/











































































































































































































































































































































































































































































































































































































































Text
E. H. Березкин
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
Издание второе,
переработанное и дополненное
Допущен о
Министерством высшего и среднего
специального образования СССР
в качестве учебного пособия
для студентов университетов
ИЗДАТЕЛЬСТВО
МОСКОВСКОГО УНИВЕРСИТЕТА
1974
УДК 531
Книга предназначена служить руководством для студентов
университетов при изучении курса теоретической механики, а
также может быть использована в качестве дополнительной
литературы студентами технических вузов. Материал книги
полностью соответствует действующей программе курса тео-
теоретической механики для университетов. Книга включает тео-
теорию скользящих векторов, кинематику, геометрическую и ана-
аналитическую статику, динамику материальной точки и системы
материальных точек, аналитическую динамику и элементы спе-
специальной теории относительности.
Рецензенты:
кафедра теоретической механики
Ленинградского университета;
проф. С. М. Попов
ИЗДАТЕЛЬСТВО МОСКОВСКОГО УНИВЕРСИТЕТА, 1974 г.
20302— 120
Б077@2)-74
Оглавление
Предисловие 7
Введение 9
Глава I. ОСНОВЫ ТЕОРИИ ВЕКТОРОВ П
§ 1. Свободные векторы 13
1. Основные определения 13
2. Сложение свободных векторов 14
3. Проекция вектора на ось 15
4. Инварианты системы свободных векторов 15
§ 2. Скользящие векторы 22
1. Определения 22
2. Координаты скользящего вектора 22
3. Момент скользящего вектора. Плюккеровы координаты . 22
4. Аналитическое определение момента скользящего вектора . 24
5. Проекция момента на ось 25
6. Момент скользящего вектора относительно оси .... 25
§ 3. Система скользящих векторов 26
1. Система сходящихся скользящих векторов 26
2. Произвольная система скользящих векторов. Элементарные
операции .... 27
3. Приведение системы скользящих векторов к простейшей экви-
эквивалентной форме 28
4. Плоская система скользящих векторов 40
5. Свойства системы параллельных скользящих векторов . . 41
§ 4. Закрепленные векторы 43
§ 5. Дифференцирование свободного вектора по скалярному аргументу 44
Глава II. КИНЕМАТИКА 46
§ 1. Кинематика точки 47
1. Скорость точки 47
2. Ускорение точки. Проекции ускорения на прямоугольные оси
координат 50
3. Скорость и ускорение точки в полярных координатах . . 51
4. Движение точки по окружности 53
5. Проекции ускорения на оси естественного трехгранника . . 53
6. Теорема о сложении скоростей в сложном движении точки . 58
7. Метод Роберваля построения касательных к плоским кривым 61
8. Аналитическое доказательство теоремы о сложении скоростей 62
9. Сложение скоростей в общем случае сложного движения точки 64
§ 2. Кинематика абсолютно твердого тела 66
1. Определения 66
2. Элементарные движения твердого тела 66
3. Мгновенные движения твердого тела 69
4. Сложение мгновенно-поступательных и мгновенно-вращатель-
мгновенно-вращательных движений твердого тела 70
5. Общий случай сложения мгновенно-поступательных и мгновен-
мгновенно-вращательных движений твердого тела Непрерывное дви-
движение твердого тела 73
6. Мгновенное движение твердого тела с одной неподвижной
точкой 82
7. Плоскопараллельное движение твердого тела 84
§ 3. Ускорение точки в сложном движении 89
1. Теорема Кориолиса 89
2. Замечание о дифференцировании единичного вектора . . 96
3. Векторный вывод теоремы Кориолиса 97
4. Теорема Ривальса 99
§ 4. Распределение ускорений в плоскопараллельном движении твер-
твердого тела 102
1. Распределение ускорений 102
2. Мгновенный центр ускорений 107
§ о. Кинематические уравнения Эйлера 112
Глава III. СТАТИКА 115
I. Геометрическая статика 115
§ 1. Аксиомы статики 117
§ 2. Понятие о силе трения 120
§ 3. Различные задачи статики 123
1. Система сходящихся сил, действующих на твердое тело . . 123
2. Равновесие трех сил . . . 124
§ 4. Момент силы .... . 126
1. Момент силы относительно точки 126
2. Момент силы относительно оси 127
3. Теорема Вариньона для системы сходящихся снл .... 127
§ 5. Произвольная система сил, действующих на твердое тело . . 127
1. Эквивалентные системы сил 127
2. Пара сил 127
3. Приведение системы снл, действующих на твердое тело, к про-
произвольной точке (центру приведения) 127
§ 6. Условия равновесия системы снл, действующих на твердое тело 128
§ 7. Приведение системы сил, действующих на твердое тело, к дииаме.
Уравнения равновесия твердого тела 129
§ 8. Условия равновесия системы твердых тел 130
§ 9. Плоская система сил 133
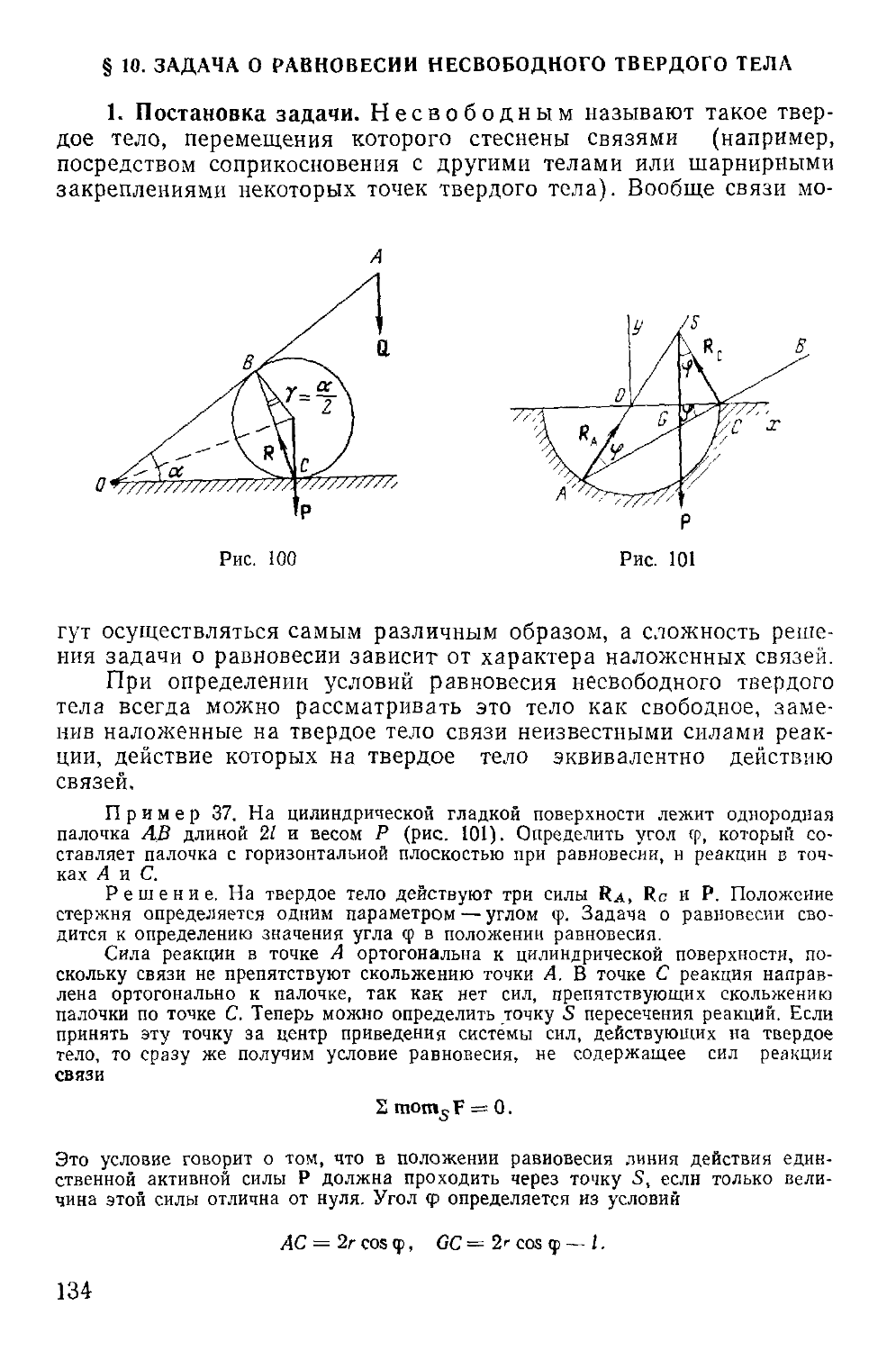
§ 10. Задача о равновесии несвободного твердого тела .... 134
1. Постановка задачи 134
2. Частные случаи равновесия твердого тела 136
§11. Задача о равновесии при наличии трения 142
§ 12. Сила тяжести и центр тяжести 149
II. Аналитическая статика 152
§ 1. Работа силы на перемещении. Силоваи функция .... 152
§ 2. Принцип возможных перемещений 156
1. Определения 156
2. Теорема Лаграижа о равновесии системы 160
3. Принцип Торричелли 167
§ 3. Общие вопросы аналитической статики 169
1. Связи и возможные перемещения 169
2. Обобщенные координаты. Уравнения Лаграижа .... 172
3. Общие теоремы о равновесии системы материальных точек . 180
4. Метод неопределенных множителей Лагранжа .... 182
5. Определение реакций 188
§ 4. Определение реакций в общем случае 191
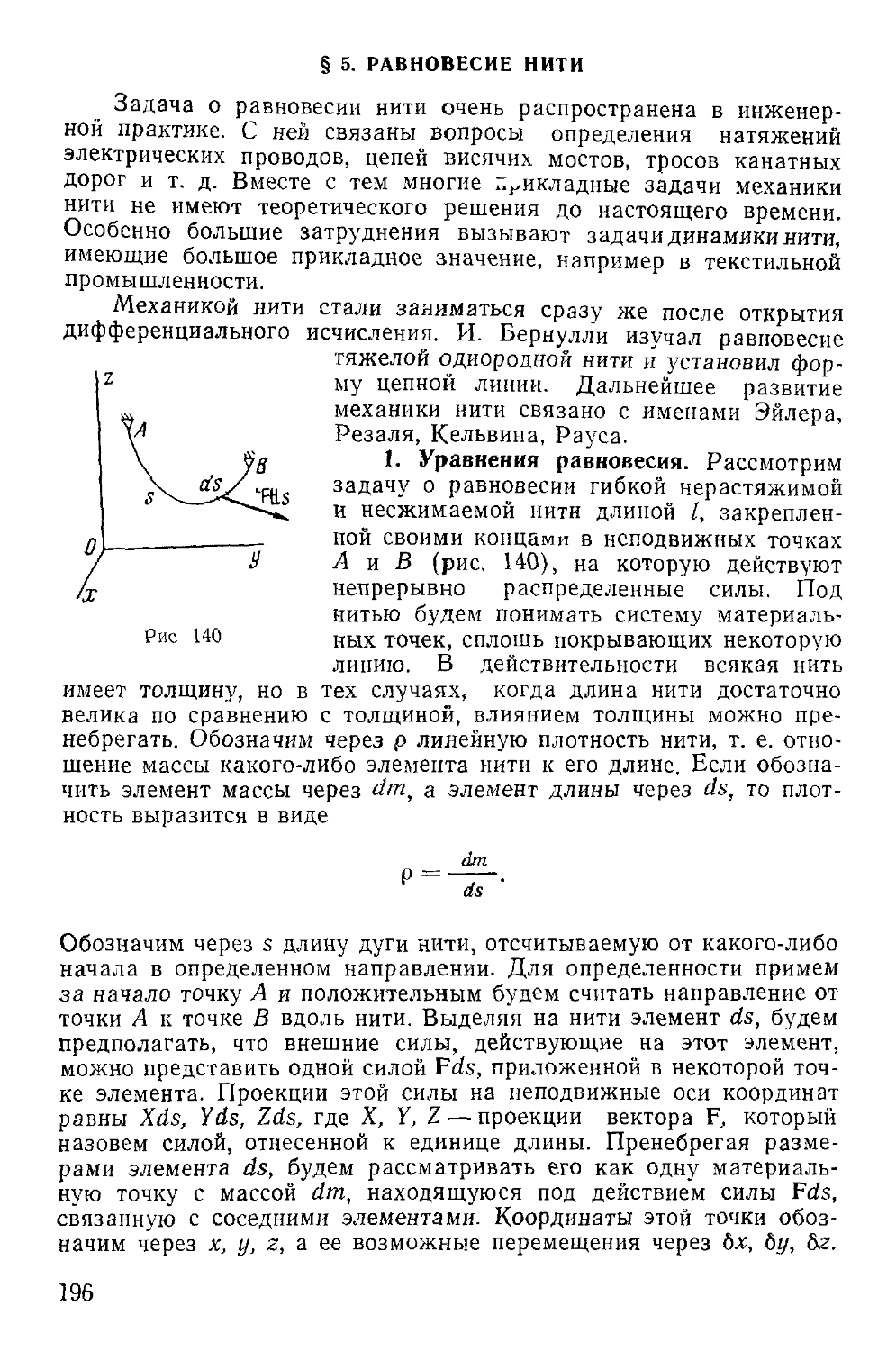
§ 5. Равновесие нити 196
1. Уравнения равновесия 196
2. Естественные уравнения равновесия нити 200
Глава IV. ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ 208
§ 1. Основные законы динамики 209
§ 2. Две основные задачи динамики. Уравнения движения точки в
декартовых осях 2J
§ 3. Естественные уравнения движения 214
§ 4. Основные теоремы динамики для свободной материальной точки 215
1. Теорема об изменении количества движения материальной
точки 215
2. Теорема об изменении момента количества движения . . 216
3. Следствия из теорем об изменении количества движения и
момента количества движения материальной точки . . . 217
,4. Теорема живых снл 221
5. Интеграл живых сил 222
6. Устойчивость равновесия. Теорема Лаграижа . . • • ¦ 6
§ 5. Движение тяжелой материальной точки в пустоте .... 230
§ 6. Движение материальной точки под действием центральных сил 237
1. Основные положения 237
2. Формулы Бине 239
3. Задача о движении планет 242
§ 7. Движение точки в сопротивляющейся среде 255
§ 8. Движение несвободной материальной точки 258
1. Движение материальной точки по кривой 258
2. Движение материальной точки по поверхности .... 269
§ 9. Относительное движение материальной точки 284
1. Теорема живых сил в относительном движении точки . . 286
2. Уравнения относительного равновесия точки 288
3 Равновесие материальной точки на поверхности Земли. Вес . 289
4. Задача о падении тяжелой точки в пустоте 291
5. Маятник Фуко 292
§ 10. Принцип Даламбера 295
Глава V. ДИНАМИКА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК . - 299
§ 1. Учение о связях 300
§ 2. Принцип Даламбера — Лагранжа 303
§ 3. Основные теоремы динамики системы 305
1. Теорема об изменении количества движения системы и о дви-
движении центра масс системы 305
2. Теорема об изменении момента количества движения . . 316
3. Теорема живых сил 326
§ 4. Теоремы о движении системы относительно осей неизменного на-
направления, проходящих через центр масс системы (осей Кёнига) 333
1. Теоремы Кёнига 333
2. Теорема об изменении момента количества движения системы
относительно осей Кёнига 335
3. Теорема живых сил в движении системы относительно осей
Кёнига 338
§ 5. Уравнения Лагранжа второго рода 339
1. Вывод уравнений Лагранжа 339
2. Случай существования силовой функции 344
3. Замечание о лагранжевых координатах 345
§ 6. Элементарные случаи интегрируемости уравнений Лагранжа . 348
1. Циклические координаты 348
2. Метод Рауса игнорирования циклических координат . . . 348
3. Обобщение теоремы и интеграла живых сил 353
§ 7. Определение реакций 359
Глава VI. ДИНАМИКА ТВЕРДОГО ТЕЛА 368
§ 1. Теория моментов инерции 369
1. Определения 369
2. Момент инерции системы относительно произвольной оси, про-
проходящей через заданную точку 373
3. Эллипсоид инерции 373
4. Определение главных осей ннерцнн для произвольной точки 376
§ 2. Вращение твердого тела вокруг неподвижной оси .... 382
§ 3. Движение твердого тела, имеющего одну неподвижную точку . 391
1. Основные динамические характеристики 391
2. Уравнения движения твердого тела с одной неподвижной
точкой 393
§ 4. Движение тяжелого твердого тела около неподвижной точки . 399
1. Постановка задачи 400
2. Интегрирование уравнений движения тяжелого твердого тела.
Первые интегралы уравнений движения 402
3. Случай Эйлера — Пуансо 406
4. Случай Лагранжа 420
5. Случай Ковалевской 436
§ 5. Определение реакций в случае движения твердого тела с одной
неподвижной точкой 438
§ 6. Уравнения движения свободного твердого тела 439
§ 7. Гиростаты 440
Глава VII. АНАЛИТИЧЕСКАЯ ДИНАМИКА 443
§ 1, Канонические уравнения Гамильтона 444
1. Преобразования Лежандра " 446
2. Канонические уравнения Гамильтона 449
3. Функция Гамильтона и ее свойства 451
§ 2. Принцип Гамильтона — Остроградского 457
1. Принцип Гамильтона — Остроградского 457
2. Вывод канонических уравнений Гамильтона из принципа Га-
мильтона — Остроградского 1^5
3. Принцип Гамильтона в форме Пуанкаре ™п
§ 3. Интегрирование канонических уравнений Гамильтона . . . 4Ь9
1. Действие по Гамильтону и его свойства 469
2. Канонические преобразования 473
3. Бесконечно малые канонические преобразования .... 477
4. Теорема Лиувилля 479
5. Теорема Якоби 481
6. Интегрирование уравнения Гамильтона — Якоби .... 482
7. Скобки Пуассона 497
§ 4. Вариационные принципы механики 500
1. Исторические замечания 500
2. Принцип Лагранжа 502
3. Принцип наименьшего действия в форме Якоби .... 506
4. Оптико-механическая аналогия 512
5. Интегральные инварианты 517
6. Принцип наименьшего принуждения Гаусса. Уравнения Аппеля 524
7. Уравнения Рауса 535
§ 5. Малые колебания 539
1. Малые колебания системы с одной степенью свободы . . 540
2. Общий случай малых колебаний системы около положения
устойчивого равновесия 551
§ 6. Устойчивость движения 571
1. Основные теоремы 571
2. Влияние новых связей на малые колебания системы около по-
положения равновесия 582
3. Влияние диссипативных сил на устойчивость равновесия . 584
4. Влияние гироскопических сил на устойчивость равновесия 589
§ 7. Элементы теории возмущений 594
1. Уравнения в вариациях Пуанкаре 595
2. Метод изменения произвольных постоянных 601
Глава VIII. ТЕОРИЯ УДАРА 604
§ 1. Основные положения 604
§ 2. Теоремы Карно 611
§ 3. Задача о центре удара 615
§ 4. Задача о баллистическом маятнике 617
§ 5. Уравнения Лагранжа для удара 618
§ 6. Задача об ударе по твердому телу с одной неподвижной точкой 619
Глава IX. ЭЛЕМЕНТЫ СПЕЦИАЛЬНОЙ ТЕОРИИ ОТНОСИТЕЛЬ-
ОТНОСИТЕЛЬНОСТИ 622
§ 1. Постановка задачи 622
§ 2. Специальный принцип относительности Эйнштейна .... 628
§ 3. Группа преобразований Лоренца 630
§ 4. Инвариантные величины в теории относительности. Четырехмер-
Четырехмерный вектор. Мир Мннковского 636
§ 5. Релятивистская динамика 640
Литература 645
П редисловие
Предлагаемый вниманию читателя «Курс теоретической меха-
механики» является переработанным и дополненным изданием
книги автора «Лекции по теоретической механике», вышед-
вышедшей двумя выпусками в 1967 и 1968 гг. Она содержит мате-
материал лекционного курса, который автор в течение ряда лет
читает на механико-математическом факультете Московского
университета. Книга предназначена служить руководством
для студентов механико-математических факультетов универ-
университетов при изучении курса теоретической механики и соот-
соответствует действующей программе для университетов.
При изложении материала автор старался следовать сло-
сложившимся в Московском университете традициям и продол-
продолжать идеи Н. Е. Жуковского, С. А. Чаплыгина и Н. Г. Четае-
ва; замечательные лекции последнего автор слушал в Мос-
Московском университете в 1953—1958 гг.
Книга включает в себя элементы теории скользящих
векторов, геометрическую и аналитическую статику, динамику
материальной точки и системы материальных точек, динамику
твердого тела, аналитическую динамику, элементы теории
удара и элементы специального принципа относительности
Эйнштейна. В основу кинематики положено понятие сложно-
сложного движения, базирующееся на теории скользящих векторов.
В статике большое внимание уделено методу возможных
перемещений. В динамике точки более подробно изучаются
центральные движения и относительные движения. При изло-
изложении основных теорем динамики системы материальных
точек автор следовал методам Н. Е. Жуковского и Н. Г. Че-
таева, продолжавших идеи Лагранжа. Это направление
проходит через весь курс и особенно подчеркивается при
рассмотрении решений задач. В раздел «аналитическая дина-
мика» включены вариационные принципы механики, методы
интегрирования уравнений механики, интегральные инвариан-
инварианты, теория малых колебаний и элементы теории устойчивости
движения. Глава IX, посвященная специальному принципу
относительности, включает только основные .понятия.
При подготовке второго издания автор старался сохра-
сохранить основное содержание курса, хотя отдельные разделы
книги и подверглись переработке. С целью улучшения содер-
содержания книги частично или полностью были переработаны
разделы, посвященные кинематике, аналитической статике,
аналитической динамике и динамике твердого тела. Некото-
Некоторые параграфы (интегральные инварианты, канонические
уравнения и др.) были написаны заново. Несколько сокра-
сокращена первая часть книги. Внесены некоторые исправления.
Автор выражает свою глубочайшую признательность
всем лицам, сообщившим свои замечания и пожелания по
улучшению содержания книги и пользуется возможностью
выразить искреннюю благодарность академику Киргизской
ССР профессору С. М. Попову и профессорам Н. Н. Поляхо-
ву и Ю. А. Архангельскому, сделавшим ряд ценных замеча-
замечаний при чтении рукописи второго издания, а также доценту
Н. Н. Колесникову, взявшему на себя нелегкий труд редакти-
редактирования книги.
Введение
Механика изучает простейшие формы движения материи, сущ-
сущность которых исчерпывается перемещениями материальных тел
или частиц в пространстве и времени. Теоретическая меха-
механика представляет собой один из разделов естествознания, по-
посвященный изучению механических движений материи. Она изуча-
изучает наиболее общие законы движения и равновесия, а также воз-
возникающие при этом взаимодействия материальных тел. Являясь
одним из разделов физики, она выделилась в самостоятельную
дисциплину благодаря своим обширным и важным приложениям.
В своей основе она содержит законы, полученные из эксперимен-
эксперимента и наблюдений явлений природы. Все прикладные механические
дисциплины опираются на методы и выводы теоретической меха-
механики.
По характеру изучаемых задач теоретическая механика разде-
разделяется на статику, кинематику и динамику. Такое разделение в
значительной степени облегчает изучение механических систем.
Статика •— наука о равновесии материальных тел. Она
изучает условия, при которых тела или системы тел, находящиеся
под действием некоторых заданных сил, остаются в состоянии
покоя по отношению к определенной системе координат. Возникнув
в глубокой древности, статика получила значительное развитие
в работах Архимеда B87—212 гг. до н. э.), С. Стевина A548—
1620), Л. Пуансо A777—1859) и других ученых. Законы статики
имеют большое значение в инженерных расчетах.
Кинематика изучает движение материальных тел вне за-
зависимости от причин, вызывающих или изменяющих это движение.
Как самостоятельная наука кинематика оформилась лишь в пер-
первой половине XIX в. Ее можно рассматривать как геометрию
движущихся объектов, к которой в качестве основного понятия
присоединено время.
Динамика изучает движение материальных тел в зависи-
зависимости от действующих на них сил. Возникновение и развитие
динамики неразрывно связано с именами Галилео Галилея A564—
1642), Исаака Ньютона A642—1727), Жозефа Луи Лагранжа
A736—1813).
Механика, основывающаяся на принципах Галилея и Ньюто-
Ньютона, называется классической, или ньютоновской, в от-
отличие от механических дисциплин, исходящих из иных принципов,
как, например, релятивистская механика, в основу ко-
которой положены понятия специального принципа относительности
Эйнштейна.
Глава I
ОСНОВЫ ТЕОРИИ ВЕКТОРОВ
Многие физические величины имеют не только числовое значение,
но еще и направление. Такие величины принято называть векто-
векторами. Они имеют большое значение в механике. В то время как
в математических курсах обычно изучаются только свободные
векторы, в механике, кроме того, применяются векторы скользя-
скользящие и закрепленные.
Векторное исчисление впервые возникло благодаря потребнос-
потребностям механики и физики. Понятие векторной величины в механику
ввел, по-видимому, голландский математик и инженер Стевин,
установивший закон сложения сил по правилу параллелограмма,
хотя аналогичный закон сложения сил уже был известен Архиме-
Архимеду. Окончательное развитие векторное исчисление получило лишь
в XIX в. в работах У. Р. Гамильтона A805—1865), Г. Грассмана
A809—1877) и Р. Болла по гиперкомплексным числам и теории
кватернионов, а также казанского математика А. П. Котельникова
A865—1944), разработавшего теорию винтового исчисления и при-
приложившего ее к механике.
При изучении различных физических величин, характеризую-
характеризующих состояния движения материальных тел, эти величины опреде-
определяются в некоторой определенной системе координат или системе
отсчета. Для определения вектора будем в дальнейшем пользовать-
пользоваться прямоугольной декартовой системой координат Oxyz. Различают
два рода прямоугольных координат: правую (английскую) и левую
(французскую). Правую и левую системы координат можно отли-
отличать следующим образом: большой, указательный и средний паль-
пальцы правой или левой руки, в том порядке, как мы их называем,
осуществляют соответственно правую или левую систему. Можно
также сказать, что в правой системе вращение от оси х кратчай-
кратчайшим образом к оси у вокруг оси z происходит против часовой
стрелки, если смотреть со стороны положительной оси z.
И
Рис. 1
Физические величины можно разделить на две существенно
различные категории: скалярные и векторные. Скалярные ве-
величины имеют лишь числовое значение. Те же физические вели-
величины, которые кроме числового значения характеризуются еще и
направлением, называются векторными. Векторную величину
изображают направленным отрезком, длина которого, измеренная
в определенном масштабе, равна
числовому значению этой физиче-
физической величины, а направление
стрелки указывает направление ее
действия (рис. 1). Примерами ска-
скалярных величин являются темпера-
температура, масса, плотность, энергия. Ве-
Величины эти могут иметь различное
значение в каждой точке простран-
пространства, но они не обладают направ-
направлением, а лишь определяют некото-
некоторые физические характеристики в
данной точке пространства. Такие
же физические величины, как скорость, сила и т. п., характеризу-
характеризуются не только числовым значением, но и направлением действия.
Отвлекаясь сначала от физического содержания, будем рас-
рассматривать абстрактные векторные величины. Векторную величину
обозначим направленным отрезком АВ. Точку А назовем началом
или точкой приложения вектора (рис. 1). Точку В будем называть
концом вектора. Продолжая неограниченно в обе стороны отрезок
АВ, получим прямую, которая называется линией действия
вектора. Каждый вектор определяется линией действия,
стороной и точкой приложения.
Аналитически вектор можно определить координатами его
начала и конца относительно декартовой системы координат или
координатами точки приложения и проекциями отрезка АВ на
координатные оси. Знаки проекций при этом определяются обыч-
обычными правилами аналитической геометрии (рис. 1).
Все векторы подразделяются на три категории: свободные,
скользящие и связанные (закрепленные) вектора.
Свободными векторами представляются векторные физи-
физические величины, не изменяющиеся при переходе от одной точки
пространства к любой другой. Такой вектор характеризует физи-
физическую величину во всем исследуемом пространстве. Так, при
поступательном движении твердого тела скорости в каждой точке
тела равны между собой по величине и по направлению. Скорость
такого движения твердого тела задается одним свободным век-
вектором.
Скользящие векторы представляют собой векторные вели-
величины, остающиеся неизменными вдоль линии действия вектора и
изменяющиеся при переходе к другой точке пространства, не
лежащей на линии действия. Например, сила, приложенная к точ-
12
ке А твердого тела, сообщит последнему вполне определенное
движение из данного его состояния. Такое же движение сообщит
эта сила, будучи приложенной к произвольной точке В, располо-
расположенной на той же линии действия. Но если эту же силу прило-
приложить к точке С твердого тела, не принадлежащей данной линии
действия, она сообщит телу уже совсем иное движение. Таким
образом, по своему действию на твердое тело сила должна рас-
рассматриваться как скользящий вектор.
Закрепленные векторы представляют векторные физиче-
физические величины только в данной точке пространства. В других точ-
точках пространства они либо имеют уже другое значение, либо во-
вообще теряют смысл. Такими векторами являются, например, вектор
скорости движущейся материальной точки и вектор силы, прило-
приложенной к деформируемому телу.
Рассмотрим последовательно эти три категории векторов и
изучим их свойства.
§ 1. СВОБОДНЫЕ ВЕКТОРЫ
1. Основные определения. Как уже говорилось, свободный век-
вектор характеризует векторную физическую величину в каждой точке
пространства, поэтому его можно переносить в любую точку. Часто
бывает удобно переносить свободные векторы в начало прямо-
прямоугольной декартовой системы координат.
Замечание. Для обозначения вектора в дальнейшем будем
употреблять малые буквы латинского алфавита, набранные жир-
жирным шрифтом, например а, а его величину (модуль) будем
обозначать через а или |а| (иногда вектор, имеющий начало в
точке А и конец в точке В, будем обозначать двумя буквами с чер-
чертой сверху АВ).
Свободный вектор в системе координат Oxyz задается направ-
направлением и величиной вектора. Направление можно определить
посредством трех направляющих косинусов а, р, у, связанных
очевидным соотношением
а? + Р2 + Y2 = 1 (а)
(направляющие косинусы двух векторов, направленных в противо-
противоположные стороны, имеют противоположные знаки). Задав еще ве-
величину, мы полностью определим свободный вектор. Из трех
направляющих косинусов произвольно можно задать только два,
поскольку третий определяется из соотношения (а). Таким обра-
образом, для полного определения свободного вектора, казалось бы,
достаточно задать три независимых параметра: два направляющих
косинуса и величину вектора. Однако такое задание не определяет
однозначно свободный вектор. Для третьего косинуса отсюда по-
получим два значения, отличающихся знаком. Поэтому трем из
указанных чисел, например, а, р и а, будут соответствовать два
13
различных вектора. Чтобы устранить неопределенность введем
другой способ задания свободного вектора а, определяя его через
три проекции на ортогональные координатные оси. Пусть X, Y, Z—
алгебраические значения таких проекций вектора а на оси х, у, z
(проектирование на какую-либо ось производится параллельно,
плоскости, проходящей через две другие оси). Будем иметь
X = аа, Y = ар1, Z = ау.
Определения. Два свободных вектора называются равны-
равными, если равны их соответствующие проекции на три координат-
координатных оси.
Два свободных вектора называются параллельными (коллине-
арными), если их проекции пропорциональны, т. е.
X, Yx _ Zx
Л2 12 Z<i
2. Сложение свободных векторов. Определение. Суммой
свободных векторов аь аг, ..., afe называется свободный вектор
а =- ах + а2 + ... + aft,
для построения которого нужно последовательно отложить в любом
порядке векторы ai, аг, ..., а^, совмещая, начало каждого сле-
Рис. 2 Рис 3
дующего с концом предыдущего; замыкающий вектор а, начало
которого совпадает с началом первого вектора, а конец с концом
последнего, представляет собой вектор суммы свободных векторов
(рис. 2).
При сложении двух свободных векторов отсюда получаем
правило параллелограмма: сумма двух свободных векто-
векторов является свободным вектором, совпадающим по величине и по
направлению с диагональю параллелограмма, построенного на
этих векторах (рис. 3). Если свободный вектор с является суммой
двух свободных векторов а и Ь, угол между которыми равен ср, то
величина вектора с будет определяться по формуле
14
с =
b2 + 2ab cos
Коммутативность и ассоциативность операций сложения векторов
очевидна
a -t- b — b -+- а,
а -'- (b + с) = (а + Ь) + с
Если свободный вектор а можно представить в виде суммы
свободных векторов
а = aL -J- а, + ... -±- а„,
то слагаемые правой части называются составляющими, или ком-
компонентами вектора а.
3. Проекция вектора на ось. Рассмотрим произвольную пря-
прямую, на которой выберем положительное направление, указанное
на рис. 4 стрелкой. Примем эту пря-
прямую за ось х. Пусть Av и Av+i обозна-
обозначают ортогональные проекции начала
и конца вектора av на ось х. Отрезок
AvAv+\ называют проекцией вектора
а% на ось х, считая ее положительной,
если направление от точки Av к точке
A?+i совпадает с положительным
направлением оси х. Из приведенного
определения видно, что проекция век-
тор.а на ось является скалярной вели-
величиной, равной произведению модуля
вектора на косинус угла между на-
направлением оси и направлением век-
вектора. Обозначая отрезок A,j4v+i одной
буквой с двумя индексами av, v+i
рассмотрим проекцию суммы векторов
А,
О
Рис. 4
а = ах + а2
на направление оси х
4-
где каждое число av,v+i положительное или отрицательное в за-
зависимости от направления вектора av. Проекция вектора а на ось
равна сумме проекций сторон многоугольника, составленного из
векторов ai, аг, ..., а„. Результат можно представить в виде сле-
следующей теоремы.
Теорема. Проекция суммы свободных векторов равна сумме
проекций составляющих векторов.
4. Инварианты системы свободных векторов. Рассмотрим
свойства свободных векторов, не зависящие от выбора системы
15
отсчета, предполагая только, что каждый раз выбирается прямо-
прямоугольная система отсчета с одной и той же единицей измерения.
Эти свойства называются инвариантными по отношению
к преобразованию системы координат (за исключением зеркаль-
зеркального отображения), а сами величины — инвариантами. Для
свободных векторов такими инвариантами являются следующие
величины.
а) Величина вектора. При изменении системы коорди-
координат меняются проекции вектора на оси координат, величина же
вектора
m
Рис. 5
а = /X3 + У2 f Z2
остается неизменной. Она является
первым инвариантом по отношению к
изменению осей.
б) Скалярное произведе-
произведение двух векторов1. Рассмотрим
систему, состоящую из двух свобод-
свободных векторов а и Ь, которые перене-
у сем в начало координат О (рис. 5).
Пусть ф — угол между положитель-
положительными направлениями векторов. Ска-
Скалярным произведением векторов а и
b называют скалярную величину
а = | а | | b | cos cp — ab cos ф,
которая зависит только от модулей векторов, инвариантных отно-
относительно преобразования координат указанного типа, и от угла
между векторами. Все эти величины можно выразить через проек-
проекции векторов на оси координат. В самом деле, пусть ах, ау, аг —
b b b
р р
проекции вектора а на оси координат, bx
by, bz
АВ
р р р x, y
щие проекции вектора Ь. Из треугольника ОАВ имеем
АВ2 = АО2 -J- ОБ2 — 2А0 ¦ OB-cos q>.
Определяя отсюда cos cp, получим
соответствую-
соответствуюа = ab cos q> = ab
- (bz - azf] = axbx
ayby
откуда получим аналитическую запись второго инварианта — ска-
скалярного произведения, которое в дальнейшем будем обозначать
круглыми скобками
1 Иногда скалярное произведение называют прямым, или алгебраическим про-
произведением векторов.
16
a = (a, b) = axbx -т- ayby -p агЬг.
Второй инвариант принимает теперь следующий вид:
аА + ауьу -г azbz = const.
в) Векторное произведение1. Третьим инвариантом,
системы свободных векторов относительно изменения системы ко-
координат является векторное произведение двух векторов. Этот
инвариант имеет векторный характер. Он определяет плоскость,
параллельную двум свободным векторам, и численно равен пло-
площади параллелограмма, который можно построить на двух сво-
свободных векторах, если их перенести в одну точку. Рассмотрим
систему, состоящую из двух свободных векторов а и Ь, перенесен-
перенесенных в начало системы координат Oxyz (рис. 5). На векторах а
и b построим параллелограмм. Площадь этого параллелограмма,
как известно, не зависит от выбора системы координат Oxyz, а за-
зависит лишь от взаимного расположения и величин векторов аи b
и определяется формулой
S = | а | | b | sin ф,
где ф — угол между линиями действия векторов а и Ь. Рассмот-
Рассмотрим свободный вектор т, модуль которого равен площади парал-
параллелограмма, построенного на векторах а и Ь, а направление линии
действия перпендикулярно к плоскости, определяемой векторами а.
и Ь. Вектор m направлен в ту сторону, откуда вращение от векто-
вектора а к вектору b (внутри параллелограмма) осуществляется
против хода часовой стрелки. Построенный свободный вектор т.
назовем векторным произведением векторов а и b и обозначим
символом [ ]
m = [а, bj.
Векторное произведение не зависит от выбора системы коор-
координат.
Проекции векторного произведения на оси
координат. Построим на векторах а и b треугольник (рис. 6).
Величина векторного произведения векторов а и b будет равна
удвоенной площади треугольника, построенного на этих векторах.
Найдем проекцию вектора пт на ось z
XXYX
тг = т cos ф = %Saaob cos ф — 2Sa1ob1 —
— Г jXj,
где А\ и В. — проекции точек А и В на плоскость Оху, Хи У1}
Zj — проекции вектора а на оси х, у, z, а Х2, Y2, Z2 — соответст-
соответствующие проекции вектора Ь.
1 Векторное произведение иногда называют внешним, произведением.
17Г
Замечание. Площадь треугольника Л1ОВ1 можно легко
вычислить (рис. 7)
с 1 и ¦
bAfiBt — ~JTaA sin Ф-
sin ф = sin (y — a) = sin у cos a — sin a cos у — (X1Y2 — КД),
axbx I
ж>
Рис. 6
отсюда
Sa,ob, —
У
Рис. 7
1)
Аналогично получаем две других проекции
my — LXA% — Лх?.ъ.
Обозначая через еь е2, е3 единичные векторы координатных осей
к, у, z, результат можно представить в виде
или более компактно при помощи определителя
ех е2 е3
Хг Yx Zx
X V 7
Иногда употребляется матричное обозначение
m = х х
18
Из определения векторного произведения
некоммутативность, т. е.
[а, Ь] = - [Ь, а],
сразу же следует его;
так как перестановка строк в определителе, представляющем век-
векторное произведение, влечет за собой смену знака.
Смешанным произведением векторов называют
скалярное произведение вектора на векторное произведение двух
других векторов:
(а, [Ь, с]).
СУ С*
+ ау
bzbx
+ аг
КЬу
г г
СХ Су
ах ау az
Ьх by К
Сх Су Сг
Из определения следует
(а, [Ь, с]) = ах
Так как две перестановки строк не меняют знака определителя, то
будет иметь место следующее свойство смешанного произведения:
(а, [Ь, с]) = (Ь, [с, а]) = (с, [а, Ь]),
т. е. при циклической перестановке векторов (замена а на b, b на
с, с на а) смешанное произведение не меняется.
Дистрибутивность векторного произведения
[a, b + с] = [а, Ь] + [а, с]
непосредственно следует из свойств определителей.
Двойным векторным произведением называют
векторное произведение вектора а на векторное произведение
m=[b, с] (рис. 8), или
Q = [а, [Ь, с]].
(а)
Вектор Q (на чертеже он не указан) перпендикулярен к векторам
а и т. В свою очередь вектор тп перпендикулярен к плоскости (я),
в которой лежат векторы b и с. Отсюда следует, что вектор Q, бу-
будучи перпендикулярным к вектору т, лежит в плоскости (я) и
может быть представлен в виде линейной комбинации векторов
b и с, т. е.
Q =
(Ь)
Для определения вектора Q теперь достаточно вычислить коэффи-
коэффициенты Р и y- Введем в плоскости (я) вектор Сь перпендикуляр-
перпендикулярный к вектору с. Умножая равенство (Ь) скалярно на вектор сь
в силу условия (сь с) =0 находим
(Q>Cl)-p(b,c).
Подставляя сюда значение Q
Q = [a, ml,
получим
(Qq) = ([a, m], q) = ([m, q], a).
Легко подсчитать величину этого скалярного произведения. С этой
целью вычислим сначала модуль векторного произведения [mci]
| п | = | [m, qj | = тсх = Ьссг sin ф.
Так как векторное произведение [mci] =n представляет собой
вектор, перпендикулярный к векторам m и Ci, то его линия дейст-
действия будет совпадать с линией действия вектора с.
Рис. 8
Рис. 9
Для скалярного произведения получим теперь значение
(Q, Су) = (п, а) = па cos (па) = Ьссга sin ф cos (па).
В то же время для скалярного произведения векторов b и Ci будем
иметь
(Ь, сх) = bc± cos (bq), cos (bq) = ± cos ф,
причем знак перед косинусом совпадает со знаком выражения
.cos(па), т. е.
sign cos(b, c^ = sign cos (n, a).
Поскольку
(с, а) = ca cos (na),
(b, ct) r= bcx cos (b, cx) = bcr cos (90° — ф) = bq sin ф,
20
то
откуда следует
(Q, сх) = (с, а) (Ь, сх) = E (b, q),
Р = (С а).
Вводя вектор Ъг ортогональный вектору Ь, аналогичным способом по-
получим (рис. 9)
или
Но
(Q,b1) = Y(c,b1),
([а, т],Ьг) = 7(с, Ьх).
([а, т]Ь1) = ([т, bj, a).
Определив величину вектора
к _- [mbj, | к | = mbx = cbbx sin ф,
направление которого совпадает с направлением вектора Ь, находим
(Qbx) = ([m, bx] a) = bcbx sin ф cos (ba) = ba cos (ba) bxc sin ф =
= — ba cos (ba) bxc cos (90° -f q>) = — (b, a) (bxc).
Таким образом,
-(b,a)(b1c)=v(b,c),
откуда y=—(b, a).
Подставляя значения коэффициентов p и у в формулу (Ь),
получим
Q = [a,[bfc]] = b(a, c)-c(a,b).
Эту же формулу можно получить и чисто аналитически. В самом
деле, рассмотрим проекцию вектора Q на ось z. По определению
лроекции имеем
ах ау
тхту
=
ах
by К
СУ С*
ЪгЪх
сг сх
— Ь,р2) — ау {ЬуСг — Ьгсу) =
= К (ахсх + аусу + а,сг) — сг (axbx + ayby + агЬг) =
\=Ь,(л,с)-сж(л,Ь).
Аналогично получим две других проекции
Ях = Ьх(л, с) — сх(а, Ь),
21
Qy = by(R, с) — су(я,Ъ).
На основании этих выражений для проекций, можно записать век-
векторное равенство
Q = [a, [b, c]] = b(a, с) —с(а, b).
§ 2. СКОЛЬЗЯЩИЕ ВЕКТОРЫ
1. Определения. Скользящие векторы в заданном пространстве
определяют такие векторные физические величины, которые не
меняются вдоль линии действия вектора. Вдоль линии действия
они имеют одно и то же значение и направление и представляются
одним н тем же вектором. При переходе к другой точке, не распо-
расположенной на линии действия, эти физические величины имеют уже
другое значение. Скользящими векторами представляются силы,
действующие на абсолютно твердое тело, вектор мгновенной угло-
угловой скорости вращения твердого тела и другие физические вели-
величины.
2. Координаты скользящего вектора. Чтобы полностью опре-
определить скользящий вектор, нужно знать его величину, сторону и
линию действия. Направление и величину можно определить
тремя проекциями X, Y, Z вектора на ортогональные оси коорди-
координат. Линия действия будет однозначно определена заданием трех
координат хотя бы одной точки М его линии действия. Не нарушая
общности, всегда можно предполагать, что линия действия не па-
параллельна плоскости Оху. Тогда за точку на линии действия мож-
можно будет выбрать точку А (х, у, 0) пересечения последней линии
с плоскостью Оху. Пять произвольных чисел X, У, Z, х, у пол-
полностью определяют скользящий вектор и называются его коор-
координатами.
Рассмотренный способ задания скользящего вектора не всегда
удобен в силу его несимметричности. Другой способ определения
скользящего вектора опирается на понятие момента скользящего
вектора относительно начала координат.
3. Момент скользящего вектора. Плюккеровы координаты.
Рассмотрим такие свойства скользящего вектора, которые не из-
изменяются при перенесении вектора в любую точку его линии дей-
действия, иначе говоря, являющиеся инвариантными относительно»
скольжения вектора вдоль линии действия. Такими инвариантными
величинами являются, прежде всего, три проекции X, Y, Z сколь-
скользящего вектора на оси декартовой системы координат. Построим
плоскость (я), проходящую через начало координат и линию
действия скользящего вектора. В этой плоскости рассмотрим тре-
треугольник АВО (рис. 10). Плоскость треугольника и его площадь
22
не меняются при скольжении вектора вдоль его линии действия.
Плоскость (я) разбивает пространство на две части. Ту сторону
от плоскости (я), откуда вращение от начала вектора а к его
концу (от А к В) видно происходящим против хода часовой
стрелки, назовем положительной, а противоположную сторону —
отрицательной. Нетрудно заметить, что положительная и отрица-
отрицательная стороны плоскости (я) не меняются при скольжении век-
вектора вдоль его линии действия. Объединяя отмеченные свойства
в одно векторное представление, введем в рассмотрение свободный
Рис. 10
вектор Q, ортогональный к плоскости (я) и направленный в поло-
положительную от нее сторону; величину вектора Q примем равной
удвоенной площади треугольника ОАВ, т. е.
| Q | = aft.
Построенный так вектор Q будем называть моментом вектора
а относительно начала координат:
Q == тот0а.
Замечание. Гак как понятие момента связано с определен-
определенной линией действия, то не имеет смысла термин «момент свобод-
свободного вектора».
Если известны величина и направление скользящего вектора,
то задание вектора Q полностью определяет скользящий вектор.
В самом деле, вектор Q однозначно определяет плоскость (я),
ортогональную к его линии действия и проходящую через начало
координат (рис. 10). Линия действия вектора а находится в плос-
плоскости (я) на расстоянии
от начала координат. Зная, кроме того, направление вектора а,
нетрудно определить и его линию действия. Для этого в плоскости
23
(я) через начало координат проведем прямую, ортогональную к
вектору а, и отложим на ней отрезок OA=h таким образом, чтобы
направления ОА, а и Q составляли бы правую тройку. Тогда линия
действия вектора а будет проходить через точку А.
Задание проекций векторов а и Q полностью определяет
скользящий вектор а, а потому величины X, Y, Z, Qx, Qv, Qz можно-
рассматривать как координаты скользящего вектора. В силу опре-
определения момента скользящего вектора эти величины не могут быть
заданы произвольно, так как векторы а и Q ортогональны и, сле-
следовательно, их скалярное произведение всегда равно нулю, т. е.
Отсюда видно, что из введенных шести координат, определяющих
скользящий вектор, независимых будет только пять. Шесть вели-
величин X, Y, Z, Qx, Qy, Qz называются плюккеровыми коорди-
координатами скользящего вектора.
4. Аналитическое определение момента скользящего вектора.
В основу аналитического определения координат вектора момен-
момента Q могут быть положены свойства момента вектора относитель-
относительно начала координат. В самом деле, пусть линия действия сколь-
скользящего вектора &{Х, Y, Z) проходит через точку А(х, у, г)
(рис. 11). Построим в точке О свободный вектор с, линия действия
которого параллельна линии действия вектора а, а величины,,
направления и стороны векторов е и а совпадают. Площадь парал-
параллелограмма, построенного на векторах е и а, будет равна модулю»
момента Q вектора а относительно точки О, а его плоскость орто-
ортогональна к линии действия вектора Q. С другой стороны, эта пло-
площадь равна модулю векторного произведения векторов ОА и е„
причем вектор т=[ОА, е] по величине и по направлению совпа-
совпадает с вектором Q, так что момент Q вектора а относительно точ-
точки О может быть формально определен как векторное произведе-
произведение векторов ОА и е
Q = \ОА, е]
или как векторное произведение векторов ОА и а, рассматривае-
рассматриваемых как свободные
Q = [ОА, а].
Полученная формула дает возможность найти проекции вектора Q
на ортогональные оси координат, но не определяет категорию век-
вектора Q. Раскрывая формулу, имеем
Q .= [ОА, а]
х у z
X Y Z
24
откуда для проекций вектора Q найдем значения
Qx = yZ-zY, Qy = zX-xZ, Qz = xY-yX.
Пример 1 Скользящий вектор а(а, 0, 0) проходит через точку Л@, й,0).
Определить момент скользящего вектора а относительно точки О
Решение
Замечание. Начало координат можно выбрать в произ-
произвольной точке пространства. Вообще говоря, момент скользящего
вектора относительно различных точек пространства будет различ-
различным и по величине и по направлению. Но этот момент представ-
представляет некоторую вполне определенную физическую величину, харак-
характеризующую свойства скользящего вектора. При изучении системы
скользящих векторов будет показано, что момент скользящего
вектора относительно начала координат в силу его свойств можно
рассматривать как вектор свободный.
5. Проекция момента на ось. Рассмотрим момент относитель-
относительно точки О скользящего вектора а(Х, Y, Z), линия действия кото-
которого проходит через точку А(х, у, г). Проекция момента Q на ось
z имеет вид
Qz = Q cos ft = 2S cos ft =r 2Slt
где S — площадь треугольника OAB; S[ — площадь треугольника
OAiBi (рис. 12). С другой стороны, если ввести единичный век-
вектор е3, то
25^3 = mom0 a^
или
mom0 ax =¦ Qze3,
т. е. проекция момента вектора на ось равна моменту проекции.
6. Момент скользящего вектора относительно оси представ-
представляет собой алгебраическое значение проекции на эту ось момента
скользящего вектора относительно всех точек на оси. Такое опре-
определение имеет смысл только в том случае, когда проекция не зави-
зависит от выбора точки на оси. Последнее свойство действительно
имеет место, так как проекция момента на ось равна моменту
проекции вектора на плоскость, ортогональную к оси. Проекция
же не зависит от положения точки на оси, что и доказывает
утверждение.
Пример 2 Найдем линию действия скользящего вектора, заданного
плюккеровыми координатами
X=l, K = 2, Z = 3; Qx=o, Qy^2, Q2 = — 3.
25
Из определения момента получим
Q* =
У z
Y Z
г х
ZX
или
— 2г = 5, г
¦* у
XY\f
/= —3.
Эта система линейно зависимых уравнений определяет в пространстве линию
действия скользящего вектора.
Рис 12
Рис 13
§ 3. СИСТЕМА СКОЛЬЗЯЩИХ ВЕКТОРОВ
1. Система сходящихся скользящих векторов. Систему сколь-
скользящих векторов, все линии действия которых пересекаются в одной
точке, будем называть сходящейся.
Определение. Результирующим вектором системы сходя-
сходящихся в точке О скользящих векторов назовем скользящий век-
вектор с, линия действия которого проходит через точку О, а величи-
величина и направление определяются сложением векторов, рассматри-
рассматриваемых как свободные.
Теорема Вариньона. Момент результирующего вектора
системы сходящихся векторов относительно начала координат ра-
равен геометрической сумме моментов составляющих векторов отно-
относительно того же начала.
Доказательство. Докажем сначала теорему для двух
сходящихся скользящих векторов. Пусть система состоит из двух
скользящих векторов а и Ь, линии действия которых пересекаются
в точке А (рис. 13). И пусть с — результирующий вектор этой си-
26
стемы. Покажем, что момент результирующего вектора с относи-
относительно точки О равен сумме моментов составляющих векторов а
и Ь. Для этого проведем через точку О плоскость (я) ортогональ-
ортогональную к прямой АО, и пусть отрезки ai, b[ и cj являются соответст-
соответственно ортогональными проекциями векторов a, b и с на плоскость
(я). По определению, момент тс вектора с относительно точки О
равен по величине удвоенной площади треугольника ОАС, т. е.
произведению ОА-С\, расположен в плоскости (я) и направлен
лерпендикулярно отрезку сь Точно так же и моменты та и т&
векторов а и b относительно точки О равны соответственно произ-
произведениям ОА-щ и OA-bi и ортогональны к прямым ODi и OBt
Отсюда видно, что параллелограмм, построенный на векторах т„
и ть, будет подобен параллелограмму, OB\C\Di, а момент шс бу-
будет совпадать с диагональю этого параллелограмма, т. е. тс яв-
является геометрической (или векторной) суммой векторов та и т&.
Теорема доказана. Она легко распространяется на любую сходя-
сходящуюся систему скользящих векторов.
Пример 3 Пусть заданы два скользящих вектора: аA, 2, 3) и
ЬD, 3, 2), проходящие через точку А(\, 3, 5). Проверим справедливость теоре-
теоремы Вариньона
Вектор с=а+Ь имеет проекции сE, 5, 5) Момент вектора с относительно
начала координат определится по формуле
Q = mom0 с =
х у г
х y г
ИЛИ
е2 es
3 5
5 5 5
Тогда
Q.X- — Ю, Qy=20, Qz= — Ю.
Вычисляя моменты векторов а и b относительно начала координат получим
QlX=-l. Qiy~=2, Qlz = -1, Q2i=--9, Q2y-18, Q2Z=- —9.
Отсюда очевидна справедливость теоремы Вариньона
2. Произвольная система скользящих векторов. Элементарные
операции. Рассмотрим произвольную пространственную систему
скользящих векторов. Поскольку каждый из скользящих векторов
представляет собой некоторую физическую величину, то и система
скользящих векторов также будет представлять определенную
совокупность физических величин. Каждый скользящий вектор
можно переносить вдоль линии действия, а скользящие векторы,
линии действия которых пересекаются, можно складывать по пра-
правилу параллелограмма. Получаемые при этом новые системы сколь-
27
зящих векторов представляют собой те же физические свойства,
что и первоначальная система, но новая система векторов может
оказаться более простой. В связи с этим возникает задача о на-
нахождении более простой системы скользящих векторов, представ-
представляющей те же физические свойства, что и первоначальная система
векторов. Рассмотрим э л е м ента р н ы е операции, являющие-
являющиеся естественным обобщением изученных выше свойств скользящих
векторов.
1. Перенос вектора в произвольную точку его линии действия
(скольжение вектора вдоль линии действия).
2. Замена системы сходящихся скользящих векторов, линии
действия которых пересекаются в одной точке, одним скользящим
вектором, линия действия которого проходит через ту же точку, а
величина и направление определяются по правилу сложения сколь-
скользящих векторов.
3. Присоединение или отбрасывание двух равных по величине
и направленных в противоположные стороны скользящих векторов
с общей линией действия (добавление или отбрасывание нулевой
системы) 1.
Определение. Системы скользящих векторов, которые
можно получить одну из другой при помощи элементарных опера-
операций, называют эквивалентными2.
3. Приведение системы скользящих векторов к простейшей
эквивалентной форме. При изучении различных систем векторов
особо выделим систему параллельных скользящих векторов.
а) Система параллельных скользящих векторов.
Определение. Векторы, линии действия которых парал-
параллельны, называются параллельными скользящими векто-
векторами.
Сначала рассмотрим случай двух параллельных векторов, на-
направленных в одну сторону, предполагая, что их линии действия
проходят через точки А и В, в которые и перенесем векторы
(рис. 14). Проведем через точки А к В прямую и присоединим к
системе два равных по величине, противоположно направленных
и лежащих на одной прямой АВ, вектора и и —и. Новая система
четырех скользящих векторов эквивалентна первоначальной систе-
системе. Но последнюю систему векторов u, b, а, —и можно заменить
эквивалентной системой, состоящей из двух скользящих векторов
Р и Q, так что
P=b + u, Q = a — u.
1 Можно было бы ограничиться двумя первыми элементарными операциями,
так как третья может быть представлена как комбинация первых двух. Мы
оставляем здесь три зависимых элементарных операции, что на наш взгляд име-
имеет преимущества при дальнейших рассуждениях.
2 Впервые такое определение эквивалентных систем было дано француз-
французским математиком и механиком Луи Пуансо.
28
Два последних вектора Р и Q перенесем вдоль их линий действия-
в точку пересечения 5 и сложим по правилу параллелограмма
Полученный вектор R эквивалентен исходной системе скользящих,
векторов, а по величине равен сумме векторов а и Ь, рассматри-
рассматриваемых как свободные. Вектор R параллелен векторам а и Ь, а по
A S
Рис. 14 Рис. 15
величине равен сумме их модулей. Из подобия треугольников
AQa и ASO, а также ВРЬ и OSB следует
а _ и Ъ и
~OS~~AO' ~OS~~OB'
или
a-OA = b-OB,
т. е.
— — ов
Ь ~ ОА '
Мы получили, что система двух параллельных векторов, на-
направленных в одну сторону, приводится к одному скользящему
вектору, эквивалентному заданной системе, линия действия кото-
которого параллельна линиям действия первоначальных векторов и
делит расстояние между ними в отношении, обратно пропорцио-
пропорциональном их величинам, а модуль равен сумме модулей векторов
системы.
Рассмотрим теперь систему, состоящую из двух параллельных
векторов, направленных в противоположные стороны. Пусть вели-
величины этих векторов различны и для определенности положим
|а|>|Ь|. Предположим, кроме того, что линии действия векторов
проходят через точки А и В (рис. 15). В силу обратимости эле-
29
ментарных операций вектор а можно заменить эквивалентной
системой из двух векторов Ь[ и Ь2, параллельных вектору а, вели-
величины которых определяются из равенств
а = Ь1 + Ьг, 1^1 = |Ь|,
где векторы a, bL и Ь2 рассматриваются как свободные. Отсюда будем
иметь
Ьх — — Ь, Ь2 = а — Ьг = а -|- Ь.
Линию действия вектора bi проведем через точку В, тогда точка S
па линии действия вектора Ь2 определится из условия
Ьх • В А = Ь% ¦ AS,
¦или
AS by b
ВА ~ b2 ~ |a| —|b| '
Система векторов b, bb b2 эквивалентна первоначальной системе.
Векторы bi и Ь2 представляют собой нулевую систему скользящих
векторов, которую можно отбросить. В результате будем иметь
один скользящий вектор Ь2, эквивалентный первоначальной системе
скользящих векторов, т. е. система двух параллельных скользя-
скользящих векторов а и Ь, не равных по величине и направленных в про-
противоположные стороны, эквивалентна одному скользящему векто-
вектору Ь2, параллельному первоначальным векторам, линия действия
которого делит отрезок, соединяющий точки приложения векторов
а и b внешним образом в отношении
AS _ Ь
BS ~ а '
Направления векторов Ь2 и а совпадают, а величина Ь2 равна раз-
разности величин векторов а и Ь.
Замечание. Вектор Ь2, эквивалентный рассматриваемой
системе векторов, называют результирующим вектором
системы.
б) Пара скользящих векторов и ее свойства. Рассмотренный
выше случай противоположно направленных параллельных векто-
векторов исключает равенство |а| = |Ь|, так как при выполнении этого
равенства невозможно определить положение линии действия век-
вектора Ь2. Величина вектора Ь2 просто исчезает.
Систему двух параллельных векторов, равных по величине,
направленных в противоположные стороны и не лежащих на одной
прямой, будем называть парой. Пара скользящих векторов об-
обладает целым рядом специфических особенностей и имеет очень
большое значение в теории скользящих векторов. Плоскость,
определяемую векторами пары, будем называть плоскостью
пары, расстояние между линиями действия векторов пары —
плечом пары. Векторы пары создают «вращение плеча» в ту
30
сторону, куда указывают их стрелки. Всегда можно указать ту
сторону от плоскости пары, откуда это вращение видно происхо-
происходящим против хода часовой стрелки. Эту сторону назовем поло-
положительной. Введем в рассмотрение вектор m — момент пары,,
направленный перпендикулярно к ее плоскости в ту сторону, отку-
откуда вращение видно происходящим против хода часовой стрелки,
равный по величине площади параллелограмма, построенного на
векторах пары (рис. 16). Будем сначала рассматривать вектор m
как вектор, приложенный к началу вектора —а. По величине и по
направлению вектор гп совпадает с величиной и направлением
вектора момента а относительно точки В
momB а = [ВА, а],
что дает возможность определить проекции вектора m на оси.
координат.
m
Рис. 16
Рис. 17
Заметим, что при помощи элементарных операций пару нельзя
привести к одному скользящему вектору, эквивалентному паре.
В этом мы уже имели возможность убедиться, рассматривая си-
систему из двух параллельных скользящих векторов, направленных
в противоположные стороны. Как было показано, система таких
векторов эквивалентна одному результирующему вектору только
тогда, когда разность величин векторов отлична от нуля. Если же
эта разность стремится к нулю, величина результирующего векто-
вектора тоже стремится к нулю, а линия его действия уходит в беско-
бесконечность.
Установим следующие свойства пары:
1. При помощи элементарных операций пару можно повер-
повернуть в своей плоскости, причем момент пары не изменяет ни вели-
величины, ни направления.
В самом деле, пусть имеется пара скользящих векторов а, —а,
линии действия которых проходят через точки А и В и пусть плечо
пары равно h (рис. 17). Проведем в плоскости пары две парал-
параллельных прямых, расстояние между которыми равно h и которые
31
образуют уюл а с векторами пары. В произвольно выбранных
точках С и D этих прямых добавим две нулевые системы скользя-
скользящих векторов ai, а2, a3, a<i, по величине равных величинам векто-
векторов пары, а направленных вдоль этих новых прямых. Полученная
новая система шести скользящих векторов эквивалентна первона-
первоначальной системе векторов. Перенося теперь нулевые системы век-
векторов вдоль линий их действия в точки А и В пересечения прямых
и складывая затем векторы ai и ъ.% с векторами первоначальной
пары, получим новую систему векторов Qi, Q2, аг, а3> эквивалент-
эквивалентную первоначальной паре. Векторы Qi и Q2 направлены по общей
диагонали ромба в противоположные стороны и равны по вели-
величине, т. е. представляют собой нулевую систему, которую можно
отбросить. В результате останется система двух скользящих век-
векторов аг и аз, равных по величине, направленных в противополож-
противоположные стороны и расположенных на параллельных прямых. Такая
система векторов является парой, у которой линии действия век-
векторов повернуты по сравнению с первоначальной на угол а. В рас-
рассмотренном преобразовании не изменилось плечо пары, не измени-
изменились по величине вектора пары, а следовательно, не изменилась
и величина вектора момента пары. Остается неизменным и
направление вектора момента пары. Этим доказано, что при по-
помощи элементарных операций пару можно повернуть в своей
плоскости, причем величина и направление вектора момента пары
остаются инвариантными по отношению к такому преобразова-
преобразованию. Новая пара оказывается эквивалентной первоначальной паре.
2. При помощи элементарных операций можно изменить плечо
пары (изменяя величины векторов обратно пропорционально изме-
изменению плеча пары), при этом получаем эквивалентную пару.
момент которой по величине и по направлению равен моменту
первоначальной пары.
Для доказательства этого предложения предположим, что не-
некоторая прямая А пересекает линии действия векторов пары под
прямым углом в точках А и В, так что отрезок АВ равен величине
ллеча пары h (рис. 18). Для построения эквивалентной пары, пле-
плечо которой /ii>/i, на прямой А на расстоянии hj2 по обе стороны
от середины О отрезка АВ отложим точки С и D и в этих точках
добавим две нулевые системы векторов и и —и, линии действия
которых параллельны векторам пары, а величины определяются из
условия
uhi — ah.
Полученная система шести векторов эквивалентна первоначальной
паре. Как нетрудно убедиться, система параллельных векторов а
и и (последний проходит через С) эквивалентна одному вектору R
с началом в точке О, причем величина вектора R определяется из
равенства
32
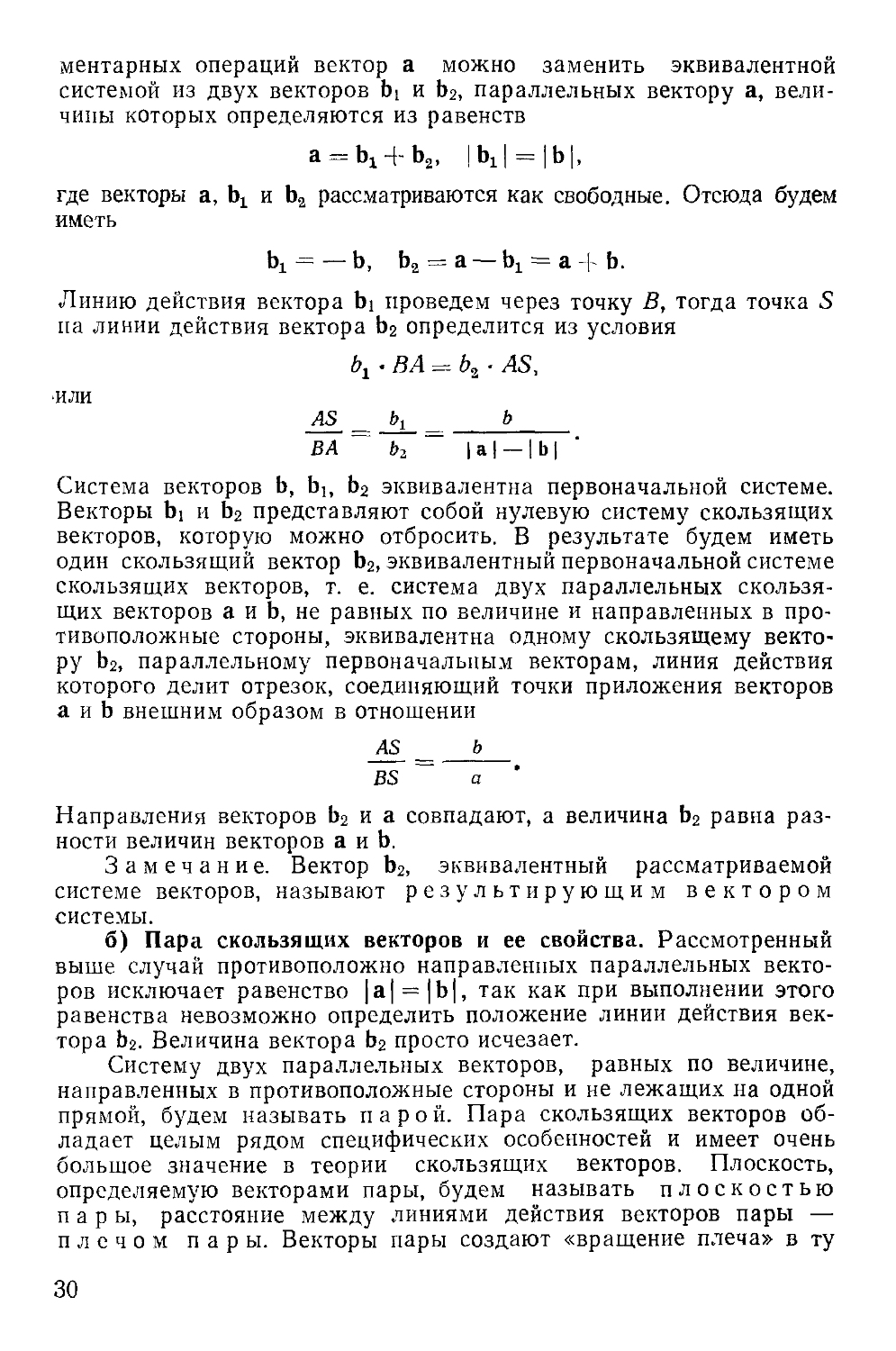
С другой стороны, векторы —а и —и (последний проходит через
точку D) эквивалентны одному вектору —R с точкой приложе-
приложения О, величина которого определяется из равенства
— R = — а — и.
Векторы R и —R представляют нулевую систему, отбросив кото-
которую, получим пару векторов и и —и с плечом hi, эквивалентную
первоначальной паре. Момент новой пары
тх = uhx = a — h1 = ah = т,
т. е. равен по величине и по направлению моменту первоначальной
пары.
u.
-u
a
В А
Z
h
R
T
-R
В С
-a
u
-a.
Рис 18
Рис. 19
3. При помощи элементарных операций пару можно перено-
переносить в параллельную плоскость. При этом величина и направление
вектора момента пары остаются неизменными.
В самом деле, пусть заданная пара скользящих векторов а
и —а расположена в плоскости (я), а линии действия векторов
пары проходят через точки А и В (рис. 19). Перпендикуляры,
восстановленные к плоскости (я) в точках А и В, пересекают
параллельную плоскость (Я]) в точках Л[ и В[. Добавим в этих
точках две пулевые системы скользящих векторов &\, —ai, ъ.% —а2,
по величине равных вектору а, линии действия которых парал-
параллельны линиям действия вектора а. Новая система шести векторов
эквивалентна первоначальной паре. Система параллельных векто-
векторов а и а2 эквивалентна одному скользящему вектору R = a+a2,
а линия действия его проходит через точку пересечения диагона-
диагоналей параллелограмма ABBiAi. Аналогично, система векторов ¦—а
и —ai эквивалентна одному скользящему вектору —R=—а—аь
линия действия которого тоже проходит через точку пересечения
диагоналей. Векторы R и —R представляют собой нулевую систе-
систему скользящих векторов, отбросив которую, получим систему, со-
Е Н Березкин
33
стоящую из двух скользящих векторов а\ и —а2, расположенных
в плоскости (jti) и представляющих собой пару с моментом, рав-
равным моменту первоначальной пары.
Замечание. Плоскость пары нельзя повернуть вокруг пря-
прямой, не являющейся ортогональной к плоскости пары. В самом
деле, если предположить, что существуют две эквивалентные пары,
лежащие соответственно в плоскостях (щ) и (яг), пересекающихся
по прямой А (рис. 20), то каждую из этих пар можно реализовать
некоторым заданным вектором а, расположенным на прямой Д, и
двумя параллельными векторами —ai и —а2) равными по величине
Рис. 20
Рис. 21
и расположенными соответственно в плоскостях (ni) и (яг).
Утверждение об эквивалентности пар сводится теперь к условию
эквивалентности двух параллельных скользящих векторов —ai и
—аг, равных по величине, но не лежащих на одной линии дейст-
действия. Последнее противоречит определению скользящих векторов.
Рассмотренные свойства пары скользящих векторов говорят
о том, что элементарными операциями можно изменять положение
пары в пространстве, но при этом остается неизменным вектор
момента пары, обладающий свойствами свободного вектора. По
отношению к элементарным операциям вектор момента пары ин-
инвариантен.
Следствие. Две пары эквивалентны, если их векторы мо-
моментов пар равны по величине, параллельны и одинаково направ-
направлены. Пары определяются своими моментами, которые являются
свободными векторами.
Теорема о сложении пар. Две произвольные пары
эквивалентны одной паре, момент которой равен геометрической
сумме моментов заданных пар.
Доказательство. Рассмотрим две произвольные пары,
плоскости которых пересекаются по некоторой прямой /, проходя-
проходящей через точку О, с моментами соответственно mi и т2 (рис. 21).
На прямой / отложим произвольный отрезок ОА, и заданные пары
преобразуем так, чтобы плечо каждой из них было равно величи-
34
не отрезка ОА. Представленные пары можно теперь реализовать
векторами аь —ai и а2, —а2, проходящими соответственно через
точки О и Л, а моменты этих пар будут соответственно равны
т1 = [ОА, aj, m2 = [ОА, aj.
Складывая векторы ai с а2 и —а.{ с
—а2, получим два скользящих вектора
z,
а =
a2, — a - - &x a2,
линии действия которых проходят со-
соответственно через точки Л и О. Век-
Векторы а и —а равны по величине, па-
параллельны и направлены в противопо-
противоположные стороны, т. е. представляют
собой пару, эквивалентную двум пер-
первоначальным парам. Применяя алгеб-
алгебру свободных векторов для определе-
определения величины и направления момен-
момента результирующей пары, бу-
будем иметь
m = [ОА, а] = [ОД аг + aj = [ОД г
Рис. 22
[ОA,
^ + тг,
или
т
в) Приведение произвольной системы скользящих векторов.
Рассмотрим произвольную систему скользящих векторов
av(Xv, Vv, 2V) v = l, 2,..., k, линии действия которых проходят со-
соответственно через точки А„(х^, yv, zv)- При помощи элементар-
элементарных операций можно построить простейшую эквивалентную систе-
систему скользящих векторов. В самом деле, добавим в точке О
нулевую систему скользящих векторов а^ и —\, линия действия
которых параллельна линии действия вектора av, а величины
равны величине вектора av (рис. 22). Система векторов av и —а^
будет представлять пару, момент которой
tTIv =
является вектором свободным. Проводя такие же преобразования
для каждого вектора системы, в результате получим систему схо-
сходящихся скользящих векторов a'v а'2, ... , &'k и систему пар с
моментами mi, m2)..., mh. Новая система скользящих векторов
эквивалентна первоначальной системе векторов аь а2, ..., aft. Си-
Систему сходящихся скользящих векторов &[, а'2> ... , &'k можно за-
заменить одним результирующим вектором
2*
35
линия действия которого проходит через точку О. Складывая пары
скользящих векторов av, —av' (v=l, 2, ..., k), получим результи-
результирующую пару с моментом
М = 2mv.
В результате приходим к следующей теореме.
Теорема. Для произвольной системы скользящих векторов
всегда можно построить эквивалентную систему, состоящую из
трех скользящих векторов, причем линия действия одного из этих
векторов (результирующего вектора) проходит через наперед за-
заданную точку, а два других представляют пару с моментом,
равным сумме моментов векторов системы относительно той же
точки.
Процесс построения результирующего вектора и результирую-
результирующей пары носит название приведения системы скользя-
скользящих векторов к произвольной точке.
Теорема об эквивалентности двух систем
скользящих векторов. Две системы скользящих векторов
&i, а.2, ..., afe и Ьь Ъ2, ..., Ъг эквивалентны тогда и только тогда,
когда при приведении к произвольной точке каждой из этих систем
их результирующие векторы и моменты результирующих пар сов-
совпадают.
Доказательство. (Необходимость). Предположим снача-
сначала, что система скользящих векторов ai, а2, ..., а& эквивалентна
системе скользящих векторов Ьь Ь2, ..., Ъг. Приводя систему сколь-
скользящих векторов ai, a2, ..., а^ к произвольной точке О, получим
результирующий вектор R и результирующую пару скользящих
векторов а и —а с моментом т. Эта система трех скользящих
векторов эквивалентна системе aj, a2, ..., а&, а значит и системе
bi, b2, ..., Ъг, т. е. последнюю можно получить из векторов R, а и
—а при помощи элементарных операций. В силу обратимости
элементарных операций векторы R, а и —а получаются из системы
bi, b2, ..., Ъг при помощи элементарных операций и представляют
собой результирующий вектор и результирующую пару этой си-
системы.
(Достаточность). Если предположить, что две системы сколь-
скользящих векторов ai, а2, ..., aft и bi, b2, ..., Ьг приводятся к одному и
тому же результирующему вектору и к одной и той же паре, то
такие системы эквивалентны. Это утверждение непосредственно
следует из обратимости элементарных операций.
г) Изменение точки приведения системы скользящих векторов.
Инварианты. Предположим, что система скользящих векторов уже
приведена к началу координат и что результирующий вектор
равен R, а момент результирующей пары равен т. Рассмотрим
произвольную точку О', не лежащую на линии действия результи-
результирующего вектора R, и добавим к системе два скользящих вектора
Ri и —Ri, лежащих на прямой, проходящей через точку О' и
36
параллельной вектору R, направленных в противоположные сторо-
стороны, а по величине равных величине вектора R. Векторы R и —Ri
представляют пару с моментом
nii = [СУО, R] - - [ОУ, R],
которую можно сложить с первоначальной результирующей парой
с моментом т, полученной при приведении системы к точке О.
Сложение этих пар дает новую результирующую пару с моментом
т* = т — [ОСУ, R].
Новая система скользящих векторов эквивалентна первоначальной
системе и состоит из скользящего вектора Ri, линия действия кото-
которого проходит через точку О', и пары с моментом ш*.
Рассмотрим инвариантные величины по отношению к измене-
изменению точки приведения системы скользящих векторов. Первым
таким инвариантом является, очевидно, величина и направление
результирующего вектора, не изменяющиеся при изменении точки
приведения. Результирующий вектор остается скользящим векто-
вектором. Вторым инвариантом является скалярное произведение
результирующего вектора на момент результирующей пары. В са-
самом деле,
(Rx, m*) = (R, m — [Ш, Щ) = (R, m) = const,
или, переписывая этот инвариант в другом виде, имеем
(R, m) — Xmx -f- Ymy + Zmz = const.
С другой стороны, скалярное произведение двух векторов равно
(R, m) = iR||m|cos(R7m).
Здесь |R| является инвариантной величиной, следовательно про-
произведение модуля момента результирующей пары на косинус угла
между направлениями результирующего вектора и момента ре-
результирующей пары, т. е. проекция момента результирующей пары
на направление результирующего вектора также есть инвариант.
д) Приведение системы скользящих векторов к винту. Как мы
уже имели возможность заметить, при изменении точки приведе-
приведения системы скользящих векторов не изменяется величина проек-
проекции момента результирующей пары на направление результирую-
результирующего вектора, так что если момент результирующей пары m
представить в виде суммы двух свободных векторов гп' и т", из
которых т' направлен вдоль линии действия вектора R, а т" ему
ортогонален, то при изменении точки приведения системы будет
изменяться только составляющий вектор т". При изменении точки
приведения добавляется пара. Выберем точку О' так (рис. 23),
чтобы плоскость этой добавочной пары была бы ортогональна к
37
вектору т", а ее момент был бы равен по величине вектору т", но
направлен в противоположную сторону, т. е. чтобы
Тогда при приведении к точке О для момента результирующей
пары будем иметь
ш' = m f m1 = m' -f m" + "h = m'.
-R
Рис. 23
m,
Рис. 24
m
m.
Этот момент коллинеарен с вектором R. Из условия коллинеарнос-
коллинеарности векторов т* и R получим
тх т
(а)
Если теперь начало координат выбрать в точке О, а координаты
точки О' обозначить через х, у, z, то, принимая во внимание, что
проекции вектора
тх == [WO, R] = - [Об7, R]
определяются из матрицы
х, у, z
можно записать уравнение (а) в виде
тх — Щг — zRy) = ти — (zRx — xRz)
Rx Ry
~тг — (xRy — yRx)
Rz
Полученное уравнение определяет прямую линию, параллельную
линии действия вектора R и проходящую через точку О'. Прямую
эту назовем винтовой осью. Для всех точек винтовой оси
момент результирующей пары имеет наименьшее значение по
сравнению со всеми другими точками пространства, равное вели-
величине проекции момента результирующей пары относительно произ-
38
вольной точки на направление линии действия результирующего
вектора *.
е) Различные случаи приведения системы скользящих век-
векторов. При изменении точки приведения системы скользящих век-
векторов остаются инвариантными две величины: 1) величина н на-
направление результирующего вектора; 2) скалярное произведение
результирующего вектора на момент результирующей пары, т. е.
R = const, (R, m) = const.
В зависимости от значений этих инвариантов можно различить
четыре различных случая приведения системы скользящих век-
векторов.
1) R Ф О, (R, m) = 0.
В этом случае для точек винтовой оси момент результирующей па-
пары будет принимать нулевое значение, и система приведется
к одному результирующему вектору, который называют равно-
равнодействующим вектором системы.
2) R = 0 m=?0.
Система приводится к одной результирующей паре, которую будем
называть равнодействующей парой.
3) R=?0 (Ц,т)фО.
При приведении к винтовой оси момент результирующей пары
получает наименьшее значение, отличное от нуля. Система приво-
приводится к винту.
4) R = 0, m = 0.
В этом случае система скользящих векторов эквивалентна нулю.
Пример 4 Система скользящих векторов приведена к началу коорди-
координат, причем результирующий вектор R@, О, а), а момент результирующей пары
т(тх, Шу, rnz). Написать уравнение винтовой оси.
Проекции момента добавочной пары определяются из матрицы
х у г\\
О 0 а\\'
а ось винта является линией пересечения плоскостей
тх ту
у = = const, х = — = const.
а а
Пример 5. Система скользящих векторов приведена к началу координат,
причем результирующий вектор R и момент результирующей пары m образуют
угол а Определить ось влита.
Приведем геометрическое решение задачи (рис. 24). Из точки О проведем
прямую /, ортогональную к плоскости, построенной на векторах R и т. На этой
прямой выберем точки Ои так чтобы момент вектора R относительно точки Oi
1 Винтовую ось называют еще центральной осью системы.
39
был бы направлен в сторону, противоположную направлению вектора
расстояние h до точки О± было бы равно
| т21 да sin a
В точке Ot добавим систему скользящих векторов, эквивалентную нулю, состоя-
состоящую из векторов R и —R. Вся система будет эквивалентна одному скользящему
вектору R, линия действия которого проходит через точку Oi, и паре, момент
которой по величине равен
т1 = m cos a
и направлен параллельно вектору R.
4. Плоская система скользящих векторов. Как частный случай
проведенных выше рассуждений рассмотрим систему скользящих,
векторов, линии действия которых расположены в одной плоскос-
плоскости (я). За центр приведения этой системы выберем точку О, рас-
расположенную в плоскости векторов. Добавив в точке О нулевые
системы скользящих векторов, равных по величине соответствую-
соответствующим векторам системы, получим в результате систему сходящихся
векторов, расположенных в плоскости (я), и систему пар, распо-
расположенных в той же плоскости. Складывая сходящиеся скользящие
векторы, получим результирующий вектор, расположенный в плос-
плоскости (я) и проходящий через точку О- сложение пар дает одну
результирующую пару, расположенную в той же плоскости (я),
момент которой будет ортогонален к плоскости (я), т. е. во всяком
случае будет иметь место условие
(R, m) = 0.
Можно отметить три различных случая приведения плоской
системы скользящих векторов.
1. При приведении к произвольной точке плоскости, результи-
результирующий вектор и момент результирующей пары отличны от нуля
Результирующий вектор и момент результирующей пары в этом
случае всегда ортогональны. Предположим, что линия действия
результирующего вектора R проходит через точку О, а пара пред-
представляется двумя скользящими векторами R и —R, линии действия
которых проходят соответственно через точки О' и О. Плечо пары
определится из условия
IRI
Векторы R и —R, проходящие через точку О, представляют собой
нулевую систему скользящих векторов, которую можно отбросить;
в результате получим один скользящий вектор R, линия действия
которого проходит через точку О' (второй вектор пары). В рас-
рассмотренном случае система скользящих векторов эквивалентна
40
одному результирующему вектору, который еще называют равно-
равнодействующим вектором системы скользящих векторов.
Случай R=^=0, m = 0 приводит к предыдущему.
2. При приведении системы скользящих векторов к произ-
произвольной точке результирующий вектор равен нулю, а момент ре-
результирующей пары отличен от нуля
R = 0, m=?0.
При изменении точки приведения системы момент результирующей
пары не меняется. Система эквивалентна одной результирующей
паре, которую еще называют равнодействующей парой.
3. Если при приведении системы к произвольной точке резуль-
результирующий вектор и момент результирующей пары равны нулю
R = 0, m = 0,
то они будут оставаться равными нулю и при приведении к любой
другой точке пространства. Таким образом, для плоской системы
скользящих векторов имеется три существенно различных случая
приведения:
2) R = 0, m^O;
3) R = 0, m = 0.
Винта, при котором результирующий вектор и момент результи-
результирующей пары совпадают по направлению, здесь не бывает.
5. Свойства системы параллельных скользящих векторов. Рас-
Рассмотрим систему скользящих векторов av, линии действия которых
параллельны некоторой неподвижной прямой с направляющими
косинусами (а, р, y), проходящей через начало координат. Выбе-
Выберем на линиях действия векторов av произвольные фиксированные
точки Д,(Ху, г/v, 2V), а проекции векторов av на неподвижные
ортогональные оси х, у, г обозначим через Xv, Yv, Zv. Эти проек-
проекции будут определяться равенствами
Xv = ava, Yv — avp, Zv — avy.
Для проекций результирующего вектора системы на оси координат
получим выражения
X =. 2XV = a2av, Y = SKV •
При приведении системы скользящих векторов к началу координат
будем иметь результирующую пару с моментом т, проекции кото-
которого на оси координат будут иметь вид
=. 2av (yvy
my =
41
— t/va) =
Очевидно, что момент результирующей пары и результирующий
вектор системы будут ортогональны между собой, так как при
приведении каждого вектора системы к началу координат появ-
появляется пара, момент которой ортогонален к линии действия ре-
результирующего вектора системы. В связи с этим будут возможны
три различных случая приведения системы
, m = 0; 2) R=0, m=?0; 3) R = 0, m = 0.
He останавливаясь на двух последних, рассмотрим только первый
случай, когда система параллельных скользящих векторов приво-
приводится к одному равнодействующему вектору. Для всех точек линии
действия равнодействующего вектора момент результирующей пары
равен нулю. Поэтому линию действия равнодействующего вектора
можно определить из уравнений
пгх = О, т*у — 0, пгг — 0,
или
тх = тх — (yZ — zY) = 0, ту = тд — (zX — xZ) = 0,
tn*z = тг — (xY — yX) = 0.
Отсюда, после подстановки значений тх, ти, тг, X, Y, Z, получим
= 0,
= 0,
™ - 0.
После перегруппировки слагаемых будем иметь
у Bavyv — J/Sav) — 0 {Savzv — z2av) = 0,
a B>avZv — zSov) — у Bavxv — x2av) = 0,
— a Bavyv — y2av) = 0,
что можно также представить в виде
*_ = —У^!- *_ t (a)
где х, у, z координаты точки линии действия результирующего
вектора. Если теперь ввести точку S с координатами
42
то уравнения (а) можно будет переписать в виде
Л - У _ Z~z - ?-* /вч
~Т~~ V ~ « ' ()
Эти уравнения определяют прямую линию, проходящую через точ-
точку S, с направляющими косинусами (а, |3, у). Нетрудно видеть,
что координаты точки S не зависят от направления линии действия
системы векторов, но зависят от величин векторов и от координат
точек Av, выбранных на линиях действия параллельных скользя-
скользящих векторов системы. Точку S будем в дальнейшем называть
центром системы параллельных скользящих век-
векторов при заданных точках приложения Av. Можно заметить,
что положение точки S не изменится, если все векторы av повер-
повернуть на один и тот же угол <р вокруг точек Av.
§ 4. ЗАКРЕПЛЕННЫЕ ВЕКТОРЫ
Закрепленными будем называть векторы, приложенные в опре-
определенных точках пространства, изменяющие свой физический
смысл при изменении точки приложения. Аналитически закреп-
закрепленный вектор задается шестью независимыми параметрами:
тремя координатами х, у, г точки приложения и тремя своими
проекциями X, Y, Z на координатные оси.
При определении скользящего вектора были введены плюкке-
ровы координаты X, Y, Z, Qx, Qy, Qz, подчиненные условию
XQX + YQy + ZQZ = 0.
Аналогичным образом можно определить и закрепленный вектор;
если ввести понятие вириала1.
Пусть а — закрепленный вектор, приложенный в точке А. Рас-
Рассмотрим произвольную точку Р. Вириалом вектора а относительно
точки Р назовем скалярное произведение
v = (а, ~АР) -- |а\\~АР\ costf,
где Ф угол между линией действия вектора а и направлением от-
отрезка АР. Если же точку А принять за начало координат, а коор-
координаты точки Р обозначить через х, у, z, то для вириала получим
выражение
v = Хх + Yy + Zz.
Теорема. Если два геометрически равных закрепленных
вектора имеют одинаковые вириалы и моменты относительно одной
и той же точки, то они приложены в одной и той же точке.
Доказательство. Так как векторы геометрически равны,
а их моменты относительно одной и той же точки совпадают, то
1 Понятие вириала было впервые введено Р. Клаузиусом A822—1888).
43
они должны иметь одну и ту же линию действия. Из равенства же
вириалов имеем
OAcos-d- = O
иначе говоря, проекции отрезков, соединяющих начало координат
с точками приложения векторов, на линию действия векторов
равны. Последнее возможно только при совпадении отрезков, а
следовательно, и точек приложения векторов.
Центр системы параллельных закрепленных
векторов. Рассмотрим систему закрепленных векторов av, при-
приложенных соответственно в точках Лу и параллельных некоторому
заданному направлению. Обозначим через Xv, Yv, Zv проекции
векторов на оси координат, через a v их величины, а через
,x:v, i/y, zv координаты точек Av. Точку S с координатами %, ц, ?,
определяемыми соотношениями
5 = г > Ц — ~ > »= i: .
назовем центром системы параллельных закреп-
закрепленных векторов. Такое определение центра системы па-
параллельных закрепленных векторов совпадает с определением
центра системы скользящих векторов при заданных точках А>.
При рассмотрении системы параллельных скользящих векторов
мы заметили, что координаты точки S не изменяются при повороте
всей системы векторов на один и тот же угол. Это же свойство
будет иметь место и для системы параллельных закрепленных
векторов.
Закрепленный вектор R, по величине равный геометрической
сумме параллельных закрепленных векторов av, параллельный
этим векторам и приложенный в точке S, будем называть резуль-
результирующим вектором системы параллельных за-
закрепленных векторов.
§ 5. ДИФФЕРЕНЦИРОВАНИЕ СВОБОДНОГО ВЕКТОРА
ПО СКАЛЯРНОМУ АРГУМЕНТУ
Рассмотрим свободный вектор а, который для удобства даль-
дальнейшего изучения перенесем в начало некоторой неподвижной
системы отсчета. Предположим, что величина и направление век-
вектора изменяются вместе с изменением некоторого скалярного па-
параметра t, которым, в частности, может быть и время, так что
При изменении параметра t конец вектора а в системе отсчета
Oxyz опишет некоторую кривую, называемую го догр а фо м
вектора а. В системе осей Oxyz вектор а можно задать его проек-
44
циями X, Y, Z на оси координат, которые при изменении парамет-
параметра t будут изменяться вместе с вектором а.
Рассмотрим два положения вектора а в моменты t и
соответственно (рис. 25). Разность
a(f + Ы) — a(f) -ЛШ1 = Аа
тоже будет свободным вектором. Производной от вектора а по ска-
скалярному аргументу t будем называть предел
dt
lim *(* + *)-»«) = iim_*L
z
-—-
9
M
/
У
Рис 25
Обозначая через Ay, Аг/, Аг проекции вектора Аа на оси х, у, г.
по теореме о проекции суммы векторов будем иметь
АХ = X (f + At) — X (*), АУ = Y(t + А*) — Y(t),
и для проекций вектора dajdt на оси координат получим
Д|!-»0
A<->0
dZ
или
da.
dt
dX
dt
dt
Более глубокое изложение теории скользящих векторов можно
найти в оригинальной работе А. П. Котельникова «Винтовое исчис-
исчисление и некоторые его приложения к геометрии и механике».
Казань, 1895 г.
45
Глава II
КИНЕМАТИКА
Как самостоятельный раздел механики кинематика оформилась
сравнительно недавно. Важность геометрического изучения движе-
движения отмечал еще Ж. Даламбер A717—1783), но лишь А. Ампер
A775—1836) обосновал необходимость изучения геометрических
свойств движения. В 1838 г. французский математик и инженер
Ж. Понселе A788—1867) представил факультету наук в Париже
свой первый курс кинематики. Дальнейшее развитие основ кине-
кинематики связано с именами М. Шаля A793—1880) и Л. Эйлера
A707—1783). В 1862 г. французским механиком А. Резалем
A828—1896) создан курс «Чистой кинематики», в котором приво-
приводятся и аналитические методы изучения движения. С появлением
этого курса кинематика окончательно утвердилась как самостоя-
самостоятельный раздел механики.
Кинематика изучает движения материальных тел, не оста-
останавливаясь на причинах, вызывающих эти движения. По своему
содержанию она является геометрией движущихся материальных
объектов, в которой независимой переменной является время. Вся-
Всякое движение материального тела или состояние его покоя можно
представить лишь по отношению к каким-то другим телам. Поэто-
Поэтому всякое движение имеет относительный характер. Конкретное
представление о движении зависит от того, в какой системе мы это
движение рассматриваем. Геометрическое пространство, по отно-
отношению к которому изучается движение материальных тел, опреде-
определим системой декартовых осей. Движение происходит во времени.
Будем предполагать, что возможна такая арифметизация тече-
течения времени, при которой одновременность каких-либо собы-
событий не зависит ни от природы и места самих событий, ни от выбо-
выбора системы отсчета, относительно которой наблюдаются события.
Определенное таким образом время будем называть абсолют-
абсолютным. Более детальное рассмотрение вопросов, связанных с опре-
определением пространства и времени, отнесем к разделу «динамика».
46
§ 1. КИНЕМАТИКА ТОЧКИ
1. Скорость точки. Рассмотрим движение материальной точки
М по отношению к системе ортогональных осей Охуг. Геометриче-
Геометрическое место последовательных положений точки в этой системе
назовем траекторией точки. Положение точки в простран-
пространстве можно задать ее координатами х, у, z, которые при движении
материальной точки будут меняться в зависимости от времени,
так что
*-ф@, у -гИО, z = x(').
Выписанные уравнения определяют закон движения матери-
материальной точки и представляют собой параметрические уравнения тра-
траектории точки. В непрерывном дви-
движении материальной точки будем
рассматривать функции ф, 1|з, %, не-
непрерывные вместе со своими произ-
производными первого и второго поряд-
порядков. Рассматривая два близких по-
положения материальной точки М и
Mi соответствующие моментам вре-
времени t и t + At, вектор ММ], соеди-
соединяющий эти точки, будем называть
вектором п ер емещени я точ-
точки за промежуток времени At
(рис. 26). Обозначая через х, у, z
координаты точки М в момент t, a
через х+Ах, у+Ау, z + Az в момент
t+Att для координат вектора пере- Рис. 26
мещения получим значения Ах, Ау,
Az. Отношение вектора перемещения ко времени перемещения
назовем средней скоростью точки за время А^
Направление вектора средней скорости точки совпадает с направ-
направлением вектора перемещения точки. Предел этого отношения при
At-+O назовем истинной скоростью точки
v = lim
At->0
ммг
Секущая MMi при Д/-^0 займет предельное положение, совпадаю-
совпадающее с положением касательной к кривой в точке М. Вектор сред-
средней скорости точки имеет проекции на оси координат Ах/At, Ay/At,
Az/At. Проекции истинной скорости определяются соотношениями
47
i. Ал: dx ,. Ду dy
vx= hm = , v = hm —- = —^-
At->o Д< Л д/-»о A< dt
д«-»о Ai df
Отсюда следует, что проекции вектора скорости являются первыми
производными от координат точки по времени.
Производная от радиус-вектора точки. Поло-
Положение движущейся материальной точки можно определить векто-
вектором t — OM, изменяющимся с течением времени по величине и по
направлению относительно некоторой системы осей Oxyz,
который будем называть радиус-вектором точки
(рис. 26). Вектор перемещения точки можно представить через
значение радиус-вектора точки в моменты t и t+At.
ММ1 = г (t + М) — г (*) = Дг (f).
Для средней скорости точки получим теперь выражение
w
Л*
Для истинной же скорости — предел этого отношения
v lm ,
At-*O ht dt
таким образом, скорость точки может быть определена как произ-
производная от радиус-вектора точки по времени.
Величину скорости точки можно выразить через ее проекции
на ортогональные оси координат.
dx у , / dy \2 / dz \я V(dxf + (dy)* + (dzf
[IT) J +[) =
или
(
(dtf \ dt
где ds — дифференциал дуги траектории точки. Выбрав опреде-
определенным образом положительное направление отсчета дуги, можно
определить, что при возрастании s производная dsjdt будет поло-
положительной. Если условиться, что скорость v положительна в на-
направлении возрастания дуги s, то
dt
Наиболее простым среди всех возможных движений точки
является такое движение, при котором в любой момент времени
выполняется условие
48
v = = a = const.
dt
Такое движение будем называть равномерным. Перепишем
последнее уравнение в виде
ds — adt,
после интегрирования отсюда получим
s = at -J- const;
последнее равенство представляет собой закон изменения пути со
временем.
Пример 6. Точка М совершает движение в плоскости Оху по закону
х = R cos at, у = R sin a>t,
где R и h) — постоянные величины. Определить траекторию и скорость точки.
Уравнение траектории задано в параметрическом виде. Исключив отсюда
время t, получим
т. е. траекторией точки является окружность радиуса R. Проекции скорости
получим, дифференцируя уравнения, определяющие координаты точки как функ-
функции времени
dx
~dT
Vx = —— = — Ra sin at, vy = Rm cos at.
Отсюда величина скорости
v = у v2 + у2 = Ra.
Пример 7. Ползун В приводится в движение нитью, наматывающейся
на шкив радиуса R, вращающийся с угловой скоростью <в. Найти скорость
ползуна как функцию расстояния ОВ = х (рис. 27).
Через неподвижную точку А нить проходит со скоростью v=Ra>. С такой
же скоростью изменяется длина отрезка нити AN В. Обозначив длину этого
отрезка через s, получим
С другой стороны,
s= /л:2-Л2-Н/?Ф> (а)
где ф определяется из соотношения
R
sin ф = —.
X
Дифференцируя тождество (а), получим
ds х dx dw
= г р J-
dt ухы _ R dt dt '
49
где dyldt определяется из условия
dq> R dx
COS ф = •—
Y dt a2 dt
Подставляя ds/dt и dq>/dt, будем иметь
x
— #со =
откуда следует
ухг — R2 dt
dx
dt
dx
dt
COS ф =
Rax
Rx
x2 — R
-R*
X
dx
2 dt
/я2 — R*
Рис. 27
Рис. 28
2. Ускорение точки. Проекции ускорения на прямоугольные
оси координат.
Рассматривая движение материальной точки, мы определили
вектор v скорости этой точки. Перенесем вектор v в начало не-
неподвижной системы осей Oxyz (рис. 28). Конец / этого нового
вектора назовем индексом скорости точки. При движении точки
по траектории вектор v скорости будет изменять свои величину и
направление, при этом индекс / скорости точки будет описывать
некоторую кривую относительно системы отсчета Oxyz, которую
будем называть годографом скорости точки. Обозначив через х\,
У\, z\ координаты индекса скорости, приходим к очевидным соот-
соотношениям
*1 =
dx
dt
dy
dt
z-, =
dz
dt
Вектор скорости движения индекса / по годографу обозначим че-
через j. Тогда проекции вектора j определяется из равенств
50
dt
dt dt* ' '" dt dt*
iz ~~
dt dF
Вектор j, приложенный к точке М, называется ускорением
точки М.
Скорость точки М определяется через производную от ее ра-
радиус-вектора
dt
Вектор ускорения точки определяется как скорость движения ин-
индекса по годографу скорости и в соответствии с определением
производной от вектора, получим
. dx_ __ jfr_
~ dt ~~ dP
(в самом определении производной от вектора по скалярному
аргументу содержится условие переноса вектора в начало коорди-
координат). Величина вектора ускорения точки может быть выражена
через проекции на ортогональные оси координат следующим
образом:
3. Скорость и ускорение точки в полярных координатах.
Пусть точка М совершает движение в плоскости Оху. При помощи
формул преобразования перейдем от декартовых координат х, у
к полярным координатам г, ср
x = rcos(p, у — г sin ф.
При движении точки М величины г и ср будут некоторыми функ-
функциями времени. Тогда проекции скорости на декартовы оси коор-
координат получим из соотношений
^ irfcoscprirsincp'
dt dt dt
du dr • dw
V,. = —2- = Sin ф + Г —— COS ф.
V dt dt ^ dt *
Введем два ортогональных направления: направление из начала
координат на движущуюся точку — радиальное и перпенди-
перпендикулярное к нему направление в сторону возрастания угла ф —
трансверсальное направление. Легко подсчитать проекции
вектора скорости vr и иф на эти направления:
51
vr — vx cos ф 4 vy sin ф,
иф = — vx sin ф -f vy cos ф,
после подстановки сюда значений vx и vy будем иметь
vr = —— cos2 ф — г —— sin ф cos ф 4-
dt y dt ^ ^
, dr . „ , dw dr
-i Sin2 ф 4 Г—— SinroCOSffi= ,
dt dt T dt
V(f — — sin ф cos Ф + г —?- sin'2 ф | sin ф cos ф
, dw a dw
+ Г—- СО32ф — Г ——,
dt ^ dt
т. e.
dr dw
Эти проекции называют радиальной и трансверсальной состав-
составляющими скорости точки.
Рассмотрим проекции ускорения точки на оси декартовой си-
системы координат
d?x \ cPr I dm \21 I o dr dw , Л1 .
Jx = "= г —- COS ф — 2 л- 4- Г —X Sin ф,
dt2 I dt* \ dt J J Y [ dt dt dt3 J Y
dt
Проектируя ускорение точки на радиальное и трансверсальное
направления, получим
dw i2
т. е.
... dV
/г = ]х COS ф + ] Sin ф =. Г
^ Л2 V dt
Уф - — ]х sin Ф + }у cos ф = 2 — -J- + г -2Lt
~1р \Т)' h~ dt
Эти проекции называются радиальной и трансверсальной состав-
составляющими ускорения. Как нетрудно заметить, эти составляющие
не являются непосредственными производными от радиальной и
трансверсальной составляющих скорости точки.
Пример 8. Определить траекторию, скорость и ускорение точки, движе-
движение которой в плоскости задано в полярных координатах:
г = at, w = U.
52
Исключив время, найдем траекторию точки Т = —— ф (архимедова спи-
о
раль), а затем определим скорость
v = VV2 -г г2ф'2 -=
и ускорение
a2b4* = a V\ ~\-
}
—V if + 1% = У
4a2fe2 = ab V* + ЬНг.
4. Движение точки по окружно-
окружности. Рассмотрим задачу о движении
точки по окружности /? = const. Из
формул для радиальной и трансвер-
сальной составляющих ускорения
получим
„ / dm \ а . D d2q>
Jr \ dt ) ' 'Ф dt*
Здесь радиальная составляющая
направлена к центру окружности, а
трансверсальная составляющая —
по касательной к окружности. Обо-
Обозначим через /т и /„ проекции уско-
ускорения точки на касательную и нор-
нормаль к окружности. Будем иметь
(рис. 29)
n d2q> dv
где
Рис 29
5. Проекции ускорения на оси естественного трехгранника.
Как мы уже заметили, при движении точки по окружности ее
ускорение может быть представлено в виде двух составляющих,
одна из которых направлена по касательной к окружности, а дру-
другая к центру окружности. При движении точки по произвольной
кривой в каждый момент времени достаточно малый участок
траектории можно рассматривать как часть дуги окружности соот-
соответствующего радиуса, а непрерывное движение точки по траекто-
траектории можно представить как некоторую последовательность дви-
движений по дугам соответствующих окружностей.
Рассмотрим три последовательных положения точки на
траектории: М, Ми М2 (рис. 30). Если точка Mi занимает беско-
бесконечно близкое положение по отношению к точке М, то отрезок
ММ\ в пределе определит положение касательной к кривой в точ-
точке М. Если траектория не является прямой линией, то три точки
М, Мг и М2 определят некоторую плоскость. Предельное
53
положение этой плоскости, когда точки М\ и М2 неогра-
неограниченно стремятся к точке М будем называть сопри-
соприкасающейся плоскостью в точке М. Касательная
к кривой, построенная в точке М, лежит в этой плоскости. В об-
общем случае три точки М, Mi и М2 однозначно определяют окруж-
h
Рис. 30 Рис. 31
ность, лежащую в соприкасающейся плоскости. Предельная
окружность, получающаяся при неограниченном приближении то-
точек Mi и М2 к точке М, называется окружностью кривиз-
н ы, или кругом кривизны. Радиус этой окружности
называют радиусом кривизны. Круг кривизны всегда на-
находится в соприкасающейся плоскости. Хорды MMi и MiM2 в пре-
пределе, при неограниченном приближении точек М] к точке М, а М2
к точке Ми определят касательные к кривой в точках М и М[ соот-
соответственно (рис. 30), а следовательно, и направление скоростей
в этих точках. Обозначим скорости точки в положениях М и Mi
соответственно через v и vb Перенесем Vi в точку М (рис. 31).
Два вектора v и Vi определят плоскость. Предельное положение
этой плоскости, когда точка Mi неограниченно приближается к
точке М, будет определять соприкасающуюся плоскость.
Вектор АВ определяет перемещение индекса скорости по годогра-
годографу. Геометрическая величина вектора АВ определится из равен-
равенства
где точки К я В лежат на одной и той же окружности с центром
в точке М (рис. 31). Разделим это равенство на А^:
АВ Ж , KB
At At At
Отношение ABjkt равно среднему ускорению точки М за время
At. Ускорение точки М является предельным значением среднего
ускорения, когда интервал времени At неограниченно стремится
к нулю.
54
Рассмотрим вектор AK/At, который всегда направлен по каса-
касательной к траектории. Предельное значение модуля этого вектора
будет иметь вид
Iim
Д(->0
АК
М
= Iim
I |vi|-|v| I
At
dt
— /х-
Производную по времени от модуля
скорости точки назовем касатель-
касательной, или тангенциальной, со-
составляющей ускорения точки. Можно
еще ввести в рассмотрение вектор ка-
касательного ускорения Ь» положитель-
положительное направление которого совпадает с
направлением скорости точки, а вели-
величина равна производной от модуля
скорости точки. Обозначив через е
угол между направлениями скоростей
v и v,, назовем этот угол углом
смежности (рис. 32). Тогда для
предельного значения модуля вектора
At
получим
Iim
KB
At
— Iim
д*-»с
= Iim
At
vi AS
-- Iim
At
AS
P
Рис. 32
д*-»о P At p
Здесь AS, как это видно из чертежа, представляет собой длину
дуги траектории, соединяющей точки М и М\. Предельное значе-
значение величины отрезка МО, когда точка неограниченно прибли-
приближается к М, назовем радиусом кривизны траектории в точке М
Mt-+M I e
Обозначив через ф угол АКВ (рис. 31), получим
я —е
Предельное значение этого угла, когда А^-^0, равно я/2 и, следо-
следовательно, Нтф= —.
до 2
Предельное значение вектора КВ1Ы обозначим через jn, т. е.
, _ ,. KB
At->Q At
55
Величина этого вектора равна отношению квадрата скорости точки
о2
к радиусу кривизны траектории, т. е. ]п = —, сам вектор лежит
Р
в соприкасающейся плоскости и направлен ортогонально к скорос-
скорости точки в сторону вогнутости траектории. Та нормаль п к траек-
траектории, которая лежит в соприкасающейся плоскости и направлена
в сторону вогнутости траектории, называется главной нор-
нормалью, а вектор jn, направленный по главной нормали к траек-
траектории, называется нормальным ускорением точки
(рис. 33).
Рис. 33
Рис 34
Рассмотрим систему осей координат с началом в точке М, ось
т направим по касательной к траектории точки, ось п по направ-
направлению главной нормали, а третью ось р (по бинормали) направим
так, чтобы тройка векторов т, n, p образовала правую систему.
Выбранные так оси представляют собой сопровождающий трех-
трехгранник, который еще называют естественным трехгран-
трехгранником1. Проекции ускорения на оси естественного трехгранника
равны
dv и2 . .
Ут = -—, У,,-—, УР -=- 0.
dt p
Модуль ускорения определяется равенством
P
Пример 9. Точка движется по плоскости Оху по закону
Определить радиус кривизны траектории точки.
Решение. Величины скорости и ускорения определяются из формул
* = x'* + y'*,
У
В дифференциальной геометрии его называют трехгранником Френе.
56
Касательную составляющую ускорения найдем, дифференцируя квадрат скорос-
скорости точки
do
Рис. 35
Вычислим радиус кривизны траектории точки по формуле
\ dt
или
у,2 _
Приводя подобные члены и умножая на о2, получим
откуда
р
х"у' — у"х'
Можно дать и геометрическое решение этой задачи. Как видно из рис. 34, про-
проекция ускорения на нормаль к траектории равна
и2
— = х" cos (90° — а) — у" sin (90° — а) =
Р
„ У' „ х'
= х" — — у" —,
V V
57
откуда сразу же следует выведенная выше формула для радиуса кривизны
траектории.
Пример 10. Точка описывает плоскую траекторию. Линия действия ее
ускорения в пересечении с кругом кривизны образует хорду МА = 1 (рис. 35).
Выразить величину ускорения точки через величину ее скорости и длину этой
хорды.
Решение. Из подобия треугольников MDC и МАВ следует
откуда получим
или
j __
MB
MA
MD
МС '
2р /
Т 7
spin
/р
Рис. 36
6. Теорема о сложении скоростей в сложном движении точки.
Пусть некоторая неизменяемая система отсчета (в частном слу-
случае такой системой может быть абсолютно твердое тело S) совер-
совершает определенное движение относительно неподвижной системы
координат Oxyz, а материальная точка М движется относительно
этой подвижной неизменяемой системы (рис. 36). Движение точ-
точки М по отношению к системе координат Oxyz называют абсо-
абсолютным движением, а ее траекторию в этом движении —
58
абсолютной траекторией. Движение точки относительно
системы 5 называют относительным движением, а тра-
траекторию в этом движении •— относительной траекторией
точки. Если точку М закрепить в некоторый момент в подвиж-
подвижной системе, то она будет двигаться лишь как точка подвижной
системы. Такое движение точки называют переносным дви-
движением точки в данный момент времени. Соответствующая
траектория точки называется переносной траекторией
для данного момента времени. Скорость движения точки по абсо-
абсолютной траектории называют абсолютной траекторией
точки, а скорость движения точки по отношению к подвижной си-
системе отсчета — ее относительной скоростью. Если точку
в рассматриваемый момент времени закрепить в подвижной систе-
системе и рассматривать ее движение вместе с этой системой, то ско-
скорость ее движения в этот момент времени представит перенос-
переносную скорость точки.
Теорема. Абсолютная скорость материальной точки равна
геометрической сумме ее переносной и относительной скоростей:
Доказательство. Рассмотрим два близких положения не-
неизменяемой подвижной системы S в моменты времени t и ti = t + At.
Перемещения точки в абсолютном, относительном и переносном
движениях (рис. 36) представляются соответственно векторами
ММ2, MiM2, MM\. Вектор ММ2 равен геометрической сумме векто-
векторов М\Мъ и ММ\\
= Лр42 + ММ[ (а)
Средняя абсолютная скорость точки М за время At, по определе-
определению, равна отношению вектора перемещения ко времени At, т. е.
w _ млк
Разделив равенство (а) на At, будем иметь
мм.2 л^лГ2
\t \t At
Вектор
(b)
wr
определяет среднюю скорость точки в подвижной системе S, вектор
59
представляет среднюю скорость переносного движения, поэтому
равенство можно переписать в виде
Vta = we + wr- (С)
Векторы we, wr, wa пропорциональны соответствующим векторам
перемещений (рис. 36). В пределе при At—>-0 векторы wa, we и wy
дают значения истинных скоростей в абсолютном, переносном и
относительном движениях, т. е.
Полученная теорема имеет исключительно важное значение в ме-
механике. Рассмотрим некоторые примеры на ее применение.
Пример 11. Палочка вращается в плоскости вокруг своего неподвиж-
неподвижного конца О с угловой скоростью a—dy/dt. Точка М скользит вдоль палочки
со скоростью о. Определить абсолютную скорость точки (рис. 37).
Решение. Точка участвует в двух движениях. Она перемещается вместе
с палочкой и, кроме того, движется вдоль палочкн. Относительно палочки точка
совершает прямолинейное движение со скоростью v, поэтому, приняв за под-
М
Рис. 37
Рис. 38
вижную систему S палочку, получим следующее значение относительной скорос-
скорости точки:
о, = о =
dr
dt
Для определения переносной скорости точки рассмотрим движение той точки
палочки, которая в данный момент совпадает с движущейся материальной точ-
точкой. В переносном движении точка описывает окружность вокруг точки О со
dw
скоростью f , а потому переносная скорость точки будет равна
at
"e dt
Так как векторы переносной и относительной скоростей ортогональны, будем
иметь
60
Полученные значения переносной и относительной скоростей совпадают с из-
известными значениями радиальной и трансверсальной составляющими скорости.
Пример 12. Палочки ОА и OiB вращаются в плоскости чертежа с уг-
угловыми скоростями «о и оL соответственно вокруг неподвижных точек О и Oi
(рис. 38). На обе палочки одновременно надето кольцо М, перемещающееся
при вращении палочек. Определить абсолютную скорость кольца.
Решение. Выберем подвижную систему Оху, связанную с палочкой ОА,
как указано на рис. 38. В этой системе кольцо все время находится на оси х,
а его относительная скорость vr направлена вдоль выбранной оси, причем ве-
величина относительной скорости остается пока неизвестной. Переносная
скорость \е колечка равна скорости той точки подвижной системы (палочки ОА),
которая в данный момент совпадает с колечком. Обозначив через х расстояние
ОМ, получим
Ve =(?>X.
Эта скорость направлена параллельно оси у. По теореме о сложении скоростей
абсолютная скорость колечка равна геометрической сумме переносной и относи-
относительной скоростей
Va = Ve + vr.
Конец вектора относительной скорости расположен на прямой А, параллельной
оси х и проходящей через конец вектора переносной скорости. Следовательно,
и конец вектора абсолютной скорости колечка будет находиться на прямой А.
Выбирая теперь за подвижную систему оси OiXiyi, связанные с палочкой О\В,
и повторяя все рассуждения, придем к заключению, что конец вектора абсолют-
абсолютной скорости будет находиться на прямой Д4, проходящей через конец вектора
переносной скорости колечка ve в системе O\Xiyi, величина которой ve =cdiXi.
Точка пересечения прямых Д и Ai определяет положение конца вектора абсо-
абсолютной скорости колечка.
7. Метод Роберваля построения касательных к плоским кри-
кривым. Рассмотрим способ построения касательных к плоским кривым
второго порядка. Каждую такую кривую можно рассматривать как
траекторию материальной точки, находящейся в сложном движе-
движении. Абсолютная скорость движения точки по такой кривой будет
определять направление касательной к кривой. Для определения
направления абсолютной окорости движение материальной точки
представляют как сумму двух более простых движений, направле-
направления которых могут быть известны.
Пример 13. При помощи теоремы о сложении скоростей построить каса-
касательную к эллипсу (рис. 39).
Решение. Эллипс представляет собой геометрическое место точек, сумма
расстояний которых до двух заданных точек (фокусов эллипса) является вели-
величиной постоянной
Г\ + Н — 2я, (а)
где а — большая полуось эллипса.
Выберем неподвижную систему осей FtXiyi с началом в первом фокусе,
направив ось FiXi в сторону движущейся по эллипсу точки М. Относительная
скорость точки М будет равна скорости изменения расстояния от точки М до
фокуса
61
_ dr,
Vn dt
Выбирая вторую подвижную систему координат Fix^ с началом во втором фо-
фокусе, направим ось Рчуг на точку М. Относительная скорость точки М в новой
системе координат направлена вдоль оси F2y2, а ее величина равна скорости
изменения расстояния от точки М до фокуса Fi
1Г
г , ,м
Рис 39
Рис 40
Из уравнения (а) имеем
или
dt
dt
vr = — о,
'Ч /
обе системы осей обладают только вращательным движением вокруг соответ-
соответствующих фокусов, поэтому переносные скорости будут направлены перпендику-
перпендикулярно к прямым FiXi и Fijjt На основании теоремы о сложении скоростей нахо-
находим положение конца вектора абсолютной скорости, который лежит на пересе-
пересечении перпендикуляров к прямым F^i и F21/2, проведенным через концы соот-
соответствующих относительных скоростей.
8. Аналитическое доказательство теоремы о сложении скоро-
скоростей. Рассмотрим движение материальной точки М в системе
OiXiyiZu совершающей некоторое движение относительно системы
Oxyz (рис. 40). В каждый момент времени можно определить по-
положение точки М как в системе Oxyz, так и в системе ОуХуу&х.
Обозначим координаты точки Ot в неподвижной системе координат
через х0, уо, z0, координаты точки М в неподвижной системе коор-
координат через х, у, z, а координаты точки М в подвижной системе
координат через xlt уь Z\. Формулы преобразования дадут зависи-
зависимость между координатами в неподвижной и подвижной системах
62
= x0
xa 4- y1a1
= 20
ft Yi
где a, ?, Y, «i. Pi. Yi. a2, К Y2 — косинусы углов между соответ-
соответствующими осями, определяемые из таблицы
X
а
II
У Р
II
2 I Ч
«1
Pi
Zi
«2
Р,
Дифференцируя величины х, у, z, получим проекции абсолютной
скорости vax, Vay, vaz на неподвижные оси координат. Из формул
преобразования будем иметь
d*
dx,
0 1
dy
dt
da
dt
d*
dXl
4-a,
dt
dzt
dt
dp
dt
dt
Л
dt
(a)
dz
vn, =- —- =
^дг
+ Y
dt
dt
dt
Для определения переносной скорости рассмотрим движение точки
вместе с подвижной системой координат. В этом движении коорди-
координаты х\, У\, Z[ остаются неизменными, а потому
dt
d<
dp
dt
dt
.^T +ft
(b)
63
Положение точки относительно подвижной системы координат за-
задается ее координатами хи \j\, г\, поэтому проекции ее скорости в
относительном движении на подвижные оси хи уи Z\ будут равны
dxjdt, dyjdt, dzi/dt. Проекции же вектора относительной скорости
на неподвижные оси координат найдем при помощи формул пре-
преобразования
dx, , dy, . du
vrx = a—*— 4- ax —^ + a2
rx dt dt
4 ax + a2
dt dt dt
dt Tl dt T2 dt
(с)
Сравнивая формулы (а), (b) и (с), получим выражения для про-
проекций абсолютной скорости точки
vax = vex ¦+- vrx, иау = vey + vry,
vaz = vez + vrz.
Откуда сразу же следует векторное равенство
va = v, -\- vr,
т. е. абсолютная скорость точки равна сумме ее переносной и отно-
относительной скоростей.
9. Сложение скоростей в общем случае сложного движения
точки. Рассмотрим сложное движение точки, движущейся относи-
относительно системы Si, которая, в свою очередь, совершает некоторое
движение относительно системы 5г. Пусть, кроме того, система 5г
совершает некоторое движение относительно системы S3 и т. д. и,
наконец, некоторая система S^ совершает движение относительно
системы S. Для определения скорости точки М относительно си-
системы S воспользуемся теоремой о сложении скоростей. Обозначим
скорость точки относительно системы Si через vr, а через Vi — ско-
скорость относительно системы 5г той точки системы Si, с которой
в данный момент совпадает точка М. По теореме о сложении ско-
скоростей находим скорость точки М относительно системы 5г
Обозначая далее через v% скорость относительно системы S3 той
точки системы S2, с которой в данный момент совпадает точка М,
по теореме о сложении скоростей получим значение скорости точ-
точки М относительно системы S3
vr3 = vr2 + v2 = vr + vx + v2.
Продолжая процесс, определим значение скорости точки М относи-
относительно системы S
64
V = V,k + Vfe = Vr + V1 + V,
2 i
"ft.
где V{ — скорость относительно системы Si+\ точки системы Siy сов-
совпадающей в данный момент с точкой М.
Пример 14. Ползун А скользит по прямолинейному рельсу со скоростью
Va. Вокруг точки А ползуна вращается со скоростью со в вертикальной плоскости
стержень АВ, по которому движется материальная точка М с относительной ско-
скоростью vo (рис. 41). Определить абсолютную скорость точки М.
X
Рис. 41
Рис. 42
Решение. Рассмотрим сначала систему, связанную со стержнем. Эта си-
система вращается относительно поступательно движущейся системы, связанной
с ползуном. Переносная скорость точки М равна мг и направлена ортогонально
к стержню. Складывая эту скорость со скоростью Но, получим скорость vi дви-
движения точки М относительно системы, жестко связанной с ползуном. Для опре-
определения абсолютной скорости точки М сложим скорость vi со скоростью посту-
поступательного движения системы вместе с ползуном.
Замечания. 1. Положение точки М относительно неподвиж-
неподвижной системы отсчета Оху можно определить радиус-вектором ОМ
(рис. 42). Определяя положение начала подвижной системы коор-
координат радиус-вектором ОО} и положение точки М в подвижной си-
системе координат радиус-вектором О[М, составим векторное равен-
равенство
справедливое для любого момента времени. Дифференцируя это
соотношение, получим
dOM
dt
dt
dt
Здесь дифференцирование левой и правой частей равенства должно
быть выполнено в одной и той же системе координат, поэтому про-
производная dOiM/dt, рассматриваемая в неподвижной системе коор-
Е. Ы. Березкин
65
динат, не будет совпадать с относительной скоростью точки так же,
как и dOOJdt не совпадает с переносной скоростью точки.
2. Относительное движение точки рассматривается относитель-
относительно движущейся системы отсчета. Если же остановить подвижную
систему, то изменится и характер относительного движения точки.
Пример 15. Пусть подвижная система отсчета Ох\ух вращается вокруг
начала неподвижной системы с угловой скоростью (о. Определить относительную
скорость точки М, покоящуюся в неподвижной системе отсчета.
Решение. Рассмотрим точку М, неподвижную относительно неподвиж-
неподвижной системы отсчета. Для определенности будем предполагать, что точка М на-
находится на неподвижной оси Ох. Тогда абсолютная скорость точки М равна
нулю. Ее переносная скорость и скорость относительно подвижной системы ко-
координат по величине равны произведению а>-ОМ и направлены в противополож-
противоположные стороны. Если же остановить подвижную систему, то скорость точки М
относительно этой покоящейся системы координат будет равна нулю и не будет
равна относительной скорости по отношению к системе, движущейся относитель-
относительно неподвижной.
3. Переносная скорость точки не зависит от характера относи-
относительного движения точки, но зависит от ее положения в подвижной
системе отсчета и от движения подвижной системы координат.
§ 2. КИНЕМАТИКА АБСОЛЮТНО ТВЕРДОГО ТЕЛА
1. Определения. Абсолютно твердым телом называют
такую систему материальных точек, расстояния между двумя лю-
любыми точками которой остаются всегда неизменными. Абсолютно
твердое тело либо заполняет некоторую область пространства, либо
состоит из нескольких отдельных точек. Перемещения абсолютно
твердого тела в пространстве могут быть либо свободными, либо
стесненными некоторыми условиями. Так, например, перемещения
твердого тела будут стеснены, если одну из его точек сделать не-
неподвижной. Если закрепить две точки твердого тела, то возмож-
возможными движениями такого тела будут только вращения вокруг не-
неподвижной прямой, проходящей через эти закрепленные точки.
Такую прямую называют осью вращения твердого тела. Если
закрепить еще одну точку твердого тела, не расположенную на оси
вращения, то тело не сможет перемещаться и будет оставаться не-
неподвижным. Таким образом, три точки твердого тела, не располо-
расположенные на одной прямой, полностью определяют положение твер-
твердого тела. Для определения движения твердого тела достаточно
знать закон движения трех его точек, не расположенных на одной
прямой.
2. Элементарные движения твердого тела. Говорят, что твер-
твердое тело испытывает перемещение, если оно переходит из од-
одного положения в другое. Вектор МгМ{, соединяющий два различ-
различных положения точки твердого тела, характеризует перемещение
точки Mi (рис. 43). Этот вектор называют вектором переме-
перемещения точки Mi твердого тела. В общем случае перемещения
66
различных точек твердого тела отличаются друг от друга как по
величине, так и по направлению.
Поступательное перемещение твердого тела.
Может оказаться, что векторы перемещений различных точек твер-
твердого тела равны по величине и параллельны. В таком случае гово-
говорят, что твердое тело совершает поступательное перемещение. При
поступательном перемещении твердого тела прямые линии, соеди-
Рис. 43
Рис. 44
няющие две произвольные точки этого тела, остаются параллель-
параллельными одному и тому же направлению. Если с твердым телом жест-
жестко связать систему прямоугольных осей, то при поступательном
перемещении твердого тела эти оси будут оставаться параллель-
параллельными своему первоначальному положению. Как уже отмечалось,
положение твердого тела вполне определяется положением трех
его точек, не лежащих на одной прямой. Через такие три точки
всегда можно провести две пересекающиеся прямые, которые пол-
полностью будут определять перемещение твердого тела.
Так как при поступательном перемещении векторы перемеще-
перемещений всех точек твердого тела равны по величине и по направлению,
то такое перемещение может быть представлено одним вектором
w = ММ',
где М — произвольная точка твердого тела. Иначе говоря, вектор
перемещения твердого тела при поступательном перемещении мож-
можно переносить в любую точку твердого тела и рассматривать как
вектор свободный.
Определение. Движение твердого тела, состоящее из по-
последовательности поступательных перемещений, называют посту-
поступательным движением твердого тела.
Можно указать много примеров поступательных движений.
Так, например, кабина лифта совершает поступательное движение,
67
кузов железнодорожного вагона, совершающего прямолинейное
движение, тоже совершает поступательное движение и т. д.
Скорость поступательного движения. Пусть вектор w поступа-
поступательного перемещения твердого тела соответствует двум положе-
положениям твердого тела в моменты t и t + kt. Отношение вектора пере-
перемещения w к интервалу времени At определяет среднюю скорость
произвольной точки твердого тела, которая называется средней
скоростью поступательного движения твердого тела. Предел
этого отношения при Д?->-0, если, конечно, он существует, будем
называть скоростью поступательного движения
твердого тела
v = lim—.
д<-»о At
Вращение твердого тела вокруг неподвижной оси. Рассмотрим
твердое тело, у которого неподвижно закреплены две точки О и Ot.
Такое твердое тело может вращаться вокруг неподвижной оси и
не может совершать других движений. При вращении твердого те-
тела всякая его точка описывает окружность в плоскости, перпен-
перпендикулярной к оси вращения. Радиус соответствующей окружности
равен расстоянию точки от оси вращения. Величина скорости про-
произвольной точки твердого тела пропорциональна расстоянию h от
этой точки до оси вращения. Положение точки можно определить
углом ¦& (двугранный угол) между двумя плоскостями, проходя-
проходящими через ось вращения, одна из которых неподвижна, а вторая
вращается вместе с рассматриваемой точкой (рис. 44). Числен-
Численная величина скорости точки М в ее круговом движении равна
dt *
где величина d$jdt = (u называется угловой скоростью вра-
вращения твердого тела. Она определяет скорость изменения угла
между плоскостью, проходящей через ось вращения и через точку
М, и неподвижной плоскостью, также проходящей через ось вра-
вращения.
Таким образом, вращение твердого тела может быть опреде-
определено так же, как и скользящий вектор, тремя элементами: осью
вращения, величиной вращения (величиной угловой скорости вра-
вращения) и стороной вращения. Если теперь ввести на оси вращения
вектор (о, направленный в ту сторону, откуда вращение видно про-
происходящим против движения часовой стрелки, а по величине рав-
равный величине угловой скорости вращения, то скорость точки М
можно будет определить как момент вектора с* относительно точ-
точки М. Величина и направление скорости v не изменяются, если
перемещать вектор с* вдоль оси вращения, т. е. с* — скользящий
вектор
68
или
v = momM w = [MO, o>] — [to, ОМ],
v = [ы, ОМ].
Полученная формула носит название формулы Эйлера.
Выберем систему осей Oxyz, начало которой находится на оси вра-
вращения. Через р, Q, г обозначим проекции вектора угловой скоро-
скорости с* на оси координат, а через i, j, k — орты координатных осей.
Тогда из формулы Эйлера получим
v = [ы, ОМ] =
i,
P
X
I
q
у
k
г
z
откуда
vy=rx —
Если ось вращения проходит через точку А(х0, yQ, zD), то для
определения скоростей точек твердого тела формула Эйлера дает
i j k
v= p q r
— х0 у — ув г-
или
3. Мгновенные движения твердого тела. В общем случае дви-
движения твердого тела каждая его точка описывает свою траекторию
и имеет свою скорость. Может оказаться, что в некоторый момент
времени скорости всех точек твердого тела равны по величине и но
направлению. В этом случае говорят, что твердое тело в данный
момент совершает мгновенно-поступательное движе-
движение. Вектор v, представляющий скорость произвольной точки
твердого тела в этот момент времени, называется вектором мгно-
мгновенно-поступательной скорости твердого тела.
Мгновенно-поступательное движение твердого тела определяет-
определяется лишь состоянием скоростей точек тела в данный момент време-
времени. В любой Другой момент времени скорости могут уже не удов-
удовлетворять условиям мгновенно-поступательного движения твердого
тела. Нельзя отождествлять мгновенно-поступательное движение с
поступательным движением тела. Это совершенно разные понятия.
Рассмотрим другой случай, когда скорости точек твердого тела
в данный момент времени удовлетворяют условию
v = [ад, Ж],
69
где Л — некоторая фиксированная точка, а М — произвольная точ-
точка твердого тела, окорость которой определяется. Если скорости
всех точек М твердого тела могут быть определены из этого урав-
уравнения, то говорят, что твердое тело совершает в данный момент
мгновенно-вращательное движение, а вектор с* являет-
является вектором мгновенной угловой скорости вращения
твердого тела.
Выражения «мгновенно-поступательное движение» и «мгновен-
«мгновенно-вращательное движение» обозначают исключительно распреде-
распределение скоростей в твердом теле в данный момент времени.
Замечание. В случае мгновенно-поступательного движения
твердого тела перемещения точек тела совпадают друг с другом по
величине и по направлению с точностью лишь до величин первого
порядка малости по сравнению с At.
4. Сложение мгновенно-поступательных и мгновенно-враща-
мгновенно-вращательных движений твердого тела. В общем случае движение твер-
твердого тела является сложным движением. Оно задается движением
относительно некоторой системы отсчета, «оторая в свою очередь
совершает движение относительно какой-то другой системы отсче-
отсчета. Последняя тоже может совершать некоторое относительное
движение и т. д. Рассмотрим некоторые конкретные случаи слож-
сложного мгновенного движения и распределение скоростей в этих слу-
случаях.
а) Сложение мгновенно-поступательных движений твердого
тела. Предположим, что в рассматриваемый момент времени t
твердое тело Т совершает мгновенно-поступательное движение от-
относительно системы отсчета Si со скоростью мгновенно-поступа-
мгновенно-поступательного движения vr. Пусть, кроме того, система St сама совер-
совершает мгновенно-поступательное движение относительно системы 5г
с мгновенно-поступательной скоростью Vi; система S2 в свою оче-
очередь совершает мгновенно-поступательное движение относительно
системы S3 с мгновенно-поступательной скоростью V2 и т. д., и
пусть, наконец, система Sk совершает мгновенно-поступательное
движение относительно системы 5 с мгновенно-поступательной ско-
скоростью vh. Рассмотрим произвольную точку М твердого тела Т.
Эта точка участвует в сложном движении. Ее относительная ско-
скорость по отношению к системе Si равна по величине и направле-
направлению скорости vr. При определении скорости точки М относительно
системы 5 заметим, что точка совершает сложное переносное дви-
движение. Каждая подвижная система Su S2, S3, ..., Sk совершает
мгновенно-поступательное движение, а потому скорость точки М
не зависит от ее положения. Относительно системы S2 ее скорость
определяется соотношением
vr2 = v, -г Vi-
Скорость относительно системы S3 находим из равенства
v,3 = vr2 + v2 и т. д.,
70
а для скорости относительно системы S имеем
Vs = Vr,k-\ + Vb
или, окончательно, после подстановки значений vr,k-i
vs = v, 4- vx + v2 + ... -t- vfc.
Теорема. В том случае, когда мгновенное движение твердого
тела является результатом нескольких одновременных мгновенно-
поступательных движений, результирующее движение тоже являет-
является мгновенно-поступательным, причем мгновенно-поступательные
скорости складываются как свободные векторы.
б) Сложение мгновенных вращений, оси которых пересекают-
пересекаются. Рассмотрим мгновенное вращение твердого тела Т относитель-
относительно системы Si с мгновенной угловой скоростью о*г. Пусть система
Si сама совершает мгновенное вращение с мгновенной угловой ско-
скоростью &е относительно некоторой неподвижной системы отсчета 5.
Предположим, кроме того, что линии действия векторов ие и с*г
пересекаются в некоторой точке О. Рассмотрим скорость произ-
произвольной точки М твердого тела Т, совершающей вместе с телом
сложное движение. Движение тела Т относительно системы S\
представляет собой мгновенное вращение с мгновенной угловой
скоростью <йг, поэтому относительную скорость точки М получим
из уравнения
Величина и направление переносной скорости точки определяются
из условия, что подвижная система отсчета тоже совершает мгно-
мгновенное вращение с угловой скоростью (ле относительно системы S.
Поэтому переносная скорость точки М будет равна
vff = К, ОМ].
На основании теоремы о сложении скоростей теперь будем иметь
va = v? + vr = [i»eOM] + К, ОМ] = К + <»г,ОМ] = [fill,
т. е. скорость произвольной точки твердого тела определяется фор-
формулой
v0 =¦ [Й, ОМ].
Как мы уже знаем, такое движение является мгновенным враще-
вращением с мгновенной угловой скоростью Q. Вектор результирующей
мгновенной угловой скорости й равен геометрической сумме век-
векторов относительной и переносной угловых скоростей, т. е.
а его линия действия проходит через точку О. Итак, если твердое
тело совершает сложное мгновенное движение, состоящее из двух
71
одновременных вращений с угловыми скоростями <аг и <ле, линии
действия которых проходят через одну и ту же точку О, то резуль-
результирующим движением будет также мгновенное вращение с мгно-
мгновенной угловой скоростью Q, которая представляет собой сумму
мгновенных угловых скоростей ше и с*г с линией действия, прохо-
проходящей через точку О.
Отсюда следует, что векторы c*e и с*г можно переносить вдоль
их линий действия и складывать по правилу параллелограмма,
если их линии действия пересекаются, т. е. ше и <ог векторы сколь-
скользящие.
Распространяя правило сложения векторов на случай трех и
более вращений, получим следующую теорему.
Теорема. Если твердое тело Т совершает мгновенное враще-
вращение с угловой скоростью е>г относительно системы Sb которая сама
вращается с угловой скоростью аи относительно системы S2, систе-
система S2 совершает мгновенное вращение относительно системы S3
и т. д., и, наконец, система Sk совершает мгновенное вращение
относительно системы S с угловой скоростью «а и если линии дей-
действия векторов (йг, (ой ©2, ..., «и пересекаются в одной точке, то ре-
результирующее движение твердого тела является мгновенно-враща-
мгновенно-вращательным движением с угловой скоростью Я, которая определяется
как геометрическая сумма векторов, т. е.
Q = W, + <я1 -j- и>2 + • • • ~г wft-
В частном случае, когда твердое тело участвует в двух мгно-
мгновенных вращениях в противоположных направлениях с одинако-
одинаковыми по величине угловыми скоростями,
результирующее движение будет соответ-
соответствовать состоянию покоя (система будет
вращаться в одну сторону, а твердое тело
вокруг той же оси — в противоположном
направлении).
Следствие. Добавление (или отбра-
отбрасывание) к системе движений твердого те-
тела двух равных мгновенных вращений в
противоположных направлениях не изме-
измени» т няет мгновенного распределения скоростей
в твердом теле.
¦ 4э Рассмотренные свойства мгновенных
вращений позволяют установить кинемати-
кинематический смысл эквивалентных систем скользящих векторов ©i, oJ,...,
..., (Ой, который соответствует одному и тому же результирующему
мгновенному движению твердого тела.
в) Пара вращений. Пусть мгновенное движение твердого тела
является сложным и состоит из мгновенного вращения подвижной
системы координат 5 вокруг неподвижной оси (пусть для опреде-
определенности эта ось совпадает с осью z) с мгновенной угловой ско-
скоростью с* и мгновенного вращения в этой системе твердого тела
72
вокруг оси, параллельной оси вращения системы S (параллельной
оси г), но в направлении, противоположном вращению системы 5
(рис. 45). Предположим, что величина мгновенной угловой скорости
вращения твердого тела относительно системы S равна величине
мгновенной угловой скорости вращения подвижной системы 5.
Такое мгновенное движение можно представить двумя скользя-
скользящими векторами с* и ¦—с*, равными по величине, направленными
в противоположные стороны и лежащими на параллельных пря-
прямых. Определяя скорость произвольной точки М твердого тела по
теореме о сложении скоростей
V. = V, + Vr
и имея в виду, что подвижная система осей совершает мгновенное
вращение со скоростью и, переносную скорость точки М определим
по формуле Эйлера (рис. 45)
ve -= [ю, ОМ).
Мгновенное относительное движение тоже является мгновенным
вращением, поэтому относительная скорость точки равна
vr = [— ы, AM].
Для определения абсолютной скорости получим соотношение
v0 = [»,Щ+[—ы,Щ= К бЩ— [», AM] =
Нетрудно видеть, что величина и направление скорости произволь-
произвольной точки твердого тела, участвующего в таком движении, не зави-
зависят от ее положения, а зависят лишь от расположения осей враще-
вращения. Скорости всех точек твердого тела оказываются равными по
величине и по направлению. Такое движение твердого тела назы-
называется мгновенно-поступательным движением. Результат можно
сформулировать в следующей теореме.
Теорема. Пара мгновенных вращений твердого тела эквива-
эквивалентна одному результирующему мгновенно-поступательному дви-
движению, скорость которого равна по величине и направлению мо-
моменту этой пары.
5. Общий случай сложения мгновенно-поступательных и мгно-
мгновенно-вращательных движений твердого тела. Непрерывное дви-
движение твердого тела. Рассмотрим сложное мгновенное движение
твердого тела, состоящее из мгновенно-поступательных движений
со скоростями V\, V2, ..., vh и мгновенно-вращательных движений
с угловыми скоростями ом, (д2, ..., c*s (рис. 46). Пусть линии дей-
действия векторов и], «2, ..., (ns проходят соответственно через точки
Ль А2, ..., As.
Теорема. Результирующее мгновенное движение твердого
тела, участвующего одновременно в нескольких мгновенно-поступа-
73
тельных и мгновенно-вращательных движениях, сводится к двум
простейшим мгновенным движениям: одному мгновенно-поступа-
мгновенно-поступательному и одному мгновенно-вращательному движению.
Доказательство. Твердое тело участвует в системе мгно-
мгновенных движений. Добавим к этой системе движеннй еще два мгно-
мгновенных движения, не изменяющих распределения скоростей в твер-
твердом теле. Такими движениями являются мгновенные вращения
с угловыми скоростями о*] и —(Оь линии действия которых совпа-
совпадают и проходят через точку О. Тогда вектор с*] с началом в точ-
точке Л] и вектор —©1, проходящий через точку О, образуют пару
вращений, эквивалентную одному мгновенно-поступательному дви-
движению со скоростью
Wl = К^О].
Аналогичные построения проведем с каждым из векторов o*i, ©г, ¦••
..., (os. Полученная новая система мгновенных движений твердого
rfd.
Рис. 46
Рис. 47
тела эквивалентна первоначальной системе и состоит из системы
мгновенных вращений с угловыми скоростями (Oi, @2, ..., ojs, линии
действия которых проходят через начало координат, и системы
мгновенно-поступательных движений со скоростями vb V2, ..., v^,
w,, w2, ..., ws, причем
wv=[<ivV)] (v = 1, 2 s).
Как было показано выше, система мгновенно-поступательных дви-
движений эквивалентна одному мгновенно-поступательному движению,
скорость которого равна геометрической сумме составляющих
скоростей мгновенно-поступательных движений
V = Vi 'r V2 -I- ... +
3 -f
Ws
74
Система мгновенных вращений вокруг пересекающихся осей экви-
эквивалентна одному мгновенно-вращательному движению, угловая
скорость Q которого равна геометрической сумме угловых скоро-
скоростей составляющих мгновенных вращений, причем линия действия
вектора Q проходит через точку пересечения линий действия со-
составляющих векторов с* у. т. е.
Q = й)х + <о2 + ... -г «V
Этим доказана теорема о том, что результирующее движение твер-
твердого тела сводится к одному мгновенно-поступательному движению
со скоростью v и одному мгновенно-вращательному движению с
угловой скоростью Я.
а) Мгновенно-винтовое движение твердого тела.
Теорема. Сложное мгновенное движение твердого тела, со-
состоящее из одного мгновенно-поступательного движения со скоро-
скоростью v и одного мгновенно-вращательного движения с угловой
скоростью Q эквивалентно одному мгновенно-винтовому движению.
Доказательство. Рассмотрим мгновенное движение твер-
твердого тела, состоящее из мгновенного вращения с угловой скоростью
О, линия действия которого проходит через точку О, и мгновенно-
поступательного движения со скоростью v (рис. 47). Представим
вектор v в виде суммы двух свободных векторов vt и v2, один из
которых vi параллелен вектору Q; а второй v2 ортогонален векто-
вектору й. В плоскости (я), проходящей через линию действия векто-
вектора Q и ортогональной к вектору V2, выберем такую точку Ои отно-
относительно которой момент вектора Q по величине совпадает с вели-
величиной вектора v2) а по направлению противоположен направлению
вектор-а V2. Положение точки О\ определяется из условия
[ОД Q]_-v2,
или
[ОО[, Q] = v2.
Умножив векторно это равенство на Q, получим
[&ЛОб~1, Q]]=[Q,v2],
или
00^-Q (OOlt Q) = [Q, vj = [Q, v].
Если, «роме того, потребовать, чтобы отрезок OOi был ортогона-
ортогонален к линии действия вектора й, то равенство можно будет пере-
переписать в виде
па tQ» vi
Q*
К рассматриваемой системе мгновенных движений твердого тела
добавим два мгновенных вращения с угловыми скоростями Q и
75
—ii, линии действия которых проходят через точку Оь Полученная
новая система мгновенных движений твердого тела эквивалентна
первоначальной системе мгновенных движений. Но вектор Q, про-
проходящий через точку О, и вектор —?2, проходящий через точку О и
образуют пару вращений, эквивалентную мгновенно-поступатель-
мгновенно-поступательному движению со скоростью
w = [Q, Щ] = — \Рдх, Щ-- v2.
Результирующее движение состоит из одного мгновенного враще-
вращения с угловой скоростью й, линия действия которой проходит че-
через точку Оь и системы мгновенно-поступательных движений со
скоростями v и w. Два последних мгновенно-поступательных дви-
движения эквивалентны одному мгновенно-поступательному движению
со скоростью
коллинеарной с линией действия вектора Q.
Мгновенное движение твердого тела, состоящее из таких мгно-
мгновенно-вращательного и мгновенно-поступательного движений, у
которых линии действия векторов мгновенно-угловой скорости и
мгновенно-поступательной скорости коллинеарны, будем называть
мгновенно-винтовым движением. Рассмотренное выше
движение является мгновенно-винтовым движением твердого тела.
Прямую линию твердого тела, для всех точек которой направление
скорости совпадает с направлением мгновенно-угловой скорости
твердого тела, будем называть винтовой осью. Отношение
скорости поступательного движения тела вдоль винтовой оси к его
угловой скорости
Н Q
называют параметром винта. При р=0 будем иметь только
одно мгновенное вращение, при р — оо мгновенно-поступательное
движение. Мгновенно-винтовое движение определяет лишь состоя-
состояние скоростей в данный момент времени, но не определяет полно-
полностью всего непрерывного движения твердого тела. Чтобы полностью
определить движение, надо знать характер изменения скорости.
Если же твердое тело действительно совершает винтовое движе-
иие, так что положение винтовой оси и параметры, определяющие
состояние скоростей, не меняются, тогда за время ^=2я/й, т. е.
за время одного полного оборота, тело продвинется вдоль винтовой
оси на расстояние
h = *Л = ^ = 2лр,
число h называют шагом винта
76
б) Теорема Эйлера. Рассмотрим самый общий случай движе-
движения твердого тела и докажем теорему, принадлежащую Эйлеру, о
распределении скоростей в твердом теле при произвольном дви-
движении.
Теорема. Произвольное мгновенное движение твердого тела
в любой момент времени может быть представлено как сумма двух
мгновенных движений: одного мгновенно-поступательного и одного
мгновенно-вращательного.
Доказательство. Будем рас-
рассматривать движение твердого тела
относительно системы осей Oxyz
(рис. 48). С твердым телом свя-
свяжем жестко другую систему осей
O\XU yu Z\, относительно которой оно
не совершает движения. Тогда движе-
движение твердого тела будет полностью
определяться движением подвижной
системы координат O\X{yiZi, Выберем
произвольную точку М твердого тела
и рассмотрим ее движение относитель-
относительно системы осей Oxyz. Координаты
точки М в неподвижной системе отсче-
отсчета обозначим через х, у, z, а ее коорди-
координаты в системе, связанной с твердым
телом,— через х\, уи z\. Через xQ, yo, z0 обозначим координаты точ-
точки Оь Положение подвижной системы координат определяется
положением точки О\ и направляющими косинусами углов между
осями подвижной и неподвижной систем координат. Эти направ-
направляющие косинусы можно задать таблицей:
Рис. 48
II x
*1
f/l
a
P
.||v
У
«X
Pi
Yi
z
a2
P2
Y2
Координаты х, у, z точки М связаны с ее координатами xh yu Z\
известными формулами преобразования координат
х ^
+ рУ1 + yzlt
2 = 20 f агх
уй~
Проекции скорости точки на неподвижные оси координат получим,
дифференцируя координаты х, у, z по времени,
77
dt dt x dt yi dt 1 dt
dt dt dt dt dt
v -A-^i+r JO*. 4- и -&- -4- 2 -^i-
z ~ dt ~ dt +Xl dt + У1 dt f 2l dt
Чтобы придать формулам более симметричный вид, рассмотрим
сначала проекции вектора абсолютной скорости точки М на по-
подвижные оси Х\, tjy Z\. Эти проекции найдем из уравнений
+ vzaiy vyi = vx$ + vy^x -f- ozp2,
которые приводят к следующей формуле:
dxo а JM±_ а i J?±_ (, \ .l v (~ da
dt dt г dt
1 \ dtdt*dt}x\ dt г dt a dt )
Аналогичным образом можно вывести формулы для vVl и vZt,
Дифференцируя тождественное соотношение, связывающее на-
направляющие косинусы a, ai и аг
получим
+ ai + a2
dt x dt 2 dt
Рассмотрим далее косинусы углов между подвижными осями коор-
координат
cos (ylt Zj) = pY + P1Y1 + P2Y2 = 0,
cos B1, x-i) = \a -r YA + Y2a2 ^ 0,
cos (xlt t/i) = ap -+- ctj^Px -\- CI2P2 ^ ^-
Дифференцируя эти соотношения по времени, приходим к следую-
следующему результату:
Y-#-+Yi~t-'fY2-
dt
«^ + «1^ + «2
dt ° dt
Pda . а aux
dt ' rl dt " dt
78
Проекции скорости точки М на оси хи уь z^ запишутся в виде
(Последние два равенства легко получаются из первого цикличе-
циклической перестановкой индексов.) Введем единичные векторы еь ег, е3,
направленные соответственно по осям хь г/ь zb Тогда вектор v
скорости точки М можно представить как сумму трех векторов
v =
-f vZle
Zle3.
Пусть вектор v0 = и° ех -j- хР е3 + и° е^ представляет скорость точки Ог
относительно системы Одгг/2. Если, кроме того, ввести вектор о> с
проекциями на подвижные оси plt qt, rt и вектор г с проекциями
xi> #i' zi> T0 сумму векторов
ei (?izi — hVi) + Ч (Vi — РА) +
можно будет представить в виде определителя
Pi
Ух zi
- [w, г],
и окончательно скорость точки М определится формулой
v = v0 + [w, г],
которая называется формулой Эйлера. Формула показывает,
что скорость произвольной точки твердого тела складывается из
скоростей начала подвижной системы координат (общей для всех
точек твердого тела) и скорости, определяемой векторным произве-
произведением [с*, г]. Последняя формула соответствует случаю мгновенно-
вращательного движения твердого тела, причем вектор с* представ-
представляет мгновенную угловую скорость вращения твердого тела отно-
относительно системы осей, совершающей поступательное движение
вместе с точкой Оь В результате в самом общем случае мгновен-
мгновенное движение твердого тела сводится к одному мгновенно-посту-
мгновенно-поступательному движению со скоростью произвольной точки Оь неиз-
неизменно связанной с твердым телом (ее иногда называют полю-
полюсом), и одному мгновенному вращательному движению с угловой
скоростью и, вектор которой проходит через точку Оь Этим и до-
доказана теорема Эйлера.
Замечание. Скорость произвольной точки твердого тела,
определяемую формулой Эйлера, можно рассматривать как ско-
скорость движения материальной точки в сложном движении в соот-
соответствии с теоремой о сложении скоростей. При этом опно m pac-
79
смотренных мгновенных движений твердого тела будет являться
переносным, а другое — относительным, и в каждый момент мгно-
мгновенное движение твердого тела можно представить как мгновенно-
вращательное движение с угловой скоростью ю относительно систе-
системы осей OiX2, 1/2, 22, движущейся поступательно со скоростью точ-
точки О]. В некоторых случаях удобнее представлять мгновенное
движение как мгновенное вращение подвижной системы осей, отно-
относительно которой твердое тело совершает мгновенно-поступатель-
мгновенно-поступательное движение.
в) Уравнение винтовой оси. Аксоиды. Непрерывное движение
твердого тела. Из теоремы Эйлера следует, что произвольное
мгновенное движение твердого тела всегда может быть сведено к
одному мгновенно-винтовому движению.
Рассмотрим самый общий случай мгновенного движения твер-
твердого тела, эквивалентного мгновенно-поступательному движению
со скоростью v и мгновенно-вращательному движению с угловой
скоростью со. Такое мгновенное движение сводится к мгновенно-
винтовому движению, в котором скорости v, точек твердого тела,
лежащих на винтовой оси, параллельны вектору мгновенной угло-
угловой скорости to (рис. 49). Условие параллельности векторов vt и ю,
записанное через проекции на оси хи уи zu неизменно связанные
с твердым телом, получает вид
Pi 9i 'л.
Если обозначить координаты точек винтовой оси в подвижной си-
системе через %\, у\, гь то по формуле Эйлера найдем
Подставляя эти значения в условие параллельности векторов,
имеем
v°x. + <7А — Г& v° + гЛ - p1z1 v°t + p^i — ял
_ = ^а^
Pi <7i ri
Полученное уравнение определяет координаты точек твердого тела,
расположенных на винтовой оси, относительно системы OyXiyiZi,
связанной с твердым телом.
Можно найти уравнение винтовой оси и в системе неподвиж-
неподвижных осей Oxyz. Обозначим через р, q, r проекции вектора ю на не-
неподвижные оси х, у, z. Проекции скорости точки О2, находящейся
на винтовой оси, на оси х, у, z определим из формулы Эйлера
v = v0 + [w. г],
80
где вектор г имеет проекции на неподвижные оси {х—хо, у—у
г—z0}. Тогда для проекций скорости получим
vx = v°x -f q (z — z0) — r (y — (/„),
vy = vy + r (x — xo* — P B— 2o).
^ = v°z + P (У — Уо) — Я (x — x0),
а уравнение винтовой оси в неподвижной системе координат Охуг
приобретает вид
+ д{г — г0) — г (у ~
(х — х0) — р (г — z0)
У о) — Я(х — х0)
(Ь)
Рис. 49
Уравнения (а) и (Ь) определяют одну и ту же прямую ли-
линию— винтовую ось. Но при движении твердого тела мгновенное
распределение скоростей непрерывно меняется со временем. При
этом изменяются величины v0 и <а. При непрерывном изменении
коэффициентов уравнения (а) и (Ь) в каждый следующий момент
будут вообще определять уже другую прямую. Геометрическое ме-
место мгновенных винтовых осей в неподвижном пространстве Охуг
называют неподвижным аксоидом, а геометрическое место
мгновенных винтовых осей, определенных относительно системы
отсчета Q\X\y\Z\, — подвижным аксоидом. Эти геометриче-
геометрические места (аксоиды) представляют собой линейчатые поверхно-
поверхности, имеющие в каждый момент по меньшей мере одну общую
прямую — мгновенную винтовую ось.
Покажем, что подвижный и неподвижный аксоиды имеют об-
общую соприкасающуюся плоскость, проходящую через мгновенную
81
винтовую ось. В самом деле, пусть неподвижный аксоид X и По-
Подвижный аксоид Si имеют общую винтовую ось А (рис. 50). Рас-
Рассмотрим движение некоторой точки М, остающейся все время на
винтовой оси. Пусть S — траектория этой точки на неподвижном
аксоиде X и Si — траектория точки М на подвижном аксоиде 2Х.
Абсолютная скорость va точки М направлена по касательной
к абсолютной траектории точки М. Относительная скорость vr на-
направлена по касательной к относительной траектории точки. Пере-
Переносная скорость — это скорость точки подвижного аксоида, совпа-
совпадающей в данный момент с точкой М. Но эта точка лежит на
винтовой оси, а потому и переносная скорость \е направлена вдоль
винтовой оси. Касательная плоскость к неподвижному аксоиду бу-
будет определяться векторами va и ve, а касательная плоскость к
подвижному аксоиду — векторами vr я ve. Но по теореме о сложе-
сложении скоростей имеем
ve = ve -j- vr,
т. е. вектор va лежит в касательной плоскости к подвижному аксо-
аду, а следовательно, касательные плоскости совпадают. Непрерыв-
,ное движение твердого тела можно теперь представить как каче-
качение подвижного аксоида Si по неподвижному аксоиду Б с про-
проскальзыванием вдоль мгновенной винтовой оси.
6. Мгновенное движение твердого тела с одной неподвижной
точкой. Мгновенное движение твердого тела, у которого закреп-
закреплена одна точка, представляет собой частный- случай общего мгно-
мгновенно-винтового движения твердого тела. Но в общем случае
мгновенно-винтового движения все точки тела, расположенные на
мгновенной винтовой оси, имеют наименьшую скорость. У твердого
тела с одной закрепленной точкой наименьшую скорость, равную
нулю, имеет сама закрепленная точка. Поэтому в рассматриваемом
случае винтовая ось должна проходить через неподвижную точку О,
а точки тела, расположенные на винтовой оси, будут иметь скоро-
скорости, равные нулю. Тогда скорость произвольной точки тела будет
определяться по формуле
v = [о>, г],
и распределение скоростей будет таким же, как и при вращении
вокруг мгновенной оси. Параметр винта
V
здесь обращается в нуль, а мгновенная винтовая ось становится
мгновенной осью вращения. В каждый момент мгновен-
мгновенная ось вращения проходит через неподвижную точку, а аксоиды
представляют собой конические поверхности (рис. 51).
Пример 16. По неподвижному круговому конусу с углом при вершине
2 а катится без скольжения другой круговой конус с углом при вершине 2 f,
82
так, что ось симметрии последнего вращается вокруг оси симметрии неподвиж-
неподвижного конуса с угловой скоростью <о\. Определить абсолютную угловую скорость
вращения подвижного конуса и аксоиды (рис. 52).
Рис. 51
Рис. 52
Решение. Подвижный конус катится по неподвижному без проскальзы-
проскальзывания, поэтому точки подвижного конуса, расположенные на общей образую-
образующей, имеют нулевые скорости. Следовательно,
мгновенная ось вращения проходит по общей
образующей двух конусов. Мгновенная ось
вращения перемещается как по поверхности
неподвижного, так и по поверхности подвиж-
подвижного коиуса, и аксоидами являются поверхно-
поверхности конусов. Движение подвижного конуса
можно представить как сложное, состоящее из
вращения подвижной системы вокруг оси сим-
симметрии неподвижного конуса с переносной
угловой скоростью cae=u>i и относительного
вращения подвижного конуса вокруг своей оси
симметрии в подвижной системе координат.
Зная направления абсолютной и относительной
угловых скоростей подвижного конуса и ве-
величину и направление переносной угловой ско-
скорости подвижной системы, легко определить
величину и направление абсолютной угловой скорости вращения конуса,
треугольника скоростей (рис. 53) имеем
Рнс. 53
<оа
sin [180°— (а
sinp '
откуда
<Ba = ¦
sin (a +
Пример 17. Горизонтальные колеса I и II дифференциального механизма
вращаются вокруг одной и той же вертикальной оси АВ го скоростями <Oi и йJ.
Определить мгновенную угловую скорость планетарного колеса III, ось которого
может свободно вращаться вокруг оси АВ (рис. 54).
Решение. Абсолютное мгновенное движение колеса III можно предста-
представить как результат сложения переносного движения вместе с колесом I и отно-
относительного движения колеса III по отношению к колесу I. Тогда переносная
В
Ш
А й
Рис 54
Рис. 55
угловая скорость колеса III будет представляться скользящим вектором coi
(рнс. 55). В относительном движении мгновенная ось вращения Д] колеса III
проходит через точку соприкосновения колес III н I и через точку О пересече-
пересечения осей колес Ш н I. Начало скользящего вектора он перенесем в точку О.
Тогда конец вектора абсолютной угловой скорости колеса III будет лежать
на прямой Si, параллельной Д[ и проходящей через конец вектора соь
Представляя теперь движение колеса III как результат сложения перенос-
переносного движения (вместе с колесом II) н относительного движения колеса III
по отношению к колесу II, аналогичным образом получим, что конец вектора
абсолютной угловой скорости колеса III лежит на прямой б2, параллельной Дг,
проходящей через конец вектора ш2 Тогда величина вектора абсолютной угловой
скорости колеса III определится геометрически из чертежа
Г,1„ \ 2
— co2 \2
где R и г соответственно радиусы колес I и III.
7. Плоскопараллельное движение твердого тела. Плоскопарал-
лельиым называют такое движение твердого тела, при котором
скоррсти всех его точек параллельны некоторой неподвижной пло-
плоскости (л). Сечение твердого тела плоскостью (л) (или плоско-
плоскостью, ей параллельной) представляет собой плоскую фигуру, неиз-
неизменно связанную с твердым телом. Как мы уже видели, три точки
твердого тела, не лежащие на одной прямой, однозначно опреде-
определяют положение твердого тела. Поэтому движение плоского сече-
сечения должно полностью определять и движение самого твердого
тела.
В общем случае мгновенно-винтового движения твердого тела
скорости точек твердого тела складываются из скорости движения
вдоль винтовой оси и скорости от вращения вокруг мгновенной
винтовой оси. При этом скорости точек твердого тела не располо-
расположены в одной плоскости. Они лежат в касательных плоскостях к
поверхности прямого кругового цилиндра, ось которого совпадает
с мгновенной винтовой осью (рис. 56). Скорости всех точек твер-
твердого тела будут параллельны одной
плоскости лишь в тех случаях, когда
мгновенное движение либо поступа-
поступательное, либо вращательное. В пер-
первом случае мгновенная винтовая
ось параллельна плоскости (я), во
втором — ортогональна к плоско-
плоскости (я).
О),
"/ a
Рис. 56
Рис. 57
Заметим, что мгновенно-поступательное движение можно рас-
рассматривать как предельный случай мгновенно-вращательного дви-
движения. В самом деле, произвольное мгновенно-вращательное дви-
движение твердого тела с угловой скоростью п всегда можно пред-
представить как сложение двух мгновенных вращений вокруг парал-
параллельных осей со скоростями ©i и ш (рис. 57), удовлетворяющими
условиям
о)
>г = 2,
= a -f
Мгновенно-поступательному движению будет соответствовать пре-
предельный случай двух вращений, когда величина угловой скорости
85
<о неограниченно приближается к величине угловой скорости
Расстояние до мгновенной оси вращения
01) =
а>1 — ш
в этом случае стремится к бесконечности, а величина мгновенной
угловой скорости Q стремится к нулю. Таким образом, мгновенно-
поступательное движение представляет собой предельный случай
мгновенного вращения, когда величина мгновенной угловой скоро-
скорости стремится к нулю, а мгновенная ось вращения уходит в беско-
бесконечность.
Рис. 58
Рнс. 59
Мгновенное плоскопараллельное движение твердого тела всег-
всегда можно привести к одному мгновенному вращению, мгновенная
ось вращения которого ортогональна к плоскости (л), параллель-
параллельной скоростям точек твердого тела.
При непрерывном движении твердого тела направления скоро-
скоростей его точек все время остаются параллельными одной и той же
неподвижной плоскости (я). В каждый момент движение представ-
представляет собой вращение мгновенной оси, ортогональной к плоскости
(л), а аксоиды в плоскопараллельном движении представляют со-
собой цилиндрические поверхности, образующие которых ортогональ-
ортогональны к плоскости (я) (рис. 58). Аксоиды пересекаются с плоскостью
(л) по двум кривым, называемым центроидами (полодия-
(полодиями), а точка пересечения мгновенной оси вращения с плоскостью
(л) называется мгновенным центром вращения. Непре-
Непрерывное движение твердого тела в плоскопараллельном движении
можно представить как качение без скольжения подвижной цен-
центроиды по неподвижной. В самом деле, если выбрать неподвижную
систему осей так, чтобы плоскость Оху совпадала бы с плоскостью
(я), а ось г была бы ортогональна к плоскости (л), то, обозначив
координаты мгновенного центра вращения через С(х0, у0, 0) и ко-
координаты произвольной точки М твердого тела через (х, у, z)
(рис. 59), из формулы Эйлера
86
v = [о>, г]
определим проекции скорости точки М. При помощи матрицы
О 0 со
— х0 у — у0 z —
находим
Чг = — «> (У — Уо)> vu = fa О — «о), v, = 0.
Из этих формул видно, что скорость точки не зависит от коорди-
координаты г и все точки твердого тела, лежащие на прямой, ортогональ-
ортогональной к плоскости (л), имеют одни и те же скорости. Следовательно,
мгновенное движение твердого тела полностью определяется дви-
У
Рис. 60
Рис. 61
жением точек плоской фигуры, т. е. качением без скольжения
подвижной центроиды по неподвижной. Точка твердого тела, совпа-
совпадающая в данный момент с мгновенным центром вращения, имеет
скорость, равную нулю.
Если положение мгновенного центра вращения известно, то
скорость произвольной точки твердого тела, лежащей в плоскости
(jt), ортогональна к прямой, соединяющей эту точку с мгновенным
центром вращения (рис. 60). Вектор скорости точки М направлен
по касательной к ее траектории, которую называют рулеттой
точки. Зная рулетты двух точек М и Mi твердого тела, можно
определить геометрическое место мгновенных центров вращения
твердого тела (центроиды), которые лежат на пересечении норма-
нормалей к рулеттам (если только эти нормали не совпадают).
Пример 18. Палочка АВ скользит концами по сторонам прямого угла
хОу. Найти центроиды (рис. 61).
Решение. Точка А скользит по оси х, а точка В — по оси у. Эти осн
являются рулеттами точек А и В. Мгновенный центр вращения S лежит на пере-
пересечении перпендикуляров к осям х и у. Фигура OBSA — прямоугольник. Отсюда
следует, что расстояние точки S от неподвижной точки О остается постоянным
87
и равно длине палочки, т. е. геометрическое место мгновенных центров враще-
вращения в неподвижном пространстве есть окружность. Диагонали в прямоугольнике
делятся пополам, поэтому расстояние точки S от середины палочки тоже равно
половине длины последней, а геометрическое место мгновенных центров враще-
вращения относительно палочки (подвижная центроида) есть окружность с центром
в середине палочки и радиусом, равным половине ее длины.
Пример 19. Палочка АВ длиной /
движется в неподвижной плоскости так,
что всегда проходит через точку М непо-
неподвижной окружности радиуса r^//2, a
конец палочки скользит по внутренней
стороне этой окружности. Найти траекто-
траектории точек палочки, а также центроиды ее
? движения (рис. 62).
Решение. Обозначим через а рас-
расстояние точки С от конца палочкн Л, тогда
расстояние МС = р будет
р = 2r cos <р — а.
Такая кривая называется улиткой Паска-
Паскаля. Чтобы определить положение мгновен-
мгновенного центра вращения, найдем рулетты
Рис. 62 двух точек палочки А и М. Рулетга точки
А — окружность, и, следовательно, мгно-
мгновенный центр вращения лежит на прямой
АО, проходящей через центр окружности. Рулетта точки М — улитка Паскаля
p=2r(coscp—coscpo). Касательная к рулетте в точке М направлена вдоль скоро-
скорости точки М палочки. Направление же скорости точки М найдем, рассматривая
движение неподвижной точки М (острия) в системе координат, связанной с па-
палочкой. Абсолютная скорость точки М острия равна нулю. В системе, связанной
с палочкой, точка М острия скользит по палочке, и, следовательно, относитель-
относительная скорость направлена вдоль палочки. Переносная скорость точки М острия—
это скорость точки М палочки. Из теоремы о сложении скоростей имеем
откуда следует, что переносная скорость тоже направлена вдоль палочки. Итак,
мгновенный центр вращения палочки расположен на прямой, ортогональной
к палочке и проходящей через точку М. Мгновенный центр вращения S нахо-
находится в точке пересечения прямых АО и MS. Прямой угол AMS всегда опи-
опирается на диаметр окружности, на которой лежат точки А и S. Поэтому точка S
также лежит на окружности с центром в точке О. Для определения центроид,
заметим, что при изменении положения палочки точка 5 всегда остается на
окружности, центр которой находится в точке О, а радиус равен г. Эта окруж-
окружность и будет неподвижной центроидой. Расстояние точки 5 от точки А палочки
не изменяется и всегда равно 2 г, поэтому подвижной цеитроидой будет окруж-
окружность радиуса 2 г с центром в точке А.
Пример 20. Стержень ОВ вращается в неподвижной плоскости вокруг
точки О с постоянной угловой скоростью шь Со стержнем ОВ шарнирно соеди-
соединен второй стержень ВА, который также вращается в той же плоскости вокруг
точки В, причем угол ср между стержнями АВ и ОВ изменяется по закону ср =
= 0J^. Определить центроиды стержня ВА (рис. 63).
Решение. Рулеттой точки В является окружность с центром в точке О,
так что мгновенный центр вращения стержня ВА лежит на нормали к рулетте,
т. е. на прямой ОВ. Стержень ВА участвует в двух вращениях вокруг парал-
параллельных осей, причем векторы угловых скоростей Ш] н и>2 направлены в одну
и ту же сторону (рис. 64). В этом случае результирующее движение также
мгновенное вращение, причем величина угловой скорости результирующего вра-
вращения
(Й = (Й! -f- OJ.
88
Вектор ш направлен в ту же сторону, что и векторы cot и <в2, а положение
линии действия определяется из уравнений
откуда
х =
dJ
Рис. 63
ш
Рис. 64
В
Расстояние мгновенного центра вращения от точки О
А' =
j + <В2
не изменяется, если остаются неизменными величины cui и шг. В этом случае
неподвижной центроидой является окружность радиуса х с центром в точке О.
Расстояние мгновенного центра вращения от точки В палочки АВ равно
со, а
и также остается постоянным, если не изменяются u)i и шг. Подвижной центро-
центроидой является окружность с центром в точке В и радиусом у. Непрерывное
движение палочки АВ можно представить как качение без скольжения подвиж-
подвижной окружности по неподвижной.
§ 3. УСКОРЕНИЕ ТОЧКИ В СЛОЖНОМ ДВИЖЕНИИ
1. Теорема Кориолиса. Между ускорениями точки в подвиж-
подвижной и неподвижной системах отсчета существует более сложная
зависимость, чем между скоростями. Эта зависимость впервые бы-
была установлена французским механиком Г. Кориолисом A792—
1843) при аналитическом изучении движения материальной точки.
Чтобы выяснить эту зависимость, рассмотрим движение матери-
материальной точки М в подвижной системе OxXiyiZu которая в свою оче-
очередь совершает некоторое движение относительно неподвижной си-
системы отсчета Oxyz (например, материальная точка перемещается
по твердому телу, которое само движется относительно неподвиж-
неподвижной системы координат).
89
Теорема Кориолиса. Абсолютное ускорение материаль-
материальной точки равно геометрической сумме ускорений: относительного,
переносного и добавочного К
Доказательство. Обозначим через х, у, z координаты
точки М относительно неподвижной системы отсчета, через
Х\, Уи %\ — ее координаты относительно подвижной системы отсче-
отсчета. Формулы преобразования устанавливают зависимость между
координатами точки в подвижной и неподвижной системах:
х = хь + а*! + Рг/Х -|- yzv
У = Уо + аЛ + Pif/i + YA,
(a)
где a, p, y — направляющие косинусы углов между осями подвиж-
подвижной и неподвижной систем координат, заданные таблицей
1Ь
X
У
а
•\-
Уг
Р
Pi
Рз
Ч
Y
Yi
Y2
Формулы преобразования (а) справедливы для любого момента
времени. Дифференцируя их по времени, получим
dx
dl
dt
dt
dt
dy __ dy0 , da!
dt dt dt
dz _ dzn , day
~dT dt """ dt
где выражение
dt
dt
dt
dt r dt
¦f"+Pi-^-+Vi
dt
Л
dt
dt
dt
(b)
dt '
dt
dt
dt
dt
представляет собой проекцию переносной скорости точки на ось х,
а выражение а —Ш- + р —— -+• у -^- — проекцию относительной
dt dt dt
скорости точки на ось х. Аналогичные соотношения получаем и
для других осей.
1 Добавочное ускорение еще называют поворотным, или к о р и о л и-
с о в ы м ускорением.
90
Дифференцируя еще раз равенства (Ь), получим
dt2 dt* df- dt* * dt* г dt* dt%
_l у d2Zl + 2
\ dt dt dt dt dt dt
d*y tPyQ d4 , d»pt d*yi d*x, <РУ1 ,
dt* dt3 dt* x dt* dt* x dt* " dp
dt dt
x1 . dp2 dyi . dy2 dzx
n—г " ""
у 2 f
™ dt2 ' \ dt dt dt dt ' dt dt
Переносным ускорением точ.ки назовем ускорение
той точки подвижной системы координат, которая совпадает в дан-
данный момент с движущейся материальной точкой М. Проекции пере-
переносного ускорения ]е на неподвижные оси координат найдем, поло-
положив в формулах (с) координаты х\, у\, zx постоянными величина-
величинами. Тогда для проекций переносного ускорения будем иметь выра-
выражения
d?xn , d4
lex - dt* ' dt2
. _ <Pyt
1'b
Положение точки в подвижной системе координат определяет-
определяется ее координатами х\, У\, zu и вектор относительного ускорения \г
точки будет иметь проекции на оси хи у\, ги равные вторым про-
производным от координат хи уи zx по времени d2xi/dt2, cPyJdt2,
d2Zi/dt2. Проекции вектора относительного ускорения на неподвиж-
неподвижные оси координат получим непосредственно из формул преобра-
преобразования
~dF + Yl IF-
d*ttl d4,
91
Рассмотрим еще вектор j' с проекциями
п I da dx1 . dp dyl ,
]* = z ~~r. г 1 7 7. г
. 2{da1_J^1_
dt dt ' dt dt dt dt
с / da, dx, . d&« dy, , J" ¦>-
dt dt dt dt dt dt
который будем называть вектором добавочного, или пово-
поворотного, ускорения точки (ускорения Кориолиса). Проекции
вектора абсолютного ускорения точки на неподвижные оси коорди-
координат можно теперь представить в виде суммы трех членов:
Lx = Зех + !rx + j'x>
lay ~ ley i Irg i lyi
!az = lez + hz + j'f
Откуда сразу же получим векторную формулу
Ja^ie+ir + j'.
т. е. абсолютное ускорение точки равно геометрической сумме пере-
переносного, относительного и добавочного ускорений.
Выясняя механический смысл добавочного ускорения, заметим
следующие его свойства:
1. Добавочное ускорение обращается в нуль, если подвижная
система координат не вращается, а движется поступательно, по-
поскольку в этом случае обращаются в нуль производные от направ-
направляющих косинусов подвижной системы осей.
2. Добавочное ускорение обращается в нуль, если равна нулю
скорость относительного движения материальной точки.
Рассмотрим проекции вектора добавочного ускорения на по-
подвижные оси координат
4 = /> + Vх! А' /»°*.
4 = /;р + /;pi + га,
i'zt = /Л + /JYi + №¦
Подставляя сюда значения проекций j'x, f, ]'г, получим
г. Г dx, ! da , dai . da* \
ix* [dt\dt1dt*dt
dt г dt % dt
d< \ dt dt " dt
92
at у a ¦ " dt ' •• dt
v4 + Vi^ + Y,f
(i< at dt
Вводя обозначения
* ' " Я Y2 di
Дифференцируя теперь тождественные соотношения
а« + о? + а*=1. р^+р2+р2=1) Y2 + Y2 + Y2=1;
PY + [PiYi + PaYa = 0. Y« + YA + Y2a3 = 0, ар + а^ + а#2 = О,
найдем
da . da, , da* n
dt ^ dt г dt
p Jt 4. p A + p2 .*_ = 0,
H rf< ^X dt F2 d/.
полученные формулы для проекций добавочного ускорения перепи-
перепишем в виде
4 = 2 [ft*; —/чу;],
93
¦что можно представить одной векторной формулой
Г =2[», vr],
где to — вектор мгновенной угловой скорости вращения подвижной
системы координат, имеющий проекции на подвижные оси коорди-
координат ри qb rx.
Сопоставляя полученную формулу с формулой Эйлера
V = [«>, Г]
.для определения скоростей точек твердого тела в случае мгновен-
мгновенного вращения последнего, заметим, что вектор добавочного уско-
ускорения направлен в сторону вращения (вместе с системой коорди-
координат) конца вектора относительной скорости точки (рис. 65).
Рис. 65
Рис. 66
Пример 21. Палочка АВ скользит своими концами по неподвижным вер-
вертикальной и горизонтальной прямым так, что конец А движется с постоянной
скоростью и. По палочке движется точка М с постоянной относительной ско-
скоростью v. Определить абсолютные скорость и ускорение точки М (рис. 66).
Решение. Мгновенный центр вращения палочки находится в точке О]
с координатами
х = 2а sin ф, у = 2а cos <p,
где 2 а — длина палочки, а ср — угол между палочкой и вертикальной прямой
Обозначая через s расстояние точки М от конца А палочки, для координат точ-
точки М получим значения
x=ssincp, у = Bа — s)cos<p. (a)
Проекции переносной скорости точки М на неподвижные оси координат получим,
рассматривая движение точки М палочки. Эти проекции можно вычислить по
формулам Эйлера, рассматривая мгновенное вращение палочки вокруг точки Оь
Эти же проекции можно найти непосредственным дифференцированием уравне-
уравнений (а), предполагая постоянной величину s
хе = sip' cos ф, уе — — Bа — s) ф' sin ф.
(Ь)
Для определения величины ср' рассмотрим скорость точки А:
— и = — 2аф' sin ф,
откуда
Ф =
2a sin ф
Тогда для проекций переносной скорости на оси х, у будем иметь
us , Bа — s)
Проекции относительной скорости точки получим, рассматривая движение точки
по палочке
хг = s' sin ф = v sin ф, у'г = — s' cos ф = — v cos ф.
Воспользовавшись теоремой о сложении скоростей, найдем проекции абсолют-
абсолютной скорости
Bа - s)
-а 2а т т *° 2а
Ускорение точки определим при помощи теоремы Кориолиса. При этом пе-
переносное ускорение получим дифференцированием уравнений (с) в предположе-
предположении, что s=const:
Если точка движется по палочке с постоянной скоростью v, то относительное
ускорение равно нулю, а проекции добавочного ускорения точки получим и*
матрицы
О 0 ш
откуда
jx = — 2ayr = 2av cos'tp,
j'y = 2(?>x'r ¦- 2cof sin ф.
По теореме Кориолиса проекции абсолютного ускорения будут теперь равны
lax = — . - . , h 2fi№ cos ф,
4а2 sin3 ф
jay~= 2wysin ф,
или, после подстановки значения а>,
u2s uv
+t '
Направления переносного и добавочного ускорений легко определить геометри-
геометрически (рис. 67).
95
Пример 22. Палочка вращается в плоскости чертежа вокруг неподвиж-
неподвижной точки О, причем угол, который она образует с неподвижной прямой, меняет-
меняется по произвольно заданному закону ср = ф>(<). Вдоль палочки скользит ползунок
по заданному закону r=r(t). Определить
ускорение ползунка в зависимости от его поло-
положения (рис. 68).
Решение. Применим теорему Кориоли-
са. В переносном движении точка движется
по окружности, поэтому переносное ускорение
может быть задано касательной и нормальной
составляющими
Относительное движение точки прямолинейное,
а относительное ускорение точки направлено
вдоль палочки
Рис. 67
Добавочное ускорение
;'=2Ф7'
•будет направлено ортогонально к палочке в сторону ее вращения, если прини-
принимать положительную относительную скорость направленной вдоль палочки от
Рис 68
Рнс. 69
точки О. Проектируя ускорение на направление палочки и на ортогональное
к ней направление, получим радиальную и трансверсальную составляющие уско-
ускорения
у = т" — Ф'*г, /ф = ф"г + 2Ф7'.
2. Замечание о дифференцировании единичного вектора. Свя-
Свяжем с движущимся твердым телом систему подвижных осей
О\Х\ухгх и рассмотрим единичный вектор еь направленный все вре-
время вдоль оси xi (рис. 69). Производная от вектора е{, взятая в си-
системе Oxyz,
96
dt
д<-»о
определяет скорость движения конца вектора
этом изменяется только направление вектора
дем при помощи формулы Эйлера
г = К eil-
t по годографу. При
^ Эту скорость най-
найdt
Точно так же определяются и производ-
производные от единичных векторов е2 и е3, на-
направленных соответственно вдоль осей у
И Z.
3. Векторный вывод теоремы Корио-
лиса. Рассмотрим движение материаль-
материальной точки М, положение которой отно-
относительно неподвижной системы коорди-
координат Oxyz задается радиус-вектором R.
Положение точки М относительно другой
системы осей OiXiy,zlt движущейся отно-
относительно системы Oxyz, определим ради-
радиус-вектором г. Пусть, кроме того, Ro ¦—
радиус-вектор начала подвижной систе-
системы координат (рис. 70). Векторы R, г, Ro
связаны между собой геометрическим
соотношением
R = Ro + г,
Рис. 70
(а)
сохраняющимся в каждый момент времени. Скорость точки М от-
относительно системы Oxyz определим, дифференцируя радиус-век-
радиус-вектор R по времени
dt
dt
—
dt
(b)
где производные как правой, так и левой части берутся в одной и
той же системе координат Oxyz. Радиус-вектор г, определяющий
положение точки М в системе O\X\y\Zu можно представить в виде
суммы трех векторов:
Тогда производная от вектора г в системе Oxyz получит вид
dr = dx1 e + dyx e _j_ dz1 e _|_ x det , 4t dea , „
dt
dt
dt
dt
dt
dt
dt
где производные dxjdt, dyjdt, dz\jdt являются проекциями отно-
относительной скорости точки М на оси подвижной системы, а произ-
производные dejdt, de2/dt, de^/dt определяются по формулам Эйлера
Е Н Березкин
97
rie, _ г
dt dt dt
Поэтому для производной dr/dt будем иметь
-jJL = vr + хг [ее, ех] + у1 [ю, е2] + zx [to, es] =
= vr + [w, ^ej + [о>, t/xe2] + [о>, гхе,] =
— vr + [w, ^ex + yxe2 + гхе,] = v, + [o>, r],
где
Обозначим через ve скорость начала подвижной системы координат,
так что
dt °'
тогда формулу (Ь) можно будет переписать в виде
v0 = vo + К Г1 4 vr. (с)
Обращаясь к теореме о сложении скоростей, получим выражение
для переносной скорости точки:
v, = v0 + К rj.
Вектор ускорения точки М получается в результате дифферен-
дифференцирования вектора ее скорости vo в системе Oxyz. Из равенства
(с) находим
а dt dt l dt
где первый член правой части dvo/dt представляет ускорение нача-
начала подвижной системы координат
Дифференцирование векторного произведения дает
d г т
— [.,rl=
= [—-, г] +kvr+Kr]]=
Наконец, дифференцирование вектора относительной скорости дает
dt dt \ dt x dt
98
-+.
di dt
Величины cPxJdt2, d^yjdt2, d2zx\dt2 представляют собой проекции
относительного ускорения точки М на оси подвижной системы ко-
координат. Таким образом, вектор jr относительного ускорения точ-
точки М будет иметь вид
ir~ № 6l+ а» а+ л» 3"
Для производной от вектора относительной скорости получим вы-
выражение
Окончательно равенство (d) приобретает теперь вид
J« = Jo + [-~' г] +1». I». «"И + 2 [«о, vr] + jr.
Переносное ускорение точки найдем, полагая, что точка не
совершает движения относительно подвижной системы координат.
В этом случае относительная скорость и относительное ускорение
равны нулю, а потому будем иметь
^. г]+1ю, К г]].
Обозначая через /' [векторное произведение
j' = 21», v,I.
приходим к теореме Кориолиса
Замечание. Добавочное ускорение получается как за счет
дифференцирования вектора относительной скорости в неподвиж-
неподвижной системе координат, так и за счет дифференцирования вектора
переносной скорости в той же неподвижной системе координат.
4. Теорема Ривальса. Для выяснения кинематического смысла
переносного ускорения рассмотрим движение твердого тела отно-
относительно неподвижной системы координат Oxyz. Подвижную си-
4* 99
стему O\X\t)\Z\ неизменно свяжем с твердым телом. В этом случае
точки твердого тела не будут совершать никакого относительного
движения относительно подвижной системы координат, относитель-
относительная скорость и относительное ускорение этих точек будут равны
нулю, и формула
установленная Ривальсом, будет определять абсолютные ускоре-
ускорения точек твердого тела. Здесь j0 — ускорение начала подвижной
системы координат (ускорение полюса), a da/dt— угловое ускоре-
ускорение тела.
Вектор
JB0
do)
dt
Рис. 71
будем называть вращательным
ускорением точек твердого тела.
Этот вектор направлен ортогонально к
плоскости, проходящей через векторы
do/dt и г, а его величина равна произве-
произведению модуля вектора dto/dt на расстоя-
расстояние точки М до линии действия вектора
dta/dt (рис. 71), т. е.
h.
dt
Определенное так вращательное ускорение точек твердого тела
может быть представлено теперь как касательное ускорение точки
твердого тела, вращающегося вокруг оси, совпадающей с линией
действия вектора do>/dt.
Вектор
Joc = K К г]]
называют осестремительным ускорением точек твер-
твердого тела. Нетрудно видеть, что вектор j00 не изменяет своих вели-
величины и направления, если переносить вектор ш вдоль его линии
действия, т. е. если перенести начало вектора ю в точку, являю-
являющуюся основанием перпендикуляра, опущенного из точки М на ли-
линию действия вектора <а, то будет иметь место равенство
[о>, [о>, г]] == [о>, [т, г2].
Раскрывая двойное векторное произведение, получим
[о>, К г]] = [о>, [о>, гЛ] = о) («о, гх) — IV*J = — rlftJ,
или
100
откуда видно, что вектор осестремительного ускорения направлен
по Г/ к линии действия вектора со, а его величина равна произве-
произведению квадрата угловой скорости вращения твердого тела на рас-
расстояние /i2 точки М от линии действия вектора ю. Это ускорение
определяется так, как будто твердое тело вращается с постоянной
угловой скоростью са вокруг неподвижной оси, совпадающей с ли-
линией действия вектора о. Отсюда получаем теорему.
Теорема Ривальса. Ускорение произвольной точки твер-
твердого тела складывается из ускорения полюса, вращательного и осе-
осестремительного ускорений.
Пример 23. Конус II с углом при вершине 20 катится без скольжения
по внешней стороне неподвижного конуса I с углом при вершине 2а, причем
Рис. 72
Рис. 73
ось симметрии подвижного конуса вращается вокруг оси симметрии неподвиж-
неподвижного конуса с постоянной угловой скоростью Ио. Определить абсолютное ускоре-
ускорение верхней точки М основания подвижного конуса, полагая, что радиус это* о
основания равен г (рис. 72).
Решение. Выберем в качестве полюса вершину конуса, остающуюся не-
неподвижной во все время движения. Будем иметь (рис. 73) jo —0, а ускорение
точки М будет складываться из осестремительного и вращательного. Для опре-
определения этих составляющих ускорения прежде всего найдем величину и направ-
направление вектора мгновенной угловой скорости вращения подвижного конуса Не-
Нетрудно видеть, что общая образующая двух упомянутых конусов является мгно-
мгновенной осью вращения подвижного конуса, поскольку точки подвижного конуса,
лежащие на этой оси, имеют равные нулю скорости. Подвижный конус участ-
участвует в сложном движении. Он вращается вокруг своей оси симметрии, которая
в свою очередь вращается вокруг вертикальной оси. Абсолютная угловая ско-
скорость вращения конуса равна сумме угловых скоростей переносного и относи-
относительного движений и определяется по правилу сложения векторов. Нетрудно
найти н величину абсолютной угловой скорости (рис 73):
101
Юг __ СОр СО
sin a sin P sin (а + Р)
откуда получим
sin (а + Р)
— 0 • а
sin р
Угловое ускорение dmjdt равно производной от вектора о> по времени, взятой
в неподвижной системе координат Очевидно, что конец вектора » будет опи-
описывать окружность вокруг вертикальной оси, и скорость конца вектора » можно
определить по формуле Эйлера
Для величины вектора dmjdt имеем условие
dt
2 sin (a + P) sin а
юою sin а = «о
sin
Величина вращательного ускорения определяется равенством
, 9 sin (a -f- ft) sin a
'»Р=тог sTnl *
Расстояние точки М до мгновенной оси вращения
h = 2r sin (90° — Р) = 2r cos р,
откуда для величины осестремительного ускорения получим
а sinMa + P) „ .
/0С==Ш° sin'P 2rC0SP'
§ 4. РАСПРЕДЕЛЕНИЕ УСКОРЕНИЙ В ПЛОСКОПАРАЛЛЕЛЬНОМ
ДВИЖЕНИИ ТВЕРДОГО ТЕЛА
1. Распределение ускорений. Плоскопараллельное движение
является частным случаем движения твердого тела. На практике
этот случай встречается наиболее часто, а потому и будет иссле-
исследован особо. При изучении плоскопараллельного движения твер-
твердого тела, как это уже отмечалось выше, можно ограничиться рас-
рассмотрением движения некоторого плоского сечения твердого тела.
Будем изучать движение плоского сечения по отношению к сис-
системе прямоугольных осей, которую будем считать неподвижной.
Обозначим эту систему осей через Оху. Пусть мгновенный
центр вращения твердого тела находится в точке С(хц, у0) (рис.74).
Координаты произвольной точки М твердого тела обозначим через
х и у. Скорости точек твердого тела определяются по формуле
Эйлера
v = [со, rj.
Откуда проекции скорости на неподвижные оси координат найдем
при помощи матрицы
102
О 0 w
х — х0 у — у0 О
откуда имеем
dx
di
Рис. 74
Проекции ускорения точки М на неподвижные оси координат полу-
получим, дифференцируя по времени формулы для проекций скорости
- щ' — со' (у — у0) — сог/о — со2 (д: — л;0) — а'[(у — у0),
= — содг0 + ых' + ы' (х — хо) =
= — сохо — со2 (г/ — у0) + со' (д; — х0),
где величины Хо =
dt
и уо =
dt
представляют проекции на
неподвижные оси координат скорости движения по центроиде мгно-
мгновенного центра вращения. Вектор Yc с проекциями (<оу0, —ах'о)
на неподвижные оси координат будет, очевидно, определять уско-
ускорение точки С твердого тела (чтобы убедиться в этом, достаточно
в формулах для ускорений положить х=Хо, у=уо). Проекции этого
вектора можно найти из матрицы
О 0 со
х'о у'о О
103
а сам вектор ус можно определить формулой
уе = — К и],
где и — скорость движения мгновенного центра вращения по цент-
центроиде. Формула показывает, что ускорение точки С твердого тела
направлено ортогонально к центроиде в сторону вращения. Это же
можно получить и непосредственно. Выберем неподвижную систему
осей так, чтобы ее начало совпадало в данный момент с точкой С,
а ось г/i была бы направлена в сторону направления скорости дви-
движения мгновенного центра вращения. Тогда для проекций скорости
мгновенного центра вращения будем иметь
л:0 = 0, f/0 =
а для проекций вектора ус получим значения
Усх = Щй = »«, усд = — ах'о =- 0.
Если бы мгновенный центр вращения оставался неподвижным, т. е.
и=0, то ускорения точек твердого тела определялись бы как уско-
ускорения во вращательном движении твердого тела. При этом каса-
касательное ускорение \х и нормальное ускорение \п можно задать
проекциями на неподвижные оси координат:
Тт{— ®'(у — г/0), а>'(х — х0)},
Здесь вектор \т направлен по скорости точки М, а вектор \п орто-
ортогонален к скорости. Формулы для определения ускорений точек
твердого тела можно представить в векторном виде
]" = Чс + Т„ + Yt-
Полученная формула представляет собой одну из разновидностей
выведенной выше формулы Ривальса, примененной для случая
плоскопараллельного движения, в которой за полюс взят мгновен-
мгновенный центр вращения плоской фигуры. Если обозначить через г
расстояние точки М от мгновенного центра вращения, то для опре-
определения величин касательного и нормального ускорений будем
иметь
уп = со2 г, Yt = ю' г.
Замечание. К этим же результатам можно прийти непо-
непосредственно, исходя из теоремы о сложении ускорений для точки
(теоремы Кориолиса), если за начало подвижной системы коорди-
координат, движущейся поступательно, принять точку твердого тела,
совпадающую в данный момент с мгновенным центром вращения.
Тогда относительное ускорение точки М определится как ускорение
точки в ее движении по окружности и будет складываться из нор-
104
мального и касательного ускорений. Переносным ускорением будет
ускорение точки С. Добавочное ускорение здесь равно нулю, по-
поскольку подвижная система движется поступательно. Для опреде-
определения переносного ускорения рассмотрим движение точки С по
центроиде (рис. 74). Мгновенный центр вращения С за время At
переместится в точку С\ и в момент t+At твердое тело будет вра-
вращаться вокруг точки С[ с угловой скоростью w+Aco. Скорость точ-
точки С будет направлена в сторону вращения, ортогонально к хорде
С{С и будет равна
ис (t Н- АО = (со + А со) СгС.
Модуль ускорения точки С по определению равен
/= lim I
А/-» О I
v (t + At) — v (t)
lim
v~(t + Ы)
= lim
(со + А со) СХС
At
¦¦ lim
Д(-»0
(со + А со) и At
А/
— COU.
Подвижная
Пример 24. Палочка АВ скользит своим концом А по окружности и
всегда проходит через точку С этой окружности. Определить ускорение точки В,
расположенной на расстоянии / от точки
А, если последняя движется по окружности
с постоянной скоростью Vo (рис. 75).
Решение. Мгновенный центр вра-
вращения палочки находится на пересечении
диаметра окружности, проходящего через
точку А, и перпендикуляра к палочке, вос-
восстановленного в точке С. Расстояние от
Центра окружности до мгновенного центра
вращения равно радиусу окружности, а не-
неподвижной центроидой является сама ок-
окружность. Расстояние от точки А до мгно-
мгновенного центра вращения равно диаметру
окружности и остается постоянным. Под-
Подвижной центроидой будет окружность диа-
диаметром 2г с центром в точке А палочки
М1иовеиная угловая скорость вращения
палочкн
Рис. 75
со = ¦
есть величина постоянная. Угловое ускорение е =
dm
равно нулю, а потому
равно нулю и касательное ускорение ух. Нормальное ускорение точки В
где
SB = /ll -t- Arl — 4rl cos ф.
Ускорение точки, совпадающей с мгновенным центром вращения, равно
ус -=
2г
105
Проекция ускорения точки В на направление палочки
/ — 2/- cos <p
—
2
Проекция ускорения точки В на ортогональное к палочке направление
¦ = sin го + -
CS
у^пф Н^-
"8
9 . 8 .
2/- sin ф = sin ф.
r
Пример 25. Окружность радиуса г катится без скольжения по неподвиж-
неподвижному прямолинейному рельсу так, что скорость ее центра »o=const. Определить
ускорение точки С окружности, касающейся в данный момент рельса (рис. 76).
С
Рис. 76
Рис. 77
Решение. Точка С является мгновенным центром вращения окружности.
Скорость движения мгновенного центра равна t»o- Ускорение точки С окружно-
окружности определяется из условия
Пример 26. Окружность радиуса г катится без скольжения по неподвиж-
неподвижной окружности радиуса R так, что скорость ее центра в данный момент равна
оо. Определить ускорение той точки подвижной окружности, которая в данный
момент касается неподвижной окружности (рис. 77).
Решение. Мгновенный центр вращения подвижной окружности находится
в точке S соприкосновения двух окружностей. Мгновенная угловая скорость
(о = ——. Скорость движения мгновенного центра вращения по центроиде опре-
определится из соотношения
106
откуда
и ускорение точки твердого тела, совпадающей с его мгновенным центром вра-
вращения, получит вид
ус — (аи =
2. Мгновенный центр ускорений. Мгновенным центром ускоре-
ускорений называется точка твердого тела, ускорение которой в данный
момент времени равно нулю. Для определения такой точки рас-
рассмотрим ускорения точек твердого тела в плоскопараллельном дви-
движении. Обозначая через /х и /„ проекции ускорения произвольной
точки твердого тела на касательную и нормаль к траектории этой
точки, будем иметь
Подставляя в эти соотношения значения Yt> Y« и Ус получим
/л = со2г — сои cos <р, /, = ш' г — co'asin ф,
где ф — угол между радиус-вектором точки М, построенным из
мгновенного центра вращения, и направлением ускорения точки С
(рис. 78). Введя обозначение w——, представим предыдущие
(О
формулы в виде
( ^-usincp). (a)
Если R — радиус кривизны рулетты точки М, то нормальное уско-
ускорение можно будет представить в виде
ln- R ¦
Это выражение обращается в нуль при и=0 или при R = °o. В по-
последнем случае точка М является точкой перегибов. Если /п=0,
то из уравнений (а) получим при со^О
г — wcosy = О,
или
r = a>cosq>. (b)
Величина w = — является одной и той же для всех точек твер-
ю
дого тела. Геометрическое место точек, удовлетворяющих уравне-
уравнению (Ь), есть окружность радиуса ш/2. Рулетты на этой окружно-
окружности имеют точки перегибов, поэтому полученную окружность назы-
107
вают кругом перегибов, или кругом Лагира. Нормаль-
Нормальные ускорения точек твердого тела, совпадающих с кругом Латра,
равны нулю, а касательные ускорения проходят через точку К
окружности, которую назовем полюсом перегибов.
Замечание. В случае поступательного движения твердого
тела со-^0, и радиус круга Лагира стремится к бесконечности.
Рис. 78
Рис. 79
Рассмотрим теперь геометрическое место точек твердого тела,
для которых обращается в нуль тангенциальное ускорение j%. Пусть
'О, тогда из формул (а) получим
г —¦
сои
sin ф.
Геометрическое место точек, удовлетворяющее этому уравнению,
является окружностью радиуса сон/2<»'. Если со'->О, то радиус этой
окружности неограниченно возрастает. Не будем рассматривать
случай, когда со' и со одновременно обращаются в нуль (случай
поступательного движения), и будем предполагать, что эти величи-
величины отличны от нуля и конечны. На окружности обращаются в нуль
касательные ускорения, и, следовательно, имеет место условие
; dv п
'0
т. е. скорость принимает стационарное значение. Поэтому получен-
полученную окружность называют кругом стационарности (или
кругом Бресса). Ускорения всех точек твердого тела, совпадающих
с кругом Бресса, направлены к мгновенному центру вращения
твердого тела. В точке S, пересечения кругов Бресса и Лагира,
обращаются в нуль и касательное и нормальное ускорения. Поэто-
Поэтому ускорение точки S твердого телз равно нулю. Точка 5 является
мгновенным центром ускорений твердого тела.
108
Круг стационарности и круг перегибов пересекаются в двух
точках S и С. Но точка С является мгновенным центром враще-
вращения, а потому в ней будет равно нулю нормальное ускорение. Ус-
Ускорение же ус точки С параллельно скорости точки С в момент t-\-
-\-М, т. е. направлено по касательной к траектории точки С и от-
отлично от нуля. Определяя предельное значение ускорения при
r-Я), заметим, что поскольку /п-»-0, то ф -»¦ , и тогда /т = сои.
Если связать подвижную систему координат с твердым телом,
то из теоремы Кориолиса будем иметь ;V=0, /'=0 и ускорения то-
точек твердого тела будут определяться формулой Ривальса
где р — радиус-вектор начала подвижной системы координат. Если
за начало подвижной системы координат выбрать точку твердого
тела, совпадающую с мгновенным центром ускорений, то —~ = 0,
и ускорения точек твердого тела будут распределяться так, как
будто твердое тело вращается вокруг неподвижной оси, ортого-
ортогональной к плоскости движения твердого тела и проходящей через
мгновенный центр ускорений (рис. 79).
Формулы, определяющие мгновенный центр ускорений и уско-
ускорения произвольной точки твердого тела в плоскопараллельном
движении, можно получить и непосредственно из формул Эйлера.
Обозначая через хй, у0 координаты мгновенного центра вращения
твердого тела в неподвижной системе координат, а через х, у —
координаты произвольной точки твердого тела, для проекций ско-
скоростей точек твердого тела получим равенства
их=-%- = -<*(у-у0), иу^^- = ы(х-х0). (а')
Отсюда для проекций ускорений точек твердого тела на неподвиж-
неподвижные оси координат будем иметь следующие соотношения:
^ ' ^Чх — хо) — ч>'(у — у0),
Обозначая через х\, у\ координаты той точки твердого тела, уско-
ускорение которой равно нулю, для определения этих координат полу-
получим равенства
0 = (ог/о — ш2 (*! — х0) — со' (#! — у0),
109
Система линейных неоднородных алгебраических относительно раз-
разностей Х\—х0, г/i—у0 уравнений имеет решение, если определитель
системы отличен от нуля
со' —со2
Это условие выполняется, когда хотя бы одна из величин со или со'
отлична от нуля, что всегда имеет место, если движение твердого
тела не является поступательным. В этом случае координаты точ-
точки твердого тела, ускорение которой равно нулю (мгновенного
центра ускорений) определяются из равенств
¦ сог/о —со
солго — со2
Cl)
д
Уг~Уо = ~
— со2
со'
— Щй
со
Д
со'*о),
со'г/0).
Вычитая уравнения (Ь') из соответствующих уравнений (а'), полу-
получим уравнения для определения ускорений точек твердого тела
/* = — ffl2 (х — хг) — со' (у — уг),
]'д = — ш2 (г/ — г/х) + со' {х — хг).
Эти формулы допускают простое геометрическое истолкование: ус-
ускорения точек твердого тела распределяются так, как будто твер-
твердое тело вращается вокруг мгновенного центра ускорений, и мо-
могут быть представлены касательной и нормальной составляющими
h = «г, /„ = со2г,
где е= угловое ускорение твердого тела.
dt
Если обозначить через <р угол между направлением ускорения и
прямой, соединяющей точку М с мгновенным центром ускоре-
ускорений, то
¦"--?-
= const,
т. е. этот угол является общим для всех точек твердого тела. Вели-
Величина же ускорения
пропорциональна расстоянию точки до мгновенного центра уско-
ускорений.
Пример 27. Стержень АВ вращается с постоянной угловой скоростью
соо вокруг своего неподвижного конца в неподвижной плоскости (я). В этой же
ПО
плоскости (я) вокруг точки С может вращаться стержень DC Концы В н D
ToeJ™Hn пС0?ТНеНЫ шаРниР"° с тРеть™ стержнем ВО. Определить ускорение
точки О в тот момент, когда стержни АВ и DC параллельны между собой и
ГОЬЫ°ТРеЗКУ ДЛИ"а СТерЖ"Я °С РЭВНа г' ДЛИНа отРезка В^
Мрс80)
Решение. В рассматриваемом положении мгновенный центр вращения
стержня BD уходит в бесконечность, а его угловая скорость вращения равна
нулю, т. е стержень ВО совершает мгновенно-поступательное движение Скоро-
Скорости точек В и D равны по величине и по направлению
в В
Я
Рис. 80
Рис. 81
Точка D совершает движение по окружности радиуса г, и ее центростремитель-
центростремительное ускорение
стержня BD:
Т°ЧКИ ° П° формуле
принимая за полюс точку В
Joe- (a)
только центростремительным при вращении во-
Осестремительное ускорение точки D равно нулю, поскольку равна нулю мгно-
точки У ск°Р°сть вращения стержня BD. Вращательное же ускорение
/вр = 8 а
содержит неизвестную величину е. Определяя центростремительную составляю-
составляющую ускорения точки D из формулы (а), получим
D2
= fi>o Я — е a cos а,
где
cos а =
111
откуда
га cos a
Тогда вращательная составляющая ускорения точки D
/х= easin a,
и полное ускорение точки D получит вид
1 = ( а>1 | т a sin а =
\ г ] [ га cos а J
где
R-r
ga~ /а2 — (R— rf'
Пример 28. Квадрат ABCD со стороной а совершает движенне в плоско-
плоскости чертежа. Найти положение мгновенного центра ускорений и ускорение вер-
вершин его Си Д если известны в данный момент ускорения точек А и В (рис.81).
Решение. Определим сначала мгновенную угловую скорость и угловое
ускорение квадрата, воспользовавшись формулой Ривальса:
Проектируя это равенство на оси хну, получим
\А — га = 0, — jB + (o2a = 0,
откуда
U , /д , со' \а
е = , со2 = , tg m = = .
а а ^ ф \в
Если величины \А и /в равны, то мгновенный центр ускорений находится в
центре квадрата, а ускорения точек D и С направлены по сторонам квадрата
и по величине равны ускорениям точек А к В.
% 5. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
При изучении движения твердого тела, у которого закреплена
одна точка, положение такого тела удобно определять специаль-
специальными углами, называемыми углами Эйлера. Тогда проекции век-
вектора мгновенной угловой скорости вращения твердого тела на оси
координат могут быть представлены в зависимости от скоростей
изменения углов Эйлера. Рассмотрим движение твердого тела с
одной неподвижной точкой. За начало неподвижной системы коор-
координат выберем неподвижную точку твердого тела О. Подвижную
систему координат Ox\t)\Z\ неизменно свяжем с твердым телом, а
начало подвижной системы координат также поместим в непод-
неподвижную точку О |(рис. 82). Прямую линию, образованную пересе-
112
чением плоскостей Оху и Ох\ух, назовем линией узлов. Положе-
Положение твердого тела с одной неподвижной точкой определяется поло-
положением системы осей, неизменно связанных с твердым телом. За-
Зададим его тремя независимыми параметрами, в качестве которых
выберем углы Эйлера.
Обозначим через ф угол между осью х\ и линией узлов, поло-
положительное направление угла будем отсчитывать от линии узлов
к оси х таким образом, чтобы со сто-
стороны положительного направления оси
Oz\ оно было бы видно происходящим
против хода часовой стрелки. Этот
угол ср будем в дальнейшем называть
углом собственного враще-
н и я.
Угол ф между осью х и линией
узлов назовем углом прецессии
и будем измерять его от оси х к линии
узлов так, чтобы положительное вра-
вращение было видно со стороны положи-
положительного направления оси z происхо-
происходящим против хода часовой стрелки.
Угол Ф между неподвижной осью
z и подвижной осью Z\ будем назы-
называть углом нутации и будем измерять его от оси z к оси Z\
так, чтобы положительное вращение было видно со стороны поло-
положительного направления линии узлов происходящим против хода
часовой стрелки.
Углы ф, -ф и О называются углами Эйлера. Они полностью
определяют положение твердого тела. В самом деле, изменение уг-
угла Ф определяет отклонение оси Z\ от оси z. При постоянном зна-
значении угла Ь ось Z\ может вращаться вокруг оси z. При этом будет
вращаться плоскость X\Oyi и угол прецессии ф будет изменяться.
Если же, кроме того, угол прецессии ф сохраняет постоянное зна-
значение, то ось Z\ будет оставаться неподвижной. Тогда твердое тело
будет иметь возможность лишь вращаться вокруг неподвижной оси
Z\. В таком движении положение твердого тела будет полностью
определяться углом собственного вращения ф. В общем случае все
три угла ф, \р и Ф могут изменяться одновременно и независимо
один от другого.
Мгновенное движение твердого тела определяется бесконечно
малыми изменениями углов Эйлера. Пусть ф', i|/, ¦&' — скорости
изменения углов ф, oj\ Ф:
Рис. 82
dt
dt
Рассмотрим три вектора «м, а>2, юз, характеризующие мгновенное
движение твердого тела. Вектор ©i направим по оси z\ в ту сто-
сторону, откуда положительное изменение угла ф видно происходящим
113
против хода часовой стрелки. Величину вектора выберем равной
скорости изменения угла ср. Вектор ©2 направим по оси г в ту сто-
сторону, откуда положительное изменение угла ty видно происходя-
происходящим против хода часовой стрелки, а величину вектора ©2 выберем
равной величине скорости изменения угла \р. Вектор ©з направим
по линии углов в ту сторону, откуда положительное изменение уг-
угла Ф видно происходящим против хода часовой отрелки. Величину
вектора ©з выберем равной скорости изменения угла Ф.
Результирующее мгновенное движение твердого тела можно
представить как сумму трех мгновенных вращений с мгновенными
угловыми скоростями ©1, ©2, ©з. а результирующая угловая ско-
скорость будет равна
ы = ыг + w2 + «)8.
Обозначим через р\, qu f\ проекции вектора мгновенной угловой
скорости со на подвижные оси Х\, t/\, z\. Тогда для проекций полу-
получим следующие значения:
рг = щ sin Ф cos (90° — ф) + со3 cos ф,
qx == со2 sin Ф sin (90° — <р) — со3 si° Ф.
г\ — Ю1 + uJcosO,
или, подставляя значения величин со^ щ, со3, будем иметь
рх = о|)' sin Ф sin ф 4- О' cos ф, q1 = о|)' sin О cos ф — ¦&' sin ф
г1 = ф' 4- г|з' cos d.
Полученные формулы носят название кинематических урав-
уравнений Эйлера.
Замечание о конечных перемещениях твердого тела. В различ-
различных курсах теоретической механики закон распределения скоростей
в твердом теле выводится из теоремы Шаля. Теорема Шаля о
конечных перемещениях твердого тела строго доказывается для
последовательных перемещений, следующих одно за другим. Суще-
Существование единого предела, не зависящего от порядка последова-
последовательности перемещений, обычно в курсах не доказывается. Это же
относится и к теореме Даламбера о конечных перемещениях.
В теореме Эйлера рассматривается не последовательность пе-
перемещений, следующих одно за другим, а сложное движение твер-
твердого тела в данный момент времени. Рассматриваемые в настоящей
книге мгновенные винты определяют лишь распределение скоро-
скоростей в данный момент времени. Их нельзя отождествлять с конеч-
конечными перемещениями твердого тела.
Глава III
СТАТИКА
I. ГЕОМЕТРИЧЕСКАЯ СТАТИКА
Статикой называется часть механики, изучающая условия, ко-
которым должны удовлетворять силы, действующие на систему ма-
материальных точек, при которых система находится в равновесии,
а также условия эквивалентности системы сил.
Равновесие, как и движение, можно изучать только по отно-
отношению к некоторой определенной системе координат, принимаемой
за неподвижную, или за абсолютную. В дальнейшем будем вво-
вводить некоторые идеальные модели материальных тел, упрощаю-
упрощающие изучение последних. В наиболее простых задачах будем рас-
рассматривать равновесия и движения таких материальных тел, поло-
положения которых с достаточной точностью могут быть определены
как положения материальных точек, размерами которых можно
пренебрегать при изучении движения или равновесия этих тел. Та-
Такие материальные тела будем называть материальными точ-
точками. Материальные точки могут быть представлены как резуль-
результат деления физического тела на бесконечно большое число ча-
частей. Но они могут представлять и конечные тела, обладающие
определенным количеством вещества, когда размеры этих тел ста-
становятся несущественными. Второй из наиболее важных моделей
является модель абсолютно твердоготела. Абсолютно твер-
твердым телом называют такую совокупность материальных точек, рас-
расстояния между которыми не могут быть изменены никакими дей-
действиями. Реальные тела обычно могут изменять свою форму, при
этом изменяются и расстояния между отдельными точками тел.
Однако в ряде случаев эти изменения (деформации) настолько
малы, что ими можно пренебрегать.
Одним из основных понятий механики является понятие силы.
Силами в механике называют объективные причины, являющие-
являющиеся результатом взаимодействия материальных объектов, способные
вызвать движение материальных тел из состояния покоя или изме-
115
нить существующее движение последних. Равными силами называ-
называются такие, которые вызывают одинаковые движения одного и то-
того же объекта. Так как всякое движение материальных тел имеет
относительный характер, а сила определяется вызываемым ею дви-
движением, то и понятие силы должно иметь относительный характер.
Одно и то же тело в различных системах отсчета в одно и то же
время оказывается подверженным действию различных сил, зави-
зависящих от относительного движения систем отсчета. Мы не будем
здесь заниматься вопросами происхождения сил, относя эти воп-
вопросы к курсам физики'.
Мы будем говорить, что несколько сил, действующих на мате-
материальную точку, находятся в равновесии, если, будучи приложен-
приложенными к этой точке, они не сообщают ей никакого движения отно-
относительно данной системы координат, и ускорение точки в этой си-
системе остается равным нулю. Система материальных точек нахо-
находится в равновесии, если она не получает никакого движения из
состояния покоя от сил, действующих на эту систему.
Из повседневного опыта известно, что силы, действующие на
твердое тело, имеют векторный характер. Они имеют определен-
определенную величину, направление и линию действия, а также точку при-
приложения. Если точка приложения силы совпадает с центром тяже-
тяжести тела, то последнее под действием силы начинает двигаться из
состояния покоя поступательно и при изучении такого движения
тела можно отвлечься от его размеров, рассматривая движение
лишь одной точки — центра тяжести. Понятие материальной точки
в этом случае принимает вполне реальный смысл.
Современное понятие силы, действующей на материальную
точку, было дано еще Галилеем, сформулировавшим свой знамени-
знаменитый закон инерции, из которого следует, что действующая на
материальную точку сила изменяет ее состояние покоя или равно-
равномерного прямолинейного движения, т. е. сообщает точке ускорение.
Определенные так силы Ньютон назвал ускоряющими. Направ-
Направление силы, действующей на точку, определяется направлением
вектора ускорения точки, которое последняя приобретает под дей-
действием силы.
Ньютон предложил измерять силу, действующую на матери-
материальную точку, тем ускорением, которое она сообщает материальной
точке, считая величину силы пропорциональной величине ускоре-
ускорения. Такую силу можно представить вектором F, определяемым ра-
равенством
1 Механика не в состоянии дать исчерпывающего определения понятия си-
силы. В общем случае причины изменения состояния движения материальных тел
обусловлены различными формами движения материи, которые сами по себе
могут оказаться очень сложными, а при анализе этих причин требуется привле-
привлечение физики, химии и других наук. Лишь в простейших случаях эти причины
являются результатом движения чисто механического типа и сводятся к меха-
механическому взаимодействию между телами, осуществляемому либо непосредствен-
непосредственным контактом, либо действием на расстоянии через материальную среду с дру-
другими физическими свойствами, находящуюся между рассматриваемыми телами.
116
F = mi,
где j — ускорение точки; т — коэффициент пропорциональности,
называемый м\ассой материальной точки.
Первой системой мер, принятой для измерения силы, были ме-
меры веса. Это было вызвано тем, что первое представление о силе
у человека возникло в связи с тем усилием, которое он должен
был приложить, чтобы удержать груз рукой. Сравнение сил с ве-
весом может быть осуществлено при помощи динамометра, сравни-
сравнивающего растяжение пружины силой с растяжением той же пружи-
пружины подвешенным грузом. При таком измерении при помощи упру-
упругих деформаций две силы оказываются равными, если они произ-
производят одинаковые деформации или если их действия взаимно унич-
уничтожаются, когда эти силы заставляют действовать на одну и ту
же точку по одной прямой, но в противоположные стороны.
Иногда в физике рассматривают силу как истинную реаль-
реальность, существующую независимо от материальных объектов, кото-
которые являются ее источником или испытывают эффект ее действия,
определяя силу независимо от движения, которое она способна
произвести. Такая концепция противоречит определению силы, при-
принятому в классической механике, и нами рассматриваться не будет.
Мы будем каждый раз понимать силу как результат взаимодейст-
взаимодействия различных материальных объектов, не останавливаясь на выяс-
выяснении физической природы взаимодействия, и будем измерять силу
тем ускорением, которое она сообщает материальной точке.
Механика изучает физические законы природы. Законы эти
устанавливаются в результате наблюдений, изучения природы.
Обобщая многовековой опыт человечества, Галилей и Ньютон сфор-
сформулировали основные законы механики, которые должны рассмат-
рассматриваться как аксиомы механики. Вся классическая механика стро-
строится на этих аксиомах, имеющих в основе экспериментальные фак-
факты. Для обоснования статики будем использовать следствия из ос-
основных законов Галилея—Ньютона, рассматривая эти следствия
как самостоятельные аксиомы.
§ 1. АКСИОМЫ СТАТИКИ
Из повседневного опыта известно, что если на материальную
точку действует несколько сил, то действие этой системы сил рав-
равносильно действию одной равнодействующей силы, строящейся по
правилу многоугольника. Вектор, замыкающий силовой мно-
многоугольник, т. е. многоугольник, составленный из векторов сил,
носит название равнодействующей силы. Этот опытный
факт порождает первую аксиому статики.
Аксиома I. Действие на точку твердого тела нескольких сил
равносильно действию одной равнодействующей силы, строящейся
по правилу сложения векторов.
117
Следствие. Силы, приложенные к точке твердого тела, скла-
складываются по правилу параллелограмма.
Аксиома II. Две силы, приложенные к точке твердого тела,
взаимно уравновешиваются тогда и только тогда, когда они равны
по величине, направлены в противоположные стороны и лежат на
одной прямой.
Аксиома III. Действие на твердое тело системы сил не из-
изменится, если добавить к этой системе или отбросить от нее две
силы, равные по величине, направленные в противоположные сто-
стороны и лежащие на одной прямой.
Две последние аксиомы позволяют установить следующее
следствие.
Следствие. Силу, действующую на твердое тело, можно
переносить вдоль линии действия этой силы. При этом действие си-
силы на твердое тело не изменяется.
Иначе говоря, действие силы на твердое тело не изменится, ес-
если последнюю приложить к твердому телу в любой точке ее линии
действия. В самом деле, пусть сила F действует на точку Л твердо-
твердого тела. На линии действия силы F добавим две направленные
в противоположные стороны силы, равные по величине силе F и
имеющие ту же линию действия, одна из которых, направленная в
сторону, противоположную силе F, приложена к точке А, а другая—
к точке В. В соответствии с аксиомой III действие новой системы
сил равносильно действию одной силы F. Отбрасывая теперь при-
приложенные к точке А силу F и силу — F, в результате получим все-
всего одну силу F, приложенную к точке В, действие которой на твер-
твердое тело равносильно действию одной силы F, приложенной
в точке Л.
Две категории сил. Силы, действующие на твердое тело, мож-
можно разделить на две категории. К первой категории отнесем силы,
которые создают или способны создать движение твердого тела.
Силы этой категории называются активными силами. Актив-
Активной силой является, например, сила веса, которая всегда создает
движение твердого тела, если только этому движению не препятст-
препятствуют другие причины. Силы, не создающие движения, но ограни-
ограничивающие перемещения твердого тела, препятствующие его пере-
перемещениям, относятся ко второй категории сил и называются пас-
пассивными силами.
В качестве примера рассмотрим одну материальную точку Л,
подвешенную на нерастяжимой нити к неподвижной точке О
(рис. 83) и находящуюся под действием силы тяжести. Сила тя-
тяжести -— активная сила, способная вызвать падение материальной
точки вниз. Этому движению препятствует пассивная сила — сила
натяжения нити. Последняя не в состоянии заставить точку дви-
двигаться вверх, но препятствует ее движению вниз. Если точку откло-
отклонить от вертикали, сохраняя нить в натянутом состоянии, то под
118
действием силы тяжести точка будет стремиться двигаться по вер-
вертикали вниз. Этому движению будет препятствовать пассивная си-
сила натяжения нити, заставляя точку двигаться по окружности.
Рассматривая движение точки по гладкой горизонтальной
плоскости, можно пренебречь действием силы тяжести, если толь-
только нас не интересует давление, оказывае-
оказываемое точкой на плоскость. Предположим, что
на точку в горизонтальной плоскости дей-
действует нерастяжимая нить. Если точке со-
сообщить скорость Vo ортогональную к нити,
то она начнет двигаться по окружности.
Изменение направления прямолинейного
движения здесь происходит под действием
пассивной силы натяжения нити, которая
не создает, а только изменяет движение
(препятствует движению). Как активные,
так и пассивные силы удовлетворяют аксио- \тд
ме Ньютона (третий закон Ньютона).
Аксиома IV. Действие одного тела
на второе равно и противоположно дейст-
действию этого второго тела на первое (действие
равно противодействию).
Геометрические условия, ограничивающие перемещения точек,
называют связями. Связи могут быть заданы аналитически в ви-
виде равенств или неравенств. Так, например, материальная точка
М, соединенная стержнем неизменной длины I с неподвижным
центром О, удовлетворяет условию связи
где х, у, z — координаты точки в системе отсчета с началом в цент-
центре О. Материальная точка, соединенная с центром О гибкой нерас-
нерастяжимой нитью длины I, удовлетворяет следующему условию связи:
х2 +- У2 + z2 < /2.
Рассмотренные связи препятствуют перемещениям материальных
точек и обусловливают силы, препятствующие этим перемещениям.
Последние будем называть силами реакции. Действие связей
эквивалентно действию сил реакции, и можно ввести следующую
аксиому связей.
Аксиома V. Связи, наложенные на систему материальных
точек, можно заменить силами реакций, действие которых эквива-
эквивалентно действию связей.
Замечание. В статике будем рассматривать только неиз-
неизменные во времени связи, которые не создают движения, а лишь
препятствуют перемещениям в тех или иных направлениях (пас-
(пассивные связи). Связи, меняющиеся со временем, будут рассматри-
рассматриваться в динамике.
119
Материальная точка, на которую действует активная сила F и
наложены связи, испытывает со стороны связей действие силы ре-
реакции R. Находясь в состоянии покоя, точка может начать движе-
движение (получить ускорение) лишь в том случае, когда активная сила
не уравновешивается силами реакции. Последние, не являясь сила-
силами, создающими движение, представляют собой силы, противодей-
противодействующие активным или уравновешивающие их. В тех случаях,
когда пассивные силы не в состоянии уравновесить действие актив-
активных сил, начинается движение.
Пример 29. Материальная точка, подвешенная при помощи нерастяжи-
нерастяжимой нити, находится под действием силы тяжести. Исследовать равновесие точки
и найти натяжение нити.
Решение. Сила реакции будет уравновешивать действие силы тяжести
в том случае, когда точка находится в наинизшем положении и нить направ-
направлена по вертикали, при этом величина силы реакции (натяжение нити) равна
величине силы тяжести. Если же точка находится в состоянии покоя в откло-
отклоненном от вертикали положении, то сила реакции уже не сможет уравновесить
силу тяжести, и точка под действием силы тяжести начнет движение по окруж-
окружности (получит ускорение по касательной к окружности). Для равновесия этой
точки необходимо приложить к ней силу F, уравновешивающую действие со-
составляющей р2, тогда составляющая силы тяжести, направленная вдоль нити,
будет уравновешиваться действием силы реакции нити, т. е. будет равна по
величине этой составляющей силы тяжести (рис. 84).
Пример 30. Тяжелый цилиндр лежит на гладкой горизонтальной плоско-
плоскости. Исследовать равновесие цилиндра.
Решение. На цилиндр действует активная сила — сила веса, способная
вызвать движение цилиндра по вертикали вниз. Этому движению препятствует
горизонтальная плоскость, создающая силу реакции, уравновешивающую дей-
действие силы веса (рис. 85).
К пассивным силам следует отнести и силу трения, о кото-
которой сделаем несколько дополнительных замечаний, поскольку она
обладает некоторыми специфическими особенностями.
Рис. 85
§ 2. ПОНЯТИЕ О СИЛЕ ТРЕНИЯ
Как уже говорилось, связи накладывают ограничения на пере-
перемещения материальных точек. Эти ограничения можно представить
120
в виде некоторых поверхностей, на которых вынуждена оставаться
соответствующая материальная точка. Если поверхности гладкие и
не оказывают сопротивления перемещениям точек вдоль поверхно-
поверхностей, то будем говорить, что на точки наложены гладкие связи.
В случае гладких связей силы реакции направлены ортогонально к
поверхностям связи. В природе свободному скольжению всегда
препятствуют некоторые силы, которые называют силами тре-
трения. Величины этих сил трения зависят от целого ряда различ-
V77/////77/Z77777777.
тр
Рис. 87
Рис. 88
ных факторов. Пусть, например, тело 5 находится на горизонталь-
горизонтальной плоскости и на него действует горизонтальная сила F (рис.86).
Из опыта известно, что тело 5 начнет движение из состояния по-
покоя лишь тогда, когда величина силы F станет достаточно боль-
большой. Состояние покоя тела S при отличной от нуля величине силы
F свидетельствует о том, что сила F уравновешивается некоторой
другой силой Q, называемой силой трения. Сила Q уравновешивает
силу F лишь до тех пор, пока величина силы F не превзойдет не-
некоторого определенного предела, после чего тело 5 начнет двигать-
двигаться. В реальных задачах мы имеем дело не с гладкими связями.
Реакции связей направлены вообще не по нормали к поверхности
связи, а составляют некоторый угол с нормалью. При этом полная
реакция всегда может быть представлена в виде суммы нормаль-
нормальной реакции и силы трения (рис. 87).
Исследованием законов трения занимался еще Леонардо да
Винчи A452—1519), рассмотревший ряд частных задач. В более
общей постановке законы трения изучал французский физик Амон-
тон A663—1705), установивший в 1699 г. независимость величины
силы трения от величины поверхностей соприкосновения. В более
законченной форме законы трения были сформулированы француз-
французским инженером Ш. Кулоном A736—1806). Установленные Амон-
тоном и Кулоном законы трения применяются в технике и по на-
настоящее время. Несмотря на то что с явлениями треиия прихо-
приходится встречаться повседневно, теория трения после Кулона была
изучена весьма незначительно и в настоящее время находится на
начальной ступени развития. В нашем курсе ограничимся лишь уп-
упрощенной трактовкой законов Амонтона—Кулона, предполагая, что
121
сила трения по величине пропорциональна нормальному давлению
соприкасающихся тел, т. е.
Коэффициент пропорциональности k определяется опытным
путем и зависит от относительных скоростей соприкасающихся то-
точек (рис. 88). Максимальное значение k принимает в момент на-
нарушения относительного покоя. Коэффициент /=йШах называют
коэффициентом трения. Пассивная сила трения зависит
от величины и направления действующих активных сил. Эту силу
будем обозначать следующим образом:
FTJ> = WV,
где коэффициент пропорциональности k зависит от характера дей-
действующих активных сил и удовлетворяет условию
Такая зависимость обусловливается пассивным характером силы
трения.
N
Рис. 89
Рис. 90
Угол ф, образованный нормалью к поверхности связи и линией
действия равнодействующей сил: нормального давления N и мак-
максимальной величины силы трения, — называется углом трения.
Угол трения ф связан с коэффициентом трения очевидным соотно-
соотношением (рис. 89)
N
Полная реакция, действующая на точку со стороны поверхности
связи, состоит из нормальной реакции и силы трения и лежит всег-
всегда внутри угла трения. Если в точке соприкосновения тела с по-
поверхностью построить конус, ось которого направлена по нормали
к поверхности связи, а угол при вершине равен 2ф, то реакция
связи в данной точке всегда будет находиться внутри этого конуса,
который называется конусом трения. Вообще говоря, шеро-
122
ховатость по различным направлениям может оказаться различ-
различной. Тогда для различных направлений коэффициент трения также
будет различным, а конус трения вообще не будет прямым круго-
круговым конусом.
Пример 31. Рассмотреть условия равновесия материальной точки на
шероховатой поверхности.
Решение. Предположим, что конус трения имеет при вершине угол 2<р.
Пусть на точку действует активная сила F, образующая угол а с нормалью к
касательной плоскости к поверхности (рис. 90). Если а<ср, то линия действия
силы F будет лежать внутри конуса трения и действие на точку силы F будет
всегда уравновешиваться действием силы реакции, лежащей внутри конуса тре-
трения, как бы велика ни была сила. Если а>ср, то линия действия силы F уже
не будет находиться внутри конуса трения, и сила F не сможет быть уравнове-
уравновешена силой реакции. В этом случае точка начнет двигаться под действием
силы F, как бы ни была мала эта сила по величине.
Замечание. При изучении статики за основу можно принять
другую систему аксиом, отличную от рассмотренных выше. Эта но-
новая система может рассматриваться и как следствие приведенных
здесь основных аксиом.
§ 3. РАЗЛИЧНЫЕ ЗАДАЧИ СТАТИКИ
1. Система сходящихся сил, действующих на твердое тело.
Сходящейся системой сил называется такая система сил, действую-
действующих на твердое тело, линии действия ко-
которых пересекаются в одной точке. По-
Последнюю всегда можно принять за нача-
начало координат.
Выше было показано, что сила, дейст-
действующая на твердое тело, является сколь-
скользящим вектором, который, следователь-
следовательно, можно переносить в любую точку ее
линии действия. В рассматриваемом слу-
случае все линии действия сил пересекаются
в начале координат, поэтому действие за-
заданной системы сил можно заменить дей-
действием одной равнодействующей
силой, линия действия которой прохо-
проходит через начало координат (рис. 91), а
величина и направление определяются
по правилу сложения векторов. Проек-
Проекции равнодействующей силы определяют-
определяются соотношениями
Рис 91
Если величина равнодействующей силы будет отлична от нуля, эта
система сил вызовет движение твердого тела. Если же равнодей-
равнодействующая равна нулю, то система сил не создаст движения твер-
твердого тела и последнее будет находиться в равновесии. Условие рав-
равновесия для сходящейся системы сил получает вид
123
R=0,
или
Отсюда следует, что в случае равновесия сходящейся системы сил
силовой многоугольник должен быть замкнутым.
2. Равновесие трех сил. Теорема. Если на твердое тело дей-
действуют три силы, и линии действия двух сил пересекаются в неко-
некоторой точке А, то равновесие этой системы сил возможно тогда и
только тогда, когда линия действия третьей силы тоже проходит
через точку А, а силовой треугольник является замкнутым.
Доказательство. Действительно, силы Fi и F2 имеют рав-
равнодействующую, проходящую через точку Л (рис. 92)
Г
F2,
а силы F3 и F* уравновешиваются только при условии, что они ле-
лежат на одной прямой, направлены в противоположные стороны и
равны по величине.
Рис. 92
Пример 32. Однородный стержень весом Р и длиной 2а опирается своим
верхним концом Л на абсолютно гладкую стену. К его нижнему концу В при-
привязана нерастяжимая нить длиной I, прикрепленная к стене в точке С, лежащей
над точкой Л на одной с ней вертикали. Определить угол а, который составляет
стержень с вертикалью в положении равновесия (рис. 93).
Решение. На стержень действуют три силы: сила веса, приложенная в
центре стержня и направленная по вертикали вниз, сила натяжения веревки Т,
направленная вдоль веревки, и сила реакции стенки R, направленная по гори-
горизонтали. Линии действия двух из этих сил — силы веса и силы реакции стенки —
пересекаются в точке 5. Из условия равновесия трех сил получим, что и третья
сила — сила натяжения веревки — тоже должна проходить через точку S. Из
треугольника DCB теперь легко получить
124
тогда
/sin p = 2asin a, /cos [5= 4acos a,
sin2p= 1 — —-— cos2 a,
после чего находим
т. е.
Р 1-
16as
cos2 a = 4a2sin2a,
cos a =
2а /Г
Реакции определим из условия замкнутости силового многоугольника, которое в
данном случае дает
откуда получим
Пример 33. Палочка АВ опирается одним концом на гладкую вертикаль-
вертикальную стенку, а другим концом — в угол. Определить реакции в точках А и В,
если вес палочки Р, ее длина 21, расстояние ОВ=а (рис. 94).
Рис 94
Рис. 95
Решение. Реакция в точке А направлена ортогонально к стенке и пере-
пересекает линию действия силы Р в точке S. При равновесии третья сила — сила
реакции в точке В—также пройдет через точку S. Зная направления NA и Nb,
построим замкнутый силовой треугольник. Определяя из чертежа tgcp:
tg(p=2
-а*
получим
или
125
V16/2 — За2
Пример 34. Гладкий однородный стержень ЛВ длиной 21 и весом />
опирается на острие в точке С, а концом А — в угол. При каком значении /
равновесие становится невозможным, если AD=a и CD=b (рис. 95)?
Решение. На стержень действуют три силы: вес, приложенный в точке О,
реакция в точке С, ортогональная к стержню, реакция в точке А, обусловлен-
обусловленная давлением на стержень пола и стенки. Линии действия двух из этих сил —
силы веса и реакции в точке С — пересекаются в точке S. Реакция /V может
пройти через точку S лишь в том случае, когда S лежит внутри угла EAD, т. е.
когда центр тяжести расположен левее точки Оь Во всех остальных случаях
силы реакции не могут уравновесить действия силы тяжести.
Таким образом, равновесие возможно только при условии
Из подобия треугольников имеем
AS a AS • АС
— = , т. е. АО, =
AOi AC a
АС = V&
С другой стороны,
АС а (АС?
, или ASX = ¦
откуда следует
'(АС)
К—-г—, или /< ^
§ 4. МОМЕНТ СИЛЫ
1. Момент силы относительно точки. Выше было установлено,
что силы, действующие на точки твердого тела, являются векто-
векторами скользящими. Это обстоятельство дает возможность распро-
распространить на силы, действующие на твердое тело, все свойства сколь-
скользящих векторов. В частности, можно определить момент силы
F относительно произвольной точки О. По определению вектор m
момента силы относительно точки О является вектором свобод-
свободным, а его координаты определяются из векторного произведения
m = [ОА, ?],
откуда для проекций вектора момента силы относительно точки О
получим следующие выражения:
_/> ?)Y т — (z ?)Х (у гO
V* ^0/ ' у V 0/ \ 0/ »
где X, Y, Z — проекции силы F на оси х, у, г, а х0, у о, za и х, у,
z — соответственно координаты точек О и А.
126
2. Момент силы относительно оси. Моментом силы F от-
относительно оси А называется алгебраическое значение проек-
проекции на эту ось вектора момента силы F относительно произвольной
точки О этой оси А.
Момент силы относительно оси является скалярной величиной,
не зависящей от выбора точки на оси А, как это следует из свойств
момента вектора относительно оси.
3. Теорема Вариньона для системы сходящихся сил. Важная
теорема Вариньона о моменте равнодействующей силы, доказатель-
доказательство которой приводилось в разделе, посвященном скользящим век-
векторам, может быть здесь сформулирована следующим образом:
Теорема. Момент равнодействующей силы для системы схо-
сходящихся сил относительно произвольной точки А равен сумме мо-
моментов всех составляющих сил относительно той же точки А.
§ 5. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ,
ДЕЙСТВУЮЩИХ НА ТВЕРДОЕ ТЕЛО
1. Эквивалентные системы сил. Из основных аксиом статики
непосредственно следуют элементарные операции, не изменяющие
действия рассматриваемой системы сил на твердое тело:
1. Силу можно переносить вдоль
ее линии действия.
2. Силы, линии действия которых
пересекаются в одной точке, можно
складывать по правилу параллело-
параллелограмма (по правилу сложения векто-
векторов). 8
3. К системе сил, действующих на
твердое тело, можно всегда добавить ^\/F
две силы, равные по величине, лежа-
лежащие на одной прямой и направленные Рис. 96
в противоположные стороны.
Эти элементарные операции позволяют установить эквивалент-
эквивалентные системы тел, как системы, производящие одинаковое действие
на твердое тело.
2. Пара сил. Система, состоящая из двух параллельных сил,
равных по величине, не лежащих на одной прямой и направленных
в противоположные стороны, называется парой сил. Пара сил
обладает всеми свойствами пары скользящих векторов. Момент
m пары сил является свободным вектором, координаты которого
определяются при помощи векторного произведения (рис. 96)
m = \BA, F].
3. Приведение системы сил, действующих на твердое тело, к
произвольной точке (центру приведения). Систему сил, действую-
действующих на твердое тело, можно заменить эквивалентной системой сил,
получающейся из данной при помощи элементарных операций. Эта
127
новая система оказывает такое же действие на твердое тело, как
и первоначальная система сил. В прикладных задачах представля-
представляет интерес замена действующей системы сил более простой экви-
эквивалентной системой. Такой более простой системой является систе-
система, состоящая из трех сил, одна из которых проходит через про-
произвольную, наперед заданную точку, а две другие представляют
собой пару сил. Построение такой системы сил называется приве-
приведением системы сил, действующих на твердое тело, к точке.
При приведении используются элементарные операции, как это
было показано в теории скользящих векторов, путем добавления в
наперед заданной точке О нулевой системы сил Fv hJ—Fv, величи-
величины которых равны величине силы Fv, действующей на v-тую точку
твердого тела. В результате получается система сил Fv, линии
действия которых проходят через точку О и систему пар с момен-
моментами mv, определяемыми из условия
mv = \0Av, Fvl,
где Av — точка приложения силы Fv. Новая система сил эквива-
эквивалентна одной результирующей силе F, величина и направле-
направление которой определяются из условия
F = SFv = SFV)
а линия действия проходит через точку О, и паре сил с моментом
m = 2mv,
которая называется результирующей парой системы.
В силу обратимости элементарных операций легко показать,
что две системы сил будут эквивалентны тогда и только тогда, ког-
когда обе эти системы приводятся к одним и тем же результирующей
силе и результирующей паре сил, т. е. когда выполняются условия
F = F', гп0 =гпо.
§ 6. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ СИЛ,
ДЕЙСТВУЮЩИХ НА ТВЕРДОЕ ТЕЛО
Пусть действующая на твердое тело система сил приводится к
одной результирующей силе F, линия действия которой проходит
через начало координат, и к паре сил {Q, —Q}. Реализуем пару
сил так, чтобы линия действия силы Q проходила через начало ко-
координат. Сходящиеся силы F и Q могут быть заменены одной ре-
результирующей силой <I> = F+Q (рис. 97), линия действия которой
проходит через начало координат О. В результате получим экви-
эквивалентную систему, состоящую из двух сил Ф и —Q, одна из ко-
которых (Ф) проходит через точку О. Под действием этих двух сил
твердое тело может находиться в равновесии тогда и только тогда,
128
когда силы Ф и —Q лежат на одной прямой, направлены в проти-
противоположные стороны и равны по величине. Это означает, что при
равновесии линия действия силы —Q проходит через точку О. При
выполнении этих условий получаем, что момент результирующей
пары сил равен нулю, т. е. то==О, а результирующая сила тоже
равна нулю (F=0). Условия равновесия твердого тела можно те-
теперь записать в виде двух уравнений
F = 0, m = 0,
справедливых для любой точки пространства.
§ 7. ПРИВЕДЕНИЕ СИСТЕМЫ СИЛ, ДЕЙСТВУЮЩИХ НА ТВЕРДОЕ ТЕЛО,
К ДИНАМЕ. УРАВНЕНИЯ РАВНОВЕСИЯ ТВЕРДОГО ТЕЛА
Пусть система сил, действующих на твердое тело, приведена к
началу координат и пусть R— результирующая сила, a m — мо-
момент результирующей пары. Из теории скользящих векторов из-
известно, что для такой системы сил всегда найдется такая точка
Оь при приведении к которой момент результирующей пары rnj
будет коллинеарен результирующему вектору силы (рис. 98). Но-
Новая пара имеет момент
iri! ^m + [O^OR] = m — [ООД,
а условие коллинеарности векторов R и тх аналитически представит-
представится в виде равенства
т1Х __ т1у _ miz
Rx Ry Rz
или после подстановки значений т1х, т1у и mlz в виде
тх — {yRz — zRy) _ my — (zRx — xRz) _ mz — (xRy — yRx)
Rx Ry Rz
Последние уравнения определяют прямую линию, при приведении
ко всем точкам которой момент результирующей пары будет кол-
коллинеарен результирующему вектору. Эта прямая называется д и-
н а мо й.
Е Н Березкии
129
Когда на оси динамы момент результирующей пары равен ну-
нулю, система сил, действующих на твердое тело, становится эквива-
эквивалентной одной результирующей силе, направленной вдоль оси ди-
динамы. Такая результирующая сила, эквивалентная всей системе
сил, действующих на твердое тело, называется равнодейст-
равнодействующей силой системы. Очевидно, что необходимым усло-
условием существования равнодействующей силы будет равенство
mxRx -Ь туЯу + mzRz = 0.
Могут представится следующие четыре различных случая приве-
приведения системы:
1) |R|^0, (R, m)^0 — динама;
2) | R | =^ 0, (R,m) = 0 — равнодействующая;
3) |R| = 0, m^bO — пара;
4) | R | — 0, | m | = 0 — равновесие.
В последнем случае два векторных уравнения равновесия
R = 0, m - 0
дают шесть скалярных уравнений в проекциях на декартовы оси
координат
Rx = SXV - 0, Ry = SYv = 0, Rt = SZV = 0,
mx = 2 (yvZv — 2v7v) = 0, my = 2 (zvXv — xvZv) = 0,
mz = S (xvYv — xvXv) — 0.
Уравнения будут иметь более или менее сложный вид в зависимо-
зависимости от выбора точки приведения системы сил и успех в решении
задачи о равновесии до некоторой степени будет зависеть от вы-
выбора точки приведения системы сил.
§ 8. УСЛОВИЯ РАВНОВЕСИЯ СИСТЕМЫ ТВЕРДЫХ ТЕЛ
При определении условий равновесия системы твердых тел,
находящихся во взаимодействии, задача о равновесии может быть
разрешена для каждого тела в отдельности. Силы реакции (взаи-
(взаимодействия), возникающие в точках соприкосновения, удовлетво-
удовлетворяют третьему закону Ньютона. В соответствии с этим мы обязаны
принять условие, что действие одного тела на другое равно и про-
противоположно по направлению действию этого другого тела на
первое.
Если при решении задачи о равновесии выбирать один и тот
же центр приведения для всех гел системы, то для каждою из тел
полу!.'.h c,:t\,лоилш \слоьия {'Ргновесия:
<P = 0,
= 0
(v=l, 2, ..., k).
где Rv и mv' соответственно результирующая сила и момент ре-
результирующей пары всех сил, действующих на данное тело, кро-
кроме сил взаимодействия между отдельными телами (внутренних
реакции). Rv и т\, — соответственно результирующая сила и мо-
момент результирующей пары сил внутренних реакций, действующих
на данное тело. Производя теперь формальное суммирование и
принимая во внимание, что для внутренних сил взаимодействия
выполняются условия
2Ri° = 0 и 2т^ = О,
получим следующие необходимые условия равновесия
системы твердых тел:
ER<f> = 0, Smlfi) = О,
где суммирование уже распространяется на все точки взаимодей-
взаимодействующих тел.
Пример 35. Система состоит из двух
однородных стержней CD длиной 2а и ОА
длиной 26 и весом Р. Оба стержня могут вра-
вращаться в одной вертикальной плоскости: стер-
стержень CD вокруг своей середины О', а стер-
стержень ОА вокруг шарнира О, расположенного
иа одной вертикали с О' на расстоянии 00'=а.
К концу D стержня CD подвешен груз весом
Q. Груз Q посредством стержня CD отклоня-
отклоняет стержень ОА от вертикального положения.
Определить угол СОО' в положении равнове-
равновесия системы, а также реакцию в точке О
(рис. 99).
Решение. Рассматриваемая система
состоит из двух твердых стержней, находя-
находящихся под действием плоской системы сил.
Условия равновесия первого стержня
Рис. 99
Rx = 0, Ш! = 0
можно переписать в виде
, = 0, 2Zv=0,
Последнее уравнение первой группы свидетельствует о том, что единственная
сила реакции Ro, расположена в плоскости чертежа. Следовательно, момент
результирующей пары направлен вдоль оси г, перпендикулярной к плоскости
хО'у. Рассматривая условия равновесия стержня ОА, заметим, что и реакция
в точке О расположена в плоскости чертежа, а условия равновесия каждого
из стержней состоят из трех уравнений. В результате получим шесть уравнений
равновесия системы для определения угла ф и реакции в точках О, О' и С. Для
определения положения равновесия системы необходимо найти только одну
величину — угол ср.
При составлении уравнений равновесия можно заметить, что они содержат
по нескольку неизвестных величин (параметр ф и неизвестные реакции). В зави-
5*
131
симости от выбора центра приведения эти уравнения будут иметь более или
менее сложный вид.
Рассмотрим сначала равновесие стержня CD, выбирая за центр приведе-
приведения точку О'. Условием равновесия является равенство нулю суммы моментов
пар от приведения сил Q и N' к точке О' (здесь N' сила реакции, действующая
со стороны стержня ОА на стержень CD)
— Qa cos Bф — 90°) + N'a sin (90° — <p) = 0,
или
N' =2Qsincp.
Перейдем теперь к исследованию равновесия стержня ОА. За центр приведения
выберем точку О, так что условие равновесия (равенство нулю суммы момен-
моментов пар при приведении к точке О) получит вид
Pa sin ф — 2Na cos ф — 0,
или
N= |"tg<p,
где N — сила реакции, действующая со стороны стержня CD иа ОА.
По третьему закону Ньютона N = —N', откуда
Р tgq> = 4Qsin ф.
Полученное уравнение имеет два решения:
1) sin ф= 0
соответствует вертикальному положению стержней ОА и CD;
2) cos Ф ^ —
возможно лишь при условии
P<4Q.
Тогда реакцию N в точке С получим в виде
W = — tg Ф = -у
Для определения реакции в точке О рассмотрим сумму проекций сил, дей-
действующих на стержень О А, на горизонтальную и вертикальную оси
где X и Y — проекции сил реакции в точке О. Отсюда получив
— N sin (90е — ф) + X = 0, — Р + N cos (90* — ф) -f Y = О,
или
X = Л cos <р = —- /\6(Р-Р\
Y = P-N sin у = Р- ——
8Q
132
§ 9. ПЛОСКАЯ СИСТЕМА СИЛ
Условия равновесия сильно упрощаются, если к твердому телу
приложена система сил, все линии действия которых лежат в одной
плоскости. Действительно, выбрав за центр приведения системы
точку О, расположенную в плоскости действия сил, после приведе-
приведения получим систему сходящихся в точке О сил, и систему пар,
расположенных в той же плоскости. Результирующая сила R и ре-
результирующая пара также лежат в плоскости сил, поэтому вы-
выполняется тождество
(m, R) = 0.
В плоскости сил всегда найдется такая точка, при приведении к
которой момент результирующей пары будет иметь наименьшее
значение. Система сил приводится либо к одной результирующей
паре, либо эквивалентна нулю. Последний случай и представляет
равновесие системы сил. Векторные уравнения равновесия
R = 0, m = 0
сводятся к трем скалярным уравнениям:
ZXv = 0, SYv = 0, 2 momz Fv = 0,
если предполагать, что ортогональные оси х и у расположены в
плоскости действия сил. Плоская система сил особенно часто встре-
встречается в приложениях.
Пример 36. Доска О А может вращаться вокруг шарнира О и опирает-
опирается в точке В на шар весом Р, который, в свою очередь, опирается на непо-
неподвижную горизонтальную плоскость. К концу А доски подвешен груз весом Q.
Определить, пренебрегая весом доски, при каких значениях угла а возможно
равновесие системы (необходимые условия), если шар шероховатый и угол тре-
трения шара о доску и о горизонтальную плоскость один и тот же и равен ср
(рис. 100).
Решение. На шар действуют три силы: сила веса, реакция в точке В
и реакция в точке С. Реакция точки С пересекается в этой точке с линией
действия силы веса шара, следовательно, эти две силы можно заменить одной
равнодействующей R. Задача сводится к определению условий равновесия твер-
твердого тела, находящегося под действием двух сил: силы R, линия действия кото-
которой проходит через точку С и силы реакции в точке В. При равновесии, как
известно, сила реакции в точке В должна проходить через точку приложения
силы R, т. е. через точку С. Согласно закону Кулона сила реакции точки В ле-
лежит внутри или на границе угла трения <р. Это означает, что равновесие воз-
возможно лишь в том случае, когда угол трения ф не меньше угла, который обра-
образует прямая ВС с нормалью к доске ОА, т. е.
о „ а
ф > у, где у = — . Так что ф > — .
Полученное условие является необходимым, но не достаточным для равновесия
системы.
133
§ 10. ЗАДАЧА О РАВНОВЕСИИ НЕСВОБОДНОГО ТВЕРДОГО ТЕЛА
1. Постановка задачи. Несвободным называют такое твер-
твердое тело, перемещения которого стеснены связями (например,
посредством соприкосновения с другими телами или шарнирными
закреплениями некоторых точек твердого тела). Вообще связи мо-
Рис. 100
гут осуществляться самым различным образом, а сложность реше-
решения задачи о равновесии зависит от характера наложенных связей.
При определении условий равновесия несвободного твердого
тела всегда можно рассматривать это тело как свободное, заме-
заменив наложенные на твердое тело связи неизвестными силами реак-
реакции, действие которых на твердое тело эквивалентно действию
связей.
Пример 37. На цилиндрической гладкой поверхности лежит однородная
палочка А.В длиной 11 и весом Р (рис. 101). Определить угол ср, который со-
составляет палочка с горизонтальной плоскостью при равновесии, н реакции в точ-
точках А я С.
Решение. На твердое тело действуют три силы Ra, Rc и Р. Положение
стержня определяется одним параметром — углом ф. Задача о равновесии сво-
сводится к определению значения угла ср в положении равновесия.
Сила реакции в точке А ортогональна к цилиндрической поверхности, по-
поскольку связи не препятствуют скольжению точки А. В точке С реакция направ-
направлена ортогонально к палочке, так как нет сил, препятствующих скольжению
палочки по точке С. Теперь можно определить точку S пересечения реакций. Если
принять эту точку за центр приведения системы сил, действующих на твердое
тело, то сразу же получим условие равновесия, не содержащее сил реакции
связи
Это условие говорит о том, что в положении равновесия линия действия един-
единственной активной силы Р должна проходить через точку S, если только вели-
величина этой силы отлична от нуля. Угол ф определяется из условий
AC = 2r cosq>, GC
cos
I.
134
Кроме того,
CS = 2r cos ф tg ф = 2г sin ф,
откуда
GC = CS tg ш = 2r Sl" ф ¦.
СОЭф
Сравнивая два последних уравнения, находим
¦ = 2r cos m — /,
coscp
или
4r cos2 ср — I cos ф — 2г = О,
откуда
С08ф=
По условиям задачи угол ф может измениться в пределах
0<Ф< —.
Тогда для cos ф остается только одно значение из уравнения
/ 4- у р + 32га
COS ф —
8г
Для действительных значений ф должно выполняться условие
/-Н//2 + 32л2 i
или
1<2г.
Этим полностью определены условия равновесия. Для определения реакций связи
можно рассматривать проекции всех сил на горизонтальную и вертикальную оси
хну. Проще, однако, получить реакции, выбирая новые центры приведения сил
и рассматривая сумму моментов всех сил относительно этих новых центров
приведения. Так, принимая за центр приведения точку С и подсчитывая сумму
моментов всех сил относительно точки С, будем иметь
— RA-AC sin ф-f P.SC sin ф= О,
или
— RA 2г cos ф -f- P2r sin ф = 0,
откуда
Выбирая теперь за центр приведения точку А и подсчитывая сумму моментов
всех сил относительно этой точки, получим
RC-AC— P-AG cos ф = О,
или
Rc2r cos ф — PI cos ф = 0,
откуда
Rr--=P—.
2. Частные случаи равновесия твердого тела. Рассматривая
общие свойства равновесия твердого тела, отметим следующую
теорему.
Теорема. Три силы уравновешивают твердое тело только в
том случае, когда все они расположены в одной плоскости.
Доказательство. При при-
приведении системы сил, действующих на
твердое тело, к произвольной точке О
результирующая сила и момент ре-
результирующей пары равны нулю, если
твердое тело находится в равновесии.
Выберем точку О на линии действия
третьей силы (рис. 102). Тогда момент
результирующей пары будет
М = Мх -t- М2.
Но в положении равновесия М = 0, откуда
М2 = — М2.
Направление вектора момента пары определяется плоскостью тре-
треугольника, а потому при равновесии плоскости треугольников Si и
S2 должны совпадать. Плоскости эти будут совпадать при приве-
приведении к любой точке на линии действия третьей силы. Это и дока-
доказывает теорему.
а) Условия равновесия твердого тела с одной неподвижной
точкой. Предположим, что у твердого тела, равновесие которого
изучается, закреплена одна точка. Выберем неподвижную прямо-
прямоугольную систему координат Oxyz с началом в этой закрепленной
точке (рис. 103). Предположим, что на каждый элемент твердого
тела с массой mv, координаты которого обозначим через xv, f/v. zv,
действует сила Fv(Xv, Yv, Zv). Через R обозначим силу реакции
в точке О. Выбирая за центр приведения неподвижную точку О,
получим условия равновесия твердого тела, не включающие реак-
реакции связи
пгх = S (yvZv — zvYv) = 0, Шу^Ъ (zvXv — xvZv) ^ 0,
mz = 2 (xvYv — f/vXv) = 0.
Приравнивая нулю результирующую силу, приходим к уравнениям
для определения реакций связи
2XV -f Rx - 0, 2FV + Ry = 0, SZv + Rz = 0.
б) Условия равновесия твердого тела, способного вращаться
вокруг неподвижной оси. Неподвижность оси может быть достиг-
достигнута закреплением двух точек тела О и Oi (рис. 104), хотя можно
было бы закрепить и большее число точек, расположенных на од-
одной прямой. Пусть на частицу m v тела действует активная сила
136
Fv. Уравнения равновесия твердого тела можно получить, выбирая
за центр приведения одну из неподвижных точек, например точ-
точку О. В качестве систем'ы неподвижных осей выберем прямоуголь-
прямоугольные оси Oxyz с началом в точке О, причем ось z направим по пря-
прямой ОО\. Тогда уравнения равновесия получат вид
2XV + Rx + Rx = 0,
Ry + Ry = 0,
— zvyv) — hRg = 0, E (zvXv
где Xv, Уv, Zv — проекции силы Fv на оси x, у, z\ Rx, Rv, Rz —
проекции силы реакции в точке О на эти же оси; Rx, Ry, Rz —
О
х
Рис. 103
Рис 104
проекции силы реакции в точке О\ на оси х, у, z; h — расстояние
между точками О и О\.
Рассматриваемое твердое тело может свободно вращаться во-
вокруг оси г, проходящей через две неподвижные точки, а его по-
положение в пространстве определяется одним параметром, в каче-
качестве которого можно взять угол поворота твердого тела вокруг этой
оси. Условием равновесия, определяющим этот параметр, является
последнее уравнение системы
137
Пять остальных уравнений служат для определения шести неиз-
неизвестных проекций сил реакции связи. Эта задача не может быть
полностью разрешена из-за того, что уравнений оказывается мень-
меньше, чем неизвестных, подлежащих определению. Такого рода зада-
задачи называются статически неопределимыми. Равновесие
твердого тела не изменится, если в точках О и О\ добавить две
равные по величине и направленные в противоположные стороны
по прямой ОО\ силы. Такие силы могут быть обусловлены началь-
начальными напряжениями. Если в точке О\ поставить цилиндрический
подшипник так, чтобы реакция в точке Oi была направлена пер-
перпендикулярно к оси z, то задача станет статически определи-
м о й. Разрешить статически неопределимую задачу можно также,
отказавшись от гипотезы абсолютно твердого тела, как это и де-
делается в курсах сопротивления материалов.
в) Условия равновесия твердого тела, способного перемещать-
перемещаться параллельно неподвижной плоскости. Рассмотрим задачу о рав-
равновесии твердого тела, опирающегося несколькими своими точками
на неподвижную гладкую плоскость Оху. Силы реакции со стороны
плоскости здесь будут действовать только на точки контакта и ор-
ортогональны к плоскости Оху. Обозначим точки контакта через Av,
а их координаты через (av, bv. О). Тогда уравнения равновесия
получат вид
SXV = 0, 2rv =- О, SZ? + 2i?v = 0,
2 (#VZV — zvyv) + lbvRv = 0, 2 (zvXv — xvZy) — 2av/?v -= 0,
S (xvYv — yvXv) = 0,
где Xv, Yv, Zv-— проекции активных сил на оси х, у, z; xx, t/v,
zv — координаты точек приложения активных сил, Rv —сила ре-
реакции, действующая на точку Av твердого тела.
Два первых и последнее уравнения дают необходимые усло-
условия равновесия твердого тела. Три остальных уравнения определя-
определяют силы реакции, действующие на твердое тело. Очевидно, что из
трех уравнений можно определить только три неизвестные силы
реакции. Задача определения сил реакции в том случае, когда
твердое тело касается плоскости более чем тремя точками, не мо-
может быть разрешена методами статики абсолютно твердого тела и
является статически неопределимой задачей. Для раз-
разрешения такого рода задач необходимо вводить дополнительные
гипотезы.
Рассмотрим частный случай, когда твердое тело опирается о
плоскость только тремя своими точками. Для определения сил ре-
реакции имеем три уравнения, которые запишем в виде
ЯП Я, + Да = — 2Zv, ^Я, + a2Rz 4 a-Rj = Му,
6^i + V?2 4 *«Яа = —Мх, Rt>0 (i = 1, 2, 3). (а)
138
Здесь
A^ = 2i
Система уравнений (а) обладает решением только в том случае,
когда определитель системы отличен от нуля, т. е.
1 1 1
А =
b*
ФО.
Отсюда видно, что задача определения реакций разрешима только
тогда, когда все три точки не лежат на одной прямой. Если это
условие не выполняется, задача определения реакций становится
неразрешимой, и мы снова приходим к статически неопределимой
задаче.
Из необходимых условий равновесия
= О, 2FV = 0,2 (xvYv — yvXv) = 0
следует, что в рассматриваемом случае система активных сил, дей-
действ} ющих на твердое тело, приводится к одной результирующей си-
силе, линия действия которой параллельна оси г. Обозначая резуль-
результирующую силу через F, а координаты точки пересечения ее линии
действия с плоскостью Оху через а и Ь, уравнения для определения
сил реакции запишем в виде
Rt>0 (i = l, 2, 3),
где F проекции вектора F на ось z. Из первого уравнения следует,
что F<.0. Два других уравнения после подстановки значения F
можно переписать в виде
а =
Эти уравнения определяют центр системы параллельных векторов
Ri, R2, Rz, который, как известно, находится внутри треугольника,
образованного точками приложения этих векторов, т. е. точками
соприкосновения тела и плоскости. Полученные условия равновесия
сводятся к тому, что линия действия результирующей силы F про-
проходит внутри треугольника, образованного точками касания.
г) Замечание о статически неопределимых задачах. Рассмот-
Рассмотрим тот случай, когда определитель А обращается в нуль
1 1 1
А =
= 0,
139
т. е. когда выполняется условие
«2 —
Последнее имеет место в случае, когда все три точки расположены
на одной прямой (если точки не совпадают). Не нарушая общно-
общности, можно предположить, что все точки Av расположены на оси х
(рис. 105) и, следовательно,
h = h = bs = 0. «i = 0. а3 > а2.
Тогда уравнения для определения реакций примут вид
R3 = — Z,
4- a3R3 =
= 0.
Последнее из этих уравнений дает условие равновесия активных
сил, два первых уравнения служат для определения трех неизвест-
неизвестных реакций. Как уже отмечалось, задачи статики, в которых не-
неизвестных больше, чем независимых уравнений равновесия, назы-
называются статически неопределимыми задачами.
Рис. 105
Статическая неопределенность обусловливается излишними
связями, накладываемыми на систему материальных точек, и мо-
может быть устранена освобождением системы от лишних связей. Та-
Такое освобождение системы от лишних связей осуществляется заме-
заменой связей силами, величины которых определяются из дополни-
дополнительных условий, являющихся следствием вводимых физических
гипотез. Так, например, рассматривая задачу о равновесии стерж-
стержня, покоящегося на трех опорах, можно предположить, что одна из
опор выполнена из упругого, легко деформируемого материала.
Предположим, что возникающая при деформации сила сопротивле-
сопротивления стержня подчинена закону Гука, а ее величина прямо пропор-
пропорциональна величине сжатия опоры. Предположим, кроме того, что
две другие опоры абсолютно жесткие, т. е. их деформации пренеб-
пренебрежимо малы. Обозначив через /о длину несжатой опоры, а через
/ длину опоры, когда на нее положен груз, силу, действующую со
стороны опоры на балку, найдем из условия
F = k(lo-t).
140
Тогда уравнения для определения реакций получат вид
Отсюда сразу определяются неизвестные силы реакции R\ и /?з-
Замечание. Статически неопределимые задачи могут стать
статически определимыми, если систему частично освободить от
некоторых связей.
Пример 38. Исследовать равновесие тяжелой абсолютно твердой палочки
весом Р, закрепленной шарнирно в двух точках А и В (рис. 106).
Решение. Задача определения горизонтальных составляющих реакций в
точках А н В оказывается неразрешимой (статически неопределимая задача).
Если частично освободить палочку от связей, оставив в точке А шарнирное за-
закрепление, а в точке В вместо шарнира ввести точечную опору, препятствующую
перемещению палочки вниз, то задача станет статически определимой (предпо-
(предполагается, что палочка гладкая). Полученная статически определимая задача не
эквивалентна первоначальной.
В общем случае статически неопределимые задачи могут быть
сделаны определимыми, если вместо гипотезы абсолютно твердого
тела ввести гипотезу упругого тела, подчиняющегося закону Гука.
Такого рода задачи решаются в курсах теории упругости и сопро-
сопротивления материалов.
При исследовании равновесия системы абсолютно твердых тел
статическая неопределимость может возникнуть как некоторое пре-
предельное положение системы.
*k
Рис. 107 Рис. 108
Пример 39. Исследовать равновесие системы, состоящей из двух тяже-
тяжелых однородных стержней, соединенных между собой шарнирно и закреплен-
закрепленных шарнирно в точках А я В (рис. 107), предполагая, что расстояние между
точками А и В равно сумме длин стержней, так что оба стержня вытянуты
в одну прямую линию.
Решение. Рассматриваемая задача является статически неопределимой,
и реакции не могут быть найдены методами геометрической статики. Выбрав
систему осей Аху, как это показано на чертеже, и, обозначив через Ха, Уа,
Хв, Ув соответствующие проекции реакций в точках А и В на эти оси, приве-
приведем систему сил, действующих на оба стержня, к точке А. Необходимые условия
равновесия системы
хл + хв = о, кд + гв-2Р = о, -я
Отсюда сразу получим Ув = Р и Уа = Р. Для определения двух величин ХА и
Хв имеем только одно уравнение. Если же рассмотреть условия равновесия
стержня ВС, то, приводя систему сил, действующих на этот стержень, к точ-
точке С, будем иметь
141
Отсюда находим Ув = Р/2, что при РфО противоречит полученным ранее ре-
результатам. Новых условий для определения реакции Хв и в этом случае не
получаем.
Противоречие устраняется, если отказаться от гипотезы абсолютно твердого
тела или исключить условие о том, что расстояние между точками А и В равно
сумме длин стержней. Рассмотрим это последнее предположение. Пусть расстоя-
расстояние АВ меньше суммы длин стержней (рис. 108). Тогда стержни образуют угол
а с прямой, соединяющей точки А и В. Для определения реакций приведем
сначала систему сил, действующих на оба стержня, к точке А. Тогда
ХА+Хв=0, YA + YB~2P=0,
—р(-у-гY
Из этой системы уравнений следует, что
Приводя затем систему сил, действующих на стержень СВ, к точке С, получим
следующую систему уравнений:
— P — cos a + YB I cos a — XBl sin a = 0,
которая дает
Реакции теперь полностью определяются (реакция в точке А находится из пер-
первой группы уравнений). Заметим, что при a-э-О величина реакции ^з->°°, т. е.
на стержень будут действовать очень большие растягивающие силы. В реальной
задаче стержни не являются абсолютно твердыми, и эти усилия растягивают
стержень так, что угол а при равновесии имеет конечное значение, отличное от
нуля. Дальнейшее развитие изложенных положений можно найти в оригинальной
монографии Пэнлеве «Лекции о трении».
§ 11. ЗАДАЧА О РАВНОВЕСИИ ПРИ НАЛИЧИИ ТРЕНИЯ
До сих пор мы рассматривали равновесие преимущественно
идеальных механических систем, предполагая, что поверхности со-
соприкасающихся тел являются абсолютно гладкими и что всякое
трение между соприкасающимися телами отсутствует, а сами те-
тела — абсолютно твердые. Такие предположения лишь приближен-
приближенно соответствуют действительности. В частности, в реальных за-
задачах невозможно полностью исключить влияние сил трения. При-
Применение же законов статики к решению практических задач о рав-
равновесии механических систем без учета сил трения может привести
к результатам, мало соответствующим действительности.
Силы трения существенно отличаются от всех других сил. Они
возникают в тех случаях, когда активные силы способны создать
142
относительное движение соприкасающихся тел. Не останавливаясь
подробно на вопросах о происхождении и физической природе сил
трения, ограничимся лишь изучением некоторых их свойств и той
роли, которую они играют при исследовании равновесия и движе-
движения механических систем.
Силы трения в статике будем определять в соответствии с за-
законами Амонтона—Кулона, сущность которых была изложена вы-
выше. Это грубое предположение достаточно хорошо согласуется с
экспериментальными данными.
гп
Рис. 109
m
Рис. 110
Аналитический метод решения задач статики при наличии сил
трения сохраняется таким же, как и при отсутствии сил трения,
но из-за того, что силы трения не определяются однозначно, усло-
условия равновесия при наличии сил трения выражаются неравенства-
неравенствами. Это говорит о том, что при наличии трения существует не од-
одно, а целое множество смежных положений равновесия исследуе-
исследуемой системы. Задача о равновесии сводится теперь к отысканию
границ области равновесия.
Рассматривая абсолютно твердые и идеально гладкие тела, мы
предполагали, что два тела, находящиеся в равновесии, могут со-
соприкасаться друг с другом в одной точке и свободно скользить од-
одно относительно другого. Такое предположение противоречит опыт-
опытным данным. Реальные тела не являются ни абсолютно твердыми,
ни абсолютно гладкими. В действительности соприкосновение тел
никогда не происходит в одной точке, ибо соприкасающиеся тела
испытывают деформации и, как бы малы ни были последние, со-
соприкасание тел происходит по некоторой площадке, размерами ко-
которой обычно пренебрегают.
Рассмотрим два твердых тела А я В, находящиеся в сопри-
соприкосновении, и пусть О — точка контакта (рис. 109). Мгновенное
движение тела В относительно тела А всегда может быть сведено
143
к мгновенно-поступательному движению с относительной скоростью
v0 точки О тела В и к мгновенно-вращательному движению тела
В с относительной угловой скоростью <о, линия действия которой
проходит через точку О. Вектор оз можно представить в виде сум-
суммы двух векторов
причем ©1 лежит в общей касательной плоскости (я), а ©2 орто-
ортогонален к плоскости (я). Вектор ом будем называть вектором
скорости качения, а вектор <й2 — вектором скорости вер-
верчения тела. Мгновенное движение тела В относительно тела А
теперь можно представить как совокупность трех движений: сколь-
скольжения, качения и верчения. Совокупность действующих на находя-
находящееся в равновесии тело В активных сил может быть приведена
к одной результирующей силе F, линия действия которой проходит
через точку О, и паре с моментом т. Действие этой системы сил
уравновешивается силами реакций со стороны тела А, которые та-
таким образом сводятся к результирующей силе R, линия действия
которой совпадает' с линией действия силы F, и результирующей
паре с моментом mi (рис. ПО), удовлетворяющих условиям
Разложим силу R и момент пары mi на составляющие, располо-
расположенные в плоскости (л) и ортогональные к ней
Составляющую Rn, направленную по нормали к соприкасающейся
плоскости (л), назовем нормальной реакцией. Эта сила
препятствует взаимному проникновению тел. Составляющую Rt,
лежащую в плоскости (л), будем называть силой трения
скольжения, или просто трением скольжения. Эта сила
препятствует проскальзыванию тела В по телу А. Составляющую
min, ортогональную к плоскости (я) и препятствующую верчению
тела, назовем парой трения верчения. Наконец, составляю-
составляющую Щи, параллельную плоскости (я) и препятствующую качению
тела, назовем парой трения качения. Заметим, что влияние
пар mix и П11та вообще очень мало по сравнению с влиянием сил
Rn и Rt, поэтому рассмотрим сначала те задачи, в которых этими
парами можно пренебрегать.
Хотя реальные тела не являются абсолютно твердыми и в об-
общем случае касание тел А я В происходит по некоторой площадке,
тем не менее в ряде задач можно пренебречь размерами этой пло-
площадки и с достаточной степенью точности считать тела А я В абсо-
абсолютно твердыми, а их касание происходящим в одной точке. Кроме
того, будем предполагать, что со стороны тела В на тело А дейст-
действует рассмотренная выше система сил.
144
Пусть тело S под действием активных сил находится в равно-
равновесии на поверхности Si, касаясь последней в точке А (рис. 111).
Действующая на тело S со стороны поверхности Si полная реак-
реакция R складывается из нормальной реакции N и силы трения FTp.
Направление последней заранее неизвестно, а максимальное значе-
значение, определенное в соответствии с законом Амонтона—Кулона,
FTP=/JV, где f — коэффициент трения скольжения. Угол ср между
направлениями полной реакции R и нормальной реакции N никог-
Рис. 111
Рис. 112
да не превосходит угла трения q>m, который определяется из ус-
условия
Для равновесия тела S необходимо, чтобы уравновешивались все
силы, действующие на тело S. Последнее возможно лишь в случае,
когда все действующие на тело силы приводятся к одной равно-
равнодействующей силе F, линия действия которой проходит через точ-
точку А, по величине, равной силе реакции R и противоположной по
направлению. Сила F должна «прижимать» тело S к поверхности
Si и образовывать с нормалью к поверхности Si угол, меньший
угла трения.
Эти необходимые условия оказываются и достаточными, так
как если они выполнены, то равнодействующую силу F можно раз-
разложить на составляющие: нормальную Р и касательную Q
(рис. 112). Сила Р уравновешивается силой нормальной реакции
N, так что N=P. Сила Q=Ptgcp, где ф-^фт, не может вызывать
скольжения тела S по поверхности Sit поскольку она остается
меньше максимальной силы трения
145
Можно придать условиям равновесия и геометрическую интерпре-
интерпретацию. Для этого достаточно рассмотреть конус вращения с углом
при вершине 2<pm, вершина которого совпадает с точкой А, а ось
направлена по нормали к поверхности S\. Необходимые и доста-
достаточные условия равновесия сводятся к тому, что равнодействую-
равнодействующая активных сил проходит
через точку А и лежит внутри
этого конуса. Рассмотренный
конус принято называть кон у-
сом трения.
Рис. ИЗ
Следствия. 1. Равнодействующая активных сил, проходя-
проходящая внутри конуса трепня, не может вызвать движения тела, как
бы велика она ни была.
2. Как бы ни была мала равнодействующая активных
сил, не лежащая внутри конуса трения, она не может быть урав-
уравновешена силами трения и сообщает телу движение.
Замечание. Коэффициент трения зависит от направления
касательной к поверхности Si, так что конус трения вообще не
является прямым круговым конусом.
Пример 40. Тяжелая материальная точка находится на шероховатой
наклонной плоскости, составляющей угол а с горизонтом (рис. 113). Найти усло-
условия равновесия точки.
Решение. Точка будет находиться в равновесии лишь тогда, когда линия
действия силы тяжести будет проходить внутри угла трения, т. е. при выполне-
выполнении неравенства Фт^а.
Пример 41. Тяжелая однородная палочка АВ длиной 2/ может сколь-
скользить своими концами по шероховатой окружности (угол трения равен срт), пло-
плоскость которой вертикальна (рис. 114). Определить условия равновесия палочки.
Решение. На палочку действуют три силы: сила тяжести и силы реак-
реакции в точках А и В, расположенные внутри соответствующих углов трения. Под
действием трех сил палочка будет находиться в равновесии, если эти силы пере-
пересекаются в одной точке, а силовой треугольник замкнут.
146
Построим в точках А и В углы трения cpm. Получим часть плоскости
S\SS2S\ заключенную внутри того и другого угла. Первое из условий равнове-
равновесия может быть выполнено лишь в случае, когда линия действия силы тяжести
пересекает фигуру S1SS2S'. Аналитически это условие можно записать в виде
xsl < *с < *м, (а)
где хс — абсцисса центра палочки. Обозначив через Р угол между горизонталь-
горизонтальным радиусом окружности и прямой ОА, соединяющей центр окружности с цен-
центром палочки, а через а — угол между прямой АО и палочкой, и опуская у ср
индекс т, полученное условие представим в виде
/+2; cos(p+q))<
cos a sin 2a cos a
cos 6 sin (a + (p)
< - / ~ + 11 —7Г2- cos (p
cos a sin 2a
откуда окончательно получаем условия равновесия
Условия (Ь) определяют не одно положение равновесия, а целую область воз-
возможных положений равновесия. Условия эти являются и достаточными. В самом
Деле, перенося силу mg в произвольную точку заштрихованной области, заме-
заметим, что эта сила всегда может быть уравновешена силами реакции.
В частном случае при ср = а условие (Ь) становится особенно наглядным
О < cos (a — Р),
откуда следует
или
я л
а-— <Р< а+ -2 .
Если трение отсутствует, т. е. ср=О, условие (Ь) сводится к уравнению
2slt7a о , о,
cos 6 = cos (a — р),
sin 2a
которое преобразуется к виду
sin (a — Р) = 0.
Последнее уравнение определяет единственное положение равновесия, соответ-
соответствующее горизонтальному положению палочки.
При наличи сил трения задача определения положения равновесия и сил
реакций однозначно не разрешается.
Замечание о трении качения. Как уже отмечалось, трение ка-
качения возникает при качении одного тела по другому. Возникнове-
Возникновение этого трения можно грубо объяснить тем, что поверхности со-
соприкасающихся тел не являются абсолютно твердыми и несколько
деформируются. Законы трения качения, основанные на этом пред-
предположении Кулоном и Мореном, представляют грубое приближение
к действительности.
147
Рассмотрим в качестве примера задачу о качении колеса по
прямолинейному горизонтальному рельсу, предполагая, что кроме
силы тяжести на колесо действует еще некоторая система сил, рас-
расположенных в плоскости колеса. Действующие силы вообще не-
несколько деформируют как само колесо, так и рельс, и для возмож-
возможности качения по рельсу необходимо приложить некоторое усилие.
Возникающее сопротивление свободному качению обычно и назы-
называют трением качения. Такое объяснение явления трения свя-
^777777777^
Рис. 115
зано с отказом от гипотезы абсолютно твердого тела, что вызывает
необходимость пересмотра основных принципов статики твердого
тела, в основе которых лежит эта гипотеза. Поэтому, сохраняя ги-
гипотезу абсолютно твердого тела, будем предполагать, что соприка-
соприкасание тел происходит в одной точке и всякие деформации тел от-
отсутствуют. Обозначим через А точку касания колеса и плоскости
(рис. 115). Приводя систему сил, действующих на колесо, к точке
Л, в общем случае получим результирующую силу F и пару сил
с моментом т, перпендикулярным к плоскости колеса. Расклады-
Раскладывая силу F на Fb нормальную к рельсу, и F2, параллельную рельсу,
заметим, что сила F2 будет вызывать скольжение колеса, а пара —
его вращение. Для отсутствия скольжения достаточно выполнения
неравенства.
где f — коэффициент трения скольжения. При выполнении этого
условия колесо еще не будет находиться в равновесии, пока не
уравновешена пара. Опыт показывает, что колесо не начнет ка-
катиться до тех пор, пока момент пары m не превзойдет некоторого
предельного значения
m" = 6/v
Величина 6 называется коэффициентом трения качения.
Этот коэффициент не зависит от величины силы F и радиуса кри-
148
визны катящегося предмета, а зависит лишь от физических свойств
соприкасающихся тел. Обычно вводится гипотеза, что кроме ак-
активных сил на твердое тело действуют нормальная сила реакций
N, уравновешивающая действие силы Fu сила трения скольжения,
уравновешивающая действие силы F2 и пара сил, называемая па-
парой трения качения, которая уравновешивает пару с моментом т.
Для равновесия достаточно выполнения двух неравенств
fF1 > F2, 8Ft > т.
Заметим, что в большинстве случаев трение качения оказывается
значительно меньшим, чем трение скольжения, и при решении
практических задач им часто можно пренебрегать.
Замечание о трении верчения. Рассмотрим тяжелый шар, ле-
лежащий на горизонтальной плоскости и касающийся ее в точке С
(рис. 116), так что СО — вертикальный радиус шара. Вращение
шара вокруг вертикального радиуса называют верчением. При-
Приводя систему активных сил, действующих на шар, к точке С, в об-
общем случае получим результирующую силу, проходящую через
точку С, и пару с моментом т. Предположим, для простоты, что
момент пары параллелен вертикальному радиусу шара. Раскла-
Раскладывая, как это уже делалось выше, результирующую силу на со-
составляющие, одна из которых F2 параллельна горизонтальной плос-
плоскости, а вторая Fi ей ортогональна, заметим, что сила Fi уравно-
уравновешивается нормальной реакцией плоскости, сила F2 — силой тре-
трения скольжения, и для полного равновесия шара необходимо еш?
уравновесить пару. Как известно из опыта, если момент пары, стре-
стремящийся привести шар в верчение, достаточно мал, то шар вертеть-
вертеться не начнет. Действию активной силы в этом случае препятствует
некоторая пара сил реакций, называемая трением верчения.
Предельный момент трения верчения можно представить в виде
произведения некоторого коэффициента k, называемого коэффи-
коэффициентом трения верчения и определяемого эксперимен-
экспериментально, на нормальную составляющую результирующей активной
силы, т. е. kF\. Коэффициент трения верчения обычно величина ма-
малая, в 5—10 раз меньшая коэффициента трения качения. Условия
равновесия сводятся к двум неравенствам:
§ 12. СИЛА ТЯЖЕСТИ И ЦЕНТР ТЯЖЕСТИ
Материальная точка, отпущенная без начальной скорости
вблизи поверхности Земли, совершает движение по отношению
к Земле с некоторым ускорением, которое называют ускоре-
ускорением силы тяжести. Это ускорение, измеренное относи-
относительно вращающейся Земли, определяется притяжением к
центру Земли и вращением Земли вокруг своей оси. Оно оказы-
оказывается различным на различных широтах и зависит от расстоя-
149
иия точки от оси вращения Земли. Силу, действующую на мате-
материальную точку и равную произведению массы этой точки на
ускорение силы тяжести, называют весом материальной точки.
Направление силы тяжести отличается от направления к центру
Земли и изменяется с изменением широты местности. Более
детальное изучение силы тяжести будет проведено в динамике.
Рассмотрим систему материальных точек Mv, каждая из ко-
которых имеет массу mv. Обозначим координаты точки Mv через
xv, г/v. 2V. Предположим, что на каждую материальную точку
действует сила тяжести. Ограничиваясь только случаем, когда
размеры тел достаточно малы, будем предполагать, что силы
тяжести Fv всех точек параллельны одному направлению. Оче-^
видно, что если повернуть всю систему на определенный угол,
сохраняя взаимное расположение точек, то сами векторы Fv не
изменят своих величин, а изменят лишь направление по отноше-
отношению к самой системе материальных точек. Векторы Fv в рас-
рассматриваемом случае приложены к определенным точкам систе-
системы, и следовательно, являются связанными векторами. В теории
векторов было показано, что для такой системы векторов суще-
существует точка S(?, т], ?), координаты которой не зависят от на-
направления векторов и даются уравнениями:
Определенная так точка S называется центром тяжести
системы. Она найдена из условия о том, что сумма моментов
сил тяжести относительно точки S равна нулю. Такая точка
будет существовать, поскольку всякая система параллельных
сил, направленных в одну сторону, приводится к равнодейст-
равнодействующей силе. Аналитически это условие запишется в виде
S moms Fv —
F^a
где а, C, у — направляющие косинусы линии действия силы тя-
тяжести относительно выбранных осей координат. Выписанное
векторное соотношение эквивалентно трем скалярным уравне-
уравнениям
- Л) ^vY - (Zv - ?) ^vPl = О,
2 [(zv - S) Fva — («v -1) ^vY] = 0,
S [(xv - s) ^vP - 0/v — ti) Fva] = 0,
которые можно переписать в виде
Y Bi\i/v - tiF) - Р B/Vv - V) - 0,
150
- V) — Y B.*>v - IF) = 0-
— |F) — a (ZFV#V — t,F) = 0,
где F = 2FV. Полученные из этих уравнений координаты |, г], и
определяют произвольную точку, лежащую на линии действия
равнодействующей. Положение равнодействующей зависит от
направления силы тяжести относительно выбранных осей. Урав-
Уравнения не будут зависеть от выбора направляющих косинусов
а, C, у, если координаты |, г\, ? удовлетворяют условиям A),
т. е. являются координатами центра тяжести системы. Если си-
систему осей жестко связать с материальными точками, то при
изменении положения системы координаты отдельных ее частиц,
не изменятся, и мы получим способ вычисления координат
центра тяжести.
Полученные формулы для координат центра тяжести систе-
системы материальных точек не могут быть непосредственно приме-
применены к определению центра тяжести сплошных материальных
тел. Определение координат центра тяжести в этом случае мож-
можно свести к вычислению интегралов.
Действительно, рассмотрим некоторую точку тела, коорди-
координаты которой обозначим через х, у, z, и выделим из тела эле-
элементарный объем AV, содержащий эту точку. Будем предпола-
предполагать, что когда объем стягивается к точке, средняя плотность рср
этого элемента стремится к определенному пределу р, не зави-
зависящему от выбора элементарного объема и от способа его стрем-
стремления к нулю. Величина р представляет собой некоторую функ-
функцию от х, у, z, которая по своему физическому смыслу одно-
однозначна и которую назовем плотностью в точке.
Разделим теперь объем, занимаемый телом, на бесконечно
малые элементы dV. Масса элемента объема равна pdV. Сила
тяжести, действующая па элемент dV, может быть представлена
в виде
dF — gdm = gpdV,
а проекции этой силы на оси координат
dX = agpdV, dY _= $gpdV, dZ = ygpdV.
Координаты центра тяжести получат вид
_ lim S xagpdV _ Щ xPdV
е _
_ lim S y$gpdV _
~ limSfepdV ~
_ lim S zygpdV
KmZygpdV j'jjp
151
II. АНАЛИТИЧЕСКАЯ СТАТИКА
При решении задач о равновесии в элементарной статике
применяются исключительно геометрические методы, основанные
на свойствах векторов.
Аналитическая статика дает другой метод исследования
равновесия механических систем, в основе которого лежит поня-
понятие работы сил, действующих на исследуемую систему.
При наличии связей уравнения равновесия механической
системы, получаемые геометрическим методом, кроме активных
•сил содержат еще и силы реакций, которые необходимо исклю-
исключить из уравнений для определения возможных положений рав-
равновесия системы. Число подлежащих исключению реакций тем
•больше, чем больше связей наложено на исследуемую систему.
Но поскольку силы реакции не создают движения системы, есте-
естественно искать такие условия равновесия, которые бы не содер-
содержали реакции связей. Эти условия могут быть получены при по-
помощи принципа возможных перемещений.
Еще Аристотель использовал метод возможных перемеще-
перемещений при решении задачи о равновесии рычага. Галилей приме-
применял его для исследования равновесия простейших машин. Однако
окончательное завершение метод получил только в 1717 г. в ра-
работах И. Бернулли и Лагранжа. Швейцарский ученый И. Бер-
нулли A667—1748) первым показал общность принципа воз-
возможных перемещений и его преимущества при решении задач
статики. Лагранж дал первое доказательство этого принципа.
После Лагранжа появилось еще несколько других доказа-
доказательств. Наиболее известные из них принадлежат Амперу,
К. Нейману и Ж. Фурье A768—1830).
§ 1. РАБОТА СИЛЫ НА ПЕРЕМЕЩЕНИИ. СИЛОВАЯ ФУНКЦИЯ
Понятие работы силы на элементарном перемещении являет-
является одним из важнейших в механике. Пусть материальная точка,
находящаяся под действием силы F(X, У, Z), совершает некото-
некоторое элементарное перемещение из положения М(х, у, z) в поло-
положение Mi(x+dx, y+dy, z + dz) и вектор элементарного переме-
перемещения точки ММ\ имеет проекции на неподвижные оси xyz:
dx, dy, dz (рис. 117). Вне зависимости от того, будет или нет
сила F действовать на точку на всем перемещении, работой си-
силы F на элементарном перемещении ММ1 будем называть ска-
скалярное произведение силы F и перемещения ММ\
А = (F, ММ[) = | F| \ММ11 cosЪ = Xdx + Ydy + Zdz.
Это формальное определение теряет смысл, если не говорится о
силе или о перемещении. Рассмотрим некоторые примеры.
1. В определении работы не возникает никаких сомнений,
если сила действует на материальную точку на всем переме-
перемещении.
152
2. Предположим, что тяжелый цилиндр находится на глад-
гладкой горизонтальной плоскости (рис. 118). Тогда со стороны пло-
плоскости на цилиндр будет действовать сила реакции R, направ-
направленная перпендикулярно к плоскости. Если сообщить цилиндру
бесконечно малое перемещение ММи при котором он покидает
плоскость, то работа силы R на этом перемещении, по опреде-
0
М
Рис. 117
Рис. 118
V7777777//.
Рис. 119
Рис. 120
лению, будет отлична от нуля, хотя сила R и перестает дейст-
действовать на цилиндр, как только последний начнет перемещаться.
3. Рассмотрим перемещение шероховатой пластинки па
острию (рис. 119). На точку М пластинки действует сила реак-
реакции R, которая совершает отличную от нуля работу на переме-
перемещении точки М пластинки, хотя сила R и не действует па точ-
точку М пластинки на всем ее перемещении. На острие со стороны
пластинки действует сила Rb равная по величине силе R, но
направленная в противоположную сторону. Эта сила Ri не со-
совершает работы на перемещении точки М острия, так как острие
остается неподвижным.
4. Цилиндр катится без скольжения по плоскости. Если
плоскость шероховата, то на цилиндр со стороны плоскости в
153
•общем случае действует сила реакции R, направленная под не-
некоторым углом а к плоскости (рис. 120). Работа силы R на пе-
перемещении точки А цилиндра равна нулю, а на перемещении dS
точки касания плоскости с цилиндром работа силы R отлична
от нуля.
Если элементарные перемещения точки образуют целую ли-
линию L и сила действует на точку на всем ее перемеще-
перемещении по линии, то можно говорить о работе силы на криво-
криволинейном пути материальной точки, определяя эту работу кри-
криволинейным интегралом
А= UXdx + Ydy + Zdz).
В общем случае эта работа зависит не только от силы, дейст-
действующей на точку, но и от вида кривой, по которой перемещает-
перемещается точка. Если элементарная работа силы на бесконечно малом
перемещении представляет собой полный дифференциал некото-
некоторой функции U (х, у, z), зависящей только от координат точки,
т. е. имеет место равенство
Xdx + Ndy + Zdz = dU = — dx ^ — dy-\ — dz,
дх ду dz
то силы, действующие на материальную точку, могут быть пред-
представлены частными производными от этой функции
Х = — Y = — Z- —
дх ' ду ' ~ дг '
Функция U называется силовой функцией. Необходимые
и достаточные условия существования силовой функции можно
представить в виде
дХ __ _дУ__ _dY_ _ _dZ_ JZ_ __ дХ
ду дх дг ду дх дг
При выполнении этих условий работа силы на криволинейном
участке пути будет зависеть лишь от начального и конечного
лоложений точки. В самом деле
м, м,
А^ ^ (Xdx + Ydy + Zdz) =. j dU = U (M2) — U (MJ.
Силы, обладающие этим свойством, называются консерва-
консервативными. Если силовая функция однозначна, то, как извест-
известно, интеграл по замкнутому контуру будет равен нулю. Для
неоднозначных функций этот интеграл может быть и отличным
от нуля. Поверхности, на которых силовая функция принимает
постоянное значение
U consr,
Не1 ¦'ЫВЭЮ1Ч Я Г |~> ^ С р X I О 1 I Я М ,1 \ р С 3 И Я
Чтобы выяснить, как расположены силы по отношению к
поверхности уровня, рассмотрим систему прямоугольных осей
Mxyz с началом в точке М поверхности уровня так, чтобы оси х
и у были расположены в касательной плоскости к поверхности
уровня. Ось z направим по нормали к поверхности в сторону
увеличения функции U(x, у, г). Тогда, представляя U как функ-
функцию координат х, у, z, в точке М будем иметь
откуда
т. е. сила направлена ортогонально к поверхности уровня в сто-
сторону возрастания силовой функции.
Рассмотрим некоторые наиболее важные примеры сил, обла-
обладающих силовой функцией.
Сила тяжести. Выберем систему координат так, чтобы ось z
была направлена вертикально вверх. Тогда действующая на ма-
материальную точку сила тяжести будет иметь следующие про-
проекции:
X = О, Y = О, Z = — mg,
где т — масса точки; g — ускорение силы тяжести. Элементар-
Элементарная работа силы тяжести на произвольном перемещении
А = Xdx + Ydy 4- Zdz = — mgdz = — d (mgz)
представляет собой полный дифференциал функции
U =. — mgz,
которая и называется силовой функцией силы тяжести.
Упругая сила. Такой силой является сила притяжения к не-
неподвижному центру, пропорциональная расстоянию точки от
этого центра. Проекции силы на оси координат имеют вид
"V , , t? f У( Jt* 1^ К I ¦ " fftii
г г '
а силовая функция U должна удовлетворять условиям
dU у, dU ,. dU ,,
дх ду а дг
Отсюда находим для силовой функции следующее выражение:
В качестве примера для силы, не обладающей силовой функцией,
рассмотрим силу, имеющую следующие проекции на оси координат:
Х=0, Y=kx, Z = 0.
155
Для этой силы будем иметь
и условие
ие выполняется.
дх
dY
дх
дХ
дХ
= 0,
§ 2. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
1. Определения. Будем рассматривать систему материаль-
материальных точек Mv(xv, yv, 2V), на которые действуют некоторые за-
заданные активные силы FV(XV, Yv, 2V), предполагая, что на точ-
Рис. 121
ки системы наложены связи, не изменяющиеся со временем и
-ограничивающие перемещения точек системы. Множество всех
бесконечно малых перемещений точек, допускаемых наложенны-
наложенными на систему связями, называется возможными переме-
перемещениями системы.
Возможные перемещения могут быть как освобождаю-
освобождающими, при которых некоторые из точек системы покидают
наложенные на систему связи (освобождаются), так и н е о с-
вобождающими, при которых наложенные на систему
связи сохраняются и после перемещения системы. Так, например,
материальная точка М, подвешенная при помощи нерастяжимой
гибкой нити к неподвижной точке 0 (рис. 121), может находить-
находиться в равновесии под действием некоторых сил, если расстояние
точки от центра не превышает длины нити. Условие связи здесь
может быть записано в виде неравенства (соединенного с равен-
равенством)
х2 \-Уъ + г2 — /2<0.
156
Тяжелый материальный шарик, находящийся на горизон-
горизонтальном столе, может перемещаться по его поверхности или
вверх, покидая стол. Выбирая систему координат так, чтобы
оси х я у были расположены в горизонтальной плоскости стола,
а ось z была бы направлена вертикально вверх, условие связи
запишем в виде
— г<0.
Если в рассматриваемом положении равновесия та или иная
связь не действует на материальную точку и не стесняет ее
перемещений, то говорят, что такая связь находится в нена-
ненатянутом положении.
Так, например, рассматривая равновесие тяжелого шарика,
находящегося внутри цилиндрической трубы с горизонтальной
осью, и предполагая, что, кроме того, перемещения шарика
стеснены наклонной плоскостью (рис. 122), условия связи можно
представить в виде
х2 + у2 — Я2<0, у — ах КО, с>0.
Вторая связь в положении равновесия не ограничивает возмож-
возможные перемещения шарика и находится в ненатянутом состоянии.
Если наложить на шарик связи вида
х2 + </2 — Я2<0, ах — у<0, с>0
(рис. 122), то в положении равновесия будут натянуты обе
•связи.
Ненатянутые связи не ограничивают возможные перемеще-
перемещения точек системы. Натянутые односторонние связи ограничи-
ограничивают возможные перемещения точек в одну сторону. Условия,
накладываемые связями на возможные перемещения, получают-
получаются дифференцированием уравнений связи. Так, для рассмотрен-
рассмотренного выше случая (рис. 121) точки, подвешенной на нити, имеем
условие связи в виде
хЬх + У&У +- zbz < 0.
Здесь знак равенства имеет место лишь для перемещений по
поверхности сферы радиуса R. Знак неравенства отвечает здесь
перемещениям, ослабляющим натяжение нити. В случае натяну-
натянутой нити на точку в положении равновесия будет действовать
сила реакции со стороны нити — реакция натяжения. Она на-
направлена в сторону освобождающих перемещений ортогонально
к поверхности связи. Рассматривая в этом случае работу силы
реакции на произвольном возможном перемещении, будем иметь
Rxbx + Ryby + R28z < 0.
Работа будет равна нулю для всех возможных перемещений, при
которых нить остается в натянутом состоянии (неосвобождаю-
157
щее перемещение), и будет положительной для перемещений,
при которых нить ослабевает, т. е. связь переходит в ненатяну-
ненатянутое состояние.
Обозначим через MVMV вектор бесконечно малого переме-
перемещения точки Mv, возможного при наложенных на систему свя-
связях. Проекции этого вектора на оси координат обозначим через
6-Kv, S#v, 6zv и будем называть их вариациями коор-
координат. Заменив наложенные на точку Mv связи силой реак-
реакции Rv (Rvx, Rvy, Rmz), действие которой эквивалентно действию
связей, можно рассматривать систему, как освобожденную от
связей, но находящуюся под действием активных сил Fv и сил
реакции Rv. Из всех связей, которые вообще могут быть нало-
наложены на систему материальных точек, будем рассматривать
лишь такие, сумма работ реакций которых на любом возможном
перемещении системы неотрицательна и, следовательно, удов-
удовлетворяет условию
0.
v=l
Связи, удовлетворяющие этому условию, будем называть иде-
идеальными. Знак равенства здесь соответствует неосвобождаю-
неосвобождающим перемещениям. Освобождающим
возможным перемещениям соответствует
знак неравенства, если только соответ-
соответствующие силы реакции отличны от нуля.
Примером идеальных связей явля-
являются гладкие связи, не препятствую-
препятствующие перемещениям материальных точек
вдоль поверхностей связи. Силы реак-
реакции таких связей всегда ортогональны к
неосвобождающим перемещениям точек
системы и направлены в сторону осво-
освобождающих возможных перемещений,
поэтому условие идеальности оказывает-
оказывается выполненным.
Идеальными могут оказаться и негладкие связи. Покажем
это на примере.
Пример 43. Исследовать состояние равновесия тяжелого колеса, на-
находящегося на шероховатом горизонтальном рельсе
Решение. Предположим, что на колесо действуют две горизонталь-
горизонтальные силы Fi и F2, как это указано на рис. 123. Тогда уравнения равновесия
получат вид
Рис. 123
откуда сразу следует, что колесо будет находиться в равновесии, если выпол-
выполняется условие
158
но тогда горизонтальная составляющая силы реакции в точке касания будет
равна
R F <0
Таким образом, равновесие оказывается возможным лишь при шероховатых
негладких связях. Связь эта является идеальной, так как работа силы реак-
реакции на возможном перемещении (вращении вокруг мгновенного центра ско-
скоростей) равна нулю.
Предполагая, что на систему материальных точек
М^(х^, yv, ;zv) действуют активные силы Fv (Xv, Yv, Zv)
и наложены односторонние связи вида
/(Y 11 У V // "9 Y 11 У \ >.<""" П
/ \Л1» i/1» *1» Ла» У2' ^2* ' ' ' » ^Л» Ун.» 'Ы/ ^ и
(/=1, 2,..., /п),
заметим, что если в положении равновесия связь удовлетворяется
в виде неравенства, то она будет удовлетворяться в виде нера-
неравенства и в некоторой достаточно малой окрестности положения
равновесия. Такие связи являются несушественными в данном
положении равновесия, поэтому могут быть исключены из рас-
рассмотрения. В дальнейшем будем рассматривать лишь такие
связи, которые в данном положении равновесия натянуты и,
следовательно, записываются в виде равенств (знак неравенства
тогда отвечает другим положениям системы, отличным от дан-
данного положения равновесия).
Предположим, что связи, наложенные на материальные
точки системы, задаются независимой системой функций, так
что в матрице Якоби
дх-i ' dt/L ' dzi ' дхг дхп ' дуп ' дгп
c'ftn dfm dfm Ofm dftn ofm d/m
dxi ' dyi ' dXj ' dx% dxn ' dyn ' dzn
составленной из частных производных по всем координатам,
оказывается отличным от нуля хотя бы один из миноров т-ного
порядка. Тогда при натянутых связях положение системы опре-
определяется k = 3n—т независимыми параметрами.
При возможных перемещениях система может освобождать-
освобождаться от некоторых из связей, поэтому вариации координат при раз-
различных возможных перемещениях системы будут удовлетворять
условиям
п
Rf -V/Asv -J_ <'h Я„ I. dfi R
где знак равенства имеет место лишь для неосвобождающих
возможных перемещений, а знак неравенства — для освобож-
освобождающих. В силу независимости функций fi, f2, —, fm среди всех
неосвобождающих перемещений будет только k = 3n—т незави-
независимых, а остальные будут выражаться через независимые. Нало-
Наложенные на систему материальных точек связи могут быть заме-
заменены силами реакций Rv (Rvx, Rvy, Rvz), действие которых экви-
эквивалентно действию связей.
2. Теорема Лагранжа о равновесии системы. Принцип воз-
возможных перемещений, предложенный Лагранжем, дает необхо-
необходимые и достаточные условия равновесия системы материаль-
материальных точек, стесненной идеальными связями, не зависящими явно
от времени. Принцип этот заключается в том, что при равнове-
равновесии системы материальных точек сумма работ всех сил, дейст-
действующих на систему, на любом возможном перемещении неполо-
неположительна и всегда равна нулю на всех неосвобождающих пере-
перемещениях системы. Впервые без доказательства принцип был
сформулирован И. Бернулли в письме к Вариньону, который и
поместил его в своей «Nouvelle Mecanique». Первое наглядное
и достаточно общее доказательство, основанное на применении
блоков, было предложено Лагранжем. Лагранж представил при-
приложенные к системе силы в виде натяжений нитей, перекинутых
через блоки и снабженных грузами. Приведем здесь другое ана-
аналитическое доказательство теоремы Лагранжа.
Лагранж рассматривал теорему только для случая двусто-
двусторонних идеальных связей. Распространением теоремы на случай
односторонних идеальных связей впервые занимался француз-
французский математик Ж. Фурье в связи с задачей о равновесии нити.
В 1834 г. М. Г. Остроградским A801—1861) была предложена
полная формулировка с доказательством обобщенной теоремы
Лагранжа для случая односторонних связей.
Теорема Лагранжа. Для того чтобы система мате-
материальных точек, на которую наложены односторонние идеаль-
идеальные связи, не зависящие явно от времени, находилась в равно-
равновесии, необходимо и достаточно, чтобы в этом положении
сумма работ всех активных сил, действующих на систему, на
любом возможном перемещении системы была бы неположи-
неположительной, т. е. удовлетворяла бы условию
п
(xv&xv + FV6#V -f zv6zv) < 0, (a)
v=l
где знак неравенства отвечает освобождающим перемещениям,
а знак равенства — неосвобождающим.
Доказательство. Необходимость. Пусть систе-
система материальных точек, на которую наложены освобождающие
идеальные связи, находится в равновесии под действием актив-
активных сил с проекциями на неподвижные оси координат Xv, Kv, Zv
160
Тогда для каждой точки системы будут выполняться условия
(v=l, 2, ..., п),
где Rvx, Rvy, i?vz — проекции сил реакций, действующих на v-тую
точку системы. Определяя отсюда величины Rvx,R^j/, Rvz и подставляя
их значения в условие идеальности связей
+ Rvz8zv) > О,
получим условие равновесия
или
О,
О,
чем и доказывается необходимость.
Достаточность. Будем исходить от противного. Пред-
Предположим, что при выполнении условия (а) система не находится
в состоянии равновесия, т. е. в данном положении системы
имеются неуравновешенные точки. Тогда, находясь первона-
первоначально в состоянии покоя, неуравновешенная система начнет
движение из этого состояния, подчиняясь наложенным на нее
связям. Освободим теперь систему от связей, заменив действие
последних действием сил реакций Ryx, Ryy, Rvz. Подсчитаем ра-
работу всех сил на том перемещении, которое получает система,
начиная движение из состояния покоя (в дальнейшем это пере-
перемещение будем называть действительным). Так как каж-
каждая точка системы начинает перемещаться из состояния покоя в
направлении действия равнодействующей силы Ф^ = Fv 4- Rv,
действительные перемещения точек будут пропорциональны этим
равнодействующим силам
+ RVy), 8% = av(Zv + Д„ж),
где av—некоторые положительные числа. Действительное пере-
перемещение подчиняется наложенным на систему связям, т. е. яв-
является одним из возможных перемещений системы. Вычисляя
работу всех сил, действующих на точки системы, на действи-
действительном перемещении будем иметь
5М = S [(*„ + Rvx) Vxv -\ - (Yv + ft,H) 8*#v + (Zv + Rvz) 6%] =
2 + (Kv + RlyJ +- (Zv + Я*,I] ¦ (b)
4-
Заметим, что работа реакций связи на действительном переме-
перемещении системы всегда равна нулю, т. е.
Е. Н. Березкнн
161
2 (Rvxb'xv -\- RvySTyv + Rv*b%) = 0. (c)
В самом деле, если действительное перемещение не является
освобождающим, то, по определению, сумма работ реакций
связи на этом перемещении равна нулю. Если же перемещение
освобождающее, т. е. хотя бы одна точка системы Av под дей-
действием силы Фу = Fv -f- Rv покидает связь, то в рассматривае-
рассматриваемом положении точка уже не оказывает действия на связь, и
соответствующая сила реакции становится равной нулю. Тогда
и работа этой силы реакции будет равна нулю на действитель-
действительном перемещении. Итак, сумма работ реакций связи всегда
равна нулю на действительном перемещении системы. Тогда
из (Ь) и (с) сразу получаем
2 (Xvb*xv + FvS*i/v 4- ZV6%) > 0.
Предполагая, что при выполнении условия (а) система не нахо-
находится в положении равновесия, мы обнаружили перемещение,
на котором не выполняется условие (а), что противоречиво и,
следовательно, система в действительности находится в равно-
равновесии.
Замечания. 1. В том случае, когда на систему матери-
материальных точек наложены только двусторонние связи, теорема
Лагранжа получает более простую формулировку.
Теорема. Для того чтобы рассматриваемое положение
системы было положением равновесия, необходимо и достаточ-
достаточно, чтобы в этом положении сумма работ всех активных сил на
любом возможном перемещении системы равнялась нулю.
Доказательство этого предложения проводится так же, как
и в общем случае. Условие же равновесия системы при двусто-
двусторонних связях получает вид
V (X^xv + Yv8yv -t- Zv6zv) =. 0.
Это уравнение называется общим уравнением статики.
2. Уравнения равновесия системы
Xv -\- Rvx = 0, i v + Rvy = 0, Zv + Rvz = 0
могут быть непосредственно получены из принципа Бернулли.
В самом деле, рассматривая систему материальных точек Afv>
на которую наложены идеальные связи и которая находится
под действием активных сил FV(XV, Yv, Zv), заменим наложен-
наложенные на систему связи силами реакций RV(RVX, R4y, Rvz). После
такой замены каждая точка системы должна рассматриваться
как свободная от связей и находящаяся только под действием
активных сил Fv и сил Rv. Возможные перемещения такой осво-
освобожденной системы 5*Xv, b*yv, 8% уже не стеснены никакими
условиями и поэтому все являются произвольными и незави-
162
симыми. Принцип Бернулли для этой системы представляется в
виде равенства
s [(xv + Rn) arx,, + (Fv + R*u) 5*t/v + (Zv + Д*«) &%] = o,
откуда в силу независимости величин 8*хч, 5*j/v, 5*zv следуют
уравнения
Хц -\- Rvx = О, Fv ~г Rvy = 0,
•Zv + R\z — 0.
3. Принцип возможных перемещений
дает возможность определять положения
равновесия системы материальных точек, не
определяя реакции связей.
4. Если существует силовая функция
для сил, действующих на систему матери-
материальных точек, то принцип Бернулли полу-
получает особенно простой вид. В этом случае
имеем
Y 6U
oxv
dU
ги
а потому условие равновесия преобразует-
преобразуется к виду
dU
dU
ди
v / dU о , dU с. ди д \ RIJ „
ИЛИ
Это условие говорит о том, что в положении равновесия силовая
функция имеет стационарное значение для всех неосвобождаю-
щих перемещений системы.
Пример 44. Полиспаст (механизм, состоящий из двух блоков, каж-
каждый из которых смонтирован в общей обойме, причем блоки насажены на
общую ось или на отдельные оси), как показано на рис. 124, оснащен нитью,
один конец которой прикреплен к неподвижной точке, а другой остается
свободным. Нить обходит последовательно все блоки, насаженные как на
подвижные, так и иа неподвижные оси. К нижнему блоку подвешен груз
весом Q, а к свободному концу нити приложена сила F, которая должна
уравновесить груз Q. Определить соотношение величин силы F и веса Q при
равновесии системы.
Решение. Предположим, что размеры блоков подобраны так, что
все части нити, заключенные между обеими системами блоков, можно рас-
рассматривать как параллельные. Тогда при перемещении точки приложения
силы F на расстояние бр груз поднимется на величину §q. Общая длина
иити остается неизменной, так что
163
как это видно из чертежа. Из принципа Бернулли для двусторонних связей
имеем
- 6p,
ипа Б
Q8q=Q,
или после подстановки значений бр
DF- QNq=0,
откуда сразу получаем условие равновесия
Q = 4F.
Пример 45. Два однородных стержня BD и ОА соответственно дли-
длиной 2а и 21 и весом Р каждый могут свободно вращаться в одной вертикаль-
вертикальной плоскости: первый вокруг своей середины О\, второй вокруг шарнира О,
расположенного на одной вертикали с О\, на расстоянии а от точки О\
(рис. 125). К концу D стержня BD прикреплен груз Q. Определить угол q>
в положении равновесия системы.
У°1
/У/'///У///УУУУУ, .
Рис. 125
Рис. 126
Решение. Активные силы Р и Q имеют проекции только на верти-
вертикальную ось у, поэтому из пршщипа Бериулли будем иметь
-QSy1~P6y2<0,
где знак неравенства имеет место только для освобождающих перемещений.
Рассматривая сначала только неосвобождающие перемещения, координаты yi
и г/г представим в функции угла <р, т. е.
у1= — a sin Bф — 90°), у2 = а — / cos ф,
откуда
6i/x = —22sin2cp6<p, 6y-2 = I sin ф бф.
После подстановки найденных вариаций координат будем иметь
BQa sin 2ф — PI sin ф) бф — 0.
164
Откуда получаем значения угла ср в положении равновесия:
1) sin ф = 0; ф = 0, я, 2л,...
Р1
2) cos ф = ¦
AQa
Первая система значений <р представляет особое решение и ие допускается
наложенными на систему связями. Второе решение имеет смысл тогда, когда
PZ< 4Qa.
Переходя к анализу освобождающих перемещений, которые могут по-
появиться только при потере контакта между стержнями, заметим, что здесь
сумма работ всех активных сил всегда будет отрицательна, так как освобож-
освобождение сопровождается либо поднятием груза Q, либо поворотом вверх стерж-
стержня ОА. Таким образом, рассмотренное положение является положением рав-
равновесия
Пример 46. Однородный гладкий стержень АВ длиной 2/ и весом Р
опирается одним концом на гладкую вертикальную стенку и, кроме того,
опирается в точке С на край неподвижного стола (рис. 126). Определить
угол ф, который образует стержень со столом в положении равновесия, если
расстояние от стенки до стола равно а.
Решение. Если центр тяжести находится слева от точки С, равнове-
равновесия быть не может, так как при освобождении точки А работа силы тяжести
станет положительной. Для определения положения равновесия, когда точ-
точка S находится справа от точки С, из принципа Бернуллн, рассматривая
неосвобождающие перемещения, имеем
-/%,=<>.
Подставляя сюда значение ws
будем иметь
cos
sin ф.
— Р (— a tg2 ф + / cos ф — а) бф = 0,
отсюда, приравнивая нулю выражение, стоящее в скобках, получаем условие
равновесия
а
COS3 ф — ,
которое возможно лишь при условии
Пример 47. В полый цилиндр радиуса R, который может кататься
без скольжения по горизонтальной плоскости, вложен массивный цилиндр
весом Р с радиусом г (рис, 127). К малому цилиндру в плоскости чертежа
приложена пара сил с моментом М. На полый цилиндр намотана нить, несу-
несущая на свободном конце груз Q. Полагая поверхности цилиндров достаточно
шероховатыми, найти положение равновесия системы и определить, при какой
зависимости между данными силами оно возможно.
Решение Положение системы полностью определяется двумя коор-
координатами х и О, которые могут изменяться независимо одна от другой.
Поэтому любое возможное перемещение системы будет определяться измене-
изменением этих двух независимых координат. Сообщим сначала большому цилиндру
такое возможное перемещение, при котором не изменяется угол О (малый
цилиндр при этом вращается вокруг своей оси, перемещаясь в горизонталь-
горизонтальном направлении). На этом перемещении сила Р не совершает работы. Обоз-
Обозначим через х горизонтальную координату центра большого цилиндра и под-
подсчитаем работу силы Q и пары М на рассматриваемом перемещении. Сила Q
165
будет совершать отличную от нуля работу лишь прн перемещении груза в
вертикальном направлении. Если центр большого цилиндра переместится на
6
величину 6.v, то сам цилиндр повернется вокруг своей оси иа угол
К
(на чертеже не указан). При этом провисающая часть нити сократится на
величину R6q = 6x, а сила Q совершит работу —Qbx. Точка В большого ци-
цилиндра (точка касания) повернется от вращения вокруг его оси Cj на вели-
А Р
Рис. 127
чину 6s=/?S(p = 6x На такую же величину повернется и точка В малого ци-
цилиндра, вращающегося вокруг своей оси С% сам же цилиндр повернется на
6s 6х
угол oiji = = (на чертеже не указан). Как нетрудно видеть, пара
сил, действующих на малый цилиндр, совершит положительную работу
6х
М (работа пары сил на поступательном перемещении сплошного ци-
цилиндра всегда равна нулю).
Приравнивая нулю работу всех сил, действующих на систему, получим
Q6 M0
откуда следует условие равновесия
0 =
м
Сообщим теперь системе такое возможное перемещение, при котором
координата х остается постоянной, а изменяется только угол #. Заметим, что
при таком перемещении сила Q не будет совершать работы (отсутствует пе-
перемещение точки приложения силы). Работа силы Р на рассматриваемом
перемещении будет равна
Р (R —г) со$(ЭО" + &) 8&.
При вычислении работы пары сил заметим, что малый цилиндр при таком
перемещении будет катиться без скольжения по поверхности большого, вра-
вращаясь вокруг своей оси. Мгновенное перемещение малого цилиндра можно
представить как сумму мгновенно-поступательного перемещения вместе с
осью Сг и мгновенного вращения вокруг этой оси. На поступательном пере-
перемещении пара сил работы не совершает. Обозначая угол поворота малого"
цилиндра относительно неподвижных осей через бф, получим для этого угла
выражение
=¦.= (R — r)
166
а работа пары сил будет равна
.. R-r
Из принципа Бернулли теперь получим
[ — Р (R — г) sin d + М R~r 1 6* = О,
откуда
Р (Я — г) г Рг
Действительное значение для угла О существует лишь при условии
М <Рг.
Мы рассмотрели все возможные перемещения системы и получили все воз-
возможные положения равновесия.
3. Принцип Торричелли. В качестве примера на применение
принципа Бернулли рассмотрим известный принцип Торричелли,
устанавливающий условия равновесия тяжелых тел. В 1644 г.
итальянский физик Еванджелиста Торричелли A608—1647)
сформулировал принцип равновесия системы тяжелых тел (си-
(системы тел, находящихся под действием только сил тяжести),
заключающийся в том, что в положении равновесия центр тяже-
тяжести системы занимает наинизшее из возможных положение.
Принцип Торричелли отбирает из всех возможных положений
равновесия только устойчивые. Обобщение этого принципа
можно непосредственно получить из принципа Бернулли. В са-
самом деле, пусть на систему материальных точек Av(x4, t/v, Zv),
стесненную идеальными двусторонними связями, действуют
только силы тяжести mvg. Выберем систему прямоугольных осей
Oxyz таким образом, чтобы ось z была направлена вертикально
вверх. Тогда для проекций активных сил на эти оси будем иметь
Xv == Yv = 0, Zv = — nu,g,
поэтому принцип Бернулли получает вид
— Smvg62v = 0.
В силу соотношения
2mvg8zv = g62/?zvzv = S (Mzc) = Mbzc,
где zc — координата центра тяжести системы, предыдущее ра-
равенство перепишется в виде
Ьге = 0.
Отсюда следует, что в положении равновесия координата zc цен-
центра тяжести системы имеет стационарное значение. Система
будет находиться в равновесии, если при всех возможных пере-
167
мещениях системы ее центр тяжести не перемещается по вер-
вертикали.
Пример 48. Палочка АВ длиной 2а и весом Р концом А опирается
иа плоскость (я), образующую угол а с горизонтом, а в точке С — на острие
(рис. 128). Определить угол <р между палочкой и горизонтом при равновесии.
Размеры и расположение плоскости и острия указаны на чертеже.
Решение. Возможное перемещение палочки сводится к повороту
вокруг мгновенного центра 5, расположенного в точке пересечения нормалей
к плоскости (я) и к палочке. Из всех точек палочки только перемещение
точки D, находящейся иа одной вертикали с точкой S, горизонтально. Как
(ЯГ)
\ /
А Ч
S '
л
Р
\
сс'/\
У
h
в
X
\
\
\
^
\\
Рис. 128
Рис. 129
следует из принципа Торричелли, палочка будет находиться в равновесии
лишь в том случае, когда ее центр тяжести будет находиться в точке D.
Для получения аналитического решения определим сначала координа-
координату Ус центра тяжести палочки:
где
тогда
АС = СЕ f g [90° — (а + ф)],
Ус = а sin ф —¦ AC sin ф,
СЕ
sin (90° + a) sin [90° — (а •+ ф)] '
= а sin ф— Ь
cos asm ф
sin (a -1- ф)
При бесконечно малом возможном перемещении палочки координата у получит
приращение
sin a cos a
оус = а cos ш — о
\ * sin" (а -f ф)
168
которое в соответствии с принципом Торричелли должно обращаться в нуль
в положении равновесия, т. е.
/ sin a cos a
а cos ф — Ъ —ГГ,
V Y 2( + )
j
V
откуда для определения угла ср получаем уравнение
a cos ф sin2 (a + ф) — Ъ sin a cos a = 0.
Пример 49. Два одинаковых цилиндра весом р каждый положены на
внутреннюю поверхность полого цилиндра. Они поддерживают третий цилиндр
весом q (рис. 129). Определить зависимость между углами аир при равно-
равновесии системы. Размеры указаны на чертеже.
Решение. Выберем систему осей Оху с началом в центре неподвиж-
неподвижного цилиндра. Ось у направим вертикально вверх. Тогда координата ус
центра тяжести системы определится из равенства
_ 2p#i 4- ду3
где yi=y2 — координаты центров тяжести нижних цилиндров: уз — коорди-
координата центра тяжести верхнего цилиндра. Тогда в силу симметрии будем иметь
Hi — Уг = — (R — r) cos а, у3 = — (R — г) cos а -j- (г + р) cos p,
где R — радиус полого цилиндра; г — радиусы нижних цилиндров, р — раднус
верхнего цилиндра. Тогда
1
ус = [— 2р (R — г) cos а — q (R — г) cos а + q (r + p) cos p],
л из принципа Торричелли получим
q
§Ус = (R — r) sin аба — — (о + г) sin ВбВ = 0. (а)
2р 4- q
Параметры аир связаны соотношением
(R— л) sin а = (г -Ь р) sfn В, (Ь)
сохраняющимся прн всех возможных перемещениях системы. Поэтому будем
иметь зависимость
(R — г) cos аба = (г + р) cos Вбв, (с)
получающуюся непосредственным дифференцированием соотношения (Ь)
Исключая из уравнений (а) и (с) величину бр, получим после сокращения
на ба
q cos а sin f5
sin а — — = 0,
2р ~|- q cos p
откуда
§ 3. ОБЩИЕ ВОПРОСЫ АНАЛИТИЧЕСКОЙ СТАТИКИ
1. Связи и возможные перемещения. Рассмотрим систему
материальных точек /4V, положение которых определяется их
Ш9
декартовыми координатами .ц,, yv, zv. Если на точки системы
не наложено никаких связей, то их координаты хч, t/v, zv
могут принимать произвольные значения. Может оказаться, что
координаты точек системы подчинены некоторым ограничениям,
которые называются связями. Эти связи могут быть пред-
представлены в виде равенств или неравенств, ограничивающих
область допустимых значений координат точек системы. Если
связи представляются в виде равенств
//(*i. Уч zi> *2> Уг> га> ••• . хп, уп, zn) = 0
(/=1, 2,..., m<3n),
то число их не должно превосходить величины 3/г—1, где п число
точек системы. В противном случае при т = 3п уравнения
связей будут однозначно определять координаты всех точек
системы, и система не сможет перемещаться из положения,
определенного связями. Так, например, для точки, вынужденной
оставаться на окружности, уравнения связи могут быть пред-
представлены в виде
Если связи представляются в виде равенств, то координаты
точек системы всегда должны удовлетворять этим равенствам.
Такие связи называются удерживающими, или двусто-
двусторонними.
Связи записываются в виде неравенств (соединенных с ра-
равенствами) вида
//С*!, Уч zi> *2. #2- г2. ••• . хп, уп, г„)<0,
когда точки системы в рассматриваемом положении подчинены
условиям, определяемым равенствами, а возможные перемеще-
перемещения таковы, что точки системы могут освобождаться от связей.
Такие связи могут ограничивать возможные перемещения си-
системы. Так, например, координаты материальной точки, находя-
находящейся внутри материальной сферы, будут подчинены условию
Если связь, накладываемая на некоторую точку системы,
осуществляется в виде строгого неравенства, то она будет осуще-
осуществляться в виде неравенства и в некоторой достаточно малой
окрестности этого положения, поэтому она не будет оказывать
никаких ограничений на перемещения рассматриваемой точки.
Такая связь оказывается несущественной в рассматриваемом
положении и при анализе данного положения равновесия может
быть отброшена из рассмотрения. Все проведенные рассуждения
могут быть распространены и на более общий случай.
170
Связи, которые записываются в виде неравенств (соединен-
(соединенных с равенствами) в дальнейшем будем называть неудержи-
неудерживаю щ и м и, или освобождающими связями (односто-
(односторонними).
Пусть на систему материальных точек наложены удержи-
удерживающие связи
l< Х2, у%, 22, . . . , Хп, уп, Zn) = О
/^1, 2, ... , т<3п),
(а)
где п число точек системы. Будем предполагать, что матрица
Якоби, составленная из частных производных от функций fj по
всем переменным хи Уи zu • ¦¦> хп, уп, zn
dfi dfx dfi dfi б/, <9Д
dh dh ' oh
dxn i dyn
dh df,
dzn
dh
dzn
dfm dfm ?fn
dxx di/1 дгг
dfm dfm dfn
dxn dyn ozn
имеет ранг т, т. е. хотя бы один из миноров m-го порядка этой
матрицы отличен от нуля. При выполнении этих условий все
функции U будут независимыми и ни одна из них не является
функцией остальных. Наряду с данным рассмотрим соседнее,
бесконечно близкое положение системы, допускаемое наложен-
наложенными связями. Тогда координаты точек этого нового положения
xv -\- 8хх, yv -',- 8f/v, А, + Szv, (v = 1, 2, ... , n)
будут также удовлетворять уравнениям связи (а), так что
// (*i + К. У\ + Si/i, Ч + бг1. • • • • хп- Ьхп, уп -г Ьуп, zn + bzn) = 0
(/=1, 2, .... т).
(Ь)
Предполагая, что уравнения связей представлены непрерывными,
сколь угодно раз дифференцируемыми функциями, перепишем
уравнения (Ь) в виде степенного ряда по малым значениям ве-
величин 8xv, 8yv, 8zv:
fj(Xi + 8xlt yx + &ylt zx + &!, . .. , xn + bxn, yn + byn, zn + Szn) =
n
= /iixi> Уъ zi' • ¦ • 1 xn, yn, zn) -1- \^
v=l
+ ... = 0,
171
где
fj{Xi, У» 2\ хп, уп, 2„) = 0
для всех значений координат точек системы.
Для достаточно малых значений 6xv, 8yv, 8zv, при которых
можно пренебречь членами выше первого порядка малости, по-
получим
xv 4-
ИЛИ
S
v=l
Вариации координат Ьхч, 8yv, 8zv удовлетворяют полученным т
уравнениям связи и не могут быть все заданы произвольно. Из
условия, что матрица, составленная из коэффициентов при
8xv, 6j/v, Szv, имеет ранг т, следует, что т из величин 8xv, Ьу^,
bz4 являются зависимыми и могут быть выражены через
остальные Зя—т независимых величин bxv, 8yv, 5zv. Число
k = 3n—т называют числом степеней свободы системы.
Оно равно числу независимых параметров, определяющих поло-
положение механической системы. Такими параметрами могут быть
как Зп—т независимых декартовых координат, так и криволи-
криволинейные координаты, в ряде случаев более отвечающие рассмат-
рассматриваемой задаче. Так, например, положение точки на окружно-
окружности можно задать всего одним параметром, в качестве которого
можно выбрать угол, который радиус, соединяющий точку с цен-
центром окружности, образует с некоторой заданной прямой.
2. Обобщенные координаты. Уравнения Лагранжа. Как уже
говорилось, для определения положения механической системы,
на которою наложено т двусторонних связей, достаточно задать
только к = Ъп—т каких-либо независимых параметров, полностью
определяющих положение этой системы. Число независимых
параметров равно числу степеней свободы системы. Каждая
новая связь будет на единицу уменьшать число степеней свобо-
свободы, а следовательно, и число независимых параметров, опреде-
определяющих положение системы. Здесь всюду предполагается, что
на систему наложены удерживающие связи. Независимые пара-
параметры, через которые могут быть выражены все декартовы коор-
координаты точек системы и которые полностью определяют поло-
положение последней, называются обобщенными координа-
координатами системы, или лагранжевыми координатами
172
(они были введены в механику Лагранжем). Эти лагранжевы
координаты имеют вполне определенный геометрический смысл.
Они вообще могут отличаться от декартовых координат, но мо-
могут также и включать в свое число одну или несколько декарто-
декартовых координат. Обозначая k независимых параметров, через
которые выражаются все декартовы координаты точек системы,
через qu q2, ..., qk, будем иметь
хч = xv(ft, ft, ... ,qk), у* = f/v(ft, ft Qk)>
zv = zv(ft, ft, ... ,ft). (a)
Во всех случаях, когда декартовы координаты различных
точек системы могут быть выражены в явном виде через систе-
систему независимых параметров ft, q2, ..., qk (которые можно изме-
изменять независимо один от другого), полностью определяющих
положение системы, будем называть такую систему голоном-
ной, а сами параметры qu q2, ¦., qh — координатами г о-
лономной системы. В этом случае можно утверждать,
что на систему наложено Зп—k = p различных связей. Если из k
уравнений системы (а) определить величины q\, q2, ..., qh в функ-
функции k величин из X,, уи ..., zn и подставить в оставшиеся Зл.—k
уравнений (а), получим р зависимостей между координатами
х\, г/1, 2], ..., хп, уп, zn, которые и будут представлять собой урав-
уравнения связей. Условие разрешимости уравнений (а) относитель-
относительно величин <7ь <72, •••, <7ь сводится к тому, что в прямоугольной
матрице из частных производных
II Оч dyi dz,
II dqs dqs dqs
содержащей k столбцов и Зп строк, хотя бы один из миноров
&-того порядка будет отличен от нуля, т. е. матрица имеет
ранг k.
Пусть значения параметров qu q2, ..., qk определяют некото-
некоторое положение системы. Рассмотрим близкое к данному положе-
положение этой системы, которое определяется значениями параметров:
<7i + 6ft, ft + 6ft, ... , qk + 6ft.
Тогда вариации декартовых координат получат вид
^ 6ft, S^V-g^ft, 5zv = V-^5ft (b)
a ЛЫ OQ id d
S=I S=l S=l
и все возможные перемещения системы можно будет задать
при помощи вариаций независимых параметров 8ft, 8q2, ..., bqk-
Пусть на точку системы с координатами xv, t/v, zv действует
активная сила Fv (Xv, Yv, Zv). Необходимое и достаточное усло-
условие равновесия
173
S (J№v + ^v5f/v + Zv8zJ = 0 (c)
при помощи равенств (а) можно выразить через вариации неза-
независимых параметров
s=l s=l s=l
или, после изменения порядка суммирования,
s=l v=l
Обозначив через Qs выражение, стоящее в квадратных скобках
V^ I ^хч ^v ^zv \
Qs = / , ( Ху — г" 'v —; г ^v —"— I,
^ V dqs c)qs dqs j
v
и перепишем уравнение (d) в виде
)fiqs = 0. (е)
s=l
Величины Qs называют обобщенными силами системы,
соответствующими ^-той обобщенной координате. В дальнейшем
всегда будем предполагать, что параметры q\, q2, ..., Ць. выбраны
так, что для каждого положения системы для любого r@<r^fe)
существует перемещение, определяемое условиями
5<7s=O, s^ r, ^гф0.
и нет перемещений, при которых все 6^ = 0.
Так, например, положение точки, вынужденной оставаться
на окружности x2+y2=R2, определяется всего одним парамет-
параметром. Но если в качестве такого параметра выбрать координа-
координату у, то при х=0 частная производная дх/ду теряет смысл и
координата у перестает удовлетворять определению лагранже-
вых координат. Нетрудно видеть, что при х=0 возможному пе-
перемещению точки соответствует значение бг/ = О, а вариация ко-
координаты х становится неопределенной. Параметр у является
координатой Лагранжа всюду, за исключением значений y=±R.
Так как все 8#s совершенно произвольны и независимы, ра-
равенство (е) будет справедливо лишь тогда, когда все Qs обра-
обращаются в нуль, т. е. выполняются условия
174
Полученные k уравнений равновесия называются уравнения-
уравнениями Лагранжа. Они определяют k неизвестных значений обоб-
обобщенных координат q\, q2, .., qu, соответствующих положению
равновесия системы.
Выражение 2QSS<7S представляет собой сумму работ всех
активных сил, действующих на систему, на произвольном воз-
возможном перемещении системы, т. е.
ЬА = ? Qsbqs.
s=l
Если сообщить системе возможное перемещение, соответствую-
соответствующее изменению только одной обобщенной координаты, напри-
например перемещение, определяемое условиями
6^ = 0 1ф\, б^>0,
и подсчитать работу сил §А\ на этом перемещении, то получим
соотношение для определения обобщенной силы
Так можно подсчитать все обобщенные силы системы.
Если существует силовая функция U(xit уь zu ..., zn), то
бЛ = 6С/ и, выразив силовую функцию через обобщенные коорди-
координаты Лагранжа, получим
Qt = -T~ (»= 1,2,...,?).
dq
В качестве примера рассмотрим задачу о равновесии сво-
свободного твердого тела. Для определения его положения зададим
координаты произвольной точки С твердого тела (рис. 130).
Свяжем с точкой С декартову систему прямоугольных осей
Cx\\j\Z\, перемещающихся поступательно, и систему Cx2y2Z2, не-
неизменно связанную с твердым телом. Положение последней си-
системы относительно осей Cx\\]\Z\ определим углами Эйлера
Ф, г|з, ft. Каждую из шести величин \, ц, ?, ср, ty, ft можно изме-
изменять независимо от других. Все они полностью определяют по-
положение твердого тела в пространстве. Если все названные
параметры остаются неизменными, то не будет двигаться и твер-
твердое тело. Параметры 1, г\, ?,, ср, ^, ft являются определяющими
координатами системы. Декартовы координаты произвольной
точки твердого тела могут быть выражены через эти параметры.
В самом деле, для произвольной точки твердого тела имеем
175
Записав таблицу направляющих косинусов углов, образованных
ОСЯМИ Х\, У], Z\ С ОСЯМИ Х2, f/2. %2
h
ч
Уъ
а
Р
Ух
«X
Pi
Yi
Ч
«а
Р2
Ъ
z
\#
lil N
\
т
1
/у
^^
Ч
-^
Рис. 130
Рис. 131
заметим, что система Cx2y2Z2 может быть получена из системы
Cx\y\Z\ тремя конечными поворотами (рис. 131), которые опре-
определяются следующими формулами преобразования:
хг = х' cos i|) — i/'sini|), y1 — Ar'sinip + y'cosij), г1 = г',
х' — х", y'=y"cos$ — z'sinft, z' = у" sin § -J- г"cos§,
x" = хг cos ф — yt sin ф, ^/" = x2 sin ф -f- У% cos Ф> z" = г2-
Тогда результирующее преобразование получит вид
xt = л;2 (cos ф cos oj) — sin ф cos ft sin i|>) + t/2 (— sin ф cos гр —
— cos ф cos § sin i|>) + z2 sin ft sin ip,
t/, = x2 (cos ф sin aj) + sin ф cos ft cos if>) + y3 (— sin ф sin г|з +
4- cos ф cos ft cos гр) — z2 sin ¦& cos oj),
2j = л:2 sin ф sin ft + #2 cos ф sin ft + гг cos d.
176
Сравнивая полученные формулы с выражениями
получим значения направляющих косинусов, выраженных через углы
Эйлера
a = соэфсоэгр — sin ф cos 0 sin гр, р = — sin ф cos г]з —
— cos ф cos^fl1 sin г|), y = s'n ® s'n 'Ф'
ax = cos ф sin aj) + sin ф cos § cos ty, Pi = — sin ф sin гр -f
-f соэфсозгрсоэд, Yi = — c
сха^втфвтф, р2 = cos ф sin ¦&, Y2 =
Эти формулы устанавливают явную зависимость декартовых
координат от независимых параметров, определяющих положе-
положение твердого тела.
Возможные скорости точек Mv твердого тела удовлетворяют
формуле Эйлера
vv = vc 4- [*л, CMV].
Для проекций возможных скоростей точек твердого тела на оси
получим
u + qzv — гуч, —— = v + rxv — pzv,
ы
—— = w + pyv — qxv-
Отсюда сразу находим проекции возможных перемещений точек сис-
системы
8,vv = (и + qzv — n/v) 8^, byv = (v 4- rxv — pzv) Ы
8zv = (w -\- рг/v — qx\) 8^-
Полученные формулы устанавливают зависимость возмож-
возможных перемещений от проекций мгновенной угловой скорости
твердого тела р, q, r. Последние определяют только возможные
перемещения твердого тела. Декартовы координаты х, у, z точек
твердого тела не могут быть выражены через р, q, r.
Предполагая, что на точки твердого тела действуют актив-
активные силы Fv, запишем принцип Бернулли в виде
S (Fv> 6rv) = 0,
177
где
6rv = (vc + [w, CAfv]Nf.
Тогда после подстановки будем иметь
8*2 (FVt vc + [<*>, CMV]) = О,
или
откуда следует
2(Fv,vc)-i 2(Fv>[
(ve, SFV) + («2 [rv,
= 0.
Это уравнение должно выполняться при любых возможных пе-
перемещениях твердого тела, находящегося в равновесии, т. е. при
произвольных значениях vc и ©, что возможно, если удовлетво-
удовлетворяются условия
SFV = 0, 2 [rv, Fv] = 0,
являющиеся известными уравнениями равновесия твердого тела.
Пример 50. Два одинаковых стержня АС и СВ, каждый длиной 21
и весом Р, связаны между собой шарниром С и опираются на неподвижный
цилиндр радиуса г с горизонтальной осью (рис. 132). Найти угол ЛСВ = 2ф
при равновесии системы и угол я|з, который биссектриса этого угла составляет
с вертикалью.
Рис. 132
Решение. Параметры ф и г|> полностью определяют положение си-
системы и потому могут рассматриваться как лагранжевы координаты. Тогда
уравнения равновесия получат вид
Первое из этих уравнений получаем, полагая что \]> не изменяется при воз-
возможных перемещениях системы. Определив координату #с центра тяжести
системы
178
/ г
== — / cos го — cos
V Y smcp j
получим уравнение равновесия
Р&Ус ! '¦ cos ср \
Q --= — 2 —— = 2Р — / sin Ф + . Y cos i|> = 0.
ф бф \ 8Ш2ф /
Полагая, что при возможных перемещениях но изменяется ф, получим
= - 2
Р6ус I r
~ 2Р /
I
= - 2Р / cos <p -
\
sin i|> = 0.
Этим уравнениям удовлетворяют следующие решения:
1. sin т|> -= 0, что возможно только при ф = 0, и угол ф определяется из
уравнения
Г COS ф
—/sin ф+ . т =0.
2
2. cosij)=0, что возможно, когда г|з=я/2 или \f = 3
деляется из уравнения
t, угол ф здесь опре-
опре/ cos ф —
sin ф
¦ — 0,
и, следовательно, должно быть выполнено условие 2r^t. Стержень АС не
оторвется от цилиндра только тогда, когда угол Р=1ф—Ф будет отрицатель-
отрицательным. Последнее выполняется только при ф>90°, что противоречит условию
для определения ф.
Если 1=2г, то уравнения равновесия имеют еще одно решение: ф=л/4,
ч|;^л/4, образующее в нуль выражения, стоящие в круглых скобках.
Замечание. При определении обобщенных сил необхо-
необходимо следить за тем, чтобы все обобщенные силы определялись
в одной и той же системе независимых переменных. Поясним
это на примере.
Пример 51. Система состоит из двух материальных точек А и В, свя-
связанных между собой нерастяжимой нитью АВ длины /2 и соединенных с не-
неподвижной точкой О нерастяжимой нитью длиной U (рис. 133). К точке А при-
приложена вертикальная сила Fi, к точке В — горизонтальная сила F2 Опреде-
Определить положение равновесия системы,
Решение. Выберем сначала за независимые переменные углы ф и \f,
которые образуют соответствующие нити с вертикалью. Определяя обобщен-
обобщенные силы в этой системе переменных, получим
<Эф = 1г [— Fx sin ф -f F3 cos ф] -= 0, Q^ = l2Fz cos i|> = 0,
откуда имеем следующие условия равновесия:
iJ>=90°, tgq>-=—-.
Если же за независимые переменные выбрать углы ф и О (ф определен выше,
а О угол между направлениями нитей), то уравнения равновесия получат вид
<?ф =
sin ф + F2 [h cos ф + l2 cos (ф
= 0,
179
хотя условия равновесия и не изменяются.
_Ml_Hicoi0L
Fl + Flsin^) *
Пример 52. Определить выражение обобщенной силы для твердого
тела, способного вращаться вокруг неподвижной оси г.
Решение. Возможное перемещение сводится к повороту вокруг не-
неподвижной оси. Примем эту ось за ось г. Тогда для определения проекций
возможных перемещений можно будет записать матрицу
»0 0 6ф||
*v Уч г\ И*
откуда будем иметь
6xv = — yv6(f, 6yv — xv6y, 6zv -= 0.
Подсчитывая работу активных сил на этом возможном перемещении, получим
2 (Xv6a-v + Yy8t,v + Zv6zv) = 2 (- yvXv + x^YJ бФ = М2бФ,
где
Мг = 2 (xvYv ~ yvXv)
представляет собой сумму моментов активных сил относительно оси г, т. е.
обобщенная сила сводится к моменту результирующей пары.
3. Общие теоремы о равновесии системы материальных то-
точек. Пусть связи, наложенные на систему материальных точек,
допускают поступательное перемещение всей системы материаль-
материальных точек вдоль некоторой неподвижной оси, которую всегда
можно принять за ось х. Для этого возможного перемещения
будем иметь
8xv = a, 6j/v = 6zv = 0 (v = 1, 2, ... , п),
п тогда в соответствии с принципом Бернулли условие равнове-
равновесия запишется в виде
aS^v = О,
где a — отличный от нуля множитель. Отсюда следует, что необ-
необходимым условием равновесия является равенство нулю суммы
проекций всех активных сил на ось х.
I,XV = 0.
Предположим, что наложенные на систему связи допускают
поворот всей системы, как одного целого, вокруг неподвижной
оси. Примем эту ось за ось z. Скорости точек тела, вращающе-
вращающегося вокруг оси z, определяются известными формулами Эйлера
<, = — «Ч/v, У'ч = a*v. г; = 0,
180
откуда для возможных перемещений получим
8л\, = — t/v8<p, 6i/v = Xv&p, 82V — О,
где 8ср угол поворота вокруг оси г. Подставляя эти значения в об
щее уравнение равновесия
2 (Xv6xv 4- Kv6i/V -- Zv8zv) = О,
будем иметь
а условие равновесия получает вид
т. е. необходимым условием равновесия системы материальных,
точек является равенство нулю суммы моментов всех активных.
сил, действующих на систему, относительно оси z.
Рассмотрим равновесие твердого тела. Произвольное мгно-
мгновенное перемещение твердого тела, как известно из кинематики,,
сводится к мгновенно-винтовому перемещению. Пусть ось 2 —
ось винтового перемещения твердого тела. Если обозначить че-
через 80 бесконечно малый угол поворота твердого тела вокруг
оси z, а через 5г величину поступательного перемещения твердо-
твердого тела вдоль оси 2, то для винтового перемещения будем иметь.
бг =- Ш\
где k — параметр винта. Из общего уравнения статики
2 (Хфх^ + Yv8yv -г ZV62V) = О
будем иметь
8й2 (*VKV — ywXy) + §22ZV = О,
или
6tt [2 (jcvyv — tjvXJ -f ?2ZV] =¦= 0.
Обозначая через Mz сумму моментов активных сил, действующих
на твердое тело, относительно осп г, перепишем последнее урав-
уравнение в виде
ЬЬ (Мг + kZ) = 0.
Отсюда следует, что для равновесия твердого тела необходимо-
выполнение условия
Мг + kZ = 0.
Замечание. Из того, что произвольное возможное пере-
перемещение твердого тела всегда может быть сведено к поступа-
поступательному перемещению и к вращению вокруг некоторой оси,
нетрудно сделать вывод, что в самом общем случае обобщенные
силы имеют размерность силы или момента силы.
181
4. Метод неопределенных множителей Лагранжа. Рассмот-
Рассмотрим голономную механическую систему, подверженную действию
активных сил Xv, У%, Zv и стесненную идеальными связями,
аналитические выражения которых имеют вид
// i*i' «/i. 2i. *2. Уг> 22> ¦ • • > *л. Ул. 2„) < 0 Га)
(/= 1, 2,3 т<3п).
Будем предполагать, что в рассматриваемом положении равно-
равновесия все связи оказываются в натянутом состоянии. Кроме того,
¦будем предполагать, что матрица Якоби, составленная из част-
частных производных
dxl ' dy1 '
dx2
dfm Щт dfm tfn
_ __
dxy ' %x ' dzx ' dx2 ' ' dxn ' dgn ' dzn
имеет хотя бы один отличный от нуля минор m-того порядка.
Тогда при натянутых связях т. координат точек системы могут
быть представлены в функции й = 3я—т остальных.
Сообщив системе произвольное возможное перемещение, за-
заметим, что на этом возможном перемещении либо все связи
остаются в натянутом состоянии, либо некоторые из связей осво-
освобождаются (переходят в ненатянутое состояние). В самом общем
¦случае возможные перемещения будут подчинены условиям
(Ъ)
j =1,2, ... , т.
Условие равновесия системы
0
(с)
содержит вариации координат 6лч>, 6yv, 8zv, которые не могут
быть выбраны произвольно, а подчинены условиям (Ь). Чтобы
отсюда получить условия равновесия, следует исключить зависи-
зависимые вариации координат. Это исключение можно провести, вос-
воспользовавшись методом неопределенных множителей Лагранжа.
Для этого умножим сначала каждое из условий связи (Ь) на
неопределенные пока множители kj и добавим получающийся
результат к левой части неравенства (с). В результате получим
сумму
182
VV,,
которая обращается в нуль на неосвобождающих перемещениях
системы. Группируя коэффициенты при одинаковых значениях
8xv, 8«/v, 82^, для неосвобождающих перемещений будем иметь
V=I
где величины 8xv, Sj/v, 6zv подчинены условиям (b) со знаком
равенства. Предполагая уравнения связи (Ь) независимыми,
заметим, что т величин 6xv, Ьуч, fizv являются в этом случае-
зависящими от k = 3n—т остальных. Последние могут прини-
принимать произвольные значения. Подберем теперь произвольные
множители Xj таким образом, чтобы коэффициенты при всех,
зависимых перемещениях обратились в нуль. Тогда равенства
(d) будет выполняться на любом неосвобождающем перемеще-
перемещении системы лишь в том случае, когда все коэффициенты при
оставшихся независимых перемещениях 6xv> &/v, 8zv обращают-
обращаются в нуль. Иначе говоря, коэффициенты при т независимых ва-
вариациях обращаются в нуль вследствие соответствующего выбо-
выбора множителей Xj, а коэффициенты при независимых возмож-
возможных перемещениях обращаются в нуль потому, что иначе урав-
уравнение (d) не будет выполняться на всех возможных перемеще-
перемещениях системы. Таким образом, для удовлетворения уравнения (d)
необходимо приравнять нулю все коэффициенты прибху, 8#v.
8zv, в результате чего получим уравнения
эти Зп уравнений вместе с т уравнениями связи (а) опреде-
определяют Зп + т неизвестных величин (Ъп координат xv, yv, zv
в положении равновесия системы и т множителей Xj).
Рассматривая теперь освобождающие перемещения, для ко-
которых условия (Ь) и (с) выполняются со знаком неравенства,
нетрудно видеть, что в положении равновесия и для этих пере-
перемещений имеет место равенство
6Л + Zbfif, =. О, (f>
18а
так как в положении равновесия равны нулю все коэффициенты при
x 6j/v, 6zv.
Перепишем равенство (f) в виде
Здесь правая часть равна нулю для всех неосвобождающих пе-
перемещений системы и больше нуля для освобождающих переме-
перемещений, поэтому
2ЭД > 0. (g)
Рассмотрим такое освобождающее перемещение, при кото-
котором освобождается только одна связь (например, связь /j)> так
что на этом перемещении будем иметь
Тогда из условия (g) получим
что возможно лишь при
Проводя аналогичные рассуждения для связей B, fi, ..., fm, при-
придем к заключению, что в положении равновесия все множите-
множители %j должны быть отрицательными.
Уравнения (е) называются уравнениями равновесия с мно-
множителями Лагранжа. Они справедливы как для освобождающих,
так и для неосвобождающих связей. Положительные значения
множителей X; не отвечают положениям равновесия системы
лишь в том случае, когда рассматриваются освобождающие
связи.
Все рассуждения относительно знаков Xj теряют смысл для
тех kj, которые соответствуют двухсторонним связям. Для этих
¦связей на всех возможных перемещениях системы имеет место
условие 6fj = 0, поэтому соответствующие множители >,5- могут
иметь произвольные знаки.
Пример 53. Через бесконечно малый блок О (рис. 134) перекинута
веревка, к концам которой прикреплена невесомая палочка АВ. Найти положе-
положение равновесия системы, если на концах палочки подвешены два груза Р и Q.
Решение. Обозначая через у\ и у2 вертикальные координаты то-
точек А и В, запишем общее уравнение статики в виде
На систему наложены следующие связи:
1. Условие неизменяемости длины палочки, которое можно представить
уравнением
h - (*i ~ *4* т- (й - Уд2 - а- = О
184
2. Условие неизменяемости длины нити (предполагается, что нить все-
время находится в натянутом состоянии), которое записывается равенством
/.= !/"*? +iff+ ]/If + ]|"-/ = 0.
Дифференцируя эти уравнения связи, получим
в/i = 2 W - *,) (8^ - 6х2) + 2 (^ - #2) F^ - 6Й) = О,
_j_ x26a.-2 -f у.,Ьу2 _ =
у///////////////////////.
Рис. 134
В X
Рис. 135
Применяя метод множителей Лагранжа, запишем следующие уравнения рав-
равновесия: к
= 0,
= 0,
— х2)
(с)
¦ = о,
к которым еще необходимо присоединить два уравнения связи. Складывая,
}равнения (а) и (с), находим 3 д
V
4 +
¦ + ¦
= 0.
185
Отсюда следует, что при равновесии один из сомножителей обращается в
нуль. Но если бы Я2=0, то, складывая (Ь) и (d), мы получили бы
•что противоречит условиям задачи. Следовательно, в нуль должен обратиться
второй множитель, откуда имеем
Но из чертежа видно, что
= cos а, г^пгг" = cos 6,
+ У~2
•следовательно, cosa=cosP или а = {3, т. е. в положении равновесия ветви нити
¦образуют равные углы с осью х.
Умножая теперь первое уравнение иа yjxi и вычитая результат из (Ь),
будем иметь
Аналогично из (с) и (d) получим
Тогда
Р х
— = — -2-, или Ркг + Qx2 = 0,
т. е. при равновесии сумма моментов сил Р и Q относительно точки О должна
быть равна нулю.
Можно отметить еще и частные решения полученных уравнений, которые
получаются при xl=x2=Q, т. е. когда палочка занимает вертикальное поло-
положение.
Пример 54. Тяжелая однородная палочка АВ скользит своими кон-
концами по вертикальной и горизонтальной гладким прямым. К нижнему концу
палочки приложена горизонтальная сила F (рис. 135). Определить положение
равновесия палочки.
Решение. Если связи в точках А и В рассматривать как двусторон-
двусторонние, то уравнения связей представятся равенствами
я из принципа Бернулли будем иметь
Применяя метод множителей Лагранжа, отсюда получим
- ~ Ч - F6x2 + ^бд* + Хфуг + 2Я.з (Xl - хг) Fх, - дхг)
Откуда, приравнивая нулю коэффициенты при бхь 8/2, б^, 6г/2, будем иметь
\1 + 2\3(х1 — х2) = 0, — F — 2А,3(х, — *.,) =0,
— -у- —2Л3 (и — ^i) = 0, Л2 + 2Л3 (y3 — yi) = 0.
Принимая из условий связи, что *1 = г/2=0, эти уравнения можно переписать
в виде
--у-+2^=0, ^
Складывая первое и второе уравнения, получим
%1—F = 0, или k1=
и из третьего и четвертого уравнений найдем
откуда видно, что оба множителя \\ и h2 положительны.
Умножая второе уравнение на у\, третье на Хч и вычитая третье из вто-
второго, получим
откуда
угол ф определяет положение равновесия системы.
Если наложенные связи являются освобождающими, то уравнения свя-
связей запишутся в виде
f1==~Xl<0, f,=~y1<0, h=(x1^x^+(y1-~y^~P=--0,
а условие равновесия
6х3) + 2Л (S^ — Ъу2)\ = 0,
отсюда получим уравнения равновесия
— ^ — 2x2^3 = 0, —F+2X3x2 = 0,
откуда будем иметь
Аа=—F<0, X2=— mg<0,
F mg 2(/j mg
187
т. е. при равновесии
mg Img
Чтобы получить отрицательное значение для )»э, необходимо и третью связь
рассматривать как освобождающую, предполагая, что расстояние между точ-
точками не может быть меньше длины стержня, т. е.
h = Р ~ (*i - *•)" - (У1 - УгУ < 0.
5. Определение реакций. Обозначим через Rvx, Rvy, Rvz про-
протекции на неподвижные оси координат силы реакции, действую-
действующей на v-тую точку системы. Тогда уравнения равновесия каж-
каждой точки системы можно будет записать в виде
Xv+-Rvx=0, Yv + R4g = 0, Zv + Rvz=--0 (v=l,2 n). (h)
'Сравнивая эти уравнения с уравнениями равновесия (е), заме-
заметим, что они совпадают, если положить
(v= 1,2, ...,«)¦
"Эти соотношения можно использовать для определения реакций
связи.
Рассмотрим вектор RJ, с проекциями
гколлинеарный вектору п нормали к поверхности
/,- = const
в точке (jcv, J/v, 2V), причем вектор п будем считать "направленным в
сторону возрастания функции /, F/;<0) (рис. 136). Вектор R{, будет
направлен в сторону убывания функции /(- и определит реакцию, дейст-
действующую на v-тую точку со стороны связи /,-.
Замечание. Уравнения равновесия со множителями для
освобождающих связей получены из принципа возможных пере-
перемещений при рассмотрении неосвооождающих перемещений.
Эти уравнения определяют как положение равновесия, так и
реакции связей. Поэтому реакции односторонних связей могут
быть всегда найдены в предположении, что связи являются дву-
двусторонними.
Пример 55. Исследовать условия равновесия шара иа гладком гори-
.зонтальном полу, принимая последний за одностороннюю связь.
.188
Решение. Уравнение равновесия с множителями имеет вид
связь может быть задана условием / = — у < 0, поэтому
df
ду
Отсюда реакция связи определяется однозначно
и направлена вверх.
Рис. 136
Пример 56. Исследовать равновесие тяжелой материальной точки, на
которую наложены связи (рис. 137),
fi = y — х<0, /2 = л2 + ^ —г2< 0.
Решение. Из принципа возможных перемещений имеем
- mgby + Хг фу - Ьх) + U Bx6* + 2у8у) = 0,
откуда, приравнивая нулю коэффициенты при Ьх и ду, получим
= 0.
¦Сначала рассмотрим случай, когда в натянутом состоянии находятся обе
связи (положения 1 и 2). Тогда из уравнений связи будем иметь
= х, х=
Подставляя эти значения в уравнения равновесия, получим
_ теУ% . _ mg
2 4r ' 1 2
Но такие значения Kv не могут соответствовать положениям равновесия (в по-
положении равновесия все Яу<0), следовательно, при натянутых связях поло-
положений равновесия не существует.
189
Если в натянутом состоянии находится только связь f\, то уравнения
равновесия становятся противоречивыми:
— mg + К = 0, — %1 = О,
т. е. и в этом случае положения равновесия не существует.
Если же оказывается натянутой только связь f2, то уравнения равновесия
— mg + 2гД2 = 0, 2хЛ2 = О
будем иметь решение
причем Я2 принимает отрицательное значение лишь при у<0, т. е. возможно
только одно положение равновесия (положение 3)
х — 0, у=—г.
Пример 57. Материальная точка с массой т находится внутри трех-
трехосного эллипсоида с полуосями a, b и с. На точку действует сила тяжести,
параллельная оси г, и сила отталкивания от оси г, пропорциональная рас-
расстоянию точки от этой осн. Найти положения равновесия точки.
Решение. Уравнение связи запишется в виде
xi уъ гг
Из принципа Бернулли имеем
6Л= — mgbz-\- kxbx-\- kyby < 0, k>0.
Дифференцируя уравнение связи
и применяя метод множителей Лагранжа, получим
— mgbz + kx&x + kySy + 2Я (~ Ьх + ~ &у + ~ &г\ -= 0.
Отсюда сразу получаем уравнения равновесия:
2Хх 2ку 11л
Присоединяя сюда уравнение связи, найдем следующие решения:
тес? тес
1\ v (\ ,. Г\ j Ь ^ Л _ г \ &
1) X — U, У — U, г— „*b.U, Z С, Л
/Л Z
,'АЬ2 mgc2
2) х=0, Л = -—¦'" "
190
ka?
п\ т _^__ ^** f\ —
' 2
Второе и третье решения существуют, если выполняются соответственно
условия
§ 4. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В ОБЩЕМ СЛУЧАЕ
Один из способов определения реакций связей был уже рас-
рассмотрен при изучении уравнений равновесия с множителями Лаг-
ранжа, когда связи задаются неявными уравнениями или нера-
неравенствами. В общем же случае связи, наложенные на систему
материальных точек, всегда могут быть заменены соответствую-
соответствующими силами реакций, действие которых эквивалентно действию
связей. После такой замены система может рассматриваться как
свободная от связей, но подверженная действию как активных,
так и пассивных сил. Принцип Бернулли для такой свободной
системы дает необходимые и достаточные условия равновесия в
виде уравнения
[(Хч +- Я«) 8*v + (Fv + Ryy) 6yv -|- (Zv + Я«) 6zv] = О, (а)
V=I
где Xm,Yv,Zv — проекции активных сил на неподвижные оси коор-
координат; RvX, Rvy, Rvz— проекции сил реакции на те же оси. Величины
8xv, 8yx, 6zv теперь полностью произвольны, так что равенство (а) бу-
будет выполняться для всех возможных перемещений лишь в том слу-
случае, когда обращаются в нуль все коэффициенты при 8xv, Ьуч, 6zv, т. е.
*v + /?v*=0, Kv + /?v» = 0, Zv + .Rv* = 0 (v-= 1,2, ... ,п).
Последние уравнения и служат для определения реакций связи.
Если по условиям задачи требуется определять не все, а лишь
некоторые силы реакции, то система освобождается только от
тех связей, реакции которых необходимо определить. Освобож-
Освобождая систему от связей, тем самым добавляем ей возможные
перемещения, которые раньше не допускались связями и на ко-
которых будут работать реакции освобожденных связей. Подсчи-
Подсчитывая сумму работ активных сил и сил реакции связей на осво-
освобожденном перемещении, получим условия для определения
реакций связи.
Пример 58. Исследовать условия равновесия твердого тела, у кото-
которого закреплены две точки О и О\ и на которое действуют активные силы
Fv(^v *V Zv)> приложенные к точкам А^(х^, yv, zv) (рис. 138).
Решение. Выберем начало неподвижной системы координат в точке О,
я ось г направим по прямой 00\. Наложенные связи допускают вращение
твердого тела вокруг осн г. Подсчитывая работу активных сил на этом воз-
возможном перемещении, получим
191
где бср — угол поворота твердого тела вокруг оси г. Отсюда сразу же полу-
получаем условие равновесия твердого тела, которое сводится к равенству нулю
суммы моментов всех активных сил, действующих на твердое тело, относи-
относительно оси г:
Для определения реакции в точке Oi освободим твердое тело от связи
в этой точке, заменив действие последней действием неизвестной силы
R' (Rx> Ry> Rz)- Освобожденное от связи тело может вращаться как вокруг
оси х, так и вокруг оси у. Сообщим твердому телу бесконечно малое воз-
можпое перемещение, повернув его вокруг оси х на угол бф, и подсчитаем
работу всех сил на этом возможном перемещении. Возможные перемещения
точек твердого тела определятся из матрицы
i|> О О
так что
В
Рис. 138 Pl!C- 139
Из принципа Бериулли для освобожденного твердого тела будем иметь
(xv6xv + Kv6i/V + z^ag + Rxbx' + R'yby' + /?;&' = о,
v=l
подставляя сюда значения вариаций координат, получим
zvXv + *VZV) - й#убг|> = 0,
—,
или, после сокращения на
192
где Мх — сумма моментов активных сил относительно оси х, a h — расстоя-
расстояние 00'.
Точно таким же путем можно получить реакцию Rx, рассматривая
поворот твердого тела вокруг оси у. Возможные перемещения в этом случае
будут определяться из матрицы
О бд О
xv Ум zv
так что
Подставляя найденные значения вариаций координат в общее уравнение ста-
статики, получим
или
Rx — — ^
Реакция R'z таким способом не может быть найдена, потому что любое воз-
возможное перемещение точки О' твердого тела ортогонально направлению силы
Rг, и задача оказывается статически неопределимой.
Пример 59. На гладкой горизонтальной плоскости лежат несколько
одинаковых однородных цилиндрических труб. Чтобы трубы не раскатыва-
раскатывались, они подпираются двумя брусьями Л и В, как показано на рис. 139.
Определить реакции брусьев.
Решение. Для определенности рассмотрим пятнадцать труб, располо-
расположенных, как указано на чертеже. Чтобы избежать рассмотрения статически
неопределимой задачи, предположим, что расстояние между брусками А и В
больше суммы диаметров нижних труб. Положение системы определим че-
четырьмя параметрами а, E, у и ф (углы, которые образуют прямые, соеди-
соединяющие центры труб нижнего и верхнего ряда с горизонталью), которые
связаны соотношением
4r (cos а + cos p + cos у -+- cos ф) + 1г — Юг -|- а, (а)
где а > 0 — сколь угодно малое число. Углы а, |3, у и ф подчиняются еще усло-
условиям
а<60°, Р<60°, Y<60°, ф< GO". (b)
Будем предполагать сначала, что последние условия выполняются лишь в
виде неравенств. Определив вертикальные координаты центров труб
у у = 2r sin a, i/2 = 2r sin р, у3 = 2r sin у, i/4 = 2r sin <p,
уь = 2r (sin а + sin f5), yt = 2r (sin f5 -f- sin y). y7 — 2r (sin ф -f- sin y) ,
y8 = 2r (sin а + sin p -f sin y), y3 = 1r (sin ф + sin у -\- sin p),
y10 — 2r (sin а + sin P + sin у -f- sin ф).
Запишем принцип Торричелли для системы с удерживающими связями:
или, после подстановки значений yt
— 2гР [4 cos аба + 6 cos рбр + 6 cos убу + 4 cos фбф] -= 0, (с)
7 Е. Н. Березкии 193
где величины ба, 6{1, 8у и 6ф связаны соотношением
sin аба + sin рбр -|- sin убу +sin фбф =0. (d)
Определив из последнего уравнения ба
sin рбр + sin убу + sin
;
tkt = —
;
sm a
и подставив это значение в равенство (с), получим уравнение для независимых
параметров 6f$, бу, 6ф
— 4 cos a sin рбр — 4 cos a sin убу — 4 cos a sin фбф +
+ 6 sin a cos f$6f5 -f 6 sin a cos убу -f- 4 sin a cos фбф = 0,
Приравнивая нулю коэффициенты при бр\ бу и бф, приходим к следующим усло-
условиям равновесия системы:
2 cos a sin р = 3 sin о cos р, 2 cos a sin у = 3 sin a cos у,
cos a sin ф — sin a cos ф,
которые можно переписать в виде
3 3
tgP=— tga, tgy;=—fga, tgtf = tga.
Принимая во внимание неравенства (b), получим условия равновесия
= Ytga a<P<60«. (е)
Величины а и р должны удовлетворять уравнению (а), которое перепишется
в виде
cos a + cos p = 1 -|- . (f)
8г
При р —» 60* отсюда находим предельное значение для а
ат= 1,22г.
В самом деле,
ат = lim a— lim 8r [cos a -+- cos В— 1] ^ 8г [0,654 + 0,5— 1] s 1,22г.
р-»ео° р-»бо°
При уменьшении C левая часть равенства (f) будет увеличиваться, а следо-
следовательно, будет возрастать и а. Таким образом, предполагая связи (Ь) в по-
положении равновесия выполненными в виде неравенств, устанавливаем, что в
положении равновесия должно быть
а > 1,22г.
Лишь при выполнении этого неравенства нижние трубы в положении равно-
равновесия не будут касаться друг друга. Уменьшая а, мы вынуждены будем отка-
отказаться от предположения, что все связи (Ь) в положении равновесия выпол-
выполняются в виде неравенств. Из условий (е) следует, что первыми переходят
в равенство связи
р< 60* и у<60*.
194
Рассмотрим теперь только такие состояния системы, для которых выпол-
выполняются условия
a<60V P = y=60#, ф<60°.
Уравнение связи для возможных перемещений (d) приобретает вид
sina6a + sin фбф = 0, 8р* = 6\ = 0. (d')
Общее уравнение статики для рассматриваемой системы перепишем в виде
— 2Рг D cos аба -+- 4 cos фбф) = 0. (с')
Система линейных относительно ба и бср уравнений (d') и (с') обладает
ненулевым решением, если обращается в нуль определитель
= 0,
или
sin a sin
cos a cos ф
sin (a — q>) = 0.
Отсюда следует, что в положении равновесия должно быть
а= ф.
Тогда из уравнения связи (а) находим
1 1 а
cosp" = T, C°Sa = T + "^7-
Как видно из последнего соотношения, при а —»0 получим
а-* 60°.
Для определения реакции в точке А, освободим систему от связи, убрав
брус А и заменив его действие силой реакции R. После такого освобождения
системы параметры а и ф можно изменять независимо друг от друга. При
этом должно выполняться условие 6|3=бу=О (при отличных от нуля 6E
или бу системе сообщается освобождающее перемещение, на котором будут
совершать отличную от нуля работу силы реакции труб, находящихся при
равновесии в соприкосновении). Сообщим системе перемещение
6а < 0, бф = О, бр = Sy = 0
;х сил, в том числе и работу
угдем иметь
4Rr sin a6a — 8Pr cos аба = 0,
и подсчитаем работу всех сил, в том числе и работу силы R, на возможном
перемещении системы. Будем иметь
откуда следует
R -= 2Р ctg a.
Если а —»0, то a —» 60° и
/3"
* 2Р
Заметим, что на рассматриваемом перемещении опускаются вниз четыре
трубы. У остальных труб вертикальные координаты не изменяются. Если
обозначить через Q вес опускающихся труб (в нашем случае Q=4P), то пре-
предельное значение силы реакции будет равно
195
§ 5. РАВНОВЕСИЕ НИТИ
Задача о равновесии нити очень распространена в инженер-
инженерной практике. С ней связаны вопросы определения натяжений
электрических проводов, цепей висячих мостов, тросов канатных
дорог и т. д. Вместе с тем многие прикладные задачи механики
нити не имеют теоретического решения до настоящего времени.
Особенно большие затруднения вызывают задачи динамики нити,
имеющие большое прикладное значение, например в текстильной
промышленности.
Механикой нити стали заниматься сразу же после открытия
дифференциального исчисления. И. Бернулли изучал равновесие
тяжелой однородной нити и установил фор-
форму цепной линии. Дальнейшее развитие
механики нити связано с именами Эйлера,
Резаля, Кельвина, Рауса.
1. Уравнения равновесия. Рассмотрим
задачу о равновесии гибкой нерастяжимой
и несжимаемой нити длиной /, закреплен-
закрепленной своими концами в неподвижных точках
А я В (рис. 140), на которую действуют
непрерывно распределенные силы. Под
нитью будем понимать систему материаль-
материальных точек, сплошь покрывающих некоторую
линию. В действительности всякая нить
имеет толщину, но в тех случаях, когда длина нити достаточно
велика по сравнению с толщиной, влиянием толщины можно пре-
пренебрегать. Обозначим через р линейную плотность нити, т. е. отно-
отношение массы какого-либо элемента нити к его длине. Если обозна-
обозначить элемент массы через dm, а элемент длины через ds, то плот-
плотность выразится в виде
О
Рис 140
Обозначим через s длину дуги нити, отсчитываемую от какого-либо
начала в определенном направлении. Для определенности примем
за начало точку А и положительным будем считать направление от
точки А к точке В вдоль нити. Выделяя на нити элемент ds, будем
предполагать, что внешние силы, действующие на этот элемент,
можно представить одной силой Fds, приложенной в некоторой точ-
точке элемента. Проекции этой силы на неподвижные оси координат
равны Xds, Yds, Ids, где X, Y, Z —проекции вектора F, который
назовем силой, отнесенной к единице длины. Пренебрегая разме-
размерами элемента ds, будем рассматривать его как одну материаль-
материальную точку с массой dm, находящуюся под действием силы Fds,
связанную с соседними элементами. Координаты этой точки обоз-
обозначим через х, у, г, а ее возможные перемещения через Ьх, 6у, &г.
196
Чтобы из принципа возможных перемещений получить урав-
уравнения равновесия нити, нужно вычислить сумму работ всех актив-
активных сил на произвольном возможном перемещении всей нити, при-
принимая во внимание, что возможные перемещения стеснены услови-
условием нерастяжимости и несжимаемости нити. Для этой цели можно
использовать метод неопределенных множителей Лагранжа. Эле-
Элементарная работа силы Fds, действующей на элемент ds, на воз-
возможном перемещении элемента имеет вид
Ydsby + Zdsbz.
Сумма элементарных работ
i
А = [(Xdsdx-r Yds by f Zdsbz) = 0. (a)
о
Условия связи, накладываемые на возможные перемещения эле-
элемента ds нерастяжимостью и несжимаемостью элемента, запишутся
в виде равенства
ds = ]/(dxf + (dy)* + {dzY =_ с = const,
откуда
bds^O,
или, если обозначить
f = V(dxf -\- (dy)* + (dzJ - с =- 0,
получим
л, _ dxb dx-\-dyS dy -\- dzbdz _ „
Y (d*J + (dyf + (dzf
Умножая это уравнение на неопределенный множитель % и интег-
интегрируя по длине нити, будем иметь
dx б dx + dybdy-\-dzbdz \ п
/
Г
I
J
о
где множитель к является функцией s и имеет свое особое значе-
значение для каждого элемента ds. Складывая (а) и (Ь), запишем ус-
условие Лагранжа
i
8dx+ bdy 5й]=0 (с)
ds ds ds )
о
197
На концах нити возможные перемещения удовлетворяют сле-
следующим условиям:
s = 0, s = I, 8x = 8y=bz = 0,
причем справедливы равенства
8dx = d8x, 8dy = d8y, 8dz=dbz.
В самом деле, рассматривая координаты х, у, z элемента ds как
функции длины дуги s, с точностью до малых второго порядка бу-
будем иметь
dx а* х (s + ds) — х (s),
тогда
8dx = 8х (s + ds) — бх (s) = dbx (s)
и уравнение (с) можно будет переписать в виде
i
dx+dy+
ds ds ds
Интегрируя по частям
i i
\ a d ox = I ox — \ 8x л ds
J ds ds о J ds \ ds J
о о
и принимая во внимание, что бдг[s=o = 0 и 8д:|5=/ = 0) получим
(
J ds J ds \ ds J
о о
Аналогичные формулы имеют место для у и 2. После такого преоб-
преобразования уравнение (d) перепишется в виде
Чтобы отсюда получить уравнения равновесия, следуя методу Ла-
гранжа, необходимо приравнять нулю коэффициенты при 8х, 8у,
6z, т. е. положить
ds \ ds J ds \ ds
198
ds
ds
= 0
в каждой точке нити. Полученные уравнения являются уравнения-
уравнениями равновесия нити с множителями Лагранжа. После исключения
из этих уравнений к получим уравнение кривой, определяющей
форму нити при ее равновесии.
Переписывая уравнение (е) в виде
Xds —
ds
Zds—dX
Yds — drk
dz
ds
dy_
ds
= 0,
= 0,
заметим, что вторые части этих уравнений представляют собой рав-
равнодействующую сил реакций, действующих на элемент ds со сто-
Рис. 141
Рис. 142
роны соседних элементов. Для идеально гибкой нити такими си-
силами реакции являются только силы натяжения нити Т, Т\, направ-
направленные вдоль нити (рис. 141). Сумма проекций этих сил на ось х
имеет вид
ds
ds
ds
где dx/ds — косинус угла между положительным направлением
оси х и положительным направлением касательной к нити. Сравни-
Сравнивая это уравнение с ,(f), получим
Т = — X.
Отсюда видно, что множитель К определяет силу натяжения нити,
а уравнения равновесия нити можно представить в виде
Xds-rd[T—)=0,
ds I
ds
199
2. Естественные уравнения равновесия нити. С элементом ds
нити в некоторой ее точке М свяжем систему прямоугольных осей,
определяемую единичными векторами t, n, р, (рис. 142), первый
из которых направлен по касательной к нити в точке М, второй —
по главной нормали, третий — по бинормали. Обозначим направ-
направляющие косинусы касательной через а, р, у, направляющие коси-
косинусы нормали — через а', р', у', направляющие косинусы бинор-
бинормали — через а", р", у". Тогда уравнения равновесия нити (g)
можно будет записать в виде
as ds ds
или, воспользовавшись формулами Френе — Серре
_da___c?_ _dp_ _ _р^_ dy у'
ds p ' ds p ' ds p
в виде
-^-а + Г —= 0, Y+^-Q + T-?
ds p ds p
Умножая каждое из этих уравнений соответственно на а, р, у и
складывая, получим
Ха + Ур + Zy f -2L (a8 + Ра + t) +
ds
^ + ^ + y^
ds ds ds
Здесь первая сумма
Ха + Fp + Zy = FT
представляет проекцию силы, отнесенной к единице длины нити,
на касательную к нити в точке М. Имея в виду соотношения
a2 + p2 + Y2 = it
(х, n)=aa' + pP'-+-YY'=0,
перепишем полученное выше уравнение в виде
Умножая каждое из уравнений (h) соответственно на а', р', у' и
складывая, получим
200
Xa' + УР' + Z? + 4L („и' + рр' -|. YY') 4.
as
P
Первая часть этого уравнения представляет проекцию силы, отне-
отнесенной к единице длины, на главную нормаль. Принимая во вни-
внимание соотношение
получим
Р
Умножая далее уравнения (h) соответственно на а", р", у" и скла-
складывая, будем иметь
Xa" + FP" -} Z\" + ^r («a" + PP" ~ YY") +
as
+ 1. (av H p'p- 4 YY) = 0,
P
откуда находим
Полученные уравнения
FT + -^ = 0, Fn + ^ = 0, Fp=0 (i)
ds p
являются уравнениями равновесия нити в проекциях на естествен-
естественные оси координат, или естественными уравнениями равновесия
нити. Из первого уравнения (i) имеем
dT = — Fxds -.— (Xa+Ур 1 Zy)ds =, —(X — + Y -^- + Z —)ds,
\ ds as ds I
ИЛИ
dT = — (Xdx + Ydy л-Zdz).
Если силы допускают существование силовой функции, то по-
последнее уравнение перепишется в виде
dT = —dU.
Интегрируя это соотношение, получим
T^ — U + h, где U = U(x,y,z), (j)
т. е. при наличии силовой функции натяжение нити в произвольной
точке М полностью определяется через координаты этой точки.
201
Зная форму нити и натяжение в некоторой точке, можно опреде-
определить натяжение в любой другой точке нити.
Пример 60. Исследовать положение равновесия нити, к точкам которой
приложены параллельные силы.
Решение. Предположим, что силы параллельны оси г. Тогда уравнения
(g) приобретают вид
d T
dx
ds
Uo,
dy
ds
= 0, Zds
dz
ds
= 0.
Интегрируя первые два уравнения, получим
¦ = А, Т
dy_
ds
где А н В — произвольные постоянные,
на первое, будем иметь
Разделив второе из полученных равенств
dy
dx
= —— = const,
Ay — Bx =
Рис. 143
где С — новая произвольная постоянная. Это-
Этому уравнению плоскости должны удовлетво-
удовлетворять координаты всех точек нити, т. е. нить
принимает форму плоской кривой.
Пример 61. Определить форму равно-
равновесия тяжелой однородной нити, закреплен-
закрепленной в двух произвольных точках А к В.
Решение. Силы тяжести — парал-
параллельные силы, а потому нить будет располо-
расположена в вертикальной плоскости, проходящей
через точки А и В (рис. 143). Выберем систе-
систему прямоугольных осей Аху с началом в точ-
точке А так, чтобы ось х была расположена в
плоскости нити горизонтально, а ось у на-
направлена вертикально вверх. Координаты точ-
точки В обозначим через а и Ь. Тогда уравнения
равновесия (g) запишутся в виде
= 0,
(к)
где р — вес единицы длины ннтн. Интегрирование первого из этих уравнений
дает
dx
Т = А = const.
ds
dx
Будем предполагать, что о>0. Тогда ~Т~>0. а значит, и i4>0. Подставляя
найденное отсюда значение Т в последнее из уравнений (k), получим
202
Здесь дифференциал дуги
ds = Vl + УЛ dx
и, вводя обозначение А = kp, где fe > 0, будем иметь
— pVl + y'* dx + kpdy' = О,
или
<V dx_
VTT^ ~ k '
Интегрируя это уравнение, получим
или
Обозначая через х0 координату х точки нити, в которой касательная к нити
горизонтальна, так что прн х=х0, if=0 и, следовательно, с = ех°, будем иметь
х—ха
е к =y' + Vl + У'2 .
Представим это уравнение в виде
Вычитая второе уравнение из первого, будем иметь
X Х0 X Хд
откуда, интегрируя, получим
X—Хо X— Хр
У= у"(е * +е U ) + Cl
где сх = уь ¦— k, уь < 0. Если ввести новые координаты
l = x — xt, r\ = y + k —1/0,
то последнее уравнение приобретет вид
JL _ J_
Ti=Y(efe +e ft)>
или
т) = k ch ——
k
k
203
Последнее уравнение характеризует связь между координатами ? и i] и пред-
представляет уравнение кривой, по которой располагается ннть при равновесии.
Эта кривая симметрична относительно оси г\ и называется цепиой линией. Ось |
называется направляющей цепной линии, а расстояние k самой нижней точки
нити от оси | называется параметром цепной линии.
Для определения натяжения нити можно воспользоваться уравнением
T-A-f,
dx
откуда
Подставляя сюда значение у', находим
т. е.
Т=-ГЩ-
Отсюда видно, что натяжение нити возрастает пропорционально ординатам, если
за ось ? взята направляющая цепной линии. Если представить, что ординаты —
материальные прямые, сделанные из той же нити, то можно сказать, что натя-
натяжение в каждой точке нити равно весу соответствующей ординаты.
Уравнение цепной лииии
k
2
содержит три параметра х0, j/o и k, которые могут быть определены из условий
на концах нити. В самом деле, пусть точка В расположена выше точки А Тогда
в точке A x=y=Q, и, следовательно,
п /„ к | . к \ i „ и
ИЛИ
k
В точке В х = а, у = Ь, откуда
Ъ = -у(е k +е * ) + уо-к.
Определяя длину нитн
l a
о о
имеем
Г» Л v v v v \п
= \ds =.) С к dx ^ S к |о'
Полученные уравнения позволяют определить три параметра хо, уо, к.
204
Покажем, что существует единственное положенне равновесия нити Для
этого предварительно, вводя обозначение уо—fe=p, перепишем полученные урав-
уравнения в виде
— 1
откуда
I —
Перемножая
Ъ =
два
Р-
Хо
~{е k -+
«о
-eft),
а—Jto
'-*¦'• '
а-*,
fc(-e *
1 — е
k +e
'+е k
последних уравнения,
а
у Р — ь2
а
а
+ е k
а
(е
а
ь-Р-4
а—х0
к _е
а—х.
k -е
), 1 + Ь-
получим
-2)= *>(
а
(е
к
х
га*
k
[е
а—х0
к ,
х.
+ е k ]
а—ж0
(г fe
а
9fc -e
еи е-1
2u
а—jc0
е fe
]
-г k
а
2ft ^ -^ П
И* U* W^
"зГ+ 5! ~
а у is _ 1,9
где м = -gT" • При «= 0 выражение обращается в единицу, а
при возрастании о также неограниченно возрастает, т. е. при равиовесни
или
откуда
I2 > а2 + Ь2 если а Ф 0.
Последнее условие означает, что длина нити больше расстояния между точка-
точками А и В. Если это условие выполнено, то можно определить а, и для постоян-
постоянных k, хо, Уо получается одна-единственная система значений, т. е. существует
одио положение равновесия.
Пример 62. Определить условия равновесия гибкой иити, находящейся
под действием центральных сил (силы, линии действия которых проходят через
одну неподвижную точку — центр сил).
Решение. В рассматриваемом случае момент силы, действующей иа
элемент нити ds, относительно любой оси, проходящей через центр сил, равен
нулю. Принимая за начало прямоугольной системы осей Oxyz центр сил, будем
иметь
(уЪ — zY) ds = 0, (гХ — xZ)ds=Q, (xY — yX)ds = Q.
Умножая соответствующие уравнения равновесия нити (g) на х, у, z и скла-
складывая, получим
205
ds \ ds / ds \ ds
\ d In, dZ \
d I dx\ d I dz
0 = z Г — v —- T
ds \ ds. ) d \
ds V ds j J ds V ds
Переписывая эти уравнения в виде
d \т (, dx dz I I n
—— \T [г —— — л- —— = 0,
ds \ \ ds ds
и интегрируя их, получим
f dz dy \ I dx dz
T\y—--z-f-\=A, T z — -x—-
\ ds ds J \ ds ds
dy dx\
Х—— — У —— = C,
ds as I
где А, В и С — произвольные постоянные. Умножая первое из полученных урав-
уравнений на х, второе на у, третье на г и складывая, находим
Ах + By + Сг = 0.
Полученное уравнение является уравнением плоскости, проходящей через начало
координат, которому удовлетворяют координаты всех точек нити, т. е. при равно-
равновесии нить имеет фигуру плоской кривой.
Примем плоскость, в которой расположена нить, за плоскость Оху. Тогда
А = В=0. Введем полярные координаты
х = г cos ф, у = г sin ф,
тогда
ds ds ds
и последний интеграл перепишется в виде
7У = С.
ds
Предположим, что силы, действующие на нить, зависят только от коорди-
координат точек приложения сил и обладают силовой функцией. Тогда из уравнения (j)
будем иметь
и задача сводится к квадратурам, В самом деле, дифференциал дуги в поляр-
полярных координатах равен
поэтому интеграл можно записать в виде
TV* (ЛрJ = С2 [(.drf -\- r' (iq>J]
206
или
[TV* — г»Са] (ЛрK = С! (drI,
откуда
-
Определив из (j') T как функцию г и подставив в полученное уравнение, найдем
уравнение с разделенными переменными, определяющее форму равновесия нити.
Глава IV
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
Динамика является главной частью механики. Она изучает движе-
движение различных механических систем в зависимости от причин, вы-
вызывающих это движение и влияющих на него. Причины эти в ме-
механике называются силами. Этим она и отличается от кинематики,
которая при изучении движения материальных объектов не прини-
принимает во внимание причины, вызывающие это движение. В механи-
механике обычно не рассматривается происхождение сил, а изучается
только их действие на движущиеся объекты. Изучение динамики
начнем с задач о движении таких тел, размерами которых можно
пренебрегать, а положение которых может быть определено как
положение геометрической точки. Такие тела, или частицы материи,
называют материальными точками. В теоретической ме-
механике все тела рассматриваются как совокупности взаимодейст-
взаимодействующих материальных точек. Одновременно с изменением положе-
положения каждое материальное тело, как бы мало оно ни было, может
вращаться и деформироваться. Рассматривая движение материаль-
материальной точки, будем изучать только изменение ее положения в про-
пространстве, не интересуясь вращением и деформацией. Такое
представление о материальной точке не лишено и реального
смысла: подобной материальной точкой, с точки зрения механики,
является центр тяжести твердого тела. В дальнейшем будет по-
показано, что центр тяжести твердого тела движется как материаль-
материальная точка, на которую действуют все силы, приложенные к этому
телу.
Всякое движение материальной точки можно определить лишь
по отношению к другим телам, а ее положение относительно других
тел может быть задано тремя координатами, относящимися к оп-
определенному моменту времени. Обычно выбирают прямоугольные
декартовы координаты, так как они проще связаны с длинами и
расстояниями.
Всякое движение происходит во времени. Моменты време-
времени, к которым относятся координаты и расстояния, а также про-
208
межутки времени, становятся определенными, когда выбрана оп-
определенная система отсчета. Измерение времени может быть в
принципе произведено при помощи любого периодического процес-
процесса. В практике же принято астрономическое измерение времени,
основанное на изучении законов движения планет и вращения зем-
земного шара. Фундаментальной единицей измерения времени являют-
являются звездные сутки — промежуток времени между двумя по-
последовательными верхними кульминациями точки весеннего рав-
равноденствия. Время, протекшее от момента верхней кульминации
точки весеннего равноденствия до любого другого момента, харак-
характеризуемого другим ее положением, выраженное в долях звездных
суток (звездных часах, минутах и секундах), называется звезд-
звездным временем. Звездные сутки в качестве основной единицы
времени неудобны, потому что начало суток при этой единице мо-
может приходиться последовательно на любое время дня и ночи. По
этой причине основной единицей времени выбрано среднегодовое
значение солнечных суток — промежутка времени между
двумя последовательными прохождениями Солнца через меридиан
данного места на земной поверхности. Продолжительность солнеч-
солнечных с\ток зависит от годового движения Земли относительно
Солнца, поэтому приходится брать среднегодовое значение солнеч-
солнечных суток. Практической единицей времени считается секунда
среднего солнечного времени, равная 1/86400 средних солнечных
суток, что составляет около 1/86164,09 звездных суток.
С 1 января 1963 г. в Советском Союзе введена международ-
международная система единиц СИ, в которой за единицу времени принята
1 секунда, равная 1/31556 925,9747 тропического года для 1900 г.
января 0 в 12 часов эфемеридного времени, не зависящая от не-
неравномерности вращения Земли.
Такой сопособ определения времени не является очень точным,
поэтому в настоящее время для определения промежутков време-
времени пользуются некоторыми естественными процессами, связанными
с колебаниями атомов, период которых нечувствителен к внешним
воздействиям. Но эти вопросы относятся уже к технике измере-
измерения времени и в курсе теоретической механики не изучаются.
Время, прошедшее между двумя событиями, называют про-
промежутком времени, а границу между двумя промежутками
называют моментом времени. В теоретической механике ус-
устанавливается независимо от событий или от системы, в которой
наблюдаются события, соответствие между моментами времени и
действительными числами. Определенное так время называют аб-
абсолютным идеальным временем.
§ 1. ОСНОВНЫЕ ЗАКОНЫ ДИНАМИКИ
Свои основные положения динамика берет из опыта и наблю-
наблюдений и с их помощью, а также с помощью кинематики и геометрии
выводит законы движения.
209
Древние ученые имели смутное представление о законах дви-
движения. Аристотель C84—322 гг. до н. э.) не знал еще закона инер-
инерции, считая, что с прекращением действия силы тела прекращают
двигаться. Только после долгих наблюдений над происходящими в
природе движениями Галилеем был раскрыт один из основных за-
законов движения, устанавливающий, что всякое тело пребывает в
состоянии покоя или равномерного и прямолинейного движения до
тех пор, пока внешние силы не выведут его из этого состояния.
Этот закон не был сформулирован Галилеем в его универсальной
форме, хотя Галилей и пользовался им в явном виде для объясне-
объяснения различных явлений.
Закон инерции Галилея является обобщением опытных фактов,
накопленных человечеством. Опираясь на него, Ньютон сформули-
сформулировал свои основные законы движения.
Первый закон Ньютона. Всякое тело продолжает удер-
удерживаться в состоянии покоя или равномерного и прямолинейного
движения, пока и поскольку оно не принуждается приложенными
силами изменить это состояние.
Под телом здесь подразумевается материальная точка, а сила
определяется как причина, изменяющая равномерное и прямоли-
прямолинейное движение материальной точки. За меру силы Ньютон при-
принял то ускорение, которое эта сила вызывает, в связи с чем сила
в механике Ньютона называется ускоряющей.
Первый Закон Ньютона называют еще законом инерции.
Под инерцией понимают способность тела сохранять свое дви-
движение или состояние покоя при отсутствии сил или изменять это
состояние под действием сил.
Связь между силой и ускорением устанавливает второй закон
Ньютона.
Второй закон Ньютона. Изменение количества движе-
движения пропорционально приложенной силе и происходит по направ-
направлению той прямой, по которой эта сила действует.
Математически этот закон можно представить в виде урав-
уравнения
— (otv) = F,
dt v ;
где v — скорость движущейся точки; m — ее масса; mv — количе-
количество движения. Считая массу материальной точки величиной посто-
постоянной, второму закону Ньютона можно придать и другую матема-
математическую формулировку:
m F,
dt
т. е. ускорение, которое получает материальная точка, пропорцио-
пропорционально действующей на точку силе. Это уравнение является основ-
210
ным законом движения материальной точки. Масса т входит в
него как коэффициент пропорциональности между силой и ускоре-
ускорением. Из этого определения видно, что масса является характе-
характеристикой инертного свойства материальной точки, т. е. способности
ее под действием заданной силы получать определенное ускорение.
Так же, как и первый закон Ньютона, второй закон является ре-
результатом обобщения многовекового опыта всего человечества и
принимается как одна из основных аксиом механики.
Третий закон Ньютона. Действию всегда есть равное
и противоположное противодействие, другими словами — действия
двух тел друг на друга всегда равны и направлены в противопо-
противоположные стороны.
Этот закон рассматривался нами при изучении аксиом ста-
статики.
Можно заметить, что второй закон Ньютона содержит в себе
и закон инерции Галилея. В самом деле, если положить F=0, то
dv n ,
из второго закона следует = 0, или v = const, т. е. если сила
не действует на материальную точку, то последняя движется рав-
равномерно и прямолинейно. Тем не менее закон инерции Галилея
устанавливает само понятие ускоряющих сил в механике.
Из второго закона Ньютона следует, что так же, как и ускоре-
ускорение, понятие силы в механике связано с определенной системой
отсчета. Поскольку сила измеряется ускорением, которое она со-
сообщает материальной точке, а ускорение имеет смысл только по
отношению к той или иной системе отсчета, то и понятие силы
должно быть относительным понятием и связано с выбором систе-
системы отсчета.
В различных системах отсчета математическая форма законов
природы различна, однако существуют такие, так называемые
инерциальные системы отсчета, в которых эти законы имеют наи-
наиболее простой вид. Такими инерциальными системами называются
системы отсчета, в которых материальная точка при отсутствии
действующих на нее сил взаимодействия (по третьему закону
Ньютона) движется равномерно и прямолинейно, т. е. системы, для
которых справедлив закон инерции Галилея (силы можно считать
отсутствующими в том случае, когда все тела, от которых эти силы
могут исходить, достаточно удалены, так что можно пренебрегать
их влиянием). С достаточной точностью такой инерциальной систе-
системой можно считать гелиоцентрическую систему координат. В пер-
первом приближении (для малых движений) система отсчета, связан-
связанная с Землей, так же может рассматриваться как инерциальная
система координат.
Уравнение mj = F справедливо только по отношению к инер-
инерциальной системе координат, в которой определена сила, действую-
действующая на материальную точку. Для всякой другой системы отсчета,
движущейся относительно данной инерциальной системы поступа-
поступательно и с постоянной скоростью, законы Ньютона остаются спра-
211
ведливыми, так как основной характеристикой в этих законах яв-
является ускорение, а не скорость.
В большинстве технических задач, в которых движения точек
ограничены, основная система отсчета может быть связана с Зем-
Землей. Для астрономических задач принятие такой системы невоз-
невозможно, и приходится учитывать вращение Земли, а за основную
систему отсчета выбирать систему, связанную со звездами. Под-
Подробнее эти вопросы будут рассмотрены в разделе, посвященном
относительному движению материальной точки.
§ 2. ДВЕ ОСНОВНЫЕ ЗАДАЧИ ДИНАМИКИ. УРАВНЕНИЯ
ДВИЖЕНИЯ ТОЧКИ В ДЕКАРТОВЫХ ОСЯХ
В динамике точки рассматриваются две основные задачи:
1. На материальную точку действует сила, определенная в
каждой точке пространства. Требуется определить движение ма-
материальной точки, происходящее под действием этой силы.
2. В некоторой системе отсчета задано движение материаль-
материальной точки. Требуется определить силу или силы, под действием
которых происходит это движение.
Чтобы пояснить сущность первой из этих задач, рассмотрим
уравнение Ньютона
т\ = F,
где j — ускорение точки в некоторой неподвижной системе коор-
координат. Будем предполагать, что сила F, действующая на матери-
материальную точку, определена в этой системе отсчета. За неподвиж-
неподвижную систему отсчета выберем систему прямоугольных осей Охуг
(все дальнейшие рассуждения остаются справедливыми и по отно-
отношению к любой инерциальной системе). Вектор ускорения j будет
иметь проекции d2xjdt2, d2y/dt2, d2z\dt2 на указанные оси коорди-
координат. Обозначим проекции силы на эти же оси координат через
X, Y, Z. Из равенства векторов F и т) непосредственно следует ра-
равенство их проекций, откуда получаем три скалярных уравнения
движения
которые назовем уравнениями движения в проекциях
на декартовы оси координат. Впервые эти уравнения бы-
были получены Маклореном A698—1746).
В общем случае силу, действующую на материальную точку,
всегда можно представить как функцию времени, координат точки
и ее скорости, т. е.
F = F(f, х, у, z, х'.у'.г').
212
В каждом конкретном движении сила может рассматриваться как
функция времени. В самом деле, если известен закон движения, т. е.
известны координаты точки как функции времени
то, определяя из уравнений движения проекции силы на декартовы
оси координат и подставляя значения х, у, г, взятые из закона
движения, будем иметь
X = mcp" (t), Y = mf (t), Z = m%" (f) •
Иногда удобнее выразить правые части уравнений движения как
функции только координат точки. Пусть, например, уравнение
может быть разрешено относительно t
t = Q>(x).
Тогда вторая производная от х представится в виде
Например, если х ¦= a sin t, то х" = — a sin t = — х, откуда
X = тх" = — та sin t = — mx.
Определять силу в функции только времени не всегда удобно
при решении задач о движении, поэтому в общем случае силы
представляют как функции времени, координат и скорости.
Можно представлять силы и как функции ускорения точки. Но
тогда эти силы уже не будут определять ускорение, т. е. не будут
ускоряющими в смысле Ньютона. Для такого класса сил может
быть построена механика, отличная от механики Ньютона.
Если действующие на точку силы заданы, то уравнения дви-
движения
т = X, т —— = Y, m = Z
dt* № dt*
представляют собой систему трех дифференциальных уравнений
второго порядка относительно неизвестных функций х, у, z и общий
интеграл этих уравнений содержит шесть произвольных постоянных
X = X (Г, С^, С2> ^3' ^4> ^Ъ' ^в)' У ~ У V' ^1> ^2' ^8> ^4> ^5> ?<$/>
z--.z(t, clt с2, с3, с4, сь, св).
В каждой конкретной задаче эти постоянные определяются из на-
начальных условий, для чего должны быть заданы в начальный мо-
момент to начальное положение и начальная скорость точки. Задача
определения констант С\, с2, Сз, с4, Cs, cq по заданным величинам
*о, Уо, z0> .to, уо, z0 сводится к разрешению системы уравнений
213
xo = Ф (to> Ск c2, cs, c4, cB, ce), y0 == i|> ft,, cx, c2l c8, c4, cB, ce),
Z0 = X Uo> Cl> C2> C3> C4" C6> Св)>
Xo =- ф' ft,, C1( C2, C3, C4, CB, Ce), l/o = 'Ф' ftp Cj, Ca, C8, C4. CB> Ce),
zo = X' (^o> ci. C2. c3> c4) cB, ce)
относительно cx, c2, c3, c4 cB ce. Для шести произвольных постоянных
получим
Ci = fi ftp *o> %- го- *о> Уо, zo) A = 1,2,..., 6),
и если выполнены условия существования и единственности, то
каждой системе начальных значений координат и скоростей будет
отвечать одно движение.
Для определения констант си с2, с3, с4, cs, cq могут быть
приняты и другие, так называемые граничные условия (пред-
(предложенные Гамильтоном). Они сводятся к тому, что рассматривает-
рассматривается положение материальной точки в два различных момента вре-
времени ^ = ^0 И t = ti.
При t = t0, х = х0, у = у0, z = z0
При t = tlt Х = Хг, у = ух, 2 = 2!
и из этих условий определяются значения произвольных постоян-
постоянных интегралов.
Вторая задача, задача определения силы по данному движе-
движению материальной точки, требует задания структуры силы, так как
ускорение точки представляется и как функция времени, и как
функция координат и скорости точки.
§ 3. ЕСТЕСТВЕННЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
Во многих случаях описание движения материальной точки в
декартовых неподвижных осях координат вызывает ряд неудобств.
Тогда приходится искать другие системы координат, в которых это
движение описывается более просто. Одна из таких систем коорди-
координат может быть определена сопровождающим трехгранником Фре-
не, который образуется касательной к траектории точки, главной
нормалью и бинормалью. Такие оси называются естественными
осями координат. Как известно из кинематики, проекции абсолют-
абсолютного ускорения точки на естественные оси координат имеют вид
Обозначая проекции силы на соответствующие оси координат че-
через Fz, Fn, Fp, сразу же получим уравнения движения материаль-
материальной точки в проекциях на естественные оси координат, или, как
их еще называют, естественные уравнения движения
214
at p
Из этих уравнений видно, что Fn всегда положительна, a ;Fp—0.
Таким образом, сила, действующая на материальную точку, всег-
всегда расположена в соприкасающейся плоскости к траектории точки
и направлена в сторону вогнутости траектории.
Если сила постоянно направлена по нормали к траектории, то
Ft=0, откуда следует, что v = const, т. е. точка движется равно-
равномерно. Если же сила постоянно направлена по касательной к тра-
г, ~ то1 п
ектории точки, т. е. гп=и, то = U, и так как v не равно
Р
тождественно нулю, то траектория точки —¦ прямая линия (р=оо).
§ 4. ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ ДЛЯ СВОБОДНОЙ
МАТЕРИАЛЬНОЙ ТОЧКИ
1. Теорема об изменении количества движения материальной
точки.
Будем изучать движение точки М относительно системы Oxyz
под действием силы F(X, Y, Z). Пусть v-—вектор скорости точки.
Введем в рассмотрение вектор Q=mv, называемый количест-
количеством движения точки. Проекции этого вектора на оси х, у, z
будут иметь вид
Qx — тх', Qy = ту', Qz — тг'.
Тогда уравнения движения материальной точки можно будет за-
записать в виде
dt
или
dQx у dQy у dQz __ 2,
dt ~ ' dt ~ ' dt ~
Эти скалярные уравнения эквивалентны одному векторному
dQ p
dt ~
Полученный результат можно сформулировать в виде теоремы.
Теорема. Скорость изменения количества движения мате-
материальной точки равна вектору силы, действующей на эту точку.
Если проекция силы на одну из осей (например, ось х) тож-
тождественно равна нулю, то теорема допускает первый интеграл
Qx = const,
выражающий закон сохранения количества движения материаль-
материальной точки вдоль оси х. Если же сила, действующая на точку, тож-
215
дественно равна нулю, то будет сохраняться вектор количества
движения точки:
Q = const.
2. Теорема об изменении момента количества движения. Из
уравнений движения материальной точки можно вывести теорему,
аналогичную теореме об изменении количества движения, но уже
характеризующую изменение векто-
вектора момента количества движения.
В неподвижных осях х, у, z рас-
рассмотрим движение материальной
точки с массой «г, имеющей в дан-
данной момент скорость v (рис. 144).
Вектором момента количе-
- ства движения точки относи-
У тельно начала координат называют
вектор а, по величине равный удво-
удвоенной площади треугольника, осно-
основанием которого является вектор
количества движения точки Q, а
вершина находится в точке О. Направим вектор а перпендикуляр-
перпендикулярно к плоскости треугольника в ту сторону, откуда вращение, сооб-
сообщаемое вектором Q, видно происходящим против хода часовой
стрелки. Проекции этого вектора на оси х, у, z будут определяться
при помощи векторного произведения
так что
Рнс. 144
dt dt ) y \ dt dt
dy
dx
dt
Для изучения свойств вектора момента количества движения
выпишем сначала уравнения движения точки в проекциях на оси
х, у, z
d2z
m
= Y,
m-
dt*
Заметим, что
dax _
dt
dy dz
dt dt
dz dy
dt dt
dt1
—z
d2y
dt2
I d?z
dt*
216
Подставляя в правую часть последнего соотношения значения вто-
вторых производных от координат, из уравнений движения получим
Аналогично получаются и два других уравнения, так что
= ти
dt A dt y dt
Эти уравнения определяют закон изменения проекций вектора мо-
момента количества движения на неподвижные оси х, у, z. Результат
можно сформулировать в виде теоремы.
Теорема. Производная по времени от момента количества
движения относительно какой-либо неподвижной оси равна момен-
моменту равнодействующей всех сил, действующих на точку, относитель-
относительно той же оси.
Если записать полученные уравнения в векторном виде
da
dt
то можно заметить, что в левой части равенства стоит скорость
движения конца вектора момента количества движения по его го-
годографу. Тогда теореме можно будет дать другую геометрическую
формулировку, принадлежащую Резалю.
Теорема. Скорость конца вектора момента количества дви-
движения точки относительно неподвижного центра равна моменту
всех сил, действующих на точку, относительно того же центра.
(В таком виде теорема была известна еще английскому матема-
математику Гейуорду.)
3. Следствия из теорем об изменении количества движения и
момента количества движения материальной точки. 1. Если сила,
действующая на материальную точку, во все время движения
остается параллельной неизмененному направлению, то точка будет
совершать движение, оставаясь в плоскости, параллельной линии
действия силы.
В самом деле, пусть Х=У=0. Тогда два первых уравнения
движения получат вид
dt"-
Откуда будем иметь два первых интеграла
—— = А — const, —— = В = const.
dt dt
217
Разделив первое из этих уравнений на второе, будем иметь
_dx A_
dy ~ В '
откуда
Вх=Ау + С.
Полученному уравнению плоскости удовлетворяют координаты точ-
точки во все время ее движения. Такое движение называют плоским
движением материальной точки.
2. Пусть линия действия силы, действующей на материальную
точку, в каждый момент времени проходит через начало коорди-
лат некоторой неподвижной системы осей. Такая сила называется
центральной. Тогда будет иметь место теорема.
Теорема. Если на точку действует центральная сила, то
движение точки происходит в неподвижной плоскости, проходящей
через центр силы.
Доказательство. Воспользуемся теоремой об изменении
момента количества движения, которая при данных условиях при-
приобретает вид
dt
и дает первый интеграл (закон сохранения момента количества дви-
движения)
<7 =
Этому векторному интегралу соответствуют три скалярных интеграла
в проекциях на неподвижные оси
ах = ш(у г -^-] = А = const,
\ dt dt j
-*-»-?)-С-с—.
Умножая последние уравнения соответственно на х, у и z и скла-
складывая, получим соотношение
Ах-\- By + Cz = Q,
которое представляет собой уравнение плоскости, проходящей че-
через начало координат. Координаты точки во все время движения
должны удовлетворять этому уравнению.
Замечание. Случай параллельных сил можно рассматри-
рассматривать как частный случай центральных сил, когда центр сил уда-
удален в бесконечность.
218
3. Рассмотрим случай, когда момент силы, действующей на
точку, относительно оси z тождественно равен нулю
Тогда из теоремы об изменении момента количества движения по-
получаем первый интеграл
или
du dx
т х — у
dt u dt
аг = С = const,
= С.
Этот первый интеграл допускает простую
геометрическую интерпретацию, а имен-
именно: пусть Р(х, у) — проекция движущей-
движущейся точки т на неподвижную плоскость
Оху в момент t (рис. 145) и Р\ — проек-
проекция этой точки на ту же плоскость в мо-
момент t+dt. Обозначая координаты точки
Pi через x+dx, y-\-dy, рассмотрим сектор
ограниченный проекцией траектории и
двумя радиусами ОР и ОР\. Площадь
этого сектора, отсчитываемая в направ-
направлении положительного вращения вокруг
оси 2,
Рис. 145
ds = —
х у
x + dx, у + dy
откуда
откуда
ds \ I dy dx \ С ,
= — х — у = = const,
dt 2 I dt dt 2m
S =
¦t+s0.
Мы получили теорему, именуемую теоремой площадей.
Теорема площадей. Если Мг=0, то в плоскости Оху в
равные промежутки времени радиус-вектор проекции точки описы-
описывает равные площади.
Величина ds/dt называется секторной скоростью про-
проекции материальной точки на плоскость Оху, а выражение
dy dx o ds
х — у = 2
dt a dt dt
представляет собой удвоенную секторную скорость проекции точ-
точки т. Таким образом, если Mz=0, то секторная скорость проек-
проекции на плоскость Оху — величина постоянная. Нетрудно показать,
219
что если положение проекции точки определить полярными коорди-
координатами г и ф (x=rcos<f, y=rsincp), то удвоенную секторную ско-
скорость можно будет представить в виде
2 _???_ = Г2 d<?
dt dt
Если Мх = М„ = Л4г = 0, то, как это уже отмечалось, будет су-
существовать векторный интеграл
а = const
или три скалярных:
Если ось z направить вдоль вектора а, то ах=ау=0 и точка
в своем движении будет оставаться в плоскости Оху, определяемой
направлением скорости в какой-либо момент времени.
4. Можно доказать обратную теорему площадей.
Теорема. Если материальная точка движется по плоской
траектории так, что ее радиус-вектор описывает около некоторого
центра О, расположенного в этой же плоскости, площади, пропор-
пропорциональные промежуткам времени, то движение происходит под
действием центральной силы, линия действия которой проходит
через центр О.
Доказательство. Выбрав центр О за начало неподвиж-
неподвижной системы координат и направив ось z ортогонально к плоско-
плоскости траектории, будем иметь
dz dt/ r. dx dz n
у 2—^-^-0, Z X = 0,
У dt dt dt dt
dy dx .
x — ц _ const.
dt y dt
Дифференцируя эти уравнения, получим
&Н d3y Л d?x йгг п
" dt* dt* df- dp
d?y d?x n
x — у s=0.
dt* dt2
Переписав последнее уравнение в виде
сРх d?y
dP dt"-
и принимая во внимание, что z=0, подставим сюда значения про-
проекций ускорения из дифференциальных уравнений движения точки.
В результате получим
220
A _ r ¦ у — о
x у
отк\да видно, что вектор силы, действующий на точку, лежит в
плоскости Оху и коллинеарен с радиус-вектором точки, т. е. сила —
центральная.
4. Теорема живых сил. Запишем уравнения движения точки в
проекциях на декартовы оси координат
d2x v d*y „ d2z r,
т —л, т —— = У, т = Z.
dt2 dt* dt2
Умножим каждое из этих уравнений на соответствующие проекции
скорости и сложим результат. Получим
dx d / dx \ j_ _dy_ _d_ /_dy_\ , J& d_ I dz \
dt dt { dt l dt dt \ dt dt dt \ dt
dt dt dt
или, после преобразования левой части
dt { 2 [\ dt J \ dt J \ dt J JJ dt dt dt
Здесь
dz
= V2
dt ) ' \ dt
есть скорость точки. Умножая полученное уравнение на dt, будем
иметь
¦Zdz.
оеличина —-— = 1 называется живой силой точки, или ее
кинетической энергией1.
1 Впервые понятие «живой силы» было введено Лейбницем A646—1716),
который назвал этим термином произведение массы точки на квадрат ее скоро-
скорости mv2. Лейбниц в отличие от картезианцев, которые считали основным зако-
законом природы закон сохранения количества движения, считал, что живая сила
является основной механической характеристикой движущейся материальной
точки. Термин «живая сила» английский физик Т. Юнг A773—1829) заменил
термином «энергия», хотя еще Кориолис применял термин «живая сила» для
выражения . Шотландский физик Ранкин iA820—'1872) для выражения
то2
предложил название «активная энергия», в настоящее же время его
называют чаще кинетической энергией. Первым же обратил внимание на выра-
mxfi
жение —-— в 1618 г. И. Кеплер.
221
Для обозначения живой силы обычно употребляют букву Т.
Величины dx, dy, dz получены из выражения действительной скоро-
скорости точки в ее движении по траектории под действием силы, по-
поэтому они определяют действительное перемещение материальной
точки. Правая часть последнего равенства представляет собой ра-
работу силы, действующей на материальную точку, на действительном
перемещении этой точки. Полученный результат можно сформули-
сформулировать в виде теоремы.
Теорема живых сил. При движении материальной точки
изменение живой силы равно работе действующих на эту точку сил
на ее действительном перемещении.
Замечание. Теорема живых сил является одним из след-
следствий уравнений движения материальной точки и не может, вооб-
вообще говоря, содержать в себе все свойства изучаемого движения ма-
материальной точки.
Пример 64. Исследовать движение материальной точки в магнитном си-
силовом поле под действием силы Лоренца, определяемой формулой
F = A[v, H],
где v — скорость движущейся точки; Н — напряженность магнитного поля.
Решение. Проекции этой силы на неподвижные оси координат имеют
вид
Х= y'Hz — z'Hy, Y = z'Hx — x'H2, Z = x'Hp—y'Hx,
а потому теорема живых сил дает только возможность установить, что точка
движется с постоянной по величине скоростью. В самом деле,
откуда
то1
mv2
= const.
Полностью характер движения может быть определен только при помощи тео-
теорем об изменении количества движения и момента количества движения.
5. Интеграл живых сил. В ряде случаев силы природы, кото-
которые могут быть представлены как функции только координат, об-
обладают свойством консервативности, заключающимся в том,
что работа, совершаемая этими силами при переносе материальной
точки из одного места пространства в другое, не зависит от пути,
по которому совершается перенос, а зависит только от положения
начальной и конечной точек переноса. Математически это свойство
выражается в том, что силы имеют силовую функцию. Усло-
Условие существования силовой функции заключается в том, что вели-
величина элементарной работы
Xdx + Ydy ±Zdz
представляет собой полный дифференциал от некоторой функции коор-
координат U, так что
222
dx: dy dz
откуда
+ -^— dz = Xdx -f Y dy + Zdz,
dz
v ди v eu v ди
dx dy dz
Таким образом, силовая функция есть такая функция коор-
координат, частные производные от которой по координатам равны про-
проекциям действующей силы на соответствующие оси координат.
Дифференцируя уравнение Y = —— по 2, а уравнение Z = ——
ду dz
по у, получим
dY d2U дг d2U
dz dzdy ' dy dy dz
дУ dZ
откуда на основании свойств частных производных — .
r dz dy
Аналогично можно получить равенства для других координат. Бу-
Будем иметь
dY dZ dZ дХ дХ дУ
dz kdy dx дг dy дх
Для существования силовой функции необходимо, чтобы компонен-
компоненты данной силы по осям координат удовлетворяли выведенным со-
соотношениям.
Рассмотрим некоторые наиболее часто встречающиеся приме-
примеры сил, для которых существует силовая функция.
а) Сила постоянная по величине и по направлению. К этой
категории сил относится и сила тяжести. Направим ось z парал-
параллельно линии действия силы в сторону, противоположную направ-
направлению силы. Тогда для проекций силы на оси координат будем
иметь
Х = 0, Y = О, Z = — mg.
Выражение работы силы на произвольном перемещении —mgdz
является полным дифференциалом функции
— mgdz = dil,
откуда
U = — mgz + С.
б) Сила ньютоновского притяжения к неподвижному центру.
Поместим начало координат О в притягивающем центре. Тогда для
компонентов силы будем иметь
\хтх у \irny 7 \irnz
гз га гз '
223
где т — масса материальной точки; Ц — постоянная тяготения; г2 =
= х2 -+- у2 + z2. Работа такой силы на произвольном перемещении
имеет вид
Это выражение представляет собой полный дифференциал неко-
некоторой функции U, т. е.
г2
откуда, проинтегрировав, найдем
Это и есть силовая функция ньютоновского притяжения.
в) Сила притяжения, пропорциональная расстоянию точки от
неподвижного центра (упругая сила). Проекции этой силы на ко-
координатные оси, имеющие начало в центре притяжения, имеют вид
X = — kx, Y = —ky, Z^ — kz.
Работа силы на произвольном перемещении
— k(xdx + ydy + zdz) = - ¦ krdr,
откуда
dU = —kr dr,
интегрируя, находим
2 2
Рассмотрим некоторые свойства силовой функции. Приравни-
Приравнивая силовую функцию постоянной величине, получим уравнение
U(x, у,г) = С,
где С — произвольная постоянная. Это уравнение определяет по-
поверхность, которая называется поверхностью уровня. Изме-
Изменяя значение постоянной величины С, получим семейство поверх-
поверхностей уровня. Покажем, что действующая сила всегда направле-
направлена по нормали к поверхности уровня в сторону возрастания функ-
функции U.
Действительно, так как проекции силы X, Y, Z пропорциональ-
пропорциональны направляющим косинусам силы, а частные производные dU/dx,
дО/ду, dU/dz пропорциональны направляющим косинусам норма-
нормали к поверхности уровня, и сами величины попарно равны друг
другу, то и направление силы совпадает с направлением нормали.
Рассматривая элементарную работу силы
224
Xdx + Ydy \-Zdz = dU,
заметим, что эта работа положительна на перемещении, направлен-
направленном в сторону действия силы; функция же U в этом случае воз-
возрастает. Утверждение доказано.
Если существует силовая функция, то теорема живых сил за-
записывается в виде
dT = dU,
откуда сразу следует первый интеграл
который называют интегралом живых сил. Постоянная жи-
живых сил h представляет собой полную механическую энергию ма-
материальной точки и определяется из начальных условий
2
Если вместо функции U ввести функцию V ^—- U, то
,, 6V „ 3V г, dV
дх ду дг
Функцию V называют потенциальной функцией. Она изме-
измеряет потенциальную энергию материальной точки. Интеграл живых
сил теперь можно переписать в виде
т. е. если сила, действующая на материальную точку, имеет сило-
силовую функцию, то во все время движения материальной точки сумма
кинетической и потенциальной энергий материальной точки остает-
остается постоянной. В этом заключается закон сохранения меха-
механической энергии материальной точки.
В физике существует закон, управляющий всеми явлениями
природы, который называется законом сохранения энер-
энергии. В теоретической механике мы ограничиваемся только меха-
механическими движениями и не касаемся других форм движения. По-
Поэтому в механике может вообще и не существовать закона со-
сохранения энергии. Интеграл живых сил не имеет места, если не
существует силовой функции. Чтобы записать закон сохранения
энергии при неконсервативных силах, надо кроме механической
принимать во внимание и другие виды энергии, например тепло-
тепловую, электрическую и т. п. Все эти виды энергии не рассматрива-
рассматриваются в курсах теоретической механики.
Замечания. 1. В некоторых случаях силы, действующие на
материальную точку, постоянно остаются нормальными к траекто-
траектории этой точки. Работа таких сил на действительном перемещении
точки равна нулю, и говорят, что силы не производят работы.
Е Н. Березкин
225
В приложениях теоремы живых сил следует учитывать лишь те
силы, которые совершают работу на действительном перемещении
точки, не обращая внимания на остальные.
2. Теорема живых сил зачастую позволяет выполнить качест-
качественный анализ движения материальной точки. В самом деле,
предположим, что на точку действуют силы, обладающие силовой
функцией U(х, у, г), я что существует интеграл живых сил
-^р = !/(*, у, z) -f ft.
Величина всегда отлична от нуля и положительна, если толь-
ко точка не находится в покое и, следовательно, в действительном
движении точки всегда выполняется условие
U (х, у, г) -+- h > 0.
Это неравенство определяет область возможных движений мате-
материальной точки. Такая область зависит как от вида функции U, так
и от величины h, определяемой из начальных условий.
Пример 65. На материальную точку действует сила, обладающая си-
силовой функцией U{x,y, г) =—— (хг + #а + z2). Исследовать область воз-
возможного движения точки.
Решение. Положение равновесия точки определяется условием, что про-
проекции силы на оси координат равны нулю, т. е.
dU дЦ_ дЦ
дх ду дг
Таким положением в рассматриваемом случае является только начало коорди-
координат. Область возможных движений точки около положения равновесия опреде-
определяется неравенством
-±(* + !Г + *> + н>о
и представляет шар радиуса
"~ 2/i
k
чем меньше величина k, тем больше радиус шара.
6. Устойчивость равновесия. Теорема Лагранжа. Положением
равновесия является такое положение материальной точки, в ко-
котором она будет оставаться, если в начальный момент находилась
в этом положении, и ее скорость равнялась нулю.
Если существует силовая функция U(x, у, z) для равнодейст-
равнодействующей действующих на точку сил, то уравнения равновесия при-
принимают вид
дх ду дг
226
и положение равновесия является стационарной точкой для функ-
функции U(x, у, z). Материальная точка, помещенная без начальной
скорости в ту точку пространства, где функция U принимает ста-
стационарное значение, будет в дальнейшем оставаться в этом поло-
положении, пока какие-либо другие силы не выведут ее из этого по-
положения.
Выберем систему координат с началом в положении равнове-
равновесия материальной точки. Может оказаться, что самый незначитель-
незначительный толчок или смещение из этого положения, сообщенные точке,
будут достаточны, чтобы привести ее в движение, в котором точка
отойдет на конечное расстояние от положения равновесия.
Определение. Положение равновесия называют устойчи-
устойчивым, если для любых двух положительных чисел А\ и Л2, как бы
малы они ни были, найдутся два других положительных числа %\ и
Яг, такие, что как только начальные значения координат и скоро-
скоростей точки будут удовлетворять условиям
х\ + yl + 2о < \, vl < К2,
во всякий дальнейший момент времени t^t0 значения координат
и скорости точки будут удовлетворять условиям
Иначе говоря, если положение равновесия точки устойчиво, то дви-
движение точки, начавшееся в достаточно малой окрестности этого
положения и с достаточно малой скоростью, будет оставаться в не-
некоторой достаточно малой окрестности этого положения равнове-
равновесия. Положение равновесия, не удовлетворяющее данному опре-
определению, будем называть неустойчивым.
Исследованием критериев устойчивости равновесия занимался
еще Аристотель, но общие критерии устойчивости равновесия бы-
были сформулированы только Лагранжем. Доказательство теоремы
об устойчивости равновесия, данное Лагранжем, не вполне совер-
совершенно; более аккуратное доказательство принадлежит Лежен Ди-
Дирихле A805—-1859). Поэтому теорему Лагранжа об устойчивости
равновесия иногда еще называют теоремой Лежен Дирихле.
Теорема Лагранжа. Если в положении равновесия мате-
материальной точки силовая функция имеет изолированный максимум,
то такое положение равновесия устойчиво.
Доказательство. Пусть условия теоремы выполнены. Не
нарушая общности будем предполагать, что в положении равнове-
равновесия значение силовой функции равно нулю. Тогда в достаточно ма-
малой окрестности положения равновесия функция U будет прини-
принимать только отрицательные значения. Для доказательства устой-
устойчивости положения равновесия достаточно показать, что по любым
двум положительным числам, как бы малы они ни были, найдутся
другие положительные числа, удовлетворяющие условию устойчи-
устойчивости равновесия.
8* 227
Принимая положение равновесия за начало координат, рас-
рассмотрим такую сферу S радиуса А\ с центром в начале координат,
чтобы внутри и на границе этой сферы функция U не имела бы
других стационарных точек, кроме начала координат. Пусть
—1\ (/i>0) —максимальное значение функции U на этой сфере,
так что во всех точках поверхности выполняется условие
U(x, у, 2)< —/,.
Пусть, кроме того, Аг — произвольное, сколь угодно малое положи-
положительное число и пусть / — наименьшее из двух положительных чи-
чисел U и HL-2-, Выберем начальные значения координат и началь-
начальную скорость Vq так, чтобы они удовлетворяли условиям при
*о + #о + 2о<^. и i>o<^2 имеют место неравенства
t/0>—-Г' г°<т
Тогда из интеграла живых сил
будем иметь
поэтому
В действительном движении левая часть этого выражения неотри-
неотрицательна, а потому
U-\-
т. е. во все время движения имеет место условие
Но при этом условии точка не может выйти на сферу Аи где удов-
удовлетворяется неравенство
Кроме того, из интеграла живых сил имеем
т. е. во все время движения
228
и условия устойчивости положения равновесия оказываются выпол-
выполненными. Теорема доказана.
Пример 66. Тяжелая материальная точка, подвешенная к концу элла-
стичного шнура, естественная длина которого равна /о. Подчиняясь закону Гука,
под действием силы тяжести mg шнур растягивается на величину Ао (рис. 146).
Исследовать колебания материальной точки.
О,-
X mg
Рис. 146
Решение. Выберем начало неподвижной системы координат в конце
нерастяиутого шнура, и ось х направим по вертикали вниз. Тогда точка будет
находиться под действием двух сил: силы тяжести mg и силы натяжения шну-
шнура kx. Равнодействующая этих сил обладает силовой функцией
Положение равновесия точки определяется из уравнения
дЦ
дх
откуда
Хп — Л|л —•
mg
k
Потребуем, чтобы в положении равновесия функция U обращалась в нуль, т. е.
чтобы
2Х„
откуда
пщк0
Кроме точки х="кц функция U не имеет других стационарных точек. Положение
равновесия оказывается устойчивым, поскольку
дх*
22Э
Из интеграла живых сил имеем
Если в начальный момент х = 0, v = vu, то
Ai = о? + Л-
Движение точки при заданных начальных условиях происходит прн значениях х,
удовлетворяющих условиям
или
2glx-
последнее выполняется для всех значений х, удовлетворяющих неравенствам
к-у
8
Представленное решение справедливо только при одновременном действии
силы тяжести и силы натяжения шнура, т. е. при х^О. Участок движения точки
при ненатянутом шнуре (когда я<0) следует рассматривать отдельно, предпо-
предполагая, что точка находится только под действием силы тяжести.
§ 5. ДВИЖЕНИЕ ТЯЖЕЛОЙ МАТЕРИАЛЬНОЙ ТОЧКИ В ПУСТОТЕ
Одним из наиболее важных приложений законов движения свободной мате-
материальной точки является задача о движении точки под действием силы тяжести.
Рассмотрим движение материальной точки, на которую действует только сила
Директриса
Рис. 147
тяжести (сила, имеющая постоянную величину и направление). При этих усло-
условиях движение происходит в одной плоскости, параллельной линии действия си-
силы и определяемой направлением начальной скорости точки.
Выберем неподвижную систему координат так, чтобы ее начало совпадало
с начальным положением точки, а ось у направим вертикально вверх. Ось х
расположим в плоскости движения (рис. 147). Пусть начальная скорость v0 об-
образует угол а с осью х. Тогда уравнения движения точки получат вид
230
Из первого уравнения получим
dx
—г- = Cj = ti0 cos a, x = vot cos a-\-Cit где C2 = 0.
Интегрируя второе уравнение, будем иметь
У = — -y + Oo'sina + Cg, где С3 = 0.
Исключая отсюда время, получим уравнение траектории
которое представляет собой уравнение параболы с параметром
v\ cos2 a
g
Точка S вершины параболы может быть определена из условия
= 0,
s
т. е.
- —— + tga = 0,
Uncos2a
откуда
.,2
sin a cos a
Подставляя это значение xs в уравнение параболы, определим ординату вершины
У$
in4 a cos3 a tig sin a cos a t^ sin4 a
gvl sin4 a cos3 a tig
+
Отсюда видно, что траектория точки является параболой, ось которой проходит
через точку 5 и параллельна оси у. Дальность полета по горизонтали
2о„ sin a cos a vl sin 2a
g g
Очевидно, что максимальная дальность полета обеспечивается при sin2a=l, т. е.
при <х=45°. В этом случае
g
231
Заметим, что расстояние от начала координат до директрисы параболы
зависит только от величины начальной скорости точки. В самом деле,
р tig sin2 a Ugcos2a v%
2 2g 2g 2g
Свойства траектории. Перепишем уравнение параболы в виде
их2
-У- f + *tg«=O,
2v\ cos2 a
или, принимая во внимание, что
cos2a= . . . . ,
f(x, y,
Ч
Вид траектории зависит от tg a. При различных значениях tg a получим семей-
семейство траекторий, имеющих одну н ту же директрису. Исключая параметр C=tga
из уравнений
/(*, у, tga)=0, f'c(x, у, tga) = O,
найдем уравнение огибающей семейства траекторий. Здесь
"о
откуда
«о
tg a = .
g*
Подставляя это значение в уравнение / = 0, получим уравнение огибающей
или
Заметим, что огибающая семейства траекторий является параболой, параметр
которой
а ось вертикальна и совпадает с осью у. Расстояние от начала координат до
вершины огибающей
"о Р,
232
равно расстоянию до директрисы семейства траекторий, а начало координат
является фокусом огибающей параболы. Все траектории семейства расположены
внутри огибающей параболы (рис. 148), так что, изменяя угол бросания, при
заданной начальной скорости v0, никогда нельзя попасть в точки, расположенные
за огибающей. В связи с этим огибающая парабола называется параболой без-
безопасности.
Директриса
Рис. 148
Задача попадания. Рассмотрим задачу попадания с заданной начальной
скоростью Vq в некоторую точку пространства М(х, у). Для того чтобы можно
было попасть в точку М, координаты этой точки должны удовлетворять уравне-
уравнению траектории
= 0.
Разрешая это уравнение относительно tg а, найдем угол бросания, необходимый
для того, чтобы траектория прошла через точку М:
Решение зависит от знака дискриминанта
Если Д>0, то для tg а получаем два действительных различных значения, и в
точку М можно будет попасть двумя различными способами, бросая ее под
углами cti и <Х2 к горизонту.
Если Д=0, то корнн кратные, т. е. имеется только одна траектория, про-
проходящая через точку М. Раскрывая равенство Д=0, получим
4 gx*
о
что совпадает с уравнением огибающей. Это значит, что точка М расположена
иа параболе безопасности.
Для точек, расположенных за параболой безопасности, дискриминант Д
отрицателен. В этом случае для tg а ие существует действительных значений, и
никакая действительная траектория не может проходить через точку М.
Рассмотренному решению можно дать простое геометрическое истолкова-
истолкование. Как уже отмечалось, все траектории точек, имеющих одну и ту же величину
начальной скорости, имеют общую директрису, расположенную на расстоянии
. «8
233
от начала координат Для определения каждой отдельной траектории достаточ-
достаточно найти положение ее фокуса. Воспользуемся определением параболы как
геометрического места точек, равноудаленных от фокуса и директрисы. Все
траектории проходят через начало координат. Расстояние от начала координат
до директрисы равно d. Следовательно, геометрическим местом всех фокусов
траекторий является окружность радиуса
. "о
с центром в начале координат (рис. 149). Если траектория проходит через
точку Ц, то расстояние от точки М до директрисы должно равняться ее рас-
расстоянию до фокуса, т. е. геометрическим местом фокусов траекторий, проходя-
проходящих через точку М, будет окружность с центром в точке М, радиус которой ра-
равен расстоянию от точки М до директрисы. В общем случае две построенные
I
Рис. 149
Рис. 150
окружности пересекаются в двух точках, которые и являются искомыми фоку-
фокусами траекторий. Два фокуса определяют две траектории, попадающие в точ-
точку М. Одна из этих траекторий называется навесной (фокус этой траектории
расположен ближе к директрисе), вторая — настильной. Нетрудно заме-
заметить, что время движения до точки М по настильной траектории меньше, чем
время движения по навесной траектории.
Если окружности имеют одну общую точку, то существует только один
фокус, и попадание возможно единственным способом. В этом случае фокус
параболы лежит на прямой, соединяющей точку М с началом координат
(рис. 150). Проведем прямую I, параллельную директрисе и удаленную от нее
на расстояние й. Нетрудно заметить, что все точки М, в которые можно попасть
только одним способом, одинаково удалены от начала координат и от прямой /,
т. е. расположены на параболе, фокусом которой является начало координат,
а директрисой — прямая (парабола безопасности)
Если окружности не пересекаются, то фокус траектории не определяется и
в точку М при данной величине начальной скорости попасть невозможно Вес
такие точки расположены за параболой безопасности.
' ПосЛе того как найдены фокусы траекторий, можно определить направле-
направление начальной скорости точки из условия о том, что вектор начальной скорости
де4шТ пополам угол между осью у л прямой, соединяющей начало координат
с фокусом.
Пример 67. Из точки О наклонной плоскости, образующей угол ф с го-
горизонтом, с начальной скоростью о0 бросают материальную точку под углом а
к горизонту таким образом, что точка падает на наклонную плоскость под пря-
прямым углом (рис. 151). Определить угол а.
Решение. Систему осей Оху выберем так, чтобы ось х была направлена
вдоль наклонной плоскости. Тогда уравнения движения примут вид
тх" = — mg sin ф, ту" = — mg cos ф.
I
Рис. 151
Сокращая на m и интегрируя, получим
gt*
= ——-COS
В начальный момент * = г/--0, поэтому с2 = с4=0. Дифференцируя найденные
зависимости, имеем
откуда
х' — — gt sin ф + сх, у' = — gt cos ф + с3,
сх = ?10 cos (а — ф), с3 = о0 sin (а — ф).
Точка падает на наклонную плоскость под прямым утлом, т. е. в момент падения
х' = 0, или
— gt sin ф -|- ?i0 cos (а — ф) =- 0,
откуда
v0 cos (a — ф)
t=-
gsin ф
В момент падения г/ = 0, т. е.
cos ф -(- vot cos (a — ф) = 0,
что можно представить в виде
о0' cos (a — ф)
2g sin2 ф
[cos ф cos (а — ф) — 2 sin (а — ф) sin ф] = 0.
Решение а—ф= — соответствует моменту времени t = 0. Приравнивая нулю
квадратную скобку, получаем
cos ф cos (а — ф) - 2 sin (а — ф) Sin ф = 0.
235
Разделив на sin ф cos фcos а, будем иметь
ctgtp—tga + 2tgq> = О,
или
Пример 68. Материальная точка брошена вертикально вверх в среде,
сопротивление которой пропорционально квадрату скорости точки, с начальной
скоростью vo. С какой скоростью V\ точка вернется на Землю?
Решение. Ось х направим вертикально вверх. Тогда для точки, движу-
движущейся вверх, будем иметь дифференциальное уравнение
tPx ( dx \2
которое можно преобразовать к виду
Интегрируя, найдем
1 {k'2 + ) 2
1л {kx + g) 2x + ]ncl,
k к
или
kx' -\ g = cxe~2kx, где сх = ki% + g.
Точка будет двигаться вверх до тех пор, пока ее скорость не станет равной
нулю. Обозначив максимальную высоту подъема через Х\, будем иметь
Для падающей точки уравнение движения запишется уже иначе:
тх" = — mg + kmx'2,
его можно преобразовать к виду
причем Ео все время движения будет выполняться неравенство
g — kx'2>0.
Разделяя переменные, получим
g — kx'2
откуда
\п (g — kxr~) ^ 2kx + \п сг
или
Если
x=xx, x' = 0,
236
то
При х = 0 из соотношения
получим значение скорости
§ 6. ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ ПОД ДЕЙСТВИЕМ
ЦЕНТРАЛЬНЫХ СИЛ
1. Основные положения. Рассмотрим движение материальной
точки, находящейся под действием силы, линия действия которой
все время проходит через неподвижную точку О, принимаемую за
начало координат. Такая сила, называемая центральной, мо-
жег либо притягивать материальную точ-
точку к неподвижному центру О, либо от-
талкивать ее от этого центра.
Отталкивающую силу условимся счи-
считать положительной, а притягивающую—
отрицательной. Выше было установлено,
что точка, движущаяся под действием
центральных сил, описывает плоскую
траекторию. Поэтому всегда можно си-
стему неподвижных осей Охуг выбрать
так, чтобы плоскость движения точки
совпадала с плоскостью Оху. В дальней-
дальнейших рассуждениях координаты движу-
движущейся материальной точки будем обозначать через х и у.
Так как для центральной силы момент относительно центра
силы всегда равен нулю, движение будет происходить по закону
площадей и будет подчиняться закону площадей
Рис. 152
dt
dt
Здесь в левой части имеем момент вектора скорости v точки отно-
относительно начала координат, поэтому постоянная С по величине
равна удвоенной площади треугольника (рис. 152), основанием
которого служит вектор скорости точки, а вершина находится в
центре сил. Другими словами
C = vp,
где р — длина перпендикуляра, опущенного на линию действия век-
вектора скорости точки.
237
Движение точки, вызываемое центральными силами, называют
центральным движением. При изучении центральный дви-
движений бывает удобно ввести в рассмотрение полярные координаты
точки г и § при помощи формул преобразования
х = г cos ¦в1, t/ = rsin •&.
Тогда, полагая, что за время dt полярный угол ¦& изменится на ве-
величину db, а полярный радиус г — на величину dr, получим с точ-
точностью до бесконечно малых величин высшего порядка прираще-
приращение заметаемой полярным радиусом площади за время dt
dS =— гШ.
2
Удвоенная секторная скорость будет равна
dt dt
Кроме теоремы об изменении момента количества движения
для исследования движения можно применить теорему живых сил,
которая в данном случае запишется в виде
. mo2 r, xdx -\- ydy c rdr
а = г = г =
2 г г
так как
Если к тому же центральная сила зависит только от положения
материальной точки и обладает силовой функцией, то существует
интеграл живых сил
Таким образом, два первых интеграла — интеграл площадей и ин-
интеграл живых сил будут определять движение материальной точки,
находящейся под действием центральной силы.
В задачах небесной механики применяется еще один вектор-
векторный интеграл уравнений движения материальной точки, находя-
находящейся под действием центральных сил — интеграл Лапласа.
Этот интеграл имеет место для центральной силы притяжения ма-
материальной точки к неподвижному центру, величина которой обрат-
обратно пропорциональна квадрату расстояния материальной точки до
притягивающего центра. Такую силу принято называть силой нью-
тонианского тяготения
]Хт г
!* г
238
Здесь т — масса материальной точки; ц — коэффициент пропор-
пропорциональности. Уравнение движения материальной точки в вектор-
векторном виде после сокращения на т можно записать так:
dv цх
dt 7*~'
Если еще обозначить через с вектор момента количества движения
материальной точки, разделенный на массу
С = —от
т
(вектор, перпендикулярный к плоскости движения материальной
точки), то можно будет рассмотреть векторное произведение
Но так как
dx
г2 dt r dt j dt
ТО
d r , d ( цг \
Отсюда следует еще один первый векторный интеграл уравнений
движения материальной точки в случае центральных движений
-I*f -r[v.cl=f,
который называется вектором Лапласа. Можно показать, что
интеграл площадей, интеграл живых сил и вектор Лапласа не
являются независимыми величинами.
2. Формулы Бине дают некоторые удобства при рассмотрении
центральных движений. Для получения этих формул рассмотрим
скорость движения материальной точки в полярных координатах
\ dt ) \ dt
Определив dt из интеграла площадей
239
представим выражение для скорости в Виде
dr \2 С2 , С2
V = ,
db I r* f
Если же сделать замену
db \ r j ~ /•* d$
то выражение для скорости приобретет вид
Полученная формула называется первой формулой Бине
для определения скорости материальной точки1. Формула позволя-
позволяет определять скорость материальной точки, движущейся в цент-
центральном силовом поле, если известна траектория точки г=г($)
и ее секторная скорость.
Вернемся к теореме живых сил, которую запишем в виде
Разделив обе части этого равенства на йф и подставляя сюда вы-
выражение скорости, полученное из первой формулы Бине, найдем
г dr m(? d
г —г- = г
Подставляя в левую часть
d§ dft \ r
и сокращая на — , получим
d® \ г I
Эта формула носит название второй формулы Бине для оп-
определения центральной силы, действующей на материальную точ-
точку, если известны траектория точки и ее секторная скорость.
1 Впервые формула получена французским астрономом Яковом Бине
A786—1865).
240
Формулы Бине позволяют разрешать и обратную задачу —
нахождение тректории точки по заданной центральной силе, дейст-
действующей на эту точку. В этом последнем случае задача сводится к
интегрированию дифференциального уравнения второго порядка.
Пример 69. Материальная точка массой т описывает окружность радиу-
радиуса R. Какой должна быть центральная сила, если ее центр находится на окруж-
окружности (рис. 153)?
Рис. 153
Решение За полярную ось примем диаметр окружности, проходящий
через центр силы. Тогда уравнение траектории запишется в виде
или
г = 2R cos О,
1
2R cos О '
Вычислим производные от ¦—
1 sin О
2R cos О '
1
2R
sin2 О
cos3 ft
cos О
Подставляя эти значения в формулу Бине для силы, будем иметь
F = —
т С2
4R2 cos2 О
sin»
cos3 О
1
1
2R cos
2R cos ft
2
8R3 cos2
cos3 О
cos О
4Я3 cos« ¦№
откуда видно, что на точку действует центральная сила притяжения, обратно»
пропорциональная пятой степени расстояния точки от притягивающего центра
Величина силы зависит от закона движения точки по траектории. Если пред-
241
положить, что в наиболее удаленной точке траектории скорость равна Vo, то
постоянная площадей C=2Rv0t и для силы получим значение
32R*v%
F = —
Пример 70. Точка описывает эллипс
а2 б3
под действием силы притяжения к его центру. Определить эту силу.
Решение. Введем полярные координаты
х = г cos ft, у = г sin ft.
Тогда, заменив х я у в уравнении эллипса, лолучим
cos2 ft sin2 ft
или
1 №¦ cos2 О + a3 sin2 ft
Вычислим производные от \\г
d /J
¦ sin ft cos ft + —— r (cos3 ft — sin2 ft).
r j аЧ*
Подставляя эти значения в формулу Бине для силы, будем иметь
О - sin2 Ь) +
— 1 =
[— (а2 — й2J sin3 ft cos2 п + (а2 — bz) (№• cos2 ft + a2 sin2 &) X
X cos 2ft + (b3 cos2 ft + a2 sin2 ft)],
или после приведения подобных членов
Сила будет полностью определена, если будет известен закон движения точки,
для чего достаточно определить постоянную площадей.
3. Задача о движении планет в течение многих лет является.
одной из наиболее замечательных задач небесной механики, позво-
242
ляющей определять положения небесных тел. С развитием иссле-
исследований космоса эта задача получила новое значение в связи с
тем, что свободные движения космических аппаратов совершаются
по законам движения планет.
Законы движения планет были открыты выдающимся немец-
немецким астрономом Иоганном Кеплером A571—1630), установившим
эти законы на основании экспериментальных данных. Будучи из-
изгнанным из Германии, Кеплер долго работал в Праге со знамени-
знаменитым астрономом Тихо-Браге A546—1601). Законы движения пла-
планет Кеплер установил, обрабатывая многочисленные наблюдения
Тихо-Браге над планетой Марс.
Законы Кеплера. 1. Все планеты и кометы движутся no-
коническим сечениям, в одном из фокусов которых находится
Солнце.
2. Площади, описываемые радиус-векторами планет относи-
относительно Солнца, пропорциональны временам движения планет.
3. Для планет, движущихся по эллипсам, квадраты звездных
времен обращения пропорциональны кубам больших полуосей, т. е.
Т2: as,= const.
Законы Кеплера давали вполне ясную картину движения пла-
планет и показывали, что мир планет представляет собой стройную си-
систему, управляемую единой силой, связанной с Солнцем. Но уста-
установить закон действия силы тяготения к Солнцу Кеплер не мог, так
как еще не были известны основные законы механики. Впервые
силу, действующую на планеты, определил Ньютон. Первые иссле-
исследования Ньютона по этому вопросу относятся, по-видимому, к
1666 г., но окончательные результаты были опубликованы в 1687 г.
в сочинении «Математические начала натуральной философии».
Все свои рассуждения Ньютон проводил сложным геометрическим
методом. При выводе закона тяготения будем пользоваться форму-
формулами Бине.
а) Вывод закона тяготения из законов Кеплера. Из второго
и первого законов Кеплера следует, что сила, действующая на пла-
планеты, центральная, причем ее центром является Солнце. Из зако-
закона площадей
xy
dt v dt
имеем
№ dt*
Определяя ускорения из уравнений движения
d?x v d2y „ dh 7
m = X, m—- = Y, m ~Z
di2 dt* dt2
243
получим
т. е. момент силы относительно начала координат равен нулю и,
следовательно, эта сила центральная.
Первый закон Кеплера определяет орбиту и дает возможность
определить силу при помощи формул Бине. В самом деле, записав
лолярное уравнение эллипса
1 _ 1 -f- e cos д
~ р '
где е — эксцентриситет эллипса
/а3 — &
е =
In
(а и Ь — большая и малая полуоси эллипса), а р~ фокаль-
фокальный параметр, и подставляя это значение г во вторую формулу
Бине, будем иметь
F — mC1 ( — е cos О + 1 + е cos ^ \ тС2
[ )
Таким образом, центральная сила, действующая на планету, —
притягивающая и обратно пропорциональна квадрату расстояния
планеты от Солнца. Величина С удвоенной секторной скорости
определяется из закона движения планеты.
Представим силу, действующую на планету, в виде
где
и покажем, что действующая сила прямо пропорциональна мас-
массам планет. Для этого предварительно необходимо показать, что
величина ц одинакова для всех планет. Но величину ц можно
представить в виде
l
р ft» '
Принимая во внимание, что за период обращения радиус-вектор
планеты заметает всю площадь эллипса, получим
С
Т = яаЬ,
2
244
откуда
р 2nab
и тогда
Т2
Отношение — по третьему закону Кеплера постоянно для всех
планет, откуда следует и постоянство ц для всех планет солнечной
системы. Если же положить, что \i = k2Mt где М — масса Солнца,
то сила, действующая на планету, может быть представлена в виде
р А2 i!fL
л /С ———
Величина k2 также постоянна для всех планет солнечной системы.
Она называется гравитационной постоянной, а сама величина k
называется постоянной Гаусса. В системе CGS
& = 6,670- Ю-8 см3
г ¦сек2'
Полученный закон взаимного притяжения тела оказался спра-
справедливым не только для планет, но и вообще для всех тел при-
природы.
б) Прямая задача Ньютона. Определение орбиты по заданной
силе. После установления закона всемирного тяготения Ньютон
обратился к следующей задаче:
Найти движение материальной точки (планеты), притягивае-
притягиваемой неподвижным центром (Солнцем) с силой, обратно пропор-
пропорциональной квадрату расстояния точки от притягивающего центра.
При решении этой задачи можно исходить непосредственно из
законов движения материальной точки и искать решение последо-
последовательными интегрированиями. Удобнее исходить из первых инте-
интегралов уравнений движения. В рассматриваемом случае сущест-
существует два первых интеграла уравнений движения: интеграл живых
сил и интеграл площадей. Первый из них имеет вид
где hi ¦— произвольная постоянная, определяемая из начальных
условий. Разделив обе части равенства на т/2, будем иметь
„ 2ix , , , 2fti
,Л — V I U Где ft _ .
г т
Определяя значение скорости с помощью первой формулы Бине, по-
получим
245
откуда
или
<** \ г У J r» """ c*r с2 ^ с* с*'
_?_Ш1Я = _Р JLV1+ _*_ + ?
dd U Л U c*) + c*^ V
Это равенство получено из интеграла живых сил и выполняется во
все время движения. Из него следует, что правая часть должна
оставаться неотрицательной во все время движения, что возможно
только тогда, когда
с2 с* \ г с2;
откуда следует, что
При помощи подстановки
г С2 V С* С*
введем новую переменную величину U и преобразуем дифференциаль-
дифференциальное уравнение траектории
dU \2 f_h_, [i3 \ _ /_ ,™ , ,s / h_ , j^_
(? С* ) \С3С*
к виду
Интегрируя это уравнение, будем иметь
± arc cos U = ¦& — д,,,
т. е.
t/=cos@ — О0).
Возвращаясь к старым переменным, получим уравнение траектории
в полярных координатах
г С3 К Са С*
Сравнивая это уравнение с уравнением конического сечения
_L 1 + е cos (й — fl0)
246
найдем
!?~~р~' ~р~= V ~& ~с*'
отсюда
Последнее выражение для эксцентриситета позволяет определить
вид конического сечения. Величина эксцентриситета, а следова-
следовательно, и вид траектории зависят от значения произвольной по-
постоянной живых сил h. Из формулы для эксцентриситета видим,
что
при h<0, e<\—эллипс,
при h = 0, e=l — парабола,
при /г>0, е>1 — гипербола.
Постоянная живых сил
зависит от начального положения планеты и от величины началь-
начальной скорости. Очевидно, что эллиптические траектории имеют мес-
место лишь при ограниченной начальной скорости. Увеличивая ско-
скорость, будем получать параболические и гиперболические траек-
траектории.
Если постоянная живых сил h = — -L, то для эксцентриситета
получаем нулевое значение е = 0. В этом случае траектория точ-
точки — окружность.
Пример 71. Вычислить скорость точки, брошенной с поверхности Земли,
необходимую для ее движения по круговой орбите вокруг Земли.
Решение. Определим сначала величину ц. для Земли. Вблизи поверх-
поверхности Земли на точку действует сила
где g — ускорение силы притяжения к центру Земли вблизи ее поверхности;
R — радиус Земли. Отсюда будем иметь
Величину начальной скорости точки определим из интеграла живых сил
Подставляя сюда ц, значение h для круговой орбиты и С = RvQ, получим
247
откуда
oo = V?r~.
На поверхности Земли ускорение силы тяжести g«*9,81 м/сек?, радиус Зем-
Земли #=6 370 000 ж, и тогда
fo = 7910
сек сек
Скорость, с которой точка могла бы двигаться вблизи поверхности Земли по
круговой орбите, называется круговой, или первой космической
скоростью.
Второй космической скоростью, или параболи-
параболической скоростью, называют скорость, необходимую для того,
чтобы тело преодолело земное тяготение и начало двигаться с по-
поверхности Земли по параболической траектории.
Для определения второй космической скорости будем исходить
из интеграла живых сил
Для параболической траектории имеем h=Q и, следовательно, для
определения начальной скорости на поверхности Земли будем
иметь
»о = -^-, где P =
к
откуда
= 11 180-^-^11,2 1&-
сек сек
При скорости большей чем 11,2 км/сек точка будет двигаться по
гиперболической траектории (рис. 154).
Здесь приведены расчеты в предположении, что на точку дей-
действует только сила притяжения со стороны Земли. На самом деле
на точку действует сила притяжения со стороны Солнца, влияние
которого вблизи поверхности Земли пренебрежимо мало по срав-
сравнению с силой притяжения к центру Земли. При удалении точки
от поверхности Земли сила притяжения к центру Земли будет
уменьшаться, и пренебрегать влиянием притяжения Солнца уже
будет нельзя. На достаточно большом расстоянии от поверхности
Земли влияние силы притяжения со стороны Земли станет незна-
незначительным по сравнению с силой притяжения к Солнцу. При вы-
вычислении орбиты нужно принимать во внимание это обстоятель-
248
ство и, пренебрегая притяжением Земли, рассматривать движение
в центральном силовом поле Солнца.
Чтобы определить скорость, которую необходимо сообщить
точке для ее движения по параболической орбите относительно
Солнца, можно снова воспользоваться интегралом живых сил, в
котором следует принять значение \х для Солнца. Не приводя здесь
км/сек
Рис 154
Рис. 155
всех расчетов, скажем, что для движения по параболической орби-
орбите необходимо сообщить точке скорость около 42,2 км/сек (отно-
(относительно системы осей, связанных с Солнцем и ориентированной
по звездам). Начав движение с такой начальной скоростью, точка
будет двигаться по параболической орбите относительно Солнца и
навсегда покинет Солнечную систему. При определении начальной
скорости точки относительно Земли необходимо учитывать движе-
движение Земли по своей орбите во время удаления точки от Земли и
притяжение со стороны Земли, пока точка находится в сфере ее
действия. Поэтому скорость точки относительно Земли должна
быть около 16,7 км/сек. Эта скорость называется третьей кос-
космической скоростью.
Эллиптическое движение точки. Рассмотрим подробно случай,
когда постоянная живых сил /i<0 и точка совершает движение
по эллиптической орбите с фокусом в /V
Фокальное уравнение эллипса имеет вид
1 1 + e cos О
r p
где
е =
эксцентриситет,
Ь2
Ь2
р= — = аA— е2) — параметр эллипса
249
a = —-—= ^ = — > 0 — большая полуось.
l — ei h? h J
~ V?
Предположим, что в начальный момент точка находится в положе-
положении Мо и имеет начальную скорость v0. Тогда величина большой
полуоси
h , 2|i
будет неизменной вне зависимости от направления начальной ско-
скорости точки. Для определения орбиты достаточно найти положение
второго фокуса, которое можно определить из условия, что сумма
расстояний от точки траектории до фокусов есть величина по-
постоянная, т. е.
гг + г2 = 2а = const.
Пусть г=г0. Геометрическое место фокусов представляет собой
окружность радиуса
г2 = 2а — rt
с центром в точке Мо (рис. 155). Известно, что касательная к эл-
эллипсу делит пополам угол между фокальными радиусами. Следо-
Следовательно, зная направление начальной скорости точки, можно
определить положение второго фокуса F2. Этим полностью решает-
решается задача определения траектории. Для ее выполнения, оказы-
оказывается, достаточно знать величину и направление начальной ско-
скорости и начальное положение материальной точки.
Задача попадания. Рассмотрим задачу о том, в каком направ-
направлении следует запустить из данного положения материальную точ-
точку с начальной скоростью v0, чтобы она, двигаясь в центральном
силовом поле, попала в наперед заданную точку М.
При решении этой задачи заметим, что на материальную точ-
точку действует центральная сила притяжения, величина которой
обратно пропорциональна квадрату расстояния точки от притяги-
притягивающего центра, являющегося одним из фокусов Fi эллиптической
орбиты. Определив, как это указывалось выше, большую полуось
орбиты а и зная г0, найдем геометрическое место вторых фокусов
эллиптических траекторий, являющееся окружностью радиуса
г2 = 2а — г0
с центром в точке Мо. Точка М должна лежать на искомой траек-
траектории, т. е. должно удовлетворяться уравнение
250
MFt + MF2 = 2a.
Построив окружность радиуса 2a с центром в фокусе Fu из точки
М опишем окружность радиуса
Эта окружность будет геометрическим местом вторых фокусов
траектории (рис. 156). Пересечение двух окружностей определит
второй фокус ^2 (^2 или F% на рисунке).
Рис 156
Рис. 157
Две окружности либо пересекаются в двух точках, либо каса-
касаются друг друга, либо вообще не имеют общих точек. В последнем
случае попадание в точку М из положения Мо при данной началь-
начальной скорости невозможно. Если имеются два фокуса, то попадание
возможно двумя способами.
Определим геометрическое место точек М\ в которые можно
попасть только одним способом, т. е. когда существует только один
второй фокус. Для этого случая имеем
'М0 = Fx№ + M'Ft + F^M0 =
FXM' +
= 2а
2a — rQ = 4a — r0 = const,
и точки М' расположены на эллипсе, фокусами которого являются
точки F\ и Мо (рис. 157). В точки, расположенные на этом эллип-
эллипсе, можно попасть только одним способом; в точки, лежащие за
пределами эллипса, попасть при заданной начальной скорости
нельзя.
По аналогии с параболой безопасности (см. задачу о движе-
движении тяжелой точки в пустоте), полученный эллипс будем назы-
называть эллипсом безопасности. Для определения начальной
скорости достаточно разделить пополам угол, образованный пря-
прямыми FiMq и MqF2.
251
Пример 72. Определить наименьшую скорость, с которой из положения
Л земной поверхности нужно бросить снаряд, чтобы попасть в точку В Земли
(рис. 158)
Решение. По условиям задачи, попадание должно осуществляться на
предельном режиме, т. е. когда точка В будет расположена на эллипсе безо-
безопасности, фокусами которого являются точки А и F\. Второй фокус 'располо-
'расположен на середине отрезка АВ. Зная фокус F2, можно построить траекторию, ко-
которая должна быть расположена вне Земли. Направление начальной скорости
определяется из условия, что вектор скорости делит пополам внешний угол
между фокальными радиусами. Величина начальной скорости находится из инте-
интеграла живых сил
r0
где а = r0 -f- AF2.
Рис 158
Рис. 159
в) Определение времени в эллиптическом движении планет.
Во многих задачах небесной механики необходимо знать время
движения точки (планеты) по эллиптической орбите. Рассмотрим
движение планеты относительно Солнца в системе осей, имеющих
начало в центре Солнца и сохраняющих неизменное направление
относительно звезд. Уравнение траектории планеты запишем в по-
полярной системе координат
е cos -ft
где # — угол между большой полуосью орбиты и радиус-вектором
планеты, называемый истинной а н о м а л и ей. Вершину орби-
орбиты, ближайшую к Солнцу, называют перигелием, а более уда-
удаленную — афелием. Эллиптическую траекторию можно рас-
рассматривать как проекцию описанного круга, который нужно по-
повернуть вокруг большой полуоси на угол, косинус которого равен
Ь/а.
252
Пусть М — точка (планета) на эллиптической орбите, а М' —
соответствующая точка описанного круга (рис. 159). Угол М'ОА
называют эксцентрической аномалией планеты.
Выразим время движения планеты через эксцентрическую ано-
аномалию. Из построения эллипса имеем
М'Н а_
МН ~ Ь "
Рассмотрим площадь сектора
Safm = Safm ,
а
НО
где
= 5сек. ОМ'А — S\OM'F = — Ни2 —- пС Sin И,
Л 2,
с = Va2 — № = ае,
так что
=-|-(и — esinu)
Safm = — {и — е sin и).
Движение планеты по орбите происходит по закону площадей, т. е.
площади, описываемые радиус-вектором FM, пропорциональны
времени движения. Тогда
Safm— —— (t —10),
где Т —¦ период обращения планеты; ^о — время прохождения че-
через перигелий. Сравнивая два последних соотношения, получим
nab ,, , , ab . .
—jr-V — t0) = — (« — esmu),
откуда
Полученное уравнение выражает время движения планеты
через эксцентрическую аномалию. Полагая л = ——, придем к
уравнению Кеплера
и — е sin и = n (t — ^0).
Для завершения задачи остается установить геометрическую
зависимость между истинной и эксцентрической аномалией.
253
Перепишем уравнение эллипса в виде
Р
1 + е cos ¦&
Г =
Подставляя сюда значение р, выраженное через эксцентриситет
р = а A — е2), получим
r==_ a A-е»)
e cos 0
С другой стороны, вводя прямоугольную систему координат с на-
началом в центре эллипса, перепишем уравнение эллипса в виде
Тогда
r=V(x-c)* + y\
что преобразуется к виду
г = а — at = a — ex,
а
где
х = a cos и,
отсюда получаем
г = а(\ — ecosu).
Сравнивая два значения для г, будем иметь
1-е2
1 — е cos и =
1 + е cos -
откуда
a cos и — е
COS 0 =
1 — г cos ц
Полученная формула легко преобразуется к виду, удобному для ло-
логарифмирования. В самом деле, подставляя в формулу
tr О _ч/~ 1-cos ft
ё 2 К l
значение для cos ft, получим
О 1 / 1 — г cos и — cos и + е _ Л / 1 + е ¦ _м_
2 у 1 — е cos u -f- cos и — е \ 1-е 2
254
§ 7. ДВИЖЕНИЕ ТОЧКИ В СОПРОТИВЛЯЮЩЕЙСЯ СРЕДЕ
При изучении движения материальной точки обычно подразу-
подразумевают под такой точкой центр масс твердого тела. При движении
твердого тела вблизи поверхности Земли, на его движение оказы-
оказывает существенное влияние сопротивление воздуха.
При движении небольших объектов с малыми скоростями
основная часть сопротивления обусловливается трением тел о воз-
воздух, и сопротивление воздуха можно считать пропорциональным
первой степени скорости. В тех же случаях, когда тела имеют
более внушительные размеры, сопротивление обусловливается
инерцией среды, в которой движется точка или тело. Можно счи-
считать, что в этом случае сопротивление воздуха пропорционально
квадрату скорости. При скоростях, близких к скорости звука, пе-
перестает быть достоверным и квадратичный закон сопротивления.
В этом случае сопротивление воздуха определяется или по зако-
закону Сиаччи A839—1907), что делается обычно в артиллерийских
расчетах, или по какому-либо другому закону, устанавливаемому
экспериментально.
Закон Сиаччи в общем случае можно представить в виде
F = Cf(z)Ft(v),
где С — коэффициент, зависящий от формы тела; г — высота тела
над уровнем моря, v — скорость.
Рассмотрим сначала такое движение, при котором силу сопро-
сопротивления воздуха можно принять пропорциональной первой сте-
степени скорости точки. Выберем оси координат так, чтобы ось z
была направлена вертикально вверх, а ось х — по горизонтали так,
чтобы начальная скорость лежала в плоскости Oxz. Тогда уравне-
уравнения движения запишутся в виде
df> dt dfi dt
dzz , dz
m = — mk mg.
dt* dt s
Все три уравнения движения можно проинтегрировать независимо
одно от другого. В результате интегрирования получим
Постоянные Си С2, С3, ... , Св определяются из начальных условий
при
t = 0, х0 = у0 = z0 = 0,
х0 = v0 cos а, г/о = 0, z0 = v0 sin а.
Значения постоянных С, находим, решая следующую систему урав-
уравнений:
255
— C4?-0, C5 + Ce==0, — kCe~ 4- = uosina.
я
Решение, соответствующее этим начальным данным, приобретает
вид
х = _?о.A _e-fe()cosa, г/ = 0,
откуда следует, что точка будет двигаться в плоскости Oxz. Исклю-
Исключив отсюда время, получим уравнение траектории.
В баллистике большое значение имеет задача о движении ма-
материальной точки при квадратичном законе сопротивления. В этом
случае, выбирая оси координат как и в предыдущей задаче, урав-
уравнения движения запишем в виде
mJ^L^ — makW — , m-^- =~mg
dt* s ds dt* s
(движение происходит в плоскости Oxz). Преобразуем первое
уравнение системы к виду
dx ^
dt2 ё dt dt
или
dt S dt
Разделяя в этом уравнении переменные
после интегрирования получим
х' = С e~k'zs,
где Съ определяется из начальных условий
С1"= u0cosa.
Обозначая через р тангенс угла наклона касательной к оси х
dz_
будем иметь
_ dp dx
~~ ~dT~dT
256
Тогда уравнение движения запишется в виде
dt dt dP & ds
Подставив сюда d2x/dt2, получим
dt dt r a ds a ds
ИЛИ
dt dt ds ds
что после упрощения дает
dp dx
dt ~d7~~g'
отсюда
dp g<*4s
dt v0 cos a
и
dp_ = _ ge^s
dx i% cos2 a
Заменяя
ds = V(dxJ + (dzJ = J/1 + p2dx,
получим
—-Г dp ge2k4s
ds v\ cos2 a
т. е. приходим к уравнению с разделенными переменными. Введем
обозначение
j VT+j?dp = -i- {p 1/TTF+ in (р -f 1/ТТ7)} - чг (р).
Тогда интеграл уравнения можно будет представить в виде
/^cos2a
В начальный момент s = 0, p = tga, откуда
C = ?(tga)+ ?
ek'es - - kv\ Vc~W(p) cos a,
после чего уже можно определить х и z. В самом деле,
9 Е. Н Березкин 257
da ap2k'?s gk2Vn cos3 a
откуда
== 1 Г dp
gft2 JC-TIpI
dz = pdx = —
далее,
pdp
или
pdp
z = —
C-
Для вычисления двух последних интегралов существуют спе-
специальные таблицы.
§ 8. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ
В технических задачах большое значение имеют вопросы дви-
движения материальной точки, перемещения которой стесняются свя-
связями. Сюда относятся задачи о движении материальной точки по
кривой и по поверхности.
1. Движение материальной точки по кривой. Наиболее просто
представляется движение материальной точки по кривой. Ее по-
положение на кривой определяется всего одним параметром и для
полного определения движения точки достаточно определить закон
изменения этого параметра со временем.
Рассмотрим движение материальной точки по гладкой мате-
материальной кривой L, предполагая, что кривая может со временем
менять свою форму и положение относительно системы отсчета
Oxyz, в которой определены силы, действующие на материальную
точку. Кроме активных сил на точку будут действовать еще и силы
реакции связи. Так как кривая гладкая, то силы реакции не буд>т
препятствовать перемещению точки по кривой, и полная реакция
кривой будет ортогональна к кривой.
Будем сначала предполагать, что кривая задана в простран-
пространстве, определяемом системой отсчета Oxyz уравнениями
?i(x, У, z, 0 = 0, [2(х, у, г, t).= 0,
т. е. представляется как геометрическое место точек пересечения
двух поверхностей. Пусть Ni и N2—нормали, проведенные в точ-
точке т соответственно к поверхностям \\ и /г. Вектор Ni будет колли-
неареи с вектором градиента к поверхности \\, и его проекции бу-
будут пропорциональны частным производным
дх ' ду дг '
258
Вектор N2 имеет соответственно проекции, пропорциональные част-
частным производным
Щг aft Jh_
dx ду дг
Любая нормаль к кривой L будет лежать в плоскости нормалей
Ni и N2. Обозначая через R(RX, Ry, Rz) силу реакции кривой L
на материальную точку, будем иметь
дх * ду
* дг * дг
Полагая, что на точку действует еще активная сила F(X, Y, Z),
получим уравнения движения точки
dt* 1 дх % дх
dt* 1 ду ^ 2 ду
dP * dz * дг
Эти уравнения называются уравнениями Лагранжа первого рода.
а) Теорема живых сил. Умножая уравнения движения соот-
соответственно на dx/dt, dyjdt и dz/dt и складывая их, получим в левой
части
1гх dx , d2u dt/ . d2z dz
dt* dt dP dt dP dt
2 dt LV dt J \ dt J \ dt } J dt
В правой же части будем иметь
У dx v dy 7 dz . ( dft dx , dfl dy dft dz \
d^ di dt \ dx dt dy dt dz dt
- / dh dx <5/2 d(/ , df2 dz
dx dt dy dt ^ dz dt
Точка движется в соответствии с наложенными на нее связями, а
координаты точки в каждый момент времени удовлетворяют урав-
уравнениям поверхностей
Д = 0 и Д = 0,
представляющих собой тождества по времени. Дифференцируя эти
тождества, будем иметь
9* 259
dfx dy fa dz _
d dt d dt
dt dx dt dy dt dz dt
df2 i Щг dx dfa dy df3 dz
?t ' <5д; dt dy dt dz dt
и окончательно получим
d I mxfi \ v d-c , v dy , 7 dz . dfl . df
v dc , v dy , 7 dz . dfl .
dt dt dt l t
f2
,
dt \ 2 / dt dt dt L dt dt
или после умножения на dt теорему живых сил представим в виде
= лад; 4- г ш/ + лаг — Ах —— dt — Aa —'-*- dt.
Уравнение получает простой вид, когда связи, наложенные на точ-
точку, не зависят явно от времени. Тогда -—— = —~- — 0, и уравне-
Of Of
ние запишется следующим образом:
d-^— = Xdx -f Ydy + Zdz.
В результате получаем, что если связи, наложенные на материаль-
материальную точку, не зависят явно от времени, то теорема живых сил
получает такой же вид, как и для свободной материальной точки.
Если, кроме того, активные силы обладают силовой функцией, за-
зависящей только от координат, т. е. существует функция U, удов-
удовлетворяющая условиям
v dl) v dl) 7 dV
Л — ——, У = ——, Z = —— ,
dx dy dz
то правая часть уравнения живых сил будет представлять собой
полный дифференциал от функции U, и уравнение получит вид
= dU,
отсюда сразу же получаем первый интеграл уравнений движения—
интеграл живых сил
Постоянная живых сил h определяется из начальных условий. Мы
получаем следующую теорему.
Теорема. Если связи, наложенные на материальную точку,
вынужденную оставаться на материальной кривой, не зависят явно
от времени, а действующие на точки активные силы обладают си-
силовой функцией, то уравнения движения материальной точки до-
допускают существование первого интеграла — интеграла живых
сил.
260
б) Качественное исследование движения. Положение матери-
материальной точки на кривой может быть определено одним парамет-
параметром — длиной дуги кривой. Поэтому для решения задачи о дви-
движении материальной точки по кривой достаточно всего одного
уравнения движения, вместо которого можно принять интеграл
живых сил, если только он существует.
Рассмотрим задачу о движе-
движении тяжелой материальной точки
М с массой т по неподвижной
замкнутой кривой с непрерывно
меняющейся касательной
(рис. 160). В рассматриваемом
случае связи, наложенные на ма-
материальную точку, не зависят
явно от времени, а действующие
силы обладают силовой функци-
функцией. Поэтому будет существовать
интеграл живых сил
Рис 160
Поскольку ось 2 направлена вертикально вверх, получим
mv'
= —mgz+hly
или
и2 = — 2gz + ft.
Положив h = 2ga} перепишем интеграл в виде
i>2 = 2g(a — z).
Из этого соотношения видим, что скорость обращается в нуль
только на горизонтальной плоскости
z — а.
Обозначим эту плоскость через (я). Если через Р обозначить про-
проекцию точки М на плоскость (я), то для скорости получим значе-
значение
и2 = 2gPM,
откуда видно, что скорость определяется расстоянием точки М от
плоскости (я).
Может оказаться, что плоскость (я) не имеет общих точек с
кривой L. Если плоскость (я) «выше» кривой, то скорость нигде
не обращается в нуль, и точка будет двигаться сколь угодно долго
по кривой. Ниже кривой плоскость (я) не может быть располо-
расположена, так как правая часть равенства u2 = 2g(a—z) должна быть
неотрицательна.
.261
Предположим, что кривая L пересекает плоскость (я) в точках
А и А'. Обозначая через s длину дуги, отсчитываемую от точки Mq,
будем иметь
ds
V =
dt
откуда
Уравнение кривой позволяет определить
Z = 2E),
а тогда в предыдущем уравнении можно разделить переменные
Пусть точка начинает свое движение из положения Мо. Обозначим
длину дуги MqA через /. Обозначая через s дугу, определяющую
положение точки в некоторый момент времени, и рассматривая z
как функцию s, разложим z в ряд Тэйлора в окрестности точки А
Если производная от z no s в точке А отлична от нуля, то разло-
разложение z(s) будет начинаться с членов первого порядка малости
относительно z—а, а для величины а—z получим выражение
21 w k\
Для точек, лежащих ниже плоскости (л), всегда будем иметь при
этом
а — 2>0.
Рассмотрим интеграл
С ds
который определяет время движения точки из положения Мо в по-
положение А Этот интеграл является несобственным, так как подын-
подынтегральная функция
у а — z (s) уф (s)
где
262
при s-*-l неограниченно возрастает. На основании признака Коши
при z-*a интеграл будет сходиться, если функция f(s) является
бесконечно большой порядка Я<1 по сравнению с , и будет
I
расходиться, если f(s) будет порядка Я^1 по сравнению с .
I —• s
Если в точке А первые к—1 производных от функции z(s)
обращаются в нуль, то
т. е. функция f(s) будет иметь порядок —. При —< 1 интеграл
сходится, а при — ^ 1 интеграл расходится'. В первом случае
время, необходимое для достижения точки А, определяется сходя-
сходящимся интегралом. После достижения точки А движущаяся мате-
материальная точка возвращается к положению Мо, которое она до-
достигает со скоростью v0, и далее движется к точке А'. Движение
в этом случае будет иметь колебательный характер.
Во втором случае, когда Х2
— г
движущаяся точка будет неограниченно приближаться к точке А,
никогда ее не достигая.
Положение материальной точки на кривой определяется всего
одним параметром. Такое движение называют однопараметриче-
ским. Если действующие на точку силы обладают силовой функ-
функцией, то движение будет происходить в соответствии с интегралом
живых сил. Для изображения состояния движения материальной
точки удобно воспользоваться понятием фазовой плоскости,
т. е. плоскости, на которой переменные s и v рассматриваются как
декартовы координаты точки. Каждая точка фазовой плоскости
изображает определенное состояние материальной точки, поэтому
такую точку называют изображающей. При движении ма-
материальной точки изображающая точка будет описывать некоторую
кривую, которая называется фазовой траекторией и не
является действительной траекторией движения. Скорость движе-
движения изображающей точки называется фазовой скоростью,
которая не является скоростью настоящей материальной точки.
1 Г М Фихтенгольц. Курс дифференциального и интегрального исчис-
исчисления, т II. М—Л , Гостехиздат, 1948, стр 596.
263
Если определить силовую функцию как U(s), то интеграл жи-
живых сил
будет определять семейство фазовых траекторий на
фазовой плоскости. Задание начального состояния движения ма-
материальной точки определяет h и однозначно определяет фазовую
траекторию точки. Семейство фазовых траекторий является одно-
параметрическим семейством. Фазовые траектории, соответствую-
соответствующие различным начальным условиям (различным /г), между собой
не пересекаются, что следует из условия единственности решения
уравнений движения. Движение изображающей точки по траек-
траектории происходит по часовой стрелке, так как в точках, где о>0
координата s должна возрастать при движении изображающей
точки. Состоянию покоя могут соответствовать только точки, нахо-
находящиеся на оси s, причем фазовые траектории пересекаются с осью
s под прямым углом. Точки, в которых обращаются в нуль v и
производная dU/ds, называются особыми точками фазовой плоско-
плоскости. В особых точках скорость изображающей точки равна нулю.
Все эти точки находятся на оси s. Зная совокупность фазовых тра-
траекторий, можно видеть всю картину возможных движений при раз-
различных начальных условиях.
Перепишем интеграл живых сил в виде
о» = ?/,. (s)-Ь Аь,
2С/
где [/1(s) = . При помощи этого интеграла легко можно по-
построить фазовые траектории. В самом деле, нетрудно видеть, что
все фазовые траектории симметричны относительно оси s. Геомет-
Геометрическим местом точек, где касательные к фазовым кривым гори-
горизонтальны, будут точки, определяемые из уравнения
за исключением, быть может, особых точек. Можно предложить
следующий способ построения фазовых траекторий. Построим сна-
сначала график функции z=Ui(s) (рис. 161). Пусть некоторые на-
начальные значения определяют постоянную ho<O. Построим гори-
горизонтальную прямую 2=—/го = ао. Разность Al/i = l/i—а0 опреде-
определяет v2. Если провести другую прямую z—a\, то получим другую
фазовую траекторию. В результате такого построения на фазовой
плоскости получим континуум замкнутых кривых, вложенных одна
в другую и охватывающих выродившуюся в точку фазовую тра-
траекторию. Особая точка здесь соответствует положению равновесия
материальной точки.
Особая точка типа «центр» будет соответствовать устойчивому
положению равновесия материальной точки. Особая точка седло-
264
вого типа соответствует неустойчивому состоянию равновесия. Не-
Нетрудно видеть, что в первом случае особая точка соответствует
максимуму силовой функции, а в случае седловой точки будем
иметь минимум силовой функции. Фазовые траектории с самопе-
самопересечением называются сепаратрисами.
в) Математический маят-
маятник. В качестве примера рас-
рассмотрим движение материаль-
материальной точки по окружности ра-
радиуса /. Положение точки на
окружности определим цен-
центральным углом Ф (рис. 162).
Тогда
Рис. 161
2 = — /cosФ, а = — / cosa, v2 = 2g (a — z), v = 1
так что
rid
dt '
= Igl (cos ft — cos a) = Agl fsin2 — — sin2 — \ ,
отсюда находим
dt
Если наинизшее положение является начальной точкой, тогда, интег-
интегрируя, получим
Г
у ft-
/sin2 — — sins
2 2
265
A
Выполним замену переменной sin = usin— и положим
sin2 =
2
Так как прн ft = 0, и — О, а при ft = а, и = 1, и, кроме того,
2k 2 2
то
Таким образом, время движения материальной точки (четверть
периода) выражается через эллиптический интеграл первого рода.
Но выражение
V1 —
можно разложить в ряд
/1—ft'u2 2 2! 2 2
31 2 2 2
и тогда задача сведется к вычислению интегралов типа
Г ""Ч" =JL. !*¦ ¦-¦^-1) („ = 0,1
, т^| _„2 2 2 • 4 • 6 • .. . 2я v
0 '
Отсюда для периода получим
Если амплитуда колебаний а достаточно мала, то в разложе-
разложении для периода колебаний можно пренебрегать членами, содер-
содержащими k. Приближенное значение периода в этом случае будет
Г = 2л 1/ — ¦
266
.\W\\\\\.\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\\
Если период вычисляется по этой формуле, то уже при ампли-
амплитуде в 20° ошибка периода достигает 0,8%, при а = 4О°~3°/о, a
при а = 90°~18%. Для математического маятника, длина которого
1=1, при амплитуде 90° ошибка периода достигает I сек.
г) Циклоидальный маятник. Нидерландский математик и ме-
механик Христиан Гюйгенс A629—1695) изобрел маятник, период
колебаний которого не зависит от
амплитуды колебаний (изохрон-
(изохронный маятник). Оказалось, что
период не зависит от амплитуды,
если точка движется по циклои-
циклоиде.
Циклоида представляет со-
собой кривую, которую описывает
точка обода круга, катящегося
по неподвижной прямой
(рис. 163).
Пусть циклоида имеет гори-
горизонтальное основание, расположена в вертикальной плоскости и
обращена своей вогнутостью вверх. За ось х примем неподвижную
горизонтальную прямую, касающуюся циклоиды в нижней точке,
ось у направим вертикально вверх. Уравнение циклоиды можно
параметрически представить в виде
откуда
х = а (ф — sincp). у = а{\ + coscp),
х' =аA — coscp)cp', у' = — аф' sin cp,
скорость точки
и2 =.: х'2 + у'2 = 2а2ф'2A —
Применяя интеграл живых сил
получим
4а2 ф'2 sin2 -5- = — 4ag cos2 -2- + h:
% S 2
Пусть при ф = a, v = 0, тогда h = 4agcos2 — и интеграл живых сил
приобретает вид
cos-5 cos
2 Ф
267
или
m
sin -—- d <p
2 - -1 ' s dt.
у со^-у-соз*-^-
Полагая cos— = ?и, cos — — ku0, получим
2, 2*
f 2du
о V Ч
откуда будем иметь
2 arc sin
inl = l/X f, или f = яТ/ — ,
т. е. время движения точки до самого низшего положения не за-
зависит от начального положения точки (от амплитуды).
д) Определение реакции. Если для изучения движения точки
по кривой применить естественные уравнения движения, то
будем иметь одно уравнение, определяющее само движение точки,
и два уравнения для определения реакции
dv г. tmfl i? , »г п о i иг
m— = Fx, = Fn-{-Nn, O = Ffi-$-Np.
at p
Первое из этих уравнений эквивалентно теореме живых сил и при-
приводит к интегралу живых сил, если выполнены условия существо-
существования последнего.
Пример 73. Шарик, масса которого равна т, нанизан на горизонтальную
проволочную окружность радиуса г. Зная коэффициент трения /, определить,
какую начальную скорость нужно сообщить шарику, чтобы он сделал по окруж-
окружности один полный оборот.
Решение. На точку действуют три силы: сила тяжести, нормальная реак-
реакция н сила трения. Составим уравнения движения точки
dv mvz
m — = -Frp< —y- = Nt Q = mg- N3.
Последние два уравнения дают модуль полной реакции
При помощи этого соотношения приведем первое уравнение движения к виду
dv f
dt r ' - ' gr '
нля
dp _/_
rfs ~ ~ r
268
Разделяя переменные, будем иметь
Но
откуда
У о*
du
¦= In
In
V** -f-
2/
¦ = — s -f In С.
При s = 2nr, In С = 4л/, а при s = О
или
In-
ojj
+ v*
откуда
Окончательно имеем
4-
«о =
2. Движение материальной точки по поверхности. Вторым
важным для приложений случаем движения несвободной мате-
материальной точки является случай дви-
движения точки по поверхности.
Предположим, что в своем движе-
движении материальная точка все время
остается на некоторой гладкой поверх-
поверхности
f(x, у, г, 0 = 0,
которая стесняет ее перемещения.
Форма и положение поверхности мо-
могут изменяться со временем, а сама
поверхность оказывает воздействие на
точку. Это воздействие можно опреде-
лить некоторой силой, которую назы-
называют силой реакции. Она не препят-
препятствует перемещению точки по поверх-
поверхности и направлена по нормали к поверхности (рис. 164), так как
по предположению поверхность является гладкой. Аналитически
это условие можно представить в виде
Рис. 164
269
— = _5_ =
df df _д[_
дх dy дг
Движение точки полностью определяется двумя силами: активной
силой F и силой реакции R, а уравнения движения имеют вид
Неизвестные величины Rx, Ry, R2 можно заменить одной неизвестной
величиной к, после чего уравнения перепишутся следующим образом:
m Xi., m = Y + k, тг + к.
dt2 дх dt* dy dt* dz
Уравнение f(x, y, z, t)—0 связывает координаты точки и является
уравнением связи. Три уравнения движения вместе с уравнением
связи полностью определяют движение материальной точки. Сами
уравнения называются уравнениями Лагранжа с множителями.
а) Теорема живых сил. При изучении движения несвободной
материальной точки большое значение имеют общие теоремы ди-
динамики материальной точки, и в первую очередь теорема живых
сил.
Если точка вынуждена оставаться на поверхности
f(x,y,z,t) = O
и определен закон движения точки, то ее координаты являются
некоторыми функциями времени, после подстановки которых в
уравнение связи, последнее становится тождеством. Дифференци-
Дифференцируя это тождество по времени, будем иметь
df _ df dx df dy df dz , df _Q
dt dx dt dy dt dz dt ' dt
Здесь dx/dtt dy/dt, dzfdt — проекции скорости точки на декартовы
оси координат в действительном движении точки.
Чтобы получить теорему живых сил, умножим каждое из.
уравнений движения соответственно на dx/dt, dy/dt, dz/dt и сло-
сложим результат
dx d?x dy d?y , dz
di dF~ dt
dt dt* dt dt*
~dT ~dT ' ~dy dt ' dz ~dt
все это преобразуется к виду
) dt dt dt
dt
270
и в результате получаем теорему живых сил для материальной
точки, движущейся по поверхности.
Теорема. Изменение живой силы материальной точки рав-
равно работе заданных сил на действительном перемещении точки и
некоторому дополнительному члену
-%Л-<ц = Rxdx + Rydy + R, dz,
at "
представляющему работу сил реакций связи на действительном
перемещении точки.
Если поверхность неподвижна и не изменяет своей формы, то
-т-0
и теорема живых сил приобретает такой же вид, как и для сво-
свободной материальной точки, т. е.
Если, кроме того, активные силы обладают силовой функцией, то
будет существовать интеграл живых сил
Для существования интеграла живых сил достаточно, чтобы связи
не зависели явно от времени и активные силы обладали силовой
•функцией.
б) Естественные уравнения движения точки по поверхности.
Положение материальной точки на поверхности определяется дву-
двумя параметрами. Для нахождения зависимости этих параметров
от времени необходимо иметь по крайней мере два дифференци-
дифференциальных уравнения движения. Одной теоремы живых сил теперь
уже оказывается недостаточно. Уравнения движения в декартовых
координатах часто оказываются очень сложными, поэтому прихо-
приходится искать другие пути решения задачи о движении.
Предположим, что уравнение поверхности, на которой вынуж-
вынуждена оставаться материальная точка, не содержит явно времени.
Точка m в своем движении по поверхности опишет некоторую тра-
траекторию, полностью расположенную на этой поверхности. Рас-
Рассматривая уравнения движения в проекциях на естественные оси
координат (рис. 165), замечаем, что касательная к траектории
¦будет расположена в касательной плоскости к поверхности, а
нормальная реакция будет давать проекции только на нормаль и
«бинормаль
271
flft) r
m ¦-=. F
dt
mv
P
Если активная сила на точку не действует, т. е. F — О, то из перво-
первого уравнения находим
v = const,
следовательно, точка будет двигаться по поверхности с постоянной
скоростью. Из последнего уравнения движения следует, что #р=0,
а потому реакция будет расположена в соприкасающейся плоско-
плоскости, т. е. нормаль к траектории будет совпадать с нормалью к по-
Рис. 165
Рис. 166
верхности. Кривые, обладающие этим свойством, называются
геодезическими. Таким образом, если на точку, движущуюся
по поверхности, активные силы не действуют, то точка движется
по геодезической кривой с постоянной по величине скоростью.
в) Движение точки по поверхности вращения. Теорема Клеро.
В качестве примера рассмотрим движение материальной точки по
поверхности вращения. Пусть ось z — ось симметрии поверхности.
Если на точку не действуют активные силы, то точка будет дви-
двигаться по геодезической кривой g, образующей с меридианом угол
i (рис. 166), причем движение происходит с постоянной по вели-
величине скоростью. Единственной силой, действующей на точку, будет
сила нормальной реакции поверхности N, направленная ортого-
ортогонально к поверхности. Линия действия этой силы пересекает ось
г. Из теоремы об изменении момента количества движения точки
относительно оси z будем иметь
daz
dt
так что
= Мг, где Mj =
аг = const.
272
Подставляя сюда явное выражение для момента количества движе-
движения, получим
mvr sin i — const.
Из постоянства массы и скорости отсюда сразу следует
rslni — const,
т. е. вдоль геодезической линии поверхности вращения произведе-
произведение радиуса параллели на синус азимута есть величина постоян-
постоянная. В этом соотношении заключается теорема Клеро
A713—1765).
Геодезические линии поверхности вращения легко определить,
если взять за систему отсчета цилиндрическую систему координат.
В этой системе дифференциал дуги
(dsJ = г2 (dftJ -J- {dry -f {dzf.
Пусть поверхность задана уравнением
2 = /</)•
Из интеграла живых сил при отсутствии активных сил получаем
v2 = и2 = const,
или
V dt
Подставляя сюда г' из уравнения поверхности^
Z' = /' (Г) Г',
будем иметь
г'2 + гг#'2+ /'2(r)r'2 = og.
Из интеграла площадей имеем
r2-^ = C = const.
dt
Определяя отсюда dt и подставляя в интеграл живых сил, получим
dr2 + г2 {d$Y + /'2 (г) {dry =
и после разделения переменных приходим к уравнению
273
интегрирование которого дает
I 4- Гг (г) dr
z = /(г).
Эти формулы определяют геодезическую кривую на поверхности
вращения.
Замечания. 1. Уравнение z = f (г) исключает из рассмотрения
цилиндрические поверхности вращения г=const. В последнем слу-
случае (ds)a = r2(utoJ+(drJ, откуда
г* (d$J + {dzf = v\ {dt)\
Исключая при помощи интеграла площадей время, найдем
(cfeJ = f-^p A (dfy* = Л2 (dftJ, где А = const.
и, интегрируя найденное уравнение, получим
z = ± Ав + const.
Это и есть уравнение винтовой линии.
2. Можно уравнения движения точки отнести к специальным
осям т, v, g, имеющим начало в движущейся точке. Здесь т —
единичный вектор касательной к траектории точки, направленный
в сторону движения; v — единичный вектор внутренней нормали
к поверхности, а единичный вектор g расположен в касательной
ллоскости перпендикулярно к т так, чтобы векторы т, g, n образо-
образовывали правую систему (рис. 167). Обозначим через ft угол между
направлением главной нормали траектории п и вектором v. Про-
Проектируя уравнения движения на оси т, v, g, получим
m = Fx, sin# = /?ff, cosw = Fv + N.
dt p g p
Первое и второе уравнения определяют движение точки по поверх-
поверхности, последнее же служит для определения реакции поверхности.
В целях дальнейшего преобразования уравнений рассмотрим
произведение
/ d '
р \ ds ] ds \ ds
Скалярное произведение (т, v) в силу ортогональности векторов
равно нулю, так что
^- = -1,,
р \ ' da
•274
Для всех траекторий, имеющих одну и ту же касательную в точке,
будем иметь
поэтому
dv
ds
(n, v)
= const,
= const.
Рнс. 167
Рис. 168
Для траектории, расположенной в плоскости нормального сечения,
имеем 0=0. Если обозначить через R радиус кривизны нормаль-
нормального сечения, то получим
1 _ cos ft
R ~ Р '
т. е. радиус кривизны произвольной кривой на поверхности враще-
вращения по своей абсолютной величине равен проекции на ее соприка-
соприкасающуюся плоскость радиуса кривизны нормального сечения,
имеющего с траекторией общую касательную (теорема
Менье). Теперь уравнения движения можно представить в виде
dt R ' tfi Ё
где R — радиус кривизны нормального сечения, а величина
Ri = . называется радиусом геодезической кривизны
(рис. 168).
г) Сферический маятник. Рассмотрим задачу о движении тя-
тяжелой материальной точки по поверхности сферы. Связь эта мо-
может быть реализована в виде нерастяжимого и несжимаемого
стержня, не имеющего массы, соединяющего точку с началом ко-
координат. На точку действует сила тяжести tng и сила реакции N,
направленная вдоль стержня. Если реакция всегда направлена
275.
к центру, то связь можно осуществить при помощи нерастяжи-
нерастяжимой идеальной нити. Уравнение связи имеет вид
х2 + уг + г2 — I2 = О
и не содержит явно времени. Ось z направим вертикально вверх.
Активная сила — сила тяжести — допускает существование сило-
силовой функции
U = — mgz,
а значит, существует интеграл живых сил
U + h
который можно представить в виде
v2 =r. — 2gz -f ft.
Момент активных сил и сил реакции связи относительно оси z
равен нулю, поэтому из теоремы об изменении момента количе-
количества движения относительно оси z имеем
da =0.
dt
откуда
аг = const,
или
2-i® =С,
dt
где dSjdt секторная скорость точки.
Задачу удобнее решать в цилиндрических координатах г, Ь, z.
В этих координатах интеграл живых сил и интеграл площадей
получают вид
(dY + (dr+
df-
dt
Уравнение связи в цилиндрических координатах получает вид
Г2 -f Z* = 1\
откуда дифференцированием находим
dt dt
Переписывая теперь интеграл живых сил
(rdrY + (rdz)*+ir*dQ? =(h_ 2дг\ f-
(dtf K ё '
276
преобразуем его к виду
окончательно получим
Полученное уравнение позволяет найти закон изменения координаты г.
Перепишем его в виде
где
Разделяя переменные и интегрируя, получим
Так как f(z) представляет собой многочлен третьей степени отно-
относительно z, то стоящий слева интеграл является эллиптическим.
После того, как будет найдено t, из последнего соотношения мож-
можно определить и уравнение траектории: с этой целью с помощью
интеграла площадей исключим из дифференциального уравнения
движения время и получим дифференциальное уравнение траек-
траектории
dfl. fcadz
Как видно, задача об определении траектории также сводится к
эллиптическим квадратурам.
д) Качественное исследование движения сферического маят-
маятника. Если вектор начальной скорости точки лежит в вертикальной
плоскости, то движение будет происходить в той же плоскости.
Для этого случая С —0, т. е. dft = 0. Следовательно, задача сводит-
сводится к обыкновенному математическому маятнику, кото-
который изучался выше.
Если СфО, то, как видно из квадратур, Ь будет монотонной
функцией относительно z. Для изучения закона изменения функ-
функции ф(г) рассмотрим график (рис. 169) функции
ф B) = {h — 2gz) (I2 — г2) — С2.
Нетрудно заметить, что
277
Для больших по модулю значений z
и знак функции определяется знаком первого члена разложения
ф(+<х=)>0, «pi—
На интервале ( + /, °°) находится по крайней мере один корень у
уравнения ф(г)=0. Координаты, определяемые полученными выше
дифферециальными уравнениями, будут принимать вещественные
значения только при условии, что подкоренное выражение ф(г) не-
неотрицательно. Пусть сначала начальное значение dz/dt веществен-
знВ
/
Рнс.169
Рнс. 17b
но и отлично от нуля. Тогда фB0)>0, и имеются действительные
корни а и Р уравнения ф(г)=0 в промежутках (—/, zq), (zo, +l).
Действительное движение происходит на интервале, где ф(г) не-
неотрицательно, т. е. между корнями аир.
Представим полином ср (г) в виде
Ф(г) = 2g (z«-
поскольку
имеем
ар -f PY + Y« - —1\
а так как а и р по модулю меньше /, то, следовательно, числитель
положителен. Но \~>$, поэтому
Р+а<0,
278
отсюда следует, что по меньшей мере один из корни аир отри-
отрицателен, т. е. во всяком случае
сс<0.
Корень р может быть как положительным, так и отрицательным
(рис. 170). Пусть для определенности при z=z0 координата г
убывает. Тогда перед корнем надлежит взять знак минус, и г бу-
будет уменьшаться до тех пор, пока не достигнет значения а. Из
интеграла площадей следует, что угол О изменяется лишь в одну
сторону, dz/dt может изменить знак лишь когда ц>(г) обращается
в нуль, т. е. при z=a или z=p. Если в начальный момент dz/dt=O,
то Zo является корнем уравнения (p(z) =0 и мы имеем критический
случай. Дифференциальное уравнение для z
dz \2 1
dt
можно преобразовать к виду
dt dP Р т ч dt
или
dP 2Р т ч
Если а и Р простые корни, то всюду ц>'(г)фО, и тогда будет про-
происходить изменение координаты z. Если аир — кратные корни,
то ф'(г)=0. В этом случае точка описывает окружность в плоско-
плоскости, перпендикулярной к оси z.
е) Определение реакции. Реакция не входит в выражение для
первых интегралов, и для ее определения следует исходить не из
первых интегралов, а из самих уравнений движения материальной
точки. Пусть R>0 тогда, когда реакция направлена к центру.
Тогда уравнения движения в проекциях на декартовы оси коорди-
координат запишутся в виде
d2x j-, х d?y п у
т = — R —, т —— = — а —,
iP I dP I
dt2 * z '
а интеграл живых сил
v2 = — 2gz + h.
Умножая уравнения движения соответственно на х, у, г и складывая,
получим
т х \- у —— -i z = — mgz (х2 -t у -+¦ z ),
\ dt* * dt* dP 1 S I
27Э
или
Дифференцируя по времени уравнение связи
х2 + f + г2 = /2,
будем иметь
X U —Z- + 2 — 0.
dt " dt dt
Повторное дифференцирование дает
или
da* , d?y
X h У
+ 2 = — U2 = 2gZ — h.
dP dP dP S
В результате приходим к следующему уравнению для определения
реакции:
Rl = tnh — 2mgz — rngz = m(h —
или
Отсюда видно, что в задаче о движении сферического маятника
реакция кроме постоянной h зависит только от координаты г. Сле-
Следовательно, на одинаковых параллелях реакции будут численно
равны. Если при определении реакции получим во все время
движения #>0 (что всегда выполняется при
R = — Cg P— h)^>0), то маятник можно осуществить при
помощи гибкой нерастяжимой нити. Если же во время движения
R обращается в нуль, то связь перестает быть натянутой, и после
освобождения точки от связи приходим к новой механической
задаче — задаче о движении свободной материальной точки.
ж) Малые колебания сферического маятника. Запишем урав-
уравнения связи для сферического маятника в виде
J2 • /2
откуда для отношения z/l получим значение
280
и будем рассматривать малые отклонения маятника от вертикали,
х2 + у2
проходящей через начало координат. Тогда величина 7г
будет оставаться малой по сравнению с единицей, и приближенно
можно считать, что — ^ — 1.
Верхнее положение точки является положением равновесия, но
это положение неустойчиво, поскольку нижняя параллель всегда
ниже экватора. Третье уравнение движения дает
или
т — g* —
dt2
При этом в положении равновесия R—mg = 0, откуда
Если это условие не выполняется, то в силу того, что
R
I, будем иметь R = const. Тогда из уравнения движения имеем
dt»
откуда
¦г-(-« + ^)'-
Но производная здесь не может неограниченно возрастать со вре-
временем, если z остается ограниченной величиной. Координаты х и
у точки т определяются приближенными уравнениями
m R, mR.
dt3 I dt2 I
Принимая во внимание, что R = mg, представим эти уравнения в
виде
d2x J &У _ g
dt2 I
Положив k- = —, получим общее решение системы уравнения дви»
жения
х = A cos U + В sin kt, у -— Ах cos kt + Вг sin kt.
Не нарушая общности, положим, что при ^ = 0 точка находится на
оси х, а начальная скорость направлена перпендикулярно к этой
оси. Тогда будем иметь
281
и соответствующее частное решение запишется в виде
х = х0 cos kt, у = -^- sin kt.
k
Исключая время, получим уравнение,
yk
которое представляет собой уравнение траектории проекции точки
на плоскость хОу, т. е. движение проекции точки происходит по
эллиптической траектории.
Пример 74. Тяжелая материальная точка движется по внутренней по-
поверхности прямого кругового конуса, вершина которого обращена вниз, ось
симметрии вертикальна, угол при вершине равен 2а. В начальный момент рас-
расстояние точки от вершины конуса равно а, начальная скорость равна t>o и на-
направлена перпендикулярно к образующей конуса. Определить траекторию точки
и давление, оказываемое ею на поверхность конуса.
Решение. Положение точки на поверхности конуса можно задать двумя
координатами. В качестве таких координат выберем расстояние точки от вер-
вершины конуса г и угол ф, который образует вертикальная плоскость (я), про-
проходящая через ось симметрии конуса и точку М, с неподвижной плоскостью
xOz. Рассматривая движение точки как сложное, состоящее из прямолинейного
относительного движения в плоскости (я) и переносного вращения вместе с
плоскостью (л) вокруг оси г, будем иметь
dr dtp
На точку действуют только сила тяжести и нормальная реакция гладкой
поверхности, поэтому существует интеграл живых сил
dr .2 / dm \ 2
J +2ib] J= mgrcosct
Кроме того, действующие силы не создают момента относительно оси г, поэтому
существует интеграл площадей
г"- sin2 а—г- = С.
ах
Постоянные h и С выражаются через начальные данные
h = —-— -f- mga cos a, С = voa sin a.
Два первых интеграла позволяют определить траекторию точки иа поверхности
конуса. В самом деле, исключая время, получим
282
m ( тяк
— [{drf + г* sin2 a (dq>)sJ — I — mgr cos a + ——-
\ r4 sin2 a
+ mga cos a
или
(^=(-2^5Ш2аСОЗа +4^^-
r4sin2a
— rz sin31
Рис. 172
Откуда уравнение траектории получается в квадратурах
sin3 a Г dr
C.
1/ а2 (f, _ Qz
Для определения давления точки на поверхность конуса можно было бы
воспользоваться естественными уравнениями движения, но такой путь оказывает-
оказывается сложным, поскольку он требует знания траектории точки. Поэтому рассмот-
рассмотрим векторное уравнение движения точки
Давление точки на поверхность равно по величине и противоположно по на-
направлению силе реакции N, которая зависит от активных сил, действующих на
точку, и ускорения, с которым движется точка. Для определения давления тре-
требуется знать проекцию ускорения точки на нормаль к поверхности конуса.
Определяя ускорение при помощи теоремы Кориоляса, заметим, что относитель-
относительное ускорение направлено по образующей конуса, а в переносном движении
точка движется по окружности, плоскость которой ортогональна к оси z и имеет
касательную \Ci и нормальную jCj составляющие ускорения (рис 171). Нор-
Нормальная составляющая ускорения ]Si направлена ортогонально к оси симмет-
симметрии конуса, а по величине равна
283
Добавочное ускорение ]' коллинеарно с направлением ускорения je, и численно
равно
На нормаль к поверхности даег проекцию только составляющая ускорения \е>
(рис. 172). Проектируя уравнение движения на нормаль к поверхности конуса,
получим
/mp'2 r sin a cos a = — mg sin a + N,
откуда
Определив ф' из интеграла площадей
N = т (ф'2 г sin a cos a -f g sin a).
r* sin3 a '
будем иметь
vi az cos a
N =* m\ —— + g I sin a.
1 r3 sm2 a '
§ 9. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
Вопрос об относительном движении материальной точки тесно
связан с основными понятиями механики. Как известно, всякое
движение материальной точки можно рассматривать только по от-
отношению к некоторой системе отсчета. Но различные системы
отсчета могут совершать движение одна по отношению к другой.
Предполагая, что в различных системах отсчета движение мате-
материальной точки полностью определяется силами, действующими на
эту материальную точку, тотчас приходим к условию, что в раз-
различных системах отсчета на точку должны действовать различные
силы. Нужно только научиться определять эти силы. В общем
случае системы отсчета, относительно которых будет в дальней-
дальнейшем изучаться движение материальной точки, могут быть неинер-
циальными системами.
Пусть в некоторой системе отсчета материальная точка с мас-
массой т совершает движение под действием силы F(^i, У\, Z\),
определенной в этой системе отсчета. В соответствии с законом
Ньютона сила F сообщает материальной точке ускорение j относи-
относительно системы отсчета O\X\t}\Z\, определяемое из условия
Рассмотрим некоторую другую систему отсчета Oxyz, совер-
совершающую некоторое произвольное движение относительно перво-
284
начальной системы отсчета О\Х^у\Х\ (рис. 173). По теореме
Кориолиса ускорение материальной точки относительно систе-
системы отсчета O\X\tj\Z\ связано с ее ускорением относительно системы
отсчета Oxyz соотношением
где j'—добавочное ускорение, определяемое по формуле
j'=2l»,v,]=2
e2 e
Я r
У' г
Для сокращения рассуждений в дальней-
дальнейшем будем первоначальную систему от-
отсчета называть неподвижной системой, а
систему отсчета Oxyz — подвижной сис-
системой координат. Вектор а(р, q, r) —
есть вектор мгновенной угловой скорости
вращения подвижной системы координат
относительно неподвижной; р, q, r — про-
проекции мгновенной угловой скорости вра-
вращения на оси х, у, г; х', у', г' — проек-
проекции вектора относительной скорости точ-
точки М на оси подвижной системы коорди-
координат. Подставляя значение ускорения в
уравнение Ньютона, будем иметь
т (je_ ^ .j. j') _ f,
что можно переписать еще в виде
м
Рис 173
Полученное уравнение движения точки определяет ее ускорение
относительно подвижной системы отсчета. Но в правой части этого
уравнения появилось два новых члена (—т]е) и (—т\'). Эти но-
новые члены имеют значение сил, действующих на материальную^
точку в подвижной системе координат. Их называют силами Ко-
Кориолиса. Будем в дальнейшем называть we=—т)е силой
Кориолиса от переносного ускорения, a wfe = —т\'
силой Кориолиса от добавочного ускорения. Урав-
Уравнения движения можно теперь представить в виде
т-
171 ~ZT = Y + wey + 2tn (pz' — rx'),
ni-
ni'— ptf).
285
Эти уравнения определяют движение материальной точки относи-
относительно подвижной системы координат. Они имеют такой же вид,
как и уравнения движения относительно неподвижной системы от-
отсчета. Только в подвижной системе координат движение происхо-
происходит под действием другой системы сил, действующих на материаль-
материальную точку. После того как определены силы, действующие на мате-
материальную точку в системе Oxyz, движение точки относительно этой
системы координат можно рассматривать, как и в неподвижной
системе координат. Это движение будет происходить в соответст-
соответствии со вторым законом Ньютона, но под действием новой силы
1. Теорема живых сил в относительном движении точки. Рас-
Рассмотрим уравнения относительного движения материальной точки,
записанные в проекциях на подвижные оси координат х, у, г.
Умножая первое из этих уравнений на dx/dt, второе на dyjdt,
третье на dzjdt и складывая их, получим
d (mt^r\ — X dx i Y dy 1 Z dz I at dx I
dt \ 2 / dt ^ dt dt ex dt
, dy . dz
dt dt
Члены, содержащие добавочное ускорение точки, сюда не войдут,
так как
2т ([toy,.], vr) =- 2т {qz'x' — ry'x' -(- rx'y' — pz'y' -f pz'r/' — </jc'z') = 0.
Умножая предыдущее уравнение на dt, получим
d ( —— 1 = Xdx -f Ydy -r Zdz + wexdx -\- weydy -f шегйг.
Теорема. Изменение живой силы в относительном движении
материальной точки равно работе заданных сил и работе кориоли-
совых сил от переносного ускорения на относительном перемеще-
перемещении точки.
П р н м е р 75 В неподвижной системе Ох\У\ движение материальной точки
определяется силой F постоянной величины, направленной вдоль неподвижной
оси х\. В начальный момент точка находится на оси х\ на расстоянии а от на-
начала координат, а ее скорость t>o направлена параллельно оси у\ (рнс. 174).
Определить силу, действующую в начальный момент на материальную точку в
системе координат Оху, вращающейся в плоскости 0Xi(/i вокруг точки О с по-
постоянной угловой скоростью о).
Решение. Определим силу Ф, действующую на точку в системе Оху.
Переносное ускорение точки
и направлено к точке О. Для определения добавочного ускорения найдем пред-
предварительно относительную скорость точки
Тогда из матрицы
10 0 о
10 v0 — ах О
определятся проекции добавочного ускорения
]х= — 2о)(и0 — ах), /у==0.
Таким образом, сила Ф, действующая иа точку в начальный момент, направлена
по оси х, а ее величина определяется формулой
= F +
2mco {v0 — а>х).
/71
Рис. 174
Пример 76 Материальная точка движется по горизонтальной плоскости,
вращающейся с постоянной угловой скоростью <в вокруг вертикальной оси. На
точку действует сила притяжения к оси вращения
F = та2г,
где г — расстояние точки от оси вращения. Исследовать движение точки.
Решение. В подвижной системе координат на точку действуют три
силы:
F = mcoV, we = mefir, w^ = 2/no)iy
В соответствии с теоремой живых сил существует первый интеграл уравнений
движения
= const.
Уравнение движения в проекции на нормаль к траектории дает
..2
mv"
откуда
р ¦= = const,
т. е. точка движется по окружности.
287
Пример 77. Исследовать колебания маятника в вагоне, движущемся с
постоянным ускорением а по прямолинейным рельсам (рис. 175).
Решение. На точку А действуют силы
F= mg, N, we= та.
Равнодействующая Ф сил F и v/s имеет постоянную величину Ф = тУg* + a% и
постоянное направление
„ та а_
~ mS ~ g '
В таком случае период определяется, как и для математического маятника,
Т=
in
Чем больше величина ускорения а, тем меньше величина периода Г.
-ПОТ???.
Рис. 175
2. Уравнения относительного равновесия точки. Чтобы полу-
получить уравнения относительного равновесия, нужно в уравнениях
¦относительного движения положить равными нулю относительное
ускорение и относительную скорость
/, = 0, tv = O.
Тогда будет равно нулю и добавочное ускорение, а уравнение от-
относительного равновесия точки запишется в виде
Пример 78. Найти положение относительного равновесия тяжелой мате-
материальной точки, вынужденной оставаться на окружности, вращающейся вокруг
своего вертикального диаметра с постоянной угловой скоростью о (рис. 176).
Решение. Сила Кориолиса F от переносного ускорения направлена от
оси вращения и по величине равна mcoVsina, где г — радиус окружности. Дей-
Действие на точку силы F и силы тяжести nig может быть уравновешено только
силой реакции N, которая направлена по радиусу окружности к ее
центру. Для равновесия необходимо и достаточно, чтобы проекции сил F и mg
на касательную к окружности были равны и противоположны по знаку, т. е.
288
mg sin a = F cos a,
или
mg sin a = rmsfir sin a cos a.
Отсюда получаем три условия равновесия:
g
a = 0; a = я; cos a = ——
g
Последнее возможно, если g^wV, или ш2>—. Силы, действующие на точку
в подвижной системе координат, обладают силовой функцией
?/= — mgy +— ,
или, выражая х и у через а,
mooV2 sin2 a
U — mgr cosa + .
Рассматривая график функции U, увидим, что при g<to2r в положениях
а=0 и а = я равновесие будет неустойчивым, а в положении, определяемом
значением
cos a =
ti'r
равновесие будет устойчивым. Тот же результат можно получить и из рас-
рассмотрения фазовых движений.
3. Равновесие материальной точки на поверхности Земли. Вес.
Рассмотрим материальную точку, находящуюся на поверхности
Земли. В системе координат, связанной с вращающейся вокруг
своей оси Землей, на точку будут действовать: сила притяжения к
центру Земли, которую обозначим через та, сила Кориолиса от
переносного ускорения w, направленная от оси вращения Земли
(рис. 177), и сила реакции (на чертеже не указана). Обозначая
через f> геоцентрическую широту местности, получим силу инерции
от переносного ускорения
w = та>Щ cos ¦&,
где R — радиус Земли. Результирующая силы притяжения к цент-
центру Земли и силы Кориолиса от переносного ускорения называются
весом mg. Угол между линией отвеса и плоскостью экватора на-
называется астрономической широтой местности. Рассмат-
Рассматривая проекции сил на оси х и ц, получим
mg sin ф = та sin ¦&,
mg cos ф = та cos ft — ma>2R cos ¦&.
10 E Н Березкин 289
Отсюда найдем зависимость между углами ф и
+_ та sin ¦& tg Ф
(та — maflR) cos i
и
1-— R
a
1 —И-
где
289
W
Рис. 177
Рис. 178
Рассмотрим изменение ускорения силы тяжести с широтой
местности:
g = Va2 sin2 Ф + (а — o>W cos3 0 =
= а У sin2 «¦ + (!— ^Jcos2u = а l/l — ЦB — jx)
Раскладывая в ряд по формуле бинома
(l + u)-5- = i + J-u--LJ-Lii. + -L-L-Li.
V 2 2! 2 2 3! 2 2 2
будем иметь приближенное значение для g:
d+ ...1,
или
Наименьшее значение g' принимает на экваторе, где ¦0=0
на полюсе же будем иметь
290
Заметим, что максимальное значение для
gmax = 983,2 см/сек2.
4. Задача о падении тяжелой точки в пустоте. Рассмотрим воп-
вопрос о влиянии вращения Земли на движение свободной матери-
материальной точки в пустоте. Движение это будем изучать в местной
системе координат. Ось z направим вертикально вверх, т. е. по
линии действия силы тяжести. Ось х направим перпендикулярно к
оси z в плоскости меридиана (рис. 178). Кроме силы тяжести на
движущуюся точку будет действовать сила Кориолиса от добавоч-
добавочного ускорения. Проекции угловой скорости вращения Земли на
подвижные оси координат равны
со{— со cos ф, 0, G>sin<p}.
Тогда проекции добавочного ускорения будут
)х = 2 (qz' — гу') = — 2ш/' sin Ф, }у = 2 (где' — pz') =
= 2ю (х' sin ф + z' cos q>), jr = 2 (ру' — qx') = — 2ш/' cos ф,
и уравнения движения получат вид
dt
m
d2y
dt*
= —mg-
\-2rtm
dy_
dt
dt T
COS ф.
, dz
' dt
¦СОЗф
Движение материальной точки определяется системой линейных
дифференциальных неоднородных уравнений с постоянными коэф-
коэффициентами. Нас будет интересовать частное решение этих урав-
уравнений, соответствующее начальным условиям
при t = 0, х0 = у0 ^ 20 = 0, х'о = у'о = zo= 0.
Можно было бы построить общее решение системы дифферен-
дифференциальных уравнений, но это будет связано с громоздкими вычис-
вычислениями. Поэтому воспользуемся приближенным методом интегри-
интегрирования уравнений движения — методом последовательных приб-
приближений Пикара.
За нулевое приближение возьмем систему x=y=z=0 и под-
подставим эти значения координат в правые части уравнений движе-
движения. Будем иметь
dt" dP dt*
Интегрированием найдем первое приближение
х=0, у = 0, z = --f-.
10* 291
Подставляя эти значения координат в правые части уравнений
движения, получим
¦ = o,
dt*
= 2<s>gt cos ф,
Интегрируя, получим второе приближение
= 0, у =
gt2
г ——-—
иткуда следует, что точка кроме движения по вертикали вниз со-
совершает движение к востоку. Подстановка в правые части исход-
исходных дифференциальных уравнений второго приближения дает
dt2
cos ф sin ф
dC-
2ю3^2 cos2
2gt<>} cos <p,
Интегрируя эти уравнения, получаем третье приближение
?t* a • (net3
Х= ——fir Sin ф COS ф, у = ——
6 3
СОЭф, Z —
о
COS2 ф.
Гретье приближение показывает, что точ-
точка в своем движении будет отклоняться
к югу и к востоку. Эти отклонения легко
могут быть объяснены. В самом деле,
точка в начальный момент находится в
покое относительно вращающейся систе-
системы координат. Относительно неподвиж-
неподвижной системы координат точка в началь-
начальный момент имеет отличную от нуля аб-
абсолютную скорость. Заметим, что если
время падения равно ^=10 сек, то откло-
отклонение к югу равно 0,04 мм, а отклонение
к востоку — 13 см.
5. Маятник Фуко. Маятником Фуко
называют сферический маятник дли-
длиной /, движение которого рассматри-
рассматривается в системе координат, жестко связанной с вращающейся
Землей. Кроме силы Кориолиса от добавочного ускорения на точ-
точку действует сила натяжения нити R (рис. 179). Уравнения дви-
движения принимают вид
т
т
d2y
= —«¦
dx
dz
2/тко sin ф -i cos ф ),
dt
dt
292
d4 n г п dy
m = — R mg — 2ти> cos ф ——.
dt2 I dt
Уравнения движения сферического маятника оказываются более
сложными, чем уравнения движения свободной материальной точ-
точки, поскольку в эти уравнения входит сила реакции, являющаяся
неизвестной функцией координат. Можно пытаться провести инте-
интегрирование уравнений методом последовательных приближений,
предварительно исключив реакцию. Но и эта задача оказывается
весьма сложной. Обычно при исследовании ограничиваются слу-
случаем малых колебаний (колебания с малой амплитудой), рассмат-
рассматривая движение приближенным методом. Отношения х/1 и у/1 рас-
рассматриваются как малые величины, квадратами которых в уравне-
уравнениях движения можно пренебрегать. В таком случае
Тогда для малых отклонений
г = / = const.
В этом случае из третьего уравнения, отбрасывая бесконечно малые
величины, получим
или
Применим теорему об изменении момента количества движения
относительно оси z. Для суммы моментов сил относительно оси г,
принимая во внимание, что изменением координаты z можно пре-
пренебречь, получим приближенное значение
хУ — уХ = — xR -У- -}- yR — х2та> sin Ф — —
о • dy n ( dx , dy \
— yZma sin ф —— = — 2/72И sin ф Ix j- у —=^- .
dt \ dt dt J
Обозначая через % угол, образованный вертикальной плоскостью
качания маятника с плоскостью xOz, получим
х = рсозФ, у = р sin ¦&,
где
тогда
Р2 =
tiy и. к, л ии
dt У ~~dT ~ P dt
293
Теорема об изменении момента количества движения дает
~dT \ dt ) ~ dt '
или
р2 — = — юр2 sin ф -| const.
dt
Если в начальный момент р0 = 0, &0 = 0, то постоянная интегриро-
интегрирования обращается в нуль, и
= —(ОЭШф.
dt
Интегрируя это уравнение, получим
т. е. угол Ф изменяется с течением времени с постоянной ско-
скоростью.
Обозначая через Т время полного оборота плоскости качания
маятника, т. е. время, за которое угол ¦& изменится на величину 2л,
будем иметь
т 2я
(о sin ф *
Здесь со — угловая скорость вращения Земли, так что
— = 24А,
со
поэтому
sin ф
На полюсе при ф=90°, Г = 24Й. На экваторе ф=0, и время полного
оборота Г->оо( т. е. плоскость качания маятника практически не
вращается. Вращение плоскости качания маятника впервые обна-
обнаружил в 1851 г. Леон Фуко A819—1868) в своих знаменитых опы-
опытах в Пантеоне. Длина нити была равна 67 м, продолжительность
простого колебания 16 сек, широта местности ф равна 48°58'. Вре-
Время полного оборота плоскости качания, полученное на основании
вычислений, оказалось равным 41 час 47 мин, что и было под-
подтверждено опытами. Плоскость качания маятника Фуко, установ-
установленного в здании Исаакиевского собора в Ленинграде (длина ма-
маятника 98 м, вес 60 кг, амплитуда колебаний 5 м, период колеба-
колебаний около 20 сек, ф=59°57/), поворачивается за каждый час приб-
приблизительно на 13°.
Все приведенные здесь рассуждения носят приближенный ха-
характер, так как предполагалось, что длина маятника достаточно
294
велика, а амплитуда колебаний мала. На практике маятник Фуко
обычно отпускают из отклоненного начального положения, так что
постоянная интегрирования в уравнении
отлична от нуля. Принимая во внимание, что в начальный момент
¦й'о = 0. получим
C = e>p§sinq>>0,
откуда
р2 = — сор2 sin ф i сор2 sin ф.
ох
Полагая Ф -f otfsin Ф = ip, преобразуем последнее уравнение к виду
Величины риф являются относительными полярными коорди-
координатами горизонтальной проекции точки по отношению к системе
осей, вращающейся вокруг вертикали с угловой скоростью
оззшф. Для полного исследования движения здесь необходимо
принять во внимание еще интеграл живых сил. Тогда уравнения
будут совпадать с уравнениями задачи о движении точки, притя-
притягиваемой неподвижным центром с силой, пропорциональной рас-
расстоянию точки до центра. Известно, что в таком движении точка
описывает эллипс.
§ 10. ПРИНЦИП ДАЛАМБЕРА
В появившемся в 1743 г. сочинении Даламбера «Трактат по
динамике» был предложен принцип, сводящий задачу о движении
материальной точки к задаче о равновесии и, таким образом, ди-
динамику к статике. Принцип этот был призван разрешить или по
крайней мере выразить в виде уравнений все задачи механики,
причем единым методом.
Рассмотрим в неподвижном пространстве материальную точ-
точку, на которую наложены некоторые связи и действует активная
сила F. Ускорение этой материальной точки в общем случае не
будет совпадать с направлением линии действия силы F. Обозна-
Обозначим через j ускорение этой точки. Величина и направление уско-
ускорения j определяются некоторой силой D = mj, которую нужно при-
приложить к свободной материальной точке, чтобы сообщить ей это
ускорение. Силу D называют действующей силой. Тогда
активную силу можно представить как сумму двух сил (рис. 180)
295
причем часть этой суммы — сила Р тратится на преодоление силы
реакции связи и называется поэтому потерянной силой.
Потерянная сила уравновешивается силой реакции связи
Определяя отсюда силу Р, получим для силы F
F = D —R.
Если к материальной точке приложить теперь силу D', рав-
равную по величине и противоположную по направлению силе D;
D' = —D,
то сила D будет уравновешиваться силой D'. Впоследствии силу
D' стали называть силой инерции. Подставляя в последнее урав-
уравнение значение действующей силы D, запишем условие равно-
равновесия
D' = —(F + R),
или
D' + F -t- R = 0.
В этом равенстве и заключается принцип Даламбера, который
можно сформулировать следующим образом:
Если к активным силам, действующим на материальную точку,
добавить силы реакции и силы инерции, то все эти силы будут
находиться в равновесии.
Рис. 180
Рис. 181
По самому определению, сила инерции D' равна произведению
массы точки на ее ускорение, взятому с обратным знаком
D' = — mj.
Чтобы найти движение материальной точки из принципа Далам-
Даламбера, нужно знать реакции связи.
296
Пример 79. Материальная точка вынуждена скользить без трения по
гладкой окружности, плоскость которой вертикальна. Определить закон движе-
движения точки.
Решение. На точку действует активная сила — сила тяжести, а поло-
положение точки на окружности характеризуется углом ф, который образуется ра-
радиусом точки с горизонтальной осью х (рис. 181). Вектор ускорения точки имеет
нормальную in и касательную jT составляющие, величины которых можно вы-
выразить в функции угла ср и его производных
По принципу Даламбера, чтобы уравновесить точку, необходимо приложить
к ней кроме активной силы еще силу реакции N и силу инерции —т]. Послед-
Последняя в рассматриваемом случае имеет две составляющие:
направленные соответственно по радиусу и по касательной к траектории точки
в стороны противоположные соответствующим ускорениям. Тогда условие рав-
равновесия получит внд
или в проекциях на оси координат
N cos ф -4- /лф' г cos ф -{- /лф"г sin ф = 0,
— ing + N sin ф -j- /лф'2/- sin ф — тф'7 cos ф — 0.
Для определения движения точки из этих уравнений необходимо исклю-
исключить N, что можно сделать, умножив первое уравнение на вшф, второе — на
соэф и сложив уравнения. Тогда получим
ту" г + mg cos ф = 0,
откуда можно найти Ф как функцию времени. Для определения реакции доста-
достаточно теперь подставить в одно из уравнений значения Ф, ф' и ф", определенные
как функции времени.
Петербургскими учеными Я. Германом A678—1733) и Л. Эй-
Эйлером A707—1783) был предложен принцип механики, сводящий
задачу о движении материальной точки к задаче о равновесии и
получивший название «Петербургский принцип механики», кото-
который по существу эквивалентен принципу Даламбера A716 г.),
хотя он был опубликован несколько раньше.
Из принципа Даламбера непосредственно следует, что в каж-
каждый момент времени сумма действующей и потерянной сил равна
активной силе, действующей на точку
Рассматривая работу сил на произвольном возможном перемещении,
получим следующее:
работа (т\) + работа (Р) — работа (F).
Но потерянные силы уравновешиваются силами реакции
R + Р = 0,
297
поэтому
работа (R) + работа (Р) =0.
Рассмотрим только идеальные связи, для которых работа сил
реакции на любом возможном перемещении точки равна нулю,
т. е. работа (R) =0. Тогда и работа (Р)=0, откуда сразу следует
работа (т\) = работа (F).
Пусть положение материальной точки определяется декартовыми
координатами х, у, z, а возможные перемещения точки Ьх, бг/, бг.
Тогда уравнение возможных работ получит вид
т (-^L8x -f -^- 8у -J- — 8z) = Х8х + Y6y + Zbz,
или
(Рх
т
df /
-Х)дх+ mJLM—Y)tiy+m-!!Z—Z)te = O.
В таком виде принцип был предложен Лагранжем. Само уравне-
уравнение имеет место для всех действительных движений материальной
точки.
Глава V
ДИНАМИКА СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
Динамика системы материальных точек является наиболее важ-
важным и интересным разделом теоретической механики. Именно
этот раздел дает наиболее полное представление о механиче-
механическом движении. В динамике системы в основном рассматривают-
рассматриваются задачи о движении систем материальных точек с конечным
числом степеней свободы (максимальным числом независимых
параметров, определяющих положение системы). Главная задача
динамики системы — изучение основных методов составления и
исследования уравнений движения механических систем и общих
свойств движения.
Наиболее примитивный подход к исследованию движения
системы, состоящей из п материальных точек, будет, очевидно,
сводиться к рассмотрению движений каждой отдельной точки
системы. При таком подходе должны быть определены все силы,
действующие на каждую точку системы, в том числе и все силы
взаимодействия между точками. Определяя теперь ускорения
каждой точки в соответствии с законом Ньютона, получим для
каждой точки три скалярных дифференциальных уравнения дви-
движения второго порядка или 3 п дифференциальных уравнений
движения для всей системы. Дальнейшее исследование сведется
в первую очередь к исключению лишних неизвестных и затем к
интегрированию уравнений. Зачастую оказывается, что движе-
движение определяется меньшим числом параметров, чем имеется
уравнений. Поэтому возникает проблема — отыскать такие мето-
методы решения задач, которые бы приводили к уравнениям, не со-
содержащим лишних параметров и сразу дающим представление
о движении механической системы. Первая такая попытка дать
общие методы принадлежит швейцарскому математику и меха-
механику Якову Бернулли A654—1705), который, изучая движение
маятника, пытался сводить задачу о движении к задаче о равно-
равновесии. Дальнейшее развитие принципа принадлежит Даламберу.
299
Одновременно с этим Я. Герман и Л. Эйлер разрабатывают свой
«Петербургский принцип динамики». Наконец, Лагранж дает
общие методы решения задачи о движении механических си-
систем.
Мы начнем изучать динамику системы с анализа связей,
накладываемых на систему материальных точек.
§ 1. УЧЕНИЕ О СВЯЗЯХ
Рассмотрим механическую систему, состоящую из п матери-
материальных точек с массами mv, координаты xv, yv, zv и скорости
x'v i/'v 2v которых связаны между собой некоторыми соотноше-
соотношениями, называемыми связями. Связи эти можно выразить
аналитически в виде уравнений
fj (Л xi> Ун 2i. х2, у,,, гг, ... , х„, уп, zn, к\, у[, г[, ... , х'п, у'п, z'n) = О
(/=-¦1,2, ...,т).
Они накладывают ограничения на координаты и скорости точек
системы.
Из всех связей выделим наиболее простой тип — линейные
связи, которые задаются уравнениями
л
? {ahdxv + bj^dyv -г civttev) + I fit = 0, {/ = 1, 2, . •. , m)
v=l
линейными относительно dxv, dyvdzv, с коэффициентами d}V, bjv, cJV, lj,
зависящими от времени и координат.
Возможные перемещения 8xv, byv, bzv системы определим как пе-
перемещения, удовлетворяющие условиям
п
V (tfjV6xv -f- bjv6yv -f cjv8zv) = 0, (/=1,2,..., m).
¦v=l
В общем случае будем иметь некоторое множество возможных
перемещений. Действительным перемещением назо-
назовем такое перемещение, которое совершают во времени точки
системы при заданных связях под действием активных сил. Дей-
Действительное перемещение удовлетворяет уравнениям связи.
Вообще действительные и возможные перемещения удовлетво-
удовлетворяют различным условиям, и действительное перемещение не
принадлежит к классу возможных перемещений системы. Если
же все (,¦=(), то уравнения для возможных перемещений будут
совпадать с уравнениями для действительных перемещений, т. е.
действительное перемещение будет находиться среди возможных.
Условия для возможных перемещений получим из уравнений
для действительных перемещений, положив в последних dt=O,
300
т. е. рассматривая в данный момент времени t как некоторый
параметр, не изменяющийся при возможных перемещениях си-
системы. Таким образом, для определения возможных перемеще-
перемещений системы достаточно рассмотреть все перемещения, которые
допускаются связями при «застывшем» времени («застывшие»
связи). Так, например, если на материальную точку наложена
связь
adz + dt = 0,
то возможные перемещения будут удовлетворять условию
бг=О,
и, следовательно, действительные перемещения (йгфО) не на-
находятся среди возможных.
Пример 80. Рассмотрим действительные и возможные перемещения
системы, состоящей из ползунка О, движущегося по прямолинейному рельсу
по заданному закону s=s(t), и точки т, соединенной стержнем с шарниром
на ползунке, так что стержень может свободно вращаться вокруг шарнира в
плоскости чертежа (рис. 182).
Рис. 182
При застывших связях точка О неподвижна, ибо ее движение заранее
определено по времени, а время не меняется при рассмотрении возможных
перемещений. Возможными перемещениями точки т будут перемещения по
окружности с центром в точке О. Аналитически связи здесь можно предста-
представить уравнением
или, в дифференциальной форме
(х — s) (ds — s'dt) + ydy=Q.
Для возможных перемещений получим условие
(х — s) 8х + уЬу -= 0.
Если ввести параметр ср и выразить через него координаты х и у, то, как
легко заметить, связи не будут накладывать ограничений на q>. Такой пара-
параметр ф называют свободным параметром, определяющим положение системы.
Определение возможного перемещения, как перемещения из
одного состояния системы в другое, сколь угодно близкое к пер-
первому, которое приводилось в аналитической статике, не всегда
301
справедливо в динамике. В динамике рассматриваются и такие
связи, при которых возможные перемещения не могут перевести
систему в бесконечно близкое положение, удовлетворяющее усло-
условиям связи.
Дифференциальные уравнения связей представляют собой
уравнения типа Пфаффа. Если такую систему уравнений связей
можно путем различных преобразований привести к виду
fj (t, хи ylt
2, у2, г%, ... , хп, у„, zn) = 0 (/=1,2,..., т),
то уравнения связей называют интегрируемыми, а связи
голономными. Если систему уравнений связи нельзя при-
привести к указанному виду, то уравнения связей называют неин-
тегрируемыми, а связи неголономными.
Пример 81. Исследовать связь вида
наложенную на материальную точку.
Если ij)(z)= const, то уравнение связи интегрируемо, а связь — голо-
номна. Если же ty (z) Фconst, то уравнение нельзя вообще привести к виду
d/=0 до тех пор, пока не будет найдена зависимость z от х и у. В этом слу-
случае связь будет неголоиомной.
Если связи интегрируемы, то уравнения связей приводятся
к виду
// (xv yv zlt хг, уг, гг, ... , хп, уп, zn,t) = 0 (/=1,2 т),
и тогда говорят, что связи заданы в конечном виде.
Действительные перемещения при этом удовлетворяют соотно-
соотношениям
(/=1,2, ...,
а возможные перемещения соотношениям
v=l
дг
=0 (/=1,2,
Если связи, наложенные на систему материальных точек,
голономны, то уравнения связей в каждый фиксированный мо-
момент времени определяют некоторые гиперповерхности. Возмож-
Возможные перемещения в этом случае можно трактовать как переход
из одного положения на этих гиперповерхностях в бесконечно
близкое положение. Для неголономных связей вообще такого тол-
толкования уже дать нельзя, о чем подробнее будет сказано ниже.
302
§ 2. ПРИНЦИП ДАЛАМБЕРА — ЛАГРАНЖА
Рассмотрим систему материальных точек n4(xv, yv, zv)
(v=l, 2, ..., n), на которые действуют активные силы Fv с про-
проекциями на неподвижные оси координат Xv, Yv, Zv. В общем
случае перемещения точек системы будут стеснены наложенны-
наложенными на систему связями, поэтому не могут быть произвольными.
Действие на точки системы связей эквивалентно действию неко-
некоторых сил, которые называются силами реакций и обозна-
обозначаются через Rv- Проекции этих сил на неподвижные оси коор-
координат обозначим через Rvx, Rvy Rvz- В соответствии с одной из
основных аксиом механики связи, наложенные на систему мате-
материальных точек, могут быть заменены силами реакций. После
такой замены система может рассматриваться как свободная от
связей.
Будем предполагать, что на систему материальных точек на-
наложены идеальные связи, т. е. связи, сумма работ реакций
которых на любом возможном перемещении системы равна
нулю, что аналитически можно записать в виде равенства
л
Заменив связи, наложенные на систему, силами, можно записать
уравнения движения для каждой точки системы
d?x dpi/ d?z
ГП Х + R 1Щ = Уv + R W! Z + i?
ГПл, Ху + Rvx, 1Щ ... Уv + Rvy> W!v Z\ + i?vz>
at2 at* at*
(v=l, 2, ...,«).
Разрешая эти уравнения относительно реакций связей и
подставляя полученные значения в уравнение, определяющее
идеальные связи, получим равенство
v=l
= 0. (а)
Равенство (а) имеет место для всех возможных перемеще-
перемещений системы. Оно, как видно из вывода, является необходимым
условием для действительного движения механической системы.
Можно показать и его достаточность, т. е. что соотношение (а)
выполняется только для действительных движений (определяет
действительное движение системы). Для доказательства к ак-
активным силам, действующим на систему, добавим силы реакции
связей, после чего будем рассматривать систему как свободную
303
от связей. Для такой системы допустимы любые возможные пе-
перемещения. Обозначив теперь через 8*xv, 8*yv, 6*zv возможные
перемещения «освобожденной» системы, будем иметь
dt"
v=i
пи,-^-Zv - Rjj 6'z,] = 0.
В силу того, что теперь величины 8*xv, 6*j/v, 6*zv независимы и про-
произвольны, отсюда получим
Avx = 0,
-Zv-/?vz = 0 (v= 1,2, ...,
Последние равенства определяют действительное движение си-
системы материальных точек, чем и доказывается достаточность
уравнения (а).
Уравнение (а) является общим уравнением дина-
динамики системы материальных точек и было впервые установле-
установлено Лагранжем. Впоследствии это уравнение стали называть
принципом Даламбера — Лагранжа, или принци-
принципом Даламбера. Оно охватывает все движения механиче-
механических систем с идеальными связями. Принцип Даламбера—
Лагранжа заключается в том, что уравнение (а) является необ-
необходимым и достаточным условием действительного движения ме-
механической системы.
Исходя из общего уравнения динамики, можно решать все
задачи о движении механических систем. Оно не содержит реак-
реакций связей, а следовательно, дает возможность решать задачи о
движении механической системы, не определяя этих реакций.
Величины &xv, byv, 5zv представляют собой возможные пере-
перемещения точек системы, т. е. те перемещения, которые допу-
допускаются связями в данный момент времени. Для каждого кон-
конкретного возможного перемещения общее уравнение дает одно
дифференциальное уравнение движения системы. Перебирая раз-
различные возможные перемещения, получим полную систему диф-
дифференциальных уравнений движения системы.
Пример 82. Рассмотрим движение системы, состоящей из двух призм,
одна из которых, с массой М, может свободно скользить по гладкой горизон-
горизонтальной плоскости, а вторая, с массой т, под действием силы тяжести сколь-
скользит без трения по первой (рис. 183).
Положение системы можно полностью определить двумя параметра-
параметрами Xi и Х2, которые можно изменять независимо один от другого. Рассмотрим
304
сначала возможное перемещение, соответствующее изменению только пара-
параметра Хи оставляя параметр дг2 неизменным. Обозначая через х^ и х2 вторые
производные по времени от величин Xi и х2, запишем уравнение для рассмат-
рассматриваемого перемещения
Afx^jfj + т (л-j 4- х2 cos а) 8хг -= 0.
Отсюда, сокращая на 8xi, получим дифференциальное уравнение движения
(М + т) .tj + тх2 cos a = 0.
Рис. 183
Рассматривая далее возможное перемещение, при котором изменяется
параметр х2 и не меняется Х\, будем иметь
т (*, cos а + х2) бх2 — mg sin абх2 = 0.
получим второе дифференциальное уравне-
т (x'j cos а -\- х'2') — mg sin а = 0.
Отсюда, после сокращения на
ние движения
Замечание. Все члены уравнения (а) имеют размер-
размерность работы, поэтому можно сказать, что общее уравнение ди-
динамики устанавливает равенство нулю работы активных сил и
сил инерции Даламбера
v
на всех возможных перемещениях системы.
§ 3. ОСНОВНЫЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ
1. Теорема об изменении количества движения системы и о
движении центра масс системы. Предположим, что среди всех
возможных перемещений системы имеется поступательное пере-
перемещение всей системы, как одного твердого тела, параллельное
какому-нибудь направлению. Не нарушая общности, всегда
можно предполагать, что это перемещение направлено вдоль
неподвижной оси х. Для такого возможного перемещения будем
иметь
305
6xv =- a, 6yv = 0, 6zv = 0 (v — 1, 2, . .. ,«),
а потому общее уравнение динамики запишется следующим образом:
at"
Оно будет представлять собой дифференциальное уравнение дви-
движения и легко преобразуется к виду
v=l v=l
Представляя левую часть этого уравнения в виде
п
п
mv —-
\ mv
v
dt \?i dt
вектор Q с компонентами
v=l v=l v=l
назовем вектором количества движения системы.
Тогда полученное уравнение движения можно будет записать
так:
dt
Из уравнения видно, что скорость изменения проекции количе-
количества движения системы на ось х равна сумме проекций на ту же
ось всех активных сил, действующих на систему.
Преобразуем выражение для количества движения системы
v=l v=l
где
М= ? гщ.
v=l
Величину М будем называть массой системы, а произве-
произведение массы системы на скорость vc ее центра масс-кол и-
чеством движения центра масс системы. Очевид-
306
но, что количество движения системы равно количеству движе-
движения центра масс системы и мы можем сформулировать следую-
следующую теорему об изменении количества движения
системы, или теорему о движении центра масс
системы.
Теорема. Если связи допускают поступательное переме-
перемещение всей системы как одного целого вдоль неподвижной оси х,
то центр масс системы будет двигаться в направлении оси х как
материальная точка, масса которой равна массе всей системы М,
на которую действуют все активные силы, действующие на си-
систему.
Математически это запишется в виде уравнения
d?xr ^Ц
М
dP
v=i
Если, кроме того, сумма проекций всех активных сил на ось х
равна нулю, т. е.
п
V X П
V=I
то теорема дает первый интеграл уравнений движения. Вводя
обозначение k = xc, будем иметь
откуда
-?- = Сх = const.
Интегрируя последнее уравнение, получаем
где С[ и С2 — произвольные постоянные, зависящие от начальных
условий.
Следствие. Если сумма проекций всех активных сил на
ось х равна нулю, то центр масс системы, движется вдоль оси х
по линейному закону, как материальная точка, на которую не
действуют никакие силы.
В этом заключается закон сохранения количества движения
системы материальных точек, который можно представить в виде
п
V mvxv = Mg' = const.
V=I
Пример 83. Тяжелая палочка АВ длины 1а опирается одним концом
о гладкую горизонталную плоскость и находится в покое, поддерживаемая за
307
другой конец В. Когда конец В палочки отпускают, она начинает падать.
Определить траекторию точки В палочки (рис. 184).
Среди возможных перемещений имеется поступательное перемещение
палочки вдоль горизонтальной оси, которую примем за ось х. Проекция
В
ААсс
Р
Рис. 184
активных сил (веса) на эту ось равна нулю, поэтому центр тяжести движет-
движется вдоль оси х по закону
М
——
at
— const.
В начальный момент палочка находилась в покое, так что
откуда
dt 0 °'
— const.
т. е. центр тяжести палочки не перемещается по горизонтали. Выбирая
новую систему координат О,х,у, так, чтобы вертикальная ось у, проходила
через центр тяжести палочки, и обозначая через Х\у[ координаты точки В,
будем иметь
2
т. е. траектория точки В —эллипс.
Замечания. 1. Установленная теорема имеет место лишь
при условии, что связи допускают поступательное перемещение
всей системы как одного твердого тела вдоль неподвижной оси х.
Уравнение движения центра масс в этом случае получается из
принципа Даламбера — Лагранжа, который не содержит реакций
связей. Следовательно, реакции связей не войдут и в уравнение
движения центра масс вдоль оси х.
2. Если связи, наложенные на систему материальных точек,
допускают поступательное перемещение всей системы как вдоль
оси х, так и вдоль осей у и г, то теорема о движении центра
масс будет справедливой для всех трех направлений, и центр
масс системы будет двигаться в пространстве как материальная
точка, масса которой равна массе всей системы и на которую
действуют все активные силы, приложенные к точкам системы,
что можно представить в виде jравнения
308
dt
v=i
3. Разделим все силы, действующие на точки системы, на
силы «внутренние» и силы «внешние». Под внутренними силами
(.Y^, , Kv. 2v ) будем понимать силы взаимодействия между
точками системы, а под внешними (Х^\ Yv, , Zv ) —силы, вы-
вызванные действием на точки системы других тел, не входящих в
рассматриваемую систему. Тогда будем иметь
7
Если предположить, что все внутренние силы подчиняются
третьему закону Ньютона, то для суммы проекций внутренних
активных сил на оси х, у, z получим
= 0, ? F<,° = 0, J] ZV = 0,
v=l v=I v=l
а теорема о движении центра масс может быть сформулирована
следующим образом.
Теорема. Если связи, наложенные на систему материаль-
материальных точек, таковы, что среди возможных перемещений имеется
поступательное перемещение всей системы как одного целого
вдоль неподвижной оси х, то центр масс системы будет двигать-
двигаться вдоль этой оси как материальная точка, масса которой равна
сумме масс всех точек системы и на которую действуют все
внешние активные силы, приложенные к точкам системы, т. е.
M
dt2
v=i
4. Внешние силы могут оказаться внутренними при рассмот-
рассмотрении более широкой системы. Так, например, при рассмотрении
движения падающих на Землю тел сила тяжести является силой
внешней. Если же рассматривать систему «Земля — Луна», то
сила, действующая со стороны Земли на Луну, и сила, действую-
действующая со стороны Луны на Землю, будут силами внутренними;
внешними в этом случае будут силы действия Солнца на Луну
и Землю.
Силы реакции также можно разделить на силы внутренние
и внешние. Так, связи, наложенные на частицы абсолютно твер-
твердого тела, являются внутренними, и силы реакции, вызванные
этими связями, суть внутренние силы реакции. Внеш-
Внешними называют такие связи, которые связывают рассматривае-
рассматриваемую систему материальных точек с другими телами. Силы реак-
309
ции, вызываемые такими связями, называются внешними
силами реакции.
5. Теорема о движении центра масс раскрывает реальный
смысл теории движения одной материальной точки, которая рас-
рассматривалась выше. Такой точкой является центр масс системы.
Пример 84. Рассмотрим внутренние и внешние силы в задаче о дви-
движении системы, состоящей из маленького колесика, принимаемого за мате-
материальную точку с массой т,\, которое может свободно скользить по прямо-
прямолинейному горизонтальному рельсу. С колесиком при помощи невесомого
стержня длины I соединена вторая материальная точка с массой т2, так что
стержень может вращаться вокруг точки т.\ в вертикальной плоскости
(рис. 185).
Активными силами, действующими на систему, здесь будут силы тяже-
тяжести mtg и m2g, являющиеся внешними силами. Силы реакции N, Ni и N2
можно разделить на внутренние силы взаимодействия N[ и N2 и внешнюю
силу N, действующую со стороны рельса на систему.
/770
/77777//////////
NJ4
да.
Рис. 185
Рис. 186
Пример 85. Задача двух тел. Рассмотрим в качестве примера движе-
движение системы Солнце — планета, считая их материальными точками, взаимно
притягивающимися по закону Ньютона
тМ
(SPf
где т. — масса планеты; М — масса Солнца (рис. 186). На систему не нало-
наложено никаких связей. Среди всех возможных перемещений системы имеются
поступательные перемещения всей системы в любом направлении. Пренебре-
Пренебрегая действием других небесных тел на рассматриваемую систему, из теоремы
о движении центра масс получим, что центр масс системы движется равно-
равномерно и прямолинейно относительно любой инерциальной системы (не нару-
нарушая общности, можно предположить, что центр масс системы находится в
покое). Обозначая через г расстояние от центра масс О до планеты Р, а че-
через е — расстояние от центра масс до центра Солнца, будем иметь
или
Me, = mr,
nr mR
М М -\- т
где R — расстояние от планеты до Солнца. Выражая силу, действующую на
планету, через расстояние от центра масс системы до планеты, получим
310
тМ тМ М
(8 4-rf =/ =f
где
Л!»
r (M 4- mJ
Теперь движение планеты можно рассматривать как движение материальной
точки под действием силы притяжения к центру масс системы Солнце — пла-
иета. Такие движения подробно рассматривались в динамике материальной
точки. Заметим, что для планеты Земля 8^450 км. Так как радиус Солнца
составляет около 696 тыс. км, то центр масс системы Солнце — Земля нахо-
находится внутри Солнца. Движение планеты происходит по коническому сечению
где ft — полярный угол; h — постоянная живых сил; С — постоянная площа-
площадей, в одном из фокусов которого находится общий центр масс системы.
Представляя это уравнение в виде
J_ 1 + е cos (ft — ft0)
г Р
где
&2 уа2 __ ?2
Р= — , е = ,
а а
а и Ъ — соответственно большая и малая полуоси эллиптической орбиты,
найдем выражение секторной скорости через эти параметры
2 ~ г.
Площадь, заметаемая фокальным радиус-вектором планеты за время полного
оборота, равна
СТ
2 — яа ,
откуда, подставив значение С, получим
Аа
или
Т2 4 я2
т. е. отношение куба большой полуоси орбиты к квадрату периода обращения
зависит от массы планеты и не является постоянной величиной, как это
утверждалось в третьем законе Кеплера.
Иногда удобнее изучать движение планеты в подвижной системе с на-
началом в центре Солнца и ориентированной по звездам (гелиоцентрическая
система). В такой системе на планету кроме силы притяжения к Солнцу
311
m
m
будет действовать сила Кориолиса от переносного ускорения / —~, направ-
направленная тоже к Солнцу. Результирующая сила, действующая на планету,
' R* ^' R* ' R
также центральная и может быть представлена в виде
где
v = / {М + т).
В этой системе движение происходит по эллиптической орбите, причем
a3 у (M -н т)
Г2 "~ 4я2 ~ 4я2
Величины к2 и п2 различны для различных планет. Например, для Земли
4я2-10м-3,960 '
Для Юпитера
2 W* 9 5
А|- 4яа.10«в. 3,968 ' Й1-Й2— 1.002-
Вычислив пг и Гс[ соответственно для Земли и Юпитера, найдем
п\:п2 = 1,001.
Задача о движении тела переменной массы. В качестве при-
примера на применение теоремы об изменении количества движе-
движения рассмотрим задачу о движении системы материальных точек
с переменной массой относительно неподвижной системы осей
Oxyz. Пусть общая масса системы М = const и вся система огра-
ограничена некоторой контрольной поверхностью 2. При движении
системы некоторые из ее точек выходят за пределы этой кон-
контрольной поверхности (рис. 187). Обозначим через m(t) массу
частиц, находящихся внутри контрольной поверхности в мо-
момент t, а через dm — приращение массы внутри контрольной по-
поверхности за промежуток времени dt. Массу частиц, выделив-
выделившихся за пределы контрольной поверхности за интервал време-
времени dt, обозначим через dm. Контрольная поверхность 2 может
перемещаться по отношению к системе координат Oxyz и изме-
изменять свою форму. Через 2' обозначим контрольную поверх-
поверхность Б в момент t + dt.
Пусть v — скорость центра масс частиц, находящихся внутри
контрольной поверхности 2 в момент t; v+^v •— скорость центра
масс частиц, находящихся внутри контрольной поверхности 2'
в момент t+dt; и — абсолютная скорость центра масс частиц,
312
выделившихся за пределы контрольной поверхности 2' в момент
t-\-dt. Пусть, наконец, связи, наложенные на систему, в каждый
момент времени допускают поступательное перемещение системы
вдоль координатных осей х, у, z, а на каждую точку системы
действуют активные силы Fve). При этих условиях ко всей си-
0
Рис. 187
Рис. 188
стеме с массой М можно применить теорему об изменении коли-
количества движения
dQ _ VipCO
dt ~2л*'
V
где Q — вектор количества движения системы. Умножая это
уравнение на dt, с точностью до малых второго порядка полу-
получим
где
Q (t) = mv, Q (t + dt) = (m + dm) (v + dv) + (— dm) u,
после чего
(m + dm) (v + dv) -f (— dm) u — mv — V Fv] dt,
V
или
m.dv + vdm + dmdv — udm = V Ff,e) dt.
v
Разделив на dt и пренебрегая бесконечно малыми величинами, полу-
получим
313
Это уравнение определяет движение центра масс частиц, нахо-
находящихся внутри контрольной поверхности. Впервые оно было
получено в 1897 г. И. В. Мещерским A859—1935) в его маги-
магистерской диссертации, а поэтому и называется уравнением
Мещерского.
Если с центром масс системы частиц, находящихся внутри
контрольной поверхности, связать подвижную систему координат
GxiyjZi, движущуюся поступательно, то разность u—v будет
представлять относительную скорость отбрасываемых частиц по
отношению к системе Gx\ij\Z\. При этом предполагается, что от-
отделение частиц происходит за счет внутренних сил или в резуль-
результате наложения (или снятия) новых связей, допускающих посту-
поступательное перемещение системы. Последний член в уравнении
Мещерского (u — v) имеет размерность силы. Этот член
dt
называется реактивной силой, действующей на систему частиц,
остающихся внутри контрольной поверхности. Если для реактив-
реактивной силы ввести обозначение Ф
то уравнение Мещерского перепишется в виде
т —— = V Fv' + Ф •
V
Если обозначить через Q* вектор количества движения системы
частиц, находящихся внутри контрольной поверхности 2, то бу-
будем иметь
Q* (t) ¦= mv, Q* (t + dt) = (m + dm) (v + dv) =
— mv + mdv -\- vdm +- dmdv,
откуда
dQ* dv 2^5B~ dm
dt ~~ dt ' dt '
после чего уравнение Мещерского получает вид
dt ^J ' ' dt ¦
V
Последнее уравнение выражает теорему об изменении
количества движения системы частиц, масса ко-
которой изменяется (система ограничена контрольной по-
поверхностью).
314
Если абсолютная скорость отбрасываемых частиц равна
нулю и = 0, то уравнение Мещерского дает
В таком виде уравнение применяется в задачах небесной меха-
механики. Оно было получено в 1928 г. итальянским механиком
Т. Леви-Чивита A873—1941).
Теорема об изменении количества движения системы с пере-
переменной массой в последнем случае запишется также, как и для
системы с постоянной массой
Если относительная скорость отбрасываемых частиц равна
нулю, то уравнение Мещерского перепишется в виде
m =
V
а теорема об изменении количества движения — в виде
dQ*
dt jLu " ' dt
V
Исторически первая задача динамики тел с переменной мас-
массой, решение которой приводится ниже, была рассмотрена в
1857 г. английским математиком Кэйли A821—1895).
Пример 86 (Задача Кэйли) Определить движение тяжелой цепочки,
свободный конец которой свешивается с горизонтального стола, тогда как не
вступившая еще в движение часть цепочки свернута в клубок у самого края
стола (рис 188).
Пусть х — длина свешивающейся части цепочки Для присоединяющейся
при движении массы имеем
dm= —dx,
g
где у — удельный вес цепочки Абсолютная скорость присоединяющейся массы
равна dx/dt. До присоединения скорость равна нулю (и=0). Уравнение Ме-
Мещерского принимает вид
нли
\х" = gx — х'2.
,„ dx' I du
Принимая обозначения х =и и учитывая, что —-— = .будем иметь
dt 2 dx
du
х ——- = 2gx— 2м,
dx
315
откуда, интегрируя, найдем
2
и = ~~Г
Постоянная С\ определяется из начальных условий. Подставляя значение и,
перепишем последнее уравнение в виде
x у 2 сг
) т8х+^
В общем случае это уравнение с разделяющимися переменными не интегри-
интегрируется в элементарных функциях. В частном случае, при Ci=0, имеем
dx
откуда
Пример 87. (Задача Циолковского.) Исследовать движение тела пе-
переменной массы в безвоздушном пространстве без воздействия внешних сил.
Относительная скорость выбрасывания частиц за контрольную поверхность
(скорость истечения) постоянна по величине и направлена коллинеарно век-
вектору v в сторону, противоположную направлению движения центра масс
основной системы.
Уравнение Мещерского для этого случая получает вид
dv dm
mdT
где ио=и—u = const — относительная скорость истечения частиц. Разделяя пере-
переменные, получим
dm
dv=—u0 ,
т
откуда
о=—«0 In m-\-c1.
Пусть при t=tQ, v = vQ, m=m0. Тогда приходим к формуле Циолковского
т„
v=u0 In +v0,
т
которая была впервые получена в 1903 г. К. Э. Циолковским A857—1935). Из
этой формулы видно, что скорость системы не зависит от режима изменения
массы, а зависит лишь от ее расхода.
2. Теорема об изменении момента количества движения.
В общем случае для системы, состоящей из п материальных то-
точек, на которую наложены идеальные связи, справедливо общее
уравнение динамики
316
2
V=I
= 0.
Пусть связи, наложенные на систему, допускают поворот всей
системы, как одного тела, вокруг неподвижной оси (например,
оси 2), т. е. среди всех возможных перемещений системы будут
находиться такие, проекции которых определяются матрицей
0 0 бф
Отсюда для 6xv, 6j/v, 6zv находим:
— 0.
После подстановки этих возможных перемещений в общее уравнение
динамики, получим
— m
-~
— Xv j г/v +
^
— Fv ) xv | = 0.
В силу произвольности 5ф отсюда следует
В левой части последнего уравнения стоит полная производная по
времени от выражения
равного сумме моментов количества движения точек системы
относительно оси г. В дальнейшем это выражение будем назы-
называть моментом количества движения системы
относительно оси г. Правая часть уравнения представляет
сумму моментов всех активных сил, действующих на точки си-
системы, относительно оси г. Обозначая эту сумму через Mz, пере-
перепишем полученное уравнение в виде
dKz _ м
dt г'
Оно представляет математическое выражение теоремы об изме-
изменении момента количества движения. Ее можно сформулиро-
сформулировать так:
317
Теорема. Если среди всех возможных перемещений си-
системы имеется поворот всей системы как твердого тела вокруг не-
неподвижной оси г, то производная по времени от момента количе-
количества движения системы относительно этой оси z будет равна сумме
моментов всех активных сил, действующих на точки системы, от-
относительно той же оси.
Следствия. 1. Пусть выполняется условие
т. е. сумма моментов всех активных сил, относительно оси г рав-
равна нулю. Тогда теорема дает
= 0,
dt
откуда следует постоянство момента количества движения отно-
относительно оси 2, т. е.
Кг = const.
Полученное соотношение является первым интегралом уравнений
движения системы и сохраняет постоянное значение во все вре-
время движения системы. Постоянная определяется из начальных
условий. В этом и заключается закон площадей в динами-
динамике системы материальных точек, или закон сохранения
момента количества движения.
Переходя от декартовых координат к полярным, интеграл
площадей, как и в динамике точки, можно представить в виде
mv —— = const,
dt
V V
dazv
где — секторная скорость проекции v-тои точки па ос-
dt
новную координатную плоскость, или
Vmv —— = с.
^J dt
v
В результате приходим к теореме.
Теорема. Если связи, наложенные на систему материаль-
материальных точек, допускают поворот всей системы вокруг неподвижной
оси, причем сумма моментов всех активных сил относительно
этой оси равна нулю, то сумма произведений масс точек системы
на секторные скорости их проекций на плоскость, перпендику-
перпендикулярную к оси возможного вращения, есть величина постоянная.
2. Предположим, что система материальных точек может
только вращаться вокруг неподвижной оси г (твердое тело на
неподвижной оси). Обозначим через со угловую скорость враще-
318
ния системы. Тогда проекции скоростей точек системы опреде-
определятся из формулы Эйлера
vv = [со, OMV],
так что
dt dt dt
Подставляя полученные значения составляющих скоростей в вы-
выражение для Кг, будем иметь
где
г2 — '
Выражение
назовем моментом инерции системы материаль-
материальных точек относительно оси z. Из теоремы об изме-
изменении момента количества движения теперь будем иметь
Если, кроме того, сумма моментов всех активных сил относитель-
относительно оси г равна нулю, т. е. Mz = 0, то получаем первый интеграл
уравнений движения
Jzco = const,
т. е. произведение момента инерции системы относительно оси z
на угловую скорость вращения вокруг той же оси есть величина
постоянная.
3. Если все активные силы, действующие на систему мате-
материальных точек, можно разделить на внутренние и внешние,
причем внутренние силы — силы взаимодействия — определяются
в соответствии с третьим законом Ньютона, то для моментов
активных сил будем иметь
Мг = М? + М?,
где ЛйС) — сумма моментов внутренних активных сил относи-
относительно оси г; М^ — сумма моментов внешних активных сил
относительно оси z. Так как моменты двух сил взаимодействия
в соответствии с третьим законом Ньютона равны по величине
и направлены в противоположные стороны, то для суммы мо-
моментов внутренних сил получим
319
лй° = о,
после чего теорему об изменении момента количества движения
можно сформулировать следующим образом:
Теорема. Если среди возможных перемещений системы
материальных точек имеется поворот всей системы вокруг непод-
неподвижной оси z, то производная по времени от момента количества
движения системы относительно этой оси равна сумме моментов
всех внешних активных сил относительно той же оси.
Пример 88. Горизонтальная трубка ОА весом Mg и длины 2 а вместе
с шариком, находящимся в ией па расстоянии а от конца О и привязанным
нитью к этому концу, сначала вращается по инерции вокруг вертикальной
оси, проходящей через точку О, с постоянной угловой скоростью щ. Затем
нить перерезают. Определить угловую скорость вращения трубки в тот мо-
момент, когда шарик вылетает из нее, если вес шарика равен mg (рис. 189).
Решение. Связи допускают поворот всей системы вокруг неподвиж-
dm
L
P-lSJ
Рис. 189 Рис. 190
нон вертикальной оси, проходящей через неподвижную точку. Поэтому можно
применить теорему об изменении момента количества движения относительно
этой оси, которая дает первый интеграл
/2@ -f- max1 — const,
поскольку момент внешних активных сил относительно этой осн (момент сил
тяжести) равен нулю. Здесь 1г — момент инерции трубки относительно верти-
вертикальной оси вращения; т — масса шарика; х — расстояние шарика от оси
вращения; со — угловая скорость вращения системы вокруг вертикальной оси.
Константа определяется из начальных условий
J2P0 + rna>0d2 = const.
По определению Jz = 2mirf. Выделим элемент массы~_dm = pdr, где р — плотность
трубки. Тогда получим (рис. 190)
2а
8а39
О
Но Масса трубки Л1=2ар, поэтому
320
Подставляя это значение в полученный интеграл, будем иметь
- Ma2 -j- тх2 \ со = I — Мер + та-2 1 ^о >
' / V 3 /
откуда прн х=2а получим
+ Зт
СО — С0„ .
4М + 12m °
Пример 89. (Задача Н. Е. Жуковского.) По доске длины 21 и веса Р,
опирающейся своими концами на гладкий горизонтальный пол и гладкую
вертикальную стену, бежит животное весом р. Спрашивается, как оно должно
бежать, чтобы доска не скользила (рис. 191)?
По условиям задачи животное должно бежать так, чтобы доска остава-
оставалась в покое. В рассматриваемом положении доски определим ее мгновенный
центр вращения С. Так как доска во время движения системы остается в
покое, точка С будет неподвижной по отношению к неподвижной системе
координат Оху. Связи, наложенные на систему, допускают в каждый момент
времени поворот всей системы вокруг горизонтальной оси, проходящей через
точку С, и перпендикулярной к плоскости чертежа. Это дает возможность
применить теорему об изменении момента количества движения системы отно-
относительно выбранной оси.
Вычислим сначала момент количества движения системы:
где К\ — момент количества движения доски относительно точки С; Къ — мо-
момент количества движения животного. Во все время движения имеем
р
Kt = 0 и Кг = — 2lx' sin ф cos ф.
Подсчитав сумму моментов всех сил относительно горизонтальной оси, про-
проходящий через точку С,
Мс — р B1 — х) cos ф -f- PI cos ф,
запишем теорему об изменении момента количества движения
—— = р B1 — х) cos ф + PI cos ф.
at
После подстановки найденного значения /(а получаем
— х"% sin ф cos ф •= р B1 — х) cos ф + PI cos ф,
откуда
Замена
,-(¦?-+•).-.
приводит к однородному линейному уравнению
а" = — SS
21 sin ф
Е. Н. Березкин 321
Общее решение этого уравнения будет иметь вид
s = cx cos Xt + c2 sin Xt,
где
л,=
~\С
О
Рис. 191
8
21 sin ф
Рис. 192
Возвращаясь к'старым переменным, получим
х= — + 2
Р
i cos At + сг sin W,
совершать колебательные движения
откуда видно, что животное должно
/ Р \
около точких = — |2 I, причем период колебаний
\ Р /
2я_
= А '
Такое же движение будет совершать материальная точка, притягиваемая к не-
неподвижному центру силой, пропорциональной расстоянию от этой точки до
центра.
Пример 90. (Задача С. А. Чаплыгина.) На гладкой неподвижной
горизонтальной плоскости лежит круглый диск. По ободу этого диска начи-
начинает двигаться из состояния покоя жук, с постоянной относительной ско-
скоростью и. Определить абсолютное движение диска и жука (рис. 192).
Решение. Связи, наложенные иа систему, допускают в каждый мо-
момент времени поступательное перемещение всей системы в любом направле-
направлении горизонтальной плоскости. Следовательно, для любого горизонтального
направления имеет место теорема о движении центра масс. Силы же тяжести,
действующие на систему (единственные внешние активные силы), не дают
проекций на горизонтальную плоскость. Поэтому будем иметь возможность
применить закон сохранения количества движения для любых постоянных
горизонтальных направлений, а центр масс в плоскости Ox\tj\ будет двигаться
равномерно и прямолинейно:
S'=d, т)'=С2.
Если предположить, что в начальный момент система находится в покое,
то Ci и С2 будут равны нулю, т. е. центр масс системы будет оставаться в
322
покое во все время движения. Центр масс С лежит на прямой, соединяющей
центр диска и жука. При этом имеет место соотношение
Обозначая через R радиус диска, будем иметь
rnR
ЛН= m(R — х), или л =
М + т
где
х= О^С^а.
Поскольку величина х постоянна, центр масс диска должен находиться и»
окружности радиуса х. Жук тоже должен находиться на окружности радиуса
_
хх = R — х —
М -\-т
Выберем неподвижную систему осей Схуг с началом в точке С. Выберем
ось х так, чтобы в рассматриваемый момент времени жук находился на оси х,
ось у направим перпендикулярно к оси х, а ось г — по вертикали вверх.
Пусть v — скорость центра диска; и — относительная скорость жука; <о — абсо-
абсолютная угловая скорость диска. Количество движения системы складывается
из количества движения диска
и количества движения жука, равного произведению массы жука на его абсо-
абсолютную скорость
Q2 = m (v + о) X R + и).
Тогда проекции количества движения системы на оси координат (на основа-
основании закона сохранения количества движения) при заданных начальных усло-
условиях будут равны нулю:
Qx = 0, Qy = Mv + т (о + со/? + и) — 0. (а)
Второе из полученных соотношений содержит две неизвестных величины v и со.
Для полного решения задачи необходимо иметь еще одно уравнение. Заметим,
что связи, наложенные иа систему, допускают вращение всей системы вокруг
любой неподвижной вертикальной оси. Среди возможных вращений находится
и вращение вокруг вертикальной неподвижной оси, проходящей через центр
масс системы. Поэтому можно применить теорему об изменении момента
количества движения системы относительно вертикальной оси г. Внешние
силы — силы тяжести — не дают момента относительно этой оси. Следова-
Следовательно,
Кг = const.
Принимая во внимание, что в начальный момент система находится в покое,
будем иметь
Кг = 0. (Ь)
Вычислим сначала момент количества движения диска относительно оси г:
И* 323
Определяя скорости по формуле Эйлера
vv = v+[<o, rv],
где
rv (xv + а, yv, 0)
для векторного произведения запишем матрицу
II 0 0 со
откуда получим
Подстановка этих значений в выражение для момента количества движения
дает
KZl = 2mv {xv [v + со (хч + а)] + со^} = — Mav -j- Jz® — Ма-ц>.
Зная количество движения жука, легко найти его момент количества дви-
движения:
Кг = m(R — a) (v -f- co/?^+ и) •
после чего интеграл площадей Кг = 0 запишем в виде
/Сг = Кг< +К2а = — Mav 4- /z» + т (R — а) (и -f w^ + «) — Alcoa3 = 0. (с)
Уравнения (а) и (с) полностью определяют закон движения системы. Учитывая,
что
niR MR
а = , R — а = ¦
М ftn М-\-т
и определяя из найденных первых интегралов уравнений движения неизпестные V
и со, будем иметь
m(R — а) и
со = - —
V = — ¦
/г + /л/? (/? — а) -
(J2 — Ma2) mu
(М + /я) [ Jz +mR{R — a)— та2]
Из этих формул видно, что первоначально выбранное направление угловой
скорости не совпадает с действительным, так же как и направление скорости
центра масс диска.
Полученные значения скоростей v и со постоянны и зависят лишь от
расположения масс системы. Следовательно, после начала движения жука
центр масс диска движется с постоянной по величине скоростью, а его угло-
угловая скорость также постоянна.
Замечание. Если связи, наложенные на систему матери-
материальных точек, допускают поворот всей системы как твердого
тела вокруг трех взаимно перпендикулярных осей, то будем
иметь три уравнения, каждое из которых отвечает возможному
вращению системы около одной из осей. Выбирая за указанные
оси координатные оси х, у, г, будем иметь
324
V V
-—¦ ^ mv (zvJTv — xvZv) = V
v v
Введем вектор К момента количества движения системы относитель-
относительно начала координат, с проекциями
К = ¦{ J] wv (i/vZv — zv#v). ? wv (zvxv — xvzv), ^ mv (xvy'v
V V V
Тогда три скалярных уравнения можно будет заменить одним век-
векторным
dt
Результат можно сформулировать в виде следующей теоремы:
Теорема. Производная от вектора момента количества
движения равна сумме моментов внешних активных сил относи-
относительно начала координат.
Полученному результату можно дать и другую формулиров-
формулировку, принадлежащую А. Резалю A828—1896).
Теорема. Скорость изменения вектора момента количе-
количества движения системы относительно начала координат равна
сумме моментов внешних активных сил относительно того же
начала
Теорема об изменении момента количества движения для си-
системы частиц с переменной массой. Рассмотрим движение систе-
системы материальных точек, ограниченных контрольной поверх-
поверхностью S, и предположим, что отдельные частицы системы могут
выходить за пределы контрольной поверхности, а сама поверх-
поверхность перемещается некоторым образом относительно инерциаль-
ной системы координат Oxyz. Обозначим через К вектор момен-
момента количества движения всей системы материальных точек отно-
относительно начала координат. Пусть Ki — момент количества дви-
движения системы материальных точек, расположенных внутри
контрольной поверхности S, а Кг— момент количества движения
системы частиц, находящихся вне контрольной поверхности.
Кроме того, будем предполагать, что в момент t
1 Вектор момента количества движения системы иногда называют «кине-
«кинетическим моментом системы».
325
а в момент t -}¦ &
к = кх + к2.
Применяя теорему об изменении момента количества движения
ко всей системе материальных точек, получим
dt
где
Обозначая
lim
Л дмо
и принимая во внимание, что
*L = -*!.+„,„
перепишем теорему об изменении момента количества движения в ви-
виде
dt
где m2 определяет «расход» момента количества движения че-
через контрольную поверхность-2 в единицу времени. Полученная
формула определяет изменение момента количества движения
системы, ограниченной контрольной поверхностью, относительно
инерциальной системы координат.
3. Теорема живых сил. Рассмотрим механическую систему,
состоящую из материальных точек с массами mv, координаты
которых обозначим через *v, г/v, zv. Предположим, что к этим
точкам приложены активные силы Хч, Fv, Zv и что система
стеснена идеальными связями.
В общем случае действительное перемещение системы мо-
может не находиться среди возможных перемещений. В самом
деле, условия, накладываемые на действительные перемещения
системы
п
V (a^dxv + bivdyv -\- civdzv) + lLdt = 0 (t = 1, 2, ... , m),
V=I
не будут вообще совпадать с условиями, накладываемыми на
возможные перемещения
326
(У8*т + bivbyv + civbzv) =- 0 (i = 1, 2, ... , m),
если 1гФ0. Могут встретиться такие случаи, когда действитель~
ное перемещение системы находится среди возможных. Это
обстоятельство имеет место всякий раз, когда уравнения связей
не зависят явным образом от времени. Если действительное пе-
перемещение системы находится среди возможных перемещений,
то после подстановки в общее уравнение динамики
Xv) 6*v -f (mv#v — ^v) &/v + (myzl — Zv) 8^] = 0
соответствующих возможных перемещений
6л\, = dxv, Syv = dyv, 6zv = ciZv
будем иметь
J] 1(т,д? — Xv) d^v + {nhlh — yv) ^v + (tfivZv — zv) rfzv] = 0,
V
откуда после соответствующих перестановок получим
v=l v=I
Разделив и умножив левую часть на dt, перепишем ее в виде
V
Выражение
V=l V
называют живой силой или кинетической энергией
системы. Предыдущее уравнение теперь приобретает вид
п
v=I
Этот результат можно сформулировать в виде теоремы.
Теорема. Если связи, наложенные на систему материаль-
материальных точек, таковы, что действительное перемещение находится
среди возможных, то дифференциал живой силы системы равен
327
сумме элементарных работ всех активных сил, действующих на
точки системы, на действительном перемещении системы.
Необходимо отметить, что в правую часть полученного урав-
уравнения не входят силы реакции связей и рассматривается работа
только одних активных сил на действительном перемещении то-
точек системы. В правой части величины dx?, dys, dzv являются
не произвольными дифференциалами координат, а действитель-
действительными перемещениями точек системы.
Если активные силы таковы, что можно подобрать функцию
U(xlt ylt zlf хп, ул, га),
удовлетворяющим условиям
У dU V dU 7 — dU
то говорят, что силы, действующие на точки системы, допускают
силовую функцию U, или что силы консервативны. Тогда тео-
теорема живых сил получает вид
dU , . dU , . dU
«Ь + * +
-57
где dU — полный дифференциал силовой функции в действитель-
действительном движении системы. Отсюда, интегрируя, получим
Последнее уравнение является первым интегралом уравнений
движения, который называется интегралом живых сил.
Величина h = T—U представляет собой полную механиче-
механическую энергию системы.
Интеграл живых сил существует, если действительные пере-
перемещения системы находятся среди возможных и если активные
силы допускают не зависящую от времени силовую функцию.
Рассмотрим несколько примеров на определение живой силы
системы и на применение теоремы живых сил.
Пример 91. Вычислим живую силу твердого тела, вращающегося
около неподвижной оси г с угловой скоростью со.
Обозначив через mv массу элементарной частицы твердого тела, а через
rv — ее расстояние от оси вращения (рис. 193), будем иметь
после чего живая сила системы
Пример 92. Однородная палочка массы т и длины а может свободно
вращаться в пространстве вокруг своего неподвижного конца. В начальный
328
момент ее приводят в горизонтальное положение и сообщают вращение в
горизонтальной плоскости с угловой скоростью (Оо. Найти, какой наименьший
угол ф с вертикалью будет составлять палочка во время движения (рис. 194).
Связи, наложенные иа систему, допускают поворот палочки вокруг вер-
вертикальной оси. Следовательно, применима теорема об изменении момента
количества движения относительно этой оси. Внешними силами, действующи-
действующими на палочку, являются силы тяжести. Момент этих сил относительно вертн-
Рис. 193
кальной оси равен нулю. Поэтому указанная теорема приводит к интегралу
площадей
Кг =
~ yv *v) = const •
v-1
Положение палочки можно определить двумя независимыми параметрами:
углом ф отклонения палочки от вертикальной оси и углом #, определяющим
отклонение вертикальной плоскости (я), в которой находится палочка, от не-
неподвижной вертикальной плоскости, проходящей через ось вращения палочки
(рис. 195). Количество движения элементарной частицы mv, отстоящей от на-
начала координат на расстоянии s, можно представить в виде двух составляю-
составляющих: mvscp', лежащей в вертикальной плоскости (к), момент которой относи-
относительно вертикальной оси г равен нулю, и составляющей mvsf&'sm(f, которая
лежит в горизонтальной плоскости и момент которой относительно вертикаль-
вертикальной оси равен m^ft'sin^. Момент количества движения всей палочки отно-
относительно вертикальной оси г получим, суммируя элементарные моменты коти-
чества движения:
К
а а
= V s2tf' sin2 (fdm = — Ь' sin2 ф \ s4s --= — ¦&' sin2 <p.
Запишем интеграл площадей в виде
— таЩ' sin2 ф = const,
о
329
или, принимая во внимание начальные условия
pft' i2
mcpft sin2 ф = -— тагщ
3 3
таг
и сокращая на , получим
Ъ' sin2 ф = а>0. (а)
Связи, наложенные на систему, не зависят явно от времени, а действую-
действующие активные силы консервативны, поэтому существует интеграл живых сил
По условиям задачи необходимо определить угол <р в тот момент, когда он
примет наименьшее значение, т. е. при выполнении условия
ф' = 0.
В начальный момент палочка совершает мгновенное вращение вокруг верти-
вертикальной осн. Живая сила зависит лишь от распределения скоростей в данный
момент времени. Поэтому для h получим
где
т. е.
U = -— mga cos ф, Uo = — mga cos ф0 = 0,
В тот момент, когда <р' становится равным нулю, палочка снова совершает
мгновенное вращение вокруг вертикальной оси г, так что
Ж2 та2 „
Г_ —= — »
и из интеграла живых сил получаем
та2 „ „
Исключая из уравнений (а) и (Ь) величину ¦&' и сокращая уравнение (Ь) на
та*
—-—, будем иметь
о
Sltla ф
что можно переписать в виде
cos ф [3g — 3g cos2 ф — асйд cos ф] = 0.
330
Отсюда получаем два решения:
cos
— 0, cos ф2 =
причем ф1 соответствует начальному положению палочки, а фг — искомый наи-
наименьший угол.
Пример 93. Призма массы М может скользить без трения по глад-
гладкому горизонтальному полу. На призме находится материальная точка
массы т, скатывающаяся вниз под действием силы тяжести. Определить дви-
движение системы, предполагая, что в начальный момент она находится в покое
(рис. 196).
Рис. 196
Призма может перемещаться только поступательно. Ее положение можно
определить расстоянием х до некоторой вертикальной неподвижной стенки.
Положение точки на призме определим расстоянием s этой точки от верхнего
ребра призмы. Среди возможных перемещений имеется поступательное пере-
перемещение всей системы в горизонтальном направлении, а следовательно, для
горизонтального направления имеет место теорема об изменении количества
движения системы. Проекция на ось х количества движения Q* всей системы
складывается из проекций на эту ось количества движения тфизмы и количе-
количества движения материальной точки:
Qx = Мх' -\-т(х' + s' cos a).
Внешние силы — силы тяжести — на ось х проекций не дают. Поэтому
будем иметь первый интеграл — закон сохранения количества движения вдоль
оси х:
Мх' + tn (x' -f- s' cos a) ~ Ct= const.
В начальный момент вся система находилась в покое, а потому Ci=0, т. е.
(М 4- т) х' + ms' cos a = 0. (а)
Связи, наложенные на систему, не меняются со временем, а параметры, за-
задающие систему, не являются заранее заданными функциями времени.
Поэтому можно применить теорему живых сил. Живая сила Т системы скла-
складывается из живой силы призмы Гп и живой силы точки Гт. Так как призма
движется поступательно, то скорости всех ее точек равны между собой.
Поэтому
Мх'2
331
Живая сила точки равна —-— , где v — абсолютная скорость точки, равная
геометрической сумме ее переносной н относительной скоростей
v*=x'2 + s'2+2x's'cosa.
Тогда
Мх т г, ,,
Г = —-— — — (х'г +¦ s'- -:- 2k's' cos a).
Активными силами, действующими на систему, являются только силы тяже-
тяжести. Они допускают силовую функцию
U = — Mgtfi — mgy2 + C2,
где г/i — постоянная ордината центра масс призмы; у2 — ордината материаль-
материальной точки
Уъ= I —ssin a,
и тогда
U — — Mgy1 — mgl + mgs sin a -f- C2.
Произвольную постоянную Ci подберем так, чтобы выполнялось условие
Са — Mgy1 - mgl = 0.
Тогда
U = mgs sin a.
Поекольку связи не зависят явно от времени, а силы допускают силовую
функцию, будем иметь интеграл живых сил
Г = ?/ + й,
или
Мх'2 + Л (х'2 + s'2 + 2k's' cos a) = mgs sin a + h.
В начальный момент система находилась в покое. Если этому состоянию
соответствует значение s=0, то будем иметь Л=0, и тогда
(M -f m) x'2 -f- m (s'2 -f- 2k's' cos a) = 2mgs sin a. (b)
Уравнения (а) и (Ь) полностью определяют движение системы, зависящее от
изменения двух параметров х и s. В самом деле, комбинируя уравнения (а)
и (Ь), получим
т (s'2 + x's' cos a) = 2/ngs sin а,
исключая отсюда х', будем иметь
„ / М + т sin3 a \
s I I = 2gs sin а,
откуда, интегрируя найдем
(М -f- m) gf2 sin a
s =
2 (Af + m sin2 a)
332
Подставляя полученное значение в уравнение (а) и интегрируя, находим
mg sin 2g
4(М -f- wisin2a)
где знак «минус» указывает на то, что координата х во время движения убн-
вает.
Замечания. 1. Если к заданным силам добавить силы
реакции связей, то систему можно будет рассматривать как сво-
свободную от связей. В этом случае для точек системы возможны
любые перемещения и применима любая из рассмотренных выше
теорем. Но в правые части формул, выражающих эти теоремы,
будут теперь входить реакции связей, которые при составлении
уравнений движения рассматриваются как некоторые заданные
силы и которые являются неизвестными величинами в уравне-
уравнениях движения.
2. При изучении динамики системы материальных точек
«чень большое значение имеет уменье пользоваться теоремами
при решении конкретных задач, на основе анализа связей выби-
выбирать ту или иную теорему, решающую задачу о движении без
введения в рассмотрение сил реакции связей, которые не опре-
определяют самого движения, а лишь накладывают ограничения на
перемещения системы.
§ 4. ТЕОРЕМЫ О ДВИЖЕНИИ СИСТЕМЫ ОТНОСИТЕЛЬНО ОСЕЙ
НЕИЗМЕННОГО НАПРАВЛЕНИЯ, ПРОХОДЯЩИХ ЧЕРЕЗ ЦЕНТР МАСС
СИСТЕМЫ (ОСЕЙ КЁНИГА)
С. Кёнигом A712—1757) были предложены теоремы, упро-
упрощающие задачу вычисления живой силы и момента количества
движения системы материальных точек.
1. Теоремы Кёнига. Рассмотрим юистему материальных точек
с массами tnv, на которые действуют силы Fv с проекциями на
неподвижные оси координат Хч, Yv, Zv. Положение точек си-
системы относительно неподвижной системы осей Oxyz будем опре-
определять координатами хч, уч, zv (рис. 197). Координаты центра
масс G такой системы определим равенствами
2mvxv 2mv#v
2m ' Sm '
В центре масс построим систему осей Gxyz, параллельных непод-
неподвижным осям Oxyz. Эти оси, перемещающиеся поступательно
относительно системы Oxyz, называют осями Кёнига. Координа-
Координаты точек системы в новых и старых осях связаны между собой
известными соотношениями:
xv = i + xv, t/v = ц + i/v, zv = ?,+2V.
333
Зависимость живой силы и момента количества движения, вы-
вычисленных в новых и старых осях, устанавливается теоремами
Кёнига.
Теорема 1. Момент количества движения системы отно-
относительно неподвижной оси z равен сумме момента относитель-
относительного количества движения системы отно-
z - сительно оси Кёнига z и момента коли-
количества движения материальной точки,
масса которой равна массе всей системы
) и которая в каждый момент времени
. pN. _ совпадает с центром масс, относительно
& неподвижной оси z.
х Доказательство. Момент коли-
количества движения системы относительно
оси г имеет вид
п
О
~У
Рис. 197
v=I
Преобразуем Кг к новым переменным
Кг = Ут^[A + хч) (г]' +~y's) — (г) + г/~) (?'
{Ь\' — 4l')
от» (йл, —
V V
Принимая во внимание соотношения
V V V V
и аналогичные отношения для других координат, получим
Кг = М Aт)' — т)|') + J mv ^ jF?
V
Выражение Vmv(Afvyv — ^v-fv) представляет собой момент коли-
v _
чества движения системы относительно оси z в ее движении по
отношению к осям Кёнига. Обозначая эту сумму через Кг,
получим
что и доказывает теорему.
334
Теорема 2. Живая сила системы материальных точек в
ее абсолютном движении равна сумме живой силы системы в ее
движении по отношению к осям Кёнига и живой силы матери-
материальной точки, масса которой равна массе всей системы и кото-
которая в каждый момент времени совпадает с центром масс си-
системы.
Доказательство. По определению, живая сила систе-
системы равна
/72 2 '9 / 2
r 2^(x + y +Z)
После замены переменных это выражение принимает вид
= ^~ (Г2 4 Л'2 + I'2) + 2mv(i'*v + Л'1/v + ?';
V
Заметим, что I,mvl'x^ обращается в нуль, так как
ас
и тогда для живой силы в абсолютном движении будем иметь
Здесь первый член правой части представляет живую силу точ-
точки, масса которой равна массе всей системы и которая движется
со скоростью центра масс системы. Второй член представляет
живую силу системы в ее движении относительно осей Кёнига.
Этим доказывается вторая теорема Кёнига.
2. Теорема об изменении момента количества движения си-
системы относительно осей Кёнига. Теорема. Если связи, нало-
наложенные на систему материальных точек, допускают поворот всей
системы как одного твердого тела вокруг неподвижной оси z и,
кроме того, допускают поступательное движение системы вдоль
неподвижных осей х и у, то производная по времени от момента
количества движения системы по отношению к оси z равна сумме
моментов сил относительно этой оси.
Доказательство. Условия теоремы позволяют приме-
применить теорему об изменении момента количества движения систе-
системы относительно неподвижной оси z и теорему о движении цен-
335
тра масс системы вдоль осей х и у, откуда получим три уравне-
уравнения движения:
V
dt»
V
По формуле Кёнига имеем
о»
Подставляя это значение в уравнение (а), представим его в виде
dK' i J?n_ _№
2 ¦ -f M [I <Ц* — г) dt
dt
(с)
или, производя сокращения, в силу уравнений (а) и (Ь) получим
V
что и доказывает теорему.
Следствие. Если связи, наложенные на систему матери-
материальных точек, допускают поворот всей системы вокруг трех
взаимно ортогональных неподвижных осей х, у, г и, кроме того,
допускают поступательные перемещения всей системы вдоль
осей х, у, г, то теорема об изменении момента количества дви-
движения в относительном движении будет иметь место для всех
трех осей, т. е.
dK- , dK- . dK~
—- = /л- , ~ = m-, — = m-
dt * dt у dt z
Вводя в рассмотрение вектор момента относительного количе-
количества движения /(*(/(-, Ку, К^), этот результат можно записать
в векторной форме
dt
так что скорость конца вектора момента относительного количе-
количества движения будет равна сумме моментов всех активных сил
относительно центра масс системы.
Пример 94. Рассмотрим момент количества движения Земли относи-
относительно осей Кёнига, пренебрегая воздействием внешних сил.
336
В качестве осей Кёнига выберем систему осей с началом в центре масс
Земли и ориентированную по звездам. Применяя теорему об изменении мо-
момента количества движения, будем иметь
dt
¦ = 0, или К = const,
откуда видно, что момент количества движения Земли относительно осей
Кёнига остается постоянным по величине и по направлению.
Пример 95. Стоя на абсолютно гладкой площадке, человек может
сообщать себе вращение вокруг вертикальной оси, размахивая рукой так,
чтобы последняя совершала конусообразные
вращения вокруг вертикали. В этом случае в
системе осей Кёнига момент количества дви-
движения будет оставаться постоянным.
Пример 96. Рассмотрим движение тя-
тяжелого волчка, находящегося на абсолютно
гладкой опоре.
Связи допускают поступательное пере-
перемещение волчка в любом горизонтальном на-
направлении. Проекции внешних активных сил
иа любое горизонтальное направление равны
нулю. При этих условиях из теоремы о дви-
движении центра масс следует, что центр масс
в горизонтальном направлении будет двигать-
двигаться равномерно и прямолинейно. Не нарушая общности, можно всегда предпо-
предполагать, что горизонтальная скорость центра масс равна нулю. Освободим си-
систему от связи, введя реакцию N (рис. 198). Тогда из теоремы об изменении
момента количества движения системы относительно осей Кёнига получим
= momGN,
Рис. 198
dt
откуда следует, что волчок совершает движение, при котором вектор момента
количества движения изменяется в направлении вектора момента силы N
mom F.
Рис. 199
momF
mom F.
TP
ТР ТР
Рис. 200
относительно точки G и будет вращаться вокруг неподвижной вертикальной
оси, проходящей через его центр тяжести. Такое движение называется пре-
прецессионным.
Пример 97 Рассмотрим движение волчка по шероховатой плоскости
(при наличии трения), предполагая, что ось волчка заканчивается маленьким
полушаром, а угловая скорость <о вращения волчка вокруг своей оси доста-
достаточно велика.
337
Пусть вектор мгновенной угловой скорости вращения волчка направлен
по оси симметрии волчка. Вектор момента количества движения К относи-
относительно центра масс волчка определяется распределением скоростей и масс
точек системы. В случае симметричного волчка вектор К оказывается направ-
направленным по оси симметрии волчка. Точка контакта S, расположенная на иожке
волчка, проскальзывает по плоскости. Этому проскальзыванию препятствует
сила трения, направленная в сторону, противоположную скорости точки 5
(рис. 199). На основании теоремы об изменении момента количества движе-
движения, момент силы трения FTp относительно центра тяжести поднимает ось
волчка. Этот факт хорошо всем известен из наблюдений. Как бы ни был
запущен волчок, при достаточно большой скорости вращения его ось стре-
стремится принять вертикальное положение.
Иначе обстоит дело с так называемым «китайским волчком», центр
тяжести которого находится близко от точки прикосновения (рис. 200). Здееь
вектор момента силы трения относительно центра тяжести направлен вниз,
а ось волчка опускается. Наблюдения показывают, что ось волчка опускается
до тех нор, пока сам волчок ие станет на ножку.
3. Теорема живых сил в движении системы относительно
«сей Кёнига. В неподвижной системе координат Oxyz рассмот-
рассмотрим движение системы материальных точек mv(xv, #v, zv),
на которые действуют активные силы Xv, Y4, Zv. Пусть точка
G (|, г), ?) является центром масс этой системы.
Теорема. Если связи, наложенные на систему, таковы,
что:
1) действительные перемещения системы находятся среди
возможных, т. е. имеется возможное перемещение, удовлетво-
удовлетворяющие условиям
6*v = dxv, бг/у = dyv, Szv = dzv.
2) среди возможных перемещений имеются поступательные
перемещения всей системы вдоль осей х, у, г, то изменение живой
силы в относительном движении системы равно работе заданных
сил на действительном относительном перемещении системы.
Первое из этих условий дает возможность применить теоре-
теорему живых сил в абсолютном движении системы, в соответствии
с которой
п
dT = У (Xv<ijcv ¦+- Yvdyv -f Zvdzv).
Второе условие дает возможность применить теорему о движе-
движении центра масс системы
V V у
По теореме Кёнига для живой силы имеем выражение
338
где Та — живая сила системы относительно осей Кёнига х, у, г.
Новые координаты связаны со старыми соотношениями
XV = 1 +~*v, Уч = Л -bl/v, Zv = t, + Zv,
и после замены координат теорема принимает вид
аг0 + *L2 \Л.
+ +
Л dP dt dP dt
Принимая во внимание теорему о движении центра масс, отсюда
получим
йТ0 = V {Xv<Fxv + Y4py~v + ZvJzv).
V
Этим доказана теорема.
§ 5. УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
1. Вывод уравнений Лагранжа. 1. При изучении общих тео-
теорем динамики системы мы исходили из общего принципа Да-
ламбера — Лагранжа. Получаемые из него уравнения движения
не включали в себя реакций связи, но при этом необходимо
накладывались определенные ограничения на связи. Принцип
Даламбера — Лагранжа дает возможность получить полную си-
систему уравнений движения и в более общем случае, когда на си-
систему материальных точек наложены идеальные голономные
связи. Такие общие уравнения впервые были установлены Лаг-
ранжем в 1788 г.
Рассмотрим движение системы, состоящей из п материаль-
материальных точек с массами mv, относительно неподвижной системы
координат Oxyz. Координаты точек обозначим через xv. Уч, zv.
Пусть на точки системы действуют активные силы Fv с про-
проекциями на неподвижные оси координат Xv, Fv, Zv. Пред-
Предположим, кроме того, что координаты точек стеснены идеальны-
идеальными голономными связями. Пусть положение такой системы мож-
можно определить независимыми параметрами gi, q2, ..., <7а> число
которых называется числом степеней свободы. Пусть
декартовы координаты точек системы можно представить как
явные функции этих независимых параметров и времени:
xv = *v(t, qit q2, ¦ • • , tffc), yv = yv(*, <7i> ft . ft).
zv = zv (t, ft. ft. • • ¦ . ft) (v = 1, 2, ... , n).
Будем предполагать, что матрица, составленная из частных про-
производных
339
dqt
dqx
dzn
dq2
dzn
Рис. 201
имеет ранг k. Параметры qi называют лагранжевыми
координатами системы. Они однозначно определяют
положение механической системы и поэтому их иногда называют
определяющими координатами (С. А. Чаплыгин),
или обобщенными координатами. Производные по
времени от обобщенных координат
называются обобщенными ско-
скоростями.
Уравнения, определяющие декар-
декартовы координаты точек через лагран-
лагранжевы координаты и время, будем в
дальнейшем называть уравнения-
уравнениями связи, так как они связывают
декартовы координаты с независимы-
независимыми лагранжевыми координатами.
Будем говорить, что связи, нало-
наложенные на систему, зависят явно от
времени, когда декартовы координаты точек явно выражаются не
только через лагранжевы координаты, но и через время, хотя та-
такая зависимость от времени может иметь условный характер.
Так, например, положение свободной материальной точки в
плоскости можно определить декартовыми координатами х, у
некоторой неподвижной системы осей. Пусть, кроме того, имеет-
имеется другая система осей Ох\У\, вращающаяся в плоскости Оху
вокруг точки О с постоянной угловой скоростью со. Положение
материальной точки по отношению к системе Ох\ух зададим по-
полярными координатами г и <р (рис. 201), которые можно рас-
рассматривать как лагранжевы координаты точки. Декартовы коор-
координаты точки х и у явно представляются через параметры г, <р
и время t:
х — rcos(cp + cat), у = rsin(q) + (at).
Будем говорить, что на точку в данном случае наложены связи,
зависящие от времени, хотя эта зависимость относится к под-
подвижной системе Ох\у\ (координаты г и <р определяют относитель-
относительное положение точки).
Уравнения связей устанавливают зависимость между декар-
декартовыми координатами точек системы и независимыми парамет-
340
рами, определяющими положение системы. Возможные переме-
перемещения системы определим как такие бесконечно малые переме-
перемещения точек системы, которые определяются лишь изменением
лагранжевых координат, но не изменением времени в уравнениях
связи. Поэтому для возможных перемещений точек системы бу-
будем иметь
qs qs q
s=t s=l s=t
Подставляя эти значения возможных перемещений в общее
уравнение динамики
п
V [(mv*v — Xv) bxv + (mvyl — Fv) byv + (/nvzv — Zv) 6zvJ = 0,
получим
U4s
s=l
v=l s=l s=t
= 0,
,, dzv
или, после изменения порядка суммирования,
k п
dqs ' dqs dqs
s=l v=l
h dqs <?9s / J
Обозначим через Qs сумму
¦v=l
Величину Qs будем называть обобщенной силой, отнесен-
отнесенной к координате qs. Смысл обобщенных сил можно прояснить,
рассматривая работу 6Л всех активных сил, действующих на си-
систему, на произвольном возможном перемещении системы. Тогда
будем иметь
341
v=l
s=l v=l
5A =
s=l
где Qs — коэффициенты при 5qs в выражении работы системы
сил на произвольном возможном перемещении системы. Если
рассмотреть такое возможное перемещение, при котором изме-
изменяется только координата qs и не изменяются остальные коорди-
координаты, то
откуда получим
i, dxv
Член xv можно представить в виде
&9
. 5xv d i . dxs ч ' d
¦*v -т—" = -~r xv "г— Xv
dt \ dqs )'
так как
s=l
то
, - , , ' ,. k
дх^ дх дх №х
q's dqs ' dqs dtdqs ^
Li dq;
dt \ dqs J + Li dq; \ dqs ) 4t dt { dq
i
q%
тогда для xv —— получим
dqs
'2 -2
1 dj:v
dt \ 2 dq's \ 2
342
Аналогичные преобразования можно записать для yv и zv, после че-
чего общее уравнение динамики перепишется в виде
к п , '2 „ '2 _ -2
v=l
v=l
или
'2 '2
+)
S=I V=l
v=l
Но выражение
—
-2
V=l V=t
представляет собой живую силу системы в ее абсо-
абсолютном движении, поэтому общее уравнение динамики при-
приобретает форму
dt dq% dqs
s=l
Это уравнение справедливо при всех возможных перемещениях
системы. Так как координаты Лагранжа таковы, что все вели-
величины 6qs в каждый момент времени могут изменяться независи-
независимо одна от другой и могут принимать значения любого знака,
то последнее равенство будет справедливо только в том случае,
когда все коэффициенты при 8qs одновременно равны нулю.
Таким образом, приравнивая коэффициенты при 8qs нулю, полу-
получим систему уравнений
A- UL — J?L _ qs = о (s = 1, 2, ...,*),
или
A-HL-HL-q (S=i 2 *)
dt до дп$
Уравнения эти впервые были получены Лагранжем и называют-
называются уравнениями Лагранжа второго рода.
343
Кроме того, что уравнения Лагранжа имеют вычислительные
преимущества, они являются и более общими уравнениями, чем
те, которые получаются из основных теорем динамики, посколь-
поскольку существуют при каких угодно голономных идеальных связях,
без ограничений на возможные перемещения системы. Кроме
того, в полученные уравнения не входят реакции связей, поэто-
поэтому для определения движения нет необходимости знать эти
реакции. Движение определяется только активными силами. Для
составления уравнений движения достаточно определить живую
силу системы и обобщенные силы.
Замечания. 1. Перепишем общее уравнение динамики
в виде
где
f d дТ дТ п
U ; т- = Уг
Предполагая, что все 6qi=/=0, можно положить ЬЦ{ = &\и после
чего уравнение получает вид
eS/f = 0.
Последнее возможно лишь в случае, когда все f{ равны нулю
одновременно. Если же не все б<7, равны нулю, то при
8qs = 0 (s = 2, ... , к) будем иметь
/А! = о,
что возможно только при fi = 0.
2. При изучении общих теорем динамики рассматривались
лишь частные случаи систем, обладающих определенным клас-
классом возможных перемещений (поступательное, вращательное
и т. д.). Для ряда механических систем эти условия общих тео-
теорем не выполняются, и последние не могут быть применимы без
введения реакций связей. Метод Лагранжа позволяет изучать
движение в самом общем случае. Естественно, что если за обоб-
обобщенные координаты будут взяты параметры, соответствующие
перемещениям, допускающим применение общих теорем, то
уравнения Лагранжа будут совпадать с уравнениями, получен-
полученными из общих теорем.
2. Случай существования силовой функции. В прикладных
задачах часто приходится иметь дело с силами, обладающими
силовой функцией. Рассмотрим этот случай в применении к урав-
уравнениям Лагранжа.
344
Пусть существует силовая функция
U = U(xlt ylt zv хг, yz, z2, ... ,хп, уп, zn).
Тогда силы, действующие на точки системы, можно представить в виде
X ди Y dU Z - dU
а для обобщенной силы получим выражение
dqs dqs aq
v=l
'ill дхч , cU dVv , dU dzv \ dU
i 1 1-
т. e.
Уравнения Лагранжа теперь запишутся в виде
dt gq dqs dqs
Если ввести функцию Лагранжа
то эти уравнения можно будет представить в виде
Функция U и потенциальная энергия системы V связаны между
собой простым соотношением
U = —V + const,
откуда видно, что полная энергия системы Е может быть представ-
представлена в виде
3. Замечание о лагранжевых координатах. При выводе урав-
уравнений Лагранжа были введены понятия обобщенных координат.
Эти координаты определяют положение системы в каждый момент
времени. Кроме того, при выводе использовалась явная зависи-
зависимость декартовых координат от обобщенных. Это обстоятельство
нельзя забывать при составлении уравнений движения. Несоблю-
Несоблюдение этого условия может привести к ошибочным результатам.
345
Рассмотрим в качестве примера ошибочные рассуждения К- Ней-
Неймана, допущенные при решении одной задачи.
Пример 98. Рассмотрим движение материальной точки массы m в плос-
плоскости Оху. Положение такой точки можно определить жолярными координатами
гид, так что живая сила точки запишется в виде
Такие координаты являются координатами Лагранжа. Пусть на точку действует
произвольная сила F. Разложим эту силу на две ортогональных составляющих,
одну из которых Fi направим вдоль радиус-вектора, а вторую F2 — ортого-
ортогонально к первой (рис. 202). Нетрудно видеть, что уравнения Лагранжа в этих
координатах получат внд
тг" —
тгЧ" — 2mrb'r' = rF2.
О х
Рнс. 202
Рис. 203
Если же, следуя К. Нейману, за координаты принять расстояние г точки до на-
начала и площадь а, заметаемую радиус-вектором точки, так что
то получим совершенно другие уравнения, которые не могут быть сведены к
уравнениям в полярных координатах. В самом деле, кинетическая энергия в
новых переменных получит вид
откуда
найдем
дТ
дг' ~~
пгг',
дТ
дг
4та'
дТ
до'
4/по'
дТ
да
= 0.
Вычисляя работу сил на произвольном возможном перемещении, получим
(F, Ss) =
+
р
= FA + 2 —- 6a = QA + Q26a,
поэтому уравнения Лагранжа запишутся теперь в виде
* ma" ''
= F1, 2
346
Преобразуя эти уравнения к полярным координатам, получим
mr" + mrW' = Fx, mrb" = Fit
что не совпадает с уравнениями движения в полярных координатах. Это не-
несовпадение объясняется тем, что координаты г и а не являются лагранжевымн
координатами. Они не определяют положения точки до тех пор, пока не ре-
решена задача о движении и не найдена траектория точки. Декартовы координаты
хну нельзя представить как явные функции параметров г и ст. Такие коорди-
координаты являются неголономнымн.
Пример 99. Тяжелый цилиндр радиуса г и массы т может скользить
по плоскости, наклоненной к горизонту под углом а. Вокруг цилиндра обмотана
нить, конец которой тянут вдоль наклонной плоскости с постоянным ускорением
а (рис. 203). Определить ускорение центра масс цилиндра, если момент инер-
инерции цилиндра относительно оси симметрии равен Mk!.
Общие теоремы, не вводя реакций связей, здесь применять нельзя, посколь-
поскольку среди возможных перемещений нет поступательных перемещений, нет пово-
поворотов воюруг неподвижной оси и действительные перемещения не находятся
среди возможных. Применяя уравнения Лагранжа, за лагранжеву координату
примем координату х центра масс системы. Обозначив через <р угол поворота
цилиндра относительно оси Кёнига, проходящей через центр масс цилиндра,
будем иметь зависимость координат <р и х
х' + гф' = at -\- Cj, или х + гф = —— at2 -\- cj -\- с2.
2
Живую силу вычислим по теореме Кёнига
тх' mk2w' "¦
2 2 ~ 2
Силовая функция имеет вид
U = — mgx sin a.
Уравнение Лагранжа, соответствующее координате х, примет вид
[fea "I
х" — — (а — х")\ = — mg sin а,
или
Для однородного сплошного цилиндра
тогда ускорение центра масс цилиндра
„ 2 / а
х = —
Естественно, что прн a>2gsma цилиндр будет двигаться с ускорением,
направленным вверх, а при a=2gsina центр цилиндра будет двигаться равно-
равномерно.
347
§ 6. ЭЛЕМЕНТАРНЫЕ СЛУЧАИ ИНТЕГРИРУЕМОСТИ
УРАВНЕНИЙ ЛАГРАНЖА
1. Циклические координаты. Предположим, что переменные q,,
можно разбить на две группы
... ,qk
так, что переменные второй группы не входят явно в функцию
Лагранжа. Будем обозначать переменные первой группы через qj,
а второй через <7«. Тогда будем иметь
Переменные <7<х, удовлетворяющие этим условиям, называются
циклическими, а переменные д3 — позиционными коор-
координатами. Уравнения Лагранжа, соответствующие циклическим
координатам, запишутся в виде
d 3L
dt
• = 0 (a = s+ I, s + 2,
откуда сразу же получаем первые интегралы
-^- = Р„ (a = 5+ I, s + 2,
где р^ — произвольные постоянные. Эти уравнения выполняются
во все время движения системы и называются циклическими
интегралами. Циклические^ интегралы линейны относи-
относительно циклических скоростей <7s+i' 9s+2 4k и не зависят явно
от переменных qs+i, <7s+2, •.., qh. Из k—s первых интегралов можно
определить циклические скорости
Я'а = fa (t, qi, Яг, ... , qs, q\, q'v . ¦. , q's, Ps+i, ps+2, ... , P*),
и задача сведется к определению циклических координат в функ-
функции времени.
2. Метод Рауса игнорирования циклических координат.
Э. Раус A831—1907) предложил составлять уравнения движения,
не содержащие циклических переменных. Для этого он ввел в
рассмотрение функцию
да
которую в дальнейшем будем называть функцией Рауса. Она
зависит только от позиционных координат и скоростей (цикличе-
348
ские скорости исключаются с помощью циклических интегралов),
так что
При помощи этой функции можно получить уравнения движения,
не содержащие циклических переменных. Рассмотрим изменение
функции Рауса R при переходе системы в другое, бесконечна
близкое состояние. Сообщим величинам qr q't, pa произвольные
бесконечно малые приращения в некоторый момент времени t, что
будет соответствовать возможному перемещению системы. При
этом изменятся функции R и L. Перемещение системы в соседнее,,
бесконечно близкое и кинематически возможное в тот же момент
времени состояние, называют вариацией состояния систе-
м ы. Вариация состояния вызывает соответствующие изменения
исследуемых функций (в данном случае функций Рауса и Лагран-
жа). Линейная часть приращения функции при вариации состоя-
состояния системы называется вариацией функции.
В рассматриваемом случае вариация функции Рауса имеет
вид
С другой стороны, принимая во внимание выражение функции Рауса
через L и ее производные, будем иметь
a=s+l
Сравнивая эти два выражения для вариации одной и той же функ-
функции, заметим, что в силу их тождественности должны быть равны
коэффициенты при соответствующих вариациях координат, скоро-
скоростей и постоянных р«. Принимая во внимание первые интеграль'.
—- = Р". (а = s + 1, s + 2, ... ,k),
получим следующие соотношения:
dR dL dR dL dR
dq/ dqi ' dq'. dq'} ' d% a
(/= 1, 2, ... ,s; a = s+\, s + 2 k),
34»
после чего уравнения движения для позиционных координат при-
примет вид
dt
dq, дсЧ
где функция R зависит уже только от позиционных координат и
скоростей. Эти уравнения называются уравнениями Рауса.
Теперь задача сводится к исследованию новой системы с 5 степе-
степенями свободы. Роль функции Лагранжа для новой системы играет
функция Рауса.
После интегрирования уравнений Рауса задача определения
циклических координат в функции времени сводится к квадрату-
квадратурам. Из уравнений
¦ _ 9R
найдем
В этом и заключается метод игнорирования циклических коорди-
координат.
Замечания. 1. Если координата Ца. является циклической,
то имеет место условие
^г = °-
или
дТ 6U п
П ~Р !7~ в= U.
Последние равенства, в частности, имеют место и тогда, когда по
отдельности выполняются условия
Эти условия являются достаточными для того, чтобы координата
<7<х была циклической. Нахождение циклических переменных значи-
значительно облегчает решение задачи о движении системы.
Если
то соответствующая координате qa обобщенная сила
350
Поэтому циклические координаты можно искать на тех перемеще-
перемещениях, где активные силы, приложенные к точкам системы, не со-
совершают работы. Это условие не является достаточным, н задача
разыскания циклических координат остается в общем случае не-
неразрешенной.
Пример 100 Рассмотрим движение материальной точки в центральном
силовом поле снл с силовой функцией U=U(r).
т
Рис 204
Перемещения, на которых сила не выполняет работы, соответствуют изме-
изменению углов ф и Ь при фиксированном г (рис 204) Живая сила точки имеет
вид
sin*
Как видно из выражения для частных производных
— = 0, -^- = mrW'sin fl cos
0,
циклической координатой является только координата ср. Интеграл, соответст-
соответствующий этой координате, имеет вид
-— = /ncpV2sin2•& == р, или ф' =
3<р
sin3
Игнорируя циклическую координату го, найдем функцию Рауса
-ф'р = — (Ф'> sin2 Ф + г2*'' + г1') + (У (г) -
- mr^ sin2 * = - {r" + ,2»") +UW-1^
Выпишем уравнения Рауса
d dR dR
— -— = 0.
dt dq] дЯ1
Если ввести в рассмотрение выражение
351
представляющее собой живую силу точки в полярной системе координат, вра-
вращающейся вокруг оси г, и вместо силовой функции рассмотреть функцию вида
и* и —
t2mr2sin ¦& '
то задача сведется к определению плоского движения точки, движущейся под
действием сил с силовой функцией У* и с функцией Рауса
2. Циклические координаты позволяют сводить задачи к иссле-
исследованию новых систем с меньшим числом степеней свободы. Этот
метод развивался в работах Герца, Рауса и Томсона, которые вы-
высказали предположение о том, что силы, имеющие силовую функ-
функцию, являются следствием существования скрытых циклических
координат. Вопрос этот остается открытым и до настоящего вре-
времени.
3. Циклические интегралы являются некоторым обобщением
основных теорем динамики системы (закона о сохранении движе-
движения центра масс и теоремы площадей). Рассматривая теорему о
движении центра масс, заметим, что она имеет место, когда связи
допускают поступательное перемещение всей системы. Пусть среди
возможных перемещений системы имеется такое поступательное
перемещение вдоль неподвижной оси х. Соответствующую этому
перемещению лагранжеву координату обозначим через <7ь Опреде-
Определяя возможные перемещения через независимые координаты Лаг-
Лагранжа, будем иметь
7s y Y^qs ^
qs aJ dqs *~1 dqs
s=l s=t s=l
Но при поступательном перемещении
8xv = a, бг/v = 0. Szv = 0,
поэтому, положив
б^ _. аф 0, 6i?2 = 6<7S = ... = bqk = 0,
•будем иметь
dqL dqx dqt
Обобщенная сила, соответствующая координате qlt имеет вид
v v
Для составления уравнения Лагранжа необходимо еще подсчитать
частные производные:
352
d V ^ V d\ V
dt dqx ^v d^ c»?1 v dqi
V
откуда следует, что уравнение Лагранжа, соответствующее коор-
координате qi, имеет вид
Циклическому интегралу здесь соответствует закон сохранения
количества движения центра масс.
Аналогичные рассуждения можно провести и для теоремы об
изменении момента количества движения.
3. Обобщение теоремы и интеграла живых сил. Рассмотрим
прежде всего структуру выражения для живой силы системы ма-
материальных точек в самом общем случае. Выражая декартовы
координаты точек системы через координаты Лагранжа, для про-
проекций скорости получим выражения:
yg, y + Y
dt 2j dqs 4s' U* dt ^ Zj dqs
dt ' Zl dq
s
s
Подставляя эти значения в выражение для живой силы системы
материальных точек, получим:
-2-
2
v
dxv
12 E H Березкин 353
Здесь первая группа, стоящая в квадратных скобках, зависит
только от обобщенных координат и времени, вторая скобка, кроме
того, линейно зависит от обобщенных скоростей, третья является
квадратичной однородной функцией обобщенных скоростей. Вводя
обозначения
т у wv г/ axv у | (д»* у | /дг- у
1 ° ~ L 2 [ [ dt } + [ dt ) + [ m )
V
представим живую силу системы в виде
где Г2 — однородная квадратичная форма обобщенных скоростей,
Ti — линейная однородная форма обобщенных скоростей, а То не
зависит от обобщенных скоростей.
Движение системы материальных точек можно определить
уравнениями Лагранжа второго рода
d дТ дТ __ q
dt dq's dqs ~ s'
Умножая каждое из этих уравнений на обобщенные скорости q's и
складывая полученные результаты, будем иметь
d дТ . дТ
что можно еще записать иначе
В силу теоремы Эйлера об однородных функциях имеем
dq-
поэтому полученный результат будет иметь вид
354
или
Умножая это уравнение на dt, получим обобщение теоремы живых сил
^^, (a)
где первая сумма правой части представляет собой работу всех
обобщенных сил на действительном перемещении системы. В част-
частном случае, когда связи, наложенные на систему, не зависят явно
от времени, будем иметь
Л у fin ft?
= 0,
dt dt dt
поэтому Ti = T0=0, и живая сила будет представлять собой одно-
однородную квадратичную форму относительно обобщенных скоростей
В этом случае из уравнения (а) непосредственно следует теорема
живых сил
dT = Щ^.
Если связи, наложенные на систему материальных точек, за-
зависят явно от времени, но живая сила Т от времени явно не зави-
зависит, и если активные силы, действующие на систему, обладают
силовой функцией U, зависящей только от координат, то из урав-
уравнения (а) сразу же получим
откуда, интегрируя, имеем
где h — произвольная постоянная, определяемая из начальных
условий. Полученный первый интеграл уравнений движения соот-
соответствует интегралу живых сил, но выведен в более общих предпо-
предположениях. Он был впервые получен К. Якоби A804—1851) и назы-
называется интегралом Якоби (в литературе иногда интеграл
Якоби называют интегралом Пэнлеве). В частном случае,
когда связи не зависят явно от времени, из интеграла Якоби непо-
непосредственно следует интеграл живых сил
T = U + h.
Пример 101. Рассмотрим движение материальной точки в системе коор-
координат O|t]g, вращающейся вокруг неподвижной оси t, с постоянной угловой ско-
12* 355
ростью <в (по отношению к неподвижной системе отсчета Oxyz) (рис 205).
Пусть приложенные к точке силы обладают силовой функцией 0(%, п, ?)•
Неподвижные и подвижные координаты точки связаны соотношениями
х = | cos at — т\ sin o>f, у = | sin ш< + т) cos (of, г = ?,
так что ?, т], t, являются лагранжевыми координатами. Живая сила точки
mv2
2 ¦
Для определения абсолютной скорости v запишем проекции ее относительной
и переносной скорости на оси ?, т), ?.
pr(?', т|', ?'), t)e(—г]Ш, ?<в, 0).
Рис. 205
Рис. 206
Тогда проекции абсолютной скорости можно представить в виде
о(Б'-ч». ч' + Бш. С),
а для живой силы получим выражение
Т = — [(Г - ti<oJ + (г,' +1@)» + ?''] = Г2 + Т1 + То,
где
Т2 = -j (V1 + г,'1 + ?'*), Тг = /«о Йл' - Til'),
Здесь выполнены условия
дТ
dU
а потому существует интеграл Якобн
который имеет вид
fr + n'4rt-f
+ Л2) - I/ E. г), С) + А-
356
Пример 102. Система состоит из невесомого стержня ОА длины k, вра-
вращающегося в горизонтальной плоскости с постоянной угловой скоростью ш во-
вокруг неподвижной точки О, и соединенного с ним шарнирно в точке А невесо-
невесомого стержня AM длины /, свободно вращающегося в горизонтальной плоско-
плоскости. На конце стержня AM закреплена точечная масса т, на которую действует
сила F=kOM [k — постоянное число) (рис. 206). Построить интеграл Якоби.
Решение. Относительные координаты точки М:
g=Ze + / cosi|>, T)=
g' = — "ф'гsin -Ц», T]' = i|>'
Проекции переносной скорости равиы:
ve% = — tosinty, ve1l = (t0+
Проекции абсолютной скорости на подвижные оси:
, Dj=0.
Для живой силы получаем выражение
T= = — [P (<o +i|>'J + 2f0fo (<o + ф') cos i|) + Ipp] = Г2 + Ti (- 7"n.
где
T2 = — l2ty' , Ti = mlwty (I + /0 cos i)>),
Силовая функция
~ 2
или, поскольку
O^f2 = l\ + f2 + 2«0 cos'
[/ = — (
2
Интеграл Якоби теперь получает вид
Пример 103. При помощи метода Рауса исследовать движение шарика
в трубке, имеющей форму окружности и способной вращаться без треиия вокруг
вертикального диаметра. В начальный момент шарик относительно трубки нахо-
находится в покое, а радиус ОМ составляет с вертикальным диаметром угол
фо = а; трубке в начальный момент соообщена угловая скорость Шо вращения
вокруг вертикального диаметра (рис. 207).
Решение. Пусть момент инерции трубки относительно вертикального диа-
диаметра равен /о, а Ь — угол поворота трубки вокруг вертикального диаметра.
Запишем выражения для живой силы и силовой функции системы:
357
HL
т = ^L + HL
ф
U = mgr cos ф.
Нетрудно видеть, что координата О является циклической. Ей соответствует
циклический интеграл
дТ
= Un + nv sin2 ф) и = В,
из которого находим
Движение шарика внутри трубки определяется координатой ф. Для определения
закона движения рассмотрим функцию Рауса
Я = L - ZP<?' =
_|_ (Г2ф' s;n2 ф _|_ Г2ф' ^ _]_ mgT cos ф _
J 0 -(- w2 sin2 ф
ф'1 + mgr cos ф —
2 (/0 + tnr2- sin2 ф)
= Т, + иг.
Движение системы, при котором не изменяются позиционные координаты, назы-
называется стационарным. Стационарному движению соответствует равновесие в
позиционных координатах, Роль силовой функции в данной задаче играет
t/i = tngr cos ф — .
Y 2 (Jo + mr2 sin2 ф)
В положении равновесия шарика 1 = 0, т. е.
— mgr sin ф + Ва (/„ -f- mr2 sin2 ф)~2 mr2 sin ф cos ф = 0.
откуда получаем два условия:
1) sinф = 0, т. е. ф = 0 или ф = я;
B2mr2 cos ф
2) ~
(/„ + mr2 sin2 фJ
= 0,
358
причем последнее равносильно уравнению
— g {Jo -г mr2 sin3 фJ + Р2г cos ф = 0,
из которого находится угол Ф, Задача сводится к исследованию корней уравне-
уравнения четвертой степени. Если ф=фо есть решение этого уравнения, то будем
иметь
Подставляя это значение в последнее уравнение, найдем
Jg_
cos ф0 = -——
Закон движения определяется из уравнения
B2/nr2 sin ф cos ф
тг2ф" — ——¦ + mgr sin <р = 0.
U о + mr sin Ф)
Последнее можно заменить интегралом живых сил, в котором с помощью цик-
циклического интеграла исключена переменная fK, т. е.
ф' + = mar cos ф + h.
2 Y 2 (Jo + mr* sin2 q>) ё Y
§ 7. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ
В ряде задач механики часто требуется определять не только
движение системы, но и силы реакций, возникающие при таком
движении. В некоторых случаях достаточно знать лишь часть сил
реакций. Для определения сил реакций можно воспользоваться
уже известными нам общими теоремами динамики системы. Заме-
Заменяя наложенные на систему связи силами, эквивалентными по
своему действию связям, можно рассматривать эту систему как
освобожденную от связей. Действительное движение освобожден-
освобожденной системы происходит в соответствии с наложенными ранее
связями, но при этом появляются новые возможные перемещения,
которым раньше препятствовали наложенные связи. Эти новые
возможные перемещения дают возможность так применять общие
теоремы динамики системы, чтобы в соответствующие уравнения
движения уже входили реакции связей (для этого достаточно
применять теоремы на тех возможных перемещениях, на которых
работа сил освобожденных реакций отлична от нуля).
В общем случае при освобождении системы от связей, появ-
появляется новое возможное перемещение, которому соответствует из-
изменение некоторой новой лагранжевой координаты д, сохраняющей
постоянное значение в действительном движении системы.
Пусть положение неосвобожденной системы определяется k
независимыми лагранжевыми координатами qJt q% ¦¦, Як. Осво-
Освобожденная система будет определяться k+l координатами q, q\,
42, ¦ ¦ ¦, <7ft. Для такой системы можно вычислить живую силу
359
Г (t, q, qlt q2 , qk, q', q\, q'2, ... , q'k)
и, определив работу всех сил на новом возможном перемещении,
соответствующем изменению координаты q, найти соответствую-
соответствующую обобщенную силу Q. В эту обобщенную силу войдет и иско-
искомая реакция связи. Записывая теперь уравнения Лагранжа для
координаты q
d дТ* _ дТ* __ q
dt dq' dq ~~
и принимая во внимание, что в действительном движении
получим уравнение для определения интересующей нас реакции.
Пример 104. Тяжелая однородная палочка длины 21, опирающаяся одним
концом на гладкую горизонтальную плоскость (рис. 208), начинает движение
из состояния покоя, когда угол <р = Фо. Найти силу давления палочки на плос-
плоскость.
Рис. 208
Определим сначала движение палочки. Связи, наложенные на систему, до-
допускают поступательное перемещение палочкн вдоль неподвижной горизонталь-
горизонтальной оси х. Применяя теорему о движении центра тяжести вдоль этой оси, по-
получим
М%" = 0, откуда I — cj + с2
(где через | обозначена координата центра тяжести по оси х).
В начальный момент палочка находилась в покое, поэтому имеем
с1 = 0, ^ = const,
т. е. центр масс находится все время на одной и той же вертикальной прямой.
Выберем неподвижную систему осей так, чтобы ось у совпадала с этой вер-
вертикальной прямой. Тогда центр масс все время будет оставаться на оси у.
Для определения движения остается найти зависимость угла <р от времени.
Но связи, наложенные на систему, не зависят явным образом от времени, и
действительные перемещения находятся среди возможных. Следовательно, мож-
можно применить теорему живых сил, которая сразу дает интеграл живых снл
или
тус
/Ф'1
+ —-— = — mgl sin ф + h,
360
m/2
где ус — ордината центра масс; J =—г— — момент инерции палочки относи-
о
тельно оси, перпендикулярной к плоскости ху н проходящей через центр масс.
Определяя величины
Ус = I sin ф, ус = /ф' cos ф, Ус= — /ф' sin ф + /ф" cos ф
и подставляя их значения в интеграл живых снл, получим
ml* C cos2 ф + 1) ,
Ф = —• mgl sin ф -f- h.
о
В начальный момент ф = ф0, ф' = О, тогда для h имеем
h = mgl sin ф0.
Для определения реакции освободим систему от связи и введем силу реакции
N. Среди возможных перемещений теперь появляется поступательное переме-
перемещение палочки вдоль оси у. Это дает возможность применить теорему о дви-
движении центра масс вдоль оси у
тус= —tng + N,
откуда получаем
Л' = от (g + у"с).
Подставляя сюда значение ус, имеем
N -=. m(g — l(f'' sin ф + 1<р" cos ф),
где ф' и ф" определяются для действительного движения, стесненного связями.
Эти значения можно выразить через ф при помощи интеграла живых сил. Диф-
Дифференцируя последний по времени, для определения ф" получим уравнение
C cos2 ф + 1) — т/2фг3 sin ф cos ф = — mgltf' cos ф.
о
После сокращения на ф' в начальный момент, когда ф'=0, будем иметь
—— ф" C cos2 ф0 + 1) = — mgl cos ф0,
о
откуда
3gcos ф0
т / Ccos2 ф0 + 1)
Реакция No в начальный момент равна
3 cos2 ф0 \ \mg
3 cos2 ф0 -j 1 ) 3 cos2 ф0 + 1
При фо?=9О° значение Л'о меньше веса палочки mg. Например, при фа = 60° в
начальный момент будем иметь
361
Пример 105. Однородная палочка АВ длины 1а и веса mg положена в
гладкий неподвижный полуцилиндр с горизонтальной осью, проходящей через
точку О, причем ZAOB=90°. Палочка движется под действием своего веса.
Определить реакцию в точке А в зависимости от угла q>=ZA0OC, где С —
центр тяжести палочки. В начальный момент ф=фо=45°, причем палочка нахо-
находится в покое (рис. 209).
Связи, наложенные на систему (т. е. на палочку), идеальны и не зависят
явно от времени, а активные силы (силы тяжести) обладают силовой функцией.
При этих условиях существует интеграл живых сил
или
2 ,2
— та' ф = mga sin ф -)- А,
о
который полностью определяет движение палочки. Постоянная h находится из
начальных условий:
Л = — mga sin ф0 = — mga
/г
Для определения реакции освободим палочку от связи в точке А, заменив ее
действие силой Л'. Будем рассматривать только движение палочки в плоскости
чертежа. Возможное перемещение точки В палочки по направлению совпадает
с касательной к окружности в точке В. Направим неподвижную ось Вх вдоль
касательной в окружности в точке В в рассматриваемый момент времени. Осво-
Освобожденная в точке А палочка может перемещаться поступательно вдоль оси Вх,
Рис. 209
Рнс. 210
так что найдется возможное перемещение палочки, при котором перемещения
всех точек палочки будут совпадать по величине и по направлению с переме-
перемещением точки В. Тогда можно применить теорему о движении центра масс для
осн х:
— {тх'с) =N — mgsin(q> — #),
где хс — проекция на ось х скорости и с центра тяжести палочки в ее дей-
действительном движении. Но
поэтому
362
= аф' cos а,
где а — угол наклона палочки к оси х меняется во время движения. Отсюда
Л;с=аф cosa — вера sin a.
Но а'= —ф', ив рассматриваемый момент а= #, тогда
хс = аф" cos ^ + аф'2 sin ® •
Подставляя это значение в формулу для определения реакции, будем иметь
N = mg sin (ф — #) -f- та qTcos a -J- таф'2 sin а.
Определяя ф" и ф'2 с помощью интеграла живых сил и подставляя в преды-
предыдущую формулу, получим
[33 1
sin (ф — ¦&) + — cos ф cos # + — (sin ф — sin ф0) sin d .
4 2 J
Отсюда, при # = 45°, найдем
N = -^— [/2~ A0 sin ф — cos ф) — 6].
о
Эту же задачу можно решить и при помощи уравнений Лагранжа второго
рода. Для этого нужно вычислить живую силу и силовую функцию палочки:
2
Т = — та2 ф'2 U — mga sin ф,
о
после чего можно записать уравнение движения в форме Лагранжа, либо пер-
первый интеграл этого уравнения, каким будет интеграл живых сил.
Для определения реакции N заменим связь в точке А силой. Среди воз-
возможных перемещений освобожденной системы будет такое, при котором изме-
изменяется угол #. Параметры ф и ¦& можно рассматривать как лагранжевы коорди-
координаты освобожденной системы. В новых параметрах живая сила имеет вид
mvi ma? таг
Т* = -f- + — (О' + Ф'J = -2-р [2Ф'а + (О' + ф')* -
— 2 у^2 ф' (ф' -\- Ф') cos
VJ
Вычисляя работу всех сил, действующих на систему, на перемещении, соот-
соответствующем изменению угла #, имеем
mga cos (90° — ф) бд + 2 Na cos (90° + 45°) бд = Qd б#,
откуда _
Q<> = mga sin ф — Na -/2 .
Дифференцируя живую силу Т* по ¦& и #'
аг*
Г 4 ._
¦ = та2 — (#' + ф') — у 2 ф' о
L 3
-^- = та2 /Г ф' (#' + ф') sin #
и принимая во внимание, что в действительном движении ^ = 0, #"=0, получим
соответствующее координате ¦& уравнение Лаграижа д.чя действительного дви-
движения
363
та2 (ф" — Y% ф" cos Щ + ф" — та2 ф'2 = mga sin ф — .Va
откуда определим Л'
та
ф — —5— ф"
После подстановки из уравнений движения значений ф'2 и ф" и соответствую-
соответствующих преобразований получим
^10sin? -совф)— 6].
8
Пример 106. Концы однородного прямого стержня АВ и длины 2/ и
массы m скользят без треиия по горизонтальному и вертикальному стержням
рамки, вращающейся с постоянной угловой скоростью со вокруг вертикальной
стороны (рис. 210). Определить вертикальное давление стержня на рамку в
точке А.
Принимая за лагранжеву координату угол наклона Ф стержня к горизон-
горизонтальной стороне рамки, будем иметь
Т = ~- (/2<в2 cos8 ф + Р ф'2) + \ (-^- Ф'2 + ~ со2 cos2 ф
U = —n;g/sin<p.
Движение стержня определяется из уравнения Лагранжа
4<р" + 4/со2 sin ф cos ф = — 3g cos ф,
которому отвечает первый интеграл (интеграл Якоби)
2
—т/а(ф'2—ш'3со52ф)= — mglsin q>-f h.
о
Для определения вертикального давления стержня на рамку освободим
стержень в точке А от связи и введем силу N, дав возможность точке А стерж-
стержня перемещаться в вертикальном направлении. Обозначим вертикальную коор-
координату точки А через х. В действительном движении х=0. Примем за лагран-
жевы координаты (при определении реакций) координаты ф и х. Тогда живая
сила системы получит вид
Т* = -у (Р ю3 cos2 ф + jyz + 21 ф' х' cos ф + х'%) +
p Р тР \
422)
Обобщенная сила, соответствующая координате х
соответствующее уравнение Лагранжа (при «=0)
ml ф" cos ф — ml ф'а sin ф = — mg -f- N.
364
Определяя ф" и <р' из уравнений движения, будем иметь
N = mg ¦— ml I со2 sin ф cos ф -f- cos ф I cos ф —¦
/ 3g Ш \
— ml I ш2 cos2 ф — sin ф -f sin ф.
Замечание. До сих пор при составлении дифференциаль-
дифференциальных уравнений движения системы материальных точек, мы пред-
предполагали, что на систему наложены идеальные связи. Такое пред-
предположение сильно сужает круг тех задач, которые могут быть
разрешены методами динамики. В частности, связи с трением в
ряде случаев являются неидеальными связями, а исключить все
такие связи из рассмотрения практически невозможно.
Можно, однако, заметить, что все рассмотренные методы со-
составления дифференциальных уравнений движения без особого
труда распространяются и на системы с неидеальными связями.
Для этого достаточно доопределить силы, действующие на систе-
систему, введя в рассмотрение неизвестные силы реакции связей, со-
совершающие отличную от нуля работу на возможных перемещениях
системы. После введения таких сил наложенные на систему связи
могут уже рассматриваться как идеальные, и все рассмотренные
методы составления дифференциальных уравнений движения будут
применимы к такой системе.
Получающиеся таким путем дифференциальные уравнения
движения в общем случае будут содержать лишние неизвестные,
исключить которые не всегда просто. На помощь приходится при-
привлекать экспериментальные факты, вносящие некоторую опреде-
определенность в постановку задачи. Одним из таких экспериментальных
фактов является, в частности, известный закон Кулона, устанав-
устанавливающий зависимость касательных составляющих сил реакции
связей от нормального давления. Составленные таким образом
уравнения движения будут представлять собой сложную систему
и дальнейшее исследование этой системы обычно проводится пу-
путем постепенного освобождения от лишних неизвестных. Исследо-
Исследование часто осложняется тем обстоятельством, что коэффициент
трения не является постоянной величиной, а изменяется в зависи-
зависимости от нагрузки.
Пример 107. Определить движение однородного круглого диска, нахо-
находящегося под действием силы тяжести и пущенного в вертикальной плоскости
по горизонтальному рельсу Ох, предполагая, что между диском и рельсом су-
существует трение, определяемое законом Кулоиа (рис. 211).
Наложенные на систему связи не являются идеальными и для того, чтобы
применить общие теоремы, необходимо ввести в рассмотрение силы, препят-
препятствующие поступательному перемещению диска. Введя в рассмотрение неиз-
неизвестную силу реакции F, направленную вдоль оси х, можно рассматривать
рельс как совершенно гладкий. При этом среди возможных перемещений появ-
появляется поступательное перемещение диска вдоль оси х, что дает возможность
применить теорему о движении центра масс, откуда
тх" = F.
365
Полученное уравнение содержит две неизвестных величины: х и F. Из опреде-
определения силы F по закону Кулона будем иметь
F = fN,
где N — вертикальная составляющая силы реакции; f — коэффициент трения.
Из теоремы о движении центра масс вдоль оси у получим, что N=mg.
F
Рис. 211
Таким образом, движение центра масс вдоль оси х будет определяться урав-
уравнением
x"=?g.
Если теперь обозначить через v скорость точки обруча, находящейся в сопри-
соприкосновении с рельсом, то будем иметь
v = х' —/•#',
где # — угол поворота диска. Сила трения, определяемая по закону Кулона,
направлена в сторону, противоположную направлению скорости и. Поэтому в
уравнении движения будем считать, что />0, если х'—л&'<0 и /<0, если
х'—НК>0. Закон изменения угла # определим из теоремы об изменении момен-
момента количества движения
т№Ъ" = ~rF,
где k — радиус инерции диска относительно его центра масс, а г — раднус
диска. Подставляя F, будем иметь
откуда без труда получим
Если в начальный момент выполняется условие
то скорость v = xf—КК убывает пропорционально времени и за конечное время
обращается в нуль.
Если в начальный момент выполняется условие
то f>0 и уменьшается со временем разность НК—xf, обращаясь в нуль за ко-
конечное время.
366
По достижении нулевого значения скорости v точки контакта, сила сопро-
сопротивления F становится равной нулю (благодаря отсутствию проскальзывания) и
дальнейшее движение происходит так, что разность xf—гЬ' остается равной
нулю
В частном случае, когда в начальный момент "О отрицательна и очень
велика, при положительном х0 абсцисса х сначала возрастает со временем,
пока скорость v не обратится в нуль, после чего центр тяжести начинает не-
неограниченно удаляться в сторону отрицательных значений х.
Глава VI
ДИНАМИКА ТВЕРДОГО ТЕЛА
Задача о движении твердого тела является одной из наиболее
интересных задач динамики. Она справедливо привлекает к себе
внимание многочисленных исследователей.
Твердым (или абсолютно твердым) телом в теоретической
механике называют систему частиц, связанных в одно целое внут-
внутренними силами, действующими вдоль прямых, соединяющих час-
частицы так, что никакие внешние причины не в состоянии изменить
расстояния между этими частицами. Абсолютно твердое тело не
может подвергаться никаким деформациям и представляет иде-
идеальный образ, который тем ближе подходит к реальному телу, чем
меньше последнее способно деформироваться под действием внеш-
внешних сил. Абсолютно твердое тело благодаря неизменяемости рас-
расстояний между частицами представляет собой механическую си-
систему, отличающуюся от других систем особыми свойствами, вслед-
вследствие чего динамика твердого тела выделяется в особый раздел.
Этот раздел динамики имеет очень большое значение в техниче-
технических приложениях, особенно при построении гироскопических и
навигационных приборов. Исключительное значение получила за-
задача о движении твердого тела около неподвижной точки.
В основе всей динамики твердого тела лежат уравнения Эйле-
Эйлера, предложенные им в 1767 г. Уравнения эти определяют движе-
движение твердого тела около неподвижной точки и имеют место при
произвольном движении твердого тела, так как самое общее дви-
движение твердого тела может быть представлено в виде суммы пере-
переносного поступательного движения, определяемого движением
центра масс тела, и относительного движения тела вокруг центра
масс. Центр масс твердого тела движется так, как если бы в нем
была сосредоточена вся масса тела и приложены все действующие
на тело силы. Относительное движение твердого тела вокруг
центра масс определяется теоремой об изменении момента коли-
количества движения относительно осей Кёнига.
368
Наибольший интерес и наибольшие трудности в решении
представляет задача о движении твердого тела около неподвижной
точки. Задача эта, несмотря на замечательные результаты Л. Эйле-
Эйлера A707—1783), Ж. Лагранжа A736—1813), С. Пуассона A781—
1840), Л. Пуансо A777—1859) и в более позднее время С. В. Ко-
Ковалевской A850—1891), А. Пуанкаре A854—1912), С. А. Чаплы-
Чаплыгина A869—1942) и многих крупных современных ученых, еще
далека от своего полного завершения.
§ 1. ТЕОРИЯ МОМЕНТОВ ИНЕРЦИИ
1. Определения. При изучении движения твердого тела су-
существенную роль играет распределение масс в твердом теле, ха-
характеризующееся, в частности, величинами моментов инерции.
Понятие момента инерции впервые ввел Христиан Гюйгенс
A629—1695) при исследовании колебаний физического маятника,
после чего это понятие исследовалось Эйлером, Пуансо и другими
учеными.
Рассмотрим систему материальных точек с массами ггъ,,
расположенных некоторым образом относительно осей х, у, z
(рис. 212). Обозначим через Sv расстояние точки tnv до некото-
некоторой плоскости (я), проходящей через начало координат. Величину
П = 2 пи, Sv
будем называть моментом инерции системы матери-
материальных точек относительно плоскости (я). Обозна-
Обозначим через Av расстояние точки ntv до прямой /, лежащей в плос-
плоскости (я) и проходящей через начало координат, а через rv —
расстояние точки tnv до начала координат. Величины
y = 2wvAv и (-1 = 2 mvr%
будем называть соответственно моментами инерции систе-
системы материальных точек относительно прямой / и
относительно начала координат.
Выделяя среди всех прямых и плоскостей, проходящих через
начало координат, координатные оси и плоскости, для момен-
моментов инерции относительно координатных плоскостей будем иметь
значения
а для моментов инерции относительно координатных осей:
Jx = 2,tn(y2 + z*), Зд = Ит{гг + х%), Jz = Ът (х2 -|- г/2).
Момент инерции относительно начала координат запишется в виде
369
Справедливы следующие очевидные соотношения:
Jz = 2 тх% 4 2 ту2 = Пуг 4- Hzx,
J^, = 2 отг2 + 2 тх2 = Пху 4- П^,
/Л = 2тг/2 + 2отг2^Пг;еЧ-П,й,
Величины моментов инерции относительно координатных осей не
могут быть выбраны произвольно и всегда связаны очевидными
соотношениями
Все выписанные формулы имеют место для случая дискрет-
дискретного распределения масс. Для сплошных сред формулы получа-
Рис. 212
Рис. 213
ются в интегральной форме путем предельного перехода. Так, на-
например, при вычислении момента инерции твердого тела послед-
последнее предполагают разбитым на элементарные объемы dv, каждый
из которых имеет координаты х, у, z и массу dm = pdv, где р —
плотность элементарного объема dv. Тогда суммы вида Ътх% или
Hmyz переходят в тройные интегралы Г Г Г рх2«to или Г[ Г pyz dv,
распространенные на объем, занятый телом. В конкретных случаях
вычисления иногда можно значительно упростить, сведя к линей-
линейным интегралам.
Пример 108. Вычислить момент инерции тонкого однородного сплош-
сплошного диска радиуса а и плотности р относительно его оси симметрии, перпен-
перпендикулярной к плоскости диска.
Для элементарного слоя (рис. 213) имеем
dj = r3dm =
откуда
а*
(• а
= р 2nr*dr = 2яр — =
о
Ма-
где М=па2р — масса диска.
370
При мер 109. Определить момент инерции однородного сплошного шара
радиуса R и Плотности р относительно его диаметра.
Решение. Для элементарного шарового слоя момент инерции относи-
относительно центра шара
d\i = p Аяг2г2 dr.
Момент инерции всего шара относительно его центра
R
Г 4
= I р 4яг* dr = — ря №.
о
4
Масса шара УИ = — pnR3, так что
ц = -^-Л1Я2.
5
Момент инерции относительно любой диаметральной плоскости
ц MR2
П = ~3~ = 5 '
Момент инерции шара относительно любой оси, проходящей через его центр
2
/ = 2П= — MR2.
5
Пример ПО. Определить момент инерции однородного сплошного эллип-
эллипсоида относительно его главных осей.
Уравнение эллипсоида, отнесенное к его главным осям, имеет вид
Формула для момента инерции тела относительно плоскости дает
Здесь интеграл распространен на объем, занятый эллипсоидом. Выполняя пре-
преобразование к новым переменным
х = ах', у — by', z — cz',
получим
Пху ^ р c*ab § § § z'2 dx'dy'dz',
и уравнение эллипсоида переходит я уравнение шара
Интеграл
берется по объему, занятому шаром, и представляет собой момент инерции
однородного сплошного шара плотности р'=1 относительно плоскости Ох'у'
371
Отсюда
4 /4 . -
Пад = р c*ab П,,., = —— яр tfcib = — яр аЬс —-
С4
5
Мс*
где Л1 — масса эллипсоида. Аналогично находим
Ma2 Mb2 _ М
* 5 5 5
Теорема Гюйгенса — Штейнера. Момент инерции от-
относительно произвольной оси равен сумме момента инерции отно-
относительно параллельной оси, проходящей через центр масс, и про-
произведения массы системы на квадрат расстояния между осями.
Доказательство. Пусть имеется система материальных
точек fflv с центром масс в точке G и пусть положение точек опре-
Id
Z1 ^
Рис. 214
Рнс. 215
делено по отношению к осям координат Oxyz. Обозначим коорди-
координаты центра масс системы через а, Ь, с и свяжем с центром масс
систему осей G, Xi, y\, zu параллельных соответственно осям
х, у, z (рис. 214). Координаты х, у, z и х\, у\, z^ связаны формула-
формулами преобразования
Вычисляя момент инерции относительно оси z, будем иметь
Jz = 2 mv D + yl) - 2 щ [{а + ^Iv)« + (b + у^)Ц =
= 2 пц (^iv + #iv) 4- 2а 2 mvxiv + 26 2 т^у^ + а2 2 /nv -1- b2 2 otv
Так как точка G является центром масс системы, то
372
Вводя обозначение
получим
Jz = 2 /nv DV Ь jffv) + M (a2
или
где /г — момент инерции относительно оси zu a d — расстояние
между осями z и Z\.
Следствие. Если имеется система параллельных осей, то
та из осей, для которой момент инерции имеет наименьшее значе-
значение, проходит через центр масс системы.
2. Момент инерции системы относительно произвольной оси,
проходящей через заданную точку.
Выберем в точке О систему прямоугольных осей Oxyz и про-
проведем через начало координат прямую /, определяемую направ-
направляющими косинусами (а, р, 7) (рис. 215). Момент инерции систе-
системы точек относительно прямой / определяется суммой
/ = 2 mv Av,
где
Av = От% — OKI = xl + y% + zl — fa a + yv p
= D + У% + 4) (a2 + p2 + Y2)~(xva + yvp
Выражение для момента инерции относительно прямой / можно запи-
записать в виде
Jt = Ла2 -т- Вр2 + Cy2 — 2D Py — 2? ya — IF ар,
где
= S OTv^v^v, ? = 2 mvA;vZv, F = 2 tnv
Нетрудно заметить, что величины А, В и С представляют собой
моменты инерции относительно осей х, у и z соответственно. Выра-
Выражения для D, Е и F называются произведениями инерции
или центробежными моментами инерции. Все шесть
величин зависят от распределения масс относительно системы осей
Oxyz.
3. Эллипсоид инерции. На прямой / выберем точку Р таким
образом, чтобы выполнялось условие
373
Обозначая координаты точки Р через X, Y, Z, будем иметь
Y = Р 17 = —У—
' / т * L л/~Т~ *
Для момента инерции относительно оси / получим
J = J (AX* + BY2 + CZ2 — 2DYZ — 2EZX — 2FXY).
Сокращая это равенство на /, получим уравнение геометрического
места точек Р
АХ2 + BY* 4- СР — 2DYZ — 2EZX — 2FXY = 1,
которое определяет поверхность второго порядка. Если все точки
системы расположены в конечной области пространства, то /
всегда будет иметь конечное значение. Если, кроме того, все точ-
точки системы не лежат на одной прямой, то / отлично от нуля, а по-
поверхность представляет собой эллипсоид. Этот эллипсоид назы-
называется эллипсоидом инерции, а его главные оси — главными ося-
осями инерции. Вид эллипсоида инерции зависит от вида коэффи-
коэффициентов А, В, С, D, E, F. Очевидно, что различным точкам соот-
соответствуют, вообще говоря, различные эллипсоиды инерции.
Среди всех эллипсоидов отметим тот, который может быть
построен для центра масс системы. Такой эллипсоид называется
центральным, а его главные оси — главными центральными осями
инерции. В главных осях уравнение эллипсоида инерции получит
вид
АХ2 + BY2 + CZ2= 1.
Необходимым условием того, чтобы ось z была главной, является
отсутствие в уравнении эллипсоида инерции линейных относитель-
относительно z членов, т. е.
D = 0 и ? = 0,
или
2 mvxvzv = 0, 2 mv«/vZv = 0.
Теорема. Если прямая 00' является главной осью инерции
для эллипсоидов, построенных в точках О и О', то эта прямая
является главной осью инерции для всех своих точек и проходит
через центр масс системы (рис. 216).
Доказательство. По условию теоремы:
D = 0, ?=0, D'=0, Е' =0,
но (см. рис. 216)
374
Тогда
D -= 2 tnvyvzv = I, niv y'v (h + zv) = S /зд^Л 4- 2 mv «/vZv = 0,
т. е. ордината центра масс равна нулю. С другой стороны,
Е = 2 mvxvzv = h 2 /nvxv ->- 2 mvxvz^ = A 2 /nvjev = 0,
т. е. абсцисса центра масс равна нулю, так что ось z проходит
через центр масс. Рассмотрим на оси г произвольную точку
А@, 0, а). Для этой точки вычислим D\ и ?V
z = а
x = 2
= 2 my (г — а) =2 /яуг — аНту — — ац — 0,
?г == 2mvA;IV2iv = 2/лд;B — а) = Ътхг — аНтх = — а\ — 0,
после чего справедливость теоремы становится очевидной.
Рис. 216
Рис. 217
Следствие. Главные центральные оси инерции являются
главными осями для всех своих точек.
Пример 111. Определить момент инерции однородного круглого тонкого
диска относительно оси /, проходящей через центр диска и составляющий угол
Ф с плоскостью диска (рис. 217).
Решение. Выберем систему координат Охуг с началом в центре диска
так, чтобы ось г была перпендикулярна к плоскости диска. Такие оси будут
главными осями инерции диска. В самом деле, здесь 2 = 0, так что
¦ 0.
Тогда
где
В =
mR2
c = -
4 4
i = 0, Э = cos ф, у = S1T1
f[ = _^5L (cos2 + 2 sin* ч
375
4. Определение главных осей инерции для произвольной точки.
Пусть центр масс системы находится в точке О, а главные цен-
центральные оси инерции направлены по осям х, у, z. Проведем пря-
прямую / с направляющими косинусами а, $, у, проходящую через
начало координат (рис. 218). Обозначая моменты инерции отно-
относительно главных центральных осей через Л, В и С, найдем мо-
момент инерции относительно оси /
Jt = Ла2 + Вр2 + Су\
х
Рис. 218
Для определения главных осей инерции в произвольной точке
О' (|, ц, ?) проведем через эту точку прямую I', параллельную
прямой /, и, воспользовавшись теоремой Гюйгенса—Штейнера, вы-
вычислим момент инерции относительно прямой /'
где
d2 = ОО72 —
Тогда
J' = Ao? +
+
J'=Jt + Md\
- М (|а 4- лР 4- SYJ + М (|2 4- Л2 +
Геометрическое место точек поверхности эллипсоида инерции для
О' удовлетворяет условию
4=,
Vr '
откуда
J' =
(ОТJ
Величина О'Р на поверхности эллипсоида инерции имеет стацио-
стационарное значение для точек, расположенных на главных осях инер-
инерции. Следовательно, и величина /' для главных осей будет прини-
принимать стационарное значение. Поэтому задача отыскания главных
376
осей инерции сводится к нахождению стационарных значений ве-
величины /', рассматриваемой как функции параметров а, §, у при
условии, что а, р и у связаны соотношением
a2 f P2 + Y2 = I-
Метод Лагранжа приводит в этом случае к отысканию стацио-
стационарного значения функции
F = J'+a,(a* + pa-| Y2-l).
где л — неопределенный множитель. Условия стационарности
имеют вид
(А + Ц аМ {la + ЧР f SY) g °
z oy
и задача сводится к исследованию решений системы линейных
однородных алгебраических уравнений, где неизвестным пока
является и множитель А,. Исследование можно проводить различ-
различными способами.
Умножая первое уравнение на —-—, второе на —-—, третье
A --f- X В -(- Я.
на —-— и складывая, получим
С -j- л
(а)
Кроме того, разделив уравнения соответственно на ?, п и ^, будем
иметь
Умножая первое уравнение на а, второе на Р, третье на у и склады-
складывая, получим
Ла2 + ЯР2 + CY2 + >" — М (|а f лР + Cy) = 0- (с)
Заметим, что величина
la -f- rip + 5y = 8
377
обращается в нуль только тогда, когда прямая I и отрезок
00' ортогональны, а потому из равенства (а) в общем случае
будем иметь
А + Х
,
Mr?
MZ?
В + Х
С+Х
или, рассматривая левую часть как функцию Я, получим урав-
уравнение
Левая часть этого уравнения представляет собой полином третьей
степени относительно Я, три корня которого зависят от координат
|, ц, ? точки О'. Пусть А~>В>С, тогда при Я->-±оо имеем
/(Я)-*—1. При Я<—А полином f(X) остается отрицательным, не-
неограниченно возрастая по модулю при Я-v—А. При переходе Я
через значение Я=—Л полином /(Я) меняет знак и при Я, удовлет-
удовлетворяющем условию
_Л<Я< — В,
неограниченно возрастает по модулю, когда Я стремится к —А или
к —В. В последнем случае /(Я) становится отрицательным, т. е. на
интервале (•—А, —В) полином /(Я)
имеет по меньшей мере один действи-
действительный корень (рис. 210). Проводя
аналогичные рассуждения, заметим,
что полином /(Я) имеет по меньшей
мере один вещественный корень на
интервале {—В, —С). Если Я>—С, то
при А.-*—С полином принимает не-
неограниченно большое положительное
значение, а при Я-*-+оо становится
отрицательным, т. е. имеется хотя бы
один действительный корень на интер-
интервале (—С, +°°). Подводя итог, мож-
можно сказать, что полином /(Я) имеет три вещественных корня
Яь Яг, Я3.
При Я=Я[ уравнение '/(!, ц, ?)=0 представляет поверхность
эллипсоида, при Я=Яг — поверхность однополостного гиперболои-
гиперболоида, при Я=Я3 — поверхность двухполостного гиперболоида.
Каждому корню Я3- сооответствуют три действительных числа
«i, |3г, Yi> определяющих направление главной оси инерции. Пока-
Покажем, что эти главные направления ортогональны. Пусть значению
корня Xi соответствуют косинусы at, p\-, у,-, а значению корня Я^ —
косинусы аи, $и, уи. Угол между двумя направлениями определится
из соотношения
-А
_3\"^ "'А ^
Рис- 219
378
ia* + PiPfe + Y/Yfe = кмь I 1
4-
(C + A,) (C + Aft
Ho
1 /1 1 \ 1
вследствие чего правая часть пребразуется к виду
1 1
A + Ki A + Xk/'KB+Xi B + X,
, »( I 1 \]_ ЪЩ Г S2 ¦
С + Я,- С + Хк ) J АА - А; [ Л +
В + А,"
' П I ^ 'у"».^ 1Л|Л 'ni^ ' ^) I 1
Это означает, что экстремальные направления для различных зна-
значений "кг взаимноортогональны. Итак, мы получили условия, опре-
определяющие направления главных осей инерции в произвольной
точке.
Определив направления главных осей инерции в точке О',
можно найти значения моментов инерции относительно главных
осей. На основании формулы (с) имеем
Г = Аа\ 4 Вр? + Су? - М (Ьы + Ф + Ш2 +
+ МA* + г]2 + ?*) = —*,, + Мг\
или
/' = Mr2 — \.
Если ввести обозначения
то функция / примет вид
f = _J
Каждому значению к = \ соответствует уравнение
?2 «2 YI
f = _J 1. _J3— + -Л 1 = о.
определяющее поверхность второго порядка в пространстве пере-
переменных Е, Ц, %,¦ При фиксированных значениях |, т), S это уравнение
379
имеет три действительных корня pi, так что точка О' (!-, х\, Z) ле-
лежит на пересечении трех поверхностей второго порядка. Величины
Pi, P2, рз можно принять за три криволинейные координаты точки,
определяемой декартовыми координатами %, т), ?. Всякой точке
будет соответствовать своя система значений этих координат. На-
Наоборот, придавая некоторые значения величинам pi, рг, рз, можно
определить положение точки. Это положение определяется неодно-
неоднозначно, потому что поверхности пересекаются не в одной, а в вось-
восьми точках. Координаты pi, рг, рз называются эллиптическими.
Пересечение поверхности f, с плоскостью Оху представляет
кривую второго порядка
% .+ у" = 1
&2 +
а2 + Pi
которая при р, = 0 обращается в эллипс, расстояние между фоку-
фокусами которого
2с = 4V& — & .
При pi>0 также будем иметь эллипсы с теми же фокусами. Если
Pi удовлетворяет неравенствам
то кривые вновь будут представлять эллипсы с теми же фокусами
(софокусные эллипсы). При pi, удовлетворяющем неравенствам
кривые являются гиперболами с фокусами, расположенными на
расстоянии
2с = 2W + Pl) + (-р,-6а) = 2 Va?-& ,
и совпадающими с фокусами эллипса. Кривые, фокусы которых-
совпадают, называются софокусными. Рассматривая различные се-
сечения, заметим совпадение их фокусов. Поэтому поверхности f,-
являются софокусными с эллипсоидом
называемым гирационным эллипсоидом.
Замечания. 1. Выберем в точке О систему прямоугольных
координатных осей Ох\, Хя, Хз и запишем уравнение поверхности
эллипсоида инерции для точки О в виде
1 Х1 "Н « 22-^2 ~\- J33^3 ' ^Jl2XlX2 ¦ь» 23-*-2-"-3 -b» 81^3% == ' >
где Jn = Jji. Величины /и, ^22, ^зз, J\2t Jn, J23 зависят как от поло-
положения точки О, так и от направления координатных осей хи х2, х%.
380
Если в точке О выбрать другую систему координатных осей Оу\,
г/2, уг, то уравнение поверхности эллипсоида инерции получит вид
причем величины /,-j выражаются через величины Jks 'по форму-
формулам _
Jii = 'ZaikajsJks, (a)
где ctis являются коэффициентами формул преобразования
У1 = Я «ife *fc.
Величины /j;- образуют матрицу
— Jn
1ЯХ,
A
— F
p
ht
-^32
— F
В
— D
•^23
«"ЗЗ
— E
— D
С
или, в других обозначениях,
00 =
Совокупность величин /jj, расположенных в виде матрицы (/) и
преобразующихся в величины 1ц по формулам (а), определяет
новую величину (/) называемую тензором инерции. Тензор
(/) представляет собой оператор, который, действуя на некоторый
вектор а, дает другой вектор Ь, проекции которого являются ли-
линейными функциями проекций вектора а, причем матрицей линей-
линейного преобразования является матрица (J), а вектор b называют
линейной вектор-функцией вектора а и обозначают в виде
Ь-=((У)а),
или в проекциях на оси координат будем иметь
2. В приложениях момент инерции твердого тела относительно
оси иногда обозначают в виде произведения J=Mk2> где М—масса
тела. Число k называют радиусом инерции тела.
Пример 112. Определить точки, для которых эллипсоид инерции пред-
представляет собой шар (такие точки называют шаровыми).
Поместим начало координат О в центре масс системы, а за направление
осей координат х, у, z выберем главные оси центрального эллипсоида инерции.
Координаты искомой точки О' обозначим через |, т), ?. Если точка О' шаровая,
то любые прямоугольные оси, проходящие через нее, будут главными осями
инерции. Проведем оси Х\, у\, Z\, параллельные осям х, у, z сооответственно.
Будем иметь
S mjfjZx = 0, 2 тг-уХг = 0,
= 0.
381
Новые и старые координаты связаны формулами преобразования:
* = ? + *i • # = л + #i • z = S + 2Х.
Переходя к координатам х, у, г, запишем условия:
2 тухгг = 2 т (у — г\) (г — ?) = 2 туг — 12 ту — г) 2 /иг + г)? 2 m = О,
-= 2 яг (г — ?) (х — I) = 2 тгх — ? 2 тг — ? 2 /их -«• К 2от = О,
= 2 т (х — I) (у — г\) = 2 тх# — тJш- g 2 my + gt] 2 m = 0.
Так как оси х, у, г — главные центральные оси инерции, то эти равенства будут
эквивалентны следующим:
Последние удовлетворяются, когда равны нулю какие-либо две из координат
\, i\, t. Пусть для определенности
т. е. точка О' лежит на оси г. Чтобы точка О' была шаровой, необходимо,
чтобы
Но
Таким образом, для определения | имеем
Отсюда видно, что А должно быть равно В, т. е. центральный эллипсоид инерции
должен быть эллипсоидом вращения около оси г. При выполнении этих условий
координата ? точки Oi определится равенством
М
Координата %, будет иметь действительное значение, если С^А, т. е. централь-
центральный эллипсоид инерции должен быть либо шаром, либо сжатым по оси г эллип-
эллипсоидом. В последнем случае шаровыми будут две точки оси г, симметрично
расположенные относительно центра масс.
§ 2. ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Задача о движении твердого тела вокруг неподвижной оси
рассматривалась еще Гюйгенсом при разработке его замечатель-
замечательной теории движения физического маятника.
Представим себе абсолютно твердое тело, у которого закреп-
закреплены две точки О и О' (рис. 220). Прямая 00', являющаяся
осью вращения тела, остается неизменной во все время дви-
движения тела как по отношению к самому телу, так и по отношению
к некоторой неподвижной системе координат Oxyz. Для опреде-
определенности выберем неподвижную систему координат с началом в
точке О, направив ось z вдоль оси вращения тела. Твердое тело
будем рассматривать как совокупность материальных точек с мас-
382
сами mv(xv, r/v, zv), на которые действуют активные силы с про-
проекциями Xv, Kv, Zv на оси координат. Твердое тело может совер-
совершать только вращательное движение вокруг неподвижной оси.
Обозначим через со угловую скорость вращения твердого тела.
Рис 220
Тогда проекции скоростей точек тела на неподвижные оси коорди-
координат определятся из матрицы
0 0
со
которая дает
dt
= — COI/v,
ЗГ
= COA'v,
~df
Q
Для определения движения тела достаточно иметь всего одно
уравнение движения, так как твердое тело имеет всего одну сте-
степень свободы. Связи же, наложенные на тело, допускают в каждый
момент времени его поворот вокруг неподвижной оси г. Следова-
Следовательно, можно применить теорему об изменении момента количе-
количества движения относительно оси г. Эта теорема приводит к урав-
уравнению движения
dKz A,
dt
где N — сумма моментов всех активных сил относительно оси z.
Если через / обозначить момент инерции тела относительно оси
вращения, то
К2 = М,
тогда
dt
¦ = N.
383
В технических задачах часто требуется определять величину
опорных реакций. Обозначим через R и R' силы реакций, прило-
приложенные в точках О и О'; а через h — расстояние между точками
О и О''. Реакции R и R' будут иметь проекции на оси координат
X, У, Z и Х\ У, Z'. Для определения сил реакций освободим си-
систему (твердое тело) от связей, заменив связи неизвестными си-
силами реакций R и к, действие которых эквивалентно действию
связей. После освобождения от связей появятся новые возможные
перемещения. В частности, будут возможны поступательные пере-
перемещения системы вдоль осей х, у, г и повороты системы вокруг
осей х и у. Это дает возможность применить теорему об изменении
количества движения и теорему об изменении момента количества
движения, откуда получим следующие уравнения:
—У,
dt jLJ'
d V4 I dz dy \
\ m I ,, v у v / hy'
at i_J \^ dt dt i
где Ь, М, Л' — суммы моментов активных сил относительно осей
х, у, г. Для определения шести неизвестных величин X, У, Z, X',
У, Z' имеем пять уравнений. Задача определения реакций остается
неразрешенной. В самом деле, реакции Z и Z' одновременно пре-
препятствуют поступательному перемещению системы вдоль оси z.
Именно эти реакции нельзя определить по отдельности, а можно
определить только их сумму. В этом заключается неопредели-
неопределимость задачи. Из кинематических уравнений для проекций ско-
скорости получим реакции действительных ускорений точек тела:
dd)
at ^
Подставляя эти значения в уравнения движения, будем иметь
-со* ? ад J-? щУч = ?XV + X + X',
со2 V mvyv2v — У] mvXv^ = L — hY',
384
= 7И -1- ЛЛ".
Для определения четырех неизвестных X, У, X', Y' имеем четыре
уравнения. Левые части этих уравнений являются известными
функциями времени, поскольку движение системы, а следователь-
следовательно, и закон изменения параметров системы, определяется из урав-
уравнения движения
dt
Если выполняются условия
Б /nv#v == 2 mvyv = 0, Б mvxvzv -= Б m^yvzv = 0,
т. е. центр масс лежит на оси г, являющейся главной цен-
центральной осью инерции, то левые части уравнений тожде-
тождественно равны нулю и тогда реакции определяются, как в ста-
статике.
Если ось z не является главной центральной осью инерции,
то при движении твердого тела в левой части первых двух урав-
уравнений будут существовать отличные от нуля коэффициенты при ш2.
При больших значениях со эти коэффициенты представляют боль-
большие величины, следовательно и реакции тоже велики. Чтобы из-
избежать больших реакций, ось вращения направляют по главной
оси центрального эллипсоида инерции.
В частном случае, когда на твердое тело действуют активные
силы, приводящиеся к равнодействующей, проходящей через точку
О, уравнения движения дают
J —— = о, откуда со = const,
dt
и твердое тело будет вращаться вокруг оси z с постоянной угловой
скоростью. Рассмотрим в этом случае условия, при которых реак-
реакция в точке О' обращается в нуль. Как видно из последних двух
уравнений, это имеет место, если
со2 2 mvzvyv = 0 и — со2 S mvzvxv = 0,
т. е. ось г должна быть главной осью инерции для точки О. При
выполнении указанных условий твердое тело будет вращаться во-
вокруг оси z с постоянной угловой скоростью, не оказывая давления
на вторую закрепленную точку. Такие оси называют постоян-
постоянными, или перманентными, осями вращения твердого тела.
Предположим, что на твердое тело не действуют активные
силы. Определим условия, при которых обе опорные реакции рав-
равны нулю. Условия эти следуют из уравнений движения и имеют
вид
= Б ffiyj/v = Б т^х^гч = Б пцу^ = 0,
Е Н Березкии 385
откуда следует, что ось z должна быть главной осью инерции и на
ней должен находиться центр тяжести твердого тела. Такая ось
является главной осью центрального эллипсоида инерции. Оси,
при вращении вокруг которых твердое тело, на которое не дей-
действуют внешние силы, не оказывает давления на закрепленные
точки этой оси, называются свободными, или естествен-
естественными, осями. Нетрудно заметить, что три перманентные оси
можно всегда найти для каждой точки твердого тела. Такими ося-
осями являются главные оси инерции для соответствующих точек
твердого тела. Свободных осей у твердого тела только три — глав-
главные центральные оси инерции.
Пример 113. Однородный тонкий диск радиуса R и веса Р вращаетея
вокруг вертикальной оси г с постоянной угловой скоростью ш. Расстояние цент-
центра тяжести диска от оси вращения равно а. Ось симметрии диска образует с
осью z угол а. Найдем реакции опор, предполагая, что расстояние между опо-
опорами равно 2/ (рис. 221)
Пусть в некоторый момент времени вертикальная плоскость симметрии
диска совпадает с плоскостью уОг Освободим точки О и Oi от связей и введем
реакции R(X, F, Z) и R'(X', Y', Z'). К освобожденному твердому телу приме-
применим теорему о движении центра масс. Заметим, что центр масс диска совер-
совершает вращательное движение по горизонтальной окружности вокруг оси г с по-
постоянной угловой скоростью со. Тогда вектор ускорения центра масс будет
расположен в плоскости уОг и направлен к оси вращения Величина его равна
/с = со2 a cos a.
Из теоремы о движении центра масс имеем
y + y, 0-= Z + Z'— Р.
Для получения недостающих уравнений применим теорему об изменении момен-
момента количества движения относительно осей х и у. Проекции момента количе-
количества движения на соответствующие оси имеют вид
Кх = Sm^(yvz'w—z^y'v) -= — 2 /nvzv^ =
Ку = 2 mv (zv xv - x^z'v) = Smv!,^=
Дифференцируя их, получим
со2 2 т^ zv у^ = Mga cos a — 2Y'l,
Для полного решения задачи необходимо вычислить соответствующие произве-
произведения инерции. Выберем в качестве новых координатных осей xit yu Z\ — цен-
центральные оси инерции диска, направив ось 2] по оси симметрии диска, а ось j/i
в вертикальной плоскости симметрии диска перпендикулярно к оси Z\. Коорди-
Координаты х, у, z и х\, у\, Z\ связаны простыми формулами преобразования (в рас-
рассматриваемый момент времени):
х = xi» У = У\ cos a — zx sin a — a cos a,
z = yt sin of-f zx cos a — a sin a + I.
Для тонкого диска 2i=0, так что
х = xlt y = y1cosa — a cos a, z=i/1sina — asm a-{-I.
386
Тогда произведения инерции примут вид
2 mv zv yv = 2 mv (j/, v sin a — a sin a + 2) (j/^ cos a — a cos a) =
= sin a cos a 2 m^ y\^ -\- Ma2 sin a cos a — Mia cos a,
где
9 MR2
sina — a sin a -f-
= sin a 2 mv *
a sin a 2
/2/«,.vIv-0.
Рис 221
Рис. 222
Подставляя эти значения в формулы для определения реакций, будем иметь
со2 ( sin a cos a -f Ma2 sin a cos a — Mia cosa ] = Mga cos a — IY'1, 0 --¦ X'.
\ 4 I
При a = 0
При а = О
a
__
У = — со2
8/
sin a cos a.
После того как определены реакции X' и У, реакции X и Y определяются сразу
из теоремы о движении центра масс:
Физический маятник. Физическим маятником называют тяже-
тяжелое твердое тело, которое может свободно вращаться вокруг го-
горизонтальной оси. Положение такого твердого тела определяется
13*
387
углом ft, который образует плоскость, проходящая через ось вра-
вращения и центр тяжести, с вертикалью (рис. 222). Обозначим мо-
момент инерции твердого тела относительно оси вращения через /г,
массу тела через М и пусть
J, = Ш2,
где k — радиус инерции маятника относительно оси вращения.
Связи допускают поворот твердого тела вокруг горизонтальной
оси, поэтому можно применить теорему об изменении момента ко-
количества движения относительно оси z
dt2
ИЛИ
Полученное уравнение подобно по своей структуре уравнению
движения математического маятника
dt* V
Физический и математический маятники будут совершать колеба-
колебания с одним и тем же периодом, если выполняется условие
г-if-.
Величина /' называется приведенной длиной физического
маятника. Построим на линии OG точку О' таким образом, чтобы
имело место условие
00' =1'.
Эту точку будем называть точкой качания (центром качания)
физического маятника. Обозначим момент инерции твердого тела
относительно оси, проходящей через центр масс и параллельной
оси z, через Мр2, число р назовем центральным радиусом инерции.
По теореме Гюйгенса — Штейнера будем иметь
= Мр2 + ЛИ»,
откуда
& = р2 -f l\
Подставляя это значение в формулу для приведенной длины фи-
физического маятника, получим
г = Л = _?!
388
Отсюда видно, что /' всегда больше, чем I, т. е. точка подвеса и
центр качания расположены по разные стороны от центра тяжести
твердого тела. Последнее условие можно переписать в виде
(Г-/)/^р2,
или
(WG -Щ = р2.
Полученная формула симметрична относительно точек О и О', а
это значит, что последние можно поменять местами, т. е. при под-
подвешивании маятника за точку О' период останется прежним. При
этом приведенная длина для точки О' будет иметь вид
/ + (//) / + /.
Отсюда непосредственно следует теорема Гюйгенса.
Теорема Гюйгенса. Точка подвеса физического маят-
маятника и центр качания суть точки взаимные. Если центр кача-
качания принять за точку подвеса, то прежняя точка подвеса будет
центром качания. Период колебания маятника при этом не изме-
изменяется.
В формуле для приведенной длины физического маятника ве-
величина /' меняется в зависимости от положения точки подвеса
маятника:
Следовательно, точки подвеса маятника, равноудаленные от центра
тяжести, имеют одну и ту же приведенную длину, т. е. геомет-
геометрическое место точек подвеса, обладающих одной и той же при-
приведенной длиной (а следовательно, и одним периодом), суть две
концентрических окружности с центром в центре тяжести
(рис. 223). Между этими окружностями расположена окружность
радиуса р (что следует из соотношения (/'—0^=Р2)- На прямой
00' получим таким же образом четыре взаимные точки О, В, О',
А, относительно которых маятник будет колебаться с одним пе-
периодом. Приведенной же длиной, очевидно, будет расстояние ООГ
или BAt т. е.
V = 00' = ВА.
Обстоятельство это используется в оборотном маятнике Катера '.
Маятник состоит из двух шаров с разными массами. Между ша-
шарами на стержне укреплены два ножа, являющиеся точками под-
подвеса маятника. Один из этих ножей неподвижен, другой может
1 Английский капитан Г. Катер A777—1835) впервые в 1818 г. применил
оборотный маятник, описанный тюбенгенским профессором Боненбергером
A765—1831) в 1811 г, для определения ускорения силы тяжести.
389
перемещаться (рис. 224). Сначала за точку подвеса принимают
один нож и определяют период колебаний Т, затем заставляют
маятник качаться на втором ноже и, передвигая его, находят точ-
точку с тем же периодом. Измерив длину АВ, определяют приведен-
приведенную длину /'. Тогда из формулы
определяют ускорение силы тяжести
4л2/'
При определении приведенной длины физического маятника необ-
необходимо помнить, что расстояния точек О и О' до центра тяжести
маятника не совпадают, если Ой
Рис 223
Рис. 224
Рассмотрим теперь свойства физического маятника при подве-
подвешивании его за точки, расположенные на большей и меньшей
окружностях. Для точек внешней окружности />р. Твердое тело в
этом случае называют маятником. Для точек внутренней окруж-
окружности /<р, и твердое тело в этом случае называют коромыслом.
Рассматривая производную
dl'
dl
== 1
получим для маятника
dl'
для коромысла
dl'
<0. При
dt dl
приближении центра масс к точке подвеса маятника /' уменьшает-
уменьшается вместе с /, а следовательно, уменьшается и период маятника.
Для коромысла приближение центра масс к точке подвеса увели-
увеличивает период, т. е. коромысло будет качаться медленнее. (Это
обстоятельство в свое время было замечено при наблюдении за
390
часами Лондонского Вестминстерского аббатства, которые отста-
отставали. При уменьшении I часы сначала стали ходить быстрее. При
дальнейшем уменьшении / часы стали замедлять свой ход.)
Задача о движении физического маятника является историче-
исторически первой разрешенной задачей динамики системы. Интерес к
этой задаче возник в связи с вопросом об усовершенствовании
часов и связан в первую очередь с именем Гюйгенса, хотя еще
Галилей предлагал использовать маятник в качестве регулятора
хода часов.
§ 3. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА, ИМЕЮЩЕГО ОДНУ
НЕПОДВИЖНУЮ ТОЧКУ
1. Основные динамические характеристики. Будем рассмат-
рассматривать твердое тело, у которого закреплена неподвижно одна
точка. Определим сначала живую силу и мо-
момент количества движения такого тела. Для
этого выберем неподвижную систему коор-
координат OiX^yiZi с началом О\ в неподвижной
точке. Мгновенное движение твердого тела,
имеющего одну неподвижную точку, опреде-
определяется вектором мгновенной угловой скоро-
скорости ?2, линия действия которого проходит
через неподвижную точку О\. Свяжем с
твердым телом систему подвижных осей
О^хуг (рис. 225), движущуюся вместе с те-
телом. Проекции вектора U на подвижные
оси хуг обозначим через р, q, r. Скорость
произвольной точки М твердого тела определяется по формуле
Эйлера
vv = [2, OMV],
а проекции скорости на подвижные оси — матрицей
Рис. 225
Р Я
г
так что
Vv]x = qzv ~ryv, vvy= rxv — p2v, vvz = pyv — qxv.
Живая сила твердого тела. Из определения живой силы имеем
Т ^
= S -^L l(qzw - гуч)* -| (rxv -
- qxvf].
Правая часть этой формулы представляет собой однородную квад-
квадратичную форму относительно величин р, q, r и может быть запи-
записана в виде
391
T = — (Ар2 + Bq2 + Cr* — 2Dqr — 2Erp — 2Fpq),
где коэффициенты А, В, С, D, E, F имеют вид
D — 2 /nvyv2v. ? = 2т„ед, F = 2 mvxw
и представляют собой моменты инерции относительно подвижных
осей координат и произведения инерции. Все эти величины не изме-
изменяются при движении твердого тела.
Момент количества движения. По определению, момент коли-
количества движения твердого тела относительно начала координат яв-
является вектором, равным сумме моментов количества движения
точек твердого тела
сг = S mv [rv vvj.
Для проекций этого вектора на оси координат будем иметь
-^ 2/7ZV [r/v(рУм — qxv) — zv(rxv — pz^)],
= Б tnv [zv (qzv — ry^) — xv (py^ — qxv)],
o2 = S mv (xvvvy — yvvvx) = S mv [xv (rxv — pzv) — yv (^zv — Щ)],
или
(yl + z%) — q Б mvxvyv — r S mvxvzv =
ApFqEr ,
dp
о у = — p Б mvxvyv + ^ S /nv Bv -r *v) — r
ог = — р Б mvxvZM — q 2 г,
дг
Таким образом,
dp dq дг
Последние формулы можно записать в виде
откуда видно, что момент количества движения является линейной
вектор функцией угловой скорости Q (здесь (J) тензор инерции, по-
построенный для точки Oi твердого тела).
392
Некоторые свойства движения твердого тела с одной непо-
неподвижной точкой. Если рассмотреть поверхность эллипсоида инер-
инерции, построенного для неподвижной точки твердого тела, уравне-
уравнение которой в общем случае записывается в виде
/ = Ах* + By2 + Cz* — 2Dyz — 2Ezx — 2Fxy —1=0,
то вектор мгновенной угловой скорости Й будет пересекать эту
поверхность в некоторой точке Р(х, у, z) (рис. 226), и в силу кол-
коллинеарности векторов Q и ОР будем иметь
X Ц Z
' • Л,
р q r
где р, q, г — проекции вектора Q на оси х, у, z, неизменно связан-
связанные с твердым телом. В точке Р построим вектор нормали к по-
Рис. 226
Рис. 227
верхности эллипсоида, компоненты пх, пу, пг которого будут про-
пропорциональны частным производным
_ df _ df df
дх у ду dz
где а — некоторый коэффициент пропорциональности. Подставляя
сюда значения частных производных, будем иметь
пх = 2а (Ах — Ег — Fy) = 2а% (Ар — Er —Fq) = 2ахал,
п„ = 2а (— Fx + By — Dz) = 2ак (— Fp + Bq — Dr) = 2ака„,
лг = 2а (— ?л: — Dy + Cz) = 2ах (— ?/? — D^ + Cr) = 2сха2.'
Последние равенства являются условием параллельности векторов
а и п, а следовательно, вектор а будет всегда ортогонален к пло-
плоскости, касающейся эллипсоида инерции в точке Р.
2. Уравнения движения твердого тела с одной неподвижной
точкой. Будем определять движение твердого тела, у которого за-
393
креплена одна точка О, относительно неподвижной системы осей
OxiyiZi. С твердым телом свяжем жестко подвижную систему осей
Oxyz. Тогда движение твердого тела полностью будет определять-
определяться движением системы Oxyz. Положение твердого тела относи-
относительно неподвижной системы осей можно определить углами
Эйлера ф, г|) и Ф (рис. 227), а скорости изменения углов ср, г|з и ®
представить векторами <р', т|/> *'. перпендикулярными плоскостям
соответствующих углов Эйлера и направленными в ту сторону, от-
откуда положительное вращение видно происходящим против хода
часовой стрелки.
Кинематические уравнения Эйлера. Мгновенное движение
твердого тела определяется тремя мгновенными вращениями со
скоростями <р', а|/ и й'. Поэтому вектор мгновенной угловой скоро-
скорости to можно представить в виде суммы
Обозначая, как и раньше, через р, q и г проекции вектора ш на
оси х, у, z и проектируя векторы <р', a|/ и й' на эти же оси, получим
р = ij/ sin ¦& sin ф -f- Ф' cos ф, q — -ty' sin ® cos ф — Ф' sin ф
Г -= ф' + ^' COS ft.
Эти уравнения называют кинематическими уравнениями Эйлера.
Динамические уравнения Эйлера. Будем предполагать, что на
точки твердого тела действуют активные силы с проекциями на
подвижные оси координат Xv, Fv, Zv, a L, M, N — проекции на
те же оси результирующего момента системы сил относительно
начала координат. Пусть а(ах, ov, az)—вектор момента количе-
количества движения твердого тела относительно начала координат.
Связи, наложенные на твердое тело, допускают в каждый мо-
момент времени поворот твердого тела вокруг любой неподвижной
оси, проходящей через неподвижную точку О. Следовательно, мож-
можно применить теорему об изменении момента количества движения
относительно неподвижной точки О, из которой следует, что ско-
скорость конца вектора момента количества движения о равна сумме
моментов всех внешних активных сил относительно этой неподвиж-
неподвижной точки О, т. е.
da
dt °
Абсолютная скорость движения конца вектора о может быть пред-
представлена как сумма относительной (по отношению к подвижной
системе осей Oxyz) и переносной скоростей. Обозначим через
dax dtjy d<3z
Ш ' dt ' dt
проекции на оси х, у, z относительной скорости конца вектора сг
¦и. определим переносную скорость Vga как скорость той точки по-
394
движной системы координат, с которой в данный момент времени
совпадает конец вектора а. Тогда
а проекции переносной скорости определяются из матрицы
oyej
Уравнения, определяющие изменение вектора момента количества
движения твердого тела относительно неподвижных осей х\, у\, Z\
в проекциях на подвижные оси координат, получают вид
^L + qaz-mu=,L, JZjL + rox- paz = M,
где L, M, N — проекции вектора m0 на подвижные оси х, у, z—
представляют собой суммы моментов активных сил относительно
подвижных осей х, у, z соответственно. Уравнения эти можно запи-
записать в векторном виде
-|- л- [Q, с] = т0.
Полученные уравнения являются общими уравнениями движе-
движения твердого тела, имеющего одну неподвижную точку. Если же
за подвижные оси координат х, у, z выбрать главные оси инерции
для точки О, то для живой силы твердого тела получим выра-
выражение
2Т = Ар2 + Bq* -f Cr2,
где А, В, С—моменты инерции твердого тела относительно глав-
главных осей эллипсоида инерции; р, q, г — проекции мгновенной угло-
угловой скорости вращения твердого тела на эти оси. Для проекций
вектора момента количества движения а на оси х, у, z получим
теперь значения
Подставляя эти значения в полученные выше уравнения движения
твердого тела, получим динамические уравнения Эйлера
Эти уравнения были получены впервые Л. Эйлером в 1758 г.
395
Применение осей, движущихся в пространстве и в теле. В не-
некоторых случаях удобно рассматривать движение твердого тела,
применяя уравнения движения в проекциях на оси координат, дви-
движущиеся независимо от движения твердого тела. Такие оси приме-
применяли Пюизе в теории движения Земли, Резаль в баллистике,
А. Н. Крылов и Б. В. Булгаков в теории гироскопов.
Будем рассматривать твердое тело с неподвижной точкой О,
которое совершает движение относительно неподвижной системы
координат OxiyiZu Пусть некоторая подвижная система координат
Oxyz совершает самостоятельное движение, вообще не связанное
с движением твердого тела, с мгновенной угловой скоростью О,,
изменяющейся с течением времени по величине и по направлению.
Мгновенную угловую скорость вращения твердого тела обозначим
через «о (рис. 228), а ее проекции на оси х, у, z через р, q, r. Пусть
Р, Q, R — проекции вектора Й на те же оси, a L, M, N, как и преж-
прежде, обозначают проекции вектора гп0 на оси х, у, z. Для живой
силы твердого тела будем иметь значение
IT = Ар2 -f Bq2 4 Cr2 — 2Dqr — 2Erp — 2Fpq.
Однако величины А, В, С, D, E и F теперь уже могут быть не
постоянными по величине и вообще будут меняться при движении
твердого тела относительно осей х, у, г. Для проекций вектора мо-
момента количества движения ст на оси х, у, z получим выражения
При составлении уравнений движения твердого тела восполь-
воспользуемся снова теоремой об изменении момента количества движе-
движения. Для проекций относительной скорости конца вектора а будем
иметь значения doxjdtt day/dt, daz/dt. Проекции же переносной ско-
скорости определятся из матрицы
Р Q R
после чего нетрудно записать уравнения движения:
dt
Полученные уравнения по внешнему виду совпадают с обоб-
обобщенными уравнениями Эйлера, когда подвижные оси жестко свя-
связаны с твердым телом. Но в рассматриваемом случае подвижные
396
оси могут двигаться независимо от твердого тела, а величины
Р, Q, R являются проекциями на подвижные оси мгновенной угло-
угловой скорости Q движения подвижной системы координат, в то
время как ах, ау, az — проекции на эти же оси вектора момента
количества движения твердого тела ст. Если тело симметрично и
за подвижную ось z выбрать ось симметрии твердого тела, ось х
направить по линии узлов, а ось у перпендикулярно к этим двум
осям так, чтобы оси х, у, z представляли собой правую тройку, то
уравнения принимают весьма компактный вид, а оси называются
Рис. 228
Рис. 229
осями Резал я. Для симметричного твердого тела оси Резаля
являются главными осями инерции, поэтому живая сила твердого
тела получит вид
Проекции же вектора момента количества движения на оси х, у, z
будут
дТ . дТ л дТ
где
p = d', q = ty' sin¦&, г = ty'
Для проекций вектора Q будем иметь
Подставляя эти значения в уравнения движения, будем иметь
Л-J- + q(Cr-Aq<Agb) = L, А-%- -р(Сг - AqctgО) = М,
dt at
dt
N.
397
В дальнейшем эти уравнения будем называть уравнениями
движения симметричного тела в осях Реза л я.
Вместо углов Эйлера иногда бывает удобно ввести другие
параметры, определяющие положение твердого тела, например
углы Рез а ля а, [3, <р, определяющиеся формулами
Углы эти оказываются удобными, когда ось симметрии остается
вблизи некоторого неподвижного направления (неподвижной оси
У\), Обозначая ось симметрии через z, а отрицательное направле-
направление линии узлов через у и выбирая ось х так, чтобы оси х, у, z
составляли бы правую тройку, будем иметь
p = a'cosp\ q = §', r= a'sinp + ф'= ptgP+ ф'
(рис. 229). Угловая скорость вращения системы осей будет иметь
проекции
и уравнения движения симметричного тела в уг-
углах Резаля получат вид
CN.
dt
Замечание о выводе уравнений Эйлера при помощи уравнений
Лагранжа второго рода. При выводе уравнений движения с по-
помощью уравнений Лагранжа второго рода необходимо сначала
выбрать обобщенные координаты, определяющие положение твер-
твердого тела. В качестве таких координат можно, например, принять
углы Эйлера, через которые могут быть выражены декартовы ко-
координаты всех точек твердого тела. В главных осях живая сила
твердого тела имеет вид
Т = -L (Ар' + Bq* + Сг*),
где величины р, q и г выражаются через углы Эйлера и их про-
производные при помощи кинематических уравнений Эйлера:
р = гр'зтдзщф + ¦в'совф, q = if' sindcosф —
г = ф' + if' cos Ф.
Выпишем сначала уравнение Лагранжа для координаты ф, харак-
характеризующей вращение твердого тела вокруг оси z. Будем иметь
JLJL — JH-— О
dt <3q>' dtp ~~
398
здесь
дТ _ _дТ_ _дг_
бф' дг <5ф'
Подстановка этих значений в уравнение Лагранжа приводит сразу
к уравнению Эйлера
C^~(A-B)pq = N. (a)
Два других уравнения Эйлера не могут быть непосредственно по-
получены применением уравнений Лагранжа, поскольку параметры
•ф и О не соответствуют вращению твердого тела вокруг подвиж-
подвижных осей х и у. Эти уравнения легко могут быть получены из
уравнения (а) циклической подстановкой. Изменяя наименования
ох;ей, переименуем ось х на у, у на г и т. п. При этом должны быть
изменены обозначения моментов инерции и проекций мгновенной
угловой скорости:
Движение же твердого тела не зависит от того, как мы обозначим
оси, а уравнения при изменении осей получаются другими. Выпол-
Выполняя указанную циклическую подстановку, получим еще два урав-
уравнения Эйлера:
A{B
§ 4. ДВИЖЕНИЕ ТЯЖЕЛОГО ТВЕРДОГО ТЕЛА
ОКОЛО НЕПОДВИЖНОЙ ТОЧКИ
Задача о движении тяжелого твердого тела около неподвиж-
неподвижной точки издавна привлекала внимание всех крупных механиков
и математиков. Эйлер в 1758 г. впервые рассмотрел решение этой
задачи для случая, когда центр масс совпадает с неподвижной
точкой. В 1788 г. Лагранжем был исследован другой случай дви-
движения тяжелого твердого тела, когда эллипсоид инерции, постро-
построенный для неподвижной точки, является эллипсоидом вращения,
а центр масс твердого тела находится на оси симметрии этого
эллипсоида. После открытия Лагранжа в течение целого столетия,
несмотря на усилия многочисленных ученых, в том числе таких
крупных математиков, как Пуассон, Якоби, Пуансо, не было полу-
получено новых существенных результатов. В 1886 г. Парижская ака-
академия наук объявила конкурс на соискание премии Бордена за
лучшее сочинение на тему о движении твердого тела около не-
неподвижной точки. Эту премию получила С. В. Ковалевская, пред-
399
ставившая в 1888 г. свой мемуар, посвященный решению этой
задачи. В случае, рассмотренном С. В. Ковалевской, эллипсоид
инерции, построенный для неподвижной точки, является эллипсои-
эллипсоидом вращения, причем моменты инерции относительно главных
осей удовлетворяют соотношению
А = В = 2С,
а центр тяжести твердого тела находится в экваториальной пло-
плоскости этого эллипсоида.
После работы С. В. Ковалевской появился ряд исследований
русских ученых Г. Г. Аппельрота, Д. К. Бобылева, Д. Н. Горячева,
Н. Б. Делоне, Н. Е. Жуковского, Г. В. Колосова, А. М. Ляпунова,
Б. К. Млодзеевского, П. А. Некрасова, В. А. Стеклова, С. А. Чап-
Чаплыгина и других и работы иностранных ученых Гесса, Лиувилля,
Леви-Чивита, Хюссона и др. В этих исследованиях либо изучались
частные решения задачи о движении тяжелого твердого тела, либо
развивались новые идеи, начало которым было положено исследо-
исследованиями С. В. Ковалевской.
1. Постановка задачи. Рассмотрим задачу определения движе-
движения твердого тела с одной неподвижной точкой, предполагая, что
на тело действует только сила тяжести. Движение такого тела
будем изучать относительно системы отсчета Охху\ги жестко свя-
связанной с Землей, выбрав ее начало в неподвижной точке О и на-
направив ось Z\ вертикально вверх. Такая система, вообще говоря,
не является инерциальной, и в строгой постановке при изучении
движения твердого тела необходимо учитывать кроме силы тяже-
тяжести еще и влияние на тело сил инерции от кориолисова ускорения.
В упрощенной идеализированной постановке предполагается, что
в системе Ox\\)\Z\ на твердое тело действуют только силы тяжести.
Движение тела будет определяться динамическими уравнениями
Эйлера
-^L + (А-С) рг = ту>
+ ,С„à Ȅ В
С + (ВА)рд = тг>
в которых правые части представляют собой проекции момента си-
силы тяжести относительно неподвижной точки на оси Oxyz, неиз-
неизменно связанные с твердым телом и направленные по главным
осям эллипсоида инерции, построенного для точки О.
Если обозначить проекции единичного вектора е3, направлен-
направленного вдоль неподвижной оси zb на оси х, у, z через у\, у2, 7з. то
проекции момента силы тяжести на эти оси определятся из мат-
матрицы
1хс Ус zc
400
где хс, ус, %с — координаты центра тяжести твердого тела относи-
относительно осей Oxyz, a P — модуль силы тяжести, так что
= — Р (zfcYi — хс у3),
— усЪ)-
Динамические уравнения Эйлера запишутся теперь в виде
-C)pr = -P (zcYl - хсУз), (а)
С -^- + (В - A) pq = - Р (хсу, - </cYl).
Полученные уравнения определяют движение тяжелого твер-
твердого тела с одной неподвижной точкой. Они содержат шесть не-
неизвестных величин р, q, г, уь Y2> "Уз> которые могут быть выражены
через три угла Эйлера ср, if, ft и производные от этих величин. Пер-
Первые три неизвестные величины непосредственно определяются кине-
кинематическими уравнениями Эйлера:
р = i|/ sin ft sin ф -f $' cos ф, q = я|/ sin ft cos ф — ft' sin ф,
Г = ф' + if COS'S1,
а направляющие косинусы Yi> Ya> Y3 — СУТЬ коэффициенты при if' в;
этих уравнениях:
Yx = sin О sin ф, y2 = sin ft cos ф, Y3 = C0S1^-
После подстановки этих значений в динамические уравнения
Эйлера получим систему трех дифференциальных уравнений вто-
второго порядка относительно неизвестных величин ф, if, ft, и задача
сведется к интегрированию этих уравнений.
Иногда удобнее рассматривать систему уравнений в перемен-
переменных р, q, r, yi, Y2» Y3> в которых уравнения получают симметричную-
форму. Но тогда для полноты системы необходимо иметь еще три
уравнения. Последние следуют из самого определения величин
Yi> Y2> Тз и были получены Пуассоном. Для получения этих уравне-
уравнений заметим, что вектор е3 не меняется в системе Ох\у\гх ни по-
величине, ни по направлению, так что абсолютная скорость va кон-
конца вектора е3 равна нулю, т. е.
V" IT =
Принимая за подвижную систему отсчета систему Oxyz и приме-
применяя теорему о сложении скоростей для проекций относительной.
скорости конца вектора е3, получим значения
401
y
dt ' dl ' dt
(здесь производные берутся в системе Oxyz). Проекции перенос-
переносной скорости определятся из матрицы
j р q r
I Yi Y2 Ys
как проекции скорости той точки подвижной системы, которая в
данный момент совпадает с концом вектора е3. Из условия равен-
равенства нулю абсолютной скорости конца вектора е3 будем иметь
07Y, - Т2) = 0. -^_ + (rYl - рЪ) = 0,
^ 0- (b)
Эти уравнения называются уравнениями Пуассона. Дина-
Динамические уравнения Эйлера вместе с уравнениями Пуассона пред-
представляют полную систему дифференциальных уравнений движения
твердого тела, и задача определения движения твердого тела сво-
сводится к интегрированию этой системы дифференциальных урав-
уравнений.
2. Интегрирование уравнений движения тяжелого твердого
тела. Первые интегралы уравнений движения. Система уравнений
(а) и (Ь), определяющих движение твердого тела с одной непо-
неподвижной точкой под действием силы тяжести, представляет собой
систему шести нелинейных дифференциальных уравнений первого
порядка с постоянными коэффициентами относительно шести не-
неизвестных функций времени р, q, r, yi, Y2> уз- После того, как ве-
величины р, q, r, yi, Y2. Y3 будут найдены в функции времени, для
определения углов Эйлера <р, ip, ft останется подставить найденные
величины в кинематические уравнения Эйлера. Поэтому задача
определения движения твердого тела сводится к нахождению ше-
шести независимых первых интегралов системы.
Для отыскания указанных первых интегралов воспользуемся
сначала некоторыми общими свойствами движения твердого тела.
Заметим, что связи, наложенные на твердое тело, таковы, что дей-
действительное перемещение твердого тела находится среди его воз-
возможных перемещений. Это обстоятельство дает возможность при-
применить теорему живых сил. Действующая же на твердое тело сила
тяжести обладает силовой функцией, поэтому из теоремы живых
сил сразу следует первый интеграл — интеграл живых сил
После подстановки значений Г и (У он принимает вид
-i- (Ар* + В<?2 + Сг*) = — Рг1С + h, (с)
402
где
Чс = хсУх +- УсЪ +
Следующий первый интеграл найдем, заметив, что среди воз-
возможных перемещений твердого тела имеется поворот вокруг не-
неподвижной вертикальной оси гь что дает возможность применить
теорему об изменении момента количества движения относительно
этой оси. Активная сила — сила тяжести параллельна оси г; и не
дает момента относительно этой оси. Поэтому теорема дает первый
интеграл — закон сохранения момента количества
движения относительно оси zu или интеграл пло-
площадей
oZl = consi,
или
Подставляя сюда значения ах, ау и а2, будем иметь
+ Cry3 = const. (d)
Здесь величины уь Y2> Y3 не могут быть выбраны произвольно, так
как они связаны условием
Y? + Y2 + Y3=l- (e>
Последнее уравнение называется тривиальным интегра-
интегралом.
Полученные здесь три первых интеграла уравнений движения
можно без труда вывести непосредственно из уравнений движения
(а) и (Ь). Умножая уравнения группы (а) соответственно на р, q
и г и складывая их, получим
at at at
+ (ZcYi — xc\s) q + (*cY2 — i/cYi) 4
Используя уравнения Пуассона, преобразуем последнее уравнение
к виду
r dt ' ^ dt dt
откуда сразу следует интеграл живых сил.
Умножая каждое из уравнений группы (а) соответственно на
Yi> Y2- Y3; a уравнения группы (Ь) на Ар, Bq, Cr и складывая полу-
полученные результаты, получим
Ау\ -\- By^ ~Ь ^Ya ~Ь ™Р — — ~Ь f$Q — Ь Сг —-— = О,
dt dt dt dt dt dt
403
откуда непосредственным интегрированием находим интеграл пло-
площадей.
Тривиальный интеграл получим, умножая каждое из уравне-
уравнений Пуассона соответственно на уь Y2. Уз и складывая. Будем
иметь
Yl dt 2 dt Г3 dt
оlкуда, интегрируя, получаем тривиальный интеграл.
Можно показать, что для полного интегрирования задачи о
движении тяжелого твердого тела около неподвижной точки доста-
достаточно найти четыре независимых первых интеграла. В самом деле,
¦систему шести дифференциальных уравнений, поскольку в них не
входит явно время, можно заменить эквивалентной системой пяти
уравнений
dp __ _dq_ __ dr _ rfyt __ dyt _ dy3 _ ^
P Q R ~ Г\ Г2 ~ Г3 ~ '
так как последнее интегрирование сводится к квадратуре
Теперь задача сводится к отысканию всего пяти первых интегра-
интегралов, три из которых, .как было показано, всегда существуют. Ос-
Остается найти еще два независимых первых интеграла. Можно,
однако, заметить, что функция Р не зависит явно от р, Q не зави-
зависит от q и т. д., так что
дР 3Q== dR _ dfj ^ дГа дГ3 Q
Q
dp dq dr ду1 ду2 dys
При этих условиях, как это доказывается в курсах дифференци-
дифференциальных уравнений, если известно четыре первых интеграла, то
пятый находится интегрированием обыкновенного дифференциаль-
дифференциального уравнения в полных дифференциалах. Пусть известно четы-
четыре первых интеграла:
/i(P. <7. r- Yi. Ya. Y3)=^i. к (P. 9. г, Yi, Ya. Yu) = сг>
/з(Р. 9. /". Yi- Ya. Y3) = C3> /4 (P- <7. ''. Yi. Ya> Y3) = C4-
Выберем новые переменные так, чтобы имели место равенства
Ух = Р. Уг= <7> ^з = /i (Р. Я> г, Yi, Ya- Ye).
У*-=к(Р> Я> r' Yi. Yt. Ys). y% = f*(p, q, r, Yi, Ya. Yd).
yu = fi{P> <?. '. Yi> Ye. Yd)-
404
После такой замены будем иметь
dya = dyt = dyb = dyb = О,
и задача сведется к интегрированию одного дифференциального
уравнения
dyi _ dy2
У г ~ Y2-
Интегрирующий множитель этого уравнения
,1=
d(h, h, h, U) '
d(r> Yi> Ya. Ya)
где М — последний множитель, обращающий в нуль выражение
d(MQ) , d(MR) д (Afrt) а (МГ2) a (AfГ3)
1 1 1 1
o д д
11111
dp dq or дух ду2 ду3
Таким множителем в рассматриваемом случае является
М= 1,
так как
JOL + М. + — 4- *h. + ^Гг + — = 0.
dp dq дг ' dyt ду.2 ду3
Если И (ух, у2) есть интеграл уравнения
то
откуда следует
и уравнение
является уравнением в полных дифференциалах, которое и дает
пятый первый интеграл. Этим задача интегрирования уравнений
движения тяжелого твердого тела оказывается полностью разре-
разрешенной. Она сводится к нахождению четвертого первого интеграла.
Найти его до настоящего времени удалось только в трех случаях:
1. Случай Эйлера — Пуансо. Здесь центр тяжести является
неподвижной точкой, а сумма моментов сил относительно непо-
неподвижной точки тождественно равна нулю.
405
2. Случай Лагранжа — Пуассона. Моменты инерции относи-
относительно главных осей удовлетворяют условиям А = ВфС, а центр
тяжести находится на оси симметрии эллипсоида инерции.
3. Случай С. В. Ковалевской. Моменты инерции относительно
главных осей удовлетворяют условиям А = В=2С, а центр тяжести
расположен в экваториальной плоскости эллипсоида инерции, так
что zc = 0.
Других общих случаев интегрирования задачи о движении тя-
тяжелого твердого тела с одной неподвижной точкой в настоящее
время неизвестно. Задачу удается проинтегрировать в ряде слу-
случаев, если наложить дополнительные ограничения на начальные
условия. Эти так называемые частные случаи задачи о дви-
движении тяжелого твердого тела с одной неподвижной точкой весьма
интересны, но в настоящем курсе рассматриваться не будут.
3. Случай Эйлера — Пуансо. Если тяжелое твердое тело имеет
в качестве неподвижной точки центр тяжести, то, предоставленное
самому себе без всякой начальной скорости, оно будет находиться
в равновесии при любых возможных положениях. Результирующий
момент внешних активных сил относительно неподвижной точки
будет все время равен нулю. Если в качестве координатных осей,
неизменно связанных с телом, выбрать главные оси инерции х, у, z
с началом в неподвижной точке твердого тела, то уравнения
Эйлера
будут представлять собой замкнутую систему трех дифференциаль-
дифференциальных уравнений первого порядка относительно трех неизвестных
функций р, q, r. Задача при этом сводится к нахождению трех
величин р, q, r в функции времени.
Аналитическое решение задачи. Для определенности будем
сначала предполагать, что моменты инерции относительно главных
осей удовлетворяют условиям
В рассматриваемом случае уравнения движения допускают два
первых интеграла: интеграл живых сил
Ар2 + Bq2 + Cr2 = h (a)
и интеграл момента количества движения
Но из теоремы об изменении момента количества движения, запи-
записанной в векторном виде
406
da =0,
dt
непосредственно следует
a = const,
т. е. вектор момента количества движения остается во все время
движения постоянным не только по величине, но и по направлению.
Введем новую произвольную постоянную D так, чтобы она
удовлетворяла условию
Р = hD,
и из уравнений (а) и (Ь) выразим р2 и г2 через q:
Р " А (А-С) ' (С)
г* _ h(A-D)-B(A-B)g* ,.
С(А-С) ' (й>
По своему механическому смыслу величины риг должны быть
действительными, что возможно только при выполнении неравенств
Введем обозначения
H(D-C) h(A-D)
В (В-С) s В (А—В)
/2 _ «2 = h(D-C) _ h(A-D) ^ h(D-B)(A-Q
В (В —С) В (А — В) В(В — С)(А—В)'
Пусть, кроме того, для определенности D~>B. Тогда будем иметь
и выражения для р2 и г2 можно будет переписать в виде.
В(ВО 2 = В (А-В) __ 2)
^ А(А-С) V V/ С(Л-С)
Так как в действительном движении правые части этих выражений
должны быть неотрицательными, то должны выполняться условия
Z2 — <72>0 и g2 — q2>0.
Сравнивая эти выражения с выведенным выше неравенством, имеем
откуда
— g<q<+g-
407
При выполнении этих условий величина р никогда не обращается
в нуль и в силу непрерывности не меняет знака. Не нарушая общ-
общности, в дальнейшем будем считать р>0. Величина г обращается
в нуль всякий раз, когда q достигает значения ±g. Как видно из
уравнения Эйлера
производная dq/dt меняет знак одновременно с г. При г>0 будем
иметь-— <0. При q = —g величина г обращается в нуль, и про-
происходит смена знака. При г<0 имеем —— >0, т. е. q возрастает
до тех пор, пока не станет по величине равной g. Подставляя зна-
значения р и г во второе уравнение Эйлера, получаем
dt ч ' V AC {A — СJ
или
2
Ч
2)
где знак «плюс» берется, когда q возрастает, до того момента, пока
не достигнет значения q = g. Затем q будет уменьшаться от +g
до —g, а перед радикалом следует брать знак «минус» и т. д.
Интегрирование последнего уравнения приводит к эллиптическому
интегралу. Если ввести обозначения
где s — новая переменная, то уравнение (/) примет вид
или
где
ds
dt
8 f
~dT "
n%
(В С
g
k V
) (A B)
4C
/ (B-
ft«)(l-#).
C)(A-B)
AC
Разделяя переменные и интегрируя, имеем
S
ds
О
408
где ^о — произвольная постоянная, представляющая собой момент
времени, в который при своем возрастании q обращается в нуль.
Определив s как функцию времени, будем знать для каждого
момента времени q, а следовательно, и р и г. При этом величины
q и г будут периодически обращаться в нуль, в то время как р
никогда в нуль не обращается. Величины р, q, r являются перио-
периодическими функциями времени t и имеют период
n* J
ds
Когда время увеличивается на эту величину, р, q, r принимают
прежние значения, а мгновенная ось вращения занимает перво-
первоначальное положение в теле (но не по отношению к неподвижной
системе отсчета).
Для завершения решения задачи остается определить углы
Эйлера ф, ijj, Ь как функции времени. Для упрощения вычислений
неподвижную ось Z\ направим вдоль вектора момента количества
движения в и рассмотрим проекции вектора а на оси х, у, г, не-
неизменно связанные с твердым телом:
ох = Ар = a sin О sin ф, оу = Bq = а sin О cos ф,
аг = Сг = о cos О.
Подставляя сюда значение о=1, получим
Ар = /эшФзтф, Bq = /sinО cosф, Cr^/cos'O1.
Из последнего уравнения теперь имеем
Ф = arc cos ——,
а из первого
Ф = arc sin —.
т I sin О
В результате ф и О определяются как функции времени. Рассмат-
Рассматривая кинематические уравнения Эйлера
р = i|/ sin d sin ф + ¦&' cos ф, q = ijj' sin d cos ф — 0' sin ф,
исключим из них ¦№', после чего будем иметь
= ф' sin ¦О1.
Отсюда производная л|з' определяется через известные функции
времени
., р sin ф -f- q cos ф
409
Задача о движении теперь полностью сведена к квадратурам. Вы-
Выражение р sincp + gcos ф можно представить в более симметричной
форме. В самом деле, из уравнений
/ sin # sin ф = Ар и / sin -& cos ф = Bq
находим
/ sin Ф (р sin ф -- qcosф) = Ар2 + Bq2,
и тогда
Af+Bf >Q
г г sin2 ^
так что во все время движения угол т|? только возрастает (не на-
нарушая общности всегда можно считать, что />0).
Мы рассмотрели движение твердого тела, закрепленного в цен-
центре масс, при выполнении условий
Рассмотрим теперь особенные случаи, когда выполняется одно из
равенств:
D — А или D = В.
Если D = А, то
Из формул (е) следует
В (В-С) г2 = В (А -В)
Н А(А-С) " 7/ С (Л-С) V
Последнее из этих равенств возможно только при r = q — 0, т. е.
твердое тело совершает вращение вокруг оси х с постоянной угло-
угловой скоростью
, _ В (В - С) f2== ±_
А (А —С) А '
Такое движение называют постоянным вращением твердого тела.
Если же D = B, то
откуда
/2=g2. ^2-?2>0.
Из формул (/) теперь получим
dq - | l/ (В"С)(Л-В) ,f2 ,.
410
или -4-
at
Интегрируя последнее уравнение и принимая знак «плюс», получим
откуда
q = f\h[fm*{t-t0)].
Зная q, теперь легко можно найти риг.
Регулярная прецессия твердого тела в случае Эйлера. До сих
пор мы рассматривали общий случай движения твердого тела,
когда моменты инерции относительно трех главных осей не равны
по величине. Частный случай, когда эллипсоид инерции, построен-
построенный для неподвижной точки, является шаром (А = В = С), не пред-
представляет интереса. Движение в этом случае сводится к чистому
вращению вокруг оси, неизменно связанной с телом, что непосред-
непосредственно вытекает из уравнений Эйлера, Эта ось остается непо-
неподвижной и в неподвижном пространстве и совпадает с направле-
направлением вектора момента количества движения.
Если эллипсоид инерции относительно неподвижной точки яв-
является эллипсоидом вращения (независимо от того, будет этот
эллипсоид сплюснутым или вытянутым), то интегрирование урав-
уравнений движения в случае Эйлера — Пуансо доводится до конца
в элементарных функциях.
Предположим, что ось z, неизменно связанная с твердым те-
телом, является осью симметрии эллипсоида инерции, так что
Тогда из последнего уравнения Эйлера
~dT ~~
следует первый интеграл
г = r0 = const. (a)
Направим неподвижную ось zx вдоль вектора момента количества
движения а. Тогда для проекций вектора момента количества дви-
движения на ось z будем иметь
о cos ¦& = Сг0.
Так как вектор момента количества движения остается неизменным
во все время движения, отсюда получим
cosfI = —— = const. (b)
а
411
Равенство говорит о том, что угол О не меняется во время движе-
движения твердого тела. Кинематические уравнения Эйлера теперь при-
принимают вид
р= il/sinflsincp, <7 = \|>'sinflcoscp, г = ф' ->- -Цэ' cosft = г0,
а проекции вектора момента количества движения:
ох — о sin О sin <f = Лф' sin ft sin ф, atf = a sin Ф cos ф = /hj/sin#cos<p.
Отсюда следует, что
У = — = const, (с)
А
и угол прецессии меняется по линейному закону
ф = .?-.* + ф0.
Из последнего кинематического уравнения Эйлера
находим
' = г0
' = г# cos О = const, (d)
А
т. е. угол ф также изменяется по линейному закону
ф. = ^0— -j cosdj ^ + ф0.
Движение твердого тела, при котором выполняются условия
ф' = const, ty' = const, 0 = const,
называют регулярной прецессией твердого тела.
Рассмотрим некоторые свойства регулярной прецессии. Пусть
вектор а представляет вектор момента количества движения твер-
твердого тела относительно начала координат (рис. 230). В случае
Эйлера этот вектор сохраняет постоянное направление и постоян-
постоянную величину в неподвижном пространстве. При регулярной пре-
прецессии твердого тела выполняется условие
аг — Cr = const,
откуда сразу следует
/¦=/•„ = const, # = #0 = const.
Обозначим проекцию вектора момента количества движения на
экваториальную плоскость эллипсоида инерции через <Ti, так что
412
ox = Л©1 = const.
Отсюда следует, что проекция угловой скорости вращения (о{ тела
на экваториальную плоскость постоянна. Обозначим через а угол
между векторами аи©. Тогда
Сгл
Рис. 230
откуда
или
так что
tga =
a = Atgft — Atga,
(Л — С) fg
¦&¦ + А
Покажем теперь, что угол а не. превосходит некоторого предель-
предельного значения, которое совпадает с экстремумом функции а(§).
Приравнивая нулю производную от tg a
Ctg^) =
JL (tga) = (Л-СНЛ
d® K cos2 ф [С tg3 d + A]3
имеем
- ±
а экстремальное значение а определяется формулой
Пусть
tga3 = ± _L( -l/ _d I/ —
. Тогда для симметричного тела будем иметь
2А = 2 т (х2 + у2) + 22 mz* > С,
413
откуда
Для крайних значений, которые может принимать отношение А/С,
-получим
при -?-= 1; tga = 0, a = 0,
А 1 г/Т
при -?- = —; \ga=±-*-— a^±19°28'.
Это значение угла а является предельным в случае регулярной
лрецессии. Можно заметить, что угол Ь при регулярной прецессии
не является произвольным. Для этого воспользуемся уравнениями
движения в осях Резаля
Л-^ + (Сг0 - A/ctg0)? = 0,
где р — Ь', q=ty'sind, r=ip/cos'ei4-q/. Эти уравнения допускают
первый интеграл
р2 + q2 = const,
и так как вектор сг момента количества движения сохраняет неиз-
неизменными величину и направление, то для определения угла нута-
нутации будем иметь равенство (рис. 231)
= const,
откуда после подстановки значений р, q и г получим
(A — С) if'
Геометрическая интерпретация Пуансо движения твердого те-
.ла в случае Эйлера. В 1851 г. Пуансо дал качественную геометри-
геометрическую картину движения твердого тела в случае Эйлера, основан-
основанную на кинематических свойствах этого движения.
За подвижные координатные оси х, у, z выберем главные оси
эллипсоида инерции, построенного для неподвижной точки О. Тог-
Тогда уравнение эллипсоида инерции запишется в виде
/ = Ах2 + Вг/а + Сгг —1 = 0.
Вектор мгновенной угловой скорости ы пересечет поверхность эл-
эллипсоида инерции в некоторой точке Р, называемой полюсом,
координаты которой в дальнейшем будем обозначать через х, у, z
414
(рис. 232). Из условия коллинеарности вектора ОР и вектора
угловой скорости и будем иметь
где А = ОР.
со
Д
П
Рис. 231
Рис. 232
Нетрудно установить следующие свойства движения такого
тела:
1. Отношение ю/Д остается постоянным во все время движения.
В самом деле, из интеграла живых сил имеем
h = Лр2 -ь В?2 +
= (—V (Лх2 + By2 + Cz2) = (—
\ Д I \ Д
2. Вектор момента количества движения а параллелен вектору
нормали к поверхности эллипсоида инерции, построенному в точ-
точке Р. Действительно, проекции вектора нормали к поверхности
эллипсоида инерции пропорциональны частным производным:
= Ax, -°L =
ду
¦ = Сг.
дх ду дг
Подставляя сюда в правые части значения х, у и г, получим
1L-. и_Д Д „
дх
со
¦Р =
JL
дг
со
ду
¦г =¦-
со
о
Отсюда следует, что вектор сг ортогонален к плоскости я, касаю-
касающейся эллипсоида инерции в точке Р. В дальнейшем эту плоскость
будем обозначать буквой п.
41S
3. Расстояние плоскости я до центра эллипсоида инерции ос-
остается неизменным во все время движения твердого тела. Нетруд-
Нетрудно найти (рис. 233), что
6 =
OP, a) АРХ
М
Crz
Д
= const.
Отсюда следует, что плоскость я
остается неподвижной в пространстве
во все время движения.
4. Конец вектора, at все время на-
находится в неподвижной плоскости я',
параллельной плоскости я. Рассмотрим проекцию вектора <а на
направление вектора момента количества движения
Рис. 233
_ (w, a) _
a
pAp + qBq -\ rCr
I
= — = const,
откуда сразу следует утверждение.
Скорость точки Р эллипсоида инерции равна нулю в рассмат-
рассматриваемый момент времени, так как через эту точку проходит век-
вектор мгновенной угловой скорости <а твердого тела. В результате
мы приходим к следующему выводу.
Эллипсоид инерции твердого тела постоянно касается непо-
неподвижной плоскости л. Точка касания Р является полюсом, а пря-
прямая ОР — мгновенной осью вращения твердого тела. Кривую,
описываемую полюсом на поверхности эллипсоида инерции, Пуансо
назвал полодией, а кривую, описываемую полюсом на непо-
неподвижной плоскости л, — герполодией. Подвижный аксоид име-
имеет вершину в точке О, а полодия служит его направляющей. Непо-
Неподвижный аксоид имеет вершину в той же точке О, а в качестве
направляющей — герполодию. Непрерывное движение твердого те-
тела соответствует качению без скольжения подвижного аксоида по
неподвижному. Такое движение может быть осуществлено, если
заставить эллипсоид инерции катиться и вертеться без скольже-
скольжения по неподвижной плоскости я, положение которой зависит от
начальных условий.
В частном случае, когда ось вращения проходит через вершину
эллипсоида инерции, твердое тело совершает постоянное вращение
¦около главной оси инерции твердого тела, сохраняющей неизмен-
неизменное положение в пространстве. Такая ось называется по сто я н-
нон, или перманентной, осью вращения твердого тела.
416
Если эллипсоид инерции является эллипсоидом вращения, то
аксоидом является прямой круговой конус. Ось этого конуса сов-
совпадает с наибольшей осью эллипсоида инерции. Полодии и гер-
полодии в этом случае будут окружностями.
Напишем уравнение полодии в общем случае, когда А^В^С
АфС (наименьшая полуось эллипсоида инерции совпадает с осью
х). Полодии расположены на поверхности эллипсоида инерции
Лх2 4-%2 + Cz2 = 1. (а)
Кроме того, координаты х, у, z полюса Р удовлетворяют уравне-
уравнению, которое следует из закона сохранения момента количества
движения
А2р2 + BY -f CV2 = I2,
после подстановки сюда вместо р, q, r значений
(В (В (В
р=^*' ч=-?* r=~z
будем иметь
Л3*2 + BV 4- С2г2 = J—^D. (b)
h
Полодия представляет геометрическое место точек, удовлетворяю-
удовлетворяющих уравнениям (а) и (Ь). Умножая уравнение (а) на D и вычи-
вычитая его из (Ь), получим уравнение конической поверхности
А{А — D)x4-?(? — D)y2-\~C(C — D)z2 = 0, (с)
являющейся подвижным аксоидом.
При D>A или D<C уравнению (с) не удовлетворяет ни одна
из точек, расположенных на поверхности эллипсоида инерции. По-
Поэтому в действительном движении величина D должна удовлетво-
удовлетворять условиям
А > D > С.
Рассмотрим следующие частные случаи:
1. A=D. Уравнение подвижного аксоида получает вид
При В<А этому уравнению удовлетворяет только одна точка с
координатами y=z = 0, что соответствует вращению вокруг наи-
наименьшей оси эллипсоида инерции. Подвижный аксоид вырождает-
вырождается в прямую линию, являющуюся постоянной осью вращения.
2. D = C. Уравнение подвижного аксоида имеет вид
А(А — С) х2 -{-В {В — С) у2 = 0.
При В>С аксоид вырождается в прямую Oz. Этому соответствует
постоянное вращение твердого тела вокруг наибольшей оси эллип-
эллипсоида инерции.
14 F Н Берсзкин 417
3. D = B. Уравнение эллипсоида инерции записывается в виде
А (А — В) х* + С (С — В) г2 = 0.
При Л>5>С уравнение аксоида можно преобразовать к виду
(/Л(Л-ЯГ*+ VC (В—С) г) [У А (А-В) х-
— УС (В —С) г) = 0
Это уравнение определяет две пересекающиеся по оси у плоскости
УЛ(А—В) х + УСф — С) г= 0,
УА(А~В) х — УС(В-С) 2= 0.
Если величина Z) имеет небольшое отклонение от рассмотренных
значений, аксоид будет представлять собой коническую поверх-
поверхность. Так, если D близко по значению к Л и удовлетворяет нера-
неравенствам
уравнение аксоида сводится к виду
и аксоид будет представлять собой дей-
действительный конус, ось которого совпа-
совпадает с осью х (рис. 234), В пересечении
с поверхностью эллипсоида инерции ко-
конус образует полодию, являющуюся
замкнутой кривой, охватывающей ось х.
Картина совершенно аналогична той, ког-
когда D близко по своему значению к С и
Рис. 234 удовлетворяет условиям
B>D>C.
Если D мало отличается от В, то полодии расположены вблизи
кривых, образованных пересечением плоскостей (B = D) с поверх-
поверхностью эллипсоида инерции.
В результате получаем следующую картину: геометрические
места полюсов (полодии) при изменении D имеют на эллипсоиде
инерции особые точки, совпадающие с точками пересечения глав-
главных осей инерции с эллипсоидом инерции. Две из этих точек явля-
являются центрами и одна — седлом. Твердое тело совершает постоян-
постоянные вращения вокруг осей, проходящих через особые точки. Если
же телу сообщить начальное движение так, чтобы мгновенная ось
вращения пересекла одну из полодий не в особой точке, то при
дальнейшем движении твердого тела мгновенная ось вращения
будет изменять свое положение в теле, но полюс будет оставаться
все время на одной и той же полодии.
'418
Устойчивость постоянных вращений твердого тела. Если твер-
твердому телу сообщить вращение вокруг одной из главных осей эл-
эллипсоида инерции, то оно будет продолжать вращаться вокруг
такой оси неограниченно долго. Такие оси называются постоян-
постоянными осями вращения. Мгновенная ось вращения остается
неподвижной в теле только при вращении вокруг главных осей
инерции.
Если мгновенная ось вращения А остается неподвижной в те-
теле, и если обозначить через а, р, у направляющие косинусы этой
оси относительно координатных осей х, у, z, то для проекций мгно-
мгновенной угловой скорости на эти оси будем иметь
р = юа, <7 = <ор\ г=©у.
Тогда живая сила твердого тела запишется в виде
±- (Ар* + Bq* + О2) = -^- (Ла* + В$* + CY2) = -у o>VA.
Из интеграла живых сил ©2/д —h получаем, что со есть величина
постоянная. Уравнения Эйлера здесь принимают вид
(С — B)©3Py = O, (Л—C)(o2Ya = 0. ф— А) ©2сф = 0.
Если эллипсоид инерции не является эллипсоидом вращения,
то по меньшей мере два из направляющих косинусов должны рав-
равняться нулю, т. е. мгновенная ось вращения совпадает с одной из
главных осей инерции. Если же эллипсоид инерции является эл-
эллипсоидом вращения и А —В, то либо y—Q, и тело вращается во-
вокруг оси, лежащей в плоскости экватора, либо а = р = 0, и тело
вращается вокруг оси г.
Движение называют устойчивым, если произвольным бес-
бесконечно малым изменениям начальных условий соответствуют бес-
бесконечно малые изменения самого движения. Движение называют
неустойчивым, если некоторое бесконечно малое изменение
начальных условий влечет за собой конечное изменение движения
(такое определение устойчивости движения является частным слу-
случаем определения устойчивости по А. М. Ляпунову, которое будет
дано позднее).
Теорема. Если эллипсоид инерции трехосный, то постоян-
постоянные вращения твердого тела вокруг большей и меньшей осей инер-
инерции являются устойчивыми, а постоянные вращения вокруг средней
оси инерции — неустойчивыми.
Доказательство. Пусть сначала тело вращается вокруг1
меньшей (или большей) главной оси эллипсоида инерции. Если'
бесконечно мало изменить начальные условия, сообщив телу на-1
чальное вращение вокруг бесконечно близкой оси, то эта ось будет
в дальнейшем перемещаться по поверхности аксоида, которому)
соответствует полодия на .эллипсоиде инерции, представляющая
малую замкнутую кривую, бесконечно близкую к вершине малой
14*
оси эллипсоида инерции. Тогда мгновенная ось вращения будет
описывать малый конус вокруг постоянной оси вращения. Нетруд-
Нетрудно заметить, что герполодия также будет представлять кривую,
сколь угодно близко расположенную к точке Ро, соответствующей
постоянному вращению твердого тела. Отсюда заключаем, что рас-
рассматриваемое постоянное вращение вокруг меньшей или большей
оси эллипсоида инерции устойчиво.
Если за постоянную ось вращения принять среднюю ось эл-
эллипсоида инерции, то бесконечно малые изменения начальных
условий приведут полюс на полодию,
окружающую либо большую, либо мень-
меньшую ось эллипсоида инерции. В дальней-
дальнейшем движении мгновенная ось вращения
отклонится от своего первоначального
положения на конечное расстояние, пе-
перемещаясь по поверхности аксоида. Это
значит, что постоянное вращение вокруг
средней оси эллипсоида инерции неустой-
неустойчиво. Теорема доказана.
Замечание. Методом А. М. Ляпу-
Ляпунова можно показать устойчивость по-
постоянных вращений твердого тела чисто
аналитическим путем.
4. Случай Лагранжа. В IX разделе
своей «Аналитической механики» Ла-
гранж показал, что уравнения движения
тяжелого твердого тела с одной неподвижной точкой могут быть
проинтегрированы, если центральный эллипсоид инерции является
эллипсоидом вращения, а неподвижная точка находится на его
оси симметрии. Геометрическое исследование движения в этом
случае было дано Пуассоном. Симметричное тяжелое твердое тело,
имеющее неподвижную точку на оси симметрии, широко приме-
применяется в технике. Результаты исследования движения такого тела
легли в основу современной теории гироскопических приборов.
Пусть эллипсоид инерции, построенный для неподвижной точ-
точки твердого тела, есть эллипсоид вращения, так что
Рис. 235
и центр тяжести твердого тела не совпадает с его неподвижной
точкой, а расположен на оси симметрии эллипсоида инерции
(рис. 235). За подвижные оси координат х, у, z примем главные
оси эллипсоида инерции. Неподвижные оси х\, г/ь z\ выберем так,
чтобы ось Z\ была направлена вертикально вверх. Пусть координа-
координаты центра тяжести относительно подвижных осей будут равны со-
соответственно
? = 0, т)=0,
420
В сделанных предположениях динамические уравнения Эйлера
примут вид
Они допускают следующие три первых интеграла:
интеграл живых сил
— {Ар* + V + Сг8) = — Mgl cos ft +—;
интеграл сохранения момента количества движения относи-
относительно вертикальной оси
интеграл, получаемый из третьего уравнения Эйлера,
Здесь ох, оу, az — проекции момента количества движения твердого
тела на оси х, у, z, а -уь 42, 7з — косинусы углов между осью гх и
осями х, у, г. При помощи кинематических уравнений Эйлера
р = i|/ sin 0 sin ф + 0' cos <p, q — ip' sin 0 cos ф — 0' sin <p,
г = ар' cos 0 \- ф'
и соотношений
Yi = sin0sin9, у2 = sin 0 cos ф, Y3 =
первые интегралы можно преобразовать к виду
О'2 Н- of'2 sin2 0 = а — а cos О, ф' sin2 О = $'— br0 cos О,
г|>'созО + ф' = г0,
где
« , д
Л А
в = А ь= —>о.
Эти первые интегралы представляют собой систему дифферен-
дифференциальных уравнений, из которых можно определить углы Эйлера
в функции времени. Исключив из первых двух уравнений \(з', бу-
будем иметь
(Р — brQ cos ftJ + О'2 sin2 ft = (a — a cos ft) sin2 ft,
421
или
(Л. cosoV = (a —acosd) (I — cos2ft) - ф — br0cosftJ.
Полагая теперь и = cosd, получим
'^.у = (в-аи) A -и?)-{$-Ьгои)\ (а)
Интегрируя это уравнение, можно найти ¦& как функцию времени.
Величины ф и \р можно легко определить из уравнений
получающихся из первых интегралов.
Рассматривая правую часть уравнения (а)
/ (и) = (а - аи) A - ы2) - (р - Ьг0 и)\
легко заметить, что она представляет собой полином третьей сте-
степени относительно и, сохраняющий в действительном движении
неотрицательное значение, так как он всегда равен квадрату дей-
действительной величины dujdt. Для исследования решения уравне-
уравнения (а) перепишем его сначала в виде
~f~J = f(u) = т*'~ (a + Ь'^о)и* + BР*"¦<>-в)« •+ о-
и рассмотрим корни полинома /(и). Исключим пока из рассмот-
рассмотрения случаи, когда и постоянно, а полином f(u) равен нулю во
все время движения, а также случай, когда и=±\, полагая, что
Ь
0
Аргументом функции f(u) является косинус угла нутации, ко-
который заключен в промежутке (—1, +1), так что для действитель-
действительного движения функция / должна принимать неотрицательные зна-
значения в этом промежутке. Пусть начальному значению угла нута-
нутации Оо соответствует значение функции f(uo)>O, где —1<Ио<0+1,
а $фЬг0. Тогда
Заметим, что f( + °o)>0. Отсюда следует, что полином f(u) имеет
три вещественных корня ии и2, «з, заключенных соответственно
в промежутках (рис. 236).
(-1, ий), (и0, +1),
Действительное движение твердого тела может происходить только
в интервале (щ, и2), расположенном внутри интервала (—1, +1),
а угол ¦& изменяется между двумя предельными значениями ¦&! и
¦&2 (|&1>'912)- Если описать вокруг оси Z\ два круговых конуса с вер-
вершинами в неподвижной точке О и с углами при вершинах 2^ и
422
202, то ось z будет во все время движения заключена между этими
конусами. Опишем из неподвижной точки О, как из центра, сферу
единичного радиуса (рис. 237), которая пересечет оба конуса по
параллелям щ и и2 с общим полюсом Z\ (буквой г^ обозначим
точку пересечения сферы с осью z{). Точка г, в которой ось z пере-
пересекает поверхность сферы, характеризуется величиной и и распо-
расположена между параллелями щ и и2. При движении твердого тела
•точка 2 будет описывать на поверхности сферы некоторую кривую.
Плоскость, ортогональная к оси zx и проходящая через точку О,
пересечет сферу по параллели, которую будем называть эквато-
Рис. 236
Рис. 237
ром. Через х\ обозначим след оси Х\ на сфере, а через у — след
линии узлов. За время dt точки гну перейдут в новые положения
г' и у'. Через полюс zt и точки гн/ проведем меридианы. Парал-
Параллель, проходящая через точку г, пересечет меридиан точки z' в
точке К. При этом будем иметь очевидные соотношения
YY' = dip, z^K, = d®.
Обозначим через zL расстояние от точки z до оси Z\
zL = sin ¦&.
Тогда для определения угла v между кривой zz' и меридианом
точки z', будем иметь
гК sin
A — «
du
Подставляя сюда значения
dt
1—
и
at
423
получим
Рассмотрим характер траектории точки г на сфере единичного
радиуса. Пусть п является корнем уравнения
Р — brou = 0.
Предположим сначала, что п>и2. Тогда для всех значений и,
удовлетворяющих условиям
скорость прецессии не обращается в нуль и не меняет направле-
направления, tgo не обращается в нуль и, следовательно, касательная к
Рис. 238 Рис 239
траектории точки не может быть параллельна меридиану. При про-
прохождении траектории через параллели и{ и и2 происходит смена
знака полинома f(u), поэтому и tg v меняет знак. На самих па-
параллелях tg и обращается в бесконечность. Траектория точки z
будет иметь вид непрерывной кривой без особых точек, попере-
попеременно касающейся то одной, то другой параллели (рис. 238).
Если теперь ы = «2, то рассуждения останутся в силе для всех
значений ы, удовлетворяющих условию
иг < и < и2.
При и = и2 для tg у получаем неопределенность, раскрывая кото-
которую по правилу Лопиталя, найдем
и->и2 и->и2 У f (и) и->и2 / (и)
т. е. касательная к траектории точки z становится параллельной
меридиану, a tg у на параллели и = и2 меняет знак (рис. 239). От-
Отсюда видно, что траектория на параллели и = и2 имеет особою точ-
точку— точку возврата.
Рассмотрим еще случай, когда корень п лежит внутри интер-
интервала («ь и2), т. е.
424
Тогда при и —и производная г)/ будет менять знак, a tg и будет
обращаться в нуль. Траектория точки г в этом случае будет иметь
вид петли, обращенной вверх (рис. 240). Последнее обстоятель-
обстоятельство становится очевидным, если проследить эволюцию траектории
при непрерывном изменении начальных условий.
Рис. 240
Рис. 241
Заметим, что при любых начальных условиях всегда будет
выполняться неравенство п>иу. Пусть п = щ, где щ— один из кор-
корней полинома f(u), лежащий внутри интервала (—1, +1). Тогда
? и / (и,) = (а - auf) A ]— и)) = 0.
и, = ——
Последнее равенство выполняется только при и} = —, и, следова-
следовательно, полином / (и) можно представить в виде
/ (и) - -^- (р - Ьгои) A - и») - (р - Ьгйи? =
Ьг0 % / \г и
При и = и,з первая скобка обращается в нуль. Если на интервале
(—1, +1) имеется второй корень и{ полинома f(u), то он будет
обращать в нуль квадратную скобку, т. е.
~-A -и\)-($-Ьгйщ) =0.
Но это возможно только при
или
р
— U i = U.
т. е. второй корень щ всегда меньше щ = и.
Особенные случаи движения твердого тела. Спящий волчок.
До сих пор предполагалось $фЬг0, что эквивалентно условию
425
ь, т. е. тому, что в начальный момент не происходит чистого
вращения вокруг оси г. Пусть теперь р = 6г0. Тогда могут пред-
представиться следующие три различных случая:
1) а>а; 2) а<а; 3) а=а.
Возвращаясь к первоначальным обозначениям, эти три условия
можно записать в виде
h —
Функция f(u) для этого случая запишется в виде
f(u) = (\-u)[(a-au)(l+u)-b*r$(l-u)],
она имеет всегда один .корень, равный единице. Два других корня
определяются из условия
Ми) = (а —аи) A + и) — b2fi(l — и) = 0.
При а>е полином fi(u) будет иметь один корень на интервале
(—1, +1) (рис. 241), поэтому движение будет происходить на
интервале от щ до 1, когда верхняя окружность и2 стягивается в
точку, причем г|/ принимает неопределенное значение в этой точке,
т. е. полюс не является точкой возврата.
Если положить а<а, то полином /i (и) будет иметь оба корня
на интервале от —1 до +1. Движение в этом случае было рас-
рассмотрено выше.
Рассмотрим случай а==а. Для f (и) получим выражение
/(и) = A-и)
откуда следует, что единица является двукратным корнем поли-
полинома f(u). Соответствующее этому случаю движение получим, если
динамически симметричное твердое тело быстро закрутить около
его оси симметрии, отклоненной от вертикали. Тело, обладающее
этим свойством, вскоре получит установившееся движение вокруг
оси, близкой к вертикальной, и называется спящим волчком.
Если в начальный момент ¦&а='б/=О, то хотя бы один из корней
полинома f(u) обращается в единицу, поэтому
откуда следует, что Р = br0. Тогда
= (l-u)[(a-au)(l+u)-b2r2o(l-u)].
Два оставшихся корня обращают в нуль квадратную скобку.
Из интеграла живых сил
p2 + q2 = a — acosft
при выбранных начальных условиях р0 = q0 = 0 имеем
426
a — acosfy, = 0,
откуда следует
a = a,
а полином f(u) получает вид
Пусть и корень уравнения
т. е.
причем всегда выполняется условие и>—1. Здесь может предста-
представиться три случая:
В первом из них будем иметь и = щ, Ы2 = из=1. и область возмож-
возможного движения будет ограничена корнями щ и иг. Уравнение
(—— j — f (и) здесь получает вид
\ dt I
откуда, разделяя переменные, будем иметь
du
= ± I/a dt.
A и) уи — и.х
Рассматривая движение, начинающееся из некоторого положения
«о, внутрь интервала (ии и2), увидим, что время движения опре-
определяется интегралом
и
1 Г* du
/a" J A — и) Vu^^i '
и,
и если ось симметрии движется вниз до параллели щ, то этот ин-
интеграл будет конечным. Если же проследить движение из положе-
положения «о до вертикального положения оси симметрии, то можно заме-
заметить, что интеграл будет расходящимся и время движения будет
стремиться к бесконечности, т. е. ось симметрии никогда не вернется
в вертикальное положение, неограниченно к нему приближаясь.
В том случае, когда полином f(u) имеет двойной корень
«i=l, выполняется условие
427
а третий корень полинома f(u) будет больше единицы и верти-
вертикальное положение волчка будет устойчивым. Если же b2r0<^2a,
то условия устойчивости выполняться не будут, так как ось сим-
симметрии будет отклоняться от вертикали на конечное расстояние.
Гироскоп. Приближенная теория. В самом общем случае
гироскоп можно определить как динамически симметричное твер-
твердое тело, способное вращаться с большой угловой скоростью около
мгновенной оси вращения, проходящей через неподвижную точку.
Последняя может быть центром тяжести твердого тела или лежать
на центральной оси инерции (оси симметрии). В технике под гиро-
гироскопом понимают механическое устройство, неотъемлемой частью
которого является вращающаяся часть — ротор с тяжелым ободом,
смонтированный так, чтобы его ось вращения имела возможность
поворачиваться в любом направлении около неподвижной точки,
лежащей на оси. Обычно это достигается при помощи так назы-
называемого карданова подвеса. В приближенном исследовании движе-
движения гироскопа массой карданова подвеса обычно пренебрегают.
Рассмотрим твердое тело в случае Лагранжа, для которого
в начальный момент выполняются условия
0 = ^0^0, го»0, Ро=д0 = 0,
т. е. твердому телу сообщается быстрое начальное вращение вокруг
оси симметрии и не сообщаются нутационные и прецессионные
движения.
Рассматривая кинематические уравнения Эйлера
р = ty' sin®sinф -f- ¦&' coscp, q = if'sin Ф cos ф— 0' в
заметим, что определитель системы при определении i|H и 00 будет
иметь вид
II sin§0 зшфо
II sinOo совфо —sm<p0
поэтому при §0 Ф 0 будем иметь
¦фо = 0, Оо = 0.
Из первых интегралов уравнений движения теперь получим,
0 = а — аи0, 0 = $ — brouo,
а для функции / (и) будем иметь выражение
/ (и) = (а — аи) A — и2) — (Р — Ьгйи)* =
= (и0 - и) [а A - и') - V г\ («0 - и)].
428
Здесь один из корней полинома f(u) равен и0. В то же время
ио = п. Следовательно, корень щ = щ. На параллели и=иа имеем
точки возврата. Корень и\ находится из уравнения
из которого имеем
аA-«?
bhi
При очень больших значениях г0 правая часть последнего соотно-
соотношения неограниченно уменьшается и разность и0—щ стремится
Рис 242 Рис 243
к нулю. Движение оси симметрии осуществляется в этом случае
в виде мелких нутационных «дрожаний» и прецессионного движе-
движения, происходящего все время в одну сторону (рис. 242). Такое
движение называется псевдорегулярной прецессией, в отличие от
регулярной прецессии, когда щ = и2.
Характер движения быстро вращающегося гироскопа позво-
позволяет дать его приближенный качественный анализ. В рассматри-
рассматриваемом случае имеем
г = ro = const, ог = Сгй = const.
Если в начальный момент ось симметрии твердого тела неподвиж-
неподвижна, а телу сообщается начальная угловая скорость ол вокруг этой
оси симметрии, то вектор угловой скорости вц будет совпадать по
направлению с вектором момента количества движения, и
а = Сщ.
Движение же гироскопа определяется из теоремы об изменении
момента количества движения
da
at
429
где m0 —сумма моментов всех активных внешних сил, действую-
действующих на гироскоп, относительно неподвижной точки. Мы пренебре-
пренебрегаем здесь трением, а потому можем считать связь идеальной.
Пренебрегая нутационным движением гироскопа, когда ско-
скорость собственного вращения достаточно велика, получим, что от-
отклонение вектора мгновенной угловой скорости ю от оси симметрии
гироскопа во время движения будет мало (рис. 243). В самом
деле, скорость конца вектора момента количества движения при-
приближенно равна
так что
[w2, <з] = tn0,
откуда
со2а sin § = atng sin 0,
или
amg atng
а Сщ
Чем больше скорость собственного вращения, тем меньше скорость
прецессии юг, поэтому можно пренебречь отклонением вектора
мгновенной угловой скорости от направления вектора а, а движе-
движение оси симметрии гироскопа определить формулой
или
С К, «х]= т0.
Эта формула определяет величину и направление момента внеш-
внешних сил, которые нужно приложить к телу, чтобы сообщить ему
определенное прецессионное движение. На приспособления, приво-
приводящие тело в движение, будет действовать момент сил той же
величины, но противоположного направления
Lo = — mo = C[w1, w2j.
Вектор Lo называют гироскопическим моментом. Из по-
полученной формулы сразу же вытекает известное правило Жу-
Жуковского: Если гироскоп, вращающийся с угловой скоростью ец,
повернуть вокруг некоторой оси, образующей угол а с осью сим-
симметрии тела, с угловой скоростью &г, то появится пара сил с мо-
моментом, равным по величине произведению Ca»ia»2sina, стремящая-
стремящаяся повернуть ось тела к оси сообщаемого вращения так, чтобы
при совпадении осей вращения a>i и <а2 были направлены в одну
сторону.
Несмотря на то что приближенные методы исследования дви-
движения твердого тела дают лишь грубое представление о движении,
они нашли большое приложение в технике, особенно в теории раз-
430
нообразных гироскопических систем. Эти методы хороши тем, что
позволяют дать достаточно правильное представление о движении
системы. При применении приближенных методов необходимо
давать оценку их точности. На практике для такой оценки сравни-
сравнивают теоретические результаты с экспериментальными. Неоспори-
Неоспоримым преимуществом приближенных методов является то, что
уравнения малых движений быстро вращающихся гироскопов по-
получаются линейными относительно про-
производных от координат по времени.
Некоторые применения гироскопов.
Гироскопы нашли широкое применение
в морской и авиационной практике, где
они служат для определения направле-
направления (гирокомпас) и горизонта (гирого-
ризонт). В этих приборах используются
быстровращающиеся симметричные ги-
гироскопы с тремя степенями свободы. Три
степени свободы обеспечиваются специ-
специальным кардановым подвесом
(рис. 244). Ротор гироскопа представ-
представляет собой тяжелый маховичок, который
приводится в движение от мотора и под-
подвешен в двух кольцах, как показано на
рис. 244. Наружное кольцо может сво-
свободно вращаться в неподвижных подшипниках, а внутреннее -—.в
подшипниках, укрепленных в наружном кольце. Гироскоп, центр
тяжести которого совпадает с неподвижной точкой (точкой пере-
пересечения подвижных и неподвижной осей вращения колец и ротот.
ра), называется астатическим. Если ротору астатического гиро-
гироскопа сообщить быстрое вращение <во вокруг собственной оси, то
вследствие отсутствия момента внешних сил, вектор момента коли-
количества движения этого гироскопа будет сохранять постоянными
величину и направление. Если приложить к собственной оси гиро-
гироскопа некоторую силу F, то действие этой силы сведется к дейст-
действию пары сил с моментом
Рис. 244
т0 = hF,
где h — расстояние от неподвижной точки О до линии действия
силы F, и ось гироскопа начнет вращаться со скоростью
Fh
asm'
вокруг прямой, проходящей через точку О и параллельной линии
действия силы F. Из формулы видно, что чем быстрее будет вра-
вращаться гироскоп вокруг своей оси, тем медленнее будет прецесси-
ровать эта ось.
431
Если гироскоп вращается с очень большой скоростью, то не-
небольшие силы, которые всегда имеют место, практически не будут
изменять направления оси вращения гироскопа. Направленная в
начальный момент на какую-нибудь неподвижную звезду ось гиро-
гироскопа будет все время сохранять это направление и, следовательно,
будет совершать суточное вращение относительно Земли. На этом
принципе основано устройство гироскопического компаса,
который в отличие от магнитного компаса не подвержен влиянию
аномалий магнитного поля, магнитных бурь и т. п.
Если с внутренним кольцом карданова подвеса гироскопиче-
гироскопического компаса жестко связать тяжелую дугу и сообщить ротору
гироскопа вращение вокруг горизонтальной оси, не лежащей в
меридиональной плоскости, то она, стремясь сохранить неизменное
направление, начнет совершать движение относительно Земли.
Пусть, например, в начальный момент ось отклонена к востоку от
меридиана. Стремясь сохранить постоянное направление при вра-
вращении Земли, ось немного поднимется над горизонтом, тяжелая
дуга, отклонившись от положения равновесия, создаст момент,
действующий на гироскоп. Этот момент будет заставлять гироскоп
повернуться в направлении к северу. То же произойдет, если в
начальный момент ось гироскопа отклонена к западу.
Аналогичным образом устроен и гирогоризонт — прибор,
позволяющий пилоту поддерживать свой самолет в горизонталь-
горизонтальном положении, когда естественный горизонт не виден. В гиро-
горизонте ротор гироскопа вращается вокруг вертикальной оси,
сохраняющей свое направление при наклонах самолета.
Мы объяснили здесь только принципиальную схему работы
некоторых гироскопических приборов. На самом деле движение
гироскопов подчиняется более сложным законам, и необходимо
учитывать влияние масс кардановых .колец, трения и других
причин.
Регулярная прецессия в случае Лагранжа. В случае Эйлера
движения твердого тела с одной неподвижной точкой было отме-
отмечено одно любопытное движение твердого тела, называемое регу-
регулярной прецессией. При регулярной прецессии твердого тела оста-
остаются неизменными угол нутации, скорость собственного вращения
и скорость прецессии. Регулярная прецессия может быть и в слу-
случае Лагранжа. Но условия регулярной прецессии в случае Лагран-
Лагранжа оказываются более жесткими, чем в случае Эйлера. В случае
Лагранжа имеем условие г~г0, а кинематические уравнения Эйле-
Эйлера при регулярной прецессии получают вид
р = ty' sin ft sincp, q — \|з' sin 0 coscp.
Отсюда в случае регулярной прецессии имеем
р' := гр'ф' sin 0 cos ф, Ц' = — 'ф'ф' sin 0 sin ф,
а из динамических уравнений Эйлера получим
Лг|/ф' sinft соэф + (С — А) у r0 sin ft совф = mgz0sin0
432
Отсюда после подстановки значений г0 будем иметь условие регуляр-
регулярной прецессии
(С — А) у2 cos 0 + С ф'-ф' — Mgz0 = 0.
Из этого уравнения определяется скорость регулярной прецессии
, ^ - Сф' ± Key2 \- 4Mgz0 (С - A) cos ft~
2 (С — Л) cos Ъ
Для того чтобы найденное решение существовало, необходимо,
чтобы подкоренное выражение было неотрицательным, т. е., чтобы
имело место условие
С2 ф'2 + AMgz0 (С — A) cos 0 > 0,
или
С2ф'2 > 4Mgz0 (Л — С) cos 0.
Последнее неравенство является необходимым условием регуляр-
регулярной прецессии в случае Лагранжа.
Вынужденная регулярная прецессия. Выясним, при каких
условиях симметричное твердое тело может совершать регуляр-
регулярную прецессию, отличную от естественной. Заметим, что для
создания регулярной прецессии при произвольном значении
угла -& нужно приложить некоторый момент сил. Для определе-
определения этого момента сил воспользуемся \равнениями движения в
осях Резаля. Кинематические условия регулярной прецессии в
этом случае примут вид
р = §' = 0, q — \|/ sin 0 = <в2 sin О,
г — <B2cosft + q^.
После чего из динамических 'уравнений получим
(Сг0 — Ац ctg b)q = mx, my==0,
откуда
[С (<в2 cos •& -t- щ) — Ао2 cos Щ а2 sin § = тх.
Полученное уравнение определяет момент сил, создающих
регулярную прецессию. Его можно переписать в виде
тх = A -\ = — cos 0 ) С (Bj ш2 sin 0. (а)
\ с щ j
(Отсюда непосредственно может быть получено условие регуляр-
регулярной прецессии твердого тела в случае Лагранжа.)
В приближенных расчетах для определения момента сил,
вызывающих регулярную прецессию, иногда применяют формулу
тх = С cousin 0 = | [щ, а] [,
433
имеющую удобное векторное истолкование. При пользовании этой
формулой необходимо помнить, что она имеет приближенное
значение. Формула дает значение близкое к действительному лишь
при условии, что отношение сог/со! близко к нулю, т. е. что скорость
собственного вращения <oi очень велика.
Пример 114. В качестве примера рассмотрим задачу о движении
мельничных бегунов, катающихся по горизонтальной плоскости. Бегун пред-
представляет собой массивное колесо. Ось маховика образует угол ft с вертикалью
и закреплена в неподвижной точке О. Она вращается вокруг вертикали с
угловой скоростью coj (рис. 245). Определить реакцию N плоскости.
Заметим, что вектор мгновенной угловой скорости Q проходит через
неподвижную точку О и точку А касания колеса с горизонтальной плос-
плоскостью. Обозначим через а угол между осью симметрии колеса и направле-
Рис. 246
нием вектора мгновенной угловой скорости Q. Нетрудно установить зависи-
зависимость величин
со,
сог
sin(d— a) sin a
Определим величину момента, создаваемого силами реакции связи, воспользо-
воспользовавшись формулой (а)
/ С — A sin a cos d \ ^ sin @ — a) sin d
И*=11 + ~С~ sin(d-a) jCC°2 s^ •
Если О = 90°, то
mx= Ccof
cos a
sin a
В приближенных расчетах пользуются этой формулой. Она дает верный ре-
результат лишь при ¦б'=90о. Если же положить, например, 6=60°, а=30°, то
(Q Д \
1 -f cos 60е Col sin 60°,
С 1
cos 60°= Уг, н поправка окажется существенной:
434
С — А ЗС-Д
2С 2С
Предположим, что центр тяжести диска находится в точке В, а вес его ра-
равен Р (рис. 246). Тогда нз законов статики будем иметь
т = № — РЪ,
откуда
К статически определяемой величине силы реакции N необходимо добавить
величину mja, положительную для вращающегося диска.
Рис. 247
Заметим некоторые соотношения для моментов инерции.
1. Для идеально тонкой однородной палочки длины I:
ml* \ С —А 1 ml*
С=0, А = -—. 1+ cos60" С = -—-<0.
-. [l+ С СА cos60°|
2. Для идеального тонкого однородного диска радиуса а:
та2 та* т
А>С, если '>—•
3. Для идеального цилиндрического катка (рис. 247):
та* т
С=-^—, А-— (За*+*¦+/»).
Если твердое тело не вращается вокруг своей оси симметрии,
т. е. Ш1 = 0, то для определения момента получим формулу
тх = (С — А) со| sin 0 cos §.
Этот же результат можно непосредственно получить и с помощью
уравнений Лагранжа второго рода.
435
5. Случай Ковалевской. После исследований Эйлера и Лаг-
ранжа ученые долго не могли найти других интегрируемых случаев
движения твердого тела с одной неподвижной точкой. Лишь
в 1888 г. С. В. Ковалевская в мемуаре «О проблеме вращения
твердого тела около неподвижной точки» рассмотрела третий ин-
интегрируемый случай движения твердого тела около неподвижной
точки. В случае Ковалевской эллипсоид инерции твердого тела,
построенный для неподвижной точки, удовлетворяет условиям
А = В = 2С.
Центр тяжести находится в экваториальной плоскости этого эллип-
эллипсоида инерции.
Рассматривая движение твердого тела в случае С. В. Кова-
Ковалевской, направим неподвижную ось z{ вертикально вверх, а под-
подвижные оси х, у, г по главным осям эллипсоида инерции так,
чтобы центр масс был расположен на положительной части оси х.
Тогда для координат центра масс получим
Обозначим через уь Y2> Ya косинусы углов между осью z\ и
осями х, у, z соответственно. Тогда проекции момента силы тя-
тяжести относительно неподвижной точки О на оси х, у, z будут
определяться из матрицы
о о
— mg у3
так что
тх = 0, ту= mg ly3, тг = — mg
а уравнения Эйлера приобретают вид
п dr i-
C — = — mgly2.
Принимая во внимание соотношения между моментами инерции,
представим эти уравнения в виде
(а)
Здесь три уравнения связывают пять неизвестных величин р, q, r,
Y2, Тз- Для получения полной системы уравнений добавим сюда
еще уравнения Пуассона:
436
Tl i f\ Y2 I Г\
dt 3 2 ' dt l з >
—7Г" + РЪ — 9Yi = 0. (b)
dt
которые являются линейными однородными уравнениями относи-
относительно величин yi, Y2> Y3- В уравнения Эйлера эти величины входят
с постоянным множителем с. Сделав подстановку
которая эквивалентна замене переменных в уравнениях Эйлера
величины с единицей и опуская индекс, получим
2$L = qr, 2-^ = -pr + y3, -*L^_Ya.
dt ч dt н хз dt Y2
Уравнения Пуассона в новых переменных останутся без изменений.
Как уже отмечалось, в задаче о движении тяжелого твердого
тела с одной неподвижной точкой существует три первых инте-
интеграла: интеграл живых сил, интеграл площадей и тривиальный ин-
интеграл.
Эти три интеграла в случае Ковалевской имеют вид
-L (Ар' + Aq* + СП ^
Ару1 + Aqy^ + Cry3 = const,
После деления на С отсюда находим:
P4?2+Y^ = -Yl+ h,
y\ •+¦ Y2 ¦+ Y3 = 1 ¦
Для построения общего интеграла задачи достаточно найти еще
один первый интеграл. С этой целью рассмотрим функцию
и производную от нее по времени в силу уравнений движения твер-
твердого тела
2p2q
dt и dt Ч dt dt
Обозначая выражение, стоящее в скобках, через
437
для производной от функции V по времени получим
Переменные U и V удовлетворяют уравнениям
являющимся следствием уравнений движения твердого тела в слу-
случае Ковалевской. Очевидно, что функция
ф = U2 + V2 = const
является первым интегралом системы полученных уравнений.
В самом деле, рассматривая производную по времени от функции
Ф, взятую в силу уравнений движения, заметим, что она имеет
вид
*> 2U*L+2V dV
dt dt ' dt
поэтому и будет тождественно обращаться в нуль в силу уравне-
уравнений движения твердого тела.
Если исключить из уравнений движения время и принять в ка-
качестве независимой переменной одну из величин р, q, r, уи у2, у3,
то останется найти еще один первый интеграл, что всегда можно
сделать с помощью интегрирующего множителя. Задача может
быть доведена до конца в гиперэллиптических функциях.
В отличие от случаев Эйлера и Лагранжа случай Ковалев-
Ковалевской до настоящего времени не нашел практического применения.
§ 5. ОПРЕДЕЛЕНИЕ РЕАКЦИИ В СЛУЧАЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
С ОДНОЙ НЕПОДВИЖНОЙ ТОЧКОЙ
Для определения реакции в неподвижной точке освободим
твердое тело от связи в этой точке, заменив действие связи силой
реакции R. Твердое тело, освобожденное от связи, может переме-
перемещаться в любом направлении. Поэтому можно применить теорему
об изменении количества движения, которая в векторной форме
имеет вид
dQ ¦ г.. лт
dt
где производная dQ/dt от вектора количества движения Q берется
по отношению к системе осей, неизменно связанной с твердым
телом. Так как
Q = М\с = М[ы> рс],
438
где рс—радиус-вектор центра масс твердого тела; М — его масса,
то для производной получим выражение
dm 1 Г dPc
Но
~Ж~ =0)
поэтому уравнение, определяющее движение центра масс, будет
иметь вид
М {[-—, рс] + »(», рс) - рссо^) = 5]F-} + R-
V
Если центр тяжести лежит на оси г, то, полагая zc = a, получим
наиболее простые уравнения в проекциях на оси, связанные с
телом
M(q' Jrpr)a = Y* *ve) + Rx, M(-p' + qr)a=%Y{* + Ry,
M [r*a - a (p2 + <72 + r*)]
Здесь величины p, q, r, p', q', г' определяются из уравнений дви-
движения. Полученные уравнения определяют проекции сил реакции
Aii Ry, Rz-
§ 6. УРАВНЕНИЯ ДВИЖЕНИЯ СВОБОДНОГО ТВЕРДОГО ТЕЛА
Чтобы знать движение свободного твердого тела, достаточно
знать движение какой-нибудь точки тела и движение тела относи-
относительно системы осей, имеющей начало в этой точке и совершаю-
совершающей поступательное движение. Удобнее всего в качестве такой
точки выбрать центр масс твердого тела.
Введем в рассмотрение некоторую инерциальную систему коор-
координат Ox\\j\Z\. Координаты центра масс G твердого тела в этой
системе обозначим через |, ц, ?. Массу тела обозначим через М.
Тогда уравнения движения центра масс примут вид
M
dp
где в правых частях стоят проекции внешних сил на оси х\, у\, zf.
Свяжем с центром масс твердого тела систему осей Кёнига ОхгУ&ъ,
совершающих поступательное движение относительно инерциаль-
ной системы Ох\, у\, z\. Введем еще три оси я, у, z, неизменно
связанные с твердым телом и направленные по главным осям его
центрального эллипсоида инерции. К свободному твердому телу
439
можно применить теорему об изменении момента количества дви-
движения по отношению к осям Кёнига. Следствием этой теоремы
будут три уравнения Эйлера:
dt
C^ + {BA)pq N,
at
где L, M, N — суммы моментов сил, приложенных к твердому те-
телу, относительно главных осей центрального эллипсоида инерции.
Полученные шесть дифференциальных уравнений движения
определяют шесть параметров |, ц, ?, <р, \|з, ft в функции времени t.
В общем случае правые части этих уравнений зависят от шести
параметров и их производных, так что приходится при определе-
определении решения системы рассматривать совместно все шесть уравне-
уравнений движения. В ряде частных случаев обе группы уравнений
удается изучать независимо одну от другой, и задача разбивается
на две: 1) изучение движения центра масс твердого тела; 2) изу-
изучение движения твердого тела относительно центра масс. Таким
образом, например, удается решать многие задачи о движении
искусственных спутников Земли.
§ 7. ГИРОСТАТЫ
Гиростатом называют механическую систему 5, состоящую из
твердого тела S[ и связанных с ним неизменно других тел 52,
изменяемых или твердых, движение которых относительно тела S\
не меняет геометрию масс системы 5. Такими системами являются,
например, твердое тело, с которым неизменно связаны оси одного
или нескольких симметричных гироскопов, твердое тело с полостью
произвольной формы, полностью заполненной однородной жид-
жидкостью, и др.
При заданном распределении масс гиростата в результате
внутренних движений тел 5г не изменяются ни положение центра
масс, ни направление главных осей инерции, ни моменты инерции
гиростата по отношению к какой-либо точке твердого тела.
В случае гиростата, так как он не является вполне неизме-
неизменяемой системой, нельзя рассматривать систему как одно твердое
тело.
Рассмотрим в качестве примера гиростат, представляющий
собой твердое тело Su имеющее закрепленную точку О, которую
примем за начало двух прямоугольных систем осей координат:
неподвижной Ogr|g, ось ? которой направлена вертикально вверх,
и подвижной Oxyz, оси которой совпадают с направлениями глав-
главных осей инерции гиростата для точки О.
Вектор в2 момента количества движения тела 5г можно пред-
представить в виде геометрической суммы векторов момента количест-
440
ва переносного движения ае и момента количества относитель-
относительного движения ог этого тела. Если обозначить через d момент
количества движения всей системы, рассматриваемой как одно
твердое тело, то момент количества движения гиростата относи-
относительно точки О представится в виде
а = аг -f <зг.
Обозначая проекции вектора аг на оси х, у, z через огь оГ2, orz,
а проекции вектора oi на те же оси соответственно
где А, В, С — главные моменты инерции гиростата 5 для точки О,
р, q, г — проекции на оси х, у, z вектора о мгновенной угловой
скорости тела Su по теореме об изменении момента количества
движения получим следующие уравнения:
А1Г + ~^Г + (С ~ в) дг + q°rs - ™п = Р {гсЪ ~ УсЪ)'
{А ~ С) гр + ™п ~ р°гз = Р {ХсУз
С -1Г + -^Г" + (В - А) W + P°rt - Я°п = Р (УсЪ -
dt at
где Р — вес гиростата, хс, ус, zc — координаты его центра масс;
Yi> Y2. Уз — косинусы углов между вертикалью ? и осями х, у, z,
удовлетворяющие уравнениям Пуассона:
К этим уравнениям необходимо еще присоединить уравнения отно-
относительного движения тела S2, зависящие от вида тела S2, характе-
характера наложенных на него связей и действующих сил, внутренних
для всей системы.
Если тело S2 представляет собой симметричный ротор с непо-
неподвижной относительно тела Si осью, то уравнения относительного
движения будут иметь вид уравнений движения твердого тела с
неподвижной осью.
Если аг заранее известен из условий задачи (когда связи
явно зависят от времени), то выписанных уравнений движения
оказывается достаточно для изучения движения гиростата.
Когда действующие на тело S2 внутренние силы обладают
силовой функцией U, а связи не зависят явно от времени, можно
получить три первых интеграла уравнений движения гиростата:
441
1) интеграл живых сил
Лра + Bq* + Cr* + 2 (рап + qar2 + rarS) + 2(Tr-U) +
+ 2Р (хс Yi + Ус Ъ + гс ъ) =-" const,
где Тг — живая сила тела 5г в его относительном движении;
2) интеграл площадей
{Ар + arl) Yi + (Bq + ап) у2 + (Сг + ar3) Y3 = const;
3) тривиальный геометрический интеграл
Дальнейший анализ движения гиростата зависит от ряда дополни-
дополнительных условий, в частности от распределения масс, от началь-
начальных условий и т. п.
Глава VII
АНАЛИТИЧЕСКАЯ ДИНАМИКА
Аналитическая динамика занимается изучением таких свойств
уравнений движения механических систем, которые обусловлены
особой формой этих уравнений. Она рассматривает общие прин-
принципы механики, вывод из них основных дифференциальных урав-
уравнений движения и методов их интегрирования. Аналитическая
динамика имеет свои методы исследования, пригодные для реше-
решения сложных задач механики, а также различных областей
физики.
Аналитическая динамика начала развиваться в конце XVII—
начале XVIII в., в период буржуазной революции в Европе. Тор-
ричелли и Бернулли положили начало аналитической статике.
Галилей и Ньютон сформулировали основные законы динамики,
а в конце XVIII в. Лагранж разработал основы современной ана-
аналитической динамики. Весь этот период характеризуется бурным
развитием техники и точных наук. В результате появилась потреб-
потребность к обобщению накопленных знаний, к созданию таких прин-
принципов, откуда бы вытекали все основные положения механики.
Одним из результатов такого обобщения явился принцип Далам-
бера — Эйлера — Лагранжа, как наиболее общий принцип меха-
механики. Он позволил сформулировать различные задачи о движе-
движении в виде системы дифференциальных уравнений.
Принцип Даламбера — Лагранжа не исчерпывал все возмож-
возможности познания движения. Еще в XVIII в. возникли новые задачи,
в которых искомые движения выделяются из всех мыслимых дви-
движений (допускаемых связями) при помощи некоторого экстре-
экстремального принципа отбора. К таким задачам относятся, напри-
например, задача о линии наибыстрейшего ската, задача о маятнике
с постоянным периодом, не зависящим от амплитуды, и др. За-
Задачи такого рода сводятся к отысканию экстремума интегралов
от некоторых функций. Задача экстремума отвечает и более ран-
443
ним принципам механики — принципу Бернулли и принципу Да-
ламбера — Лагранжа.
Развитие принципов механики связано с развитием принци-
принципов оптики и приводит к задаче об оптико-механической аналогии.
В оптике принципы распространения света высказывались значи-
значительно раньше, чем принципы динамики. Герои еще в I в. до н.э.
высказывал мысль, что свет распространяется по кратчайшему
пути. В XVII в. П. Ферма A601—1665) предложил принцип рас-
распространения света, согласно которому при прохождении границы
двух сред свет распространяется по тому пути, на который затра-
затрачивается наименьшее время. Дальнейшим развитием этого прин-
принципа занимались Эйлер, Лагранж, Гамильтон. Последний устано-
установил аналогию принципа Ферма с принципами механики.
Не меньшее значение получили в аналитической механике
методы исследования малых движений системы вблизи положе-
положения устойчивого равновесия или установившегося движения. Эти
методы начали развиваться из запросов небесной механики и
нашли широкое применение в технике. Развитие методов связано
с именами Лагранжа, Рауса, Пуанкаре, Ляпунова и многих дру-
других математиков и механиков.
В нашем курсе мы останавливаемся лишь на изложении ос-
основных положений аналитической механики. Не придерживаясь
исторической последовательности, начнем изложение с принципа
Гамильтона, который может быть получен непосредственно из
принципа Даламбера — Лагранжа. Автор ряда исследований в
оптике, ирландский математик Гамильтон A805—1865) внес в
механику принцип, аналогичный принципу Ферма, смысл которого
заключается в том, что механическое движение совершается из
одного заданного положения в другое за определенный отрезок
времени при условии, что разность потенциальной и кинетической
энергии в среднем имеет в этом движении экстремальное значение
(минимум). Гамильтоном этот принцип установлен для систем, на
которые наложены не зависящие от времени связи. Независимо от
Гамильтона и несколько позже этот принцип был установлен рус-
русским механиком М. В. Остроградским A801—1861) для систем со
связями, зависящими явно от времени.
§ 1. КАНОНИЧЕСКИЕ УРАВНЕНИЯ ГАМИЛЬТОНА
Движение механической системы, на которую наложены голо-
номные идеальные связи, полностью определяется уравнениями
Лагранжа второго рода
d dL dL =0 (i=l, 2, .... k).
dt dqt dqi
Эти уравнения представляют собой систему дифференциальных
уравнений второго порядка относительно неизвестных величин
444
<7ь ?2, ••• ?a- Они могут быть легко разрешены относительно стар-
старших производных от функций qu Действительно, функция Лаг-
ранжа L = L(t, q, q') может быть представлена, как сумма трех
однородных функций относительно обобщенных скоростей q'i-
L^L2 + Li-\- Lo,
где L2 = T2, L\ — Tu L0 = T0 + U, причем, как было показано выше,
L% является однородной квадратичной формой относительно обоб-
обобщенных скоростей <7i- Пусть
где а13, пх — функции только координат и времени. Тогда
поэтому уравнения Лагранжа второго рода могут быть записаны
в виде
/?/ = ЛС> Я' Я')-
Заметим, что определитель, составленный из коэффициентов при
старших производных уравнений Лагранжа
равен дискриминанту однородной квадратичной формы Т2, кото-
который не равен нулю тождественно. В самом деле, если связи, на-
наложенные на систему, не зависят явно от времени, то имеют место
равенства
Г1 = Го = 0, Т=Т%.
По определению, живая сила Т отлична от нуля, если хотя бы
одна точка системы не находится в покое, поэтому Т и Т2 являют-
являются знакоопределенными квадратичными формами, так как система
будет двигаться только тогда, когда отлична от нуля хотя бы одна
из обобщенных скоростей системы.
В общем случае, когда связи зависят явно от времени, т. е.
выполняются условия
xv = xv (t, ft, q2, ... , <7й), г/v = i/v (*> <7i> <72> • • • . Qk),
zv = zv(t, qly q2 qk),
живая сила является уже суммой трех однородных относительно
обобщенных скоростей форм, т. е.
445
где, как уже было показано,
Ti=±
2 2
Форма Гг представляет собой живую силу воображаемого движе-
движения той же системы, происходящего при мгновенно остановленных
(замороженных) связях. В последнем случае живая сила этого
воображаемого движения
(b)
По определению, живая сила системы обращается в нуль только
тогда, когда равны нулю скорости всех точек системы. Для мгно-
мгновенно остановленных связей имеют место зависимости
dq ' 6J dq
<7s, 0V qs, 2;vGsi
dqs ' 6J dqs jLl dqs
s s s
и обращение в нуль всех скоростей vt влечет за собой обращение
в нуль всех обобщенных скоростей. Поэтому квадратичная фор-
форма Т оказывается положительно определенной квадратичной фор-
формой. В силу того, что форма Т в каждый момент времени совпа-
совпадает с формой Т2, последняя тоже будет положительно-опреде-
положительно-определенной квадратичной формой относительно обобщенных скорос-
скоростей, а ее коэффициенты а.ц удовлетворяют известным критериям
Сильвестра, выражающим положительность дискриминанта квад-
квадратичной формы Т2, т. е.
det|a?/|>0,
вместе со всеми диагональными минорами. При выполнении этих
условий система уравнений Лагранжа второго рода может быть
разрешена относительно старших производных.
Если вместо обобщенных скоростей ввести новые перемен-
переменные, то система уравнений Лагранжа будет представлять собой
систему уравнений, разрешенную относительно производных от
этих новых переменных. Гамильтон обнаружил преобразования,
которые делают функцию Лагранжа линейной относительно ско-
скоростей при одновременном удвоении числа переменных. Благодаря
этому преобразованию задачи механики могут быть сведены к ка-
каноническим дифференциальным уравнениям. В основе преобразо-
преобразования Гамильтона лежит идея общих преобразований француз-
французского математика Лежандра A752—1833).
1. Преобразования Лежандра. Введем некоторую произволь-„
ную функцию F от переменных х\, хч,..., хп, стесненную лишь усло-
условием, что определитель из вторых производных от этой функции,
т. е.
446
. ,i| 62f
det
II
t
II
отличен от нуля. При помощи этой функции определим новые
переменные г/*:
dxt
после чего, введя новую функцию от переменных tfi.
f(!fv Уъ> • • ¦ . Уп) = 2лг;уг —F(xlt х2, ... , хп),
рассмотрим бесконечно малую вариацию функции f, вызванную
произвольными бесконечно малыми вариациями переменных \)\.
Будем иметь
Ц = S -3L Ьу, ~ 2 (*,8Й + yfixii ~^-~ bxi.
ду{ dxt
В силу определения переменных у* коэффициенты при вариациях
координат 6*j обращаются в нуль, поэтому будем иметь, сравни-
сравнивая вариации левой и правой частей:
¦%-=х1 (t = l, 2,..., м).
Последние уравнения определяют обратное преобразование от
переменных уг к переменным х*.
Преобразование Лежандра может быть применено не ко всем
переменным, а только к некоторым из них. Пусть, например, дви-
движение системы определяется переменными
а преобразуются только переменные xs. Тогда переменные хх, х%,..., хп
называются активными переменными преобразования, а щ, Ыг, ...
..., uh — пассивными переменными преобразования. Предположим,
что функция
F = F(xlt хг хп, их, и2, ... , uk)
такова, что определитель матрицы
составленной из частных производных второго порядка по пере-
переменным xit отличен от нуля. Тогда можно рассмотреть преобразо-
преобразование к новым переменным у*:
447
рассматривая величины us как некоторые параметры преобразова-
преобразования. Определив при помощи равенства
функцию /(г/i, у2,-.,Уп, Щ, u2,...,Uh), обратное преобразование
получим при помощи равенства
Варьирование функции f приводит нас к равенству
2 Л- ЬУ1 4 2 JL Ьщ = Zxfiyt + 2уМ -
°У1 дщ
откуда, приравнивая коэффициенты при одинаковых вариациях
координат, получим в дополнение еще одно равенство
df _ dF
дщ дщ
Пример 115. Пусть положение механической системы определяется
лагранжевыми координатами q\, q2, ..., Qh и обобщенными скоростями
^j, q2, . ¦. > Ць и пусть первые г лагранжевых координат являются цикли-
циклическими. Рассмотрим преобразование Лежандра при помощи функции Лаг-
ранжа, принимая в качестве активных переменных циклические скорости.
Как и прежде, будем обозначать циклические скорости и координаты
индексом а, а позиционные индексом \. Преобразование Лежандра, опреде-
определяющееся функцией Лагранжа
L = L {qs+1, qs+2, ... , qk, q[, q'2 q'k),
дается формулами
которые представляют собой циклические интегралы уравнений Лагранжа.
Для определения обратного преобразования имеем функцию
откуда
дл = --^~ (а=1, 2, ..., s),
и, кроме того, равенства
448
где функция R, называемая функцией Рауса, зависят от переменных qi, q:y $a
Тогда уравнения Лагранжа для переменных д,- (позиционный координат) перей-
перейдут в уравнения Рауса
?" = 0 (/=1,2 s).
dt dq'j дЯ]
2. Канонические уравнения Гамильтона. Пусть положение
механической системы с голономными идеальными связями пол-
полностью определяется лагранжевыми координатами qu q%,..., q^, a
движение системы — уравнениями Лагранжа второго рода:
d д___а/1==0 и 2^^ k)
"* dq: Oqj
Функция Лагранжа в общем случае является квадратичной фор-
формой относительно обобщенных скоростей <7ь <7г. • • • . <7*> и удов-
удовлетворяет условию
det
(система, удовлетворяющая этому условию, называется нормаль-
нормальной), поэтому можно рассматривать преобразование Лежандра
функции Лагранжа L, принимая в качестве активных переменных
преобразования обобщенные скорости <7ь <72, .. . , qu- Новые пере-
переменные
Pi=^r (i = l, 2, ..., k) (a)
называют импульсами. Преобразование (а), осуществляемое при
помощи функции Лагранжа, называется преобразованием Гамиль-
Гамильтона. Обратное преобразование осуществляется функцией
1=1
зависящей от координат и импульсов. Тогда обобщенные скорости
будут определяться равенствами
q'L=f- (i=l, 2 k).
Кроме того, будем иметь соотношения
5Я dL_ дН_ d_L_
dqi dqi ' 6t dt
Уравнения Лагранжа в новых переменных получат теперь вид
(после исключения обобщенных скоростей)
15 Е U Березкин 449
i?L = _i*L (/=l, 2,..., k).
At dqt
Присоединяя сюда группу уравнений
получим 2k дифференциальных уравнений первого порядка, кото-
которым удовлетворяют переменные qu Ри причем правые части диф-
дифференциальных уравнений являются функциями времени и пере-
переменных <7г, Pi-
Переменные qit pt были введены в механику Пуассоном и Га-
Гамильтоном и называются каноническими переменными
Гамильтона. Сами же дифференциальные уравнения
dqi _ _дН_ йр;_ = _ Ш_ П ^ \ 2 k)
dt dpi' dt dqt У ,,..-,)
были получены впервые Гамильтоном в 1834 г. и называются
каноническими уравнениями и Гамильтона. Функция
Н называется функцией Гамильтона, или характерис-
характеристической функцией. Уравнения Гамильтона оказываются
удобными при исследовании не только динамических задач класси-
классической механики, но и ряда вопросов современной физики.
„ дН dL
Следует отметить, что в соотношении __ производные
dqi dqi
левой части берутся в системе переменных q, p, а в правой — в
системе переменных q, q'. Если связи не зависят явно от времени,
а силовая функция тождественно равна нулю, будем иметь
тогда
дТ
HL
q.P
Пример 116. Рассмотрим преобразование Гамильтона для свободной
материальной точки, движущейся по инерции в плоскости, положение которой
определяется полярными координатами г и Ь. Живая сила точки, записанная
в полярных координатах, имеет вид
а обобщенные импульсы соответственно равны
рг = mr', р# =
Функция Гамильтона
450
Рассмотрим частные производные
Р* «1,2
or or mr3
будем иметь'
дТ _ дН_
дг дг '
3. Функция Гамильтона и ее свойства. Преобразования Га-
Гамильтона связаны с новой функцией Н —¦ функцией Гамильтона,
зависящей только от канонических переменных q, p:
Такое представление функции оказывается всегда возможным в
силу того, что определитель преобразования
Pi = JJi- = 2altqi + at (f=l, 2, .... k)
oqi
отличен от нуля.
Пример 117. Составим функцию Гамильтона для материальной точки,
вынужденной оставаться на сфере, радиус которой меняется по некоторому
заданному закону:
' - / (О
и на которую не действуют никакие внешние силы.
Положение точки можно определить сферическими координатами г, т|э, Ф,
из которых г—заданная величина, а г|? и Ь являются координатами Лаг-
ранжа. Тогда живая сила точки
т = 1Г[/а {t) #'2 + f'2
причем
обобщенные импульсы
—
р2 sin* $ ,
' m2/4sin*d ,
15*
\ 2тР
дТ
rasin2fl 2 [
2
\Р:* + sin2 ¦& )
¦ „..
' 1""'"
2
451
В общем случае живая сила системы является суммой трех одно-
однородных относительно обобщенных скоростей форм
поэтому функция Гамильтона Я может быть представлена в виде
В самом деле,
Н ^Ърм — Т — и =2 -^ q't — T — U,
или, после подстановки значения Т,
dq{ €q\
На основании теоремы Эйлера об однородных функциях от-
отсюда имеем
Н = 272 + 7\ — Т — U,
или
Я = Т2 — То — U.
Если же связи, наложенные на систему, не зависят явно от времени,
то
То = Тх = О, Т-= Т2,
и тогда
н=т—и
представляет собой полную механическую энергию системы.
Пример 118. Составить функцию Гамильтона для эллиптического
маятника (рис. 248), состоящего из ползуна массы М, способного скользить
по горизонтальному рельсу, и точки массы ш, соединенной стержнем с ползу-
ползуном, предполагая, что движение ползуна по рельсу происходит по заранее
заданному закону x=x(t).
Система имеет одну степень свободы, и ее положение определяется пара-
параметром Ь. Живая сила системы
Т = М + т х'2 + — Bte'6' cos 6 + 1Ч'2),
где
Г2 = — гЧ}'2, Г, = m/л-'О' cos ft,
7",=-
m + М ,2
2
На систему действует сила тяжести с силовой функцией
U = mgl cos d,
452
поэтому функция Гамильтона получает вид
н = т2 — т0 — и,
но
дТ
р=— — тгЧ' + mix' cos ft,
т
Рис. 248
Рис. 249
поэтому
*»_-?
— Ы*' cos ¦&
(Р —
cos ¦ftJ—
Рассмотрим изменение функции И при движении механической
системы. Это изменение можно определить, составив выражение
для производной по времени от функции Я:
dH
dt
dt
dqt dt
дН dPl
dpi dt
В действительном движении системы координаты q и р удовлетво-
удовлетворяют каноническим уравнениям Гамильтона, поэтому
dH дН , v, / дН дН дН дН \ дН
dt
дГ
dqt dpi dpi dqt
dt
т. е. полная производная по времени от функции Гамильтона равна
частной производной по времени
дН
dt
дН
dt
453
Если же функция Гамильтона не зависит явно от времени, то
дН п
—- = 0, тогда
at
dt
откуда следует, что в действительном движении выполняется усло-
условие
H = T2 — T0 — U = h = const.
Полученное условие представляет собой первый интеграл канони-
канонических уравнений Гамильтона, известный как интеграл
Я ко б и. Он существует при тех же предположениях, что и ин-
интеграл Якоби уравнений Лагранжа второго рода.
Если связи, наложенные на систему материальных точек, не
зависят явно от времени, то интеграл Якоби совпадает с интегра-
интегралом живых сил
Н = Т— U = h.
Пример 119. Составить канонические уравнения движения материаль-
материальной точки массы пг, которая может свободно скользить по окружности ра-
радиуса г, вращающейся вокруг вертикального диаметра (рис. 249).
Примем за лагранжевы координаты угол ф поворота системы вокруг
вертикальной оси и угол а, определяющий положение точки ш, отсчитывае-
отсчитываемый от вертикального диаметра. Тогда живая сила системы запишется в виде
и будет представлять собой однородную квадратичную форму относительно
ф' и а'. Предположим, что закон вращения окружности вокруг вертикального
диаметра задан:
ф = Ф @ •
Тогда
U = mgr cos a.
Функция Гамильтона
mr2a'2 (J + mr* sin2 a) ,„ ,
H = ——! ф'2 (i) — mgr cos a
Ho
dT
p = = mr2a ,
da
поэтому
а'->р
454
и канонические уравнения Гамильтона принимают вид
а' =
/2 с;
р' = — [— тг2у sin а cos а + mgr sin а].
Если выполняется условие op'(<)=const, эти уравнения допускают первый ин-
интеграл #=const, т. е.
(/ + mr2 sin2 а) ф'2
— mgr cos a — h.
Пример 120. Составить канонические уравнения Гамильтона для сво-
свободной материальной точки массы т, движущейся в центральном ньютонов-
ньютоновском поле сил, определяя ее положение сферическими координатами.
Живая сила точки в сферических координатах имеет вид (рис. 250)
Т = — (ф'2 /•* sin2 О + г'2 + r2fl'2).
Рис. 250
Рис. 251
Для силовой функции будем иметь выражение
На точку не наложено никаких связей, а потому функция Гамильтона Я за-
запишется в виде
Определяя импульсы
и заменяя обобщенные скорости в Я их выражениями через импульсы, будем
иметь
Я:
2/и
455
после чего запишем канонические уравнения Гамильтона
dr
dt
dPr
dt
Pr
m
mr3
d<p
dt
Pi
sin»*
dp<)
dt
Рф
mr2 sin2 ¦&
2
Pb [im
mr9 r2
p^cosfl
mr* sin* ¦&
dt mr2
—— = 0,
dt
Функция Гамильтона здесь не зависит явно от времени, поэтому существует
первый интеграл
или, в явном виде,
1 г 4_
2т
Кроме того, уравнения движения допускают еще один первый интеграл, соот-
соответствующий циклической координате <р
рф = const.
Пример 121. Составим канонические уравнения Гамильтона для сфери-
сферического маятника (рис. 251).
В сферических координатах живая сила и силовая функция точки соот-
соответственно равны
т
I/ = /ngl cos ©.
Уравнения, определяющие импульсы через обобщенные скорости, имеют вид
РФ = пг1Ч', рф — Ы2<р' sin2 О.
Поэтому для функции Гамильтона получим выражение
а канонические уравнения Гамильтона запишутся в виде
Эти уравнения допускают два первых интеграла:
4
2m
рф -= const.
456
Если координата qs является циклической, то из условия
дН _ dL_
dqs dqs
будет следовать, что и функция Гамильтона Н не зависит явно
от координаты qs, а тогда соответствующее уравнение Гамильтона
получит вид
0,
dt
и ему будет соответствовать циклический интеграл
ps — const.
Таким образом, циклическими интегралами оказываются импуль-
импульсы, сохраняющие постоянное значение во все время движения.
Канонические уравнения Гамильтона имеют ряд преимуществ
при исследовании общих свойств движения механических систем
с голономными связями.
§ 2. ПРИНЦИП ГАМИЛЬТОНА — ОСТРОГРАДСКОГО
1. Принцип Гамильтона—Остроградского в настоящее время
стал одним из основополагающих принципов механики. Для голо-
номных механических систем он может быть непосредственно по-
получен как следствие принципа Даламбера — Лагранжа. В свою
очередь, все свойства движения голономных механических систем
могут быть получены из принципа Гамильтона — Остроградского.
Рассмотрим движение системы материальных точек mv отно-
относительно некоторой инерциальной системы отсчета Oxyz под дей-
действием активных сил Х^, Fv, Zv. Пусть возможные перемещения
точек системы стеснены идеальными голономными связями. Обозна-
Обозначим декартовы координаты точки mv через xv, i/v. zv, а незави-
независимые лагранжевы координаты через <7ь <7г, ¦•-. Як- Зависимость
между декартовыми и лагранжевыми координатами задается
соотношениями
xv = л\, (t, ft, Яг Як)' У* =¦ Ум V, ?!, 9а. • • • . Як)
zv = zv(t, qlt q2, ... , qk).
В дальнейшем будем предполагать, что координаты xv, yy, zv
представляются однозначными, непрерывными и сколь угодно
раз дифференцируемыми функциями переменных t, q{, q2, ..., qk.
Кроме того, будем предполагать, что из каждого положения систе-
системы параметры <7ь Цг, •••> <7ft могут изменяться как в положительном,
так и в отрицательном направлении. Движение системы будем рас-
рассматривать начиная с некоторого момента времени U ДО момента
t\. Пусть начальному положению системы отвечают значения лаг-
457
9
ранжевых координат qY , q\ > ¦ •. . qh > а положению системы в
момент tx — значения q^, q^K ¦¦-, qil)- Введем в рассмотрение
k+ 1-мерное расширенное пространство координат qu q%...,qh и
времени t, в котором каждому конкретному положению системы
отвечает одна точка. В таком расширенном k+ 1-мерном прост-
пространстве движение системы представляется некоторой кривой, кото-
которую в дальнейшем будем называть
траекторией системы. На-
Начальному и конечному положениям
системы здесь будут соответство-
соответствовать две точки Pq и Pi (рис. 252).
В действительном движении систе-
системы из положения Ро в положение
Pi лагранжевы координаты непре-
непрерывно изменяются, определяя в
А+1-мерном пространстве кривую,
которую будем называть д е й с т в и-
тельнойтраекторией систе-
м ы. Можно заставить перемещать-
перемещаться систему в соответствии с нало-
наложенными на систему связями из по-
положения Ро в положение Рг за тот
же интервал времени, но по другой траектории, близкой к действи-
действительной, не заботясь о том, чтобы удовлетворялись уравнения дви-
движения. Такую траекторию в I&+1 -мерном пространстве назовем
окольной траекторией. Сравнивая движения по действи-
действительной и окольным траекториям, зададимся целью определить
действительную траекторию среди окольных. Пусть положение си-
системы в момент t на действительной траектории отмечается точ-
точкой Р, а положение системы в тот же момент времени на окольной
траектории — точкой Р' (рис. 252). Отрезок РР', соединяющий две
точки на различных траекториях в один и тот же момент времени,
будет представлять возможное перемещение системы в момент /.
Он соответствует изменению лагранжевых координат в момент t
при переходе из положения Р в положение Р' на величину
6<7i, 8q2,..., 8qu. Возможному перемещению системы будут отве-
отвечать вариации декартовых координат 8atv, 8j/v, 8zv, которые могут
быть выражены через вариации координат Лагранжа в виде
равенств
Рис. 252
dqs
clyv
oqs
&v =
dzv
Рассмотрим произвольное однопараметрическое семейство «траек-
«траекторий»
qt(t, a), fo<f<^,
458
каждая из которых соединяет точки Ро и Р\, проходя через них
в моменты времени ^о и ty соответственно, и пусть значению пара-
параметра а=0 отвечает действительная траектория (прямой путь),
которую проходит система за время t\—to из положения Ро в поло-
положение Pi. Значениям а, отличным от нуля, отвечают «окольные»
траектории (окольные пути), т. е. все остальные траектории, сое-
соединяющие точки Ро и Р] за время tv—to. Перемещению системы
вдоль какой-либо траектории будет соответствовать изменение
лагранжевых координат за счет изменения времени t, когда пара-
параметр ее остается неизменным. Параметр а будет меняться лишь при
переходе с одной траектории на другую. Вариация координаты qs
будет теперь определяться следующим образом:
bqs- ^ oa,
а производная по времени от координаты qs будет иметь вид
dqs _ 3qs
dt ~ dt '
Пусть лагранжевы координаты qs являются однозначными не-
непрерывными дифференцируемыми функциями от t и а. Тогда
dt dt dtda dadt
~ со 1 dt j a ~ da [ dt J ~ \ dt
ИЛИ
dt 4s \ dt j
Полученные соотношения в механике называются «перестановоч-
«перестановочными». Операции дифференцирования перестановочны только
тогда, когда все координаты qs независимы и не связаны неинтег-
рируемыми соотношениями.
Покажем, что перестановочность операций варьирования и
дифференцирования выполняется и для декартовых координат.
Пусть
xv = xv (t, qx, G2, ... , qk) v = 1, 2, . . . , 3n.
Тогда
KM =
dt dt ' ±J dqs n
s
459
Рассмотрим производную по времени от блу.
6х^(У8дАУ 8qs
dt dt \Л dqs ^s) Li dqidqs 4s dt
s {,s
iJ4 dxv d
С другой стороны,
=?
0%
dt ^J dqsdt;
. 4-
Вычитая второе равенство из первого, получим
_!. fix, _6J^ = yJ^L('.A6fi-8-^4=0.
dt dt La dqs \ dt 4s d; '
откуда следует
d с. s dxv
— oxv = о
dt dt
т. е. операции дифференцирования и варьирования перестановочны
и для декартовых координат, если на систему материальных точек
наложены только голономные идеальные связи.
Перейдем к определению действительной траектории среди
всех окольных. Действительное движение системы происходит в
соответствии с принципом Даламбера — Лагранжа
У [mv*v — Xv) 6xv J- (mvf/v ~ "^v) 6i/v J~ (тч4 — Zv) 6zv] = 0,
¦v
который определяет «тенденцию» истинного движения (действи-
(действительного движения) в каждый момент времени. Рассмотрим ин-
интеграл
v) — Zv) 8zv]j ctt = 0,
-т
взятый вдоль действительной траектории системы. Все сравнивае-
сравниваемые траектории системы начинаются в один и тот же момент вре-
времени и из одной и той же точки k+ 1-мерного пространства. Все
они оканчиваются в одной и той же точке в один и тот же момент
времени. Поэтому на концах траекторий при t—t0 и t=tx будут
выполняться условия
6*v = 6#v = 8zv = 0.
460
Преобразуем полученное уравнение, проинтегрировав по частям
выражение
(• П Г*
.} J
^0 '.
dx
'*
dt
dt =
dfi
Л
dt,
а так как на концах траектории вариации 6xv, 6i/v> 62V обра-
обращаются в нуль, будем иметь
*\ Af,y
V
I nvxv bxvdt = — \ /nvXv
J J
dt
dt.
В силу перестановочности операций дифференцирования и варьи-
варьирования, имеем
U .- tx tx '2
Л / "OXV [» , , (• "lv^v
1 (/("yAV ' Wt 1 i/t\iAv Сл*) Ci.1- ' I \J ~ Lilt j
J Л J J 2
после чего уравнение принимает вид
' f V^ mv '2 'г '2 Y^ ]
V V
или
f ГбГ + Y (^V6xv -t Yvby* + ZV62VI dt = 0.
J L *-* J
В таком виде полученное уравнение выражает «принцип наи-
наименьшего действия» Гамильтона для общих механических систем.
На действительной траектории системы обращается в нуль ин-
интеграл от функции
ЬТ 4- V {Xvbxv -f- Fv6i/V 4- ZV82V).
Если силы, действующие на систему, обладают силовой функ-
функцией U (xlt yv zx, ... , хп, уп, zn), то имеет место соотношение
xv + Yvbyv + Zv6zv) = Ш,
а выведенное выше уравнение принимает вид
1! (ЬТ + Ш) dt = 0.
461
Так как варьирование не связано с изменением времени, то опе-
операции варьирования и интегрирования можно поменять
местами:
6 f (Г+ !/)<# = О, илибГШ=0,
и и
и
т. е. интеграл ( (Г -f- U) dt на действительной траектории имеет
и
стационарное значение.
Мы показали необходимость стационарного значения интегра-
интеграла на действительной траектории. Покажем, что обращение вариа-
вариации интеграла в нуль является достаточным условием действи-
действительного движения системы. Для этого достаточно из принципа
Гамильтона получить уравнения движения системы.
Рассмотрим механическую систему с голономными идеальны-
идеальными связями, положение которой определяется лагранжевыми
координатами q\, q%,..., Qh, а живая сила
T = T(t, qlt qv ¦. . , qk, q[, q2, ... , q'k)
зависит от обобщенных скоростей, координат и времени. Прини-
Принимая во внимание известное соотношение
перепишем принцип Гамильтона в виде
Выполняя варьирование живой силы
s
Ъ,
и интегрируя затем по частям
J dq's
дТ
П
d дТ
462
так как на концах интервала вариации координат равны нулю, из
принципа Гамильтона получим
ИЛИ
Вариации &qs произвольны и независимы внутри интервала (to, ti),
а тогда в силу основной леммы вариационного исчисления равенст-
равенство будет возможно только тогда, когда все коэффициенты при
8qs обращаются в нуль, т. е. когда выполняются условия
dt dqs dqs
Полученные уравнения должны выполняться в действительном
движении механической системы. Достаточность принципа Гамиль-
Гамильтона доказывается тем, что эти уравнения являются уравнениями
Лагранжа второго рода, описывающими движение механической
системы, на которую наложены голономные идеальные связи.
Принцип Гамильтона для механических систем с голономны-
ми идеальными связями можно теперь сформулировать следующим
образом:
Действительное движение системы с голономными идеальными
связями между двумя заданными положениями отличается от
кинематически возможных между этими положениями движений,
совершаемых за тот же промежуток времени, тем, что на действи-
действительном движении обращается в нуль интеграл
| -г ? (*vSxv - Kvfyv + Zv8zv)] dt-0
U v
для всех значений bxv, 8yv, 6zv, удовлетворяющих 'указанным усло-
условиям.
Принцип Гамильтона может быть принят в качестве основного
принципа механики систем с идеальными голономными связями.
Мы доказали, что интеграл принимает стационарное значение на
действительной траектории системы, но при некоторых ограниче-
ограничениях можно показать, что действительная траектория не только
является экстремалью, но и доставляет наименьшее значение ин-
интегралу
h
\Ldt.
U
463
Вопрос о характере экстремума не имеет существенного значе-
значения при выводе уравнений движения. Но существуют задачи, в
которых использование свойств минимальности играет большое,
значение. Если произвольно выбирать начальное и конечное поло-
положения системы, то может оказаться, что эти два положения не-
невозможно соединить действительной траекторией или, как говорят,
«прямым путем». Так, например, при прямолинейном движении
точки в поле тяготения будем иметь
т _ тх'2 п тк*х2
~ 2 ' ~ 2 '
Положения точки х=0 и х=1 не могут быть соединены прямым
путем за время At -- —.
k
В общем случае между двумя данными положениями можно
провести несколько отличных друг от друга прямых путей, по
которым движение происходит за одно и то же время. Если два
положения Л о и А\ таковы, что могут быть соединены между собой
несколькими различными прямыми путями, то такие положения
называются сопряженными кинетическими фокусами.
Рассмотрим в качестве примера движение несвободной мате-
материальной точки массы т = 1, вынужденной оставаться на поверх-
поверхности сферы радиуса R — 1 при отсутствии силового поля. В сфери-
сферических координатах кинетическая энергия точки
Так как координата ч|э является циклической, ей соответствует
циклический интеграл
i|/ sin2 ф = р = const.
Известно, что при отсутствии силового поля точка движется по
геодезической кривой. Такими геодезическими кривыми в данном
случае являются дуги больших кругов. Таким образом, прямое
движение — это движение точки по дуге большого круга. Не на-
нарушая общности, можно всегда предположить, что во все время,
движения выполняется условие i|/ = 0, откуда следует р = 0. Тогда
в действительном движении будет выполняться условие <p' = a0>
т. е. прямой путь будет представлять равномерное движение точки
по дуге большого круга. Обозначая через W интеграл
= \Ldt,
будем иметь
464
В окольном движении
поэтому
V0 (V - D0) Л > D0 J (U - l>0) Л = V0 (SOK - Snp),
где SOk — окольный путь; 5пр — прямой путь. Если точки Ао а Аг
являются диаметрально противоположными точками, то они будут
сопряженными кинетическими фокусами. Во всех остальных слу-
случаях окольная дуга всегда будет больше дуги большого круга.
Если расстояние между Ао и Ах больше, чем я, то окольный путь
может стать короче прямого и действие не будет иметь минимума.
2. Вывод канонических уравнений Гамильтона из принципа
Гамильтона — Остроградского. Из принципа Гамильтона—Остро-
Гамильтона—Остроградского можно получить и другую форму дифференциальных
уравнений движения голономной механической системы — кано-
канонические уравнения Гамильтона. Будем предполагать, что на рас-
рассматриваемую систему наложены идеальные голономные связи, а
действующие на точки системы активные силы обладают силовой
функцией U. Принцип Гамильтона для такой системы запишется
в виде равенства
и
Ь^{Т |- U) dt = 0.
io
Перепишем это равенство в виде
to i i
или, вводя функцию Гамильтона Н,
и
Выполняя операцию варьирования интеграла, в предположении,
что интервал времени не варьируется, получим
j (J Pibq[ + ? q\ 5Pi - ЬН\ dt = 0.
io i i
465
Интегрируя первую сумму по частям
J" . dt
и и
и принимая во внимание, что вариации координат на концах
интервала равны нулю, будем иметь
>,&д- dt = —
Тогда математическое выражение принципа Гамильтона приобре-
приобретает новую форму
Здесь коэффициенты при вариациях бр, обращаются в нуль, в силу
преобразований Лежандра, поэтому
Последнее равенство в силу произвольности множителей bqi имеет
место в том случае, когда все коэффициенты при б^г обращаются
в нуль одновременно, т. е.
Р\ = —?Г (*=1. 2,..., к).
Таким образом, на действительной траектории системы канониче-
канонические переменные должны удовлетворять уравнениям
?; = ¦—. pt=—r- с = 1. г,...,*),
dpi dqi
где первая группа уравнений следует непосредственно из преобра-
преобразований Лежандра. Полученные уравнения являются канониче-
каноническими уравнениями Гамильтона, выведенными выше при помощи
преобразований Лежандра— Гамильтона.
3. Принцип Гамильтона в форме Пуанкаре. При выводе урав-
уравнений движения из принципа Гамильтона предполагалось, что
независимыми являются только координаты q\, q%, ..., q\. Обоб-
Обобщенные скорости и импульсы предполагались зависимыми. Отно-
Относительно вариаций координат предполагалось: а) вариации bqt
обращаются в нуль на концах интервала времени (при ?=^о и
t=t{)\ б) вариации bQi произвольны и независимы внутри интер-
интервала (?0, М- Французский математик и механик А. Пуанкаре
466
A854—1912) заметил, что если уравнения Гамильтона рассмат-
рассматривать как некоторый критерий действительного движения, то
принципу Гамильтона можно будет дать несколько иную трак-
трактовку, считая, что при переходе с одной окольной траектории
на другую независимыми являются не только вариации коорди-
координат, но и вариации импульсов. Справедливость такого утвержде-
утверждения может быть доказана, если при выполнении условий: а) на
концах интервала (^0, ^i) обращаются в нуль вариации координат
и импульсов
8?i = 6ft = • • • = % = 0, 6pt = 6р„= ... = bpk = 0;
б) внутри интервала (t0, h) вариации координат б?» и импульсов
dpi произвольны и независимы, из принципа Гамильтона будут
следовать уравнения движения механической системы. Для боль-
большей наглядности введем в рассмотрение расширенное фазовое
пространство 2&+1 переменных — координат щ\, q2,..., qu, импуль-
импульсов pi, р2,..., pk и времени t. Каждая точка этого пространства
отвечает некоторому состоянию движения механической системы.
С точки зрения Пуанкаре можно рассматривать новую вариацион-
вариационную задачу, в которой все траектории сравнения начинаются в
одной и той же точке расширенного фазового пространства и окан-
оканчиваются в некоторой другой точке этого пространства. Но так
как заданные начальные условия полностью должны определять
траекторию системы, произвольно выбранная вторая точка может
вообще оказаться не на действительной траектории. Поэтому ва-
вариационная задача имеет смысл только тогда, когда обе точки
лежат на одной действительной траектории. Кроме того, в новых
переменных функция Лагранжа L в соответствии с преобразова-
преобразованиями Лежандра —¦ Гамильтона имеет вид
L-
где величины qt выражаются через координаты и импульсы при
помощи преобразований
3L
ft-—•
dqt
Последнее условие, очевидно, должно иметь место и для всех
траекторий сравнения.
Записывая принцип Гамильтона в форме
и
б \(ZPiql-H)dt = O
V.
и производя варьирование подынтегральной функции
467
после интегрирования по частям выражения
J |* j*
pfiq\dt = |Pl -**L. dt = рМ
и и t, t,
и
где pfiqt = 0, представим принцип Гамильтона в виде
to
В сделанных выше предположениях интеграл обращается в нуль,
если равны нулю все коэффициенты при независимых вариациях
б?,, бр,, т. е. если выполняются равенства
*EL-M-=0, -iff—2*L=0 A=1,2,...,*)
dt dpi dt dqc
вдоль действительной интегральной кривой. Последние же пред-
представляют собой канонические уравнения Гамильтона, что и дока-
доказывает справедливость принципа Гамильтона в форме Пуанкаре.
Геометрическое представление движения в пространстве 2k
измерений впервые предложил американский физик Д. Гиббс
A839—1903), который и ввел понятие фазового простран-
пространства, считая, что р и q являются ортогональными координатами
2&-мерного евклидова пространства. Использование фазового
пространства вносит ряд преимуществ при изучении движения
механических систем. Так, например, на многие вопросы
механики нельзя дать удовлетворительный ответ, рассматривая
одно частное решение системы, соответствующее определенным
начальным данным. Необходимо знать все множество траекторий.
Движение может начинаться из любой точки k-мерного прост-
пространства в произвольном направлении. В фазовом пространстве
задание одной точки Р однозначно определяет всю траекторию.
Для полного решения канонических уравнений Гамильтона необ-
необходимо знать величины <7г и /?,- как функции времени t и 2k по-
постоянных интегрирования, которые можно интерпретировать как
значения 2k координат фазового пространства в момент t=0. Рас-
Рассматривая 2k координат как различные измерения в фазовом про-
пространстве, можно изобразить полное решение канонических урав-
уравнений в упорядоченном виде без пересечений в виде бесконечного
множества кривых, заполняющих 2k+ 1-мерное пространство (пе-
(пересечение кривых означало бы, что в одной и той же точке воз-
возможны две касательные к кривой, а канонические уравнения при
отсутствии особых точек определяют единственную касательную).
Геометрическая картина движения аналогична картине дви-
движения жидкости. Рассмотрим движение жидкости в обычном трех-
468
мерном пространстве. Это движение можно описывать различ-
различными способами. Метод Лагранжа изучает движение жидкости
в объеме, метод Эйлера рассматривает движение жидкости в каж-
каждой точке пространства. В первом случае координаты точек яв-
являются функциями начальных значений этих координат и времени:
x = fl{a, Ь, с, t), t/ = /2(a, Ъ, с, t), г = /3(а, Ь, с, t).
Во втором рассматриваются характеристики в определенных точ-
точках пространства:
а = ф(х, у, z, t), b = ^(x, у, z, t), c = t(x, y, z, t).
Так, скорость точки равна
х' = х' (x,y,z,t), у' = у' (x,y,z,t), z' = z' (x,y,z,t).
Гидродинамическая картина полностью переносится на фазовое
пространство, но вместо трех координат х, у, z здесь имеется 2k
координат q, p.
§ 3. ИНТЕГРИРОВАНИЕ КАНОНИЧЕСКИХ УРАВНЕНИЙ ГАМИЛЬТОНА
1. Действие по Гамильтону и его свойства. Можно по-разному
подходить к задаче интегрирования канонических уравнений Га-
Гамильтона. В частности, ее можно связать со свойствами некоторо-
некоторого интеграла, взятого вдоль интегральной кривой.
Введем в рассмотрение 2k-\- 1-мерное расширенное фазовое
пространство, в котором координатами точки являются величины
Цг, pi, t. Каждому состоянию системы в этом пространстве соответ-
соответствует одна-единственная точка. Движению системы отвечает
«траектория» в расширенном пространстве. Пусть в некоторый
момент времени t0 положение точки определяется координатами
q°u <&,..., ql, Р°и Р°, ¦¦ ¦ , pl- Тогда траектория точки будет
определяться равенствами
qi = 4i{t, U, ?°, р»), p^Ptit, t0, q\ р<>).
Эту траекторию в дальнейшем будем называть действительной
траекторией системы. Вдоль этой действительной траектории рас-
рассмотрим интеграл
V = J (Т + U) dt,
который будем называть действием по Гамильтону.
Очевидно, что действие по Гамильтону является функцией на-
начальных значений координат, импульсов и времени
V = V(t, t0, <Д р°).
469
На действительной траектории координаты и импульсы яв-
являются функциями времени и начальных значений координат и
импульсов:
,,оо ооо оч
Ц-1 = Qi (ь <?ь 92 Як, Ри Р2, ... , Pk),
Pi =Pi(t> чь ql,
¦ > (ft Pu p°2, ..., p°).
Полагая, что в каждой точке фазового пространства определитель,
составленный из частных производных
отличен от нуля, можно определить начальные значения импуль-
импульсов и представить действие в виде функции времени, координат q*
и их начальных значений, т. е.
V = V(t, q, q°).
Представляя подынтегральное выражение через переменные Га-
Гамильтона, получим
v = f (Sp#; - н)ш.
и
Рассмотрим вариацию действия при переходе с одной действитель-
действительной траектории на другую (получающуюся изменением начальных
условий)
Так как
= f (EPi8?; + E q't 6A - 2 M. bqt - 2 M. ЬрА dt.
J V dqt dpi I
J pH dt = j Pl
t t
dt = Pfi4i
bqt <BL dt,
to to
то для вариации действия получим
SV= E p&i-Zp* б??
470
Здесь последний интеграл на действительной траектории обра-
обращается в нуль в силу уравнений Гамильтона, поэтому будем иметь
( i
Последнее соотношение можно рассматривать как самостоятельный прин-
принцип механики, если за функцию V принять определенное выше действие по
Гамильтону. Если моменты времени t и t0 бесконечно близки, так что можно
принять t=U+dt, то
Применяя теорему о среднем, получим для вариации действия выражение
или
С другой стороны
Р?
Пренебрегая членами выше первого порядка малости, отсюда получим
i ? t i
Сравнивая коэффициенты при одинаковых вариациях, получим уравнения
движения механической системы, совпадающие с уравнениями Лагранжа вто-
второго рода, что и доказывает утверждение. В самом деле,
&Г ди дТ
1 dqt dqt dq{
откуда после подстановки значений pi в первую группу уравнений получим
dt dq{ dqi dqt
Функодя V зависит от переменных qlt q2, ... , qk, qf\ qf>, ... ,
q?K Варьирование этой функции дает
471
<*—§ «-'.»••••¦*>¦
Сравнивая результаты варьирования, получим
Вторая группа этих уравнений приводит к зависимости
p? = p°(^, ?, ?°) (i=l, 2,..., ft).
Если отличен от нуля определитель матрицы из вторых производных
отсюда можно будет определить координаты, как функции време-
времени, т. е. найти закон движения системы. Трудность заключается в
определении самого действия V, поскольку интеграл должен рас-
рассматриваться вдоль действительной траектории, которая нам не-
неизвестна до интегрирования уравнений движения. Задача сводит-
сводится к определению функции V. Рассматривая производную от функ-
функции V вдоль действительной траектории, будем иметь
dV _ _ду_ _, \"Л ЗУ
dt ~ dt
С другой стороны
так что
ЗУ
dt
Подставляя значение = ph имеем
dq
т. е. функция действия V удовлетворяет уравнению в частных
производных, которое называется уравнением Гамильто-
Гамильтона — Якоб и. Функция эта зависит от переменных qu q2,..., qh
и от произвольных начальных условий qlt q2, ... , qk- Такая функ-
функция, удовлетворяющая уравнению в частных производных и усло-
условию, что определитель матрицы из вторых производных
472
отличен от нуля, является полным интегралом уравнения
в частных производных. Для определения движения механической
системы достаточно найти полный интеграл уравнения в частных
производных Гамильтона — Якоби, после чего задача определе-
определения действительного движения сводится к уравнениям
2. Канонические преобразования. При изучении движения ме-
механической системы, на которую наложены голономные идеальные
связи, можно пользоваться уравнениями Лагранжа второго рода.
При этом удачный выбор параметров, определяющих положение
системы, может значительно облегчить задачу исследования дви-
движения. Так, наличие циклических координат дает возможность
сразу найти первые интегралы уравнений движения. Циклические
координаты иногда могут быть найдены преобразованием перво-
первоначальной системы координат.
Аналогичная ситуация возникает и при изучении движения
системы с помощью канонических уравнений Гамильтона. Возни-
Возникает задача — найти такое преобразование фазового пространст-
пространства, после которого канонические уравнения, в новых переменных,
можно было бы сравнительно просто проинтегрировать.
Пусть состояние движения механической системы, на кото-
которую наложены голономные идеальные связи, определяется коор-
координатами Лагранжа q\, q-i, ¦¦, Яь, и обобщенными импульсами рь
р2 ри. Рассмотрим преобразование к новой системе переменных
Qi, Q2,..., Qfe, Pi, />2> •¦•> Pk> определяющих состояние движения той
же механической системы. Преобразование называют канониче-
каноническим, или контактным, если после преобразования любые кано-
канонические уравнения Гамильтона переходят в канонические урав-
уравнения для новых переменных.
Пусть старые и новые переменные связаны соотношением
Spt6qr( = SP?6Q, + 61F, (a)
где функция W{t, qu Яг, ..., <7ь, Qi, Q2 Qh) удовлетворяет усло-
условию
det
\фО.
Такую функцию будем называть производящей функцией
преобразования. Подставляя вариацию функции W, будем
иметь
Е ^- 8?i + Б ^- 6Q,.
dqt dQi
473
Последнее равенство должно удовлетворяться в каждый момент
времени для любых вариаций переменных. Это условие выпол-
выполняется, если в равенстве обращаются в нуль коэффициенты при
одинаковых вариациях переменных, т. е.
Pi = -Т— > ^i — ~ЗГ (l ~1' l R)-
dq{ dQ,-
Полученные соотношения представляют собой формулы преобразо-
преобразования переменных <?*, pi к переменным Q(, Рг. Так как производя-
производящая функция W зависит от переменных qu q2,-.,<fk, Qu Q2, •-, Qft.
то формулы преобразования можно записать в виде
Pi = Pi (t, д, Q), Рс = Pi (t, q, Q) (i =1,2 k),
а поскольку определитель матриц:
отличен от нуля, эти фор-
формулы могут быть разрешены либо относительно новых переменных
Ql = Qi(t, q, p), Pi^Pdt, q, p),
либо относительно старых переменных
Qi-^qdt, Q, P), Pi = pi(t, Q, Р).
Для осуществления рассмотренного преобразования доста-
достаточно задать производящую функцию преобразования. Если,
например,
то преобразование примет вид
pt-=Qt. Pi = ~qc (i-i, 2,..., k).
Нетрудно видеть, что любые два последовательных преобразо-
преобразования (а) можно заменить одним. Для любого преобразования
вида (а) всегда имеется обратное ему преобразование. Множест-
Множеству преобразований (а) присуще свойство ассоциативности. На
основании всего этого можно утверждать, что преобразования (а)
образуют группу. Нейтральным элементом группы является тож-
тождественное преобразование.
Покажем, что преобразование (а) есть каноническое преобра-
преобразование. Для этого нам нужно убедиться, что новые переменные
Q, Р удовлетворяют дифференциальным уравнениям, имеющим
вид канонических уравнений Гамильтона.
Для получения уравнений движения в новых переменных вос-
воспользуемся принципом Гамильтона в форме Пуанкаре
474
Преобразуя подынтегральное выражение к новым переменным, 3aiw
тим, что
поэтому
^J dqi Ami oQt dt dQ,- dt
или
off
dt
Принцип Гамильтона теперь запишется в виде
где
Из формул преобразования видно, что вариации новых перемен-
переменных линейно выражаются через вариации старых bqi и 6р*.
Последние обращаются в нуль на концах интервала при t—t0 и
t = t\. Следовательно, и вариации bQi и bPi должны обращаться в
нуль на концах интервала и остаются произвольными внутри ин-
интервала. Исходя из этих соображений, получим, что на концах
интервала (to, t\) обращается в нуль вариация функции W, т. е.
dt
Введем новую функцию Я*
= H*(t, Q, Р)
и представим принцип Гамильтона в виде
, —Я')Л= 0.
475
В новых переменных этот принцип имеет такую же структуру, как
и в старых. Роль функции Гамильтона в новых переменных играет
функция Я*. В силу независимости вариаций переменных Q* и Pi
внутри интервала и равенства их нулю на концах интервала,
подобно тому, как это делалось в старых переменных, получим
уравнения движения в новых переменных:
(f i, 2.....).
dt дР; • dt dQi
Уравнения в новых переменных имеют гамильтонову форму. Сле-
Следовательно, преобразование, осуществляемое при помощи произво-
производящей функции W,—каноническое.
Уравнения принимают наиболее простой вид в том случае,
когда функция Я* тождественно равна нулю, т. е.
Тогда канонические уравнения в новых переменных примут вид
J&.-0. ^0 ,|_1.2 *>.
Отсюда сразу получим систему первых интегралов:
Q, -= const, Pi = const (i = 1, 2, ... , k).
Производящая функция W(t, qu qb...,qk, Qu Q2 ..., Qk) такого
преобразования зависит от всех переменных <7ь Цъ, ••-, Цъ и k по-
постоянных af=Q,-. Определитель матрицы, составленной из вторых
производных от этой функции
существует и отличен от нуля. Кроме того, эта функция удовлетво-
удовлетворяет уравнению Гамильтона — Якоби
^ 4- Я It, q, 3*\ = 0.
{' Ч' dqj
4 Я It, q,
dt {' Ч' dqj
Функция W, удовлетворяющая этим условиям, является полным
интегралом уравнения Гамильтона — Якоби, а уравнения преоб-
преобразования имеют вид
Последнюю группу этих уравнений можно разрешить относительно
переменных q\, q<i, ..., qu- Она определяет закон движения механи-
механической системы.
476
В качестве примера рассмотрим прямолинейное движение ма-
материальной точки массы ш = 1 под действием силы тяжести. Будем
иметь
уравнения движения получат вид
Уравнение
допускает
dt h
Гамильтона — Якоби
3W 1
dt 2
полный интеграл
dt
\ дх )
W-M (g*A) + a.
Если вместо h ввести новую переменную Q и рассмотреть произво-
производящую функцию
-{ Q)
то в новых переменных во все время движения будут выполняться
условия
Q = const, P — const,
где
dQ '
или
3. Бесконечно малые канонические преобразования. Рассмот-
Рассмотрим фазовое пространство переменных qu q2,..., q^, Pi, Рг,..., Pk-
Каноническое преобразование, задаваемое производящей функ-
функцией W(t, q, Q), определяет множество преобразований этого про-
пространства с помощью формул преобразования
(.= 1,2....,*),
, Л
если рассматривать время t как некоторый параметр преобразова-
преобразования. Каждому значению времени t соответствует свое определен-
477
ное преобразование. Рассмотрим два таких преобразования, соот-
соответствующие моментам времени t и t+At. Каждое из этих пре-
преобразований можно рассматривать как преобразование фазового
пространства самого на себя. Первое отображает некоторую точ-
точку А фазового пространства в точку В, второе — ту же точку А в
некоторую другую точку В\.
Производящая функция пре-
преобразования W является не-
непрерывной функцией време-
времени t. Поэтому при Д^->0 точ-
точка Bi стремится к точке В.
Ввиду того, что канониче-
канонические преобразования обла-
обладают групповыми свойства-
(Q,P) ми, переход от точки В к
рис 253 точке 5i тоже осуществ-
осуществляется каноническим преоб-
преобразованием.
Таким образом, с помощью канонических преобразований
каждая точка фазового пространства переходит в соседнюю, близ-
близкую к ней точку, так что
Q, = ^ + Aqh Рг = р,- + Ар; (? = 1, 2, ... , k),
где Д<7г и Api — малые величины. Подобное преобразование назы-
называется бесконечно малым каноническим преобра-
преобразованием. При таком преобразовании точки фазового прост-
пространства получают бесконечно малые смещения. Рассмотрим два
бесконечно малых канонических преобразования одной и той же
точки фазового пространства (Q, Р) в бесконечно близкие точки
фазового пространства (q, p) (рис. 253):
(Pi + Apt) в [qi
i
где
7, Q)=W (t, q, Q)
Так как Aqi — бесконечно малые величины, то, пренебрегая вели-
величинами выше первого порядка малости, получим
q,
478
Откуда
^ =- 8W + ? bqfiPi -Ь 2 Р<6Л*' + 6 1Г
поэтому, рассматривая разность уравнений преобразования, будем
иметь
Определяя из формул преобразования р; = координаты
Qi как функции qit ри t и подставляя эти значения в dw/dt,
получим
—- = — v(t> <7i> <7а. • • • . ft. Pi. Pa. ¦ ¦ • • Pa^-
ОС
Тогда условие канонического преобразования примет вид
i i i ' i
Сравнивая здесь коэффициенты при 6<?г и 6рг-, будем иметь:
Др. = ^-М, ^ = ~М (i=l,2,...,*).
Эти уравнения в явном виде определяют бесконечно малое кано-
каноническое преобразование. Переходя к пределу при А^->0, получим
уравнения
j*L *L = -J}L (,= 1,2,...,*),
dq v
dt dPi dt
которые являются каноническими уравнениями Гамильтона, если
V—функция Гамильтона. Результат можно сформулировать сле-
следующим образом: в фазовом пространстве движение системы
можно представить как непрерывную последовательность беско-
бесконечно малых канонических преобразований, т. е. как задачу о пре-
преобразовании координат.
Замечание. Точки (q, p) и (Q, Р) связаны формулами
канонического преобразования, которому в случае (Ch=const,
Pi = const) соответствует производящая функция W, удовлетворяю-
удовлетворяющая уравнению гй = 0. Тогда V будет совпадать с функ-
функцией Гамильтона.
4. Теорема Лиувилля. Теорема A838 г.). Произвольно вы-
выделенный в момент to объем а фазового пространства, ограничен-
ограниченный контрольной поверхностью Е, не изменяется при движении
479
системы, в то время как сама контрольная поверхность деформи-
деформируется и перемещается.
Доказательство. Рассмотрим элементарный объем
фазового пространства da = dqidq2... dq^dpxdpi ...dpk. Тогда ин-
интеграл /da, взятый по области фазового пространства, ограничен-
ограниченной контрольной поверхностью 2, будет равен ее объему. Покажем
инвариантность объема по отношению к каноническому преобра-
преобразованию переменных <7ь Q2, ¦¦-, Qh, p\, Рг, Рь. к новым переменным
Qu Q2, ¦¦-, Qk, Pi, P2, —, Pk- После преобразования объем, ограни-
ограниченный поверхностью 2, перейдет в новый объем JdQidQ2 ...
... dQhdP\dP2 •¦• dPh, ограниченный той же поверхностью. Преобра-
Преобразуя этот интеграл к старым переменным, имеем
где
= dpi dp% ... dpk,
D(Qlt Q.z, ... ,Qk, Л, Pt, ... , Pk)
D(qu g2, ... , qk, p,, p2l
pk)
якобиан преобрази^ания. Неизменяемость объема будет, очевидно,
обеспечена, если этот якобиан равен единице. Но
откуда
D&.Q,, ...
D(qu 92, ...
?>(Qi, Qa,
D (ft , 92.
?>(<?!, ?2, ¦
?>(?!, 92, ¦•
D(Qi, Qt, ...
.Qk.
, 4k,
. . . , 1
• • ¦> 4
¦ , 9ft
p p
Pi, Pi, ¦ ¦ ¦ ,
Qk, Pi. Pi.
4k, Qi, Q2, ¦
k, Pi, pi, • • ¦
. Qi, Qt. ...
Pi, P.. ... .
' Pk) __
Pk)
¦¦¦Pk)
• • .Qk)
.Pk)
.Qk) '
• Pk)
D(qlt 92) ... , qk, plt p2 pk)
k D(PU P8, . ¦ ¦ , Pk) . D(Pi. Pi, ... , Pk)
= (— 1)
D(9i, 92, ••¦ , 9ft) D(Qi> Qi, ¦¦¦ , Qk)
Переменные P, Q и q, p связаны каноническим преобразованием:
n — p
Hi — ~T > "l —
Поэтому
DjP,, Pa, ... , Pk) _
D(qlt q2, ... , 9ft)
D{pi, pa, ... , pk)
D(QltQt, ... .Qk)
480
Откуда
P(Qi, Q«, ••¦ , Q*. Pi,
°(?i. ?2. ¦•• . qk, P\> Pi 'Pk)
и, следовательно, объем, ограниченный поверхностью 2, остается
неизменным при перемещении в фазовом пространстве.
5. Теорема Якоби. Мы установили, что для построения общего
интеграла канонических уравнений Гамильтона достаточно найти
полный интеграл уравнения Гамильтона — Якоби. К. Якоби при-
принадлежит следующая замечательная теорема.
Теорема. Если известен полный интеграл
W(t, ft, <72, ... , qk, ах, а2, ... , ak) 4- <xfc+i
уравнения Гамильтона — Якоби
то система равенств
= Р„ = — Pi (t=l,2,...,k),
где аи Рг — произвольные постоянные, образует общее решение
канонических уравнений Гамильтона.
Доказательство. Пусть W=W{t, qu—,qh, а\,...,аи) +
+ аь+1 полный интеграл уравения в частных производных
Гамильтона — Якоби. Покажем, что уравнения
— = А. -J^- = -p, (/ = 1,2, ... ,k) (a)
dqi дщ
определяют общее решение канонических уравнений Гамильтона.
Прежде всего, так как W=W(t, qb...,qk, ait ¦¦¦ аи) +au+i полный
интеграл уравнения Гамильтона — Якоби, то определитель мат-
матрицы
dqt daj \\
составленной из частных производных второго порядка, существует
и отличен от нуля, поэтому уравнения (а) все независимы и опре-
определяют неявные функции qt в зависимости от t и 2k произвольных
постоянных а,-, C,-. Остается показать, что равенства (а) сохра-
сохраняются во все время движения механической системы, т. е. при
дифференцировании по времени в силу канонических уравнений
Гамильтона выполняются условия
dt \ % 7 dt \ 6щ
Е Н Берсзкин 481
Рассмотрим первое из этих условий. В силу канонических
уравнений Гамильтона будем иметь
d I dW г \ VI d2W ' . dW dpi __
dt I do,-1 ' I -~J dqi dqj da; dt dt
1
SOW
dqt d
OW dH j d*W JH
qt qj dpj ' dqt dt + dqt '
С другой стороны, так как W есть полный интеграл уравнения Га-
Гамильтона — Якоби, то при подстановке этого полного интеграла
в уравнение Гамильтона — Якоби, последнее обращается в тож-
тождество, дифференцируя которое по qt, будем иметь
d I 6W , o\ '62tt7 , 5Я , VI dH "-«" . = o
Л / cfyclf (?(?,• ^-i 5p? 5(/i
Сравнивая полученный результат с правой частью выражения (Ь),
приходим к убеждению, что выражение ( ~рЛ будет
dt \ dqt J
равно нулю в силу канонических уравнений Гамильтона.
Обращаясь ко второму условию, будем иметь
i dqj dpj
Подставляя снова полный интеграл W в уравнение Гамильтона —
Якоби и дифференцируя результат по параметру а*, получим тож-
тождество
dW < н\ = d*W 4- ^ дН d*W
dt
i
откуда следует, что и правая часть равенства (с) обращается в
нуль в силу канонических уравнений Гамильтона. Теорема дока-
доказана.
Задача определения общего интеграла канонических уравне-
уравнений Гамильтона сводится теперь к нахождению полного интегра-
интеграла уравнения в частных производных Гамильтона — Якоби.
6. Интегрирование уравнения Гамильтона—Якоби. Рассмот-
Рассмотрим сначала некоторые свойства полного интеграла уравнения в
частных производных Гамильтона — Якоби
dV
dq
482
По определению, полным интегралом
V (t, <7i> 9-2> • • ¦ > Як< ai> а2> • • •
уравнения в частных производных называется функция, зависящая
от всех независимых переменных t, qu Цч,-—,Ць. и k+l произволь-
произвольных постоянных си, сс2 afe+ь удовлетворяющая тождественно
этому уравнению и отвечающая условию, что ранг матрицы из
частных производных
дУ дгУ д*У dW
дщ dci; dt да; dqt дщ dq2
имеющей k + 2 столбца и k+l строк, равен числу независимых
переменных &+1.
Существует другое эквивалентное определение полного ин-
интеграла: функция V(t, q\,...,qh, щ,.-, а.ъ.+\) является полным ин-
интегралом уравнения в частных производных, если, исключая по-
постоянные а* из равенства
V = V(t,q,a) (a)
и равенств
J = У; (t, q, a), -^- = V'ql(t, q, a),
aq
at qi
полученных дифференцированием (а), можно получить единствен-
единственное уравнение в частных производных, которому удовлетворяет
данная функция; то, что ранг матрицы, составленной из частных
производных, равен k+l есть необходимое, но не достаточное
условие возможности такого исключения.
Можно заметить, что если функция V не входит явно в урав-
уравнение в частных производных, то наряду с решением V(t, q\,..., qu)
будет существовать решение V(t, qu..., qh)+C этого уравнения в
частных производных, где С — произвольная постоянная, поэтому
можно искать полный интеграл, содержащий одну из произволь-
произвольных постоянных аддитивно.
Уравнение Гамильтона — Якоби не содержит явно функцию V, по-
поэтому полный интеграл этого уравнения можно искать в виде
V = V(t, qu <72, ... , qk, at, сц, ... , ак) + afe+I.
Пример 122. Покажем, что функция
является полным интегралом уравнения в частных производных, а
не является полным интегралом.
16* 483
Для построения уравнения в частных производных в первом случае имеем
равенства
dV dV
—— =—а, ——-=а<7,
dt dq
откуда, исключая а, найдем
6V ву
dq Я dt '
Во втором случае определяются постоянные
dV dV I
но они не могут быть исключены.
Заметим, что производная dv/dt не входит явно в функцию Н,
и исключение постоянных из равенств
V = V(t, ft, q2, ... , qk, %, a2, . . . , ak) + afc+b
dV
dt
dV
= Vt(t, <7i, q2, ... . <7*> ctt, a2, . .. , afe),
> 9i' 9г> • • • ' 9&- ai> a2> • • • > afe) (i = 1 > 2, ... , k)
будет приводить к уравнению Гамильтона — Якоби, если отличен
от нуля определитель из частных производных
dqi дщ
Пример 123. Рассмотрим свойства полного интеграла уравнения Гамиль-
Гамильтона — Якоби
dV . 1 / dV
dt 2 \ дх
задачи о свободном падении тяжелой материальной точки. Покажем, что пол-
полный интеграл этого уравнения имеет вид
В самом деле, для исключения постоянных имеем равенства
нричем
3L
A
2
и существует, если И.Ф—gx. Исключение h приводит к исходному уравнению.
484
Если время не входит явно в функцию Гамильтона Н, то пол-
полный интеграл уравнения Гамильтона — Якоби можно искать в виде
V = — ht+W (qlt qt, ... ,'qki av a2, ... , aft_,, ft) + afe)
где ft—произвольная постоянная, W — полный интеграл уравнения
в частных производных
qk
=7г.
A)
Непосредственной подстановкой убеждаемся, что функция V
удовлетворяет уравнению Гамильтона — Якоби. Кроме того, если
W — полный интеграл уравнения в частных производных A), то
этот интеграл имеет вид
W = W(ft, <7з qk, alf ... , aft_b ft) + ak,
и в результате исключения постоянных аь а2,..., afe из равенств
qk,
2. • • • > «ft-ь h)
должно следовать уравнение в частных производных A). Послед-
Последнее возможно, если отличен от нуля определитель из частных
производных
dh dqt ' dh dq2 dh dqk
Этот определитель тождественно равен определителю
dW d*V dW
dhdqx
dqx
dh
dW
dhdqk
at dqk
dW
и, следовательно, V есть полный интеграл уравнения Гамильто-
Гамильтона — Якоби.
485
Метод Имшенецкого разделения переменных. Общего метода
нахождения полного интеграла уравнения в частных производных
Гамильтона — Якоби не существует. При некоторых условиях
оказывается возможным сравнительно просто найти полный ин-
интеграл, причем нахождение его сводится к интегрированию системы
обыкновенных дифференциальных уравнений с одной зависимой
переменной каждое. Последние полностью интегрируются. Такого
рода задачи называются задачами с разделяющимися переменны-
переменными. Метод решения уравнений в частных производных с разделяю-
разделяющимися переменными был предложен русским математиком и ме-
механиком В. Г. Имшенецким A832—1892). Этот метод обобщает
известные теоремы Лиувилля и Штеккеля.
Метод Имшенецкого применим к уравнениям Гамильтона —
Якоби, в которых может быть выделена одна из переменных, на-
например Ц\, после чего уравнение может быть записано в виде
at
dV
= 0.
Тогда полный интеграл можно представить в виде
V = ф (<7i. cti) + W (t, q2, <73 qk, alt aa, ..
ak)
где <р(<7ь cti) является решением обыкновенного дифференциаль-
дифференциального уравнения
f Яи
= alt at — const;
t, 72. Q3,—,Qk) —полный интеграл уравнения в частных произ-
производных
Hit,
<72- Яз> ••¦
= 0.
dt ' " V" '"' '"' '" dqt ' dq, ' •"¦ ' a?ft /
Такая функция V удовлетворяет уравнению Якоби и зависит от
всех переменных <7ь Яг, •••. <7ь и произвольных постоянных аь а.2,....
.... ал+i, af — полный интеграл уравнения в частных произсодных,
поэтому определитель Гесса для функции W существует и отли-
отличен от нуля, т. е.
(о, р = 2,3, ... , k).
dqgdap
Определитель Гесса для функции V теперь принимает вид
dqada0
dqx
дддда0
485
Он отличен от нуля, так как -— =^0 (<р — интеграл уравнения
dq до^
f (<p,—5_]=a1), а это означает, что функция V действительно
\ Щ\ I I
является полным интегралом исходного уравнения Гамильтона—Якоби
dV Tjj, dV dV 6V
dt \ ' 1г 2> ' ' " ' й> dqt dq2 6qk
Частные случаи: 1. Координата ^ является циклической,
так что = 0. Так /= —-—, а полный интеграл имеет вид
V = a]V"i 4~ W (t, 72' 9з> ; • • > Qk)'
где функция W — полный интеграл уравнения в частных произ-
производных
BW , „ /, dW dW aw
+ Н (t, q2, qs, ... , qk, a1( ——, ——, .... ——j = 0.
V dq* dq3 dqk j
dt
2. Функция Гамильтона Н не зависит явно от времени:
дН
dt
¦ = 0.
Тогда полный интеграл уравнения Гамильтона — Якоби запишется
в виде
V = — ht+W(q1,qt qk),
где функция W — полный интеграл уравнения в частных произ-
производных
Пример 124. При помощи метода Гамильтона — Якобн рассмотрим
движение планеты в центральном ньютоновском поле притяжения (см. рис.251).
Выбирая за лагранжевы координаты сферические координаты г, ср, в1, для
живой силы будем иметь
Т = — (г'2 + г2 О'2 +rV2sin2 &) ¦
U/7Z
Силовая функция ньютоновского поля тяготения V— ——. Выражая обобщен-
обобщенные импульсы через обобщенные скорости
рг — tnr', Pq = mr* ф', Рф = я^2 ф' sin2 Ф
и полагая m = 1, получим для функции Гамильтона значение
487
Для определения закона движения планеты необходимо найти полный интеграл
уравнения Гамильтона — Якоби
dV J_ Г/ dV \2 . 1 / dV \2 . 1 ( dV
dt 2
Здесь время не входит явно в функцию Гамильтона, а координата <р — цикли-
циклическая. Поэтому полный интеграл можно искать в виде
V = — ht + al(f-{-W(r, ft),
где h и а — постоянные; Щг, О) — полный интеграл уравнения в частных про-
производных
2
Выделяя отсюда группу членов с переменной
полный интеграл W запишем в виде
W = ф (О) + Ф (г)
где ф'('й') н Ф (/¦) —решения дифференциальных уравнений
4
Из последних уравнений находим
"а
г2
о о
Полный интеграл исходного уравнения Гамильтона — Якоби получает вид
sina
и зависит от переменных <р, ¦&, Л произвольных постоянных h, ait аг и аддитив-
аддитивной постоянной аз. На основании теоремы Якоби общий интеграл канонических
уравнений движения получим из уравнений
488
dV
dV
= -ft (. = 1.2,3).
Вторую группу этих уравнений можно представить в виде
дУ
да2
Первое из этих уравнений определяет г как функцию времени и произвольных
постоянных
r = r(t, ft, a2, Pi).
Третье уравнение после подстановки г дает
и, наконец, из второго имеем
ф=ф(<, ft, at, а2, Pi, Р2>РзЬ
Эти три уравнения полностью определяют закон движения планеты в пере-
переменных г, ф, Ь.
Замечание. Определенная здесь функция V является полным интегра-
интегралом уравнения Гамильтона — Якоби, если функциональный определитель
существует и отличен от нуля. Для рассматриваемой задачи этот
дщ дщ ||
определитель имеет вид
Д =
dqi дщ
dhdr
О
ca2
dh dr das dft
Подставляя сюда значение производных, получим значение определителя
1 do
Д= -
489
Этот определитель не существует, если обращается в нуль хотя бы одно из под-
подкоренных выражений знаменателя. Определитель обращается в нуль, если а2=0,
а также когда становятся нулями гий. При этих условиях функция V пере-
перестает быть полным интегралом рассматриваемой задачи и уже не определяет
первых интегралов канонических уравнений Гамильтона.
Оставшаяся группа уравнений дает систему первых интегралов уравнений
движения системы:
dV dV l^a2 sini
d(f K<p> d& sind
dV
dr
= Pr,
первый из которых представляет собой закон сохранения момента количества
движения относительно оси г:
Второй из этих первых интегралов дает закон изменения момента количе-
количества движения в подвижной плоскости, вращающейся вокруг оси z. Его можно
записать в виде
илн
a2 = г2 I/ft'2 + ф'2 sin2 * .
Последний интеграл является интегралом живых сил. В самом деле,
2/гг2 - а?2 = ргг
можно переписать в виде
откуда
Подставляя сюда значение Oj, получим
+
чем н доказывается утверждение.
Пример 125. Теорема Лиувилля. Лиувилль показал, что урав-
уравнения движения механической системы с голоиомными идеальными связями инте-
интегрируются в квадратурах, если живая сила и силовая функция имеют вид
490
и.
Доказател ьство. Для определения импульсов имеем уравнения
ft
s=l
Определяя отсюда g(-, найдем выражение для функции Гамильтона:
k
2 2 °l (Я1)
Pi i=i
i=l [=1
Уравнение Гамильтоиа — Якобн теперь запишется в виде
3V 1
Z Ai № i=l
1=1
Так как время не входит явно в функцию Гамильтона, то полный интеграл
уравнения Гамильтона — Якоби можно искать в виде
V = — М + W ((?!, i7a. • • ¦ .<?*)¦
Здесь функция W представляет собой полный интеграл уравнения в частных
производных
которое можно переписать в виде
В последнем уравнении переменные полностью разделены, поэтому его можно
переписать так:
i—1
где
491
Полный интеграл этого уравнения имеет вид
W = Wx (ft) + W2 (<7г) ¦+• • • • + Wk (qk)>
где Wi (qt) — решение дифференциального уравнения
VW (щ) [Ui W + hAi (qt) + щ],
dqt
так, что
Wt = J /ЭД (<») [t/j (ft) + hAi Ш + Of] dft.
Полный интеграл исходного уравнения Гамильтона — Якоби запишется следующим
образом:
k
V= -М +J] J /2S? (qi) [Ut (qi) + ft/1/ (qi) + щ\ dqi + a,
i~\
где постоянные а* подчинены условию
ai + «2+ • •• + a* = 0.
Полагая a^ = — (ai + a2 + ... + a/t-i) < получим систему первых интегралов урав-
уравнений движения:
fe
9V \Л [ Aj (qi) vBi(qi) dqt
= —Pi,
VBk(qk) dqu
^ir^rr— = — Pi ('=1,2 k — 1),
(«) [Ui (qi) + hAt (qt) + a() = pi (i - 1, 2 ft).
Пример 126. При помощи метода Гамильтона — Якоби рассмотрим
общее решение задачи о движении тяжелого твердого тела с одной неподвиж-
неподвижной точкой в случае Лагранжа — Пуассона (А = ВфС, ?=ri = 0, ?<0)
(рис. 254).
Выбирая за подвижные оси координат оси, неизменно связанные с твердым
телом и направленные по главным осям эллипсоида инерции, построенного для
неподвижной точки твердого тела, живую силу твердого тела запишем в виде
т==т(Лр2
а силовую функцию — в виде
U = — mgZ, cos ¦Ь.
Для проекций мгновенной угловой скорости на оси, неизменно связанные с твер-
твердые телом, имеем
492
p =
sin
¦&' cos q>, <7 = ty' sin d cos ф — ¦§' sin <
Г = 1|)' COS # + ф',
откуда
= ф'' sin2
после чего живая сила твердого тела получит вид
Т = — [А №'* sin2 ¦& + #'') + С (ф' cos Ф + ф'J].
2
Принимая углы Эйлера в качестве обобщенных координат, вычислим значения
импульсов:
Pi|) = Aty' sin2 # + С W cos d + ф') cos ft = Дф' sin2 ¦& + Cr cos ¦d.
Так как связи не зависят явно от времени, функция Гамильтона будет иметь
вид
нли
-Р
Ф
: ^ A A sin2 fl
Для решения задачи о движении достаточно найти полный интеграл уравнения
Гамильтона—Якоби
6V
dt
1 / <9V 5V „\21
-Г" ¦—--^cosd
in2 ¦& \ 5г|) сф / J
+ г
/1 sin2
Здесь время не входит явно в функцию Гамильтона, а координаты ф и
являются циклическими, поэтому полный нитеграл можно искать в виде
у = _ ht -f С4Ф +
W
где фунция W($) — решение дифференциального уравнения, которое получим
подстановкой в исходное уравнение Гамильтона — Якоби вместо V его выра-
выражения
493
или
откуда
Для полного интеграла теперь имеем выражение
axA (a2 — a cos $\z
2Л/г — 2me.PL cos ft — dft + a•
С sin2 ft
Закон движения твердого тела определится системой первых интегралов:
с* АйЬ
~. о а1Л (а2 — a, cos ftJ
2Лй —2mg^cosft - -
С sin2 v
a,/t a»—ar cos ft
1~+ \
sin2
5V 1 /
1 / И B — aj cos
которые сводят задачу к эллиптическим квадратурам Исследование таких квад-
квадратур было подробно проведено выше.
Пример 127. Рассмотрим в качестве примера движение частицы массы т
с электрическим зарядом е в электромагнитном поле, считая вектор Е(ЕХ, Еу, Ez)
напряженностью электрического поля, а вектор h(Hx, Hy, Hz) напряженностью
магнитного поля.
Пусть V — скорость частицы. Электрическое поле действует на частицу
с силон F, компоненты которой
494
Xi = — eEx, Y1=—eEg, Z1=—eE2.
Сила Fi, с которой магнитное поле действует на частицу, определяется по фор-
формуле Лоренца
где с — скорость света. Для проекций результирующей силы получим выраже-
выражения
Fx = - еЕх - — (г'Ну - у'Нг), Fy=-eEy- — {х'Н2 - г'Нх),
С С
Fz = -eE2—j (y'Hx - х'Ну).
Заметим, что по своей структуре электромагнитная сила, действующая на дви-
движущуюся частицу, напоминает силу Кориолиса.
Уравнения движения частицы можно привести к форме уравнений Лагран-
Лагранжа, если в качестве функции Лагранжа рассмотреть функцию
где Т= — (*' -\-у' + г'), а члены Ах, Ау, Аг зависят лишь от координат и
времени. Тогда уравнения Лагранжа в переменных х, у, z примут вид
где
так что
или
дА дА
^ dt + дх
дАх dU
dt дх
в рассмотрение
d dL
dt дх'
dL
дх' ~
Х + ду
дх
( дАх
\ ду
вектор
Н =
dL
дх
тх' +
дАг
дх
дАу \
дх )
= rot A
Ах,
dz '
У +
" дх-
¦о,
( дАх
{ дг
дА
дх
дАг\
dx J
г'=0.
проекции которого определяются матрицей
_д д д_
дх ду дг
так что
Нх =
дАг
ду
дАу
дг
Ах Ау Аг
дАх
'- дг
дАг
дх
дх
дАх
дц
49т
то уравнение получит вид
" дА* _ dU
Если еще принять условие, что
дАх
dt
то будем иметь
= 0,
тх" = —— + Нгу' — Hyz'.
дх *
Чтобы уравнения Лагранжа описывали движение такой частицы, достаточно
записать функцию Лагранжа в виде
L = Т + U + -j- (Ахх' + АуУ' + Агг'),
где
ви г, ди аи
— = еЕх, —- = еЕу, — = еЕг
дх ду * дг
и
Н = rot A.
Уравнения движения можно записать в каноническом виде. Преобразо-
Преобразования Гамильтона здесь принимают вид
е
рх = тх' -\ Ах,
или
, е
Pi = mxt-\- — At.
С
А для функции Гамильтона получим выражение
или
i
Канонические уравнения Гамильтона получают вид
dx, дН dpi дН
dt dpi ' dt дХ[
Соответствующее уравнение Гамильтона — Якоби запишется в виде
у
i
496
и задача сводится к отысканию полного интеграла уравнения в частных произ-
производных.
7. Скобки Пуассона. Рассмотрим некоторые свойства первых
интегралов канонических уравнений Гамильтона:
dt ~ дп' dt ~ dqt V-l'z> •¦••*>•
Функция f(t, qu Я2 4h, Pu pi, —, Ph) называется первым ин-
интегралом канонических уравнений Гамильтона, если она сохра-
сохраняет постоянное значение на всяком конкретном движении систе-
системы (постоянная меняется при переходе от одного движения сис-
системы к другому). Производная от функции /, взятая в силу сис-
системы канонических уравнений Гамильтона, тождественно обра-
обращается в нуль, т. е.
dt ~ dt 2j dqt dpi 2j dpi dqi ~
i l
Очевидно, что если функции fb f2, ¦••, h являются первыми ин-
интегралами уравнений движения, то произвольная функция от этих
интегралов
F(h,U,... ,fk)
также будет первым интегралом. (В дальнейшем нас будут инте-
интересовать только независимые интегралы.) Метод Пуассона дает
возможность по двум первым интегралам канонических уравне-
уравнений Гамильтона найти еще один первый интеграл, который может
вообще оказаться некоторой функцией двух первых.
Чтобы пояснить метод, введем понятие скобок Пуассона.
Пусть имеются две произвольные функции ср(^, q, p) и r|)(?, q, p).
Выражение
qt dpi dpi oqi
называется скобками Пуассона.
Условие, что функция /(/, q, p) является первым интегралом
канонических уравнений Гамильтона, с помощью скобок Пуассона
запишется следующим образом:
Из определения скобок Пуассона вытекают следующие их
свойства:
2) (сф, г|з) = с (ф, i|?), с = const;
497
3) (<р + Ч>,х) = (ф.х) + (Ч>.х);
4) (X, (Ф, Ч>)) + (Ф, (Ф, X)) + 01?. (X, Ф)) = 0;
Все эти свойства очевидны, за исключением соотношения 4), назы-
называемого тождеством Пуассона. Доказать его можно не-
непосредственным вычислением двойных скобок Пуассона. Можно
также воспользоваться следующими соображениями. Б скобке
Пуассона (%, (ф, ¦»]))) операция дифференцирования выполняется
дважды над функциями ф и ч|з, а вся скобка представляет собой
линейную однородную функцию производных второго порядка от
Ф и i|). Таким образом, левая часть тождества Пуассона является
линейной функцией вторых производных от всех трех функций ф,
i|) и х- Соберем вместе члены, содержащие вторые производные от
функции %. Они войдут в выражение
(ф, A|>, х)) + (Ф, (х. ф)) = (ф, (Ч>, х)) — СЧ>, (ф, х)>-
Введем линейные дифференциальные операторы
Л(/) = (Ф.Л иЯ(/) = (г|>,/).
Тогда
(ф. (*, X)) - (Ф, (ф, X)) = Л (В (х)) - В (А (%)) = (АВ- ВА) (х).
Легко видеть, что такая комбинация линейных операторов не
может содержать вторых производных от %. Обозначая для упро-
упрощения вычислений координаты и импульсы через xh и представляя
k k
будем иметь
1 дХкдХ] jLl * dxk dXl
a^a^j ^j dxk
дщ д
Разность этих операторов
АВ — ВА =
дч dxk ] dxj
есть снова оператор, содержащий только первые производные. По-
Поэтому в левой части тождества Пуассона сокращаются все члены
со вторыми производными от %, то же самое относится, очевидно,
498
и tf функциям ф и 1|з. Следовательно, левая часть тождественно
равна нулю.
Теорема Пуассона. Если fug — первые интегралы кано-
канонических уравнений Гамильтона, то скобка Пуассона (/, g) =const
также является первым интегралом канонических уравнений Га-
Гамильтона.
Доказательство. Если f и g — первые интегралы, то
для них выполняются соотношения
Из пятого свойства скобок Пуассона теперь имеем
д ,<¦ > / df \ , /о dg \
dt \ dt ) \ dt )
Подставляя в правую часть значения производных dfjdt и dg/di, по-
получим
-jf (Л е) = - ((/. Я), s) - (Л te> Д)) = ((Л, /), г) + (fe, Я), /),
или, на основании тождества Пуассона,
-?-(/. г) = -((/. г), я).
Последнее равенство означает, что скобка (f, g) является первым
интегралом канонических уравнений.
Теорема Пуассона дает правило, позволяющее из двух первых
интегралов получать третий При этом не всегда получается новый
интеграл. Часто оказывается, что скобка Пуассона от двух пер-
первых интегралов или является линейной функцией уже найденных
интегралов, или тождественно обращается в нуль.
Замечание. Если функция Н не зависит явно от времени,
то имеет место интеграл Якоби
Если, кроме того, известен еще один первый интеграл канониче-
канонических уравнений Гамильтона
Ф (t, q, p) = а,
то скобка Пуассона (<р, //)=const тоже будет представлять пер-
первый интеграл канонических уравнений Гамильтона. Но так как
Ф — первый интеграл, то
¦2—<**>.
и, следовательно, на интегральной кривой будет выполняться соот-
соотношение
499
дф
— с,
dt
откуда следует, что функция dtp/dt будет представлять собой пер-
первый интеграл канонических уравнений Гамильтона.
§ 4. ВАРИАЦИОННЫЕ ПРИНЦИПЫ МЕХАНИКИ
1. Исторические замечания. Уравнения движения механических
систем можно получать исходя из весьма различных положений,
которые могут рассматриваться, как основные принципы механики.
Эти принципы должны полностью характеризовать движение сис-
системы материальных точек и быть эквивалентными всей системе
дифференциальных уравнений движения. Все законы механики
системы материальных точек, на которую наложены идеальные
связи, могут быть получены из принципа Даламбера — Лагранжа
(общего уравнения динамики). Тем не менее представляет интерес
преобразовать общее уравнение динамики так, чтобы получить но-
новую форму, эквивалентную этому уравнению, но отличную от него
по структуре. Новые формы либо допускают некоторые обобщения,
выходящие за рамки чисто механических задач, либо дают воз-
возможность получить новые формы дифференциальных уравнений
движения. С теоретической точки зрения новые формы в некото-
некоторых случаях позволяют обнаруживать некоторые общие свойства
системы, которые не всегда очевидны в первоначальной формули-
формулировке принципа. Полученный новый принцип может быть принят
за основной закон, и из него можно вывести все свойства движе-
движения, если только он правильно отображает природу.
Первые основные принципы механики связаны с именами Га-
Галилея, Ньютона, Лагранжа. В основу механики эти ученые поло-
положили понятие пространства, времени, силы и массы. Так, принцип
Галилея — Ньютона определяет силу как причину, вызывающую
движение материального тела. Законы Ньютона создают основу
дальнейшего развития механики. С их помощью можно проанали-
проанализировать любые механические движения.
Даламбер, Эйлер, Лагранж создали принцип, основанный на
сравнении движений. Этот принцип изучает мгновенное состояние
движения и возможные отклонения от этого состояния, допускае-
допускаемые связями в данный момент времени (возможные перемеще-
перемещения). Для механических систем с голономными идеальными связя-
связями из этого принципа непосредственно следуют уравнения движе-
движения системы материальных точек — уравнения Лагранжа второго
рода.
Гамильтоном был предложен другой принцип, сравнивающий
движения за конечный промежуток времени. Сравниваемые движе-
движения происходят за один и тот же промежуток времени в соответ-
соответствии с наложенными на систему связями. Принцип содержит в
себе всю механику систем с голономными идеальными связями.
500
Из аналитического выражения принципа видно, что он содержит в
себе такие физические понятия, которые не связаны с определен-
определенной лагранжевой системой переменных q\, q?.,..., Ць.. Достоинство
его заключается еще и в том, что он легко распространяется на
немеханические системы. Последнее обстоятельство дает возмож-
возможность переносить результаты и методы исследования из механики
в различные области физики и наоборот.
Свойства механических движений могут быть выведены из
других принципов. Из многих принципов, предлагавшихся до на-
настоящего времени, представляет интерес принцип наименьшего
действия в форме Якоби.
Принципы не всегда вносят новое физическое содержание в
механику или упрощают практическое решение механических
задач. Тем не менее они в ряде случаев более удобны для обще-
общего анализа движения механических систем. Так, интегральные
принципы Гамильтона и Якоби позволили построить такой метод
интегрирования уравнений динамики, благодаря которому было
решено много задач, представлявшихся до того неразрешимыми.
Впервые вариационный принцип для физической проблемы
был отчетливо сформулирован в геометрической оптике в XVII в.
французским математиком Пьером Ферма A601—1665), автором
знаменитой теоремы о том, что уравнение xn+yn = zn, где п — це-
целое число, больше двух, не имеет решения в целых положительных
числах. Принцип Ферма является обобщением известного прин-
принципа Герона об отражении света и основан на положении, что
природа действует наиболее легкими и доступными путями. Этот
принцип заключается в том, что действительный путь распростра-
распространения света есть тот, для прохождения которого свету требуется
минимальное время по сравнению с другими путями между теми
же точками. Математическое выражение принципа следует из
определения скорости v = ——, откуда, обозначая через Ло и At
начальную и конечную точки, будем иметь
Условие минимума времени дает математическую трактовку прин-
принципа
^
Президент Берлинской академии наук, французский матема-
математик Мопертюи A698—1759) сформулировал принцип, который
назвал «общим законом природы». Согласно принципу Мопертюи,
всякое изменение в природе происходит таким образом, что коли-
501
чество действия, необходимое на это изменение, является наимень-
наименьшим. Природа как бы «экономит» свое действие. Под количеством
действия Мопертюи понимал произведение массы точки на ее
скорость и пройденный путь, т. е.
М = mvds.
Заслуга аналитического оформления этого принципа принад-
принадлежит швейцарскому математику и механику Леонарду Эйлеру,
долгое время работавшему в Петербурге и в Берлине. Он опреде-
определил действие в виде интеграла
а1
= [vSlt
взятого по дуге траектории, соединяющего начальную и конеч-
конечную точки. По Эйлеру, этот интеграл имеет наименьшее значение
для любого отрезка истинной траектории по сравнению со смеж-
смежными кривыми, имеющими те же концы.
Лагранж распространил принцип Эйлера на систему мате-
материальных точек. Полное математическое обоснование этого прин-
принципа принадлежит К. Якоби.
Принцип наименьшего действия Мопертюи — Лагранжа менее
общий, чем принцип Гамильтона. Он применим только к системам,
у которых связи не зависят явно от времени, а силы обладают
силовой функцией, не зависящей явно от времени.
2. Принцип Лагранжа. Пусть имеется механическая система
материальных точек, на которые наложены голономные идеальные
связи, не зависящие явно от времени, а силы обладают силовой
функцией U. Для такой системы существует интеграл живых сил
T^U + h, (a)
где постоянная h имеет значение полной механической энергии
системы, не изменяющейся во все время движения. Будем рас-
рассматривать лишь такие движения, переводящие систему из поло-
положения Ао в положение Аи которые совершаются с одним и тем же
запасом механической энергии h.
Принцип Лагранжа утверждает, что интеграл
имеет минимальное значение на действительной траектории, если
все рассматриваемые движения обладают одним и тем же запасом
энергии.
Преобразуем подынтегральное выражение, разделив и умно-
умножив его на dt,
502
Тогда принцип Лагранжа запишется в виде
At
б f 27Yff = 0,
л.
т. е. интеграл от кинетической энергии системы на действительной
траектории принимает экстремальное значение, если сравниваемые
траектории обладают одной и той же полной механической энер-
энергией. При этих условиях движение по действительной и сравни-
сравниваемой траекториям происходит вообще за разное время. Время
достижения точки А\ оказывается различным.
Если через t0 обозначить момент начала движения системы из
положения До, а через t момент прохождения через положение А\,
то математическая формулировка принципа может быть представ-
представлена уравнением
t
б j 2Tdt = 0
при условии, что все сравниваемые движения происходят с одина-
одинаковым запасом энергии h.
Задача определения действительного движения системы сво-
сводится теперь к отысканию у ел о вн о го экстремума интегра-
интеграла с подвижным верхним пределом. Вариации координат и скорос-
скоростей уже не являются независимыми и связаны условием
6Г—6С/ = О.
В таком виде впервые задачу рассмотрел в 1815 г. испанский
математик Оленд Родригес A794—1851), применивший метод
неопределенных множителей Лагранжа (независимо от Родригеса,
позднее этой же задачей занимался английский механик Раус).
Метод неопределенных множителей сводится здесь к отысканию
безусловного экстремума интеграла от функции
Ф = 27+ХG — U — И),
после чего принцип можно записать в виде
б/ = 6 <?>dt = О,
U
или
t
б J [2Г 4- Л. (Г — I/ — Л)] Л = 0,
<0
503
и метод сводится к отысканию экстремума интеграла с подвижным
верхним концом. Все траектории сравнения совпадают на концах
интервала, проходя через точку А\ в различные моменты времени,
поэтому для вариаций координат в точках Ао и А\ будем иметь
8х0 = б*/0 = бг0 = 0, бх1 = Ьу1 ~ бгх = О
или, переходя к обобщенным координатам,
h
а
%
i
I
i
7 )
¦*-
Рис. 255
В курсах вариационного исчисления показывается, что вариация
функционала с подвижными концами имеет вид
б/ = \ >
дФ \
dt
дФ
~ 5G;
— У—rfyi
Zj dqt Ч
— Ф —
\
Ф —
оФ
где t\ — момент прохождения действительной траектории через
точку А\ (рис. 255). В рассматриваемом случае все сравниваемые
движения начинаются в один и тот же момент времени, поэтому
б^о = О- Тогда формула для экстремума функционала получает вид
и
Г V4 / дФ d дФ \ с ., I^ V^ (ЭФ Л с, _ Л
J Zj \ % dt dq't ) l \ Zj ид- '/ г=г,
U i i
U
Действительная траектория дает экстремум функционалу ( Odt
и
среди всех допустимых траекторий, а следовательно, и среди
траекторий, проходящих через точки Ао и А\ за одно и то же вре-
время. Тогда
и
б j Odt = 0,
504
т. е. на действительной траектории удовлетворяются уравнения
дФ ±_Л®_ _о
которые называются уравнениями Эйлера, а основное условие
экстремума записывается в форме
1 «=*,
= 0
и называется условием трансверсальности. Записывая
последнее условие в явном виде, будем иметь
Здесь выражение, стоящее в круглых скобках, обращается в нуль,
так как для сравниваемых траекторий имеет место интеграл энер-
энергии. Кроме того, в силу независимости связей от времени живая
сила является однородной квадратичной формой от обобщенных
скоростей. Поэтому на основании теоремы Эйлера об однородных
функциях имеем
после чего условие трансверсальности принимает вид
— 27 — №27 = 0,
откуда следует К = — 1, а функция Ф равна
Ф = Т + U + h,
или
После подстановки этого значения в уравнения Эйлера, получим
уравнения Лагранжа второго рода
-~ — -0 (/-= 1,2,
dt лп.
Эти уравнения подтверждают справедливость принципа наимень-
наименьшего действия в форме Лагранжа.
После Лагранжа принцип наименьшего действия сначала не
оказывал практического влияния на развитие науки. Его рассмат-
рассматривали как некоторый математический курьез, как интересный, но
излишний придаток к ньютоновской механике. Пуассон назвал его
«бесполезным правилом», и лишь после исследований Томсона,
505
Тэта, Кирхгофа и других механиков оказалось, что этот принцип
является важным инструментом при решении задач динамики.
В 1867 г. Томсон и Тэт показали, что принцип имеет большое зна-
значение для развития многих разделов физики. Как оказалось
впоследствии, он играет существенную роль в теории относитель-
относительности.
3. Принцип наименьшего действия в форме Якоби. Наиболее
аккуратное изложение принципа наименьшего действия дал К. Яко-
Якоби. В лекциях по динамике, которые он читал в 1843—1844 гг.,
говорится о том, что принцип наименьшего действия трудно понять,
так как при его формулировке обычно забывают об исключении
времени при помощи интеграла живых сил. После такого исклю-
исключения все рассмотрение сводится к пространственным элементам.
Переходя к изложению принципа наименьшего действия в
форме Якоби, будем предполагать, чго положение механической
системы в каждый момент времени определяется лагранжевыми
координатами ди q2,..., Цк, а наложенные на систему связи не
зависят явно от времени. Будем, кроме того, предполагать, что
силы, действующие на точки системы, консервативны. При сделан-
сделанных предположениях живая сила системы будет однородной квад-
квадратичной формой относительно обобщенных скоростей
?./=1
где коэффициенты а^ зависят только от координат q\, q2,..., Цк-
Движение изучаемой системы происходит в соответствии с интегра-
интегралом живых сил
в котором U = U(qit q2,..., Qk) —силовая функция.
В пространстве обобщенных координат qu q-i,.... q\ введем мет-
метрику, определив квадрат длины дуги ds2 с помощью положитель-
положительно определенной квадратичной дифференциальной формы
где коэффициенты аг} те же, что и в выражении живой силы. Каж-
Каждому положению системы в пространстве обобщенных координат
будет отвечать точка. Пусть Ро и Л — два положения системы
материальных точек в этом пространстве. Задача заключается в
том, чтобы отыскать действительную траекторию, соединяющую
точки Ро и Р], по которой системы будет двигаться из положения
Ро в положение Pi при заданных силах и заданной величине пол-
полной энергии ft.
Принцип Якоби утверждает, что на действительной траектории
системы интеграл
506
h) ds
принимает стационарное значение, иначе говоря, вариация интегра-
интеграла обращается в нуль, т. е.
р.
6 Г j/2 (С/ + h) ds = 0.
p.
Принцип Якоби является дальнейшим развитием принципа
наименьшего действия Лагранжа. В самом деле, если (dsJ =
= 2T(dtJ, то
f ТТЛ = [ V 2Т1/2Г Л = j' V2T ds = (' /2A/ +ft) ds,
P» Po Po P.
поэтому из соотношения
6 2Tdt = 0
p»
следует
S f /2 (I/ + A) ds = 0,
Po
Л=^
если соответствующим образом определен класс сравниваемых
траекторий и полностью исключено время.
Чтобы убедиться, что принцип
наименьшего действия является
фундаментальным принципом меха-
механики, необходимо показать, что из
него следуют все свойства движе-
движения механических систем, на кото-
которые наложены голономные, не за-
зависящие от времени связи и дей-
действуют консервативные силы. Кро-
Кроме того, нужно убедиться, что
принцип может быть получен из
других принципов механики.
Свойства механических систем
определяются дифференциальными уравнениями движения систе-
системы, в качестве которых могут быть приняты уравнения Лагранжа
второго рода. Покажем, как могут быть получены эти уравнения
из принципа наименьшего действия в форме Якоби.
Вывод уравнений Лагранжа второго рода из принципа Яко-
Якоби. Так как предполагается, что движение по всем траекториям
сравнения происходит с одним и тем же запасом энергии h, то
507
необходимо ввести такой параметр, чтобы начальным и конечным
точкам траекторий соответствовали одинаковые значения этого
параметра. С этой целью рассмотрим семейство поверхностей
4<7i. <7г. ••• ><7ft) = const,
каждая из которых пересекает все траектории сравнения и на
каждой из которых остается неизменной новая независимая пере-
переменная X. Пусть через точки Ро и Pi проходят поверхности Х=1о
и X=Ai (рис. 256). Рассматривая последовательность поверхностей
вдоль траекторий, на каждой траектории определим зависимость
лагранжевых координат от параметра X:
Ца = Ца (^) (о = 1, 2, . . . , fe)
так, чтобы для всех траекторий начальное и конечное значения
параметра X были одинаковыми.
За возможное перемещение системы примем перемещение с
одной траектории на другую по поверхности X—const. Тогда на
концах интервала движения при Х=Хо и X=%i будем иметь
Внутри же интервала движения вариации координат будут прини-
принимать произвольные значения. Вариационный принцип Якоби полу-
получает теперь вид вариационной задачи с неподвижными концами
dX
по аналогии с принципом Гамильтона. Роль функции Лагранжа
здесь играет функция
/ ds \2
из которой уже исключено время, а выражение по своей
\ dX I
структуре напоминает удвоенную живую силу системы. В самом
деле,
ds у V dqi dqi
dX I ^J dX dX
Если ввести обозначения
—l- =q'{, 29 = \ a4q'fl',,
dX s—l ' ' '
TO
Ф = /2 (U + h) /29,
508
а уравнения Эйлера для вариационной задачи примут вид
d 5Ф сФ Л
= и,
или, после вычисления частных производных,
d \ /2 (U + Щ 59 I /29 8и _
/29 ^t J /2~(Z7
/26
= 0 <» = 1, 2 As).
Параметр Я не является временем движения по различным траек-
траекториям системы, поэтому для 0, вообще говоря, не существует за-
зависимости вида
на всех траекториях, и вообще выполняется неравенство
поэтому до вычисления частных производных нельзя производить
сокращений.
После того как частное дифференцирование выполнено, после-
последовательности моментов времени t на действительной траектории
сопоставим однозначно последовательность значений X так, чтобы
всюду выполнялось условие
X = t,
где t — время движения системы по действительной траектории.
На действительной траектории теперь будем иметь условие
е = т,
а для Т справедлив закон сохранения энергии
поэтому на действительной траектории выполняется равенство
/26
а уравнения Эйлера, определяющие экстремаль, перейдут в урав-
уравнения Лагранжа второго рода
. , ~ и \i — 1,4,..., к),
dt dq\ dqi %
509
т. е. в самые общие уравнения, описывающие движение механи-
механической системы с голономными идеальными связями.
Сравнение принципа Якоби с принципом Гамильтона. Прин-
Принцип наименьшего действия в форме Якоби не является непосредст-
непосредственным следствием принципа Гамильтона, так как экстремали в
обоих принципах определяются при совершенно различных пред-
предположениях. Тем не менее, принцип Якоби может быть получен
из принципа Гамильтона, если наложить определенные ограничения
на рассматриваемую систему.
Рассмотрим механическую систему, на которую наложены
голономные идеальные связи, не зависящие явно от времени. Дви-
Движение такой системы происходит в соответствии с законом живых
сил T = U + h.
Пусть в момент t0 система находится в положении Л, а в момент
ti — в положении В. Тогда, в соответствии с принципом Гамильто-
?i
на, на действительной траектории интеграл f Ldt принимает
to
стационарное значение среди всех допускаемых связями траекто-
траекторий, соединяющих точки Л и В за то же время. Переходя к новой
независимой переменной x—f(t), преобразуем этот интеграл к виду
W dx,
I
где V = . Преобразование обобщенных скоростей дает
dx
dq _ dq dt q'
dt ~~ dx ' dx ~ V
Введем функцию
b
рассматривая ее как функцию Лагранжа для задачи о движении
системы с k+l степенями свободы, положение которой определяет-
определяется параметрами <7ь Чг, ••-, <Jk, t. Так как связи, наложенные на
первоначальную систему, не зависят явно от времени, то и функция
L\ не зависит явно от t, а следовательно, t является циклической
координатой для L\. Применяя метод Рауса игнорирования цикли-
циклических координат к переменной t, рассмотрим циклический ин-
интеграл
— = const,
dt
который можно представить в виде
510
dqi r* ~L
Этот интеграл равносилен интегралу живых сил исходной механи-
механической системы
T — U = h.
Рассматривая функцию Рауса
сведем задачу к системе с k степенями свободы, где роль функции
Лагранжа уже играет функция Рауса R, откуда переменная V
исключена при помощи циклического интеграла Т—U=h. Величи-
Величина h должна оставаться одной и той же для всех сравниваемых
траекторий, что накладывает ограничения на переменную т.
Задача сводится к отысканию движения в пространстве k пере-
переменных, где роль времени играет т, а роль функции Лагранжа —
функция R, не зависящая явно от т. Параметр т следует выбирать
так, чтобы движение по всем траекториям происходило с одной
и той же энергией h, начиная с момента т0 и заканчиваясь в мо-
момент ть Записывая для такого движения принцип Гамильтона,
будем иметь
(*)
dt
что можно записать в виде
То
где
T =
Тогда
1 / ds \2 1 / ds
2 \ dt I 2('2 V dx
6 ( 1-!±-
То
511
Живая сила рассматриваемой системы определяется формулой
т = _L ^ - - - • 1
~ 2
а интеграл живых сил
it"
откуда
Но тогда из принципа Гамильтона (Н<) имеем
==— i -
dx
[V2{U
J
h) — Л = О,
а принципу Якоби можно придать следующую трактовку.
Если система вынуждена двигаться, сохраняя постоянную
энергию Т—U = h, то ее действительная траектория представляет
собой экстремаль интеграла
То
среди всех траекторий, определенных двумя крайними положения-
положениями системы, соответствующими значениям то и х\ параметра т.
4. Оптико-механическая аналогия. Одним из важнейших откры-
открытий аналитической механики является оптико-механическая анало-
аналогия, обнаруженная Гамильтоном, который установил одинаковый
вид канонических уравнений
Mi _ dff dpi _ , дН ц _ л о ь\
dt dpi dt dqi
для консервативных механических систем и для волновой теории
света Гюйгенса. Дальнейшее развитие оптико-механической ана-
аналогии связано с именами Якоби, Пуанкаре, Гельмгольца, Четаева.
Оптико-механическая аналогия играет немалую роль и при разра-
разработке современных проблем аналитической механики.
Сравним сначала оптический принцип Ферма с принципом
наименьшего действия Якоби. Согласно принципу Ферма, луч в
неоднородной среде распространяется по такому пути, чтобы время
его движения
t
С ds
J v
So
512
было минимальным, т. е. для действительного пути луча должно
выполняться условие
J v
Вводя коэффициент преломления света в среде Ц = —, где с —
скорость распространения света в пустоте, запишем этот принцип
в виде
Г Vds=.
С другой стороны, для одной материальной точки принцип наи-
наименьшего действия Якоби дает
б j 1/2 (t/ f k)
Сравнивая эти два принципа, можно заметить, что траектория
светового луча совпадает с траекторией точки, если потребовать,
чтобы выполнялось условие
W =-1/2 (U 4- к) ,
где п — некоторый коэффициент пропорциональности. При п=\
будем иметь
Полагая, что вблизи поверхности Земли показатель преломления ц
является линейной функцией высоты z
где Н — высота атмосферы, получим
или
2 m 4. h) = ^o — 2uo^ —
я
Считая отношение z/H малым и пренебрегая членами второго по-
порядка малости, отсюда находим (с точностью до аддитивной по-
постоянной)
и
17 Е. Н. Березкин 513
Следовательно, луч света движется как материальная точка,
находящаяся под действием силы с силовой функцией, линейной
относительно г. Такой вид имеет силовая функция для силы тя-
тяжести вблизи поверхности Земли. При произвольных начальных
условиях тяжелая материальная точка движется вблизи поверх-
поверхности Земли по параболе с вертикальной осью. Такой же вид будет
иметь и путь светового луча. Это предло-
предложение остается справедливым при всех су-
существующих гипотезах о природе света.
Аналогия между динамическими урав-
уравнениями движения и волновой теорией све-
света была предложена Гамильтоном. В осно-
основе ее лежит предположение, что свет рас-
распространяется волновым фронтом, теория
которого была разработана Христианом
Гюйгенсом еще в 1690 г.
Пусть имеется оптически изотропная
среда. В этой среде рассмотрим две близкие точки: Р(х, у, z) и
Pi(xu Уи zi)- Время, в течение которого свет распространяется из
точки Р в точку Ри является функцией координат точек
t1 — t = V(x,y,z,x1,y1,z1). (a)
Функцию V Гамильтон назвал характеристической. Прин-
Принцип Гюйгенса заключается в том, что каждая точка, до которой
доходит световое возбуждение, является, в свою очередь, центром
вторичных волн. Поверхность, огибающая эти вторичные волны,
указывает положение фронта действительно распространяющейся
волны. Поэтому, если 2 является фронтом световой волны в мо-
момент /, то огибающая Si вторичных волн, центрами которых являют-
являются точки, расположенные на 2, представляет собой фронт волны
в момент t\ (рис. 257). В изотропной среде световой луч распрост-
распространяется по нормали к волновому фронту. Обозначая через (а, C,
¦у) направляющие косинусы нормали п к поверхности волнового
фронта 2 в точке Р, а через (аь Ci, yi) —направляющие косинусы
нормали rii в точке Р\ волнового фронта 2i, запишем уравнение
поверхности 2 в виде
где 8х, 8у, 8z — бесконечно малое перемещение вдоль поверх-
поверхности 2.
Характеристическая функция V сохраняет постоянное значение
вдоль поверхности 2, поэтому при неизменном времени получим
8х-\ 8у -} —oz = 0. (с)
дх ду дг
514
Сравнивая (Ь) и (с), получим
dV oV ЗУ
дх ду дг ...
= %. (d)
а р у
Аналогичное соотношение будем иметь для фронта волны
JV дУ дУ
<*i Pi Yi
Из уравнений (a), (d), (e) и "тождеств
можно найти величины хи уи Z\, «ь Рь Yi как функции от л:, у, 2,
a, p, y> чт0 полностью определяет поведение светового луча в
среде. Таким образом, функция V определяет изменение системы
световых лучей.
Переход от переменных х, у, z, а, C, у к переменным Х{, yi, Zi
ab Pi, yi можно рассматривать как преобразование переменных.
Преобразование это является каноническим, или контактным (Со-
фус Ли). В самом деле, функция V определяет преобразование
поверхности 2 в поверхность 2ь Дифференцируя V, получим
дх ду дг дх1
= % (a dx + f>~dy + ydz) + щ (ах dx1 + p2 dyx + Yi dzx), (g)
a это и есть условие канонического преобразования.
Пусть и — скорость распространения света в точке Р, направ-
направленная ортогонально к фронту волны 2, а ds — путь, который про-
проходит луч света из точки Р за время dt. Тогда ds = udt. Положив
скорость распространения света в пустоте равной единице, для
показателя преломления среды в точке Р будем иметь а=—. Тогда
и
dt = — = Цds = ц (а2 + Р2 -f Y3) ds = I* (adx -f pd^ + vdz).
Рассуждая аналогично, для перемещения луча из точки Рх получим
dtx = цх (a! d*! 4- Pi d^ J- Yi dz^,
a изменение характеристической функции V равно
dV = dtx — dt = ii1 (Ol djcj + px фх -f- уг dz^ — \a(adx + ^dy-{-y dz).
Сравнивая это с (g), находим
17* 516
т. е. коэффициент пропорциональности % представляет собой пока-
показатель преломления. Введем новую систему переменных:
Тогда
dV = hdXl + r\1dy1 + tldz1 — {ldx + 4\dy-\-ldz). (h)
Функция V определяет преобразование переменных х, у, z, \,
т], ?, в переменные лгь уи zu |i, tji, ?i. Распространение света по лучу
представляется как каноническое преобразование.
Рассмотрим бесконечно малое каноническое преобразование на
малом интервале времени At=ti—t. Положим
хг = x + uAt, уг = у j-vAt, 21 = 2
l^l + fAt, ц^п-4-gAt, 51 = ?^-AA/, (i)
V = WAt
(с точностью до малых величин). Тогда уравнение (h) примет вид
dV = dWM = fadx,. + 4xdyx -f- ttdzj - (Idx
= Atifedu + i\dv -\- t,dw + fdx -\-gdy -1- hdz) -\- чл. высш. пор.
Отсюда, пренебрегая малыми величинами, получим
dW = f dx I- gdy + hdz t- d (& -+ j)v + ?w) — {udl + vdv\
Вводя обозначение
— // = W — (|и + "Пи 4- ^ш).
будем иметь
С другой стороны,
Приравнивая коэффициенты при одинаковых дифференциалах,
получим
дх ду дг
дН _ дН _ дН _
—— — и, ——— — v, — w.
516
В силу формул (i) в пределе будем иметь
поэтому
d\
dt
dx
dt
dx
dt
dH
dx '
dH
dt
dy
dt
dy
dt '
dH
dy '
dH
&n '
d?
dt
dz
dt
dz
dt
dff
dH
dz
По форме эти уравнения совпадают с уравнениями Гамильтона.
Вся система может рассматриваться как аналитическое выраже-
выражение бесконечно малого преобразования, определяющего перемеще-
перемещение волнового фронта из данного положения в бесконечно близ-
близкое.
Используя волновую теорию света, Гамильтон получил воз-
возможность написать уравнения динамики в форме, зависящей лишь
от одной функции Н. Дальнейшим развитием теории распростра-
распространения света занимались Коши, Кирхгоф, Максвелл, Гельмгольц и
другие физики. Коши поставил задачу о дальнейшем развитии
оптико-механической аналогии. В рамках аналитической механики
этой задачей занимался немецкий математик Феликс Клейн
A849—1925). Развитие аналогии следует искать в области коле-
колебательных движений, поскольку свет представляет собой некото-
некоторый колебательный процесс. Аналогией между математической
теорией света Коши и устойчивыми движениями голономной кон-
консервативной системы занимался Н. Г. Четаев A902—1959), но
рассмотрение этих вопросов выходит за рамки нашего курса.
5. Интегральные инварианты. Французский математик и ме-
механик А. Пуанкаре обратил внимание на некоторые свойства меха-
механических движений, связанные с математическими понятиями, ко-
которые называются интегральными инвариантами.
Для упрощения рассуждений будем сначала предполагать,
что дифференциальные уравнения движения механической системы
имеют вид
-*%- = Х, (t, *!, *s хп) 0 = 1,2 л),
at
и пусть выражения
Xt = Х{ (t, Х°и Х° Х°п) (I =- 1, 2, . . . , П.)
представляют собой общее решение этой системы с определителем
Р(*1, Х9, ... , Х„) ¦ q
517
тогда, если в п+ 1-мерном пространстве переменных Х\, X2,..., xn, t
рассмотреть движение изображающей точки Р, выходящей в мо-
момент /0 из положения Ро, можно установить непрерывное одно-
однозначное соответствие точек Р и Ро.
Можно показать, что в этом случае всякому многообразию Уо
с числом измерений г<;п в момент t будет соответствовать некото-
некоторое другое многообразие V в пространстве переменных xh х2,...,
..., хп, т.
Предположим, что начальное многообразие образует некото-
некоторую область 5оп «-мерного пространства и пусть Sn — соответст-
соответствующая область в момент t. Тогда, если (х = (х (хи х2,..., хп t) —не-
—некоторая достаточно гладкая функция координат и времени, тогда
интеграл
J = \v-ds,
s
распространенный по этому многообразию, имеет вполне опреде-
определенный смысл и представляет собой функцию времени t, т. е.
J = J(t). Чтобы проследить за изменением функции J(t), рассмот-
рассмотрим производную от J(t) по времени. Но так как область S все
время деформируется, удобно отнести интеграл к неизменной об-
области So. Так как область S получается из So в результате замены
переменных
v v /7 v° v° v°1
-*"? — -W t/) -M j «^2? • • • > **7V >
будем иметь
s,
где
U \Х\, *2, ¦ ¦¦ , хп)
сохраняет знак, поскольку, по условию, нигде не обращается в
нуль. После такой замены область интегрирования уже не будет
зависеть от t, поэтому можно применить дифференцирование под
знаком интеграла. Будем иметь
—— = I (V-D) ds° =
dt J dt
s0 s
Но, как известно,
dD _ yi D
dt ~ —J "
f
где
D l У v У • X • Y У }
1 плО 0 0 00 0-
518
dxk
& dxk dxO '
i k i
поэтому в определитель Dt войдет строка, состоящая из элементов
j dxk УЧ dXj dxk y\ dXj dxk
2 Z
S
д-Ч дхо ' 2j jxk дхо ' " ' • ' Zj дхк дхоп '
и тогда
dXj Р(хг, х2, ... , Xj_lt xh, xM хп) ___
дхь п (у® г° у° j-0 j-0 v°\
« U [Xv Х2, . . . , *;_,, Х{, Х1+1, ... , Хп)
_ dXi D<-Xl' *Д' ••• ' Л'я) _ р dXi
дЧ D{x\,4> ¦¦¦>¦<) " дх' '
а следовательно,
dt iU дх{
i
Преобразуем теперь подынтегральное выражение
dt
после чего можно записать
s
Определение. Назовем интеграл
J = j> ds
s
интегральным инвариантом относительно системы диф-
дифференциальных уравнений, если при изменении времени t он
сохраняет постоянное значение независимо от того, какова об-
область ннтегрирования 50 в начальный момент t0.
Из определения следует, что для того, чтобы интеграл / был
интегральным инвариантом, необходимо и достаточно, чтобы в
любой момент / имело место условие
dt =
519
В силу произвольности области Sa это условие будет выпол-
выполнено только тогда, когда имеет место равенство
(a)
Иначе говоря, величина \х должна удовлетворять уравнению с
частными производными (а). Такие величины называют множи-
множителями системы дифференциальных уравнений.
Если при этом jj, имеет порядок системы, то эта величина назы-
называется множителем Якоб и.
Замечание. Если имеет место условие
то для нахождения множителя получаем уравнение
dt
откуда следует условие jx = const, и тогда выражение
будет интегральным инвариантом системы. В частности, таким
интегральным инвариантом должен быть фазовый объем гамильто-
нова фазового пространства (см. теорему Лиувилля). Последнее
свойство имеет большое значение в статистической механике.
Линейные интегральные инварианты. Пуанкаре предложил
рассматривать интегральные инварианты, распространяющиеся на
многообразия меньшего числа измерений, чем порядок системы.
Многообразием, имеющим наименьшее число измерений, является
линия. Если многообразие, на котором определяется инвариант,
является замкнутым многообразием, то интеграл / называют
относительным интегральным инвариантом. Ин-
Интегральный инвариант, распространенный по замкнутой линии,
является относительным интегральным инвариантом.
Из формулы Стокса преобразования интеграла по замкнутому
контуру в поверхностный интеграл
С i Q 1.1 '
следует, что каждому относительному интегральному инварианту
соответствует абсолютный интегральный инвариант второго
порядка'.
1 Под порядком интегрального инварианта понимают степень формы отно-
относительно дифференциалов в подынтегральном выражении.
520
Рассмотрим линейный интегральный инвариант для системы
канонических уравнений Гамильтона
дщ _ дН dPi __ дН (i==lf2f ... ,jfe).
dt dPi dt dq,
Покажем, что интеграл
распространенный на замкнутую линию L фазового пространства,
является линейным инвариантом канонических уравнений Гамиль-
Гамильтона.
Пусть
</;=<^<ЛРо). р? = pt (t, qa, p0) (t=l,2, ... ,k)
есть некоторое частное решение канонических уравнений Гамиль-
Гамильтона, определяемое начальными значениями q°, p° координат и им-
импульсов, и пусть всюду выполняется условие
?>(</*, p°)
Тогда замкнутой линии L будет соответствовать в начальный мо-
момент замкнутая линия Lo. Последнюю можно представить пара-
параметрически уравнениями
<7<о = 9ю (т). Рю = Рю (т) (» = 1. 2, ... , &),
а линию L уравнениями
<7i = 9i ('> т^' Pi = Pi (^ T) (i = 1, 2, ... , А).
Для определения инвариантности интеграла / достаточно
рассмотреть производную dJ/dt и показать, что она всюду равна
нулю. При этом дифференцирование по t не затрагивает измене-
изменения параметра т. Для удобства введем обозначение дифференциро-
дифференцирования по параметру т в виде
и перепишем интеграл J в виде
Тогда
f $ 2 ' + Р' ton),
$> 2 0%'
521
где штрихом обозначена производная по t. Интегрирование по час-
частям дает
Ф Pi fyi — — \ qi $Pi,
поэтому
dj
dt
L t
где р; и qi удовлетворяют кононическим уравнениям Гамильтона.
В результате имеем
i
чем и доказывается утверждение. Интегральный инвариант
называют линейным инвариантом Пуанкаре.
Интегральный инвариант Пуанкаре — Картана. Другим ин-
интегральным инвариантом канонических уравнений Гамильтона,
распространенным на замкнутую кривую в 2k+ 1-мерном прост-
пространстве, является интегральный инвариант Пуанкаре — Картана:
L, i
Пусть
qi = qt (t, a, p), p, = Pi (t, a, p)- (i= 1, 2 k)
частное решение канонических уравнений Гамильтона, где а» и pi —
начальные значения координат и импульсов. Введем новую неза-
независимую переменную т условием
t = f(alr og, ... ,ак, plf p2, ... , pft, т)
где / — монотонная функция т, так что
<7;^<7;(а,р\ х), pi = р;(а, р, т), f = /(a, р, х).
Рассматривая о* и ^ как некоторые непрерывные функции пара-
параметра К, определим в расширенном фазовом пространстве замкну-
замкнутую кривую с:
о,- = о,(Х), Р, = р,(Ь) (t=l,2, ... ,А)
при т =т,., причем б^ = -—-6^, а Й= б А, и ьпри изменении х
будет меняться сама кривая с. В силу независимости дифференци-
дифференцирования операции d и б перестановочны, поэтому
522
= V (dpi 6<7; — 6p< dqi) — dH6t+ ЬН dt.
Дифференцируя теперь выражение J, получим
P, 69i - Я tt) = <j> б (? Pi d7? -Hdt
Li L L
первый из этих интегралов на замкнутом контуре обращается в нуль,
дН Ы.
. &
i
поэтому
i
, дН
¦ dcli -г -т~
dt\ Ы
Здесь подынтегральное выражение обращается в нуль в силу ка-
канонических уравнений Гамильтона, поэтому dJ = O, т. е. / действи-
действительно является интегральным инвариантом.
Можно показать, что если движение системы определяется
дифференциальными уравнениями вида
и имеет место интегральный инвариант Пуанкаре — Картана, то
имеют место соотношения
q. =J*L p. = dJL
которые непосредственно следуют из произвольности и независи-
независимости вариаций 6<7*, бри и 8t. Последнее обстоятельство означает,
что инвариант Пуанкаре — Картана может быть положен в основу
голономной механики.
Замечание. В интеграле Пуанкаре — Картана функция
Гамильтона Я входит на правах импульса. Если ввести новую
переменную z— —H(t, q, p), то можно будет определить р\ в
функции остальных переменных
Р] = — Ф (*> 9i> Яг> ¦ • • . 4k> 2. р2, pj, ... , pk),
523
тогда интеграл Пуанкаре — Картана можно будет переписать в
виде
t=2
где роль времени уже играет координата qx. В новых переменных
движение будет определяться каноническими уравнениями
dt df dqi дН dz 3<p
dqt dz ' dqt dpt ' dqx dt
dpi <Эф_
Полученные уравнения называются уравнениями Уиттекера.
6. Принцип наименьшего принуждения Гаусса. Уравнения
Аппеля. В начале XIX в. получил большое развитие метод обра-
обработки наблюдений—метод наименьших квадратов. В аналитиче-
аналитической механике этот метод приводит к новому общему принципу.
В 1829 г. Карл Фридрих Гаусс A777—1855) опубликовал свой зна-
знаменитый мемуар, в котором предложил доказательство принципа
наименьшего принуждения. Это была единственная работа Гаусса
по аналитической механике. Как замечает сам Гаусс, каждый
новый принцип вносит новую точку зрения на законы природы.
По мнению Гаусса, его принцип имеет то преимущество, что
обнимает одинаковым образом как законы движения, так и законы
покоя.
Доказательство принципа, которое дает Гаусс, не содержит
явного выражения вида связей. (Это доказательство приводится во
втором томе аналитической механики Лагранжа.) По-видимому,
Болотов первым обратил внимание на необходимость строгого
определения понятия возможного перемещения при распростране-
распространении принципа Гаусса на системы с неголономными связями. Боло-
Болотов рассматривал линейные неголономные идеальные связи. Позд-
Позднее Н. Г. Четаев распространил принцип Гаусса на нелинейные
неголономные связи.
Рассмотрим систему материальных точек tnv(xv, yv, zv), на кото-
которые действуют активные силы Xv, У\>, Z* и наложены идеальные,
вообще неголономные связи вида
п
{аих] + Ьч у] + сч г]) -М, = 0 (i = 1, 2, ... , т),
где через х\, tjj, z\ обозначены производные по времени от соот-
соответствующих координат, а коэффициенты ац, Ьц, ci3- и lt являют-
являются функциями времени и координат точек системы.
Наиболее общим принципом динамики, позволяющим отбирать
действительные движения среди возможных, является принцип
524
Даламбера — Лагранжа, аналитическая запись которого имеет
вид
[{пи, 4 — Xv) Sxv + (ntyth — Ум) 6?/v + (fnJv — Zv) 8zv] = 0.
V
Определим возможные перемещения системы при неголономных
связях как перемещения, удовлетворяющие условиям
? (а?/ Ьх, + Ьч 6у, -\ сИ 6z;.) = 0 (i = 1, 2, ... , т).
/=i
Эти условия, очевидно, содержат в себе и определение возможного
перемещения для голономных связей. Возможные перемещения
стеснены т условиями связей, так что независимых перемещений
будет Зп—т.
Координаты точек механической системы в действительном
движении изменяются в соответствии с наложенными на систему
связями. В этом смысле координаты системы тождественно удов-
удовлетворяют условиям связи. Дифференцируя по времени уравнения
связи, будем иметь
п
(ач х" -+¦ Ъцу] + сИг]) + AL (t, х, у, г, х', у', г') = 0 (t = 1,2,... ,т),
(а)
где Л,- представляют совокупность членов, не зависящих от уско-
ускорений.
Характер движения системы из заданного положения зависит
от активных сил, действующих на эту систему. Силы эти сообщают
ускорения точкам системы. Ускорения стеснены наложенными на
систему связями.
Изменяя для данного состояния системы действующие силы,
будем изменять ускорения точек системы, оставляя неизменными
в данный момент координаты и скорости.
Мыслимыми движениями системы будем называть
такие движения, которые может совершать система при наложен-
наложенных на нее связях, если изменять действующие на систему силы.
Действительное д_в иж е н и е всегда будет одним из мысли-
мыслимых. Обозначая через xv, yv, z ускорения точек системы в мыс-
мыслимом движении, получим следующие условия для мыслимых
движений:
К % + Ьц~У, + сИг,) + Л = 0 (i = 1, 2, ... , т), (Ь)
где координаты и скорости те же, что и в действительном движе-
движении. Вычитая уравнения (Ь) из уравнений (а), получим
525
) (]
? К- (*/ — ~x'i) + Ьч (у- — у,) + ct, (г] — г-)] = 0 (i = 1, 2, ... , от),
/=i •
откуда видим, что разности ускорений действительного и мысли-
мыслимого движений удовлетворяют тем же условиям, что и возможные
перемещения системы. Это значит, что среди возможных переме-
перемещений системы найдутся перемещения, пропорциональные раз-
разностям ускорений, т. е.
. = 8 (Х„ — Xv), 6wv — 6 {Us, —
62V = 6 (Zv — Zv) (V = 1, 2, ...,«). (C)
Освободим систему от г последних связей и будем предпола-
предполагать, что движение этой системы стеснено уже т—г связями
л
(ацх\ + Ьцу\ + с</ 2/) + Л, = 0 (* = 1, 2, ... , m — г).
Движение такой освобожденной системы, которое она будет совер-
совершать под действием сил X,, Yv, Zv (тех же сил, что и в действи-
действительном движении) будем называть действительным осво-
освобожденным движением. Обозначим через xV) t/v> ~z»
ускорения точек в действительном освобожденном движении. Уско-
Ускорения эти подчинены условиям
п
ац'х] + bij'y'j + счг") -f A (t, x, y, z, x', y\ z') = 0
В соответствии со связями возможные перемещения для освобож-
освобожденного движения будут удовлетворять условиям
(ач б* х, + Ь,, б*у, + сч б*Z/) = 0 (f = 1, 2, .... /л- г).
Среди возможных перемещений освобожденной системы будут на-
находиться и возможные перемещения неосвобожденной системы,
среди которых есть перемещения, пропорциональные разностям
ускорений действительного и мыслимого движений. Следователь-
Следовательно, и среди возможных перемещений освобожденной системы най-
найдутся перемещения, пропорциональные разностям ускорений дейст-
действительного и мыслимого движений, т. е.
l)
6*xv = т] (xv — xl), 8*j/v = т] (t/v — yl),
6*zv = ti (г, — Zv) (v = 1, 2, ... , /г). (d)
526
Как уже отмечалось выше, движение системы с идеальными связя-
связями подчиняется принципу Даламбера — Лагранжа, математическое
выражение которого имеет вид уравнения
+ (m.z'y — Zv) Szv] = 0.
Этот принцип справедлив при любых возможных перемещениях.
Следовательно, он будет справедлив и при перемещениях, опреде-
определяемых равенствами (с), после подстановки которых получим
" К
в ? \{mvxl — Av) O'v — jcv) + (пцу1 — Yv) (y"v —
V
+ («vC — Zv) (zv — zv)] = 0. (e)
А так как принцип Даламбера — Лагранжа справедлив и для
освобожденных систем, то будем иметь
v — ^v) 6'Z/V -!- (Л!,Х — Zv) 6* Zv] = 0.
V
В этом случае, принцип справедлив снова для любых возможных
перемещений, а следовательно, и для перемещений (d). Подстанов-
Подстановка этих перемещений в последнее уравнение дает
xl) + {пи, y"v — Vv) Гг/^ — г/v) +
+ (mv Z v — Д-) (Zv — Zv)] -= 0. (f)
Вычитая теперь (f) из (е), получим
пи, [(x"v — xv) (x"v — x"v) -f (г/v — г/v) (f/v — i/v) +
V
+ (zv — г v) (zv — zv)] = 0. (g)
Полученное соотношение дает возможность сравнивать действи-
действительные движения системы с освобожденными и мыслимыми.
Предварительно выполним некоторые преобразования вида
II ~П П —// »2 » —" ~П II ~/г —И
(Лд1 Xyj yXy -^"v/ ~~ V Ху X у Х\ Ху, - -р ЛГу Х\ ^^
1 «2 «—« —Т'2 1 — »2 — «-и ~»2
— (-^v ^*лу Xv t~ Xy J (-^v ?-Ху Ху ~^~ Ху} ~~\~
\ ^2 2
~\ ~~ (Xv ZXyXy -(- A'v )
вместе с аналогичными преобразованиями для координат у и z. В ре-
результате будем иметь
527
-\ 1
,-*v)=T
г — У») = — [(У* — У-'J I" (Ум —
{zl —7V) (zl — ?) -= -j [(zl — г'J -i D — г^J — (zC — г
Если теперь ввести обозначения
2
- г/v)
2
у
v=l
[D - .rCJ f (f/v - КJ + D -^J j,
n
1x5 =
v=i
то равенство (g) можно будет переписать в виде
где каждое из слагаемых неотрицательно. Отсюда следуют два
}словия
Л?ц "С A\id, Add ^ A^g.
Первое из этих ) словий утверждает, что отклонение действи-
действительного движения от любого из мыслимых не больше, чем откло-
отклонение освобожденного движения от мыслимого. Второе неравенст-
неравенство (неравенство Э. Маха A838—1916))
представляет собой обобщение принципа наименьшего принужде-
принуждения Гаусса, которому можно придать следующую формулировку:
Действительным является то из мыслимых движений, для ко-
которого отклонение от освобожденного движения принимает наи-
наименьшее значение.
Рассмотрим независимые ускорения qu q2, ... , Цъп-т- Срав-
Сравнивая мыслимые движения с действительным освобождением,
будем менять независимые ускорения в классе мыслимых. Тогда
Условие экстремума функции А»а сводится к следующим соотно-
соотношениям:
528
(s=l, 2,..., Зп — т),
которые и будут представлять основные уравнения движения сис-
системы. При выполнении условий экстремума мыслимое движение
становится действительным, Лц.а переходят в Ацв, поэтому уравне-
уравнения движения получают вид
—^- = 0 (;= 1, 2, ... , Зп — т).
Эти уравнения не включают понятия силы. Если предположить
систему освобожденной от всех связей, то для действительного
освобожденного движения будем иметь
ПЦХу = ^v, WVZ/V = ^v- tTU}Zv = Zv (V = 1, 2, . . . , n).
Определяя из этих уравнений ускорения действительного освобож-
освобожденного движения, получим выражение для «принуждения» по»
Гауссу
после чего условия минимума можно б\дет записать в виде
-^-=0 (v=l, 2,..., Зп — т).
Последние уравнения называются обобщенными уравне-
уравнениями Аппеля. Они определяют движение механической сис-
системы, на которую наложены голономные или неголономные связи
Функцию «принуждения» Л можно представить в виде
п п
. V^ mv «2 »2 «2
/л — т ^-^v i v v ¦"V /
V=l V=l
где выражение для Л* не зависит от действительных ускорений.
Первый член выражения для А называют «энергией ускорений»
по аналогии с кинетической энергией
п
т. „2 «2 »2S
v=l
После подстановки функции 5 уравнения Аппеля преобразуются
к следующей форме:
529*
А
Если ввести обозначение
4)Qv (v=l,2 3*-
то для систем с голономными связями величины Qv будут совпа-
совпадать с введенными раньше обобщенными силами. В самом деле,
ft
xv = xv{t, qlt qz, ... , qk), x\ =
V
at ^J dqs
к
q
S=I S=I
s r=l s=l
откуда видно, что
ft
dxv dxv
rlqs
а тогда
ft),
v=l
и уравнения Лппеля ' запишутся в виде
OS
Qs (s= 1, 2, ... , Ъп — т).
Мы рассмотрели определение обобщенных сил для голоном-
ных связей. Рассмотрим теперь случай, когда на систему мате-
материальных точек наложены неголономные связи. Предположим, что
1 Уравнения впервые были получены французским математиком и меха-
механиком П. Аппелем A855—1930) в 1899 г.
530
положение системы определяется k параметрами q\, q2,..., 17ft, так
что
Xs, = xv (t, qlt q2, ..., qk), yv = yv (t, qlt q% qk),
Zv = Zv(t, qlt q2 , qk) (v = 1, 2, ... , n) (i)
и, кроме того, на систему наложены неголономные связи в виде
неинтегрируемых соотношений
(ацх\ +Ьчу] 4- сцг',) + lt = 0 (i = 1, 2, ... , m). (j>
Дифференцируя по времени уравнения (i) и подставляя резуль^
тат в (j), получим
V
*=2-
ctys 6< ^J c*<7s ot
s=l s=l
•i-S-
s=l
откуда
(t)(
s=l s=l
s=l
Последнее можно записать в виде
k
? otfl) +at = 0 (t = 1, 2 /и< A), (k)
/=1
где коэффициенты ajj, a,- — функции лагранжевых координат qi,
q2, ..., qk и времени. В силу независимости уравнений (к) найдется-
по крайней мере один определитель от-ного порядка из коэффи-
коэффициентов a,j, отличный от нуля. Не нарушая общности, можна
всегда предполагать, что из матрицы коэффициентов
КII
будет отличен от нуля минор
||а,-,-1|Ф0 (t, j = k — т + 1, k — tn + 2, ... , к).
531
При таком предположении можно разрешить систему относитель-
относительно Обобщенных СКОрОСТеЙ %-т+и Qk-m+2, • . • , Цк>
так что
ft— m
iM/ + P< (i = k — m+l,k — m + 2,...,k), A)
л получить выражения для проекций скоростей на декартовы оси
координат. В самом деле,
ft ft—m
s=l s=l r=ft—m+1
ft—m fe ft—m
5 ^
«-^ дх„ , dx
У -r— gr + —- =
s=l r=ft—m+1 s=l
fe—m
s=l
поэтому
k—m k—m
-I- Yv, У* = J] Yvs^s 4- Y
Yvi
s=l
k—m _ _
zi = ? YvSgs - Yv (v = 1, 2, ... , n). (m)
s=l
Для возможных перемещений получим соответственно
fe—m
ft—га k—m _ A—m
6xv= ]T YvS6?s, 6yv= J] YvbSgs, 8zv --
s=l s=l s
(V- 1, 2, ... , П).
Дифференцируя соотношения (m), будем иметь
ft—m ^ k—m
" ^ "
S=l S"= 1
fe—m __
Zv = V Yvs^I + Cv (v = 1, 2, ... , д),
где Д,, Bv, Cv уже не содержат величин ^s-
S32
Рассматривая выражение работы активных сил на возможных
перемещениях системы
ЬА =
увидим, что обобщенные силы в уравнениях Аппеля и в случае
неголономных связей определяются через работу сил на возмож-
возможных перемещениях системы.
Пример 128. Составить уравнения Аппеля для одной материальной точ-
точки, движущейся под действием силы F(X, Y, Z), предполагая, что на эту точ-
точку наложена связь
х' = гу'.
Решение. Уравнение связи не интегрируется до тех пор, пока не из-
известна зависимость z от х и у, а следовательно, данная связь является неголо-
номной. В рассматриваемом случае энергия ускорения имеет вид
причем ускорения х", у"э г" удовлетворяют соотношению
х" = г'у' + гу",
так что
5 = -у №У' + 'У")* + У + 2J •
и уравнения движения приобретают вид
dS OS
— = m [z (г'у' + гу") + у"} = Qu — = тг" = Q2.
Работа активной силы с проекциями Xt Y, Z на произвольном возможном пере-
перемещении имеет вид
6А = Хдх + Уду + 1Ьг = ХгЬу + Yby + Zbz =
= {Хг + Z) ду + 26г == Qy6y + Qjk,
откуда
Пример 129. Составить уравнения Аппеля для задачи о движении ма-
материальной точки в плоскости под действием силы F(X, У).
Решение. Положение материальной точки можно определить полярными
координатами г и tp. Предполагая, что на точку не наложено никаких связей,
для энергии ускорений получим выражение
5 = -f-Kr" -гф'я)« + (Ф'> + 2г'Ф'J] .
533
Частные производные dSjdr" n dS/dy" будут иметь вид
dS „ ,2 dS
Подсчитаем работу силы (X, Y) на возможном перемещении точки
6Л =Х &х + Убу = X FY cos ф — г sin фбф) -f У (б/- sin ф + г cos фбф),
или
дА = (X cos ф + У sin ф) 6г -)- (— Х> sin ф -{- Уг cos ф) 6ф,
откуда находим
Qr — X cos ф + У sin ф, Qy = — /• (X sin ф — У cos ф).
Уравнения Аппеля теперь запишутся в виде]
т (г" — /-ф'2/= X cos ф + У sin ф,
тг (лф" + 2г'ф') = — г (X sin ф —У cos ф).
Если в качестве неголономной координаты ввести секторную скорость
точки
1
то
0 =т
< _ 2<т' ., _ 2 Bг'а' — гст")
Ф — г% • ф — —
и для энергии ускорений получим выражение
т \ { „ 4а'2 \2 / 4г'а' 2га" 4т'а'
Л.\( 4с ' 2 ( 2ст" \21 '
Составив выражение для частных производных
dS I 4а'2 \ dS Aa"m
¦ = т г — -
запишем уравнения Аппеля
4а'2 \ * 4та"
Эти уравнения совпадают с уравнениями в полярных координатах. Чтобы убе-
убедиться в этом, найдем сначала обобщенные силы
ЬА = 2 ДОх -f Уб?>) = (X cos ф + У sin ф) 6> + (— X sin ф -f У cos ф) гбф =
26<7
= (X cos ф + У sin ф) ол + (— X sin ф + У cos ф) ,
откуда видим, что
534
Переходя к полярным координатам, получим
т (г" — /-ф'2) = Qr, mr Br'q/ + Гф") •= Q<p.
Последние уравнения совпадают с полученными ранее. Условие голоиомности
нигде не фигурирует при выводе уравнений Аппеля. Независимыми должны быть
лишь скорости. Это условие здесь выполнено.
Пример 130. Записать энергию ускорений для твердого тела с одной
неподвижной точкой.
Решение. Ускорения точек твердого тела определяются формулами Ри-
вальса
Г dw 1
j = , ОМ +<в [to, ОМ] — ОМвР,
I dt J
откуда для проекций на декартовы оси координат, связанные с телом, будем
иметь
I'x = </'z — r'y + p (qy + rz) — x (q2 + r2),
jy =r'x- р'г + q(px + rz) - у (p2 + r2),
/, = p'y -q'x + r (px + qy)-z (p» -f 92).
В общем случае для энергии ускорений имеем выражение
5 = 2 —ОхМ-уу-г-/г).
Если оси х, у, z — главные оси инерции для неподвижной точки
тела, то члены, содержащие произведения различных координат,
пропадут и выражение для энергии ускорений получит вид
S = — {р'2 2 т (га + У2) + Ч'2 S m (г2 + *2) + г'2 2 т (х2 --'у2) +
-f- 2q'pr S m (z2 — хг) + 2r'pg Б т (х2 — у2) +
или, вводя принятые выше обозначения,
S = — {Ар'2 i В^'2 -г С/"'2 + 2p'qr (C — B) + 2q'pr (A — Q +
~2r'pq{B-A)}.
7. Уравнения Рауса. Раньше других для исследования движе-
движения механической системы с неголономными связями были приме-
применены уравнения Рауса со множителями. Эти уравнения применимы
как для систем с голономными, так и с неголономными связями.
Будем предполагать, что на систему материальных точек
mv(xv, t/v, zv) действуют активные силы Xv, Yv, Zv и наложе-
наложены голономные связи, так что положение системы определяется
535
координатами qu q2,..., qk, а декартовы координаты хч, yv, 2V
выражаются через эти координаты:
xv — a-v (t, qlt q2, ... , qk)> yv = #v (t, ft. q2, ... , qk),
zv = 2V (t, qlt qv qk) (v = 1, 2, n). (a)
Пусть, кроме того, на систему наложены неголономные связи
к
U = ? atfii +at =- 0 (t = 1, 2, ... , от< k), (b)
/=t
тогда число независимых координат qt будет равно k—т. Для
вывода уравнений движения системы материальных точек приме-
применим метод неопределенных множителей Лагранжа
Дифференцируя уравнения (а), получим
dtj ' ii-J dqs ' dt
s=l s=l
0<?s
s=l
где <7s не являются независимыми. Применяя теперь принцип Да-
ламбера — Лагранжа
п
г-•» * I/ It
заметим, что вариации декартовых координат &tv, byv, 8zv можно
выразить через зависимые вариации 6qlt 6q2, ... , bqr:
k k -, * a
"f/v = 7 oqs, ozv = > од
*^ 'в.ч ^J dqs
(c)
s=l s=l s=l
на которые наложены условия
k
а..б9/ = 0 (t = 1, 2, .. . , т).
Подставляя в уравнение Даламбера — Лагранжа вариации декар-
декартовых координат (с), после преобразований представим его в виде
dt dq. dqs
s=!
536
Сюда нужно еще добавить уравнения связей
6Д. = ? aijbqj = 0 (i = l, 2 т).
которые предполагаются независимыми, так что матрица
Ik/В.
составленная из коэффициентов уравнений связи, имеет по край-
крайней мере один отличный от нуля определитель m-ного порядка.
Умножая уравнения связей на неопределенные пока множители
Аь Х2,...,Хт и добавляя результат к уравнению Даламбера — Лаг-
ранжа, получим
[J-J?L —dJL _ qs - у лАЛ =о. (d)
\ dt dq, dqs V* Zj ' ") W
s=l 1=1
Множители Xj подберем так, чтобы уничтожались все коэффициен-
коэффициенты при зависимых вариациях б^ь 6<7г> ••¦> б<7я, т. е.
^a/s = 0 (s= 1, 2 т). (е)
Тогда в уравнении (d) останутся лишь независимые вариации &qs.
Равенство может выполняться при произвольных 6gs только в том
случае, когда все коэффициенты при независимых вариациях обра-
обращаются в нуль, т. е.
т
—— , - Ц53 у f'iuis — U \Ъ -- III t l, ГП -[- 4, . . . , К).
at oq aqs ^»
@
К этим уравнениям можно еще добавить т уравнений связи (Ь).
В результате будем иметь m+k уравнений для определения tn + k
неизвестных <7ь Цъ ¦¦•. <7ft> Xi, %2, ¦¦•. аа. Число полученных уравнений
превосходит число независимых параметров qm+\, qm+2,..., qu. За-
Задача решается путем исключения лишних неизвестных.
Другие методы составления уравнений движения для систем
с неголономными связями в нашем курсе рассматриваться не
будут, хотя в настоящее время имеется несколько других способов
исследования систем с неголономными связями.
Пример 131. В качестве примера составим уравнения движения одно-
однородного шара, катающегося без проскальзывания по горизонтальной плоскости,
предполагая, что на шар кроме силы тяжести действуют еще и другие активные
силы, уточнять характер которых мы не будем.
Обозначим через G центр тяжести шара. Пусть Х\, у\, г{ — оси Кёиига, а
х, у, z — оси, неизменно связанные с шаром н имеющие начало в центре шара.
537
Положение шара можно определить пятью координатами: двумя координатами
центра масс |, Ц и углами Эйлера tp, г|), ¦&. Проекции мгновенной угловой ско-
скорости шара на оси Кёнига будут иметь вид (рис. 258)
Pi = "&' cos if> -f ф' sin ¦& sin ip, <7X = ¦&' sin г[)
rt =-г[/ + ф' cos ¦&.
' sin ft cos i|),
Рис 258
Точку касания шара с горизонтальной плоскостью обозначим
через Р. Ее координаты в системе Кёнига суть @, 0, —а). Так как
проскальзывание отсутствует, то абсолютная скорость точки каса-
касания vp = 0. Переносная скорость точки касания имеет проекции |',
у\, 0. Проекции относительной скорости определяются из матрицы
Pi ?i 'i
0 0 —а
откуда имеем
Окончательно уравнения связи после подстановки значений q и г
приобретают вид
|' — а (#' sinij; — ф' sin ¦&cos-ф) = О,
ц' -г а (§' cos i|5 + ф' sin # sin -ф) = 0.
Эти уравнения неинтегрируемы, т. е. связи неголономны. Поэтому
мы не можем воспользоваться уравнениями Лагранжа второго
рода для исследования движения этой системы. Чтобы применить
уравнения Рауса, составим сначала выражение для живой силы
f
Т - -f (I'2 + г)'2) -f ± (р«
—
' + 2ф'-ф' cosd),
где А —момент инерции шара относительно его диаметра. Уравне-
Уравнения Рауса запишутся теперь в виде
538
ml" = Qi + ^, тц" = <?„ + Я,,
Л — (ф' + if' cos ft) = <2Ф H- ^a sin ft cos if 4- ?i2a sin ft sin if,
,4ft" + Лф'г|з' sin ft = Qe — ^a sin if — ?i2 a cos if,
где Qg, Qy,, Q<p, Q$, Q^ — обобщенные силы.
Мы получили систему, состоящую из пяти уравнений для опре-
определения семи неизвестных величин g, r\, ф, if, ft, Яь ?.2- К ней необ-
необходимо присоединить еще два уравнения связей. При определении
обобщенных сил Qg, Qn, Q<p> Qt. Q* параметры |, tj, ф, if, ft сле-
следует рассматривать как независимые. Подсчитав при этом условии
работу всех сил на произвольном возможном перемещении, обоб-
обобщенные силы получим обычным образом как коэффициенты при
вариациях б|, 6tj, бф, 6if, 6ft. В частном случае, когда на шар дей-
действуют активные силы, приложенные только к центру масс, с проек-
проекциями на неподвижные оси X и У, будем иметь:
Замечание. Рассмотренный здесь пример можно решать
и при помощи уравнений Аппеля. При определении энергии уско-
ускорений следует применить теорему, аналогичную теореме Кёнига
для живой силы, которая без труда распространяется и на энергию
ускорений.
§ 5. МАЛЫЕ КОЛЕБАНИЯ
Одним из наиболее замечательных примеров эффективности
аналитических методов исследования движения является приложе-
приложение теории дифференциальных уравнений к исследованию малых
движений системы вблизи ее положения равновесия. Этот раздел
механики выделился в настоящее время в самостоятельную дис-
дисциплину, которая и называется теорией малых колебаний.
Теория малых колебаний является приближенной теорией дви-
движения механических систем вблизи положения равновесия или
определенного состояния движения. Изучение колебательных про-
процессов имеет первостепенное значение для самых разнообразных
разделов физики. Начало современного учения о колебаниях отно-
относится к классическим работам Галилея, Гюйгенса, Ньютона, Лаг-
ранжа. В основе теории лежат приближенные методы исследова-
исследования движения в окрестности положения равновесия. Предположе-
Предположение о малости колебаний значительно упрощает математическую
сторону задачи, позволяет ограничиться линейными дифферен-
дифференциальными уравнениями движения. Результаты оказываются спра-
539
ведливыми, когда рассматриваются колеоания около устойчивого
положения равновесия.
Общность теории является наиболее важным ее свойством, а
благодаря малости движений появляется возможность сильных
упрощений уравнений движения.
1. Малые колебания системы с одной степенью свободы.
Прежде чем рассматривать общие методы теории малых колеба-
колебаний механической системы, остановимся на некоторых задачах о
колебании системы с одной степенью свободы и, в частности, о ко-
колебаниях одной материальной точки.
Систему материальных точек с одной степенью свободы,
совершающую колебательные движения около положения равнове-
равновесия, называют осциллятором. Простейшим движением такой
системы является гармоническое колебание. Система,
совершающая гармонические колебания, называется гармони-
гармоническим осциллятором. В частном случае гармоническим
осциллятором является материальная точка, совершающая прямо-
прямолинейное движение под действием силы, пропорциональной откло-
отклонению точки от положения равновесия, направленной в каждый
момент в сторону положения равновесия. Такая сила всегда стре-
стремится вернуть точку в положение равновесия. Физическая природа
силы может быть самой разнообразной, но проще всего ее пред-
представить как упругую силу, подчиняющуюся закону Гука.
Выбирая начало координат неподвижной системы отсчета в
положении равновесия точки и направив ось х вдоль прямой, по
которой движется точка, для живой силы и силовой функции точки
получим выражения:
~ 2 ' ~~ ~2~'
Тогда уравнение Лагранжа будет иметь вид
тх" = —сх,
или
х" = — k2x, где /г2 = — > 0.
т
Общее решение этого уравнения, как известно, имеет вид
х — с1 sin kt -\- с2 cos kt,
или
х = Acos(kt + a).
Движение точки по такому закону называют гармоническим
колебанием. Коэффициент А называетя амплитудой гар-
гармонического колебания, аргумент kt+a — фазой ко-
колебания, а а — начальной фазой. Тогда cos (kt + а) будет
периодической функцией с периодом
540
2я
Период определяет время, в течение которого точка совершает
одно полное колебание. Величина k называется циклической,,
или круговой, частотой колебаний. Частота колебаний
является основной характеристикой колебаний, не зависящей от
начальных условий движения. Она полностью определяется свойст-
свойствами механической системы.
Состояние движения гармонического осциллятора в каждый
момент времени определяется заданием значений его координаты х
и скорости x' = v. Для изображения этого состояния движения
можно воспользоваться представлением движения на фазовой
плоскости переменных х и и, рассматриваемых как декартовы
координаты. Тогда каждая точка фазовой плоскости будет опреде-
определять состояние движения осциллятора. Такую точку будем назы-
называть изображающей.
В общем случае колебаний системы с одной степенью свободы,
подчиненной голономным идеальным связям, не зависящим явно
от времени, живая сила и силовая функция системы представ-
представляются в виде
T=-La(q)q'a, U=U(q).
Для малых движений в окрестности положения равновесия вели-
величины q и q' остаются малыми, если в положении равновесия ^=0.
Тогда коэффициент a(q) и силовую функцию U(q) можно пред-
представить в виде степенных рядов
a(q)=,a@) + a' @)q + ar(O)-? + ... ,
U (q) = U @) + V @)q + U" @) -J + ...
Так как <7=0 является положением равновесия, то С/'@)=0. Пре-
Пренебрегая в выражениях для живой силы и силовой функции члена-
членами выше второго порядка малости, будем иметь:
т а@)<7'2 L, _ Ц"Ф)д2 Ма
где а@) и Ьо — постоянные величины, причем о@)>0. Уравнение
для малых движений примет теперь вид
а (О)?" = -&„</.
При Ьо>О система будет совершать колебательные движения
в окрестности положения равновесия.
При движении системы изображающая точка описывает не-
некоторую кривую на фазовой плоскости — фазовую траекто-
541
рию (эта траектория не является траекторией материальной точ-
точки в кинематическом смысле). Скорость движения изображающей
точки называют фазовой скоростью.
Зная решение дифференциального уравнения гармонического
осциллятора, нетрудно найти уравнение траектории на фазовой
плоскости. Если
х = q = a cos (tit -f a), v = q' — —ak sin (kt + a),
то фазовой траекторией будет эллипс
При изменении начальных условий в общем случае будет меняться
амплитуда колебаний. В результате получим семейство подобных
эллипсов (рис. 259), представляющее фазовый портрет гар-
гармонических колебаний.
Уравнение гармонического осциллятора допускает первый ин-
интеграл — интеграл живых сил
где постоянная h определяется начальными значениями координа-
координаты и скорости, т. е. начальным запасом полной механической энер-
энергии. Связывая значения скорости v и координаты q в каждой точке
траектории, первый интеграл является конечным уравнением фазо-
фазовых траекторий, которое и решает вопрос о движении системы.
По фазовым траекториям можно выяснить направление движения
изображающей точки. В самом деле, если скорость v положитель-
положительна, то х возрастает, т. е. в первой четверти фазовой плоскости
изображающая точка движется в сторону увеличения абсциссы
и т. д.
Затухающие колебания. До сих пор предполагалось, что вся-
всякое сопротивление движению системы со стороны среды отсутст-
отсутствует. Сопротивление воздуха, трение и другие подобные силы во
внимание не принимались. Действие же сил сопротивления прояв-
проявляется прежде всего в том, что процесс движения перестает быть
чисто механическим. Механическая энергия системы переходит в
другие виды энергии, как говорят физики, диссипируется. Имеется
определенная категория случаев, когда движение в среде можно
описать с помощью уравнений механики введением в последние не-
некоторых дополнительных членов. При этом считается, что на точ-
точки системы действуют силы, зависящие только от скорости. Обоб-
Обобщенную силу в этом случае можно представить в виде отрицатель-
отрицательной функции f(qf). Если скорость точки достаточно мала, то мож-
можно считать, что сила сопротивления среды пропорциональна ско-
скорости, т. е.
542
Тогда уравнение движения примет вид
а@)д" = — Ьод — ад',
или
= — Щ — 2Кд',
1ап
¦>о.
Общее решение этого уравнения зависит от характера корней ха-
характеристического уравнения
При №^-k2 корни этого уравнения действительны, при
комплексны. В соответствии с этим получим два типа решений и
Рис. 259
Рис. 260
два различных процесса движения: при h2<k2 — затухающие коле-
колебания, при X2^k2 — затухающее апериодическое движение. В слу-
случае затухающих колебаний решение имеет вид
cos
+ 6),
где ю0 = Vk2 — А,2 (а и б — постоянные интегрирования).
На фазовой плоскости этому решению соответствует семейство спи-
спиралей, имеющих асимптотическую точку в начале координат.
С помощью преобразования
где
I = woq,
v = ц' = — ае~и \кcos
обозначив сооа = с1г получим
? = cxe~%t cos ((aot + б),
или в полярных координатах
v + Kq,
~ Ь) + соо sin (aot + б)],
т] = — схе-я/ sin (coo/ -f 6),
qp = — (ю0^ + б)
получим уравнение логарифмической спирали (рис. 260). Заметим,
что при малых значениях величины 2л—, называемой лога-
543
рифмическим декрементом затухания, спираль в те-
течение каждого оборота близка к соответствующему кругу g2 + rj2 =
=const, а в плоскости (q, q') близка к эллипсу
q'2 + 2kqq' + k*q* = const.
Вынужденные колебания. Резонанс. Если на материальную
точку кроме упругой силы действует некоторая изменяющаяся со
временем сила F(t) (возмущающая сила), то колебания назы-
называются вынужденными.
Пусть наряду с потенциальными силами, стремящимися вер-
вернуть отклоненную от положения равновесия систему обратно в это
положение, действуют еще и возмущающие силы, зависящие от
времени. Эти возмущающие силы представляют собой некоторые
внешние воздействия на механическую систему, выражающиеся
в виде сил, действующих на точки системы в заданной системе
отсчета. Тогда уравнение движения системы будет иметь вид
dt dq' dq dq
Для малых движений системы имеем
U = -±-q>, a>0. c>0,
поэтому
Общее решение этого уравнения складывается из общего решения
однородного уравнения и частного решения неоднородного.
Наиболее распространенным является тот случай, когда воз-
возмущающая сила изменяется по синусоидальному закону
Q — Я sin (pt — a).
Вводя обозначение — = fe2, общее решение представим в виде
а
q -— A sin (kt -~ 6) -) sin {pt -1- a),
TJ
где P = —, а Л и б — произвольные постоянные.
а
При действии возмущающей силы система совершает сложное
колебательное движение около положения равновесия, являющееся
результатом суперпозиции (наложения) двух колебаний:
собственных колебаний с частотой k и вынужденных колебаний с
частотой р, равной частоте возмущающей силы. Амплитуда вынуж-
вынужденных колебаний
i_ „г
544
не зависит от начальных условий. Если частота возмущающей
силы очень велика, то амплитуда вынужденных колебаний стре-
стремится к нулю, и действие возмущающей силы почти не нарушает
режим собственных колебаний системы. При частоте возмущающей
силы, равной частоте собственных колебаний системы p = k, урав-
уравнение движения не допускает частных решений вида
qi = ^гг7sin (pt + а)'
В этом случае частное решение можно получить в виде
fr = — cos(& + a),
а для общего решения будем иметь выражение
q = Asm (kt + 6) — cos(kt + a).
Отсюда видно, что амплитуда вынужденных колебаний в этом
случае неограниченно растет со временем. Такое явление назы-
называется резонансом. Резонанс в колебательных системах
может стать очень опасным явлением, влекущим за собой разру-
разрушение системы вследствие чрезмерного возрастания амплитуды.
Если частоты собственных колебаний и возмущающей силы
имеют очень близкие значения, так что разность k—р по модулю
очень мала по сравнению с k, то сложные колебания называют
биениями. Биения имеют вид то возрастающих, то ослабляю-
ослабляющихся колебаний.
Пример 132. Тяжелый грузик весом Р подвешен на пружинке, верх-
верхний конец которой совершает вертикальные гармонические колебания по закону
х = a cos pt.
Предполагая, что жесткость пружинки равна с, а длина невытянутои пружинки
равна /, определить закон движения грузика в среде, сопротивление которой
пропорционально скорости движения грузика.
Решение. Свяжем начало подвижной системы координат с верхним
концом пружинки, приняв зл координату q — расстояние между двумя конца-
концами пружинки. В подвижной системе отсчета на точку будут действовать четыре
силы: вес Р, направленный вниз, сила упругости пружинки c(q—/), направлен-
р
ная вверх, когда q>l, сила Кориолиса от переносного ускорения —х", на-
g
правленная вверх, когда х">0, и сила сопротивления среды kq', направленная
вверх, когда q'>Q. Уравнение движения грузика примет вид
Р Р
— о" = Р — с (q — I) — kq' + — ЯР2 cos pt,
S g
или, положив
p p p
q = z— -— , имеем — z" = — cz — kz' + — a& cos pt,
' 8 S
18 E. H. Березкин 545
или
-у- г' + ~- г =
Введем обозначения
При отсутствии возмущающей силы F=ap2cosp^ движение грузика будет зави-
зависеть только от характера корней уравнения
откуда
г=—ц ± /ц2 —
Если сопротивление среды велико, то система не будет совершать колебаний и
процесс движения будет апериодическим, если же сопротивление мало и ц2<&2,
то система будет совершать затухающие колебания. Рассмотрим этот последний
случай. Введем обозначение
Тогда общее решение однородного уравнения запишется в виде
где А и В — произвольные постоянные. Частное решение неоднородного урав-
уравнения запишем в виде
г = сх cos ф,
где ф=р^+Сг; ci и Сг — произвольные постоянные. Непосредственная подста-
подстановка этого решения в уравнение движения приводит к равенству
—г c-jfl cos ф — 2[icxp sin ф + 6асх cos ф =
= ар1 (cos ф cos c2 -J- sin ф sin c3),
откуда получаем
сх (— ра + 6а) = ар3 cos с2, — 2(АСхр = ар* sin с,.
Из этих уравнений имеем
Общее решение теперь получим в виде
г = Ле""*' cos (w< -f- В) + cos (pt + c2).
Нетрудно видеть, что при наличии сопротивления среды (ц=И=0) амплитуда
колебаний не может возрастать неограниченно. Можно установить зависимость
амплитуды вынужденных колебаний
ар*
546
от сопротивления среды и частот собственных и вынужденных колебаний. Для
этого перепишем выражение для а в виде
ар2
h i/7i ргУ . 4^р
или, вводя обозначения
ар2
б2 " Ъ ' Ь
получим
. _. д JL х
Ао
При х = 0 вынужденные колебания отсутствуют, а полином
/ (х) = A — х2J + 4xa/ja
обращается в единицу. Производная от f (х)
/'(х) = 4х [ха — A — 2/г2)].
Если сопротивление среды мало, так что А<1, то при достаточно малых зна-
значениях х будем иметь /'(х)<0, т. е. при возрастании х амплитуда а тоже
возрастает. При х=0 или х = уг1—2Л2, /(х) принимает стационарное зна-
значение, но
/"(х)=8/г2 -Ы2и3 —4,
откуда следует, что при х=0 амплитуда а получает наименьшее значение, а при
х = у^1 — 2Лг — наибольшее. Последний случай называется резонансом в со-
сопротивляющейся среде. При резонансе в сопротивляющейся среде частоты вы-
вынужденных и собственных колебаний могут не совпадать-
Постоянная сг определяет фазу вынужденных колебаний. Нетрудно видеть,
что
2цр 2цр 2х/г
g Сз = р3 — Ьг = Ь2 (ха— 1) ~ (ха — 1) '
и при критических значениях х (кх — 0, ха == }^1 — 2Аг) имеем
tg c2 = 0 или tg c2 =
— h
Все последние рассуждения теряют смысл при отсутствии сопротивления среды.
Параметрический резонанс. Существуют такие колебательные
системы, у которых внешнее воздействие сводится лишь к измене-
изменению со временем некоторых из ее параметров. Примерами такой
системы могут быть маятник, длина которого изменяется по не-
некоторому наперед заданному закону, или человек, раскачиваю-
раскачивающийся на качелях путем изменения момента инерции относительно
оси качания. Возникает вопрос: как будут изменяться колебания
системы при периодическом изменении со временем ее параметров.
Рассмотрим это явление на примере маятника, длина нити кото-
18* 547
рого меняется по периодическому закону: s = a sin kt. Живая сила
такого маятника запишется в виде
а обобщенная сила будет равна
Q = — mgs sin ф.
Уравнение движения получит вид
— (ms\f) = — mgs sin <p,
dt
или, предполагая, что величина ф остается малой во все время
движения,
(ms^p') — —mgsy.
dt
В общем виде это уравнение можно записать так:
Здесь а и b — вообще некоторые периодические функции.
Если ввести новую независимую переменную т по формуле
, dt
dx=fz —
a
то уравнение движения получит вид
a dx
1 da
или, так как а = —,
a dx
dx*
Задача сводится к исследованию решений уравнения вида
___ (т)<7— .
где со2(т) —периодически меняющаяся функция т. Уравнения тако-
такого вида называются уравнениями Хилла.
Не вдаваясь в подробности, заметим, что общее решение
такого уравнения имеет вид
q = схе%<* Фх (t) + с2е**т Ф2 (т),
548
где cj и с2 — произвольные постоянные; Яг и Я2 — постоянные,
определяемые видом уравнения Хилла. Ф, и Ф2 — периодические
функции т. Для определения характера решения нужно знать Хг
и Яг, являющиеся вообще некоторыми комплексными величинами.
Если величины Xi и Хо равны между собой, то может существовать
частное решение вида
q = %ехФ(х).
Если предположить, что в начальный момент ^о = 9'о = 0, то из
свойств определителя Вронского будет следовать, что 6i = C2 = 0.
Таким образом, в отличие от обычного резонанса в рассматривае-
рассматриваемом случае система будет оставаться в покое.
Если система в начальный момент не находится в покое, то
характер решения будет зависеть от свойств чисел Х\ и Х2. Нетруд-
Нетрудно видеть, что если действительные части чисел Я] и Х2 отрица-
отрицательны, то амплитуда q будет убывать со временем и система
будет совершать затухающие колебания.
Отметим еще, что если обе величины Xt чисто мнимые, то
решение будет периодическим или почти периодическим, т. е. для
сколь угодно малого е найдется такое т(е), что |<?(?+т(е)) —
—q(t)\<e. Если же ReXi>0, то амплитуда q будет неограниченно
возрастать,
В общем случае здесь всегда существует положение равнове-
равновесия, но оно может быть как устойчивым, так и неустойчивым.
В последнем случае система, выведенная из положения равнове-
равновесия, автоматически себя раскачивает. Это свойство придает всему
явлению характер резонанса. Такой резонанс называется парамет-
параметрическим, так как он вызван искусственным изменением со време-
временем некоторого параметра. Возрастание амплитуды колебаний
происходит лишь тогда, когда правильно подобрана частота изме-
изменения параметра.
Существенными для параметрического резонанса являются два
свойства: 1) находящаяся в равновесии система не начинает сама
раскачиваться; 2) существует сколь угодно много областей пара-
параметрического резонанса у данной системы.
Нелинейные колебания. Теория нелинейных колебаний, или
нелинейная механика, посвящена изучению колебательных движе-
движений, описываемых нелинейными дифференциальными уравнения-
уравнениями. Нелинейная механика дает иногда более точное представление
о свойствах колебательных движений механических систем. Как
можно было заметить выше, линейные системы получаются в
результате упрощения нелинейных. Поэтому изучение линейных
систем дает возможность сделать лишь некоторые заключения о
свойствах малых движений, однако такое представление может
оказаться лишь приближенным.
Реальные системы вообще неконсервативны. Полная механи-
механическая энергия таких систем не остается постоянной, а рассеи-
рассеивается. В некоторых случаях процесс рассеивания происходит мед-
549
ленно, и этим рассеиванием можно пренебрегать, считая справед-
справедливым закон сохранения механической энергии. В других случаях
рассеиванием энергии пренебрегать нельзя, и системы рассматри-
рассматриваются как неконсервативные. v p
Простейшей консервативной системой является материаль-
материальная точка, совершающая движение по некоторой заданной мате-
материальной кривой под действием силы, зависящей от положения
материальной точки. Движение такой точки полностью опреде-
определяется уравнением живых сил
где f(x) —консервативная сила, действующая на точку Зная
совокупность фазовых траекторий, мы имеем возможность охва-
охватить всю картину движений при различных начальных условиях
Для консервативных систем исследование облегчается тем что
имеет место интеграл живых сил
2=-А.
в котором постоянная h определяется из начальных условий Но
одному и тому же значению h соответствует множество различных
состояний системы, что на фазо-
фазовой плоскости представится лини-
линией равной энергии. Изображаю-
Изображающая ^ точка будет двигаться по
одной из этих линий. Заметим,
что уравнение (а) .не меняется
при замене v на —у, а точки, в
которых касательные к фазовым
траекториям параллельны оси v,
будут находиться на оси х. Ка-
Касательные к фазовым траектори-
траекториям будут
6U
если
дх
параллельны
0.
ОСИ X,
Рис. 261
Для построения фазового
портрета нарисуем сначала гра-
график функции z = U(x). Затем
нужно вычислить квадратные корни из суммы U+h и отложить их
на фазовой плоскости вверх и вниз от оси х
, ПУСть, например, при х=0С/@)=-а. Выберем Л,= _а
(рис. 261). Тогда при х=0 сумма U+h^O. Отложим на графике
прямую z=—Ai. Разность Д=.?/_й, будет определять значение
v*ll на фазовой плоскости. Для данного значения А, на оси х
фазовой плоскости получим три точки, где сумма U+ht обращает-
обращается в нуль {1 2 и 3). Выбирая h2<hu получим аналогичные точки
*, о и 6. При яз<«2 получим точки 7 и 8.
550
Через точки 2 и 3 пройдет замкнутая фазовая траектория.
Фазовая траектория, проходящая через точку 4, будет охватывать
точку У и т. д. Точка 7 — особая точка. Особые точки фазовой
плоскости соответствуют стационарным точкам графика функции
z = U(x). Фазовые кривые, проходящие через особые точки, назы-
называются сепаратрисами. Сепаратрисы состоят из одной или не-
нескольких ветвей, каждая из которых представляет собой отдель-
отдельную траекторию. Они представляют собой граничные кривые,
отделяющие области, заполненные траекториями различных типов.
Положения равновесия системы соответствуют стационарным
значениям U(x). Устойчивыми положениями являются те, которые
на фазовой плоскости оказываются окруженными замкнутыми кри-
кривыми, называемыми циклами, т. е. те, для которых силовая функ-
функция имеет в положении равновесия максимум.
Диссипативные системы. Предположим, что на систему с одной
степенью свободы действуют кроме консервативных сил еще и не-
некоторые неконсервативные силы, имеющие характер сопротивления
движению системы, так что элементарная работа этих сил на
действительном перемещении системы имеет вид
Qdq = Qq'dt < 0
[ СИС1
с сил
Qq'dt,
и не равна нулю, если ц'ф§. Такая система называется диссипа-
тивной системой. Из теоремы живых сил будем иметь
где
На фазовой плоскости линия, где выполняется условие
T — U = const,
уже не является интегральной кривой. Такими линиями можно
воспользоваться как топографическими кривыми, позво-
позволяющими следить за изменением полной энергии системы ео время
ее движения. Примем, что в положении равновесия выполняется
условие G=0. В зависимости от характера положения равновесия
кривые Т—?/=const будут либо окружать начало координат, либо
через начало будет проходить сепаратриса. В последнем случае
положение равновесия будет неустойчивым. В первом же случае
в положении равновесия функция Я = Т—U имеет минимум в на-
начале координат. Так как -С 0 на действительной траектории,
dt
то фазовые кривые либо пересекают топографические кривые
снаружи внутрь, либо касаются их. Касание может быть только
на оси абсцисс.
2. Общий случай малых колебаний системы около положения
устойчивого равновесия. В общем случае мы будем рассматривать
551
движение механической системы, состоящей из материальных
точек, на которые наложены голономные идеальные связи, не за-
зависящие явно от времени, предполагая, что на эту систему дейст-
действуют консервативные силы, обладающие силовой функцией. Пусть
положение такой системы, состоящей из материальных точек с мас-
массами пи), определяется лагранжевыми координатами q\, q2 Ц\ и
пусть на систему действуют силы, обладающие силовой функцией
U(qu qb ..., qh). Положение равновесия такой системы, как извест-
известно, определяется уравнениями
J* О, ^- = 0,..., f- = 0.
dq1 dq2 dqk
Предполагая, что эти уравнения определяют некоторую изолиро-
изолированную точку, лагранжевы координаты q\, q2,..., Цъ выберем таким
образом, чтобы в рассматриваемом положении равновесия все они
обращались в нуль. При сделанных предположениях живая сила
системы будет представлять собой однородную квадратичную
форму относительно обобщенных скоростей
2Т = ? ar'q'tq'h
где коэффициенты пц — функции только лагранжевых координат.
Будем предполагать, что эти коэффициенты удовлетворяют усло-
условию
ац = ati.
Движение системы вблизи рассматриваемого положения рав-
равновесия будет определяться уравнениями Лагранжа второго рода
й дТ - дТ Ш_
<U dq'{ dqt ~~ dqt '
Устойчивость равновесия. Теорема Лагранжа об устойчивости
равновесия. Рассматриваемое положение равновесия может ока-
оказаться устойчивым или неустойчивым. О характере этого положе-
положения равновесия можно судить по тому, как ведет себя система
вблизи положения равновесия.
Определение. Положение равновесия системы называется
устойчивым, если для любых, сколь угодно малых положительных
чисел А и А\ можно всегда подобрать два других числа 1и1|
таких, что при начальных значениях координат qiu и скоростей а'ю,
удовлетворяющих условиям
для каждого момента времени t^t0 будут выполняться условия
552
Другими словами, для устойчивого положения равновесия
координаты и скорости не будут превосходить некоторых заданных
пределов, при достаточно малых начальных возмущениях коорди-
координат и скоростей.
Задачей отбора устойчивых положений равновесия занима-
занимались еще в древности. Принципы отбора таких положений пыта-
пытались установить Аристотель C84—322 гг. до н. э.) и Архимед
B87—212 гг. до н. э.). Торричелли уже сформулировал общий
принцип устойчивости равновесия тяжелых тел, заключающийся
в том, что при равновесии центр тяжести системы занимает наи-
наинизшее положение. Общий принцип устойчивости равновесия кон-
консервативных систем впервые был сформулирован Лагранжем в
1788 г. в его знаменитой теореме об устойчивости равновесия,
первое строгое доказательство которой дал Лежен Дирихле в
1847 г. Доказательство Лежена Дирихле легло в основу известной
теоремы А. М. Ляпунова A857—1918) об устойчивости движения.
Теорема Лагранжа. Если в положении равновесия систе-
системы силовая функция имеет изолированный максимум, то такое
положение равновесия системы устойчиво.
Доказательство. Чтобы доказать эту теорему, достаточ-
достаточно показать, что для любых двух положительных чисел А и А\, как
бы малы они ни были, всегда можно найти два других положи-
положительных числа % и Х\ такие, что движение системы, удовлетворяю-
удовлетворяющее в начальный момент условиям
при любом t^,to будет удовлетворять неравенствам
Будем предполагать, что в положении равновесия силовая
функция обращается в нуль, так что в положении равновесия
имеют место равенства
U@, О, ... ,0) = 0, Г@, 0, ... ,0) = 0.
Рассмотрим такую окрестность положения равновесия
в которой силовая функция U не имеет других стационарных точек,
кроме положения равновесия, и пусть А — некоторое положитель-
положительное число, меньше Я, т. е.
А<Н.
Рассмотрим сферу
553
Как непрерывная функция U будет иметь на этой сфере А некото-
некоторое максимальное значение, которое обозначим через —ег. Тогда
на сфере А будем иметь
Пусть, кроме того, А\ —некоторое произвольное достаточно малое
положительное число и пусть для всех значений координат и ско-
скоростей, удовлетворяющих условиям
29» < Я 2*; = ^,
живая сила системы оказывается ограниченной снизу
где ег — некоторое положительное число. В силу непрерывности
живой силы системы такое число всегда можно подобрать. Обо-
Обозначим через s наименьшее из чисел si, e2 и выберем числа К и %\
так, чтобы при значениях координат и скоростей, удовлетворяю-
удовлетворяющих условиям
имели место неравенства
^ 2 2
В силу непрерывности выражений для U и Т такие числа ^ и А|
всегда можно подобрать.
Пусть теперь начальные значения координат и скоростей
точек системы удовлетворяют условиям
Тогда
и постоянная h из интеграла живых сил будет удовлетворять
условию
h = T0 — G0<8.
Так как левая часть интеграла живых сил
T=*U + h
неотрицательна, будем иметь
U + Ta-U0>0,
554
откуда следует
U>U0 — Го> — s>8l)
поэтому движение, начавшееся в области начальных значений
координат и скоростей, удовлетворяющих неравенствам
будет происходить так, что во все время движения будет выпол-
выполняться неравенство
Кроме того, из интеграла живых сил имеем
T = U+ ro-(/o<To-t/o<8<82,
а это может быть только тогда, когда во все время движения
выполняется неравенство
Таким образом, по заданным числам Л, нам удалось найти
такие числа X, которые удовлетворяют условиям устойчивости по-
положения равновесия. Этим теорема доказана.
Теорема Лагранжа дает только достаточные условия устойчи-
устойчивости равновесия. Ниже будет показано, что эти условия являют-
являются и необходимыми условиями при довольно общих ограничениях
на силовую функцию.
Пример 133. Весомая однородная квадратная пластинка ABCD
(рис. 262) может вращаться в вертикальной плоскости около своего угла А.
К ближайшему углу квадрата В привязана нить, перекинутая через блок Е и
натягиваемая грузом Q. Бесконечно малый блок Е расположен вертикально над
углом А на расстоянии, равном стороне квадрата. Величина груза Q относится
к весу Р пластинки, как 1:^2.
Найти положения равновесия пластинки и определить их устойчивость.
Решение. Силовая функция системы в данном случае имеет вид
U — —0гх — Ргг + const,
где
Ф а -/2 ( я
гcos ( +
, г3cos ( Ф +
Подставляя эти значения и полагая Q= P > получим
и = ~ р ~Г~ B sin "T +cos (ф + Т
В положении равновесия =0, или
dtp
a -/2 I _ф_ _
2 \0S 2 ~S1" У* "^ 4 ) ) ~ "'
555
что можно записать еще в виде
1
Последнему уравнению удовлетворяют следующие положительные значения ф:
я я 3
<Pi = „ . фг = ~г~, фз = ~г~ я,
* о Л>
которые и определяют три положения равновесия системы.
Рис. 263
Рассматривая вторую производную от U
увидим, что при ф = —- выполняется неравенство
6
ние равновесия неустойчиво. При ф = ~г~ имеем
дЮ
\>0, т. е. это положе-
<0, т. е. это положение
3 W
равновесия устойчиво. При ф = —т~ я имеем неравенство ~
л Сф
>0 и, следо-
вательно, снова имеем неустойчивость положения равновесия.
Пример 134. На неподвижный круглый цилиидр раднуса г, ось которого
горизонтальна, положен однородный круглый цилиндр радиуса ./?, ось которого
тоже горизонтальна и перпендикулярна к оси первого цилиндра. Определить
условия устойчивого положения равновесия системы (рис. 263).
556
Решение. Силовая функция здесь имеет вид
U — — mgyc,
где
Ус = г cos ф + /-ф sin ф + R cos ф.
Положения равновесия определяются из уравнения
dU
—— = — mg(rt$ cos ф — R sin ф) = 0,
так что при ф = 0 система будет находиться в равновесии. Рассматривая вторую
производную от функции U, найдем
2 ~т? (— ^ cos ф -f гф sin ф + ^ cos ф)
и при ф = 0 будем иметь
d2U , , „,
Силовая функция имеет максимум в этом положении равновесия, и, следова-
следовательно, оно будет устойчивым, если
Замечание об устойчивости стационарных движений. Стацио-
Стационарными движениями механической системы называют такие дви-
движения, при которых все позиционные координаты и циклические
скорости сохраняют постоянные значения, равные начальным. По-
Постоянные значения циклических скоростей здесь могут быть
выбраны произвольно, позиционные же координаты будут опреде-
определяться условиями
dq,
где qi — позиционная координата, или после исключения циклических
координат
где R — функция Рауса, определяемая равенством
где суммирование производится лишь по циклическим переменным.
Раусу принадлежит несколько теорем об устойчивости стацио-
стационарных движений. Приведем здесь только одну из них, получив-
получившую наибольшее распространение. Эта теорема справедлива для
голономных консервативных систем, обладающих циклическими
интегралами.
557
Пусть положение голономной консервативной системы опреде-
определяется лагранжевыми координатами q\, 92,—, <7ь, из которых пер-
первые s — циклические, которым соответствуют циклические ин-
интегралы
—— = % (а = 1, 2 s).
Тогда движение системы в позиционных координатах можно будет
определить уравнениями Рауса
d dR__ dR_ _ Q
dt dq]
ИЛИ
dq'. dQi dqi [ dt aq
dRx 1
где R2 — квадратичные относительно позиционных скоростей члены;
Ri—линейные; Ro — не зависят от позиционных скоростей. Пред-
Предположим, что этим уравнениям при некоторых значениях постоян-
постоянных ра удовлетворяет стационарное движение <^ = 0 (i=s+l,
s+2,...,k). Если функция Рауса не зависит явно от времени, то
этим уравнениям будет удовлетворять первый интеграл
f = Ri — R0 = const, / = / (qlt q\, pa).
Теорема Рауса. Бели функция
V = f-f0,
где fo—f @, 0, pa), является знакоопределенной положительной
функцией относительно переменных q\, qit то стационарное движе-
движение системы устойчиво по отношению к возмущениям, при которых
постоянные ра остаются неизменными.
Доказательство. Функция V имеет вид
V = R% Ro — /0,
или, выписывая значение /0,
V = /v2 Ко ~ *^о>
где ^о —значение Яо при <7j = 0; R2 — однородная квадратичная
форма относительно обобщенных скоростей. Из условия, что V —
знакоопределенная функция, следует, что разность Ro — Ro яв-
является знакоопределенной отрицательной функцией позиционных
координат qit т. е. в стационарном движении функция Ro — Ro
имеет изолированный максимум. Рассуждая как и при доказатель-
доказательстве теоремы Лагранжа об устойчивости равновесия, теперь мож-
можно показать, что стационарное движение
558
qt = 0, <7;==0, pa = const (t = s+l,s+2 k)
является устойчивым по отношению к возмущениям, при которых
не изменяются величины рв, если только воспользоваться инте-
интегралом
Яй = Ro + h,
аналогичным интегралу живых сил.
Малые колебания системы около положения устойчивого рав-
равновесия. Рассмотрим малые колебания системы около положения
ее устойчивого равновесия. Ограничиваясь лишь малыми движе-
движениями системы, будем предполагать, что величины д1у Цъ •••, <7ь.
q'v q'2, ... ,q'k остаются во все время движения настолько малыми,
что при разложении в степенные ряды живой силы и силовой
функции можно ограничиться лишь первыми членами разложения.
Разложим в ряд коэффициенты а,ц в выражении живой силы:
s=l
где индекс 0 означает, что взяты значения величин, соответствую-
соответствующие qi = cj2= ... =<7а=0. При малых значениях qs можно использо-
использовать их приближенные значения
ач@, 0, ...,0)*=^ (*,/= 1,2, ...,*).
Тогда для живой силы получим приближенное значение
которое является однородной квадратичной формой относительно
q\, q'v ... , q'k с постоянными коэффициентами.
Определяя силовую функцию U так, чтобы в положении равно-
равновесия она обращалась в нуль, разложим ее в степенной ряд в
окрестности положения равновесия
к
U{q1,q2....,qh) = U@,0 0) + W-fM qt +
dW
Пренебрегая в разложении членами выше второго порядка малос-
малости относительно qi, qi, ¦¦., qk и принимая во внимание, что в поло-
положении равновесия
559
Ц@, О, ...,0)=0, [^- = 0 A = 1,2,...,*),
V a9i /о
получим приближенное значение силовой функции
где постоянные коэффициенты Ьц определяются из равенств
Воспользовавшись приближенными значениями силовой функции
и живой силы, запишем уравнения Лагранжа второго рода
'Л (( = 1.2,...,А).
Задача определения движения в окрестности положения равно-
равновесия свелась к исследованию решений системы линейных одно-
однородных дифференциальных уравнений второго порядка с постоян-
постоянными коэффициентами. Общее решение такой системы известно из
курсов дифференциальных уравнений, и мы не будем останавли-
останавливать на нем внимания.
Будем искать частное решение системы в виде
(i = I, 2,
Тогда для определения коэффициентов А{ получим систему алге-
алгебраических уравнений
Отличное от нулевого решение такой системы существует только
тогда, когда равен нулю определитель системы
А (Й) = К,?2-М до-
дополученное уравнение называют характеристическим, или
уравнением частот.
Можно найти такое преобразование координат, после которого
живая сила и силовая функция будут представлены в виде
2Г = 2л;;', 2U = — ЪХ,х\.
Для новых переменных будем иметь следующие уравнения Лаг-
Лагранжа:
*; = — K*v (v=l,2 k).
560
Переменные х\, Х2, —, хк, в которых уравнения Лагранжа имеют
указанный вид, называются главными, или нормальными,
координатами.
Уравнения движения в нормальных координатах можно полу-
получить посредством линейной комбинации уравнений Лагранжа.
Умножим каждое из уравнений движения
Е <?/"ЕМ/ (*¦=!, 2,..., А) (а)
на неопределенный пока множитель /П; и сложим полученные урав-
уравнения
*М/- (Ь)
Множители ггц подберем так, чтобы имело место соотношение
k k
х = ? ^
Тогда уравнение (b) примет вид
Преобразование должно выполняться для всех значений коорди-
координат, а это возможно, если совпадают все коэффициенты преобразо-
преобразования, т. е.
k k
2OTifl?/ = xXmi&" (/=1-2,...,А),
C=l i=l
или
;-**/)= ° (/=1,2, ...,k).
Нетривиальные значения коэффициентов m^ могут быть определе-
определены отсюда, если обращается в нуль определитель системы
А (Я) = | Ц°. - Ьи | = 0.
Но этот определитель совпадает с уравнением частот. Определив
корни этого уравнения, для каждого значения корня Ks будем
иметь систему коэффициентов т<, зависящих по крайней мере от
одного параметра. Относительно корней Ks докажем следующую
теорему, принадлежащую Сильвестру.
19х/2 Е. Н. Березкин 561
Теорема Сильвестра A814—1897). Все корни уравне-
уравнения частот вещественны.
Доказательство. Пусть Ко— комплексный корень урав-
уравнения частот. Тогда для коэффициентов т{ получим некоторые
комплексные значения Для сопряженного корня Ко будем иметь
систему сопряженных значений /л,-, которые определяются из урав-
уравнений
kк
fitf (/ = 1, 2, ... , ft).
Умножая эти уравнения на т.,- и складывая результат умножения,
получим
t./=i
откуда
= V
2j mim.fij 2j mimiaii
Этим и доказывается теорема.
Для каждого вещественного корня Ко можно определить систе-
систему коэффициентов тг- и тем самым координату х, удовлетворяю-
удовлетворяющую уравнению
х" = — Кох.
Теорема Вейерштрасса. Матрица определителя Д(К)
имеет простые элементарные делители.
Доказательство этого предложения можно провести при по-
помощи известного метода Жордана. Предположим, что уравнения
линейного преобразования имеют вид
I ^^ + / • 1 О f \
j=2
Уравнение Лагранжа для координаты х запишем в виде
d дТ ди ~о
dt дх' дх
Так как
* и
дТ VI дТ dU Vl 6U
562
dq'i " дх
(=1 i=i
будем иметь
_d дТ dU
dt дх' дх ' ?J~l I dt
и при щ = Шг получим, как это было показано выше, уравнение
х" + Хх = 0.
Последнее может быть только тогда, когда живая сила и силовая
функция имеют вид
А—1 А—1
По определению, живая сила является знакоопределенной функ-
цией. Поэтому выражение V а*цЯ\ Я] также является знакоопреде-
ленной положительной функцией от &— 1 переменных Я* < Я1 • • ¦ я1—г
Переменные q*, q*2, ... , q*k_x независимы, поэтому можно представить
движение в пространстве k— 1 переменных, где живая сила
и силовая функция
Уравнения Лагранжа для оставшихся переменных будут допускать
по меньшей мере одно преобразование, подобное рассмотренному.
Продолжая этот процесс, в итоге придем к следующему выраже-
выражению для живой силы и силовой функции:
2Г = xl + х1' + ... + *;\ 2и = - (Ч^ + 44 + ¦ ¦ ¦ + К4)-
Причем среди величин Xv' могут оказаться равные между собой.
После выполненных преобразований уравнения Лагранжа примут
вид
а сами переменные Х\, х% ..., хк оказываются главными координа-
координатами системы. Полученные уравнения системы интегрируются не-
независимо одно от другого. Если в положении равновесия силовая
функция имеет изолированный максимум, т. е. все Яг->0, то общее
решение системы имеет следующую форму.
191/а* 563
= civ cos
+ c2v sin
(v = 1, 2, ... , k).
Если среди ?iv окажется хотя бы одно отрицательное, то будет
существовать неограниченное частное решение, и предположение
о том, что можно пренебрегать членами высшего порядка в разло-
разложениях живой силы и силовой функции системы, не будет оправ-
оправдано. Существенным при выводе было предположение о том, что
живая сила системы представляет собой знакоопределенную поло-
положительную функцию от обобщенных скоростей. Если это предполо-
предположение не выполняется, то может оказаться, что нормальные коор-
координаты и не существуют.
Пример 135. Материальная точка массы m привязана ингью длины a
к неподвижной точке О и соединена со второй точкой той же массы m при по-
помощи нити длины а. Система находится в однородном поле силы тяжести.
Определить частоты малых колебаний системы и нормальные колебания
(рис. 264).
Рис. 264
Решение. Вводя в качестве обобщенных координат углы ср и -ф, как указано
На рис. 264, для живой силы получим следующее выражение:
Т =
a3<p'
(ф —
или приближенно
Силовую функцию задачи
U = mga cos ф + mg (a cos ф + a cos ф) -j- const.
Подбирая соответствующим образом константу, заменим выражение для сило-
силовой функции ее приближенным значением:
564
Уравнения Лагранжа для малых колебаний запишутся в виде
2аф" + Щ" = — 2gq>, аф"
Здесь уравнение частот
_
можно переписать в виде
откуда
При fe2 = k\ = для определения величин mj и т2 имеем уравнение
или
откуда
m2
так что можно положить
/пг = 2 +/2", /ni== —A
Для новой переменной
хх = — о У 2ф + а'
уравнение примет вид
*1 = —
где
При fe2 = fe2 — ДОЯ определения величин mt и т2 приходим к уравне-
уравнению
или
откуда
/«! = — 1 + /2", /«2
Для новой переменной
ха = а /2 ф
19 Е. Н. Березкин
уравнение движения примет вид
где
В главных координатах решение имеет вид
х1 — cL cos kit + с2 sin kj, хг — c3 cos k4 + c4 sin k2t.
Пример 136. Трубка, согнутая в виде окружности, плоскость которой
вертикальна, может свободно вращаться вокруг неподвижного вертикального
диаметра. Внутри трубки находится шарик массы т. Трубке сообщают началь-
начальную угловую скорость Мо вращения вокруг вертикального диаметра. При этом
шарик находится в положении относительного равновесия, так что ZAOM = a.o.
Исследовать устойчивость относительного положения равновесия (см. рис. 249).
Решение. Принимая за обобщенные координаты угол ср поворота систе-
системы вокруг вертикальной оси и угол а между вертикалью и радиус-вектором
шарика, для живой силы и силовой функции соответственно будем иметь
Jq>'2 m
Т = —¦?— + — (а2ф'г sin2 а + а3а'г), U = mga cos а.
Угол tp представляет собой циклическую координату, которой соответствует
первый интеграл
дТ
VT = (J + ma2 sin2 а) ф' = 0,
Оф
где для Р из начальных условий получим следующее значение:
Р = (J + та2 sin2 а0) <в0.
Составим функцию Рауса
Рф' та2а'2
R — L — ф'Р =¦ + + mga cos a — рф' -
2 J
= mga cos a
2 (J -f- /na2 sin2 a) 2
Полагая
Я = T* + I/*,
где
ma2a'2 P
T* , U* = mga cos a— >
2 2 (¦/ +ma2 sin2 a)
приходим к задаче об относительном движении точки по окружности в поле
сил с силовой функцией U*. Положение «относительного» равновесия опреде-
определяется уравнением
CU* . P2ma2 sin a cos a
)
которое равносильно двум следующим уравнениям:
sin d = 0, - mga (J + ma2 sin2 a0J +- pV;a2 cos a0 = 0.
Из последнего уравнения находим после подстановки значения р2
566
cos a0 = -—
откуда следует, что положение равновесия существует при
g < <n^a.
Если шарик поместить в положение, определяемое углом ао, то при движения
системы будет изменяться только циклическая координата ср, а координата
а будет сохранять постоянное значение. Такие движения, в которых все неци-
нециклические координаты сохраняют постоянное значение, Раус назвал стационар-
стационарными. Для исследования устойчивости положений относительного равновесия
рассмотрим вторую производную от функции U*:
дЮ*
Л 3 ^ — mga cos a — mp2a2 {J -f ma2 sin2 a) X
COL
X l(J + ma2 sin2 a) cos 2a — ma2 sin2 2a].
При a = a0 получаем
= — mga cos a0 + та2а>^ [cos 2a0 — mi3 (J -f- ma2 sin2 a,,) sin2 2a].
a=a0
<5a2
Здесь
— mga -\- maaMj cos a0 -= 0
поэтому
bW*
c'a
ma2 u)q sin2 a
0
a=a0
[¦/ + ma3 A + 3 cos2 a0)] < 0,
т. е. силовая функция при a=a0 имеет максимум, и положение равновесия
устойчиво.
При ai=0 имеем
d2U*
<?а2
- mga
= mga — 1 -j- —^— Bma2J sin a0 + m2a4 sin4 a0) >• 0,
Э2С/*
если a®2>g, то д >0 и положение равновесия неустойчиво.
Малые движения в окрестности устойчивого положения равновесия будут
определяться уравнением
/ш2Мп sin2 a0
maV = [J + таг A + 3 cos2 ao)]x.
J + ma3 sin2 a0
Общее решение этого уравнения имеет вид
х = Cj cos /tf + с2 sin ?i,
где
. , , ma2 A+3 cos2 a0)
— м0 sin a0
J + msJ sin15 a0
19* 567
Такие движения будут существовать, если в начальный момент при а = а0 и
ю = а>0, а' ф 0.
Влияние диссипативных сил на малые колебания системы око-
около устойчивого положения равновесия. До сих пор рассматрива-
рассматривались малые колебания механических систем. При этом предполага-
предполагалось, что на систему наложены идеальные связи и всякое сопро-
сопротивление движению системы отсутствует. На самом деле на всякую
механическую систему действуют некоторые силы сопротивления.
В общем случае характер этих сил очень сложный и каждый раз
определяется экспериментально. В простейшем случае предпола-
предполагается, что силы сопротивления, действующие на каждую точку
системы, пропорциональны скорости движения соответствующей
точки и направлены в сторону, противоположную скорости движе-
движений этой точки.
Будем предполагать, что обобщенные силы, соответствующие
силам сопротивления, линейны относительно скоростей соответст-
соответствующих точек
и матрица постоянных коэффициентов Сц является симметриче-
симметрической, так что
СЦ = СЦг
и квадратичная форма Hc^q^q'. неотрицательна
2<W,: > о.
Функция
называется диссипативной функцией Релея. Она характеризует
сопротивление среды. Обобщенные силы сопротивления среды
можно теперь представить в виде
п'- df
Мы будем предполагать, что силовая функция активных сил,
действующих на систему материальных точек U(qu q2, ..., qu) имеет
в положении равновесия изолированный максимум и что в некото-
некоторой окрестности положения равновесия <?i='<72= ... =<7а = 0 она
является знакоопределеннои отрицательной функцией переменных
<7ь <?2, •••, Яъ,- Тогда для малых движений системы в окрестности
положения равновесия живую силу и силовую функцию можно
представить в виде
568
где uij и Ьц — постоянные величины. Будем предполагать, что дис-
сипативная функция является знакоопределенной положительной
функцией обобщенных скоростей. Тогда уравнения движения сис-
системы в окрестности положения равновесия можно будет записать
в виде
или в матричной записи
Aq" + Cq' + Bq = О,
где А, В и С — квадратные матрицы; q — матрица-столбец.
Разыскивая решение системы в виде
(U — матрица-столбец с постоянными элементами, к— некоторое
число), получим после подстановки в уравнение и сокращения
на ем
(АХ,2 + Ск + В) U = О,
или
ч№ + сцк + b4) и, = 0 (i = 1, 2, ... , k).
i
Умножая каждое уравнение на щ, где щ — величина комплексно соп-
сопряженная с М;, и складывая, получим
W'ZaquJii + KZCijU^t + ЪЬци^ ^ О,
или в сокращенных обозначениях
А (и, ы) К2 + С (и, п.) к 4- В (и, и) = О,
где А («,«)> О, В («,«)> 0, С(«,й)>0,
откуда видно, что любой корень к удовлетворяет квадратному
уравнению с положительными коэффициентами, поэтому ReXi<Q.
Если А = а-Н"р — комплексный корень, то существует и комп-
комплексно сопряженный корень
к=а — ф.
Комплексно сопряженным корням отвечают и комплексно сопря-
сопряженные решения дифференциальных уравнений, сумма которых
всегда может быть приведена к вещественному виду
569
где А и В — произвольные вещественные постоянные. Если же
к — вещественный корень, то и второй корень тоже будет вещест-
вещественным отрицательным. Отсюда следует, что добавление диссипа-
диссипативных сил делают колебания системы либо затухающими, либо
колебания при добавлении диссипативных сил переходят в зату-
затухающие апериодические движения.
Рассмотрим влияние малых диссипативных сил на главные ко-
колебания системы. Пусть в главных координатах
2
а диссипативная функция
является знакоопределенной положительной функцией, и все ее
коэффициенты р,- и р,-,- малы. Уравнения движения системы в этом
случае получат вид
х = — \xt — р,*; — ? р?/дг; (/= 1.2 й).
Разыскивая решение этих уравнений в виде
А'; = Л;бК ,
для определения величин А{ получим уравнения
Определитель этой системы уравнений имеет вид
= 0.
Раскрывая этот определитель и отбрасывая члены, содержащие
малые произведения р*, p,j, будем иметь
П (х2 + р,х 4 Л,,) = 0.
В первом приближении корни этого уравнения имеют вид
570
а так как величины р,- малы по сравнению ел*, то можно записать
Решение, соответствующее этим корням, можно представить в виде
откуда можно сделать следующие замечания:
1. В первом приближении малые диссипативные силы не изме-
изменяют частот консервативной системы.
2. При добавлении малых диссипативных сил колебания зату-
затухают при t->oo.
§ 6. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
1. Основные теоремы. Задача об устойчивости имеет значение
не только при исследовании положений равновесия, но и при ис-
исследовании движения механических систем. Она возникает в связи
с необходимостью знать, как изменится движение при отклонении
начальных условий от заданных. Исследованием вопросов устой-
устойчивости равновесия занимался еще Аристотель. Лагранж сформу-
сформулировал известную теорему об устойчивости равновесия и рассмот-
рассмотрел малые возмущенные движения в окрестности положения равно-
равновесия системы. Развитием учения об устойчивости равновесия и
движения занимались такие крупнейшие ученые, как П. Тэт A831 —
1901), Томсон (лорд Кельвин) A824—1907), Э. Раус, А. Пуанкаре,
Н. Е. Жуковский A847—1921) и др.
Наиболее полное решение задачи об устойчивости движения
дал А. М. Ляпунов в своей докторской диссертации в 1892 г.
В настоящее время задачи об устойчивости решаются во всех об-
областях механики.
Предположим, что уравнения движения механической системы
сведены к дифференциальным уравнениям
-^-=- У1$,У1,УЛ Уп) (* = 1,2, ...,«),
правые части которых являются голоморфными функциями коор-
координат г/ь г/г Уп и пусть
#s = /S@ (S= 1, 2, ... , Л)
некоторое частное решение системы, отвечающее начальным дан-
данным ys = yso при t = t0.
Это частное решение назовем невозмущениым движением. Все дру-
другие решения системы будем называть возмущенными движениями.
571
Разности значений ys для возмущенного и невозмущенного дви-
движений
*. = У« —/.(О
называются возмущениями.
Определение. Невозмущенное движение ys = fs(t) будем
называть устойчивым по отношению к величинам ys, если для
всякого положительного числа А, как бы мало оно ни было, всегда
найдется другое положительное число Я,, такое, что для всех воз-
возмущенных движений, удовлетворяющих в начальный момент не-
неравенству
s=l
при всяком t > tu будет выполняться условие
s=l
в противном случае невозмущенное движение будем называть
неустойчивым.
Решение задачи об устойчивости движения зависит от тех диф-
дифференциальных уравнений, которым удовлетворяют возмущения
и которые мы будем называть уравнениями возмущенно-
возмущенного движения. Уравнения эти получаются следующим образом:
JEi_ = Ail. %L = Yt(t,yi,y.,...,yn)-
dt dt dt
- Ys (t, Д, /„..., /„) = Ys (t, fx + xlt f2 + X2,...,fn + xn) -
^s (*> III2 In) = Л5 ((, Xlt Xz, ..• , Xn).
ИЛИ
dxs
dt
¦=-Xs(t,xlt хг xn) (s= 1, 2, ... ,n).
Определению устойчивости движения можно теперь дать иную
формулировку.
Невозмущенное движение xs=0 (s=l, 2, ..., п) будем называть
устойчивым, если для любого положительного числа А, как бы
мало оно ни было, можно всегда подобрать другое положительное
число X такое, что для всех возмущений, удовлетворяющих в на-
начальный момент условию
572
для всех значений t^t0 будет выполняться неравенство
л.
2
Если уравнения возмущенного движения не включают явно
времени t, то невозмущенное движение будем называть установив-
установившимся, в противном случае — неустановившимся.
Будем предполагать, что правые части дифференциальных
уравнений возмущенного движения являются непрерывными огра-
ограниченными функциями переменных t, xu х% ..., хп, допускающими
единственное решение для каждой системы начальных значений
переменных, лежащих в области
Прямой метод Ляпунова заключается в отыскании некоторых
функций вещественных переменных t, X\, х% ..., хп и в изучении
свойств их производных, взятых в силу дифференциальных урав-
уравнений возмущенного движения. В основе метода лежит изложен-
изложенный ранее способ, использованный Леженом Дирихле при доказа-
доказательстве теоремы Лагранжа об устойчивости равновесия.
В области
2<Я, t>t0 (*)
будем рассматривать функции вещественных переменных t, X\,
х2,..., хп, однозначные, непрерывные, дифференцируемые и уничто-
уничтожающиеся при Xi = a:2= ... —хп=0.
Определения. 1. Функция V (t, xu х2 хп), которая в
области (*) может принимать значения только одного знака, назы-
называется знакопостоянной функцией.
2. Функцию V (t, x\, х2, ..., хп), которая при сколь угодно ма-
малых значениях хи Хц,...,хп в области (*) может принимать значе-
значения как положительные, так и отрицательные, будем называть
знакопеременной функцией.
3. Функцию W(xi, X2,—,xn), зависящую только от координат
и не зависящую явно от времени, принимающую в области (*)
значения лишь одного знака и обращающуюся в нуль лишь при
xv=xi= ... хп=0, будем называть знакоопределенной
функцией.
4. Функция V (t, xu х2,..., хп) называется знакоопределенной,
если возможно найти такую знакоопределенную положительную
функцию W(x\, x2,...,xn), зависящую лишь от координат х\, х2,...,
..., хп, которая удовлетворяет в области (*) условиям
V — W>0 или — V — W>0.
573
5. Будем говорить, что функция V (t, хи х% ..., хп) допускает
бесконечно малый высший предел, если для всякого
положительного числа /, как бы мало оно ни было, найдется дру-
другое число е>0, такое, что в области
:e, t>t0
функция V удовлетворяет неравенству
W\<1.
Этому требованию, в частности, удовлетворяет всякая непрерыв-
непрерывная, не зависящая от времени t функция W(xu x% ..., хп).
Теорема Ляпунова. Если дифференциальные уравнения
возмущенного движения
= Xi (t, xlt х2, ... ,хп) (i = 1, 2, ... , п)
dt
таковы, что можно найти знакоопределенную функцию V(t, x\,
х% •••» *п), производная от которой dv/dt, взятая в силу системы
дифференциальных уравнений возмущенного движения
была бы знакопостоянной функцией, знака противоположного с V,
или тождественно равной нулю, то невозмущенное движение
устойчиво '.
Доказательство. Покажем, что существование функ-
функции V, удовлетворяющей условии теоремы, дает возможность по
заданным числам А найти соответствующие числа К, удовлетво-
удовлетворяющие определению устойчивости.
Пусть V — знакоопределенная положительная функция, а
V — знакопостоянная отрицательная или тождественно равная ну-
нулю функция в области (*) и пусть А<Н — некоторое произвольное
положительное число. Тогда существует знакоопределенная функ-
функция W(xu x2, ..., хп) такая, что
V>W.
Рассмотрим сферу
= Л
и обозначим через I минимум функции W на сфере А. Тогда по-
поверхность W=l не будет выходить за пределы сферы А. Рассмот-
Рассмотрим функцию V (tQ Х\, Х2, .--, хп), зависящую только от переменных
1 Функция V, удовлетворяющая условиям теоремы Ляпунова, называется
функцией Ляпунова.
574
xi, Хг,..., xn и начального значения времени ^о- Такая функция до-
допускает бесконечно малый высший предел, т. е. найдется такое
число X, что в области
?*2<Л t>t0
S
будет выполнятся условие
V{t0, xlt хг хп)<1.
Выберем теперь начальные значения координат (х10, х-2о хпо)
так, чтобы имело место неравенство
Тогда
V (t х х у \ <" /
Обозначим производную от функции V через V, т. е.
dy
dt ~
Интегрированием получим
V-V0=$V'dt.
и
Из условия V' -< 0 следует
V-Vo<0,
но тогда
W<V<VO<1,
т. е. для всех t^>t0 выполняется неравенство
На сфере Hxj-.A функция W удовлетворяет неравенству
_ /. Следовательно, координаты ^i, x% ...,хп во все время движе-
движения не будут удовлетворять уравнению поверхности сферы А, и
возмущенное движение будет оставаться внутри сферы
2 __ Д
Этим доказана теорема Ляпунова об устойчивости движения.
Замечание. Если не зависящие от времени первые интег-
интегралы уравнений движения U\, U2,..., Up являются голоморфными
функциями координат и скоростей и можно так подобрать числа
%и %2, —, Ьр, Си с2 Ср, чтобы разложение функции
575
v = Wi
начиналось бы со знакоопределенной квадратичной формы, то
функция V будет удовлеторять условиям теоремы Ляпунова об
устойчивости движения.
Пример 137. Методом Ляпунова докажем теорему Лагранжа об устой-
устойчивости равновесия системы материальных точек.
Пусть иа систему наложены идеальные, голономные и не зависящие явно
от времени связи. Движение такой системы будет определяться системой урав-
уравнений
JJL Л?^L ^l • ,i2 k)
ei2 k)
dt dq's dqs dq, • dt =Я> {S1'2 k)'
частным решением которой является положение равновесия системы
?i = <?2 --=...= qk =?!=¦•¦= % = ° ¦
Уравнения движения в сделанных предположениях допускают существование
интеграла живых сил
Т — (/ = const.
Если функция U в положении равновесия имеет изолированный максимум, то
она является знакоопределениой отрицательной функцией переменных </i, q2, ...
..., <7л в некоторой окрестности положения равновесия системы. Живая сила
системы по самому определению является знакоопределенной положительной
функцией относительно обобщенных скоростей qv q2 Ц^ Поэтому функция
V=T — U
будет знакоопределениой положительной функцией от переменных
9i> 92, ••¦ . Чк, <?1> <?2' ••• ¦ Як-
Производная от функции V, взятая в силу системы дифференциальных уравне-
уравнений движения, тождественно равна нулю
dt
так как V — первый интеграл уравнений движения. Поэтому функция V удов-
удовлетворяет условиям теоремы Ляпунова об устойчивости движения, и положение
равновесия системы будет устойчиво.
Теорема Ляпунова дает только достаточные условия устойчи-
устойчивости движения. Самым трудным местом в использовании теоре-
теоремы является вопрос о построении функции Ляпунова.
Определение. Невозмущенное движение х\=х%— ... =
= хп = 0 будем называть асимптотически устойчивым,
если оно удовлетворяет условиям устойчивости и, кроме того,
если всякое возмущенное движение, достаточно близкое к невозму-
невозмущенному, будет приближаться к нему асимптотически при t—>-oo
так, что
п
limV1 х? @ = 0.
576
Теорема об асимптотической устойчивости. Если дифференци-
дифференциальные уравнения возмущенного движения таковы, что можно най-
найти знакоопределенную функцию V (t, хи х2, ..., хп), допускающую
бесконечно малый высший предел, производная от которой, взятая
в силу дифференциальных уравнений возмущенного движения,
представляет собой знакоопределенную функцию, знака противо-
противоположного с V, то невозмущенное движение устойчиво асимпто-
асимптотически.
Доказательство. По определению функции V и Vx
существуют такие знакоопределенные положительные функции W
и W], зависящие только от координат хи что
V — W>0, —V' — W1>tt
для всех значений координат и времени в области (*). Функция
V удовлетворяет условиям теоремы Ляпунова об устойчивости
движения, т. е. по заданному числу А можно найти такое число X,
что всякое движение, начинающееся внутри или на границе сферы
будет всегда оставаться внутри сферы
Пусть / — точная низшая граница функции W на сфере А.
Выберем X так, чтобы для начальных значений координат
выполнялось неравенство
V (т0, х10, х21), ... , х
Покажем, что не существует положительного числа а, которое
было бы меньше всех значений, получаемых функцией V при^-voo.
Действительно, если бы такое число а существовало, то в силу
существования у функции V бесконечно малого высшего предела
нашлось бы такое е>0, что в области
?<e, t>t0
s
выполнялось бы неравенство
и для действительного возмущенного движения имело бы место
условие
577
*<%4<A. (**)
s
Но в замкнутой области функция W\ имеет низший предел, кото-
который обозначим через /, так что в области (**) будем иметь
Из уравнения
V-Vo= JV'd*
и
получим теперь
или
и всегда найдется такой момент t>t0, когда функция V станет
меньше, чем а. Мы пришли к противоречию с предположением, что
во все время движения функция V>a. Будучи убывающей функ-
функцией, V затем всегда будет оставаться меньше с. Если за а при-
примем точную низшую границу функции W в области
то обязательно наступит момент, когда функция V сделается и
будет оставаться меньше а. Начиная с этого момента значения
переменных xs всегда будут оставаться в области
Следовательно, при всяких начальных возмущениях Х& в области
(X) значения переменных xs с беспредельным возрастанием t
стремятся к нулю.
Ляпуновым были предложены теоремы о неустойчивости невоз-
невозмущенного движения. Эти теоремы были обобщены Н. Г. Четае-
вым, предложившим теорему, более пригодную для решения тех-
технических задач.
Чтобы установить неустойчивость невозмущенного движения,
достаточно найти одну траекторию возмущенного движения, не
удовлетворяющую условиям устойчивости.
При исследовании неустойчивости будем рассматривать функ-
функции V (t, хъ х2, ..., хп), обращающиеся в нуль когда х\ — х2~ ... =
= хп = 0, и, может быть, на некоторой поверхности
V (t, xlt хг, ... , хп) = О,
578
проходящей через начало координат. Совокупность значений пере-
переменных х\, Хг хп, где выполняются условия
V>0, 2*52<Я, t>ta,
будем называть областью У>0. Эта область может вообще ме-
меняться со временем.
Функцию W(t, xu X2,..., хп) назовем знакоопределенной в об-
области У>0, если она может обращаться в нуль в этой области
лишь на границе V = 0 и если для произвольного е>0 всегда най-
найдется число />0 такое, что для всех значений координат, удов-
удовлетворяющих условию
V>e, t>t0,
имеет место неравенство
Теорема Четаева о неустойчивости движения. Теорема. Если
дифференциальные уравнения возмущенного движения таковы, что
можно найти функцию V, ограниченную в области V>0, сущест-
существующей в сколь угодно малой окрестности невозмущенного дви-
движения, производная которой dvjdt, взятая в силу уравнений возму-
возмущенного движения, была бы определенно положительной в области
V>0, то невозмущенное движение неустойчиво.
Доказательство. Функция V ограничена в области
V>0, так что в этой области
V<L,
где L — некоторое положительное число. Покажем, что не сущест-
существует такого положительного числа Я, для которого при всех началь-
начальных возмущениях, удовлетворяющих условию
и при всех t^.tQ не нарушается неравенство
Доказательство будем вести от противного. Пусть такое чис-
число "к существует и в то же время выполняются условия теоремы.
Выберем начальные возмущения так, чтобы имели место условия
& = Ь, V0>0.
Так как V — знакоопределенная положительная функция, то для
значений координат хз, удовлетворяющих неравенству
v>v0,
579
найдется такое llt что будем иметь
V > 1Х.
Тогда из соотношения
получим
где правая часть неограниченно растет вместе с t. Совместно с не-
неравенством V<L последнее неравенство может существовать лишь
для значений t, не превосходящих величины
, , 'L- Vo
к
Этим и обнаруживается неустойчивость.
Пример 138. Рассмотрим устойчивость постоянных вращений тяжелого
твердого тела, закрепленного в одной неподвижной точке в случае Эйлера.
Постоянными осями вращения, как было показано выше, являются главные
оси эллипсоида инерции твердого тела, построенного для неподвижной точки.
Таким образом, постоянным вращением будет движение
удовлетворяющее уравнениям Эйлера. Для аналитического исследования устой-
устойчивости этого движения рассмотрим возмущенное движение
р = х, q = y, г = /•„¦+ г.
Тогда уравнения возмущенного движения запишутся следующим' образом:
А -^~ = E - С) у (г, + z), В-^- = (С - А) х (r0
dz
С— = (А-В)ху.
at
Уравнения Эйлера допускают два первых интеграла
Ар* + Bq* A- Cr\ = h, Агр> + 5у + CV2 = Р,
из которых можно получить
^P+ fC,. A
Отсюда легко получить первые интегралы уравнений возмущенного движения:
/1= х+ р = С1 к А
о л
Составим функцию Ляпунова в виде комбинации этих первых интегралов:
V = ЛС л2 + В~С уг + (Ах* + By* + 2Cr0z + Сг2J.
580
При А^В>С (знак плюс) — эта функция знакоопределения положительная,
при А^.В<С (знак минус) — функция знакоопределенная отрицательная. Про-
Производная от функции V, взятая в силу систем уравнений возмущенного дви-
движения, тождественно равна нулю, так что функция V удовлетворяет условиям
теоремы Ляпунова об устойчивости движения, т. е. постоянные вращения твер-
твердого тела вокруг наибольшей и наименьшей полуосей эллипсоида инерции
устойчивы.
Неустойчивость вращения вокруг средней оси эллипсоида инерции (когда
Л<С<В) доказывается рассмотрением функции
V = xy.
Ее производная, взятая в силу уравнений возмущенного движения,
Если 2+го=О, то неустойчивость непосредственно следует из уравнений возму-
возмущенного движения. Если rn+z>0, то V определенно положительна в области
V>0. Таким образом, на основании теоремы Четаева о неустойчивости движе-
движения, вращение вокруг средней полуоси эллипсоида инерции неустойчиво.
Пример 139. В качестве второго примера рассмотрим задачу об обраще-
обращении теоремы Лагранжа об устойчивости равновесия. Будем предполагать, что на
механическую систему с голономными идеальными связями, не зависящими явно
от времени, действуют консервативные силы с силовой функцией
U(Si, <72 Як),
являющейся однородной формой m-ного порядка, и движение в окрестности
положения равновесия определяется каноническими уравнениями Гамильтона:
dqi дН dpi дН
dt dpi ' dt dqi
Покажем, что если функция U не имеет в положении равновесия максимума, то
это положение равновесия неустойчиво.
Для доказательства рассмотрим функцию Четаева вида
Область, где выполняются условия
— Я>0, 2p
будет областью V>0. Представим живую силу в виде
2Г = 2 aijPiPi + 2
где ац — некоторые постоянные величины, a Aij — функции обобщенных
координат, обращающиеся в нуль, когда все qi равны нулю. Рассмотрим про-
производную dVjdt, взятую в силу системы дифференциальных уравнений. Имеем
dV VI / дН дН \ VI dH
dt "^JV dPi dqt I ^J™1 dt
dT V dAit , V du
„ ¦» • дАц
IT + mUm - } , qs —-L- pip,-
dqs
581
Выражение, стоящее в скобках, представляет собой знакоопределенную в облас-
dV
ти V>0 функцию переменных р, Я, поэтому будем иметь —— >0 в области
at
t/>0, и положение равновесия оказывается неустойчивым. Таким образом, если
силовая функция не имеет в положении равновесия максимума и является одно-
однородной формой, то такое положение равновесия неустойчиво.
2. Влияние новых связей на малые колебания системы около
положения равновесия. Если на механическую систему, совершаю-
совершающую малые колебания около положения равновесия, наложить
новые связи, совместимые с рассматриваемым положением равно-
равновесия, то после наложения связей система будет совершать колеба-
колебания уже по другому закону. В самом деле, пусть положение меха-
механической системы определяется k независимыми нормальными
координатами, так что
т 2Jfи
Тогда уравнения малых колебаний около положения равновесия
получат вид
Пусть на систему накладывается новая связь, которую в первом
приближении можно представить в виде равенства
или после дифференцирования
где все величины Ач предполагаются постоянными. Нормальные
координаты являются координатами Лагранжа, для которых
принцип Даламбера — Лагранжа может быть записан в виде
или, ограничиваясь членами первого порядка малости,
a;v = 0.
Но при наложении новой связи величины 6*v уже не будут незави-
независимыми и при получении уравнений движения нужно учитывать
это обстоятельство. Если воспользоваться методом множителей
Лагранжа, то получим уравнение
i
i 2 (jcv + Kxv + НА) оХ, = 0,
откуда будем иметь
х1 + %vxv +- hAv = 0. A)
582
Эти уравнения вместе с уравнением связи
= О
B)
определяют движение системы после наложения связи.
Для тех из нормальных координат, для которых постоянные
А, оказываются равными нулю, дифференциальные уравнения
будут сохранять свой первоначальный вид, и новая связь не будет
оказывать влияния на изменение этих нормальных координат по
крайней мере в первом приближении. Те нормальные координаты,
которым соответствуют отличные от нуля постоянные Av, будут
изменяться по другому закону. В дальнейшем такие переменные
будем называть переменными, стесненными связями.
Пусть стесненными связями оказываются первые п коорди-
координат tu^k и пусть
^1 "С ^2 -< Л-з "< ... "С ^„.
Для переменных, стесненных связями, уравнения движения полу-
получают вид A) и B). Переменные, стесненные связями, изменяются
с новой частотой, отличной от ?iv. Положим
где Вч и М — некоторые постоянные величины. Подстановка в
уравнения дает условия для определения этих постоянных:
— IBV + Mv + MA, = О, 2 Л.Д, = 0 (v = 1, 2, . •. , л),
т. е. для определения постоянных Bv, M получаем систему линей-
линейных однородных уравнений. Для существования нетривиального
решения этих уравнений должен быть равен нулю определитель
или
= 0,
„! — К
0
0
4
0
Art — А , .
0
4 •¦
0
о
. К-ь
. 4
4
4
4
0
Нетрудно видеть, что
i+n
583
А (Х„_0 = 4_! П
откуда следует, что определитель А(Я) будет иметь п—1 действи-
действительных корней, разделяющих числа А,ь А,2, —, kn- В результате
приходим к теореме.
Теорема. При наложении на консервативную систему но-
новой связи частоты новой системы будут разделять частоты свобод-
свободной системы. В случае кратных частот частоты новой системы
будут совпадать с частотами старой.
В частном случае, когда только одна постоянная А\ отлична
от нуля, а все остальные равны нулю, уравнение связи можно
представить в виде
Тогда получаем вырожденный случай. Для К будут возможны все
значения A,v, кроме А^. Значение A,vi как бы выпадает при этом.
Если начальное положение равновесия было устойчивым, то
все ?^>0. После наложения связей на такую систему все К ока-
окажутся положительными, и, следовательно, устойчивость положения
равновесия сохраняется.
Если равновесие было неустойчивым и число неположительных
"К» было больше двух, то неустойчивость сохраняется и при на-
наложении новой связи.
Если же число неположительных "кч равно единице, то нало-
наложением соответствующей связи равновесие системы можно упроч-
упрочнить.
3. Влияние диссипативных сил на устойчивость равновесия.
В природе всегда существуют силы сопротивления движению, воз-
возникающие благодаря трению или вязкости. Эти силы превращают
механические формы энергии в другие формы. Такие силы англий-
английским физиком Кельвином названы диссипативными. В ме-
механике диссипативные силы представляют в функции скорости.
При малых движениях системы можно считать, что силы сопротив-
сопротивления являются линейными функциями скоростей. Эти силы всегда
тормозят движение системы, поэтому работа диссипативных сил на
действительном перемещении системы всегда отрицательна. Если
через Qa обозначить диссипативные обобщенные силы системы,
то будем иметь
Полагая, что для малых скоростей имеют место условия
584
где коэффициенты ац могут зависеть только от координат точек
системы, из выражения элементарной работы получим
Если ввести диссипативную функцию f (положительную квадратич-
квадратичную функцию от обобщенных скоростей)
2
то обобщенные диссипативные силы можно будет представить в
виде
Q. = d/ (t = 1,2, , k).
dqt
Если функция / зависит от всех скоростей и является знако-
определенной относительно скоростей, то диссипация называется
полной. Коэффициенты этой функции предполагаются постоян-
постоянными. С помощью диссипативной функции уравнения движе-
движения можно записать в виде
d дТ дт аи 'df /• 1 о и\
—'— (t=l,2, ... , k),
dt dql дЯ{ dqt
где U — силовая функция консервативных сил.
Если связи, наложенные на систему материальных точек, не
зависят явно от времени, то живая сила Т будет представлять
собой однородную квадратичную форму относительно обобщенных
скоростей. Умножая в этом случае каждое из уравнений движения
на Цг и суммируя полученные уравнения, будем иметь
yj_.w_~: V_эг „; du ул df
—
lT dql qt L dq'. qi dt
Левая часть этого уравнения легко преобразуется:
rd дТ дТ \ j d_ /\П дТ
~~ dt
дТ - dT
?("
и поскольку f есть однородная квадратичная форма относительно
обобщенных скоростей, будем иметь
dt ч
20 Е. Н. Березкин 585
т. е. производная по времени от полной механической энергии сис-
системы будет равна диссипативной функции системы, взятой с об-
обратным знаком. Отсюда сразу получаем
т-и<то-ио.
Иначе говоря, в процессе движения происходит уменьшение пол-
полной механической энергии системы. Из полученного неравенства
сразу следует теорема, принадлежащая Кельвину.
Теорема 1. Если положение равновесия консервативной
системы устойчиво при одних только консервативных силах, то оно
будет оставаться устойчивым и при добавлении диссипативных сил.
Рассматривая в качестве функции Ляпунова функцию
V = T — U,
являющуюся знакоопределенной положительной функцией коорди-
координат и скоростей, получим производную от функции V, являющуюся
знакопостоянной отрицательной функцией обобщенных скоростей
и координат (производная является знакоопределенной только от-
относительно обобщенных скоростей).
При наличии одних только консервативных сил движение сис-
системы в окрестности положения равновесия определяется системой
линейных дифференциальных уравнений, которые в нормальных
координатах могут быть записаны в виде
= Q (v= I, 2, ... , k).
При наличии диссипативных сил эти уравнения примут вид
dt dt
= ->,*,—?., / = -J-УУ, x\x) (v = 1, 2, .... k).
Докажем еще две теоремы, принадлежащие, как и первая, Кель-
Кельвину, о влиянии диссипативных сил на устойчивость положения
равновесия голономной консервативной системы.
Теорема 2. Устойчивое положение равновесия становится
асимптотически устойчивым при добавлении диссипативных сил
с полной диссипацией.
Доказательство. Рассмотрим в качестве функции Ляпу-
Ляпунова функцию
V = Т — ?/ + pSjCvJfv,
где постоянную р выберем так, чтобы функция V была знако-
знакоопределенной положительной функцией. Записанная в явном виде
функция получает вид
v=т S(х^+м*} +
586
Для дискриминанта квадратичной формы V получим выражение
1 0 0 ... О р 0 ... О
О 1 О ... О О р ... О
д =
О 0 0 ... 1 0 0 ... р
р 0 0...0 Я,! 0...0
о р о...о о я, ... о
ооо...ро о ... ь„
Подбирая р из условия
Р2<>? (»= 1, 2, ... , я),
получим, что V является знакоопределенной квадратичной формой
Рассмотрим производную от функции V в силу уравнений дви-
движения
— = V*
dt ^J
-P Vxv -4-= - \V(a4 -
(,/
где 6y — символ Кронекера.
Дискриминант квадратичной формы, заключенной в скобки,
Д =
\ К
>о
в силу малости величины р.
Таким образом, производная dVjdt является знакоопределен-
знакоопределенной отрицательной формой переменных xt, хг, ... , хк, х\, хг,...,
**» т. е. положение равновесия системы асимптотически устойчиво.
20*
587
Теорема 3. Изолированное и неустойчивое при одних по-
потенциальных силах положение равновесия не может быть стаби-
стабилизировано диссипативными силами (стабилизация означает, что
исследуемое положение равновесия или движение приобретает
свойство устойчивости).
Доказательство. Пусть среди Я; существует по меньшей
мере один отрицательный коэффициент и нет ни одного равного
нулю. Для определенности положим ?ц<0. Тогда уравнение, соот-
соответствующее Xi, имеет вид
= Лд:
dt2
где A,i= —&2<0.
Общее решение этого уравнения запишется следующим обра-
образом:
причем коэффициент ci связан с начальными условиями соотно-
соотношением
xok + х'о
Сл =
2k
Если сгФ0, то решение неограниченно возрастает с ростом време-
времени, т. е. положение равновесия неустойчиво.
При наличии диссипативных сил уравнения движения при-
приобретают вид
- - — — АЛ: —
Введем в рассмотрение функцию Ляпунова
где Н = Т — U. При х3 — хъ = ... = хп =0, Х\ = х'2 = ... = х'п =
== 0 будем иметь
Следовательно, всегда будет существовать область V>Q. Вычис-
Вычислим производную от функции V в силу уравнений движения
At
588
Она представляет собой однородную квадратичную форму пере-
переменных xV) xv. Дискриминант этой квадратичной формы
1о//-ММ 1
1
>о
(при достаточно малых значениях р можно пренебрегать членами
с высшими степенями Р). Таким образом, функция V удовлетво-
удовлетворяет условиям теоремы Четаева о неустойчивости движения. Тео-
Теорема доказана.
4. Влияние гироскопических сил на устойчивость равновесия.
Если положение равновесия системы неустойчиво, то оно может
быть в некоторых случаях стабилизировано добавлением гироско-
гироскопических сил. Гироскопическими (по определению Томсо-
на и Тэта) называются силы, сумма работ которых на действитель-
действительном перемещении системы равна нулю. Это могут быть действи-
действительно силы или просто некоторые члены уравнений движения,
обусловленные определенной структурой этих уравнений. В связи
с этим гироскопические силы иногда называют гироскопическими
членами. По определению, гироскопические силы Г\, удовлетво-
удовлетворяют соотношению
из которого непосредственно следует, что гироскопические силы
являются линейными функциями обобщенных скоростей
Из определения гироскопических сил находим
1
v=l
viqlqv =
+ gw)q'vq't = 0.
f.v
Таким образом, если матрица ||gfiv|| кососимметрическая, т. е.
giv = —gvi, то работа сил тождественно равна нулю, и силы Fv
будут гироскопическими. Гироскопические члены в уравнениях
Лагранжа могут появляться, например, при наложении на систему
связей, зависящих явно от времени. Действительно, так как в этом
случае
Т = Т2 -f- 7\ + То,
где
589
то уравнения Лагранжа записываются в виде
d JT2 дТ2 , d дТг дТг _ дТ0
of ла aoj at дд (% a^-
ИЛИ
^J dq^ *mJ ' 4mi dq^ 2 XJ dqi
V,J / V V,/
v
Здесь члены
dt dq, 61l *-*
v» v=l
являются гироскопическими, так как
дЬ, дЬ„
Эти гироскопические члены уничтожаются, если величины Ь{ по-
постоянны. (Нетрудно видеть, что гироскопическими будут, например,
силы Кориолиса от кориолисова ускорения.)
Рассмотрим механическую систему, совершающую малые дви-
движения около положения равновесия. Пусть положение механиче-
механической системы определяется главными координатами Х\, хч.,-—,Хк-
Предположим, что кроме консервативных сил на систему дейст-
действуют еще диссипативные и гироскопические силы. Пусть диссипа-
тивная функция в главных координатах.
2/= Haijx'ix'j,
а гироскопические силы
1 v =
Докажем следующие теоремы, принадлежащие Кельвину.
Теорема 1. Равновесие, устойчивое при одних консерватив-
консервативных силах, сохраняет устойчивость и при добавлении гироскопиче-
гироскопических и диссипатшных сил.
Доказательство. При добавлении гироскопических и
диссипативных сил уравнения движения системы вблизи положе-
положения равновесия принимают вид
dt dt
590
Если все Xv положительны, то положение равновесия устойчиво
при одних потенциальных силах, и функция
2
будет определенно положительной. Производная от функции Я в
силу уравнений движения
dti
dt
не будет положительной. Поэтому справедливость теоремы сразу
следует из теоремы Ляпунова об устойчивости движения.
Теорема 2. Изолированное неустойчивое движение равно-
равновесия не может быть стабилизировано добавлением гироскопиче-
гироскопических и диссипативных сил, если последние обладают полной
диссипацией.
Для доказательства достаточно рассмотреть функцию Ляпу-
Ляпунова
w = у
Она допускает бесконечно малый высший предел, так как не за-
зависит явно от времени. Величины хч, хч всегда можно подобрать
так, чтобы функция W имела отрицательные значения в сколь
угодно малой окрестности начала координат, ибо среди Xv сущест-
существует по крайней мере одно отрицательное. Производная от функ-
функции W
dW o, ,
dt
-р VMv-^г-Н-
будет определенно отрицательной функцией, если р достаточно
мала. Следовательно, функция W удовлетворяет условиям теоремы
о неустойчивости, чем и доказывается неустойчивость.
Отрицательный ответ дается и на вопрос о возможности стаби-
стабилизации неустойчивого изолированного положения равновесия
одними гироскопическими силами, если неустойчивость при одних
консервативных силах имеет нечетную степень, т. е. число
отрицательных Яч нечетно.
В самом деле, пусть число отрицательных %ч нечетно, и все
V» отличны от нуля. Рассмотрим уравнения возмущенного движе-
движения
591
dT
dt
= — guv-
Характеристическое уравнение этой системы запишется следующим
образом:
ёт *
= 0.
Заметим, что
д @) = (-1
Д (Я) |к-*оо = (— 1)" И2
и если число отрицательных Л* нечетно, то Д@) и Д(и) имеют
разные знаки, а характеристическое уравнение Д(х)=0 имеет по
меньшей мере один положительный корень. При выполнении этих
условий общее решение линейной системы содержит экспоненци-
экспоненциальный член, неограниченно возрастающий по модулю, откуда и
следует, что положение равновесия системы оказывается неустой-
неустойчивым.
Теорема. Равновесие, неустойчивое при одних консерватив-
консервативных силах, может быть стабилизировано добавлением подходящих
гироскопических сил, если степень неустойчивости была четной и
диссипативные силы отсутствуют.
Покажем это на примере. Пусть система имеет вид:
xT = —ax + gy', у" = — $y — gx%
аир — отрицательны. Характеристическое уравнение этой линейной
системы
и если выполняются неравенства
g2 л_ а _[_ р -> 0; (g2_ua4-pJ_4ap->0,
то уравнение имеет только чисто мнимые корни, а движение в
окрестности положения равновесия будет совершаться по гармо-
гармоническому закону. Этим и доказывается устойчивость при наличии
гироскопических сил.
" Замечание. Диссипативные силы в природе всегда сущест-
существуют, поэтому рассмотренная стабилизация является временной.
592
Пример 140. Рассмотрим устойчивость равновесия гироскопического ма-
маятника, представляющего собой гироскоп с тремя степенями свободы, центр
тяжести которого лежит на оси фигуры на некотором расстоянии от опоры
(рис. 265).
Пусть О|т]? — абсолютная система координат с началом в неподвижной
точке маятника, причем ось ? направлена вертикально вверх. Ось ротора гиро-
гироскопа обозначим через г, и пусть 24 — проекция оси г на плоскость \х\. Обо-
Обозначим через а угол между осями ? и zit a через Р угол между осями zt и г.
Линию пересечения плоскости ?? с плоскостью, перпендикулярной к оси г и
Рис. 265
проходящей через точку О, обозначим через х, а ось у выберем так, чтобы
система Охуг образовывала правую тройку. Преобразование от осей O?ri? к
осям Охуг можно осуществить двумя поворотами, так что
| = х cos а — у sin а sin P + г sin а cos P,
т) = г/cosp-h zsinp,
? = — х sin а — у sin p cos а -f- г cos P cos а.
Направляющие косинусы приведены в таблице
II *
1
ц
С
cos a
0
]
— sin а
У
- sinp sin а
cosp
— sin p cos а
г
cos p sin а
sinp
cos p cos а
Проекции угловой скорости Й вращения подвижной системы координат на оси
*, у, г суть
Р=—Р', Q=a'cosP, R =- a'sinp cosa.
Обозначим через Шо угловую скорость вращения твердого тела относитель-
относительно системы координат Охуг. Тогда проекции угловой скорости со твердого тела
на оси х, у, г
= — Р', q= a' cosp, /• — a'sin р + озо,
593
а живая сила равна следующему выражению:
2Г= Л(р2 + д2) + Сг2,
или
2Г = А (Р'2 + a'2 cos2 р + С (а' sin Р + ш0J-
Считая величины а, Р, а', |3' малыми и пренебрегая в выражении для
живой силы членами выше второго порядка малости, приближенно будем иметь
2Г = А (Р'2 + а'2) + С Bа'Рш0 + tag).
Если к твердому телу приложены лишь силы тяжести, то силовая функция за-
задачи запишется следующим образом:
U = —mgt>c= — mgl cos P cos a « — mgl ( 1 — —— — —
Тогда приближенные уравнения для малых движений в окрестности положения
равновесия примут вид
Аа" + С ш„Р' = mgl <х, А {5" — С <во<х' = mgl P.
Если Мо=0, то гироскопические члены не войдут в уравнения, и система
будет консервативной:
Аа" —mgla=0, ЛР" — mgfp=0.
При /<0 положение равновесия такой системы устойчиво, при />0 — неустой-
неустойчиво
При наличии гироскопических сил характеристическое уравнение системы
имеет вид
Лга — mgl С <вог
— С uv Ar2 — mgl ~ '
или
АV* + ( - ZmglA + С2 а>1) г2 + т*^Р = 0.
Положение равновесия будет устойчивым, если действительные части кор-
корней этого уравнения будут равны нулю (тогда решение представится в виде
тригонометрических функций и будет ограниченным). Последнее выполняется,
если
9 AmglA
Таким образом, при />0 положение равновесия может быть стабилизировано
гироскопическими силами. Диссипативные силы в природе уничтожить невоз-
невозможно, поэтому такая стабилизация оказывается временной.
§ 7. ЭЛЕМЕНТЫ ТЕОРИИ ВОЗМУЩЕНИЙ
Дифференциальные уравнения движения механической систе-
системы дают возможность определить в ^-мерном пространстве траек-
траекторию этой системы, соответствующую определенным начальным
условиям и заданным силам. В теории возмущений будем сопо-
сопоставлять эту траекторию с другими движениями системы, которые
можно получить либо изменением начальных условий, либо измене-
594
нием сил, действующих на систему. Обе эти задачи имеют много
общего и по методам решений и по характеру приложений.
1. Уравнения в вариациях Пуанкаре дают возможность изу-
изучать поведение траекторий в некоторой окрестности заданного
движения.
Пусть движение механической системы с k степенями свободы
определяется каноническими переменными q\, q%, .-., qu, Р\, р2, —
..., pk, удовлетворяющими уравнениям Гамильтона
——— ——
— , =
at dps dt dqs
- 1 9 ъ\
— 1, z, ... , к).
Заданному движению системы отвечает частное решение урав-
уравнений Гамильтона:
<7s = <7s<?)> Ps = Ps@ (s= 1, 2, ... ,k),
соответствующее определенным начальным условиям. В отличие от
других движений, отвечающим другим начальным условиям, будем
называть это частное решение невозмущенным движе-
движением.
Изменяя начальные условия, получим другие частные реше-
решения, которые будут давать возмущенные движения. Для возму-
возмущенных движений обобщенные координаты и импульсы qs, ps
представим в виде
q'. = q,(t) + t,(t). Л=Р.@ + Ч.@ (s=l, 2, ... , fe).
Величины Is, Tjg представляют возмущения, или вариации,
координат и импульсов. Возмущенное движение удовлетворяет
тем же каноническим уравнениям, что и невозмущенное:
d' ' Я*, Р*) dPs dH(t,q*, p*) , _ . „ ъ.
или
*P\
jr(ps + 4s) } (,)
Раскладывая правые части этих уравнений в ряды Тейлора, будем
иметь
dqs djs _ dHjtqp) у д*Н ? \П &Н
dt dt dps Zj dqj dps "' ill <3p,- dps '/-*-•••'
595
?« ^ Л dqs 2^ dq;dqs S
Отсюда получим уравнения для возмущений
Л
Отбрасывая члены выше первого порядка малости, получим прибли-
приближенные уравнения для вариаций Sfs, t)s
которые называются уравнениями в вариациях Пуан-
Пуанкаре. Эти уравнения играют очень важную роль при исследова-
исследовании задач устойчивости невозмущенного движения.
Рассмотрим некоторые свойства уравнений в вариациях.
Теорема 1. Если
Si» 1г> •¦• • Eft» %> гJ, .. . , Щ,
суть два частных решения уравнения в вариациях Пуанкаре, то вдоль инте-
интегральной кривой выполняется соотношение
к
J = У] (ls% — ^s Ij) = Const •
s=l
Величина / называется инвариантом Пуанкаре.
Доказательство. Справедливость этого положения устанавливается
непосредственным дифференцированием
dJ VI/, drls < x ^ / dl d4
-- Vie
«; +
dqj dqs dpj dqs
596
SI д2Н х>
i
+1
Xm).
•ps 3<7j ops opj o?s o?/ oi?s op/
S.J
Легко видеть, что после замены индексов суммирования правая часть тождест-
тождественно обращается в нуль, что и доказывает предложение.
Теорема 2. Если функция
ф(<. Чк 9а Qk, Pi, Р^, ¦•• , Рк)=а
является первым интегралом уравнений Гамильтона, то выражение
Y / d(D д<$
>, —— Es + — i
s
представляет собой интеграл уравнений в вариациях Пуанкаре.
Доказательство. В самом деле, рассмотрим полные уравнения для
возмущений
где Af', By' — совокупность членов /-того порядка относительно вариаций 2js,
r\s. Так как ср(^, q, p) — первый интеграл уравнений Гамильтона, то функция
также будет первым интегралом. Разложим функцию ф в ряд по степеням
h И T]s
Зф
dp
где К — совокупность членов г-того порядка относительно ?s и гM. Так, напри-
например, при i = 1
dqs dps
597
Так как
К = /@> + /(<2> + ... =а* — а = ccnst,
то
Вычисляя эту производную, будем иметь
( i s
или
можно переписать в виде
л^ + в^ ™-высш- пор = °-
Голоморфная функция тождественно уничтожается лишь в случае, когда тож-
тождественно уничтожается по отдельности совокупность членов любого порядка,
откуда
а это и есть полная производная от Кт по времени в силу уравнений в вариа-
вариациях
дф
Таким образом, функция
«A)-Е
являегся первым интегралом уравнений в вариациях.
Теорема 3. Если
JU = Yt <-А* ^ 4- Bs tis) = const,
где А, и В,—функции времени, U — линейный интеграл уравнений в вариациях
Пуанкаре, то уравнения в вариациях Пуанкаре допускают решение
ls = — Bs, r)s=As.
Доказательство. Так как U — первый интеграл уравнений в вариа-
вариациях, то
= y(ig + i + yA9B,
dt Zj\ dt * dt "V Zj V * dt dt
s
598
или
dAs
dt
dt
I
г
Равенство должно выполняться при любых значениях ?t, ть> поэтому
dBs
dt
1
dqjdps
¦ — 0.
Если положить |8 = Ss, r\s——As, то получим уравнения в вариациях Пуанкаре,
что и доказывает теорему.
4. Теорема Пуассона (см. «Скобки Пуассона»). Пусть уравнения
Гамильтона имеют два первых интеграла:
Л q, p) = a и
q, р) =
В этом случае, как это показано выше, уравнения в вариациях Пуанкаре имеют
два первых интеграла:
const-
(см. теорему 2 об уравнениях Пуанкаре). На основании теоремы 3 уравнения
в вариациях допускают частные решения:
<9го Зф
^1 % ^
dip
Имея два частных интеграла, составим интегральный инвариант Пуанкаре:
Это выражение уже не зависит от переменных |, г\ и, следовательно, является
первым интегралом исходных канонических уравнений Гамильтона. Мы дока-
доказали теорему:
Если известно два первых интеграла уравнений Гамильтона, то скобки
Пуассона дают еще один первый интеграл
Теорема Гельмгольца A821—1894). Изменение в первоначальной
системе какой-нибудь координаты gi за произвольный промежуток времени,
вызванное изменением импульса тI0 в начальный момент времени, равно и про-
противоположно по знаку изменению в обращенном движении за этот же проме-
промежуток времени координаты ?10, вызванному таким же по величине изменением
«начального» импульса т|,.
599
Доказательство. Рассмотрим возмущенное движение, определяемое
начальными условиями.
Б?=0 «=1,2, ....ft), rtf^O, T)!|=T|g=...=Tl2=O.
Пусть ?г и г|/ — возмущения для этого движения в момент t, и возмущенное дви-
движение |!, т)(' с начальными возмущениями ?;о, r\i0 в момент ta, для которого в
момент t будем иметь ?{ = О, т), Ф О, г|2 = rj3 = . . . т)А = 0.
Для двух частных решений имеет место инвариант Пуанкаре
к к
s=l s=l
После подстановки рассматриваемых решений получим
Если r),= —Т]1О, то отсюда имеем
^i = =ю.
т. е. уравнения движения механических систем являются как бы обратимыми.
Гельмгольцем дано следующее физическое истолкование этого результата:
если системе сообщить небольшой импульс рю, то он может быть измерен
вызванным им изменением одной из величин ?i, ?2, ..., ?,ч- Изменение |10, при-
приводящее к изменению одного импульса т^, может быть реализовано в обра-
обращенном движении, т. е. в движении системы, у которой в каждом положении
скорости отличаются знаком от соответствующих этому положению скоростей
в необращенном движении. Будущее обращенной системы совпадает с прошед-
прошедшим первоначальной системы.
Следствие. Из свойств инварианта Пуанкаре, следует чго каноничес-
каноническими уравнениями Гамильтона невозможно записать необратимые процессы.
Устойчивость консервативных систем. Пусть имеется некоторая непрерыв-
непрерывная функция <p(t). Предс-тавим ее в виде произведения
Ф С) = /(')«".
где А, — некоторое постоянное число. Если окажется, что функция }(t)eet
при t-i-oo будет исчезающей при любом е<0 и неограниченной при любом
е>1' то число К называют характеристическим показателем Ляпунова функ-
функции ф(<). (Характеристические показатели впервые были введены А. М. Ляпу-
Ляпуновым, но с противоположными знаками, по сравнению с определенными выше).
Рассмотрим систему уравнений в вариациях Пуанкаре. Пусть имеется
некоторое решение этой системы |ь, t)s (s=l, 2, ..., k) и пусть Яо — наиболь-
наибольший из характеристических показателей функций |i, |г, ..., |ь, tji, т]2 г\к.
Представим решение в виде
Is - As (t) еЧ r|s = Bs @~eV (s = 1, 2 k).
Тогда функции As(t) и Bs(t) будут иметь только нулевые или отрицательные
характеристические показатели и будут либо исчезающими, либо ограниченны-
ограниченными. Число Ао называется характеристическим показателем решения уравнений
в вариациях Пуанкаре.
Предположим, что имеется еще одно частное решение уравнений в вариа-
вариациях Пуанкаре l[, 1'2' • • • > ?*¦ 'Пр %' • • • • Т1* с характеристическим показа-
600
телем решения X'. Записывая инвариант Пуанкаре для этих решений, будем
иметь
j = e(K+b'U ^ (ASB'S — BSA'S) = const.
s
Сумма \] (ASBS— BSAS) является исчезающей или ограниченной функцией, по-
S
этому условие /=const выполняется только тогда, когда имеет место неравенст-
неравенство или равенство
т. е. хотя бы одни из характеристических показателей Ло, Я' должен быть
неотрицательным.
Предположим, что характеристический показатель Хо>О. Это значит, что
среди функций |s. г|„ имеется хотя бы одна, неограниченно возрастающая при
t->-ool и невозмущенное движение неустойчиво. Невозмущенное движение может
быть устойчивым только тогда, когда ограничены все возмущения, т. е. когда
все характеристические показатели решений уравнений в вариациях неполо-
неположительны. Так как всегда существует два решения уравнений в вариациях, для
которых
то невозмущенное движение консервативной системы может быть устойчивым
только тогда, когда все характеристические показатели решений уравнений в
вариациях равны нулю.
2. Метод изменения произвольных постоянных. Рассмотрим
систему материальных точек, на которую наложены голономные
идеальные связи. Пусть состояние движения системы определяется
каноническими переменными
Ра» ••• » Pk,
а закон движения определяется из уравнений Гамильтона:
d^ = JH_ dp^^ дН_ (s=1> 2.....Й). (а)
dt дрь dt dqs
Предположим, что функцию Гамильтона можно представить в виде
Н = Н0 (t, qx, <7a, ... , qk, рх, р2, . .. , pk) +
+ W(t, qlt q2 qk, pL, pa, ... , pk)
и возможно найти решение упрощенной системы дифференциаль-
дифференциальных уравнений
^M j-JEi_ A=1, 2 k) (b)
dt dPi ' dt dqt
с помощью полного интеграла
VX = V (t, qlt qt, ... , qk, ax, aa, ... , ak) + ak+l
601
уравнения Гамильтона — Якоби
W , г, I, dV dV dV \ п
-—— + п0 It, qt, qv ... , <7fe> ——, -z—y • ¦ • , -— =¦ <J. (c)
dt \ dqi oq2 dq^ j
Общее решение укороченной системы тогда можно будет предста-
представить в виде
-^- = Ps> -?-=-P. (s=1> 2 к), (d)
dqs das
или
Функции (е) при любых значениях произвольных постоянных а
и р обращают уравнения (Ь) в тождества. Если а\, аг, ..., а&, Pir
Р2, ..., Ра рассматривать не как постоянные, а как некоторые функ-
функции времени, то их можно будет подобрать так, чтобы функции
4s = 4s (t, a (t), P @). Ps =- Ps (*, a(t), p (t))
удовлетворяли исходной системе уравнений движения. В этом и
заключается идея метода изменения произвольных постоянных,,
предложенного Лагранжем.
Для выяснения свойства предложенного преобразования рас-
рассмотрим изменение функции V (t, qu q2, .... qu, «ь «2, •¦¦, ак) ПРЯ
переходе с действительной траектории на окольную. Тогда
k k k k
4^- ба; = V pibqi — V рг5а;,
°щ "™ ^«
откуда
k k
pfiqi = У, Р;баг + bV.
Полученное равенство определяет каноническое преобразова-
преобразование с производящей функцией V (t, q, а) при переходе от канони-
канонических переменных qs, ps к новым переменным as, ps. Новые пере-
переменные удовлетворяют каноническим уравнениям Гамильтона
das дН^ ^j)H* , j , k)
K ...... л
dt c»ps ' dt da
где новая функция Гамильтона
или
602
н- = ^- + н0 + w.
от
Так как V есть полный интеграл уравнения в частных производных
то Н* = W, а канонические {уравнения для переменных а и р прини-
принимают вид
Последние уравнения называются уравнениями теории
возмущений. Сама функция W называется возмущающей,
или пертурбационной. Она должна рассматриваться как
функция величин aS) {5S и t, получающаяся в результате подстанов-
подстановки вместо qi и рг их выражений через as, fts и t.
До тех пор, пока не делается никаких предположений о функ-
функции W, преобразованная система не имеет особых преимуществ по
сравнению с первоначальной. Дело будет обстоять иначе, если W
остается малой по сравнению с Но, например Wm—гНи где Н\ —
сравнимая с Яо функция, а г — малая величина.
Такого рода задачи встречаются при исследовании движений
планеты под действием Солнца, когда необходимо учитывать влия-
влияние других планет, или при исследовании влияния фигуры планеты
на траекторию спутника. В этих задачах силовая функция можег
быть представлена в виде ряда, расположенного по степеням ма-
малого параметра е:
U = Uo + dJx 4- e«f/, + ...
Определяя невозмущенное движение при U=U0, для возмущений
первого порядка малости относительно е получим уравнения
dt d$s ' dt das '
и если невозмущенное движение известно, то возмущения первого
порядка определятся простыми квадратурами.
Глава VIII
ТЕОРИЯ УДАРА
§ 1. ОСНОВНЫЕ ПОЛОЖЕНИЯ
В природе нередко наблюдаются такие явления, при которых
отдельные материальные точки системы внезапно изменяют свои
скорости за очень короткий промежуток времени, в то время как
вся система за этот промежуток времени почти не изменяет своего
положения. Такого рода явления называются ударом. Они вызы-
вызываются очень большими силами, действующими на точки системы
в течение короткого промежутка времени.
Рассмотрим сначала явление удара для одной материальной
точки, массу которой обозначим через т. Уравнение движения
точки запишем в векторном виде
т = F.
dt
Под действием больших по величине сил точка получит большое
ускорение Рассматривая силы, действующие на точку как функ-
функции времени, проинтегрируем уравнение движения. Получим закон
изменения количества движения точки
mv1 — т\й =
f,
где vi — скорость точки в момент tu v0 — скорость точки в мо-
момент to- Выражение, стоящее в правой части полученного равенст-
равенства называется импульсом силы за время t\—10. Если интервал
времени U—tQ очень мал, а действующие на точку силы конечны,
то интеграл правой части будет величиной малой, порядка t\—t0,
а изменение количества движения оказывается мало заметным за
время t\—10. Так происходят все непрерывные процессы Если же
604
сила F оказывается достаточно большой, порядка , то ин-
^ 1 'о
теграл правой части будет величиной конечной, и за малый про-
промежуток времени произойдет заметное изменение количества дви-
движения, т е. произойдет явление удара.
Если через г обозначить радиус-вектор точки, то будем иметь
и
J
откуда следует, что при конечном изменении скорости за время
h—4 интеграл правой части является величиной малой, и им
можно пренебречь при изучении малых движений точки.
Во всех случаях, когда промежуток времени t{—to можно рас-
рассматривать практически как бесконечно малый и когда сила, дей-
действующая на точку за это время, имеет порядок , будем
говорить, что происходит явление удара, а величину
будем называть ударом. Уравнение
ту1 — mv0 = Р
позволяет измерять удар по производимому им эффекту. Его мож-
можно переписать в виде
Л (щу) = Р.
В дальнейшем это уравнение будем называть основным урав-
уравнением теории удара для одной материальной
точки
Удар материальной точки о связь. Будем предполагать, что
движение материальной точки подчиняется неудерживающей связи
f(x, у, г, 0<0,
находящейся в рассматриваемый момент в ненатянутом состоянии,
и что в некоторый момент времени t0 частица попадает на эту
связь, так что выполняется условие
f(x, у, z, t0) = 0,
:я как наименьший
f[x(t), y(t), z(t), q = o,
и момент to определяется как наименьший положительный корень
уравнения
605
где функции x(t), y(t), z(t) определяются законом движения точ-
точки до удара. В момент удара скорость точки не может иметь
произвольного значения, а удовлетворяет условию
df
dt
¦<0,
или
^х + ^У + ^гКО,
дх ду dz
где х!', у', z'—проекции скорости точки на неподвижные оси коор-
координат.
Пусть скорость v0 удовлетворяет в момент U условию
df
dt
U
= 0,
тогда, если все высшие производные удовлетворяют условию
= 0,
то материальная точка после удара будет двигаться по связи. Если
же хотя бы одна из производных отлична от нуля, и, следовательно,
отрицательна, то после удара точка вновь покидает связь.
Если в момент удара t0 выполняется условие
*L
dt
то в момент удара связь окажет действие на точку. Мы будем
говорить, что на точку действует ударная реакция связи R, изме-
изменяющая в момент t0 скорость v0 на Vi, которая удовлетворяет
условию
df Q
dt ta+x
При этом предполагается, что: 1) время т действия силы реак-
реакции R бесконечно мало; 2) за время т удара материальная точка
и поверхность не успевают изменить своего положения; 3) за вре-
время удара импульс всякой конечной силы равен нулю.
Сделанные предположения представляют идеализацию дейст-
действительного движения. В действительности за время удара поверх-
поверхности соударяемых тел деформируются и вступают в действие
ударные силы. Но процесс деформации протекает очень быстро
и для упрощения мы вынуждены вводить гипотезу мгновенного
удара.
При сделанных предположениях будем иметь
dt
t=t.
>0 -=*-
dt
606
и если считать, что за время т скорость материальной точки ме-
меняется непрерывно, то будет существовать момент t\\
= 0.
в который выполняется равенство
d[_
dt
Поэтому удар можно разделить на две стадии. Первая происходит
за время (t0, t\)—сжатие, вторая за время (tu to+x)—отраже-
to+x)—отражение. Удар называют абсолютно неупругим, если вторая стадия от-
отсутствует и t=^i—10. В противном случае удар называют упругим.
Скорость v0, с которой материальная точка приходит в соприкос-
соприкосновение со связью, называют скоростью падения материальной
точки, а скорость Vj — скоростью отражения. Угол а между отри-
отрицательным направлением скорости vq и нормалью к поверхности
связи называют углом падения, а угол р между нормалью и
направлением скорости Vi — углом отражения.
Накладываемую на материальную точку связь называют иде-
идеальной, если работа ударной реакции R на любом возможном
перемещении точки равна нулю. Пусть t некоторый момент вре-
времени в промежутке to и to + x. Тогда
Л (/от) = j Ш = n° j Rdt,
где п°—единичный вектор нормали к поверхности в точке соударе-
соударения. Отсюда следует, что приращение скорости за время удара
всегда направлено коллинеарно с положительной нормалью к по-
поверхности в точке соударения, а скорость падения и скорость
отражения расположены в плоскости, нормальной к поверхности
f(x, у, z, t)=0 и
v0 sin a = v1 sin p.
Как уже говорилось в механике различают упругий и
неупругий удары. Неупругим называют такой удар, при кото-
котором материальная точка как бы прилипает к связи и после удара не
покидает поверхности связи. При упругом ударе точки после удара
освобождаются от связи. На практике чаще приходится встречать-
встречаться с явлениями не вполне упругого удара, при котором происходит
потеря энергии и соударяющиеся тела не полностью восстанавли-
восстанавливают свою форму. При расчете явлений удара для таких тел при-
приходится вводить опытные гипотезы. Одна из основных таких гипо-
гипотез была введена Ньютоном, который предположил, что при со-
соударении тел отношение величин проекций скоростей соударяю-
соударяющихся точек после и до удара на направление общей нормали к
поверхности соударяемых тел в точке соприкосновения этих тел,
607
есть величина постоянная, зависящая лишь от материала соуда-
соударяющихся тел.
Если через vin обозначить проекции скорости точки на нор-
нормаль к поверхности связи, а через у« проекции скорости на каса-
касательную плоскость к поверхности связи, то отношение
называют коэффициентом восстановления. Коэффици-
Коэффициент восстановления показывает, насколько восстанавливается нор-
нормальная составляющая скорости после удара. Если е=1, то удар
называют абсолютно упругим. В общем случае
При гладких связях касательная составляющая скорости точки за
время удара не меняется. Но вследствие неполной гладкости будет
меняться и эта составляющая. Поэтому можно ввести коэффици-
коэффициент "к мгновенного трения, так что
Коэффициенты ей!, обычно определяются опытным путем. Иногда
принимается гипотеза Кулона, т. е. делается предположение,
что касательный удар связан с нормальным. Как показывает экспе-
экспериментальная проверка, влияние трения на удар значительно
меньше, чем влияние упругости.
Рассмотрим систему материальных точек mv(xv, yv, zv)> пе-
перемещения которых стеснены голономными связями. Связи в со-
соответствии с одной из основных аксиом механики можно заменить
силами, действующими на точки системы. Под действием ударных
сил будут возникать очень большие реакции. Обозначим через R
вектор реактивного удара, действующего на материальную точку,
с проекциями Ях, Ry, Rz, подразумевая под этим предельные зна-
значения импульсов сил реакций. Тогда для каждой точки системы
уравнения удара можно записать в виде
Следуя идее Лагранжа, введем аксиому идеальных связей
для удара. По определению, идеальными будем называть такие
связи, для которых сумма работ сил реактивного удара на любом
возможном перемещении системы равна нулю, т. е.
(RvSrv) = 0.
v=l
Подставляя сюда значение реактивного удара, найденного из ос-
основного уравнения удара для точки, получим общее уравне-
уравнение теории удара для системы материальных
точек
608
или в проекциях
2 {[Л {mtx\) - Pxi] Sx, + [Д fay!) - PJ by, + [Д (m^) - Ря1] fc(} = 0.
Это уравнение имеет такое же значение, как и общее уравнение
динамики для системы.
Замечание. Если через N обозначить силу реакции в неко-
некоторой точке, то эта реакция будет нормальной к поверхности свя-
связи, если отсутствует трение. За время удара соударяющиеся тела
не перемещаются, поэтому за время удара не меняется и направ-
направление реакции. Отсюда следует, что во время удара выполняется
условие N||R, а это значит, что идеальные связи остаются идеаль-
идеальными и для ударных реакций.
За время удара связи могут сохраняться, но могут и не сохра-
сохраняться. Будем называть связь сохраняющейся, если она существу-
существует во время удара и сохраняется после удара. В этом случае
действительное перемещение будет допускаться связями и после
удара. Связи будем называть несохраняющимися, если они
существуют во время удара, но исчезают сразу после удара. Тогда
действительное перемещение, имеющее место после удара, не будет
принадлежать к перемещениям, допускаемым этой связью.
Рассмотрим некоторые следствия из общего уравнения теории
удара для системы материальных точек.
1. Пусть связи, наложенные на систему материальных точек,
допускают поступательное перемещение всей системы, как одного
целого вдоль некоторой неподвижной оси. Не нарушая общности,
можно предполагать, что связи допускают поступательное переме-
перемещение всей системы вдоль неподвижной оси х. Тогда среди всех
возможных перемещений системы будет находиться перемещение,
удовлетворяющее условиям
bxv = а, бгд, = 0. Szv = 0.
Подставляя эти значения перемещений в общее уравнение теории
удара, будем иметь
о J] [Д (mv*v) — Р«] = 0.
Но так как
= Д (?ад) - Д (?ад)' = Д (W),
где t, — координата центра тяжести по оси х. Полученный резуль-
результат можно представить в виде
609
Этот результат можно сформулировать в виде теоремы об измене-
изменении количества движения системы за время удара.
Теорема. Если среди возможных перемещений системы
имеется поступательное перемещение вдоль оси х, то изменение
проекции количества движения системы вдоль оси х равно сумме
проекций ударов приложенных к точкам системы, на эту ось х.
2. Предположим, что среди возможных перемещений системы
имеется поворот всей системы как одного целого вокруг неподвиж-
неподвижной оси z. В этом случае среди возможных перемещений системы
будут находиться перемещения
8xv = — «/vS<p, byv = xv8q>, Szv = 0.
Подставляя эти значения перемещений в общее уравнение теории
удара, будем иметь
S<p ? { — [А (щх'ч) — Pxv] yv + [Л (mv2/v) — PBV] *v} = 0,
что легко привести к виду
Д (mvtfo) — уЛ (mvx'v)] =
За время удара скорости точек системы изменяются на конечную
величину. Поэтому из уравнения
dxv
dt =Xv
получим
Ho ''
lim Г x'vdt = 0,
так как xv — конечная величина. Следовательно, в течение вре-
времени удара имеет место условие
т. е координаты точек системы не меняются Принимая это обстоя-
обстоятельство во внимание, перепишем полученное уравнение в виде
V [A (mvxvy'v) — A (mvyvxv)] — S (xvPyv — у^Рхм),
или
AV *« t 1Г 4 1 II V \ V / V О
610
( vPyv
V
Обозначая момент количества движения системы относительно
оси z через Kz
перепишем уравнение
В результате приходим к следующей теореме:
Теорема. Если среди возможных перемещений системы
имеется поворот вокруг неподвижной оси z, то изменение момента
количества движения системы относительно этой оси за время
удара равно сумме моментов ударных импульсов относительно
оси г.
§ 2. ТЕОРЕМЫ КАРНО
Рассмотрим некоторые следствия из основного уравнения тео-
теории удара, аналогичные теореме живых сил. Будем предполагать,
что на точки системы не действуют внешние удары, т. е. выполня-
выполняются условия
Pv = 0 (v= 1, 2 , k).
Удар в этом случае происходит только за счет наложения или
снятия связей.
1. Предположим сначала, что удар происходит от внезапного
наложения связей, не зависящих явно от времени. Пусть, кроме
того, внезапно накладываемые на систему связи остаются во всем
дальнейшем движении системы. Такие связи называются удержи-
удерживающими, или неупругими, связями. Среди возможных перемеще-
перемещений системы будут находиться перемещения, совместимые со свя-
связями (сохраняющиеся связи). Так как связи не зависят явно от
времени, то среди возможных перемещений находятся действи-
действительные перемещения, которые будут иметь точки системы после
удара, т. е. перемещения, пропорциональные скоростям точек
системы после удара:
6xv = 6xv, 8«/v = 0yv, Szv = 8zv.
Подставляя эти значения в основное уравнение теории удара
^ [A (mv*v) 6*v + A (mv#v) Syv + А (/я^) Szv] = О,
будем иметь
8 ^ [A (ffZv*v) x'v f A (mvf/v) f/v + А (пг^) zv] = О,
611
или
2^ mv [ (Xv A'vo) Xv -.
После преобразований вида
1 <i
I v \r \ у /-V"
1 «v-y ""VO/ ""V — I V
2
2 1 -2 1-2
= —- (xv — xv0J 4-
получим
—— [(Xv — Xvo) f- (l/v — (/voJ г (Zv —
V
«v -2 '2 '2 mv -2 '2 '2
Введем понятие вектора потерянной скорости
Тогда полученное уравнение можно будет переписать в виде
о ^ 1 >
2
v
Здесь Го—Г. представляет изменение живой силы за время удара.
Результат можно сформулировать в теореме, принадлежащей
Л. Карно A753—1823).
Теорема 1. Потеря живой силы системы при наложении
связей равна живой силе потерянных скоростей.
Теорема определяет изменение живой силы системы при аб-
абсолютно неупругом ударе, происходящем от наложения неупругих
связей на систему материальных точек.
2. Рассмотрим случай, когда на систему материальных точек
наложены идеальные, не зависящие явно от времени, голономные
связи. Предположим, кто в некоторый момент времени связи вне-
внезапно снимаются (например, при взрыве летящего снаряда). За
время удара происходит освобождение системы от связей. В тече-
течение времени удара возможные перемещения системы находятся в
соответствии с наложенными связями. При этом среди возможных
перемещений находятся и действительные перемещения до удара
(соответствующие уравнениям связи), т. е. перемещения, пропор-
пропорциональные скоростям точек системы до удара:
612
Подставляя эти значения в основное уравнение теории удара, бу-
будем иметь
6 J^Wv [(*v — *vo) *vO + (f/v — <Лю) </vO -1- Bл; — Zvo) Zv0] = 0.
V
Преобразуем выражения вида
1 'a 1 '2 _ 1 ,2 1 '2 1 ' ' . a
— xvo i — xv — xv —¦ — xVq — (xv x^o) -
? Z, ? \ "
Проделывая аналогичные преобразования для координат i/, иг,, бу-
будем иметь из общего уравнения динамики
2
v
(х
или, вводя вектор потерянной скорости w,
_ у щХ + V ^у^2 _ у Щ^ = 0,
откуда
v v v
Мы получили вторую теорему Карно, которую можно сформулиро-
сформулировать следующим образом:
Теорема 2. При освобождении системы, от связей приобре-
приобретенная живая сила равна живой силе приобретенных скоростей.
Сформулированные здесь теоремы Карно применяются только
к неупругим системам.
Переходя к изучению не вполне упругого удара системы мате-
материальных точек, заметим, что скорости точек системы до и после
удара связаны соотношениями, вытекающими из гипотезы Нью-
Ньютона:
где vn0 и vni — нормальные составляющие вектора скорости до и
после удара; vx0 и vTi — касательные, составляющие скорости до
и после удара. Введем вектор
613
a = ev0 -f vj, = evn0 + evx0 + vnl + vTi =
= — v,i + evx! + vnl + vT, = A + e) vT! = A + e) vx0,
расположенный в обшей касательной плоскости соударяющихся
поверхностей. Если удар происходит благодаря наложению и сня-
снятию связей, то среди возможных перемещений системы будут нахо-
находиться перемещения, совместимые с накладываемыми на время
удара несохраняющимися связями. Среди всех перемещений бу-
будут находиться перемещения, пропорциональные векторам <rv, т. е.
&xv = 0 (ж, + ех^о), 6#v = 8 (г/, +
6^=8(г; + ег;0) (v=l, 2, ... , я),
где 8 — коэффициент пропорциональности. Подставляя эти значе-
значения в общее уравнение теории удара, будем иметь
8 ? пч I(*v — *vo) (Ъ, + ex'vo) + (t/v — y'vo) (y'v + ey'v0)
V
+ (Zv — z'v0) (zi + ezvo)] = 0.
Преобразуем выражение
1 , '2 ~ ' ' '* 1 '2 1 "Л
-— {Xv ZXyXyQ -f- ^vo) T~ ~T~ -^v T~ -^vO ~T
1 'а 1 '2 1
e (xv — 2xvxv0 + xv0) + — xv — —
a 2
Г 1 '2 » '
(xv — 2xvxv0
L ^
_ 1 — e , ' ' \2 i I + e '2 __ 1 + e 'a
2 2 2
После аналогичных преобразований для других координат общее
уравнение теории удара можно привести к виду
V
mv '2 /2 ,2 _ mv .a ,a .z
2 v 2
V
ИЛИ
- A -j- е) Тх — A -f е) Тп — О,
2
v
т. е.
614
Полученное уравнение определяет потерю кинетической энергии
при не вполне упругом ударе и представляет обобщение теоремы
Карно. При е=\ потери живой силы не происходит.
§ 3. ЗАДАЧА О ЦЕНТРЕ УДАРА
Пусть твердое тело может свободно вращаться вокруг непод-
неподвижной оси, закрепленной в точках О и О', расстояние между
которыми равно h (рис. 266). Будем
предполагать, что твердое тело в на-
начальный момент находится в покое.
Неподвижную систему координат
Oxyz выберем так, чтобы центр тяже-
тяжести твердого тела находился в плоско-
плоскости Oxz: G(l, О, т)). Предположим
еще, что удар производится в точку
Р(а, О, с) той же плоскости ударным
импульсом Ф@, В, 0).
Положение твердого тела не из-
изменится за время удара, но при этом
твердое тело приобретет угловую
скорость «а вращения вокруг оси z, так
что скорости точек твердого тела бу-
будут определяться из соотношений Рис 266
Xv = — «H/v, l/v = G)Xv, Zv = 0.
Освободив твердое тело от связей в точках О и О' и заменив их
действие реактивными ударами Rx Ry, Яг, Rx, Ry, Rz можно при-
применить теорему о движении центра масс. Теорема дает следующие
уравнения для скоростей точек тела после удара:
но
= RX + R"x, Ъту' = B + Ry + Ry, 0 = Rz + Rz,
Hmx' = — a&my = 0, 2my' — aiZmx = coM?,
поэтому уравнения удара можно будет переписать в виде
/?, + «*= 0,
Обратимся теперь к теореме об изменении момента количества
движения за время удара. Сначала определим момент количества
движения после удара с помощью соотношения
которое дает
— со
615
2 ^
v
Таким образом,
Поскольку момент количества движения системы до удара равен
нулю, будем иметь:
= — Вс — hRy, — со 2 туг = hRx, coJz = aB.
Если удар приложен в некоторой точке Р и не оказывает влияния
на подшипники, то такая точка Р называется центром удара.
В этом случае
Г) Г) Г) п' Г\
К.х — Ад; = К.у = Ку — U,
и уравнения примут вид
соЛ4? = В, со V mvxvzv = Be, — со 2 mvyvzv = 0,
V
Ja = aB.
Отсюда будем иметь
т. е. центр удара находится с той же стороны, что и центр тяжести
тела, и расстояние от оси вращения до центра удара зависит толь-
только от распределения масс в твердом теле. Кроме того,
со
или
V
Рассмотрим свойства точки 5@, 0, с). Если перенести начало
координат в точку 5, то получим
V mvxv (Zv — с) — ?mvXvzv = 0,
т. е. ось г для точки 5 является главной осью инерции. Отсюда
сразу получаем способ построения центра удара:
На оси вращения твердого тела необходимо найти точку, для
которой эта ось является главной осью инерции, и отложить
(в сторону центра масс) расстояние а.
616
§ 4. ЗАДАЧА О БАЛЛИСТИЧЕСКОМ МАЯТНИКЕ
Баллистическим маятником называют аппарат, предназначен-
предназначенный для измерения скорости снарядов. Он состоит из трубы, за-
заполненной песком и подвешенной к гори-
горизонтальной оси. Снаряд, проникая в трубу,
застревает в песке. Происходит очень быст-
быстрая потеря скорости снаряда ¦— удар. Этот
удар происходит благодаря наложению
связи (рис. 267).
Предположим, что центр тяжести маят-
маятника находится в точке G на расстоянии I
от оси вращения. Массу маятника обозна-
обозначим через М, а момент инерции его отно-
относительно оси вращения — через J = Mk2.
Для простоты будем считать, что снаряд
застревает в цилиндрической трубе на про-
продолжении линии OG на расстоянии а от оси
вращения маятника. После удара маятник приобретает скорость
и начинает совершать колебания около оси вращения. Применяя
теорму Карно для случая наложения связей, будем иметь
Рис 267
где
ma2) со2.
Здесь т — масса снаряда; ю — скорость вращения маятника после
удара; v0 — скорость попадания снаряда. Отсюда
2 2 v ° 2
со".
Подставляя эти значения в (а), получим
mv\ — (Mk? + та2) со2 = т (v0 — awJ + М/гасо2,
откуда имеем
та2 + Mk1
со.
та
(Ь)
Предоставленная сама себе после удара, система будет совер-
совершать движение в соответствии с интегралом живых сил
где
U = (та + Ml) g cos®,
21
Е Н Береэкин
617
так что
м* + т* Ю2 = (та + Ml) g cos O-f Л.
Постоянную /г надлежит определять из условия, что скорость в
конце движения обращается в нуль, т. е.
h = — (та -f- Ml) g cos Ф.
Тогда, поскольку в начале движения ¦& = 0, имеем
Mk% + ma2 ш2 = («а + A//) g — (та + Ml) g cos #,
или
(M:2 + шаа) &2 = 4 (m/ + Ma) g sin2 —,
отсюда
Подставляя это значение в (Ь), получим
V
та -\- Ml . ¦&
2 У (та2 +¦ М№) (та+ Ml) g ¦ *
Ул ^ Sin —7Г- •
и ота 2
Зная угол отклонения маятника ¦&, можно найти скорость снаряда
при попадании его в маятник.
§ 5. УРАВНЕНИЯ ЛАГРАНЖА ДЛЯ УДАРА
Рассмотрим голономную механическую систему, состояние
движения которой определяется обобщенными координатами
Я\, Я2, -.., 'Яъ.. Движение такой системы удовлетворяет уравнениям
Лагранжа второго рода
dt
dq'(
(/=1,2 k).
Предположим, что механическая система получает удар за очень
короткое время т, причем связи, наложенные на систему до удара>
остаются и после удара. Проинтегрируем уравнение движения за
время удара:
U+X t»+x
-^-)— Г -^-dt= f Qbdt. (a)
dqs I J д^ J
618
Принимая во внимание, что dT/dqs — конечная величина, будем иметь
lim
im f
-+о J
i f
т-+о J dqs
U
Тогда в пределе уравнения (а) примут вид
^-) =limf Qsdi.
Полученные уравнения являются основными уравнениями теории
удара в форме Лагранжа.
§ 6. ЗАДАЧА ОБ УДАРЕ ПО ТВЕРДОМУ ТЕЛУ
С ОДНОЙ НЕПОДВИЖНОЙ ТОЧКОЙ
Рассмотрим движение твердого тела с одной неподвижной
точкой. Выбирая за оси подвижной системы координат главные
оси инерции тела, запишем динамические уравнения Эйлера:
+(C B)qr L, В
di. dt
Пусть в момент t0 к твердому телу приложен внешний удар. Тог-
Тогда будем иметь
U+x U+x
lim Г (B — C)qrdt=:O, lim Г (С — A) prdt =-- О,
т-»0 V X -*0 J
?о 'о
lim Г (A — B)pqd(= 0.
Из уравнений Эйлера получим
to+X to+X
ЛЛр = lim Г Ldt, Bbq .= lim l" МЛ,
т-*о J т-»о J
to to
СДг =. lim f Ndt.
т-»о J
Пример 141. Исследовать влияние удара, приложенного к твердому
симметричному телу, совершающему быстрое вращение вокруг оси симметрии.
Решение. Предположим, что к телу приложен импульс Fdt в точке К,
расположенной на оси вращения на расстоянии h от неподвижной, точки. Си-
Систему координат Oxyz выберем так, чтобы вектор удара лежал в плоскости
21* 619
Oyz (рис. 268). He ограничивая общности, можно предполагать, что удар орто-
ортогонален к оси симметрии. Тогда
lim
x-»0
Ldt=Fh,
и изменение момента количества движения за время удара будет равно
Ар = Fh.
После удара момент количества движения твердого тела имеет проекции
(Ар, 0, Сг),
т. е. твердое тело кроме вращения вокруг оси симметрии начинает вращаться
вокруг оси х в сторону направления импульса
Fdt
Рис. 268
Рис. 269
Замечание. Рассматривая движение твердого тела с одной
неподвижной точкой, из теоремы об изменении момента количества
движения в подвижных осях, неизменно связанных с твердым
телом, имеем:
da ,
— +
з] = т.
Если величина т достаточно мала, а в велика, то скоростью изме-
изменения момента количества движения по отношению к телу можно
пренебречь. Тогда приближенное уравнение запишется в виде
[w, a] = m,
т. е. изменение момента количества движения определяется враще-
вращением самого тела.
Если действуют очень большие силы в течение короткого вре-
времени, то можно пренебречь перемещением тела за время удара,
т. е. величиной [со, а], поэтому приближенное уравнение в этом
случае принимает вид
620
dt
где производная левой части рассматривается в подвижной систе-
системе координат. Из этого уравнения следует, что вектор момента
количества движения мгновенно изменяет свое положение в твер-
твердом теле.
Рассмотрим еще пример на общие теоремы.
Пример 142. Два шкива, вращающиеся вокруг параллельных осей, сое-
соединены бесконечным ремнем. Определить изменение угловых скоростей в мо-
момент натяжения ремня (рис. 269).
Решение. В результате наложения связи происходит удар. По теореме
Карно имеем
где
Здесь использованы обозначения: /ь /2 — моменты инерции шкивов относитель-
относительно их осей вращения; <Вю, ю^о — угловые скорости шкивов до удара, а юш
<В21 — после удара. Принимая во внимание ограничение на угловые скорости,
накладываемые связью #i<Bii=i?2@2i, где Ri и Rz — радиусы шкивов, получим
V
Подставляя эти значения в (а), получим
h (® Ш — »п) f h Цо — ®li
отсюда
причем
так что
Ч
Окончательно имеем
1=
Глава IX
ЭЛЕМЕНТЫ СПЕЦИАЛЬНОЙ ТЕОРИИ ОТНОСИТЕЛЬНОСТИ
§ 1. ПОСТАНОВКА ЗАДАЧИ
В основе классической механики лежит уравнение Ньютона
m~d~P~ '
где F — сила, действующая на частицу, являющаяся функцией
времени, положения и скорости движения частицы, а длина и вре-
время измеряются в некоторой неподвижной системе отсчета.
Вопрос о выборе неподвижной системы отсчета возник в глу-
глубокой древности. Он обсуждался еще Аристотелем. Коперник
A473—1543) уже вводит понятие «преимущественной» системы
отсчета, связанной с Солнцем и звездами. Наконец, Г. Галилей
вводит понятие инерциальной системы координат и утверждает,
что никакие механические опыты и наблюдения, производимые
внутри этой инерциальной системы отсчета, не дают возможности
решить вопрос о том, имеет ли система в целом прямолинейное
равномерное движение или же она находится в покое. В этом
утверждении заключается принцип относительности
Галилея.
Принцип относительности Галилея связан с понятием закона
инерции, согласно которому тела, не взаимодействующие с други-
другими телами, продолжают оставаться в состоянии покоя или равно-
равномерного и прямолинейного движения До тех пор пока система
координат не выбрана, закон инерции в том виде, в каком он здесь
сформулирован, не имеет смысла. Для любого тела можно вы-
выбрать такую систему отсчета, относительно которой это тело, не
испытывающее влияния других тел, движется неускоренно. Это
инерциальная система отсчета. С физической точки зрения инер-
циальные системы отсчета существуют только приближенно. Так,
для земных условий инерциальной может считаться система, обра-
образованная осями, проведенными из центра Земли и ориентирован-
ориентированными по звездам.
622
Переход от одной системы к другой, движущейся относительно
первой, определяется формулами преобразования. Если одна си-
система движется относительно другой поступательно, прямолиней-
прямолинейно и с постоянной скоростью, то, предполагая, что в начальный
момент оси обеих систем параллельны и совпадают, будем иметь:
где vx, vy, vz — компоненты скорости системы Ox\\)\Z\ относительно
системы Oxyz. Это преобразование называют преобразовани-
преобразованием Галилея. Предполагается, что время не зависит от выбора
системы отсчета, так что t\ = t (универсальное время), а
а также, что расстояния между любыми двумя точками в данный
момент времени не зависят от того, в какой системе они измеря-
измеряются (что непосредственно следует из формул преобразования
Галилея). Обозначая через xiyiZi координаты точки А, а через Х2,
У2, %2 — координаты точки В, будем иметь
S = VT*s - хг)* + (у, - уху + (г, - ггу =
- х'у + (у'2 - у\У + (г'2 - z\)\
где х', у', z" — координаты точек в подвижной системе.
По отношению к некоторой определенной инерциальной систе-
системе можно указать множество других инерциальных систем, полу-
получающихся одна из другой с помощью преобразования Галилея.
Уравнение Ньютона связано с предположением о существова-
существовании инерциальной системы отсчета, в которой на точку действуют
только реальные силы. Неинерциальность системы можно объяс-
объяснить наличием кориолисовых сил инерции, которые устраняются
соответствующим выбором системы отсчета. Таким образом, если
не выполняется закон инерции, то это может объясняться или вы-
выбором системы отсчета (неинерциальная система), или существо-
существованием некоторых реальных сил, природа которых пока не
известна.
Записанное в некоторой инерциальной системе уравнение Нью-
Ньютона остается инвариантным относительно любой другой инерци-
инерциальной системы.
В XIX в начинает развиваться новая отрасль физики — элект-
электродинамика Максвелл A831—1879) сформулировал законы
электромагнетизма. Характер максвелловской теории электромаг-
электромагнетизма существенно отличается от механики Ньютона, и возни-
возникает вопрос о применимости принципа относительности Галилея
к электродинамике.
Максвелл установил, что электромагнитные волны распростра-
распространяются со скоростью, зависящей от свойств среды, заполняющей
пространство, а в пустоте — с постоянной скоростью с.
Кроме того, было установлено, что свет является одним из
видов электромагнитного излучения. Господствовавшая до Макс-
623
велла теория Френеля A788—1827) предполагала, что свет рас-
распространяется посредством колебаний упругого эфира. Теория
Максвелла не требует наличия такой среды. Но уравнения Макс-
Максвелла не удовлетворяют принципу относительности Галилея. Будучи
справедливыми в одной какой-либо инерциальной системе, они
перестают быть верными в другой инерциальной системе. Для
разрешения этого противоречия нидерландским физиком Лорен-
цом A853—1928) вновь вводится гипотеза эфира. Под эфиром
понимается такая абстрактная среда, в которой всегда справед-
справедливы уравнения электродинамики Максвелла, и скорость света
постоянна относительно неподвижного эфира. Для наблюдателя
движущегося относительно неподвижного эфира, световые явления
должны протекать иначе, чем для неподвижного наблюдателя.
Для экспериментальной проверки теории эфира делались по-
попытки определить скорость движения Земли относительно эфира.
Эксперимент такого рода был поставлен Майкельсоном и Морли
в 1880 г. Идея эксперимента состояла в сравнении наблюдаемых
скоростей света в двух различных направлениях. Предположения
сводились к тому, что Земля не может служить привилегированной
системой отсчета, так как она движется относительно Солнца со
скоростью около 30 км/сек. Если даже в некоторый момент време-
времени движение Земли совпадает с движением эфира (эфирным
ветром), то через полгода скорость Земли относительно эфира бу-
будет равна около 60 км/сек. Движение это можно обнаружить, если
измерить скорость света в двух перпендикулярных направлениях
с относительной точностью, превышающей отношение у/с»10~4
(где v — скорость Земли, ся^ЗООООО км/сек — скорость света), и
если эксперимент осуществляется в течение периода, превышающе-
превышающего шесть месяцев.
Если обозначить через v скорость Земли относительно эфира,
то скорость света в направлении, противоположном направлению
скорости Земли, будет равна v + c, а скорость света в противопо-
противоположном направлении равна с—v. Если s — путь света от источни-
источника до зеркала, то промежуток времени, за который свет пройдет
до зеркала и обратно, будет
, s . s 2sc 2 s[c
t — —¦ 1- ¦ —
c + v c — v с3 —о3 1 — v%lc%
(луч света совпадает с линией вектора скорости Земли). Если
скорость Земли ортогональна направлению луча (рис. 270), то за
время движения света зеркало будет перемещаться, так что
i — ,
с
где
624
поэтому
t' =
2s
Для измерения разности
sv*
Майкельсон и Морли воспользовались интерферометрами, имею-
имеющими два взаимно перпендикулярных плеча. Схема такого интер-
Рис 270
ферометра представлена на рис. 271. Свет от источника S расщеп-
расщепляется полупрозрачным серебряным зеркалом Р па два луча,
которые после отражения от зеркал М\ и М2 снова встречаются на
экране. Если для прохождения света по обоим путям требуется
одинаковое время, то на экране должны появиться интерференци-
интерференционные полосы, положение которых зависит от разности скоростей
в направлениях 1\ и /2. Эксперимент сводится к подбору соответ-
соответствующих положений зеркал, после чего прибор поворачивается на
90° и благодаря вращению Земли на экране должна появиться
другая интерференционная картина. Изменение интерференцион-
интерференционной картины обусловливается изменением времени прохождения
светом пути относительно эфира.
Майкельсон и Морли при помощи многократных отражений
сумели довести эфирные расстояния 1\ и /2 до нескольких метров,
но обнаружить эффекта движения Земли относительно эфира не
625
удалось. Подобные опыты повторялись в течение десятилетий. Они
показали, что обнаружить движение Земли относительно эфира
невозможно. Предположение о том, что Земля увлекает прилегаю-
прилегающий к ней эфир, не выдерживает критики, так как в этом случае
видимые положения звезд смещались бы каждый год назад и
вперед, но не так, как это наблюдается в действительности. Ир-
Ирландский физик Фицджеральд A851 —1901) и Лоренц сделали
попытку объяснить полученный Майкельсоном и Морли результат,
предположив, что длины всех физических тел, движущихся со ско-
ростью v относительно эфира, сокращаются в отношении
l:Vl—u2/c2. Тогда при повороте интерферометра на 90° длина
плеча его меняется так, что компенсируется ожидаемый эффект.
Эта гипотеза, высказанная Лоренцом в 1892 г., сохраняет приви-
привилегированный характер определенной системы отсчета (эфира) и
объясняет отрицательный результат опыта Майкельсона. При вы-
числении времени t вместо s необходимо взять величину
syl—u2/c2, после чего
t __ 2s Y\ — t>2/c3 = 2s
~ (l»/») ~ /
так что разность t—V обращается в нуль. Эта гипотеза не удовле-
удовлетворяла и самого ее автора. Поэтому Лоренц поставил задачу
найти такую группу преобразований, в которой основные уравне-
уравнения Максвелла остаются неизменными. Эту задачу разрешил в
1905 г. французский математик и физик Анри Пуанкаре и в том
же 1905 г. Альберт Эйнштейн A879—1955).
Решение Пуанкаре. Пуанкаре показал, что если первая систе-
система движется относительно второй прямолинейно и равномерно в
направлении оси х, то для инвариантности уравнения Максвелла
относительно выбора системы отсчета формулы преобразования
должны иметь следующий вид:
x' = $(x — vt), t' = $(t—jx\, y'=y, г' = г,
Это преобразование называется преобразованием Лорен-
ц а. Для обратного преобразования получим
Уравнения Максвелла выражают закон распространения
электромагнитных волн в свободном пространстве. Пусть X, Y, Z—
проекции вектора напряженности электрического поля на коорди-
626
натные оси, a L, M, N — соответствующие проекции вектора на-
напряженности магнитного поля, тогда уравнения Максвелла запи-
запишутся в виде
J_ J)X_ _ dN_ __ дМ , 1 oY_ ^ dL_ __ dN_
с dt ду dz ' с dt dz дх '
JdZ
dN
ду
dL
dM
dz '
1
1
с
dL
aY
dt
с dt дх ду ' с dt ~ \ ду дг
1 дМ I дХ dZ\ I dN f dY дХ
с dt \ dz дх )' с dt \ дх ду
-^L'iL-f—=0 dL.dM.dN 0
дх ду дг дх ду dz
Применяя преобразование Лоренца к первому уравнению первой
группы, будем иметь
1 дХ_ l_(dX_JX_ , dX_jte_\ = _g_i?L_j Pp дХ
с dt' с \ dt dt' дх dt' J ~ с dt с дх '
Подставляя
откуда
сюда значения
с dt' ^ \ ду
i ах \
с df
dX/dt
дМ
6z
V
N— —
с
аи'
и
/
Y
дХ/дх,
+ J?_
с
) «
получим
( dY —
\ dy
дг'
dZ
dz
(а)
Преобразуя первое уравнение второй группы, получим
~ of T dt ^ с dx ^ ~
или
1
с
dL
df
CO.
/ az
\ ду
jap(
1
оУ \
dz )
с
dy
¦M
CO.
)
V
с
[ dM
1
ap (
i ,
dz J
V —— д/ \
dz
(b)
Нетрудно видеть, что уравнения Максвелла сохраняют свою фор-
форму, если
у у у R [ V V лЛ 7'
л. =л, г =рг— — j\ , z, =
627
L'=L, М' = $(М+- — Z\,
Тогда преобразованные уравнения будут иметь такой же вид, как
и первоначальные
1 дХ' д№ дМ' 1 dL' I dZ' dY'
с дУ ду' дг' с dt' \ ду' дг'
Как видно из формул преобразования, векторы напряженнос-
напряженности электрического и магнитного полей оказываются не инвариант-
инвариантными величинами. Это обстоятельство не является неожиданным,
если вспомнить, что движущийся электрический заряд создает
магнитное поле, которое отсутствует в системе отсчета, движущей-
движущейся вместе с зарядом.
Уравнения Максвелла оказываются инвариантными относи-
относительно преобразования Лоренца Скорость же света принимается
постоянной во всех системах координат.
§ 2. СПЕЦИАЛЬНЫЙ ПРИНЦИП ОТНОСИТЕЛЬНОСТИ ЭЙНШТЕЙНА
Задачу инвариантности уравнений Максвелла почти одновре-
одновременно с Пуанкаре решает Эйнштейн, который, основываясь па
опытных результатах, предполагает, что при движении источника
свет в пустоте распространяется изотропно, и в любой галилесв-
ской системе отсчета его скорость равна абсолютной постоянной
с да 300 000 км/сек. Изотропность и постоянство скорости света
предполагают справедливость преобразований Лоренца, что и обес-
обеспечивает инвариантность уравнений Максвелла относительно пре-
преобразований.
Таким образом, или необходимо сохранить уравнения Ньюто-
Ньютона и оставляющие их инвариантными преобразования Галилея, не
сохраняя инвариантными уравнения Максвелла; или следует счи-
считать универсальными преобразования Лоренца — Пуанкаре, отно-
относительно которых инвариантны уравнения Максвелла. В последнем
случае необходимо строить соответствующую кинематику и дина-
динамику. Принимая последнее предложение, Эйнштейн показал, что
сокращение длин, определяемое формулами Лоренца, не носит
искусственного характера. Оно вытекает из анализа понятия одно-
одновременности событий с точки зрения постулата постоянства ско-
скорости света в пустоте независимо от выбора галилеевской инер-
циальной системы.
Одновременность событий. Чтобы можно было говорить об од-
одновременности событий в двух различных точках А и В, удаленных
друг от друга на расстояние /, необходимо, чтобы в этих точках
имелись синхронизированные часы. Для проверки син-
синхронизации необходимо пользоваться каким-то сигналом. Наиболее
быстрыми являются электромагнитные сигналы. Поправки, связан-
связанные с конечностью времени распространения для этих сигналов,
будут наименьшими. Можно, в частности, воспользоваться свето-
световыми сигналами.
628
Пусть два наблюдателя с часами находятся в точках А и В.
Для синхронизации воспользуемся световыми сигналами. Пусть
наблюдатель из точки А посылает в момент tA сигнал в точку В.
Дойдя до точки В в момент tB сигнал возвращается в точку А
вместе с сигналом времени наблюдателя В (наблюдатель А видит
в зеркале отражение своих часов и непосредственно часы наблю-
наблюдателя В). Будем говорить, что часы у обоих наблюдателей син-
синхронны, если
^В — tA = tA — tB,
где tB — время наблюдателя В; tA — время возращения сигнала
в точку А. Такой способ заключает в себе и определение одновре-
одновременности в различных точках пространства с точки зрения данной
инерциальной системы. При переходе к другой инерциальной си-
системе синхронизация не сохраняется. Все эти соображения основы-
основываются на принципе постоянства скорости света и принципе
относительности, которые были сформулированы Эйнштейном сле-
следующим образом:
1. Законы, по которым изменяются состояния физических си-
систем, не зависят от того, к которой из двух координатных систем,
движущихся друг относительно друга равномерно и прямолинейно,
эти изменения состояния относятся.
2. Каждый луч света движется в «покоящейся» системе коор-
координат с определенной скоростью с независимо от того, испускается
этот луч покоящимся или движущимся телом.
Таким образом, все системы, движущиеся друг относительно
друга прямолинейно и равномерно, оказываются совершенно рав-
равноправными и невозможно выделить какую-либо привилегирован-
привилегированную систему отсчета. Скорость распространения света в вакууме
оказывается одинаковой во всех системах координат, движущихся
прямолинейно и равномерно друг относительно друга.
Пусть имеется покоящийся в некоторой системе стержень АВ,
длина которого, измеренная покоящимся масштабом, равна /, и
пусть этому стержню, ось которого направлена параллельно оси х
покоящейся координатной системы, сообщается равномерное и
параллельное оси х поступательное движение со скоростью v в
сторону возрастающих значений х. Длину движущегося стержня
будем определять двумя способами:
а) измерением в подвижной системе, движущейся вместе со
стержнем, непосредственным приложением масштаба;
б) с помощью световых.сигналов покоящегося наблюдателя и
синхронных в покоящейся системе часов, расставленных в непо-
неподвижных точках А и В, расстояние между которыми измерено
покоящимся масштабом и не равно /. В дальнейшем эту длину
обозначим гАв.
Согласно принципу относительности длина стержня в подвиж-
подвижной системе, измеренная операцией а), должна равняться длине I
покоящегося стержня. Длину, устанавливаемую операцией б), бу-
629
дем называть «длиной движущегося стержня в покоящейся систе-
системе». Пусть на концах А к В движущегося отрезка имеются под-
подвижные наблюдатели с часами, синхронными с часами неподвиж-
неподвижного наблюдателя. Тогда сигнал, посланный подвижным
наблюдателем А в момент tA, достигнет наблюдателя В в момент
tB по наблюдениям неподвижного наблюдателя. Принимая во вни-
внимание принцип постоянства скорости света, имеем
*в — м = ¦
С — V
Отраженный сигнал вернется к наблюдателю А в момент
причем
с -\-v
и наблюдатели, движущиеся вместе со стержнем, найдут, что их
часы идут несинхронно. Итак, два события, одновременные при
наблюдении из одной координатной системы, не будут одновремен-
одновременными при рассмотрении из другой системы, движущейся относи-
относительно первой.
§ 3. ГРУППА ПРЕОБРАЗОВАНИЙ ЛОРЕНЦА
Рассмотрим две системы координат: неподвижную Oxyzt и
подвижную Oi?t]^, движущуюся поступательно'и равномерно с по-
постоянной скоростью v в положительном направлении оси х. Пусть
соответственные оси систем отсчета Oxyz и Oi?r]? параллельны.
Каждая система предполагается снабженной масштабом и часами.
Масштабы и часы обеих систем одинаковы. Пусть, кроме того, в
начальный момент точки О и О\. совпадают, а отсчет часов равен
нулю. Каждому набору значений х, у, z, t, полностью определяю-
определяющему место и время событий в покоящейся системе, соответствует
набор значений ?, т|, ?, т, устанавливающий это событие в подвиж-
подвижной системе. Необходимо найти уравнения, связывающие эти ве-
величины. Эти уравнения должны быть линейными в силу свойства
однородности, которое приписывается пространству и времени.
Все точки системы должны быть эквивалентны по отношению к
преобразованию.
Выберем на оси ? точку Р, покоящуюся в подвижной системе
координат. Тогда для неподвижного наблюдателя имеем
ОгР = х' = x — vt.
Время т в подвижной системе является функцией координат и
времени неподвижной системы
т = т(х', y,z,t).
630
Пусть из начала Оi в момент времени то посылается луч света в
точку Р, который отражается от этой точки в момент ti и приходит
в начало координат в момент т2. Из свойств синхронности часов
следует
или
_ т0 + т2
Ti—т~-
Применяя принцип постоянства скорости света к покоящейся си-
системе, имеем
т1==т *',0,0,*4--^—
С — V
1|т@, 0,0,04
2 L
|т@, 0,,04 @,,M +
2 L \ с
и, рассматривая х' как бесконечно малую величину, получим
т (V, 0, 0, * —) = т@, 0, 0, *) 4 4тгд;' + -^-^— +¦¦¦
\ c — vj дх ' dt c—v
Пренебрегая здесь членами выше второго порядка малости, будем
иметь
т(о,о, о,о+-п-*'+-ат '
Ot С —V
х' , х'
2 L х - - - > • dt \ c — v c + v
откуда следует
дх' 2 dt \ c — v c+v
ИЛИ
Этому уравнению удовлетворяет функция
с2-к2
где а —неизвестная пока функция от v. Чтобы найти теперь
величины |, т|, ?, заметим, что свет при измерении в движущейся
системе должен распространяться со скоростью с. Если через Z,
обозначить координату точки Р, то сигнал из начала координат
достигнет точки Р за время
631
Но
Г = а (f — v x'
с2—
где t = , поэтому
с — v
= a \ x w ^ - axc
= cr = -"- = ax
c — v c2 — v2 ) c2 — v2 '
откуда
или
причем
Пусть, далее, Q — точка подвижной системы, расположенная
на оси т|. Время распространения сигнала из точки О\ до точки Q
в неподвижной системе определяется из соотношения
сЧ* = v*t* + у2,
которое дает
t = у
В подвижной системе координат
аналогачно получим
? = ф.
Вводя обозначение (p(v)=a p и подставляя значение х' приходим
к следующим формулам преобразования:
ч = <ру, ? = <pz.
Для определения функции q>(y) рассмотрим еще одну систему
li, Ц\, %и ti, движущуюся поступательно в отрицательном на-
направлении оси i со скоростью v. Дважды применяя формулы пре-
преобразования, будем иметь
632
= ф (— V) ф (У) *,
Si = <р (—у) р (—у) 1? +- УТ1 = ф (—и) ф (у) *.
Соотношение между |i и х не содержит f, и, следовательно, систе-
системы Oxyzt и O]giTii?iTi находятся в покое относительно друг друга.
Тогда
Для выяснения физического смысла функции ф(у) рассмотрим
точку Q. Ордината этой точки равна
Из соображений симметрии ясно, что эта величина может за-
зависеть только от величины скорости, а не от направления движе-
движения, поэтому
ф(о) = ф(—») = 1-
Формулы преобразования теперь запишутся в виде
р=
и представляют собой преобразование Лоренца. Преобразования
Лоренца приводят к представлениям, противоречащим привычным
представлениям о свойствах пространства и времени. Рассмотрим,
например, понятие «длины». Пусть в системе О&ц^х покоится неко-
некоторый стержень длины /, направленный вдоль оси |. Длину I,
измеренную в системе О&ц^т, назовем собственной длиной
стержня. Найдем длину этого стержня в системе Oxyzt. Обозначим
абсциссы концевых точек стержня через |i и |2. Для определения
длины в системе Oxyzt нужно определить координаты хх и х2 кон-
концевых точек стержня в момент t. Воспользуемся формулами пре-
преобразования Лоренца
которые дают
Х2 Хх = —
т. е.
633
Обе системы отсчета являются совершенно равноправными.
Поэтому, если стержень покоится в системе Oxyzt, то его длина
в системе Oi|t]?t будет меньше, чем в системе Oxyzt, так что
собственная длина всегда больше той, которую отмечает непод-
неподвижный наблюдатель.
Сокращение длины имеет чисто кинематический характер.
Фундаментальному изменению подвергается в теории относи-
относительности и представление о времени. Если в некоторой точке ?
системы Oigri^r происходит физический процесс в течение времени
Ат=т2—ть то в системе Oxyzt для моментов t2 и t\ получим
Отсюда сразу же находим:
т. е. собственное время всегда меньше, чем время, прошедшее
между событиями в неподвижной системе отсчета. Течение вре-
времени оказывается зависящим от состояния движения. Не сущест-
существует универсального мирового времени. Подчеркнем, что имеется
полная взаимность между системами Oxyzf и О^ц^т, и если физи-
физический процесс происходит в точке х и имеет длительность Д?, то
в системе О&ц^х он будет иметь длительность
Дт = $At.
Одновременность событий. Пусть в системе O^Ti&r в некото-
некоторый момент т произошли одновременно два физических события
в точках Ei и |г (|2>li). Рассмотрим инерциальную систему Oxyzt,
относительно которой система О^т]^т движется поступательно со
скоростью v в положительном направлении вдоль оси х. В системе
Oxyzt первое событие происходит в момент
'х = Р (* + f
второе — в момент
с*
При этом события уже происходят не одновременно, так как
В общем случае промежуток времени Д? может оказаться как
положительным, так и отрицательным, но понятие одновременнос-
одновременности событий оказывается относительным.
Преобразование скорости. Преобразование Лоренца позволяет
по координатам события в одной системе отсчета найти коорди-
€34
наты того же события в другой системе. Эти же формулы позво-
позволяют определить зависимость скоростей частицы в различных
системах координат. Представим формулы Лоренца в виде
Дифференцированием отсюда получим:
откуда
dx dx dy ~~dx
dt i + JLJL dt
2 dx r \ c* dx
dt
dz dx
dt
dx
Полученные формулы определяют преобразование скоростей. Они
дают и закон сложения скоростей в теории относительности.
В частном случае, при движении частицы параллельно оси х
будем иметь
Если же отношение —т^~ "*^' то формула переходит в обычный
зако^ сложения скоростей классической механики.
Нетрудно убедиться в том, что сумма двух скоростей, меньших
скорости света, во всяком случае не больше, чем скорость света
В самом деле, пусть ve—kc, vr=nc, где k и п — постоянные поло-
положительные коэффициенты, меньшие единицы. Тогда
с,
\+kn
и так как <] 1, то абсолютная скорость ~оа всегда остается
1 + kn
меньше скорости света.
635
§ 4. ИНВАРИАНТНЫЕ ВЕЛИЧИНЫ В ТЕОРИИ ОТНОСИТЕЛЬНОСТИ.
ЧЕТЫРЕХМЕРНЫЙ ВЕКТОР. МИР МИНКОВСКОГО
Задача теории относительности сводится к нахождению
абсолютных, не зависящих от выбора инерциальной системы отсче-
отсчета, законов природы. Эта задача связана с нахождением величин,
инвариантных относительно преобразований Лоренца. Первой из
таких инвариантных величин является скорость распространения
света с, общая для всех инерциальных систем координат.
Второй инвариантной величиной является «интервал». Интер-
Интервалом в теории относительности называется величина
s =
Инвариантность интервала относительно преобразований Лоренца
проверяется непосредственным вычислением. При этом, если
о — 1//Л If __fYZ /у у\2 /,, ,Л2 (у 7\г
то
Sl = s.
Утверждение, что два события разделены интервалом s, имеет
абсолютный характер. Из определения интервала непосредственно
следует
ds2 = с2 (dtf — {dxY — (dyf — (dzJ.
Величина ds может рассматриваться как элементарный интер-
интервал четырехмерного пространства, отнесенный к системе парал-
параллельных ортонормированных осей. Пространство это является
несобственным, так как длина ds не обязательно будет положи-
положительно определенной.
Преобразования Лоренца указывают на равноправность всех
четырех координат х, у, z, t. Этим воспользовался немецкий мате-
математик Герман Минковский A864—1909), который, введя четырех-
четырехмерное пространство, упростил многие проблемы и сделал реляти-
релятивистские законы более ясными.
Отложим на ортогональных осях четырехмерного пространства
три пространственные координаты и время (мир Минковского).
Событие в этом пространстве будет изображаться точкой, назы-
называемой мировой точкой. Всякой частице соответствует миро-
мировая линия, точки которой определяют координаты частицы во
все моменты времени. В силу инвариантности интервала качест-
качественное различие связи между событиями не будет зависеть от
выбора системы отсчета.
Чтобы упростить дальнейшие рассуждения, будем рассматри-
рассматривать «плоский мир» (t, x), положив скорость распространения
света с равной единице. Движение точки в этом мире будет пред-
представляться кривой t = f(x), касательная к которой образует с осью
времени угол #
636
dt
Поэтому всегда будем иметь 0^45°. Прямая, для которой 0=45°,
соответствует траектории световых лучей (рис. 272). Наблюдатель;
Рис. 272
движущийся вдоль оси х со скоростью v, будет описывать прямую
линию в плоскости неподвижного наблюдателя, которая образует
с осью х угол а
tga=-^-=D.
Этот угол а определяет скорость движения подвижного наблюда-
наблюдателя. Это же следует и непосредственно из формул Лоренца:
Из формулы
— vx), %=
S2 = ti _ X2
получим уравнение кривой, соответствующей единице длины
Это будет гипербола, проходящая через точку А. Сопряженная ей
гипербола отличается знаком правой части. Переход от системы
(х, t) к системе (§, т) соответствует переходу от прямоугольных
координат к косоугольным на плоскости Минковского. Это же сле-
следует и из преобразования Лоренца, которое можно представить
в виде
-tsina), t — px^sina + tcos<x),
Pi-
637
После такого преобразования уравнение гиперболы принимает вид
tfi [(I sin a + т cos аJ — (I cos а + т sin аJ] = 1,
или
Pi [(sin2 а — cos2 а) V + (cos2 а — sin2а) т2] =• 1.
Подставляя значение 0i, будем иметь
— &* + *»= 1.
В системе Oxt все события на оси х одновременны, в системе
же О|т эти же события уже не одновременны. Так, например, три
одновременных события А, В, С в системе Oxt (рис. 273) будут
чередоваться в последовательности С, В, А в системе О|т.
Рис. 273
Рис. 274
Часы, неподвижные в системе Oxt, изображаются точкой, опи-
описывающей прямую Ot. Единице времени в системе Oxt соответст-
соответствует точка А. За это время стрелка часов подвижного наблюдате-
наблюдателя еще не пройдет через единицу (с точки зрения неподвижного
наблюдателя) и будет находиться в положении В (рис. 274).
С точки зрения подвижного наблюдателя за единицу времени он
окажется в положении А\, а часы неподвижного наблюдателя в
этот момент покажут время, меньшее единицы (чему соответствует
точка В]). Таким образом, движущиеся часы всегда идут мед-
медленнее.
Взаимное сокращение длин и увеличение промежутков време-
времени связано с отказом от возможности определить абсолютную
одновременность.
Изменение собственной системы отсчета. Формулы Лоренца
позволяют перейти от собственной системы отсчета к любой дру-
другой инерциальной системе. Собственной мы называем ту
инерциальную систему, с которой неизменно связано движущееся
тело. Посмотрим теперь, как будут изменяться длины и время
при переходе от одной инерциальной системы к другой.
638
Предположим, что в системе Oxt находится стержень длины
/о- Пусть этот стержень за короткое время получает ускорение,
благодаря чему его скорость относительно системы Oxt становится
равной v. Новая собственная система снова будет инерциальной.
Длина стержня в этой новой системе равна to. В системе же Oxt
его длина / = ——. Но длина /о может отличаться от /0. Если
теперь стержень получает замедление и останавливается в системе
Oxt, то его длина станет равной /Оо, которая может отличаться и от
/о, так как стержень два раза испытывал ускорение.
Аналогичные результаты получаются и с часами. Оказывается,
что результаты такого мысленного эксперимента необратимы.
Точки, движущиеся неравномерно и не прямолинейно, в про-
пространстве Минковского изобразятся кривыми линиями. В каждой
точке такие движения определяются касательной к мировой
линии.
Введем понятие четырехмерного радиус-вектора га(а=1, 2,
3, 4), проекции которого на оси координат равны х, у, z, ct.
Четырехмерным вектором аа будем называть вектор, ¦ проекции
которого при преобразованиях Лоренца преобразуются по одному
и тому же закону, так что компоненты вектора аа должны изме-
изменяться, как и компоненты вектора г«.
Ограничиваясь, для простоты, движением только в плоскости
Oxt, будем иметь
- vax), ay = Дт,, az - as, a; = p a,4—- ag
Компоненты д*, ay, az называются пространственными, а компо-
компоненту at называют временной. При преобразовании остается неиз'
менным «квадрат» вектора
2 _ 2 2 2 2
В общем случае квадрат вектора не является положительным.
В дальнейшем нас будут интересовать четырехмерный вектор
скорости и четырехмерный вектор ускорения. Первый образуется
в виде производной по инварианту скаляру от четырехмерного
радиуса-вектора. Выбор инварианта-скаляра определяется тем, что
при малых скоростях и<Сс пространственные компоненты четырех-
четырехмерного вектора скорости должны превращаться в компоненты
обычной скорости.
В связи со сказанным выше определим четырехмерный вектор
скорости соотношением
639
ds
где dr0 =. элемент собственного времени. Для компонент
четырехмерного вектора скорости будем иметь
— — dt
При и-С с получим отсюда совпадение пространственных ком-
компонент скорости с компонентами трехмерной скорости. Заметим,
что компоненты четырехмерного вектора скорости ненезависимы,
так как
2 2 2 Э п
= щ — их — иу — иг = с2,
и величина вектора является заданной постоянной.
Четырехмерное ускорение. Определим четырехмерный вектор
ускорения как вектор, проекции которого определяются равенст-
равенствами
dt dx0 at dx0 \ dt dt
= P4+P*-^-(v, v).
p« -2L (v, v), и = рЧ + P4 -J- (v, v)
C V
/ &c 6
/t dt dx VC dt V a '
где
• _ dv
V ~ dt '
§ 5. РЕЛЯТИВИСТСКАЯ ДИНАМИКА
Будем рассматривать инвариантные и ковармантные свойства
уравнений движения. Инвариантными относительно преобра-
преобразований называются такие уравнения, которые не изменяются,
при переходе от одной системы отсчета к другой. Уравнения,,
остающиеся справедливыми в силу того, что их члены, не явля-
являющиеся инвариантными, преобразуются по одним и тем же зако-
законам, называются ковариантными относительно данного преоб-
преобразования.
Уравнения классической механики ковариантны относительно
преобразований Галилея, но не ковариантны относительно преоб-
640
разований Лоренца. Чтобы уравнения оставались ковариантными
относительно преобразований Лоренца, необходимо иначе опреде-
определить основные понятия динамики.
Как и в классической динамике, будем рассматривать движе-
движение материальной частицы. Заметим прежде всего, что закон
инерции инвариантен относительно преобразований Лоренца, т. е.
если частица движется без ускорения относительно инерциальной
системы S, то она будет двигаться без ускорения и относительно
другой инерциальной системы Si. Для нахождения ковариантпой
формы уравнений движения их нужно представить четырехмерны-
четырехмерными векторами.
Состояние движения частицы в данный момент времени пол-
полностью определяется ее массой и скоростью. Введем понятие мас-
массы покоя /По, которая определяет инерционные свойства частицы
и не меняется при изменении системы отсчета.
Количество движения точки определим четырехмерным век-
вектором
Ра =¦ тоиа,
или, в проекциях на оси,
Тогда в предельном случае, когда v <^с и Р -*¦ 1, будем иметь
Р°х = т<рх, Р°у = movy, pi -- movz, Pt = cm0,
Естественным обобщением уравнений Ньютона теперь будут
уравнения М и н к о в с к о г о.
dt
где Фа— четырехмерный вектор, называемый силой Мин-
ковского. Ковариантный характер уравнений Минковского бу-
будет следовать непосредственно из свойств четырехмерных векто-
векторов. Расписывая уравнения в проекциях на оси х, у, z, t, будем
иметь
Потребуем, чтобы в правых частях первых трех уравнений
стояла компонента обычной силы классической механики, т. е.
Р х' р у> р ~ *'
641
тогда при v<g.c формулы превращаются в обычные уравнения
Ньютона для точки с постоянной массой. Для четвертой компонен-
компоненты здесь будем иметь
Чтобы выяснить физический смысл компоненты Фт, рассмот-
рассмотрим инвариант
2 2 2 2
Щ — Ux — «у — Uz^= С2.
Дифференцируя его по т0, получим
йщ dux d.Uy diiz л
' dt0 х dt0 » dt0 г dx0
и после подстановки значений производных
или
Отсюда
Фт =¦ — (v, F).
с
Правая часть этой формулы содержит работу, производимую си-
силой F за единицу времени. Подставляя значение Фт. получим
Если в правой части стоит выражение работы силы за единицу
времени, то в левой части должно быть изменение энергии за еди-
единицу времени. Выражение, стоящее в левой части под знаком
производной, является полной энергией частицы
Е = ш0с2р =
Уравнение движения частицы
d
dt
КН ¦= F
теперь можно переписать в виде
о d\ v dE „
тпа = F,
оН dt с2 dt
откуда видно, что направление силы, действующей на частицу, вооб-
вообще говоря, не совпадает, с направлением ускорения.
642
Представляя трехмерный импульс
в виде р = т (v) v определим релятивистскую массу
т(\) =-
/¦-¦?
Релятивистская масса зависит от состояния движения частицы и
равна полной энергии, деленной на с2.
Релятивистская энергия Е не обращается в нуль, если ско-
скорость частицы равна нулю. В этом случае получим энергию покоя
Ео = тос\
Оказывается, что масса покоя в с2 раз меньше энергии покоя. При
малых скоростях (и<Сс), раскладывая энергию по степеням v/c,
получим
Исключая скорость v из выражения для импульса и энергии, бу-
будем иметь
Уравнения движения можно записывать и в обобщенных коор-
координатах Лагранжа. Для этого нужно прежде всего составить
функцию Лагранжа. Для свободной точки она является величиной,
производные от которой по компонентам скорости представляют
проекции импульса, а производные по координатам — компоненты
силы, т. е.
dL a dL u dU
где U — силовая функция. Таким уравнениям удовлетворяет функция
и уравнения Лагранжа принимают вид
— J^ ^l — О
dt dqt dqt
Зная функцию Лагранжа, можно найти и функцию Гамильтона
Н = 2/wI — L- ш0и2р + ^?- ~U = ш0рс2 — U.
Р
643
Но так как
то
т. е. в релятивистской динамике функция Гамильтона с<
с полной энергией, выраженной через импульс частицы.
Литература
Ann ел ь П. Теоретическая механика, тт. I, II. М., Физматгиз, I960.
Бергман П. Введение в теорию относительности. М., ИЛ, 1947.
Бухгольц Н. Н. Основной курс теоретической механики, чч. I, II. М.,
«Наука», 1966.
Бухгольц Н. Н., Вороиков И. М., Минаков А. П. Сборник задач
по теоретической механике. М.—Л., Гостехиздат, 1949.
Валле-Пуссен Ш. Ж. Лекции по теоретической механике, тт. I, II. М.,
ИЛ, 1948.
Гантмахер Ф. Р. Лекции по аналитической механике. М., Физмат-
гнз, I960.
Дубошин Г. Н. Небесная механика. Основные задачи и методы. М.,
Физматгиз, 1963.
Жуковский Н. Е. Теоретическая механика. М.—Л., Гостехиздат, 1952.
3 е р н о в Б. С. Сборник задач по теоретической механике, чч. I, II. М.—Л.,
ГТТИ, 1932.
Космодемьянский А. А. Курс теоретической механики. М., Уч-
Учпедгиз, 1955.
Л а г р а н ж Ж- Аналитическая механика, т. I. М.—Л., Гостехиздат, 1950.
Ландау Л. Д. и Лифшиц Е. М. Теория поля, М., Физматгиз, 1962.
Л а н ц о ш К. Вариационные принципы механики. М., «Мир», 1965.
Л о й ц я и с к и й Л. Г. и Лурье А. И. Курс теоретической механики,
ч. II, Динамика. М, — Л., ГТТИ, 1948.
Лурье А. И. Аналитическая механика. М., Физматгиз, 1961.
Меркин Д. Р. Алгебра свободных и скользящих векторов. М, Физматгиз,
1962.
Мещерский И. В. Сборник задач по теоретической механике. М.,
«Наука», 1970.
Моисеев Н. Д. Очерки развития механики. Изд-во МГУ, 1961.
Седов Л. И. Галилей и основы механики. М., «Наука», 1961.
645
Суслов Г. К. Теоретическая механика. М., Гостехиздат, 1946
Тоннела М. А. Основы электродинамики и теории относительности.
М, ИЛ, 1962.
Уиттекер Е. Аналитическая дннамнка. М.—Л., ОНТИ, 1937.
Чаплыгин С. А. Механика системы. Соч., т. IV. М— Л., Гостех-
Гостехиздат, 1949.
Ч е т а е в Н. Г. Устойчивость движения. Работы по аналитической ме-
механике. М., Изд-во АН СССР, 1962.
Эйнштейн А. К электродинамике движущихся тел. Соч., т. I. M.,
«Наука», 1965.
Я к о б и К. Лекции по динамике, пер. с нем. Ж.—Л., ОНТИ, 1936.
ЕВГЕНИИ НИКОЛАЕВИЧ БЕРЕЗКИН
КУРС
теоретической механики
Второе издание
Тематический план 1974 г. № 122
Редактор Н. Н. Колесников
Редактор издательства Л. Н. Лукиных
Художественный редактор В. В. Воронин
Переплет художника Г. А. Жегина
Технический редактор 3. С. Кондрашова
Корректоры И. А. Большакова, С. Ф. Будаева, И. А. Мушникова,
Л. А. Айдарбекова
Сдано в набор 30/IV 1974 г. Подписано к печати 20/IX 1974 г.
Л-4Э452 Формат бОхЭО'Де Бумага тип. № 1
Физ. печ л. 40,5 Уч.-изд. л. 40,17 Изд. № 2192
Зак. 487 Тираж 18700 экз. Цена в переплете № 5—1 р. 51 к ,
в переплете № 7—1 р 65 к.
Издательство Московского университета Москва, К-9, ул Герцена, 5/7
Типография Изд-ва МГУ Москва, Ленинские горы