/

























































































































































































































































Author: Ольховский И.И.
Tags: общая механика механика твердых и жидких тел физика теоретическая механика
Year: 1978




Text
И. И. ОЛЬХОВСКИЙ
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ДЛЯ ФИЗИКОВ
ИЗДАНИЕ ТРЕТЬЕ, ДОПОЛНЕННОЕ И ПЕРЕРАБОТАННОЕ
Допущено Министерством высшего
и среднего специального
образования СССР
в качестве учебника для студентов вузов»
обучающихся по специальности «Физика»
ИЗДАТЕЛЬСТВО
МОСКОВСКОГО
УНИВЕРСИТЕТА
1978
УДК 531.0 {075.8)
Рецензенты:
Кафедра электродинамики и квантовой теории поля
и кафедра теоретической физики
Томского университета.
И. И. Ольховский.
Курс теоретической механики для физиков. М., Изд-во
Моск. ун-та, 1978 г,
575 с, 127 ил. Библиогр. 66 назв.
Книга содержит систематическое изложение теоретической механики и основ
механики сплошных сред. Большое внимание уделено фундаментальным понятиям
и законам механики Ньютона — Галилея, законам изменения и сохранения импуль-
импульса, кинетического момента и энергии, уравнениям Лагранжа, Гамильтона и Га-
Гамильтона — Якоби для класса обобщенно-потенциальных сил, а также законам
механики сплошных сред, на единой основе которых рассматриваются идеальная
и вязкая жидкости, упругое тело. В книге подробно излагаются; задача двух тел
и классическая теория рассеяния, законы изменения импульса, кинетического мо-
момента и энергии относительно неинерциальных ' систем отсчета, теория линейных
колебаний систем под действием потенциальных, гироскопических и диссипатив-
ных сил, метод Крылова — Боголюбова для слабо нелинейных систем, методы
усреднения уравнений движения. Книга содержит большое количество примеров,
интересных для физиков, в частности рассматриваются примеры на движения за-
зарядов в заданных электромагнитных полях, задачи на рассеяние частиц, коле-
колебания молекул, нелинейные колебания, колебания систем с медленно меняющими-
меняющимися параметрами, примеры из магнитогидродинамики. Книга рассчитана на сту-
студентов и аспирантов физических специальностей.
20302 105
О 84—78 (с) Издательство Московского университета, 1978
077@2)—78
ОГЛАВЛЕНИЕ
Предисловие к третьему изданию
ЧАСТЬ I. ТЕОРЕТИЧЕСКАЯ МЕХАНИКА ........ 7
ГЛАВА I. ОСНОВНЫЕ ПОНЯТИЯ И ЗАКОНЫ МЕХАНИКИ
§ 1.1. Понятия о материальной точке, о пространстве и времени . 8
§ 1.2. Понятия о силе и массе 26
§ 1.3. Понятие об инсрциальной системе отсчета и законы Ньютона.
Принцип относительности Галилея 35
§ 1.4. Решение уравнений движения и начальные условия ... 41
ГЛАВА II. ЗАКОНЫ ИЗМЕНЕНИЯ И СОХРАНЕНИЯ ИМПУЛЬСА,
КИНЕТИЧЕСКОГО МОМЕНТА И ЭНЕРГИИ
§ 2.1. Законы изменения и сохранения импульса и момента им-
импульса материальной точки 60
§ 2.2. Законы изменения и сохранения энергии материальной точки 65
§ 2.3. Движение в центрально-симметричном поле 77
§ 2.4. Движение под действием силы, обратно пропорциональной
квадрату расстояния до центра силы. Законы Кеплера . . 82
§ 2.5 Движение центра масс; законы изменения и сохранения им-
импульса системы 94"
§ 2.6. Законы изменения и сохранения кинетического момента си-
системы 102
§ 2.7. Законы изменения и сохранения энергии системы . . . 106
ГЛАВА III ЗАДАЧА ДВУХ ТЕЛ Й ТЕОРИЯ
РАССЕЯНИЯ ЧАСТИЦ
§ 3.1. Задача двух тел 114
§ 3.2. Упругое рассеяние частиц 121
§ 3.3. Поперечные сечения рассеяния 139
ГЛАВА IV. ДВИЖЕНИЕ ОТНОСИТЕЛЬНО НЕИНЕРЦИАЛЬНЫХ
СИСТЕМ ОТСЧЕТА
§ 4.1. Положение системы отсчета 150
§ 4.2. Поступательное движение и изменение ориентации системы
отсчета 154
§ 4.3. Общий случай движения системы отсчета 162
§ 4.4. Положение, скорость и ускорение материальной точки от-
относительно разных систем отсчета 165
§ 4.5. Уравнение движения материальной точки относительно не-
инерциальной системы отсчета; силы инерции 171
§ 4.6. Законы изменения кинетического момента и кинетической
энергии относительно поступательно движущейся- системы
центра масс .... 180
§ 4.7. Законы изменения и сохранения импульса, кинетического мо-
момента и энергии относительно произвольных неинерциальных
систем отсчета 186
ГЛАВА V. УРАВНЕНИЯ ЛАГРАНЖА
§ 5.1. Основная задача динамики несвободной системы и понятие
о связях 197
§ 5.2. Действительные, возможные и виртуальные перемещения;
идеальные связи 201
§ 5.3. Уравнения Лагранжа с реакциями связей; законы изменения
импульса, кинетического момента и энергии для систем со
связями 206
§ 5.4. Уравнения Лагранжа в независимых координатах и общее
уравнение механики; циклические координаты и симметрия
силового поля и связей 214
§ 5.5. Структура уравнений движения в независимых координатах
и функция Лагранжа 229
§ 5.6. Законы сохранения обобщенного импульса и обобщенной
энергии 237
§ 5.7. Ковариантность уравнений Лагранжа в независимых коорди-
координатах 248
ГЛАВА VI. ЛИНЕЙНЫЕ КОЛЕБАНИЯ
§ 6.1. Собственные одномерные колебания 253
§ 6.2. Положение устойчивого равновесия 262
§ 6.3. Собственные и главные колебания системы под действием
потенциальных сил 270
§ 6.4. Собственные колебания системы под действием потенциаль-
потенциальных, гироскопических и диссипативных сил 289
§ 6.5. Вынужденные колебания 300
ГЛАВА VII. НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
§ 7.1. Собственные колебания и метод Крылова — Боголюбова . 311
§ 7.2. Вынужденные колебания и резонанс 320
§ 7.3. Метод усреднения 331
ГЛАВА VIII. ДИНАМИКА ТВЕРДОГО ТЕЛА
§ 8.1. Уравнения движения твердогр тела 338
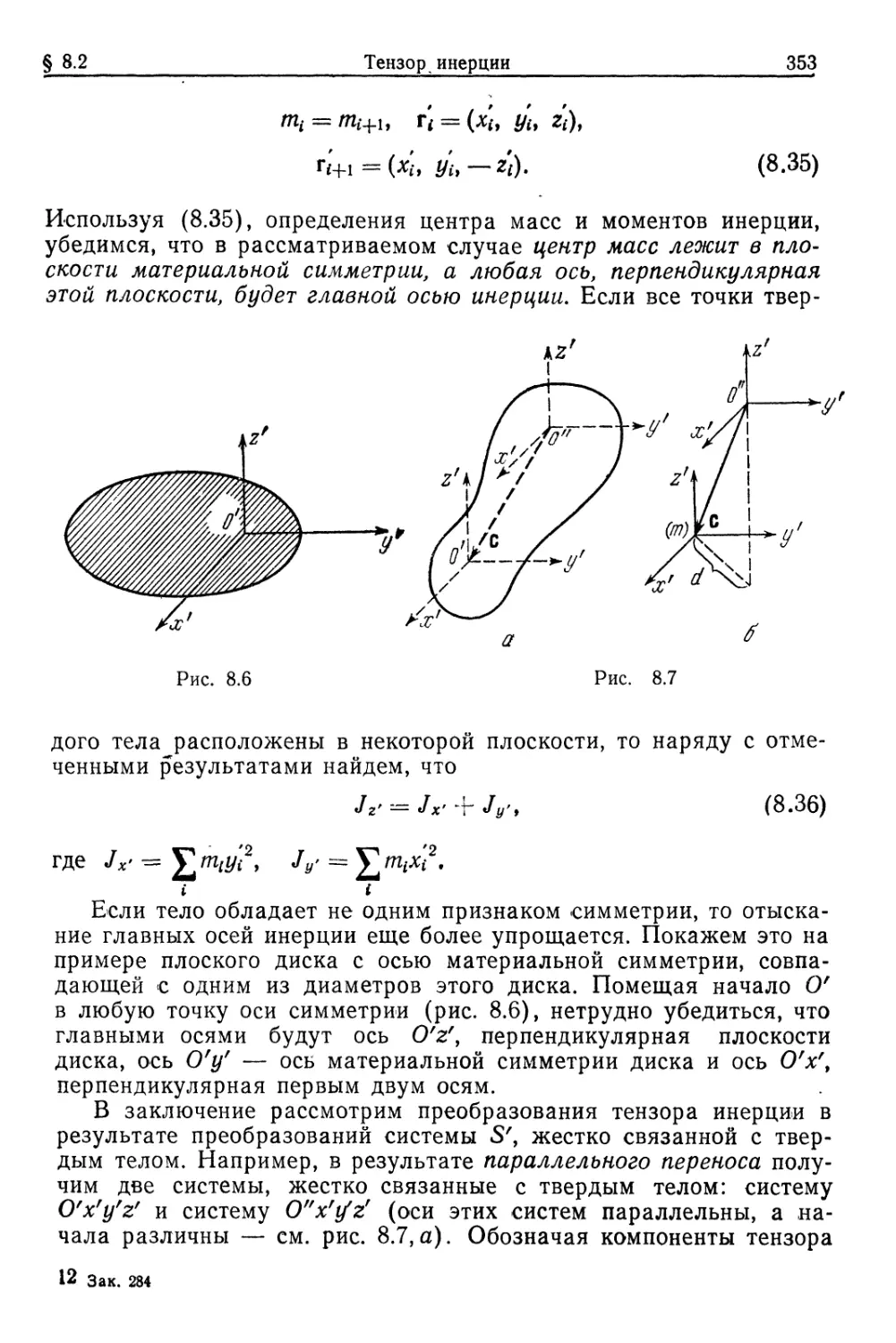
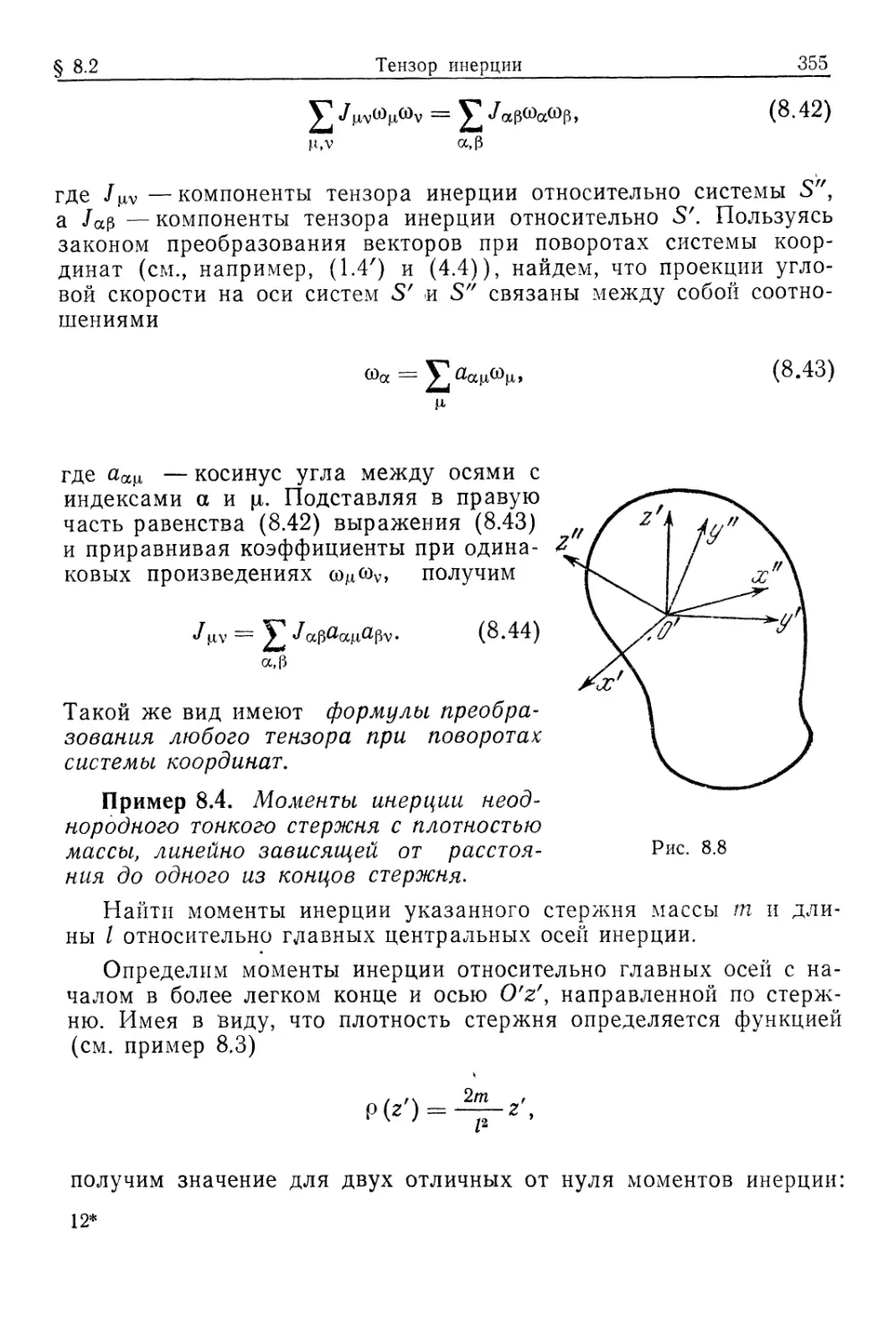
§ 8.2. Тензор инерции 348
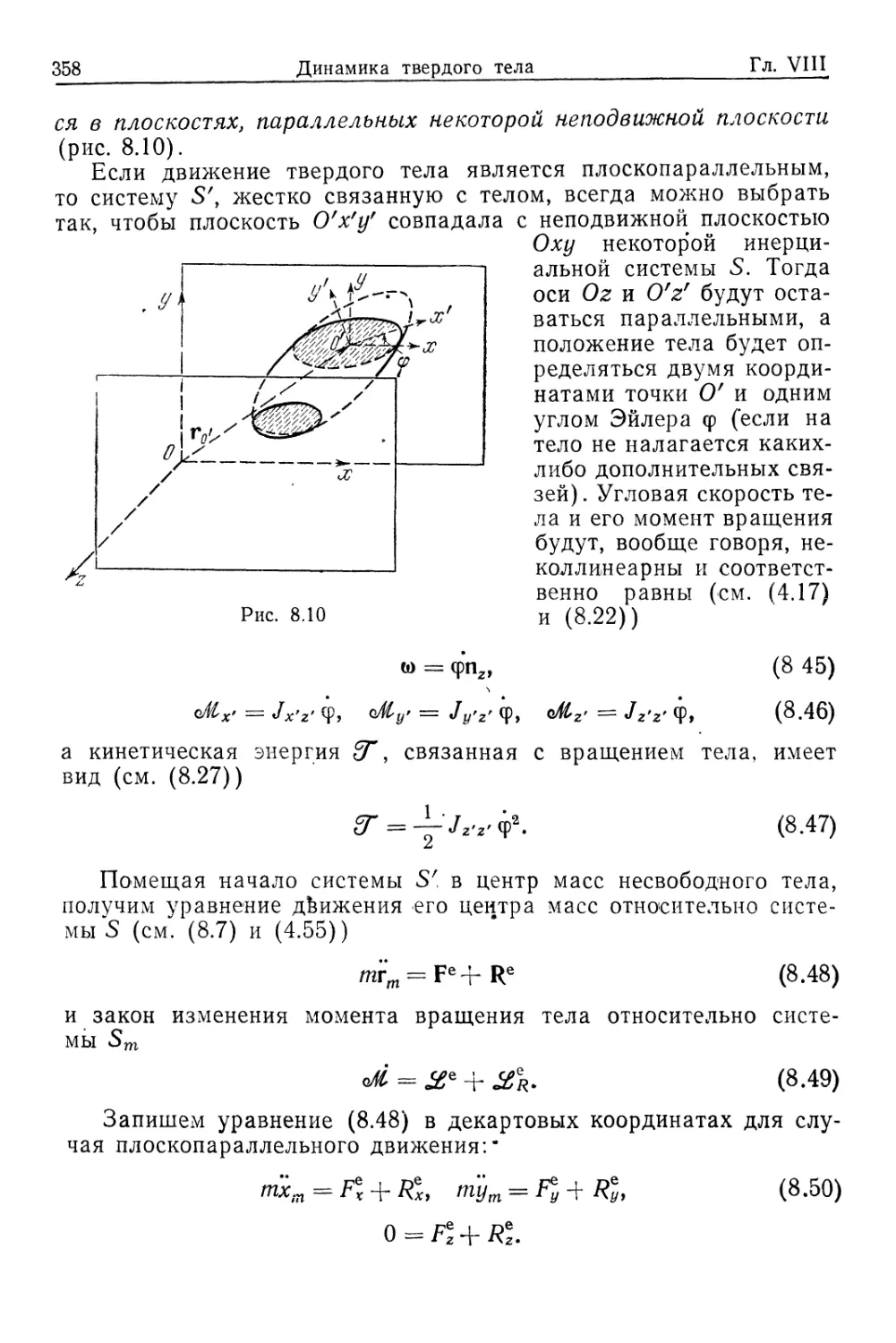
§ 8.3. Плоскопараллельное движение твердого тела 357
§ 8.4. Движение твердого тела с одной неподвижной точкой. Урав-
Уравнения Эйлера . 367
§ 8.5. Линейные неголономные связи 379
ГЛАВА IX. УРАВНЕНИЯ ГАМИЛЬТОНА
§ 9.1. Канонические уравнения 384
§ 9.2. Фазовое пространство и теорема Лиувилля 389
§ 9.3. Скобки Пу.ассона 394
§ 9.4; Уравнение Гамильтона — Якоби 399
§ 9.5. Метод разделения переменных 407
§ 9.6. Движение материальной точки и волновой процесс . . . 415
§ 9.7. Интегральный инвариант Пуанкаре—Картана 419
§ 9.8. Канонические преобразования 427
§ 9.9. Переменные «действие — угол» и адиабатические инварианты 438
§ 9.10. Уравнения движения и интегральные вариационные принципы 449
ЧАСТЬ И. ОСНОВЫ МЕХАНИКИ СПЛОШНЫХ СРЕД . ... 459
ГЛАВА X. ОСНОВНЫЕ ПОНЯТИЯ И ЗАКОНЫ МЕХАНИКИ
СПЛОШНЫХ СРЕД
§ 10.1. Физически бесконечно малая частица 459
§ 10.2. Деформация малой частицы 461
§ 10.3. Законы сохранения массы, изменения импульса и кинетиче-
кинетического момента 470
§ 10.4. Уравнение изменения кинетической энергии. Законы термо-
термодинамики 475
ГЛАВА XI. ИДЕАЛЬНАЯ ЖИДКОСТЬ
§ 11.1. Уравнения движения идеальной жидкости 482
§ 11.2. Основные теоремы динамики идеальной жидкости . . . 487
§ 11.3. Потоки импульса и энергии 494
§ 11.4. Несжимаемая жидкость 496
§ 11.5. Звуковые волны 504
§ 11.6. Ударные волны 511
§ 11.7. Магнитогидродинамика идеальной жидкости 515
ГЛАВА XII. ВЯЗКАЯ ЖИДКОСТЬ
§ 12.1. Тензор напряжений и уравнения движения 522
§ 12.2. Уравнение Навье — Стокса 525
§ 12.3. Малые колебания 537
§ 12.4. Магнитогидродинамика вязкой жидкости 541
ГЛАВА XIII. ИДЕАЛЬНО УПРУГОЕ ТЕЛО
§ 13.1. Закон Гука и уравнения изменения импульса 546
§ 13.2. Равновесие изотропных тел 553
§ 13.3. Упругие волны . . 561
Литература 565
Предметны й указатель 567
ПРЕДИСЛОВИЕ К ТРЕТЬЕМУ ИЗДАНИЮ
Отличия предлагаемого издания «Курса теоретиче-
теоретической механики для физиков» от второго издания этого
учебника обусловлены изменением программы курса,
принципы совершенствования которой были доложены
автором на IV Всесоюзном съезде по теоретической ме-
механике. В связи с этим, в частности, опущен материал,
посвященный распаду частиц, и в то же время за счет
изложения метода усреднения расширена глава, в ко-
которой рассматриваются нелинейные колебания.
При работе над третьим изданием «Курса» автор
также учитывал появление учебного пособия «Задачи
по теоретической механике для физиков» (И. И. Оль-
Ольховский, Ю. Г. Павленко, Л. С. Кузьменков. М., Изд-во
Моск. ун-та, 1977). Этот сборник задач полностью
соответствует «Курсу» (ч. I) и дополняет учебник боль-
большим числом задач. По мнению автора, «Курс» и «Зада-
«Задачи» следует использовать, по существу, как единое учеб-
учебное пособие с целью глубокого освоения теоретической
механики — одной из фундаментальных естественно-
естественнонаучных дисциплин.
Автор приносит глубокую благодарность В. Г. Баг-
Багрову за неизменную поддержку в работе по совершенст-
совершенствованию «Курса», многие ценные советы и полезные
замечания. Автор искренне благодарен всем, кто при-
принимал участие в обсуждениях этого учебника на уче-
ученых советах, кафедрах и совещаниях. Автор также
благодарен В. Л. Экелекяну и Н. М. Садыкову за по-
помощь в подготовке третьего издания к печати.
Пользуясь случаем, автор выражает глубокую при-
признательность переводчику Е. Богдановичу и коллективу
Гос. Научного Издательства ПНР, которые успешно
подготовили и издали эту книгу на польском языке
И. И. Ольховский
ЧАСТЬ I
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Глава I
ОСНОВНЫЕ ПОНЯТИЯ И ЗАКОНЫ МЕХАНИКИ
Все известные нам материальные объекты: поля, элементар-
элементарные частицы, атомы, молекулы, неживые и живые тела — движут-
движутся в самом общем смысле этого слова, т. е. изменяются вообще *.
Наиболее простой формой движения тел является их перемеще-
перемещение относительно друг друга. Любая другая форма движения,
будучи связанной с каким-либо перемещением, не исчерпывается
этим перемещением и является более сложной.
«Само собой разумеется, что изучение природы движения
должно было „ исходить от... простейших форм его... И, действи-
действительно, мы видим, что в историческом развитии естествознания
раньше всего разрабатывается теория простого перемещения,
механика небесных тел и земных масс» **. Эта теория называется
классической механикой. В ней рассматриваются дви-
движения макроскопических тел, т. е. тел, состоящих из большого
количества атомов и молекул, причем допускается, что движения
совершаются со скоростями, малыми по сравнению со скоростью
света. Итак, классическая механика — это теория достаточно мед-
медленных перемещений одних макроскопических тел относительно
других ***.
Основными понятиями классической механики являются по-
понятия о пространстве и времени, о силе и массе, об инерциальной
системе отсчета. Основными законами являются закон инерции
Галилея — Ньютона (первый закон Ньютона), уравнение движе-
движения относительно инерциальной системы отсчета (второй закон
Ньютона), закон равенства действия и противодействия (третий
закон Ньютона). Эти понятия и законы были сформулированы
И. Ньютоном в его гениальном трактате «Математические начала
натуральной философии» A687).
* Q движении как изменении вообще см.: Энгельс Ф. Диалектика при-
природы. М., Политиздат, 1965, с. §0, 214.
** Там же, с. 50.
*** В некоторых частных случаях классическая механика описывает также
движение микрочастиц.
8 Основные понятия и законы механики Гл. I
С точки зрения современного состояния науки взаимодейст-
взаимодействие тел осуществляется посредством полей и передается с конеч-
конечной скоростью — со скоростью света; совокупность тел и полей
представляет собой единую материальную систему. Под влиянием
взаимодействия тела могут изменять свое расположение относи-
относительно друг друга, т. е. перемещаться в пространстве. Вме-
Вместе с тем изменение относительного расположения обладает дли-
длительностью, т. е. перемещение происходит не только в простран-
пространстве, но и во в р е м е н и. Однако пространство и время не являют-
являются объектами, подобными телам, полям и т. д. Пространство и
время представляют собой общие формы существования всех ма-
материальных объектов. Энгельс подчеркивал, что «...обе эти формы
существования материи без материи суть ничто, пустые представ-
представления, абстракции, существующие только в нашей голове» *.
Создание общей теории относительности подтвердило правиль-
правильность такого представления о пространстве и времени. По мне-
мнению Эйнштейна, основателя общей теории относительности, если
бы исчезла материя, то исчезли бы и пространство и время.
Классическая механика изучает такие перемещения тел в
пространстве и времени, при которых процесс передачи взаимо-
взаимодействия тел можно считать практически мгновенным; тем самым
процессы, протекающие в самих полях, мы можем не рассматри-
рассматривать. Несмотря на это ограничение, область применимости клас-
классической механики очень велика (скорости тел должны быть
малыми по сравнению со скоростью света). Отметим также, что
большое количество понятий и аналитических приемов классиче-
классической механики с успехом используется в других разделах теорети-
теоретической физики.
§ 1.1. Понятия о материальной точке, о пространстве и времени
Реальные движения тел настолько сложны, что, изучая их,
нужно отвлечься от несущественных (для рассматриваемого дви-
движения) деталей. С этой целью используются понятия, примени-
применимость которых зависит от того, какое именно движение тел изу-
изучается. Среди этих понятий большое значение имеет понятие о
материальной точке. Материальной точкой называется
тело исчезающе малых размеров; в задачах механики о движении
реальных тел понятие материальной точки применимо к такому
телу, размерами которого можно пренебречь по сравнению с раз-
размерами, характеризующими- движение этого тела. Например, изу-
изучая движение Земли вокруг Солнца, и Землю и Солнце можно
считать материальными точками, хотя радиус Земли примерно
6-Ю6 м, а радиус Солнца 7-Ю8 м. Дело в том, что эти размеры
* Энгельс Ф. Диалектика природы. М., Политиздат, 1965, с. 203.
§ 1.1 Понятия о пространстве и времени 9^
весьма малы по сравнению с расстоянием между центрами
Солнца и Земли, составляющим примерно 1,5-1011 м. В другом
случае, при изучении вращения Земли вокруг своей оси, представ-
представление о Земле как о материальной точке неприменимо. Действи-
Действительно, максимальны^ размером, характеризующим это движе-
движение, является длина окружности, по которой движется какая-либо
точка поверхности Земли, находящаяся на экваторе. Очевидно, что
радиусом Земли нельзя пренебречь по сравнению с указанной
длиной.
Совокупность нескольких тел, каждое из которых можно счи-
считать материальной точкой, называют системой матери-
материальных точек. Например, нашу Галактику можно представ-
представлять как систему очень большого числа материальных точек-
звезд; в ряде задач газ, состоящий из молекул, также можно
представлять себе как систему большого числа материальных то-
точек-молекул. Из приведенных примеров и из определения мате-
материальной точки видно, что это понятие не связано с представле-
представлением об атомистическом строении вещества.
Важную роль в механике играет понятие абсолютно твердого
тела, или, кратко говоря, твердого тела. Так называется си-
система материальных точек, расстояния между которыми не изме-
изменяются при произвольных перемещениях этой системы. Конечно,
размеры реальных тел остаются практически неизменными либо
в определенных условиях, либо в течение определенных интерва-
интервалов времени. Например, годовое угловое смещение большинства
звезд^ составляет примерно 0",01. Следовательно, система Солн-
Солнце — «неподвижные» звезды может быть принята с известной сте-
степенью точности за твердое тело, причем для сравнительно дли-
длительных интервалов времени.
При изучении взаимного расположения материальных точек
первостепенное значение имеет определение расстояний между
ними с помощью эталона длины. Расстояние между точками будет
определяться при этом тем числом, которое показывает, сколько
раз эталон длины «укладывается» на отрезке прямой, соединяю-
соединяющей точки. До 1960 г. за эталон длины принимался метр—длина
некоторого сплошного твердого тела, находящегося в стационар-
стационарных условиях. Согласно единой международной системе СИ,
введенной с 1960 г., за эталон длины принят м етр—длина, рав-
равная 1 650 763,73 длины волны излучения, соответствующего пере-
переходу между уровнями 2рю и 5с?5 атома криптона-86 (в вакууме).
Этот эталон обеспечивает большую точность измерений по сравне-
сравнению со старым эталоном.
Рассмотрим движение некоторой системы А материальных
точек относительно системы 5. Пусть для данных перемещений
системы А систему S можно считать твердым телом. Тогда с те-
телом 5 можно жестко связать систему отсчета, т. е. три
10
Основные понятия и законы механики
Гл. I
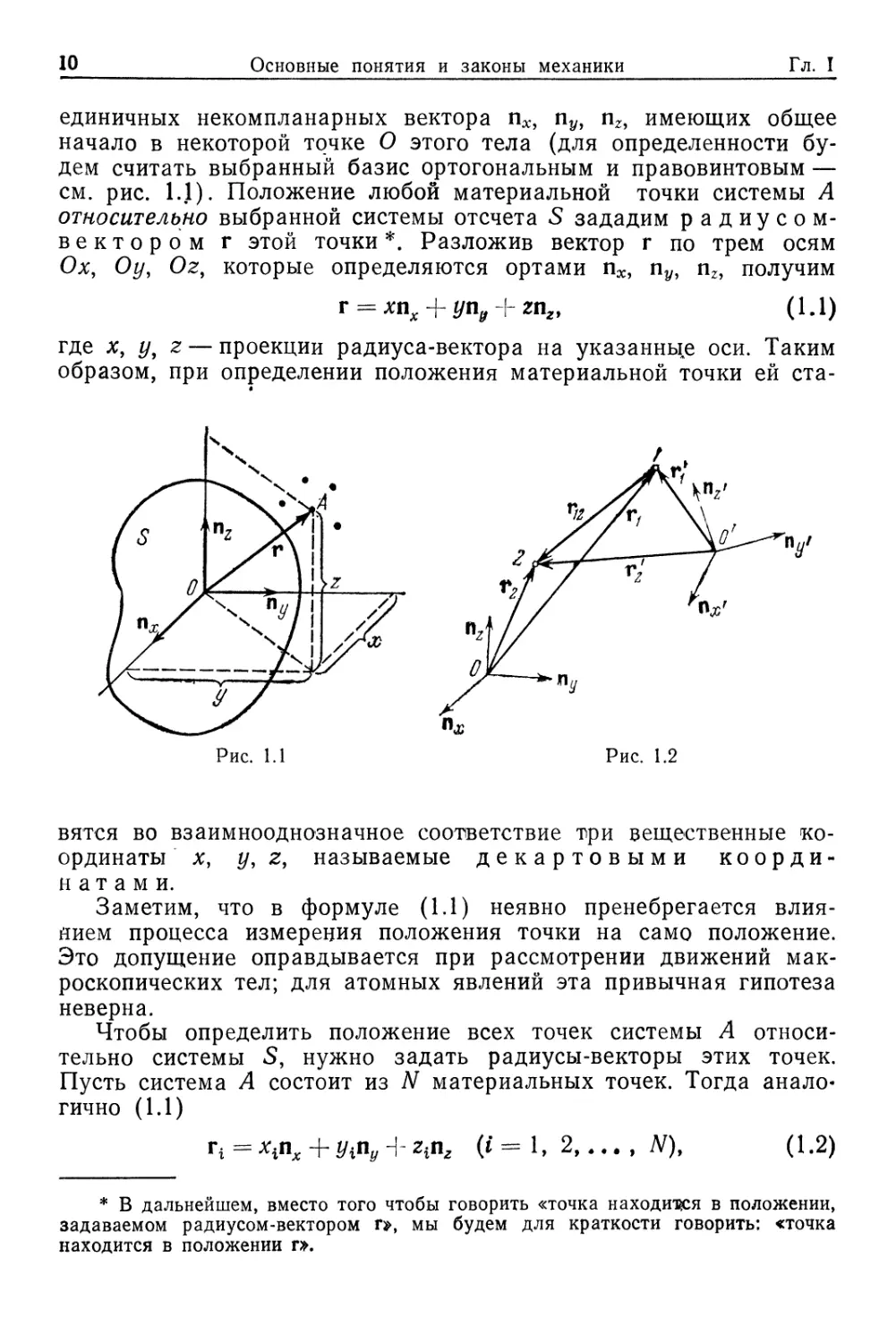
единичных некомпланарных вектора пх, пу, nz, имеющих общее
начало в некоторой точке О этого тела (для определенности бу-
будем считать выбранный базис ортогональным и правовинтовым —
см. рис. 1.1). Положение любой материальной точки системы А
относительно выбранной системы отсчета 5 зададим радиусом-
вектором г этой точки *. Разложив вектор г по трем осям
Ох, Оу, Ог, которые определяются ортами nx, ny, nz, получим
г = хпх + ущ \ znz, A.1)
где х, yf z — проекции радиуса-вектора на указанные оси. Таким
образом, при определении положения материальной точки ей ста-
Рис. 1.1
Рис. 1.2
вятся во взаимнооднозначное соответствие три вещественные ко-
координаты х, у, z, называемые декартовыми коорди-
координатами.
Заметим, что в формуле A.1) неявно пренебрегается влия-
влиянием процесса измерения положения точки на само положение.
Это допущение оправдывается при рассмотрении движений мак-
макроскопических тел; для атомных явлений эта привычная гипотеза
неверна.
Чтобы определить положение всех точек системы А относи-
относительно системы 5, нужно задать радиусы-векторы этих точек.
Пусть система А состоит из N материальных точек. Тогда анало-
аналогично A.1)
угпу + z{nz
= 1, 2,. •. ,
A.2)
* В дальнейшем, вместо того чтобы говорить «точка находится в положении,
задаваемом радиусом-вектором г», мы будем для краткости говорить: «точка
находится в положении г».
§ 1.1 Понятия о пространстве и времени И
где г* — радиус-вектор i-той точки, а хи Уи %г — декартовы коор-
координаты i-той точки.
Приведем пример системы отсчета. Для изучения движения
планет солнечной системы относительно системы Солнце — звезды
можно в течение сравнительно длительного промежутка времени
систему Солнце — звезды считать твердым телом. Совмещая на-
начало системы отсчета с центром Солнца и связывая направления
декартовых осей с направлениями на определенные звезды, полу-
получим гелиоцентрическую'систему отсчета Копер-
Коперника.
Рассмотрим свойства пространства, для чего возьмем любые
две точки 1 и 2. Положения этих точек относительно некоторой
системы S, зададим радиусами-векторами п и г2:
гх - хгпх + угпу + 2хп2,
Г2 = Х2ПХ + У2Пу + 22П2.
Вектор, проведенный от точки 1 к точке 2, равен
(здесь и в дальнейшем порядок индексов 1 и 2 соответствует на-
направлению вектора от точки 1 к точке 2), а расстояние между
этими точками равно модулю вектора ri2, т. е.
гп = [(*2 -*х)а + (#2 - Ух? + Bа - SiJ]1'2. A.3)
На основании опыта с макроскопическими телами, скорости
которых достаточно малы, можно утверждать, что величина дан-
данного пространственного интервала относительно разных произ-
произвольно движущихся систем отсчета — одна и та же в данный мо-
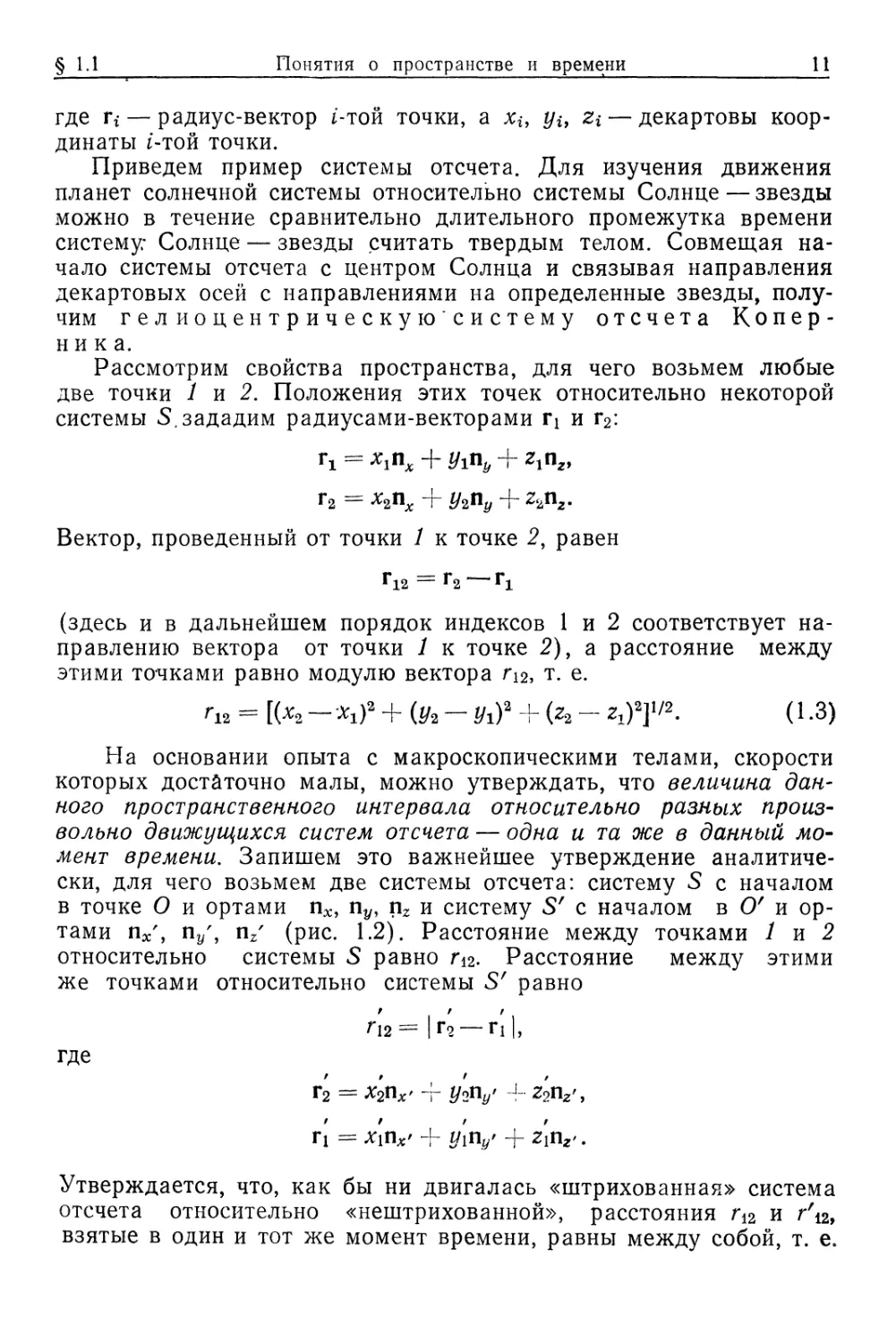
момент времени. Запишем это важнейшее утверждение аналитиче-
аналитически, для чего возьмем две системы отсчета: систему S с началом
в точке О и ортами пх> щ, nz и систему S' с началом вО'и ор-
ортами пх', пу\ п/ (рис. 1.2). Расстояние между точками 1 и 2
относительно системы S равно ri2. Расстояние между этими
же точками относительно системы S' равно
Г12= |Г2 —г!|,
где
ft * /
Г2 = Х2ПХ' + #2*У f 22П2',
г! =х[пх> + у[пу> + г[пг>.
Утверждается, что, как бы ни двигалась «штрихованная» система
отсчета относительно «нештрихованной», расстояния ri2 и r'i2,
взятые в один и тот же момент времени, равны между собой, т. е.
12Основные понятия и законы механикиГл. I
[(Дл;J + (Д</J + (Д*)Т/2 = [(Д*')я + (W + (Л2'J]1/2; A -4)
здесь Ах=х2—xlr>Ax'=x'2—х'г и т. д. Из постулата A.4) сле-
следует, что проекции вектора r'i2 на оси S' и проекции вектора
г12 на оси 5 связаны между собой ортогональным преоб-
преобразованием, а именно преобразованием
Дл;' = аХ'Х Дл: + а^д Ay + ax>zAz,
&У' = а*х Д* + а„уАу + ay>zAz, A.4')
Дг' = а*хАх + az>yAy + az>zAz,
где коэффициенты ai',- подчинены условиям ортогональ-
ортогональности
= О,
+ 4'у + <&'у = 1, а>х'хах>г + а„>хау>2 + аг>хаг>г - 0, A.4")
d f аГиаг>г = О
и равны косинусам углов между ортами S' и S (например, ах'х —
это косинус угла между пх* и пх).
Как известно, пространства, в которых расстояния между
любыми двумя точками определяются формулой A.3), называют-
называются евклидовыми. Таким образом, из постулата A.4), осно-
основанного на опыте, следует, что пространства в классической ме-
механике—это евклидовы пространства *.
Преобразование A.4') нетрудно представить в форме
Г12 = Г12, A.5)
где
Г12 = Г2 — г[ = (Дл:') пх> + (Ау') щ> 4 (Дг') tv,
г12 = г, — Гх = (Дл:) пх + (Ау) пу + (Дг) п2, A.5')
а орты системы 5 связаны^ с ортами S' следующим образом:
Пх = ах>хХ\х' + йу'хЩ' + пг'хПг',
пд = ах>упх> + a^n^' + а2^пг-, A.5")
nz = ах>гпх> -\-ау>гпу'
* Ньютон подчеркивал: «... самое проведение прямых линий и кругов, слу-
служащее основанием геометрии, в сущности относится к механике. Геометрия не
учит тому, как проводить эти линии, но предполагает (постулирует) выполни-
выполнимость этих построений». «Итак, геометрия основывается на механической прак-
практике» (из предисловия Ньютона к первому изданию «Математических начал»,
см. [3]).
§ 1.1 Понятия о пространстве и времени 13
Из A.5) вытекает простое, но очень важное соотношение радиу-
радиусов-векторов одной и той же точки относительно разных систем
отсчета. Пусть го' — радиус-вектор начала системы S' относи*
тельно системы 5, г — радиус-вектор точки относительно системы
S, а гг — радиус-вектор той же точки относительно S'. Тогда,
полагая г2 =г, т[ = г', тг — r0-, r[ = о, из A.5)* получим
Г = ГО' + Г\ A.6)
Подчеркнем еще раз, что соотношения A.5) и A.6) справедливы
только в классической механике. Если же скорости тел не пре-
пренебрежимо малы по сравнению со скоростью света, то эти «оче-
«очевидные» постулаты становятся неверными. Движение тел с лю-
любыми скоростями (в том числе сравнимыми со скоростью света)
рассматриваются в релятивистской механике Эйнштейна.
Важную роль в механике играет понятие периодического
процесса, т. е. регулярно повторяющегося явления. Например,
такими процессами являются колебания маятника, вращение
Земли вокруг своей оси, движение Земли по орбите вокруг
Солнца. Тело, с помощью которого осуществляется периодический
процесс, может служить, часами, а длительность периода — этало-
эталоном времени. Конечно, длительность периода реального периоди-
периодического процесса постоянна лишь с определенной степенью точ-
точности. До 1960 г. эталоном времени служила определенная часть
средних солнечных суток. Но ввиду экспериментально доказан-
доказанной (с помощью атомных -часов) неравномерности вращения
Земли, а также изменений среднего тропического года, за эталон
времени в системе СИ принята секунда — длительность, рав-
равная 1/31556 925,9747 части тропического года для 1900 г., янва-
января 0, в 12 часов эфемеридного времени (cto. [41, гл. II]).
В классической механике постулируется существование таких
часов, длительность периода которых не изменяется при произ-
произвольных перемещениях этих часов. Такие часы позволяют измерить
длительность различных процессов в любых системах отсчета и
установить, что величина данного временного интервала относи-
относительно разных произвольно движущихся систем отсчета одина-
одинакова, т. е.
*» = 4; A.7)
здесь ti2—t2~-1\ — длительность определенного процесса относи-
относительно системы 5, t\2 = h — t\ — длительность того же процесса
относительно системы S'. Кроме того, предполагается, что изме-
измерение длительности некоторого процесса можно провести, не
влияя на саму длительность.
Согласно A.7) в любых системах отсчета можно произвольно
выбирать одно и то же начало отсчета времени и тем самым ввес*
14
Основные -понятия и законы механики
Гл. I
ти одну временную «координату» t. Постулат A.7), как и посту-
постулат A.5), справедлив, пока скорости движения макроскопических
тел пренебрежимо малы по -сравнению со скоростью света *.
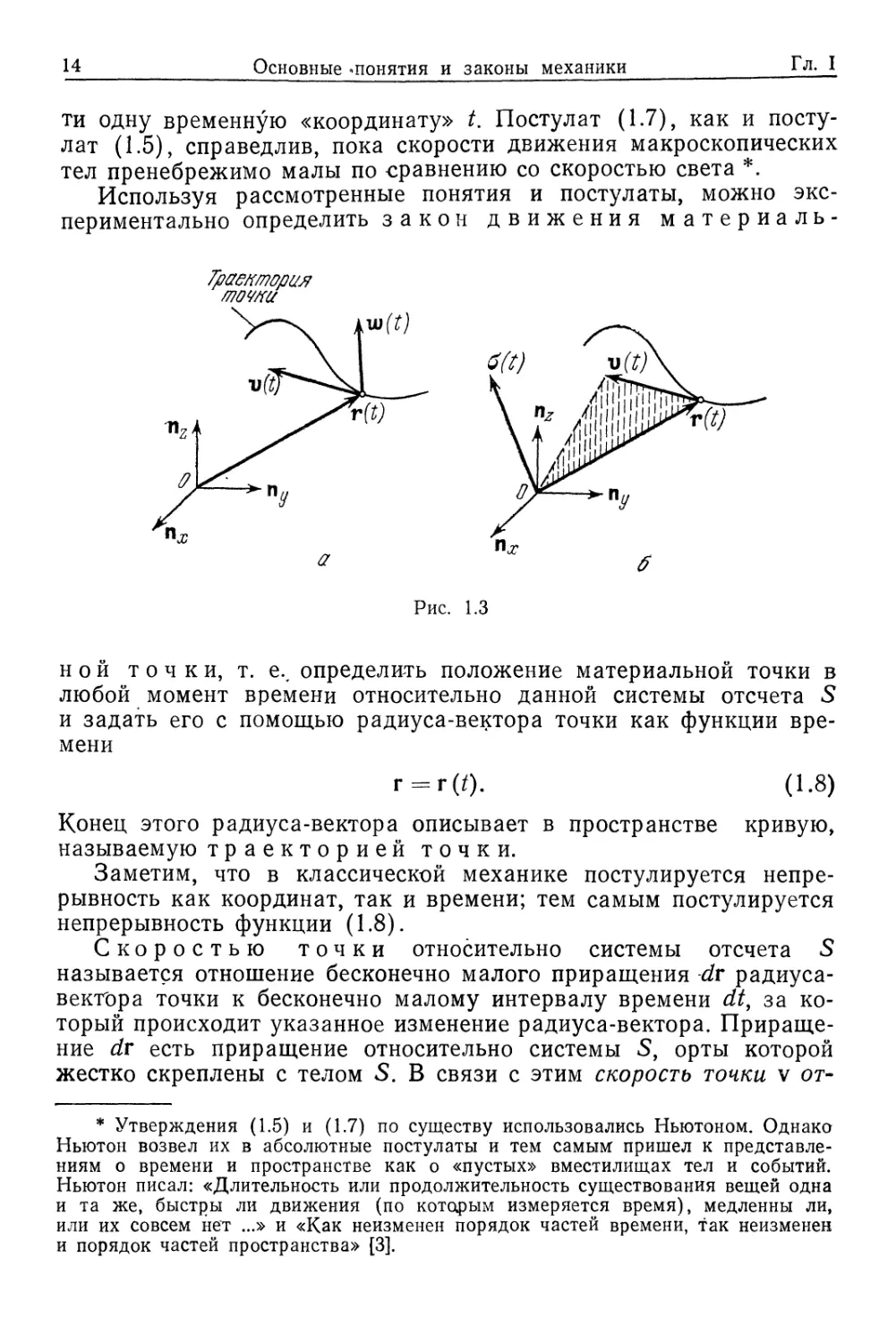
Используя рассмотренные понятия и постулаты, можно экс-
экспериментально определить закон движения материаль-
Граехтория
томи
w(t)
Рис. 1.3
ной точки, т. е% определить положение материальной точки в
любой момент времени относительно данной системы отсчета S
и задать его с помощью радиуса-вектора точки как функции вре-
времени
г = г(*). A.8)
Конец этого радиуса-вектора описывает в пространстве кривую,
называемую траекторией точки.
Заметим, что в классической механике постулируется непре-
непрерывность как координат, так и времени; тем самым постулируется
непрерывность функции A.8).
Скоростью точки относительно системы отсчета S
называется отношение бесконечно малого приращения -dv радиуса-
векгора точки к бесконечно малому интервалу времени dt, за ко-
который происходит указанное изменение радиуса-вектора. Прираще-
Приращение dx есть приращение относительно системы S, орты которой
жестко скреплены с телом S. В связи с этим скорость точки v от-
* Утверждения A.5) и A.7) по существу использовались Ньютоном. Однако
Ньютон возвел их в абсолютные постулаты и тем самым пришел к представле-
представлениям о времени и пространстве как о «пустых» вместилищах тел и событий.
Ньютон писал: «Длительность или продолжительность существования вещей одна
и та же, быстры ли движения (по которым измеряется время), медленны ли,
или их совсем нет ...» и «Как неизменен порядок частей времени, так неизменен
и порядок частей пространства» [3].
§ 1 1 Понятия о пространстве и времени 15
носительно системы S равняется производной радиуса-вектора по
времени при постоянных ортйх пх, пу, nz (рис. 1.3,а) *:
v=r, A.9)
Ускорение точки w относительно системы S опреде-
определяется как первая производная скорости по времени при посто-
постоянных ортах пх, пу, nz. Учитывая A.9), ускорение можно также
записать в виде второй производной от г по времени. Таким об-
образом,
w-v-r, A.10)
dv •• d4
где v = —, г = .
dt dt*
В ряде задач используется понятие секторной скоро-
скорости точки а, по определению равной
*=--y-[rv]" AЛ1)
Величина 7г | [vdr] | равна площади, очерчиваемой радиусом-век-
радиусом-вектором при элементарном перемещении точки на dr. Следователь-
Следовательно, модуль секторной скорости равен скорости, с которой изме-
изменяется площадь, очерчиваемая радиусом-вектором точки (рис. 1.3,
б). Иногда также рассматривают секторное ускорение а.
Радиусы-векторы точек, их скорости и ускорения задают с
помощью различных координат.
В декартовых координатах радиус-вектор точки как функция
времени задается тремя координатами x(t), y(t), z(t) как функ-
функциями времени. Этот вектор определяет положение точки относи-
относительно выбранной системы отсчета S в любой момент времени. Диф-
Дифференцируя радиус-вектор r(t) по времени при постоянных ортах
пх, Щ, nz, найдем скорость и ускорение точки в виде
\ = xnx + yny + zn2i A.12)
ч = хпх + упу + гпг.~ A.13)
Следовательно, проекции скорости и ускорения точки на декарто-
декартовы оси соответственно равны
vx = х> vy = У> vz = *;
wx = x, wy = y, wz = z. A.14)
* Скорость точки v иногда называется линейной скоростью.
16
Основные понятая и законы механики
Гл. I
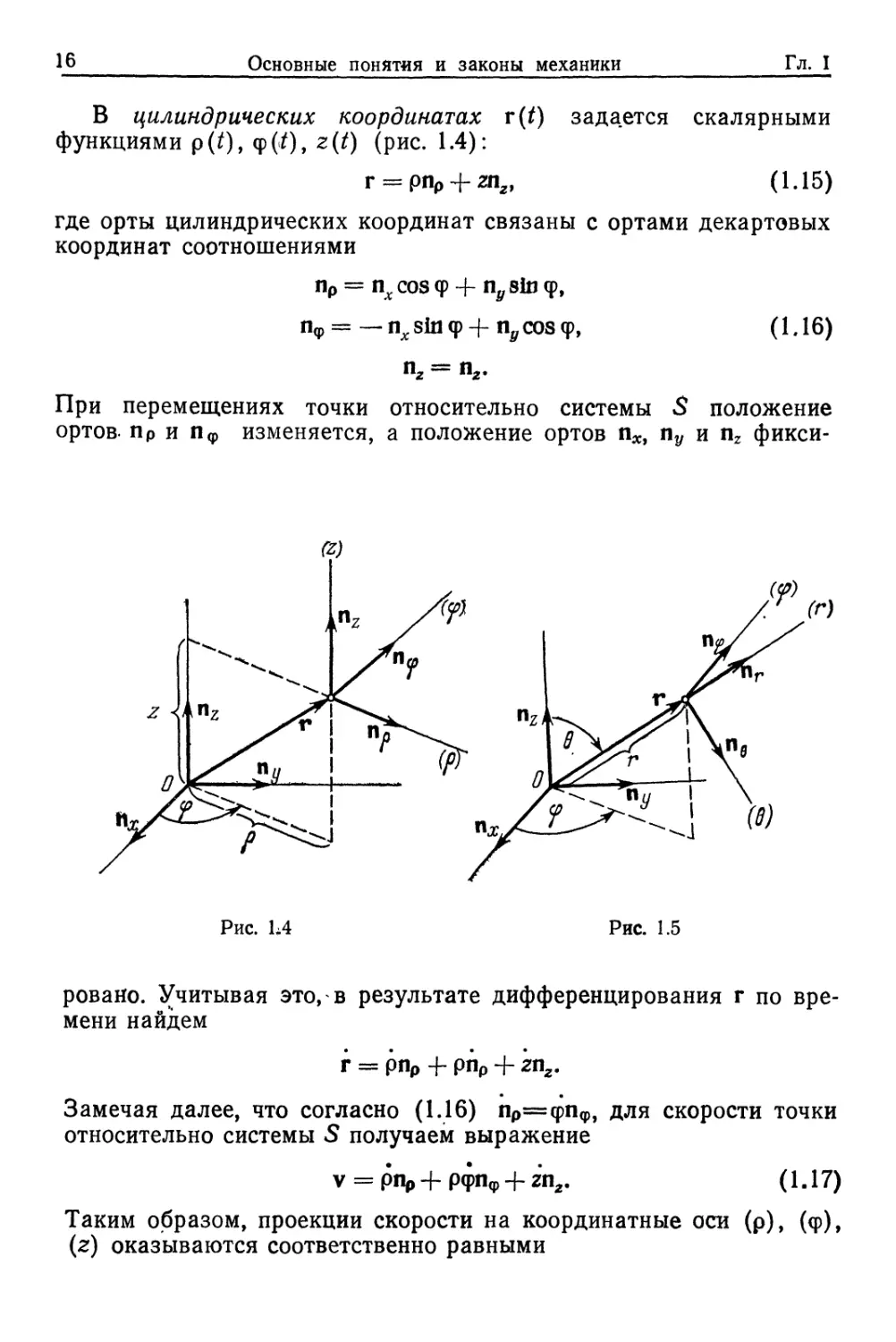
В цилиндрических координатах r(t) задается скалярными
функциями р@, ф@, z(t) (рис. 1.4):
zn2, A.15)
где орты цилиндрических координат связаны с ортами декартовых
координат соотношениями
Пр = П^ COS ф + П^ SlO ф,
пф = — п^ sin ф+ n^ cos ф, A.16)
пг = п2.
При перемещениях точки относительно системы S положение
ортов. При пф изменяется, а положение ортов пх, пу и nz фикси-
(f)
Рис. Ь4
Рис. 1.5
ровано. Учитывая это, в результате дифференцирования г по вре-
времени найдем
г = рпр + рпр + mz.
Замечая далее, что согласно A.16) пр=фпф, для скорости точки
относительно системы 5 получаем выражение
• •
Таким образом, проекции скорости на координатные оси (р), (ф),
(г) оказываются соответственно равными
§ 1.1 Понятия о пространстве и времени 17
V9 = P, Уф-рф, VZ=.Z. A.18)
Аналогично, дифференцируя по времени v и учитывая зависи-
зависимость пр и пф от ф@, получим ускорение точки относитель-
относительно S в виде разложения по ортам цилиндрических координат:
W-(p-pcp2)np + — ^(р2ф)Пф + 2П2. A.19)
~р at
Следовательно, проекции ускорения на оси (р), (ф), (г) соответ-
соответственно равны
о>р = Р — РФ2, шф = — -4- (Р2ф)> w2 = 'L A.20)
р at
Отметим, что проекция ускорения Wq> связана с проекцией
секторной скорости а2 соотношением
поскольку согласно A.11), A.15) и A.17)
(L22>
В сферических координатах радиус-вектор точки задается
функциями r(t), Q(t), q(t) (рис. 1.5). Разложение радиуса-век-
радиуса-вектора по ортам сферических координат и сами орты определяются
формулами
г - гпп
Пг = ( ^
по = (пх cos Ф + n^ sin ф) cos 6 — пг sin 6, A.23)
пф = —Ш
Учитывая, что направления ортов пг, пе, пф зависят от положения
точки, для ее скорости получим выражение *
v = гпг + гёпе + г51п0фПф. A-24)
Следовательно, проекции скорости точки на координатные оси
(г)у (в), (ф) соответственно равны
i/r = /% ve=rQ, v(p = rsinQ-y. (L25)
Иногда используется естественное задание движения точки,
при котором в качестве аргумента радиуса-вектора точки берется
* Проекции ускорения в сферических координатах будут получены более-
простым способом на с. 228.
18
Основные понятия и законы механики
Гл. I
длина 5 дуги траектории, а сама длина дуги задается как функ-
функция времени:
r = r(s), s = s(t) A.26)
(длина дуги отсчитывается от начального положения точки в
направлении ее движения).
а
Рис. 1.6
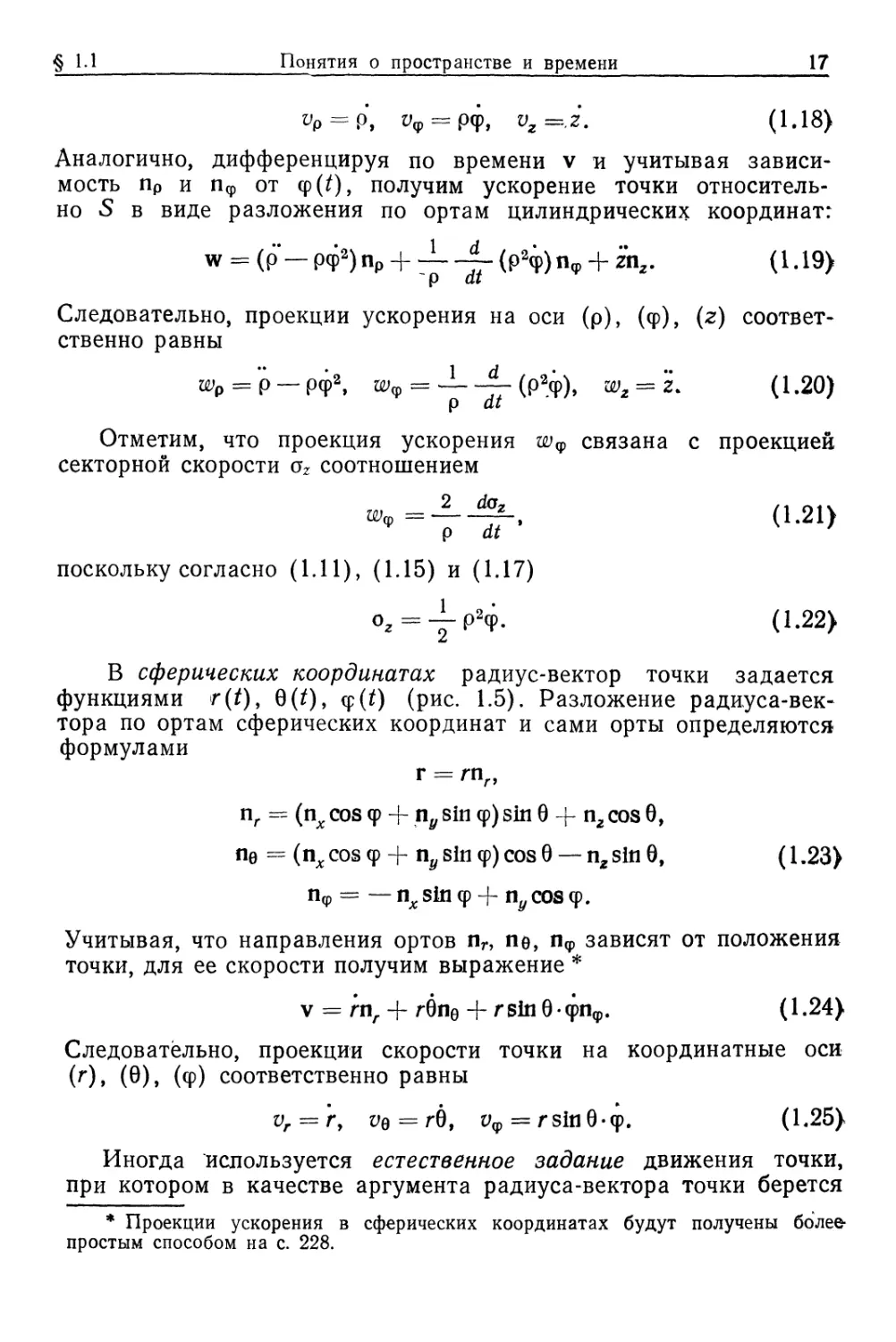
С помощью векторной функции r(s) в каждой точке траекто-
траектории можно определить орты, совокупность которых называется
естественным трехгранником (рис. 1.6,а). Один из
этих ортов пт направляют по приращению dv, определяющему
касательную к траектории. Поскольку |dv[ с точностью
до бесконечно малых высшего порядка равен элементу дуги
ds, орт
_ dv
Х~~ ds '
A.27)
Второй орт п направляют по приращению dnx, т. е. по г л а в н о й
нормали к траектории*. Используя A.27), находим
ds
n,
A.28).
*Приращение любого вектора а постоянной длины перпендикулярно самому
вектору. В самом деле, дифференцируя обе части равенства а2 = const, получим
ada = 0, чем и доказывается утверждение.
§ 1.1
Понятия о пространстве и времени
19
т. е.
п .=
ds*
ds*
A.29).
Орт п можно записать с помощью радиуса кривизны тра-
траектории R, который определяется, как отношение приращения
длины дуги ds к da — углу между пс и nT-\-dn%:
ds A.30)
da
Так как пх — единичный вектор, то модуль его приращения \dnx\
с точностью до величины высшего порядка малости равен углу da
(рис. 1.6, б). Поэтому согласно A.30) и A.28)
R =
ds*
а орт п определится выражением
ds
(Г.31)
A.32)
Третий орт щ естественного трехгранника задается с помощью
векторного произведения [птп] и определяет бинормаль к
траектории.
Разложение скорости точки по «естественным» ортам полу-
получим, используя A.9), A.26) и A.27):
где s =
ds
dt
v = snt,
A.33)
Дифференцируя обе части A.33) по времени, найдем ускоре-
ускорение точки
w = snT + s
Замечая, что согласно A.28) и A.31)
dt
dt
__ п '
окончательно получим
w = snt
R
п.
Учитывая, что s = v, ускорение точки в естественных координатах
можно также представить в виде
20
Основные понятия и законы механики
Гл. I
W = ОТ1Т +
¦п.
A.34)
Введенные в этом параграфе понятия и соотношения дают
возможность решать кинематические задачи, т. е. зада-
задачи, в которых движение описывается вне связи с причинами, вызы-
вызывающими это движение.
Пример 1.1. Траектория, скорость и ускорение материальной
точки в декартовых координатах.
Закон движения точки относительно системы отсчета S имеет
вид
х = acosco/, r/ = ?sinco/, 2 = 0,
где a, b и со — постоянные величины. Найти траекторию, линей-
линейную и секторную скорости, а также ускорение точки относительно
системы S.
Дифференцируя по времени заданные функции x(t), y(t) и
z(t)y получим проекции скорости и ускорения точки на декартовы
оси
х = —aco sifico/, у = + бсо cos со/, 2 = 0;
х = —aco2 cos со/, у =— йсо2 sin со/, 2 = 0.
г Выражая проекции ускорения
через проекции радиуса-векто-
радиуса-вектора, убедимся в том, что ускоре-
ускорение в любой момент времени
направлено к началу коорди-
координат (рис. 1.7):
х = — со2л:, у = — со2у, 2 = 0,
т. е. г = —со2г.
Для секторной скорости, ис-
используя функции #(/), y(t),
x(t)> У{t)$ найдем выражение
Рис. 1.7
a =
X
X
У
У
0
0
Jo>
где Оо — значение секторной скорости в начальный момент време-
времени * (?=0). Наконец, исключая t из функций x(t)9 y(t)9 получим
уравнение траектории
* Здесь и в дальнейшем все величины с индексом «О» являются постоян-
постоянными.
§ 1.1 Пснгятия о пространстве и времени 21
Таким образом, в рассмотренном случае точка движется с посто-
постоянной секторной скоростью по эллипсу, лежащему в плоскости
г=0, причем ускорение все время направлено к центру эллипса.
Пример 1.2. Траектория, скорость и ускорение материальной
точки в цилиндрических координатах.
Цилиндрические координаты точки при ее движении относи-
относительно некоторой системы отсчета 5 изменяются по закону
Найти траекторию, линейную и секторную скорости, а также уско-
ускорение точки.
Для простоты рассмотрим три частных случая.
1. Полагая в заданных функциях ро=О и исключая из них
время, найдем уравнение траектории
п п ф —фо z — Zp
Р = Ро» : ~ : »
фо Ч
а используя выражения A.15), A.17) и A.19), получим
V = РофоПф + 20П2, W = — Рф
Отсюда видно, что точка движется по винтовой линии (ее шаг ра-
равен 2яго/фг)) с постоянными по абсолютной величине скоростью
v = (рофо + 2оI/2 и ускорением w = роф2о; направлено же ускоре-
ускорение все время к оси цилиндра перпендикулярно к ней (рис. 1.8).
Нетрудно убедиться, что модуль и направление секторной скорос-
скорости в этом случае не сохраняются.
2. Полагая фо=0 и поступая аналогично предыдущему, найдем
р — р0 z — z0
= ~> Ф = Фо,
Ро *о
= (Pot + Ро) пр + (V + *о)
v = ропр + zonz, w = О,
Таким образом, точка движется по прямой с постоянной линейной
и секторной скоростями (рис. 1.9).
22
Основные понятия и законы механики
Тл. I
Рис. 1.8
Рис. 1.9
кроме того, положить ро = О, фо=О,
3. Если задать zo = O
Zo=O, то
г = ро/пр, v = ропр +
w = — рофо /пр + 2роФопф, сг = —
В этом случае секторная скорость изменяется по величине, но со-
сохраняет свое направление, что обусловлено движением по плоской
траектории. Исключая время из функций р=ро^ и ф=фь?, получим
уравнение траектории — архимедову спираль
Р =
фо
(рис. 1.10). Такую кривую описывает точка, движущаяся с посто-
постоянной скоростью ро вдоль прямой, которая сама вращается с по-
постоянной угловой скоростью фо.
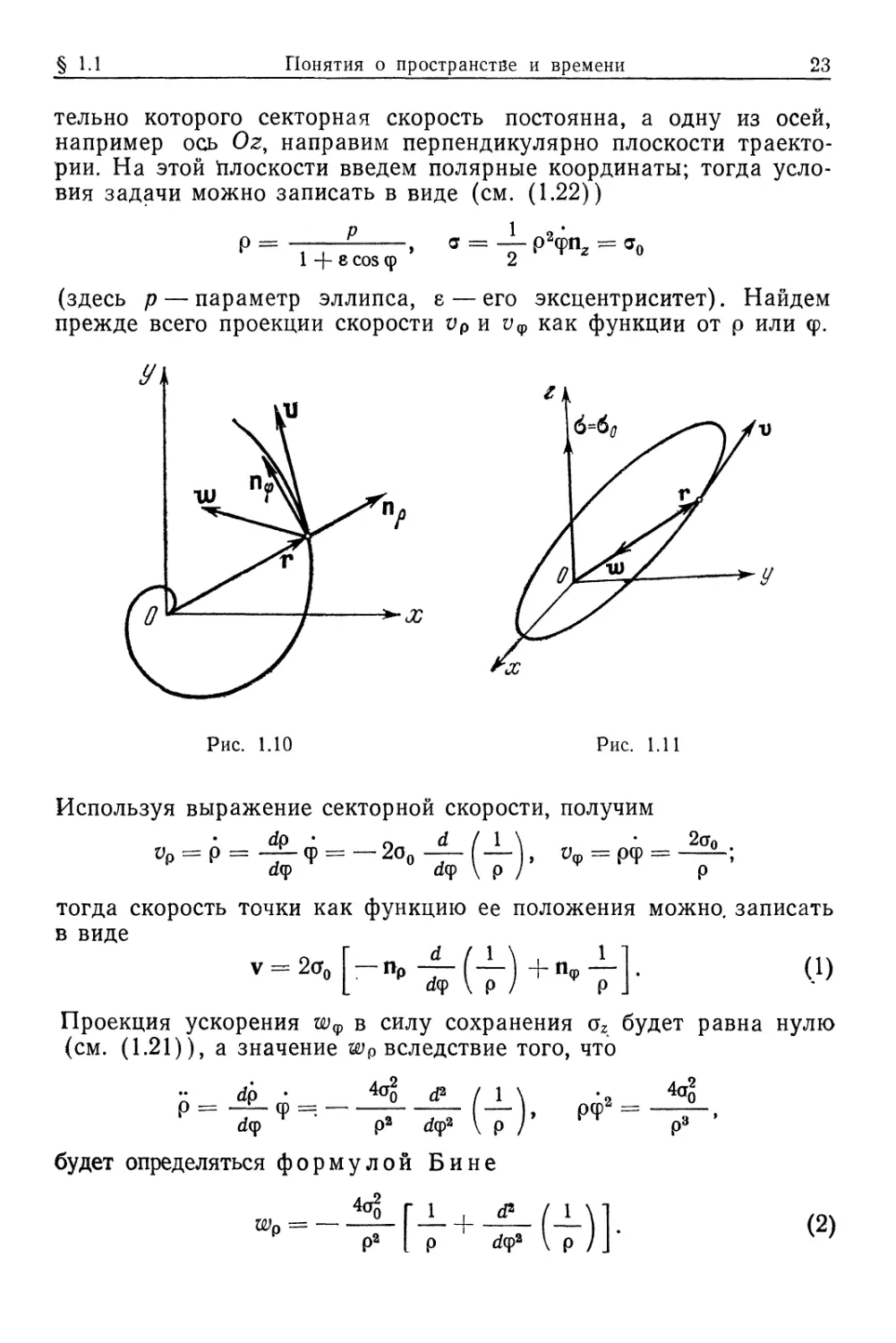
Пример 1.3. Ускорение точки, движущейся по эллипсу с по-
постоянной относительно фокуса эллипса секторной скоростью.
Из эмпирически установленных двух законов Кеплера извест-
известно, что в гелиоцентрической системе отсчета любая планета опи-
описывает эллипс с фокусом в центре Солнца, а секторная скорость
планеты относительно фокуса постоянна (рис. 1.11) *. Основы-
Основываясь на этих законах, найти w—ускорение любой планеты как
функцию ее расстояния от Солнца.
Выберем систему координат с учетом характера исследуемого
движения. Начало координат поместим в центр Солнца, относи-
* Более подробное обсуждение законов Кеплера см. на с. 87 и 120.
§ 1.1
Понятия о пространстве и времени
тельно которого секторная скорость постоянна, а одну из осей,
например ось Oz, направим перпендикулярно плоскости траекто-
траектории. На этой Плоскости введем полярные координаты; тогда усло-
условия задачи можно записать в виде (см. A.22))
1 + 8 COS ф 2
(здесь р — параметр эллипса, 8 — его эксцентриситет). Найдем
прежде всего проекции скорости Vp и иф как функции от р или ф.
Рис. 1.10
Рис. 1.11
Используя выражение секторной скорости, получим
тогда скорость точки как функцию ее положения можно, записать
в виде
i
Проекция ускорения w^ в силу сохранения az будет равна нулю
(см. A.21)), а значение w9 вследствие того, что
dp • 4<*5 d2 / 1 \ -2 Щ
р = -Л. ф == — — — , РФ — —-
^Ф р2 ^ф2 \ р / Р3
будет определяться формулой Бине
р2 [ р ^ф2 \ р / J
Wo =
B)
24 Основные понятия и законы механики Гл. I
Отсюда, используя уравнение эллипса, окончательно получим
Таким образом, исходя из законов Кеплера, приходим к выводу,
что ускорение любой планеты обратно пропорционально квадрату
расстояния от планеты до Солнца и направлена к центру Солн-
Солнца (сравните этот результат с законом всемирного тяготения
Ньютона A.49)).
Отметим, что формулы A) и B) сцраведливы для любой
плоской траектории, заданной в полярных координатах функцией
р(ф), причем формула B) верна лишь при условии постоянства
секторной скорости.
Пример 1.4. Ускорение точки, движущейся по эллипсу с по-
постоянной относительно центра эллипса секторной скоростью.
Точка движется по эллипсу с полуосями а и 6. Ее секторная
скорость относительно центра эллипса постоянна. Определить
ускорение точки как функцию ее положения.
Совместим начало декартовых координат с центром эллипса,
а ось Ог направим перпендикулярно к плоскости траектории
(см. рис. 1.7). Тогда оси Ох и Оу можно выбрать так, что траек-
траектория точки будет описываться уравнением
а2 б2
Условие постоянства секторной скорости в декартовых координа-
координатах имеет вид
Дифференцируя левую и правую части уравнения эллипса по вре-
времени, вместо исходных уравнений получим систему
a2 b2
из которой находим проекции скорости точки как функции х, у:
2сго • , 2а0
X — L. yf у = -\ — X.
Ь* а2
Отсюда имеем
Ь2
§ 1.1 Понятия о пространстве и времени 25
Ц 4 X
X = '
Ч
т, е.
W = — Г.
262
Таким образом, в отличие от предыдущего примера ускорение
точки направлено к центру эллипса и пропорционально расстоя-
расстоянию от точки до этого центра.
Пример 1.5. Определение положения точки по ее скорости.
Точка движется по плоскости траектории с постоянной сектор-
секторной скоростью а0. Величина ее линейной скорости обратно про-
пропорциональна расстоянию р от точки до некоторого центра, лежа-
лежащего в плоскости движения г==0 и выбранного "за начало коорди-
координат. Найти закон движения точки, ее траекторию и ускорение,
если при ?=0 заданы р = ро, v = v0 и угол а между радиусом-век-
радиусом-вектором точки и ее скоростью @<а0<я/2).
Выберем полярную ось так, чтобы в начальный момент вре-
времени точка была расположена на этой оси. Тогда условия задачи
можно записать в виде
= 2or0, v - с/р,
где 2ао=ро^о sinao, c^po^o. Пользуясь тем, что, с одной стороны,
а с другой стороны, согласно условию v = povo/p, найдем радиаль-
радиальную составляющую скорости как функцию р:
Так как 0<а0<я/2, то ро>О и, следовательно, в последнем выра-
выражении нужно выбрать знак «плюс». Разделяя в этом выражении
переменные р и К, в результате интегрирование получим
р2 *= Bроуо cos a0) t + const,
откуда, учитывая начальные условия (?=0, р=р0), окончательно
находим
Определяя далее <р из выражения секторной скорости, получим
ф = rpoPosinao
pg + Bp0u0 cos oo) t '
26 Основные понятия и законы механики Гл. I
Отсюда интегрированием найдем ф(/):
ф==
р0
(здесь для определения постоянной интегрирования использовано
условие: при /=0, фО=О). Из функций р (t), q(t) исключим t и по-
получим уравнение траектории — логарифмическую спираль
Наконец, зная уравнения орбиты р(ф) и используя постоянство
секторной скорости, находим ускорение точки как функцию р
(см. формулу Бине на с. 23)
2 2
§ 1.2. Понятия о силе и массе
Рассмотрим движение материальной точки относительно про-
произвольной системы отсчета, предполагая, что начальные ус-
условия, т. е. радиус-вектор точки г0 и ее сжорость v0 в началь-
начальный момент времени tOi могут быть заданы произвольно (такую
точку будем называть свободной) *. Пользуясь эталонами
длины и времени, можно определить положение, скорость и уско-
ускорение точки в любой момент времени. Затем, помещая вблизи
точки некоторое тело, можно заметить, что то^ка приобретает
добавочное ускорение, исчезающее по мере удаления тела на бес-
бесконечно большое расстояние от точки.
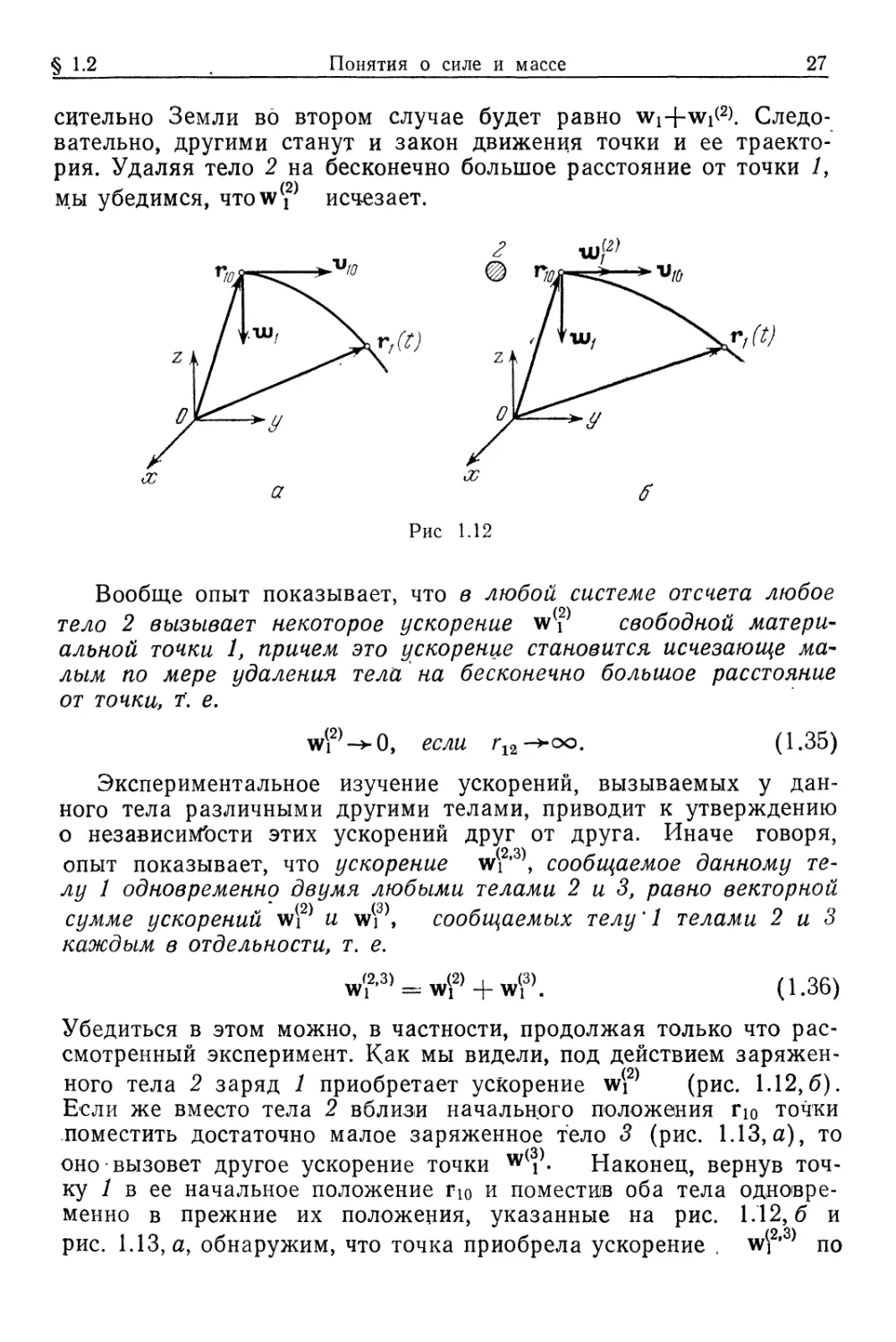
Например, рассмотрим движение материальной точки / вбли-
вблизи поверхности Земли (рис. 1.12, а, на котором плоскость Оху со-
совпадает с землой поверхностью). Предполагая, что эта точка
обладает электрическим зарядом, сравним ее движение в двух
случаях: а) в отсутствие каких-либо других тел, б) при наличии
заряженного тела.
Пусть в первом случае точка 1 в начальный момент времени
находится в положении г10 и имеет скорость Vi0. Определим поло-
положение точки, ее скорость и ускорение wt в любой момент времени.
Затем исследуем движение той же точки при тех же начальных
условиях, поместив вблизи начального положения точки достаточ-
достаточно малое заряженное тело 2 (рис. 1.12, б). Измерения покажут, что
по сравнению с предыдущим; случаем точка приобрела дополни-
дополнительное ускорение Wi<2). Результирующее ускорение точки отно-
* Произвольность начальных условий исключает рассмотрение таких случаев
движения точки, как, например, движение по поверхностям абсолютно твердых
тел и т. п. Теория движения несвободных точек будет изложена в гл. V.
§ 1.2
Понятия о силе и массе
27
сительно Земли во втором случае будет равно Wi+wi<2>. Следо-
Следовательно, другими станут и закон движения точки и ее траекто-
траектория. Удаляя тело 2 на бесконечно большое расстояние от точки /,
B)
мы убедимся, 4T0Wi исчезает.
Рис 1.12
Вообще опыт показывает, что в любой системе отсчета любое
тело 2 вызывает некоторое ускорение w? свободной матери-
материальной точки 1, причем это ускорение становится исчезающе ма-
малым по мере удаления тела на бесконечно большое расстояние
от точки, т. е.
wf-
¦О, если г12->-оо
A.35)
Экспериментальное изучение ускорений, вызываемых у дан-
данного тела различными другими телами, приводит к утверждению
о независимости этих ускорений друг от друга. Иначе говоря,
опыт показывает, что ускорение w(i2'3), сообщаемое данному те-
телу 1 одновременно двумя любыми телами 2 и 3, равно векторной
сумме ускорений wi и wi , сообщаемых телу' 1 телами 2 и 3
каждым в отдельности, т. е.
», ^2,3) _.B) [ C) /1 о??\
Wi = W\ -j- Wi . (l.OO)
Убедиться в этом можно, в частности, продолжая только что рас-
рассмотренный эксперимент. Как мы видели, под действием заряжен-
заряженного тела 2 заряд 1 приобретает ускорение w(i2) (рис. 1.12,6).
Если же вместо тела 2 вблизи начального положения гю точки
поместить достаточно малое заряженное тело 3 (рис. 1.13, а), то
оно вызовет другое ускорение точки w(i}- Наконец, вернув точ-
точку 1 в ее начальное положение Гю и поместив оба тела одновре-
одновременно в прежние их положения, указанные на рис. 1.12,6 и
рис. 1.13, а, обнаружим, что точка приобрела ускорение . wB'3) по
28
Основные понятия и законы механики
Гл. I
сравнению с тем случаем, когда оба тела отсутствуют (рис. 1.13,6).
Измерив wi2), w(i3) и w(i2'3), можно убедиться в справедливости
A. 36). Заметим, что утверждение о независимости ускорений имеет
место при любом числе воздействующих тел'
Итак," на основании опытов можно сделать вывод о том, что,
во-первых, одни тела воздействуют на другие, причем это воздей-
W д
Рис. 1.13
ствие проявляется в приобретении телами ускорений, и, во-вто-
во-вторых, ускорения, сообщаемые разными телами данному телу, неза-
независимы. Этот вывод лежит в основе важнейшего понятия механи-
механики о силе. Под силой, с которой произвольное тело 2 действует
на данную материальную точку 1, понимают такое влияние тела 2
на точку 1, в результате которого точка 1 приобретает ускорение,
исчезающее при удалении тела 2 на бесконечно большое расстоя-
расстояние от точки 1. Заметим, что если воздействия одних тел на дру-
другие существуют объективно, то введенное в механике понятие о
силах отражает эти воздействия лишь с некоторой точностью.
Поскольку сила является причиной ускорения, а ускорение
обладает свойствами вектора, то постулируется, что и сила есть
вектор, причем направленный так же, как и ускорение, вызывае-
вызываемое этой силой, т. е. постулируется, что
F tt wl2) П 37Ъ
21 11 1' \ • /
где F2i — сила, действующая со стороны тела 2 на точку 7, а
w<2>— ускорение точки 1, обусловленное действием этой силы..
«Одна из важнейших характеристик силы — ее материальное
происхождение», «...говоря о силе, мы всегда неявно предпола-
предполагаем, что когда нет физических тел, то сила равна нулю»
[26, вып. I, с. 210—211]. Это значит, что как ускорение wi2),
§ 1.2 Понятия о силе и массе 29
так и сила F2i стремятся к нулю по мере удаления тела 2 на бес-
бесконечно большое расстояние от точки F, т. е.
F21-*" 0» если г21->оо. A.38)
Так как ускорения, сообщаемые точке различными телами, не-
независимы друг от друга, то в отношении сил, действующих на точку
со стороны этих тел, постулируется аналогичное свойство. А имен-
именно, полагают, что сила F(i2f3), с которой тела 2 и 3 действуют на
данную точку 1 одновременно, равна векторной сумме сил F2i и
F3i, действующих на точку 1 со стороны этих тел порознь, т. е.
Ff'3) = F21 + F31. A.39)
Может случиться, что одновременное действие нескольких тел
на материальную точку не изменяет того ускорения точки, кото-
которое она имела в отсутствие этих сил. В таком случае сумма сил,
действующих на точку со стороны этих тел, и сумма соответствую-
соответствующих ускорений равны нулю:
Ff'^O, wF}=:0. A.40)
Основываясь на A.36), A.39) и A.40), можно производить
измерение сил, т. е. их сравнение с силой-эталоном. В каче-
качестве силы-эталона можно взять, в частности, силу, с которой дей-
действует на тело прикрепленная к нему одним из концов определен-
определенная пружина, растянутая до определенной длины /et> Пусть в ре-
результате действия на точку силы-эталона и некоторого тела 2
(например, произвольной пружины 2) ускорение точки останется
таким же, как и в отсутствие эталонной пружины и тела 2 (на-
(например, точка остается в покое относительно Земли). Это значит,
что
wi^2) = wirt)+wf) = 0, A.41)
где Fet — сила-эталон, a wiet)— ускорение точки /, вызываемое
эталонной пружиной. Из A.41) видно, что F2i== —Fet, т. е. сила
F2i оказывается измеренной. Имея несколько одинаковых эталон-
эталонных пружин и располагая их параллельно или под различными
углами, в принципе можно измерить любую силу.
Пользуясь указанным способом измерения сил, эталонами дли-
длины и времени/ экспериментально устанавливают зависимость сил
от различных величин. Приведем ряд исследованных таким обра-
образом сил.
Упругая сила, действующая со стороны пружины 2 на
тело /, прикреплённое к ее концу," при достаточно малых удли-
30 Основные понятия и законы механики Гл. I
нениях пружины пропорциональна этому удлинению и направлена
по прямой, совпадающей с осью пружины (предполагается, что
второй конец пружины прикреплен к другому телу):
A.42)
2i (ai)
Г21
Здесь r2i = ri—г2, Г! — радиус-вектор точки 1 и скрепленного с цей
конца пружины, г2 — радиус-вектор другого конца пружины, I —
длина ненапряженной пружины, к — характеризующая данную
пружину положительная константа, называемая жесткостью. Из
A.42) следует, что действующая на точку 1 сила F2i сжатой пру-
пружины направлена от конца 2 пружины в. сторону точки / (в этом
случае г2\<1, т. е. удлинение г2\—/ отрицательно). Если же пру-
пружина растянута (г2\>1у удлинение положительно), то эта сила
направлена от точки / в сторону точки 2. Итак, опыт показывает,
что абсолютная величина и направление рассмотренной упругой
силы зависят лишь от положения точек 1 и 2.
Согласно закону Кулона сила электростатического воз-
воздействия заряженной точки 2 на заряженную точку 1 обратно
пропорциональна квадрату расстояния между точками и направ-
направлена по прямой, соединяющей эти заряды:
21— —ъ —> U-4O)
здесь ех и е2 — электрические заряды первой и рторой точек соот-
соответственно *.
Сила Лоренца F, действующая на точечный заряд е со
стороны электрического и магнитного полей, зависит как от по-
положения заряда, так и от его скорости:
F = *S+ y[vX]. A.44)
Здесь с — скорость света; <§ (г, t) и Ж (г, t)—напряженности
соответственно электрического и магнитного полей в точке г
пространства, где находится заряд; v — скорость заряда. Напом-
Напомним, что напряженность электрического поля определяется силой,
действующей со стороны этого поля на единицу положительного
заряда; направление напряженности Ж магнитного поля можно
определить как такое направление скорости заряда, при котором
сила, действующая на заряд в магнитном поле, равна нулю; вели-
величину напряженности магнитного поля можно определить как
отношение модуля силы, действующей на заряд е со стороны
* Единицу электрического заряда можно выбрать, имея эталоны силы и
длины. См., например, [40, с. 20].
§ 1.2 Понятия о силе и массе 31
магнитного поля, к величине (e/c)v±, где v± —составляющая
скорости заряда, перпендикулярная направлению напряженно-
напряженности Ж в данной точке пространства (конечно, радиус-вектор г,
скорость v заряда и напряженности полей должны измеряться
в одной и той же системе отсчета) [40, с. 212, 553—554].
Поскольку в классической механике не рассматриваются про-
процессы, происходящие в полях, постольку напряженности полей <?
и % 8 наших задачах будут-считаться заданными функциями
радиуса-вектора точки и времени. Например, напряженность
электрического поля плоского конденсатора постоянной емкости,
к пластинам которого подводится переменное напряжение, изме*
няющееся со временем по гармоническому закону, вдали от краев
пластин с большой степенью точности можно считать равной
<§0cos(D^,'TOe <§о —напряженность электрического поля при t = 09
а со — частота, с которой изменяется подводимое напряжение. Та-
Таким образом, сила, действующая на заряд е со стороны этого
поля, будет равна
F-??<S0cos<d/. A.45)
Сила сопротивления среды, действующая на осе-
симметричное твердое -тело при его движении в жидкости или
газе, зависит от скорости тела относительно среды и направлена
противоположно этой скорости (если ось симметрии тела колли-
неарна скорости). При достаточно малой скорости эта сила
имеет вид
F = —*v, A-46)
где k — положительная константа, характерная для данного тела
и данной среды, a v — скорость тела относительно покоящейся
на бесконечности среды.
Итак, опыт показывает, что существует широкий класс сил,
явно зависящих от положений и скоростей тела, а также от неко-
некоторых постоянных величин и времени *.
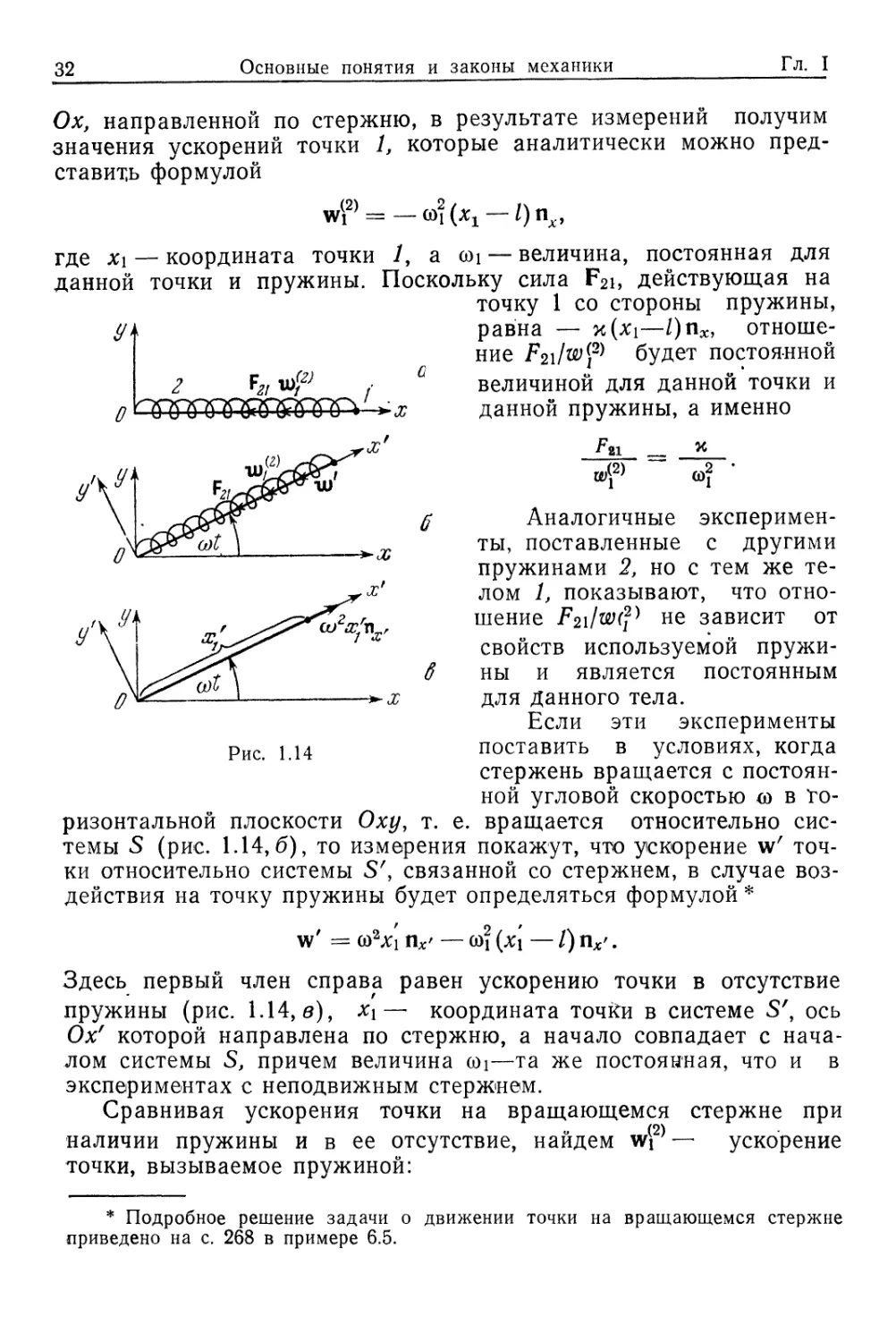
Рассмотрим детальнее соотношение между силой и вызывае-
вызываемым ею ускорением. Исследуем, например, движение материаль-
материальной точки / по горизонтальному идеально гладкому стержню
(рис. 1.14,а) под действием прикрепленной к точке пружины 2,
навитой на стержень и закрепленной другим концом в точке О
стержня (сила, с которой идеально гладкий стержень действует
на точку, перпендикулярна к стержню). Если пружина 2 действу-
действует на точку с силой A.42), а стержень неподвижен относительно
Земли, то, выбирая систему отсчета 5 с началом в точке О и осью
* Известна также сила, зависящая от третьей производной координаты по
времени. Таковой является сила лучистого трения, с которой электромагнитное
излучение заряда тормозит этот заряд.
32
Основные понятия и законы механики
Гл. I
Ох, направленной по стержню, в результате измерений получим
значения ускорений точки 1, которые аналитически можно пред-
представить формулой
где х\ — координата точки 7, a coi — величина, постоянная для
данной точки и пружины. Поскольку сила F2i, действующая на
точку 1 со стороны пружины,
равна — x(*i—/)пх, отноше-
отношение F2i/wf> будет постоянной
величиной для данной точки и
данной пружины, а именно
У
Wy ' COj
Аналогичные эксперимен-
эксперименты, поставленные с другими
пружинами 2, но с тем же те-
телом 1, показывают, что отно-
отношение F2\/w(f) не зависит от
свойств используемой пружи-
пружины и является постоянным
для данного тела.
Если эти эксперименты
поставить в условиях, когда
стержень вращается с постоян-
постоянной угловой скоростью &> в Го-
Горизонтальной плоскости Оху, т. е. вращается относительно сис-
системы S (рис. 1.14,6), то измерения покажут, что ускорение w/ точ-
точки относительно системы S', связанной со стержнем, в случае воз-
воздействия на точку пружины будет определяться формулой *
Рис, 1.14
W' =
Пх>.
! ПХ' — Cof (X\ —
Здесь первый член справа равен ускорению точки в отсутствие
пружины (рис. 1.14, в), х[— координата точйи в системе S', ось
Ох' которой направлена по стержню, а начало совпадает с нача-
началом системы S, причем величина o>i—та же постоянная, что и в
экспериментах с неподвижным стержнем.
Сравнивая ускорения точки на вращающемся стержне при
наличии пружины и в ее отсутствие, найдем wi2)— ускорение
точки, вызываемое пружиной:
* Подробное решение задачи о движении точки на вращающемся стержне
приведено на с. 268 в примере 6.5.
§ 1.2 Понятия о силе и массе 33^
Сопоставляя это выражение с силой, действующей со стороны
пружины и равной —%{х\ — /)tv, убедимся в том, что для дан-
данной точки отношение силы к вызываемому ускорению- в обеих
системах отсчета S и S' одинаково.
На основании этих опытов, а также опытов с использованием
других сил, приходим к фундаментальному утверждению класси-
классической механики: в любой системе отсчета отношение силы,
действующей на некоторую материальную точку, к ускорению
точки, вызываемому этой силой, является величиной постоянной
для данной материальной точки. Эту постоянную называют
инертной массой или просто массой. Таким образом,
-%=mlf A.47)
где Ш\ — положительная постоянная — масса точки 1. Утвержде-
Утверждение A.47) означает независимость массы от того, как движется
тело. Это справедливо, однако, для скоростей, малых по сравне-
сравнению со скоростью света. Если же скорость тела сравнима со ско-
скоростью света, то утверждение A.47) оказывается неверным.
Основываясь на A.47), можно измерять массы различных
тел *. Действительно, выберем за эталон массы массу met некото-
некоторого -тела и определим ее как отношение f^et/^?» где F2,et —
абсолютная величина силы, действующей на тело-эталон со сто-
стороны тела 2, а ы$— величина вызываемого этой силой ускорения
тела-эталона. Массу тела 1 можно определить, используя воздей-
воздействие произвольного тела 3. Тогда отношение массы тх к массе-
эталону будет равно
Пользуясь способом измерения масс, сил и расстояний, мож-
можно экспериментально установить закон всемирного тяго-
тяготения Ньютона, согласно которому сила гравитационного
притяжения двух материальных точек пропорциональна произве-
произведению масс этих точек, обратно пропорциональна квадрату
расстояния между ними и направлена по прямой, соединяющей
точки. Из эксперимента находится и коэффициент пропорциональ-
пропорциональности — гравитационная постоянная 7- Таким образом,
сила гравитационного воздействия одной точки на другую равна
Г2\
Об измерении масс см. также с. 34 и 176.
2 Зак. 284
34 Основные понятия и законы механики Гл. I
Подчеркнем, что только гравитационные силы обладают заме-
замечательным свойством одинаково ускорять любые тела, помещае-
помещаемые в данную точку пространства. Действительно, из A.49), A.47)
и постулата о том, что F21fT wi2)» видно: ускорение, которое при-
приобретает тело 1 в гравитационном поле тела 2, равно
A.50)
и не зависит от массы Ш\. Следовательно, ускорения двух любых
тел / и et, находящихся на одинаковых расстояниях от тела 2,
равны между собой, т. е.
wf = *$. A.51)
Из A.49) и A.51) вытекает, что отношение сил гравитацион-
гравитационного притяжения двух данных тел 1 и et к любому третьему телу 2
(при условии равенства расстояний r2i=r2jet) равно отношению
масс:
-I*-*=-?*-. A.52)
Это свойство гравитационных сил удобно использовать для изме-
измерения масс.
Наряду с определением инертной массы в классической ме-
механике имеется определение гравитационной (или тяже-
тяжелой) массы*. При этом исходят из экспериментально установ-
установленного постоянства отношения /W^et для данной пары тел 1 и
et, поочередно помещаемых в одну и ту же точку гравитационного
поля любого тела 2. Это отношение определяют как отношение
гравитационных масс mf/mg[. Иначе говоря, исходят из зако-
закона всемирного тяготения в виде
A.53)
Далее, опираясь на экспериментально установленное свойство
гравитационных сил A.51) и исходя из отношения инертных масс
A.48), убеждаются в том, что гравитационная и инертная массы
тела пропорциональны, т. е.
(^)f, A.54)
«
S
причем коэффициент пропорциональности met/mft зависит от
Оно аналогично определению электрических зарядов, см. [40, с. 20].
§ 1.3
Понятие об инерциальной системе и законы Ньютона
35
выбора системы единиц измерения (обычно полагают, что
wet = mft и тем самым фиксируют размерность [у] гравитацион-
гравитационной постоянной; в системе единиц LMT в этом случае [у] =
— ЬгМ-1Т-2). Заключение о пропорциональности гравитационной
и инертной масс тела неоднократно и с большой степенью точно-
точности подтверждалось на опыте.
§ 1.3, Понятие об инерциальной системе отсчета
и законы Ньютона. Принцип относительности Галилея
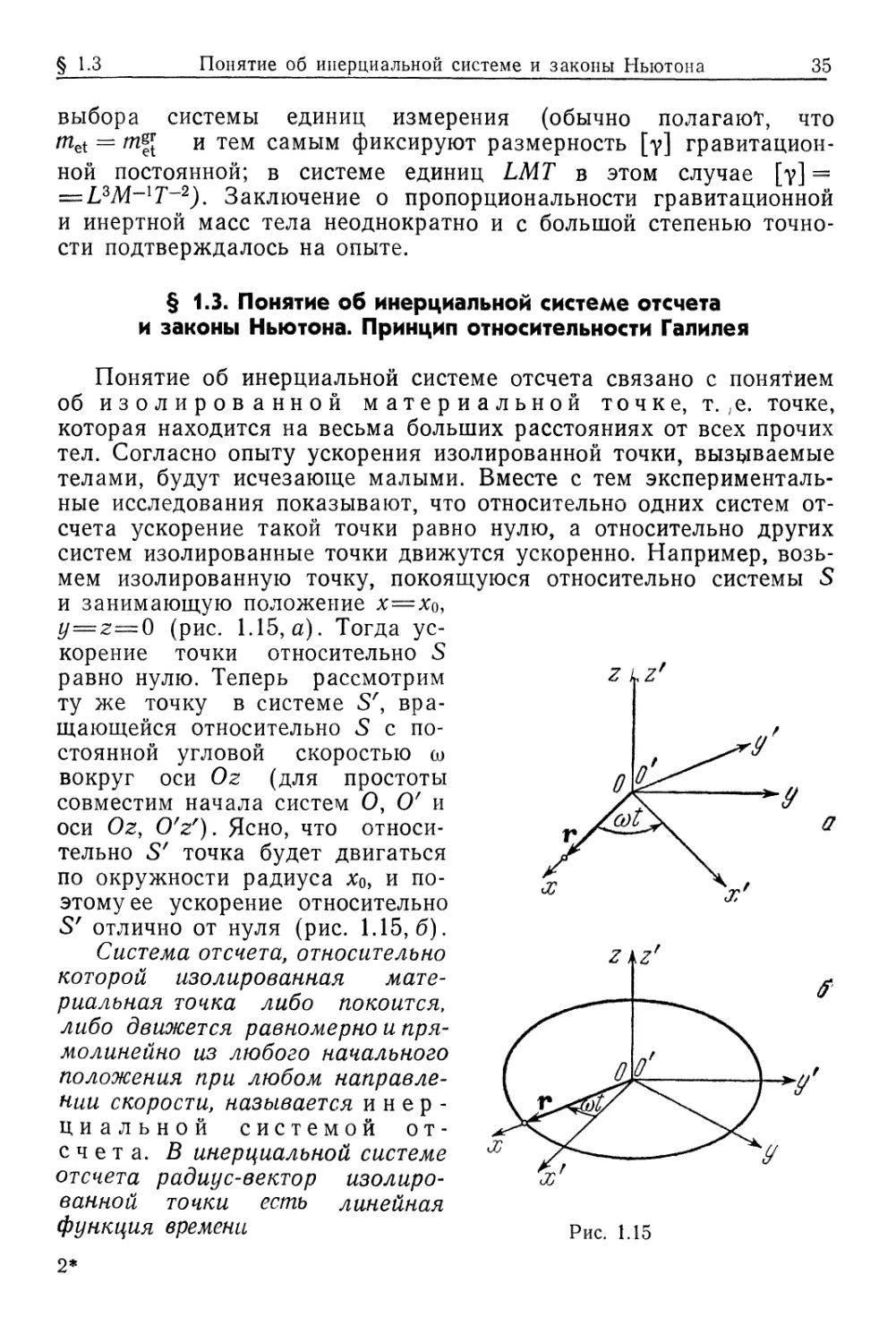
Понятие об инерциальной системе отсчета связано с понятием
об изолированной материальной точке, т. ;е. точке,
которая находится на весьма больших расстояниях от всех прочих
тел. Согласно опыту ускорения изолированной точки, вызываемые
телами, будут исчезающе малыми. Вместе с тем эксперименталь-
экспериментальные исследования показывают, что относительно одних систем от-
отсчета ускорение такой точки равно нулю, а относительно других
систем изолированные точки движутся ускоренно. Например, возь-
возьмем изолированную точку, покоящуюся относительно системы S
и занимающую положение х=Хо,
y=z=0 (рис. 1.15, а). Тогда ус-
ускорение точки относительно S
равно нулю. Теперь рассмотрим
ту же точку в системе S', вра-
вращающейся относительно 5 с по-
постоянной угловой скоростью со
вокруг оси Oz (для простоты
совместим начала систем О, О' и
оси Ог, OV). Ясно, что относи-
относительно S' точка будет двигаться
по окружности радиуса хо, и по-
поэтому ее ускорение относительно
S' отлично от нуля (рис. 1.15,6).
Система отсчета, относительно
которой изолированная мате-
материальная точка либо покоится,
либо движется равномерно и пря-
прямолинейно из любого начального
положения при любом направле-
направлении скорости, называется инер-
инерциальной системой от-
отсчета. В инерциальной системе
отсчета радиус-вектор изолиро-
изолированной точки есть линейная
функция времени РИС.
36 Основные понятия и законы механики Гл. I
r = vo*-f-ro A.55)
при любых постоянных Го и Vo. Система отсчета, в которой усло-
условие A.55) для изолированной точки не выполняется, называется
неинерциальной системой.
Существование инерциальных систем отсчета подтверждается
экспериментом (как всегда, с известной степенью точности). Про-
Простейший опыт Галилея заключался в наблюдении над отполиро-
отполированным металлическим шариком, скатывающимся по наклонной
гладкой доске. Наблюдением было установлено, что если угол на-
наклона доски к горизонту стремится к нулю, то ускорение шарика
также стремится к нулю. Отсюда был сделан вывод о том, что
«когда тело движется по горизонтальной плоское*™, не встречая
никакого сопротивления, то... движение его является равномерным
и продолжалось бы бесконечно, если бы плоскость простиралась
в пространстве без конца» [2, с. 417, 418]. В последующих более
точных опытах была установлена неинерциальность геоцентриче-
геоцентрической системы, которая фактически использовалась в эксперименте
Галилея. В то же время наблюдения над ускорениями небесных
тел показали инерциальность гелиоцентрической системы Копер-
Коперника. Конечно, участие солнечной системы во вращении вокруг
центра нашей Галактики должно приводить к весьма малой не-
инерциальности гелиоцентрической системы (по сравнению с не-
инерциальностью геоцентрической системы). Однако тогда за инер-
циальную систему можно принять систему, связанную с несколь-
несколькими галактиками.
Первый закон классической механики, или з а -
кон инерции Галилея — Ньютона, сводится к утверж-
утверждению, что инерциальные системы отсчета существуют, т. е. суще-
существуют системы, удовлетворяющие требованию A.55) *. Конечно,
возникает вопрос: с чем связано существование такой привилеги-
привилегированной системы отсчета, как инерциальная система? Однако
этот вопрос до сих пор не может считаться решенным.
В основе второго закона Ньютона лежат утвержде-
утверждения о независимости массы от движения тела, о независимости
сил и независимости ускорений, сообщаемых данному телу раз-
различными другими телами, и утверждение о существовании инер-
циальной системы отсчета.
* Приведем обычную формулировку закона: «Всякое тело продолжает удер-
удерживаться в своем состоянии покоя или равномерного и прямолинейного движе-
движения, пока и поскольку оно не понуждается приложенными силами изменять это
состояние» [3, с. 39]. Мы видели, однако, что существуют и такие системы от-
отсчета, относительно которых изолированное тело (т. е. тело, «не понуждаемое
приложенными силами») движется ускоренно. Следовательно, объективным со-
содержанием приведенной формулировки закона инерции является утверждение о
том, что действительно инерциальные системы существуют.
§ 1.3 Понятие об инерциальной системе и законы Ньютона 37
Рассмотрим для простоты систему из трех точек У, 2 и 5. Для
первой точки можно получить соотношение между силой
F(i2'3), действующей на нее со стороны второй и третьей точек, и
ускорением wf's\ которое вызывает эта сила.
Действительно, согласно утверждению о существовании инерт-
инертной массы и постулату об одинаковой направленности силы и ус-
ускорения, вызываемого этой силой,
m.wp^pf^ (L56)
где т1 — масса точки 7,
wB,3) == WB) 4. wC)?
рB,3) р , р
ri =г21 + г31.
Однако ускорение w^3* точки 1, вызываемое телами 2 и 3, равно
ускорению wi точки 1 относительно инерциальной системы отсче-
отсчета, поскольку в этой системе тела 2 и 3 являются единственной
причиной ускорения точки; таким образом,
wf8>= wlf A.57)
где Wi = vx (см. A.10)).
Нетрудно показать, что соотношения вида A.56) и A.57) бу-
будут справедливыми и при любом числе тел, действующих на дан-
данную точку. Следовательно, ускорение Wi точки 1 относительно
инерциальной системы и сумма сил Fb действующих на точку со
стороны всех тел, связаны уравнением
m1W1 = F1, A.58)
которое называется вторым законом Ньютона.
Итак, согласно второму закону Ньютона произведение массы
любой материальной точки на ее ускорение относительно инер-
инерциальной системы отсчета равно сумме всех сил, действующих
на данную .точку со стороны других тел. Второй закон является
одним из фундаментальных законов природы. Он лежит в основе
того раздела механики, в котором рассматривается движение ма-
материальных точек в зависимости от действия сил. Этот раздел ме-
механики называется динамикой.
Второй закон позволяет найти положение и скорость точки в
любой момент времени, если известны: масса точки-т, сила F (г,
v, t) как функция положения, скорости и времени, а также поло-
положение точки Го и ее скорость v0 в некоторый момент времени t0
(конечно, рассматриваются положение и скорость относительно
инерциальной системы). Действительно, зная г0 и v0, можно опре-
определить силу в момент t0, а зная эту силу и массу, найти ускоре-
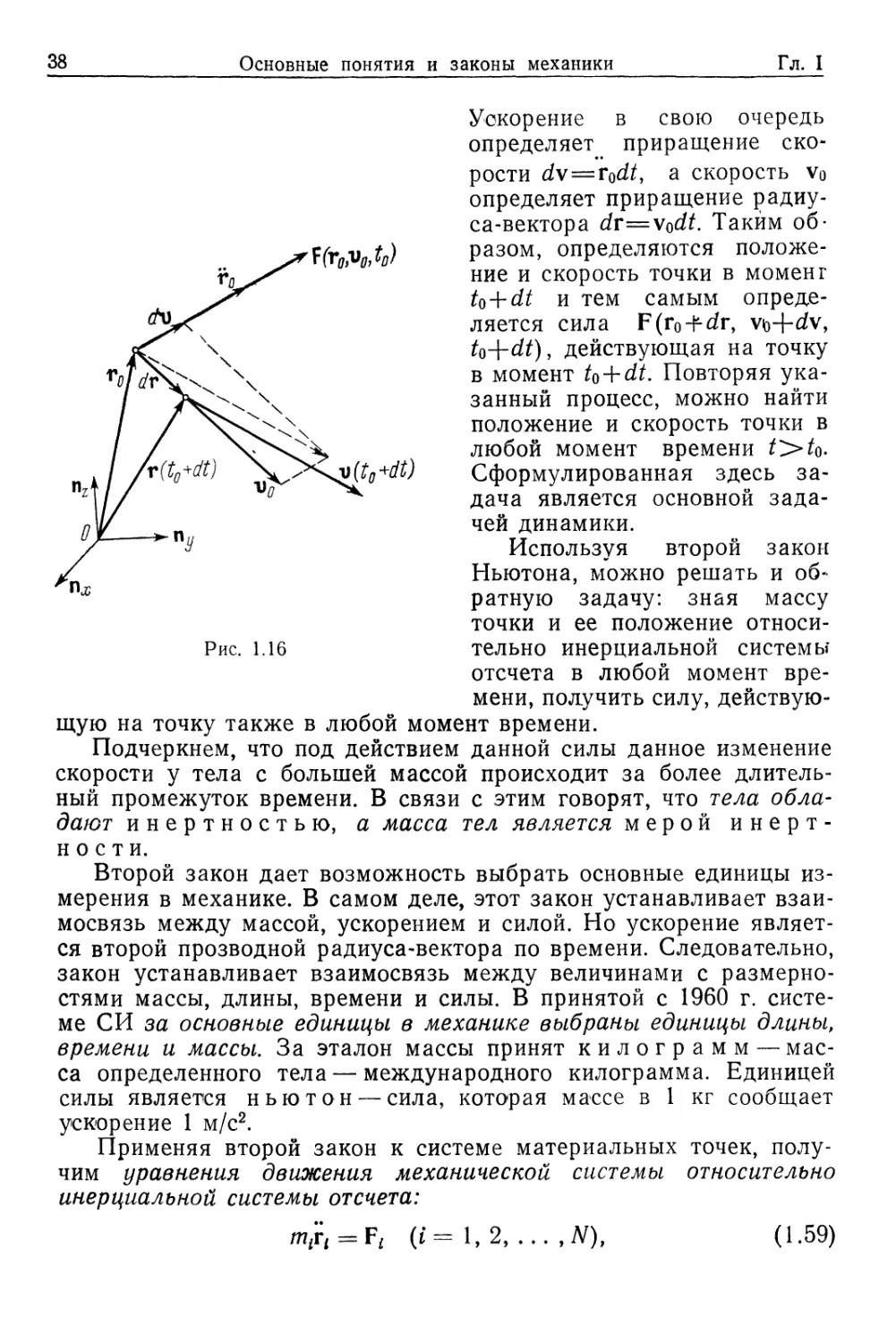
ускорение в тот же момент времени го = —F(r0, v0, t0) (рис. 1.16).
m
38
Основные понятия и законы механики
Гл. I
Ускорение в свою очередь
определяет приращение ско-
скорости d\=rodt1 а скорость v0
определяет приращение радиу-
радиуса-вектора dr=Vodt. Таким об-
образом, определяются положе-
положение и скорость точки в момент
U+dt и тем самым опреде-
определяется сила F(ro-Mr, Vb+dv,
U-\-dt)} действующая на точку
в момент U + dt. Повторяя ука-
указанный процесс, можно найти
положение и скорость точки в
любой момент времени t>U.
Сформулированная здесь за-
задача является основной зада-
задачей динамики.
Используя второй закон
Ньютона, можно решать и об-
обратную задачу: зная массу
точки и ее положение относи-
относительно инерциальной системы
отсчета в любой момент вре-
времени, получить силу, действую-
действующую на точку также в любой момент времени.
Подчеркнем, что под действием данной силы данное изменение
скорости у тела с большей массой происходит за более длитель-
длительный промежуток времени. В связи с этим говорят, что тела обла-
обладают инертностью, а масса тел является мерой инерт-
инертности.
Второй закон дает возможность выбрать основные единицы из-
измерения в механике. В самом деле, этот закон устанавливает взаи-
взаимосвязь между массой, ускорением и силой. Но ускорение являет-
является второй прозводнои радиуса-вектора по времени. Следовательно,
закон устанавливает взаимосвязь между величинами с размерно-
размерностями массы, длины, времени и силы. В принятой с 1960 г. систе-
системе СИ за основные единицы в механике выбраны единицы длины,
времени и массы. За эталон массы принят килограмм — мас-
масса определенного тела — международного килограмма. Единицей
силы является ньютон — сила, которая массе в 1 кг сообщает
ускорение 1 м/с2.
Применяя второй закон к системе материальных точек, полу-
получим уравнения движения механической системы относительно
инерциальной системы отсчета:
Рис. 1.16
^F, (i= 1,2, ... ,N),
A.59)
§ 13
Понятие об инерциальной системе и законы Ньютона
39
здесь Fi — сила, действующая на /-тую материальную точку; пред-
предполагается, что все эти силы являются заданными функциями гь
Г2, ..., Tjv, Vi, v2, ..., vN и t (см., например, A.42) — A.46)).
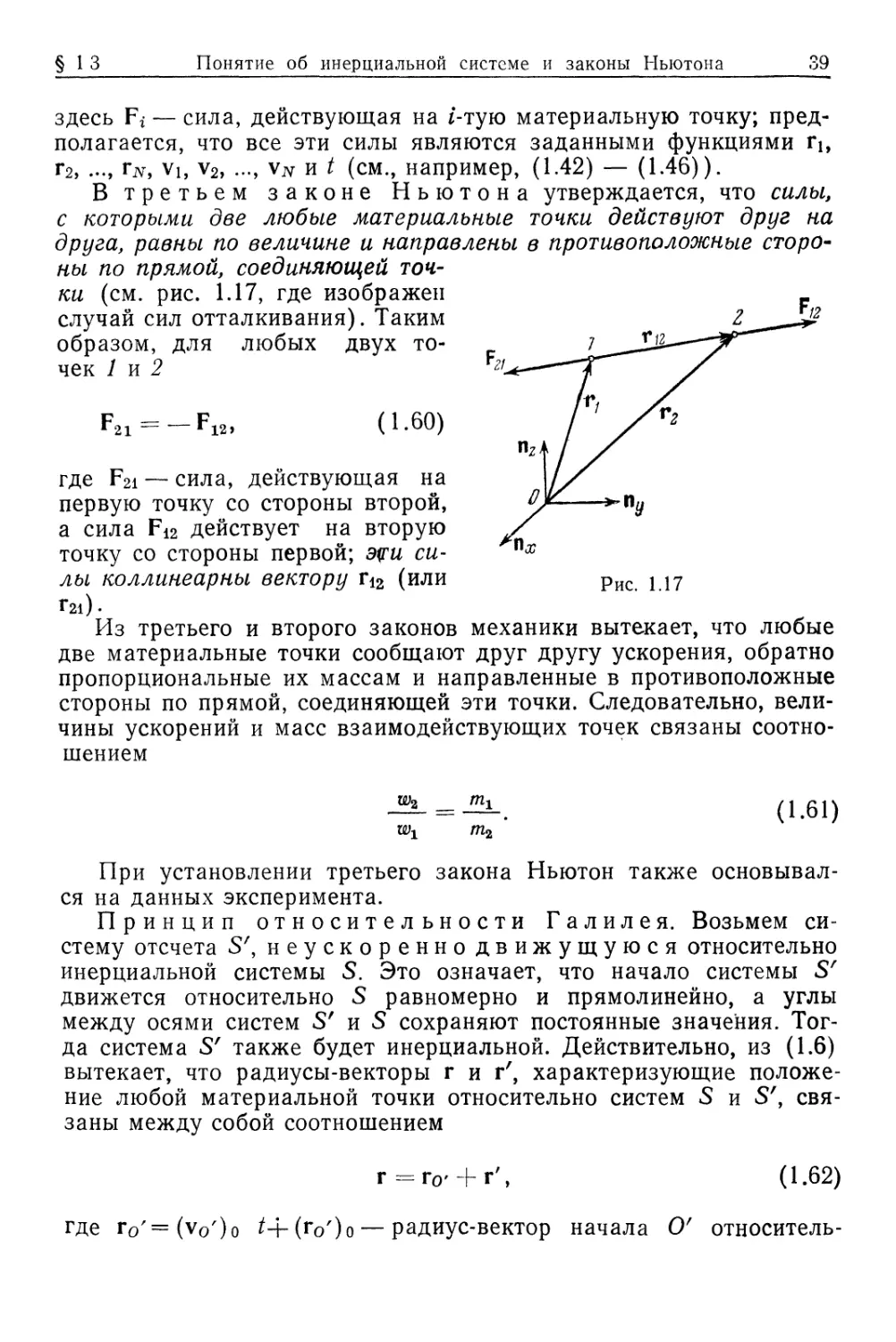
В третьем законе Ньютона утверждается, что силы,
с которыми две любые материальные точки действуют друг на
друга, равны по величине и направлены в противоположные сторо-
стороны по прямой, соединяющей точ-
точки (см. рис. 1.17, где изображен
случай сил отталкивания). Таким
образом, для любых двух то- ;
чек 1 и 2 *Х
Fai=-F.
21
12 >
A.60)
где F2i — сила, действующая на
первую точку со стороны второй,
а сила Fi2 действует на вторую
точку со стороны первой; э$и си-
силы коллинеарны вектору ri2 (или Рис j 17
Из третьего и второго законов механики вытекает, что любые
две материальные точки сообщают друг другу ускорения, обратно
пропорциональные их массам и направленные в противоположные
стороны по прямой, соединяющей эти точки. Следовательно, вели-
величины ускорений и масс взаимодействующих точек связаны соотно-
соотношением
щ
w1
m2
A.61)
При установлении третьего закона Ньютон также основывал-
основывался на данных эксперимента.
Принцип относительности Галилея. Возьмем си-
систему отсчета S\ неускоренно движущуюся относительно
инерциальной системы S. Это означает, что начало системы S'
движется относительно S равномерно и прямолинейно, а углы
между осями систем S' и S сохраняют постоянные значения. Тог-
Тогда система S' также будет инерциальной. Действительно, из A.6)
вытекает, что радиусы-векторы г и г', характеризующие положе-
положение любой материальной точки относительно систем S и S7, свя-
связаны между собой соотношением
г=го- + г\ A.62)
где r0'=(V(/)o *4-(iV)o — радиус-вектор начала О' относитель-
40
Основные понятия и законы механики
Гл. I
но 5; (v0/)o и (г0г)о — скорость и радиус-вектор начала О' в мо-
момент времени^=0. Дифференцируя обе части A.62) по времени
и учитывая неизменность ориентации осей S'f получим соотноше-
соотношение для скоростей точки
v =
V,
A.63)
где v и v' — скорости точки относительно систем S и S' соответ-
соответственно. Дифференцируя по времени A.63), найдем, что
W = W .
A.64)
Таким образом, ускорение точки в данный момент времени одина-
одинаково относительно любой из систем, неускоренно движущихся от-
относительно друг друга. Следовательно, если в системе S ускоре-
ускорение изолированной точки равно нулю, то и в системе S' оно равно
нулю. Итак, если система S является инерциальной системой, то
любая другая система S', неускоренно движущаяся относительно
S, также инерциальна.
Преобразование координат при переходе от одной инерциаль-
инерциальной системы к другой инерциальной системе определяется соотно-
соотношением A.62). Это преобразование называется преобразова-
преобразованием Галилея. Оно заметно упрощается, если системы S и S'
одинаково ориентированы, око-,
рость начала О' направлена по
одной из осей (например, по оси
Ох), а в начальный, момент вре-
времени точки О' и О совпадают
(рис. 1.18). В этом случае пре-
преобразование Галилея имеет вид
o+, у у, ,
A.65)
где Vq=(xo,)o (конечно, в этом
преобразовании «участвует» фун-
фундаментальное допущение класси-
классической механики о преобразова-
преобразовании времени A.7)).
Галилеем был сформулирован
классический принцип относительности, согласно которому законы
механики одинаковы в любых инерциальных системах отсчета.
Это значит, что уравнения движения относительно любых инерци-
инерциальных систем 5 и S' совпадают друг с другом, т. е. уравнение
Рис. 1.18
На основании наблюдений
§ 1.4 Решение уравнений движения 41
mw = F
эквивалентно уравнению
m'wf = F\
Поскольку в классической механике масса данной точки постоян-
постоянна (m=m/), а ускорение точки в данный момент времени одина*
ково по отношению к любым инерциальным системам (w=w/),
из принципа Галилея следует, что
F = F'f A.66)
т. е. следует утверждение о неизменности сил, действующих на
точку, при переходе от одной инерциальной системы к другой,
также инерциальной системе. Итак, все величины, входящие в
уравнение Ньютона, не изменяются при преобразовании от одной
инерциальной системы к другой инерциальной системе. Иными
словами, уравнения Ньютона инвариантны относительно преобра-
преобразований Галилея.
Рассмотренные выше основные понятия и законы классиче-
классической механики: понятия о материальной точке, о пространстве и
времени, о силе и массе, понятие об инерциальной системе отсче-
отсчета, законы Ньютона и принцип относительности Галилея — яв-
являются фундаментом классической механики. Этот фундамент был
построен в результате деятельности многих поколений, был роз-
роздан в результате анализа и теоретического обобщения экспери-
экспериментальных данных. Проверкой правильности основ классической
механики, ее соответствия природе является сопоставление выво-
выводов теории опять-таки с экспериментом. Так как теория создается
человеком в определенные исторические эпохи с определенными
воззрениями и техническими возможностями, то любая физичес-
физическая теория является приближенной, ограниченной. В том числе
приближенными, ограниченными являются основные понятия и за-
законы классической механики.
§ 1.4. Решение уравнений движения и начальные условия
Движение механической системы N материальных точек под-
подчинено уравнениям A.59). Если известны массы всех точек и их
положения в любой момент времени, то, используя A.59), можно
определить силы как функции времени. Однако несравненно более
трудной задачей является отыскание радиусов-векторов точек как
функций времени, если заданы силы как функции положений то-
точек, их скоростей и времени. В математическом отношении эта за-
задача является задачей о нахождении общего решения системы
Основные понятия и законы механики Гл. I
3N дифференциальных обыкновенных уравнений 2-го порядка *.
Это решение будет зависеть от 6N произвольных постоянных и
может быть записано в виде
Г/^г^^^С, ...,С6Л,) A-1,2, ... ,N). A.67)
Постоянные интегрирования связаны с начальными условиями.
Действительно, пусть нам известно общее решение A. 67) и за-
заданы начальные положения и скорости точек системы, т. е. зада-
заданы ri0=r<(*0), Vio=v*(*o) (i=l, 2, ..., N). Дифференцируя A.67)
по времени, получим скорости точек как функции времени и 6N
произвольных постоянных
v,=v,(f,ClfCB, ..^СбАг) (t-1,2, ... 9N). A-68)
Полагая в системах A.67) и A.68) i = tQi будем иметь
гю = rt (*о> Clf С2, ... , Се//)»
vio ^ v* (^о> С1э С2, ¦.. , Cqn)
<*-1,2, ...,Л0. A.69)
Допуская, что система A.69) разрешима относительно постоянных
интегрирования, найдем
Са = Ca(t0> Г10, Г20, . . . , Tjvo, Vlo> V20, . . . , Vjvo) (a = 1, 2, . . . , 6iV).
A.70)
Наконец, подставляя A.70) в A.67), получим общее решение
уравнений движения механической системы в виде
ri = ri (^» ^0» ri0i Г20» • • • » ГАГО, V1O, V20, . . . ,
(f=l,2f ...,iV). A.71)
Таким образом, если заданы массы точек, силы, действующие на
точки системы, и начальные условия, то поведение системы опре-
определяется однозначно. В этом проявляется причинная обусловлен-
обусловленность механического движения.
Рассмотрим ряд примеров на решение уравнений движения
относительно инерциальной системы отсчета. При этом обратим
внимание на большое значение выбора системы координат, кото-
который должен отражать особенности заданных сил и начальных ус-
условий. Такой выбор обеспечивает сравнительную простоту реше-
решения задачи.
Пример 1.6. Заряженная частица в переменном электрическом
поле.
* Здесь и далее предполагается выполнимость математических условий, при
которых решение системы дифференциальных уравнений единственно.
§ 1-4
Решение уравнений движения
43
Заряд е массы т движется между обкладками плоского не-
неподвижного конденсатора, где напряженность электрического по-
поля равна
<§ = <g0 cos at
((§о и со— постоянные величины). В момент времени ? = 0 заряд
находился в положении г0 и имел скорость Vo относительно систе-
системы отсчета, связанной с пластинами конденсатора. Найти поло-
положение и скорость заряда в любой момент времени ?>0.
Из условия вытекает, что на заряд действует сила (см. A.45))
F = ee0cosa>t,
а уравнением движения является уравнение
тт = е60
Сила в любой момент времени
коллинеарна постоянному векто-
ру<§ 0. Поэтому ускорение и при-
приращение скорости также кол\лине-
арны <§о- Следовательно, движе-
движение заряда происходит в плоско-
плоскости, задаваемой векторами <§0 и
v0. В соответствии с этим выбе-
выберем систему декартовых коорди-
координат (начало отсчета и орты
должны быть жестко связаны с
конденсатором). Одну из осей
(например, ось Ох) направим
вдоль вектора <§0, а плоскость
<г=0 совместим с плоскостью
движения (рис. 1.19). В выбран-
выбранной системе координат проекции
силы имеют вид
О
\ 1
еЯГ
v
F
Рис. 1.19
Fy - F2 = 0,
а проекции радиуса-вектора и скорости на ось Ог равны нулю.
Проектируя левую и правую части векторного уравнения дви-
движения на оси выбранной системы, получим три дифференциаль-
дифференциальных уравнения
шх = е§о cos со/, ту = 0, тг = 0
(подчеркнем, что проекция силы на ось Ох изменяется по гармо-
гармоническому закону и в соответствии с этим изменяется абсолютная
величина и знак ^проекции ускорения на ось Ох). В результате
интегрирования уравнений найдем
44 Основные понятия и законы механики Гл. I
X
= — Sin (dt
ma) raco2
У = ^2» {/ == ^2^ + C6,
Подставляя в эти функции tf=O и используя начальные условия,
получим решение для v(t) и г (t) в виде
mooa
Итак, заряд движется в плоскости, образуемой векторами <§о
и v0 (т. е. в плоскости 2=0). Движение вдоль оси Оу происходит
с постоянной скоростью, так как сила действует лишь в направ-
направлении оси Ох. Движение заряда вдоль оси Ох слагается из дви-
движения по инерции с начальной скоростью хо и колебания с часто-
частотой со изменения заданной силы. Усредненная по времени за пе-
период 2я/со проекция скорости на ооэ Ох равна проекции началь-
начальной скорости на эту ось, т. е. х = л:0. Отметим также, что
изменяющиеся по гармоническому закону составляющие проекций
скорости и радиуса-вектора заряда на ось Ох отстают по фазе
от изменения проекции ускорения соответственно на я/2 и я.
В общем случае, когда на материальную точку действует
сила, зависящая только от времени, все три уравнения движения
имеют вид
n? = Fx(t).
Интегрируя это уравнение и учитывая начальные условия,
найдем общее решение в квадратурах:
t t t
x = ±^Fx(t)dt + x0, x = -i- J [J Fx(t) Л] dt + xo(t-to) + x0.
U U. to
Для других проекций скорости и радиуса-вектора результаты ана-
аналогичны.
Пример 1.7. Задача о пространственном осцилляторе.
На точку массы m действует сила, направленная к неподвиж-
неподвижной точке О и пропорциональная расстоянию между этими точ-
точками (коэффициент пропорциональности х). Найти уравнение
траектории материальной точки, а также ее радиус-вектор и ско-
§ 1.4 Решение уравнений движения 45
рость как функции времени, если в момент времени /=0 она на-
находилась в положении г0 относительно системы отсчета с началом
в точке О и имела скорость v0.
Уравнением движения в рассматриваемой системе отсчета яв-
является уравнение
тт = —хг.
Таким образом, в любой момент времени ускорение (и прираще-
приращение скорости) коллинеарно вектору г, а движение точки происхо-
происходит в плоскости, определяемой векторами г0 и v0. Действительно,
если ? = 0, то приращение скорости коллинеарно вектору г0
(см. рис. 1.7), и поэтому в момент времени, бесконечно близкий
к начальному, точка будет находиться в указанной плоскости.
Аналогично, рассматривая последующие приращения радиуса-век-
радиуса-вектора и скорости точки, можно прийти к выводу о ее движении в
плоскости, определяемой начальными условиями. В связи с этим
плоскость Оху декартовой системы координат целесообразно сов-
совместить с плоскостью движения.
Проектируя левую и правую части уравнения движения на оси
Ох и Оу, придем к системе уравнений
х 4- со2* = 0, у + со2у == 0,
где со2=х/т. Общее решение этой системы уравнений имеет вид
х = Сг cos со/ +'С2 sin со/,
у = C3cosco/ + C4sinco/.
Дифференцируя его по времени, получим
x=z—(иС1 sin со/ + ®С2 cos со/,
у = — о)С3 sin со/ + соС4 cos tot.
Полагая в последних четырех функциях t==0 я используя началь-
начальные условия, найдем
п y Г — х° Г и Г — ^°
со со
Общее решение можно записать также в виде
х = ах cos (со/ + ах), у == а2 cos (со/ -f а2),
где аь а2, аи а2 — произвольные постоянные. Из полученных реше-
решений следует, что в направлении осей Ох и Оу точка совершает
гармонические колебания с частотой со, амплитудами а\, &2
46 Основные понятия и законы механики Гл. I
и ф а з а м и аь <Х2 соответственно. Амплитуды и фазы выражают-
выражаются через начальные положение и скорость точки; например,
v>2 \ 1/2 v
Jl) , tgou = —•
со2 / ша
Запишем y(t) в следующей форме:
ot + ах + б),
где разность фаз 6 = o&2~ai, и возведем в квадрат правые и
левые части функций x(t), y(t), представленных в виде, удобном
для исключения времени:
^— =CQs((ut + аг),
| — cos (со/ + ai)cos61 __ _ sin(o)^ + аг).
sin о L °2 J
Складывая результаты возведения в квадрат, получим уравнение
траектории
Итак, под действием силы — иг материальная точка движется
по эллипсу с центром в неподвижной точке О, к которой в любой
момент времени направлена сила. Плоскость эллипса определяет-
определяется начальными условиями, этими же условиями определяются
величины полуосей эллипса (аи аг) и его ориентация в плоскости
движения (т. е. разность фаз б).
В общем случае, когда сила зависит только от положения точ-
точки, а каждая декартова проекция силы зависит только от соответ-
соответствующей проекции радиуса-вектора, уравнения движения имеют
вид
mx = Fx (*), my == Fy (у), mz = Fz B).
Общее решение этих уравнений может быть получено в квадрату-
квадратурах. Например, умножая обе части первого уравнения на dx и
учитывая, что
xdx = dx = xdx\
dt
получим
xdx = — F (x) dx.
m
§ 1.4
Решение уравнений движения
47
Интегрируя это уравнение, найдем х(х):
(здесь выбирается тот знак, который имеет х при я = Хо), а Раз*
деляя в последнем уравнении переменные t, x и интегрируя еще
раз, получим ?(л;):
Пример 1.8. Движение в однородном поле тяжести при нали-
наличии силы сопротивления.
Пусть достаточно малое невращающееся тело массы m дви-
движется в однородном поле тяготения напряженности g вблизи по-
поверхности Земли. Кроме то-
того, среда, покоящаяся отно-
относительно Земли, действует
на тело с силой, пропорци-
пропорциональной его скорости отно-
относительно Земли (коэффици-
(коэффициент пропорциональности k).
Найти положение и ско-
скорость тела как функции вре-
времени.
Выберем систему от-
отсчета, жестко связанную с
-Землей, и будем считать эту
систему инерциальной, что с
определенной степенью точ- ис" '
ности допустимо (см. при-
пример 4.3). Сила, действующая на тело, слагается из постоянной
силы притяжения mg и силы сопротивления среды — &v, где v —
скорость тела (см. A.46)). Следовательно, ускорение в любой мо-
момент времени лежит в плоскости, определяемой векторами g, v0;
в этой же плоскости будет двигаться тело (рис. 1.20). Учитывая
данное обстоятельство, одну из координатных плоскостей, (напри-
(например, Oyz) совместим с плоскостью движения, а ось Oz направим
вверх по вертикали.л
Уравнение движения точки имеет вид
Я7Г = mg —kr9
48 Основные понятия и законы механики Гл. I
где г — радиус-вектор, определяющий положение тела. Проекти-
Проектируя левую и правую части уравнения движения на координатные
оси указанной выше системы отсчета, найдем, что
уy9 g(+
m \ mg
Интегрируя эти уравнения и используя начальные условия, полу-
получим решение для проекций скорости
у
k
т
mg
-—t
(в качестве начальных условий здесь взяты не у0 и 20, а модуль
скорости v0 и угол ао между начальной скоростью и осью Оу).
Интегрируя второй раз, получим общее решение задачи в виде
У = yvo OTS «о О — е т ) + Уо>
Рассмотрим следующие частные случаи. Пусть уо=О и <хо =
= +я/2, т. е. начальная скорость направлена вверх. Тогда началь-
ное ускорение z0 = — gil Ч z0) < 0, т. е. будет направ-
\ гпё 1
лено вниз. С возрастанием времени (как видно из решения) ус-
ускорение, оставаясь отрицательным, стремится к нулю, так как
сила сопротивления в конце концов компенсирует силу притяже-
притяжения. Установившаяся скорость падения оказывается равной
— (mg/k)- Если начальная скорость направлена вниз (#о=О,
ао=—я/2), но | г0 | < {mg/k), то опять zo<O.
Если же начальная скорость направлена вниз, а | z0 \>(mg/k),
то начальное ускорение направлено вверх. Сила сопротивления в
этом случае направлена взерх и по величине больше, чем сила
притяжения. В последующие моменты времени ускорение, остава-
оставаясь положительным, стремится к нулю; соответственно скорость
стремится к предельной скорости падения.
Пусть теперь уоФО, zo>O и ао заключено в пределах: либо
О<ао<я/2, либо (я/2)<ао<я. Тогда в начале движения (при t9
очень близком в ?=0) z >0, а для достаточно больших t z<0.
Решение уравнений движения
Следовательно, в течение некоторого времени тело будет подни-
подниматься, а затем начнет падать. Время подъема определим, пола-
полагая 2 = 0:
mg
Из функций y(t) и z(t) легко отыскать координаты точки в тот
момент, когда она достигает максимальной высоты. Действитель-
Действительно, полагая в этих функциях t=t^==oy найдем
y{t. ) =
z—0
til sin 2oo
Уо>
1 + v0 sin Oo
mg
z(t. ) =
z=o
mg
v0 Sin a
Уравнение траектории z (у) получим, исключая время из функции
z(t) с помощью функции y(t):
mg
mg
^о sin a0
Для наглядности рассмотрим предельные случаи, когда можно считать, чта
(klm)t^>\ или {klm)t<.\. Если тело в начальный момент находится достаточно
высоко над поверхностью Земли, то время полета (до падения на поверхность
Земли) может быть достаточно велико (рис. 1.21,а); тогда в конце полета бу-
будет выполняться условие (k/m)t'^>\. Устремляя ?->-+оо, получим предельные
значения y(t)t y(t)t z(t):
mg
Уоо = °> zoo== — —•
Эти величины дают приближенные значения дальности полета и проекций ско-
скорости в момент падения тела на поверхность Земли.
Трае/тория
р
Рис. 1.21
50 Основные понятия и законы механики Гл. I
Если время полета достаточно мало, то выполняется условие (klm)t<C\.
Предполагая, что сила сопротивления среды мала по сравнению с силой притя-
притяжения тела Землей, и разлагая интересующие нас функции в ряды по малым
величинам, получим приближенные решения. Пусть, например, в начальный мо-
момент времени тело находится на поверхности Земли и требуется вычислить время
полета tit дальность z/i и квадрат скорости тела в момент его падения на по-
поверхность Земли (рис. 1.21,6). Полагая z=20 = 0 в функции z(t) и разлагая ее
по степеням (k/m)t, а также имея в виду, что {kvo/mg) <Cl, получим приближен-
приближенное значение для времени полета
kv0 . \
_ sin a \
mg °)
Полагая t=ti в функции y(t) и считая величины, пропорциональные k, малыми,
найдем приближенное значение для дальности полета
^sin2a0 / 2kv9 \
уг = 1 — sin a0
g \ mg )
Наконец, полагая t = ti в функциях $(t) и z(t), получим приближенное значение
квадрата скорости тела в момент его падения на поверхность Земли:
Приближенное уравнение траектории найдем с помощью разложения функции
z(y) в ряд по величинам, содержащим k:
{у Уо).
Q Q cos3 a0
Отсюда видно, что в рассматриваемом случае траектория весьма близка к пара-
параболе. Устремляя &->0 либо в уравнениях движения, либо в решениях, получим
описание движения точки в однородном поле тяготения.
В общем случае, когда сила является функцией только скоро-
скорости точки, причем каждая декартова проекция силы зависит лишь
от соответствующей проекции скорости, уравнения движения
имеют вид
Общее решение этих уравнений может быть получено в квадра-
квадратурах. Например, возьмем первое уравнение движения. Так как
** dx ,
Xz=: , то сразу видно, что переменные t и х разделяются и
dt
соответствующий интеграл равен
(
-4-
Fx(x)
§ 1.4 Решение уравнений движения 51_
Если отсюда можно выразить х как функцию от /, то можно бы-
было бы найти в квадратуре x(t), т. е.
х = х0 + J х (t) dt.
Отметим еще один прием интегрирования уравнений указанного
типа. Умножая обе части уравнения движения на dx и имея в ви-
виду, что х dx = x dx, получим зависимость х(х):
х = х0 + т
Г xdx
) FAx)
х0
Аналогично интегрируются и остальные уравнения движения.
Пример 1.9. Движение заряженной частицы в постоянных одно-
однородных электрическом и магнитном полях.
Теория движения заряда в электромагнитных полях имеет
большое значение в современной физике: она играет важную роль
в исследованиях плазмы, в ускорительной технике, в астрофизике
и т. д.
Рассмотрим сначала поведение заряда в постоянном однород-
однородном электрическом поле напряженности <§. Уравнение движения
и его решение в векторной форме имеют вид '
гпх = е&,
(здесь r0, v0 — начальные значения радиуса-вектора и скорости
заряда). Отсюда следует, что заряд движется ускоренно в нап-
направлении вектора & и по инерции в направлении, перпендикуляр-
перпендикулярном к ё, а траекторией точки является парабола. Эти основные
черты рассматриваемого движения будут лучше видны, если спро-
спроектировать левую и правую части векторного решения на оси де-
декартовой системы координат, выбранной так, чтобы ось Ох была
параллельна вектору <§, а ось Оу была расположена в плоскости
движения, определяемой векторами <§ и v0. Тогда
е Р
X = ~2^- *2 + Xj + Х09 У = yot + Уо, 2 = 0.
•52
Основные понятия и законы механики
Гл. I
Исключая из этих функций время, найдем уравнение траектории
Уо
W?(»-*•>'•
Измеряя элементы этой траектории, можно получить значение ве-
величин el ту о и хо!уо.
Движение заряда в постоянном однородном магнитном поле
напряженности Ж подчиняется векторному уравнению (см. A.44))
e г* -
mv = — [ra
Для решения этого уравнения выберем декартову систему коор-
координат с осью Ог, параллельной Ж (рис. 1.22). В такой системе
сила Лоренца имеет вид
F = —
ПХ ПУ ^2
л; j/ z
0 055?
(yn^ — xnX
а уравнениями движения являются уравнения
х = cot/, у = — (oi, z = О,
еЖ
гдесо= так называемая циклотронная часто-
частоте
т а. Интегрируя эту систему один раз и учитывая начальные усло-
условия, найдем
х = а(у — уо)+ х0, у=—®(х — хо)+ г/0, 2 = г0.
Подставляя функцию у(х) в первое из уравнений движения, полу-
получим
X + СО2 (Х — Хо) =@ 1/0.
Это уравнение гармонических колебаний с постоянной правой
частью имеет общее решение вида
х = х0
+ a).
Отсюда дифференцированием найдем выражение для проекции
скорости на ось Ох:
х = acosin((D/ + a).
1.4
Решение уравнений движения
53
Используя функции х(t) и х(t), определим постоянные а и а:
sta « = /. ,\1Я1 cos a = -,
Затем, подставляя решение x(t) в полу-
полученную выше функцию х (у),
откуда следует, что
у .= a(ocos(o)H- a).
Наконец, исключая время из функций
(t) (f)
x(t) и z/(f), придем к выводу, что проек-
проекция материальной точки на плоскость,
перпендикулярную Ж , движется по ок-
окружности
гд"е
Уо
Уо
ч
Рис. 1.22
х<у =
¦и»—г--
Радиус а этой окружности определяется удельным зарядом ejmy
напряженностью магнитного поля Ж и проекцией начальной ско-
скорости на плоскость, перпендикулярную вектору напряженности Ж
(величина радиуса а не зависит от начального положения заря-
заряда). Центр указанной окружности определяется взятыми в на-
начальный момент времени проекциями радиуса-вектора и скорости
заряда на плоскость Оху> т. е. величинами Хо, уь, #о, Уо> & также
циклотронной частотой со. В направлении оси Oz точка движется
по инерции со скоростью &о. Следовательно, траекторией точки
является винтовая линия с постоянным шагом г0Bя/(о).
54
Основные понятия и законы механики
Гл. I
«аи
Из решения видно, чт величина
проекции скорости на плоскость Оху
постоянна; остается постоянным и мо-
модуль скорости точки. Дифференцируя
x(t)t и y(t) по времени, получим проек-
проекции ускорения как функции времени
х = а со2 cos (cot + а),
у = — а (о2 sin (at + а),
а выразив их через х и у, найдем
.* = —<о2(л: —*о')» */ = — <°2 (У —
Уо>)-
Рис. 1.23
Из приведенных соотношений, а
также из того, что проекция ускоре-
ускорения на ось Ог равна нулю, следует, что абсолютная величина
ускорения заряда является постоянной:
а вектор ускорения направлен все время перпендикулярно к оси
воображаемой цилиндрической поверхности радиуса а, на кото-
которую навивается траектория заряда.
Отметим важное свойство фокусировки рассматриваемого
магнитного поля. Оно проявляется в том, что частицы с одинако-
одинаковым удельным зарядом и одинаковым начальным положением, но
с различными начальными скоростями, перпендикулярными Ж, при-
приходят в одно и то же положение через период времени Т*=2п/ы.
Теперь рассмотрим движение заряда во взаимно перпендику-
перпендикулярных электрическом и магнитном полях с напряженностями
& и Ж [14, стр. 245—248]. Если начальная скорость v0 заряда
перпендикулярна Ж, то его движение будет плоским, поскольку
приращение скорости в начальный и последующий моменты вре-
времени лежит в плоскости, определяемой векторами v0 и Fo =
= е& + — [\0Ж] (см. A.44)). В связи с этим ось Ог направим
с
вдоль вектора Ж, а ось Ох вдоль § (см. рис. 1.23, где е<0).
Уравнение движения заряда
mv =
§ 1.4 Решение уравнений движения 55
в выбранных декартовых координатах принимает вид
. eg ..
* = coy +-^-, У = —сох,
е. 'W
где (о = . Интегрируя эту систему по аналогии с предыдущим
тс
случаем, находим
где
Для проекций скорости и ускорения соответственно имеем
i = со a sin (со? + а), х = co2acos (arf -f a),
у = — —^- + со a cos (ю* 4a)J = — со2а si
Уравнение траектории (циклоиды) запишем в виде
где
, с S
Отсюда видно, что движение заряда происходит в полосе, лежа-
лежащей в плоскости Оху, и может быть наглядно представлено как
равномерное вращение заряда с постоянной угловой скоростью со
по окружности радиуса а, центр которой движется параллельно
с Р
оси Оу с постоянной скоростью -щ- (рис. 1.24). Существен-
Существенно, что со зависит от отношения efflltn и не зависит от начальных
условий, а скорость центра указанной окружности зависит лишь
от отношения напряженностей полей S/S5? и, следовательно, одина-
одинакова для частиц с различными удельными зарядами е/т и раз-
различными начальными условиями. Ширина полосы, в которой про-
происходит движение заряда, равна 2а. Она зависит от удельного за-
заряда, напряженностей полей, начальной скорости и не зависит от
начального положения ввиду однородности полей.
56
Основные понятия и законы механики
Гл. I
Рассмотренное движение заряда в направлении вектора
с постоянной в среднем скоростью называют дрейфом заря-
д а. Средние значения проекций скорости и ускорения за период
Г=2я/со соответственно равны
х — 0 и = — г
Рис. 1.24
Кстати отметим, что абсолютная величина ускорения отлична от
нуля и равна
\е\Я Г -2 , / • , eg
w = I а I со2 =
тс
Уо
-)*]"'•
а вектор ускорения направлен все время к центру «образующей»
окружности.
Изучаемые поля обладают важным свойством фокусировки.
Дело в том, что ни частота со, ни скорость дрейфа — с -~г
не зависят от начальных условий. Поэтому расстояние / между
двумя последовательными вершинами циклоиды, равное произве-
произведению величины скорости дрейфа на период Т, также не зависит
от начальных условий:
Следовательно, частицы с одинаковым удельным зарядом и оди-
одинаковым начальным положением, но с различными начальными
скоростями, перпендикулярными к Ж, будут приходить в одно и
то же положение через периоды времени Т.
Рассмотрим детальнее явление дрейфа заряда. С этой целью
перенесем начало координат в начальное положение заряда, а на-
начальную скорость направим перпендикулярно плоскости полей,
т. е. положим, что xo=yo = O и Xo=O. Такой выбор начальных ус-
§ 1.4 Решение уравнений движения _57
ловий по существу не вносит ограничений, поскольку, изменяя на-
начало отсчета времени t0, всегда можно добиться того, чтобы хо = О.
Подставляя выбранные начальные условия в общее решение, по-
получим
с р
х = a(lcos<ut) i/ ?
где
а = —(' С§
СО \ <^2»
Возьмем для определенности отрицательный заряд ?<0 и поло-
положительно направленную начальную скорость #р>0. Учитывая, что
при этом со<0 и а<0, вычислим х, у, х, у, х, у при значениях ар-
з
гумента - Ы = О, —я/2, —я,— — я, —2я (на рис. 1.24 эти
точки обозначены 0, 1, 2, 3, 4 соответственно, а в каждой из этих
точек изображены скорость v, сила е&> сила. Fa? = — [v Ж] и
сумма этих сил F). В результате мы увидим, что на участке тра-
траектории 0—1—2 электрическое поле разгоняет заряд от скорости,
равной г/о, до скорости максимальной величины уъ-\-2с {&!Ж).
Одновременно магнитное поле, искривляя траекторию, поворачи-
поворачивает скорость настолько, что в положении 2 она становится анти-
антипараллельной начальной скорости; при этом сила F#? оказывается
направленной по вектору <§, а по величине превосходит силу е &
(так как скорость в положении 2 достаточно велика). В.связи с
этим на участке траектории 2—3—4 появляется составляющая
скорости, направленная против силы е §; происходит торможение
заряда электрическим полем, а магнитное поле продолжает ис-
искривлять траекторию; скорость заряда в точке 4 достигает мини-
минимальной величины уо и поворачивается до направления начальной
скорости. Из этой картины движения следует, что на участке тра-
траектории /—2—3 величина средней скорости движения заряда в
направлении, перпендикулярном плоскости полей, больше, чем на
участках 0—У, 3—4. В самом деле, легко подсчитать, что средние
значения проекции скорости на участке 1—2—3 соответственно
равны
х = 0, у = -щ — асо,
а на участках '0 — 1, 3 — 4
11 W ^ к
-г eg _2_
= 0, у = «г- + - <
58
Основные понятия и законы механики
Гл. I
Аналогично возникает дрейф частицы и при других значениях на-
начальной скорости (см. рис. 1.25, на котором изображены все воз-
возможные случаи траекторий отрицательного заряда, если Хо = Уо—:
Исследуем движение заряда в постоянных однородных элект-
электрическом и магнитном полях с произвольной ориентацией векто-
векторов <§, Ж и v0. Направляя ось Ог вдоль Ж, а ось Ох в одной из
плоскостей, определяемых векторами & и Ж, убедимся, что дви-
движение проекции материальной точки на плоскость Оху описыва-
описывается полученными ранее уравнениями с той разницей, что роль
величины $ играет ёх —проекция & на ось Ох, а движение
проекции точки на ось Ог будет равноускоренным и определится
проекцией напряженности электрического поля <?2. Таким обра-
образом, общее решение имеет вид
с ^ \
— acos {(at + a),
Xo
t + asin (octf + <*)>
= ZQ + Zot +
2m
где
§ 1.4 Решение уравнений движения 59
В этом случае движение заряда может быть наглядно представ-
представлено как его равномерное вращение с угловой скоростью со по
окружности радиуса а, плоскость которой все время остается пер-
перпендикулярной напряженности Ж, а центр движется с постоянной
с &
скоростью * в направлении вектора [ёЩ и равноускорен-
равноускоренно вдоль Ж. Следовательно, траекторией заряда является некото-
некоторая винтовая кривая, вьющаяся около параболы с осью, парал-
параллельной напряженности магнитного поля.
Глава II
ЗАКОНЫ ИЗМЕНЕНИЯ И СОХРАНЕНИЯ ИМПУЛЬСА,
КИНЕТИЧЕСКОГО МОМЕНТА И ЭНЕРГИИ
В первой главе было показано, что зада'ча о движении одной
точки имеет общее решение для сравнительно широкого класса
сил. Задача о движении двух точек также имеет общее решение
в квадратурах при достаточно общих предположениях о силе
взаимодействия между точками (см. § 3.1). Однако отыскание
общего решения задачи трех и более точек при достаточно общих
предположениях о силах взаимодействия встречает непреодоли-
непреодолимые трудности*. В связи с этим общие теоремы, справедливые
при любом числе материальных точек, приобретают громадное
значение. Такими универсальными теоремами являются законы
изменения и сохранения импульса, кинетического момента и энер-
энергии. Рассмотрим эти законы для механических систем свободных
точек (см. с. 26), или, кратко говоря, для свободных систем.
§ 2.1. Законы изменения и сохранения импульса и момента
импульса материальной точки
Из дальнейшего будет ясно, что законы сохранения импуль-
импульса, кинетического момента и энергии приводят к так называемым
интегралам движения. Интегралом движения называется
такая' функция времени, координат и скоростей точек, которая
при движении механической системы сохраняет постоянное зна-
значение, определяемое начальными условиями. Таким образом, ин-
интеграл движения определяет соотношение ©ида
f{t, гх, г2, ... , vNy vlf v2, ... , \N) = С B.1)
между радиусами-векторами и скоростями точек системы. Функ-
Функция / сохраняет постоянное значение при любых начальных усло-
условиях, а значение постоянной С фиксируется, если начальные усло-
условия заданы, т. е.
* В настоящее время частные решения задачи трех тел находятся с по-
помощью методов вычислительной математики.
§ 2.1 Сохранение импульса и момента импульса точки 61
/С ri» г2, ... , rNt vu v2, ... rv;v) = C0, B.2)
где
Co = f(t0) гю> r2o> • • • » гмь v10, v20, . • • , vjvo).
Интегралы движения, содержащие скорости точек, называют-
называются первыми интегралами. Вторыми интегралами
называются такие функции времени, координат точек и произ-
произвольных констант, которые при движении системы сохраняют
постоянные значения.
Если известны 6N независимых первых интегралов движе-
движения
fa(t, Г1э Г2, . . . , Tjv, У19 V2, . . . , VN) = Са B.3}
(<х=1, 2, ... ,
то уравнения движения A.59) механической системы можно счи-
считать проинтегрированными, поскольку соотношения B.3) опреде-
определяют радиусы-векторы и скорости точек системы как функции
времени и 6N произвольных постоянных. Соответственно зна-
знание s независимых первых интегралов дает возможность пони-
понизить порядок системы уравнений движения на 5.
Рассмотрим связь законов сохранения со свойствами сил на*
примере одной точки, движущейся относительно определенной
инерциальной системы отсчета.
Закон изменения импульса материальной
точки совпадает со вторым законом Ньютона. Действительно,
импульсом точки р называется произведение массы точки m
на ее скорость v (часто эту величину называют количеством
движения). Поскольку масса точки постоянна, то из уравне-
уравнения A.58) получаем закон изменения
р = F. B.4>
На основании B.4) можно утверждать: если проекция силы на
некоторую неподвижную ось в любой момент времени равна ну-
нулю, то проекция импульса на ту же ось сохраняется; например,
если F2=0, то
Если проекции силы на две фиксированные оси равны нулю, то
получим два интеграла. Например, пусть на точку действует сила
тяжести mg. Так как вектор g постоянен, то проекции силы на
оси, перпендикулярные этому .вектору, равны нулю в любой мо-
момент времени. Следовательно, проекции импульса (и скорости) на
оси, перпендикулярные g, сохраняются, т. е. х=х0, у=уо (ось Ог
62 Законы изменения импульса, момента и энергии Гл. II
направлена вдоль /вектора g). Наконец, если сумма сил, действую-
действующих на точку, равна нулю (F=0), то
Р = Ро> B.6)
т. е. имеет место закон сохранения импульса точки.
Отметим: если проекция силы «а подвижную ось равна нулю,
то отсюда не вытекает сохранение (проекции импульса на эту ось.
Пусть, например, проекция силы на координатную ось (р) равна
нулю. Спроектировав на эту ось обе части уравнения движения
точки (или B.4)), найдем, что
mwQ = jFp.
Левая часть этого уравнения (согласно A.20)) равна
Рр — т рф2,
где рр=тр и является проекцией импульса точки на ось (р). Та-
Таким образом, если /7р=0, то это не означает, что рр сохраняется.
Закон изменения момента импульса точки
является следствием второго закона Ньютона. Действительно,
умножая B.4) векторно слева на радиус-вектор точки г, получим
Правая часть этого уравнения называется моментом силы L.
Левую часть (используя определение импульса и очевидное ра-
равенство [vv]=0) можно представить в виде
[гр]
dt
где М= [гр] — момент импульса точки. В результате най-
найдем, что производная момента импульса материальной точки по
времени равна моменту силы, действующей на эту точку,
M-L. B.7)
Отсюда следует: если проекция момента силы на некоторую
неподвижную ось в любой момент времени равна нулю, то про-
проекция момента импульса точки на ту же ось сохраняется; напри-
например, если Lz=0, то
М2 = М20. B.8)
Подчеркнем, что момент силы (или его проекция) может рав-
равняться нулю не только в том случае, когда сила равняется нулю.
Пусть, например, задана сила, направление которой постоянно.
§2.1
Сохранение импульса и момента импульса точки
Направляя координатную ось Oz коллинеарно силе, на основании
B.8) йайдем (рис. 2.1, а)
Ьхф0, 1уф0, L,=xFy — yFx = O; B.9)
М 2 = т (ху — ух) = MzQ.
Таким образом, проекция момента импульса точки на направле-
направление силы сохраняется, что дает один первый интеграл движения.
х
\
Теперь рассмотрим силу (рис. 2.1,6), лщшя действия которой все
время пересекает неподвижную ось под прямым углом (линией
действия силы называется прямая, на которой расположен
этот вектор). Выбирая неподвижную ось за ось Oz, на основании
B.8) получим
Fy = 0, 1Ф ф 0, Lz = р^ф - 0;
М2 =тр2ф-Л/]20.
B.10)
Следовательно, проекция момента импульса точки «а неподвиж-
неподвижную ось сохраняется и дает также один первый интеграл *, тогда
как из- равенства Lp нулю не следует постоянство Мр, по-
поскольку орт пр сам зависит от времени.
В физических приложениях очень распространен случай
центральной силы, т. е. силы, линия действия которой все
время проходит через некоторую неподвижную точку — центр
сил ы. Выбирая эту точку за «ачало координат (рис. 2.1, в), най-
найдем
* Случаи B.9) и B.10) являются частными случаями более общего, когда
линия действия силы все время пересекает неподвижную прямую под любым
углом.
€4
Законы изменения импульса, момента и энергии
Гл. II
B.11)
М = m[rv] = Мо.
Рис. 2.2
m[rv]r = Мог =
Таким образом, момент импульса точки относительно центра силы
сохраняется. Однако между тремя проекциями момента импульса
имеется очевидная зависимость:
Mv = m[rv]v = 0, B.12)
поэтому из полученных трех
первых интегралов незави-
независимы лишь два.
Под действием цент-
центральной силы точка всегда
движется по плоской траек-
траектории. Это видно как из
уравнения движения *(см.,
в частности, пример 1.7 на
с. 45), так и из второго
интеграла
B.13)
Плоскость траектории проходит через центр силы и перпендику-
перпендикулярна ^постоянному моменту импульса точки; положение этой плос-
плоскости определяется начальными условиями, так как
Mo = m[rovo].
Во всех отмеченных случаях для выявления сохраняющихся
величин важен такой выбор системы координат, который учиты-
учитывает особенности сил. Только в случае изолированной точки не
существенно, где поместить начало координат и как направить
оси, поскольку силы, действующие на точку, отсутствуют (F=0);
в этом случае
М=М0, B.14)
т. е. имеет место закон сохранения момента импуль-
импульса точкой.
Для более наглядного представления о сохранении моменту
импульса выразим уравнение B.7) через секторную скорость <т
(см. A.11) и рис. 1.3,6). Тогда получим
B.15)
откуда вытекает, что из равенства Mz=Mz0 следует
B.16)
§22 Сохранение энергии точки 65
Это значит, что проекция радиуса-вектора точки на плоскость,
перпендикулярную оси Ог, описывает одинаковые площади за лю-
любые одинаковые (интервалы времени (рис. 2.2). По этой причине
интеграл B.16) часто называется интегралом- площадей.
§ 2.2. Законы изменейия и сохранения энергии
материальной точки
Закон изменения 'кинетической энергии точки получим, умно-
умножая обе части уравнения движения A.58) скалярно на перемеще-
перемещение точки dv:
mv dv = ? dv.
Правая часть этого уравнения называется элементарной ра-
работой dA силы F на перемещении dv, з. левая часть,
равна дифференциалу от кинетической энергии. В последнем мож-
можно убедиться, используя определение скорости A.9) и известное
утверждение о том, что скалярное произведение вектора на его
приращение равно произведению модуля вектора на приращение
этого модуля*:
dv
т dv = mv dv = mvdv = dT,
dt
где T=mv2l2—кинетическая энергия точки. В ре-
результате получаем, что дифференциал кинетической энергии точки
равен элементарной работе действующей на точку силы:
dT = dA. B.17)
Разделив B.17) на dt и определив мощность силы как отно-
отношение , получим другую форму закона изменения
dt
кинетической энергии, а именно: производная кинетиче-
кинетической энергии точки по времени равна мощности силы, действую-
действующей на точку:
^ B.18)
dt
* Действительно, по определению скалярного произведения для любого
вектора а имеем
a da = a \ d a | cos (a, da).
Но приращение модуля вектора равно
da = \ d a | cos (a, da),
следовательно,
a da = a da.
3 Зак 284
66 Законы изменения импульса, момента и энергии Гл. II
Следует иметь в виду, что элементарная работа dA не всегда
является полным дифференциалом, а мощность — полной
dt
производной скалярной функции по времени.
Потенциальные с и л ы. Как предполагалось выше, сила
является заданной функцией положения, скорости точки и време-
времени. Поэтому, не зная закона движения точки (т. е. функции v{t))f
нельзя вычислить работу на конечном (перемещении точюи. Для
вычисления конечного изменения кинетической энергии >в общем
случае нужно знать решение уравнений движения. Однако для
весьма широкого класса сил можно, не зная решения уравнений
движения, найти изменение кинетической энергии. Такими силами
являются потенциальные силы.
Понятие о потенциальных силах тесно связано с понятием о
силовом поле, которое рассмотрим на примере электростати-
электростатического поля. Известно, чтЬ сила, с которой неподвижный заряд
2 действует на заряд 1, может быть записана в виде
где <§2 = е% —~ (здесь начало координат совмещено со вторым
зарядом, см. A.43)). В этом выражении вектор <§2 не зависит от
величины заряда ех. Поэтому становится возможным следующее
представление о силе: заряд 2 — источник силы — порождает
силовое поле, которое в каждой точке пространства имеет опреде-
определенную напряженность 62 независимо от того, присутствует
ли в этой точке пространства другой заряд — объект воздейст-
воздействия— или нет; если такой заряд имеется, то на него действует
поле с силой, равной произведению этого заряда на напряжен-
напряженность поля в месте нахождения этого заряда. Таким образом, си-
силовое поле можно задать с помощью напряженности поля или си-
силы как функций точки пространства.
Силовое поле называется потенциальным, если его напряжен-
напряженность удовлетворяет требованию, которое для рассматриваемого
примера имеет (вид
rot<S2(rj-e2rot(r/r3) =-0
(дифференциальная операция «ротор» производится по коорди-
координатам точки пространства). Соответственно силу называют потен-
потенциальной, если она зависит только от координат и удовлетворяет
требованию
rotF(r)-0. B.19)
Учитывая, что векторная функция, удовлетворяющая требова-
требованию B.19), «всегда может быть выражена через градиент некото-
§ 2.2 Сохранение энергии точки 67
рой скалярной функции U от положения точки, потенциальную
силу можио представить в виде
F = — gradG(r). B.20)
Элементарная работа потенциальной силы будет полным диффе-
дифференциалом *:
dA = —yUdr = —dU. B,21)
Отсюда вытекает, что работа на конечном перемещении точки из
положения Го в положение т\ равна определенному интегралу:
d(/ = ty(r0)-i;(r1) B.22)
(Го)
(здесь и далее предполагается, что U— однозначная функция).
Итак, работа потенциальной силы равна разности значений функ-
функции U в начальном и конечном положениях материальной точки
и не зависит от формы траектории, по которой движется точка.
Скалярную функцию U называют потенциальной энергией
точки, т. е. энергией, зависящей от расположения точки в по-
потенциальном силовом поле. Из B.21) и B.20) видно, что потен-
потенциальную энергию можно найти по заданной потенциальной силе
с помощью неопределенного интеграла:
?/ = —JFdM-C B.23)
(здесь С — постоянная, определяющая «нулевой уровень» потен-
потенциальной энергии; выбор такого уровня произволен и не влияет
на значение силы и работы этой силы).
Приведем ряд примеров. Пусть сила перпендикулярна к непо-
неподвижной плоскости и является функцией расстояния от этой плос-
плоскости. Такая сила потенциальна, поскольку она удовлетворяет ус-
условию B.19). Если координатную ось Oz направить вдоль силы,
т. е. перпендикулярно к указанной плоскости, то найдем
F = F(z)nz, Fdr = F(z)dz,' U - — JF(z)dz + С. tB.24)
В частности, напряженность <S поля равномерно заряженной бес-
бесконечной плоскости постоянна по величине и направлена перпен-
перпендикулярно этой плоскости [40, гл. I, § 4]. Совмещая координат-
координатную плоскость Оху с заряженной плоскостью, получим следую-
следующие выражения для силы и элементарной работы:
* Здесь и далее градиент записывается с помощью векторного дифферен-
дифференциального оператора «набла», который в декартовых координатах имеет вид
д д д
68 Законы изменения импульса, момента и энергии Гл. II
F-e?n,, dA = egdz. B.25)
Для потенциальной энергии заряда и работы силы электростати-
электростатического поля на конечном перемещении заряда соответственно на-
находим
U = —egz + C, 4 = — j dU = eS{zl — z0). B.26)
Отсюда -видно, что работа силы по перемещению точки с плоско-
плоскости z=z0 на плоскость z=Z\ не зависит от формы траектории
(каждая из указанных плоскостей представляет собой экви-
эквипотенциальную поверхность, т. е. поверхность, в каждой
точке которой потенциальная энергия имеет одно и то же зна-
значение) .
Рассмотрим -силу, величина которой зависит от расстояния до
неподвижной прямой^ а линия действия которой проходит через
эту прямую перпендикулярно к ней. Поле такой силы цотенци-
ально, поскольку условие B.19) выполняется. Бели ось Oz совме-
совместить с осью симметрии поля, то в цилиндрических координатах
будем иметь
B.27)
Po
В качестве частного примера можно взять электростатическое по-
поле равномерно заряженной бесконечной прямой. Как известно,
сила, действующая на заряд е со стороны такого поля, равна
F = e-^-np, B.28)
Р
где х — заряд, приходящийся на единицу длины [40, гл. I, § 4].
Подставляя B.28) в B.27), получим
dA =-*2-dp9 I/= -2exlnp + C, А = 2ек\п(-^-\. B.29)
p \ Po /
В данном примере эквипотенциальными поверхностями являются
коаксиальные цилиндры с осью, совпадающей с заряженной пря-
прямой, а работа, совершаемая над зарядом при его движении по
любому пути между двумя такими поверхностями, будет одной и
той же.
Наконец, приведем случай центральной силы, являющейся
функцией расстояния от центра силы. Совмещая начало коорди-
§ 2.2 Сохранение энергии точки 69
нат с центром силы и используя сферические координаты, запи-
запишем силу в виде
F^F(r)nr. B.30)
Непосредственной проверкой убедимся в потенциальности силы
B.30); при этом интересующие нас выражения будут определять-
определяться следующими формулами:
dA = F(r)dr, U~-$F(r)dr + C, A = \F(r)dr. B.31)
Например, если
г2
р -- д2 п
Г2 Г>
ТО
(/ = -?Л- + с, Л = еА f-L — —V B.32)
г \ го гх I
В этом примере поверхностями равного потенциала являются
сферы с центром, совпадающим с неподвижным зарядом (см.
с. 66).
Во всех рассмотренных случаях сила являлась стационар-
стационарной, т. е. явно от времени не зависела. Это означает, что п.ри
фиксированном положении точки ее потенциальная энергия не из-,
меняется со временем, т. е. частная производная = 0. Од-
dt
нако если точка перемещается, то ее потенциальная энергия будет
изменяться. Такое изменение характеризуется полной производ-
производной*:
dt V dt
(здесь г является радиусом-вектором материальной точки). В при-
приведенных на с. 67—69 примерах полная производная 0=^0.
Сила, явно зависящая не только от положения, но и от вре-
времени, также может удовлетворять условию потенциальности B.19)
(в этом случае сила называется нестационарной потен-
потенциальной силой). Тогда выражение B.20) также имеет место,
а потенциальная энергия определяется по заданной силе интегра-
* В более подробной записи полная производная в декартовых координа-
координатах имеет вид
dU(r) _ dU dx dU dy , dU dz
dt ~ dx dt dy dt ~^ dz dt
70 Законы изменения импульса, момента и энергии Гл. II
лом B.23), причем интегрирование производится при фиксирован-
фиксированном времени. Что касается соотношения B.21), то оно не имеет
места. Действительно, если U явно зависит от г и t, то
dU = у Udr + — Л B.33)
dt
и, следовательно,
dA = — yf/dr = —dU + -Ш-dt. B.34)
v dt v '
Так как свойство B.22) в этом случае не выполняется, то для оп-
определения работы, совершенной на конечном пути, нужно знать
закон движения точки, т. е. функцию г(/).
Рассмотрим в качестве примера заряд е в переменном элект-
электрическом поле напряженности <S0coscd? (!см. A.45)). Направляя
ось Ох вдоль вектора бо, согласно B.23) получим
U = —е(?0л;со8(о? + С. B.35)
Следовательно, в этом примере как полная, так и частная произ-
производные потенциальной энергии по времени отличны от нуля.
Гироскопической силой F# называется сила, линейно
зависящая от скорости точки и направленная всегда перпендику-
перпендикулярно этой скорости; проекции гироскопической силы на коорди-
координатные оси являются однородными линейными формами относи-
относительно проекций скорости точки с коэффициентами, составляющи-
составляющими антисимметричную матрицу; работа гироскопических сил
всегда равна нулю.
Возьмем, например, часть Лоренца A.44), зависящую от
напряженности магнитного поля:
?=^ — [\Щ. B.36)
с
Проекции этой силы на декартовы оси соответственно равны
откуда видно, что матрица, составленная из коэффициентов при
проекциях скорости, антисимметрична:
§ 2.2
Сохранение энергии точки
71
о +жг -жу
-Жг О +ЖХ
+ ЖУ ~ЖХ о
B.37)
Так же легко убедиться, что мощность силы B.36) всегда равна
нулю:
dt
B,38)
Диссипативной силой Fd называется сила, направлен-
направленная всегда противоположно скорости тела относительно среды,
вызывающей торможение этого тела. Такая сила имеет вид
— —— /v v j
B.39)
где k — положительная скалярная функция, которая может за-
зависеть от положения и скорости тела *. Диссипативная сила за-
задается диагональной матрицей коэффициентов при проекциях ско-
скорости на координатные оси
k
0
0
0
k
0
[0
0
k
Мощность диссипативных сил при перемещениях тела относитель-
относительно среды, вызывающей торможение тела, отрицательна:
dA
dt
= —Ь2<0.
B.40)
Например, сила сопротивления A.46) является диссипативной си-
силой. При достаточно больших относительных скоростях сила соп-
сопротивления пропорциональна квадрату скорости и имеет вид
B.39), где k=kiv (k\ — положительная постоянная). Сила тре-
трения скольжения, возникающая при движении тела по поверхности
другого твердого тела, прямо пропорциональна /?х — величине
нормальной реакции твердого тел_а на движущееся тело. Таким
образом, в этом случае k =
\L
(k2 — положительная пос-
постоянная, a R± может зависеть от положения тела).
Теперь предположим, что на точку действуют потенциальная,
гироскопическая и диссипативная силы, сумма которых равна
F = — v^ + Fg + pd- B.41)
* В гидродинамике встречаются диссипативные силы , более общего по
сравнению с B.39) вида, например силы, проекции которых на координатные
оси являются однородными линейными формами относительно проекций ско-
скорости тела с коэффициентами, составляющими симметричную матрицу.
72 Законы изменения импульса, момента и энергии Гл. II
B.42)
Мощность силы F получим, учитывая B.34) и B.38):
dA (j + J!L+F*v
dt dt
Тогда, определяя полную механическую энергию Е
точки как сумму ее кинетической и потенциальной энергий
E^T + U9 B.43)
с помощью B.18) найдем закон изменения полной энергии точки
при наличии потенциальных, гироскопических и диссипативных
сил:
Ё = Ш- + Fdv. B.44)
dt
Итак, изменение полной энергии точки обусловлено явной зависи-
зависимостью потенциальных сил от времени, а также наличием дисси-
диссипативных сил; гироскопические силы не изменяют энергии.
Например, изменение полной энергии заряда в переменном
электрическом поле A.45) подчиняется уравнению (см. B.35))
Ё = е § о ®х sin ®t.
Если на точку действует потенциальная сила тяжести и диссипа-
тивная сила сопротивления, т. е. юила F=mg—kv (см. пример 1.8
на с. 47), то потенциальная энергия точки равна U=mgz + C
(ось Oz направлена против силы тяжести), а закон изменения
энергии примет вин
Следовательно, полная энергия точки убывает, что, конечно, не
означает исчезновения энергии; механическая энергия Е убывает,
превращаясь в определенное количество теплоты, но это превра-
превращение уравнение B.44) не отражает.
В общем случае полная энергия точки может возрастать, убьь
вать или сохранять постоянное значение; в частности, энергия бу-
будет сохраняться, если ее прибыль и убыль компенсируют друг
друга. Однако возможны случаи, когда процессы поступления
энергии в систему и убыли энергии отсутствуют. Действительно,
если среди сил, действующих на точку, нет диссипативных сил, а
потенциальные силы стационарны, то полная энергия точки будет
сохраняться, т. е. если Fd = 0 и = 0, то
dt
E=^ + U(r) = E0. B.45)
§ 2.2 ; Сохранение энергии точки 73
Закон B.45) сохранения полной энергии точки
дает один первый интеграл — интеграл энергии, который
позволяет, не отыскивая решения уравнений движения, опреде-
определять величину скорости как функцию положения точки.
Например, в задаче о пространственном осцилляторе потен-
потенциальная энергия равна
(/=— г2 B.46)
(см. пример 1.7). Поскольку U явно от времени не зависит, а дис-
сипативные силы отсутствуют, то полная энергия осциллятора бу-
будет сохраняться, т. е.
«?7 7J л/ ftlVn */
2 2 2 2°
Отсюда можно определить величину скорости как функцию рас-
расстояния от центра силы:
jl/2
V '=¦ I 1)г ~\~ —— ' " "
L m
В примере 1.9 рассматривалось движение заряда в постоян-
постоянном однородном магнитном поле, т. е. движение под действием
только гироскопической силы (см. с. 52). Закон B.45) в этом
случае приводит к интегралу
? = Г = ^-=^, B.47)
из которого следует сохранение абсолютной величины скорости
заряда.
При движении заряда .в постоянных однородных взаимно
перпендикулярных электрическом и магнитном полях на заряд
действуют потенциальная сила её и гироскопическая ?ж (см.
пример 1.9 на с. 54). Направляя ось Ох вдоль вектора б, найдем
выражение потенциальной энергии
U = —eix-rC
и получим интеграл энергии
Так как оила F#, искривляя траекторию, ограничивает движе-
движение заряда в направлении оси Ох, то и кинетическая энергия из-
изменяется в определенных пределах.
74 Законы изменения импульса, момента и энергии Гл, II
Теорема Клаузиуса о в и риале сил. Если движе-
движение точки происходит в ограниченной области пространства с ог-
ограниченной по модулю скоростью, то имеет место теорема Клау-
Клаузиуса, согласно которой кинетическая энергия точки, усреднен-
усредненная по бесконечному интервалу времени, равна усредненному по
тому же интервалу времени вириалу сил; вир и алом силы F
называется функция
--i-Fr. B.48)
В самом деле, умножим обе части уравнения движения A.58) ска-
лярно на радиус-вектор г точки и представим результат умноже-
умножения в виде
— (mvr) — 27-Fr.
Усредняя все члены по бесконечному интервалу времени, найдем,
что
lim m vr
Д/-»оо At
— 27 = Fr.
Отсюда, учитывая ограниченность v и г, получим соотношение
Т = — — Fr, B.49)
доказывающее справедливость теоремы Клаузиуса.
Если сила F потенциальна, то B.49) можно представить в
виде
1 '—^ B.50)
Теперь дополнительно потребуем, чтобы потенциальная энер-
энергия была .однородной функцией v-той степени относительно коор-
координат точки. В этом случае из соотношения B.50) следует прак-
практически важное соотношение между средними значениями кинети-
кинетической и потенциальной энергий точки
Т = —0 B.51)
(при этом используется теорема Эйлера об однородных функциях
[44, с. 477]). Например, для линейного гармонического осцил-
осциллятора (U~r2, v=2)
Т = ?/, B.52)
§ 2.2 Сохранение энергии точки 75
а для точки, движущейся в поле тяготения Ньютона (f/^— 1/г,
v=-l)
г = --?¦• B-53)
Теорема о вириале используется в механике, статистической ме-
механике и атомной физике (например, для вывода уравнений сос-
состояния и определения постоянных межмолекулярного взаимодей-
взаимодействия). Теорема в виде B.50) и B.51) имеет место и в квантовой
механике (с соответствующими обобщениями используемых опе-
операций усреднения и других понятий).
Для системы iV точек теорема о вириале сил следует из урав-
уравнений A.59). Действительно, умножая обе части каждого из урав-
уравнений A.59) на соответствующий радиус-вектор г* и складывая все
результаты умножения, аналогично B.49) получим
N
^ B>54)
для произвольных заданных сил и
N
О^ B-55)
?=.1
для потенциальных сил.
Пример 2.1 Движение через потенциальный барьер.
Точка массы m движется из полупространства, где ее потен-
потенциальная анергия равна постоянной величине U, в полупростран-
полупространство, где потенциальная энергия равна постоянной Uf=^=U. Эти
полупространства разделены плоскостью. Найти скорость точки
после того, как она перейдет плоскость раздела (начальная ско-
скорость точки известна).
Изменение потенциальной энергии происходит только на плос-
плоскости раздела в направлении, перпендикулярном этой плоскости.
Поэтому сила, действующая на точку, отлична от нуля только на
плоскости и перпендикулярна к ней. В связи с этим координат-
координатную плоскость Oyz совместим с плоскостью потенциального
барьера, а ось Ох направим перпендикулярно к нему. Так как
проекции силы на оси Оу и Oz равны нулю, то из закона сохра-
сохранения импульса следует, что
V'y=VV> V>V*
(в этом примере «нештрихованные» величины относятся к полу-
полупространству, где потенциальная энергия равна U, а «штрихован-
76 Законы изменения импульса, момента и энергии Гл. II
ные» — к полупространству, где потенциальная энергия равна
U\ причем все «нештрихованные» величины считаются заданны-
заданными). Из закона сохранения энергии вытекает, что
2 2
Полученные соотношения дают возможность найти направ-
направляющие косинусы и абсолютную величину скорости после про-
прохождения плоскости пртенц'иального барьера как функции тех же
величин до прохождения барьера:
' = -^ !"cos2a H
v L
cos P' == -^- cos p, cos y' = "v cos y,
v v
где
v' - v I 1 4-
a, p, v и a', ?', y7 — углы между координатными осями и скоро-
скоростью точки до и после прохождения потенциального барьера со-
соответственно. Приведенное решение справедливо, если
me/2 ч
в противном случае имеет место отражение частицы от потенци-
потенциального барьера.
Пример 2.2. Заряд в неоднородном магнитном поле.
В магнитном поле постоянного тока силы /, протекающего
по бесконечному прямому тонкому проводнику, движется точка
заряда е<0. Найти удельный заряд точки, полагая известными
начальное расстояние ро заряда до проводника, начальную ско-
скорость vo, направленную вдоль тока, и максимальное расстояние
Ртах заряда от проводника.
Направляя ось Oz по проводнику вдоль тока, получим выра-
выражение для напряженности магнитного поля в цилиндрических
координатах [40, с. 204]
Ж = пр. A)
Проекции силы Лоренца будут соответственно равны
§ 2.3 Движение в центрально-симметричном поле 77
Используя B), найдем, что проекция Lz момента силы Лоренца
равна нулю, что привадит к интегралу площадей (ом. B.16).
Р2Ф = Рофо- C)
Отсюда в силу начальных условий (vo=zonz, т. е. ро=О, фо = О)
заключаем, что заряд движется в плоскости ф==фо.
Сохранение кинетической энергии (см. B.47)) дает еще один
интеграл
который для заданных начальных условий сводится к соотношению
P*+z*^zl D)
Поскольку законы сохранения других интегралов движения не
дают, воспользуемся одним из уравнений движения
тс2 р
которое сразу интегрируется:
2 = ^ + j?fln(P/Po). E).
тс2
При максимальном удалении проекция скорости р должна
обращаться в нуль и, следовательно, z согласно D) должна рав-
равняться ±z0. Таким образом, из интеграла E) с учетом знака за-
заряда е<С0 получим величину удельного заряда
т J In (Pmax/Po)
§ 2.3. Движение в центрально-симметричном поле
Рассмотрим движение материальной точки массы т под дей-
действием центральной силы, произвольно зависящей только от рас-
расстояния между точкой и центрохМ силы. Такая сила потенциальна
и стационарна (см. с. 69). Помещая начало системы отсчета в
центр силы и используя законы сохранения момента импульса «
энергии, получим четыре первых интеграла движения
m[rv]=M0, JH^+U(r) = E09 B.56)
из которых три независимы (здесь и далее потенциальная энер-
энергия U(г) считается заданной).
78 Законы изменения импульса, момента и энергии Гл. II
Наряду с первыми интегралами в дайной задаче можно найти
три вторых независимых интеграла. Один ш таких интегралов,
а именно интеграл Мог—0, представляет собой уравнение B.13)
плоскости, в которой происходит движение точки. Два других ин-
интеграла вытекают из B.56). Действительно, направляя ось Ох по
вектору Мо и вводя на плоскости Оху полярные координаты, по-
получим
тг2ф^М0, ^ (/» +гУ)•!-?/(г) =?0. B.57)
Исключая ф из интеграла энергии с помощью интеграла площа-
площадей, придем к уравнению, допускающему разделение переменных
г и t:
r'2^ ±[E0-UeU]f B.58)
где функция Uett(r), часто называемая «эффективной» по-
потенциальной энергией, равна
М2
u uM ? <2-59>
(отметим, что уравнение B.58) эквивалентно уравнению для пря-
прямолинейного движения точки с потенциальной энергией, равной
f/eff). Разделяя переменные в уравнении B.58), найдем еще один
второй интеграл
+ const. B.60)
Из интеграла B.60) в принципе можно определить функцию r(t)
а подставить ее в интеграл момента. Тогда получим, что
ф__Мо_ B61)
Отсюда найдем последний второй интеграл
B.62)
ф
Интеграл момента позволяет найти уравнение траектории, если
с его помощью в интеграле энергии исключить at, а затем вычис-
вычислить квадратуру:
§23 Движение в центрально-симметричном поле 79
Ф = ± \ f2 "* .1/2 + const. B.63)
}
Выбор злака в интегралах B.60) и B.63) диктуется начальными
условиями; например, знак перед интегралом B.60) определяется
знаком производной г, взятой в начальный момент времени.
Итак, три вторых интеграла B.13), B.60) и B.62) определяют
общее решение поставленной задачи (один из интегралов B.60)
или B.62) может быть заменен интегралом B.63)). Это решение
содержит шесть постоянных: ?0, МхОу Му0, Mz0, r0> <р0. Выбор пос-
постоянных не является единственным: можно, например, ввести г0,
фо> Ль Фо и два угла, определяющие положение плоскости движе-
движения. Однако выбор постоянных интегрирования, содержащих
энергию и момент, имеет определенное преимущество, в частно-
частности, при переходе к соответствующим (Квантовым задачам.
Замечательным является то, что полученное общее решение
справедливо для любой центральной силы, зависящей только от
расстояния до центра силы. Движение точки в поле таких сил
обладает общими свойствами, а именно: движение происходит в
неподвижной плоскости, проходящей через центр силы; радиус-
вектор точки описывает равные площади за равные промежутки
времени; угол ф изменяется со временем всегда монотонно; траек-
траектория точки симметрична относительно апсид (так называются
прямые, проходящие через центр силы, и точки поворота,
находящаяся (В начальный момент времени в точке поворота и
обладающая в одном случае начальной скоростью v0, а в другом
случае — v0, будет двигаться по симметричным кривым. Действи-
Последнее утверждение означает, что материальная точка,
т. е. точки траектории, в которых величина радиуса-вектора при-
принимает экстремальные значения).
тельно, в точках поворота г обращается в нуль, а в окрестности,
этих точек изменяет знак; вместе с г изменяет знак выражение
которое определяет знак подынтегральных функций в B.60) и
B.63). Следовательно, при^отсчете ср от некоторой апсиды участки
траектории, находящиеся по разные стороны от апсиды, будут
отличаться знаком <р (при одинаковых значениях г). Это свойст-
свойство симметрии позволяет построить всю траекторию, зная лишь
участок траектории между двумя апсидами. Таковы общие черты
движения точки в центрально-симметричном поле.
80 Законы изменения импульса, момента и энергии Гл. II
Если функция U(г) задана, то, вычисляя интегралы B.60) и
B.62) (или B.63)), можно получить общее решение для соответ-
соответствующего 1В1Ида взаимодействия. Однако до нахождения общего
решения полезно, провести его качественный анализ. Построив
график Uett(г), можно определить область- изменения коорди-
координаты г движущейся точки. Действительно, поскольку в классиче-
классической механике, г, v й t вещественны, то г2 должна быть положи-
положительно определенной величиной. Таким образом, из уравнения
B.58) вытекает неравенство
E0>Ueff(r), B.64)
определяющее область изменения г, и уравнение
Eo=Veff(r), B.65)
определяющее границы указанной области. Рассмотрим простей-
простейший пример, когда точка движется по инерции относительно сис-
системы координат с началом, не лежащим на траектории точки.
В этом случае
М2
(МОФО,
UeffT
а область изменения г определяется неравенством
Траекторией точки может быть любая прямая, касающаяся ок-
окружности радиуса r = rmin (см. рис. 2.3, где (плоскость Оху являет-
является плоскостью движения точки).
Если точка движется в потенциальном поле B.46), то
2 2mr2
В этом случае уравнение B.65) дает "две точки поворота, опреде-
определяемые равенствами
Mo I
гп ) \
а неравенство B.64) определяет область ri^r<Cr2 (рис. 2.4). Если
?0= (f/eff)min= (%/пгI^2МоУ то точка будет двигаться по окружности
радиуса г=г1 = г2= (Eq/kI!2. Траектория точки в общем случае,
когда ?о> (^eff)min, находится с помощью интеграла B.63). Ею
является эллипс, центр которого находится в центре силы и кото-
который дважды касается окружностей с радиусами гх и г2 соответст-
соответственно (см. пример 1.7).
§ 23
Движение в центрально-симметричном поле
81
Анализ графика Ueti позволяет найти условие падения час-
частицы «а центр силового поля. Пусть, например,
(такая степенная функция используется при рассмотрении меж-
молекулярного взаимодействия). Из графика Uett (рис. 2.5) (Вид-
//77,
Ъг
х
h- ь
Рис. 2.4
но: если (?/eff)max<?o, то движение происходит в неограниченной
области и, в частности, возможно падение точки на центр. Если
0<?о<С (Uett)max, то движение происходит либо в области г^г2,
либо в области г<Сгь в которой точка достигает центра; при
Ео^О также имеет место падение на центр.
В общем случае условие падения на центр можно получить
с помощью неравенства B.64), записанного в виде
2т
Устремляя здесь г к нулю, найдем условие падения на центр си-
силового поля
82
Законы изменения импульса, момента и энергии
Гл. II
О >
1т
B.66)
Для степенного потенциала ?/(г) = —а/гп это условие выполняется
при
п = 2, если а >
Ml
2т
п > 2, если а > 0;
B.67)
Рис. 2.5
иначе говоря, потенциальная
энергия должна достаточно быст-
быстро стремиться к —оо при Гг-^О.
В заключение приведем ус-
условие замкнутости финитной тра-
траектории, КОГДа 0<rmin^(r^rmax<
<оо. В этом случае, определяя
из B.63) угол Аф поворота ради-
радиуса-вектора точки за период вре-
времени, в течение которого г изме-
изменяется ОТ rmin ДО Гтах И ОПЯТЬ ДО
fmim и приравнивая Аф рацио-
рациональной части от 2jt, получим ус-
условие замкнутости траектории
Мо
тг2
dr
1/2
B.68)
где k и п — целые числа. Действительно, если B.68) имеет место,
то через k полных оборотов точка займет первоначальное поло-
положение. Соотношение B.68) при любых -начальных условиях вьь
полняется только для двух полей:
§ 2.4. Движение под действием силы, обратно пропорциональной
квадрату расстояния до центра силы. Законы Кеплера
Исследуем движение точки массы т оз центрально-симметрич-
центрально-симметричном поле .вида
§ 2.4 Законы Кеплера 83
[/=-— B.69)
с неподвижным центром силы; в случае электростатического поля,
создаваемого неподвижным зарядом ес, постоянная а=—eeCi где
е — заряд движущейся точки, а в случае гравитационного поля,
создаваемого неподвижной массой тс, постоянная а=уттс (см.
A.43), A.49), B.32)).-
Анализируя график Uett (рис. 2.6) и принимая во# внимание
неравенство B.64), убедимся, что в случае притяжения (<х>0) и
положительной полной энергии (?0>0) r^rmin; в случае а>0 и
Eq = 0 движение точки также будет происходить в неограниченной
области (т. е. будет инфинитным); в случае а>0 и отрица-
отрицательной энергии (?0<0) движение происходит в ограниченной об-
области rmin^r^rm3iX (т. е. движение финитно); если а>0 и
Ео= (f/eff)min, то точка движется по окружности; наконец, в слу-
случае отталкивания (а<0) всегда r^rmin, а полная энергия поло-
положительна (?0>0).
Во всех указанных случаях траектория, или, как часто гово-
говорят, орбита точки, определяется одной-формулой. Действи-
Действительно, подставляя B.69) в B.63), получим
«
(-У
2m|g|
Ml . Ml
т)-(т)Т
(здесь знак «+» под радикалом соответствует случаю а>0, a
знак «—» случаю а<0). Вводя вместо постоянных Ео и Ь% поло-
положительные (по определению) постоянные
iir. B.70)
т|а|
запишем последний интеграл в виде
Затем в результате интегрирования получим
ф — с = ± arccos — (— =F I
е \ г
Опуская знак «—» перед углом (ср—с) ввиду четности косинуса^
найдем уравнение орбиты
84 Законы изменения импульса, момента и энергии Гл. II
г = 2 , B.71)
± 1 + е cos (ф — с)
где знак «+» соответствует случаю притяжения (а>0), а знак
«—» случаю отталкивания (а<0).
Уравнение B.71) является уравнением кривой второго по-
порядка, в фокусе которой находится начало координат; постоян-
постоянная р называется параметром орбиты, а постоянная е —
ее эксцентриситетом. Значение с зависит от выбора нап-
направления полярнрй оси в плоскости орбиты. Если полярную ось
направить на ближайшую к центру силы точку траектории
(см. выбор осей на рис. 2.6), то с=0.
Из аналитической геометрии известно, что траектории вида
B.71) представляют собой гиперболу (при е>1), параболу (при
?=1), эллипс (е<1) или окружность (е=0). Принимая во вни-
внимание B.70), получим, что в заданном потенциальном поле
U=—а/г в случае притяжения (а>0) траекторией точки будет
гипербола, если Ео > 0,
парабола, если Ео = 0,
н B.72)
эллипс, если 0 > Ео > (Ueff)mfn,
окружность, если Ео = (t/eff)min;
в случае отталкивания (а<0) точка может двигаться только по
гиперболе (?0>0).
Рассмотрим подробнее движение по эллиптической орбите,
когда а>0, >a 0>E0> (f/eff)min, т. е. е<1 (рис. 2.6). Из уравне-
уравнения B.71) следует, что
С помощью известных из аналитической геометрии формул для
полуосей эллипса
а = —^—, Ъ - r p B.74)
1-е2 /1—82 ^ >
и формул B.70) а и Ь можно выразить через постоянные Ео и Мо:
а= а , h- м° - B.75)
2|?01 V2m\E0\ '
Отсюда видно, что большая полуось эллипса зависит от полной
энергии и не зависит от значения момента.
§ 2.4
Законы Кеплера
85
?ff>0
0>I0 > (Ueff)mn (e<0
Рис. 2.6
86 Законы изменения импульса, момента и энергии Гл. II
В частном случае круговой орбиты (EQ= (f/eff)min, e=0)
имеем
r = 09 г==Го = а--=Ь. B.76)
Очевидно, что при движении по окружности постоянна не только
полная энергия, но и потенциальная и кинетическая энергия
точки.
Закон движения точки по эллиптической траектории получим
из интеграла B.60). Учитывая, что Ео=—|?о| « а>0, а также
используя формулы B.75), запишем B.60) в виде
rdr
2|?о|
G помощью B.74) убедимся, что Ь2=а2 A-е2), и сведем интеграл
к следующему:
rdr
Сделав подстановку
г = а{\ —ecosg),
найдем
Выбирая параметр | так, чтобы с его увеличением время возра-
возрастало, и принимая начальные условия
го = аA — e) = rmin, ^0 = 0 при |=0, B.77)
получим закон движения точки по эллиптической орбите в пара-
параметрическом виде
(gesIn6), B.78)
где Т — 2п У md?!a — период полного оборота точки по эл-
эллипсу. Значение этого периода легко получить с помощью интег-
интеграла площадей, записав его в виде (см. B.8))
2maz - 2m— = Мо, B.79)
dt
где dS — площадь, очерчиваемая радиусом-вектором точки за
время dt. Интегрируя это выражение по полному периоду и учи-
учитывая, что площадь эллипса равна nab, иайдем
§ 2.4 Законы Кеплера 87
2mnab = М0Т.
Отсюда, используя B.75), получим
2 |?ol3 a ' '
Таким образом, период обращения по эллипсу зависит только от
полной энергии (или от величины большой полуоси) и не зависит
от момента (и от величины малой полуоси).
Уравнение орбиты B.71), закон площадей B.79) и соотноше-
соотношение периода и большой полуоси B.80) являются математическим
выражением трех законов Кеплера, установленных им
эмпирически примерно в 1609—1619 гг. в результате обработки
наблюдений над движением планет. В этих законах утвержда-
утверждалось, что
каждая планета движется по эллипсу, в одном из фокусов
которого находится Солнце (первый закон);
секторная скорость каждой планеты относительно Солнца
постоянна (второй закон);
отношение квадратов периодов обращения планет к кубам
больших полуосей их орбит постоянно и для всех планет одинако-
одинаково (третий закон).
Заметим, что применительно к движению планет третий за-
закон Кеплера верен приближенно (см. с. 120). Тем не менее отк-
открытие законов Кеплера имело очень большое значение. В частно-
частности, на их основе Ньютоном был установлен закон всемирного
тяготения: допуская, что движение тел в поле тяготения Земли
также подчинено законам Кеплера, можно было на основании пер-
первого и второго законов утверждать, что величина ускорения тел
вблизи поверхности Земли равна (см. пример 1.3)
8 R* '
где R — радиус Земли. Кроме того, из третьего закона Кеплера
следовало, что квадрат периода обращения Луны вокруг Земли
прямо пропорционален кубу радиуса а лунной (приблизительно
круговой) орбиты, т. е.
Т2 = а3.
С
Допуская, что постоянные С в последних двух выражениях имеют
одинаковые-значения, можно было найти следующую формулу
для ускорения g:
88 Законы изменения импульса, момента и энергии Гл. II
Таким образом, ускорение тел вблизи поверхности Земл'и можно
было вычислить как по данным наблюдений за Луной, так и по
данным эксперимента, проведенного около земной поверхности.
Совпадение этих двух результатов являлось одним из доказа-
доказательств справедливости закона всемирного тяготения (см. A.49)).
На основе закона всемирного тяготения и второго закона
Ньютона была создана количественная теория движения
небесных тел относительно гелиоцентрической системы отсчета.
Совпадение наблюдений и выводов этой теории доказало инер-
циальность гелиоцентрической системы Коперника — Бруно и ее
преимущественность .над геоцентрической системой Птолемея,
что явилось крупным шагом в победе материалистического воззре-
воззрения на вопросы мироздания.
В случае а>0 и ? = 0 (е=1) точка движется по параболе (см. рис. 2.6).
Минимальное расстояние, на котором она проходит вблизи центра силы, равно
rmin = P/2. B.82)
В этом положении скорость точки максимальна, а по мере удаления точки
от центра силы ее скорость стремится к нулю, поскольку при г->оо потенциаль-
потенциальная энергия становится исчезающе малой и по условию E0 = T+U = 0.
Закон движения точки по параболе легко получить в параметрическом виде
из B.60):
(здесь начальное условие выбрано аналогично B.77)).
В случае движения по гиперболе под воздействием притягивающего центра
имеем а>0, ?о>О (е>1). Орбитой при этом будет левая ветвь гиперболы (см.
рис. 2.6)' с минимальным расстоянием до центра силы, равным
B.84)
1 +8
Учитывая, что полуоси гиперболы связаны с параметром р и эксцентриситетом
е гиперболы соотношениями
B-85>
с помощью B.70) находим
а =-2-, Ь= *Ь_ . B.86)
§ 2.4
Законы Кеплера
89
Закон движения точки по гиперболе в случае а>0 получим (аналогично B.78))
в виде
г — а(е dig— 1), t =
B.87)
(здесь начальные условия также аналогичны B 77)).
Наконец, приведем формулы для случая движения точки по гиперболе под
действием отталкивающего центра (а<0):
8—
а =
2?0
Мо
B.88)
орбитой при этом будет правая ветвь гиперболы (см. рис. 2.6).
Пример 2.3. Изменение орбиты космического корабля.
Пусть в момент прекра-
прекращения работы двигателя
космический корабль массы
m находился на расстоянии
г0 от центра Земли и имел
скорость vo, направленную
под углом yo к радиусу-век-
радиусу-вектору корабля г0 (рис. 2.7).
Определить элементы орби-
орбиты корабля в плоскости его
движения, пренебрегая со-
сопротивлением атмосферы,
если напряженность поля
тяготения на поверхности
Земли равна g, а радиус
Земли равен R. Насколько
нужно изменить кинетичес-
кинетическую энергию корабля в перигее, чтобы он перешел на орбиту при-
приземления, изображенную на рисунке штриховой линией (измене-
(изменением массы корабля в результате достаточно кратковременной
раооты двигателя можно пренебречь)?
Учитывая лишь силу притяжения корабля Землей и при-
небрегая воздействием всех прочих тел, мы можем .воспользовать-
.воспользоваться общим решением задачи о движении точки в центральном
поле. г
Поместим начало системы координат в центр Земли, так как
он является центром силы притяжения. Плоскость Охи .совмес-
.совместим с плоскостью орбиты, сохраняющей свою ориентацию отно-
относительно гелиоцентрической системы отсчета, а ось Ох .направим
на ближайшую к центру Земли точку орбиты —перигей Вы-
Рис. 2.7
90 Законы изменения импульса, момента и энергии Гл. II
бранную систему можно считать инерциальной для достаточно
больших интервалов времени. Выразим постоянные а, Ео и МОг
входящие в общее решение задачи о движении точки в централь-
центральном поле, через постоянные," заданные в условии примера. Пола-
Полагая, в частности, в A.49), что r2\ = R9 а массы т\ и т2 соответст-
соответственно равны массе корабля т и массе Земли т3, найдем
а = у пищ = mgR2.
Тогда потенциальная энергия корабля-спутника (см. B.69)) при-
принимает вид
Полная энергия и момент импульса спутника в начальный момент
времени соответственно равны
) м°= тг°щ sln Y°- B)
С помощью этих выражений на основе B.72) можно убедить-
убедиться, что траекторией рассматриваемого тела будет
гипербола, если ug > v2(R/r0O
парабола, если v2 = v2(R/rQ)>
эллипс, если v2 < o|(/?/r0), C)
окружность, если v\ = v\(R/r0) и у0 = я/2,
где vx = VgR— первая космическая скорость, a v2 =
= ]/2gR —^вторая космическ ея скорость.
Параметр и эксцентриситет орбиты, выраженные через на-
начальные условия, находим, используя B.70) и формулы B) нас-
настоящего примера:
С помощью B.74) и B.85) получим выражения полуосей, спра-
справедливые как в случае эллипса, так и в случае гиперболы:
а = ¦
-•«
1/21
§ 2.4 Законы Кеплера 91
Наконец, согласно B.80) период полного оборота спутника по
эллипсу равен
7 = *Й5 . F)
/ 2gR? „\з/2 v '
Если орбита спутника известна, то его положение в любой
момент времени определяется законом B.78). Величину скоро-
скорости как функцию г легко найти из интеграла энергии
G)
Направление же скорости можно определить, отыскивая с по-
помощью интегралов момента и энергии величины г и гф как функ-
функции г:
• = гоур sin уо
г
поскольку отношение этих функций дает tg^o как функцию г.
Теперь найдем изменение кинетической энергии, при котором
космический корабль перейдет на орбиту приземления. Так как
в перигее радиальная составляющая скорости корабля равна
нулю, а расстояние до центра силы минимально, то из формулы
(8) найдем
Эту скорость нужно изменить так, чтобы корабль стал двигаться
по эллипсу, касающемуся поверхности Земли. Большая полуось
новой орбиты при этом будет равна
rmin + Я
Учитывая, что ai=a/2|?i| (см. B.75)), определим полную энергию
* mm i 4N>
которой корабль должен обладать при движении по заданной ор-
орбите приземления. Затем, пользуясь сохранением полной энергии
корабля, движущегося по новой орбите, получаем значение кине-
кинетической энергии корабля на орбите приземления в точке r=rmin
92 Законы изменения импульса, момента и энергии Гл. II
A0)
2 \ rm[n mn + I
Наконец, из формул (9) и A0) находим требуемое изменение ки-
кинетической энергии
*у9- 2**
rmin
где rmln = , a p и е определены формулами D) настоя-
щего примера.
Пример 2.4. Движение по баллистической траектории.
Пусть достаточно малое тело масеы m запускается с поверх-
поверхности Земли со скоростью vo<^v%(v2 = ]f2gR). Пренебрегая со-
сопротивлением атмосферы, определить максимальную высоту, даль-
дальность и время полета тела (под дальностью будем понимать длину
дуги большого круга, которая по поверхности Земли соединяет
точки вылета и падения,— см. рис. 2.8).
Этот пример является частным случаем примера 2.3, поэтому
выбор системы координат и предыдущие результаты остаются в
силе. В частности, в рассматриваемом примере тело будет дви-
двигаться по отрезку эллиптической орбиты, пересекающей поверх-
поверхность Земли ,в точках вылета и падения.
Максимальная высота подъема тела над поверхностью Земли
равна
^тах == гтах ^м
где /-тах определяется одной из формул B.73), а значения пара-
параметра и эксцентриситета орбиты находятся с помощью формулы
D) примера 2.3:
[
Используя эти соотношения, получим
2gR-v20
Угол фо между осью Ох и направлением на точку вылета
находится из уравнения орбиты B.71), в котором г полагается
равным R:
§ 2.4
Законы Кеплера
93
ф0 = arccos —
Зная ф0, получим угол между
направлениями на точки выле-
вылета и падения
Аф = 2 (я — ф0),
отсюда определим дальность
полета
/ =
= 2nR x
Hi-1)]-
Рис.
Время полета получим, исполь-.
зуя решение B.78). Учитывая,
что в этом решении приняты
начальные условия B.77), мо-
момент U начала движения тела с поверхности Земли и соответст-
соответствующее ему значение параметра go определим так:
R = а(\ —
(So-
где Т =
(см. формулу F) примера 2.3). Момент
прохождения апогея, т. е. наиболее удаленной от центра Земли
точки эллиптической орбиты, будет равен (Г/2) —10. Учитывая,
что время полета точки от места запуска до апогея равно време-
времени полета от апогея до места падения, для полного времени по-
полета находим
где
= arccos
— fl-—), a =
e V a I
2gR-v20
(см. формулу E) примера 2.3).
94 Законы изменения импульса, момента и энергии Гл II
§ 2.5. Движение центра масс; законы изменения и сохранения
импульса системы
Как будет ясно из дальнейшего, закон изменения импульса
механической системы тесно связан с понятием о центре масс.
Центром масс или центром инерции механической
системы называется воображаемая точка, которая как бы обла-
обладает массой, равной массе всей системы, и положение которой
определяется радиусом-вектором
N
rm=— . B-89)
m
где mi и Ti — масса и радиус-вектор i-той точки системы,
N
у— масса всей системы, a N— число материальных то-
точек системы. Скорость центра масс vm можно получить, продиф-
продифференцировав левую и правую части B.89) по времени:
N
2
т
Аналогично найдем ускорение ww центра масс:
N
2
B.90)
B.91)
Из определений .B.89), B.90) и B.91) вытекают некоторые
свойства центра масс, его скорости и ускорения. Например, ско-
скорость и ускорение, приобретаемые центром масс в результате
движения i-той точки (см. рис. 2.9, на котором изображена систе-
ма двух точек), будут равны v^ и—-wt соответствен-
т т
но. Таким образом, скорость и ускорение центра масс, связанные
с движением только i-той точки, параллельны соответственно ско-
скорости v* и ускорению \уг- этой точки и в m/m* раз меньше их по
величине.
Импульсом механической системы Р называется
сумма импульсов точек системы
Р = ? Р/. B-92)
t=.-i
§25
Закон сохранения импульса системы
95
где р{=гп{\{ — импульс t-той
точки. Согласно B.90) импульс
системы равен массе всей сие-
темы, умноженной на скорость
центра масс, т. е.
Р = mvm, B.93)
а согласно B.91) производная
импульса по времени равна
массе системы, умноженной на
ускорение центра масс:
B.94)
Заметим, что определение им-
импульса системы в виде B.93)
аналогично определению им-
импульса одной материальной
точки.
Уравнение движения цент-
центра масс можно получить с по-
Рис. 2.9
мощью уравнений движения материальных точек A.59), так как
движение центра масс —этой воображаемой точки — обусловлено
движением отдельных реальных точек механической системы. Из
B.91) следует, что
N
B.95)
однако в инерциальной системе отсчета произведение маосы ка-
какой-либо точки на ее ускорение согласно второму закону Ньютона
должно быть равно аиле, приложенной к этой точке, т. е.
= F4.
B.96)
Следовательно, произведение массы всей системы на ускорение
центра масс ввиду B.95) должно быть равно сумме всех сил, дей-
действующих >на отдельные точки системы (см. рис. 2.9, в):
mwOT = F, B.97>
\, a F{— сила, действующая на i-тую точку.
96 Законы изменения импульса, момента и энергии Гл II
Среди сил, действующих на точки системы, есть как внутрен-
внутренние, так и внешние силы. Под внутренними силами пони-
понимают силы, действующие между точками данной механической
системы, а под внешними — силы, действующие на точки дан-
данной системы со стороны тел, не входящих в эту систему. Деление
сил на внутренние (и внешние зависит от того, какую систему мы
считаем данной, движение какой системы изучается. Если система
выбрана, то силу, действующую на ее /-тую точку, всегда можно
записать в виде
B.98)
N
где ?\п = jT F;i — сумма внутренних сил, действующих на /-тую
точку, F/1 — сила, действующая на /-тую точку со стороны /-той
точки системы, a F* — суммарная внешняя сила, действующая
на /-тую точку. Складывая все силы B.98), действующие на точ-
точки системы, находим
N N N
F = EEF"+EF'e- B-99)
*=1/=1 1=1
Однако сумма всех внутренних сил равна нулю, поскольку силы
взаимодействия каждой пары точек равны по величине и проти-
противоположны по направлению. Действительно, представляя сумму
всех внутренних сил Fin в виде
Fin = ? ? (F/i + Fi/) BЛ00)
и применяя третий закон Ньютона к каждой паре точек системы
(см. A.60)), найдем
Fin-0. B.101)
Таким образом, из уравнения B.97) получаем уравнение движе-
движения центра масс относительно инерциальной системы отсчета
mw^-F6, B.102)
N
где Fe = V Ff — сумма всех внешних сил, действующих на
точки системы. Уравнение B.102) ввиду соотношения B.94) при-
приводит к закону изменения импульса
§ 2.5 Закон сохранения импульса системы 97
P = Fe. B.103)
На основании B.103) в полной аналогии со случаем одной ма-
материальной точки (см. B.5)) можно утверждать, что если проек-
проекция суммы внешних сил на некоторую неподвижную ось в любой
момент времени равна нулю, то проекция импульса системы или
проекция, скорости центра масс системы на ту же ось сохра-
сохраняется. Например, если
то
N
Р2 = У тл, =-P,Ot B.104)
или
N
га
i=l
Следовательно, в направлении оси Oz центр масс системы дви-
движется равномерно
Теперь рассмотрим замкнутую, или изолированную,
систему, т. е. систему, взаимодействием которой с прочими не
входящими в нее телами можно пренебречь *. Для такой системы
все внешние оилы равны нулю:
Ff = O (i=l, 2, .... N),
и поэтому
N
Р = Vm^Po B.106)
или
N
, = vm0>
т. е^имеет место закон сохранения импульса замкну-
замкнутой 'системы.
В физике термин «замкнутая система» является весьма распростра-
распространенным.
4 Зак 284
98 Законы изменения импульса, момента и энергии Гл. II
Центр масс замкнутой системы движется равномерно и пря-
прямолинейно, а ее внутренние силы не могут изменить скорости
центра масс (или импульса системы). Например, солнечная систе-
система с определенной степенью точности может рассматриваться как
замкнутая, и поэтому силы взаимодействия между ее телами не
влияют на равномерное и прямолинейное движение центра масс
системы, хотя все тела, входящие в солнечную систему, движутся
ускоренно.
В случае незамкнутой системы внутренние силы, вообще
говоря, влияют на изменение импульса и ускорение центра масс
системы, если сумма внешних сил зависит от положения или ско-
скоростей точек системы. Действительно, изменение импульса систе-
системы определяется вектором, Fe —суммой всех внешних сил, дейст-
действующих на систему (см. B.103)), причем вектор Fe считается
известной функцией радиусов-векторов точек и их скоростей.
Однако радиусы-векторы и скорости точек изменяются под воз-
воздействием как внешних, так и внутренних сил согласно уравне-
уравнениям движения
m-r- = F-n 4- F? (i — 1 2 N)
Вместе с тем изменяются аргументы вектора Fe и как следст-
следствие этого изменяется сам вектор Fe. Влияние внутренних сил на
ускорение центра масс подробно проиллюстрировано на приме-
примере 2.6.
Подчеркнем, что закон сохранения импульса справедлив и для
таких замкнутых систем, поведение которых не подчинено уравне-
уравнениям Ньютона. Например, при исследовании движения системы
заряженных частиц, среди внутренних сил которой есть электро-
электромагнитные силы, было обнаружено излучение электромагнитных
волн. Это излучение, как оказалось, обладает импульсом, в свя-
связи с чем импульс собственно зарядов не сохраняется. Однако сум-
суммарный импульс зарядов -и электромагнитного поля остается не-
неизменным, т. е. имеет место закон сохранения импульса замкну-
замкнутой системы, под которой в данном случае следует понимать
совокупность зарядов и поля излучения.
Пример 2.5. Движение центра масс в однородном поле.
В однородном постоянном электрическом поле с напряжен-
напряженностью <§ движутся две заряженные точки. Их массы и заряды
соответственно1 равны пги гп2 и еи е2. Найти положение центра
масс как функцию времени, если начальные значения rmo и vwo
известны.
Направляя ось Ох вдоль вектора & и учитывая, что внутрен-
внутренние силы электростатического взаимодействия подчинены третье-
третьему закону Ньютона, получим уравнение B.103) в проекциях на
декартовы оси
§ 2.5 Закон сохранения импульса системы 99
шхт = в^> -\- е%э, ут = 0, 2т = 0.
Интегрируя эту систему, найдем
Хт = ; (9 ~~~ "Т" XmQt " *^тО>
Сопоставляя это решение с решением задачи о движении одного
заряда (см. с. 51), мы видим, что воображаемая точка —
центр масс двух зарядов — движется как материальная точка
с массой mi+m2 и зарядом ei+e2. Что касается движения каждо-
каждого из зарядов, то без решения системы уравнений A.59) найти
закон такого движения нельзя.
Пример 2.6. Движение центра масс в неоднородном поле.
Две точки с массами trt\ и пг2 движутся в силовом поле
(здесь %>0, а г — радиус-вектор точки пространства в инерцн-
альной системе отсчета с началом в центре силы). Найти поло-
положение центра масс системы как функцию времени в двух случа-
случаях: а) пренебрегая взаимодействием точек друг с другом; б) пред-
предполагая, что внутренними силами являются силы притяжения,
прямо пропорциональные расстоянию между точками с коэффи-
коэффициентом пропорциональности к.
В обоих случаях движение центра масс определяется одним
и тем же уравнением B.102)
m?m = F?f F^xO^ + ia), A)
где m = mi+m2. Однако уравнения движения точек системы будут
различными. В случае (а)
mir1 = кг1У m2r2 = нг2, B)
а в случае (б)
m/i = F2i + w1$ m2r2 = F12 + xr2, C)
где F21 = — %{тх—r2)=— F12.
Перепишем системы B) и C) в удобном для интегрирования
виде:
а) г1 = й?г1, га =Air2; D)
б) Y1 = k\v^ r2 = k22ru E)
100 Законы изменения импульса, момента и энергии Гл. Н
где &i = —^-, А| = -^-. Решение этих систем в декартовых коор-
ди«атах не представляет затруднений. Найдем, например, реше-
решение системы уравнений, описывающих движение точек в направ-
направлении оси Ох:
а) х± — k\xl9 x2 = k22x2; F)
б) хг = k\x^ x2 =$х±. G)
Решение системы F) имеет вид
^ = 9i@. ** = %(')¦ (8)
где
<Pi @ = Vм + A*<r-klt, Ф2 @ - Вге^ + В2е-Ы,
а А\ ,и Лг, Bi я Вг — произвольные постоянные, определяемые на-
начальными условиями. Учитывая (8), из уравнения A) найдем
проекцию ускорения центра масс невзаимодействующих точек как
функцию времени
*«(') = — Ы0 + ф.@]. (9)
т
а из определения центра масс "и решения (8) легко получим
xn(t) - — [ШхФЛО + /п2ф2@]- (Ю)
/71
Умножая правую и левую части второго из уравнений G) на
отношение k\\k% и затем один раз складывая, а второй раз вычи-
вычитая результат умножения из первого уравнения системы G), при-
придем к уравнениям
^ = к^9 в = — kxkA A1)
где у = ^ + --i- аг2| 6 = л:х ^ л;2.
AJ2 «2
Решением системы A1) являются функции
= a cos (К&А' Н- «)•
Отсюда, используя соотношения между д^, х2 и ф, 6, находим
*i @ = v f* @ + 6 WJ. ^ 10 = ^г- № @ - в @].
§ 2.5 Закон сохранения импульса системы ИМ
Это решение дает возможность определить проекцию ускорения
центра масс и проекцию центра масс на ось Ох в случае взаимо-
взаимодействующих точек:
Решение для других проекций ускорения центра масс аналогично
полученному.
Из формул (9) и A2) видно, что в отсутствие внешних сил
скорость центра масс становится постоянной и внутренние силы
не могут ее 'изменить. Однако если внешняя неоднородная сила
отлична от нуля, то внутренние силы влияют на движение центра
масс (сравните A0) и A3)).
Пример 2.7. Движение тела переменной массы; задача Циол-
Циолковского.
В современной технике большое практическое значение имеет
задача о движении тела переменной массы. Пусть изменение мас-
массы тела происходит за счет непрерывного отделения от тела неко-
некоторых его частей, причем за бесконечно малый элемент времени
отделяется частица бесконечно малой массы. Однако скорость
отделившейся частицы отличается от скорости тела на конечную
величину. Найти уравнение движения тела (в предположении, что
тело и отделяющиеся частицы можно считать материальными
точками).
Отделение частиц от тела происходит за счет внутренних сил
системы тело — частица. Следовательно, изменение импульса
рассматриваемой системы подчинено закону B.103). Подсчитаем
это изменение. В момент времени t (до отделения частицы от
тела) импульс системы равен
где га— масса тела в момент tt v — скорость тела в тот же мо-
момент времени относительно некоторой инерциальной системы
отсчета. В момент времени t-\-dt (после отделения частицы) им-
импульс системы равен сумме импульса тела и импульса частицы:
где d\— изменение скорости тела за время dt, dm — уменьше-
уменьшение массы тела,^ соответственно \dm\—масса отделившейся час-
частицы, Vi—скорость этой частицы относительно инерциальной
системы отсчета.
102 Законы изменения импульса, момента и энергии Гл. II
Следовательно, изменение импульса системы с точностью до
бесконечно малых второго порядка равно
dP =a mdv + | dm | (vx — v).
Подставляя это выражение в BЛ03), получим уравнение движения
точки с переменной массой, т. е. уравнение Мещерского
где u=Vi—v —скорость отделяющихся частиц относительно тела,
Fe — внешняя сила, действующая на тело, а <0. Нетрудно
dt
убедиться, что в случае присоединяющихся к телу частиц
f dm . А\
I ~~тг -> и! справедливо то же уравнение A).
В качестве примера на решение уравнения A) рассмотрим
задачу Циолковского. Пусть ракета движется в отсутст-
отсутствие внешнего поля, скорость и отделяющихся частиц сгорающего
топлива постоянна и направлена противоположно v0—скорости
тела в начальный момент времени. Найти скорость, которую при-
приобретает тело за счет .конечного изменения своей массы.
Умножая правую и левую части уравнения A) на Л и проек-
проектируя их на ось, направленную по вектору Vo, получим
mdv = — udm,
откуда находим, что
v = vo+u\n-^. B)
m
Таким образом, скорость, приобретаемая телом, зависит только
от величины относительной скорости отделяющихся частиц и от
изменения массы тела и не зависит от того, по какому закону
изменялась масса тела.
§ 2.6. Законы изменения и сохранения кинетического
момента системы
Умножая каждое из уравнений движения A.59) векторно сле-
слева на Гг — радиус-вектор соответствующей точки и учитывая, что
F{ = F*n + Ff у получим уравнение, определяющее изменение мо-
момента импульса i-той точки.
M,-l4n-f Lte, B.107)
где Lf1 = [тг?\п] — момент внутренней силы, действующей на t-тую
точку, Lf = [гД7? ] — момент внешней силы, действующей на t-тую
точку. Суммируя B.107) по всем точкам, находим
2.6 Закон сохранения кинетического момента системы 103
?, B.108)
N
где М = V М< — кинетический момент системы, равный
*=i
сумме моментов импульсов всех точек системы. Учтем далее, что
силы взаимодействия между каждой парой точек согласно третье-
третьему закону Ньютона равны по величине, противоположны по на-
направлению и расположены на прямой, соединяющей взаимодейст-
взаимодействующие точки. С этой целью запишем момент внутренних сил в
виде суммы моментов аил по всем парам взаимодействующих
точек
N N N
\Ф1 i<j
Каждый член последней суммы в силу третьего закона Ньютона
равняется нулю в любой системе отсчёта (см. рис. 1.17), т. е.
[г/у<] + ВД = [(г, - г,) F/7] = 0, B.110)
так как вектор ?^ коллинеарен вектору г^ —г^—Гу.
Учитывая B.110) и B.109), из B.108) найдем, что производ-
производная кинетического момента системы по времени равна сумме мо-
моментов внешних сил, действующих на точки системы (закон
•изменения кинетического момента системы):
М-1Д B.111)
где
i=\
Из B.111) вытекает (сравните с B.8)): если проекция суммы мо-
моментов внешних сил на некоторую неподвижную ось для любого
момента времени равна нулю, то проекция кинетического момента
системы на ту же ось сохраняется; например, если
то
i--=\
104
Законы изменения импульса, момента и энергии
Гл. II
Учитывая определение -секторной (скорости A.11), последний ин-
интеграл можно представить в виде интеграла площадей
N
= Af20, B.113)
из которого следует сохранение суммы произведений масс точек
на площади, описываемые за любые одинаковые интервалы .вре-
.времени проекциями радиусов-
векторов этих точек на пло-
плоскость Оху. (См. ряс. 2.10,
на котором изображены
проекции площадей, описы-
описываемых радиусами-вектора-
радиусами-векторами двух точек за интервал
времени At; если для систе-
системы двух точек Lt = 0, то
сумма произведений масс то-
точек на соответствующие
площади сохранится и для
любого другого интервала
времени, равного А/.)
В случае замкнутой
Рис. 2.10
системы все силы F; = О
и поэтому
N
т. е. согласно B. 111) будет иметь место закон сохранения
кинетического момента замкнутой системы:
N
= М0. B.114)
Таким образом, момент замкнутой системы не может изменяться
под действием внутренних сил, поскольку они подчинены третьему
закону Ньютона. Однако ориентация такой системы под действием
внутренних сил может изменяться. Действительно, под воздейст-
воздействием внутренних сил может произойти перемещение некоторых
точек системы и изменение их скоростей. При этом другие точки
системы также переместятся и изменят скорости, т. е. произойдет
переориентация системы. Вместе с тем момент всей системы оста-
останется неизменным.
В случае незамкнутых систем внутренние силы, вообще гово-
говоря, могут влиять на изменение кинетического момента, если сумма
§ 2.6 Закон сохранения кинетического момента системы 105
моментов внешних сил зависит от положений и скоростей точек
системы (причинна этого уже была выяснена при рассмотрении
закона изменения имшульса на с. 98).
Пример 2.8, Изменение моментов импульсов точек замкнутых
систем.
Рассмотрим две замкнутые системы, каждая из которых со-
состоит из N^.3 взаимодействующих точек. Внутренними силами
первой системы являются силы притяжения, прямо пропорцио-
пропорциональные расстоянию между взаимодействующими точками и про-
произведению масс этих точек (коэффициент пропорциональности х).
Точки второй системы взаимодействуют по закону всемирного
тяготения. Сравним изменения моментов импульсов точек обеих
систем.
Так как обе системы замкнутые, то их кинетические моменты
сохраняются относительно. любой инерциальной системы отсчета.
Выбирая инерциальные системы с началами в центрах масс рас-
рассматриваемых механических систем, для каждой из них получим
, = М0.] A)
Изменение момента импульса t-той точки определяется моментом
внутренних сил согласно уравнению B.107)
] B)
где F/г — оила, с которой /-тая точка действует на t-тую точку.
Для первой системы
/7 — —пщтрл, (б)
где Tji = ^i—г —вектор, направленный от /-той точки к t-той точ-
точке, nij и Шг — массы этих точек; для второй системы
F/7 = Y "з гц- D)
Используя C), найдем момент сил, действующих она i-тую точку
первой системы:
/=•-1
Учитывая, что начало отсчета помещено в центр масс (rm=0),
согласно B.89) получаем
106 Законы изменения импульса, момента и энергии Гл. И
и, таким образом, для точек первой системы
Un = 0 (i=l, 2, ..., N).
Следовательно, сохраняется не только кинетический момент всей
системы, но и момент импульса каждой точки:
M, = m,[r,vt-] = M/0 (U=l, 2 JV).
Отсюда вытекает, что точки первой системы при любых началь-
начальных условиях движутся каждая в своей плоскости постоянной
ориентации.
В системе грквитирующих точек момент сил, действующих на
i-тую точку, отличен от нуля:
N
Следовательно, моменты импульсов точек не сохраняются, а при
произвольных начальных условиях изменяются как по величине,
так и по направлению. Последнее означает, что движение грави-
тирующих масс при N^3, вообще говоря, неплоское. Например,
момент каждой планеты солнечной системы изменяется. Но по-
поскольку масса Солнца значительно больше массы любой плане-
планеты, то воздействие планет друг на друга весьма мало по сравне-
сравнению с воздействием Солнца на планеты. Поэтому в любой момент
времени картину движения можно представить так: каждая пла-
планета движется по определенному эллипсу только под^ воздействи-
воздействием Солнца, а влияние всех прочих планет сводится к медленному
изменению характеристик этого эллипса. Величины параметров,
эксцентриситетов и наклонений орбит различных планет взаимо-
взаимосвязаны между собой, и эту взаимосвязь дает закон сохранения
кинетического момента всей системы.
§ 2.7. Законы изменения и сохранения энергии системы
Умножим t-тое уравнение системы A.59) скалярно на переме-
перемещение dvi соответствующей точки и учтем разделение сил на
внутренние и внешние. Тогда аналогично тому, как было получе-
получено B.17), получим выражение для изменения кинетической энер-
энергии i-той точки
§ 2.7 Закон сохранения энергии системы 107
dTt=dAn + dAl B.115)
где Ti — кинетическая энергия t-той точки, dAl" и dAet —работы
внутренней и внешней сил на элементарном перемещении i-той
точки соответственно. Суммируя B.115) по всем точкам, находим
dT = dAln + dA\ B.116)
n
где Т = V Tt — кинетическая энергия системы,
N
равная сумме кинетических энергий точек, dAln = V F/n drt —
N
элементарная работа всех внутренних сил, dAe = V F| rfr^ —•
i=i
элементарная работа всех внешних сил. Итак, дифференциал ки-
кинетической энергии системы, равен элементарной работе всех
внутренних и внешних сил, действующих на точки системы.
В отличие от изменений импульса и кинетического момента
изменение кинетической энергии зависит как от внешних, так и от
внутренних сил. Чтобы убедиться в этом, используем третий за-
закон Ньютона и представим работу внутренних сил в виде
dAin= ? {F/ldr,+Fi/rfr/}= ? F^dn-dr,). B.117)
Поскольку перемещения различных точек под воздействием даже
одинаковых сил, вообще говоря, различны, т. е.
vj (t, /= 1,2, ... ,N,
то
d№=?0. B.118)
Теперь рассмотрим закон изменения кинетической энергии
B.116) в предположении, что сумма всех ©нешних сил, действую-
действующих на i-тую точку системы, и сумма всех внутренних сил, дейст-
действующих на ту же точку, соответственно равны:
F? - Ff'p + F^g + F*e'd, Fln - Ип'р + Fjn'd B.119)
(здесь индексами р, g, d обозначены соответственно потенциаль-
потенциальные, гироскопические и дисоипативные силы). Учитывая, что гиро-
гироскопические силы не совершают работы, т. е.
F?'gdr<=0 (/=1,2, ... ,N) B.120)
108 Законы изменения импульса, момента и энергии Гл. II
(см. B.38)), найдем, что
N N
dA* = V Ff'prfr-4- V F?'ddr
B.121)
N N
Для потенциальных сил имеем
rprfr,+C (* = 1,2, ... ,ЛГ); B.122)
здесь t/^(rb f) — потенциальная энергия /-той точки во внешнем по-
потенциальном поле, а символом уг- обозначен оператор «набла»,
где дифференцирование производится по координатам t-той точ-
точки (см. с. 67). Используя B.122), получим выражение для рабо-
работы внешних потенциальных сил (см. B.34)):
f'p dvt - — dUe + -^- dU B.123)
где ?/e=rV U* — потенциальная энергия системы во внешних полях.
Предположим, что потенциальная энергия взаимодействия
любой пары точек системы задается функцией
^/ = ^;(|r<-i7l). B.124)
Тогда для потенциальных сил взаимодействия точек находим
F& = - V. Ulh FF/ = - Vy Uti. B.125)
Нетрудно убедиться, что эти силы удовлетворяют закону действия
и противодействия, а >их элементарная работа равна
F^d^ + Fl-drj^—dUif. B.126)
Суммируя B.126) по всем парам точек системы, получим работу
всех внутренних потенциальных сил в виде
jn'p
dr, = ? {Fldri + Fl-drj} - -dUin9 B.127)
1-^=1 t,/=i
N
где t/ln = V f/</—внутренняя потенциальная энергия системы,
/i
§ ^ 7 Закон сохранения энергии системы 109
Потенциальную энергию U системы определяют
как сумму ее потенциальной энергии во внешних полях и внутрен-
внутренней потенциальной энергии:
U =^Ue + Uin. B.128)
При допущениях B.122) и B.124) потенциальная энергия систе-
системы имеет вид
N N
tt)+-L ? Uu(\rt-r,\). B.129)
Полная механическая энергия Е системы (или,
кратко, энергия системы) определяется как сумма кинети-
кинетической и потенциальной энергий системы
Е = T + U. B.130)
Основываясь на законе изменения кинетической энергии B.116) и
используя B.121), B.123), B.127) и B.130), получим
N
dE = -^- dt + J]F? tfr,, B.131)
где F? = Ft-n>d + F^d— сумма внутренних и внешних дисоипатив-
ных сил, действующих «а t-тую точку. Разделим левую и правую
части B.131) на элемент времени dt; тогда найдем, что полная
производная механической энергии системы по времени равна сум-
ме^частной производной потенциальной энергии системы во внеш-
внешних полях по времени и мощности диссипативных внутренних и
внешних сил, Действующих на точки системы:
С помощью этого закона изменения механической
энергии системы относительно инерциальной си-
системы отсчета получим закон сохранения механи-
механической энергии системы. Действительно, если потенци-
потенциальная энергия системы во внешних полях явно от времени не
зависит, а диссипативные силы {внешние и внутренние) отсутст-
отсутствуют, т. е. если
= 0 и F? = 0 (* = 1, 2, ... , Л/), B.133)
dt
ПО Законы изменения импульса, момента и энергии ГлУ II
то механическая энергия системы сохраняется:
N 2 N N
JL+Sf;f"i- X U"=E°- BЛ34)
/
Такую систему называют консервативной.
Энергия может сохраняться также и \в том случае, когда
убыль энергии за счет диссипативных сил компенсируется поступ-
поступлением энергии в систему. Тогда
N
-^- + V Ffv, = О, Е = EOf B.135)
причем
N
(см. B.40)).
Механическая энергия замкнутой системы сохраняется, если
внутренние диссипативные силы отсутствуют:
? = 7+[/in = ?0. B.136)
Если же внутренние диссипативные силы отличны от нуля, то ме-
механическая энергия замкнутой системы убывает, т. е.
Ё= У F!Mv,<0, B.137)
где E = T-{-U{n. Однако это не означает исчезновения энергии: на-
наличие диссипативных сил приводит к превращению механической
энергии \в определенное количество теплоты. В связи с этим под-
подчеркнем, что закон сохранения механической энергии является
частным случаем 'всеобщего закона сохранения и
превращения энергии всех форм движения ма-
материи, согласно которому формы движения «при известных
обстоятельствах... переходят друг в друга», «и притом так, что
данному количеству энергии в одной форме всегда соответствует
определенное количество энергии в какой-либо другой форме»*.
Например, механическая энергия движущихся зарядов, излучаю-
излучающих электромагнитные волны, превращается в энергию этого из-
излучения. Закон сохранения энергии, учитывающий изменение энер-
Энгельс Ф. Диалектика природы. М., Политиздат, 1965, с. 58 и 168,
§ 2 7 Закон сохранения энергии системы Ш
гии за счет излучения, формулируется в электродинамике. Что
касается закона сохранения энергии, учитывающего передачу
тепла, то он изучается в термодинамике. Полученный выше закон
сохранения механической энергии представляет собой лишь закон
прев!ращения кинетической энергии в потенциальную и обратно.
В заключение сделаем ряд общих замечаний о законах изме-
изменения и сохранения импульса, кинетического момента ,и энергии.
Законы изменения
N
dt
+V F,dv, B.138)
представляют собой семь уравнений, которые при определенных
свойствах оил приводят к законам сохранения.
В случае замкнутой системы в отсутствие внутренних дисси-
пативных сил число интегралов движения, вытекающих из законов
сохранения, максимально, а именно в этом случае имеем семь
первых и три вторых интеграла
Р = Р0 (vm = vm0), М = М0, Е = Е0,
B.139)
гт = Vm0 (t — t0) + Гт0,
т. е. десять классических интегралов механики.
Законы сохранения могут иметь место для систем с любым чис-
числом точек, в связи с чем они являются важнейшим орудием иссле-
исследований. Например, изучение свойств газа, состоящего из очень
большого числа молекул, основано на законах сохранения.
В настоящей главе законы сохранения были получены как
следствие уравнений движения Ньютона. Поэтому они связаны со
свойствами пространства и времени, которые постулируются в
классической механике. Эту связь лучше рассмотреть на примере
замкнутой системы (см. приложение к гл. IX, а также [21,
§ 6—9]). Оказывается, что сохранение импульса связано с одно-
однородностью пространства, в силу которой механические свойства
замкнутой системы не меняются при любом параллельном перено-
переносе системы как целого. Сохранение момента связано с изотропией
пространства, в силу которой механические свойства замкнутой
системы не изменяются при любом повороте системы как целого.
А сохранение механической энергии связано с однородностью
времени, в' силу которой механические свойства замкнутой систе-
системы не меняются при любом «переносе» системы во времени.
Наконец, подчеркнем, что законы сохранения справедливы и
в таких замкнутых системах, когда движение объекта не описы-
описывается уравнениями Ньютона. Следовательно, значение законов
112 Законы изменения импульса, момента и энергии Гл. II
сохранения импульса, момента и энергии выходит далеко за рам-
рамки классической механики.
Пример 2.9. Зависимость скоростей планет от их расстояний
до Солнца и их расстояний между собой.
Рассмотрим солнечную систему как систему, состоящую из
N материальных точек (планет) и Солнца — одной точки весьма
большой массы по сравнению с массами прочих точек. Поскольку
эту систему можно считать замкнутой, ее центр масс движется
равномерно и прямолинейно. Если пренебречь процессами излу-
излучения и диссипации, то механическую энергию системы можно
считать постоянной. Найдем интеграл энергии относительно инер-
циальной системы отсчета с началом в центре масс солнечной
системы. Для этого вычислим потенциальную энергию взаимодей-
взаимодействия любой пары точек (см. B.126)):
Используя третий закон Ньютона и закон всемирного тяготения,
получим, что
([ i^. A)
Таким образом, интеграл энергии B.134) можно записать в виде
N о ., о N ,, N
2-г-
i=\
где mi и \i — масса и скорость i-той планеты, Ms и vs — масса и
скорость Солнца. Учитывая, что в системе центра масс vm=0,
установим связь между скоростью Солнца и скоростями планет
(см. 2.90);
N
i = l
Исключая с помощью C) из интеграла B) скорость vs, получим
соотношение между скоростями планет v^, их взаимными расстоя-
расстояниями Гц и расстояниями до Солнца r{S (i, / = 1, 2, ..., N, i=~
N с, N N ., N
'«i
D)
Таким образом, изменение расстояний от планет до Солнца и рас-
расстояний между планетами приводит к иЗхМенению скоростей
планет.
§ 2 7 Закон сохранения энергии системы ИЗ
В интеграле D) вторая и четвертая суммы малы по сравне-
сравнению с первой и третьей суммами соответственно, так как Ms^>trii
(t=l, 2, ..., N). Пренебрежение указанными малыми членами
равносильно пренебрежению воздействием планет на движение
Солнца и друг на друга, т. е. равносильно допущению о том, что
каждая планета движется только под действием Солнца. При
таком допущении вместо интеграла D) будут иметь место интег-
интегралы энергий для каждой планеты в центр ал ьнонсимметричном
поле Солнца
mtMs
? is
(cm. B.56) и B.69)).
Глава III
ЗАДАЧА ДВУХ ТЕЛ И ТЕОРИЯ РАССЕЯНИЯ ЧАСТИЦ
Под задачей двух тел обычно понимают задачу о движении
двух взаимодействующих точек в отсутствие внешних сил. Значе-
Значение этой задачи весьма велико: ее решение лежит в основе небес-
небесной механики и теории свободного движения спутников, в основе
теории столкновения и рассеяния частиц; ее решение использует-
используется в статистической механике, когда задачу о движении многих
частиц фактически сводят к статистической задаче двух точек,
и т. д.
§ 3.1. Задача двух тел
Исследуем движение двух точек с массами гп\ и т2, если по-
потенциальная энергия их взаимодействия U зависит только от
расстояния между точками, а внешние силы отсутствуют.
Уравнениями движения точек относительно инерциальной си-
системы S являются уравнения
тхт, =F21 (|га —гх|)э
C.1)
',Р12([г2— rj),
где Fal = —Vif/(|ra —141), a Fia = — уа?/(|га-rt|) (см. B.124),
B.125)).
Один из векторных интегралов уравнений C.1) очевиден:
ввиду отсутствия внешних сил центр масс системы движется от-
относительно S равномерно и прямолинейно (см. B.106)). Таким
образом, скорость центра масс и его радиус-вектор соответственно
равны
Ym = Vm0> rm = Vm(/ + Г/;г0, C.2)
где vm0 = — (ЩУю + ЩУ*о)> rmo = —(тхг10 + ЩГ20), а г10, г20, v10>
m m
v20 — начальные положения и скорости соответствующих точек.
§ зл
Задача двух тел
115
Рассмотрим далее движение точек относительно поступа-
поступательно движущейся системы центра масс Sm
(рис. 3.1). Так называют систему отсчета, начало которой нахо-
находится в центре масс механической системы, а оси не изменяют
своей ориентации относительно системы 5 (т. е. углы между ося-
осями систем Sm и 5 неизменны).
В данном случае система Sm
инерциальна, поскольку центр
масс движется равномерно и
прямолинейно относительно
системы 5. Следовательно, по-
положения, скорости и ускорения /
точек относительно S и Sm свя- u
заны между собой соотноше-
соотношениями (см. A.62) —A.64)):
rt = rm + r't, v, = vm0 + vi,
w, = Wj (t = 1, 2), C,3)
где «нештрихованные» векто-
векторы относятся к системе S, а
«штрихованные» — к системе
Sm. Учитывая инвариантность
уравнений движения при переходе от системы S к Sm (см. с. 41)s
из C.1) получим
Рис. 3.1
Однако положения точек 1 и 2 в системе 5т не являются незави-
независимыми. Действительно, из определения центра масс B.89) и од-
ределения системы Sm имеем
тхх\ + щг2 = 0. C.5)
Поэтому радиус-вектор г=г2—гь характеризующий относитель-
относительное расположение точек, выражается через п и г2:
m m
г2 — гх = г2 —
Г2 =
C.6)
а радиусы-векторы п и r2 связаны с вектором г соотношениями
г;=—
m
C.7),
116 Задача двух тел и теория рассеяния частиц Гл. III
Дифференцируя C.5) — C.7) по времени, получаем аналогичные
соотношения для скоростей точек
+ m2v2 = 0, C.8)
' ' rn ' m '
C.9)
' \tTln ' ТПл
Vi = — — V, V2 = — V,
m m
где v = v2 —v1#
Соотношения C.6J или C.7) дают возможность разделить
переменные в уравнениях C.4). Действительно, подставляя
C.6) в C.4), найдем
Отсюда, переходя к переменной г, сведем оба уравнения к одному
и тому же уравнению
Hr = Fia(|r|)f C.11)
где ц = * 2 — «приведенная» масса. Это уравнение
1 + 2
представляет собой уравнение движения одной точки в заданном
поле с центром силы, как бы помещенным в центр масс системы
двух точек. Таким образом, задача двух тел сводится к эквива-
эквивалентной задаче о движении ji-t очки — воображаемой точки с
массой [i и радиусом-вектором г — в центрально-симметричном
поле с неподвижным центром, т. е. к задаче, разобранной в § 2.3.
Поскольку на ji-точку «действует» центральная стационарная
потенциальная сила, имеет место сохранение момента импульса
и энергии относительно Sm:
J? \) = EQ. C.12)
Выведем эти интегралы, исходя непосредственно из законов со-
сохранения B.114) и B.136). Согласно этим законам кинетический
момент и энергия системы двух точек относительно Sm сохра-
сохраняются:
М' - Mi + Mo = Mo, E' = Т[ + f2 + U - Е'о. C.13)
Выразим момент импульса и кинетическую энергию точки / в пе-
переменных г, v (см. C.7) и C.9)):
C.14)
mi (v[J mx
§ 3.1 Задача двух тел 117
MJ = пг1 [n vi] = т1
Т\ =
2 2 \ m
Аналогично для второй точки получим
TVL 1 о =z ^ I I V"> @.10)
2 \ m J
а учитывая C.14) и C.15), найдем (Выражения кинетического
момента и кинетической энергии системы в переменных г и v:
M'=|i[rv], Г=-^-. C.16)
Следовательно, C.12) и C.13) представляют собой одни и те же
законы сохранения.
Сопоставляя C.12) с интегралами B.56), мы видим, что ре-
решение задачи двух тел относительно 5т можно найти сразу, если
в общем решении, описывающем движение точки в центрально-
симметричном потенциальном поле, произвести замену
Тогда из B.13), B.60) и B.63) получим общее решение урав-
уравнения C.11):
C.18)
г
где t/eff ^
Смысл первого из интегралов C.18) очевиден: он определяет
плоскость движения [х-точки. Эта плоскость проходит через центр
масс перпендикулярно к Мо, т. е. совпадает с плоскостью О'х'у'
на рис. 3.1. Второй и третий интегралы определяют движение
ji-точки на указанной плоскости в полярных координатах. Таким
образом, с помощью интеграло>в C.18) можно определить функ-
118 Задача двух тел и теория рассеяния частиц Гл. III
цию г(/) и тем самым с помощью C.7) найти положения точек
1 и 2 относительно Sm. Затем, используя C.2) и C.3), можно
найти законы движения точек относительно системы S в виде
ri(O=rm(O 2*-г (9,
т
C.19)
т
Аналогично для скоростей точек относительно 5 получим решение
в виде (см. C.9) и C.3))
@,
tn
C.20)
a@ m0+
т
dv(t)
где v(t) - ,
Итак, Общее решение задачи двух точек, потенциальная
энергия взаимодействия которых зависит только от расстояния
между ними, в отсутствие внешних сил определяется формулами
C.2), C.18) и C.19). Из этих формул следует, что относи-
относительно инерциальной системы отсчета центр масс точек движется
равномерно и прямолинейно, а обе точки относительно системы
центра масс совершают движение в плоскости, проходящей через
центр масс и сохраняющей свою ориентацию относительно инер-
инерциальной системы отсчета; траектории обеих точек относительна
системы центра масс подобны, а центр подобия находится в цент-
ре масс, причем соотношение подобия равно отношению масс
точек.
Проиллюстрируем задачу двух тел «а примере системы с по-
потенциальной энергией взаимодействия
Г
где а равняется либо ут\т2 (гравитационное взаимодействие)>
либо —е\е2 (электростатическое взаимодействие). В этом случае
общее решение аналогично решению, приведенному в § 2.4. На-
Например, производя в формуле B.71) замену C.17), получим урав-
уравнение ОрбиТЫ A-ТОЧКИ
? COS ф
3.1
Задач двух тел
119
где р =
\i\a\
—параметр орбиты
- 8 = [1 + ^ J--
эксцентри-
эксцентриситет орбиты, значение + 1 в знаменателе формулы соответствует
случаю а > 0, а значение — 1 — случаю а < 0.
Закон движения |л-точки по эллиптической орбите иайдем из
формулы B.78):
2я
где а =
1-е2
— большая полуось эллипса, по которому дви-
движется ц-точка, T2=4n2{\ia3/a)—квадрат периоду обращения по
эллипсу, а р и е определены в C.21).
((
\ \
\
г^-—
ч*
0'*
/
У
У /
/
!
1
1
\
\
\
/
(
\
N
ч
Г2
Ч
х
Чч
\
V
\ \
1 1 >
/у
Рис. 3.2
Чтобы представить себе движение реальных точек 1 я 2 отно-
относительно Sm, рассмотрим их движение по эллиптическим орбитам
при различных соотношениях масс и заданных р я е. Например,
пусть m2<Cmi, тогда выражения радиусов-векторов точек через
радиус-вектор jx-точки можно записать в виде (см. C.7))
т1
1
т2
г;
если же m2 =- mlf то
Таким образом, если уточка движется по эллипсу, то и реальные
точки описывают эллиптические орбиты (рис. 3.2). Рассмотрен-
Рассмотренные случаи дают представление о движении систем: планета —
Солнце и двойные звезды соответственно.
120 Задача двух тел и теория рассеяния частиц Гл. III
Полезно найти соотношения между периодом обращения точек
по эллиптическим орбитам и их большими полуосями. Например,
в случае гравитационного притяжения для ji-точки
Y Щ+т2
Периоды обращения точек 1 и 2, очевидно, равны периоду Г.
С другой стороны, большие полуоои орбит этих точек выражаются
через а, поскольку из C.7) вытекает, что
и, следовательно,
Г\ = —- Г, Го = —-
т т
—*-а, а2 = —i-a,
т т
где ai и а2 — большие полуоси эллиптических орбит точек 1 я 2
соответственно. Таким образом, найдем отношения квадрата пе-
периода Т к кубам больших полуосей а,\ и а2:
Т2 4я2 т2] Т2 , 4я2 т2
где m=mi-\-m2. Эти отношения зависят от масс точек, в связи
с чем становится понятной приближенность третьего закона Кеп-
Кеплера, приведенного на с. 87. Действительно, поскольку масса
любой планеты весьма мала по сравнению с массой Солнца, то
отношение Т2/а1 для любых двух планет одинаково ic большой
точностью.
Теперь применим' к рассматриваемой задаче теорему о вириа-
ле сил в том случае, когда точки движутся по эллипсам. Согласно
формуле B.54), отнесенной ,к S^-системе, получим
Подставляя сюда выражения сил через потенциальную энергию
U(г), найдем соотношение
которое для потенциала вида U——а/г упрощается:
Г = - 4- C.22)
§ 3.2 Упругое рассеяние частиц 12J
Кроме того, поскольку T' + U=EOf C.22) приводит к формулам
Г = —Ei, Z7= 2Е0, C.23)
которые определяют средние значения кинетической и потенци-
потенциальной энергий системы через ее полную энергию в начальный
момент .времени.
§ 3.2. Упругое рассеяние частиц
Если в начальный момент времени две частицы находятся
достаточно далеко друг от друга, а их начальные скорости на-
направлены так, что с течением врехмени происходит сближение
частиц, б результате взаимодействия они могут снова удалиться
на достаточно большое расстояние друг от друга, причем их ско-
скорости как по величине, так и по направлению изменятся. В этом
случае говорят, что произошло рассеяние частиц. Если в
результате взаимодействия при /->+°° расстояние между части-
частицами стремится к нулю или остается ограниченным, то говорят,
что произошел захват частиц. Рассеяние и захват частиц
зависят от характера взаимодействия между частицами, в связи
с чем изучение таких процессов играет большую роль в физике.
Рассмотрим задачу о рассеянии двух частиц, в которой счи-
считаются известными массы частиц и потенциальная энергия их
взаимодействия как функция расстояния г между ними, а внеш-
внешними силами можно пренебречь. До рассеяния, т. е. при
t-+—сю, частицы считаются бесконечно удаленными друг от друга;
они обладают скоростями, соответственно равными
v7 - у г @ U-oo, v7 = v2 (О I,.*»*,, C.24)
где \i(t) и v2@—скорости обеих точек в момент времени t.
Практически состояние «до рассеяния» характеризуется таким
конечным расстоянием между частицами, на котором энергией их
взаимодействия можно пренебречь. Скорости, рассматриваемые в
C.24), являются скоростями частиц относительно некоторой инер-
циальной системы отсчета, которую в теории рассеяния обычно
называют лабораторной системой, или ^-системой.
В задаче считается известной ориентация плоскости движения
частиц относительно системы Sm, которую в теории рассеяния
часто называют ^-системой. Также считается известным при-
прицельное расстояние р-, т. е. расстояние между асимпто-
асимптотами траекторий частиц относительно 5т, по которым частицы дви-
движутся до рассеяния; прицельное расстояние можно также опре-
определить как минимальное расстояние, на котором частицы пролете-
пролетели бы друг от друга в отсутствие взаимодействия (см. рис. 3.3, где
122
Задача двух тел и теория рассеяния частиц
Гл. III
в качестве траектории [i-точки изображена ветвь гиперболы, соот-
соответствующая случаю отталкивания — cpatBHHTe с рис. 2.6, а траек-
траектории действительных точек изображены для т\ =
Рис. 3.3
Бели скорости частиц до рассеяния заданы, то ориентация
плоскости движения относительно Sm определяется одним скаляр-
скалярным параметром. Действитель-
Действительно, по этим скоростям можно
определить их разность-вектор
z
V- = V2
C.25)
который лежит в плоскости
движения частиц относительно
«Sm, так как в любой момент
времени вектор v коллинеарен
скоростям^ частиц vi и V2
относительно Sm. Поэтому ори-
ориентацию этой плоскости всегда
можно задать единичным век-
вектором п2', перпендикулярным
к плоскости и, следовательно,
перпендикулярным к v~
(рис. 3.4). Но направление
п2', если v- задан, определяется одним скалярным параметром,
например углом е между п2 и единичным вектором ПхУ, лежащим
в плоскости О'ху и перпендикулярным к \~.
Итак, в задаче о рассеянии двух частиц будем считать извест-
известными массы этих частиц тх и т2, потенциальную энергию их вза-
Рис. 3.4
§32 Упругое рассеяние частиц 123
имодействия U(r), скорости до рассеяния v7 и v7 относитель-
относительно лабораторной системы отсчета, угол е, определяющий ориента-
ориентацию плоскости движения относительно системы центра масс, а
также прицельное расстояние р", которое характеризует относи-
относительное расположение точек до рассеяния в системе центра масс.
По этим данным требуется определить vf и Уг" - скорости
обеих частиц после рассеяния, т. е. при t-^ + oo:
vt = vAt)\t-n.»9 v^-v2@U+oo. C.26)
Устремляя t к +°°*в соотношениях A2.9) и A2.20), справед-
справедливых для любого момента времени, и используя сохранение
скорости центра масс частиц, получим
m
C.27)
vt = v^ - -^ v+, v2+ = v« + -^ v+, C.28)
m m
где vi'", V2+ — скорости точек после рассеяния относительно
системы Sm, Vm = —{щчТ + Щч7) — скорость центра масс.
Как видно, в C.27) и C.28) входит один неизвестный вектор v+ —
разность скоростей точек после рассеяния. Величину этого векто-
вектора можно найти, используя закон сохранения энергии относитель-
относительно системы Sm. Действительно, вторая из формул C.12) приво-
приводит к интегралу
*^)а + U+ = И"J + 1Г, C.29)
где {/-, U+ — значения потенциальной энергии взаимодействия
частиц до и после рассеяния. Эти значения равны между собой,
т. е.
[/+ = (/", C.30)
поскольку как до рассеяния, так и после него частицы находятся
на бесконечно большом расстоянии друг от друга. Таким образом,
из C.29) и C.30) вытекает, что величина разности скоростей час-
частиц после рассеяния и до него одна и та же:
v+==v~. C.31)
По существу этот вывод основан на предположении о том, что
внутренняя энергия частиц в процессе рассеяния остается неиз-
неизменной (такое рассеяние называется упругим).
124 Задача двух тел и теория рассеяния частиц Гл. III
Учитывая C.31), неизвестный вектор v+ можно представить
в виде
v+ =irnem> C.32)
где vr = | v~ — vrl> т- е- является известной величиной, а щт —
единичный вектор, направленный по вектору v+ или по вектору
Vg+1 что видно из C.27). Орт nem легко определить, используя
решение задачи двух тел. Действительно, .вычисляя последний из
интегралов C.18) в пределах от rmin до оо, получим фт — угол
между асимптотой траектории и апсидой (см., например, рис. 3.3):
Ф = \ , (о.оо)
где rmin определяется из уравнения EQ = Ueu.
Интеграл C.33) определяет угол фт .как функцию Ео, Мо
и приведенной массы \х (при заданной потенциальной энергии
U(г)). В свою очередь, постоянные Ео и Мо могут быть выраже-
выражены через известные величины, т. е. через v~ — величину разности
скоростей точек до рассеяния и р~ — прицельное расстояние. На-
Например, полагая потенциальную энергию на бесконечности равной
нулю, получим
?о=Л1р!_. C.34)
Величину кинетического момента относительно системы центра
масс можно записать в виде (см. C.12))
Sitl (Г, V) |^-оо,
откуда, учитывая, что .
г sin (r, v)^ee= p- C.35)
(см. рис. 3.3), найдем
М0 = Цр-?г\ C.36)
Соотношения C.36), C.34) и решение C.33) дают воз-
возможность найти угол фт как функцию заданных величин и тем
самым определить углы отклонения скоростей первой и второй
частиц в системе центра масс. Эти углы р&вны между собой, так
как в указанной системе импульс двух частиц всегда равен нулю,
и, следовательно, скорости обеих частиц в любой момент времени
§ 3.2 Упругое рассеяние частиц 125
направлены в противоположные стороны. Таким образом, угол
между векторами Vi+ и vi~ равен углу между v2+ и v2"~.
Назовем этот угол углом рассеяния в системе центра
масс и обозначим его 6т. Между углами фт и 6т существует
соотношение, которое для центрально-симметричного взаимодейст-
взаимодействия принимает весьма простой вид. Действительно, в этом случае
движение частиц относительно их центра масс происходит в плос-
плоскости, а траектории частиц симметричны относительно апсид
(см. с. 79), поэтому
6w = rt-2q>m. C.37>
Соотношения C.27) и C.28) с учетом C.32) —C.37) приво-
приводят к решению задачи о рассеянии двух частиц. Запишем это
решение в виде
v;+ = -^-trnew,vH- = ^tF-neWf C.38)
где
Vm = — (т^уТ + Щ v7), V- = | vJT — vF|,
tn
а единичный вектор r»em определен углами е и 9W; один из этих
углов е задает ориентацию плоскости движения относительно си-
системы центра масе при заданных векторах v|T> vf, а угол 9W
является углом рассеяния частиц в системе центра масс; зависи-
зависимость угла 6т от величин р~, v~ и характера взаимодействия опре-
определяется интегралом
(з.40>
т% Г, 2U(r) (р-)* ] 1/2
г . IX (УГ /2 J
где /"тш является корнем уравнения
= 0. C.41 >
Итак, формулы C.39) и C.40) представляют собой решение
задачи об упругом рассеянии двух частиц. Эта задача является
частным случаем задачи двух тел, когда интересуются лишь ско-
скоростями частиц, после рассеяния. Поэтому в задаче о рассеянии
требуется меньшая информация относительно начальных условий
по сравнению с задачей двух тел. Подчеркнем еще одну особен-
126 Задача двух тел и теория рассеяния частиц Гл. III
ность задачи о рассеянии. Так как решение в виде C.39) полу-
получено на основе лишь законов сохранения, то скорости после рас-
рассеяния vt, V2~ являются одними и теми же функциями скорос-
скоростей до рассеяния v7\ vjT и углов е, 6т при любом центральном
взаимодействии частиц. С другой стороны, vt и vt как функции
скоростей v~, v$T, угла е и прицельного расстояния р- будут
различными для разных взаимодействий, так как зависимость 6W
от р~ и v определяется видом потенциальной энергии.
Только в одном случае угол отклонения в системе центра
масс имеет определенное значение при любой потенциальной
энергии взаимодействия U(г). Это случай лобового удара,
когда
р-= 0 (фт = 0, 6т = я) C.42)
и, следовательно, вектор пе направлен противоположно вектору v~:
пе =-—. C.43)
m v- ч
Подставляя C.43) в C.39), получим решение задачи о рассеянии
для случая лобового удара
+ /72i -— /722 — , 2tf22 —
Vl — Vl + ¦: V2 ,
m m
C.44)
т
Расчет общего случая (р~=7^=0) становится более наглядным,
если использовать графическое изображение решения C.39), т. е.
так называемую диаграмму скоростей. Прежде всего по-
построим эту диаграмму в системе Sm. Скорости после рассеяния
известны из решения C.38), а скорости до рассеяния получим,
устремив в C.9) /->—оо:
т
Используя C.45) и C.38), получим диаграмму скоростей в си-
системе 5W (рис. 3.5, а). В этой системе особенно просто выглядит
диаграмма импульсов. Умможая скорости точек (см. C.38) и
C.45)) на соответствующие массы, получим выражения для им-
импульсов точек относительно Sm (рис. 3.5, б)
C.46)
3.2
Упругое рассеяние частиц
127
Из диаграммы видно, что упругое рассеяние двух частиц
относительно системы их центра масс сводится к повороту скоро-
скоростей и импульсов частиц на оди-н и тот же угол рассеяния 0т; при
этом величины скоростей (и импульсов) сохраняются.
и
Рис. 3.5
Диаграмма скоростей относительно лабораторной системы
отсчета соответствует .решению C.39) (рис. 3.6). Заметим, что
в общем случае плоскость, образуемая на диаграмме скоростей
векторами УГ и V2~> не совпадает с плоскостью , образуемой
векторами vt и V2~- Однако эти
плоскости пересекаются и конец
вектора скорости центра масс
лежит на этой линии пересечения.
Плоскость, в которой лежат ско-
скорости точек, определенные отно-
относительно системы Srn, не совпа-
совпадает, вообще говоря', ни с плос-
плоскостью вектороъ v~, v~, ни с
плоскостью векторов v^, v+.
В заключение этого парагра-
параграфа рассмотрим захват частиц,
точнее, рассмотрим падение
частиц друг на друга, когда
г->0 при t-*-\-oo. Исследование
этого случая можно провести с
помощью условий B.64) и B.66).
Действительно, заменяя в этих
формулах т на приведенную мас-
массу \i и учитывая, что
Рис. 3.6
Mo = \Lp~-V-,
128
Задача двух тел и теория рассеяния частиц
Гл. III
получим неравенство, определяющее область изменения г в зада-
задаче двух тел:
VJZ2- >U(r) + ±?2L . JdL C.47)
а также условие падения частиц
C.48)
Для сил отталкивания условие падения не удовлетворяется
ни при каких р~. В случае преобладания быстро убывающих сил
-/+ притяжения (при г->0) падение
становится возможным хотя бы
для некоторых прицельных рас-
j; стояний. Если известны потенци-
потенциальная энергия взаимодействия
частиц, их массы и скорости до
захвата (т. е. при t~>—сю), то
можно, воспользовавшись соот-
соотношениями C.47) и C.48),опреде-
C.48),определить, при каких прицельных
расстояниях произойдет захват.
Пример 3.1. Рассеяние двух
частиц, одна из которых до рас-
рассеяния покоится.
Частица с массой Ш\ до рассеяния покоится, т. е. v~ = О,
а вторая частица пг2 движется со скоростью \~ относительно
л-системы. Определить абсолютные величины и направления ско-
скоростей обеих частиц после рассеяния относительно л-системы как
функции 9т — угла рассеяния в системе центра масс.
Из условия видно, что скорость центра масс и разность ско-
скоростей частиц до рассеяния соответственно равны
Рис. 3 7
т2
Vm = —- УГ>
m m г
0)
Отсюда с помощью C.45) получим скорости точек до рассеяния
в системе Sm
—
1
ГПо
tn 2
V — i- V —
2 m 2
B)
а используя C.38) и C.39), найдем скорости частиц после рас-
рассеяния
§ 3.2 Упругое рассеяние частиц 129
C)
m
В рассматриваемом примере движение язляется плоским как
относительно системы Smj так и относительно л-системы, причем
плоскости движения в обеих системах совпадают друг с другом.
Благодаря этому одну из координатных плоскостей л-системы
можно совместить с плоскостью движения. Тогда вектор nem»
лежащий в этой плоскости, будет определяться одним параметром,
а именно углом рассеяния 8т. Заметим также, что в системе Sm
величина скорости первой точки после рассеяния равна величине
скорости центра масс, а отношение v'^jv'^ всегда равно обрат-
обратному отношению масс точек.
Диаграмма скоростей для данного примера приведена на
рис. 3.7. Здесь 6i и 02 — углы рассеяния первой и ©торой частиц
в л-системе; они отсчитываются от направления скорости v~ вто-
второй частицы до рассеяния. Пользуясь этой диаграммой, решением
C) и тригонометрическими соотношениями, найдем
/722
D)
m
I* A __ sin 0m
f2- = -^— [mf + m| 4- 2m1m2 cos 6m]1/2
— + cos em
Рассмотрим решение D) при различных соотношениях между
массами частиц, считая для определенности, что между частицами
действуют силы отталкивания. Тогда 8т может изменяться от О
до я; причем 6т—0 соответствует бесконечно далеким пролетам
частиц, a 0w=jt — лобовому удару.
Пусть, например, .mi>m2, т. е. масса частицы, покоящейся до
рассеяния, больше массы налетающей частицы (рис. 3.8, а).
В этом случае с изменением 6т от 0 до я; угол Э2 изменяется так-
также от 0 до я, т. е. налетающая частица может быть рассеяна по
5 Зак. 284
130
Задача двух тел и теория рассеяния частиц
Гл. III
любому направлению. Соответственно частица, покоящаяся до
рассеяния, может быть рассеяна под углом от я/2 до 0. Угол раз-
разлета 01+02 для любых 0т будет больше я/2, а в случае лобового
удара скорости частиц после рассеяния
взаимно про-
Рис. 3.8
швоположны. Весьма простой вид принимает решение D), если
7J+ := О ?J+ = ?Г~. 09 = 0^,. E)
1 » 2 2 ' * т т v '
В случае равенства масс налетающей и покоящейся частиц
из решения D) получим (рис. 3.8, б)
- В —
F)
v+ = v?coa-f
§ 3.2 Упругое рассеяние частиц Ш
Здесь угол разлета 9i+92 для любого Эт равен я/2, а в случае
лобового удара происходит «обмен» скоростей.
Пусть теперь т2>ть т. е. масса налетающей частицы боль-
больше, чем масса покоящейся до рассеяния частицы (рис. 3.8,в).
Из диаграммы скоростей видно, что угол разлета 9i+92 для лю-
любого 9т меньше, чем я/2, а в результате лобового удара скорости
частиц v+ и v+ направлены одинаково. Наиболее интересной осо-
особенностью рассматриваемого случая является то, что данному
углу Qm соответствуют определенные значения vf ы 92, а данному
углу 92 соответствуют два значения 9т и v+. Иначе говоря, функ-
функции t>+@m) и 62Fт) являются однозначными функциями, а
функции 6,7гF2) и v+(%)— двузначными. Это необходимо иметь
в виду, так как экспериментально измеряется именно угол 92, а
ему соответствуют два возможных значения 6ОТ и v+. С этой
особенностью связано и то, что угол отклонения 92 налетающей
частицы изменяется в пределах от 0 до некоторого максимального
значения 92тах (рис. 3.8, г), определяемого формулой
81п62тах-^~. G)
т2
Пользуясь последней из формул D), найдем, что
— cos262-0. (8)
m+2,n+ (
В решении этого уравнения следует выбрать знак перед радика-
радикалом, для чего рассмотрим предельные случаи далекого пролета и
лобового удара. Например, если m2<mi, то из диаграммы, пред-
представленной на рис. 3.8, а, в пределе получим
92-*(), если 6т->-0; 62-*я, если 9/?г->я. (9)
К этим предельным значениям приводит решение уравнения (8)
с положительным знаком перед радикалом:
= +cos62 л[ 1 — № sin62J — ^-sin202. A0)
Если т2>ти то из диаграммы, представленной на рис. 3.8, в,
можно увидеть, что
е2-*0 при 9т->0 и 6т-*я, A1)
т. е. решение уравнения (8) будет содержать оба знака:
cos6/n-±cose2 Л/ 1— lf^-sin%J — ^^sin262. A2)
Г \^i I ггц
132 Задача двух тел и теория рассеяния частиц Гл. III
Первая ветвь этой функции, соответствующая положительному
знаку перед радикалом, дает значения 0т, лежащие в пределах
ОТ О ДО 0т@2тах) (при ЭТОМ 02 ИЗМвНЯвТСЯ ОТ О ДО 02max) • Вторая
ветвь соответствует значениям 07П, лежащим в пределах от
Э|?7г@2тах) До я (при этом 92 изменяется от 02тах ДО 0).
Пример 3.2. Рассеяние двух частиц, скорости которых до
рассеяния равны по величине и противоположны по направлению.
Пусть скорости обеих частиц до рассеяния относительно л-си-
стемы соответственно равны
v— —/- 0 v— = v—
vl ^ U» V2 M '
Определить абсолютные величины и направления скоростей час-
частиц в лабораторной системе как функции угла 0т.
Согласно условию задачи скорость центра масс частиц, раз-
разность их скоростей и скорости частиц относительно системы Sm
до рассеяния соответственно равны (см. C.45))
m m I > 1 >
(О
Отсюда с помощью C.39) находим
m х m l m
B)
v+ = —i vr + 2 —^ vrt\Q .
1 m l m 1 m
Поскольку скорости vj~" и Vg"" согласно A) коллинеарны ско-
скорости центра масс, постольку движение является плоским не толь-
только в системе центра масс, но и в л-системе. Это дает возможность
построить плоскую диаграхмму скоростей (рис. 3.9). При построе-
построении диаграммы мы учли, что между величинами скоростей
v'+ и v'-r имеет место соотношение
и что о-< tif (см. A)).
Из .решения B) и диаграммы скоростей получим интересую-
интересующие нас функции:
§ 3.2 Упругое рассеяние частиц 133
vf = — [4ml + (m1 — m2J — 4m2 (m2 — m,) cos 0m]1/2,
m
v~ 2 1/2
m
tg 02 =
ml m2 л /«2 — ml
+ cos Qm -~ -f cos 9m
2
2m2
Проанализируем это решение. Пусть, например, mi>3m2; тогда
из A) и B) следует
*2+>vr>vz>v[+. D)
Таким образом, скорость центра масс по величине больше, чем
скорость первой частицы в системе Sm, но меньше скорости вто-
второй частицы в той же системе. Поэтому функция От (ВО будет
двузначной, функция 0т(б2) —однозначной, a 0i будет изменяться
в пределах от 0 до Bimax (рис. 3.9, а). Угол максимального откло-
отклонения первой частицы определяется формулой
Sitl Glmax = 2"*2 . E)
пг1 — гпч
В предельных случаях далекого пролета и лобового удара
согласно диаграмме (рис. 3.9, а) имеем:
если 0т->0, то 61-^0 и 62-*0; ,fi.
если 6ш->я, то 01->0, a 62-^ я.
Используя эти предельные значения, а также третью и четвертую
функции из формул C), получим выражения:
1 - \*=±jWe,]-- ( «gSL) sin^e,, G)
cos6m = cos6Л1 - ( т^~тЛ2sin26alm + щ~щ sin262. (8)
L \ 2mj / J 2mx
В случае ml=3m2 общее решение C) приводит к более прос-
простым формулам для первой частицы
v+=vTcos^, е1==-9=-. (9)
Если же 3m2 > mt > m2 (рис. 3.9, б), то
134
Задача двух тел и теория рассеяния частиц
Гл. III
Поэтому как 0Ь так и 02 изменяются от 0 до я, причем в предель-
предельных случаях
m—>u, и± —ьи, и2"^* ^J
(И)
Рис. 3.9
В соответствии с этим из решения C) аналогично предыдущему
получим однозначную функцию 0m@i), которую запишем в виде
(меняя здесь индексы 1 и 2 местами, найдем функцию cos0m@2)).
Наконец, если mi=m2, то скорость центра масс равна нулю и,
следовательно, с помощью формулы B) найдем (рис. 3.9, в)
§ 3,2 Упругое рассеяние частиц 135
11 1
Соответственно из формулы C) получим
v+^v+^VTy 6l = е2 = em. A4)
В этом случае решение принимает очень простой вид, так как
л-система и система центра масс совпадают.
Пример 3.3. Рассеяние двух частиц с электростатическим
взаимодействием.
Предполагая, что одна, из частиц до рассеяния покоится
(v7" = 0), а вторая налетает на нее с заданной скоростью v~ от-
относительно л-системы, а также считая известными прицельное
расстояние р- и ориентацию плоскости, в которой движутся час-
частицы, определить абсолютные величины и направления скоростей
обеих частиц как функции и~ и р-.
Часть этой задачи уже решена в примере 3.1. Действительно,
формулы D) этого примера дают интересующие нас величины
как функции v~ и 6т — угла рассеяния в ц-системе:
,%m), e2 = e2F,rt).
Теперь нужно найти угол 0т как функцию скорости v~ и при-
прицельного расстояния р~. Эта зависимость определяется интегра-
интегралом C.40)
в котором подставлена потенциальная энергия U — —а/г, а—
постоянная, характеризующая взаимодействие, v~ = \v~ — v~| —
величина относительной скорости частиц до рассеяния, а |тах
определяется из уравнения
|2 ?2 1—1=0
w>-(f-J
(см. C.41)). Вычисляя этот интеграл, для угла отклонения в
Ч-системе получаем выражение
вт = — 2 arctg . B)
sW>-(tr)» v ;
136 Задача двух тел и теория рассеяния частиц Гл. III
В случае сил притяжения (а>0) угол отклонения 9m<0, a для
сил отталкивания (а<0) этот угол положителен и функция B)
принимает вид
8m = 2arctg |(Х| . C)
В соответствии с условием данного примера в формулах B) и
C) нужно положить v~ — v~.
Совокупность формул D) примера 3.1 и формул B), C) на-
настоящего примера дает решение поставленной задачи. Запишем
его в общем виде
vt=vf[v^9em(p-,i>-)], e^eje^p-,^)],
vt = vf[v-,Qm(p-,v-)], e2^e2[ew(p-,L-)].
Ввиду громоздкости этого решения приведем более простой
частный случай. Пусть, например, массы .налетающей и покоя-
покоящейся до рассеяния частиц равны, тогда, учитывая формулу F)
примера 3.1, получаем
, ех = — — а,,
2
:
L 2a J}
E)
H—7v If
т2р (v9 J
Если скорости частиц до рассеяния равны по величине и противо-
противоположны по направлению, т.. е.
У7 = -УТ (^ = 2^Г), F)
то и+, 6Х, v+, 62, как функции v~ и р~, будут заданы совокуп-
совокупностью формул C) примера 3.2 и формул B), C) и F) настоя-
настоящего примера. В частном случае при mi = 3m2 для первой частицы
получим (см. формулу (9) примера 3.2)
—IT
, 91=-arctg| I. G)
Пример З.4. Рассеяние двух однородных абсолютно упругих
шариков.
§ 3,2 Упругое рассеяние частиц 1_37_
Потенциальная энергия взаимодействия двух указанных час-
частиц с массами Ш\ и т2 имеет вид
Г 0, если г > а,
[ f оо, если г<^а,
где a = ai-\-a2 — сумма радиусов первой и второй частиц-«шари-
ков». Предполагая, что в одном случае вторая частица налетает
на первую, покоящуюся до рассеяния, а во втором — обе частицы
движутся навстречу друг другу с одинаковой скоростью: Опреде-
Определить абсолютные величины и направления скоростей обеих частиц
после рассеяния как функции их скоростей до рассеяния и при!
цельного расстояния.
Пользуясь C.40) и C.41), можно определить угол откло-
отклонения От- Однако ввиду обращения U в бесконечность 0т удобнее
определить с помощью графика «эффективной» потенциальной
энергии и траекторий частиц в ^-системе. Действительно, подстав-
подставляя значение Л?о = fip~"ir- :в выражение Uetu получим
Формулы A) и B) дают возможность построить график Uett(r)
(рис. 3.10, а), из которого видно, что
/*min = а, если Ео > Е'о (—) (р~ < а);
C)
^min = р~, если Ео < Ео (—) (Р~ > а).
В первом случае происходит столкновение шариков, во вто-
втором— нет. Для обоих случаев траектории геометрических центров
шариков относительно ч-системы изображены на рис. 3.10, б и
3.10, в (эти рисунки соответствуют соотношениям mi>m2 и
а\>а2\ их полезно сравнить с рис. 2.6 и 3.3). Из рис. 3.10, б и
3.10, в нетрудно видеть, что
D)
Отсюда, учитывая соотношение C.37), найдем
(Р <а), E)
138
Задача двух тел и теория рассеяния частиц
Гл. III
Рис. 3 10
Следовательно, угол 0т не зависит от разности скоростей и от
масс частиц. Он зависит лишь от отношения константы взаимо-
взаимодействия а и прицельного расстояния р", что связано с особен-
особенностью взаимодействия абсолютно упругих шариков. Заметим, что
E) можно получить интегрированием C.40), определяя rmin из
§ 3.3 Поперечные сечения рассеяния 139
формулы C); при этом следует учесть, что потенциальная энер-
энергия U в пределах интегрирования от rmin до оо равна нулю.
Если скорости обеих частиц до рассеяния относительно л-сис-
темы задать так же, как в примерах 3.1 и 3.2, то решение
задачи о рассеянии частиц-«шариков» в первом случае определит-
определится совокупностью формул D) примера 3.1 и формулы E) на-
настоящего примера, а во втором случае — совокупностью формул
C) примера 3.2 и той же формулы E).
Приведем решение в простейших случаях. Пусть
тогда, используя формулы E), F) примера 3.1 и считая р~
найдем
F)
= arccos() ^
Решение в случае v~ = — v~ найдем, используя, например,
формулы (9) примера 3.2. Тогда для первой частицы получим
v+ = vr (-*— \, 6Х = arccos
1 l * a J
G)
\ = 3m2, p
§ 3.3. Поперечные сечения рассеяния
В предыдущем параграфе было изучено рассеяние двух час-
частиц; однако на практике чаще приходится иметь дело не с одним
актом рассеяния, а со множеством таких актов. Например, в из-
известных опытах Резерфорда пучок a-частиц рассеивался на ядрах
атомов металлической пленки.
Изучим более общий случай рассеяния, а именно рассеяние
одного пучка частиц на другом пучке.
Пусть один из пучков, достаточно разреженный и однородный
по сечению, состоит из одинаковых частиц с массами п%\\ все эти
частицы до рассеяния имеют одинаковые скорости, равные v".
Второй пучок состоит из других одинаковых частиц с массами т^
и скоростями до рассеяния vj (в остальном второй пучок удов-
удовлетворяет тем же требованиям, что и первый). Процесс рассея-
рассеяния одного пучка на другом ввиду их разреженности можно свес-
свести к рассеянию каждой частицы одного пучка на некоторой части-
140 Задача двух тел и теория рассеяния частиц Гл. III
це другого пучка, причем рассеяние каждой частицы по той же
причине можно считать однократным. Следовательно, в задаче о
рассеянии таких пучков нужно учитывать взаимодействие каждой
частицы одного пучка с некоторой частицей другого пучка, в то
время как взаимодействием частиц данного пучка между собой
можно пренебречь. Тогда акты рассеяния разных пар частиц будут
независимы друг от друга, причем рассеяние каждой пары харак-
характеризуется своим прицельным расстоянием р~" и происходит в оп-
определенной плоскости относительно системы центра масс пары,
т. е. характеризуется своим углом е (см. рис. 3.11, на котором
изображены траектории ц-точки для двух различных пар сталки-
сталкивающихся частиц с одинаковыми е и (различными р~).
Центры масс всех пар взаимодействующих частиц покоятся
относительно друг друга, поскольку эти центры движутся относи-
относительно лхистемы с одинаковой скоростью, равной
Поэтому угол рассеяния 0W для каждой данной пары взаи-
взаимодействующих частиц будет одним и тем же относительно систе-
системы отсчета с началом в центре масс любой пары взаимодейст-
взаимодействующих частиц. Выберем одну из таких систем отсчета и будем
называть ее условно системой центра масс или ^-системой. В этой
системе отсчета рассмотрим те [х-точки, прицельные расстояния
которых лежат внутри интервала р~, р~+ф~, а значение угла е
изменяется в пределах от 0 до 2я. В силу центральной симмет-
симметрии взаимодействия между частицами эти jx-точки рассеются на
углы от 9W до Qm+dQm каждая в своей плоскости. Следовательно,
на достаточном удалении от начала ^-системы выбранные ji-точ-
ки попадут в телесный угол dQm (рис. 3.11, б). Этот телесный угол
ограничен поверхностями конусов с вершинами в начале ч-сиете-
мы и углами растворов, равными соответственно 20т и 2@т+
+d9m); ось конусов параллельна вектору v~, т. е. параллельна
скорости jx-точек до рассеяния. Частицы второго пучка, соответ-
соответствующие рассмотренным ^-точкам, после рассеяния также попа-
попадут в телесный угол dQm, поскольку они движутся по траектори-
траекториям, подобным траекториям ji-точек. Что касается частиц первого
пучка, соответствующих рассмотренным ju-точкам, то они рас-
рассеются в телесный угол той же величины, но с раствором конусов,
направленным противоположно вектору v~.
Важной характеристикой процесса рассеяния является диф-
дифференциальное эффективное поперечное сечение
рассеяния. Например, для частиц первого пучка эта величина
определяется как отношение числа djf его частиц, рассеивае-
рассеиваемых в телесный угол dQm за единицу времени, к числу /~ час-
§ з.з
Поперечные сечения рассеяния
141
тиц того же пучка, пролетающих за единицу времени через еди-
единичную площадку поперечного сечения пучка до рассеяния. Таким
образом, дифференциальное сечение рассеяния частиц первого
пучка по определению равно
dax - -А-. C.49)
Рис. 3.11
Кроме дифференциального сечения, часто рассматривают
полное эффективное сечение рассеяния, равное
отношению общего числа А/+ частиц данного пучка, рассеивае-
рассеиваемых за единицу времени под всеми углами 6т=7^=0, к плотности
/~ потока этого пучка до рассеяния. Итак, по определению полное
сечение рассеяния частиц первого пучка равно
C.50)
/Г
Поскольку до рассеяния пучки однородны по сечению, можно
предположить, что поток числа частиц с прицельными расстоя-
расстояниями, лежащими .в интервале от р- до p~+dp"~, равен плотности!
потока частиц до рассеяния, умноженной на площадь кольца с ра-
радиусами, равными р~ и р~+ф-\ Тогда число частиц, рассеивае-
рассеиваемых в телесный угол dQm за единицу времени, равно (для перво-
первого пучка)
142
Задача двух тел и теория рассеяния частиц
Гл. III
ip-. C.51)
Отсюда получим дифференциальное сечение рассеяния в системе
центра масс как функцию прицельного расстояния:
da = 2яр-ф~
C.52)
(здесь индекс у da опущен, так как в ^-системе две взаимодейст-
взаимодействующие частицы отклоняются на один и тот же угол 0т, поэтому
сечение рассеяния (выражается через прицельное расстояние оди-
одинаково как для частиц первого пучка, так и для частиц второго
пучка).
Формула C.52) дает возможность найти наглядное выраже-
выражение для полного сечения рассеяния в том случае, когда на не-
некотором расстоянии r=rmSiX между частицами можно пренебречь
потенциальной энергией их взаимодействия. Тогда, очевидно, пол-
полное сечение будет равно площади круга радиуса rmax:
а^л(гтах)\ C.53)
На основании C.52) легко также получить сечение рассбяния
как функцию угла 0т и величины относительной скорости частиц
v~. Действительно, в задаче об упругом рассеянии двух частиц
угол 0т является функцией р~, v~ и масс частиц, причем вид этой
функции зависит от характера взаимодействия между частицами.
Разрешая функцию C.40) относительно р~, найдем прицельное
расстояние .в зависимости от 6т и v~
p-^p-@/H, V-I C.54)
а затем, используя C.52), получим дифференциальное сечение
рассеяния обоих пучков как функцию угла рассеяния в системе
центра масс:
= 2яр-
dp-
C.55)
Знак модуля в C.55) связан с тем, что производная —— может
быть отрицательной, а сечение рассеяния по определению являет-
является положительной величиной. Вместо выражения C.55) часто ис-
используют дифференциальное сечение в виде
d9-
sin Эл
C.56)
где dQm==2ttsin0md6m.
Экспериментальные исследования процессов рассеяния сво-
сводятся к измерению потока частиц до рассеяния и количества час-
частиц, рассеиваемых под различными углами. Тем самым находят
§33 Поперечные сечения рассеяния 143
сечения рассеяния в л-системе. Теоретически эти величины можно
получить, вычисляя da(Qm) в ^-системе, а затем определяя функ-
функции 0m@i) и 0т@2) из диаграммы скоростей, основанной <на реше-
решении C.39) @i и 02 — углы рассеяния частиц первого и второго
сорта .в л-системе). Дифференциальные сечения рассеяния частиц
первого и второго сортов в лабораторной системе можно получить
как результат подстановок
da, = da Fm) |em@l), da2 = daFw) \в^ш). C.57)
Формулы C.57) справедливы, если функции 0m@i) и 0т@г) одно-
однозначны; однако примеры 3.1 и 3.2 показывают, что это требо-
требование не всегда выполняется. Пусть, например, функция 0т@2)
будет двузначной, т. е.
0т(б2) = | 6т@2)' C.58)
I СF2),
где функции 6т и 6т однозначны. Из C.58) следует, что в
л-системе под углом 02 рассеиваются все частицы, которые в
^-системе рассеиваются либо под углом 6т, либо под углом 0т-
Поэтому в случае двузначной функции 0т(©2) для нахождения do>2
следует брать сумму сечений, соответствующих двум ветвям функ-
функции. Таким образом, учитывая C.58), вместо второй из формул
C!57) получим
do, = do(Qm) \Qys) + da(%m) |e^@2). C.59)
Замерим, что сумма сечений, подобная C.59), является суммой
модулей соответствующих функций, поскольку сечения рассеяния
по определению положительны.
Полное сечение захвата os определяется аналогич-
аналогично C.50) как отношение числа всех частиц данного пучка, захва-
захваченных за единицу времени, к плотности потока этого пучка до
рассеяния. Если из условий C.47) -и C.48) вытекает, что при-
прицельные расстояния, при которых происходит захват, удовлетво-
удовлетворяют неравенствам
0<р-<р~, C.60)
то, исходя из дифференциального .выражения C.52) и условия
C.60), получим полное сечение захвата
Пример 3.5. Дифференциальные сечения рассеяния частиц
с электростатическим взаимодействием; формула Резерфорда.
144 Задача двух тел и теория рассеяния частиц Гл. III
Даны два пучка частиц. Первый пучок состоит из частиц с
массой Ш\ и зарядом е\\ скорость этих частиц до рассеяния отно-
относительно л-системы равна vl~. Аналогичные величины для частиц
второго пучка равны m2, e2, V2~- Оба пучка достаточно разрежены
и до рассеяния однородны по сечению. Определить дифферен-
дифференциальные сечения рассеяния частиц обоих сортов в л-системе.
Пользуясь формулой B) примера 3.3, найдем зависимость
прицельного расстояния от угла отклонения в ^-системе:
где а =—0102, причем если а>0, то 8т<0, если же а<0, то
0™>О.
Подставляя эту функцию в C.56), получим выражение для се-
сечения рассеядия в ц-системе:
da = ( 2 °-i J dUm ' B)
2
где
dQm = 2я sin 0m^em.
Для отыскания сечения рассеяния в л-оистеме нужно знать
6m@i) и 6тFг). Найдем эти функции для двух простых случаев.
Пусть, например, частицы первого пучка до рассеяния покоятся,
а частицы второго движутся со скоростью v~. Тогда вторая из
формул D) примера 3.1 дает соотношение
Ш 1 * \ /
где 0i изменяется в пределах от 0 до я/2.
Подставляя C) в B), получим дифференциальное сечение рас-
рассеяния частиц, которые до рассеяния покоились:
где dQi=2jt sin8id8i.
Используя формулы E) и F) примера 3.1, из формулы B)
данного примера получим дифференциальные сечения рассеяния
частиц второго пучка:
V dQl (mi<m1;0<Q2<n), E)
§ 33 Поперечные сечения рассеяния 143
2а \2cos02dQ2 / А - А . я \ /ty,
-~Т^ [Щ^Щ\ 0<62<— ), F)
(i?-)a / sin 92 \ 2 7
где dQ2 = 2Ksin62^82. Формула E) называется формулой
Резерфорда. Вывод этой формулы и ее сопоставление с экс-
экспериментом по рассеянию быстрых а-частиц на ядрах тяжелых эле-
элементов явились в свое время ключом к открытию структуры атома.
Теперь найдём сечение рассеяния частиц второго пучка, если
Ш2>гп\. В этом случае 0т@2) является двузначной функцией (см.
пример 3.1). Представляя сечение B) в форме
|dcos9"'1 G)
(i-cosemJ'
в соответствии с C.59) получим
где cos От и cos 0т определяются формулой A2) примера 3.1. Из
формулы A2) найдем
d cos 0m = — (t + ii)sin %d%, ,g.
d COS 0m = — (t — T)) Sin 02d02,
где
ДСО8в 4-
Воспользовавшись формулой G) примера 3.1, найдем пределы
изменения угла 02
о < е2 < б2тах < y
определяющего знаки т и ц и их отношение. Из A0) следует, что
(И)
>2> (
т1 пг1 г \ т
1 + (Щ2 > 1 г f-^-Vcos 202 > (^-У - 1 > 0. A2)
Легко также убедиться, что отношение х/ц изменяется от величи-
величины, меньшей, чем +1> до 0, а производная этого отношения меньше
нуля (она равна нулю только при 02 = 0).
146
Задача двух тел и теория рассеяния частиц
Гл. Ill
Учитывая сказанное, из формул (9) получим
I d cos 6m I = «
1 +
V m1 )
cos 202
l/i - (ЛИ-
"Ч
sin2 Э2
Sin62d62,
A3)
.— 2^i~COs6?
а подставляя A3) в (8), найдем
x
x
cos 202
mi
sin2 92
A4)
где Ci = 1 — cos 0W, ?2 - 1 — cos 0m.
Далее, используя формулы A2) примера 3.1, получим
= 21 A +
т1
cos2 e.
л [ fTLn
L \ ^1
' sin2
—?f = 4созв2
A5)
A6)
A7)
Наконец, подставляя A5)—,A7) в выражение A4), после ряда
преобразований :найдем дифференциальное сечение рассеяния час-
частиц, налетающих на покоящиеся до рассеяния частицы (при
условии
s(^J
а 1 + cos* 62 — I —
т
02
V
т1
sin*62
A8)
Возьмем другие начальные условия для скоростей. Пусть
частицы обоих пучков движутся навстречу друг другу с одинако-
§ 3.3 Поперечные сечения рассеяния 147
выми скоростями. Тогда функции 9m(8i) и 6т@2) определяются
третьей и четвертой формулами решения C) примера 3.2. Напри-
Например, если mi>3m2, то eos9m(9i) и cos0m@2) заданы формула-
формулами G) и (8) примера 3.2, причем cos0m(9i) в этом случае яв-
является двузначной функцией, аналогичной функции A2) примера
3.1. Поэтому, используя формулы, аналогичные формулам
G) — A8) настоящего примера, сразу найдем дифференциальное
сечение рассеяния частиц первого пучка:
sin401
2m2
(m1>3m2). A9)
Если же mi = m2, то из формулы A4) примера 3.2 и формулы B)
настоящего примера следует:
d^—=d<y2. B0)
Все полученные формулы дифференциальных сечений справед-
справедливы как в случае сил отталкивания (а<0), так и для сил при-
притяжения (а>0). Нетрудно также убедиться в том, что полное
сечение рассеяния для заряженных частиц равно +оо. Это связано
с бесконечно большим «эффективным радиусом» кулоновских
сил: при р~-^оо угол отклонения 9т весьма «медленно» стремится
к нулю.
Пример 3.6. Дифференциальное сечение рассеяния однородных
абсолютно упругих шариков.
Даны два пучка частиц, которые можно представить себе как
абсолютно упругие шарики. Первый пучок состоит из частиц мас-
массы Ш\ и радиуса аь скорость этих частиц до рассеяния относи-
относительно л-системы равна v~; те же величины для частиц второго
пучка соответственно равны m2, a2, v~. Определить сечения рас-
рассеяния частиц в л-системе.
С помощью формулы E) примера 3.4 найдем прицельное рас-
расстояние как функцию угла рассеяния в ^-системе:
— (а = а1 + а^)9 (I)
а затем из C.55) получим
da = Ji_dQ B\
148
Задача двух тел и теория рассеяния частиц
Гл. III
Следовательно, рассеяние частиц-«шариков» в системе центра масс
изотропно. Интегрируя B) по всем углам, найдем, что полное
сечение рассеяния равно о=па2 (см. C.53)).
Вычислим дифференциальное сечение рассеяния в л-системе.
Например, если частицы первого пучка до рассеяния покоятся, а
частицы второго движутся со скоростью v7, то из формулы B)
настоящего примера и формулы D) примера 3.1 найдем
do1 = a2coselflfQ1 C)
(при любом соотношении масс частиц). Для вычисления Лг2 бу-
будем исходить из формул (см. B), C.59) и формулы A0), A2)
примера 3.1):
da2 =
d cos 6/7l F2) |, если щ < m19
Тогда, используя анализ функции
мере 3.5, из D) и E) найдем
D)
doosQm(Q2)\}, если тг>п\. E)
, проведенный в при-
при1 +
т1 )
cos 20,
_ 2 ^- cos 6,
sin2 92
(пц
1-f-
cos 29o
(тг > nh).
F)
G)
Если же частицы первого и второго пучков движутся до рас-
рассеяния с одинаковыми скоростями навстречу друг другу, то следует
взять функции, полученное в примере 3.2. Используя двузначную
функцию G) и однозначную функцию A2) примера 3.2, а также
используя формулы, аналогичные формулам D) и .E) данного
примера и формулам A0) — A2) примера 3.5, найдем дифферен-
дифференциальные сечения рассеяния частиц первого пучка:
da, =
/ т, — т2 \
1+ *- М cos 20!
Y4-
2т,
(8)
sin2 01
§ зз
Поперечные сечения рассеяния
149
1+(
V'-
т1 — m2
2m2
I tTli — ^2
\ 2m2
\ 2
COS29!
— j sina6i
— /722
• cos
C/n2
т2).
(9)
Из последнего выражения заменой индексов можно получить
сечение рассеяния частиц второго пучка при условии mi>m2 (см.
формулы (8) и A2) примера 3.2).
Наконец, используя формулу B) данного примера и форму-
формулу A4) примера 3.2, найдем, что в простейшем случае, когда
da х = —dQt =
4
A0)
Глава IV
ДВИЖЕНИЕ ОТНОСИТЕЛЬНО НЕИНЕРЦИЛЛЬНЫХ СИСТЕМ ОТСЧЕТА
Как отмечалось ранее, уравнения Ньютона справедливы толь-
только в инерциальных системах отсчета. Однако на практике часто
встречаются и неинерциальные системы. Поэтому необходимо
найти уравнения движения относительно таких систем. При этом
естественно исходить из уравнений Ньютона, которые, как извест-
известно, содержат массы и ускорения материальных точек, а также
силы, действующие на них со стороны других тел. Массы точек
и время инвариантны относительно перехода от одной системы
отсчета к другой, а силы являются функциями положений и ско-
скоростей точек. Таким о!бразом, чтобы вывести интересующие нас
уравнения движения, прежде всего нужно выяснить, как преобра-
преобразуются положения, скорости и ускорения при переходе от инер*
циальной системы к неинерциальной системе отсчета. В свою оче-
очередь для решения этого вопроса следует с кинематической точки
зрения проанализировать движение одной произвольной системы
отсчета относительнб другой произвольной системы отсчета.
Кстати напомним, что в классической механике системы отсчета
мыслятся связанными с твердыми телами, поэтому кинематика
движения одной системы отсчета относительно другой эквивалент-
эквивалентна кинематике твердого тела.
§ 4.1. Положение системы отсчета
Рассмотрим положение некоторой системы отсчета S' с нача-
началом в О' и ортами IV, пу'9 п/ относительно системы 5 с нача-
началом в О и ортами пх, пу, nz (рис. 4.1). Положение начала О' от-
относительно системы S определяется вектором го', который на
основании A.1) можно задать в виде разложения по ортам си-
системы S:
Т(у = хо>пх + уо>пу + zo>nz. D.1)
Ориентацию системы S' относительно системы 5 можно задать с
помощью косинусов углов между ортами обеих систем отсчета.
§ 4.1
Положение системы отсчета
151
Однако среди девяти направляющих косинусов av\ только три
независимых, поскольку щч подчинены шести условиям ортого-
ортогональности A.4").
Часто вместо трех независимых направляющих косинусов
используют три угла Эйлера, которые вводятся следующим
образом. Построим наряду с системой S' систему Sos начало кото-
Рис. 4.1
Рис. 4.2
рой совпадает с началом О', а направления осей — с направления-
направлениями соответствующих осей системы 5 (рис. 4.1 и 4.2). Тогда ориен-
ориентация системы S' относительно системы So> совпадает с ориен-
ориентацией S' относительно S. Пересечение плоскостей О'ху и О'х'у'
определяет прямую О'?, которая называется линией узлов.
Положительное направление на этой линии задается единичным
вектором
п. = г D.2)
Углами Эйлера называют углы
Ф = ^ К» nt)> е = ^ (п2> п*')> * = ^ К» IV) D.3)
@<Ф<2хс, 0<6<я, 0<\|?<2я).
Положительное направление отсчета углов ф, 0 и \|з определяется
обычным для правых систем образом с помощью ортов nz, n^ и
tV соответственно. Например, положительным направлением от-
отсчета угла ф считается направление отсчета против часовой стрел-
стрелки, если смотреть с конца орта nz на его основание.
152 Движение относительно неинерциальных систем Гл. IV
Итак, положение одной произвольной системы отсчета S' отно-
относительно другой произвольной системы отсчета S определяется в
общем случае шестью независимыми величинами: тремя проек-
проекциями радиуса-вектора начала системы S' и тремя углами Эйлера;
углы Эйлера определяют ориентацию системы S' относительно
системы S. Этот вывод полностью относится к определению поло-
положения твердого тела, в чем легко убедиться, жестко скрепляя
«штрихованную» систему отсчета с данным твердым телом.
Рассмотрим простейший случай, когда ориентация системы
определяется одним углом. Пусть, например, iv параллелен п.,
т. е. пусть угол 0 = 0. Тогда плоскость О'х'у' совпадает с плос-
плоскостью О'ху я линию узлов можно провести по любой прямой,
проходящей через О' в плоскости О'ху. Например, совмещая
линию узлов с осью О'х' (т. е. полагая -ф = 0), убеждаемся, что
ориентация .системы действительно определяется одним углом ср.
В этом случае
ах>х = ау>у = cos ф, аХ'У = — аух = sin <p,
Clz'z = 1, 0>x'z = Cty'z = Clz'y = 0,
а формулы преобразования ортов сводятся к формулам
пх> = nx cos ф + ПУ s^ ф,
4- п^соэф, D.4)
Матрица такого простейшего ортогонального преобразования
имеет вид
cos ф sin ф О
- sin ф cos ф О
D.5)
0 0 1
-а ее элементы подчинены условиям (см. A.4")):
<&>х + dy'x = 1, (&'у + а2у'у = 1,-
пх'х dx'y + аух аУ'У =0. D.6)
В общем случае матрица А ортогонального преобразования
A.4') определяется тремя углами Эйлера. Выражение коэффи-
коэффициентов Яг/j через углы Эйлера нетрудно получить, если заметить,
что преобразование от системы So* к системе S' может быть вы-
выполнено тремя последовательными ортогональными преобразова-
преобразованиями типа D.4), совершаемыми в определенном порядке, при-
причем соответствующие этим преобразованиям повороты опреде-
определяются углами Эйлера.
§ 4.1
Положение системы отсчета
153
Действительно, перейдем от системы So, к первой промежуточной системе
0%цг, у которой ось О'? совпадает с линией узлов системы S\ а ось Orz совпа-
совпадает с такой же осью системы SQ, (см. рис. 4.3,а). Система O'\\\z может быть
получена из системы Sq, поворотом последней на угол ср вокруг оси O'z в по-
положительном направлении. Согласно D.4) преобразование от Sq> к O'\x\z и его
матрица D определяются формулами
щ = nrcosq) + n^sincp,
пц = — пА sin ф -f пу cos ф,
cos ф sin ф О
— sin ф cos ф О
О 0 1
Теперь перейдем от системы O'%x\z ко второй промежуточной системе -О'^'г',
у которой ось OV совпадает с той же осью системы 5', а ось CKg совпадает с
той же осью первой промежуточной системы 0%цг (рис. 4.3,6). Вторая проме-
промежуточная система О'^ц'г' может быть получена из первой системы 0%цг пово-
поворотом на угол 6 вокруг оси 0% (в положительном направлении). Преобразова-
Преобразование от первой ко второй промежуточной системе согласно D.4) имеет вид
Щ = п^,
пЛ' = nn cos 6 Ч- n2 sin 6,
п2г = —г\ц sin 6 -f n2 cos 6,
а матрица С этого преобразования равна
п ,
1
0
0 -
0
cos 6
-sin6
0
sine
cose
154
Движение относительно неинерциальных систем
Гл. IV
Наконец, перейдем к системе S'. Она может быть получена поворотом второй
промежуточной системы O'%v)'z' на угол 9 вокруг оси O'z' в положительном
направлении (рис. 4.3,в). Орты системы S' связаны с ортами предыдущей систе-
системы соотношениями
tV = n^cos \f> + щ> sin i|),
nyf =, — n^sin я|) + пЛ' cos \(
nz> =n2',
а матрица этого преобразования равна
cos -ф sin i|) О
О
B =
sin i|? cos -
О 0
1
Все прийеденные формулы дают возможность выразитьп^, п^>, x\z, через пх, пу>
nz и углы Эйлера и тем самым определить матрицу преобразования A.4') через
независимые величины. Эта матрица может быть также получена перемножением
матриц В, С, D в порядке, сооответствующем последовательности поворотов на
углы ф, 9, i|r.
Запишем в окончательном виде матрицу преобразования от системы So, к си-
системе S':
е S:
Icos г|) cos ф — cos 9 sin <p sin i|) cos \|з sin ф + cos 9 cos cp sin ф sin \f> sin 9
— sin ф cos ф — cos 9 sin ф cos ф — sin ф sin ф -j- cos 9 cos ф cos ф cos ф sin 9
sin 0 sin ф — sin 9 cos ф cos 9
D.7)
Обратное преобразование от системы S7 к системе So, выра-
выражается формулами A.5")- Матрицу этого преобразования, обратную по отноше-
отношению к Л, обозначают символом Л. Матрица Л получается из матрицы А за-
заменой строк на столбцы, т. е. является траспонированной по отношению
к Л. Транспонированную матрицу обозначают символом Л. Таким образом, для
ортогональной матрицы Л имеем A~i=A.
§ 4.2. Поступательное движение и изменение ориентации
системы отсчета
Из предыдущего видно, что положение «штрихованной» систе-
системы относительно «нештрихованной» будет определено в любой
момент времени, если г0/, ф, 0, г|? заданы как функции времени.
§ 42
Поступательное движение и изменение ориентации
155
Рассмотрим два вида движения системы: поступательное
движение и изменение ориентации. В случае посту-
поступательного движения ориентация системы S' относительно систе-
системы S остается неизменной. Это означает, что остаются неизмен-
неизменными направления ортов tv, пу>, iv, т. е. сохраняют постоян-
постоянное значение косинусы a/j (или углы Эйлера). Следовательно,
1^=1^=^=0. D.8)
Таким образом, поступательное движение системы S' определяется
движением ее начала О', т. е. функцией r0' (t), а все точки твер-
Рис. 4 4
дого тела, скрепленного с системой S', движутся с одинаковыми
скоростями и ускорениями по траекториям, которые могут быть
получены друг из друга параллельным смещением. Действитель-
Действительно, радиусы-векторы гиг' любой точки твердого тела относитель-
относительно систем S и S' связаны соотношением A.6), причем абсолют-
абсолютная величина вектора г' постоянна при произвольных перемеще-
перемещениях твердого тела, а его направление относительно системы S
неизменно только при поступательном движении тела (см.
рис. 4.4, на котором изображены два положения твердого тела
при поступательном движении). Дифференцируя A.6) по времени
и учитывая постоянство г', получим
v = vo', w = w0'. D.9)
Другим частным случаем движения системы отсчета (твердого
тела) является изменение ориентации при неизменном положении
156
Движение относительно неннерциальных систем
Гл. IV
начала системы S'. В этом случае го> — постоянный вектор, а орты
«штрихованной» системы (косинусы arj и углы Эйлера) являют-
являются функциями времени. Анализ этого вида движения основывает-
основывается на простой, но важной теореме Эйлера, в которой утвер-
утверждается: если относительно некоторой системы отсчета S твердое
в
Рис. 4.5
тело имеет одну неподвижную точку, то перемещение твердого
тела из любого положения в любое другое положение может быть
совершено одним поворотом на определенный угол вокруг опреде-
определенной оси, проходящей через неподвижную точку тела.
Доказательство этой теоремы основано на неизменности рас-
расстояний между всеми точками твердого тела. Пусть система S'
жестко соединена с твердым телом, а ее начало О' находится в не-
неподвижной точке тела. Очертим вокруг точки О' жестко соединен-
соединенную с твердым телом сферу единичного радиуса, отметив на ней
концы ортов iv, п2' и соединив эти концы дугой х'г' большого
круга. Положение этой дуги определяет положение твердого тела
(или системы S'). Следовательно, произвольные положения 1 и 2
тела можно задать двумя положениями X\Z\ и x2Z2 дуги x'zr
(рис. 4.5, а и б).
§ 4.2 Поступательное движение и изменение ориентации 1_57
Чтобы доказать теорему Эйлера, нужно убедиться в том, что ду-
дуга Х\2\ может быть совмещена с дугой x2z2 одним поворотом, указать
способ нахождения оси и угла поворота. Соединим точки Xifx2 и
точки Z\t z2 дугами больших кругов (рис. 4.5, б), а через середины
дуг х\х2 и Z\z2 проведем перпендикулярные к ним. дуги больших
кругов до пересечения их друг с другом в точках аир. Стороны
X\Z\ и x2z2 сферических треугольников Д(.ада) и Д (х2г2 а)
(рис. 4. 5, в) равны, так как это одна и та же дуга в различных
положениях, а стороны х[а и х'2а равны по построению точки а,,
лежащей на дуге, проведенной через середину основания Х\х2 тре-
треугольника A(xix2a). Равны друг другу также стороны Z\a н z2a.
Таким образом, сферические треугольники^ Д (х\ Z\ а) и Д (х2 z2 a)
равны и, следовательно, равны углы ^ X\az\ и ^ x2az2. Поэтому угол
между дугами г[а и z'2a равен углу между дугами х[а их2а, Итак,
если твердое тело (систему S') повернуть из положения 1 вокруг оси
О'а на определенный угол ^х[ах2 (или равный ему ^Z\az2)t то
твердое тело (система отсчета) переместится в положение 2. По-
Поскольку положения 1 и 2 выбраны произвольно, теорема Эйлера
доказана.
Подчеркнем, что теорема Эйлера справедлива для поворотов
как на конечные, так и на бесконечно малые углы. Однако сами
эти повороты отличаются друг от друга: результат двух поворотов
на конечные углы, вообще говоря, зависит от последовательности
этих поворотов, в то время как результат двух любых беско-
бесконечно малых поворотов с точностью до бесконечно малых
величин высшего порядка не зависит от их последовательности.
Проиллюстрируем это на примере поворотов твердой квадратной
пластинки (рис. 4.6). Сначала повернем ее вокруг оси O'z' на
я/2, а затем вокруг оси О'х' также на я/2 (рис. 4.6,а). После
этого изменим последовательность поворотов: повернем пластин-
пластинку сначала вокруг оси О'х' на я/2, а затем вокруг O'z' на л/2
(рис. 4.6,6). Как видно, результат одних и тех же поворотов на
конечные углы является различным в зависимости от последова-
последовательности поворотов *.
Теперь проанализируем бесконечно малый поворот. Пусть
твердое тело (система S') обладает одной неподвижной точкой О'.
Положение этого тела в момент времени / определяется углами
* В связи с этим говорят: операция поворота на конечный угол неком-
некоммутативна. Этому соответствует некоммутативность умножения матриц
конечных поворотов. Например, на с. 154 преобразование Л от системы «So,
к системе S' было получено как результат трех ортогональных преобразова-
преобразований В, С и Д примененных в определенном порядке. Соответственно А равня-
равнялось некоммутативному произведению BCD.
158
Движение относительно неинерциальных систем
Гл. IV
z'k
о'
i
1
У
/ос*
Эйлера ф, 8, ф, а положение того же тела в момент времени
t + dt — углами ф + йф, Q + dQy a|) + di|). Это означает, что орты пх\
п/, iv, т. е. орты системы S', занимающие в момент t соответст-
соответствующие положения, в момент t + dt получают определенные при-
приращения dnx', dny>, dnz> (рис. 4.7). Согласно теореме Эйлера
перемещение тела (системы S') из первого положения во второе
можно совершить одним поворотом на определенный угол d%
вокруг определенной оси, проходящей через О'. Рассматриваемый
бесконечно малый поворот в отличие от конечного поворота можно
задать вектором
dx = dx-nx; D.10)
модуль этого вектора равен углу поворота d%\ прямая, на которой
расположен вектор, является осью вращения, а направления* век-
вектора dx и соответствующего единичного вектора п% выбраны так,
чтобы поворот казался совершаемым против часовой стрелки, если
смотреть с конца вектора dx на неподвижную точку О'. В общем
случае величина и направление вектора dx могут изменяться со
временем. Поэтому ось бесконечно малого поворота, определяе-
определяемую вектором dx, называют мгновенной осью вращения.
Нетрудно найти приращение любого жестко связанного с систе-
системой S' вектора, которое он получает в результате поворота системы
§ 4.2
Поступательное движение и изменение ориентации
159
S' на угол d% вокруг %. Например, учитывая, что приращение орта
IV перпендикулярно к плоскости, образуемой dx и пх>, величина
приращения div равна d%-sin(nx, пх>) (см. рис. 4.7), приращение
dnx' можно представить в виде
dn^-[dx IV], D.11)
Аналогично для приращений dny' и div, [полученных в результате
того же поворота, имеем
dny = [dX tv], dnz> = [dX tv]. D.12)
Для любого вектора г', жестко скрепленного с системой S', найдем
r'J.
D.13)
dX.
dtiyt
Формула D.13) позволяет непосредственно убедиться в том,
что результат двух бесконечно малых поворотов не зависит от их
последовательности. В самом де-
деле, совершая два поворота радиу-
радиуса-вектора г7 какой-либо точки
твердого тела в разной последо-
последовательности, для вектора конеч-
конечного положения выбранной точ-
точки получим * , ^у~ угпу'
или
r'+[(dX2 Idx^r'
где dxi и d/2—векторы рассматри- Рис. 4.7
ваемых поворотов. Два по-
последних выражения совпадают с точностью до бесконечно малых
высшего порядка по величинам d^i и d%2. В связи с этим еще раз
подчеркнехМ, что для конечного поворота нельзя написать опре-
определение, аналогичное D.10), так как конечный поворот некомму-
некоммутативен, а сложение векторов должно быть коммутативной опера-
операцией. Поэтому вектор бесконечно малого поворота был обозначен
d/, а не d% (вектора % не существует!).
Угловую скорость или скорость изменения
ориентации системы S' относительно системы S
160
Движение относительно неиыерциальных систем
Гл. IV
определим как вектор со, равный
отношению вектора d% к прира-
приращению времени:
со =
dt
D.14)
Если система S' (твердое тело)
вращается с угловой скоростью со,
то концы базисных векторов tv,
гу и iv движутся относительно
системы S с линейными скоростя-
скоростями, соответственно равными (см.
D.11) и D.12))
пх> = [coiv], iy = [ону], iv == [coiv].
D.15)
Угловая скорость ю связана со значениями углов Эйлера и их
производными по времени. Установим эту связь, учитывая прежде
всего, что в результате поворота, который изображается векто-
вектором d/, углы Эйлера получают приращения Лр, dQ и d\j), а ука-
указанное изменение ориентации может быть получено также тремя
поворотами, осуществленными в любой последовательности, а
именно поворотами вокруг nz на Лр, вокруг гц на dQ и вокруг
*V на rf\|). Следовательно, вектор поворота d% равняется сумме
трех векторов:
d^ = n/kp + n^d6 + ftz'dty, D.16)
а угловая скорость может быть задана в виде
to = фп2 + 6п| + ^*V- D.17)
Найдем разложение со по ортам системы S'. Для этого умно-
умножим D.17) скалярно на iv, ny' и п2' соответственно и выразим
необходимые скалярные произведения ортов через углы Эйлера.
Например, проектируя орт nz на плоскость О'х'у', получим отре-
отрезок, перпендикулярный к линии узлов и равный по величине sin 8
(см. рис. 4.2 и 4.8). Проектируя далее этот отрезок на ось О'х' и
ось О'у' соответственно, найдем (см. также цатрицу D.7))
= sin 6 sin -ф,
= sin 6 cos if).
Кроме того, из определений углов Эйлера D.3) и линии узлов
D.2) вытекает (см. рис. 4.2), что
n2tv = cos 6, щпг> = 0,
ЩПХ> = COS Я|), 1Му = — Sin 1|3.
§ 4.2 Поступательное движение и изменение ориентации 161
Используя полученные выражения, а также то, .что базис систе-
системы S' ортонормирован, находим проекции угловой скорости на
оси системы S':
ov = f^iti \|)Sin 0 + 6 cos i|),
ay = ф сое г|) sin 0 — 6 sin \|),
ф. D.18)
Аналогично, умножая D.17) скалярно на пх, пу, nz соответствен-
соответственно и учитывая, что базис 5 ортонормирован, получи-м разложе-
разложение о по осям системы S:
(ох = 0 cos Ф + \|э sin 0 sin ф,
(ду = 0 Sin ф — ф Sin 0 COS ф?
D.19)
Формулы D.18) и D.19) называются кинематическими
формулами Эйлера; они устанавливают связь угловой ско-
скорости со значениями углов Эйлера и их производными по вре-
времени.
Угловая скорость, так же как и вектор d% бесконечно малого
поворота, в общем случае изменяется и по величине, и по направ-
направлению. Приведем выражения модуля угловой скорости
со = (<fJ + 02 + \jJ + 2<рф cos 0I/2 D.20)
и одного из направляющих косинусов мгновенной оси вращения
Фsinij)sin9 + 8 cosг|) /л vi\
ах'а>=—: : : т^ -—У**Ч
Пример 4.1. Регулярная прецессия твердого тела.
Углы Эйлера, определяющие положение твердого тела (систе-
(системы S7) относительно системы 5, заданы как функции времени:
ф = фо?, 6 =
О,
Определить законы движения оси О'г' и мгновенной оси враще-
вращения твердого тела.
Используя условие и формулы D.18), D.19) и D.20), полу-
получим
GV - ф0 sin 0О sin %t9 ®х = -фо si« % sin Фо^»
в Зак 284
162
Движение относительно неинерциальных систем
Гл. IV
оу == ф0 sin 60 cos %t,
ду = — ф0 sin 80 cos q>0*,
со2, = ф0 cos 60 + \j?0, <°2 = Фо + я|H cos 0О.
со2 = Фо + $) + 2фо^о cos 60 = (Оо.
Отсюда ясно, что в рассматриваемом примере величина угловой
скорости и ее проекции на оси O'z, O'z' сохраняются и, следова-
следовательно, углы между со и этими
осями постоянны. Кроме того,
мгновенная ось вращения все
время находится в плоскости
O'zz' или, иначе говоря, со и ли-
линия узлов все время перпенди-
перпендикулярны друг " другу. Действи-
Действительно, из определений углов Эй-
Эйлера и линии узлов следует, что
ri? = пх> cos г|) — щ> sin i|)
(см. также рис. 4.2). Используя
это разложение и разложение о>
по осям системы S\ убедимся,
что скалярное произведение
<о rig равно нулю.
Таким образом, система S' изменГяет свою ориентацию отно-
относительно S с постоянной (по величине) угловой скоростью
(рис. 4.9). Мгновенная ось вращения системы S7 сама вращается
вокруг оси O'z с угловой скоростью фо будучи наклоненной под
постоянным углом 01 к этой оси; косинус угла 0i равен (со с
D.21)): F'
Рис. 4.9
Фо + % cos Go
COS §г =
Ось OV также вращается с угловой скоростью <р0 вокруг оси O'z,
так как она в любой момент времени находится в одной плоскости
с вектором со и осью O'z. Описанное движение твердого тела
(или системы отсчета, жестко связанной с ним) называется регу-
регулярной прецессией, а угловая скорость ф0 — скоростью
прецессии.
§ 4.3. Общий случай движения системы отсчета
В случае произвольного движения твердого тела и жестко
связанной с ним системы отсчета как радиус-вектор ее начала г<г.
§ 4.3 Общий случай движения системы отсчета 163
так и ее орты (косинусы а г/ и углы Эйлера) являются функция-
функциями времени. Покажем, что любое перемещение твердого тела и
жестко связанной с ним системы S' всегда можно представить как
совокупность поступательного перемещения и изменения ориента-
ориентации с осью поворота, проходящей через начало системы S'.
Действительно, рассмотрим положения 1 и 2 системы S' в мо-
моменты времени t и t + dt соответственно (см. рис. 4.1 и 4.10,а).
Рис. 4.10
Перемещение системы из положения 1 в положение 2 мысленно*
можно произвести двояким образом. Например, можно «сначала»
совершить такой поворот d% вокруг оси, проходящей через О и
в результате которого орты S' будут ориентированы так же, как
и в положении 2 (такой поворот по теореме Эйлера всегда возмо-
возможен); «затем» эту сориентированную систему следует перенести
поступательно до совмещения с положением 2 (это перемещение
характеризуется dvo> — перемещением начала системы S' — см.
рис. 4.10,6). Изменяя последовательность этих операций, можно
«сначала» поступательно перенести систему до совмещения О
с О2, а «затем» совершить тот же поворот d% вокруг оси, парал-
параллельной оси поворота в первое случае, но проходящей через О 2
(слова «сначала» и «затем» не имеют здесь временного смысла).
Учтем далее, что при поступательном движении приращения
dtix'—dtiy' = dnz' = 0 (см. D.8)). Поэтому из вышесказанного
следует, что в общем случае изменение ортов системы S' относи-
относительно системы 5 связано с вектором поворота &% так же, как в
том случае, когда начало О' остается неподвижным относительно
системы S. .Таким образом, выражения D.15) для производных
от единичных векторов и разложения угловой скорости D.17),
D.18) и D.19) имеют место и в общем случае.
Указанное выше разложение движения тела на поступатель-
поступательное и вращательное можно осуществить бесконечным числом
способов: любую точку твердого тела можно взять за начало О\
164
Движение относительно неинерциальных систем
Гл. IV
а ортам системы S' можно задать любую ориентацию, лишь бы
все эти «штрихованные» системы были жестко связаны с данным
твердым телом. Однако у ,разных точек твердого тела различное
положение и, вообще говоря, различные перемещения по отноще-
нию к определенной системе S. Следовательно, функция гс@>
характеризующая поступательное движение твердого тела, зависит
2
+-Z
Рис. 4.11
от выбора начала системы S'\ что касается вектора поворота
и угловой скорости со @» то эти функции для данного твердого
тела в его движении относительно данной системы отсчета S не
зависят от выбора системы S', жестко связанной с телом, причем
ось поворота всегда будет проходить через выбранное начало
«штрихованной» системы, т. е.
г о' (t) т/Ьго" (t), <*>о' @ ~ юо*@- D.22)
Проиллюстрируем D.22) на примере квадратной пластинки,
перемещающейся параллельно своей плоскости из положения /
в положение 2 (см.. рис. 4.11, на котором плоскость пластинки
совпадает с плоскостью Оху). Это перемещение можно разложить
на отличающиеся, друг от друга поступательные перемещения и,
как убедимся, одно и то же вращение вокруг параллельных
осей, проходящих через различные точки. В самом деле, введем
системы S' и S", жестко связанные с пластинкой. Ориентация си-
системы S" относительно S' неизменна. Следовательно, угол между
осями O'xf и О"х" при любом положении пластинки остается по-
* / № I II
стоянным и, таким образом, ^.Х\Х\ = ^:х2х2 (рис. 4.11,в).
Поэтому угол поворота -^ х[ х2 равен углу поворота ^х[хл
Что касается осей поворота, то они совпадают с осями О'г' и
О"г", т. е. параллельны между собой и проходят через О' и О"
§ 4.4 Скорость и ускорение точки в разных системах 165
соответственно. Итак, в частном случае свойство D.22) действи-
действительно имеет место. Нетрудно провести и аналитическое доказа-
доказательство D.22) в общем случае, основываясь на том, что все
«штрихованные» системы, жестко связанные с данным твердым
телом, сохраняют ориентацию по отношению друг к другу.
§ 4.4. Положение, скорость и ускорение материальной точки
относительно разных систем отсчета
Выводы последних трех параграфов позволяют ответить на
вопрос: как связаны между собой положения, скорости и ускоре-
ускорения материальной точки, рассматриваемые относительно различ-
различных произвольных систем отсчета? В свою очередь ответ на этот
вопрос необходим для вывода уравнений движения относительно
неинерциальной системы.
Пусть г является радиусом-вектором материальной точки от-
относительно системы S, а г' — радиусом-вектором той же точки
относительно системы S'. Зададим г в виде разложения A.1) по
осям системы S. Вектор г0' также разложим по осям этой си-
системы:
г0' = хо>пх + уо> пу + zo> n2, D.23)
аг' — по осям системы S':
г' = х'п** + у'щ> + г'ть-. D.24)
В классической механике между векторами гиг7 имеет место
соотношение A.6), которое с учетом A.1), D.23) и D.24) можно
записать в виде
(х — хо>) пх + (у — у о^) пу +[{г — го>) п2 = х'пх> + у'пу> + г'пг>.
D.25)
Подставляя A.5") в D.25), получим выражения «штрихованных»
координат через «нештрихованные», т. е. выражения вида A.4х)
с матрицей коэффициентов А. Если же в D.25) выразить
пх>, iv, п2' через пх, пу9 п2, то найдем преобразование
х — хо> = аХ'Хх' + пу>ху' + аг'хг\
У — Уо>= ах>у х' + ау>у у' + агу г',
г — 2(у = а^х' + пугу1 + пГгг\ D,26)
определяемое матрицей А~\ обратной по отношению к матрице А.
Теперь рассмотрим движение материальной точки. В общем
случае точка движется как относительно системы 5, так и отно-
относительно системы S\ причем сами системы S и S' также могут
166 Движение относительно неинерциальных систем, Гл. IV
двигаться относительно друг друга. Для определенности будем
рассматривать движение относительно S. Тогда орты системы S
следует считать постоянными, т. е. не зависящими от времени, а
радиус-вектор го' и] орты iv, ny>9 пг> следует считать функция-
функциями времени. В связи с этим систему, относительно которой рас-
рассматривается движение, часто называют «неподвижной», а движу-
движущуюся относительно нее систему — «подвижной» (условность этой
терминологии очевидна).
Получим соотношение между скоростью точки, с которой она
движется относительно системы 5, и скоростью той же точки, с ко-
которой она движется относительно системы S'.
Как известно, скорость точки относительно S равна производ-
производной по времени от радиуса-вектора точки при постоянных ортах
этой системы (см. A.9) и A.12)). Если же продифференцировать
по времени г' при постоянных «штрихованных» ортах, то прлучим
скорость той же точки, но относительно системы S':
v' = -^- = х'пу, + у'пх> + г'пг>, D.27)
at
где
at.
Используемые в D.27) символы и означают производ-
dt dt
ные по времени при постоянных «штрихованных» и «нештрихован-
ных» ортах соответственно.
Дифференцируя соотношение A.6) по времени при постоянных
ортах пх, пу, nZ; найдем
Согласно A.9) — является скоростью точки относительно S, а
dt
скооостью начала системы S' относительно S. Производная
at
же —-— не является скоростью точки относительно системы S', так
at
как ее следует брать, учитывая зависимость пх>, ry, rv от времени,
т. е. учитывая вращение S' относительно S:
-*L— = x'hx> + y'hy + z'nz> + x'nx + у'пу + *z'nz>t D.29)
Первые три ^члена правой части D.29) связаны с изменением
ориентации системы S' относительно S. Используя D.15), их сум-
сумму можно представить в виде
§ 4.4 Скорость и ускорение точки в разных системах» 167
[со (х'пх> + у'щ> + г'пж>)] = far']. D.30)
Сумма вторых трех членов правой части D.29) согласно D.27)
равна скорости точки относительно S'. Таким образом, «нештрихо-
ванная» производная от г' по времени равна
-*L = [m']+j*iLm D.31)
dt J dt v '
Подставляя D.31) в D.28), получим интересующее нас соотноше-
соотношение между v — скоростью материальной точки относительно систе-
системы S и v7 — скоростью той же точки относительно системы S':
v^vo' + far'J + v'. D.32)
Здесь vo' и со — скорость начала и угловая скорость системы S'
относительно системы S соответственно, аг' — радиус-вектор ма-
материальной точки относительно системы S'. Сумму \о> + far']
называют переносной скоростью vh точки. Она представ-
представляет собой скорость точки, жестко связанной с системой S' и сов-
совпадающей в данный момент времени с рассматриваемой мате-
материальной точкой. В самом деле, для такой скрепленной с S' точки
скорость Vх=0, а скорость относительно S равна
v - \<у + far']. D.33)
В связи с этим соотношение D.32) можно представить в виде
v = vb + v'. D.34)
Если точка жестко скреплена с системой S', движущейся
поступательно, то v'=0, co = O и, следовательно, D.32) перейдет
в первое из соотношений D.9). Если точка жестко скреплена с
системой S', начало которой покоится относительно системы S, то,
полагая v' = 0 и vc = 0, из D.32) получим
v - far'] D.35)
(ср. с. D.13))."
Найдем соотношение между ускорениями точки относительна
систем 5 и S'. Ускорение w точки относительно системы 5 полу-
получим, дифференцируя по времени скорость точки при постоянных
«нештрихованных» ортах (см. A.10) и A.13)). Если же продиф-
продифференцировать D.27) по времени при постоянных «штрихованных»
ортах, то получим ускорение той же точки, но относительно си-
системы S':
w' - -^ - *Ч- + у'щ- + z'lV, D.36)
dt
168 Движение относительно неинерциальных систем Гл. IV
где
* dt* ' У dt* ' * dt* '
Связь ускорений w и w' найдем, продифференцировав D.32) при
постоянных ортах nx, ny, nz:
*^ I ГХ] + J*l. D.37)
dt J L Л J <# Ч ;
Здесь согласно A.10) и есть ускорения точки и нача-
dt dt
ла Ог относительно системы 5.
Теперь заметим, что для любого вектора а7, заданного в виде
разложения по ортам системы S', вращающейся относительно сис-
системы S, имеет место следующее соотношение между «штрихован-
«штрихованной» и «нештрихованной» производными:
JL 4- -^ D.38)
dt v ;
dt l J dt
(вывод этого соотношения аналогичен выводу D.31), так как в
D.31) не предполагалось, что г7 является именно радиусом-векто-
радиусом-вектором точки) *.
Полагая в D. 38) вектор г! равным <о и у', получим
d(o __ d'ta
dt ~~ dt *
Наконец, из соотношения D.37); подставляя в него D.31), D.39)
и используя определения
dv , d'v' , d'vr
W v = И w' =
dt dt dt
* Из D.38) следует, что различие «штрихованной» и «нештрихованной»
производных исчезает при поступательном движении «штрихованной» системы.
Действительно, если <о=0, то
da' d'a'
dt dt
Отметим еще одно следствие, вытекающее из D.38): проекция производной век-
вектора на подвижное направление не равна производной от проекции вектора на
то же направление, например
db!
(-f"LeI"^ + "
dt ' dt
§ 4.4 Скорость и ускорение точки в разных системах 169
найдем искомое соотношение между w и w' — ускорениями точки
относительно систем отсчета S и S' соответственно:
w = wo- + [tor'] + [<*> К']] + 2 [tov'J + w'; D.40)
здесь. We, <о и со — ускорение начала О', угловая скорость и угло-
угловое ускорение системы S' относительно системы 5 соответственно;
г' и v/ — радиус-вектор и скорость материальной точки относи-
относительно системы S'. Сумму первых трех членов правой части D.40)
называют переносным ускорением wh точки. Оно пред-
представляет собой ускорение точки, жестко 'связанной с системой S' и
совпадающей в данный момент времени с рассматриваемой мате-
материальной точкой. Действительно, для такой связанной с S' точки
v/=0 и w' = 0, т. е. ее ускорение относительно S равно
w = wo* + [<*>г'] + [со [tor']]. D.41)
•
Часть [юг'] переносного ускорения отлична от нуля лишь при не-
неравномерном вращении, другая же часть [<о[<ог']] всегда направ-
направлена перпендикулярно к мгновенной оси вращения и по величине
равна со2р, где р — расстояние от оси вращения до точки.
Итак, переносное ускорение связано с ускоренным движением
системы S' относительно системы S, а ускорение w' связано с
движением точки относительно S'. Что касается ускорения 2[cov/],
то оно появляется в результате как изменения ориентации S7 от-
относительно S, так и движения точки относительно S'. Это уско-
ускорение называется кориолисовым (или поворотным)
ускорением и обозначается wc. Оно исчезает в трех случаях:
1) при жестком скреплении точки с системой S' (v'=0); 2) при
поступательном движении S' (со = 0) и 3) при движении точки па-
параллельно угловой скорости (collv').
В заключение, используя введенные обозначения, представим
соотношение D.40) в виде
w = wh + wc + w', D.42)
где
wh = wo- + [wr'] + [to [eor']], wc = 2 [cov'J.
Пример 4.2. Положение, скорость и ускорение точки относи-
относительно движущейся системы отсчета.
Относительно системы S материальная точка движется в пло-
плоскости Оху по окружности радиуса а2 с угловой скоростью соь
Определить закон движения точки относительно системы S'y если
начало О' этой системы движется по окружности радиуса ах с
постоянной угловой скоростью (Oi относительно системы 5 (пло-
(плоскость окружности совпадает с плоскостью Оху, оси Ог и O'z*
170
Движение относительно неинерциальных систем
Гл. IV
параллельны), а угол <р между осями О'х' и О'х равняется со?, где
со постоянно; см. рис. 4.12, а.
Согласно условию движение системы S' относительно S описы-
описывается функциями (см. D.17))
Х(у = аг (пх cos ®xt + ny sin ©^),
to = conz, ф = ©?, 6 = 0, \|)=0,
а законом движения точки относительно S является
г = а2 (nx cos ©!* + n^ sin ©^).
Рис. 4.12
Используя соотношение r = ro'+r', получим разложение вектора
г' по ортам системы S:
г' «= (а2 — ах) (n^ cos со^ + пу sin со^).
Отсюда с помощью преобразования
п^ = пх> cos at — щ> sin cot, пу = Пл;' sin coi + щ> cos со^
найдем разложение вектора г' по ортам системы S':
где
я' = (а2 — аг) cos (со1 — ©) ?, у' — (а2 — ах) sin (©х — со) t.
Из этих формул видно, что относительно S' точка движется по
окружности радиуса а2—п\ с постоянной угловой скоростью
о/—© (рис. 4.12,6). Дифференцируя г' по времени при постоян-
постоянных ортах iv и IV, получим скорость v' точки и ее ускорение w'
относительно S':
§ 4.5 Силы инерции 17]
Нетрудно убедиться, что скорости точки относительно S и S' и ее
переносная скорость направлены по "линии, перпендикулярной ра-
радиусу-вектору точки г, а ускорения точки относительно 5 и S\ ее
переносное и кориолисово ускорения направлены вдоль радиуса-
вектора (рис. 4.12,в).
§ 4.5. Уравнение движения материальной точки относительно
неинерциальной системы отсчета; силы инерции
Пусть некоторая система отсчета S является инерциальной
системой, а некоторая другая система S' движется относительно
S произвольным, но известным образом. Получим уравнение дви-
движения точки относительно системы S'.
Относительно инерциальной системы 5 движение точки подчи-
подчинено уравнению движения Ньютона:
Векторы • o/h и q7c называются переносной и корио-
лисовой силами инерции соответственно, а часть перенос-
переносной силы, равная —т[со[юг']], называется центробежной
силой инерции (о свойствах этого вектора см. с. 169).
Уравнение D.43) является уравнением движения
материальной точки относительно неинерциаль-
ной системы отсчета S'. В самом деле, будем считать си-
172 Движение относительно неинерциальных систем Гл. IV
лу F известной функцией радиуса-вектора и скорости точки отно-
относительно системы S', а движение S' относительно S заданным.
Следовательно, известны радиус-вектор г0' начала системы S'
и ее угловая скорость to, a w<?' — ускорение начала %О' — и
угловое ускорение со могут быть определены как функции времени
дифференцированием. В этом случае вся правая часть уравне-
уравнения D.43) является заданной функцией г', v' и t. Далее, пусть
система S' движется ускоренно по отношению к инерциальной
системе, т. е. выполняется хотя бы одно из условий
ыфО. D.44)
Тогда какая-либо из сил инерции oth или 3е или обе они вместе
будут отличцы от нуля и, следовательно, будет отлично от нуля
ускорение изолированной точки относительно S' (см. определение
неинерциальной системы на с. 36). Таким образом, уравнение
D.43) действительно является уравнением движения материаль-
материальной точки относительно неинерциальной системы отсчета.
Ускорение материальной точки относительно неинерциальной
системы отсчета возникает под действием силы F со стороны опре-
определенного тела (»или тел), а также в результате ускоренного дви-
движения системы S/ no отношению к инерциальной системе S. Уско-
Ускорение материальной точки, связанное с ускорением неинерциаль-
неинерциальной системы отсчета по отношению к инерциальной системе, мож-
можно трактовать как результат действия сил инерции. Для этих сил
нельзя указать источник в виде определенного тела, действующего
на данную материальную точку. Поэтому данная сила инерции не
имеет соответствующей ей противодействующей силы, иначе
говоря, силы инерции, в отличие от сил взаимодействия, не под-
подчинены третьему закону Ньютона.
Рассматривая уравнение движения Ньютона, уравнение D.43)
и принцип относительности Галилея, можно убедиться в том, что
инерциальные системы являются преимущественными по сравне-
сравнению с неинерциальнымьи системами. В самом деле, силы инерции
определены, если известны векторы w0' и <&, характеризующие
движение неинерциальной системы относительно инерциальной.
Кроме того, уравнение движения точки под действием сил со сто-
стороны определенных тел справедливо в любой инерциальной систе-
системе отсчета, т. е. уравнения движения относительно инерциальной
системы в указанном смысле имеют абсолютный характер. С дру-
другой стороны, уравнения движения точки под действием сил со
стороны определенных тел, вообще говоря, различны в разных
неинерциальных системах отсчета (поскольку для этих систем
различны ускорение начала w0' и угловая скорость со).
Пример 4.3. Уравнение движения точки относительно Земли,
Найти уравнение движения точки около поверхности Земли
относительно Земли.
§ 4.5 Силы инерции 173
Пренебрегая воздействием планет солнечной системы на дви-
движение Солнца (см. пример 2.9), примем в качестве инерциаль-
ной системы отсчета систему 5 с началом О в центре инерции
Солнца и осями, направленными на «неподвижные» звезды. Отно-
Относительно этой системы центр инерции Земли движется по эллипсу
под действием силы притяжения со стороны Солнца. Кроме того,
Зехмля наменяет свою ориентацию относительно 5 с угловой ско-
скоростью <о, которую можно считать практически постоянной и рав-
равной по величине 2я/B4-3600) рад в звездную секунду или прибли-
приближенно равной 7,3-10 с-1 [41, § 12, 16].
Введем жестко связанную с Землей систему S' с началом О'
в центре инерции Земли. Уравнение движения точки относительно
этой системы имеет вид
msNf = F — mwo' — пг [со [tor']] — 2т [wv'].
Теперь учтем, что на точку действуют силы притяжения со сто-
стороны Земли и Солнца, а также другие силы, например сила со-
сопротивления атмосферы Земли. Обозначим указанные силы через
Fo', Fo и Ф. Тогда
где силы притяжения Земли и Солнца соответственно равны
~ тто' , ~ тто
F F
(здесь то>—масса Земли, т0 — масса Солнца, г' и г — радиусы-
векторы точки относительно S' и 5).' Учитывая, что ускорение
центра инерции Земли относительно 5 равно
т0
wo- =?= — Y —— Yoo>
roof
(здесь too— вектор, начало и конец которого находятся в точках
О и О' соответственно), запишем уравнение движения относитель-
относительно Sf в виде
тт0 тт0
mw' = Fo- — Y —г~ г f Y -3— r°or ~ m [w lm'\\ — 2m [wv'l + ф-
r rOO'
Ограничиваясь случаем движения точки около поверхности
Земли, можно считать, что г' порядка /?, где./? — радиус Земли.
Тогда величина г' подчинена условию г' < гоо'> поскольку ра-
радиусы-векторы гиг' связаны соотношением г = Too' -f г\
a R<^roo>. При таком ограничении часть переносной силы инер^
ции —mwo' и сила притяжения Солнца Fo компенсируют друг
174 Движение относительно неинерциальных систем Гл. IV
друга и уравнение движения точки около поверхности Земли
примет вид
=-Fo--^m[(o[(or']] — 2m[wv'] + Ф. A)
Заметим, что пренебрежение разницей между силой инерции
—mw0' и силой притяжения Fo исключает объяснение приливных
явлений, вызываемых Солнцем на поверхности Земли.
Легко оценить влияние сил инерции, если сопоставить цент-
центробежное и кориолисово ускорения с ускорением силы тяготения
на поверхности Земли, по величине равным
су .. то _п о М/С2в
Отношения максимальных величин центробежного и кориолисова
ускорений к- ускорению силы тяготения будут соответственно
равны
0,003; -^ly'^ l,5.10-5i>' .(#^6,4-10е м)
ут0,
(здесь v' следует подставлять в м/с).
Отсюда видно, что влияние кориолисовой силы по сравнению
с центробежной мало, если скорость v' < -^— ^2,3-102 м/с.
В свою очередь, центробежная сила мала по сравнению с силой
тяготения. Однако несмотря на малую величину сил инерции от-
относительно геоцентрической* системы отсчета, эти силы в ряде
задач необходимо учитывать.
. Например, рассмотрим движение точки около поверхности
Земли в некоторой малой области по сравнению с радиусом
Земли R. Для изучения такого движения удобно ввести систему
отсчета S" с началом О" на поверхности Земли. Эта система так
же жестко связана с Землей, как и система S'. Радиусы-векторы,
скорости и ускорения точки относительно- систем S' и S" весьма
просто выражаются друг через друга, поскольку система S" не
движется относительно S'. Действительно, применяя соотноше-
соотношения A.6), D.32) и D.40) к этим системам, найдем
г' -го<о".+ г", v'=v", w'=w",
где Тою" = RnR> a nR— единичный вектор, направленный от
центра Земли к началу О". Используя эти соотношения и усло-
условие малости области движения (г"<<^), приведем уравнение
движения точки к виду
mw" = Fo' — tnR [to [<опд]] — 2т [u>v"] + Ф,
§4.5
Силы инерции
175
где
flrs,
Два первых члена в правой части этого уравнения пропорцио-
пропорциональны массе точки и не зависят от положения и скорости точки
в системе S". Обозначим сумму этих членов вектором сР :
$* = mg, B)
где
= — Y
тг,
@2/?СОЗв-Пр|
tip—единичный вектор, перпендикулярный к оси вращения-Зем-
вращения-Земли и направленный от этой оси; 0 — геоцентрическая ши-
широта, т. е. угол между экваториальной плоскостью и направле-
направлением от центра Земли на О" — начало системы S" (рис. 4.13).
Используя обозначения B), придем к уравнению движения точ-
точки около поверхности Земли
mw" = mg — 2m [<ov"] ,+ Ф > C)
справедливому в достаточно малой области на заданной широте.
Отсюда видно, что сила, измеряемая при взвешивании тела,
равна сумме силы притяжения Земли и центробежной силы
инерции. Действительно, пусть взвешивание происходит с по-
помощью динамометра. Тогда Ф является упругой силой, дейст-
действующей на взвешиваемое тело со
стороны пружины динамометра.
Изменяя длину пружины и поло-
положение прикрепленного к ней тела,
можно достичь состояния покоя
этого тела относительно Земли,
т. е. состояния, в котором v7/=0
и w" = 0. С другой стороны, си-
сила Ф, с которой пружина покоя-
покоящегося динамометра действует на
тело, по величине равна весу
тела, т. е. силе, с которой по-
покоящееся тело действует на пру-
пружину динамометра. Следователь-
Следовательно, если и веры, и взвешиваемое
тело покоятся относительно Зем-
Земли, то вес тела равняется &* —
сумме силы тяжести и центро-
центробежной силы инерции. Линия действия <&* называется верти-
вертикалью, а угол между вертикалью и плоскостью экватора —
географической широтой ф.
Рис. 4.13
176 Движение относительно неинерциальннх систем Гл. IV
Как мы видели, для достаточно мадых скоростей можно пре-
пренебречь силой Кориолиса по сравнению с центробежной силой.
Если же, кроме того, пренебречь и сопротивлением атмосферы,
то ускорение любого свободно падающего тела относительно
Земли будет одинаково на данной широте и равно вектору g.
Следовательно, ускорение свободно падающего тела, как и вес
тела (см. B)), зависит от географической широты г|э. Однако
отношение веса к этому ускорению равно постоянной для данного
тела величине, т. е, равно массе тела:
=т. D)
Отсюда, учитывая независимость ускорения, g(^) от свойств
тела, получим, что отношение весов двух тел равно отношению
масс этих тел:
Это соотношение обычно используется в практике измерения
масс*.
Пример 4.4. Отклонение падающего (или взлетающего) тела
от вертикали.
Рассмотрим два случая движения свободной материальной
точки относительно Земли: падение с нулевой начальной ско-
скоростью и движение с начальной скоростью, ij_anpaiBленной вверх
по вертикали. Будем считать, что движение в обоих случаях
происходит в достаточно малой области на географической ши-
широте ij?, а сопротивлением атмосферы можно пренебречь. Тогда
уравнением движения точки является уравнение C) предыдуще-
предыдущего примера, где Ф = 0. Начало системы S", жестко связанной с
Землей, поместим на поверхности Земли на одной вертикали с
материальной точкой в ее начальном положении; ось O'V на-
направим вверх по вертикали, ось О"х" — на юг, а ось О"у" —
на восток (рис. 4.13). В этой системе проекции постоянных век-
векторов, входящих в уравнение движения, соответственно равны
g = @, 0, — g), ю = (—©соаф, 0, со sin i|>).
Опуская для удобства штрихи у переменных, из уравнения
* Независимость ускорения свободного падения от свойств тела была экс-
экспериментально установлена Галилеем [2, с. 158], а утверждение D), также
основанное на опыте, было одним из важнейших утверждений, положенных
Ньютоном в основу понятия о массе.
§ 4.5 Силы инерции 177*
C) примера 4.3 получим уравнения движения точки относительна-
системы S":
х = 2o)*/si*i'i|>,
и = — 2со(хsin oj; -j- zcosi))), A)
z = — g + 2coy cos i|).
Одно интегрирование системы A) после подстановки начальных
условий дает
х = *0 + 2со (у — t/0) sin \|),
У = у0 — 2@ [(л; — *0) sin г|> + (z ~ z0) cos г|?], B)
z = — ^ + г0 + 2@ (у — у0) cos г|?.
Подставим решение B) в уравнения движения A) и пренебре-
пренебрежем членами порядка со2. Тогда придем к системе уравнений,
правые части которых являются либо постоянными, либо функ-
функциями только времени:
х = 2cot/osin я|?,
у = — 2со [л:0 sin г|? + (— ^ + z0) cos *ф],
2 = — f§r -f 2@Г/0 COS 1|?.
Отсюда нетрудно получить приближенное решение для проекций
радиуса-вектора точки:
— cos г|) — (о (х0 sin г|) + 20 cos ^) Р + yot,
о
(здесь учтено, что в силу выбора системы отсчета хо = уо = О).
В случае падения точки с высоты z0 с нулевой начальной ско-
скоростью
х = 0, у =—
2 °
Эти функции определяют время падения точки на поверхность
178
Движение относительно неинсрциальных систем
Гл. IV
Земли и величину отклонения точки на восток:
2z0 \з/2
~)
В случае вертикального взлета точки с поверхности Земли
{г0 = 0, xQ = у0 = О, z0 > 0) решение C) имеет вид
Отсюда для полного времени полета точки и ее западного скло-
склонения соответственно находим
а^ 220 * 4 4
Рис. 4.14
Итак, в обоих случаях точка
остается в плоскости, перпенди-
перпендикулярной меридиану; однако в
первом случае она отклоняется
на восток, а во втором — на
запад (имеется в виду движение
в северном полушарии). Причи-
Причиной отклонения с точки зрения
земного наблюдателя является
кориолисова сила инерции о7с
(траектории точки и направления
сил инерции изображены на
рис. 4.14).
Пример 4.5. Состояние невесомости.
Рассмотрим поведение тела, находящегося в спутнике, кото-
который движется под действием притяжения Земли вне ее атмо-
атмосферы с выключенным двигателем. Допустим, что спутник изме-"
няет ориентацию относительно инерциальной системы отсчета с
постоянной угловой скоростью о (в качестве инерциальной си-
системы с достаточной степенью точности можно принять систе-
систему S, начало которой помещено в центр инерции Земли, а оси
направлены на «неподвижные» звезды). Определить силу, с ко-
которой стенка спутника действует на материальную точку, сопри-
соприкасающуюся со стенкой.
§ 4.5 Силы инерции 179
На любую материальную точку, находящуюся в спутнике, дей-
действует Fe — сила притяженця со стороны Земли и, кроме того,
может отличаться от нуля R — сила, с которой на точку действует
оболочка спутника или скрепленные с оболочкой тела. Уравнение
движения точки массы т относительно системы S' с началом в
центре масс спутника и осями, жестко связанными со спутником,
имеет вид (см. D.43))
mw' =R f Fe — mwM — m[to [tor']] — 2m[tov'].
Ускорение wM центра масс спутника нетрудно определить, учи-
учитывая силу притяжения спутника Землей и пренебрегая воздей-
воздействием материальной .точки на движение центра масс.
Используя уравнение B.102), получим
где т3 — масса Земли; г,-, т^ — радиус-вектор и масса у-той до-
достаточно малой части спутника, аМ=2^т^ — масса спутника.
/
В уравнении A) векторы г,- можно заменить на радиус-век-
радиус-вектор Тм центра масс спутника, поскольку размеры спутника ибче-
зающе малы по сравнению с расстоянием от центра Земли до лю-
любой точки спутника. Поэтому
гм
По той же причине сила притяжения Fe и сила инерции —mwM
компенсируют друг друга:
Fe — mwAf = утпгз I —Д — I -^ 0;
\ Гм г I
здесь г — радиус-вектор материальной точки относительно *!>.
Таким образом, приходим к уравнению движения точки относи-,
тельно спутника
т\я' — R — m[w [wr']] — 2m [wv'].
Если материальная точка, соприкасающаяся со стенкой спут-
спутника или с поверхностью тела, скрепленного со спутником, нахо-
находится в покое, то сила, с которой стенка или тело действует на
точку, отлична от нуля и равна
180 Движение относительно неинерциальных систем Гл. IV
Следовательно, и точка действует на стенку с силой, равной по
величине тсо2р (р — расстояние точки до оси вращения, прохо-
проходящей через центр масс спутника). Эта сила и является ©есом
точки во вращающемся спутнике (ср. с определением веса на
с. 175). Если точка соприкасается с Достаточно малым телом,
скрепленным со спутником и размещенным на оси вращения,
проходящей через центр масс спутника, то г'||<ю и вес точки рав-
равняется нулю, т. е. точка невесома (она не давит на «под-
«подставку»).
Если же а) = 0 (т. е. спутник движется поступательно относи-
относительно инерциальной системы отсчета), то в любом месте спут-
спутника точка невесома. В состоянии невесомости точка либо покоит-
покоится относительно спутника, либо движется равномерно и прямо-
прямолинейно до столкновения с другими телами *.
§ 4.6. Законы изменения кинетического момента
и кинетической энергии относительно поступательно
движущейся системы центра масс
Система Sm или поступательно движущаяся система центра
масс характеризуется тем, что ее начало О' находится в центре
масс механической системы, а ее угловая скорость относительно
инерциальной системы S равна нулю, т. е.
г0' = г,п, (о = 0, D.45)
где rm — радиус-вектор центра масс механической системы. Если
ускорение центра масс отлично от нуля, то поступательно дви-
движущаяся система центра масс является неинерциальной систе-
системой (см. условие D.44)), однако по сравнению с другими не-
инерциальными системами она обладает рядом особых свойств.
Например, соотношения между положениями, скоростями и уско-
ускорениями точек, взятыми относительно 5 и Sm, согласно A.6),
D.32), D.40) и D.45) имеют вид
г* = rm + ти \t = vm + vi, щ = wm + w- D,46)
(здесь ?=1, 2, ..., N\ N — число точек механической системы).
Отсюда видно, что все величины гг, v< и w* .являются суммами
двух членов: один из них характеризует движение центра масс
относительно инерциальной системы S, а другой* — движение
точек относительно системы Sm.
* «Инерциальность» невращающейся системы S' связана не с поведением
точки в отсутствие прочих тел (см. определение на с. 35), а с тем, что грави-
гравитационное поле в достаточно малой пространственной области одинаково уско-
ускоряет все тела. Поэтому системы, подобные S', называются л о к а л ь н о-и н е р-
диальными.
§ 4.6 Поступательно движущаяся система центра масс 18]
Из первого условия D.45) вытекает, что радиус-вектор, ско-
скорость и ускорение центра масс относительно системы Sm равны
нулю:
rm = 0, vm = 0, wm = 0. D.47)
Следовательно, в системе центра масс существуют зависимости
между радиусами-векторами, скоростями и ускорениями всех
точек соответственно. Действительно, пользуясь определениями
B.89), B.90), B.91) в системе Sm и учитывая D.47), найдем, что
N N N
^ i 0, D.48)
Второе из этих соотношений означает, что Р' — импульс механи-
механической системы относительно Sm — равен нулю. Итак, импульсы
механической системы относительно S и Sm соответственно равны
(см. B.93))
Р = mv,rt, P' = 0. D.49)
Используя определения кинетического момента и момента
внешних сил (см. с. 103), а также используя соотношения D.46),
получим
М = ? mt [rmvm] + ? щ [г, vm] + ? щ [тту\\ + М',
i
i
N
где M' = V Щ [rWi] — кинетический момент системы относительно Sm,
N
(Le)' = V[r;F?l — сумма моментов внешних сил относительно Sm.
"Отсюда, учитывая D.48), найдем
M = [rmP] + M', D.50)
Le - [rmFe] + (И\ D.51)
где Fe — сумма всех внешних сил, действующих на точки систе-
системы. Из D.50) видно, что кинетический момент механической
системы относительно инерциальной системы отсчета- S равен
сумме взятого относительно S момента импульса центра масс, в
котором как бы сосредоточена вся масса системы, и кинетиче-
кинетического момента системы относительно поступательно движущейся
182 Движение относительно неинерциальных систем Гл. IV
системы центра масс Sm. Соотношение D.51) показывает, что
векторы Le и (Le)' отличаются на момент суммы внешних сил,
действующих на точки и мысленно приложенных к центру масс.
Соотношения для кинетических энергий и мощностей получим
аналогично, воспользовавшись определениями этих величин (см.
с. 65, 107) и формулами D.46):
2
т = ЛЧп_ + т>9 D.52)
dt m dt
(J
D.53)
V4 mi (vt*J
где T' = V кинетическая энергия в системе Sm,
* + У] ^ Vi ~ мощность всех сил относительно Sn
————— ^ZZ Ъ Г ? У? —j— » Ж J V J IVXVJULJ^llVyV. i. Jb» JLJ\^V-.^V VI1V1 V/ 1 HWVyli t W1UUV <~'ГТХ
f=l 1=1
(в соотношении D.53) учтено, что внутренние силы подчинены
закону действия и противодействия). Следовательно, кинетиче-
кинетическая энергия механической системы относительно инерциальной
системы отсчета равна сумме кинетической энергии центра масс,
в котором как бы сосредоточена вся масса системы, и кинетиче-
кинетической энергии относительно поступательно движущейся системы
центра масс. В свою очередь, мощность всех сил относительно
системы S равна сумме мощности всех внешних сил, мысленно
приложенных к центру масс, и мощности всех сил относительно
системы Sw*.
Теперь найдем законы изменения кинетического момента и
кинетической энергии относительно системы 5т. Подставляя выра-
выражения D.50) и D.51) в уравнение для кинетического момента
относительно инерциальной системы (см. B.111)), получим
fr pi 4- Гг Р1 4- ^М == Гг Fel -^ ^LeV
Здесь член [гтР] равен нулю, поскольку он пропорционален век-
векторному произведению скорости центра масс самой на себя, а
[rmPJ = [rmFe], D.54)
* Заметим, что соотношения D.46) и D.50)—D.53) справедливы при любом
выборе системы S, относительно которой система Sm движется поступательно.
Система 5 может быть как инерциальной, так и неинерциальной, поскольку со-
соотношения A.6), D.32) и D.40) справедливы для любых двух систем отсчета.
§ 4.6 Поступательно движущаяся система центра масс 183
что вытекает из уравнения B.103). Следовательно, закон измене-
изменения кинетического момента относительно поступательно движу-
движущейся системы центра масс имеет вид
-^-=(И'. D.55)
Подставляя D.52) и D.53) в уравнение для кинетической энер-
энергии относительно инерциально'й системы (см. B.116)), получим
-га +
dt '" dt
Первые члены обеих частей этого уравнения равны друг другу,
что следует из уравнения движения центра масс B. 102). Дейст-
Действительно, скалярно умножая B.102) на vm, найдем
л • - ' - - D-56)
(см. вывод B.17) на с. 65). Учитывая D.56), придем к закону
изменения кинетической энергии относительно поступательно
движущейся системы центра масс:
D.57)
dt dt dt '
(dAiny Ше)'
где ~^ i- и —— мощности внутренних и внешних сил отно-
dt dt
сительно Sm.
Итак, законы изменения кинетического момента и кинетиче-
кинетической энергии относительно поступательно движущейся системы
центра масс по форме совпадают с соответствующими законами
относительно инерциальной системы отсчета. Это свойство систе-
системы Sm связано с тем, что сумма моментов и сумма мощностей сил
инерции в рассматриваемой системе равны нулю. Действительно,
в системе Sm могут отличаться от нуля только переносные силы
инерции (о> = 0)
$ = ^ m,wm (i = 1, 2, ... , ЛО, D.58)
а сумма моментов и сумма мощностей этих сил с учетом D.47)
равны нулю:
D.59)
184 Движение относительно неинерциальных систем Гл. IV
Пример 4.6. Система N точек в однородном поле тяжести.
Найти закон движения системы N материальных точек, кото-
которые движутся в однородном постоянном поле тяжести напря-
напряженности g; внутренними силами системы являются силы притя-
притяжения, прямо пропорциональные расстоянию между точками и
произведению масс соответствующих точек (коэффициент про-
пропорциональности %).
Уравнениями движения системы относительно инерциальной
системы S являются уравнения
m,ri = ? Fyi + F? (i=l, 2, ... , N), A)
где
Fyi = — wnimi (г, — г7), F• = tntg.
Прежде всего найдем закон движения центра масс относи-
относительно S, для чего используем уравнение (см. B.102))
N
где m = V mit Отсюда
rm = g-^ + vm0^ + rm0. B)
Итак, относительно S центр масс движется по параболе с по-
постоянным ускорением g и, следовательно, система Sm будет не-
инерциальной. В этой системе единственными отличными от нуля
силами инерции будут переносные силы
= —m,g C)
(t=l, 2, ..., N)y а уравнения движения имеют вид
? ? $ (i =1,2,..., N).
Подставляя сюда выражения сил, (см. A) и C)) и имея в виду, что
г^ — Г/ = r't — г/, найдем
^^-r)) (i=h 2,..., N).
§ 4.6
Поступательно движущаяся система центра масс
185
Правые части этих уравнений згависят только от радиуса-вектора
соответствующей точки. Действительно,
N N
(т — тг) х\ — ? туг/ = тт\ — ? myr},
/•=1 /=i
где последняя сумма равна нулю в силу D.48). Таким образом,
уравнения движения сводятся к системе уравнений
^l, 2, ... , ЛГ).D)
Отсюда видно, что каждая
материальная точка движется
так, как будто еа нее дейст-
действует сила притяжения со сто-
стороны точки, находящейся в
центре масс и обладающей
массой, равной массе всей си-
системы. Эти силы центральны,
и моменты импульса каждой
точки относительно Sm сохра-
сохраняются:
Рис. 4.15
t=.l, 2, ... ,
а движение точек происходит по плоским траекториям.
Общее решение Ti(t) каждого из уравнений D) в декарто-
декартовых координатах имеет вид
= at
а,),
- bt cos
z't = c,cos(arf + yO, (t = 1, 2, ... э N),
где амплитуды и фазы определяются начальными условиями.
Из приведенных результатов следует, что центр масс механи-
механической системы движется по параболе относительно инерциаль-
ной системы отсчета; относительно системы Sm точки движутся
по эллипсам с общим центром в центре масс и одинаковым перио-
периодом, равным 2я/(хтI/2; орбиты точек лежат в плоскостях, про-
проходящих через центр масс; ориентация этих плоскостей постоянна,
но может быть различной для разных точек (только в случае N = 2
точки относительно Sm движутся в одной и той же плоскости, см.
рис. 4.15).
186 Движение относительно неинерциальных систем Гл. IV
Что касается законов изменения момента, то из уравнений
B.111), D.55) вытекает
M'=(Le)' =m[r;&]-0.
Следовательно, момент М относительно инерциальной системы S
не сохраняется, в то время как момент М' относительно Sm со-
сохраняется. «Энергия системы относительно S, как видно из B.133)
и B.134), сохраняется:
7 1 г Ип ¦ т те г?
где
rrin ж™1 AjfYi *у) r^-lO II* \^ m rtr шит
i<i i
Используя D.52), этот интеграл можно представить в виде
mvm , rp, . rrin , rye = ?
2 i- i- i- о-
Ввиду потенциальности суммы сил Fe из уравнения D.56) сле-
следует сохранение «энергии центра масс», т. е.
-~~ — т8Гт = COnst.
Таким образом, из последних двух интегралов вытекает, что
энергия Е' относительно системы Sm сохраняется:
Г + Uln = Е'о
(этот интеграл можно получить также из D.57)).
§ 4.7. Законы изменения и сохранения импульса,
кинетического момента и энергии относительно произвольных
неинерциальных систем отсчета
Рассмотрим соотношения важнейших динамических величин,
характеризующих механическую систему и отнесенных к произ-
произвольным системам отсчета S и S'. Пусть движение системы S'
относительно 5 известно, т. е. г0, — радиус-вектор начала систе-
системы S' и ш — ее угловая скорость заданы как .функции времени;
будем также считать, что все векторы, характеризующие меха-
механическую систему относительно S, заданы s виде разложений
по ортам S, а векторы, характеризующие систему относитель-
относительно S', — в виде разложения по ортам S'.
§ 4.7 Произвольные неинерциальные системы 187
Найдем, например, соотношение между Р — импульсом си-
системы относительно S и Р' — импульсом той же системы относи-
относительно S'. Для этого используем определение импульса и связь
скоростей любой точки относительно систем S и S' (см. B.92) и
D.32)). Тогда
N N N
р = ? miyo> + J] mi [wrj + ? щ\\.
В первой и второй суммах этого выражения множители v0, и со
не зависят от номера точки, а третья сумма является импуль-
импульсом Р' относительно S'. Учитывая это, придем к соотношению
между импульсами Р и Р' (одной и той же механической систе-
системы) относительно систем отсчета S и S':
Р = mvo, + m [<ог«] + Р', D.60)
где m — масса системы, гт— радиус-вектор центра масс относи-
относительно S'. Отсюда следует, что скорость центра масс системы
относительно S равна (юм. B.90))
vm = VO' + [0>Гт] + Vm, D.61)
где Vm— скорость центра масс относительно S'.
Аналогично найдем соотношения кинетических моментов и мо-
моментов внешних сил. В самом деле, используя определения кине-
кинетического момента и момента внешних сил (см. с. 1.03), а также
соотношения A.6) и D.32) для каждой точки системы, получим
N
М = [го*] + m [r'm vo'] + 2 щ \xt [(о v{\\ + М', D,62)
Le-[r0'Fe] + (Le)', D.63)
где М' и (L6)' — кинетический момент системы и сумма момен-
моментов внешних сил относительно S'.
Соотношения для ' кинетических энергий и мощностей всех
сил, действующих на точки, найдем, используя определения этих
величин (см. с. 107), формулы D.32) и третий закон Ньютона.»
В результате получим
2 N
И^ "у" W + ^ + Т >
D.64)
il = FeVo, + ш (L^ + -^р-, D.65)
188 Движение относительно неинерциальных систем Гл. IV
N
где Т' —кинетическая энергия относительно S', = у Fj—
dt ( — dt
N , , l~
о Id AY \л г dtt
мощность сил относительно S, -—— = \ Ft мощность сил
dt *шЛ dt
относительно S'. Заметим, что соотношения D.60) — D.65) спра-
справедливы для любых двух систем отсчета S и S'.
Чтобы установить законы изменения Р', JVT и V относительно
S', систему S будем считать инерциальной, а систему S' — неинер-
циальной и исходить из уравнений движения относительно не-
инерциальной системы отсчета (см. D.43)). Например, суммируя
эти уравнения по всем точкам, найдем
N N N N
уг* ' ^ч р | ^Г1 <уЬ ¦ y44 (yc (л f\f\\
Левая часть этого уравнения согласно определению равна про-
произведению mwm, а ускорение любой точки относительно S' со-
согласно D.36) есть производная скорости этой точки относитель-
относительно S', взятая при постоянных «штрихованных» ортах. Следова-
тельно, wm =
dt
Сумма всех сил F^ из уравнения D.66) равна сумме только
внешних сил Fe, поскольку внутренние силы взаимодействия под-
подчинены третьему закону Ньютона. Суммируя переносные силы
инерции, найдем
N
#? = - m {vtcy + [» rm] + [to [w'M]]}. D.67)
Отсюда видно, что сумма переносных сил инерции, «приложен-
«приложенных» к точкам системы, равна переносной силе инерции, «прило-
«приложенной» к центру масс. Аналогично для суммы кориолисовых
сил инерции получим
N
? <{7? = -2m[»vm]. D.68)
§ 4.7 Произвольные неинерциальные системы 189
Таким образом, уравнение D.66) представляет собой закон из-
изменения импульса относительно неинерциальной системы от-
отсчета:
JL*L = p oj $\ + $* D.69)
dt ! '
где
Как мы видим, вывод и содержание этого закона аналогичны
выводу и содержанию закона изменения импульса относительно
инерциальной системы отсчета B.103). Однако в неинерциальной
системе кроме сил, действующих на точки со стороны различных
тел, имеются силы инерции, которые не подчинены закону дей-
действия и противодействия. Эти силы играют роль внешних сил и
также изменяют импульс системы.
Вывод закона изменения момента JVT аналогичен выводу урав-
уравнения B.111) для момента М. Действительно, умножим обе части
уравнения D.43), взятого для t-той точки, векторно слева на г{
и просуммируем полученные выражения по всем точкам. Затем
учтем, что v/ — скорость t-той точки относительно S' — равна про-
производной от г/ по времени при постоянных «штрихованных» ортах.
Тогда, исключая внутренние силы взаимодействия с помощью
третьего' закона, получим закон изменения кинетического момента
относительно неинерциальной системы отсчета:
N N
DJ0>
Умножая каждое из уравнений D.43), взятых для различных
точек системы, скалярно на скорость соответствующей точки
относительно системы S', в результате простых преобразований
найдем закон изменения кинетической энергии относительно не-
неинерциальной системы отсчета:
N
d'T' (dA)'l in <yh ' ,Л 71Ч
dt dt Ad K r
где ——-- мощность всех сил Fz- относительно S'. При выводе
D.71) следует иметь в виду, что производная кинетической энер-
энергии по времени при постоянных ортах системы S равна производ-
производной той же функции при постоянных ортах системы S', т. е.
190 Движение относительно неинерциальных систем Гл. IV
поскольку
Кроме того, нужно также учитывать, что работа кориолисовых
сил относительно S' равна нулю:
— 2mi [fovj d' vt = 0 (? = 1,2, ... , Л^). D.73)
Итак, согласно закону D.71) изменение кинетической энергии
относительно S' определяется работой внутренних и внешних сил,
а также работой переноснщх сил инерции. Рассмотрим подробнее
этот закон, предполагая, что внешние силы заданы как функции
положений и скоростей точек относительно S', а также предпо-
предполагая, что среди этих сил есть потенциальные, диссипативные и
гироскопические силы; относительно внутренних сил взаимодей-
взаимодействия предположим, что среди них могут быть потенциальные и
диссипативные силы.
Указанные предположения аналогичны тем, которые были сде-
сделаны при выводе закона B.132) изменения энергии относительно
инерциальной системы отсчета (см. с. 107—109). Для потенциаль-
потенциальной энергии U' относительно S' аналогично B.128) и B.129) по-
получим
U' = (U*)' + t/in, D.74)
где
N N
а для гироскопических сил будем иметь (ср. с B.120))
F?*d'rt = O (i = l,2, ... ,Л0. D.75)
Учитывая D.74), D.75) и соотношения типа B.117) — B.127),
закон D.71) можно записать в виде, аналогичном B.132):
-1_(Г + V) = -^- + Y?t у! + ^ у\. D.76)
Изучим свойства переносных сил инерции, имея в виду, что
эти силы заданы как функции времени и координат точек, по-
поскольку wo' — ускорение начала системы S7 и о — ее угловая
скорость считаются известными функциями времени. Вычисляя
§ 4.7 Произвольные неинерциальные системы НИ
ротор от каждого из трех слагаемых переносной силы инерции,
убеждаемся в потенциальности части сил:
rot we = 0, rot [to [cor']] = 0, rot [cor'] = 2@ D.77>
(здесь дифференцирование производится по координатам точки
пространства в системе 5' при фиксированном времени). Таким
образом, сила инерции, возникающая за счет поступательного
ускорения, и центробежная сила являются потенциальными си-
силами. Поэтому можно ввести tit — потенциальную энергию
t-той точки, соответствующую указанным двум силам, и соглас-
согласно B.122) записать эту функцию в виде
= Щ J {wo- + [w К',]]} df rl D.78)'
[to [tori]] = (о (со v'i) — со2 г'ь
j
Учитывая, i
получим
где
и т. д.
что
Ifi
Таким
[w[(t
= Ш/ J Wo' 1
f 2
образом,
; ш
у\
Затем, используя векторное тождество
окончательно получим
{;^;} D.79)
Суммируя это выражение по всем точкам, найдем потенциаль-
потенциальную энергию Uh системы в поле переносных сил инерции:
N
ЦЪ = m rm wo- -
(подчеркнем, что эта потенциальная энергия соответствует не
всем переносным силам инерции, а только потенциальной ее
части).
192 Движение относительно неинерциальных систем Гл. IV
Учитывая свойства сил инерции оХ? (см. D.43) и D.77)), за-
запишем мощность этих сил в виде, аналогичном B.123):
;. D.8i)
Затем, используя D.80), найдем частную производную:
N
= тгт wo— 7 mi I*01**] lwi]' D.82)
3t JmmJ
Наконец, из D.76), .учитывая D.81) и D.82), получим закон
изменения полной энергии относительно неинерциальнои системы
отсчета:
N N
d'E' _ д (U*)'
dt dt
D.83)
где ?'=Г/+[/'+ Uh — полная механическая энергия относитель-
относительно" неинерциальнои системы отсчета; ?/', Uh определены в D.74)
и D.80), a w0' и со являются заданными функциями времени.
Законы сохранения относительно неинерциальных систем от-
отсчета аналогичны соответствующим законам для инерциальных
систем; однако для сохранения какой-либо проекции импульса
или момента необходимо большее число требований,' включаю-
включающее в себя требования на соответствующие проекции сил инерции
или момента сил инерции. Например, из D.69) следует:
если Ft- = q7^ = 3mZ' = 0, D.84)
то Рг> = Р^о;
а из D.70) получим:
если (LeV = ? [и <??]*' = J] [т\ &zi \Z' = 0, D.85)
то Mz> = MZ'o.
В случае изолированной механической системы (F? =0, i ==
= 1, 2, ..., N) ее импульс и кинетический момент относительно
инерциальной системы отсчета сохраняются; если же движение
механической системы отнесено к неинерциальнои системе отсче-
отсчета, то импульс и кинетический момент механической системы
§ 4.7
Произвольные неинерциальные системы
193
сохраняться не будут, так как и в случае изолированной системы
на нее «действуют» силы инерции.
Наконец (см4. D.83)), если потенциальная энергия механиче-
механической системы во внешних цолях стационарна, диссипативные си-
силы (внутренние и внешние) отсутствуют, а неинерциальная систе-
система отсчета движется относительно инерциальной с постоянной
угловой скоростью и постоянным ускорением начала, то полная
энергия механической системы относительно неинерциальной си-
системы отснета будет сохраняться, т. е.
если
то
dt
= 0, F?d = 0 (t=l,2, ... 9N)9
(!) =<00, Wo-
D.86)
Пример 4.7. Задача двух тел в
неинерцальной системе отсчета.
Рассмотрим движение двух взаи-
взаимодействующих точек относитель-
относительно поступательно движущейся сис-
системы S' с началом в одной из точек
(рис. 4.16). Поместим начало этой
системы в точку 1, т. е. потребуем,
чтобы г1 = 0. Учитывая, что дви.-
жение S' относительно инерциаль-
инерциальной системы S поступательно, т. е.
@ = 0, и что w'i = 0, получим из
уравнений вида D.43) уравнения
движения относительно S':
= F12 —
0)
Рис. 4.16
Первое из этих уравнений по существу является уравнением дви-
движения начала системы §' относительно 5, а,второе — уравнением
движения точки 2 относительно S'. Это движение точка 2 совер-
совершает под действием силы F12 и силы инерции — т2гь Исклю-
Исключая i*i из второго уравнения с помощью первого уравнения, по-
получим уравнение* движения второй точки в виде
|xfo = F12 (|гг|), B)
где ц=^».
m
За к. 284
194 Движение относительно неинерциальных систем Гл. IV
Сопоставляя B) с C.11), придем к выводу, что точка 2 дви-
движется относительно неинерциалъной системы S' так же, как во-
воображаемая «ii-точка» движется относительно инерцшглъной си-
системы центра масс.
Интересно рассмотреть законы сохранения относительно не-
инерциальной системы S'.
Закон изменения момента ^ D.70) в данной задаче принимает
вид
C)
где М' = т2 [>2 Уг], 3\ = —щтг. Из первого уравнения A) следует,
что переносная сила инерции равна
#2=-^F12(|r;i) D)
и является центральной силой; момент силы 3\ относительно
точки 1 равен нулю, а значит, момент М' сохраняется:
Щ[*2 V2J = Мо. E)
Закон изменения энергии относительно S' используем в форме
D.76), поскольку в рассматриваемом случае ускорение начала
системы Sf является не заданной функцией времени, а заданной
функцией координат. Тогда
d(T'+U')=QyUr2, F)
где
T =
Теперь учтем, что переносная сила инерции D) потенциальна, а
соответствующая ей потенциальная энергия равна
G)
Таким образом, используя F) и G), придем к интегралу энергии
Отметим также, что в предельном случае m2<^mi центр масс
двух точек совпадает с точкой /, а система 57 становится инер-
циальной.
§ 4.7 Произвольные неинерциальные системы 195
Пример 4.8. Возмущение эллиптической орбиты.
Как известно, под действием силы гравитационного притяже-
притяжения A.49) точка может двигаться по эллиптической орбите отно-
относительно инерциальной системы отсчета. Определить центральную
силу, которую необходимо добавить к силе A.49) с тем, чтобы
орбита стала вращаться относительно инерциальной системы без
изменения своего вида, т. е. чтобы точка в некоторой вращаю-
вращающейся системе отсчета двигалась по эллиптической орбите с фо-
фокусом в центре сил (центры добавочной и гравитационной сил
совпадают).
Начало О инерциальной системы 5 поместим в центр сил, а
плоскость Оху совместим с плоскостью орбиты (орбита будет пло-
плоской, так как и сила гравитационного притяжения F, и возмущаю-
возмущающая сила Ф центральны). Введем также неинерциальную систе-
систему S' с началом О', совпадающим с О, а координатную плоскость
О'х'у' этой системы совместим с плоскостью Оху.
Если на точку действует только сила F, то относительно S эта
точка движется по эллипсу. Если же на точку действует сила
F + Ф, то по условию задачи точка также будет двигаться по
эллипсу, но относительно S'; причем относительно S точка будет
двигаться, вообще говоря, по незамкнутой орбите между двумя
концентрическими окружностями (см. рис. 2.6).
Уравнение движения точки относительно S' получим (см.
D.43)), учитывая, что w0' =0:
mw' = ? + Ф + &ъ + &*; A)
здесь
d7h = — m [cor'] — m [o> [wr']], d7c - — 2m [cov'];
кроме того, по условию mw' = F. Таким образом, для неизвестной
силы Ф получаем уравнение
Ф + 3h + &с = 0, B)
в котором угловая скорость со также неизвестна. Векторы о>, г' и
v', входящие в это уравнение, можно записать в виде
С0=@П2', Г'=-ГПГ, V' =fnr-f Гф'Пф, C)
поскольку система S' вращается относительно 5 только вокруг
оси Oz, а движение точки происходит в плоскости О'х'у' (коор-
(координаты г и q/ являются полярными координатами точки в этой
плоскости). Используя C), найдем выражения для сил инерции:
7*
-j- mr (о2пл,
2т со (гпф — rq/nr).
196 Движение относительно неинерциальных систем Гл. IV
Учитывая D) и центральность силы Ф, из уравнения B) получим
го)+ 2(о/ = 0, E)
Ф (г) + тг со2 + 2т cor q/ = 0, F)
Интегрируя E), найдем со как функцию г:
со^-^. G)
Так как сила F центральна, а сумма сил инерции и добавочной
силы Ф равна нулю, имеет место сохранение момента импульса
точки относительно S':
/nr2q/=Mo. (8)
Подставляя G) и (8) в уравнение F), получим
Ф(г)=
Глава V
УРАВНЕНИЯ ЛЛГРАНЖЛ
§ 5.1. Основная задача динамики несвободной системы
и понятие о связях
Многие задачи механики (например, такие, которые были рас-
рассмотрены в гл. I—IV) сводятся к решению уравнений движения
Щ г/ = Ft (rlt ... , rNi v1? ... , Viv, t) (i = 1,2, ... , N),
где силы считаются известными функциями положений и скоро-
скоростей точек, а также времени (такие силы будем для краткости
называть заданными); при этом начальные условия можно
задавать произвольно: на них никаких ограничений не налагается.
Однако в механике существует и другой класс задач, в которых
наряду с заданными силами рассматриваются силы, не известные
нам как функции положений, скоростей точек и времени. Метод
решения таких задач был намечен д'Аламбером в. 1743 г. в его
трактате «Динамика» [5, с. 108—109] и окончательно сформули-
сформулирован Лагранжем в 1788 г. в
«Аналитической механике» [6,
т. 1, отд. 1, 2 и 4].
Рассмотрим постановку задач
такого класса на примере сфе-
сферического маятника
(рис. 5.1). Пусть тело весьма ма-
малых размеров колеблется вблизи
земной поверхности, будучи под-
подвешенным на нерастяжимой нити
длины /, а сопротивлением воз-
воздуха можно пренебречь; тогда на
материальную точку массы m
действует заданная сила mg и
неизвестное натяжение нити R.
Следовательно, согласно A.58)
уравнение движения маятника
имеет вид
Рис. 5.1
mv = mg + R.
198 Уравнения Лагранжа Гл. V
Это векторное уравнение эквивалентно системе трех дифферен-
дифференциальных уравнений в координатах и содержит шесть неизвест-
неизвестных функций — проекции радиуса-вектора материальной точки и
проекции натяжения нити; в декартовых координатах неизвест-
неизвестными являются x(t), y(t), z(t), Rx(t), Ry(t), Rz{t). Для отыска-
отыскания решения приведенного уравнения необходимы дополнитель-
дополнительные сведения. В поставленной задаче такие сведения есть:
во-первых, в любой момент времени материальная точк$ нахо-
находится на сферической поверхности радиуса / (если нить натяну-
натянута) и, следовательно, координаты точки должны удовлетворять
условию г2 = /2; во-вторых, натяжение нити направлено вдоль
нити, в связи с чем можно написать, что R = 2Ar, где Я — неиз-
неизвестная скалярная функция. Таким образом, условия задачи
приводят к системе
ш = mg + 2hr, r2 — Г2 = О,
т. е. к системе четырех дифференциальных уравнений в коорди-
координатах с четырьмя неизвестными функциями, например функциями
x(t)> У@> 2@ и!(/). С помощью приведенных уравнений можно
найти закон движения точки по сфере и.натяжение нити, необхо-
необходимое для того, чтобы точка двигалась именно по сфере. Началь-
Начальные условия в этой задаче не произвольны: точка и в начальный
момент времени должна находиться на поверхности сферы радиу-
радиуса /, а вектор скорости — в плоскости, касательной к сфере. При
этом допускается, что длина нити остается неизменной, т. е. допус-
допускается, что жесткость нити бесконечно велика, изменение длины
нити исчезающе мало, а ее натяжение конечно.
Как видим, с рассматриваемой задаче положение точки и ее
скорость удовлетворяют определенным условиям, не вытекаю-
вытекающим из уравнений движения. В этом смысле говорят, что мате-
материальная точка несвободна, на нее наложена связь.
В общем случае под связями понимают не вытекающие из
уравнений движения ограничения, налагаемые на положения,
скорости и ускорения точек механической системы. Связи реали-
реализуются посредством поверхностей различных тел, стержней,
нитей и т. п.; аналитически связи выражаются уравнениями
связей, т. е. соотношениями между радиусами-векторами то-
точек, их скоростями и ускорениями. Силы, с которыми тела, осу-
осуществляющие связи, действуют на точки системы, называются
реакциями связей. Если на систему N точек наложено
k связей, то, обозначая через Rai реакцию связи с номером а
на i-тую точку, согласно A.39) получим, что реакция всех k свя-
связей на i-тую точку равна
§5.1 Понятие о связях Ш9
k
Rcrf. E.1)
Различают следующие виды связей: голономные и неголоном-
ные, удерживающие и неудерживающие, стационарные и неста-
нестационарные. Голономными (или интегрируемыми) свя-
связями называются связи, уравнения которых всегда можно свести
к уравнениям вида
/(гх, ... ,r*f 0 = 0, E.2)
где f является функцией только координат точек и времени.
Эти связи налагают ограничение не только на положение, но и
на скорости и ускорения точек системы. Действительно, диффе-
дифференцируя E.2) по времени, получим ограничение, налагаемое
голономной связью на скорости:
>/)v, + 2--0. E.3,
а продифференцировав E.3) по времени, найдем ограничение
на ускорения точек:
2[И' + -г:(-2-)-0- F-4)
Однако характерным для голономиых связей является то, что
ограничения на ускорения и скорости сводятся к ограничению
только на положения точек; иначе говоря, уравнения связей, за-
заданные в виде E.3) или E.4),^ могут быть проинтегрированы.
Например, пусть одна точка движется на горизонтальной пло-
плоскости, перемещающейся с постоянной скоростью и в вертикаль-
вертикальном направлении (рис. 5.2, а). . Такая связь реализуется, если
шарик исчезающих размеров движется между двумя жестко
скрепленными друг с другом телами с параллельными поверх-
поверхностями, причем расстояние между поверхностями исчезающе
мало, а их деформациями можно пренебречь (рис. 5.2,6). На-
Направляя ось Ог по вертикали, запишем уравнение связи в виде
/ = 2—И* = 0,
откуда следует, что рассматриваемая связь голономна, а на по-
положение точки, ее скорость и ускорение налагаются ограничения:
г — ut, z = и> г = 0.
Неголономными {или неинтегрируем ы ми) связями
называются такие связи, уравнения которых нельзя свести к урав-
200 Уравнения Лагранжа Гл. V
л- -л
Y///////y////////////C///C/Z^/////
Х//////////////////^
Рис 5.2
нениям, содержащим только координаты точек и время. Наиболее
изученными являются неголономные связи первого порядка, ли-
линейные относительно скоростей, т. е. неинтегрируемые связи вида
Va,Vi-f 6 = 0, E.5)
где &{ и Ь могут зависеть от положений точек и времени. Напри-
Например, неголономной связью является, вообще говоря, связь, нала-
налагаемая на шар, катящийся по шероховатой поверхности (см.
с. 381). Большое практическое значение имеют неголономные усло-
условия, встречающиеся в задачах об оптимальных траекториях раз-
различных тел.
В дальнейшем мы будем рассматривать главным образом го-
лономные сзязи, поскольку задачи о движении систем с неголо-
номными связями, как правило, очень сложны в математическом
отношении и редко встречаются в современных физических прило-
приложениях механики *.
Удерживающими связями называются связи, задавае-
задаваемые равенствами. Соответственно неудерживающие связи
задаются неравенствами; например, неудерживающую связь мож-
можно реализовать с помощью гибкой нерастяжимой нити, соединяю-
соединяющей две материальные точки. Однако в этом случае движение
точек сводится либо к свободному движению (когда связь, как
говорят, не напряжена), либо к движению несвободных точек
(когда связь напряжена). Неудерживающие связи мы также рас-
рассматривать не будем.
¦ Уравнения движения систем с линейными неголономными связями будут
кратко рассмотрены в § 8.5 гл. VIII.
§ 5.2 Виртуальные перемещения; идеальные связи 20J
Если уравнение связи явно от времени не зависит, то связь
называется стационарной (например, связь, имеющая место
в задаче о сферическом маятнике). В противном случае связь
называется нестационарной (см. приведенный выше пример
с движущейся плоскостью).
Введение понятий о связях и их реакциях позволяет сформу-
сформулировать основную задачу механики несвободной системы N
точек с голономными связями как задачу об отыскании закона
движения системы и реакций связей по заданным силам F*
(i=l, 2, ..., N) и заданным k уравнениям голономных связей. Эта
задача сводится к совместному решению уравнений движения и
уравнений связей
mivi = ?i + ^i (i=l, 2, ...,#),
E.6)
Мгх, ... ,г*, 0 = 0 (а-1,2, ... , А)
с начальными условиями, заданными в соответствии с уравне-
уравнениями связей.
Система E.6) представляет собой систему 3N + k скалярных
уравнений, содержащих 6N неизвестных функций — проекций
векторов г*@ и Ri@ на координатные оси (i=l, 2, ..., N), при-
причем наиболее интересным является случай, когда число связей
k<C3N. Действительно, если k = 3Ny то уравнения связей Полностью
определяют движение системы. С другой стороны, если k<3N, то
рассматриваемая задача является определенной только в том
случае, когда известны 6N—CN + k)=3N—k независимых соот-
соотношений между положениями точек и реакциями связей. Забегая
вперед, скажем, что основная задача динамики несвободной си-
системы является определенной для так называемых идеальных
связей. Однако введение этого понятия требует знакомства с неко-
некоторыми свойствами связей.
§ 5.2. Действительные, возможные и виртуальные перемещения;
идеальные связи
Определим действительные, возможные и виртуальные пере-
перемещения на примере одной точки, 'подчиненной одной голономной
удерживающей связи
/(г, 0 = 0. E.7)
Действительным перемещением dv точки назы-
называется бесконечно малое перемещение этой точки под действием
как заданных сил, так п реакций связи; действительное переме-
перемещение происходит за время dt в соответствии с уравнением дви-
движения и уравнением связи.
202 Уравнения Лагранжа Гл. V
Возможным перемещением назовем «перемещение»
dx точки, допускаемое связью)-в отличие от действительных пере-
перемещений возможные перемещения удовлетворяют только уравне-
уравнению связи. Действительное перемещение всегда является одним
из возможных. Дифференциальное уравнение, которому подчине-
подчинены возможные перемещения точки, получим, взяв дифференциал
от левой части уравнения E.7) и приравняв его нулю*:
d/ = v/dr + JLd/ = O. E.8)
ot
Наконец, виртуальным перемещением бг называется
воображаемое бесконечно малое «перемещение» точки, допускае-
допускаемое связью в данный фиксированный момент времени; в этот мо-
момент времени связь «застывает», т. е. ее изменение со временем
мысленно прекращается. Виртуальные перемещения не происхо-
происходят под действием сил и не обладают длительностью. Представле-
Представление о виртуальных перемещениях можно получить, если сделать
мгновенную фотографию движущейся поверхности и рассмотреть
возможные перемещения точки по изображению этой поверхности
на фотографии. Дифференциальное уравнение, которому подчине-
подчинены виртуальные перемещения точки, получим, вычисляя диффе-
дифференциал левой части уравнения E.7) при фиксированном вре-
времени, т. е. вычисляя вариацию f(r, t) и приравнивая ее нулю
[46, гл. 6, § 1]:
6/ = у/6г = 0. E.9)
Здесь приращение бг радиуса-вектора точки также «происходит»
при фиксированном времени, т. е. является вариацией радиуса-
вектора. Из E.8) и E.9) видно, что совокупность виртуальных
-перемещений совпадает с возможными перемещениями только в
случае стационарных связей, когда —— — 0.
dt
Проиллюстрируем уравнения E.8) и E.9) на примере точки,
движущейся по горизонтальной плоскости (см. рис. 5.2). В этом
случае уравнения для возможных и виртуальных перемещений
точки имеют вид
Легко обобщить рассмотренные определения на систему N то-
точек, подчиненных k голономным связям
fa(rl9 ... ,nv, 0-0 (а =1,2, .... , k\ E.10)
* В силу равенства нулю функции f дифференциал любого порядка от этой
функции равен нулю.
§ 5.2 Виртуальные перемещения; идеальные связи 203
и получить уравнения для механической системы, аналогичные,
уравнениям. E.8) и E.9). В самом деле, вычисляя дифферен-
дифференциалы и вариации левых частей уравнений E.10) и приравнивая
их нулю, найдем
N df
tfadrl+-?-dt = O (a=l,2 Л), E.11)
Ja8Ti = 0 (a-1,2, ... ,k). E.12)
Понятие о виртуальных, перемещениях позволяет определить
очень важный класс связей. Пусть сумма работ всех реакций свя-
связей на виртуальных перемещениях точек системы равна нулю;
иначе говоря, пусть 6AR — виртуальная работа реакций
связей — равна нулю:
6ЛЛ= ? Мг, = 0, E.13)
1=1
где N— число точек системы. Связи, удовлетворяющие условию
E.13), называются идеальными. Этот класс связей обладает
достаточной общностью, причем физические причины идеальности
связей могут быть различными. Убедимся в этом на двух при-
примерах.
Еще раз рассмотрим точку, движущуюся по горизонтальной
плоскости, допуская, что плоскость абсолютно гладкая. Тогда
реакция плоскости на точку в любой момент времени перпенди-
перпендикулярна плоскости (рис. 5.2), т. е. Rx = Ry = 0y Я2ф0. Следова-
Следовательно, виртуальная работа, совершаемая реакцией связи, равна
нулю:
поскольку для рассматриваемой связи 6г = 0. ПоэтОхМу гладкая
плоскость, покоящаяся или движущаяся, является идеальной
связью: и в том, и в другом случаях виртуальная работа равна
нулю. Заметим, что работа clAR, совершаемая реакцией гладкой
плоскости на действительных перемещениях, равна нулю только
в том случае, когда плоскость покоится. Если же плоскость дви-
движется, то действительная работа отлична от нуля:
dAR = Rtdz = Rzii
Таким образом, понятие виртуальной работы, «совершаемой» на
воображаемых перемещениях, отражает физическое свойство по-
204
Уравнения Лагранжа
Гл. V
верхности — ее гладкость. Ясно, что любые гладкие поверхности и
кривые (неподвижные и подвижные) также являются идеальными
голономными связями.
В качестве другого примера идеальной связи рассмотрим
прямолинейный стержень длины I и исчезающей массы, который
соединяет материальные то'ч'ки 1 и 2, движущиеся, например, по
параболической поверхности (рис. 5.3,а). На точки действуют
Рис. 5 3
заданные внешние силы m\g и m2g, реакции поверхности
R? и R2, а также реакции стержня | R
n
Для системы
«точки — стержень» силы тяжести и реакции поверхности являют-
являются внешними силами (величина и направление реакций поверх-
поверхности зависят от характера поверхности), а реакции стержня
являются внутренними силами. Для системы «стержень» внеш-
внешними силами являются силы —R|n и —R211, с которыми точки
действуют на концы стержня, а также силы тяжести. Поэтому
законы изменения импульса и кинетического момента стержня
конечной массы имеют вид
гстержня i
dt
^стержня ___ I
dt ~
где rrii — масса достаточно малой части стержня, а суммирова-
суммирование ведется по всем его частям. Отсюда, устремляя все т*
к нулю, для стержня исчезающей массы получим соотношения *
RJn + R211 = 0, [riR!n] +
= 0,
* Этот предельный переход совершается в предположении, что ускорение
центра масс стержня и его угловое ускорение остаются конечными ^величинами.
§ 5.2 Виртуальные перемещения; идеальные связи 205
из которых следует, что реакции Rln H^R2n равны по величине и
направлены по стержню в противоположные стороны:
(здесь к — некоторая скалярная функция). Используя эти выра-
выражения, найдем, что виртуальная работа реакций стержня равна
нулю:
S4n = Я (г, - тг) б (г2 - гг) = А б (г2 - г,J = 0,
поскольку длина стержня задана: |r2—ri|=/.
К тому же результату можно прийти, замечая, что виртуаль-
виртуальное перемещение 6ri2 перпендикулярно к 1*12 = Г2—гь так как дли-
длина стержня задана (рис. 5.3,6). Следовательно, проекции векто-
векторов 6ri и бг2 на направление стержня одинаковы, а работа- Ri6ri
равна по величине и противоположна по знаку работе Кгбг2
(R21 = —Rin). Таким образом, стержень заданной длины и исче-
исчезающей массы действительно является идеальной голономной
связью. Кроме того, эта связь стационарна и, следовательно, со-
совокупности виртуальных и возможных перемещений точек 1 и 2
совпадают. Учитывая также, что действительное перемещение
всегда является одним из возможных, придем к выводу о равен-
равенстве нулю работы реакций стержня и на действительных пере-
перемещениях точек 1 и 2:
dA% = R jn dr1 + Rindr2 = 0. E.14)
Приведенные примеры показывают сравнительно большую
общность класса идеальных связей. Например, любое сочетание
гладких связей со связями, состоящими из тонких стержней исче-
исчезающей массы и заданной длины, является идеальной связью,
если в местах соединения связей отсутствует трение. Все абсо-
абсолютно шероховатые поверхности, по которым происходит каче-
качение тел без проскальзывания, также представляют собой идеаль-
идеальные связи (как голономные, так и неголономные). Действитель-
Действительно, поскольку в точке касания тела и поверхности отсутствует
проскальзывание, виртуальное перемещение точки тела, совпа-
совпадающей с точкой касания, равно нулю, в силу чего и виртуаль-
виртуальная работа реакции поверхности равна нулю *.
Подробнее см. пример о шаре на с. 381.
206 Уравнения Лагранжа Гл. V
§ 5.3. Уравнения Лагранжа с реакциями связей;
законы изменения импульса, кинетического момента
и энергии для систем со связями
Выше отмечалось, что основная задача механики голономных
систем становится определенной для класса идеальных связей.
Действительно, пусть на систему из N точек наложено k голо-
голономных идеальных связей. Число проекций виртуальных пере-
перемещений точек на координатные оси, или, иначе говоря, число
вариаций координат точек, равно 3N. Так как вариации коорди-
координат подчинены уравнениям E.12), то k вариаций являются зави-
зависимыми, a 3N—k вариаций — независимыми. Зависимые вариа-
вариации могут быть единственным образом выражены через незави-
независимые, поскольку детерминант из коэффициентов при зависимых
вариациях в системе E.12) по предположению отличен от нуля
(в противном случае среди связей будут такие, которые являют-
являются следствием остальных). Учтем далее, что кроме требований
голономности связей выполняется требование их идеальности
(см. E.13)). В этом условии k зависимых вариаций с помощью
E.12) можно выразить через 3N—k независимых вариаций.
После такой подстановки (для того чтобы удовлетворить требо-
требованию идеальности) следует приравнять нулю коэффициенты
при независимых вариациях. Тем самым можно получить 3N—k
соотношений между реакциями связей и радиусами-векторами
точек. Таким образом, основная задача динамики несвободной
системы с голономными идеальными связями является опреде-
определенной, поскольку число уравнений и число неизвестных функ-
функций в этом случае совпадают.
Рассмотренное сейчас непосредственное исключение зависи-
зависимых вариаций координат можно в общем случае провести м е-
тодом неопределенных множителей Лагранжа.
Изложим существо этого метода. В силу идеальности и голоном-
голономности связей из условий E.13) и E.12) имеем
i=\
(а =1,2, ... ,k). E.16)
?-=1
Умножая каждое из k последних соотношений на соответствую-
щий неопределенный скалярный множитель — Яа(а=1, 2, ..., k),
и складывая все полученные результаты с условием идеальности,
придем к соотношению
§ 5.3 Уравнения Лагранжа с реакциями связей 207
r<=0; E.16)
а= 1
в котором k вариаций координат являются зависимыми, а
ЗА^—k — независимыми. Подберем k множителей ка так, чтобы
коэффициенты при k зависимых вариациях в E.16) обратились
в нуль. Этот подбор можно провести единственным образом, так
как детерминант из коэффициентов при зависимых вариациях в
системе E.12) отличен от нуля (по предположению о связях).
С другой стороны, коэффициенты при независимых вариациях
в E.16) должны равняться нулю в силу условия идеальности.
Итак, коэффициенты при всех 8т{ должны быть приравнены
нулю. В результате приходим, к заключению, что между реак-
реакциями идеальных голономных связей и функциями fa, опреде-
определяющими уравнения связей, имеют место соотношения
R*= V KVif* (* = 1,2, ... ,N). E.17)
a=l
Соотношения E.17) являются необходимым условием обращения
в нуль виртуальной работы реакций связей, т. е. необходимым
условием идеальности голономных связей. Можно непосредст-
непосредственно убедиться и в достаточности этого условия.
Проиллюстрируем исключение зависимых вариаций координат
на примере точки, движущейся по гладкой окружности, накло-
наклоненной под углом а к горизонту. Эта кривая представляет собой
пересечение сферы и наклонной плоскости. Следовательно, на точ-
точку наложены две голономные связи (см. E.10))
/i-*2 + </2 + z2-/2 = 0, /2=z-i/tga = 0
(начало координат помещено в центр сфер-ы, ось Ог направлена
по вертикали вверх, а плоскость проходит через центр сферы и
ось Ох и наклонена к оси Оу под углом а). Так как кривая глад-
гладкая, то условие идеальности E.13) выполняется:
Rx8x-+ Ry8y + Rz8z = 0.
Виртуальное перемещение точки подчинено системе двух уравне-
уравнений (см. E.12))
V*/i •б* + Vyfi • % + Vzh • в* = .0,
Vxfz-bx + V^2-Sy -f УгАг.бг = 0;
поэтому одна из вариаций координат, например 8ху является
независимой. Выразим зависимые вариации 8у и бг через неза-
независимую 6х, что можно осуществить, поскольку соответствующий
детерминант отличен от нуля:
208 Уравнения Лагранжа Гл. V
Vyh Vz/г
Используя полученные выражения
6у блг, 6г 8х
y + ztga y + ztga
и исключая из условия идеальности зависимые вариации, найдем
(Rx *- Ry
\ X + t} y
y
y y + ztga
Отсюда видно, что между проекциями реакции связей и радиуса-
вектора точки имеет место соотношение
Это же соотношение можно получить методом неопределен-
неопределенных множителей. Действительно, умножая уравнения для вариа-
вариаций координат на —К\ и —^ соответственно и складывая ре-
результаты умножения с условием идеальности связей, находим
(см. E.16))
(R-^iV/i-^V/2)er = 0.
Затем подберем множители К\ и Х2 так, чтобы коэффициенты
этого уравнения при зависимых вариациях Ьу и 8z обратились
в нуль; тогда
Ry =-= h Vyh + К Vyh, R2 - h vzh +¦ К v*/*-
Указанный подбор множителей можно осуществить единствен-
единственным способом, так как два последних соотношения являются си-
системой, которую можно разрешить относительно Xi я А,2, посколь-
поскольку соответствующий детерминант отличен от нуля:
V2/1 S/z
(э!от детерминант равен детерминанту, использованному выше).
После указанного подбора Х\ и ^2 следует приравнять нулю
коэффициент при независимой вариации 6х, т. е. положить
В результате придем к сдотношению (см. E.17))
R = ^iV/i + 4v/2»
которое в декартовых координатах имеет вид
Rx = 2^, Rg = 2\у — К tg a, Rz = 2Хгг + Я2.
§ 5.3 Уравнения Лагранжа с реакциями связей 209*
Исключая отсюда %г и Я2, найдем ранее полученное соотношение
между проекциями векторов R и г.
Итак, реакции идеальных голономных связей являются линей-
линейными формами относительно градиентов функций fa(a=l, 2, ...
..., k)9 определяющих уравнения связей E.10). Подставляя E.17)
в E.6), получим уравнения движения механической системы с
голономными идеальными связями, т. е. уравнения Лагран-
Лагранжа с реакциями связей или уравнения Лагр-анжа
первого ро д а *:
Здесь силы Fi являются заданными функциями гг-, v* и t (i=l> ...
..., N). Неизвестными в этих уравнениях являются все радиусы-
векторы точек Ti(t) и множители Лагранжа A,a@ (a=l, 2, ..., k).
Число уравнений и число неизвестных функций совпадают и рав-
равны W + k.
Подчеркнем, что реакции связей определяются в результате
решения уравнений E.18) и, следовательно, зависят от заданных
сил, поэтому заданные силы часто называют активными
силами, а реакции связей — пассивными. Такая зависи-
зависимость одних сил от других появляется в результате упрощения
представлений о реальном взаимодейртвии тел: само наложение
связей на систему представляет собой по существу такое упро-
упрощение (например, в задаче о сферическом маятнике мы прене-
пренебрегаем упругими свойствами нити подвеса и тем самым нала-
налагаем связь);
При применении уравнений Лагранжа возникает также во-
вопрос о выполнении условия идеальности связей. Выше мы виде-
видели, что это требование связано с определенными физическими
допущениями, которые не всегда выполняются, например нали-
наличие сил трения на голономных связям делает их неидеальными. •
Однако всегда можно выделить нормальные составляющие реак-
реакций, которые будут удовлетворять условию идеальности E.13);
тогда остальные составляющие реакций должны быть заданы
как функции положений, скоростей точек и времени.
Законы изменения импульса, кинетического момента и энер-
энергии системы при наличии связей могут быть получены из урав-
уравнений Лагранжа E.18) так же, как аналогичные законы для
свободных систем были получены из уравнений движения Ньюто-
* Вывод уравнений Лагранжа первого рода для систем с неголономными
связями см. на с. 379—380.
210 Уравнения Лагранжа Гл. V
на с помощью закона действия — противодействия. В самом деле,
учитывая, что по отношению к исследуемой системе связи могут
быть как внутренними, так и внешними, найдем
P-Fe + R% E.19)
M = Le + I^, E.20)
где, Rj = Rjn + R; — сумма реакций внутренних и внешних связей на
N
N
i-тую точку; Re = V Rf —сумма реакций внешних связей: L%
~ У\ \vi Rfj—сумма моментов реакций внешних связей.*По сравне-
нию с законами изменения импульса, кинетического момента и
энергии для свободных систем (см. B.103), B.111) и B.132)) здесь
появились дополнительные члены: сумма внешних реакций и их
моменты, а также мощность как внутренних, так и внешних реак-
реакций.
Мощность реакций можно представить и в другом виде, ис-
лользуя идеальность и голономность связей. Действительно, имея
в виду E.17) и E.11), получим
t v, = 2 К (f](V/f«) v,) = -V Л«-^-. E.22)
t=l а=--1 t=l а=1
Зто выражение позволяет записать уравнение E.21)^8 виде
Законы 'сохранения имйульса и момента при наличии связей
должны быть сформулированы в соответствии с законами для
свободных систем (см. B.104) и B.112)), только к требованиям
на заданные внешние силы добавятся аналогичные требования
к реакциям внешних связей. Что касается закона сохранения
энергии при наличии связей, то он имеет место при условиях
B.133) и стационарности идеальных голономных связей,
когда
-%-=0 (а =1,2,.../А). E.24)
§ 5.3 Уравнения Лагранжа с реакциями связей 2П
Во многих случаях применение законов сохранения упрощает
решение задач о движении несвободных систем. В свою очередь,
законы сохранения могут быть связаны с симметрией заданных
силовых полей и связей. Поэтому выбор координат целесообраз-
целесообразно осуществлять с учетом этой симметрии.
Рассмотрим некоторые примеры • на составление и решение
уравнений Лагранжа с реакциями связей.
Пример 5.1. Точка на колеблющейся горизонтальной пло-
плоскости.
Точка массы m движется по колеблющейся горизонтальной
гладкой плоскости. Найти положение точки и реакцию связи как
функции времени, если плоскость колеблется в направлении,,
перпендикулярном плоскости, с амплитудой а и частотой со,
а напряженность поля тяжести равна g.
Выберем систему координат так, как это показано на рис. 5.2, а,
т. е. направим ось Oz коллинеарно вектору g; тогда систему урав-
уравнений E.18) можно записать в виде
nix = О, my = 0, mz = — mg + Rz,
z — asinatf =~0.
Здесь учтено, что плоскость является гладкой, поскольку состав-
составляющие реакции Rx и Ry приравнены нулю.
Из первых двух уравнений движения находим
а из третьего уравнения движения и уравнения связи получим,,
что
z = a sin Ш, Rz =' m (g — aco2 sin со/).
Проекции импульса точки на оси Ох, Оу сохраняются, так как
проекции заданной силы и реакции связи на эти оси равны нулю;
кроме того, сохраняется проекция момента импульса точки на ось
Oz, поскольку проекции момента заданной силы и момента реак-
реакции на эту ось равны нулю. Что касается энергии, то она изменяет-
изменяется со временем согласно уравнению
Ё = Rzz = ma со cos co? (g — aco2 sin arf).
Обратим внимание на то, что Rz>0, если частота колебаний
плоскости достаточно мала (aco2<g). Если же aco2>g, то Rz
будет отрицательной на интервалах времени
2пя + arfj < со/ < B/1 + 1) jc — arflf
где co^i = arcsin(g"/a<o2), а п — целые неотрицательные числа. Это
связано с тем, что на указанных интервалах времени 2-я компо-
212
Уравнения Лагранжа
Гл. V
нента ускорения точки отрицательна и достигает большой вели-
величины.
Пример 5.2. Точка на расширяющейся цилиндрической поверх-
поверхности.
Точка массы m движется в поле тяжести по расширяющейся
гладкой цилиндрической поверхности с вертикальной осью. Найти
закон движения точки, если напряженность поля тяжести равна g,
а радиус цилиндра увеличивается с постоянной скоростью ро.
Учитывая симметрию связи, совместим ось Ог с осью цилинд-
цилиндра, а ось Ох (или Оу) направим произвольно (рис. 5.4). Из тех
Рис. 5.4
Рис. 5.5
,же соображений симметрии будем использовать цилиндрические
координаты. Тогда, разлагая обе части уравнения E.18) по ортам
пр, пф и пг, получим
mz = —mg, p = po* + Po.
Здесь учтено, что реакция R перпендикулярна к цилиндрической
поверхности и, следовательно, только Rp отлична от нуля.
Используя второе из уравнений движения, найдем первый
интеграл
Р2Ф = РоФо,
который по существу представляет собой интеграл площадей.
Отсюда
§ 5.3 Уравнения Лагранжа с реакциями связей 21_3
• РоФо
(p
Интегрируя это уравнение, найдем <p(t):
ф4%,
Ро* + Ро
а интегрируя третье уравнение движения, получим z(t):
Наконец, подставляя функции р(/) и ф(/) в первое из уравнений
движения, найдем реакцию связи
Полная энергия точки Е не сохраняется вследствие нестационар-
нестационарное™ связи.
Пример 5.3. Точка на пересечении сферы и движущейся пло-
плоскости.
Точка массы m движется по пересечению неподвижной глад-
гладкой сферы радиуса а и гладкой горизонтальной плоскости, дви-
движущейся в вертикальном направлении по закону z = asinco^. Най-
Найти закон движения точки и реакции связей для 0s?^<jt/2co.
Учитывая симметрию связей, поместим начало координат в
центр сферы, а ось Ох направим коллинеарно вектору g (рис. 5.5).
Тогда систему E.18) с уравнениями связей можно записать в виде
rnx = mg 'I- ^i^/i + ^2У/г>
f V2 ! /,2 ' ~2 пЧ А
]± — х -г у -~ z а — и, *
/2 = 2 —a Sin ddt ¦= 0.
Замечая, что момент импульса точки относительно оси Ох
постоянен и что от цилиндрической координаты ф уравнения свя-
связей не зависят, спроектируем обе части уравнения Лагранжа на
цилиндрические орты. В результате получим следующую систе-
систему уравнений:
пг(р — рф2) = 2А,,р, — (р2ф) = 0, mz = —mg + 2X,z -j- Я2,
p at
Из уравнений связей и второго уравнения движения найдем
функции р(^) и ф(/):
214 Уравнения Лагранжа Гл. V
(здесь учтено, что в начальный момент времени to = O, р = а).
Интегрируя ф@» получим угол ср как функцию времени:
Множители К\ и А,2 определим из первого и третьего уравнений
движения:
Отсюда с помощью соотношений
R& = 2kxz, R2z =
находим реакции связей
Фо2
- /?ip = —та со
cos4 со/
§ 5.4. Уравнения Лагранжа в независимых координатах
и общее уравнение механики; циклические координаты
и симметрия силового поля и связей
Как уже отмечалось, уравнения Лагранжа с реакциями-связей
дают возможность найти и положение точек системы, и реакции
связей как функции времени. Однако на практике часто не нуж-
нужна столь «подробная» информация о механической системе, а
требуется найти лишь закон движения точек по связям. Для
разрешения таких задач необходимы уравнения движения, кото-
которые в качестве неизвестных содержат только независимые коор-
координаты. С другой стороны, эти уравнения должны полностью
учитывать влияние связей на систему. Такие уравнения сущест-
существуют и называются уравнениями Лагранжа в' неза-
независимых координатах (или уравнениями Лаг-
Лагранжа второго рода). Значение этих уравнений не исчер-
исчерпывается применением к указанному типу задач. Если требуется
определить реакции связей, зачастую проще с помощью уравне-
уравнений Лагранжа второго рода определить закон движения систе-
системы, а затем с помощью уравнений Лагранжа первого рода най-
найти реакции связей. Уравнения Лагранжа второго рода имеют
большое значение и для свободных систем. В этом случае они
§ 5.4 Уравнения Лагранжа в независимых координатах 215
представляют собой уравнения движения в произвольных криво-
криволинейных координатах (см. пример 5.7 на с. 227—228 и [15]).
Ввиду большой общности этих уравнений выведем сначала
дифференциальное уравнение, которому подчинена независимая
координата какой-либо простейшей системы, например матема-
математического маятника. Так называется тело достаточно
малых размеров, подвешенное на стержне (или нити) исчезающе
малой массы и постоянной длины / и совершающее движение в
вертикальной плоскости (в точке подвеса трением пренебре-
гается).
Движение такого маятника описывается уравнением Лагран-
Лагранжа с реакциями связей (см. E.18))
mr = mg 4- ^iV/i
{начало координат помещено в точку подвеса, плоскость z=0
совмещена с плоскостью движения, а ось Ох найравлена по вер-
вертикали вниз).
Чтобы исключить из этих уравнений реакции связей, умножим
уравнение движения маятника скалярно на виртуальное пере-
перемещение бг; тогда, учитывая идеальность связей (см. E.13)),
найдем
гбг = g6r.
Отсюда, используя декартовы координаты и учитывая уравнения
связей, получим систему
которая явно не содержит реакций связей, но учитывает их влия-
влияние на движение материальной точки, поскольку вариации 8х и
8у соответствующим образом зависят друг от друга.
Используя голономность связи, перейдем в найденной системе
уравнений к независимой координате, в качестве которой удобно
взять угол* ф отклонения маятника от вертикали. Выражая де-
декартовы координаты маятника через ф
х = / cos ф, у = I sin ф,
найдем
6л; = —Ism фбф," х ==-— /(фэшф + ф2со8ф),
8у = / cos ф бф, у = / (ф cos ф — ф2sin ф).
Наконец, используя эти выражения, придем к уравнению, содер-
содержащему только независимую вариацию 6<р:
16 Уравнения Лагранжа Гл. V
= О,
где со? = gll. Приравнивая коэффициент при независимой ва-
вариации нулю, получим одно дифференциальное уравнение, описы-
описывающее движение математического маятника:
Ф -f coo sin ф = 0.
Это уравнение не содержит реакций связей в качестве неизвест-
неизвестных, однако полностью учитывает их воздействие на точку, по-
поскольку сама независимая координата выбрана с учетом связей.
В самом деле, уравнение связи, выраженное через угол ф, удов-
удовлетворяется тождественно:
f = /2 (cos2 ф + sin2 ф) — /2 = 0.
Теперь выведем уравнения Лагранжа второго рода для меха-
механической системы, состоящей из N точек, на которые налагает-
налагается k идеальных голономных связей. Движение такой системы
подчинено уравнениям E.18). Чтобы исключить из этих уравне-
уравнений реакции связей, умножим каждое из них скалярно на соот-
соответствующее виртуальное перемещение бг* и' сложим результаты
умножения; тогда
? mtrtbrt = ? F,6r? -f ? (? KVtfa) Sr,. E.25)
i^=\ f=l {=1 a=l
Двойная сумма в этом уравнении представляет собой виртуаль-
виртуальную работу всех реакций связей и по условию идеальности свя-
связей равна нулю (см. E.17)):
? ? ЬаЪЬ-Ъ = ? Ц? V</a-fir,) = 0. E.26)
f=l a—1 a=l i=l
Поэтому E.25) можно записать в виде уравнения
й0, E.27)
которое называется общим уравнением механики или
уравнением д'Аламбера — Лагранжа.
Заметим, что уравнения Лагранжа с реакциями связей могут
быть получены из общего уравнения механики совместно с урав-
уравнениями связей
Ыг2, ....г*, 0 = 0 (a=l,2,...fft).
§ 5.4 Уравнения Лагранжа в независимых координатах 217
Действительно, используя уравнения связей в виде
/«6гг = 0 (а = 1,2 К).
умножим левур часть каждого из этих уравнений на соответ-
соответствующий неопределенный множитель —Яа (а=1, 2, ..., k)y a все
результаты умножения сложим с левой частью E.27). Тогда
N k
- Fj — у ^ccVf/aj Sri = 0.
сс=1
Далее, применяя к этому уравнению последующую процедуру
метода неопределенных множителей, изложенного на с. 206, при-
придем к уравнениям Лагранжа с реакциями связей. Таким образом,
система, состоящая из уравнения E.27) и уравнений связей
E.10), эквивалентна системе E.18). Более того, можно утвер-
утверждать, что общее уравнение механики и уравнения движения с
реакциями любых идеальных связей эквивалентны*..
Прежде чем продолжить'вывод уравнений Лагранжа второго
рода, остановимся на понятии независимых обобщенных
координат. Такими координатами по определению являются
любые 3N—k величины, однозначно определяющие положение
системы (N и k — числа точек системы и голономных связей соот-
соответственно). Число независимых обобщенных координат, равное
s = 3N—k, в случае систем с голономными связями называется
числом степеней свободы. Независимые обобщенные ко-
координаты будем обозначать qu q2, ..., q8, а всю эту совокупность
для краткости будем в дальнейшем обозначать символом q.
Из определения независимых координат следует, что они долж-
должны удовлетворять двум требованиям.
Действительно, система с идеальными связями подчинена уравнениям
N
R*6rf = 0, (a)
из которых вытекает, что
N
Если же исходить из последнего уравнения, то, полагая
Rt = miu — F;,
придем к системе (а).
218
Уравнения Лагранжа
Гл. V
Во-первых, радиусы-векторы точек системы должны быть одно-
однозначными функциями а:
r, = r,(<7i, ?2, ...,<7S, t) (i= 1,2, ...,#), E.28)
причем из 3Af функций — проекций радиусов-векторов — 5 каких-
либо функций должны быть независимыми, что обеспечивается'
требованием: ранг матрицы
dx
3N
E.29)
должен равняться числу s степеней свободы (здесь проекции ра-
радиусов-векторов точе^ обозначены символом х\ с общей для всех
точек нумерацией, например проекции вектора г4 обозначаются
#i, X2, Хз, а проекции вектора г2 обозначаются Хь, хъ, #6 и т. д.)
[44, с. 520].
Во-вторых, координаты q должны быть выбраны в соответствии
с уравнениями связей, т. е. функции E.28) должны обращать в
тождество уравнения связей E.10):
= 0 (а =1,2,...,*). E.30)
Л О Г.
Обратим внимание на то, что в случае стационарных связей
уравнения связей явно от времени не зависят; поэтому и функ-
функции E.28) можно подобрать явно не зависящими от времени.
В дальнейшем это условие для стационарных связей будем счи-
считать выполненным.
Ввиду важности понятий о независимых обобщенных коор-
координатах и числе степеней свободы рассмотрим несколько при-
примеров.
Пусть точка движется по эллипсу с полуосями а и Ь. В систе-
системе координат с началом в центре эллипса и осями Ох, Оу, направ-
направленными по осям эллипса, уравнениями связей являются
Первое из этих уравнений обращается в тождество, если поло-
положить, что
х = a cos а, у = Ь sin а.
Таким образом, в качестве независимой координаты можно
выбрать параметр а, а число s степеней свободы в этом случае
равно единице.
§ 5.4 Уравнения Лагранжа в независимых координатах 219
Если точка движется по сфере радиуса I с центром в начале
координат, то уравнением связи является уравнение
которое обращается в тождество подстановкой
х = I sin 6 cos ф, у = 1 sin 6 sin ф, г = I cos 6,
где 8 и ф — углы сферических координат (см. рис. 5.1). Следо-
Следовательно, эти углы могут служить независимыми координатами,
а число степеней свободы 5 = 2.
Наконец, в случае свободной точки 5 = 3, а в качестве неза-
независимых координат можно взять различные криволинейные коор-
координаты, например цилиндрические; эти координаты связаны с
декартовыми координатами точки соотношениями вида E.28)
х = р cos ф, у — р sin ф, z =-"z.
Используя формулы преобразования E.28), представим общее
уравнение механики в форме уравнения относительно независи-
независимых координат и их производных по времени. Для этого прежде
всего найдем виртуальные перемещения 6i\ всех точек как функ-
функции q:
Подставляя E.31) в общее уравнение механики и изменяя поря-
порядок суммирования, получим
Здесь все суммы по индексу i имеют размерность энергии, делен-
деленной на размерность соответствующей координаты qj. При этом
те суммы по i, в которые входят ускорения точек, определяются
кинетической энергией как функцией обобщенных координат и их
производных по времени. Действительно, преобразуем i'-тый член
одной из таких сумм:
JL ('t *L\ Г{ Л. I *L\. E.33)
dt \ dq ) K '
dq, dt \ dqj } dt \ dqj ).
Затем, используя E.28), найдем скорости точек как функции
обобщенных координат
220 Уравнения Лагранжа ^ Гл. V
*Lj,+ *L (l=\,2,...,N). E.34)
Отсюда видно, что скорости материальных точек являются ли-
линейными функциями величин q^ (/=1, ..., 5), называемых обоб-
обобщенными скоростями. Из E.34) также видно, что в
общем случае имеет место равенство частной производной от ско-
скорости точки по обобщенной скорости и частной производной
радиуса-вектора той же точки по соответствующей обобщенной
координате, т. е.
**_**_ /( = 1,2 N;
д<7/ д<>1 \j = li 2, ... ,S
Используя E.35) и изменяя порядок дифференцирования по t
и <7j, вместо E.33) получим
iAJ\f(i?L. E.36)
dq,
Применяя эти соотношения, все зависящие от ускорений «суммы
по точкам системы» можно представить в виде
\\m}t iL^^fV^A^-y^A E.37)
Далее, пользуясь E.34), зададим кинетическую энергию систе-
системы как функцию обобщенных скоростей и координат:
N
^J 2
E.38)
(здесь и в дальнейшем под q понимается совокупность обобщен-
обобщенных скоростей, так же как под q понимается совокупность всех
обобщенных координат). Дифференцируя эту функцию по обоб-
обобщенным скоростям и координатам, найдем
N N
Щг.^- (/=lf2,...fs). E.39)
Сопоставляя E.37) и E.39), получим
N
т^ iEL =-А-/ДЛ _ iZL (/= 1,2, ... ,s). E.40)
=i
§ 5.4 Уравнения Лагранжа в независимых координатах 221
«Суммы по точкам системы» (см. E.32)), зависящие от задан-
заданных (активных) сил, обозначим символами
N
?i^t tf=1'2'••"*)• E'41>
Величины Q являются заданными функциями обобщенных
координат, скоростей и времени. Действительно, все F* определе-
определены как функции гг-, v^ и t (i=l, 2, ..., N), а все векторы тг и V;
согласно E.28) и E.34) являются функциями q, q и t.
Используя введенные обозначения, виртуальную работу всех
заданных сил F? можно представить в виде
N s
Следовательно, величина Qj. играет по отношению к вариации б^-
независимой координаты ту же роль, которую сила F* играет по
отношению к виртуальному перемещению 6г; точки. Поэтому
величину Qj называют обобщенной силой, соответствую-
соответствующей координате qj. Размерность обобщенной силы Qj равна раз-
размерности работы, деленной на размерность соответствующей
координаты qj.
Используя E.32), E.40) и определение обобщенной силы,
придем к общему уравнению ' механики в обобщенных коорди-
координатах:
^(^)fQ,}4 , E.43)
где все вариации 8qj независимы друг от друга. Поэтому из об-
общего уравнения механики вытекают дифференциальные уравне-
уравнения движения, а именно уравнения Лагранжа в независимых
координатах
M%)% E-44)
Эти уравнения, как и уравнения Лагранжа с реакциями связей
E.18), справедливы для систем с голономными идеальными свя-
связями.
Итак, уравнения Лагранжа в независимых координатах не
содержат реакций связей в качестве неизвестных функций, хотя
полностью учитывают влияние связей на движение механической
системы. Неизвестными в этих уравнениях являются обобщенные
222 Уравнения Лагранжа Гл. V
независимые координаты как функции времени. Число неизвест-
неизвестных и число уравнений равно'числу степеней свободы.
Если заданные силы потенциальны, а потенциальная энергия
системы равна U (гь ..., rNi t), то, воспользовавшись формулами
и определением E.41), получим
N
/ ~ — 7 \№ \У == *> ^> • • * >^/# ^o.rtOj
Таким образом, уравнения Лагранжа для случая потенциальных
сил приобретают вид
<« V fy / ' dqj dqj W ; V '
Подчеркнем, что рациональный выбор независимых коорди-
координат может существенно упростить конкретный вид уравнений
Лагранжа и т-ем самым облегчить решение задачи. Лагранж по
этому поводу писал: «Так как эти уравнения могут иметь раз-
различные более или менее простые формы и, в частности, более
или менее удобные для интегрирования, является не безразлич-
безразличным, в каком виде они представлены с самого начала; пожалуй,
одно из главных преимуществ нашего метода заключается в том,
что он всегда дает уравнения каждой задачи в наиболее простой
•форме по отношению к примененным при этом переменным и
дает нам возможность наперед судить о том, каковы те перемен-
переменные, пользование которыми может нам максимально облегчить
интегрирование» [6, т. I, с. 403]. Действительно, пусть обобщен-
обобщенная координата q$ выбрана так, что кинетическая энергия Т явно
не зависит от нее, а соответствующая этой координате обобщен-
обобщенная сила Qj равна нулю, т. е.
-^ = 0, Q/ = 0. E.47)
Тогда уравнение Лагранжа, соответствующее координате qh
сразу приведет к первому интегралу
^L^t(q9q9 t) = const. E.48)
dqj
Если заданные силы потенциальны, то условия E.47) приобре-
приобретают вид
• -^--0, -^- = .0. E.49)
§54 Уравнения Лагранжа в независимых координатах 223
Координаты, от которых кинетическая и потенциальная энер-
энергии системы явно не зависят, называются циклическими
координатами. Цикличность координат во многих случаях
связана с симметрией заданного силового поля и связей, поэтому
рациональный выбор обобщенных координат должен отражать
эту симметрию.
Выбирая независимые координаты так, чтобы число цикли-
циклических координат было максимальным, и интегрируя уравнения
Лагранжа, можно найти общее решение уравнений E.44) (или
.E.46)) в виде
qt = q,(t,Cl9C2,...,Cu) (/«1,2,... ,s) . E.50)
(здесь С а— постоянные интегрирования). Это решение позволяет
определить закон движения системы и реакции связей как функ-
функции времени. Действительно, используя E.28), найдем гг-@
(/=1, 2, ..., N). Затем, дифференцируя тг(г) по времени, получим
векторы скоростей и ускорений всех точек: Vi{t), vf%{t) (i=l, 2, ...
..., N)\ И наконец, используя найденные функции и уравнения
Лагранжа E.18), получим реакции связей как функции времени:
Ri @=^^@-^@ (*=l,2,...,tf), E.51)
где
F* @ - F, (гх @, . .. , г* @, vx @; . • • , Viv (i), t).
В заключение этого параграфа рассмотрим принцип виртуаль-
виртуальных перемещений, являющийся основой статики — большого
раздела механики, в котором .изучается равновесие механических
систем (этот принцип играет важную роль во многих инженерных
расчетах). Пусть в начальный момент времени система находится
в положении r^0 (i=l, 2, ..., N), а скорости всех ее точек равны-
нулю; если система и в любой другой момент времени остается
в положении гг-0 (*=1, 2, ..., N), то это положение называется
положением равновесия системы. Из общего уравне-
уравнения механики следует, что в положении равновесия виртуальная
работа заданных сил должна равняться нулю, т. е.
N
бл =SFi бг' = °- E-52>
1=1
Это необходимое и достаточное условие равновесия системы на-
называется принципом виртуальных перемещений
(необходимость и достаточность E.52) следует из эквивалент-
эквивалентности уравнений Лагранжа с реакциями связей и общего уравне-
уравнения механики (см. с. 217)). Записывая принцип виртуальных пе-
перемещений в независимых координатах с помощью E.42), получим
224
Уравнения Лагранжа
Гл. V
E.53)
откуда ввиду независимости всех вариаций 8qj следует, что необ-
необходимым и достаточным условием равновесия механической си-
системы с голономными идеальными связями является обращение в
нуль всех обобщенных сил в рассматриваемом положении си-
системы. Таким образом, положение равновесия системы опреде-
определяется s уравнениями:
Q/==0 (/= 1,2 s). E.54)
Рассмотрим ряд примеров на решение уравнений Лагранжа в
независимых координатах.
Пример 5.4. Циклоидальный маятник. -
Точка массы пг движется
в однородном поле тяжести
по гладкой циклоиде, рас-
расположенной .в вертикальной
плоскости (см. рис. 5.6).
Найти закон движения точ-
точки, если напряженность по-
поля тяжести g, а радиус ок-
окружности, производящей
циклоиду, равен R.
Рис 5 6 Выберем декартовы оси
так, чтобы одна из осей бы-
была коллинеарна g, а одна из координатных плоскостей совпадала
с плоскостью циклоиды. За независимую координату возьмем угол
Ф — угол поворота производящей окружности, отсчитываемый от
оси Оу (производящая окружность катится без скольжения по
штрихованной прямой, параллельной оси Ох). Тогда уравнение
связи запишется в виде
-slncp), f/ = /?(l—созф).
Используя эти функции, легко найти Т и U как функции <р и <р:
Т = 2mR2 cos2 (SA ф2, U = 2mgR sin2 L$-
Отсюда видно, что уравнение Лагран^а
d / дТ \ _ дТ_ д?_
dt \ дф / дф дф '
соответствующее координате ф, будет достаточно сложным. Одна-
Однако из тех же выражений можно усмотреть, что Т и U принимают
весьма простой вид, если в качестве переменной взять величину,
§ 5.4 Уравнения Лагранжа в независимых координатах 225
пропорциональную sin(cp/2). Действительно, производная от
sin(cp/2) по t пропорциональна cos(cp/2)(p. В связи с этим Вхместо ф
выберем обобщенную координату s = 4#sin(<p/2) (s является дли-
длиной дуги циклоиды, отсчитываемой от начала координат до мате-
материальной точки). Выражая Т и U через переменную s:
Т — m с Г! — т& с2
получим уравнение Лагранжа, соответствующее этой переменной:
d
\ds ) ds ~~ ds '
dt
т. е.
s + co2s = 0,
где со2=^/4/?. Отсюда находим закон движения точки по циклоиде
s = a cos (со^ 4-а).
Здесь а и а — амплитуда и фаза гармонического колебания соот-
соответственно; их можно выразить через s0 и v0 — величины дуги и
скорости точки в начальный момент времени:
В частности, если ио = О, то решение принимает вид ,
S~SQ COS (dt,
откуда следует, что при любом начальном отклонении
So<Smax = 4/? точка придет в наинизшее положение за один и тот
же промежуток времени (это свойство движения называется изо-
хронностью).
Пример 5.5. Точка на колеблющейся горизонтальной плоско-
плоскости.
Рассмотрим решение примера 5.1 с помощью уравнений Лаг-
Лагранжа в независимых координатах.
Поскольку на одну точку налагается одна связь, то число сте-
степеней свободы точки будет равно двум. В качестве независимых
координат можно выбрать декартовы координаты х и у (см. рис.
5.2,а), а используя уравнение связи, найти кинетическую энер-
энергию Т как функцию обобщенных скоростей хну
Т - -— (?- -j- f + flV cos2
8 Зак 284
226 Уравнения Лагранжа Гл. V
и потенциальную энергию
U = mga sin со/.
Эти выражения для Т и U дают возможность составить уравне-
уравнения Лагранжа E.46) для рассматриваемой задачи:
d [ дТ \ дТ ди • А
dt \ дх J дх дх
' d ( дТ \ дТ dU л
—г- = , т. е. ту = 0.
dt \ду ) ду . &/
В настоящем примере обе координаты л: и у циклические, так
как ни Г, ни [/ явно от них не зависят (см. E.49)). Поэтому для
решения задачи не обязательно выписывать уравнения Лагранжа;
можно сразу получить интегралы вида E.48)
дТ дТ '
--,- = тх = тх0, —г- = ту = ту0,
дх ду
с помощью которых найти окончательное решение (см. пример
5.1). Заметим, что сохранение проекций скорости х я у здесь свя-
связано с цикличностью координат х и у.
Пример 5.6. Точка на расширяющейся цилиндрической поверх-
поверхности.
Рассмотрим решение примера 5.2, используя независимые ко-
координаты.
Согласно условию связь, налагаемая на точку,, обладает ци-
цилиндрической симметрией, а ось цилиндра направлена вдоль век-
вектора g (рис. 5.4). Поэтому выберем в качестве независимых пере-
переменных цилиндрические координаты ф, z (число степеней свободы
точки равно двум) и запишем уравнения E.46) в этих перемен-
переменных в общей форме:
d ( дТ \ дТ _ dU
dt \ dqp / дф дф
d / дТ \ дТ_ ^ dU
dt \дг ) дг "" дг '
Используя выражение для скорости в цилиндрических коорди-
координатах (см. A.17)) и уравнение связи
найдем кинетическую и потенциальную энергии как функции обоб-
обобщенных скоростей и координат:
§54 Уравнения Лагранжа в независимых координатах 227
U = mgz.
Отсюда видно, что координата ф является циклической. .Это приво-
приводит к интегралу
m((V + py2p c
который дает возможность найти w(t). Нетрудно убедиться, что
частная производная —— равна Mz — проекции момента им-
дф
пульса на ось Oz, а ее сохранение связано с цикличностью коор-
координаты ф.
Независимая координата z не является циклической, так как
Ф 0. Поэтому закон изменения этой координаты получим из
dz
соответствующего уравнения Лагранжа
Пример 5.7. Уравнение движения свободной точки в цилинд-
цилиндрических и сферических координатах.
Поскольку свободная точка обладает тремя степенями свобо-
свободы, то в качестве независимых координат можно взять любые три
независимые координаты точки, в частности цилиндрические коор-
координаты р, ф, z. Приращение радиуса-вектора в этих координатах
равно
dx = прф +
Следовательно, кинетическая энергия точки имеет вид
T = f(p*+p\* + J), A)
а частные производные, необходимые 'для получения обобщенных
сил, соответственно равны
Используя эти выражения, найдем (см. E.41))
QP = F^-=FP! Q, = F-fL=pF,- Q^F.f- = F2) B)
где Fp, Fq>9 ^ — проекции силы F на цилиндрические орты. Таким
образом, обобщенные силы Qp и Qz являются проекциями силы F
на координатные оси (р) и (г), а обобщенная сила <2Ф равна Lz —
проекции момента силы на ось (г).
228 Уравнения Лагранжа Гл. V
Подставляя A) и B) в E.44), найдем уравнения движения
точки в цилиндрических координатах:
m(p-p(p2)=Fp, т-4-(р?ф)-РРф, mz=Fz. C)
at
По определению сферических координат приращение радиуса-
вектора свободной точки равно
rfr = nrdr + nerdO + пфг sin 0dcp.
Следовательно, кинетическая энергия в сферических координатах
имеет вид
Т = — (г'2 -f г262 -г г2 sin2 6. ф2); D)
нетрудно также получить
А- = п„ ±- = я1в, -^^rsinb-щ.
дг дд ^ф
Используя эти частные производные, найдем обобщенные силы
Qr = Fn Qe^rFe, Qv = rein 6-,Рф, E)
где Fr, Fe9 Fq> — проекции заданной силы F на сферические
орты. Подставляя D) и E) в уравнения E.44), где в качестве
независимых координат взяты г, 0 и ф, получим уравнения движе-
ния*точки в сферических координатах:
т {г — г (б2 + sin2 в. ф2)} = Frt
т I— (г2б) — г2Bin6 cos в-ф2] = rF0, F)
1 dt ч ; Y J ' v ;
m —^(r2sin2 в-ф) = г sin Q-F9.
dt
Отсюда легко найти проекции ускорения точки на орты сфериче-
сферических координат:
wr = r — r (б2 + sin2 б • ф2),
wQ=— — (г2б) — rsin6cos6-cp2, G)
г dt
Wr, — —(Г S -ф).
§ 5.5 Функция Лагранжа 229
§ 5.5. Структура уравнений движения в независимых
координатах и функция Лагранжа
В предыдущем параграфе было выяснено, насколько важен
выбор независимых обобщенных координат при составлении урав-
уравнений Лагранжа. В свою очередь, вопрос о выборе координат
требует более тщательного изучения структуры этих уравнений.
С этой целью прежде всего рассмотрим структуру кинетической
энергии.
Кинетическая энергия является однородной положительно-оп-
положительно-определенной квадратичной формой от скоростей точек. Положи-
Положительная определенность этой формы означает, что Г>0 при лю-
любых значениях проекций скоростей, одновременно4 не равных нулю,
а Т=0 только в том случае, если все Vi = 0 (i=l, 2, ..., Лт) (освой-
(освойствах квадратичных форм см. [48, гл. 1, § 4—7]). Однако кине-
кинетическая энергия как функция обобщенных скоростей в общем
случае будет неоднородной квадратичной формой. Убедимся в этом
непосредственно, подставляя в кинетическую энергию скорости
точек, выраженные через обобщенные переменные, т. е. подстав-
подставляя
Изменяя порядок суммирования, найдем, что
где Т&\ TW и 7<°) являются однородными формами соответствен-
соответственно второй, первой и нулевой степени относительно обобщенных
скоростей:
»^А.. E.56)
2 jL
Как видно, все коэффициенты а#, а;- и форма нулевой степени
74°) зависят только от обобщенных координат и времени, а неодно-
неоднородность кинетической энергии как функции обобщенных скоро-
230 Уравнения Лагранжа Гл. V
стей имеет место только в том случае, если преобразование E.28)
явно зависит от времени (например, в случае системы с нестацио-
нестационарными связями). Если же преобразование E.28) подчиняется
условиям
-^L=0 (*=l,2,...,tf). E-57)
ot
то кинетическая энергия будет однородной формой обобщенных
скоростей, т. е. Т = ТB\ Условия E.57) выполняются, в частности,
для случая стационарных связей.
Рассматривая свойства Т<2>, прежде всего заметим, что все
коэффициенты а^ симметричны по индексам, т. е.
ajk = akI (/, А= 1,2, ... ,s). E.58)*
Далее можно убедиться, что Г<2) является положительно-опреде-
положительно-определенной формой обобщенных скоростей. Положительная определен-
определенность TW относительно q означает, что Г^Г^О, причем Г<2) = 0
только в том случае, если все ^ = 0 (/=1, 2, ..., 5).
Для доказательства этого утверждения запишем TW в виде
/--1
Отсюда следует, что Г<2) является положительно-определенной
формой относительно сумм
Иначе говоря, при любых значениях этих сумм ГB)^0, причем
7B) = о только в том случае, если все эти суммы равны нулю:
4/ = 0 (*=1,2,...,Л0. E,59)
"''
Матрица, составленная из коэффициентов вида '—-, представ-
ляет собой функциональную матрицу системы функций E.28).
Согласно предположению о независимости s этих функций
(см. E.29)) ранг этой матрицы равен s. Если же ранг матрицы
равен числу неизвестных в линейной однородной системе E.59),
то нулевое решение такой системы является единственным
[47, с. 83]. Таким образом, TW действительно обращается в нуль
§ 5.5 Функция Лагранжа 23]_
только в случае, когда все qj = O (/=1, 2, ..., s). С другой сторо-
стороны, если хотя бы одна из этих скоростей отлична от нуля,
то Г<2)>0. Итак, форма Т<2) является положительно-определенной
формой от обобщенных скоростей. Следовательно, детерминант,
составленный из ее коэффициентов, отличен от нуля [48, гл. 1, §6,
теорема 3]:
an ... als
#22 • • • a2s
E.60)
as2 ... и,
Основываясь на этом свойстве, можно убедиться, что уравне-
уравнения Лагранжа E.44) однозначно определяют движение механи-
механической системы, если заданы начальные значения обобщенных ко-
координат и скоростей. Действительно, из E.55) и E.56) найдем
ijkVk + aj (/- 1, 2, ... ,s), E.61)
откуда следует, что
dt х aL / / ,-/«-/« . , , -iKiK . --/ (/ = 1, 2, ... ,s) E.62)
(величины вида q называются обобщенными ускорения-
ускорениями). С другой стороны, члены —г- не зависят от обобщенных
ускорений, не зависят от них и обобщенные силы, так как все
заданные силы F* являются функциями только положений, скоро-
скоростей точек и времени. Поэтому уравнения E.44) представляют
собой систему
7= 1, 2, ... ,s),
которую в силу E.60) можно разрешить относительно ускоре-
ускорений q и представить в виде
41 = §/ (<7> i 0 (/=1,2,..., s). E.63)
На основании известной теоремы из теории обыкновенных диффе-
дифференциальных уравнений [46, с. 86] система E.63) с заданными
функциями Qj (qy qy t) имеет единственное решение, удовлетворяю-
удовлетворяющее начальным условиям
232 Уравнения Лагранжа Гл. V
?/ = <7/о, 41=410 (/= 1, 2, ... ,5).
Переходя к изучению структуры обобщенных сил, вспомним,
что эти силы согласно E.41) определяются известными вектор-
векторными силами, а в случае потенциальных сил — потенциальной
энергией или потенциалом U как функцией^ положения точек и
времени.
Рассмотрим обобщенно-потенциальные силы, ко-
которые могут быть заданы с помощью скалярной функции %1, зави-
зависящей не только от положений точек и времени, но и от скоро-
скоростей точен (такая функция называется обобщенным потен-
потенциалом). Например, сила Лоренца, с которой электромагнитное
поле действует на движущийся заряд, является обобщенно-потен-
обобщенно-потенциальной и, как будет показано ниже, вможет быть представлена
в виде
J(M)*L E.64)
dt \ дг ) дг
где
% = — — Ar + *F, E.65)
с
а А и ф — векторный и скалярный потенциалы электромагнитно-
электромагнитного поля, заданные как функции точки пространства и времени и
определяющие напряженности поля [40, с. 431]:
fi = _V4>--L-^-, 3^-fvAJ; E.66)
в формуле E.64) символом обозначен градиент, а символом
дг
— дифференциальный оператор
дг
п д ¦ п -^- : п -?-
А дх ' у ду " dz
Подставляя E,65) в E.64), получим
d ( Ш \ dU е 2 е
dt
— \ = ___д_ у(Аг)
\ дг ) дг с с ук )
Затем, используя полную производную векторного потенциала по
времени
А = -^- + (гу)А E.68)
(здесь к вектору А применяется оператор — скалярное произведе-
произведение rV), убедимся, что правая часть равенства E.67) имеет вид
§ 5.5 Функция Лагранжа 233
E.69)
Наконец, подставляя сюда E.66), придем к известному выраже-
выражению силы Лоренца. Эта сила слагается из потенциальной силы
т-, u e дА
—?V(p, непотенциальнои силы — , зависящей от положения
с Ы
и времени, а также из гироскопической силы —[у Ж].
с
Обобщенные силы, соответствующие силе вида E.64), всегда
можно представить в форме
q *(МЛ-^~. E.70)
Ч/ dt \ dq} ) dqj K }
Действительно, пользуясь E.64) и определением обобщенной си-
силы, получим
Q. = _*_ («L \ _* 11. E.71)
^' dt \ дг ) dqj dr dqj V ;
Затем, учитывая, что —=——, E.71) можно привести к виду
дЯ) дд)
Qj?= — — -T—-^i- . E.72)
^ \ dr d<fr / dr dqj dr dqj
Отсюда, принимая во внимание очевидные равенства
Ш __ dU dr dU Ш dr dU dr
dqj dr dqj dqj dr dqj dr dqj *
убеждаемся в справедливости E.70).
Обобщенный потенциал, определяющий силы вида E.70), дол-
должен быть линейной формой относительно скоростей точек (в про-
противном случае мы получим силы, зависящие от ускорений).
Например, обобщенный потенциал системы зарядов во внешних
электромагнитных полях согласно E.65) имеет вид
N N
ei A *
1=1
Выражая здесь скорости точек и их радиусы-векторы через обоб-
обобщенные переменные (см. E.28) и E.34)), получим, что
U = ПA) + U@\ E.75)
234 Уравнения Лагранжа Гл. V
s
где %A) = \) Ujqj — линейная однородная форма- обобщенных сксрос-
тей, %т — форма нулевой степени (Uf и U{0) являются функциями
только координат и времени). Нетрудно убедиться, что силы Q/, соот-
соответствующие обобщенному потенциалу E.75), равны:
dUk dUj , ,
где yik = — коэффициенты, антисимметричные по ин-
dq; dqk
дексам. Отсюда видно, что гироскопическая часть обобщенной си-
силы может быть задана с помощью антисимметричной матрицы
(см. определение гироскопической силы на с. 70).
При наличии обобщенно-потенциальных и ^диссипативных сил
уравнения Лагранжа в независимых координатах можно записать
в виде
где J? = Т — % — разность кинетической энергии и обобщенного по-
потенциала, a QJ — обобщенные диссщштивные силы. Подчеркнем, что
j? и все Q/ являются функциями обобщенных координат и обобщен-
обобщенных скоростей. Функция Jz? называется функцией Лагранжа,
или лагранжианом. Она является неоднородной квадратичной
формой относительно обобщенных скоростей (см. E.55) и E.75))
ср нпB) | /tW cil^\ ! /Т1^) QI@K /К 1Q\
еХ 1 | \1 Us ) Г \ * Us /•• \DttOf
Когда диссипативные силы линейно зависят от скоростей то-
точек, они также могут быть выражены через скалярную функцию.
В самом деле, если
F? = — ktviy kt>0 (i == 1, 2, ... , N)t E.79)
то, подставляя E.79) в определение
N
dqj
и используя равенства —— = , получим
dq) дЯ)
(/=1,2, ...,s), E.80)
§ 5.5 Функция Лагранжа 235
N
где D
N
D = V — (rt-J— диссипативная функция Рэлея.
il
Структура этой функции аналогична структуре кинетической энер-
энергии, так как формально диссипативная функция может быть по-
получена из кинетической энергии заменой каждой массы гщ на со-
соответствующий коэффициент ki. Производя такую замену, из
E.55) и E.56) найдем
E.81)
где
N
2 i~J \ a*
(здесь все коэффициенты bjh симметричны относительно переста-
перестановок индексов).
Пример 5.8. Теорема Лармора.
Пусть электрон (заряда е и массы ш) движется в электро-
электростатическом поле ядра (порядковый номер ядра равен Z, его мас-
масса значительно больше массы электрона, а начальная скорость
ядра равна нулю). Эта система помещается в достаточно слабое
однородное и постоянное магнитное поле напряженности Ж- По-
Показать, что при этом орбита электрона будет прецессировать
вокруг оси, параллельной напряженности Ж с угловой скоростью,
равной частоте Лармора со = —— .
Поскольку масса ядра значительно больше массы электрона,
введем систему, отсчета с началом в ядре (эта система отсчетд
будет весьма близка к инерциальной — см. замечание на с. 194).
Ось Oz направим вдоль вектора Ж\ тогда, используя цилиндри-
цилиндрические координаты, получим уравнение для определения вектор-
потенциала А (см. E.66)):
Пф
+ — ( —— ) п2.
р V ар д<? ) z
236 Уравнения Лагранжа Гл. V
Полагая здесь, что ЛР = Л: = О и что проекция Лф не зависит от г,
найдем
и, следовательно,
(определение А по заданной напряженности Ж неоднозначно, од-
однако эта неоднозначность не сказывается на значении силы, так
как сила зависит от напряженности Ж).
Таким образом, обобщенный потенциал рассматриваемых по-
полей равен (см. E.65))
где U — е потенциал электростатического поля. Исполь-
/р» + г»
зуя это выражение 11, получим лагранжиан заряда
Jg = ^-(p*-pV + z*)- Ul2f 9\-V. A)
Чтобы убедиться в справедливости теоремы Лармора, введем
вращающуюся с угловой скоростью оз систему отсчета с началом
в ядре и перейдем от переменных р, ф, г к переменным р, а, г,
где а=ф—o)f. Функция Лагранжа в новых переменных будет рав-
равна
& = HL (р« + р W + г*) - — р2со2 - U.
Так как по условию напряженность магнитного поля мала, то,
пренебрегая членом, пропорциональным о2, получим
X' 5г — (р2 -^ р V + г*) — U. B)
С другой стороны, функция A) в отсутствие магнитного поля
равна
Хж=ъ - -? (Р2 + Р V + *2) - Ь\ C)
Совпадение вида функций B) и C) говорит о том, что при
наличии магнитного поля электрон движется относительно систе-
системы, вращающейся с частотой Лармора, так же, как он движется
в отсутствие магнитного поля относительно инерциальной систе-
§ 5.6 Обобщенный импульс и обобщенная энергия 237
мы. Это свидетельствует о прецессии орбиты электрона с угло-
угловой скоростью о.
§ 5.6. Законы сохранения обобщенного импульса
и обобщенной энергии
В главе II были рассмотрены законы сохранения импульса,
кинетического момента и энергии, вытекающие из уравнений Нью-
Ньютона; соответственно законы сохранения обобщенного импульса и
обобщенной энергии являются следствием уравнений Лагранжа.
Запишем уравнения E.77) в виде
J ?? Q? (/ -1,2,..., s), E.82)
dt dq,-
'где величина pj =] * называется обобщенным, импуль-
dqf
сом, соответствующим координате </j. Из E.82) следует, что
обобщенный импульс р?- сохраняется, если функция Лагранжа
явно от координаты Qj не зависит и если соответствующая этой
координате диссипативная обобщенная сила равна нулю. Таким
образом,
Р/ = -Ц- = Р/о. E.83)
d
если*" =0 и Q/ = 0. Если же все диссипативные силы равны
dqf
нулю, то закон E.83) сохранения обобщенного им-
импульса принимает вид
Pl - р/0, если -f^- = 0. E.84)
°Ql
Приведем ряд небольших примеров. Функция Лагранжа для
пространственного осциллятора в декартовых координатах имеет
вид (см. B.46))
^ = у (*' + У" + ^~~f(Х* + У% + Z%)>
а обобщенные импульсы
Рх = -Щ- = тх, ру=: -Щ- = ту, рг = ^
д д
Щ ру Щ у, рг ^
дх ду dz
являются декартовыми проекциями импульса точки. Ни одна из
координат х, у, z в данном случае не является циклической, соот-
238 Уравнения Лаграижа Гл. V
ветственно ни один из обобщенных импульсов pXi py, Pz не сохра-
сохраняется.
Теперь запишем лагранжиан пространственного осциллятора
в сферических координатах (см. формулу D) -в примере 5.7):
<? = -2L(r2 + гФ + Г28Ш20.ф2) — — Г2.
Обобщенными импульсами точки в этих координатах являются
рг = Щ- = тг, ре = -Щ- = тг26, рф = -Ц- = тг2в1п26.ф,
дг дб ду
причем обобщенный импульс рф равен Mz — проекции момен-
момента импульса точки на ось Ог. Поскольку координата ср цикличе-
циклическая, то Рф сохраняется, т. е.
mr2 sin2 6-ф = рф0.
Лагранжиан циклоидального маятника равен (см. пример 5.4)
здесь координата s нециклическая и обобщенный импульс
рв = —=- == ms
не сохраняется.
Наконец, возьмем заряд, движущийся в электростатическом
поле неподвижного ядра и постоянном однородном магнитном по-
поле (см. пример 5.8). В этом случае координаты р и z не цикли-
циклические, а ф — циклическая. Поэтому закон сохранения E.84) при-
приводит к интегралу
рф = —^— = тр2 (ф — (О) = рф0.
^Ф
Установим структуру обобщенного импульса в общем случае.
Принимая во внимание определение обобщенного импульса и
форму лагранжиана E.78), находим
S
/tf* + fl/ —ty. E.85)
где щи, a>j — коэффициенты однородных форм Г<2) и Г<!> кинети-
кинетической энергии, Uj — коэффициенты однородной формы Uil>
обобщенного потенциала. Отсюда видно, что обобщенные им-
§ 5.6 Обобщенный импульс и обобщенная энергия 239
пульсы являются неоднородными линейными формами обобщен-
обобщенных скоростей.
Закон изменения обобщенной энергии получим
из уравнений Лагранжа в независимых координатах аналогично
тому, как из уравнений Ньютона был получен закон изменения
энергии B.132). Умножая каждое из уравнений E.77) на соот-
соответствующую обобщенную скорость q} и складывая полученные
выражения по всем степеням свободы, найдем
-?
<*«¦ «>•«>
Как оказывается, в этом уравнении можно выделить полную про-
производную по времени от такой функции, которая в частном слу-
случае будет совпадать с энергией системы. Действительно, исполь-
используя очевидное соотношение
_____ [Щ-ц] ) —-М-<7/> E-87)
dt \ dq}- I dqj
представим левую часть уравнения E.86) в виде
S S
л / V~l г\ Ф • N К~"~1 / гЪ Ф • ri Ф •• \
/ ^к ' о*-* \ ^ « / j ! с/' \ /С QQ\
___^__ I m ________ п. \ — m I Q . , _________ Q , j ^ I jj,O0)
dt \--i dq; I ^-f\ ^/ dq) I
Затем, учитывая, что функция Лагранжа является функцией
обобщенных координат, скоростей и времени и, следовательно, ее
полная производная по времени равна
E.89)
вместо E.86) получим уравнение
S
^Г = —eT^LQl^ E-90)
где
H
Эту функцию обобщенных координат, скоростей и времени будем
называть обобщенной энергией системы, а уравнение
E.90) — законом изменения обобщенной энергии.
240 Уравнения Лагранжа Гл. V
Функция Н в частном случае совпадает с полной энергией
системы Е, в чем можно убедиться, рассматривая структуру Н.
В самом деле, используя E.85), а также E.56) и E.75), найдем,
что
s
Подставляя это выражение в E.91) и учитывая структуру лаг-
лагранжиана (см. E.78))^, получим
И = 7B) _ 7@) -j- %цо\ E.92)
Отсюда видно, что обобщенная энергия не содержит линейных
форм обобщенных скоростей, в то время как полная энергия вклю-
включает в себя форму ГО) (см. B.130), E.55))
Е == 7B) + ТЫ + Г<°> + I/ E.93)
(здесь U — обычная потенциальная энергия).
Из сравнения E.92) и E.93) следует, что обобщенная энер-
энергия- системы и ее полная энергия совпадают в тех случаях, когда
радиусы-векторы точек системы как функции независимых коор-
координат явно от времени не зависят, поскольку в этом случае
7 = 7B) (ГО) = Г<°) = 0), а %@) =?/; в частности, это имеет место для
,
систем со стационарными связями [—— = 0, i = 1, 2, ... , N).
\ dt I
Закон сохранения обобщенной энергии непо-
непосредственно вытекает из уравнения E.90): обобщенная энергия
системы сохраняется, если функция Лагранжа явно от времени
не зависит, а диссипативные силы отсутствуют, т. е.
Я = 7B) — Т<°> + Ш» - Яо E.94)
при условии, что —— = 0 и Qj = 0 (/ = 1, 2, ... , s). Первое из
dt
этих условий не обязательно связано с условием—^- =0 (i = 1, 2,..., N).
dt
Может случиться, что—^-=^=0 (f=l, 2, ... , N), а —— = 0; тогда в
dt dt
отсутствие диссипативных сил уравнение E.90) приводит к интегралу
движения, не совпадающему с интегралом энергии. Если же наряду
с условиями сохранения обобщенной энергии выполняются требования
—?i- =0 (t = 1, 2, ... , N), то законы сохранения обобщенной и
dt
полной энергий системы совпадают, т. е. Н = Е = ?0.
В заключение отметим достаточно распространенный случай
механической системы со стационарными связями и диссипа-
§ 5.6 Обобщенный импульс и обобщенная энергия 241
тивными силами, линейными относительно скоростей точек. Для
такой системы мощность обобщенных диссипативных сил равна
(см. E.80) и E.81))
Jf E'.95>
Учитывая, что кинетическая энергия системы со стационарными
связями явно от времени не зависит, из уравнения E.90) найдем
^L E.96)
dt
Пример 5.9. Сферический маятник.
Точка массы m движется в однородном поле тяжести напря-
напряженности g по гладкой неподвижной и твердой сфере радиуса /,
причем диссипатавными силами можно пренебречь. Найти общее
решение в независимых координатах.
Учитывая однородность поля тяжести и сферическую симмет-
симметрию связи, совместим начало координат с центром сферы, ось Ог
направим вдоль вектора g, а за независимые координаты возьмем
сферические углы 6 и ф (рис. 5.1). Тогда, функцию Лагранжа
можно записать в биде
& = -^ (ё2 + sin2 6-qJ) + mg7 cos 9.
Отсюда следует, что координата ф является циклической, а ——=0»
т. е. имеют место два интеграла движения (см. E.84) и E.94))
рф= —Ц- = m/2sin20-q) = Мг09
дф
Н
С помощью этих интегралов решение задачи можно довести
до квадратур. В самом деле, из интеграла момента следует, что
Y m/2 sin26
Подставляя это выражение в интеграл энергии, получим
242 Уравнения Лагранжа Гл. V
откуда найдем закон движения точки по траектории в виде
t = | ' —Ь const, C)
m/2
где
м2 1
t/eff = —^ mg/ COS 9.
2m/2 sin29 б
Исключая из уравнения B) элемент времени
получим уравнение траектории *
Ф= f M*>dQ + const. D)
ml* sin* Q
Область изменения координаты 8 определяется неравенством
?o^?/eff@)> аналогичным неравенству B.64). При этом гранич-
граничные значения координаты 6 можно найти, используя уравнение
?1o=^effF), которое в случае Mz0=^=0 является уравнением третьей
степени относительно cos 6 (рис. 5.7). Функция t/effF) прини-
принимает бесконечные значения в точках 0 и я, а при 6 = я/2 равна
(M2z0/2ml2) > 0; минимум этой функции достигается в точке
0 = 9eq, определяемой из уравнения ¦
cos 9eq __
Sin4 Geq M2z
E)
z0
Из графика видно, что область изменения угла 8 ограничена зна-
значениями 0min И бтах, Причем
тах<я- F)
Это означает, что траектория точки расположена на поверхности
сферы между двумя горизонтальными плоскостями, пересекаю-
пересекающими сферу, а угловая скорость ф изменяется в конечных преде-
пределах (см. A)).
Обобщенное ускорение 8 положительно, если 8<6eq, отрица-
отрицательно, если 8>8eq, и равно нулю, если 8 = 8eq. Это вытекает из
уравнения Лагранжа, соответствующего углу 8 и записанного с
помощью A) в виде
* Квадратуры t(Q) и ср(9) сводятся к эллиптическим интегралам, которые
подробно исследованы, например, в [8, т. 1, с. 433].
§ 5.6
Обобщенный импульс и обобщенная энергия
243
6 =
cos 9
m2/4 sin40 /
—-?- | Sine.
Для вычисления реакции
сферы воспользуемся тем, что
реакция направлена по норма-
нормали к сфере. Проектируя обе
части уравнения Лагранжа
первого рода на орт пг, найдем
mwr = m§cos0 -f Rr. (8)
Проекцию wr ускорения сфе-
сферического маятника определим
с помощью формулы G) при-
примера 5.7 при г=1. Тогда из
уравнения (8) получим (см.
A) и B))
Rr = — — Ео — 3mgcos 9. (9)
-mglcosS
Рис. 5.7
Рассмотрим частный случай, когда 9тах=я/2, а в начальный
момент времени угол Оо наклона маятника по отношению к вер-
тикали равен Этах. Тогда под действием силы тяжести маятник
начнет опускаться; соответственно угловая скорость маятника бу-
будет возрастать, кинетическая энергия увеличиваться, а потенци-
потенциальная убывать. Одновременно возрастет реакция сферы, причем
у реакции появится вертикальная составляющая. Это в конце
концов приводит к подъему маятника, который сопровождается
уменьшением кинетической энергии, угловой скорости и реакции
сферы, а также увеличением потенциальной энергии.
Рассмотрим еще один частный случай, когда начальные усло-
условия подобраны так, что ?о= (^eff)mm, т. е. прямая Ео и кривая
^eff(fl) пересекаются в одной точке, которой соответствует посто-
постоянный угол 0min=6 = 8max (см. рис. 5.7). Учитывая это, из закона
сохранения энергии, записанного в виде
v* = — (E0 + mgl cos в),
т
найдем (см. B) и E))
sin2 Qp
cos 0о
(Ю)
244
Уравнения Лагранжа
Гл. V
Отсюда
Ф5
/ cos Go
Итак, если начальная скорость точки направлена по горизонталь-
горизонтальной касательной к сфере, а величина начальной скорости опре-
определяется формулой A0), то точка будет двигаться по горизон-
горизонтальной окружности радиуса po = /sin9o.
Пример 5.10. Точка на вращающейся
прямой.
Достаточно малое тело массы т дви-
движется в однородном поле тяжести по
гладкому абсолютно твердому стержню,
который вращается с постоянной угло-
угловой скоростью со вокруг вертикали, про-
проходящей через закрепленную точку О
стержня. Угол между стержнем и верти-
вертикалью постоянен и равен 9b. Найти об-
общее решение в независимых координатах.
В ткачестве независимой координаты
выберем г — расстояйие материальной
точки от точки О (рис. 5.8), а* уравнения
связи запишем в виде 9 = 9о, ср = о>?; тогда
—Ш?СО8б0-/\
Рис. 5.8
Интегрируя уравнение Лагранжа
г — co2sin29o-r = — gcos90,
получим общее решение
coa sin2 Go
to sin 60
g cos Qp
со2 sin2 Go
Анализ этого решения облегчается, если воспользоваться инте-
интегралом обобщенной энергии (см. E.94))
Я = — га — — (D2sin290.r2 -г mgcoB%-r =
= Н0 =— Го— —
§ 5-6
Обобщенный импульс и обобщенная энергия
245
Переписывая его в виде
где
(г) = mg cos 60 • г — — со2 sifl2 90 • г2,
найдем, что область измене-
изменения координаты г опреде-
определяется требованием
Если 0о<я/2 (рис. 5.9),
то Uett имеет максимальное
значение, равное
т
со sin 80
в связи с чем можно рас-
рассмотреть три случая:
#0 >
Рис. 5.9
В первом случае движение может происходить в неограниченной
области; осуществляется этот случай, если начальная радиаль-
радиальная скорость удовлетворяет условию, которое вытекает из нера-
неравенства #o>(?4ff)max:
Во втором случае движение возможно в двух областях
0<r<rlf г2<г<сю.
Границы этих областей определяются корнями
(f—
\
2#о 11/2
g COS 8q
со2 sin2 0o ' Ц со2 sin2 0O ) mco2 sin2 0O
квадратного уравнения
HQ = Geff = -
m
— -у о2 sin2 0О- г2.
246 Уравнений Лагранжа Гл. V
Этот случай осуществляется, если начальная радиальная скорость
сравнительно мала,
В третьем случае область изменения г ограничена снизу:
f*2^rs?:cx>? а начальные условия должны удовлетворять неравен-
неравенству
^<oJsin20o-^-2^cos9o.ro (#0<0).
Если 0o^jt/2, то, рассматривая соответствующий график ?/eff,
легко прийти к выводу об инфинитности движения точки в обла-
областях: Os?r^oo(#o>0), гшШ<г<оо(Я0<0).
Пример 5.11. Движение заряда вблизи магнитного полюса.
Точка массы m ,и заряда е движется около одного из полюсов
длинного магнитного стержня. Найти закон движения заряда.
Напряженность магнитного поля в рассматриваемом случае
равна (в сферических координатах)
&=-^пг> A)
где постоянная \к — так называемый «магнитный заряд», а нача-
начало координат помещено в полюсе магнита. Кинетическая энергия
точки в сферических координатах явно не содержит только угол ср.
Поэтому попытаемся выбрать вектор-потенциал А магнитного по-
поля так, чтобы он тоже не зависел от ф. С этой целью запишем со-
соотношение 3^=rotA в сферических координатах с учетом A):
*—
0. D,
Отсюда видно, что можно положить Лг = Ле = О, гЛф=/(8). Тогда
отличная от нуля компонента вектор-потенциала равна
J E)
Учитывая E), найдем лагранжиан заряда (см. E.65))
(^+гв + гБ1пвф) юзф. F)
§ 5,6 Обобщенный импульс и обобщенная энергия 247
Поскольку -^- = 0 и -^- - 0, получим (см. E.84) и E.94)):
дф dt
рч = Щ- = тг°~ slnae-<j> — -^-cosO = рфо, G)
дф с
Я = Г») = То. (8)
Теперь запишем G) в виде
м ?Я. (пг) = const (9)
с
и обратим внимание на то, что интеграл (9) имеет место при лю-
любом направлении оси Oz. Это возможно только в том случае, если
М-^пг-С, A0)
с
где С — постоянный вектор, зависящий от начальных условий.
Направим ось Oz по этому вектору и умножим затем обе части
A0) скалярно на пг. Тогда, поскольку Мпг=0,
= Ссо8 0. A1)
с
Таким образом, 0 = 0О и, следовательно, заряд движется по
поверхности конуса с осью, направленной по вектору С. При этом
интегралы G) и (8) ввиду 0 = 0 упрощаются и принимают вид
A2)
г2 + /V sin2 0О = го + гофо sin2 60. A3)
Интегрирование этой системы приводит к закону движения
г2 = у2 (t — ?0J + а2 A4)
и уравнению траектории (на поверхности конуса)
— = cos [(ф — ф0) sin 0O] A5)
(постоянные v и а могут быть выражены через начальные усло-
условия, а момент времени ?о является моментом, когда заряд нахо-
находится на минимальном расстоянии от полюса). Итак, заряд дви-
движется по спирали A5), навивающейся на поверхность конуса
0=0о согласно закону движения A4).
248 Уравнения Лагранжа Гл. V
§ 5.7. Ковариантность уравнений Лагранжа в независимых
координатах
Уравнения Лагранжа E.44) в независимых координатах были
получены из общего уравнения механики E.27) с помощью
преобразования E.28),-представляющего собой преобразование от
радиусов-векторов г* всех точек к обобщенным независимым коор-
координатам q. Однако выбор этих координат неоднозначен: в самом
деле, координаты q всегда можно задать с помощью произволь-
произвольных однозначных функций других 5 переменных q' и времени
Я] = Я]{Я1 Я» 0 (/=1, 2,..., s). E.97)
Подставляя E.97) в E.28), найдем однозначные выражения ра-
радиусов-векторов точек через величины q'\
г, = rtfob ..., q's, t) (Г=1, 2, .... N). E.98)
Эти функции, как и функции E.28), обращают в тождество урав-
уравнения связей (см. E.30)), и, следовательно, величины q' также
являются обобщенными координатами механической-. системы.
Преобразование E.97), т. е. преобразование от одной системы
обобщенных координат к другой системе, называется точечным
преобразованием.
Если исходить из общего уравнения механики E.27), а в ка-
качестве независимых переменных взять координаты q\ то, исполь-
используя E.98) и проводя вычисления, аналогичные E.31) — E.43),
получим уравнения Лагранжа в новых переменных
дт' — л) (j—l 2 s) E 99)
где кинетическая энергия Г' и обобщенные силы Q' являются
функциями q\ qf и t. Сопоставляя уравнения E.44) и E.99), при-
приходим к выводу, что общая форма уравнений Лагранжа в неза-
независимых координатах не зависит от выбора этих координат; дру-
другими словами/ уравнения Лагранжа в независимых координатах
ковариантны относительно точечных преобразований. Это свой-
свойство уравнений Лагранжа является отражением того," что при
любом выборе независимых переменных между обобщенными
координатами, скоростями и ускорениями существует взаимо-
взаимосвязь.
Точечные преобразования независимых координат включают в
себя ряд важных случаев; например, для свободных систем то-
точечные преобразования могут представлять собой преобразования
между различными криволинейными координатами в данной си-
системе отсчета, а также преобразования между координатами в
различных системах отсчета, в том числе и в неинерциальных.
§ 5.7 Ковариантность уравнений Лагранжа 249
•Убедимся з этом, показав, что уравнения движения свободной
точки относительно неинерциальной системы отсчета можно запи-
записать в форме уравнений Лагранжа.
Действительно, поступательная и центробежная части перенос-
переносной силы инерции могут быть выражены через потенциальную
энергию Uh точки в поле этих сил (см. D.80)); сила инерции,
определяемая угловым ускорением со, является непотенциальной
силой, зависящей от положения точки и времени, а кориолисова
сила гироскопйчна. Таким образом, сумму всех сил инерции мож-
можно записать в форме
$ = — v?/h — т [<ог'] + 2/и [\'ь>],
аналогичной силе Лоренца:
г, е д\ е г 1 а 1
г = — еуф 1 - — [v rot A].
С 01 С
Сопоставляя эти выражения, видим, что скалярным потенциалом
сил инерции является функция C/h, а вектор-потенциал этих сил;
равный \# — m[(or'], можно найти из уравнений
= т [W], rot Ку = 2т<о.
dt
Итак, силы инерции являются обобщенно-потенциальными си-
силами с потенциалом
у; = _ m [wf] v' + uh, E. mo)
где
Uh = mw&r* — -у [tor']2
(в случае системы Л" точек потенциал %' будет равен сумме чле-
членов зида E.100), каждый из которых относится к г-точке). Из вы-
вышесказанного вытекает, что уравнения движения относительно
неинерциальной системы отсчета (см. D.43)) могут быть пред-
представлены в виде следующих уравнений Лагранжа:
EЛ01)
здесь У = Т'—%', Т' — кинетическая энергия относительно не-
неинерциальной системы, %' — обобщенный потенциал сил инерции,
a Q' — обобщенные силы, соответствующие векторным силам F^
с которыми различные тела действуют на точки механической си-
системы.
250 Уравнения Лагранжа Гл. V
Пример 5Л2. Преобразование лагранжиана свободной точки.
Свободная точка массы m движется в центрально-симметрич-
центрально-симметричном поле U(r) с центром силы в начале координат О. Найти
функцию Лагранжа этой точки относительно системы отсчета S',
начало которой О' и ось Orzr совпадают соответственно с нача-
началом О и осью Oz инерциальной системы отсчета S, предполагая,
что система S' вращается относительно 5 с постоянной угловой
скоростью со.
Если в качестве независимых координат выбрать декартовы
координаты точкд относительно системы S, то функция Лагранжа
имеет вид
= JHL (х2 + у2 -rZ2) — U {]/х2 + if + г2).
Координаты х, у, z связаны с координатами точки относитель-
относительно S' формулами:
х = х' cos ad — у' sin ®t,
у •= х[ sin orf + У' cos cof,
Поэтому в новых переменных функция Лагранжа равна:
где
_ HL (Х>* + у>* + г>% Т^У = mco(x't/ - yfx')t
Подставляя функцию «S?/ в E.101), получим уравнения движе-
движения точки относительно системы Sr
(*V n't 9 t \ OLJ
x — 2coy — aflx) = ,
dU'
tnz = —
dz' '
Поскольку &' явно от времени не зависит, то обобщенная энер-
энергия точки сохраняется:
§ 5.7
Ковариантность уравнений Лагранжа
251
Нетрудно видеть, что в данном случае функция Я является пол-
полной энергией точки относительно неинерциальной системы отсче-
отсчета (см. D.86)).
Пример 5.13. Движение точки по вращающейся окружности^
Точка массы m движется по <
гладкой окружности радиуса а,
вращающейся с постоянной уг-
угловой скоростью со вокруг верти-
вертикальной оси, проходящей через
некоторую точку окружности
(плоскость окружности перпен-
перпендикулярна оси вращения). Найти
уравнение движения точки.
Выберем системы координат
S HfS' так, как это показано, на
рис. 5.10, а в качестве независи-
независимой переменной возьмем угол ср
между г' и осью О'х'. Выражая
через ф проекции радиуса-векто-
радиуса-вектора точки на оси системы
х = a cos tot + a cos (со/ + <р),
у = a sin Ы + а sin (со/ + ф),
получим кинетическую энергию точки в виде
о
Рис. 5.10
Т =
{со2 А- (со + фJ f 2со (со -f ф) cos ф}.
Для данной задачи эта функция является функцией Лагранжа;
она приводит к уравнению движения
ф-f со2 sin ф = 0.
Отсюда следует, что относительно неинерциальной системы S'
точка движется так же, как математический маятник в однород-
однородном поле тяжести движется относительно инерциальной систе-
системы S.
Записывая кинетическую энергию в виде E.55), где
tvo\ та2- •»
= та2со2 A f cos ф),
нетрудно получить интеграл обобщенной энергии
та2
Ф2 — ша2со2 cos ф = #0.
252 Уравнения Лагранжа Гл. V
Здесь та2ф2/2 — кинетическая энергия точки относительно S',
а —ma2oJ cos ф — потенциальная энергия точки в поле перенос-
переносной силы инерции —mwo'. Что касается центробежной силы
инерции, равной moV, то она не совершает работы на перемеще-
перемещениях точки относительно S' и поэтому не дает вклада в Яо. Таким
образом, функция Н является полной энергией Е' точки относи-
относительно S' (см. D.86)).
Глава VI
ЛИНЕЙНЫЕ КОЛЕБАНИЯ
В этой главе изучается движение механической системы с до-
достаточно малыми скоростями в достаточно малой пространствен-
пространственной области около положений равновесия точек системы. Если
при этом диссипативные силы малы, то система будет совершать,
как говорят, малые колебания; если же диссипативные си-
силы значительны, то будет иметь место апериодическое движение.
Теория малых колебаний широко применяется для изучения как
механических, так и немеханических систем. Например, с по-
помощью этой теории можно описать колебания математического
маятника и колебания напряжения в электрическом контуре. По-
Поэтому излагаемая ниже теория играет большую роль в различных
областях физики.
§ 6.1. Собственные одномерные колебания
Пусть на систему с одной степенью свободы наложены ста-
стационарные голономные связи. Тогда кинетическая энергия как
функция независимой координаты q и обобщенной скорости q
равна (см. E.55))
T = \<hx(q)& F.1)
(здесь коэффициент аи явно от времени не зависит, так как связи
стационарны). Пусть также на систему действуют стационарные
потенциальные силы и диссипативные силы, пропорциональные
первой степени скоростей точек системы. В этом случае потенци-
потенциальная энергия и диссипативная функция D системы имеют вид
(см. E.81))
U = U{q), D=±bn(q)q2. F.2)
Предположим, что наложенные связи и заданные силы таковы,
что существует хотя бы одно положение равновесия системы (для
254
Линейные колебания
Гл. VI
обозначения положения равновесия будем использовать символ
•eq). Согласно E.54) обобщенная сила, прилагаемая к системе,
покоящейся в положении равновесия, равна нулю:
bnq
G=0
= 0.
F.3)
eq
Отсюда следует, что потенциальная энергия в положении равно-
равновесия должна обладать экстремумом, т. е.
dU 0 F.4)
= 0.
Это уравнение определяет положения равновесия системы.
Рассмотрим свойства до-
достаточно малой окрестности
таких положений. Пусть, на-
например, система имеет два по-
положения равновесия (qeq)i и
(qeqJ> причем в первом поло-
положении потенциальная энергия
достигает минимума, а во вто-
втором— максимума (рис. 6.1).
Тогда в окрестности положе-
положения (<7eq)i имеем Q<0, • если
<7>(<7eq)i, и Q>0, если
<7<(<7eq)l (Здесь (<7eq)l—&<q<
<(<7eq)l + 8, а 6 — СКОЛЬ УГОД-
УГОДНО малая положительная ве-
величина), В окрестности поло-
положения (<?eqb наоборот: Q>0,
если q>(qeqJ, и Q<0, если
<7<(<7eqh (Здесь (^eqJ—6<^<
< (<7eqb + e)« Следовательно,
вблизи максимума потенциаль-
потенциальной энергии возникает сила,
стремящаяся отклонить систему от положения равновесия, а
вблизи минимума возникает сила, стремящаяся вернуть систему
в положение равновесия. В этом последнем случае система, обла-
обладающая достаточно малым "начальным отклонением #b—qeq от по-
положения равновесия и достаточно малой начальной скоростью #Ь,
при любом t^U не выйдет за пределы наперед заданной сколь
угодно малой окрестности положения равновесия, причем обоб-
обобщенная скорость также будет сколь угодно мала *. Положения
* В справедливости этого утверждения можно Цедиться с помощью закона
изменения энергии (доказательство признака устойчивости системы в общем
случае см. в § 6.2).
Рис. 6.1
§ .6,1 Собственные одномерные колебания 255
равновесия, окрестности которых имеют описанные свойства, на-
называются у с т о й ч и*в ы м и.
Учитывая эти свойства, кинетическую и потенциальную энер-
энергии системы, а также ее диссипативную функцию можно разло-
разложить в положении устойчивого равновесия [в ряд по степеням от-
отклонения 'E) = q—^eq 0T этого положения и степеням скорости
g=g. С точностью до величин второго порядка малости включи-
включительно эти разложения имеют вид
(здесь в разложении потенциальной энергии опущена несущест-
несущественная постоянная U(qeq) и* учтено F.4)). Используя F.5), най-
найдем приближенное уравнение Лагранжа, справедливое в малой
окрестности положения устойчивого равновесия:
аи1 + bnl + сп1 = °> vb-b)
где
а11 — all Weq/> и1\ — ui\ Weq/» сц — ( , 9 I •
\ dq* } eq
Уравнение,F.6) является линейным дифференциальным урав-
уравнением второго порядка с постоянными коэффициентами. Если ко-
коэффициент fon равен нулю или сравнительно мал, то это уравне-
уравнение описывает колебания системы, называемые линейными.
Стационарность сил и связей, рассматриваемых в данной задаче,
приводит не только к постоянству коэффициентов уравнения F.6),
но и к его однородности-, поэтому описываемые этим уравнением
колебания называют собственными (или свободны-
м и).
Решение уравнения F.6) разыскивается, как известно, в виде
F.7)
Подставляя F.7) в F.6) и сокращая на общий множитель e%t,
получим
СД(Л) = 0, F.8)
где А(к)=ац№ + Ьик+Сп. Поскольку интерес представляет нетри-
нетривиальное решение (т. е. решение при С=^0), то уравнение F.8)
эквивалентно следующему уравнению относительно К:
а. F.9)
Это уравнение называется характеристическим урав-
уравнением (или уравнением частот). Вводя обозначе-
обозначения 6ц/ац = 2(|х, Сп/ац = соо, запишем его в виде
256 Линейные колебания Гл. VI
V + 2цХ+<й§ = 0. F,10)
Значения К, удовлетворяющие характеристическому уравнению,
называются собственными значениями. В одномер-
одномерном случае имеем два собственных значения К:
где со = у озо — И-2. Вид A,i,2 соответствует известной алгебраической
теореме о том, что корни всякого многочлена с вещественными коэф-
коэффициентами либо вещественны, либо попарно комплексно сопряжены.
Действительно, если соо > \i, то Хх = Я^, а если \х > соо, то
Xi,2 = —M, F.12)
где |Ai#2 == Ц ± V ц2 — соо (случай кратных корней, когда соо = ц-, мы
рассматривать не будем).
Наличие двух собственных значений X соответствует двум ча-
частным независимым решениям
где Ль >w2, О1) и ОТ могут быть комплексными. Если в качестве
обобщенных координат выбираются действительные величины *,
то в ^качестве общего решения уравнения F.6) следует взять дей-
действительную часть суммы частных независимых решений |A) и ?B^:
| = Re {COW + CVW}, F.13)
где С^> и О2) — постоянные интегрирования, а ^ и Л2 определе-
определены характеристическим уравнением F.10) **. Заметим, что двум
комплексным постоянным соответствуют четыре действительные
постоянные. Однако после отделения действительной части з
F.13) фактически остаются две произвольные постоянные, как и
должно быть в общем решении дифференциального уравнения
второго порядка. Например, записывая решение F.13) в случае
<оо>4и в виде
| = e-^t ^ {CWe?®* + (?%-***} F.14)
и учитывая, что постоянные СМ и С® всегда можно представить
в форме
а<2> + №, F.15)
* Здесь и в дальнейшем мы будем использовать только вещественные не-
независимые координаты.
** Мнимая часть суммы |п> и ?B) также будет общим решением уравнения
F.6) — см. [46, с. 95]. :
§6.1 Собственные одномерные колебания 257
после отделения вещественной части найдем
6 = ?г-^(Сх coscd/ + C2sln со/), F.16)
где Cj и С2 — действительные произвольные постоянные, опреде-
определяемые начальными условиями. Решение F.16) легко также
представить в виде
I = ое-"'cos (Ы + а), F.17)
где постоянные а и а связаны с постоянными С{ и С% соотноше-
соотношениями
а= V С\ + С\, tga = —. F.18)
Решение F.17) или F.16) описывает затухающее
гармоническое колебание системы. Величина мнимой
части X называется собственной частотой колеба-
колебаний ш, а величина действительной части X называется коэффи-
коэффициентом затухания р,.
В случае |л><оо общее решение F.13) «с учетом F.12) прини-
принимает вид
F.19)
где Ci и С2 — действительные постоянные. В этом случае имеем
апериодическое движение, характеризующееся двумя
коэффициентами затухания.
Из решений F.17) и F.19) видно, что в линейной теории соб-
собственные частоты и коэффициенты затухания не зависят от на-
начальных условий. Отметим еще две характерные черты линейной
теории малых колебаний: в решении F.17) отсутствуют «оберто-
«обертоны», т. е. частоты, кратные собственной частоте; кроме того, в
силу линейности уравнения F.6) его общее решение является
суммой частных решений, т. е. имеет место, как говорят, прин-
принцип суперпозиции.
Независимость собственной частоты и коэффициента затуха-
затухания от начальных условий приводит к интересному свойству ли-
нейных одномерных колебаний — к свойству изохронности.
Оно заключается в том, что при равной нулю начальной скорости
(|=0) время, за которое система переходит из начального поло-
положения в положение равновесия, не зависит от величины началь-
начального отклонения |0. Действительно, подставляя в F.17) /=0, по-
получим
lo = acosa, |0 = — [iacosa — coasina,
откуда
fl* = ^ + Jk±i^L tg«-
9 Зак. 884
258
Линейные колебания
Гл. VI
Полагая здесь ?0 = 0, найдем
где tga=—[i/(o. Следовательно, интервал времени, за который
система переходит в положение равновесия ?eq=0, равен
. td = —
Этот интервал не зависит от
.величины отклонения go-
В отсутствие затухания энер-
энергия системы пропорциональна
произведению квадратов ампли-
амплитуды и частоты колебания. В
этом нетрудно убедиться, если
учесть, что при fi=0 решение
F.17) описывает незатухающее
гармоническое колебание
Рис. 6.2
где cuo= — • Подставляя эту функцию в выражения F.5) для Т и
ап
и, получим
F.20)
Пример 6.1. Движение точки по эллипсу в среде с «линейным»
сопротивлением вблизи положения устойчивого равновесия.
Точка массы пг движется по гладкому эллипсу в среде с соп-
сопротивлением. Полуоси эллипса равны соответственно а и Ь9 при-
причем первая полуось направлена по вертикали (рис. 6.2). Найти
собственную частоту и коэффициент затухания линейных колеба-
колебаний точки.
Согласно условию точка подчинена двум стационарным свя-
связям
Выберем в качестве независимой переменной параметр г|), с кото-
которым декартовы координаты точки связаны соотношениями
§ 6.1 Собственные одномерные колебания 259
тогда для кинетжческой и потенциальной энергий точки получим
выражения
Т = — a2 (sin21|) •+ Ь2 cos2 -ф) V,
U = — mgacosip,
где g — напряженность поля тяжести. Предполагая, что сопро-
сопротивление среды пропорционально первой степени скорости точки,
выразим диссипатнвную функцию через \|э и if:
D^—la2 sin* \b + b2 cos2 ib) \b2.
Учитывая, что согласно F.3) и F.4) положения равновесия
определяются уравнением
= tnga sin i|) = 0,
находим две точки равновесия: t|?eq=O и \feq=jt. В первом поло-
положении потенциальная энергия минимальна, так как (—¦—) >0,
а во втором положении она обладает максимумом, так как
( ] <^ о. Следовательно, первое положение равновесия
\ d\f>2 /%q=n
устойчиво, а второе неустойчиво.
Разлагая в положении устойчивого равновесия кинетическую и
потенциальную энергии, а также диссипативную функцию в ряд
по степеням г|з и \|э с точностью до величины второго порядка ма-
малости включительно, получим
Используя эти функции, найдем линеаризованное уравнение Лаг-
ранжа
mb2 ij) + kb2 q> + tnga i|) = 0,
представляющее собой уравнение затухающих гармонических ко-
колебаний (или апериодического движения). Собственная частота
и коэффициент затухания колебаний точки соответственно равны
2т
В случае алериодического движения коэффициенты затухания
равны
9*
260
Линейные колебания
Гл. VI
f 1,2 =
2m
JL-V ?5Ll
2m ) Ьа J
1/2
Пример 6.2. Колебания тонки по наклонному эллипсу.
Точка массы m движется по гладкому эллипсу с полуосями,
равными а и Ь. Плоскость эллипса вертикальна, а полуось а от-
отклонена от вертикали на угол фо. Найти собственную частоту ли-
линейных колебаний точки (сопротивлением среды пренебречь).
Выберем систему координат так, как это показано на рис. 6.3.
Тогда уравнения связей совпадут с аналогичными уравнениями
предыдущего примера, а за не-
независимую переменную можно
будет взять параметр г|). В таком
случае кинетическая и потен-
потенциальная энергии точки будут
соответственно равны
Т = — (a2sin2\|5 + 62со82
2$
[/== —mgr =
= — mg(acos фо cos ty
4-
где g — напряженность поля тя*
жести. Для исследования U на
экстремум находим ее первую и
вторую производные. Приравни-
ис" ' вая первую производную нулю,
получаем уравнение
ь
tg^eq = tgфo,
а
определяющее положение равновесия i|)eq. Выбирая положение ус-
устойчивого равновесия и учитывая, что вблизи этого положения
БШ \|3 =5= Sltl
(здесь ?=ф—
сти получим
5 C0Si|5eq —
, с точностью до величин второго порядка мало-
малот
§ 6.1
Собственные одномерные колебания
261
Отсюда находим уравнение линейных колебаний
т (a2 sin2 ^ + б2 cos2 г|)еч) % 4-
и квадрат собственной частоты
6=0
Пример 6.3. Колебания точки, нахо-
находящейся на горизонтальном стержне,
под действием пружины.
Точка массы т, движущаяся по глад-
гладкому горизонтальному стержню, соедине-
соединена пружиной с неподвижной точкой О,
находящейся на расстоянии / от стержня.
Найти частоту линейных колебаний точ-
точки (жесткость и длина пружины в не-
ненапряженном состоянии соответственно
равны х и а, см. A.42)); пружина навита
на гладкий стержень, шарнирно закреп- Рис. 6.4
ленный в точке О).
Выберем систему координат так, как это показано на рис. 6.4,
тогда
Чтобы определить положение устойчивого равновесия, рассмотрим
первую и вторую производные от U:
ду
= и
- a)
Приравнивая нулю
dU
получим три положения равновесия:
Первое положение будет устойчивым, если
262 Линейные колебания Гл. VI
т. е. будет устойчивым, если 1>а (пружина в положении равнове-
равновесия растянута). Два других положения равновесия существуют,
если а>/, причем эти положения устойчивы, поскольку
Разлагая U в положении устойчивого равновесия yeq=0t получим
U = f (l-a? + -f- (l - -*-) у'(I >a),
а в двух других положениях
где i^y
Используя эти выражения для ?/, найдем квадраты частот ли-
линейных колебаний точки в окрестностях указанных выше положе-
положений:
Как видно, при разных соотношениях а и / возможны различные
положения устойчивого равновесия и соответственно различные
частоты колебаний.
§ 6.2. Положение устойчивого равновесия
Теория собственных линейных колебаний системы с 5 степе-
степенями свободы во многом аналогична теории одномерных колеба-
колебаний. В этой теории предполагается, что связи, наложенные на си-
систему, идеальны, голономны и стационарны, а заданные силы явно
от времени не зависят; кроме того, предполагается, что система
обладает по крайней мере одним положением устойчивого равно-
весия.
Существо этой теории сводится к линеаризации уравнений Ла-
гранжа в окрестности положения устойчивого равновесия. Поэто-
Поэтому исследование, собственных колебаний нужно начинать с оты-
отыскания таких положений, Прежде всего напомним, что необходи-
необходимым и достаточным условием равновесия механической системы
с голономными идеальными связями является обращение в нуль
всех обобщенных сил в некотором положении — положении рав-
равновесия (<7j)eq (/=^1, 2, ..., s) (см. E.54)). Приведем это условие
§ 6.2 Положение устойчивого равновесия 263
в более общем случае, когда обобщенные силы зависят не толь-
только от координат q, но. и от скоростей q:
<,=(,,)eq ?s=(,s)eq;;,=...4=o =0 (/=1,2,..., s). F.21)
Таким образом, состояние равновесия характеризуется 25 вели-
величинами: <7j=(<7j)eq и <7j==0 (/=1, 2,...,5). Это состояние может
быть представлено в виде точки 25-мерного пространства обоб-
обобщенных координат и скоростей.
Определим положение устойчивого равновесия.
Пусть для сколь угодно малых наперед заданных положительных
величин eq и е* можно найти такие положительные величины 6q
ud'Q, что для любого момента времени t^U отклонения q—(
от положения равновесия и скорости q будут удовлетворять не-
неравенствам
I Qi - (<7/)eq|< V \q, |< e*. (/ = 1, 2, ... f s)9* F.22)
если только отклонения и скорости в начальный момент времени
удовлетворяют неравенствам
I<7/o-(<7/)eqI < б,., | qj01< 6-^ (/ = 1, 2, ... , 8) F.23)
(величины &q и 8gt конечно, зависят от наперед заданных вели-
величин sq к Eg) *. Тогда положение равновесия (q)eq называется
устойчивым. (Для краткости окрестность состояния равновесия в
25-мерном пространстве, определяемую условием F.22), назовем
г-окрестностью «точки» qeqt а окрестность, определяемую F.23),
д-окрестностью этой «точки»).
Достаточный признак устойчивости положе-
положения равновесия механической системы относи-
относительно инерциальной системы отсчета устанав-
устанавливается следующей теоремой. Пусть идеальные голономные свя-
связи, наложенные на систему, стационарны, заданные силы явно от
времени не зависят, а потенциальная энергия системы в некотором
положении обладает изолированным минимумом; тогда это поло-
положение будет положением устойчивого равновесия. Минимум по-
потенциальной энергии U называется изолированным, если в неко-
некоторой окрестности положения qeq, в котором энергия минимальна,
нет других экстремальных «точек» функции 1). Иначе говоря, ми-
минимум будет изолированным, если при
* Здесь» символом гЙ обозначена совокупность величин е^, е^, ... , zq : сим-
символом z-q — совокупность е^, е^2> ... , 8^ и т. д. В дальнейшем везде сово-
совокупность s величин будем обозначать соответствующим символом без индекса /.
264 Линейные колебания Гл. VI
. |<7/-(<7/Ы<Д/ (/=1,2 s)
(положительные величины Д определяют окрестность минимума),
потенциальная энергия удовлетворяет условию
а равенство имеет место только в том случае, когда qj—{qj)eq
(/=1,2, ..., s).
Сначала докажем сформулированную теорему, предполагая,
что диссипативные силы отсутствуют, т. е. предполагая, что пол-
полная энергия системы сохраняется (Е=Ео). Положение qeq, в ко-
котором потенциальная энергия системы минимальна, является по-
положением равновесия. В самом деле, обобщенные силы, прило-
приложенные к системе, покоящейся в этом положении, равны нулю
(см. E.76) и F.21)):
Так как потенциальная энергия определяется с точностью до
постоянной, то, полагая ?/(<7ieq, ..., <7seq)=0, из условия теоремы
получим
У foi. -...*.)> О, F.24)
если \q$—<7jeq|<Aj (/=1, 2,..., s) (здесь равенство имеет место
только в том случае, если все <7j=<7jeq). Из условия стационарно-
стационарности связей вытекает, что кинетическая энергия является положи-
положительно определенной формой обобщенных скоростей (см. E.55) и
E.56)), т. е.
Т = 7<2> > 0, F.25)
причем Т равняется нулю только в том случае, если все qj=O. Из
F.24) и F.25) следует, что в А-окрестности
E^T + U>0, F,26)
а равенство имеет место только в том случае, когда все отклоне-
отклонения от положения равновесия и скорости равны нулю, т. е. ^ =
= ^jeq и #j=0 (/=1, 2, ..., s). Итак, из условия теоремы (в от-
отсутствие диосипативных сил) вытекает, что полная энергия систе-'
мы при ее перемещениях сохраняется, а как функция обобщенных
координат и скоростей имеет изолированный минимум в 25-мер-
25-мерной точке q=qeq, q=0.
. Зададим некоторую е-окрестность состояния равновесия, т. е.
зададим сколь угодно малые величины eq и ej:
§ 6.2 Положение устойчивого равновесия 265
Д/>в„>0, е;7>0 (/=1,2 s). F.27)
Точки, лежащие на границе этой окрестности, определяются таки-
такими значениями отклонений и скоростей, когда по крайней мере
одно отклонение q$—(qj)eq равняется eq. или хотя бы одна ско-
скорость <7/ равна Вд, а остальные отклонения и скорости удовлет-
удовлетворяют условиям
Полную энергию как функцию «точки», лежащей на указанной
границе, обозначим символом Ее. В силу непрерывности эта функ-
функция имеет как максимальное значение max EB) так и минималь-
минимальное значение min Ее [44, с. 246—247].
Теперь выберем такую 6-окрестность состояния равновесия,
чтобы выполнялось неравенство
тах?б< min?e, F.28)
где Eq — значения полной энергии на границе б-окрестности. Та-
Такой выбор возможен, так как непрерывная функция Е обращает-
обращается в нуль только при Qj=(qj)eq, <7/ = 0 (/=1, 2, ..., s), а другие
экстремальные «точки» в рассматриваемой Д-окрестности отсутст-
отсутствуют. Наконец, подчиним начальные условия неравенствам F.23),
где совокупность величин 6д и б^ удовлетворяет требованию
F.28). Тогда ?о<тах Е& (такой выбор начальных условий воз-
возможен в,силу тех же причин). Таким образом, для заданной сколь
угодно малой е-окрестности положения qeq всегда может быть
найдена такая б-окрестность и такие начальные условия, чтобы
Е = ?0 < max E6 < minEe. F.29)
Следовательно, в любой момент времени ?<min E8. Это озна-
означает., что ни одна из обобщенных координат и скоростей системы
с течением времени не достигает границ 8-окрестности, так как на
границе E=Ee^min Ee, что и доказывает теорему в отсутствие
диссипативных сил.
Для иллюстрации рассмотрим доказательство теоремы на ча-
частном примере циклоидального маятника (см. пример 5.4). Энер«
гия такого маятника равна
266
Линейные колебания
Гл. VI
где oJ=g"/4/?, as — длина пути точки, отсчитываемая от положе-
положения равновесия 5=0. Зададимся е-окрестностью состояния равно-
равновесия, т. е. возьмем сколь угодно малые величины е, удовлетво-
удовлетворяющие неравенствам 4i?>es>0, es- >0 (для определенности бу-
будем считать, что е| < co28s). Поскольку движение в данном слу-
случае одномерное, состояние маятника можно изобразить на плос-
плоскости, откладывая по одной оси координату s, а по другой —
обобщенную скорость s. Тогда границей е-окрестности будет гра-
граница прямоугольника (рис. 6.5). В точках 1 этой границы функ-
функция Ег достигает своего максимального значения
а в точ-
В точках 2 функция ?8 принимает значение (m/2)co28s
ках 3 ?еимеет минимальное значение
т
. г, т
пип?8= —
Аналогично максимальное значение
энергии на границе б-окрестности
равно
max?e = —F? +co26s2).
Подберем 8S и 8's так, чтобы выпол-
выполнялось неравенство F.28):
Рис. 6.5
Очевидно, что этот подбор б-окрестности можно осуществить при
любом сколь угодно малом %. При этом «траектория» точки
(эллипс) в плоскости (s, 5) будет лежать внутри эллипса, соот-
соответствующего max ?б, если в начальный, момент времени точка
находится внутри б-окрестности.
Доказательство достаточного признака устойчивости положе-
положения равновесия было проверено без учета диссипативных сил. Ес-
Если эти силы присутствуют, то полная энергия системы убывает.
Следовательно, повторяя доказательство, вместо F.29) получим
§ 6.2
Положение устойчивого равновесия
267
Е < Ео < max E6
F.30)
откуда и вытекает справедливость теоремы.
Можно также сформулировать достаточный признак устойчи-
устойчивости относительно неинерциальной системы отсчета. В этом слу-
случае к условию теоремы нужно добавить требования постоянства
vfcy — ускорения начала неинерциальной системы и со — ее угло-
угловой скорости. Такое заключение вытекает из закона изменения
энергии относительно неинерциальной системы отсчета, который
в рассматриваемом случае по форме совпадает с уравнением
D.83), полученным для свободных систем (совпадение имеет ме-
место, поскольку мощность реакций идеальных стационарных свя-
связей равна нулю).
Заметим, что наряду с признаком устойчивости положения рав-
равновесия большое значение имеют признаки неустойчивости; они в
ряде важных случаев устанавливаются теоремами Ляпунова и
Четаева [30, 23].
Пример 6.4. Положение устойчивого равновесия материальной
точки, подвешенной на пружине.
Точка массы m подвешена на
пружине жесткости % и длины
а в ненапряженном состоянии.
Определим положение устойчиво-
устойчивого равновесия точки (напряжен-
(напряженность поля тяготения равна g).
Выберем систему координат
так, как. это показано на рис. 6.6,
а в качестве независимых коорди-
координат возьмем полярные координа-
координаты р и ф. Тогда потенциальная
энергия, равная сумме энергии
точки в поле тяготения и энер-
энергии упругой деформации пружи-
пружины, имеет вид рис> е.6
U = — rng p cos ф + — (р - аJ.
Для отыскания положения устойчивого равновесия найдем пер-
первые и вторые производные от U по р и ф:
JMJ-
= —mg cos q> + и (р — а),
dp дер
6U
дф
d2U
=-nig р sin у,
268 Линейные колебания Гл. VI
Приравнивая первые производные нулю, определим положения
равновесия. Одно из них, а именно положение
Peq = а + -2?-f q>eq = 0,
является устойчивым. Действительно, в этом положении вторые
производные равны
eq \вф» jeq
и удовлетворяют неравенствам
>о
eq \ ар" /eq \ df» /eq
что свидетельствует о наличии изолированного минимума потен-
потенциальной энергии [44, гл. 14, § 6]. Другое положение равновесия
peq = п
как нетрудно убедиться, является неустойчивым.
Пример 6.5. Колебания точки на вращающемся стержне.
Точка массы m движется по гладкому тонкому стержню, вра-
вращающемуся в горизонтальной плоскости с постоянной угловой
скоростью со вокруг оси, проходящей через неподвижную точку
стержня О. Ось и материальная точка соединены между собой
пружиной жесткости к и длины а в ненапряженном состоянии
(см. .A.42)). Определить собственную частоту колебаний точки
около положения устойчивого равновесия.
Напишем обобщенный потенциал в неинерциальной системе
отсчета Ох'у' (см. рис. 1.14, в и формулу E.100)). Bi рассматри-
рассматриваемом случае векторы [cor'] и v' перпендикулярны, следовательно,
обобщенный потенциал сводится к потенциальной энергии в поле
упругой силы и центробежной силы инерции:
U' =*-(х'—а)* — —со2 ж'2.
2 Ч ; 2
Отсюда, приравнивая первую производную от V по хг нулю, по-
получим положение равновесия
'~ ка
eQ к — тсо2
Это положение существует и будет устойчивым, если угловая ско-
скорость удовлетворяет условию со2<к/m. Выражая U' через откло-
отклонение \=xf—x'eq и отбрасывая несущественную постоянную, по-
получим
§6.2
Положение устойчивого равновесия
269
Используя это выражение и выражение кинетической энергии от*
носительно Ох'у'
найдем уравнение Лагранжа (см. E.101))
tni + (n — mco2)?-=0.
При оJ<х/т решение этого уравнения описывает гармоническое
колебание точки с частотой, равной
Пример 6.6. Колебания точки на вращающемся эллипсе.
Точка массы m движется по
гладкому эллипсу с полуося-
полуосями а и Ь. Эллипс вращается
с постоянной угловой ско-
скоростью' со вокруг вертикальной
оси, совпадающей с одной из
его полуосей (рис. 6.7). Най-
Найти частоту линейных колеба-
колебаний точки.
Выберем инерциальную
систему Oxyz и неинерциаль- У
ную систему Oxryrzr так, как
это показано на рис. 6.7. В ка-
качестве независимой перемен-
переменной используем безразмерный
параметр v|), определяемый функциями
х
z z
Рис. 6.7
х' = a sin \|), z = &cos\|).
Тогда кинетическая энергия относительно системы S'
Т' = —(
равна
а обобщенный потенциал сводится к потенциальной энергии точ-
точки в поле тяжести и в поле центробежной силы инерции:
?/' = — mgbcos ^ — — со2 a2 sin2 \|>.
Приравнивая нулю первую производную от U' по г]), найдем
положения равновесия
270Линейные колебанияГл. VI
-феч = о, я
Рассматривая в этих точках значения второй производной от V
по -ф, получим, что положение i|)eq=0 устойчиво, если gb>co2a2
(в противном случае оно неустойчиво); положения, определяемые
равенством cos 11^ = ——, устойчивы, если ?&<ю2а2, если же
©ааа
gb>(u2a2, то этих положений равновесия не существует; что ка-
касается положения \|)eq=:rc, то оно в любом случае неустойчиво.
Предполагая, что gb>(o2a2y разложим Т и U' в положении
устойчивого равновесия \|?eq=0. В результате с точностью до чле-
членов второго порядка малости включительно получим (см. F.5))
Г = — a2aj>?, [/' = — (gb — со2 a2) f>.
Далее, используя и F.6) — F.11), найдем частоту соо колебаний
около положения $eq=0:
соо =
Если же gb<co2a2, то Т и U' следует разлагать в точках, опре-
определяемых равенством cos\|)eq=gb/oJa2. Тогда
Г = — (a2 COS2 \J?eq + Ь2 Sitl2 l|?eq)i2,
где |=г|з—\peq. Частота колебаний около рассматриваемого поло-
положения равновесия будет равна
а Г }-cos^eq -11/2
(здесь cos ipeq определен выше).
§ 6.3. Собственные и главные колебания системы
под действием потенциальных сил
Рассмотрим несвободную систему с идеальными "голономными
стационарными связями и 5 степенями свободы, предполагая, что
заданные силы, действующие на точки системы, потенциальны и
стационарны, а у системы есть хотя бы одно положение устойчи-
устойчивого равновесия. Покажем, что в достаточно малой окрестности
§ 6.3 Собственные и главные колебания системы 271
такого положения каждая независимая координата системы как
функция времени может быть представлена в виде суммы гармо-
гармонических функций, изменяющихся во времени с частотами, кото-
которые определяются свойствами системы, связей и заданных сил.
В силу стационарности связей
s
где ajk = akj (см. E.55) — E.57)), а в силу стационарности задан-
заданных сил потенциальная энергия системы будет функцией лишь не-
независимых координат.
Разложим кинетическую энергию в положении устойчивого
равновесия в ряд по степеням координат ?/ = <?/ —- (fy)eq и степе-
степеням обобщенных скоростей kj=Qj (/= 1, 2, ..., s). Тогда с точ-
точностью до членов второго порядка малости включительно из F.31)
получим
s
<а/«)*6/Ь. F.32)
i,k=\
(ik)q ikqq ?q)
Предполагая, что в положении устойчивого равновесия потен-
потенциальная энергия U обладает изолированным минимумом и раз-
разлагая ее в том же положении по степеням отклонений |, найдем
*)* 6/Ь, F'33)
d2U
где Cjk = = ck}- (здесь опущена несущественная постоян-
ная). Разложение потенциальной энергии может начаться с чле-
членов третьего или более высокого порядка малости, что приведет
к нелинейным уравнениям. В связи с этим допустим, что не все
коэффициенты cjh в разложении F.33) равны нулю.
Подставляя F.32) и F.33) в уравнения Лагранжа, придем
к уравнениям
? (a/fc%k + cikW = 0 (/=1,2. ... ,s) F.34)
(здесь знак равновесия при коэффициентах опущен для сокраще-
сокращения записи, однако всегда следует помнить, что коэффициенты в
F.34) берутся в положении равновесия, т. е. являются постоянны-
272 Линейные колебания Гл. VI
ми величинами)*. Итак, закон движения системы с s степенями
свободы около положения устойчивого равновесия определяется
линейными однородными уравнениями с постоянными действи-
действительными и симметричными коэффициентами.
Решение этих уравнений ищем в виде
Ь = С*еИ (k= 1,2, ... fS). F.35)
Подставляя F.35) в F.34), получим уравнения для «амплитуд»
+ cik)Ch - 0 (/=1,2 s). F.36)
Эта система однородных уравнений имеет нетривиальное реще-
ние, если ее детерминант равняется нулю:
cik) = Q F.37)
(для краткости детерминант системы F.36) будем обозначать
символом А (X) — см. F.9)).
Характеристическое уравнение F.37) представляет собой ал-
алгебраическое уравнение 2$-той степени относительно К и, следо-
следовательно, имеет 2s корней %& (эти корни называются собственны-
собственными значениями характеристического уравнения)*. Система F.36)
после подстановки в нее данного корня Я« определяет соотноше-
соотношение между «амплитудами» С:
? iflik^ + cJk) Ck = 0 (/ = 1, ... , s). F.38)
Полученные отсюда амплитуды будем обозначать С% и называть
«амплитудами, принадлежащими собственному значению Я«».
Общее решение системы дифференциальных уравнений F.34)
можно записать в виде действительной (или мнимой) части сум-
суммы частных решений, т. е. в виде
6* = Re 2 С$<№ (A=lf ... ,s), F.39)
cc=l
где амплитуды С? (а точнее, их отношения) определяются си-
системой F.38), а корни Ха — уравнением F.37).
Из F.39) видно,, что существенным шагом в решении уравне-
уравнений F.34) является определение собственных значений Я. Поэто-
* Далее предполагается, что характеристическое уравнение не имеет кратных
корней.
§ 6.3 Собственные и главные колебания системы 273:
му большое значение имеют общие заключения о корнях харак-
характеристического уравнения. Например, можно утверждать, что в
рассматриваемом случае консервативных систем действительные
части всех К должны равняться нулю, так как иначе q я q имели
бы экспоненциальные возрастающие и убывающие со временем
множители, которые при произвольных условиях привели бы к на-
нарушению закона сохранения энергии *. Таким образом, если на
систему действуют только потенциальные стационарные силы, то-
все собственные значения А, будут чисто мнимыми:
Ь? = + *'соа, Ха = — *соа (а = 1, 2, ... , s); F.40>
здесь соа — действительные величины, называемые собствен-
собственными частотами системы, а собственные значения А, пе-
перенумерованы не от 1 до 25, а от 1 до s, поскольку каждому но-
номеру соответствует одна пара комплексно сопряженных значений
корня. Тогда F.39) можно записать в виде
j; {(j) + (%ГF*41>
а—1
Значения амплитуд С?, соответствующих Лар определяются с
помощью однородной системы F.38). Поскольку интересующее
нас решение нетривиально, среди амплитуд С% должна сущест-
существовать хотя бы одна амплитуда, отличная от.нуля. Пусть от ну-
нуля отлична амплитуда Cf (обобщенные координаты всегда мож-
можно перенумеровать так, чтобы от нуля отличалась амплитуда, со-
соответствующая координате gs). Тогда, перенося в правую часть
системы F.38) слагаемые (fl/&^a +?/s) С?, согласно правилу ре-
решения линейных уравнений получим **
C?=-^-Gt (ft =1,2, ... ,s-l), F.42>
где Д?-— алгебраическое дополнение к элементу й-того столб-
столбца любой строки характеристического детерминанта, взятого при
значении %=Ка- Так как амплитуда Cf не определена, то вводя
обозначение Са ~ Cf/&f, все амплитуды можно представить в
виде
С? = СаД? (*=1,2, ... fs), F.43>
* Строгое доказательство отмеченного свойства корней характеристического
уравнения см. в приложении 6.1.
** Здесь предполагается, что ранг матрицы, составленной из коэффициентов,
системы F.38), равен 5—1; см. [47, гл. 2, § 12].
274 Линейные колебания Гл. VI
где Са — произвольная постоянная. Подставляя F.43) в F.41),
получим
lk = Re ? {Ct Д, (+ icoa) е+ш«* + С а А, (- ша) Гш<*}
(ft = 1, 2, ... ,s). F.44)
. Ввиду потенциальности заданных сил характеристическое урав-
уравнение F.37) и все дополнения характеристического детерминанта
содержат только степени квадрата L Поэтому в рассматривае-
рассматриваемом случае дополнения будут действительными величинами, ко-
которые удовлетворяют соотношениям (см. F.40))
\ l F.45).
a = 1, 2, ... ,sj
Используя эти соотношения и учитывая, что
Re {C? e+to<*' + Са е~ш«*} = ааcos (<oat + pa) F.46)
(здесь aa и pa— действительные произвольные постоянные), най-
найдем общее решение системы дифференциальных уравнений F.34)
в виде
|й = ? Д,(«оаNа (k = 1, 2, ... , s), F.47)
где 0а = aacos (соа^ + Ра).
Итак, собственные колебания системы, описываемые координа-
координатами |а (k=l, ..., s), представляют собой наложение гармониче-
гармонических колебаний с собственными частотами системы. Функции 8
являются строго периодическими функциями времени, а | в общем
случае не являются таковыми (например, при несоизмеримости
собственных частот координата ?ь никогда не примет начального
значения ?&о). Подчеркнем также, что нельзя отождествлять ка-
какую-либо собственную частоту соа с частотой колебаний какой-
либо определенной точки системы. Такое представление верно
лишь в предельном случае невзаимодействующих точек системы,
если каждая из них обладает одной степенью свободы. Вообще
говоря, собственные частоты характеризуют движение системы в
целом; всегда можно задать начальные условия так, чтобы все
координаты гармонически изменялись со временем с одной из соб-
собственных частот системы. Действительно, в силу произвольности
амплитуд а начальные условия можно выбрать так, чтобы все
амплитуды, кроме одной, равнялись нулю. Например, пусть aa- ф
=7^=0, тогда из F.47) лолучим частное решение
§ 6.3
Собственные и главные колебания системы
275
Ь = Д* ("Осе') Яа' COS (@а^ + ра,) (ft - 1, . . . , s). * F.48)
В этом случае все координаты гармонически изменяются с одной
собственной частотой ,соа', в фазе или противофазе в зависимости
от знака Д^(/©а')- Во многих простых случаях такое выделение
гармонических колебаний из собственных колебаний системы по-
помогает сразу определить соответствующую частоту.
Из общего решения F.47) следует, что в-качестве независи-
независимых координат можно взять величины 0а (а=1, ..., 5). Действи-
Действительно, это решение определяет линейное преобразование от коор-
координат 8 к координатам g. Координаты 8 называются главными
(или нормальными) координатами. Соответственно гар-
гармонические колебания с собственными частотами системы назы-
называются главными (или нормальными) колебаниями.
Очевидно, что координаты 6 удовлетворяют уравнениям
а = 0 (<Х= 1, ... ,S).
F.49)
Эта система представляет собой уравнения Лагранжа в главных
координатах*. Каждое из этих уравнений является уравнением
относительно лишь одной главной координаты. Поэтому системе
F.49) соответствует функция Лагранжа, равная сумме функций
«5?а, каждая из которых зависит только от соответствующей глав-
главной координаты Оа и ее производной 6а, т. е. лагранжиан систе-
системы в главных координатах должен иметь вид
а=1
где
> а —" J а Uа > ' а —
F.50)
Введение главных координат равносильно одновременному
приведению двух квадратичных форм Т и U к каноническому ви-
виду. Действительно, Т и U в случае произвольных независимых
координат задаются с помощью двух симметричных матриц
аХ1 а12 ... а1ь
#21 #22 • • •
а
S1
* Строгое преобразование от уравнений движения в произвольных незави-
независимых координатах g к уравнениям движения в главных координатах 9 см.
в приложении 6.2.
276
Линейные колебания
Гл. VI
Еслл одна из двух квадратичных форм определенно положитель-
положительна, то некоторым линейным преобразованием обе формы всегда
можно привести к каноническому виду [49, гл. 8, § 37]; при этом
матрицу преобразуются к диагональным матрицам
о... о
О а2
О О...а.
с, 0 ... О I
О
О
О 0 ... с.
Соответственно для систем с идеальными голбномными связями и
консервативными потенциальными силами всегда можно ввести
главные координаты.
В' заключение остановимся на случаях кратных и нулевых кор-
Бей характеристического уравнения. Если некоторый корень этого
уравнения является кратным, то в качестве общего решения сле-
следует опять-таки взять решение вида F.47). Однако в этом слу-
случае коэффициенты Д?, соответствующие кратному корню, не явля-
являются алгебраическими дополнениями характеристического детер-~
минанта и должны быть определены из уравнений F.38). Нужно
также иметь в виду, что кратному корню соответствуют главные
колебания, одинаковые по частоте, но различные в общем слу-
случае по амплитуде и фазе (см. пример 6.9).
Если какая-нибудь собственная частота соа*=О, то, как видно
из F.49),
6а =
6ао.
F.51)
«Нулевая частота» возникает, например, в том случае, когда по-
потенциальная энергия системы достигает минимума не в одной
«точке», а в некоторой области, т. е. в том случае, когда потен-
потенциальная энергия не обладает изолированным минимумом (см.
примеры 6.10 и 6.11),
Пример 6.7. Плоские колебания материальной точки, подве-
подвешенной на пружине.
Положение устойчивого равновесия точки, подвешенной на
пружине, а именно положение
Peq = а +
mg
= 0,
было определено в примере 6.4. Там же были найдены значения
вторых производных потенциальной энергии в рассматриваемом
положении, Используя эти результаты, найдем общее решение,
описывающее линейные колебания точки в вертикальной плоско-
плоскости.
§' 6.3 Собственные и главные колебания системы 277
Разлагая кинетическую и потенциальную энергии точки в по-
положении устойчивого равновесия, получим
Т = -f- (I2 + P*q ф2), U = -i- (я|2 + m* Peq ф»),
где ?=р—peq. Отсюда видно, что координаты g и ф являются
главными координатами (см. F.50)). Используя выражения Т и
U, получим уравнения колебаний (см. F.49))
и значения квадратов двух собственных частот
2 И 2
(Of = , 0J =
m
peq
Общим решением уравнении будут функции
| = ах cos (©!< + Pi), Ф = а2 cos (co2* + р2).
Таким образом, колебание точки слагается из гармонического ко-
колебания вдоль оси пружины с частотой, равной (х/тI/2, и гармо-
гармонического колебания математического маятника длины peq с час-
частотой, раВНОЙ (g/peqI/2*
Пример 6.8. Колебания системы двух точек на горизонталь-
горизонтальном стержне.
Две точки одинаковой массы m находятся t на неподвижном
гладком и горизонтальном стержне длины За. Эти точки соеди-
соединены друг с другом и с концами стержня тремя пружинами, под-
подчиненными закону Гука (жесткость каждой из пружин и длина в
ненапряженном состоянии соответственно равны х и а). Найти
закон движения системы вблизи ее положения устойчивого равно-
равновесия.
Направим ось Ох вдоль стержня и совместим начало отсчета
с одним из концов стержня. Выбирая в качестве независимых
координат декартовы координаты точек Х\ и х2 (рис. 6.8, а), для
кинетической энергии системы получим выражение
Потенциальная энергия U системы слагается из энергии упругой
деформации всех пружин, т. е.
где Д/; (t=l, 2, 3) — удлинения пружин, соответственно равные
^11 = х1 — а9 &12*=х2—х1 — а9 A/3 = 2a — x2.
278
Линейные колебания
Гл. VI
В данном случае положение устойчивого равновесия очевидно и
определяется координатами
Рис. 6.8
Кинетическая и потенциальная энергии как функции отклонений
от этого положения и обобщенных скоростей будут соответствен-
соответственно равны
где %1 = х1 — а, %2=х2 — 2а.
Соответственно уравнения движения F.34) примут вид
где со2 = к!т.
Повторяя общую процедуру решения уравнений, запишем
уравнения для амплитуд (см. F.36))
(X2 + 2со2) Сх — со2 С2 - 0, — со2 Сг + (№ + 2со2) С2 = О
и характеристическое уравнение (см. F.37))
—со2
2со2
= 0.
Последнее уравнение распадаемся на два квадратных уравнения,
решение которых приводит к.четырем собственным значениям К:
где 0I = —, о>2 = 3 —.
пг пг
§ 6.3^
Собственные и главные колебания системы
279
Подставляя К\ в первое из уравнений для амплитуд, найдем
(Я,? + 2со2) С\" - со* СУ> = 0, т. е. <#> = dt\
Аналогично получим, что
с<22> = cf, сТ = -cf\ сB4) = -cf.
Используя эти соотношения, находим общее решение (см. F.39))
?i = ei + 02> h = 0i — 02,
где
бх = а± cos (©! t + pj, 62 = а2 cos (со2г + р2).
Итак, колебания системы двух точек в общем случае харак-
характеризуются двумя собственными частотами о)Ь сог и слагаются из
двух главных- колебаний. Главное колебание 0i осуществляется
(см. рис. 6.8, б), если в начальный момент времени средняя пру-
пружина не растянута, обе точки одинаково отклонены в одну сторо-
сторону и имеют одинаковые начальные скорости (по величине и на-
направлению). В этом случае средняя пружина в любой момент
времени не напряжена и, следовательно, йе влияет на колебания
точек; соответственно частота этого колебания равна (х/тI/2.
Главное колебание 02 осуществляется, если в начальный момент
боковые^лгружины одинаково сжаты (или растянуты), а скорости
точек одинаковы по величине и противоположно направлены
(рис. 6.8, в). Соответственно частота второго колебания больше
частоты первого колебания и равна (Зх/тI/2.
Пример 6.9. Маятник с кратными собственными частотами.
Две материальные точки 1 и 2 с одинаковыми массами m сое-
соединены невесомым стержнем _ 9
длины 21. Центр этого маятника ^h^stfSWftffiT
движется по горизонтальному^
гладкому и неподвижному стерж-
стержню длины 2а (рис. 6.9). Каждая^ 0^ \ |_
р )
из точек 1 и 2 соединена с двумя
одинаковыми ' пружинами жесг-
кости х и длины а в ненапря-
женном состоянии. Неподвижные
концы пружин закреплены на
расстоянии / от горизонтального
стержня. Найти общее решение
для линейных колебаний маятни-
У
Рис-
ка в вертикальной плоскости
(плоскости рисунка).
Выберем систему координат так, как это показано на рис. 6.9.
В качестве независимых координат возьмем координату у центра
280 Линейные колебания Гл. VI
маятника и угол ф его наклона относительно вертикали. Тогда ко-
координаты точек 1 и 2 будут соответственно равны
f/i = У + I sin ф, уа = у — / sin ф,
хг = Z cos ф, лг2 = — / cos ф.
Подставляя в общее выражение для потенциальной энергии маят-
маятника
приближенные значения удлинений пружин
А* и = ±(У + /ф), А/8,4 = ± (У — /ф),
получим
Кинетическая энергия маятника в тех же обобщенных переменных
и с той же точностью будет равна
Из выражений-для Т и U следует, что у и ф являются главны-
главными координатами, удовлетворяющими уравнениям Лагранжа:
где со2=2х/т. Корни характеристического уравнения этой системы
кратны, соответственно чему общее решение определяется двумя
главными колебаниями с одинаковыми частотами и с различными,
вообще говоря, амплитудами и фазами;
у=ах cos (со/ + рх), ф = — а2 cos (of + Ра).
Эти колебания можно осуществить, задавая «симметричные» и
«антисимметричные» начальные условия (см. предыдущий при-
пример).
Пример 6.10. Продольные колебания невращающейся двух-
двухатомной молекулы.
Известно, что внутренняя энергия двухатомной молекулы с хо-
хорошей степенью точности описывается потенциалом как функцией
расстояния г между атомами [43, с. 225]:
где, D, к и а — постоянные, характеризующие молекулу (напри-
§ 6.3 Собственные главные колебания системы 281
мер, а является расстоянием между атомами, при котором потен-
потенциальная энергия минимальна).
Если отклонение г—а достаточно мало, то энергию взаимодей-
взаимодействия атомов можно приближенно записать в виде
(здесь опущена несущественная постоянная). Поэтому двухатом-
двухатомную молекулу можно представлять как систему двух материаль-
материальных точек с массами тх и т2, соединенных между собой пружи-
пружиной жесткости х и длины а в ненапряженном состоянии. Предпола-
Предполагая, что такая молекула движется только вдоль своей оси, т. е.
вдоль оси пружины, найти закон движения молекулы.
Совмещая декартову ось Ох с осью молекулы, получим выра-
выражения для кинетической и потенциальной энергий молекулы:
Отсюда видно, что U обращается в нуль не только в некотором
фиксированном положении Ar2eq—#ieq=tf, но и в любом другом
положении,, соответствующем требованию x<i—Х\=а* Следователь-
Следовательно, U не имеет изолированного минимума в положении 'Xseg—
—#ieq=a. Несмотря на это, применим метод решения, изложенный
в настоящем параграфе (оправданность этого шага будет видна в
дальнейшем).
Введем отклонения от положения равновесия
где х\щ и jc2eq связаны соотношением* %eq—Xieq=a.
Выражая Т и U через отклонения, получим
Соответственно уравнения движения, уравнения для амплитуд и
частот будут иметь вид
l+~-h- — Ь = 0, -JLb + b + JLb-O,
till tTLi ГП2 ТП4
(v +^-)c1 —2-е, = 0, —2-сх + Ы + -2-Vc, = 0,
+ —\ =о
(здесь \х — приведенная масса). Из этих уравнений находим ча-
частоты и отношение амплитуд
282 Лцнейные колебания Гл. VI
Используя эти результаты, получим общее решение
т х т
где в = С cos (]/—* + Р); С, Р, Сх и С2 — действительные кон-
станты, а коэффициенты при в выбраны в соответствии с решением
задачи двух тел (см. C.7)). Выражая Сг и С2 через начальные зна-
значения х10, лго0, #ю, #20i найдем общее решение для х± и #2:
m
/71
где
1 1
m m m m
Используя систему центра масс молекулы, ту же задачу можно
решить короче. В этой системе кинетическая и потенциальная
энергии молекулы выражаются формулами
где х = х'2 — х[ (см. C.7)). Отсюда можно найти уравнение Лагранжа
ц.в + х0 = 0,
где 6=д:—а, а затем, используя соотношения задачи двух тел, по-
получить решение
где
Из обоих решений видно, что движение молекулы слагается из
движения молекулы как целого со скоростью хто (с„чем связана
нулевая частота, появившаяся в первом решении) и колебаний
атомов с частотой (х/тI/2,,которые совершаются в системе цент-
центра масс около положения устойчивого равновесия
/По /' , /7Zi
* = — <* * = + ~~ п
§ 6.3
Собственные и главные колебания системы
283
? a
. Рис. 6.10
Колебания первого и второго ато-
атомов совершаются в противофазе
с отношением амплитуд, рав-
равным m^/nti.
Пример 6.11. Продольные ко-
колебания линейной трехатомной
симметричной молекулы. .
Рассмотрим трехатомную ыо-
лекулу как систему, состоящую
из трех точек с массами ти пг2
и ти расположенных на одной
прямой и соединенных между со-
собой одинаковыми пружинами
(длина в ненапряженном состоянии и жесткость каждой из пру-
пружин соответственно равны а и к). Найти собственные частрты ко-
колебаний невращающейся молекулы и закон ее движения.
Решая задачу в произвольной инерциальной системе отсчета,
мы, так же как и в предыдущем примере, получим нулевую часто-
частоту, связанную с поступательным движением молекулы как целого.
Однако проще с самого начала исключить эту частоту и рассмат-
рассматривать колебания молекулы в системе ее центра масс.
Направим Д^картову ось Ох по оси молекулы (рис. 6.10, а).
Тогда кинетическая и потенциальная энергии будут соответствен-
соответственно равны
U = Y {(*2 - *i - af + {х, -хг- af).
Здесь координаты точек связаны соотношением (см. D.48))
mxxz = 0,
с помощью которого из выражений для Т и U можно исключить,
например, Х2. В результате получим
-6/722
щ
ml
и
284 Линейные колебания , Гл. VI
Имея в виду, что положение устойчивого равновесия в системе Sm
определяется равенствами
%1 eq ^ — &> %2 eq ==1 ^, ^3 eq == ^>
и вводя в качестве переменных отклонения от этого положения
Si == Х1 I #э ?2 == X2i 1з == #3 #>
в независимых координатах |i и |3 найдем
17 = "т
Используя эти функции, придем к уравнениям движения, урав-
уравнениям для амплитуд и характеристическому уравнению;
= О,
(li + «02|i) + i3 + «^8 = 0;
^ + ^)С3=0,
где
Д(Ч-»Ч-ЧУ
2 __
01
тг + w2)
2
02 —
Характеристическому уравнению удовлетворяют
где
2 ,Я а 2 .Ч2
М,2 = —©1» Л3,4= —0J,
тх
а m=2mi+m2 — масса всей молекулы. Соответственно из уравне-
уравнений для амплитуд вытекают соотношения
§63 Собственные и главные колебания системы ; 285
ci1^»—с11Л. cP = ci3'4).
Таким образом, общее решение будет иметь вид
?i = ei + 02» Ъз = ~ ^i + 02,
где
0Х = ах cos ((ох/ + Pi), 0? = а2 cos (со2* +¦ Рг)«
Возвращаясь к переменным #ь х2, х$ и учитывая соотношения меж-
между ними, окончательно найдем
/7X2
Из этого решения видно, 'что продольные колебания трехатомной
симметричной молекулы сводятся к наложению двух главных ко-
колебаний. Главное колебание 9i совершается с частотой (к/тхI/2*
и осуществляется, если в начальный момент времени отклонения
и скорости двух крайних атомов одинаковы по величине и на-
направлены в разные стороны, средний атом в этом случае все вре-
время находится в центре масс молекулы (рис. 6.10, б). Второе глав-
главное колебание 02 с частотой (х ) асимметрично; для
\ тхтг )
его осуществления нужно задать одинаковые начальные условия
для крайних атомов; что касается атома 2, то его начальные от-
отклонения и скорость должны относиться к отклонениям и скоро-
скоростям крайних атомов как — 2гп\1т2 (рис. 6.10, в).
Пример 6.12. Теплоемкость кристалла.
При сравнительно невысоких температурах атомы кристалла
совершают линейные колебания около узлов кристаллической ре-
решетки, т. е. около положений устойчивого равновесия. Поэтому
энергия атомов кристалла будет равна (см. F.32) и F.33)).
где §ь &г> !з — проекции отклонения первого атома от «своего»
узла и т. д. Выражение A) в главных координатах 0 имеет вид
?=?*«. B)
а=1
где
±1\1 C)
286 :_ Линейные колебания Гл. VI
Отсюда ясно, что полную энергию кристалла можно представить
как сумму энергий $N независимых осцилляторов.
Согласно теореме о вириале сил (см. B.52)) Еа — 2Та. По-
Полагая далее, что энергия Е в среднем равнораспределена по всем
осцилляторам, из B) найдем
где Га — средняя кинетическая энергия любого a-го осциллято-
осциллятора. Далее определим абсолютную температуру Т системы ка$ ве-
величину, пропорциональную средней кинетической энергии Та,
т. е. положим Та = — Т (здесь множитель k — постоянная
Больцмана — имеет размерность энергии, деленной на градус)..
Тогда средняя энергия кристалла запишется в виде E = 3kNT, а
теплоемкость с кристалла, т. е. отношение приращения средней
энергии к приращению температуры, будет равна c=3kN (закон
Дюлонга — Пти).
Приложение 6.1. Общие соотношения, которым подчинены собственные зна-
значения X для систем с идеальными голономными стационарными связями и потен-
потенциальными стационарными силами
Умножая каждое из уравнений системы F.38) на соответствующую ком-
комплексно сопряженную амплитуду (Cj1)* и складывая все результаты умножения,
получим
(S/^^L(?^??) A)
Uk
Входящие в это соотношение билинейные формы от амплитуд (С**)* и Са соот-
соответствуют квадратичным формам Т и U. Действительно, выполняя ,в F.32)
замену
найдем билинейную форму Г((Са)*, Са). Производя аналогичную замену в
F.33), получим билинейную форму С/((Са)*, Са). Используя эти обозначения,
запишем соотношение A) в виде *
* Соотношение B) не может служить уравнением для отыскания Ха, по-
поскольку билинейные формы Т и У зависят от амплитуд, определение которых
требует знания Ха. Однако соотношение B) может быть полезным для общего
анализа корней характеристического уравнения F.37).
Приложения 287
C?) = 0. .B)
Квадратичные формы* Г и (/ являются положительно определенными формами
с действительными симметричными коэффициентами. Следовательно, билинейные
формы Г((Са)*, С06) и ?/((Са)*, Са) являются действительными положитель-
положительными величинами при любом а. Чтобы убедиться в этом, представим амплитуды
С в виде
Ck = Uk + ivk, С* = Uj — ivj,
где коэффициенты и и v вещественны. Тогда для билинейной формы Т получим
Т(С*,С)= ~y2j а\к (UjUk + vjvk) + -у 2jajk (tiflk — uhvj).
hk Lk
Мнимая часть формы Г (С*, С) равна нулю в силу симметрии коэффициентов
ajk и антисимметрии множителей UjVh—UhVj. Действительная часть той же фор-
формы равна сумме билинейных форм от вещественных амплитуд и и vt т. е.
Т(С*,С) = Т(и, u) + T(v, v).
Если хотя бы один из коэффициентов и или v отличен от нуля (а нас интере-
интересует именно такой случай нетривиального решения), то Т(С*, С)>0. Аналогично
найдем, что U(C*t C)>0. Таким образом, из соотношения B) действительно вы-
вытекает свойство F.40).
Приложение 6.2. Уравнения Лагранжа в главных координатах.
Чтобы получить уравнения F.49), найдем исходя из F.32) и F.33) кине-
кинетическую и потенциальную энергии в главных координатах. Например, подстав-
подставляя F.47) в F.33), получим
Эта форма зависит только от квадратов 0, поскольку коэффициенты при произ-
произведениях 0а0р (а=т^Р) равны нулю:
>• B)
/.*
Действительно, умножая каждое из уравнений F.38) на амплитуду Су и скла-
складывая все результаты умножения, найдем соотношения, аналогичные соотноше-
соотношениям B) приложения 6.1:
0. C)
288 . Линейные колебания Гл. VI
Таким же образом получим соотношение для Ар
Т (С*С$) X\ + U (СаС$) = 0. D)
Ввиду симметрии коэффициентов а$ъ и Cjk билинейные формы, входящие в C)
д D), также симметричны относительно индексов а и р, т. е.
= U (СаС$). E)
Используя это свойство, из соотношений C) и D) найдем
Г (СрС) (**-!§) = О (аф&.
Отсюда, предяолагая отсутствие кратных корней, получим
Т(С?С*) = 0 (а=^Р) F)
и, следовательно, (см. C)),
U((f*(P) = 0 (а^=Р). G)
Представляя билинейную форму
f,k
с помощью F.42) в виде
«(здесь Са и Ср отличны от нуля) и используя соотношения G), убеждаемся
в справедливости B).
Учитывая эти соотношения, найдем потенциальную энергию в главных коор-
координатах
s
а$ (8)
где
Аналогично для кинетической энергии получим выражение
§ 6.4 т Колебания под действием потенциальных и др. сил 289
где
uk
С помощью (8) и (9) нетрудно убедиться, что уравнения Лагранжа в главных
координатах имеют вид F.49).
§ 6.4. Собственные колебания системы под действием
потенциальных, гироскопических и диссипативных сил
Рассмотрим колебания системы при наличии потенциальных
и гироскопических сил, а также диссипативных сил, линейных от-
относительно скоростей точек. В остальном сохраним предположе-
предположения о силах и связях, сформулированные в предыдущем парагра-
параграфе. Тогда кинетическая энергия Г, обобщенный потенциал % и
диссипативная функция D будут иметь вид (см. E.55), E.75),
E.81))
i,k=i /-=1
s
0 = -f S Wfc' F.52)
i,k=i
где все функции а^и Uj, %W и bjh зависят только от координат,
поскольку силы и связи стационарны; кроме того, коэффициенты
ajk и bjk симметричны относительно перестановок индексов.
Разлагая Г, % и D в положении устойчивого равновесия с
точностью до членов второго порядка малости включительно,
можно получить линейные уравнения движения. Однако эти урав-
уравнения легче получить, проводя разложение обеих частей уравне-
уравнений Лагранжа E.77) с точностью до членов первого порядка.
Запишем исходные уравнения E.77) с учетом E.80)
d ( дТ \ ОТ
dt
di \ dqj ) dqj
-^L__^ (/=1.2 S). F.53)
dqj dqj
Используя выражение для кинетической энергии (см. F.52)),
представим левые части системы F.53) в виде
Зак. 284
290 Линейные колебания Гл. VI
Затем, учитывая, что производные от обобщенного потенциала
соответственно равны
d / dU \ = JUj^ = vi dUj •
dt \ dqj ) dt 2j dqk Як>
k=l
dU V4 dUk • . dU{0)
= ЦЛ
dqj jfcJ dqj dqf
для обобщенно-потенциальной силы получим выражения
—г— = — \ VibQk • (/=1,2,... , s), (b.oo)
dt \ dqi ) dqj Zj Yjk4k dqj W ' V 7
dUb dUi л *
где Y/л == — ^ — коэффициенты, антисимметричные по индек-
индексам. Для обобщенных диссипативных сил соответственно найдем
(/= 1,2, ... ,s). F.56)
Теперь разложим все члены, входящие в уравнения Лагранжа,
в положении устойчивого равновесия, т. е. в положении изолиро-
изолированного минимума обычной потенциальной энергии 1LW (см. до-
достаточный признак устойчивости на с. 263). Это положение опре-
определяется из уравнений
dqj
Разложение доведем до членов первого порядка малрсти включи-
включительно по степеням отклонений Sj и обобщенных скоростей gj
(/=1, 2, ..., s). В результате из F.54), F.55) и F.56) с учетом
F.57) получим
dT \ dT _
*=i /f=i
§ 6.4 Колебания под действием потенциальных и др. сил 291
Подставляя F.58) в F.53) и опуская для простоты записи знак
равновесия eq, найдем интересующие нас уравнения
e/*|fc + (*/* + V/*)i + ^A} = 0 (/= 1.2 s). F.59)
.В этой системе уравнений коэффициенты а$ь, bjh, cjk симметрич-
симметричны, a yjk антисимметричны относительно перестановки индексов.
Общая процедура решения системы F.59) аналогична методу
решения системы F.34). Поэтому сразу приведем соответствую-
соответствующее характеристическое уравнение и уравнения для амплитуд:
det {aj}p + (bIk + yik) X + clk) = 0, F.60)
Л + ip!k + yik) К + cik) Ck = 0 (/ = 1,2, ... , s). F.61)
Общее решение системы F.59) имеет вид
gft=Re?C^«* (A =1,2 s), F.62)
а=1
где Ха определяются из F.60), а отношения амплитуд — из
F.61).
Каждое из собственных значений X может быть либо комп-
комплексным (и тогда сопряженное ему число также будет корнем ха-
характеристического уравнения), либо вещественным. Таким обра-
образом, каждое из собственных значений X можно записать в одной
из форм
*?•"" = — Ha ± fofe, Я?'~" = — f4"f~> F.63)
где соа, jxa, [>ф~" — действительные величины. Это следует из из-
известной теоремы о корнях алгебраического уравнения с действи-
действительными коэффициентами [49, с. 159—161]. Кроме того, можно
утверждать, что все коэффициенты затухания [ia, ц+, ц~ положи-
положительны. Действительно, согласно закону E.96) энергия системы
со стационарными силами и связями убывает за счет работы дис-
сипатлвных- сил. Ввиду того, что в общем решении имеются экс-
экспоненциальные множители, это возможно только в случае поло-
положительности коэффициентов затухания.
10*
292 Линейные колебания Гл. VI
Если диссипация энергии достаточно мала, то все корни X
можно разбить на пары комплексно сопряженных корней, а об-
общее решение имеет вид
~w Re {CcTAfe (№) emat + C~A,^ (?v
(Л= 1, 2, ... ,s) F.64)
и описывает затухающие колебания системы. Если диссипация
энергии отсутствует (т. е. все коэффициенты 6jfe=0), то корни
будут чисто мнимыми, коэффициенты затухания равны нулю, а
система совершает незатухающие колебания. Наконец, если все
коэффициенты bjk достаточно велики, то все корни X вещественны.
В этом случае система совершает апериодическое движение, кото-
которое описывается решением
<ГН<Х' Re (C?Ak (X+)) + <Г"а' Re (С« Л*
(А= 1, 2 s). F.64')
Если среди всех корней характеристического уравнения часть кор-
корней является комплексной,- а часть действительной, то соответ-
соответствующую форму общего решения нетрудно получить из F.62).
В общем случае при наличии диссипативных и гироскопиче-
.ских сил алгебраические дополнения, определяющие отношение
амплитуд в решении F.62), не удовлетворяют требованию F.45),
т. е. имеют место неравенства
Дв(Ь«)^Д*Ю (*,a=l,2,...,s). F.65)
Однако в частных случаях и при наличии диссипативных сил воз-
возможно выполнение требований F.45) и введение «главных» ко-
координат (в том смысле, что каждое из уравнений F.59), записан-
записанное в таких переменных, будет уравнением относительно какой-
либо одной переменной).
Пример 6.13. Движение маятников, соединенных пружиной, в
среде с сопротивлением.
Точки подвеса двух одинаковых математических маятников
длины I и массы m находятся на расстоянии а друг от друга и
расположены на одной горизонтали. Точки соединены между со-
собой пружиной жесткости к и длины а в ненапряженном состоянии,
система помещена в среду с сопротивлением, пропорциональ-
§ 6.4
Колебания под действием потенциальных и др. сил
293
\l
ным первой степени скорости тела (коэффициент сопротивления
k). Найти закон движения маятников в вертикальной плоскости,
проходящей через точки подвеса, вблизи положения устойчивого
равновесия системы *.
Выберем систему координат так,
как это показано на рис. 6.11, а в
качестве независимых координат
возьмем ф1 и ф2 — углы отклонения
каждого маятника от положения
устойчивого равновесия: cpieq—-
= qJeq=0. Тогда удлинение пружи-
пружины для малых отклонений и энергия
ее упругой деформации с точностью
до величин второго порядка малос-
малости будут соответственно равны Рис. 6.11
JC
С той же точностью для потенциальной энергии обоих маятников
в поле тяжести получим выражение
— mgl (cos «Pi + cos ф2):
Следовательно, потенциальная энергия системы будет равна
U = ~ {(mgl + х/2) ф? Н (mgl + и/2) <р* - 2х/2ф1ф2}_
(здесь опущена несущественная постоянная). Выражения для ки-
кинетической энергии и диссипативной функции будут иметь вид
г = ^-(ф?,Кф1), 2> = -?-'(ф?+<й).
Квадратичные формы Г, D и U могут быть заданы с помощью
матриц
It)" «22 I'
0
О Ь.
22
* Метод решения данной задачи применим к решению ряда задач о колеба-
колебаниях немеханических систем; например, задача об индуктивно связанных электри-
электрических контурах решается в полной аналогии с данным примером.
294
Линейные колебания
Гл. VI
где
Си = С22 = mg/ + и/2, с12 == с21 = — и/2.
Записывая линейные уравнения движения в форме F.59)
= О,
найдем характеристическое уравнение
сп
Учитывая, что ац = а22, Ьц = Ь22, Сц =
можно записать в виде
и Ci2=C2i, это уравнение
или в виде двух квадратных уравнений
с коэффициентами
m
g . 2*
_.—j e
/ m
Таким образом, решение характеристического уравнения приводит
к четырем собственным значениям Я:
42 = —
зд = - Ц dz
где
СО, =(О)о —I
—
Общее решение уравнений движения запишем в виде F.64)
2
Ф* = ^ ? ^е{Ci^k 0&)еШ°* + Cakk (К) е~Ша'} (А = 1, 2).
сс=1
Затем получим значения алгебраических дополнений
характеристического детерминанта при различных корнях к харак-
характеристического уравнения. Нетрудно убедиться, что
§ 6.4
Колебания под действием потенциальных и др. сил
295
а дополнение Дг, как видно, не зависит от X. В связи с этим общее
решение может быть записано в виде
Ф1 = е1 —e2f % = вх + ея.
Здесь 6i и 02 соответственно равны
г + РО, если cog>|i»f
+ С2егМ, если cog < ц2
9v
o2* + ра), если со* + — > И2,
яг
9v
если ©г + -^- < (А2
m
m
Таким образом, функция 0! описывает либо затухающее колеба-
колебание с частотой coi и коэффициентом затухания jx, либо апериоди-
апериодическое движение с коэффициентами затухания jjlli и \i2. Функция
9г соответственно характеризуется частотой <02 и затуханием \i
или двумя коэффициентами затухания \i$ и \ia.
Величины 0i и 02 являются главными координатами системы.
Действительно, эти независимые координаты подчинены уравне-
уравнениям Лагранжа ¦
= О,
каждое из которых является уравнением относительно одной из
этих координат. Соответственно Г, D и U, выраженные через
главные координаты, будут содержать только квадраты перемен-
переменных, т. е. коэффициенты этих форм будут образовывать диаго-
диагональные матрицы:
l_||2m/2 О II пЬ п 2kl2 О II „ ji_||2mg/ 0 |
1 0 2т/2|Г ||М~> 0 2kl*\\> 11Cail""|| О
\\п || _
Главное «колебание» 0i осуществляется, если начальные откло-
отклонения обоих маятников и их скорости соответственно равны меж-
296
Линейные колебания
Гл VI
ду собой (рис. 6.12, а). Если же начальные отклонения обоих
маятников и их скорости соответственно равны по величине, но
противоположны по знаку, то реализуется второе главное «коле-
«колебание» 02 (рисЛ)Л2, б).
В заключение отметим частные слу-
случаи. Пусть, например, сопротивление
достаточно мало, т. е. со^ >[л2. Тогда
функции 0! и 02 описывают затухающие
гармонические колебания. Если же маят-
а ники помещены в достаточно, вязкую
среду
S,
то 0i изменяется апериодически, а 02 со-
совершает затухающее колебание. Нако-
Наконец, в весьма'вязкой'среде, когда
Рис 6.12
т
обе главные координаты описывают апе-
апериодические движения.
Пример.14. Линейный заряженный осциллятор в магнитном
поле.
Точка массы пг с зарядом е движется в постоянном однород-
однородном магнитном поле напряженности Ж. На материальную точку
также действует сила притяжения, пропорциональная расстоянию
до центра силы О (коэффициент пропорциональности к). Найти
частоты колебаний осциллятора и закон его движения.
Выбирая систему декартовых координат с началом в точке О
и осью Oz, направленной вдоль Ж, и проектируя правую и левую
части уравнения движения точки
/иг = — иг -г — [гЖ]
с
на координатные оси, получим систему дифференциальных урав-
уравнений
дН-о&л; — ©if = 0,
®гх + У + С0нУ = 0,
* = 0,
где
2 +
т
тс
§ 6.4 Колебания под действием потенциальных и др. сил 297
Эти же уравнения можно получить, используя уравнения Лагран-
жа. Действительно, обобщенный потенциал в рассматриваемой
задаче равен (см. E.65) и E.75))
где А — вектор-потенциал магнитного поля. Выбор А диктуется
(хотя и неоднозначно) условиями задачи. Например, если поло-
положить
Ах = Аг = О, А у =
то мы сможем удовлетворить условию (см. E.66))
Используя выражение для А, найдем функцию Лагранжа в декар-
декартовых координатах
-I- —xy- -f(*a + У2 + *2)>
которая приведет к полученным выше линейным уравнениям дви-
движения.
Соответствующие им уравнения для амплитуд и характеристи-
характеристическое уравнение имеют вид
А (X) = [(^2 + (& У + со? Щ (X2 + ®1) = 0.
Из последнего уравнения находим собственные значения X:
X\t2 = ± 1®1У Яз,4 = zfc ?а>2, Яб,б = ± 1Щу
где
co3 = cox,
a o)L = ларморова частота.
2mc * v
Последовательно подставляя собственные значения X в урав-
уравнения для амплитуд, найдем соотношения между амплитудами:
298Линейные колебанияГл. VI
Используя эти соотношения, придем к общему решению в виде
х = Re {С{Ре{^ + dper***} + Re {CfV®»' 4- CiV*»*'}-
у = Re f {C?) ^ — C{V-to*'} — Re i {Cf еР* — C(i4) *-*»«'},
z = Re {Cf e*M + cfe-**},
откуда окончательно находим
* = % cos (со^ + р^ 4- а2 cos (coaf + p2),
у = % cos ^f + px + -|Л — fla cos
где всё аир—- постоянные, определяемые начальными условия-
условиями.
Итак, колебание проекции заряженной точки на плоскость,
перпендикулярную Ж> характеризуется частотами coi и <ог отлич-
отличными от сон — собственной частоты осциЛлятора в отсутствие
магнитного поля. Интересно отметить, что первое частное реше-
решение описывает движение проекций точки по окружности с угло-
угловой скоростью coi .по часовой стрелке; второе частное решение
описывает аналогичное движение с угловой скоростью ©2 против
часовой стрелки. Колебание заряда в направлении Ж происходит
с собственной частотой со*. В случае малой напряженности маг-
магнитного поля частоты ом и со2 сводятся к сумме и разности собст-
собственной частоты осциллятора и ларморовой частоты:
Пример 6.15. Линейные колебания вращающейся двухатомной
молекулы.
Исходя из той же модели молекулы, что и в примере 6.10, и
допуская, что внешние силы отсутствуют, определить частоту ли-
линейных колебаний вращающейся молекулы.
Применяя законы сохранения момента и энергии относитель-
относительно системы центра масс молекулы, получим.два интеграла дви-
движения в полярных координатах в плоскости движения молекулы
(см. C.12))
§6.4
Колебания под действием потенциальных и др. сил
299
где ц =
ИР2Ф = М09 f (р2 + Р2Ф2) + у (Р - яJ = Е09
р и ф — полярные координаты вектора г=Г2—
-j- /722
a Mo и ?0 — момент и энергия молекулы относительно Sm-систе-
мы.
Исключая из интеграла энергии с помощью интеграла момен-
момента угловую скорость ф, найдем
Функция ?/eff (p) имеет минимум
(рис. 6.13), причем если?0= (f^eff)min,то BSw-системе каждый атом
будет двигаться по окружности, а расстояние р между ними бу-
будет неизменным.
Обозначая расстояние
между атомами, соответ-
соответствующее (?/eff)min, СИМ-
СИМВОЛОМ peq и приравнивая
нулю первую производ-
производную f/eff(p), ПОЛуЧИМ
уравнение, определяю-
определяющее peq:
1 —
Peq
Рис. 6.13
Если Во несколько превы-
превышает (C/eff)min, то молеку-
молекула будет вращаться во-
вокруг своего центра масс с переменной угловой скоростью ф, а
атомы будут совершать колебания вдоль оси молекулы. Чтобы
найти частоту этих колебаний, разложим UQtt в ее минимуме до
членов второго порядка малости включительно. Тогда с точностью
до несущественной постоянной получим
где ^=р—peq. Таким образом, интеграл энергии примет вид
300 Линейные колебания Гл. VI
Дифференцируя правую и левую части этого интеграла по време-
времени, с точностью до линейных членов найдем
ГДе O)Vib = 1 T~ •
\l M^Peq
Замечая, что величина M0/\iplq равна угловой скорости ф в
«равновесии» (когда p=peq), приходим к выводу, что квадрат
частоты линейных колебаний вращающейся двухатомной моле-
молекулы равен сумме квадрата частоты колебаний невращающейся
молекулы и утроенного квадрата угловой .скорости вращения мо-
молекулы в «равновесии», т. е.
2 X . о/ Ч2 я
^vib = h О (COrot)eq,]
где (corot)eq = M0/\ipiq. Влияние колебаний молекулы на ее угло-
угловую скорость вращения можно определить, используя интеграл
момента. Тогда с точностью до членов первого порядка включи-
включительно найдем, что
ф = «rot = (O)rot)eq ( 1 — 2 —?-
§ 6.5. Вынужденные колебания
Рассмотрим механическую систему, подчиненную требовани-
требованиям, сформулированным в начале 6.4, предполагая, что на систе-
систему также действуют нестационарные силы, т. е. силы, явно зави-
зависящие от времени. Ниже мы убедимся, что такая система наряду
с собственными колебаниями будет совершать еще и вынуж-
вынужденные колебания. Чтобы получить в этом случае урав-
уравнения движения, необходимо линеаризовать уравнения Лагранжа
около положения устойчивого равновесия, как это было сделано
вч^§ 6.4. Ввиду наличия нестационарных сил вместо уравнений
F.59) здесь будут иметь место уравнения
aikik + {Ь1Л + yik)ik + ciklk) = (fi(t) (/=1,2,..., s), F.66)
где Q/@'—' заданные функции времени*.
* Система уравнений F.66) является лишь одной из простейших систем,
описывающих движение под действием нестационарных сил. В ряде случаев
нестационарность сил приводит к более сложным уравнениям, например к урав-
уравнениям с переменными коэффициентами.
§ 6.5 Вынужденные колебания 3(П
Как известно, решение системы F.66) слагается из общего
решения соответствующей однородной системы и частного реше-
решения неоднородной системы. Решение однородной системы было
рассмотрено в предыдущих параграфах. Поэтому рассмотрим толь-
только частное решение системы F.66), которое и будет описывать
вынужденные колебания. Сначала исследуем систему с одной
степенью свободы, на которую действует вынуждающая сила, гар-
гармонически зависящая от времени. В этом случае уравнение дви-
движения имеет вид
flllll + *lill + Cnll = Qe COS (CO,* + E,), F.67)
где Qe, (x)e и Ce — соответственно амплитуда, частота и фаза вы-
вынуждающей силы. Представляя уравнение F.67) в комплексной
форме
а А 4 Vl + *i?i = Qee^t+^, F.65)
его частное решение будем искать в виде
l1 = a/AfW(°V+M. F.69)
Подставляя F.69) в F.68) и сокращая на общий множитель,
найдем комплексную амплитуду
a/^-=Qe-±-, F.70)
А (кое)
где A(tco^) = an(to)a + bllt(i(ue) + cll9 Далее, записывая F,70) в виде
aee^e = Qe A*(tog) F71)
6 ^е А (Ше) A* (iG>e) ' V '
получим амплитуду ае и разность фаз А|Зе как функции частоты
сов вынуждающей силы:
[К- «2J
il/2
где соо= -^-, 2ц = -Ji. Функции a?(coj и Apeto) называются
плипгудной и фазовой характеристиками соответственно.
302
Линейные колебания
Гл. VI
Итак, F.69) и F.72) опре-
определяют частное решение урав-
уравнения F.67) t
о
-Л ¦¦
. +ДР.К)]- F.73)
Это решение описывает вы-
вынужденное колебание системы.
Из F.73) и F.72) видно, что
амплитуда вынужденного ко-
колебания зависит от амплитуды
возмущающей силы Qe и час-
частот сое и шо. Если (ОеЯ^соо, а за-
тухание достаточно мало (^2<С
<^о), т0 имеет место резо-
резонанс, т. е. резкое возраста-
возрастание амплитуды вынужденных
колебаний (рис. 6.14). Нетруд-
Нетрудно также видеть, что вынуж-
вынужденное колебание по фазе
всегда отстает от возмущаю-
возмущающей силы, т. е. Аре всегда отрицательна. Приведем выражения ае
и Дре для ряда случаев:
•-¦?¦-
Рис. 6.14
^0, если
= Qe
«и
tg(AP#)
если о; = (о0 —!
е alx 2ficoo '
=-—--, если со,
F.74)
= со0;
§
§ 6.5 Вынужденные колебания 303
tg(Ap,)«-^-f если со,»(оо.
Резонансные свойства амплитудных характеристик лежат в осно-
основе устройства «усилителей» и «фильтров».
Отметим предельный случай, когда диссипацией энергии мож-
можно пренебречь, т. е. ]х можно устремить к нулю. Тогда из F.72)
и F.73) получим разрывное решение:
>, если (ое < со0;
— я), если &е > со0 F.75
(амплитудная и фазовая характеристики, соответствующие F.75),
изображены на рис. 6.14 штриховыми линиями).
Полная энергия Е рассматриваемых одномерных колебаний,
т. е. функции
после того как собственные колебания вследствие затухания ста-
станут исчезающе малыми, будет с большой степенью точности рав-
равна
Qe
OU
Qe
ап
•5-
1
1
-0J
- cos (со/ +
cos(co^*f
^ F.76)
Изменение энергии Е со временем характеризуется производной
Ё = апае + ^иеI. F.77)
Это выражение с помощью уравнения F.67) можно записать в
виде
Е = - bng + Qe cos (ю«* + р,) i. F.78)
Если (ое=соо, то мощность, вносимая в систему нестационарной
силой, компенсирует диссипацию энергии; в результате энергия
остается постоянной. Действительно, учитывая, что функция le(t)
удовлетворяет уравнению
i + co^-0, F.79)
из F.77) при сое=@о получим ?;=const.
При произвольном соотношении о)е и соо энергия, усредненная
по периоду колебания Ге=2я/@е, сохраняется (здесь опять-таки
предполагается, что собственными колебаниями системы можно
пренебречь).
304 Линейные колебания Гл. VI
В самом деле, имея в виду, что
Ъ = — , \е = - ,
из F.76) найдем
Е = -^- а2 _? 2_ F.80)
9 9
(черта над функциями означает усреднение по периоду Те).
Если нестационарная сила Qe(t) является произвольной функ-
функцией времени, разложимой в ряд Фурье,
со
Qe @ = J Q^COS (ГМО^ + Р?}), F.81)
то интересующее нас решение можно представить в виде
/2=0
Если же Qe(t) — произвольная функция, представимая интегра-
интегралом Фурье, то общим решением уравнения
g+2|iE + <oo6 = -5^-. F.83)
а
= [g0 cos со/ + —
например, в случае соо>|я, является решение
J
-— f Qe (*) e-^-T)sto со (f — т) dt, F.84)
hi© J
an©
о
где со = |/ coq — И2 (здесь пределы интеграла выбраны так, чтобы
удовлетворить начальным условиям).
Частное решение системы уравнений F.66) находится анало-
аналогично одномерному случаю. Например, если нестационарные си-
силы являются гармоническими функциями времени
QHt) = Q/cosK/ + p,) (/ = 1, 2, ... , s) , F.85)
то, заменяя эти функции соответствующими комплексными выра-
выражениями и представляя решение полученной системы в виде
Ь = с1ес< e««V+e.> {k = 1, 2 s), F.86)
§ 6.5 Вынужденные колебания 305.
после соответствующих подстановок получим
V {ац& + (bjk + yJk) К + cjk} at е*% = <f, (/ - 1, 2,... , s), .
F.87>
где Xe = ше. Эта система линейных неоднородных уравнений имеет
решение
а^~Т7Г7 (k=\,...,s)9 F.88)
где А(Яе) — характеристический детерминант системы F.61),
взятый при значении Я=А,е, a AftEw?) — детерминант, полученный
из характеристического заменой элементов k-тото столбца на
столбец, составленный из Qe\y Qt, ... , Qt. Так как характеристиче-
характеристическое уравнение имеет 2s корней ла, то А(ле) можно предстаЁить
в виде произведения
Д(Ьв) = аП(Ч-*«). F-89>
где а — некоторая постоянная. Если все корни характеристиче-
характеристического уравнения комплексны, то детерминант А(Ке) целесообраз-
целесообразно свести к произведению s сомножителей вида
) (К - Ю ^ fi - (U + ^) К+ *и • ^Г.
Учитывая, что
Аа + Х~ = — 2[Ха, it^a == СОоа,
где сооа = ^а 4-со|, характеристический детерминант F.89) можна
представить в виде
а=1
Умножая числитель и знаменатель правых частей F.88) на
Д*(Ле), придем к выводу, что амплитуды а| обратно пропорцио-
пропорциональны произведению характерных резонансных сомножителей^
поскольку
А (Хе) А (Х*е) ~ П
306 Линейные колебания Гл. VI
Таким образом, если затухание достаточно мало, то каждая ам-
амплитуда at будет иметь s резонансных пиков на s частотах
<ое^сооа (а=1, 2, ..., s). Эти максимумы обращаются в бесконеч-
бесконечность, если диссипация энергии отсутствует, т. е. все [ха-^0. В этом
случае
а% 1 (ft=l, 2,..., s).
п к-$)
а=1
Пример 6.16. Движение системы при наличии силы, действую-
действующей на конечном интервале времени.
На систему с одной степенью свободы, собственной частотой
со и коэффициентом а, играющим роль «массы», в течение про-
промежутка времени t\ действует постоянная сила Qo. Найти откло-
отклонение системы от начального положения (предполагается, что это
лоложение является положением устойчивого равновесия), если
б начальный момент времени система покоилась.
Уравнением движения системы (см. F.83)) является уравнение
где
Его решение можно получить, воспользовавшись F.84)-. Однако
более наглядным является непосредственное решение уравнений
движения на двух интервалах времени с последующим «сшива-
«сшиванием» этих решений. Учитывая, что
Ш
находим решение первого уравнения
(здесь использованы начальные условия go—0, |о=О), а также
общее решение второго уравнения g=iCiCOS©?+C2Sina>f (h^t),
где постоянные С\ и С2 должны быть выбраны из условия непре-
непрерывности координаты и скорости при t=t\. Пользуясь этими ус-
условиями, получаем
§ 6.5
Вынужденные колебания
307
Со =
(COS @^-
sin ®U
Соответственно находим решение, справедливое для
20 о Oofi / (?)t-t
асоа 2 \ 2
Отсюда видно, что если время действия силы t\ равно (или
кратно) собственному периоду системы 2ох/со, то после действия
силы система останется в по-
положении устойчивого равно-
равновесия (рис. 6.15).
Пример 6.17. Вынужден-
Вынужденные колебания под действием
силы, экспоненциально спада-
спадающей со временем.
Пусть система с одной сте-
степенью свободы, собственной
частотой со, коэффициентом
затухания ц и коэффициентом
а, играющим роль массы, в
начальный момент времени Рис. 6.15
?=0 покоилась в положении
устойчивого равновесия. Найти отклонение системы от положе-
положения равновесия под действием силы Qoe*"^.
Используя F.83) и F.84), напишем уравнение движения си-
системы
и его решение в виде интеграла
? = -^!- ет** \ sin со (t — х) dr.
о
Отсюда окончательно найдем
¦e-^sin2
aco2
Пример 6.18. Гашение колебаний.
Исследуем колебания системы двух маятников, отличающихся
от тех, которые были рассмотрены в примере 6.13, только масса-
массами точек (см. рис. 6.11), предполагая, что на первую точку мае-
508 . Линейные колебания Гл. VI
сы Ш\ кроме пружины действует сила, направленная по горизон-
горизонтали и изменяющаяся по гармоническому закону с частотой ое и
амплитудой Qo. Как выбрать массу второго маятника m<i и жест-
жесткость к пружины, соединяющей оба маятника, чтобы амплитуда
колебаний первого маятника была исчезающе малой?
Учитывая некоторые результаты примера 6.13, запишем кине-
кинетическую и потенциальную энергии системы в виде
(m2gl + x/2) 4 - 2х/2ф1ф2}
(здесь ф1 и ф2 — углы отклонения маятников от положения устой-
устойчивого равновесия). Обобщенные силы, соответствующие неста-
нестационарной силе, равны (см. E.41))
Qle - Qo cos ®et -^- = Qol cos (oet, Q2e = 0.
Используя полученные функции, найдем уравнения движения си-
системы (см. F.66))
<P + Ч>2 + ( °>о + —) ф2 = 0,
m1
<Pi
т2
где (Оо = g/l.
Уравнения для амплитуд и характеристическое уравнение этой
линейной системы имеют вид
72 Л- «? -L. К \ Г К Г — П
mx j гщ
Д(К) = ^ + X2 B(og + ^+ а^ ^ + ^.j = О,
где \i = —тхШ% . Отсюда получим собственные значения X и квад-
раты собственных частот системы
л 2 /Ч2 ^2 2 И
Л1,2 = — ^0, л3,4 = — ^>0 »
§ 6.5 Вынужденные колебания 309
а также соотношения амплитуд
?0.2) = ?A,2) ?,C,4) = __ Щ ^C,4)
A722
Это дает возможность найти общее решение для собственных ко-
колебаний маятников (см. F.39))
Ф! = ех + е2, ф2 = 0! — — е2,
где
бх = аг cos (%* -г рх), 62 = а2 cos (со2^ + р2).
Амплитуды частного решения уравнений движения *(см. F.85)
и F.86)) определяются из уравнений
х г _ Qo
тх тг1
Lle г Ав "Г СО0 -4 L2e — U,
где Ке = ше. Отсюда
сй + —— о>2
С ^ Qo ° ma е с = Qp>c 1
е тх{ А (ш^) ' ^ m^g/ Д (со^)
где
Л (со^) = (со? — а?е) (оJ — со?).
Общее решение исходных уравнений слагается из общего ре-
решения, описывающего собственные колебания системы, и част-
частного решения, описывающего вынужденные колебания:
Фг = 6i — — % + С2е cos ®et.
Если, например, оба маятника в начальный момент времени поко-
покоятся в положении равновесия, т. е.
Фю = Ф20 = 0, Фю = ф2о = 0,
тогда
Фх =¦ аг cos щг + а2 cos со2^ + Cle cos ©ef,
310 Линейные колебания Гл. VI
Ф2 = ах cos @^ — а2 cos <o2t + C2e cos &J,
где
Это решение дает возможность ответить на вопрос, поставлен-
поставленный в условии примера. Действительно, если 0е<соо, то можно так
подобрать массу второго маятника т2 и жесткость пружины и,
чтобы Cie=0. В этом случае решение принимает вид
ф1 _ Hsl <Ь* (cos со2/ — cos сох0,
1 ~г
т
= Си /cos vjt S2i^i_\ _ И^ 9м cos щи
Если при этом m2<C/72i, то амплитуда колебаний первого маятни-
маятника станет исчезающе малой по сравнению с амплитудой второго
маятника. Таким образом, чтобы второй маятник играл роль «га-
«гасителя* колебаний», должны выполняться требования:
— = G)i; —coo К>со0), щ^т^
щ.
Гашение колебаний первого маятника связано с тем, что воздей-
воздействия вынуждающей силы и второго маятника на первый маят-
маятник уравновешивают друг друга с точностью до величины поряд-
порядка /П2//П1.
Глава VII
НЕЛИНЕЙНЫЕ КОЛЕБАНИЯ
§ 7.1. Собственные колебания и метод Крылова — Боголюбова
Рассмотрим систему с одной степенью свободы, на которую на-
наложены голономные стационарные связи и действуют заданные
стационарные силы; при этом предположим, что у системы имеет-
имеется- положение устойчивого равновесия. Разложение кинетической,
потенциальной и диссипативной функций в окрестности этого по-
положения вплоть до членов второго порядка малости включитель-
включительно приводит к линейному уравнению. Однако во многих практи-
практически важных задачах возникает необходимость исследования ко-
колебаний с достаточно большими амплитудами и скоростями.
В таких случаях линейное приближение оказывается недостаточ-
недостаточным и приходится учитывать последующие члены разложений,
приводящие к нелинейным уравнениям. Если при этом отклоне-
отклонения от положения равновесия и скорости точек не слишком вели-
велики, то соответствующие уравнения будут описывать малые нели-
нелинейные колебания.
Изучим особенности таких
колебаний на примере матема- I
хтического маятника, помещен-
помещенного в среду с «линейным» со-
сопротивлением (рис. 7.1). Его
кинетическая и потенциальная
энергия, а также диссипатив-
ная функция соответственно
равны
/
4,
— cos ф), D = — i
Рис. 7.1
Разлагая потенциальную энергию в положении устойчивого рав-
равновесия qpeq=O с точностью до членов четвертого порядка мало-
малости включительно, получим
312 Нелинейные колебания Гл. VII
т т 1 I Ф2 Ф4
U = mgl — —
а используя E.77) и E.80), найдем уравнение Лагранжа
2
Ф + 2цср + соЦф = —-Ф3,
о!
где coo = g/l9 2iL = k/m. Если в этом уравнении пренебречь не-
нелинейным членом, пропорциональным qp3, то придем к линейному
уравнению; решением которого в случае соо>ц является функция
где со2 == соо — |я2. Если же не пренебрегать нелинейным членом,
то, учитывая его милость по сравнению с линейным членом, про-
пропорциональным ф, можно предположить, что решение, описываю-
описывающее нелинейное колебание, по форме близко к решению линейного
уравнения, т. е.
, G.1)
где аиф — неизвестные амплитуды и фаза нелинейного коле-
колебания.
Величина обобщенной силы, связанной с отклонением маятника
от вертикали и пропорциональной —Ф+фз/6, меньше величины той
же силы в линейном приближении, причем различие в этих зна-
значениях тем больше, чем больше отклонение маятника от вертика-
.ли (см., например, рис. 6.1). Следовательно, первая производная
фазы г|) по времени или частота гр нелинейных колебаний маят-
маятника будет меньше собственной частоты сою его линейных .колеба-
.колебаний и будет зависеть от амплитуды колебаний. В связи с этим
можно допустить, что для собственных нелинейных колебаний,
вообще говоря, имеет место зависимость:
4>=<о(а), G.2)
где со (а) — неизвестная функция, вид которой определяется ви-
видом обобщенной силы.
Предположение об изменении амплитуды нелинейного колеба-
колебания, по существу, также связано с допущением G.1) d «близо-
«близости» нелинейного и линейного колебаний в течение одного перио-
периода. Действительно, в линейном приближении амплитуда матема-
математического маятника изменяется по закону
а = aQe~^f
и удовлетворяет уравнению
а = — |ш.
§ 7.1 Собственные колебания и метод Крылова — Боголюбова 313
Поэтому будем считать, что и в общем случае производная от
. амплитуды нелинейных колебаний является функцией амплитуды,
т. е.
a = f(a). G.3)
Характерным для нелинейных колебаний является наличие
«обертонов», т. е. частот, кратных основной частоте. В частности,
это можно видеть на примере математического маятника, уравне-
уравнение которого содержит нелинейный член, приводящий к появле-
появлению высшей гармоники (см. G.1)):
Ф3 ^= a3 cos3 if = ^— C cos ^ f cos 3^).
Наконец, в силу нелинейности уравнения движения его общее
решение не сводится к сумме частных решений, и, следовательно,
принцип суперпозиции не имеет места. Таковы особенности нели-
нелинейных малых колебаний или, как говорят, слабо-нелиней-
слабо-нелинейных колебаний.
Рассмотрим уравнение слабо-нелинейных собственных одно-
одномерных колебаний вида
i"+«>g?-eQ(i i), G.4)
где е — параметр, указывающий на малость функции &Q по
сравнению с линейным членом (порядок малости членов в этом
и последующих уравнениях определяется так, чтобы при г-+0 имел
место случай линейных гармонических колебаний). Одним из ме-
методов решения этого уравнения является метод Крылова — Бо:
голюбова.
Учитывая G.1), решение уравнения G.4) будем искать в виде
ряда
I = асозг|э + е& (а, г|)) + г%(а, яр) + ... , G.5)
где е?ь 82^2 — неизвестные функции амплитуды а и периодические
функции фазы г|э. В свою очередь, амплитуда а и фаза ф являют-
являются неизвестными функциями времени, подчиненными «своим» диф-
дифференциальным уравнениям (см. G.3) и G.2))
а = е/1(аН-еа/а(а)+ ...,
G.6)
г|) = со0 + 8@! (а) + 82со2 (а) + ...
Правые части этих уравнений могут быть найдены, поскольку
ряд G.5), в котором а и -ф как функции времен определяются
уравнениями вида G.6), должен удовлетворять исходному урав-
уравнению G.4). Неизвестные' функции e|i, e2g2, ..., efi, e2b, ..., ясоь
314 Нелинейные колебания Гл. VII
е2ео2, ... определяются с некоторым произволом, который можно
исключить, если потребовать, чтобы а явилась полной амплиту-
амплитудой основной гармоники. Тогда функции egi, 82^2, ... не будут со-
содержать членов, пропорциональных cos г|э и sin гр, и будут удов-
удовлетворять условиям:
2Я 2Я
Г г%{а9 ф)со8*И> = 0, JVg>> t|))sln^ = O (л=1,2,...).
о о
G.7)
Общая схема решения исходного уравнения заключается в
отыскании функций е/ь е«ь e?i и т. д. по заданной функции eQ;
при этом амплитуда и -фаза как функции времени будут опреде-
определяться по найденным функциям е/ь еам и т. д. с помощью урав-
уравнений G.6).
Найдем решение исходного уравнения в первом приближении.
Прежде чем подставить ряд G.5) в уравнение G.4), получим
величины ? и 1 как функции а и г|) с точностью до е включительно.
Дифференцируя первые два члена ряда G.5) по времени, найдем
G.8)
a +
да dip
Учитывая, что а и if> подчинены уравнениям G.6), в результате их
подстановки с той же точностью получим
g = —cooasini|) + е (/хcosгр — (D1asini|3 + соо —— 1. G.9)
Дифференцируя G.9) по времени, получим
j) + e f—^
f
I da
-ij)+ coo—^— a + coo—^ ^l 9
dadty dif2 . J
G.10)
а подставляя сюда G,6), найдем с точностью до 8 включительно
? = — cooacosib + 8 ( — 2cooacoicosг|) — 2(о0/хsinяЬ-f ®о——}.
( агM2 J
G.11)
Формулы G.11) и G.5) дают возможность определить левую
часть исходного уравнения как функцию а и г|>.
Для отыскания с точностью до 8 правой части G.4) как функ-
функции а и i|) нужно разложить eQ(?, |) в «точке» a fcosty, —co6asini|):
§ 7.1 Собственные колебания и, метод Крылова — Боголюбова 315
G.12)
Подставляя G.5), G.11) и G.12) в исходное уравнение G.4),
й
с указанной точностью получим
e?i H y I = 2©oae(D1 cos г|) + 2^^ sin ty + eQ0 (а, -ф),
G.13)
где eQo (a, ф)=еС(асозф, —co0asin\|;).
Соотношение G.13) дает возможность определить неизвестные
функции egi, e/i и ecoi по заданной функции eQ0. Действительно,
представим заданную функцию eQo и неизвестную функцию e?i
(по предположению, она является периодической функцией 'ф) в
виде рядов Фурье
00
eQ0 (a, 'ф) = V (ePn (a) cos пф + eart (a) sin m[)}, GЛ4)
/1--0
где ерп(а) и еап(а) —известные коэффициенты Фурье, и
оо
е? (п <\V\ —
л=0
где 8Vn(^) и е\'п(а) (л=0, 2, 3, ...) — коэффициенты Фурье, под-
подлежащие определению, а коэффициенты evi и еуь согласно G.7O
равны
8V1=8Yi=0. GЛ6)
Подставляя G.14) и G.15) в G.13) и приравнивая коэффициенты
при одинаковых гармониках, находим е/ь ewi и коэффициенты
evn и вуп*:
8fi) = Ё1-; G.17)
2©0 '
Приведем промежуточные вычисления:
оо
~^~- = 2j (— л2) (bva cos пф + еул sin лф),
п=2
V A — ft2) (ev,j cos пф + гуп sin /гф)| = гсооабШх cos ф + 2©0в/г sin ф +
2
оо
рх cos ф + га± sin ф + V (eprt cos /гф + eart sin пф).
316 Нелинейные колебания Гл. VII
0 cog ' " A-я2) со* r" (l_^)co2 * '
G.18)
Используя G.17), из G.6) "получим дифференциальные урав-
уравнения для амплитуды и фазы
a = __jM^, ^^-JEiisL. G.19)
2соо ' Т ° 2cooa V '
Таким образом, в первом приближении производная ампли-
амплитуды по времени и частота определяются коэффициентами Фурье
заданной функции eQo(a, г|)), т. е. коэффициентами Фурье правой
(вообще говоря, нелинейной) части исходного уравнения, взятой с
точностью до е; производная амплитуды определяется коэффи-
коэффициентом Фурье при sin\|;, а производная фазы определяется ко-
коэффициентом Фурье при cosi|).
Подстановка G.18) в G.15) приведет к определению функции
0 te2
G.20)
Решая систему уравнений G.19), получим амплитуду а и фа-
фазу г[) как функции времени и начальных значений а0, г|H. Исполь-
Используя эти функции с помощью G.5) и G.20), найдем решение ис-
исходного уравнения
Проводя аналогичные вычисления с точностью до s2, можно по-
получить решение во втором приближении.
На достаточно большом интервале времени первому прибли-
приближению для функций а и f соответствует нулевое приближение
для |, а второму приближению для а и гр соответствует первое
приближение для g и т. д. [19, с. 42—43]. Действительно, возьмем
за меру большого временного интервала время ~1/е. Для таких
интервалов конечные приращения амплитуды Да и фазы А (гр—
—(ОоО можно записать в \виде (юм. уравнения G.6) в первом при-
приближении)
где /i и coi — средние значения fx и coi на рассматриваемом ин-
интервале времени. Таким образом, погрешностям порядка е в зна-
значениях производных а и ф соответствуют погрешности нулевого
порядка в значениях самих амплитуды и фазы. Поэтому для до-
§ 7.1 Собственные колебания и метод Крылова — Боголюбова t 317
статочно больших интервалов времени в качестве первого и вто-
второго приближений нужно брать приближения
tg = acos\|>, a = e/1(a), -ф = со0 + шх{а)\ G.22)
I = a cos г|) + еЬ. (а, г|>), а = е/х (а) + 82/2 (а),
-ф = соо + 8@! (а) + 82(о2(а). G.23)
Пример 7.1. Нелинейные колебания математического маятни-
маятника в среде с «линейной» силой сопротивления.
Пусть математический маятник совершает малые нелинейные
колебания в среде, сила сопротивления которой пропорциональна
первой степени скорости точки. Найти закон движения маятника.
Перепишем уравнение движения маятника (см. с. 311) в виде
G.4) ^ -
ф + СОоф = 8<2(ф, ф),
СО*
где еф(ф, ф) = —^-ф3 — 2цср. Затем в первом приближении определим
о!
правую часть этого уравнения как функцию а. и -ф (см. G.13)):
о
eQ0 (а, -ф) = —— а3 cos3 -ф + 2цсо0а sin -ф.
«3!
Разлагая эту функцию в ряд Фурье, что в данном случае сводит-
сводится к использованию формулы
3 1
cos3 -ф = — cos ф Н cos 3-ф, *
4 4
найдем
cog а8 а& а3
sQ0 (а, -ф) = cos -ф + 2|ха>0а sin ф -| — cos Зф.
Отсюда получим коэффициенты Фурье
0J а3
8реа
а следовательно, и уравнения для амплитуды и фазы (см. G.22))
Подставляя решение первого из этих уравнений
а =
во второе уравнение, в результате интегрирования найдем угол
отклонения маятника как функцию времени
318
Нелинейные колебания
Гл. VII
= а^е-м сов
(постоянные интегрирования по и яро связаны с начальными усло-
условиями фо И фо) .
Итак, в данном примере учет нелинейной потенциальной силы
приводит к уменьшению частоты со по сравнению с частотой соо
линейных колебаний. С течением времени благодаря сопротивле-
сопротивлению амплитуда становится исче-
зающе малой, поэтому о стремит-
стремится к оо (рис. 7.2).
Пример 7.2. Автоколебания
математического маятника.
Подвес маятника жестко скреп-
скреплен с муфтой, которая надета на
вал, вращающийся с постоянной
угловой скоростью Q (рис. 7.3).
Сила сухого трения Fd, действующая
со стороны вала на маятник, из-
известна как функция их относитель-
относительной угловой скорости; k — коэффи-
коэффициент трения маятника о воздух.
Найти амплитуду установившихся
колебаний маятника.
Уравнение движения маятника
определяется кинетической и по-
потенциальной энергиями, диссипатив-
ной функцией (см. пример 7.1), а
также диссипативной силой.
со
Рис. 7.2
Ф + Щ sin Ф =
ml
где ф —• угол отклонения маятника
от вертикали. Используя E.77), по-
получим
k # 2
(Я —ф) ф, где ссо = ?//,
171
Сила сухого трения как функция угловой скорости Q имеет
«падающие» участки (рис. 7.4), на которых F't<0. Выберем ско-
скорость Q вращения вала так, чтобы она являлась абсциссой точки
перегиба на «падающем» участке функции -F(Q), тогда /^(ЯH
кроме того, допустим, что ^(Я)+Л/<0, a /7///(Q)>0.
§7.1
Собственные колебания и метод Крылова — Боголюбова
319
Учитывая, что положение cpeq равновесия маятника опреде-
определяется соотношением sm^eq=F(Q)/mgy и разлагая обе части ис-
исходного уравнения Лагранжа по степеням отклонения ?=ф—qpeq
т
Рис. 7.3
Si
Рис. 7.4
от положения равновесия и скорости
для слабо-нелинейных колебаний
где
+<{-
= ф, получим уравнение
(D
/ш
6ml
Знак обобщенной диссипативной силы, пропорциональной
(хх — и2?2) |, при ?-*•() совпадает со знаком скорости |; для до-
достаточно больших значений | этот знак противоположен знаку |.
Это связано с тем, что в качестве «рабочего» участка выбран «па-
«падающий» участок функции F(Q—ф). Итак, для очень малых | ам-
амплитуда колебаний маятника будет нарастать, а для достаточно
больших § — убывать, следовательно, возможно установление
стационарной амплитуды, независимой от начального значения
амплитуды.
Изучаемый маятник является типичным примером автоко-
автоколебательной системы. Такая система состоит из «коле-
«колебательного контура» (маятника), «источника питания» (вращаю-
(вращающегося вала) и «нелинейного элемента» (силы сухого трения), ре-
регулирующего поступление энергии в колебательный контур. Авто-
Автоколебательные (механические и немеханические) системы часто
320 Нелинейные колебания Гл. VII
встречаются на практике (например, такой автоколебательной си*
стемой является простейший ламповый генератор).
В первом приближении правая часть уравнения A), как функ-
функция а и г[), равна
2 • v 2
sQo (в, Ф) = % 5Ш 9eq & cos2. ^
& cos. г|) +
f a2 sin2
— (Xjl — и2 cof a2 sin2 if) a'coo sin г|).
Выделяя здесь первые гармоники, получим
2
Отсюда, используя G.14), G.17) и G.19), найдем уравнения для
амплитуды а и фазы ф
Интегрируя первое из уравнений B), получим амплитуду как
функцию времени
аое 2
и ее значение а*, при t-^ + oo:
am=J-W'=*!Z:M + «l C)
С00 Г F"'(Q)C0S(peq
где cos9eq= l/ I— f ) • Из C) видно, что амплитуда
установившихся колебаний не зависит от начального значения
амплитуды: достаточно сколь угодно малого начального откло-
отклонения от положения равновесия, чтобы амплитуда возросла вплоть
до значения а^
§ 7.2. Вынужденные колебания и резонанс
Проанализируем физические особенности вынужденных нели-
нелинейных колебаний на примере системы с одной степенью свобо-
свободы, предполагая, что на систему действует малая нестационарная
сила, гармонически изменяющаяся со временем: eQeoCOsco^. С этой
целью определим среднюю мощность силы
§ 7.2 Вынужденные колебания и резонанс 321
1
д, j ^ .-• dt G.24)
на некотором интервале времени Д?, причем потребуем, чтобы
этот интервал был, с одной стороны, достаточно большим по срав-
сравнению с периодом 2я/о)о собственных линейных колебаний, а с
другой стороны, достаточно ограниченным с тем, чтобы форма
колебаний не успевала заметно измениться (такой выбор Д/ воз-
возможен ввиду малости внешней силы и нелинейных членов). Учи-
Учитывая, что на интервале Д^ нелинейное колебание близко к. ли-
линейному (см. G.1)), т. е.
| =5r a cos i]), ? ^ — асо0 sin я|),
где \|) = соо^ + Э(/), и принимая во внимание, что изменения функ-
функций a(t) и 6(/) на интервале А/ малы, для средней мощности по-
получим выражение
8 ОеоЩп (t) Г COS [((йе + СР0) / + 6 @1 COS [((йе — С00) ?—9 @1 ] 1/°+Л' /7 ОК\
I —. — _ i ^ ^ / .ZD)
At ( (ое -j~ o)q (ое — (Oq J |^o
Отсюда видно, что в нерезонансном случае, когда ше весьма отли-
отличается от о)О, мощность вынуждающей силы исчезающе мала, по-
поскольку Д/^>2я/соо. Если же имеет место резонанс, т. е. сс^шо,
то мощность становится порядка е. Действительно, подставляя в
G.25) (ое=о)о + Асо и устремляя Дсо к нулю, за счет второго сла-
слагаемого в фигурных скобках для средней мощности получим
— 8 Qe() (о0 a (t) sin 6 (t). G.26)
Таким образом, в случае резонанса средняя мощность является
функцией как амплитуды а, так и «расстройки фазы» 8.
Основываясь на этом примере, можно предположить, что в ре-
резонансном случае как изменение амплитуды, так и частота зави-
зависят от значений амплитуды а и «расстройки фазы» 6. Что касает-
касается нерезонансного случая, то изменение амплитуды и частота за-
зависят только от амплитуды (так же как в случае собственных ко-
колебаний).
Другая особенность вынужденных нелинейных колебаний за-
заключается в появлении резонанса на комбинационных ча-
частотах. Это можно видеть из того, что в решение уравнения
вынужденных нелинейных колебаний благодаря наличию нелиней-
нелинейных членов войдут высшие гармоники с частотами, примерно
равными псоо- Рассматривая среднюю мощность; вносимую в си-
систему «с помощью» этих гармоник, т. е. подставляя в интеграл
G.24) не sin(coo^ + 6), a sin(ncoo^ + 6n), придем к выводу о возмож-
возможности резонанса на частоте, примерно равной ясоо- В общем слу-
И Зак. 284
322 Нелинейные колебания Гл. VII
чае, когда правая часть уравнения G.4) более сложным образом
зависит от аргумента оо^, возможно возникновение резонанса на
комбинационных частотах вида ла>о + /и<ое, где пит — целые чис-
числа. Действительно, разложение функции eQ в ряд Фурье приво-
приводит к появлению гармоник с указанными частотами. Итак, в чоб-
щем случае возможен резонанс вынужденных колебаний на ча-
частотах
со^-1 со0, G.27)
р
где р и q — целые взаимно простые числа (если p = q, то резо-
резонанс называется главным).
Изложим метод Крылова — Боголюбова применительно к вы-
вынужденным нелинейным колебаниям. В качестве исходного урав-
уравнения рассмотрим уравнение вида
1 + ЮЕ =
где eQ — периодическая функция относительно сое^ с периодом
2я.
В нерезонансном случае решение уравнения G.28) будем ис-
искать в виде ряда
I = a cos г|> + е5г (а, ^ vet) ~\ ... , G.29)
где а и i|) подчинены уравнениям G.6). Подставляя G.29) в
G.28) и учитывая G.6), найдем соотношение, определяющее пер-
первое приближение (ср. с G.13)):
З + 2с0 +
== e Qo (a, ty, (oet) + 2co0 aeco1 cos ^ + 2(oo e/x sin -ф, G.30)
где
Разлагая известную функцию eQo в двойной ряд Фурье по пе-
переменным ф и aipt
eQ0(a, of, <V) = ? 8anm(a)e?(n^'+m*) G.31)
n,m
и представляя в виде ряда Фурье неизвестную функцию
G.32)
§ 7.2 Вынужденные колебания и резонанс 323
из G.30) получим
п,т
~ ?4 гапте^Ш + 2(о0ае(йгcosг|) + ^o^f% sin я|). G.33)
Из этого соотношения видно, что в решении могут появиться ко-
коэффициенты гупШ) обращающиеся в бесконечность. Чтобы исклю-
исключить появление таких членов, потребуем выполнения условия, ана-
аналогичного условиям G.7):
гапт е*ше*+т^ + 2(о0агау, cos ф + 2а0г[1 sin ф = 0, G.34)
если (Оо — (п(йе + то)оJ = 0.
Требование G.34) позволяет определить функции ecoi и efi-
В самом деле, поскольку рассматривается нерезонансный случай,
условие
(Dq — (П(х)е + /Ж00J = 0
будет выполняться, если
n^O, m-±L G.35)
Следовательно, сумма по п и m в G.34) сводится к сумме двух
членов с коэффициентами oo,+i и ао,-ь Таким образом, используя
G.35) и общее выражение для коэффициентов Фурье
2Я 2Я
[ ( ^Qo(a,^(oet)^i{n("et+m^d((oet)db G*36)
о о
из условия G.34) найдем
2я 2я
Qo (а, я(), (x>et) sin ij) rf\|) d {a>et)9 G.3?)
о о
2я 2Я
4я2со0а
f Qo(a. Ф, (o,Ocosij)d\|)d((o^). G.38)
о о
В резонансном случае частота вынуждающей силы или равна
резонансной частоте или близка к ней. Следовательно, можно по-
положить (см. G.27)), что
©о ==.(-?-©Л*+ еД, G.39)
11*
324 Нелинейные колебания Гл. VII
где еД — малая заданная расстройка между квадратом собствен-
собственной частоты соо и квадратом резонансной частоты. Используя
G.39), запишем исходное уравнение G.28) в форме
i ®jt)-&}. G.40)
Решение этого уравнения будем искать в виде ряда G.29), где а
и ф подчинены «своим» уравнениям, имеющим более общий вид
по сравнению с G.6), так как в резонансном случае изменения
амплитуды и фазы зависят не только от значения амплитуды а,
но и от фазовой расстройки 6:
а - е/г(а, 6) + .. . , яр = -?-<о,-^ eoja, в) -f ... , G.41)
где i|) и 6 связаны соотношением
^ = -?L(o^ + e@. G.42)
я
Кроме того, потребуем, чтобы в решении отсутствовали члены, об-
обращающиеся в бесконечность.
Подставляя G.42) в G.29) и G.41), найдем, что
? = acos (-?-(*>,* + b) -I- egja, 6, <oet) -\- ... , G.43)
\ Я J
а уравнения, которым подчинены переменные а и 8, имеют вид
* = е/, (a, 6) + ... , 6 - eco, (a, 6) + ... G.44)
С помощью G.43) и G.44) из G.40) получим соотношение, опре-
определяющее функции 8|i, efi и 8u)i в резонансном случае (промежу-
(промежуточные вычисления аналогичны G.8) —G.13)):
(т
) acos
J
;-?-а>,*+е); G.45)
здесь
Я
= eQ I a cos (— u>et 4- 6 j, —— (
7.2 Вынужденные колебания и резонанс 325
Разлагая е^ в ряд Фурье (см. G.32)), получим
ге1 \ я е )\, G.46)
I \ 4 I \ 4 / )
ntm
Принимая далее во внимание разложение функции eQo в ряд
Фурье (см. G.31)) и требуя, чтобы коэффициенты гуПт были ко-
конечны, из G.45) найдем
2i Inont+m (—<dJ
шпте1 1» е
+ 2 ^(o^slD f ^©ef + в) = 0, G.47)
где суммирование ведется по любым целым пит, для которых
причем это условие эквивалентно более простому:
0. G.49)
Приравнивая в G.47) коэффициенты при cos\|) и sim|) соответ-
соответственно, можно будет найти функции efi и ешь С этой целью, ис-§
пользуя G.49), запишем показатели экспонент из G.47) в виде
==F ( — (oet+Q) —^-9. G.50)
, \ Я 1 Р
Тогда двойную сумму в соотношении G.47) можно будет предста-
представить как сумму только по п:
п р
Г \Л
п
п
—In
ea
\ я,—я
/ (еа
\ nt-
-
—+ 1
Р
^ 4-'1
Р
^ + У еа
п
Р
р
-еа , \е~'
Р
Я а
р ] COS ib + -
J
W — 8
р sin г|),
G
.51)
Где суммы и разности коэффициентов Фурье равны (см. G.36))
326 Нелинейные колебания Гл. VII
е<х +еа - —i— ( Г eQ0* * cos ij> d{pf)d%
п,— п — +\ п,[—п— 1 2.71* J J
р р 0 0
G.52)
I 2я 12
I 2я 12Я ;л
ео —8а * \=__Г Г 8Qoe
\ п,—п — -j-1 л,—я -^ 1 / 2яа J J
р р 0 0
Используя G.51), G.52) и приравнивая соответствующие ко-
коэффициенты при simp и cosxp, из G.47) получим
cos
G.53)
еД
2 —
И
Я п оо
G.54)
(здесь 0 = г|5 — — со^,суммирование ведется по п = 0, +1, + 2, ..Л.
Эти соотношения позволяют получить решение задачи о резонан-
резонансе вынужденных нелинейных колебаний в первом приближении*
Пример 7.3. Резонанс нелинейных колебаний материальной
точки, подвешенной на пружине.
Точка массы m совершает колебания в вертикальном направ-
направлении в среде с сопротивлением под действием силы упругой де-
деформации пружины и достаточно малой силы Qe, гармрнически
зависящей от времени. Найти амплитудную характеристику ста-
стационарных колебаний точки вблизи резонанса.
Помещая начало отсчета в точку подвеса и направляя ось Ох
вдоль оси пружины, получим выражения кинетической и потенци-
потенциальной энергий точки, диссипативной функции и нестационарной
силы:
§ 7.2 Вынужденные колебания и резонанс 327
где Ux — энергия упругой деформации пружины, k — коэффици-
коэффициент сопротивления среды (предполагается, что сила сопротивле-
сопротивления пропорциональна скорости точки), Fe и озе — амплитуда и
частота нестационарной силы, а х — координата точки. Опреде-
Определяя положение xeq равновесия точки из уравнения
ди
eq
дх
eq
= 0,
разложим потенциальную энергию U в ряд по степеням отклоне-
отклонения % = х—хщ точки от положения равновесия- с точностью до ве-
величин четвертого порядка малости включительно:
U ~ ~2~ l"a^"/eq l + "ЗГ Г дх* Jeq 6 + 4! [ дх* )eqg *
Тогда уравнение движения точки можно будет записать в виде
G.28)
I + <og g - eQ (Е, |, (oet) = - xxE2 - xaE8 ~ ;2|x| + fe sin ®et9 A)
где
~2 - 6m
Рассматривая выражение средней мощности нестационарной
силы (см. G.24) и G.25)), придем к выводу о возможности глав-
главного резонанса, в связи с чем решение исходного уравнения A)
будем искать в виде (см. G.43))
? = асозяр, B)
где яр = сое/ + 0. Подставляя B) в eQ, с точностью до г найдем
(см. G.45))
8Qo = — я3 cos яр + 2ию<, a sin яр + /esiti ®et —
4
Отсюда видно, что в первом приближении коэффициент к\ (или
третья производная функции С/к) не влияет на поведение системы.
Пользуясь выражением eQ0, найдем необходимые для решения
коэффициенты Фурье этой функции (см. G.53) и G.54)). Напри-
Например, коэффициенты Фурье, соответствующие п = 0, получим, учи-
учитывая, что
328 Нелинейные колебания Гл. VII
2Я 2п ( 4я2цсоея
3
оо 12
Аналогично коэффициенты Фурье, соответствующие л=±1, най-
найдем, вычисляя интегралы
2Я 2Я
Г f 8Q0(cose±fsin6)sini|}dil5d(coeO»
о о
где
6 = -ф — (oet.
Принимая во внимание, что величина этого интеграла определена
значениями
2Я 2Я
f f eQ0 cos if sin \|) cos (a>et) dty d (co^O = 0,
о о
2Я 2Я
f f 8>Q {
J J °
о о
2Я 2я
о о
2Я 2Я
f f eQ0 cos г|) sin яр sin (coe t) rfi|) d(®et) = 0,
о о
найдем
2Я 2Я
о о
Нетрудно убедиться, что соответствующие /г=±1 члены ряда
G.54) пропорциональны значениям
2Я 2Я
j J
о о
а интегралы с п==±2, ±3, ... все рдвны нулю.
Далее, используя G.53) и G.54), найдем функции
e а +
§ 7.2 Вынужденные колебания и резонанс 329
определяющие уравнения для а и 8 (см. G.44)):,
а = —\ха — cos 0,
2(де
2сое 8(ое 2(оеа
здесь еД = 0о — ©5 (см. G.39)).
В случае^ стационарного режима а = 0 и 6 = 0; следовательно,
Возводя в квадрат обе части каждого, из этих уравнений и скла-
складывая результаты, найдем амплитудную характеристику а((ое) в
виде
Это уравнение можно упростить, используя близость сое к ©о и ма-«
лость всех членов, входящих в правую часть уравнения A). Вво-
Вводя вместо еД разность частот Дсо = сое—соо, из C) получим
" = (-^-)\ D)
Пренебрегая в этом уравнении членами, пропорциональными
(АсоK и (До>L, найдем
J] ^^^ До -
E)
Уравнение E) также можно упростить, поскольку соо^2,
«о>,|г (ввиду малости всех членов sQ). Полагая далее, что все
члены, входящие в eQ, являются величинами одного порядка, и
сопоставляя второй и третий члены eQ, найдем, что х2а2~~|1соэ.
Учитывая все приведенные оценки, получим амплитудную харак-
характеристику в виде
F)
где я. = ~-.
330
Нелинейные колебания
Гл. VII
Разрешая это квадратное относительно Дсо уравнение, найдем
функцию
Дсо =
-ц2
G)
с помощью которой нетрудно построить амплитудную характери-
характеристику (см. рис. 7.5, где изображен случай хг<0). Дифференцируя
по Дсо правую и левую части уравнения F), получим
<Ца?)\ =
AU) ЛЮ
— Асо)
— 4Яа2 Дю + |^2 + (ДсоJ
(8)
Рис. 7.5
Эти результаты позволяют исследовать амплитудную характе-
характеристику. Сначала рассмотрим известный уже предельный случай
линейных колебаний. С этой целью устремим /v-э-О и а-М) в функ-
функциях F) и (8) (см. F.72) и кривую а на рис. 7.5); тогда
л* + (ДюJ
с* (Дсо)
= / fe'
\ 2соо
— 2Асо
(Ао)J]2
Если нелинейным членом пренебречь нельзя, а |^|а2<[г, то ам-
амплитудная характеристика близка к соответствующей характери-
характеристике линейных колебаний: ее максимум смещен в сторону Дсо<0,
поскольку %2<0 (-см. р на рис. 7.5). Действительно, амплитуда а
достигает максимума при Дсо = Ха2, а ее значение
О... = (-М -1
\ 2соо ) \i
совпадает с соответствующим значением амплитуды линейных ко-
колебаний. В этом случае производная
не обращается.
d(Aco)
нигде в бесконечность
§ 7.3 Метод усреднения 331
Если Ша2>|1, то производная —^—обращается в бесконеч-
d (До)
ность при двух значениях
Дсо = 2Х а2 ± [(Ха2J ~ ц2]1/2. (9)
При этом условии, как показывает анализ выражения F), за-
зависимость амплитуды вынужденных колебаний в некоторой обла-
области частот оказывается неоднозначной (см. у на рис. 7.5). Поэто-
Поэтому становится возможным так называемый срыв амплиту-
амплитуды. Это явление происходит следующим образом. Пусть частота
ые вынуждающей силы сравнительно велика. Тогда при уменьше-
уменьшении сое до достаточно малых значений амплитуда вынужденных
колебаний будет плавно изменяться в областях со^>(ое и сое< ®е,
а в «точке»
со, = о/, = соо + 2Х а2 + [(ка*У - Ц2]1/2,
которой соответствует бесконечное значение производной
да* „ I
, произойдет скачкообразное изменение амплитуды от
величины а2 до величины а3. Аналогично при увеличении ше от до-
достаточно малых значений до сравнительно больших значений ам-
амплитуда вынужденных колебаний изменяется скачкообразно в
точке
<ье = о)Г = со0 + 2Ха* - [(Ха2J - (я2]1/2
-. ** **
от величины а^ до величины а\, а в областях сое<<ое и сое>(о5
происходит плавное изменение амплитуды. Скачкообразное изме-
изменение амплитуды и представляет собой срыв амплитуды.
Заметим, что срыв может наблюдаться только в том случае,
если область со/—соб частот, в которой зависимость амплитуды
от частоты неоднозначна, отлична от нуля. При оое —co^-^ О
явление срыва будет исчезать. Последнему условию соответствует
равенство нулю подкоренного выражения (9). Используя ампли-
амплитудную характеристику F) й введенные ранее обозначения, най-
найдем, что в этом случае
к-
d4J%
eq
дх*
eq
§ 7.3. Метод усреднения
Рассмотрим точку, совершающую периодическое движение в
стационарном потенциальном поле U(q) с периодом Г0=2я/озо.
Пусть на точку кроме поля U(q) действует также периодическая
332 Нелинейные колебания Гл. VII
сила Q(q^t) частоты Q, значительно большей по сравнению с соь
[34, 21, 19, 35]. Тогда уравнением движения точки является
aq= ~ + Q(q,t)9 G.55)
dq
где сила Q может быть представлена в виде
G.56)
При достаточно большой частоте Q решение уравнения G.55)
можно представить в виде суммы медленно меняющейся за пе-
период Г функции т] и осциллирующей с частотой Q функции |, т. е.
в виде
q - Л + Ь G.57)
Предположим также, что смещение точки в результате воздей-
воздействия силы Q много меньше смещения под воздействием силы,
действующей на точку в поле U. Следовательно^
lll«h|. G.58)
Разложим далее функции — и Q(q, t) в ряд Тейлора в «точке»
dq
г] по степеням ?:
ди
dq \ dq ' * dq* '
Q(q, t) « 2 (ей + I -^- ± ...) I У«. G.59)
Затем, подстгвляя G.57) и G.59)-в G.55), получим
(:^!l jQ'. G.60)
Теперь подчеркнем, что среднее значение функции g по периоду
7 равно нулю, а изменение функции т) -за это же время очень ма-
мало. Поэтому при усреднении по периоду Т члены, содержащие
§ 7.3 Метод усреднения 333
только функцию г|, можно вынести за знак интеграла по време-
времени. Следовательно, усредняя обе част*! G.60) по периоду Г, най-
найдем
здесь </> =™ j* /(x)dt.
t+T
Вычитая почленно G.61) из G.60) и пренебрегая членами поряд-
порядка ?, получим уравнение, определяющее функцию |:
я|= У Яп(ц)е1пШ. G,62)
Отсюда в силу «постоянства» коэффициентов Qn('n)> получим
G.63)
С помощью G.63) запишем G.61) в виде
^=~~Sr+jF(r))' G-64)
где
F (л) = Qo (ri) - — (У -^^ е*ы У ^Я^Ш. есп'ш \. G.65)
а \ лттл (nQJ **A дг\ I
Далее учитывая, что
( Pi{n-\-n')ut Af .— R , G C\fo\
вместо G.65) найдем
JL V ^1М_ _1_, G.67)
2а ^J a-n (n QJ ;
ИЛИ
334 Нелинейные колебания Гл. VII
где
Уравнение движения по «сглаженной» за период Т траектории
с учетом G.64) и G.68) имеет вид
G.69)
где эффективная потенциальная энергия
= ?/ (Л) + Ф (Л).
JQ0(ti)*1.
G.70)
Отсюда видно, что действие быстроосциллирующей силы сводит-
сводится к возникновению эффективного потенциального поля Ф(т]).
В частном случае гармонической силы
Q(q,t)=Q(q)cosQt. G.71)
Используя G.63), получим
i—&-: G.72)
а уравнение движения по «сглаженной» траектории примет вид
G.69), где согласно G.70)
-1^-Q2(Ti). G.73)
Таким образом, усредненное по осцилляциям движение точки
происходит как бы под действием поля U и дополнительного ста-
стационарного поля, потенциал которого квадратично зависит от
амплитуды переменной силы.
Пример 7.4. Устойчивость маятника с вибрирующим подвесом.
Точка подвеса математического маятника длины / и массы m со-
совершает вертикальные колебания по закону s=socos®t. Найти эф-
эффективную потенциальную энергию маятника и его положения
устойчивого равновесия.
Помещая начало координат в положение точки подвеса маят-
маятника при ^=0 и направляя ось х вниз по вертикали, а ось у в
плоскости качания маятника, для координат маятника получим
х = I cos ф + s0 cos со/, y = l sin ф, A)
где ф — угол отклонения маятника от вертикали. Тогда для ки-
кинетической и потенциальной энергий маятника найдем выраже-
выражения
§ 7.3 Метод усреднения 335
Т = — (/2 ф2 — 2/s0 соф cos ф sin со/ +- si со2 sin2 со/), B)
[/ = —mgl sin у.
Теперь напишем уравнение движения
ml2 9 = (— mgl cos ср) — /я/so<°2 sitl ? cos ю^- C)
Применяя метод усреднения, находим, «что переменная сила
G.71) в данном случае равна
Q = — mls0 со2 cos со/ sin ф. D)
Поэтому эффективная потенциальная энергия G.73) имеет вид
где
Положения устойчивого равновесия найдем из уравнения
Weft * 1 [ 1 / SaCO \2 1 /пк
^— = — mgl — sin ф — — —— sin ф cos ф = 0. (о)
Отсюда
tylea ~ 0» Ф2ед == ^5 COS ф3еG = 2
S0 СО
Определяя знак второй производной
(8)
найдем, что положение ф1е<7=0 всегда устойчиво, а положение
<p2?f0 = jt является устойчивым, если выполняется условие
Как видно положение Щещ=щл является положением динамиче-
динамического равновесия.
Пример 7.5. Заряженная частица в высокочастотном электро-
электромагнитном поле [50, 35].
Частица заряда е и массы m движется в стационарных полях
Ео(г) и Но (г), на которые наложено неоднородное быстроосцил-
лирующее поле Е^(г, /) = E(r)cosco^. Найти уравнение, описываю-
описывающее усредненную траекторию, если частота Q движения в стацио-
стационарных полях мала по сравнению с частотой Чо переменного поля.
336 Нелинейные колебания Гл. VII
Запишем уравнение движения частицы в виде
mr = F0 + ??E^ + a[vIij, A)
где Fo = еЕ0 -f cr[vH0], (су = е/с), а Н_ — напряженность возникаю-
возникающего быстроосциллирующего магнитного поля.
Согласно G.57) решение уравнения A) будем искать в виде
г = Ч + g, B)
где |||<C,|if||. Из уравнения A), разлагая все функции аргумен-
аргумента г по степеням § с точностью до членов первого порядка, по-
получим
HJ. C)
Далее, усредняя все члены C) по периоду 2я/со, найдем
\ v)HJ + оЦн„]), D)
^. E)
Теперь положим, что Е_ (г, t) = Е (г) cos at. Тогда из уравнения
Максвелла
rotE = 1 Ш
с dt
следует, что
ИЦг, /) = Н (г) sin cor, Н (г) = — — rot E (r), k = со/с.
k
Затем учитывая, что двумя первыми членами правой части E)
ввиду их малости можно пренебречь, после интегрирования E)
поручим
mco
Е sin со/ — — [in Н] cos od\ ,
с I
cos cot -J- — ГузН! эшсоЛ. F)
I fE cos cot ГузН! эшсоЛ
m со2 \ ' с J /
Подставляя F) в D) и пренебрегая членами порядка ц2/с2,
найдем
(EV)E +
т со2 mco
§ 7.3 Метод усреднения 337
Щ ^Ро(ч)--^г{(Еу)Е + [Его1Е]}. G)
Учитывая, что
2 v*
запишем G) в виде
где
Таким образом, усредненная по времени сила, действующая на
частицу, потенциальна, причем потенциал силы пропорционален
квадрату модуля напряженности электрического поля и не зави-
зависит от знака заряда.
Глава VII!
ДИНАМИКА ТВЕРДОГО ТЕЛА
Ранее (например, в гл. I) отмечалась важная роль, которую
играет понятие абсолютно твердого тела как тела отсчета. С по-
понятием твердого тела связано также введение эталона длины. На-
Наряду с этим большое значение имеет теория движения твердых тел
под действием внешних сил. Эта теория находит самое широкое
применение в практике, в частности на основе этой, теории реша-
решаются задачи о движении гироскопоб, о вращении спутников и т. д.
§ 8.1. Уравнения движения твердого тела
Любое твердое тело можно представить как систему матери-
материальных точек, жестко соединенных между собой стержнями посто-
постоянной длины и исчезающей массы (см. § 5.2, с. 205). Иначе гово-
говоря, твердое тело можно рассматривать как систему материальных
точек, на которые наложены внутренние идеальные связи. Поэто-
Поэтому число степеней свободы твердого тела меньше, чем число сте-
степеней свободы соответствующей системы свободных точек.
Для того чтобы полностью охарактеризовать движение твер-
твердого тела относительно некоторой, системы отсчета S, достаточно
знать закон движения системы S', жестко связанной с изучаемым
твердым телом (см. рис. 4.1 и 4.2); например, закон движения
свободного твердого тела (тела, на которое не налагаются
внешние связи) определяется шестью скалярными функциями:
тремя проекциями радиуса-вектора ro'(t) начала системы S' и
тремя углами Эйлера ф@> 6@ и ^@-
Заметим, что к свободному твердому телу как системе мате-
материальных точек применимы законы изменения импульса и кинети-
кинетического момента, причем эти законы (в силу жесткой связи точек
тела друг с другом) будут полностью описывать движение тела,
т. е. будут являться уравнениями движения *. В последнем можно
* Законы изменения импульса и кинетического момента в применении к
произвольной системе материальных точек не дают возможности получить пол-
полную информацию о движении системы.
§ 8.1 Уравнения движения твердого тела 339*
убедиться, показав, что законы B.103) и B.111) представляют
собой систему шести дифференциальных уравнений второго по-
порядка относительно шести переменных: трех проекций вектора г0'
и углов ф, 0 и г|). В самом деле, радиусы-векторы всех точек твер-
твердого тела относительно системы S', жестко связанной с этим те-
телом, являются постоянными относительно S' векторами, а скорости
точек тела относительно S' равны нулю, т. е.
г; = x'rfix' + зду +*z:oiv, vj = 0 (i = 1, 2, ... , N)9 (8.1>
где v't и v^ — радиус-вектор и скорость i-той точки тела относи-
относительно S', пх>, пу>, IV— декартовы орты этой системы,^, y'iQ, z'm —
постоянные проекции вектора т\ на оси5', а N — число точек твер-
твердого тела. Следовательно, радиусы-векторы и скорости точек твер-
твердого тела относительно'системы S соответственно равны (см. A.6),
D.32))
гг = го- + г;., v, = vo- -Ь К] (i = 1, 2, ... , N), (8.2)
где \су и о)—соответственно скорость начала системы S' и ее
угловая скорость относительно S.
Используя эти выражения или соотношения § 4.7, получим
Р = т\(у + т [ur'J, М = [го'Р] + т [г'т\о>\ + <МУ (8.3)
где г'т — радиус-вектор центра масс тела относительно S', а
является частью кинетического момента, обращающейся в нуль,
если (д = 0 (в связи с этим вектор <М можно назвать кинетиче-
кинетическим моментом вращения твердого тела). Здесь следует
иметь в виду, что согласно (8.1) в системе S', жестко связанной
с телом,
vm = О, Р' = О, М' = 0. (8.4)
Выражения векторов Fe и Le в теории твердого тела имеют такой
же вид, как и в общей теории (см. B.102) и D.63)):
N
t Le = [r0'Fe] + i?e, (8.5)
где Г=?.№].
340
Динамика твердого тела
Гл. VIII
Таким образом, из (8.3), D.17) —D.19) следует, что импульс
тела Р зависит от vos углов Эйлера и их производных, а кинети-
кинетический момент М тела, сумма внешних сил Fe и сумма моментов
внешних сил Le кроме указанных величин могут содержать го'.
Итак, законы изменения импульса и кинетического момента твер-
твердого тела
Р = Fe, M - Iе
(8.6)
содержат в качестве неизвестных только функции т&, ср, 0, я|> и,
следовательно, являются уравнениями движения свободного твер-
твердого тела.
Если на твердое тело налагаются внешние связи, то уравнения
движения тела примут вид (см. E.19) и E.20))
где Re и L%
соответственно сумма реакций всех внешних по
й й
у р
отношению к телу связей и сумма моментов реакций этих связей
(для решения уравнений (8.7)
следует добавить уравнения свя-
связей, наложенных на тело).
Заметим, что выбор системы
S', жестко связанной с твердым
телом, произволен и сказывается
на значении .момента J?e внешних
сил*; лишь в частном случае,
когда сумма внешних сил равна
нулю, момент J*?e внешних сил
не зависит от выбора начала О'
системы S', т. е.
Рис. 8.1
если Fe ='()-•
(8.8)
Например, это имеет место, когда к телу приложена пара сил,
т. е. две силы, равные по величине и противоположно направлен-
направленные по различным линиям действия (рис. 8.1); тогда
Le =
-{- [r2F2e] = [r21F?J -
поскольку Fj| = —
* Не зависит от выбора О' только скалярное произведение j?eFe, равное
«согласно (8.5) произведению LeFe.
»§ 8.1 Уравнения движения твердого тела 34J
Подчеркнем, что выбор системы S', который отражает свойства
тела и другие условия задачи, может существенно упростить ее
решение. В частности, при решении задачи о движении свободного
тела начало системы S' целесообразно поместить в центр масс
тела, так как при этом
го- = гш, v0' = vl/x, rm = 0, (8.9)
а выражения импульса и кинетического момента примут простой
вид
Р = mvv, М =, [та Р] -+ а4С; (8.10)
здесь o/tC является кинетическим моментом вращения тела отно-
относительно поступательно движущейся системы Sm центра масс (см.
D.50)). В этом случае в качестве уравнений движения свободного
тела вместо уравнений (8.6) можно использовать уравнение дви-
движения центра масс тела относительно системы S и закон изменения
момента вращения тела относительно системы Sm (см. B.102) и
D.55)):
/wrm = Fe, Jt=J?e. (8.11)'
Если тело имеет одну неподвижную относительно S точку, то
начала систем S и S' целесообразно совместить с этой точкой.
Тогда
гО' = 0, vo'-О, (8Л2)
а векторы Р, М и Le согласно (8.3) и (8.5) будут соответственно
равны
P = m.[tor^], М = оЛ, Le=:ife (8.13)
(в этом случае импульс и кинетический момент полностью обус-
обусловлены вращением тела относительно системы 5).
Если тело движется в однородном поле тяжести, то сумма
внешних сил и их момент соответственно равны (см. определение
B.89))
ig = mg, Le = ? [r^g] = [rwFe]. (8.14)
Отсюда видно, что сумма моментов внешних сил, действующих на
тело в однородном поле тяжести, равна моменту суммы внешних
сил, «приложенных» к центру масс. Момент сил относительно
центра масс вследствие (8.14) равен нулю, а уравнения движения
свободного тела в рассматриваемом поле принимают вид
rm-g, <^ = 0. (8Л5)
342 " Динамика твердого тела Гл. VIII
Таким образом, если свободное твердое тело движется в однород-
однородном поле тяжести, то его кинетический момент относительно си-
системы Sm сохраняется *.
В случае равновесия твердого тела Р = 0 и М = 0. Следователь-
Следовательно, силы, действующие на покоящееся тело, и их моменты должны
подчиняться уравнениям (см. (8.7))
Red = O, (8.16)
где R^ —реакции связей на i-тую точку (уравнения (8.16) должны
быть дополнены уравнениями связей или некоторыми условиями,
определяющими, например, направления реакций).
Все приведенные выше уравнения движения твердого тела
могут быть записаны и в форме уравнений Лагранжа. Чтобы со-
составить уравнения Лагранжа второго рода, следует определить
кинетическую энергию тела, обобщенный потенциал и диссипатив-
ные силы Qd как функции независимых переменных. Используя
соотношения D.64), (8.4) и учитывая, что Г'=0, найдем
Т = ^f- + mvo> [WJ + gr, (8.17)
где mi^,/2 — часть кинетической энергии, обусловленная только
N
поступательным движением тела, 2Г = V ~- [o)i\ ]2 — часть ки-
нетической энергии, обусловленная только вращением твердого
тела, a m\or [®rm] — «смешанный» член, связанный как с посту-
поступательным, так и с вращательным движением тела. Если начало
О' совмещено с центром масс тела, то «смешанный» член в любом
случае равен нулю, а (8.17) принимает вид (см. D.52))
2
7 = -^+SV (8,18)
где ЗГ равняется кинетической энергии вращения
твердого тела относительно системы Sm.
Обобщенный потенциал IIе твердого тела равен потенциалу %
этого тела во внешних полях, так как внутренняя энергия тела
постоянна ввиду неизменности расстояний между точками тела,
U^.U\ (8.19)
* Формулы (8.14) и уравнения (8.15) имеют место для любой свободной
механической системы, движущейся в однородном поле тяжести; однако для
такой системы уравнения (8.15) не являются уравнениями движения.
§ 8.1
Уравнения движения твердого тела
343
Соотношения (8.17), (8.19) совместно с кинематическими фор-
формулами Эйлера D.18) позволяют составить лагранжиан твердого
тела. Если в качестве независимых координат свободного тела
выбрать углы Эйлера и проекции вектора Го'на оси системы S и
выразить Г, У? и Qd через эти переменные, то из E.77) найдем
d
dt
dqj
(8.20)
где <7ь 92, <7з являются проекциями вектора гО',дч = Ф, <75=в, <7б=/ф,
a eS?=T—%е. Если же на тело наложены голономные идеальные
связи, то получим уравнения вида (8.20), но с меньшим числом
степеней свободы.
Пример 8.1. Заряженная двухатомная молекула в постоянном
однородном электрическом поле.
Две точки массы mY и т2 с за-
зарядами ?i и ?2 соединены стержнем
исчезающей массы и длины /. Эта
«гантель» движется в постоянном
однородном электрическом поле на-
напряженности <§. Начальные условия
выбраны так, что движение молеку-
молекулы происходит в неподвижной плос-
плоскости, параллельной напряженности
поля. Найти уравнения движения
молекулы — «гантели» и реакции
стержня на материальные точки как
функции обобщенных координат и
скорости.
Сориентируем • инерциальную
систему S так, чтобы ее ось Ох
была направлена вдоль напряжен-
напряженности <§, а плоскость Оху совпа-
совпадала с плоскостью движения (рис. 8.2). Начало системы S',
жестко связанной с молекулой, поместим в центр масс молекулы,
ось О'х' направим по оси молекулы, а плоскость О'х'у' совместим
с плоскостью Оху. Проектируя на координатные оси левую и
правую части уравнения движения центра масс молекулы (см.
(8.11))
получим уравнения
Рис 8.2
ут = и,
344 Динамика твердого тела Гл. VIII
откуда найдем закон движения центра масс
Хт = ; х- t ~Ь Хт(Г ~"Ь Хт0> Ут — Ут(Г ~Ь УтО«
Изменение ориентации молекулы определяется законом изме-
изменения кинетического момента вращения, равного
оМ = |a(jo/ — ух)п2,
где ji — приведенная масса. Учитывая, что x = /cos(p, y — lsincp
(здесь ф — угол между осями О'х и О'х'), преобразуем последнее
выражение к виду
Принимая во внимание, что
IP
[ \ — т2^) sin
в результате подстановки выражений <М и Ze в уравнение мо-
моментов (см. (8.11)) получим
(me ще^sin ф =
Отсюда видно: если начальная кинетическая энергия вращения
достаточно мала, а т\е2 > т2еи то молекула будет совершать
малые колебания около положения 9eq=0 (вектор r = r2—n в по-
положении равновесия молекулы направлен вдоль вектора <§); если
же m\e2<m2ei, то молекула будет колебаться около положения
фед = я (вектор г в положении равновесия направлен противопо-
противоположно <§); наконец, если mie2 = m2ei, то молекула будет равномер-
равномерно вращаться с начальной угловой скоростью ф0.
Реакцию Ri стержня на точку 1 определим из уравнения ее
движеция
Используя соотношение между ускорениями точки / .относитель-
.относительно 5 и Sm (см. D.46)) и уравнение движения центра масс, полу-
получим, что
и, следовательно,
R
х =
пг1 -ь т%
§ 8.1
Уравнения движения твердого тела
345
Разлагая ускорение гь равное —(m2/m)r, по ортам цилиндриче-
цилиндрических координат, найдем
т т
Наконец, подставим C) в B) и исключим ср с помощью A); тогда
R
D)
её
Таким образом, реакция стержня связана не только с различием
в действии внешнего поля на заряды / и 2: при равных удельных
зарядах (ei/mi = e2/m2), так же как и в отсутствие внешнего поля,
реакция Ri будет связана с вращением тела относительно инер-
циалъной системы отсчета.
Пример 8.2. Заряженная трехатомная линейная молекула в по-
постоянном однородном электрическом поле.
Три точки одинаковой массы m жестко скреплены с прямым
стержнем исчезающей массы и длины /: первая и третья на кон-
концах стержня, а вторая — посередине (рис. 8.3). Все точки обла-
обладают одинаковым по величине электрическим зарядом: первая и
третья — положительным, а вто-
вторая — отрицательным. Эта «моле-
«молекула» движется в неподвижной
плоскости, параллельной напряжен-
напряженности <§ постоянного однородного
электрического поля. Найти урав-
уравнение движения «молекулы» в не-
независимых координатах и реакции
стержня.
Выбирая системы S и S' анало-
аналогично тому, как это было сделано
в предыдущем примере, для радиу-
радиуса-вектора центра масс, радиусов-
векторов точек и угловой скорости рис. 8 3
молекулы получим
где г = г3—Гь а ср — угол между осью молекулы и осью Ох. Кине-
Кинетическая энергия, ввиду того что начало О' совмещено с центром
масс молекулы, равна (см. (8.18))
346 Динамика твердого тела Гл. VIII
Если за независимые координаты взять декартовы координаты х
и ут центра масс и угол ф, а также учесть, что все векторы г
перпендикулярны п2, то
A)
Потенциальная энергия молекулы в силу однородности поля равна
Ue = — 6 (еггг + е2г2 + е3г3),
где ?1 = е3 = ?> а 62 = —в. Используя соотношения- D.46) для каж-
каждой точки и имея в виду, что Г2 = гш, a rj + гз = 0» найдем энер-
энергию Ue в независимых координатах
W = -e§xm. B)
Наконец, учитывая A) и B), из уравнений Лагранжа получим
^ /2 1 /I У
6т A/fiioL \ лт0>
C)
Отсюда видно, что центр масс молекулы движется равноускорен-
равноускоренно в направлении вектора ?, а вся молекула равномерно вра-
вращается.
Реакцию стержня #! на точку / определим из уравнения дви-
движения этой точки
Действительно, используя соотношение
ri=rm4-ri
и "исключая гт с помощью C), после вычисления п найдем
(как видно, реакция Ri при наличии внешнего поля не параллель-
§ 8.1
Уравнения движения твердого тела
347
на стержню). Аналогично вычисляются реакции стержня на точки
2 и 3:
_4е_
~3~
E)
Реакции D) и ' E) являются суммарными силами, действую-
действующими на точки со стороны всего стержня, причем составляющие
реакций, перпендикулярные стержню, связаны с исчезающе ма-
малым изгибом бесконечно жесткого стержня. Нетрудно проверить,
что сумма реакций и сумма их моментов равняются нулю, так как
реакции стержня — это внутренние силы механической системы.
Сумма действительных и виртуаль-
виртуальных работ реакций также равна
нулю, поскольку стержень — абсо-
абсолютно твердое тело (см. с. 204—
205).
Пример 8.3. Равновесие тонкого
неоднородного стержня.
Плотность неоднородного тонко-
тонкого стержня веса mg и длины / ли-
линейно зависит от расстояния до од-
одного из его концов. Более легким
концом стержень опирается на глад-
гладкий выступ высоты hy а более тяже-
тяжелым — на гладкую горизонтальную
опору, причем нижний конец стерж-
стержня удерживается нитью (рис. 8.4).
Определить реакции опор и нити.
Рис. 8.4
Напишем уравнения (8.16) с учетом (8.14):
mg + Ri -f R2 + R3 = 0,
friRi] + [r2R2] + [r3R3] = 0.
A)
Учитывая, что реакция Ri перпендикулярна стержню, R2 перпен-
перпендикулярна горизонтальной опоре, a R3 направлена по горизонтали,
выберем систему координат Оху так, чтобы большее число компо-
компонент сил равнялось нулю. Тогда уравнения A) можно представить
в виде
Rx cos a — R3 = 0, — mgxm — yxR± cos а + x2R2 = 0,
— mg + R± sid а + /?2 = 0.
B)
348 Динамика твердого тела Гл. VIII
Используя систему О'х'у' (см. рис. 8.4), определим положение
центра масс стержня. С этой целью заменим в A) суммирование
по точкам интегрированием по длине; тогда получим
j1 p (xr) x! dxr
где р(х')=ах' — плотность массы стержня (здесь постоянная а
выражается через массу стержня и равна 2т//2). Отсюда найдем
координату хт центра масс стержня относительно Оху:
xm = htga — —sin a. C)
о
Используя B) и C), окончательно получим
#х = JUiL Sin 2а, R2^rng — Rx sin a, Rb = Rx cos a.
6h
§ 8.2. Тензор инерции
Кинетический момент и энергия твердого тела содержат доста-
достаточно сложные выражения М и Sr, связанные с вращением тела
(см. (8.3) и (8.17)). Изучим подробнее эти величины, являющие-
являющиеся соответственно линейной и квадратичной формами от проекций
угловой скорости (коэффициенты этих форм зависят от распреде-
распределения масс в теле). Принимая во внимание известное векторное
соотношение
представим кинетический момент вращения в виде
;)}. (8.21)
Поскольку векторы г/ постоянны лишь относительно системы,
жестко связанной с твердым телом, целесообразно использовать
проекции момента <М на оси системы S'. Проектируя (8.21), на-
например, на ось О'х\ получим
Аналогично определяя оЛ1У' и <Мг* убедимся, что все проекции мо-
момента можно записать в форме
§ 8.2
Тензор инерции
349
(8.22)
здесь индексы аир являются индексами координатных осей си-
системы 5', а совокупность величин /ар представляется матрицей
(8.23>
Вывод соотношения (8.22) полезно повторить, используя тен-
тензорные обозначения. Тогда (8.21) будет иметь вид
(8.24)
где индекс i материальной точки опущен для сокращения записи,
а а и р пробегают значения 1, 2 и 3, являющиеся индексами осей
OV, ОУ> О'? соответственно (например, символом х2 обозначена
проекция tji радиуса-вектора г/). Учтем далее, что проекцию угло-
угловой скорости" соа можно представить в виде
с помощью символа Кронекера, по определению равного
1 при а =-- Р,
О при аф р.
(8,25)
Таким образом, действительно, выражению (8.24) можно 'придать
форму (8.22), в которой коэффициенты равны
(8.26)
Часть кинетической энергии <7", связанную только с враще-
вращением тела (см. (8.17)), также можно выразить через величины
J ар. Действительно, учитывая, что
найдем
(8.27)
350
Динамика твердого тела
Гл. VIII
Совокупность величин Ja$ называется тензором инер-
инерции, а его отдельные компоненты — моментами инерции.
Кинетический момент вращения <М и энергия вращения 9~ выра-
выражаются через моменты инерции /ар и проекции угловой скоро-
скорости (о. 31аметим, что моменты инерции /ар, характеризующие дан-
данное твердое тело, являются посто-
постоянными величинами, которые зави-
зависят только qt выбора системы S\
жестко связанной с телом, от рас-
распределения массы твердого тела и
его формы. Тензор инерции являет-
является симметричным тензором, т. е. яв-
является совокупностью шести мо-
моментов инерции: трех «диагональ-
«диагональных» МОМеНТОВ Jx'x'y Jy'y', Jz'z'i
которые называется осевыми
моментами инерции, и трех
«недиагональных» моментов JX'y'>
Jx'z'y Jy'z'* которые называются
центробежными момента-
м и и н е р ц и и.
Вычислим, например, моменты
двухатомной молекулы относительно .систем отсчета
с началами в точке 1 и центре масс молекулы соответ-
соответй
¦i/
Рис- 8.5
инерции
Si и
ственно и с одной из координатных осей, направленной по оси
молекулы ('рис. 8.5). В системе S\ координаты точек соответ-
соответственно равны
х\ = у[ = 2Х = О, Х2 = У2 = 0, 22 = /,
где / — расстояние между точками.* Подставляя эти координаты
в (8.23), найдем моменты инерции молекулы в системе S/
7 , , 1 , , 7 7 П
** х у — Jx z — w у z' — dz'z' — vf
JX>X' = Jy'y' = fll-fix -f- /7?2^2 = tn^l2.
Вычисления в системе S2r также приводят к двум равным и от-
отличным от н^ля моментам инерции:
где
гх =
пг
а \х — приведенная масса. Таким образом, тензор инерции моле-
молекулы в системах Si и S2 соответственно имеет вид
§ 8.2
Тензор инерции
351
т2/2 О
О /га2/2
О 0
ц/2
0 1
0
0
i/2
0
0
0
0
Оси системы S\ жестко связанные с твердым телом, всегда
можно выбрать так, чтобы все центробежные моменты инерции
обратились в нуль. Действительно, часть ёГ кинетической энергии
является положительно определенной квадратичной формой про-
проекций вектора со с вещественными симметричными коэффициен-
коэффициентами /ар (см. (8.27)). И поэтому некоторым преобразованием ко-
координат ее всегда можно привести к каноническому виду
сг _!_// /(й2, i т ,п2, I т ,лл2,\ (R ОЯ\
Этому процессу соответствует приведение симметричного тен-
тензора с вещественными компонентами к диагональному виду
/,' О О
о jy.
0 0
о
(8.29)
Оси, жестко связанные с твердым телом, относительно которых
тензор инерции диагоналей, называются главными осями
инерции. В этом случае «диагональные» моменты называются
главными моментами инерции и обозначаются /*',
Jy'%. Jz*. Для каждого начала системы S', жестко связанной с
телом, существуют свои направления главных осей и свои значе-
значения главных моментов.
В большинстве случаев при решении конкретных задач оси
системы S' целесообразно направлять по главным осям; при таком
выборе осей выражение для энергии вращения ST упрощается
(ср. (8.28) и (8.27)), упрощается также выражение (8.22) для мо-
момента вращения:
= Ju
'С0„
(8.30)
Общей процедурой отыскания главных осей инерции является
известный алгебраический процесс приведения квадратичной фор-
формы \^Г к каноническому виду. Наиболее просто диагонализация ?Г
осуществляется в тех случаях, когда тело обладает симметрией в
распределении масс, или, как говорят, материальной, сим-
симметрией.
352 - Динамика твердого тела Гл. VIII
Пусть, например, тело обладает осью материальной симмет-
симметрии (это означает, что все точки тела можно разбить на пары
одинаковых по массе точек, расположенных симметрично относи-
относительно данной оси). Тогда, производя соответствующую перену-
перенумерацию точек, для каждой пары симметрично расположенных
точек получим
г* = (xiy t/it Zi)
r;+i=(—*;, —уь z]) (8.3i)
(здесь ось O'z' совмещена с осью симметрии). Подставляя (8.31)
в выражение
N
1 VI '
Гт= У Г,
m ЬшА
?=1
и суммируя по указанным парам, придем к выводу, что центр масс
тела находится на оси материальной симметрии:
х'т = 0 Urn = 0 Zm Ф О* (8 321
а суммируя по тем же парам выражения для моментов инерции
(см. (8.23)), убедимся, что JХ'г' = Jy'z' =0, и, следовательно, тен-
тензор инерции имеет вид
Jx'x' Jx'y' ^
(8.33)
'х'
'х'
0
Jx'y'
Jy'y'
0
0
0
Jz'
Таким образом, ось материальной симметрии тела является глав-
главной осью инерции.
В предельнОхМ случае, когда все точки тела находятся на од-
одной прямой (такое тело называется рот автором), координаты
х{ и у/ точек равны нулю и, следовательно, JX'y* = 0. Поэтому
все оси, перпендикулярные оси ротатора, являются главными ося-
осями инерции, а главные моменты инерции равны
/,' = /,' = ? m,(zi)a (8.34)
(ротатор имеет две вращательные степени свободы, поскольку,
говорить о вращении ротатора вокруг своей оси бессмысленно).
Пусть теперь тело обладает плоскостью материальной сим-
симметрии. Тогда, совмещая плоскость О'х'у' с плоскостью симмет-
симметрии,'все точки (вне плоскости)^ можно разбить на пары, для ко-
которых
§ 8.2
Тензор инерции
353
= (x'h tJu—Zi).
(8.35)
Используя (8.35), определения центра масс и моментов инерции,
убедимся, что в рассматриваемом случае центр масс лежит в пло-
плоскости материальной симметрии, а любая ось, перпендикулярная
этой плоскости, будет главной осью инерции. Если все точки твер-
Рис. 8.6
Рис. 8.7
дого тела расположены в некоторой плоскости, то наряду с отме-
отмеченными результатами найдем, что
Z= J X
(8.36)
где JX' •=
Если тело обладает не одним признаком симметрии, то отыска-
отыскание главных осей инерции еще более упрощается. Покажем это на
примере плоского диска с осью материальной симметрии, совпа-
совпадающей с одним из диаметров этого диска. Помещая начало О'
в любую точку оси симметрии (рис. 8.6), нетрудно убедиться, что
главными осями будут ось O'z', перпендикулярная плоскости
диска, ось О'у' — ось материальной симметрии диска и ось OV,
перпендикулярная первым двум осям.
В заключение рассмотрим преобразования тензора инерции в
результате преобразований системы S', жестко связанной с твер-
твердым телом. Например, в результате параллельного переноса полу-
получим две системы, жестко связанные с твердым телом: систему
O'x'y'z' и систему Orfxftfzr (оси этих систем параллельны, а на-
начала различны — см. рис. 8.7,а). Обозначая компоненты тензора
12 Зак. 284
354 Динамика твердого тела Гл. VIII
инерции относительно системы S" (т. е. системы O"x't/z') симво-
символом Ja$ согласно (8.26) будем иметь
4Р=? щ «г;'J баР - (Г;')а (Г;- )э}, (8.37)
где Г; — радиус-вектор i-той точки относительно системы S", а
(г* )а — его проекция на ось с индексом а. Поскольку радиусы-
векторы любой точки тела относительно рассматриваемых систем
связаны соотношением (см. A.6))
г;'=!•;•+с, (8.38)
где с = Го»о', то, подставляя F.38) в (8.37) и используя опреде-
определение центра масс, найдем
j'afr ^J'afr + tn (С28а$ ~ СаС$) + ГП {2ох'т бар — {г'т)а С§ — (гт)$ Са},
(8.39)
где т — масса всего тела, а тт — радиус-вектор центра масс
тела относительно S'. Если начало О' поместить в центр масс те-
тела, то rm = 0 и (8.39) сведется к более простому выражению
4р = У"э + т (с2баР - сас& (8.40)
здесь «/ар — тензор инерции относительно системы S' с началом
в центре масс тела. Такой тензор называется центральным,
а главные оси инерции, проходящие через центр масс, называются
главными центральными осями.
Используя (8.40), можно найти соотношение между осевыми
моментами инерции относительно параллельных осей, одна из ко-
которых проходит через цеьСтр масс (теорема Штейнера). На-
Например, соотношение между моментами JZ'zr и У?2' имеет вид
J*-z' = J?'Z' + md\ (8.41)
где d = (cl> + с2у>I/2 — расстояние между параллельными осями
O"z' и O'z', проходящими через начало О" и центр масс тела соот-
соответственно (см. рис. 8.7,6). ,
Для того чтобы найти преобразование тензора при поворотах
системы координат, выберем жестко связанные с твердым телом
системы S' и S", имеющие общее начало (рис. 8.8). Выражая
какую-либо скалярную функцию,- зависящую от компонент тензо-
тензора, сначала через величины, отнесенные к системе S7, а затем
через аналогичные величины, отнесенные к системе S", можно по-
получить закон преобразования тензора. В частности, выбирая в ка-
качестве скалярной функции кинетическую энергию ЗГ, получим
§ 8.2
Тензор инерции
355
(8.42)
li,v
а» В
где /jiv — компоненты тензора инерции относительно системы S",
а /ар —компоненты тензора инерции относительно S'. Пользуясь
законом преобразования векторов при поворотах системы коор-
координат (см., например, A.4') и D.4)), найдем, что проекции угло-
угловой скорости на оси систем S' и S" связаны между собой соотно-
соотношениями
(8.43)
где aajLl — косинус угла между осями с
индексами а и \х. Подставляя в правую
часть равенства (8.42) выражения (8.43)
и приравнивая коэффициенты при одина-
одинаковых произведениях (Од<*К;> получим
(8.44)
Такой же вид имеют формулы преобра-
преобразования любого тензора при поворотах
системы координат.
Пример 8.4. Моменты инерции неод-
неоднородного тонкого стержня с плотностью
массы, линейно зависящей от расстоя- Рис. 8.8
ния до одного из концов стержня.
Найти моменты инерции указанного стержня массы m и дли-
длины / относительно главных центральных осей инерции.
Определим моменты инерции относительно главных осей с на-
началом в более легком конце и осью Orz\ направленной по стерж-
стержню. Имея в виду, что плотность стержня определяется функцией
(см. пример 8.3)
получим значение для двух отличных от нуля моментов инерции:
12*
356
Динамика твердого тела
Гл. VIII
Главные центральные оси могут быть найдены параллельным пе-
переносом уже рассмотренных осей. Применяя теорему (8.41), по-
получаем
Jx, =
т (-j-1J, J9. =
т
так как расстояние от более легкого конца стержня до его центра
масс равно 2//3 (см. пример 8.3). Отсюда
тГП тГП
Jx, — Jy, —
ml2
18
х
х
¦^^ 00"~~~ ~— ~*"* **•"** —— —j*
а
Рис. 8.9
Пример 8.5. Главные оси
инерции твердого тела, представ-
представляющего собой систему четырех
точек, расположенных в углах
прямоугольника.
Определить направление
главных осей инерции с началом
в одной из материальных точек
твердого тела (рис. 8.9), предпо-
предполагая, что масса каждой точки
равна т, а стороны прямоуголь-
прямоугольника равны а п,Ь ссютветственно.
Ось О"г'\ перпендикулярная плоскости тела, будет главной
осью инерции. Поэтому остается определить положение оси О"х"
в плоскости тела, т. е. определить угол <р, указанный на рис. 8.9.
Прежде чем найти моменты инерции относительно системы с
началом в О", вычислим главные центральные моменты инерции *.
Из соображений материальной симметрии следует, что центр масс
находится на пересечении диагоналей прямоугольника, а оси О'х'
и О'уг являются главными центральными осями; используя (8.36),
найдем моменты инерции относительно этих осей:
J% = mb\ J$ = ma2, J?> = m(a2 + b2).
Затем, применяя преобразование (8.40), получим моменты /ар
относительно системы O"xry'zr. Используя преобразование для
* Такой путь решения не является кратчайшим, но позволяет проиллюстри-
проиллюстрировать преобразование (8.40).
§ 8.3 Плоскопараллельное движение тела 357
диагональных элементов
и преобразование для недиагональных элементов
Л*р = Ja$ — 4тсас$ (а ф р),
найдем
Jx>x> = 2mb29 Jy>y> =r- 2ma\ . Jt. = 2m (a2 + b%
Jx'y* = — ttUlb, J х'г' = Jy'z' == 0,
Отсюда следует, что оси О"хг и О"#' не являются главными.
Поэтому повернем систему O"x'y'z' вокруг оси O"z' так, чтобы
центробежный момент «/*у относительно новой системы Offx"y"zr
обратился в нуль. При этом повороте интересующая нас компо-
компонента преобразуется по закону (см. (8.44))
Jx'y» == Jx'x'CLx'x"a>x'y" + Jx'yfa
+ Jy'x'ay>x«ax>y>' -t- «Л/v a^'^
+ Jz'x' a2'x" 0>x'yn + Jz'y' CLz'xf CLy'y» + Jz'z' Q>z'x" пг
Учитывая, что aZ'X" = flW = 0, а остальные aajn выражаются че-
через угол ф согласно формулам
аХ'х" = ву'у" = cos ф, аХ'уп = —- sin ф, ау** = sin ф,
и требуя обращения в нуль момента инерции Jx»y% получим сле-
следующее уравнение относительно угла ф:
— Jx*x* cos ф sin ф + Jy'y* sin ф cos ф -f- JX'y» (cos2 ф — sin2 ф) = О
и его решение в виде
i~ o~ 2Jx'y' аЬ
§ 8.3. Плоскопараллельное движение твердого тела
Инерционные свойства твердого тела зависят от массы тела и
ее распределения по объему тела. В связи с этим движение твер-
твердого тела представляет собой достаточно сложное механическое
явление. Начнем его изучение с простейшего случая — плоско-
плоскопараллельного движения, когда все точки тела движут-
358
Динамика твердого тела
Гл. VIII
ся в плоскостях, параллельных некоторой неподвижной плоскости
(рис. 8.10).
Если движение твердого тела является плоскопараллельным,
то систему S', жестко связанную с телом, всегда можно выбрать
так, чтобы плоскость О'х'у' совпадала с неподвижной плоскостью
Оху некоторой инерци-
альной системы 5. Тогда
оси Oz и О'г' будут оста-
оставаться параллельными, а
положение тела будет оп-
определяться двумя коорди-
координатами точки Ог и одним
углом Эйлера ф (если на
тело не налагается каких-
либо дополнительных свя-
связей). Угловая скорость те-
тела и его момент вращения
будут, вообще говоря, не-
коллшеарны и соответст-
соответственно равны (см. D.17)
и (8.22))
Рис. 8.10
СО =
— *y'z'
ф>
(8 45)
fcZ'=/2V<p, (8.46)
а кинетическая энергия ?7*, связанная с вращением тела, имеет
вид (см. (8.27))
^ = -^"JW<j)a. (8.47)
Помещая начало системы S' в центр масс несвободного тела,
получим уравнение дЬижения его центра масс относительно систе-
системы S (см. (8.7) и D.55))
= Fe-f Re
(8.48)
и закон изменения момента вращения тела относительно систе-
системы Sm
сМ = %* + <%%> (8.49)
Запишем уравнение (8.48) в декартовых координатах для слу-
случая плоскопараллельного движения:"
Rl, mym = F? -f #S,
(8.50)
§ 8J3 Плоскопараллельное движение тела 359
При использовании же уравнения (8.49) нужно иметь в виду,
что производная момента вращения по времени берется при по-
постоянных ортах пХу пу, nz, а сам момент <М задается в виде раз-
разложения (8.46) по ортам пх>, iy, iv, движущимся вместе с телом.
Чтобы устранить эту трудность, воспользуемся соотношением
db! г ,, , d'a.'
dt L J dt
справедливым для любого вектора а7, заданного в виде разложе-
разложения по движущимся ортам (см. D.38)). Тогда вместо (8.49) будем
иметь
(8.51)
dt ' 1
где производная по времени при фиксированных ортах tv,
dt
iy, nz>.
Отсюда, учитывая (8.45) и (8.46), найдем уравнения измене-
изменения момента в форме
Ф + mJx>z> Ф2 = Xl> + B%)s. (8.52)
Таким образом, уравнениями плоскопараллельного движения тела
являются уравнения (8.50) и (8.52). Что касается уравнений в
независимых координатах, то они будут определяться функцией
Лагранжа вида
Л = -f - (xl -V yl) -\- ^f-^-U (8.53)
(здесь также использованы декартовы координаты центра масс
тела).
Распространенным случаем плоскопараллельного движения те-
тела с внешними связями является движение физического
маятника (так называется твердое тело, жестко связанное с
неподвижной осью — осью маятника, вокруг которой оно может
совершать колебания). В предположении идеальности этой связи
задача легко решается в независимых координатах. Совместим
одну из бсей инерциальной системы с осью маятника, предпола-
предполагая, что она горизонтальна. Другую ось системы координат напра-
направим вдоль напряженности поля тяготения g. В качестве начала О
360
Динамика твердого тела
Гл. VIII
возьмем точку пересечения оси маятника и перпендикулярной к
ней прямой, проходящей через центр масс маятника (рис. 8.11).
Далее с иллюстративной целью рассмотрим данную задачу
при разных выборах системы S', жестко связанной с твердым те-
телом. Пусть система S' выбрана так, что О' совпадает с О, ось
х
Рис. 8.11
ОV — с осью Ог, а ось О'х' проходит через центр масс. Тогда, вы-
выбирая в качестве независимой координаты угол <р между осями Ох
и Ох' (рис. 8.11,а), в соответствии с (8.12) и (8.17) найдем, что
вся кинетическая энергия маятника будет равна кинетической
энергии вращения ST, а в соответствии с первой из формул (8.14)
и (8.19) для потенциальной энергии маятника получим
U = — mgvm •= — mgl cos q>,
где т — масса маятника, а / — расстояние от центра масс маят-
маятника до его оси. Пользуясь выражениями ST (см. (8.47)) и ?/, с
помощью уравнения Лагранжа найдем
Ф+ (DgSincpF-O, (8.54)
где cog = {mgllJZ'z')xl2 — частота линейных колебаний маятника.
Если начало системы S' поместить в центр масс, а ось OV
направить параллельно оси Oz (рис. 8.11,6), то для кинетической
энергии получим выражение (см. (8.9) и (8.18))
2 тт
71 — т ^- zz> (p2t
где ут=/ф. Учитывая, что потенциальная энергия остается той же,
придем к уравнению движения (маятника с квадратом частоты ли-
линейных колебаний, представленным в.виде
,л __ mgl
ml*
(8.55)
§ 8.3
Плоскопараллельное движение тела
361
Наконец, совместим начало системы S' с центром масс, а ее
оси направим по главным центральным осям инерции (рис.8.11,в).
При таком выборе системы S' проекции угловой скорости со на
оси S7 равны:
(Од/ = СОДфя', (ду' = (дйюу', С02' = 0)Д@2'> (8.56)
где aw — косинусы угла между осью вращения и главной цент-
центральной осью с индексом а, а со — модуль угловой скорости. Под-
Подставляя (8.56) в (8.28), получим кинетическую энергию вращения
в виде
2 Ш '
где /со = У™ #L;' + J'y'cfm' + ^?^L' —момент инерции тела относитель-
относительно оси вращения, a J™, J™> J™~ главные центральные моменты. В дан-
данном случае /© совпадает с /?г' и является постоянной величиной,
так как углы между осями 5 и S' не изменяются *. Указанный вы-
выбор системы S' приводит нас к тому же уравнению движения с
квадратом частоты линейных колебаний, представленным * в виде
(8.57)
mgl
(8.58)
Подчеркнем, что закон из-
изменения координаты ф не за-
зависит от выбора системы S' и
все полученные выражения
для cog хотя и имеют разный
вид, равны друг другу (мо-
(моменты инерции Jz'z', Jf'z'
и «/?, J™, J™ связаны между
собой соотношениями (8.40) и
(8.44)).
Пример 8.6. Плоскопарал-
Плоскопараллельное движение однородно-
однородного шара.
Исследовать плоскопарал-
плоскопараллельное движение шара массы
т радиуса R в постоянном од-
однородном электрическом поле напряженности <§, если одна из то-
точек на поверхности шара обладает электрическим зарядом е (из-
(изменением поля, обусловленным наличием тела, пренебречь).
* Кинетическая энергия, связанная с вращением тела, всегда может быть
представлена в виде (8.57). Однако в общем случае /<о зависит от времени,
поскольку положение оси вращения относительно S' изменяется.
Рис. 8.12
362 Динамика твердого тела Гл. VIII
ВыберехМ инерциальную систему S так, чтобы плоскость Оху
проходила через центр масс шара параллельно вектору <§, а ось
Ох была направлена вдоль этого вектора (рис. 8.12). Начало О'
системы, жестко связанной с шаром, поместим в его центр масс,
а ось О'х' совместим с прямой, проходящей через центр масс ша-
шара и заряд е.
Согласно (8.18) и (8.47) кинетическая энергия шара равна
где хт, ут— декартовы координаты центра масс шара, а ф —
угол между осями Ох и О'х'. Потенциальная энергия шара в
электрическом поле равна
где г — радиус-вектор заряда. Выражая U через независимые ко-
координаты хт> ут и ф, получим
Затем из уравнений Лагранжа найдем
еЕ р • • •• е8%
' '' Ут=-Уто* + Уто> Ф+—s-staq^O.
«„о.
Отсюда видно, что центр масс шара движется равноускоренно
вдоль напряженности поля и по инерции перпендикулярно к ней.
Одновременно шар совершает движение, подобное движению ма-
математического маятника; при малых ф шар будет совершать ли-
линейные колебания с частотой
egR У/2
Момент инерции /^ ввиду симметрии шара равен (см. (8.23))
R л 2л;
б о'о
= т Шр (rJ dv'
где р — плотность массы на единицу объема, dV' = (r'Jsin0',X
Xdr'dQ'dB' — элемент объема в системе S' в сферических коорди-
координатах г', 0' и е7. Учитывая однородность шара, получим
§ 8.3
Плоскопараллельное движение тела
363
Наконец, принимая во внимание, что
т =
4яр
(УУ
найдем значение главного центрального момента инерции
а также квадрат частоты линейных колебаний шара
9 О 6
2 mi?
Пример 8.7. Колебания диска.
Найти частоту линейных колебаний однородного диска массы
т радиуса R (рис. 8.13) в двух случаях: а) в случае шарнирного
Рис. 8.13
соединения диска со стержнем в центре масс диска, б) в случае
жесткого скрепления диска со стержнем (стержень невесомый дли-
длины Z, трением в местах соединения пренебречь).
Выбирая в случае (а) системы 5 и S' так, как это показано
на рис. 8.13, а, и учитывая (8.18) и (8.47), получим кинетическую
энергию диска
ф2,
где ф1 —угол между Ох и 00'у ф2 —угол между О'х и О'х'.
Учитывая, что потенциальная энергия диска равна
U = — rngl cos ф1э
364
Динамика твердого тела
Гл. VIII
найдем уравнение Лагранжа, соответствующее координате <рь и
обобщенную скорость ф2*.
Фх + со* sin ф! = 0, ф2 = ф20,
где соа = ^//. Таким образом, в этом случае происходит колебание
центра диска и его вращение с постоянной угловой скоростью.
В случае (б) имеем физический маятник, кинетическая энер-
энергия которого равна
т =
Ф1
J г'
где J™ = mR2/2 — главный центральный момент инерции относи-
относительно оси, перпендикулярной диску. Поэтому квадрат частоты
линейных колебаний маятника, жестко скрепленного с подвесом
равен
2/2 + #2
Л'
Рис. 8.14
рис. 8.14, получим
энергий стержня:
Т =
выражения для
та*
б2
Пример 8.8. Колебания не-
неоднородного тонкого стержня,
опирающегося на обруч.
Найти частоту линейных ко-
колебаний неоднородного тонкого
стержня массы m длины /, кон-
концы которого скользят
(рис. 8.14) по расположенному
в вертикальной плоскости
гладкому обручу радиуса R
(плотность массы стержня ли-
линейно зависит от расстояния
до одного из его концов).
Выбирая системы координат
так, как это показано на
кинетической и потенциальной
U == — mgacos 6,
где а = /?»—
2/2
9
1/2
— расстояние от центра обруча до центра
масс стержня (здесь учтено, что центр масс находится на расстоя-
расстоянии 2//3 от более легкого конца стержня — см. пример 8.3). Имея
в виду, что разность между углами 0 и ф постоянна, а главный
§ 8.3
Плоскопараллельное движение тела
365
центральный момент стержня равен ml2/l8 (см. пример 8.4), най-
найдем значение квадрата частоты линейных колебаний стержня
1/2
/2
Пример 8.9. Плоскопараллельное качение неоднородного ци-
цилиндра.
По горизонтальной абсолютно шероховатой плоскости катается
неоднородный цилиндр массы т и радиуса а (расстояние от его
геометрической оси до центра масс равно /, а ось, проходящая че-
/////////////////////X//////,
X
а
Рис 8 15
рез центр масс параллельно оси цилиндра, является главной осью
инерции — момент инерции относительно этой оси равен /). Най-
Найти частоту линейных колебаний цилиндра и реакцию плоскости,
если движение цилиндра плоскопараллельно.
Выберем системы 5 и S' (т. е. системы Оху и О'х'у') так, как
показано на рис. 8.15, а. Качение цилиндра по абсолютно шерохо-
шероховатой плоскости представляет собой движение системы, на кото-
которую наложена идеальная связь. Действительно, скорость точки
цилиндра, касающейся плоскости, будет в момент касания равна
нулю и, следовательно, виртуальное перемещение такой точки
равно нулю. Учитывая, что реакция плоскости приложена к точке
касания цилиндра, приходим к выводу, что эта реакция не совер-
совершает виртуальной работы.
Уравнение рассматриваемой связи можно записать в виде
(см. (8.2)) '
Гк] - О,
A)
366 Динамика твердого тела Гл. VIII
где vm, о — скорость центра масс и угловая скорость цилиндра,
vK, гк — скорость точки касания относительно S и ее радиус-век-
радиус-вектор относительно S'.
Условие A) в случае плоскопараллельного качения приводит
к двум уравнения^:
Хт = «>Ук> У т =—<**'** B)
где хт, ут— декартовы координаты центра масс цилиндра, xKi yK —
проекции радиуса-вектора гк на оси Ох и Оу. Координаты хк и ук
выражаются через угол ф между осями О'х и О'х' с помощью
формул
хк = а — /cosф, г/к = — /sin ф.
Таким образом, уравнения B) можно представить в виде
C)
а затем проинтегрировать и тем самым получить хт и ут как
функции ф:
xm = lcos(f9 ym = —ay + ls\ny D)
(здесь постоянные интегрирования выбраны так, чтобы при ф = 0
центр масс цилиндра находился в наинизшем положении). Сле-
Следовательно, в случае плоскопараллельного качения связь A) яв-
является голономной.
Кинетическая и потенциальная энергии цилиндра как функции
независимой координаты ф и обобщенной скорости ф соответст-
соответственно равны (см. формулы C) и D))
Т = — [пг (а2 + /2 — 2а/ cos <р) + /J Ф2, U=— mgl cos ф.
Отсюда получим уравнение линейных колебаний цилиндра
§ 0, E)
где
mgl
(Og = -
Чтобы найти реакцию плоскости, используем закон изменения
импульса цилиндра (см. (8.7) и рис. 8.15,6):
тхт = mg + Rx, тут = Ry.
§ 8,4 Движение тела с одной неподвижной точкой 367
Подставим сюда проекции скорости центра масс из формулы C)
и пренебрежем членами второго порядка малости и выше по ве-
величинам ф и ф. Тогда, используя уравнение E), найдем
Отсюда видно, что при малом отклонении ф>0 возникает состав-
составляющая реакции Ry>0y стремящаяся вернуть центр масс цилинд-
цилиндра к положению устойчивого равновесия; момент всей реакции R
относительно центра масс стремится повернуть цилиндр почасовой
стрелке, т. е. опять-таки к положению устойчивого равновесия.
§ 8.4. Движение твердого тела с одной неподвижной точкой.
Уравнения Эйлера
Изменение ориентации тела с одной закрепленной точкой свя-
связано с изменением всех углов Эйлера, поэтому задача о движении
такого тела является более сложной по сравнению с задачей о
плоскопараллельном движении.
Для исследования рассматриваемой задачи поместим в непо-
неподвижную точку тела как начало О инерциальной системы 5, так и
начало О' системы S'\ жестко связанной с телом, а оси системы S'
направим по главным осям инерции относительно неподвижной
точки. Тогда векторные уравнения движения (8.7) с учетом (8.13)
можно записать в виде
P-Fe + Re, <d=№, (8.59)
где P~m[(orm] — импульс тела, Re — реакция опоры в точке
закрепления (момент реакции в силу выбора начала отсчета равен
нулю).
Так как оси системы S' направлены по главным осям инерции,
то в уравнении моментов необходимо использовать разложение
вектора о4С по этим осям (см. (8.30)). С этой целью представим
уравнение для момента в форме (8.51) и, таким образом, полу-
получим
-^- + [сооЖ] •= «#е. (8,60)
dt J ч '
Проектируя правую и левую части уравнения (8.60) на оси
системы S', жестко связанной с телом, и учитывая, что проекции
производной ^ на оси S', согласно (8.30), соответственно
равны
368 Динамика твердого тела Гл. VIII
найдем динамические уравнения Эйлера
«Voy + (/*' — Л'К'©*' = i?2', (8.61)
Jz><i>z' + (Jy' — Jx>) tox>®y> = •?*'¦
Для решения задачи методом Лагранжа необходимо найти
кинетическую энергию как функцию независимых координат ф, 0,
if и обобщенных скоростей <р, 9, i|). Учтем, что кинетическая энер-
энергия Т равна энергии вращения ?7" (см. (8.17)), а оси системы S'
направлены по главным осям инерции (см. (8.28)). Тогда, исполь-
используя кинематические формулы Эйлера D.18), получим *~
J , . J ,
Т = —*- (ф sin г|) sin 0 4- 6 cos г|)J + -У— (<р cos г|> sin 6 — 6 sin г|?J +
+ -^- (ф cos 0 + г|)J. (8.62)
Выражение (8.62) заметно упрощается, если моменты инерции
относительно двух главных осей равны друг другу (в этом случае
тело называется симметричным волчком). Действительно,
направляя по этим главным осям оси О'х' и О'у' и полагая
Jx>z=Jy>9 из (8.62) найдем
Т = -^(qJsin20 + 02) + — (cpcos 0 + ^>)\ (8.63)
Z Z
Отметим известные общие решения задачи о движении тела
с одной закрепленной точкой под действием однородного поля
тяжести, которые справедливы при произвольных начальных усло-
условиях. Такими решениями являются решения: а) задачи Эйлера
(случай уравновешенного волчка), когда неподвижная точка и
центр масс тела совпадают, б) задачи Лагранжа (случай симмет-
симметричного неуравновешенного волчка), когда Jx' — -V Ф Jzf> а центр
масс находится на оси Oz\ в) задачи Ковалевской (случай сим-
симметричного неуравновешенного волчка), когда Jx' = Jy' =2Jzr, a
* Подставляя (8.62) в E.44), можно убедиться, что только третье урав-
уравнение системы (8.61) является уравнением Лагранжа относительно перемен-
переменной я|), а два других уравнения не являются уравнениями Лагранжа относитель-
относительно ф и 0.
§ 8.4
Движение тела с одной неподвижной точкой
369
центр масс находится в плоскости О'х'у'**. Кроме этих случаев
существования общих интегралов известны также некоторые част-
частные интегралы, т. е. интегралы, имеющие место при определенных
начальных условиях.
Пример 8.10. Изменение ориентации спутника (свободного
симметричного волчка).
Найти закон изменения ориентации спутника Земли относи-
относительно гелиоцентрической системы отсчета.
. В качестве инерциальной системы S выберем систему с нача-
началом в центре Земли и осями, направленными на «неподвижные»
звезды (см. пример 4.5). Начало системы S', жестко связанной со
спутником, поместим в его центр " lz
масс, а ось Orzr направим по оси zf\ \
материальной симметрии спутника \ ^ '
р
(рис. 8.16).
Уравнения движения спутника
относительно S можно записать в
виде (8.11)
(О
где m — масса спутника, д(г*) = —
— у ~-^i — напряженность поля тя-
и и
Рис. 8.16
готения Земли в точке «пространства, где находится t-тая доста-
достаточно малая часть спутника с радиусом-вектором гг- относительно
5 и радиусом-вектором г/ относительно системы S'. Учитывая,
что размеры спутника исчезающе малы по сравнению с расстоя-
расстоянием от центра Земли до любой точки спутника, т. е. полагая, что
g (г*) » g (rm), получим
Г zz^. о I Г»». )• оЛр" , ^— ГП IГm 2 1 Г*и) I "~- \) • I ** f
ТП О V ffl/' L •'* О \ /71/J " \ А
где rm — радиус-вектор центра масс спутника относительно S,
arm =? 0 в силу выбора системы S'. Таким образом, задача о дви-
движении спутника распадается на две независимые задачи: задачу о
движении центра масс, которая была рассмотрена в § 2.4, и задачу
06 изменении ориентации спутника относительно поступательно
движущейся системы Sm центра масс.
** Подробное изложение этих случаев производится во многих книгах, на-
например см. [9].
370 Динамика твердого тела Гл. VIII
Из B) видно, что кинетический момент вращения относитель-
относительно Sm сохраняется. Кроме того, имеет место интеграл полной
энергии спутника относительно системы 5
4- и -1- U — Еп, • (о)
где U = —tng(rm)rm. Пользуясь уравнением движения центра масс
(см. B)), нетрудно показать, что
2
^~-mg{rm)rm = const. D)
Сопоставляя выражения C) и D), видим, что кинетическая энер-
энергия вращения ?Г также сохраняется и, следовательно, при реше-
решении задачи об изменении ориентации спутника (свободного волч-
волчка) можно исходить из двух законов сохранения:
оЛ = оЛ0, ST-STo. E)
Направляя ось O'z по вектору в^о, достигаем того, что <М\ —
проекция момента на линию узлов — будет равна нулю (см.
рис. 4.2). С другой стороны, эта проекция равна выражению
(М% — <МХ' cos г|) — сМУ' sin г|),
которое для симметричного волчка можно записать в виде (см.
(8.30) и D.18))
оМ^ = Jх' 6.
Следовательно, в выбранной системе координат 8 = 0о, т. е. наклон
оси симметрии тела по отношению к о^0, остается постоянным. Это,
в свою очередь, приводит к сохранению проекции угловой скоро-
скорости со на ось симметрии волчка, поскольку (см. рис. 8.16)
<MZ' — оМо COS 0о = JZ' GV.
Используя (8.63), запишем интеграл энергии в виде
ф Ь ф F)
где /?, Jf> — главные центральные моменты инерции волчка. От-
Отсюда, учитывая постоянство 9 и сог', приходим к выводу о посто-
постоянстве ф, что обусловливает постоянство г|) (см. третью из формул
D.18)). ,
Итак, симметрия волчка и законы -сохранения его кинетиче-
кинетического момента и кинетической энергии приводят к решению
§84 Движение тела с одной неподвижной точкой 371
Ф = Фо> . 6 = 0, ij> = ij>0, (jy
Ф = Фо^ + Фо> 9 = 6о» ^ = Н>о* + По-
Последовательно, свободный симметричный волчок совершает регу-
регулярную прецессию (см. пример 4.1). Для этого движения харак-
характерно, что ось симметрии волчка и его ось вращения сами вра-
вращаются относительно инерциальной системы вокруг постоянного
вектора q41q с постоянной скоростью прецессии фо; наклоны этих
осей по отношению к вектору оМ0 различны, но постоянны, а угло-
угловая скорость о) изменения ориентации волчка, оставаясь по вели-
величине постоянной, все время лежит во вращающейся плоскости»
образуемой осью симметрии и вектором Ло-
Еели в начальный момент ось симметрии совпадала по направ-
направлению с вектором <Mq, to из решения G) следует, что
0 = 60 = О, GV = Оу = (Ох = (йу = О, GV = С02 == СО,
т. е. в этом случае волчок все время будет вращаться вокруг
главной оси инерции,, сохраняющей ориентацию относительно
инерциальной системы; эта ось по направлению все время будет
совпадать с угловой скоростью о) и моментом <М0.
Рассмотрим тот же пример методом независимых переменных,
в качестве которых возьмем углы Эйлера. Лагранжиан свободного
симметричного волчка'относительно Sm равен кинетической энер-
энергии вращения ЗГ (см. (8.63)), т. е.
<е = -1 /? (фа sin2е -г е2) + у
Отсюда, ввиду цикличности времени и углов ф и tj), получшм инте-
интеграл энергии F) и два интеграла для проекций момента вра-
вращения:
dV = J* ((pcosе
(9)
Направляя ось О'г по вектору о410 и используя интегралы F) и
(9), найдем решение задачи.
Если исходить из уравнений ^Эйлера (8.61), то, учитывая сим-
симметрию волчка (Jx> - Jy>) и равенство нулю момента внешних
сил относительно Sm, получим
372
Динамика твердого тела
Гл. VIII
/.'¦
где Q = —
gv -f- Йсо^' = 0, ofy' — Qgv == 0, <oZ' = 0,
. В результате решения этой системы найдем
проекции угловой скорости как функции времени
ov = Ссоз(Ш + а), оу = Csln(Q/ + а), gv = gv0,
откуда, используя D.18), получим решение для углов Эйлера.
Регулярная прецессия является сравнительно распространен-
распространенным видом движения твердого тела. Например, такое движение
совершают уравновешенный гироскоп и симметричная молекула
(как твердое тело); ось вращения Земли прецессирует вокруг ее
полюсов (это связано с тем, что Земля является не сферой, а
слегка сплющенным у полюсов эл-
эллипсоидом, симметричным относи-
относительно оси).
Пример 8.11. Симметричный тя-
тяжелый быстрый волчок.
Симметричный волчок с одной
закрепленной точкой и центром
масс, находящимся от нее на рас-
расстоянии /, движется в однородном
поле тяжести. Найти закон движе-
движения волчка, если в начальный мо-
момент времени его кинетическая
энергия вращения вокруг оси сим-
симметрии велика по сравнению с по-
потенциальной энергией.
Выберем системы координат S и
S' так, как это показано на рис. 8.17,
и рассмотрим сначала качественное
решение задачи на основе уравнения
моментов (см. (8.60)). Поскольку в
начальный момент времени волчок
быстро вращается вокруг оси сим-
симметрии, допустим, что его угловая скорость в любой момент вре-
времени примерно равна со =^ gviv, т. е. gv =^= %'^0. Тогда момент
вращения волчка равен (см. (8.30))
о4С ^z Jz'®z>nz>y A)
где Jz> — момент инерции относительно оси симметрии. Используя
A), а также представляя момент силы тяжести в виде
Рис. 8.17
= [гт Щ\ = — mgl [iv п2],
B)
§ 8.4 Движение тела с одной неподвижной точкой 373
из уравнения моментов получим -
Сопоставляя уравнение C) с соотношением D.38), составленным
для iv, придем к выводу, что вектор п2' прецессирует вокруг
вертикали с угловой скоростью
малой по сравнению с со2' (по условию задачи).
Используя to = ov IV, получим, что Р = т [<ог'т] =0 и соответствен-
соответственно реакция опоры R=—mg (см. (8.59)). Если же принять, что
со = gviv + <*)npnz, то Р = тсопр/[п2п2'], однако значение реакции
будет отличаться от найденного лишь на величину порядка сО
К C)
у р Р
Как видно из формулы C), ось волчка все время движется в
направлении, перпендикулярном силе тяжести, что в действитель-
действительности возможно, лишь при специальном выборе начальных условий.
Рассмотрим строгое решение поставленной задачи. Учитывая,
что кинетическая энергия волчка равна энергии вращения (см.
(8.17)), найдем функцию Лагранжа как функцию углов Эйлера
и их производных (см. (8.63)):
х =^J-((i>2sin2e +e'2)+ -^-(фсове+'ФJ —m^/cose, E)
где JX', JZ' — главные моменты инерции относительно осей О'х'
и OV с началом в неподвижной точке О'. Поскольку лагранжиан
E) явно не зависит от времени и углов <р и -ф, имеют место три
первых интеграла:
Я = —I1-(Ф2 sin2 G + в2) Ч- ^|^ ^
оЛ1г, == -24— = ]z. (ф cos 6 +- \j>) = g^z'o, F)
dip
<М2= -|4- = Jx> Ф sin2 6 + ]г. [(ф cos 0 + г|5) cos 6 = <Мг0.
Эти же интегралы можно получить и из других соображений.
Действительно, момент силы тяжести перпендикулярен как к вер-
вертикали, так и к оси О'г\ проходящей через центр масс. Следова-
Следовательно, проекция момента силы на ось O'z равна нулю, а проек-
проекция oMz момента вращения сохраняется. Проекция момента силы
на ось O'zr также равна нулю, однако ввиду подвижности этой оси
374 Динамика твердого тела Гл. VIII
проекция o4Cz> сохраняется только в случае симметричного тела
(см. третье уравнение Эйлера (8.61)).
Из последних двух интегралов F) найдем ф и г|з как функ-
функции 6:
M 4CcosQ АС,0 •
фсоэе G)
Подставляя эти функции в, интеграл энергии, получим дифферен-
дифференциальное уравнение относительно угла 6
9 2Jv, sin2 0 2/./
В частных случаях это уравнение имеет решение в виде эле-
элементарных функций. Например, пусть в начальный момент време-
времени наклоненный волчок закручен вокруг своей неподвижной оси
симметрии, т. е. пусть
О ~~f~ 0 ibn ~~f~ 0 ф = 0п ==: 0 ^9^
Учитывая, что при этом
Jz, . 2
Ео ~ —^— 'Ф о + mgl cos 60, qM-z'o — Jz' ^о' °^20 ~ ^г' 'Фо C(>s ^o >
сведем уравнение (8) к виду
ga = jmgL(cose cos6)-(igiAy (^eo-cQS0J t
J%' \ •'л' / sin2 0
откуда вытекает, что угол 9 не может быть'меньше 60.
Так как 02^0, а по условию задачи кинетическая энергия
вращения ?Го в начальный момент времени велика по сравнению
с потенциальной энергией Uo, т. е.
2mgl cos 0О у/ +
то из уравнения A0) будет следовать, что 8 в любой момент вре-
времени близко к 0о (Ав<Ю9о?=О).
Разлагая правую часть уравнения A0) в «точке» 6о и прене-
пренебрегая членами третьего и более высокого порядка малости,
найдем
dt
§ 8.4 Движение тела с одной неподвижной точкой 375
(здесь нельзя пренебречь членом, пропорциональным (ДЭJ, так
как од умножается на большую величину). Вводя обозначения
Jz' *) * 2mglJ x,s\n%
©nut = , (A6)max= —~ ,
J 1\ $
запишем уравнение A2) в виде
- ©nut А6 [(Л6)тах - А6].
Решением этого уравнения, удовлетворяющим начальному усло-
условию 8о?=О, 8о=О, является функция
(^ A4)
Используя G) и A4), с той же степенью точности получим
2
ё= mg'sin9° sin(©nuto, A5)
откуда находим.углы Эйлера как функции времени:
^
Л
Jz>
Jx>mglcos%
Приведем также выражения для угловых скоростей, усредненных
по периоду 2jx/(Dnut:
Как видно из решения, ось симметрии волчка медленно пре-
цессирует вокруг вертикали со средней угловой скоростью, рав-
376 Динамика твердого тела Гл. VIII
ной ф (сравнить с формулой D)); эта скорость тем меньше, чем
больше начальная скорость вращения вокруг оси симметрии. Зна-
Значение скорости прецессии ф колеблется около своего среднего зна-
значения с малой амшштудой и большой частотой conut, прямо прот
порциональной г|H. Одновременно с этим ось симметрии совершает
колебания вокруг линии узлов с большой частотой conut и малой
амплитудой Дбтах (см. рис. 8.17, на котором штриховой линией
изображена траектория конца орта fiz-). Таким образом, в сред-
среднем получаем картину регулярной прецессии вокруг вертикали, а
на это 'усредненное движение налагается дрожание оси с малой
амплитудой, т. е. нутация. Такое движение твердого тела назы-
называется псевдорегулярной прецессией.
Эта прецессия происходит следующим образом: в начальный
момент времени ось волчка опускается под действием тяжести,
соответственно потенциальная энергия волчка уменьшается, а ки-
кинетическая возрастает; увеличение наклона оси,- благодаря собст-
собственному вращению тела, приводит к появлению прецессионной
скорости ф, пропорциональной Д9. Угловая скорость со и момент
<М> тела в этом случае также прецессируют по сравнительно слож-
сложному закону вокруг вертикали, отклоняясь друг от друга и от
оси волчка на малые величины/ пропорциональные отношению
Uo/Vo.
Заметим, что задачи, аналогичные рассмотренной, использу-
используются в теории гироскопических навигационных приборов, имеющей
большое практическое значение.
Пример 8.12. Симметричный заряженный быстрый волчок в
однородном магнитном поле.
Симметричное заряженное тело с, покоящимся центром масс и
одинаковыми удельными зарядами его точек (е{/тг = const) вра-
'Щается в однородном постоянном магнитном поле напряженности
Ж . Определить закон движения волчка, если в начальный момент
времени угловая скорость вращения вокруг оси симметрии тела
велика по сравнению с частотой Лармора.
Поместим начала систем 5 и S' в центр масс тела, ось Oz
направим по вектору Ж, а ось Oz' — по оси симметрии тела.
Представляя вектор-потенциал однородного магнитного поля
в виде
А=-1-Г»г]. A)
где г — радиус-вектор точки пространства, и учитывая, что элект-
электростатическая энергия твердого тела постоянна, с помощью E.74)
получим
§ 8.4 Движение тела с одной неподвижной точкой 377
Здесь г*, Vi — радиус-вектор и скоро'сть t-той точки тела, обла-
обладающей зарядом ?г«. Так как по условию удельный заряд е\\Шх для
всех точек одинаков, положим его равным е/т, тогда для обоб-
обобщенного потенциала найдем выражение:
B)
2тс
где <М — кинетический момент вращения тела. Используя разло-
разложение момента вращения по осям S' (см. (8.30)), запишем ска-
скалярное произведение о4СЖ в виде
<МЖ = ]х. (GV Шх' + <*у> ШV) + Л' <«V Ж г',
затем выразим проекции напряженности Ж на оси S' через углы
Эйлера:
ggy, =55?sin9cos-ф,
В результате найдем лагранжиан волчка
^(e jJ + (/sin2e + jvcos2e)ф + o)L/z'фоове,
где col = частота Лармора.
2mc
Отсюда видно, что обобщенная энергия, равная в данном случае
кинетической энергии вращения, и обобщенные импульсы рф и р$
сохраняются:
jx* (ф2 sin2 е + ё2) + jt> (ф cos е + -фJ =
(Jr sin2 6 + Jz> cos2 9) ф + J2> i сое 8 + coL (Jx> sin2 9 + J2> cos2 8) = /?ф0,
D)
iz' фСО8 8 + Jz> If + °>L Jz' COS 9 = Рфо.
Из последних двух интегралов получим ф и ty как функции 9:
-P^cos8 •=[Р!!Ю__РФ0-Р^осо59
.-sin» в Y /г- /sin»e ч '
378 Динамика твердого тела Г л VIII
Подставляя эти функции в интеграл энергии, найдем уравнение
для 0:
б2 Н j f sin2 Q . (рфо — Р^о cos 6 — coL Jx> sin2 6J -f
- coL Л- cos 6J = -^-. F)
x z jx.
Это уравнение упрощается, если начальные условия заданы
так же, как в предыдущем примере. Действительно, выражая с
помощью D) постоянные рфо, р$о, ёГ0 через % и 60:
+ °^ (^' sin2 60 + JZ' cos2 0O) = рфо,
0 + coL cos 60) - р
f1 Ч?
и располагая члены в уравнении F) по степеням \j>0 и со^, получим
^+ ;29° (cos6D- cos9I-
sin2 9 Jx, sin2 9 J
Jx- [ sin2 9 Jx
1 f2 1 lfl [/«- cos 60 (cos 60 - cos 6) + Jx. (sin2 60 - sin2 6)f +
I »/ y' Sill и
eJ • G)
Из этого уравнения следует (см. с. 374), что А0=8~8О должно
быть малой величиной, поскольку скорость *ф0 собственного вра-
вращения велика по сравнению с частотой Лармора coL. Полагая для
определенности в<0, а ^о>О, и оставляя в уравнении G) только
СО,
члены порядка А6 и порядка (Д6J, получим
dt
где
<*>nut = %i (ЛИ)шах =
'.-
Отсюда (см. с. 375) найдем решение
(^^ (8)
§85 Линейные неголономные связи 379
6 = |coL| sin60sin(conut/),
- il^tL cos e0
\ 2
Следовательно, ось симметрии заряженного быстрого волчка мед-
медленно прецессирует вокруг направления напряженности однород-
однородного магнитного поля со средней угловой скоростью, равной час-
частоте Лармора. Кроме того, ось волчка быстро нутирует с малой
амплитудой и частотой порядка угловой скорости г^о собственного
вращения волчка. Таким образом, рассматриваемое движение за-
заряженного тела в однородном магнитном поле аналогично псевдо-
псевдорегулярной прецессии волчка в поле тяжести.
§ 8.5. Линейные неголономные связи
В заключение главы кратко рассмотрим уравнения движения
механической системьис неголономными связями. Пусть на систе-
систему N точек наложено k{ голономных связей и k2 неголономных
связей, линейных относительно скоростей точек. Тогда движение
системы будет подчинено уравнениям Лагранжа (сравнить с урав-
уравнениями E.6))
гх, ... , гаг, 0 = 0 (а= 1,2, ... , k±), (8.64)
N
где все коэффициенты арг и ар могут быть функциями координат
и времени. Допустим, что число связей k = k{ + k2<3Nf а все связи
идеальны, тогда число уравнений и неизвестных в системе (8.64)
совпадает. Действительно, в силу идеальности всех связей и голо-
номности k\ связей имеем
лг w
? Rt 8r< =0, ? v//a 6r; = 0 (а = 1, 2, ..., kx)\ (8.65)
кроме того, линейные неголономные связи налагают на виртуаль-
виртуальные перемещения точек ограничения вида
ар*6г, - 0 (Р = 1, 2, ... , /г2). (8.66)
380 . Динамика твердого тела Гл. VIII
Применяя метод неопределенных множителей Лагранжа к си-
системе (8.65) — (8.66), найдем соотношения между реакциями-свя-
реакциями-связей и уравнениями связей (сравнить с выводом соотношений E.17))
? (i = 1. 2, ... , N), (8.67)
0=1
где все Яа и м-Э — неизвестные скалярные функции. Подставляя
(8.67) в (8.64), получим систему 3N+k\ + k2 уравнений с 3N+
+ ki + k2 неизвестными: гг (i = 1, 2, ..., N), Яа (а = 1, 2, ..., k\),
цэ (Р=1, 2, ..., k2). Как легко убедиться, эта система эквивалент-
эквивалентна общему уравнению механики с уравнениями связей (см. E.25) —
E.27) и примечание на с. 217):
N
/аОч, ... , rNf t) = 0 (a = 1, 2, ... , kx), (8.68)
N
J] awv? + flP = 0 (P- 1,2, ... , fta).
t=i
Найдем эквивалентную системе (8.68) систему уравнений Ла-
Лагранжа в обобщенных координатах. С этой целью, используя голо-
номные связи, введем Si = 3N—kx обобщенных координат q (см.
E.28) и E.30)). Затем, выражая (8.68) через координаты q и
повторяя вычисления, проведенные на с. 219—221, получим
- А> = 0 (р= 1, 2, ... ,
где
N N
Заметим, что выражения, стоящие в фигурных скобках, лельзя
приравнивать нулю, поскольку неголономные связи налагают на
вариации обобщенных координат условия
? 4Р/6<7;- = 0 (Р=1,2 к,), (8.70)
/•=1
§ 8.5 Линейные неголономные связи 381
и, следовательно, координаты q ъ данном случае не являются не-
независимыми.
Чтобы получить дифференциальные уравнения движения, при-
применим к первому из уравнений (8.69) и уравнениям (8.70) метод
неопределенных множителей Лагранжа. В результате придем
к уравнениям Лагранжа в обобщенных координатах для систем с
голономными и линейными неголономными связями
р—1
= 0 (Р= 1,2,
эти 3N—ki+k2 уравнений содержат 3N—ki+k2 неизвестных:
qh щ (/=1, 2, ...,si; р=1, 2, ...,k2).
Одной из известных систем с неголономной связью является
шар, катящийся по абсолютно шероховатой твердой плоскости.
Ввиду отсутствия скольжения скорость точки шара, касающейся
плоскости, равна нулю. В связи с этим условие качения можно
записать в виде (см. (8.2) и формулу-A) примера 8.9).
vm + [<or;] = 0, (8.72)
где vm — скорость центра масс шара, со — его угловая скорость,
rk —радиус-вектор точки касания относительно системы 5', жест-
жестко связанной с шаром. Если шар однородный, то начало системы
S' лучше поместить в центр шара. Тогда, направляя ось Oz систе-
системы S, связанной с плоскостью, вверх перпендикулярно к ней, и
проектируя (8.72) на оси S, получим уравнения связи в виде
(см. D.19))
хт = R Fsin ф — *фsin 8 cos ф),
ут — — R F cos ф + -ф sin 6 sin ф),
где R — радиус шара. В -общем случае это, очевидно, неинтегри-
руемая (или неголономная) связь. Однако в частном случае плоско-
плоскопараллельного качения шара (ф=\|? = 0) эта связь становится
интегрируемой (т. е. голономной), так как при этом
или
*т = *то> Ут = УтО ~ Я @ — 60).
382 Динамика твердого тела ^ Гл. VIII
Пример 8.13. Движение конька по горизонтальной плоскости.
Пусть однородный тонкий стержень (конек) массы m движет-
движется так, что скорость его центра масс все время направлена вдоль
стержня. Найти закон движения стержня (конька) по горизонталь-
горизонтальной плоскости и ее реакцию.
Совместим координатную плоскость Оху с горизонтальной
плоскостью, по которой движется стержень. Тогда положение
стержня определится двумя координатами хт, ут его центра масс
и углом ф между стержнем и осью Ох. Кинетическая энергия
стержня в этих координатах равна
где Jf — центральный момент инерции относительно оси O'z.
Условие того, что скорость центра масс стержня в любой момент
времени направлена вдоль стержня, запишем в виде
Ут
хт
= tg<p. A)
Учитывая, что Si = 3, C=1, а все обобщенные силы Q равны
нулю, получим систему четырех уравнений (см. (8.71))
тхт = >csin ф,
тут= — исозф, B)
imsln<p— у,Л
с четырьмя неизвестными функциями времени:. хт, ут> Ф и х.
Из третьего уравнения системы B) найдем
Ф = Фо*-г Фо- C)
Из уравнения неголономной связи следует, что проекции скорости
центра масс стержня (конька) имеют вид
D)
а из первых двух уравнений системы B) и уравнения связи A)
вытекает, что ускорение центра масс ww перпендикулярно его ско-
скорости vw, в связи с чем величина а должна быть постоянной. Та-
Таким образом, используя начальные условия, найдем
хт = vm0 cos ф, 'ут= vm0 sin ф, E)
§ 8.5 . Линейные неголономные связи 383
где Отю — величина скорости центра масс в начальный момент вре-
времени, а угол ф определен формулой C).
Интегрируя E) по времени и определяя постоянные интегриро-
интегрирования, получим
Хт = -^ (SiB Ф — Slt1 Фо) + *тО>
фо
F)
Ут = -^- (C0S Фо - COS ф) + f/m0.
Фо
Отсюда следует, что центр масс стержня (конька) движется по
окружности
4 G)
радиуса (аотО/фо) с центром в точке
с т фо !/f !/mo
Фо Фо
причем движение по окружности происходит с постоянной по ве-
величине скоростью.
Наконец, дифференцируя E), получим выражения тхт и тутг
определяющие реакцию плоскости; величина этой реакции по-
постоянна и равна
# = /оттОФо. (8)
Глава IX
УРАВНЕНИЯ ГАМИЛЬТОНА
Как уже отмечалось, уравнения Лагранжа представляют собой
систему 5 дифференциальных уравнений второго порядка относи-
относительно 5 обобщенных координат q как функций времени. Этим
уравнениям можно сопоставить эквивалентную систему 25 уравне-
уравнений первого порядка, где в качестве неизвестных взяты 25 функ-
функций времени: s обобщенных координат q и s обобщенных импуль-
импульсов р. Переменные q, p называются каноническими, а соот-
соответствующая система 25 уравнений движения называется кано-
каноническими уравнениями Гамильтона.
Исследование свойств уравнений Гамильтона привело к фор-
формулировке ряда эффективных методов решения динамических
задач. Кроме того, оказалось, что известная равноправность обоб-
обобщенных импульсов и координат, имеющая место в уравнениях
Гамильтона, является таким свойством, которое можно использо-
использовать при построении статистической и квантовой механики.
§ 9.1. Канонические уравнения
Движение механической системы с голономными идеальными
связями, обобщенно-потенциальными и диссипативными заданны-
заданными силами подчинено уравнениям Лагранжа
dt
\-JJL -nd Г/-1 2
(cm. E.77)). Конкретный вид этих уравнений определяется лагран-
лагранжианом как функцией переменных q> q и t. Что касается уравне-
уравнений Гамильтона, то, как будет показано ниже, их конкретный вид
определяется обобщенной энергией Н как функцией переменных
q, p и t (см. E.91)). Эта функция, равная по определению
iwi-*}**»»- (9Л)
§ 9.1 Канонические уравнения 385
называется функцией Гамильтона (или гамильтониа-
гамильтонианом); здесь обобщенные скорости q как функции канонических
переменных определяются из системы уравнений
s
Pi= E°i*4k + <*i-Ut (/=1,2, ... ,s),
детерминант которой отличен от нуля — см. E.85), E.60).
Например, функция Гамильтона свободной точки в потенциаль-
потенциальном поле (в декартовых, цилиндрических и сферических коорди-
координатах) (см. формулы A) и D) примера 5.7)
+U(x, у, г), (9.2)
р2р + ~^~ + ч+и<-р>ф> 2)> (9-3)
2m
Подставляя в (9.1) функцию Лагранжа (см. E.65))
2 с
свободного заряда, движущегося в заданном электромагнитном
поле с потенциалами А и ф, и переходя к обобщенному импульсу,
равному
р = —— = ту -{- — А, (9.5)
dv с
получим гамильтониан такого заряда:
Ч*Ч-«Р. (9.6)
Функция Лагранжа свободной точки относительно произволь-
произвольной неинерциальной системы 5Г определяется кинетической энер-
энергией точки относительно 5^ обобщенным потенциалом сил инерции
E.100) и потенциалом сил взаимодействия U:
где г' и v/ — радиус-вектор и скорость точки относительно S';
w0' и со — ускорение начала системы S' и ее угловая скорость
относительно инерциальной системы 5. Определяя обобщенный
импульс
13 Зак. 284
386 Уравнения Гамильтона Гл. IX
v +[wrj) (9.7)
UV
и обобщенную энергию (см. E.92))
Н = -у- (v'J + m wo- r' j- [tor']2 + U,
находим функцию Гамильтона
Я = — (р' — т [tor']J -j- m wo' г' — [tor']2 + I/. (9.8)
Упрощая (9.8), окончательно получим
Н - Дг- (р'J + со [pV] -f- m wO'rr + U. (9.9)
Теперь выведем уравнения Гамильтона. С этой целью возьмем-
дифференциал от функции Н, один раз как от известной функ-
функции <7, р и t, а другой раз исходя из определения (9.1). Тогда
получим
— dpt H Л, (9.10)
(9.11)
Сопоставляя здесь отдельные члены и используя определение
обобщенного импульса (см. с. 237), найдем соотношения
On On О jj On О jO / • 1 о \
dpi dqt\ \dqi dt dt
(9.12)
Выражая далее с помощью уравнений движения E.77) каждую
производную через производную соответствующего обобщен-
обобщенного импульса pi по времени, получим систему уравнений
• dH • d Н . r\d
4> ft = ir
dpi dqt
=1.2 s). (9.13)
которые называются каноническими уравнениями Гамильтона.
Эти уравнения, как следует из вывода, эквивалентны уравне-
уравнениям Лагранжа E.77). Однако уравнения Гамильтона по сравне-
сравнению с уравнениями Лагранжа имеют более симметричную форму,
§ 9.1 Канонические уравнения 387
что в особенности видно из сопоставления этих уравнений в отсут-
отсутствие диссипативных сил:
А=°- (t = 1.2,...,s), (9.14)
dt \ qi qi
ql=™ pt = -JJL (f=i,2,...,s). (9.15)
dpi dqt
Приведем в качестве примера уравнения Гамильтона свободной
точки: в обычном потенциальном поле (в декартовых и цилиндри-
цилиндрических координатах, см. (9.2) и (9.3))
(9.16)
У -
дН
дрх
дН
дру
^дН
дрг
9-
Ф
Рх
т
Ру
т
Pz
т
pQ
т
РФ
тр2
Pz
Рх
Ру
•
Pz
рр
•
~> Рф
> Рг
дН
дх
дН
ду
дН
дг
Рф
тр3 •
dU
ду
[dU
dU
dp
>
dU
дх '
dU
ду
dU
дг '
(9.17)
в обобщенно-потенциальном поле (в декартовых координатах,
см. (9.6))
1
г = —
т
е
тс \ с j ду ду
(9Л8)
тс
Закон сохранения обобщенного импульса в канонических пере-
переменных формулируется аналогично E.83). Действительно, из
соотношений (9.12) видно, что частные производные Jz? и Я по
координатам обращаются в нуль только одновременно. Следова-
Следовательно, если какая-либо координата является циклической в отно-
13*
388 Уравнения Гамильтона Гл. IX
шении функции Лагранжа, то она будет циклической и в отноше-
отношении функции Гамильтона. Таким -образом, уравнения (9.13) при-
приводят к следующей форме закона сохранения обобщенного им-
импульса:
Р; = р/0, если JJL = о и Q? = 0. (9.19)
Частные производные от Я и ^ по времени обращаются в нуль
также одновременно. Эта «цикличность» времени приводит к со-
сохранению функции Я. Действительно, из уравнения E.90) и по-
последнего из соотношений (9.12) получим закон изменения функции
Гамильтона
из которого следует соответствующий закон сохранения
Н = Н0, если ^JL ^о и Q/ =0 (/= 1, 2, ... , s) (9.21)
dt
(в этом случае система называется обобщенно-консерва-
обобщенно-консервативной).
Пример 9.1. Функция Гамильтона и интегралы канонических
уравнений в задаче двух тел.
Функция Лагранжа двух материальных точек с потенциальной
энергией взаимодействия U может быть представлена в виде
где m — сумма масс обеих точек, ]х — их приведенная масса,
\т —скорость центра масс точек, u=|v2—vi| —модуль разности
скоростей точек, а г — расстояние между ними. Выбирая в качест-
качестве обобщенных импульсов проекции импульса encf емы Рт = ——
m
и обобщенные импульсы рГ, ре и рф, характеризующие движение
точек относительно центра масс, для функции Гамильтона полу-
получим выражение
it Pm , У_(г? , Ре 1 РФ \ • ]1(г\
2т 24u V г* ^ /«sin»в )
Отсюда видно, что проекции радиуса-вектора центра масс гт и
угол ф являются циклическими координатами. Это приводит к ин-
интегралам
Рт = ™т = Рт0, рф = \1 Г2 Sin2 0 • ф = рф0.
§ 9.2 Фазовое пространство и теорема Лнувилля 389
Первый из этих интегралов соответствует сохранению импульса
системы, а второй — сохранению кинетического момента относи-
относительной полярной оси, проходящей через центр масс. В силу про-
произвольности выбора оси ее можно направить вдоль вектора Го.
Тогда полярный угол 0о = О и, следовательно, /?фо = О. Рассматривая
общий случай, когда в последующие моменты времени угол 9
отличен от нуля, приходим к выводу, что ф = 0 в любой момент
времени, т. е. движение точки относительно центра масс, происхо-
происходит в плоскости, сохраняющей свою ориентацию. Функция Гамиль-
Гамильтона, описывающая движение системы в этой плоскости, будет
иметь вид
Эта функция не зависит явно от времени и координаты 9, что при-
приводит к двум интегралам
1 ' * ' "° ' U(r) = E0, ре = ,
Получая с помощью найденного гамильтониана канонические
уравнения
; = .?-, в = -?-
и используя приведенные выше интегралы движения, нетрудно
решение задачи двух тел привести к известным квадратурам
(см. C.18)).
§ 9.2. Фазовое пространство и теорема Лиувилля
Одним из важнейших положений, на которых основывается
статистическая механика, является теорема Лиувилля о сохране-
сохранении фазового объема. Эта теорема связана с понятием о фазовом
пространстве. Фазовым пространством называется вооб-
воображаемое пространство 2s измерений, по координатным осям кото-
которого «откладываются» обобщенные координаты q^ и импульсы pj
механической системы (/=1, 2,..., s; s — число степеней свобо-
свободы). Состояние механической системы в данный момент времени
изображается в фазовом пространстве одной фазовой точкой.
G течением времени эта точка движется по фазовой траек-
траектории.
Если заданы гамильтониан механической системы, диссипа-
тивные силы и начальные условия q^9 р$ (/= 1, 2,..., s), то с по-
помощью уравнений Гамильтона можно определить скорости изме-
изменения координат и импульсов в начальный момент времени U:
390
Уравнения Гамильтона
Гл. IX
дН
Р/0 =
дН
dqf
Яо, Ро.
(9.22)
(здесь, как и ранее, под q и р понимается совокупность всех
координат и импульсов). Через каждую точку фазового простран-
пространства проходит лишь одна фазовая траектория данной механиче-
механической системы (ввиду единственности решения уравнений Гамиль-
Гамильтона). Этим свойством не обладает, например, пространство
конфигураций, «точки» которого являются совокупностью
обобщенных координат q.
Рассмотрим бесконечную совокупность одинаковых механиче-
механических систем, отличающихся друг от друга только начальными
условиями [38, гл. 1]. Иначе говоря, рассмотрим бесконечное
множество точных копий данной реальной системы (для всех этих
систем задан одинаковый гамильтониан, одни и те же диссипатив-
ные силы, но начальные условия этих систем различны). Такая
виртуальная совокупность систем называется ансамблем
Г и б б с а. Пусть в произвольный момент времени h ансамбль
заполняет область (Го) фазового пространства, причем фазовый
объем этой области равен
= J
(Го)
(9.23)
В момент времени t = to+At ансамбль займет другую область (Г)
с фазовым объемом
Г= f ... f
(D J
Рис 9
времени, запишем
области (Го):
фазовый
(9.24)
(см. рис. 9.1, на котором изоб-
изображено перемещение некоторо-
некоторого ансамбля систем в двумер-
двумерном фазовом пространстве).
Найдем соотношение между
величинами Г и Го или закон из-
изменения фазового объема ан-
ансамбля Гиббса. Учитывая, что
действительное перемещение
каждой системы ансамбля под-
подчинено уравнениям движения,
а следовательно, переменные
q, p в момент t являются функ-
функциями этих же переменных,
взятых в начальный момент
объем Г в виде интеграла по
§ 9.2 Фазовое пространство н теорема Лиувилля 39|_
Г = f ... f D8q10 ... 8qs08p10 ... 6/?s0, (9.25)
(Г.)
где D = —&-&• якобиан преобразования от переменных #,
/? к значениям этих переменных q0, p0 в момент времени U, а функ-
функции
q ~ q (qOi pQt t), p = p (g0, p0, /)
являются решениями уравнений движения.
Из сопоставления (9.25) и (9.23) видно, что задача об отыска-
отыскании закона изменения Г сводится к отысканию закона изменения
якобиана D. В связи с этим найдем значение D и его производной
по времени в произвольно выбранный момент времени U, учиты-
учитывая, что значения координат и импульсов в момент времени
U+At соответственно равны
п. — п. -4- п. At р- = р- -*- р- At (i = 1 2 s) (9 26)
(Несмотря на то, что эти соотношения верны лишь с точностью
до первой степени малого приращения At включительно, прибли-
приближенность (9.26) не налагает каких-либо ограничений на оконча-
окончательный вывод, поскольку в процессе доказательства необходимо
перейти к пределу At-^Q). Используя (9.26), получим элементы
якобиана с той же точностью
dpjo
(9.27)
dq}0 dpj0
(I,/- 1,2, ...,
Подставляя (9.27) в выражение для якобиана D, находим точное
значение D(t0) и приближенное значение D{U + At)
^fe) (9.28)
(здесь члены порядка Д? появляются только за счет диагональ-
диагональных элементов якобиана). Отсюда, переходя к пределу, находим
производную якобиана при t = t0
392 Уравнения Гамильтона Гл. IX
Поскольку движение систем ансамбля подчинено уравнениям Га-
Гамильтона, постольку каждое слагаемое в правой части (9.29)
будет равно (см. (9.22))
= 1^ «=1,2,...,s). (9.30)
Op
Используя (9.30) и имея в виду произвольность U, получим
выражение для производной якобиана Д справедливое в любой
момент времени:
Следовательно, производная фазового объема Г равна (см. (9.25))
-69io...4o6pio...'SpsO. (9.32)
P
Отсюда вытекает з а к о н сохранения фазового объе-
объема (теорема Луивилля). Согласно этому закону фазовый
объем данного ансамбля механических систем с обобщенно-потен-
обобщенно-потенциальными силами и голономными идеальными связями в отсут-
отсутствие диссипативных сил сохраняется, т. е.
Г = Г0, если Q? = 0 (*=l,2,...,s). (9.33)
В этом случае D = 0 и, следовательно, величина якобиана в любой
момент времени равна (см. (9.28))
D=l. (9.34)
Соотношения (9.33) и (9.34) справедливы при любом числе
точек в системе и поэтому могут служить основой для изучения
систем с большим количеством частиц, т. е. систем, которые изу-
изучаются статистической механикой.
Пример 9.2. Сохранение фазового объема ансамбля систем
с одной степенью свободы.
Рассмотрим движение точки по линии пересечения неподвижной
сферы и колеблющейся горизонтальной плоскости (см. пример 5.3).
В этом случае лагранжиан, обобщенный импульс и функция Га-
Гамильтона соответственно равны
= maaq>eosaGrf,
§ 9.2
Фазовое пространство и теорем-а Лиувилля
393
2ma2 cos2 Ш
(в выражениях ^иЯ опущены члены, зависящие только от вре-
времени, поскольку они, как нетрудно видеть, не влияют на вид урав-
уравнений Лагранжа).
Отсюда получаем канонические уравнения
и их решение
та2 cos2 со/
Ф = ~~- tg о)/ + Фо,
Фазовое пространство в данном случае двумерно, а фазовыми
траекториями являются прямые, параллельные оси ф (рис. 9.2).
Изучим движение воображае-
воображаемой совокупности материальных
точек, отличающихся друг от
друга только начальными усло-
условиями рфои фо (в остальном точ-
точки, силы и связи тождественны).
Пусть в начальный момент вре-
времени фазовый объем этого ан-
ансамбля равен Го=Дф(гДр<ро (об-
(область (Го) ограничивают прямые,
соединяющие точки /—4). С те-
течением времени этот прямоуголь-
прямоугольник деформируется, но величина
его фазового объема (в данном
случае фазовой «площади») сохраняется, о чем свидетельствует
прямое вычисление якобиана:
Рис. 9.2
дер
эр*
1
0
та2 а
1
Что касается деформации «прямоугольника», то ее можно опре-
определить, рассматривая законы движения точек /—4 в фазовом
пространстве:
394 Уравнения Гамильтона Гл. IX
Фа = ~Щ^ *8 ^ -г Фо + дФо» (Рф>2 = РфО,
Ф° Ф° tg Ш + фО' (Рф)з = Рфо т
^ Ф° tg ^ + Фо "г
Тогда
Ф2—Ф1 = Афо = Ф4 — ФЗ>
8^ = Ф4 —Ф2.
и, следовательно, с течением времени «прямоугольник» деформи-
деформируется во все более косой «параллелограмм», «площадь» кото-
которого равна «площади» «прямоугольника».
§ 9.3. Скобки Пуассона
Движение механической системы с обобщенным потенциалом %
и голономными идеальными связями в отсутствие диссипативных
сил подчиняется уравнениям Гамильтона
дН • дН / • 1 г» \
я P (l 12s>
(см. (9.15)). Найдем необходимое и достаточное условие того,
чтобы некоторая функция f(q, /?, t) сохраняла постоянное значение
с течением времени:
f(q,p, t) -const, (9.35)
т. е. представляла собой первый интеграл уравнений (9.15).
Пусть (9.35) имеет место; тогда полная производная по вре-
времени от функции / равна нулю, т. е.
dt dt Zd\ dqj 4l^ dPj
Используя уравнения (9.15), получим интересующее нас необхо-
необходимое условие в виде
-|- + [ЛЯ] = 0, (9.36)
§9.3 Скобки Пуассона 395
где
\-^ — дн ]
? dqj dpj dpj dqj J*
Обратные рассуждения убеждают в достаточности условия (9.36).
Это условие записано с помощью дифференциального выраже-
выражения, обозначенного символом [i/, Я]. Вообще для двух функций
канонических переменных можно составить выражение
которое называется скобками Пуассона. Оно обладает свой-
свойством антисимметрии, так как
[/i,/i] = 0, [/1,/s] = -[/a,/J, (9.38)
и рядом других столь же очевидных свойств, вытекающих из опре-
определения (9.37):
[/i. (/2 + /з)] = Г/х, /2] + [/1. h], (9.39)
[/i, (/2, /,)] = Ifi, /2] /з + Ifi, /з] /2. (9.41)
Более громоздко доказательство тождества Пуассона*
[/i, [/2, /3]] + [/2, [/з, /1]] + [/з, [/1, /2]] = 0. (9.42)
С помощью этого тождества нетрудно доказать теорему
Пуассона, в которой утверждается: если функции fi(q, p, t)
и h{q, p, t) являются первыми интегралами канонических урав-
уравнений (9.15), то и [fu /2] также будет интегралом этих уравнений,
т. е.
* Из определения (9 37) нетрудно видеть, что левая часть (9.42) должна
представлять собой сумму членов вида: вторая производная от одной из функ-
функций fi, f2 или /з, умноженная на некоторый коэффициент. Поэтому, чтобы убе-
убедиться в справедливости тождества, достаточно показать, что левая часть
(9.42) не содержит ни одной второй производной. Ввиду симметрии тождест-
тождества относительно fi, f% и /з проверку можно сделать лишь для одной функции,
например для }з. Замечая, что вторые производные от /з могут входить лишь
в сумму
[М/../з]]+ [/.,[/»./Л.
непосредственно убедимся, что эти производные в данной сумме уничтожаются.
396 Уравнения Гамильтона Г>. IX
If» Ы = С (9.43)
Из условий теоремы и в силу (9.36) имеем
-^. + [fltH] = 0, -|t--f [/,,//]•=(). (9.44)
Составляя далее тождество Пуассона для функций fu [г и Я и
исключая из него с помощью (9.44) скобки [/4, Н] и [[г, #], полу-
получим тождество
которое согласно (9.38) и (9.40) сводится к условию (9.36) для
функции [fb f2]:
dUld)h] +llfi,NUH] = 0, (9.45)
что и доказывает теорему.
Пусть, например, функция Гамильтона явно от времени не
зависит, a f(q, p, t) является интегралом системы (9.15). Тогда
на основании условия (9.36) и теоремы Пуассона, примененной
к функциям / и Я, можно утверждать, что частные производные
df d2f
-^-, , .. . являются интегралами канонических уравнении, т. е.
ot dt2-
дГ 1У dPL2"" (У*4Ь)
Эти интегралы могут оказаться новыми интегралами, независи-
независимыми от исходного. Однако если / явно от времени не зависит, то
вместо (9.46) придем к тривиальному тождеству [f#]=0. Это
обстоятельство нужно иметь в виду, применяя теорему Пуас-
Пуассона *.
С помощью скобок Пуассона можно записать ряд соотноше-
соотношений, имеющих важные аналогии в квантовой механике. Например,
фундаментальные скобки Пуассона, т. е. скобки от
самих канонических переменных:
[<7„«/] = 0, [pltp,] = 0, [qit Pi] = 6„, (9.47)
двляются классическими аналогами перестановочных соотноше-
соотношений Гейзенберга [42, 43].
* Действительно, может случиться, что скобки Пуассона от функций f4 и
f2, являющихся интегралами уравнений (9.15), либо тождественно равны нулю
(постоянной), либо представляют собой функцию от fi и fz. В этих случаях
метод Пуассона не приводит к новым независимым интегралам.
Скобки Пуассона 397
Получим еще два легко проверяемых результата, имеющих
квашговомеханиче'ские аналоги. Используя определение момента
импульса одной точки, нетрудно показать, что между проекциями
момента импульса в декартовых координатах имеют место соот-
соотношения
[МХ,МУ]=М„ [Му,Мг] = Мх, [Mz,Mx] = My. (9.48)
Следовательно, две компоненты момента импульса не могут одно-
одновременно играть роль канонических переменных, так как канони-
канонические переменные должны удовлетворять фундаментальным
соотношениям (9.47) (этому утверждению, справедливому в
классической механике, соответствует квантовомеханическое ут-
утверждение о том, что две компоненты момента не могут быть
одновременно точно вычислены). Вместе с тем квадрат момента
и любая компонента момента могут одновременно играть роль
обобщенных импульсов (в квантовомеханической теории этому
соответствует возможность одновременного точного вычисления
М2 и Ма , а = л\ у, г). Действительно, используя тождества (9.39)
и (9.41), найдем
[Ма, М2] = ?[Ма, М%\ - 2 ?[Л*а, Мр] Л1р (а, р = х, уч г).
Отсюда, используя (9.48), получим для любой компоненты
[Ма,М2]-0 (a = x,yfz). (9.49)
Наконец, покажем, как с помощью скобок Пуассона формули-
формулируется одно из основных уравнений статистической механики.
Вероятность пребывания механической системы в элементарном
фазовом объеме 6Г определяется как отношение числа 8Jfo си-
систем ансамбля Гиббса, находящихся в 6Г, к постоянному числу J№
всех систем этого ансамбля, наверняка находящихся в некотором
фиксированном фазовом объеме АГ. Соответственно плотность ве-
вероятности 3) определяется как отношение вероятности к соответ-
соответствующему фазовому объему 6Г, т. е.
25 -ш <9-50>
(плотность вероятности является функцией 2s+1 переменных
9, Р и t).
Рассматривая bJ№ определенных систем, занимающих в-момен-
в-моменты времени \U и t фазовые объемы FГ)^ и FГ)* соответствен-
соответственно, получим очевидное равенство F*f*)f#= (bJf*)u которое,
согласно определению (9.50), можно записать в виде
= 25,F0,;
398 Уравнения Гамильтона Г л ./IX
здесь S)t0 — плотность вероятности пребывания системы в, мо-
момент времени /0 в фазовой точке, находящейся в объеме (рГ)*0,
a 2Dt — плотность вероятности в момент / в точке, находящейся
в объеме (8Г)г. Учитывая, что величины фазовых объемов (бГ)/в
и (Sr)t равны между собой (см. (9.33)), получим S5* = 25*в.
Таким образом, плотность вероятности оказывается интегралом
канонических уравнений и, следовательно, подчиняется уравнению
= 0 или — + [25, Я] = 0, (9.51)
dt dt
которое представляет собой одно из основных уравнений статисти-
статистической механики.
Закон (9.51) изменения плотности вероятности в фазовом про-
пространстве аналогичен уравнению непрерывности несжимаемой
жидкости. Действительно, плотность р жидкости, являющаяся
функцией положения г частицы жидкости и времени, для данной
частицы несжимаемой жидкости сохраняет постоянное значение;
поэтому ее полная производная по времени равна нулю:
где v = r — скорость частицы жидкости. Сравнение этого уравне-
уравнения непрерывности с уравнением (9.51) показывает, что можно
провести аналогию между плотностью вероятности и плотностью
жидкости, между 25-мерным градиентом плотности вероятности
д& д2) ,. t о ч
с компонентами » (i = 1, 2, ... , s) и градиентом VP плот-
dqt dpi
ности жидкости, между 25-мерной «скоростью» фазовой «частицы»
с компонентами q\, p% (t=l, 2,..., 5) и скоростью v частицы жид-
жидкости. Следовательно, движение ансамбля систем, подчиненных
уравнениям Гамильтона (9.15), можно представить себе как дви-
движение «несжимаемой фазовой жидкости».
Пример 9.3. Скобки Пуассона для проекций радиуса-вектора,
импульса и момента импульса точки.
Найти скобки Пуассона для проекций радиуса-вектора, им-
импульса, момента импульса точки и показать, что в центрально-сим-
центрально-симметричном поле соответствующие скобки Пуассона приводят к ин-
интегралам момента.
Выберем в качестве независимых координат свободной мате-
материальной точки ее декартовы координаты. Обобщенными импуль-
импульсами при этом будут проекции импульса точки рх, ру и рг. Состав-
Составляя скобки Пуассона для х и Mx = ypz—zpy, а затем для рх и Мх
и т. д., в случае произвольного потенциального внешнего поля
получим
§ 9^4 Уравнение Гамильтона — Якоби 399
[а:, Мх] = [у, Му] = [г, Mz] = 0,
[*, Ми] = 2, [f/, MJ = х, [г, Мх] = у,
[^» MJ = — г, [г, Му] = —х, [х, Mz] = —у\
[P^AlJ = [pp,Afy] = [ft,AlJ = O,
[p,v, Лу = р2, [ру, М2] = рх, [р2, Мх] = рр,
f/7^, Мл] = — р2, [р2, AfJ = - рх, [рх, Мг] = —ру
(эти результаты полезно сравнить с соответствующими квантово-
механическими соотношениями).
Если точка движется в центрально-симметричном поле, то,
вычисляя скобку
дМх дН дМх дН 1 дМх дН
\м //1 —
1
дх дрх дрх дх ду дру
дМх дН , дМх дН дМх дН
дру ду dz dpz dpz dz
где Я = -±- (р| + р\ + pi) +U(r) иг = (^Ч</Ч z2)'/2. найдем
т дг г у т
Последнее условие совпадает с условием (9.36), поскольку Мх
явно от времени не зависит. Следовательно, Мх является интегра-
интегралом движения канонических уравнений. Составляя скобку Пуас-
Пуассона [Му, Я], аналогично убедимся, что и Му = Муо. Что касается
проекции Mz, то она, как нетрудно подсчитать, равна скобке
[Мх, Му] и согласно теореме Пуассона также сохраняется.
§ 9.4. Уравнение Гамильтона — Якоби
Наряду с уравнениями движения Лагранжа и Гамильтона,
которые являются обыкновенными дифференциальными уравне-
уравнениями, существует уравнение в частных-.производных, описываю-
описывающее движение механической системы'в поле обобщенно-потен-
обобщенно-потенциальных сил при наличии голономных идеальных связей. Этому
уравнению, называемому уравнением Гамильтона —
Якоби, подчиняется функция действия
^ (9.52)
400 Уравнения Гамильтона Гц! IX
с помощью которой оказывается возможным находить решение
каноничеаких уравнений Гамильтона. Прежде чем убедиться в
этом, покажем, как по известному решению канонических уравне-
уравнений определяется функция действия, и, изучим ее основные свой-
свойства.
Пусть известны все независимые интегралы канонических урав-
уравнений (9.15) или их решение:
РоЛ>')> (9.53)
РоЛ>О- (9.54)
Дифференцируя (9.53) по времени, получим обобщенные скоро-
скорости в виде
Po>to, t). (9,55)
Подставляя (9.53) и (9.55) в (9.52), найдем действие S как
функцию начальных условий и времени:
S = S(qo,pQ,to,t). (9.56)
Можно найти действие как функцию координат и времени,
а также начального положения и начального момента времени.
Действительно, предполагая, что
det
(-Iй-) Ф °> (9.57)
и выражая начальные импульсы /?0 с помощью (9.53) через q, t>
<7о и U, получим
( *»<7оЛ)> (9-58)
а подставляя эти функции в (9.56), найдем
S = S(q,t,qo,to). (9.59)
Пользуясь (9.58) и (9.54), можно найти обобщенные импульсы
как функции координат и времени, начального положения и на-
начального момента to:
P = p(q,t,qo,Q. (9.60)
Покажем, что «поле импульсов», определяемое функциями
(9.60), потенциально, *а его потенциалом является функция дей-
действия (9.59). С этой целью найдем вариацию действия при фикси-
фиксированных моментах времени t и U (эту вариацию удобно сначала
записать в виде вариации от интеграла (9.52)):
= J 2 {JUL
t /1
at (9.61)
§ 9.4
Уравнение Гамильтона — Якоби
Используя коммутативность операций дифференцирования па
времени и варьирования при фиксированном времени, т. е. исполь-
используя равенства
8q}- = б —У- =.- 8qj (/ = 1, 2, .. . , s),
часть членов (9.61) можно будет представить в виде
t t
qi \ dt 4l) J dt
J qi )
to to
Тогда вместо (9.61) получим
dqj
\ dqj
s t
J
i=\ to
dqj
(9.62)
. (9.63)
t0
. (9.64)
Учитывая, что между измененными начальным и конечным поло-
положениями система движется по действительной траектории в соот-
соответствии с уравнениями движения (9.15) (или (9.14)), прирав-
приравняем нулю выражения в фигурных скобках и тем самым найдем,.
что
dqj
(9.65)
Переходя в (9.65) к каноническим импульсам р,-
чательно найдем
dqj
окон-
(9.66)
откуда следует, что
as
(9-67>
где S — S(q, t, q0, to). Таким образом, действие как функция на-
начального и конечного положений является потенциалом «поля
импульсов», а первая и вторая .группы функций (9.67) представ-
представляют собой решение канонических уравнений, записанное в виде
(9.60) и (9.58) соответственно.
Найдем функцию действия и определяемые ею импульсы для
твердого тела, вращающегося вокруг одной из главных осей
инерции. Лагранжиан такого т$ла равен кинетической энергии
402 Уравнения Гамильтона Гл. IX
—ср2, где ф — угол поворота тела вокруг оси вращения, а / —
соответствующий момент инерции. Очевидно, что здесь обобщен-
ный импульс рф, равный /ф, сохраняется, а решением уравнения
движения является функция
Используя это решение, получим действие в виде (9.56)
а затем в виде (9.59)
v / (Ф — ФоJ
2 i f *•
откуда следует, что
OS т Ф — фо dS j ф — фо
дф t — ^0 дфо t — ^о
Итак, зная решение канонических уравнений, можно найти
функцию действия и с ее помощью записать решение в форме
(9.67). Более интересной и практически важной задачей являет-
является отыскание функции действия в том случае, когда решение
канонических уравнений заранее не известно. Для выполнения
этой задачи следует прежде всего найти уравнение, которому
должна удовлетворять функция действия. Учитывая, что, с одной
стороны, согласно (9.52)
— =¦?, (9.68)
dt v ;
а, с другой стороны,
jH^il+yii.^ 0.69)
dt dt ' Li dqi Ч! К '
яайдем, что функция 5 как функция координат и времени подчи-
подчинена уравнению
s
~^ + ?р,<?/-^ = 0. (9.70)
/«1
§ 9.4 Уравнение Гамильтона — Якоби 403
Это уравнение с помощью определения (9.1) и первой группы
соотношений (9.67) можно представить в виде
dS , uln Л dS dS dS Л П /О 71V
— -\rH[q19q2,...,qs; —, —-, ... , —-; t\ = 0, (9.71)
dt \ dqx dq2 dqs )
(dS v
q, , t) — гамильтониан системы, куда вместо обобщен-
dq j
ных импульсов подставлены частные производные функции S па
соответствующим координатам. Полученное уравнение в частных
производных, которому удовлетворяет функция действия, назы-
называется уравнением Гамильтона — Якоби.
Рассмотрим полный интеграл уравнения Гамильтона —
Якоби, т. е. такое решение этого уравнения
...,qb,t; al9 ...,as), (9.72)
которое зависит от 5 произвольных постоянных а и удовлетво-
удовлетворяет условию *
-)ФО. (9.73)
det
Из определения (9.72) и (9.73) видно, что функция дейст-
действия (9.59) является полным интегралом уравнения Гамильтона —
Якоби. В самом деле, эта функция удовлетворяет уравнению
(9.71), а ввиду допущения (9.57) и соотношений (9.67) обладает
свойством
(поскольку к функции S всегда можно прибавить произвольную
постоянную, то некоторая комбинация из 5+1 постоянных q0 и
^о войдет'в S аддитивным образом). Так как функция действия
может быть определена по известному решению канонических
уравнений, то из вышесказанного следует, что с помощыО этого
решения можно найти полный интеграл уравнения Гамильтона —
Якоби.
Большое практическое значение имеет обратное утверждение,
основанное на теореме Якоби, которая дает возможность по
известному полному интегралу уравнения Гамильтона — Якоби
находить независимые интегралы канонических уравнений (9.15).
Согласно этой теореме, если некоторая функция S(#, t, а) являет-
является полным интегралом уравнения Гамильтона — Якоби, то реше-
* Поскольку уравнение (9.71) не содержит саму неизвестную функцию,
а только ее производные, (s+1)-h произвольная постоянная будет аддитивным
образом входить в полный интеграл.
404 Уравнения Гамильтона Гл. IX
ние канонических уравнений Гамильтона (9.15) определяется
соотношениями
*)р, = ¦??-, б) Р/ = "Р- (/=1.2 s), (9.75)
dqj дщ
где ее и р — произвольные постоянные. Соотношения (9.75, а)
определяют функции вида p=p(q, t, а), т. е. определяют обобщен-
обобщенные импульсы как функции координат и времени. Соотношения
(9.75, б) представляют собой вторые интегралы канонических
уравнений вида р = р(^, t, а). Разрешая эти интегралы относитель-
относительно q, найдем решение в виде q{t, ос, Р),?т. е. найдем коорди-
координаты системы как функции времени и 2s произвольных постоян-
постоянных.
Для доказательства теоремы Якоби нужно убедиться в том,
что решение (9.75) тождественно удовлетворяет каноническим
уравнениям Гамильтона (9.15). G этой целью будем исходить из
очевидного тождества
°> Н- Я U К «.*.*), Л = 0, (9.76)
\ dq j
dt q j
дифференцируя которое можно получить ряд новых тождеств. На-
Например, дифференцируя (9.76) по всем а, получим
=0 (/=1J)...;S), (9.77)
0 (/
dpi du:dqi
a вычисляя полную производную по времени от каждого из ин-
интегралов (9.75, б), найдем
dS(q9 tta) \ = d*S(gt t,a) л у • d*S fo, t, a) = Q
tta) \ =
dt { даi ) dtdaj ;
(/= 1,2, ... ,s). (9.78)
Системы (9.77) и (9.78) являются системами неоднородных
дн
линейных уравнении относительно величин -— и qt соответст-
opi
венно. Коэффициенты этих' систем одинаковы, а определители
равны и, согласно (9.73), отличны от нуля. Следовательно, корни
этих систем тождественно равны, т. е.
? = 1, 2, ... ,s), (9.79)
dpi
что означает тождественное удовлетворение первой группы кано-
канонических уравнений (9.15).
§ 9.4 Уравнение Гамильтона — Якоби 405
Дифференцируя тождество (9.76) по всем q и вычисляя полную
производную по времени от обеих частей всех равенств
(9.75, а), получим две системы уравнений:
&S(qtt,a) , дН'^ГУ.дН d*S(q, t,a) __ п /; i о «Л
dqjdt dqj ^J dpi dqjdqt
(9.80)
s
d*S(q, t,a) , \Л d*S(q, t,a)
y\ d*S(q, t,a) • (. 1 9 ,
^-* datddi
dt dtdqj ^ dqidqj
первую из которых с помощью (9.79) можно записать в виде
7=1,2,:... ,s). (9.81)
dqfit LA dqjdqc 4t dqj
Сравнивая между собой (9.80) и (9.81), убеждаемся в том, что
вторая группа уравнений (9.15) также тождественно удовлетво-
удовлетворяется:
4^ /= 1, 2 s). (9.82)
dqf
Таким образом, теорема доказана.
Основываясь на теореме Якоби, можно применять следующий
метод решения задач о движении механических систем с обоб-
обобщенно-потенциальными силами и голономными идеальными связя-
связями. Этот метод заключается в составлении уравнения Гамильто-
Гамильтона ¦— Якоби по известной функции Гамильтона и в отыскании
полного интеграла этого уравнения с последующим использова-
использованием соотношений (9.75).
Например, составим уравнения Гамильтона — Якоби для сво-
свободной точки в потенциальном поле в декартовых, цилиндриче-
цилиндрических и сферических координатах (см. (9.2) — (9.4)):
(9.84)
dS , 1 f / dS у ¦ 1 / dS \а , 1 / dS \2) , ,. . . v л
(9.85)
406 Уравнения Гамильтона Гл. IX
и рассмотрим решение уравнения Гамильтона — Якоби для сво-
свободной точки, движущейся относительно инерциальной системы
в отсутствие силовых полей. В этом простейшем случае все пере-
переменные в уравнении Гамильтона — Якоби
dt 2m \\ дх ) \ dy j \ dz
разделяются, а его полный интеграл имеет вид
S = — Eot + а±х 4- а2у + asz + а4.
Определяя с помощью подстановки этого выражения в уравне-
уравнение Гамильтона — Якоби связь между постоянными (число неза-
независимых неаддитивных постоянных должно равняться числу не-
независимых переменных), найдем полный интеграл
S = (с^ + а| + а1) t + агх + а2у + a3z + а4.
Отсюда на основании (9.75, а) убеждаемся, что все обобщенные
импульсы сохраняются:
— — — а — — ~а dS
х дх v у ду z dz 3>
as
а приравнивая производные произвольным постоянным р
С/СХ
(см. 9.75, б), находим вторые интегралы:
р1 = =• 1 -\- х,
даг т
о dS си j. I
Р2 = -г— = * + У у
да2 т
а<*з т
Наконец, используя начальные условия и переобозначая постоян-
постоянные, получим решение канонических уравнений
Г) Г) Г) Г) Г) Л
л — АЛкО» A^w — Pi/O» rz HzOi
т т
В заключение подчеркнем, что физические допущения, лежа-
лежащие в основе канонических уравнений (9.15) и уравнения Га-
§95 .Метод разделения переменных 407
мильтона — Якоби (9.71), одинаковы*. Однако преимуществом
уравнения Гамильтона — Якоби является то, что основной метод
решения этого уравнения — метод разделения переменных —
включает в себя как частный случай метод циклических коорди-
координат Лагранжа (см. § 9.5). Кроме того, при рассмотрении уравне-
уравнения Гамильтона — Якоби наиболее естественно вскрывается глубо-
глубокая аналогия между механикой точки и волновым процессом,
которая играет важную роль при. обсуждении волнового аспекта
квантовомеханических явлений.
§ 9.5. Метод разделения переменных
В ряде случаев гамильтониан системы обладает свойствами,
которые приводят к разделению переменных в уравнении Гамиль-
Гамильтона — Якоби.
Рассмотрим обобщенно-консервативную систему, гамильтониан
которой явно от времени не зависит (см. (9.21)), а уравнение Га-
Гамильтона — Якоби имеет вид
Этому уравнению удовлетворяет полный интеграл
W(q19 ... ,q8; av a2, ... ,as_btf0), (9.87)
линейно зависящий от времени; здесь роль s-той неаддитивной
постоянной играет постоянная обобщенной энергии Яо, а «уко-
«укороченное» действие W удовлетворяет уравнению
В последнем нетрудно убедиться, подставляя (9.87) в (9.86) и имея
в виду, что
Щ- = -Н» -?- = -?- (/=1,2,...,«). (9.89)
dt dq dq
Если полный интеграл уравнения (9.88) известен, то, применяя
теорему Якоби, можно получить решение канонических урав-
уравнений. Действительно, учитывая последние s равенств (9.89), а
также равенства
(/ = 1,2, ... ,s— 1), —— = — ' + -ПГ' (9-9°)
да i daf u дН* дН*
* О математической эквивалентности уравнения в частных производных и
системы уравнений с обыкновенными производными см. [45, гл. IX, § 6, п. 1].
408 Уравнения Гамильтона Гл. IX
согласно (9.75) найдем
a)P (/= 1,2 s),
б) ру= ^- (/=1,2, ...,5-1), (9.91)
в) р, = - **
+ .
Поскольку W явно от времени не зависит, то «поле импульсов»
(9.91, а) стационарно, s—1 интегралов (9.91, б) определяют сово-
совокупность «траекторий» системы в пространстве конфигураций, а
последний интеграл (9.91, в) определяет закон движения системы.
При наличии циклических координат также имеет место раз-
разделение переменных в уравнении Гамильтона — Якоби. В самом
деле, если 5—m независимых координат являются циклическими,
то уравнение (9.71) принимает вид
а его решение будет линейным относительно всех циклических
координат:
S = V(qv ... , qm; a19 ... , as; t) 4- ? aflh (9.93)
/=m+l
Подставляя (9.93) в (9.92) и учитывая, что
aS dV OS dV
— , — .7=1,2,..., m),
dt dt да, да: w '
dqj
(9.94)
(из последних 5—m равенств следует постоянство импульсов, соот-
соответствующих циклическим координатам), получим уравнение для
функции V:
dV dV
+ H[q19 ... ,qm; ——, ... , -
dt \ dq1 dqm
(9.95)
dV dV Л r\
dq dq )
Зная полный интеграл этого уравнения и используя теорему
Якоби, можно найти решение канонических уравнений.
Наконец, рассмотрим такой случай разделяющихся перемен-
переменных, когда функция Гамильтона имеет форму
§ 9.5 Метод разделения переменных 409
Н = H{qv ... , qm\ plt ... , рт\ fm+\ (<7m+i, Pm+\), • • • > fs(Qs> Ps)> t)>
(9.96)
где каждая из функций fj зависит только от соответствующей
одной пары канонических переменных q$, pj. Тогда решение урав-
уравнения Гамильтона — Якоби будет иметь вид
s
S = V(qlt ... ,д„; аъ . .. ,ai;t)+ ? W,(q,\ alt о,),
(9.97)
где Wj — аддитивная часть действия, зависящая только от коор-
координаты 9j и постоянных а. Подставляя (9.97) в уравнение Га-
Гамильтона— Якоби, соответствующее гамильтониану (9.96), и
используя очевидные равенства
as dV dS dV - /,. i тч
= = (/= 1, ... , m),
dt dt ' dqj dqf W ? 7
^-^^J. (/em+l,...,s)f (9.98)
найдем уравнение для функций V и Wj (/=m+1,..., s):
(9.99)
Если (9.97) является решением исходного уравнения, то урав-
уравнение (9.99) должно обращаться в тождество при любых значе-
значениях координат qm+u •••> Qs> Это возможно только в том случае,
когда все функции fj будут постоянными, так как при изменении
данной координаты qi изменяется лишь функция f*. Таким обра-
образом, уравнение (9.99) распадается на систему уравнений:
W , и Г dV dV A A
dt { dq± dqm ^ J
(9.100)
:al (/ = /Пт1 s), (9.101)
из которых s—m последних уравнений являются обыкновенными
дифференциальными уравнениями. Если полный интеграл V урав-
уравнения (9.100) и решения уравнений (9.101) могут быть найдены,
то, используя (9.98) и теорему Якоби, получим решение исход-
исходного уравнения в виде
410 Уравнения Гамильтона Г л IX
P (/=!m) Р ^Р (/ mls)
T (/!....,m),
P
(9.102)
Рассматриваемый случай разделяющихся переменных вклю-
включает в себя, в частности, случай циклических координат. Действи-
Действительно, если в (9.96) положить fj=Pj, то система (9.101) при-
примет вид
-^¦ = ау (/ = /nfl s) (9.103)
dq
и, таким образом, полный интеграл (9.97) совпадет с интегра-
интегралом (9.93).
Заметим, что в методе разделения переменных, как и в методе
циклических координат, очень большую роль играет выбор пере-
переменных. Например, в задаче двух тел полярные координаты
допускают разделение, а декартовы не допускают. Может также
случиться, что в одной и той же задаче несколько систем перемен-
переменных допускают разделение, а может случиться, что разделение
переменных вообще провести нельзя, как, например, в задаче
трех тел.
Пример 9.4. Движение заряда в поле электрического диполя.
Как известно [40, с. 49], потенциальная энергия заряда е в
поле неподвижного электрического диполя с моментом а равна
аг
Найти общее решение уравнения движения заряда [14, гл. III].
Гамильтониан заряда в сферических координатах с началом
в диполе и полярной осью, направленной по вектору а, имеет вид
(см. (9.4))
г2 г2 sin2 8 )
eacose
2т \ г2 г2 sin2 8 / г2
Поскольку полная энергия заряда сохраняется, то «укороченное»
действие W, зависящее от координат г, 0 и ер, подчиняется уравне-
уравнению (см. (9.88))
1 Г/ 0W у . 1 frdW у 1 / dW y\ ea cos 8 ¦ ?
2т ([ дг ) г* \ дЪ ) г2 sin2 8 \ дер ) J г2 0#
Замечая, что ф является циклической координатой, а г и 0 раз-
разделяются, полный интеграл последнего уравнения будем искать
в виде (см. (9.97))
§ 9.5 Метод разделения переменных 4П_
W = Wr(r, а19 а2, E0) + WQ(Q, аь а2, Я0)
В результате уравнение для «укороченного» действия распа-
распадается на обыкновенные дифференциальные уравнения
2теа cos Q = аи
r2mE0r a1, +
dr ) ° lf V « / sin»e
решения которых легко записать в квадратурах. Таким образом,
находим полный интеграл исходного уравнения
W =
2
0--^V/2d/-+ f faj ^
г2 / J V sin2 6
A)
с помощью которого нетрудно получить вторые интегралы (см.
(9.91))
r _ 1
Pi — г"
а2 \1/2
2 6
B)
C)
/ а2 \
sin2 0 di— ~- — 2теа cos 6
\ sin20 )
Первые два из этих интегралов определяют траекторию заря-
заряда, а третий легко берется и представляет собой закон движения
заряда:
Производя в C) замену констант
ах +2mEol\ JB- + -mg F)
и учитывая, что a2=p<po=Afzo, получим формулу D) примера 5.9.
Следовательно, проекция точки на сферу постоянного радиуса
(с центром в диполе) будет описывать траекторию, совпадающую
с траекторией подобранного соответствующим образом сфериче-
сферического маятника.
41 2 Уравнения Гамильтона Гл. IX
Первые интегралы Якоби (см. (9.91, а)) представляют србой
обобщенные импульсы заряда как функции координат:
. G)
М2
^ 2\\Q, (8)
Ар = М20 (9)
(здесь вместо постоянной а2 введена равная ей константа Л120 и
для определенности выбран заряд е<С0). Из соотношений G) и
(8) вытекают неравенства, определяющие области изменения
координат г и 9:
2т?0г2>а1э A0)
м* (И)
sin'2 6
а на основании интеграла (9) можно заключить, что при
заряд вращается вокруг полярной оси все время в одном направ-
направлении (знак ф совпадает со знаком фо); если же AfzO=O, то заряд
либо совершает плоское движение (ф = 0), либо движется вдоль
полярной оси @ = 0).
Рассмотрим различные частные случаи.
Пусть, например, ?^<0, тогда а4<0 (см. G)) и имеют место
неравенства (см. A0))
|Oll
п <-- #-2 <^ г2
2т\Е0\
т. е. траектория финитна. Если при этом Alzo=O, а бо^О, то из
A1) вытекает, что заряд будет двигаться в секторе меридиональ-
меридиональной плоскости с углом раствора 26таХ> где
2т\е\а
Если же Mzo^P, то траектория заряда будет расположена между
двумя конусами; соответственно 8 будет изменяться в пределах
@тт и 8тах определяются из уравнения (И)). В рассматривае-
рассматриваемом случае полной отрицательной энергии время движения за-
заряда от г = гтах до г = 0 равно I' (см. E)).
2 ?
§ 9.5 Метод разделения переменных 413
Пусть ?1о = О и ai = 0, тогда лз интеграла G) вытекает, что
рг = 0; следовательно, заряд движется по сфере конечного ра-
радиуса г=го (рг=тг=0). Если при этом М20 = 0, то из неравен-
неравенства A1) видно, что 0 изменяется от 0 до я/2, т. е. заряд описы-
описывает полукруг в некоторой меридиональной плоскости. Если же
МгпФО, то движение заряда будет аналогично соответствующему
движению сферического маятника.
Отметим специальный подбор начальных условий, при котором
заряд совершает равномерное движение по окружности, пер-
перпендикулярной полярной оси, что соответствует тому случаю дви-
движения сферического маятника, когда Ео= (f/eff)min (см. при-
пример 5.9). Используя связь констант F) и условие E) примера
5,9, найдем соотношение
cos в т\е\а
sin46
с другой стороны, согласно A0)
М2
20
¦ sin2e
Таким образом, получим
*= 2m\e\acosti.
cos2 0 = —, M2z0 = — т\е\а9
3 3/3
причем из последнего выражения нетрудно найти
т
Из этих результатов видно, что все круговые траектории лежат
на одном и том же конусе, раствор которого не зависит ни от
заряда и его массы, ни от момента диполя, а момент импульса
заряда относительно оси диполя не зависит от расстояния заряда
до диполя.
В случае EQ = 0, а oci<0 движение инфинитно и будет проис-
происходить между конусами, растворы которых определяются соотно-
соотношением A1), при этом г2 будет линейно зависеть от времени.
В случае ?0>0 движение инфинитно как при ai<0, так и при
ai>0, причем если ai>0, то
т. е. заряд не может упасть на диполь.
414 Уравнения Гамильтона Гл. IX
Пример 9.5. Обобщенно консервативная система с одной сте-
степенью свободы.
Рассмотрим задачу о точке, движущейся по гладкому вра-
вращающемуся стержню (см. пример 5.10), и ее решение методом
Гамильтона — Якоби.
По известной функции Лагранжа определим гамильтониан
точйи
4
2/я
{здесь pr=mr), а затем получим уравнение Гамильтона — Якоби
(см. (9.86))
as \_
dt 2m
Так как функция Я явно от времени не зависит и, следовательно,
обобщенная энергия сохраняется (Н=Н0), то полный интеграл
этого уравнения имеет вид (см. (9.87))
— —по1 + w (/, по)9
а «укороченное» действие W подчиняется ^уравнению (см. (9.88))
1 / dW \2 тсо2
2т \ dr
Достаточно привести решение этого обыкновенного дифферен-
циальното-уравнения в квадратуре
W = ± f BтЯ0 — 2m2gr cos Go + m2coV2 sin2 %fl2 dr,
чтобы, используя теорему Якоби в форме (9.91), получить импульс
рг как функцию положения точки:
р = J0L = ± BтЯ0 — 2m2grcos 60 + m2co2r2sin26oI/2,
и закон движения точки в форме
mdr
Bmtfо — 2m*gr cos 60 + m2co2r2 sin2 Q0)l/2%
Вид этого закона будет несколько различным в зависимости от
знака величины
2 со2 sin2 во
§ 9.6
Движение точки и волновой процесс
415
который в свою очередь зависит от соотношения постоянных #о
и (t/eff)max (см. пример 5.10 и рис. 5.9).
§ 9.6. Движение материальной точки и волновой процесс
В § 9.4 (см. 407) обращалось внимание на весьма интерес-
интересную аналогию, которую можно провести между механикой точки
и теорией волнового процесса. Проанализируем эту аналогию на
примере свободной материальной точки, движущейся в стацио-'
нарном потенциальном поле U(r)> и монохроматической волны,
распространяющейся в оптически неоднородной среде. Движение
точки подчиняется уравнению Гамильтона — Якоби
dt
2т
(9.104)
где S — функция г и t. Так как функция Гамильтона Я в рас-
рассматриваемом случае сохраняет постоянное значение, равное пол-
полной энергии Ео, то решение для S следует искать в виде (см,
(9.87))
S= —Eot + W(r). (9.105)
Подставляя (9.105) в (9.104), получим уравнение для «укорочен-
«укороченного» действия
(у№J = 2т [Ео - U (г)]. (9.106)
Заметим, что поверхности lF=const стационарны, поскольку W
не зависит явно от времени, а поверхности равного действия
^ const
(9.107)
движутся, причем в любой мо-
момент времени любая поверхность
равного действия 5 совпадает с
некоторой поверхностью «укоро-
«укороченного» действия. Например, по-
поверхность S = C в момент време-
времени t совпадает с поверхностью
W=d, если параметр семейства
этих поверхностей С4 равен С+
-j-Eot (рис. 9.3).Поверхность5 =
= С в момент t+dt будет совпа-
совпадать с другой поверхностью
S(t)-C
Рис-
Можно найти выражение для скорости и, с которой движется
поверхность равного действия. В данной точке поверхности S = C
416 Уравнения Гамильтона Гл. IX
эта скорость равна , где ds— расстояние, которое по-
dt
верхность проходит за время dt в направлении, перпендикуляр-
перпендикулярном к самой себе в рассматриваемой точке. Кроме того, измене-
изменение dW при передвижении поверхности S = C за время dt равно
Eodt. С другой стороны, как известно, dW=\yW\ds. Следователь-
Следовательно (см. также (9.106)),
и= Е° = Е° = -^-, (9.108)
где v — модуль скорости материальной точки (следует иметь в
виду, что скорость и определена лишь с точностью до произволь-
произвольной постоянной).
Одновременно с движением поверхности равного действия S
материальная точка движется по траектории, перпендикулярной
как к поверхности S, так и к поверхности W, поскольку импульс р
точки, согласно (9.89) и (9.91, а), равен
(9.109)
Вид траектории точки определяется уравнением (9.106), которое
с формальной точки зрения совпадает с известным в геометри-
геометрической оптике уравнением эйконала
, (v/)« =/г2 (г), (9.110)
где / — так называемый эйконал, п — показатель преломления,
равный отношению скорости света с в вакууме к скорости света
в данной среде, а г — радиус-вектор точки пространства.
Уравнение эйконала может быть получено из волнового урав-
уравнения
^^ 0, (9.111)
v с2 дР
где ф является любой из компонент напряженности электриче-
электрического или магнитного поля. Если считать п постоянным, то одним
из решений уравнения (9.111) будет функция
Ф = о^О*-®'), (9.112)
где а — постоянная амплитуда, со — заданная частота, а к — вол-
волновой вектор, направленный по лучу, т. е. по нормали к волновой
поверхности (по величине к = = , где л — длина волны).
X с
Если же п является медленно меняющейся функцией г, то реше-
решение уравнения (9.111) естественйо искать в виде
(9.113)
§ 9.6 Движение точки и волновой процесс 417
* 2л со f о
где #0 = = — — волновое число в вакууме, а / — эйконал.
Подставляя (9.113) в (9.111) и приравнивая действительную
и мнимую части полученного выражения нулю, придем к уравне-
уравнениям для амплитуды а и эйконала /
V2a + akl [n2 — (у/J] = 0, (9.114)
ау2/ + 2(уа)(у/)-0. (9.115)
Используя предположение о том, что изменением показателя
преломления п на расстояниях порядка длины волны можно пре-
пренебречь (это предположение эквивалентно тому, что длина волны
исчезающе мала по сравнению с линейным размером неоднород-
неоднородности среды), совершим в уравнении (9.114) предельный переход
ko=z *оо. Тогда получим основное уравнение геометриче-
ской оптики (9.110)*. В этом предельном случае поверхности
kol(r) — G>t = const (9.116)
являются поверхностями равной фазы и определяют фронт волны,
а световые лучи ортогональны к фронту волны и направлены по
волновому вектору к, равному
к = *7?Л~=в*оУ/> (9Л17)
поскольку из предыдущего ясно, что k=nkOi а я=|у Ч- Сопостав-
Сопоставляя (9.107) и (9.116), (9.109) и (9.117), (9.106) и (9.110), прихо-
приходим к аналогии между величинами:
p~k, 2m(E0—U)~n2. (9.118)
Итак, аналогом фронта волны является поверхность равного дей-
действия; роль эйконала играет «укороченное» действие W; волновой
вектор можно сопоставить импульсу точки; роль лучей играют
* При этом в (9.114) следует пренебречь первым членом, что приводит к
требованию V2a<Ca Dя2/ ^), характеризующему достаточно малое изменение
амплитуды на расстоянии порядка длины волны. Что касается уравнения
(9.115), то оно с точностью до постоянного множителя представляет собой
закон сохранения энергии, имеющий место при распространении рассматриваемой
волны. В этом нетрудно убедиться, записывая (9.115) в виде V(a2VO=0 и
учитывая, что поток энергии в волне направлен по вектору k~V/, а величина
этого потока пропорциональна а2.
14 Зак. 284
418
Уравнения Гамильтона
Гл. IX
траектории точки, а показатель преломления аналогичен вели-
величине [2m (?o— ?/)]1/2*.
В связи с указанной аналогией возникает вопрос о механи-
механическом уравнении, соответствующем волновому уравнению не
только в области коротких волн, айв области длинных волн,
т. е. вопрос, на который отвечает квантовая механика.
Пример 9.6. Движение точки в однородном поле тяжести и
распространение светового луча.
Точка массы m движется в
поле тяжести с напряженностью-
g. Найти показатель преломления
такой оптической среды, в кото-
которой луч света будет двигаться па
кривым, совпадающим с траекто-
траекторией материальной точки в поле
тяжести.
Совмещая плоскость Оху с
плоскостью движения точки и
- направляя оси Ох и Оу соответ-
соответственно по горизонтали и верти-
вертикали (рис. 9.4), найдем функцию Гамильтона точки
rj 1__
~" 2/л
Следовательно, решение уравнения Гамильтона — Якоби
dw
Рис. 9.4
дх
нужно искать в виде
Подставляя B) в A), найдем полный интеграл
з/2
а затем интересующий нас геометрический интеграл (см. (9.91,6))
* Для системы точек можно указать на ту же аналогию, однако она*
будет иметь место уже не в трехмерном пространстве, а в s-мерном пространст-
пространстве конфигураций.
$ 9.7 Интегральный инвариант Пуанкаре — Картана 4Ш
Отсюда, используя начальные условия, получим уравнение семей-
семейства траекторий точки (парабол)
а приравнивая W постоянной С, найдем уравнение семейства ор-
ортогональных к траекториям кривых (полукубических парабол)
3 (C-PxOx)VK D)
Полагая в C) и D) для простоты дго = О, ру0 = 0у придем к
функциям
У^Ух
графики которых изображены на рис. 9.4 (график кривой W=C
при различных значениях'С может быть получен сдвигом вдоль
оси Ох полукубической параболы, соответствующей, например,
значению С=6).
Подбирая показатель преломления оптической среды в соот-
соответствии с уравнением A) (см. (9.118));
— у),
придем к выводу, что луч света в такой среде будет двигаться
по параболе, а фронт волны последовательно совпадать с поверх-
поверхностями семейства полукубических парабол.
§ 9.7. Интегральный инвариант Пуанкаре — Картана
Как неоднократно отмечалось, важную роль в теоретической
механике играют общие теоремы о сохранении и инвариантности
различных величин. Большое значение имеет инвариант Пуан-
Пуанкаре — Картана.
Чтобы убедиться в существовании этого инварианта, восполь-
воспользуемся так называемой полной вариацией действия
S(q, t, qo, А)), когда варьируются не только начальное и конечное
положения системы, но и начальный и конечный моменты времени.
Используя определение
to
14*
420
Уравнения Гамильтона
Гл. IX
для полной вариации действия найдем выражение (ср. с (9.61))
6S = f ЬХМ + ХгЫг — ХъЬи, (9 Л19)
и
где J^i — значение функции *? в момент tu $о — значение ?б в
момент /о, а 8ti и б/о — вариации конечного и начального момен-
моментов времени. Повторяя вычисления, приведенные на с. 400—401, к
Р
О
Рис. 9.5
Рис. 9.6
учитывая, что между измененными положениями система движет-
движется по действительным траекториям в соответствии с уравнениями
Гамильтона или уравнениями Лагранжа (см. (9.15), (9.14)), вместо
(9.66) получим полную вариацию
0)
(9 Л 20)
здесь рл и pjo — импульсы в моменты времени t\ и ^о соответст-
соответственно, a 8qj(ti) и 6#j(to) являются вариациями функций qj(t) в мо-
моменты времени ti и ^о (еще раз подчеркнем, что эти вариации
связаны только с изменением вида функций qj(t) и в отличие от
полных вариаций берутся при фиксированном времени *)•
Найдем соотношения между вариациями функций 8qj(to)y
8qj(ti) и вариациями начального и конечного положений bq& и
б#ji, причем для простоты ограничимся случаем системы с одной
степенью свободы (см. рис. 9.5, на котором изображены две
«траектории» системы в пространстве q, t\ одна из этих «траекто-
«траекторий» проходит черев «точку» q0, tOt а вторая — через qo+6qo,
to+6U). Нетрудно видеть, что вариация начального положения
§ 9.7 Интегральный инвариант Пуанкаре — Картана <Ш
6<7о с точностью до бесконечно малых высшего порядка слагается
из вариации bq{t), взятой в момент времени tOi и члена
q(to)8to, т. е.
+ ^('о)в'о; (9-121)
аналогично вариация коцечного положения равна
+ f('i)Ui (9Л22)
(из выражений (9.121) и (9.122) следует, что полное варьирова-
варьирование, связанное с изменением как вида функции, так и ее аргумента,
не коммутативно с операцией дифференцирования по времени).
Наконец, используя определение функции Гамильтона (9.1),
а также соотношения (9.121) и (9.122) для каждой координа-
координаты qj, из (9.120) найдем полную вариацию действия
SS = V pn8qn - Н±Ыг - ? pj08ql0 -h Н0Ы0, (9.123)
где Hi и #о — значения гамильтониана Н в моменты времени h
и to соответственно.
Теперь введем понятие о «расширенном» фазовом
пространстве, по координатным осям которого «откладывают-
«откладываются» величины q, p, /, и выберем ансамбль механических систем
с начальными состояниями qo, р0 и /0, образующими в указанном
пространстве некоторый замкнутый контур Со; этот контур зададим
с помощью функций
<7/о = <7/о(«)» Р/о = Р/о(а)> U = to{a) (/ = 1 s; 0 <а < а0),
(9.124)
где значениям а = 0 и а = ао соответствует одна и та же «точка»
контура Со (см. рис. 9.6, выполненный для случая 5=1). Через
каждую «точку» контура Со проходит единственная действитель-
действительная «траектория» системы, а совокупность этих «траекторий»
образует «трубку». Каждой образующей этой трубки соответст-
соответствует определенное значение а (только одной образующей соответ-
соответствуют значения а = 0 и а = а0). Выберем на данной трубке замк-
замкнутый контур Ci так, чтобы каждая образующая трубки проходи-
проходила только через одну точку контура Ci; контур Ci также можно
задать с помощью функций
Яц = Чп («), Рп = Рц («), 'i = h (а)
(/-1, ... , s; 0<а<а0). (9.125)
Вычислим действие 5 на фазовой траектории, которая прохо-
проходит через соответствующие определенному значению парамет-
422 , Уравнения Гамильтона Гл. IX
ра а точки контуров Со и С±. Ввиду (9.124) и (9.125) это значение
действия зависит от параметра а:
Ш)
S(a)= |
Интегрируя полную вариацию функции S(a), найдем
j(a) = S(a0) —S@) = 0, (9.126)
поскольку 5(оьо) =5@). Используя (9.123), равенство (9.126) мож-
можно записать в виде
§ [? P,bq,-Hbt] = §[? Р,Ч—НЫ[ (9.127)
Ct /=1 С9 /==1
где в подынтегральные выражения подставлены функции (9.125) и
(9.124) соответственно, а контурными интегралами обозначены
интегралы по переменной а в пределах от 0 до а0.
Подчеркнем, что при выводе свойства (9.127) было использо-
использовано выражение вариации 6S, справедливое для систем, движе-
движение которых подчинено уравнениям (9.14) или (9.15). Поэтому
можно утверждать, что для механической системы с обобщенно-
потенциальными силами и голономными идеальными связями ве-
величина интеграла
j (9.128)
не зависит от выбора замкнутого контура, охватывающего дан-
данную трубку фазовых действительных траекторий в 2s + 1-мер-
1-мерном пространстве (q, р, t) (лишь бы каждая фазовая траектория
данной трубки проходила только через одну точку контура). Инте-
Интеграл (9.128) называется интегральным инвариантом
Пуанкаре — Картана (или основным интегральным
инвариантом механики) (см. [12], гл. I; [23], гл. III).
Справедливо и обратное утверждение: пусть движение систе-
системы подчиняется уравнениям вида
Ъ = Ф,(Й, pit), Pj^^iiq, p, 0 (/ = 1, ... , s) (9.129)
(в этом случае движение однозначно определяется по начальным
условиям), а интеграл Пуанкаре — Картана является инвариантом
относительно выбора замкнутого контура, охватывающего любую
данную трубку действительных фазовых траекторий в пространст-
§9.7 Интегральный инвариант Пуанкаре — Картана 423
ее (q, p, t); тогда уравнения (9.129) будут каноническими урав-
уравнениями Гамильтона с функцией Н, входящей в интеграл Пуан-
Пуанкаре — Картана.
С помощью дополнительного к системе (9.129) уравнения
-j- = ? (9Л30)
(здесь у — произвольная функция от q, put), введем вспомога-
вспомогательный параметр \х. Проинтегрировав систему уравнений (9.129)
и (9.130), найдем ее общее решение
t = i(li, qQ, Po, t0) (/=1,..., s). (9.131)
Выберем из этого общего решения только те частные решения,
которые соответствуют фазовым траекториям, проходящим через
точки данного (произвольно выбранного) контура Со. Задавая
контур Со уравнениями (9.124) и подставляя (9.124) в (9.131),
найдем уравнения действительных траекторий, проходящих через
точки контура Со:
<7/ = Я\ Сц, «), Pj = Pi (P> «), t
(/= 1, ... , s; 0<а<а0). (9.132)
Здесь определенному значению а соответствует определенная фа-
фазовая траектория (значениям а=0 и а=ао соответствует одна
траектория), а определенному значению \х соответствует опреде-
определенная точка каждой траектории и замкнутый контур, составлен-
составленный из таких точек.
Подставляя (9.132) в интеграл (9.128), запишем условие ин-
инвариантности этого интеграла в виде
dl = (J5 [?] dPj • 6<7у + J] р^Щ — dH- 8t — Hdbt} = 0, (9.133)
Co /=-1 /=1
где символом d обозначено бесконечно малое приращение, связан-
связанное с изменением jn, а символом б — приращение, связанное с из-
изменением а. Поскольку параметры \х и а независимы, то опера-
операции d и б коммутативны. Используя это свойство, из (9.133) по-
получим
J dprbqj + J] pjbdqj — dH.bt — Hbdt} = 0, (9.134)
/--1 /=1
424 Уравнения Гамильтона Гл. IX
Учитывая, что интеграл по замкнутому контуру Со является
интегралом по а в пределах от 0 до а0, а значения подынтеграль-
подынтегральной функции при а = 0 и а = ао совпадают, найдем, что
ф Hbdt + j) bHdt = ф б (Hdt) = Hdt |a° = 0, (9.135)
Со Со Со
и, следовательно,
1Я6Л = — §bHdt. (9.136)
Со
Аналогично получим
? yfy (? // (9.137)
У=1 Со У^1!
Подставляя (9.136) и (9.137) в (9.134), найдем
| \Y dpfrt - V ^убр; - йЯб/ 4 bHdt 1 - 0, (9.138)
а отсюда, используя вариацию 8Н, получим
С; 1
^ ^)/ = 0 (9.139)
(следует иметь в виду, что от а зависят все аргументы функ-
функции Я, см. (9.132)). Это условие инвариантности интеграла Пуан-
Пуанкаре— Картана с учетом (9.129) и (9.130) принимает форму
Со
(Jf^))°- <9Л40>
Ввиду произвольности функции у, т. е. произвольности конту-
контура, охватывающего данную трубку действительных траекторий,
подынтегральное выражение в (9.140) должно равняться нулю, а
ввиду произвольного выбора этих трубок (см. (9.132)) коэффи-
коэффициенты при всех 8<7j, 8pj и 6? также должны быть равны нулю, т. е.
§ 9.7 Интегральный инвариант Пуанкаре — Картана 425
1 dpf dq; dt dt
(9.141)
и, следовательно, уравнения (9.129) будут каноническими урав-
уравнениями Гамильтона.
Таким образом, инвариантность интеграла Пуанкаре — Крр-
тана является необходимым и достаточным условием того, чтобы
механическая система подчинялась каноническим уравнениям Га-
Гамильтона (9.15), т. е. была гамильтоновой системой.
Если в равенстве (9.127) интегрирование произвести по конту-
контурам Ctl и Ct все точки которых будут представлять состояния
системы в фиксированные моменты времени ti и to соответственно,
то вместо (9.127) получим
j/ (9Л42)
контуры Ctl и Ct, можно задать с помощью функций (9.125) и
(9.124) с фиксированными ti и /0.-Интеграл
?p/S<7/, (9.143)
взятый по контуру Ctf точки которого представляют собой различ-
различные состояния системы в один и тот же момент времени t, на-
называется интегралом Пуанкаре. Утверждение (9.142)
удобнее интерпретировать в 2s-MepHOM фазовом пространстве
(q, p), в котором «точки» данного контура Cto через интервал
времени t\ — ?о занимают соответствующее положение на конту-
контуре Ctl. На основании (9.142) можно утверждать, что для механи-
механической системы с. обобщенно-потенциальными силами и голоном-
ными идеальными связями значение интеграла Пуанкаре, взятого
по произвольному замкнутому контуру в пространстве (q, р)ф
с течением времени сохраняется.
Интеграл Пуанкаре является, как говорят, универсаль-
универсальным инвариантом, поскольку в вышеуказанном смысле он
сохраняет постоянное значение для любой гамильтоновой системы.
В заключение рассмотрим важную теорему об единст-
единственности интегрального инварианта Пуанкаре,
согласно которой любой универсальный интегральный инвариант
вида
Г = & Y [At (qr p, tNqt4- Bt (q, p, t) 6pJ
J *i
426 Уравнения Гамильтона Гл. IX
отличается от интеграла Пуанкаре лишь постоянным множите-
множителем*. Полагая для простоты 5=1, запишем условие сохранения /'
в виде
^^§ 0. (9.144)
Здесь в подынтегральное выражение вместо q и р следует под-
подставить решение канонических уравнений (9.15)
Ро> *)> Р = Р(Яо> Ро> 0» (9.145)
куда, в свою очередь, вместо начальных условий qo и р0 нужно
подставить функции, определяющие произвольный замкнутый
контур CtQ в момент времени ?о, т. е. функции
Йо = <7о (а)> Ро = Ро (а)> (9-146)
где параметр а изменяется в пределах О^а^ао, а его значениям
а = 0 и а = ао соответствует одна и та же точка контура С/о.
Заменяя порядок дифференцирования по времени и интегри-
интегрирования по а, а также порядок дифференцирования по t и а, из
(9.144) получим
j^ S? + Л 6 ^ + — 8р + В6 -*-1 == 0. (9.147)
dt Ч dt dt H dt \ v ;
Интегрируя здесь по частям второй и четвертый члены, найдем
^б^-бЛ^ + ^бр-бВ-^Л-О. (9.148)
dt ч dt г dt ^ dt \ к ;
Наконец, используя выражения полных производных и вариаций
от Л и В как функций q, p и /, получим условие сохранения Г
в виде
p+ ^f) &7 + (-Zq + ^ бр] = 0, (9.149)
где
Z= Ji-iL. (9.150)
dp dq Ч ;
Поскольку контур интегрирования в (9.149) произволен, то
подынтегральное выражение должно быть полным дифференциа-
дифференциалом относительно переменных q и р, т. е.
а / 7 • , дА \ д ( -• . дВ \
Zp -4 I = — Zq -\ .
dp \ H^ dt ) dq \ ч dt j
* Теорема об единственности всех универсальных инвариантов в прост-
пространстве (q, р) доказана в работе Hwa—Chung Lee, см. Proc. Roy. Soc, Edin-
bourgh, ser. A, v. LXII, 1947, p. 237—247.
§ 9.8
Канонические преобразования
427
Отсюда, используя уравнения Гамильтона (9.15), найдем
dZ дН
dp dq
dZ
dq
dH
dp
+
dZ
dt
= 0.
(9.151)
Это требование ввиду универсальности исходного инварианта
должно удовлетворяться при любом Я. Поэтому все частные
производные функции Z будут равны нулю, а сама функция бу-
будет равна постоянной: Z = c. Таким образом,
dA dB d(A — cp) dB
= с или —* — = .
dp dq dp dq
Из этого условия вытекает существование такой функции
Ф(<7, Р> t)> вариация которой равна
бф = (А — ср) 8q + BSp. (9.152)
Интегрируя обе части этого равенства по замкнутому контуру,
окончательно найдем, что исходный инвариант равен
I' = cllt (9.153)
где 1\ — инвариант Пуанкаре.
§ 9.8. Канонические преобразования
Каноническими преобразованиями называются
такие преобразования канонических переменных, которые не из-
изменяют общей формы уравнений
dH • dH
dpt
dqt
t=l, 2, ... ,
для любой гамильтоновой системы. Эти преобразования дают воз-
возможность свести задачу о движении системы с данным гамильто-
гамильтонианом к задаче о системе с более простым гамильтонианом, в
связи с чем метод канонических преобразований имеет большое
значение. Итак, преобразование
(9.154)
•-. , Qs> Pi» ••• i Рь> Ot
/ = <FVfai. ... э 9S, Pi, ... , Ps, t)
(/=!,..., s),
d (Qi, ... , Qs; сУЧ, . • ¦ . ^s
.-• . fl's; Pi» ... . Ps)
:0
называется каноническим, если оно преобразует уравнения Га-
Гамильтона с любой функцией Н
428 Уравнения Гамильтона Гл. IX
bi = -~, Р, = —т- (/-!.....«) .(9.155)
dpj dqj
также в канонические уравнения с другой, вообще говоря, функ-
функцией Гамильтона:
Найдем условие каноничности преобразования (9.154). Из оп-
определения канонических преобразований следует, что как в
«старых» переменных q, p, так и в «новых» переменных Q, &*
уравнения движения должны иметь каноническую форму. Следо-
Следовательно, и в «старых», и в «новых» переменных должны выпол-
выполняться условия инвариантности интеграла Пуанкаре — Картана
(9.127) "
§ B р&1 ~ т) = § [2 р№' -
С, /=1 Со 1=1
[2 ^/6Q/ ~ жы}= § 12 #*№ ~~ты \ (9Л57>
1 1
С, Г-=1 Со '-1
где согласно (9.154) контуры Ci и Со преобразуются в контуры
Ci и Со соответственно. Пользуясь произвольностью контура Со,
составим его из фазовых точек расширенного пространства
(<7, р, t), соответствующих «одновременному достоянию» t=\to.
Тогда контур Со будет состоять из «точек» пространства (Q, ^, t),
для которых также t = to, поскольку канонические преобразования
не преобразуют время t. При таком выборе контура Со вместо
(9.157) получим
си i
(9.158)
Учитывая, что интеграл^ V^^SQ,, преобразованный к
«старым» переменным, согласно теореме об единственности интег-
интегрального инварианта Пуанкаре (см. (9.153)), равен
6 У &№l Lp.o = с & У Pjbqh (9.159)
§98 Канонические преобразования 429^
из (9.158) найдем
[ ,-Hbt]} = О, ;(9Л60)
где «новые» переменные должны быть выражены через «старые»
с помощью (9.154). Ввиду произвольности контура С\ подынтег-
подынтегральное выражение в (9.160) будет полным дифференциалом —
бФ некоторой функции 25+1 переменных q, p и t, т. е.
B &fiQi — fflbt\ — c{J? Pj8qj~H8t) - -бФ. (9.161)
Подчеркнем, что исходные равенства (9.157) являются •необ-
•необходимыми и достаточными условиями того, чтобы уравнения дви-
движения в переменных q, p и переменных Q, §Р> были канонически-
каноническими. Следовательно, тождественное удовлетворение равенства
(9.161) данным преобразованием (9.154) при некоторой функции
ф и постоянной с является необходимым и достаточным условием
каноничности этого преобразования. Иначе говоря, если дано
каноническое (преобразование, то оно обращает (9.161) в тожде-
тождество при некоторой функции Ф и постоянной с\ и, обратно, если
дана произвольная функция Ф и постоянная q, то преобразование
вида (9.154), обращающее (9.161) в тождество, является канони-
каноническим.
В связи с отмеченной ролью функция Ф называется произ-
производящей функцией. Эта функция является функцией
2s+l независимых переменных, в число которых входит время t
и 2s координат и импульсов, причем о.ни могут быть выбраны
произвольно из 4s «старых» и «новых» координат и импульсов,
связанных между собой соотношениями (9.154). Например, при
выводе условия (9.161) функция Ф считалась функцией q, p и t.
Допуская, что
Ш <9Л62>
и выражая с помощью (9.154) «старые» импульсы через «старые»
и «новые» координаты
Pi = Pi(q, Q, 0 (/=1,... , s), (9.163)
представим производящую функцию в виде
Ф(<7> Р(<7, Q, t), *) = <Di(<7, Q> О- (9Л64)
430 Уравнения Гамильтона Гл. IX
Рассмотрим наиболее распространенный случай канониче-
канонических преобразований, когда с=1, а в качестве аргументов произ-
производящей функции взят один из следующих наборов переменных*:
<7, Q; <7, &\ Р, Q: Р, ^. (9Л65>
Если аргументами являются «старые» и «новые»-координаты, то,
записывая основное тождество (9.161) в виде
S<X>i fo, Q, 0 = ? P,S<7/ - ? «P/6Q, -(Н-Ж) 6t, (9.166)
получим формулы, определяющие каноническое преобразование:
р == __^ ^ е7 у == —— (] = 1, . . . , Sj, (^
а также соотношение между «новой» и «старой» функциями
Гамильтона
Ж^Н + -^-. (9.168)
dt
Действительно, записывая (9.167) в виде (см. (9.164))
Pj = Pj(q, Q> t), f>, = &,(q,Q9 t) (/ = 1, ... , s) (9.169)
и выражая с помощью s первых соотношений «новые» координа-
координаты Q через q и р, в результате подстановки Q(q, p, t) в функции
&*(Я> Q» t) получим, -все формулы канонического преобразования
(9.154). При этом следует иметь в виду, что определение Q как
функций 9» P и t возможно лишь при отличном от нуля якобиане
с элементами
LJ^^ (*,/=!,...,*). (9.170)
V J } K f
Если в качестве аргументов производящей функции выбрать
вторую группу переменных из (9.165), то вместо Фх следует взять
производящую функцию
?А (9.171)
(преобразование от q, Q к q, <&* является преобразованием Ле-
жандра). Тогда условие каноничности (9.166) перейдет в условие
6Ф2(9, #,0 = 2 PMi + ? QfiFj - (Н-Ж) Ы, (9.172)
/ /i
* Подробное изложение теории произвольных канонических преобразова-
преобразований см. в [23, гл. IV].
9.
Канонические преобразования
.а формулы, определяющие каноническое преобразование, и соот-
соотношение между функциями Гамильтона Ж и Я примут вид
^; (9.174)
при этом функция Ф2(<7><^> t) должна удовлетворять требованию:
якобиан с элементами
д2ф =JQL (г, /= 1 ,s) (9.175)
dqf V ' ' V '
должен отличаться от нуля.
Переход к третьей группе переменных (см. (9.165)), выпол-
выполняемый с помощью функции
Ф3(Р> Q, 0 =Фх-?><?/, (9Л76)
приводит к основному тождеству
6Ф3(Р, Q, 0 = -? 0M-?<P/8Q/-(tf-#)«, (9Л77)
а также к формулам канонического преобразования
и соотношению для функций Гамильтона
5? = Я-Ь-^_; (9.179)
при этом якобиан с элементами
должен отличаться от нуля. Заметим, что формулы канонического
преобразования в переменных q, §* и Q, р по существу эквива-
эквивалентны, так как наименования «старые» координаты ,и «новые»
импульсы или «новые» координаты и «старые» импульсы относи-
относительны.
Наконец, используя производящую функцию
Ф4 (Р. &, 0 = Фх - 2 РУ<7/ 4 ? ^Q/, (9.181 >
432
Уравнения Гамильтона
Гл. IX
получим основное тождество, формулы преобразования и соотно-
соотношение для функций Гамильтона в <виде
(Р, *>, 0 = -
-(Н-Ж) Ы\ (9.182)
пр^ условии неравенства нулю якобиана с элементами
dpj .
(9.183)
(9.184)
(9.185)
Теперь убедимся, что якобиан канонического преобразования
равен единице. В самом деле, используя известное свойство яко-
якобианов, его можно записать, например, в виде такой дроби:
д(д,р) .
здесь числитель и знаменатель соответственно равны
д (q, с?3)
dQi
dqi
dQs
dqx •
dqx
d<Ps
dqi '
dQi
" dqs
dQs
dqs
dqs
dS»s
dqs
jo...
0...
I ...
0...
0
0
0
I
7, p)
9 (q,
I ...0
0... I
0...0
0...0
dqs dqs
dps
dps
d(p)
(9.186)
(9.187)
(9.188)
§ 9.8 Канонические преобразования 43$
Отсюда, учитывая, что согласно (9.175) последние два якобиана
равны между собой, получим (ср. с. (9.34)) *
*> -1. (9.189>
)
В качестве примера простейшего канонического преобразо-
преобразования приведем тождественное преобразование
p, = Pr Qj^q, (/«1.....S), (9.190)
определяемое производящей функцией (см. (9.173))
(919Л>
Пример 9.7, Простейшие канонические преобразования.
1. Производящая функция
определяет (см. (9.167)) преобразование
которое по существу эквивалентно переобозначению импульсов
координат.
2. Функция
определяет (см. (9.173)) преобразование инверсии в фа
зовом пространстве
3. Линейное преобразование переменных q, p
Q = aq + pp,
&> = yq + vp
для системы с одной степенью свободы будет каноническим, если
постоянные а, р, у и v удовлетворяют условию (см. (9.189))
av — Py = 1 •
* Аналогично, используя (9.170), (9.180) или (9.185), придем к такому же
результату.
434 Уравнения Гамильтона Гл. IX
Пользуясь условием каноничности (9.166) в виде
8Ф = p8q —
найдем производящую функцию рассматриваемого преобразова-
преобразования. Подставляя сюда исходные функции <и учитывая, что якобиан
преобразования равен единице, получим
6Ф= —
откуда
Ф = — &VPQ аул2 Bvp2 (av — 6v = 1).
Если a=v, a p =—7, то преобразование, условие его каноничнос-
каноничности и производящая функция принимают вид
Q = ш? + Рр,
(например, преобразование этого типа используется при анализе
явления сверхпроводимости металлов).
Пример 9.8. Точечные преобразования.
1. Согласно формулам канонических преобразований «новые»
координаты, вообще говоря, зависят как от «старых» координат,
определяющих положение системы, так и от «старых» импуль-
импульсов. Поэтому с помощью «новых» координат нельзя задать поло-
положения системы, и только совокупность всех «новых» переменных
Q и сР определяет цоложения и скорости точек механической си-
системы. Однако в частном случае канонических преобразований с
производящей функцией
A)
(здесь <pj — произвольные независимые функции) «новые» коорди-
координаты будут определять положение системы. Действительно, ис-
используя A) и (9.173), получим точечные преобразования
Qi = %(q,t) (/=l,...,s), B)
(см. E.97)).
§ 9.8 Канонические преобразования 435
2. Если производящая функция .имеет вид
s
где ф,- = ^Г a\fiP а постоянные коэффициенты ац удовлетворяют
условию ортогональности
то, используя формулы (9.173), найдем
Pi = J>A/^V = J>**V. (О
tf/ (* = i s). B)
Умножая каждое из s уравнений A) на аци суммируя резуль-
результаты по /, получим
Li г
Следовательно, рассматриваемое каноническое преобразование
представляет собой совокупность точечного ортогонального пре-
преобразования B) и ортогонального преобразования обобщенных
импульсов
4/P/ (* = 1 S). C)
3. Преобразование от декартовых координат точки к ее ци-
цилиндрическим координатам можно осуществить с помощью про-
производящей функции
которая также приводит к точечным преобразованиям. Поло-
Положим, что «старые» координаты qu q2 и qs соответственно равны
декартовым координатам точки х, у и z> а. «новые» координаты
Qi, Q2, $з соответственно равны цилиндрическим координатам
точки р/ф, z. Тогда, используя функцию
Ф3 = — pj) cos ф — рур sln<p — pz-z
436 Уравнения Гамильтона Гл. IX
« (9.178), найдем формулы преобразования координат и обобщен-
обобщенных импульсов
X = = p COS ф, рр = = р COS ф -f Рц S1H ф,
р. A)
Замечая, что производящая функция Ф3 явно от времени не за-
«висит, и преобразуя с помощью формул (I) «старый» гамиль-
гамильтониан
к новым переменным, получим
Используя производящую функцию
Ф2 = РУрЧ7^ + ^e arctg (-?-
.перейдем от цилиндрическ-их координат к сферическим координа-
координатам г, 6, ф. Тогда согласно (9.173) найдем
6 = arctg -Н-, B)
а, учитывая (9.174) и преобразование B), вместо «старого» га-
гамильтониана получим гамильтониан в сферических переменных
2т
Пример 9.9. Неизотропный пространственный осциллятор.
Пусть на точку действует сила, проекции которой на декар-
декартовы оси равны
Fx = — пхх9 Fg = — щу, F2 = — х3г.
§ 9.8 Канонические преобразования 437
Найти общее решение уравнения движения точки методом кано-
канонических преобразований.
Запишем гамильтониан рассматриваемого осциллятора в де-
декартовых координатах:
Я = ^г(р? + р^ + р2) + -^(х1^ + х2у2+^3г2) A)
и совершим каноническое преобразование к «новым» перемен-
переменным Q, сР с помощью функции
B)
где ki — постоянные, которые соответствующим образом подберем
ниже, a q\=xy <72=У, 9з=2. Каноническое преобразование будет
определяться формулами (9.167)
р, = 2АЛ ctg Qg, g>t^ -М- (i = 1, 2, 3) C)
(здесь символами рь р2, рз обозначены проекции импульса рх,
Ру> Pz соответственно).
Записывая C) в виде
= 1 / — sin Q,, p, == 2 К M% cos Q, D)
и подставляя D) в A), найдем гамильтониан осциллятора в «но-
«новых» переменных
з
% = ? (-^-cos2 Q, + -^-sta'Q,) ^. E)
Полагая здесь 2kt = Vx^m, сведем E) к функции
о
которая не зависит от координат Q. Составляя уравнения Га-
Гамильтона в «новых» переменных (см. (9.156)), получим
<2, = а>|э &( = 0 D=1,2,3), G)
откуда найдем решение
Q, = c^ + Qi0, &<=&«> (i= 1,2,3). (8)
438 Уравнения Гамильтона Гл. IX
Решение в «старых» (декартовых) переменных
0* = 1/ —— s& (®it + Q,o),
У тщ (i^ 1,2,3) (9)
со^1о cos (co^ + Q.o)
можно получить, используя D) и (8).
§ 9.9. Переменные «действие—угол» и адиабатические
инварианты
При исследовании систем, совершающих движения, близкие
к периодическим, большую роль играет метод канонических пре-
преобразований, с помощью которого можно получить частоты, ха-
характеризующие это движение, не отыскивая самого закона дви-
движения системы.
Пусть механическая система является обобщенно-консерва-
обобщенно-консервативной, а хотя бы один набор канонических переменных разде-
разделяется, причем либо каждая из соответствующих переменных
qiy pi является периодической функцией времени с одинаковым
периодом, либо каждый импульс рг является периодической функ-
функцией координаты qh в то время как сама координата не является
периодической функцией времени. Движение первого типа обыч-
обычно называется либрацией, а второго типа — вращением.
Примером либрации могут служить колебания неизотропного
осциллятора (см. пример 9.9), а примером вращения — движе-
движение математического маятника при достаточно большом значении
начальной энергии. В самом деле, получая из интеграла энергии
маятника обобщенный импульс
ре = /2т/2 (Ео 4- mgl cos 6)
как функцию угла 8 отклонения маятника от вертикали, убедим-
убедимся, что при E0>mgl (когда осуществляется вращение маятника)
импульс р изменяется периодически, в то время как 8 неограни-
неограниченно растет.
Решение уравнения Гамильтона — Якоби
для рассматриваемых систем имеет вид (см. (9.88), (9.96), (9.97))
?i ?,;а, а.) -= ? W, (qr, olt ... , <zg). (9.193)
§ 9.9 Переменные «действие — угол» 439
Подставляя (9.193) в (9.192), сведем решение задачи к решению
системы обыкновенных дифференциальных уравнений (см.
(9.101))
ЦЧ1^\=Щ (i=l,...,s); (9.194)
Отсюда определяются функции Wiiqv, cti, ..., as), где постоянные
а связаны соотношением
f ...,ae) = #0. (9.195)
Разрешая систему (9.194) относительно производных d
найдем каждый импульс pi как функцию координаты qc
р(= ^(ft-.cn, ...,а5) (l.= 1>##t>s) (9.196)
dqt
(по условию эти функции являются периодическими функциями
соответствующих координат).
Идея излагаемого метода решения поставленной задачи за-
заключается в применении канонического преобразования от пере-
переменных q, p к таким переменным, где роль новых импульсов
играют специальным образом выбранные постоянные, являющие-
являющиеся функциями постоянных а, а «новый» гамильтониан зависит
только от «новых» импульсов. В качестве таких импульсов вво-
вводятся величины, равные
/i=-^-$M0i (t = 1, .. . ,s), (9.197)
где интегралы берутся по полным периодам изменения импульсов
pi как функций соответствующих координат qi. Эти величины
называются «переменными действия» и являются неза-
независимыми функциями постоянных а: .
Ii = It(a19 ... ,ая) A= 1, ... ,5), (9.198
что следует из независимости функций (9.196). Если обе соответ-
соответствующие переменные pi и qi являются периодическими функ-
функциями времени с одинаковым периодом, переменная действия U
равна «площади» фигуры, ограниченной проекцией фазовой тра-
траектории на плоскость рг-, qi (эта проекция будет замкнутой
кривой). Если же функция pi(qi) периодическая, а qi неограничен-
неограниченно возрастает, то /^ равна «площади» фигуры, ограниченной кри-
кривой pi{qi), осью qi и двумя ординатами, соответствующими пол-
полному периоду этой функции (см. рис. 9.7 и рис. 9.8, на которых
изображены проекции фазовых траекторий неизотропного осцил-
осциллятора на плоскость (рх, х) и математического маятника в случае
вращения на плоскость (ре, Э) соответственно).
440
Уравнения Гамильтона
Гл. IX
Разрешая систему (9.198) относительно а, получим
ai = <M/i. ¦-../.) (t = b...,«), (9.199)
а подставляя эти функции в полный интеграл (9.193), найдем W
как функцию «старых» координат и' «новых» импульсов — пере-
переменных действия:
...fq>; I19...,IS). (9.200)
Рис. 9.7
Рис 9.8
Используя это «укороченное» действие в качестве производящей
функции указанного выше канонического преобразования, найдем
(см. (9.173))
Pi > Ф* [ , ,)9 \
dqi dli
где величины фг являются «новыми» координатами и называются
угловыми переменными. Принимая во внимание, что W
явно от времени не зависит, в результате подстановки функций
(9.199) б функцию Гамильтона (см. (9.195)) найдем
5? = S8T(/i /,). (9.202)
Поскольку гамильтониан в переменных «действие — угол» зависит
лишь от импульсов, канонические уравнения в новых переменных
примут вид
Ф = а#@, /; = _J^. = o (t=i,...,s), (9.203)
откуда следует, что угловые переменные являются
функциями времени:
дЖ
(i== Ь 2, ... ,
линейными
(9.204)
Угловые переменные обладают еще одним важным своист-
дЖ
вом, заключающимся в том, что величина —— является часто*
Oil
§ 9.9 Переменные «действие — угол» 44]_
той изменения импульса pi. Чтобы убедиться в этом, найдем при-
приращение Афг за полный период изменения функции pj(qj) при ус-
условии постоянства всех координат, кроме #/, т. е. найдем
2f-% (9.205)
Представляя это приращение в виде (см. (9.201))
-dq, (9.206)
и учитывая, что переменной интегрирования является координа-
координата gj, получим
Отсюда (см. (9.201) и (9.197)) следует, что приращение угловой
переменной равно
дф =2л^- = Bя' !=*' (9.207)
^ Sit 10, \Ф1. '
С другой стороны, согласно (9.204) имеем
Дф1 = -§7-Т|> (9.208)
где Ti — полный период изменения- импульса pi. Сопоставление
(9.207) и (9.208) показывает, что частота со* изменения импуль-
импульса pi действительно равна .
аи
Итак, для вычисления частот со* нужно определить функции
затем найти переменные действия как функции а (см. (9.198)),
определить гамильтониан как функцию переменных действия и,
наконец, с помощью уравнений (9.203) найти
"-)/s) (i = 1, ... ,s). (9.209)
li
Проиллюстрируем изложенный метод на примере неизотроп-
ного осциллятора, для которого уравнение Гамильтона — Якоби в
декартовых координатах имеет вид (>см. формулу A) примера
9.9)
\ дх ) \ ду ) \ дг )
442 Сравнения Гамильтона Гл. IX
Это уравнение согласно (9.192) — (9.194) сводится к трем уравне-
уравнениям
р» + т^х2 = alt р2у + тщу2 = а2, p2z + тк3г2 = а3,
dWx dW2 dW3
где рх = —-, ри = ——, р2 = —-, а постоянные а связаны с пос-
dx y dy dz
тоянной #0 соотношением (см. (9.195))
«1 + <х2 +'<х3 = 2тЯ0.
Переменная действия 1Х осциллятора будет равна
поскольку рх совершает полный цикл изменения при изменении х
от —а до +а и обратно до —а (величину 1Х можно подсчитать
как площадь эллипса, по которому движется проекция фазовой
точки на плоскость (рх, х)—сж. рис. 9.7). Аналогично вычис-
вычисляются переменные действия 1У и Iz:
2 ¦/mxi" '
Принимая во внимание (9.195) и (9.199), получим гамильтони-
гамильтониан в переменных действия (сравнить с формулой F) примера 9.9)
откуда согласно (9.209) найдем частоты неизотропного осцилля-
осциллятора
V т у
COv=-^-=l/ -^ CD,,= -^- = 1/ -^-, 0,=
1/ » (О- I /
dig \ т z dl2 У т
Если эти частоты несоизмеримы, то траектория точки будет
незамкнутой и, следовательно, точка никогда не займет повторно
того положения, которое она уже занимала, хотя через достаточ-
достаточно большой интервал времени точка как угодно близко подойдет
к этому положению (такое движение является примером услов-
условно-периодического движения).
Если же частоты соизмеримы, т. е. подчиняются условиям
вида
§ 9.9 Переменные «действие — угол» 443
3
У nL(oi:= 0 (9.210)
(здесь щ — целые числа), то говорят, что движение вырожде-
вырождено. В том случае, когда частоты подчиняются двум независимым
соотношениям вида (9.210), говорят, что движение полностью
вырождено; при этом фазовая траектория системы становится
замкнутой, а движение строго периодическим.
Очень важным свойством переменных действия является их
адиабатическая инвариантность. Это свойство заклю-
заключается в том, что переменные действия сохраняют постоянные
значения при достаточно медленном изменении параметров си-
системы (изменения параметров за время, ^сравнимое с периодами
системы Тг = 2л/(х){, весьма малы). Для доказательства этого ут-
утверждения рассмотрим систему, которая в каждый момент вре-
времени близка по свойствам к изученной выше обобщенно-консер-
обобщенно-консервативной системе с разделяющимися и периодически изменяющи-
изменяющимися со временем переменными. Гамильтониан такой системы
явно зависит от медленно меняющихся со временем парамет-
параметров к у т. е. имеет вид
?х.Р1>М>--->/Д<?5.Р*Л)}. (9-2П)
где каждый импульс р* является периодической функцией соот-
соответствующей координаты <7г при постоянном Кг- Система с гамиль-
гамильтонианом (9.211) неконсервативна, однако решение уравнения
Гамильтона — Якоби можно искать в виде, близком к (9.87):
, as; Xv ... Д5),
(9.212)
где параметры X, а следовательно, и величины а и Яо являются
медленно меняющимися функциями времени. Используя (9.212)
и пренебрегая в уравнении Гамильтона — Якоби. (по сравнению
с Яо) членами, пропорциональными Я, найдем уравнение «нуле-
«нулевого приближения» рассматриваемого метода:
= H0(*1 «о.
(9.213)
Это уравнение отличается от уравнения (9.192) зависимостью от Я,
но согласно условию его следует решать так, как будто бы все А,
постоянны, а в решении X считать заданными функциями времени*
Поэтому формулы (9.194), (9.196) — (9.201) справедливы и для
рассматриваемой системы, однако во все эти соотношения войдут
параметры Я; например, обобщенные импульсы будут функциями
вида
444 Уравнения Гамильтона Гл. IX
Pt=Pi(9tl a; *) ('= 1 в). (9.214)
Подставляя (9.214) в (9.197) и интегрируя при постоянных % и а
(поскольку за период изменения импульса р% функции Я и а
остаются практически неизменными), вместо (9.198) получим
/, = /,(<*,*,). (9.215)
Эти величины оказываются постоянными, несмотря на изме-
изменение а и X со временем. Чтобы убедиться в этом, выберем в ка-
качестве «новых» импульсов переменные действия (9.215) и произ-
произведем соответствующее каноническое преобразование. Выражая а
с помощью (9.215) через / и X и исключая а из W (q, а, К), най-
найдем производящую функцию интересующего нас преобразования:
W = W(q19 ... , 9i; /lf ... , /s; X19 ... , \). (9.216)
»
Эта функция определяет каноническое преобразование к перемен-
переменным действие— угол (см. (9.201))
_
р. =
f ф
новыми уравнениями движения при этом будут уравнения (ср. с
(9.203))
ф = , Jt — (t = l,...,s), (9.21о)
где (см. (9.174))
5^ = Я + —. (9.219)
dt
Используя (9.219), найдем выражение гамильтониана Ш в «но-
«новых» переменных ф, / и t (см. (9.195), (9.215) и (9.216))
1=1
при этом «новые» уравнения движения (9.218) примут вид
дНA, к) , \ч &W (<7(<р, /, X), /, К) j .
(9.221)
¦ __у »ГИф./,Х),ЛХ) к
§ 9.9 Переменные «действие — угол» 445*
Усредним вторую группу этих уравнений по интервалу вре-
времени, достаточно малому по сравнению со временем заметного
изменения параметров Я и достаточно большому по сравнению с
периодами системы 7\-. Допущение о малости интервала усредне-
усреднения позволяет считать величины Я и Я постоянными при усредне-
усреднении; следовательно,
Цг*' <'¦=> «• <9:222>
Функция W, входящая в уравнения (9.222), является неоднознач-
неоднозначной функцией координат. Действительно, эта функция, равная
сумме интегралов (см. (9.193) и (9.196))
W = V #dft, (9.223)
El J
за полный период изменения координаты <7г (при прочих постоян-
постоянных координатах) получает приращение (см. (9.197))
(9.224)
Однако частные производные будут однозначными функ-
функциями координат, так как неоднозначность W вызывается добав-
добавлением величин, кратных 2nli и исчезающих при дифференциро-
дифференцировании по Я. Производные * »'—-—*-^— являются перио-
дХ
дическими функциями угловых переменных <р, поскольку коорди-
координаты q в свою очередь являются периодическими функциями ср
(при полном цикле изменения координаты qi угловая перемен-
переменная q>i, получает приращение, равное 2я—см. (9.207)). Так как
* dW
производные являются однозначными периодическими функ-
функциями <р, то они могут быть разложены в ряды Фурье с коэффи-
коэффициентами, зависящими от / и Я. Поэтому ряды Фурье для произ-
д i dW \ ^
водных не будут содержать постоянных членов и?,
dcp \ дХ )
следовательно, при усреднении по достаточно большому интерва-
лу времени все производные обратятся в нуль, что и
dyidXj
доказывает адиабатическую инвариантность переменных действия:
7, = 0 (t = l,...,s). (9.225)
446 Уравнения Гамильтона Гл. IX
Наконец, пренебрегая в уравнениях (9.221) членами, пропор-
пропорциональными Xjy найдем приближенные выражения для частот
(?= 1 s), (9.226)
с которыми изменяются импульсы pi (в свою очередь, сами часто-
частоты являются медленно меняющимися функциями времени).
Пример 9.10. Адиабатическое изменение длины математиче-
математического маятника.
Определить изменение амплитуды линейных колебаний мате-
математического маятника при адиабатическом изменении длины его
подвеса.
Уравнение (9.213) для случая линейных колебаний маятника
имеет вид
где Е — медленно меняющаяся полная анергия маятника. Интег-
Интегрируя это уравнение при постоянных I к Е> найдем полный ин-
интеграл
W = V^?z I— \/—
\ 2 V tngl
arcsin
arcsin
mgl -шГ 2Е
V
V
который является неоднозначной функцией в. Приращение функ-
функции W за полный цикл изменения 0 в пределах ± \f2E/mgl
(см. (9.197) и (9.224)) равно
= 2п — =.- 2я/,
0)
где со = Vg/l, а / — переменная действия. Поскольку / является
адиабатическим инвариантом, то полная энергия маятника будет
пропорциональна медленно изменяющейся частоте маятника:
A)
В соответствии с доказательством инвариантности действия /
энергия в формуле A) является энергией, усредненной по неко-
некоторому интервалу времени:
W /JL- B)
(здесь мы пренебрегли членом, пропорциональным /2, и вынесли
адиабатически изменяющиеся функции за знак усреднения).
§ 9.9 Переменные «действие — угол» 447
Учитывая, что маятник совершает гармоническое колебание с
медленно меняющейся амплитудой 0о(О и частотой со(/), в ре-
результате усреднения получим
fi2 __ д2
в» = А_, е2 = А о2,
2 2
и, таким образом, вместо ,B) найдем
Е = ЛМ-1Ъ1 C)
Наконец, из формул A) и C) получим соотношение
/3/4 0О - const, D)
согласно которому при бесконечно медленном удлинении подвеса
маятника его угловая амплитуда 0о уменьшается, а линейная
амплитуда /0О увеличивается; при этом энергия маятника (соглас-
(согласно A)) уменьшается обратно пропорционально ]//.
Пример 9.1 h Переменные «действие — угол» в задаче двух
тел.
Найти переменные «действие — угол» ,в случае финитного
движения двух тел с приведенной массой \i и энергией взаимо-
взаимодействия U——а/г.
Гамильтониан двух точек относительно системы их центра
масс равен (см. пример 9.1)
Я(р4 )
2|i Vr г» / г
Составляя уравнение Гамильтона — Якоби
2[х \ дг ) 2цг* \ дф / г ~
и отыскивая его решение в виде
W = Wr(r, Е, М) + ^ф(Ф, Е, М),
получим уравнения для функций Wr и W9
где |?|=—Е iB силу финитности движения. Эти уравнения (см.
(9.196)) определяют функции рг(г, ?, М) и рФ(Л1), которые необ*
ходимы для вычисления переменных действия:
448 Уравнения Гамильтона Гл. IX
2Л
О
В силу очевидной периодичности движения первый интеграл
можно представить в виде удвоенного интеграла от
= P/A + е) ДО Гтах = р/A — 8),
где р = Мя/|ш, а в = A + 2?М>а2I/2.
Тогда находим
К 2|?|
откуда получаем гамильтониан в переменных действия
^"~ 2(/г + /ф)* ' ^>
Отсюда следует, что частоты сог и соф совпадают друг с другом
(см. (9.209), (9.210)):
со -
-EL
т. е. имеет место вырождение (последние два соотношения при-
приводят к третьему закону Кеплера, см. B.80)). Наконец, исполь-
используя формулы для параметра и эксцентриситета эллипса, найдем
В классической механике непрерывному изменению началь-
начальных условий соответствует непрерывное изменение постоянных
/г и /ф, а также энергии Е и момента М\ при таком изменении
эллиптические орбиты обеих точек будут изменяться непрерыв-
непрерывным образом. Другая картина имеет место в квантовой механике.
В частности, в теории Бора, сыгравшей большую роль в станов-
становлении квантовой механики, постулировалась дискретность посто-
постоянных /г и /ф, т. е. постулировалось, что
1Г = пгй, /ф = /z<pft, D)
где h — «квант действия» (постоянная Планка), а пг и пф — целые
числа. В этом случае энергия системы (см. A)) будет дискрет-
дискретной; например, для атома водорода (а=е2) было найдено
E)
Е
2HW
где л=лг+пф = 1э2> ..., [13, § 45].
§ 9.10 Интегральные вариационные принципы 449
§ 9.10. Уравнения движения и интегральные
вариационные принципы
Как мы видели, движение механических систем можно опи-
описать с помощью различных дифференциальных уравнений: урав-
уравнений Ньютона, уравнений Лагранжа с реакциями связей, урав-
уравнений Лагранжа в обобщенных координатах, канонических
уравнений Гамильтона и уравнения Гамильтона — Якоби.
Уравнения движения определяют действительное изменение
механического состояния системы за бесконечно малый элемент
времени и тем самым (если заданы начальные условия) опреде-
определяют изменение состояния системы на конечном интервале вре-
времени. В связи с этим становится возможным отыскание, как гово-
говорят, интегральных принципов, характеризующих движе-
движение механической системы на таких конечных интервалах. Приме-
Примером интегрального принципа может служить утверждение об
инвариантности интеграла Пуанкаре — Картана; инвариантность
этого интеграла была установлена с помощью полной вариации
функции действия. При этом, по существу, производилось сопос-
сопоставление значений функции действия на различных действитель-
действительных траекториях механической системы. Однако возможно соот-
соответствующее сопоставление значения какой-либо функции на дей-
действительной траектории с ее значениями на виртуальных траекто-
траекториях. Такое сопоставление (как будет видно) также приводит к
некоторому интегральному принципу. '
Рассмотрим, например, в пространстве конфигураций близкие
друг к другу действительную и виртуальную траектории системы,
предполагая, что в начальный и конечный моменты времени обе
траектории пересекаются. Действительная траектория определяет-
определяется функциями Ti(t), удовлетворяющими уравнениям движения и
уравнениям связей, в то время как виртуальные траектории опре-
определяются функциями Ti(t, е), подчиненными только уравнениям
связей. Полагая, что r*(^, е) | e=o =U(t)t зададим виртуальные
перемещения точек системы в виде
6г,(*, 8) = гс (*, е) -г,@ (* = 1, 2, ... , N). (9.227)
Действительное и виртуальное положения системы совпадут друг
с другом в начальный и конечный моменты времени, если потребо-
потребовать, чтобы
6г, (t9) = 0, 6г, (tj = 0- (i = 1, 2, ... , N). (9.228)
В каждой точке действительной траектории удовлетворяется
общее уравнение механики, являющееся необходимым и достаточ-
достаточным условием движения системы в соответствии с уравнениями
движения, а виртуальное «движение» отличается от действитель-
15 Зак. 284
450 Уравнения Гамильтона Гл. IX
ного тем, что для него не удовлетворяется общее уравнение меха-
механики.
Преобразуем общее уравнение механики E.27) к виду, более
удобному для дальнейшего исследования. Используя очевидные
соотношения
и коммутативность дифференцирования по времени и варьирова-
варьирования по параметру е (см. (9.62)), получим
N N N
,фг = JJL ? m,r.6r, - J] ШЛвг,._ (9.229)
N
Учитывая, что V т^бг,- равна вариации 6Г кинетической энер-
t=i
гии системы, представим общее уравнение механики в форме:
N
6Г + 6Л = -^jL Qg m, f, 6rf), (9.230)
где 6Л — виртуальная работа заданных сил.
Интегрируя обе части (9.230) по времени и учитывая (9.228),
получим интегральное условие
|(8Г + 8A)dt = 0, 6г,(*0) = бгД/О = 0 (i = 1, 2, ... , N), (9.231)
которое вместе с уравнениями связей (см., например, (8.68))
/а(Гх, •.. , rN, t) = 0 (а = 1, 2, ... , ^),
ap = 0 (P=l,2f ... , ^) (9.232)
описывает движение механической системы. Действительно, если
имеют место уравнения движения (8.64) совместно с (8.67), то
удовлетворяется система (8.68), а следовательно, удовлетворяется
и (9.231) совместно с (9.232). Исходя из этих последних уравне-
уравнений и выполняя все вычисления в обратном порядке, нетрудно
убедиться в справедливости уравнений (8.64) .совместно с (8.67).
Таким образом, можно утверждать, что условие (9.231) (вместе с
уравнениями связей (9.232)) представляет собой интегральный
вариационный принцип для систем с любыми заданными силами
§ 9.10 Интегральные вариационные принципы 451
и идеальными (голономными и линейными него лоно мными) свя-
связями.
Используя обобщенные координаты (обращающие уравнения
голономных связей в тождества), этот принцип можно записать
в виде
^ 0, (9.233)
+ Лр = 0 (Р = 1,2, ... ,?2),
=O (/-1,2, ... ,Sl; s^SN-k,).
Полагая здесь все Лр/ и Лр равными нулю, найдем интеграль-
интегральный вариационный принцип для механических систем с идеаль-
идеальными голономными связями:
j (8Г + 8Л)dt = 0, &/Д *0) - &7/Сi) =0 (/= 1, 2, ... , s), (9.234)
где 5 — число степеней свободы.
Этому принципу можно придать еще более компактную фор-
форму, если допустить, что заданными силами являются обобщенно-
потенциальные силы. Действительно, используя выражение для
виртуальной работы таких сил (см. E.42) и E.70))
<7/ (9.235)
! (/- 1, ... ,S).
и соотношения
d
dt
найдем
а подставляя (9.236) в интеграл (9.234), получим:
/=1
Отсюда, учитывая определение функции Лагранжа «5? и дейст-
действия 5 и то, что 6^(/o)=8^(^i)=O, найдем интегральный вариаци-
15*
452 Уравнения Гамильтона Гл. IX
онный принцип для систем с обобщенно-потенциальными силами
и идеальными голономными связями (принцип Гамильто-
Гамильтона — Остроградского):
8S = 0, fy, (*0) = Ч-(tx) = О (i = 1, 2, ... , s). (9.237)
Согласно этому принципу функция действия на действительной
траектории имеет экстремальное значение по сравнению с ее
значениями на виртуальных траекториях, точки которых в началь-
начальный и конечный моменты времени совпадают соответственно с
начальным и конечным положениями системы.
Из принципа Гамильтона — Остроградского следует, что дей-
действие и лагранжиан данной механической системы определяются
неоднозначно: к действию можно прибавить любую постоянную,
а к лагранжиану — полную производную по времени от любой
функции координат и времени. Действительно, вычисляя действие
с помощью функции Лагранжа
?), (9.238)
at
получим
Таким образом, условие 6S'=0 эквивалентно условию 65=0, и,
следовательно, уравнения движения в обоих случаях совпадают.
Можно убедиться в том, что для сравнительно малых интер-
интервалов времени ti—tQ вторая вариация 62S>0 и, следовательно, на
действительных траекториях имеет место минимум действия.
В самом деле, вторая вариация функции действия равна
J (9.239)
где
2
Используя оценку вариаций координат [32, гл. 12]
= | [ 6G/ dt | < (t - t0) max 16^, | (9.240)
§ 9.10
Интегральные вариационные принципы
453
(/=1, 2, ..., s, to<.t<.t\) и пренебрегая в (9.239) всеми членами,
линейными и квадратичными относительно малого интервала
t\—to, получим
Г V д*^ bqfbqkdt: (9.241)
Так как
= а.
(9.242)
(cm. E.56) и E.78)), то подынтегральное .выражение в (9.241)
будет положительно определенной формой вариаций скоростей,
to
а
Рис. 9.9
что и доказывает положительность б25 на сравнительно малых
интервалах времени. Таким образом, из принципа Гамильтона —
Остроградского следует, что разность между усредненными по
времени кинетической энергией и обобщенным потенциалом на
действительных траекториях достигает минимума min (Т— <Ц)*
Рассмотрим другую форму принцица наименьшего действия
для обобщенно-консервативных систем с идеальными голономны-
ми связями. С этой целью рассмотрим совокупность траекторий*
проходящих через фиксированную «точку» qo в различные на-
начальные моменты времени и через фиксированную «точку» q\ в
различные конечные моменты времени (сравнение этого способа
варьирования с варьированием, применяемым в принципе Га-
Гамильтона— Остроградского см. на рис. 9.9). Для таких траекто-
траекторий полные вариации начального и конечного положения равны
/i = 0 (t =
(9.243)
454 Уравнения Гамильтона Гл. IX
и, следовательно, между вариациями координат в начальный и ко-
конечный моменты времени и вариациями начального и конечного
.моментов времени будут иметь место соотношения (см. (9.121) и
(9.122))
8<7/ (U) - - <7/0 бг0, &7; (h) = - qn Ыг (/ = 1, 2, ... , s). (9.244)
Пользуясь (9.243), для полной вариации действия (см. (9.123))
получим (Выражение
* (9,245)
to
Далее, учитывая консервативность системы (Я=Яо), а также то,
что
б I dt = бЛ — 8tn,
из (9.245) найдем
б | (# + Я)Л=;0. (9.246)
to
Затем примем во внимание, что согласно определению функции
Гамильтона
а согласно (9.87) для обобщенно-консервативных систем имеет
место равенство
J (J? + H)dt = S + H0(t±-t0) = W.
to
Таким образом, полная вариация «укороченного» действия
w= \Y*pMdt (9-247>
to j
равна
8W = 0 (9.248)
при
Я = Яо> &7/о = &7/i = 0 (/=1,2, ... ,s).
Требование (9.248) представляет собой принцип наимень-
наименьшего действия Мопертюи.
§ 9.10 Интегральные вариационные принципы 455
Для систем с обычными потенциальными силами и стацио-
стационарными связями этот принцип примет вид
б J Tdt = O (9.249)
to
при E=EOf 6<7/o=S<7ji=0 (/=1, 2,...,s). Действительно, в этом
случае обобщенный потенциал U сводится к потенциальной энер-
энергии ЭД°), зависящей только от координат (см, E.75)), а кинети-
кинетическая энергия равна однородной квадратичной форме TW
(см. E.55) — E.57)); «следовательно, «укороченное» действие ста-
становится равным
W = 2 [Tut, (9.250)
i
а функция Гамильтона совпадает с полной энергией Е.
Если в (9.249) с помощью интеграла энергии
т2
lk
(dtJ
исключить элемент времени di, то можно получить принцип
наименьшего действия в форме Якоби
(Qt) г
X VE0-
()
U ds=O, (9.251)
где ds^
Поскольку в (9.251) время исключено, принцип © форме Яко-
Якоби дает возможность определять траекторию системы. Покажем
это на примере свободной материальной точки. В этом случае
(9.251) можно записать в виде
vU6r dA =0,
{То
где (dsJ=i(drJ и, следовательно, ds-6ds=dr-8dr (г — радиус-
вектор точки). Отсюда, заменяя 6dr на d6r и учитывая, что бг в
начальном и конечном положениях точки обращается в нуль, пос-
после интегрирования по частям получим
J
)
I L ds J— 2-/E0-U
(Го)
456 Уравнения Гамильтона Гл. IX
Это интегральное условие ввиду произвольности вариации бг при-
приводит к дифференциальному уравнению траектории
1 +l s/U 0 (9.252)
ds L ds J 2/E0-U
В уравнении (9.252) с помощью интеграла энергии
ds f 2 dt
можно перейти к дифференцированию по времени и тем самым
получить уравнение Ньютона
тт = —у (/.
Итак, основываясь на дифференциальных уравнениях движе-
движения, можно подучить соответствующие (интегральные вариацион-
вариационные принципы, а полагая в основу эти принципы, можно прийти к
эквивалентным им уравнениям движения; те и другие основаны
на фундаментальных физических допущениях, изложенных, в пер-
первой главе.
Приложение к главе IX. Теорема Нетер
Большое значение этой теоремы в развитии современной теоретической фи-
физики обусловлено тем, что в ней устанавливается весьма общая связь между
преобразованиями, оставляющими действие инвариантным, и законами сохранения.
Теорема Нетер в наиболее простом случае сводится к утверждению о том,
что любому непрерывному обратимому преобразованию координат, при котором
функция действия данной гамильтоновой системы остается инвариантной, соот-
соответствует первый интеграл уравнений Лагранжа этой системы [31].
Пусть задано непрерывное обратимое преобразование
q]=q'l(q, t, e) (/=1, 2, ... ,s), A)
которое зависит от некоторого параметра 8, причем если 8=0, то преобразова-
преобразование переходит в тождественное, т. е.
Я}\**О = Я1 iU=L 2, .... s). B)
Следовательно, вариации координат qt соответствующие преобразованию A),
равны
-{¦*¦)
(/ = 1.2 s) C)
Приложение
457
(здесь 8 — бесконечно малая величина). Используя C) и выражение (9.65),
найдем вариацию действия на действительной траектории
6S
=«s^
/
дг
D)
Эта вариация должна равняться нулю, поскольку действие 5 по условию ин-
инвариантно относительно A). Поэтому
де /е=о
дг /е=о
E)
откуда ввиду произвольности *о и U вытекает, что преобразованию A) соответ-
соответствует первый интеграл уравнений Лагранжа
qj]
Теорема доказана.
В частности, получим законы сохранения для замкнутой свободной системы,
лангранжиан которой относительно инерциальной системы отсчета имеет вид
Этот лагранжиан (а следовательно, и функция действия) инвариантен относи-
относительно произвольного бесконечно малого параллельного переноса 8 механической
системы (в этом проявляется однородность пространства, см. с. 111). Направляя
8 вдоль оси Ох, получим рассматриваемое преобразование координат точек
системы в виде
' *._j_o #i r z (i—-12 1
и соответствующий этому преобразованию интеграл движения
дх'(
дг
(8)
(9)
Используя произвольность вектора 8, аналогично убедимся в сохранении проек-
проекций импульса системы на оси Оу и Oz. Таким образом, импульс замкнутой
системы сохраняется (см. B.106)).
Нетрудно убедиться в инвариантности лагранжиана G) относительно беско-
бесконечно малого произвольного поворота 8 механической системы (в этом прояв-
проявляется изотропия пространства, см. с. 111). Направляя 8 вдоль оси Oz (т. е.
рассматривая поворот вокруг Oz), получим преобразование координат точек си-
системы в виде (см. D.13))
458 Приложение I к главе IX. Теорема Нетер Гл. IX
Z; = 2? (t = 1, 2 ,N) A0)
и соответствующий интеграл движения
e=0 Oyi \ ое /е=0
Аналогично найдем остальные интегралы и тем самым убедимся в сохранении
кинетического момента системы (см. B.114)).
Наконец, функция G), как не зависящая явно от времени, инвариантна от-
относительно бесконечно малого «смещения» системы во времени, т. е. инвариантна
относительно преобразования
t'=t+* A2)
(в этом проявляется однородность времени). Поскольку в данном случйе вари-
вариация времени отлична от нуля и равна 6t=t'—*=е, постольку нужно восполь-
воспользоваться полной вариацией действия (9.123). Тогда, учитывая, что 6/o=6fi = e,
6<7о—6<7i=O, а также то, что для рассматриваемой системы функции Гамильтона
и полная энергия совпадают, найдем
§S = (E Я)е = 0 A3)
откуда вытекает сохранение полной энергии системы:
о
' ' -¦" ' A4)
ЧАСТЬ II
ОСНОВЫ МЕХАНИКИ СПЛОШНЫХ СРЕД
Глава X
ОСНОВНЫЕ ПОНЯТИЯ И ЗАКОНЫ МЕХАНИКИ СПЛОШНЫХ СРЕД
§ 10.1. Физически бесконечно малая частица
Одним из важнейших объектов механики являются системы с
очень большим (практически бесконечным) числом N молекул,
которые располагаются в пространстве в известном смысле плот-
плотно, т. е. образуют континуум, или сплошную среду*. Исходя из
классико-механических представлений о движении таких систем,
можно написать соответствующие уравнения движения, однако
проинтегрировать их невозможно. Например, чтобы найти закон
движения молекул, находящихся в 1 см3 воздуха при атмосферном
давлении и комнатной температуре, потребовалось бы проинтег-
проинтегрировать примерно 1019 уравнений движения. Поэтому естественно
ограничиться приближенным (но практически весьма точным)
описанием движения сплошной среды. С этой целью рассматри-
рассматривается не отдельная молекула, а физически бесконечно
малая частица, т. е. совокупность молекул, число AN кото-
которых, с одной стороны, достаточно велико (AN^>1), а с другой
стороны, весьма мало по сравнению с числом N молекул во всей
системе или в ее какой-либо макроскопической части (AN^N);
эта совокупность должна занимать физически бесконечно
малый объем AV, т. е. объем, который достаточно велик,
чтобы содержать большое число молекул, и весьма мал по срав-
сравнению с областью заметного изменения макроскопических пара-
параметров среды.
Положение данной физически бесконечно малой частицы в
момент времени / задают радиусом-вектором центра масс этой
частицы, усредненным по физически бесконечно малому
интервалу времени At, который намного больше, чем не-
некоторое время, характерное для движения отдельной молекулы
под действием других молекул, и весьма мал по сравнению
со временем заметного изменения макроскопических пара-
метров среды (интервал At должен включать в себя момент ©ре-
* Молекулы, из которых состоит среда, в зависимости от их структуры
можно представлять как материальные точки или другие более сложные меха-
механические модели.
460 Основные понятия и законы механики сплошных сред Гл. X
" 7 '
мени t). Таким образом, если говорят, что физически бесконечно
малая частица в момент времени t находится в точке г простран-
пространства, то следует иметь в виду, что в определениях этих величин
имеются неточности порядка At и (АУI/3 * В механике сплош-
сплошных сред указанными неточностями пренебрегают и в соответствии
с этим считают возможным рассматривать изменение состояния
частицы за бесконечно малый интервал времени dt, а также рас-
рассматривать бесконечно малое перемещение dx частицы из точки г
пространства в точку r+dr*.
По аналогии с определением скорости центра масс (см. B.90))
полагают, что скорость v данной частицы связана с ее радиусом-
вектором г соотношением
,-.*.; A0.1)
а по аналогии с B.91) ускорение w частицы считают равным
Обсудим теперь другое важное понятие механики сплошных
сред, а именно понятие о поле. Напомним, что полем называет-
называется любая физическая величина, заданная как функция точки про-
пространства и времени. Поля могут быть скалярными, векторными,
тензорными и др. Рассмотрим, например, скалярное поле плотно-
плотности массы. Для этого усредним по физически бесконечно малому
интервалу времени At (включающему в себя данный момент t)
массу всех молекул, находящихся в физически бесконечно малом
объеме А У (включающем в себя конец данного вектора г). Затем
отнесем найденное таким образом среднее значение массы Am к
AV и определим плотность массы р—Дт/ДУ той частицы, которая
в момент времени t находится в точке г. Повторяя эту процедуру
для любого ДУ в любой момент t, найдем плотность массы
Р = р(г,0 (Ю.З)
как функцию точки пространства и времени, т. е. найдем поле
плотности массы.
Бесконечно малое перемещение dx данной частицы, 'вообще
говоря, зависит от положения частицы до перемещения, т. е. от г,
а в общем случае и от времени t. Таким образом, перемещение
является .векторной функцией координат и времени
dr = u(r,0; (Ю.4)
* Здесь и в дальнейшем под термином «частица» понимается «физически
бесконечно малая частица».
§ 10.2
Деформация малой частицы
461
эта функция называется полем бесконечно малых пере-
мещенийх Отсюда, используя A0.1), можно определить поле
скоростей
v = v(r, t)
A0.5)
в среде. Это поле можно также определить, усредняя по физиче-
физически бесконечно малому интервалу времени А/ скорость центра
масс материальных точек, находящихся в объеме AV, и подсчиты-
подсчитывая эту величину для разных ДУ. Далее в этой главе будут рас-
рассмотрены друлие поля, характеризующие сплошную среду.
Итак, в механике сплошных сред макроскопические движе-
движения дискретной системы, состоящей из бесконечно большого чис-
числа микроскопических объектов — молекул, описываются усред-
усредненными величинами^ а именно полевыми («континуальными»)
функциями. Общие соотношения между этими функциями, т. е.
законы механики сплошных сред, были установлены в соответст-
соответствии с очень большим числом экспериментальных данных. Эти
законы являются основой весьма обширной области исследований
движения различных сред, а также основой многочисленных тех-
технических приложений. Подчеркнем также, что взаимосвязь мак-
макроскопических движений среды, изучаемых ib механике сплошных
сред, с движением и свойствами молекул, из которых состоит
среда, изучается в статистической физике. Поэтому статистиче-
статистическая теория дает теоретическое обоснование соотношений и зако-
законов, постулируемых в этой главе, см. [59].
§ 10.2. Деформация малой частицы
Изучим перемещение дан-
данной малой частицы среды и с
этой целью рассмотрим два ее
бесконечно близких положения
A) и B) (рис. 10.1). Радиусы-
векторы двух любых точек О'
и А этой частицы связаны
соотношением A.6), откуда
следует, что перемещение dx
точки А равно
dr = drO'+dr'. A0.6)
С другой стороны, перемеще-
перемещения dx и dxo, представляют
собой значения одной и той же Рис. юл
функции и в точках пространства г и гО' (см. A0.4)):
462 Основные понятия и законы механики сплошных сред Гл. X
dv = u(r, О, dxo> = и (го-, 0. A0-7)
причем г=гО'+г/. Следовательно, перемещение dr' точки А отно-
относительно поступательно движущейся системы отсчета с началом
в О' равно
dr'=u(r, t) — u(r0-, t).
Разложим u(r, /) ib точке r0' и учтем, что г'— достаточно
малая величина, поскольку достаточно мала вся рассматривае-
рассматриваемая частица. В результате, пренебрегая членами разложения вто-
второго порядка малости по сравнению с членами первого порядка,
найдем, что
dr' = (r'grad)u A0.8)
(здесь и в дальнейшем, если частица называется малой, допус-
допускается справедливость указанного пренебрежения).
Запишем выражение A0.8) в тензорной форме, вводя обозна-
обозначения
х = хи y = x2i z = x3, их = иъ иу = и2, uz = u3 A0.9)
и применяя известное правило записи, согласно которому сумми-
суммирование производится по всем возможным значениям повторяю-
повторяющегося в произведении индекса, а знак суммы опускается. Тогда
получим
dxt=xk-2p- (ШЛО)
(в данном случае повторяющимся индексом является индекс К
пробегающий значения 1, 2, 3): Приведем более подробную
запись выражения A0.10), например, для ?=1:
dxx =
дх2
Сопоставление этой формулы с A0.10) показывает преиму-
преимущество тензорной формы записи, которая далее будет применять-
применяться без соответствующих оговорок.
Теперь заметим, что производная —— всегда может быть
dxk
представлена в виде суммы компонент антисимметричного тен-
тензора
±(Л«dJtL) A0.11)
dxk , д>
и симметричного тензора
ен = ~7Г \—Г-+-^Л- - A0.12)
§ Ю.2
Деформация малой частицы
463
т. е. в виде суммы
A0.13)
Следовательно, относительное перемещение точки А .можно запи-
записать в виде
dxl = x'ktki + *'k4i< A0.14)
Рассмотрим подробнее первую сумму правой части A0.14).
Тензор %ki в 'силу своей антисимметричности определяется тремя
независимыми компонентами и может быть задан матрицей
0 Xl2 Xl3
Xl2 0 Х23
Ххз — X2s 0
При этом компоненты %ki имеют вид
Хы — akPi — аА> A0.15)
т. е. такой же вид, как и компоненты векторного произведения
с== [а, Ь] двух любых 'векторов а и Ь:
\\%Н\\=
Поэтому три независимые компоненты анттисимметричного тензо-
тензора образуют векторное произведение двух соответствующих векто-
векторов. Для тензора A0,11) таким векторным произведением, очевид-
очевидно, является —[vu]> т» е* — го*и с компонентами
-—(rot и)г = Х2з, -у (rot uJ =
A0.16)
Поскольку rot u предстабляет собой бесконечно малый вектор (он
линеен относительно перемещения и), введем для вектора A0.16)
и его компонент обозначения
=—rotu,
= Х23,
A0.17)
Теперь, используя антисимметричность тензора хьг « A0.17), най-
найдем для интересующей «ас суммы из A0.14) выражение (при
t=l)
464 Основные понятия и законы механики сплошных сред Гл. X
' i = [d/, r'ji. A0.18)
Аналогично получим:
' = [dX, г']2,
Таким образом, сумма Xktki представляет собой i-тую компоненту
векторного произведения [d%, г'].
Что касается второй суммы из A0.14), то ее всегда можно за-
записать в виде:
ekix'k==^L, A0.19)
dxi
где*
;;. A0.19')
Следовательно, вторая сумма из A0.14) равна i-той компоненте
градиента функции 4я по переменной х\. Наконец, используя
A0.6), A0.10), A0.14), а также A0.18), A0.180 и A0.19), най-
найдем, что перемещение dv точки А с точностью до величин первого
порядка малости равняется
rfr = dr0- + [dX, r'] + gradr> ?. A0.20)
Сопоставляя A0.20) с выражениями для перемещения мате-
материальной точки и точки абсолютно твердого тела (такие выраже-
выражения следуют из формул D.32) и (8.2)), убеждаемся в том, 4fo
перемещение любой точки малой частицы с точностью до величин
первого порядка малости слагается из перемещения drOf +
+ [dx>r/]> которое точка совершает в результате движения всей
частицы, как абсолютно твердого тела, и перемещения, равного
grad/ "Ф и связанного сдеформацией частицы, т. е. а измене-
изменением ее формы и объема. Таким образом, dxo* представляет собой
поступательное перемещение частицы, d/ — вектор бесконечно
малого поворота частицы, как абсолютно твердого тела, а пере-
перемещение gradr'4я является, как его называют, вектором де-
деформации. Для данных точек О' и А все слагаемые переме-
перемещения точки А определяются полем перемещений, при этом век-
вектор поворота определяется посредством тензора %ku & вектор
деформации — посредством тензора ем- По этой причине тензор
%ki называется тензором поворота, а тензор гм — тензо-
тензором деформации за ©ремя dt.
* Приведем подробную запись этой квадратичной формы:
Y [ ('
§ 10,2 Деформация малой частицы 46S
Имея h виду, что перемещение tii=Vidt, запишем тензоры по-
поворота и деформации в виде
%kl=akidti ski =vMdt, A0.21>
где
JfJ2?E) A0.22>
dxk dxt
r\ — l I dv{ т- dvk \
2 \ dxk dxt )
Тензор со/ьг определяет угловую скорость частицы
ю = -^.=—rotv A0.24>
dt 2 v /
(так же, как тензор %ы определяет поворот d/). Тензор vm9 кото-
который называется тензором скоростей деформации, оп-
определяет скорость деформации, т. е. вектор vkL Xk.
Этот вектор может быть представлен в ©иде градиента
~^~ = vHx'k A0.25)
dxt
от квадратичной формы
Таким, образом, учитывая формулы A0,21) — A0.25) >и относя
перемещения dr, dxo\ поворот d^ и вектор деформации к эле-
элементу времени dt, из A0.20) придем к соотношению для скорос-
скоростей точек А и О':
v = vo' + [tor'] + gradr- Ф. A0.26>
Зная тензор деформации, можно найти изменение длины ма-
малого материального «отрезка» сплошной среды, т. е. элемента
среды, состоящего из частиц, лежащих на малом отрезке прямой,
а зная тензор скоростей деформации, можно определить скорость
такого изменения. Например, найдем относительное изменение
длины материального отрезка О'А (рис. 10.1). В первом положе-
положении его длина равнялась г'=|г/|, а (во втором получила прира-
приращение dr\ Используя справедливое для любого вектора равенст-
равенство vrdr' = r'dr\ а также выражение
и учитывая A0.19), A0.19'), для относительного удлинения (сок-
(сокращения) отрезка получим
466
Основные понятия и законы механики сплошных сред
Гл. X
-7--««**«*, A0-27>
где аг ~Х(/гг—косинус угла между вектором г' и t-той координат-
координатной осью.
Нетрудно выяснить смысл компонент тензора деформации в
простейших случаях. Из A0.27) видно, что компонента ец представ-
представляет собой относительное удли-
удлинение малого отрезка среды, пер-
первоначально направленного парал-
параллельно i-той координатной оси.
Например, для отрезка, первона-
первоначально параллельного оси х\9 на-
направляющие косинусы равны
ai == 1, a2 = a3=0 и, следователь-
следовательно, относительное удлинение бу-
будет равно dr'/r'=еп. Отсюда яс-
ясно, что компоненты тензора де-
деформации с одинаковыми индек-
индексами характеризуют деформации
растяжения (или сжатия) в на-
направлении соответствующей оси.
Рассмотрим также деформа-
деформацию двух малых отрезков среды,
первоначально направленных
вдоль осей Х\ и х2 соответствен-
соответственно (рис. 10.2). Полагая, что поступательное перемещение, враще-
вращение и растяжение отсутствуют, а деформация происходит только
в плоскости X\X2f из A0.14) найдем компоненты смещения точки Л
Рис. 10.2
и компоненты смещения точки В
Отсюда следует, что
= (-V) = (^) =tgF/2)«6/2,
т. е. 8i2 равняется половине угла 6, на который уменьшился перво-
первоначально прямой угол. Из этого примера ясно, что компоненты
тензора деформации с различными индексами характеризуют де-
деформации сдвига.
Тензор деформации, как и всякий симметричный тензор, мож-
можно привести к главным осям, т. е. в каждой данной точке Ог мож-
§ 10.2 Деформация малой частицы 467
но так выбрать систему координат, чтобы все «недиагональные»
компоненты тензора обратились в нуль. Следовательно, тен-
тензор деформации, вычисленный в такой системе координат, имеет
в общем случае три отличные от нуля главные компоненты:
вь ?2, ез- Координатные оси указанной системы называются
главными осями тензора деформации. Отнесенные
к главным осям выражения для квадратичной, формы Ч1", компо-
компонент вектора деформации и относительно удлинения заметно уп-
упрощаются:
^(х2Г+чШ% (Ю.28)
Ц. = e2x2, -2i- = e3x3, A0.29)
дх1 дх2
A0.30)
Из A0.29), в частности, следует, что точка, первоначально нахо-
находившаяся на главной оси, после деформации останется на ней.
В самом деле, если Х\ФО, а х2 =л:з = 0, то проекции вектора де-
деформации будут равны: и\ = г\Х\, и2=^з=0. Из A0.29) также
следует, что произвольную деформацию малой частицы всегда
можно рассматривать как совокупность трех деформаций растя-
растяжения (сжатия) вдоль главных осей.
Теперь найдем относительное изменение объема частицы.
Имея в виду, что изменение объема не связано с поступательным
движением и вращением частицы, будем рассматривать перемеще-
перемещения, связанные лишь с ее деформацией. В качестве координатных
осей с началом в данной частице среды возьмем главные оси тен-
тензора деформации. Объем AV частицы до деформации (предста-
(представим ее в виде параллелепипеда со сторонами, параллельными
главным осям) будет равен произведению Х\ х2 Хз длин соответст-
соответствующих отрезков, направленных первоначально вдоль главных
осей. Однако после деформации отрезок длины х1У как было уста-
установлено, будет направлен так же, а его длина станет равной
Aj(l + 8t) (здесь суммирование по повторяющемуся индексу не
производится). Следовательно, объем AV+dAV частицы после
деформации равняется х\ х2 хъ{\ + ех) A + е2) A + Ч)- Отсюда, пре-
пренебрегая членами высшего порядка малости, найдем относитель-
. ное изменение объема
= 81 + 82+83. A0.31)
468
Основные понятия и законы механики сплошных сред
Гл. X
Далее учтем, что сумма главных компонент симметричного тензо-
тензора является инвариантом относительно поворота осей, т. е. при
любом направлении декартовых осей
?i + Ч + Ч = 4i + 822 + Чз A0.32)
(это можно непосредственно установить, используя преобразова:
ние поворота (8.44)). Следовательно, при любом направлении
осей относительное изменение объема частицы равно дивергенции
поля перемещений:
AV
— d#i . ди2
дхг дх2
^ = divu.
A0.33)
Соответственно скорость относительного изменения объема час-
частицы равна дивергенции поля скоростей:
AV dt
A0.34)
Пример 10.1. Деформация «квадрата».
Рассмотрим перемещение малой частицы — «квадрата» — в
его плоскости, полагая, что сторона квадрата до деформации рав-
Рис. 10.3
•на /, поступательное движение отсутствует (dro> = 0), а углы ска-
скашивания сторон квадрата малы и соответственно равны 9i и 82
(рис. 10.3, а).
В случае перемещений в плоскости Xix2 проекции вектора и
любой точки квадрата и относительное удлинение любого отрез-
отрезка имеют вид (см. A0.14), A0.27)):
§ 10.2 Деформация малой частицы 469
dr'lr' = eua? + e22a| + 2e12a1a2. A)
Отсюда для проекций перемещения точки А и относительного
удлинения отрезка ОГА соответственно получим:
их ='eu/t щ = (хи + е1Я) /, Л"/г' = 8П.
Аналогично найдем для точки В и отрезка ОГВ
Ul = (fol + 82l) *» = W, dr'lr' = 822,
а также для точки С и отрезка О'С
Ul = (Х21 + 8П + 821) /, U2 = (Xi2 + Sl2
+ elt.
Так как углы скашивания малы, то (u2)aII=Qi и (и\)в/1=%*
С другой стороны
Следовательно,
^TUl> дх2 U2>
xii = -j (в. - во, е21 - -L (е2 + е,).
Таким образом, в рассматриваемом случае одновременно проис-
происходят повороты квадрата, как твердого тела, на угол ^хз=%12=
= @i—9г)/2 (см. A0.17)), две деформации растяжения, опреде-
определяемые компонентами 8ц и г22, и деформация сдвига, определяе-
определяемая углом (8i+02)/2. При построении фигуры после деформации
следует учесть, что любая прямая ввиду линейности преобразова-
преобразования A) преобразуется в некоторую другую прямую.
В частном случае, когда 01 = 02=0, 811 = 822=8, поворот от-
отсутствует (xi2=0), а перемещение сводится к чистой деформации
со следующими проекциями смещений точки А:
точки В
и точки С
8/,
= е/,
«2 = 6/,
// о/
i*2 =::= of
Отсюда видно, что С после деформации остается на диагонали
квадрата (ui = ti2) и, следовательно, диагональ является главной
осью тензора деформаций (рис. 10.3,6). Поворачивая оси Х\ и х2
470 Основные понятия и законы механики сплошйых сред Гл. X
на угол я/4 и применяя преобразование (8.44), найдем главные
компоненты тензора ei = e+6, 82=е—0, а также проекции на
главные оси х\9 х2 перемещения точки А и относительное удли-
удлинение отрезка О'А
dr'\r' = е;
аналогично получим для точки В и отрезка О'В
Ux = 8// У<Г, Щ = 82// J/^ dr'/r' = 8,
а также для точки С (и отрезка О'С
их = /2*8^, 1/2 = 0, dr'/r' = 8l = 8 -t- в.
§ 10.1. Законы сохранения массы, изменения импульса
и кинетического момента
Рассмотренные в § 10.1 поля плотности р(г,/) и скорости
v(r, /) связаны друг с другом уравнением, вытекающим из зако-
закона сохранения массы. Чтобы убедиться в этом, проследим
за движением данной частицы массы Am. Поскольку эта масса
неизменна, то
' A0.35)
dt
Здесь использована полная производная по времени, так как эта
производная характеризует .изменение во времени величины, свя-
связанной с движущейся в пространстве частицей, в данном случае
изменение величины Am (полную производную по времени часто
называют субстанциональной производной). Напомним, что в от-
отличие от полной лроиэводной частная производная по времени
характеризует изменение некоторой величины со временем в дан-
данной точке пространства (частную производную по времени назы-
называют, также локальной производной).
Учитывая, что Д/п=рАУ, из A0.35) получим соотношение
+ = o9 A0.35')
dt AV dt V '
в котором скорость относительного изменения объема частицы
определяется полем скоростей согласно A0.34). Таким образом,
найдем уравнение, связывающее поля плотности и скорости,
^- + pdivv = 0. A0.36)
dt'
§ 10.3 Законы сохранения массы, изменения импульса и момента 471
Оно называется уравнением непрерывности. Далее, ис-
используя выражение для полной производной по времени от плот-
плотности частицы
—L— — —Е—h(rgrad)p, (lU.o/)
получим уравнение непрерывности в другой форме, чаще упот-
употребляемой © теоретической физике,
— + div p v = 0. A0.38)
dt
В тензорных обозначениях уравнение непрерывности приобретает
вид:
дт =0.
Это дифференциальное уравнение связано с определенным
интегральным соотношением. Чтобы получить его, рассмотрим
фиксированный объем Vo пространства, для которого согласно
A0.38)
Теперь с помощью формулы Остроградского преобразуем объем-
объемный интеграл от дивергенции в поверхностный интеграл [65,
с. 188]:
С div p vdV = ф pvdcr, A0.40)
здесь Go — замкнутая поверхность, ограничивающая объем Уо, а
da — «элемент поверхности», т. е. вектор, равный по абсолютной
величине площади элемента поверхности и направленный по ор-
орту п, определяющему внешнюю нормаль к этому элементу. В ре**
зультате придем к искомому интегральному соотношению
A0.41)
согласно которому скорость изменения массы, среды в объеме Vo
пространства равна разности масс частиц среды, втекающих и
вытекающих за единицу времени через поверхность oq, охваты-
охватывающую объем Vo (в соответствии с принятым определением нор-
нормали п скорость изменения массы положительна, если поверх-
поверхностный интеграл отрицателен, т. е. масса втекающих частиц
472 Основные понятия и законы механики сплошных сред Гл. X
больше, чем масса вытекающих; в противном случае скорость
изменения массы будет отрицательна). Вектор pv называется
плотностью потока среды.
Продолжая изучать движение данной частицы массы Am и
учитывая определение ее скорости v, как усредненной скорости
центра масс, напишем закон изменения импульса час-
частицы в виде
Am- — = Fe. A0.42)
dt
Здесь Fe — сумма внешних сил, приложенных к частице. Эта сила
зависит от положения частицы и времени, т. е. должна быть за-
задана векторным полем. Силу Fe следует рассматривать как ре-
результат усреднения правой части закона изменения импульса всех
молекул, из которых состоит данная частица среды (см. B.103)).
Сила Fe обусловлена, во-первых, силами взаимодействия молекул
среды друг с другом и, во-вторых, включает в себя внешние по
отношению ко всей среде силовые поля. Будем рассматривать
среду с весьма малым радиусом действия межмолекулярных сил.
Тогда сила, с которой физически бесконечно малые частицы сре-
среды действуют на данную частицу, проявляется только в тонком
поверхностном слое этой частицы. Толщиной такого слоя в меха-
механике сплошных сред заведомо пренебрегают, а силы, с которыми
соседние частицы среды действуют друг на друга, считают по-
поверхностными силами. Что касается внешних силовых
полей, то они практически одинаково действуют на все молекулы,
находящиеся в объеме AV. Поэтому эти силы называются объ-
объемными силами (если эти силы пропорциональны массе час-
частицы, то их называют массовыми силами). Такими силами яв-
являются гравитационные и электромагнитные силы, а также силы
инерции, которые появляются при изучении движения среды отно-
относительно неинерциальных систем отсчета.
Итак, в механике сплошных сред предполагается, что сумма
всех сил, приложенных к данной частице массы А/n, может быть
представлена в виде
A0.43)
да
где dFa — поверхностная сила, приложенная к элементарной пло-
площадке da поверхности частицы, Аа — поверхность частицы, a f —
объемная сила, приходящаяся на единицу массы. Относительно
поверхностной силы dF° предполагается, что она зависит от
ориентации площадки, т. е. от направления вектора da=nday a
также пропорциональна величине da этой площадки (рис. 10.4).
Иначе говоря, предполагается, что поверхностная сила имеет вид
§ 10.3
Законы сохранения массы, изменения импульса и момента
473
A0.44)
т. е. определяется совокупностью величин Pik и зависит от ком-
компонент вектора da, а именно OTda&=icos(n, nk)da (здесь cos(n, nh) —
косинус угла между ортом п и координатной осью с ортом п&)в
4 I
ш^-v/
Рис. 10.4
ъч
Рис. 10.5
Совокупность величин .Pik называется тензором напря-
напряжений. Компоненты этого тензора являются функциями г, f и
определяют поле напряжений ib среде. Компонента Pik тен-
тензора напряжений представляет собой i-тую компоненту силы, дей-
действующую на единицу поверхности, перпендикулярной оси хь.
Например, на площадку, перпендикулярную к оси х (вектор da
такой площадки направлен вдоль х), действует сила dF? = Pixdax
(рис. 10.5). Проекции этой силы соответственно равны:
dF°x = Pxxdax, dF°y = Pyxdox, dF% = PZxdax.
Отсюда видно, что Рхх — нормальная по отношению к рассматри-
рассматриваемой площадке компонента плотности силы, а Рух и Pzx — ка-
касательные компоненты плотности силы.
Теперь преобразуем суммарную поверхностную силу, дейст-
действующую на данную частицу, используя A0.44), теорему Остро-
Остроградского и учитывая малость частицы '
*.
Да
Да
dxk
¦AV.
A0.45)
* Последнее равенство в A0.45) имеет место согласно теореме о среднем
значении, при этом дРгк/дхк берется в некоторой точке, принадлежащей AF.
Эта точка отличается от г на величину порядка (AVI^. Так как величинами
такого порядка в механике сплошных сред пренебрегают, dPik/dxk можно
брать в точке г. В дальнейшем мы будем использовать равенства, аналогичные
A0.45) без соответствующих оговорок.
474 Основные понятия и законы механики сплошных сред , Гл. X
Наконец, используя A0.42), A0.43), A0.45) и сокращая все
члены полученного уравнения «а АУ, придем к уравнениям дви-
движения сплошной среды
^ + р/, (* = 1, 2, 3), A0.46)
где полная производная по -времени
•2—S-+-5-* . (ГО-47)
Теперь убедимся <в том, что закон изменения кинетического
момента частицы приводит к требованию симметрии тензора нап-
напряжений. По аналогии с D.50) и D.51) положим, что кинетиче-
кинетический момент частицы и момент сил, действующих на нее, соответ-
соответственно равны
L* = j) [rdF°] + Am-[rf] + (Le)\ A0.48)
Да
При этом момент импульса центра масс частицы пропорционален
Am и, следовательно, является малой величиной порядка /3 (/ —
характерный размер частицы). В то же время момент М' относи-
относительно поступательно движущейся системы центра -масс частицы
пропорционален Am»/2, т. е. является величиной порядка /5. Мо-
Момент сил (Le)' относительно центра масс частицы также является
величиной более высокого порядка малости по сравнению с дру-
другими моментами сил в A0.48). Следовательно, слагаемыми М' и
(Le)' можно пренебречь. Тогда, учитывая, что
Am = 0, a v = -^-,
dt dt
получим закон 'изменения кинетического момента
частицы в виде
Am- [rv] = ф [rdF°] + Am. [rf]. A0.49)
Далее спроектируем обе части A0.49) на координатные оси,
для чего выразим компоненты 'векторных произведений через ком-
компоненты векторов-сомножителей, т. <е. запишем момент ускорения
и момент аил ib виде антисимметричного тензора второго ранга
(см., например, A0.15)). Тогда получим
^^ ifiifi — XtU). A0.50)
да
§ 10.4 Законы термодинамики 475
Затем преобразуем первый поверхностный интеграл' из A0.50),
используя A0.44) и формулу Остроградского. В результате най-
найдем, что
дхк
да
Но
= OikPik + Xt
где 8ш — символ Кронекера. Поэтому
Наконец, получая аналогичное A0.51) 'выражение для второго
поверхностного интеграла из A0.50), вместо A0.50O найдем
Отсюда, 1ввиду уравнений движения A0.46), получим, что
Таким образом, тензор напряжений является симметричным тен-
тензором, т. е. представляет собой совокупность шести независимых
компонент.
§ 10.4. Уравнение изменения кинетической энергии.
Законы термодинамики
Кинетическая энергия частицы массы Am и полная производ-
производная по времени от кинетической энергии соответственно равны:
* @1) *««'* A0-53)
Имея в виду эти выражения, умножим правую и левую ^асти урав-
уравнений движения A0.46) с индексом i на проекцию Vi скорости, а
затем сложим результаты умножения для i=l, 2, 3. Тогда полу-
получим уравнение изменения кинетической энергии
соответствующее уравнению D.56) для системы точек.
476 Основные понятия и законы механики сплошных сред Гл. X
Левая часть A0.54) равна полной производной кинетической
энергии по времени, отнесенной к единице объема, а последняя
сумма справа является мощностью объемных сил, затрачиваемой
при перемещении частицы (эта величина также отнесена к еди-
единице объема). Что касается двойной суммы по i и k, то она со-
содержит члены двух различных типов. Чтобы выяснить их смысл,
представим эту сумму в виде
tk
v р
1 dxk dxk tk dxk
Затем воспользуемся соотношением
Следовательно,
v> -Ц- - ~^г § vMa* ~ P*vbi> X10-55)
Да
поскольку согласно A0.22) и A0.23)
причем Pik(uki=O> так как тензор Ры — симметричен, а соь*— анти-
антисимметричен.
Из A0.55) ясно, что выражение v{ —— равно разности,
отнесенной .к единице объема мощности
A0.56)
Да
поверхностных сил на перемещениях частицы и отнесенной к еди-
единице объема мощности
РцРн A0.57)
напряжений, связанной с деформацией частицы.
Получим другую форму уравнения A0.54), справедливую для
случая потенциальных объемных сил, когда
/,= --^- A0.58)
(здесь ue(r, t)—потенциальная энергия во внешнем поле, при-
приходящаяся на единицу массы). Для этого используем очевидные
выражения
§ 10.4 Законы термодинамики 477
Первое и второе начала термодинамики. И:*
уравнения A0.54) видно, что часть .мощности объемных сил за-
затрачивается на изменение скорости центра масс частицы, т* е. на
изменение кинетической энергии частицы как целого. Теперь рас-
рассмотрим внутреннюю энергию частицы, т. е. усредненную
по интервалу времени At сумму кинетической энергии молекул
частицы относительно ее центра масс и энергии взаимодействия*
между молекулами частицы. Изменение внутренней энергии, как
показывает опыт, происходит за счет работы напряжений на де-
деформации частицы, а также за счет теплообмена между частица-
частицами. Наличие тепловых явлений приводит к необходимости исполь-
использовать © механике сплошных сред законы термодинамики.
Напомним, что в термодинамике изучаются равновесные
состояния макроскопических систем, т. е. состояния, когда все
параметры, описывающие систему, не зависят от времени, а лю-
любые стационарные потоки, обусловленные каким-либо внешним па
отношению к системе источником, отсутствуют.
Важнейшей величиной, характеризующей состояние термоди-
термодинамического равновесия системы и имеющей одно и то же зна-
значение у любой макроскопической части всей системы, является
температура Т (в частности, для одноатомного газа, атомы
которого движутся по законам классической механики, температу-
температура пропорциональна средней кинетической энергии газа).
Равновесные состояния сред, называемых простыми, опре-
определяются двумя независимыми параметрами, например плотно-
плотностью и температурой; при этом внутренняя энергия и другие ве-
величины являются функциями этих параметров, т. е. являются, как
говорят, функциями состояния. Однако в механике сплош-
сплошных сред наряду с равновесными состояниями изучаются и нерав-
неравновесные состояния, для которых, вообще говоря, нельзя ввести
понятия температуры в указанном выше смысле. Тем не менее
применение законов термодинамики в механике сплошных сред
будет оправдано, если ограничиться сравнительно медленными
процессами, для которых в каждый момент времени любую части-
частицу среды, являющуюся достаточно малой, но макроскопической
системой, можно считать находящейся в «своем» равновесном
состоянии, а состояния соседних частиц можно считать доста-
достаточно близкими друг к другу. Такие состояния называются ло-
локально равновесными.
478 Основные понятия и законы механики сплошных сред Гл. X
Для среды, находящейся в локально равновесном состоянии,
функции состояния частицы являются теми же самыми, что и
функции состояния рассматриваемой среды в термодинамическом
равновесии с той разницей, что независимые параметры, т. е. ар-
аргументы этих функций, в случае термодинамического равновесия
неизменны, а в случае локального равновесия зависят от поло-
положения частицы и времени. Например, приходящаяся на единицу
массы внутренняя энерлия е для простой среды, находящейся в
равновесном состоянии, определяется из опыта, как функция
е(р, 7), где р и Т — постоянны (при наличии внешнего поля
е=е(р(г), Г). Для той же среды, находящейся в локально равно-
равновесном состоянии, внутренняя энергия будет иметь вид
е = е(р(т9 0, Т(г, 0)- (Ю.61)
Итак, применим к данной частице массы Am и объема AF
первое начало термодинамики, т. е. закон изменения
энергии с учетом тепловых явлений. Согласно этому закону изме-
изменение d(eAtn) внутренней -энергии частицы слагается из работы
напряжений Р^е^ДУ, связанной с деформацией частицы, и коли-
чества теплоты dQ, получаемой при этом частицей от соседних
частиц, т. е.
A0.62)
(работа напряжений и количество теплоты не являются полными
дифференциалами, поэтому для количества теплоты введено обоз-
обозначение dQ).
Теплообмен между частицами определяется плотностью
потока тепла q, т. е. плотностью среднего потока кинетиче-
кинетической энергии молекул относительно системы центра.масс частицы
(положительным направлением этого потока считается направле-
направление внешней нормали п). Согласно определению вектора q коли-
количество теплоты, получаемое частицей от соседних частиц за еди-
единицу времени, равно
^ф (Ю.63)
Теперь преобразуем A0.62), относя все члены этого уравне-
уравнения к элементу времени dt и используя то, что —-Дт = 0,
at
zki = vkidt (см. A0.21)), а также используя следующее выраже-
выражение для потока тепла через поверхность частицы:
=-^-AV. A0.64)
dxk
AC
§ 10.4 - Законы термодинамики 479
Тогда вместо A0.62) «получим уравнение изменения внут-
внутренней энергии
pjL=Plp EL, (Ю.65)
dt dxk
где PihVih — мощность напряжений, связанная с деформацией
частицы, — ——— количество теплоты, получаемое частицей за
единицу времени на единицу объема.
Основываясь на уравнениях изменения кинетической и внут-
внутренней энергий, нетрудно получить уравнение изменения полной
энергии частицы, равной
Ьт.(^- + е). A0.66)
Действительно, складывая почленно A0.54) с A6:65) и используя
A0.55), A0.64), найдем, что
®* L \ * / J t7 «7
Да да
т. е. полная производная по времени от полной энергии частицы
равна сумме мощностей объемных и поверхностных сил, дейст-
действующих на частицу, а также потока тепла через поверхность час-
частицы.
Напомним, далее, содержание второго начала термо-
термодинамики. Согласно этому закону любая макроскопическая
система в равновесном состоянии характеризуется функцией сос-
состояния — энтропией 5; при этом изменение энтропии в резуль-
результате передачи системе тепла dQ при температуре Т равно
dS = M~, A0.68)
а процесс передачи тепла должен происходить весьма медленно
по сравнению с процессом установления равновесия в системе.
Такие достаточно медленные процессы, называемые квазиста-
квазистатическими, обладают свойством обратимости. Действи-
Действительно, в этом случае любое промежуточное состояние между на-
начальным и конечным состояниями системы является равновесным,
поэтому система в обратном процессе проходит те же состояния,
что и в прямом процессе, и возвращается в начальное состояние
без каких-либо изменений в окружающих 'систему телах.
Второе начало термодинамики содержит еще одно утвержде-
утверждение: если в результате передачи тепла dQ с конечной скоростью
при температуре Т система перешла из одного равновесного сос-
состояния в другое близкое к нему равновесное состояние, то
480 Основные понятия и законы механики сплошных сред Гл. X
ds>J-Lt (io.6d)
еде dS— разность значений энтропии в конечном и начальном
состояниях. Процессы, происходящие с конечной скоростью, назы-
называются неравновесными (или нестатическими), Из
опыта известно, что практически все неравновесные процессы
необратимы. Напомним, что необратимыми называются такие
процессы, при которых невозможен возврат системы в первона-
первоначальное состояние без какого-либо изменения в окружающих те-
телах.
Из A0.69) следует, что в результате неравновесного процесса
энтропия изолированной системы (dQ = 0) возрастает. Следова-
Следовательно, изменение энтропии является м^рой необратимости про-
процесса в изолированных системах. Такое истолкование физического
смысла энтропии подтверждается в статистической физике, где по-
показывается, что энтропия связана с вероятностью состояния сис-
системы, а возрастание энтропии для изолированной системы соот-
соответственно связано с переходом системы из менее вероятного в
>более вероятное состояние.
Очевидно, что соотношения A0.68) и A0.69) можно объеди-
объединить в одну формулу, вводя обозначение dQD для разности
TdS—dQ; dQo является частью механической энергии, необрати-
необратимо превращающейся в тепло. Тогда второй закон термодинамики
можно записать в виде
TdS^dQ^r №d> dQD>0\ A0.70)
здесь <uQd=0 для обратимых процессов и dQD>0 — для необра-
необратимых.
Теперь применим второй закон термодинамики к частице
сплошной среды. Относя все члены в A0.70) к элементу време-
времени dt, вводя энтропию s, приходящуюся на единицу массы, и учи-
учитывая сохранение массы, из A0.70) найдем
dt
Отсюда, используя A0.63) и A0.64), получим уравнение из-
изменения энтропии:
dt dxk
(ЮЛ)
где?> = — —диссипативная функция, равная
ДУ dt
отнесенной к единице объема и единице времени части механиче-
механической работы, которая необратимо переходит в тепло.
§ 10.4 Законы термодинамики 481^
В заключение этой главы приведем все основные урав-
уравнения механики сплошных сред, а именно: уравнение непрерыв-
непрерывности, уравнения изменения импульса, внутренней энергии и энт-
энтропии:
Л.+ Р-^=0, A0.72)
at oXk
f + pft (i = 1, 2, 3), A0.73)
at oxk
^-^ A0-74>
dx
dt
— = —-^
dt dxk
D>0. A0.75)
Это — система шести дифференциальных уравнений в частных
производных с семнадцатью неизвестными функциями, зависящи-
зависящими от координат и времени: пятью скалярными величинами р, е,
Т, 5, D, шестью компонентами векторов v^ 9i и шестью компонен-
компонентами тензора Р^- Таким образом,, становится очевидным, что для
использования системы основных уравнений необходимы также
допущения о характере среды или движений средь?, при которых
система уравнений стала бы замкнутой.
16 Зак.
284
Глава XI
ИДЕАЛЬНАЯ ЖИДКОСТЬ
§ 11.1. Уравнения движения идеальной жидкости
Идеальной жидкостью называется такая сплошная
среда, в которой при любой деформации и скорости деформации
касательные напряжения пренебрежимо малы по сравнению с
нормальными напряжениями, а все нормальные напряжения оди-
одинаковы (в данный момент .времени, в дайной точке пространства,
занимаемого средой). Таким образом, тензор напряжений иде-
идеальной жидкости имеет вид
Pik--Pbik, A1.1)
т. е. все его компоненты с различными (Индексами (равны нулю, а
все компоненты с одинаковыми индексами равны друг другу. Под-
Подставляя A1.1) в A0.44), получим выражение для поверхностной
силы
dFf^.— pdo,. A1.2)
Следовательно, абсолютная величина силы, действующей на еди-
единичную площадку, в идеальной жидкости не зависит от ориента-
ориентации площадки.
Модель идеальной жидкости применима ко многим задачам
о движении жидкостей и газов с пренебрежимо малой вязко-
вязкостью *. Если »в качестве «идеальной жидкости» рассматривают
газ, то р>0, а в случае жидкой среды давление р может быть как
положительным, так и отрицательным^ поскольку возможны и
сжимающие, и растягивающие напряжения (давление в газе свя-
связано главным образом со средней кинетической энергией моле-
молекул, а в жидкости — как с кинетической энергией, так и с потен-
потенциальной энергией взаимодействия молекулы).
* Во избежание недоразумений отметим, что под термином «идеальный
kT
газ» понимают газ с уравнением состояния р == р V (здесь k — постоян*
/71
ная Больцмана, a m — масса молекулы газа), в то время как под «идеальной
жидкостью» понимают среду (жидкость или газ) с изотропным тензором на-
напряжений.
§ ил Уравнения движения идеальной жидкости 483
Учитывая изотропность тензора .напряжений, пренебрегая
теплопроводностью среды (^г-=0) и ограничиваясь изучением об-
обратимых течений (Z) = 0), из основных уравнений сплошных сред
получим уравнения движения идеальной жидко-
жидкости:
-*--f pdivv = 0, A1.3)
dt
p-^ = -gradp+pf, A1.4)
P —= -pdivv, A1.5)
dt
-|-=0. A1.6)
Поскольку в механике сплошных сред изучаются локально-равно-
локально-равновесные состояния, то эта система должна быть дополнена термо-
термодинамическими уравнениями состояния:
е = е(р, 7), р = р(р, Г); A1.7)
первая из этих функций называется калорическим уравнени-
уравнением состояния, а вторая — термическим (эти функции опре-
определяются из опытных данных для систем, находящихся в равно-
равновесных состояниях).
Уравнения идеальной жидкости совместно с уравнениями сос-
состояния представляют собой замкнутую систему уравнений; урав-
уравнение изменения импульса A1.4) называется уравнением Эй-
Эйлера. Решение этой системы должно удовлетворять граничным
условиям на поверхностях, ограничивающих среду, а в случае не-
нестационарных течений — и начальным условиям в некоторый мо-
момент времени t0. Например, нормальная к поверхности неподвиж-
неподвижной твердой стенки компонента скорости среды должна обращать-
обращаться в нуль
"„ = 0, A1.8)
поскольку жидкость не может протекать через стенку.
Теперь получим общие выражения для силы Fa и момента
сил La, приложенных к твердому телу, движущемуся в идеаль-
идеальной жидкости. На элемент tide поверхности тела действует сила
—pnda (орт п направлен от поверхности тела внутрь жидкости,
так как согласно определению этого вектора он должен быть на-
направлен по внешней нормали к поверхности рассматриваемого
тела). Следовательно, суммарная сила, действующая на тело,
равна
1б*
484 Идеальная жидкость Гл. XI
F° = -(j5pda, A1.9)
а момент сил давления
A1.10)
(здесь а — поверхность тела). Подставляя в эти выражения дав-
давление, (найденное из уравнений движения жидкости, и вычисляя
соответствующие интегралы, по заданной поверхности тела, най-
найдем векторы Fa и La.
Рассмотрим решения уравнений идеальной жидкости <в част-
частном случае, когда жидкость покоится, т. е. v=0. Тогда система
A1.3) — A1.5) сводится к уравнению гидростатики
gradp = pf, A1.11)
которое описывает механическое равновесие среды.
Приведем несколько простых решений уравнения A1.11). Ес-
Если, например, объемными силами можно пренебречь (f=0), то
давление р одинаково во всех точках «среды (закон Паскаля).
Если же жидкость несжимаема (p=const) и находится в одно-
однородном поле тяжести (f=g), то, располагая начало координат на
поверхности жидкости и направляя.ось z вниз по вертикали, из
A1.11) получим уравнения
-^ = -fL=--O, J/L = pjr,
дх ду dz
откуда следует, что
где ро — внешнее давление на поверхности жидкости. Это реше-
решение определяет гидростатическое давление, равное давлению на
поверхности, сложенному с весом столба жидкости с единичной
площадью поперечного сечения и высотой г.
Наконец, рассмоприм равновесие идеального газа в однород-
HOtM поле тяжести, если тепловое равновесие (T=const) имеет
место во всех точках газа. В этом случае, используя уравнение
kT
состояния идеального газа р = р (здесь k — постоянная
т
Больцмана, т — масса молекулы газа) /и направляя ось z вверх
по вертикали, из A1.11) получим уравнения
JL = J?- = о, iL •&- = - pg.
дх ду т dz
§ 11.1 Уравнения движения идеальной жидкости 485
Отсюда найдем выражение для распределения плотности с высо-
высотой
которое называется барометрической формулой.
Пример 11.1. Закон Архимеда.
Определить силу, с которой' тяжелая несжимаемая жидкость
действует на погруженное в нее неподвижное тело.
Сила, с которой жидкость действует на поверхность Go погру-
погруженного в жидкость тела, равна интегралу A1.9). Преобразуя
этот интеграл в объемный, используя A1.11) и то, что p = const, a
f==g, найдем
= —• Г gradpdV = — mg;
здесь Vo — объем тела, am — масса жидкости в этом объеме.
Следовательно, сила, jc которой тяжелая несжимаемая жидкость
действует на погруженное в нее тело, по величине равна весу
жидкости в объеме тела и направлена противоположно силе тяже-
тяжести (закон Архимеда).
Пример 11.2. Равномерно вращающаяся несжимаемая жид-
жидкость.
Пусть несжимаемая жидкость плотности р вращается с пос-
постоянной угловой скоростью со вокруг неподвижной оси. Найти
форму свободной поверхности (р = 0) жидкости в состоянии рав-
равновесия, если частицы жидкости притягиваются к центру, поме-
помещенному на оси вращения, с силой, пропорциональной расстоя-
расстоянию до центра (здесь под состоянием равновесия понимается
равновесие относительно системы отсчета, вращающейся с жидко-
жидкостью). Найти также форму свободной поверхности жидкости в
однородном гравитационном поле g и определить силу, действую-
действующую на однородное тело плотности рт, которое погружено в жид-
жидкость и вращается вместе с ней (точнее, скорость тела относитель-
относительно жидкости предполагается пренебрежимо малой).
В указанной системе отсчета на частицу жидкости с радиу-
радиусом-вектором г (начало отсчета помещено в центре силы) дейст-
действует сила притяжения — mxr <и центробежная сила инерции
mcoV (г'— радиус-вектор точки, направленный по перпендикуляру
от оси). Потенциал этого силового поля в расчете на единицу
массы в сферических координатах имеет вид
ae==JLr2_^r2sin26# (!)
2 2 '
486 Идеальная жидкость Г л XT
Учитывая, что f=—gradue, запишем уравнение A1.11) в форме
gradp = — pgradae, B)
откуда следует
р + ри? ^ с. C)
Полагая здесь р = 0 и определяя С из условия r=R при 0 = 0, из
C) найдем уравнение свободной поверхности вращающейся жид-
жидкости:
г5(^
/2
(R — расстояние между центром силы и ближайшими к нему
точками поверхности). Эта фигура представляет собой сфероид,
т. е. сплющенную вдоль оси вращения сферу.
Если вращение жидкости происходит в однородном поле, то
потенциал /на единицу массы в декартовых координатах
ue = gz--f-(*2 + */2). E)
Подставляя эту функцию в интеграл вида C), получим уравнение
свободной поверхности
z = Zo + -g-(*2 + n F)
где Zq—-координата точки поверхности на оси вращения. Таким
образом, свободная поверхность жидкости представляет собой йа-
раболоид вращения.
В рассматриваемом (случае на единицу массы жидкости дей-
действует сила
f==_VMe = g + C0V G)
(вектор г' направлен по перпендикуляру от оси вращения); а си-
сила, с которой жидкость действует на тело объема Vo, погруженное
в жидкость и вращающееся вместе с ней, равна (см. A1.9))
F<* = — <jj pnda = — р j tdV. (8)
Go Vo
Используя выражения G) и (8), найдем
F? = -p(g + co2rm)l/0, (9)
где Г/n = f r'dV/V0—направленный по перпендикуляру от оси
Vo
вращения радиус-вектор центра масс однородного тела.
§11.2 Основные теоремы динамики идеальной жидкости 487
Теперь найдем результирующую силу F, приложенную к телу
(включая силы тяжести и инерции):
F = Pryog + pr^v/m +¦ F*.
Учитывая (9), эту силу можно представить в виде
F = CPr-P)(g + (**r'm)V0.
Отсюда следует, что при рг>р сила F направлена вниз от оси
вращения, а при рг<Ср вверх к окэи вращения.
§ 11.2. Основные теоремы динамики идеальной жидкости
Течения идеальной жидкости, подчиняющиеся уравнениям
A1.3) — A1.6), являются течениями, при которых .сохраняется
энтропия данной частицы жидкости. Такие движения называются
изэнтр опич еским и. Интеграл энтропии в рассматриваемом
случае сразу следует из уравнения A1.6):
s = s0. A1.12)
Отсюда можно получить соотношение между давлением и
плотностью, имеющее место вдоль траектории частицы. Напри-
Например, найдем такое соотношение для идеального газа, уравнения
состояния которого задаются функциями
е = СхТ, р = Р—, A1.13)
m
где сх—теплоемкость газа при постоянном объеме © расчете
на единицу массы. С этой целью получим прежде ©сего антропию
идеального газа как функцию температуры Т и удельного
объема т=1/р. Будем исходить из первого и второго начал
термодинамики, записанных в виде уравнения*
Tds = de +pd A/р). (И.14)
Подставляя A1.13) в A1.14), получим
Т пг
откуда с точностью до*постоянной найдем
k
s = cx\n(TlpmCx). A1.15)
* Начала термодинамики, взятые в виде A0.74) и A0.75), приводят к
ds de
уравнению рГ = р —PikVik + D, из которого, учитывая A1.1) и
at at
A1.3), в случае обратимых процессов нетрудно получить A1.14).
488 Идеальная жидкость Гл. XI
Исключая отсюда Т с 'помощью термического уравнения состояния
A1.13), получим энтропию как функцию р и р
A1.16)
1 + ~^г~- Затем используем известное с<
шение Майера*
k
где показатель у = 1 -1 . Затем используем известное соотно-
между с% и ср — теплоемкостью при постоянном давлении в рас-
расчете на единицу массы. Тогда, для показателя у найдем .выражение
Итак, интеграл A1.12) в случае идеального газа приводит к соот-
соотношению
p/pv = const, A1.19)
которое выполняется вдоль траектории данной частицы.
Напомним еще одну термодинамическую функцию, а именно,
тепловую функцию, или энтальпию, приходящуюся на
единицу массы и равную по определению
h = e +-?-. A1.20)
Используя эту функцию, представим A1.14) в ©иде соотношения
dft = 7ds + —', A1.21)
Р
из которого вытекает, что приращение энтальпии для изэнтропи-
ческих течений равно
Tenqpb получим основные интегралы движения уравнений
идеальной жидкости. С этой целью используем прежде всего урав-
уравнение кинетической энергии A0.60) с учетом (ИЛ). Тогда, имея
в виду выражение для полной производной давления по времени
* Соотношение A1.17) вытекает из первого начала термодинамики
dQ 1 / dQ \
—— = de -+- pdx. Действительно, полагав по определению ср = -—— I —— ,
Am . Дт \ al J р
из первого начала и уравнений состояния A1.13) найдем, что
dx \ k
§ 11.2 Основные теоремы, динамики идеальной жидкости 489
dp dp . dp n « Om
at а* d*fc
найдем, что
дие , I dp I dp
fit \ 2 У а/ p dt p dt
Отсюда следует один из важных интегралов движения идеаль-
идеальной жидкости. В самом деле, допуская, что гидродинамические и
силовые поля стационарны, т. е. явно не зависят от времени
— = 0), и принимая во внимание A1.22), придем к интег-
dt J
ралу
который называется интегралом Бернулли. Как видно из
вывода, этот интеграл имеет место для изэнтропических стацио-
стационарных течений идеальной жидкости, если объемные силы потен-
потенциальны и стационарны. При этом фигурирующая в интеграле
Бернулли сумма кинетической энергии, энтальпии и потенциальной
энергии во внешнем поле сохраняется вдоль траектории данной
частицы среды.
Заметим, что при стационарном течении среды траектории
частиц совпадают с линиями тока, т. е. с линиями, в каждой
точке которых скорость жидкости в данный момент времени на-
направлена по касательной к ним. Очевидно, что линии тока опреде-
определяются уравнениями
Vx Vg Vz
В случае изэнтропических течений несжимаемой жидкости
ds — О и d(l/p)=O, поэтому согласно A1.14) имеет место интеграл
движения e=const. Учитывая его, из A1.24) получим интеграл
Бернулли для несжимаемой жидкости:
JL + ?- + u* = C. A1.26)
2, р
Для иллюстрации рассмотрим простой пример. Пусть несжи-
несжимаемая жидкость вытекает из достаточно широкого наполнен-
наполненного жидкостью резервуара высоты / через малое отвфстие вбли-
вблизи дна. Тогда течение на заметном интервале времени можно счи-
считать стационарным, а скорость частиц, находящихся на поверх-
поверхности жидкости в сосуде, равной нулю. Направим ось z по вер*
тикали вверх с началом отсчета (В отверстии и определим
490 Идеальная жидкость Гл. XI
постоянную интеграла Бернулли для любой частицы на поверх-
поверхности жидкости. В результате получим
2 р р •
(здесь v — cKOipocTb частицы, находящейся в отверстий, а р — ат-
атмосферное давление, которое полагается одинаковым как на по-
поверхности жидкости в сосуде, так л в струе, вытекающей из
отверстия). Отсюда для скорости истечения находим известную
формулу Торричелли
Важное свойство идеальной жидкости устанавливается в тео-
теореме Том с она о сохранении циркуляции скорости.
Циркуляцией скорости вдоль замкнутого материаль-
материального контура (т. е. контура, состоящего из частиц жидкости) на-
называется интеграл
(j)v6r;
здесь контур задан функцией v{t, г), где каждому значению пара-
параметра е соответствует одна определенная частица среды, за исклю-
исключением 'Двух значений е=0, ео> которым соответствует одна и та
же частица, «замыкающая» контур (следовательно, параметр г
изменяется в пределах 0^е<^е0); дифференциал бг связан с при-
приращением параметра е, а интегрирование ведется "по е от нуля
до е0.
Согласно теореме Томсойа при изэнтропическом движении
идеальной жидкости циркуляция скорости по замкнутому данному
материальному „контуру сохраняется, если объемные силы потен-
потенциальны. Чтобы убедиться в справедливости этой теоремы, нужно
показать, что полная производная по времени от циркуляции
A1.27) равна нулю. При дифференцировании циркуляции необхо-
необходимо учесть, что с течением времени изменяется не только ско-
скорость частицы, но и форма контура, т. е. дифференцировать по
времени нужно как скорость, так и элемент бг длины контура. Та-
Таким образом, для производной от циркуляции получим выражение
-^-6r. A1.28)
Имея в виду очевидные преобразования
яайдем, что второй интеграл в A1,28) равен
§11.2 Основные терремы динамики идеальной жидкости 491_
(как интеграл от полного дифференциала по замкнутому контуру).
Что касается первого интеграла из A1.28), то с помощью теоре-
теоремы Стокса его можно представить в виде
= J (rot V) S<r, A1.30)
где а—поверхность, которая опирается на рассматриваемый кон-
контур, а 50 — элемент этой 'поверхности. Теперь, учитывая изэнтро-
пичность движения среды (см. A1.22)) и потенциальность объем-
объемной силы, представим уравнение Эйлера A1.4) в форме
v = — grad(/i + ae). A1.31)
Подставляя A1.31) в A1.30), убедимся в том, что циркуляция
ускорения равна нулю, поскольку rotgrad=0. Следовательно,,
имеет место интеграл движения
(?v6r=C. A1.32?
Тем самым теорема Тсйисона доказана.
Из этой теоремы следует важное утверждение о сохранении
вихревого движения идеальной жидкости. Действительно, 'приме-
'применяя формулу Стокса к левой части A1.32) и используя то, что
©=rotv/2, найдем интеграл движения в виде
согласно которому поток угловой скорости (или поток вихря ско-
скорости) через данную материальную поверхность при ее движении
сохраняется. Если же в начальный момент времени rotv=0 во
всей среде, то и в последующие моменты времени во всей среде
rotv=0, т. е. имеет место движение идеальной жидкости, которое
называется безвихревым, или потенциальным.
Заметим, что в случае, когда траектория частицы проходит
вдоль поверхности тела, обтекаемого средой, в среде нельзя про-
провести материальный контур, охватывающий такую траекторию.
Поэтому теорема Томсона и теорема о сохранении вихря, строго
говоря, неприменима в тонком пристеночном (пограничном)
слое. Более того, в этом слое сама модель адеаль'ной жидкости
становится неприменимой ввиду заметной роли вязкости среды.
Несмотря на это, в ряде случаев, например в случае хорошо обте-
обтекаемых тел, движение среды почти везде близко к потенциально-
потенциальному* течению.
Если изэнтропическое потенциальное течение идеальной жид-
жидкости совершается под действием потенциальных объемных сил,
то для таких течений имеет место интеграл движения» называемый
492 Идеальная жидкость Гл. XI
интегралом Кош и. Действительно, поскольку энтропия со-
сохраняется, а заданные силы потенциальны, справедливо уравне-
уравнение A1.31), которое запишем в форме
Теперь учтем, что движение среды потенциально. Поэтому ско-
скорость может быть представлена в виде градиента некоторой ска-
скалярной функции
v^gradcp A1.35)
(функция ф называется потенциалом скорости). Подстав-
Подставляя A1.35^ в A1.34) и выполняя преобразование
[ dxk \ dxi ) J dxk t dxt i 2 \ дх^ ) \ дх^ / J дХ{ \ 2 /
найдем
dxt \ dt 2 /
откуда следует интеграл Коши
A1.36)
где f(t) —произвольная функция «времени.
В отличие от постоянной ,в интеграле Бернулли, которая имеет,
(вообще говоря, различные значения для траекторий разных частиц
среды, произвольная функция f(t) в интеграле Коши одинакова^
во всем объеме, занятом средой. Чтобы определить f(t), достаточ-
достаточно найти левую часть интеграла Коши как функцию времени в
любой одной тючке потока.
Отметим, что в случае стационарных течений (—— —0)
\ dt I
функцию f(t) следует положить равной произвольной постоянной
С, которая в отличие от постоянной интеграла Бернулли имеет
одно и то же значение для .всех частиц жидкости. Таким образом,
для стационарного потенциального течения интеграл Коши прини-
принимает вид
— + h + uQ = C. A1.37)
z
Пример 11.3. Стационарное течение несжимаемой идеальной
жидкости в горизонтально расположенной трубке переменного по-
поперечного сечения.
§ 11.2 Основные теоремы динамики идеальной жидкости 493
Найти в указанном случае соотношение между скоростями и
давлениями жидкости в поперечных сечениях ai и аг.
Из уравнения непрерывности A0.41) в интегральной форме
ввиду стационарности потока будем иметь
= 0. A)
Применяя это уравнение к объему, ограниченному поверхностью
трубки и сечениями о\ и a2, получим, что
pv2a2 = 0,
откуда
*=•.(¦*¦). т
Поскольку потенциал ие «поля тяжести постоянен вдоль тече-
течения, интеграл A1.26) приводит к соотношению
J^a-A-- _*_ +jL
р ^ 2 - р ^ 2 '
которое с помощью B) можно записать в виде
Из B) и C) следует, что с уменьшением сечения {
скорость потока увеличивается, а давление падает.
Пример 11.4. Стационарное течение сжимаемого идеального
газа.
Пусть изменение потенциала поля тяжести вдоль линий тока
пренебрежимо мало, а плотность, скорость и температура газа на
бесконечном расстоянии от обтекаемого газом неподвижного тела
соответственно равны роо, у©о и Т^. Найти значения температу-
температуры, плотности и давления газа в критической точке (т. е.
точке поверхности обтекаемого тела, где -скорость потока обра-
обращается в нуль).
Согласно условию из интеграла A1.24)^ имеем
2
J?- + ftc=ftc, A)
где Лоо и hc — значения энтальпии на бесконечности и в критиче-
критической точке соответственно (для других величин индексы оо и с
будем относить к тем же состояниям).
494 Идеальная жидкость Гл. XI
Из определения энтальпии -h = е 4- — и соотношений
Р
A1.13), A1.17) следует, что энтальпия идеального газа равна
h = cpT. B)
Подставляя B) >в A), получим соотношение для температур
о
Т V
=1 + ^ C)
СР1 ОО
Затем, используя A1.15), A1.17) и A1.18),' перепишем условие
изэнтропичноста течения в виде
Тогда из C) и D) можно определить связь плотностей
Наконец, привлекая соотношение между давлением и плотностью
(см. A1.19))
( Рс У
Рс
найдем
§ 11.3. Потоки импульса и энергии
Уравнения импульса и энергии идеальной жидкости могут
быть представлены >в виде уравнения непрерывности для соответ-
соответствующей величины. Прежде всего убедимся, что для любой тен-
тензорной величины Q н силу уравнения непрерывности A0.39) .име-
.имеет место равенство
. A1.38)
dt \ dt dxk ) dt
Полагая здесь Q = v{, найдем
dt dt ^ ' dxk
д (pvkvi) / j j
§ 11.3 : Потоки импульса и энергии 495
С другой стороны, уравнение Эйлера можно записать в виде
Р-5--—^- + P/i. (H-40)
dt dxk
Сопоставляя A1.39) ih A1.40), получим уравнение непрерывности
для компоненты импульса pvif приходящегося на единицу объема:
dt dxk "l N
здесь nik=pViVk+p8ik.
Для выяснения смысла тензора П^ проинтегрируем каждый
член этого уравнения по фиксированному объему Vo пространства
и применим преобразование Остроградского. Тогда найдем интег-
интегральную форму уравнения A1.41)
-±-^pVidV= -§nikden A1.42)
Vo (Jo
(в этом соотношении мы опустили внешний источник изменения
импульса — силу f). Из сопоставления левой и правой частей
A1.42) видно, что поверхностный интеграл представляет собой
разность i'-тых компонент импульса частиц среды, вытекающих и
втекающих за единицу времени через поверхность а0, охватываю-
охватывающую объем Vq. Таким образом, П^о^ есть i-тая компонента им-
импульса, протекающего за единицу времени через площадку de> a
nik — /-тая компонента импульса среды, протекающей за единицу
времени через единичную площадку, перпендикулярную оси xh.
Поэтому тензор Пг&. называется тензором плотности по-
потока и м п у л bcia.
Теперь подставим в A1.38) величину Q, равную полной энер-
гии +^, приходящейся на единицу массы. Тогда получим,
ЧТО
С другой стороны, уравнение A0.67) в случае изэнтропических
течений идеальной жидкости принимает вид
Из последних двух уравнений, имея в виду определение энтальпии,
найдем уравнение непрерывности для энергии
(здесь опять-таки опущен член с силой f).
496 Идеальная жидкость Гл. XI
Для изменения энергии среды в заданном абъеме Vo за еди-
единицу времени аналогично A1.42) получим
dt
V,
1р (¦?¦+е) ы=-§м (-j-+h)dOi' AL46)
откуда видно, что величина
PV (-?¦+*] A1.47)
представляет собой плотность потока эн ер ги и (вектор
Умов а). Этот поток слагается из потока полной энергии
pv \-е\ и мощности pv сил давления.
§ 11.4. Несжимаемая жидкость
Уравнения движения идеальной жидкости заметно упрощают-
упрощаются, если жидкость можно считать несжимаемой, т. е. ее плот-
плотность массы р (при (изменении давления © широком диапазоне)
можно считать равной постоянной 'величине ро во всем объеме
жидкости в любой момент времени *. Поскольку плотность извест-
известна, то движение среды определяется полями давления и скорости.
Действительно, в этом случае уравнение непрерывности и уравне-
уравнение Эйлера принимают вид
divv = 0, A1.48)
po-^=-gradp + Pof A1.49)
at
и являются системой уравнений, замкнутой относительно четырех
функций p(r, t), Vi(rf t) (i=l, 2, 3). Поэтому для решения задачи
о механическом движении несжимаемой идеальной жидкости не
требуется знания внутренней энергии и энтропии.
Уравнения идеальной жидкости в особенности упрощаются,
если течение несжимаемой жидкости потенциально. Тогда уравне-
уравнение непрерывности A1.48) после подстановки v=gradq)**4CBOAHTcfl
к уравнению Лапласа
Дф = 0 A1.50)
для потенциала ф скорости течения (как видно, потенциал скоро-
скорости подчиняется тому же уравнению, что и потенциал электроста-
* Различают однородную и неоднородную несжимаемые жидкости. В пер-
первом случае плотность массы одинакова и постоянна для всех частиц, а во
втором случае различна для разных частиц, но постоянна для каждой данной
частицы. Мы ограничимся случаем несжимаемой однородной жидкости.
§ 11.4 Несжимаемая жидкость 497
тического (поля в отсутствие зарядов). В случае неподвижной твер-
твердой стенки граничным условием для этого уравнения является
условие (ом. A1.8)):
„.-А-О. A1.51)
Если же твердая стенка движется заданным образом, то ——
дп
должна быть приравнена соответствующей известной функции
времени и координат.
Что касается уравнения Эйлера, то оно для потенциальных
течений несжимаемой жидкости под действием потенциальных
объемных сил ввиду постоянства внутренней энергии (см. с. 492)
приводит к интегралу Коши .вида
-|f + Y(grad(pJ+7" + ae=l/@' AL52)
Отсюда вытекает, что в случае стационарного потенциального те-
течения несжимаемой идеальной жидкости имеет место интеграл
±(md(fy + JL + ue = C9 A1.53)
где постоянная С одинакова для всех частиц жидкости.
Пример, 11.5. Движение сферы в неограниченной несжимаемой
жидкости.
Сфера радиуса а в отсутствие объемных сил движется посту-
поступательно в неограниченной несжимаемой и безвихревой жидкости
со скоростью U(t)y направление которой коллинеарно некоторой
неподвижной прямой. Найти реакцию жидкости на сферу.
Положим сначала скорость U постоянной и рассмотрим зада-
задачу в системе отсчета S\ связанной со сферой. Поскольку необхо-
необходимо найти решение уравнения Лапласа для потенциала -q/, удов-
удовлетворяющего граничным условиям на поверхности сферы, вос-
воспользуемся сферической системой координат с началом в центре
сферы и полярной осью, направленной по вектору U. Тогда гра-
граничные условия задачи будут иметь вид
dq>'
дг
г.—а
= 0, 9/Uc = —Угсовв. A)
Учитывая, что течение обладает азимутальной симметрией,
решение уравнения Лапласа можно искать в виде функции
ф'=/?(г)РF), B)
где R (г) и Р@) —функции, зависящие соответственно только от г
и 0. Подставляя B) в уравнение Лапласа
где Я — постоянная разделения. Как известно, уравнение E) допу-
допускает однозначные непрерывные решения при Х=1A+1) A=0, 1,
2, ...). Такими решениями являются полиномы Лежандра Pj(cos9)
(например, Ро=1, Pi=cos6). Далее из уравнения D) при
Х=1A+1) для радиальной функции найдем
где А и В — произвольные постоянные. Следовательно, решение
уравнения Лапласа C) может быть записано в виде
/(сове). F)
Используя граничное условие на бесконечности, найдем
Д = -(/81/; G)
затем из условия на сфере получим
Aila1-1 —Bt(l + \) or1-2 = 0. (8)
Из G) и (8) (следует, что
Таким образом, получим решение задачи об обтекании неподвиж-
неподвижной сферы в виде
f?A*Q. A0)
Нетрудно найти отличные от нуля компоненты скорости v'
течения относительно системы S':
498 Идеальная жидкость Гл. XI
§11.4 Несжимаемая жидкость 499
Скорость течения «а сфере будет равна
^9 . A2)
откуда видно, что точки 6 = 0, я являются критическими (при 8 =
= 0, я, v'=0), а в точках 6=л;/2 скорость максимальна и в полто-
полтора раза (превышает скорость потока на бесконечности.
Поскольку поток при обтекании сферы стационарен, восполь-
воспользуемся интегралом A1.26) для определения давления жидкости
на сферу. Подставляя A2) в этот интеграл, получим
A3)
Отсюда ясно, что суммарная сила Fa давления жидкости на сферу
равна нулю. В этом можно убедиться, вычисляя интеграл A1.9).
Например, для проекции юилы <на полярную ось в результате под-
подстановки A3) в (П.9) найдем
-F? = — J J pcosO аН]пЫЩ = 0. A4)
Вывод об отсутствии сопротивления движущемуся телу назы-
называется парадоксом д'Аламбера, поскольку из опыта из-
известно, что такое сопротивление существует. Этот парадокс являет-
является следствием неправомерного пренебрежения вязкими свойствами
жидкости в пограничном слое.
Теперь легко получить решение задачи о течении (покоящей-
(покоящейся на бесконечности) жидкости под действием движущейся сферы.
Для этого перейдем из системы S' с началом в центре сферы в
систему S, относительно которой скорость сфоры равна U. При
этом относительно 5 скорость течения равна v=U+v/, откуда сле-
следует, что потенциал ф скорости v связан с потенциалом <р' соот-
соотношением
т. е.
аЮ cos 9
Ясно также, что при движении сферы со скоростью U(/), завися-
зависящей от времени, потенциал имеет аналогичный вид
500 Идеальная жидкостьГл. XI
Потенциал ер, описывающий нестационарное течение жидкости
относительно 5, 'выражен через переменные г и 9 подвижной си-
системы S' с началом в центре сферы и имеет, следовательно, .вид
<p(#, у, z — fU(t)dt, t). Учитывая это, из интеграла Коши A1.52)
найдем
„ Р(УФJ _
РР
Подставляя A5) при г=а в A1.9) и имея в виду, что отличный от
нуля вклад дает лишь член, пропорциональный —^-, для реакции
dt
жидкости получим выражение
2я Я
яра3 у ^3Q
3 *
я
0
и
0
2я
3
dt Jr^a 2
О О
Я тг О ~*
A6)
Следо)вательно, реакция жидкости как бы увеличивает массу
сферы на величину, равную половине массы жидкости, вытеснен-
ной сферой. По этой причине величина — яра? называется при-
о
соединенной массой.
Пример 11.6. Подъемная сила Жуковского.
Стационарный поток несжимаемой жидкости в отсутствие
внешних сил обтекает неподвижный бесконечный круговой цилиндр
радиуса а, причем скорость Voo потока на бесконечности перпен-
дикулярна* оси цилиндра. Найти потенциал скорости течения, при
капором реакция жидкости на тело отлична от нуля.
Направим ось z по оси цилиндра, а ось х по вектору Voo
(рис. 11.1,а). Ввиду двумерности задачи, запишем уравнение Лап-
Лапласа A1.50) в полярных координатах /*, 6
±J!!L = o. A)
(r
Решение этого уравнения должно удовлетворять граничному усло-
условию A1.51) на поверхности цилиндра
-?- = 0 B)
§ 11.4
Несжимаемая жидкость
501
и условию на бесконечности
ф |r-*oo = V^X == V*> Г COS 0-. C)
Будем искать решение уравнения (Л) в виде
D)
Рис. 11.1
Подставляя D) в A), найдем уравнения для функции R(r) и Ф@)
+ ЬаФ = 0, E)
dr \ dr ) г
F)
502 Идеальная жидкость Гл. XI
где К2 — постоянная разделения. Уравнение E) допускает частные
решения вида
Поскольку значения угла 9 = 0 и 6 = 2я должны соответствовать
одной и той же точке поля скоростей, то Ф@) =Ф(8+2я). Это
условие приводит к требованию Х=т, где т=0, ±1, ±2,....
Подставляя значения К=т в уравнение F), «айдем его частные
решения
д ^ | Ао -Ь Во In г при т = 0,
т 1 Атгт г Втг~т при т = ± 1, ± 2
Таким образом, уравнение Лапласа A) имеет решение
+ 00
ф = XI ^w(a^cos т6 +р-skl тв>- G>
Подставляя G) в граничные условия C) ,и B), найдем постоянные
и тем самым получим искомый потенциал
)
Отсюда легко найти компоненты скорости в любой точке потока
а также на поверхности цилиндра
vr \r=a =*0, t;e |r=a = — 2у«х> sin 6
(как видно, в точках поверхности при 0= —, —г скорость по
абсолютной (величине в два раза превышает значение скорости
на бесконечности). Далее, используя интеграл A1.53)
§ 11.4 Несжимаемая жидкость 503
найдем реакцию жидкости на единицу длины цилиндра
2Я
т. е. снова придем к парадоксу д'Аламбера. Однаксг в действитель-
действительности в пограничном слое около поверхности цилиндра вследствие
вязкости среды возникает движение с циркуляцией, отличной от
нуля, т. е., вообще говоря,, вихревое движение. Оставаясь в рам-
рамках модели идеальной жидкости и не рассматривая вопрос об
образовании циркуляции, зададим такое движение (во всем про-
пространстве, за исключением области г=0) потенциалом
I (Г = const). (8)
Этот потенциал удовлетворяет уравнению A) и определяет поле
скорости (рис. 11.1,6)
причем
(rot v), = — —(rve) ~ -rf- = °
везде, кроме г=0. Таким образом, циркуляция скорости по любо-
любому замкнутому контуру, не охватывающему точку г=0, равна ну-
нулю, а по любому замкнутому контуру, охватывающему точку г=0,
отлична от нуля. Например, циркуляция скорости по некоторой
линии тока, т. е. по окружности с центром в начале координат,
равна
2Я
(? v6r = f Уегбб = Г
^ б'
{заметим, что задача о магнитном поле бесконечного прямолиней-
прямолинейного постоянного тока аналогична задаче о рассматриваемом тече-
течении с потенциалом (8) —см. пример 2.2; в частности, напряжен-
напряженность такого магнитного поля описывается формулами вида (9)).
Теперь рассмотрим течение, определяемое потенциалом, рав-
равным сумме
==1>оо (r + — ^cose -t- ~?-
Этот (потенциал удовлетворяет условиям B), C) и определяет поле
скорости (рис. 11.1, в)
504Идеальная жидкостьГл. XI
= —v»(l 4-
2nr
Отсюда
Vr \r=-.a = 0, Vq \r=_a = Ъ)^ Sltl 0.
Далее, используя интеграл A1.53), найдем реакцию жидкости
на единицу длины цилиндра
2Я
Fx = — Г (p)r=a cos 0 • adb = б, A0)
о
2Я
F^ = — I (p)r=^a sin 0 • ad0 =
о
2Л
Sin0d0 = — рГ^оо. A1)
.??. Г (v2)r=a
Как видно, поток с циркуляцией действует на цилиндр .с силой,
перпендикулярной направлению потока та бесконечности (знак
Fl, конечно, зависит от знака Г). Эта сила называется подъем-
подъемной силой Жуковского. Теоретический расчет величины
циркуляции Г может быть проведен на основе постулата Жуков-
Жуковского— Чаплыгина (см., например, [51], [&2]).
§ 11.5. Звуковые волны
Рассмотрим звуковые волны в жидкостях и газах, иопользуя
модель идеальной жидкости. Пусть среда (в отсутствие объемных
сил) находится в равновесном состоянии, которое задано постоян-
постоянными плотностью ро и давлением р0. Пусть также по какой-либо
причине в среде возникают малые отклонения плотности р' и дав-
давления р' от равновесных значений этих величин. Таким юбразом^
плотность и давление среды в возмущенном состоянии будут соот-
соответственно равны
р = ро4-р', р^ро + р', A1.54)
где р7 и рг зависят от координат и времени и удовлетворяют усло-
условиям: |р7|<ро, |рх|<РЬ.
Найдем уравнения, которым подчинены р' и р', ограничиваясь
линейным приближением. Для этого подставим A1.54) ,в уравнение
§ 11.5 Звуковые волны 505
непрерывности и уравнение Эйлера и опустим члены второго по-
порядка малости, имея в веду, что (величины р/, рг и скорость частиц
V являются величинами первого порядка малости («иже будет
показано, что скорость v должна быть малой по «сравнению со ско-
скоростью звука). Тог^а полные производные по времени можно за-
заменить частными производными, например
dp __ dp
A1.55)
dt dt
а из уравнений A1.3) и A1.4) в том же приближении найдем
|1 О, A1.56)
Po|^+gradp'=O. A1.57)
Ввиду изэнтропичности движения идеальной жидкости между
приращениями давления и плотности данной частицы среды имеет
место соотношение
Р = Ро+ (ljr)(P-Po)' <П-58>
где ( ——) означает производную, взятую при постоянной эн-
\ д9 /s
тропии в равновесном состоянии. Это соотношение согласно A1.54)
можно записать ©.виде
Р'=с5р', A1.59)
где
-Hi).- ("*>
Учитывая, что
-^Г=с"~Г' gradp'=^gradp', A1.61)
и исключая р' из уравнения A1.57), получим
|j ?=O.- A1.62)
Наконец, продифференцируем A1.56) частным образом по времени
и применим операцию дивергенции к A1.62). Затем, исключая из
полученных выражений divv и имея в виду, что лапласиан
A=divgrad, найдем волновое уравнение
506 Идеальная жидкость. Гл. XI
А'°'-Т^ = ° AL63)
для отклонения плотности от ее равновесного значения. Такому же
уравнению подчинено отклонение давления р' (поскольку р' 'Про-
'Пропорционально р')> а также отклонение температуры Т от ее рав-
равновесного значения (поскольку Т' пропорционально р'):
Г ={-%-) р'. A1.64)
\ дР /8
Теперь убедимся в том, что нестационарное поле скорости v,
подчиненное уравнениям A1.56) и A1.62), является потенциаль-
потенциальным полем, также удовлетворяющим 'волновому уравнению. С этой
целью воспользуемся теоремой Гельмгольца, согласно ко-
которой векторное поле, в частности поле скорости, может быть
представлено в виде суммы потенциального и соленоидального
полей. Поэтому положим
v = v1-fv2, A1.65)
где Vi— потенциальное поле, т. е.
rotv1 = 0> AK66)
a v2 — соленоидальное поле, т. е.
divv2-0. A1.67)
Подставляя A1.65) .в A1.56) и учитывая A1.67), получим
A1.68)
найдем
rotva=0. A1.69)
а применяя оператор rot к A1.62) и используя A1.66), найдем
—
dt
Из последнего уравнения ясно, что rot v2, а следовательно, и v2
являются стационарными полями. Таким образом, чтобы рассмот-
рассмотреть нестационарный процесс распространения малых возмущений
в среде, можно положить V2==0, т. е.
v = grad<p. A1.70)
Далее подставим 11.70 в уравнение A1.56) и A1.62). Тогда по-
получим
§ 11.5 Звуковые волны 507
Po-^ + clp' = O. A1.72)
Следует заметить, что уравнение A1.72), вообще-говоря, имеет вид
где f(t)—произвольная функция В|ремени; однако эту функцию
можно приравнять нулю, поскольку скорость определяется произ-
производными функции ф по координатам и, следовательно, без ограии-
1 (*
чения общности ср можно заменить на ср -j \ f(t)dt. Диффе-
ренцируя A1.72) по времени и исключая -?— из A1.71), найдем,
dt
что потенциал скорости подчинен волновому уравнению
(применяя к A1.73) оператор grad, можно получить волновое
уравнение для скорости v).
Итак, все малые (возмущения равновесного состояния среды
подчиняются волновому уравнению с одной и той же постоянной
с0 и, следовательно, распространяются в виде волн со скоростью,
определяемой этой постоянной. Рассматриваемые »волны являются
волнами с малыми амплитудами и связаны со сжимаемостью жид-
жидкости, т. е. с изменением объема частиц среды, поскольку
div v=^0 (см. A0.34) и A1.56)). Такие волны называются звуко-
звуковыми волнами,'а постоянная с0 соответственно называется
скоростью звука. Ее можно вычислить, зная уравнение адиа-
адиабаты для данной среды. Например, в случае идеального газа, ис-
используя A1.19) и A1.13), получим
1~у-^ = у-^. A1.74)
Ро гп
Таким образом, скорость звука в идеальном газе примерно равна
средней тепловой скорости его молекул.
Если потенциал скорости в звуковой волне зависит от времени
и от одной из координат, например от х, то A1.73) сводится к
уравнению
которое, как нетрудно убедиться, имеет решение
Ф = Ф+ (х — cot) + ф- (х + cot), A1.76)
508 Идеальная жидкость Гл. XI
где ф+ и ф~ — произвольные функции, зависящие от начальных и
граничных условий. Из вида решения ф+(х—cot) ясно, что значе-
значения ф+ одинаковы при значениях аргументов, удовлетворяющих
условию х—cot=const. Следовательно, функция ф+(л:—cot) описы-
описывает распространение некоторого возмущения в положительном
направлении оси х со скоростью Cq без искажения начальной фор-
формы этого возмущения. Функция ф-(*+ОH описывает аналогичную
волну, распространяющуюся в отрицательном направлении оси х.
Такие волны называются бегущими плоскими волнами.
Бели возмущения, характеризующие звуковую волну, явля-
являются гармоническими функциями времени, то волна называется
монохроматической. Важным частным случаем таких волн
являются бегущие .плоские монохроматические волны. Значение
этого класса волн весьма велико, поскольку любую волну можно
представить в виде совокупности различных монохроматических
плоских волн, т. е. в виде разложения в ряд или интеграл Фурье.
Решение волнового уравнения для случая бегущих плоских монот
хроматических волн-должно иметь вид
Ф = a cos (kr — со/ + а), A1.77)
где постоянные а, к, со и ос называются соответственно амплиту-
амплитудой, волновым вектором, частотой и начальной
фазой волны, а скалярная функция кг—со/+а— фазой вол-
н ы. Приведем также более удобную для вычислений форму ве-
вещественной функции A1.77), записанной в виде действительной
части от комплексной функции
Ф = Ие{Л^кг-^}, A1.78)
где A = aeia — ,к о мйп л е к с н а я «а м »п л и т у д а».
Подставляя A1.78) (или A1.77)) в A1.73), убедимся в том,что
со2 = Со &2- Следовательно, со и k должны быть связаны между собой
соотношением
со = с0?; A1.79)
при этом волновой вектор полагается равным
к = —п, A1.79)
Со
где п — единичный вектор в направлении распространения волны.
Таким образом, волновое уравнение имеет решение
Ф = Re {&№*-*<*% A1.80)
где А — произвольная постоянная.
Решение A1.80) описывает плоскую монохроматическую волну,
фронт которой распространяется со скоростью со в направле-
§ 11.5 Звуковые волны 509
нии .волнового вектора. Действительно, продифференцировав по
времени соотношение kr—kcot=€onst9 определяющее данное значе-
значение фазы, найдем для скорости с распространения франта вдоль к,
значение c=cq. Скорость с называется фазовой скоростью.
Согласно A1.79) ее можно представить в виде
c = -f. A1.81)
Отметим также, что соотношение A1.79), характеризующее моно-
монохроматическую волну, справедливо в системе отсчета, связанной
со средой, в которой распространяется волна (.конечно, система
связывается со средой в ее невозмущенном состоянии).
Итак, постоянная с0 в полученных выше волновых уравнениях
равна фазовой скорости распространения плоской монохроматиче-
монохроматической звуковой волны или, кратко говоря, скорости звука. Что ка-
касается скорости v движения частиц жидкости, то она по «направ-
«направлению коллинеарна волновому вектору (в этом случае волна назы-
называется продольной), а по величине много меньше скорости
звука. Действительно, рассматривая волну с потенциалом
Ф = a cos (kr — kcQt),
найдем, что
v = уф-ф'к, A1.82)
а
JjL = -kco<?'. A1.820
С помощью этих выражений из A1.72) получим, что poV — cop'. От
сюда ввиду малости р' по сравнению с ро следует
«1. A1.83)
?>о Ро
Таковы основные свойства плоской монохроматической звуковой
волны.
В общем случае может иметь место дисперсия скорости
звука, т. е. зависимость фазовой скорости от частоты волны,
-^-=с = с(ю). A1.84)
k
Дисперсия звука определяется законом дисперсии, т. е.
функцией вида
со = со (к) A1.85)
(см. пример 11.9, а также § 12.3). Этот закон определяет группо-
групповую скор ость
510 Идеальная жидкость Гл. XI
и=-|-, A1.86)
т. е. скорость переноса анерлии группой монохроматических волн
(«волновым пакетом»). Фазовая и групповая скорости монохрома-
монохроматической волны A1.80) ввиду отсутствия дисперсии совпадают.
Пример. 11.7. Эффект Допплера.
Найти частоту звука, воспринимаемого наблюдателем, дви-
движущимся относительно' источника звука с постоянной скоростью.
Рассмотрим случай, когда источник звукц частоты со покоится
относительно 'невозмущенной звуком среды, а наблюдатель дви-
движется относительно среды со скоростью V. В системе 5, связанной
с источником и средой, фаза монохроматической волны равна
1сг—о)^, причем (d = cok. Совершим преобразование r=Vf+r' к си-
системе S', связанной с наблюдателем, и учтем инвариантность фазы,
т. е. соотношение
кг —ю/ = к'г' —<©7, A)
где к' и со'— волновой вектор и частота звука в системе S'. Тогда
получим
k'=k, (o'=co — Vk. B)
Используя соотношение A1.79) (которое выполняется в системе 5,
связанной со средой) и вводя угол 0 между направлением распро-
распространения волны и скоростью наблюдателя, из B) окончательно
находим
©'=© (l - Л-соав). C)
Если же источник, звука частоты о/ движется относительно
неподвижной среды и наблюдателя со скоростью V, то для часто-
частоты, наблюдаемой в системе S, получим
со= f . D)
1 — cos 0
со
Из C) и D) видно, что частота звука, регистрируемая на-
наблюдателем, движущимся относительно источника звука, отли
чается от частоты источника (эффект Допплера). Например,
из формулы D) видно, что для удаляющегося источника (cos0<O
лри к, направленном на наблюдателя) со<о/, а для приближаю-
приближающегося источника (cos0>O) со>о/. Если же V cos0>O), то со<0;
следовательно, если источник посылает сначала один звуковой
сигнал, а затем другой, то более поздний сигнал дойдет до наблю-
наблюдателя первым.
§ 11.6 Ударные волны 511
§ 11.6. Ударные волны
Рассмотрим стационарный однородный -поток газа, движущий-
движущийся со скоростью V относительно неподвижной системы отсчета S*
Если скорость V потока превышает скорость с звука в газе (отно-
(относительно самого газа), то лоток называется сверхзвуковым;
если же V меньше с, то поток называется дозвуковым. Свой-
Свойства сверхзвукового потока существенно отличаются, от свойств
дозвукового течения. В связи с этим важной характеристикой по-
потока является отношение М скорости потока к скорости звука в
нем:
Л1=—. A1.87)
с
Это число называется числом Маха.,
Одна из особенностей сверхзвукового потока заключается в
том, что малые возмущения плотности газа (и других величин)
не могут в таком потоке распространяться по любому 'направле-
'направлению. Действительно, скорость распространения возмущений отно-
относительно S равна сумме V+?n, где п"—направление распростра-
распространения возмущений относительно газа. ПсГэтому все возможные
скорости распространения возмущений относительно 5 могут быть
получены, если из неподвижной точки О (в которой возникают воз-
возмущения) отложить вектор V+cn и при фиксированном V при-
придавать вектору п все возможные направления. В результате такого
изменения вектора п .конец вектора V+oi будет скользить по сфе-
сфере радиуса с с центром в конце вектора V.
Из сказанного ясно, что в дозвуковом потоке (V<.c) вектор
V+oi может иметь любое направление, в то время как в сверх-
сверхзвуковом потоке (V^>c) вектор V+cn (при любом направлении п)
будет лежать внутри конуса (или на его поверхности) с вершиной
в источнике возмущений О и с образующей, касающейся сферы ра-
радиуса с с центром в конце вектора V. Угол а полураствора этого
конуса определяется равенством
since- — = —. A1.88)
Итак, малые возмущения в сверхзвуковом потоке могут распро-
распространяться лишь <в указанном конусе.
Другой особенностью сверхзвукового потока является, как
известно из опыта, возможность возникновения ударной вол-
н ы. Так называется волна значительного уплотнения среды, свя-
связанного с резким повышением давления и температуры; при этом
практически скачкообразное изменение параметров происходит в
очень тонком слое среды и сопровождается потоком вещества че-
через этот слой. Ударные волны возникают при обтекании тел сверх-
512 Идеальная жидкость Гл. XI
звуковым потокам газа, при взрывах и других сильных возмуще-
возмущениях среды.
Рассмотрим теорию ударной волны, отвлекаясь от процессов,
происходящих в весьма толком слое среды, где ее параметры силь-
сильно изменяются. Это позволяет заменить такой слой поверхно-
поверхностью разрыва, т. е. поверхностью, ла которой параметры сре-
среды терпят разрыв непрерывности.
Ограничимся случаем стационарного течения газа, когда
поверхность разрыва будет неподвижной относительно системы
отсчета, в которой рассматривается движение газа. Величины, ха-
характеризующие состояние газа *до прохождения поверхности раз-
разрыва и после него, связаны между собой законами сохранения
массы, импульса и энергии. Следовательно, -на поверхности разры-
разрыва должны быть непрерывными потоки вещества, импульса и
энергии. -
Чтобы сформулировать эти условия, возьмем некоторый эле-
элемент nda поверхности разрыва и свяжем с ним систему координат,
направляя ось х вдоль нормали п к элементу. Затем построим ци-
цилиндр с осью, направленной по х, поперечным сечением, равным
do, и с основаниями," лежащими по разные стороны от рассматри-
рассматриваемого элемента поверхности разрыва бесконечно близко к этому
элементу. Тогда, применяя к среде, находящейся <в указанном ци-
цилиндре, законы сохранения массы, импульса и анергии ? интег-
интегральной форме (см. A0.41), A1.42)-, A1.46)) и учитывая стацио-
стационарность" потока, получим условия:
PAi = W> A1.89)
Pi + Pl^l =ftf P2^2, A 1.90)
fPAAi = P2^V A1.91)
PAAi = Р2^2^2, A1.92)
2
) { ) (H.93)
где индекс 1 относится к газу до прохождения поверхности раз-
разрыва, а индекс 2 — к газу после такого прохождения.
Из этих условий видно, что может существовать танген-
тангенциальный разрыв, т. е. такой разрыв, при котором отсутст-
отсутствует поток вещества через поверхность разрыва, тогда vx\ = vX2=
= 0. В этом случае Pi=p2, а скачки плотности и тангенциальных
составляющих скорости vy и vz произвольны. Если же поток 1веще-
ства через поверхность разрыва отличен от нуля (т. е. ^1=^=0,
^х2=7^=0), то имеет место ударная волна. В этом случае ввиду
A1.89) тангенциальные составляющие скорости непрерывны
§ 11.6 Ударные волны 513
vyi = vifl* Vzi = vz2> A1.94)
а плотность, давление и нормальная составляющая скорости изме-
изменяются скачком. Эти изменения подчинены условиям цA1.89),
A1.90), а также условию
4- + Л1--Ф- + *.. A1.95)
вытекающему из A1.93) с учетом A1.89) и A1.94).
Теперь рассмотрим неподвижную ударную волну, перпенди-
перпендикулярную к направлению потока, т. е. рассмотрим прямой ска-
скачок уплотнения. В этом случае тангенциальные составляю-*
щие скорости равны нулю и, следовательно, vx=v. Поэтому усло-
условия A1.89), A1.90) и A1.95) можно записать в виде
A1.96)
(П.97)
Полученные условия определяют конечные изменения всех
термодинамических величин при прохождении среды через удар-
ударную .волну, в том числе и изменение энтропии,- Это связано с дис-
сипативными процессами, обусловленными вязкостью и теплопро-
теплопроводностью газа и происходящими в тех весьма тонких слоях газа,
толщиной которых в этой теории пренебрегают. Итак, движение
идеальной жидкости через ударную волну является необратимым
течением, т. е. течением, для которого согласно второму закону
термодинамики
s2>Si. A1.99)
Из формул A1.96) — A1.98) следует ряд соотношений. Напри-
Например, обозначая плотность потока среды через j=pv и учитывая
его непрерывность на поверхности разрыва, из A1.96) получим
vt =*-*-, *а = -А A1.100)
Pi Pa
а исключая из A1.97) скорости v{ и v2 с помощью A1.100), найдем
/а _ As —Pi
J ~ J____^ ' A1.101)
Pi P2
Отсюда следует, что либо р2>Р\ и р2>рь либо р2<.р\ и Р2<рь
Однако в действительности реализуется скачок уплотнения, так
17 Зак. 284 .
514 Идеальная жидкость Гл. XI
как только условия p2>pi и р2>Р\ соответствуют требованию
A1.99) (см., нкпримар, [52]). Заметим также, что скачок уплотне-
уплотнения ввиду непрерывности потока вещества сопровождается паде-
падением скорости газа после прохождения ударной .волны {v2<V\).
Это уменьшение скорости газа означает также, что скорость и
стационарной ударной волны по отношению к газу впереди нее
(ц1==—vx) и позади (и2=—v2) различна (и2>щ).
Наконец, исключая из A1.98) скорости V\ я v2 с помощью
A1.100) и используя затем A1.101), найдем скачок энтальпии:
Это соотношение, называемое адиабатой Гюгонио (или
ударной адиабатой), определяет зависимость между р2 и
р2 при заданных pi и р\.
Пример 11.8. Ударная волна в идеальном газе.
Найти отношение температуры Т2 идеального газа за фрон-
фронтом ударной волны к температуре Т\ газа перед фронтом этой
волны, считая известными давления pi, р2 и отношение у=ср/Сх
для данного газа. Найти аналогичные отношения для плотностей
и скоростей.
Используя термическое уравнение состояния идеального газа,
выражение энтальпии (см. формулу B) примера 11.4), а также
A1.17) и A1.18), из уравнения адиабаты A1.102) найдем
/ Р2 \
\ Рг /
Отсюда с помощью уравнения состояния и A1.96) получим, что
Р2 = (Y — 1) Р1 + (У+ 1) Р2 =. Vl /2\
Pi
Приведем также выражение для разности энтропии (см. A1.16))
В случае ударных волн весьма большой интенсивности, т. е.
в случае, когда
из A) —C) найдем
§ 11.7 Магнитогидродинамика идеальной жидкости 515
F)
G)
Pi
Из E) и F) следует, что скачок температуры и давления может
возрастать неограниченно *, «в то время как скачки плотности и
скорости ограничены предельными значениями. Например, для од-
одноатомного газа 7==5/з и, следовательно, <в пределе D) имеют ме-
место соотношения
Р2 = 4р1, v2 = vj4; (8)
для двухатомных газов у=7/5 |И> таким образом,
p2-6Pl, 1^ = ^/6. (9)
§ 11.7. Магнитогидродинамика идеальной жидкости
Рассмотрим движение электропроводящей идеальной жидко-
жидкости, на которую действует внешнее магвитнюе поле. Электрические
токи, возникающие в такой жидкости, обусловливают механиче-
механическое воздействие и а жидкость со стороны магнитного поля и, кро-
кроме того, изменяют само магнитное поле. Для описания этих про-
процессов следует1 использовать систему уравнений идеальной жидко-
жидкости совместно с уравнениями Максвелла (см., например, [40])*
Ограничимся случаем, когда частота со колебания напряжен-
ностей полей сравнительно мала, а электропроводность среды X
весьма велика и постоянна, т. е. тем случаем, когда есо<С2яЯ
(е — диэлектрическая постоянная среды). Тогда можно прене-
^ 1 до
бречь током смещения по сравнению с током проводи-
4л dt
мости j. Ввиду большой электропроводности можно также пре-
пренебречь конвекционным током, поскольку он связан с движением
(вместе со средой) свободных объемных зарядов, которые расса-
рассасываются тем быстрее, чем выше электропроводность. Кроме того,
будем рассматривать среду с магнитной проницаемостью |х=1,
так как для всех проводящих жидкостей и газов |i«l. Если все
перечисленные допущения выполняются, то из уравнений Макс-
Максвелла следует система:
rotE = —— —, A1.103)
с dt
rotH = — j, . A1.104)
С
* Большое повышение температуры приводит к диссоциации молекул газа
и другим явлениям, которые здесь не рассматриваются.
17*
516 Идеальная жидкость Гл. XI
divH«0, A1.105)
A1.106)
(здесь с — скорость света в вакууме)*.
Эту систему можно свести к уравнениям, содержащим только
напряженность Н магнитного поля. Действительно, исключая из
A1.103) с помощью A1.106) напряженность Е электрического по-
поля, получим
-^—--i-rotj + rotfvHJ.
Отсюда с помощью A1.104) исключим j, Тогда найдем, что на-
напряженность магнитного поля подчинена уравнению
— = rot[vH] ?- rot rot H, A1.107)
которое следует решать совместно с A1.105)\ Наконец, имея в ви-
виду, что электропроводность среды весьма велика и, следовательно,
члены, пропорциональные 1Д, весьма малы, получим исходные
для рассматриваемого случая уравнения электромагнитного поля:
— = rot[vH], A1.108)
divH = 0. A1.109)
Эту систему следует решать совместно с уравнениями A1.3) —
A1.6) для гидродинамических полей идеальной жидкости. Учи-
* Выражение A1.106) можно получить, если соотношение j = A,E', справед-
справедливое, вообще говоря, для неподвижного проводника,, применить в системе от-
отсчета «S', относительно которой данный проводящий элемент среды в данный мо-
момент времени покоится. В самом деле, указанная система S в данный момент
времени движется со скоростью v проводящего элемента относительно систе-
системы S, в которой, изучается движение жидкости и электромагнитного поля.
Тогда согласно принципу Галилея
Е + —[vH] = E' + 4-lv'H'l,
С С
где v' следует приравнять нулю, поскольку проводящий элемент покоится в S\
Таким образом, напряженность электрического поля в 5' равна
откуда следует A1.106).
§11.7 Магнитогидродинамика идеальной жидкости 617
тывая, что сила Лоренца pfL, действующая на ток j со стороны
магнитного поля, равна
— №Ц=-у-[rot H, Н] A1.110)
С 4Л
(здесь использовано уравнение A1.104)), запишем уравнения
A1.3) —A1.6) в виде
-^- + р div v = 0, A1.111)
dt
^ gradp + 4M,H], A1.112)
dt 4я
р — = — pdivv, A1.113)
dt
— = 0. A1.114)
dt x '
Здесь термодинамические уравнения состояния считаются извест-
известными (в уравнении A1.113) опущен член j2/K9 пропорциональный
малой величине 1/Х и равный выделяемому джоулеву теплу).
Итак, уравнения A1.108), A1.109), A1.111) —A1.114) представ^
ляют собой систему уравнений магнитогидродинамики идеальной
жидкости.
Теперь убедимся, что рассматриваемая бесконечно-проводя-
бесконечно-проводящая среда обладает важным свойством, заключающимся в том,
что поток магнитной напряженности через данный материальный
контур не изменяется со временем и, следовательно, магнитные
силовые линии «вморожены» в среду и движутся вместе с ней.
Действительно, из A1.106) видно, что в рассматриваемом случае
ток проводимости создается напряженностью
?'=?+ — [VH]. A1.115)
с
Следовательно, электродвижущая сила, возникающая в данном
замкнутом материальном контуре такой среды, будет равна инте-
интегралу
(j)E'6r, A1,115')
где интегрирование определяется аналогично интегрированию в
A1.27). Согласно закону Фарадея электродвижущая сила опреде-
определяется изменением потока магнитной индукции через поверхность,
опирающуюся на проводящий контур, т. е.
518 Идеальная жидкость Тл. XI
где поток магнитной индукции Ф = f Шс, поскольку ц=1,
а
Подставляя A1.115) в правую часть закона A1.116) и используя
теорему Стокса, получим
Г rot Ed*+ — frot[vH]i*.
g a
Наконец, используя уравнение Максвелла A1.103), найдем, что
to. A1.117)
dt
Отсюда сразу видно, что в бесконечно проводящей среде, где име-
имеет место A1.108) ,ч поток магнитной напряженности через данный
материальный контур сохраняется. Следовательно, силовые линии
магнитного поля движутся вместе с находящимися на этих ли-
линиях частицами жидкости. Поэтому говорят, что силовые линии
«приклеены» к жидкости или «вморожены» в нее.
Пример 11.9. Магнитогидродинамические волны в несжимае-
несжимаемой идеальной жидкости.
Несжимаемая идеальная жидкость плотности р помещена во
внешнее постоянное однородное магнитное поле напряженности
Но. Найти закон дисперсии магнитогидродинамических волн, соот-
соотношения между возмущениями магнитного поля, скорости и дав-
давления, а также независимые направления поляризации волн.
Поскольку плотность жидкости неизменна, уравнения магни-
магнитогидродинамики существенно упрощаются и принимают вид
— = rot[vH], A)
р — = — grad р + — [rot H, Н], B)
dt 4я J
div v = 0, div Н = 0. C)
Линеаризуем эту систему, полагая, что
где
а также считая v малой величиной. Тогда
Oil j. Г it 1 /С\
= rotlvn0], (о)
dt
§ 11.7 Магнитогидродинамика идеальной жидкости 519
р IT e ~ grad pf + 17[rot h' H°J' F)
div v = 0, div h == 0. G)
Теперь преобразуем E) и F), используя формулы векторного
анализа, справедливые для двух произвольных векторов:
[V fvAJJ = (AV) v - (vV) A + v (VA) - A (Vv), (8)
V (hA) = (hV) A + (AV) h + [h [VAJ] + [A [yhJJ. (9)
Полагая здесь А=Н0 и учитывая уравнения G), найдем, что
rot [vH0] = (H0 grad) v, (8')
grad (hH0) = (Ho grad) h ¦+ [Ho, rot hj, (9')
и тем самым вместо E) и F) придем к системе уравнений
|L , A0)
+-?-(Hograd)h, A1)
которые следует решать совместно с условиями G).
Будем искать решение системы G), A0), A1) в виде плоских
волн
v = o ь
р'^ру^чт A2)
с волновым вектором к и частотой со. Подставляя A2) в G), A0)
и A1), получим
kv = 0, kh = O, A3)
-coh-(Hok)v, A4)
pcov =
k
4я / 4я
Из A3) и A4) следует, что возмущение h магнитного поля и
скорость v частиц среды перпендикулярны волновому вектору к,
а п коллинеарно v. Что касается соотношения A5), то, умножая
его скалярно на к и используя A3), найдем
т. е. соотношение между возмущениями давления и магнитного
поля. Затем, учитывая A6), из A4) и A5) получим систему
520 Идеальная жидкостьГл. XI
h + cov=O, A7)
4яр
с характеристическим уравнением
со* = -«!-. A8)
4яр V ;
Наконец, исключая из A4) частоту со с помощью A8), найдем
два возможных соотношения между скоростью и возмущением
магнитного поля
b A9)
Полученное решение описывает поперечные плоские ©олны
магнитной напряженности h и скорости v, а также волну р' дав-
давления с законом дисперсии, вытекающим из A8):
со = "А . B0)
К4яР v '
Этот закон определяет групповую скорость (см. A1.86))
направленную вдоль Но, т. е. по невозмущенным силовым линиям.
Рассматриваемые волны называются магнитогидродина-
мическими волнами (или волнами Альфвена).
Теперь определим независимые направления поляризации маг-
нитогидродинамических волн. Для этого направим ось z вдоль
заданного вектора к, а плоскость хг совместим с плоскостью, оп-
определяемой векторами к и Но. Тогда условия A3) поперечности
v и h сведутся к требованиям
v, = 0, ft2 = 0, B2)
а
Hok = HOzk
(здесь k — проекция волнового вектора на ось z). Таким образом,
система A7) сводится к следующим двум4 системам уравнений
chx + #оЛ =0, J^ hx + cvx = 0; B3)
chy + H02vy = О," J^Lhy + cvy = 0, B4)
TT
где с = —~=—фазовая скорость волн Альфвена.
у 4яр
§11.7 Магнитогидродинамика идеальной жидкости 521
Из систем B3) и B4) ясно, что возмущения hx и vx распро-
распространяются независимо от возмущений hy и vy. Следовательно,
существуют два независимых направления поляризации: вдоль
оси х и вдоль оси у, т. е. в плоскости векторов Но и к и перпенДи-
кулярно к ней.
При указанном выборе системы координат возмущение давле-
давления определяется формулой
?к B5)
Отсюда видно, что возмущение рг связано только с составляющи-
составляющими напряженностей Но и h вдоль одного из направлений поляри-
поляризации, лежащего в плоскости векторов Но и к.
Глава XII
ВЯЗКАЯ ЖИДКОСТЬ
§ 12.1. Тензор напряжений и уравнения движения
Рассмотренная в § 11.1 модель идеальной жидкости предпола-
предполагает полное пренебрежение касательными напряжениями. Однако
в действительности такие напряжения имеют место при движении
жидкостей и газов. Изучим свойства среды, в которой напряжения
зависят от скоростей деформаций, при этом наряду с нормальными
напряжениями, вообще говоря, отличаются от нуля и касательные
напряжения. Такую среду называют вязкой жидкостью.
О наличии касательных напряжений свидетельствуют простей-
простейшие эксперименты. Например, возьмем две плоские твердые пла-
пластинки, между которыми находится жидкость, и закрепив одну из
них, будем двигать вторую пластину параллельно первой с малой
постоянной скоростью. Опыт покажет: чтобы поддержать скорость
постоянной, к ней нужно приложить силу, пропорциональную пло-
площади пластины и отношению ее скорости к расстоянию между
обеими пластинами; из опыта также следует, что коэффициент
пропорциональности, называемый коэффициентом вязкости, будет
зависеть от свойств среды (теория этого опыта подробно изложе-
изложена в примере 12.1).
Чтобы учесть касательные напряжения, представим тензор на-
напряжений в виде
*«='-рв* + *й. A2Л)
где второй член определяет силу, пропорциональную производным
скорости по координатам, т. е. силу, зависящую от скорости дви-
движения частиц среды относительно друг друга. Это допущение,
сделанное еще Ньютоном, основано на экспериментах, подобных
рассмотренному.
Итак, «вязкий» тензор напряжений Тгь должен быть однород-
dvt
ной линейной формой относительно производных ——, причем
формой, симметричной относительно перестановки индексов в си- *
лу требования A0.52).
§ 12.1 Тензор напряжений и уравнения движения 523
Чтобы найти выражение т*л, заметим, что из компонент тензо-
тензора —— можно образовать два симметричных тензора, связан-
связанна
ных со скоростями деформаций различного характера, а именно,
со скоростями деформаций чистого сдвига и равномерного сжатия.
Такими тензорами являются
Sik = vik-Vik A2.2)
и
где vik — тензор скоростей деформации A0.23). Действительно, симмет-
симметричный тензор Sik связан только со сдвиговыми деформациями, по-
поскольку Sik = 0 при равномерном сжатии (в этом случае все члены
(JEL.) = о, JZl. = J3L. = JZl). Компоненты симметричного тен-
\ дхь ) ijtk дхх дх2 дх$ )
зора Vik пропорциональны дивергенции скорости, т. е. связаны только
со скоростью изменения объема частиц среды (см. A0.34)). В <:амом
деле, если —— Ф 0 при i Ф k, а при i = k —— = 0, т. е. если имеют
dxk dxk
место только сдвиговые деформации, то Vik = 0. Таким образом, ис-
используя тензоры Sik и Vik9 с которыми связаны две возможные дефор-
деформации различного характера, а также учитывая требование линейности
xik относительно производных ——, найдем
dxk
/ dvt . dvk 2 Л д°а \ . гл dva no л\
ik [dxk ^ dxt 3 ik dxa ) ^ lk дха' К }
где скалярные величины r\ и ^ соответственно называются пер-
первым и вторым коэффициентами вязкости (эти ко-
коэффициенты, вообще говоря, зависят от плотности и температуры
среды).
Среда, для которой «вязкий» тензор напряжений т^ имеет
вид A2.4), называется линейной вязкой жидкостью
(обычно ее кратко называют вязкой жидкостью). Такая среда
является изотропной, поскольку ее свойства определяются скаляр-
скалярными величинами г) и ?.
Используя A0.73), A2.1) и A2.4), нетрудно получить урав-
уравнения изменения импульса вязкой жидкости
п dvt _ dp д ( ( dv{ dvk 2 dva
A2.5)
524 Вязкая жидкость Гл. XII
Эти уравнения описывают необратимые процессы, причем не-
необратимость связана с тензором тг-ь, поскольку щи инверсии вре-
времени t-+—t (v-*—v) изменяют знак, только те члены A2.5), ко-
которые связаны с хш, а остальные члены не меняют знака, Поэто-
Поэтому диссипация энергии (переход части механической энергии в
тепловую) будет определяться мощностью «вязких» напряжений,
выделяемой при деформациях частицы, тА е. диссипативной функ-
функцией вида
D = xikvik. A2.6)
Поскольку—l- = ®ki + vki (см. A0.22), A0.23)), диссипативную
dxk
функцию можно также представить в форме
D = Ttk-%L. A2.6')
Для преобразования A2.6') используем выражение xik через сим-
симметричные тензоры Sik и Vlky а также очевидное выражение для тен-
зора -т-*-:
дхк
^ = S*+Vib + <»ik- A2.7)
Тогда, имея в виду, что
Sik<oik = 0, V,*co,fe = O, A2.8)
и учитывая, что 6^6ife = 3, а
1 дщ 1 dok I dv
f^o, A2.9)
3 дха \ dxt дх )
найдем выражение для диссипативной функции вязкой жидкости
A2.10)
Теперь, используя A2.1) и A2.6), получим мощность всех на-
иряжений, связанную с деформацией
P,kvlk=-p-%!- + D. A2.11)
oxi
Подставляя A2.11) в A0.74), придем к уравнению изме-
изменения энергии вязкой жидкости
p^L^-pJ^ + D--^. A2.12)
v dt H dxt dxt
§ 12.2 Уравнение Навье — Стокса 525
Наконец, используя A2.10J, из A0.75) найдем уравнение
изменения энтропии вязкой жидкости
A2.13)
где D определено в A2.6) или A2.10). Таким образом, из нера-
неравенства D>0 и A2.10) вытекает неравенство
из которого ввиду положительной определенности форм SikSik и
VikVik следует, что коэффициенты вязкости всегда положительны:
Л>0, П>0. A2.14)
Уравнения A2.5), A2.12) и A2.13) совместно с уравнением
непрерывности являются системой уравнений движения вязкой
жидкости. Она становится замкнутой, если ее дополнить уравне-
уравнениями состояния
р==р(р,Г), е = е(р,Т), A2.15)
а также эмпирическим законом Фурье, согласно которо-
которому плотность потока тепла пропорциональна градиенту темпера-
температуры:
, A2.16)
где к — коэффициент теплопроводности, который
является заданной функцией плотности и температуры (%>0, по-
поскольку поток q всегда направлен от частицы с большей темпера-'
турой к частице с меньшей температурой). Отметим, что уравне-
уравнения A2.15) в данном случае используются для описания необра-
необратимых процессов. Однако такое использование оправдано, если гра-
градиенты скорости, температуры и других величин малы и пред-
представляется возможным пренебречь степенями этих градиентов (на-
(начиная со второй и выше), а также пренебречь производными выс-
высших порядков по координатам.
§ 12.2. Уравнение Навье —Стокса
Уравнения движения вязкой жидкости несколько упрощаются,
если коэффициенты вязкости можно считать постоянными для
данной жидкости величинами. Действительно, в этом случае
(см. A2.4))
526 Вязкая жидкость Гл. XII
dxk \ dxkdxk dxtf)xi 3 dxidxa
причем входящие сюда суммы вторых производных можно запи-
записать в форме
d2v d2Vr, д
—— =Av, —^- = __divv. A2.18)
dxkdxk axidxa oxi
Таким образом, уравнения A2.5) приводят куравнению На-
вье — Стоке а:
р — = — gradp + rjAv + (J- + A grad div v + pf: A2.19)
dt \ 3 /
Если жидкость можно считать несжимаемой, то в силу урав-
уравнения непрерывности divv = 0 и, следовательно, тензор Vik = O
(см. A2.3)), а тензор напряжений A2.4) и диссипативная функ-
функция A2.10) преобразуются соответственно к виду
<ti* = 4(-^L + -~). A2.20)
A2.21)
dxk дх( ) \ dxk dx
Поэтому системой уравнений движения несжимаемой вязкой жид-
жидкости является следующая замкнутая относительно неизвестных
vnp система
divv = 0, A2.22)
Am I
— = — — gradp + vAv + f, A2.23)
dt p
где v=T|/p — удельная вязкость (v часто называют ки-
кинематическим коэффициентом вязкости, а первый коэффи-
коэффициент вязкости — динамическим коэффициентом вязкости).
Если система A2.22) — A2.23) решена, т. е. поля давления и ско-
скорости найдены, то поле температуры может быть определено с
помощью уравнений A2.12) и A2.13) совместно с A2.15) и
A2.16).
Граничным условием к уравнениям движения вязкой жидкости
является условие обращения в нуль скорости среды на непо-
неподвижной твердой поверхности а0:
vk = 0. A2.24)
§ 12.2 Уравнение Навье -— CtQKca 527
Это условие, связанное с представлением о молекулярном взаимо-
взаимодействии между молекулами среды и поверхности, подтверждает-
подтверждается на опыте в довольно большом интервале плотностей и темпе-
температур. Заметим, что на движущейся твердой поверхности скорость
среды должна равняться скорости U соответствующего элемента
поверхности:
A2.25)
(здесь ra — радиус-вектор элемента поверхности).
Часто приходится вычислять силу, действующую на неподвиж-
неподвижную твердую поверхность со стороны жидкости. В связи с этим
получим выражение для.силы, действующей на элемент da по-
поверхности. Эта сила должна равняться • потоку импульса через
элемент da. Поэтому найдем тензор Пгл плотности потока им-
импульсу для вязкой жидкости. Для этого рассмотрим уравнение из-
изменения имшульса вязкой жидкости
л dvc _ _ dp л dxik ^ рд
dt dxi dxk
и представим это уравнение в виде A1.41). Тогда
-P§ik — xik- A2.26)
Отсюда, учитывая граничное условие A2.24), найдем силу
действующую со стороны вязкой жидкости на элемент da непо-
неподвижной твердой поверхности:
dF? = (— рщ + xiknk) da A2.27)
(напомним, что орт п направлен по нормали, внешней к поверх-
поверхности твердого тела, т. е. внутрь жидкости).
Теперь рассмотрим вопрос о подобии стационарных
течений несжимаемой вязкой жидкости в отсутствие заданных
сил. Определим понятие подобия, для чего рассмотрим два раз-
различных стационарных потока. Если каждой точке ri пространства
в случае одного потока можно поставить в соответствие точку Г2
пространства в случае другого потока с помрщью преобразования
rt = *rlf A2.28)
где постоянная k одинакова для всех точек сравниваемых прост-
пространственных областей, и при этом окажется, что любая величина
Qu характеризующая первый поток и взятая в любой точке гь
связана с соответствующей величиной Q2, характеризующей вто-
второй поток и взятой в точке Г2=&гь соотношением
rJ A2.29)
528 Вязкая жидкость' Гл. XII
с постоянной kQ, то такие стационарные течения называются по-
подобными, а постоянные k, kQ называются коэффициентами
подобия.
Чтобы выяснить интересующий нас критерий подобия, пред-
представим уравнение Навье—Стокса A2.23) в безразмерной форме.
Для этого зададим постоянные величины, характеризующие тече-
течение несжимаемой вязкой жидкости, а именно: удельную вязкость
% размер / неоднородности и скорость U потока (например, в слу-
случае обтекания шара / и U будут соответственно равны радиусу
шара и скорости потока на бесконечности). Тогда, вводя безраз-
безразмерные функции и операторы
?-т- '-V- '-?¦• A2-30)
из A2.23) для стационарных течений при f=0 найдем
(vy) v = —уН Ду, A2.31)
где
Я= — A2.32)
— число Рейнольдса (это единственная* безразмерная ком-
комбинация размерных величин Ur /, v, характеризующих течение).
Из уравнения A2.31) следует закон подобия Рейнольдса,
согласно которому два стационарных потока несжимаемой вязкой
жидкости, обтекающие геометрически подобные тела в отсутствие
заданных сил, являются подобными, если оба потока характери-
характеризуются одним и тем же числом Рейнольдса. Действительно, если
числа R и граничные условия для обоих течений одинаковы, то ре-
решениями уравнения A2.31) в этих двух случаях будут одни и те
же функции вида
v = v(F, Я), P==p(F, R). A2.33)
Отсюда с учетом A2.30) для скоростей и радиусов-векторов двух
потоков, удовлетворяющих закону Рейнольдса, получим выраже-
выражения
которые указывают на подобие течений.
Решение уравнения Навье—Стокса в виде A2.33) позволяет
прийти и к другим практически важным заключениям. Например,
подставляя A2.33) в A2.27), учитывая A2.30) и интегрируя по
§ 12.2 Уравнение Навье — Стоке а 529
поверхности тела, найдем, что сила, действующая на тело со сто-
стороны обтекающего его потока, должна иметь вид
F* =J!?-dV(R)f A2.35)
где а — «эффективная» площадь, пропорциональная квадрату ха-
характерного размера тела (а~/2).
В заключение отметим, что решения рассмотренных уравнений
вязкой жидкости лишь формально могут существовать при любых
числах R. В действительности же только то решение описывает
реальное течение, которое является устойчивым по отношению к
бесконечно малым возмущениям. Согласно экспериментальным
данным стационарное течение тела является устойчивым при ма-
малых числах Рейнольдса, а начиная с некоторого достаточно боль-
большого числа Рейнольдса такого обтекания не существует. В первом
случае траектории частиц среды имеют достаточно гладкий ха-
характер, среда движется как бы слоями, т. е. имеет место слоистое
или ламинарное течение. Во втором случае частицы дви-
движутся беспорядочно, происходят хаотические пульсации скорости»
т. е. имеет место турбулентное движение,- Поскольку
мы, изучая основы механики сплошных сред, не будем рассмат-
рассматривать вопросы устойчивости и теорию турбулентности, все при-
приведенные далее решения описывают лишь ламинарные течения.
Пример 12.1. Течение между параллельными плоскостями,
движущимися относительно друг друга.
Пусть несжимаемая вязкая жидкость в отсутствие внешних
сил стационарно движется между двумя параллельными плоско-
плоскостями, одна из которых покоится, а другая движется с постоянной
скоростью U, находясь на заданном расстоянии I от неподвижной
плоскости. Найти поли давления и скорости.
Поместим начала координат на неподвижной плоскости, ось х
направим вдоль скорости U, а ось у перпендикулярно плоскостям.
Тогда ввиду условия задачи все поля могут зависеть только от у>
т. е
а скорость жидкости v направлена вдоль х, т. е.
v = (vx9 0, 0). B)
Таким образом, нужно определить две неизвестных функции вида
*>х(У)> Р(У)-
Уравнение непрерывности
dvx
530 Вязкая жидкость Гл. XII
удовлетворяется, как видно, тождественно. Левая часть уравне-
уравнения A2.23) ввиду A) и B) равна
dt dt ^ дх х ду у^ дг г
а само уравнение преобразуется к виду
d2v
ду2
откуда
А«0, -&- = о,
dy dy*
и, следовательно,
Используя условия «прилипания» жидкости к плоскостям (см.
A2.24) и A2.25))
найдем поле скорости
vx = ^-y. C)
Теперь подсчитаем силу fa, действующую со стороны жидкости
на единичную площадку неподвижной плоскости. Орт п для та-
такой площадки имеет компоненты 0, 1,0. Следовательно, из A2.27)
лолучим, что
С другой стороны, согласно A2.20) и C)
Таким образом,
/2 = Л — > fy=—Po*
Аналогично для единичной площадки на движущейся плоскости
найдем
/? = — л— у Гу =Ро-
§ 12.2
Уравнение Навьё — Стокса
531
Отметим, что рассмотренное ламинарное течение является вих-
вихревым течением, поскольку
(о == — rot v =
21
Пример 12.2. ^Течение между параллельными неподвижными
плоскостями при наличии перепада давления.
Рассмотрим стационарный поток
несжимаемой t вязкой жидкости
между параллельными неподвижны-
неподвижными плоскостями при наличии посто-
постоянного перепада давления.
Выберем систему координат,
как показано на рис. 12.1. В этой
системе скорость потока будет
иметь только одну составляющую
^^=0; Тогда из уравнения непре-
dvx a
рывности вытекает, что —— = О,
дх
т. е. vx=vx(y). Учитывая сказан-
сказанное, а также двумерность задачи,
из уравнения A2.23) получим
dp d^Vr dp
Рис. 12.1
дуг
ду
A)
Последнее из этих уравнений показывает, что р может быть
функцией только х. Поэтому первое из уравнений A) сводится к
двум уравнениям
c,
dx
интегрируя которые находим
Полагая, что давление на плоскостях х=0 и x=L имеет зна-
значения ро и ри получим, что
р = —
B)
где Ар=ро—р\ — перепад давления. Для определения С2 и Са
используем граничные условия A2.24) при у = ±— и, таким
образом, найдем поле скорости
532 Вязкая жидкость Гл. XII
Итак, давление падает по линейному закону в сторону течения, а
скорость в любом поперечном сечении потока изменяется по
параболическому закону, достигая максимального значения
/а Ар
*W = -г- посредине между граничными плоскостями (на
от) L
рис. 12.1 изображен профиль скоростей в сечении #=0),
Применяя фррмулу A2.27), аналогично предыдущему приме-
примеру найдем силу, с которой жидкость действует на единичную пло-
площадку плоскостей
ну __ / А/7 fa ___ _ Ар
Наконец, определим объем Q жидкости, протекающей за еди-
единицу времени через сечение, ограниченное плоскостями 2=0 и
z=a. Для этого, используя C), вычислим интеграл
/_
2
Отсюда видно, что протекающее количество жидкости пропор-
пропорционально кубу расстояния между плоскими стенками, падению
давления на единицу длины и обратно пропорционально коэффи-
коэффициенту вязкости.
Пример 12.3. Течение Пуазейля.
Пусть несжимаемая вязкая жидкость в отсутствие объемных
сил течет по цилиндрической трубе кругового сечения радиуса /.
Полагая, что течение стационарно, а перепад давления на едини-
единицу длины трубы задан, найдем поля давления и скорости, а также
количество протекающей за единицу времени жидкости.
Выбирая начало координат на оси трубы и направляя ось z
вдоль этой оси, найдем из A2.22) и A2.23), что
. v др др л др / d2v2 i d2v2 \ ,..
Ввиду того, что р=р(г), и в силу симметрии течения
vz = v2(V*2 + У2) последнее из уравнений (I) распадается на
два уравнения, которые запишем в цилиндрических координатах
(используя соответствующее выражение для оператора Лапласа)
dz r dr \ dr ) r\ *
§ 12.2 Уравнение Навье — Стокса 533
Следовательно,
p = Cz + С1Э vz « — г2 + С2 In г + С3.
Аналогично формуле B) примера 12.2 найдем поле давления
До ,
Р = — ~ 2 + р0,
где Ap/L — перепад давления на единицу длины. Требуя затем ог-
ограниченности скорости во всей области 0<^г<С/ и используя гра-
граничное условие A2.24) при г=/, получим
Таким образом,
Отсюда нетрудно найти касательную силу, приложенную к еди-
единице поверхности трубы (см. формулы A0), A1) приложения к
гл. XII)
а также секундный расход жидкости (формула Пуазейля^
Из этой формулы следует, что при ламинарном течении коли-
количество протекающей жидкости пропорционально четвертой степе-
степени радиуса трубки и падению давления на единицу длины и об-
обратно, пропорционально коэффициенту вязкости.
Пример 12.4. Формула Стокса.
Неподвижную сферу радиуса / обтекает стационарный поток
вязкой несжимаемой жидкости со скоростью U на бесконечности.
Найти поле скорости и силу, с которой жидкость действует на
сферу, если число Рейнольдса весьма мало.
Для стационарного течения несжимаемой вязкой жидкости
уравнения движения имеют вид (см. A2.22) и A2.23))
divv = 0, A)
= — VP + *lAv. B)
534 ; Вязкая жидкость ^_Jn. XII
Выберем начало координат в центре сферы и направим ось z
по вектору U. Далее обратим внимание, что левая часть уравне-
уравнения B) и его последний члеьг справа имеют порядок. величины,
соответственно равный ~— и —-—.
Таким .образом, отношение рассматриваемых членов по поряд-
порядку величины* равно числу Рейнольдса.
Следовательно, при /?1
p|(vv)v|«r1|Av|.
Поэтому вместо B) в качестве исходного примем уравнение
с граничными условиями
vM = 0, v I№00 = U. D)
Применяя операцию rot к обеим частям C) и имея в виду, что
rot grad=O, исключим неизвестное р и тем самым найдем
rot Av = 0. E)
Теперь используем известное соотношение
А = grad div — rot rot E0
и учтем A). Тогда вместо E) получим уравнение
rot rot rot v = 0, F)
которое следует решать совместно с A). Учитывая граничные ус-
условия D) на бесконечности
vr \„ = U cos в, t>eU = — (/sine G)
и азимутальную симметрию течения, будем искать решение систе-
системы F), A) в виде
vr = Uf (г) cos 6, vq —Uty{r)sln 8, 1><р = 0, (8)
где f(r) иф(г) — неизвестные функции.
Сделаем в уравнении F) подстановку rot у=2ш, т. е. подста-
подстановку
rsin 9
§ 12.2 Уравнение Навье—Стокса 535
которая после использования (8) сводится к формулам
(ог = (ое = 0, соф-^- -^-sta6, A0)
2i T
где
|]. A1)
Далее, совершим подстановку rot <o=e, используя формулы,
аналогичные (9), и вычислим компоненты е с помощью A0)
е -(/J-cosG, ее = -* — -?-eine, A2)
г2 2 г
еф = 0,
а также компоненты rot г с помощью A2)
rotr e = rote 8=0,
Таким образом, F) сводится к уравнению rot e=0, т. е. к
уравнению
гУ-2? = 0. A4)
Решая это уравнение с помощью подстановки g=rk, убедимся в
том, что его единственным решением, обращающимся на бесконеч-
бесконечности в нуль, является решение
g=-y. A5)
а имея в виду A1), представим A5) в виде уравнения относитель-
относительно ф и f
Второе уравнение относительно этих функций получим, записы-
записывая A) в сферических координатах (см. G) * приложения к
гл. XII)
1 д (t;9sin6)+-l— -^- = 0 A7)
rsine ae rsine
и подставляя сюда (8):
d
j (r2/) + 2гг|) = 0. A8)
dr
536 Вязкая жидкость Гл. XII
Нетрудно убедиться, что решением системы A6J, A8J являют-
являются функции
/=_Ci--2?l+-^L, A9)
если С2=—С/2. При этом граничными условиями для функций f
и -ф являются условия (см. D) и G).)
/оо = 1, IN. = — 1, Д=/ = W= 0. B0)
Используя B0), найдем постоянные интегрирования
^ = -1, C.Jf, C3 = [-J- B1)
и тем самым определим поле скорости (см. (8)J:
Чтобы найти поле давления, представим C) в виде
= — 2л е B3)
(здесь использованы E0, A) и подстановка го! rot v=2e).
Имея в виду, что компоненты вектора е известны, из B3) полу-
получим уравнения
B4)
иг г" г ии -6 i~
откуда
" ^-. B5)
Силу, действующую на единицу поверхности сферы, получим
из A2.27), учитывая, что в сферических координатах орт п, нор-
нормальный к поверхности сферы, имеет компоненты 1, 0, 0. Таким
образом, плотность силы f будет равна:
fr =(-р+ %п)о, /е = (твг)а, {%= 0.
Подставляя сюда B5) и компоненты вязкого тензора (см. прило-
приложение к гл. XII)
§ 12.3 Малые колебания 537
dvr /I dvr dvQ v
V2^ ( +
дг ' \ г ае дг
с учетом B2) получим
Гг-—рсо у —
Суммарная .сила F, действующая на сферу со стороны потока,
ввиду симметрии потока направлена по U. Поэтому спроектируем
слагаемые силы на направление U и проинтегрируем полученное
выражение по поверхности сферы:
Fz = J [(dF?) cos 6 - (dF%) sin в].
В результате вычислений найдем, что
Я!
— роо + — -^- cos 6 \ cos Ыо = 2яС//т1. B6)
L Jill slna ed(y = 4jx[//tj B7)
(здесь do=2nl2 sin8 d0) и, следовательно,
Fz = блШц. B8)
Формула B8), которая называется формулой Стоке а,
определяет силу, действующую со стороны потока жидкости на
неподвижную сферу при малых числах Рейнольдса (эта сила рав-
равна силе сопротивления, действующей на сферу, * движущуюся в
жидкости с постоянной скоростью). Заметим, что вклад B6) нор-
нормальных слагающих сил в Fz составляет третью часть, а две тре-
трети от Fz связаны с касательными напряжениями.
§ 12.3. Малые колебания
Рассмотрим плоскую звуковую волну, распространяющуюся в
вязкой жидкости в положительном направлении оси х. С целью
упрощения задачи допустим, что коэффициенты вязкости постоян-
постоянны, а теплопроводностью жидкости можно пренебречь. Тогда ис-
исходными уравнениями для описания звуковой волны будут урав-
уравнения непрерывности и Навье—Стокса, а также уравнение для эн-
энтропии и энергии. Вводя малые возмущения плотности, давления
и других величин аналогично тому, как они были введены в
§ 11.5 и интересуясь только линейным приближением, из уравне-
уравнения Навье—Стокса A2.19) найдем
538 Вязкая жидкость Гл. XII
dvx dp' , / 4 . J\ d2vx /10 ocv
Далее, из уравнения A2.13) следует, что течение жидкости в зву-
звуковой волне можно считать приближенно изэнтропическим, по-
поскольку диссипативная функция A2.21) содержит только квадра*
тичные относительно vx члены, а теплопроводностью жидкости
мы пренебрегли (уравнение энергии A2.12) и уравнение непре*
рывности с учетом указанных допущений приводят к тому же вы-
выводу об изэнтропичности течения). В этом случае можно исполь-
использовать соотношение A1.59) между возмущениями давления р' и
плотности р'.
Итак, возьмем уравнение непрерывности A1.56) для одномер-
одномерных течений и исключим р' из A2.36) с помощью A1.59). Тогда
получим систему уравнений
решение которой будем искать в виде
р' = С^*-^), A2.39)
vx = ^
где Cj и С2 — постоянные амплитуды, а волновое число, равное
k - Р + т, A2.40)
является комплексным; здесь р— вещественное волновое число,
а коэффициент а>0, приводящий согласно A2.39) к появлению
экспоненциального множителя ехр (—ах) в решении уравнений,
называется коэффициентом затухания звука.
Найдем фазовую скорость с звука (см. A1.81)) и коэффици-
коэффициент затухания а, считая последний достаточно малым. С этой
целью подставим A2.39) в A2.37), A2.38) и. после сокращения на
общий множитель найдем
= 0,
+ [-tcoPo+ A2 (|t| + gj J C2 =0. A2.41)
Характеристическое уравнение этой системы
— ко ikp0
ikc\ — tcopo +
= 0 A2.42)
§ 12.3 Малые колебания 53?
определяет закон дисперсии (см. A1.85))
?2 = -~- —_1_— ^ A2.43)
где
Теперь подставим A2.40) в A2.43) и отделим вещественную
и мнимую части. Тогда получим два уравнения относительно р
и а:
р? _ а2 =, _?? 1 (Л2.44)
Н с* A + е*)' 1 '
о
Допуская, что частота звука достаточна мала, т. е".
и пренебрегая в A2.44) членами порядка е3 и выше, из A2.44)
найдем
о со /1 3 Л со
6 = 1- е2), а = е.
с0 V 8 / 2с0
Приведем также более подробные выражения для фазовой ско-
скорости звука
+ —-^- ( — Л+CVI A2-46)
и для коэффициента затухания
Как видно, скорость звука зависит от частоты, т. е. имеет место
дисперсия скорости (см. A1.84)). Также заметим, что разность
с—Со и коэффициент поглощения звука пропорциональны квад-
квадрату рго частоты.
Наряду с изученными сейчас продольными волнами, в вязкой
жидкости могут распространяться поперечные возмущения (по-
(поскольку сдвиговые напряжения в такой среде отличны от нуля).
В этом можно убедиться, показав, что уравнения движения вязкой
540 Вязкая жидкость Гл. XII
жидкости имеют решение в виде плоской волны, распространяю-
распространяющейся вдоль некоторого направления, с полем скоростей, перпен-
перпендикулярных этому напраЁлению. Такие возмущения возникают в
жидкости, соприкасающейся с плоскостью, колеблющейся парал-
параллельно самой себе. Направим ось х перпендикулярно к такой
плоскости, а ось у коллинеарно прямой, вдоль которой происходят
колебания плоскости. И бу^ем искать решение для скорости в ви-
виде vy—Vy(x, t) (другие величины также пусть зависят только от
хи t).
Положим для простоты, что жидкость несжимаема. Тогда
уравнениеA2.22) удовлетворяемся тождественно!divv ==—2^- =0),
\ ду I
а A2.23) приводит к двум уравнениям,' во-первых, к уравне-
уравнению —?- = 0, откуда следует, что давление постоянно, и, во-вто-
во-вторых, к уравнению
Будем искать решение уравнения A2.48) в виде
vw=At
Тогда придем к закону дисперсии
---, A2.49)
откуда, имея в виду A2.40), получим
Следовательно, фазовая скорость и коэффициент затухания рас-
рассматриваемой волны соответственно равны
o = — = V2v(o, a = l/-^-. A2.50)
Таким образом, в вязкой жидкости действительно могут воз-
возникать малые поперечные возмущения, которые очень быстро за-
затухают; _^шшштуда волны падает в е раз на расстоянии
—— , а на расстоянии, равном длине волны 2я/р, падает
со
в е2л раз, причем отношение коэффициента затухания звука к
коэффициенту затухания поперечной волны пропорционально ю3/2.
§ 12.4 Магнитогидродинамика вязкой жидкости 541
§ 12.4. Магнитогидродинамика вязкой жидкости
Рассмотрим уравнения движения вязкой проводящей жидко-
жидкости, предполагая, что выполнены условия, сформулированные в
начале § 11.7. Допустим также, что электропроводность жидкости
достаточно велика, но конечна, а плотность жидкости постоянна.
Тогда движение жидкости может быть описано уравнениями
i5- = 'rot[vH] — rot rot H, divH = 0, A2.51)
dt 4ял
div v = 0, p — = - grad p + r\A v + pf, A2.52)
at
где объемная сила является силой Лоренца, равной
pf^-L-frotH, H], A2.53)
4я
(см. A1.107), .A1.109), A1.110), A2.22), A2.23)).
Преобразуем первое из уравнений A2.51), используя соотно-
соотношения (см. формулу (8) примера 11.9)
rot rot H = grad div H — ДН = — ДН,
rot[vH] = (Hv)v — (vy)H
(здесь учтено, что div H=0 и div v=0). Тогда вместо A2.51)
получим систему
| = (Hv)v-(vv) H + -^ АН, A2.54)
divH = 0. A2.55)
Затем преобразуем силу Лоренца A2.53) с помощью соотношения
(см. формулу (9) примера 11.9)
В результате получим гидродинамические уравнения в виде
divv = 0, A2.56)
tiAv +-1-(Ну)Н. A2.57)
С помощью системы' уравнений A2.54) — A2.57) можно опи-
описать изменение гидродинамических полей и магнитного поля в не-
несжимаемой вязкой достаточно проводящей жидкости.
542 Вязкая жидкость Гл. XII
Пример 12.5. Стационарное течение несжимаемой вязкой про-
проводящей жидкости между параллельными плоскостями в однород-
однородном постоянном магнитном поле.
Пусть напряженность Но внешнего магнитного поля перпен-
перпендикулярна неподвижным параллельным плоскостям, расстояние
между которыми равно /; пусть также вдоль некоторого направ-
направления, параллельного плоскостям, задан постоянный перепад
давления на единицу длины. Учитывая, что при стационарном те-
течении скорость жидкости направлена вдоль перепада давления,
выберем систему координат с осью л:, направленной вдоль ско-
скорости, и осью у — вдоль вектора Но (начало координат поместим
посредине между плоскостями).
Очевидно, что скорость потока зависит только от координаты
у и посередине потока больше, чем у стенок; это приводит к рас-
растяжению силовых линий в направлении движения- и появлению
составляющей hx напряженности магнитного поля. В соответст-
соответствии с этими качественными соображениями будем искать реше-
решение в виде:
v = v(y)nx, p = p(xty),
H = H0+h, Но = Яоп„, h = h(y)nx. A)
Используя A), из уравнений A2.54) — A2.57) получим
О Я dv и с* д*Н (9\
дР ^л &vx ¦ ff» dhx
дх ду* 4я ду '
Уравнение D) сразу приводит к интегралу
А E)
оЛ
который связывает давление и возмущение магнитного поля.
Теперь упростим B) и C), имея в виду форму решения A)
и постоянство градиента давления вдоль оси х:
dv с* d?h 0
dy 4nlH0 dy* '
,ffo dh 1 _Ар_
dy2 4пц dy r\ L
где Ap/L — перепад давления на единицу длины (вдоль течения).
§ 12.4 Приложение 543
Нетрудно проверить, что решением этой системы, удовлетво-
удовлетворяющим граничным условиям
1 =0, h\ г = 0,
2 2
являются функции
д /
Влияние магнитного поля на характер движени-я жидкости ха-
характеризуется значением параметра а/. При а/<С1 (т. е. при не-'
больших значениях напряженности #0 магнитного поля) из фор-
формулы F) получим предельный случай, который был рассмотрен
в примере 12.2. Если же Яо велико, т. е. а/Э>1, то из F) и G)
следует
Сопоставляя формулы (8) настоящего примера и C) приме-
примера 12.2 при у=0, убедимся в том, что отношение максимальной
скорости течения при включенном магнитном поле большой напря-
напряженности к максимальной скорости в отсутствие магнитного поля
равно Ac^^/HolK112. Таким образом, включение магнитного поля
уменьшает максимальную скорость течения (в связи с этим и
средняя скорость течения становится меньше).
Приложение к главе XII
Во многих случаях, когда поля обладают некоторой симметрией, удобно
использовать соответствующие криволинейные координаты <7ь (&=1, 2, 3), кото-
которые связаны с декартовыми координатами Xi (i= 1,2,3) с помощью функций
Xi = xi(qliq2,q^ (t = 1,2,3). A)
544
Приложение
Гл. XII
В каждой точке пространства можно задать локальный базис, состоящий
из ортов nh F=1, 2, 3), касательных к соответствующим координатным линиям
^i = const. Напомним также, что элемент ds длины дуги между двумя близкими
точками в координатах q определяется квадратичной дифференциальной формой
ds* = (dxj* + (dxj*
= atk dqt dqk
с коэффициентами
дха
B)
C)
которые образуют тензор, называемый метрическим; при этом в случае
ортогональных'криволинейных координат форма B) имеет вид
Вместо коэффициентов этой формы часто используют более удобные к о э ф ф и-
диенты Ламэ, равные
tii = у пц. (О;
Теперь приведем выражения основных операторов векторного анализа, а
именно градиента, дивергенции и ротора (в правой системе ортогональных коор-
координат) \
grad ф]=
1
dqx
1
Ня
""ьпз>
Шуу=-^{-^г
dq2
rot v =
F)
G)
(8)
здесь H=HiHiH3 (см. [65, гл. 6]).
Приведем также выражение для двух компонент тензора скоростей дефор-
деформации A0.23) в тех же координатах:
(9)
v2
dq2
Приложение 545
(остальные компоненты Vik можно получить из этих формул соответствующей
заменой индексов). Наконец напомним, что в цилиндрических и сферических
координатах коэффициенты Ламэ соответственно равны
#р=1, #ф = р, #*=1, A1)
Яг = 1, #е = г, Н=г sine. A2)
18 Зак. 284
Глава XIII
ИДЕАЛЬНО УПРУГОЕ ТЕЛО
§ 13.1. Закон Гуна и уравнения изменения импульса
Важную роль в механике сплошных сред занимает раздел, по-
посвященный изучению твердых тел, т. е. сред, у которых сопро-
сопротивление сдвигу при данных (не зависящих от времени) деформа-
деформациях сколь угодно долго остается конечной (отличной от нуля)
величиной *. Ограничимся изучением таких твердых тел, напряже-
напряжения которых в любой точке в любой момент времени зависят от
деформаций в той же точке в тот же момент времени (кроме того,
напряжения могут зависеть от температуры Г). Такие тела на-
называются идеально упругими. Принимается также, что со-
состояния идеально упругих тел являются локально равновесными,,
а процессы, происходящие в них, термодинамически обратимы-
обратимыми.
Одной из основных величин, характеризующих идеально упру-
упругое тело, является тензор деформации, который вводится путем ,
сравнения двух состояний среды (см. § 10.2). Выберем в качест-
качестве начального состояния тела его недеформированное состояние -в
отсутствии внешних сил при некоторой заданной температуре Го
и плотности ро, а в качестве второго состояния возьмем деформи-
деформированное состояние тела при температуре Т и плотности р (пере-
(переход в это состояние может происходить как в результате воздей-
воздействия внешних сил, так и за счет передачи тепла из внешнего ис-
источника).
Рассмотрим случай, когда деформации тела и изменение его
температуры достаточно малы, а напряжения линейно зависят от
деформаций и разности температур, т. е. случай, когда тензор на-
напряжений имеет вид
Pik = Cikjm e/m - aik (T - To), A3Л >
где Cib,im и ocifc — постоянные, называемые соответственно м о -
дулями упругости и коэффициентами термоуп-
* В отличие от данной главы термин «твердое тело» употреблялся до
сих пор как краткий термин, обозначающий «абсолютно твердое тело», т. е. та-
такое тело, которое не может быть деформировано.
§ 13.1 Закон Гука и уравнения изменения импульса 547
р угости. Соотношение A3.1) представляет собой обобщение
закона Гука, справедливое как для изотропных тел,
у которых свойства упругости и термоупругости в любой точке
одинаковы во всех направлениях, так и для анизотропных
тел, свойства которых различны в различных направлениях.
С другой стороны, учитывая только линейную зависимость напря-
напряжений от деформации и изменений температуры и пренебрегая за-
зависимостью напряжений от скоростей деформации, мы заведомо
отказываемся от рассмотрения нелинейных упругих эффектов, а
также от изучения вязких свойств твердых тел.
Получим уравнения идеально упругого твердого тела, исходя
из системы A0.72) — A0.75). Поскольку тензор напряжений A3.1)
выражается через тензор деформации, а тензор деформации через
вектор смещения и (г, /), выберем этот вектор в качестве неиз-
неизвестной функции в уравнениях движения A0.73). Смещение и дан-
данной частицы всегда можно определить, как
и = г(го,О-го, A3.2)
где г — радиус-вектор частицы в момент времени ty а г0 — ра-
радиус-вектор той же частицы в начальный момент времени. Тогда
скорость рассматриваемой частицы будет равна
уд ац(^° . A3.3)
Здесь в отличие от A0.1), где были использованы переменные
г, t, применяются переменные Го, t, т. е. такие переменные, кото-
которые позволяют следить за изменением величин, характеризующих
данную частицу (например, фиксируя г0 в A3.3), мы получим зна-
значение скорости в любой момент времени для той частицы, кото-
которая в момент U была в точке пространства г0). Переменные г, t
называются эйлеровыми, а переменные r0, t — лагранже-
в ы м и.
Теперь допустим малость смещений на любом интервале вре-
времени, тогда вместо A3.3) можно написать
дм (г, t) tio л\
v _. v . A3.4)
dt ч '
Отсюда, полагая скорости малыми и используя A0.47), найдем
ускорение частицы в виде
_*L = ^L A3.5)
dt дР '
Далее, допуская малость ускорений и отклонений плотности, из
A0.73) получим уравнения изменения импульса
18*
548 Идеально упругое тело Гл. XIII
Ро-ТЙП^-Т^+РоЛ С =Ь2,3). A3.6)
dt2 dxk
Уравнение непрерывности, представленное в виде (см. A0.33),
A0.350)
— ро
ре
¦ = — divu, A3.7)
дает возможность определить плотность массы по известному по-
полю смещений.
Наконец, уравнения A0.74) и A0.75) приводят к важным тер-
термодинамическим соотношениям. В самом деле, исключая из этих
уравнений тепловой поток и полагая, ввиду обратимости дефор-
деформаций, D=0, найдем уравнение
9JL=p Vtk + 9TJ*-m A3.8)
v dt lk lk v dt K '
Далее тензор скоростей деформации с помощью A3.4) можно
представить в виде *
1_^ Г d I dui \ , d / dtik \ j dttk /1 о q\
ik ~~ IT [ dxk \ dt ) dxi \ dt J J ~" dt ' ^ *'
откуда в случае малых скоростей следует, что vik = ——. Таким
dt
образом, вместо A3.8) получим
р de — Pik deik -+ pTds. A3.10)
Наконец, вводя более удобные для рассматриваемой теории энер-
энергию (f =рое и энтропию ?f =pos, приходящиеся на единицу неде-
формированного объема и учитывая малость отклонений плотно-
плотности, найдем термодинамическое уравнение
d$ = Pikdetk + Td^f. A3.11)
Система уравнений A3.6), A3.7) и A3.11) представляет собой си-
систему уравнений движения идеально упругого
тел а.
Приведем ряд соотношений, вытекающих из термодинамиче-
термодинамического уравнения. Например, из него следует, что
A3.12)
4k
* В силу A3.4) соотношение A3.9) является приближенным. Можно убе-
убедиться в справедливости точного соотношения, согласно которому скорость
изменения тензора деформации для данной частицы равна тензору скоростей де-
деформации [59, гл. II, § 9].
§ 13.1 Закон Гука и уравнения изменения импульса 54?
(здесь и далее символ ( ) означает частную производную
\ др ) v
по р при постоянной у). Эти формулы дают возможность, зная
энергию, как функцию деформаций и энтропии, получить напря-
напряжения и температуру. Если же выразить A3.11) через другую
термодинамическую функцию, а именно через свободную
энергию
F = g—Ttf, A3.13)
то A3.11) примет форму
dF = PikdEik — tfdT, A3.14)
откуда вытекают соотношения
определяющие напряжения и энтропию, как функции деформаций
и температуры.
Из сопоставления A3.1) с первой формулой A3.15) следует,
что свободная энергия упругого тела должна иметь вид
F = -j- CiKlm eik г1т + щк г,к (Т - То) + Fo (T), A3.16)
где модули упругости и термоупругости не зависят от температу-
температуры (можно показать, что неопределенная здесь функция Fo (T)
связана с теплоемкостью тела при постоянных деформациях).
Действительно, в этом случае из A3.16) и первой формулы A3.15)
получим закон Гука A3.1), который при изотермической дефор-
деформации (Т=Та) принимает обычную форму
Pik = Cik,lmZlm. A3.17)
Как видно, упругие свойства тела определяются тензором чет-
четвертого ранга Cik,im, который будем называть тензором упру-
упругости. В общем случае тензор четвертого ранга имеет 34=81
независимую компоненту. Однако максимальное число независи-
независимых компонент тензора упругости равно 21. Действительно, по-
поскольку тензоры Pik и еш симметричны, т. е. каждый из них имеет
по 6 независимых компонент, то число независимых компонент
тензора упругости снижается до 36. Это связано с симметрией
Cik,im относительно перестановок индексов как внутри первой, так
и внутри второй пары индексов (ввиду симметричности Pik и е^):
Cik,lm = Ckijm = Ciktmf A3.18)
Кроме того, имеются еще 15 соотношений, связанных с симметрией
модулей упругости относительно перестановки первой пары
индексов со второй,
550 Идеально упругое тело Гл. XIII
Cik,lm = Cimtik\ A3.19)
эта симметрия вытекает из существования свободной энергии, как
скалярной функции вида A3.16). Итак, благодаря наличию соот-
соотношений A3.18) и A3.19) упругие свойства твердых тел в общем
случае характеризуются 21 независимым модулем упругости.
Можно непосредственно убедиться, что в число этих модулей
входят по 3 модуля каждого из видов Сц} и, Си, ш, Qfe, гь»
Cijthk, Cij,ik (ьфЬ> 1ф'и \ФЬ) и 6 модулей вида СцЛк Aфк).
Если анизотропное тело обладает какой-либо присущей ему
симметрией, то появляются дополнительные соотношения между
модулями упругости и тем самым уменьшается число независи-
независимых модулей. Например, возьмем монокристалл кубической си-
системы. Направляя координатные оси по ребрам элементарного
куба и имея. в виду симметрию кубического кристалла при отра-
отражении относительно координатных плоскостей, придем к выводу,
что все модули, у которых одинаковые значения индексов встре-
встречаются нечетное число раз, равны нулю (если, например, заменить
у на —у,-то еХу изменит знак; поэтому следует положить CXXtXy=
= 0, в противном случае свободная энергия изменится, что будет
противоречить указанной симметрии кристалла). Таким образом,
остаются отличными от нуля 9 модулей: по 3 модуля каждого из
видов: Сцг и, Ciiikki Cik,ik Aфк). Кроме того, в выбранной систе-
системе координат все координатные оси равноправны (например, за-
замена оси х на ось у не должна изменять свободную энергию).
Поэтому кубический кристалл характеризуется лишь тремя неза-
независимыми модулями упругости СХХ} хх, СХХ) уУ, СХУ) ху.
У изотропного тела симметрия еще выше: тензор упругости
вообще не зависит от выбора направления осей координат, что
приводит еще к одному соотношению, а именно
(~>хх,хх == (^хх,уу I (^ху,ху* AO.4U)
В самом деле, учитывая, что модули изотропного тела должны
быть скалярными величинами, а из компонент г^ можно составить
единственный линейный скаляр 8ц+ 822 + 633 (см. A0.32)), заклю-
заключаем, что закон Гука A3.17) для изотропного тела должен иметь
вид
A3.21)
где X и ид, — постоянные, которые называются модулями Ламэ
(здесь и в дальнейшем гкк означает сумму 811 + 822+833). Сопостав-
Сопоставляя A3.21) с A3.17), видим, что
^хх,хх ^ А + Л\1, ^xxtyy ^ ^> ^ху,ху = ^М1»
откуда следует A3.20). Итак, упругие свойства изотропного тела
характеризуются двумя постоянными.
§ 13.1 Закон Гука и уравнения изменения импульса 551
Тензор напряжений A3.21) можно представить в виде, анало-
аналогичном тензору A2.4) напряжений вязкой жидкости, т. е. в ви-
виде
Рц = 2ц (в// - -~ Чф^ + Kskk 8Ф A3.22)
где /С = ^ Ч ц; здесь первый член (с коэффициентом \х) связан
3
с деформацией сдвига, а второй член, пропорциональный skk,
связан с изменением объема. Поэтому модуль \\ называется м о -
2
дулем сдвига, а К=к-\ ^i — модулем объемного
о
сжатия.
Заметим, что тензору A3.22) соответствует свободная энергия
¦+ -f- eL, A3.23)
которая в состоянии термодинамического равновесия должна об-
обладать минимумом. В отсутствие внешних сил минимум свобод-
свободной энергии будет иметь место при е^=0, в связи с чем F дол-
должна быть положительно определенной формой деформаций. Это
доказывает, что модули сдвига и объемного сжатия являются по-
положительными величинами:
Ц>0, К>0. A3.24)
Получим практически полезное соотношение, обратное соотно-
соотношению A3.22). Для этого «свернем» тензор A3.22) с 6^, т. е.
найдем сумму
Заметим, что
Тогда получим (здесь и в дальнейшем Рц означает сумму Рц +
Я Р)
A3.25)
а используя A3.25), из A3.22) придем к искомому соотношению
-srp»6w A3-26)
(обратим внимание на формулу A3.25), согласно которой сумма
диагональных компонент тензора напряжений пропорциональна
относительному изменению объема га).
552 Идеально упругое тело Гл. XIII
Тензор термоупругости ац является симметричным тензором,
что следует из A3.1) ввиду симметрии тензора напряжений. Чис-
Число независимых компонент ац уменьшается, если тело обладает
симметрией. Например, для кубических кристаллов и изотропных
сред тензор а^ сводится к одной величине а. Таким образом,
закон Гука для изотропных упругих тел с учетом изменения тем-
температуры можно представить в форме
Рц = teufiti + 2^у -Ка(Т- То) 8Ф A3.27)
где а —• коэффициент теплового расширения.
В этом легко убедиться, сворачивая A3.27) с S*j при Рг; = 0 (по-
(поскольку при тепловом расширении в отсутствие внешних сил на-
напряжения должны отсутствовать). Тогда, используя A0.33), полу-
получим соотношение
-~- = а{Т-Т0), A3.28)
из которого становится понятным смысл постоянной а, как коэф-
коэффициента теплового расширения.
Свободная энергия, соответствующая тензору напряжений
A3.27), должна иметь вид
-К*(Т- То) г1к 8
ik
A3.29)
где X, \х, К, а, се, ?Р0 — постоянные величины. Действительно, та-
такая функция деформаций и температуры согласно первой форму-
формуле A3.15) приводит к правильному выражению A3.27) для тензо-
тензора напряжений, а согласно второй формуле A3.15) определяет
энтропию
(|) + Сг -^- + <?„ A3.30)
и тем самым отличную от нуля теплоемкость се тела при посто-
постоянных деформациях. Такая теплоемкость по определению и со-
согласно первому и второму законам термодинамики равна
С8 =
дТ
В заключение параграфа получим уравнедие изменения им-
импульса для изотропного упругого тела, аналогичное уравнению
Навье—Стокса. Предполагая, что модули упругости Я и \х посто-
постоянны, и пренебрегая изменением температуры (что справедливо
§ 13.2 Равновесие изотропных тел 553
при достаточно малых значениях а), подставим A3.27) в A3.6) и
совершим преобразования типа A2.17) и A2.18). Тогда найдем
уравнение изменения импульса изотропного
упругого тела
Ро—— = (К + |i)graddivu +|iAu + pof> A3.31)
dt2
которое называется уравнением Ламэ. Если же пренебречь
изменением температуры нельзя, то правую часть уравнения Ла-
Ламэ следует дополнить членом — KolVT и рассматривать получен-
полученное уравнение совместно с уравнением теплопроводности, выте-
вытекающим из A0.75).
§ 13.2. Равновесие изотропных тел
Рассмотрим деформированное изотропное тело, находящееся
в стационарном состоянии. Деформации такого тела подчинены
уравнению (см. A3.6))
+ р0Д. = 0 (* = 1,2,3), A3.32)
где fi — заданная стационарная объемная сила, приходящаяся
на единицу массы, а тензор напряжений Р^ определен в A3.27);
при этом уравнение A3.32) должно быть дополнено уравнением
теплопроводности в стационарном случае. Если же модуль упру-
упругости и температура тела постоянны, то уравнение A3.32) приоб-
приобретает вид (см. A3.31)):
(Я -г n)graddivu + ИДи + Ро' = ° A3.33)
(внешней объемной силой, обычно рассматриваемой в теории уп-
упругости, является однородная сила тяжести).
Весьма важный для приложений оказывается случай равно-
равновесия тел, деформации которых вызываются силами, приложенны-
приложенными к поверхности этих тел. Тогда уравнением равновесия является
уравнение
(к + и) grad divu -f fiAu = 0, A3.34)
а внешние поверхностные силы будут учитываться в граничных
условиях. Если fa — заданная, внешняя сила, приходящаяся на
единицу поверхности тела, то к площадке de=ndo (n направлен
по внешней нормали к поверхности тела) будет приложена сила
ft do, которая должна уравновешиваться силой Pikdok, вызванной
напряжениями тела. Таким образом, при равновесии должно вы-
выполняться условие
554
Идеально упругое тело
Гл. XIII
Pik4 = ft A3.35)
для всех элементов поверхности тела.
Наиболее простым случаем деформированного равновесного
состояния изотропного тела является однородная деформа-
деформация, при которой компоненты тензора деформации можно считать
постоянными вдоль всего тела. Рассмотрим ряд простых приме-
примеров. Пусть тело подвергается всестороннему равномер-
равномерному сжатию. Это значит, что сила dV°, приложенная к лю-
любой площадке da поверхности тела, равна —pda, где р — давление
постоянной величины. Следовательно, на поверхности тела соглас-
согласно A3.35) должно выполняться условие Piknk=—рщ, которое
удовлетворяется, если тензор напряжений равен
Отсюда, а также из A3.26) следует, что
Ра = - 3Р» *ik = — ¦
3/С
¦ 8**.
A3.36)
A3.37)
Таким образом, всестороннее равномерное сжатие приводит толь-
только к изменению объема гц=—р/К, которое определяется давле-
давлением р и модулем объемного сжатия К; при этом все деформации
сдвига отсутствуют: 8^=0 (гфк):
Далее изучим деформацию
чистого сдвига кубика с
гранями единичной площади (см.
рис. 13.1, на котором изображен
кубик до деформации). Пусть к
граням кубика 1—4 приложены
равные по величине касательные
силы fa , так как это показано на
рисунке. Нормаль к грани /
имеет составляющие 1, 0, 0 и,
следовательно, условие A3.35)
для этой грани сводится к усло-
условию Pix=f°i , откуда Рхх=Рух=
=0, PZx=fG . Для грани 2 с нор-
нормалью п=@, 0, 1) найдем РХт=
=/<*, Pyz=Pzz=0, Для граней 3
и 4 получим те же результаты, а
условия на гранях 5 и 6 да дут, что
РхУ=Руу=Ргу=§- Таким образом, единственной отличной от ну-
нуля компонентой тензора напряжений будет РХ2, которая согласно
A3.26) определяет деформацию сдвига и угол скашивания (см.
€. 466):
Рис. 13.1
§ 13.2 Равновесие изотропных тел 555
е,г=-?-, е = -?-. A3.38)
Как видно, эти величины зависят только от внешней силы и мо-
модуля сдвига. Объем же тела при чистом сдвиге остается неизмен-
неизменным, поскольку Рц=0, и, следовательно, &ц=0.
Теперь рассмотрим растяжение (сжатие) стержня —
прямоугольного параллелепипеда, к торцам которого приложены
противоположно направленные, равные по величине, постоянные
силы с равномерным распределением по площади каждого торца.
Направляя ось z вдоль стержня и используя условия A3.35) на
боковых гранях и торцах стержня, найдем единственную отлич-
отличную от нуля компоненту тензора напряжения Pzz, равную /а —
плотности растягивающей силы. Подставляя Pzz=fa в A3.26), по-
получим значения компонент тензора деформации
(НЛ <13-40)
Как видно, растяжение стержня вдоль направления внешней силы
происходит одновременно с его поперечным сжатием, при этом
отношение поперечного сжатия к продольному растяжению равно,
v = Ехх =3/(-~2^
ezz 2
A3.41)
и называется коэффициентом Пуассона. Поскольку К>0
и |х>0 (см. A3.24)), значения v заключены в пределах
-Kv<-y A3.42)
(хотя в действительности неизвестны тела, для которых v<0).
Заметим, что относительное удлинение стержня удобно пред-
представить в форме
*« = -1Г' A3.43)
где
МК A3.44)
— постоянная, которая называется модулем Юнга. Так как
постоянные Е и v употребляются очень часто, приведем формулы,
обратные формулам A3.41) и A3.44):
556
Идеально упругое тело
Гл. XIII
Пример 13.1. Чистый изгиб стержня.
Пусть к обоим торцам цилиндрического стержня произвольно-
произвольного поперечного сечения приложены поверхностные силы с плот-
плотностью
f° = — cun2 A)
и моментом сил, равным по абсолютной величине L°\ при этом
начало координат находится в центре масс торца 1, а ось z про-
проходит через центры масс торцов недеформированного стержня
(здесь под центром масс торца следует понимать центр масс од-
однородного плоского диска, по форме совпадающего с торцом).
Предполагая, что деформация происходит изотермически в отсут-
отсутствие объемных сил, а центр масс торца 1 не смещается в про-
процессе деформации, найти поля деформаций и смещений стержня
(рис. 13.2).
Согласно A) суммарная си-
сила Fa, действующая на торец 2,
,у Равна
^. —an2 J xdaf
где интеграл справа пропорцио-
пропорционален координате хш центра масс
этого торца. Таким образом, в
силу выбора начала координат
получим
Рис. 13.2
Момент LG сил, действующих на торец 2, равен
J [rfa] da = апу J х2 do — an^ j xy da.
Появившиеся справа интегралы можно определить как моменты
инерции торца (в отличие от обычных моментов инерции здесь
вместо элемента массы стоит элемент площади). Центробежный
момент инерции
§ 13.2 Равновесие изотропных тел 557
f xyda = 0,
так как оси х и у совпадают с главными осями инерции торца 2.
Поэтому для момента сил, приложенных к 2, получим выражение
LG = a Jny,
где J = J х2 da — момент инерции относительно оси у. Отсюда сле-
дует, что
/о
а = 4" B)
На торце 1 аналогично получим
J F dcr = 0, j [rFJ da = — IA
Итак, суммарные силы и моменты сил, приложенные ко всему
стержню, равны нулю, причем ввиду A), B) и условия A3.35)
напряжения на торце 2 равны
Ргг = j х> Рхх = Руу ~ РХ9 ~ ™хг == ^г ^ 0- C)
Более того, эти напряжения удовлетворяют уравнению равновесия
A3.32) и условию A3.35) на боковых поверхностях стержня (по-
(поскольку на них ft = 0).
Подставляя C) в закон Гука A3.26), найдем тензор дефор-
деформации
__ vLG
гхх — гуу — ej х>
1 * 6^ = 8^ = 8^ = 0. D)
Отсюда видно, что частицы стержня, лежащие в плоскости х=0,
не испытывают деформаций. Все «отрезки» стержня, параллель-
параллельные оси 2, при л:>0 сжимаются вдоль 2, а при х<0 растягивают-
растягиваются; «отрезки» же, параллельные оси х, при х>0 удлиняются, а при
х<0 сокращаются вдоль оси х (аналогичные деформации испы-
испытывают «отрезки», параллельные оси у).
Запишем D) в виде системы уравнений относительно смеще-
смещения
дих дии duz
—— == —^~ = v ах, —— = — ах,
дх ду дг
558 Идеально упругое тело Гл. XIII
дих дид дих диг __ dug duz __ Л
ду дх дг дх дг ду
где а = L°/EJ. Эта система имеет решение
uy = v аху, uz = — ахг
(здесь постоянные интегрирования опущены, поскольку перемеще-
перемещение центра масс торца / равно нулю). Таким образом, точка Го
недеформированного стержня после деформации переходит в точ-
точку r=ro + u, причем компоненты ее радиуса-вектора равны:
Отсюда, например, видно, что точки оси стержня хо=г/о=(>
после деформации лежат на параболе
x
а точки, лежащие до деформации в плоском сечении z=z0, после
деформации образуют плоское поперечное сечение
го \1 ~~ЕГ х)
деформированного стержня (форма сечения при этом изменится,,
что связано с различием знаков гхх и еуу при х>0 и х<0). Из
решения также видно, что жесткость стержня EJ зависит не толь-
только от материала стержня, т. е. от модуля ?, но и от момента /,
а следовательно, от формы поперечного сечения.
Пример 13.2. Кручение цилиндрического стержня.
Найти деформации и напряжения цилиндрического стержня
радиуса R и высоты h в случае чистого кручения, а также найти
поверхностные силы, приложенные к торцам стержня (торцы пер-
перпендикулярны оси цилиндра, объемные силы отсутствуют, а тем-
температура при деформации не изменяется).
Направим ось z через центры инерции торцов, помещая нача-
начало координат на закрепленном торце 1. Чистое кручение
представляет собой такую деформацию, при которой смещение
каждой частицы представляет собой поворот в плоскости, перпен-
перпендикулярной к оси z на угол
§ 13.2 Равновесие изотропных тел 559
без изменения расстояния г от оси z (здесь Аф — угол поворота
второго торца). В этом случае координаты смещенной частицы
будут равны
у = г sin (ф -f- бф) =. г sin ф + г cos ф • бф,
z =z.
Отсюда, используя A3.2), определение е^ и A3.22), найдем
поле смещений
Аф
" h
Дф
Аф
их = х - г cos ф = -=- yz,
h
Uy =у Г81Пф
иг -О,
тензор деформации
гхх = гуу ~ 82Z —
2/i ^ 2/1
и тензор напряжений
Р =. Р —-Р — Р — О
гхх гуу — гzz — гху —^»
h h
Уравнения равновесия A3.32), очевидно, удовлетворяются, а
граничное условие на торце 2 сводится к требованию Pu = ft,
откуда
со Лф му Аф i.a л
h h
Суммарная поверхностная сила, приложенная к торцу 2, равна
интегралу по поверхности О2 этого торца, причем
поскольку
560 Идеально упругое тело Гл. XIII
Момент сил, приложенных к торцу 2, будет отличен от нуля
здесь /== ] (х2-\- у2) da — момент инерции торца 2 относи-
тельно оси г. Поскольку / = я/?4/2, выражение A) приводит к ос-
основному результату этого примера — к зависимости угла круче-
кручения от материала и размеров цилиндра, а также от момента
внешних сил:
Нетрудно убедиться в том, что на торце 1 суммарная сила равна
нулю, момент этих сил равен — La, а на боковой поверхности ци-
цилиндра fa=0.
Пример 13.3. Гравитационное сжатие шара.
Найти поле смещений и деформаций сплошного шара радиуса
R под действием собственного гравитационного поля.
Сила тяготения, приходящаяся на единицу массы, в указанном
случае равна
f—f-r. (!)
где g — напряженность поля тяжести на поверхности шара. Учи-
Учитывая A) и преобразуя уравнение равновесия A3.33) с помощью
соотношения
grad div u = Аи + rot rot и,
получим
(X + 2ц) grad div u — \i rot rot u + p0 f =- 0. B)
По соображениям симметрии смещение должно иметь вид
п = и(г)пг C)
и, следовательно (см. формулы (8) и G) приложения к гл. XII):
rot u = 0, div u = — (г2и). D)
г2 dr
Поэтому B) сводится к уравнению
dr [ г* dr K }\ (X + WR K f
§ 13.3 Упругие волны 561
которое легко интегрируется:
М гз+ _?1_г+_^ F)
Это решение будет конечным в области 0<Сг<;#, если поло-
положить С2=0. Постоянную Ci можно определить из условия Ргг=0
при г = R. С этой целью найдем зависимость Ргг от координат.
Используем связь Ргг с компонентами тензора деформации (см.
A3.21))
а также выражения компонент е^ в сферических координатах
(см. формулу (9) в приложении к гл. XII). Тогда с помощью F)
получим
Ргг = ~Т^7Г~ I ~7~~Г7~ I г + ( ^ 7Г И- I ^1»
юя V к + 2р ; ^ \ з
откуда определяется С\. Таким образом, найдем смещения и де-
деформации
г2 3 —<
?00 = ?ФФ = '
l+v
3 —v
где а = — , v - коэффициент Пуассона. Компонента егг
10 (X + 2ц)
10
( + ц)
обращается в нуль при ^^Rl ^^—\ . Следовательно,
\ 3 A + v) /
внутри этой сферы вещество в радиальном направлении сжато, а
вне сферы растянуто. Аналогичное заключение можно сделать и
о «поперечном» сжатии, поскольку е00 и еФФ обращаются в нуль
на сфере
Г 9. == ¦
§ 13.3. Упругие волны
Изменение положения частицы упругого тела со временем свя-
связано, вообще говоря, с изменением ее температуры. Однако рас-
распространение колебаний частиц вдоль тела (т. е. упругие волны)
происходит достаточно быстро по сравнению с передачей тепла от
562 Идеально упругое тело Гл. XIII
частицы к частице. Поэтому эти волны можно считать изэнтропи-
ческим процессом. Тогда изменение температуры данной частицы
тела будет определенным образом связано р изменением дефор-
деформации этой частицы, что в свою очередь скажется на напряже-
напряжениях.
Вычислим тензор напряжений, учитывая изэнтропичность уп-
упругой волны. С этой целью используем A3.30), т. е. выражение
для энтропии, как функции деформаций и температуры, и поло-
положим в нем & — сУ0. Тогда найдем изменение температуры
ги A3.46)
и тензор напряжений с учетом этого изменения (см. A3.27)):
Pik = (я. + -^- Го) е„ 8ik + 2це«. A3.47)
Полученный тензор отличается от тензора напряжений A3.21)
тем, что вместо изотермического модуля упругости К здесь появил-
появился адиабатический модуль
^( А^Т0 A3.48)
(при этом модуль сдвига не изменился).
Уравнение для смещений в упругой волне в отсутствие объем-
объемных сил получим аналогично уравнению A3.31), используя A3.6)
и A3.47). В результате найдем, что
Ро-^Г = ftad + И) graddivu н- цДи A3.49)
ИЛИ
— - (с? - с\) grad div и -г с\ Аи, A3.50)
где
J±2 A3.51)
Ро Ре
Теперь покажем, что уравнение движения A3.49) (или A3.50))
может быть сведено к системе двух уравнений, из которых одно
описывает распространение продольной упругой волны со ско-
скоростью си а другое — распространение поперечной упругой волны
со скоростью ?2. Согласно теореме Гельмгольца о представлении
векторного поля в виде суммы потенциального и соленоидального
долей (см. A1.65) —A1.67)), положим
§ 13.3 Упругие волны 563
O^Ui + Ua, A3.52)
где
rotu1 = 0, A3.53)
= 0. A3.54)
Подставляя A3.52) в A3.50) и учитывая A3.53), A3.54), а так-
также то, что
Аи = grad div uA — rot rot u2,
найдем исходное уравнение в виде
dt*
C2 graci div щ —A rot rot ua. A3.55)
Исключим отсюда U2. G этой целью применим к членам урав-
уравнения A3.55) операцию div, имея в виду A3.54) и то, что
div gradsA, a div rots=0. Тогда получим, что
при этом
так как Ui — потенциальный вектор. Если же во всем простран-
пространстве div и rot вектора равны нулю, то и сам вектор должен рав-
равняться нулю. Следовательно, потенциальная часть смещения —
вектор Ui — подчинен волновому уравнению
Н A3.56)
которое описывает волны, распространяющиеся со скоростью с\ =
= [(^аа+Зм^/ро]1/2; эти волны являются волнами сжатий и растя-
растяжений, поскольку divui^O.
Применяя к обеим частям A3.55) операцию rot, учитывая
A3.53) и то, что rot grad=0, исключим из уравнения вектор Ui и
найдем, что
rot
с\ rot rot щ\ = 0. A3.57)
Но для соленоидального вектора
rot rot u2 = —Au2.
564 Идеально упругое тело Гл. XIII
Поэтому из A3.57) получим
лричем согласно A3.54)
Следовательно, вектор и2 подчиняется уравнению
= 0, A3.58)
д2щ
которое описывает волны, распространяющиеся со скоростью
С2= (мУроI/2. Эти волны являются волнами сдвига, поскольку
смещения частиц в такой волне представляют собой повороты
(rot щфО), не сопровождающиеся изменением объема частиц
(div u2=0).
Наконец, рассматривая плоские монохроматические волны сме-
смещений
подставляя эти смещения в соответствующие волновые уравнения
и условия A3.53), A3.54), получим для первой волны
— =q, [kaJ = O A3.59)
я для второй волны
— = с2, ка^О. A3.60)
k
Отсюда ясно, что волны сжатия и расширения являются продоль-
продольными, поскольку к||аь а волны сдвига — поперечными, так как
k_La2.
ЛИТЕРА ТУРА
Часть I
1. Галилей Г. Диалог о двух главнейших системах мира. М.—Л., Гостех-
издат, 1948.
2. Галилей Г. Беседы и математические доказательства, касающиеся двух
отраслей науки, относящихся к механике и местному движению. М.—Л,,
Гостехиздат, 1934.
3. Н ь ю т о н И. Математические начала натуральной философии (русский
перевод). — Собр. соч. акад. А. Н. Крылова. М.—Л., Изд-во АН СССР, 1936.
4. Эйлер Л. Основы динамики точки. М.—Л., ОНТИ, 1938.
5. Даламбер Ж. Динамика. М.—Л., Гостехиздат, 1950.
6. Лагранж Ж. Аналитическая механика. Т. 1—2. М.—Л., Гостехиздат, 1950.
7. Я ко б и К- Лекции по динамике. М.—Л., ГОНТИ, 1936.
8. Аппель П. Теоретическая механика. Т. I, II. М., Физматгиз, 1960.
9. С у с л о в Г. К. Теоретическая механика. М.—Л., Гостехиздат, 1946.
10. Планк М. Введение в общую механику. М.—Л., Госиздат, 1927.
11. Жуковский Н. Е Теоретическая механика. М.—Л., Гостехиздат, 1952.
12. Карт ан Э. Интегральные инварианты. М.—Л., Гостехиздат, 1940.
13. Зоммерфельд А. Механика. М., ИЛ, 1947.
14. Богуславский С. А. Избранные труды по физике. М., Физматгиз, 1961.
15. Френкель Я. И. Аналитическая механика. Изд. Ленинградского инду-
индустриального института, 1935.
16. Лойцянский Л. Г. и Лурье А. И. Курс теоретической . механики.
Т. I, II. М., 1955—1957.
17. Стрелков С. П. Механика. М., «Наука», 1975.
18. Хайкин С. Э. Физические основы механики. М., «Наука», 1971.
19. Боголюбов Н. Н. и Митропольский Ю. А. Асимптотические мето-
методы в теории нелинейных колебаний. М., «Наука», 1974.
20. Голдстейн Г. Классическая механика. М., Гостехиздат, 1975.
21. i/Гандау Л. Д. и Л и ф ш и ц Е. М. Механика. М., «Наука», 1973.
22. Невзглядов В. Г. Теоретическая механика. Ч. I. M., Физматгиз, 1959.
23. Гантмахер Ф. Р. Лекции по аналитической механике. М., «Наука», 1966.
24. Лич Дж. У. Классическая механика. М., ИЛ, 1961.
25. С и н г Дж. Л. Классическая динамика. М., Физматгиз, 1963.
26. Ф е й н м а н Р., Л е й т о н Р., С э н д с М. Феймановские лекции по физике,
вып. 1, 2. М., «Мир», 1976.
27. Greenwood D. Principler of Dynamics. Prentice-Hall, England, Clifford,
New Zersey, 1965.
28. Добронравов В. В., Никитин Н. Е, Дворников А. Л. Курс тео-
теоретической механики. М., «Высшая школа», 1974.
29. Бухгольц Н. Н. Основной курс теоретической механики. Ч. I, II. М.,
«Наука», 1972.
30. Ч е т а е в Н. Г. Устойчивость движения. Работа по аналитической механике.
М., «Наука», 1965.
31. Нетер Э. Инвариантные вариационные задачи. — В кн.: «Вариационные
принципы механики». М., Физматгиз, 1959.
32. Лурье А. И. Аналитическая механика. М., Физматгиз, 1961.
33. К и т т е л ь Ч., Найт У., Р у д е р м а н М. Механика (Берклеевский курс
физики, т. I). M., «Наука», 1971.
34. Капица П. Л. Маятник с вибрирующим подвесом. УФН, 44, вып. 1, 1951.
35. Ольховский И. И., Павленко Ю. Г., Кузьменков Л. С. Задачи
по теоретической механике для физиков. М., Изд-во Моск. ун-та, 1977.
36. К о т к и н Г. Л., С е р б о В. Г. Сборник задач по классической механике.
М., «Наука», 1977.
3?. Гречко Л. Г. и др. Сборник задач по теоретической физике. М., «Высшая
школа», 1972.
38. Г и б б с Дж. В. Основные принципы статистической механики. М.—Л., Гос-
техиздат, 1946.
39. Власов А. А. Макроскопическая электродинамика. М., Гостехиздат, 1955.
40. Т а м м И. Е. Основы теории электричества. М., «Наука», 1976.
41. Куликов К. А. Курс сферической астрономии. М., «Наука», 1974.
42. Давыдов А. С. Квантовая механика. М., «Наука», 1973.
43. Соколов А. А., Лоскутов Ю. М., Тернов И. М. Квантовая механи-
механика. М., «Просвещение», 1965.
44. Ильин В. А., П о з н я к Э. Г. Основы математического анализа. Ч. I. M.,
«Наука», 1971.
45. Степанов В. В. Курс дифференциальных уравнений. М., «Наука», 1959.
46. Эльсгольц Л. Э. Дифференциальные уравнения и вариационное исчисле-
исчисление. М., «Наука», 1969.
47. Мальцев А. И. Основы линейной алгебры. М., «Наука», 1975.
48. Гельфанд И. М. Лекции по линейной алгебре. М., «Наука», 1971.
49. Кур ош А. Г. Курс высшей алгебры. М., «Наука», 1975.
50. Гапонов А. В., Миллер М. А О потенциальных ямах для заряженных
частиц в высокочастотном электромагнитном поле, ЖЭТФ 34, вып. 1, 1958.
Часть II
51. Жуковский Н. Е. Теоретическая механика. М.—Л., Гостехиздат, 1952.
52. К о ч и н Н. Е., К и б е л ь И. А., Р о з е Н. В. Теоретическая гидродинамика.
Ч. I, П. М., Физматгиз, 1963.
53. Ландау Л. Д., Л и ф ш и ц Е. М. Механика сплошных сред. М., Гостех-
Гостехиздат, 1953.
54. Широков М. Ф. Физические основы газодинамики. М., Физматгиз, 1958.
55. Каулинг Т. Магнитная гидродинамика. М., ИЛ, 1959.
56. Ландау Л. Д., Лифшиц Е. М. Теория упругости. М., «Наука», 1965.
57. Ф е й н м а н Р., Лейтон Р., С э н д с М. Фейнмановские лекции по физике,
вып. 7. М., «Мир», 1967.
58. Седов Л. И. Механика сплошной среды. Т. 1, 2. М., «Наука», 1970.
59. Ильюшин А. А. Механика сплошной среды. М., Изд-во Моск. ун-та, 1971.
60. Бэтчелор Дж. Введение в динамику жидкости. М., «Мир», 1973.
61. Л о й ця некий Л. Г. Механика жидкости и газа. М., «Наука», 1970.
62. И л ь ю ш и н А. А., Л о м а к и н В. А., Ш м а к о в А. П. Задачи и упражне-
упражнения по механике сплошной среды. М., Изд-во Моск. ун-та, 1973.
63. Леон то вич М. А. Введение в термодинамику. М.—Л., ГИТТЛ, 1952.
64. Базаров И. П. Термодинамика. М., «Высшая школа», 1976.
65. Ильин В. А., Позняк Э. Г. Основы математического анализа. Ч. II. М.,
«Наука», 1973.
66. А м е н з а д е Ю. А. Теория упругости. М., «Высшая школа», 1976.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсолютно гладкая поверхность 203,
204
— твердое тело 9
в однородном поле тяжести
341, 342
¦ с одной неподвижной точкой
367 и далее
— шероховатая поверхность 205, 381
Автоколебания 318
Адиабата Гюгонио 514
Адиабатическая инвариантность 443
Адиабатические инварианты матема-
математического маятника 446
Амплитуда волны 508
комплексная 508
— вынужденных колебаний 302
— комплексная 301
— собствендых гармонических коле-
колебаний 45, 272
Амплитудная характеристика 301
Аналогия между силой Лоренца и
силами инерции 249
Ансамбль Гиббса 390
Апериодическое движение 257
Апогей 93
Апсида 79
Барометрическая формула 485
Бесконечно малый поворот 157—160
Бинормаль к траектории 19
Вариация координат 206
— радиуса-вектора 202
Вектор деформации 464
— Умова 496
Вертикаль 175
Вес 175, 176
Вириал силы 74
Виртуальная работа 203, 450
Виртуальное перемещение 202
Возможное перемещение 202
Возмущение эллиптической орбиты
195
Волна бегущая плоская 508
монохроматическая 508
Волновое уравнение 505
Волновой вектор 508
Время 8, 13
Вынужденное колебание «линейное 301
—, его полная энергия 303
• нелинейное 320 и далее
Вырожденное движение 443
Вязкая жидкость 522
Гамильтониан (см. функция Гамиль-
Гамильтона) 385
Гамильтонова система 425
Гармоническое колебание 45
, его полная энергия 258
Гашение колебаний 307
Гироскопическая сила 70
, антисимметрия коэффициентов
70
Главная нормаль к траектории 18
Главные компоненты тензора дефор-
деформации 467
Главные (нормальные) колебания 275
— (нормальные) координаты 275
Главные моменты инерции 351
— оси инерции 351
— центральные оси инерции 354
Голономная (интегрируемая) связь
199
Гравитационная тяжелая масса 34
— постоянная 33, 35
Гравитационное сжатие шара 560
Групповая скорость 509
Движение тела переменной массы 101
— центра масс в неоднородном поле
99
в однородном поле 98
Действительное перемещение 201
Декартовы координаты 10, 15
Деформация однородная 554
— частицы 464
* Указатель содержит термины, употребляемые как в первой, так и во второй
частях книги. Во избежание недоразумений термины, употребляемые в механике
сплошных сред, в ряде случаев дополнены сокращением «м. с. с».
568
Диаграмма импульсов 126
— скоростей 126
Динамика 38
Динамические уравнения Эйлера 368
Дисперсия 3BVKa 509
Диссипативная функция в м. с. с. 480
Диссипативная функция Рэлея 235
вблизи положения устойчи-
устойчивого равновесия 255, 289
, симметрия коэффициентов
235
Дифференциальное сечение рассеяния
140
абсолютно упругих шариков
147
частиц с электростатическим
взаимодействием 143
Дифференциальное уравнение траек-
траектории 456
Дозвуковой поток 511
Дрейф заряда 56
Евклидово пространство 12
Естественное задание движения 17
Естественный трехгранник 18
Задача двух тел 114 и далее
в неинерциальной системе
193
в случае гравитационного и
электростатического взаимодейст-
взаимодействия 118
, общее решение 117
, функция Гамильтона 388
—э — Лагранжа 388
Задача Циолковского 102
Закон Архимеда 485
— всемирного тяготения Ньютона 33
— Гука 29, 546, 547
Закон движения материальной точки
14
твердого тела 338
Закон дисперсии 509
Закон изменения импульса 61, 96, 111
в м. с. с. 472—474
, кинетического момента и
энергии в неинерциальной системе
189—192
кинетического момента 103
в м. с. с. 474, 475
кинетической энергии 65, 107
в м. с. с. 475
момента импульса точки 62
обобщенной энергии 239
полной энергии 72, 109
функции Гамильтона 388
Закон инерции Галилея—Ньютона 36
Закон Кулона 30
— Паскаля 484
— подобия Рейнольдса 528
Закон сохранения импульса 62, 97,
— , кинетического момента и
энергии в неинерциальной системе
192—193
и превращения энергии всех
форм движения материи ПО
• кинетического момента 103, 104,
111
Закон сохранения массы в м. с. с. 470
Закон сохранения момента импульса
точки 62—64
распространенные слу-
случаи 62, 64,
обобщенного импульса 237, 388
обобщенной энергии 240
полной энергии 73, 109, 111
Закон Фурье 525
Законы изменения импульса, кинети-
кинетического момента и энергии при на-
наличии связей 209, 211
— Кеплера 22, 87
— Ньютона 36—39
Замкнутая (изолированная) система
97
Заряд в неоднородном магнитном по-
поле 76, 246
— в однородных электрическом и
магнитном полях 51—59
Заряд в переменном поле 42
— в поле электрического диполя 410
— в высокочастотном поле 335
Заряженная молекула в электриче-
электрическом поле 343, 345
Затухающие колебания 257, 292
Захват частиц 121
Звуковые волны 507
Идеальная жидкость 482
— связь 203
Идеальный газ 482
Изменение ориентации (вращение)
155
Измерение масс 33, 176
— сил 29
Изолированная материальная точка
35
Изотропия пространства 111, 457
Изохронность колебаний 257
Изэнтропическое течение 487
Импульс (количество движения) ма-
материальной точки 61
— механической системы 94
в разных системах отсчета
187, 194
— твердого тела 339
Инвариант Пуанкаре 425
— Пуанкаре—Картана 422
Инерциальная система отсчета 35
, ее преимущественность 172
Инертность тела 38
Интеграл Бернулли 489
для несжимаемой жидкости 489
Интеграл движения первый 60, 61
второй 61
Интеграл Коши 492
для стационарных течений 492
Интеграл площадей 65, 104
— энергии 73
Интегральный вариационный принцип
449, 450
Инфинитное движение 83
Канонические переменные 384
— преобразования 427
инверсии 433
—• — , производящая функция 429
— »— тождественные 433
, якобиан преобразования 432
— уравнения Гамильтона 384, 386
Касательная к траектории 18
Качение тел 205, 365, 381
Квазистатический процесс в м. с. с.
479
Килограмм 38
Кинематические задачи 20
—¦ формулы Эйлера 161
Кинетическая энергия 65, 107
вблизи положения устойчивого
равновесия 255, 271
— — в декартовых, цилиндрических
и сферических координатах 227—
228
в разных системах отсчета 182,
187
вращения твердого тела 343
, симметрия коэффициентов 230
твердого тела 342
Кинетический момент 103
— — в разных системах отсчета 181,
187
— ¦¦— вращения твердого тела 342
твердого тела 342
Классическая механика 7
Ковариантность уравнений Лагран-
жа 248
Колебания атомов кристалла 280, 283
Колебания вынужденные 301
, их энергия 303—304
— гармонические 45
, их энергия 258
— главные (нормальные) 275
— двухатомной молекулы 280
вращающейся 298
— затухающие 257, 292
— линейные 255
— малые 253
— нелинейные 311
— симметричной трехатомной моле-
молекулы 283
569
— слабо нелинейные'313
— собственные (свободные) 255
Комбинационные частоты 321
Консервативная система ПО
Координаты главные (нормальные)
27о
— декартовы 10, 15
Координаты независимые 217
— обобщенные 217
— сферические 17
— циклические" 223
— цилиндрические 16
Кориолисово (поворотное) ускорение
169
Космическая скорость первая 90
вторая 90
Коэффициент затухания 257
— — звука 538
— Пуассона 555
— теплового расширения 552
— теплопроводности 525
Коэффициенты вязкости (кинематиче-
(кинематический и динамический) 526
¦— — (первый и второй) 523
— Ламэ 544
— подобия 528
— термоупругости 546
Критическая точка 493
Лагранж!иан (см. функция Лагранжа)
234
Ламинарное течение 529
Либрация 438
Линейная скорость 15
Линейные колебания 255
— — маятников 279, 292
• системы двух точек 277
— — твердых тел 360—367 и далее
точки 257, 267—270, 276
Линия действия силы 63
Линия тока 489
— узлов 151
Лобовой удар 129
Локально равновесное состояние 477
л-Система (лабораторная система от-
отсчета) 121
Магнитогидродинамические волны
(волны Альфвена) 520
Малые колебания 253
Масса гриватационная (тяжелая) 34<
— инертная 33
Математический маятник 215
Материальная точка 8
в однородном поле тяжести 47
и далее
в центрально-симметричном по-
поле 77 и далее
, условие замкнутости
траектории 82
570
, движение по баллистической
траектории 92
под действием силы, обратно
пропорциональной квадрату рас-
расстояния до центра силы 82 и далее
Маятник математический 215
— с вибрирующим подвесом 334
— сферический 197, 241
— физический 359
— циклоидальный 224
Мгновенная ось вращения 158
Мера инертности 38
Метод Крылова—Боголюбова 313 и
далее
— неопределенных множителей Ла-
гранжа 206 и далее
— разделения переменных 407 и да-
далее
— усреднения 331 и далее
Метр 9
Модули Ламэ 550
Модуль объемного сжатия 551
— сдвига 551
— упругости 546
— Юнга 555
Момент импульса 62
— силы 62
в разных системах отсчета 181,
195
Моменты инерции 350
главные 351
• осевые 350
центробежные 350
Мощность силы 65
в разных системах отсчета 182,
195
гироскопической 71
диссипативной 71
Напряженность поля 66
Начала термодинамики (первое и
второе) 477—481
Начальные условия 26, 42
Невесомость 178—180
Неголономная связь 199
Независимые координаты 217
Неинерциальная система отсчета 36
Нелинейные колебания 311
математического маятника 317
материальной точки, подвешен-
подвешенной на пружине 326
Неравновесный (нестатический) про-
процесс 480
Несжимаемая жидкость 496
Нестационарная связь 201
Нормальные (главные) колебания 275
координаты 275
Нутация 376
Ньютон (сила) 38
Обобщенная сила 221
— скорость 220
— энергия 239
Обобщенное ускорение 231
Обобщенно-консервативная система
388
Обобщенно-потенциальная сила 232
, антисимметрия коэффициентов
234
вблизи положения устойчивого
равновесия 290
Обобщенные координаты 217
Обобщенный импульс 237
— потенциал 232, 233, 249
заряда в электромагнитном по-
поле 232
Обратимость квазистатических про-
процессов 479
Общее уравнение механики 216
Однородное поле 47, 51 и далее
Однородность времени 111, 458
— пространства 111, 457
Оптико-механическая аналогия 415
Орбита точки 83
Ортогональное преобразование 12
обратное 154
простейшее 152
Осциллятор заряженный (в магнит-
магнитном поле) 296
— неизотропный 436
— пространственный 44
Падение точки на центр силового по-
поля 81
— частиц друг на друга 127
Парадокс Д'Аламбера 499
Параметр орбиты 84
Пара сил 340
Переменные «действие — угол» 439,
440
— в задаче двух тел 447
— Лагранжа в м. с. с. 547
— Эйлера в м. с. с. 547
Переносная сила инерции 171
— скорость 167
Переносное ускорение 169
Перигей 89
Периодический процесс 13
Плоскопараллельное движение 357
Плотность потока среды в м. с. с. 72
— энергии в м. с. с. (см. вектор Умо-
ва) 496
Поверхность разрыва 512
Подобие стационарных течений 527
Подъемная сила Жуковского 504
Поле 7, 8
— бесконечно малых перемещений
461
— напряжений 473
— плотности массы 460
571
— силовое 66
потенциальное 66
— скоростей 461
— соленоид альное 506
— стационарное 489
— центрально-симметричное 68, 77
Полная вариация действия 419
Полное сечение захвата 143
рассеяния 141
Положение равновесия 223
— точки в разных системах отсчета
165
1 преобразование ко-
координат 165
— устойчивого равновесия 255, 263
Поперечная волна 520, 539, 564
Поступательно-движущаяся система
центра масс (см. ц-система) 115,
121, 180
у законы изменения ки-
кинетического момента и кинетиче-
кинетической энергии 183
Поступательное движение 155
Потенциал скорости 492
Потенциальная энергия 67, 108—109
— — вблизи положения устойчивого
равновесия, симметрия коэффици-
коэффициентов 271
внутренняя 108
— — в однородном поле 73 и далее
в поле переносной силы инер-
инерции 191
Потенциальное (безвихревое) течение
491
Потенциальный барьер 75
Поток тепла, его плотность 478
Преобразование Галилея 40
— тензора инерции при параллельном
переносе системы координат 354
при повороте системы коор-
координат 355
Прецессия псевдорегулярная 376
— регулярная 371
«Приведенная» масса 116
Принцип виртуальных перемещений
223
— наименьшего действия Гамильто-
Гамильтона—Остроградского 452
— Мопертюи 454
— Якоби 455
— относительности Галилея 39
Принцип супеппозиции 257
Присоединенная масса 500
Прицельное расстояние 121
Продольная волна 509, 539, 564
Производные вектора по времени в
разных системах отсчета 168
Производящая функция канонических
преобразований 429
Пространство 8, И—13
— евклидово 12
— конфигураций 390
— фазовое 389
«расширенное» 421
Простые среды 477
Прямой скачок уплотнения 513
Работа силы (см. элементарная ра-
работа силы) 65
Равновесие 223
— твердого тела 342, 347
—, условие равновесия 223
Равновесное состояние в м. с. с. 477
Радиус-вектор 10
Радиус кривизны - траектории 19
Разложение движения твердого тела
на поступательное и вращательное
163
Рассеяние абсолютно упругих шари-
шариков 136
— двух частиц, одна из которых до
рассеяния покоится 128
, скорости которых до рас-
рассеяния противоположны 132
Рассеяние частиц 121
с электростатическим взаимо-
взаимодействием 135
Растяжение стержня 555
Реакция идеальной голономной свя-
связи 207
— связи 198
Регулярная прецессия 162, 370
Резонанс линейных колебаний 302
— нелинейных колебаний 321
— главный 322
Ротатор 352
Сверхзвуковой поток 511
Свободная материальная точка 26
— система 60
Связь 198
— голономная 199
— идеальная 203
— неголономная 199
— нестационарная 201
— неудерживающая 200
— стационарная 201
— удерживающая 200
Секторная скорость 15
Секторное ускорение 15
Секунда 13
Сжатие всестороннее равномерное 554
Сила 28
— активная 209
— внешняя 96
— внутренняя 96
— гироскопическая 70
— гравитационного притяжения 33
— диссипативная 71
— заданная 197
— инерции 171
кориолисова 171
572
переносная 171
центробежная 171
— Лоренца 30
¦— нестационарная 69
— обобщенная 221
— объемная (массовая) 472
¦— пассивная 209
•— поверхностная 472
•— потенциальная 66
— сопротивления среды 31
•— стационарная 69
— упругая 29
— центральная 63
— электростатического воздействия
/30
Символ Кронкера 349
Симметричный волчок 368
— заряженный волчок в магнитном
поле 376
— свободный волчок 369
— тяжелый быстрый волчок 372
Симметрия материальная 351
— связи 211, 223
'•— силового поля 211, 223
— траектории 79
Система взаимодействующих точек в
однородном поле тяжести 184
— материальных точек 9
Система отсчета 9
инерциальная 35
— — Коперника 11
—— лабораторная 121
локально-инерциальная 180
неинерциальная 36
^ неускоренно движущаяся 39
¦ ускоренно движущаяся 172
— центра масс 115, 121, 180
Скобки Пуассона 395
• для проекций радиуса-вектора,
импульса и момента импульса точ-
точки 398
фундаментальные 396
Скорость деформации 465
— звука .507
— материальной точки 14
- в декартовых, цилиндриче-
цилиндрических и сферических координатах
IS—17
• в разных системах отсчета
167
• , разложение по «естествен-
«естественным» ортам 19
— прецессии 162
— фазовая 509
Слабо нелинейные колебания 313
Собственные (свободные) колебания
255
— частоты системы 273
Соотношение Майера 488
Срыв амплитуды нелинейных колеба-
колебаний 331
Статика 223
Стационарная связь 201
Сферические координаты 17
Сферический маятник 197
Тангенциальный разрыв 512
Твердое тело 546
идеально упругое 546
анизотропное 547
изотропное 547
Температура 477
Тензор деформации 464
— инерции 350
центральный 354
— метрический 544
— напряжений 473
— плотности потока импульса 495
— поворота в м. с. с. 464
— скоростей деформации 465
— упругости 549
Теорема Гельмгольца о разложении
векторного поля 506
— Клаузиуса о вириале сил 74
— Лармора 235
— Лиувилля о сохранении фазового
объема 392
— Нетер 456
— о единственности инварианта Пу-
Пуанкаре 425
— Пуассона 395
— Томсона о циркуляции скорости
490
— Штейнера 354
— Эйлера о повороте твердого тела
156
— Якоби 403
Течение проводящей вязкой жидко-
жидкости 542
—- Пуазейля 532
Тождество Пуассона 395
Точечное преобразование 248
Точка поворота 79
Траектория точки 14
Турбулентное течение 529
Угловая скорость системы отсчета
(абсолютно твердого тела) 159
частицы в м. с. с. 465
Углы Эйлера 151
Угол рассеяния 125
Ударная адиабата (см. адиабата Гю-
гонио) 514
— волна 511
Удельный объем 487
«Укороченное» действие 407
Упругие волны 561 и далее
Упругое рассеяние 123
Уравнение Гамильтона—Якоби 399,
403
, его полный интеграл 403
— Д'Аламбера—Лагранжа 216
— гидростатики 484
— движения точки 41 и далее
в декартовых, цилиндриче-
* ских и сферических координатах 44,
46, 227, 228
в неинерциальной системе
171
относительно Земли 172—
175
центра масс 94
— изменения внутренней энергии в
м. с. с. 479
кинетической энергии в м. с. с.
475
энтропии 480
— Ламэ 553
— Лапласа 496
— Мещерского 102
— Навье — Стокса 526
— непрерывности 471
— связи 198
— состояния 483
калорическое 483
термическое 483
— Эйлера в м. с. с. 483
Уравнения движения вязкой жидко-
жидкости 523—525
идеальной жидкости 483
идеально упругого тела 548
механической системы 38
несжимаемой вязкой жидкости
526
— Лагранжа вблизи положения ус-
устойчивого равновесия 255, 271, 291
в главных координатах 275
— — в независимых координатах
(уравнения второго рода) 214, 229
в неинерциальной системе 249
в обобщенных координатах
(для неголономных систем) 381
— —, их ковариантность 248
— — с реакциями связей (уравнения
первого ряда) 209
— — для голономных си-
систем 209
дЛЯ неголономных си-
систем 381
Уравнения магнитогидродинамики
вязкой жидкости 541
идеальной жидкости 517
Ускорение материальной точки 15
— в декартовых, цилиндриче-
цилиндрических и сферических координатах
20, 21, 228
— в разных системах отсчета
169
Условия ортогональности 12
Условно-периодическое движение 442
Устойчивое равновесие 263
, достаточный признак 263
573
Устойчивость маятника с вибрирую-
вибрирующим подвесом 334
Фаза волны 508
— колебаний 46
Фазовая скорость 509
— точка 389
¦— траектория 389
— характеристика 301
Фазовое пространство 389
«расширенное» 421
Физически бесконечно малая частица
459
малый интервал времени 459
объем 459
Физический маятник 359
Финитное движение 83
Фокусировка зарядов 54, 56
Формула Бине 23
— Резерфорда 143—145
— Стокса 537
— Торричелли 490
Функция Гамильтона 385
в задаче двух тел 388
— — в неинерциальной системе 386
свободного заряда 385
— , в поле электрического
диполя 410
свободной точки в декартовых,
цилиндрических и сферических ко-
координатах 385
Функция действия 399
— — заряда в поле электрического"
диполя 411
свободной точки 406
¦ точки в однородном поле тя-
тяжести 418
Функция Лагранжа 234
— -— в главных координатах 275
— — в задаче двух тел 388
¦ заряда в центрально-симмет-
центрально-симметричном магнитном поле 246
. ¦— в поле ядра и магнитном
поле 236
— *— осциллятора 238
свободного заряда 385
свободной точки в неинерци-
неинерциальной системе 385
симметричного тяжелого волч-
волчка 373
— — сферического маятника 241
—ч— твердого тела 342—343
Функция состояния в м. с. с. 477
Характеристическое уравнение 255,
278
Центрально-симметричное поле 68, 77
Центр масс (центр инерции) 94
— силы 63
574
Центробежная сила инерции 171
Циклические координаты 223
Циклотронная частота 52
Цилиндрические координаты 16
Циркуляция скорости 490
Ц-система (см. система центра масс)
121
Частота волны 508
— Лармора 235
— колебаний линейных 45, 257
нелинейных 312
Число Маха 511
— Рейнольдса 528
— степеней свободы 217
свободного твердого тела
338
Чистое кручение 558
Чистый изгиб 556
— сдвиг 554
Широта географическая 175
— геоцентрическая 175
Эквипотенциальная поверхность 68
Эксцентриситет орбиты 84
Элементарная работа силы 65
на виртуальном перемеще-
перемещении (см. виртуальная работа) 203,
450
на действительном переме-
перемещении 65
потенциальной нестационар-
нестационарной 69—70
стационарной 67—69
Энергия внутренняя в м. с. с. 477
— кинетическая 65, 107
в м. с. с. 475
— полная 72, 109
— потенциальная 67, 108—109
—¦ — внутренняя 108
во внешних полях 108
в поле переносных сил инер-
инерции 191
— свободная 549
Энтальпия (тепловая функция) 488
Энтропия 479
Эффект Допплера 510
«Эффективная» потенциальная энер-
энергия 78, 334
Игорь Иванович Ольховский
КУРС ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ ДЛЯ ФИЗИКОВ,
изд. з
Зав. редакцией
А. А. Л о к ш и н
Редактор Р. А. Бунатян
Переплет художника
Н. А. Князькова
Технический редактор
Г. Д. Дегтярева
Корректоры
И. А. Большакова,
С. С. Мазурская
Тематический план 1978 г. № 84
ИБ № 491
Сдано в набор 24.11.77.
Подписано к печати 14.09.78.
Л-78450 Формат 60X90/ie
Бумага тип. № 3.
Гарнитура литературная.
Высокая печать.
Усл. печ. л. 36,0
Уч.-изд. л. 32,26 Изд. '№ 310
Зак. 284 Тираж 16830 экз.
Цена 1 р. 30 к.
Издательство
Московского университета.
Москва, К-9, ул. Герцена 517.
Типография Изд-ва МГУ.
Москва, Ленинские горы