названия. Для уменьшения
вероятности ошибочного декодирования в подмножество 7VZ включаются те запре-
щенные кодовые комбинации 2?*, для которых
/’(В,.)р(в;|5,)>/’(Ву)р(^|5у.),;61:М j*i, (16.10)
где Р(В,) — априорная вероятность передачи кодовой комбинации 2?,; | Bt j —
условная вероятность принятия кодовой комбинации В*к при передаче кодовой
комбинации Вг Таким образом, в подмножество должны входить кодовые ком-
бинации Вк, при приеме которых наиболее вероятной комбинацией является Вк
При передаче равновероятных сообщений по каналам с независимыми ошибка-
ми, когда вероятность появления ошибок уменьшается с увеличением кратности,
для минимизации средней вероятности ошибочного декодирования необходимо в
первую очередь исправлять однократные ошибки, как наиболее часто встречающие-
ся, затем двукратные и т. д. При этом в подмножество 7V} следует включить все те
кодовые комбинации 2?*, которые отличаются от Bj в меньшем числе символов по
сравнению с другими разрешенными кодовыми комбинациями. Соответственно
декодер принимает решение о приеме кодовой комбинации Вь если принятая ком-
бинация Д* отличается от нее в меньшем числе символов, чем любые другие. Та-
кое правило принятия решения называется оптимальным по критерию максимума
правдоподобия.
Код можно задать таблицей, устанавливающей соответствие между сообщени-
ями и кодовыми комбинациями. Кодирующее устройство (кодер) при этом будет
просто запоминающим устройством, в памяти которого хранятся N разрешенных
кодовых комбинаций. Соответственно универсальный метод декодирования, при-
годный для любого кода, заключается в сличении принятой кодовой комбинации
со всеми N разрешенными и нахождении той разрешенной кодовой комбинации,
которая отличается от принятой в меньшем числе символов. Хотя такие методы
кодирования и декодирования и являются универсальными, они не нашли широкого
применения из-за большого объема требуемой памяти. В особенности это ограни-
чение существенно для кодов большой длины. Поэтому к настоящему времени соз-
даны и продолжают разрабатываться коды, не требующие запоминания большого
количества комбинаций. Известно много помехоустойчивых кодов, которые класси-
фицируются по различным признакам.
Прежде всего корректирующие коды разделяются на два больших класса: блоч-
ные и непрерывные.
При блочном кодировании последовательность элементарных сообщений источ-
ника разбивается на отрезки и каждому отрезку ставится в соответствие определенная
последовательность (блок) кодовых символов, иначе называемая кодовой комби-
нацией. Множество всех кодовых комбинаций, разрешенных (возможных) при
данном способе кодирования, и есть блочный код.
Длина блока может быть как постоянной, так и переменной. Соответственно
различают равномерные и неравномерные блочные коды. Помехоустойчивые коды
являются, как правило, равномерными.
Блочные коды бывают разделимыми и неразделимыми. К разделимым относятся
коды, в которых каждый из символов может быть отнесен к одной из двух непере-
658
Глава 16. Радиоэлектронная защита
секающихся групп: информационные символы, несущие сообщение, и провероч-
ные, служащие исключительно для обнаружения и исправления ошибок. Такие коды
принято обозначать как (/V, £), где N— длина кода; к — число информационных
символов. Число разрешенных комбинаций в коде (7V, не превышает 2к.
К неразделимым относятся коды, у которых нельзя выделить информационные
и проверочные символы. Неразделимые коды — это, например, коды с постоян-
ным весом, и коды на основе матриц Адамара. Коды с постоянным весом характе-
ризуются тем, что все их кодовые комбинации содержат одинаковое число единиц.
Примером такого кода является стандартный телеграфный код, у которого в каж-
дой кодовой комбинации по три единицы и четыре нуля (код «3» из «7»).
Среди разделимых кодов выделяют коды линейные и нелинейные. К линейным
относятся коды, в которых поразрядная сумма по модулю 2 любых двух разрешенных
кодовых слов также является разрешенным кодовым словом. Линейный код называ-
ется систематическим, если следующие подряд к символов любой его кодовой комби-
нации являются информационными, а остальные (и - к) символов — проверочными.
Наиболее простой линейный систематический код — это (л, п - к), содержащий
один проверочный символ, который равен сумме по модулю 2 всех информацион-
ных символов. Такой код называется кодом с проверкой на четность. Он позволя-
ет обнаружить все сочетания ошибок нечетной кратности. Вероятность необнару-
женной ошибки в первом приближении можно определить как вероятность иска-
жения двух символов:
Р ~С2Р (\-Р Г’2 (16.11)
где Рош — вероятность искажения помехами одного символа, а С™ — число соче-
таний из п по т.
Подклассом линейных кодов являются циклические коды. У таких кодов все
комбинации, образованные циклической перестановкой любой кодовой комбина-
ции, являются также кодовыми комбинациями. Это свойство позволяет значительно
упростить кодирующее и декодирующее устройства, особенно при обнаружении
ошибок и исправлении одиночной ошибки. Примерами циклических кодов могут
служить коды Хемминга, коды Боуза — Чоудхури — Хоквингема (БЧХ-коды) и
некоторые другие.
Примером нелинейного кода является код Бергера, у которого проверочные
символы формируются как двоичная запись числа единиц в последовательности
информационных смолов. Например, таким является код: 00000; 00101; 01001; ОШО;
10001; 11010; 11111. Коды Бергера применяются, как правило, в асимметричных
каналах. В симметричных каналах они обнаруживают все одиночные ошибки и
некоторую часть многократных.
Непрерывные коды не разбиваются на блоки. Операции кодирования и декоди-
рования производятся над непрерывной последовательностью символов. Самые рас-
пространенные и удобные для практического применения среди непрерывных ко-
дов — сверточные коды.
К числу основных характеристик кода относятся длина кода п, его основание т,
мощность N (число разрешенных кодовых комбинаций), полное число кодовых
комбинаций Уо, число информационных символов к, число проверочных симво-
лов г- п- к, вес кодовой комбинации (число единиц в комбинации), избыточность
кода и кодовое расстояние.
16.10. Кодирование в помехозащищенных системах передачи информации 659
Избыточность кода определяется числом
. logN
Y = 1------
log7V0
или для двоичного кода (т = 2), когда N = 2п и 7У0 = 2/с:
(16.12)
(16.13)
где — называется относительной скоростью
п
г
9
п
кода.
Для оценки степени сходства разных комбинаций, составляющих код, в про-
странстве кодовых последовательностей вводится метрика, т. е. определяется пра-
вило вычисления расстояния. Наиболее употребительна метрика, основанная на
использовании расстояния Хемминга dfa, В}J, которое определяется числом разря-
дов, в которых Bi отличается от Bj. Для двоичного кода
п
= (16.14)
к=\
где bik и bjk — символы кодовых комбинаций и Bj соответственно; Ф — символ
суммирования по модулю 2.
Наименьшее расстояние Хемминга для данного кода называется кодовым рас-
стоянием d.
При независимых ошибках в канале через кодовое расстояние удобно выража-
ется корректирующая способность кода. Если код имеет d = 1, это значит, две ко-
довые комбинации отличаются минимум в одном символе. Искажение одного сим-
вола сразу трансформирует кодовую комбинацию в другую разрешенную, т. е. код
с d = 1 не способен корректировать ошибки. Такой код защищен от негативного
действия помех. Чтобы код мог обнаруживать любую одиночную ошибку, необхо-
димо обеспечить кодовое расстояние, равное двум. Рассуждая аналогичным обра-
зом, можно получить, что для обнаружения всех ошибок кратности / требуется код
с расстоянием
d>l + \. (16.15)
Для исправления всех ошибок некоторой кратности требуется большее кодо-
вое расстояние, нежели для их обнаружения. Если кратность исправляемых оши-
бок равна /, то кодовое расстояние должно удовлетворять условию
J>2/ + 1. (16.16)
Помимо режима декодирования с обнаружением и исправлением ошибок ис-
пользуется режим с восстановлением предварительно стертых ненадежных сим-
волов. В таких системах решающая схема приемника имеет некоторую область
неопределенности. Решение о переданном символе принимается только в случае,
если входной сигнал не попадает в указанную область, в противном случае прием-
ник отказывается от принятия решений и заменяет данный символ специальным
символом стирания. Для восстановления стертых символов используются коррек-
тирующие коды.
Таким образом, задача построения кода с заданной корректирующей способ-
ностью сводится к обеспечению необходимого кодового расстояния путем введе-
ния избыточности. При этом желательно, чтобы число используемых проверочных
символов было минимальным. К сожалению, задача определения минимального
числа проверочных символов, необходимых для обеспечения заданного кодового
660
Глава 16. Радиоэлектронная защита
расстояния, не решена. Имеется лишь ряд оценок для максимального кодового
расстояния при фиксированных N и Л, которые часто используются для выясне-
ния того, насколько код близок к оптимальному, имеющему минимальное кодо-
вое расстояние для заданной корректирующей способности.
Так, для блочного линейного кода (л, к) справедливо неравенство
2
(16.17)
J-1
2
означает целую часть чис-
где г называется верхней границей Хемминга;
J-1
ла ----.
2
Граница Хемминга (16.17) близка к оптимальной для кодов с большими значе-
ниями п/к. Для кодов с малыми значениями N/k более точной является верхняя
граница Плотина:
W (16.18)
Но существует также блочный линейный код (N, к) с кодовым расстоянием d,
ддя которого справедливо неравенство
d-2
(16.19)
' — *^62 Xj л ’
/=0
называемое нижней границей Варшамова — Гильберта.
Границы Хемминга (16.17) и Плоткина (16.18) являются необходимыми усло-
виями существования кода с параметрами п, к и d, а граница Варшамова — Гиль-
берта — достаточным условием. Равенство в (16.19) справедливо только для так
называемых совершенных кодов. Такие коды исправляют все ошибки кратности
Г</-1“1
прежде,
и менее и не исправляют ни одной ошибки кратности / >
Frf-11
d-\
2
где, как и
J-1 ГТ
— целая часть числа —— • Примером совершенных кодов являются
2
коды Хемминга.
По определению, любой линейный код (N,k) можно получить из к линейно
независимых кодовых комбинаций путем их посимвольного суммирования по моду-
лю 2 в различных сочетаниях. Исходные линейно независимые кодовые комбинации
называются базисными. Все к базисные комбинации длиной N символов можно
расположить по строкам порождающей матрицы
2
(16.20)
С использованием этого обозначения процесс кодирования заключается в вы-
полнении преобразования
B = AG, (16.21)
где А — вектор размерности к, соответствующий кодируемому сообщению; В —
вектор размерности п, соответствующий кодовой комбинации.
Таким образом, порождающая матрица (16.21) содержит всю необходимую для
кодирования информацию, которая должна храниться в памяти кодирующего уст-
ройства. Для двоичного кода объем памяти равен кп двоичных символов. При таб-
личном задании кода кодирующее устройство должно запоминать п2к двоичных
символов.
16.10. Кодирование в помехозащищенных системах передачи информации 661
Кодирующее устройство для линейного (л, &)-кода (рис. 16.21) состоит из fc-раз-
рядного сдвигающего регистра и г = п - к блоков сумматоров по модулю 2.
Рис. 16.21. Кодер линейного (л, А)-кода
Информационные символы одновременно поступают на вход регистра и на вы-
ход кодирующего устройства 2 через коммутатор. С поступлением Zc-ro информаци-
онного символа на выходах блоков сумматоров в соответствии с уравнениями (16.21)
формируются проверочные символы, которые затем последовательно поступают на
выход кодера. Процесс декодирования сводится к выполнению операции
S = B*HT, (16.22)
где S — вектор размерности (и, к), называемый синдромом; В* — вектор приня-
той кодовой комбинации, возможно искаженной помехами, и поэтому отличаю-
щийся от В; Н — проверочная матрица размерности (rxTV) такая, что вектор В
принадлежит коду только в том случае, если ВНТ = 0; т — символ транспонирова-
ния матрицы.
Если принятая кодовая комбинация В* совпадает с одной из разрешенных В
(либо отсутствуют ошибки в принятых символах, либо из-за действия помех одна
разрешенная кодовая комбинация трансформировалась в другую), то
S = B*HT=0. (16.23)
В другом случае S 0 и вид синдрома зависит только от вектора ошибок е, оп-
ределяемого как
В* = ВФе. (16.24)
Из определения (16.24) видно, что е — это такая же последовательность из N
символов, как В и В*, но имеющая нули на тех позициях, на которых символы В*
не отличаются от символов В и единицы на позициях искаженных символов. На
основании (16.22) и (16.24) можно утверждать, что
S = B*HT =(ВФе)Нт =еНт, (16.25)
где В — вектор переданной кодовой комбинации, а В* — вектор принятой комби-
нации с возможными ошибками в некоторых символов.
Из (16.25) следует, что при S = 0 декодер должен принимать решение об отсутст-
вии ошибок, а при S Ф 0 — о том, что ошибки произошли. Число различных син-
дромов, соответствующих различным сочетаниям ошибок, равно 2N~k- 1. По кон-
кретному виду синдрома можно в пределах корректирующей способности кода
указать на ошибочные символы, а следовательно, и исправить их.
Схема декодера линейного кода (рис. 16.22) содержит ^-разрядный сдвигающий
регистр, п-к полусумматоров (сумматоров по модулю 2), схемы сравнения, анали-
затор ошибок и корректор ошибок. На регистре запоминаются информационные
символы принятой кодовой последовательности, из которых в блоках сумматоров
662
Глава 16. Радиоэлектронная защита
формируются проверочные символы. В результате сравнения формируемых на
приемной стороне проверочных символов с принятыми проверочными символами
анализатор ошибок определяет ошибочно принятые символы. Эти решения выно-
сятся на основании анализа синдрома. Исправление информационных символов
производится в корректоре.
Рис. 16.22. Декодер линейного (п, £)-кода
В общем случае, при декодировании линейного кода с исправлением ошибок в
памяти декодера нужно хранить таблицу соответствий между синдромами и векто-
рами ошибок. Такая таблица должна содержать 2п~к строк. Для каждой принятой
кодовой комбинации декодер должен просматривать всю таблицу. При небольших
значениях N эта операция не вызывает затруднений. Но для высокоэффективных
кодов длиной п » 10 разность п- к принимает такие значения, что перебор по таб-
лице из 2п~к строк оказывается практически невозможным.
Циклические коды относятся к классу линейных систематических. Поэтому для
их построения в принципе достаточно знать порождающую матрицу. Но можно ука-
зать другой способ построения циклических кодов, основанный на представлении
кодовых комбинаций полиномами. Так, всякой кодовой комбинации {Ьп_ъ Ьп_2,
..., />0} может быть поставлено в соответствие число в позиционной двоичной сис-
теме, составленное из цифр bn_{, Ьп_2, bQ. А значение этого числа определяется
полиномом
5(х) = bn-xxn~l + Ьп_гхп~- +... + box°, (16.26)
где х— основание системы счисления; be [0, х); суммирование ведется по модулю х.
В частности, комбинации двухосновного кода представляются двоичными чис-
лами b = 0; 1, х = 2 и суммирование ведется по модулю 2.
Из эквивалентности кодовых комбинаций полинома (16.26) следует, что все
операции при преобразовании кодированных сообщений могут быть представле-
ны, как алгебраические действия над полиномами.
Каждый циклический код (и, к) характеризуется порождающим полиномом. Им
может быть любой полином р(х) степени п - к, который делит без остатка двучлен
а также любую разрешенную кодовую комбинацию /?(х). Поэтому процесс
кодирования сообщения С(х) сводится к отысканию такого полинома В(х), отде-
ления которого без остатка на р(х) получается частное С(х). Иначе говоря, кодо-
вая последовательность должна формироваться по правилу
5(х) = С(х)р(х), (16.27)
причем С(х) в соответствии с (16.27) представляется многочленом степени не вы-
ше к- 1.
16.10. Кодирование в помехозащищенных системах передачи информации 663
Однако при кодировании в соответствии с правилом (16.27) формируются только
неразделимые коды: информационные и проверочные символы в получаемых ко-
довых последовательностях оказываются перемешанными. Это свойство затрудня-
ет процесс декодирования. Поэтому на практике чаще всего применяется иной метод
нахождения полинома Z?(x).
Если умножить многочлен С(х) на х!*~к и полученное произведение разделить
на р(х), в остатке будет полином г(х):
С(х)х"'* = Q(x)P(x)©r(x). (16.28)
Так как операции суммирования и вычитания по модулю 2 совпадают, из (16.28)
следует, что полином
С(х)ху'*Фг(х) = е(х)Р(х) (16.29)
делится на порождающий полином р(х) нацело (без остатка).
Следовательно, этот полином является разрешенной кодовой последовательно-
стью для кода, заданного порождающим многочленом р(х).
У полинома С(х)х',-А коэффициенты при к старших членах совпадают с коэф-
фициентами С(х), а коэффициенты при л-Нравны нулю, т. е. совокупность л ко-
эффициентов это число, равное передаваемому сообщению, увеличенное на л-к
порядков. Остаток от деления г(х) имеет степень не выше п-к. Таким образом,
коэффициенты при к старших членах полинома C(x)xyv-/c ©г(х) — это информа-
ционные символы, совпадающие с символами кодируемого сообщения, а при л - к
младших — проверочные символы. Эти свойства полиномов подсказывают схемотех-
нические приемы построения кодеров циклического кода. Для примера на рис. 16.23
приведена схема кодера для кода с порождающим многочленом /?(х) = х3 ©х2 ©1.
Рис. 16.23. Кодер циклического кода с порождающим
полиномом р (х) = х3 © х2 © 1
Триггеры Tl, Т2 и ТЗ образуют регистр сдвига. В исходном состоянии ключи
К1 и К2 находятся в положении 1. Кодируемая последовательность С(х) подается
на вход кодера и вместе с этим поступает на выход ячейки ТЗ (это соответствует
умножению многочлена С(х) на х3). За четыре такта сдвига происходит деление
многочлена С(х)х3 на многочлен р(х) = х3 Фх2 ©1. В результате в регистре запи-
сывается остаток, представляющий собой проверочные символы. Ключи К1 и К2
перебрасываются в положение 2, и в течение трех следующих тактов содержащие-
ся в регистре символы поступают на выход кодера.
От порождающего полинома р(х) зависит корректирующая способность кода,
поэтому его выбор очень важен. Необходимо помнить, что степень порождающего
многочлена должна быть равна числу проверочных символов.
Обнаружение ошибок при использовании циклических кодов сводится к деле-
нию многочлена В*(х) = В(х) + е(х), соответствующего принятой комбинации, на
/?(х). Если остаток г(х) оказывается равным нулю, то считается, что ошибки нет,
в противном случае фиксируется ошибка.
664
Глава 16. Радиоэлектронная защита
Полином
г(х) = [Б(х) + е(х)]тобР(х) = e(x)modP(x) (16.30)
зависит только от многочлена ошибок е(х) и играет ту же роль, что и вектор-синд-
ром. Поэтому в принципе ошибки можно исправлять на основе таблицы соответ-
ствий между е(х) и г(х), сохраняемой в памяти декодера, как при линейных не-
циклических кодах. Однако свойство цикличности позволяет существенно упростить
процедуру декодирования.
Один из распространенных алгоритмов исправления ошибок использует следую-
щие свойства синдрома циклического кода. Если имеется циклический код с кодо-
вым расстоянием d, исправляющий все ошибки вплоть до кратности
вклю-
d-\
2
, а сам синдром будет совпа-
d-\
2
чительно (квадратные скобки, как и прежде, обозначают целую часть отношения
---- , возможны следующие ситуации. Если искажены только проверочные сим-
2 /
волы, то вес синдрома будет меньше или равен
дать с вектором ошибок; если вектор ошибки искажает хотя бы один информаци-
онный символ, то вес синдрома будет больше
ления многочлена Z>(x) на р(х), то остатком от деления полинома />(х)х' на р(х)
(х)х' mod /?(х), иначе говоря, синдром некоторого цикличес-
J-1
2
; если г(х) — остаток от де-
является многочлен г
кого сдвига многочлена £>(х) является соответствующим циклическим сдвигом син-
дрома исходного многочлена, взятого по модулю р(х).
Работа алгоритма декодирования иллюстрируется схемой рис. 16.24 для кода с
порождающим полиномом р(х) = х3 © х2 © 1. Такой код имеет кодовое расстояние
d = 3. Он способен исправлять все однократные ошибки.
Рис. 16.24. Декодер циклического кода с порождающим
полиномом р(х) = х3©х2©1
Принятая кодовая комбинация одновременно поступает в буферный регистр
сдвига, служащий для ее запоминания и для циклического сдвига, а также на уст-
ройство деления на многочлен р(х) для вычисления синдрома. В исходном состо-
янии ключ находится в положении 1. После семи тактов принятая кодовая комби-
нация оказывается полностью загруженной в буферный регистр, а в регистре уст-
ройства деления будет вычислен синдром. Если вес синдрома больше 1, декодер
начинает производить циклические сдвиги комбинации в буферном регистре при
16.10. Кодирование в помехозащищенных системах передачи информации 665
отсутствии новой комбинации на входе и одновременно вычислять их синдромы
г(х)х' mod р(х) в устройстве деления. Если на некотором /-м шаге вес синдрома
окажется меньше 2, то ключ переходит в положение 2, обратные связи в регистре
деления разрываются. При последующих тактах ошибки исправляются путем по-
дачи содержимого регистра деления на вход сумматора по модулю 2, включенного
в буферный регистр. После семи тактов работы декодера в автономном режиме
исправленная комбинация в буферном регистре возвращается в исходное положе-
ние (информационные символы будут записаны в старшие разряды).
К циклическим кодам относятся коды Хемминга, которые являются примера-
ми немногих известных совершенных кодов. Они имеют кодовое расстояние d = 3
и исправляют все одиночные ошибки. Длина кода выбирается из условия 2N~k = N,
которое имеет простой смысл: число различных ненулевых синдромов равно числу
символов в кодовой последовательности. Так, существуют коды Хемминга (2r — 1,
2Г- г- 1), в частности, коды (7, 4), (15, 11), (31, 26), (63, 57) и другие. Ранее исполь-
зованный в примерах многочлен р(х) = х3 Ф х2 © 1 является порождающим для кода
Хемминга (7, 4).
Известно, что для любых целых положительных чисел т и I < N/2 существует
двоичный код БЧХ длины 2т - 1 с кодовым расстоянием d> 21 + 1, причем число
проверочных символов п - к< ml.
Относительно более простой является процедура мажоритарного декодирова-
ния, применимая для некоторого класса двоичных линейных, в том числе цикличе-
ских кодов. Основана эта процедура на том свойстве этих кодов, что у них каждый
информационный символ можно несколькими способами выразить через другие
символы кодовой комбинации. Если для некоторого символа эти способы провер-
ки дают неодинаковые результаты (одни дают результат 0, а другие 1, что может
быть только в случае ошибочного приема), то окончательное решение по каждому
из информационных символов принимается по мажоритарному принципу, т. е. по
большинству. Декодеры мажоритарных кодов выполняются на регистрах сдвига.
Примером кода, допускающего мажоритарное декодирование, является уже рассмот-
ренный выше циклический код (7, 3).
Мощные коды (т. е. коды с длинными блоками и большим кодовым расстоя-
нием d) можно строить, объединяя несколько коротких кодов. Так строится, напри-
мер, итеративный код из двух линейных систематических кодов (ль кх) и (и2, к^).
Вначале сообщение кодируется кодом первой ступени (л15 кх). Кодированная пос-
ледовательность разбивается на блоки по к2 символов. Эти символы считаются
информационными для кода второй ступени. При кодировании на второй ступени
к каждому блоку из к2 информационных символов приписываются п2 - к2 провероч-
ных. В результате получится блок, содержащий пхп2 символов, из которых кхк2
являются информационными. Процесс формирования кода можно дополнить тре-
тьей итерацией, четвертой и т. д. При декодировании обнаруживают и исправляют
ошибки каждого блока. Сначала первой ступени, затем — второй. При этом ис-
правляются только те ошибки, которые не были исправлены кодом первой ступе-
ни. Минимальное кодовое расстояние для двумерного итеративного кода равно
произведению минимальных кодовых расстояний для кодов первой и второй сте-
пеней, т. е. d = d{d2.
На итеративный код похож каскадный код, но между ними имеется существенное
различие. Первая ступень кодирования в каскадном коде осуществляется так же,
как в итеративном. После того как сформированы к2 блоков кода первой ступени
666
Глава 16. Радиоэлектронная защита
(внутреннего), каждая последовательность из кх двоичных (информационных) сим-
волов внутреннего кода рассматривается как один символ недвоичного кода 2-й
ступени (внешнего). Основание этого кода v = 2k{. К этим символам приписывает-
ся еще п2 - к2 проверочных символов га-ичного кода, также в виде строк длиной
УУр К каждой из этих строк приписываются двоичные проверочные символы в
соответствии с внутренним кодом (пх, кх).
В процессе приема сначала декодируются (с обнаружением или исправлением
ошибок) все блоки внутреннего кода, а затем декодируется блок внешнего /и-ичного
кода (л2, к^, причем исправляются ошибки, оставшиеся после декодирования внут-
реннего кода. В качестве внешнего кода используют обычно w-ичный код Рида —
Соломона, обеспечивающий наибольшее возможное d при заданных п2 и къ если
п2 < т.
Сверточный код — это линейный рекуррентный код. В общем случае он обра-
зуется следующим образом. В каждый /-Й тактовый момент времени на вход коди-
рующего устройства поступает Ло символов сообщения: ciXci2...cjkQ. Выходные сим-
волы bixbi2...bik$ формируются по рекуррентному правилу из символов сообщения,
поступивших в данный и в предшествующие тактовые моменты времени. Величи-
на Ло называется длиной кодового ограничения. Она показывает, на какое макси-
мальное число выходных символов влияет данный информационный символ. Эта
величина играет для сверточного кода ту же роль, что и длина блочного кода. Свер-
точный код имеет избыточность % = 1-/с0/и0. Обозначение такого кода (&0/и0).
Кодер сверточного кода может быть реализован с помощью сдвигающего реги-
стра и сумматоров по модулю 2. Кодирующее устройство, выполненное по схеме
рис. 16.25, на каждый символ сообщения вырабатывает два символа выходной
последовательности, которые по очереди подаются на выход через коммутатор.
Выходные символы формируются в результате линейного преобразования вход-
ного информационного символа и комбинации, записанной в первых двух разря-
дах регистра. Связь между ячейками сдвигающего регистра и сумматорами по моду-
лю 2 удобно описывать порождающими полиномами СДх), jel:и. Для конкрет-
ного примера кодера рис. 16.25 Qx (х) = х2 © 1 описывает связи верхнего сумматора
и Q2 (х) = х2 © х © 1 описывает связи нижнего сумматора. Наличие члена V, i = 0, 1,
2,... в порождающем многочлене означает, что (/ + 1)-й разряд регистра сдвига соеди-
нен с сумматором. Нумерация разрядов регистра — слева направо.
Сверточный код получается систематическим, если в каждый тактовый момент
к$ выходных символов совпадают с символами сообщения. На практике обычно
используются несистематические сверточные коды.
Рис. 16.25. Кодер сверточного кода
Сверточные коды могут обладать свойством прозрачности. Прозрачные коды
оказываются инвариантными по отношению к операции инвертирования сигнала:
изменение значений символов на входе кодера на противоположные не влияет на
16.10. Кодирование в помехозащищенных системах передачи информации 667
результат декодирования. Это свойство очень удобно и широко используется для
борьбы с эффектом обратной работы в РСПИ, использующих сигналы с фазовой
модуляцией на 180°.
Корректирующая способность сверточного кода зависит от свободного рассто-
яния JCB, аналогичного кодовому расстоянию d для блочных кодов.
Декодеры сверточных кодов алгоритмически и схемотехнически довольно слож-
ны. Декодирование с вычислением проверочной последовательности применяется
только для систематических кодов. По своей сущности оно ничем не отличается от
соответствующего метода декодирования блочных кодов. На приемной стороне из
принятых информационных символов формируют проверочные символы по тому
же закону, что и на передающей стороне. Затем эти проверочные символы сравнива-
ют с принимаемыми проверочными символами. В результате сравнения образуется
проверочная последовательность, которая при отсутствии ошибок состоит из одних
нулей. При наличии ошибок на определенных позициях последовательности появля-
ются единичные символы. Закон формирования проверочных символов выбирается
так, чтобы по структуре проверочной последовательности можно было определить
искаженные символы. Алгоритмы декодирования без вычисления проверочной
последовательности используют принцип максимума правдоподобия или последо-
вательное декодирование [97].
За счет введения избыточности можно создавать сигналы, максимально отли-
чающиеся друг от друга. Естественная мера сходства и различия сигналов — коэф-
фициент их взаимной корреляции. Если система передачи информации использует
набор сигналов (/), i е 1: т, t е [0; 7] с одинаковой энергией
т
Q = Js? (/) dt = const (/), (16.31)
о
то на множестве, содержащем все т сигналов, коэффициент взаимной корреляции
определяется соотношением
(16.32)
Ру =
(16.33)
о
Сигналы 5/ (/) различаются в максимальной степени, если
1 при i = j,
Pmin при ' * J-
Если pnlin = 0, сигналы s, (/) называются ортогональными. Теоретически мини-
мальное значение р может быть и меньше нуля:
Pmin
---- при m = 2q,
т-1
(16.34)
— при /и = 2^-1,
т
где q — натуральное число.
Известны системы сигналов, имеющих pmin как в (16.34). К ним относятся,
например, рассмотренные выше симплексные псевдошумовые сигналы на основе
^/-последовательностей. Для таких сигналов т = 2п - 1, где п — разрядов регистра
сдвига, используемого для генерации Л/-последовательности.
Из формулы (16.34)' следует, что при большом числе сигналов т » 1 pmin ~ 0,
т. е. оптимальные сигналы очень мало отличаются от ортогональных.
668
Глава 16. Радиоэлектронная защита
Удобная математическая модель описывает ортогональные сигналы, как стро-
ки матрицы Адамара размера т^т. Матрица Адамара Н — квадратная, состоящая
из символов ±1 и обладающая свойством
ннт = ы,
(16.35)
где FT — транспонированная матраца Н; I — единичная матица.
Из свойства (16.35) матрицы Адамара следует, что любые две ее строки орто-
гональны. Перестановка строк или столбцов, равно как и умножение ее строк или
столбцов на -1, сохраняет ортогональность. Считается, что матрицы Адамара су-
ществуют для всех т = 4<у, а для всех т < 200 в настоящее время матрицы Адамара
построены. Если т = 2q, то матрицы Адамара образуются как кронекеровское про-
изведение матриц Адамара меньшего размера. В соответствии с этим правилом
= fH29_1 н29_Л
29 |н29_, h29_J
(16.36)
где Н/ — матраца Адамара размера z*x/; Hz — матрица Адамара размера /х/, у ко-
торой все элементы заменены на противоположные (1 на -1 и наоборот); Hj = (1).
Последовательности символов, составляющих строки получаемых в соответствии
с рекуррентным правилом (16.36) матриц Адамара, называются функциями Уолша
и обозначаются wal(z,z). В этом обозначении число z — порядок функции. Оно
определяет количество перемен знаков функции на периоде повторения Т и назы-
вается частостью (секвентностью). Переменная 1 — это время. Очень удобно ис-
пользовать безразмерное время 0 = — и рассматривать функции Уолша на основ-
т „ Г 1 и
ном нормированном к единице интервале 0 е — .
Те функции Уолша, которые на своем периоде оказываются периодическими
меандровыми колебаниями, называются функциями Радемахера. Очевидно, что по-
рядок функций Радемахера z = 2q- 1,^ = 0, 1,2.... Все функции Радемахера генериру-
ются триггерными делителями частоты следования импульсов задающего генератора.
Для функций Уолша справедливо свойство мультипликативности:
wal(z, 6) wal(j, 6) = wal(z® j, 6). (16.37)
Иначе говоря, порядок функций Уолша, полученной в результате перемножения
функций Уолша порядка z и порядка у, равен поразрядной сумме по модулю 2 двоич-
ных значений индексов z и у. Свойство мультипликативности позволяет построить
простую логическую схему для генерации всего ансамбля функций Уолша, пере-
множая функции Радемахера. На рис. 16.26 для примера приведена схема генерации
ансамбля из 8 функций Уолша, т. е. всех функций wal(z,0) для zg{0, 2,..., 7}.
Если ансамбль функций Уолша включает wal(0,0), то такие множества ортого-
нальных сигналов в теории кодирования называются кодами Рида— Мюллера (РМ)
первого порядка. Если ко всем комбинациям ортогонального двоичного кода доба-
вить их инверсии, то полученное множество из 2m комбинаций будет составлять би-
ортогональный код. Полученная таким образом системы сигналов будет иметь сред-
1
нее значение коэффициента взаимной корреляции любой пары сигналов р =-----.
т-\
Оптимальный приемник для ортогональных и симплексных сигналов содержит,
как на рис. 16.27, параллельный набор из т корреляторов (последовательно соеди-
ненных перемножителей и интеграторов за время длительности сигналов Т, кото-
16.10. Кодирование в помехозащищенных системах передачи информации 669
wal(7, 0)
wal(6, 0)
wal(5, 0)
wal(4, 0)
wal(3, 0)
wal(2, 0)
wal(1, 0)
wal(O, 0)
Рис. 16.26. Генератор функций Уолша
рая в т раз превосходит длительность символа Т = /итс) и устройства выбора макси-
мума, которое выносит решение о том, какому из возможных сигналов наиболее
близко принятое колебание. Компаратор на выходе схемы служит для обнаруже-
ния сигнала, т. е. для принятия решения о том, что выбранное максимальное зна-
чение соответствует сигналу на входе приемника, а не шумовому выбросу.
Рис. 16.27. Оптимальный приемник для
ортогональных и симплексных сигналов
Процедуру, реализуемую при такой обработке сигнала, обычно называют прие-
мом «в целом». Название подчеркивает то обстоятельство, что для вынесения реше-
ния о том, какой из возможных сигналов принят, обрабатывается целиком вся на-
блюдаемая на входе приемника реализация смеси сигнала с помехами.
Таким образом, ортогональные, симплексные и биортогональные сигналы либо
оптимальны, либо близки к оптимальным при использовании приема «в целом» в
присутствии аддитивного белого гауссова шума. Такие сигналы довольно просто
генерировать. Но практическая реализация приема «в целом» наталкивается на опре-
деленные трудности, связанные со сложностью схемотехнической реализации прием-
ника. Действительно, если блок из к информационных символов, поступающих от
источника сообщений, в кодере преобразуется в один из т = cf сигналов, сложность
реализации приемника «в целом», пропорциональная требуемому числу корре-
ляторов, составит
Сл ~ т = qk = exP{klNq} = 6°*, (16.38)
где а= INq > 0, т. е. экспоненциально растет с увеличением длины блока информа-
ционных символов. Для практически интересных значений к такой приемник оказы-
вается технически очень сложным и даже нереализуемым.
Для разрешения проблемы сложности используют регенерацию символов при-
нимаемого сигнала (посимвольный прием), а затем обрабатывают полученную кодо-
670
Глава 16. Радиоэлектронная защита
вую последовательность двоичных символов, используя цифровые схемы согласо-
ванных фильтров. Схема для приема и восстановления символов сигнала представ-
лена на рис. 16.28 [11].
Рис. 16.28. Цифровой согласованный фильтр для приема «в целом»
На схеме рис. 16.28 $0(/) и яД/) — это сигналы, которые соответствуют пере-
даче противоположных символов 0 и 1 соответственно. Такая схема оказывается
оптимальной для приема и восстановления символов на фоне помехи в виде адди-
тивного нормального шума.
Разумеется, приемник с двухступенчатой схемой решения, когда на первой сту-
пени восстанавливаются символы кодовой последовательности и лишь на второй
ступени эти последовательности обрабатываются в соответствии с процедурой при-
ема «в целом», проигрывает по помехоустойчивости оптимальному приемнику по
схеме рис. 16.27. Этот проигрыш служит платой за упрощение практической реа-
лизации схемы приема «в целом».
16.11. Обратная связь для адаптации к помеховой обстановке
Реализация любого способа повышения помехозащищенности системы передачи
информации связана с введением информационной избыточности. При использо-
вании помехоустойчивых кодов избыточность связана с усложнением структуры
кодированных сообщений, которое в конечном счете эквивалентно расширению
спектра сигнала или увеличению времени передачи сообщения. При использова-
нии сложных сигналов, предназначенных для приема «в целом», база увеличивается
также за счет расширения спектра. Кроме того, повышение помехозащищенности
всегда связано с некоторым усложнением систем передачи информации, т. е. с уве-
личением аппаратурной избыточности.
Использование информационной и аппаратурной избыточности путем приме-
нения кодов, обнаруживающих и исправляющих ошибки, а также при использова-
нии приема «в целом» сигналов с большой базой — не единственный и, возможно,
не самый лучший способ обеспечения помехоустойчивости. Дело в том, что назван-
ные методы помехозащиты систем передачи информации оказываются не гибкими.
Они проектируются для фиксированных, заранее определенных условий работы.
Скорее всего — самых тяжелых, наихудших. Но на практике помеховая обстановка
в среде, где работают системы, может меняться. Соответственно могут меняться и
требования к помехозащите: при меньшей интенсивности помех можно обойтись
меньшей избыточностью и обеспечить более высокую скорость передачи инфор-
мации. Но для такой адаптации скорости передачи информации к изменяющимся
помеховым условиям необходимо иметь обратный канал передачи данных от при-
емника к передатчику. Системы, использующие такой канал, называются система-
ми передачи информации с обратной связью. Обычно используют три основных
варианта осуществления обратной связи по передаваемой информации.
16.11. Обратная связь для адоптации к помеховой обстановке
671
При первом варианте сообщение, записанное в ЗУ, а затем принятое и запом-
ненное получателем, ретранслируется источнику информации по обратному кана-
лу. Переданное и ретранслированное сообщения сравниваются. Если ошибки при
передаче не случилось, переданное сообщение совпадает с принятым по обратно-
му каналу, и передатчик формирует сигнал подтверждения правильности получен-
ных данных. В случае несоответствия сообщения, принятого по каналу обратной
связи, тому, которое ранее было передано по прямому каналу, передатчик фикси-
рует ошибку и формирует специальный сигнал стирания данных в памяти прием-
ного устройства. После стирания передача сообщения повторяется вновь. И так до
тех пор, пока не будет зафиксирован факт неискаженной передачи. Поскольку вся
передаваемая информация ретранслируется по обратному каналу, подобная обрат-
ная связь называется информационной. Функциональная схема РСПИ с инфор-
мационной обратной связью приведена на рис. 16.29.
Прямой канал
Обратный канал
Рис. 16.29. РСПИ с информационной обратной связью
Очевидно, что чем больше интенсивность помех в прямом и обратном каналах
на рис. 16.29 и соответственно вероятность ошибки при передаче, тем больше сле-
дует ожидать повторных передач и тем больше информационная избыточность.
Другой вариант использования обратного канала — организация решающей об-
ратной связи. В радиосистемах с решающей обратной связью проверка правильно-
сти приема сообщения и принятие решения о необходимости повторной передачи
производятся на приемной стороне аппаратурой получателя информации. Функ-
циональная схема такой радиосистемы приведена на рис. 16.30.
Рис. 16.30. РСПИ с решающей обратной связью
Прямой канал
Обратный канал
Анализ принятой кодовой комбинации выполняется декодирующим устройством
приемника. Естественно, что для реализации этой возможности применяется кор-
ректирующий код. В случае обнаружения ошибки принятое сообщение считается
искаженным и по обратному каналу передается запрос на повторную передачу. Если
декодер не обнаруживает ошибок в принятой кодовой комбинации, по обратному
672
Глава 16. Радиоэлектронная защита
каналу передается подтверждение правильности приема (квитанция). Получив кви-
танцию, удостоверяющую правильность приема, источник сообщений передает
следующий блок информации. В противном случае он повторяет передачу предыду-
щего искаженного блока. Таким образом, решение о правильности принятого сообщ-
ения выносится в точке приема (отсюда название «решающая обратная связь»). Иное
название систем с решающей обратной связью — системы с переспросом. При ис-
пользовании решающей обратной связи по обратному каналу передается всего одна
двоичная единица информации на каждый информационный блок в прямом канале.
Третий вариант использует одновременно принципы как информационной, так
и решающей обратной связи. Это комбинированная корректирующая обратная связь
в системах передачи информации. Например, при решении об ошибке передачи
сообщения по обратному каналу посылается квитанция — подтверждение, как при
решающей обратной связи. Если приемник выносит решение о правильном при-
еме, по обратному каналу ретранслируется все принятое сообщение. При этом
появляется возможность для устранения трансформации на приеме одной разре-
шенной кодовой комбинации в другую разрешенную, но тем не менее отличающу-
юся от переданной.
При любом способе осуществления проверочной обратной связи повторная
передача сообщения может происходить, вообще говоря, неограниченное число раз
до тех пор, пока не будет принято решение о достоверности принятого сообщения.
Но практически максимально возможное число повторений rmax всегда ограничи-
вается некоторой величиной, определяемой максимально допустимой задержкой
при передаче, т. е. минимально допустимой скоростью передачи информации.
При анализе эффективности цифровых радиосистем передачи информации с
проверочной обратной связью вычисляют остаточную вероятность Рост [98], т. е.
вероятность тех ошибок, которые не обнаруживаются и не исправляются в резуль-
тате г < rmax сеансов повторной передачи. Значения Рост и rmax зависят от свойств
как прямого, так и обратного каналов РСПИ, и от характеристик действующих в
этих каналах помех.
Процесс передачи сообщения можно представить как последовательность от-
дельных циклов. Каждый цикл включает в себя передачу блока информации по
прямому каналу и передачу соответствующего сообщения по каналу обратной связи.
В момент окончания каждого цикла возможны следующие три ситуации: ошибки в
прямом канале отсутствуют и блок информации принят правильно с вероятностью
Рправ; случается необнаруживаемая ошибка с вероятностью Рно; случается ошибка,
которая обнаруживается за счет избыточности кода с вероятностью Роо. В послед-
нем случае производится повторная передача сообщения по прямому каналу.
Перечисленные ситуации составляют полную группу случайных событий, по-
этому
^прав ^но + Pqo ~~ 1 • (16.39)
В результате однократной передачи остаточная (необнаруженная) ошибка бу-
дет происходить с вероятностью (16.39)
^ост! = ^но = 1 — ^прав* (16.40)
Если при первой передаче ошибка обнаруживается (с вероятностью Роо), цикл
повторяется и опять возможны три исхода. Остаточная вероятность ошибки после
повтора составит, очевидно,
^ост2 — ^оо (1 — ^прав ) — ^оо (^оо + ^но ) ~ ^оо^но + ^оо• (16.41)
16.11. Обратная связь для адаптации к помеховой обстановке
673
В результате r+ 1-кратной передачи, когда ошибка обнаруживается г раз, оста-
точная вероятность ошибки составит РН0Р^9 где Р'о — это вероятность появле-
ния обнаруживаемой ошибки в г предыдущих циклах передачи. При неограничен-
ном числе повторений, когда г ->
/’ост = /’но + ^00/’но + /’оо Л.О + - - = /’но (1 + /’оо + ^0 + -)• (16.42)
В скобках формулы (16.42) заключена сумма бесконечной геометрической про-
грессии:
ро-=7Т7- (1643)
* *00
Как видно, вероятность остаточной ошибки зависит не только от вероятности
Рно, но и от вероятности Роо. При высокой вероятности обнаружения ошибок Роо—> 1,
вероятность остаточной ошибки может существенно превосходить Рно.
Среднее число передач одного и того же сообщения можно определить как
(г) = £rP(r) =%/P£l (1 - /’оо)=гЛ~’ (16.44)
г=1 г=1 1 Роо
где P(r) = Р°о[ (1 - Роо) — вероятность r-кратной передачи сообщения, вычисляемая
в предположении о том, что в каждом из г- 1 предыдущих циклов передачи обнару-
живается ошибка, а в цикле с номером г обнаружения ошибки не происходит.
Как следует из (16.44), среднее число повторений при передаче сообщений по
системе с корректирующей обратной связью зависит от вероятности Роо, с которой
происходит обнаруживаемая ошибка. При уменьшении соотношения сигнал/шум
увеличивается вероятность ошибки и соответственно монотонно растет Роо. Но при
этом растет и среднее число повторений сообщения, т. е. система с корректирую-
щей обратной связью автоматически уменьшает скорость передачи информации при
ухудшении помеховой обстановки в среде распространения сигнала.
Стойкость цифровой радиолинии с информационной обратной связью к по-
мехам легче всего оценить, предполагая, что для передачи сообщений используется
безызбыточный код. Такое предположение совершенно естественно, поскольку до-
стоверность передачи сообщений в радиосистеме с информационной обратной свя-
зью определяется не корректирующей способностью кода, а числом повторений.
Можно также предположить, что ошибки в прямом и в обратном канале статисти-
чески независимы. Это действительно так: поскольку сообщения в прямом и в обрат-
ном канале не должны влиять друг на друга, постольку независимыми друг от друга
будут и помехи в этих каналах. Статистически независимыми предполагаются и ис-
кажения отдельных символов передаваемых сообщений (ошибки при передаче не
группируются в пакеты). Если даже помехи таковы, что могут воздействовать на
группы соседних символов и вызывать пакеты ошибок, то для борьбы с ними при-
няты специальные меры. Например, символы передаваемого сообщения переме-
шаны по известному на приемной стороне закону. При восстановлении на приеме
естественного порядка следования символов пакеты ошибок разравниваются по всей
длине сообщения.
При безызбыточном кодировании каждое сообщение содержит к информацион-
ных символов и искажение любого из них приводит к ошибке, и как следствие, к
повторной передаче всего блока из к символов. При этом не важно, где конкретно
произошла ошибка в прямом или в обратном канале. Необнаруживаемая ошибка
соответствует такой комбинации искажений отдельных символов сообщения в пря-
674
Глава 16. Радиоэлектронная защита
мом и обратном каналах РСПИ, при которых искажения взаимно компенсируются.
Пример подобных ошибок — «зеркальные» ошибки, когда при передаче по обрат-
ному каналу искажаются те и только те символы, которые были искажены в пря-
мом канале.
Вероятность искажения одного символа в прямом канале а в обратном Рх<г_.
Причем эти вероятности достаточно малы, так что kPx^ « 1 и кРх^_ « 1. При обо-
снованных ранее предположениях о независимости искажений символов помехами
ошибка передачи сообщения произойдет в результате одиночной «зеркальной ошиб-
ки», т. е. тогда, когда в прямом канале исказится один символ, а в обратном — тоже
только один и именно тот же самый. Вероятность искажения только одного симво-
ла из к информационных символов в прямом канале равна
P^=kPl^(l-P[^)k~'. (16.45)
Условная вероятность обратной трансформации символа, который исказился в
прямом канале, при ретрансляции сообщения по обратному каналу (имеется в виду
случай, когда трансформация указанного символа не сопровождается другими
ошибками в обратном канале) вычисляется по формуле
Р^ = kPlt_ (1 - /V )*-1 • <1646)
Основываясь на (16.45) и (16.46), вероятность одиночной зеркальной ошибки
можно определить соотношением
Рт = Р^ = кР^ (1 - Р^ )*"* Р^ (1 -Р^)к-' = кР^Р^. (16.47)
Вероятность обнаружения ошибки при использовании информационной обрат-
ной связи — это вероятность любой ошибки, кроме зеркальной. Вероятность тако-
го события
Роо = 1 ~ Лтрав “ Лю ~ + — 1 • (16.48)
А вероятность правильного приема команды в одном цикле передачи опреде-
ляется формулой
/’прав = (1 - Р^)* (1 - )к-1~к(Р^ + Р^-Р^Р^). (16.49)
Рассматривая предельный случай гтах->©о9 используя соотношения (16.45) (16.49)
и учитывая соотношение (15.47), можно получить
/’ост = /’но = (16.50)
Для прямого канала системы передачи информации вероятность искажения
блока из к символов определяется приближенным соотношением
(16.51)
Сравнение выражений (16.49) и (16.50) показывает, что применение системы
передачи информации с полной ретрансляцией позволяет существенно уменьшить
вероятность ошибки, если обратный канал обладает достаточно высокой помехо-
устойчивостью (Ple_ « 1).
При невысоком энергетическом потенциале в обратном канале последнее ус-
ловие может и не выполняться. Тогда вместо полной ретрансляции применяют
другие способы использования обратного канала. При этом скорость передачи
информации по обратному каналу выбирается меньшей по сравнению со скоро-
стью в прямом канале РСПИ. Один из таких способов используется при организации
уже рассмотренной решающей обратной связи, когда по обратному каналу переда-
ется 1 бит информации на каждый блок из к бит информации в прямом канале. За
16.12. Стойкость к имитирующим и дезинформирующим помехам
675
счет уменьшения скорости передачи информации по обратному каналу увеличива-
ется его помехозащищенность. Но использование решающей обратной связи тре-
бует применения в прямом канале корректирующих кодов, т. е. передачи, кроме к
информационных, еще и некоторого количества N проверочных символов. Известны
способы борьбы с ошибками в обратном канале, приводящими к потере сообщения,
основанные на несимметричном кодировании. При этом в обратном канале исполь-
зуются такие коды и такие правила декодирования, которые обеспечивают вероят-
ность ошибочного приема сигнала переспроса существенно меньшую вероятности
ошибки при приеме сигнала подтверждения.
Повторение передачи сообщения при использовании проверочной обратной
связи любого типа (информационной, решающей или комбинированной) эквива-
лентно введению дополнительной избыточной информации. Но количество такой
избыточной информации изменяется в зависимости от результатов каждого сеанса
приема отдельного сообщения. При благоприятных условиях приема в прямом и
обратном каналах искажения сообщений возникают сравнительно редко, и следо-
вательно, среднее число повторных передач оказывается небольшим. Если уровень
помех в точке приема сообщений увеличивается, то автоматически увеличивается
и количество повторений. Таким образом, при изменении мощности принятого
сигнала или мощности помех автоматически регулируется средняя скорость пере-
дачи информации по РСПИ. Так работает механизм адаптации РСПИ с обратной
связью к помеховой обстановке.
РСПИ с обратной связью применяются для передачи очень важных сообщений.
Например, информации при командном радиоуправлении. Очень эффективны адап-
тивные РСПИ с корректирующей обратной связью при работе в условиях замира-
ний сигнала и в условиях создания преднамеренных помех.
16.12. Стойкость к имитирующим и дезинформирующим
помехам (обеспечение подлинности сообщений)
Помехи системам передачи информации могут навязывать получателю ложные
сообщения, дезинформировать его. Противодействие такому информационному
нападению входит в круг задач радиоэлектронной защиты точно так же, как и про-
тиводействие помехам, искажающим сигналы, переносящие эти сообщения. Дезин-
формируют только те помехи, которые образуют сообщения, подобные истинным,
и могут быть приняты как подлинные, созданные собственным источником инфор-
мации, т. е. дезинформирующие помехи должны имитировать истинные сообще-
ния. Поэтому защита от дезинформирующих помех иначе называется имитозащи-
той, а способность систем и сообщений противостоять действию дезинформирую-
щих помех — имитостойкостью.
Для обеспечения имитостойкости передаваемых сообщений применяются крип-
тографические методы, в некотором смысле подобные тем, что применяются для
обеспечения секретности при передачи информации. Но функции обеспечения
секретности (информационной скрытности) и обеспечения подлинности сообще-
ний не тождественны друг другу [11].
Устойчивость к расшифровке еще не достаточна для обеспечения стойкости
сообщений к вредному действию имитирующих помех. Из того факта, что сообще-
ние не может быть расшифровано (может быть расшифровано лишь с достаточно
676
Глава 16. Радиоэлектронная защита
малой вероятностью или по прошествии неприемлемо длительного времени) еще
не следует, что в ходе РЭП противник не может создать ложное, дезинформирую-
щее сообщение. Попытка имитации будет успешной, если система противодействия
создаст поддельную шифрограмму Ши и эта шифрограмма на приемной стороне
будет принята за истинную, посланную собственным передатчиком, т. е. законным
абонентом системы связи. Вероятность такого события Ри.
Подобно потенциальной криптостойкости можно определить предельно дости-
жимый уровень имитостойкости информации как способность системы обеспечи-
вать подлинность передаваемых сообщений. Пусть — число всех возможных
криптограмм, т. е. таких криптограмм, априорная вероятность которых (для систе-
мы перехвата) не равна нулю Р(Ш) 0. Пусть также Nc и NK — соответственно числа
возможных сообщений и ключей, т. е. Р(С)^0 и Р(К)^0. Это значит, что для
каждой последовательности ключа К существует по крайней мере Nc различных
криптограмм и условная вероятность криптограммы для каждого ключа не равна
нулю Р(Ш|К)^0. Следовательно, если противник, желающий создать ложное со-
общение, выберет совершенно случайно криптограмму из полного числа 7Vm (по-
пытается имитировать шифрованное сообщение), вероятность успеха такой ими-
тации будет Ри = Nc/Nj. Если же есть какие-либо основания для того чтобы предпо-
честь при имитации одни возможные криптограммы другим, вероятность успеха
нарушения информационной стойкости будет не меньше. Поэтому
р
Г1Л ~ КТ
(16.52)
Из (16.52) следует, что для хорошей защиты от имитации каждое из малого чис-
ла Nc возможных сообщений должно при шифрации превращаться в одну из боль-
шого числа криптограмм. Также (16.52) показывает, что нельзя достичь Ри = О,
поскольку в этом случае или Nc = 0 и ничего нельзя передать, или ©о, что столь
же нелепо. Иначе говоря, потенциально достижимая защищенность от имитации
принципиально не может быть абсолютно совершенной. Предельно достижимый
уровень потенциальной защищенности может быть оценен на основе следующих
соображений.
Пусть, как и прежде, Р(Ш) — вероятность криптограммы Ш(С, К) для систе-
мы перехвата, не знающей ключа к шифру; Рдоп (Ш) — вероятность допустимой
криптограммы, возможной при данном секретном ключе К. С этой вероятностью
законный получатель сообщения примет криптограмму как возможную (правдопо-
добную). Условная вероятность Р(Ш| К) — это вероятность создания криптограм-
мы при известном ключе. Все три величины связаны очевидными неравенствами
Р(Ш)< Рдоп (Ш)< Р(Ш|К). (16.53)
Поскольку логарифм — монотонная функция своего аргумента, а Р(Ш) #0 по
определению, будут справедливы и неравенства, равносильные (16.53):
JXmJiog^m,.)<Хр(ш,)1оёрдоп (ш,)<£р(ш, )iogp(in( |л), (16.54)
i i i
где суммирование проводится по всему множеству вероятных криптограмм /g l:Afm.
Но
-£Р(Ш,.)^Р(Ш,.)+ХР(Ш(.)1оёРдоп(Ш(.) =
/ /
= Я(Ш)- Я(Ш|ЛГ) = 7(Ш, К),
(16.55)
16.12. Стойкость к имитирующим и дезинформирующим помехам
677
т. е. равна разности безусловной энтропии шифрограммы и условной энтропии при
условии знания ключа к шифру. По определению [11], эта разность — взаимная
информация Ш и К. Она указывает количество информации о ключе К, содержа-
щейся в шифровке Ш.
Входящая в (16.55) величина P(UIz)log Рдоп (Ш,-) представляет собой среднее
/
значение логарифма вероятности допустимой криптограммы. Но среднее значение
некоторой величины не может превосходить ее максимального значения. Поэтому
с учетом сделанных обозначений из (16.55) следует, что
1оё{тахРЛОП (Ш)}> /(Ш, К). (16.56)
Наилучшая, обещающая наибольшую вероятность успеха попытка имитации
шифрованного сообщения, состоит в выборе такой конкретной шифровки, кото-
рая имеет максимальную вероятность из всех Рдоп (Ш):
Рк = тах{РД0П (Ш,)}, (16.57)
поэтому из (16.56) и (16.57) следует, что
logPH >-(Ш, К). (16.58)
Соотношение (16.58) называется нижней границей Симмонса. Равенство в
(16.58) достигается тогда, когда шах{Рдоп (Ш,)} равен среднему по i значению ве-
роятности (LUZ ), т. е. когда вероятность РДОП(Ш/ ) не зависит от i.
Наивысшая достижимая аутентичность, т. е. потенциально достижимая стой-
кость к подделкам сообщений, соответствует равенству в (16.58). Но из того же соот-
ношения (16.58) следует парадоксальный факт: вероятность обмана (создания под-
дельного сообщения) тем меньше, чем больше взаимная информация /(Ш, К), т. е.
чем больше информации о ключе содержится в шифровке! Таким образом, требо-
вание к ключу при обеспечении имитостойкости прямо противоположно требова-
нию к ключу криптозащиты. Парадокс разрешается довольно просто, если учесть,
как удостоверяется подлинность (обеспечивается стойкость к обману и подделке)
сообщения не в РСПИ, а в обычной житейской и деловой практике. Традиционно
для аутентификации документа к нему присоединяют специальное сообщение —
подпись и (или) печать. И то и другое сообщение должно быть всем известно и
точно указывать на источник, т. е. на того, кто ими обладает и кто их использовал
для удостоверения подлинности информации. Неразборчивость печати или подписи
уменьшает степень доверия к документу (сообщению). Аналогичная ситуация скла-
дывается и в таких широко известных системах аутентификации, как системы опо-
знавания воздушных целей (системы «свой-чужой»). В них сигналы, посылаемые
бортом в ответ на запрос подсистемы опознавания целей в составе комплексов ПВО
или УВД, должны уверенно идентифицироваться с типом и государственной принад-
лежностью цели, т. е. они должны быть понятны всем операторам РЛС. Но созда-
вать эти сигналы могут только определенные объекты и созданные сигналы должны
быть надежно защищены от имитации.
Специальное сообщение, удостоверяющее подлинность переданной информа-
ции, называется аутентификатором. Такие аутентификаторы, как подпись и печать,
присоединенные к сообщению.для удостоверения его подлинности, хороши, если
сообщение передается на бумажном носителе и не может быть изменено без повреж-
дения этого носителя. При передаче сообщения при помощи сигналов, используе-
мых радиоэлектронными системами вообще и радиосистемами передачи информа-
Глава 16. Радиоэлектронная защита
ции в частности, простое присоединение группы символов к основному тексту нс
может надежно удостоверять его подлинность. Такую группу символов можно пе-
рехватить и присоединить к любому ложному сообщению, создав тем самым усло-
вия для дезинформации приемника. Для исключения возможности такого обмана
необходимо распространить действие аутентификатора на весь текст сообщения,
достоверность и подлинность которого требуется подтвердить.
Известны несколько способов формирования и использования такого аутенти-
фикатора. Эти способы могут различаются по тому, каково назначение использую-
щих их систем передачи информации, и по тому, какие требования по имитостой-
кости предъявляются к системам.
В системах передачи сообщений с повышенной секретностью, когда использу-
ется криптозащита информации, аутентификатор присоединяется к исходному
шифруемому тексту. После такого сцепления (конкатенации) символов сообщения
и аутентификатора производится шифрация полученного расширенного сообще-
ния с использованием секретного ключа, известного только передатчику и прием-
нику. При шифрации все символы исходного текста обязательно перемежаются и
замещаются символами криптограммы. В результате каждый символ криптограм-
мы оказывается зависящим от всех символов исходного текста, символов аутенти-
фикатора и символов секретного ключа. Сформированная таким образом крипто-
грамма доставляется получателю, который расшифровывает ее с использованием
известного ему ключа и восстанавливает как исходный текст, так и присоединен-
ный к нему аутентификатор. Этот аутентификатор известен только источнику и
получателю сообщения. Наличие аутентификатора в полученном и расшифрован-
ном тексте подтверждает подлинность сообщения. Разумеется, тайну аутентифика-
тора нужно охранять не менее строго, чем тайну секретного ключа. Криптографи-
ческие преобразования, совершаемые при передаче имитостойкого сообщения с
повышенной секретностью, иллюстрируются рис. 16.31.
Если при шифрации расширенного сообщения используется стойкий крипто-
алгоритм, то, перехватывая шифровку, противник не может (практически, за прием-
Рис. 16.31. Криптографические методы аутентификации
информации в РСПИ
16.12. Стойкость к имитирующим и дезинформирующим помехам
679
лемое время) восстановить исходный открытый текст и аутентификатор. В такой
ситуации противнику при создании дезинформирующего сообщения не остается
ничего иного, как случайным образом сформировать шифротекст в надежде, что
он будет воспринят получателем как подлинный. Но если аутентификатор содер-
жит г двоичных символов, то противник при случайной генерации криптограммы
сможет угадать неизвестный ему аутентификатор и сможет выдать свое сообщение
за подлинное с вероятностью Ри = 2-г. Эта вероятность характеризует имитостой-
кость шифрованного сообщения. Если даже противнику удалось расшифровать
криптограмму, это вовсе не значит, что за время вскрытия шифра передатчик и при-
емник информации по взаимному соглашению не изменили аутентификатор. В слу-
чае замены аутентификатора вероятность успеха дезинформации получателя сообще-
ния будет, очевидно, не выше РИ.
Возможны случаи, когда шифрация сообщения не нужна или даже нежелательна,
как в уже приведенном примере системы опознавания воздушной цели «свой-чужой».
В этих случаях может быть использован другой алгоритм установления подлинно-
сти передаваемых сообщений. Работа алгоритма формирования открытого (нешиф-
рованного) имитостойкого сообщения иллюстрируется рис. 16.32.
Рис. 16.32. Формирование имитостойких нешифрованных сообщений
В соответствии с алгоритмом обеспечения имитостойкости без шифрации тек-
ста исходное сообщение разбивается на блоки, содержащие одинаковое число г
следующих подряд символов. Первый блок почленно складывается по модулю 2
с некоторой неизвестной противнику последовательностью символов — начальным
вектором. Длина начального вектора равна длине блока. Его значение держится в
секрете и время от времени изменяется. Полученный блок длиной г символов скла-
дывается по модулю 2 со вторым блоком исходного сообщения. И так далее проце-
дура итерационно повторяется до тех пор, пока не будут обработаны все блоки текста.
Если последний блок содержит менее г символов, его всегда можно дополнить
нулями. Последний полученный после суммирования блок шифруется. Ключ шифра
и алгоритм шифрации известны передатчику и приемнику. В частности, это может
быть и шифр с открытым ключом. Очевидно, что последняя r-битовая шифровка
является функцией исходного сообщения, начального вектора и ключа к шифру.
Эта комбинация из г символов присоединяется к исходному тексту в качестве аутен-
тификатора. Полученный текст может передаваться по линии связи в открытом виде.
680
Глава 16. Радиоэлектронная защита
Получив расширенное аутентификатором сообщение, приемник радиосистемы
передачи информации при необходимости (при сомнениях в подлинности и (или)
истинности авторства сообщения) производит обратное преобразование аутенти-
фикатора, используя для этого текст самого сообщения и ключ к шифру. Если
сообщение не было изменено или подделано, в результате расшифровки получается
известный приемнику начальный вектор. В противном случае фиксируется наруше-
ние подлинности сообщения и оно признается недостоверным. Такая ситуация воз-
никнет как в том случае, когда противник попытается присоединить аутентификатор
перехваченного сообщения к другому, поддельному или измененному тексту, так и
в том случае, когда он попытается осуществить генерацию аутентификатора, не зная
начального вектора. В любой из этих ситуаций истинное значение аутентификатора
при передаче поддельного сообщения можно угадать, если будут угаданы все г симво-
лов начального вектора. Вероятность такого события Ри = 2-г, т. е. весьма мала.
В соответствии с описанным алгоритмом суммирование шифрованных блоков
и блоков исходного текста осуществляется по модулю 2. Сцепление аутентифика-
тора с открытым текстов для формирования расширенного имитостойкого сооб-
щения производит мультиплексер.
Как можно видеть, оба рассмотренных алгоритма обеспечения стойкости сооб-
щения к подделкам и искажениям основываются на увеличении избыточности
передаваемого сообщения. Разумеется, возможны и иные, отличные от двух при-
веденных выше, протоколы защиты подлинности сообщений. Но общим для лю-
бых протоколов остается то, что аутентификатор присоединяется к исходному тек-
сту. И чем больше внесенная аутентификатором избыточность, тем выше имито-
стойкость. Присоединенный к сообщению избыточный идентификатор может быть
назван электронной подписью. Очевидно, такая подпись подтверждает подлинность
сообщения и в том случае, когда оно передается без посредства бумажного носителя.
Способы подтверждения подлинности основаны на внесении избыточности
точно так же, как и способы повышения помехоустойчивости. Но для улучшения
помехоустойчивости избыточные символы преобразуют сообщения в такие после-
довательности, которые группируются возможно более близко (в соответствии с
принятой метрикой в пространстве сигналов) к неискаженному сигналу. При ис-
пользовании избыточности для формирования имитостойких сообщений они кон-
струируются иначе: чтобы любые изменения символов в соответствии со стратеги-
ей дезинформации распределяли получающиеся кодовые последовательности слу-
чайно и равновероятно по всему сигнальному пространству.
16.13. Радиоэлектронная защита систем наведения ракет
В настоящее время применяются разнообразные методы наведения ракет. Так,
на пассивные неизлучающие цели ракеты наводятся с использованием методов
автономного радиоуправления, командного радиоуправления различных модифи-
каций (КРУ-I, КРУ-П), радиотеленаведения (управления «в луче»), активного и
полуактивного самонаведения. При наведении ракет на активно излучающие цели
с успехом применяют самонаведение [99].
Командное управление двух названных выше видов КРУ-I и КРУ-П объединя-
ет использование командной радиолинии (КРЛ). При КРУ-I координаты ракеты и
цели измеряются на пункте управления. Там же формируется и управляющее воз-
действие UK для наведения ракеты. По командной радиолинии (КРЛ) значение
16.13. Радиоэлектронная защита систем наведения ракет
681
команды UK передается на борт ракеты. При КРУ-П информация о координатах
цели формируется на борту ракеты с помощью радио- или телевизионного визира.
Результат визирования передается на пульт управления посредством специальной
РСПИ. Выработанное пунктом управления на основе этих данных командное воз-
действие UK по КРЛ передается на ракету.
Радиотеленаведение (РТН) — наведение в радиолуче или в радиоплоскости
(радиозоне). При таком способе радиоуправления пункт управления формирует
«радиолуч» (радиозону, радиоплоскость), ориентируя его в требуемом направлении
полета ракеты. Аппаратура, установленная на борту ракеты, фиксирует отклонение
ее фактической траектории от направления радиолуча и вырабатывает команду для
возвращения на необходимую траекторию. При РТН координаты цели измеряются
на пункте управления, а координаты ракеты относительно радиолуча — на борту
ракеты. Там же формируются команды управления движением UK.
При самонаведении координаты ракеты и цели, а также UK формируются на бор-
ту ракеты. Пункт управления после пуска не участвует в процессе наведения ракеты
на цель, хотя при полуактивном самонаведении подсвечивает цель зондирующим сиг-
налом РЛС, сопровождающей цель по угловым координатам.
Как видно, тактически методы радиоуправления могут быть двухточечными
(одна точка — ракета, другая — цель) или трехточечными (ракета — цель — пункт
управления).
Системы управления ракетами используют разные диапазоны электромагнитных
волн. По используемому диапазону различают: радиотехнические, инфракрасные,
оптические (лазерные) системы управления.
Современные системы радиоуправления способны комплексировать и исполь-
зовать несколько методов наведения, адаптируясь при выборе того или иного ме-
тода к конкретной тактической обстановке и изменяя метод наведения при смене
этапа полета управляемой ракеты. Следует отметить, что во всех современных зенит-
но-ракетных комплексах (ЗРК), и авиационных ракетных комплексах (АРК) пре-
дусмотрен режим самонаведения на постановщика помех, когда этот постановщик
маскирует сигнал, отраженный от цели или излученный целью.
Кроме того, все системы радиоуправления в составе современных ЗРК и АРК
рассчитаны на реализацию кинематического метода наведения ракеты в упрежден-
ную точку. Трехточечные методы наведения иллюстрируются схемой рис. 16.33.
Рис. 16.33. Трехточечные методы наведения
682
Глава 16. Радиоэлектронная защита
Координаты цели измеряются (цель визируется) радиовизиром цели РВЦ, а ра-
кеты — радиовизиром РВР. Это специальные РЛС, которые измеряют те параметры
взаимного движения ракеты и цели, которые нужны для реализации выбранного
способа наведения. Устройство формирования команд (УФК) формирует управля-
ющие воздействия UK, которые по командной радиолинии (КРЛ) передаются на борт
ракеты. Радиоканал КРЛ может быть совмещен с каналом передачи запросного сиг-
нала РЛС РВР, но может использовать и отдельный независимый сигнал. Очевид-
но, схема рис. 16.34 реализует метод КРУ-I. Для КРУ-П РВЦ и РВР совмещены в
одном устройстве на борту ракеты, а кроме КРЛ имеется еще радиолиния для транс-
ляции результатов визирования цели на пункт управления, в УФК. Реализация РТН
не требует КРЛ, а на РВР возлагается только задача формирования радиолуча.
Пункт управления
Рис. 16.34. Полуакгивное самонаведение
Совмещенный постановщик помех чаще всего подавляет информацию о дально-
сти до цели 7?ц в РВЦ. В этом случае основной способ РЭЗ сводится к переходу на
иной способ наведения. Например, на наведение по радио лучу, выставляемому РВР
в направлении прямо на цель или на прогнозируемую точку встречи ракеты с целью.
Иногда в качестве радиоэлектронной защиты на конечном участке траектории
переходят к пассивному или полуактивному самонаведению на источник помех.
Применение полуактивного самонаведения предполагает использование РЛС под-
света цели рис. 16.33. В частности, роль такой РЛС может исполнять и РВЦ.
Если после перехода на полуактивное самонаведение помехи подавят сигнал
подсвета цели, то радиоголовка самонаведения (РГСН) ракеты оказывается в двух-
альтернативной ситуации. Во-первых, постановщик помех может быть совмещен с
целью. В этом случае РГСН должна наводиться на помеху. Во-вторых, постанов-
щик помех вынесен, так что РГСН должна селектировать полезный сигнал от по-
мехи и наводить ракету на цель в условиях действия вынесенной помехи.
Эти ситуации легко различаются, если в радиокоординаторе РГСН применя-
ются две антенны Ai (основная), А2 (вспомогательная). Если сигнал, принятый Аь
по уровню больше сигнала с выхода А2, имеет место первая ситуация. В против-
ном случае — вторая. Во втором случае РГСН не наводит ракету на постановщика
помех, а производит поиск цели. Так как пеленги цели и постановщика помех на
конечном участке траектории наведения сильно различаются, такой поиск, как
правило, кончается надежным захватом сигнала, отраженного от цели.
В комбинированной системе наведения, сочетающей любой из трехточечных
методов с полуактивным самонаведением, очень важно своевременно перейти на
второй этап управления (на самонаведение) [99]. Для оптимального выбора момента
16.13. Радиоэлектронная защита систем наведения ракет
683
перехода на самонаведение требуется оценивать расстояние между ракетой и целью
/?цр (рис. 16.34). Это позволяет вовремя перейти на полуактивное самонаведение.
Кроме всего прочего, радиолинии КРЛ при КРУ-I и КРУ-П защищаются от
активных помех всеми доступными способами: применяется быстрая перестройка
несущей частоты для затруднения разведки сигнала, специальное помехоустойчивое
кодирование, шифрация сигнала для исключения имитации команд управления,
применяются остронаправленные передающие и приемные антенны для простран-
ственной селекции сигнала от помех. Не многим легче требования к помехозащите
радиолинии «ракета — РВР», по которой транслируются результаты определения
координат взаимного положения при КРУ-П.
Для радиоэлектронной защиты систем полуактивного самонаведения известны
и используются разные методы, в частности резервирование.
Пример такого резервирования — использование двухчастотного подсвета цели.
Два разнесенных (по частоте на /ь /2) и п0 пространству (на базу d) радиовизира
подсвечивают одну и ту же цель (рис. 16.35, а). РГСН полуактивного самонаведе-
ния выполняется по двухканальной схеме (рис. 16.35, б) и принимает сигналы под-
света цели Сь С2 раздельно. Эти сигналы всегда различаются по доплеровским
сдвигам частот 7^ и /^2, поскольку ракурсы цели различны, а также по фону от
местных предметов. Поэтому автоматически селекторы сигналов АСС-1 и АСС-2
могут различать сигналы подсвета.
Рис. 16.35. Резервирование аппаратуры наведения
Каналы обработки принятых на борту ракеты сигналов от цели не обязательно
независимы: один сигнал можно использовать при создании строб-импульса для
другого сигнала (рис. 16.35, в).
Для повышения помехозащищенности системы полуактивного самонаведения
используют сигнал подсвета с переменной частотой. Например, можно использовать
импульсный сигнал с перестройкой частоты от импульса к импульсу. Если органи-
зовать дополнительный канал приема сигнала подсвета через антенну в хвостовой
части ракеты, в приемнике РГСН можно реализовать возможность быстрого маневра
параметрами сигнала. Настолько быстрого, что противник для защиты цели не смо-
жет эффективно применить прицельную имитационную помеху. Противника эта
мера заставит перейти на менее эффективную заградительную шумовую помеху. Но
против ответной импульсной помехи такой метод защиты не эффективен.
Кроме частотной модуляции сигнала подсвета, применяют также глубокую ам-
плитудную модуляцию (прерывание сигнала). Прерывистый характер сигнала под-
684
Глава 16. Радиоэлектронная защита
света скважности вплоть до q > 2 не очень сильно сказывается на процессе полу-
активного самонаведения. Однако при таком сигнале резко ослабляется эффектив-
ность уводящих помех.
При самонаведении очень опасны пространственно разнесенные помехи. Для
борьбы с такими помехами, создаваемыми не одной, а несколькими целями, при-
меняют различные методы селекции полезного сигнала. Если две близко располо-
женные цели летят параллельными курсами и подсвечиваются одним лучом РВЦ,
то отраженные от целей сигналы, будучи приняты в РГСН ракеты, отличаются по
доплеровским сдвигам ф Рд2), хотя и находятся в главном лепестке ДНА РГСН.
Селекция по частоте, подобная той, что осуществляется в СДЦ, позволяет наво-
дить ракету на одну из целей, предварительно выбранных при пуске.
Помехозащите РГСН помогает и пространственная селекция сигналов узкона-
правленными антеннами. Но применять такие антенны на борту ракеты трудно:
диаметр антенны ограничен размером миделя ракеты, а значит и ограничена ши-
рина ДНА, определяемая отношением J/Х. Кроме того, узконаправленные антен-
ны увеличивают риск срыва слежения за целью, если цель маневрирует.
Для повышения помехозащиты применяют сложные модулированные сигналы
подсвета цели, структурную и функциональную селекцию этих сигналов на фоне
организованных помех. В частности, для селекции можно использовать дополни-
тельный канал приема сигнала подсвета антенной в хвостовой части ракеты.
Известны также и другие технические решения, увеличивающие помехозащи-
щенность РГСН. Более подробный перечень мер, способов и схем помехозащиты
полуактивных РГСН имеется в работах [И, 95].
Для помехозащиты активных РГСН используют те же меры, что и для помехо-
защиты моностатических РЛС (сложные сигналы с внутриимпульсной модуляци-
ей, многочастотный режим работы, все виды селекции сигналов от помех). Кроме
того, применяют логическую селекцию сигнала от ретранслированных и уводящих
помех, которые создаются из зоны, где барражируют постановщики помех.
Пассивные системы самонаведения имеют ограниченные возможности для се-
лекции и стробирования сигналов. Однако эти системы защищены уже тем, что
они не требуют работы с излучением сигналов (кроме, разумеется, электромагнитных
излучений целей). Для помехозащиты в пассивных РГСН применяют режимы ра-
боты с разной шириной ДЕА (широкая — в режиме поиска и захвата цели, узкая —
при сопровождении цели для защиты от пространственно разнесенных помех).
Сужение ДНА возможно за счет перехода на работу на высших (второй, третьей)
гармониках частоты сигнала РЭС, по которым работают пассивные РГСН. Эти
источники сигнала очень мощные. Даже при работе по непреднамеренному и побоч-
ному излучению РЭС уровень сигнала на входе приемников РГСН обычно выше,
чем уровень отраженного сигнала при полуактивном самонаведении. А в спектре
всех сигналов РЭС обычно имеются внеполосные составляющие на высших гармо-
никах основной рабочей частоты. Поскольку для высших гармоник отношение dfk
больше, чем для основной рабочей частоты, ДНА РГСН оказывается уже, а прост-
ранственная селекция сигналов и помех — лучше.
Против пассивных РГСН не эффективны любые совмещенные помехи (ра-
кета наводится на источник помех точно так же, как и на сигнал защищаемых
помехами РЭС), а помехи, пространственноразнесенные с источниками сигнала,
селектируются. При этом разделить помехи и сигналы тем легче, чем ближе раке-
та с РГСН к цели.
16.14. Защита от ракет с радиоголовками самонаведения 685
16.14. Защита от ракет с радиоголовками самонаведения
Ракеты, самонаводящиеся на источники электромагнитного излучения, явля-
ются очень мощным средством борьбы с радиоэлектронными системами и сред-
ствами. Радиотехническая система наведения таких ракет (головка самонаведения)
включает в себя антенную систему на подвижной гиростабилизированной платформе
под радиопрозрачным обтекателем, приемник и систему формирования команд
управления для автопилота. Все современные радиоголовки самонаведения исполь-
зуют моноимпульсный принцип определения угловых координат источника радио-
излучения.
Такие головки имеют трехканальные приемники (см. рис. 12.14, б): в двух ка-
налах усиливаются сигналы разностных колебаний А — с выходов каждой из двух
пар антенн, а в одном — суммарный сигнал всех четырех антенн моноимпульсного
пеленгатора. Сигналы ошибок по курсу и по тангажу формируются соответствую-
щими фазовыми детекторами (ФД курса и ФД тангажа).
Приемники современных радиоголовок самонаведения обладают достаточно
высокой чувствительностью для того, чтобы обеспечить наведение ракеты на излуче-
ние РЭС разных типов, структур и назначения, используя для этой цели достаточ-
но слабое побочное и непреднамеренное излучение. Однако основное тактическое
назначение таких головок — поражение РЛС. С поражением РЛС комплексов ПВО
связаны и первые случаи боевого применения ракет с такими пассивными радио-
головками самонаведения. Поэтому обычно в литературе они называются проти-
ворадиолокационными ракетами (ПРР).
Принцип работы моноимпульсной головки самонаведения иллюстрируется на
рис. 12.14, я, а схема приема и обработки сигнала — рис. 12.14, б.
Спектр способов защиты радиосистем и радиосредств от ракет с пассивными
головками самонаведения весьма широк. Он включает разнообразные организацион-
ные меры (например, выключение питания передатчиков при обнаружении ракет-
ной атаки) и фортификационные, сводящиеся к такому оборудованию позиций РЭС,
при котором максимально снижается эффект от воздействия поражающих факто-
ров ПРР, т. е. осколков и взрывной волны (устраиваются валы и брустверы вокруг
антенн, кабели бронируются для защиты от поражения осколками). Ниже, обсужда-
ются не все способы защиты от ПРР, а только способы радиоэлектронной защиты.
Для защиты от самонаводящихся ракет нужно создать условия, при которых
работу бортового моноимпульсного радиокоординатора ПРР сопровождают аномаль-
ные ошибки. В гл. 5 описаны способы постановки помех моноимпульсным пелен-
гаторам и показано, что кроме некоторых частных случаев такие пеленгаторы по-
давляются пространственно-разнесенными помехами. Разнесенные помехи могут
быть когерентными, некогерентными и мерцающими.
Самые естественные и эффективные способы защиты от радиоголовок самона-
ведения — маскировка электромагнитного излучения РЭС.
Не менее важны для защиты от ПРР технические решения, использующие раз-
личные способы дезинформации радиокоординатора головки самонаведения отно-
сительно истинных координат излучающей цели. Например, для дезинформации
радиоголовок применяется РЛС с многими ложными антеннами, излучающими те
же зондирующие сигналы, что и основная антенна. При этом ложные антенны
разнесены в пространстве и не имеют кабин РЛС, где происходит обработка инфор-
мации. Если противник перед пуском противорадиолокационной ракеты не отли-
686
Глава 16. Радиоэлектронная защита
чает, какая из антенн истинная, возможно попадание ракеты в ложную антенну.
Для лучшей мимикрии запросные сигналы, излучаемые всеми антенными систе-
мами, идентичны и синхронизированы. Синхронизация, кстати, необходима для
обеспечения электромагнитной совместимости. Но иногда для имитации работы
нескольких РЛС запросные сигналы всех антенн умышленно видоизменяются по
параметрам. Аналогичные методы РЭЗ применяются для защиты РЛС от активных
и полуактивных систем наведения ракет.
Другие способы дезинформации комплекса прицеливания и наведения ПРР,
также основанные на многоточечном излучении, предусматривают объединение
нескольких РЛС. Обычно РЛС объединяются для повышения надежности получа-
емой радиолокационной информации. При этом цель считается обнаруженной, если
она присутствует в стробах хотя бы одной из нескольких РЛС, работающих на раз-
личных несущих частотах. Такое комплексирование РЛС не только затрудняет
противнику постановку эффективных помех, ибо требует подавления всех РЛС
одновременно в широком диапазоне частот, но и делают неэффективным приме-
нение ПРР против одной или даже нескольких РЛС комплекса.
Комплексирование радиолокационных измерителей координат и параметров
движения целей открывает возможность для применения пассивных методов, не
требующих излучения зондирующего сигнала. Работа таких измерителей не обна-
руживается средствами оперативной радиотехнической разведки, что затрудняет
организацию радиоэлектронного противодействия. Более того, шумовая или одно-
точечная имитационная помеха подавляет в РЛС дальномер, но создает условия для
триангуляционных методов определения координат.
ГЛАВА 17
ДЕСТРУКТИВНЫЕ ПРОГРАММНЫЕ ВОЗДЕЙСТВИЯ
17.1. Воздействие деструктивных программ в сетях ЭВМ
Рассматривая использующиеся в настоящее время сети ЭВМ и компьютерные
среды, в которых развивается информационный конфликт, можно представить их
обобщенную структуру в виде рис. 17.1.
пункт Сервер пункт
локальной сети
пункт Сервер
локальной сети
пункт
Рис. 17.1. Обобщенная структура сети ЭВМ
Абонентские пункты (АП) сети могут быть объединены в единую систему с
серверами локальных сетей, которые, в свою очередь, соединяются между собой.
Таким образом через линии связи объединяются несколько территориально близ-
ких или удаленных локальных вычислительных сетей.
Серверы локальной сети могут быть подключены к концентратору сообщений,
объединяющему потоки информации с нескольких локальных сетей или/и изоли-
рованных абонентских пунктов. Объединенный концентратором сообщений инфор-
мационный поток поступает на коммутационную машину (коммутатор), которая в
свою очередь производит логическую коммутацию передаваемых информационных
потоков в другие локальные сети, их объединения, концентраторы сообщений или
изолированные абонентские пункты.
Следуя схеме рис. 17.1, можно выделить следующие функционально закончен-
ные элементы сети:
• локальные сегменты сети (с различной архитектурой); их особенностью явля-
ется возможность использования удаленных ресурсов файловых серверов или
других рабочих станций или абонентских пунктов;
• коммуникационные сегменты сети, которые производят фрагментирование и
объединение пакетов данных, их коммутацию и собственно передачу.
Как правило, рабочие станции не могут использоваться для доступа к ресурсам
коммуникационных фрагментов вне решения задач передачи сообщений или уста-
новления логических соединений.
688
Глава 17. Деструктивные программные воздействия
Для различных сегментов сети можно выделить следующие угрозы безопасно-
сти информации:
1) перехват, искажение, навязывание информации со стороны фрагментов сети;
2) имитация посылки ложных сообщений на локальные фрагменты сети;
3) имитация логического канала (удаленный доступ) к ресурсам локальных сег-
ментов сети;
4) внедрение в циркулирующие по сети данные кодовых блоков, которые могут
оказать деструктивное воздействие на информацию и программное обеспечение;
5) перехват, навязывание, искажение информации при передаче по собствен-
ным линиям связи локальных сегментов сети;
6) внедрение деструктивных программ в программное обеспечение рабочих
станций или в общедоступные ресурсы (во внешней памяти файл-серверов) локаль-
ных сегментов сети.
Деструктивные программы представляют опасность как для АП с их программ-
ным обеспечением, так и для коммутационной машины и серверов локальных сетей.
Возможны следующие пути проникновения (внедрения) деструктивных про-
грамм в сеть:
• заражение программного обеспечения абонентских пунктов вирусами и де-
структивными программами как типа «троянских коней», так и «компьютер-
ных червей» вследствие нерегламентированных действий пользователей (за-
пуск посторонних программ, игр, иных внешне привлекательных программных
средств — «архиваторов», «ускорителей» и т. п.);
• умышленное внедрение в программное обеспечение абонентских пунктов за-
кладок типа «компьютерных червей» путем их ассоциирования с выполняе-
мыми модулями или программами начальной загрузки;
• передача деструктивных программ и вирусов с пересылаемыми файлами на
другой АП и заражение его в результате пользования зараженными програм-
мами;
• распространение вирусов в среде АП, объединенных в локальную сеть общего
доступа;
• внедрение в программное обеспечение АП вирусов при запуске программ с
удаленного терминала;
• внедрение вирусов и закладок в пересылаемые файлы на коммутационной ма-
шине или/и на сервере локальной сети.
Телекоммуникационные сети, как правило, имеют неоднородную операцион-
ную среду, поэтому передача деструктивных программ по направлению АЛ — ком-
мутатор чрезвычайно затруднена: пользователи с АП не могут получить доступ к
программному обеспечению коммутатора, поскольку информация на коммутаторе
представляется в фрагментированном виде (в виде пакетов) и не контактирует с
программным обеспечением коммутационной машины. В этом случае заражение
вирусами может наступать только при пользовании коммутационной машиной как
обычной ЭВМ (для игр или выполнения нерегламентированных работ). При этом
возможно заражение коммуникационного программного обеспечения и негативное
влияние на целостность и достоверность передаваемых пакетов.
Исходя из перечисленных угроз в сети, можно детализировать эти угрозы.
1. Для абонентских пунктов:
• уменьшение скорости работы, неадекватная реакция на команды операто-
ра и т. д.;
17.2. Угрозы информационным ресурсам и информационные атаки...
689
• искажение (разрушение) файлов и областей операционной среды;
• вмешательство в процесс обмена сообщениями по сети путем непрерывной
посылки хаотических сообщений;
• блокирование принимаемых или передаваемых сообщений, их искажение;
• имитация физических сбоев типа «потеря линии» и т. д.;
• имитация пользовательского интерфейса или приглашений ввода пароля (клю-
ча), с целью запоминания этих паролей (ключей);
• накопление обрабатываемой конфиденциальной информации в скрытых об-
ластях внешней памяти;
• считывание оперативной памяти для выявления ключевых таблиц или фраг-
ментов ценной информации;
• искажение программ и данных в оперативной памяти АП.
2. Для серверов локальных сетей:
• искажение проходящей через сервер информации (при обмене между АП);
• сохранение проходящей информации в скрытых областях внешней памяти;
• искажение или уничтожение собственной информации сервера (в частности,
идентификационных таблиц) и, вследствие этого, нарушение работы локаль-
ной сети;
• внедрение вирусов в файлы, пересылаемые внутри локальной сети или на уда-
ленные абонентские терминалы.
3. Для коммутатора:
• разрушение собственного программного обеспечения и вывод из строя ком-
мутационного узла вместе со всеми присоединенными абонентскими терми-
налами;
• засылка пакетов не по адресу, потеря пакетов, неверная сборка пакетов, под-
мена пакетов;
• внедрение вирусов в коммутируемые пакеты;
• контроль активности абонентов сети для получения косвенной информации
о характере данных, которыми обмениваются абоненты сети.
17.2. Угрозы информационным ресурсам и информационные
атаки на вычислительные системы
Основные угрозы информации, хранимой и перерабатываемой в вычислительных
системах, циркулирующей в сетях — это ограничение доступа к данным, видоизмене-
ние этих данных и нарушение конфиденциальности. Несколько причин, объединив-
шись, сделали угрозы безопасности информации в вычислительных средах особенно
опасными. Во-первых, появились новые информационные технологии, увеличившие
не только мощность, но и доступность компьютеров. Во-вторых, развитие комму-
никаций и универсальность международных стандартов построения информацион-
ных систем и протоколов обмена данными открыли возможность дистанционного
доступа к информации без физического преодоления систем их охраны и защиты.
Особенно остро проблемы защиты данных проявляются при использовании ЭВМ
для обработки и хранения информации конфиденциального и секретного характера.
Несанкционированное раскрытие содержания информации встречается наиболее
часто. Последствия раскрытия содержания конфиденциальных данных могут быть
самыми разными.
690
Глава 17. Деструктивные программные воздействия
Не меньшую опасность представляют искажения информации. Многие жизнен-
но важные данные хранятся в компьютерных файлах. Если такие данные будут иска-
жены или стерты, то работа парализуется. Самое опасное в этом, что шифрация
данных не гарантирует их устойчивость против искажения: в примитивных крипто-
графических системах искажения могут быть внесены и без знания ключа.
Незаконное, несанкционированное предостановление доступа к данным не ме-
нее опасно, нежели сознательная дезинформация.
Разумеется, приведенные выше рассуждения носят весьма общий характер и спо-
собны помочь в деле защиты информации только в принципе, а не в конкретных жиз-
ненных ситуациях (инженеры умеют отличать технические решения, пригодные для
воплощения «в принципе» от решений, годящихся для реализации «в кожухе»). По-
этому необходима детализация и конкретизация приведенных общих рассуждений.
Попытки реализации угроз информации в вычислительных системах и средах,
а также в сетях сбора и передачи данных (сокращенно информационно-вычисли-
тельных системах — ИВС) в дальнейшем именуются общепринятым в настоящее
время термином «информационные атаки» или просто называются атаками. Защи-
та циркулирующей и обрабатываемой информации требует осознания и выявления
потенциальных угроз на всех этапах жизненного цикла ИВС от замысла, проекти-
рования, создания, эксплуатации и модернизации до утилизации. Каждый их трех
перечисленных больших классов информационных атак можно разделить на не-
сколько групп по нижеследующим критериям [39].
1. По характеру источника информационных атак. Возможны угрозы как слу-
чайных, так и преднамеренных атак.
2. По расположению источника угроз, который может быть как внутренним, в
пределах ИВС, так и внешним по отношению к ИВС.
3. По отношению источника угроз к процессу обработки информации. Оно
может зависеть от процесса обработки информации, но может проявляться лишь в
процессе работы ИВС.
4. По отношению угроз к элементам ИВС — без изменения элементов, с изме-
нением элементов, с физическим доступом к элементам ИВС, с программным до-
ступом к элементам и подсистемам ИВС.
Причинами случайных воздействий на элементы ИВС при ее эксплуатации могут
быть отказы и сбои аппаратуры, помехи в каналах связи, вызванные воздействиями
внешней среды, непреднамеренные ошибки обслуживающего персонала, схемные и
системотехнические ошибки разработчиков ИВС, структурные, алгоритмические
и программные ошибки. Частота отказов и сбоев аппаратуры обычно увеличивается
при усложнении аппаратно-программных комплексов. Человеческий фактор может
обуславливать ошибки логические (неправильно принятые решения), сенсорные
(неправильное восприятие оператором информации), а также оперативные или
моторные (неправильная реализация решения). Интенсивность ошибок человека
может колебаться в широких пределах. Хотя человек как элемент автоматизирован-
ной системы обладает по сравнению с техническими средствами рядом преимуществ
(обучаемостью, избирательностью, способностью к работе в конфликтных ситуа-
циях), он имеет и ряд недостатков (зависимость психологических параметров от
возраста и психофизиологического состояния, чувствительностью к изменениям
окружающей среды и т. п.).
По сравнению со случайными угрозами, более широк и опасен круг искусст-
венных или, как их еще называют, преднамеренных угроз информационным систе-
17.2. Угрозы информационным ресурсам и информационные атаки...
691
мам и обрабатываемой информации. Угрозы преднамеренных атак могут обуслав-
ливаться человеческой деятельностью. Преднамеренные угрозы могут быть направ-
лены практически против всех без исключения элементов ИВС. Их отличает высо-
кая целенаправленность, опасность и регулярность.
Можно выделить следующие наиболее часто реализуемые преднамеренные угро-
зы: несанкционированный доступ (НСД) посторонних лиц к конфиденциальной
информации; несанкционированное копирование программ и данных; кража физи-
ческих носителей, содержащих конфиденциальную информацию; кража распеча-
танных документов; умышленное уничтожение информации; несанкционирован-
ная модификация служащими документов и баз данных; фальсификация и отказ
от авторства сообщений, передаваемых по каналам связи; отказ от факта получе-
ния информации; навязывание ложного сообщения; разрушение информации на
физических носителях. Учитывая то, что современные ИВС, построенные на базе
сетей ЭВМ, интегрированы в глобальные информационно-вычислительные сети,
очень опасным стали угрозы информации, источник которых является внешним
по отношению к элементам и подсистемам ИВС. Попытки реализации подобного
рода угроз называют удаленными атаками. Можно выделить два вида удаленных
атак. Во-первых, удаленные атаки на инфраструктуру и протоколы сетей передачи
и обработки данных, входящих в ИВС. Во-вторых, удаленные атаки на телекомму-
никационные службы. По характеру воздействия удаленные атаки могут быть пас-
сивными, активными и условно пассивными.
Пассивные атаки не оказывают непосредственного влияния на работу ИВС, но
могут нарушать систему обеспечения ее безопасности. Активные атаки имеют целью
нанесение прямого ущерба ИВС и предусматривают нарушение конфиденциально-
сти, целостности и доступности информации, а также специальное психологиче-
ское воздействие на пользователей ИВС. Очевидной особенностью активного воз-
действия, по сравнению с пассивным, является принципиальная возможность его
обнаружения. Могут случиться и условно-пассивные атаки. Они имеют целью подго-
товку к активной информационной атаке и включают в себя ведение компьютерной
разведки, преодоление (взлом) системы защиты информации.
Удаленные атаки могут преследовать цели нарушения конфиденциальности
информации; нарушения целостности информации; нарушения работоспособно-
сти ИВС, блокирование информации. Этот классификационный признак удален-
ных атак, очевидно, является прямой проекцией трех перечисленных выше основных
типов угроз информации. Но все цели достигаются при условии получения несанк-
ционированного доступа к информации.
По характеру начала осуществления воздействия атака может производиться по
запросу от атакуемого объекта, по наступлению ожидаемого события на атакуемом
объекте или быть безусловной.
В первом случае атакующий ожидает передачи от потенциальной цели атаки
запроса определенного типа, который и будет условием начала осуществления воз-
действия. Во втором случае атакующий сервер осуществляет постоянное наблюде-
ние за состоянием операционной системы удаленной цели атаки и при наступле-
нии определенного события в этой системе начинает воздействие. Как и в первом
случае, инициатором осуществления начала атаки выступает сам атакуемый объект.
В случае безусловной атаки она осуществляется немедленно и безотносительно к
состоянию системы и атакуемого объекта. В этом случае атакующий сервер явля-
ется инициатором начала осуществления атаки.
692
Глава 17. Деструктивные программные воздействия
По условию ситуации осуществления воздействия атаки делятся на информа-
ционное нападение и на ответные (ответно-встречные) воздействия. Информаци-
онным нападением называется внезапное применение информационного оружия
для осуществления воздействий на ИВС противостоящей стороны.
Удаленная атака может осуществляться при наличии обратной связи с атакуе-
мым объектом. При этом на некоторые запросы, переданные на атакуемый объект,
атакующему требуется получить ответную реакцию. Атакующая сторона при этом
приобретает возможность управления удаленной атакой (в идеальном случае — в
масштабе реального времени). В то же время, прерывание обратной связи может
привести к потере управления атакой и, следовательно, к прекращению атаки. При
атаках без обратной связи на атакуемый объект обычно передаются одиночные
запросы, ответы на которые атакующему серверу не нужны. Удаленные атаки пре-
дусматривают межсетевое взаимодействие информационных систем.
Программное обеспечение, наиболее часто подвергаемое атакам, это системы
управления базами данных (СУБД), компоненты операционной системы (ОС),
сетевое программное обеспечение. Из этой тройки реже всего подвергаются ата-
кам СУБД. Этот факт можно объяснить тем, что СУБД имеют строгую внутрен-
нюю структуру и четко определенный набор операций над данными, хранящимися
в базе (базах) данных. Такую структуру легче защищать: доступ к ее элементам легко
регламентируется и контролируется. Поэтому взломщики предпочитают получать
доступ к файлам базы данных не на уровне СУБД, а средствами ОС. В отличие от
СУБД, защитить ОС гораздо сложнее. Поэтому адекватная организация безопас-
ности является значительно более трудной задачей, чем в случае с СУБД. Реализа-
ции того или иного алгоритма атаки на практике в значительной степени зависит
от архитектуры и конфигурации конкретной ОС. Однако есть несколько видов атак,
которым может быть подвергнута практически любая ОС. Это кража и (или) подбор
пароля, сканирование носителей информации, превышение полномочий.
Кроме выше перечисленных, существует достаточно большая группа угроз ин-
формации, не связанных с физическим доступом к элементам ИВС. Каждое уст-
ройство хранения, передачи, обработки информации является источником излуче-
ния различной природы (электромагнитные, акустические волны). Перехватывая
и обрабатывая излучения ИВС иногда возможно получать достаточно разнообраз-
ную и ценную информацию о процессах, сопровождающих обработку данных в ИВС.
Источником подобного рода излучений могут быть различные электронные устрой-
ства (системные блоки и мониторы компьютеров, принтеры, сканеры и т. п.). Осо-
бенно опасны с точки зрения защищенности информации электромагнитные из-
лучения мониторов и линий передачи данных. Расстояние, с которого потенциаль-
но возможен перехват вторичных излучений, зависит от характера источника,
производимого им излучения и колеблется в пределах от нескольких метров до не-
скольких десятков и сотен метров. Опасность таких угроз в том, что злоумышлен-
ник получает оперативный доступ к обрабатываемой информации дистанционно,
без непосредственного контакта с системой защиты. Поэтому информационные
атаки не регистрируется системой защиты или регистрируется слишком поздно. Ме-
роприятия и средства по нейтрализации НСД за счет паразитных и непреднаме-
ренных излучений должны разрабатываться и строго контролироваться на всех
этапах проектирования и эксплуатации ИВС.
Таким образом, потенциальные угрозы информации в современных ИВС от-
личаются многообразием, сложностью своей структуры и функций, их действие
17.3. Компьютерные вирусы
693
направлено практически против всех структурных компонентов современных сис-
тем управления, а их источники могут располагаться как в самой ИВС, так быть и
вне ее, в том числе удаленными на значительное расстояние. В связи с тем, что
объем материальных средств, выделяемых на защиту информации, обычно ограни-
чен, возникает задача рационального их распределения. При этом материальные
средства целесообразно расходовать в первую очередь на нейтрализацию угроз,
реализация которых может нанести ИВС наибольший вред. Общую задачу оценки
угроз можно представить совокупностью следующих составных элементов:
1) обоснование структуры и содержания системы показателей, необходимых для
исследований и практического решения всех задач, связанных с защитой инфор-
мации;
2) обоснование структуры и содержание тех параметров, которые оказывают
существенное влияние на значение показателей уязвимости информации;
3) разработка комплексов моделей, отображающих функциональные зависимо-
сти показателей от параметров и позволяющих определять значения всех необхо-
димых показателей уязвимости информации во всех представляющих интерес со-
стояниях и условиях жизнедеятельности ИВС;
4) разработка моделей для оценки показателей уязвимости при исследованиях
и практическом решении различных вопросов защиты. При этом уязвимость ин-
формации должна быть оцениваема на всех стадиях и этапах разработки и функци-
онирования ИВС.
Угрозы информационным ресурсам в вычислительных системах и средах реали-
зуются с использованием специальных деструктивных программ. Такие программы,
работа которых вызывает нежелательные и даже опасные последствия, обладают
целым рядом свойств. И эти свойства можно рассматривать как классификационные
признаки деструктивных программ. В частности, такие программы, осуществляю-
щие реализацию угроз информационному ресурсу, должны обладать скрытностью
работы (и даже присутствия в программно-аппаратной среде), должны обладать
возможностью разрушать (искажать) коды программ и данных в памяти ЭВМ, нейт-
рализовывать работу систем защиты информационных ресурсов.
Деструктивные программы в зависимости от их свойств, целей и способов воз-
действия на информационные ресурсы делятся на компьютерные вирусы, средства
несанкционированного доступа к информации и на программные закладки.
17.3. Компьютерные вирусы
Компьютерные вирусы — один из наиболее распространенных видов деструк-
тивных программ и едва ли не самый серьезный источник угроз информации в
современных информационных системах. Но, тем не менее и несмотря на это, к
настоящему времени не существует четкого определения для вирусных программ.
Чаще всего компьютерным вирусом называется программа, которая может заражать
другие программы, включая в них свою копию (возможно, модифицированную) и
сохраняет способность к дальнейшему размножению. При этом она производит
несанкционированные и скорее всего вредные действия.
Можно назвать по крайней мере несколько причин широкого распространения
компьютерных вирусов. Во-первых, массовое распространение стандартизованной
вычислительной техники, у которой процессоры совместимы на уровне микроко-
манд друг с другом, а также с аналогичными подсистемами предыдущих и будущих
694
Глава 17. Деструктивные программные воздействия
в поколений. Во-вторых, стандартизация программного обеспечения, массовое
использование операционных систем, дружественных не только для пользователя,
но и для вирусов. В третьих, отсутствие информационной культуры у пользовате-
лей вычислительной техники и довольно широкая популяризация в печати сведе-
ний о создании саморазмножающихся вредоносных программ. В четвертых, несо-
вершенство законодательства, не предусматривающего неотвратимой ответствен-
ности за правонарушения с использованием вычислительной техники.
К настоящему времени компьютерная вирусология накопила определенный опыт
и создала арсенал средств борьбы с опасными проявлениями вирусных угроз.
Можно перечислить пять основных видов вирусов [39].
1. Программы-вандалы, которые маскируются (по имени) под видом широко
используемых программ и выполняющие несанкционированные действия (напри-
мер, стирание информации с диска) при запуске. Способностью к самостоятель-
ному размножению они не обладают и распространяются при копировании про-
грамм пользователями. По сравнению с иными вирусами вандалы не получили ши-
рокого распространения по достаточно простым причинам: они либо уничтожают
себя вместе с остальными данными на диске, либо демаскируют свое присутствие
и уничтожаются пострадавшим пользователем.
2. Бутовые (загрузочные) вирусы, заражающие диски (дискеты, логические диски
жесткие диски).
3. Файловые вирусы. Заражают выполняемые модули.
4. Макровирусы (макрокомандные вирусы). Заражают файлы документов, со-
держащие в своем составе программный код макрорасширений.
5. Сетевые вирусы (сетевые черви). Редкие и очень сложные по структуре и
принципам работы программы, использующие для своего распространения по сети
ЭВМ ошибки (дыры) в коде или особенности функционирования сетевого программ-
ного обеспечения операционной системы.
Практически все виды вирусов бывают резидентными и нерезидентными. Ре-
зидентные вирусы способны оставлять свои копии в оперативной памяти, перехва-
тывать некоторые события (например, обращения к файлам или дискам) и иници-
ировать при этом процедуры заражения обнаруженных объектов (файлов и секто-
ров). Поэтому резидентные вирусы активны не только во время работы зараженной
программы, но и после окончания ее работы. Резидентные копии таких вирусов
остаются жизнеспособными вплоть до очередной перезагрузки, даже если на диске
уничтожены все зараженные файлы.
Нерезидентные вирусы, напротив, активны довольно непродолжительное вре-
мя — только в момент запуска зараженной программы.
После появления специализированных антивирусных программных комплек-
сов, возникли вирусы, использующие для скрытия своего присутствия в системе
специальные приемы (СТЕЛС-вирусы). Эти приемы обычно сводятся к перехвату
и контролю некоторых системных ресурсов. Процесс лечения системы усложняет-
ся еще и тем, что появились вирусы, меняющие свой код, а иногда и способы за-
ражения, в процессе своего функционирования. Даже сегодня бороться с вируса-
ми, использующими механизмы полиморфизма, достаточно сложно.
Упрощенно процесс заражения вирусом программных файлов можно предста-
вить следующим образом. Код зараженной программы обычно изменяется таким
образом, чтобы вирус получил управление первым, до начала работы программы-
носителя. При передаче управления вирусу он находит новую программу и выпол-
17.3. Компьютерные вирусы
695
няет вставку в нее своей копии. Самый распространенный и часто встречающийся
способ заражения файловым вирусом — вставка в конец программы. В этом слу-
чае вирус корректирует код заражаемой программы таким образом, чтобы получить
управление первым. При запуске программы вирус первым получает управление,
отрабатывает свой код, после чего восстанавливает «скрытые» первые байты и пе-
редает управление программе-вирусоносителю.
Может быть вставка вируса в начало зараженной программы. При вставке в на-
чало файла вирус переписывает первые блоки (или все тело) зараженной програм-
мы в ее конец. Поэтому до передачи управления зараженному модулю, вирус дол-
жен предварительно переписать перемещенные блоки программы на первоначаль-
ное место, переместив часть своего кода таким образом, чтобы она не была затерта.
При заражении вирусом, вставленным в конец или в середину программы, как
правило не производится перенос замещаемых блоков. В этом случае длина зара-
женной программы не изменяется, а исходный выполняемый модуль безвозвратно
разрушается, что маскируется вирусом при его запуске выдачей одного из сообще-
ний операционной системы.
Для предупреждения повторного заражения файлов вирусы используют специ-
альные приемы. Например, в поле даты и времени создания файла проставляются
несуществующие данные. Резидентный вирус вводит дополнительную функцию
перехваченного им прерывания, которая возвращает значение, означающее присут-
ствие копии вируса в памяти. Другим наиболее часто используемым способом «ре-
гистрации» наличия резидентного вируса в памяти является запись в редко исполь-
зуемую область памяти некоторой комбинации битов.
Процесс лечения от файловых вирусов обычно заключается в поиске в теле
вируса сохраненных байтов, восстановление их в программе носителе и «выреза-
нии» вируса из кода программы.
Разумеется, файловые вирусы используют и другие механизмы взаимодействия
с программными модулями.
Бутовый вирус заражает жесткие и гибкие диски (как загрузочные, так и иные).
В отличие от файлового вируса он состоит из двух раздельных секций: головы и
хвоста. Положение головы вируса всегда одинаково — она расположена в Boot-
секгоре. При загрузке с зараженной дискеты бутовый вирус получает управление и
сначала копирует себя в старшие адреса памяти. Затем он уменьшает размер памя-
ти, заменяя значения вектора прерываний для перехвата обращений к диску. По-
этому при обращении к диску управление всегда передается вирусу. После этих
действий вирус запускает стандартный системный загрузчик, и только после этого
происходит стандартная загрузка операционной системы.
Важно, что некоторые бутовые вирусы перехватывают прерывания от клавиа-
туры и поэтому могут сохраниться в памяти при быстрой перезагрузке по команде.
Большинство макровирусов можно считать резидентными, поскольку они при-
сутствуют в области системных макросов в течение всего времени работы редакто-
ра. Они, так же как резидентные, загрузочные и файловые вирусы, перехватывают
системные события и используют их для своего размножения. К подобным собы-
тиям относятся различные системные вызовы, возникающие при работе с докумен-
тами и таблицами (открытие, закрытие, создание, печать и т. д.), вызов пункта меню,
нажатие на какую-либо клавишу или достижение определенного момента времени.
Для перехвата событий макровйрусы переопределяют один или несколько систем-
ных макросов или функций.
696
Глава 17. Деструктивные программные воздействия
При заражении некоторые макровирусы проверяют наличие своей копии в зара-
жаемом объекте и повторно себя не копируют. Другие макровирусы не делают этого
и переписывают свой код при каждом заражении. Если при этом в заражаемом файле
или области системных макросов уже определен макрос, имя которого совпадает с
макросом вируса, то такой макрос оказывается уничтоженным.
Полиморфные вирусы таковы, что их невозможно (или крайне затруднительно)
обнаружить при помощи так называемых масок — участков постоянного кода, спе-
цифичных для конкретного вируса [39]. Достигается это двумя основными спосо-
бами — шифрованием основного кода вируса с непостоянным ключом и случай-
ным набором команд расшифровщика или изменением самого выполняемого кода
вируса. Существуют также другие, достаточно экзотические примеры полиморфизма.
Сложность кода служит классификационным признаком полиморфных вирусов.
СТЕЛС-вирусы обладают способностью скрывать свое присутствие в системе.
Известны СТЕЛС-вирусы всех типов: загрузочные вирусы, файловые и даже мак-
ровирусы.
Загрузочные СТЕЛС-вирусы для скрытия своего кода используют два основных
способа. Первый способ заключается в том, что вирус перехватывает команды чте-
ния зараженного сектора и подставляет вместо него незаряженный оригинал. Этот
способ делает вирус невидимым антивирусными программами.
Второй способ направлен против антивирусов, поддерживающих команды пря-
мого чтения секторов через порты контроллера диска. Такие вирусы при запуске
любой программы (включая антивирус) восстанавливают зараженные сектора, а
после окончания ее работы снова заражают диск.
С некоторыми оговорками СТЕЛС-вирусами можно назвать вирусы, которые
вносят минимальные изменения в заражаемый сектор либо маскируются под код
стандартного загрузчика.
Большинство файловых СТЕЛС-вирусов либо перехватывают вызовы обращений
к файлам, либо временно лечат файл при его открытии и заражают при закрытии. Так
же как и для загрузочных вирусов, существуют файловые вирусы, использующие для
своих функций перехват прерываний более низкого уровня — вызовы драйверов.
В настоящее время не существует ни одного программного компонента инфор-
мационных систем, который не был бы подвержен опасности вредоносного воздей-
ствия вирусов. Эксперты считают, что сегодня число существующих вирусов превы-
шает 40 тысяч, причем ежедневно появляется, по разным оценкам, от 6 до 15 новых.
Однако положение вовсе не так трагично, как может показаться. Дело в том, что
старые вирусы выходят из обращения. Кроме того, большинство вирусов никогда
не покидают резерваций — тщательно охраняемых коллекций в исследовательских
лабораториях, а многие настолько плохо сработаны, что просто не могут распрост-
раниться дальше машины своего создателя и подпольных Web-страниц и BBS,
посвященных проблемам разработки вирусов. Поэтому «диких» (т. е. реально цир-
кулирующих) вирусов в настоящее время насчитывается около 400 [100].
17.4. Программные средства борьбы с компьютерными вирусами
К настоящему времени разработана довольно широкая и полная система про-
граммных средств борьбы с вирусами. Это программы-вакцины (иммуунизаторы),
программы-ревизоры, программы-мониторы, программы-фаги (сканеры).
17.4. Программные средства борьбы с вирусами
697
Самыми популярными и эффективными антивирусными программами счита-
ются антивирусные фаги (иначе эти программы называются сканерами или поли-
фагами) и ревизоры (CRC-сканеры). Часто обе приведенные разновидности объ-
единяются в одну универсальную антивирусную программу, что значительно по-
вышает ее мощность. Реже используют различного типа мониторы (блокировщики)
и вакцины (иммунйзаторы). Следует, однако, иметь в виду, что в принципе нельзя
создать универсальное и абсолютно надежное средство борьбы со всеми существу-
ющими и будущими вирусами.
Принцип работы антивирусных фагов основан на проверке файлов, секторов и
системной памяти и поиске в них известных и новых (неизвестных сканеру) виру-
сов. Для поиска известных вирусов используются маски или как их еще называют
сигнатуры — некоторые постоянные последовательности кода, специфичные для
этого конкретного вируса. Если вирус не содержит постоянной маски или длина
этой маски недостаточно велика, то используются другие методы. Например, пере-
бор всех возможных вариантов кода вирусов. Этот способ эффективно использует-
ся для детектирования полиморфных вирусов.
Во многих полифагах используются алгоритмы эвристического сканирования,
т. е. анализ последовательности команд в проверяемом объекте, набор некоторой
статистики и принятие мягкого решения («возможно, заражен» или «не заражен»)
для каждого проверяемого объекта.
К достоинствам сканеров относится их универсальность, к недостаткам — низ-
кая скорость сканирования, а также необходимость постоянного обновления анти-
вирусных баз.
Ревизоры подсчитывают контрольные суммы для присутствующих на диске фай-
лов и системных секторов. Эти суммы сохраняются в базе данных антивируса вместе
с некоторой другой информацией: размерами файлов, датами их последней моди-
фикации и т. п. При последующем запуске ревизоры сверяют данные, содержащи-
еся в базе данных, с реально подсчитанными значениями. Если информация о файле,
записанная в базе данных, не совпадает с реальными значениями, ревизоры сигна-
лизируют о том, что файл был изменен или заражен вирусом.
Ревизоры, использующие антиСТЕЛС-алгоритмы, являются довольно сильным
оружием против вирусов: практически 100 % вирусов оказываются обнаруженны-
ми почти сразу после их появления в компьютере. Существенным недостатком таких
средств борьбы с вирусами является то, что программы-ревизоры распознают на-
личие вируса в системе уже после его распространения. Кроме того, они не рас-
познают вирусы в новых, только что полученных или записанных файлах, поскольку
в их базах данных отсутствует информация об этих файлах. Периодически появля-
ются вирусы, которые используют эту слабость ревизоров, заражая только вновь
создаваемые файлы. Такие вирусы остаются невидимыми.
Антивирусные мониторы — это резидентные программы, перехватывающие
вирусоопасные ситуации и сообщающие об их возникновении. К вирусоопасным
относятся вызовы на открытие для записи в выполняемых файлах, запись в загру-
зочные секторы дисков, попытки программ остаться резидентно. Иначе говоря,
вызовы характерны для вирусов в моменты их размножения.
К достоинствам мониторов относится их способность обнаруживать и блоки-
ровать вирус на самой ранней стадии его размножения. К недостаткам относятся
существование путей обхода защиты монитора и большое количество ложных сра-
батываний.
698
Глава 17. Деструктивные программные воздействия
Вакцины (иммунизаторы) делятся на два типа: сообщающие о заражении и блоки-
рующие заражение каким-либо типом вируса. Первые обычно записываются в конец
файлов (по принципу файлового вируса) и при запуске файла каждый раз проверяют
его на изменение. Второй тип вакцин защищает систему от поражения вирусом
какого-то определенного вида. Файлы на дисках модифицируются таким образом,
что вирус принимает их за уже зараженные. Для защиты от резидентного вируса в
память компьютера заносится программа, имитирующая копию вируса. При запуске
зараженной программы вирус распознает вакцину как свою резидентскую копию и
не активизируется. Такой тип вакцинации не может быть универсальным, посколь-
ку при его помощи нельзя иммунизировать файлы от всех известных вирусов.
17.5. Программные закладки
Другой, отличный от вирусов, вид деструктивных компьютерных программ, не
обладает способностью к размножению, к самодублированию. Но эти программы,
получая НСД к данным в памяти ЭВМ, перехватывают эти данные. Для перехвата
данные несанкционированно копируются и сохраняются в специально созданных
разделах памяти или передаются по сети потребителям, не имеющим законного пра-
ва на доступ к информации. Кроме того, деструктивные программы могут, подоб-
но вирусам, искажать или уничтожать данные, но в отличие от вирусов деструк-
тивное действие таких программ селективно направленно на конкретные данные.
Такие программы назвали «закладками» — по аналогии с тайно размещаемы-
ми миниатюрными электронными системами перехвата радио-, видео-, и аудиоин-
формации.
При рассмотрении воздействия закладок и программ защиты информации умест-
ны аналогии с взаимодействием вируса и прикладной программы. Вирус может
присоединиться к исполняемому файлу, соответствующим образом изменив его,
может уничтожить некоторые файлы или встраиваться в цепочку драйверов. Закладка
отличается более направленным и тонким воздействием. Но и вирус, и закладка
должны скрывать свое присутствие в операционной среде компьютерной системы.
Особенностью закладок может быть и то, что они фактически становятся неотде-
лимы от прикладных или системных программ, если внедрены в них на стадии
разработки программного обеспечения.
Если компьютерная система содержит механизмы защиты от НСД, то несанкци-
онированные действия могут быть вызваны отключением или видоизменением за-
щитных механизмов нелегальным пользователем, входом в систему под именем и с
полномочиями реального пользователя. В первом случае, злоумышленник должен
видоизменить защитные механизмы в системе (например, отключить программу за-
просов паролей пользователей), во втором — каким-либо образом выявить или под-
делать идентификатор реального пользователя (например, подсмотреть пароль,
вводимый с клавиатуры).
В обоих случаях НСД можно представить моделью опосредованного доступа —
когда проникновение в систему осуществляется на основе некоторого воздействия,
произведенного предварительно внедренной в систему программой или несколькими
программами.
Например, злоумышленник пользуется информацией, которая извлечена из не-
которого массива данных, созданного работой программного средства злоумышлен-
ника совместно с системой проверки прав доступа и предоставления этих прав.
17.5. Программные закладки
699
Предварительно внедренная в систему программа при доступе легального пользова-
теля запомнит его пароль и сохранит в заранее известном доступном злоумышленни-
ку файле. Затем нелегальный пользователь воспользуется этим паролем для входа
в систему. Либо злоумышленник изменит часть системы защиты так, чтобы она пе-
рестала выполнять свои функции. Например, изменит программу шифрования вруч-
ную или при помощи некоторой другой программы так, чтобы она перестала шифро-
вать или изменила алгоритм шифрования на более простой.
Часто используют синонимы термина «закладка»: «логическая бомба», «логиче-
ский люк», «троянский конь». Обычно в литературе понятие закладки в основном
связано с разработкой программного обеспечения, а конкретно — с написанием
исходных текстов программ, которые оснащаются дополнительными функциями.
Следовательно, ранее закладка понималась как внутренний объект защищенной
системы. Однако, вообще говоря, закладка может быть и внешним по отношения к
защищенной системе объектом.
Программные закладки можно классифицировать по методу и месту их внедре-
ния и применения:
• закладки, ассоциированные с программно-аппаратной средой;
• закладки, ассоциированные с программами первичной загрузки;
• закладки, ассоциированные с загрузкой драйверов и других компонентов опе-
рационной среды;
• закладки, ассоциированные с прикладным программным обеспечением общего
назначения (встроенные в клавиатурные и экранные драйверы, программы
тестирования ЭВМ, утилиты и оболочки), исполняемые модули, содержащие
только код закладки;
• модули-имитаторы, совпадающие с некоторыми программами, требующими
ввода конфиденциальной информации;
• закладки, маскируемые под программные средства оптимизационного назна-
чения (архиваторы, ускорители и т. д.);
• закладки, маскируемые под программные средства игрового и развлекательного
назначения (как правило, используются для первичного внедрения закладок).
Как видно, программные закладки имеют много общего с вирусами, особенно
в части ассоциирования себя с исполняемым кодом (с загрузочными вирусами,
файловыми вирусами).
Кроме того, программные закладки, как и многие известные вирусы классиче-
ского типа, имеют развитые средства борьбы с отладчиками и дисассемблерами.
Для того чтобы закладка смогла выполнить какие-либо функции по отношении
к прикладной программе, она должна получить управление на себя. Иначе говоря,
процессор должен начать выполнять инструкции (команды), относящиеся к коду
закладки. Для этого:
1) закладка должна находиться в оперативной памяти до начала работы про-
граммы, которая является целью воздействия закладки, следовательно, она должна
быть загружена раньше или одновременно с этой программой;
2) закладка должна активизироваться по некоторому событию, т. е. при выпол-
нении ряда условий в программно-аппаратной среде управление должно быть пе-
редано на программу-закладку.
Это достигается путем анализа и обработки закладкой общих относительно
закладки и прикладной программы воздействий (как правило, прерываний). При-
чем прерывания должны сопровождать работу прикладной программы или работу
700
Глава 17. Деструктивные программные воздействия
всей ЭВМ. В качестве таких прерываний закладки используют прерывания от тайме-
ра ЭВМ, прерывания от внешних устройств, прерывания от клавиатуры, прерыва-
ния при работе с диском, прерывания операционной среды (в том числе прерывания
при работе с файлами и запуск исполняемых модулей).
Кроме того, возможен случай, когда при запуске программы (в этом случае
активизирующим событием является запуск программы) закладка разрушает неко-
торую часть кода программы, уже загруженной в оперативную память, и, возмож-
но, систему контроля целостности кода или контроля иных событий и на этом
заканчивает свою работу.
Таким образом, можно выделить следующие закладки [100].
1. Резидентного типа — такие закладки находятся в памяти постоянно с неко-
торого момента времени до окончания сеанса работы ЭВМ (выключения питания
или перезагрузки). Закладка может быть загружена в память при начальной загруз-
ке ЭВМ, загрузке операционной среды или запуске некоторой программы (кото-
рая по традиции называется вирусоносителем), а также запущена отдельно.
2. Нерезидентного типа, начинающие работу по аналогичному событию, но
заканчивают ее самостоятельно по истечении некоторого промежутка времени или
некоторому событию, при этом выгружая себя из памяти целиком.
Исполнение кода закладки должно сопровождаться операциями несанкциони-
рованной записи (для сохранения некоторых фрагментов перехваченной информа-
ции) и несанкционированного считывания, которое может происходить отдельно
от операций чтения прикладной программы или совместно с ними. При этом под
операциями считывания и записи понимаются любые обращения к внешнему ус-
тройству (возможно и не связанные с получением информации). Например, счи-
тывание параметров устройства или его инициализация; закладка может использо-
вать для своей работы такие операции, в частности, для инициирования сбойных
ситуаций или переназначения ввода-вывода.
Несанкционированная запись информации закладкой может происходит в мас-
сив данных, не совпадающий с пользовательской информацией (сохранение ин-
формации) или в массив данных, совпадающий с пользовательской информацией
или ее подмножеством (искажение, уничтожение или навязывание информации
закладкой). Поэтому можно рассматривать три основные группы деструктивных
функций, которые могут выполняться закладками:
1) сохранение фрагментов информации, возникающей при работе пользовате-
ля, прикладных программ, вводе-выводе данных, во внешней памяти (локальной
или удаленной) сети или выделенной ЭВМ;
2) разрушение функций самоконтроля или изменение алгоритмов функциони-
рования прикладных программ;
3) навязывание некоторого режима работы (например, при уничтожении ин-
формации блокирование записи на диск, при этом информация, естественно, не
уничтожается) либо замена записываемой информации навязанной закладкой.
Сохранение фрагментов информации программой-закладкой может происходить
при выводе информации на экран видеотерминала, при выводе информации в файл
или иное внешнее устройство, при вводе информации с клавиатуры. Программа вы-
деляет себе в оперативной памяти некоторую область, где помещается информация
для обработки (как правило, доступная для непосредственного восприятия: область
экрана, клавиатурный буфер). Закладка определяет адрес информативной области
программы (иногда этот адрес фиксирован) и анализирует события, связанные
17.5, Программные закладки
701
с работой прикладной программы или операционной среды, причем интерес пред-
ставляют лишь события, результатом которых может стать появление интересующей
информации в информативной области. Установив факт интересующего события,
закладка переносит всю информативную область либо ее часть в свою область со-
хранения (непосредственно на диск или в выделенную область оперативной памяти).
При перехвате вывода на экран выделяется область видеобуфера с фиксирован-
ным адресом. Видеобуфер с точки зрения программ представляет собой область
обычной оперативной памяти. Выводимый на экран текст одновременно помещается
в видеобуфер, откуда может быть считан и сохранен закладкой. Синхронизирую-
щим событием в этом случае может быть ввод с клавиатуры длинной последова-
тельности символов (обрабатываемого текста), чтение из файла, запуск программ
с определенными именами.
Кроме того, возможно периодическое сохранение области экранного буфера.
Надо отметить, что закладки этого типа малоинформативны, поскольку на эк-
ран помещается небольшое количество информации, а символы пароля, как пра-
вило, на экран не выводятся.
Перехват ввода с клавиатуры достаточно опасен, поскольку клавиатура являет-
ся основным устройством управления и ввода информации. Через клавиатурный
ввод можно получить сведения о вводимых конфиденциальных сообщениях (тек-
стах), паролях и тому подобных важных данных.
Перехват и обработка файловых операций происходит, когда открывается файл
и часть его (или весь файл) считывается в буфер оперативной памяти, обрабатыва-
ется и затем, возможно, записывается в файл с прежним или новым именем.
В операционной среде закладка, влияющая на файловые операции, порождает
в системе новые связи, включая в них свои операции и массивы данных.
Если злоумышленнику известна интересующая его программа с точностью до
команд реализации на конкретном процессоре, он может создать модель процесса
ее загрузки и выяснить относительные адреса частей программы относительно сег-
мента оперативной памяти, в который она загружается. Это означает, что возмож-
но произвольное изменение кода программы и соответственно отклонение (возмож-
но негативного характера) в ее прикладной работе. Алгоритм действия закладки дол-
жен предусматривать:
• загрузку закладки в память;
• перехват закладкой одного или нескольких прерываний и получение управ-
ления на себя;
• проверку принадлежности запущенной или уже работающей программы к тем,
против которых закладка направлена;
• отключение схемы контроля;
• изменение программы.
Наконец, возможен случай, когда содержательный код программы защиты вме-
сте со схемой контроля будет удален из памяти полностью и все последующие
операции будут выполнены без влияния программы защиты.
Основным способом активизации разрушающих закладок является запуск ассо-
циированных с ними программ. При этом закладка получает управление первой и
выполняет некоторые действия (изменения адресов прерывания на собственные
обработчики, исправление в коде программ защиты и т. п.). В этом случае борьба
с воздействием закладок может быть произведена только путем контроля целостно-
сти исполняемых файлов непосредственно перед их исполнением.
702 Глава 17. Деструктивные программные воздействия
Особенностью применения программно-аппаратных средств защиты состоят в
следующем:
• собственные программы управления аппаратной частью, как правило, нахо-
дятся в ПЗУ и, следовательно, не могут быть изменены программным путем;
• под управление аппаратным комплексом выделяются средства низкого уров-
ня (операции с портами, либо выделенные прерывания);
• управление программам аппаратной части передается до загрузки операцион-
ной среды и часть операций, в основном связанных с инициализацией началь-
ных состояний устройства, также происходит до загрузки операционной среды.
Все эти факторы накладывают определенные ограничения на процесс воздей-
ствия программных закладок на рассматриваемые программно-аппаратные комп-
лексы. Однако эти ограничения не таковы, чтобы в общем виде полностью исклю-
чить это воздействие.
Поскольку обращение к аппаратным средствам происходит из прикладных
программ и, как правило, через некоторую промежуточную программу управления,
воздействие на аппаратное средство может быть сведено к воздействию либо на
прикладную программу, либо на программу управления аппаратным комплексом,
которая находится в ОЗУ.
17.6. Защита компьютерных сетей и сред
от деструктивных воздействий
Проанализировав возможные информационные угрозы сети и их последствия,
можно предложить комплекс защитных мер, снижающих вероятность проникно-
вения и распространения деструктивных программ в сети, а также облегчающих
локализацию и устранение негативных последствий вредных воздействия. Меры
защиты нужно предусматривать как на этапе разработки программного обеспече-
ния сети, так и на этапе ее эксплуатации.
Прежде всего, на этапе разработки выявляются исходные тексты программ и те
фрагменты или подпрограммы, которые могут обеспечить доступ к данным по
фиксированным паролям, беспарольный доступ по нажатию некоторых клавиш,
обход регистрации пользователей с фиксированными именами и реализацию тому
подобных угроз. Наличие таких фрагментов сводит на нет весь комплекс мер обес-
печения информационной безопасности сети, поскольку доступ через них возмо-
жен как человеком, так и программой-вирусом (закладкой). Присутствие таких
фрагментов не всегда является результатом злого умысла и зачастую используется
для тестирования программного обеспечения. Для выявления подобных фрагмен-
тов может быть произведено сквозное тестирование исходных текстов программного
обеспечения независимыми экспертами по стандартным, нормативно утвержденным
методикам; тестирование готового программного обеспечения в критических ре-
жимах эксплуатации (в период испытаний сети) с фиксацией и устранением выяв-
ленных слабостей и отклонений от нормальной работы.
Необходимо также обратить внимание на возможные конфликты прикладного
программного обеспечения и средств защиты. Такие конфликты могут возник-
нуть вследствие конкуренции по ресурсам (захват прерываний, памяти, блокировка
клавиатуры и т. д.). Эти моменты, как правило, можно выявить лишь в период
испытаний.
17.6. Защита компьютерных сетей и сред от деструктивных воздействий 703
Также на этапе разработки должны быть предусмотрены меры защиты от НДС,
меры по проверке целостности хранимых на внешних носителях программных
средств зашиты, контроль целостности их в оперативной памяти и т. д.
На этапе штатной эксплуатации должны на регулярной основе предприниматься
меры защиты и контроля, проводиться разовые, эпизодические защитные меропри-
ятия в период повышения опасности информационного нападения.
Кроме того, в сетях должны применятся следующие общие средства и методы
защиты.
1. Ограничение физического доступа к абонентским терминалам, серверам ло-
кальных сетей и коммутационному оборудованию. Для такого ограничения устанав-
ливается соответствующий организационный режим и применяются аппаратные и
программные средства ограничения доступа к ЭВМ.
2. Контроль целостности программного обеспечения при его активизации. Для
такого контроля подсчитываются контрольные суммы и вычисляются хеш-функ-
ции, которые потом сравниваются с эталонными значениями для каждой ЭВМ.
3. Максимально возможное ограничение и контроль передачи по сети испол-
няемых файлов. При этом снижается вероятность распространения по сети файло-
вых вирусов.
4. Организация выборочного и внезапного контроля работы операторов для вы-
явления фактов использования нерегламентированного программного обеспечения.
5. Сохранение архивных копий применяемого программного обеспечения на
защищенных от записи носителях, учет и надежное хранение архивных копий.
6. Немедленное уничтожение ценной и ограниченной для распространения
информации сразу по истечении потребности в ней.
Проблема защиты от воздействий закладок имеет много общего с проблемой вы-
явления и дезактивации компьютерных вирусов. Она разработана и изучена доста-
точно подробно [100].
Основные методы борьбы с закладками сводятся к следующим.
I. Общие методы защиты программного обеспечения.
1. Контроль целостности системных областей, запускаемых прикладных про-
грамм и используемых данных.
2. Контроль цепочек прерываний и фильтрация вызовов, критических для бе-
зопасности системы прерываний.
Эти методы действенны лишь тогда, когда контрольные элементы не подвер-
жены воздействию закладок и разрушающее воздействие входит в контролируемый
класс. Так, например, система контроля за вызовом прерываний не будет отслежи-
вать обращение на уровне портов. С другой стороны контроль целостности инфор-
мации может быть обойден за счет навязывания конечного результата проверок,
влияния на процесс считывания информации, изменения аутентификаторов, хра-
нящихся в общедоступных файлах.
Вообще говоря, включение процесса контроля должно быть выполнено до на-
чала работы закладки, либо контроль должен осуществляться полностью аппарат-
ными средствами с программами управления, содержащимися в ПЗУ.
3. Создание безопасной и изолированной операционной среды.
4. Предотвращение результирующего воздействия вируса или закладки: напри-
мер, запись на диск только в зашифрованном виде на уровне контроллера (при этом
сохранение информации закладкой теряет смысл) либо запрет записи на диск на
аппаратном уровне).
704
Глава 17. Деструктивные программные воздействия
II. Специальные методы выявления программ с потенциально опасными послед-
ствиями.
1. Поиск фрагментов кода по характерным последовательностям (сигнатурам),
свойственным закладкам, либо наоборот — разрешение на выполнение или вне-
дрение в цепочку прерываний только программ с известными сигнатурами.
2. Поиск критических участков кода методом семантического анализа (анализа
фрагментов кода на выполняемые ими функции, например, выполнение несанк-
ционированной записи, часто сопряженной с дисассемблированном или эмуляци-
ей выполнения).
Большую опасность представляют программы-закладки, помещенные в ПЗУ и
ассоциированные с существенно важными прерываниями. Для их автоматизиро-
ванного выявления используется следующая методика:
1) выделяется группа прерываний, существенных с точки зрения обработки ин-
формации программой, относительно которой проводится защита;
2) для выделенной группы прерываний определяются точки входа (адреса входа)
в ПЗУ, используя справочную информацию либо выполняя прерывание в режиме
трассировки;
3) для выделенных адресов создаются цепочки исполняемых команд от точки
входа до команды IRET — возврату управления из BIOS.
В цепочках исполняемых команд выделяются команды работы с портами, ко-
манды передачи управления, команды пересылки данных. Они используются либо
для информативного анализа, либо порождают новые цепочки исполняемых команд.
Порождение новых цепочек исполняемых команд происходит тогда, когда управ-
ление передается внутри сегмента BIOS.
Утечки (потери) информации гарантированно невозможны, если программная
среда изолирована, т. е.:
1) на ЭВМ с проверенным BIOS установлена проверенная операционная среда;
2) достоверно установлена целостность и неизмененость операционной среды;
3) кроме проверенных программ в программно-аппаратной среде не запускаются
никакие иные программы.
Выполнение перечисленных условий может быть достигнуто при использовании
загрузочной дискеты, без загрузки с которой невозможен запуск программ. Загрузка
с обыкновенной загрузочной дискеты является надежным методом установления
собственной операционной среды, но лишь тогда, когда оператор не допускает оши-
бок или преднамеренных действий.
ГЛАВА 18
ЭФФЕКТИВНОСТЬ СРЕДСТВ И СПОСОБОВ
РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
18.1. Методы исследования эффективности комплексов
радиоэлектронной борьбы
При решении задач оценки эффективности комплексов РЭБ прежде всего за-
даются некоторыми критериями (показателями) их эффективности. Значительная
сложность решения подобных задач, связанная с многообразием средств РЭБ и
условий их боевого применения, делают невозможным проводить оценку их эф-
фективности по какому-либо одному единственному критерию. Поэтому приходится
пользоваться несколькими показателями в зависимости от поставленной цели ис-
следования. Общая характеристика критериев дана в гл. 1. Здесь более подробно
рассматриваются различные группы критериев применительно к научно-практичес-
ким задачам разработки и боевого применения средств и комплексов РЭБ.
Для исследования эффективности комплексов РЭБ используются как теорети-
ческие, так и экспериментальные методы.
Получение достоверных теоретических оценок эффективности средств РЭБ
обычно наталкивается на непреодолимые трудности. Это связано с невозможностью
точно определить адекватную математическую модель комплекса, поскольку нельзя
учесть все многообразие условий его работы в динамично меняющейся обстанов-
ке боевых действий. Несмотря на весьма большие возможности современных средств
и методов исследований, до сих пор не разработаны математические модели даже
многих простейших средств РЭБ (например САП). Однако применение теорети-
ческих методов, основанных на использовании упрощенных математических мо-
делей, позволяет осмыслить проблему в целом и получить хотя бы приближенные
оценки эффективности комплексов РЭБ, функционирующих в заданных услови-
ях. А это очень важно, поскольку в процессе исследований выявляются наиболее
общие закономерности, зачастую приводящие к неожиданным результатам.
Более детальные характеристики эффективности средств РЭБ получаются в ре-
зультате имитационного математического моделирования, которое предусматрива-
ет решение уравнений, описывающих функционирование комплексов РЭБ в проти-
воборстве с противником. Такие модели всегда оказываются стохастическими, что
связано со случайным характером параметров всех систем, входящих в комплекс и
участвующих в конфликтном взаимодействии. Это порождает дополнительные труд-
ности при исследованиях. Но, несмотря на трудоемкость математического моделиро-
вания, исследования эффективности комплексов РЭБ с использованием имитацион-
ных моделей, реализуемых на основе мощных современных вычислительных средств,
находят применение на всех этапах разработки и эксплуатации комплексов РЭБ.
Экспериментальные методы исследований предусматривают использование ла-
бораторных и летных испытаний.
Лабораторные испытания проводятся на стендах (установках), состоящих из
комплекса РЭБ, физических моделей объектов РЭБ и контрольно-измерительного
комплекса. Как правило, при лабораторных (стендовых) испытаниях анализируется
706
Глава 18. Эффективность средств и способов РЭБ
качество функционирования отдельных устройств и подсистем комплекса, прове-
ряется правильность принятых при проектировании технических решений и оп-
ределяются пути совершенствования комплекса.
Наиболее эффективны лабораторные испытания, которые проводятся методом
полунатурного моделирования. Сущность этого метода сводится к частичному ис-
пользованию реальной аппаратуры комплекса, функционально соединяемой с ЭВМ,
которая имитирует работу отдельных устройств комплекса, работающих в реаль-
ной боевой обстановке. Прежде всего, имитируется внешняя среда, в которой ра-
ботает комплекс РЭБ, и устройства объектов радиоэлектронного поражения, фи-
зические модели которых недоступны. На полунатурных моделях весьма успешно
проводится ситуационное (игровое) моделирование, позволяющее оценивать эф-
фективность подавления разнообразных РЭС комплексами активных и пассивных
помех, создаваемых совокупностью (системой) комплексов РЭБ. Полунатурное мо-
делирование не требует больших затрат времени и материальных ресурсов. Резуль-
таты моделирования доступны широкому кругу специалистов и могут детализиро-
ваться в зависимости от интересов испытателя.
Возможны различные варианты построения полунатурных моделей [107]. Близ-
кой к действительности является модель системы самонаведения, в структуру ко-
торой включается реальная аппаратура головки самонаведения (ГСН), станция ак-
тивных помех (САП) и генераторы, имитирующие сигналы цели (рис. 18.1).
Рис. 18.1. Полунатурная модель самонаведения ракеты
Программный комплекс модели имитирует кинематику движения ракеты и цели
(кинематическое звено замкнутого контура управления), автопилот и ракету. Ре-
зультаты решения системы уравнений движения ракеты и цели преобразуются в
фазовые координаты (ф, ф, 0, ё) перемещения подвижной платформы, соответству-
ющие действительным перемещениям ракеты под действием сигнала и помехи.
Платформа имеет три степени свободы. Напряжения, пропорциональные линейным
перемещениям центра масс ракеты хр(/) и цели xu(z), используются математиче-
ской моделью кинематического звена, на выходе которого формируются напряже-
ния, имитирующие перемещение системы «ракета — цель». Эти напряжения управ-
ляют движением динамического стенда, на платформе которого располагается ан-
тенна имитатора сигнала. Мощность полезного и помехового сигналов, создаваемых
соответственно имитатором цели и реальной САП, изменяется по программе в соот-
18.2. Критерии боевой эффективности комплексов РЭБ
707
ветствии с изменениями дальности до ракеты. При необходимости изменяются и
пространственно-временные параметры помехи, имитируя движения постановщика
помех (САП). Угловые ошибки сопровождения цели и все другие параметры, не-
обходимые для оценки эффективности помех, измеряются и фиксируются прибо-
рами измерительного комплекса.
Наиболее затратны летные и полевые испытания. К ним привлекаются весьма
квалифицированные специалисты, различная авиационная и наземная техника.
Летные испытания проводятся на заключительном этапе создания КРЭБ и на всем
протяжении жизненного цикла функционирования комплексов: на учениях, полиго-
нах, аэродромах, ремонтных заводах. Однако из-за ограниченности времени и до-
пустимых затрат не удается получить всестороннюю оценку эффективности комп-
лекса. Главным образом вследствие того, что в качестве объекта РЭБ используются
собственные РЭС, характеристики которых часто не совпадают с соответствующи-
ми характеристиками РЭС-аналогов противника.
18.2. Критерии боевой эффективности комплексов
радиоэлектронной борьбы
Значительная сложность задачи большое многообразие форм боевого приме-
нения КРЭБ не позволяют оценить их эффективность одним критерием (показа-
телем). По этой причине в зависимости от поставленных целей исследования при-
меняются различные критерии эффективности РЭБ, которые в гл. 1 были сведены
в три группы: боевые, технические и экономические.
Самолетный комплекс групповых и индивидуальных средств РЭБ при прорыве
ПВО противника может вывести из строя соответствующие РЭС противника двумя
способами: путем уничтожения РЭС или основных жизненно важных элементов
(например антенной системы); путем функционального поражения или радиоэлект-
ронного подавления РЭС.
Эффективность уничтожения РЭС различными видами оружия, в том числе и
ракетами класса «воздух — РЭС», оценивается известными методами теории веро-
ятностей, радиоуправления и боевой эффективности [18-22]. При оценке эффек-
тивности радиоэлектронного подавления РЭС противника пользуются обобщенны-
ми (общими) и частными оперативно-тактическими критериями.
Обобщенные критерии применяются для оценки эффективности мероприятий
по РЭБ в боевых действиях авиационных соединений и частей. На практике при-
меняются следующие обобщенные критерии: степень снижения надежности (вероят-
ности) управления войсками и оружием ПВО противника, вероятность выполне-
ния группой самолетов (звено, эскадрилья, полк и т. д.) боевого задания (Рбз), число
атак истребителей, пусков ракет, прицельных или эффективных выстрелов на за-
данном участке маршрута полета (w), среднее число подавленных РЭС противника
(А/) в полосе прорыва. Обобщенные критерии могут применяться для оценки бое-
вых возможностей комплексов РЭБ.
Частные оперативно-тактические критерии применяются для оценки эффектив-
ности отдельных мероприятий по РЭБ, эффективности комплексов и средств РЭБ,
способов РЭБ. Основными частными критериями являются: вероятность пораже-
ния самолета (группы самолетов) оружием средств ПВО, промах ракеты (снаряда),
число эффективных обстрелов и др. При оценке эффективности боевого примене-
708
Глава 18. Эффективность средств и способов РЭБ
ния авиационных комплексов и средств РЭБ следует различать три степени дез-
организации работы РЭС: срыв, нарушение и затруднение управления (наведения).
Срыв управления (наведения) — это степень подавления (дезорганизации), при
которой противник теряет управление войсками (не может эффективно применять
управляемое оружие). Срыв достигается снижением надежности (вероятности) управ-
ления примерно на 80 %, что обеспечивается поражением (выводом из строя) не ме-
нее половины наиболее важных пунктов управления и РЭС, а также радиоэлект-
ронным подавлением большинства оставшихся РЭС.
Нарушение управления наведения — это степень дезорганизации, при которой
противник периодически теряет управление войсками (оружием) в отдельных звень-
ях управления и на отдельных направлениях действий своих войск. Нарушение до-
стигается снижением надежности управления, что обеспечивается поражением не
менее значительного количества наиболее важных РЭС и радиоэлектронным по-
давлением большинства сохранившихся РЭС.
Затруднение управления наведения — это степень дезорганизации, при кото-
рой имеют место перебои в управлении войсками (оружием), сокращается обмен
информацией в различных звеньях и нарушается централизованная работа систем
управления противника. Затруднение управления наведения достигается снижени-
ем надежности управления. Это обеспечивается поражением наиболее важных РЭС
и радиоэлектронным подавлением до половины оставшихся РЭС.
Вероятность выполнения группой самолетов боевого задания равна
Л>з — ^ПВО ^обн ^пор > (18.1)
где /пво — вероятность прорыва ПВО; Робн — вероятность выхода на цель и ее об-
наружения; Рпор — вероятность поражения цели; Рн — надежность комплексов РЭБ.
В общем случае вероятности Робн и Рпор являются условными, однако из-за сла-
бой вероятностной связи рассматриваемых событий (прорыв ПВО, выход на цель,
поражение цели, надежность комплекса РЭБ) перечисленные вероятности можно
рассматривать как безусловные.
Разработка, эксплуатация и боевое применение комплекса РЭБ должны быть
направлены на повышение вероятности Рбз.
Увеличение Рпво Достигается путем уничтожения и радиоподавления РЭС уп-
равления войсками и оружием ПВО. На этапе поиска, обнаружения и поражения
цели самолетные средства РЭБ снижают эффективность РЭС (в том числе и средств
РЭБ), за счет чего возрастают Робн и Рпор. Совершенствование эксплуатационных
характеристик комплексов РЭБ, проводимое инженерно-авиационной службой
(ИАС), увеличивает Рбз за счет повышения надежности комплекса.
Критерий (18.1) или отдельные его составные части Робн, Рпор и Рн могут приме-
няться для оценки боевой эффективности комплекса групповых и индивидуальных
средств РЭБ. Показатели эффективности, связанные с определением среднего числа
атак истребителей, пусков ракет, прицельных или эффективных выстрелов т, сред-
него числа подавленных РЭС М применяются главным образом для оценки эффек-
тивности комплексов групповых средств РЭБ. Однако в ряде случаев эти показате-
ли могут быть успешно применены и для оценки эффективности комплексов ин-
дивидуальных средств РЭБ.
Эффективность комплексов индивидуальных средств РЭБ оценивается с помо-
щью частных оперативно-тактических критериев: вероятности поражения (непора-
жения) самолета Рн пор, промаха ракеты или снаряда Д (или о).
18.2. Критерии боевой эффективности комплексов РЭБ
709
На каждом этапе исследования комплекса РЭБ (проектирование, испытание,
эксплуатация, боевое применение) обосновывается необходимость применения того
или иного критерия и устанавливается функциональная связь выбранного крите-
рия с техническими и оперативно-тактическими характеристиками комплекса: Рбз =
= Рбз (а, р), т = /л(а, р), Рпор (а, р) и т. д. Установим такие связи для некоторых опе-
ративно-тактических критериев.
Вероятность прорыва ПВО (/пво) определяется как вероятность непоражения
прикрываемого самолета за время t при пролете зон действия ЗРК, ЗАК и ИА:
Л1во =(1-^зрк)(1-^зак)(1“^ил)’ (18.2)
где РЗРК, РзлК’ Ллл — вероятности поражения самолета в зонах действия ЗРК, ЗАК
и истребительной авиации (ИА).
Вероятность поражения нашего самолета, например, истребительной авиацией
противника определяется средним число ш атак и вероятностью поражения само-
лета за одну атаку Р{ :
= (18.3)
где т — число атак.
Если предположить, что в процессе преодоления ПВО поток атак или обобщен-
ных выстрелов является стационарным и пуассоновским, то вероятность того, что
за время t по цели будет произведено ровно т атак:
(18-4>
т\
или
т
Рт^^-е~а, (18.5)
т\
где X — математическое ожидание числа атак за единицу времени; а = X/— матема-
тическое ожидание числа атак за промежуток времени /.
Считая поражение цели в первой, второй и т. д. атаках ИА как несовместные
события, в соответствия с теоремой сложения вероятностей можно получить
% = Р,ЖН> (18-6)
т=1
где
Л1А=1-е-/>,Х/. (18.7)
В (18.7) учтено, что
Вероятность того, что самолет не будет сбит за время t
(18.9)
Определяя аналогичным образом вероятность того, что самолет не будет сбит в
зонах действия ЗРК, ЗАК, с помощью (18.2) и (18.9) можно найти
^ПВО=^ПВО/, (18.10)
где Хпво — средняя плотность обобщенных выстрелов (атак истребителей, пусков
ракет):
^пво (18.11)
/=1
710
Глава 18. Эффективность средств и способов РЭБ
где X/ — средняя плотность воздействия /-го средства ПВО (средняя скорострель-
ность); Ри — вероятность поражения нашего самолета 7-м средством ПВО на за-
данном участке маршрута; п — число зон ПВО.
Формулы (18.10) и (18.11) важны для понимания роля групповых и индивиду-
альных средств РЭБ. Они показывают, каким образом проявляется действие помех
при подавлении РЭС управления войсками и оружием ПВО.
Математическое ожидание числа, обобщенных выстрелов за единицу време-
ни характеризует качество работы систем обнаружения, целераспределения,
целеуказания, т. е. РЭС управления войсками. Снижение Хпво может быть достиг-
нуто либо за счет применения мощных станций маскирующих помех, подавляю-
щих РЭС У В по боковым лепесткам ДНА, либо за счет применения большого чис-
ла пространственно-распределенных маломощных станций активных имитирующих
помех. Мощные САП могут размешаться только на специальных самолетах и вер-
толетах-постановщиках помех. Они обеспечивают непоражение большого числа
самолетов и поэтому составляют основу комплекса групповых средств РЭБ. Мало-
мощные станция имитирующих помех имеют малые габариты и массы, поэтому
могут размещаться на всех самолетах, в том числе и ударных. Поиск оптимальных
соотношений между высокопотенциальными групповыми САП и маломощными
индивидуальными САП является важной и не решенной пока проблемой.
Вероятность поражения самолета одним обобщенным выстрелом может быть
снижена за счет применения индивидуальных средств РЭБ, воздействующих на РЛС
управления оружием (бортовые РЛС, радиолокационные головки самонаведения
и т. д.).
Таким образом, выражение (18.10), кроме использования по прямому назначе-
нию (для определения боевой эффективности комплекса РЭБ), позволяет опреде-
лять общую концепцию построения бортовых комплексов РЭБ. Из (18.10) и (18.11)
вытекает необходимость разработки комплексов как групповых, так и индивиду-
альных средств РЭБ. Важной задачей является определение оптимальных соотно-
шений между групповыми и индивидуальными средствами РЭБ.
Для определения вероятности поражения ЛА ракетой с контактным взрывателем
необходимо знать характеристику уязвимости самолета и закон рассеивания сна-
рядов. Характеристика уязвимости (живучести) ЛА описывается координатным
законом 6(аи), который представляет собой условную вероятность поражения ЛА
очередью независимых выстрелов при условии, что в самолет попало ровно т сна-
рядов [17, 22]:
G(/w) = l-(l-Af, (18.12)
где рх — вероятность поражения цели одним снарядом, попавшим в нее.
Для поражения ЛА необходимо попадание в него определенного числа снаря-
дов. Среднее необходимое число попаданий со зависит от типа ЛА и калибра снаряда.
При заданном значений вероятности рх можно найти среднее необходимое число
попаданий [17]
со = —. (18.13)
Pi
Из уравнений (18.12) и (18.13) следует:
(18.14)
18.2. Критерии боевой эффективности комплексов РЭБ
711
Полная вероятность поражения (сбитая) цели при стрельбе по ней очередью
из п снарядов:
Рпор = X (18.15)
т=1
где рт п — вероятность попадания в цель ровно т снарядов при стрельбе очередью
из п снарядов.
Вероятность рт п равна
(18.16)
где С™ — число сочетаний из п по /и; Р{ — вероятность попадания одного снаряда.
Подставляя выражения (18.16), (18.14) в (18.15), после преобразований получим,
что
Вероятность попадания снаряда в контур цели 5Ц (в картинной плоскости XY)
определяется законом рассеяния снарядов
Р\ = JJ р(&х , &y}dxdy, (18.18)
•$ц
где Дх, Ду — промахи, порождаемые действием помех; 5Ц — проекция самолета на
картинную плоскость.
При малых размерах самолета по сравнению с размерами области рассеяния
снарядов
(18.19)
где Ех = 0,68ох; Еу = 0,68оу — главные вероятные отклонения вдоль главных осей
эллипса рассеяния; ох, ау — среднеквадратические значения промахов; р = 0,477;
Дх, Ду — математические ожидания промахов.
Если установлены зависимости Е. = К(а,р) и Д. = Д.(а,Р), то с помощью фор-
мулы (18.19) можно оценить эффективность комплекса РЭБ по борьбе с зенитно-
артиллерийскими комплексами (ЗАК) и определить оптимальные параметры (ха-
рактеристики) комплекса. _
При отсутствии систематических ошибок (Дх =0, Ду =0) выражение (18.16)
упрощается:
кЕхЕу 2тизх<5у
(18.20)
Анализ (18.20) показывает, что при нулевом математическом ожидании прома-
хов наиболее эффективны те помехи, которые приводят к росту и ау. В более
общем случае, когда радиопомехи вызывают изменение математических ожиданий
Дх, Ду и дисперсий промахов вх и оу, увеличение ах и <зу может быть нежела-
тельным.
В некоторых случаях можно положить Дх = Ду = Д, ох = <зу = о. Тогда, учитывая
что Е = р\/2о, из (18.19) следует, что
----уехр
2 лег
(18.21)
712
Глава 18. Эффективность средств и способов РЭБ
При о = А вероятность Р{ достигает максимального значения
э _
Imax Л —э •
2леА2
(18.22)
Следовательно, наиболее неблагоприятными для РЭБ являются такие помехи,
которые вызывают промахи с одинаковыми эффективным значением и математи-
ческим ожиданием G = А. Более целесообразно выбирать такие помехи, которые при-
водят к промахам с G » А или А » о.
При Ах = А^ = А; Ех = Еу = Е и представлении зоны поражения в виде круга с
радиусом, равным радиусу поражения Апор, вероятность поражения
’пор=1-ехр
п2 р2
Р Лпор
(18.23)
Формула (18.23) применяется для проведения грубых оценок эффективности
средств РЭБ против РЭС ЗАК, использующих для стрельбы по воздушным целям
снаряды большого калибра, когда можно считать р{ = 1.
Вероятность поражения ЛА ракетой с неконтактным взрывателем равна [20]
/>пор = JJp(Ax, Лу)р(лх, Ay)dAxdAy, (18.24)
где р[Ах, Ау) — условная вероятность поражения цели при заданных значениях
ошибок наведения Ах, Ау; р(ах, Ду) — закон рассеивания ракеты, характеризую-
щий двумерную плотность вероятности промахов Дх, Ду; S — область интегрирова-
ния, соответствующая площади, ограниченной проекцией контура цели в картин-
ной плоскости XY.
Точность наведения ракет с неконтактными взрывателями характеризуются эф-
фективным радиусом поражение цели Т^ф. Выраженная через Лдф условная вероят-
ность поражения цели
(18.25)
Для гауссовского закона распределения ошибок наведения ракеты Ах и Ау при
Ах=Ау=0
1
----уехр
2лсг
(18.26)
где Од = gx = <зу — среднеквадратические отклонения промахов.
Подстановка (18.26) в (18.24) приводит к простому выражению для искомой
вероятности поражения [20]:
Рпор о *
1 ...
(УЪ.ТГ)
При интегрировании уравнения (18.24) учтено, что < Ах< ©© и -©© < Ау < ©©.
В общем случае при Ах 0, А^ 0 и наличии взаимной корреляции ошибок
наведения ракеты для вычисления рпор необходимо использовать формулу (18.24).
Описанные выше способы количественной опенки эффективности средств РЭБ
справедливы, когда ошибки наведения, порождаемые помехами, значительно пре-
вышают естественные ошибки системы, вызываемые непреднамеренными помехами.
18.2. Критерии боевой эффективности комплексов РЭБ
713
Вероятность наведения истребителя противника может быть определена на ос-
нове следующих соображений. Истребитель противника может поразить цель Ц,
если сам он выведен в зону, где его бортовая РЛС обнаружит цель Ц, создающую
радиопомехи (рис. 18.2). В предположении возможности всеракурсной атаки с даль-
ностей, соответствующих дальности обнаружения цели бортовой РЛС Лобн, веро-
ятность поражения цели равна [22]
Рпор — АлавР\» (18.28)
где рнав — вероятность наведения истребителя на цель; рх — условная вероятность
поражения прикрываемого самолета.
Рис. 18.2. Наведение истребителя
Рнав — это вероятность того, что ошибка наведения (промах) А не превышает допу-
стимого значения А< Адоп. При известном законе распределения промахов р(Д) ве-
роятность рнав равна
^обн
РНав = J Р(Д)</Д-
~Д)б11
При нормальном законе распределения промахов р(А) с математическим ожи-
данием А и дисперсией Од
где Ф(х) =
V7C
Агав 2
^обн Д
Одл/2
(18.29)
2
Добн-Д
< у
Г -г2
I е dt — функция Лапласа,
о
Значение Добн в случае самоприкрытия зависит от характеристик бортового
комплекса обороны (БКО) аир. При подавлении бортовой РЛС активными поме-
хами Лобн равна минимальной дальности подавления [19]:
л _ л = / к ПрлсацА/п
-^обн min 4 А п п Л . г »
V псап4лД/пру
(18.30)
где КП — коэффициент подавления; ПРЛС, ПСАП — энергетические потенциалы
бортовой РЛС и САП; Afu — ширина спектра помехи; A/np — полоса пропускания
подавляемого приемника; оц — ЭПР самолета-цели; у — поляризационный коэф-
фициент.
714
Глава 18. Эффективность средств и способов РЭБ
Можно считать, что а = (7Сп,оц, Д/п,Пслп,у).
Математическое ожидание и среднеквадратическое значение ошибки наведе-
ния истребителя на цель зависят от характеристик комплексов РЭБ осг, 0Г:
од=Од(аГ)Рг); (18.31)
А = А(аг,Рг). (18.32)
Функциональные зависимости (18.31) и (18.32) могут быть определены для каж-
дой конкретной задачи.
Таким образом, соотношение (18.29) с учетом уравнений связи (18.30)-(18.32)
дает возможность применять оперативно-тактический критерий рнав для решения
различных задач по оценке эффективности комплексов РЭБ. Вероятность рх в
формуле (18.28) зависит от вида применяемого оружия и характеристик БКО. Спо-
собы определения рх были описаны выше.
В качестве частного оперативно-тактического критерия может применяться число
эффективных обстрелов. Под эффективным обстрелом понимается выстрел (пуск
ракеты), поражающий ЛА с вероятностью рпор. Для определения числа эффектив-
ных обстрелов пэ$ летательного аппарата, преодолевающего зоны обстрела средств
ПВО, местоположение которых известно, используется формула
то 4
^эф ~ 2L2L^пор,у — ^эф/ ’ (18.33)
7 = 1 /=1 7 = 1
h
где лЭф| =ХРпоР,/ — число эффективных обстрелов, совершаемых У-м средством
У=1
ПВО; Рпор/у — вероятность поражения ЛА У-м средством ПВО приу-м обстреле; т$ —
число типов оружия, применяемого противником при перехвате (обстреле) ЛА; —
число обстрелов, совершаемых У-м средством ПВО.
Если количество средств ПВО большое и координаты их точно не известны, то
для определения /?Эф при пролете ЛА к зон ПВО используется выражение
Лэф —' 2^^эф/‘ — — /’ (18.34)
7=1 /=1 ./=1 /=1
т
где /Лдфу -AAypfy рпор, — число эффективных обстрелов на каждом участке марш-
т
рута (всего £ участков) всеми типами средств ПВО; /и^- = рпop i — ЧИСЛО
7 = 1
эффективных обстрелов, совершаемых У-м средством ПВО (всего средств т штук)
на всем маршруте; Lj— ширина зоны обстрела У-го комплекса ПВО на у-м участке
(при общем числе типов т); р,у — плотность комплексов ПВО У-го типа на каждом
у-м участке маршрута; ADj—длина отрезков маршрута, проходящего через зону ПВО,
обслуживаемую комплексом ПВО У-го типа на каждом у-м участке; /?пор — вероят-
ность поражения ЛА при обстреле его комплексом У-го типа.
Ожидаемые потери самолетов, преодолевающих зону ПВО при нарушенном
целераспределении:
1-е 7/611
N
1 ’ пот
(18.35)
где Абп — число самолетов боевого порядка.
18.2. Критерии боевой эффективности комплексов РЭБ
715
Число эффективных обстрелов при использовании средств РЭБ зависит от ха-
рактеристик средств РЭБ аир.
Эффективность средств РЭБ может быть оценена с помощью абсолютного и
относительного снижения числа обстрелов
Р) — ^эф РЭБ (^’ Р)’
/ п \ ^эфРЭь(^’Р)
"отн (а,₽) = —--------,
^эф
где /?Эф — число обстрелов при отсутствии средств РЭБ. Аналогично определяется
снижение числа потерь.
Оптимизация характеристик комплекса РЭБ сводится к минимизации числа
эффективных обстрелов [23, 24]:
^эф РЭБ — О^опт’ Р — Рорт ) ~ (^эф РЭБ )т]П ’
Пример использования рассмотренного критерия РЭБ) . приводится далее,
при оптимизации БКО с ограниченной массой. _
Математическое ожидание числа подавленных РЛС М является важной харак-
теристикой боевой эффективности комплексов и систем РЭБ. Значение М зави-
сит от многих характеристик комплекса или системы РЭБ: от числа станций ак-
тивных помех N, их энергетического потенциала ПСАП, вида помех, качества по-
меховых сигналов, параметров системы разведки и АСУ и некоторых других.
Определим зависимость от числа САП в системе РЭБ N и вероятности подав-
ления РЛС рпод. Предполагается, что подавляемая система ПВО имеет А/однотип-
ных РЛС, а система РЭБ — А однотипных САП (рис. 18.3). Задача решается для
системы РЭБ с АСУ и без нее.
Рис. 18.3. Подавляемая система ПВО имеет Л/однотипных РЛС,
а система РЭБ — N однотипных САП
Вероятность подавления каждой /-й РЛС одной у-й САП равна
Алод ij ~ Pij Plij s
где Ру — вероятность действия (наведения) у-й САП на i-ю РЛС (при наличии АСУ
РЭБ ру = 1, если же АСУ РЭБ отсутствует, то р^ < 1); — условная вероятность
подавления z-й РЛС у-й станцией помех.
716
Глава 18. Эффективность средств и способов РЭБ
Вероятность подавления 7-й РЛС системой РЭБ, состоящей из N штук САП,
равна N
Анод — 1 ~ j 1 (1 ~~ Pij P\ij )•
У=1
Математическое ожидание числа подавленных РЛС М определяется как сум-
ма вероятностей:
м м
М = ^Рпоа1=£
/=1 /=1
N
•-ПО-зд)
у=1
При подавлении однотипных РЛС, когда Ан = А12 = ••• Puj - ••• Pun-Pi, получим
М Г N
М=Ъ ^П^-а/а)
z=iL ;=i
(18.36)
Математическое ожидание числа подавленных РЛС Мт системой РЭБ, состоя-
щей из однотипных САП и имеющей систему АСУ, можно получить, если в (18.36)
положить ру = 1:
(18.37)
Здесь учтено, что с вероятностью рц = 1 на каждую подавляемую РЛС наводится
- N - - -
N = — штук САП. Если N не является целым числом (или N < 1), то величина N
М
представляет собой математическое ожидание числа САП, подавляющих z-ю РЛС.
При отсутствии АСУ РЭБ или при ее подавлении можно положить, что САП
распределяются на все подавляемые РЛС с равной вероятностью. Полагая в фор-
муле (18.36) рц =—, можно получить математическое ожидание числа подавленных
_ М
РЛС системой РЭБ без АСУ:
Afji — Л/ 1 — 1
(18.38)
Как следует из анализа выражений (18.37) и (18.38), боевая эффективность
системы РЭБ, имеющей АСУ, оценивается зависимостью (18.37), не совпадающей
с эффективностью (18.38) второй системы РЭБ, не имеющей АСУ. По показателю
эффективности М вторая система РЭБ проигрывает первой (Мп < М{) при малом
числе САП (N < 10).
18.3. Критерии технической эффективности комплексов
радиоэлектронной борьбы
Критерии технической эффективности определяют степень технического совер-
шенства как комплекса РЭБ в целом, так и отдельных средств РЭБ, входящих в его
состав. Они применяются для оценки качества выполнения средствами РЭБ (комп-
лексами РЭБ) своих целевых функций по поражению РЭС противника, по ра-
диоэлектронному подавлению РЭС, по радиоэлектронной защите собственных
средств и т. д. На практике нашли широкое применение две основные группы кри-
териев, которые связаны с информационными и энергетическими характеристика-
ми средств РЭБ.
18.3. Критерии технической эффективности комплексов РЭБ
717
Информационные критерии используются для сравнительной оценки качества
помеховых сигналов и их способности нанесения противнику наибольшего инфор-
мационного ущерба. Перспективным считается применение информационных кри-
териев для оценки качества функционирования систем информационного обеспе-
чения, систем принятия решения, систем контроля надежности и боевой эффек-
тивности комплексов РЭБ.
Информационные критерии характеризуют совокупность различных техничес-
ких характеристик комплекса РЭБ по наносимому информационному ущербу. По
информационным критериям можно судить о том, насколько эффективен комп-
лекс РЭБ и насколько он устойчив к контрмерам противника.
В настоящее время информационные критерии разработаны для оценки качества
маскирующих и имитирующих помех [19, 23-25].
Энергетические критерии предназначены для оценки энергетических возможно-
стей комплексов РЭБ по подавлению РЭС противника. С помощью энергетичес-
ких критериев оценивается эффективность использования энергетического ресур-
са, отводимого для комплекса РЭБ, в интересах радиоэлектронной борьбы с РЭС
противника [19, 23, 24].
Информационные и энергетические критерии применяются на стадии проек-
тирования, испытаний, эксплуатации и боевого применения комплексов РЭБ.
Информационные критерии для оценки качества маскирующих помех. Любое РЭС
противника работает в условиях неопределенности. Мера неопределенности —
энтропия И [26, 27]. Для систем связи — это неопределенность принимаемого со-
общения. Для РЛС — это пространственно-временная неопределенность поло-
жения целей.
В теории информации конечную задачу РЛС представляют как выбор конкретно-
го элементарного объема Уц, содержащего цель, из всего рабочего объема Уо, обслу-
живаемого РЛС (рис. 18.4).
Рис. 18.4. Рабочий и обслуживаемый РЛС объемы
Объем Иц определяется пространственно-временной разрешающей способно-
стью РЛС. Весь рабочий объем можно разбить на элементарные объемы Vj про-
нумеровать их (т. е. сделать их различными, j = 1, 2, 3, ..., TV), а затем каким-либо
N
методом произвести выбор объема из всей совокупности объема Ио =
У=1
При действии радиопомех обнаружение цели Ц, находящейся в объеме по-
требует от противника переработки большого количества информации, которое при
отсутствии априорных данных, равно логарифму числа выборов:
I = log2TV бит.
718
Глава 18. Эффективность средств и способов РЭБ
Например, при N = 8 необходимы три ответа на вопрос: «Есть ли цель в объ-
еме И?» (Выбор половины, выбор четверти, пары и ответ: Иц—» Vj.)
Преобразование параметров цели в сигнал, несущий информацию о них, осуще-
ствляется самим объектом. Это преобразование отражает параметры состояния
объекта: координаты, скорость и другие. Отраженный от цели сигнал несет пол-
ную информацию о состоянии цели:
S = S(t, г, X, а),
где г — радиус-вектор, характеризующий местоположение цели; X, а — векторы
измеряемых и неизмеряемых параметров полезного сигнала (например, задержка
сигнала, мощность и др.).
Маскирующие и имитирующие помеховые сигналы характеризуются аналогич-
ным образом:
n = n(t, гп, Хп, ап),
где гп — радиус-вектор, характеризующий местоположение САП; Хи, ап — векторы
измеряемых и неизмеряемых параметров помехи.
Одной из важнейших теорем теории информации является следующая [26, 29]:
если 1) сигнал S(t} и помеха n(t) независимы и 2) принимаемый сигнал является
их суммой'.
ф, г,гп, X, Хп, a, an) = 5(z, г, X, а) + л(/, гп, Хп, ап),
то количество информации на один отсчет (или на единицу времени) равно
= (18.39)
где Я(д) и Н(п\ — энтропии принимаемой смеси <;(/, г, гп, X, Хп, а, ап) и поме-
хи n(t, гп, Хп, ап).
Из формулы (18.39) следует, что необходимо обеспечивать увеличение энтро-
пии помехового сигнала n(t, гп, Хп, ап), так как это приводит к росту неопреде-
ленности сообщения. Неопределенность в данном случае определяется лишь мно-
гомерной плотностью случайного процесса с;(г, г, гп, X, Хп,а, ап).
В теории РЭБ наилучший маскирующий сигнал определяется, исходя из прин-
ципа максимума энтропии, согласно которому из множества помеховых сигналов
выбирается тот, энтропия которого выше (при одних и тех же ограничениях, нало-
женных на помеховые сигналы) [19]. Распределения вероятностей случайной вели-
чины (амплитуды, частоты, фазы), позволяющие получить максимальное значение
энтропии, называются экстремальными. При постоянной средней мощности мак-
симальной энтропией обладает гауссов процесс и в этом смысле прямошумовая
помеха имеет наилучшие маскирующие свойства.
Достоинством энтропии как характеристики качества маскирующих помех явля-
ется возможность оценки потенциальной маскирующей способности помех без рас-
смотрения конкретных особенностей обработки сигналов в подавляемом устройстве.
Маскирующий помеховый сигнал, синтезированный по критерию максимума энтро-
пии, является наилучшим среди всех видов маскирующих помех только в том случае,
если в процессе синтеза не задаются конкретной структурой подавляемого РЭС.
Когда структура подавляемого РЭС известна, можно подобрать помеху, наилучшим
образом маскирующую полезный сигнал, исходя из других критериев (например,
по критерию минимума вероятности правильного обнаружения цели при заданном
значении ложной тревоги).
18.3. Критерии технической эффективности комплексов РЭБ
719
Энтропия помехи /?(/) является основной характеристикой ее маскирующей
способности. С помощью энтропии помехи Н(п) определяется коэффициент ка-
чества маскирующей помехи ц, являющийся функцией энтропии: т| = Г|[//(л)].
Коэффициент качества маскирующей помехи может быть представлен в виде
П^ПэнПсп, (18.40)
где цэн — энтропийный коэффициент качества, учитывающий степень отличия
плотности распределения мгновенных значений помехи р(п) от гауссовой; цсп —
спектральный коэффициент качества, учитывающий неравномерность спектра
помехи 5Л(/). Энтропийный коэффициент качества определяется выражением
Лэн
e2//(m)
2пеР„ ’
(18.41)
где
Рп — средняя мощность помехи.
Спектральный коэффициент качества находится с помощью формулы
где
ехр
А/г
- JlnSn(/)#
п о
(18.42)
Псп
1
А/п 0
Д/п — ширина спектра помехи.
В качестве грубой опенки т|сп можно принять следующее выражение:
Псп =l-5nmax~‘5'nmin, (18.43)
ten С । С 7
max + min
4/п
где £, m„v, 5П min — соответственно максимальное и минимальное значения спект-
11 НЫЛ7 11 1H1I1
ральной плотности помехи.
Информационные критерии для оценки качества имитирующих помех. Имитирую-
щие помехи действуют на РЭС двояким образом. Они затрудняют выделение (обна-
ружение) полезных сигналов на фоне подобных им имитирующих помех и кроме
того вносят случайные и детерминированные ошибки при оценке информационных
параметров X полезного сигнала и пространственных координат г источника полез-
ного сигнала.
Исходя из особенностей воздействия имитирующих помех на РЭС, необходи-
мо оценивать эффективность действия помех по изменениям тех характеристик РЭС,
которые определяют их тактико-технические возможности. Такими характеристика-
ми РЭС являются способность распознавания полезного сигнала в помехах, а также
точность и разрешающая способность.
Для оценки степени устойчивости имитирующей помехи к мерам противника,
направленным на ее распознавание, вводится информационный критерий подобия.
Эффективность имитирующей помехи с точки зрения ухудшения точности и
разрешающей способности подавляемой РЭС оценивается информационными кри-
териями ошибок.
Информационный критерий подобия оценивает, в вероятностном смысле, сте-
пень отличия имитирующей помехи от полезного сигнала.
В качестве применяется разность многомерных условных энтропий некоторо-
го параметра сху (например мощности) имитирующей помехи и полезного сигнала
ДЯ (ИП/С).
720
Глава 18. Эффективность средств и способов РЭБ
Для помех, имитирующих полезные сигналы 5(z,v) в пространстве парамет-
ров v, случайно изменяющихся во времени: v = (vj (г), v2 (f),..., vn (г)), разность мно-
гомерных условных энтропий ДЯ(ИП/С) определяется по формуле [19]
дяДип/с)=я„(у,.)-яДуу),
где Нп [nj ), Hs [уj) — условные многомерные энтропии имитирующей помехи и по-
лезного сигнала по параметру v, (при условии, что опознавание ведется по пара-
метру vy).
Информационный критерий ошибок дает возможность количественно опреде-
лить степень ухудшения точностных характеристик РЭС, работающих в условиях
РЭП. Кроме того, с помощью этого критерия может быть произведена оценка
ухудшения разрешающей способности РЭС.
Полное и достоверное описание информационного ущерба, наносимого помеха-
ми, может быть достигнуто путем изучения статистических характеристик достаточ-
ной статистики, под которой понимается некоторая функция оцениваемого случай-
ного параметра v. При исследовании особенностей радиоподавления РЛС под доста-
точной статистикой понимается отклик РЛС как реакция на воздействие полезного
сигнала и помехи.
Отклик РЛС, представляющий собой выходной эффект РЛС, при пространствен-
но-временной обработке суммарного случайного электромагнитного поля может
быть записан в виде [30]
9(v,vc>vn)= J ]<;(/,v,vc,vn,x)Wz(r,vc,x)J/J2x, (18.44)
5ат
где
д(/, v, vc, vn, х) = 5С (z, v, vc, х)+5П (t, v, vn, х) + n(t, v, x); (18.45)
где 5С (/, v, vc, x) и 5П (/, v, vn, x) — сигнальные и помеховые поля в апертуре антен-
ны РЛС; n(t, v, х) — приведенные внутренние и внешние шумы; v = (vj, v2,..., v„) —
вектор информационных параметров, измеряемых РЛС; vc и vn — истинные значе-
ния рассматриваемых информационных параметров сигнала и помехи; х — радиус-
вектор точки области интегрирования 5А, занимаемой антенной; d2x — элемент
интегрирования области 5А; W(t, vc, х) — весовая функция РЛС, описывающая осо-
бенности обработки пространственно-временного сигнала во всем приемном тракте,
включая антенну (vc — «настройка» РЛС, определяющая, например, направление
максимума ДНА РЛС или положение временного строба приемника); Т — время
обработки сигнала в РЛС.
В соответствии с формулой (18.44) выражение для отклика (18.45) можно пред-
ставить в виде трех слагаемых:
?(v,vc,vn) = ?c(v,vc) + ?n(v,vn) + ?m, (18.46)
где <7c(v,vc) и <7n(v’vn) — соответственно отклики на полезное и помеховое воз-
действия; дш — составляющая, порожденная приведенным естественным шумом
(в дальнейшем при большом отношении помеха/сигнал не учитывается).
На рис. 18.5 пунктирными пиниями изображены отклики РЛС на воздействие
полезного сигнала и помехи. Предполагается, что энергия помехового отклика
<7n(v,vn) значительно превышает энергию полезного отклика <7c(v,vc). Помехо-
вый и полезный отклики имеют максимумы соответственно в точках v = vn и v = vc.
Суммарный отклик РЛС #(v) принимает максимальное значение при v ~ v;i.
18.3. Критерии технической эффективности комплексов РЭБ
721
В рамках теории оценок качество имитации и вносимая в измерительную сис-
тему РЛС ошибка могут быть оценены средним смещением и средней шириной
отклика mv и ov [31]:
(18.47)
(18.48)
Смещение максимума суммарного отклика Av относительно положения макси-
мума помехового отклика носит случайный характер и зависит от ширины по-
мехового отклика av. Если Av = 0, то вносимая помехой ошибка полностью опреде-
ляется значением mv (рис. 18.5).
Рис. 18.5. Отклики РЛС на воздействие полезного сигнала и помехи
Для определения Av разложим выходной отклик </(v) в ряд Тейлора в окрест-
ности экстремума v = vn:
+ 7?(vn).
(18.49)
Уравнение правдоподобия в линейном приближении имеет вид [30, 31]
^с(Уп) , ^п(Уп) , JMVn)Av , rf2^(Vn)Av, g (18.50)
dv dv dv2 dv2
Так как в соответствии с принципами оценивания по максимуму функции прав-
доподобия при большом отношении помеха/сигнал должно выполняться условие
722
Глава 18. Эффективность средств и способов РЭБ
(v)
----—- = 0 при v = vn, из уравнения (18.50) получим выражение для случайной ошиб-
t/v
ки (без учета знака):
L JV=V„
При большом отношении помеха/сигнал можно пренебречь вторым слагаемым
в знаменателе (18.51), поэтому
(v)
dv
do. (v)
В общем случае, как следует из рис. 18.5, -— 0 при v = vn, поэтому Av Ф 0.
dN
На практике для оценки среднего смещения Avcp применяют формулу
^с(у)
dv
d2qn (v)
Для гауссовой аппроксимации отклика <7П (v):
(18.52)
Av =н
где av определяется формулой (18.48); Еп — энергия имитирующей помехи.
Подставляя формулу (18.53) в (18.52) можно получить
(18.54)
где Ес — энергия полезного сигнала; qcu (v) — нормированный отклик РЛС на дей-
ствие полезного сигнала.
Как следует из (18.54), имеет место квадратичная зависимость Avcp — от шири-
ны помехового отклика, что приобретает важное значение при определении требо-
ваний к структуре помехи.
Физически формула (18.54) характеризует положение «центра тяжести» откли-
ка РЛС на суммарное воздействие помехи и сигнала. При значительном отноше-
нии помеха/сигнал (En/EQ » 1) Avcp = 0, и вносимая помехой ошибка в определении
истинной оценки (координат цели) полностью характеризуется средним смещени-
ем mv, значение которого можно найти с помощью соотношения (18.47).
В качестве критерия эффективности детерминированных имитирующих помех,
широко применяемых для подавления следящих систем, можно использовать среднее
значение ошибки, т. е. усредненное смещение wv, определяемое с помощью (18.47).
18.3. Критерии технической эффективности комплексов РЭБ
723
Выражения (18.47), (18.48) с учетом (18.46) позволяют при заданных характе-
ристиках полезного сигнала 5c(r,v,vc,x) и весовой функции РЛС Ж(г,ус,х) найти
оптимальную пространственно-временную структуру помехи, которая при фикси-
рованном отношении помеха/сигнал вызывает наибольшую погрешность оценки
координат цели при определении ее типа. Так, при необходимости получения макси-
мального смещения mv max следует применять помехи, порождающие отклики с ми-
нимальной шириной, определяемой соотношением (18.48). Следует заметить, что
методы определения mv и ov могут быть различными. Так, при исследовании дина-
мических систем для определения mv и ov могут быть использованы методы опреде-
ления точности систем радиоуправления, радиоавтоматики, радиосвязи и т. д.
Энергетический критерий служит для определения необходимого энергетического
потенциала САП, значений параметров ложных целей, средств создания пассив-
ных помех и других средств РЭБ, применение которых дает возможность нанести
противнику заданный информационный ущерб.
В качестве энергетического критерия в теории и практике РЭБ широко исполь-
зуется коэффициент подавления под которым понимается минимальное отно-
шение мощности помехи Рп к мощности полезного сигнала Рс, при котором имеет
место заданный информационный ущерб. Мощности Рп и Рс измеряются в преде-
лах полосы пропускания подавляемого приемника. Характер информационного
ущерба и степень подавления РЭС определяются боевой задачей, видом помехи и
типом подавляемого РЭС.
Коэффициент подавления ки может быть определен теоретически и экспери-
ментально. В обоих случаях задаются парой «подавляемое РЭС — САП» и для кон-
кретной помехи определяют кп.
При теоретическом определении ки используются различные зависимости, ха-
рактеризующие функциональную связь показателей качества функционирования
РЭС с отношением помеха/сигнал. Применительно к РЛС обнаружения для опре-
деления ки используют кривые обнаружения. Задаваясь значениями вероятности
правильного обнаружения рпо и ложной тревоги рлт, находят пороговое значение
отношения мощности помехи к мощности сигнала ки. Для определения ки при
подавлении связных радиоприемников в качестве исходных рассматривают зави-
симости разборчивости речи от отношения помеха/сигнал. Коэффициент подавле-
ния каналов автоматического сопровождения целей по скорости, дальности и углу
определяется с помощью кривых срыва слежения или зависимостей ошибок слеже-
ния от энергетических параметров помехи и сигнала.
Значение кП во многом определяется характеристиками помехового сигнала:
плотностью распределения мгновенных значений, спектральной плотностью, ши-
риной спектра и др. Обычно имеются оптимальные параметры помехи ауопт, при
которых коэффициент подавления минимален. Однако оптимизация помехового
сигнала по минимальному значению коэффициента подавления может быть про-
ведена только для конкретной пары «РЭС — САП» и не может распространяться
на широкий класс помех (маскирующих, имитирующих), предназначенных для
подавления нескольких типов РЭС. Оптимальные параметры помехи, определен-
ные для одного РЭС, могут быть неоптимальными для другого РЭС.
Для экспериментального определения кв необходимо иметь макет подавляемо-
го РЭС, станцию активных помех, имитатор полезного сигнала и измеритель мощ-
ности. На вход приемного устройства РЛС подается полезный сигнал й фиксиру-
ется его мощность Рс вх. Затем туда же подводится помеха, мощность которой увели-
724
Глава 18. Эффективность средств и способов РЭБ
чивается до тех пор, пока не будет достигнут заданный информационный ущерб.
Пороговое значение Рп пор замеряется. Отношение (Рп ПОр/Л: вх) является искомым
коэффициентом подавления. Когда по условиям эксперимента нет возможности
изменять мощность помехи, варьируют мощностью полезного сигнала.
Значение ки имеет большое практическое значение для проведения оператив-
но-тактических расчетов. Помеховые сигналы станций помех одного и того же
комплекса РЭБ однотипных самолетов могут иметь различные значения коэффи-
циента подавления кП заданной РЛС. Поэтому при эксплуатации необходима пас-
портизация кп по отношению к типовым РЛС противника.
Изменения кТ[ должны немедленно доводиться до начальников РЭБ частей и
учитываться ими при проведении оперативно-тактических расчетов.
Коэффициент подавления не может быть принят в качестве обобщенного энер-
гетического критерия, способного оценивать качество маскирующего или имити-
рующего сигнала по подавлению РЭС различного назначения.
Нельзя по значению кп однозначно определять степень помехозащищенности
каких-либо РЭС. Иными словами, если, например, для одного типа РЭС кп ока-
жется больше, чем для РЭС другого типа, то при одной и той же помехе это еще не
значит, что РЭС первого типа имеет большую степень помехозащиты.
18.4. Стоимость комплекса радиоэлектронной борьбы
Авиационная радиоэлектронная аппаратура военного назначения имеет сто-
имость, соизмеримую со стоимостью планера и двигателя ЛА. Поэтому уменьше-
ние стоимости комплекса РЭБ является актуальной проблемой.
Стоимость комплекса РЭБ зависит от его состава и характеристик систем и
устройств, входящих в комплекс. На стоимость влияют следующие основные фак-
торы [32]:
• принципы (концепция) разработки комплекса РЭБ;
• принципы пространственно-временной обработки информации (принципы
синтеза приемопередающих устройств, систем принятия решения и т. д.);
• принципы обеспечения надежности;
• элементная база;
• конструктивные и технологические особенности производства комплекса;
• время, отпускаемое на разработку комплекса;
• методы, используемые при проектировании комплекса;
• принципы эксплуатации комплекса;
• принципы боевого применения комплекса.
Принципы (концепция) разработки комплексов РЭБ оказывают главное влия-
ние на стоимость комплекса. Они определяют назначение и целевые функции ком-
плекса РЭБ. На основании сложившейся концепции РЭБ формируется облик ком-
плекса и разрабатываются тактико-технические требования (ТГТ) к комплексу. От
степени «жесткости» и сложности ТТТ находится в прямой зависимости стоимость
комплекса РЭБ.
Принципы пространственно-временной обработки определяют прежде всего
характеристики приемопередающих устройств и антенных систем комплекса РЭБ.
Применение достижений современной теории пространственно-временной обра-
ботки сигналов позволяет существенно повысить помехозащищенность радиотех-
нических систем РЭБ. Однако опыт показывает, что повышение уровня оптимиза-
18.4. Стоимость комплекса РЭБ
725
ции радиотехнических систем на базе теории пространственно-временной обработки
случайных электромагнитных полей влечет за собой необходимость применения
сложных многоканальных многопозиционных приемопередающих систем РЭБ, что
приводит к значительному удорожанию комплекса РЭБ.
Из формулы (18.1) следует, что надежность комплекса РЭБ прямым образом
влияет на эффективность всех мероприятий по РЭБ. В процессе проектирования и
эксплуатации комплекса РЭБ необходимо использовать наиболее прогрессивные
методы увеличения надежности, обеспечивающие заданную надежность при мини-
мальных или допустимых затратах.
Состав элементной базы, конструктивные и технологические особенности про-
изводства комплексов РЭБ, методы, используемые при проектировании, в значи-
тельной степени влияют на стоимость комплекса как за счет непосредственного
воздействия на стоимость составных частей комплекса, так и косвенно — за счет
влияния рассматриваемых факторов на стоимость носителя комплекса РЭБ, экс-
плуатацию и боевое применение комплекса РЭБ.
При различных исследовательских задачах, связанных с оценкой эффективно-
сти комплексов РЭБ, необходимо определить основные закономерности, влияю-
щие на стоимость отдельных устройств комплекса РЭБ.
Основными устройствами, в наибольшей степени влияющими на стоимость
комплекса РЭБ, являются передающие устройства САП (особенно выходные кас-
кады — ЛОВ, ЛБВ и др.); передающие и приемные антенные системы, особенно
ФАР и другие остронаправленные многолучевые и сканирующие антенны; систе-
мы информационного обеспечения (станции РТР, теплопеленгаторы и др.); устрой-
ства запоминания и воспроизведения сигнала; автоматизированные системы управ-
ления РЭБ, в том числе — ЭВМ, входящие в состав комплекса РЭБ.
На стоимость систем и комплексов РЭБ влияют следующие параметры: число
САП и станций РТР, входящих в состав комплекса или систем РЭБ; пропускная
способность САП, станций РТР (в частности, число подавляемых РЭС противни-
ка); рабочая длина волны; ширина рабочего диапазона волн САП или станции РТР;
энергетический потенциал САП (мощность, коэффициент усиления антенны);
коэффициент качества маскирующих и имитирующих помех; чувствительность
приемников; кратность резервирования отдельных устройств; точность измерения
пространственно-временных параметров сигналов.
Стоимость передатчиков, приемников и антенн САП оценивается следующи-
ми формулами [32]:
> Аа
ср
(18.55)
прд ^прд ан р
<^сран )
а '-'а ан
(18.56)
ш
прм '“'прм ан
(18.57)
ш ан 7
где Спрдан, Саан, Спрман — стоимости предыдущих аналогов передатчиков, при-
емников и антенн; Рср, Рср ан — мощности рассматриваемого передатчика и его ана-
лога; 5а, 5а ан — площадь раскрыва рассматриваемой антенны и ее аналога; 7Ш,
Тшан — шумовая температура рассматриваемого приемника и его аналога.
126
Глава 18. Эффективность средств и способов РЭБ
Безразмерные коэффициенты а, 0, у определяются путем статистического ана-
лиза имеющихся данных о стоимости изучаемых устройств. Они имеют порядок
Чем шире диапазон возможных изменений параметров Рср, 5а, Тш, тем грубее
будут аппроксимации (18.55)-(18.57). Полезными являются некоторые соотношения,
устанавливающие зависимость стоимости средств РЭБ от их массы М и объема V:
См=С'Ма'-, (18.58)
Сг=С2Г°2; (18.59)
Г = С3Л/°\ (18.60)
где См, Су— стоимость аппаратуры РЭБ, имеющей массу М и объем И; q, с2, с3,
q, а2, а3 — положительные коэффициенты, определяемые опытным путем, их зна-
чения зависят от уровня развития науки и техники. В современных условиях для
грубых оценок можно принять а{ = 0,5...!; а2 « 1; л3 = 0,5... 1.
18.5. Принципы разработки комплексов радиоэлектронной борьбы
Задача синтеза комплекса РЭБ возникает при разработке нового комплекса.
Синтез комплекса РЭБ может производиться и в процессе эксплуатации на основе
имеющихся средств РЭБ.
При разработке нового комплекса РЭБ или при определении состава и харак-
теристик оптимального комплекса для решения конкретной боевой задачи неиз-
бежно сталкиваются с проблемой выбора одного или нескольких вариантов. Во всех
случаях возникают следующие главные вопросы:
• какую часть полезной нагрузки самолета (топливо, вооружение, оборудова-
ние) должны составлять средства РЭБ?
• какими техническими и оперативно-тактическими характеристиками должны
обладать эти средства для достижения заданная эффективности?
• какова стоимость комплекса РЭБ?
При решении данных вопросов необходимо учитывать следующие факторы:
• назначение ЛА;
• ограничения, накладываемые конструкцией, массой, габаритами ЛА;
• ограничения, накладываемые экипажем;
• степень связи характеристик комплекса с его эффективностью;
• объем априорных сведений об объектах РЭБ, тенденции их развития и такти-
ки применения;
• взаимосвязь характеристик комплекса со способами боевого применения са-
молета;
• состояние элементной базы;
• отпускаемые на создание комплекса средства;
• сроки разработки.
Степень влияния перечисленных факторов на разработку комплексов может быть
различной. Так, стоимость комплекса иногда не так важна, если стоит вопрос о весь-
ма срочной разработке нового комплекса в качестве ответной меры на качественное
изменение оружия противника. При проектировании комплексов групповых средств
РЭБ их массогабаритные характеристики не так ограничиваются, как в случае раз-
работки БКО. Проектирование начинается с оценки различных способов РЭБ
и различных вариантов построения комплексов. Обосновывается функция эффек-
18.5. Принципы разработки комплексов РЭБ
727
тивности комплекса РЭБ, под которой понимается мера целесообразности того или
иного комплекса и выигрыша от его применения. В качестве функции эффек-
тивности может быть использован показатель относительной стоимости — эффек-
тивности
Э(«,Р),Д1Ц), (18-61)
k ’ С(а,₽)’
где а = (а1,а2,...,ал) — вектор технических признаков средства РЭБ;
Р = (Р1,Р2,—»Рл) — вектор оперативно-тактических признаков средства РЭБ.
В соответствии с (18.61)
Э = Э(а1, а2,...,ал,р1,р2,...,рт). (18.62)
Из всех возможных разновидностей комплексов выбирают те, для которых функ-
ция эффективности превосходит некоторый заданный порог, определяемый потреб-
ной боевой эффективностью комплекса:
Этах^эпор. (18.63)
Это первое главное ограничение.
Следующая группа ограничении связана с ограничениями, накладываемыми на
некоторые параметры комплекса РЭБ, например, на массу и габариты. Обоснова-
ние ограничений проводится при постановке задачи на оптимизацию комплекса
или средств РЭБ.
Решение задачи создания оптимального комплекса РЭБ или выбора рациональ-
ного варианта комплекса проводится по следующей схеме:
1) определяется функция эффективности (18.62)
Э = Э(а1,а2,...,а„,р|,р2,...,рт);
2) определяется пороговое значение этой функции Эпор;
3) задаются ограничения на некоторые параметры комплекса az, осу, рЛ, pj;
4) определяются максимальное (или минимальное) значение функции эффек-
тивности Этах и оптимальные параметры комплекса аопт и Ропт, на которые огра-
ничения не накладывались;
5) производится сравнение значения Эмах с порогом Эпор. Отбираются только
те варианты, для которых
^тах (с^опт’ Ропт) — ®пор* (18.64)
Наиболее сложным является задание функции эффективности Э(а, Р).
Подбор подходящей аппроксимации функции эффективности производится на
основании физических соображений и опыта. В процессе решения задачи выражение
для Э(а, р) итерационно уточняется. При этом используется так называемый ме-
тод «последовательных уступок». Суть этого метода заключается в «замораживании»
значений некоторых параметров комплекса РЭБ в некотором интервале «разумных»
значений, близких к оптимальным. Интервал «разумных» значений для некоторых
параметров комплекса может устанавливаться методом экспертных оценок.
В общем случае поставленная задача принадлежит к классу вариационных за-
дач определения условного экстремума функции с конечным числом степеней сво-
боды [33].
Рассмотрим методику решения задачи оптимизации двух параметров комплек-
са РЭБ — аь а2 при наличии всего одного ограничения на массу Л/зад. Параметра-
ми аь а2 могут быть, например, мощность передатчика помех и коэффициент уси-
ления передающей антенны.
728
Глава 18. Эффективность средств и способов РЭБ
Итак, предполагается, что известны функциональные связи эффективности Э
и массы М комплекса с параметрами cq и ос2:
Э = Э(ана2); (18.65)
М = М (ана2). (18.66)
Так как функции Э(аиа2) и Л/(ана2) известны, то для решения задачи не-
обходимо рассмотреть и сравнить функцию эффективности Э(аьа2) только для
тех точек в плоскости cq а2, которые расположены на кривой
М(ана2)=Л^зад- (18.67)
На рис. 18.6 изображены линии равной эффективности Эь Э2, Э3, Э4 функции
(18.65), имеющей безусловный экстремум в точке Этах. На этом же рисунке пунк-
тирная линия L соответствует уравнению (18.67). Следуя по линии L, в точке А
подходим к линии равной эффективности Э3, затем переходим на меньшие значе-
ния Э4 (точка В) и в точке С получаем условный максимум (в точке В — условный
минимум). Точке С соответствуют оптимальные параметры а10ПТ и а2опт.
О 0Цопт а1
Рис. 18.6. Линии равной эффективности комплекса РЭБ
Имеются три пути определения условного экстремума.
Во-первых, использование правила определения безусловного экстремума (ана-
литическое решение). Если из уравнения связи (18.67) можно выразить а2 через cq:
a2=j(«i), (18.68)
то, подставляя (18.68) в (18.65), получаем
Э = Э[а,^(а2)]. (18.69)
Как следует из (18.69), экстремум этой функции находится по правилам опре-
деления безусловного экстремума, ибо условие (18.66) учтено.
Первый путь решения задачи является самым легким и к нему необходимо по
возможности стремиться, выражая зависимости (18.68) в удобном виде путем раз-
личных аппроксимаций уравнения связи (18.66).
Во-вторых, графическое определение условного экстремума. В координатах аь а2
производится построение топографических сечений функции Э(аьа2). На плос-
кости ось а2 наносится график функции (18.67) —линия L (рис. 18.6). Производит-
ся поиск условного экстремума функции Э(а1? а2). На рис. 18.6 условному экст-
ремуму соответствует точка С, положение которой определяет оптимальные пара-
метры комплекса eq и ос2.
18.5. Принципы разработки комплексов РЭБ
729
Графический метод поиска условного экстремума удобно проводить с помощью
современных ЦВМ, которые дают возможность быстро определять экстремальные
точки на топографических семействах кривых Э(ан а2) = const, изображаемых на
дисплеях.
В третьих, метод неопределенных множителей Лагранжа. Этот метод применяет-
ся, когда никакими преобразованиями из уравнения связи (18.67) невозможно полу-
чить явную зависимость (18.68). Однако рассматриваемый метод предполагает, что
зависимость (18.69) имеется, хотя нам в явном виде и неизвестна. Следовательно,
функция эффективности формально может быть записана в виде (18.64). По прави-
лам отыскания экстремума этой сложной функции необходимо найти производную
--W 4-Э——
бщ а* Ус1Щ>
(18.70)
dy
где -—
da{
Так как
— производная неявной функции а2 = у (oq), заданная уравнением (18.67).
Л/(а1,а2)-Л/3ад = 0,
(18.71)
можно записать
Отсюда
+ М'у=0.
dy _
dcq М'
(18.72)
(18.73)
Подставив (18.72) в (18.73), можно получить
Л?"Э“'+Э’ «Г'
Для определения экстремума решается уравнение
(18.74)
а _ У
(18.75)
или
К. М’у
М' Э'
___а _
М’у ~ э; ’
В теории вариационного исчисления отношение
(18.76)
а, М'у
(18.77)
называется множителем Лагранжа.
Из уравнений (18.74) и (18.77) для точки условного экстремума следует, что
(18.78)
(18.79)
э; + Л.М' =0;
а1 а1
э;+хм; = о.
Обозначив
Э (а,, у, Х) = Э(а1, j>) + ХАГ(oq, у), (18.80)
можно получить уравнение относительно функции Лагранжа Э* (а,, у, X). Соотно-
шение (18.80) позволяет упростить уравнения (18.78) и (18.79):
' 1 ; = 0
3oq
— '=0.
<>У
(18.81)
730
Глава 18. Эффективность средств и способов РЭБ
Уравнения (18.81) вместе с уравнением связи (18.66) образуют систему трех
уравнений с тремя неизвестными:
ЭЭ-(а„а;,Х)-0; (lg82)
Э»!
ЭЭ*(а., а2, X)
---- . 2 -0; (18.83)
ду
Л/(а1,а2)-Л/зап=0. (18.84)
Здесь учтено, что в соответствии с (18.74) у(а1) = а2.
Решение системы уравнений (18.82)-(18.84) дает возможность определить оп-
тимальные параметры alopt, a2opt.
Рассмотренная процедура определения условного экстремума может быть приме-
нена для любого числа переменных а2> •••» ал» ₽2> •••> Р/л и любого числа свя-
зей типа (18.66).
Пусть определяется экстремум функции эффективности Э = Э(ап а2,..., ая), за-
висящей от п технических параметров комплекса РЭБ при наличии трех ограниче-
ний (на массу Л/яял, объем Иял и качество помехи п,яп):
М(а|,а2,...,а„) = Л/зап; (18.85)
K(oCj, Ot2j •••> ~ (18.86)
т](а1,а2,...,а„) = т]зац. (18.87)
Для определения оптимальных параметров а = aopt аналогично (18.80) находит-
ся безусловный экстремум функции
3’(a1,a2,...,a„) = 3(a1,a2,...,a„) + X1A/(a1,a2,...,an) +
+ X1K(a1,a2,...,an) + X1T|(a1,a2,...,an)
где Х15 Х2, Х3 — неизвестные (неопределенные) множители Лагранжа.
Необходимые условия экстремума функции (18.88) имеют вид
^1 = 0, (18.89)
где j= 1, 2, ..., п.
Таким образом, полученные п уравнений вида (18.89) и три уравнения связи
(18.85), (18.86) и (18.87) дают п + 3 уравнений для определения п + 3 неизвестных:
^1’ ^2’ С^/р ^2» ^3’
Пример. Определить оптимальные параметры комплекса РЭБ, функция эффек-
тивности которого задана в виде
э = (18.90)
100 ’
где а, — мощность передатчика САП; а2 — объем САП; а3 — качество помехи.
Масса САП 4^! + 2a2 + а3. Имеется всего одно ограничение на массу САП:
Мзал=15. (18.91)
Уравнение связи
40CJ + 2ос2 + аз = 15. (18.92)
Функция Лагранжа
Э* = +Ц4а1 +2а2 + а3). (18.93)
18.6. Оптимальная структура комплекса РЭБ самолета...
731
Производные:
dS* a2a3 ' + 4X; 100 (18.94)
^ + 2X; (18.95)
da2 100
б/Э*_ =^-+x. (18.96)
da3 100
Из выражений (18.92)—(18.96) получаются искомые оптимальные параметры
комплекса:
_4. _10. _60
^1опт — ’ ^2опт — Л ’ ^Зопт ~ 1 '
5 4 14
Подставляя полученные значения параметров а1опт, а2опт> азопт находим услов-
ный максимум функции эффективности Этах. Если это значение удовлетворяет ус-
ловию [18, 90], то решение задачи заканчивается. Если же получается неудовлетво-
рительный результат, используя метод последовательных уступок, изменяют огра-
ничения и решают задачу вновь.
18.6. Оптимальная структура комплекса радиоэлектронной
борьбы самолета при ограничениях на массу
Синтезируем оптимальную структуру комплекса РЭБ самолета, преодолеваю-
щего систему ПВО. Силы и средства ПВО определяются на основании разведдан-
ных и наносятся на карту.
Учитывая общие принципы разработки комплексов РЭБ, изложенные в преды-
дущем разделе, можно в качестве критерия оценки эффективности комплекса РЭБ
принять число эффективных обстрелов иЭф.
В соответствии с выбранным маршрутом по формуле (18.33) можно вычислить
число эффективных обстрелов в каждой зоне действия ИА, ЗРК, ЗАК и полное чис-
ло эффективных обстрелов иэф при пролете зон ПВО. Накладывается всего одно
ограничение на массу комплекса М:
щ=М = М^. (18.97)
Основное уравнение оптимизации комплекса РЭБ записывается в виде
Э = лэф(М,Р), (18.98)
где М= Л/зад; р — вектор признаков оперативно-тактических характеристик иссле-
дуемого комплекса.
В рассматриваемой задаче р определяет состав комплекса:
Р = (Р1>?2 >•••>?./>•••>?#)>
где Ру — число, характеризующееу-й вариант комплектации комплекса РЭБ; напри-
мер, Р] = 1 характеризует комплекс РЭБ, состоящий всего из одной САП; при р2 = 1
в состав комплекса РЭБ входит САП и устройство выброса средств РЭБ и т. д.
Предполагается, что любой вариант комплекса РЭБ состоит из конечного числа
средств РЭБ, связи между которыми осуществляются конечным числом способов.
Необходимо выбрать такой вариант, который при М= Мзад удовлетворяет условию
«эф(Л/>Р) = «эфтт; (18.99)
^эф min — ^эфзад’ (18.100)
где иЭф зад — заданное пороговое значение функции эффективности.
732
Глава 18. Эффективность средств и способов РЭБ
Методика определения оптимальной структуры комплекса РЭБ конкретного
типа ЛА базируется на основных положениях теории морфологического анализа
оптимальных вариантов комплексов [18]. Она включает следующие этапы.
1. Сначала из всего заданного массива средств РЭБ формируется полное мно-
жество альтернативных вариантов, которое включает все мыслимые варианты комп-
лекса , .
Р=(Р1, р2>М-
2. Затем полученное полное множество «фильтруется» путем удаления из него
«нежизненных» вариантов, не обеспечивающих выполнение комплексом РЭБ за-
данных задач. Оставшиеся варианты исследуются в соответствия с формулами (18.99)
и (18.100).
3. В зависимости от выполняемой боевой задачи определяется положение зон
обстрела по маршруту полета и типы ударных средств ПВО, обстреливающих боевые
порядки самолетов. Определяется число эффективных обстрелов иэф без применения
средств РЭБ. Если нэф>иэфзал, то переходят к следующему этапу исследования.
4. Задаются различные варианты построения (комплектации) комплекса РЭБ
Определяется масса каждого варианта Mj. Для каждого варианта находится лЭф/
5. После осуществления четвертого этапа строится морфологическая табл. 18.1,
в которой для каждого варианта указывается масса, число эффективных обстрелов
каждым типом средства ПВО и итоговое число эффективных пусков.
Таблица 18.1
Вариант комплекса Состав комплекса Масса комплекса Число эффективных обстрелов одиночными средствами ПВО Итоговое число обстрелов
ИА ЗР ЗА
₽! САП м, ЛИА1 ЛЗР1 ЛЗА1 «Эф1
₽2 САП+УВСРЭБ М2 ЛИА2 ЛЗР2 ЛЗА2 ,?эф2
..
₽, САП^САП^УВСРЭБ м, лид, лзр; ЛЗА/
САП ^САП!+САПЗ+УВСРЭБ ЛИА7У ПЗРН ЛЗАЛ ЛэфЛ
6. С помощью морфологической таблицы с учетом условий (18.99) и (18.100)
определяется оптимальный вариант комплекса РЭБ, состоящего из САП, устройств
выброса средств РЭБ и т. д.
7. При необходимости строятся зависимости числа эффективных обстрелов иЭф
от массы комплекса М. Для располагаемой массы 71/зад определяется структура ком-
плекса, которая обеспечивает наибольшее снижение иэф, и оцениваются ожидае-
мые потери при использовании комплекса данного типа.
Логический алгоритм синтеза комплекса средств РЭБ представлен на рис. 18.7.
18.7. Оценка средств радиоэлектронного подавления
по критерию «эффективность — стоимость»
В современных условиях актуальной становится проблема системного подхода
к организации РЭП, обеспечивающей подавление поля сигналов с заданной эф-
фективностью. Эффективность подавления РЭС определяется мерой разрушения
полезной информации, поступающей на вход обнаружителя РЭС. Эта информация
18.7. Оценка средств РЭП по критерию «эффективность — стоимость» 733
Рис. 18.7. Логический алгоритм синтеза комплекса средств РЭБ
содержится в сумме полезного сигнала и помехи. Реализация определенных энерге-
тических соотношений помехи и сигнала на входе подавляемого РЭС требует реше-
ния сложнейших технических и тактических вопросов, связанных с созданием высо-
коэффективных станций помех и их управлением в системе РЭП. Сложность ре-
шения проблемы эффективности системы РЭП определяется тем, что в конкретных
условиях достижение требуемого значения эффективности может быть осуществлено
множеством вариантов. Очевидно в этом множестве вариантов имеет место опти-
мальный вариант, соответствующий минимуму затрат на его реализацию. В соответ-
ствии с этим перед разработчиками средств РЭП возникает актуальная проблема,
связанная с выбором системы РЭП, которая при заданном (требуемом) значении
эффективности имела бы наименьшую стоимость, т. е. возникает необходимость
оценки средств РЭП по критерию «эффективность — стоимость». Ниже рассматри-
ваются энергетические характеристики системы РЭП, определяющие эффективность
радиопротиводействия, и методика использования критерия «эффективность —
стоимость» на примере подавления самолетной РЛС обзора земной поверхности и
управления оружием с помощью наземных станций помех (СП).
Критерий «эффективность — стоимость» может быть применен для минимиза-
ции затрат на создание системы РЭП.
Прикрытие наземных объектов и зоны местности от наблюдения их бортовыми
РЛС противника — одна из важнейших задач систем ПВО. Примем априори, что на
некоторой местности площадью 5 имеется N объектов для поражения и имеет место
налет средств воздушного нападения (СВН), оснащенных РЛС обзора земной по-
верхности, излучение которых образует поле сигналов, информация которого ис-
пользуется противником для выполнения поставленных перед СВН боевых задач.
734
Глава 18. Эффективность средств и способов РЭБ
Перед организаторами РЭП ставится задача создания поля помех, обеспечива-
ющего с заданной вероятностью разрушение поля сигналов путем подавления ин-
формационного канала РЛС и, как следствие, невыполнение боевых СВН задач.
Ранее были предложены и получены выражения для определения количествен-
ных значений эффективности системы РЭП. Очевидно, что число СП, образую-
щих систему РЭП, обеспечивающих подавление конкретного множества РЛС с
заданной эффективностью, определяется ТТХ СП, реализация которых, в свою
очередь, определяет схемно-конструктивную сложность СП и, следовательно, ее
стоимость и стоимость системы в целом.
В этой ситуации критерий «эффективность — стоимость» является универсаль-
ной мерой оптимальности системы. Он позволяет разработчикам систем РЭП и тем,
кто их эксплуатирует, решить актуальную задачу получения эффективности не ниже
заданной при минимальных затратах на создание и эксплуатацию этих систем.
Очевидно, реализация системы РЭП будет оптимальной при условии максими-
зации отношения эффективности к стоимости
Ч' = — —>тах. (18.101)
С
Для принятой модели прикрытия N объектов от поражения их п средствами
воздушного нападения, создание поля помех, как уже указывалось, можно пред-
ставить множеством способов. Каждому способу будет соответствовать свое значе-
ние критерия Т и, очевидно, значение Т = Ч/тах множества вариантов будет соот-
ветствовать оптимальному.
Множество способов создания поля помех определяется:
• типами применяемых помех (имитирующие однократные, многократноим-
пульсные, шумовые, ответные, квазинепрерывные, прицельные, заградитель-
ные и, возможно, другие);
• энергетическими характеристиками СП;
• пропускной способностью СП;
• пределами работы СП по направлению в полярной системе координат;
• быстродействием наведения помех по направлению и частоте;
• количеством и0 СП, участвующих в создании поля помех;
• принципами управления СП при их работе в комплексе поля помех.
Реализация совокупности способов создания поля сигналов с заданной эф-
фективностью определяется техническими характеристиками СП, конкретными
схемно-конструктивными решениями отдельных устройств и систем аппаратуры,
которые в конечном итоге определяют стоимость системы РЭП в целом.
Таким образом, эффективность поля помех через схемно-конструктивные ре-
шения аппаратуры связана с затратами на реализацию этих помех. Сравнивая ва-
рианты по критерию «эффективность — стоимость» можно выбрать оптимальный
вариант, соответствующий максимальному значению этого критерия. При этом мож-
но определить оптимальные технические характеристики конкретной СП и их чис-
ло nj в системе РЭП, обеспечивающие максимальное значение критерия «эффек-
тивность — стоимость».
Очевидно, что стоимость СП определяется суммой затрат на разработку, куда
входит стоимость схемно-конструктивной разработки аппаратуры, изготовления и
испытания опытного образца, на серийное изготовление и ее эксплуатацию при бое-
вом использовании. Безусловно, прямой расчет стоимости СП является весьма тру-
доемким и зависит от множества факторов. Приходится прибегать к аналогам СП.
18.7. Оценка средств РЭП по критерию «эффективность — стоимость» 735
Опыт показывает, что стоимость СП, отличающихся друг от друга основными
характеристиками, может быть оценена по стоимости известного аналога СП, пере-
считанной с учетом различий исследуемой СП и СП-аналога по значениям энергети-
ческих потенциалов, полос рабочих частот и количества одновременно подавляемых
целей (пропускным способностям) в соответствии с выражением [20]
+|nJL+ln ksF-^-
•« _si js (ЛА)ан лан ^сран
с — ^сан Лс
(18.102)
ан
где Ссан — стоимость известного аналога СП; л, /?ан — число подавляемых целей
исследуемой СП и СП-аналогом, т. е. их пропускная способность; Рп^л/Рп^ъ).
относительное изменение энергетического потенциала исследуемой СП по сравне-
нию с потенциалом аналога; Кс — коэффициент изменения стоимости, зависящий
от схемно-конструктивно-технологических решений при создании и серийном произ-
водстве СП, от элементной базы, сложившихся цен на комплектующие изделия;
AF ~
лд/, =----— относительное изменение полосы рабочих частот исследуемой СП по
AFaH
сравнению с аналогом; Fc^ Fcp ан — средняя рабочая частота исследуемой СП и
СП-аналога соответственно. Если принять, что все исследуемые СП и СП-аналоги
имеют одинаковые рабочие диапазоны частот, то стоимость СП по сравнению с
аналогом будет определяться как:
Рпвц п
111--—7—+111-----
(PhG..) л.,..
\ н и/ан
(18.103)
с ^сан“с
Очевидно, что стоимость всех и0 СП, входящих в систему РЭП, будет равна сумме
стоимости каждой СП:
+ 111-----hill К
лап
^•р
^•‘Ран
(18.104)
При идентичности СП, применяемых в системе РЭП, суммарная стоимость этих
СП составит
In, .
[0vc ан 74 с
—°—°—+1п—
•ан яан.
(18.105)
Аналогично оценивается стоимость станций радиотехнической разведки (СРТР),
входящих в систему РЭП или отдельно применяемых в войсках:
и Р F
1п---+1п—2»®—+in AfAF-;-cp- +
и Р р
1 /i js\_ ан 1 экван -*сран
р ~ '-'р ан с ’
(18.106)
где Рэкв, Рэкв — эквивалентная чувствительность приемного устройства исследу-
емой СРТР и СРТР-аналога соответственно.
Полученные зависимости стоимости СП и СРТР показывают, что стоимость СП
определяется стоимостью некоторой СП, принятой за аналог, и экспоненциальной
зависимостью отношений энергетических потенциалов, пропускной способности
и ширины диапазона рабочих частот исследуемой СП и СП-аналога. С увеличением
значений этих характеристик стоимость СП растет.
Стоимость исследуемой СРТР определяется стоимостью аналога и экспонен-
циальной зависимостью отношений эквивалентных чувствительностей, пропускных
способностей и ширины рабочих частот исследуемой СРТР и аналога.
136
Глава 18. Эффективность средств и способов РЭБ
Полученные оценки стоимости позволяют с достаточной степенью точности
прогнозировать стоимость разработки и эксплуатации средств системы РЭП в за-
висимости от технических характеристик и конкретных условий технической реа-
лизации СП и системы управления.
Очевидно, что варьирование этих характеристик дает возможность изменять сто-
имость системы РЭП, отыскивая приемлемый (оптимальный) вариант построения
ее с точки зрения стоимостной оценки. При этом изменения характеристик системы
РЭП однозначно приведут к изменению ее эффективности при подавлении конкрет-
ного поля сигналов. Система РЭП, оптимальная по параметру стоимостной оценки,
может оказаться не оптимальной по своей эффективности или, наоборот, опти-
мальной по эффективности, но не оптимальной по стоимостной оценке. Поэтому
оптимизацию следует проводить одновременно и по эффективности и стоимости.
Оценку эффективности подавления поля сигналов полем помех более целесооб-
разно проводить частными методами для конкретных случаев организации РЭП.
При этом эффективность системы РЭП можно определить двумя составляющими:
вероятностью (эффективностью) подавления бортовых РЛС и вероятностью
(эффективностью) наведения СП на бортовые РЛС Э2:
Э = Э1Э2.
(18.107)
Если принять априори, что у-я СП поля помех обеспечивает подавление z-й РЛС
с некоторой вероятностью р, то эффективность подавления всех п бортовых РЛС
полем помех л0 СП системы РЭП определится как:
(18.108)
/=1 l J
В частном случае, когда вероятности подавления z-й РЛС СП равны, а также
равны количества РЛС и СП, (18.108) преобразуется к виду
Э,= 1-(1-р)
(18.109)
где л0 и п — число СП и РЛС.
Поскольку наведение j-й СП на z-ю РЛС будет осуществляться с некоторой веро-
ятностью 7ун, эффективность наведения поля помех на поле сигналов РЛС составит
Э2=П
(18.110)
L 7=1 J
В частном случае, оговоренном выше и описываемом соотношением (18.100),
выражение (18.110) преобразуется к виду
Э2= 1-(1-Рн)
(18.111)
Таким образом, в соответствии с (18.105) и (18.110), критерий «эффективность —
стоимость» применительно к полю помех, образуемых СП и подавляющих поле
сигналов, как мера оценки оптимальности построения системы РЭП, будет выра-
жаться в виде
(18.112)
18.8. Эффективность средств РЭБ в локальных войнах
737
Для условий, определяемых соотношениями (18.105) и (18.109),
Г - ~1Л
1 — (1 — р) 0
т = _ (18.НЗ)
С Г. PnGn . п ' ’
In--—2—+In-
и Г* FL ' п^п)ан "ан _
'*0VC анЛс
Учитывая, что у рассматриваемых вариантов построения системы РЭП при конк-
ретных неизменяемых характеристиках поля сигналов в части диапазона рабочих
частот и пропускной способности стоимость системы СРТР будет постоянной, при
оценке системы РЭП по критерию «эффективность — стоимость» можно не учиты-
вать станцию РТР.
Поскольку а^ь =Ь^а, из (18.112) следует окончательное значение критерия
«эффективность — стоимость» для рассматриваемых условий в виде
(18.114)
В случае идентичности используемых СП в системах РЭП, а также равенства
для всех СП и подавляемых РЛС вероятностей подавления и наведения, критерий
«эффективность — стоимость» будет определяться выражением
(18.115)
Выражения (18.114) и (18.115) при оценке оптимальности выбора принципов
построения и организации систем РЭП неудобны для практических вычислений.
Анализ показывает, что более целесообразна сравнительная оценка исследуемых
систем при фиксированных параметрах с некоторой гипотетической системой,
состоящей из одной СП и удовлетворяющей подавлению поля сигналов с заданной
эффективностью независимо от числа РЛС.
Приведенная зависимость критерия 4х дает возможность, используя «эффек-
тивность — стоимость» и варьируя параметрами и количеством СП в составе сис-
темы РЭП, образующей поле помех, найти оптимальный вариант построения этой
системы в соответствии с требованиями противодействия полю сигналов РЛС.
Интересно отметить, что анализ выражения (18.115) показывает, что при ма-
лой эффективности подавления РЛС р « 0,1 оптимальное число САП примерно рав-
няется числу подавляемых РЛС (п « и0) при л0 > 10.
Описанная методика оптимизации системы РЭП по критерию «эффектив-
ность — стоимость» может быть использована для различных вариантов систем РЭП.
18.8. Эффективность средств радиоэлектронной борьбы
в локальных войнах
После Второй мировой войны произошло более 100 локальных войн. В наиболее
крупных из этих войн — в Корее, во Вьетнаме и на Ближнем Востоке, в Персид-
ском заливе, на Балканах — весьма интенсивно велась радиоэлектронная борьба.
738
Глава 18. Эффективность средств и способов РЭБ
На полях сражений локальных войн испытывались новые образцы техники и совер-
шенствовались способы разведки, радиоэлектронного подавления и защиты РЭС
от радиопомех. Только во Вьетнаме в боевых условиях проверено более 200 амери-
канских образцов радиоэлектронной техники, предназначенных для обнаружения
живой силы, военной техники, средств, управления войсками и оружием, для ве-
дения радиоэлектронной борьбы [4]. В локальных войнах велись настоящие сра-
жения в эфире между средствами радиоэлектроники и радиоэлектронного подав-
ления. Часто именно превосходство в области РЭБ обеспечивало достижение ус-
пеха в боевых действиях авиации, войск ПВО, военно-морских сил и сухопутных
войск. В ходе локальных войн совершенствовалась техника и тактика РЭБ, возра-
стали интенсивность и возможности по дезорганизации систем разведки управле-
ния противника; по обеспечению устойчивости действия таких же систем своих
войск, авиации, сил флота и боевых комплексов.
В корейской войне в 1951-1953 гг. американская авиация создавала активные и
пассивные радиопомехи, войска ПВО КНДР применяли меры защиты РЛС от
подавления радиопомехами. В 1951 г. после того как зенитная артиллерия и истре-
бители МиГ-15 нанесли серьезное поражение американской бомбардировочной
авиации, она начала создавать радиопомехи РЛС ПВО. Радиопомехи создавали
самолеты стратегической авиации В-29, В-50 и средние бомбардировщики В-26
«Меродер», оборудованные аппаратурой активных радиопомех и устройствами
выбрасывания радиолокационных отражателей. Бомбардировщики В-29 соверша-
ли налеты ночью, ориентируясь с помощью радиолокационных бомбардировочных
прицелов. При массированных налетах американской авиации обычно впереди
ударных групп или в составе групп обеспечения следовали специальные самолеты
РЭБ В-29 или В-26, создававшие активные и пассивные помехи РЛС управления
батареями ЗА. Во время полета ударных групп вдоль побережья самолеты-поста-
новщики радиопомех следовали на фланге ударной группы, создавая помехи стан-
циям, расположенным в прибрежной зоне (рис. 18.8).
Самолеты-постановщики радиопомех, действовавшие в группах обеспечения,
обычно не входили в зону огня зенитной артиллерии, а действовали на удалении
20...25 км от объекта удара.
Вначале радиопомехи создавались для подавления РЛС кругового обзора, а также
подавления каналов обнаружения станций орудийной наводки СОН-ЗК, а затем —
РЛС управления огнем зенитной артиллерии.
12 сентября 1952 г. при налете бомбардировщиков В-29 на гидроэлектростанцию
«Супун» противник впервые применил в комплексе активные и пассивные помехи
в метровом и дециметровом диапазонах радиоволн для подавления работы РЛС
обнаружения и орудийной наводки типа СОН-ЗК, СОН-2Б и SCR-584 (рис. 18.9).
Радиопомехи создавались для подавления работы радиопрожекторов РАП-150,
осуществлявших поиск и освещение воздушных целей. Помехи РЛС метрового диа-
пазона, которые использовались в комплексах радиопрожекторов, создавались с по-
мощью станций АРТ-1 и АРТ-2 длинными металлизированными лентами и диполь-
ными отражателями.
Радиопомехи, создаваемые авиацией, значительно затрудняли работу РЛС и
радиопрожекторов, особенно в первый период войны, когда их расчеты не имели
опыта работы в условиях помех. Наиболее сильно радиопомехи влияли на работу
поисковой системы РЛС орудийной наводки зенитной артиллерии СОН-ЗК. При
подавлении поисковой системы станции, работающей в метровом диапазоне, эки-
пажи осуществляли поиск воздушных целей системой сопровождения, работавшей
18.8. Эффективность средств РЭБ в локальных войнах
739
Рис. 18.8. Радиоэлектронная борьба в Корее в 1951-1953 гг. Т — фронтовой бом-
бардировщик; Т — дальний (стратегический) бомбардировщик; — самолет радио-
технической разведки и РЭБ; ® — батарея зенитных орудий; — радиолокационная
станция; — радиолокационная станция разведки воздушных целей
в сантиметровом диапазоне. На самолетах-постановщиках радиопомех и бомбар-
дировщиках кроме станций радиопомех использовались радиоразведывательные
приемники. С помощью этих приемников обнаруживалась работа РЛС, а потом
производилась подстройка станций радиопомех.
Пассивные радиопомехи создавались сбрасыванием металлизированных лент
длиной 26...30 м и шириной 1,3 см, а также полуволновых отрезков фольги. Длин-
ные ленты выбрасывались в пачках по 10... 12 лент, а дипольные отражатели — по
нескольку сотен штук. Ленты создавали засветку экрана в течение 25...30 мин, а
дипольные отражатели иногда и более продолжительное время. Пассивные радио-
помехи на индикаторах с линейной разверткой РЛС четырехметрового диапазона
наблюдались в виде импульсов, подобных сигналам от группы самолетов. Отлича-
лись они от отметок целей относительно малой подвижностью и более частой и
глубокой пульсацией.
740
Глава 18. Эффективность средств и способов РЭБ
Группа подавления средств ПВО
Рис. 18.9. РЭБ при налете американской авиации
на ГЭС «Супун» 12 сентября 1952 г.
На завершающем этапе войны американская авиация часто создавала весьма
высокие плотности радиопомех станциям сантиметрового диапазона, которые ис-
ключали возможность наблюдения воздушных целей на расстояниях до 30...40 км.
В войне во Вьетнаме американские вооруженные силы, рассчитывая на легкую
и быструю победу, вначале применяли самолеты тактической и палубной авиации
без поддержки достаточным количеством средств РЭБ. Но по мере эскалации агрес-
сии, после 1964 г., расширялись сферы применения военно-воздушных и военно-
морских сил при поддержке средствами РЭБ, см. рис. 18.10 [4].
о
ЕВ-66 ..
Границы зоны
ЕС-121А
или ЕА-6В
. Граница зоны радиолокационного
\ обнаружения воздушных целей
Создание
помех РЭС
за 10...15 мин
до подлета
ударных групп
поражения ЗУР ДРВ
Рис. 18.10. Радиоэлектронная борьба при налетах
американской авиации на объекты ДРВ
Ханой
4 Хайфон
Группа
подавления
ЗРК и РЛС
ЕС-121А
или ЕВ-66
Ударная группа
Разведка
РЭС и СИР ЗРК
за сутки до
нападения авиации
Отвлекающая
группа
18.8. Эффективность средств РЭБ в локальных войнах
741
По мере возрастания напряженности боевых действий увеличивалась интенсив-
ность РЭБ и расходы на разработку и производство средств ее ведения (рис. 18.11).
Рис. 18.11. Расходы США на исследования и разработку средств РЭБ в период
войны в Юго-Восточной Азии: Заштрихованная область — дополнительные
ассигнования, вызванные войной в Юго-Восточной Азии
В зависимости от способов, интенсивности, применяемой техники и тактики
ведения радиоэлектронную борьбу во Вьетнаме можно разделить на три этапа.
Первый этап, охватывающий период с августа 1964 г. (начало открытой агрессии
США против ДРВ) по 1967 г., характерен ограниченным применением в основном
устаревших средств РЭБ. В этот период американцы путем воздушных бомбар-
дировок стремились разрушить промышленность, инфраструктуру железных и авто-
мобильных дорог, дезорганизовать систему ПВО, деморализовать население рес-
публики и сорвать оказание военно-экономической помощи борющимся патриотам
Южного Вьетнама. Первоначально тактическая и палубная авиация, используя свое
господство в воздухе, а также отсутствие в ДРВ зенитных ракетных комплексов,
наносила систематические удары по населенным пунктам, объектам ПВО и позици-
ям радиолокационных средств на территории ДРВ. Удары наносились в основном
в светлое время суток большими группами по 40...50 самолетов, следовавшими к
целям практически без прикрытия радиопомехами на высотах 5000...7000 м, превы-
шающих верхнюю границу зоны поражения малокалиберной зенитной артиллерией.
Со второй половины 1965 г., когда в составе ПВО Демократической Республи-
ки Вьетнам появились зенитные ракетные комплексы С-75, американская авиация
стала нести большие потери и поэтому вынуждена была изменить тактику и перей-
ти к действию небольшими группами или звеньями истребителей-бомбардировщи-
ков на малых и предельно малых высотах. Однако действия на малых высотах не
принесли ей успеха, так как самолеты уничтожались зенитной артиллерией и зе-
нитными пулеметами; к тому же снизилась эффективность авиационных ударов.
Стремясь повысить точность бомбометания и уменьшить потери от огня зенитных
пулеметов и зенитной артиллерии, американская авиация снова изменила тактику
налетов. Истребители-бомбардировщики за 5...6 км от объектов нападения стали
резко набирать высоту до трех-четырех тысяч метров и после обнаружения цели на-
носили удары с пикирования. С целью снижения потерь от зенитных ракет экипажи
начали применять противоракетный маневр путем переворота через крыло или раз-
ворота в сторону атакующей ракеты, а также использовали средства РЭБ. Дело в
том, что при маневре с резким изменением траектории и радиальной скорости
742
Глава 18. Эффективность средств и способов РЭБ
движения самолета относительно головки самонаведения ракеты и позиции стрель-
бового радиолокатора складывались условия, при которых с высокой вероятностью
происходил срыв слежения за целью и, соответственно, промах ракеты.
Характеристики некоторых средств радиоэлектронной разведки, применявшихся
в локальных войнах, приведены в табл. 18.2.
Таблица 18.2
Характеристики средств радиоэлектронной разведки,
применявшихся в локальных войнах
Шифр и наименование Назначение .Диапазон частот, МГц Размещение Примечание
APR-25, 26, 27, обнаружительный приемник Предупреждение об облучении самолета РЛС ЗРК, ЗА и ИА, наведение самолета 5800...12000 F-105, RA-5C, А-6А, F-4C, ЕС-121А й др.
APR-35, 36, 37, разведывательные приемники Обнаружение, определение местонахождения РЛС и наведение на них противо- радиолокационных ракет F-105, RF-4C, D, Е, В-52, С-130, FB-111
ALR-15, 18, 19, станции радиоразведки Разведка радиолокационных средств 2500... 11000 А-6А, А-7А, В-52
ALR-20, панорам- ный разведыва- тельный приемник Обнаружение, определение параметров и местоположения РЭС 30...10900 В-66, В-52 Чувствитель- ность 65 дБ
ALR-23, обнаружи- тельный приемник ИК-диапазона Прием теплового излучения двигателей самолетов и ракет, предупреждение экипажей самолетов о пуске ракеты В-52, F-111A
ALQ-86, станция радиоразведки Обнаружение, перехват и ана- лиз сигналов РЭС, управление бортовыми средствами РЭБ и противорадиолокационными ракетами Сантиметровые и дециметровые волны ЕА-6В
ER-142, самолетный радиопеленгатор Пеленгование и наведение самолета на РЛС 350...10900 RF-4C, F-100, F-105
APS-105, 107, 109, самолетные системы обнаружения и предупреждения Обнаружение и анализ сигна- лов, пеленгование РЭС, опове- щение о радиолокационном облучении самолета, обеспече- ние пуска ракет по РЛС и управление средствами РЭБ В-52, RF-4, F-105, F-111A
ALR-3, корабельный разведывательный приемник Обнаружение РЭС Сантиметровые и дециметровые волны Торпедные катера
На самолетах военно-воздушных сил применялись радиоприемники APR-25 или
APR-26, а на самолетах военно-морских сил — радиоприемники APR-23 или APR-27.
Эти средства позволяли обнаруживать и предупреждать экипажи об облучении
самолетов станциями, работавшими в диапазоне от 200 МГц до 10 ГГц. В дальней-
шем некоторые самолеты применяли усовершенствованные станции APS-105 или
APS-107, обеспечивающие обнаружение и анализ излучений, пеленгование радио-
электронных средств, предупреждение экипажей о радиолокационном облучении
18.8. Эффективность средств РЭБ в локальных войнах
743
самолетов, определение тактического назначения и координат обнаруженных ра-
диолокационных средств, а также вывод самолетов в район их позиций и пуск про-
тиворадиолокационных ракет.
Стратегические бомбардировщики В-52 использовали панорамные разведыва-
тельные приемники ALR-20 с электронной системой сканирования. Они позволя-
ли одновременно просматривать широкий участок спектра частот, в котором рабо-
тали радиоэлектронные средства ПВО. Эти приемники принимали излучения РЛС
одновременно в шести поддиапазонах частот в пределах от 30 МГц до 10,9 ГГц и
управляли передатчиками помех.
Радиоприемниками обнаружения и предупреждения в этот период было оборудо-
вано около 4000 американских самолетов. Кроме пилотируемых самолетов во Вьет-
наме для ведения воздушной разведки американцами применялись и беспилотные
управляемые самолеты типа AQM-34. Действовали они днем сначала на большой
высоте, достигавшей 12000 м, а затем только на малой, не превышавшей 500 м.
Перед налетами американской авиации на объекты ДРВ самолеты ЕС-121А или
ЕВ-66С, барражировавшие вдоль побережья над Тонкинским заливом на высоте
около 2000 м, с помощью аппаратуры радиоразведки обнаруживали работу РЛС,
определяли момент пуска зенитных ракет и оповещали по радио ударные самоле-
ты, направлявшиеся к целям. Последние, получив оповещение, начинали манев-
рировать, чтобы избежать поражения зенитными ракетами, стараясь уйти ниже зоны
поражения ЗУР. Одновременно часть самолетов наносила удары по обнаруженным
РЛС и станциям наведения зенитных ракет [4].
Наряду с аппаратурой предупреждения об облучении РЛС и радиоразведки на
самолетах начали использоваться средства постановки радиопомех. В соответствии
с военной доктриной США 1950-х гг. роль основной ударной силы отводилась стра-
тегической авиации, самолеты которой оборудовались многими типами средств
РЭП. Однако большие потери тактической авиации во Вьетнаме заставили США
пересмотреть эту доктрину. Средствами радиоэлектронного противодействия начали
оснащаться все самолеты тактической авиации. В 1965 г. в спешном порядке были
изготовлены, направлены во Вьетнам и установлены на истребителях-бомбардиров-
щиках 50 передатчиков шумовых помех QRC-160-1 и QRC-160-2, работающих в
диапазонах 1,55...6,20 и 8,50... 10,20 ГГц.
В этот период группы тактической авиации по 30...40 самолетов, наносившие
удары по объектам ДРВ, защищаемым зенитными средствами, прикрывались са-
молетами ЕВ-66 (рис. 18.12), создававшими помехи из зон, расположенных за пре-
делами досягаемости зенитного огня.
Эти самолеты применяли по четыре-пять передатчиков шумовых помех санти-
метрового и дециметрового диапазонов радиоволн типа ALT-15, ALT-16, ALQ-18
и QRC-279A, перекрывавших диапазон частот от 30 до 10750 МГц, автоматы
ALE-24/25, пять радиоразведывательных приемников APR-9, APR-14-25, APR-26,
радиопеленгатор ALA-6 и анализатор радиосигналов АРА-74. Эти средства позволяли
вести радиоразведку, подавлять РЭС и контролировать эффективность воздействия
радиопомех. Несмотря на мощное вооружение средствами РЭБ, эти самолеты не
всегда с достаточной эффективностью подавляли РЛС зенитных ракетных комплек-
сов (ЗРК). Тогда американцы вынуждены были в состав каждой ударной группы
включать один-два самолета со средствами радиопомех, установленными вместо бое-
вой нагрузки. Но и они не смогли скрыть от радиолокационного обнаружения
большие группы самолетов. Поэтому начиная с 1966 г. ударные группы уменьши-
744
Глава 18. Эффективность средств и способов РЭБ
Рис. 18.12. Самолет РЭБ ЕВ-66
лись до четырех-шести самолетов, один из которых вместо авиабомб применял сред-
ства радиопомех. Однако, как показал опыт боевых действий, средства одного само-
лета не могли скрыть радиопомехами даже небольшие ударные группы. В качестве
выхода из создавшегося положения командование ВВС США приняло решение —
средства РЭП установить на каждый ударный самолет тактической авиации. Осо-
бенно интенсивные работы по оборудованию самолетов, действовавших во Вьет-
наме, развернулись в 1965 г. после потери двух истребителей-бомбардировщиков
F-105, сбитых самолетами МиГ-17, и в связи с началом применения в системе ПВО
ДРВ зенитных ракет.
В 1966 г. часть истребителей-бомбардировщиков переоборудовалась в специаль-
ные самолеты РЭБ. На эти самолеты устанавливались станции помех для подавле-
ния РЛС наведения ракет, автоматы выбрасывания радиолокационных отражате-
лей и аппаратура радиоэлектронной разведки. Самолеты РЭБ действовали из зон
барражирования и в боевых порядках нападающей авиации, прикрывая ударные
группы. По мере оснащения самолетов средствами РЭБ совершенствовалась и так-
тика их боевого применения.
В этот период самолеты, оборудованные средствами радиопомех, стали совер-
шать полеты в плотном строю, что позволяло активными и пассивными помехами
с высокой плотностью прикрывать ударные группы авиации. Интенсивнее начали
применяться пассивные радиопомехи для подавления РЛС обнаружения, целеука-
зания, наведения истребителей и станций наведения ЗУР. В зависимости от типа
подавляемых средств одновременно выбрасывалось от одной-двух пачек отражате-
лей для подавления работы РЛС обнаружения воздушных целей и целеуказания
средствам ПВО до трех-четырех пачек против станций наведения ракет, станций
управления огнем зенитной артиллерии и радиолокационных прицелов истребите-
лей. Группы самолетов тактической авиации создавали пассивные помехи в поло-
се шириной до 3 км и длиной в несколько десятков километров.
Характеристики средств создания пассивных помех, применявшихся в локаль-
ных войнах, приведены в табл. 18.3.
В мае 1966 г. американская авиация впервые нанесла удары противорадиолокаци-
онными ракетами «Shrike» AGM-45 (рис. 12.1) по позициям РЛС и ЗРК ДРВ. Обычно
18.8. Эффективность средств РЭБ в локальных войнах
745
Таблица 18.3
Характеристики средств создания пассивных помех РЛС,
используемых в локальных войнах [4]
Наименование Назначение Размещение Примечание
Радиоотражатели Создание пассивных помех РЛС в сантиметровом, деци- метровом и метровом диапа- зонах волн Применялись самолетами всех видов авиации и кораблями
ALE-24, электро- механический автомат Выбрасывание пачек диполь- ных радиоотражателей, ИК- ловушек и передатчиков помех одноразового использования В-52 Состоит из восьми пяти- канальных механизмов выброса, размещаемых в крыльях
ALE-25, пусковое устройство Запуск ракет с дипольными радиоотражателями В-52Н
ALE-27, электро- механический автомат Выбрасывание пачек диполь- ных радиоотражателей, теп- ловых ловушек и передатчи- ков радиопомех одноразового использования B-52C/F, в фюзеляже Имеет 4 пятиканальных механизма, размещаемых в хвостовой части. Запас — около 1000 пачек радио- отражателей
ALE-28, автомат пневматического типа То же F-111A Управляется с пульта станции APS-109
ALE-29, пиротехнический автомат То же На самолетах тактической и палубной авиации А-4, А-6, А-7, F-4, F-8, RA- 5С, FB-lll,Ha беспилотных само- летах типа AQM-34 Имеется два магазина по 32 трубки в каждом, в которых помещаются патроны с радиоотража- телями или ИК- ловушками
ALE-32, электро- механический автомат Выбрасывание дипольных радиоотражателей и передатчиков помех одноразового применения В-52, ЕА-6А, в контейнере два автомата Запас радиоотражателей — по 500 кг на автомат
ALE-38, электро- механический автомат То же F-4, БС AQM-34H Запас радиоотражателей — по 230 кг на автомат (около 500 пачек)
ADR-8A, противо-радиоло- кационная ракета Выстреливание дипольных отражателей в переднюю полусферу самолета В-52 Ракеты запускаются с помощью автомата ALE-25
для борьбы с РЛС выделялись специальные группы в составе двух-четырех истреби-
телей-бомбардировщиков, совершавших полет впереди ударных групп. Один из них
обнаруживал излучения и определял параметры и местоположение РЛС, остальные
наносили по ним удары ракетами. Противорадиолокационные ракеты пускались
самолетами, совершавшими горизонтальный полет на высоте 2000...4000 м, с дально-
сти 15...35 км от РЛС, иногда с пикирования или с кабрирования. В ряде случаев
для повышения вероятности поражения целей практиковался одновременный пуск
двух ракет по одной позиции РЛС. В связи с тем, что опытные операторы РЛС ПВО
научились засекать пуск и прослеживать траекторию полета противорадиолокаци-
онных ракет и принимали меры защиты от них, американские летчики стремились
приблизить точку их пуска к позиции РЛС до 15, а иногда и до 10 км. Так, напри-
746
Глава 18. Эффективность средств и способов РЭБ
мер, временное переключение РЛС на эквивалент антенны или выключение анод-
ного напряжения на магнетроне передатчика приводило к большим отклонениям
противорадиолокационных ракет «Shrike», достигавшим нескольких десятков, а
иногда и сотен метров.
На втором этапе, в 1967-1968 гг., американские самолеты использовали более
совершенные средства РЭБ. Тактическая авиация применяла контейнерные станции
ALQ-72 для создания шумовых помех, модулированных частотой сканирования
антенн станций наведения зенитных ракет. Некоторые истребители-бомбардиров-
щики использовали одну-две контейнерные станции, создававшие маскирующие и
дезинформирующие помехи в трех-, пяти- и десятисантиметровом диапазонах волн,
одну-две ракеты «Shrike», обнаружительные приемники APR-25 или APR-26 и стан-
ции непосредственной оперативной радиотехнической разведки ALR-17, способ-
ные обнаруживать излучения РЭС в сантиметровом и метровом диапазонах волн.
Основные характеристики средств создания активных радиопомех приведены
в табл. 18.4.
Таблица 18.4
Характеристики средств создания активных помех РЭС,
применявшихся в локальных войнах
Шифр и наименование Виды создаваемых радиопомех Диапазон частот, МГц (волн, см); ширина спектра, МГц Излучаемая мощность Размещение
1 2 3 4 5
ALT-6 (А, В), самолетный передатчик радиопомех Амплитудно-модулированые шумовые прицельные и скользящие радиопомехи 350... 10 500; 1...80 150 Вт, плотность мощности 30... 100 Вт/МГц В-52, ЕВ-66С, в фюзеляже
ALT-13, самолетный передатчик радиопомех РЛС Шумовые заградительные, прицельные или скользящие 250...3100; 40...150 150...300 Вт В-52, ЕВ-66С, в фюзеляже
ALT-15, самолетный передатчик радиопомех Шумовые прицельные и заградительные 30...300; 50...100 100...200 Вт В-52, ЕВ-66С, В-6А, ЕС-121, в фюзеляже
ALT-16, самолетный передатчик радиопомех РЛС Шумовые прицельные радиопомехи 500... 1000; 50 200 Вт В-62, ЕВ-66С, ЕС-121, А-6А, в фюзеляже
ALQ-19, самолетная станция радиопомех Импульсные ответные уводящие радиопомехи РЛС 2500...3500 1000 Вт в импульсе А-4, в контейнере
ALQ-31, самолетная станция радиопомех Шумовые радиопомехи РЛС 3-санти- метровый — ЕА-6А, в контейнере
ALQ-41 самолетная станция радиопомех Ответные импульсные для срыва автосопровождения РЛС управления ЗРК и ЗА 5200... 10 900 1000...5000 Вт в импульсе, коэффициент усиления антенны 2 F-111, А-6А, ЕА-6А, в контейнере
ALQ-51, самолетная станция радиопомех То же 1550...5200 300... 1000 Вт, коэффициент усиления антенны 5 А-З, А-4, А-5С, А-6А, ЕА-6А, F-101
ALQ-55, самолетная станция радиопомех Шумовые помехи УКВ радиосвязи 30...300 — ЕА-6В, А-5С, А-4
18.8. Эффективность средств РЭБ в локальных войнах
747
Продолжение табл. 18.4
1 2 3 4 5
ALQ-71, самолетная станция радиопомех Шумовые заградительные и прицельные -3000 300 Вт В-52, В-57, F-4, F-105, В-66, AQM-34M, в контейнере
ALQ-72, самолетная станция радиопомех Шумовые модулированные с частотой сканирования антенн СНР 5200... 10 200 150 Вт, плотность мощности 15 Вт/МГц F-4, В-52, F-105D, Fill, В-66, F-101, в контейнере
ALQ-75 (76), самолетная станция радиопомех РЛС Комбинированные шумовые маскирующие и имитирующие ответные радиопомехи РЛС ЗР и ЗА 2600...3150 40 Вт В-52, ЕА-6А, F-4C, в контейнере
ALQ-87, самолетная станция радиопомех РЛС Комбинированные шумовые и ответные импульсные помехи РЛС ЗРК и ЗА -85, -3000 400 Вт, плотность мощности 25 Вт/МГц F-4, FB-111, F-105, в контейнере
ALQ-92, самолетная станция радиопомех радиосвязи Шумовые УКВ радиосвязи 30...300 — ЕА-6В, в фюзеляже
ALQ-99, самолетная станция радиопомех РЛС Шумовые прицельные и заградительные радиопомехи 100...3000, 20 000 — ЕА-6В, в контейнерах по две станции
ALQ-100, многоцелевая станция радиопомех Имитирующие помехи для подавления работы и срыва автосопровождения РЛС 1650...6500, 8000... 10 500; 20 1...5 кВт в импульсе А-4, А-7, ЕА-6В, в контейнере
ALQ-119, самолетная станция радиопомех РЛС Шумовые и имитирующие 1О3...1О4 — F-4, А-7, F-111, в контейнере
QRC-279A, самолетная станция радиопомех РЛС Шумовые прицельные и заградительные 2500...3000 300 Вт ЕВ-66, F-4, В-52
SLQ-7, корабельная станция радиопомех РЛС Комбинированные шумовые и импульсные ответные радиопомехи 4 и 30 — Торпедные катера
SLQ-12, корабельная станция радиопомех РЛС Шумовые прицельные радиопомехи самолетным и корабельным РЛС 8000...10 900 500 Вт Авианосцы
ИК (тепловые) ложные цели- ловушки Отвлечение ракет с ИК- головками самонаведения от самолетов На самолетах тактической, палубной и стратегиче- ской авиации
В этот период США начали производство новых контейнерных станции ALQ-100
для создания имитирующих радиопомех и срыва автосопровождения воздушных це-
лей радиолокационными станциями. К июню 1967 г. передатчики радиопомех ис-
пользовали почти все ударные американские самолеты, действовавшие во Вьетнаме.
Более интенсивно начали совершать полеты специальные самолеты РЭБ, имев-
шие на борту от 12 до 15 передатчиков радиопомех метрового, дециметрового и сан-
тиметрового диапазонов волн, предназначенные для подавления работы РЛС развед-
748
Глава 18. Эффективность средств и способов РЭБ
ки, целеуказаний и наведения ракет, по два автомата выбрасывания дипольных
радиоотражателей и ловушек, а также разнообразную аппаратуру разведки РЭС.
Например, самолеты ЕА-6А «Интрудер» применяли станции помех радиосвязи
ALQ-92 и станции шумовых и ответных радиопомех ALQ-31, ALQ-71, ALQ-76 для по-
давления работы РЛС, автоматы ALE-32, обнаружительные радиоприемники APR-26
и станции радиоразведки ALR-15. Эти самолеты поддерживали действия палубных
штурмовиков и тактических бомбардировщиков, ведя разведку и создавая помехи
РЭС ПВО.
Самолеты ЕА-6В «Проулер» (рис. 18.13) применяли станции шумовых и дезин-
формирующих радиопомех ALQ-99 и ALQ-100 для подавления работы РЛС, станции
помех радиосвязи ALQ-92, автоматы ALE-29 для выбрасывания дипольных радио-
отражателей, ИК-ловушек и миниатюрных передатчиков радиопомех. Они также
имели станции радиоразведки ALQ-86, обеспечивающие обнаружение, перехват,
анализ радиосигналов в широком диапазоне частот и выдачу данных о параметрах
и местоположении радиоэлектронных средств в реальном масштабе времени. Для
анализа радиоэлектронной обстановки, управления бортовыми средствами РЭП и
пуском противорадиолокационных ракет на самолетах применялись специальные
ЭВМ. Станция ALQ-92 создавала помехи УКВ авиационной радиосвязи в диапазо-
не от 30 до 300 МГц, станции ALQ-99 — маскирующие шумовые и радиопомехи и
ALQ-100 — маскирующие и ответные радиопомехи РЛС в сантиметровом, деци-
метровом и метровом диапазонах волн. По утверждению печати, средства РЭБ
самолетов позволяли вести разведку и создавать шумовые и дезинформирующие
радиопомехи РЛС с быстрой перестройкой частоты в широком диапазоне.
Рис. 18.13. Самолет РЭБ ЕА-6В «Проулер» (под крыльями
подвешены контейнеры со средствами РЭБ)
К середине 1972 г. имелось 42 таких самолета, а к концу 1976 г. планировалось
довести их количество до 90. С авианосцев 7-го флота США, принимавшего учас-
тие в войне против вьетнамского народа, кроме самолетов ЕА-6В действовали палуб-
ные штурмовики А-4, А-6, А-7 и истребители-бомбардировщики F-4, оборудован-
ные средствами РЭБ. Расширение масштабов, повышение интенсивности ведения
РЭБ и увеличение количества обеспечивающих и отвлекающих самолетов позволили
ударной авиации начиная с 1967 г., летать к объектам на средних высотах от 3000
до 5000 м. В результате улучшились условия обнаружения целей, увеличился ра-
диус действия и снизилась уязвимость самолетов от огня малокалиберной зенит-
ной артиллерии и крупнокалиберных пулеметов.
18.8. Эффективность средств РЭБ в локальных войнах
149
Претерпела изменение и тактика ведения радиоэлектронной борьбы. Перед
нанесением ударов авиации по объектам, защищаемым зенитными комплексами,
самолеты ЕВ-66Е или ЕС-121 А проводили предварительную разведку, определяя
параметры излучения и позиции РЭС зенитных ракетных комплексов и батарей
зенитной артиллерии, см. рис. 18.14.
Группа прикрытия (самолеты F-4, F-105)
Рис. 18.14. Ведение РЭБ при нанесении удара
по промышленному объекту эскадрильей
На основании анализа добытых данных вырабатывались рекомендации по соста-
ву, подавлению РЭС, тактике действий авиации, участвующей в нанесении ударов.
Как правило, в каждую нападающую группу кроме ударных самолетов, оснащен-
ных аппаратурой РЭБ индивидуальной защиты, включались специальные самоле-
ты РЭБ и истребители прикрытия. Такая группа для преодоления ПВО создавала
помехи и наносила удары по позициям РЛС и ЗРК противорадиолокационными
ракетами. Чтобы ввести в заблуждение систему радиолокационной разведки ПВО,
американцы стали более интенсивно использовать отвлекающие группы самолетов.
Вторгаясь на короткое время с различных направлений в зону радиолокационного
обнаружения, они создавали впечатление налета ударной авиации и таким образом
отвлекали на себя внимание боевых расчетов ЗУР и ЗА. Во время воздушных налетов
выделялось больше сил для борьбы с РЭС ЗРК и ЗА, применялись противорадио-
локационные ракеты «Shrike» и различные приемы уклонения от зенитных ракет.
На третьем этапе, начиная со второй половины 1970 г., когда американская
авиация совершила налеты на Ханой, Хайфон и другие города, а также на южные
районы ДРВ, и до конца агрессии США во Вьетнаме (январь 1973 г., когда США
вынуждены были подписать Парижское соглашение о прекращении войны), нача-
лось массированное применение средств РЭБ для обеспечения действий всех ви-
дов авиации, участвующей в ведении разведки и нанесении ударов. В этот период
действия американской авиации при ведении разведки и нанесении ударов совер-
шались только под прикрытием радиопомех, с применением ложных целей и про-
тиворадиолокационных ракет. Действия тактической авиации по объектам с силь-
ной ПВО всегда обеспечивались группами подавления РЛС ЗРК и ЗА.
В войнах на Ближнем Востоке РЭБ велась авиацией и силами ПВО, военно-
морскими силами и сухопутными войсками воюющих сторон, см. рис. 18.15.
750
Глава 18. Эффективность средств и способов РЭБ
Рис. 18.15. Радиоэлектронная борьба в войне 1967 г. на Ближнем Востоке
В июне 1967 г. Израиль, напав на Египет, Сирию и Иорданию, преследовал цель
разгромить их вооруженные силы и тем самым укрепить на Ближнем Востоке по-
зиции западных стран. В достижении целей войны первостепенное значение при-
давалось фактору внезапности. Наряду с проведением мер оперативно-стратегичес-
кой маскировки и дезинформации, большая роль отводилась радиоэлектронной
борьбе. Чтобы выполнить эти планы, в период подготовки к началу военных дей-
ствий велась непрерывная и интенсивная разведка, в ходе которой были вскрыты
аэродромная сеть, позиции ЗРК, РЛС, пункты управления, узлы связи, добыты дру-
гие данные, необходимые для ведения РЭБ. В результате до начала войны Израиль
располагал данными о системах управления ПВО арабских государств, рабочих и
запасных частотах РЭС и линий государственной и военной радиосвязи.
С началом агрессии планировалось проведением мер радиоэлектронной борь-
бы нарушить радиосвязь между арабскими государствами, радиосвязь управления
войсками и подавить работу радиоэлектронных средств, используемых для обнару-
жения средств воздушного нападения, наведения зенитных ракет и истребительной
авиации. Выполняя эти задачи, израильские средства РЭБ утром 5 июня, в период
нанесения первого массированного авиационного удара, нарушили помехами ра-
диосвязь между Каиром, Дамаском и Амманом, подавили работу РЛС дальнего
обнаружения и управления авиацией и средствами ПВО.
Одновременно диверсионные отряды, высаженные с вертолетов, разрушили
линии проводной связи на Синайском полуострове. С целью достижения внезапно-
сти и обхода египетской системы ПВО основные силы нападающей авиации дей-
ствовали со стороны Средиземного моря на высотах 150...300 м. Радиолокационные
станции в полосе пролета авиации подавлялись радиопомехами. После нанесения
ударов по самолетам на аэродромах и по позициям РЛС поражались пункты управ-
ления авиацией и средствами ПВО. В первый же день войны израильская авиация
вывела из строя фронтовой узел связи египтян на Синайском полуострове.
18.8. Эффективность средств РЭБ в локальных войнах
751
Кроме того, израильские войска проводили радиодезинформацию. Для этого
по сетям радиосвязи танковых подразделений и авиации арабов передавались лож-
ные распоряжения и команды.
Предпринятые Израилем меры РЭБ и дезинформации затруднили управление
и координацию действий сухопутных войск, авиации и войск ПВО арабских стран.
В результате израильскому командованию удалось обмануть военное руководство
арабских стран, добиться оперативной и тактической внезапности в развязывании
войны и нанести серьезное поражение Египту, Сирии и Иордании.
В октябре 1973 г. во время четвертой израильско-арабской войны (6-25 октября)
РЭБ велась с учетом опыта, приобретенного во Вьетнаме и в предыдущих войнах
на Ближнем Востоке. Подтверждением этому является применение аналогичной тех-
ники и тактики ведения РЭБ, а также участие в боевых действиях американских
летчиков, получивших боевой опыт в войне против ДРВ. Для ведения разведки и
подавления РЭС около 30 % израильских ударных самолетов были оборудованы
американскими средствами РЭБ, а часть из них — противорадиолокационными
ракетами. Кроме того, Израиль разработал собственные передатчики радиопомех.
Средства РЭП использовали истребители-бомбардировщики «Фантом», «Скайхок»
и «Мираж», беспилотные самолеты и специальные постановщики радиопомех. Само-
леты «Фантом» применяли контейнеры с аппаратурой предупреждения об облуче-
нии и станции радиопомех ALQ-71 и ALQ-87, а самолеты «Скайхок» — аппаратуру
предупреждения и станции помех ALQ-19, ALQ-55 и ALQ-100. Впервые 180 стан-
ций постановки радиопомех ALQ-71, ALQ-87 и аппаратуру предупреждения о ра-
диолокационном облучении американцы поставили Израилю в 1970 г. В последую-
щем станции ALQ-71 модернизировались для использования на более высоких
частотах, на которых работали РЭС, применяемые Сирией и Египтом.
К октябрю 1973 г. в составе израильских ВВС имелось 68 самолетов, оборудо-
ванных средствами создания радиопомех. Кроме того, Израилю были поставлены
ракеты «Shrike», автоматы выбрасывания радиолокационных отражателей и инфра-
красных ложных целей, а также станции радиопомех ALQ-119 [4]. Некоторые са-
молеты, как например «Фантом», переоборудовались в специальные самолеты РЭБ.
Все эти средства израильская авиация интенсивно использовала в октябрьской войне
1973 г. (рис. 18.16).
В начале боевых действий для подавления РЛС создавались преимущественно
пассивные помехи. В ходе войны эта тактика совершенствовалась. Кроме того,
использовались специальные авиабомбы с дипольными отражателями.
Для повышения эффективности подавления РЭС и преодоления ПВО действия
ударных групп в составе шести-восьми истребителей-бомбардировщиков часто под-
держивались группами обеспечения в составе 20...25 самолетов РЭБ. Примерно за
час до вылета ударной группы проводилась разведка объектов удара, станций наведе-
ния ЗУР и радиолокационных станций. Разведку проводили с использованием пи-
лотируемых и беспилотных самолетов-разведчиков. Затем в процессе налета созда-
вались радиопомехи со средних и больших высот, осуществлялись демонстративные
действия на отвлекающих направлениях и наносились удары по позициям РЛС и
систем наведения ракет. С целью скрытия от радиолокационной разведки самолеты
ударных групп действовали на малых высотах, не превышающих 200...300 м.
Израильская авиация, наряду со средствами РЭБ, применяла американские про-
тиворадиолокационные ракеты «Shrike» для поражения РЛС. Запускались они с даль-
ности 20...25 км от позиций РЛС, часто под прикрытием радиопомех. По призна-
752
Глава 18. Эффективность средств и способов РЭБ
Рис. 18.16. Способы радиоэлектронной борьбы израильской
авиации при нанесении удара по объекту с сильной ПВО
нию американской военной печати, ракеты «Shrike» обладали недостаточной дально-
стью действия, что вынуждало израильские самолеты для их пуска заходить в зону
поражения ЗУР. Кроме того, арабские экипажи станций наведения зенитных ракет
умело проводили меры борьбы с противорадиолокационными ракетами. Наряду с
ракетами «Shrike» самолеты «Фантом» и «Скайхок» для поражения РЭС применили
американскую тактическую управляемую ракету «Мейверик» AGM-65A с телевизи-
онной системой наведения. Пускались они только в тех случаях, когда пилот хорошо
видел цель при помощи оптического прицела и на телевизионном экране, установ-
ленном в кабине самолета. После обнаружения цели и «захвата» телевизионной
камерой, смонтированной в носовой части ракеты, пилот включал системы сопро-
вождения и передачи изображения с ракеты на самолет и производил пуск ракеты.
Выпущенная ракета автоматически наводилась на цель, а самолет уходил в сторону.
Радиоэлектронная борьба велась и военно-морскими силами Израиля. С этой
целью создавались активные, пассивные радиопомехи, запускались ложные цели.
Перечисленные меры и средства обеспечивали удары ракетных и патрульных кате-
ров по надводным кораблям и береговым объектам арабских стран. Действовали
они преимущественно в ночное время, во взаимодействии с вертолетами и самоле-
тами, наносившими удары по береговым РЛС и артиллерийским позициям.
В израильской армии действовали и наземные части и подразделения РЭБ,
оснащенные в основном американской аппаратурой радиоразведки и постановки
радиопомех. Располагались они, как правило, на возвышенностях в пределах так-
тической зоны. Средства этих подразделений обнаруживали работу РЭС в диапа-
зоне от 2 до 16 ГГц, определяли местоположение РЛС, центров и пунктов управле-
ния, позиций зенитных ракетных комплексов и создавали радиопомехи. Помеха-
ми радиосвязи они стремились дезорганизовать управление частями сухопутных
войск арабских стран так же, как это было в войне 1967 г.
18.8. Эффективность средств РЭБ в локальных войнах
753
Наряду с самолетными, корабельными и наземными средствами РЭБ, израиль-
ские войска применяли передатчики радиопомех разового действия.
В ходе боев израильское военное командование организовало интенсивную
разведку РЭС пилотируемыми и беспилотными самолетами-разведчиками, а также
разведывательно-диверсионными отрядами, забрасываемыми в тыл арабских войск
вертолетами и катерами. В добывании разведывательных данных Израилю содей-
ствовали Соединенные Штаты Америки, которые вели разведку самолетами и ис-
кусственными спутниками Земли типа «Феррет». Результаты воздушно-космичес-
кой разведки войск и их РЭС доводились до генерального штаба в Тель-Авиве.
Египетские и сирийские вооруженные силы в октябрьской войне 1973 г. радио-
электронную борьбу вели с целью обеспечения защиты РЭС своих войск от раз-
ведки, подавления радиопомехами, поражения самонаводящимися ракетами, а также
для нарушения работы радиоэлектронных систем и средств врага.
РЭС скрывались от радиоэлектронной разведки, сокращая до минимума продол-
жительность работы на излучение, маневрируя частотами и позициями. Защита
радиоэлектронных средств систем ПВО Сирии и Египта от радиопомех, по свиде-
тельству печати [4], обеспечивалась благодаря использованию новых принципов
наведения ЗУР и ЗА, а также применению в системах нескольких типов РЭС, рабо-
тающих в импульсном и непрерывном режимах.
Применение в войсках ПВО арабских государств разнообразных РЭС наведения
ЗУР и ЗА затрудняло израильской авиации их подавление и требовало применения
большого количества средств РЭБ. Размещать эти средства на тактических самолетах
становилось затруднительно или вообще невозможно. С учетом этой тенденции в
среде специалистов по РЭБ сложилось устойчивое представление о том, что для
преодоления ПВО тактической авиацией, наряду со средствами РЭБ ударных само-
летов, необходимо продолжать применять специальные пилотируемые и беспилот-
ные самолеты РЭБ, способные поражать и подавлять помехами РЭС.
В случае нарушения радиопомехами средств радиолокационной разведки воздуш-
ные цели обнаруживались визуально постами, оснащенными оптическими прибо-
рами наблюдения, средствами связи и сигнализации. Располагаясь вдоль линии
фронта, преимущественно на возвышенностях, посты визуального наблюдения
обнаруживали на дальности до 10... 12 км воздушные цели, совершавшие полеты
под прикрытием радиопомех или на малых высотах. Ценные сведения о воздушном
противнике давали также посты радиоэлектронной разведки и пассивной радиоло-
кации, обнаруживающие самолеты противника по излучению работающих борто-
вых РЭС на 2...3 мин раньше РЛС с активным ответом.
Вооруженные силы Сирии и Египта для нарушения работы РЭС Израиля нано-
сили удары по пунктам управления и РЭС, создавали активные и пассивные поме-
хи. Так, например, 6 октября египетская авиация нанесла удары по пунктам управ-
ления и центрам РЭБ на Синайском полуострове и РЭС управления авиацией,
расположенным на аэродромах Бир-Гифгафа, Эль-Ариш, Рас-Насрани и Бир-Та-
мада. В результате удара был выведен из строя основной КП Израиля на Синае,
центр РЭБ и несколько ЗРК «Хок».
Египетская авиация для поражения РЛС ПВО противника на Синайском полу-
острове весьма успешно применяла противорадиолокационные ракеты.
Таким образом, в боевых действиях локальных войн средства, способы и тактика
РЭБ непрерывно совершенствовались, а ее масштабы и возможности повышались.
Наиболее интенсивно она велась авиацией и войсками ПВО воюющих сторон.
754
Глава 18. Эффективность средств и способов РЭБ
В ходе боевых действий в Ливане в июне 1982 г. авиация Израиля вела массиро-
ванную радиоэлектронную борьбу против системы ПВО Сирии и Ливана. В ней
принимали участие самолеты радиотехнической разведки; самолеты РЭБ «Арава»;
средства РЭП индивидуальной защиты истребителей-бомбардировщиков; наземные
станции радиоразведки и радиопомех; аэростаты, оборудованные средствами со-
здания пассивных радиопомех. Управление ударной авиацией и радиоэлектронной
борьбой осуществлял воздушный командный пункт Е-2С «Хокай». Самолеты РЭБ,
а также дальнего радиолокационного обнаружения (ДРЛО) Е-2С действовали в зо-
нах над морем за рубежом досягаемости средств ПВО.
В период подготовки агрессии израильские вооруженные силы провели деталь-
ную разведку систем радиолокационной разведки и управления силами и средствами
ПВО в долине Бекаа и на территории Сирии, выявили местоположение, парамет-
ры излучения и режимы работы РЛС обнаружения, целеуказания и наведения ЗУР
и истребительной авиации, систему радиосвязи управления силами и средствами
ПВО и сухопутными войсками.
Военные действия началась 9 июня демонстративными группами с создания
пассивных помех массированным выбрасыванием аэростатами дипольных радио-
отражателей, а также с создания активных помех РЛС ПВО наземными средства-
ми, см. рис. 18.17.
Радиоотражатели образовали широкую полосу пассивных помех, перемещаю-
щуюся под действием ветра в направлении Ливана, маскируя действия нападаю-
щей авиации. Истребители прикрытия F-15 и F-16 заняли зоны барражирования
над морем.
Одновременно беспилотные самолеты типа «Мастифф» и «Скаут» периодически
вторгались в зону поражения ЗРК, в результате чего их расчеты в течение несколь-
ких часов держались в напряжении и изматывались физически и морально. Само-
леты-разведчики в это время уточняли местоположение РЛС для последующего
нанесения по ним авиационных ударов.
После подавления системы ПВО израильская авиация нанесла удары по танко-
вым частям и другим объектам фугасными и осколочными авиабомбами, осуще-
ствляя противозенитный и противоистребительный маневры в сочетании с созда-
нием помех средствами РЭП индивидуальной защиты.
В операции английских экспедиционных сил по захвату Фолклендских (Мальдив-
ских) островов в 1982 г. английская авиация и надводные корабли применяли раз-
личные средства и способы РЭБ (рис. 18.18, с 756).
Готовя вторжение на Фолклендские острова, англичане в срочном порядке ус-
тановили на корабли, самолеты и некоторые типы вертолетов («Чинук», «Си Кинг»
и «Линкс») приемники предупреждения о радиолокационном облучении, устройства
для выбрасывания дипольных отражателей, ИК-излучатели и передатчики активных
помех одноразового использования. Эти средства затем применялись для подавле-
ния РЛС управления огнем зенитных средств, а также для отклонения и перенаце-
ливания противокорабельных ракет (ПКР) «Экзосет». Бомбардировщики «Вулкан»
были оборудованы американскими станциями радиопомех ALQ-101 и ALQ-131.
При высадке десанта на Восточный Фолкленд английская авиация и ВМС осу-
ществляли разведку и радиоэлектронное подавление РЛС аргентинской стороны
корабельными и самолетными средствами РЭП и обеспечивали РЭЗ своих систем
управления войск, авиации и ВМС. Военно-морские силы Великобритании при под-
готовке и в ходе боевых действий проводили мероприятия по скрытию истинных
18.8. Эффективность средств РЭБ в локальных войнах
755
планов и намерений командования по применению экспедиционных сил. До ми-
нимума были сокращены радиопереговоры, строго соблюдались радиодисциплина
и режимы излучения РЭС.
Радиопомехи показали достаточно высокую эффективность в борьбе с ПКР,
применяемыми аргентинской авиацией. Ввиду ограниченного количества аргентин-
ские ВВС применили всего лишь шесть ПКР типа «Экзосет» АМ39, из которых три
поразили цель, а три были отклонены от целей пассивными радиопомехами.
Аргентинская авиация для скрытия от радиолокационной разведки и уменьше-
ния времени на применение противником зенитных огневых средств совершала
полет за складками местности на предельно малых высотах (10...15 м). Кроме того,
налеты выполнялись, как правило, с западного и юго-западного направлений в конце
дня со стороны заходящего солнца.
В результате 167 боевых вылетов без средств РЭП аргентинская авиация потопила
эсминец «Ковентри», фрегаты «Ардент» и «Антилопа». При этом потеряно 117 само-
летов. Англичане, применяя средства РЭП, потеряли всего 10 самолетов и вертоле-
тов. Кроме того, пассивными радиопомехами были спасены авианосец «Гермес»,
эсминец «Глеморган» и другие корабли английского оперативного соединения ВМС,
756
Глава 18. Эффективность средств и способов РЭБ
«Супер Этандар»
Зона обнаружения РЛС
Мальдивских о-вов
орт
-(6)
Зона радиолокационного обнаружения
воздушных целей кораблями РЛД
Район
боевого
маневри-
рования
АМГ
P2V
«Нептун»
«Супер Этандар»
«Скайхок»
Рис. 18.18. Радиоэлектронная борьба в англо-аргентинском
конфликте у Фолклендских (Мальдивских) островов
Фолклендские г
Мальдивские) о-ва
Рио-Гранде
всего около 100. Для защиты надводных кораблей от ракет английские ВМС при-
менили три тактических приема РЭП.
Первый прием заключался в создании маскирующих пассивных помех для сни-
жения вероятности захвата головками самонаведения (ГСН) защищаемого кораб-
ля при групповой атаке противокорабельными ракетами.
После обнаружения приближающихся ракет на дальности 1...2 км вокруг ко-
рабля образовывалось до четырех облаков дипольных отражателей на различной
высоте и дальности. Этот прием использовался 25 мая при отражении удара пары
самолетов «Супер Этандар» по корабельной группировке. Соединение кораблей было
обнаружено бортовыми РЛС аргентинских самолетов на дальности 80 км.
С расстояния 45 км с самолетов были выпущены три ракеты «Экзосет» по ан-
глийскому противолодочному авианосцу «Гермес», находящемуся в ордере. Раке-
ты были обнаружены корабельной РЛС. После этого их ГСН были подавлены с
помощью большого количества дипольных отражателей, выброшенных кораблями
оперативного соединения, и активных радиопомех, созданных вертолетом «Линкс».
Одна ракета была отведена от авианосца и затем сбита зенитной ракетой «Си Вулф»,
запущенной с кораблей охранения. Вторая ракета прошла мимо ордера кораблей.
Третья — после выхода из дипольного облака перенацелилась и потопила находя-
щийся в четырех милях от авианосца контейнеровоз «Atlantic Conveyor» вместе с
находившимися на борту пятнадцатью вертолетами (рис. 18.19).
Корабли английского флота начали интенсивно создавать пассивные радиопо-
мехи при угрозе воздушного нападения противника после того, как 4 мая был по-
топлен эсминец УРО «Шеффилд». Для непрерывного пополнения запаса дипольных
отражателей английская фирма «Плесси аэроспейс» в течение месяца работала
круглосуточно.
18.8. Эффективность средств РЭБ в локальных войнах
757
Рис. 18.19. Срыв ракетной атаки против авианосца «Гермес»
и перенацеливание на контейнеровоз «Atlantic Conveyor»
Второй прием предназначался для срыва автосопровождения цели ГСН раке-
ты после ее захвата. На дальности до 2 км от корабля с помощью ракет, запускае-
мых корабельными пусковыми установками «Корус», создавалось облако диполей
так, чтобы корабль и облако оказывались в пределах строба дальности ГСН раке-
ты. В результате ракета наводилась на облако, а корабль выходил из него и одно-
временно выполнял противоракетный маневр. Этот прием был использован эскад-
ренным миноносцем «Глеморган» при обстреле позиций аргентинских войск в
районе Порт-Стенли 12 июня. Из четырех ракет «Экзосет», запущенных по эсмин-
цу с наземной пусковой установки, три были отведены от корабля пассивными
помехами и только одна попала в кормовую надстройку, но корабль остался на плаву.
Третий прием предусматривал совместное использование пассивных и активных
радиопомех для увода ракет от кораблей. Корабль с помощью неуправляемой ракеты
выставлял облако дипольных отражателей на удалении 400 м и одновременно вклю-
чал станцию активных радиопомех, работавшую в режиме увода ракеты на это обла-
ко. В результате ложная и реальная цели образовывали как бы один протяженный
объект. На его центр наводились противокорабельные ракеты, которые проходили
мимо цели. Такой прием показал высокую эффективность в борьбе с одиночными
ракетами. Одновременно выстреливались ложные ИК-цели, имитирующие тепло-
вое излучение корабля. После приводнения они удерживались на поверхности воды
и уводили на себя ракеты с тепловыми головками самонаведения.
В боевых действиях активные помехи создавали также английские бомбарди-
ровщики «Вулкан» с помощью станций радиопомех, переставленных со штурмо-
виков «Буканир», и самолеты «Си Харриер», оборудованные приемниками преду-
преждения о радиолокационном облучении и автоматами для создания облаков ди-
польных отражателей. При налете на аэропорт Порт-Стенли бомбардировщики
подавили РЛС наведения зенитно-ракетных комплексов «Роланд» и «Тайгеркэт»,
защищавших аэродром, и нанесли бомбовый удар.
В ходе конфликта стратегические бомбардировщики «Вулкан» нанесли два удара
по РЛС TPS-43F противорадиолокационными ракетами «Shrike» AGM-45, но через
два дня станция возобновила свою работу, а перед последующими ударами вообще
выключалась.
758
Глава 18. Эффективность средств и способов РЭБ
При нанесении по кораблям авиационных ударов средства РЭП не могли по-
влиять на результаты удара, и корабли несли потери. Так был потоплен 21 мая фрегат
«Ардент», по которому был нанесен удар неуправляемыми ракетами и авиабомба-
ми со штурмовика «Аэромакки» в то время, когда вел артиллерийский огонь по
позициям аргентинских войск в районе г. Сан-Карлос. Аналогично были потопле-
ны эсминец «Ковентри» ударом авиабомб со штурмовика «Скайхок» и фрегат УРО
«Антилопа», а два корабля были повреждены.
Изучив опыт ведения РЭБ в фолклендском конфликте, английские вооружен-
ные силы приняли меры по совершенствованию средств РЭП, повышению чувстви-
тельности аппаратуры радиоразведки, увеличению точности пеленгования РЭС до
значений лучше 1°, по увеличению мощности и расширению диапазона частот
постановщиков помех. Были сформулированы технические задания на разработку
комбинированной системы радиопротиводействия, состоящей из станции актив-
ных помех и пусковых установок для запуска неуправляемых ракет, начиненных
дипольными отражателями и ИК-излучателями для защиты кораблей от ракет с ГСН.
Были приняты меры по совершенствованию системы создания помех тепловым
ГСН. Тепловые ловушки после опыта применения их на Фолклендах выпускаются
с характеристиками, максимально приближенными к реальным тепловым портре-
там надводных кораблей. Создаются пассивные ложные цели, способные двигать-
ся со скоростями, близкими к скорости защищаемых самолетов. Разрабатываются
комплексные системы РЭП, способные обеспечить защиту кораблей и самолетов
от ракет, оборудованных радиолокационными, тепловыми и лазерными ГСН.
В период англо-аргентинского конфликта применялись также космические
средства радиоэлектронной разведки (РЭР). Так, благодаря информации с разведы-
вательных спутников США о местонахождении аргентинских кораблей 2 мая 1982 г.
английской подводной лодке удалось торпедировать аргентинский крейсер «Генерал
Белграно». Из 1042 членов экипажа удалось спастись лишь 400.
В апреле 1986 г. был совершен авиационный удар по различным объектам Ливии.
Удар наносился авиацией военно-воздушных и военно-морских сил под защитой
радиоэлектронных помех. В нем участвовали истребители-бомбардировщики F-111F,
базирующиеся в Великобритании на авиабазе Лейкенхит, и штурмовики А-6Е «Ин-
трудер» с авианосцев «Америка» и «Корал Си», находившихся в Средиземном море.
Ударную авиацию поддерживали две группы РЭБ. Первая группа в составе трех
самолетов EF-111А вылетела с аэродрома Аппер-Хейфорд (Великобритания), а вторая
в составе четырех самолетов ЕА-6В — с авианосцев. Во взаимодействии с самолетами
РЭБ действовали палубные штурмовики А-7Е и истребители F/A-18, вооруженные
противорадиолокационными ракетами, а также истребители прикрытия F-14 и
F/A-18. Контроль воздушного пространства и управление нападающей авиацией
обеспечивали два палубных самолета дальнего радиолокационного обнаружения и
управления Е-2С «Хокай». В операции принимали участие также два авианосца, на
борту которых базировались 170 боевых самолетов, подводная лодка типа «Лос-
Анджелес», самолеты радиоэлектронной разведки, самолеты-заправщики КС-10,
КС-135 и другие средства. Результаты удара оценивали разведывательные ИСЗ и
самолеты стратегической разведки SR-71 и RC-135.
Всего в операции принимали участие около 200 самолетов, 36 боевых кораблей
и вспомогательных судов. Под защитой радиопомех истребители-бомбардировщи-
ки и палубные штурмовики нанесли удары управляемыми и неуправляемыми авиа-
бомбами по резиденции ливанского правительства в Триполи, международному
18.8. Эффективность средств РЭБ в локальных войнах
759
порту, академии ВМС и по объектам в Бенгази. Создаваемые радиопомехи затруд-
нили обнаружение и поражение ударной авиации. Вследствие этого из тридцати
нападавших самолетов был сбит только один.
Радиоэлектронная разведка и радиоэлектронная борьба занимали ключевое место
в обеспечении подготовки и ведения наступательной операции многонациональ-
ных сил (МНС) против Ирака в феврале 1991 г., см. рис. 18.20.
Рис. 18.20. Радиоэлектронная борьба в войне в Ираке
На этапе стратегического развертывания основные усилия РЭР концентрирова-
лись на вскрытии мероприятий по подготовке Ирака к войне, на слежении за хо-
дом оперативного развертывания его вооруженных сил, на подготовке данных по
целям на иракской и кувейтской территориях для планирования ракетно-бомбовых
ударов и радиоэлектронного подавления. РЭР также обеспечивала контроль за су-
доходством и проведением морской блокады в Персидском заливе.
С началом боевых действий главное внимание разведка уделяла оценке резуль-
татов ракетно-бомбовых ударов, выявлению новых целей для поражения — в первую
очередь пусковых установок мобильных комплексов иракских оперативно-такти-
ческих ракет «Скад», слежению за перемещением иракских войск и авиации, а также
контролю воздушного пространства. На начальном этапе развертывания группи-
ровки МНС разведка велась в основном силами и средствами центрального разве-
дывательного управления (в ведении ЦРУ находятся спутники видовой разведки),
управления национальной безопасности США (АНБ), ведающего космическими и
наземными средствами стратегической РЭР, самолетами-разведчиками стратегичес-
кого авиационного командования ВВС США и самолетами дальнего радиолокаци-
онного обнаружения и управления авиацией (ДРЛО) Е-3 AWACS ВВС США, Саудов-
ской Аравии и Объединенных вооруженных сил НАТО, а также средствами морс-
кой и воздушной разведки 6-го и 7-го оперативных флотов ВМС США.
760
Глава 18. Эффективность средств и способов РЭБ
Группировка сил и средств космической разведки включала до шести спутни-
ков оптико-электронной разведки «Кихоул-11», один спутник радиолокационной
разведки «Лакросс», три спутника радио- и РТР типа «Магнум» и «Вортекс», один-
два спутника обнаружения пусков баллистических ракет «Имеюс», спутники метео-
разведки и некоторые другие. Наряду с данными военных спутников в интересах
командования МНС использовались фотоснимки, полученные с коммерческих спут-
ников исследования природных ресурсов «Лэндстат» (США) и «Спот» (Франция).
ИСЗ типа «Кихоул-11» первых моделей способны осуществлять фотографиро-
вание земной поверхности в дневное, а последних — ив ночное время с разреша-
ющей способностью 0,15 м. Периодичность пролета одного спутника над зоной раз-
ведки — до нескольких часов (перигей и апогей орбиты ИСЗ «Кихоул» соответствен-
но 270...950 км). Однако спутники этого типа были малоэффективны в условиях
ограниченной видимости при пыльных бурях в пустыне и дымах от пожаров на
нефтяных скважинах Кувейта.
Бортовой радиолокатор с синтезированной апертурой ИСЗ «Лакросс» обеспе-
чивал круглосуточное ведение разведки при любых условиях видимости, включая
сплошную облачность, задымление или песчаные бури, с разрешающей способно-
стью 0,6...3 м. Установленная на них аппаратура позволяла обнаруживать объекты,
скрытые под песком на глубине до 5...6 м. Периодичность пролета спутника над
зоной разведки — до одних суток, высота орбиты 750 км.
Изображения объектов, полученные с помощью ИСЗ «Кихоул» и «Лакросс»,
передавались в цифровой форме на наземные центры приема и обработки данных,
расположенные как на территории США, так и за рубежом (основной — в Форт-
Бельвуар, штат Вирджиния). Полученные радиолокационные изображения анали-
зировались в национальном центре дешифрирования данных видовой разведки ЦРУ.
Полученная на основе анализа информация по каналам спутниковой связи посту-
пала в войска на заокеанском театре военных действий (ТВД). При таком цикле
обработки время доведения информации до потребителя с момента сброса с ИСЗ
обычно составляло не более одного часа.
Для повышения оперативности использования данных видовой космической
разведки при планировании ракетно-бомбовых ударов по целям на территории Ирака
в зону Персидского залива были переброшены 12 наземных мобильных станций
приема и обработки данных системы «Контакт Соре» ВВС США. Эти станции,
развернутые в частях тактической авиации, позволяли принимать и преобразовы-
вать в удобный для анализа и обобщения вид необработанные сигналы, передава-
емые непосредственно с разведывательных спутников или ретранслированные по
каналам спутниковой связи после их сброса на стационарные центры приема и об-
работки. Длительность временного цикла от момента сброса информации до ее по-
ступления в информационно-аналитический орган соответствующего разведыватель-
ного подразделения на ТВД составляла около 10 мин.
ИСЗ «Магнум» и «Вортекс» вели разведку с геостационарных орбит. Эти аппа-
раты предназначаются для перехвата сигналов радио- и радиотехнических средств,
работающих в УКВ-, СВЧ- и микроволновых диапазонах волн. Для приема инфор-
мации на территории США и за рубежом была развернута сеть стационарных центров
приема и обработки данных, основной из которых находился в Форт-Мид, штат
Мэриленд. Передаваемая со спутников информация анализировалась и обобщалась
в соответствующих подразделениях управления национальной безопасности, пос-
ле чего передавалась в войска на заокеанский ТВД.
18.8. Эффективность средств РЭБ в локальных войнах
761
Спутники обнаружения пусков баллистических ракет «Имеюс» использовались
в качестве первого эшелона системы предупреждения о ракетных ударах Ирака.
Данные о пусках поступали на наземные приемные центры системы «Имеюс», а
затем после обработки на командном пункте системы ПВО североамериканского
континента по каналам спутниковой связи ретранслировались на Ближневосточ-
ный ТВД. Высота орбиты ИСЗ «Имеюс» — около 36 тыс. км, время доведения
данных до войск с момента обнаружения пуска — 1 мин.
Радиоэлектронную разведку и РЭБ вели специальные формирования в назем-
ной группировке МНС. В составе группировки насчитывалось более 250 наземных
станций, 27 вертолетов и 48 самолетов радио- и радиотехнической разведки, РЛС
разведки движущихся целей и позиций артиллерии, до 40 самолетов радиолокаци-
онной и оптико-электронной разведки.
В ходе боевых действий против Ирака сухопутные войска и морская пехота
впервые применили новые разведывательные комплексы на базе беспилотных ле-
тательных аппаратов (БЛА) «Пионер». Каждый такой комплекс, размещенный на
двух автомобилях «Хаммер», может включать 14... 16 БЛА, а также комплект назем-
ной аппаратуры управления полетом и приема данных. БЛА «Пионер» оснащен
телевизионной камерой, инфракрасной аппаратурой и средствами связи. Макси-
мально допустимое удаление БЛА от станции управления полетом — 185 км, про-
должительность полета — до 4 часов.
Имевшиеся в составе наземной группировки силы и средства разведки позво-
ляли решать разведывательные задачи на глубину до 100... 150 км. На базе этих сил
и средств формировались органы войсковой (тактической и глубинной) радио- и
радиотехнической, видовой артиллерийской, инженерной, радиационной, химичес-
кой и биологической разведки.
Разведка ВВС применяла самолеты стратегической (RC-135, TR-1) и тактичес-
кой (RF-4C) авиации США, тактические самолеты-разведчики ВВС Великобрита-
нии («Ягуар» и «Торнадо» GR.1) и Франции («Мираж» F-1CR), самолеты дальнего
радиолокационного обнаружения и управления авиацией Е-3 AWACS ВВС США,
Саудовской Аравии и объединенных ВВС НАТО, а также американскую систему
детальной радиолокационной разведки наземных целей JSTARS.
Самолеты стратегической разведывательной авиации вели радио-, радиотехни-
ческую (RC-135), радиолокационную и аэрофотографическую (TR-1) разведку. Цели
обнаруживались практически на всей иракской территории. Полеты самолетов
RC-135 выполнялись круглосуточно, a TR-1 — преимущественно в светлое время
(продолжительность одного самолетовылета до 12 ч). Эти самолеты вели разведку
с больших высот из нескольких зон барражирования.
Тактическая разведывательная авиация действовала на маршрутах выдвижения
оперативных резервов вооруженных сил Ирака. Самолеты ДРЛО Е-3, выполняя
полеты над территорией Саудовской Аравии, в центральной и восточной части
Средиземноморья, а также над юго-восточными районами Турции, организовали
круглосуточный контроль воздушного пространства в пределах всей зоны Персид-
ского залива.
Поскольку объекты разведки для ДРЛО Е-3 AWACS (ударные самолеты, крыла-
тые ракеты и другие ЛА) могут иметь скорости в очень широком диапазоне и со-
вершать полеты на малых высотах, современные средства РЛР ДРЛО применяют
импульсно-доплеровские РЛС со сложными зондирующими сигналами. Такие сред-
ства РЛР обнаруживают воздушные и надводные цели на больших дальностях на
162
Глава 18. Эффективность средств и способов РЭБ
фоне отражений от поверхности земли и моря. Они имеют в своем составе высо-
копроизводительные средства обработки, отображения и обмена информацией. Это
позволяет не только успешно обнаруживать и автоматически сопровождать боль-
шое количество целей, но использовать средства РЛР в составе комплексов опера-
тивного управления войсками и оружием, т. е. реализовать уникальную возможность
создания мобильного информационно-управляющего поля. Мобильность авиацион-
ных комплексов ДРЛО позволяет повысить живучесть и боевую устойчивость ра-
диолокационного поля и средств управления боевыми действиями, а также расши-
рить границы радиолокационного поля. Поэтому, несмотря на высокую стоимость
создания и эксплуатации, авиационные комплексы РЛР получают большое распро-
странение в разных странах.
Помимо бортовых систем самолета-носителя Е-3 в состав комплекса радиолока-
ционного дозора и наведения входят шесть подсистем бортового оборудования: РЛС,
подсистема опознавания, подсистема навигации и управления, система связи, под-
система обработки информации, подсистема отображения и управления (рис. 18.21).
Рис. 18.21. Общая схема компоновки радиоэлектронной аппаратуры комплекса ДРЛО:
1 — пульт управления подсистемой связи; 2 — аппаратура подсистемы связи; 3 —
подсистема обработки данных; 4 — пульт оператора БЦВМ; 5 — многофунк-
циональные пульты отображения данных и управления; 6 — пульт дежурного опера-
тора; 7— пульт технического обслуживания РЛС; 8— приемное устройство и цифро-
вой вычислитель РЛС; 9 — КВ антенна подсистемы связи; 10 — антенная система
РЛС; 11 — антенны системы радиолокационного опознавания и системы передачи
данных; 12 — аппаратура радиолокационного опознавания и навигационная аппара-
тура; 13 — передающее устройство РЛС; 14 — радиоэлектронная аппаратура управ-
ления полетом; 15— источник постоянного тока; 16— распределительное устройство
Средства РЛР с системами ДРЛО способны при высоте полета 9...12 тыс. м
обнаруживать и сопровождать несколько сотен целей на расстояниях до 650 км. Зона
обзора 360° по азимуту и ±30° по углу места. Разрешающая способность — несколько
сотен метров по дальности и полтора градуса по азимуту.
В период подготовки и в ходе военных действий против Ирака впервые в бое-
вых условиях была применена и опробована проходящая войсковые испытания
перспективная система детальной радиолокационной разведки наземных целей
JSTARS. Система включала авиаэскадрилью в составе двух самолетов Е-8 на базе
18.8. Эффективность средств РЭБ в локальных войнах
763
гражданского самолета Боинг-707 и шесть наземных мобильных станций приема и
обработки данных. Бортовая РЛС с синтезированной апертурой самолета Е-8 по-
зволяла обнаруживать наземные движущиеся цели, различать колесные и гусенич-
ные объекты, обнаруживать низколетящие вертолеты на дальности до 250 км и пе-
редавать данные целеуказания на наземные станции в реальном масштабе време-
ни. По замыслу американского командования, основное предназначение системы
J STARS заключалось в разведке целей для поражения их ракетами АТАКМС (даль-
ность стрельбы — более 120 км). Вместе с тем в ходе конфликта система успешно
использовалась для наведения на наземные цели и тактической авиации. Этот класс
систем использует синтезирование апертуры антенны РЛС для получения высоко-
го разрешения (узкой ДНА) при использовании на борту антенны сравнительно
малого размера.
Считается, что используя метод синтезирования, можно увеличить разрешаю-
щую способность РСА по азимуту в 100 раз и более по сравнению с панорамными
РЛС. По потенциальным характеристикам разрешающей способности РЛС с син-
тезированной апертурой приближаются к разрешению, характерному для оптичес-
ких приборов. Но при этом показатели разрешения и точности измерения коорди-
нат объектов не зависят от погодных условий.
Возможности средств РЛР с синтезированной апертурой существенно расши-
ряются если работать с произвольными углами ориентации ДНА относительно
траектории полета носителя. В частности, кроме бокового обзора, можно реализо-
вать обзор полосы местности (переднебоковой обзор), обзор в заданном секторе
(секторный обзор), детальный обзор местности в окрестности заданного ориенти-
ра (телескопический обзор). Все другие виды обзора, как правило, сводятся к ком-
бинации бокового, переднебокового и телескопического обзоров. При переднебо-
ковом обзоре радиолокационная информация формируется в полосе местности, гра-
ницы которой располагаются параллельно траектории ЛА
Как показал опыт войны, самолеты радиолокационной разведки Е-8 и TR-1
наряду с ИСЗ «Лакросс» явились единственным средством, обеспечивавшим раз-
ведку территории противника в глубоком тылу в условиях плотной облачности,
песчаных бурь, а также сильной задымленности, вызванной пожарами на нефтя-
ных скважинах.
В ходе боевых действий против Ирака было опробовано и налажено комплекс-
ное использование средств космической и воздушной разведки, в частности — для
поиска и обнаружения иракских мобильных пусковых установок оперативно-так-
тических ракет (ОТР) «Скад». Так, комплект средств, привлекавшийся для реше-
ния этой целевой задачи, включал элементы системы «Имеюс» (оповещение орга-
нов управления ПВО и ПРО на театре военных действий), самолеты Е-3 AWACS
(обнаружение пусков ОТР с учетом данных целеуказания космической разведки и
наведение тактической авиации) и Е-8 J STARS (обнаружение позиций пусковых
установок оперативно-тактических ракет с учетом данных целеуказания космичес-
кой разведки и наведение ракетных комплексов и тактической авиации).
Характеризуя деятельность разведывательного обеспечения боевых действий
многонациональных сил и прежде всего ВС США в зоне Персидского залива, за-
рубежная печать указывала на высокую эффективность технических средств раз-
ведки, в первую очередь космической, доставлявшей более 90 % всего объема развед-
данных, воздушной видовой, воздушной и наземной радио- и радиотехнической.
Именно технические средства радиоэлектронной разведки обеспечили возможность
764
Глава 18. Эффективность средств и способов РЭБ
получения значительной части информации в реальном или близком к реальному
масштабе времени, комплексирование сил и средств для решения целевых задач,
высокий уровень автоматизации управления сбором, обработкой и доведением до
потребителей разведданных.
В ходе военных действий радиоэлектронная борьба носила плановый, комплекс-
ный и целенаправленный характер. Она велась, по существу, как составная часть
специальной операции по дезорганизации деятельности военно-политического
руководства, управления войсками и оружием иракских Вооруженных сил.
Сухопутные войска развернули 60 наземных станций радиопомех AN/TLQ-17
«Трефиккджам» и 30 вертолетов РЭБ со станциями радиопомех AN/ALQ-151 «Квик
фикс». Эти средства разведывали и подавляли радиопомехами КВ-, УКВ- и радио-
релейную связь в тактическом и оперативно-тактическом звене управления на даль-
ности до 120... 150 км.
В составе авиационной группировки насчитывалось 108 самолетов РЭБ EF-111A
«Рейвен», ЕС-130Н «Компас колл», F-4G, ЕА-6В «Проулер» с комплексами радио-
помех AN/ALQ-99, AN/ALQ-137 для подавления РЛС, линий радиосвязи и пораже-
ния радиолокационных средств ПВО противорадиолокационными ракетами. Кро-
ме того, на всех ударных самолетах ВВС США, Великобритании и Франции, а также
кораблях ВМС были установлены станции радиопомех AN/ALQ-32, AN/ALQ-137,
AN/ALQ-161 индивидуальной защиты от обнаружения радиоэлектронными сред-
ствами и поражения управляемым оружием. Значительная часть боевой авиации
была оснащена подвесными контейнерами с аппаратурой радиоэлектронных помех
коллективной защиты.
За сутки до начала боевых действий наземные части РЭБ приступили к созда-
нию радиопомех в каналах управления вооруженных сил Ирака, а за несколько часов
началось массированное радиоэлектронное подавление системы ПВО.
В воздушной наступательной операции первоочередной задачей РЭБ было по-
давление и дезорганизация системы управления ПВО на территории Ирака в мас-
штабах страны с последующим переносом основных усилий на систему ПВО груп-
пировки иракских войск в Кувейте.
При нанесении массированных авиационных ударов самолеты РЭБ EF-111A и
ЕА-6В действовали в эшелонах дезорганизации систем ПВО и управления, в удар-
ных эшелонах на каждом из направлений, подавляя из боевых порядков РЛС обна-
ружения воздушных целей и станции наведения ракет. Самолеты РЭБ ЕС-1 ЗОН из
зон, находившихся на удалении 80... 100 км от линии боевого соприкосновения,
обеспечивали подавление радиолиний и связи комплексов ПВО. Одновременно
самолеты F-4G при вхождении в зону обнаружения ПВО провоцировали расчеты
на включение РЛС, а затем применяли по ним противорадиолокационные ракеты
HARM и «Стандарт ARM». Головки самонаведения ракет предварительно настра-
ивались на выявленные при подготовке к удару рабочие частоты РЛС. Впервые были
применены новые самонаводящиеся на излучение ракеты ALARM. Ими вооружа-
лись самолеты английских ВВС «Торнадо». Уже на начальном этапе воздушной
наступательной операции было поражено до 70 % выявленных пунктов управле-
ния и радиоэлектронных объектов системы управления и связи Ирака в оператив-
ном и тактическом звене.
В последующих воздушных налетах самолеты РЭБ EF-111A и ЕА-6В использо-
вались для прикрытия ударных групп тактической и палубной авиации в районах
формирования их боевых порядков в воздухе, на маршрутах и при нанесении ударов
18.8. Эффективность средств РЭБ в локальных войнах
765
по объектам. При этом особое внимание уделялось обеспечению действий тактиче-
ского истребителя F-117 «Stealth»: к объектам ударов заранее выводились самолеты
РЭБ EF-111A и ЕА-6В для затруднения обнаружения самолетов F-117.
Авиационные средства РЭБ, прежде всего — самолетов РЭБ EF-111 «Рейвн» и
F-4G «Уайлд уизл», обеспечивали практически полное подавление радиолокацион-
ных станций ПВО Ирака. Создаваемые спектральные плотности мощности помех
затрудняли также применение зенитных ракетных и артиллерийских средств Ирака.
Особенно результативно было применение средств РЭБ в ночное время, когда не-
возможно использовать оптические системы обнаружения и сопровождения воздуш-
ных целей. 18 самолетов EF-111 совершили более 900 вылетов. 48 самолетов F-4G
произвели 2500 вылетов. Иракцы опасались самолетов F-4G, вооруженных противо-
радиолокационными ракетами HARM. Поэтому они использовали свои РЛС крат-
ковременно, ограниченно и неэффективно. А в случаях применения РЛС с само-
летов EF-111 создавались эффективные помехи, сводившие на нет способность РЛС
обнаруживать и сопровождать цели, наводить на них средства поражения. Самоле-
ты «Рейвн» и «Уайлд уизл» постоянно сопровождали боевые самолеты, наносив-
шие удары по целям на территории Ирака и на Кувейтском театре военных дей-
ствий. Свидетельством успешных действий этих самолетов является тот факт, что
после четвертого дня войны авиация антииракской коалиции могла повсеместно
действовать на средних и больших высотах, не неся потерь.
Таким образом, при первых массированных налетах и в процессе последующих
боевых действий РЭБ обеспечила многонациональным силам преимущество в про-
тивоборстве с Ираком. По сути, был реализован принцип «радиоэлектронного уда-
ра», в результате которого удалось создать благоприятные условия для внезапного
применения авиации и сухопутных группировок войск (сил), высокоточного ору-
жия, добиться в целом превосходства в управлении, в воздухе и на суше.
С переходом к наземным действиям части разведки и РЭБ корпусов и дивизий
наряду с самолетами ВВС и ВМС вели массированное радиоэлектронное подавле-
ние каналов связи и передачи данных систем управления сухопутных войск и ПВО
Ирака во всем диапазоне рабочих частот. Основу комплекса средств РЭБ назем-
ной группировки составили мобильные наземные и вертолетные станции помех ра-
диосвязи КВ- и УКВ-диапазона, состоящие на оснащении формирований развед-
ки и РЭБ дивизионного и корпусного звена сухопутных войск США. Наземные стан-
ции, как правило, применялись из боевых порядков батальонов первого эшелона
на удалении 3...5 км от линии соприкосновения сторон, тогда как удаление марш-
рутов полетов самолетов со средствами РЭБ от линии фронта составляло до 20 км
и более. Одновременно наносились огневые удары по пунктам управления и узлам
связи. Для исключения непреднамеренных радиопомех своим РЭС от средств РЭП
управление многонациональными силами в этот период осуществлялось в основ-
ном по каналам спутниковой связи.
Вооруженные силы Ирака тоже вели РЭБ. Но в составе Вооруженных сил Ира-
ка имелись батальоны РЭБ, оснащенные в основном устаревшей техникой иност-
ранного производства. Самолеты ВВС Ирака были оборудованы средствами поста-
новки пассивных помех, противорадиолокационными ракетами и ракетами с теп-
ловыми головками самонаведения, однако в период боевых действий активного
использования даже этих средств не было отмечено.
Один из важных уроков боевых действий в зоне Персидского залива состоит в
том, что РЭБ переросла из оперативного (боевого) обеспечения в один из важнейших
766
Глава 18. Эффективность средств и способов РЭБ
способов вооруженной борьбы. Комплексное применение средств огневого пора-
жения, разведки и РЭБ позволило нарушить управление войсками и оружием Ира-
ка и обеспечить оперативную внезапность действий многонациональных сил. Вой-
на показала возрастание роли всех видов разведки, прежде всего — космической.
Достаточно сказать, что командование многонациональных сил большую часть
информации получало с помощью орбитальной группировки космических аппара-
тов, обладающих высокой надежностью и оперативностью. Не меньшее значение
имели мероприятия по дезинформации и оперативной маскировке, а также широ-
кое применение автоматизированных систем управления и связи. Надо отметить,
что на практике в полном объеме была реализована концепция объединения в еди-
ное целое средств автоматизированной системы управления, связи, контроля, раз-
ведки и РЭБ различной национальной принадлежности с выходом на глобальную
систему оперативного управления. Комплексное их применение позволило многона-
циональным силам, несмотря на длительный период подготовки, достичь опера-
тивной и тактической внезапности в войне. Впервые на практике было реализова-
но объединение в единый комплекс систем управления войсками и оружием, сис-
тем связи, разведки, РЭБ и огневого поражения.
Операция «Союзническая сила» против Югославии началась 24 марта 1999 г. в
23.30 по югославскому времени с того, что группировка ВВС и ВМС НАТО нанесла
по Югославии несколько авиационных ударов. Первыми их объектами стали аэро-
дромы ВВС, военные и промышленные объекты СРЮ. В воздушном нападении бы-
ли применены до 100 крылатых ракет воздушного и морского базирования, а также
тактическая авиация.
Боевые действия развивались не по испытанному в Ираке сценарию. Ирак
обладал способностью ответить на первый удар наступлением сухопутных войск и
пусками ракет «Скад», поэтому агрессор нанес ему немедленное решительное по-
ражение. Югославия не располагала возможностями адекватного ответа, и НАТО
взяло курс на показательный, растянутый во времени расстрел страны, которая не
могла оказать достойного отпора. В ходе воздушной фазы операции «Буря в пустыне»
авиация НАТО совершала в среднем около 2 тыс. вылетов в сутки, тогда как за пер-
вые 20 дней операции «Союзническая сила» число их не превышало 6 тыс.
Со стороны Североатлантического блока в конфликте участвовала мощная груп-
пировка вооруженных сил. Всего во время боевых действий была задействована
авиационная группировка в составе 1121 боевых, обеспечивающих и транспортных
самолетов, развернутая на территории Италии, ФРГ, Великобритании, Турции,
Франции, а также на континентальной части США, см. рис. 18.22.
Военно-морская группировка в Адриатическом и Средиземном морях состоя-
ла из трех авианосцев, 6 ударных подводных лодок, двух боевых кораблей класса
крейсер, 7 эсминцев, 13 фрегатов; амфибийная группировка имела в своем соста-
ве 4 крупных десантных корабля. Развернутая в Средиземном море наземная груп-
пировка имела в своем составе 16,6 тыс. человек, а на территории Македонии, и
10 тыс. — в Албании.
Успеху первого удара способствовала предварительная детальная фото-, радио-,
радиотехническая и радиолокационная разведка местности. Кроме того, в полет-
ные задания крылатых ракет была занесена информация о точных координатах
важнейших объектов. Эти данные были получены многочисленными группами
наблюдателей и агентурной разведкой с помощью аппаратуры спутниковой нави-
гации системы «Навстар». Космический сегмент средств радиоэлектронной разведки
18.8. Эффективность средств РЭБ в локальных войнах
767
Швейцария
F-16A, F-16B, Турция
«Торнадо», ФРГ
Франция
«Ягуар», Франция
«Мираж-2000С», Франция
Геди
F-16C, F-16D, США
F-117A, США
А-10А, США
ЕА-6В, США
ЕС-1 ЗОЕ, США
CF-18A, Канада
EF-18B, Испания
F-16, Португалия
V
Истрана
ЗЦ- Виллафранка
^Пьяченца
Червия jO
F-15, США
X
о. Сардиния
Средиземное море
Австрия
Венгрия
Ли
Авиано
о
к
СРЮ
Греция
о.
Ионическое море
ъ
F-16C, США
«Торнадо-GR.I», Великобритания
«Xappwep-GR.7», Великобритания
«Торнадо-ADV и -IDS», Италия
F-16, Дания
F-16, Португалия
2
§
L0
F-16, Бельгия
F-16, Нидерланды
ю
5
Босния
и
Хорватия
Герцеговина
%.
Граьуданисе
Амендола
о. Корсика
Джоя
Сицилия
Рис. 18.22. Группировка ВВС США и стран НАТО
в ходе боевых действий в Югославии
Македония
%
составляли спутники оптической разведки «Кейхол» КН-11 (США), «Гелиос-1 А»
(Франция); спутники радиолокационной разведки «Лакросс» (США); спутники двой-
ного применения, специализированные для получения изображений земной поверх-
ности, «Спот» (Франция). Авиационные разведывательные комплексы на самолетах
дальнего радиолокационного обнаружения и управления AWACS Е-3 «Сентри», уже
упоминавшиеся выше в связи с военными операциями ВВС США и их союзников
в Персидском заливе; самолеты дальней радиолокационной разведки наземных це-
лей Е-8С системы JSTARS (рис. 18.23), которые впервые использовались штатно
(во время проведения операции «Буря в пустыне» они удачно выдержали испытания);
самолеты радио- и радиотехнической разведки RC-135V/W «Ривет Джойнт» и RC-12
«Гардрейл»; самолет комплексной стратегической разведки U-2; беспилотные раз-
ведывательные летательные аппараты «Хантер», «Предатор» (оба — США, послед-
ний помимо разведки осуществлял лазерное целеуказание), CL-289 (Германия, Фран-
ция), «Кресерель» (Франция).
Из средств РЭБ применялись самолеты ЕС-1 ЗОН и ЕА-6В; противорадиолока-
ционные ракеты AGM-88 (носители — тактические истребители F-16C, самолеты
РЭБ ЕА-6В).
В ходе военных действий применялись крылатые ракеты воздушного базирова-
ния AGM-86 (носитель — В-52Н, израсходован почти весь запас ВВС США); крыла-
тые ракеты морского базирования AGM-109 (носители — корабли и подводные лод-
ки ВМС США и Великобритании); управляемые авиабомбы JDAM с наведением
по сигналам космической навигационной системы «NAVSTAR» (ныне ее именуют
GPS) (носитель — впервые примененный в боевых условиях стратегический мало-
768
Глава 18. Эффективность средств и способов РЭБ
Рис. 18.23. Самолет дальней радиолокационной разведки
наземных целей Е-8С системы JSTARS
заметный бомбардировщик В-2А, выполненный по технологии «Stelth»); управ-
ляемые ракеты AGM-130 с телевизионной командной системой наведения (носи-
тель — F-15E); кассетные авиабомбы CBU-97 с самоприцеливающимися боевыми
элементами для поражения бронетанковой техники (носитель — В-1В).
Со стороны СРЮ действовал 52-ой (Приштинский) корпус в составе 3-й ар-
мии ВС СРЮ и некоторых других частей общей численностью около 30 тыс. чело-
век. Кроме того, в провинции действовали отряды полиции и сил безопасности
общей численностью около 16 тыс. чел.
Стационарная группировка ПВО Югославии имела на вооружении устаревшие
РЛС и ЗРК советского производства С-75 (40 пусковых установок) и С-125 (60 пус-
ковых установок), разработанные в 1950-1960-х гг. и неспособные бороться с со-
временными средствами воздушного нападения, а также около 60 ПУ мобильных
ЗРК «Квадрат».
За последние годы в каждом очередном конфликте американцы отрабатывают
боевое применение принципиально новой техники, средств и методов. Опера-
ция «Союзническая сила» в этом смысле не стала исключением. Так в ударах по
СРЮ впервые были действовали новейшие малозаметные бомбардировщики В-2А
(рис. 10.6).
Взлетев 24 марта с авиабазы Уайтмен (штат Монтана), пара В-2А «Спирит» за
31 час долетела до Югославии, отбомбилась и вернулась на свою базу. Каждый из
самолетов доставил к целям по 16 управляемых авиабомб нового поколения JDAM
калибра 2000 фунтов (907 кг). Первый полет В-2А состоялся 17 июля 1989 г. Се-
рийные машины начали поступать в войска в 1996 г., но даже и после этого их
продолжали дорабатывать и модернизировать. В частности, последние модифика-
ции В-2А «Блок 30» имеют усовершенствованную авионику, значительно большее
число режимов работы бортовой РЛС (в том числе следование рельефу местности
и обнаружение наземных целей), систему радиоэлектронной разведки, выявляю-
щую РЛС ПВО и позволяющую экипажу обходить опасные районы. Но специали-
сты отмечают, что даже и после переоборудования В-2А не полностью соответствуют
требованиям ВВС, в том числе и по малозаметности. Так противорадиолокацион-
ное покрытие бомбардировщика для сохранения требуемого уровня скрытности
нуждается в трудоемком обслуживания. Самолет, в сущности, не является малоза-
метным в инфракрасном диапазоне.
В-2А является наиболее совершенным в мире бомбардировщиком. Он способен
преодолевать эшелонированную ПВО, вести поиск и уничтожение в тылу противни-
ка подвижных объектов. Считается, что три В-2А в одном боевом вылете способ-
ны уничтожить до 350...750 танков и боевых бронированных машин. Предполага-
ется закупить 21 машину, 16 из которых будут полностью боеготовы. Стоимость
18.8. Эффективность средств РЭБ в локальных войнах
769
одного В-2А «Спирит» превышает 2 млрд долл, (контрактная стоимость одного эк-
земпляра составляет 1,3 млрд долл.). Эксперты полагают, что В-2А, постоянно модер-
низируясь, будет оставаться эффективным самолетом по крайней мере до 2050 г.
События на Балканах показали и отличие реальных свойств малозаметных са-
молетов, созданных по технологии «Stelth», от их рекламируемых характеристик и
возможностей. В ночь с 27 на 28 марта средствами ПВО СРЮ был сбит самолет-
невидимка F-117A.
Первые серийные F-117A, получившие наименование «Найтхок», начали по-
ступать в ВВС США в 1983 г. В ходе войны против Ирака в 1991 г. F-117A выпол-
нили 1271 боевой вылет, не потеряв ни одного самолета. До недавнего времени в
ВВС США имелось 54 такие машины. В рамках операции «Союзническая сила» на
итальянскую базу Авиано прибыли 12 «Найтхоков». F-117A — относительно неболь-
шой самолет. Его взлетный вес 23,’6 т. Форма машины подчинена требованиям
малозаметности — многочисленные плоские грани фюзеляжа отражают излучение
радаров в узких секторах. Другой элемент технологии «Stelth» — специальные
радиопоглощающие покрытия, решетки, экранирующие компрессоры двигателей
от излучения радаров, позолоченные стекла фонаря кабины. Ракеты и авиабомбы
размещаются во внутренних отсеках фюзеляжа, чтобы уголковые конструкции
пилонов внешних узлов подвеса оружия не влияли на эффективную отражающую
поверхность самолета.
За малозаметность заплачена немалая цена — F-l 17А имеет относительно низкие
летные характеристики. Его скорость — 1040 км/ч, боевой радиус действия — 800 км
(это примерно соответствует показателям реактивных самолетов начала 1950-х гг.).
На самолете отсутствует бортовой радар, поскольку его излучение демаскирует
машину. Основное средство обнаружения противника — тепловизионные систе-
мы переднего и заднего обзора. Обнаружив цель, «Найтхок» наводит на нее управля-
емые авиабомбы с лазерным наведением GBU-10, GBU-27 или другое оружие. Кроме
того, он может нести ракеты класса «воздух — поверхность» малой дальности.
Следует отметить, что старательно муссируемое представление о F-117A, как о
несбиваемом самолете, далеко от действительности. Его отражающая поверхность
в курсовой проекции — примерно 0,1 м2 (в десять раз меньше, чем у обычных бо-
евых машин). Соответственно радиус обнаружения F-117A локаторами ПВО неве-
лик, однако вовсе не равен нулю. При должном уровне обученности и грамотном
построении системы ПВО бороться с «Найтхоками» могут многие стоящие ныне
на вооружении ЗРК. Разумеется, F-117A может обнаруживаться не только радио-
локационными, но и электронно-оптическими средствами, а также визуально. Кроме
того, F-117A вовсе не является самолетом-невидимкой: современные трехкоординат-
ные радиолокационные станции кругового обзора, работающие в метровом диапа-
зоне волн, эффективно обнаруживают малозаметные самолеты. Уже в ходе боевых
действий в Персидском заливе выявились такие недостатки самолетов F-117A, как
меньшая, чем ожидалось и официально объявлялось, эффективность действия
новейших систем оружия: самолеты поразили только 60 % целей (ожидалось 90 %).
Другой новацией, примененной союзниками на Балканах стало применение
электромагнитного оружия. В прессу попали сообщения (хотя несколько противо-
речивые и не полные) об использовании в ходе ведения РЭБ «электромагнитной
бомбы» как средства ФП радиоэлектронных систем противника. Средства функцио-
нального поражения используют электромагнитные поля не для воздействия на
сигналы в информационных системах управления войсками и оружием, а разру-
шают или меняют характеристики компонентов радиоэлектронной аппаратуры,
770 Глава 18. Эффективность средств и способов РЭБ
рассеивая на них не совместимую с нормальными условиями работы большую
мощность. При этом поражаются не только радиосистемы и радиосредства. В той
же мере негативные последствия от применения электромагнитного оружия (ЭМО)
испытывают вычислительные средства и оптоэлектронные устройства.
Ключевым вопросом проблемы создания ЭМО является оценка эффективнос-
ти воздействия СВЧ-излучения на радиоэлектронные элементы и компоненты. Такое
воздействие возможно как непосредственно через входной приемный тракт, так и
через различные конструкционные щели, отверстия и разъемы аппаратуры. В этом
случае мощное СВЧ-излучение наводит токи на внешней поверхности конструк-
ции изделия, а эти токи через неоднородности создают поля внутри и воздейству-
ют на радиоэлектронную аппаратуру. Прежде всего — на полупроводниковые р-п
переходы. Результатами такого воздействия может стать снижение качества функ-
ционирования прибора за время действия СВЧ-импульса; временная потеря рабо-
тоспособности; необратимый выход из строя радиоэлементов за счет их перегрева
или полевого пробоя. Наиболее тяжелый и радикальный случай — необратимый
выход из строя их радиокомпонтов, в первую очередь кристаллических смесите-
лей, малошумящих усилителей и детекторов. На этой основе получаются самые на-
дежные оценки эффективности ЭМО.
Еще одной особенностью войны против Югославии стало планирование и про-
ведение информационной операции.
По мнению американских специалистов, информационные технологии ныне
трансформируют характер боевых действий точно так же, как в конце XIX — нача-
ле XX столетия, в период промышленной революции: технологии машинострое-
ния обусловили приход на смену пехотным каре пулеметов, танков и самолетов.
США заблаговременно начали подготовку к военным действиям в информацион-
ном пространстве, и это нашло свое отражение в Единой доктрине информацион-
ных операций, которая была утверждена председателем Объединенного комитета
начальников штабов (ОКНШ) Генри Шелтоном и опубликована в октябре 1998 г.
В доктрине сформулированы основополагающие принципы, которых должны при-
держиваться вооруженные силы США при в борьбе с противником, использующим
в качестве оружия «байты, а не пули».
Информационные операции, согласно этой доктрине, «являются действиями,
оказывающими влияние на информацию и информационные системы противника
и защищающие собственную информацию и информационные системы». При этом
информационные операции могут предусматривать использование психологических
операций, дезинформации, радиоэлектронного противодействия, несанкциониро-
ванного доступа к информации, а также защиту собственных компьютерных систем
и сетей. Сюда же относятся действия по обеспечению секретности, скрытности,
помехозащиты и многие другие вопросы радиоэлектронной борьбы.
Одновременно с началом агрессии НАТО против СРЮ компьютерные систе-
мы США подверглись атаке, которую инициировали югославские хакеры. В частно-
сти, в адрес получателей электронной почты военного ведомства США были на-
правлены тысячи сообщений и этот поток снизил скорость прохождения инфор-
мации в компьютерных сетях. Белградский отправитель-рекордсмен посылал более
2000 сообщений в день. Эта информационная атака не была безрезультатной [57].
По сообщению пресс-службы ВС США, во время проведения операции «Со-
юзническая сила» компьютерные сети американских войск подвергались нападе-
нию почти ежедневно. Министерство обороны США обычно обнаруживало от 80
до 100 «электронных взломов» компьютерных систем каждый день. Разумеется,
18.9. Влияние РЭБ на успех боевых действий
771
точные данные о подобных случаях информационного нападения получить очень
трудно: случаи особо опасных атак не предаются гласности, они исследуются контр-
разведывательными и юридическими службами.
Обнаруженные в январе — феврале 1999 г. атаки неизвестных хакеров с целью
прорыва на объекты информационного ресурса ВС США признаны самыми серь-
езными и заметно отличающимися от всего того, что было отмечено ранее. Заме-
ститель министра обороны США Джон Хамре, выступая в конце февраля на слу-
шаниях в профильном комитете палаты представителей, заявил, что его министер-
ство «...уже сейчас вовлечено в настоящую информационную войну. Неясно пока,
кто инициировал эту серию загадочных программных атак. Возможно, источником
угрозы является одиночный хакер. Но не исключается, что работала целая органи-
зованная группа, поскольку установлены признаки единого методического подхо-
да к планированию и проведению специального программно-математического воз-
действия» [57].
Боевым операциям, а также операциям радиоэлектронной и информационной
борьбы на Балканах сопутствовали психологические операции (ПсО). В странах
альянса, особенно в США, Великобритании, ФРГ, Франции, они давно стали од-
ним из действенных средств достижения национальных целей как в мирное, так и
в военное время. Цель психологических операций — оказание влияния на мнения,
чувства и поведение конкретного объекта воздействия в нужном направлении для
достижения политических и военных целей. Решение на проведение ПсО против
СРЮ принимал сам президент Соединенных Штатов. Его личное участие говорит
о том, что в США психологические операции поставлены в один ряд с боевыми и
операциями спецслужб. Объекты воздействия: на стратегическом уровне — обще-
ственность стран НАТО и мировая общественность, на оперативном и тактичес-
ком — население и военнослужащие Югославии.
План операции был согласован со всеми странами — участниками НАТО, от
которых выделялись воинские контингенты и средства, в частности, специальный
самолет психологических операций ЕС-1 ЗОЕ. Основные задачи в оперативной ПсО
возлагалась на подразделения 4-й группы психологических операций армии США.
Ее подразделения принимали активное участие во всех войнах, которые вели за
последние два десятилетия вооруженные силы США, в том числе в Афганистане,
на Гренаде, в Панаме, Северном Курдистане, Сомали. Часть подразделений 4-й груп-
пы ПсО действуют на протяжении длительного времени в составе воинского контин-
гента Международных сил по выполнению Дейтонских соглашений на территории
Боснии и Герцеговины. В состав оперативного формирования ПсО, действующего
на данной территории вошли несколько тактических подразделений, оснащенных
автомобильными звуковещательными станциями, а также подразделения по обслу-
живанию полиграфической, радио- и телепередающей техники.
18.9, Влияние радиоэлектронной борьбы на успех боевых действий
Опыт мировых и локальных войн показал существенное влияние РЭБ на успех
боевых действий всех видов вооруженных сил развитых в промышленном отноше-
нии государств. В то же время на развитие РЭБ сказался количественный и каче-
ственный рост применяемых в прошедших войнах РЭС разведки, связи, локации,
навигации, наведения оружия. Сказалось увеличение их влияния на эффективность
применения боевой техники, вооружения в военных действиях.
772
Глава 18. Эффективность средств и способов РЭБ
В начале XX в., когда в сухопутные войска и военно-морской флот внедрялись
средства радиосвязи, в ходе русско-японской и Первой мировой войн отмечались
отдельные случаи радиоперехвата и нарушения помехами радиосвязи между воен-
ными кораблями и штабами соединений сухопутных войск. В этих целях исполь-
зовались штатные радиоприемники и радиопередатчики, применяемые средства-
ми радиосвязи.
В последующем, перед Первой мировой войной, с внедрением в армию, авиацию
и на флот новых средств радиосвязи, а также радиолокации и радионавигации, в
Германии, Великобритании, во Франции и в других странах проводились отдельные
работы по созданию специальных средств радиоразведки и радиопомех. В военных
конфликтах и на учениях, проводившихся в этот период, с помощью средств радио-
связи осуществлялась дезинформация противника передачей ложных сообщений.
С началом Второй мировой войны в сражающихся армиях были организованы
радиоразведка и радиодезинформация. Начиная с 1943 г., увеличилась интенсив-
ность РЭР, эффективность радиомаскировки и помехозащиты РЭС, а также РЭП,
для нарушения работы РЭС противника. Разумеется, совершенствование средств
и способов РЭБ явилось следствием массового применения в боевых действиях
средств радиолокации, радиосвязи и радионавигации.
Создаваемые радиопомехи в ряде операций подавляли работу средств радиолока-
ции и радиосвязи, используемых авиацией, силами флота и войсками ПВО, штабами
соединений и объединений сухопутных войск. Наиболее важные радиолокацион-
ные посты и узлы связи выводились из строя огнем артиллерии и ударами авиации.
В связи с этим для обеспечения устойчивой работы систем и средств радиоло-
кации и радиосвязи стали применяться способы и средства скрытия их работы от
радиоэлектронной разведки и защиты от радиопомех.
Обобщенные характеристики средств, применявшихся для разведки и подавле-
ния работы радиоэлектронных средств в конце Второй мировой войны, приведены
в табл. 18.5.
Как показывает анализ, в ходе Второй мировой войны самолетные средства ак-
тивных и пассивных помех РЛС применялись только бомбардировочной авиацией,
совершающей налеты большими группами в плотных строях. Такой способ создания
радиопомех позволял прикрывать от радиолокационного обнаружения и поражения
зенитной артиллерией все самолеты, участвующие в налете. Наземные станции РЭП
использовались в основном для нарушения радиосвязи штабов окруженных диви-
зий, корпусов и армий. Особое внимание уделялось нарушению радиосвязи взаи-
модействия, разведывательных частей и управления артиллерийским огнем.
В ходе Второй мировой войны начали применяться меры обеспечения работы
РЭС в условиях применения организованных радиопомех. Радисты при воздействии
радиопомех производили маневр частотами и мощностями радиостанций, переда-
вали радиограммы по частям в паузах между действием радиопомех или одновре-
менно на двух частотах, прекращали радиообмен и возобновляли его в другое время,
передавали сообщения о переходе на другие частоты при продолжении работы на
прежней частоте и др. В РЛС производилась перестройка на частоты, свободные
от помех, применялись схемы защиты от активных радиопомех и аппаратура селек-
ции движущихся целей, увеличивались мощности передатчиков РЛС.
После Второй мировой войны наметилось некоторое замедление в темпах раз-
вития средств и способов РЭБ, за исключением средств радиоразведки. В начале
локальных войн в 1950 г. в Корее и в 1964 г. во Вьетнаме, и в 1967 г. на Ближнем
Обобщенные характеристики средств радиоразведки
и радиопротиводействия, применявшихся в конце Второй мировой войны
Таблица 18.5
Наименование Назначение Рабочий диапазон частот/ Полоса помехи* Мощность Носитель (место размещения) Примечание
Самолетные станции активных радиопомех РЛС 1) Создание активных радиопомех РЛС орудийной наводки 2) Создание активных радиопомех РЛС обнаружения, целеуказания и наведения ИА 160...4000 МГц 2...10 16... 150 Вт Самолеты бомбардировочной авиации Генераторы на маячковой лампе или магнетроне; радиопомехи шумовые
25...600 МГц 0,15...6,0 15...40 Вт
Радиоотражатели Создание пассивных радиопомех РЛС обнаружения, целеуказания, наведения ИА и управлени огнем ЗА 450...600 МГц Самолеты бомбардировочной авиации, ракеты Выбрасывались с самолетов вручную
Наземные станции радиопомех РЛС Создание активных радиопомех самолетным РЛС 480...600 МГц 30...50 кВт Автоприцеп Передатчик на резонаторе; радиопомехи шумовые
Наземные станции радиопомех радиосвязи Создание радиопомех КВ и СВ радиосвязи сухопутных войск 250...12 000 кГц 25...120 м 100...150 Вт Автомобиль Амплитудно-модулированные и шумовые радиопомехи
Самолетные разведывательные радиоприемники Разведка РЛС ПВО и авиации 90...3000 МГц Самолеты разведывательной авиации
Самолетные радиопеленгаторы Радиопеленгование наземных и корабельных РЛС 100...3000 МГц То же
Наземные разведывательные радиоприемники Обнаружение и перехват радиопередач 250...12 000 кГц Автомобиль
Наземные радиопеленгаторы Радиопеленгование наземных и корабельных радиопередатчиков 250... 12 000 кГц Автомобиль
18.9. Влияние РЭБ на успех боевых действий
774
Глава 18. Эффективность средств и способов РЭБ
Востоке средства и способы РЭБ по своим возможностям практически не отлича-
лись от применявшихся во Второй мировой войне. Поэтому они не оказали значи-
тельного влияния на эффективность боевых действий сторон. В дальнейшем, в завер-
шающем периоде войн во Вьетнаме и затем на Ближнем Востоке в 1973 г. начали
широко использоваться РЭС управления зенитными ракетами и корабельной артил-
лерией. В связи с этим в США в спешном порядке были разработаны и начали при-
меняться в боевых действиях новые или модернизированные средства РЭБ, РЭП,
ложные радиолокационные и инфракрасные цели, ракеты с головками самонаве-
дения на излучение наземных РЛС. Главное внимание в локальных войнах уделя-
лось развитию средств, способов и тактики радиоэлектронного подавления и по-
ражения самонаводящимся оружием радиоэлектронных средств ПВО, управления
авиацией, войсками на поле боя и кораблями в море. Обобщенные характеристи-
ки средств РЭБ завершающего периода локальных войн приведены в табл. 18.6.
Как показывает сравнение данных, приведенных в табл. 18.5 и 18.6, средства
радиопомех, применяемые в локальных войнах, обладали в несколько раз большими
мощностями (рис. 18.24) и более широким рабочим частотным диапазоном подав-
ления РЭС (рис. 18.25). С учетом одновременного возрастания чувствительности
подавляемых РЭС возможности средств РЭБ к концу локальных войн возросли в
несколько раз. Для защиты от подавления радиопомехами в средствах радиолока-
ции и радиосвязи применялись такие способы и средства защиты от активных и
пассивных радиопомех, как маневр частотами и мощностями, сужение диаграмм
направленности антенн, схемы и аппаратура защиты от РЭП.
Рис. 18.24. Рост мощностей средств активных помех
в мировых и локальных войнах
Обобщенные характеристики средств РЭБ, применявшихся в локальных войнах
Таблица 18.6
Наименование Назначение Рабочий диапазон частот/ Полоса помехи* Мощность/ Плотность мощности помехи Носитель (место размещения) Примечание
Самолетные станции активных радиопомех РЛС 1) Создание активных радиопомех РЛС дальнего обнаружения, целеуказания и наведения ИА 100...3000 1...25 МГц 5...10Вт/МГц Самолеты РЭБ и стратегической авиации
2) Создание активных радиопомех РЛС наведения ЗУР 3000...10 000 1...100 МГц 100...500 Вт 5... 10 Вт/МГц Пилотируемые и беспи- лотные самолеты, в фю- зеляже или контейнере
3) Создание помех УКВ радиосвязи 3...300 МГц Самолеты РЭБ
Радиоотражатели Создание пассивных радиопомех РЛС обнаружения, целеуказания и наведения ЗУР Сантиметровый, деци- метровый и метровый диапазоны радиоволн Самолеты всех видов авиации, снаряды кора- бельной артиллерии Выбрасывались автоматами, раке- тами и снарядами
Наземные станции радио- помех радиолокации Создание активных радиопомех самолетным РЛС Сантиметровый диапазон радиоволн До 1 кВт Автомобили, прицепы
Наземные станции радио- помех радиосвязи Создание помех КВ и УКВ радио- связи сухопутных войск и авиации 1,5...300 МГц До 1 кВт Автомобили
Самолетные разведыва- тельные радиоприемники Обнаружение и перехват сигналов РЛС и средств радиосвязи 100...10 750 МГц Самолеты РЭБ и разве- дывательной авиации
Самолетные радиопеленгаторы Радиопеленгование РЭС 100...10 750 МГц То же
Наземные разведыва- тельные радиоприемники Обнаружение, перехват и анализ сигналов РЭС 1...20 000 МГц Автомобили и переносные
Наземные радиопеленгаторы Пеленгование наземных и самолетных РЭС 1...20 000 МГц Автомобили
Корабельные станции помех радиолокации Создание активных радиопомех самолетным и корабельным РЛС 8...20 ГГц 500 Вт Боевые надводные корабли
Ложные радиолокацион- ные цели Введение в заблуждение опера- торов РЛС Сантиметровый, деци- метровый, метровый диапазоны радиоволн Самолеты РЭБ и стра- тегической авиации Выбрасывались автоматами, раке- тами и снарядами
Инфракрасные ложные цели-ловушки Отвлечение на себя ЗУР с тепло- выми головками самонаведения Диапазон инфракрасных волн Самолеты всех видов авиации Выстреливались автоматами
Самолетные противора- диолокационные ракеты Поражение наземных РЛС ПВО 3 и 10 см Дальность пуска до 20 км Самолеты РЭБ, тактиче- ской и палубной авиации
18.9. Влияние РЭБ на успех боевых действий 775
776
Глава 18. Эффективность средств и способов РЭБ
HfltlllllllH — самолетные станции помех РЛС дальнегообнаружения,
целеуказания и наведения ЗУР
llllllllllllll — наземные станции помех радиосвязи
Рис. 18.25. Расширение диапазона рабочих частот средств
активных радиопомех в мировых и локальных войнах
Самолетные средства активных и пассивных радиопомех использовались не
только для коллективной, но и для индивидуальной защиты самолетов стратеги-
ческой, тактической и палубной авиации. Радиопомехи создавались в сочетании с
поражением наземных радиолокационных средств ПВО самонаводящимися раке-
тами, применением ложных целей и тактических приемов для уклонения самолетов
от поражения зенитными управляемыми ракетами. Наземные средства радиопомех
нарушали радиосвязь тактического звена управления сухопутных войск, а также
самолетных средств радиосвязи и радиолокации. Самолетные, наземные и кора-
бельные средства РЭБ начали использоваться во взаимодействии для обеспечения
боевых действий авиации, сухопутных войск и военно-морских сил.
Как показал опыт мировых и локальных войн, увеличение количества и роли
радиоэлектронных средств в ведении разведки, наведении оружия, управлении
войсками и силами флота приводило (к концу каждой войны) к возрастанию воз-
можностей и масштабов применения сил и средств радиоэлектронной борьбы.
С учетом опыта мировых и локальных войн в зарубежных вооруженных силах
продолжается дальнейшее развитие техники, способов и тактики радиоэлектрон-
ной борьбы.
Опыт ведения РЭБ в мировых и локальных войнах тщательно анализируется
во многих государствах по материалам радиоэлектронной разведки, аэрофотосъ-
емки и космической съемки, показаниям пленных и свидетельствам очевидцев, а
также по захваченным описаниям систем и средств РЭБ, на основании анализа
образцов техники РЭБ [4]. Особое внимание уделяется анализу рабочих частот,
длительности, частоты следования, структуры и других параметров радиосигналов,
знание которых необходимо при совершенствовании техники, способов и тактики
РЭБ. Результаты изучения показывают, что некоторые средства РЭБ в боевых ус-
ловиях показали недостаточную эффективность. Поэтому Соединенные Штаты
Америки уже в ходе боевых действий во Вьетнаме модернизировали старую и раз-
работали новую технику разведки и подавления РЭС с учетом возможности их
18.9. Влияние РЭБ на успех боевых действий 777
использования на европейском театре войны. В ходе локальных войн началось
перевооружение этой техникой всех видов вооруженных сил, что вызвало значи-
тельное увеличение расходов на ее разработку и производство. Если в период с 1969-
го по 1971 г. на эти цели в США расходовалось около 400 млн долл, в год, то в
1972-м финансовом году было истрачено 622,5 млн долл., в 1973 г. — 600,0 млн, в
1974 г. — 674,0 млн, а в 1975 г. — 812,0 млн долл. Более 30 % выделяемых средств
расходовалось на разработку и производство техники радиоэлектронной борьбы.
Американские фирмы эту технику разрабатывали и модернизировали по 65 про-
граммам общей стоимостью свыше 400 млн долл. Время на заключение контрак-
тов, разработку и производство техники РЭБ значительно сокращено после введе-
ния в 1961 г. программы быстрого реагирования на появление новых или модер-
низированных радиоэлектронных средств (программа QRC). По этой программе
разработано около 400 образцов техники радиоэлектронной борьбы. В авиации эта
техника, изготовленная в виде стандартных блоков-модулей, монтировалась пре-
имущественно в контейнерах, подвешиваемых под крыльями самолетов. Контей-
неры имеют автономный турбогенератор, приводимый в движение встречным воз-
душным потоком, антенны и систему охлаждения. В зависимости от состава аппа-
ратуры применялось десять различных вариантов контейнеров общей длиной до
четырех метров. Применение контейнеров позволяло производить быструю смену
средств радиоразведки и радиопротиводействия при изменении радиоэлектронной
обстановки.
С учетом опыта локальных войн за рубежом уточнены направления исследова-
ния и разработок техники разведки и подавления радиоэлектронных средств [4].
Во-первых, вместо отдельных станций разрабатываются самолетные, корабель-
ные и наземные комплексы, способные обнаруживать и подавлять различные сред-
ства, применяемые для разведки и управления оружием, войсками, авиацией и сила-
ми флота. Новые комплексы состоят, как правило, из трех элементов. Первый эле-
мент — многофункциональная система разведки, предназначенная для обнаружения
и анализа электромагнитных излучений, предупреждения экипажей об облучении
самолетов или кораблей радиолокационными и инфракрасными средствами, оп-
ределения параметров, местоположения и распознавания РЭС, а также наведения
на них самолетов и ракет. Распознавание, определение координат и очередности
подавления обнаруженных средств обеспечиваются с помощью быстродействую-
щих ЭВМ, которые кроме перечисленного устанавливают оптимальный режим
работы, мощность средств РЭП и анализируют работу подавляемых средств. Вто-
рым элементом являются автоматизированные станции активного радиопротиво-
действия и автоматы, выбрасывающие дипольные отражатели и миниатюрные пе-
редатчики радиопомех. И наконец, в состав комплексов входят противорадиоло-
кационные ракеты и ложные радиолокационные и тепловые цели.
Во-вторых, средствами РЭБ оборудуются самолеты и вертолеты тактической и
армейской авиации, которая, как показал боевой опыт, не может выполнять бое-
вые задачи без подавления РЭС ПВО. Специалисты считают, что только примене-
ние собственных автономных бортовых средств РЭБ в сочетании со средствами,
установленными на специальных самолетах РЭБ, позволит надежно подавить работу
РЭС ПВО, зенитной артиллерии и истребительной авиации, обеспечив тем самым
эффективность боевых действий тактической авиации.
В-третьих, наблюдается тенденция упреждающей разработки средств РЭБ с
учетом прогнозов развития военной радиоэлектроники, а не просто реагирование
778 Глава 18. Эффективность средств и способов РЭБ
на изменение радиоэлектронной обстановки, как это было в прошлом. Общепризна-
но, что самолеты и корабли средствами РЭБ оборудуются в процессе разработки,
а не после постройки. Первыми самолетами, на которых предусмотрена установка
средств РЭБ в процессе разработки и проектирования, были FB-111, F-14 и F-15.
Эта тенденция оптимизации конструкции летательного аппарата по комплексному
критерию, учитывающему как требования аэродинамики, так и боевого примене-
ния в условиях ведения РЭБ, нашла свое отражение в развитии технологии «Stelth».
В-четвертых, отчетливо просматривается тенденция интеграции средств РЭБ с
другой бортовой аппаратурой. При этом одни и те же элементы и подсистемы (фази-
рованные антенные решетки, а также малогабаритные управляющие ЭВМ, передаю-
щие и приемные устройства, сигнальные процессоры) используются разными функ-
циональными устройствами и системами: бортовыми РЛС, системами связи, пере-
дачи данных и навигации. Такое комплексирование позволяет унифицировать и
уменьшить объем бортовой аппаратуры, сократить стоимость и потребление энер-
гии, повысить ее надежность. Новым направлением в исследованиях и разработ-
ках средств радиоэлектронной борьбы является создание аппаратуры, способной
адаптироваться к возможному изменению радиоэлектронной обстановки.
18.10. Тенденции развития комплексов радиоэлектронной борьбы
Развитие средств РЭБ идет во взаимодействии с развитием техники радиоэлект-
ронных систем других классов и характеризуется постоянной технической и научной
конфронтацией. Каждый этап совершенствования техники РЭС, связанный с по-
вышением их эффективности, надежности и помехоустойчивости, вызывает ответ-
ную реакцию РЭБ. Разрабатываются новые методы и технические средства, направ-
ленные на компенсацию или полное устранение преимуществ РЭС в конфликте со
средствами РЭБ. Разработчики РЭС, в свою очередь, предпринимают соответству-
ющие меры и совершенствуют свою технику таким образом, что эффективность
новых методов и средств РЭБ снижается или сводится до нуля, и этот процесс
развития идет непрерывно, взаимно обогащая обе области техники.
Развитие радиолокационной техники. С учетом состояния техники в области РЭБ
развились следующие методы радиолокации.
Моноимпульсный метод углового сопровождения. Хотя этот метод первоначально
был разработан для улучшения точности и надежности пеленгации цели, интенсив-
ное развитие моноимпульсных РЛС с середины 1950-х гг. было в значительной степе-
ни определено их более высокой помехозащищенностью по сравнению с однока-
нальными угломерными системами, такими как РЛС с коническим сканировани-
ем луча. Моноимпульсный метод потребовал новых методов создания угловых помех.
Когерентный режим работы РЛС. Первоначально данный режим работы был
введен в перспективные РЛС для обеспечения возможности выделения движущих-
ся целей на фоне отражений от Земли. Этот режим работы привел к тому, что си-
стемы высокочастотного запоминания сигналов, разработанные для созданная помех
некогерентным РЛС, оказались устаревшими.
Излучение сигналов с более высоким уровнем мощности. В перспективных РЛС были
введены более мощные передатчики и антенны с более высоким усилением, что
увеличило дальность действия РЛС и их помехозащищенность. Подавление таких
РЛС потребовало более мощных передатчиков помех.
18.10. Тенденции развития комплексов РЭБ
779
Сжатие импульса. Сначала РЛС со сжатием импульса были созданы для увели-
чения дальности обнаружения путем достижения более высоких уровней средней
мощности без увеличения импульсной мощности. Но при этом было достигнуто и
увеличение помехозащищенности РЛС, поскольку для противодействия РЛС со
сжатием импульса потребовались устройства запоминания когерентных сигналов
в системах РЭБ.
В конфликте с системами РЭБ для повышения помехозащищенности реализо-
ваны специальные режимы функционирования РЛС, в том числе:
быстрая перестройка частоты следования импульсов, исключающая возможность
системам РЭП создавать ложные цели РЛС на дальностях, меньших дальности до
защищаемого объекта;
быстрая перестройка несущей частоты, препятствующая созданию шумовых и
многократных ответных помех РЛС на дальностях, меньших дальности до защи-
щаемого помехами объекта;
разнесение несущих частот, что вынуждало систему РЭП соответственно расши-
рять свой рабочий диапазон;
сопровождение по переднему фронту импульса, предназначенное для противодей-
ствия уводящей помехи по дальности и основанное на естественной задержке по-
мехового сигнала в станции помех относительно сигнала, отраженного от цели;
угловое сопровождение при сканировании луча антенны только на прием, что пре-
пятствует созданию прицельных на частоте сканирования помех, в том числе ин-
версной угловой помехи;
многорежимность и многофункциональность РЛС. Особое место здесь занимает
режим сопровождения цели по излучаемой ею помехе без излучения радиолокато-
ром собственных сигналов. Этот режим находит наиболее широкое применение,
когда помеха — непрерывная шумовая и создается с помощью передатчиков с фик-
сированной настройкой по частоте;
бланкирование и компенсация боковых лепестков диаграммы направленности ан-
тенны РЛС, направленные на снижение возможностей создания помех через боко-
вые лепестки ДНА РЛС;
излучение с малой вероятностью обнаружения, предусматривающее широкопо-
лосное излучение, позволяющее создавать радиолокационный сигнал с уровнем
ниже порогового уровня обнаружения приемника системы РЭП;
дезинформирующие излучения, сводимые к излучению сигналов РЛС с ложными
модуляциями, устраняющими возможность определения истинной модуляции сиг-
налов и создания эффективной помехи;
защищенность РЛС от противорадиолокационных ракет, которая обеспечивается
как наделением каждой РЛС, входящей в систему ПВО, свойствами малой веро-
ятности перехвата ее сигналов, так и переключениями между РЛС. Мерцание радио-
локационного сигнала от нескольких пространственно разнесенных РЛС дезори-
ентирует противорадиолокационные ракеты. Наряду с этими мерами широко исполь-
зуются отвлекающие ловушки.
При реализации перечисленных выше методов радиолокации и режимов рабо-
ты РЛС были разработаны следующие новые технические средства.
Фазированные антенные решетки, обеспечившие гибкость в управлении поло-
жением луча в перспективных РЛС и затруднившие идентификацию РЛС по ха-
рактеру сканирования, необходимую при создании помех.
780
Глава 18. Эффективность средств и способов РЭБ
Антенны со сверхнизким уровнем боковых лепестков, достигающим величины
менее 60 дБ, что делает практически невозможным создание помехи по боковым
лепесткам ДНА РЛС.
Антенны со сканированием только на прием. В этом случае исключается возмож-
ность простого создания прицельной по частоте сканирования помехи.
Синтезированные антенные апертуры, позволяющие получать сверхостронаправ-
ленные антенны.
Высокочастотные генераторы с быстрой перестройкой частоты, позволившие
создать РЛС с быстрой скачкообразной перестройкой частоты, обладающие повы-
шенной помехозащищенностью.
Когерентные генераторы. Будучи высокостабильными по частоте, такие генера-
торы позволили создать РЛС, способные обнаруживать цели в очень низких поло-
сах частот (менее 1 кГц) и осуществлять селекцию движущихся целей. Это, в свою
очередь, потребовало разработки когерентного режима работы системы РЭП при
создании помех таким РЛС.
Передатчики с мощным усилителем. В совокупности с маломощными когерент-
ными генераторами мощные усилители позволили реализовать когерентные РЛС.
Синтезированные дисплеи. Обработка сигналов в когерентных РЛС не сохраня-
ет видеохарактеристик сигнала для оператора, поэтому приходится прибегать к
индикации символами с помощью синтезированных дисплеев.
Развитие средств РЭБ. В ответ на совершенствование радиолокационной техники
специалистами систем РЭБ были следующие разработаны аппаратные и методи-
ческие приемы:
быстродействующее наведение по частоте шумовой помехи, позволившее созда-
вать помехи перспективным РЛС с быстрой перестройкой несущей частоты;
скользящие по частоте сканирования сигналы прямоугольной формы, что дало воз-
можность создавать помеху угломерной системе со скрытым коническим сканиро-
ванием. Эффект действия помехи усиливается, если при этом еще использовать
реакцию антенной системы на действие помехи для сужения диапазона скольже-
ния частоты до пределов полосы пропускания следящей угломерной системы РЛС;
организованное создание помех с двух и более пространственно разнесенных объек-
тов, наиболее известными помехами такого рода являются мерцающие помехи;
помеха на кроссполяризации, явившаяся ответом на внедрение моноимпульсно-
го метода радиолокации. Однако реализация ее имеет свои ограничения. Одно из
них заключается в том, что поляризация приемной антенны РЛС может отличать-
ся от поляризации передающей антенны, что приводит к необходимости измене-
ния параметров поляризации сигнала помехи в пределах, определяемых априорной
информацией;
когерентная помеха, излучаемая из двух разнесенных в пространстве точек, кото-
рая может применяться также для противодействия моноимпульсным радиолока-
торам. Реализация ее связана с решением ряда проблем, связанных, прежде всего,
с обеспечением определенных амплитудных и фазовых соотношений сигналов
помехи на входе приемной антенны подавляемой РЛС;
помехи из вынесенной точки',
увод строба дальности и (или) скорости на ложные цели', особенно эффективно
при воздействии на РЛС, работающие в автоматическом режиме сопровождения
цели по дальности и скорости без вмешательства оператора;
перенацеливающие помехи на подстилающую поверхность, ДО, ловушки',
18.10. Тенденции развития комплексов РЭБ
781
аннигилирующая (гасящая) помеха, поступающая на вход подавляемого приемни-
ка в противофазе с полезным сигналом и тем самым «уничтожающая» полезную ин-
формацию,
активно-пассивная помеха, создаваемая путем облучения активной помехой каких-
либо переизлучающих объектов (облака противорадиолокационных отражателей, бук-
сируемые ловушки и др.);
передатчики одноразового действия;
адаптивные РЭП в том числе с устройствами искусственного интеллекта;
помехи, ориентированные на нарушение функционирования систем цифровой обра-
ботки информации в РЭС путем введения в них деструктивных программ.
многократная ответная сигналоподобная помеха по дальности и скорости, очень
эффективная против РЛС, работающих в режиме поиска и обнаружения;
комбинирование помех нарушения селекции по дальности и/или скорости с по-
мехами угломерным системам;
распределенные системы РЭБ, когда средства РТР и РЭП разнесены в простран-
стве (находятся на разных объектах) и связаны между собой системой обмена ин-
формации, что помимо повышения эффективности РЭП облегчает проблему ЭМС.
При реализации перечисленных методов были разработаны:
мгновенный измеритель частоты, способный измерять несущую частоту с точ-
ностью в несколько герц по одному импульсу.
генератор с электронным управлением, используемый как возбудитель передат-
чиков помех с мощными усилителями и обеспечивающий перестройку частоты в
широких диапазонах за очень короткие интервалы времени (порядка наносекунд);
системы с мощным усилителем сигналов задающего генератора, очень полезные
там, где требуется быстрое наведение помехи по частоте и различные модуляции
(например, при создании многократной ответной помехи и многих видов помех
системам сопровождения по дальности, скорости и углам);
широкополосные высокочастотные компоненты, разработка которых обусловле-
на разбросом РЛС по частоте в очень широком диапазоне частот и включает рас-
ширение рабочих полос следующих компонентов: ЛБВ, малошумящих усилителей,
приемных и передающих антенн, широкополосных антенн с электронным скани-
рованием, ФАР, поляризаторов, банков высокочастотных фильтров, быстродейству-
ющих СВЧ-переключателей на средние и большие мощности;
средства функционального поражения РЭС мощными электромагнитными и акус-
тическими полями',
цифровая высокочастотная память, необходимая для запоминания сигналов РЛС,
использующих как простые, так и когерентные сигналы со сложной частотно-вре-
менной структурой, их воспроизведения с высокой точностью при создании помех,
уводящих по дальности и (или) скорости, а также имитационных и прицельных мас-
кирующих помех с минимальными энергетическими потерями при обработке в
радиолокационном приемнике;
применение СБИС, в том числе на арсенид-галлиевой технологии.
Среди перечисленных средств РЭП особое положение занимают противоради-
олокационные ракеты, наводящиеся по излучению РЛС и нацеленные на физичес-
кое уничтожение РЛС противника.
Перспективы дальнейшего развитая РЛС. Следует ожидать дальнейшего совер-
шенствования радиолокационной техники в целях повышения тактико-техничес-
ких характеристик и помехозащищенности.
782
Глава 18. Эффективность средств и способов РЭБ
Дальнейшее развитие радиолокационных методов наведения ракет на перехваты-
ваемые цели. В этой области доминирующую роль играет активная головка самона-
ведения (ГСН), способная самостоятельно обнаружить цель, осуществить выбор
режима излучения, подавлять помехи от местных предметов, обнаруживать актив-
ные помехи, принимать меры защиты от них и обеспечивать максимально надеж-
ное поражение цели. Дальность действия активной ГСН ограничена миделем (по-
перечным сечением корпуса ракеты). Для увеличения дальности наведения ракеты
необходима коррекция траектории на среднем участке ее полета. Наведение на
среднем участке траектории может быть осуществлено с помощью либо полуактив-
ной системы наведения, работающей с разделением во времени, либо корректиру-
емой инерциальной системы. В зависимости от тактической ситуации возможно
использование в одной системе различных методов наведения, включая метод на-
ведения через ракету.
Увеличение уровней излучаемой мощности. Основным стимулом наращивания
излучаемой мощности является необходимость обеспечения радиолокационного
обнаружения объектов с малыми ЭПР, таких как ракеты и самолеты, изготовлен-
ные по технологии «Stelth». Поскольку требуемые уровни помех пропорциональны
уровням мощности подавляемых РЛС, это приведет к необходимости увеличения
мощности систем РЭП.
Антенны с электронным управлением. Такие антенны создаются на базе ФАР,
обеспечивающих гибкость формирования ДНА в реальном масштабе времени и
высокоскоростное управление лучом при работе по нескольким целям одновремен-
но. Они также позволяют формировать провалы в ДНА в направлениях на источ-
ники помех, снижая их эффективность. Скоростное управление лучом, особенно
по случайному закону, лишает систему РЭП возможности предсказания последую-
щих положений луча антенны РЛС, необходимых при реализации ряда методов РЭП.
Интеграция датчиков. Это производится в целях повышения надежности сис-
темы ПВО. Используемые совместно с РЛС другие датчики могут быть дополне-
нием и частью комплекса РЛС. При ухудшении работы РЛС из-за выхода из строя
какого-либо компонента или действия помех дополнительные датчики поддержи-
вают работоспособность системы.
Работа в режиме многопозиционной радиолокации. В этом режиме работы радио-
локационные приемники размещаются в удалении от передатчиков. Поскольку при
организации РЭП РЛС приемник является объектом воздействия помехи, а поло-
жение его в данном случае для постановщика помех неизвестно, подавление мно-
гопозиционных РЛС представляет проблему для РЭП.
РЛС с низкой вероятностью перехвата ее сигналов (РЛС с повышенной скрыт-
ностью). Характерная особенность таких РЛС состоит в режиме излучения широ-
кополосных сигналов (иногда шумоподобной структуры) со случайной перестрой-
кой параметров (несущей частоты, частоты следования импульсов) и скачкообраз-
ным перемещением луча ДНА в пространстве по случайному закону. Низкий
уровень импульсной мощности и случайная перестройка ряда параметров РЛС се-
рьезнейшим образом затрудняет и даже может исключить обнаружение таких РЛС
и измерение параметров сигналов приемными средствами систем РЭП и, как след-
ствие, не позволяет организовать РЭП РЛС.
Использование искусственного интеллекта. Предполагается, что перспективные
радиолокационные системы будут снабжаться устройствами искусственного интел-
лекта, позволяющими в процессе работы анализировать электронную обстановку
18.10. Тенденции развития комплексов РЭБ
783
и вырабатывать наиболее оптимальные решения в отношении режимов работы. При
РЭП искусственный интеллект будет автоматически менять алгоритмы работы,
включать средства помехозащиты, менять параметры излучаемых сигналов и про-
чее. В результате методы РЭП, рассчитанные на определенные уязвимые логичес-
кие операции в РЛС, могут оказаться неэффективными.
Многофункциональные антенны. Предполагается использование единых антенн
для выполнения функций многих датчиков (например, бортовых средств навига-
ции, радиолокации, РТР). Такие антенны могут работать в пассивном режиме,
позволяя радиолокатору сопровождать постановщик помех по помехе, не исполь-
зуя радиолокационного излучения.
Сверхбыстрая перестройка несущей частоты. В настоящее время такая пере-
стройка используется в основном в некогерентных РЛС. Что касается когерентных
РЛС, то там требуется поддержание режима работы с постоянной несущей частотой,
по крайней мере в период когерентного обнаружения цели. Так как быстрая пере-
стройка частоты РЛС существенно уменьшает возможности РЭП, то следует ожи-
дать реализации такого режима и в когерентных РЛС, например, путем изменения
несущей частоты от пачки к пачке.
Применение дезинформирующих излучений. Поскольку формирование эффектив-
ной помехи зависит от достоверной информации о режиме работы РЛС, примене-
ние дезинформирующих излучений следует рассматривать перспективным методом
повышения помехозащищенности РЛС.
Внутриимпулъсная модуляция. Она усложняет организацию помех РЛС, поэто-
му следует ожидать дальнейшего ее использования в перспективных РЛС.
Использование уникальных характеристик излучений систем РЭБ. Наличие в рас-
поряжении оператора РЛС уникальных характеристик излучений систем РЭП мо-
жет позволить идентифицировать и разделять системы РЭП при одновременном
их действии, что облегчит оценку обстановки в зоне действия.
Антенны со сверхнизкими уровнями боковых лепестков. В настоящее время много
радиолокационных систем, чьи антенны имеют сравнительно высокие уровни бо-
ковых лепестков ДНА, позволяющие создавать помеху через них. Перспективные
РЛС должны исключить такую возможность.
Радиолокаторы миллиметрового диапазона волн. Интерес к таким радиолокато-
рам обусловлен их широкополосностью и трудностями создания им помех на дан-
ном уровне развития техники РЭП.
Многофункциональные РЛС. Отличием таких РЛС является сосредоточение функ-
ций, выполняемых в настоящее время различными типами РЛС, в едином радио-
локационном комплексе.
Основой современной многофункциональной РЛС является активная ФАР.
Применение АФАР имеет весьма важное значение по ряду причин.
1. Будучи оснащенной твердотельными приемопередающими модулями, АФАР
позволяет осуществлять электронное управление положением ДНА в азимутальной
и угломестной плоскостях с высокой скоростью. Так, при современных фазовраща-
телях на арсениде галлия время переключения луча ДНА составляет менее 50 нс, в
то время как при механическом сканировании изменение направления обзора про-
изводится не быстрее чем за 8 с. Благодаря высокой скорости сканирования луча
АФАР открывается возможность реализации режимов излучения, характеризующих-
ся низкой вероятностью перехвата сигналов РЛС средствами разведки и предуп-
реждения; будучи установленной на стратегических и тактических самолетах, АФАР
784
Глава 18, Эффективность средств и способов РЭБ
позволяет несколько снизить ЭПР цели по сравнению с антенной с механическим
сканированием, что особенно важно для самолетов с малой радиозаметностью,
разрабатываемых с использованием технологии «Stelth». Этот эффект обусловлен
тем, что антенна с механическим сканированием представляет собой поверхность,
формирующую сильный отраженный сигнал в направлении на облучающую РЛС
противника. Активная ФАР является неподвижной системой, ее плоскость может
быть наклонена на некоторый угол относительно наиболее вероятных направлений
облучения самолетов радиолокаторами, что исключает использование АФАР как
маяка и позволяет значительно повысить надежность радиолокационной системы.
Расчеты показывают, что выход из строя до 10 % приемопередающих модулей не
приводит к существенному ухудшению характеристик антенны (коэффициента
усиления, формы и уровня боковых лепестков ДНА) [15].
2. АФАР может работать как две или более антенн и позволяет использовать ее
в пассивном режиме как высокочувствительную систему РТР, а в активном режи-
ме — в качестве средства противодействия системам РЭП противника. Например,
часть приемопередающих модулей может быть перепрограммирована для генера-
ции сигнала, компенсирующего излучение постановщика помех.
Следует отметить крупный недостаток АФАР, заключающийся в потенциаль-
ной возможности поражения ее твердотельных элементов даже сравнительно сла-
быми электромагнитными и акустическими полями.
В состав многофункциональной РЛС входят три основные подсистемы: АФАР,
приемное устройство со стабилизированным гетеродином и универсальный про-
цессор сигналов. Структурная схема такой РЛС приведена на рис. 18.26.
Режимы работы РЛС.
1. При действии по воздушным целям.
Режим поиска:
• поиск по скорости;
• поиск с измерением дальности: на встречных курсах, всеракурсный, в верх-
ней полусфере, в полном секторе обзора;
• режим воздушного боя;
• пассивный прием.
Режим сопровождения:
• сопровождение «на проходе» — нормальное, с высокой точностью на боль-
ших дальностях;
• сопровождение одиночной цели;
• предупреждение о приближении ракет и сопровождение ракет;
• сопровождение заданной цели.
Режим опознавания целей:
• определение национальных признаков целей по их радиолокационным при-
знакам;
• распознавание целей в групповом строю;
• опознавание на большой дальности.
2. При действии по наземным целям.
Режим получения изображения земной поверхности:
• с помощью обычного луча;
• с доплеровским сужением луча;
• обнаружение метеообразований;
• режим маяка.
18.10. Тенденции развития комплексов РЭБ
785
Панель Шина передачи Система
управления данных индикации
Рис. 18.26. Структурная схема многофункциональной РЛС
Режим когерентного обзора земной поверхности:
• синтезирование апертуры;
• селекция движущихся наземных целей;
• выделение тактических целей.
Навигационные режимы:
• следование рельефу местности;
• облет препятствий;
• измерение скорости;
• определение местоположения самолета.
3. При воздействии помех:
• применение пассивных контрмер (выключение передатчика, компенсация по-
мех, изменение частоты и другие контрмеры);
• применение активных контрмер (создание ложных излучений, создание контр-
помех и другие контрмеры);
• многопозиционная работа в составе группировки разнесенных в пространстве
РЛС.
В рассматриваемом примере (рис. 18.26) активная ФАР состоит из 1980 при-
емопередающих модулей и имеет диаметр 81,3 см. Приемопередающие модули вы-
полнены на арсенид-галлиевых пластинах диаметром 7,5 см, содержащих по 16 ИС.
В состав каждой ИС входят усилители, фазовращатели, аттенюатор, переключатели.
786
Глава 18. Эффективность средств и способов РЭБ
Для управления фазой каждого модуля используется пятиразрядное управляющее
устройство. Общее управление формированием луча осуществляется с помощью че-
тырех автономных ЭВМ на микропроцессорах, каждая из которых управляет од-
ним квадрантом ФАР. В состав приемного устройства входят 43 модуля, из них два
формируют переключатель/малошумящий усилитель, 19 модулей — приемник с
устройствами дискретизации, преобразующими синфазный и квадратурный выход-
ные сигнала в цифровую форму, шесть модулей составляют контроллер, шесть
модулей — источники питания. Каждый модуль предназначен для выполнения
определенной функции и содержит в себе схемы управления и контроля. Основой
модулей являются цифровые сверхскоростные интегральные схемы и аналоговые
СВЧ-интегральные схемы. При выходе из строя любого модуля производится его
замена на резервный или осуществляется перепрограммирование модулей таким
образом, чтобы утраченная функция восстанавливалась, если она имеет важное
значение. В случае когда нет возможности восстановить все утраченные функции,
производится реконфигурация модулей таким образом, чтобы утрачивалась наименее
важная функция. Все это обусловливает высокую надежность РЛС, превышающую
надежность существующих бортовых РЛС в несколько раз.
В приемном устройстве реализовано восемь каналов с тройным согласованным
понижением частоты и два широкополосных приемника. Четыре канала непосредст-
венно связаны с ФАР, а оставшиеся четыре предусмотрены для обеспечения избы-
точности и выполнения вспомогательных функций. В случае отказа каждый из че-
тырех выходных сигналов ФАР может подаваться на любой широкополосный уси-
литель. Предусматривается жидкостное охлаждение.
Процессор сигналов рассматриваемой РЛС состоит из ряда стандартных моду-
лей, в числе которых 32-разрядный процессор с быстродействием 3,85 млн операций
в секунду с оперативной памятью емкостью 1 Мбайт. Используется волоконно-опти-
ческая линия обмена данными с быстродействием 50 Мбит/с.
Перспективы дальнейшего развития систем РЭБ. Перечисленные выше направ-
ления совершенствования радиолокационной техники определяют пути дальней-
шего совершенствования средств РЭП. Некоторые из наиболее важных разработок
в этой области приведены ниже.
Совершенствование управления мощностью. Необходимость такого управления,
как уже указывалось, диктуется наличием в системе РЭП ограниченной мощности
и необходимостью обеспечения на входе подавляемого радиолокатора высоких пре-
вышений мощности помехи над сигналом. Несмотря на то, что в этом направле-
нии сделано немало, еще много предстоит сделать, особенно с учетом новых усо-
вершенствований, вводимых в конструкции РЛС.
Защита объектов, разработанных по технологии «Stelth». Применение техноло-
гии «Stelth» несколько облегчает защиту объектов, поскольку им обеспечиваются
малые уровни ЭПР. Вместе с тем использование активных средств РЭП для защиты
может привести к преждевременному обнаружению таких объектов. В соответствии
с этим может оказаться целесообразным в этой ситуации применять для защиты
отделяемые от объекта системы РЭП до того, как они начинают излучать. В эту
категорию попадают и средства одноразового применения, выбрасываемые с бор-
та защищаемого объекта.
Интеграция датчиков. Как и в случае радиолокации, интеграция данных от
других датчиков, совмещенных функционально с системой РЭП, может улучшить
анализ угрожаемой обстановки и выбор соответствующих средств реагирования.
18.10. Тенденции развития комплексов РЭБ
787
Искусственный интеллект. Используемая в современных системах РЭП логика
обычно ограничивается заданными алгоритмами, которые при появлении новых
прогрессивных РЛС часто становятся бесполезными. Поэтому в перспективное
оборудование РЭП желательно включать устройства, которые бы обладали способ-
ностью самообучения и подстройки алгоритмов в соответствии с изменяющейся
обстановкой. Такие устройства, очевидно, должны быть на уровне искусственного
интеллекта.
Многофункциональные антенны. Применение в системах РЭБ многофункциональ-
ных антенн может дать выигрыш в массе, габаритных размерах и стоимости аппа-
ратуры, а также в эффективности РЭП. В качестве такой антенны можно приме-
нить ФАР, но в ограниченной полосе частот. Разработка широкополосных много-
функциональных антенн может помочь преодолеть это ограничение.
Решетки с активными элементами. Ведутся разработки по установке маломощных
твердотельных усилителей в каждый элемент ФАР, что обеспечит высокую гибкость
управления ориентацией луча антенны и более высокую излучаемую мощность.
Математическое перепрограммирование. Несмотря на высокую степень компью-
теризации современных систем РЭП, должна быть реализована еще возможность
полного перепрограммирования системы РЭП в целях выполнения новых требова-
ний, обусловливаемых появлением новых РЛС.
Включение в состав комплексов РЭБ средств функционального поражения.
Интегрированное распределение систем РЭП. В настоящее время еще низка ко-
ординация в действиях различных систем РЭП. Обычно каждая такая система ра-
ботает автономно, поэтому не исключены ситуации, когда все системы работают
по одной РЛС, и ни одна из систем не подавляет РЛС, представляющую непосред-
ственную угрозу защищаемому объекту.
ЗАКЛЮЧЕНИЕ
Радиоэлектронная борьба во всех ее четырех ипостасях (радиоэлектронная раз-
ведка, радиопротиводействие, радиомаскировка и помехозащита) очень сложная и
динамично изменяющаяся системная конфигурация. Причем в динамике развития
средств, систем и методов РЭБ просматриваются как медленные, эволюционные
изменения, так и быстрые, революционные трансформации. Эволюции связаны с
развитием элементной базы и совершенствованием частных технических решений
при построении средств радиоэлектронной борьбы. Скачкообразные революцион-
ные изменения касаются концептуальных положений. Так, появление новых ком-
плексных методов обеспечения радиоэлектронной незаметности (технологии
«Stealth») выдвинуло в ряд основных и перспективных пассивные совмещенные и
вынесенные активные средства РЭБ. Работая над книгой, очень трудно угнаться
за этими изменениями. Тем не менее, в этой книге рассмотрены, как представля-
ется авторам, все или почти все, заслуживающие внимания методы и приемы из
арсенала средств разработчика систем и комплексов РЭБ.
Другая особенность проблемы РЭБ обусловлена ее многоаспектностью. В настоя-
щее время на поприще теории, техники и тактики радиоэлектронной борьбы трудятся
специалисты, имеющие очень разные профессиональные интересы и, соответст-
венно, разную подготовку. Действительно, вопросы организации РЭБ и тактики при-
менения средств постановки радиоэлектронных помех, проектирования средств
радиоэлектронной разведки, радиоэлектронного противодействия, маскировки и
создания помехозащищенных радиосистем — существенно разные предметные об-
ласти. Едва ли возможно создать такое пособие, которое представляло бы даже при-
мерно одинаковый интерес для специалистов по разным направлениям РЭБ. Поэто-
му данная книга ориентирована прежде всего на разработчиков технических средств
РЭБ, причем только на достаточно общие вопросы, в процессе освоения которых
постигаются технические основы этой обширной и увлекательной предметной обла-
сти. Вопросы тактики и эффективности применения систем и средств РЭБ в посо-
бии рассматриваются очень поверхностно и постольку, поскольку они нужны для
анализа и обоснования проектных решений при создании технических средств РЭБ.
Перечисляя главные особенности подготовки книги, посвященной такой слож-
ной и деликатной области как РЭБ, связанной с борьбой и конфликтным взаимо-
действием технических систем, авторы рискуют высказать надежду на то, что резуль-
тат их работы будет встречен с интересом широким кругом специалистов. Авторы
особенно надеются на благосклонное внимание к книге студентов и аспирантов, вы-
бравших сложную и увлекательную проблему РЭБ своей специальностью. Книга так-
же может и должна принести пользу специалистам, интересующимся комплексными
проблемами теории и техники современных радиоэлектронных систем, вынужденных
работать в условиях информационного конфликта. Последнее очень важно, по-
скольку в настоящее время отчетливо прослеживается тенденция интеграции РЭС
разного функционального назначения и структуры в единые комплексы. Наиболее
ярко эти тенденции проявляются при создании бортовых радиоэлектронных комп-
лексов ЛА, радиотехнических систем в составе комплексов ПВО и ПРО, во многих
других областях, перечисление которых здесь едва ли уместно.
СПИСОК ЛИТЕРАТУРЫ
1. Военный энциклопедический словарь / пред. гл. ред. комис. С. А. Ахромеев. М.: Воен-
издат, 1986.
2. Расторгуев С. П. Философия информационной войны. М.: Вузовская книга, 2000.
3. Гуржеянц Г. В., Дербин Е. А., Крылов Г. О., Кубанков А. Н. Информационные операции
современности. М.: ВАГШ, 2004.
4. Палий А. И., Куприянов А. И. Очерки истории радиоэлектронной борьбы. М.: Вузовская
книга, 2006.
5. К столетию радиоэлектронной борьбы. Основные этапы развития 1904-2004. Воронеж,
2004.
6. Постановление Государственного Комитета обороны от 16 декабря 1942 г. № ГОКО
2633 сс, г. Москва. «Об организации в Красной Армии специальной службы по забивке
немецких радиостанций, действующих на поле боя».
7. Докладная записка народного комиссара внутренних дел СССР от 14 декабря 1942 г.
№ 2072/6 И. В. Сталину с проектом Постановления Государственного Комитета Обороны.
8. Тенденции развития средств РЭБ авиации вооруженных сил США на пороге XXI века
И Зарубежное военное обозрение. 1998. № 6.
9. Столетие радиоэлектронной борьбы // Независимое военное обозрение. 2003. № 13.
10. Научно-техническая информация //Авиационные системы. № 10-12. ГосНИИАС, 1995.
11. Куприянов А. И., Сахаров А. В. Радиоэлектронные системы в информационном конфликте.
М.: Вузовская книга, 2003.
12. Выборнов С., Горев В. Создание специальных технических средств для борьбы с терро-
ризмом в США // Зарубежное военное обозрение. 2003. № 7/8. С. 16-19.
13. Лагутин В. С., Петраков А. В. Утечка и защита информации в телефонных каналах. М.:
Атомиздат, 1996.
15. Перунов Ю. М., Фомичев К И., Юдин Л. М. Радиоэлектронное подавление информаци-
онных каналов систем управления оружием. М.: Радиотехника, 2008.
16. Цветков А. Г. Принципы количественной оценки эффективности радиоэлектронных
средств. М.: Сов. радио, 1971.
17. Вентцель Е. С. Введение в исследование операций. М.: Сов. радио, 1964.
18. Дубов Ю. А. и др. Многокритериальные модели формирования и выбор вариантов си-
стем. М.: Наука, 1986.
19. Вакин С. А., Шустов Л. Н. Основы радиопротиводействия и радиотехнической разведки.
М.: Сов. радио, 1968.
20. Максимов М. В., Горгонов Г. И., Чернов В. С. Авиационные системы радиоуправления.
М.: ВВИА им. Н. Е. Жуковского, 1984.
21. ^бчук В. А. и др. Справочник по исследованию операций. М.: Воениздат, 1970.
22. Дуров В. Р. Боевое применение и боевая эффективность истребителей перехватчиков. М.:
Воениздат, 1972.
23. Хорев А. А. Техническая защита информации. Т. 1. М.: МПЦ «Аналитика», 2008.
24. Защита от радиопомех / под ред. М. В. Максимова. М.: Сов. радио, 1976.
25. Бобнев М. П, Казаков В. Д.у Шустов Л. Н. и др. Основы теории радиоэлектронной борь-
бы / под ред. Н. Ф. Николенко. М.: Воениздат, 1987.
26. Шеннон К. Работы по теории информации и кибернетике. М.: Изд-во иностранной лит-ры,
1963.
27. Кульбак С. Теория информации и статистики. М.: Наука, 1967.
28. Тихонов В. И. Статистическая радиотехника. М.: Сов. радио, 1966.
29. Тарасенко Ф. П. Введение в теорию информации. Томск: ТГУ, 1963.
30. Фалькович С. Е. Оценка параметров сигнала. М.: Сов. радио, 1971.
31. Дудник П. И., Чересов Ю. И. Авиационные радиолокационные устройства. М.: ВВИА
им. Н. Е. Жуковского, 1986.
790
Список литературы
32. Гуткин Л. С. Проектирование радиосистем и радио устройств. М.: Радио и связь, 1986.
33. Таха X. Введение в исследование операций. Кн. 2: пер. с англ. М.: Мир, 1985.
34. Вентцель Е. С. Теория вероятностей. М.: Изд-во физ.-мат. лит-ры, 1962.
35. Овчаров Л. А. Прикладные задачи теории массового обслуживания. М.: Машинострое-
ние, 1968.
36. Радиосистемы управления: учебник для вузов / под ред. В. А. Вейцеля. М.: Дрофа, 2005.
37. Авиационные системы радиоуправления. Основы синтеза и анализа: в 2 т. // под ред.
А. И. Канащенкова, В. И. Меркулова. М.: Радиотехника, 2003.
38. Меньшаков Ю. К. Теоретические основы технических разведок: учеб, пособие / Под ред.
Ю. К. Лаврухина. М.: Изд-во МГТУ им. Н. Э. Баумана, 2008.
39. Куприянов А. И., Сахаров А. В., Шевцов В. А. Основы защиты информации. М.: Акаде-
мия, 2007.
40. Осипов В. Ю., Ильин А. П., Фролов В. И, Кондратюк А. П. Радиоэлектронная борьба. Те-
оретические основы. Петродворец: ВМИРЭ им. А. С. Попова, 2006.
41. Вартанесян В. А. Радиоэлектронная разведка. М.: Воениздат, 1991.
42. Мартынов В. А., Селихов Ю. И. Панорамные приемники и анализаторы спектра / под
ред. Г. Д. Заварина. 2-е изд., перераб. и доп. М.: Сов. радио, 1980.
43. Березин Л. В., Вейцель В. А. Теория и проектирование радиосистем. М.: Сов. радио, 1977.
44. Справочник по радиоэлектронным устройствам. Т. 2 / под ред. Д. П. Линде. М.: Энер-
гия, 1978.
45. Хореев А. А. Защита информации от утечек по техническим каналам. Ч. 1: Технические
каналы утечки информации. М.: Гостехкомиссия России, 1998.
46. Сколник М. Справочник по радиолокации: в 4 т. М.: Сов. радио, 1976.
47. Атражев М. И, Ильин В. А., Марьин Н. Н. Борьба с радиоэлектронными средствами. М.:
Воениздат, 1972.
48. Бобнев М. П. Генерирование случайных сигналов. 2-е изд., перераб. и доп. М.: Энергия,
1971.
49. Теоретические основы радиолокации / под ред. Я. Д. Ширмана. М.: Сов. радио, 1970.
50. Бакулев П. А. Радиолокационные системы: учебник для вузов. М.: Радиотехника, 2004.
51. Гоноровский И. С. Радиотехнические цепи и сигналы. Ч. II. М.: Сов. радио, 1967.
52. Кондратенков Г. С. и др. Радиолокационные станции воздушной разведки. М.: Воениз-
дат, 1983.
53. Добыкин В. Д., Куприянов А. И, Пономарев В. Г., Шустов Л. Н. Радиоэлектронная борьба.
Цифровое запоминание и воспроизведение радиосигналов и электромагнитных волн. М.:
Вузовская книга, 2008.
54. Физический энциклопедический словарь / гл. ред. А. М. Прохоров. М.: Сов. энциклопе-
дия, 1983.
55. Мидлтон Д. Введение в статистическую теорию связи. М.: Сов. радио, 1962.
56. Добыкин В. Д., Куприянов А. И, Пономарев В. Г., Шустов Л. Н. Радиоэлектронная борьба.
Силовое поражение радиоэлектронных систем. М.: Вузовская книга, 2007.
57. Радиоэлектронная борьба в войнах и вооруженных конфликтах / под ред. И. В. Филип-
пова и Д. В. Гордиенко. М.: ВАГШ, 2007.
58. Великанов В. Д. и др. Радиотехнические системы в ракетной технике. М.: Воениздат, 1974.
59. Слепечец А. С., Запорожец Г. В. Основы физики и оценка эффективности маскирующих
аэрозолей. М.: ВВИА им. Н. Е. Жуковского, 1989.
60. Вакин С. А., Шустов Л. Н. Основы радиоэлектронной борьбы. М.: ВВИА им. Н. Е. Жу-
ковского, 1986.
61. Прищепенко А. Б. Оружие уникальных возможностей // Независимое военное обозрение.
1998. № 26.
62. Абрикрсов А. А., Шаврин Ю. В. Сверхпроводимость // Физический энциклопедический
словарь. М.: Сов. энциклопедия, 1965. Т. 4. С. 475-482.
63. Вул Б. М., Чесноков В. А. Полупроводники // Физический энциклопедический словарь.
М.: Сов. энциклопедия, 1965. Т. 4. С. 407-412.
64. Взрывные генераторы мощных импульсов электрического тока / под ред. В. Е. Фортова.
М.: Наука, 2002.
65. Ганнота А. Объект поражения — электроника // Независимое военное обозрение. 2001.
№ 13.
Список литературы
791
66. Баскаков С. И. Электродинамика и распространение радиоволн. М.: Высшая школа, 1992.
67. Кроуфорд Ф. Волны. М.: Наука, 1974.
68. Диденко А. Н. СВЧ энергетика. Теория и практика. М.: Наука, 2003.
69. Кузелев М. В., Рухадзе А. А., Стрелков П. С. Плазменная релятивистская СВЧ-электрони-
ка. М.: Изд-во МГТУ им. Н. Э. Баумана, 2002.
70. Месяц Г. А. Генерирование мощных наносекундных импульсов. М.: Наука, 1973.
71. Антенны и устройства СВЧ / под ред. Д. И. Воскресенского. М.: Изд-во МАИ, 1999.
72. Космическое оружие: дилемма безопасности / под ред. Е. П. Велихова, Р. 3. Сагдеева,
А. А. Кокошина. М.: Мир, 1986.
73. Кондратенков Г. С. Обработка информации когерентными оптическими системами. М.:
Сов. радио, 1972.
74. Дьяков В. А., Тарасов В. Л. Оптическое когерентное излучение. М.: Сов. радио, 1974.
75. Авиационные лазерные и оптико-электронные устройства / под ред. В. М. Сидорина. М.:
ВВИА им. Н. Е. Жуковского, 2003.
76. Радиосистемы управления / под ред. В. А. Вейцеля. М.: Дрофа, 2005.
77. Каплун В. А. Обтекатели антенн СВЧ (радиотехнический расчет и проектирование). М.:
Сов. радио, 1974.
78. Небабин В. Г., Кузнецов И. Б. Защита РЛС от противорадиолокационных ракет // Зару-
бежная радиоэлектроника. 1990. № 7.
79. Максимов М. В., Торговое Г. И. Радиоэлектронные системы самонаведения. М.: Радио и
связь, 1982.
80. Авиационные системы радиоуправления / под ред. А. И. Канащенкова, В. И. Меркулова.
М.: Радиотехника, 2003.
81. Кранов А. Исследования поражающих свойств подводного взрыва в США и Великобри-
тании // Зарубежное военное обозрение. 2003. № 6. С. 50-55.
82. Бреховских Л. Распространение звуковых и инфразвуковых волн на большие расстоя-
ния // УФН. 1960. Т. LXX, вып. 2. С. 351-360.
83. Бронер Н. и др. Низкочастотный шум и испытания его влияния на человека // Пер.
NBC-279 ЦНИИ информации. 1970. С. 56-60. (Источник — Vibration And Noise Enginee-
ring. Sydney, 1976. October. P. 11-12.)
84. Кайно Г. Акустические системы. M.: Мир, 1990.
85. Исакович М. А. Общая акустика. М.: Наука, 1973.
86. Электромагнитная совместимость радиоэлектронных средств / под ред. Н. М. Царькова.
М.: Радио и связь, 1985.
87. Электромагнитная совместимость радиоэлектронных средств и непреднамеренные помехи
/ Сост. Р. Ж. Дональд, Уайт Джермантаун, Мериленд, 1971-1973. Вып. 1: Общие вопро-
сы ЭМС. Межсистемные помехи / сокращ. пер. с англ., под ред. А. И. Сапгина; послесл.
и ком. А. Д. Князева. М.: Советское радио, 1977.
88. Дятлов А. П., Дятлов П. А., Кульбикян Б. X. Радиоэлектронная борьба со спутниковыми
радионавигационными системами. М.: Радио и связь, 2004.
89. Соловьев Ю. А. Системы спутниковой навигации. М.: Эко трендз, 2000.
90. Тихонов В. И. Оптимальный прием сигналов. М.: Радио и связь, 1983.
91. Рытое С. М., Кравцов Ю. А., Татарский В. И. Ввведение в статистическую радиофизику
/ под ред С. М. Рытова. М.: Наука, 1978.
92. Защита от радиопомех / под ред. М. В. Максимова. М.: Сов. радио, 1976.
93. Котельников В. А. Теория потенциальной помехоустойчивости. М.: Госэнергоиздат, 1956.
94. Защита радиолокационных систем от помех / под ред. А. И. Канащенкова и В. И. Мер-
кулова. М.: Радиотехника, 2003.
95. Van Brunt L. В. Applied ECM. USA, 1978.
96. Гуткин Л. С. Теория оптимальных методов радиоприема при флуктуационных помехах.
М.: Сов. радио, 1972.
97. Борисов В. А., Калмыков В. В., Ковальчук Я. М. и др. Радиотехнические системы передачи
информации: учеб, пособ. для вузов / под ред. В. В. Калмыкова. М.: Радио и связь, 1990.
98. Пеннин П. И. Системы передачи цифровой информации.. М.: Сов. радио, 1976.
99. Вейцель В. А. и др. Радиосистемы управления / под. ред. В. А. Вейцеля. М.: Дрофа, 2005.
792
Список литературы
100. Киселев В. Д., Есиков О. В., Кислицын А. С. Защита информации в современных систе-
мах ее передачи и обработки. М.: Изд-во «Солид» 2000.
101. Уфимцев П. Я. Теория дифракционных волн в электродинамике. М.: БИНОМ, 2007.
102. Борн М., Вольф Е. Основы оптики. М.: Наука, 1973.
103. Никольский А. В., Никольская Т. И. Электродинамика и распространение радиоволн. М.:
Наука, 1989.
104. Сигналы и помехи в лазерной локации / под ред. В. Е. Зуева. М.: Радио и связь, 1985.
105. Ишанин Г. Г. Приемники излучения оптических и оптико-электронных приборов. Л.:
Машиностроение, 1986.
106. Афинов В. Средства РЭБ стратегической авиации ВВС США. Зарубежное военное обо-
зрение. 1994. № 3. С. 35-45.
107. Лазарев Л. П. Оптико-электронные приборы наведения летательных аппаратов. М.: Ма-
шиностроение, 1984.
108. Справочник по радиоэлектронике. Т. 3 / под ред. А. А. Куликовского. М.: Энергия, 1970.
109. Фомин Я. А, Тарловский Г. Р. Статистическая теория распознавания образов. М.: Радио
и связь, 1986.
110. Фомин Я. А., Савич А. В. Оптимизация распознающих систем. М.: Машиностроение, 1993.
111. Небабин В. Т., Сергеев В. В. Методы и техника радиолокационного распознавания. М.:
Радио и связь, 1984.
112. Поваляев А. А. Спутниковые радионавигационные системы. М.: Радиотехника, 2008.
113. Афинов В. Тенденции развития средств РЭБ авиации вооруженных сил США на пороге
XXI века // Зарубежное военное обозрение. 1998. № 6.
114. Кобак В. О. Радиолокационные отражатели. М.: Сов. радио, 1974.
115. Леонов А. И., Фомичев К. И. Моноимпульсная радиолокация. М.: Сов. радио, 1970.
116. Яворский Б. М., Детлеф А. А. Справочник по физике для инженеров и студентов вузов.
7-е изд., исправ. М.: Наука, 1977.
117. www/supergan.ru.
118. Голубков А. Г Радиолокатор дельфина. Л.: Судостроение, 1977.
119. Володин В. Поле боя — эфир // Красная звезда. 2000. 15 апреля.
120. Гофман Ю. В. Законы, формулы, задачи физики. Киев: Наукова Думка, 1977.
121. Кравченко В. И. Грозозащита радиоэлектронных средств. М.: Радио и связь, 1991.
122. Кравченко В. И., Лету нова Н. И., Болотов Е. А. Радиоэлектронные средства и мощные
электромагнитные помехи. М.: Сов. радио, 1987
123. Беляев А. Ф. Взрывы // Физический энциклопедический словарь. М.: Сов. энциклопе-
дия, 1960. Т. 1. С. 258-259.
124. Гинзбург В. Л. Распространение электромагнитных волн в плазме. М.: Наука, 1967.
125. Диденко А. Н, Григорьев В. П., Усов Ю. П, Мощные электромагнитные пучки и их при-
менение. М.: Атомиздат, 1977.
126. Эберт Г Краткий справочник по физике. М.: Изд-во физ.-мат. лит-ры, 1963.
127. Айзенберг Г 3. Антенны и распространение радиоволн. М.: Госиздат, 1957.
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ..............................................................3
СПИСОК СОКРАЩЕНИЙ........................................................5
ВВЕДЕНИЕ.................................................................9
Глава 1. ОСНОВЫ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ.................................13
1.1. РЭБ — составная часть информационного конфликта..................13
1.2. Цели и задачи РЭБ................................................14
1.3. Характеристика комплексов и средств РЭБ..........................19
1.4. Основные функции комплексов РЭБ..................................21
1.5. Критерии эффективности комплексов РЭБ............................24
Глава 2. ОБЪЕКТЫ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ................................28
2.1. Общая характеристика объектов РЭБ................................28
2.2. РЭС управления войсками как объекты РЭБ..........................30
2.3. Системы управления оружием как объекты РЭБ.......................39
2.4. Радиоэлектронные средства разведки как объекты РЭБ...............51
2.5. Системы связи и командного управления как объекты РЭБ............60
2.6. Электронно-вычислительные системы как объекты РЭБ................64
2.7. Энергетические системы и сети как объекты РЭБ....................65
Глава 3. РАДИОЭЛЕКТРОННАЯ РАЗВЕДКА......................................67
3.1. Назначение и задачи радиоэлектронной разведки....................67
3.1.1. Назначение, задачи и особенности радиоэлектронной разведки...68
3.1.2. Характеристика видов радиоэлектронной разведки...............69
3.1.3. Разведка радиоэлектронных средств............................74
3.1.4. Упрощенная структурная схема станции радиотехнической разведки.76
3.1.5. Радиоэлектронная разведка радиолектронных систем в интересах
организации и ведения РЭБ...........................................78
3.2. Способы и устройства определения несущей частоты радиосигнала....78
3.2.1. Поисковые способы определения частоты........................79
3.2.2. Беспоисковые способы определения частоты.....................86
3.3. Цифровые измерители частоты......................................97
3.4. Запоминание частоты сигнала......................................100
3.5. Измерение временных параметров сигнала.........................101
3.6. Пеленгация и определение местоположения радиоэлектронных систем....103
3.6.1. Способы пеленгации объектов разведки.........................103
3.6.2. Системы местоопределения в радио- и радиотехнической разведке..112
3.7. Опознавание типов и различение образцов радиоэлектронных средств...120
3.8. Акустическая разведка...........................................122
Глава 4. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ РАДИОЛОКАЦИОННЫХ
СИСТЕМ ОБНАРУЖЕНИЯ И ЦЕЛЕРАСПРЕДЕЛЕНИЯ.................................134
4.1. Радиолокационные системы как объекты РЭБ........................134
4.2. Оценка информационного ущерба, наносимого
радиолокационным системам средствами РЭБ........................... 136
4.3. Маскирующие активные помехи.....................................143
4.3.1. Прямошумовая помеха.........................................144
4.3.2. Непрерывные шумовые помехи................................. 148
4.3.3. Модулированные шумовые помехи...............................149
4.4. Активные имитирующие помехи.....................................162
4.4.1. Общие сведения............................................ 162
4.4.2. Создание пространственно-временных помех....................164
794
Оглавление
4.5. Радиоэлектронное подавление многопозиционных
радиолокационных систем...............................................171
4.6. Подавление взаимокорреляционных радиолокационных систем.174
4.7. Аннигилирующая помеха..............................................179
Глава 5. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ УПРАВЛЕНИЯ ОРУЖИЕМ.................182
5.1. Радиоэлектронная система управления оружием как объект
радиоэлектронного подавления..........................................182
5.2. Радиоэлектронное подавление радиоэлектронных систем
со сложными сигналами.................................................182
5.3. Коэффициент подавления.............................................186
5.4. Имитирующие активные помехи радиолокационным системам..............196
5.4.1. Ответные имитационные помехи...................................196
5.4.2. Эффективность ответных имитационных помех......................197
5.4.3. Генераторы ложных сигналов — ретрансляционных ответных помех...198
5.4.4. Помехи каналу дальности........................................200
5.4.5. Помехи каналу скорости.........................................203
5.4.6. Совмещенные помехи измерителям угловых координат...............205
5.4.7. Некогерентные пространственноразнесенные помехи
угломерным системам...................................................208
5.4.8. Когерентные помехи.............................................212
5.4.9. Помехи, мерцающие в разнесенных по пространству точках.........217
5.4.10. Пространственноразнесенные помехи радиосистемам самонаведения.218
5.4.11. Подавление помехами взаимокорреляционных систем...............220
5.4.12. Помехи многопозиционным радиолокационным системам.............223
5.5. Сигналоподобные помехи ............................................226
5.5.1. Аналоговые устройства запоминания и воспроизведения
параметров сигналов...................................................227
5.5.2. Цифровые устройства запоминания и воспроизведения радиосигналов.230
5.5.3. Устройства запоминания и воспроизведения амплитуды.............232
5.5.4. Одноканальное однобитовое фазовое устройство
запоминания и воспроизведения сигналов.................................234
5.5.5. Двухканальное фазовое устройство запоминания
и воспроизведения сигналов.............................................237
5.5.6. Двухканальные квадратурные цифровые устройства запоминания
и воспроизведения сигналов.............................................240
5.5.7. Спектральное устройство запоминания и воспроизведения сигналов..244
5.6. Радиолокационные ловушки...........................................247
Глава 6. ПАССИВНЫЕ И ПАССИВНО-АКТИВНЫЕ ПОМЕХИ.............................264
6.1. Общая характеристика пассивных помех................................264
6.2. Противорадиолокационные отражатели.................................269
6.3. Аэрозоли...........................................................278
6.4. Уравнение радиоэлектронного подавления
радиолокационных систем пассивными помехами...........................285
6.5. Эффект усиления электромагнитного сигнала в аэрозольном облаке.....296
6.6. Эффективность подавления радиолокационных систем
пассивными помехами...................................................301
6.7. Активно-пассивные помехи...........................................304
6.8. Энергетические соотношения при создании активно-пассивных помех....307
6.9. Устройства создания пассивных помех................................311
Глава 7. УСТРОЙСТВА ОПТИКО-ЭЛЕКТРОННОГО ПОДАВЛЕНИЯ
АВИАЦИОННЫХ КОМПЛЕКСОВ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ..........313
7.1. Краткая характеристика оптико-электронных устройств................313
7.2. Принципы действия оптических приборов обнаружения
и автосопровождения целей.............................................320
Оглавление
795
7.3. Тепловые ложные цели..............................................327
7.3.1. Виды тепловых ложных целей и их характеристики.................327
7.3.2. Уравнение оптико-электронного подавления для тепловых ложных целей ....331
7.3.3. Подавление головок самонаведения с амплитудно-фазовой модуляцией.333
7.3.4. Подавление ИК-головок самонаведения с времяимпульсной модуляцией
изображения цели.....................................................335
7.3.5. Станции активных модулированных помех..........................340
7.3.6. Помехи, прицельные по частоте сканирования.....................340
7.3.7. Заградительные помехи..........................................345
7.3.8. Прерывистая помеха.............................................346
7.4. Перспективные способы оптико-электронного поражения...............349
7.5. Механическое повреждение элементов тепловых головок самонаведения...350
7.6. Помехи тепловым головкам самонаведения, создаваемые плазмой,
образованной лазерным излучением......................................350
7.7. Пассивные средства оптико-электронного поражения..................352
Глава 8. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ РАДИОСИСТЕМ
ПЕРЕДАЧИ ИНФОРМАЦИИ ......................................................354
8.1. Подавление радиолиний связи и командного радиоуправления..........354
8.2. Станции активных помех радиолиниям командного радиоуправления.....357
8.3. Станции активных помех радиолиниям передачи информации............358
8.4. Радиоэлектронное подавление цифровых линии связи и передачи данных..359
Глава 9. КОМПЛЕКСЫ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ ...............................366
9.1. Назначение и функциональная схема комплексов
индивидуальных средств РЭБ............................................366
9.2. Система информационного обеспечения...............................367
9.3. Система управления бортовым комплексом обороны....................368
9.4. Система исполнительных устройств..................................372
9.5. Система контроля..................................................375
9.6. Станции активных помех на основе фазированных антенных решеток....375
9.7. Устройства запоминания и воспроизведения сигналов
радиоэлектронной системы...............................................384
9.8. Возможные контрмеры противника, направленные на снижение
эффективности бортового комплекса обороны..............................387
9.9. Бортовой комплекс обороны как система массового обслуживания......391
9.10. Влияние коэффициента усиления передающей антенны станции
формирования активных помех на эффективность радиоэлектронного
подавления радиолокационных станций...................................392
9.11. Облик современной цифровой станции активных помех................397
9.12. Энергетический потенциал многолучевой станции помех..............400
Глава 10. СНИЖЕНИЕ РАДИОЛОКАЦИОННОЙ ЗАМЕТНОСТИ............................403
10.1. Снижение эффективной поверхности рассеяния за счет выбора
малоотражающей формы объекта..........................................403
10.2. Применение противорадиолокационных покрытий......................407
10.3. Уменьшение радиолокационной заметности антенных систем...........411
10.4. Комплексное применение методов противорадиолокационной маскировки..413
Глава 11. ФУНКЦИОНАЛЬНОЕ ПОРАЖЕНИЕ РАДИОЭЛЕКТРОННОЙ
СИСТЕМЫ ЭЛЕКТРОМАГНИТНЫМИ ПОЛЯМИ..........................................416
11.1. Принцип действия и применения оружия функционального поражения.....416
11.2. Физические основы функционального поражения электронных средств....417
11.3. Воздействие мощного импульсного электромагнитного излучения
на элементы радиоэлектронной системы..................................418
11.3.1. Воздействие электромагнитного поля на металлы................419
11.3.2. Воздействие электромагнитного поля на диэлектрики............420
11.3.3. Воздействие сильных электромагнитных полей на полупроводники.422
796
Оглавление
11.4. Критические энергетические уровни
функционального поражения электронных устройств.......................428
11.5. Источники сильных электромагнитных полей..........................429
11.6. СВЧ-оружие функционального поражения многоразового применения.....431
11.7. СВЧ-оружие функционального поражения одноразового применения......433
11.7.1. Взрывомагнитные генераторы....................................434
11.7.2. Физические принципы получения высокоэнергетических
электромагнитных полей................................................435
11.7.3. Преобразование энергии электромагнитного поля
при взрывном сжатии...................................................439
11.7.4 Энергетические характеристики взрывомагнитного генератора.....443
11.7.5. Электромагнитное оружие на основе взрывомагнитного генератора.445
11.8. Многоразовые СВЧ-средства функционального поражения...............449
11.8.1. Возможности многоразовых средств функционального поражения....450
11.8.2. Состав многоразовых СВЧ-средств функционального поражения.....453
11.8.3. Генераторы сверхмощных СВЧ-импульсов..........................455
11.8.4. Сильноточные электронные ускорители...........................457
11.8.5. Генераторы мощных импульсов...................................461
11.8.6. Диоды с взрывной эмиссией электронов..........................467
11.8.7. Электродинамические системы...................................471
11.8.8. Вакуумные сверхмощные СВЧ-генераторы..........................472
11.8.9. Черенковские генераторы.......................................472
11.8.10. Гиротроны....................................................479
11.8.11. Плазменные сверхмощные СВЧ-генераторы........................482
11.8.12. Виркатор.....................................................485
11.8.13. Антенные системы сверхмощных генераторов.....................489
11.9. Лазерные средства функционального поражения.......................495
11.9.1. Принцип действия лазера.......................................496
11.9.2. Особенности применения лазера.................................497
11.9.3. Оценка поражающего действия лазера............................499
11.10. Уравнение функционального поражения..............................503
11.11. Воздействие на радиоэлектронную систему излучений
высокопотенциальных радиолокационных станций...........................506
11.12. Учет показателей и критериев.....................................509
Глава 12. ВЫСОКОТОЧНОЕ ОРУЖИЕ ПРОТИВ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ .................................................511
12.1. Алгоритм управления движением противорадиолокационной ракеты......514
12.2. Структура и состав аппаратуры головки самонаведения
противорадиолокационной ракеты.........................................517
12.3. Пеленгаторы пассивных радиоголовок самонаведения..................527
12.4. Антенны головок самонаведения противорадиолокационных ракет.......531
12.4.1. Принципы конструирования широкополосных антенн................532
12.4.2. Антенные системы противорадиолокационных ракет................536
12.5. Приемники радиоголовок противорадиолокационных ракет..............544
12.6. Пролонгаторы пассивных радиолокационных головок самонаведения.....550
Глава 13. АКУСТИЧЕСКИЕ СРЕДСТВА ФУНКЦИОНАЛЬНОГО ПОРАЖЕНИЯ.................555
13.1. Акустическое оружие...............................................555
13.2. Акустические волны................................................557
13.3. Энергетические характеристики акустических волн...................564
13.4. Ослабление акустических волн......................................566
13.5. Когерентность акустических волн...................................568
13.6. Акустические излучатели...........................................573
13.6.1. Одиночные излучатели..........................................573
13.6.2. Системы излучателей...........................................579
13.7. Инфразвуковые волны.............................................. 586
13.8. Слышимый звук.....................................................590
Оглавление 797
13.9. Ультразвук.....................................................594
13.10. Устройства функционального поражения..........................596
13.10.1. Одноразовые устройства акустического поражения.............597
13.10.2. Многоразовые устройства акустического поражения............599
13.11. Эффективность акустического поражения.........................602
13.12. Маскировка звуковых сигналов..................................603
Глава 14, ЭЛЕКТРОМАГНИТНАЯ СОВМЕСТИМОСТЬ
РАДИОЭЛЕКТРОННЫХ СИСТЕМ.................................................606
14.1. Непреднамеренные помехи и проблема электромагнитной
совместимости радиоэлектронных систем.................................607
14.2. Технические характеристики радиоэлектронных систем
и проблема электромагнитной совместимости.............................610
14.3. Оценка электромагнитной совместимости радиоэлектронной системы.
Уравнение электромагнитной совместимости..............................616
14.4. Способы обеспечения электромагнитной совместимости
радиоэлектронных систем...............................................622
14.5. Особенности обеспечения электромагнитной совместимости
комплексов РЭБ с радиоэлектронными комплексами и средствами
другого назначения...................................................623
14.6. Контроль выполнения технических и организационных мероприятий
по обеспечению электромагнитной совместимости комплексов РЭБ
с радиоэлектронными комплексами и средствами другого назначения.......625
Глава 15. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ...............................................626
15.1. Сетевые спутниковые радионавигационные системы
как объект радиоэлектронного подавления..............................626
15.2. Радиоэлектронное подавление канала обнаружения.................630
15.3. Подавление канала слежения за частотой
принимаемого сигнала и измерения скорости............................633
15.4. Подавление канала слежения за задержкой
навигационного сигнала и измерения псевдо дальности..................634
15.5. Радиоэлектронное подавление канала демодуляции.................635
15.6. Радиоэлектронное подавление приемника потребителя
навигационной информации узкополосной помехой........................636
15.7. Радиоэлектронное подавление аппаратуры потребителей
навигационной информации имитирующими помехами.......................636
15.8. Уравнение радиоэлектронного подавления для потребителей
спутниковых радионавигационных систем................................637
Глава 16. РАДИОЭЛЕКТРОННАЯ ЗАЩИТА.......................................639
16.1. Виды помех радиоприему и методы помехозащиты...................639
16.2. Помехозащита радиоприемников...................................642
16.3. Специальные схемы подавления различных преднамеренных помех....646
16.4. Помехозащита радиолокационных станций..........................648
16.5. Выбор антенной системы радиолокационных станций................649
16.6. Анализ и индикация помеховой обстановки........................650
16.7. Защита от помех, уводящих по дальности и по скорости...........651
16.8. Схемы защиты от поляризационных помех..........................652
16.9. Помехоустойчивость и помехозащищенность систем передачи информации ...654
16.10. Кодирование в помехозащищенных системах передачи информации...656
16.11. Обратная связь для адаптации к помеховой обстановке...........670
16.12. Стойкость к имитирующим и дезинформирующим помехам
(обеспечение подлинности сообщении)...................................675
16.13. Радиоэлектронная защита систем наведения ракет.................680
16.14. Защита от ракет с радиоголовками самонаведения................685
798
Оглавление
Глава 17. ДЕСТРУКТИВНЫЕ ПРОГРАММНЫЕ ВОЗДЕЙСТВИЯ........................687
17.1. Воздействие деструктивных программ в сетях ЭВМ................687
17.2. Угрозы информационным ресурсам и информационные
атаки на вычислительные системы...................................689
17.3. Компьютерные вирусы...........................................693
17.4. Программные средства борьбы с компьютерными вирусами..........696
17.5. Программные закладки..........................................698
17.6. Защита компьютерных сетей и сред от деструктивных воздействий.702
Глава 18. ЭФФЕКТИВНОСТЬ СРЕДСТВ И СПОСОБОВ
РАДИОЭЛЕКТРОННОЙ БОРЬБЫ..............................................705
18.1. Методы исследования эффективности комплексов РЭБ..............705
18.2. Критерии боевой эффективности комплексов РЭБ..................707
18.3. Критерии технической эффективности комплексов РЭБ.............716
18.4. Стоимость комплекса РЭБ.......................................724
18.5. Принципы разработки комплексов РЭБ............................726
18.6. Оптимальная структура комплекса РЭБ самолета
при ограничениях на массу.........................................731
18.7. Оценка средств РЭБ по критерию «эффективность — стоимость»....732
18.8. Эффективность средств РЭБ в локальных войнах..................737
18.9. Влияние радиоэлектронной борьбы на успех боевых действий......771
18.10. Тенденции развития комплексов РЭБ............................778
ЗАКЛЮЧЕНИЕ.............................................................788
СПИСОК ЛИТЕРАТУРЫ......................................................789
Куприянов Александр Ильич
Шустов Лев Николаевич
РАДИОЭЛЕКТРОННАЯ БОРЬБА
ОСНОВЫ ТЕОРИИ
Книга издана в авторской редакции
Ответственный редактор М. Б. Гаража
Технический редактор П. С. Корсунская
Корректор А. И. Гундаев
Компьютерная верстка Н. С. Супотницкой
Подписано в печать 02.03.2011. Формат 70x100/16
Печать офсетная. Бумага офсетная. Гарнитура «Таймс».
Усл. печ. л. 64,5 Тираж 300 экз.
ЗАО «Издательское предприятие «Вузовская книга»
125993, Москва, А-80, ГСП-3, Волоколамское шоссе, д. 4,
МАИ, Главный административный корпус, к. 301а.
Тел./факс (499) 158-02-35. E-mail: vbook@mail.ru; vbook@mai.ru
www.vuzkniga.ru
ИЗДАТЕЛЬСТВО
ВУЗОВСКАЯ КНИГА
ф Издательство «Вузовская книга» предлагает большой выбор литературы
различной тематики. Около пятнадцати лет успешной работы на рынке
издательских услуг позволили ему занять достойное место в ряду круп-
нейших научных издательств.
ф Каталог издательства включает монографии, учебные и учебно-методи-
ческие пособия для вузов и средних специальных учебных заведений,
тематические сборники научных статей, справочники, словари, а также
научно-познавательные и прикладные издания. Наши книги адресованы
абитуриентам, студентам, аспирантам, преподавателям, специалистам и
всем любознательным читателям.
ф В числе авторов преподаватели, научные работники, специалисты из Моск-
вы, Санкт-Петербурга, Самары, Ростова-на-Дону, Томска, Новосибирска,
Якутска и других городов РФ, а также из стран ближнего и дальнего
зарубежья.
ф Реализацией книжной продукции издательства занимается торговое пред-
приятие «Вузовская книга», которое много лет взаимодействует с круп-
нейшими книжными магазинами г. Москвы, а также книготорговыми
компаниями как Москвы, так и других городов РФ и стран ближнего
зарубежья. Особая программа реализации существует для библиотек и
библиотечных систем.
ЗАО «Издательское предприятие «Вузовская книга»
125993, Москва, А-80, ГСП-3, Волоколамское шоссе, д. 4,
МАИ, Главный административный корпус, к. 301а.
Тел./факс: (499)158-02-35. E-mail: vbook@mail.ru; vbook@mai.ru;
www.vuzkniga.ru
Куприянов Александр Ильич —
доктор технических наук, старший
научный сотрудник, профессор ка-
федры радиосистем передачи инфор-
мации и управления Московского
авиационного института (технического
университета «МАИ»).
Автор более 120 научных трудов и
изобретений, использованных при
создании современных аэрокосми-
ческих комплексов и средств радио-
электронной борьбы.
Область научных интересов -
теория и техника радиоэлектронных
систем, информационная безопас-
ность технических и организационно-
технических систем.
Шустов Лев Николаевич — доктор
технических наук, профессор кафедры
радиоэлектронной борьбы ВВИА им.
Н.Е. Жуковского.
Основоположник теории простран-
ственно-временных помех. Разрабо-
тал и развил теорию построения
комплексов РЭБ.
Автор более 200 научных и учебно-
методических работ, опубликованных
в России, США, Великобритании,
Китае и других странах.
Область научных интересов —
теория и техника радиоэлектронных
систем, теория и техника радиоэлект-
ронной борьбы.