






















































































































































































































Author: Дятлов А.П. Дятлов П.А. Кульбикаян Б.Х.
Tags: военно-инженерное оборудование и работы по инженерному обеспечению пути сообщения противорадиолокационные средства военная топография радиотехника космическая техника
ISBN: 5-256-01750-0
Year: 2004




А.П. Дятлов, П.Л. Дятлов, Б.Х. Кульбмкаян
РАДИОЭЛЕКТРОННАЯ БОРЬБА
СО СПУТНИКОВЫМИ
РАДИОНАВИГАЦИОННЫМИ
СИСТЕМАМИ
• Радио и связь •
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО
ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ТАГАНРОГСКИЙ ГОСУДАРСТВЕННЫЙ РАДИОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
А.П. Дятлов, П.А. Дятлов, Б.Х. Кульбикаян
РАДИОЭЛЕКТРОННАЯ БОРЬБА
СО СПУТНИКОВЫМИ
РАДИОНАВИГАЦИОННЫМИ СИСТЕМАМИ
Москва
«Радио и связь»
2004
УДК 623.624
Дятлов А.П., Дятлов П.А., Кульбикаян Б.Х.
Радиоэлектронная борьба со спутниковыми радионавигационными систе-
мами. — М.: Радио и связь, 2004 — 226 с.
ISBN 5-256-01750-0
Рассмотрены методы и средства радиоэлектронной борьбы со спутниковой
радионавигационной системой «Навстар», исследованы алгоритмы радиомони-
торинга излучений спутниковых радионавигационных систем при различном
уровне априорной неопределённости; приведена методика анализа радиоподав-
ления аппаратуры потребителей при различных типах организованных помех,
описаны принципы построения комплекса радиоэлектронной борьбы при про-
тиводействии СРНС «Навстар», функционирующей в штатном режиме; дан
анализ тенденций и перспектив развития средств радиоэлектронной борьбы с
учётом модернизации и развития системы «Навстар».
Книга предназначена для инженеров и научных работников, а также может
быть полезна преподавателям и студентам радиотехнических специальностей
ВУЗов.
Табл. 2. Ил. 36. Библиогр.: 103 назв
Рецензенты:
доктор техн, наук, профессор Бурлай И.В.
доктор техн наук, профессор Литюк В.И
© Дятлов А.П., Дятлов П.А , Кульбикаян Б.Х., 2004
СОДЕРЖАНИЕ
Содержание........................................................ 3
Список основных сокращений.........................................5
Предисловие........................................................9
Глава 1. Противоборство спутниковой радионавигационной
системы «Навстар» и средств радиоэлектронной борьбы..............12
1.1 Информационные войны в XXI веке...........................12
1.2. Назначение, состав и основные характеристики СРНС «Навстар».... 15
1.3. Радионавигационный конфликт..............................24
Глава 2. Радиомониторинг излучений СРНС «Навстар».................36
2.1. Задачи радиомониторинга излучений СРНС «Навстар»........ 36
2.2. Обнаружение радиоизлучений СРНС «Навстар»................47
2.2.1. Рабочие модели радиообстановки.............................47
2.2.2. Обнаружение ФМС на фоне гауссовской помехи.................52
2.2.3. Обнаружение навигационных сигналов на фоне совокупности
гауссовской стационарной и взаимных помех.........................58
2.3. Поиск и автосопровождение радиоизлучений СРНС «Навстар»..69
2.3.1. Пространственно-частотный поиск радиоизлучений............ 69
2.3.2. Автосопровождение радиоизлучений.......................... 77
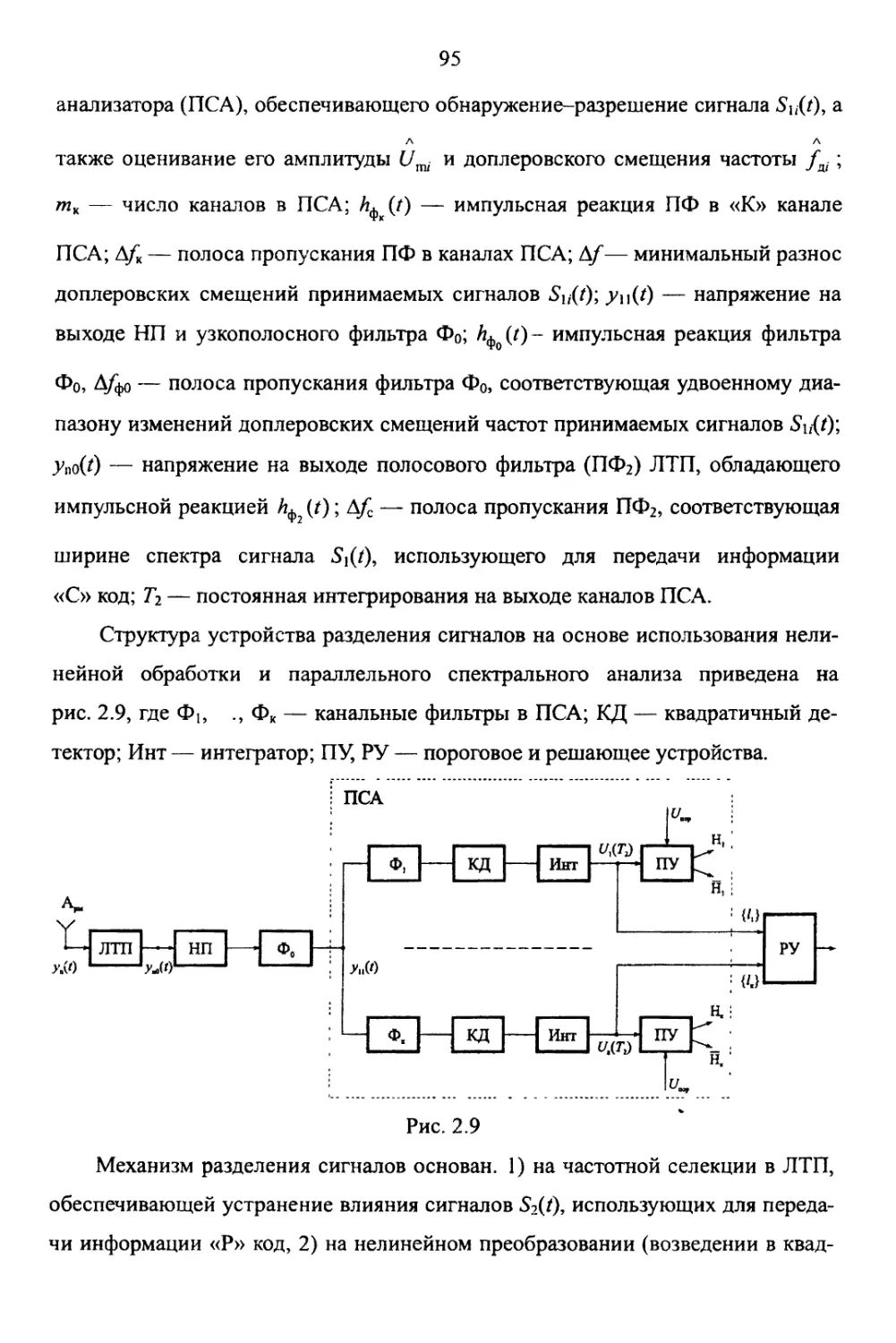
2.4. Разрешение, классификация и оценивание параметров
навигационных сигналов........................................ 91
Глава 3. Радиоэлектронное подавление аппаратуры потребителя
СРНС «Навстар» ..........................................114
3.1. Особенности организации радиоэлектронного подавления
СРНС «Навстар»...............................................114
3.2. Радиоэлектронное подавление каналов аппаратуры потребителя
СРНС «Навстар» гармонической и шумовой помехами............. 120
3.2.1 Радиоэлектронное подавление канала обнаружения............ 120
4
3.2 2 Радиоэлектронное подавление канала слежения за частотой.....133
3 2 3. Радиоэлектронное подавление канала слежения за задержкой...145
3.2 4. Радиоэлектронное подавление канала демодуляции ............155
3.3. Радиоэлектронное подавление аппаратуры потребителей
СРНС «Навстар» сигналоподобными помехами..................... 159
3.4. Сравнительный анализ эффективности радиоэлектронного
подавления аппаратуры потребителей СРНС «Навстар»............ 172
Глава 4. Принципы построения комплекса радиоэлектронной борьбы с
СРНС «Навстар»...................................................175
4.1. Постановка задачи........................................175
4.2. Принципы построения подсистемы радиомониторинга..........180
4.3. Принципы построения командной радиолинии.................196
4.4. Принципы построения подсистемы постановки помех..........202
4.5. Принципы построения комплексов радиоэлектронной борьбы...206
4.6. Тенденции противоборства средств радиоэлектронной борьбы с
СРНС «Навстар»............................................... 211
Заключение........................................................214
Библиографический список..........................................216
СПИСОК ОСНОВНЫХ СОКРАЩЕНИИ
А — антенна
АОКО — автокорреляционное устройство с квадратурной обработкой
АП — аппаратура потребителей
АПел — амплитудный пеленгатор
АРУШ — автоматическая регулировка усиления по шумам
АЧД — автокорреляционный частотный дискриминатор
БЗ — блок защиты
ВУ — вычитающее устройство
Г — гетеродин
ГК — генератор кода
ГКС — генератор копии сигнала
ГП — гармоническая помеха
ГС — главная станция
Д — детектор
Дел — делитель напряжений
Дем — демодулятор
ДОЧ — датчик опорных частот
ДУ — декодирующее устройство
ДЧ — дискретно-частотный
ЗСП <— заградительная сигналоподобная помеха
ИВ — информационная война
ИК — устройство извлечения квадратного корня
Инд — индикатор
ИФНЧ — идеальный фильтр нижних частот
К — кодер
КА — космический аппарат
КД — квадратичный детектор
6
КО — канал обнаружения
Ког.О — когерентный обнаружитель
КРЛ — командная радиолиния
КРЭБ — комплекс радиоэлектронной борьбы
КСег — космический сегмент
КСЗ — канал слежения за задержкой
КСт — контрольные станции
КСЧ — канал слежения за частотой
КУКО — когерентное устройство с квадратурной обработкой
КФО — корреляционно-фильтровой обнаружитель
КФУ — корреляционно-фильтровое устройство
ЛЗ — линия задержки
ЛТП — линейный тракт приёмного устройства
МКО — многоканальный когерентный обнаружитель
МНО — многоканальный некогерентный обнаружитель
Мод — модулятор
МП — многоканальный приёмник
НП — нелинейный преобразователь
НУ — накопительное устройство
ОПУ — опорно-поворотное устройство
П — перемножитель
ПИФ — пропорционально-интегрирующий фильтр
ПМИЧ — приёмник с мгновенным измерением частоты
ПП — передатчик помех
ППП — подсистема постановки помех
ППУ — приёмопередающее устройство
ПРМ — подсистема радиомониторинга
ПрСП — прицельная сигналоподобная помеха
ПСА — параллельный спектральный анализатор
ПСП — псевдослучайная последовательность
7
ПУ ПФ — пороговое устройство полосовой фильтр
РЗ — радиоэлектронная защита
РК — разностный коррелятор
РЛЗ — регулируемая линия задержки
РПрУ — радиоприёмное устройство
РПУ — радиопередающее устройство
РУ — решающее устройство
РФ — режекторный фильтр
РЭБ — радиоэлектронная борьба
РЭП — радиоэлектронное подавление
РЭР — радиоэлектронная разведка
свд — станции ввода данных
сд — синхронный детектор
См — смеситель
СП — сигналоподобная помеха
СПот — сегмент потребителей
СРНС — спутниковая радионавигационная система
СРЭБ — средства радиоэлектронной борьбы
ссп — следящая сигналоподобная помеха
СУ — сегмент управления
Сум — сумматор.
СуП — супергетеродинный приёмник
СФ — согласованный фильтр
СЧ — синтезатор частоты
УВСО — устройство выделения сигнала ошибки
УГ — управляемый генератор
УМ — усилитель мощности
Упр — управитель
УСС — устройство свёртки спектра ФМС
8
УСЧ — устройство сдвига частоты
УУ — устройство управления
уф — узкополосный фильтр
УЭ — управляемый элемент
Ф — фильтр
ФАПЧ — фазовая автоподстройка частоты
Фв — фазовращатель
ФМС — фазоманипулированный сигнал
ФНЧ — фильтр нижних частот
ФП — функциональный преобразователь
ФУ — формирующее устройство
ЦУ — целеуказания
ШАРУ — шумовая автоматическая регулировка усиления
ШП — шумовая помеха
ЭА — экспресс-анализатор
ЭМС — электромагнитная совместимость
ЭО — энергетический обнаружитель
9
ПРЕДИСЛОВИЕ
Навигационные системы представляют собой средства получения инфор-
мации о местоположении абонента и параметрах его движения относительно
других подвижных и неподвижных объектов.
В зависимости от используемого физического поля при получении инфор-
мации о местоположении подвижного объекта в определённой системе коорди-
нат физического поля навигационные системы делятся на следующие типы [1]:
— инерциальные навигационные системы;
— корреляционно-экстремальные навигационные системы;
— оптические навигационные системы;
— радионавигационные системы.
Из вышеперечисленных систем наиболее широкое применение получили
радионавигационные системы, поскольку они позволяют обеспечивать точное
определение местоположения практически любых подвижных объектов вне за-
висимости от метеорологических условий, географического положения и вре-
мени суток.
В зависимости от назначения радионавигационные системы подразделяют-
ся [2] на 1) радиосистемы дальней навигации; 2) радиосистемы ближней нави-
гации; 3) радиосистемы предупреждения столкновений; 4) радиосистемы по-
садки; 5) универсальные системы навигации.
Наибольшего внимания заслуживают универсальные системы навигации,
которые должны обеспечивать глобальное высокоточное обеспечение определе-
ний пространственных векторов положения, ориентации и скорости высокоди-
намичных потребителей навигационной информации. В наибольшей степени
требованиям, предъявляемым к универсальным системам навигации, удовле-
творяют спутниковые радионавигационные системы (СРНС). В процессе эво-
люции радионавигационных систем создано два поколения СРНС. СРНС перво-
го поколения «Transit» (США, 1974 г.), «Циклон» и «Цикада» (Россия, соответ-
ственно 1976 г. и 1979 г.) базировались на низкоорбитальных космических ап-
10
паратах (КА) и использовались для навигации военных и гражданских морских
судов. Однако отсутствие непрерывного глобального покрытия и невысокая
точность определения местонахождения (70- 100 м) не удовлетворяла требова-
ниям всех групп потенциальных потребителей.
Указанные недостатки были устранены в процессе создания СРНС второго
поколения: СРНС «Навстар» (США, 1993 г.) и «Глонасс» (Россия, 1995 г.).
СРНС «Глонасс» и «Навстар» находят широкое применение в различных
сферах человеческой деятельности.
Опыт, накопленный в результате использования СРНС «Навстар» в по-
следних военных конфликтах, показал, что эта информационная система оказы-
вает большое влияние на результаты военных действий и превращается в стра-
тегическое средство. В связи с вышеизложенным весьма актуальной становится
задача разработки методов и средств снижения эффективности СРНС «На-
встар» при её использовании в военных целях. В данной монографии для реше-
ния вышеуказанной задачи используются методы и средства радиоэлектронной
борьбы (РЭБ).
Процесс функционирования СРНС в условиях постановки организованных
помех ранее рассматривался фрагментарно в рамках журнальных статей и рек-
ламных материалов.
В книге предпринимается попытка системно изложить общие и специфи-
ческие задачи данной комплексной проблемы, связанные как с выбором прин-
ципов построения, так и с расчётом основных характеристик подсистем радио-
мониторинга и радиопротиводействия, а также комплекса радиоэлектронной
борьбы в целом.
Все конкретные примеры технических решений при построении комплекса
радиоэлектронной борьбы ориентированы на противодействие СРНС «На-
встар»
Книга в значительной части содержит материалы оригинальных исследо-
ваний авторов, а также теоретические обобщения материалов, опубликованных
в открытой печати.
11
Книга состоит из предисловия, четырёх глав и заключения.
В первой главе дается общая характеристика информационным войнам в
XXI веке, особенностям построения СРНС «Навстар» и содержанию радиона-
вигационного конфликта
Во второй главе описываются задачи и методы радиомониторинга излуче-
ний СРНС «Навстар» при различных уровнях априорной неопределённости, со-
ответствующих как штатному, так и нештатному режимам функционирования.
В третьей главе исследуются методы анализа радиоэлектронного подавле-
ния аппаратуры потребителя СРНС «Навстар» при воздействии шумовых, гар-
монических и сигналоподобных помех.
В четвёртой главе исследуются принципы построения комплекса радио-
электронной борьбы (КРЭБ), обеспечивающего радиоэлектронное подавление
аппаратуры потребителя СРНС «Навстар», функционирующей в штатном ре-
жиме на частоте Ц с использованием «С» кода.
В заключении подводятся итоги выполненных исследований и формули-
руются направления дальнейших работ с учётом динамики развития СРНС «На-
встар».
Книга предназначена для широкого круга специалистов, занимающихся
проблемами радиоэлектронной борьбы, радионавигации, радиомониторинга,
радиопротиводействия, электромагнитной совместимости, а также для аспиран-
тов и студентов вузов, обучающихся по радиотехническим и телекоммуникаци-
онным специальностям.
Авторы будут признательны читателям за предложения и замечания по
улучшению содержания книги, которые следует направлять по адресу элек-
тронной почты: dap@tsure.ru на имя Дятлова Анатолия Павловича.
12
ГЛАВА 1. ПРОТИВОБОРСТВО СПУТНИКОВОЙ
РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ «НАВСТАР» И
СРЕДСТВ РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
1.1. ИНФОРМАЦИОННЫЕ ВОЙНЫ В XXI ВЕКЕ
Анализ военных действий на протяжении веков свидетельствует о посто-
янном совершенствовании методов и средств их проведения В большинстве
случаев причинами таких процессов было появление и развитие новых про-
грессивных технологий. В эру промышленной революции войны традиционно
велись с применением механизированных и моторизованных боевых средств и
такой подход соответствовал концепции «контактных войн» [3].
В настоящее время в мире происходит новая революция, связанная с бур-
ным развитием информатизации всех сфер жизни современного общества.
Роль информации постоянно растёт и уже не вызывает скепсиса крылатая
фраза— «тот, кто владеет информацией, тот владеет миром».
Качественные изменения информационных систем и информационных
технологий, широко используемых вооруженными силами при решении боевых
задач, требуют пересмотра их роли и значения в способах ведения боевых дей-
ствий в современных условиях, основанных на использовании концепции «бес-
контактных войн» [3].
Концепция информационной войны (ИВ) возникла, когда практически бы-
ло доказано, что вычислительные системы, информационные технологии и
средства связи могут влиять на исход многих событий и реализацию тех или
иных сценариев проведения боевых операций. В настоящее время термин ИВ
получил официальное признание США, а министерство обороны США присту-
пило к разработке концепции и стратегии ИВ [4].
На сегодняшний день полное общепринятое определение термина ИВ от-
сутствует. Часто термин «информационная война» трактуется как война с ис-
пользованием информационных технологий [4-8] В отечественной литературе
аналогом понятия «ИВ» является термин «информационный конфликт» [9-11],
13
который в основном и используется в данной монографии.
К особенностям ИВ относится то, что она ведётся как во время фактиче-
ских боевых действий, так и в мирное время в кризисных ситуациях без офици-
ального объявления, что не позволяет определить дату её начала. В ИВ может
отсутствовать линия фронта и имеется возможность обеспечения анонимности
исполнителям операций.
Все формы ИВ сводятся к воздействию на информационную инфраструк-
туру потенциального противника с целью искажения получаемой им информа-
ции, лишения его возможности получения новой информации или фактическое
уничтожение его информационных средств, а также к защите собственных
средств от аналогичных действий противника.
В настоящее время существует следующие формы ИВ [3, 8]:
— психологическая война;
— война с использованием средств разведки;
— кибернетическая война;
— РЭБ.
Психологическая война состоит из ряда психологических операций, на-
правленных:
— на искажение получаемой политическим руководством, командованием
и личным составом вооружённых сил потенциального противника ин-
формации и навязывания им ложной информации, лишающей их воз-
можности правильно воспринимать события или текущую обстановку и
принимать верные решения;
— психологическую обработку войск и населения;
— идеологические диверсии и дезинформацию;
— пропаганду сведений, искажённых различными средствами информа-
ции.
В ИВ с использованием средств разведки будут широко применяться раз-
личные системы и датчики для наблюдения и контроля обстановки на театре
боевых действий Получаемые от средств разведки оперативные сведения могут
14
использоваться при принятии решений по управлению боевыми действиями и
при наведении оружия на цели.
Кибернетическая война — специфическая форма ИВ, основанная на ис-
пользовании моделей и имитации. Прогресс в области информационно-
вычислительных технологий способствует существенному повышению эффек-
тивности систем сбора, обработки информации и управления как гражданского,
так и военного назначения Однако при этом системы стали уязвимыми к дейст-
виям потенциальных противников, направленным на хищение, дезорганизацию
и разрушение вычислительных и информационных ресурсов. Обеспечение ин-
формационной безопасности и борьба с компьютерными преступлениями опре-
деляет содержание задач, решаемых в рамках кибернетической войны.
РЭБ является формой ИВ, использующей организованные помехи для на-
рушения функционирования радио систем различного назначения. При этом
РЭБ может быть разделена на следующие направления:
— радиолокационный конфликт [9];
— радиосвязной конфликт [11];
— радионавигационный конфликт [12].
Радиолокационный конфликт соответствует целенаправленному противо-
борству радиолокационных систем и КРЭБ.
Радиосвязной конфликт соответствует целенаправленному противоборству
средств связи и КРЭБ.
Радионавигационный конфликт соответствует целенаправленному проти-
воборству радионавигационных систем и КРЭБ.
В данной монографии акцент делается на исследование аспектов радиона-
вигационного конфликта при противоборстве СРНС «Навстар» и КРЭБ.
В рамках определения общей политики использования СРНС «Навстар» с
учетом её значения для национальной безопасности министерство обороны
США приступило к разработке концепции «навигационной войны», которая ба-
зируется на следующих принципах [12].
— защита СРНС «Навстар» от возможных злонамеренных действий и
15
обеспечение ее нормального функционирования для всех пользователей
США и дружественных ей стран;
— предотвращение использования этой системы недружественными США
организациями и странами в будущих войнах.
Навигационная война (в данной работе полагается синонимом радионави-
гационного конфликта) предусматривает проведение наступательных и оборо-
нительных операций. Цель наступательных операций заключается в том, чтобы
не допустить использования потенциальным противником СРНС «Навстар» в
определённых географических регионах без запрета их использования на ос-
тальной территории. Задача оборонительных операций состоит в защите СРНС
«Навстар» от активных помех противника и обеспечении своим и дружествен-
ным вооружённым силам доступа к услугам, предоставляемых СРНС «На-
встар».
Для решения поставленных задач министерством обороны США намечен
комплекс организационно-технических мер по модернизации и развитию СРНС
«Навстар» [12-14].
1.2. НАЗНАЧЕНИЕ, СОСТАВ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
СРНС «НАВСТАР»
1 2.1. Описание СРНС «Навстар» приводится в целом в ряде публикаций
[13-16]. СРНС «Навстар», получившая также обозначение NAVSTAR-GPS
(NAVigation System usmg Timing And Ranging — Global Positioning System),
предназначена для всепогодного, пассивного, непрерывного в реальном мас-
штабе времени, надёжного, глобального, высокоточного навигационно-
временного обеспечения всех видов вооружённых сил США и гражданских
пользователей различных стран.
В соответствии с классификацией СРНС [17] данная система является ав-
тономной, универсальной, пассивной с непрерывной обработкой информации в
масштабе реального времени.
СРНС «Навстар» включает в себя три взаимодействующих сегмента
16
(рис. 1.1):
— сегмент управления (СУ);
— космический сегмент (КС);
— сегмент потребителей (СПот).
КС
\
СУ СПот
Рис. 1.1
1 2.2. Сегмент управления обеспечивает следующие виды работ:
— контроль за работой бортовых систем и управление полётом КА, входя-
щих в космический сегмент СРНС «Навстар»;
— формирование системного времени и синхронизацию его относительно
универсального координированного времени;
— проведение траекторных измерений для определения параметров орбит
КА и временных измерений для определения расхождений бортовых
шкал времени с системным временем;
— прогнозирование для каждого КА его будущих эфемерид и поправок
бортового времени;
— формирование массива служебной информации и передачу навигацион-
ных данных в бортовые ЭВМ КА для модуляции ими навигационных
сигналов.
Сегмент управления состоит из сети наземных станций слежения, распо-
ложенных в разных географических регионах Земли по периметру экватора.
Сеть, структура которой приведена на рис. 1.2, включает главную станцию (ГС),
контрольные станции (КСт), станции ввода данных (СВД). Сеть работает во
взаимодействии с Центром управления спутниками ВВС США и Центром над-
водного вооружения ВМС США Основной функцией СУ является обеспечение
17
КА информацией для формирования навигационных сигналов с временной
ошибкой порядка 1 нс.
Главная станция обеспечивает сбор информации от всех контрольных
станций, их обработку, расчёт орбит, параметров ионосферной и тропосферной
моделей, корректирующих поправок для бортовых часов. Главная станция
функционирует совместно с Центром управления спутниками ВВС США и
Центром надводного вооружения ВМС США. Контрольные станции обеспечи-
вают слежение за КА по излученным навигационным сигналам и сбор инфор-
мации об их пространственных и частотных параметрах. Каждая контрольная
станция содержит многоканальный приёмник навигационных сигналов, высо-
костабильный эталон частоты с устройством формирования временной шкалы,
датчики метеорологических данных и процессор с интерфейсом.
Рис. 1.2
В результате обработки навигационных сигналов в контрольной станции
каждые 6 секунд измеряются псевдодальность, интегральный доплеровский
сдвиг частоты излучения относительно частоты наземного эталона и выделяют-
18
ся навигационные данные. Станция ввода данных предназначена для передачи
по прямому командному радиоканалу навигационных данных на каждый КА,
которые поступают на неё по специальным линиям связи от главной станции, а
также для мониторинга состояния КА и передачи данных с КА на Землю по об-
ратному командному радиоканалу.
Прямой командный радиоканал «Земля-KA» использует частоту
2227,5 МГц, а обратный командный радиоканал «KA-Земля» использует часто-
ту 1783,74 МГц [18].
1.2.3. Космический сегмент включает в себя созвездие КА, состоящее из 24
основных и 3 резервных КА. КА расположены на шести круговых орбитах вы-
сотой порядка 20000 км, наклонением 55° и равномерно разнесённых по долго-
те через 60° с периодом обращения вокруг Земли примерно 12 часов.
В процессе реализации СРНС «Навстар» использовались несколько типов
КА: Блок-1, Блок-П, Блок-П А, Блок-П R, которые в дальнейшем будут заме-
няться на КА типа Блок-П F.
По мере совершенствования КА улучшается их технико-экономические ха-
рактеристики, например, масса на орбите, мощность энергоисточников, срок
активного существования, функциональные возможности и т.п.
В состав радиоэлектронного бортового оборудования, структура которого
приведена на рис. 1.3, входят такие устройства, как датчик опорных час-
тот (ДОЧ); синтезатор частоты (СЧ); радиопередающее устройство (РПУ), из-
лучающие сигналы на частотах Ц = 1575,42 МГц и£2= 1227,6 МГц; командная
радиолиния (КРЛ) и ЭВМ.
Передающее устройство является двухканальным. Первый канал состоит
из модулятора (МодО; усилителя мощности (УМ|); антенны (Ад); генератора
«С» кода (Гс) и генератора «Р» кода (ГР). Второй канал состоит из модулятора
(Мод2); усилителя мощности (УМ2); антенны (А£2) и генератора «Р» кода (ГР).
Командная радиолиния является составной частью системы ввода данных.
Командная радиолиния состоит из кодера (К); приёмопередающего устройства
(ППУ); передающей (AjK) и приёмной (А2к) антенн.
19
Датчик опорных частот используется при формировании навигационного
сигнала, обеспечивает точное бортовое время, синхронизацию всех бортовых
устройств На КА типа Блок-П используется два рубидиевых эталона частоты
со стабильностью 5 10"13 и два цезиевых эталона частоты со стабильностью
2-1СГ'3.
Рис. 1.3
Передающее устройство излучает два непрерывных навигационных сигна-
ла на частотах Ц и Сигнал на частоте L\ — Suit) состоит из двух компонен-
тов Sc(0 и 5pi(0, которые смещены по фазе на 90° [15],
^.(0 = ^(0 +МО;
5с(0 = Ac Qic(t) Di(t) cos(2rc£i/ + Ф,);
Spi(0 =ЯР1 QiP(t) Di(t) sin(2n£if + <pj), i e [1, wKa],
где Ac, Api — амплитуды компонентов сигнала на частоте Qic(t), — ма-
нипулирующие функции, представляющие «С» и «Р» коды; £>,(/) — манипули-
20
рующие функции, используемая для передачи навигационных данных; — на-
чальная фаза сигнала на частоте i — номер КА, входящего в созвездие СРНС
«Навстар», состоящие из п КА; лка — количество КА, входящих в созвездие
СРНС «Навстар».
Сигнал SL2(t) на частоте L2 является однокомпонентным и записывается в
следующем виде:
SL2(t) =АР2 QlT(t) Dt{t) cos(2tlL2* + фг),
где Лрг, Ф2— амплитуда и начальная фаза сигнала на частоте L2.
Использование когерентных сигналов на частотах Ц и L2 позволяет осуще-
ствить компенсацию ионосферных ошибок в навигационных измерениях.
Чтобы обеспечить защиту от несанкционированного доступа в СРНС «На-
встар», каждый из сигналов модулируется по фазе «Р» кодом, формируемым с
частотой fop = 10,23 МГц, а основной сигнал на частоте L\ дополнительно моду-
лируется «С» кодом, формируемым с частотой Уде= ОДД, = 1,23 МГц.
Код «С» является относительно коротким кодом Голда с периодом
Тк = 1 мс, формируемым двумя десятиразрядными регистрами сдвига с соответ-
ствующими обратными связями. Из всей совокупности кодов Голда, которая
равна 1025 вариантам, выбирают 37 кодов, имеющих минимальный уровень бо-
ковых лепестков корреляционных функций, и закрепляют их за соответствую-
щими КА.
КодР реализуется псевдослучайными М-последовательностями, форми-
руемыми двумя двадцатиразрядными регистрами сдвига с соответствующими
обратными связями и укороченным циклом.
Идентичные по содержанию и времени для каждого компонента навигаци-
онного сигнала навигационные данные £>,(/) z-го КА передаются со скоростью
50 бит/с за счёт инверсной модуляции «С» и «Р» кодов. Данные передаются
кадрами, состоящими из 1500 бит, те. длительностью 30 с. Каждый кадр делит-
ся на субкадры длительностью 6 с. Один субкадр содержит 10 слов по 30 бит
каждое.
Все КА используют один и тот же частотный ресурс, который составляет
21
20,46 МГц с центральными частотами Ц и Л2. Выбор индивидуальных для каж-
дого КА кодов с низким уровнем их взаимной корреляции обеспечивают воз-
можность последующей обработки каждого сигнала на основе реализации ко-
дового принципа разделения.
Излучаемые КА навигационные сигналы имеют правостороннюю круго-
вую поляризацию.
1.2.4. Сегмент потребителей включает в себя комплекты аппаратуры по-
требителей (АП) и самих пользователей. АП принимает сигналы от нескольких
КА, входящих в созвездие СРНС «Навстар», обрабатывает их, выделяет навига-
ционные параметры, функционально связанные с псевдодальностями и псевдо-
скоростями, определяет на их основе координаты, составляющие скорости в
геоцентрической системе координат, поправку к местной шкале времени отно-
сительно системного времени и её уход, а затем геодезические координаты и
составляющие вектора скорости в системе координат WGS-84. Обычно в зоне
радиовидимости АП находится от 4 до 8 КА из созвездия СРНС «Навстар». По-
скольку поступающие на вход АП навигационные сигналы имеют уровень зна-
чительно меньший, чем уровень собственных шумов АП, то для их выделения
приходится использовать статистические методы, которые реализуются алго-
ритмами первичной и вторичной обработки информации.
С учётом вышеизложенного структура АП может быть представлена на
рис. 1.4, где Аа — антенна; ЛТП — линейный тракт приёмника; УПОИ — уст-
ройство первичной обработки информации; УВОИ — устройство вторичной
обработки информации; Инд — индикатор.
А.
Рис. 1.4
Для обеспечения работоспособности АП независимо от пространственного
положения КА СРНС «Навстар» на момент сеанса позиционирования целесо-
образно использовать в её составе ненаправленную антенну с линейной поляри-
22
зацией, что существенно упрощает реализацию АП. ЛТП обеспечивает частот-
ную селекцию и нормировку уровня навигационного сигнала
В устройстве первичной обработки информации осуществляется решение
таких задач, как поиск и обнаружение сигналов; оценивание их информативных
параметров (временного сдвига огибающей и доплеровского смещения часто-
ты); демодуляция и декодирование навигационных сообщений. В состав уст-
ройства первичной обработки информации входят: канал поиска и обнаруже-
ния, канал слежения за частотой, канал слежения за задержкой и канал демоду-
ляции.
Для повышения быстродействия АП при одновременной обработке сигна-
лов от нескольких КА устройство первичной обработки информации реализует-
ся в многоканальном варианте. Для повышения помехоустойчивости АП в уст-
ройстве первичной обработки информации целесообразно использовать алго-
ритм когерентной обработки информации.
В устройстве вторичной обработки информации, которое реализуется на
основе использования специализированных микропроцессоров, осуществляет-
ся:
— обработка результатов измерений и эфемеридной информации для рас-
чёта координат КА на момент сеанса позиционирования;
— определение координат и вектора скорости потребителя вначале в гео-
центрической, а затем в географической системах координат;
— прокладка выбранных маршрутов перемещения потребителя;
— контроль работоспособности отдельных устройств и АП в целом.
Индикатор отображает состояние КА, находящихся в зоне видимости АП;
измеренные координаты и скорости потребителя как для фиксированного мо-
мента времени, так и для различных отрезков времени. Возможности индикато-
ра постоянно расширяются по мере развития сервисных приложений СРНС
«Навстар».
АП СРНС «Навстар» разрабатывается уже несколько десятилетий и посто-
янно совершенствуется как в алгоритмическом, так и в аппаратурном аспектах,
23
что обусловлено развитием элементной базы приёмных устройств, средств об-
работки сигналов и данных, а также соответствующего математического обес-
печения.
К числу основных технико-эксплуатационных характеристик АП можно
отнести:
— среднеквадратическую погрешность определения местоположения;
— длительность проведения сеанса позиционирования;
— место установки АП и скорость перемещения носителя АП;
— вес и габариты.
В зависимости от места установки аппаратуры, скорости перемещения по-
требителя и требований ко времени определения координат в АП используется
последовательная, мультиплексная или параллельная обработка информации.
В зависимости от требований к точности определения координат и вектора
скорости потребителя в АП используются следующие виды обработки сигна-
лов:
— кодовая одночастотная с использованием «С» кода;
— кодовая двухчастотная с использованием «Р» кода;
— кодово-фазовые двухчастотные с использованием дальномерного
«С» кода и фазовых измерений на частоте Л2;
— кодово-фазовые двухчастотные с использованием дальномерных кодов и
фазовых измерений на частотах Ц и L2,
Сопоставление достоинств и недостатков различных вариантов построения
АП показывает, что наиболее высокие точность и быстродействие обеспечива-
ют многоканальные двухчастотные АП.
В настоящее время выпускается большое количество различных типов АП,
обладающих погрешностью определения местоположения от долей до десятков
метров и быстродействием от единиц до десятков секунд. Перечни существую-
щих АП приводятся в,различных источниках, например в [18-21].
24
1.3. РАДИОНАВИГАЦИОННЫЙ КОНФЛИКТ
1.31. РЭБ начала использоваться для решения военных задач в период вто-
рой мировой войны. В процессе становления теория и практика РЭБ прошла
много этапов, тесно связанных с прогрессом науки и техники
Существенный вклад в совершенствование методов и средств РЭБ внесли
отечественные учёные: Вакин С.А., Перунов Ю.М., Викулов О.В., Бори-
сов В И., Быков В.В., Радзиевский В.Г., Карманов Ю.Т., Ягольников С.В. и дру-
гие.
РЭБ является одним из разделов радиоэлектроники, связанного с использо-
ванием организованных помех для противодействия радиоэлектронным средст-
вам различного назначения В настоящее время большой интерес представляют
такие направления РЭБ как радиолокационный, радиосвязной и радионавига-
ционный конфликты.
При реализации РЭБ необходимо использовать методы извлечения и раз-
рушения информации [22-24], обеспечивающие:
— радиоэлектронное подавление (РЭП);
— радиоэлектронную разведку (РЭР);
— радиоэлектронную защиту (РЗ);
— электромагнитную совместимость (ЭМС).
Между перечисленными методами извлечения и различения информации
существует взаимодействие в плане обеспечения и совершенствования техниче-
ских средств обработки и формирования сигналов и помех при реализации
КРЭБ.
РЭП представляет собой действия, связанные с нарушением работоспо-
собности и снижением эффективности информационных радиосистем различ-
ного назначения до недопустимого уровня.
РЭР подразделяется на радиоэлектронную разведку сигналов (Sigint), раз-
ведку радиосвязи (Comint), разведку радиолокации (Elint), радиоэлектронную
поддержку (EMS) [23].
При построении КРЭБ из вышеперечисленных видов РЭР наиболее важ-
25
ную роль играет радиоэлектронная поддержка, поскольку она соответствует
специализированному радиомониторингу, обеспечивающему поиск, перехват,
определение местоположения и анализ радиоизлучений средств потенциально-
го противника, являющихся объектами РЭП.
РЭП может осуществляться на основе использования [23-25]:
— активных помех;
— пассивных помех;
— алгоритмического воздействия;
— лучевого оружия;
— противолокационных ракет с целью уничтожения носителей радиоизлу-
чений;
— средств уменьшения и искажения физических полей защищаемых объ-
ектов.
Из перечисленных видов РЭП наиболее широкое распространение получи-
ли активные помехи, которые классифицируются по эффекту воздействия на
маскирующие и дезинформирующие, а по соотношению параметров сигнала и
помехи — на прицельные и заградительные.
В настоящее время наиболее значимые результаты достигнуты в теории и
практике РЭБ, соответствующих таким направлениям, как радиолокационный и
радиосвязной конфликты.
Методы и техника создания помех РЛС и систем радиосвязи различных ти-
пов и назначений описаны в работах [24-29].
Намного скромнее выглядят результаты в теории и практике использования
РЭБ в радионавигационном конфликте, поскольку он находится на начальном
этапе развития.
В общем плане радионавигационный конфликт подразумевает противобор-
ство радионавигационных систем различных типов и назначения и средств РЭБ.
Однако в связи с тем, что применительно к решению военных задач наиболее
важное значение имеют СРНС второго поколения, то в рамках данной моногра-
фии рассмотрение радионавигационного конфликта ограничивается рассмотре-
26
нием из всех радионавигационных систем СРНС «Навстар». Актуальность та-
кого подхода к трактовке радионавигационного конфликта подтверждается по-
зицией министерства обороны США [12], которое ввело термин «радионавига-
ционная война», означающий противоборство СРНС «Навстар» и средств РЭБ.
13.2. Процесс функционирования СРНС «Навстар» при постановке орга-
низованных помех по своей физической сущности соответствует радионавига-
ционному конфликту, в котором, с одной стороны, участвует СРНС, а с другой
стороны — средства радиоэлектронной борьбы (СРЭБ). В этом конфликте каж-
дая из противоборствующих сторон преследует противоположные цели. СРЭБ
стремится нарушить функционирование СРНС, понизив её эффективность до
недопустимого уровня, a GPHC, в свою очередь, стремится сохранить свою до-
конфликтную эффективность.
В качестве общего критерия эффективности конфликтующих сторон мож-
но использовать вероятность успешного навигационного обеспечения с задан-
ной погрешностью определения координат Руую при оценке эффективности
СРНС и вероятность радиоэлектронного подавления АП Ppn = 1 - Руно при оцен-
ке эффективности СРЭБ [33]. В исследуемом конфликте этот показатель мини-
мизируется со стороны СРЭБ и максимизируется со стороны СРНС.
Анализ особенностей функционирования СРНС «Навстар» показывает
возможность организации РЭБ сегменту управления, космическому сегменту и
сегменту потребителей. В качестве объектов РЭП в сегменте управления могут
быть избраны все контрольные станции. Однако организация систематического
РЭП контрольных станций с использованием наземных и авиационных средств
РЭБ, обеспечивающих постановку помех на частотах Ц и L2, затруднена в связи
со специфическим (трудно доступным для средств РЭБ) географическим распо-
ложением контрольных станций, а использование средств РЭБ космического
базирования для этих целей требует реализации сложного и дорогостоящего
проекта с большими сроками выполнения и непредсказуемыми политическими
последствиями.
При организации РЭБ космическому сегменту СРНС «Навстар» необходи-
27
мо иметь сеть передатчиков помех для РЭП командного радиоканала «Земля-
КА» на частоте 2237,5 МГц по каждому КА, входящих в созвездие СРНС «На-
встар». Реализация данного проекта наземными и авиационными средствами
РЭБ также является сложным и дорогостоящим проектом, поскольку передат-
чики помех должны иметь большой энергетический потенциал, обеспечивать
пространственное слежение за КА, обладать информацией о пространственно-
временном графике ввода данных из станции ввода данных на каждый КА,
осуществлять радиоэлектронное подавление бортовой аппаратуры при исполь-
зовании в её составе устройств пространственной компенсации помех.
В связи с вышеизложенным можно констатировать, что организация РЭБ
сегменту управления и космическому сегменту СРНС «Навстар» не соответст-
вует концепции асимметричных ответных действий, и поэтому далее в данной
работе не рассматривается.
При этом качестве основного направления организации РЭБ СРНС «На-
встар» в данной работе рассматривается возможность РЭП сегмента потребите-
лей с конкретизацией размера территории, на которой могут находиться потре-
бители навигационной информации с комплектами АП. В этом случае для РЭП
АП предлагается использовать КРЭБ, реализация которых должна обеспечивать
нарушение функционирования СРНС «Навстар» при затратах значительно
меньших, чем стоимость технических средств потенциального противника, ис-
пользуемого в конкретном сеансе противоборства.
Как показано в [22, 24], КРЭБ состоит из подсистемы радиомониторин-
га (ПРМ) и передатчика помех (ПП). Такая структура КРЭБ реализуется в слу-
чае размещения подсистемы радиомониторинга и передатчика помех на одном
носителе и возможности обеспечения ЭМС между подсистемой радиомонито-
ринга и передатчика помех при их одновременном функционировании. При ор-
ганизации РЭП импульсным РЛС наиболее эффективным способом обеспече-
ния электромагнитной совместимости между подсистемой радиомониторинга и
передатчиком помех является временное разделение.
При организации РЭБ с СРНС «Навстар» необходимо учитывать, что нави-
28
гационные сигналы имеют непрерывный характер и частотный диапазон ра-
диомониторинга и РЭП совпадают В этих условиях из-за неэффективного ис-
пользования временного и частотного разделения для обеспечения электромаг-
нитной совместимости подсистемы радиомониторинга и передатчика помех
приходится осуществлять их пространственное разделение, и при этом для свя-
зи между подсистемой радиомониторинга и передатчиком помех в состав КРЭБ
необходимо вводить командную радиолинию (КРЛ), чтобы не накладывать же-
стких ограничений на мобильность всего комплекса. При использовании в со-
ставе КРЭБ нескольких передатчиков помех они образуют подсистему поста-
новки помех (ППП).
При организации РЭБ с СРНС «Навстар», излучаемые КА сигналы пере-
хватываются подсистемой радиомониторинга, а организованные помехи излу-
чаются передатчиком помех в зону расположения АП для их РЭП. Подсистема
радиомониторинга предназначена для частотно-пространственного поиска и ав-
тосопровождения сигналов, излучаемых КА СРНС «Навстар»; обнаружения;
оценивания информативных параметров; демодуляции и идентификации мани-
пулирующих последовательностей; формирования целеуказаний для постанов-
ки организованных помех различного типа.
К числу основных технических характеристик подсистемы радиомонито-
ринга относятся:
— сектор пространственного поиска навигационных сигналов;
— рабочий частотный диапазон, соответствующий интервалу нахождения
несущих частот навигационных сигналов;
— реальная чувствительность;
— разрешающая способность по пространству и частоте;
— быстродействие;
— вероятность правильного обнаружения и ложной тревоги;
— погрешности оценивания информативных параметров навигационных
сигналов.
КРЛ предназначена для передачи целеуказаний на передатчик помех с це-
29
лью обеспечения формирования помех различного типа. К числу основных тех-
нических характеристик КРЛ относятся:
— зона обслуживания;
— частотный ресурс;
— скорость передачи информации;
— вероятность ошибок;
— помехозащищённость;
— скрытность.
Передатчик помех предназначен для излучения организованных помех,
обеспечивающих РЭП АП. К числу основных технических характеристик пере-
датчика помех относятся:
— зона РЭП;
— энергетический потенциал;
— спектральные, корреляционные, временные, статистические параметры
помех и диапазоны их регулировки;
— эффективность помех.
Структура технических средств, участвующих в радионавигационном кон-
фликте, приведена на рис 1.5, где приняты следующие обозначения: КС — кос-
мический сегмент СРНС «Навстар», состоящий из п КА, на каждом из которых
установлен передатчик {П1? ..., Пл}, излучающий навигационный сигнал; АП —
аппаратура пользователей СРНС «Навстар» {АПЬ ..., АПт}; ПРМ — подсисте-
ма радиомониторинга; ППП — подсистема постановки помех.
Результаты решения задач навигационного обеспечения в СРНС «Навстар»
зависят от состояния и характеристик технических средств, входящих в состав
всех её сегментов. В штатном режиме функционирования СРНС «Навстар»
предполагается полная работоспособность всех КА, среднестатические затуха-
ния навигационных сигналов при распространении в атмосфере и влияние на
качество функционирования АП только внутренних шумов и естественных по-
мех Ситуации, соответствующие функционированию АП при постановке орга-
низованных помех, следует рассматривать в рамках нештатного режима функ-
30
ционирования СРНС «Навстар».
Рис. 1.5
При решении задач навигационного обеспечения в АП используются алго-
ритмы первичной и вторичной обработки информации. На этапе первичной об-
работки информации применяются статистические алгоритмы, обеспечиваю-
щие выделение навигационных сигналов на фоне помех и оценивание их ин-
формативных параметров, а на этапе вторичной обработки информации исполь-
зуются вычислительные алгоритмы, обеспечивающие получение навигацион-
ных параметров для каждого потребителя.
С учётом вышеизложенного вероятность успешного навигационного обес-
печения в СРНС «Навстар» определяется из следующего соотношения:
Руно = Л
где РуНо, Pi, Pi — вероятности успешной реализации в АП первичной и вторич-
ной обработки информации.
В условиях воздействия на АП организованных помех эффективность её
функционирования определяется в основном вероятностью успешного выпол-
нения первичной обработки информации, т.е. Руно = Рь
Первичная обработка информации в АП реализуется в виде набора сле-
дующих задач [34]:
31
1) двумерный поиск навигационного сигнала по задержке и частоте, обнару-
жение и подтверждение наличия сигнала;
2) слежение за доплеровским сдвигом сигнала и его оценивание;
3) слежение за задержкой огибающей сигнала и его оценивание;
4) демодуляция сигнала.
Эффективность обнаружения сигнала можно охарактеризовать вероятно-
стью ошибочных решений РОь которая при использовании в АП последователь-
ного поиска по задержке, параллельного поиска по частоте и алгоритма под-
тверждения наличия сигнала типа «К из К» может быть определена из следую-
щих соотношений [35]:
Ро. = 1 -Роб = 0,5(ро + а); р0 = l-Z>0; Do = £>цк; Дц = ;
1 р(1 (X)
P=l-D; £> = ф^0_&п];И1[ = ^.;
Д/ф Рэ
а=1-(1-а1)я«;а1 = 1-Ф(§пор); Ф(х)=-^|е 2Л,
где Роб — вероятность отсутствия ошибок при обнаружении; 0О — вероятность
ошибочных решений за счёт пропуска сигнала при поиске, обнаружении и под-
тверждении; а, ой — вероятность ложных тревог в одном из каналов обнаружи-
теля в многоканальном обнаружителе; к — количество подтверждений; /)ц,
Do— вероятность правильного обнаружения при поиске, одном и к подтвер-
ждениях; D, р — вероятность правильного обнаружения и пропуска сигнала в
ячейке поискового пространства по задержке; тя — количество ячеек поисково-
го пространства по задержке; Тк, Тэ — период и длительность символа дально-
мерного кода; В — база сигнала; пк — количество каналов параллельного поис-
ка по частоте в многоканальном обнаружителе; А/ф — полоса пропускания ка-
нала частотного поиска; A/i — диапазон доплеровского сдвига частоты сигнала;
go — отношение сигнал/помеха по напряжению на выходе канала обнаружения
АП, gn — нормированный порог; Ф(х) — функция Лапласа.
32
Слежение за частотой навигационных сигналов осуществляется специаль-
ным каналом, в состав которого входит ФАПЧ. Эффективность слежения за до-
плеровским сдвигом можно характеризовать вероятностью срыва слежения за
частотой в системе ФАПЧ Рс/ канала слежения за частотой АП. При линеариза-
ции ФАПЧ для расчёта вероятности PCf можно использовать следующие соот-
ношения [36]:
/ \ X t2
Рс/=1-Ф| — |; Дф<тг; о<р = 2ло/77, Ф(х) = [е 2 Л; оф=—,
gz
где Аф — диапазон однозначного отсчёта фазы в ФАПЧ; оф, а/ — среднеквад-
ратичная погрешность оценивания фазы и частоты сигнала; постоянная
времени ФАПЧ в канале слежения за частотой; gz— отношение сигнал/помеха
по напряжению на выходе ФАПЧ.
Слежение за задержкой навигационных сигналов осуществляется также
специальным каналом, в состав которого входит разностный коррелятор (РК) и
ФАПЧ. Эффективность слежения за задержкой сигнала можно характеризовать
вероятностью срыва слежения за задержкой Рсх, которую можно рассчитать сле-
дующим образом [36]:
Рст=1-ф — ; ДТ=ГЭ; от = —; Ф(х) = [е 2dt,
gx >/2лД
где ЛГ — линейный участок дискриминационной характеристики РК; от —
среднеквадратичная погрешность оценивания задержки сигнала; gT — отноше-
ние сигнал/помеха по напряжению на выходе канала слежения за задержкой.
При решении задачи демодуляции сигнала находят применение алгоритмы
когерентной и некогерентной обработки информации. В качестве критерия эф-
фективности при демодуляции можно использовать вероятность ошибочных
решений на бит информации PQ2. В случае использования квазикогерентного ал-
горитма демодуляции имеем [36]:
Рог= 1 -0(V2gacos5<p); gR= 1-^- ; E = PS7’6,
33
где ga — отношение сигнал/шум по напряжению на выходе канала демодуля-
ции; 5<р — фазовый сдвиг, обусловленный неидеальностью формирования опор-
ного напряжения в канале слежения за частотой; Е, Ps — энергия и мощность
сигнала на входе АП, Гб — длительность бита сигнала; Afn — спектральная
плотность помех n(t) на входе АП.
Поскольку в штатном режиме функционирования СРНС «Навстар» нару-
шения любого из подэтапов первичной обработки приводят к потере работо-
способности АП в целом, то это обстоятельство позволяет использовать при
расчёте критерия эффективности Руно мультипликативную форму [33, 37]
Руно = (1 - Poi)( 1 - Рс/)(1 - Рсг)(1 - Ро2).
Целесообразность использования мультипликативного критерия для оцен-
ки эффективности СРНС «Навстар» обусловлена тем, что она обеспечивает
простоту расчётов и при этом появляется возможность декомпозиции процесса
исследования радионавигационного конфликта в виде набора частных задач.
Кроме того, использование функциональной зависимости вероятностных оце-
нок с энергетическим критерием эффективности в виде отношения сиг-
нал/помеха существенно упрощает процесс исследования СРНС «Навстар» как
при отсутствии, так и при наличии организованных помех
Конфликт между СРНС «Навстар» и средствами РЭБ соответствует модели
антогонической игры двух лиц, которая в общем случае описывает многошаго-
вый процесс, учитывающий принятие соответствующих мер противоборст-
вующими сторонами.
В настоящее время СРНС «Навстар» функционирует в штатном режиме,
т.е. когда предусматривается присутствие только естественных помех и наличие
большого объёма априорной информации о пространственных, частотных, вре-
менных и энергетических характеристиках навигационных сигналов. Данная
ситуация обусловлена стремлением получения наибольшей прибыли при экс-
плуатации СРНС и снижения стоимости комплектов АП Однако поскольку
СРНС «Навстар» является динамично развивающейся системой с обширным
планом модернизацйи по повышению помехозащищённости [12-14], то при
34
разработке методов и средств РЭБ для РЭП СРНС «Навстар» необходимо учи-
тывать как существующие (в штатном режиме), так и изменяющиеся (в нештат-
ном режиме) особенности функционирования и характеристики навигационных
сигналов.
1.3.3. Стратегия развития СРНС «Навстар», функционирующей в условиях
РЭБ, предложенная министерством обороны США, представляет собой сле-
дующий набор организационно-технических мер [12-14, 18, 38]:
1) по космическому сегменту:
— увеличение энергетического потенциала излучений;
— увеличение количества КА, находящихся в зоне радиовидимости АП, за
счёт увеличения количества КА, входящих в состав СРНС «Навстар» и
комплексирования её со спутниковыми системами связи типа «Инмар-
сат», «Глобалстар» и т.п.;
— использование дополнительных частот для излучений навигационных
сигналов;
— использование навигационных сигналов с различными видами и пара-
метрами модуляции;
2) по сегменту потребителей:
— использование в АП алгоритмов, обеспечивающих повышение помехо-
защищённости;
— комплексирование АП с другими навигационными датчиками;
— усложнение алгоритмов первичной и вторичной обработки информации
в АП;
3) комплексирование СРНС «Навстар» с системами разведки и поражения
передатчиков помех КРЭБ самонаводящимися ракетами
В свою очередь стратегия развития РЭБ по предварительным оценкам
должна представлять собой следующий набор организационно-технических
мер:
— радиомониторинг всех излучений КА СРНС «Навстар» с целью вскры-
тия режимов функционирования и обеспечения экспресс-анализа нави-
35
гационных сигналов;
— формирование эффективных помех на основе использования целеуказа-
ний полученных в результате радиомониторинга излучений КА
СРНС «Навстар», находящихся в зоне радиовидимости КРЭБ;
— повышение «живучести» технических средств КРЭБ (передатчика по-
мех, КРЛ) в условиях использования противником самонаводящихся ра-
кет и организованных помех;
— увеличение зоны обслуживания КРЭБ за счёт перехода к многопозици-
онному построению и комплексированию с системами раннего преду-
преждения об угрозах.
36
ГЛАВА 2. РАДИОМОНИТОРИНГ ИЗЛУЧЕНИЙ
СРНС «НАВСТАР»
2.1. ЗАДАЧИ РАДИОМОНИТОРИНГА ИЗЛУЧЕНИЙ
СРНС «НАВСТАР»
2 1 1. В настоящее время доступ всех потенциальных потребителей к услу-
гам, предоставляемым СРНС «Навстар», является бесплатным. Однако такая
ситуация, судя по экономическим и политическим тенденциям, является вре-
менной С целью снижения экономических рисков от использования СРНС
«Навстар» необходима организация систематического радиомониторинга, по
результатам которого возможна разработка ассиметричных мер, например та-
ких, как вскрытие в случае необходимости кода доступа или разработка специ-
альных методов определения местоположения на основе использования радио-
излучений СРНС «Навстар» и т.п.
Систематический радиомониторинг также необходим при решении воен-
ных задач с целью изучения тенденций развития, выявления нештатных режи-
мов функционирования СРНС «Навстар», определения степени потенциальных
угроз в различных регионах и выработки ответных мер.
Реализация систематического радиомониторинга в глобальном масштабе
является сложным и дорогостоящим проектом, который может быть рассмотрен
в далёком будущем.
В рамках данной работы рассмотрим особенности эпизодического локаль-
ного радиомониторинга излучений СРНС «Навстар», необходимого при органи-
зации РЭБ путём радиоэлектронного подавления комплектов АП СРНС «На-
встар», находящихся в некотором локальном районе, соответствующем зоне об-
служивания КРЭБ.
Радиомониторинг является начальным этапом при организации РЭБ, зада-
чей которого является выработка достоверных, полных и своевременных целе-
указаний, необходимых для формирования эффективных помех.
Сложность и состав задач радиомониторинга существенно зависит от осо-
37
бенностей режима функционирования СРНС «Навстар».
2.1 2 Основной режим функционирования СРНС «Навстар», который на-
зовём штатным режимом, предполагает использование АП при наличии радио-
видимости, нормальных условиях распространения радиоволн и отсутствии ор-
ганизованных помех.
Для штатного режима функционирования СРНС «Навстар» характерно на-
личие большого объёма априорной информации о траекториях полётов КА, ви-
де навигационного сигнала и его энергетических, частотных, временных и ста-
тистических характеристик. При этом априорно неизвестными параметрами
сигнала, которые необходимо оценить в результате радиомониторинга, являют-
ся амплитуда, доплеровское смещение частоты и временное запаздывание оги-
бающей сигнала.
При постоянном закреплении некоторого варианта кодовой последователь-
ности, формирующей манипулирующую функцию сигнала, за определённым
КА, для её распознавания достаточно одного сеанса радиомониторинга и затем
в ходе дальнейшей обработки информации манипулирующая функция сигнала,
излучаемого конкретным КА, может полагаться априорно известной. Однако в
случае непредсказуемой смены номеров кодовых последовательностей для КА
манипулирующая функция сигнала является априорно неизвестной, и в процес-
се радиомониторинга необходимо предусмотреть её распознавание.
В штатном режиме СРНС «Навстар» возможно несколько вариантов функ-
ционирования, которые влияют на особенности радиомониторинга.
Первый вариант характеризуется излучением фазоманипулированного сиг-
нала (ФМС) на частоте с использованием «С» кода.
Второй вариант характеризуется излучением двухкомпонентного ФМС на
частоте L\ с использованием «С» и «Р» кодов.
Третий вариант характеризуется излучением двухкомпонентного ФМС на
частоте Ц с использованием «С» и «Р» кодов, а на частоте £2 излучается ФМС с
использованием «Р» кода.
В зависимости от особенностей радиоизлучений КА в штатном режиме
38
СРНС «Навстар» радиомониторинг осуществляется в одном или двух частот-
ных поддиапазонах и включает в себя набор таких статистических задач, как
обнаружение, автосопровождение КА, оценивание доплеровского смещения
частоты, оценивание временного запаздывания огибающей сигнала и в случае
необходимости распознавание манипулирующей функции.
2.1.3. В соответствии с планом модернизации СРНС «Навстар», планируе-
мым министерством обороны США, в её характеристики вносятся существен-
ные изменения при наличии угрозы радиоэлектронного противодействия. При
этом СРНС «Навстар» переходит в нештатный режим, отличительной особен-
ностью которого является существенное увеличение априорной неопределённо-
сти о пространственных, энергетических, частотных, временных и статистиче-
ских характеристиках сигналов, что приводит к увеличению набора и сложно-
сти задач радиомониторинга [38].
В процессе радиомониторинга излучений СРНС «Навстар», функциони-
рующей в нештатном режиме, особого внимания заслуживают тактические си-
туации, которые связаны с необходимостью проведения следующих действий:
1) своевременного выявления фактов как прекращения излучений отдель-
ными КА, так и увеличения их энергетического потенциала;
2) своевременного выявления изменения в структуре и параметрах радио-
излучений отдельных КА;
3) своевременного выявления дополнительных КА и траекторных измене-
ний существующих КА с целью перегруппировки космического сегмента СРНС
«Навстар».
Модели радиообстановки при проведении радиомониторинга в зависимо-
сти от особенностей тактических ситуаций описываются двухкомпонентными и
многокомпонентными процессами [39].
При формализации задач радиомониторинга целесообразно использовать
их систематизацию и унификацию на основе положений теории распознавания
образов [40, 41]
К числу наиболее простых тактических ситуаций при радиомониторинге
39
излучений СРНС «Навстар» следует отнести задачу установления факта нали-
чия или отсутствия излучений от отдельного КА, входящего в состав космиче-
ского сегмента СРНС «Навстар», при наличии целеуказаний по пространствен-
ным, частотным и временным характеристикам радиоизлучений.
Данная тактическая ситуация соответствует статистической задаче обна-
ружения при следующих исходных данных.
Целеуказания по каждому КА для сеанса радиомониторинга могут быть
описаны следующими соотношениями:
Л Од 0 ?
1а-аи1<-^; 1Р-₽и1<-у; АЛ=—; %.5<ер>
где аи, ри — истинное значение пеленга и угла места КА относительно позиции
подсистемы радиомониторинга; а,р — оценки пеленга и угла места КА отно-
сительно позиции подсистемы радиомониторинга; 0О 5 — ширина, диаграммы
направленности антенны подсистемы радиомониторинга; 0р — величина эле-
мента пространственного разрешения радиоизлучений от различных КА; fQ —
частота радиоизлучения КА; fs — частота сигнала, принимаемого подсистемой
радиомониторинга; — диапазон доплеровских смещений радиоизлучений
КА, входящих в космический сегмент СРНС «Навстар»; A/s — ширина спектра
сигнала, принимаемого подсистемой радиомониторинга; Тэ — длительность
элемента сигнала; /0, Тс — момент начала и длительность сеанса радиомонито-
ринга.
Наряду с вышеперечисленными исходными данными априорно известно,
что радиоизлучения всех КА СРНС «Навстар» используют однократную фазо-
вую манипуляцию по закону Голда с разными коэффициентами порождающего
полинома для каждого КА.
Наличие пространственных и частотных целеуказаний при использовании
в подсистеме радиомониторинга пространственной и частотной селекции по-
зволяет преобразовать многокомпонентный входной процесс yn(t) в двухкомпо-
нентный входной процесс
40
Л(0 = S(t) + n(t) при t0<t<t0 + Tc,
где y2(t) — аддитивная смесь ФМС S(t) и гауссовой стационарной помехи «(/),
образованной космическими, атмосферными помехами, а также внутренним
шумом подсистемы радиомониторинга.
Алгоритм обнаружения ФМС соответствует выражению:
Но: > ^ПОр
Н0:Г1[Л(/)] = [/л(Г)<^пор;
при^о <t <t0 + Т, T<TCi
где Но, Но — гипотеза о наличии и отсутствии сигнала; Л[у2(0] — оператор,
описывающий функциональные преобразования в обнаружителе;
Ц(7), С7П(7) — выходной эффект при воздействии на вход подсистемы радио-
мониторинга процессов y(t) и л(0; Unop — пороговое напряжение; /о, Т — мо-
мент начала и длительность сеанса обнаружения.
Вторая тактическая ситуация связана с контролем за изменением энергети-
ческого потенциала радиоизлучений КА СРНС «Навстар» во времени за счёт
регулировки мощности передатчиков или использования фазированных много-
лучевых антенн.
Данная тактическая ситуация соответствует при использовании интерваль-
ного оценивания статистической задаче различения уровней сигнала.
Исходные данные для этой задачи эквивалентны исходным данным рас-
смотренной выше задачи обнаружения.
Алгоритм различения уровней сигнала может быть описан следующим об-
разом:
н,: Ft[у2(0] =^,(Л; Uaopi < «юря-1 при I < t < ?,+ Tt;
t/nop ж - l/nop. = At/; £ £ < Гс; ma =Uf~SB' ,
i AU
где {H/} — множество гипотез, соответствующих множеству оценок уровня
сигнала {Ц(7)}; Unopi — i-e пороговое напряжение; ti9 7] — оценка начала уста-
41
новления Ui(T) и длительности его существования; С7В — верхняя граница
ожидаемого уровня сигнала; At/ — шаг квантования уровня сигнала; mu — ко-
личество возможных уровней сигнала.
Третья тактическая ситуация связана с выявлением радиоизлучений КА в
новых участках частотного диапазона при исходных данных, аналогичных для
случая, соответствующего первой тактической ситуации, за исключением того
факта, что средняя частота «нового» сигнала/s априорно неизвестна [4 е
где/н,/в — нижняя и верхняя границы частотного диапазона].
Данная тактическая ситуация соответствует статистической задаче совме-
стного обнаружения и оценивания частоты сигнала:
{Ну} и Но; Оду} = {Hty,.... Ну,, Н„у}; Н,/ F2[y2(t)] =fsj ; fsj е fJf ;
A/n » A/»,; A/n =/в“Л; mf ПРИ го1 5'о + Tf-T^
¥до.
где {Н#} — множество гипотез, соответствующих множеству оценок частоты
{ДД при интервальном оценивании; F2[y2(0] — оператор, описывающий функ-
циональные преобразования при оценивании частоты; AfaO3 — доверительный
интервал при оценивании частоты; — ширина рабочего частотного диапазо-
на; т/— количество гипотез Н7/ A/sm — максимальная ширина спектра ожидае-
мых сигналов; Tf— длительность сеанса оценивания частоты.
Четвертая тактическая ситуация связана с определением состава и пара-
метров радиообстановки при наличии пространственных целеуказаний об ис-
следуемом КА и наличии в эфире, кроме полезного радиоизлучения, непредна-
меренных и организованных помех.
Исходные данные для этой ситуации соответствуют исходным данным для
первой тактической ситуации за исключением того, что модель радиообстанов-
ки на входе подсистемы радиомониторинга описывается не двухкомпонентным
процессом _у2(г), а многокомпонентным процессом
42
л(0 = 51(0+£р/о+«(0,
y=i
где Pj{t) — j-й квазидетерминированный процесс, представляющий собой кор-
релированную помеху; ир — ожидаемое количество коррелированных помех.
Данная тактическая ситуация может быть формализована в виде статисти-
ческой задачи совместного разрешения, обнаружения и оценивания. Алгоритм
для данной задачи в общем виде может быть описан следующими соотноше-
ниями:
{Но/} и {Ну,}; {Но/} = {Hoi,Но/, Но„};
{Н^} = {Нд,..НЛ}; п е [2, + 2]
Но,: Лз[уп(О] ЫО -» Л[у2,(/)] = ЩТ) > [7пор;
Нл: Г3[уп(/)] -> y2l{t) Fs|>2,(0] = Л,;
b(0=Z5,.(0+«W;/s, e
П=1
при < t < tQ + TJjy, То^ < Tc 9
где {H^} — множество гипотез при оценивании частот компонент/ь
{Но/} — множество гипотез, соответствующих обнаружению (ир + 1) компо-
нент; F3[yn(0] — оператор разрешения компонент на основе частотной селек-
ции; ^4(5)[у2Х0] — оператор, описывающий функциональные преобразования
при обнаружении и интервальном оценивании частоты z-го компонента, соот-
ветствующему сигналу 5/(/); Ut{T) — эффект на выходе обнаружителя сигнала
5/(0; Afpi — разрешающая способность по частоте; Г0/ — длительность сеанса
при решении задачи совместного обнаружения и оценивания частоты.
Пятая тактическая ситуация связана с установлением факта наличия кон-
троля за энергетическим потенциалом радиоизлучений КА при отсутствии точ-
ных пространственных целеуказаний. Такая ситуация возникает при нестацио-
нарных траекториях КА и в случае необходимости проведения радиомонито-
ринга в режиме сопровождения радиоизлучений различных КА «на проходе».
Данная тактическая ситуация может быть формализована в виде статисти-
ческой задачи совместного пространственного поиска, обнаружения и различе-
43
НИЯ.
Алгоритм для данной задачи в общем виде может быть описан следующи-
ми соотношениями:
Нои {Н/0}; {Н7е} - {Н|0, Hm0}; Н> F6[y2(0] =еу=(ау, ₽/);
ё. е е.±-^-
J ' 2
• ла < а • т — АаДР
, Аид < ио,5, W0 — 2
И),5
при tQ<t<tQ + T^TQ<Tc,
где {Ну0} — множество гипотез, соответствующих множеству оценок простран-
ственных координат КА{ 0у} при интервальном оценивании; ау, 0у — у-я оцен-
ка пеленга и угла места, соответствующая гипотезе Ну0; /чЬъСО] — оператор,
описывающий функциональные преобразования при определении пространст-
венных координат КА; Д0д — доверительный интервал при оценивании про-
странственных координат; Да, Др — сектор неопределённости по азимуту и
углу места; ли0 — количество гипотез Ну0, 7© — длительность сеанса оценивания
пространственных координат КА.
Шестая тактическая ситуация связана с долговременным мониторингом
радиоизлучений конкретных КА на основе автосопровождения с целью контро-
ля их траекторных, энергетических и частотных характеристик.
Исходные данные для этой ситуации характеризуются многокомпонентной
радиообстановкой, в состав которой могут входить один или несколько полез-
ных сигналов, а также и коррелированные помехи. В зависимости от детализа-
ции исходных условий эта ситуация соответствует целому набору статистиче-
ских задач.
В случае необходимости контроля состава радиоизлучения исследуемого
КА, например, при наличии сигналов на частоте L\ с использованием «С» и «Р»
кодов, и на частоте L2 с использованием «Р» кода, следует решать статистиче-
скую задачу совместного обнаружения, автосопровождения и классификации.
Алгоритм для данной задачи в общем виде может быть представлен сле-
дующим образом:
44
Нои Нли {H*,}; {Н*,} е {Н*ь .... Нй,.... Н*4;
0
а) на частоте Li ш = 3:
HwSHpF8[yn(0]=Sp(0;
H4mSHcp:F8[yn(0]=Sc(0+5p(0;
к(0=Л(0+ £Р(О+п(Опри t0<t<t0 + Tk{,Tki<TK,
б) на частоте L2 m = 1:
Н« « Нр: F.obW] =5р(0; Но иНм(НР);
Л(0 = Sp(t)+ n(t) при t0 < t < t0 + Tk2, Tk2 < Тс,
где m — количество сигналов; {Щ} — множество гипотез, соответствующих
различным вариантам состава компонент в радиоизлучений КА; Нс, Нр — гипо-
теза о наличии в радиоизлучении КА сигнала Sc(t) или SP(Z), т.е. кодов «С» или
«Р»; Нср — гипотеза о наличии в радиоизлучении КА одновременно сигналов
5С(/) и 5Р(/); Sc(0 и 5р(0 — оценка сигналов Sc(t) и Sp(/); F7[yn(0], ^s|>n(0]>
^9[Уп(0] — операторы, соответствующие функциональным преобразованиям,
обеспечивающим разделение и оценку наличия сигналов Sc(t) и SP(Z);
Ло[У2(О] — оператор, обеспечивающий функциональные преобразования по
выделению сигнала 5Р(Г); 7*ь Тк2 — длительность сеанса классификации состава
радиоизлучения КА.
В случае необходимости обеспечения автосопровождения радиоизлучения
исследуемого КА в условиях воздействия на боковые лепестки диаграммы на-
правленности антенны подсистемы радиомониторинга организованных помех
на частоте следует решать статистическую задачу совместного разрешения,
обнаружения, автосопровождения.
Алгоритм для данной задачи в общем виде может быть представлен еле-
45
дующим образом:
HosU Нор и Н0;
Hos:F11[y3(0]=t>s(0>t/no₽1
Hop=Hp:F12[y3(0]=t7p(0>t7nop2;
Нв:Г13[у3(О]=0;/5-/р^^;
в(') =5с(0+ЛО + «(О при /0 < t < t0 + t6v, т^<те,
где HOs, Hop — гипотезы о наличии полезного сигнала Sc(f) и коррелированной
помехи Р(/); Но — гипотеза об интервальной оценке пространственных коорди-
нат КА; Us(t), Up(t)— оценки, свидетельствующие о наличии сигнала Sc(t) и
помехи Р(/); t/nOpb САюрг — пороговые напряжения при обнаружении Sc(t) и Р(/);
/,/р — средняя частота сигнала Sc(t) и помехи Р(0; 2ер — длительность сеанса
радиомониторинга.
В случае необходимости обеспечения демодуляции сигналов исследуемого
КА для вскрытия закона и параметров манипулирующей функции, например с
целью формирования сигналоподобной помехи, используемой для РЭП АП
СРНС «Навстар», следует решать статистическую задачу совместного обнару-
жения, автосопровождения, классификации, оценивания, демодуляции.
Алгоритм для данной задачи в общем виде может быть представлен сле-
дующим образом:
НоиНсиНеи {Ну?} и {Н„} о Нд;
{Hti} = {Hh,.. ,HT/...,HmT}, mT=~;
•* -i
HtI: Fl4[y2,(Z)] =т,.; т( e
т
Нд:F|5[y2(0] =П(Г-т,) при tQ^t<t0 + Ta, ТЛ<ТС,
где {Щ} — множество гипотез, соответствующих множеству оценок временно-
го сдвига Ti манипулирующей функции сигнала, обусловленного разносом КА и
подсистемы радиомониторинга; Ат — интервал неопределённости для парамет-
46
ра т,; mx — количество гипотез HTZ; Лтд — доверительный интервал при оцени-
вании т,; т, — оценка временного сдвига т,; /г14{>?2/(0] — оператор, описываю-
щий функциональные преобразования при оценивании параметра tz; Нд — ги-
потеза о достоверной демодуляции; — оператор, описывающий функ-
циональные преобразования при демодуляции; Гд — длительность сеанса демо-
дуляции.
Седьмая тактическая ситуация связана с мониторингом радиоизлучений
всех КА СРНС «Навстар», находящихся в зоне наблюдения однопозиционной
подсистемы радиомониторинга.
Целесообразность использования однопозиционной подсистемы радиомо-
ниторинга обусловлена возможностью существенного снижения объёма ис-
пользуемой аппаратуры, а также стоимости организации и проведения радио-
мониторинга по сравнению с вариантами многопозиционного построения под-
системы радиомониторинга.
Данная тактическая ситуация соответствует статистической задаче сопро-
вождения на «проходе» совместно с задачами разрешения, обнаружения, разли-
чения, классификации, оценивания, демодуляции.
Набор совместно решаемых задач определяется целями и исходными дан-
ными радиомониторинга, примеры которых рассмотрены при описании выше-
рассмотренных тактических задач.
Важным достоинством радиомониторинга с использованием сопровожде-
ния на «проходе» является возможность повышения пропускной способности и
формирование комплексного целеуказания для РЭП АП СРНС «Навстар», ис-
пользующих радиоизлучения от 1 до 8 КА, входящих в космический сегмент
СРНС «Навстар» и находящихся в зоне наблюдения подсистемы радиомонито-
ринга в конкретный момент времени.
Алгоритм для данной задачи может быть представлен в следующем виде:
{Но7} и {HJ о {Нву} о {Н#} u {Hv} и {Нда} при /0 < t < t0 + Тт;
47
Т
Но/ Hcy<J HfyAJ Ну/ НТ7 о Нд,,у е [1, ика] при ^j~\) ^(/-i) 4* Ту, Tcj < ,
^ка
где {Н0/},{НС7},{Не/},{Ну/},{НХ7},{Нд/} — множество рассмотренных выше гипо-
тез для радиомониторинга радиоизлучений КА, входящих в космический сег-
мент СРНС «Навстар» и находящихся в зоне обслуживания подсистемы радио-
мониторинга; Гка — длительность возможного контакта подсистемы радиомо-
ниторинга с КА; tq_ 1), Tcj — начало и длительность радиомониторинга радиоиз-
лучения у-го КА; пКй — количество КА, находящихся в зоне наблюдения подсис-
темы радиомониторинга.
Конкретизация алгоритмов рассмотренных выше задач радиомониторинга
возможна на основе использования результатов синтеза при применении сле-
дующих статистических критериев эффективности [42]:
а) для задач поиска и обнаружения — критерия Неймана-Пирсона;
б) для задач различения, классификации, интервального оценивания и де-
модуляции — критерия идеального наблюдателя;
в) для задач разрешения и точечного оценивания — критерия максималь-
ного правдоподобия;
г) для задач совместного решения нескольких частных статистических за-
дач — критерия среднего риска.
2.2. ОБНАРУЖЕНИЕ РАДИОИЗЛУЧЕНИЙ СРНС «НАВСТАР»
2.2.1. Рабочие модели радиообстановки
2.2.1 J. Каждый КА, входящий в созвездие СРНС «Навстар», может фор-
мировать набор радиоизлучений, соответствующих различным вариантам нави-
гационных сигналов.
В настоящее время в СРНС «Навстар» применяются одночастотные и
двухчастотные излучения с использованием частот Ц и Z2 При модернизации
СРНС «Навстар» планируется осуществление радиоизлучений на трех и боль-
шем количестве частот [12-14].
48
Навигационные сигналы представляют собой одно- и двухкомпонентные
фазоманипулированные (ФМ-2) процессы с использованием псевдослучайных
манипулирующих функций на основе «С» и «Р» кодов. В зоне радиовидимости
подсистемы радиомониторинга могут одновременно находиться от 4 до 8 КА
[18].
При проведении радиомониторинга навигационных сигналов необходимо
учитывать динамику движения КА, условия распространения радиоволн, а так-
же различные помехи естественного и искусственного происхождения.
Условия распространения радиоволн могут изменяться в зависимости от
состояния тропосферы и ионосферы, а также геометрии наблюдаемых КА.
Как отмечено в работе [43], глубина замираний радиоволн в L диапазоне
составляет порядка 6 дБ, период замираний находится в интервале от 2 до 15 с,
а интервал изменения временной задержки находится в промежутке от 10"7 с до
3,3-10-7 с.
При функционировании СРНС «Навстар» необходимо учитывать фазовые
искажения сигналов, которые обусловлены большим количеством факторов,
прежде всего эффектом Доплера и уходом частоты опорного генератора, распо-
ложенного на КА. Величина доплеровского сдвига частоты определяется пара-
метрами орбиты КА и расположением подсистемы радиомониторинга, причём
для каждого КА эта величина индивидуальна.
Радиомониторинг навигационных сигналов осуществляется в присутствии
аддитивных и неаддитивных помех. Аддитивные помехи отличаются большим
многообразием. Они могут быть обусловлены наличием собственных шумов
подсистемы радиомониторинга, космических и атмосферных шумов, излучений
Земли, непреднамеренными и организованными помехами различных типов.
В соответствии с классификацией, предложенной в работе [44], аддитив-
ные помехи подразделяются на гауссовские и негауссовские, стационарные и
нестационарные, узкополосные и широкополосные, коррелированные и некор-
релированные.
Неаддитивные помехи проявляются в виде замираний сигналов за счёт на-
49
личия переотражений и изменения во времени параметров эфира и аппаратуры.
В соответствии с рассмотренными в подразделе 2.1 тактическими ситуа-
циями, при проведении радиомониторинга излучений СРНС «Навстар» следует
использовать следующий набор рабочих моделей радиообстановки.
2.2.1.2. Наиболее простой моделью радиообстановки является двухкомпо-
нентная модель, которая реализуется при использовании в ходе радиомонито-
ринга пространственной и частотной селекции, обеспечивающей разрежение
потока сигналов и помех.
Первая рабочая модель радиообстановки описывается аддитивным двух-
компонентным процессом y2(f) следующим образом:
yift) = Sift) + МО при t0 < t <, tQ + тс,
где Si(f) — навигационный сигнал; N(t) — гауссовая помеха; t0, Тс — момент на-
чала и длительность сеанса радиомониторинга.
С учётом кодовой структуры ФМС СРНС «Навстар» на входе подсистемы
радиомониторинга соответствующий z-му КА, имеет следующий вид:
St(t) = Umi Щ/ - т,) cos[(g>o + й>дО(/ - т») + cpsd;
®о = 2л/о; /о е ]; Года = 2я/да;
П,<0 = А(0 Q,(t) = £ v,. rect[< - (j0 -1)7;];
A>=1
MQ = ent
т т
Л/з Л/23
D,{t) = гесф- (у3 - 1)Гб]; 0,(0 = £& [' - (Л" П^];
Л=1 /2=1
У13
g,(O=D,rect[/-(jl-l)T;]>
где Si(t) — навигационный сигнал, соответствующий излучению z-ro КА;
Umii /у, (ps/ — амплитуда, доплеровский сдвиг и начальная фаза ФМС от z-ro
КА; fG — средняя частота ФМС, излучаемого z-м КА; rect[x] — временное окно;
L},L2,..>,Lx — набор частот излучений КА СРНС «Навстар» в настоящее время
50
(£i и L2), в будущем добавится (Лл); т,- — временное запаздывание ФМС, соот-
ветствующее дальности между /-м КА и подсистемой радиомониторинга;
Щ0— псевдослучайная последовательность, осуществляющая манипуляцию
ФМС Dt(t) — навигационные данные; gt{t) — манипулирующая последова-
тельность ФМС Si{t) на кодовом интервале Д; Qi(t) — кодовая последователь-
ность ФМС Si(t) на интервале, равном длительности бита Гб, Д — длительность
элемента манипулирующей функции ФМС; ah bh v, — коэффициенты, прини-
мающие значение ±1 согласно закону чередования элементов в функциях Д(/),
Щ/); ext[x] — целая часть х; MQi М2з — количество вре-
менных окон для рассмотренных выше вариантов.
Гауссовская помеха N(t), обусловленная совокупностью внутреннего шума
подсистемы радиомониторинга, космических и атмосферных помех, может
быть стационарной n(t) и нестационарной <p(/) n(t), где ср(О — функция, соответ-
ствующая изменению уровня помехи.
В качестве модели гауссовской стационарной помехи n(t) используется ква-
зибелый шум с автокорреляционной функцией
Дт)=ОпГп(т)с08(0п/ при гп(т) = sinc(27iA/n/); (Оп==2л/П,
где — дисперсия помехи «(/); гп(т) — огибающая коэффициента автокорре-
ляции помехи n(t)',fn9 А/, — средняя частота и ширина спектра помехи n(t).
При априорно известных частоте /о и длительности элемента Т3 ФМС па-
раметры помехи n(t) соответствует условиям/» Д/о, А/п= 2/Тэ.
При функционировании СРНС «Навстар» в штатном режиме ФМС отно-
сится к классу квазидетерминированных сигналов с неизвестными параметрам^
<Psz- Для случаев, когда отсутствует априорная информация о манипу-
лирующей функции gi(t\ ФМС относятся к классу сигналов с неизвестной фор-
мой.
Вторая рабочая модель радиообстановки описывается аддитивным трех-
компонентным процессом
y^t) = ЭД + P(t) + n(t) при ГО</<ГО + ГС,
51
где P{t) — коррелированная помеха.
Для ситуаций, когда радиоизлучение КА является двухкомпонентным при
использовании в подсистеме радиомониторинга направленной антенны, имеем
y3(t) = SC(Z) + Sp(t) + n(t) при Г0</</0 + Гс,
где Sc(t) — ФМС с манипулирующей функцией на основе «С» кода; Sp(t) —
ФМС с манипулирующей функцией на основе «Р» кода.
Для ситуаций, когда радиоизлучение КА является однокомпонентным, при
использовании в подсистеме радиомониторинга направленной антенны модель
радиообстановки становится трёхкомпонентной, если в частотном диапазоне
радиомониторинга существует коррелированная помеха P(t). В качестве моде-
лей коррелированной помехи P(t) могут быть использованы гармонические,
частотномодулированные, фазоманипулированные и т. п. процессы с шириной
спектра, не превышающей ширину спектра ФМС A/s.
Третья рабочая модель радиообстановки описывается многокомпонентным
аддитивным процессом в следующем виде:
yn(t) = S(t) +%Р^)+ n(t) при t0 < t < t0 + Tc,
7=1
где Pj(t) — j-я коррелированная помеха; пр — количество коррелированных по-
мех.
Многокомпонентная модель радиообстановки соответствует ситуациям, ко-
гда в подсистеме радиомониторинга используется ненаправленная антенна, то-
гда и приём ФМС Sj(t) приходится осуществлять в присутствии ФМС от всех
КА, находящихся в зоне радиовидимости подсистемы радиомониторинга. При
этом имеем
Л1 (О = 5,(0 + £ $у1 (0 + и(0 при t0 < t < t0 + тс,
/1=1
где — ФМС, соответствующий радиоизлучениюу-го КА; пка — количество
КА, находящихся в зоне радиовидимости подсистемы радиомониторинга.
Для ситуаций, когда в подсистеме радиомониторинга используется направ-
52
ленная антенна, модель радиообстановки может быть многокомпонентной при
многолучевом приёме навигационных сигналов за счёт переотражений или при
использовании для РЭП АП СРНС «Навстар» сигналоподобных помех. При
этом имеем
Ун
Лг(0 = Sift) + X Kmsi ((- Тш ) + «(О ПРИ 'о 'о + Тс >
/и=1
где Si(t - тт) — f-й ФМС с временным сдвигом относительно St{t) на тт; ЛГ1П —
нормированный уровень ФМС Sz(Z~Tm); Мп — количество сопутствующих
ФМС.
Модели радиообстановки, представленные процессами ^ni(0 и уП2(0» явля-
ются наиболее сложными, поскольку соответствуют проведению радиомонито-
ринга в присутствии как внутренних шумов, так и взаимных или сигналоподоб-
ных помех.
Приведённые рабочие модели радиообстановки соответствуют условиям
проведения радиомониторинга излучений СРНС «Навстар», функционирующей
как в штатном, так и нештатном режимах.
2.2.2. Обнаружение ФМС на фоне гауссовской помехи
2.2.2.1. В общем случае радиомониторинг начинается с решения таких ста-
тистических задач, как пространственно-частотный поиск и обнаружение нави-
гационных сигналов от всех КА, находящихся в зоне радиовидимости подсис-
темы радиомониторинга. При штатном режиме работы СРНС «Навстар» необ-
ходимость в пространственно-частотном поиске отпадает, поскольку частотные
параметры сигналов априорно известны, а пространственное наведение антен-
ны подсистемы радиомониторинга на каждый КА при известных стационарных
орбитах может быть осуществлено программным методом. Поэтому начальный
этап радиомониторинга сводится к обнаружению сигналов.
Наиболее просто обнаружение сигналов осуществляется для тактических
ситуаций, соответствующих первой рабочей модели радиообстановки, когда
ФМС необходимо выделять на фоне гауссовской как стационарной n(t), так и
53
нестационарной N(f) помехи.
Решению задач обнаружения ФМС на фоне гауссовской стационарной по-
мехи n(t) посвящено большое количество работ [44-48], в которых показано,
что а) при детерминированном характере сигнала оптимальный алгоритм осно-
ван на когерентной обработке сигналов; б) при квазидетерминированном харак-
тере сигнала оптимальный алгоритм основан на оценочной корреляционно-
фильтровой обработке сигналов; в) при неизвестной форме сигнала оптималь-
ный алгоритм основан на использовании энергетической или автокорреляцион-
ной обработке сигналов.
В данном подразделе рассматривается обнаружение ФМС с неизвестной
формой на фоне гауссовской стационарной n(t) и нестационарной помехи У(/),
поскольку данная постановка задачи обнаружения соответствует различным
моделям при двухкомпонентоной радиообстановке.
Сравнительный анализ помехоустойчивости обнаружителей с энергетиче-
ской и автокорреляционной обработкой показывает [48], что в случае согласо-
ванного по спектру приёма, т.е. когда Д4 = A/s, предпочтение следует отдать
энергетическому обнаружителю, а в случае несогласованного по спектру приё-
ма, т. е. когда А/, » предпочтение следует отдать автокорреляционному об-
наружителю.
Поскольку при априорно известных частотных параметрах ФМС с неиз-
вестной формой реализуется согласованный по спектру приём, то для этого слу-
чая целесообразно использовать алгоритм с энергетической обработкой сигна-
лов, представленный в следующем виде:
WT)=±]y20(t)dt S° С7пор;
jfi„(t-x)y2(x)Ur(x)dx,
-00
где Uy(X) — напряжение на выходе энергетического обнаружителя; Т — посто-
янная интегрирования; Но, Но — гипотеза о наличии и отсутствии сигнала;
54
j/2o(O — аддитивная смесь y2(t) после прохождения через линейный тракт (ЛТП)
приёмного устройства подсистемы радиомониторинга; hn(t) — импульсная ре-
акция ЛТП; /7ПОр — пороговое напряжение; Ur(t) — напряжение гетеродина
Структура подсистемы радиомониторинга в режиме обнаружения ФМС на
фоне гауссовской стационарной помехи n(f) приведена на рис 2.1, где Арм —
антенна; ЛТП — линейный тракт приёмника; ЭО — энергетический обнаружи-
тель; ПУ — пороговое устройство; КД — квадратичный детектор; Инт — инте-
гратор.
Рис 2.1
2.2.2.2. Характеристики помехоустойчивости энергетического обнаружите-
ля (ЭО) ФМС с неизвестной формой сигнала на фоне гауссовской стационарной
помехи и(/) определяются из следующих соотношений [49]:
D3= Ф
агсФ(1-аэ)
ёэ
р1 2 * * * * * В =ZL- Q2=N&f- о =
овх 2 » °п уЧ1Ч/л, 5э /— >
71 + 2^х
1 v --
ф(х)=-= fe 2dt; А/ПТ»1; аэ=1-Ф(£п); Т< Тс,
где Д, аэ — вероятности правильного обнаружения и ложных тревог; Ф(х),
аге Ф(х) — функция Лапласа и обратная функция Лапласа; gB2x — отношение
сигнал/помеха по мощности на входе подсистемы радиомониторинга, g3 — от-
ношение сигнал/помеха по напряжению на выходе ЭО; gri — нормированный
порог в ЭО; — мощность сигнала на входе подсистемы радиомониторинга;
Nn — спектральная плотность помехи и(/) на входе подсистемы радиомонито-
ринга
В целом ряде случаев необходимо учитывать нестационарность гауссов-
55
ской помехи, которая может быть обусловлена, например, изменением уровня
передачи ЛТП подсистемы радиомониторинга, изменением уровня естествен-
ных помех или наличием в зоне действия подсистемы радиомониторинга ис-
точника прерывистой шумовой помехи. Будем полагать, что гауссовская ста-
ционарная помеха «(/) может быть представлена квазистационарной моделью
[49], в соответствии с которой
ф(0 = Ко при t0 < t < /0 + Гст,
где Ко — априорно неизвестное значение нормированного уровня помехи У(/);
Тег — интервал стационарности помехи N(t).
Оптимальный алгоритм обнаружения ФМС на фоне гауссовской нестацио-
нарной помехи N(t) имеет следующий вид:
If л
иуСП = - J | 1/пор (Г) при t0 < t < to + Гст,
* о
где С/Пор(/) — оценка порогового напряжения, которая формируется в специаль-
ном канале.
В случае обнаружения слабых ФМС, когда £вХ«1, необходимость в спе-
циальном канале для формирования оценки дисперсии помехи N(t) отпадает
[50], и при этом вышеприведённый алгоритм может быть реализован ЭО с шу-
мовой автоматической регулировкой усиления (ШАРУ), структура которого
приведена на рис. 2.2.
Рис. 2.2
С учётом неидеальности функционирования ШАРУ отношение сиг-
нал/помеха по напряжению на выходе ЭО с ШАРУ при ф(/) = 1 + к t имеет еле-
56
дующий вид [51 ]
_ М[С7у(Т)] — M[t/N(T)]
£эш -----------------------
VAM2[T] + D[t/N(T)]
аи('о + D = cn + Д<*2('0 + D;
7 Да2(г0 + Г) ?
K2H(t0 + Г) =---Ц-----М[ВД] =Knc2N(t0 + Г);
CTn
ДМ(7) = К2 AX’2 a2 (z0 + T); D[C/N(7)] =^£±±11,
где к — нормированная скорость изменения уровня помехи N(t)\ M[t/y(7)],
M[t/N(7)] — математические ожидания эффектов на выходе обнаружителя при
воздействии процесса у2о(О и помехи N(t); ДМ(7) — смещённость оценки мате-
матического ожидания эффекта на выходе обнаружителя при воздействии поме-
хи N(t) на момент отсчёта; о^(^04-Т) — дисперсия помехи N(t) на момент от-
счёта; Дсг2(/0 + Г) — приращение дисперсии помехи N(t) на момент отсчёта,
обусловленное нестационарностью; + Т) — нормированный коэффициент
приращения дисперсии помехи N(t) на момент отсчёта; Кп — коэффициент пе-
редачи квадратичного детектора по напряжению с размерностью 1/В; ДАТ2 —
нормированный коэффициент, обусловленный смещённостью оценки ДМ(7).
После преобразований получаем при g2x«l следующие выражения для
расчёта характеристик помехоустойчивости ЭО с ШАРУ'
а 2 _____£вх_____. а — £п
71 + ДКЖГ ’ ,XN 1 + Ки('о + Л’ "Ш 7, + д^нАЛ^’
Otyui “ 1 — Ф(£пш)> А)эш — Ф[£эш ~ аге Ф(1 — аэш)],
где g-)U! — отношение «сигнал/нестационарная помеха» по напряжению на вы-
ходе ЭО с ШАРУ, gnu! — нормированный порог; £>эш, аэш — вероятность пра-
вильного обнаружения и ложной тревоги в ЭО с ШАРУ; g2xN — отношение
«сигнал/нестационарная помеха» по мощности на входе ЭО с ШАРУ
Смещенность оценки ДМ(7) может оказывать различное влияние на поме-
57
хоустойчивость ЭО с ШАРУ в зависимости от значений нормированного коэф-
фициента нестационарности и коэффициента фильтрации = &fnT.
Для случаев, когда ЛК*А/пТ«1 смещённостью оценки ДМ(7) можно пре-
небречь, так как при ~ Q2 и g2x «1 имеем g3 = . Поскольку
g3III = £э, то при этом ЭО с ШАРУ эквивалентен по помехоустойчивости ЭО.
При \K^\fnT> 1 смещённость оценки ДМ(7) в ЭО с ШАРУ приводит к
энергетическим потерям от 3 дБ и более по сравнению с ЭО.
Для иллюстрации полученных результатов проведём анализ энергетиче-
ских характеристик помехоустойчивости при обнаружении навигационного
сигнала с неизвестной формой при использовании «С» кода для случая задан-
ных D = 0,9 и а = 10~5 при g2x «1
При одинаковой для ЭО и ЭО с ШАРУ постоянной интегрирования, рав-
ной Т= Те = 2*10"2 с, с учётом того, что Д/п = Д/s “ 2/Тэ = 2-106 Гц, величина ко-
эффициента фильтрации Кф = Д/Г составляет 4* 104.
По заданным статистическим характеристикам помехоустойчивости D и а
можно определить нормированный порог gn и выходное отношение сиг-
нал/помеха, которые равны
gn = аге Ф( 1 - а) = 4,26
и
g3 = arc Ф(/>) + arc Ф(1 - а) = 5,5.
Минимально допустимые величины отношения сигнал/помеха по мощно-
сти на входе ЭО g2x м и нормированного коэффициента нестационарное™ ДЛ^М
определяются из следующих соотношений
При ЛХ2 <ДА/ ЭО и ЭО с ШАРУ имеют одинаковую помехоустойчи-
вость. Реальная чувствительность ЭО Рс 3 может быть рассчитана из следующих
соотношений:
58
Pc, = kToNJ&g^; кТ0 = 4-Ю-2' Вт/Гц;
где Уш — коэффициент шума ЛТП подсистемы радиомониторинга
Учитывая, что для принятых исходных данных g2x = 2,75-10"2 при = 2,5,
имеем Рс э = 5,5-1 (Г16 Вт
При расчете минимально необходимого коэффициента усиления <7рм ан-
тенны Арм, используемой в подсистеме радиомониторинга, учтем, что мини-
мально ожидаемый уровень навигационного сигнала на входе ЛТП PSH при ис-
пользовании ненаправленной антенны (7а=1 составляет -166дБВт, т.е.,
5 10“|7Вт [52].
С учётом вышесказанного имеем
Ga = 22.
2.2.3. Обнаружение навигационных сигналов на фоне совокупности
гауссовской стационарной и взаимных помех
2.2 3 1 При проведении радиомониторинга с использованием слабона-
правленных антенн на вход подсистемы радиомониторинга поступают радиоиз-
лучения от всех КА, находящихся в зоне радиовидимости, и при этом модель
радиообстановки соответствует третьей рабочей модели
Vn 1(0 = 51(0 + Z Sm + п(^ ПРИ ‘о * zo + •
/л=1
m*i
В данном случае обнаружение сигнала осуществляется на фоне аддитив-
ной гауссовской стационарной помехи n(t) и взаимных помех, квазиортогональ-
ных по отношению к сигналу St{f) и между собой.
В соответствии с особенностями функционирования СРНС «Навстар» при
решении данной задачи обнаружения необходимо учитывать следующие факто-
ры:
— спектры сигнала и взаимных помех полностью перекрываются;
59
— спектральные плотности сигнала и взаимных помех примерно одинаковы и
значительной меньше спектральной плотности помехи n(t);
— полная мощность взаимных помех не превышает дисперсии помехи .
Алгоритм обнаружения сигнала 5,(0 в данном случае описывается сле-
дующими преобразованиями:
а
ЛЫО] +y2(t); ЯУ2(0] Ц(7); W | ивор,
Но
где /*ТУп1(О] — функционал, соответствующий преобразованию многокомпо-
нентного процесса>>П|(0 в двухкомпонентный процесс j>2(0; ДУгМ] — функцио-
нал, соответствующий выделению сигнала S£t) на фоне помехи.
Функционал Г[уП1(0] может быть выполнен на основе преобразований, со-
ответствующих пространственной, частотной или кодовой селекции.
При использовании пространственной селекции информативным призна-
ком является пространственный разнос КА, являющихся носителями навигаци-
онных сигналов. В этом случае в подсистеме радиомониторинга применяется
направленная антенна Арм, ширина диаграммы направленности 0О,5 которой вы-
бирается из условия 90,5 < 0Р, где 0Р — величина элемента пространственного
разрешения.
При использовании частотной селекции информативным признаком явля-
ется частотный разнос между навигационными сигналами, обусловленный тем,
что радиоизлучение каждого КА имеет индивидуальное значение доплеровско-
го смещения частоты
При использовании кодовой селекции в качестве информативного признака
следует использовать индивидуальную для каждого сигнала манипулирующую
функцию.
Важно отметить, что применение пространственной и частотной селекций
возможно при обнаружении сигналов с неизвестной формой, а применение ко-
довой селекции возможно только при обнаружении квазидетерминированных
сигналов.
Для случаев, когда в подсистеме радиомониторинга используется про-
60
странственная селекция, то можно полагать, что взаимные помехи подавлены. С
учетом вышеизложенного задача обнаружения упрощается и становится анало-
гичной, рассмотренной в подразделе 2.2.2.
2.2 3.2. Для случаев, когда в подсистеме радиомониторинга используется
частотная селекция, необходимо учитывать, что на выходе ЛТП спектры сигна-
ла Si(t) и взаимных помех перекрываются Возможность разрешения сигнала
Sjff) и взаимных помех появляется только после предварительной свертки их
спектров на основе нелинейного преобразования [53], когда они преобразуются
в гармонические процессы с частотным разносом, определяемым индивидуаль-
ными значениями доплеровских смещений.
Алгоритм обнаружения в этом случае описывается следующими соотно-
шениями [50, 53]:
Но 1 т
Uy(T) g t/nop; l/y(7) = 1JU2^t}dt, U*(t) x)y2l0(x)dx;
H) * Q -ОС
Упю(0= f hn(t -x)y2\x)Uv(x)dx; кф(/) = 2Д/Ф 8тс(лД/фО cos[4Tt(/n4 +/дМ;
йл(?) = 2Af„ sinc(nAfn() cos(2n/n4Z),
где /гл(^), йф(7) — импульсные реакции ЛТП и узкополосного фильтра (УФ), ис-
пользуемого для выделения свёрнутого по спектру сигнала 5z(r), имеющего доп-
леровское смещение частоты Д-, £/ф(/) — напряжение на выходе УФ, имеющего
полосу пропускания Л/ф;/пч — промежуточная частота в ЛТП; _упю(0 — процесс
на выходе ЛТП.
Структура данного обнаружителя приведена на рис. 2.3, где НП — нели-
нейный преобразователь с квадратичной амплитудной характеристикой
При воздействии на вход НП процесса упю(0 на выходе УФ получаем на-
пряжение х(0, которое содержит составляющие с удвоенной промежуточной
частотой, обусловленные перекрёстным взаимодействием всех компонентов
процесса >»nlo(z):
^(0= £t/mmW+&m(O+,’£t/2m(O+- + Цпк.ч)п„(0 +2X.(')+ ад;
w=l w=l m-l
61
t4m(0= C/|m(z)=Kn |Аф(/-х)5|(х)5(|+П1)(х)</г;
-ос -ОС
C/2m(0 = Кп рф(/ - x)S2(x)S(2+m)(x)dr,
Цп„-о»„(О = Ка ']h^t-x)S^x)S^}dx-
U„M = Ка \h^t-x)Sm{x)n(x)dx\ Um{f) =К„ jh^(t-x)n2(x)dx,
-ос -ОС
где Кп — коэффициент передачи НП с размерностью 1/В; C/mmW — составляю-
щая, обусловленная взаимодействием ФМС с одинаковыми индексами;
£Лт(/)— составляющая, обусловленная взаимодействием ФМС Si(t) с ФМС
•S(i+niXO; ^2ш(0 — составляющая, обусловленная взаимодействием ФМС S2(0 с
ФМС 5(i+m)(0; ЦПка-1)пка(0— составляющая, обусловленная взаимодействием
ФМС 5(п а_0(/) с ФМС S (/); C/mn(0 — составляющая, обусловленная взаимо-
действием ФМС 5т(/) с помехой n(t); U^ft) — составляющая, соответствующая
компоненту «помеха-помеха».
Рис. 2.3
Анализ составляющих, входящих в напряжение x(Z), показывает [53], что
при взаимодействии ФМС с одинаковыми индексами происходит свёртка спек-
тра ФМС, и при этом на выходе УФ для этих составляющих имеем
лка Лка ____ Г J -
^t/mn,(z)=/rnX^mcoS(4n/sm0; /s,n=/o+/«m, /OTeO,V„ =
/и=1 т=\
где f0 — частота, соответствующая частоте радиоизлучения КА, например, £1
или A2,/sm — частота ФМС Sm(r) на входе подсистемы радиомониторинга; —
62
диапазон доплеровских смещений частот радиоизлучений КА; Pstn, Usn} — мощ-
ность и амплитуда ФМС 5т(/); А™ — доплеровское смещение частоты ФМС
SM
Спектральные распределения составляющих напряжения Г/2т(0> •••>
(0» ^mn(0 и Uin(0 имеют треугольное распределение [48]
W =^<2/пч)Г1-Ш>| при |/|е0^,
I VJ
где ^/(2/Пч) — спектральная плотность на частоте 2/пч для одной из вышепере-
численных составляющих напряжения x(t).
Для обеспечения частотного разрешения обнаруживаемого сигнала 5,(Z) от
всех взаимных помех параметры УФ целесообразно выбирать из следующих
условий:
f^2(fn4+f^ А/с1<А/ф<А/р1; А/с1=2/Г,
где A/ci — ширина спектра составляющих напряжения — разре-
шающая способность по частоте сигнала St{t) и любого из компонентов взаим-
ных помех.
Поскольку в результате свёртки спектра обнаруживаемого сигнала Sz(/)
zX/ci <<z^fn «А/n, то отношение «сигнал/результирующая помеха» по напря-
жению на выходе УФ имеет вид
и™
2E4(2/n4)A^
где А/нп — количество составляющих на выходе УФ, соответствующих преобра-
зованию в НП результирующей помехи
Jsm(O+»(O
После расчёта спектральных плотностей Gj{2f„4) можно показать [53], что
при Р5| = Psi = Psm
g* = -I—*------:—r;
V1 2ика£>вх + (”ка ~ 0<?ax
gL = PJ<%-
63
Поскольку при радиомониторинге излучений СРНС «Навстар» выполняет-
ся условие иКа£вх<<:Ь то это позволяет при решении данной задачи обнаруже-
ния влиянием взаимных помех на помехоустойчивость пренебречь и полагать,
ЧТО£ф= glxy]bfn /А/ф .
Для случаев, когда Д/фГ» 1, выходное отношение сигнал/помеха в ЭО
равно go = -jJ--г.
Характеристики помехоустойчивости ЭО с НП рассчитываются из соотно-
шений [48]
_ _ агсФ(1-а) ,
& = ф g0-----1—=r“ ; a=l-<D(gn).
L -FF J
2.2 3.3. Для случаев, когда имеется априорная информация о манипули-
рующей функции обнаруживаемого сигнала St{t), преобразование многокомпо-
нентного процесса _yni(0 в двухкомпонентный процесс y2(f) можно осуществить
на основе кодового разделения.
При этом алгоритм обнаружения может быть реализован на основе корре-
ляционно-фильтровой обработки сигналов по аналогии с алгоритмом, исполь-
зуемым в АП СРНС «Навстар» [53, 54]:
I» 1 f Г~2----2~~
ЩТ) | t/nop; t/y(7) = -f №(t) + U^t)dt;
Ho 1 0
= }лф2(/-х)С/ф(л)С/гЛ(х>&; je 1,^-; Us(t) = \h^(t-x)U^x)Urjs(x)dx-,
-ос А/ф2 -a,
Ц>(0 = J M' - x)jnlo(x)So,[x,T(O]dv ;№io(0 = J h„(t - x)ynl(x)Ur (x)dx,
^vjc ~ £АпО COS(27t//), t/iys ~ ^4nO sin(2Tt^Z),
где Лф1(/), Лф2(0 — импульсные реакции фильтров, используемых для выделения
продуктов корреляционно-фильтрового преобразования с полосой пропускания
А/ф! и квадратурных составляющих Uc(t) и £Д(г) с полосой пропускания Л/ф2;
64
Urjc, t4/s — квадратурные составляющие напряжения второго гетеродина с ам-
плитудой С7т0 и частотой fj\ S0/[x, т(/)] — опорное напряжение, соответствующее
копии обнаруживаемого сигнала St(f) со смещением его огибающей во времени
по закону т(/)
Структура корреляционно-фильтрового обнаружителя (КФО) приведена на
рис. 2.4, а и 6, на которых использованы следующие обозначения* Арм — антен-
на; ЛТП — линейный тракт приёмника; КФУ — корреляционн-фильтровое уст-
ройство; ПФ — полосовой фильтр; МНО — многоканальный некогерентный
обнаружитель; РУ — решающее устройство; ГОС — генератор опорных сигна-
лов; См — смеситель; КУКО], КУКО,, .. , КУКОЛк — 1, , i, . , пк коге-
рентное устройство с квадратурной обработкой, СЧ — синтезатор частот;
УУ — устройство управления поиском по задержке ФМС; Пер — перемножи-
те
тель; Фв — фазовращатель на —; ФНЧ — фильтр нижних частот; Кв — квадра-
тор, Сум — сумматор; Ф — выходной фильтр; ИК — устройство извлечения
квадратного корня; КО — канал обнаружения.
Рис. 2.4
65
б
Рис. 2.4
С целью устранения влияния априорной неопределенности в квазидетер-
минированном сигнале Sfe) на помехоустойчивость КФО в последнем исполь-
зуется двумерный последовательно-параллельный поиск. Последовательный
поиск обеспечивает устранение влияния априорной неопределенности по за-
держке огибающей сигнала а параллельный поиск обеспечивает устранение
влияния априорной неопределённости по доплеровскому смещению частоты
Обнаружение сигнала \(/) осуществляется в два этапа.
На первом этапе решения задачи обнаружения в КФУ на основе использо-
вания корреляционно-фильтровой обработки сигнал St(0 преобразуется в гар-
монический процесс
уМ = JЛф10 -х)Лю(хКш[х> т(')]*; = Цп,оП,(Г- т,) cos(co,0? + (ps/o);
о
*^onz(0 £^топП/[/ — Tq — т(/)] COS(gW Oon), CO/q С0пч1 +
Афi(Z) = 2А/ф1 5тс(7гД/ф10 cosCcW),
где y\(t) — процесс на выходе КФУ; 5от(/) — опорный сигнал с амплитудой
[/пюп, частотой сооп и начальной фазой 0ОП, соответствующий по форме /-му
66
ФМС со «скользящей» по времени манипулирующей функцией Щ/- то - т(0];
То — начальный временной сдвиг 5ОШ(0; т(0 — закон изменения временного по-
ложения огибающей 5опК0; ^o(z) — ФМС после прохождения сигнала S^t) через
ЛТП с амплитудой UmiQ, частотой начальной фазой (ps/0 и манипулирующей
функцией П/(/-т,); соПчь соПЧ2 — первая и вторая промежуточные частоты;
Д/ф! — полоса пропускания ПФ.
В процессе поиска по задержке при выполнении равенства т, = т0 + т(0
при полной корреляции 5Ю(/) и 5Ош(0 обеспечивается свёртка спектра сигнала
5,(0 и на выходе КФУ имеем:
У|(0=5!/(0+ 2^(0+«|(0; cosf®!,?+ ©„);
7И=1
«и=®,-®оп; <=>и = <рао-®оп;
t t
= jh^(t-x)Sm(x)Soni[x,r(t)Vx; n,(t) = |лф2(Г-х)п(х)5ога[х,т(г)}*с;
А/ф1 > А/д,
где 5h(z) — свёрнутый по спектру сигнал 5Ю(/); t4u> — априорно неиз-
вестные амплитуда, частота и начальная фаза процесса Sh{t)‘, SiTa(t) — процесс,
обусловленный взаимодействием т ФМС с опорным сигналом 5ОШ(7) 5ога(/);
Hi(0— процесс, обусловленный взаимодействием помехи n(t) с опорным сиг-
налом 5om(z); Д4 — диапазон доплеровских смещений радиоизлучений КА,
входящих в состав СРНС «Навстар».
Учитывая квазиортогональность т ФМС с опорным сигналом 5ОШ(0> а
также малый уровень процессов 5zm(Z) по сравнению с помехой «i(Z), влиянием
Яр ц
компонент Х5/т(/) при £вХ«1 на характеристики помехоустойчивости КФО
т=\
можно пренебречь. В результате кодового разделения в УСС многокомпонент-
ный процесс _уП|(/) преобразуется в двухкомпонентный процесс.
На втором этапе решения задачи обнаружения используется МНО, со-
стоящий из набора КУКО Алгоритм функционирования и основные характери-
67
стики MHO исследованы в работах [54, 55].
Количество каналов в МНО пк выбирается на основе компромисса между
аппаратурной сложностью КФО, характеристиками помехоустойчивости, а так-
же с учётом следующих выражений:
а/„>а/к; Д/к = Д/ф|/«к; А/Ф| = А/Д,
где А/к — полоса пропускания одного канала MHO; А/м — минимально возмож-
ный частотный разнос между радиоизлучениями различных КА, входящих в
состав СРНС «Навстар».
Обнаружение сигнала St{t) происходит при совмещении во времени его
огибающей с огибающей опорного сигнала на выходе канала МНО со средней
частотой в котором выполняется условие AI < Д/к/2 и Uy(T)> 1/пор. При
&f*T» 1 плотность вероятности напряжения на выходе каждого канала МНО
имеет нормальный закон, и при этом характеристики обнаружения КФО могут
быть рассчитаны на основе следующих соотношений [54, 55]:
(1-Р)(1-а^ а = (
Т Т.
a, = i-®(gn);^ = <i>[g-gn]; w« = —; тш = —Ч
2
/пяе[6, 2Г /Г]; glt=gBx5/A/n/А/к; Tu = mtT,
71 + 2£к ст"
где — вероятность правильного обнаружения за один цикл поиска по за-
держке; D — вероятность правильного обнаружения за время интегрирования Т
в МНО, си, a — вероятность ложной тревоги в одном канале КУКО и в МНО;
р — вероятность пропуска сигналов; шя — количество ячеек поиска по задерж-
ке; gK — отношение сигнал/помеха по напряжению на входе канала МНО; Гк,
Т3— длительность цикла дальномерного кода и посылки ФМС; Ти — длитель-
ность цикла поиска по задержке; тш — шаг поиска по задержке; g — отношение
сигнал/помеха по напряжению на выходе МНО.
2.2.3 4 Для иллюстрации полученных результатов проведём сравнитель-
68
ный анализ рассмотренных выше обнаружителей для случая, когда принимае-
мый навигационный сигнал излучается на частоте L\ с использованием «С»
кода; вероятности правильного обнаружения и ложных тревог равны D = 0,9,
а=10~5, постоянная интегрирования во всех обнаружителях равна
Г=Гб = 2 10 2 с.
В качестве критериев для сравнения обнаружителей используем величину
реальной чувствительности Рс и входного отношения сигнал/помеха по мощно-
сти gBX, полагая коэффициент шума ЛТП равным = 2,5.
Для ЭО реальная чувствительность Рс э и входное отношение сиг-
нал/помеха gBX3 могут быть рассчитаны из следующих соотношений*
Рс э = кТ^^2т э; кТ0 = 4-10-2' Вт/Гц,
g2x э=-7^=; & = arc Ф(О) + аге Ф( 1 - а).
Для ЭО с НП реальная чувствительность Рснп и входное отношение сиг-
нал/помеха gBX нп могут быть рассчитаны из следующих соотношений
Рснп = лтлд/п^хнп; g.2xHn-7-;/<;AZ ;
744/44
72 р
£ф = /Л- ПРИ £ф > 1; £нп = аге Ф(£>) + аге Ф(1 - а)
7444
Для КФО реальная чувствительность РСКф и входное отношение сиг-
нал/помеха gBXI^ могут быть рассчитаны из следующих соотношений*
Рс кф — gBX кф, gBX кф —
v^ggA
#Ф = "/ТТ- ПРИ £ф > 1 > £*Ф = агс ф(£>)+ агс Ф(1 - а); а = лкаь
#/ф^б
С учетом вышеприведённых исходных данных получаем
а) для ЭО Л з = 5 10’16 Вт, g2X3 = 2,75-Ю’2,
£ф .
44/44;
69
б) для ЭО с НП при Д/ф = 103 Гц — Рс нп = 7,6-10'16 Вт, g2x нп = 3,8 10’2;
в) для КФОРскф= 3,6-10"17 Вт, g2XK$ = 1,8-10'3.
Из проведённых расчётов следует, что наибольшей помехоустойчивостью
обладает КФО, который превосходит по чувствительности и входному отноше-
нию сигнал/помеха ЭО на 11,5 дБ и ЭО с НП на 13,2 дБ.
К дополнительным достоинствам КФО следует отнести возможность, на-
ряду с обнаружением, осуществлять оценивание доплеровского смещения час-
тотыи задержки огибающей т,. Погрешности оценивания указанных пара-
метров определяются разрешающей способностью по частоте и по задержке
при проведении поиска и могут быть рассчитаны следующим образом:
273лк 4л/3
где q/i, от — среднеквадратичные погрешности оценивания доплеровского
смещения частоты и задержки.
С учётом того, что Д/д= 104Гц, пк = 10, Гэ= 10“%, имеем су/д = 290Гц и
от = 1,45 10“7 с.
2.3. ПОИСК И АВТОСОПРОВОЖДЕНИЕ РАДИОИЗЛУЧЕНИЙ
СРНС «НАВСТАР»
2.3.1. Пространственно-частотный поиск радиоизлучений
2.3.1.1. В подсистеме радиомониторинга осуществляется многоэтапная об-
работка информации, состав и содержание которой зависит от уровня априор-
ной неопределённости и целей радиомониторинга.
При большой априорной неопределённости о радиообстановке и необхо-
димости формирования целеуказаний для передатчиков помех процесс радио-
мониторинга состоит из следующих задач обработки информации.
1) установление информационного контакта подсистемы радиомониторинга с
источниками радиоизлучений, находящихся в зоне её обслуживания;
70
2) разрежение потока входных процессов до двух компонентного уровня;
3) установление энергетического контакта подсистемы радиомониторинга с
источниками радиоизлучений, находящихся в зоне её обслуживания;
4) выделение полезного сигнала на основе классификации при многокомпо-
нентной радиообстановке и многоальтернативных ситуациях;
5) автосопровождение радиоизлучений;
6) оценивание информативных параметров полезного сигнала и формирова-
ние целеуказаний для постановки эффективных помех.
Совокупность перечисленных выше первых четырёх задач радиомонито-
ринга в общем случае соответствует сложной статистической задаче поиска-
разрешения-обнаружения-предварительного оценивания-классификации (вы-
деления) полезного сигнала [56].
Под информативным контактом подсистемы радиомониторинга с иссле-
дуемым радиоизлучением понимается процедура устранения априорной неоп-
ределённости о поляризационных, пространственных и частотных параметрах
радиоизлучения, а под энергетическим контактом подсистемы радиомонито-
ринга с радиоизлучением понимается решение задачи его обнаружения при от-
сутствии априорной неопределённости о его поляризационных, пространствен-
ных и частотных параметрах [57].
При функционировании СРНС «Навстар» в штатном режиме для установ-
ления информационного контакта в подсистеме радиомониторинга осуществля-
ется программное наведение направленной антенны Арм в расчетную точку тра-
ектории исследуемого КА и настройка ЛТП в соответствии с частотными пара-
метрами радиоизлучения При выполнении условия 0и-врас<во,5 (0и»^Рас —
истинные и расчётные значения пространственных координат КА; 0О,5 — шири-
на диаграммы направленности антенны Арм) необходимость в пространствен-
ном поиске и в разрежении потока радиоизлучений отпадает, что позволяет сра-
зу после обнаружения сигнала перейти в режим автосопровождения.
Ширина диаграммы направленности антенны Арм 0О,5 выбирается, исходя
из совокупности следующих требований: 1) обеспечение пространственного
71
разрешения радиоизлучений всех КА, входящих в созвездие СРНС «Навстар»,
2) повышение уровня сигнала на входе подсистемы радиомониторинга до её ре-
альной чувствительности; 3) обеспечение требуемых угловых скоростей про-
граммного наведения антенны
При функционировании СРНС «Навстар» в нештатном режиме для уста-
новления информационного контакта возникает необходимость в различных ва-
риантах поиска в зависимости от тактических ситуаций.
Так, при выполнении радиомониторинга радиоизлучений КА, находящихся
на стационарных траекториях с использованием нештатных частотных пара-
метров, в подсистеме радиомониторинга для установления информационного
контакта необходимо использовать частотный поиск наряду с программным на-
ведением направленной антенны Арм в расчётную точку.
При проведении радиомониторинга радиоизлучений КА, находящихся на
нестационарных траекториях с использованием штатных частотных парамет-
ров, в подсистеме радиомониторинга для установления информационного кон-
такта необходимо использовать пространственный поиск наряду с программ-
ным наведением направленной антенны Арм в район поиска [58].
А в случае проведения радиомониторинга радиоизлучений «новых» КА,
введённых в состав созвездия СРНС «Навстар», использующих нештатные час-
тотные параметры, для установления информационного контакта в подсистеме
радиомониторинга необходимо использовать пространственно-частотный поиск
наряду с программным наведением направленной антенны Арм в район поиска.
Для установления энергетического контакта подсистемы радиомониторин-
га с исследуемым излучением требуется, чтобы на вход обнаружителя поступал
двухкомпонентный процесс y2(t) = S(t) + n(t), в котором сигнал S(t) имеет тре-
буемый уровень. Эти условия достигаются соответствующим выбором элемен-
тов разрешения по пространству 0Р и частоте A/pJ алгоритма обнаружения, а
также постоянной интегрирования Т при обнаружении.
Если в районе поиска будет находиться несколько КА, обладающих не-
штатными пространственно-частотными параметрами радиоизлучений, то по-
72
еле установления энергетического контакта с каждым КА следует предвари-
тельно осуществить идентификацию полезного сигнала перед тем как перейти к
автосопровождению конкретного КА, представляющего наибольший интерес
2.3 1.2. При установлении информационного контакта подсистемы радио-
мониторинга с источниками радиоизлучений могут использоваться следующие
методы пространственного и частотного поисков [55]:
— одно- и многоцикловые;
— с постоянной и переменной скоростью поиска;
— одно- и двухступенчатые;
— последовательные и параллельные;
— с использованием различных видов селекций.
При ограничениях на сложность аппаратурной реализации подсистемы ра-
диомониторинга при проведении пространственного поиска приходится ис-
пользовать методы последовательного анализа. В качестве ЛТП подсистемы ра-
диомониторинга рассмотрим возможность использования приёмников как на
основе методов последовательного спектрального анализа (супергетеродинных
приёмников (СуП), так и параллельного спектрального анализа (многоканаль-
ных приёмников (МП), приёмников с мгновенным измерением частоты
(ПМИЧ) [56].
Рассмотрим особенности проведения радиомониторинга на основе приме-
нения одноцикловой дискретно-шаговой поисковой процедуры с постоянной и
переменной скоростью анализа при одновременном использовании методов
пространственной и частотной селекции [59]. Длительность цикла поиска Гц за-
висит от количества ячеек поиска тя и времени анализа в одной ячейке поис-
ка Тя, Тп = тяТя. Количество ячеек поиска тя определяется диапазонами неопре-
делённости по пространству и частоте, а также параметрами подсистемы ра-
диомониторинга (0О,5, А/^т):
Да ДР Д/п
= па= — , —
Ц},5 У0,5 Д' лт
где иа, Ир, nf — количество ячеек поиска по азимуту, углу места и частоте; Да,
73
ДР — диапазон неопределённости по азимуту и углу места; ЛД — диапазон не-
определенности по частоте; Л/п — полоса пропускания ЛТП
В случае обнаружения в районе пространственного поиска радиоизлучения
одного КА и при отсутствии или подавлении помех, воздействующих на боко-
вые лепестки диаграммы направленности антенны Арм, модель радиообстанов-
ки на входе подсистемы радиомониторинга соответствует первой рабочей моде-
ли При этом количество шагов в одном цикле поиска зависит от размеров поис-
кового пространства при радиомониторинге, а время анализа в одной ячейке
поиска Тя соответствует постоянной интегрирования в обнаружителе Гоб, т. е.
Тя = Гоб.
Для штатной ситуации длительность цикла поиска определяется следую-
щим образом:
Ki = ^пн + гоб,
где Гпн — длительность программного наведения.
Длительность цикла поиска для нештатных ситуаций определяется по-
разному в зависимости от используемых видов поиска. Так, например, при ис-
пользовании
а) пространственного поиска имеем Тц2 = Тпн + Ге, Те = па Гоб,
б) частотного поиска имеем Тц3 = Тпн + 7}, Tf- nf Тоб;
в) пространственно-частотного поиска имеем Гц4 = Тпн + Г6у, па nj-T^
где TQ — длительность цикла пространственного поиска; Т/ — длительность
цикла частотного поиска; TQf — длительность цикла пространственно-
частотного поиска.
Для уменьшения длительности цикла поиска радиоизлучений СРНС «На-
встар» при её функционировании в нештатном режиме целесообразно исполь-
зовать в ПРМ антенну типа ФАР и приёмники типа МП или ПМИЧ.
На основе соотношений, приведенных в подразделе 2 2.2 для анализа по-
мехоустойчивости обнаружителя сигнала с неизвестной формой, можно опре-
делить время, необходимое для обнаружения сигнала при g^« 1 на основе еле-
74
дующего соотношения:
_ [arc Ф(£>) + arc Ф( 1 - а)]
1 °б---------Г77---------’
&вхА^1
причём при использовании СуП А/, = А&
Л f
при использовании МП А/, = —-;
«к
при использовании ПМИЧ A/i = Л/н,
где А/н — диапазон частотного поиска, пк — количество каналов в МП.
Так, при Z> = 0,9; а=10’5; Д/п = 210бГц; g2x=3102 (-15 дБ) получаем
Тоб = 210~2с.
2.3.1.3. В случае наличия в районе пространственного поиска радиоизлу-
чений нескольких КА и (или) при присутствии помех, воздействующих на бо-
ковые лепестки диаграммы направленности антенны Арм, модель радиообста-
новки на входе подсистемы радиомониторинга соответствует третьей рабочей
модели В этом случае процесс обработки информации значительно усложняет-
ся, поскольку наряду с пространственно-частотным поиском и обнаружением
необходимо обеспечить разрешение всех компонентов радиообстановки и про-
извести классификацию радиоизлучения, которое представляет наибольший ин-
терес.
Величина элементов разрешения зависит от диапазонов априорной неопре-
делённости по пространственным и частотным параметрам радиоизлучений,
количествам компонентов в радиообстановке на входе подсистемы радиомони-
торинга, законов распределений пространственных и частотных параметров ра-
диоизлучений и допустимой величины успешного решения задачи полного раз-
решения компонентов радиообстановки Ррк [56].
Под полным разрешением компонентов радиообстановки понимается обес-
печение приёма, при котором в элементе разрешения находится не более одного
компонента без учёта внутреннего шума «(/). Появление в элементе разрешения
двух и более компонентов считается ошибочным решением, которое характери-
зуется вероятностью Рор = 1 - Ррк.
75
При равномерном законе распределения информативных (пространствен-
ных и частотных) параметров радиоизлучений величина элемента разрешения
информативного параметра AZP может быть определена на основе закона Пуас-
сона [59]
X2 N
Рор =—ехр(-Х), X = UAZp;u--f,
2 А/
где X — среднее количество радиоизлучений, попадающих в элемент разреше-
ния AZP информативного параметра Z; и — потоковая интенсивность; AZ — диа-
пазон неопределённости информативного параметра; NK — общее количество
компонентов в радиообстановке без учёта шума n(f).
При X «1 получаем
Откуда следует, что при Рор = 5 10 2 и NK = 10, необходимо иметь
AZ _2
-^- = 310 , а общее количество ячеек в поисковом пространстве составляет
тя = 34
Длительность цикла Тц пространственного поиска с шагом 0ОУ2 и
@о,5 = 0Р = 5° в секторе с параметрами Аа = Ар = 30° при заданной вероятности
успешного разрешения Ррк = 0,95 составляет порядка 3 с, что приемлемо для
большинства тактических ситуаций.
Специфика пространственно-частотного поиска при многокомпонентной
радиообстановке состоит в том, что наряду с обнаружением компонентов и
предварительной оценкой их угловых координат 9а , , несущей частоты fs
необходимо проводить классификацию компонентов радиообстановки с целью
идентификации полезного сигнала, и только затем осуществлять переход к ав-
тосопровождению.
При последовательной реализации всех функциональных вышеперечис-
ленных преобразований время анализа в ячейке поискового пространства Тя для
76
случая многокомпонентной радиообстановки существенно увеличивается:
7’o6+7’ioj + Гоц= 7^(1 + *i+K2); Кх>\-К2» 1,
где Гоб — время, необходимое на обнаружение компонента радиообстановки;
Гкл — время, необходимое для классификации компонентов радиообстановки и
выделения полезного сигнала; Гоц — время, необходимое для предварительного
оценивания параметров источника радиоизлучения, соответствующего полез-
ному сигналу; Кх, К2 — коэффициенты пропорциональности.
С целью ускорения поиска целесообразно операции классификации компо-
нентов осуществлять только в тех ячейках поискового пространства, в которых
осуществлено обнаружение компонентов радиообстановки, а операции оцени-
вания параметров — только после успешной классификации полезного сигнала.
Такой подход требует перехода в процессе поиска от режима с постоянной ско-
ростью поиска к режиму с переменной скоростью. При использовании в под-
системе радиомониторинга СуП для случая многокомпонентной радиообста-
новки имеем
Тп4 ~ Па ^3 Tq^ + (AfK 4" TVjjt + 1) Ткд + Tэц, — CL Afjn TqQ Па
где Njn — количество неверно обнаруженных компонентов радиообстановки.
С целью дальнейшего уменьшения времени поиска при многокомпонент-
ной радиообстановке целесообразно использовать в подсистеме радиомонито-
ринга сочетание двух типов приёмников: МП на этапе обнаружения и СуП на
этапе классификации и оценивания параметров полезного сигнала. При этом
время поиска равно
Гп4 = па п$ Тоб 4- (Л/р + + 1) (Тн/-4- Ты) + Тоц,
где Tnf— время, необходимое для настройки СуП на обнаруженного компонен-
та радиообстановки по целеуказанию от МП.
Детальный анализ пространственно-частотного поиска в случае многоком-
понентной радиообстановки требует конкретизации особенностей радиообста-
новки, перечня информативных признаков, используемых при классификации и
оценивании с учётом используемых критериев помехоустойчивости
77
2.3.2. Автосопровождение радиоизлучений
2.3 2.1 После установления информационного и энергетического контак-
тов подсистемы радиомониторинга с исследуемым радиоизлучением начинает-
ся этап его автосопровождения.
При исследовании режима автосопровождения наибольшего внимания за-
служивают ситуации, соответствующие первой и второй рабочим моделям ра-
диообстановки.
В настоящее время для автосопровождения радиоизлучений КА широкое
распространение получили амплитудные пеленгаторы (АПел) с коническим
сканированием диаграммы направленности антенны [58]. Типовая структура
АПел для ситуации, соответствующей первой рабочей модели радиообстанов-
ки, приведена на рис. 2.5, на котором используются следующие сокращения:
Арм — антенна; ЛТП — линейный тракт супергетеродинного приёмника; Д —
детектор; ФНЧ — фильтр нижних частот; УВСО — устройство выделения сиг-
нала ошибки; Упр — управитель; ОПУ — опорно-поворотное устройство;
C/s(0 — напряжение, используемое для демодуляции ФМС.
и.®
Рис. 2.5
Принцип действия АПел при приёме двухкомпонентного процесса
y2(f) = S(t) + n(t) описан в работе [60].
Среднеквадратичная флюктуационная погрешность автосопровождения
О|0 при этом равна [61]
во.5 о . г
> Л ^ 2 ’ ®sn
V1 + 2^sn
Na\fn’
Afn>A/s,
где 0О,5 — ширина диаграммы направленности антенны; gsn, g} — отношение
78
сигнал/помеха n(t) по напряжению на входе и выходе АПел при воздействии
процесса y2(t)\ &fn — полоса пропускания ЛТП; — ширина спектра сигнала;
AFhj — шумовая полоса пропускания контура автосопровождения в АПел; Ps —
мощность сигнала на входе АПел; о2я — дисперсия помехи n(t) на входе АПел;
М, М — спектральная плотность сигнала S(t) и помехи и(/).
При использовании в АПел антенны с коэффициентом усиления (7рм = 200,
т.е. когда 0О,$~11,5О, при приёме навигационных ФМС с использованием
«С» кода СРНС «Навстар», функционирующей в штатном режиме, имеем
gs2n = 10"1, тогда при А7?ш= 10 Гц погрешность автосопровождения составляет
G0i = 0,4°.
При воздействии на вход типового одноканального АПел (рис. 2.5) трёх-
компонентного процесса у3(/) = S(t) + P(t) + n(t) среднеквадратичная флюктуа-
ционная погрешность авто сопровождения g20 существенно возрастает [62]’
п А-л/2 ^°’5-ст 0
g2 S2 + 2g2n + g^fa / ДГЩ + 2gl
S22 gSp при g2 < 1; g2n > 1;
Уо »] =/₽-• P2 =-S.
• s" < &p <
где g2 — отношение сигнал/результирующая помеха по напряжению на выходе
АПел при воздействии процессаy(f); gpn — отношение помехи P(t) к помехе n(t)
по напряжению на входе АПел; gsp — отношение сигнала S(t) к помехе P(t) по
напряжению на входе АПел; Рр — мощность помехи P(t) на входе АПел.
Для того, чтобы воздействие помехи P(t) не привело к срыву автосопрово-
ждения в АПел, необходимо при доверительной вероятности Рдов = 0,95 обеспе-
чить среднеквадратичную погрешность: G20fl <$оУ4. Для вышеприведённых ис-
ходных данных допустимая среднеквадратичная погрешность а20д равна 2,9°.
При этом для обеспечения автосопровождения полезного радиоизлучения
требуется обеспечить реальную чувствительность АПел, равной Ps = 210"15 Вт
79
при Nm = 2,5, а максимально допустимый уровень помехи не должен превышать
Рр = 6,4-1017 Вт.
2.3.2.2. При автосопровождении радиоизлучений КА для ситуаций, когда
радиообстановка соответствует второй рабочей модели для подавления корре-
лированной помехи и уменьшения погрешности автосопровождения, использу-
ются методы частотной и пространственной селекции.
Рассмотрим вначале пути снижения погрешности автосопровождения при
использовании частотной селекции, полагая, что коррелированная помеха P(t)
может представлять собой квазидетерминированное воздействие типа гармони-
ческого процесса или процесса с угловой модуляцией, например, процесса с
прыгающей частотой, который в соответствии с классификацией, приведённой
в работе [57], называется дискретно-частотным (ДЧ) процессом.
С целью уменьшения влияния помехи P(f) на эффективность автосопрово-
ждения в АПел можно ввести блок защиты (БЗ) [29, 44, 47]. Структура АПел с
БЗ приведена на рис. 2.6. В состав БЗ входят: Фь Фь , Фт — полосовые
фильтры с плотно примыкающими друг к другу амплитудно-частотными харак-
теристиками; УЭЬ..., УЭЬ..., У Эю — управляемые элементы типа коммутато-
ров или ограничителей с регулируемым порогом; ЭА — экспресс-анализатор
радиообстановки; Сум — сумматор.
Рис 2.6
При воздействии на вход АПел коррелированной помехи P(t) в виде гармо-
нического процесса с фиксированной частотой в экспресс-анализаторе (ЭА)
производится оценивание частоты помехи и формирование целеуказания, обес-
80
печивающего отключение соответствующего фильтра. Для этого случая увели-
чение погрешности автосопровождения не зависит от мощности помехи, опре-
деляется потерей энергии сигнала за счёт режекции и рценивается коэффициен-
том Кр на основе следующего соотношения:
У АЛ
где Д/к — полоса пропускания канального фильтра.
При большом количестве каналов в БЗ пк увеличением погрешности авто-
сопровождения сг20 за счёт наличия помехи P(f) можно пренебречь.
При воздействии на вход АПел ДЧ помехи P(f), частота которой меняется
по псевдослучайному закону, при организации работы БЗ можно использовать
следующие подходы.
Первый подход основан на адаптации БЗ, суть которой состоит в том, что
экспресс-анализатор должен оперативно за время Tyd« Тп (Тэл — быстродейст-
вие экспресс-анализатора, Тп — длительность ДЧ посылки) оценивать уровень
и частоту помехи P(t) и далее формировать целеуказания для соответствующих
УЭ с целью режекции или ограничения помехи P(t)
При большом количестве частотных скачков NfB помехе P(t) реализация БЗ
в виде следящего фильтра становится проблематичной из-за запаздывания це-
леуказаний и наличия переходных процессов в ПФ
Второй подход более прост в реализации, так как в этом случае экспресс-
анализатор предварительно оценивает весь ансамбль частот Nf помехи P(t), а за-
тем формирует целеуказания на отключение соответствующих ПФ с целью ре-
жекции всех частотных компонентов помехи P(t).
При этом среднеквадратичная флюктуационная погрешность автосопрово-
ждения Оз 0 равна
СТзе = л/2^; g3=gJl-^; Д/п = А/„ пк=^-, ДЛ>^-; Nf<nK,
Sy V «к АЛ Л
где g3 — отношение сигнал/результирующая помеха на выходе АПел при воз-
действии процесса у3(/) и отключении в БЗ Nf ПФ, пк — количество каналов в
81
БЗ; Л/к — полоса пропускания ПФ в БЗ.
При N/nK > 0,9 погрешность автосопровождения о20 возрастает не менее,
чем на 10 дБ При большом значении Nf(Nf> 30) реализация БЗ связана со зна-
чительной аппаратурной сложностью.
Другим недостатком АПел с БЗ является необходимость проведения пред-
варительного экспресс-анализа для определения всего ансамбля частот {а>ру}
помехи P(t), что существенно увеличивает длительность цикла пространствен-
но-частотного поиска Гц.
2.3.2.3. При функционировании АПел в условиях воздействия коррелиро-
ванной помехи P(t) для повышения эффективности АПел, наряду с методами
частотной селекции, используются методы пространственной и пространствен-
но-частотной селекций.
К недостаткам АПел с типовой структурой следует отнести их низкую по-
мехозащищённость при воздействии на боковые лепестки диаграммы направ-
ленности антенны непреднамеренных и организованных помех, сосредоточен-
ных по спектру в рабочем частотном диапазоне радиомониторинга.
С целью повышения помехозащищённости АПел разработано большое ко-
личество автокомпенсаторов помех [63, 64]. Однако известные автокомпенсато-
ры обладают малым быстродействием, неинвариантны к изменению частотных
и пространственных параметров помехи и основаны на использовании сложных
многоканальных ЛТП с высокой идентичностью АЧХ и ФЧХ каналов
В данном подразделе описывается АПел с компенсацией боковых лепест-
ков диаграммы направленности антенны, реализованный на основе использова-
ния сочетания пространственной и корреляционно-фильтровой обработки с ре-
жекцией помехи, обладающей высоким быстродействием и инвариантный к
пространственным и частотным изменениям помехи [65]
Структура АПел приведена на рис. 2 7, где Аь А2 — антенны основного и
компенсационного каналов АПел; ЛТПЬ ЛТП2 — линейные тракты приёмника
основного и компенсационного каналов; СЧ — синтезатор частоты; ОПУ —
опорно-поворотное устройство антенны А|; Пь П2 — перемножители; ПФЬ
82
ПФ2, ПФ3 — полосовые фильтры; Дь Д2, Дз — детекторы; УСЧ — устройство
сдвига частоты, Г — фиксированный гетеродин, Инть Инт2, Инт3 — интеграто-
ры; РФ — режекторный фильтр; РЛЗ — регулируемая линия задержки, РУ —
решающее устройство; Упр — управитель; Дем — демодулятор; Инд — инди-
Рис 2 7
В исследуемом АПел компенсация помехи P(f) осуществляется на основе
использования корреляционно-фильтрового преобразования с режекцией [48] и
фильтрации с возвратным гетеродинированием [66]
83
В данном подразделе исходные условия, определяющие особенности функ-
ционирования АПел, формулируются следующим образом:
1) зона обслуживания АПел по азимуту Да = 360° и по углу места Др = 170°,
2) модель радиообстановки двух- и трехкомпонентная, состоящая из ФМС
S(t) с неизвестной формой; гауссовой стационарной помехи n(t) и непре-
рывной помехи Р(г), сосредоточенной по спектру, например, гармониче-
ской или частотно-манипулированной различного вида, включая ДЧ-
процессы;
3) спектры сигнала S(t) и помехи P(t) перекрываются fs -fv <
Vs
2
A/P<A/s,
где/s,/p — средние частоты сигнала S(t) и помехи Р(/); A/s — ширина спек-
тра сигнала; A/pi — ширина спектра помехи;
4) синтезатор частоты обеспечивает настройку ЛТП! и ЛТП2 на ФМС на ос-
нове внешних целеуказаний (4 = /п, A/n > А4> где fn — средняя частота на-
стройки ЛТП1 и ЛТП2, А/п — эквивалентная шумовая полоса ЛТП1 и
ЛТП2);
5) помеха P(t) воздействует на АПел через боковые лепестки диаграммы на-
правленности антенны Аь пространственные и частотные характеристики
помехи P(t) априорно неизвестны.
Антенна Ai имеет коэффициент усиления по основному лепестку Gi и по
боковым лепесткам С72, а антенна А2 имеет коэффициент усиления по всем на-
правлениям G2.
На входы ЛТП1 и ЛТП2 воздействуют процессы уЭ1(0 иу32(0:
Уз1(0 = S1W + P1W + «1(0; .Ы0 = S2(t) + P2(t) + n2(t);
S\(t) = f/sln(O cos (cosZ +<psl); S2(0 = Ц2П(0 cos (cosf +Фз2);
Pi(0 = cos (cop/ +q>p(O + S(pp]); P2(t) = f/p2 cos (copr +фр(0 + бфр2);
П(?) g [-1; +1] при t0 + (i-V)T3<t<tQ + i T3, i g 1Д; = Tc/T3\
G)s = 27t/s; tOp = 27t/p, Д/5 = 2/Гэ; A/n = A/s, con = 2л/п; A/s>A/pb
/?п(т) =^sinc(7tzVnT)cos(a)nT);
84
^/^2=^, </pi=C7p2=C7p; А/=|А-/р1<ДЖ
где (7si, t/s2, c°s, (psi, <Ps2 — амплитуды, частота и начальные фазы сигналов S](t) и
S2(t)\ П(Г) — априорно неизвестная манипулирующая функция ФМС; (7рЬ Up2,
<Ор, фр(0, 8фр1, 5<рР2 — амплитуды, частота, закон изменения фазы, начальные
фазы помех Prff) и ^о, Тс — момент начала и длительность сеанса радио-
мониторинга; Гэ, N3 — длительность и количество посылок в ФМС; /^(*0 — ав-
токорреляционная функция помех и и2(0 в виде квазибелого шума, которые
между собой некоррелированы; v2n,fn, АЛ — дисперсия, средняя частота и ши-
рина спектра помех «1(/) и n2(f)', \f — разнос частот сигнала Si(f) и помехи P\(t).
Распределение энергетических спектров компонентов процессов Л’зИО и
j>32(0 описываются следующими соотношениями:
тт^т и2т
<Ш=^5тс2[л(/-Л)7;]; 6s2(/)= ^smcW-X)?;];
G2
GPi(/) = СРг(/) =777 при /р - А/р/2 </</р + А/р/2 — при
2А/р
использовании прямоугольной аппроксимации спектра помехи P(t)\
2
Gnl(/) = Gn2(/) =-5- при /„ - A/n/2 </</n + A/n/2,
ДЛ
где Gsi(/), Gs2(/) — спектральные плотности сигналов и S2(0; Gpl(/),
Gp2(/) — спектральные плотности помех P{(t) и P2(0; Gni(/), G^{f) — спектраль-
ные плотности помех ni(t) и n2(t).
В ЛТП1 и ЛТП2 (с учётом УСЧ) компоненты процессов jv3i(0 и yn(t) усили-
ваются и смещаются по частоте в область промежуточных частот соответствен-
но на сопч 1 и сопч2, где <опч1 = cos - сосч, сопЧ2= - о>сч - о>г, «11Ч1, соПч2 — промежу-
точная частота на выходе основного и компенсационного каналов; сосч — часто-
та настройки синтезатора частоты, сог — частота гетеродина в УСЧ.
Отношения сигнал/помеха по мощности на входе АПел в основном кана-
ле ^вх1 и компенсационном канале g*x2 определяются на основе следующих
85
соотношений:
g2 = g2 =—^2.,-.
/>,+< S~‘ Рр+<
2 ^sl 2 ^s2 2 2 2 ^s2
Ssln^-y; gs2n=-T> V
an an Gn Pp Pp
a2 ст2
2 — g$ln p-2 — os2n
где Psb Ps2 — мощность сигнала на входе основного и компенсационного кана-
лов; Рр — мощность помехи Pi (О и Р2(/) на входе АПел; а2 — дисперсия поме-
хи n(t) на входе АПел; gs2 n, g22n — отношение сигнал/шум по мощности на вхо-
де основного и компенсационного каналов; gpn — отношение помеха/шум по
мощности на входе АПел; g2lp, g22p — отношение сигнал/помеха Р(г) по мощ-
ности на входе основного и компенсационного каналов.
Далее после прохождения процессов y3i(t) и y32(t) через ЛТП в АПел осу-
ществляется корреляционно-фильтровое преобразование, в результате которого
на выходе ПФ1 имеем [65]*
xw=(о,
t/i(0 = jлф1(/-x)Su(x)S21(x)dx; U2(t) = jh^(t - x)Pn(x)P2i(x)dx;
<А(0 = ^h^(t-x)nn(x)n2l(x)dx; U4(t) = jh^(t-x)Sn(x)P2l(x)dx;
Us(t) = jh^(t-x)S2l(x)Pn(x)dx; U6(t) = |йф|(г-х)51|(х)л21(х)бй;
t/?(0 = f лф1 (t - x)S21 (х)и], (x)dx, Ut(t) = J йф1(Г - x)Px |(x)w2 j (x)dx;
-OC -00
1/9(0 = }лф1(г-х)Р2|(х)511(х)Л,
-00
86
где 5ц(/), Рц(/), Лц(О — компоненты процесса у31(7) на выходе ЛТПЬ S2i(0,
n2\(t) — компоненты процессаy32(t) на выходе ЛТП2 и УСЧ; Аф|(/) — им-
пульсная реакция ПФ^ — компоненты процесса x(t) на выходе ПФь
С учетом того, что разнос частот сигнала и помехи А/ может находиться в
интервале [О, ±А//2], полосу пропускания ПФ1 следует выбирать из равенства
A/i=2A/s
Распределения энергетических спектров компонентов процесса x(t) можно
аппроксимировать набором дискретного, прямоугольного, sinc2(x) и треугольно-
го законов и описать следующими соотношениями [65]:
т2 г т2
(?.(/) = ns'ls2!8(/-/r) при Дт12«7’э;
4
G1(/) = ^"^'^21 Sinc2[7t(/ -/г)Гэ] при Дт12 > 4;
4
с2(/) = —"р21 8(/ - /г) = ^-8(/ -/г) при Т3 < Дт12« Ткр, Ткр = 1/Д/рь
G3tf) =5-п.?лПстп2./! _ = < А/п;
4 I 44 J Д4 k 44 J
J*
G<tf) = n s1' р21 э sine2[я(/ - /г + ДГ)ГЭ] при Д/=14-/р1<Д/п/2;Д4>Д/р1;
4
г2 Т г2 гр
С5(/) = sinc2[jt(/_/r _ WJ.
4
G6(f) = (i _Ц^| при /s«/n; Д4 = Д/„;
2А/„ к Д/„ )
GM= п/2' р2‘ при Д/-г-А/п/2-Д/</<Д/г*Д/„/2-Д/; V=l/s~/pi;
2Д4
U2
G,(f)^ п р21 при Д/г-Д/п/2 + Д/</<Д/г + ДЛ/2 + Д4
2А/П
87
где G|(/) —: спектральная плотность компонента «сигнал-сигнал». Кп — коэф-
фициент передачи П1 размерностью 1/В; Дт!2 — неидентичность ЛТП! и ЛТП2
по групповому запаздыванию; (72(/) — спектральная плотность компонента
«помеха-помеха»; Ткр — интервал корреляции помехи P(t); 8(х) — дельта-
функция; (7з(/) — спектральная плотность компонента «шум-шум»; G4(f),
G5(f)— спектральная плотность компонентов «сигнал-помеха»; Д/ — разнос
частоты сигнала S(t) и помехи P(t); G2{f) — спектральная плотность ком-
понентов «сигнал-шум»; G8(/), G9(f) — спектр компонентов «помеха-шум»; l/sll,
(/s2i, Ль Р21 — амплитуды сигналов Si(0, $2<f) и помех Pi(f), Р2(0 на выходе
ЛТП] и ЛТП2; ^1и^п22 — дисперсии шумов n2(t) на выходе ЛТП1, ЛТП2
В результате коореляционно-фильтрового преобразования компоненты
«сигнал-сигнал» U\(f) и «помеха-помеха» U2(t) сворачиваются по спектру и
фильтруются РФ, что позволяет далее ими пренебречь. Кроме этого, учитывая,
что сигнал принимаемый основным каналом, значительно превосходит по
амплитуде сигнал S2(i), принимаемый компенсационным каналом, в ходе даль-
нейшего анализа можно также пренебречь компонентами и U2(t).
Отличительная особенность данного АПел состоит в том, что после корре-
ляционно-фильтрового преобразования с режекцией в качестве сигнальной ком-
поненты в процессе X\(t) используется компонента «сигнал S{(t) — помеха
Р2(0», представляемая напряжением U4(f), и при этом отношение сигнал/помеха
по напряжению на выходе РФ gj равно
_ I^Slp _ | gsln^pn
У ^nn + ^sln + 2Ррп у 1 + gsln *" 2gpn
При этом необходимо учитывать, что полная фаза напряжения U4(t) опре-
деляется манипулирующей функцией ФМС П(Г), угловой модуляцией срр(/), при-
сущей помехе Р(/), случайным частотным сдвигом (сог-Дсо) й случайной на-
чальной фазой 8(рь
U4(t) =--п—1-рП(/ - T|)cos[(cor - Дсо)(Г - Tj) + (рр(/ - т,) + fopj; Дсо = 2лД/,
88
где т, — групповое запаздывание напряжения U4(f), вносимое ПФЬ.РФ.
Для устранения влияния на конечный результат частотного разноса А/*и уг-
ловой модуляции по закону фр(г) следует использовать фильтрацию с возврат-
ным гетеродинированием [66], в результате которой на выходе ПФ2 имеем
(Д|(0 = Кп Um4 UP П(/ - Ti - т2) cos[cos (t - Ti - т2) + Зф2],
где Um4 — амплитуда напряжения U4(t)\ т2 — групповое запаздывание сигнала в
П2 и ПФ2; Зф2 — случайный фазовый сдвиг.
Для полной компенсации угловой модуляции фр(/) при возвратном гетеро-
динировании необходимо, чтобы выполнялось условие тлз = ть где Тлз — время
задержки, вносимое РЛЗ.
Для случаев точной настройки ЛТП АПел на частоту сигнала (a>s = соп) по-
лоса пропускания ПФ2 выбирается из условия А/ф2 =
Напряжение U4\(t) можно в дальнейшем использовать как для пеленгова-
ния на основе энергетической обработки, так и для дальнейшей обработки
ФМС с целью формирования целеуказаний для постановки эффективных по-
мех.
При осуществлении фильтрации с возвратным гетеродинированием про-
цесс x(t) преобразуется в процесс Xi(/), средняя частота которого совпадает со
средней частотой процесса
Для случаев, когда помеха P(f) имеет большой уровень (gs2p« 1 и
gpn >:> 1), влиянием на конечный результат процессов S2(t) и n2(t) можно пренеб-
речь. При этом отношение сигнал/помеха по напряжению на выходе ПФ2 равно
отношению сигнал/помеха по напряжению на выходе РФ
После квадратичного детектирования процесса Х](/) на выходе ИнТ1 полу-
чаем напряжение U}(T), состоящее из постоянных составляющих Ц1р-, (/sin=,
Ц>п=, £7nn= и переменных составляющих Ц™-, С/щ»-
После компенсации в РУ постоянных составляющих l/pn=, L/nn=, не связан-
ных с наличием сигнала 5|(/), отношение сигнал/помеха по напряжению на вы-
ходе основного канала АПел определяется следующим образом [65]:
89
---у .Т.-Д.Т ' " - ... , ---.' ,1— -IT ,, — —, - - — - 5
7, + 2^n +^.n + 2g2n(gs4ln + 3g2n +l) + 4gpn(l+4gj]n)
где T\ — постоянная времени Инть g4 — отношение сигнал/помеха по напря-
жению на выходе Интр Выражение для g4 существенно упрощается для сле-
дующих исходных случаев:
О при gs2ln< 1 и g2n< 1 имеем
gfmgpnVA/nT;
g* =" / 7 ' ;
V^ + 2^sln + 2Spn
2) при g2ln < 1 и g2n = 1 имеем g4 =0^2пЛ/Д/„7;;
3)при g2n< 1 и g2n> 10 имеем g4=0,5g2nA/V„7] •
На практике наибольший интерес представляет случай, когда помеха P(t)
имеет большой уровень (gpn> 10). При этом, если Т\ = l/AFu, то среднеквадра-
V20O5
тачная погрешность автосопровождения а40 =-------- возрастает на 6 дБ и для
%4
рассмотренных выше исходных данных составляет 0,8°.
Максимально допустимый уровень мощности помехи P(t) на входе АПел
Ррв определяется коэффициентом подавления компонента «помеха-помеха» в
РФ Л'рф и уровнем сигнала Ps, т.е. из условия Ррв < PJK^ При приёме радиоиз-
лучений СРНС «Навстар» при Хрф = КГ6 мощность помехи Ррв не должна пре-
вышать 2-10"9Вт.
Полученные результаты свидетельствуют о возможности автосопровожде-
ния радиоизлучений КА при воздействии на боковые лепестки диаграммы на-
правленности антенны коррелированных помех Р(г), уровень которых превос-
ходит уровень полезного сигнала до 60 дБ.
Рассматриваемый АПел предназначен для работы в ситуациях, соответст-
вующих как первой, так и второй рабочим моделям радиообстановки. С целью
адаптации АПел к радиообстановке в его состав введён классификатор радио-
обстановки, представляющий собой взаимокорреляционное устройство, со-
90
стоящее из Аь А2, ЛТПЬ ЛТП2, СЧ, Пь ПФ3, Д2, Инт2 и предназначенное для
установления факта наличия (гипотеза Нр) или отсутствия (Нр) помехи P(t) во
входном процессе в соответствии со следующим алгоритмом [67]
1 Тг '
Нр и3(Т)>ипор, С/з(7)=-|^фз(ОЛ; Ц>з(0 = \h^{t-x)yi{x)y2{x)dx,
*2 0 -ос
Афз(/) = 2А/Фз sine (тсА/фзГ) cos (2л/г0; А/3 « А/рь &iP - 1>
^кр » Ат |2 > *Cjcs> ^ks 2^, ТКр 1/A/pi,
где Ui(T) — напряжение на выходе Инт3; Т2 — постоянная времени Инт3;
Ц>з(0 — напряжение на выходе ПФ3; Аф3(/) — импульсная реакция ПФ3, А/3 —
полоса пропускания ПФ3; tks — интервал корреляции ФМС; ткр — интервал
корреляции помехи Р(/)
Вероятность ошибочных решений по гипотезе Нр Рош с учётом нормализа-
ции эффекта на выходе Инт2 (zVn/Д/фз» 1, А/ф3Г3 » 1) равна [67]
; а=1-ФЫ; Ф(х)=-Д=Р'2Л;
У 2 Я JL
_ £рп дМ/п/А/з _ £фЗ д/^фЗ^З
^+g,u+2gvn V1 + 2&P
где а — вероятность ложных тревог; Ф(х), аге Ф(х) — функция Лапласа и об-
ратная функция Лапласа; g3, £фз — отношение помеха Р(/)/шум n(f) по напряже-
нию на выходе Инт3 и ПФ3; А/ф3 — полоса пропускания ПФ3; gn — нормирован-
ный порог.
Классификатор радиообстановки должен обеспечивать заданную вероят-
ность ошибочных решений Рош кл при той минимальной мощности помехи Ррн,
когда типовой одноканальный АПел обеспечивает допустимую погрешность
пеленгования а0д при воздействии на его вход трехкомпонентного процесса
j'Kd-
В зависимости от результатов классификации в РУ используются результа-
ты обработки входных процессов, полученных в виде напряжения U](T) на вхо-
91
де основного и компенсационного каналов или напряжения U2(T) на выходе ти-
пового одноканального пеленгатора, включающего в себя Аь ЛТПЬ Дз, Инт3,
РУ, Упр, ОПУ
Рассматриваемый АПел инвариантен к а) пространственным координатам
источников помеховых радиоизлучений, поскольку в компенсационном канале
используется ненаправленная антенна; б) к частотным параметрам помехи, по-
скольку при корреляционно-фильтровом преобразовании осуществляется
свёртка спектра процессов с произвольными законами угловой модуляции и пе-
ренос их на фиксированную частоту сог.
К достоинствам данного АПел следует отнести также и то, что в нём реа-
лизуется бесподстроечный по пространству и частоте принцип компенсации
помехи, в связи с чем обеспечивается высокое быстродействие. Это обстоятель-
ство выгодно отличает рассматриваемый АПел от известных автокомпенсаторов
помех.
2.4. РАЗРЕШЕНИЕ, КЛАССИФИКАЦИЯ И ОЦЕНИВАНИЕ
ПАРАМЕТРОВ НАВИГАЦИОННЫХ СИГНАЛОВ
2.4.1. Наибольшие трудности в организации радиомониторинга возникают
для ситуаций, когда радиообстановка соответствует третьей рабочей модели.
Такие ситуации, как правило, возникают при использовании в подсистеме ра-
диомониторинга ненаправленной антенны При этом из-за отсутствия про-
странственной селекции при проведении радиомониторинга на частоте
Li = 1575,42 МГц на вход подсистемы радиомониторинга поступает следующий
многокомпонентный процесс:
y«(t)= ZSi,(0 + £s2>(<H«(0: Лкаб[4,8]; тх>т2,
/=1 7=1
где ^гХО — ФМС, соответствующие радиоизлучениям f-го иу-го КА СРНС
«Навстар» и использующие для передачи информации «С» и «Р» коды; пкг —
количество КА, находящихся в зоне радиовидимости подсистемы радиомонито-
92
ринга
Поскольку в СРНС «Навстар» используется кодовое уплотнение навигаци-
онных сигналов, то это обстоятельство вызывает серьёзные затруднения при
выделении каждого из ФМС Для разрешения отдельных компонентов процесса
yn(z) необходимо использовать методы кодовой, частотной и пространственной
селекции Ниже рассматриваются возможности применения каждого из пере-
численных видов селекции.
2.4.2. При наличии априорной информации о законах формирования мани-
пулирующих функций с использованием «С» и «Р» кодов в радиоизлучениях
всех исследуемых КА разрешение ФМС можно осуществлять на основе кодово-
го разделения.
Детальное описание кодового разделения навигационных сигналов приво-
дится в работах [19, 74].
При проведении радиомониторинга в интересах радиоэлектронного подав-
ления при кодовом разделении наибольшего интереса заслуживают оценки та-
ких параметров навигационных сигналов для каждого КА, как амплитуда, доп-
леровское смещение частоты и временного сдвига огибающей сигнала
Используемый для этих целей алгоритм квазикогерентной обработки имеет
следующий вид:
Н, Н7 ___ ________
[7пор, Uj{7\) t/nop; i g ; j g l,m2; m}>m2; m = m\ + m2,
H, Hy
T T
W) =1/Ло(О5,с(ОЛ; ад) =|f
Л о Ao
Ло(О = JЛф(t - X)yn(x)UT(x)dx; h^t) = 2 bfa smc(7tA/nZ) cos(2nA/„,0;
W ={й»,ЛЛ}; № ={<4,>АЛ]’
где H/,HZ — гипотезы о наличии и отсутствии сигналов Sy(t); Н7,Ну — гипоте-
зы о наличии и отсутствии сигналов S2j{t); UjfTi) — напряжение на выходе од-
93
ного из когерентных обнаружителей, обеспечивающих обнаружение сигна-
лов с использованием «С» кода; Ц(Л) — напряжение на выходе одного из т2
когерентных обнаружителей, обеспечивающих обнаружение сигналов с исполь-
зованием «Р» кода; упо(О — напряжение на выходе ЛТП; Ur(t) — гетеродинное
напряжение; S/c(0, 5/р(0 — опорное напряжение, соответствующее приёму сиг-
налов и S2j(t)\ Т\ — постоянная интегрирования в когерентных обнаружи-
телях; Аф(/) — импульсная реакция полосового фильтра на выходе ЛТП со сред-
ней частотой />ч; {/<}, {lj} — совокупность оцениваемых информативных пара-
метров сигналов Sh(0 и S2j(t); и — оценки амплитуды, до-
плеровского смещения и временного сдвига сигналов Sh(r) и 17ПоР — поро-
говое напряжение.
Структура устройства разрешения сигналов на основе использования коге-
рентной обработки приведена на рис. 2.8.
а ' б
Рис. 2.8
На рис. 2.8 используются следующие обозначения: Ai — ненаправленная
антенна; Ког.Оь . , Ког.От — (1, ..., т) когерентный обнаружитель; МКО —
многоканальный когерентный обнаружитель; П — перемножитель; ГКС/(/) —
генератор копии сигналов Su(t) и S2j{t)\ Инт — интегратор; ЦУ — внешние це-
леуказания по/н, TZ, фП, П1/(0, фгг, Пг/(0; ПУ — пороговое устройство.
2.4.3. При отсутствии априорной информации о законах формирования ма-
нипулирующих функций ФМС задача их разрешения усложняется и целесооб-
разно на начальном этапе её решения осуществлять квазиполное разрешение
94
[69] Под квазиполным разрешением ФМС понимается преобразование, позво-
ляющее осуществлять разделение сигналов, т.е обеспечить определение коли-
чества компонентов т в процессе уп(/) и нахождение оценок уровней
j[/nv, UnyJ и доплеровского смещения частот исследуемых сигналов.
Поскольку спектр ФМС при нелинейном преобразовании на основе квад-
ратичной амплитудной характеристики сворачивается и становится дискрет-
ным, а доплеровское смещение частот fai и для радиоизлучений каждого КА
индивидуально, то эти обстоятельства можно использовать для разделения
ФМС [53, 68].
Алгоритм разделения ФМС, основанный на использовании нелинейного
преобразования и частотной селекции, позволяет определить количество ком-
понентов т в процессе дать оценки уровня (7nh и доплеровского смеще-
ния частоты сигналов 5h(z), использующих для передачи информации
«С» код Данный алгоритм записывается в следующем виде
Нх 2Af 1 Т1
ипор; к е [1, mK]; mK т; тк=—~, UK(T2) =— Jyl(t)dt;
Н, ДЛ Т2 Jo
t t
У&) = jйфк (t- x)yn(x)dx; = jАфо(t - x)y2n0(x')dx;
t
y^i) = J йф2 (Z - x)y2 (x)UT (x)dx,
Лф2 (Z) = 2 A/c sinc(nA/cz) cos(2nA/n4z); A/c = 2/Г,,,
ЛФ0 (0 = 2 ДЛ sinc(uA/;z) cos(47tA/n4z); Д/ф0 = 2A/a;
(Z) = 2 A/K sinc(7tA/KZ) cos[4n -fa + (к - 1 )A/K/2 + A/K/4) Z];
A/iWpa-» {/,}
где UK(T2) — напряжение на выходе К-го канала параллельного спектрального
95
анализатора (ПСА), обеспечивающего обнаружение-разрешение сигнала а
также оценивание его амплитуды Uini и доплеровского смещения частоты /д/;
тк — число каналов в ПСА; (t) — импульсная реакция ПФ в «К» канале
ПСА; А/к — полоса пропускания ПФ в каналах ПСА; Л/ — минимальный разнос
доплеровских смещений принимаемых сигналов 5к(/); ,ун(0 — напряжение на
выходе НП и узкополосного фильтра Фо; /гфо(/)- импульсная реакция фильтра
Фо, А/фо — полоса пропускания фильтра Фо, соответствующая удвоенному диа-
пазону изменений доплеровских смещений частот принимаемых сигналов Sh{t);
упо(0 — напряжение на выходе полосового фильтра (ПФ2) ЛТП, обладающего
импульсной реакцией Лф2 (f); — полоса пропускания ПФ2, соответствующая
ширине спектра сигнала Sj(/), использующего для передачи информации
«С» код; Т2 — постоянная интегрирования на выходе каналов ПСА.
Структура устройства разделения сигналов на основе использования нели-
нейной обработки и параллельного спектрального анализа приведена на
рис. 2.9, где Фь ., Фк — канальные фильтры в ПСА; КД — квадратичный де-
тектор; Инт— интегратор; ПУ, РУ — пороговое и решающее устройства.
Рис. 2.9
Механизм разделения сигналов основан. 1) на частотной селекции в ЛТП,
обеспечивающей устранение влияния сигналов S2(f), использующих для переда-
чи информации «Р» код, 2) на нелинейном преобразовании (возведении в квад-
96
рат), обеспечивающем преобразование ФМС в гармонические колебания с уд-
военной несущей частотой; 3) на разрешении, обнаружении и оценивании па-
раметров сигналов Sj(r) на основе использования ПСА с полосой пропускания в
каналах Д4, меньшей минимального частотного разноса сигналов Sj(/) с учё-
том их доплеровского смещения fa.
В случае необходимости в процессе радиомониторинга на основе выше-
описанного алгоритма выделения сигналов S2(0> использующих для передачи
информации «Р» код, необходимо полосу пропускания ЛТП выбрать равной
А/р = 2/Тэ2, но при этом для устранения влияния на конечный результат сигналов
необходимо перед НП включить РФ с центральной частотой 2/,ч и полосой
режекции Д/с= 2/Тэ[.
2.4.4. Одним из эффективных путей разрешения ФМС при радиообстанов-
ке, соответствующей третьей рабочей модели, является использование про-
странственной селекции. При установке в подсистеме радиомониторинга на-
правленной антенны с 0О,5 ~ 0р осуществляется разрежение потока радиоизлу-
чений и на её вход при проведении радиомониторинга на частоте L\ поступают
двух- или трёхкомпонентные процессы следующего вида:
Уг(0 = 5|>(0 + n(t), y2(t) = + S2,(z) + n(t).
Сигналы Sy(t) и S2z(0 принадлежат Z-му КА и описываются следующими
соотношениями:
= Uy П1,(? - г,) cos[co,(z - т,) + (pi,];
52,(Z,) = U2i П2/(/ - г,) cos[m,(z - -с,) + <р2,];
и, =2л/;/ = £|+^;£1=/0; П1,(0 е [-1; +1] при t0+ (i- 1)ГЭ1 <t< Го + гТэ1;
i е [1; ТУГ,,];
Fi = 1/Гэ1; F2 = 1 /Тз2; П2,(?) е [-1; +1] при t0 + (/ - 1)Гэ2 < t < t0 +jT32,
j e [1; TJT32],
где Un, q>i„ IT1,(f) — амплитуда, начальная фаза, псевдослучайная манипули-
рующая последовательность при передаче информации «С» кодом; U2i, <р2„
П2,(?) — амплитуда, начальная фаза, псевдослучайная манипулирующая после-
97
довательность при передаче информации «Р» кодом; /, А — несущая частота и
доплеровский сдвиг радиоизлучения z-ro КА СРНС «Навстар» с частотой Ц на
входе подсистемы радиомониторинга; т, — временной сдвиг сигналов 5h(/) и
S2/(0, соответствующий расстоянию между i КА и подсистемой радиомонито-
ринга; /0, Тс — момент начала и длительность сеанса радиомониторинга;
Та — длительность элементов манипулирующих последовательностей П i(r) и
П2(/); Л, Fi — тактовая частота при использовании «С» и «Р» кодов.
При функционировании СРНС «Навстар» в штатном режиме на частоте L\
для модуляции навигационных сигналов 5h(Z) и S2XO применяется однократная
ФМ, при формировании и П2(/) используется закон Голда с известным ви-
дом образующего полинома; Fx = 1,023 МГц; F2 = 10,23 МГц; при формирова-
нии сигналов Su(t) используется инверсная модуляция (0, л), а для сигналов
S2i(f) используется ортогональная модуляция (-л/2, ±л/2); отношение мощно-
стей сигналов SiXO и S2/(r) равно P^JP^ = 2 [18].
В случае приёма ФМС с неизвестной формой для разделения сигналов
Sh(0 и 52/(0 можно также использовать алгоритм, основанный на автокорреля-
ционной обработке сигналов [70].
В процессе разделения проверяются гипотезы Нс и Нср, где Нс — гипотеза
об использовании в радиоизлучении только сигнала 51/(0, а Нср — гипотеза об
использовании в радиоизлучении одновременно сигналов 5h(f) и S2j{t\ а также
оценивание амплитуды Ц , тактовой частоты Fx сигнала Su(t) и амплитуды U2,
тактовой частоты F2 сигнала S2j{t) [68] При этом алгоритм разделения сигна-
лов Suit) и S2j{t) имеет следующий вид:
Нс: ЩГ3)>£7пор; Нср: {(71(Г3)> с/поР; U2(T3)> ^Л1Ор } 9
UJT3) =1]А2ф1(0Л; и2(Т3) =1JА2ф2(t)dt
73 О 73 о
Ууф|(О = \hy^(t-x)y30(x)yw(x-xx)dx\ Т| = TJ2-,
98
ЛФ2(0 = jЛуф2(г - x)^30(x)j’30(x - z2)dx; т2 = Тл/2,
-ос
Ло(0 = /Лф2(t - x)y2{x)Ur(x)dx;
—ос
Лф1 (/)= 2 Д/уф 5Шс(лД/уф/) cos(2TtFiO;
Лф2(0= 2 Д/Уф 5тс(лД/Уф/) cos(2nF2z);
Аф(/) = 2 Д/п sinc(7t4/nZ) cos(2?t/пчГ);
где (71(7з), и2(Тз) — напряжения на выходе каналов для обработки сигнала Sh<0
и S2j(ty, Т3 — постоянная интегрирования; _Ууф1(О> 32уфг(О — напряжение на выхо-
де узкополосных фильтров УФ| и УФ2; ть т2 — временные сдвиги, вносимые
линиями задержки Л3| и Л32 при автокорреляционной обработке; узо(О — на-
пряжение на выходе ЛТП; Лф(/), Лф1 (0, Лф2(/) — импульсные реакции ЛТП, УФ1 и
УФ2; Д/Уф — полоса пропускания УФ| и УФ2; |/z j — набор оценок параметров
сигналов.
Структура устройства разделения сигналов $п(0 и S2j{t) на основе выше-
описанного алгоритма приведена на рис. 2.10, где АОКОЬ АОКО2 — автокорре-
ляционные устройства с квадратурной обработкой; Фв — фазовращатель; УФЬ
УФ2 — узкополосные фильтры; КД — квадратичный детектор; Инт — интегра-
тор; Сум — сумматор; ПУ, РУ — пороговое и решающее устройства.
При этом для разделения сигналов и S2j(t) используется то обстоятель-
ство, что при автокорреляционной обработке ФМС с перестройкой ЛЗ в случае
выполнения условий Tj = Т3\/2 и т2 = Гэ2/2 (на выходе квадратурных каналов
АОКО) появляются дискретные составляющие спектра. Уровень и частота этих
составляющих связаны с уровнем и шириной спектра соответствующего сигна-
ла [70]
При приеме ФМС на выходе квадратурных каналов АОКО имеем
99
К U2 1
UCOs(t)= m cos(2rt/n4T) |йуф(/-х)П(х)П(х-т)й!г;
К IJ2 ‘
UsM = sin(2n/,4x) /^ф(/-х)П(х)П(х-г)<&,
Как показано в [70], нормированная спектральная плотность мощности
G(f, т) эффекта от перемножения манипулирующих функций П(/) П(/ - т) имеет
следующий вид:
G(/J т) = (1 - Ft)2 + Ft2 sinc2(7i/c) + (Ft)2 ^sinc2(nw77T)8(/ + nF).
n=-ac
n*0
Первый компонент G(f т) имеет дискретный спектр на нулевой частоте и
соответствует коэффициенту автокорреляции ФМС, который традиционно ис-
пользуется в корреляционных устройствах различного назначения [71]
Второй компонент G(f> т) имеет непрерывный спектр и соответствует «соб-
ственному шуму» ФМС.
Третий компонент G(f, т) имеет дискретный спектр на частотах nF и имеет
100
наибольший уровень на частоте F при т -> Гэ/2, что и позволяет использовать
его в качестве полезного эффекта в устройстве разделения сигналов Sh(z) и
W
При Т| = Гэ1/2;/уф1 = Гь т2 = Тз2П\ /уф2 = Г2 и Д/"уф <<: 4/с квадратурные со-
ставляющие имеют следующий вид:
в АО КО, к и2 t/icos(0_ " ml cos(2n/n47;i) cos(2nFit); 2л jh r/2 t/isin(O = sin(2#nqr31) 008(27^); 2л
в АОКО2 M) = cos(2irfM cos(27rF2z); 2л MO = cos(2nF2t), 2л
где ЛфьЛф2 — средние частоты УФ1 и УФ2.
2.4.5. Проведём анализ помехоустойчивости рассмотренных выше методов
разделения сигналов. При решении задачи оценивания количества сигналов ис-
пользуем в качестве критерия эффективности вероятность ошибочных решений
Рош, а при решении задачи оценивания информативных параметров сигналов
используем в качестве критерия эффективности среднеквадратичную погреш-
ность о/.
При проведении радиомониторинга количество принимаемых радиоизлу-
чений КА СРНС «Навстар» ика зависит от пространственного расположения КА
и направленных свойств используемой в подсистеме радиомониторинга антен-
ны Арм и колеблется от 1 до 4-^-8 [18]. При этом в каждом радиоизлучении на
частоте наряду с сигналом S\(t\ может как присутствовать, так и отсутство-
вать сигнал S2(0-
Оценка количества принимаемых сигналов S\(t) и S2(/) осуществляется на
основе анализа сложных параметрических гипотез {Hci; Hcml}, {Нр1; HptnI}; Нс,
Нср по результатам решения задач обнаружения в каждом из каналов устройств
101
разрешения или разделения [72].
В случае независимых ошибок в каналах устройств разделения сигналов
вероятность появления от одной до г ошибок определяется соотношением Бер-
нулли [68]:
т т)
Р™ = Z«с„(1 - Р^Г4; ; Л„Ск = 0,5(аск + рск);
г.'Ои-О!
т т
Л>рк= £с^1рк(1 -Ро1рк)т- ; Р01рк = 0,5(арк + ₽рк); Рки = £«сн(1 -Ро1снГ',
z=r+l i=r+l
т
-^oich ~ 0,5(асн + Рен); Л>рн ~ ICwPo1ph(1 ~ ^о1Рн) ’ ^о1рн “ 0,5(арн + ррн);
i=r+l
^oca ~ Q?5(a,Ca + Pea), -^opa “ 0,5((Xpa + Ppa),
^ocpa Poca -^opa Poca (1 oca) Popa (1 ~~ Popa),
где PO1CK, Poich, Poca — вероятность ошибочных решений в каналах устройств
разрешения или разделения сигналов 51(f) при использовании когерентной, не-
линейной и автокорреляционной обработки; PoipK, Р01рн, Рора — вероятность
ошибочных решений в каналах устройств разрешения или разделения сигналов
S2(0 при использовании когерентной, нелинейной и автокорреляционной обра-
ботки; Роск, Рорн — вероятность ошибочных решений за счёт появления (г + 1)
независимых ошибок в устройстве разделения сигналов Si(r) и S2(t) при исполь-
зовании когерентной обработки; Росн, Рорн — вероятность ошибочных решений
за счёт появления (г + 1) независимых ошибок в устройстве разрешения сигна-
лов ^(z) и S2(t) при использовании нелинейной обработки; Роса _ вероятность
ошибочных решений в устройстве разрешения или разделения сигналов S](t) и
S2(t) при использовании автокорреляционной обработки; аск, арк, асн, арн, аса,
ара ~~ вероятность ложных тревог в каналах устройств разрешения или разде-
ления сигналов Si(Z) и S2(t) при использовании когерентной, нелинейной и авто-
корреляционной обработки; рск, ррк, рсн, Ррн, Рса, Рра — вероятность пропуска
сигналов Si(t) и S2(t) при использовании когерентной, нелинейной и автокорре-
ляционной обработки.
Поскольку для всех рассматриваемых устройств разрешения или разделе-
102
ния эффекты на выходе каналов нормализуются при выполнении условия
А/ф Т» 1, то это обстоятельство позволяет производить расчет вероятностей
ложной тревоги а и пропусков сигналов Р по единой методике [68]:
Рек = Ф^ск - arc Ф( 1 - аск)]; аск = 1 - Ф(£п); Ррк = Ф[£Рк - arc Ф( 1 - арк)];
Орк = 1 - Ф(£п);
Рсн = Ф gCH
агсФ(1-асн)
ас„ = 1 - Ф(£п); Ррн = Ф gpH
агсФ(1-арв)
д/^ + ^фнр
арн = 1 - Ф(£п);
Pea = Ф gca
агсФ(1-аса)
аСа = 1 - Ф^п);
агсФ(1-ара)
ра 71+24₽
ССра = 1 - Ф^п); Ф(х) = ~7== р 2dt,
V27U _
—00
где Ф(х) — функция Лапласа; gn — пороговое отношение сигнал/помеха по на-
пряжению в каналах устройств разрешения или разделения сигналов; gCK, gpK,
gcni gpH> gca, gPa — отношение сигнал/помеха по напряжению на выходах каналов
устройств разрешения или разделения сигналов Si(/) и S2(0 при использовании
когерентной, нелинейной и автокорреляционной обработки; £фНС, £фнр, £фас,
£фаР — отношение сигнал/помеха по напряжению на выходе канальных фильт-
ров в устройствах разделения сигналов Sift) и 52(z) при использовании нелиней-
ной и автокорреляционной обработки;
Среднеквадратичные погрешности оценивания информативных парамет-
ров в устройствах разделения сигналов при оговоренных выше условиях могут
быть рассчитаны из следующих соотношений [73]:
1 CTf_A/K . 1
Um g’ 7 2V3’ F g’
aUm gF
где ---относительная среднеквадратичная погрешность оценивания
амплитуды и тактовой частоты сигналов; о/ — среднеквадратичная погрет-
103
ность оценивания частоты; g — выходное отношение сигнал/помеха по напря-
жению на выходе AOKOi и АОКО2.
Отношение сигнал/помеха по напряжению на выходах каналов устройств
разрешения или разделения сигналов S\(f) и S2(t) с использованием когерентной
обработки может быть рассчитано из следующих соотношений [74]:
gCK=gcM^; А/» = 2/Гэ2; g2 = ^—- g2=^;
О»+/>вп1 СТп
m2 _____ р
^0 = 4-10-2,BT/rU; gPK=gpJ^; gP=-r^-;
7=1 7=1 Qn + ^вп2
p
gs22=^>
7=1 7=1 CTn
где gc, gp — входное отношение сигнал/помеха по напряжению при выделении
сигнала Si(t) или S2(t) на фоне шума n(t) и взаимной помехи; gsb gs2 — входное
отношение сигнал/помеха по напряжению при выделении сигнала S\(t) или S2(t)
на фоне шума; РвпЬ Рвп2 — мощность взаимной помехи при выделении сигнала
Si(t) или S2(t); nJ; — дисперсия шума на входе ЛТП; Nw — коэффициент шума
ЛТП; TiC9 Tip — постоянная интегрирования на входах каналов МКО при обра-
ботке сигнала S\(t) или S2(t).
Отношение сигнал/помеха по напряжению на выходах каналов ПСА в уст-
ройстве разделения сигналов Si(t) и S2(t) с использованием нелинейной обра-
ботки может быть рассчитано из следующих соотношений [68]:
_ ^фс'\/А/'к^2с . _
£сн , £фс
gcoWnO^K
71 + 2mlgco+(OTl-1>1g^)
; Д4о = 2/Гэ1; gs210=-3-;
an0
2 -^1/ a2 =kTN Р =У Р о - М^Р .
Sco — 2 п ’ an0 К/оАшД/пО> -*вп10 2-f^sb’’ ^»РН I--------------------’
апо + ^пЮ >1 V1 + 24
А/no ~ 2/ТЭ1;
gpoVA/n/A/;
£фр ------- ------------- ?
д/1 + 2т^ро + (m, - l>,gpo
р т2
an + ^впго /=1
где £фС, £фР — отношение сигнал/помеха по напряжению на выходе полосовых
104
фильтров в каналах ПСА при выделении сигнала 5j(Z) или S2(ty gco, gpo — отно-
шение сигнал/помеха по напряжению на входе НП при выделении сигнала 5i(Z)
или 52(0 на фоне шума n(t) и взаимной помехи с мощностью Рвп10 или Рвп2о,
А/По — полоса пропускания ЛТП при выделении сигнала 5*1(0; gsio — отношение
сигнал/помеха по напряжению при выделении сигнала 5*1(0 на фоне шума n(t) с
дисперсией ог„0; Г2с — постоянная интегрирования на выходах каналов ПСА
при обработке сигнала Si(0 или 52(0-
Отношение сигнал/помеха по напряжению на выходах каналов устройства
разделения сигналов 5*1(0 и S2(0 с использованием автокорреляционной обра-
ботки может быть рассчитано из следующих соотношений [68]*
_ ^ф1д/Д/уф^Зс .
gca г — ~;
V1 + 2g21
= 2 gs2.M/A^.
717o>25g«(Vn //=;) + (1 - Л /44XI + 2g522) + 2g2 (1 + gs2) + g4 ’
__ gф2 •JOfгф^Зр
gpa j - ;
V1 + 2g«2
2
g*2 =---r=----.---- - -----= ,
* V0,25gs42(A/n /F2) + (1 - F21 Afn)(l + 2g;2) + 2gs2(l + gs2)
где £ф1, £ф2 — отношение сигнал/помеха по напряжению на выходе УФ1 и УФ2;
Г3с, Г3р — постоянная интегрирования на выходах АУКО} и АУКО2.
При радиомониторинге радиоизлучений КА СРНС «Навстар» в случае
применения ненаправленных антенн Арм с учётом того, что gs/> 10 3; gc/gp = 2;
F2fF\ = 10; т\ = 4,8, выражения для отношения сигнал/помеха по напряжению
на выходе устройств разрешения или разделения сигналов при использовании
когерентной и нелинейной обработки можно преобразовать к следующему ви-
ду:
£кс - gsl-jAfn7jc ; gxp = gs2-jA/n^iP > £нс = при gфc<<l;
105
A/к Лс > —; £нр =------г=--- при ^фр « 1; Ад Г2р > —•
фс V Sфр
При радиомониторинге радиоизлучений КА СРНС «Навстар» для случая
применения направленной антенны Арм, когда выполняется условие Срм gs22 —> 1,
где Срм — коэффициент усиления антенны Арм, выражение для отношения сиг-
нал/помеха по напряжению на выходе каналов устройства разделения сигналов
при использовании автокорреляционной обработки можно упростить:
= -ф1^уфГзс; g*. = 0,3^7^; 5Ф1 > 1;
gaP = ^ф2^уфГзр-; g4>2= О^Д^/Д/^; гф2>1.
Для иллюстрации полученных соотношений определим характеристики
помехоустойчивости рассмотренных устройств разделения сигналов при сле-
дующих исходных данных:
= mi = т2 = 8; а=10~5; 0 = 10“3; Ft = 106 Гц; Г2=107Гц, Ма = 2,5;
^=210-3; gs22=10-3; Д/п = 2-107 Гц; g20= 2-1СГ2; Д/п1 = 2Ю6 Гц,
Д/д=104Гц; Д/ра, = 1250 Гц.
С учётом исходных данных вероятность ошибочных решений в каналах
всех устройств разрешения или разделения сигналов составляет
Рош 1 = 0,5(а + Р) = 5*10-3 при выходном отношении сигнал/помеха по напряже-
нию g = 7,36 и нормированном пороге gn = 4,26.
Для обеспечения требуемых g и gn в каналах устройства разрешения сигна-
лов с использованием когерентной обработкой необходимо выбирать постоян-
ную интегрирования из следующих соотношений:
. Т S
71с ТУТ"’ 7’р-----Г77~*
SsiVr, gs24/n
С учётом вышеизложенного в результате расчёта получаем Т\с = 1,35-10"3 с;
Т2 = 2,7-10’3 с; cUm/Um = 0,135.
При использовании в МКО восьми каналов (лк = 8) для обнаружения каж-
106
дого из сигналов S\(t) и S2(f) вероятность ошибочных решений при оценке числа
сигналов Si (Г) и S2(t) и соответственно числа радиоизлучений равно
^ОШ К ~ ош 1 ~ * 10 .
Для обеспечения требуемых g и gnop в каналах устройства разделения сиг-
налов с использованием нелинейной обработки параметры каналов ПСА необ-
ходимо выбирать из следующих соотношений.
Т* = “ТТГ ’ = 50/Г2с; «к = ^ •
^sloA/nl Л/фк
С учётом вышеизложенного в результате расчёта получаем T2z- 0,135 с;
А/фк = 385,7 Гц, шк = 52; aUm/Um = 0,135; qf= 52,6 Гц.
При использовании в ПСА большого числа каналов (например, пк = 52) ве-
роятность ошибочных решений при оценке числа радиоизлучений равна
Рош н» nKP0UI 1 = 2,6-10-2.
Для обеспечения требуемых g и gn в каналах устройства разделения сигна-
лов с использованием автокорреляционной обработки необходимо параметры
АОКО выбирать из следующих соотношений:
т _ 2g2 _ _ 2g2
уф ^ф1А/ уф
Если Д/уф = 2-105 Гц; g^= 10; gф2 = 4, то имеем Г3с= 5,4 10“5с; Гзр= 1,2-1 (Г* с.
При этом среднеквадратичные погрешности информационных параметро соот-
ветственно равны oUm/Um = 0,135; gF\ = 1,36-105 Гц; oF2 = 1,36-106 Гц, а веро-
ятность ошибочных решений при разделении сигналов S}(t) и S2(t) равна
а = 2Рош 1 = 10 .
Рассмотренные устройства можно использовать для разрешения или разде-
ления сигналов при кодовом уплотнении на этапе проведения радиомониторин-
га радиоизлучений как навигационных, так и связных КА при различном уров-
не априорной неопределённости.
2 4 6. При функционировании СРНС «Навстар» в нештатном режиме нави-
гационные сигналы (ФМС), как правило, относятся к классу сигналов с неиз-
107
вестной формой, что делает актуальной задачу оценивания их средней частоты
/s с целью определения доплеровского смещения частоты и обеспечения ква-
зикогерентной обработки для переноса манипулирующей последовательности
П(г) на видеочастоту с последующим вскрытием закона её формирования
[75, 76].
При квазикогерентной обработке ФМС с использованием гармонического
опорного напряжения, частота которого fr соответствует оценке /s, выходное
напряжение /7КО(/) имеет следующий вид*
UM - Кп Ums Umr П(0 cos(2tcA/20, Д/г =/s - Л ,
где Um3 — амплитуда ФМС; £/mr — амплитуда гетеродина опорного напряжения;
Af2 — разнос частоты ФМС и опорного напряжения.
Наличие осциллирующего сомножителя cos(27tz\^r) при обработке напря-
жения затрудняет вскрытие закона формирования функции П(/). При этом
для вскрытия закона функции П(7) следует использовать те временные интерва-
лы напряжения UKQ(f)> на которых выполняется условие:
COS(27tAf2TB)>ZH,
где Т3 — временной интервал, используемый при вскрытии закона функции
П(0; zH — нормированный уровень напряжения £/K0(Z), соответствующий допус-
тимому ослаблению за счёт осцилляции.
Анализ данного условия позволяет определить требования, предъявляемые
к допустимой среднеквадратичной погрешности оценивания частоты ФМС о/д>
при которой обеспечиваются приемлемые значения параметров zH и Гв Так, по-
лагая, что zH = 0,57 (-5 дБ); Тъ = Гб =210-2 си Д/, имеем рЛ =
= 1/67Ъ = 8,3 Гц
Задачу оценивания средней частоты ФМС с неизвестной формой на фоне
гауссовой стационарной помехи n(t) с указанной выше погрешностью оЛ сле‘
дует отнести к классу прецизионных статистических задач, что обусловлено
низким уровнем сигнала g2x« 1 необходимостью устранения аппаратурных
108
погрешностей и наличием специфических погрешностей, обусловленных «соб-
ственным шумом» ФМС [77].
Для решения данной задачи целесообразно использовать автокорреляцион-
ный частотный дискриминатор с квадратурной обработкой (АЧД), реализован-
ный на основе квазиоптимального алгоритма:
Л =/о + /д -Л; /о = ц - 1575,42 МГц; ;/0 ~fr
где fsl — оценка частоты сигнала в АЧД; /?у(т), Яу±(т) — квадратурные состав-
ляющие автокорреляционной функции процесса ^(0; т — величина временного
сдвига, вносимого линией задержки;/^ — частота гетеродина в ЛТП;У„ч — про-
межуточная частота в ЛТП; /д — оценка доплеровского смещения частоты
сигнала
Структура АЧД приведена на рис. 2.11, где ЛТП — линейный тракт приём-
ника подсистемы радиомониторинга; ЛЗ — линия задержки; Фвр — фазовра-
щатель на я/2; П — перемножитель; Инг — интегратор; Дел — делитель на-
пряжений; ФП — функциональный преобразователь вида —arctg (х).
Рис. 2.11
При воздействии на вход АЧД ФМС напряжения на выходах квадратурных
каналов Яу(т) и 7?у±(т), а также, на выходе ФП U^T) имеют следующий вид.
109
ад = rs(T) cos(2n/51t); rs(t) = 1 -|T (Я ^kI ,
К I J1
/eyl(T) = rs(T) sin(27t/slT); /sl =/0 +/a
(//7) = 5(/sI -/si); = n e 1,T6/2TK, Kn = 1 [1/B],
где rs(x) — огибающая коэффициента автокорреляции навигационного ФМС;
5 — крутизна дискриминационной характеристики АЧД
Дискриминационная характеристика АЧД имеет периодический пилооб-
разный характер, поэтому оценка частоты является многозначной, если частот-
ный диапазон АЧД превышает диапазон однозначного отсчёта.
Среднеквадратичная погрешность оценивания частоты ФМС о/ в одно-
шкальном АЧД равна [78]
ст/=-г; gm=”7?;
sSm V2
g .
д/1 + rn2(t)+2g2x[l + rs(?)rn(?)] + gl[l -rs(t)]2Afn / Vs ’
гп(т) = sine (лА/„т); A/n= A/s,
где g — отношение сигнал/шум по напряжению на выходе квадратурных кана-
лов АЧД; g№ — отношение сигнал/шум по напряжению на выходе ФП; гп(т) —
огибающая коэффициента автокорреляции помехи n(t)\ &f3 — ширина спектра
ФМС.
Для уменьшения погрешности оценивания частоты необходимо увеличи-
вать крутизну 5 и выходное отношение сигнал/шум g^. При этом следует учи-
тывать, что наличие «собственных шумов» ФМС независимо от входного от-
ношения сигнал/шум gBX ограничивает максимальное значение выходного от-
ношения сигнал/шум:
g№M = ПРИ gBX » 1
Так, при rs(x) = 0,5, A/s = 2 106 Гц, T= 7g = 210'2 с имеем gK0M = 2 102.
но
При выборе крутизны S необходимо учитывать характер огибающей коэф-
фициента корреляции ФМС rs(x), что позволяет с учётом оптимизационного ус-
ловия тг5(т) max, справедливого при g^x« 1, использовать следующие зна-
чения крутизны: So = лтэ и Si = 2япТк. Для случая, когда S = яГэ, учитывая, что
rs(0,5T3) = 0,5 и гп(0,5Гэ) = 0, основные характеристики АЧД рассчитываются из
следующих соотношений:
1
gKo=^»p^!4..; ст/=----/ &fa = \IT3
2д/1 + 2?Вх 27rZ;g.x7^
где А/о1 — диапазон однозначного отсчёта.
Для исходных данных, соответствующих случаю оценивания частоты
ФМС с использованием «С» кода, т.е. когда Тэ - 10"6 с; Тк = 10"3 с; Гб - 2 10"2 с,
при g2x=0,l; Д/п = 2Ю6 Гц; Т = Тб основные характеристики АЧД0 имеют сле-
дующие значения: gK0 == 10; АДи = 106 Гц; So = 3,14-Ю"6 Вс; сг/0 = 3,18-Ю5 Гц.
Данный вариант построения АЧДо не обеспечивает требуемой для вскры-
тия закона функции П(0 среднеквадратичной погрешности q/д, и поэтому тре-
буется использование другого варианта построения АЧД1 с большей крутизной
В соответствии с вышеизложенным можно выбрать при п = 1 Si = 2лпГк.
Поскольку г5(Гк) = 1 и /*П(ГК) = 0, то, как показано в работе [79] имеем
1
£ко!
; А/о2=1/2Гк.
вх
При использовании исходных данных, аналогичных вышеприведённым,
имеем в АЧД1
gKO1 = 20; Д/о2 = 500 Гц; cr/i = 8 Гц.
Полученные результаты свидетельствуют о том, что второй вариант по-
строения АЧД1 удовлетворяет требованиям, предъявляемым к погрешности
оценивания частоты. Однако при этом необходимо отметить, что поскольку
диапазон однозначного отсчёта частоты Л/02 оказывается меньшим, чем диапа-
зон изменения доплеровского смещения частот радиоизлучений КА СРНС «На-
Ill
встар» 104 Гц, то это приводит к появлению в АЧД] аномальных ошибок,
обусловленных многозначностью отсчёта частоты.
Для устранения аномальных ошибок следует ввести в состав подсистемы
радиомониторинга вторую шкалу в виде АЧД2 Для устранения аномальных
ошибок, например с вероятностью Ра = 0,95, необходимо, чтобы в этой шкале
АЧД обеспечивались а) диапазон однозначного отсчёта ДУоз > 2 Д/д = 2-104 Гц,
б) крутизна дискриминационной характеристики АЧД S2 = л/ДУоз = 1,57-10 4 В с,
в) среднеквадратичная погрешность <yf2 < ДУог/4 < 125 Гц
Для реализации АЧД2 с приведенными параметрами приходится использо-
вать промежуточное нелинейное преобразование, которое ФМС превращает в
гармонический процесс с удвоенной средней частотой
При этом алгоритм АЧД2 описывается следующими соотношениями [79].
/ =—"— arctg — - ; т2 - 52/2л;
S 2лт2 Ду3(т2)
Луз(т2) = ^п^п"!> rs(T2) cos(2n/sT2);
ЛУ1з(т2) = Кп^тф rs(r2) sin(2n/sT2);
Ц>(0= \^(t-x)yl0(x)dx; y2o(t)= ]hn(t-x)y2(x)Ur(x)dx;
h$(t) = 2Д/ф sinc(n440 cos[47t/n4r],
где r(x2) — величина коэффициента автокорреляции напряжения U$(t) при ар-
гументе, равном т2; hn(t), h$(t) — импульсные реакции ЛТП и УФ установленно-
го на выходе НП.
При приеме ФМС на выходе НП и УФ при ДУф = 2АД имеем гармонический
процесс С/ф(/) = ЦПф cos(4tc40, частота которого оценивается в АЧДз Средне-
квадратичная погрешность оценивания частоты ФМС в АЧД2 равна
112
f 1
0/2=7------•
*^2^ко2
g«o2 =-.--=------=====— — ;
V1 + rn 1 (т2 ) + 2^ф [1 + kn 1 (T2 )]
г(т2) = 1 ; гп1(тз) = sine (лД/фТз); g* = /-
Г2 V1 + 2S»x
где £ф — отношение сигнал/шум по напряжению на выходе УФ; г(т3), гп1(т3) —
огибающие коэффициента автокорреляции процесса Ц»(0 и шума на выходе
УФ; Г3 — постоянная интегрирования в АЧД.
При т3 - 1/4А/ц« Т получаем
г(т2) = 1; гп1(т2) = 2/л
<§Ф2 /А , А z- 2 -I
и тогда gKo2 = ....-; £ф = gBX JAfn / А/ф при gBX « 1.
71,4+3,34
Поскольку в АЧД оценка частоты проводится на основе обработки гармо-
нического процесса то это обстоятельство позволяет в случае необходи-
мости достигать требуемой погрешности ог/2 путём выбора крутизны 52 и вре-
мени накопления Т2 из условия Т2 > Т6.
На основе приведённых для анализа характеристик АЧД следует, что для
обеспечения <sf2 -125 Гц при gBX =0,1; ДД, = 2106 Гц; Д/ф = 2-104 Гц;
У2 = 1,57 10 4 В с; т2 - 2,510"5 с необходимо, чтобы Т2 = 0,85 с
Структура двухшкального АЧД, обеспечивающего требуемую погрешность
оценивания частоты и устранение аномальных ошибок, приведена на рис. 2.12.
В АЧД1 осуществляется точная, но многозначная оценка частоты /т, а в
АЧД2 осуществляется грубая оценка частоты /г, учёт которой позволяет устра-
нить в РУ многозначность отсчёта.
Приведённые результаты справедливы без учёта нестабильности частоты
гетеродина в ЛТП 5/; нестабильности запаздывания, вносимого ЛЗ 5тлз, и аппа-
113
Для того, чтобы перечисленные источники погрешностей не влияли на по-
грешность q/1, необходимо, чтобы относительная нестабильность частоты гете-
родина в ЛТП ufr/fr не превышала значения 1О"10, относительная нестабиль-
но §Тлз
ность ЛЗ} соответствовала условию —— <-------т.е не превышала значения
ЮЛ и для уменьшения аппаратурной погрешности в АЧД применялась перио-
дическая калибровка с использованием тестовых сигналов.
114
ГЛАВА 3. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ
АППАРАТУРЫ ПОТРЕБИТЕЛЯ СРНС «НАВСТАР»
3.1. ОСОБЕННОСТИ ОРГАНИЗАЦИИ РАДИОЭЛЕКТРОННОГО
ПОДАВЛЕНИЯ СРНС «НАВСТАР»
3.1 1. Прогресс в области СРНС после ввода в эксплуатацию системы «На-
встар» привел к необходимости использования противоборствующей стороной
методов и средств радиоэлектронной борьбы (РЭБ).
Одним из основных этапов РЭБ, ориентированном на снижение эффектив-
ности СРНС «Навстар», является радиоэлектронное подавление (РЭП) аппара-
туры потребителя (АП). Особенности организации данного этапа поясняются на
рис 3 1, на котором используются следующие сокращения: Арм, Ап, Аа — ан-
тенны подсистемы радиомониторинга, передатчика помех и АП; КРЭБ — ком-
плекс радиоэлектронной борьбы; ПРМ — подсистема радиомониторинга;
Рис 3 1
115
АП СРНС «Навстар» может размещаться на наземных, морских и воздуш-
ных носителях в различных точках околоземного пространства.
КРЭБ представляет собой в общем случае совокупность подсистемы ра-
диомониторинга и передатчика помех Радиоизлучения передатчика помех
обеспечивают РЭП всех комплектов АП, находящихся в зоне обслуживания
КРЭБ. Зона обслуживания КРЭБ представляет собой сектор околоземного про-
странства с шириной обзора по азимуту Аа, по углу места Ар и с диапазоном по
дальности от г0 до rm, где г0 — минимальная дальность, гт — максимальная
дальность.
3.1.2. АП является многофункциональным приемным устройством, со-
стоящим из каналов обнаружения, слежения за частотой и задержкой, демоду-
ляции принимаемого навигационного сигнала и решающего устройства
Структура АП приведена на рис 3.2, где Аа — антенна; ЛТП — линейный
тракт приёмника, КО — канал обнаружения; КСЧ — канал слежения за часто-
той; КСЗ — канал слежения за задержкой; КДем — канал демодуляции; РУ —
решающее устройство.
Рис. 3.2
В ходе анализа РЭП в данном разделе полагаем, что СРНС «Навстар»
функционирует в штатном режиме со следующими исходными данными
— средняя частота навигационных радиосигналов Ц = 1575,42 МГц;
116
— вид модуляции — ФМ-2;
— вид кода — «С»;
— длительность посылки для «С» кода Т3 = 0,977 мкс,
— длительность бита — Гб =2* 10"2 с;
— длительность дальномерного кода — Тк = 10~3 с;
— АП одновременно принимает сигналы не менее чем от четырёх КА СРНС
«Навстар»;
— разделение сигналов в АП — кодовое;
— кодирование сигналов осуществляется последовательностями Голда с из-
вестным законом образующего полинома и различными коэффициентами
перед членами полинома для конкретных КА;
— поляризация излучаемых КА сигналов — правосторонняя круговая;
— антенна АП Аа является всенаправленной по азимуту и имеет коэффициент
усиления Ga > 1;
— диапазон уровней сигналов, принимаемых от КА СРНС «Навстар» нахо-
дится в пределах Psi е [—166; -156] дБ Вт;
— полоса пропускания ЛТП составляет Д/лТ = 2-106 МГц;
— период обновления информации в АП То = 1 с;
— длительность кадра навигационного сообщения в СРНС «Навстар»
Гкн ~ 30 с;
— среднеквадратичная погрешность определения текущих координат носите-
ля АП составляет порядка 10 м.
3.1.3. При организации РЭП АП СРНС «Навстар» полагаем, что передат-
чики помех используют организованные помехи различных типов, которые
формируются на основе внешних целеуказаний от подсистемы радиомонито-
ринга.
Организованные помехи делятся на активные и пассивные Для РЭП АП
СРНС «Навстар» пригодны активные организованные помехи, которые в свою
очередь делятся на маскирующие и имитирующие [24]. Активные маскирую-
щие помехи создают на входе АП фон, который затрудняет обнаружение нави-
117
гационных сигналов и оценивание их информативных параметров Маскирую-
щие помехи делятся на непрерывные шумовые помехи, хаотические импульс-
ные помехи и последовательности детерминированных импульсных сигналов.
Эффективность маскирующих помех зависит от соответствия временных, спек-
тральных и статистических характеристик сигнала и помехи, а также от отно-
шения сигнал/помеха на входе АП. В качестве критерия эффективности помех
при РЭП АП СРНС «Навстар» целесообразно использовать коэффициент по-
давления [28]
Пр = Лв/Л»; Лв = 2,5-10~16 Вт,
где FSB — максимальножидаемый уровень сигнала на входе АП; Ррд — уровень
помехи P(t) на входе АП, достаточный для нарушения функционирования кана-
лов первичной обработки АП.
Для РЭП АП СРНС «Навстар» из маскирующих помех наиболее пригодны
прицельные и заградительные непрерывные шумовые помехи, которые реали-
зуются на основе гармонических процессов и квазибелого шума. Первый тип
маскирующих помех назовём гармонической помехой (ГП), а второй тип маски-
рующей помехи — шумовой помехой (ШП).
Активные имитирующие помехи предназначены для внесения ложной ин-
формации в АП и перегрузки каналов первичной обработки информации с це-
лью нарушения функционирования АП Чтобы затруднить возможность ком-
пенсации имитирующей помехи, она должна формироваться процессом, сход-
ным с навигационным сигналом.
Формирование активных имитирующих помех может осуществляться как
генераторным, так и ретрансляционным способами [24]. Имитирующие помехи,
формируемые генераторным способом, будем называть сигналоподобными по-
мехами [80]. Использование ретрансляционного способа формирования имити-
рующих помех для РЭП АП СРНС «Навстар» нецелесообразно по следующим
причинам:
1) низкий уровень принимаемого АП навигационного сигнала, соответст-
вующего малому входному отношению сигнал/помеха (gBX < 1);
118
2) отсутствие априорной информации о псевдодальностях между АП и КА,
находящихся в зоне её радиовидимости;
3) многокомпонентный характер модели радиообстановки и непрерывный ха-
рактер навигационного сигнала.
3 1.4. Для эффективного РЭП комплектов АП СРНС «Навстар», находя-
щихся в зоне обслуживания КРЭБ, необходимо, чтобы выполнялись следующие
условия:
1) поляризация излучений передатчика помех должна быть согласованной с
поляризацией излучений антенны передатчика помех;
2) высота подъёма антенны передатчика помех hn должна обеспечивать пря-
мую радиовидимость с комплектами АП, находящимися на максимальном
расстоянии гт при наземном расположении носителей АП;
3) антенна передатчика помех Ап должна обеспечивать беспоисковое зонди-
рование пространственного сектора обслуживания КРЭБ;
4) энергетический потенциал передатчика помех PnGn должен обеспечивать
на входе АП для максимальной дальности гт уровень Ррд, достаточный для
нарушения функционирования каналов первичной обработки информации
в АП.
Выбор высоты подъёма антенны Ап осуществляется из уравнения радиови-
димости
Гт (км) “(3,8 4,15) (^1 ^п(м) + д^а(м) ),
где ha — высота подъёма антенны АП Аа.
Если в передатчике помех используется одна антенна, то для исключения
её пространственного наведения необходимо, чтобы параметры АП рассчиты-
вались из следующих соотношений:
26460
Да = 0о,5а; ДР = 0О,5У; &п=------ при т] = 0,85,
®0,5а^0.5у
где 0о,5а> 6о,5у — ширина диаграммы направленности антенны Ап по азимуту и
по углу места; Gn, ц — коэффициент усиления и коэффициент использования
119
площади антенны Ап.
Без учёта замираний радиоволн и потерь в атмосфере энергетический по-
тенциал передатчика помех рассчитывается из следующих соотношений.
РпСп = 4лг>; 1Г=^,5а = -^-Д = у,
47Г Jq
где №— плотность потока мощности помехи на входе АП; Ga, Sa — коэффици-
ент усиления и эффективная площадь антенны АП; X — длина волны навигаци-
онных сигналов; с — скорость распространения электромагнитных волн в сво-
бодном пространстве.
Учитывая, что /о = 1575,42 МГц, при Ga = 1 уровень помехи на входе АП
и высота подъёма антенны Лп определяются следующими соотношениями
Рр = 2,28-10^^-; h„ {м) = 7,9-10-2^(км) при йа 0.
гт
Результаты расчётов по приведённым соотношениям для rm, равном (10;
Рис 3.3
120
В настоящее время по РЭП АП СРНС «Навстар» выполнен ряд исследова-
ний [30-32] при постановке ГП и ШП. Однако известные публикации посвяще-
ны описанию результатов экспериментов без детализации методик исследова-
ний и критериев РЭП АП СРНС «Навстар».
Для проектирования эффективных КРЭБ с АП СРНС «Навстар» необходим
теоретический базис, основанный на анализе РЭП при постановке организован-
ных помех различных типов.
3.2. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ КАНАЛОВ АППАРАТУРЫ
ПОТРЕБИТЕЛЯ СРНС «НАВСТАР» ГАРМОНИЧЕСКОЙ И
ШУМОВОЙ ПОМЕХАМИ
3.2.1. Радиоэлектронное подавление канала обнаружения
3.2.1.1. Первичная обработка информации в АП начинается в канале обна-
ружения (КО). КО предназначен для поиска и обнаружения навигационных сиг-
налов на фоне гауссовой стационарной помехи n(t).
В качестве критериев эффективности при анализе помехозащищённости
КО используем критерий Неймана-Пирсона и энергетический критерий.
Типовая структура КО приведена на рис. 3 4, а, б, где Аа — антенна;
ЛТП — линейный тракт приёмника; КФУ — корреляционно-фильтровое уст-
ройство; См — смеситель, ГОС — генератор опорных сигналов; ПФ — полосо-
вой фильтр; МНО — многоканальный некогерентный обнаружитель; РУ — ре-
шающее устройство; Пер — перемножитель; КУКОЬ КУКО,,.., КУКОЯ —
1; , i, п когерентное устройство с квадратурной обработкой; СЧ — синтеза-
тор частот; У У — устройство управления поиском навигационных сигналов;
Фв — фазовращатель на л/2, ФНЧ — фильтр нижних частот; Кв — квадратор;
Сум — сумматор; Ф — выходной фильтр
121
/ б
Рис. 3.4
Приведённая структура обеспечивает реализацию циклического парал-
лельно-последовательного поиска навигационных сигналов. Параллельный по-
иск осуществляется по частоте навигационных сигналов, а последовательный
поиск осуществляется по задержке огибающей навигационных сигналов ЛТП
представляет собой линейный тракт супергетеродинного приемника с двойным
преобразованием частоты и использованием автоматической регулировки уси-
ления по шумам (АРУШ) Напряжение на выходе ЛТП упо(О имеет следующий
вид:
Ло(О= jvn(x)t/r(x)A,(f-x)dx; ^no(/)=^5,0(r) + «0(0,
122
nKael,8; tQ<t<to+ Tc;
Ufa) = Umr cos oV; A|(0 = 2 А/лт sinc[nA/nTr] cos <o„4|/; fm =fa -fa,
Si0(t) = Um3i П,р - tr/] cos[<bs/ + 0,]; coSI = 2nfa; Afa > bfa Af3 = 2/Тэ, fa =f0 +fa;
яка
y»(0=£5/(0 + «W; £V) = C4u n,[r--r,] cos[atf+ 0,];
1=1
Tf ~~ *£Ri ^гр» O>si
где лка — количество KA, находящихся в зоне обслуживания АП; уп(0 — адди-
тивная многокомпонентная смесь, состоящая из лка навигационных сигналов
St{t) и гауссовой стационарной помехи n(f) на входе ЛТП; Ur(t), Umr, сог — на-
пряжение, амплитуда, угловая частота гетеродина; h\(t) — импульсная реакция
ЛТП; /пч1 - сопч1/2я; Д^т — первая^промежуточная частота и полоса пропускания
ЛТП; Sto(t), Si(f) — Z-й квазидетерминированный навигационный сигнал на вхо-
де КО и входе ЛТП; — запаздывание огибающей навигационного сигнала; 0,
— начальная фаза; упО(0 — аддитивная многокомпонентная смесь yn(t) после
прохождения ЛТП; 5,о(О — i-й навигационный сигнал на выходе ЛТП; Umi, оу,
Ti, Qi — параметры f-го навигационного сигнала на выходе ЛТП; Тгр — группо-
вое время запаздывания, вносимое ЛТП; Ц-р-Тш] — манипулирующая функ-
ция z-го навигационного сигнала, обеспечивающая фазовую манипуляцию, A/s
— ширина спектра навигационного сигнала; Тэ — длительность элемента ма-
нипулирующей функции; /ц — доплеровское смещение частоты навигационно-
го сигнала £,(/).
ЛТП обеспечивает перенос спектра процесса yn(t) в область промежуточ-
ной частоты и его предварительную фильтрацию. Все принимаемые навигаци-
онные сигналы являются фазоманипулированными (ФМС) с одинаковой часто-
той манипуляции FT= 1/Тэ, но при этом имеют разные несущие частоты^,, за-
паздывания tR/ и начальные фазы О,. Амплитуды навигационных сигналов
Цпь , Umh • , ^mn — являются при обнаружении информативными параметра-
ми, которые также априорно неизвестны.
Сложность задачи обнаружения Z-го навигационного сигнала обусловлена
123
тем, что необходимо осуществлять его выделение не только на фоне помехи
n(z), но и перекрывающихся с ним по спектру (ика - 1) навигационных сигналов,
которые являются в данном случае взаимными помехами.
Следует также отметить, что обнаружение необходимо проводить при ус-
ловии, когда уровни навигационных сигналов ниже уровня помехи n(t):
<?«(/)/#„« 1; Gs,(/) = Т, Sinc2[7t Г, «-/„)];
Л, =^’ при/пч|
2 2 2 ,=I
где G3i(f) — спектральная плотность z-ro навигационного сигнала; Nn — спек-
тральная плотность помехи и(Г); Psi — мощность z-ro навигационного сигнала;
— дисперсия помехи w(/); fml — значение первой промежуточной частоты.
3.2.1.2. При вышеприведённых исходных условиях для выделения и обна-
ружения z-ro навигационного сигнала в случае априорно известных законов ма-
нипуляции и тактовой частоте F? в КО реализуется квазикогерентная обра-
ботка с поиском по несущей частоте^ и задержке огибающей Tr,
На первом этапе решения задачи обнаружения применяется корреляцион-
но-фильтровая обработка [54], обеспечивающая свёртку спектра z-ro навигаци-
онного сигнала:
t
У1 (0 = J У„ (0 -Son, [*> т:(*Жф (t - x)dx; Soni(t) = <7топ П,[/ - т0 —т(/)] cos[coonz + 0on];
Лпф(/) = 2Д/Пф sine (лА/пф)/ cos (oW);
где у i(t) — процесс на выходе КФУ; т(/)] — опорный сигнал с амплитудой
Unon с частотой сооп и начальной фазой 0ОП, соответствующий по форме z-му на-
вигационному сигналу со «скользящей» по времени манипулирующей функци-
ей П/р - то - т(0]; то — значение временного положения огибающей опорного
сигнала на момент начала поиска по задержке; У^ч2 = соПч2/2л; Д/^ф — вторая
промежуточная частота и полоса пропускания ПФ.
В процессе поиска по задержке при выполнении условия tRz = т0 + т(/) ко-
эффициент корреляции Si(t) и 5Ош[Л ^(0] стремится к единице, в результате чего
124
обеспечивается свёртка спектра г-го навигационного сигнала:
^i(0 = 5lt(z)+ ^%(0+«i(0;
Si,(0 = Цп1/ COS [<osl,/ +е„];
(Osiz СО/ сооп,
0i, = 6, -0on; /н = (о,|//2л; /пч2-^ </„ </пч2+^;
Sy(i) = jSj<(x)Soni(x)hn*(t - x)dx; n^t) = jn(x)Smi(x)ha^(t-x)dx;
Л =/пч2 ; /в =Лч2 , Д/пф Д/д,
где Su{t) — свёрнутый по спектру f-й навигационный сигнал; I7ml/, cosll-, 0lz —
амплитуда, круговая частота и начальная фаза Su(t); S//0 — процесс, обуслов-
ленный взаимодействием у-го навигационного сигнала (j' * i) с опорным сигна-
лом 5ош(г); Л,/в — нижняя и верхняя границы интервала неопределённости по
частоте; n\(t) — процесс, обусловленный взаимодействием помехи n(t) с опор-
ным сигналом $ого(0; 4/д — диапазон изменения несущих частот навигационных
сигналов, обусловленных эффектом Доплера.
Учитывая ортогональность у-го навигационного сигнала с опорным сигна-
лом Sow(0> а также их малый уровень по сравнению с помехой «(/), в ходе даль-
^ка"1
нейшего анализа влиянием компонент можно пренебречь [47].
7=1
Поскольку на выходе КФУ при выполнении условия = т0 + ^(0 процесс
yi(t) может быть представлен двухкомпонентной смесью, состоящей из квазиде-
терминированного гармонического процесса с априорно неизвестными па-
раметрами (7mh, coh, 0h и гауссовой стационарной помехи то на втором
этапе решения задачи обнаружения используется многоканальный некогерент-
ный обнаружитель, реализованный на основе набора КУКО.
Алгоритм МНО на основе использования КУКО описывается следующими
соотношениями [54]:
ЩТ)= {С/у1(7), .. , t/yn/D} ^7пор?
125
л л л А/1 2
н, iyj)>un^ /д=/у=/н+(7_1)д/ф+_/Ф, Д/ф=-, ик-Д/пф/Д/ф,
2 7Ф
<4(7) =ур,(Г,Гф)Л, ^(Г,7ф) = ^.(/,7’ф) + ^.(/,7ф);
1 о
U гф у 7ф
W*)fy№r№fj)dt, UCJ(t,T^ = -^\yx{t)^{2nfKit)dt,
7Ф о 7Ф о
где Uy(T) — множество эффектов на выходе MHO; Uy\(T), , Uyj(T), ,
U (Т) — эффекты на выходе 1, . ,у, . , пк КУКО; пк — количество каналов в
МНО; Но, Но — гипотеза о наличии и отсутствии навигационного сигнала,
Unop— порог; f^fj — оценка доплеровского смещения навигационного сиг-
нала 5ю(0; 4/ф — рабочий частотный диапазон КУКО; Гф — постоянная интег-
рирования ФНЧ в КУКО; Uj(t, 7ф) — напряжения на выходе Сум в у-м канале
КУКО; Т — постоянная интегрирования выходного фильтра Ф в КУКО, t/w-,
— амплитуды напряжений в квадратурных каналах КУКО; fKj — частота
опорного напряжения ву-м канале МНО.
Количество каналов в МНО пк выбирается на основе компромисса между
аппаратурной сложностью КО и помехоустойчивостью.
Обнаружение навигационных сигналов происходит после совмещения во
времени огибающих входного навигационного и опорного сигналов
При этом в РУ, наряду с установлением факта наличия навигационного
сигнала, производится оценка доплеровского сдвига его несущей частоты
Д =fj и оценка запаздывания огибающей навигационного сигнала
Характеристики обнаружения навигационных сигналов в КО на фоне ква-
зибелого шума при выполнении условия &f$T» 1 могут быть рассчитаны на
основе следующих соотношений [35].
Do - £>цк, Du =
, Р = 1 - D;
126
an = 1 - (1 - а)'1', тия = Гк/О.бТэ;
О = Ф[£з-£п], a=l-O[g„];
Ф(х)=-^]е 2dt- gn=—^j,
^2Л -00
где £>о — вероятность правильного обнаружения навигационных сигналов в КО
при использовании «к» подтверждений (алгоритм «к» из «к»); £>ц — вероят-
ность правильного обнаружения за один цикл поиска по задержке в МНО; тя —
количество ячеек поиска по задержке в одном цикле, Гк, Т3 — период и дли-
тельность символа дальномерного кода навигационных сигналов; D — вероят-
ность правильного обнаружения навигационных сигналов в КУ КО; а, р — ве-
роятность ложной тревоги и пропуска в КУКО, Ф(х) — функция Лапласа;
С/пор — пороговое напряжение; Кп — коэффициент пропорциональности с раз-
мерностью 1/В; gi — отношение сигнал/шум по напряжению на выходе КУКО;
gn — нормированный порог при компенсации постоянной составляющей шумов
в выходном эффекте; аПк — вероятность ложной тревоги в МНО.
Для установления взаимосвязи между характеристиками обнаружения и
реальной чувствительностью КО Рско необходимо использовать соотношения
для расчёта отношения сигнал/шум в различных точках структуры КО
Лко = кТ^ш Afmg2m; kT0 = 4-10-2’ Вт/Гц ; gB2x = Ps,/a2;
ft = ; 44 *4fs; s2 = ; ft =
V1+2ft
где gBX, g, — отношение сигнал/шум по напряжению на входе КО и выходе
КФУ; — коэффициент шума КО; Fs — мощность навигационного сигнала на
входе КО; g2 — отношение сигнал/шум по напряжению на входе КУКО.
Отношения сигнал/шум gi и g2 соответствуют алгоритму когерентной об-
работки, осуществляемой в КФУ и квадратурных каналах КУКО; а отношение
сигнал/шум g3 соответствует алгоритму энергетического обнаружения, осуще-
ствляемого на выходе КУКО.
127
При использовании в составе МНО десяти каналов (пк 10) полоса про-
пускания квадратурных каналов КУКО выбирается из условия АД = При
= 104 Гц имеем АД = 103 Гц
Постоянная интегрирования выходного фильтра КУКО выбирается согла-
сованной с длительностью бита навигационного сигнала
Т= Тб = плтя Т3 = п^Тк,
где Гб — длительность одного бита навигационного сигнала; яд — количество
периодов дальномерного кода в одном бите навигационного сигнала При
тя = 2 103, Т, = 10“6 с; па = 20 имеем Тк = 10“3 с; Т= Т5 = 2 10-2 с
При проведении в КО циклического параллельно-последовательного поис-
ка в режиме «холодного» старта, те когда интервал неопределенности прини-
маемого навигационных сигналов по задержке составляет Atr ~ Гк и по несу-
щей частоте составляет |со,- - соо| лАД, в случае принятия решения об обнару-
жении принимается на основе использования алгоритма с подтверждением «к»
из «к», при к = 4, время поиска и обнаружения z-ro навигационного сигнала оп-
ределяется из соотношения Гоб < Гц + Гпод < (пгя + к)Г= 40 с, где Гц — длитель-
ность цикла поиска; Ггюд — интервал времени, необходимый для подтверждения
факта обнаружения z-ro навигационного сигнала.
После обнаружения z-ro навигационного сигнала в РУ формируются целе-
указания по частоте и задержке для КСЧ, КСЗ, КДем и КО может приступить к
поиску и обнаружению следующего навигационного сигнала Поскольку для
определения текущих координат носителя АП необходимо использовать ин-
формацию. передаваемую несколькими КА, то общее время поиска Тп в КО со-
ставляет Тп < nKd Гоб, где zzKa — количество КА, используемых при определении
координат При zzKa = 4 в режиме «холодного старта» имеем Тп < 160 с
При заданных характеристиках обнаружения Dq = 0,87, = 10~э для вы-
бранных выше исходных условий (/< = 4; пк = 10, тя = 2\0\ АД-10э Гц,
АДТ--2 106 Гц, 7'=2 10~2 с; ЛГ!П = 2,5) на основе приведенных выше соотноше-
ний получаем-
128
1) вероятности правильного обнаружения D и ложной тревоги а в одном
канале КУКО равны D = 0,965; а = 10~6;
2) отношения сигнал/шум по напряжению на входе и выходе КУКО g2 и g3,
а также нормированный порог gn равны g2 = 2,2; g3 = 6,55; gn = 4,75,
3) отношения сигнал/шум по напряжению на входе КО gBX и выходе УСС gi
равны gaX= l,110"3,gi =0,69;
4) реальная чувствительность КО равна Рско = 2,4-10"17 Вт (-166,2 дБВт).
Зависимости D = F(g3) и = P(g7x) при а = 10"6 при обнаружении навига-
ционных сигналов на фоне внутреннего шума n(t) приведены на рис. 3.5.
3. 2.1.3. Далее проведём анализ помехозащещённости КО для случая, когда
на его вход воздействует организованная помеха Р(/) определённого типа. При
этом входной процесс имеет следующий вид:
y^t)=^Si0(t)+P(t) + n0(t).
1=1
Рассмотрим два варианта организованной помехи:
1) P,(t) = cos [соР1 / + (рР1 (0], (Ор,«С00; ®о = 2л/о;
Л1(т) = Op sinc(nA /Р1 г) cos юР11; сР1 = WP1 Д/Р1; Д/Р| = Д/5;
2) Р2(0 = t/mp cos [сор21 + <pP2 ];
129
/?2(т) = cos сор2 т; сор2 е [со0- яА/лт, со0 + лД/п],
где Pt (г) — шумовая помеха типа «квазибелый» шум с дисперсией opi, спек-
тральной плотностью 2V , шириной спектра Д/Р1; С/тш(0> ФР1 (О — закон изме-
нения огибающей и фазы помехи copi — средняя частота помехи Pi(t);
/?1(т)— автокорреляционная функция помехи Рг(0 — гармоническая по-
меха; /7тр, со Р2, ср р2 — априорно неизвестные амплитуда, угловая частота и на-
чальная фаза помехи P2(Z); Я2(т) — автокорреляционная функция помехи Р2(0-
При обнаружении z-ro навигационного сигнала в условиях РЭП имеем [54]:
1) для шумовой помехи Pi(z)
^BXt
я2 =______• я2 2 =%i_. 2 =fp .
6вх1 ^-2 । _2 ’ «sn бвх 2 > 5Р«1 2 '
+ Qp Qn Qn
^^А/лт^/пф /аг 7л?
«11=---Г---; «г^&^А/пф^ф; «3! =
<£sn .
(1+«рп1)’
«2.7^7.
РП1
= ФОы - gnopil; а. = 1 - O(gn0pi); gni = л;-2пор-'—л;
АК+с‘)
2) для гармонической помехи P2(t)
Р и1
_ Р . р _ Ump . pl ___________
2 ’ S э ’ &вх2 /1 , _2 ч ’
СТп О + Spn 2 '
, £22 = £12^пф/Д/ф ; §32= "1—....
V1 + 2&22
g2 =—Si—• g2
6ВХ2 n2 n ’ SPn2
^12=---Г— ......
£2
osn
рп2
А - Ф&32 - gn2]; а2 - 1 - ®(gn2); gn2 - 2°р2 о \ ’
*„(Оп+^р)
где gs2n, gpn — отношение сигнал/шум и организованная помеха/шум по мощ-
ности на входе КУКО; Рр — мощность ГП; ор — дисперсия ШП; D\, оц — ха-
рактеристики обнаружения при наличии шумовой помехи; Z>2, а2 — характери-
стики обнаружения при наличии ГП; АГП — коэффициент пропорциональности
130
размерностью 1/В
Сравнительный анализ соотношений сигнал/шум для различных вариантов
радиообстановки на входе КО позволяет сделать следующие выводы
1) при дополнительном воздействии на вход КО организованной помехи
P(t) происходит снижение отношения сигнал/помеха на выходе КУКО пропор-
ционально отношению g2n,
2) величина выходного отношения сигнал/помеха g32 инвариантна к значе-
нию несущей частоты ГП.
На основе вышеприведенных соотношений на рис 3.6 приведены зависи-
Будем полагать, что для нарушения процесса функционирования в КО тре-
буются воздействия организованной помехи P(t) такого уровня, при котором
Z)->0,5 (те. Do -> 6,25*10-2) При этом из соотношений O[g3i(2) — gnoPi(2)] = 0,5,
а = 1 - O(gnopl(2)) = 10‘6, следует, что нарушение функционирования КО про-
изойдёт при g31(2) = 4,75 При этом остальные энергетические характеристики
КО имеют следующие значения g2i(2) = 1,6; gn(2) = 0,51; g2Xi{2 = 6,6* 10~5
Мощность организованной помехи, достаточной для уменьшения вероят-
ности правильного обнаружения D до 0,5, определяется из следующих соотно-
131
шений*
^вх^вх1(2)“ 1 + &pn1(2)-' U82, gpnj(2) - 0,82, Рр - ор - on gPn1{2)>
АЛт=2-10“14Вт; Рр= о2 = 1,64-10"*4 Вт.
Одинаковая эффективность РЭП при воздействии ГП и ШП обусловлена
тем, что принятие решения о наличии или отсутствии сигнала принимается на
основе сравнения энергии компонент, обусловленных взаимодействием опорно-
го напряжения с полезным сигналом и мешающими воздействиями без учёта
тонкой структуры последних.
Анализ помехозащищённости КО при воздействии ГП и ШП показывает,
что выражения для расчётов Z>0, и D совпадают по форме с рассмотренным
выше случаем обнаружения навигационных сигналов на фоне помехи n(t). От-
личия обусловлены изменениями отношений сигнал/помеха в различных точках
КО, которые рассчитываются следующим образом:
sn—'г~2 ; ;
\1+2&21
а = VZg^Afjrr^ . 2 . gsn .
oil " " » овх! . , 2 ’
1+g₽“
где glb g2i, g3i — отношение сигнал/помеха по напряжению на выходе КФУ, КК
и КО.
Как показано в [54], при приёме навигационных сигналов с максимально-
ожидаемым уровнем PS3 = 2,5-10-16 Вт для обеспечения D = 0,5; DQ = 6,25-10“2;
аПк = 10 5 за Гоб = 1 с необходимо, чтобы уровень помех на входе АП составлял
Ррд=ОрД= 1,64-10-13 Вт. Таким образом, для нарушения функционирования КО
АП, когда Рошоб = 1 - D = 0,5, при постановке ШП или ГП коэффициенты по-
давления должны быть не менее, чем
Лрп =^>5в/о’рД== 1,540 3; т|р|2 ~ Р^Рра. ~ 1,540 3,
где т|рц, г|Р12 — коэффициенты подавления КО при постановке ШП и ГП
Следует учитывать, что для повышения помехозащищенности АП СРНС
132
«Навстар» может комплексироваться с инерциальными и другими типами дат-
чиков пространственных характеристик носителей [52] При этом в КО АП по-
является возможность увеличения периода обновления информации Г0| и пере-
хода от одноциклового поиска к многоцикловому поиску при обнаружении сиг-
налов Так, при Г01 = Гкн = 30 с, где Тк» — длительность кадра навигационного
сообщения в СРНС «Навстар», количество циклов поиска может быть увеличе-
но до иц = Ткц/Т0 = 30
В соответствии с методикой расчета характеристик обнаружения для мно-
гоциклового последовательно-параллельного поиска, приведенной в работе
[35], имеем:
Dn=Du^~Dur-'},
/=|
Du = (l-₽Xl-anJ(e-|,(l-a)(”'-|),
D = 1
где Dn — вероятность правильного обнаружения сигнала за пц циклов поиска
При 7)ц » D, nuD « 1 выражение для расчета Dn преобразуется к следую-
щему виду
£>п = (ни-1)|1-^Ч Ьа.
В этом случае для обеспечения РЭП КО АП на интервале подавления
/рн = ^кн необходимо выбрать такой энергетический потенциал ПП PnGn, при ко-
тором вероятность правильного обнаружения в КО АП снижается до D - 102, и
поскольку при этом Z)n = 0,255. то пользоваться АП СРНС «Навстар» для опре-
деления координат носителя становится нецелесообразным, поскольку
Лш об =0,745
При приёме навигационных сигналов с максимальноожидаемым уровнем
FSB = 2,5 10-!6 Вт для достижения D = 10~2 при an = 10”5 необходимо, чтобы в
результате РЭП обеспечивались следующие энергетические характеристики
g31 - 2,43, g2xl = 2-10 5, g2n - 5, Ррд = о2д = 1042 Вт
133
Таким образом, при переходе к многоцикловому поиску в КО для наруше-
ния функционирования АП, когда Рош = 1 - D = 0,99, при постановке ШП или
ГП коэффициенты подавления должны быть не менее, чем црц = т|Р12 = 2,5-10-4
Энергетический потенциал ПП, необходимый для РЭП КО, рассчитывается
из следующих соотношений:
F(]Gn= 4,4 105Ор для шумовой помехи и
PnGn= 4,4-105Рр для гармонической помехи.
При постановке ШП для гю = (10; 31,6; 100) км необходимо, чтобы энерге-
тический потенциал ПП составлял
а) для одноциклового поиска — (8,5; 18,5; 28,5) дБВт;
б) для многоциклового поиска — (16,5; 26,5; 36,5) дБВт, соответственно.
При постановке ГП для гт = (10; 31,6; 100) км необходимо, чтобы энерге-
тический потенциал ПП составлял
а) для одноциклового поиска — (8,5; 18,5; 28,5) дБВт;
б) для многоциклового поиска — (16,5; 18,5; 28,5) дБВт, соответственно.
3.2.2. Радиоэлектронное подавление канала слежения за частотой
3.2.2.1. КСЧ взаимодействует с КСЗ, КО, КДем и РУ. КСЧ представляет со-
бой совокупность корреляционно-фильтрового устройства и фазовой автопод-
стройки частоты. Структура КСЧ приведена на рис. 3.7, где КФУ — корреляци-
онно-фильтровое устройство; ФАПЧ — фазовая автоподстройка частоты; Смь
См2 — смесители; ПФ — полосовой фильтр; Ф — фильтр нижних частот;
Упр — управитель; УГ — управляемый генератор.
Для оценки эффективности КСЧ при РЭП используем вероятность срыва
слежения за частотой Рс/. Однако поскольку при срыве слежения ФАПЧ функ-
ционирует в нелинейном и нестационарном режимах и расчёт Рсу весьма за-
труднён, то в данной работе в качестве критерия эффективности КСЧ предлага-
ется использовать отношение сигнал/помеха по напряжению на выходе
ФАПЧ g.
134
Рис 3.7
При РЭП КСЧ необходимо, чтобы выбранный энергетический потенциал
ПП PnGn обеспечивал уменьшение отношения сигнал/помеха на выходе ФАПЧ
до величины, при которой гарантированно обеспечивается срыв слежения за
частотой
Процесс обработки информации в АП с КСЧ состоит из следующих опера-
ций*
— частотной селекции, усиления, преобразования входных процессов на про-
межуточную частоту/ПЧ1 и их нормирования по амплитуде в ЛТП;
— корреляционно-фильтрового преобразования, обеспечивающего свёртку
спектра исследуемого навигационного сигнала и перенос его в область вто-
рой промежуточной частоты/пч2,
— фазовой автоподстройки частоты, обеспечивающей поиск, захват и слеже-
ние за средней частотой исследуемого навигационного сигнала
Операции, выполняемые в ЛТП, описаны выше в подразделе 3.2.1
КФУ предназначено для преобразования исследуемого ФМС Sz(0 в гармо-
нический процесс UK(t) с целью повышения эффективности ФАПЧ и КСЧ в це-
лом
В качестве опорного напряжения на Cmj подается напряжение с выхода
КСЗ, представляющего собой копию исследуемого сигнала:
C7oi W = Unoi Щг- tz ] COSCOqiZ,
135
где UmQ], coqj — амплитуда и средняя круговая частота напряжения C/oiWi
П,[/ - Т/ ] — манипулирующая функция, соответствующая z-му навигационному
сигналу, оценка временного сдвига которой т, формируется в КСЗ
После прохождения навигационного сигнала Sfa) через CMi и ПФ на выхо-
де КФУ получаем напряжение
t
fh^t-x)Si0(x)U0i(x)dx
-00
и если Лф(/) = 2Д/"Ф smc (лД/ф /) cos сопЧ2/; Д/ф > Д/д, (®оi - <д) е [соПч2 - Д<»ф/2,
сопч2 + Д®ф/2;], сопч2 = 2л/пч2, ДсОф = 2лД/ф (где Лф(/) — импульсная реакция
фильтра ПФ, Д/ф — полоса пропускания ПФ, щпч2 — вторая промежуточная час-
тота; Д/^ — диапазон изменения доплеровских смещений частоты навигацион-
ного сигнала), то выходной эффект в результате свёртки спектра навигационно-
го сигнала имеет гармонический характер
UK(t) = Ki Umi cos(co0l - coz)Z,
где K\ — коэффициент передачи КФУ по напряжению.
Напряжение UK(t) поступает на вход ФАПЧ, где взаимодействует с опор-
ным напряжением, формируемым в УГ:
Uoi(t) = С4ю2 COS JcDyr(/)cZr,
/
где соуг(0 — закон изменения круговой частоты УГ; 7\ — постоянная времени
контура ФАПЧ
После поиска, захвата и перехода в режим слежения за частотой исследуе-
мого сигнала в КСЧ формируется напряжение
^ксч(О — UmQ2 COS [(С0пч2 “' ®д/)^ ^ф(0],
где 8<р(/) — фазовое рассогласование между навигационным сигналом Sz(r) и его
оценкой в КСЧ, обусловленное влиянием шумов и изменениями частот иссле-
дуемого сигнала и гетеродинов в АП.
Качество функционирования КСЧ при использовании критерия минимума
136
среднеквадратичного отклонения между частотой навигационного сигнала Sz(Z)
и её оценкой в КСЧ определяется среднеквадратичным отклонением фазы сер.
Анализ прохождения аддитивной смеси сигнала Sz(z) и помехи n(f), соот-
ветствующей внутреннему шуму АП при корреляционно-фильтровой и коге-
рентной обработках, выполнен в работах [48, 82], где показано, что отношения
сигнал/шум по напряжению на выходах КФУ g0 и ФАПЧ g определяются сле-
дующими выражениями:
go = g,x ; g = goyl^/ty™ = gM ;
gB2x=^-; а^=АИГлт; Д/ф = А®ф/27г; № = ВДШ; kT0 = 4 10 2' Вт/Гц,
где gBX — отношение сигнал/шум по напряжению на входе АП; — эквива-
лентная шумовая полоса ФАПЧ; — коэффициент шума АП.
Среднеквадратичное отклонение фазы в КСЧ сгф, обусловленная влиянием
шумов, равно [36]
Оф=1= ЕК
g N psi
При фиксированных значениях мощности сигнала Psi и спектральной
плотности шума Nn на входе АП изменение оф определяется интервалом изме-
нения эквивалентной шумовой полосы ФАПЧ Д/ш-
Верхняя граница шумовой полосы ФАПЧ А/Шв соответствует слежению за
частотой сигнала 5,(0, обладающего максимальноожидаемым уровнем PsiB на
входе АП, установленной на малоподвижном носителе, при оф = <эфн, где
офн — величина пф, при которой энергетические потери при демодуляции за
счет неидеальности КСЧ в КДем не превышают допустимой величины [36], на-
пример, 1 дБ,
Аг Р^р1^
А + _ мм т п
Ч/П1В
При PsiH = 2,5 10”16 Вт; Nn = 1О~20 Вт/Гц; NUI = 2,5 и о<р„ =0,1 рад имеем
А/шв = 250 Гц
137
При установке АП на высокоскоростном маневренном носителе за счет из-
менения во времени доплеровского смещения частоты сигнала 5,(г) нижняя гра-
ница шумовой полосы КСЧ Д/шн ограничивается допустимыми динамическими
искажениями При использовании в КСЧ ФАПЧ 2-го рода имеем [36]-
А/шн - о,7 ;/я = ; /д = - f„. с = 3 105 км/с,
С с
где Д, /д — доплеровское смещение и скорость его изменения, V, V — ско-
рость и ускорение носителя АП
При /s= 1575,42 МГц, V = 1 км/с, V = 100 м/с2, когда Л = 5,25 кГц,
/д = 525 Гц/с2, имеем Л/шн = 16 Гц При уменьшении ускорения до V= 10 м/с2,
когда /д = 52,5 Гц/с2, имеем Д/цН = 5 Гц Таким образом, при выделении нави-
гационного сигнала в АП на фоне внутреннего шума диапазон изменения шу-
мовой полосы КСЧ находится в пределах от 5 Гц до 250 Гц
3.2 2 2. Рассмотрим далее характеристики КСЧ при воздействии организо-
ванных помех
Полагаем, что ШП P\{t) соответствует «квазибелому шуму» с автокорреля-
ционной функцией 7?Р1(/)= о2 sine (лА/р1т) coscop,т параметры которой выбира-
ются из условий
Ор>Оп; А/р| = А/, <»р1 ~ ®0; ®Р1 = 2л/Р1, = Wp A/Pi,
где с2, сор1, Д/р! — дисперсия, средняя круговая частота, ширина спектра и спек-
тральная плотность помехи отношения сигнал/помеха на выходе КФУ и
ФАПЧ рассчитываются по методике, аналогичной для аддитивной смеси
v2(O = W) + «o(O [74]:
goi = 2§вх|7д/лт/А/ф ;g! = g01 ^А/ф / A/u, = gBX! 7Д/„ / A/u, ,
2 _ Ssn 2 _ 2 1 _ °p 2 _
obxI “* . 2 ’ ^sn — S BX 7 ’ £pnl 7 ' S] z А/ к А г 1
1 + gpm (^„ + /Vp)A/11
где gBX1, gon gi — отношения сигнал/результирующая помеха [/7(Z) P\(Г)] по на-
пряжению на входе ЛТП, выходе КФУ и выходе ФАПЧ, gsn — отношение сиг-
138
нал/шум n(t) по напряжению на входе ЛТП; g?n{ — отношение дисперсий по-
мехи Р|(0 и шума n(t).
Среднеквадратичное отклонение фазы в КСЧ ncpi при воздействии шумо-
вой помехи P\(t) определяется из следующего соотношения-
1 М+^)А/Ш
Оф! = — = ------------.
Sx V
При постановке гармонической помехи Р2(0 ~ Ump cos со2/, параметры ко-
торой выбираются из условий
Рр > Ль Л> ; (Во - лА/ < со2 < coo + kA/s; со2 = 2л/2,
где Рр, со2 — мощность и круговая частота помехи P2(r); Ump — амплитуда поме-
хи Р2(0 на входе АП, необходимо учитывать, что при прохождении смеси y2(t) =
= Sj(f) + ЛИ + n(t) через КФУ компонента «сигнал-помеха» t/sp(0, обусловлен-
ная взаимодействием помехи ЛИ с опорным напряжением существенно
отличается по спектральному составу от компонент «сигнал-сигнал» U^t) и
«сигнал-шум» Usn(t).
Учитывая, что опорное напряжение C7oi(Z) имеет дискретный спектральный
состав [29]
Goi(<o) = -аРДУ ./sinc 1Я ®-<оО1 ——- --^8(<й-Юо1);
L _1л=-00, \ А )
я#0
в=^тк,
где п — номер дискретной составляющей спектра напряжения Uoi(t); Goi(co) —
энергетический спектр напряжения [/О1(0; В — база сигнала, то напряжение на
выходе КФУ имеет вид
ЩО = им + ад + гЛп(О;
UM = Ki Uni cos (cool -
ад=^
“7=^2lcos qoi-со2--------L 0;
vB _W1 I Tv )
А/ФГК
2
139
Us„(t) = U„(t) cos[(<a0i - <on.,i) t + <pn(Z)],,
где wi — номер дискретной составляющей спектра напряжения (7sp(z);
фп(0 — закон изменения огибающей и фазы напряжения Usn(t)
Отличительной особенностью данной ситуации является необходимость
обеспечения функционирования ФАПЧ в условиях воздействия на её вход, кро-
ме полезного сигнала Uss(t) и шума C/sn(Z), совокупности дискретных состав-
ляющих спектра напряжения U3p(f)
В результате взаимодействия напряжения UK(t) с опорным напряжением УГ
£/ог(О в ФАПЧ происходит перенос спектра в область нулевых частот, где выде-
ляется компонент «сигнал-сигнал» USs(t) и при этом фильтрующие свойства
ФАПЧ позволяют существенно уменьшить влияние спектральных составляю-
щих напряжения f/sp(Z)
Поскольку напряжение U&p(f) имеет дискретный спектр с периодом 1/Гк, то
на выходе ФНЧ ФАПЧ при А/ш < 1/2Гк можно учитывать только две спектраль-
ные составляющие компоненты «сигнал-помеха» с частотами
«21 = «si - «2 + «22 = «si - «2 + 2л(/ + 1 )/Т^j е[-ль
О < со21 < лА/ш; лА/ш < со22 < 2лА/ш,
где j — номер спектральной составляющей опорного напряжения £70i W
В установившемся режиме ФАПЧ на выходе Ф имеем
1/ф(0 = К2 Umi cos S<p(r) + [/Сф(«21) cos («2,/) + /Сф2(«22) cos («22 z)] +
+ K2 Un(t) cos[(«0i - «о - «г) t + (pn(Z)],
где K2 — коэффициент передачи по напряжению ЛТП и КСЧ; /Сф(со21), ^(«22) —
коэффициент фильтрации ФАПЧ на выходе Ф на частотах «21 и «22
В результате воздействия компонент «сигнал-сигнал» (7ss(z), «сигнал-
помеха» Z7sp(r), «сигнал-шум» C7sn(r), входящих в напряжение £/ф(0, на Упр на
выходе УГ формируется напряжение, обладающие паразитной частотной моду-
ляцией.
^02(0 = С/П102 COS [(«0| - «i) t + 5cps(r) + pI cos co2J t + p2 cos «22 /];
140
Р, =—-L; A®, = SyK2 Кф(<021); ДЮу = SyK2 Umi;
A<oy 4b
p2 =4^; A®2 = SyK2 Ч^к^>21)-, <o21 + <o22 = 2ii!TK,
A<Oy 4b
где t/m02 — амплитуда напряжения У Г, рь р2 — индексы паразитной частотной
модуляции; А<оь Асо2 — значения девиации сопутствующей частотной модуля-
ции; Sy — крутизна модуляционной характеристики Упр; Асоу — полоса удер-
жания ФАПЧ; 8(ps(r) — фазовая модуляция, обусловленная воздействием компо-
ненты «сигнал-шум».
При co2i « (022, когда АГф(со22) « Рг <<: Pi и Pi < 1, выражение для
напряжения Uo2(t) можно упростить:
^02(0 = UmQ2 COS[((Ooi “ &i) t + Sq>s(Z) + pi COS (O21 <].
Спектр данного напряжения, как показано в [74], состоит из полезной цен-
тральной составляющей
г/2
G(cool - ®,) 4(₽.) 8(<оО1 - <о/)
и двух сопутствующих боковых составляющих
ту2
G(a>oi - ®,- со21) =—J|2(P|)6(ио1 - со/-«21) и
гу2
(7(®о1 - + <о21) =-у2- J,2(p,) 8(®oi - <0/+ со2!),
где Jo (PJ, J, (pj — функции Бесселя нулевого и первого порядка
Сопутствующие спектральные составляющие напряжения /70г(0 в процессе
демодуляции навигационного сигнала приводят к снижению помехоустойчиво-
сти, и поэтому их действие классифицируется как действие «собственного шу-
ма» опорного напряжения.
Отношение сигнал/результирующая помеха P2(Z) + n(t) по мощности на вы-
ходе КСЧ можно определить из следующих соотношений [74]
141
P I J1
g} —ГТГ' = Э J0(₽') ’
Р>п + *&&-
pss_=^M-/>2 * *(₽!); Лп=£рп2=4ЙМ+2/М)Ж
i=l A/jrr
где Pss= — мощность полезной (постоянной) составляющей эффекта на выходе
ФНЧ ФАПЧ; Р^ — мощность сопутствующей (переменной) составляющей
эффекта на выходе ФНЧ ФАПЧ, обусловленной «собственным шумом», появ-
ляющимся за счёт взаимодействия опорного напряжения U^2(t) и гармонической
помехи Р2(0‘, Лп — мощность компоненты, образованной взаимодействием
опорного напряжения t/oz(O с внутренним шумом n(f) АП, РлЬ Рп2, Рпз — ком-
поненты Psn, обусловленные взаимодействием центральной и боковых спек-
тральных составляющих опорного напряжения {7ог(0 с внутренним шумом n(i).
При pi < 1 можно полагать, что Jq(P1) + 2J12(P1)= 1, a J/Pi)- Pi/2
Воздействие гармонической помехи P2(t) приводит к появлению в опорном
напряжении Uv2(t) дополнительных спектральных составляющих, величина ко-
торых пропорциональна индексу модуляции рь Связь между уровнем помехи
P2(t) и индексом модуляции Pi может быть описана следующими соотношения-
ми:
1 “7------gps гтс
А<оу -V 5
4
’ Sps
где gps — отношение помеха P2(t) — исследуемый сигнал Si(t) по напряжению
на входе АП
С учётом вышеизложенного, выражение для отношения сиг-
нал/результирующая помеха P2(t) + n(t) на выходе КСЧ g2 можно представить в
следующем виде.
g^o(Pi)(VOT/A4)
Для случаев, когда влияние гармонической помехи P2(t) оказывает большее
влияние на эффективность функционирования КСЗ, чем внутренние шумы «(/),
142
имеем
ё2
2Л2(Р,)Д
gps^(®2l)
gpS^(g>21)
4в
gp2s^(®2l)
в
Для количественных оценок g2 необходимо иметь соотношения для расче-
та фильтрующих способностей ФАПЧ в зависимости от частоты со2 ]
Как показано в работе [83], при использовании в ФАПЧ пропорционально-
интегрирующего фильтра (ПИФ) коэффициент фильтрации А7ф(со21) описывают-
ся следующими соотношениями
^ф(<021) = 1 ~ -,У = Ю2|/ДС0у,
ото= Т\/Т-, Т\ = RiC', Т = (Я| +Я2)С Асйу = 2лД/у, ®2i = 2л^|,
где у — относительная частота расстройки помехи Pitt)-, mo — безразмерный ко-
эффициент ПИФ; Т}, Т — постоянные времени в ПИФ, Тсу — относительная
собственная постоянная времени ФАПЧ, \fy — полоса удержания ФАПЧ
л/2
В работе [74] показано, что если 7k = 1; А/у = 2,8 Д/и2 Г; Afui =—, то выра-
^1
жение для Кф(а)21) можно преобразовать к виду
Кф(й>2|)=-7=----=7=7 ПРИ
Vl + dlO'2-^/^ 2ГК
Интервал изменения отношения f2Xlнаходится в пределах от 0 до
------. При этом, если Тк = 1O'J с и Д/и1Н = 5 Гц, то верхняя граница
2W™
/п/Д/ш^ 100 и коэффициент фильтрации ^((d2i) изменяется в пределах от 1 до
4 10’2.
Среднеквадратичное отклонение фазы в КСЧ о(р2 при воздействии гармо-
нической помехи Р2(0 определяется из соотношения ст<р2 = l/gi
Наличие выражений для расчёта отношений сигнал/результирующая поме-
ха gi и g2 позволяет произвести оценку среднеквадратичного отклонения фазы
143
стер при формировании опорного напряжения UQ2(t) в КСЧ и среднего времени
до срыва слежения Гср.
В работе [36] отмечено, что с точки зрения устойчивости ФАПЧ пороговая
величина среднеквадратичного отклонения фазы не должна превышать
о(рпор = 0,5 рад, что эквивалентно пороговой величине отношения сигнал/помеха
по напряжению gnop = 1/с(рпор > 2, что обеспечивает Рс/= 5-10"2.
При проведении РЭП для обеспечения допустимой вероятности срыва сле-
жения в КСЧ PCf= 0,32 при справедливости гауссовской аппроксимации необхо-
димо, чтобы выходное отношение сигнал/«результирующая помеха» gr было
равно 1, т.е. на 6 дБ меньше, чем gnop.
Используя соотношения для gj и g2, можно определить уровни ГП и ШП на
входе АП, обеспечивающие РЭП КСЧ (т.е когда g1(2) = gr = 1):
2 Р g2 = 5*
р °n<Ssn ’ 'р n j^2z x » osn 2 •
Из расчётных кривых, приведённых на рис. 3.8 и 3 9, следует, что при
приёме навигационных сигналов с максимальноожидаемым уровнем
PSZB = 2,5-10"16 Вт мощность ШП и коэффициент подавления при Д4, = 250Гц
составляет прр = 2-10“12 Вт, r|p2i = 2,5-10-6 и при Д/^ = 5Гц — орр = 10 10 Вт,
Лр21 = 2,5-10’6, а мощность ГП и коэффициент подавления равняется при
А/ш = 250 Гц Ррд = 610"12 Вт, пР22 = 4,17-10"3, а при А/ш = 5 Гц и/21 =500 Гц —
Ррд = 3,1-1О-10 Вт, т|р22 = 8,06-10"5, где т|р2ь т]р22 — коэффициенты подавления
КСЧ при постановке ШП и ГП.
При этом необходимо учитывать, что эффективность гармонической поме-
хи P2(t) существенно повышается при повышении точности установки частоты
помехи, так, например при f2\ < Д/i, требуемая для РЭП мощность Рр0 снижает-
ся до 5-10"13 Вт, что обеспечивает г|р22 = 5102.
Однако, поскольку доплеровские смещения частоты навигационного сиг-
нала от различных КА априорно неизвестны, то без реализации специального
режима обработки навигационного сигнала, обеспечивающего точные частот-
144
ные целеуказания ПП, воспользоваться вышеприведенной зависимостью для
повышения эффективности ГП не представляется возможным.
Рис. 3 9
Энергетический потенциал ПП, необходимый для РЭП КСЧ, рассчитывает-
ся по соотношениям, аналогичным для КО.
Величина шумовой полосы A/m КСЧ зависит от особенностей функциони-
рования АП
При функционировании АП в автономном режиме можно выбирать
А/ш = 250 Гц, а при комплексировании АП с инерциальной навигационной сис-
темой можно выбирать A/Li = 5 Гц.
При постановке ШП для гП1 = (10; 31,6; 100) км необходимо, чтобы при
A/Ul = 250 Гц энергетический потенциал ПП составлял (19,5, 29,5; 39,5) дБВт,
145
соответственно.
При постановке ГП, частота которой разнесена от частоты навигационного
сигнала на500 Гц, для rm = (10; 31,6; 100) км необходимо, чтобы при
АДп = 250 Гц энергетический потенциал ПП составлял (24,4; 34,4; 44,4) дБВт
соответственно.
При постановке ШП для гт = (Ю; 31,6; 100) км необходимо, чтобы при
Д/ш = 5 Гц энергетический потенциал ПП составлял (36,5; 46,5; 56,5) дБВт соот-
ветственно.
При постановке ГП, частота которой разнесена от частоты навигационного
сигнала на f2\~ 500 Гц, для гт = (Ю; 31,6; 100) км необходимо, чтобы при
А/ш = 5 Гц энергетический потенциал ПП составлял (41,4; 51,4; 61,4) дБВт соот-
ветственно.
3.2.3. Радиоэлектронное подавление канала слежения за задержкой
3.2.3.1. КСЗ предназначен для слежения и оценивания временного сдвига
огибающей навигационного сигнала с целью последующего расчёта псевдо-
дальности между АП и КА. Рассмотрим РЭП КСЗ с когерентной обработкой,
структура которого приведена на рис. 3.10, где СД — синхронный детектор; Пь
П2 — перемножители; Фь Ф2, Фз — фильтры нижних частот; ВУ — вычитаю-
щее устройство; Упр — управитель; ГК — генератор кода; РК — разностный
коррелятор.
В общем случае эффективность КСЗ характеризуется вероятностью срыва
слежения за задержкой FCT в течение определенного интервала времени и сред-
неквадратичной погрешностью оценивания задержки от между принимаемым
навигационным сигналом S(t) и опорным напряжением, сдвиг фазы которого
формируется в ГК
При РЭП КСЗ выбор энергетического потенциала ПП PnGn должен обеспе-
чить существенное увеличение погрешности слежения за задержкой от до по-
рогового уровня отпор, при которой вероятность срыва слежения за задержкой
146
соответствует условию Рсх >РДГ, где Рг — допустимая вероятность срыва сле-
жения за задержкой, при которой использование АП становится нецелесообраз-
ным
ксз
Рис. 3 10
Процесс обработки информации в КСЗ состоит из следующих операций.
1) частотной селекции, усиления, преобразования входных процессов на про-
межуточную частоту и нормирования выходного эффекта по амплитуде в ЛТП;
2) синхронного детектирования, обеспечивающего перенос спектра навигаци-
онных сигналов в область видеочастот, 3) дискриминационной обработки, обес-
печивающей выделение временного сдвига одного из навигационных сигналов
относительно опорного напряжения, 4) автоматической подстройки фазы мани-
пулирующей последовательности опорного напряжения; 5) оценивания задерж-
ки огибающей навигационных сигналов и формирования целеуказания для
функционирования КСЧ
Когерентная обработка в КСЗ состоит из двух этапов, синхронного детек-
тирования и временной дискриминации В качестве опорного напряжения на
СД подаётся напряжение с выхода КСЧ
Coi(0 = UnOl cos (tos/Z + Ooi).
147
которое совпадает со средней частотой с исследуемого сигнала S;(0 с точностью
до начальной фазы 0Oi (0Oi ~ О/) В результате синхронного детектирования на
выходе Ф], который представляет собой идеальный фильтр нижних частот
(ИФНЧ) с полосой пропускания Л/ф1, исследуемый сигнал преобразуется к сле-
дующему виду.
L/S,{c) = рф|(t - x)S, (x)Uot(x)dx = Кп Umi П;[/ - т,]; Лф)(0 = 2Д/ф1sinc(nA/j>|Z),
-00
где (/) — импульсная реакция Фь Кп — коэффициент передачи СД и Ф]
Временная дискриминация осуществляется в разностном корреляторе (РК)
В качестве опорного напряжения t/ozW на перемножители Д и П2 подается на-
пряжение с выхода ГК после завершения этапов поиска и обнаружения иссле-
дуемого сигнала
£7ог(О ~ ^п102 П,(7- То); €7o2i(0 ~ ^тО2 Щ7- т0-Д/2);
Г^о22(О = £7П1о2 ПД7 — т0 + Д/2); Д = Д,
где т0 — временной сдвиг опорного напряжения t/mo2, величина которого опре-
делена на этапе поиска 5/(z); Д — временной сдвиг между опорными напряже-
ниями в каналах РК {/021 (О и С/оггМ-
При использовании в каналах РК фильтров Ф2 в виде ИФНЧ с полосой
пропускания Д/ф2 получаем
С/1р«(0 = рф2('~ x)Us,(x)U022(x)dx = R& - 7^2);
^2рк(0 = j лф2 (/-x)U^x)U022(x)dx= Rs(c, + 7У2);
~ Т/ — т0, Тк — ВТ.,
где £ — рассогласование по времени между 5z(Z) и опорным напряжением
BS(E>) — автокорреляционная функция сигнала 5z(r); Тк — длительность кодовой
последовательности; В — база навигационного сигнала
Дискриминационная характеристика РК D(Q имеет следующий вид
148
т
d& = И[црк(О-сЫ')к
1 о
где Т — постоянная интегрирования фильтра Ф3.
Напряжение D(^) поступает в кольцо автоподстройки временного сдвига
т0 опорного напряжения t/02(z), где в установившемся режиме слежения за за-
держкой обеспечивается устранение рассогласования, т.е. ► 0.
Анализ прохождения аддитивной смеси сигнала 5f(Z) и помехи n(t) при ко-
герентной обработке выполнен в работе [84], где показано, что отношение сиг-
нал/шум по напряжению на выходе фильтра Ф1 после синхронного детектиро-
вания go, на выходе фильтра Ф2 после корреляционной обработки в каналах РК
g и на выходе РК после фильтра Ф3 gpK определяется следующими соотноше-
ниями:
go = V2gBX д/АУ/Д/'ф! cos Дф; g = ;
^рк = ^7^ф2/Л4з; s™=^’ A(? = 6‘-0oi;
Nw=kT0N^, А7’о = 4-10’21Вт/Гц,
где gaX — отношение сигнал/шум по мощности на входе ЛТП; — коэффи-
циент шума АП; А(р — разность фаз между навигационным сигналом Si(t) и
опорным напряжением СД £/0i(0> обусловленная неидеальностью функциони-
рования КСЧ; Д/ф15 А/ф2, А/ф3 — полоса пропускания фильтров Фь Ф2, Ф3.
При нормальном функционировании КСЧ можно полагать, что Аф < 0,1 рад
[36].
Для обеспечения согласованного приёма полоса пропускания фильтров Ф1
и Ф2 выбирается из условий Д/^ = 2/Гэ; А/^2 > 1/Тк.
При использовании в качестве Ф3 пропорционально-интегрирующего
фильтра (ПИФ) шумовая полоса КСЧ А/и выбирается из соотношения [83]:
А/фз=А/ш=^г; 1\=R2C' T=(Ry+R2)C,
где 7\,Т — постоянные интегрирования ПИФ.
149
С учетом вышеизложенного отношение сигнал/шум на выходе РК имеет
вид [36]
gPK = g.x7Vs/4/’03
3 2 3 2. Полагаем, что ШП соответствует «квазибелому шуму» с автокорре-
ляционной функцией 7?Р1(т) = Op sine лД/pjT coscop jT, параметры которой выби-
раются из условий
Пр>о^, Д/р1 = Д/$; соР1 - со0; Шр|=27г/Рг, со0 = 2л/0,
где Пр, соР1, A/pi — дисперсия, средняя угловая частота и ширина спектра шумо-
вой помехи P\(t) на входе АП, параметры КСЗ определяются из следующих со-
отношений [84].
gi = ^вх1д/ДЛ/А/ф2; gpxi = g,xiVA/s/44>; gB2xi = —Ц > g2» = gL
1 + gpnl
g2.=^
6pnl 2 ’
где gBX1, gb gpK1 — отношение сигнал/результирующая помеха n(t) + P^t) по на-
пряжению на входе ЛТП, выходе каналов РК и РК в целом; gsn — отношение
сигнал/шум n(t) по напряжению на входе ЛТП; gpnl — отношение дисперсий
помехи P}(t) и шума n(t)
При постановке гармонической помехи Р2(0 = Цпр cos(cop2 /), параметры ко-
торой выбираются из условий
U2
Рр > Лй Рр = -у1, «О - яД/s < й)р2 < too + 7lA/s,
где Рр, сор2 — мощность и угловая частота гармонической помехи Р2(0 на входе
АП В этом случае необходимо учитывать, что при прохождении смеси
у3(/) = Si(t) + Р2(0 + м(0 через РК компонент «сигнал-помеха», обусловленный
взаимодействием опорного напряжения To2i(2)(O и гармонической помехи Р2(7),
существенно отличается от компонента «сигнал-шум», обусловленного взаимо-
действием опорного напряжения Uq2i(2)W и шума n(t) по спектральному составу
Компонент «сигнал-помеха» имеет дискретный спектральный состав, по-
150
скольку опорное напряжение С/02(0 представляет периодическую последова-
тельность двоичного видеосигнала по закону Голда, который формируется на
основе использования М последовательностей [13]. Выражение для энергетиче-
ского спектра напряжения UQ2(t) имеет вид [29]
г- / \ + 0 • v1 of 2тпЛ ^т02 яг ч
602(со) = ” - ,—-smc —- > 8 со--------------—^З(со).
2В2 12 АХ I Тк J 2В2
л*0
Огибающая спектра опорного напряжения U§2(f) имеет такой же вид, что и
огибающая энергетического спектра одиночного элемента кода, расстояние ме-
жду дискретными спектральными составляющими равно 2к/Тк, а мощность и-й
гармоники спектра (исключая п = 0) равна
<W«) = ^sinc2f^
Zn V В j
Для случая, когда полоса пропускания Ф2 выбирается из условия
Д/ф2 - компонент «сигнал-помеха» на выходе каналов РК образуется в ре-
зультате взаимодействия гармонической помехи P2(f) с л-й спектральной со-
ставляющей напряжения С/огСО, Для которой
Асо, =
, 2пп
---Ю2
П
Тк
С учётом вышеизложенного на выходе фильтра Ф2 при |со« - со21 < — A/s
К2 U2 Р
мощность компонента «сигнал-помеха» равна Psp = —сз mQ-2—р, где Ксз — коэф-
22?
фициент передачи по напряжению КСЗ на выходе фильтра Ф2.
Отношение сигнал/«результирующая помеха» P2(t) + n(f) по мощности на
выходе каналов РК gf определяется следующим выражением [84]-
Р К2112
g22 =^-^psi^±r3/2),
Qsn
„2 _^02 2 A/s
°sn ~ °n АГ ’
2 А/ф2
151
где Pss — мощность компонента, обусловленного взаимодействием в каналах
РК полезного сигнала Us,(t) и опорного напряжения — дисперсия
компонента, обусловленного взаимодействием в каналах РК внутреннего шума
n(t) и опорного напряжения C/o2i(2)W, ± TJ2) — коэффициент автокорреля-
ции полезного сигнала и опорного напряжения
После преобразований на выходах Ф2 и РК с учетом неидеальности кана-
лов РК и фильтрации компонента «сигнал-помеха» фильтром Ф3 имеем
£рк2
М/ф2
¥s
^Д/ф2
£sn SpnZ
2_К^+К1~2К{К2г^)
n __
= ] + bK ;
K2
g2 =
= cos(A<o, £); A: = K& (Aco,),
где A?i, K2 — коэффициенты передачи по напряжению каналов РК; А*, А2 —
коэффициенты ослабления компонента «сигнал-помеха» в ВУ и после фильтра-
ции в Ф3, г(£) — коэффициент взаимной корреляции компонентов «сигнал-
помеха» в каналах РК, &К — относительная нестабильность коэффициентов пе-
редачи каналов РК; Л?ф3(Дсо,)— коэффициент передачи Ф3 на частоте Дсо,
Поскольку автоматическая подстройка времени в КСЗ по своей сущности
соответствует ФАПЧ [36], то как показано в [83] при использовании в качестве
фильтра Ф3 ПИФ коэффициент фильтрации ЛГфзСДсо/) может быть определен сле-
дующим образом
A^3(Acoz) = , у = Дсо/Дсоу,
ф + у2Т2/т20
т0 = Т}/Т, 7) = R2C; Г= (/?, R,)C; Дсоу = 2лД/у, Дсо, = 2nbf„
где у — относительная расстройка частоты гармонической помехи Р2(/); то —
безразмерный коэффициент ПИФ, 7], Т2 — постоянные времени в ПИФ; Гс> —
152
относительная собственная постоянная времени ФАПЧ; &fy — полоса удержа-
ния ФАПЧ.
При Гсу = 1 имеем А/у = 2,8 А/ш2 Г, А/ш = 41 / 7] и с учётом этого получаем
ЛГфз(Аа>/) —
1
Vi+6-io-2a/;2/^
при А/<1/2Гк.
3.2 3.3. Выполним анализ погрешности слежения за задержкой от и веро-
ятности срыва слежения Рст при функционировании КСЗ в штатном режиме и
наличии РЭП.
Среднеквадратичная погрешность слежения за задержкой от и вероятность
срыва слежения Рст при типовом режиме функционирования, когда полезный
сигнал S[{t) выделяется на фоне внутреннего шума АП и сопутствующих нави-
гационных сигналов, определяется из соотношений [36]:
от =21 =Г 1^^-; Р„ = 1 - Рдт;
£рк 1
dt\x = A/от; А = Тэ,
где Рдт — доверительная вероятность, соответствующая вероятности успешного
слежения за задержкой; Ф^л) — функция Крампа.
При РЭП КСЗ шумовой помехой Px(t) имеем
ОТI =— = CTT^l + gpn! ; Pyrl = 1 - Perl = Ф1(Х1); Xi = Д/oTi,
£рк!
где ОТ1 — среднеквадратичная погрешность слежения за задержкой при РЭП
КСЗ шумовой помехой Pi(t\, Рсх{, Рут1 — вероятности срыва слежения и успеш-
ного слежения за задержкой при РЭП КСЗ шумовой помехой Pi(t).
При РЭП КСЗ гармонической помехой Р2(0 имеем
стт2 =2L = к + 2gpn2A'Al ; Рут2 = 1 - Р„г = Ф iО2); Xi =
£рк2 V ДЛ
где от2 — среднеквадратичная погрешность слежения за задержкой при РЭП
153
КСЗ гармонической помехой Р2(0; Л:т2, Ру-а — вероятности срыва слежения и
успешного слежения за задержкой при РЭП КСЗ гармонической помехой Р2(0-
Проведём количественную оценку эффективности функционирования КСЗ
и сформулируем требования к энергетическому потенциалу ПП.
В штатном режиме функционирования СРНС «Навстар» при допустимой
вероятности успешного слежения за задержкой PyTi(2)= 0,997 при справедливо-
сти гауссовой гипотезы необходимо, чтобы ах/Т3< 1/6, т.е. от< 1,67-10~7 с, а
&рк1(2) = 6.
При приёме навигационных сигналов на фоне внутреннего шума n(t) для
обеспечения нормального функционирования КСЗ необходимо, чтобы шумовая
полоса Д/ш выбиралась из условия
д/ш = -Аг; № = даш; кто = 410’21 Вт/Гц.
При gpK = 6 и Мп = 2,5 в зависимости от уровня навигационного сигнала не-
обходимо выбирать Д/ш в диапазоне от 694 Гц до 69,4 Гц. Для приведённых ис-
ходных условий реализация устойчивого сопровождения в КСЗ при обработке
навигационного сигнала на фоне внутреннего шума АП не представляет за-
труднений.
При постановке помех КСЗ задача РЭП может считаться решённой успеш-
но в случаях, когда вероятность срыва слежения за задержкой превосходит за-
данный порог Рдт.
При справедливости гауссовой гипотезы для эффекта на выходе РК в усло-
виях воздействия на АП организованных помех для обеспечения Рдт > 0,5 необ-
ходимо, чтобы от/Гэ > 0,35, т.е. gpKi(2) < 2,85.
При РЭП КСЗ шумовой помехой Px(t) величина её мощности на входе АП
Ср, необходимой для срыва слежения, определяется из соотношения
°р = °"
154
1 75 10-,°
При gpK1 = 2,85, /VU1 = 2,5 и P3l =2,5 IO-16 Вт имеем о2 = —----
и
При РЭП КСЗ гармонической помехой P2(t) величина ее мощности на вхо-
де АП Рр, необходимой для срыва слежения, определяется из соотношения
где С — коэффициент пропорциональности, учитывающий ослабление компо-
ненты «сигнал-помеха» в РК.
6 Ю"10
При gpK2 = 2,85, Wu, = 2,5 и Psz = 2,5 10"16 Вт имеем Рр =-
ЗД/п
В зависимости от степени неидеальности каналов РК ЪК и качества фильт-
рации компоненты «сигнал-помеха» в фильтре Ф3 величина С может находить-
ся в пределах от 10~3 до 10-5.
В случае комплексирования СРНС «Навстар» с датчиками инерциальной
навигационной системы фильтр Ф3 может быть адаптивным. При этом появля-
ется возможность сужения эквивалентной шумовой полосы КСЗ до
A/UI = 3 10~2 Гц, что позволяет существенно повысить помехозащищенность
КСЗ.
Выбор шумовой полосы А/и1 КСЗ зависит от особенностей функционирова-
ния АП.
При функционировании АП в автономном режиме можно выбирать
А/ш = 694 Гц, а при комплексировании АП с инерциальной навигационной сис-
темой можно выбирать = 3 10-2 Гц.
При изменении А/и1 в диапазоне от 310“2 Гц до 694 Гц необходимая для
РЭП КСЗ мощность шумовой помехи P\(t) на входе АП п2 должна находиться в
пределах от 5,8 10’9 Вт до 2,5-10“13 Вт, а мощность гармонической помехи P2(t)
на входе АП Рр должна находиться в пределах от 5,8 10’5 Вт до 2,5 10 9 Вт при
С = 10'4 При постановке ШП на входе КСЗ коэффициент подавления соответ-
ствует диапазону т|р31 е 4,310 6;103
а при постановке ГП имеем
155
Т|рз2 е 4,3’10 1О,10 7, где г|рЗЬ т]р32 — коэффициенты подавления КСЗ при поста-
новке ШП и ГП.
Энергетический потенциал ПП, необходимый для РЭП КСЗ, рассчитывает-
ся по соотношениям, аналогичным для КО.
При постановке ШП для гт = (10; 31,6; 100) км необходимо, чтобы энерге-
тический потенциал ПП составлял
а) (10,4; 20,4; 30,4) дБВт при Д/ш = 694 Гц;
б) (54; 64; 74) дБВт при Д/щ = 3-10“2 Гц, соответственно.
При постановке ГП для гт = (10; 31,6; 100) км необходимо, чтобы энерге-
тический потенциал ПП составлял
а) (50,4; 60,4; 70,4) дБВт при Д/ш = 694 Гц;
б) (94; 104; 114) дБВт при Д/^ = 3-10"2 Гц, соответственно.
Низкая эффективность ГП по сравнению с ШП при РЭП КСЗ обусловлена
возможностями её компенсации в РК.
3.2.4. Радиоэлектронное подавление канала демодуляции
3.2.4.1. Рассмотрим РЭП КДем с когерентной обработкой, структура кото-
рого приведена на рис. 3.11, где П — перемножитель; СФЬ СФ2 — согласован-
ные фильтры; НУ, ПУ, ВУ — накопительное, пороговое и вычитающее устрой-
ства.
Эффективность КДем характеризуется вероятностью ошибочных решений
РОшд и энергетическим критерием в виде отношения сигнал/помеха по напря-
жению на выходе ВУ g.
При РЭП КДем необходимо, чтобы выбранный энергетический потенциал
ПП PnGn обеспечивал уменьшение энергетического критерия g и вероятности
Рош д до недопустимого уровня, например до Рошд = 0,1.
Процесс обработки информации в АП с КДем состоит из следующих опе-
раций:
— частотной селекции, усиления, преобразования входных процессов на про-
156
межуточную частоту и их нормирования по амплитуде в ЛТП,
— когерентного детектирования, обеспечивающего перенос манипулирующей
функции навигационного сигнала на видеочастоту,
— двухканальной согласованной фильтрации и накопления с целью выделе-
ния навигационной информации, заложенной в исследуемом навигацион-
ном сигнале и передаваемой бинарным кодом;
— принятия решения о наличии навигационного сигнала и знаке бита переда-
ваемой информации с использованием ВУ и ПУ
Рис 3 11
Операции, выполняемые в ЛТП. описаны выше в подразделе 3 2 1.
В качестве опорного напряжения (70Л(г) на П подаётся с КСЧ гармониче-
ский процесс, синфазный с исследуемым сигналом Si0(t)
^4>п(0 ~ ^Лпоп COS(2Tt/s/o/)
Прохождение навигационного сигнала 5,о(0 и помехи nQ(f) через СФ и НУ
описывается следующим образом
1 г
w6) =-£
и2(.Т6) j/ic^(t-x)y„0(x)Lfo„(x)dx.
'6 .-=l-r
Лсф|(г) = Кф П,(г0-' - т,), t0 = (z+ 1)ГК,
157
^сф2(0 = ~^ф ЩГо - t - tz); NK - Tq/Tk,
где t/](r6) — напряжение на выходе СФ| и НУ; U2(T6) — напряжение на выходе
СФ2 и НУ; Лсф1(7), Лсф1(г) — импульсные реакции СФ1 и СФ2; Кф — коэффициент
передачи СФ1 и СФ2; NK — количество кодовых интервалов Тк в одном бите.
Принятие решения о наличии и знаке бита переданной информации осу-
ществляется на основе проверки гипотез Hi и Н2 следующим образом:
Нь ад)-^2(Тб)>0;
Н2: ад)-£/2(Гб)<0.
Характеристики помехоустойчивости КДем при когерентном детектирова-
нии описываются следующими соотношениями [44]:
Л>шд=1-Ф(л/2£); g=V2g,x7A^f; Д/„ = Д/5; Т= Г6,
где Т— постоянная накопления в КДем.
При приёме навигационного сигнала с минимальноожидаемым уровнем
PSH - 2,5-1017 Вт; Аш = 2,5; Д/n = 2Ю6 Гц и Гб = 2-10”2 с в штатном режиме
функционирования СРНС «Навстар» КДем обеспечивает в соответствии с при-
ведёнными соотношениями следующие характеристики помехоустойчивости
g = 7,l иРО1ЯД = 2-10-12.
3.2.4.2. Рассмотрим далее характеристики КДем при воздействии органи-
зованных помех.
При постановке ШП типа «квазибелый шум», как показано в работе
[47], характеристики помехоустойчивости могут быть рассчитаны следующим
образом:
Лшд1 = 1-Ф(л/251); g,=
2 2
р2 =—_______• 22=—- £2 =—
ОВХ1 . , 2 ’ <5sn 2 ’ opln 2 ’
1 + £pln <*n On
Анализ помехоустойчивости КДем при воздействии гармонической помехи
Р2(0 показывает наличие зависимости вероятности Рош Д1 не только от её уровня,
но и от частотной расстройки Л/=/р2 -fon [81], где fp2 — частота помехи Р2(0;
/оп — частота опорного напряжения £/оп(0, следующим образом:
158
а)Рошд21=Ф(725^) при 1/7L, gs2p=^-«l,
б) Рош д22 =| - arcsin при А/< 1 /Т6; g*f « 1; В = A/sr6,
где В — база навигационного сигнала; gs2p — отношение сигнал/помеха P2(t) по
мощности на входе АП.
Если полагать, что функционирование КДем нарушается при Рошд1(2) > Ю’1.
то при этом необходимо, чтобы при приёме навигационного сигнала с макси-
мальноожидаемым уровнем PSH = 2,5-10-16 Вт мощность помех и коэффициент
подавления соответствовали бы следующим значениям:
а) при постановке ШП
о*д=310-1,Вт,т]р41 = 8,3 ЮЛ
б) при постановке ГП
ОрД= Ю"11 Вт, Т|р42 = 2,5-10-5, где r|p4i, т|р42 — коэффициенты подав-
ления КДем при постановке ШП и ГП.
Энергетический потенциал ПП, необходимый для РЭП КДем, определяется
из соотношений, аналогичных для КО.
При постановке ШП для rm = (10; 31,6; 100) км необходимо, чтобы энерге-
тический потенциал ПП составлял (31,4; 41,4; 51,4) дБВт, соответственно.
При постановке ГП для rm = (10; 31,6; 100) км необходимо, чтобы энерге-
тический потенциал ПП составлял (26,5; 36,5; 46,5) дБВт.
Для повышения помехозащищённости КДем можно увеличить время нако-
пления Т при соответствующем изменении структуры кадров передаваемой
СРНС «Навстар» навигационной информации. При этом для случая, когда
Г = 10Гб = 0,2 с, необходимый для РЭП КДем энергетический потенциал ПП
должен быть увеличен на 10 дБВт.
159
3.3. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ АППАРАТУРЫ
ПОТРЕБИТЕЛЕЙ СРНС «НАВСТАР» СИГНАЛОПОДОБНЫМИ
ПОМЕХАМИ
3.3 1 Сигналоподобные помехи (СП) относятся к классу «интеллектуаль-
ных» организованных помех, которые формируются генераторным методом в
ПП с использованием внешних целеуказаний от подсистемы радиомониторинга
индивидуально для каждого навигационного сигнала, принимаемого АП в кон-
кретный момент времени.
При РЭП с применением СП на выходе ЛТП имеем
Ьо(О= £S,o(O+]L^o(') +«о(0 при t0<t<t0 + Tc,
/=1
где Ло(О — СП, противоборствующая навигационному сигналу от z-ro КА.
По аналогии с маскирующими помехами СП подразделяются на прицель-
ные сигналоподобные помехи (ПрСП), следящие сигналоподобные помехи (ССП)
и заградительные сигналоподобные помехи (ЗСП) [82].
Под ПрСП понимается однокомпонентный процесс
Ptl(0 = Kf5^-AT),
подобный навигационному сигналу S^t) с частотным рассогласованием
A/рас с временным рассогласованием Атрас < Гэ, а также с фиксированным
значением фазы огибающей манипулирующей функции Щ/), где К, — коэффи-
циент, учитывающий уровень ПрСП.
При размещении АП на подвижном носителе, перемещающимся относи-
тельно передатчика помех СП со скоростью VH, интервал времени эффективно-
го РЭП АП Грп может быть определён из соотношения грп = с7УУн, с = 3-108 м/с.
При VH = 200 м/с и Тэ = 10~6 с имеем — /рп = 1,5 с.
Под ССП понимается процесс
Р/2(0=КД[(/-т(Г)], т(0 = г(0/с; с = 3-108м/с,
подобный ПрСП, но только с переменной начальной фазой закон измене-
ния которой соответствует изменению расстояния r(t) между АП и ПП.
160
К достоинствам ССП следует отнести возможность существенного увели-
чения времени эффективного РЭП АП, благодаря соответствующему измене-
нию фазы огибающей манипулирующей функции Щг). Однако, поскольку по-
лучение целеуказаний, необходимых для формирования ССП, является сложной
задачей, то использование ССП в настоящее время проблематично.
Под ЗСП понимается многокомпонентный процесс
р,э(о=2;м^-^)’
;=1
имитирующий набор навигационных сигналов S£t) с одинаковыми частотным
рассогласованием &fpac <fRi для всех компонент и различным временным рассо-
гласованием для каждого компонента:
тР7 = тн + (/ - 1) 2ТЭ; Дт3 = тв - тн;у е [1, ир];
ир Дт3/27э, Гц стн, гв ств, Д/?3 сДт3, /рП A7?3/Vн,
где ир — количество компонентов в ЗСП; тн, тв — временное рассогласование
первой и последней компонент ЗСП с навигационным сигналом; Дт3, Д/?3 — ве-
личина заградительного интервала по временному сдвигу и расстоянию; гв,
гн — нижняя и верхняя граница расстояния между АП и ПП, в пределах кото-
рых обеспечивается РЭП АП при использовании ЗСП.
Если ир =10; T,= 106c; Vh = 200m/c, то имеем Дт = 210-5 с, Дг3«6км;
^рп — 30 с
При наличии существенного временного рассогласования (xpi < тн; трПр > тв)
между первым и последним компонентами ЗСП и опорным напряжением, па-
раметры которого согласованы с принимаемым навигационным сигналом S;(z),
ЗСП оказывает на помехоустойчивость АП такое же влияние, как и гауссовая
помеха с эквивалентной мощностью, что делает нецелесообразным её примене-
ние.
Эффективность РЭП при использовании ЗСП существенно возрастает, ко-
гда временное рассогласование между компонентами ЗСП и опорным напряже-
нием находится в пределах заградительного интервала тн < тР7 < тв, поскольку
161
при этом в случае подвижного носителя АП попеременно для одного из компо-
нентов ЗСП выполняется условие тР7 < Тэ, и этот компонент становится эквива-
лентным ПрСП, функции которой передаются от одного компонента к другому
как по эстафете от верхней границы тв защитного временного интервала к ниж-
ней границе в случае сближения АП и ПП.
Сравнительный анализ эффективности различных типов СП при их воз-
действии на АП показывает [82], что наибольшая эффективность РЭП обеспе-
чивается при использовании ССП, когда величина временного и частотного рас-
согласования между помехой Р2(0 и опорным напряжением достаточно мала
(А/рас < А/к; трУ - Т/ < от).
К недостаткам ССП и ПрСП следует отнести сложность получения необ-
ходимых для её формирования целеуказаний. Более простой в реализации явля-
ется ЗСП, поскольку она не требует для формирования точных временных целе-
указаний. Однако необходимо учитывать, что этот вид помехи обеспечивает вы-
сокую эффективность РЭП только тогда, когда разнос между АП и ПП соответ-
ствует заданному заградительному интервалу по дальности.
3.3.2. В данном подразделе рассмотрим особенности РЭП АП СРНС «На-
встар» при постановке ЗСП.
Модель радиообстановки на входе ЛТП АП может быть описана следую-
щим образом:
лка лка ПР
yn(t) = £s,(0 + ££^.(0 + n(t); ика e [4, 8],
/=1 i=\ /=1
где yn(Z) — аддитивная смесь навигационных сигналов, ЗСП и гауссовой помехи
я (7); Si(t) — навигационный сигнал от /-го КА СРНС «Навстар»; —j-и
компонент r-й составляющей ЗСП для РЭП АП при приёме навигационного
сигнала пка — количество КА в зоне наблюдения АП; пр — количество
компонентов, входящих в состав каждой составляющей ЗСП
7=1
Для РЭП АП в случае обработки навигационного сигнала Sz(r), учитывая,
162
что при Ps\ = P3i = Ps, где Ps\, Р31, Ps — мощность 1, z-ro и лка навига-
ционного сигнала; п^Рр1« oj; при Рр\ = Р^ = Рр, где РрЬ Рр1, Рр — мощность
ЗСП для 1, z-ro и zzka навигационного сигнала, описание модели радиообстанов-
ки можно упростить до следующего вида
МО = s,(r)+J^ (/)+«(?);
7=1
Si(t) = Umsi П/(г - tsZ) cos[coz(Z - TSi) + ф/]; coz = соПч1 + <од,;
Pij(t) ~ ^rnpz — Tp/y) COS [(OpZ(Z — Тру) + фру], «р/ — ®пч1 A^Opb
nz(r) g [-1, 1] при tQ + (Z- 1)7; < t < t0 + IT,; I g [1, TJT&
где Um3i, сод„ Ф/, — параметры навигационного сигнала S^t) (амплитуда,
частота, доплеровское смещение, начальная фаза, временной сдвиг огибающей
навигационного сигнала); Umph <ор/, сор„ AcopZ, фр/>, тр/у — параметры z-й состав-
ляющей ЗСП (амплитуда, частота, смешение частоты за счёт неточности целе-
указания, начальная фаза и временной сдвиг огибающей у-го компонента);
о>пч1 — первая промежуточная частота; П/(/) — манипулирующая функция нави-
гационного сигнала S&t) и ЗСП Р/у(г); Ту — длительность посылки навигацион-
ного сигнала и ЗСП; /0, Тс — момент начала и длительность сеанса наблюдения.
Рассмотрим особенности РЭП АП при воздействии ЗСП на КО и КСЗ.
Принцип действия и анализ помехоустойчивости КО и КСЗ при функцио-
нировании АП в штатном режиме приведены в подразделах 3.2.1 и 3 2.3.
В КО осуществляется обнаружение навигационного сигнала 5z(Z), а также
осуществляется предварительное (грубое) оценивание временного сдвига оги-
бающей навигационного сигнала т*- и доплеровского смещения частоты fai.
В КСЗ осуществляется допоиск, захват, слежение за фазой огибающей на-
вигационного сигнала 5,(г) и точное оценивание временного сдвига огибающей
навигационного сигнала Sz(r) ts/t
На основе оценок т5/гр и rSZT осуществляется расчет оценки псевдодально-
163
сти между z-м КА и АП /;пд
В качестве критерия эффективности РЭП канала обнаружения при поста-
новке ЗСП используем вероятность ошибочного решения о принятии навигаци-
онного сигнала 5,(г) — РОЦ| об [80]
В качестве критерия эффективности РЭП канала слежения за задержкой
при постановке ЗСП используем допустимую среднеквадратичную погреш-
ность оценивания псевдодальности отпд и связанную с ней вероятность срыва
слежения за задержкой Рст.
При позиционировании в горизонтальной плоскости между нормальной
среднеквадратичной погрешностью определения координат погрешностью
огпд и среднеквадратичной погрешностью оценивания временного сдвига оги-
бающей навигационного сигнала 5,(г) от существует следующая связь [18]:
стЛ'н = агПд НДОР, агПд =д/стэ + стс + °т + аи + стм + > стш = сот,
где оАГн — нормальная среднеквадратичная погрешность определения коорди-
нат; НДОР — горизонтальный геометрический фактор, учитывающий про-
странственное расположение КА СРНС «Навстар» в течение сеанса определе-
ния координат в АП; оэ, ос, от, ои, ом, ош — среднеквадратичная погрешность
определения псевдодальности из-за неточностей эфемеридной информации,
синхронизации, знания скорости распространения радиоволн в тропосфере и
ионосфере, многолучевости и шумов приёмного устройства АП.
При автономном режиме определения координат в АП стандартные значе-
ния составляющих погрешности определения псевдодальности и временного
сдвига огибающей на основе обработки навигационного сигнала с использова-
нием «С» кода имеют следующие значения [18]
+^с = 12,96 м; стт = 0,7м; ой = 7м; ам=1,2м; ои1=1,5м,
огпд = 8,1 м; от = ош/с =5 109 с
При типичном геометрическом факторе НДОР, равном 2, имеем
о/Сн = 16,2 м При постановке ЗСП для обеспечения эффективного РЭП АП не-
164
обходимо, чтобы погрешность определения координат возрастала до аномаль-
ной величины. При этом, как показано в работе [87], аномальная среднеквадра-
тичная погрешность определения координат <зКа равна утроенному значению
оХ'н. С учётом вышеизложенного следует, что при организации РЭП АП с ис-
пользованием ЗСП требуется, чтобы сКа > 48,6 м Данное условие выполняется,
если флюктуационная погрешность ош возрастает до 22,6 м, т. е. возрастает в 15
раз. С учётом результатов, полученных в подразделе 3.2.3, следует, что при этом
вероятность срыва слежения в КСЗ Рсх -> 1.
3.3.3. Анализ РЭП при постановке ЗСП проведём для трёх ситуаций, ха-
рактеризующихся различными величинами временных рассогласований между
навигационным сигналом компонентами ЗСП Р$) и опорным напряжени-
ем в КФУ
При первой ситуации предполагается наличие больших временных рассо-
гласований между опорным напряжением ЗЦО и всеми компонентами ЗСП Ру{1)
~ ^soi ^soz — ^pzy — Ph ^р/(/ + 1) — Ъру > Тэ,
где Tso, — временной сдвиг огибающей опорного напряжения
Поскольку при этом в КФУ имеет место декорреляция компонент, обуслов-
ленных взаимодействием S0l(t) с Sj(t) и то это позволяет при расчёте отно-
шения сигнал/помеха по напряжению на выходе КФУ£фр1 действие ЗСП считать
эквивалентным действию гауссовой стационарной помехи [82, 85]
Ssn''(bz ^SOi )д/Д/n /
2фр1 - . —......- - у -—......- ;
J1 + + 2gs2n[l -- rsol)f
V /=1
g2„=^-; Д4 = 2/Т3- г(г) = 1 - |г|/Гэ; gp2ln=g2n,
где Ppj — мощность у-го компонента ЗСП на входе АП; gp7-n — отношение у-го
компонента ЗСП к гауссовой помехи n(t) по мощности на входе АП; A/s — ши-
рина спектра навигационного сигнала; г(т) — коэффициент взаимной корреля-
ции опорного напряжения, соответствующего одному из навигационных сигна-
165
лов и компонентов ЗСП.
При r(TSI.-tS0/) = 1; g^n=gpn; gs2n« 1 имеем
£фр!
I. . 2Л/ф 2
I Ир£рп
Энергетические характеристики помехоустойчивости КО и КСЗ для первой
ситуации имеют вид
_ ^Фрпд/4/к1^ _ _ gsnVA/n / 441
g°!----/ 2 - “ > ЯфрИ-1" -----------
V 1 + ^^фр! 1 11 + —/2 g2
V p6pn
ф + ^^фр!2
_ &фр12 V4/к2 / 4/ш , _ gsnV44
£pk1---Г ’ £фР12 —I . 7 -
\{ + ^п^
V Л S' "рбрп
где goi- gpKi — отношения сигнал/помеха по напряжению на выходе КО и КСЗ
для первой ситуации; gфpll, gфpl2 — отношения сигнал/помеха по напряжению
на выходе КФУ в КО и КСЗ для первой ситуации.
Статистические характеристики КО и КСЗ для первой ситуации при поста-
новке ЗСП описываются соотношениями, аналогичными вышеприведённым в
подразделах 3 2.1 и 3.2.3 при приёме навигационного сигнала S&t) на фоне гаус-
совой помехи n(t) с заменой g0 на goi и gpK на gpK|.
В первой ситуации воздействие ЗСП приводит к уменьшению вероятности
правильного обнаружения навигационного сигнала DOi и увеличению погреш-
ности оценивания псевдодальности огПд1-
Расчёты основных характеристик КО и КСЗ для первой ситуации при по-
становке ЗСП, выполненные при использовании приведённых в подразделе
3 2.1 исходных данных, показывают, что влиянием ЗСП на параметры £>Oi и
огПД] можно пренебречь при яр = 10 и g?n < 10 для КО и ир = 10 и gpn< 102 для
КСЗ, что свидетельствует о низкой эффективности ЗСП, соответствующих пер-
вой ситуации.
166
При второй ситуации предполагается, что один компонент z-й составляю-
щей ЗСП Pn(t) выполняет функции прицельной СП, если ts/-т5О/-0;
пр
6тр = tsoz - Tsp/] <±7У2, а остальные компоненты z-й составляющей ЗСП
7=2
соответствуют эквивалентной гауссовой стационарной помехе, если
“ ^soz 0. Tso/ — TpZy > Гэ, Tp/(j+] j — Tp/y > Ту.
Поскольку при этом в КО и КСЗ не обеспечивается разрешение S^t) и Pj(z),
то можно показать [82, 86], что отношение сигнал/помеха на выходе КФУ для
второй ситуации с использованием ЗСП имеет вид
_ [«^Sn^C^SZ — T'SOZ ) + gpr/Gpj ~ ^SOZ 1 / |)
&фр2-------------- --------^-==2.^ ............ ;
+ +2gs2n[l -Tso,)]2 +2gpn[1 -/'(Tp,l -Tso,)f
V i=2
где ^фр2 — отношение сигнал/помеха по напряжению на выходе КФУ в КО и
КСЗ для второй ситуации.
Если r(Ts, - tsoi) -» 1; gs2n < 1 и g2„ < 1, то имеем
#фр2 =[&>п + gpn''(Tp, - Tso, )]7АЛ/А/ф при г(тр11 - Tso,) > 0,5.
При расчёте характеристик помехоустойчивости КО можно воспользовать-
ся соотношениями, приведёнными ранее для случая двухкомпонентой модели
радиообстановки, осуществив замену £ф1 и £фр2, учитывая, что Д/ф = Д/Кь
Поскольку при второй ситуации в КО не обеспечивается разделения нави-
гационного сигнала Sz(Z) от компонента ЗСП Рп(г), то отношение сигнал/помеха
go2 на выходе КО за счёт увеличения математического ожидания возрастает, что
приводит к увеличению вероятности правильного обнаружения D02 > Do. Одна-
ко необходимо учитывать, что этот результат достигается ценой того, что вме-
сто гипотезы о наличии сигнала Hs принимается гипотеза Hs и Нр совместного
наличия навигационного сигнала S^f) и 1-го компонента z-й составляющей ЗСП
Р,м-
Как показано в работе [80], вероятность ошибочного принятия решения о
наличии навигационного сигнала S,(t) POU)KO зависит от соотношения уровней
167
навигационных сигналов S^t) и компонента ЗСП также от степени иден-
тичности компонента ЗСП Pu(t) и опорного напряжения характеризую-
щейся коэффициентом взаимной корреляции г5оР(Зтр):
. p*i
Рош ко 1 — Ф
1 2 gps ^^ps'sOpC^p) ’ Sps
SH
где gpS— отношение компонента ЗСП Ph(r) к навигационному сигналу Si(t) по
мощности на входе КО.
Если PSH = 2,5-10-16 Вт, г5ор(3тр)=1, то при допустимой вероятности
Дшкод = 0,5 необходимо, чтобы мощность компонента ЗСП Pu(t) на входе КО
составляла Рр/1 = 2,5-10“16 Вт.
При расчёте точностных характеристик КСЗ влияние компонента Pu{t)
приводит к появлению смещённости математического ожидания выходного эф-
фекта Асм при оценивании временного сдвига навигационных сигналов tS£[86]
а - &ф(ТрП ~ TS/) . 2 _
^см , 6sp п >
^(Т'рП — ^so/) + £sp ^р/1
где g2p — отношение навигационного сигнала S&t) к первому компоненту z-й
составляющей ЗСП Рц(0 по мощности на входе АП.
Результирующие погрешности оценивания временного сдвига навигацион-
ного сигнала от2 и псевдодальности <угпд2 в КСЗ равны от2 = д/А2см+о2т ,
ОТ 7V^pK> <ЗТПд2 С ОТ2.
Расчеты при приведенных выше исходных данных показывают, что ЗСП в
случае второй ситуации обеспечивает РЭП КСЗ АП (т е от2 - 22,6 м), когда
Тр,1 - Tso, < 0,5; &р = 0,1; g2 = 0,15, Рр„ = 2,4-10"15 Вт.
При расчёте коэффициентов подавления КО т]р13 и КСЗ т]р33 в случае поста-
новки ЗСП, соответствующей второй ситуации, необходимо учитывать ее мно-
гокомпонентно сть Тогда в случае, когда ир = 20, получаем rjpi3 = 5 10’2 и
Лрзз = 5-10'3
Для третьей ситуации предполагается, что в процессе поиска по временно-
168
му сдвигу огибающей навигационного сигнала в КО происходит перепутывание
навигационного сигнала с одним из компонентов ЗСП, что становится воз-
можным, если в интервале временного поиска по задержке Атп находится не-
сколько компонентов ЗСП и выполняются следующие условия
7Vn = епфХТп/ДТр] > 1; Атр = тр/(/+1) - тр,7 > 27/, Атп = тияАтя,
Tsz - TSOz > 7],, Тр// — tsoz- < Т'э, Атя — 7^2, Л/п —
где Атр — временной разнос между компонентами ЗСП; Nn — количество ком-
понентов ЗСП, попадающих в пространство поиска в КО, ent[x] — целая часть
числа х; тя — количество ячеек поиска; Атя — шаг поиска по запаздыванию.
В результате перепутывания компонента Л1(0 ЗСП с навигационным сиг-
налом Si(t) модель радиообстановки трансформируется к следующему виду
яо = Р.М + 5,(0 +%Py(t) + n(t).
J=2
В данном случае компонент ЗСП Рп(0 соответствует исследуемому сигна-
лу, а компонент 5,(/) следует считать коррелированной помехой.
Поскольку при корреляционно-фильтровом преобразовании высокий уро-
вень корреляции с опорным напряжением Soi(t) имеет только компонент P,i(r), то
при этом выходное отношение сигнал/помеха £фр3 имеет вид [86]
^pnr(V-Tso/)WA^M4
£фР3 I----Т7--------------------------------тт----*
J1+-гуЧ - Ogpn + 2gp„ [1 - /-(v - Т^.)]2 + -A gln
V s s
Если /-(Тр,! - Tso,) -» 1, gs2n < 1; gpn < 1, то имеем g^ = gpn .
При расчёте характеристик помехоустойчивости и точности КО и КСЗ
можно воспользоваться t соотношениями, полученными выше в подразделах
3.2.1. и 3 2.3 для случая приема навигационного сигнала S,(z) на фоне гауссовой
помехи n(t) с заменой £ф1 на £фр3. Поскольку при принятых выше исходных ус-
ловиях влиянием на функционирование АП навигационного сигнала и 2 -ь j
компонент ЗСП можно пренебречь, то при этом для обеспечения перепутывания
навигационного сигнала £,(г) с компонентом ЗСП в КО достаточно, чтобы
169
выполнялось условие Pp/I =PSB = 2,5 1(Г16Вт, поскольку имеем £>0з = Dq = 0,85,
(Хоз = а = КУ4.
При принятии компонента ЗСП Pa(t) за сигнал в КСЗ осуществляется оце-
нивание временного сдвига тр/1 и при этом результирующая погрешность оце-
нивания временного сдвига навигационного сигнала т5/ и псевдодальности гпд
определяется из соотношений
ОТ3 = '7Асм2+ст2т ; СТТ = ^goi Дсм2 = Та - Тр; > Т3\ ОГПД = С СТТ3.
Если положить, что Дсм2 = Тэ = ПГ6 с, а от = 5-Ю"9 с, то имеем от3 = 10"6 с и
сггпд = 300 м, что существенно превосходит принятое выше требование к по-
грешности псевдодальности, необходимой для обеспечения РЭП КСЗ.
Вероятность перепутывания Рошоб навигационного сигнала St{t) и компо-
нента Z-й составляющей ЗСП может быть определена следующим образом:
N
Лшоб = = ет[Дтп/Дтр]; Дтп = 7пяДтя; Дт3 = ир Дтр; Дт3> Дтп.
Wn + 1
При Атя=7У2; шя = 10; Дтр = 27’э; лр=10, когда Дтг, = 5 КГ6 с;
Дт3 = 2-10"5с; Ап = 2; Рр = 0,67, вероятность перепутывания Рошоб составляет
0,67.
При расчёте коэффициентов подавления КО т|р1з и КСЗ т|Рзз при использо-
вании ЗСП, соответствующей третьей ситуации, необходимо учитывать ее мно-
гокомпонентность При этом в случае, когда пр = 10, получаем т]р13 = r|p33 = 10"1
Выполненные выше исследования соответствуют различным случаям РЭП
АП при оценивании псевдодальности между АП и одним из КА, входящих в со-
став созвездия КА СРНС «Навстар».
При определении координат местонахождения АП используются алгорит-
мы, учитывающие результаты оценивания псевдодальности между АП и не ме-
нее, чем четырьмя КА. К числу наиболее распространенных алгоритмов опре-
деления координат относятся [87]: 1) метод наименьших квадратов; 2) алгоритм
RA1M; 3) алгоритм FDI. Основным недостатком метода наименьших квадратов
является чувствительность оценки координат к наличию хотя бы одной ано-
170
мально большой ошибки при оценивании псевдодальности, что позволяет осу-
ществлять РЭП при использовании ЗСП, имитирующей навигационный сигнал
одного из КА, находящихся в зоне радиовидимости АП в течение сеанса пози-
ционирования.
При использовании алгоритмов RAIM и FDI имеется возможность выявле-
ния и отсеивания одной аномально большой ошибки при оценивании псевдо-
дальности, что приводит к необходимости привлечения для РЭП АП двух ЗСП,
имитирующих навигационные сигналы от двух КА. В общем случае по мере
совершенствования алгоритмов определения координат в АП может возникнуть
необходимость привлечения для РЭП совокупности ЗСП, имитирующих нави-
гационные сигналы от всех КА, находящихся в зоне радиовидимости АП, т.е. от
4 до 8.
К числу основных характеристик ЗСП можно отнести: 1) энергетический
потенциал PnGn, где Рп — мощность ПП, Gn — коэффициент усиления антенны
ПП; 2) заградительный интервал по дальности AR3 ~т\- гп, где гв, гн — верхняя
и нижняя границы по дальности; 3) заградительные сектор по азимуту Аа и уг-
лу места ДР; 4) погрешность целеуказаний по доплеровскому смещению часто-
ты ofai и временному сдвигу огибающей навигационного сигнала пт; 5) период
обновления целеуказаний Т^.
При РЭП АП, установленных на подвижных носителях, важной характери-
стикой ЗСП является интервал времени эффективного РЭП, который определя-
ется из соотношения Грг, = Д7?3/Кн, где Кн — скорость перемещения носителя АП.
Энергетический потенциал ПП может быть рассчитан из следующих соот-
ношений:
PniGn = 27tr;W- tv=ppij/sa- P„ = npnaPnl-, Sa=^-; Ga=^?,
4л AaAp
«р=Т^-; Дт,=^-, Дт =тв-т„; тв = тт; PnG„ = 4-105 пр пю Руг*,
Дтя с
где Fnl — необходимая для РЭП мощность одной компоненты z-й составляющей
ЗСП Pij(t) в ПП; Gn — коэффициент усиления антенны ПП; (7а, Sa — коэффици-
171
ент усиления и эффективная площадь рассеяния антенны АП; X — рабочая
длина волны навигационного сигнала; Рп — мощность ПП для результирующей
ЗСП для РЭП навигационных сигналов, принимаемых от ика.
При формировании целеуказаний по границам заградительного временного
интервала тн и тв необходимо учитывать псевдодальность между КА и местом
размещения подсистемы радиомониторинга, между КА и АП при появлении ее
носителя в упреждённой зоне, между подсистемой радиомониторинга и ПП, а
также между ПП и АП. Наличие ошибок при определении длины указанных
трасс приводят к случайному смещению Агсм границ заградительного интервала
по дальности гн и гв Для устранения влияния указанных ошибок необходимо
произвести увеличение заградительного интервала по дальности Л7?3 на величи-
ну максимально ожидаемого смещения Агсм, определяемого параметрами кон-
кретной тактической ситуации.
Период обновления целеуказаний Тоб зависит от параметров перемещения
КА, носителей АП, подсистемы радиомониторинга и ПП, что требует расчёта
для каждой тактической ситуации.
Если предположить, что АП размещается на подвижном носителе со ско-
ростью перемещения Ин, то временной интервал грп, в течение которого обеспе-
чивается РЭП АП в обслуживаемой зоне, находится из соотношения
ду^ _ Д/-
/Рл>—---. Количество компонент wp каждой составляющей ЗСП пропор-
ол
ционально заградительному интервалу по дальности пр = А7?3/сАтя.
Для обеспечения грп = 25 с при А/?3 = 6 км, ArCM = 1 км и Ин = 200 м/с каждая
пр
составляющая ЗСП Р^ (t) для второй ситуации должна состоять из 20 компо-
/=1
нент, а для третьей ситуации должна состоять из 10 компонент
Сравнительный анализ эффективности различных вариантов ЗСП показы-
вает целесообразность использования ЗСП, соответствующей третьей ситуации.
Расчеты показывают, что для данного варианта ЗСП необходимо, чтобы
172
энергетический потенциал ПП при rm = (10; 31,6; 100) км составлял при РЭП
как КО, так и КСЗ (-9,5; 0,5, 10,5) дБВт для пр = 10, ика = 1 и (-3,6; -6,4;
16,4) дБВт для пр = 10, ика = 4.
3.4. СРАВНИТЕЛЬНЫЙ АНАЛИЗ ЭФФЕКТИВНОСТИ
РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ АППАРАТУРЫ
ПОТРЕБИТЕЛЕЙ СРНС «НАВСТАР»
Выполненные в подразделе 3.2 исследования показывают, что при функ-
ционировании СРНС «Навстар» в штатном режиме при отсутствии организо-
ванных помех вероятность успешного навигационного обеспечения Руно зависит
от ошибочных решений в КО (Р0шоб =1,75-10 2), КСЧ {PCf~ 510~2), КСЗ
(Рст = З-Ю”3) и КДем (Рошд = 2-1012) и составляет Руно = 0,93.
При постановке организованных помех эффективность функционирования
АП снижается, и для оценки эффективности РЭП можно использовать вероят-
ность радиоэлектронного подавления АП Ppn = 1 - Руно, а также её отдельных
каналов Ррш-
При постановке ГП и ШП эффективность РЭП отдельных каналов АП ха-
рактеризуется вероятностями
а) для КО Ppni Рош об»
б) для КСЧ Ррп2 = Pcfi
в) ДЛЯ КСЗ РрпЗ = Рст;
г) ДЛЯ КДеМ Ррп4 Рош Д’
При постановке ЗСП эффективность РЭП отдельных каналов АП характе-
ризуется вероятностями
а) для КО РРп1 — Рош ко»
б) дляКОРрпз =Рош ксз
Результаты исследований РЭП каналов АП при использовании ШП, ГП и
ЗСП для ситуаций, когда АП функционирует автономно в штатном режиме,
приведены в табл. 3.1.
173
Таблица 3 1
Наименование канала АП Тип помехи Вероятность РЭП Энергетический потенциал, P„G„ (дБВт) Примечание
ШП Ppni = 0,5 8,5 rm - 10 км ОДНОЦИКЛОВЫЙ поиск
ко ГП Рpni = 0,5 8,5
ЗСП Рpni ~ 0,67 -9,5 -3,6 г-4 тГ II II К »
КСЧ ШП Ррп2 = 0,32 19,5 rm = 10 км
ГП РрП2 = 0,32 24,4 Д/„, = 250Гц
ШП Ррпз = 0,5 10,4 гт = 10 КМ
ксз ГП Ррпз = 0,5 54 Д/ш = 694 Гц
ЗСП Лпз = 0,67 -9,5 -3,6 II II S2 К
кд ШП Т^рпд 0,1 18,7 rm = 10 км
ГП Лп4=0,1 18,7 т=т6
Из приведённых в табл. 3.1 результатов следует, что из всех рассматривае-
мых помех наименьший энергетический потенциал ПП (PnGn = -3,6 дБВт,
Ика= 4, ир = 10) требуется при постановке ЗСП.
При учёте воздействия ЗСП на КО и КСЗ вероятность РЭП АП рассчиты-
вается из соотношения Ррп = 1 - (1 - РОш ко)( 1 - Рош ксз) и составляет 0,89.
При постановке ГП и ШП с энергетическим потенциалом ПП, равным
8,5 дБВт вероятность РЭП составляет Ррп = РОш об = 0,5.
С целью увеличения вероятности РЭП (Ррп 1) необходимо при постанов-
ке ШП иметь энергетический потенциал ПП порядка 20 дБВт, а при постановке
ГП — порядка 25 дБВт.
С целью повышения помехозащищённости АП возможно её комплексиро-
вание с инерциальной навигационной системой, что позволяет а) перейти от
одноциклового к многоцикловому режиму поиска и обнаружения; б) обеспечить
уменьшение шумовой полосы ФАПЧ А/ш в КСЧ с 500 Гц до 5 Гц, а в КСЗ с
694 Гц до 3 10~2 Гц, ; в) обеспечить увеличение постоянной интегрирования Т в
КДем от Т6 = 2-10~2 с до 10Гб = 0,2 с.
Результаты исследований РЭП каналов при использовании ШП, ГП и ЗСП
174
для ситуаций, когда применяется комплексирование АП с инерциальной нави-
гационной системой, приведены в табл. 3.2.
Таблица 3.2
Наименование канала АП Тип помехи Вероятность РЭП Энергетический потенциал, P„G„ (дБВт) Примечание
ко ШП ГП МП ЦП о сГ II И е с 16,5 16,5 = 10 км многоцикловый поиск
ЗСП Ррп! =0,67 -9,5 -3,6 а а £ S II II
КСЧ ШП ГП 3 S bJ II II О О Ъэ Ъэ м ьэ 36,5 41,4 rm = 10 км Д/ш = 5 Гц
ксз ШП ГП а э II II р О ui 50,4 94 гт = 10 км Д/ш = 3-10’2 Гц
ЗСП Ррпз = 0,67 -9,5 -3,6 Я Й II II
КДем ШП ГП ‘в II II р р 28,7 28,7 II II О О
Из приведённых в табл. 3.2 результатов следует, что из всех рассматривае-
мых помех наименьший энергетический потенциал ПП (PnGn ~ -3,6 дБВт,
ика = 4, ир = 10) требуется при постановке ЗСП Следует отметить, что интеллек-
туальный характер ЗСП обеспечивает её инвариантность к вышеупомянутой
мере по повышению помехозащищенности АП.
При постановке ШП и ГП в случае использования комплексирования тре-
буется дополнительное увеличение энергетического потенциала ППпрч и
Ррп = 0,5 на 8 дБВт и при Ррп -> 1 на (15-20) дБВт
Сравнительный анализ РЭП с использованием ШП, ГП и ЗСП позволяет
сделать вывод о целесообразности перехода от «силовых» помех (ШП, ГП) к
«интеллектуальным» помехам (ЗСП).
При увеличении максимальной дальности РЭП до rm == 100 км величина
допустимого энергетического потенциала ПП без учета затухания в атмосфере
и влияния земной поверхности должна быть увеличена на 20 дБВт для всех ти-
пов померс и каналов АП, приведенных в табл 3 1 и 3 2.
175
ГЛАВА 4. ПРИНЦИПЫ ПОСТРОЕНИЯ КОМПЛЕКСА
РАДИОЭЛЕКТРОННОЙ БОРЬБЫ С СРНС «НАВСТАР»
4.1. ПОСТАНОВКА ЗАДАЧИ
4 1 1. В настоящее время КРЭБ нашли применение при решении задач са-
мозащиты и прикрытия объектов различной сложности.
Самозащита малоразмерных объектов обеспечивается при использовании
КРЭБ индивидуальной защиты, а при прикрытии объектов, имеющих большие
размеры, находят применение КРЭБ групповой защиты [25].
В случае самозащиты все средства КРЭБ размещаются непосредственно на
защищаемом малоразмерном объекте, а при прикрытии объектов, имеющих
большие размеры, используется целый ряд передатчиков помех (ПП), которые
пространственно разнесены с подсистемой радиомониторинга.
В ходе проведённых во второй и третьей главах исследований разработан
теоретический базис, необходимый для проектирования КРЭБ с СРНС «На-
встар» при различных исходных данных и тактических ситуаций.
КРЭБ относится к классу информационных систем, предназначенных для
разрушения информации. КРЭБ можно также причислить к системам массового
обслуживания, если под обслуживанием понимать РЭП большого количества
комплектов АП СРНС «Навстар».
Разработка КРЭБ является сложным многоэтапным процессом, включаю-
щим системное и техническое проектирование.
На этапе системного проектирования КРЭБ основным предметом исследо-
вания является структура, представляющая собой совокупность элементов и
связей между ними. При определении облика структуры учитывается набор
следующих правил*
1) элементы представляют собой автономные, функционально завершенные
устройства и подсистемы;
2) наличие частных целей управления для каждого элемента и общей цели
для всей системы,
176
3) преобразование и обобщение информации в элементах в соответствии с
общим алгоритмом системы;
4) взаимовлияние элементов структуры из-за наличия общих ограничений;
5) возможность управления КРЭБ при различном объёме априорной инфор-
мации.
Исследование возможных вариантов построения структуры КРЭБ является
важным этапом проектирования, позволяющим получить представление об об-
лике и сложности системы при различных исходных данных.
При этом необходимо учитывать, что поскольку КРЭБ функционирует в
условиях информационного конфликта, то при его проектировании необходимо
учитывать, как текущее состояние средств противодействующей стороны, так и
возможность их динамического развития.
В данной главе рассматриваются принципы построения КРЭБ, обеспечи-
вающего прикрытие объекта, путём РЭП всех комплектов АП СРНС «Навстар»,
находящихся в зоне обслуживания КРЭБ. При этом предполагается, что СРНС
«Навстар» функционирует в штатном режиме при приёме комплектами АП на-
вигационных сигналов, излучаемых на частоте L\ = 1575,42 МГц с использова-
нием «С» кода.
Зона обслуживания КРЭБ определяется такими параметрами, как Аа —
сектор по азимуту; др — сектор по углу места; гн, гв — нижняя и верхняя гра-
ницы по дальности.
КРЭБ обеспечивает РЭП АП при постановке помех (ГП, ШП, СП) в тече-
ние заданного интервала времени при заданной вероятности радиоэлектронного
подавления Ррп.
В случае штатного режима функционирования СРНС «Навстар» в зоне ра-
диовидимости АП находятся от 4 до 8 КА. Уровень навигационных сигналов на
входе АП при использовании приёмной всенаправленной антенны соответству-
ет gBX~ IO’3, где g*x— отношение сигнал/шум по мощности на входе АП. Про-
странственное положение всех КА СРНС «Навстар» соответствует стационар-
ным траекториям и поэтому может быть предсказано с определённой погреш-
177
ностью для каждого момента времени. К числу априорно неизвестных парамет-
ров навигационных сигналов, принимаемых АП относятся следующие пара-
метры: t/ms — амплитуда навигационного сигнала; fai — доплеровское смеще-
ние навигационного сигнала; tRz — временной сдвиг огибающей навигационно-
го сигнала; ф, — начальная фаза навигационного сигнала. В ряде случаев к чис-
лу априорно неизвестных навигационных параметров также относятся коэффи-
циенты в образующем полиноме манипулирующей функции Щ/).
КРЭБ получает внешние целеуказания о начале и окончании сеанса РЭП.
Поскольку радиомониторинг навигационных сигналов и постановка помех
осуществляется на одной и той же частоте Ц, то для обеспечения ЭМС подсис-
тем КРЭБ необходимо использовать пространственный разнос подсистемы ра-
диомониторинга и ПП, а для связи между подсистемой радиомониторинга и ПП
использовать командную радиолинию (КРЛ). ПП преобразуется в подсистему
постановки помех (ППП) при использовании в составе КРЭБ нескольких ПП.
При организации РЭП комплектов АП с неизвестным местоположением в
зоне обслуживания КРЭБ осуществляются следующие этапы обработки инфор-
мации:
1) радиомониторинг навигационных сигналов;
2) формирование и передача целеуказаний на ПП;
3) создание и постановка помех.
В соответствии с проведёнными в третьей главе исследованиями для РЭП
АП СРНС «Навстар» целесообразно использовать ГП, ШП и СП.
Обобщённый алгоритм КРЭБ можно представить следующим образом:
Fnba)]-^); ^13
F16[{/V)}]->{Sp(0},
где Fii[yn(0] — оператор пространственно-частотной селекции, реализуемый в
подсистеме радиомониторинга с целью преобразования многокомпонентного
процесса yn(t) в двухкомпонентный процесс у2(0; — оператор стати-
/р ; Fi5 /р
178
стической обработки процесса y2(t) с целью определения оценок информатив-
ных параметров навигационных сигналов J Zs !>; Fi3 ys
— оператор преобра-
зования параметров у 3 в радиосигнал с параметрами, используемыми в каче-
стве целеуказаний от ПП; Fi4[SK(0] — оператор статистической обработки ра-
диосигнала SK(t) в КРЛ с целью формирования управляющих воздействий ур >;
— оператор формирования набора помех {P(z)} с использованием
управляющих воздействий ур >; Fi6[{P(/)}] — оператор преобразования помех
{Р(г)} в набор мешающих воздействий {5p(z)} на входе АП.
Операторы Гц[уп(0] и Л2[у2(0] реализуются в подсистеме радиомонито-
ринга; операторы F^ ys
и Fi4[Sk(0] реализуются в КРЛ; операторы Fi5 < /р
и F16[{P(r)}] реализуются в ПП.
На основе вышеизложенного структура КРЭБ может быть представлена
как на рис 4 1, где Аа, Аь А2, А3, Ад — антенны; ПРМ — подсистема радиомо-
ниторинга; ППУ1 — приемопередающее устройство прямого канала КРЛ;
ППУ2 — приёмопередающее устройство обратного канала (канала подтвержде-
ния) КРЛ; РазП — разведывательный приёмник.
Предложенный в первой главе критерий радиоэлектронного подавления в
виде вероятности Ррп удобен при анализе функционирования и оценке эффек-
тивности АП СРНС «Навстар», но встречает затруднения при решении задач
проектирования подсистем КРЭБ и КРЭБ в целом. Для того, чтобы преодолееть
указанные затруднения, необходимо увязать критерий эффективности КРЭБ с
критериями эффективности его отдельных подсистем.
КРЭБ обеспечивает успешное РЭП при постановке организованных помех
выбранного типа (ГП, ШП, СП) с необходимыми энергетическим, пространст-
179
венными, частотными, статистическими и временными характеристиками.
Рис. 4.1
Достижение перечисленных характеристик организованных помех обеспе-
чивается распределением функций между подсистемами КРЭБ следующим об-
разом. Подсистема радиомониторинга на основе радиомониторинга излучений
КА СРНС «Навстар» и приёма команд от средств связи систем раннего преду-
преждения (авиационными, спутниковыми) о приближении носителей АП к зо-
не обслуживания КРЭБ формирует целеуказания для управления КРЭБ. Целе-
указания состоят из команд на включение и выключение ПП и информации, не-
обходимой для формирования помехи соответствующего типа. Для обеспечения
нормального функционирования КРЭБ необходимо, чтобы формируемые в под-
системе радиомониторинга целеуказания были достоверными, полными и свое-
временными, что обеспечивается при соответствующей помехоустойчивости,
быстродействии и многофункциональности подсистемы радиомониторинга и
командной радиолинии. Конкретизация основных характеристик подсистемы
радиомониторинга требует учёта специфики тактических особенностей исполь-
зования КРЭБ и параметров навигационных сигналов.
Потребность в использовании КРЛ возникает при пространственном раз-
180
носе подсистемы радиомониторинга и ППП и необходимости их взаимного пе-
ремещения.
Специфика применения КРЛ в составе КРЭБ требует, чтобы к числу ос-
новных её характеристик были отнесены не только помехоустойчивость и про-
пускная способность, но также скрытность и помехозащищённость.
ППП формирует организованные помехи различных типов. При этом на
основе целеуказаний устанавливаются частотные, статистические, временные и
энергетические характеристики помех, а пространственные характеристики и
поляризация помех определяются параметрами антенной системы ППП.
В результате взаимодействия всех подсистем КРЭБ формирует организо-
ванную помеху выбранного типа с энергетическим потенциалом, обеспечиваю-
щим РЭП комплектов АП в заданной зоне обслуживания, параметры которой
определяются особенностями конкретной тактической ситуации.
Для дальнейшей детализации принципов построения КРЭБ необходимо
рассмотреть принципы построения его подсистем: подсистемы радиомонито-
ринга, КРЛ и ППП.
4.2. ПРИНЦИПЫ ПОСТРОЕНИЯ ПОДСИСТЕМЫ
РАДИОМОНИТОРИНГА
4.2 1. В зависимости от задач, стоящих перед подсистемой радиомонито-
ринга, радиомониторинг может осуществляться постоянно (систематический
радиомониторинг) или в заданные промежутки времени (эпизодический радио-
мониторинг)
Систематический радиомониторинг осуществляется в случае необходимо-
сти постоянного контроля за пространственными, энергетическими, частотны-
ми, статистическими и временными параметрами радиоизлучений всех КА, вхо-
дящих в состав СРНС «Навстар», с целью фиксации всех режимов как при
штатном, так и при нештатном функционировании.
Эпизодический радиомониторинг предназначен для обеспечения сеансов
РЭП при использовании КРЭБ и должен обеспечивать оценки радионавигаци-
181
онных параметров радиоизлучений только тех КА, которые находятся в зоне
радиовидимости АП и подсистемы радиомониторинга в текущий момент вре-
мени.
Далее рассмотрим принципы построения подсистемы радиомониторинга, в
которой осуществляется эпизодический радиомониторинг, при нижеприведён-
ных исходных данных
Модель радиообстановки на входе подсистемы радиомониторинга соответ-
ствует первой рабочей модели радиообстановки, когда на вход ЛТП поступает
двухкомпонентный процесс:
у2(0 = S(t, I , а) + n(t) при Го < Г < Го + Тс;
S(t, I, а) = ит П(/ - tr) cos [2л/5(7 - tr) + <p0]; fs =fo
П(<) e [-1; 1] при t0 + (i- 1) T3 < t< t0 + iT3; i e [1, Tc/T3]-,
sine (лД/„т) cos (2л/от); I e [JZn,/s, Tr, П(/)],
где S(r, I, a) — фазоманипулированный навигационный сигнал с неизвестной
формой; I — набор навигационных параметров; a = фо — сопутствующий па-
раметр (начальная фаза); /д — доплеровское смещение частоты сигнала; n(t) —
гауссовая стационарная помеха с известной автокорреляционной функцией
(квазибелый шум) /?п(г); о* — дисперсия помехи и(г); А/, — полоса пропуска-
ния ЛТП подсистемы радиомониторинга, xR — временной сдвиг навигационно-
го сигнала, обусловленный разносом дальности КА и подсистемы радиомони-
торинга; П(г) — априорно неизвестная манипулирующая функция навигацион-
ного сигнала.
Решение исследуемой задачи радиомониторинга необходимо осуществлять
в виде следующей последовательности этапов обработки информации [89].
— установление информационного контакта подсистемы радиомониторинга с
исследуемым КА на основе использования пространственной и частотной
селекции;
— установление энергетического контакта;
182
— оценивание частоты сигнала /s;
— распознавание параметров и структуры манипулирующей функции сигнала
п(0;
— оценивание временного сдвига xR ;
— формирование целеуказаний для организации РЭП АП СРНС «Навстар».
Структура подсистемы радиомониторинга приведена на рис. 4.2, где Арм —
антенна; ОПУ — опорно-поворотное устройство; ЛТП — линейный тракт при-
ёмника; ОБН — обнаружитель; РУ — решающее устройство; ИЧ — измеритель
частоты; Кл — классификатор; ИВС — измеритель временного сдвига; Но,
Но — гипотеза о наличии и отсутствии сигнала; Um, fs, tr — оценки ампли-
туды, частоты и временного сдвига; П(^) — оценка параметров и структуры
манипулирующей последовательности.
4.2.2. Для обеспечения информационного контакта подсистемы радиомо-
ниторинга с одним из КА, входящих в состав СРНС «Навстар», необходимо
произвести программное наведение антенны на радиоизлучение КА по задан-
ным пространственным координатам а и р, а также осуществить частотную
настройку ЛТП (f0 +/,4i; A/n > A/s, где fr — частота гетеродина; fmi — первая
промежуточная частота; А/п — рабочий частотный диапазон; — ширина
спектра сигнала). Алгоритм данного этапа радиомониторинга описывается сле-
дующими соотношениями:
^1[Уп(0] при to < t < to + Т„„ + Тс; Тс =^.; 0О,5 < 6Р; 0Р < АаА-^,
а ика
где /7’1[уп(0] — оператор, соответствующий пространственной и частотной се-
лекции радиоизлучения исследуемого КА; t0, Тс — момент начала и длитель-
ность сеанса радиомониторинга; 7’пн — время программного наведения Арм;
0о.5 — ширина диаграммы направленности антенны; 0Р — элемент пространст-
венного разрешения КА, входящих в состав СРНС «Навстар»; Аа, АР — секто-
183
ры радиовидимости подсистемы радиомониторинга по азимуту и углу места;
ика — количество КА, находящихся в зоне радиовидимости подсистемы радио-
мониторинга.
Рис. 4.2
Оценка пространственных характеристик КА СРНС «Навстар», приведён-
ного в работе [89], показывает, что 0Р > 16°, a d < 0,5 °/мин.
4 2.3. На этапе радиомониторинга, соответствующего установлению энер-
гетического контакта подсистемы радиомониторинга с исследуемым радиоиз-
лучением, осуществляется обнаружение сигнала и оценивание уровня сигна-
ла/7ш:
Н.
^2[Уг(0] Ц'(Т’о); Uy(To) g tAop> Uy(To) ~ при t\ < t < + To,
Ho
где F2[y2(0] — оператор, соответствующий статистической обработке процесса
y2(t) в ОБН; С/У(7о) — эффект на выходе ОБН; t/nop — порог обнаружения; Um —
оценка амплитуды сигнала, t\ — начало сеанса обнаружения; TQ — время интег-
рирования в ОБН.
184
После установления информационного и энергетического контактов под-
системы радиомониторинга с исследуемым радиоизлучением последовательно
реализуются этапы радиомониторинга, обеспечивающие оценивание частоты
сигнала /s, классификации (распознавания) параметров и структуры манипу-
лирующей функции П(^), оценивание временного сдвига rR и формирование
целеуказаний для организации РЭП комплектов АП, находящихся в зоне обслу-
живания КРЭБ:
F1 [Уг(О] -> Z при t2 < t < t2 + Tfi F4|>2(0] П(/) при t3 < t < t3 + TK„-
^[>2(0] tr при t4 < t < t4 + 7r; F6[ I ] -> lu при t5 < t < t5 + Гцу,
где Г3[у2(0]» — операторы, соответствующие статистической
обработке процесса y2(t) в ИЧ, Кл, ИВС; F6[/ ] — оператор, соответствующий
формированию целеуказаний на основе набора оценок информативных пара-
метрам сигнала / в УУ, /ц — набор целеуказаний по информативным парамет-
рам сигнала; /2, 6, t*, ts — моменты начала сеансов оценивания частоты fs,
классификации параметров и формы П(^), оценивание временного сдвига tr ,
формирование целеуказаний; 7}, Т^, Тцу — длительность сеансов оценива-
ния fs, классификации П(0, оценивание tr , формирования целеуказаний.
При выборе алгоритмов статистической обработки на этапах радиомонито-
ринга, связанных с обнаружением, оцениванием и классификацией информа-
тивных параметров сигнала необходимо учитывать следующие отличительные
особенности по сравнению с обработкой информации в АП СРНС «Навстар»:
— модель радиообстановки на выходе ЛТП подсистемы радиомониторинга за
счёт пространственной селекции упрощается и становится двухкомпонент-
ной,
— отношение сигнал/шум по мощности g*x на входе подсистемы радиомони-
185
торинга при сравнении с АП возрастает пропорционально коэффициенту
усиления антенны Арм — (7рм,
— параметры и структура манипулирующей функции П(/) исследуемого сиг-
нала априорно неизвестны.
Как показано в подразделе 2.2, при проведении радиомониторинга излуче-
ний КА на этапе установления энергетического контакта при выполнении вы-
шеуказанных особенностей целесообразно использовать алгоритмы энергети-
ческого или автокорреляционного обнаружения.
В данном случае остановимся на использовании энергетического обнару-
жителя (ЭО), поскольку он более прост в аппаратурной реализации.
Алгоритм ЭО имеет вид
1 т°
Но: Ц(Г0)> 1/пор, Uy(T0)= — \yi(t)dt при ti<t<tx + TQ.
о
Основные характеристики ЭО могут быть рассчитаны из следующих соот-
ношений [50,51]:
агсФ(1 - а)
8э 71 + 2gB2xl _
Ф
а = I - Ф(£п); Ф(х) =-,== f е 2dt;
_£вх1УД/п^0 . _ Цюрл/А/пТр . 2
ьэ I - > <5П 2 ’ ОВХ
Vl + 2gB2xl «Л
a2=Wn,
Na = kT<yNm-, кТ0 = 4 Ю"21 Вт/Гц; Д/„ = Д4; Afs = 2/7^; 7’0=7’б;
1 /в> <§вхт 2
ап
— ^sl — ^ВХ1 . — _J_
^sm &вхт
где D, a — вероятность правильного обнаружения «ложной тревоги»; g^, —
отношение сигнал/шум на входе ЛТП подсистемы радиомониторинга на этапе
обнаружения; g3 — отношение сигнал/шум по напряжению на выходе ЭО, gn —
пороговое отношение сигнал/шум по напряжению; /Лор — порог обнаружения;
Ф(х), arc Ф(х) — функция и обратная функция Лапласа; Ка — коэффициент пе-
редачи квадратичного детектора (КД); а*, Nn — дисперсия и спектральная
186
плотность помехи n(t) на входе ЛТП; Рс1 — реальная чувствительность подсис-
темы радиомониторинга при обнаружении сигналов; Nw — коэффициент шума
ЛТП; A/s — ширина спектра сигнала; То — постоянная интегрирования в ЭО;
g2xm — отношение сигнал/шум по мощности на входе ЛТП при Ga = 1 и приёме
сигнала с минимальноожидаемым уровнем PSB; (7рм — коэффициент усиления
антенны подсистемы радиомониторинга, необходимый для обеспечения тре-
буемых характеристик помехоустойчивости ЭО D и а; ~~~ — относительная
погрешность оценивания амплитуды сигнала.
Для обеспечения D = 0,997 и а=10"5 при 7Vm = 2,5; Д/^ = 2-106 Гц,
Го“2-10"2с; Psb=-166 дБВт; g2xm = 1,254 О-3 в результате расчётов по выше
приведённым соотношениям получаем следующие значения энергетических
характеристик ЭО:
g3 = 6,14; gn = 4,26; g2xl = 3,14-1(Г2; Pcl = 6,3-КГ16 Вт; GpM > 25; ^®-=0,16
4 2.4. Перейдём далее к этапу радиомониторинга, связанного с оценивани-
ем частоты fs навигационного сигнала. С учётом результатов работ [78, 79] и ис-
ходных условий для исследуемой задачи радиомониторинга измеритель частоты
(ИЧ) как показано в подразделе 2.4 следует реализовать в виде совокупности
двухшкального автокорреляционного частотного дискриминатора АЧД и систе-
мы фазовой автоподстройки частоты (ФАПЧ), входящей в состав устройства
восстановления несущей частоты [90].
Структура ИЧ совместно с ЭО приведена на рис 4.3, где Смь См2 — сме-
сители; Фь Ф2, Ф3 — полосовые фильтры; НПЬ НП2, НП3 — нелинейные пре-
образователи (умножители частоты); ЛЗЬ Л32 — линии задержки; ФНЧЬ ФНЧ2,
ФНЧ3, ФНЧ4 — фильтры нижних частот; Дел — делитель; ФП — функцио-
нальный преобразователь вида arctg(x) ; КД — квадратичный детектор;
2лт
ПУ— пороговое устройство; РУЬ РУ2, РУ3 — решающие устройства; Упрь
187
Рис 4.3
На вход ИЧ поступает процесс У21(0> который отличается от входного про-
цесса y2(t) средней частотой, которая равна fs -fr =fQ +/л -fr =fmi +fa, где fr —
частота гетеродина в ЛТП; /Пч1 — первая промежуточная частота; — допле-
ровское смещение частоты сигнала.
На входы АЧД! и АЧД2 поступает процесс y22(t) после преобразования час-
тоты в Cmj процесса y2i(0- Средняя частота процесса y22(t) равна /sl =/s -fr~
Лго =Упч2 гДе fyro — начальное значение частоты УГ,^ч2 — вторая промежу-
точная частота.
Первая (точная) шкала (АЧД1) должна обеспечить беспоисковую работу
ФАПЧ, а вторая (грубая) шкала (АЧД2) должна обеспечить устранение много-
значности в интервале неопределенности частоты сигнала.
188
Алгоритм точной АЧД, имеет вид [78]
Л =-1-arctg^g^; Л =/о -fr -/уг0 + Л ;
27ГТ! С/сС^Т!)
] Ti ! Ti
С/с(Гь Т|)= — J^(Л, и) = ~f Л21 (t)y12(t - xx)dt;
71 о А о
~ Тк; Т\ = Ть,
где /ST — оценка частоты сигнала в АЧДь tt — временной сдвиг, вносимый ЛЗг
в АЧДь 7\ — постоянная интегрирования в АЧДь Us(7\, Ti), UC(J\, Ti) — квадра-
турные напряжения на выходе ФНЧ, у?2±(0 — квадратурная составляющая про-
цесса у2(0; Лт — оценка доплеровского смещения частоты сигнала в АЧДЬ
В грубой шкале (АЧД2) осуществляется предварительное нелинейное пре-
образование процесса >’22(0, которое обеспечивает умножение частоты сигнала
на два и свертку спектра, в результате чего фазоманипулированный сигнал пре-
образуется в гармонический процесс:
У2з(1) = f h^2(t -x)y22(x)dx = Us(t) + Un(t);
Лф2(/) = 2Д/ф2 sine (лД/ф2Г) cos (4л/пч20;
44(0 = KHn cos [4n(fm2 +/д)г], Д/ф2 = 2ДЛ; K„n = 1 7B,
где /2фг(О — импульсная реакция полосового фильтра Ф2 со средней частотой
2fn42 и полосой пропускания А/ф2; t/s(z), ЩО — сигнальная и помеховая состав-
ляющие процесса у23(г); Кнп — коэффициент передачи НП; A/a — интервал не-
определенности доплеровского смещения частоты.
Далее осуществляется оценивание частоты процесса Us(t) [79]
7sr arctg7777^ ’ 7r =/o -fr -/yro + far;
4лт2 C/c(7^,t2)
189
UATz, Tz) — ~ f У2з(?)У2з(! tz)^> ^Л(Гг> ^2) JУгзЛОУп^ тг)^>
Go '20
t2=-^; T^~T^
4 Д/д
где /sr — оценка частоты сигнала в АЧД2; /дг — оценка доплеровского смеще-
ния частоты сигнала в АЧД2, т2 — временной сдвиг вносимый Л32; Г2 — посто-
янная интегрирования в АЧД2; UC(T2, т2), U3(T2, т2) — квадратурные напряжения
на выходе ФНЧ; _y23j_(Z) — квадратурная составляющая процесса j23(Z).
В решающем устройстве (РУ2) формируется частотное целеуказание для
управляемого генератора (УГ).
Для обеспечения беспоискового захвата частоты сигнала в ФАПЧ необхо-
димо, чтобы на основе частотного целеуказания обеспечивалась точная под-
л Л /*
стройка УГ, когда - f < Д/щь q/i < , Рдов1 = 0,95, где Д/Ш1 — шумовая по-
4
лоса ФАПЧ; q/] — среднеквадратичная погрешность оценивания частоты в
АЧДь РД0В1 — доверительная вероятность.
При использовании частотного целеуказания от АЧД1 и АЧДг после под-
стройки частоты УГ появляется возможность существенно сузить полосу про-
пускания фильтра Ф3 А/з, выбирая её из соотношения ДУз = 8q/i
Алгоритм оценивания частоты при использовании ФАПЧ описывается сле-
дующими соотношениями [74]:
Л ->/; Л -/угю = /д; ЩТз) = ^y2^)Uyr[t,fyr(t)]dt -> 0;
73 о
У24(0 = jЛф3(< - x)yl2(x)dx, = 2Д/Фз sine (лД/фзО cos (4л/пч2г);
о
7’з=-^;Ы0 = ^(0 + ад,
441
где / — оценка частоты УГ; Uy(T3) — напряжение на выходе ФАПЧ, Т3 — по-
190
стоянная времени ФАПЧ; £7уг[/, /уг (0J — напряжение УГ, Лф3(/) — импульсная
реакция фильтра Ф3,у24(0 — процесс на выходе фильтра Ф4
Основные характеристики АЧД1 и АЧД2 могут быть рассчитаны из сле-
дующих соотношений [79]:
qfi=——, g, = ; т, = Тк- 7\ = Г6; A/„ = A/S; g2x2=^;
2mlgl ^/l + 2gBx2 on
GPm2=^-; qA<^-; РДОВ1=0,95; o/2=——; t2=-J-;
4 2nT2g2 4AA
_ T >T- a - ^2x3 7д/п /А/з . _
g2—I----- - , 22 >/б, g*--j- •. --, q/2—-—
jl,4 + 3,3g2 V1 + 2^BX3 4
0— > f’noBi 0,95;
2 . G -
овхЗ 2 ’ ^Рм3 D
^sm
где q/i, сгД — среднеквадратичная погрешность оценивания частоты в АЧД1,
АЧД2; Т|, т2 — временной сдвиг, вносимый ЛЗЬ Л32; gh g2 — отношение сиг-
нал/шум по напряжению на выходе АЧДЬ АЧД2, ggx2, gB2x3 — отношение сиг-
нал/шум по мощности на входе ЛТП при оценивании частоты в АЧДЬ АЧД2; Рс2,
Рс3 — реальная чувствительность подсистемы рад,иомониторинга при оценива-
нии частоты с использованием АЧД! и АЧД2; Срм2, <7рм3 — коэффициент усиле-
ния Арм, необходимый для обеспечения требуемых точностных характеристик в
АЧД] и АЧД2, А/од] — диапазон однозначного отсчёта частоты в АЧД].
На основе приведённых соотношений при исходных данных Т] = Г3 = 10-3 с;
т2 =-2-= 2,5-Ю’5; Д/д= 104 Гц; Ряов1 = 0,95; = 2,5; Рдов2 = 0,95; Д/п = 2 106 Гц;
4 Д/д
Г| = Т6 = 2 10~2с; Т2= 107б = 0,2с; Д/ш1=40Гц; PSB =-166 дБВт,
Д/3 = 8o/i = 80 Гц; A/oai = 500 Гц погрешность оценивания частоты в АЧД1 со-
ставляет ufi = 10 Гц и в АЧД2 составляет q/г = 125 Гц .
В результате расчётов по вышеприведённым соотношениям получаем сле-
дующие значения энергетических характеристик АЧД] и АЧД2.
191
g!=16; gB2x2=810-2; PC2 = 1,6-10’15 Вт; Gpm2 = 64;
g2 = 51; g2x3=l,610-3, Рсз = 3,2-1О45Вт; GpM3=128.
Основные характеристики ФАПЧ, обеспечивающей малую вероятность
срыва слежения за частотой, могут быть рассчитаны из следующих соотноше-
ний [74]:
Стф =— < сгфдоп; g3 = g<j,7A/3''A/'ini ; g* = ; Д/з = 8ст/,;
gj Vl + 2g2x4
2 — ^С4 . — ^с4
6вх4 2 ’ ^Рм4 п »
°n
где оф — среднеквадратичная погрешность оценивания фазы; суфдоп — допус-
тимая величина оф; g3 — отношение сигнал/шум на выходе ФАПЧ; gB2x4, Рс4 —
отношение сигнал/шум по мощности на входе ЛТП и реальная чувствитель-
ность подсистемы радиомониторинга при оценивании частоты с использовани-
ем ФАПЧ; СгрМ4 — коэффициент усиления антенны, необходимый для устойчи-
вого функционирования подсистемы радиомониторинга с использованием
ФАПЧ.
При заданных сфдоп = 0,33 рад; А/з = 80Гц, А/ц1= 40 Гц; Аш = 2,5;
Д/п = 2-106 Гц; Psm = -166 дБВт в результате расчётов по вышеприведённым со-
отношениям получаем следующие значения энергетических характеристик
ФАПЧ:
g3 = 3; gBx4= 1,310'2; Рс4 = 2,610-16Вт; Gpm4=10,5.
4.2.5. Для распознавания в классификаторе (Кл) параметров образующего
полинома, определяющего характер манипулирующей функции П(0, можно
применить алгоритм и структуры, аналогичные используемым в АП СРНС «На-
встар» и описанные в работах [19, 54].
Алгоритм Кл при использовании когерентной обработки описывается сле-
дующими соотношениями [75, 76]:
192
т
Hf Uyl(T4) > Unop, ^X^)=^j\21(W'-Tz(r)]^ при 7-4 >T6.
*4 О
So.R - т//)] = Um0 П[/ - т/z)] cos (2Ttfsi); П(/) е [-1, 1 ] при tOi, + (к - 1) Т3 < t <t0i+kT3;
i е [1, JVn]; к е [1; Tci/T3]; tj(t) = т0 + (/-О Дт при t0l + (/- 1)7;< t< tOl+jT4;
j e [1, m„]; mt - ; At = T-J2;
At
= Mi Kt, Tci = m„T4; &T=—.
c
где Hi — гипотеза об использовании в сигнале z-ro варианта манипулирующей
функции; ЦчСТд) — напряжение на выходе коррелятора при правильном распо-
знавании варианта реализации манипулирующей функции H(z); /7пор — порого-
вое напряжение; Г4 — постоянная интегрирования; SQi(t) — опорное напряже-
ние, соответствующее z-му варианту реализации П(7); т/г) — закон изменения
временного сдвига П(^); UmQ — амплитуда опорного напряжения; Ат — шаг из-
менения временного сдвига П(0; т0, АГ — начальное значение и диапазон неоп-
ределенности временного сдвига П(г); Mi — количество вариантов реализации
П(7), представляющих при классификации интерес, тя — количество шагов по-
иска по времени; ТС1, — длительность сеанса классификации при использо-
вании одного и Mi видов опорного напряжения; АТ? — диапазон неопределенно-
сти по дальности между подсистемой радиомониторинга и КА.
После классификации структуры и параметров П(г) начинается этап оцени-
вания временного сдвига tr, реализация которого возможна на основе алгорит-
ма, включающего в себя синхронное детектирование и временную дискрими-
нацию [36, 84].
Структура Кл и ИВС приведена на рис. 4.4, где П1,П2,П3 — перемножите-
ли, ФНЧЬ ФНЧ2, ФНЧз, ФНЧ4, ФНЧ5 — фильтры нижних частот; См — смеси-
тель, СЧ — синтезатор частоты, Мод — модулятор, ГК — генератор кода;
ПУ — пороговое устройство; ВУ — вычитающее устройство, Упр — управи-
тель, РК — разностный коррелятор.
193
Рис. 4.4
Алгоритм ИВС по аналогии с АП СРНС «Навстар» описывается следую-
щими соотношениями [84]:
1 т>
иу(Т5, 8т) = -рЦ[Г4;г(0]-^Т;;г(/)]}Л -0;
7 5 0
1 Л
ВД, Т(/)] = - Jy25(r)^.[x(/)] + M2]dt,
7 4 о
1 Ъ
т(0] = - Jj25(0S„[t(0]-A/2]^;
7 4 0
yis{t) = — j У21 (О^сч (0<* > Т6 = Т3\ UC4(t) = исч cos (2n/C4z); /сч =/пч| + /д,
'б о
где Uy(T5, St) — напряжение на выходе РК; Л, Т5, Г6 — постоянные времени
ФНЧ2, ФНЧз, ФНЧ4, ФНЧ5; St — величина ошибки по временному сдвигу,
UX[T^ т(/)], С/2[Л, ^(01 — напряжение на выходах ФНЧ3 и ФНЧ4, >2s(0 — на-
194
пряжение на выходе ФНЧ2, А — линейный участок дискриминационной харак-
теристики РК; UC4(t) — напряжение СЧ с амплитудой UC4 и частотой/^.
Основные характеристики Кл и ИВС могут быть рассчитаны из следующих
соотношений [54, 84]:
а) Рот\ = 0,5(0 + а); 0 = 1 — £>; D = <t>[g4 - gnop]; а = 1 - O(gnop);
g* ~ &вх5 VA/п^З ’ ^3 = ^вх5 = -^; ^рм5="^> Т’кл = Ml тя Ткл<' ?<:'>
CTn PSB
т
б) стг<стгяоп; ог=саг; с = 3-108м/с, ат=—;
gs
gs= gBx67Vn/A42; gB2x6=^-; брмб=^->
°n ^SB
где Рош1 — вероятность ошибочных решений при классификации; £ — вероят-
ность пропуска; g4 — отношение сигнал/шум по напряжению на выходе коге-
рентного детектора; Т3 — постоянная времени ФНЧ1; g2x5, Рс5 — отношение
сигнал/шум по мощности на входе ЛТП и реальная чувствительность подсис-
темы радиомониторинга на этапе классификации П(г); агдоп — допустимое зна-
чение среднеквадратичной погрешности подсистемы радиомониторинга по
дальности аг; с — скорость распространения электромагнитных волн в свобод-
ном пространстве; от — среднеквадратичная погрешность оценивания времен-
ного сдвига Ат; g5 — отношение сигнал/шум по напряжению на выходе РК;
A/j!2 — шумовая полоса контура ИВС; g}xb, Fc6 — отношение сигнал/шум по
мощности на входе ЛТП и реальная чувствительность подсистемы радиомони-
торинга на этапе оценивания временного сдвига tr; <7рм5, 6рмб — коэффициенты
усиления Арм, необходимые для обеспечения требуемых значений Рош и от на
этапах классификации П(г) и оценивания tr.
При заданных Рош1 = 10"6, отдоп = 3 м; Л/п = 2 106 Гц; = 2,5; Г3 = 2-10-2 с;
Ат = TJ2 = 5 IO 7 с; АТ? = 180 км, А/п = 25, А/ш2 == 5 Гц в результате расчётов по
вышеприведённым соотношениям получаем следующие значения основных
характеристик Кл и ИВС
J 95
g4 = 9,5; gB2xS = 2,5 1 O’2, Pc5 = 5-1О"16 Вт; GpMS = 20, TK„ = 10 мин,
ат = IO"8 c; g5 = 100, g2x6 = 2,25-Ю"2; Pc5 = 3 IO"15 Вт, GpM6 = 18
4 2 6 Сравнительный анализ энергетических характеристик подсистемы
радиомониторинга на различных этапах функционирования показывает, что
наиболее жесткие требования по реальной чувствительности предъявляются в
режиме оценивания частоты сигнала в АЧД2, что обусловлено появлением поро-
гового эффекта при использовании в алгоритме дополнительного нелинейного
преобразования.
С учётом вышесказанного коэффициент усиления антенны 6рм в подсисте-
ме радиомониторинга следует выбрать из следующих условий
брм = Срмз > Ср, Ср « 100 при 0р = 16°,
где Ср — коэффициент усиления Арм, при котором обеспечивается пространст-
венное разрешение радиоизлучений КА, входящих в космический сегмент
СРНС «Навстар».
Таким образом, для решения всех задач радиомониторинга при функцио-
нировании СРНС «Навстар» в штатном режиме необходимо, чтобы реальная
чувствительность подсистемы радиомониторинга составляла Рс = Рс3 = 3,2-10-15
Вт при коэффициенте усиления антенны Срм = Срмз ~ 128.
Поскольку при этом ширина диаграммы направленности антенны подсис-
темы радиомониторинга составляет 0О,5 = 14°, то длительность сеанса радиомо-
ниторинга Тс с учётом угловой скорости перемещения КА по траектории
а = 0,5 °/мин будет составлять без обновления целеуказаний по пространст-
венному положению КА порядка 28 минут. При этом появляется возможность
увеличения времени, отводимого на этап классификации и снижения требова-
ний к интервалу неопределенности по дальности А/? и количеству вариантов
реализаций П(г) Nn, используемых в качестве тестовых.
Вышеприведенные результаты соответствуют случаю радиомониторинга
радиоизлучения одного КА с использованием одноканального Кл. В случае не-
обходимости повышения быстродействия подсистемы радиомониторинга еле-
196
дует использовать многоканальный Кл
Для организации эффективного РЭП АП СРИС «Навстар» необходимо,
чтобы подсистема радиомониторинга формировала целеуказания по результа-
там радиомониторинга не одного, а всех КА, находящихся в зоне наблюдения
АП СРНС «Навстар», число которых может составлять от 4 до 8. Для обеспече-
ния радиомониторинга по такому количеству КА при построении подсистемы
радиомониторинга можно использовать два подхода:
— многоканальное построение с использованием совокупности автономно
функционирующих подсистем радиомониторинга по радиоизлучениям ка-
ждого КА;
— одноканальное построение с использованием режима автосопровождения
радиоизлучений каждого КА на проходе.
Второй подход является более привлекательным с точки зрения уменьше-
ния сложности аппаратурной реализации подсистемы радиомониторинга, но
при этом нарушается непрерывность радиомониторинга, что создаёт проблемы
с качеством целеуказаний и обеспечением высокого уровня эффективности
РЭП.
Полученные результаты могут быть также использованы при проведении
радиомониторинга радиоизлучений СРНС «Навстар» на частоте L2 с использо-
ванием «Р» кода, а также взяты за основу при построении подсистемы радио-
мониторинга, обеспечивающей решение задач радиомониторинга при функцио-
нировании СРНС «Навстар» в нештатном режиме.
4.3. ПРИНЦИПЫ ПОСТРОЕНИЯ КОМАНДНОЙ РАДИОЛИНИИ
4.3.1 При построении КРЭБ необходимо учитывать, что радиомониторинг
излучений КА и постановка организованных помех для РЭП АП должны осу-
ществляться на одной частоте. При этом для обеспечения ЭМС подсистемы ра-
диомониторинга и ПП необходимо осуществлять их пространственный разнос,
а для обеспечения связи между ними — использовать командную радиолинию
(КРЛ)
197
КРЛ должна включать в себя прямой и обратный каналы [91, 92] . Прямой
канал используется для передачи целеуказаний, формируемых в подсистеме ра-
диомониторинга и необходимых для функционирования ПП Обратный канал
используется для передачи от ПП в подсистему радиомониторинга подтвержде-
ний о приёме целеуказаний, а также информации о текущих координатах ПП в
случае его размещения на подвижном носителе [92, 93].
Структура каждого из каналов КРЛ приведена на рис. 4.5, где AiK, Д2к —
антенны; РПУ, РПрУ — радиопередающее и радиоприемное устройства;
Мод — модулятор; Дем — демодулятор; КУ, ДУ, РУ — кодирующее, декоди-
рующее и решающее устройства; ИС — источник сообщения.
Рис. 4.5
Принципы построения КРЛ освещены во многих работах, например,
[91-93].
К числу основных характеристик КРЛ следует отнести следующие: 1) вы-
сокие достоверность, скрытность и помехозащищённость; 2) необходимость
подтверждения о принятой информации; 3) дальность действия; 4) скорость пе-
редачи информации.
Достоверность КРЛ определяется её помехоустойчивостью, которая харак-
теризуется вероятностью правильного приёма информации Р1к = 1 - Р01к, где
Pou — вероятность ошибочного приёма информации.
Под скрытностью КРЛ понимается ее способность противостоять мерам
разведки, проводимой противником При этом скрытность подразделяют на
198
энергетическую, структурную и информационную [93]. Энергетическая скрыт-
ность характеризуется способностью КРЛ противостоять мерам, связанным с
обнаружением ее радиоизлучений разведывательным приемником. Структурная
скрытность характеризуется способностью КРЛ противостоять мерам, связан-
ным с распознаванием её радиоизлучений и оцениванием параметров. Инфор-
мационная скрытность характеризуется способностью КРЛ противостоять ме-
рам, связанным с раскрытием смысла передаваемой информации
4 3.2. В качестве критерия эффективности скрытности КРЛ можно исполь-
зовать вероятность успешной разведки радиоизлучений КРЛ Р2к = Р22 ^23,
где Р2\ — вероятность успешного обнаружения радиоизлучений КРЛ; Р22 — ве-
роятность успешного вскрытия структуры радиоизлучений КРЛ; Р2з — вероят-
ность правильного раскрытия смысла передаваемой в КРЛ информации
Поскольку для организации радиопротиводействия КРЛ в ряде случаев
достаточно использовать факт обнаружения сигнала, то это обстоятельство по-
зволяет учитывать только энергетическую скрытность КРЛ, что позволяет упро-
стить критерий эффективности скрытности КРЛ, полагая Р2к = Р2\.
Под помехозащищённостью КРЛ понимается её способность противосто-
ять подавлению организованными противником помехами. Помехозащищён-
ность КРЛ определяется скрытностью и помехоустойчивостью, а для её оценки
используется вероятность РЭП Р3к = 1 - Pj Р2[.
Выбор и обоснование основных характеристик КРЛ проведем для следую-
щих исходных данных:
1) в КРЛ используются сложные сигналы и когерентная обработка;
2) в разведывательном приёмнике потенциального противника используется
энергетический обнаружитель;
3)КРЛ должна обеспечить передачу достоверных целеуказаний, формируе-
мых в подсистеме радиомониторинга и поставляемых для ПП с заданными
скоростью передачи информации RK и дальностью действия и;
4) параметры КРЛ должны обеспечивать энергетическую скрытность при за-
данном расстоянии г2 между передающим устройством прямого канала
199
КРЛ и разведывательным приёмником потенциального противника;
5) в случае пространственного совмещения технических средств КРЛ с под-
системой радиомониторинга и ПП особое внимание следует уделить обес-
печению скрытности функционирования прямого канала КРЛ, чтобы не
демаскировать местоположение подсистемы радиомониторинга,
6) обработка сигналов в КРЛ осуществляется на фоне гауссовой помехи n(t).
Выбор параметров КРЛ с учётом особенностей информационного кон-
фликта между режимами связи и радиоразведки следует осуществлять таким
образом, чтобы в прямом канале КРЛ обеспечивался допустимый уровень дос-
товерности Р1к на заданной дальности и, а обнаружение сигнала КРЛ в разве-
дывательном приёмнике потенциального противника, находящемся на расстоя-
нии г2 от подсистемы радиомониторинга, происходило с пропусками, величина
вероятности которых должна быть не менее допустимой величины Рпр >Л|РД.
Диапазон изменения дальности гь соответствующий разносу между ме-
стоположениями подсистемы радиомониторинга и ПП, находится в пределах от
сотен метров (для случая использования метода временного разделения радио-
мониторинга и РЭП) до максимальной дальности РЭП rm, которая обычно со-
ставляет от единиц до десятков километров. Для обеспечения высокой скрыт-
ности КРЛ с целью затруднения определения со стороны противника местопо-
ложения подсистемы радиомониторинга необходимо, чтобы зона обнаружения
сигнала КРЛ имела по возможности наименьший радиус г2.
При использовании в КРЛ широкополосных ФМС и когерентной демоду-
ляции ее параметры могут быть рассчитаны из следующих соотношений
[48, 54]
1 х /2
Р01к<Рыка; Ро|К= 1 -Ф(72§1); Ф(х)=-у=[е 2dt,
л/2л Д
g^gBxiV^; Bc = Vsk7’6k; Лк=1/7’6к; g„V [?-rS ФС ~Poik)]2 =_£L)
200
PC* С* л
^,=адш1д/, л. = ^2; ^=-^4; s2=-^
/1 5Г14 /1
XiK = c//|K; PS| >Pnpi; Pnpi = WoyuiA/sgL J kTo= 4-10 21 Вт/Гц;
где Ли кд — допустимая вероятность ошибочных решений при демодуляции;
Л1к — вероятность ошибочных решений в прямом канале КРЛ при однократной
передаче целеуказаний; gBX1, gi — отношения сигнал/шум по напряжению на
входе и выходе радиоприёмного устройства прямого канала КРЛ; Вс, Д/^ — база
сигнала и ширина спектра, используемого в КРЛ; Ф(х) — функция Лапласа; 7бК,
RK — длительность бита и скорость передачи информации в прямом канале
КРЛ; — плотность потока мощности на входе радиоприёмного устройства в
прямом канале КРЛ; ^1К, fiK — длина волны и частота радиоизлучений в прямом
канале КРЛ; Psi — уровень сигнала на входе радиоприёмного устройства в пря-
мом канале КРЛ; Рпр1 — реальная чувствительность радиоприёмного устройст-
ва в прямом канале КРЛ; — дисперсия шума на входе радиоприёмного уст-
ройства в прямом канале КРЛ; АШ1 — коэффициент шума радиоприёмного уст-
ройства; Рпк — мощность радиопередающего устройства в прямом канале КРЛ,
Gb Gi — коэффициенты усиления антенн AiK и А2к в прямом канале КРЛ; S2 —
эффективная площадь рассеяния антенны А2к; с — скорость распространения
радиоволн.
4 3 3 Для анализа основных параметров разведывательного приёмника по-
тенциального противника в случае использования в нём энергетического обна-
ружителя можно применить следующие расчетные соотношения [48, 93]:
?по?
Р...Ф - агсФ<_1-2>„)
1 ПО 6 2 /J
-\/1 + £вх2
, -/пт 1 <Ж), Г*Пр 1 Рпо;
& = §в2х2=4-, о;2=адш2д/п> рл = рпрг
Vl + 2gB2x2 пП2
/S2 = W2Sp,
_PmGxK s
4лг22 р 4л
201
где Рпо — вероятность правильного обнаружения; Рпр, Ли — вероятности про-
пуска сигнала и ложных тревог; gBx2, g2 — отношения сигнал/шум по напряже-
нию на входе и выходе разведывательного приёмника; gn — нормированный
порог; Ps2 — уровень сигнала на входе разведывательного приёмника; Рпр2 —
реальная чувствительность разведывательного приёмника; п22 — дисперсия
шума на входе разведывательного приёмника; Nm2 — коэффициент шума разве-
дывательного приёмника; &fn — рабочий частотный диапазон разведывательно-
го приемника; Го — постоянная интегрирования при обнаружении сигнала;
W2 — плотность потока мощности на входе разведывательного приёмника; <7Р,
5Р— коэффициент усиления и эффективная площадь рассеяния антенны А3
разведывательного приёмника, Кос — коэффициент ослабления сигналов на вхо-
де разведывательного приёмника в случае приёма радиоизлучений КРЛ с на-
правлений, соответствующих боковым лепесткам антенны Аь
Достижение скрытности КРЛ обуславливается отсутствием априорной ин-
формации о сигнале КРЛ, что не позволяет использовать в нём когерентную об-
работку и приводит к появлению порогового эффекта.
Взаимную увязку параметров КРЛ и разведывательного приёмника для
случаев, когда МШ1 =Аш2 и А/п = ДА , с учётом вышеприведённых соотношений
можно осуществить следующим образом:
*1 _ . о — ^рмЗ . £> — <?вх1
---------]-$--------------о2 -—
<22 в2 KocG5 g2x2
Для иллюстрации полученных соотношений рассмотрим пример со сле-
дующими исходными данными: Ро1к= Ю-6; Рпр = 0,9; Мы = Мы = 2,5;
RK= 103бит/с; Вс = 104; G3 = 10; G5 = 100; К5-10-2; Гбк.
При этом основные параметры КРЛ имеют следующие значения:
Л/п = ДЛ=107Гц; 7’=7’6к=10-3с; Рпр1 = 4:5-10“'7 Вт; g, = 3; gB2xt = 4,5-КГ4;
2
Рпр2 = l,3-10~’5 Вт, g2=l,3; g2x2= 1,3 ИГ2 и тогда -“300.
Г2
Для обеспечения дальности действия КРЛ, равной Г\ = 5 км, необходимо
202
при G\ = 100, чтобы мощность передатчика КРЛ составляла Рпк = 510'9 Вт без
учёта затухания и замирания радиоволн. КРЛ будет обнаружения разведыва-
тельным приёмником только тогда, когда он будет находится на расстоянии не
более г2 ~ 294 м.
Выше были рассмотрены меры по обеспечению энергетической скрытно-
сти КРЛ. С целью увеличения помехозащищённости, наряду со скрытностью, в
КРЛ следует принять следующие меры:
— использовать в прямом канале сигналы с прыгающими частотами;
— сократить длительность информационного пакета, передающего целеуказа-
ния на ПП;
— увеличить скважность передачи команд;
— использовать многократное подтверждение принятой ПП информации че-
рез обратный канал;
— использовать вынесенные ретрансляторы.
Принципы построения КРЛ, входящей в состав КРЭБ, должны соответст-
вовать принципам построения современных военных систем радиосвязи
[94-97].
4.4. ПРИНЦИПЫ ПОСТРОЕНИЯ ПОДСИСТЕМЫ
ПОСТАНОВКИ ПОМЕХ
4.4.1. Подсистема постановки помех (ППП) представляет собой набор тех-
нических средств, называемых передатчиками помех (ПП), обеспечивающих
формирование организованных помех различных типов с фиксированными и
управляемыми энергетическими, пространственными, частотными, статистиче-
скими и временными характеристиками.
Состав ППП определяется задачами и харакеристиками РЭБ. К числу рас-
пространенных задач РЭБ относятся самозащита и прикрытие объектов. При
использовании КРЭБ для прикрытия объектов в зависимости от размеров зоны
РЭП и требований к надёжности и живучести в состав ППП могут входить один
или несколько ПП, которые могут функционировать как в автономном режиме,
203
так и представлять координированное пространственное поле, управляемое от
внешних целеуказаний. ПП характеризуется набором технических, эксплуата-
ционных и экономических характеристик.
К числу основных технических характеристик ПП можно отнести: Рп —
мощность помехи; Gn — коэффициент усиления антенны ПП; hn — высота
подъёма антенны ПП, fp — несущая частота помехи; Л/р — ширина спектра по-
мехи; Гр — время, необходимое для постановки помехи; вид используемых по-
мех.
Важной характеристикой ПП является эффективность помех, которая оп-
ределяется коэффициентом подавления, величина которого зависит от своевре-
менности постановки, типа и параметров формируемых в ПП радиоизлучений,
возможности управления режимами ПП и адаптации с использованием внеш-
них целеуказаний. При построении ПП для РЭП АП СРНС «Навстар» следует
учитывать, что априорно известны поляризация, несущая частота, ширина
спектра и вид модуляции подавляемого сигнала, примерный уровень сигнала в
зоне нахождения АП.
Поскольку, как показано в главе 3, эффективность помех можно сущест-
венно повысить при использовании таких априорно неизвестных параметров
навигационных сигналов, как доплеровское смещение временное запаздыва-
ние огибающей навигационного сигнала характер манипулирующей функ-
ции навигационного сигнала то это обуславливает необходимость привле-
чения внешних целеуказаний, формируемых в подсистеме радиомониторинга.
Структура ПП с учётом вышеизложенного может быть представлена
рис. 4.6, где А3, А4 — антенны; РПУК — радиопередающее устройство обратно-
го канала КРЛ; РПрУк — радиоприёмное устройство прямого канала КРЛ; ДУ,
ФУ, УУ — декодирующее, формирующее, управляющее устройства; Мод — мо-
дулятор; Гоч — генератор опорных частот.
204
А3 А4
Рис 4.6
Принцип действия ПП состоит в следующем. От подсистемы радиомони-
торинга через А3 на вход РПрУк поступают команды управления и внешние це-
леуказания. После проверки правильности приёма целеуказаний в ДУ на вход
РПУК поступает команда подтверждения, которая излучается кодированным ра-
диосигналом на подсистему радиомониторинга В УУ определяется тип и па-
раметры формируемой помехи и осуществляется управление режимами работы
РПУК, РПрУк, ФУ, Гоч и УМ.
4.4.2. Объём и содержание внешних целеуказаний зависят от типа исполь-
зуемых для РЭП помех, а также от режима функционирования СРНС «На-
встар». Для штатного режима функционирования СРНС «Навстар» при форми-
ровании ШП достаточно ограничиться командами управления для включения и
выключения ПП При формировании ГП необходимо, чтобы в целеуказания на-
ряду с командами управления была введена информация о доплеровских сме-
щениях навигационных сигналов. При формировании ЗСП необходимо, чтобы в
целеуказания наряду с командами управления была введена информация о доп-
леровских смещениях, временных сдвигах огибающих и манипулирующих
функциях навигационных сигналов.
Существенное влияние на размещение антенны ПП оказывают размеры и
форма зоны обслуживания КРЭБ. В связи с тем, что априорно неизвестны вре-
мя появления, длительность нахождения и количество носителей АП, подлежа-
щих РЭП, то с целью повышения оперативности при постановке организован-
ных помех целесообразно использовать в составе ПП антенны, диаграммы на-
правленности которых согласованы с секторами обслуживания по азимуту Да и
205
углу места Др
В тех случаях, когда АП размещаются на наземных, морских или воздуш-
ных носителях перемещающихся на малых высотах, сектор обслуживания по
углу места сужается до 5°-Ч5°.
Если зона обслуживания КРЭБ представляет секторную площадку, ПП це-
лесообразно располагать в вершине сектора при условии, что его энергетиче-
ский потенциал обеспечивает РЭП до максимальной дальности rm При этом в
ПП следует применять секторную антенну, диаграмма направленности которой
согласована с Да и др.
В случае, когда зона обслуживания КРЭБ представляет небольшую пло-
щадку с произвольной формой периметра, ПП целесообразно располагать в её
центральной части, чтобы обеспечить РЭП АП, находящихся на всех точках
контура по периметру площадки При этом в ПП целесообразно использовать
ненаправленную антенну по азимуту с шириной диаграммы направленности по
углу места, равную Др.
Для случаев, когда размеры зоны обслуживания КРЭБ превосходят даль-
ность РЭП, обеспечиваемую энергетическим потенциалом ПП, возникает необ-
ходимость в разделении зоны обслуживания на соты с радиусом, равным ожи-
даемой дальности РЭП при использовании одного ПП, и размещении ПП в цен-
тре каждой соты. При этом в составе ППП следует использовать число ПП, рав-
ное количеству сот.
Расчёт энергетического потенциала ПП РП(7П, необходимого для обеспече-
ния максимальной дальности РЭП при высоте подъема антенны ПП hn, следует
производить по методике, приведённой в третьей главе.
В зависимости от характера используемых помех ПП можно разделить на
специализированные и универсальные В специализированных ПП формирует-
ся один вид помех (ГП, ШП либо ЗСП), а в универсальных ПП возможно по-
следовательное и одновременное формирование любого вида помех (ГП, ШП и
ЗСП)
К числу эксплуатационных характеристик ПП можно отнести” надёжность,
206
вес и габариты, энергопотребление, устойчивость к механическим и климатиче-
ским воздействиям, требования к управлению и местам установки и т.п.
Как показано в третьей главе, минимальное значение допустимого энерге-
тического потенциала РП(7П, необходимое для РЭП АП, путём нарушения функ-
ционирования канала обнаружения (КО), составляет 8,5 дБВт для ГП и ШП и
-3,6дБВт для ЗСП при гт= 10 км. При увеличении максимальной дальности
РЭП канала обнаружения АП до 100 км энергетический потенциал ПП
PnGn увеличивается на 20 дБВт для каждого из указанных типов помех.
Современный уровень развития средств РЭБ, как свидетельствуют данные
работ [26, 27], обеспечивает создание ПП для РЭП СРНС «Навстар», функцио-
нирующей в штатном режиме при максимальной дальности РЭП порядка ста
километров.
При размерах зоны обслуживания КРЭБ более 104 км2 выбор типа помех,
энергетического потенциала и количества ПП должен осуществляться путём
решения многопараметрической задачи с учётом не только перечисленных вы-
ше характеристик, но и с учётом необходимости обеспечения живучести,
скрытности, адаптации к ответным мерам потенциального противника.
Окончательный выбор энергетического потенциала ПП, используемых для
РЭП АП, следует производить на основе критерия «эффективность-стоимость».
4.5. ПРИНЦИПЫ ПОСТРОЕНИЯ КОМПЛЕКСОВ
РАДИОЭЛЕКТРОННОЙ БОРЬБЫ
4 5.1. Состав и структура КРЭБ зависят от большого количества факторов,
определяемых тактическими, техническими, эксплуатационными и экономиче-
скими характеристиками [24].
В данном разделе рассмотрим некоторые варианты построения КРЭБ на
основе таких классификационных признаков, характеризующих сложность
структуры элементов, вид и способ организации РЭБ.
Наиболее простым по составу является КРЭБ, в котором используется
только подсистема постановки помех (ППП), состоящая из одного или несколь-
207
ких ПП (рис 4 7) с ручным или автоматическим управлением, одно- или много-
разового использования, мобильного или стационарного размещения Такое по-
строение КРЭБ возможно для обеспечения РЭП АП в штатном режиме функ-
ционирования СРНС «Навстар» при наличии целеуказаний о времени и грани-
цах зоны появления носителей АП. Забрасываемые или стационарно установ-
ленные ПП должны обеспечивать постановку прицельной гармонической или
заградительной шумовой помех на априорно известной частоте с определённым
энергетическим потенциалом в необходимом пространственном секторе.
Ручное управление может быть использовано в забрасываемых одноразо-
вых ПП, в состав которых входят технические средства, необходимые для фор-
мирования помехи. Автоматическое управление используется при стационар-
ном размещении ПП в зоне обслуживания КРЭБ. При этом в состав ПП вводит-
ся приёмник КРЛ, обеспечивающий приём команд на включение и выключение.
i ППП
i ПЦ
пц
ПНдг
Рис 4.7
Второй вариант построения КРЭБ (рис. 4.8) позволяет обеспечить РЭП АП
при использовании одного ПП, формирующего ГП, ШП и ЗСП. Такой КРЭБ
применяется для случаев, когда СРНС «Навстар» работает как в штатном, так и
нештатном режимах при наличии целеуказаний о времени и месте появления
носителей АП. При стационарном размещении подсистем КРЭБ и небольшом
пространственном разносе подсистемы радиомониторинга и ППП, обеспечение
связи между ними достигается применением кабельного канала. Применение
208
кабельного канала связи ограничивает мобильность КРЭБ. Подсистема радио-
мониторинга должна обеспечивать обработку навигационных сигналов от всех
КА, находящихся в зоне радиовидимости, и формировать целеуказания для ПП.
ППП должна обеспечивать формирование всех видов помех с необходимыми
энергетическими, пространственными и статистическими характеристиками
ПРМ ПП
Рис. 4 8
При большом пространственном разносе подсистемы радиомониторинга и
ППП и их размещении ПП на мобильных носителях в состав КРЭБ необходимо
вводить КРЛ.
Третий вариант построения КРЭБ (рис. 4.9) обладает функциональными
возможностями второго варианта построения КРЭБ, но при этом в состав ППП
может входить набор ПП, образующих управляемое пространственное поле.
Рис. 4.9
Все вышерассмотренные варианты КРЭБ обеспечивают эффективное
функционирование при наличии целеуказаний о времени и месте появления но-
сителей АП. Для получения таких целеуказаний могут использоваться, напри-
мер, авиационные или спутниковые системы раннего предупреждения, что не
всегда возможно. Поэтому для обеспечения автономного использования КРЭБ в
его состав следует ввести дополнительно технические средства раннего преду-
преждения, содержащие пассивные датчики (оптические, инфракрасные, теле-
визионные, радиоразведывательные) и размещаемые, например, на беспилот-
ных летательных аппаратах (БПЛА).
Четвёртый вариант построения КРЭБ (рис. 4.10) отличается от третьего ва-
рианта построения КРЭБ тем, что в её состав вводится подсистема раннего пре-
дупреждения (ПРП), размещаемая на БПЛА. Кроме того, в состав КРЭБ при
данном варианте построения включена дополнительная КРЛ2, обеспечивающая
связь между БПЛА и подсистемой радиомониторинга
209
Рис. 4 10
4.5.2. Сравнительный анализ рассмотренных вариантов построения КРЭБ
позволяет сформулировать их достоинства и недостатки.
Для первого варианта построения КРЭБ к достоинствам следует отнести
простоту реализации и низкую стоимость, а к недостаткам:
1) потребность в больших объёмах априорной информации о типе и парамет-
рах навигационных сигналов, а также о времени и месте появления носи-
телей АП;
2) возможность применения только ГП и ШП, эффективность которых может
быть снижена при использовании в АП методов пространственной и час-
тотной селекций.
Для второго варианта построения КРЭБ к достоинствам следует отнести:
1) возможность организации РЭП АП из одной точки пространства, как при
штатном, так и в нештатном режимах функционирования СРНС «Навстар»
на основе использования помех различного типа (ГП, ШП, ЗСП);
2) возможность обеспечения скрытности размещения подсистемы радиомо-
ниторинга за счёт использования кабельного канала связи,
а к недостаткам можно причислить:
1) ограниченную мобильность;
2) возможность вывода КРЭБ из строя путём уничтожения ПП, самонаводя-
щейся ракетой потенциального противника;
3) необходимость обеспечения развязки между подсистемой радиомонито-
ринга и ПП
Для третьего варианта построения КРЭБ к достоинствам следует отне-
сти.
210
1) возможность организации РЭП АП пространственно управляемым полем
помех различного вида как при штатном, так и в нештатном режимах
функционирования СРНС «Навстар»;
2) возможность повышения живучести КРЭБ за счёт использования большо-
го числа ПП и режима мерцания радиоизлучений пространственно-
разнесённых ПП;
3) повышение эффективности помех за счёт комбинирования их типов и соз-
дания общего нестационарного фона;
4) создание затруднений потенциальному противнику при попытках повыше-
ния помехозащищённости АП на основе использования методов простран-
ственной и частотной селекций;
5) возможность использования мобильных и стационарных носителей для
размещения подсистемы радиомониторинга и ПП,
а к недостаткам можно причислить:
1) снижение помехозащищённости и «живучести» подсистемы радиомонито-
ринга за счёт демаскирования её местоположения на основе разведки по-
тенциальным противником радиоизлучений прямого канала КРЛ;
2) повышение требований по количеству и качеству обрабатываемых навига-
ционных сигналов в подсистеме радиомониторинга, что приводит к услож-
нению её реализации.
Для четвёртого варианта построения КРЭБ, наряду с достоинствами и
недостатками, свойственными третьему варианту построения КРЭБ, к достоин-
ствам можно отнести:
1) обеспечение автономности функционирования КРЭБ за счёт решения зада-
чи раннего предупреждения о времени и месте появления носителей АП,
а к недостаткам можно причислить
1) усложнение состава и процесса управления;
2) дополнительное снижение помехозащищённости и «живучести» КРЭБ за
счёт возможности разведки потенциальным противником по радиоизлуче-
ниям КРЛ между подсистемой радиомониторинга и БПЛА их местополо-
211
жения
Следует отметить, что при реализации КРЭБ, предназначенных для РЭП
СРНС «Навстар», функционирующей в штатном режиме, можно использовать
уже существующие средства РЭБ. Это касается прежде всего специализирован-
ных ПП, использующего ГП и ШП для РЭП АП СРНС «Навстар», имеющих
энергетический потенциал PnGn = 19 дБВт [98].
Кроме того, следует отметить возможность применения
а) передатчиков ШП с энергетическим потенциалом РПС7П ~ 50 дБВт, ис-
пользуемых при РЭП современных РЛС [27];
б) портативных передатчиков с использованием перспективной элементной
базы [99-101];
в) мобильных КРЭБ, размещаемых на дистанционно пилотируемых лета-
тельных аппаратах (ДПЛА) типа «Мошкарец», с энергетическим потенциалом
шумовой помехи РПСП ~ 10 дБВт [102].
Приведённые в данном параграфе материалы не претендуют на полноту
анализа возможных вариантов построения, а отражают некоторые (наиболее
важные на взгляд авторов) тенденции развития КРЭБ с учётом состояния и пер-
спектив развития СРНС «Навстар».
Как отмечено в работе [103], посвящённой анализу концепции группового
РЭП, проектирование КРЭБ, аналогичных рассматриваемым в данной работе,
требует решения целого ряда научно-методических задач в области радионави-
гации, радиоразведки, радиопротиводействия, радиосвязи с учётом большого
количества тактических, технических и экономических факторов В данной мо-
нографии делаются только первые шаги в этом направлении.
4.6. ТЕНДЕНЦИИ ПРОТИВОБОРСТВА СРЕДСТВ
РАДИОЭЛЕКТРОННОЙ БОРЬБЫ С СРНС «НАВСТАР»
- До настоящего времени средства РЭБ использовались при РЭП АП СРНС
«Навстар» эпизодически и в локальных масштабах [8] СРНС «Навстар», функ-
ционирующая в штатном режиме, создавалась для ситуаций, когда на входе АП
212
отсутствовали организованные помехи.
Поскольку частотно-временные характеристики используемых в СРНС
«Навстар» навигационных сигналов априорно известны, то это упрощает фор-
мирование организованных ГП и ШП. Как показали исследования, выполнен-
ные в третьей и четвёртой главах, реализация допустимого для РЭП АП энерге-
тического потенциала ПП не вызывает проблем, а сам КРЭБ может представ-
лять собой только ПП с небольшими весо-габаритными характеристиками и не-
большой стоимостью [99-102].
В связи с наличием реальной угрозы применения средств РЭБ для РЭП АП
СРНС «Навстар» в широких масштабах в США разрабатывается концепция на-
вигационной войны [12], в рамках которой предусматриваются меры по модер-
низации СРНС «Навстар» с целью повышения её помехозащищённости.
Реализация намеченного комплекса мер по модернизации СРНС «Навстар»
обеспечит существенное снижение эффективности РЭП при использовании ГП
и ШП Для преодоления принимаемых при модернизации СРНС «Навстар» мер
по повышению помехозащищённости требуются ответные действия по разви-
тию методов и средств РЭБ. С учётом вышеизложенного просматриваются два
этапа противоборства средств РЭБ с СРНС «Навстар».
На первом этапе противоборства в ситуациях, когда СРНС «Навстар»
функционирует в штатном режиме, для РЭП АП целесообразно использовать
ГП и ШП. Для уточнения разработанных в монографии теоретических положе-
ний необходимо провести экспериментальные исследования и сформулировать
требования к ПП для различных тактических ситуаций.
На втором этапе противоборства в ситуациях, когда СРНС «Навстар» будет
функционировать в нештатном режиме, возникает необходимость в существен-
ном усложнении методов и средств РЭБ с использованием не только ГП и ШП,
но и «интеллектуальных» сигналоподобных помех, формируемых на основе це-
леуказаний по результатам радиомониторинга. При этом с целью повышения
живучести КРЭБ целесообразно осуществлять переход от использования оди-
ночных ПП к использованию наборов пространственно-распределённых ПП с
213
адаптивным управлением
Выполненные исследования могут использоваться при эффективном про-
ектировании КРЭБ как на первом, так и на втором этапах противоборства.
214
ЗАКЛЮЧЕНИЕ
Работа посвящена системному исследованию радионавигационного ин-
формационного конфликта. В настоящее время информационный конфликт ме-
жду СРНС «Навстар» и средствами РЭБ находится на начальном этапе, который
можно охарактеризовать следующим образом:
1) СРНС «Навстар» работает в штатном режиме, при котором предполагается
отсутствие организованных помех, воздействующих на АП;
2) возможность организации РЭБ против СРНС «Навстар» находится в ста-
дии обсуждения и проведения экспериментальных исследований, подтвер-
ждающих возможность и целесообразность её практической осуществимо-
сти
Результаты проведённых исследований определяют пути организации РЭБ
с СРНС «Навстар» и показывают, что при современном уровне развития средств
РЭБ имеется реальная возможность существенного снижения эффективности
СРНС «Навстар» при решении задач самозащиты малоразмерных объектов и
прикрытия объектов и зон достаточно больших размеров.
Появление комплексов РЭБ, предназначенных для РЭП СРНС «Навстар»,
функционирующей в штатном режиме, активизирует модернизацию всей сис-
темы как в плане введения соответствующих изменений в технических средст-
вах космического сегмента, так и в АП, что потребует ответных мер по совер-
шенствованию технико-эксплуатационных характеристик КРЭБ.
В работе намечен ряд направлений организации РЭБ при переходе СРНС
«Навстар» к нештатному режиму функционирования. К числу таких мер можно
отнести
1) использование «интеллектуальных» сигналоподобных помех;
2) использование пространственного поля передатчиков помех с адаптивным
управлением энергетическим потенциалом;
3) использование комбинированных (гармонических, шумовых и сигналопо-
добных) помех с использованием стационарных, мобильных и забрасывае-
215
мых ПП
Разработанный теоретический базис может использоваться при эскизном
проектировании перспективных КРЭБ, обеспечивая выбор алгоритмов и струк-
тур, а также оптимизацию технических характеристик для различных тактиче-
ских ситуаций.
216
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Шкирятов В.В Радионавигационные системы и устройства. — М.: Радио
и связь, 1984 — 160 с
2. Сосновский А А., Хаймович И.А Авиационная радионавигация. Спра-
вочник. — М/ Транспорт, 1985. — 255 с.
3. Дружинин В.В., Конторов Д.С. Вопросы военной системотехники — М.:
Воениздат, 1976. — 224 с.
4. Переход США к информационной войне (перевод). — М : Иностранная
печать об экономическом, научно-техническом и военном потенциале го-
сударств-участников СНГ. Серия «Технические средства разведыватель-
ных служб капиталистических стран», ВИНИТИ, № 1, 2000. — С. 20-33.
5 Проблемы информационной борьбы (перевод). — М.: Иностранная пе-
чать об экономическом, научно-техническом и военном потенциале госу-
дарств-участников СНГ. Серия «Технические средства разведывательных
служб капиталистических стран» ВИНИТИ, № 9, 1997. — С. 20-31.
6 Тактика информационной войны (перевод) — М.: Иностранная печать
об экономическом, научно-техническом и военном потенциале госу-
дарств-участников СНГ. Серия «Технические средства разведывательных
служб капиталистических стран», ВИНИТИ, № 12, 1997. — С. 37-42.
7. Современные тенденции в информационной войне (перевод). — М.: Ино-
странная печать об экономическом, научно-техническом и военном по-
тенциале государств-участников СНГ. Серия «Технические средства раз-
ведывательных служб капиталистических стран», ВИНИТИ, № 3, 2000.
— С. 29-31.
8 Некоторые аспекты ведения информационной войны (перевод). — М.:
Иностранная печать об экономическом, научно-техническом и военном
потенциале государств-участников СНГ. Серия «Технические средства
разведывательных служб капиталистических стран», ВИНИТИ, № 10,
1996 — С 26-35.
217
9 Дружинин В В , Конторов Д.С. Конфликтная радиолокация М.: Радио и
связь, 1982. — 124 с.
10. Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной
разведки. — М.: Радиотехника, 2004. — 432 с.
11. Борисов В.И., Зинчук В.М Помехозащищённость систем радиосвязи. Ве-
роятностно-временной подход. — М.: радио и связь, 1999. — 252 с.
12 Глобальная система определения местоположения GPS и навигационная
война (перевод). — М.: Иностранная печать об экономическом, научно-
техническом и военном потенциале государств-участников СНГ. Серия
«Технические средства разведывательных служб капиталистических
стран», ВИНИТИ, 1999, № 3. — С. 20-26.
13. Мищенко И.Н., Волынкин А.И., Волосов П.С. и др. Глобальная навигаци-
онная система «Навстар». — М.: Зарубежная радиоэлектроника, № 8,
1980. —С. 52-83.
14. Denaro R.P. Navstar Global Positioning System offer unprecedented naviga-
tional accuracy // Microwave System News, vol. 14. 1984. № 12. 54-79.
15. Parkinson B.W History and operation of Navstar, the Global Positioning Sys-
tem.// “IEEE Trans. Aerospace and electronic systems”. 1994, vol. 30, № 4,
1145-1161.
16. Navstar GPS. Interface Control Document. 1991.
17. Шебшаевич B.C., Дмитриев П.П., Иванцевич H.B. и др Сетевые спутни-
ковые радионавигационные системы. — М.: Радио и связь, 1982. — 272 с.
18. Соловьев Ю.А. Системы спутниковой навигации. — М.: Эко-Трендз,
2000. — 268 с
19. Волынкин А.И., Кудрявцев И.В , Мищенко И.Н. и др. Аппаратура потре-
бителей СРНС «Навстар». — М.* Зарубежная радиоэлектроника, 1983,
№ 4. — С. 70-93; № 5. — С. 59-82.
20 http://www.trimble.ru
21. http://www.agp.ru
218
22 Вакин С А , Шустов Л.Н Основы радиопротиводействия и радиотехниче-
ской разведки. — М : Сов Радио, 1968. — 448 с.
23 Партала А.Н Средства радиоэлектронной борьбы ВМС зарубежных
стран —С -Петербург: ТХО «Юпитер», 1991. — 100 с.
24. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление
информационных каналов систем управления оружием. — М/ Радиотех-
ника, 2003. — 416 с.
25. Викулов О.Б., Добыкин В.Д., Дрогалин В.В. и др Современное состояние
и перспективы развития авиационных средств радиоэлектронной борьбы.
— М.. Зарубежная радиоэлектроника. Успехи современной радиоэлектро-
ники, 1998. № 12. —С 3-16.
26 Афинов В Состояние и перспективы развития средств РЭБ армии США.
— М • Зарубежное военное обозрение, 1985. № 5. — С. 20-29; № 6.
— С 20-26
27 Фомичев К.И., Юдин Л.М. Техника создания шумовых помех радиолока-
ционным системам обнаружения: Обзор. — М.: НИИЭИР, Радиоэлектро-
ника (состояние и тенденции развития). Т.З. 1987. — С. 1-43.
28. Максимов М В., Бобнев М.П., Кривицкий Б.Х. и др. Защита от радиопо-
мех — М/ Сов. Радио, 1976. — 496 с.
29. Тузов Г.И , Сивов В.А , Прытков В.И. и др. Помехозащищенность радио-
систем со сложными сигналами. — М.: Радио и связь, 1985. — 264с
30. Countering GPS Jamming Journal of Electronic Defense, vol. 22, № 8 1999.
31. Johannesen R. Interference: Sources and Symptoms. GPS World, № 11. 1997.
32. Spilker J. Signal Structure and Performance Characteristics, Navigation, № 2.
1978.
33. Цветков А Г. Принципы количественной оценки эффективности радио-
электронных средств. — М Сов. Радио, 1971. — 200 с
34. Глобальная спутниковая радионавигационная система ГЛОНАСС/ под
ред В Н Харисова, А И Перова, В.А. Болдина 2-е изд. исправ. — М.:
ИПРЖО, 1999 — 560 с.
219
35. Поиск, обнаружение и измерение параметров сигналов в радионавигаци-
онных системах./ Под ред. Казаринова Ю.М. — М.: Сов. Радио, 1975.
— 269 с.
36. Спилкер Дж. Цифровая спутниковая связь. — М.. Связь, 1979. — 592 с.
37. Кузьмин С.З Основы проектирования систем цифровой обработки радио-
локационной информации. — М.: Радио и связь, 1986. — 352 с.
38. Дятлов А.П., Дятлов П.А., Кульбикаян Б.Х. Задачи радиомониторинга из-
лучений спутниковых радионавигационных систем. — Ростов-на-Дону:
Известия Вузов «Северокавказский регион», сер. Естественные науки,
2004. № 3. — С. 40-47.
39. Дятлов А.П., Кульбикаян Б.Х. Рабочие модели электромагнитной обста-
новки при проведении радиомониторинга. — Ростов-на-Дону: Вестник
РГУПС, 1999. № 1,— С.25-30.
40. Дятлов А.П., Кульбикаян Б.Х. Систематизация задач радиомониторинга
сетей связи — Ростов-на-Дону: Известия Вузов «Северокавказский реги-
он», сер. Технические науки, 2000. № 2. — С. 39-41.
41. Дятлов А.П., Кульбикаян Б.Х. Унификация задач радиомониторинга на
основе использования теории распознавания образов. — Ростов-на-Дону:
Известия Вузов «Северокавказский регион», сер. Технические науки,
2000. № 2. — С. 42-44.
42. Харченко В.П., Косенко Г.Г., Кукуш А.Г. Байесовская теория совместного
разрешения, обнаружения, оценивания и распознавания сигналов.
— Киев: Радиоэлектроника. Известия Вузов, 1994. № 3. — С. 52-59
43. Sarma A., Chakrarearti. Wawe Propagation Effects on Satellite Aided Commu-
nication Navigation Surveillance. —IETE Technical Review, № 6, 1993. —
C. 535-542.
44. Тихонов В.И. Оптимальный прием сигналов. — М.: Радио и связь, 1983
— 320 с.
45. Тузов Г.И. Статистическая теория приема сложных сигналов. — М : Сов.
Радио, 1977 —400 с
220
46 Шумоподобные сигналы в системах передачи информации. Под ред В Б
Пестрякова. — М ’ Сов Радио, 1973. — 424 с.
47. Варакин Л.Е. Системы связи с шумоподобными сигналами. — М.: Радио
и связь, 1985. — 384 с.
48. Дятлов А.П. Обнаружители и измерители параметров сигналов в радио-
контроле: Учебное пособие. — Таганрог. ТРТУ, 1993. — 85 с.
49 Гаткин Н.Г., Гаранин В.А., Карновский М.И. и др Помехоустойчивость
типового тракта обнаружения сигнала. — Киев: Техника, 1971. — 204 с.
50. Дятлов А.П., Володин А.В. Радиомониторинг слабых связных фазомани-
пулированных сигналов с кодовым уплотнением. — Воронеж: ВНИИС,
Труды VI МНТК «Радиолокация, навигация, связь» (RLNC 2001). Т.1.
2001. —С. 651-660.
51. Дятлов А.П., Дятлов П А., Кульбикаян Б.Х. Обнаружение слабых фазома-
нипулированных сигналов на фоне гауссовой нестационарной помехи. —
Воронеж: ВНИИС, Труды IX МНТК «Радиолокация, навигация, связь»
(RLNC2003) Т.1. 2003. —С. 285-293.
52. Харисов В.Н., Гордеев Д.В., Павлович Б.В. Улучшение характеристик по-
мехоустойчивости авиационных приёмников СРНС на основе оптимиза-
ции алгоритмов обработки сигналов. — М.: Радиотехника, 2000. № 7.
С. 96-103.
53. Дятлов А.П., Кульбикаян Б.Х. Обнаружение радиоизлучений космиче-
ских аппаратов. — Ростов-на-Дону: Известия Вузов «Северокавказский
регион», Серия Естественные науки, 2003. № 4. — С. 37-42.
54 Дятлов А П., Володин А.В., Дятлов П.А. Радиоподавление канала обна-
ружения аппаратуры потребителя системы «Навстар». Труды VIII МНТК
“Радиолокация, навигация, связь» (RLNC 2002), — Воронеж, ВНИИС.
Т.1.2002. —С. 527-533
55. Борисов В.И., Зинчук В.М , Лимарев Д.Е. и др. Помехозащищённость
систем радиосвязи с расширением спектра сигналов модуляцией несущей
221
псевдослучайной последовательностью. — М.: Радио и связь, 2003.
—640 с
56. Дятлов А.П., Дятлов П А., Савушкин В.Т. Оптимизация быстродействия
экспресс-анализатора автоматического комплекса радиомониторинга.
— Ростов-на-Дону: Вопросы радиоэлектроники. Серия «Общие вопросы
радиоэлектроники», РНИИРС, в. 19, 2000. — С. 158-164.
57 Дятлов А.П. Оптимизация радиосистем первичной обработки информа-
ции. Учебное пособие. — Таганрог. ТРТУ, 1993. — 33 с.
58. Покрас А.М., Цирлин В.М. Системы наведения антенн земных станций
спутниковой связи. — М.. Связь, 1976. — 180 с.
59. Венскаускас К.К., Коргополов С.Г., Михайлова С.А. и др. Системы и
средства радиосвязи морской подвижной службы. — Л.: Судостроение,
1986 —432 с.
60 Зуфрин А.М. Методы построения судовых автоматических угломерных
систем. — Д* Судостроение, 1970. — 408 с.
61. Кантор Л.Я , Аскинази Г.Б., Быков В.Л. и др Спутниковая связь и веща-
ние: Справочник. — 2-е изд. — М.: Радио и связь, 1988. — 394 с.
62. Дятлов А.П , Дятлов П.А., Кульбикаян Б.Х. Амплитудный пеленгатор с
повышенной помехозащищённостью. — Ростов-на-Дону: Известия Вузов
«Северокавказский регион», Серия Технические науки, 2004. № 2.
С. 46-49
63 Южаков В.В. Принципы построения автокомпенсаторов активных помех.
— М.: Зарубежная радиоэлектроника, № 2, 1986. — С. 47-60.
64. Тузов Г.И. Статистическая теория приема сложных сигналов. — М.: Сов.
радио, 1977. — 400 с.
65. Дятлов А.П., Дятлов П.А. Амплитудный пеленгатор с компенсацией боко-
вых лепестков диаграммы направленности антенны. — М.: Антенны,
2004. № 11. —С. 57-63.
66. Левин В А., Норкин Г.А. Радиотехнические системы фильтрации с воз-
вратным гетеродинированием. — М : Сов Радио, 1979 — 272 с
222
67. Дятлов А.П , Дятлов П А., Кульбикаян Б X. Корреляционно-фильтровой
классификатор вида модуляции связных сигналов. — Воронеж* ВНИИС,
Труды II МНТК «Радиолокация, навигация, связь», 2000. — С 625-633.
68 Дятлов А.П , Дятлов П.А., Кульбикаян Б.Х. Сравнительный анализ мето-
дов разделения сигналов при кодовом уплотнении в каналах связи. — М
Электросвязь, 2005 № 5. — С. 31-35.
69 Ширман Я Д. Разрешение и сжатие сигналов. — М : Сов. Радио, 1974,
—360 с.
70 Дятлов А П , Дятлов П.А , Миронец Е.В. Автокорреляционный классифи-
катор спектральных составляющих фазоманипулированных сигналов.
— Ростов-на-Дону Вопросы радиоэлектроники. Серия «Общие вопросы
радиоэлектроники», в 20 2002. — С. 131-139.
71 Дятлов А.П , Дятлов П.А., Кульбикаян Б X Вскрытие спектрально-
временной структуры фазоманипулированных сигналов. Труды IX МНТК
«Радиолокация, навигация, связь» (RLNC 2003), — Воронеж, ВНИИС.
Т.3,2003. —С. 1322-1330.
72 Аганин А.Г. Метод разрешения сигналов по доплеровской частоте на ос-
нове проверки статистических гипотез. — М. Радиотехника, 2000. № 5.
С. 22-26.
73 Белавин О.В. Основы радионавигации. — М.: Сов. Радио, 1967, -472 с.
74 Дятлов А П., Володин А В., Дятлов П.А Радиоподавление канала слеже-
ния за частотой аппаратуры потребителя системы «Навстар». Труды IX
МНТК «Радиолокация, навигация, связь» (RLNC 2003), — Воронеж,
ВНИИС Т.2,2003. —С. 1169-1181
75 Петров Е.П., Прозоров Д.Е., Частиков А.В. Обнаружение и распознавание
псевдослучайных сигналов с рекуррентным законом формирования //
Труды VI МНТК «Радиолокация, навигация, связь» (RLNC 2000), Воро-
неж, ВНИИС. Т.З, 2000. — С. 1-7.
223
76. Дурденко В.А., Жуков А.П , Лещенко С.Н Выбор ключевой ходовой по-
следовательности в комплексах радиоохраны. — М. Радиосистемы, в 37,
2004. — С. 92-95.
77 Дятлов А.П. Автокорреляционные частотные дискриминаторы. // Учебное
пособие. — Таганрог: ТРТИ, 1988. — 58с.
78. Дятлов А.П., Дятлов П.А., Кульбикаян Б.Х. Оценивание частоты фозома-
нипулированных сигналов систем спутниковой связи. — М.. Радиотехни-
ка, 2004. №4. —С. 91-93.
79. Дятлов А.П., Дятлов П.А., Кульбикаян Б.Х. Оценивание доплеровского
смещения частоты сигналов спутниковой радионавигационной системы
«Навстар». — Ростов-на-Дону: Известия Вузов «Северокавказский реги-
он», Серия Естественные науки, 2004. № 4. — С. 30-36.
80 Радзиевский В.Г. Метод обоснования сигналоподобных излучений в кон-
фликтной радиолокации. — М.: Радиотехника, 2000. № 6. — С. 53-58.
81. Шумоподобные сигналы в системах передачи информации. Под ред.
В.Б. Пестрякова. — М.: Сов. Радио, 1973. — 4?4 с.
82. Дятлов А П., Дятлов П.А., Кульбикаян Б.Х. Корреляционно-фильтровая
обработка ФМ сигналов на фоне аддитивной смеси квазибелого шума и
сигналоподобных помех. — Ростов-на-Дону: Известия Вузов «Северокав-
казский регион», Серия Естественные науки, 2004. № 7. — С. 3-11
83. Шахгильдян В В , Ляховкин А.А. Фазовая автоподстройка частоты. — М.:
Связь, 1966. —334 с.
84. Дятлов А.П., Володин А.В., Дятлов П.А. Радиоподавление канала слеже-
ния за задержкой навигационного сигнала в аппаратуре потребителя сис-
темы «Навстар». — М.: Радиотехника, 2004. № 10. — С. 63-70.
85 Дятлов А.П., Дятлов П.А., Кульбикаян Б.Х. Радиоподавление аппаратуры
потребителей СРНС «Навстар» сигналоподобными помехами. — Ростов-
на-Дону: Известия Вузов «Северокавказский регион», Серия Естествен-
ные науки, 2004. № 4. — С. 24-31.
224
86 Дятлов А.П., Дятлов П.А., Кульбикаян Б.Х Оценка характеристик кана-
лов приёма спутниковых навигационных сигналов. — Ростов-на-Дону:
Вестник РГУПС, 2004. № 3 - С 25-30.
87 Савинков А Ю., Фурсов С.В., Зимовец К.А. и др. Определение координат
мобильного абонента в городских условиях. — М.: Мобильные системы,
2003. № 10. —С. 6-10.
88 Дятлов А.П., Дятлов П.А , Кульбикаян Б.Х. Радиомониторинг спутнико-
вой радионавигационной системы «Навстар» // Труды X МНТК «Радио-
локация, навигация, связь» (RLNC 2004), — Воронеж, ВНИИС. Т.2, 2004.
— С 1288-1299.
89 Серапинас Б.Б. Глобальные системы позиционирования. Учебное изда-
ние — М.: ИКФ «Каталог», 2002. — 106 с.
90 Дятлов А.П , Колунтаев Е.Н. Устройство восстановления несущей часто-
ты универсального демодулятора фазоманипулированных сигналов при
МДВР. — Ростов-на-Дону: Вопросы радиоэлектроники. Серия «Общие
вопросы радиоэлектроники», РНИИРС, в.21, 2003. — С. 39-47.
91 Тепляков И М., Калашников И.Д., Рощин Б.В. Радиолинии космических
систем передачи информации. — М.: Сов. Радио, 1975 — 400 с.
92 Курский В.Н. Космическая радиотелеметрия. — М.: Наука, 1971. — 192 с.
93 Тузов Г.И., Урядников Ю.Ф., Прытков В.И. и др. Адресные системы
управления и связи. Вопросы автоматизации. — М : Радио и связь, 1993.
— 384 с.
94 Тактические цифровые системы связи, (перевод). — М.: Иностранная пе-
чать об экономическом, научно-техническом и военном потенциале госу-
дарств-участников СНГ. Серия «Технические средства разведывательных
служб капиталистических стран» ВИНИТИ, 2000. № 12. — С. 12-20.
95 Проблемы развития тактической радиосвязи (перевод). — М.: Иностран-
ная печать об экономическом, научно-техническом и военном потенциале
государств-участников СНГ Серия «Технические средства разведыва-
225
тельных служб капиталистических стран» ВИНИТИ, 1996 №2 —С 31-
38
96 Баушев С.В., Передрий А.В. Разработка перспективных систем связи воо-
руженных сил США и объединенных вооруженных сил НАТО. — М . За-
рубежная радиоэлектроника. Успехи современной радиоэлектроники,
2000. № 7. — С. 3-20
97. Вопросы защиты радиосвязи (перевод). — М.: Иностранная печать об
экономическом, научно-техническом и военном потенциале государств-
участников СНГ. Серия «Технические средства разведывательных служб
капиталистических стран» ВИНИТИ, 2003. № 3. — С. 19-25.
98. Передатчик помех приёмником спутниковых навигационных сигналов
GPS/Глонасс. Рекламный проспект. — М.: ООО «Авиаконверсия», 2003.
99. Портативные передатчики помех (перевод). — М.: Иностранная печать об
экономическом, научно-техническом и военном потенциале государств-
участников СНГ. Серия «Технические средства разведывательных служб
капиталистических стран» ВИНИТИ, 1997. № 12. — С. 44-45.
100. Системы радиоэлектронного подавления (перевод) —М. Иностранная
печать об экономическом, научно-техническом и военном погенциале го-
сударств-участников СНГ. Серия «Технические средства разведыватель-
ных служб капиталистических стран» ВИНИТИ, 2002. № 4. — С. 3-5.
101. Комбинированные технологии для станций радиоэлектронного подавле-
ния (перевод). — М.: Иностранная печать об экономическом, научно-
техническом и военном потенциале государств-участников СНГ Серия
«Технические средства разведывательных служб капиталистических
стран» ВИНИТИ, 2001. № 8. — С. 3-10.
102. Комплекс радиоэлектронной борьбы «Мошкарец». Рекламный проспект
(ht^://www.dpla.ru/Moshkarec/).
103 Алексеев Ю.В., Баландюк В.А., Кирпанев А.В. и др. Концепция группово-
го РЭП // Труды X МНТК «Радиолокация, навигация, связь» (RLNC
2000), — Воронеж, ВНИИС. Т 3, 2000. — С 1466-1470.
научное издание
Дятлов Анатолий Павлович
Дятлов Павел Анатольевич
Кульбикаян Баграт Хачересович
РАДИОЭЛЕКТРОННАЯ БОРЬБА СО СПУТНИКОВЫМИ
РАДИОНАВИГАЦИОННЫМИ СИСТЕМАМИ
Редактор
Корректор
Оригинал-макет
Белова Л. Ф.
Селезнёва Н.И.
Дятлов П.А
ИБ№3159
Издательская лицензия № 010164 от 29 января 1997 г.
Подписано к печати 9. «
Формат 60х84Иб. Бумага офсетная
Офсетная печать. Усл. п.л. — 14,1. Уч.-изд л — 14,0
Заказ К^З^З Тираж 500 экз.
Издательство «Радио и связь»
127473, Москва, 2-й Щемиловский пер., д 5/4, стр. 1
Типография Таганрогского государственного радиотехнического университета
ГСП 17 А, Таганрог, 28, Энгельса, 1
ISBN 5-256-01750-0
© Дятлов А.П., Дятлов П.А., Кульбикаян Б.Х , 2004