/












































































































































































































































































































































































































































































































































































































Author: Бать М.И. Джанелидзе Г.Ю. Кельзон А.С.
Tags: общая механика механика твердых и жидких тел теоретическая механика
Year: 1966




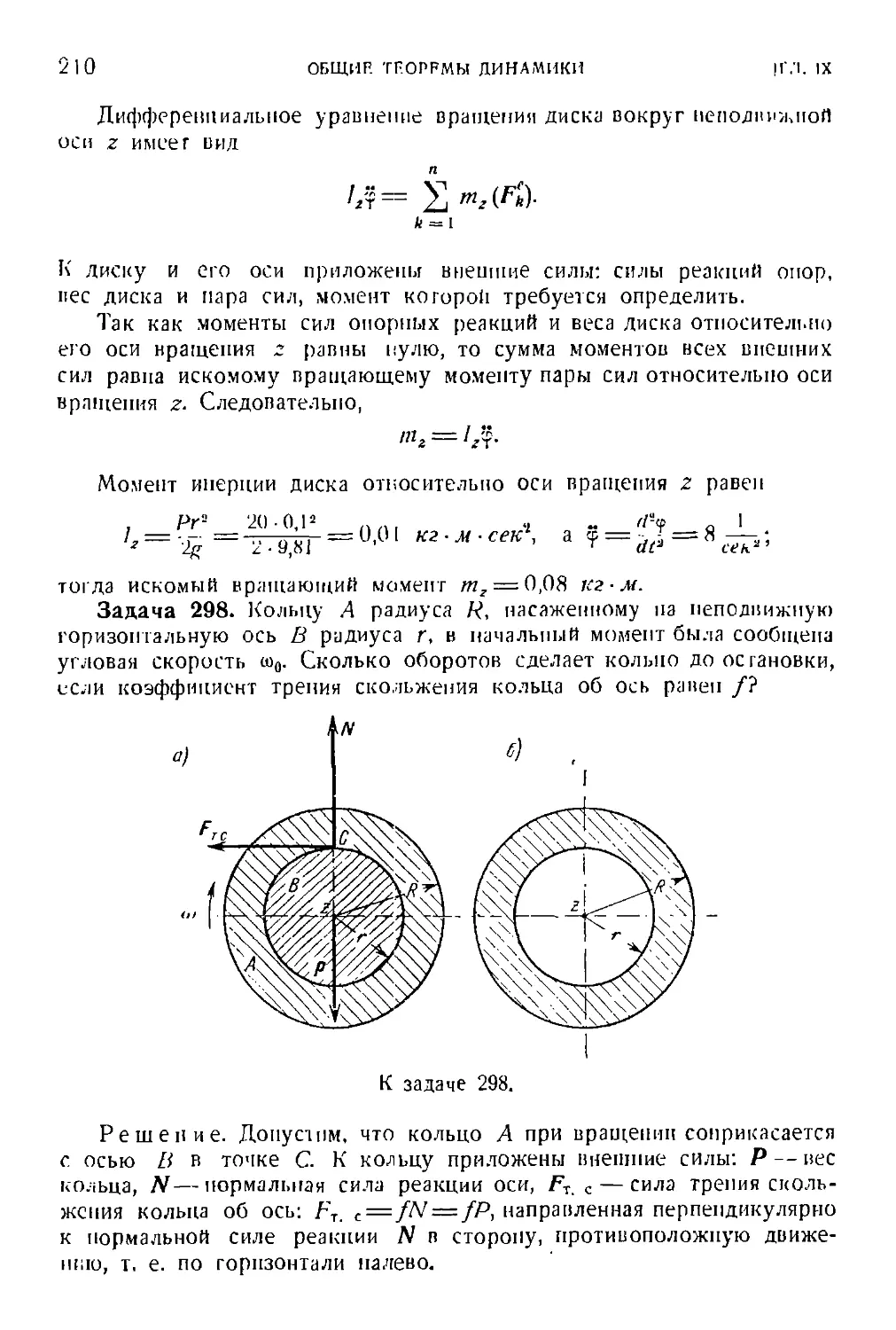
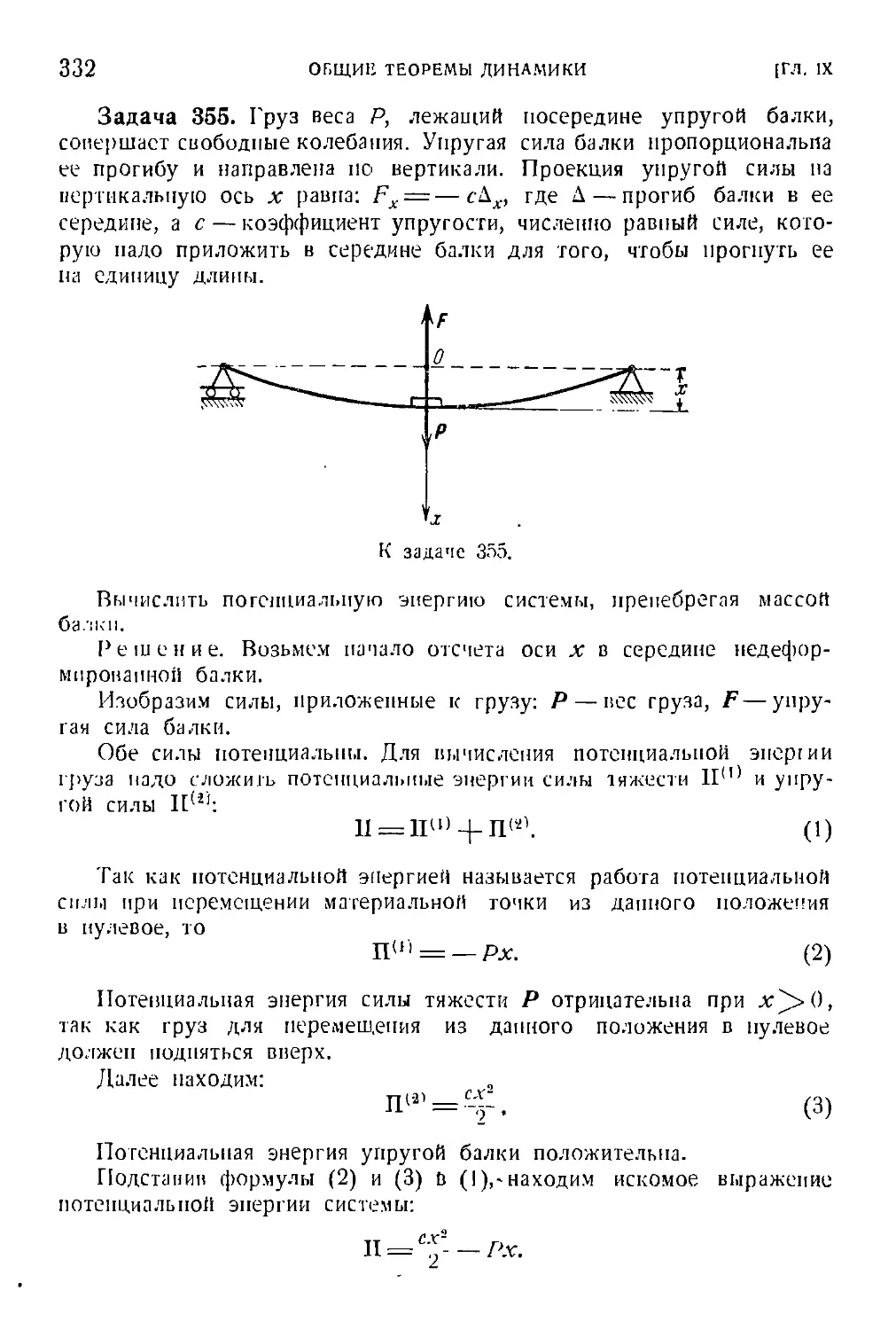
Text
М. И. БАТЬ, Г. Ю. ДЖАНЕЛИДЗЕ, А. С. КЕЛЬЗОН
ТЕОРЕТИЧЕСКАЯ
МЕХАНИКА
В ПРИМЕРАХ И ЗАДАЧАХ
Под редакцией Г. К). ДЖАНЕЛИДЗЕ
ТОМ ВТОРОЙ
ДИНАМИКА
издание трг.ты:, стерг.отипиое
Допущено Министерством
высшего и среоне'гп специального образования РСФСР
в качгстпе у ie6m\:o пособия
для jaQ'iHiAX и вечерних втузов
ИЗДАТЕЛЬСТВО «НАУКА»
СЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-.МАТК.МАТИЧНСКОЙ ЛИТЕРАТУРЫ
Л1 О С К И А I Э G G
531
Б 28
УДК 531.
ОГЛАВЛЕНИЕ
Предисловие редактора ко второму изданию 7
РАЗДЕЛ ТРЕТИЙ
ДИНАМИКА
Глава VKI. Дифференциальные уравнения динамики материальной
точки II
§ 1. Основные формы дифференциальных уравнений динамики мате-
материальной точки 11
§ 2. Определение сил по заданному движению (прямая задача дина-
динамики материальной точки) 13
§ 3. Определение движения по заданным силам (обратная задача ди-
динамики материальной точки) 28
§ 4. Колебательное движение 74
Г. Восстанавливающая сила 74
2°. Свободные колебания материальной точки 75
3°. Влияние силы сопротивления, пропорциональной скорости, на
свободные колебания материальной точки 76
4°. Вынужденные колебания материальной точки. Возмущающая
сила 96
§ 5. Относительное движение 123
Глава IX. Общие теоремы динамики 141
§ 1. Дифференциальные уравнения движения системы материальных
точек 141
§ 2. Теорема о движении центра инерции системы материальных
точек 142
Г. Центр инерции системы материальных точек 112
2°. Теорема о длижении центра инерции системы материальных
точек 146
3°. Случай сохранения скорости центра инерции системы мате-
материальных точек 165
§ 3. Теорема об изменении главного вектора количеств движения си-
системы материальных точек 169
1°, Импульс силы. Главный вектор количеств движения системы
материальных точек 169
1*
4 ОГЛАВЛЕНИЕ
2°. Теорема об изменении коли1 ества движения материальной
точки (к интегральной форме) 173
3°. Теорема об изменении главною вектора количеств движения
системы материальных точек (в интегрально!! форме) 176
4°. Теорема об изменеш п главного вектора количеств движения
системы материальных точек в приложении к сплошным сре-
средам (теорема Эйлера) 180
§ 4. Теорема об изменении главного момента количеств движении
системы материальных точек. Моменты инерции твердых тел. . 185
Г. Главный момент ко.т 1честв движения системы материальных
точек 185
2° Теорема об изменении момента количества движения мате-
материальной точки 186
3°. Случай сохранения момента количества движения материаль-
материальной точки 191
4°. Теорема об изменении главного момента количеств движения
системы материальных точек 193
Г>°. Случай сохранения главного момента количеств движения си-
системы материальных точек 193
6". Дифференциальное уравнение вращения гнерлого тела вокруг
неподвижной оси ¦ 207
7°. Теорема об изменении главного момента количеств движения
системы материальных точек и относительном движении но
отношению к центру инерции 241
8°. Моменты инерции и эллипсоид инерции 243
§ Г). Динамика плоского движения твердого тела 252
§ E. Теорема об изменении кинетической энергии системы материаль-
материальных точек 272
Г. Работа силы ' 272
2°. Кинетическая энергия материальной точки и системы мате-
материальных точек 284
3°. Теорема об изменении кинетической энергии материальной
точки 300
4°. Теорема об изменении кинетической энергии системы мате-
материальных точек .405
5°. Потенциальная энергия 330
6°. Закон сохранения механической энергии 333
Глава X. Динамика несвободной системы материальных точек. . . 335
§ I. Классификация связей. Число степеней свебоды. Классификация
сил 335
§ 2. Метод кинетостатики 3119
1°. Силы инерции. Приведение сг.л инерции к главному вектору
и главному моменту 339
2°. Метод кинетостатики 349
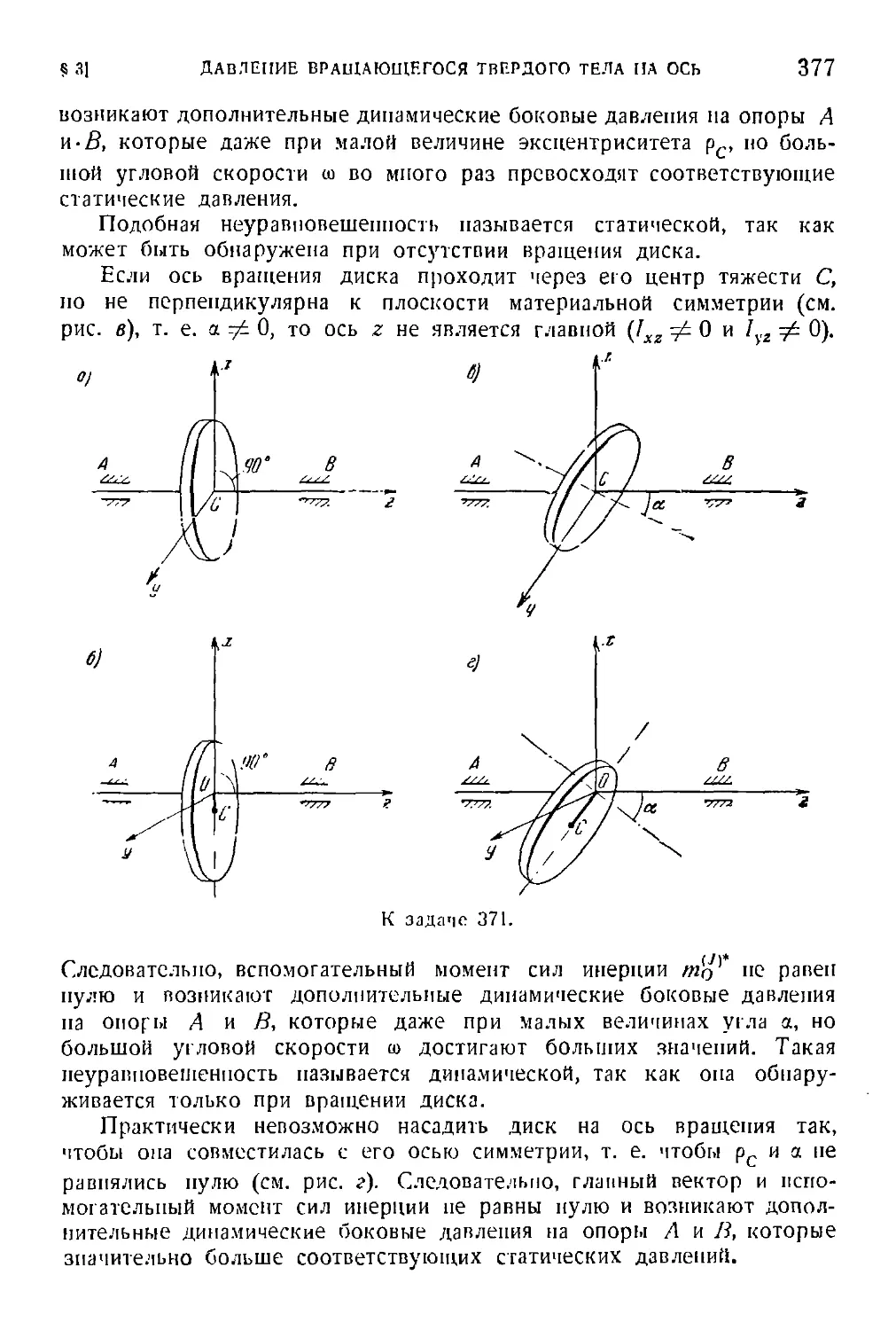
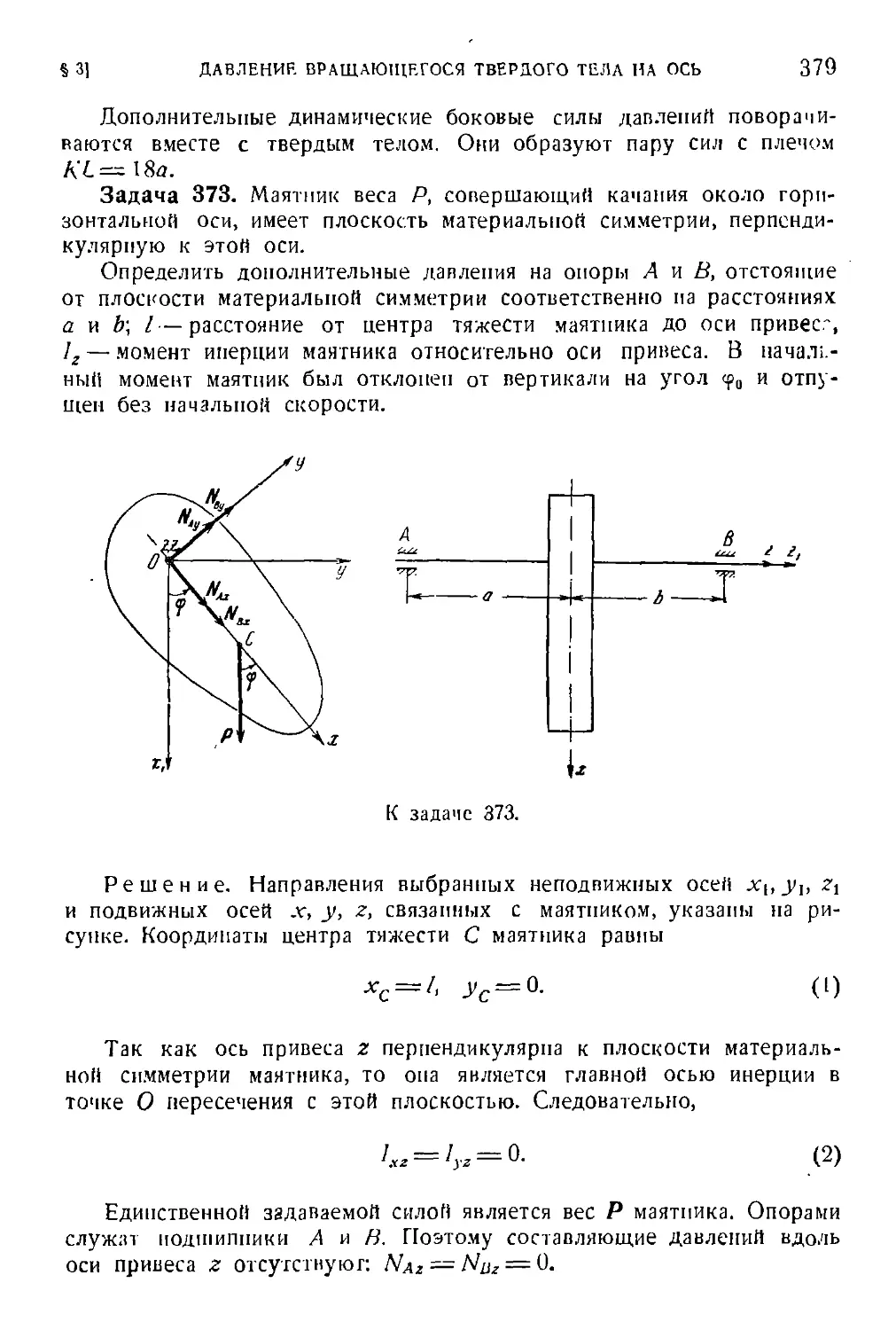
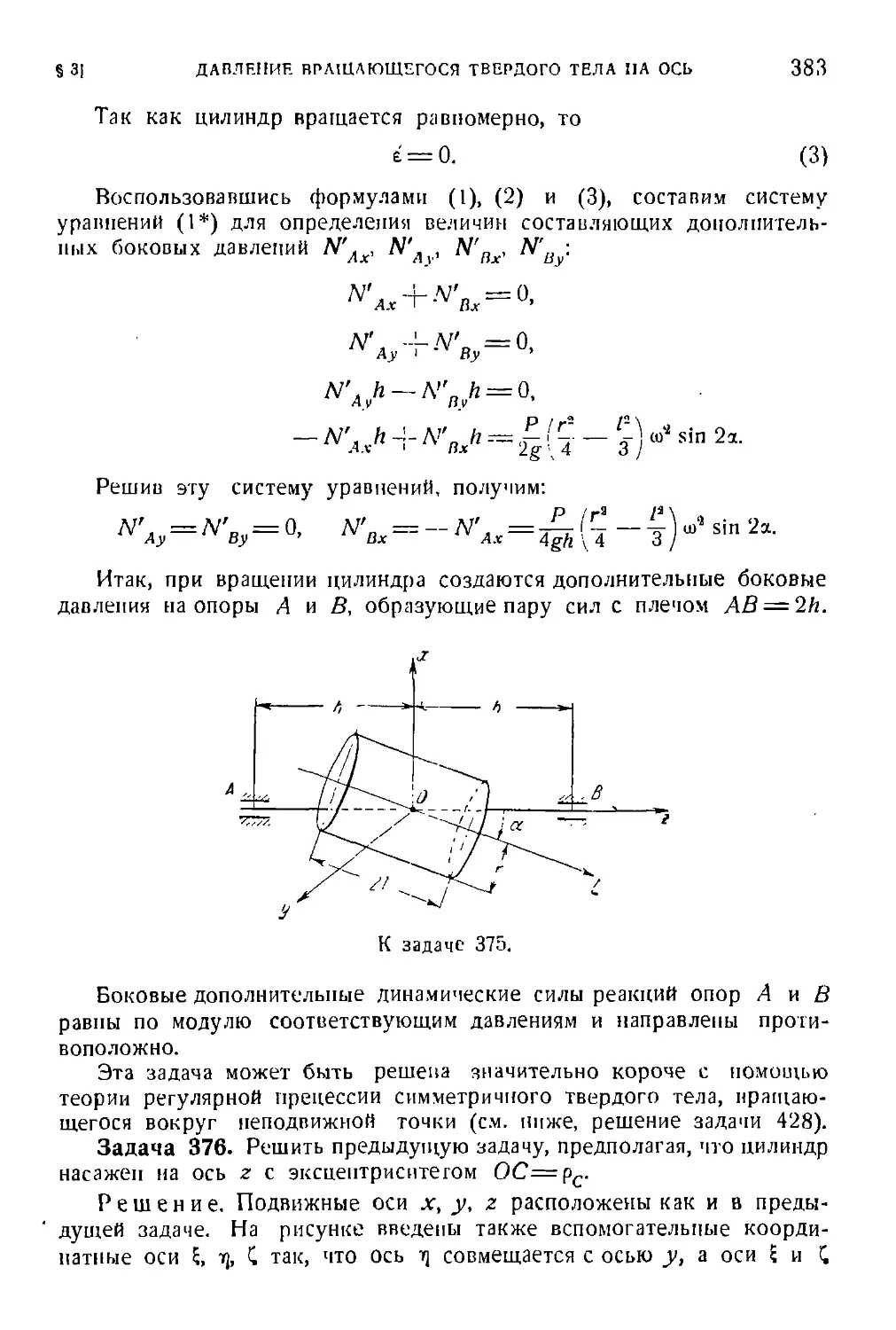
§ 3. Давление вращающегося твердого тела на ось вращения 372
§ 4. Принцип возможных перемещений 385
Г. Возможные перемещения. Идеальные связи 385
2°. Принцип возможных перемещении 387
3°. Рычаг Жуковского 407
§ 5. Общее уравнение динамики системы материальных точек .... 412
ОГЛАВЛЕНИЕ 5
§ п. Ураянення Лзгранжа пгоро/о рода 453
1°. Обобщенные координаты. Обобщенные силы 453
2°. Общие ураниенпс динамики и обобщенных координатах. Урав-
Уравнения Лаграпжа иторого рода 471
§ 7. Приближенная теория гироскопом Till
I". Гироскоп с гремя степеням! свободы "ill
2°. Гироскоп с двумя степенями еиободы 517
§ Н. Дши.микл тиердо/о тела, прлщающегося вокруг неподвижной
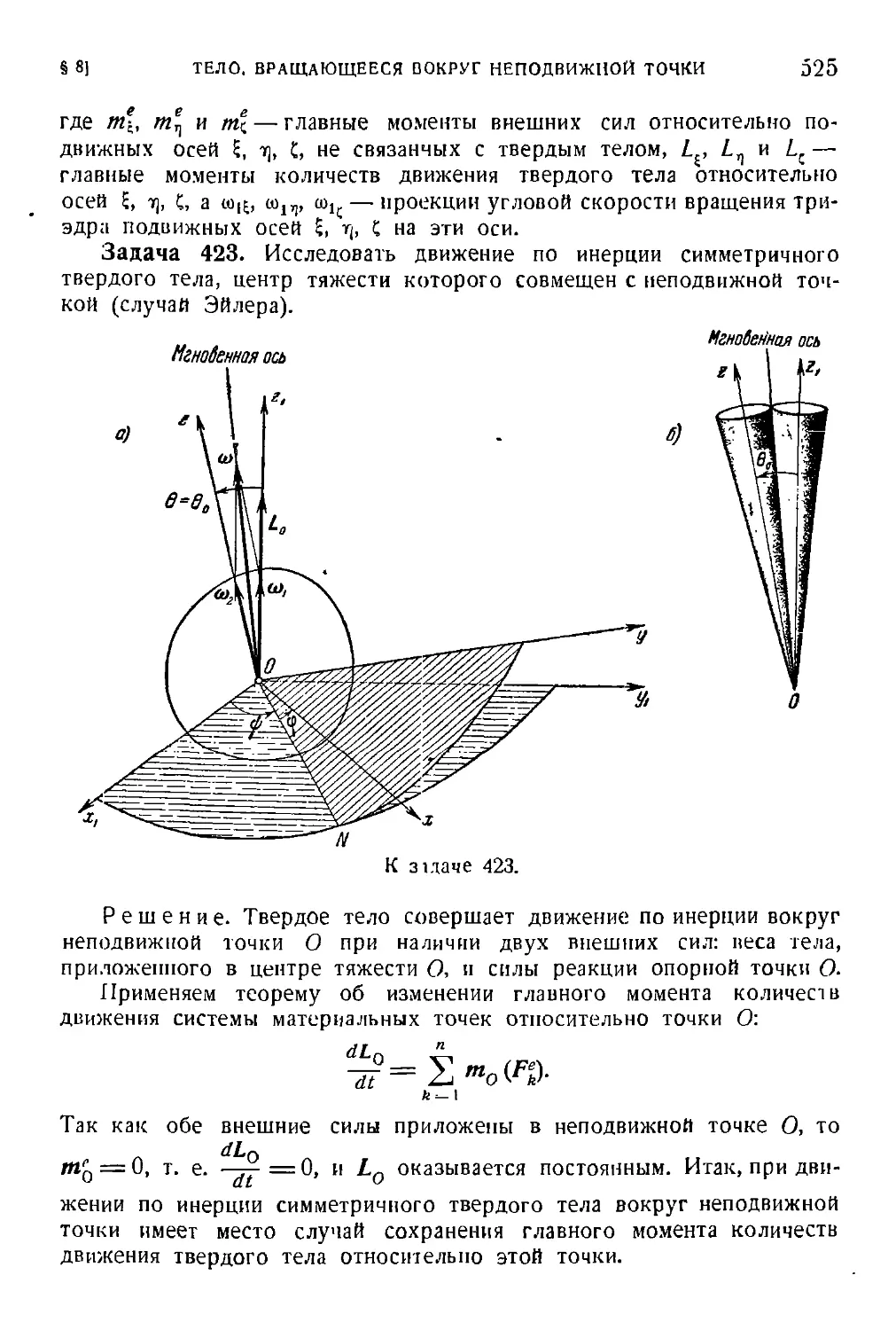
точки '. 523
1°. Движение по инерции ткердого тела, имеющего неподвижную
точку 52.'!
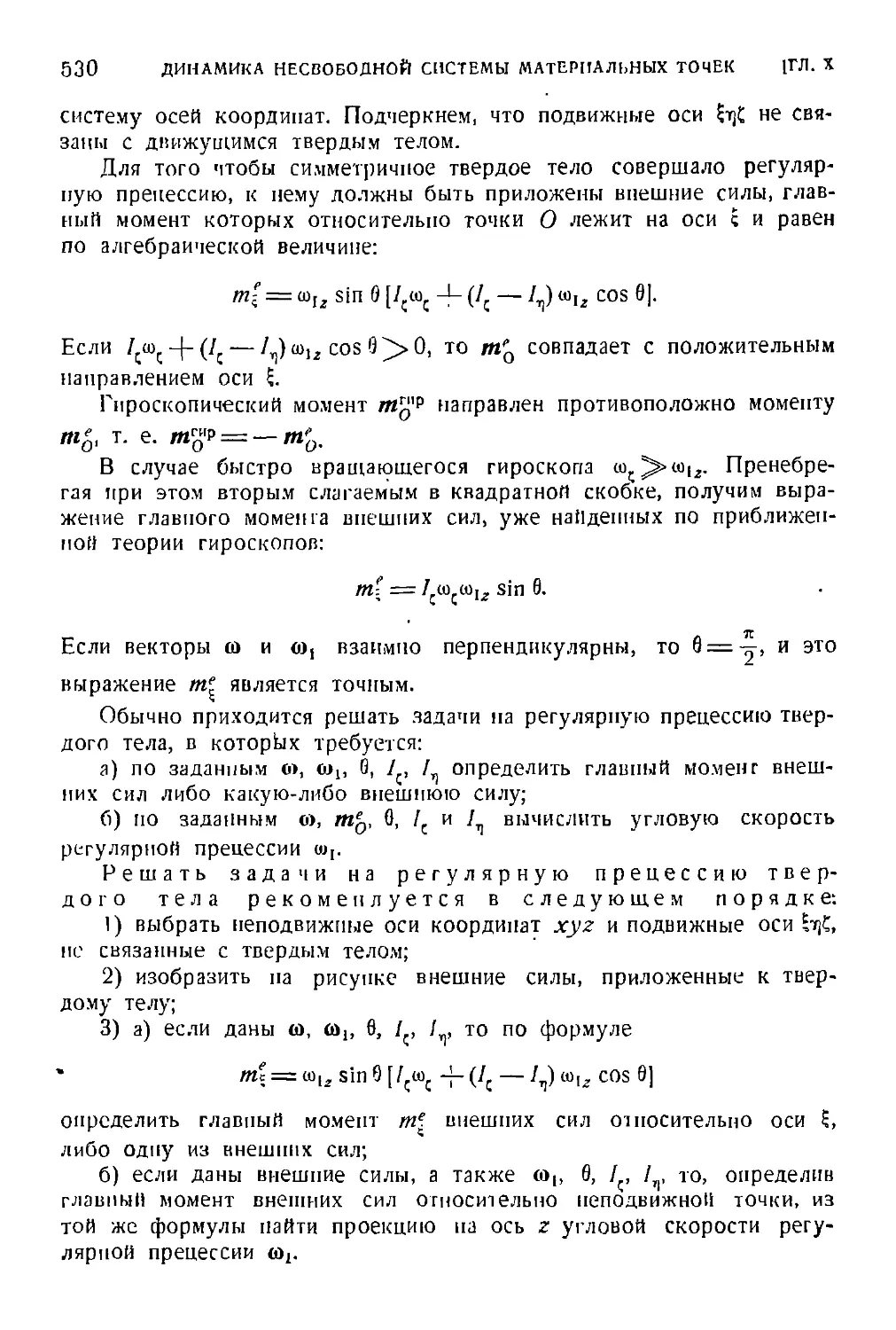
Т. Регулярная прецессия симметричного тиердого тела, имеющею
неподвижную точку 529
Г лапа XI. Краткий обзор методов решения задач динамики 5,17
§ I. Вводные замечания 537
§ 2. Задачи динамики материальной точки 537
§ 3. Задачи динамики системы материальных точек 5.4!)
§ 4. Задачи динамики твердого тела 510
1°. Поступательное движение твердого тела 5К)
'Г. Иращение твердою тела покруi неподвижной огн 511
Н". Плоское движение твердого тела 541
•1°. Вращение тверт/но тела вокруг неподвижной тчкн 512
5°. Движение свободного твердого тела 51;!
§ о. Об-Jine замечания но решению задач динамики 514
Глава XII. Специальные задачи динамики 516
§ I. Удар 54ti
1°. Удар двух тел. Удар тела о неподвижную преграду 510
2°. Теорема об изменении главного момента колп'/сстп движении
системы материальных точек в приложении к мгновенным
силам 559
¦Т. Потеря кинетической энерши при ударе дв\х тел 5(i5
4°. Удар но телу, ьращающемуси вокруг неподвижной оси . . . Г)')Х
§ 2. Динамика материальной точки переменной массы 57'.;
Глава XIII. Теория малых движений системы с конечным числом
степеней свободы. Устойчивость равновесия и движе-
движения системы • 580
§ I. Устойчивость равновесия системы 580
§ 2. Свободные колебания системы с одной nciienwo свободы .... 5S5
§ 3. Свободные колебания сиегеу.ы с двумя степенями свободы. . . . 501
§ 4. Вынужденные колебания системы с одной и двумя степенями
свободы под действием синусоидальных возмущающих сил. . . . 1H2.
§ 5. Влияние шроскоинчееких сил и сил вязкого сопротивления па
свободные и вынужденные колебяппя твердого телп с двумя сте-
степенями свободы 607
б ОГЛАВЛЕНИЕ
1°. Влияние гироскопических сил на свободные колебания систе-
системы с двумя степенями свободы 607
2°. Влияние вязкого трения и гироскопических сил на свободные
колебания твердого тела с двумя пенегячп свободы 613
3". Вынужденные колебания тисрдого тела с двумя степенями
свободы с учетом гироскопических сил 615
4°. Влияние вязкого трения на вынужденные колебания твердого
тела с двумя степенями свободы 621
5°. Влияние гироскопических сил на свободные колебания твер-
твердого тела с четырьмя степенями свободы 624
6°. Влияние гироскопических сил па вынужденные колебания
твердого тела с четырьмя степенями свободы. Самоцентриро-
Самоцентрирование 631
7°. Вынужденные колебания тпердого тела при резонансе .... 642
§ 6. Устойчивость движения 645
1°. Прямой метод исследования 645
2°. Устойчивость движения по перпому приближению 651
3°. Устойчивость движения при наличии гироскопических сил . . 657
Приложение I. Международная система единиц (СИ) 661
Приложение II. Список номеров задач из сборника задач по теорети-
теоретической механике И. В. Мещерского (издания 18—27), рекомендуе-
рекомендуемых для самостоятельной работы 663
ПРЕДИСЛОВИЕ РЕДАКТОРА КО ВТОРОМУ ИЗДАНИЮ
Второй том «Теоретической механики п примерах и задачах.» поспя-
щен динамике -- третьему и важнейшему разделу курса механики.
Решение конкретных задач динамики часто связано с трудностя-
трудностями выбора законов и теорем, применение которых оказывается наи-
наиболее целесообразным. В связи с этим в книгу иключена глаиа Xf,
п которой дан краткий обзор методом решения задач динамики.
В соответствии с замыслом, и книге даны в конспективной форме
лишь краткие сведения из теории, — предполагается, что для изуче-
изучения теории читатель пользуется одним из курсом теоретической ме-
механики. Из большого числа учебником но этому предмету, опубли-
опубликованных Е! СССР, следует прежде всего для изучения динамики
рекомендовать курс Л. Г. Лойцянского и Л. И. Лурье «Теорети-
«Теоретическая механика» т. II, 5-е изд., 1955 (книга, определившая сов-
современные традиции преподавания механики во тузах и предназна-
предназначенная для лип, изучающих теоретическую механику по полной
программе) и книгу С. М. Тарга «Краткий курс теоретической ме-
механики», 3-е изд., 1963 (учебник, предназначенный для лиц, пзучаю-
ецих теоретическую .механику по сокращенной программе).
Наиболее эффективным путем обучения искусству приложения
методов теоретической механики является не облегчение формального
заучивания правил и приемов (чему часто способствуют обширные
методические указания), а показ их и действии. Ввиду этого в руко-
руководстве основное внимание уделено решению конкретных задач,
специально составленных для того, чтобы, с одной стороны, избе-
избежать разбора задач, входящих в сборник И. В. Мещерского и иные
распространенные п СССР задачники, а с другой — дать возможность
после изучения книги (или ее разделов) самостоятельно решать глав-
главные типы задач.
Для облегчения активного изучения материала (а только такое
изучение и имеет смысл) в каждом разделе книги даны краткие ре-
рекомендации о последовательности решения тех или иных типов задач
и лишь после этого приведено подробное рассмотрение подобных
задач, причем зачастую сравнены и оценены различные методы ре-
решения.
8 ПРЕДИСЛОВИЕ РЕДАКТОРА КО ПТОРО.ЧУ ИЗДАНИЮ
Предполагается, что парачлелыю с разбором материала по руко-
полстну читатель на основе изученного самостоятельно решает cooi-
ветствующпе задачи из сПотиика задач по теоретической механике
П. В. Мещерского, применяя тем ca.Mi.iM полученные знания.
Сравнительно большой объем руководства объясняется тем, что
оно сооанлепо is расчете как на последовательное изучение, так и
на выборочное использование. Последний способ н является гллппой
(|юрмой применения ввиду различия объема материала и порядка его
прохождения в различных высших учебных заведениях.
Во вюром томе главы V111, IX, X, XI и § 1 главы XII написаны
М. И. Бал.; глава XIII написана Л. С. Кельзоном; § 2 главы XII
написан Г. Ю. Джанелидзе. Он же принял участие в составлении
многих других параграфов, п частности § 3 и 4 глапы VIII, § 4, 5
и 6 главы X, § 1 главы XII, § 5 и 6 главы XIII, а также осущест-
осуществил общее редактирование.
В настоящем втором нздппии второго тома произведена коррек-
корректировка значительного числа отдельных мест текста, ряда рисунков
и введены некоторые допол! синя.
Авторы считают приятным долгом принести глубокую благодар-
благодарность М. Л. Александровой, Н. II. Барановской, Г. II. ВаловоП,
О. Е. Короли, Л. К. Колосоп.:коп, Д. Р. Меркипу, Л. И. Мачабели,
'Г. В. Нутята, Г. II. Савину и В. И. П'хлкачеву за цепные указания и
критические замечания.
Хочется надеяться, что и впредь читатели будут помогать совер-
совершенствованию книги своими критическими замечаниями, которые будут
с благодарностью рассмотрены.
Ленинград, сентябрь 1963 г. /'. К). .Н.):санели():\с\
РАЗДЕЛ ТРЕТИЙ
ДИНАМИКА
Динамикой называется раздел теоретической механики, в котором
изучаются механические движении материальных тел в занменмости
от причин, их нызыпающих.
R статике изучались задачи о припедепии систем сил к простер-
простершему виду и относительном раш.опесии материальных тел, и кинема-
кинематике рассматривались задачи о геометрических характеристиках меха-
механического движения. В динамике — главном разделе курса — па осиог.е
сведений из статики и кинематики и специальных законом динамики
решаются задачи о связи сил и движений.
Всякое механическое движение материальных тел происходит
с течением времени в пространстве. Пет движения материальных тел
пне пространства, также нет движения и вне времени. Время и про-
пространство не могут существовать помимо и независимо от движении
материальных тел. Таким образом, они являются формами существо-
папин диижущейся материи.
Материальной точкой называется материальное тело, враща-
вращательными движениями которого, но сравнению с поступательными,
можно пренебречь. Таким образом, не обязательно понимать под.
материальной точкой тело очень малых размеров. Твердое tj:o,
движущееся поступательно, рассматривается как материальная точка.
Материальная точка называется свободной, если па ее движение
не наложены никакие ограничения.
Несвободной называется материальная точка, на которую нало-
наложены связи, ограничивающие ее движение.
Законы динамики описынаюг механическое движение материаль-
материальных тел по отношению к так называемым «-неподвижным» или «аО-
солюгиым» осям координат и по отношению к осям, которые дви-
движутся поступательно и равномерно по отношению к неподвижным
(нперциальные оси). Начало абсолютной системы координат прини-
принимается в центре Солнца, а оси направляются на три отдаленные
звезды. Конечно, в природе, где материальные тела находятся но
взаимодействии и движении, нет неподвижных осеИ координат. Однако
в зависимости от требований, предъявляемых к результатам подсче-
подсчетов, можно и другие координатные системы приближенно считать
10 РАЗДЕЛ ТРЕТИЙ. ДИНАМИКА
«неподвижными». Так, при решети многих технических задач
коордипа тые оси, связанные с Землей, можно считать «неподвижными».
Применение законов динамики к изучению механических движений
материальных тел но отношению к движущейся системе отсчета рас-
рассмотрено ниже, в главе VIII, § 5.
В оспоие динамики, как и других паук, лежат физические
законы—аксиомы, подтверждаемые миоговекоиой практической дея-
деятельностью человека. Их установление явилось результатом длитель-
длительного нуги развития механики. Важнейшее значение имели исследова-
исследования Галилея A564—1642) и Ньютона A643—1727).
Аксиома первая (принцип инерции). Изолированная материальная
точка сохраняет свою скорость неизменной по величине и по напрап-
лепию.
Эта аксиома фактически утверждает сущестЕювание ииерциальпых
систем.
Материальные тела движутся с течением времени в пространстве,
взаимодействуя друг с другом. Количественные меры этих механи-
механических взаимодействий называются силами. Материальная точка назы-
называется изолированной в том случае, когда действиями па нее всех
прочих материальных тел можно пренебречь (это понятие является,
конечно, абстракцией).
Таким образом, в реальных условиях движение материально/) точки
в тех случаях, когда действием на нее сил можно пренебречь, про-
происходит без ускорения, т. е. равномерно и прямолинейно, либо мате-
материальная точка находится в покое.
Инерцией называется свойство материальной точки оказывать со-
сопротивление изменению ее скорости.
Аксиома вторая (основной закон динамики). Ускорение, сооб-
сообщаемое свободной материальной точке, приложенной к ней силой,
имеет направление силы и по величине пропорционально силе:
F—mw.
Силы характеризуются не скоростями точек, а изменениями ско-
скоростей, г. е. ускорениями. Из основного закона динамики F—mw
следует, что при F=0 ускорение «> = 0.
Величина т, стоящая множителем при ускорении в основном за-
законе динамики, называется массой. Эга физическая величина характе-
характеризует степень сопротивляемости материальной точки изменению ее
скорости, т. е. является мерой инертности материальной точки. Сле-
Следовательно, масса оказывается одной из характеристик движущейся
материи (из других характеристик можно назвать: протяженность, не-
непроницаемость, упругость и т. д.).
В классической механике изучаются движения материальных
тел, происходящие со скоростями, малыми по сравнению со ско-
скоростью света. При этом масса считается величиной постоянной
§ I] УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ I 1
(в механике теории относительности масса япляется величиной пере-
переменной, занисяидей от скорости движения материальной точки).
В технической системе единиц, где за основные единицы приняты:
единица длины—метр, единица силы—килограмм и единица вре-
времени— секунда, масса является производной единицей, измеряемой
в кгсек*/м.
Аксиома третья (принцип равенства действия и противо-
противодействия). Сила, с которой материальная точка А действует на ма-
материальную точку В (действие), раина по модулю и противоположна
по направлению силе, с которой точка В дейстпует на точку А (про-
(противодействие). Обе силы направлены по одной линии действия. Сле-
Следует иметь и виду, что силы, именуемые действием и противодей-
противодействием, приложены к разным материальным точкам. Так, и случае
несвободной материальной точки, к точке приложено «действие*,
а к связи, наложенной па материальную точку, приложено «противо-
«противодействие».
Аксиома четвертая (закон независимости действия сил). При
одновременном действии нескольких сил ускорение материальной
точки ранпо векторной сумме ускорений, которые имела бы эга
точка при действии каждой из сил в отдельности:
«I = «»1 + «12 -}-...-+- wn>
где «, = ?, «,= ?, ... , W,, = ^-.
Это значит, что при определении ускорения материальной точки
можно пользоваться методом суперпозиции (наложения). Следует иметь
в виду, что при определении скорости материальной точки аналогич-
аналогичная суперпозиция не имеет места, т. е. скорость материальной точки
не равна векторной сумме скоростей, которме имела бы эта точка
при действии каждой из сил в отдельности.
ГЛАВА VIII
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ
МАТЕРИАЛЬНОЙ ТОЧКИ
§ 1. Основные формы дифференциальных уравнений
динамики материальной точки
Ускорение w материальной точки массы т, движущейся под дей-
сгнием приложенных к пей сил Fv Fit..., Fn, определяется с по-
помощью основного закона динамики в сочетании с законом независи-
независимости действия сил:
12
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
Дифференциальные уравнения движения материальной точки
в проекциях на осп декартовых координат имеют нид:
здесь х, у, z — проекции ускорения w, a l:llx, i'Uv и Vkz — проекции
силы I'\ па соответствующие оси декартоиых координат.
Дифференциальные уравнения движения материальной точки
в проекциях на оси натурального триэдра записываются в форме:
dv.
Ill —
p
здесь v. — проекция скорости па направление касательной к траекто-
траектории, v — .модуль скорости, р—радиус, кривизны траектории в данной
точке,/'V. /¦'/,„. /-',,й — проек-
проекции силы Fk па оси нату-
натурального триэдра (-: — каса-
касательная, и — глапмая по])-
лаль, Ъ — бинормаль).
К'ак следует из послед-
последнего ураппепня, проекция
рапподейстпуютеи сил, при-
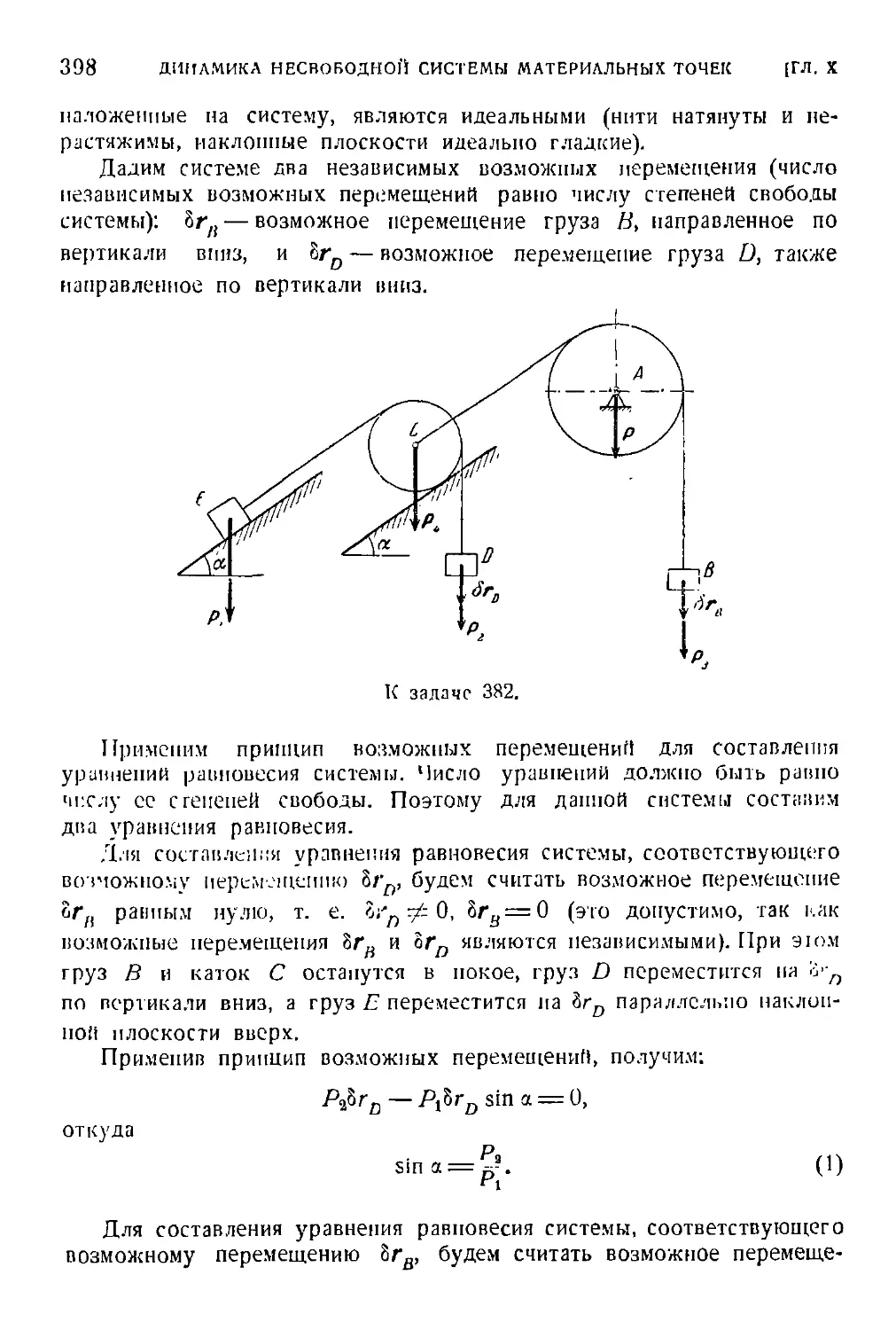
приложенных к материальной
точке, па бинормаль раина
пулю, т. е. траектория рас-
располагается так, что раппо-
дейсгпуюшаи сила оказы-
оказывается лежащей в соприка-
соприкасающейся п.тоскости, нропедспной в данной точке траектории.
Дифференциальные урал.клшя гглоского дппжепия материальной
точки в полярных координатах имеют вид:
Рис. 110.
/м(г —rs'
-(jt
к.- I
ядесь г — радиус-вектор точки, с — полярный угол (рис. 110).
Дифференциальные уравнения движения .материальной точки запи-
записываются соответственно избранной системе координат. Так, диффе-
дифференциальные уравнения .можно составить в цилиндрических, сфериче-
сферических и других криволинейных координатах. Ниже, в главе X, § (i
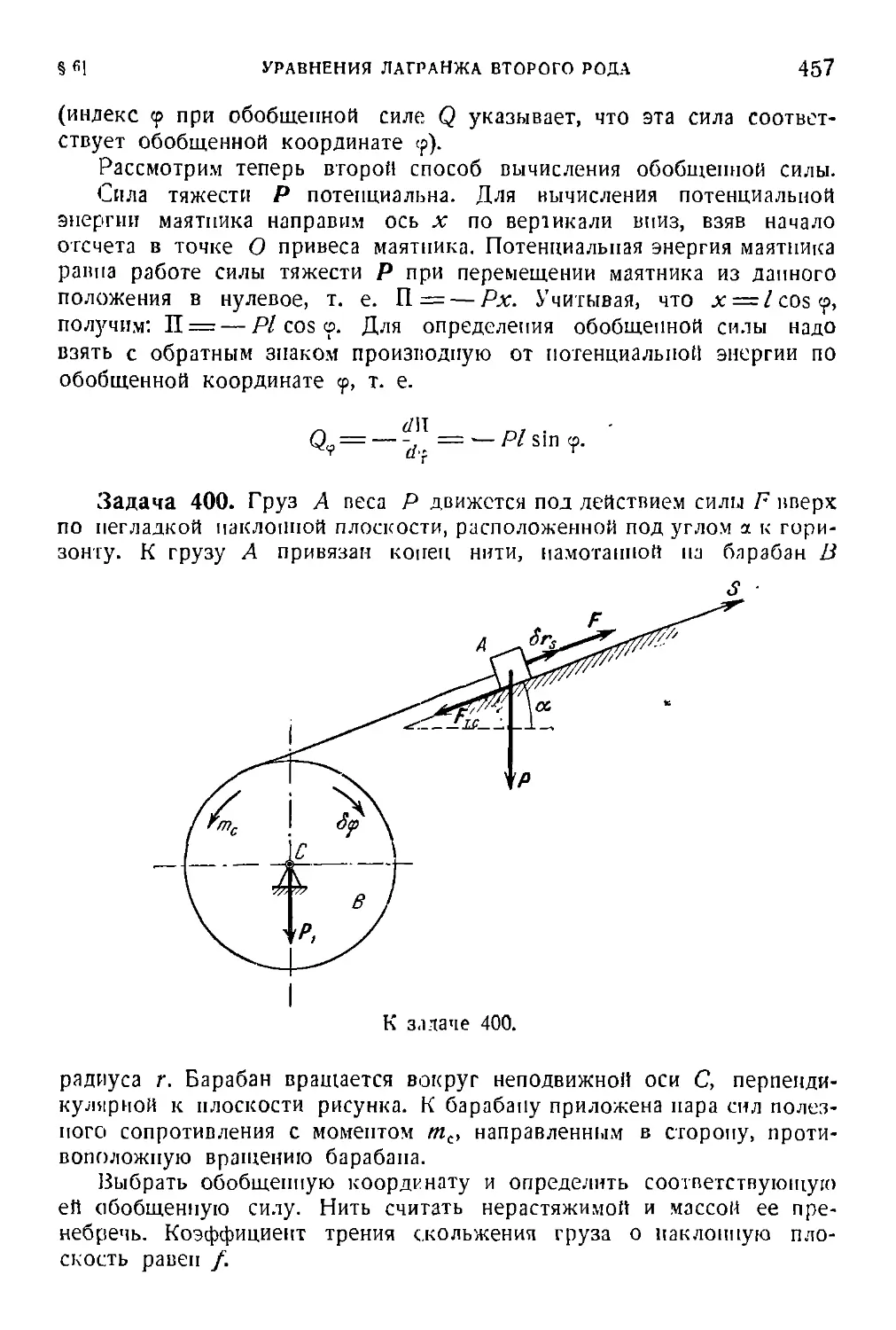
записаны дифференциальные уравнения движения материальной точки,
отнесенные к любой системе координат.
§ 21 ОПРЕДЕЛЕНИИ СИЛ ПО ЗАДАННОМУ ,WT>KFHHK1 13
С помощью дифференциальных уравнений движения материальной
точки можно решать две основные задачи динамики: прямую и
обратную.
Прямой называется задача, и которой по заданным движению и
массе материальной точки определяется равнодействующая сил, при-
приложенных к этой точке.
Обратной называется задачл, в которой по заданным силам и
массе материальной точки определяется ее движение.
Следующий параграф посвящен решению прямых задач динамики
материальной точки.
§ 2. Определение сил по заданному движению
(прямая задача динамики материальной точки)
Если даны уравнения движения материальной точки массы т
п декартовых координатах: x = fx{t),y=f-.i(t), z =/-,(/), то проек-
проекции Гх, Гх и Fz силы F=Fxi-\- Fyj -j- FM, иызывающеи это движение,
определяются по формулам:
Fx = mx, Fv=my, F, = m2, (I*)
откуда
F = /F^fTpn^,
cos (*Г>) = -?-, cos 0,Г>) = ?*¦ , cos (zTF) = F?-.
Таким образом, прямая задача динамики материальной точки
легко решается посредством дифференцирования заданных уравнений
движения точки.
Если дано уравнение диижегия материальной точки массы т по
траектори!!, т. е. a=f(t), то проекции Fz, Fn и Fh силел F=F,t-\-
~\~ ^'пп~\~ ^\Ь, вызмнающей это дпнжение, определяются по формулам:
1-\ = т %, 1\ = т-, Г„ = 0, B*)
откуда
PT, cos (тГ>) = у, cos (я,">) = Гр, cos (О) = 0.
В формулах B*) i}z = ~.
Если даны уравнения плоского движения материальной точки
массы т в полярных координатах r=/j (t), <p=/2(?), то проекции Fr
и Ff силы F, вызывающей это движение, определяются по формулам:
Иг = т(Г-гП Г9= ¦?-¦?№), C*)
откуда
F =//•? + F?> cos (rTn = у, со8(?Г>) = ^-.
14 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Сила, приложенная к материальной точке, называется центральной,
если линия ее действия прохоаит по премя дпижеипя через неподвиж-
неподвижную точку, называемую центром. Сила, непременная к неподвижному
центру, называется силой притяжения. Сила, направленная от непо-
неподвижного центра, называется силой отталкивания.
Движение материальной точки под действием центральной силы
происходит в плоскости, проходящей через нектор-радиус и началь-
начальную скорость точки. Для его исследования удобно ввести полярные
координаты и использовать формулу Бине
г ~ 4тС- п
где С—секториальная скорость точки, которая при наличии цен-
центральной силы постоянна: С=:5=-„- г^Ь. (Секчориалыюй скоростью S
называется пропннодпая по времени от площади ?, описываемой век-
тор-радиусом г движущейся ~очкн.)
Применение формулы Бнпе позволяет определить закон изменения
центральной силы по данном) уравнению нейтральном орбиты (пря-
(прямая задача). Если Fr оказывается положительной, то центральная сила
является силой отталкивания, если — отрицательной, то — силой при-
притяжения.
Прямые задачи динамики несвободной материаль-
материальной точки, в которых требуется определить зада-
задаваемую силу или силу реакции, приложенную к томке,
рекомендуется решать в следующем tiopHflKe:
1) изобразить на рисунке материальную точку в текущем поло-
положении и приложенные к пей задаваемые силы;
2) применив принцип освобождаемости от связей, изобразить со-
соответствующие силы реакций связей;
3) выбрать систему отсчета, если она не указана в условии задачи;
4) определить по заданному закону движения ускорение матери-
материальной точки и найти его проекции па выбранные оси координат;
5) составить дифференциальные уравнения движения материальной
точки, соответствующие принятой системе отсчета;
6) из системы составленных уравнений определить искомую ве-
величину.
Если при решении прямой задачи динамики материальной точки
требуется определить равнодействующую сил, приложенных к этой
точке, то решение задачи сьодится ь дифференцированию заданных
уравнений движения точки с последующим использованием формул
A*), B*) или для плоского движения формул C*).
Задача 211. Материальная точка движется согласно уравнениам
x = at, у i=bt, где а и b— постоянные. Определить силу, вызываю-
вызывающую это движение.
§21
ОПРЕДЕЛЕНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ
15
Решение. Проекции искомой силы на оси декартопых коорди-
координат определяем по формулам Fx--=mx и Fv = my. Воспользовавшись
заданными уравнениями дпижсния, находим: х = у = 0. Следовательно,
^ = ^=0, т. е. 5=0.
Эту задачу можно решить и иначе, определив траекторию и ско-
скорость точки. Точка движется по прямой _у = — х с постоянной ско-
скоростью v= \/х*-\-у* = \/аг-\-Ь^, Следовательно, согласно принципу
инерции, /7=0.
Задача 212. Материальная точка массы т движется согласно
уравнениям х = a cos kt, у — b s n kt. Определить силу F, вызываю-
вызывающую это движение, если изве-
известно, что сила зависит только
от положения точки.
Решение. Проекции си-
силы F, приложенной к материаль-
материальной точке, определяются по
формулам Fx = mx, Fy = my.
В данном случае
х = — akq cos kt,
К задаче 212.
Следовательно,
Fx = — mak1 cos kt,
Fy=— mbk^ sin kt.
Так как, по условию, сила F зависит от положения материальной
точки, то ее проекции Гх и Fy являются функциями координат х и у.
Воспользовавшись уравнениями движения точки, получим:
гх = — tnk'x, Fv = —inky.
Модуль силы
F ранен: F -= ]fFj -\- F\. = mti1 \fxl -\-y% = mk^r,
где r — модуль вектор-радиуса материальной точки г=^0М.
Направление силы F определяем с помощью направляющих коси-
нусон: ^^ ^^
cos(x, F)^=^- = — ^, cosQ/, F) = ^ = -^.
Так как — и - определяют углы, образуемые соответственно осями
х и у с вектор-радиусом г, то сила направлена от М к О. Следо-
Следовательно, данная материальная точка движется под действием силы
притяжения к центру О, равной но модулю F = k'lmr. Эта сила
называется центральной.
Задача 213. Материальная точка массы т движется но окруж-
окружности радиуса а согласно уравнению a = bt.
16
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIH
Определить силу, выбывающую это движение (з — дуговая коор-
координата, b — постоянная величина).
Р е ш е и и е. Воспользуемся осями натурального триэдра i, n и Ь.
Проекции искомой силы па =ти оси определяются по формулам:
dv,
Vs
—
Учитывая, что алгебраическая величина скорости точки равна v.—
Я = — t находим, что v. = b. Следовательно:
F dv. ,. v2 b-
Итак, Fz = 0, Fn == in —, /:ft = 0, т. е. сила Z7, пызыпаютая
заданное движение материальной точки, направлена по ради-
радиусу окружности к ее центру и по модулю равна т —.
Задача ЧЛ\. Пассажирский лифт иеса Р=800 кг опу~
скается вниз с ускорением а» = 0,4^, где g—ускорение
силы тяжести.
Определить натяжение поддерживающего троса, если
сила сопротивления движению F рапна 0,2 иеса лифта.
Решение. К лифту приложена задаваемая сила —
вес Р, сила сопротивления движению F, направленная
в сторону, противоположную движению, т. е. по верти-
вертикали внерх. Применив принцип осг.обождаемости or свя-
связей, мысленно рассечем трос и компенсируем дейстпге
отброшенной части троса па лифт силой реакции Jt, направлен-
направленном по вертикали пперх. Направим ось х вдоль траектории лифта,
т. е. по вертикали вниз.
Запишем дифференциалы ое уравнение движения материальной
точки в проекции на ось х:
ь
К зада-
задаче 21.1.
тх=
В данном случае имеем:
о гкуда
Учитывая, что ^ = ^ = 0,4^, a F^(
Р ..
х.
, получим:
Искомое натяжение троса равно по модулю реакции R.
§21
ОПРЕДЕЛЕНИЕ СИТ ПО ЗАДАННОМУ ДВИЖЕНИЮ
17
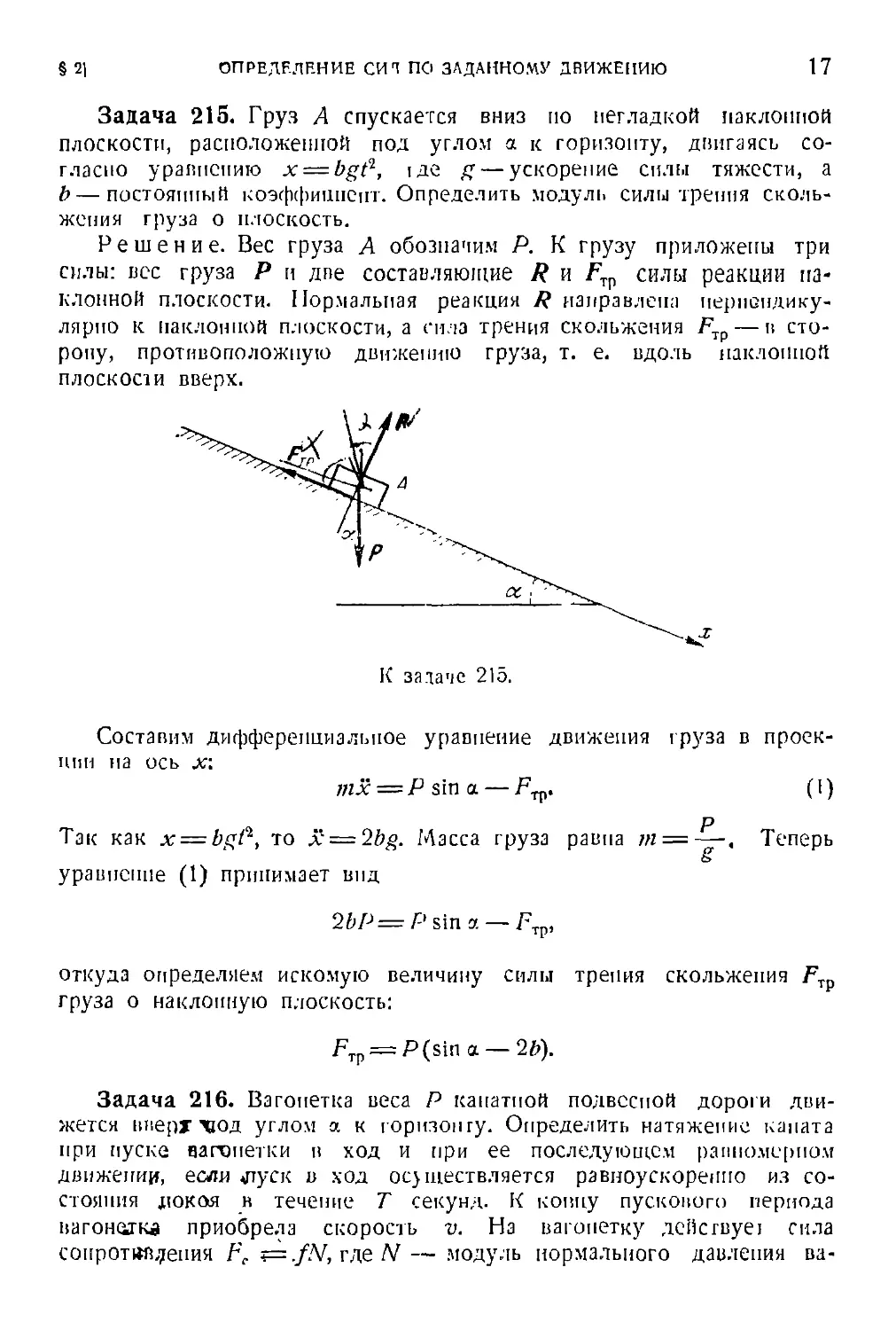
Задача 215. Груз А спускается вниз по негладкой наклонной
плоскости, расположенной под углом а к горизонту, двигаясь со-
согласно уравнению x — bgp, 1де g— ускорение силы тяжести, а
b—постоянный коэффициент. Определить модуль силы трения сколь-
скольжения груза о плоскость.
Решение. Вес груза А обозначим Р. К грузу приложены три
силы: вес груза Р и дпе составляющие R и /\р силы реакции на-
наклонной плоскости. Нормальная реакция R направлен;! перпендику-
перпендикулярно к наклонной плоскости, а сила трения скольжения FTp — и сто-
сторону, противоположную дшгжепню груза, т. е. вдоль наклонной
плоскости вверх.
К задаче 215.
Составим дифференциальное уравнение движения груза в проек-
проекции на ось х\
тх = Р sin a. — F^. (I)
Так как x = bgfiy то x~2bg. Масса груза раина //z = —-, Теперь
с»
уравнение A) принимает вид
откуда определяем искомую величину
груза о наклонную плоскость:
силы трения скольжения
FTp = P(sina — Щ.
Задача 216. Вагонетка веса Р канатной подвесной дороги дви-
движется imepj чцод углом а к горизонту. Определить натяжение каната
при пуска вагонетки в ход и при ее последующем равномерном
движение, если ^пуск в ход ос}тествляется равноускоренно из со-
состояния люкая н течение Т секунд. К копну пускового периода
вагонетка приобрела скорость v. На вагонетку деНсгвуе! сила
сопротивления Fe == ./.V, где N — модуль нормального давления ва-
18
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
;гл. vnt
гоиетки на канат, а/—постоянный коэффициент. Прогибом каната
пренебречь.
Решение. Решаем задачу в предположении, что все силы
приложены в точке М. В этой точке, помимо веса груза Р, прило-
приложим суммарную нормальную реакцию N двух колес, силу реакции R
каната и силу сопротивления движению FQ. Направим ось х вдоль
канага, осуществляющего подъем вагонетки.
'////////л/ ,. / ,• ¦////////////////,/.у,*'/'///-'/. /-//. /y/,'//////////////////.W////-'y7//777,
К задаче 216.
Так как пуск в ход осуиествляечся из состояния покоя равно-
равноускоренно, то v = wT, откуда находим ускорение вагонетки w, на-
направленное при пуске в ход вдоль каната виерх:
Запишем дифференциальное уравнение движения вагонетки при
пуске в ход в проекции на ось х:
откуда
— х = R — Р sin а — Fc,
Учитывая, что Fc = fN = fP cos a, a x = w=-f, находим:
Р и
ОПРЕДЕЛЕНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ
19
При раппомерпом движении вагонетки л' = 0 и формула A) прини-
принимает 1ШД
/? = P(sin a-j-/cos a).
Искомое натяжение каната раппо по модулю реакции R.
Задача 217. Определить силу сопротивления поды движению
лодки веса Р, если ее движение' происходит согласно уравнению
Р -a-Z-t
х =— vu(l—е р ), где z'o — пгчальпая скорость диижепия, а — по-
стоянмий коэффициент. Сила сопротивления движению яиляется функ-
функцией только скорости лодки.
1
'-'.: ¦ ~- '¦"¦ —-:
- ¦¦ -¦ ¦¦
N
P
--— _-_^r:- -¦_—-X
—~
К задаче 217.
Решение. К лодке приложены силы: Р — пес лодки, N—нор-
N—нормальная сила реакции воды, R—сила сопротивления води движению
лодки, направленная и сторону, противоположную ее движению.
Проекция скорости лодки на ось х равна
.- 4-'
Проекция ускорения лодки на ось х имеет вид
(i)
B)
Запишем дифференциальное уравнение движения лодки в проекции
на ось л':
Воспользовавшись формулой B), находим:
Так как, по условию, сила сопротиилемия R является функцией ско-
скорости лодки, то, учитывая формулу A), получим: Rx = — avx.
20
ДИФФЕРЕНЦИАЛЬНЫЕ yPARH-.HHH ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
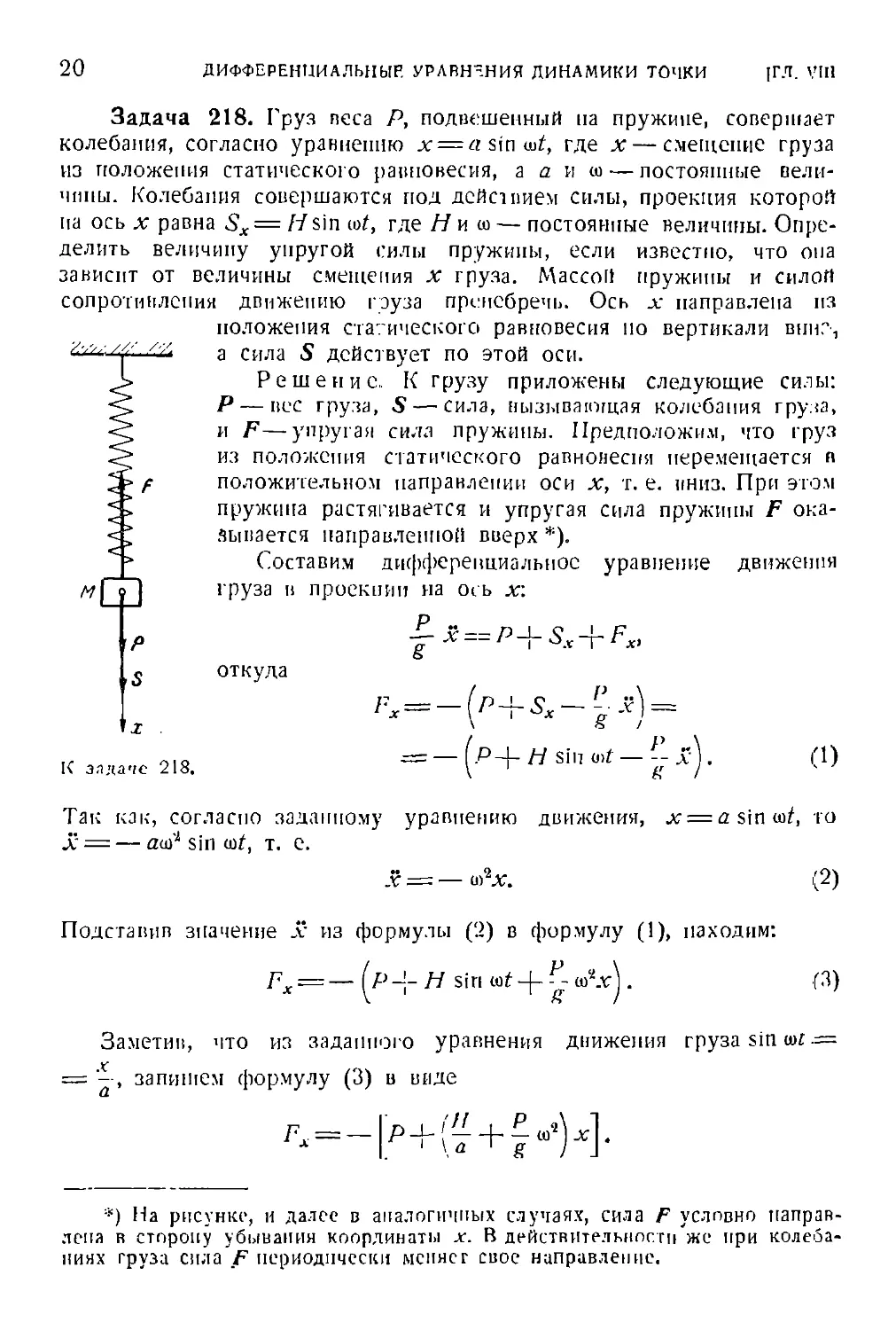
Задача 218. Груз веса Р, подношенный па пружине, совершает
колебания, согласно уравнению jt = tfsinu^, где х — смещение груза
из положения статического равновесия, а а и со — постоянные вели-
величины. Колебания совершаются под действием силы, проекция которой
на ось х равна Sx= /-/sin iot, где Я и со — постоянные величины. Опре-
Определить величину упругой силы пружины, если известно, что она
зависит от величины смещения х груза. Maccoll пружины и силой
сопротивления движению гэуза пренебречь. Ось х направлена из
положения статического равновесия по вертикали вню,
¦2 а сила S действует по этой оси.
Решение. К грузу приложены следующие силы:
Р — пес груза, 5 — сила, вызывающая колебания грума,
и F—-упругая сила пружины. Предположим, что груз
из положения статического равновесии перемещается п
положительном направлении оси х, т. е. «низ. При этом
пружина растягивается и упругая сила пружины F ока-
оказывается направленной вверх *).
Составим дифференциальное уравнение движения
груза в проекции на ось х:
Р «_
откуда
К эя.ча-ic 218.
= — f.P-}- H sin wt — -'- x).
@
Так как, согласно заданному уравнению движения, л; = й sin со/, то
Х' = — am'1 sin utf, т. е.
х = — ш'х.
Подстапив значение х из формулы ('.2) в формулу A), находим:
C)
Заметив, что из задаипо1-о уравнения движения груза sin cor.
= '—, запишем формулу C) в виде
']•
*) На рисунке, и далее в аналогичных случаях, сила F условно направ-
направлена r сторону убывании координаты х. В действительности же ври колеба-
колебаниях груза сила JF периодически меняет сиое направление.
ОПРЕДЕЛЕНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ
21
При х = а, т. е. в крайнем нижнем
сила F достигает наибольшего згачения:
положении груза, упругая
При прохождении грузом положения ею статического равновесия,
т. е. при .v = 0, упругая сила пружины равна весу груза.
Задача 219. Автомобиль веса /-'=1200 кг движется по дну
оврага с постоянной по модулю скоростью ъ = Ш км/час. Опреде-
Определить давление автомобиля
па дно оврага и паинилшей
точке. Радиус кривизны
траектории р в этой точке
равен 50 м. Автомобиль
считать точечном массой.
Силой сопротивления дви-
движению пренебречь.
V е ш е и и е. Восполь-
Воспользуемся осями натурального
триэдра, направив ось - но
горизонтали направо и ось п
по вертикали вверх. К авто-
автомобилю, принимаемому за
точечную массу, приложены к задаче '219.
две силы: вес Р и нормаль-
нормальная сила реакции R грунта, направленная идоль главной нормали по
вертикали вверх.
Применим дифференциальное уравнение движения материальной
точки в проекции на главную нормаль п:
т — := ^ Р,.„.
В данном случае
откуда
Подставив численные значения, получим, что /?= 1445 кг.
Искомое давление автомобиля па дно оврага исправлено проти-
противоположно силе нормальной реакции R и равно еМ по модулю.
Задача 220. Определить, с какой скоростью должен двигаться
искуспвенный спутник Земли па высоте h = 900 км, если орбиту
спутника можно приближенно принять за окружность, центр которой
22
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
совмещен с центром Земли. Радиус Земли # = 6370 км. Ускоре-
Ускорение силы тяжести на поверхности Земли g= 9,81 м'сек*. Сила
притяжения спутника Землей обратно пропорциональна квадрату
расстояния от спутника до
г, центра Земли. Спутник считать
| ,--''' ~~~--_ точечной массой.
Р е in е н и е. Пронедем ось п
через спутник М и центр
Земли О. При движении с по-
^rfpZT^""-'' //////7Z^r/'%b7b>^ стоянной скоростью v спут-
*??!" ^^ ник имеет нормальное ускоре-
ускорение wn, направленное к центру
Земли О.
Так как орбитой спутника
считается окружность радиуса
R-\-h с центром в центре
Земли О, то
К задаче 220.
На спутник дейстует сила F
притяжения к Земле, направ-
направленная к центру Земли О, об-
обратно пропорциональная квад-
квадрату расстояния OM = R-\-h
от спутника до центра Земли,
т. с.
1 ()
где т — масса спутника, a k —
коэффициент пропорциональ-
пропорциональности. Учитывая, что на поверхности Земли, т. е. при й = 0,
l: = P=mg, находим из формулы B), что k = gR'!. Следовательно,
сила притяжения
}¦— mgP? m
Запишем далее дифференциальное уравнение движения спутника,
принимаемого за материальную точку, » проекции на ось п:
Восмользоиашпись формулами A) и C), получим:
R ¦[- h — (R +¦ hf
ОПРЕДР.ЛРНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ
23
откуда искомая скорость
•а/И = /? I/ -п-г-г = 7,4 км /сек.
Задача 221. 11а какую пысогу надо запустить искусственный
спутник Земли для того, чтобы с Земли он казался неподпижным
для наблюдателя, вращающегося имеете с Землей? Орбиту спутника
Земли приближенно считать окружностью, концентричной с эквато-
экватором. Радиус Земли /^ = 6370 км. Ускорение силы тяжести па по-
перхности Земли g=9,8l м/сек*. Модуль углопой скорости враще-
вращения Земли вокруг своей оси ш = 0,00007 \[сек.
м
Т
Спутник
К задаче 221.
Сила притяжения спутника Землей обратно пропорциональна
квадрату расстояния от спутника до центра Земли. Спутник считать
точечной массой.
Решение. Для того, чтобы искусственный спутник, движущийся
по орбите, концентричной с экватором, казался с Земли неподвиж-
неподвижным, он должен быть расположенным на оси п, проходящей через
спутник М, центр Земли О, а также через наблюдателя А, распо-
расположенного на экваторе и «ращающегося вместе с Землей (см. рис. а,
на котором изображен вид Земли в плане с Северного полюса). ГГри
соблюдении этого услопия скорости спутника М и наблюдателя А
должны удовлетворять соотношению
Ум _ОМ
24
ДИФФЕРЕНЦИАЛЬНЫЕ УРЛПНГ.НИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
Так как vл = Rш, где со — уолуль угловой скорости суточного вра-
вращения Земли вокруг сврзй осп, ОМ = R -\-h, СМ=А?, ю
г».и = (R -!- Л) tu. Подставив это значение г».ц в формулу (-1) преды-
предыдущей задачи, находим:
откуда искомая высота
Подсташш численные значения, паМдем, что искомап высота равна
36 800 км.
Существует проект запуска трех искусственных спутнякон на эту
высоту так,
и вершинах.
чтобы они образоизлн рявностороипий треугольник,
которого находилиС!. бы спутники. Учитывая неподвиж-
неподвижность этих спутников по отно-
отношению к Земле, их предпола-
предполагают использопать п качестпе
миропоИ рстргщсляшюммоП стан-
станции телепидепия. ДеИстпителыю,
с мысоты /г = 3()800 км волны,
распространяясь прямолинейно,
могут попасть и любую точку
земной поверхности (см. рис. б).
Задача 222. Материальная
точка движется внутри гладкою
кругового конуса по горичоп-
in.Tbiioli окружности с посточн-
noil по модулю скоростью v.
Определить радиус р окружно-
окружности, если угол при вершине ко-
конуса равен 2а.
Решение. Совместил начало
координат с движущейся точ-
точкой, изобразим оси натураль-
натурального триэдра т, п, Ь (оси п и b
расположены
супка, ось х
дикулярио к
за рисунок).
К материальном точке приложен ее вес Р и нормальная сила
реакции R внутренней боковой поверхности конуса. Точка, движу-
движущаяся равномерно по горизонтальной окружности, имеет только нор-
нормальное ускорение wn, направленное но горизонтали палево.
К задаче 222.
в плоскости ри-
папранлепа перпеи-
плоскости рисунка,
ОПРЕДЕЛЕНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ
25
Запишем дифференциальные уравнения движения материальной
точки и проекциях па оси п и Ь:
«7 = У Ъг, 0= У /¦',„.
В данном случае
?'-"- = /? cos а,
р
0 = R sin a — P.
Исключил из этой системы ураипепий R, определим искомую
величину радиуса окружности:
p=vtga-
Задача 223. При спуске с горы лыжник псса Р достигает точки
О со скоростью v0. При исследующем подъеме на пригорок лыжник
К зал.1чс 713.
движется по дуге окружности ОС радиуса г со скоростью
v = yv'i — '2gr(\- cos =), где s -угол, образуемый радиусом AM
с вертикалью. Опредсипь даи.чеине лыжника па снег при прохожде-
прохождении им участка ОС. Силами сопротиплепня диижешпо пренебречь.
Лыжника считать точечной массой.
Решение. Траекюрия лыжпчка мзнсстма. Изобразим оси нату-
натурального триэдра, расположив гх начало и точке Л/, занимаемой
лыжником и данный .момент.
К лыжнику приложены силы: Р—пес лыжника, R—нормальная
сила реакции снега, иапраплсииая пдоль радиуса дуги ОС от М
к центру А.
И.чобрааим нормальную wn и касательную w. состаиляющие
ускорения лыжника. Для определения нормальной силы реакции R
применим дифференциальное уравнение движения и проекции
26
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
V~ V1.
на главную нормаль п: т ¦ ¦= / /'<¦«• ^ данном случае получим:
Р v~ Р v~
= R — Р cos ф, откуда R = Р cos 9 -J -. Учитыная, что, со-
согласно условию задачи, v = \f v\ — ^.?f(L — cosy), находим:
R = P\ cos ? -r ^ «-^
Искомое давление лыжника на снег противоположно силе регк-
цни R по направлению и рашю ей по модулю.
Наибольшее давление
имеет место в точке О при
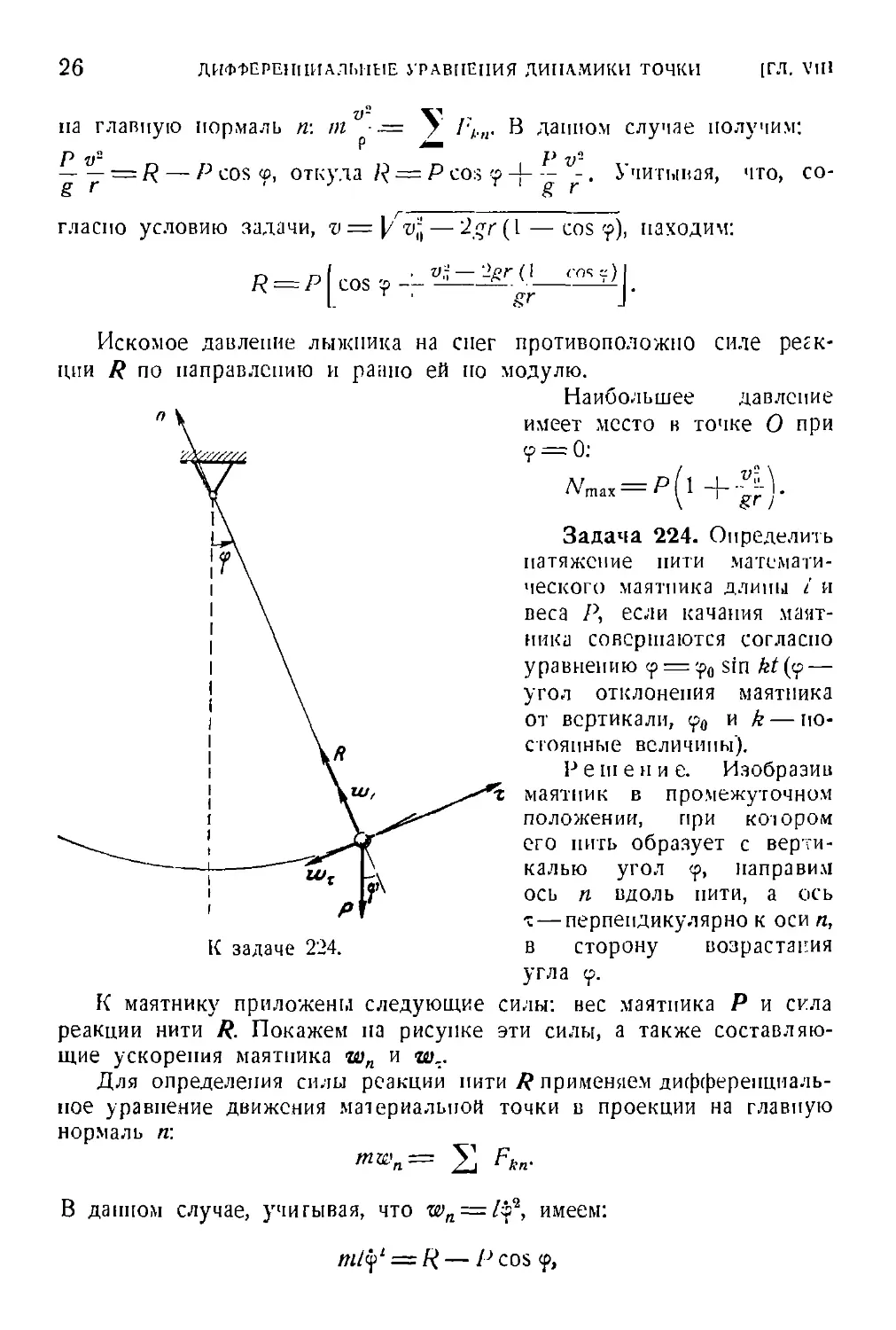
Задача 224. Определить
натяжение нити математи-
математического маятника длины / и
веса Р, если качания маят-
маятника совершаются согласно
уравнению <? = :?о s'n Ы(? —
угол отклонения маятника
от вертикали, уо и k — по-
постоянные величины).
V е ш е и и е. Изобразив
маятник в промежуточном
положении, при котором
его пить образует с верти-
вертикалью угол ср> направим
ось л вдоль нити, а ось
•с — перпендикулярно к оси п,
в сторону возрастания
угла у-
К маятнику приложены следующие силы: вес маятника Р и сила
реакции нити R. Покажем па рисунке эти силы, а также составляю-
составляющие ускорения маятника wn и w..
Для определения силы реакции нити R применяем дифференциаль-
дифференциальное уравнение движения материальной точки в проекции на главную
нормаль п:
mwn= ^ Fka.
В данном случае, учитывая, что wn = l$*, имеем:
nti<f' = R — Р cos 9,
К задаче 224.
« ^l ОПРЕДЕЛЕНИЕ СИЛ ПО ЗАДАННОМУ ДВИЖЕНИЮ 27
откуда
9 + /4>s A)
Так как по условию v — <?osinkt, го
ф = ^,Й COS kt.
Подставив значение ср и ф, находим:
# = pfcos (ср0 sin W) -f — cos2 A/j.
Наибольшего значения сила реакции нити достигает с отвесном поло-
положении, т. е. когда kt=nr.:
Искомое натяжение нити Т направлено противоположно силе
реакции R и равно ей ио модулю.
Задача 225. Материальная точка движется под действием цент-
центральной силы по логарифмической спирали, уравнение которой имеет
вид: г = ае~х<9, где а и X — постоянные величины. Определить закон
изменения центральной силы.
Решение. Воспользуемся формулой Бипе
Ураппепие логарифмической спирали запишем к нидс
г а
Взяв вторую производную по ср> находим:
Подставив это значение в формулу Бипе и решив уравнение отно-
относительно Fr, получим:
где А = 4тС2 A -|- X2). Знак минус указывает, что центральная сила,
[называющая диижепие материальной точки по логарифмической сми-
смиряли, является силой притяжения. Эта сила обратно пропорциональна
кубу расстояния от неподвижного центра.
28 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
§ 3. Определение движения по заданным силам
(обратная задача динамики материальной точки)
Даны силы Flt Fb ... , Fn, приложенные к материальной точке
массы т. Для определения закона дпижения этой точки следует про-
проинтегрировать систему дифференциальных уравнений движет :и,
соответствующих избранной системе отсчета.
Так, если задача решается и проекциях па оси инерциалыюй
системы дскартоных координат, го интегрированию подлежит система
дифференциальных уравнений движения:
„,.v^_- у; гкх, ту= ? гку, mz = V Flu. (I*)
fc --- I к — \ к - I
I? результате интегрирования этой системы определяют закон
движения точки п декартовых координатах, т. е.
¦*=--/|@. У=/Л*\ -г =/,(/).
Решение обратных задач, связанное с интегрированием системы
дифференциальных уранисии:) (I*), предстанляет подчас значитель-
значительные трудности и часто не может быть иынолнено п кпадрагурах.
(То1да приходится систему A*) решать численно, применять иные
методы приближенного интегрировании, либо пользоваться пычисли-
тсльпыми машипа.ми.)
Так как система A*) состоит из трех дифференциальных ураш:е-
иий второго порядка, то при ее интегрировании появляются шесть
произвольных постоянных С\, С>, С3, (\, Cs и Q. Для их опреде.ченпя
в условии задачи должны быть дополнительные данные, называемые
начальными условиями движения.
Начальные условия движения материальной точки определяют
положение точки и ее скорость и некоторый фиксированный момент
премеми. Положение точки определяется тремя координатами х, у, z,
а скорость точки — тремя проекциями скорости л", у, ?\ га к им обра-
образом, начальные условия имеют вид:
при t = t0
х = х0, у^уф г^г0 (положение точки),
х = л", у =з"'|„ г = ?0 (скорость точки).
(Часто эти условия задаются для начального момента времени ^ = 0.)
В результате подстановки начальных условий движения в первые
и вторые интегралы системы A*) образуется система шести уравне-
уравнений для определения шести неизвестных С(, Сл, ... , С6.
Если движение материальной точки происходит в плоскости, то
при расположении координатных oceit x и у п этой плоскости число
§ 8| ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 29
дифференциальных уравнений движения равно двум, и поэтому число
начальных условий движения равно четырем:
при t = t0
х = хе, у=у0 (положение точки),
х = ха, у=уа (скорость точки)
(в данном случае г„ = гп = 0).
Если материальная точка движется прямолинейно, то при направле-
направлении оси х вдоль траектории точки имеется одно дифференциальное
уравнение движения, и поэтому число начальных условии движения
равно двум:
при t = t0
х = х0 (положение точки),
х = х0 (скорость точки).
Силы, приложенные к материальной точке, могут быть;
1) постоянными силами (например, сила тяжести при движении
материальном точки вблизи земной поверхности);
2) силами, зависящими от времени (например, периодически изме-
изменяющиеся силы, вызывающие колебания материальном точки);
3) силами, зависящими от положения точки (например, силы при-
притяжения и отталкивания, силы упругости пружин, упругих нитей
и т. д.);
4) силами, зависящими от скорости точки (например, силы со-
протннлепия дпижепию точки).
Н более общем случае силы являются функциями времени, поло-
положения, скорости и ускорения точки. Тогда система уравнений (I*)
имеет вид:
тх =/,(/; х, у, z, х, у, i, .?, у, z),
ту =/9 (/; д-, у, г, х, у, i, x, $, г),
mz =h(i\ х, у, z, ?, у, ?, х, У, г).
Обратные зада ч и динамики материальной т о ч к и
рекомендуется решать и следую m с м порядке:
1) выбрать систему координат;
2) записать начальные условия движения точки;
3) изобразить па рисунке задаваемые силы и силы реакции связей,
приложенные к материальной точке;
4) составить дифференциальные уравнения движения материаль-
материальной точки;
5) проинтегрировать систему дифференциальных уравнений дви-
движения. Использовав начальные условия движения, определить посто-
постоянные интегрирования;
30 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
6) воспользовавшись урагнениями дпижения материальной точки,
полученными и предыдущем пункте, определить искомые величины.
При составлении дифференциальных уравнений движения надо
рассматривать материальную точку в текущем Положении.
В случае движения свободной материальной точки удобно пользо-
пользоваться системой осей декартовых координат. При криволинейном
движении несвободной материальной точки проще решать задачу
в проекциях па оси натурального триэдра.
При движении материальной точки под действием центральной
силы F удобно пользоваться дифференциальными уравнениями дви-
движения в полярных координатах или формулой Вине
(j = F
d-i'\r i ' r AmC- r
(см. § 2).
Задача 226. Определить услония, выполнение которых обеспечи-
обеспечивает прямолинейное движение материальной точки.
Решение. Направим ось х вдоль прямолинейной траектории
материальной точки; при движении вдоль этоН оси у = 2 = 0.
Следовательно,
j> = i = 0 A)
j> = 2 = 0. B)
Запишем систему дифференциальных уравнений движения в про-
проекциях на оси декартопых координат:
к = \ к = \ к = I
Воспользовавшись условиями B), находим:
к=\ fc=1 *=1
Из второго и третьего уравнений следует, что проекции равно-
равнодействующей сил, приложенных к материальной точке, на оси у и
и я
z равны пулю: Ry= ? Ъ-у = °> Я*= 2 Fbz = 0> т- а ра«"одей-
*=i *=i
ствуютая сил, приложенных к материальной точке, должна быть
направлена вдоль оси х, т. е. вдоль неизменного направления.
Иа условия A) вытекает: j> = ? = 0, т. е. проекция скорости
точки па оси у и z равна пулю; таким образом, скорость точки
всегда направлена вдоль оси х. Следовательно, и начальная скорость
точки должна иметь аналогичное направление.
Выясним достаточность =>тих условии.
i 31
ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ
31
Дано: в начальный момент точка находится на оси х, т. e.yn = za =
= 0, начальная скорость точки направлена вдоль оси х, т. с. у„ =
= ?0 = 0, равнодействующая сил, приложенных к материальной точке,
направлена вдоль оси х, т. е.
«>= 2 ^v = o, R*= ? /¦'», = о.
*=i a«i
Требуется пыяснить, достаточно ли выполнения этих условий для
прямолинейного движения точки гдоль оси х?
В данном случае дифференциальные уравнения движения мате-
материальной точки принимают вид:
= У] Н
кх,
к ^ 1
Из второго дифференциального уравнения 7и$ = 0 находим, что
у = С\. Так как у0 — О, то С1 = 0 и, следовательно, у = 0, откуда
_y = Csi. Так как _уо=О> то Q = 0 и, следовательно, _у = 0.
Аналогично, из третьего дифференциального уравнения имеем z=Q.
Из полученного результата _у==.г = 0 следует, что материальная
точка движется вдоль оси х.
Итак, для осуществления прямолинейного движения материальной
точки необходимо и достаточно, чтобы начальная скорость точки и рав-
равнодействующая сил, при-
приложенных к эгой точке,
лежяли на оаной примой.
Задача 227. В речуль-
таге полученного толчка
кирпич начал скользить
«низ с начальной ско-
скоростью t!,,.-=2 MjCetc no
неподвижной лепте кон-
конвейера, расположенной
под углом а = 30° к го-
горизонту. Определить путь
s, пройденный кирпичом
за промежуток времени п = 2 сек, если коэффициент трения сколь-
скольжения кирпича о ленту конвейера равен /=0,4. Кирпич считать то-
точечной массой.
Решение. Направим ось х вдоль наклонной лепты конвейера
вниз. Возьмем начало отсчета па оси х ч начальном положении
кирпича, рассматриваемого как материальная точка.
Начальная скорость ф0 направлена вдоль оси х вниз. Следова-
Следовательно, начальные условия днижения имеют вид:
при ^ = 0 дг=0, х = ъй.
К задаче 227.
32 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Обозначим вес кирпича через Р. К кирпичу, являющемуся не-
спободной .материальной точкой, приложена одна задаваемая сила —
его пес Р. Применив принцип освобождаемое™ от связей, отбросим
мысленно наклонную ленту конвейера, заменив ее действие на кирпич
соответствующей силой реакции. Эта сила реакции имеет дпе со-
стан.'.'якнцие: нормальную составляющую — силу реакции R, перпен-
перпендикулярную к плоскости ленты, и силу трения скольжения /% с кир-
кирпича о ленту конвейера, направленную в сторону, противоположную
диижению, т. е. вдоль лент л конвейера нперх.
Запишем дифференциальное уравнение движения материальной
точки в проекции па ось х:
п
тх = ^ Fkx.
к — I
В данном случае получим:
р
— х = Р sin a — FT c.
(f Т. С
Так как по закону сухого трения FTC=fN=fPcos т., то после
сокращения па Р находим:
Ji; =r^gr(sin a—/cos a). A)
Для интегрирования дифференциального ураппепия движения за-
менп.м х па -т-. После отделения переменных получим:
dx = g(s\n a—/cos a)dt,
Прошпегрировав, имеем:
x = g(smai— /cos a) ^-!-С,. B)
Соотношение B) является первым интегралом дифференциального
уравнения движения A). Для определения постоянной интегрирования
С] подстаним в уравнение B) начальное условие движения (при i--= О
x = vu), откуда следует, то С, =11„. Полученное значение С, под-
подставляем в уравнение B):
x = vo-\-f!(s\na—Jcoss.)t. C)
Для определении закона движения кирпича заменим в уравнении C)
х на -jj. После отделения переменных находим:
a—/cos n)tdt.
Проинтегрировав, получим:
x = v,t -f I g(sin a—/cos a) i* -\- Q. D)
Постоянная интегрирования Сг определяется после подстановки на-
начальных условии движения в D) (при г = 0 .*¦ —0), откуда имеем, что
§31
ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ
33
С.2 = 0. Внося это значение С2 в D), получаем уравнение движения
кирпича
x = voi -|- -~-g(s\u a—/cos а)/2. (о)
Для определения искомого пути s, пройденного за т секунд, сле-
следует в уравнении E) положить t=z. Тогда
s = vo~. -г- ^-^(sina —/ cos я) - .
После подстановки численных значений получим 5=7,02 м.
Если бы при решении этой задачи мы направили ось х вдоль
ленты конвейера вверх, то начальные условия движения приняли бы
вид:
при t = 0, л; = 0, х~ — va.
И дифференциальном уравнении движения изменились бы знаки:
— л* = — Psin т. -'- Frc, т е. х = —#-(sin ж—/cos 7.).
Повторив решение этой задачи, мы последовательно получим:
х — — g(sin a — /cos a)^-j- С,,
-[- g-(sin а — /cos а) [} ~ С2,
С<2 = 0, х = — \vut-'-g(s\n а—/cos a)'
с = — т>от —|— ^(s 1 п я—/cos 7.)^ , с^—7,02 .v.
Знак минус указывает, что кирпич расположен в отрицательной
части оси х. Так как ось х направлена вверх, то это значит,
Я
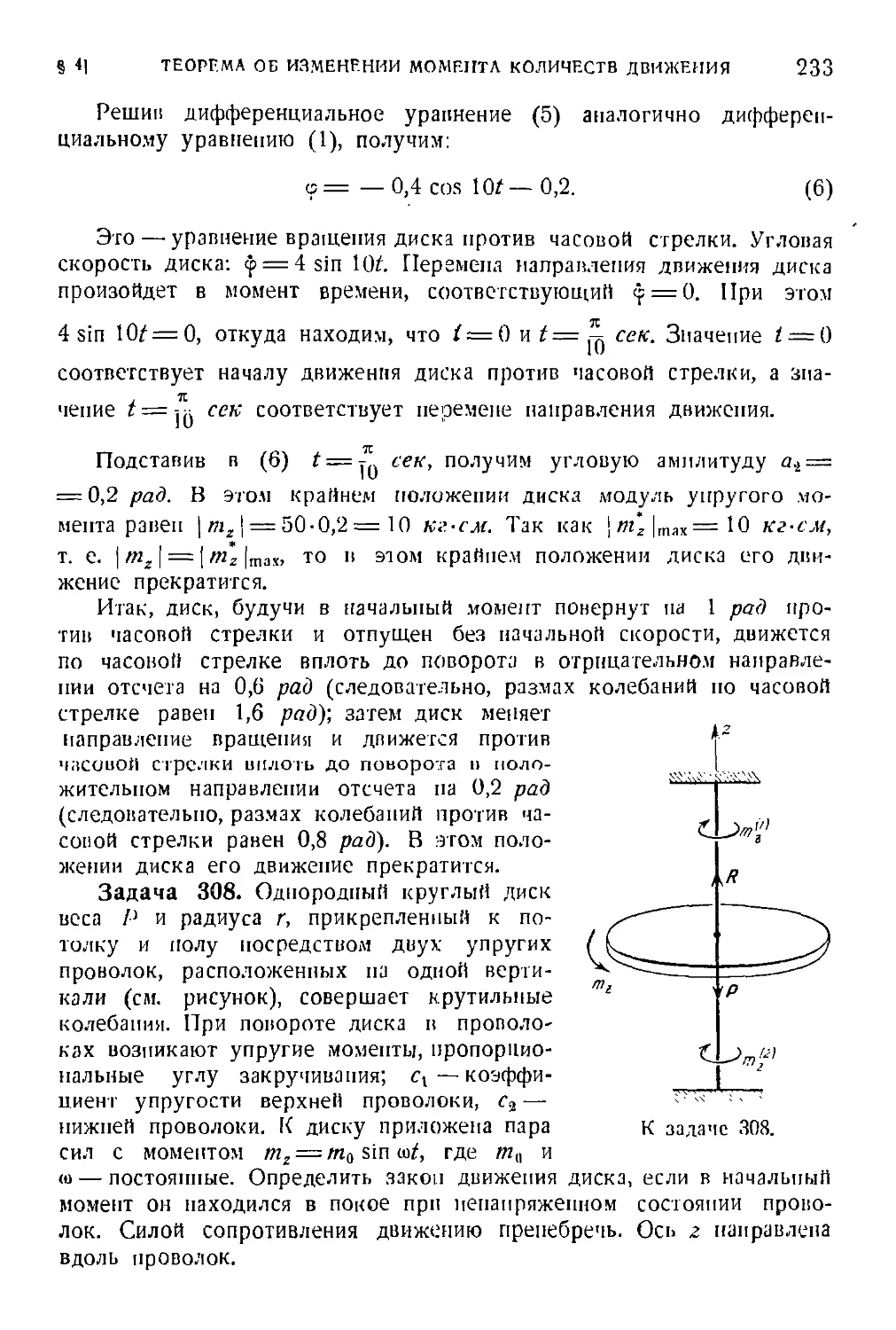
Г
К задаче 228.
что кирпич опустился пдоль ленты копвсИера вниз, пройдя путь,
ранный 7,02 м.
Задача 228. Груз веса Р, находившийся в покое па гладкой го-
горизонтальной плоскости, начинает днигаться под действием горизон-
горизонтальной силы, проекция которой на направленную по горизонтали
2 Теоретическая механика, том II
34 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНЛМИКИ ТОЧКИ [ГЛ. VIII
направо ось х равна Fx= /-/sin kt, где И и k — постоянные вели-
величины. Найти закон движения груза.
Решение. Возьмем начало отсчета оси .v в начальном положении
груза. Учитывая, что в начальный момент груз находился в покое,
запишем начальные условия движения:
при ^==0 дг = О, х = 0.
К грузу приложены следующие силы: Р — вес груза, F—движу-
F—движущая сила, R—нормальная сила реакции горизонтальной плоскости.
Дифференциальное уравнение движения груза в проекции на ось х
имеет вид
Р Не
— x=Fx или х = --~- sin kt.
Так как Л: = —, то, огделии переменные, имеем:
dx = Hfi sin ktdt,
откуда
Jfr = —JJ costt + d. A)
Подставив в A) начальное условие (при t = Q x = 0), находим,
что Ci = -pf. Уравнение A) после подстановки в него значения Q
принимает вид
Учитыиая, что х—-.--, отделяем в уравнении B) переменные:
dx^'/Zdt-'^-cos ktdt.
Интегрирование приводит к результату:
Для определения С2 подставляем в C) начальное условие дви-
жепия (при ^ = 0 х = 0), откуда следует, что С4 = 0. Следовательно,
искомое уравнение движения груза имеет вид
Как видно из уравнения D), на равномерное движение груза, про-
Hs
исходящее по гориаонтали направо со скоростью -?-, накладывался
I.I jy Г\
колебание с амплитудой O-~-~eL и периодом Т=^-.
§ 3] ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 35
Просмотрев внимательно решение этой задачи, можно обнару-
обнаружить, что равномерное прямолинейное движение груза является
следствием соответствующих начальных условий движения (наличие
Не\
в уравнении B) постоянного слагаемого --° . Нетрудно подобрать
начальные условия движения, при которых груз совершал бы только
колебательное движение. Для этого постоянная интегрирования Су
должна в уравнении A) обратиться в нуль. Из уравнения A) при
t = 0 и С, = 0 получим хо = — ру.
Следовательно, если бы в условии задачи било указано, что
в начальный момент грузу сообщили налево скорость, равную по
модулю-—, то уравнение B) приняло бы вид: х== — -^ cos kt,
1 ft / Hi
He
а уравнение движения груза—соответственно х — -—^ sin A^. Итак,
от величины начальной скорости зависит характер движения груза.
Так как в данной задаче начальное положение груза не было
оговорено, то мы выбрали начало отсчета на оси лев начальном поло-
положении груза и, таким образом, получили лго = О. При выборе начала
отсчета на оси х в другой точке мы получили бы лг0 -ф 0. Тогда па
основании уравнения C) С<1 = х0, и в формулу D) пходит дополни-
дополнительное слагаемое ха. Итак, от выбора начала отсчета зависит лишь
величина постоянного слагаемого, которое на характер движения
груза не влияет.
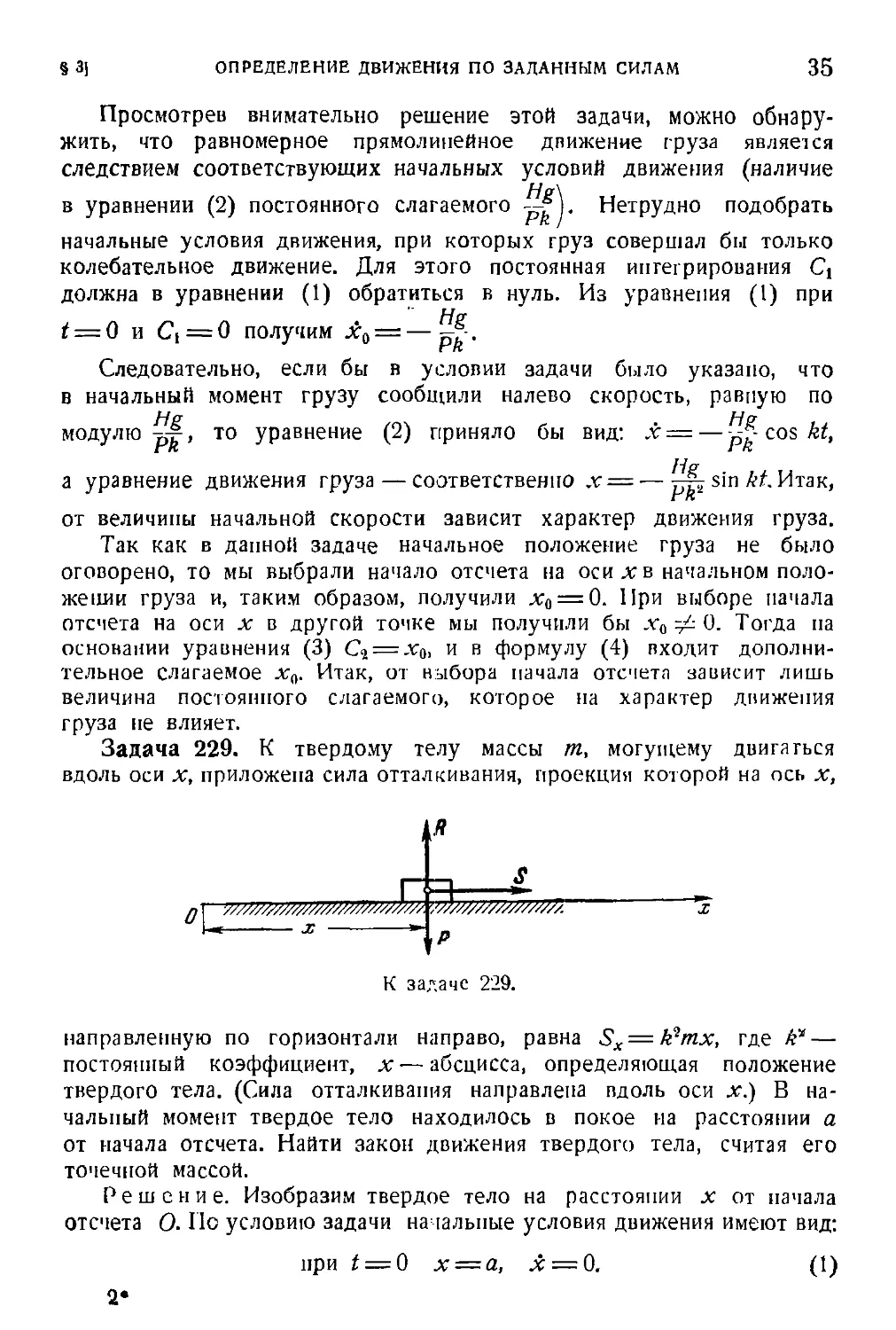
Задача 229. К твердому телу массы т, могущему двигаться
вдоль оси х, приложена сила отталкивания, проекция которой на ось х,
У//////
J
г
я
р
S
У///////////.
X
К задаче 229.
направленную по горизонтали направо, равна Sx = k?mx, где k* —
постоянный коэффициент, х — абсцисса, определяющая положение
твердого тела. (Сила отталкивания направлена вдоль оси х.) В на-
начальный момент твердое тело находилось в покое на расстоянии а
от начала отсчета. Найти закон движения твердого тела, считая его
точечной массой.
Решение. Изобразим твердое тело на расстоянии х от начала
отсчета О. По условию задачи начальные условия движения имеют вид:
при t — О х = а, х = 0. A)
36 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
К твердому телу приложены следующие силы: Р — вес груза,
R—нормальная сила реакции гладкой горизонтальной плоскости,
5 — сила отталкивания, направленная от точки О направо.
Дифференциальное уравнение движения твердого тела в проекции
на ось х имеет вид
тх = Sx.
Так как Sx = kimx, то
х — к*х==0. B)
Для решения дифференциального уравнения B), являющегося ли-
линейным уравнением второго порядка с постоянными коэффициентами
без правой части, составим соответствующее характеристическое
уравнение
откуда
\
Учитывая, что корни характеристического уравнения оказались ве-
вещее гвеипыми, запишем решение уравнения A) в ниде
v г< „kt i /-> -kt ,-)¦.
Для определения постоянных интегрирования С\ и С2 надо иметь
два уравнения. Дифференцируя х но t, имеем:
х = Cxkeu — Ctkeru. D)
Подставив начальные условия A) в выражения C) и D), а затем
решии полученную систему уравнении, находим, что Ci = C2=')-.
После подстановки значений Су и Сг в C) приходим к искомому
закону движения твердого тела:
х=% (** + «-*'). E)
который с помощью гиперболического косинуса угла Ы можно за-
записать в виде:
х = а ch kt.
Предположим теперь, что горизонтальная плоскость является
негладкой. Рассмотрим влияние силы трения скольжения па движе-
движение тпердого тела, если коэффициент трения скольжения ранен /.
К силам Р, S и R, приложенным к твердому телу, добавляется
сила трения скольжения F^c==fP, направленная п сторону, противо-
противоположную движению, т. е. по горизонтали налево. При эшм FT c.
воИдет в правую часть дифференциального уравнения движения со
знаком минус. Дифференциальное уравнение B) примет иид
x-klx = -fg. F)
§3| ОПРЕДЕЛЕНИЕ ДПИЖЕПИЯ ПО ЗАДАННЫМ СИЛАМ 37
Общее решение х этого неоднородного линейного дифференци-
дифференциального уравнения второго порядка с постоянными коэффициентами
равно сумме общего решения Xi соответствующею однородного
уравнения и частного решении х.г уравнения с правом частью, т. с
.\- = xl^-xi. G)
Обшсе решение xL дается выражением C). Учитывая, что правая
часть уравнения F) является постоянно», ищем частное решение
и виде постоянного, т. е. х^= Л. Подставив это значение п уравне-
уравнение F), находим, что д\2=Л=: ~. Итак, в соответствии с форму-
формулой G), общее решение имеет иид
Для определения постоянных ишегриропания С, и С, вычислим;
A"=:C'jfrC C-ikc . (9)
Подставив и (8) и (9) иачальимз условия A) и решив полученную
систему уравнении, находим: Ci=C2 = -., [а—?,\. Внося значения
С\ и С-1 в уравнение (8), получим искомое уравнение движения твер-
твердого тела
х= -!2- (а — ff'j ¦ckl -(- «?-*'j -| -^5. (Ю)
Сопоставление формул A0) и (а) приводит к выводу, что при
наличии силы трения скольжения движение твердою тела будет
совершаться медленнее. Действительно, коэффициент -,,- о. — ^',
СЮНШ.ИЙ при ек1-7е~к\ меньше соотнстстпуютего коэ([)фициен-
¦ia "г.Интересно отметить, что при a— fet=°> T- е- 'Фи значении
коэффициента трения скольжении
flfe2 /,,ч
уравнение движения A0) принимает вид
Значит, твердое тело находится и покое. Это легко объяснить. Дейст-
Действительно, при fg^s-ali1 имеем
jl'^kma. (U)
Так как fP=Frn a klma равно модулю силы огталкиванмя F
и начальном положении твердою тела при х = а, то неравенство A2)
38 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОМКИ [ГЛ. VIII
показывает, что модуль силы отталкивания меньше модуля силы трения
скольжеЕШЯ. Следовательно, сила отталкивания не может нарушить
покой твердого тела. (Предполагаем, что коэффициент трения сколь-
скольжения при движении равен коэффициенту трения скольжения при
покое.)
Задача 230. Груз веса Р прикреплен к правому концу пружины,
левый конец которой защемлен в степе. В начальный момент пру-
пружина не была деформирована, а грузу, лежащему на горизонтальной
плоскости, посредством толчка сообщили начальную скорость va,
О ?
АЛЛА А ААЛААЛА/¦*¦/**
VVVVVVV V Vvv[vV"V
v v
////////////////////////////А, '////////////¦ У/'/
h-— x —
P
К задаче 230.
иапраиленную по горизонтали направо. Ось х направлена вдоль оси
пружины по горизонтали направо, причем начало отсчета находится
в правом копне педеформиронанной пружины.
Найти наибольшее смещение груза, если проекция упругой силы
пружины равна Fx = — а.х — pjcs, где х — удлинение пружины, а г
и ^ — постоянные положительные коэффициенты. Силой трения сколь-
скольжения груза о горизонтальную плоскость и массой пружины пре-
пренебречь.
Решение. Запишем начальные условия движения груза:
при ?=0 jc=O, x — v0.
Изобразим груз во время движения смещенным по оси х направо.
При этом пружина растянется на х. Упругая сила пружины F направ-
направлена но горизонтали налево. Ее проекция на ось х раина Fx=~
К грузу приложены следующие силы: Р — вес груза, Я—нор-
Я—нормальная сила реакции горизонтальной плоскости, F—упругая сила
пружины.
Составим дифференциальное уравнение движения груза в проекции
па ось дг:
-Jc:= — ох — $х\ A)
Это нелинейное дифференциальное уравнение второго порядка. Инте-
Интегрирование уравнения (I) для определения уравнения движения груда
x=f(t) связано с вычислительными трудностями. Вместе с тем вичио
§ 31 ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 39
леиие наибольшего смещения можно легко осуществить, так как для
этого достаточно найти зависимость между х и х и, приравняв затем
в крайнем положении груза х нулю, определить искомую величину.
Для этого умножим левую и правую части дифференциального урав-
уравнения A) на dx и, учитывая, что Jc dx= -r-dx = xdx, запишем:
- х dx = — (our -j- fix3) dx.
Проинтегрировав это уравнение, находим:
В начальный момент времени лг=О и x = v0. Следовательно,
С= — %¦. Теперь уравнение B) принимает оид
(К уравнению C) можно непосредственно прийти с помощью теоремы
об изменении кинетической энергии материальной точки; см. ниже,
главу IX, § 6.)
В момент, соответствующий наибольшему смешению а, скорость
груза равна нулю. Поэтому подставим в уравнение C): лг = а, Jc = O.
Получим биквадратное уравнение относительно искомого смещения а:
Решив это уравнение, находим:
Задача 231. В момент выключения диигателя моторная лодка
веса Р имела скорость v0. Через какой промежуток времени скорость
К задаче 231.
лодки станет в три раза меньше начальной, если проекция на ось х
силы сопротивления воды движению лодки равна Гх = — zx — $х*,
где х — проекция скорости лодки, а и р — постоянные положительные
40 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VII
пеличины. Ось х направлена по горизонтали направо в сторону
движения лодки. Вычислить также путь, пройденный лодкой за это г
промежуток времени. Лодку считать точечной массой.
Решение. Возьмем начало отсчета на оси х в начальном поло-
положении лодки. Начальные условия движения лодки имеют вид:
при t = Q x = 0, x = va.
Изобразим силы, приложенные к лодке: Р — пес лодки, R—сум-
R—суммарная нормальная сила реакции воды, F—суммарная сила сопро-
сопротивления движению, направленная в сторону, противоположную дни-
жепию лодки, т. е. по горизонтали палево.
Составим дифференциальное уравнение движения лодки в проек-
проекции па ось х:
тх = Fx;
так как по услонию Fx = — a.v — fix1, то
^х==-ах-$х\ A)
„ ,,. .. fix
Заменив в уравнении A) х на —- и отделии переменные, получим:
- . dk. . = — dt. B)
g X (а -, ?Х)
Интегрируя дифференциальное уравнение B) и учитывая, что
=
.X (а (- {IX) ал" а (а -(- jjj
будем иметь:
-In—4^ = —/-|-С. C)
ga а -г ?Х ' у '
Использомав в уравнении C) начальное условие движения (при / =
х — va), находим, что
Следовательно, уравнение C) принимает вид
<=1п у. {4)
Уравнение D) определяет занисимость между проекцией скорости
лодки х и временем t. После подстановки в D) i=T, x— ,^°
§ 31 ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 41
определим искомый промежуток времени Т, по истечении которого
скорость лодки стала в три раза меньше начальной:
Для определения пути s, пройденного лодкой за промежуток
времени Т, вернемся к дифференциальному уравнению A). Умножим
d х
его па dx. Учитывая, что х dx =-- -~ dx = х dx, после отделения пе-
dt
ременных получим:
Р d.t ,
гтгг = — ах.
Проинтегрировав это уравнение, будем иметь:
^ln(a-L^) = -jf-l-C. E)
р
Так как в начальный момент j:=:0h x = v^, то С=-„ In (а-I-ЗщА
После подстановки значения С в уравнение (о) получим:
Для определения искомого пути s, пройденного лодкой от началь-
начального момента времени до момента, соответствующего уменьшению
начальной скорости v0 в три раза, надо в уравнение F) подставить:
х = s, х = ^°. Тогда
Интересно ог.метить, что при заданно» силе сопротивления дии-
жепию лодка никогда не ост.шоиится. Действительно, полет авиь
в уравнение D) х = 0 и I = -, получим т = оо.
Предел соответствующего пути, пройденного лодкой, можно
определить ил уравнения F). Учитывая, что пройденный пугь s= lim.v
t —• си
и lim x = 0, находим:
Задача 232. Измерение глубины реки произподктся с помощью
груза, опускаемого па тросе в поду до дна реки. При опускании
груза со скоростью v0 трос оборвался, и груз достиг дна через Т
секунд после момента обрыва троса.
Определить путь //, пройденный грузом до дна реки, если проек-
проекция на ось х силы сопротивления воды движению груза раина
42
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
Rx = — kmx, где т — масса груза, х— проекция его скорости на
ось х, k — постоянный коэффициент. Ось х направлена по вертикали
вниз. Силой выталкивания груза из воды пренебречь.
Решение. Возьмем начало отсчета О в положении груза,
соответствующем моменту обрыва троса. К грузу приложены следующие
силы: Р — вес груза, К—сила сопротивления воды движению груза,
направленная в сторону, противоположную дви-
движению, т. е. по вертикали пверх.
Составим дифференциальное уравнение дви-
движения груза в проекции на ось х:
mx = P+Rx. A)
Так как Rx = — kmx, то
_ _ р
,\\\\\\\-w
Л —— ¦ 4j лЛ • I ¦" I
Такоио дифференциальное уравнение движе-
движения груза, которое следует дважды проинтегри-
проинтегрировать для определения пути, пройденного грузом.
Заменив и урагшении B) х на -т- и отделив ке-
dx
ременные, имеем: — = dt. После интегрироиа-
ния находим:
— .-ln(g — kx)^t-\-Ci. i'3)
Для определения постоянной интегрирова-
интегрирования С(, подставип в уравнение C) г = 0 и x = va,
получим, что С] = —-г hi (g—kvu). Внеся это значение Q в урав-
пение C), находим:
К задаче 232.
откуда
]n
k g —
R g—
k
D)
Уравнение (З), устанавливающее зависимость проекции скорости
груза от времени, является первым интегралом дифференциального
dx
уравнения движения груза. Заменив в уравнении DJ х па —гг и от-
отделив переменные, получим:
« 3] ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ
После интегрирования находим:
kt i
е
43
E)
Подстапив п уравнение E) t-=0 и л; = 0, получим, что С2 —
= —g v". Подставив это значение Q в уравнение E), находим
закон движения груза:
F)
Для определения пути Н, пройденного грузом до дна реки за
промежуток времени Т, надо в уравнение F) подставить t= 7, х=Н.
В результате получим, что
Задача 233. Парашютист в момент раскрытия
парашюта имел скорость <ий, направленную верти-
вертикально пниз. Найти уравнение движения парашю-
парашютиста, если проекция па ось х силы сопротивления
движению равна Rx = —Hlmxl, где m — масса пара-
парашютиста, х — проекция па ось х его скорости,
k1 — постоянный коэффициент. Ось х направлена по
вертикали вниз.
Движение парашютиста рассматривать как дви-
движение материальной точки.
Решение. Возьмем начало отсчета на оси х в
месте раскрытия парашюта. Запишем начальные
условия движения:
при ^=0 лг=0, x==vu.
Изобразим материальную точку но время движения
па расстоянии х от начального положения. Вес пара-
парашютиста обозначим Р. К парашютисту приложены к задаче 233.
следующие силы: Р — вес его, J?—суммарная сила
сопротивления движению, направленная в сторону, противоположную
движению, т. е. по вертикали вверх.
("оставим дифференциальное уравнение движения в проекции на
ось х: р
X
Так как /?л = —h?mx\ то
Таково дифференциальное уравнение движения.
A)
44 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Записав х=-- и отделив в уравнении A) переменные, находим:
ИЕпегрируя уравнение ('2) и учитывая, что
g—k-.i- 2 \,-'g \ )/g-\-k.i y'g — kx/'
получим:
Подставив в уравнение (Л) начальное условие (при t = Q x = va),
получим, что С] — 1п —?—1 -. Теперь уравнение C) принимает вид
У g — ItVu
Решив это уравнение относительно х, получим:
x = ?jL ( У g 4 - kv«) e1" Vr' — (У g - kva)
или
Для интегрирования уравнения D) следует заменить Л па ~ и отде-
отделить переменные.
Ввиду того, что правая часть уравнения D) имеет громоздкий вид,
затрудняющий интегрирование, запишем уравнение D) в гиперболи-
гиперболических функциях, воспользовавшись формулами:
ёи -)- 1 — 2ег ch z, elz —\—'2ег sh z.
Теперь уравнение D) принимает вид
х = -Ч*-
V'g ch (fe Kgf) + *u0 sh (fe
откуда
dx = }.?. V'g sh (ft i^Q 4- kvn ch (fe
Нетрудно видеть, что числитель дроби, стоящий п правой части
ураииепкя F), является производной or знаменателя дроби, деленной
§ 3( ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 45
на k\fg. Поэтому получим:
* = Is I" iVg <* (A V'gt) + kv0 sh (ft V~gt)] -f C2. G)
Подставин в уравнение G) начальное условие (при t = Q лг = О),
видим, что С$ = —co-inV^- После подстановки этого значения С2
в уравнение G) получим искомое уравнение движения парашютиста:
х = 1 In [ch (ft- ]/";?0 + ^ sh (А /^)] • (8)
Определим величину, к которой стремится скорость парашютиста,
совершающего длительный спуск с большой высоты, т. е. вычислим
предел х при t—>-oo. Для этого воспользуемся формулой E). Разде-
Разделив почленно числитель и знаменатель правой части на ch (k У gt),
находим:
Х=Ув 1/g • th (A Vgt)-\-kva
k Vi + kva ¦ th (k \~gt)'
Учитывая, что lim th(k]/rgi)= \, получим, что
t -+ CO
lim Л = -^,
т. е. при длительном спуске движение парашютиста приближается
к равномерному со скоростью, не зависящей от начальных условий
движения.
Задача 234. Вертикальный спуск парашютиста происходит без
начальной скорости с высоты // мри наличии силы сопротивления,
указанной в условии предыдущей задачи. Определить скорость пара-
парашютиста в момент приземления.
Решение. Для определения скорости парашютиста в момент
приземления нецелесообразно повторить решение предыдущей задачи,
так как при интегрировании по времени мы плходи.м проекцию ско-
скорости х и координату х в виде функций времени. Пришлось бы из
уравнения движения определить момент времени 7", соответствующий
спуску па высоту Н, затем полученное значение Т подставить в х
для определения искомой скорости.
В данной задаче удобнее получить х и зависимости от х, т. е.
выразить проекцию скорости парашютиста в зависимости от его по-
положения х и затем, нодставип х = И, определить искомую скорость v.
Для определения зависимости х=/(х) следует применить прием,
заключающийся в умножении левой и правой частей дифференциаль-
дифференциального уравнения движения па clx. Зто быстро приводит к результа-
результату, причем интегрировать дифференциальное уравнение движения
46 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VI]Г
приходится только один раз (R предыдущей задаче для определения
закона движения x=/(t) мы осуществляли интегрирование дважды).
Для применения указанного выше приема запишем дифференциаль-
дифференциальное уравнение A), полученное при решении предыдущей задачи, в виде
Учитывая, что xdx^ -=- dx = x dx, и отделив переменные в уравне-
уравнении A), получим:
Проинтегрировав это уравнение, находим:
= х-^С. B)
В начальном положении парашютиста, т. е. при х = 0, скорость его,
по условию задачи, равнялась пулю, т. е. х = 0. Подставив эти зна-
значения в уравнение B), находим, что
1
После подстановки полученного значения С уравнение B) принимает
вид
1 И я —х
2.R J? ~~ к л"
от куда
Уравнение C) определяет проекцию скорости парашютиста в зависи-
зависимости от его положения.
Для нахождения скорости парашютиста в момент приземления надо
в уравнение C) подставить: х=Н, x=v. Тогда
Как было указано, тог же результат, но более громоздким спосо-
способом можно получить с помощью формул, выведенных при решении
предыдущей задачи. Действительно, запишем формулы (о) и (8), полу-
полученные в предыдущей задаче, положив в них ^ = 0. Тогда
ь~ ' *¦" v r fi v • D)
¦. „ In ch (/г 1/ gt). (a)
к
§31
ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИПАМ
47
Обозначив через Т продолжительность спуска парашютиста с высо-
высоты Н, из формулы E) имеем:
Так как
ch(A VgT)
TO
th(kY gT)==V i _e-
F)
Искомую скорость определим из формулы D), положив в ней
x = v. Воспользовавшись формулой F), находим:
Задача 235. Камень брошен вертикально вверх со скоростью v^
Определить, на какой высоте И от поверхности Земли скорость камня
уменьшится в два раза, если проекция на ось х силы сопротивления
движению К равна: Rx = —k'imx'1, где т. — масса камня, х — проек-
проекция на ось х его скорости, tiL — постоянный коэффи-
коэффициент. Ось х направлена по вертикали вверх.
Решение. Возьмем начало отсчета па оси х
па поверхности Земли в начальном положении камня.
Начальные условия движения имеют вид:
при ^ = 0 jt=0, x = va. A)
Вес камня обозначим через Р. К камню прило-
приложены следующие силы: Р— его вес, R—сила со-
сопротивления движению, направленная в сторону,
противоположную движению, т. е. по вертикали
вниз.
Составим дифференциальное уравнение движения
кампя в проекции па ось х:
mx = — P + Rx;
так как Rx=—
, то
К задаче 235.
По условию задачи требуется определить положение камня в за-
зависимости от его скорости. Поэтому применим прием, использованный
в предыдущей задаче, т. е. левую и правую части дифференциального
уравнения B); умножим па dx:
48 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ, VIII
Учитыпая, что xdx = xdx, и отделив переменные, перепишем урап-
нение C) так:
it dit ,
g+k**— X-
Проинтегрировав это уравнение, найдем:
2^ «n fe~b **¦*") = — а; + С. D)
Воспользовавшись начальными условиями движения A), получаем:
С=~?1п(?+*Ч,5)-
Подстапив это значение в уравнение D), находим:
Уравнение (о) выражает зависимость между положением камнл и
его скоростью. Для определения высоты Н подъема камня, соответ-
соответствующем уменьшению его начальной скорости v0 в два раза, надо
в уравнение E) подставить х = Н, ? = ®°-. Тогда
I p- l b
14 ' 1П Л К I к
I 1 -, . а 11 J I
2й2
Задача 236. Определить условия, выполнение которых обеспечи-
обеспечивает движение материальной точки в плоскости.
Р е ш е п и е. Расположим оси хну па плоскости, в которой на-
находится траектория материальной точки. Тогда 2 = 0, откуда
i=0 (])
и
5 = 0. B)
Запишем систему дифференциальных уравнений движения мате-
материальной точки в проекциях на оси декартовых координат:
п п п
тх = Yj FkX> »'У= 2 Fky, тг= ^ Fk2.
*=i *=1 *^i
Воспользовавшись условием B) находим:
л п. п
тх= V l\x, my=^ Fkv, 0= ^ Fk2.
k^=\ k --. l * = i
Из последнего уравнения следует, что проекция па ось z равно-
равнодействующей сил, приложенных к материальной точке, равна нулю:
ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 49
R2— 2^Fkz = Q, т. е. равнодействующая расположена в плоскости,
в которой происходит движение точки.
Из условия A) i = 0 следует, что проекция скорости точки па
ось z равна нулю, т. е. скорость точки расположена в плоскости,
в которой происходит движение точки. Следовательно, начальная
скорость точки лежит в той же плоскости, т. е.
1-0 = 0.
Выясним достаточность этих условий. Пусть в начальный момент
точка находится в плоскости ху, т. е. zo = O, начальная скорость
точки лежит в той же плоскости, т. е. ?0 = 0, и равнодействующая
сил, приложенных к материальной точке, лежит в той же плоскости,
л
Достаточно ли выполнения этих условий для движения материаль-
материальной точки в плоскости ху?
Дифференциальные уравнения движения материальной точки в дан-
данном случае принимают вид:
п п
тх = ^ Fkx, ту = ^ Fky, mz = 0.
k = I h ¦ ~ \
Из последнего дифференциального уравнения находим l = Ct. Так
как io = (_), то Ci = 0 и, следовательно, 2= (_). Тогда г^С.г. Но так
как гц = 0, то Ci = 0 и, следовательно, 2 = 0. Из полученного ре-
результата г = 0 следует, что движение материальной точки происходит
в плоскости ху.
Итак, для осуществления движения материальной точки в пло-
плоскости необходимо и достаточно, чтобы начальная скорость точки и
равнодействующая сил, приложенных к этой точке, лежали в одной
плоскости.
Задача 237. Человек бросает камень из точки, расположенной на
высоте h над поверхностью Земли, сообщив ему горизонтальную на-
начальную скорость tH. Определить уравнение траектории камня, даль-
дальность полета и скорость в момент падения на Землю. Силой сопро-
сопротивления движению и кривизной Земли пренебречь.
Решение. Выбранная система осей декартовых координат изо-
изображена па рисунке. Мй — начальное положение камня.
Изобразим камень во время движения в промежуточном положе-
положении М. Вес камня обозначим Р. К камню приложена лишь одна
сила — его пес Р, направленный по вертикали вниз.
Так как начальная скорость г/0 и сила Р лежат в вертикальной
плоскости ху, то движение k.imhh происходит в этой плоскости.
50
дифференциальный уравнения динамики точки
[ГЛ. VIII
Поэтому достаточно составить два дифференциальных уравнения дви-
движения в проекциях на оси х и у.
Запишем начальные услопия движения камня:
при ? = 0 х = 0, y = h, x —
= Q.
(Довольно часто, решая подобные задачи, ошибочно приклады-
прикладывают к материальной точке некую движущую силу, направленную но
касательной к траектории в данной точке в сторону движения. Дви-
Движение камня по траектории, отличной от вертикальной прямой, про-
происходит в результате сообщения камню в начальный момент скорости <v9.
К залаче 237.
Начальная скорость Vq является результатом толчка, имевшего место
в течение весьма малого промежутка времени, равного тысячным
долям секунды. За начало отсчета времени принимают момент конца
толчка, когда камень приобретает скорость щ. Это указание следует
учитывать при решении задач о полете пули, снаряда и т. д. Так,
сила давления пороховых газов на пулю или снаряд проявляется
в сообщении им начальной скорости.)
Составим дифференциальные уравнения движения камня в проек-
проекциях на оси х и у:
тх -¦= О, ту = — Р,
или х — 0, $ = — g.
5 31 ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 51
При интегрировании дифференциального уравнения х = 0 полу-
получим: х = Ср Так как при t = 0 х = vu, то Ct=v0. Следовательно,
в любой момент времени
x==v0. A)
Записав х = — и проинтегрировав уравнение A), получим:
x = vot-\-C,. B)
Так как в момент / = 0 х = 0, то из уравнения B) следует, что
Сз^О. Таким образом, уравнение B) можно окончательно записать
в виде
x = vj. C)
Для интегрирования дифференциального уравнения jJ = — g заме-
заменим j) на Уг. Отделив переменные, находим:
Проинтегрировав это уравнение, получим
у = — gt -j- Сл. D)
Так как при ? = 0 _р = 0, то из уравнения D) следует, что Сз = 0,
и ураннение D) принимает вид
y = -gt. E)
Осуществим последующее интегрирование, предварительно заменив у
dv
на -~т и отделив переменные. Тогда
У — — Y°+C*- F)
Так как при ? = 0 y = h, то С4 = й, и уравнение F) принимает вид
J' —А--- G)
Уравнения
Jf = V, C)
.У = А--1г G)
определяют закон движения камня. Для нахождения уравнения траек-
траектории камня исключаем из этой системы время. Траекторией является
парабола
52 ДИФФР.РЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ |ГЛ. VIII
Дальность полета камня определяется его абсциссой в момент
падения па Землю. Подставив в уравнение (8) у = 0, определим
дальность полета:
Для нахождения скорости камня в момент падения воспользуемся
формулами A) и E) проекций его скорости на оси декартовых коор-
координат:
-* = гго, A)
y = — gt. 0)
Момент времени Т, соответствующий падению камня на Землю,
вычисляем из уравнения G), учитывая, что при t— T у = 0. Полу-
Получим:
Следовательно, проекции скорости камня в момент падения даются
формулами:
Тогда модуль скорости кг мня в момент падения
¦От = Yxr+Ут = Vv'i -j- '2gh.
Направляющие косинусы скорости имеют вид:
Считая начальную скорость г/й равной нулю, получим из формул
C) и G) уравнения свободного падения материально!! точки в бел-
воздушном пространстве:
х=0. y = h~-g?.
Так как х=0, то траекторией точки является вертикальная прямая,
совмещенная с осью у.
Задача 238. Решить предыдущую задачу с учетом силы сопро-
сопротивления движению, пропорциональной скорости камня: /? = — kmv,
где m — масса камня, V — его скорость, k — постоянный коэффициент.
Определить уравнение траектории камня.
Решение. Начальные условия движения камня остаются преж-
прежними:
при i!r=0 je=:O, y = h, x = v0, у = U.
§31
ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ
53
К камню М приложены две силы:/*—пес камня, R — сила сопро-
сопротивлении димжепию, направленная по касательной к траектории и дан-
данной точке и сторону, противоположную движению.
У k
К задаче 238.
Состаиим векторное дифференциальное уравнение дшгжения камня:
mw ¦.= Р -f R,
по так как w=r и /? — —mkv = — tnk'r, то получим
Проектируя па оси х и у, имеем:
х = — кх, у = —g — /су.
Так как je = -i то
откуда
С)
\п х =--— И-\-d.
Постоянная С( находится путем использования начального условия
движения (?=0, x=^v0), что дает С1 = 1пг»й. Следовательно,
1п*=-,
т. е.
Проиптегрироиав уравнение B), находим:
54 ДИФФР-РРИПИАЛЬНЫГ. УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
причем так как при ( = 0 х = 0, то С2== °. Итак,
C)
Для решения второго дифференциального уравнения A) заменим
dy
у на ^ и отделим переменные:
Тогда
Использовав начальное условие движения (при ? = 0_у = 0), найдем,
что С3 — —fe- In g. Следовательно,
откуда
Заменив в уравнении D) у па -j- и интегрируя это уравнение,
получим:
?Г ^ К е ш I Q
Так как при ^ = 0 _у = /;, то С4 = й-|-*; и, следовательно,
у = Л — ?¦ < -4- 5„ A — е~ *'). (Я)
Итак, камень совершает движение согласно уравнениям:
х = *Щ-е-«), C)
Исключив время из системы C) и E), определяем уравнение
траектории камня:
При движении с малой скоростью сила сопротивления пропор-
пропорциональна первой степени скорости точки. Движению материальной
§3|
ОПРЕЦЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ
55
точки со значительной скоростью соответствует сила сопротивления,
пропорциональная квадрату скорости (см. задачу 239).
Задача 239. Сохраняя условие задачи 237 с учетом силы сопро-
сопротивления движению, пропорциональной квадрату скорости камня:
R = ktnvi, где т — масса камня, г» — его скорость, k — постоянный
коэффициент, определить уравнение участка M0Mi траектории камня,
непосредственно примыкающего к его начальному положению Мй.
Л
и
\4N4\\\W\\\
V
\
У
/
/
'п
0:1 ^
IP
/
\у
\\
\
\ f
К задаче 239.
Решение. Начальные условия движения камня остаются преж-
прежними:
при ^ — 0 х=0, y — h, x=v0, j> —0.
Направления сил Р и R не изменились по сравнению с преды-
предыдущей задачей. Поэтому
R = — kmw = — ktnvr.
Запишем векторное дифференциальное уравнение движения камня:
mw =P-\-R
или
? = g — kvr.
Проектируя на оси Л" и у, получим:
х = — kvx, A)
V= — g— k
56 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГП. VIII
Для интегрирования дифференциального уравнения A) заменим
х на --, a v на , где а — дугоная координата, измеряемая по
траектории от точки Жо. После отделения переменных получим:
откуда
\пх= — ка-\-С. C)
В начальном положении камня, т. е. при а = 0, проекция скорости
x = va. Следовательно, C=\nva. Подставив это значение С в ураи-
пепие C), находим:
In д = — А'о,
Т. С.
x = vHc-k\ D)
Для упрощения решения задачи нместо дифференциального урап-
нсния B) воспользуемся дифференциальным уранпенисм движения
камня в проекции на глэнную нормаль п:
т - - = /°соя а
Р
(сила сонротиллепия R дает проекцию на гланную нормаль, ранную
пулю). Так кик а = 2т — <?, 1~де ср — угол между осью х и касатель-
касательной, го cosa = cos<f> т. е.
^¦=/TCOSC9. E)
Как изпестпо из курса дифференциальной геометрии, кринизпа
кривой н данной точке
da
F)
Знак минус взят потому, что с возрастанием а угол ср убывает.
Так как tg<p=_yi, то <f^'
Следовательно,
d-a d . , ,, 1 , dx
Учитыпая, что do=\^\-\-у'х'гdx, находим: -'•- = ——~—т-^-.—. (Это—-
из {l ¦ р v ^ -1'/>
выражение кривизны кривой, извепное hj курса дифференциальной
геометрии.)
§ 31 ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 57
Подставив полученное значение -~- в формулу F), имеем:
1 = .к = -v.;
У (I'V-v;2)-1" A г iu=r )¦''-'
т. е.
1 __ ,созя .?.
Воспользовавшись формулой G), перепишем уравнение E) в виде:
-. ".; vl cos- о = — е.
dx- ¦ ь
Учитынап, что t)COS'f = jc1, г также формулу D), получим:
рг=-гс^. (8)
dx- t/0J *¦ ;
По условию задачи требуется определи!\, уравнение настильного
участка траектории МЛМЪ непосредственно прилегающего к началь-
начальному положению точки Л10. Так как этот участок траектории близок
к горизонтальному, то, считая а исличииой черного порядка малости,
мы можем с точностью до слагаемых перпого порядка малости вклю-
включительно заменить в уравнении (8) а па х (разность х — с является
величиной нторого порядка малости). Теперь дифференциальное
уравнение (8) принимает вид
4>=-*^. (9)
dx- о-„ v '
Проинтегрировав это приближенное дифференциальное уравнение,
находим:
dx
A0)
При лг = О ^- = 0 (касательная к траектории и точке Af0 распо-
расположена горизонтально). Подстаипи эти начальные услоиия н уравне-
уравнение A0), находим, что Q^^* "'• Следовательно, уравнение A0)
принимает вид
dx Ikvl 2Щ v
Проинтегрировав дифференциальное уравнение A1), получаем:
v _. _^_ „ й_ егкх _i_ q (\1\
58 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Так как при х = 0 y = h, то Cg = h -}- .f 3, и уравнение A2) при-
принимает вид
Это — искомое приближенное уравнение участка траектории
Задача 240. Материальная точка М движется в вертикальной
плоскости под действием центральной силы притяжения, пропорцио-
У
м„
нальной ее расстоянию до неподвижного центра: /¦"= — k^mr, где
г—вектор-радиус точки, т—ее масса, № — постоянный коэффи-
коэффициент.
НаИти уравнение траектории точки, если в начальный момент она за-
/ с \
нимала положение Мо[а, — ?., и имела скорость ©0, направленную
по вертикали вверх (см. рисунок).
Решение. Начало осей декартовых координат взято в непо-
неподвижном центре О, к которому притягивается точка М. Ось х про-
проходит по горизонтали направо, ось у — по вертикали вверх. Запишем
начальные условия движения точки в виде:
при ? = 0 х — а, у = —°.,, х — 0, у — v0.
К материальной точке М приложены следующие сипы: Р — ее
вес, F—сила притяжения, направленная к неподвижному центру О-
§ 31 ОПРРЛЕТЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 59
Составим векторное дифференциальное уравнение движения .ма-
.материальной точки
mw ==
или
Проектируя па оси хну, получим:
x + k!x = 0, A)
У + &у = — & B)
Уравнение A) является однородным линейным дифференциальным
уравнением второго порядка с постоянными коэффициентами. Для его
интегрирования составим характеристическое уравнение X.'2-J-/^ = О/
откуда X.],2=:i:AJ. Следовательно, общее решение дифференциаль-
дифференциального уравнения A) запишется в виде
x=Q cos kt -\- С, sin kt, C)
где С, и С4 — постоянные интегрирования. Для определения d и Са
вычислим
х = — Cik sin kt-\-Cik cos kt D)
и затем подставим в уравнение C) t = 0, x = a, а в уравнение D)
? = 0, х = 0. Находим: С,=а, Са = 0. Внося эти значения Cj и С3
в уравнение C), имеем:
х = а cos ^^. (о)
Дифференциальное уравнение B), в отличие от дифференциального
уравнения A), является неоднородным. Следовательно, его общее
решение имеет вид
У=У\Л~Уь F)
где yq — частное решение неоднородного уравнения, а _у, — общее
решение соответствующего однородного уравнения:
у r*!v = o. G)
Заметив, что дифференциальное уравнение G) аналогично диффе-
дифференциальному уравнению A), запишем:
ух — С3 cos kt -f d sin kt. (8)
Правая часть дифференциального ураппепия B) постоянна. 11оэтому
ищем частое решение в видез/2:=Л, где А — постоянная.
Положив в уравнении B)_у = Л, находим:
60 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ (ГЛ. VIII
Воспользовавшись формулами (8) и (9), запишем общее решении
по формуле (б):
у =рС,cos/it -f Qs inM—t,- О3)
Для определения постоянных интегрирования С, и Q вычислим:
J' = — C3k sin kt-\-Qk cos й?. A1)
Затем подставим в уравнение A0) ? = 0, _у — —5., а в уравне-
уравнение A1) i = 0, y = va. Тогда C.i = 0, Q = ^. Подстаиип эти зна-
значения С;, и Q и ураьпепие A0), получим:
j/=-ft«sin^ — -J. A2)
Итак, уравнения движения материальной точки имеют пид
х = a cos At,
Для определения уравнения траектории следует из уравнений
движения исключить время. Замечая, что
coskt=x-, sin М = k-(у-\--fX
получим искомое уравнение' траектории
(Эю — уравнение эллипса с центром в точке а(о, —ЙД Одна по-
полуось эллипса равна а, а другая полуось равна .".)
Задача 241. Материальная точка движется is вертикальной пло-
плоскости под действием центральной силы отталкивания, пропорциональ-
пропорциональной расстоянию до неподвижного центра: Р=кгтг, где г-—ьектор-
радиус точки М, т. — ее масса, k% — постоянный коэффициент.
Пайти уравнение траектории точки, если в начальный момент она
занимала положение Л1а (OM0 = t>) и имела скорость vu, направлен-
направленную но горизонтали напраио (си. рисунок/.
Решение. Качало декартоиых осей координат пзято в непо-
днижио.м центре О, or которого сталкивается точка Л1. Ось х про-
проходи г но горизошали папраио, ось у — через начальное положение
§ Л] ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 61
точки по вертикали вверх. Запишем начальные условия движения
точки в виде:
при ? = 0 х=0, y — b, x = vu,y = Q.
К материальной точке М приложены следующие силы: Р — ее
вес, F—сила отталкивания, направленная вдоль ОМ от центра О.
К задаче 2-11.
Составим векторное дифференциальное уравнение движения ма-
материальной точки:
mw = P-j-F,
или
r = g+k*r.
Проектируя па оси х и у, получим:
0)
Ураппеыие A) янляется однородным линейным дифференциальным
уравнением второго порядка с постоянными коэффициентами. Для
его интегрпронания составим характеристическое ураппеиие:
X1 — &2 = 0, откуда А| 4 = zLA. Следовательно, решение дифферен-
дифференциального уравнении A) запишется в виде
»-«
C)
62 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Для определения постоянных интегрирования Q и Са вычислим
x=Clkebt — Сфе~ы D)
и затем подставим в уравнение C) t = 0, х = 0, а в уравнение D)
t — Q, jc = va. Тогда получаем систему уравнений:
Vg = Ctk
„-! и С9 =— о-.
Решив эту систему, имеем: С1 = „-! и С9 =— о-°. Следовательно,
окончательно получим:
= ?
х = ?° (eht — е-*') = ^ sh kt. E)
Так как дифференциальное уравнение B) является неоднородным,
то его общее решение у имеет вид
У—У1-\-Уъ F)
где у,—общее решение соответстпующего однородного уравнения:
j>-*Jj, = O G)
и y<i — частное решение ураннеиия B).
Дифференциальные уравнения A) и G) аналогичны, поэтому
Л = Сз**'-f Q*-*'. (8)
Правая часть дифференциального уравнения B) постоянна. По-
Поэтому частное решение _у2 ищем в виде постоянного: у$= А. Поло-
Положив в уравнении B)_у9=Л, находим:
Л = |г- (9)
Воспользовавшись формулами (8) и (9), запишем общее решение
по формуле F):
y=QfiM+Cier*'+j[. (Ю)
Для определения постоянных интегрирования С3 и d вычислим:
y = C3kekl~ С ike'"'. A1)
Затем подставим в уравнение (Ю) t = 0, у — b, а в уравнение (II)
( = 0,^ = 0. Тогда полупим систему уравнений:
0 = C3k — Qk,
§ 31 ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 63
откуда
Окончательно:
т. е.
Итак, уравнения движения материальной точки имеют вид:
x = *shkt, E)
г U-. (Щ
Для определения уравнения траектории точки следует из уравне-
уравнений движения исключить время. Из E) и A2) находим:
sh
ch
kt
kt
kx
~~ V
a —
b —
s
k-
R.
Учитывая, что ctfkt — sli'2/ef^l, получаем искомое уравнение тра-
траектории точки М:
,,-Я.У
k2) х"
*-**) U)
Это — уравнение гиперболы с центром в точке А (О; ~). Дей-
ствительная полуось равна b — Д, а мнимая полуось -?.
Задача 242. Найти наибольшую высоту подъема над поверх-
поверхностью Земли снаряда, вылетевшего с начальной скоростью vu под
углом а к горизонту и упавшего на Землю, считая силу притяже-
притяжения Земли обратно пропорциональной квадрату расстояния до центра
Земли. Силой сопротивления- днижению пренебречь. Снаряд считать
точечной массой. На поиерхности Земли ускорение силы тяжести
равно g. Радиус Земли равен R.
Решение. Предположим, что снаряд в рассматриваемый произ-
произвольный момент времени находится в точке М (см. рисунок), а в на-
начальный момент времени находился в точке уИ0.
64
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
Учитывая, что к снаряду приложена только центральная сила F,
решаем задачу в полярных координатах. Полюс О выбираем п центре
Земли, оси г даем направление вектор-радиуса ОМ от О к Ж. Ось -.р
проводим через точку М перпендикулярно к оси г. Оси г0 и ой соот-
соответствуют начальному положению снаряда Мо.
К задаче 242.
Запишем начальные условия движения снаряда в виде:
при ?=0 г = Го = Л!> ? = 0)
Действительно, если обозначить начальное значение <у через ф0. то
.?1)ф0 = ro^o. a вследствие соотношения пр.^ф,) —xi0 cos я находим:
^<Ь0 = г>0 cos я, A)
§ 3[ ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 65
откуда следует записанное выше:
К снаряду приложена только сила притяжения F, обратно про-
bin
порциональная квадрату расстояния до центра Земли, т. е. F==—-.
Учитывая, что на поверхности Земли, т. е. при r = R, F=P=mg,
находим, что k^gR'1. Следовательно,
B)
Сила притяжения F направлена к центру О.
Дифференциальные уравнении движения материальной точки в
проекциях на оси полярных координат имеют вид:
В данном случае
F— — F — — И^ F — О
гг — — г — рг~ > rf—и.
Следовательно:
f —гф»=—^, C)
й^) = 0. D)
Из дифференциального уравнения D) следует интеграл площадей:
Л? = С, т. е.
r*$ = rlW E)
Учитывая, что го = /?, а также формулу A), запишем формулу E)
в виде
г2ф =: Rvf, cos а,
откуда
^ (g)
(rlh является удвоенной секториальпой скоростью снаряда, т. е. про-
изводной по времени от площади, описываемой вектор-радиусом г
снаряда. Итак, при центральном движении материальной точки ее
секториальная скорость постоянна).
Обратимся к интегрированию дифференциального уравнения C).
Воспользоиавшись формулой F), запишем это уравнение в виде
г р. — — г-. •
3 Теоретическая механика, тон II
66 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Умножив почленно на dr, осуществим интегрирование, учитывая,
что
rdr=jtdr = fdt.
Получим:
Я , JPv*n cos* a __gfi*
2 i ~ip — f Tu
Так как в начальном положении снаряда r = ra = R, r = nprovo =
= v0 sin а, то постоянная интегрирования имеет вид
Cz= 2 •
Следовательно,
*— Л- R*v« cns3 а SR2 2gR — vl /7ч
Уравнение G) устанавливает зависимость между проекцией скорости
снаряда t на ось г и радиусом-вектором г.
В наивысшей точке траектории проекция скорости снаряда на
ось г равна нулю, т. е. при г=:Гтах f = 0. Подстапив эти значения
в уравнение G), получим квадратное уравнение относительно гтлх:
BgR -1$ rU - ZgRhnn + Rvlcos4 = 0,
откуда
Ия уравнения (8) следует, что при vl^2gR величина гтш обращает-
обращается в бесконечность, т. е. снаряд на Землю не возвратится (v0 = Y^igR =
= 11,2 км/сек называется Е1торой космической скоростью). Поэтому
снаряду надо сообщить начальную скорость, удовлетворяющую усло-
условию 2gR— vl^>0, т. е. v0<СV^gR-
Наибольшая высота подъема снаряда над поверхностью Земли
Н=гтЛц. R.
Использовав формулу (8), получим:
„ _-gR + vl±ygW-
Отбрасывая отрицательное значение //4, окончательно находим:
— gR + vl + V^R* - ('IgR -
Для случая, когда начальная скорость ф„ направлена по вертикали
вверх, т. е. при а= к-, имеем:
ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗА1АННЫМ СИЛАМ
67
Задача 243. 4 октября 1957 г. в Советском Союзе был запущен
первый в мире искусственный спутник Земли. В момент выведения на
орбиту в положении Мо па высоте h спутник имел скорость <и0, рас-
расположенную под углом а к вертикали, проходящей через центр Земли.
Требуется показать, что спутник дпижется по эллипсу. Сила
земного притяжения обратно пропорциональна квадрату расстояния
а)
94 Ось Симметрии
злпипса Р
S)
К задаче 243.
спутпика от центра Земли. Ускорение силы тяжести на поверхности
Земли равно g. Радиус Земли R. Силой сопротивления движению
пренебречь.
Решение. Так как начальная скорость <и0 и сила земного при-
притяжения F лежат в одной плоскости, то траектория спутпика является
плоской кривой. Поэтому выберем систему полярных координат
с полюсом О в центре Земли (рис. а). Радиус-вектор ОМ соединяет
полюс О с промежуточным положением М движущегося спутника.
Вдоль ОМ проводим ось г, а перпендикулярно к пей через точку М —
ось 9- Мй — начальное положение спутпика на орбите.
Из условия задачи видно, что начальные условия движения спут-
спутника имеют вид:
при ? = 0 г = fo = R -)- h, (f = Q,
г = i\ = np^^o = Щ cos а, 9о ==
a,
68 дифференциальные уравешния динамики точки п\п. viii
ибо, если обозначить начальное значение <у через <prt, то npw«0 = го<р„,
и вследствие соотношения npnv0 = v<> sin а находим:
r,)Cffl = T»osin а, A)
т. е. ф0 является заданной величиной.
Движение спутника М происходит под действием центральной
силы F земного притяжения, направленной к центру Земли. Сила
земного притяжения обратно пропорциональна квадрату расстояния
до центра Земли, т. е.
Р = $. B)
На поверхности"Земли, т. е. при r = R, F=P=tng. Подставив эти
значения в формулу B), находим, что ? = gR2. Следовательно, фор-
формула B) принимает вид
Составим дифференциальные уравнения движения спутника в по-
полярных координатах. Учитывая, что дифференциальные уравнения
движения материальной точки в полярных координатах имеют вид:
„ . 2. р т d . 9. ч р
в данном случае получим:
m(? — rf) = — F, ~^(г\) = 0
или, принимая во внимание формулу C):
d
Из дифференциального уравнения E) находим:
г*$=С. F)
Так как секториальная скорость точки, т. е. производная по времепи от
площади 5, описываемой вектор-радиусом г, равна S = -к- г2ф, то C=2S.
Итак, секториальная скорость спутника постоянна, т. е. r3<p = r;i<b0.
Воспользовавшись формулой A), запишем формулу F) в виде
откуда
3] ' ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 69
Переходим к исследованию дифференциального уравнения D):
Вычислим производную от г по времени: />=--ф. Учитывая форму-
формулу G), находим:
dr rovo sin a
Так как ?^ — = - у, то, воспользовавшись формулами G) и (8),
имеем:
Запишем дифференциальное уравнение D) с учетом формул G)
и (9). Тогда
rlvl Sin a _rfa_ / J\ rlvl Sitl3 a g?!^
r"- df\rj F ~" r- '
где
Проинтегрировав дифференциальное ураппепие A0), мы определим
искомое уравнение траектории спутника в полярных координатах.
(Дифференциальное уравнение A0) можно было непосредственно по-
получить, воспользовавшись формулой Биие:
r r mO'
где С—удвоенная секториальпая скорость: 0=28= rav0 sin a, a
Ураннепие A0) является неоднородным линейным дифференциаль-
дифференциальным уравнением относительно -¦•- с постоянными коэффициентами. Его
общее решение — равно сумме общего решения (¦—I соответствую-
соответствующего однородного уравнения
70 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ (ГЛ. V1I1
и частного решения ( —) неоднородного уравнения, т. е.
Для решения дифференциального уравнения A1) составляем харак-
характеристическое уравнение Х9-|-1=0, откуда \ = ±L Следовательно,
у), = В cos (9-е), A3)
где S и s — постоянные интегрирования, подлежащие последующему
определению.
Нетрудно видеть, что частное решение дифференциального урав-
уравнения A0) равно его постоянной правой части, т. е.
Воспользовавшись формулами A3) и A4), запишем общее решение
по формуле A2) а виде
i =Z?cos (<p —e) +A A5)
Это уравнение является уравнением траектории спутника.
Для определения постоянных интегрироиания Си е вычислим про-
производную от — по времени:
— -pf== — Я <? sin (<р - е). A6)
Подставив в уравнение A5) г = ru = R-\- h, <р = 0, а в уравнение A6)
г = г0 = /? -}- Л, <р = 0, г = г0 = г»0 cos a,
Г»„ sin а vn sin а
получим систему уравнений:
р„ COS a __
Для определения постоянных интегрирования В и е из уравне-
уравнений A7) запишем эту систему в виде:
Bcos Л-А, A8)
A9)
§ 3] ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 71
Из системы A8) и A9) находим:
или, подставляя значение А, после несложных преобразований:
~ (/?+ft)X Sin-a
Разделив A9) на A8), находим tg e и, следовательно,
> —3rctc (*
Вернемся к уравнению траектории спутника, записанному в виде A5).
Решив это уравнение относительно г, находим:
1
' А -\- В cos (<p — е)
ИЛИ
r = T+W' B2)
где
)'gj Sill» о.
_ ^ + ,0 „и B4)
ф=9 —е. ('25)
Здесь е определяется по формуле B1).
Как изиестпо из курса аналитической геометрии, уравнение B2)
является ураппением кривых второго порядка в полярных координа-
координатах. В нем р—параметр крииой, а е — эксцентриситет.
Кривая является: а) окружностью при е = 0; б) эллипсом мри
0<М; в) параболой при е=\; г) гиперболой при е"^>\.
Угол <|) отсчитынается от oc^i симметрии криноя до радиуса-век-
радиуса-вектора, определяющего положение точки М на крипой (см. рис. в),
причем ось симметрии направлена от полюса О (в данном случае
центра Земли), находящегося в одном из фокусов кривой, и сторону
ближайшей к фокусу вершины. Угол е определяет положение оси
симметрии кривой.
Выясним характер начальных условий запуска спутника для того,
чтобы он мог двигаться но каждой из этих кривых:
а) Для того чтобы спутник двигался по окружности, должно бы ib
выполнено условие е = 0, т. е., согласно формуле B4),
72 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
откуда получаем биквадратное уравнение относительно начальной ско-
скорости va спутника на орбите:
(R + hf vi sin* a - 2gR* (R + A) v> sin'2 a + g'R' = 0,
т. e.
Комплексное значение v\ указывает, что движение спутника по
круговой орбите возможно только в частном случае, когда n=~t
т. е. при горизонтальном направлении начальной скорости v0. Тогда
(Эта формула получена выше, в задаче 220.)
б) Для того чтобы спутник двигался по эллипсу, должно быть
выполнено условие е<^\, т. е., согласно формуле B4),
_ (Я + <„ ^
Для выполнения этого неравенства необходимо, чтобы
т. е.
Итак, для того чтобы движение спутника происходило по эллипсу,
его начальная скорость v0 на орбите должна удовлетворять условию
* B7)
Однако этого услопия недостаточно, так как эллиптическая траек-
траектория спутника не должна проходить внутри Земли. Значит, наимень-
наименьшее расстояние г должно быть больше или равно радиусу Земли R,
т. е.
B8)
Расстояние от фокуса О, совмещенного с центром Земли, до точки
на эллипсе является кратчайшим в момент прохождения спутником
положения Mi (см. рис. б), т. е. при ф = 0. Поэтому, подставив в не-
неравенство B8) значение г из уравнения B2) и считая при этом ф = 0,
получим:
§ 3| ОПРЕДЕЛЕНИЕ ДВИЖЕНИЯ ПО ЗАДАННЫМ СИЛАМ 73
Подставив в неравенство B9) значение величин р и е, из формул
B3) и B4) найдем после ряда преобразований:
Сопоставив неравенства B7) и C0), видим, что условие, при вы-
выполнении которого спутник будет двигаться вокруг Земли по эллип-
эллиптической орбите, можно записать в форме
где v0 — начальная скорость спутника на орбите; h—начальная вы-
высота спутника над поверхностью Земли; g—ускорение силы тяжести
у поверхности Земли; а — угол, образуемый начальной скоростью
с вертикалью.
Для вещественности левой части неравенства C1) необходимо,
чтобы
| sin а | Ss ^рг.
При запуске спутника с поверхности Земли, т. е. при h = 0, по-
получаем, что | sin а |=1, т. е. а = у или а = у (см. рис. в). Однако
в этом случае левая часть неравенства C1) принимает неопределенный
вид -„-. Полагая в левой части C1) |sina|=l и затем устремляя h
к пулю, приходим к неравенству
Полагая g-=9,81 м/сек* и /^ = 6370 км, имеем:
7,9 км/сек sSao<ll,2 км/сек. C3)
Итак, при запуске с поверхности Земли для движения спутника
по эллиптической орбите модуль его начальной скорости должен
удовлетворять неравенству C3), причем начальная скорость должна
быть направлена горизонтально. Значение г» =7,9 км/сек называется
первой космической скоростью, а значение v= 11,2 км/сек называется
второй космической скоростью.
В случае wo<^7,9 км/сек тело падает па Землю.
в) Для того чтобы тело двигалось по параболе, должно быть вы-
выполнено условие е=]. Из формулы B4) следует, что при е=\
^ -Оц = 0, откуда
R. C4)
74
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
г) Для того чтобы тело двигалось по гиперболе, должно быть
выполнено условие е^>1, откуда следует, что
C5)
C6)
тело будет двигаться по параболе или гиперболе, т. е. не окажется
спутником Земли и будет от нее бесконечно удаляться. Если,
кроме того, в начальный момент тело находится на поверхности
Земли, т. е. /г = 0, то из формулы C6) получим:
Из формул C4) и C5) следует, что при
¦R
т. е.
'Уо^ 11,2 км /сек.
§ 4. Колебательное движение
C7)
C8)
1°. Восстанавливающая сила. Теория колебаний является
одним из важнейших разделов теоретической механики. Ее роль
в современной технике все время возрастает. При проектировании
двигателей, машин и механизмов, мостов и других сооружений всегда
производятся расчеты на коле-
колене J бапия.
В данном параграфе рассма-
рассматривается простейшая задача о ли-
линейных колебаниях материальной
точки (крутильные колебания рас-
рассмотрены ниже в главе IX, малые
колебания систем материальных
точек — в главе XIII). Линейными
называются колебания, описывае-
описываемые линейными дифференциаль-
v " "д нымп уравнениями.
pfIC m При дпиженпи материальной
точки может действовать упругая
сила, стремящаяся вернуть точку к некоторому положению. Эта упру-
упругая сила называется восстанавливающей. В большинстве задач рассмат-
рассматривается восстанавливающая сила F, изменяющаяся по линейному
закону (по закону Гука) (рис. 111). При растяжении пружины эта сила
прямо пропорциональна удлинению F=—сД, где А — смещение кон-
конца пружины из ненапряженного состояния, с — коэффициент упруго-
упругости (коэффициент жесткости), численно равный силе, которую
§ 4] КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 75
надо приложить к пружине для того, чтобы изменить ее длину
на единицу. Единица измерения коэффициента упругости — кг/см.
Вообще линейной восстанавливающей называется сила, стремя-
стремящаяся вернуть точку в положение равновесия и пропорциональная
отклонению этой точки от положения равновесия.
О F М
Рис. 112,
2°. Свободные колебания материальной точки. Сво-
Свободными называются колебания материальной точки, которые про-
происходят под действием восстанавливающей силы. При движении
материальной точки М массы т. по горизонтальной оси х (рис. 112)
под действием восстанавливающей силы F, равной по
модулю F = c\x\ (О—положение равновесия точ-
точки /И), имеет место дифференциальное уравнение дви-
движения
где k = — .
т
В случае колебаний материальной точки М массы т,
подвешенной к нижнему концу пружины, верхний ко- М[
пец которой прикреплен к потолку, упругая (восста-
(восстанавливающая) сила F при движении точки М вниз на-
направлена вверх (рис. 113), причем Fx =— с (Дст -)- х),
где Дст — статическое удлинение пружины под дейст-
иием силы веса P=mg. Ось х направлена вдоль оси
пружины в сторону ее растяжения, т. е. вниз. Начало
отсчета на оси взято в положении статического равно- Рис. 113.
песия материальной точки М, висящей, на пружине. При
этом выборе начала отсчета дифференциальное уравнение свободных
колебании материальной точки имеет вид
... с
где kl = —.
т
При начальных условиях движения материальной точки, записан-
записанных в виде:
закон ее свободных колебаний имеет вид
х = а sin (kt-\- а),
76 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
т. е. материальная точка совершает гармоническое колебательное дви-
движение; здесь а — амплитуда колебаний — наибольшее отклонение
колеблющейся точки от положения равновесия
kt-\-a — фаза колебаний, а — начальная фаза колебаний, определяе-
определяемая по начальным данным:
kxa
k — круговая частота колебаний — число колебаний материаль-
материальной точки за 2« секунд:
Круговая частота колебаний от начальных условий движения (лг0 и ^0)
не зависит. Это свойство называется изохронностью, а колебания —¦
изохронными (амплитуда колебаний а и начальная фаза а зависят от
начальных условий движения).
Периодом колебаний Т материальной точки называется наимень-
наименьший промежуток времени, по истечении которого точка имеет ту же
координату и ту же проекцию скорости
Размахом колебаний называется расстояние между крайними поло-
положениями колеблющейся точки. Размах колебаний равен двум ампли-
амплитудам колебаний.
3°. Влияние силы сопротивления, пропорциональ-
пропорциональной скорости, на свободные колебания материаль-
материальной точки. При движении материальной точки п среде, препят-
препятствующей движению (воздух, жидкость), возникает сила сопротивления
движению. Эта сила при малых скоростях движения точки можег
приближенно считаться прямо пропорциональной первой степени ско-
скорости точки: /? = рг», где [) — постоянный коэффициент; при больших
скоростях — квадрату скорости точки: ^=:|31'гД где j3j—постоянный
коэффициент.
Ниже рассмотрены свободные колебания материальной точки при
наличии силы, пропорциональной первой степени скорости точки:
R=z$v. В этом случае дифференциальное уравнение движения мате-
материальной точки имеет вид
где
ш' m
§ 41 КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 77
Различаются три вида движения: a) n<^k — случай малого сопро-
сопротивления, б) л^>? — случай большого сопротивления, в) n = k —
предельный случай.
a) n<^k — случай малого сопротивления. Материальная точка со-
совершает затухающие колебания но закону:
х = Ae-nt sm (\/№ — и'Ч + а) (при t — со дг —0).
При заданных начальных условиях движения (при ? = 0 х = х0,
= х0) Л и а имеют вид
Это движение не является периодическим, так как выражение Ae~nt
переменно и убывает по экспоненциальному закону. Однако по ана-
аналогии со свободными колебаниями и здесь вводят круговую частоту
и период колебании.
Круговая частота колебаний k% материальной точки при наличии
силы сопротивления равна
kR= y/tf — t?,
т. е. kf(<^k. Итак, сила сопротивления движению, пропорциональная
скорости, уменьшает круговую частоту колебаний.
Период колебаний 7# материальной точки при наличии, силы со-
сопротивления, пропорциональной скорости, равен
Так как при отсутствии силы сопротивления Т= t , то
т. е. Tr^>T. Итак, сила сопротивления, пропорциональная скорости,
увеличивает период колебаний.
Обычно условно вводят переменную амплитуду колебаний а = Ae~nt,
предстапляющуго, по существу, величину наибольшего отклонения.
Амплитуда колебаний a = Ae"nt (при t—>оо а—*0) убывает с
каждым полупериодом (см. рис. П4) по закону геометрической про-
прогрессии, знаменатель которой равен
nTR
78 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Логарифмическим декрементом колебаний" называется логарифм ог-
tr
ношения двух смежных амплитуд, отличающихся во времени на - -,
т. е.
б) n^>k — случай большого сопротивления. Материальная точка
совершает затухающее апериодическое (непериодическое) движение
согласно уравнению
Х'п-2 — *2 / . _ — yV1 -к- Сч
х = e-nt (C,e
').
При t—+oo x—»0. Вследствие изменения по показательному закону
движение быстро затухает.
При заданных начальных условиях движения:
при ? = 0 дг = лг0, х = хй,
постоянные интегрирования имеют вид:
,- х„ 4- (я ¦
bj =
= rd—.. [[Яв 4- (п -4- /и2 —
[(л-0 -L ял-0) sh /я'2 —
ch /я2 —
Характер движения зависит от начальных условия. При лг = л:0^:0
^O, т. е. когда в начальный момент материальная точка
КОЛЕБАТЕЛЬНОЙ ДВИЖЕНИЕ
79
смешена из положения статического равновесия на х9 и ей сообщена
начальная скорость в том же направлении, материальная точка вна-
вначале отклоняется в указанном направлении до точки А (см. на
рис. 115 кривую /), а затем асимптотически приближается к поло-
положению равновесия (не переходя через пего).
При д: =
х = хо<^О (причем \ха\^>х0(п-\- /иа —
т. е. когда в начальный момент материальная точка смещена из по-
положения статического равновесия на х0 и ей сообщена в противопо-
противоположном направлении скорость, модуль которой удовлетворяет указан-
указанному выше неравенству, материальная точка приближается к поло-
положению равновесия, проходит его
(см. на рис. 115 кривую //), от-
отклоняется в противоположную,
сторону до точки В и затем асимп-
асимптотически приближается к поло-
положению равновесия (больше не
переходя через него).
При х =
(причем | х01 О«(я+ i/л"' —
т. е. когда в начальный момент
материальная точка смещена из
положения равновесия на ха и от-
отпущена без начальной скорости,
либо ей сообщена в противоположном направлении начальная ско-
скорость, модуль которой удовлетворяет указанному неравенству, мате-
материальная точка асимптотически приближается к положению равно-
равновесия, не переходя через него (см. кривую ///).
Во всех трех случаях движение быстро затухает.
в) n = k — предельный случай. Материальная точка совершает за-
затухающее апериодическое движение: х = е~"? (Q -\- С4)- При t—-оо
х становится неопределенностью типа 0 • оо. Раскрытие неопределен-
неопределенности по правилу Лопиталя дает Итлг=0, что указывает па затуха-
t -¦оо
ние движения.
При заданных начальных условиях движения t = 0 x = x0, х = хл
уравнение движения имеет вид
х = е-1" \х0 -\- (л-„ + пхй) t].
Характер затухания зависит от начальных условий движения. При
лг = лго^О х = ха^>0 движение материальной точки соответствует
кривой /. При лг = лгп^>0, х = хй<^0 (причем | .?„|>ллга) движение
материальной точки соответствует кривой //. При дг = д;0^>0, X—X(f=Q
либо JC0<^0 (причем \хо\<^пхо) движение материальной точки соот-
соответствует кривой ///.
30 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Во всех трех случаях движение быстро затухает.
Решение задач на свободные колебания матери-
материальной точки рекомендуется выполнять в следую-
следующем порядке:
1) пыбрать систему отсчета, взяв начало отсчета в положении
статического равновесия материальной точки;
2) записать начальные условия движения материальной точки;
3) изобразить па рисунке задаваемые силы, приложенные к мате-
материальной точке. Применив принцип освобождае.мости от связей, доба-
добавить силы реакций связей;
4) составить дифференциальное уравнение движения материальной
точки в проекции па соответствующую ось;
5) проинтегрировать дифференциальное уравнение движения, ис-
использовав начальные условия движения для определения постоянных
интегрирования.
Для определения круговой частоты ^и^и периода колебаний Т
и TR пет необходимости в интегрировании дифференциального урав-
уравнения движения. Достаточно, составив дифференциальное уравнение
движения, определить коэффициент kl при координате, коэффициент 'In
при проекции скорости х точки и вычислить круговую частоту и
период колебаний по указанным выше формулам.
При составлении дифференциального уравнения надо изобразить
материальную точку в промежуточном положении, соответствующем ее
положительной координате, предположив при этом, что точка пере-
перемещается в сторону возрастания этой координаты.
После составления дифференциального уравнения движения
(пункт 4) следует рассмотреть условие статического равновесия мате-
материальной точки, совершающей колебания. Использовав это условие,
часто удается сократить ряд постоянных слатаемых в правой части
дифференциального уравнения.
Рассматривая задачу о свободных колебаниях материальной точки
при отсутствии силы сопротивления, можно довести решение до ре-
результата в общем виде и затем подставить в пего численные дан-
данные. Решая же задачу о свободных колебаниях материальной точ-
точки при наличии силы сопротивления, надо подставить численные
данные в составленное дифференциальное уравнение и определить ,ч
и k, так как в зависимости от соотношения коэффициентов п и k
приходится записывать решение уравнения в тригонометрических либо
и гиперболических функциях (случаи малого, большого сопротивлений
и предельный случай).
Задача 244. Груз веса Я=98 г подвешен к концу пружины,
находившейся в начальный момент в покое в педеформированном со-
состоянии, и отпущен без толчка. Найти уравнение колебаний груза,
если известно, что для деформации пружины на 1 см надо приложить
к ней силу, модуль которой равен 14,4 г.
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ
81
Решение. Направим ось х по вертикали вниз, изяв начало от-
отсчета в положении статического равновесия груза.
В начальный момент груз подвешивался к копну Мл иедеформи-
ровапной пружины, следовательно, он находился выше положения ста-
статического равновесия па величину статической деформации пружины
р
Дст=-, где с — коэффициент упругости пружины. Отсутствие
в начальный момент толчка указывает на дниже- у////////////////,
ние без начальной скорости. Итак, начальные
условия движения груза имеют вид:
'Р
'Р
при 1 = 0 х = хо = , х = хй —
(х0 имеет знак минус, так как ось х направлена
по вертикали вниз, а груз и начальный момент
находился над положением статического равно-
равновесия).
Изобразим груз в положении, смещенном от-
относительно нуля па х вниз и предположим, что
он движется в сторону возрастания х, т. е. вниз.
При этом пружина растягивается, и ее упругая
сила F (восстанавливающая сила) равна F= — сД,
где А — смещение конца пружины из ненапря-
ненапряженного состояния,
Следовательно,
т. е. Д^ -- МйМ = Дст
х.
r = —с(Дст-(-
К задаче 244.
Кроме силы F, к грузу приложен его вес Р.
Составим дифференциальное уравнение движения груза в проекции
на ось х:
mx==p<Fx. B)
Применив формулу A), имеем
р
— х = Р — сДст — сх.
C)
Рассмотрим груз в положении статического равновесия. К грузу
приложен его вес Р, направленный по вертикали вниз, и статическая
упругая сила FCT, которая появилась при растяжении пружины на
Аст под действием песа груза, т. е. FCT = cACT. Упругая сила FCT
направлена по вертикали вверх. Из условия равновесия груза следует:
т. е.
D)
82 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Воспользовавшись этим результатом, запишем дифференциальное
уравнение C) в виде
x + k*x = 0, E)
где
Дифференциальное уравнение E) свободных колебаний груза яв-
является линейным однородным уравнением второго порядка с постоян-
постоянными коэффициентами. Его характеристическое уравнение имеет вид
Корни характеристического уравнения мнимые: X, 2 = it^i. Следова-
Следовательно, решение уравнения записывается в виде
х = Q cos kt -f- Ca sin kt. F)
Для определения постоянных интегрирования Q и С4 вычислим:
х = — Qk sin kt-\-Qk cos kt. G)
Подставив в F) начальное условие движения:
находим
p
С\=хй = , Сч = 0.
Уравнение F) движения груза после подстановки значений Q и
принимает вид
р
х = cos kt,
с
где
Воспользовавшись численными данными, получаем:
12i 68^
Итак,
л; = — 6,8 cos 12^ еж,
или, делая множитель при тригонометрической функции положитель-
положительным:
лг = 6,8 sin f 12^ — -|j
в 41
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ
83
Сопоставляя этот результат с уравнением свободных колебаний, за-
записанным в общем виде: х = а sin (kt-\-a), видим, что амплитуда ко-
колебаний а = 6,8 см, начальная фаза колебаний а = ,.- и круго-
круговая частота колебаний k= 12 —.
сек
Период колебаний груза определяется по формуле
_ 2л 2т.
Т= k = J = 0,52 сек.
Эти результаты можно непосредственно получить с помощью фор-
фор6}
у///////'///*//'.
мул:
а = У < + ~k1 = -е= 6.8 см, а = arctg ^ =arctg (- сю) = -]\.
Задача 245. Под действием груза, подвешенного к концу пру-
пружины, пружина получила статическое удлинение Дст = 5 см. Найти
закон колебаний этого груза п.а пружине, если в начальный момент
грузу, находившемуся в положении статического равновесия, была со-
сообщена вверх начальная скорость
-D0 = 28 см/сек.
Решение. Напраним ось х
по вертикали вниз, взяв начало
отсчета в положении статического
равновесия груза. В этом поло-
положении пружина под действием
силы тяжести груза растянута
на Дст.
До сообщения начальной ско-
скорости груз находится в равпоие-
сии под действием двух сил:
веса Р и упругой силы пружи-
пружины /7СТ, направленной по верти-
вертикали вверх (см. рис. а). По мо-
модулю FC1 = сДст, где с — коэффи-
коэффициент упругости пружины. Запи-
Запишем условие равновесия груза:
ИЛИ
A)
К задаче 245.
Начальные условия движения груза имеют вид:
при
= 0 х = х0 —; 0, х = ха = — 28 см/сек
(х0 отрицательно, так как начальная скорость щ, сообщенная грузу,
направлена вверх).
84 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. \Ш
Изобразим груз в промежуточном положении М, соответствующем
его положительной абсциссе х (см. рис. б). При этом пружина ока-
оказывается растянутой на Д == Дст-[- д:, а упругая сила F (восстанавли-
(восстанавливающая сила) — направленной по вертикали виерх. Тогда
Рх = -.сЬх = -с(Ь„ + х). B)
К грузу, помимо упругой силы F, приложен его вес Р. Составим
дифференциальное уравнение движения груза в проекции на ось х:
Воспользовавшись формулами B) и A), получим:
x-Jrk*x = 0, C)
где
к = Уъ-
Вычисление &* непосредственно провести невозможно, так как не-
неизвестен коэффициент упругости с пружины. Подставив в формулу A)
P = mg, представим ее в виде — = -.-. Следовательно,
т дст
(Дст в условии задачи задано).
Интегрирование дифференциального уравнения C) не представляет
затруднений. Составим соответствующее характеристическое уравне-
уравнение К1-\- /г* = 0, откуда lli = ±ki. Так как корни характеристического
уравнения мнимые, то решение уравнения имеет вид
х== С, cos kt -f- C9 sin kt. E)
Для определения постоянных интегрирования С\ и Q найдем:
х = — Qk sin kt -f- dk cos kt. ((i)
Подставим в уравнение E): ^ = 0, jc = ato==O, а в уравнение ((i):
t = 0, х = хй. Тогда С, = 0, С2 = ^°.
(Следовательно, уравнение E) принимает вид
A- = ^°sin^. G)
Использовав численные данные, получим:
=14 СеК > Ъ=-Г4 = -2 СМ-
§ 4| КОЛЕБАТЕЛЬНОЙ ДВИЖЕНИЕ 85
Итак, груз совершает на пружине гармонические колебания, согласно
уравнению х =—2 sin I4t см. Делая множитель при тригонометри-
тригонометрической функции положительным, имеем:
л-= 2 sin (l4/-j-s) см.
Амплитуда колебаний грузя а = 1 см, начальная фаза колебаний
a = ic, круговая частота колебаний k=\A сект1.
Период колебаний Г можно вычислить по формуле
7 04о«ж
Задача 246. Груз веса Р==9,8 кг лежит на гладком горизонталь-
горизонтальной плоскости. Слепа и спранг он соединен с концами двух горизон-
горизонтально расположенных пружин (см. рисунок) с коэффициентами упру-
упругости С| = 4 кг'см, cs = 5 кг-см. В положении равновесия груза обе
К задаче 246.
пружины педсформировапы. Найти уравнение дпижеиия и период ко-
колебаний груза, если в начальный момент он был смещен из положе-
положения равновесия направо на 4 см и ему была сообщена направо на-
начальная скорость 90 см/сек.
Решение. Направим ось х по горизонтали напрапо, взяв па-
чало отсчета в положении равновесия груза.
Запишем начальные условия движения груза:
при t = 0 xo — 4 см, хо = 9О см/сек.
Изобразим груз в промежуточном положении, смещенным по от-
отношению к началу отсчета напрапо на х, и представим, что он дви-
движется в сторону возрастания х, т. е. направо.
При этом правая пружина сжимается на х, и ее упругая сила F^
направлена налево. Одновременно левая пружина растягивается на дг,
и, следовательно, ее упругая сила F] также направлена палево, т. е.
Fix = — с}х> Fax = — с^х.
Кроме двух восстанавливлющих сил F{ и Ег, к грузу приложен
его вес Р и нормальная сила реакции R гладкой плоскости.
86 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VII]
Запишем дифференциальное уравнение движения материальной
точки в проекции на ось дг. В данном случае получим:
x Fix + Fix, или E-X = -(ct+c4x. A)
Как следует из дифференциального уравнения A), обе пружины
можно заменить одной эквивалентной пружиной, коэффициент упру-
упругости которой рапен сумме коэффициентов упругости двух данных
пружин, т. е. с = с,-j-c2. Запишем дифференциальное уравнение A)
в виде
j
где
Составим характеристическое уравнение, соответствующее диффе-
дифференциальному уравнению B): X1 -}- k? = 0, откуда Xli4 = rtAi. Следо-
Следовательно, решение уравнения A2) имеет вид
х = Q cos kt -|- Q sin kt. C)
Для определения постоянных интегрирования Ci и Са вычислим:
х = — Qk sin kt -)- Cqk cos kt. D)
Подставив в уравнение C) t=^0, x = xa> а в уравнение D) ^ = 0,
x = .i~0, получим: Ci = Jf0, Q=:-r-. Тогда уравнение (З) принимает
вид
х = хл cos kt -+- -? sin kt. E)
Положим
jr0 ^ a sin a, -? = a cos a, (f>)
где a и а — постоянные. Тогда уравнение E) колебаний груза можно
представить так:
Амплитуда колебаний а и начальная фаза колебаний а определяются
из системы уравнений F):
= ~°. (9)
Воспользовавшись численными значениями, получим из формулы B):
сек'
§ 4| КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 87
из формулы (8):
из формулы (9):
~ *o ~ 90 -
откуда
a = arctg^- = 0,92
Итак, закон колебаний груза дается формулой
* = 5 sin C0*-j- 0,92) см
причем период колебаний
Задача 247. Решить предыдущую задачу в предположении, что
обе пружины соединены последовательно (см. рисунок).
~г
//////////.
К задаче 247.
Решение. Начало отсчета оси х принимаем в положении ран-
повесия груза при недеформированных пружинах. Ось х направляем
по горизонтали направо. Начальные условия движения остаются преж-
прежними:
при ? = 0 jc = xo==4 см, jf = jfo = 9O cmjсек.
Изобразим груз в промежуточном положении смешенным направо
на х. При этом в пружинах возникает восстанавливающая сила F,
направленная палево.
Вычислим коэффициент упругости с пружины, эквивалентной двум
данным пружинам. Суммарное удлинение пружин равно смещению
груза, т. е. \х\; поэтому
И A)
При смещении груза направо на х каждая из пружин получила удли-
удлинение. Сумма этих удлинений равна \х\, т. е.
88 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Так как каждая из пружин растягивается под действием силы F, то
, , C)
Подставив формулы A) и C) з формулу B), находим:
Величины, обратные коэффициентам упругости (жесткости), называются
коэффициентами податливости. Итак, при последовательном соедине-
соединении пружин податливость эквивалентной пружины равна сумме по-
датливостей данных пружин. Из формулы D) находим коэффициент
упругости с эквивалентной пружины:
E)
В дальнейшем вместо днух данных последовательно соединенных
пружин будем рассматривать одну эквивалентную пружину с коэффи-
коэффициентом упругости с.
При смещении груза направо на х проекция восстанавливающей
силы F, направленной налево, равна
Кроме силы F, к грузу приложены следующие силы: Р — его вес,
/i—нормальная сила реакции гладкой горизонтальной плоскости.
Составим дифференциальное уравнение движения груза в проекции
ни ось х:
mx = Fr или тх = с'Сд х.
х fi + c2
Полученное уравнение перепишем так:
х-\»к?х = 0, G)
где
k = l/—'-*- f. = 14,9 —. (8)
У Ci-\- с, Р сек к '
Нетрудно обнаружить тождественность дифференциального урав-
уравнения G) и дифференциального уравнения B), полученного в преды-
предыдущей задаче. Поэтому можно, минуя промежуточные выкладки, запи-
записать ответ па основании формул G), (8) и (9) предыдущей задачи:
= 14^04 =0.66, я = arctg 0,66 = 0,58 рад.
x = 7,25 sin A4,9/ -f 0,58) см.
§4]
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ
89
Период колебаний
Задача 248. Решить задачу 246 в предположении, что обе пру-
пружины соединены параллельно. Груз считать точечной массой.
Решение. Выбираем начало отсчета, направляем ось х и изо-
изображаем силы Р, R и F u соответствии с решением предыдущей задачи.
F ^
К задаче 248.
Заменяем две параллельные пружины одной эквивалентной пру-
пружиной. При смещении груза направо на х обе пружины также рас-
растягиваются на х, т. е. jcx=xt = x. При этом в пружинах возникают
восстанавливающие силы Fx и /\2, сумма которых равна F, т. е. /•" =
= Ft-4-/\2. Разделив последнее равенство почленно на |лг| и учиты-
F F /¦')
вал, что | дг| = |лг, | = | дг9|, получим: -— = ;—--\--,——,. 'Гак как
то окончательно
-- — с J± = c F" =<
\х\ ' |д-,| " |д-г'
c = Cl-fc,. A)
Таким образом, при параллельном соединении пружин коэффициент
упругости эквивалентной пружины равен сумме коэффициентов упру-
упругости данных пружин.
Последующий ход решения задачи повторяет решение дпух пре-
предыдущих задач.
Использовав формулу A), запишем сразу окончательные результаты:
~ 80 ±.
, кх0 .30-4 4 Л,,,, ,
а = arctg —. — = arctg -т^г- = arctg ¦ = 0,92 рад,
х = 5 sin C0* -f °.92) см,
1=^ = 1* = 0 21 сек.
90
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
(При выполнении конструкции, соответствующей этой задаче, для
каждой из пружин должна быть предусмотрена отдельная направляюшая.)
Задача 249. Груз веса Р=98 г, подвешенный к концу пружины,
движется в жидкости. Коэффициент жесткости пружины с= 10 г/см.
Сила сопротивления движению пропорциональна первой степени ско-
скорости груза: R = $v, где р = 1,б гсек/см. Найти уравнение дви-
движения груза, если в начальный момент груз был смещен из поло-
положения статического равновесия вниз на 4 см и ему была сообщена
вниз начальная скорость vo = 4 см/сек.
Решение. Направим ось х вдоль пружины по вертикали вниз,
взяв начало отсчета в положении статического равновесия груза.
Запишем начальные условия движения
груза:
при ?=0 дг = лго = 4 см,
х = jca = 4 см:сек.
Изобразим груз в положении, при
котором его абсцисса х положительна.
Так как пружина при этом получит
удлинение Д = Дст-)-д:, то проекция
на ось х упругой силы F пружины,
направленной по вертикали вверх, равна
Fх = — с (Дст -|- х). A)
\\\\\^ Предположим, что груз движется в
сторону возрастания абсциссы х. Сила
сопротивления R движению груза па-
К задаче 249. правлена противоположно скорости,
т. е. по вертикали вверх.
Кроме сил F и /?, к грузу приложен его вес Р. Составим диффе-
дифференциальное уравнение движения груза:
тх. = Р 4- Fx -\- Rx.
Подставив в это уравнение Rx = — §vx и значение Fx из формулы (I),
находим:
^ x = P — c\T — cx—$vx. B)
Нетрудно видеть, что
Р-СДст = 0. C)
Действительно, в положении статического равновесия к грузу при-
приложены следующие силы: Р — его вес, направленный по вертикали
вниз, и статическая упругая сила пружины FCI=cAcr, направленная
? *] КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 91
по вертикали пверх. Так как rpy:i находится в равновесии, то Р —
•—FCT = 0, откуда и следует формула C).
Первые два слагаемых в праиой части дифференциального уравне-
уравнения B), на основании формулы C), уничтожаются. Заменив в послед-
последнем слагаемом vx на х, имеем:
kqx = Q, D)
где
Подставив численные значения, находим, что ?=10 сек'1, п =
= 8 сек; таким образом, n<^k (случай малого сопротивления).
Запишем характеристическое уравнение дифференциального урав-
уравнения D): X9 -[- 2лХ -j- /г9 = 0, откуда
X, 9 = — п± /я*^* /
Следовательно, уравнение движения груза имеет вид
х = e-nt (Q cos yfk* — i? t -f- C9 sin /k* — ri* i). E)
Для определения постоянных интегрирования вычислим:
х = e~nt (— Q /k1 — л2 sin /F^-IT* t -\-
— иа cos /Aa — n^ 0 — ne~nt (C, cos /A9 — ла
+ Casin /A9 —n4t). F)
Подставив n уравнение E) ? = 0, x = jc0, а в уравнение F) ? = 0,
х = хл, получаем: С1=хл, Са = - " 7* "^ ¦ Подставив значения С, и
Са в уравнение E), находим:
Преобразуем полученное уравнение. Для этого положим:
.»¦¦„ + n.v0
дг0 = Л sin а, Т7|?з^р = -4 cos а, (8)
где А и а — постоянные. Из (8) легко найги, что
+Щ±^. (9)
92 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Теперь уравнение G) принимает вид
х = Aent sin (/А:2 — и21 -f- a). A1)
Движение груза является затухающим (так как при t — aox — Q)
с круговой частотой
kR = VkT^7i. A2)
Амплитудой колебаний а является коэффициент, стоящий перед
синусом и уравнении A1), т. е.
a — Ae-nt, A3)
где А определяется по формуле (9).
Выше было найдено, что А = 10 сснг1, п^8 сект1. Из условия
задачи следует, что А = 4 см; -?0 = 4 см/сек. Подставив эти чис-
численные значения в формулы (9), A0), A2), A3), находим: Л =7,2 см,
а = 0,59 рад, kR = 6 сек'1, а = 7,2<?-8' см.
Итак, груз совершает затухающие колебания по закону
л; = 7,2е"8'sin F^-1-0,59) CAL A4)
Период колебаний Tr груза равен Т% = ^— = >.- = 1,05 сек. (Если
бы груз совершал колебания при отсутствии силы сопротивления, то
период его колебаний был бы меньше. Действительно, по формуле
Г= - получим 7^0,63 сек)
Амплитуда колебаний груза a = 7,2e~st см убывает по экспонен-
экспоненциальному закону. Допустим, что моменту времени rf соответствует
i-я амплитуда а,-. Следующая амплитуда а,-+1 имеет место через пол-
полпериода, т. е. при tUt = ti-]--—. Следовательно,
ai = 7,2e-\ al+1 = 7,2e-»W = 7,2e [i * К
Разделив а;+1 па а{, находим:
так как 7>=l,05 сек, то ^-' = е~4'2 я« 0,02.
Таким образом, последовательность амплитуд образует бесконечно
убывающую геометрическую прогрессию со знаменателем q«=; 0,0'.2.
Задача 250. Решить предыдущую задачу в предположении, чго
сила сопротивления движению равна Fi = $v, где C = 5,2 гсек/см.
В начальный момент груз был смещен из положения статического
§4] КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИИ 93
равновесия на 4 см и ему была сообщена вверх начальная скорость
•ио = 24О см /сек.
Решение. Начало отсчета оси х по-прежнему расположим в
положении статического раиповесия груза и ось х напраиим по вер-
вертикали вниз. В данном случае начальные условия движения груза
имеют вид:
при ^ = 0 х — хй = \ см, х = ха = — 240 см/сек
(хй отрицательно, так как начальная скорость направлена вверх).
Следуя решению предыдущей задачи, получим дифференциальное
уравнение движения груза (см. формулу D) предыдущей задачи)
х + Чпх-^Рх^О,
где
— V Р ' 19'
Подставив численные значения, получим, что ?=10 сек'1, п =
=--20 сек~'; таким образом, n~^>h (случая большого сопротивления).
Составим характеристическое уравнение: Хг -\- 2rik -\- k* = 0, откуда
Так как и^> k, то корни X, и Хг являются вещественными и отрица-
отрицательными. Уравнение движения груза имеет вид:
A)
Для определения постоянных интегрирования Q и С2 вычислим:
х = qX^ + C2X,e^'. B)
Подставив в уравнение A) t == 0, х = хй, а в уравнение B) tf = 0,
х = Ха, получим систему уравнений:
Хо = С] -р Ci, Xq = С) A.j -)- C%t-z,
откуда
Заменив п уравнении (I) Cf и С2 вычисленными значениями, на-
находим уравнение движения груза
x=T~[(hx,-x(t)e^-(Kix(t-xl>)e^]. C)
Воспользовавшись значениями а, и Ха и гиперболическими функ-
функциями, запишем уравнение дпижения C) в виде:
х=y$=W l(*°+пХй) sh V"Tzr?t +
94
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
Движение груза является апериодическим и притом затухающим,
так как при t—>-оо х —*-0.
После подстанопки в уравнения C) и D) численных значений:
л = 26 сек'1, ?=10 сек'1, хо = 4 см, хо =—240 см/сек, получим:
или
дг = ~ e-W A2 ch 24* — 17 sh 24 t).
E)
F)
Выясним теперь, переходит ли груз положение статического рав-
равновесия. Для этого приравняем х в уравнении E) нулю:
1 .,-26/ /-оси-9
Моменты времени, в которые груз находится в положении статиче-
статического равновесия, определяются из уравнений
= 0 е~*ы* — 0.
Произведя вычисления, найдем, что ^ = 0,037 сек, ti = oo.
Значение г, = 0,037 сек соответствует переходу груза через поло-
положение статического равновесия. Значение га = оо соответствует за-
затуханию движения (см. рисунок).
(Если бы при решении задачи
значение tl оказалось отрицатель-
отрицательным, то это указывало бы на отсут-
отсутствие перехода груза через положе-
положение статического равновесия.)
Итак, в данной задаче груз пере-
переходит один раз через положение
статического равновесия и затем
асимптотически к нему приближается
с другой стороны (больше одного
раза груз через положение стати-
статического равновесия перейти tie может, так как при лг = О получается
только одно значение t, отличное от бесконечности).
Задача 251. Решить задачу 249 в предположении, что сила со-
сопротивления движению равна R = $v, где C = 2 гсек/см. В начальный
момент груз был смещен из положения статического равновесия вниз
на 4 см и отпущен без начальной скорости.
Решение. Как и в двух предыдущих задачах, начало отсчета
расположим в положении статического равновесия и ось х направим
по вертикали вниз. Запишем начальные условия движения груза:
К задаче 250.
при t = 0 X = дг0 = 4 см, х = х0 = 0.
§ 4] КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 95
Аналогично тому, как делалось в двух предыдущих задачах, полу-
получим дифференциальное уравнение движения груза:
где
¦=/:
р. Я— 2р.
Подставив сюда численные значения, получим, что А =10 сек,
п= 10 сек; таким образом, л=? (случай предельного сопротивления).
Составим характеристическое уравнение: X."-j-2яХ.-{-#¦ = 0, откуда
Так как n = k, то Х.,=:Х4 =— п, т. е. корпи характеристического
уравнения являются вещественными и равными. Уравнение движения
груза имеет вид
t -nt. A)
Для определения постоянных интегрирования С, и С9 вычислим:
х = — пС,(?""' -|- СУ""' — nC4e-nt. B)
Подставив в уравнение A) x = jc0 при ?:=0, а в уравнение B)
х = 0 при * = 0, имеем С1 = х0, С9 = ялг0.
Заменив о уравнении A) С\ и Са вычисленными значениями, полу-
получим уравнение движения груза в виде
x = xuent(\^nt\ C)
Движение груза является апериодическим. При t-+oo выраже-
выражение C) оказывается неопределенностью типа 0-со. Для раскрытия
неопределенности применяем правило Лопиталя, предварительно пред-
представив C) в виде
l
Тогда
lim x= Urn -^—7—'= lim -. == lim -—я?-= 0;
/->00 /—00 е / — DO __ („nt\ /—00 Пе
таким образом, при t—у со х—>-0.
Итак, груз, согласно уравнению C), совершает апериодическое
затухающее движение. Подставив численные значения: и^Ю сек~],
хй = 4 см, получим уравнение движения груза
' D)
Выясним теперь, переходит ли груз через положение статиче-
статического равновесия. Для этого приравняем х в уравнении D) пулю
96
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
1ГЛ. VIII
и определим соответствующие значения времени, т. е.
4е-'<"A_(-10/) = 0> откуда ] + 10/,= 0, е~ш* = 0.
Находим: /, = — 0,1 сек, /, =оо.
Отрицательное значение /, указывает на то, что груз не пере-
переходит через положение статического равновесия при значениях ?^>0.
Значение t,1 = oo соответстиует затуханию движения.
Таким образом, картина движения существенно отличается от рас-
рассмотренной в предыдущем задаче — при данных начальных условиях
движения груз асимптотически приближается к положению статического
равновесия, ни разу не переходя через него. Кроме того, благодаря
равенству нулю скорости груза в начальный момент времени, каса-
касательная к кривой x=x(t) п
точке / = 0 параллельна оси t.
4;. В и п у ж д е и н ы е кол е-
5 а и и я материальной точ-
точки. Возмущающая сила.
В теории колебаний возму-
возмущающей называется сила, прило-
приложенная к материальной точке и
заданная как функция времени.
Эта сила большей частью является
непрерывной функцией времени.
Рис. 116. (В некоторых технических зада-
задачах возмущающая сила бывает
машинных агрегатах и механизмах
результате неточной балансировки
в
в
прерывистой и импульсивпоп.)
возмущающая сила возникает
вращающихся частей машин (турбинных дисков, роторов электромо-
электромоторов, маховиков) либо при наличии периодически изменяющееся
силы давления воды, газа или пара в цилиндрах двигателей и т. д.
Простейшей является возмущающая сила S, изменяющаяся но гар-
гармоническому закону: S = И sin (pt-\-Ъ), где //—наибольшая вели-
величина возмущающей силы (амплитуда силы), р — круговая частота
изменения возмущающей силы, 8 — начальная фаза. Н измеряется
и кг, р измеряется и сек'1, Ь — безразмерная величина.
Если возмущающая сила S(i) является периодической функцией
времени (рис. 116) с периодом т = -*-, т. е. S(t-\- T) = S(i), и
удовлетворяет условиям Дирихле (наличие па протяжении одного
периода конечного числа максимумов и минимумом и конечного числа
точек разрыва первого рода), то эту функцию можно разложить в ряд
Фурье:
S(t)=~2-
(Л; cos ipt-\-Bi sin ipi),
Ml
где
р =
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ
cos ipt dt, Bi = j\s @ sin
6
97
здесь i = 0, 1, 2, 3, ...
Вынужденные колебания материальной точки вызываются дейст-
действием системы сил, и составе которой имеются восстанавливающая
сила F и возмущающая сила 5. На рис. 117 ось х на-
направлена вдоль линий действия сил F и S. Начало отсчета
изято в положении статического равновесия материаль-
материальной точки. Сила S условно направлена вниз, однако,
как следует из ее закона изменения, ее направление
является переменным.
Возмущающая сила изменяется по гармоническому
закону: S = Н sin(pt-\-Ъ). Дифференциальное уравнение
иынужденпых колебаний материальной точки имеет вид
m
где
x -f- kqx — h sin (pt -j- i
(.1 1 /; ^
Л. ¦ — . II — .
trt ' иг
m
in
Закон движения материальной точки в случае р ф k p ц7
лается формулой x = xi-{-xi (jc, — общее решение соот-
соответствующего однородного дифференциального уравнения, xq — ча-
частное решение неоднородного уравнения), где
c, =Ci cos kt -\-C« sin A/, Xo= r^ г sin (pt A- 8).
значит,
x = C, cos kt -}- C9 sin kt -L-. _ „ sin (pt -f- 8).
При начальных условиях движения материальной точки, т. е. при
7=0 х = х0, х = хй постоянные интегрирования выражаются фор-
формулами:
Л
i = хй i^ « Sln
л о
ph
k (k- —/Is)
COS i
Окончательно уравнение движения материальной точки имеет вид
х = x« cos kt -(
sin kt — -rs ( sin 3 cos kt -I- Fr cos 8 sin
4 Теоретическая механика, том II
98 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Последний член правой части уравнения движения г., j sin (pt -j- 8)
определяет пыпуждеппые колебания, первые дна слагаемых
хл cos kt -(-- °- sin kt определяют свободные колебания, которые со-
К
вершала бы материальная точка при отсутсткии возмущающей силы,
а слагаемое
— -.-.,- —.-,: sin 8 cos kt -\-%- cos Ь sin kt*
r- —p- v l k j
— колебания материальной точки, имеющие частоту свободных и
нызнаниые возмущающей силой Л\
Вынужденные колебания материальной точки: x<l = -rz, г X
X sin (pt-- Ь) имеют кругонук) частоту р колебаний, ранную крую-
вой частоте р изменения позмущающей силы (т. е. период вынужден-
вынужденных колебаний х.2, нызнапиых возмущающей силой S, ранен периоду
этой силы).
Амплитуда вынужденных колебаний а, т. е. величина наибольшего
динамического смещения материальной точки, раниа а = —; —.
Статическое смещение материальной точки под действием посто-
постоянной силы И равно Д?/ =
Коэффициентом динамичности I. называется отношение ампли-
амплитуды а вынужденных колебаний к статическому смещению Д/?, т. о.
, а
Коэффициент динамичности X определяет, во сколько раз пай-
большее динамическое смещение материальной точки, вызываемое
переменной возмущающей силой .S= /fsin (pt—- о), больше стати-
статического смещения Д«, происходящего под действием постоянной силы,
рапной по величине амплитуде возмущающей силы.
Коэффициентом расстрой/си z называется отношение круговой
частоты р вынужденных колебаний материальной точки к кругоной
частоте k ее свободных колебаний, т. е. г^--.
Коэффициент динамичности X связан с коэффициентом рас-
расстройки z зависимостью Х==—-. —. График этой функции изоб-
изображен на рис. 118. Рассмотрим его подробнее:
1) В случае 0<^г<[1, т. е. при р<^k, происходят вынужден-
вынужденные колебания малой частоты. При этом коэффициент динамичности-
X растет от единицы до бесконечности.
КОЛЕВЛТР.ЛЫЮЕ ДВИЖЕНИЕ
2) При г-И, т. е. при p-yk, Х-+00. При p=k, т. е. при
раиенстие круговых частот свободных и иынужденпых колебаний,
имеет место явление, называемое резонансом. При резонансе пере-
переменная амплитуда иынужденпых колебаний неограниченно возрастает
(в реальных задачах при учете силы сопротивления движению ампли-
амплитуда является конечной).
3) В случае z^>\, т. е. при р^> k, происходят вынужденные
колебания большой частоты. При 2->оо коэффициент динамично-
динамичности \ убывает до нуля.
В случае резонанса, т. е. при p = k, частное решение Хц неодно-
неоднородного ураипения x-\-k'sx = h sin (pt-i-Ь) имеет вид: —- ' t cos (kt-\ 8).
2k
Pnc. 118.
Рис. II!).
При резонансе переменная амплитуда вынужденных колебаний
a=-r.-r-t растет прямо пропорционально времени (рис. 119).
Уравнение движения материальной точки п случае резонанса, т. е.
при р = к, имеет вид
х = х0 cos kt-\—г0 sin kt-]- :-.a cos Ь sin kt — - t cos {kt -j- 8).
2k
Последнее слагаемое спрана —-,.~ t cos (kt -}- 8) определяет ны-
пужденпые колебания, первые дпа слагаемых х0 cos kt ~\--u~ sin kt
соответствуют свободным колебаниям, которые имели бы место при
отсутствии возмущающей силы, слагаемое ,-,.,, cos 8 sin lit определяет
колебания, вызванные возмущающей силой, имеющие круговую ча-
частоту свободных колебаний.
4*
100
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
Сдвиг фаз между возмущающей силой и вынужденными коле-
колебаниями материальной точки (рис. 120):
1) В случае вынужденных колебаний малой частоты, т. е. при
p<C_k, сдвиг фаз е между возмущающей силой 5 и вызванными ею
вынужденными колебаниями jc2 равен нулю. (Возмущающая сила
и вынужденные колебания одновременно достигают наибольших, наи-
наименьших значений и обращаются
в пуль.)
—^——• 2) В случае резонанса, т. е.
при p^k, сдвиг фаз е между
возмущающей силой .S и выну-
вынужденными колебаниями х$ ра-
равен ~ (вынужденные колебания,
вызванные возмущающей силой,
отстают по фазе от этой силы
О
Р<К
Р>к
па-2
Ч 3) В случае вынужденных ко-
Рис. 120. лебаний большой частоты, т. е.
при р ^> k, сдвиг фаз s между
возмущающей силой 5 и вынужденными колебаниями дг9 равен я:
(вынужденные колебания отстают по фазе от соответствующей воз-
возмущающей силы на ic).
Рассмотрим случай, когда возмущающая сила 5@ является
периодической функцией времени периода Т. Разложим ее в ряд
Фурье:
5@=
«- cos
sin
г т
где p = -j,-, At = -f~ \ S(t) cos iptdt, 5; = ^- \ 5@ sin Ipt dt;
о о
здесь 1 = 0, 1, 2, 3, ...
Тогда дифференциальное уравнение вынужденных колебаний ма-
материальной точки имеет вид
оо
= -о—° -\ 7 (A.cosiptA-BiSmipt).
Уравнение движения материальной точки при р ф k будет:
х = лг, -}- хъ где хх — общее решение соответствующего одно-
однородного дифференциального уравнения, дга — частное решение
§41 КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 101
неоднородного уравнения:
л:, = d cos kt -\- C9 sin kt,
00
U. , 1 \1 / Д: ... Bl
Х* = 2 V + ~т 1 [T^W C°S lf>t + 1^=7V
При начальных условиях вида: х = х0, х = хй при t = 0 посто-
постоянные интегрирования имеют значения:
I Г_А ' Р Ш
*~ k m k Y
Окончательно уравнение движения материальной точки запишется
r форме: ю
cos г^ + I^Tv sin ipt) •
{y v )
n
Здесь -- У (-т^—тз-5- cos ipt -f- -^—^ sin ipr1) — вынужденные ко-
H* Ав^ \ /t I р К IP I
лебания материальной точки; х9 cos kt -\- —г- sin kt — свободные коле-
колебания материальной точки, которые имели бы место в случае отсут-
отсутствия возмущающей силы;
\2 с ' т ^щ, йа — i3/9J/ \mk ?d k —tp 1
r = I i = I
— колебания материальной точки, вызванные возмущающей силой и
имеющие круговую частоту свободных колебаний.
При k = ip, где 1=1, 2, 3, ..., наступают резонансные колеба-
колебания /-го порядка, т. е.:
при k=p — резонансные колебания первого порядка,
при k = 2p — резонансные колебания второго порядка и т. д.
При одинаковом порядке коэффициентов At и Bt по мере повы-
повышения порядка резонансных колебаний амплитуды их убывают. По-
Поэтому в таких случаях наиболее опасными являются резонансные
колебания низших порядков.
Если возмущающая сила задана тригонометрическим полиномом,
т. е. рядом Фурье, оборванным при i = n, то число резонансных коле-
колебаний равно п.
102
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОМКИ
[ГЛ. VIII
Влияние силы сопротивления, пропорциональной скорости, на
вынужденные колебания материальной точки.
Пусть материальная точкг массы т совершает колебания под дей-
действием восстанавливающей силы F, возмущающей силы 5 и силы
сопротивления движению, пропорциональной
скорости тонки R=—|Зф, где 6 — постоян-
постоянный коэффициент. Ось х направлена вдоль
линии действия сил F и S (рис. 121). На-
Начало отсчета взято в положении статического
равновесия материальной точки. Возмущаю-
Возмущающая сила изменяется по гармоническому за-
закону 5= И sin (pt-{- 3).
Дифференциальное уравнение нынуждеп-
пых колебаний материальной точки при на-
наличии силы сопротивления, пропорциональ-
пропорциональной скорости, имеет вид
х -'- 2)ix -j- klx = h sin (pt -\ - 8),
--?
'/У////////' ////
V77///////////
где 2п=-ш~, k*= — h=- -
hi ' in ' m
X
Рис. 121.
Тогда уравнение движения материальной
точки будет: x = x1-\-xi, где xt — общее
решение соответствующего однородного диф-
дифференциального уравнения; х* — частное решение неоднородного
дифференциального уравнения.
Решение xi в зависимости or соотношении n<^k, n~^> k,
ti = k получается в одном из рассмотренных выше видов (см
стр. 76—79).
Частное решение х2, определяющее вынужденные колебания, равно
где
с4 == сг sin (pt — 8 — е),
h
2пр
Введя для сокращения записи обозначение
Л
/@=-
^=- sin (pt -f S — О.
получим уравнение движения материальной точки в следующем'окон-
следующем'окончательном виде:
x—
e~nl (С, sin У& — пЧ -\- С, cos Vk* — ri21) -f A (t) при п < k;
e-ru{Cl~{-Cil)-\- A (l)
при л = А;
1фи „ > k
К0ЛЕВАТЕЛ1Л10Е ДВИЖЕНИЕ
103
Постоянные интегрирования Су и С4 определяются по заданным
начальным условиям движения: при ? = 0 х = х0, х=^хй.
Так как во всех трех случаях {n<^k, n = k и n^>k) в иырл-
жение х, пходит е~т', то движения Х\ быстро затухают, в то иремя
как амплитуда вынужденных колебаний а = — |— -, кру-
круги/?
k* — t>*
говая частота вынужденных колебаний р и сдвиг фаз e = arctg
от иремени не занисят.
Круговая частота р вынужденных колебаний jc2 равна круговой
частоте р возмущающей силы 5, т. е. имеет место раиепство перио-
периодов Т вынужденных колебаний и позмущающей силы, вызывающей
вынужденные
нолебиния
мппоп чистоты
Р<к
ВынужОенные колебания
Ьальшой частоты
I*
Рис. т.
эти колебания. Это означает, что сила сопротивления движению, про-
пропорциональная первой степени скорости, не влияет на пеличину кру-
круговой частоты вынужденных колебаний материальной точки.
Переменная амплитуда а вынужденных колебаний и случае отсут-
отсутствия силы сопротивления неограниченно возрастала при резонансе,
т. е. при p = k, по закону: a — r-t. При наличии силы сопротив-
сопротивления, пропорциональной скорости, амплитуда а. постоянна и painia:
h
"рез-
' ''ink •
Зависимое гь коэффициента динамичности
стройки z имеет вид (рис. 122)
от коэффициента рас-
расгде v=?-.
104
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
1ГЛ. VIII
Каждая из кривых, изображенных на рисунке, соответствует
определенному значению v. С. увеличением v, т. е. с увеличением
силы сопротивления, коэффициент динамичности \ и, следовательно,
амплитуда вынужденных колебаний уменьшаются.
В зоне вынужденных колебаний большой частоты, далеко за
резонансом (например, при 2~>3), все кривые, независимо от вели-
величины v, почти сливаются. Следовательно, в этой зоне при вычисле-
вычислении амплитуды вынужденных колебаний силой сопротивления можно
пренебречь.
Максимум коэффициента динамичности \ имеет место не при ре-
резонансе; он несколько смещен в зону 2<М:
При ЭТОМ Хтах =
При
2ч ]/ 1 — vJ
-^y- функция ).=/(.?) монотонно убывает.
Сдвиг фаз е = arctg т^—* между возмущающей силой и выз-
вызванными ею вынужденными колебаниями остается при резонансе
^у=0^^0.05
71
О
Вынужденные
нолебания
малой частоты
Вынужденные, колебания
большой частоты
Рис. 123.
неизменным: е = -^-. Сдвиг фаз с возрастанием v, т.е. силы сопротив-
сопротивления, увеличивается в зоне вынужденных колебаний малой частоты
и убывает в зоне вынужденных колебаний большой частоты (рис. 123).
Рассмотрим случай, когда возмущающая сила S(t) является
периодической функцией времени периода Т. Разложим ее в ряд
Фурье:
S(t) = у Ао-\- У (At cos ipt-f- Bt sin ipt),
§41 КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 105
где
т т
р = -?-, Ai=j С S(t) cos iptdt, Bi = j [ 5@ sin ipt dt;
здесь i = 0, 1, 2, 3, ...
В этом случае дифференциальное уравнение вынужденных коле-
колебаний материальной точки при наличии силы сопротивления, про-
пропорциональной скорости, имеет вид
оо
а-+inx + tfx=~ A -f -~ 2 (Аicos ДО + Bisin ?)¦
Тогда уравнение движения материальной точки будет: дг = дг,-1-
J-jc2, где xt — общее решение соответствующего однородного диф-
дифференциального уравнения; х^ — частное решение неоднородного
дифференциального уравнения.
Колебания xt во всех трех случаях: n<^k, n = k, n^>k зату-
затухают (c.v. стр. 76—79).
Вынужденные колебания, определяемые частным решением хь
происходят по закону:
Хъ = -х -f- У \ai cos lP*~T ^i S1n ipt),
где
m (й2 — i'p1)* + 4n!ispa '
_ 1
m {k2 — /V)= + 4n!i"/»! '
При k = lp наступают резонансные колебания г-го порядка. При
этом
а. = L_i_ ft =
1 m 2inp ' ' m 2inp '
Решение задач на вынужденные колебания мате-
материальной точки рекомендуется проводить в сле-
следующем порядке:
1) пыбрать систему отсчета, взяв начало отсчета в положении
статического равновесия материальной точки;
2) записать начальные условия движения материальной точки;
3) изобразить на рисунке силы, приложенные к материальной
точке;
4) составить дифференциальное уравнение движения в проекции
на соответствующую ось;
106 ДИФФЕРЕНЦИАЛЬНЫЕ УРЛПНГ.НИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
5) проинтегрировать дифференциальное уравнение движения, ис-
использовав начальные условья для определения постоянных интегри-
интегрирования.
Материальную точку следует всегда изображать в промежуточном
положении, соответствующем ее положительном координате, и пред-
предположить, что точка дпижегся в сторону иозрастапия координаты.
При составлении дифференциального уравнения движения следует
воспользоваться условием статического равновесия материальной
точки. Это часто приводит к уничтожению ряда постоянных сла-
слагаемых в правой части дифференциального уравнения движения.
Если составленное дифференциальное уравнение движения тож-
лестненно одному иа выше написанных уравнений, то, не интегрируя
эго уравнение, можно сразу получить результат по указанным фор-
формулам.
Проводя решение задачи в общем виде, следует определить чис-
численные значения коэффициентов дифференциального уравнения, так
как вид частного решения уравнения зависит от соотношения между
круговыми частотами вынужденных и свободных колебаний, т. с.
между р и k.
Так, интегрируя дифференциальное уравнение движения х~-/г1х-==
— h sin (pt-\- 8), надо:
а) при отсутствии резоп,знса, т. е. при р ф k, записать частное
решение хч в виде xt = /I sin (pt -j- 8) -j- В cos (pt -j- 8) (очевидно,
что В = 0);
6) при наличии резонанса, т. е. при р = к, искать частное реше-
решение х2 в виде л;3= At sin (pt-\- 8)-|-/tf cos (pt-\-b).
Интегрируя дифференциальное уравнение движения х-\- 1пх-[-
-J- k*x = h sin (pt-\- 8), независимо от соотношения между р и к,
надо искать частное решение х^ в виде
хг = A sin (pt -\- Ь) -J-- Б cos (pt -j- 8).
При решении задач, в которых требуется определить условие,
обеспечивающее попадание материальной точки в резонанс, не сле-
следует интегрировать дифференциальное уравнение движения. Для
этого достаточно, воспользовавшись составленным дифференциальным
уравнением движения, определить круговые частоты свободных и
вынужденных колебаний и приравнять их друг другу.
Задача 252. На рисунке изображена схема прибора для изме-
измерения давлений. К ползуну А веса Р-=196 г прикреплена стрелка В,
отмечающая показания иа неподвижной шкале С. Ползун А, при-
прикрепленный к концу пружины D, перемещается по горизонтальной
идеально гладкой плоскости. К ползуну приложена горизонтальная
сила S=Hs\npt, где //=1,6 кг, ^ = 60 сек'1. Коэффициент упру-
упругости пружины равен с = 2 кг/см. В начальный момент ползун на-
находился в полое в положении статического равновесия.
КОЛЯПАТЕЛЬНОЕ ЛВИЖРНИЕ
107
Определить: уравнение дпижения стрелки В в случае отсутствия
силы сопротивления, коэффициент динамичности и коэффициент рас-
расстройки; уравнение движения стрелки И при наличии силы сопро-
сопротивления, пропорциональной перной степени скорости ползуна:
R = «к», где р = 25,6 кг • сек/см.
Решение. Направим ось х параллельно оси пружины по го-
горизонтали направо, взяв начало отсчета в положении ползуна, соот-
соответствующем педеформированной пружине.
Начальные условия движения ползуна имеют вмд:
при t =
х=0, х =
Изобразим ползун сметенным из положения равновесия вправо
на х. При этом пружина растянется па Д = дг.
А/
К задаче 252.
К ползуну приложены следующие силы: Р—пес ползуна, N —
нормальная сила реакции горизонтальной плоскости, сила 5, F— уп-
упругая сила растянутой пружины, проекция которой па ось х равна
Fx = -r-cx.
Составим дифференциальное уравнение движения ползуна в проек-
проекции па ось х:
пли
откуда
х-{-k-x=k sin pt,
где k=\/ Щ , 1г = -~~. В данном случае k =100 сек'1, h =
= 8000 см-сек-*.
Уравнение A) является линейным неоднородным дифференциаль-
дифференциальным уравнением второго порядка с постоянными коэффициентами.
108 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Общее решение уравнения равно сумме xt — общего решения соот-
соответствующего однородного уравнения
Я + к*х = 0 B)
и х9 — частного решения уравнения A), т. е.
x = xl—xi. C)
Составим характеристическое уравнение: г* -\- ft* = 0, откуда
г19 = ±?г. Следовательно,
хх = С, cos kt -\- Q sin kt. D)
Для определения вынужденных колебаний, т. е. мастного реше-
решения хг, следует предварительно выяснить соотношение между кру-
круговыми частотами свободных и вынужденных колебаний. Так как
?=100 секгх, а /? = 60 сек~\ то p<^k, т. е. имеют место выну-
вынужденные колебания малой частоты. При этом частное решение х*
надо искать в виде
xq = A sin pt -j- В cos pt, E)
где А и Я — коэффициенты, подлежащие определению. Подставив jc2
в дифференциальное уравнение A) и приравняв коэффициенты, стоя-
стоящие в левой и правой частях уравнения при соответствующих три-
тригонометрических функциях, находим:
д — ? о — о
Следовательно, частное решение, записанное в формуле E), прини-
принимает вид
l' ((J)
Воспользовавшись формулами D) и F), запишем общее решение
по формуле C):
х = С, cos kt -\- C2 sin kt -j- ft!! _ -2 sin pt. G)
Для определения постоянных интегрирования Ct и С2 вычислим:
х = — Cxk sin kt -f C%k cos kt -\- j?~-j cos /;?. (8)
Подставив в уравнение G) ? = 0 лг = 0, а в уравнение (8) —
? = 0 jf = O, находим: С, = 0, С.2 = — ~ й»-ц— 2 ¦
Итак, уравнение движения ползуна и, следовательно, стрелки В
имеет вид
x = ~Pk W^ sin ki + ?^ sin PL
§ 41 КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 109
Подставив численные значения p = QO сект1, ? = 100 сенг1, h —
= 8000 см • сек~\ получаем:
х = (— 0,75 sin 100^-|-l,25 sin 60?) см. (9)
Первое слагаемое соответствует колебаниям ползуна со стрелкой
с частотой свободных колебаний, вызванным действием возмущаю-
возмущающей силы S, второе слагаемое определяет вынужденные колебания.
(Следует обратить внимание на ошибку, которую часто совер-
совершают при вычислении постоянных интегрирования С, и Q, подстав-
подставляя начальные условия движения в общее решение D) однородного
уравнения вместо того, чтобы подставить их в общее решение G).)
Определив по формуле (9) отклонение стрелки, а, следовательно,
ползуна А и конца пружины D, можно найти величину упруго»
силы F, умножив смещение х на коэффициент упругости пружины с.
Так как с = 2 кг/см, то
F = (— 1,5 sin lOOf-f 2,5 sin GO?) кг.
При наличии силы сопротивления движению, пропорционально!)
скорости ползуна, колебания с частотой свободных колебаний зату-
затухают и стрелка прибора регистрирует чисто вынужде »ie колеба-
колебания: х4=т-т; ^ sm pt. Данный прибор предназначен для определе-
д- р
пия величины силы S=fi%\n pt. Получив показание стрелки х.г на
шкале, т. е. величину смещения конца пружины, можно вычислить
величину силы S,, указываемую прибором, умножив jca на коэф-
коэффициент упругости с пружины
he
Si = сх2 =?пгр- sin P*-
Погрешность прибора Д5 определяется разностью между ^ и S,
т. е.
bS=Si — S = kJ_ а sin pt — Hsm pt.
j j
Учитывая, что hc = c — — Hk1, находим:
m
bS^^-j^ sin pt.
Относительная погрешность прибора будет
71 Т k-—ps '
Относительная погрешность прибора незначительна при условии:
—-—.ji^O. Это имеет место, если k^p. Учитывая, что А=1/ - ,
К "^~ р f lit
1 IО ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОМКИ [ГЛ. V[|[
приходим к выводу о необходимости установки пружины с большим
коэффициентом жесткости с.
Для нахождения значения коэффициента динамичности X посмоль-
зуемся формулой Х. = а/Д//. Так как а= 1,25 см и Д//= Н\с= 1,6/2 =
= 0,8 ел/, то \ =1,56. Это означает, что амплитуда вынужденных
колебаний более чем к полтора раза превышает статическое смеще-
смещение. Соответствующее значение коэффициента расстройки z будет
.z =/>/& = 60/100 = 0,6.
Решим эту задачу с учетом силы сопротивления движению R =
= 3г>, где 3 = 25,6 кг-секшем, v — скорость ползуна А.
К силам» ранее приложенным к ползуну, добавляется сила сопро-
сопротивления движению R, направленная п сторону, противоположную
скорости движения. Считая, что ползун А движется в сторону воз-
возрастания абениссы х, направляем силу R по горизонтали налево.
Следовательно,
тх = Sx^-Fx-\-Rx
или
откуда
х-\- 2пх-\-Рх = h sm pt, (Щ
где
ft= 1^ = 100 сек~\ n = ^jy = 64 сект1, h=-^ = 8000 см/сек\
р=Н0 сек'1.
Итак, n<^k и ^
Общее решение дифференциального уравнения A0) имеет вил:
х==х,-\-хь (II)
где Х| — общее решение соответствующего однородного уравнения
0, A2)
a Xi — частное решение неоднородного уравнения.
Характеристическое уравнение, соответствующее A2), имеет вид
Г2 _[_ 2nr -\- k* = 0, откуда г = — п± У г? — К1. Так как я<&, то
корни получаются комплексными: rI|S = — nrtij/^ — ril. Находим
общее решение однородного уравнения A2):
х, = e~nl (С, cos Vkl — ri1 f — Q sin Уkr — n11). A3)
Учитывая, что р<^k, ищем частное решение лг9 в виде
хг = A $mpt-\-B cos pt. A4)
§ 41 КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 1 1 1
Вычислив хъ x.h подставив их вместе с х.2 в дифференциальное
уравнение A0), приравняв коэффициенты, стоящие и левой и правой
частях уравнения при синусе и косинусе, находим:
Решив эту систему уравнений, определим:
А h(k°- —Р2) г, '2nph
П (k-— р-)-+4п-р- ' (ft3 р*)*+4п*р3
и, внося значения Л и И в формулу A4), имеем:
h (кг—р-) . , Inpli , .,_.
X* = -Th« —¦>,., , , ., , МП pt ~ -—, ~ —— COS pt. A 5)
Теперь, воспользовавшись формулами A3) и A5), можно общее
решение дифференциального уравнения A0) запислъ в виде
х = е~п' (С, cos [/>' _ я» t — С2 sin \'?^~ril i) -L
-:--rn гт^— . ., .,- sin pt -,t, .7-f—„ , .. cos pt. AЛ)
Для опрелеления постоянных интегрирования С, и Ct, вычислим:
x = — ne-nt (С, cos j/> — л" t - C, sin У k* — «a 0 г
-f l/"^2"^^ е~я' (— C, sin ]/ F^Tw'11 ;•- С4 cos ^A2 — я* О -f
bin pt, A 7)
Подставив в уравнение A6) f = 0, x = 0, а в уравнение A7)
=0, л" = 0, получим систему уравнений:
(A;2 - р-)'- -
1 ' r ' (ft- — р-у-{Ап-р* '
откуда
' Inph
s)* + 4n2pa ' '" [(й*
Cl (ft8—/>s)*
Подставив эти значения С\ и С2 в уравнение A6), находим иско-
искомое уравнение движения ползуна А и, следовательно, стрелки В:
л-п/
5 i
и
К*'
^- К*' - АО ^п ^ - Inp cos ^]. A8)
112 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VUI
Введем обозначения:
Л(й2— р») Inph
' == a COS е, -—; г- ¦ = a sin e.
р^у\Ап-р' (ft—/ЯJ -\ 4п2р3
Теперь уравнение A8) принимает вид
х = be~nt sin fl/Ф" — nlt -f- a) -f- a sin (pt — s), A9)
где
л РЛ 1 Ли B"" + />2 — fe2)" i 2n /ft-' — па
= arctg-
Y(k"—р2)* -\- Ап*р* k2—р1
При численных значениях п = 64 сек'1, k= 100 сек, р^60 сек~1,
h = 8000 см/сек1*, получим: ? = 0,63 см, a =1,74 pad, a = 0,8 см,
? = 0,87 pad.
Следовательно, уравнение движения ползуна А и стрелки В
имеет вид
'sinG6,8?-f !>74)-|-0,8sinF0f — 0,87)] см. B0)
Первое слагаемое уравнения B0) определяет колебания стрелки
с частотой свободных колебаний, которые быстро затухают благо-
благодаря наличию множителя е~ш.
Второе слагаемое уравнения B0) определяет вынужденные коле-
колебания стрелки В.
Вторые слагаемые уравнений (9) и B0) соответственно определяют
вынужденные колебания стрелки В при отсутствии и при наличии
силы сопротивления движению. Из сопоставления полученных резуль-
результатов следует, что сила сопротивления движению па круговую ча-
частоту вынужденных колебаний не влияет. Как в формуле (9), так
и в формуле B0) р = 60 сек'1; амплитуда вынужденных колебаний
при наличии силы сопротивления стала меньше. Она уменьшилась
от 1,25 см до 0,8 см; сила сопротивления движению создала Сдвиг
фаз между возмущающей силой и вынужденными колебаниями: вы-
вынужденные колебания отстают по фазе от возмущающей силы па
? = 0,87 рад.
Задача 253. Определить уравнение вынужденных колебаний
стрелки прибора, описанного в предыдущей задаче, если возмущаю-
возмущающая сила .S изменяется согласно уравнению S^Hs'mpi, где Н =
= 1,6 кг, р = 100 сек. Решить задачу в двух вариантах: при от-
отсутствии силы сопротивления дпижению; при наличии силы сопро-
сопротивления движению R = $v, где C = 25,6 кг-сек/см, v — скорость
ползуна А со стрелкой В.
§ 4\ КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ 113
Решение. Воспользуемся дифференциальным уравнением A)
предыдущей задачи:
х -f- k*x = h sin pt, A)
где
, -. /"'eg' -i /000 ¦ <jxo , пп , пп ,
k=y -pr=y —щ—= 100 ceK > -» = 1°° ceir\
. Jig 1600-980 ...-. _2
h = -y = —jTjQ— = 8000 см • сек \
Так как ^ = А=100 сек~\ то имеет место явление резонанса.
В случае резонанса, когда p = k, частное решение дифферен-
дифференциального уравнения A) надо искать в виде
xt= At sin pt-\-Bt cos pt. (Г)
Для определения коэффициентов А и В подставим лг.2 в урав-
уравнение A). Для этого вычислим:
хг = A sin pt -j- Apt cos pt 4- В cos pt — Rpt sin pt,
x.i = lAp cos pt — Ap1 sin pt — Wp sin pt — BpH cos pt.
Приравняв коэффициенты в левой и правой частях уравнения A)
при синусе и косинусе и использовав, что p = k, получим —1Bp = h;
1Ар = 0.
Решив эту систему уравнений, имеем:
Теперь уравнение (Г), определяющее вынужденные колебания
стрелки В, принимает вид
h . .
х% = — ,у t cos pt.
Подсчитав численные значения и введя сдвиг фаз, находим:
jcs=40*sinfl00f—-!; j он. B)
Переменная амплитуда вынужденных колебаний при резонансе
а = 40? см. растет прямо пропорционально времени, что представляет
угрозу сохранности прибора и той машины, на которой прибор смон-
смонтирован (так как в действительности имеется, хотя бы небольшая,
сила сопротивления движению, то уравнение вынужденных колебаний
оказывается иным. См. ниже второй вариант решения задачи).
Круговая частота вынужденных колебаний раина круговой частоте
возмущающей силы: р= 100 сек~1. Вынужденные колебания отстают
но фазе от возмущающей силы на -. ,
114 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Рассмотрим эту задачу в случае учета силы сопротивления дни-
жепию R—$v, где р^25,6 кг¦ секjсм.
При этом можно воспользоваться дифференциальным уравне-
уравнением A0) предыдущей задачи:
x-\-'2nx~k'lx=hs\upt, C)
где
/» = А=100 сек~\ п ==^ = 64 сек'1, h = 8000 см • сек~г.
Для нахождения нынуждеипых колебаний стрелки прибора ищем
частое решение в виде
х.1= Л sin pt-\-D cos pt. D)
Для определения Л и В вычислим х% и л\2:
х.г = Ар cos pt — Вр sin pt; х.г = — Ар1 sin /tf — Вр11 cos pt.
Поцсгавив эти значения в уравнение C) и приравняв коэффициенты
и левой и правой частях ур,1внепия при синусе и косинусе, находим:
А (Аг — р2) — 2Впр = А; В {kl — р*) -]- 2.4и/» = 0.
Решив эту систему уравнений, имеем:
h{k'—p-) „ _ , 2nph
Подставив эти значения .4 и В в уравнение D), получим:
!i(ks—p-) . , 'Inph , ,..
Для определения амплитуды а и сдвига фаз е между вынужден-
вынужденными колебаниями и возмущающей силой введем обозначения:
h(ka—ps) 'Inph . ...
— /.= й cos s, —r^ „ ; ., 0 = a sin a. F)
Теперь уравнение E) примет вид
jc.2 = a sin (pt — s), G)
где а и s определяются ил системы уравнений F):
\f{k-—p~)" -\- 4nsp* bk---p
ае при резонансе р
е= ^- и уравнение G) принимает вид
В данном случае при резонансе p = k. Следовательно, а = А" ,
§41
К0ЛЕГ,АТГЛ1>К0Е ДВИЖЕНИЕ
115
При численных значениях:
= 8000 см-сек'1, находим:
п — 64 сек'\ р=100 сек~\ h =
xt = 0,625 sin A00t — ~ \ см.
(8)
Из сопоставления формул B) и (8) следует, что в то время, как
при отсутствии силы сопротивления переменная амплитуда вынужден-
вынужденных колебаний стрелки В при резонансе росла прямо
пропорционально времени: а = 40? см, при наличии
силы сопротивления движению R = 25,6 т/ кг, амплитуда
оказывается величиной постоянной, равной 0,625 см.
На величины круговой частоты вынужденных коле-
колебании и сдвига фаз сила сопротивления при резонансе
не влияет.
Задача 254. Для регистрации вибраций железнодо-
железнодорожного вагона к потолку вагона подвешена пружина,
коэффициент жесткости которой равен с = 10 г/см.
К концу пружины подвешен груз веса Р=98 г со стрел-
стрелкой В (см. рисунок). При вертикальных колебаниях
нагона, т. е. точки А, начинаются колебания груза по
отношению к вагону, которые регистрируются движе-
движением стрелки ндоль шкалы, изображенной на стене
вагона. Написать уравнение движения стрелки В, опре-
определить коэффициент динамичности и коэффициент рас-
расстройки, если вагон совершает колебания согласно
уравнению ? = я sin pt, где а = 0,5 см, уэ^16т сск~1. ^ за[лчс 254
В начальный момент груз находился в покое в поло-
положении статического равпоиесия. Силой сопротивления движению
груза пренебречь.
Р е ш е п и е. Введем ось х, связанную с неподвижной средой.
Начало отсчета выберем в положении статического равновесия груза.
Ось х направим по вертикали вниз. Запишем начальные условия дпи-
жепии груза, отнесенные к неподвижной оси х:
ППЫ / ^^ О V "V* — (| V" — V* ^^— Г\
I l^rl L \J -X —— _Л Q - •—' *-Jj -*• -Л' () W,
Изобразим груз в промежуточном положении, смещенном из начала
отсчета па х вниз. Если вагон неподвижен, то в этом положении
груза пружин;! была бы растянута на Дст-f-дг. Однако при этом имеет
место смещение вагона и, следовательно, точки А на ? вниз, поэтому
удлинение Д пружины оказывается меньше на величину I, т. е. Д* =
К грузу приложены две силы: его вес Р и упругая сила F пру-
пружины, направленная, в связи с растяжением пружины, по вертикали
вверх, причем
Fr = — сД,= —с (Д.,-г- х — *). (I)
116 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. Vlir
Составим дифференциальное уравнение движения груза в проекции
на ось х: mx = P-\-Fx. С учетом формулы A) запишем:
тх = Р — сДст — сх-\- с\.
Так как в положении статического равновесия л; = .? = ? = О, то
Р — сДст=0 и дифференциальное уравнение движения принимает вид
тх = — сх-\- с\.
По условию 1 = a sin pt. Поэтому
тх ~\-сх = са sin pt. B)
Мы получили дифференциальное уравнение вынужденных колебаний
груза при наличии возмущающей силы са sin pt = ct Таким образом,
колебания вагона и, следовательно, точки А привеса пружины ока-
оказались источником возмущающей силы, приложенной к грузу. Пере-
Перепишем дифференциальное уравнение B) в виде
X-\-kqx = h sin pt, C)
где
k= Уcjr= 10 сек'1, р=\6к сек~\ h = M^=50 см-секЛ
Так как p^>k, то имеют место вынужденные колебания большой
частоты. Проинтегрировав дифференциальное уравнение C), мы поду-
подучим уравнение движения груза по отношению к неподвижной оси х,
не связанной с вагоном: х = хх -f- xit где Х\ — колебания груза,
определяемые общим решением соответствующего однородного урав-
уравнения
x-\-k9x = 0, D)
а хг-—вынужденные колебания груза, определяемые частным реше-
решением дифференциального уравнения C).
Решив уравнение D), находим:
xt = Q cos kt -f- C9 sin kt. E)
Частное решение хь ввиду отсутствия резонанса, ищем в виде
дг2 = A sin pt -\- В cos pt, (б)
где А и В подлежат последующему определению. Вычислив jc2, Хч,
подставим лга, х.г, х.ь в уравнение C). Приравняв затем коэффициенты,
стоящие в левой и правой частях уравнения C) при синусе и коси-
косинусе, найдем:
§41 КОЛЕБАТЕЛЫЮЕ ДВИЖЕНИЕ 117
Следовательно, уравнение F) принимает вид
G)
Запишем общее решение дифференциального уравнения C): .v =
= X!-)-д:4. Воспользовавшись формулами E) и G), находим:
х = Су cos kt -f Ct sin kt -j- k, ^_ a sin pt. (8)
Для определения постоянных интегрирования С\ и Са вычислим:
х = — Cjk sin Atf -|- Qk cos to + ьГ^-2 cos Рг- (9)
Подставив п уравнение (8) ^ = 0, .\; = хо = О, а в уравнение (9)
/ = 0, х^хо = О, определим:
Теперь уравнение движения стрелки принимает вид
¦« = — o^=^sinW+F=7"sin^-
Использовав численные данные, получим:
л; = @,1 sin 10/ — 0,02 sin 16^0 см. A1)
Первые слагаемые в уравнениях A0) и (И) определяют колебания
груза со стрелкой, имеющие частоту свободных, а вторые слагае-
слагаемые— вынужденные колебания.
При наличии силы сопротивления, пропорциональной скорости
груза, колебания, имеющие частоту свободных, быстро затухают.
Поэтому в дальнейшем будем рассматривать только вынужденные
колебания груза со стрелкой:
h . ,
Так как шкала, по которой регистрируются колебания стрелки,
прибита к стене вагона и, следовательно, совершает колебания вместе
с вагоном, то стрелка отмечает колебания груза по отношению
к нагону, рапные разности лг4 и ?, т. е. лгг = х2 — ?.
Получим:
> h . . . h — ak- -\- ар- . .
хг = Хъ — ? = -rz sin pt — a sin pt = —-г-, '.. r sin pt.
r * k2 — p~ k- — p- '
Учитывая, что h = -fl = afi1, находим:
in
118
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
(Этот результат можно получить с помощью уравнения динамики
относительного движения материальной точки. См. и следующем napj-
графе задачу 259.)
Данный прибор предназначен для регисч рации колебании нагона,
т. е. S. Стрелка же отмечает хг. Для тою чтобы колебания стрелки
возможно точнее воспроизводили колебания вагона, необходимо,чтобы
дробь
к.
—s была близка к единице. Это имеет место при ,
Учитывая, что k = 1/ -с > следует для данного прибора подбирать
весьма слабую пружину с малым коэффициентом упругости с. (Чем
слабее пружина, тем меньше реагирует груз на колебания точки
подвеса пружины, оставаясь как бы неподвижным по отношению
к колеблющемуся вагону.)
В рассматриваемой задаче
г/-т = — 1,04.
к- - pJ
Аналогично данному прибору конструируются вертикальные сей-
сейсмографы—приборы для регистрации землетрясении.
Для нахождения значения коэффициента динамичности X воспользуем-
воспользуемся формулой ), = а'А/г Так как а = 0,02 см и Д?/ = 0,5 см,то X = 0,04.
Это означает1, что амплитуда вынужденных колебании в 25 раз меньше
статического смешения. Соответствующее значение коэффициента рас-
расстройки z будет
Задача 255. Пневматический отбойный молоток приводится в дви-
движение сжатым воздухом, поступающим в корпус молотка через шланг А.
Л/1Л Л Л
L
VV
г
и--
Ч за.тачс 255.
Давление воздуха, приложенное к поршню О молотка, изменяется,
согласно уравнению
5= //0 -\- Их cos pi -|- H3 cos dpt,
где р, ff0, Н\ и th — постоянные величины. В корпус молотка вмон-
вмонтирована пружина В с коэффициентом жесткости с. Пружина упи-
« 41 КОЛЕБАТЕЛЬНОЕ ЛВИЖР.Е1ИЕ 1 1 9
рается левым концом в поршень, а правым — в корпус молотка. Пор-
Поршень D соединен штоком Е с бойком М. Написать уравнение выну-
вынужденных колебаний поршня при работе молотка вхолостую. Массой
штока Е, боМка М и пружины В, а также силой сопротивления дви-
движению пренебречь.
Решение. Направим ось х по горизонтали направо, взяв ппчало
отсчета в положении статического равновесия поршня под действием
силы Но и упругой силы пружины FCT.
В этом положении пружина сжата из Дст силой Но. При этом
возникает упругая сила пружины /гст = сАсг. Обе силы направлены
по горизонтали: //0 — направо, a Ё„— палево. Запишем условия
равновесия поршня в проекции на ось х:
Н0-сА„ = 0. A)
Изобразим поршень смещенным из нуля направо па х. При этом
пружина сжата па Дл. = Аст-(-лг и возникшая в ней упругая сила F
направлена по горизонтали палево. Ее проекция па ось х равна
Fx = — c\x = -c(±CJ+x). B)
Кроме того, к поршню приложены следующие силы: Р— его вес,
N—нормальная сила реакции корпуса, «S — сила давления сжатого
воздуха.
Составим дифференциальное уравнение движения поршня D в про-
проекции на ось х:
Учитывая формулу B) и заданный закон изменения силы S, находим:
р
— х=Н0 -|- Mi cos pt -\~ /7л cos 3/tf — сДст — ex.
Принимая во внимание формулу A), запишем дифференциальное урав-
уравнение вынужденных колебаний поршня в виде
х -|- Hlx = ht cos pt -\- h3 cos 3^, C)
где
Для определения закона вынужденных колебаний поршня следует
найти частное решение уравнения (Н). Принимая во внимание правую
часть этого уравнения, ищем частное решение х.2 в виде
ха = Ах sin pi - j- Bi cos pt -\- A3 sin 3pt -j- Д, cos 3^^, D)
120 ДИФФЕРЕНЦИАЛЬНЫЕ. УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ (ГЛ. VIII
где Аь Z?,, А3 и Вл— постоянные коэффициенты, подлежащие опре-
определению. Для отыскания А\, Въ Ал и В3 вычислим:
X} = А {р cos pt — В{р sin pt -r ЗрАл cos 3pt — ЗрКл sin 3pt,
J?4= — А У sin pt — ВУ cos pt — 9Л3р* sin 3/rf — 9В3р* cos 3pt.
Подставив xit x.lt Jc$ в дифференциальное уравнение (З) и при-
приравнял коэффициенты, стоящие в левой и право» частях уравнения
при синусе и косинусе, находим:
A1(^—pi) = 0, Bl(ki—p*) = h1, А3(к'1 — 9р*) = 0,
?j(A» — 9p2) = >h.
Решив эту систему уравнений, имеем:
Подставив значения А\, Bit A^ н /?я в уравнение D), находим
искомое ураннение вынужденных колебании поршни:
,V2 = , ' ., COS pt -+- и ^r-s- COS Upt.
В случае k=p наступают резонансные колебания первого порядка.
В случае k=2p наступают резонансные колебания третьего по-
порядка. _
Так как к= 1/ -^- , то подбор коэффициента упругости пружины с
следует производить так, чтобы обеспечить выполнение неравенств
k^r-p w k^t?ip. При этом поршень не будет попадать в резонанс.
Задача 256. Груз веса Р подвешен к концу пружины, коэффи-
коэффициент жесткости которой равен с. К грузу приложена возмущающая
сила S=f(t), где /(/) — однозначная, непрерывная, дифференцируе-
дифференцируемая функция.
Найти уравнение движения груза, применив метод вариации про-
произвольных постоянных. Ось х направлена вдоль оси пружины впи:!,
начало отсчета взято в положении статического равновесия груза.,
Начальные условия движения груза:
при t = 0 х = х0, х — х0.
Силой сопротивления диижепню пренебречь.
Р е in e и и е. В положении статического равновесия груза, под деA-
стнием его веса Р, пружина растянута на Дст вниз. При этом возни-
возникает упругая сила FQ1, направленная вертикально вверх, Fcl = cA(T.
Так как в рассматриваемом положении P=FCT, то
Р-сДет = 0. A)
§4] КОЛЕВАТЕЛЬНОЕ ДВИЖЕНИЕ 121
Изобразим груз смещенным из нуля на х вниз. При этом пружина
растянута на кх = Дгт-(-л:, и упругая сила пружины F направлена
вертикально вверх. Ее проекция на ось х равна
Fx = —cLx=: — c(La + x). B)
Кроме силы F, к грузу приложены следующие силы: Р — нес
груза, S — возмущающая сила, проекция которой на ось х равна
Sx=f(t). Составим дифференциальное уравнение движе-
движения груза в проекции па ось х:
При Sx=f(t) и значении Fx, записанном в формуле B),
находим:
х р !/(/) _сДст_сх.
Приняв ro внимание формулу A), запишем дифференциаль-
дифференциальное уравнение вынужденных колебаний груза в виде
C)
,o eg К задаче 250.
где «2 = -^-.
Общее решение уравнения C) имеет вид х = х1-\-хъ где дг,—
общее решение соответствующего однородного уравнения, т. е.
xt = С! cos kt -j- Сг sin kt, D)
a Xq — частное решение неоднородного уравнения. Однако при про-
произвольном законе изменения возмущающей силы S=f(t) отыскание
частного решения дифференциального уравнения C) подбором подчас
представляет значительные трудности.
Применим для решения этой задачи метод вариации произвольных
постоянных. Ищем решение уравнения C) в виде
х = Q cos kt -f- Gj sin kt, Dя)
аналогичном общему решению однородного уравнения. Однако теперь
будем считать С% и С2 некоторыми функциями времени, подлежащими
последующему определению. Так как «место одной неизвестной функ-
функции мы ввели две, то имеем право наложить на Q и С-г дополни-
дополнительное условие. Вычислим предварительно х, воспользовавшись фор-
формулой D). Получим:
х = — C\k sin kt -4- Сф cos kt -\- Q cos kt - j- C9 sin kt. E)
122 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ |ГЛ. VIII
В качестве упомянутого дополнительного условия для упрощения иы-
кладок возьмем:
С, cos kt -\- C\ sin kt = 0. F)
Тогда формула E) примет вид
х = — C\k sin kt -f- Сгк cos A?
Определив x, вычислим:
x = — Qk* cos kt — C9A8 sin Af — C,A sin A* -f C^A cos «. G)
Подставив .г из формулы Dа) и jp из формулы G) в ^ф
циальнос урапнсние C), получим второе соотношение, связывающее
функции С\ и Q.
(8)
Решив систему F) и (8) относительно C'i и С\, находим:
откуда
t t
С, = — fp J / W sin А, Л + С,, С, = /p j /(т) cos fc</:| c*
(' о
Подстаппв эти значения функций Q и Q в уравнение D), получим:
f
л; = Q cos Af -f- Qsin kt — tJ. Cos kt f /(-c) sin A- dt -]-
0
f
-|-^sin Af i /(t)cos A-rf-,
о
или
.v: = C, cos kt -!- C2 sin Af -[- ^ f /(-:) sin A (t — t) rft. (9)
о
Для определения постоянных интегрирования С) и Q вычислим:
х= —Qk sin kt-b-Cvk cos kt-\--j± <if(-.)cosk(t — x)dz. A0)
о
Подставив в (9): I = 0, лг = лг0, a n A0) ^ = 0, л' = л0. имеем:
7^ __ A -in
§51 ОТНОСИТЕЛЬНО!: ДНИЖЕПИЕ 123
Внеся значения постоянных интегрирования Ct и Сг п уравне-
уравнение (9), получим искомое уравнение движения груза:
f
•xr^-YuCos/W-j-^-sin М-\-{р ( /(t) sin k(l — i)d:. A1)
0
Первые два слагаемых формулы A1): x0cos kt-\- -"- s\n kt опре-
определяют свободные колебания груза, которые он совершал бы при
отсутствии возмущающей силы S=f(t).
г
Последнее слагаемое уравнения A1) ~ \ f(z) sin k(t — -z)dz on-
u
ределяет колебания груза с частотой свободных, пызнапиые возмущаю-
возмущающей силой, а также вынужденные движения груза под действием
возмущающей силы S=f(t).
Уравнением A1) можно широко пользоваться при решении задач
динамики па вынужденные колебания материальной точки при про-
произвольном законе изменения возмущающей силы S=f(t). Как мы
уже указывали, им целесообразно пользоваться в тех случаях, когда
трудно подобрать частное решение дифференциального уравнения
.г+ ***=-§-/(О-
§ б. Относительное движение
Законы динамики сформулированы по отношению к так назы-
называемым «неподвижным» осям координат. Система отсчета считается
неподвижной, если ее ускорением (вычисленным относительно другой
системы отсчета) по сравнению с ускорением данной материальной
точки можно пренебречь.
Уравнение динамики материальной точки, отнесенное к «непод-
«неподвижной» системе отсчета, имеет вид
mw=
Для применения уравнений динамики к материальной точке, дви-
движущейся в подвижной системе отсчета, следует внести в них поправ-
поправки в виде дополнительных слагаемых — сил инерции, которые добав-
добавляются к силам Fk, приложенным к материальной точке.
Силы инерции равны по модулю произведениям массы матери-
материальной точки на соответствующее ускорения и направлены в сторо-
стороны, противоположные этим ускорениям.
124
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
Определение относительного движения материальной точки
по заданному переносному движению, массе точки и приложен-
приложенным к ней силам.
Пусть материальная' точка массы т движется по отношению к
подвижной системе отсчета, связанной со средой, совершающей пере-
переносное движение. Даны силы, при-
приложенные к материальной точке, и
уравнения переносного движения
подвижной среды. Требуется опре-
определить относительное движение ма-
материальной точки.
Зная переносное движение по-
подвижной среды, можно, минуя опре-
определение абсолютного движения, не-
непосредственно найти уравнения отно-
относительного движения материальном
точки.
Относительное движение мате-
материальной точки происходит по таким
же законам, как диижеиие абсо-
абсолютное под действием всех сил Fk,
приложенных к точке, а также силы инерции в переносном движении
Je и кориолисовой силы инерции Jc:
Рис. 124.
где
mw,=
Je= — mwe,
Jc= —mwc= —
По модулю
Je= mwc, Jc = 2mu>vr sin («, <vr).
Если переносное движение представляет собой вращение вокруг
неподвижной оси (рис. 124), то сила инерции в переносном движе-
движении Je является суммой центробежной Jcn и вращательной Jei сил
инерции:
причем
По модулю
Jen = — т<®еп- Je, = — "lWex.
Jen ;= mhw\ Je^ = milt,
§ 51 ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 1 25
где h — расстояние материальной точки до неподвижной оси, ш и
е — угловая скорость и угловое ускорение подвижной среды, враща-
вращающейся вокруг неподвижной оси.
В этом случае относительное движение материальной точки изу-
изучается с помощью уравнения
/июг= ?/'* + /„,+ •'„ + ¦'„
Если переносное движение подвижной среды является поступа-
поступательным, то кориолисова сила инерции Jc равна нулю. Тогда отно-
относительное движение материальной точки изучается с помощью урав-
уравнения
Если переносное движение подвижной среды является равномер-
равномерным и прямолинейным, то сила инерции в переносном движении Je
и кориолисова сила инерции Jc равны нулю. В этом случае относи-
относительное движение материальной точки изучается с помощью уравне-
уравнения, тождественного ее уравнению абсолютного движения
л
mwr = Yi Fh-
Отсюда следует, что никакие механические явления, происходящие
в подвижной среде, не могут обнаружить ее прямолинейного и рав-
равномерного движения (принцип относительности классической меха-
механики).
Таким образом, «абсолютное» движение материальной точки может
рассматриваться не только но отношению к «неподвижным» осям
координат, но и по отношению к любой системе отсчета, движу-
движущейся равномерно и прямолинейно по отношению к «неподвижным»
осям координат. Эти системы отсчета называются инерциальными
(галилеевыми осями).
Механические движения по отношению к инерниальным системам
отсчета являются динамически равноценными.
В случае относительного покоя материальной точки по отноше-
отношению к подвижной среде, совершающей переносное движение, отно-
относительное ускорение wr ускорение Кориолиса wc и кориолисова
сила инерции Jc равны нулю.
Уравнение относительного покоя материальной точки имеет вид
k=\
126 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Определение переносного движения среды по заданному отно-
относительному движению материальной точки, ее массе и силам,
приложенным к этой точке.
Пусть материальная точка массы т движется по отношению к под-
(шжной системе отсчета, снязанной со средой, совершающей перенос-
переносное движение. Даны силы Fk, приложенные к материальной точке, и
уравнение относительного движения материальной точки. Требуется
определить переносное движение подиижной среды.
Зная относительное движение материальной точки, можно непо-
непосредственно найти уравнения переносного движения подвижной среды.
Переносное движение точки подвижной среды, через которую
проходит данная материальная точка, происходит как абсолютное дви-
движение материальной точки иод действием ясех сил Fk, приложенных
к этой точке, а также силы инерции в относительном движении Jr
и кориолисовой силы инерции Jc:
mwe--= %Fk + Jr + Jc,
где Jr = — mwr, Jc= — niwc — — 2ти> Х фг- По модулю
Jr = mwr, Jc = 2mu>vr sin (ш, vr).
Если переносное движение подвижной среды является поступа-
поступательным, то кориолисопа сила инерции равна нулю.
При этом переносное движение изучается с помощью уравнения
п
mwc= XI Fk + Jr-
k = \
Задачи динамики относительного движения ма-
материальной точки рекомендуется решать в следу-
следующем порядке:
1) Разложить «абсолютное» движение материальной точки па
относительное и переносное; выбрать неподвижную систему отсчета
и подвижную систему отсчета, связанную с подвижной средой, совер-
совершающей переносное движение;
2) записать начальные условия относительного движения матери-
материальной точки;
3) изобразить па рисунке силы Fk, приложенные к материальной
точке;
4) определить ускорение материальной точки в переносном дви-
движении we, ускорение Кориолиса wc, найти силу инерции в перенос-
переносном движении Je, кориолисову силу инерции Jc. Добавить эти силы
инерции к силам Fk, приложенным к материальной точке;
5) составить дифференциальные уравнения относительного движе-
движения материальной точки в проекциях па подвижные оси координат;
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
127
впин по боковой грани
горизонту. Призма дви-
п
6) проинтегрировать составленные дифференциальные уравнения,
определи» постоянные интегрирования с помощью начальных условий
движения;
7) определить искомые величины.
При решении прямой задами, л. е. при определении сил но задан-
заданному движению, пункты 2) и 6) следует опустить.
Материальную точку следует изображать \\ промежуточном поло-
положении, соответствующем положительным координатам этой точки, и
предположить, что точка днижется в сторону возрастания этих коор-
координат.
При относительном криволинейном движении материальной точки
удобно пользоваться дифференциальными уравнениями движения в
проекциях на оси натурального триэдра.
Задача 257. Груз А веса Р спускается
призмы В, расположенной иод углом а к
жется по горизонтальной пло-
плоскости направо с ускорением w.
Определить ускорение гру-
груза по отношению к призме и
давление груза на боковую
грань призмы, если коэффи-
коэффициент трения скольжения груза
о боковую грань призмы ра-
ранен /.
Р е iu е и и е. 11аправнм ось х
вдоль боковой грани призмы К задаче 257.
вниз. Движение груза А яв-
является сложным. Разложим его па относительное движение по отно-
отношению к боковой грани призмы и па переносное движение вместе
с призмой. К грузу Л приложены следующие силы: Р—пес груза,
R — нормальная сила реакции боковой грани призмы, FT с — сила
трения скольжения, направленная и сторону, противоположную дви-
движению груза, т. е. но боковой грани вверх.
Для решения задачи методом динамики относительного движения
материальной точки надо ко всем силам, приложенным к материаль-
материальной точке, добавить силу инерции Je в переносном движении и кори-
олпеову силу инерции Jc.
Так как переносное движение является поступательным, то уско-
ускорение Кориолиса равно нулю и, следовательно, кориолисова сила
инерции J,. равна также нулю. Сила инерции Je в переносном дви-
движении направлена в сторону, противоположную переносному уско-
ускорению w, т. с. по горизонтали палево и равна но модулю
128 ДИФФЕРЕНЦИАЛЬНЫЙ. УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Для определения ускорения груза wr относительно боковой гра-
грани призмы составим дифференциальное уравнение относительною
движения груза в проекции на ось х:
mxr = Р sin а — F1C — Jg cos г.
р
Учитывая, что /\г-с=//?> а ./,= - т, находим:
xr = gs\na —- — w cos a. A)
Для определения нормальной реакции R бокопои грани призмы
состаинм дифференциальное ураипение относительного движения гру-
груза и проекции на ось у:
wyr =R — Р cos a — Je sin a.
Так как ускорение груза в относительном движении wr паправ-
р
депо перпендикулярно к оси у, то уг = 0. Заметии, что Je= -w, на-
о
ходим:
tf = P('cosa -f W- sin %). B)
Искомое давление груза на боковую грань призмы направлено
противоположно нормальной реакции R и равно ей по модулю. Под-
ставии и уравнение A) значение R из формулы B), получим:
xr^g(i\i) a —-/cos a) — и) (cos а -j-/sin a). C)
Воспользовавшись уравнением C), можно определить значение
угла а, при котором груз будет находиться в относительном покое.
Считая, что хг=^0, имеем:
g(sin я —/cos a) — tw(cos a--[-/sin a) = 0,
откуда
а = arclg g&- = ? -r arctg |,
s
где ф — угол трения.
Задача 258. Проволока, изогнутая и виде параболы, уравнение
которой у1 — 2рх, вращается вокруг вертикальной оси .v с постоян-
постоянной угловой скоростью со. На проволоку надето кольцо, которое
может двигаться пдоль проволоки.
Определить: 1) скорость кольца по отношению к проволоке, если
в начальный момент оно находилось в покое в положении Мй с абс-
абсциссой ха, 2) в какую точку поднимется кольцо, если в начальный
момент оно находилось в начале координат и ему была сообщена
SSI
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
129
по горизонтали направо скорость v0. Трением скольжения кольца о
прополоку пренебречь.
Решение. Оси ху вращаются вместе с проволокой. Кольцо со-
нершает сложное движение, которое можно разложить па относитель-
относительное по отношению к проволоке и переносное вращательное в.месте
с проволокой вокруг вертикальной оси х,
х
К з!даче 258.
Изобразим кольцо в промежуточном положении М(х, у) в пред-
предположении, что оно движется вцоль проволоки вверх. Обозначим вес
кольца Р.
К кольцу приложены следующие силы: Р — вес кольца, R —
нормальная сила реакции проволоки. Добавим силы инерции в пере-
переносном движении Je и кориолисову силу инерции Jc.
При равномерном вращении проволоки с угловой скоростью со
ее угловое ускорение г ранно пулю. Следовательно, переносное
вращательное ускорение кольца и>ех и вращательная сила инерции
5 Теоретическая механика, том И
130 ДИФФЕРЕНЦИАЛЬНЫЕ. УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ (ГЛ. Vlli
п переносном движении Je. равны пулю. Переносное центростре-
центростремительное ускорение wen кольца направлено по горизонтали палево,
причем
Поэтому центробежная сила инерции в переносном движении Jcn
папраилепа по горизонтали направо и по модулю раина
Jen = ^У^-
Ускорение Кориолиса wc== 2<о X «V направлено перпендикулярно
к плоскости рисунка от нас (vr, согласно сделанному предположению,
направлено по касательной к проволоке и точке М вверх). Следома-
телыю, кориолисоиа сила инерции Jc папраилепа перпендикулярно
к плоскости рисунка на нас и по модулю равна
р
Jr = 2 — ш). sin a
(угол а. образопан положительными направлениями осей х и т).
Составим дифференциальное уравнение относительного движения
кольца в проекции па касательную т к проволоке в данной точке М:
Р
— wr. = Jen sin a — Р cos a
б
(силы R и Jc проектируются па ось х в точку). Учитывая, что
Л-л= gJ"°. a mr-. = ~dj, находим:
^ = to5VSina — й-cos a. A)
Так как -^- = tga, то нетрудно видеть, что sina= -, a cosa=--
= ~i~. Кроме того,
dvr dvr ds dvr
~dt rfV " di Vr da '
Теперь уравнение A) принимает вид
vrdvr — (o5j/ dy — gdx.
ГГроинтегрирОвав это уравнение, находим:
r С.
Так как, согласно условию, j'5 = 2рх, ю
v? = t2(j№>*—g)x-rC. B)
§51 ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 131
Определим скорость кольца vr в относительном движении, зная,
что в начальный момент кольцо находилось в покое в положении
Мо с абсциссой' хй.
Подставии в уравнение (L>) лг = х0, vr = Q, получаем, что С =
= —2 (pw1 — g)x0. Следовательно, уравнение B) принимает вид
откуда
T-g)(x-xa). C)
Исследовав формулу C), можно определить направление движе-
движения кольца.
При движении кольца вдоль проволоки вверх х^>хй. Так как
подкоренное выражение в формуле C) положительно, то pu?^>g,
т. е. угловая скорость вращения проволоки должна удовлетворять
условию ш2^> ?-, где р — параметр параболы j/9 = 2pje.
При движении кольца вдоль проволоки вниз лг<^лг0. Следова-
тел ыю, pw* < g, откуда ш3 <^ -? .
При относительном покое кольца, т. е. при vr = 0, получим, что
pixiL = g, откуда следует, что кольцо будет находиться па проволоке
в относительном покое, если углоиая скорость вращения проволоки удов-
летпоряет условию ш9;= ^-.
Определим, в какую точку проволоки должно подняться кольцо,
если в начальный момент оно находилось в начале координат и ему
была сообщена по горизонтгли направо скорость ф0-
Подстанив в уравнение B) х = 0, vr = vlj, получим, что С=иа0,
Следовательно, уравнение B) принимает вид
V* = vq -f- 2 (рш* — g) x,
откуда
V" D)
В наивысшей точке под ьема кольца по проволоке vr — 0; поэтому
X =
irax
Учитывая, что у* = 2//л;, находим:
Так как -х ~^>0, т0 из формулы E) имеем: g—ри?~^>0, т. е.
иг<^?-. Если же и>\> Л , то и, в пуль не обрат шея, и кольцо
будет неограниченно подниматься но проволоке вверх.
б*
132
ДИФФЕРЕНЦИАЛЬНЫ!! УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ
[ГЛ. VIII
В случае ur= *- из формулы D) следует, что d/. = d0, т. е.
кольцо будет двигаться по проволоке с постоянной по модулю ско-
скоростью va.
Задача 259. Определить движение по отношению к шкале стрелки
В прибора для регистрации колебаний железнодорожного вагона, рас-
рассмотренного в задаче 254. И с по. и. зон пь данные этой задачи.
Решение. Направим по вертикали вниз ось х, связанную с же-
железнодорожным вагоном. Начало отсчету возьмем в положении ста-
статического равновесия груза, т. е. при рас-
>
Дст = —.
тяжепип пружины на
Груз сопершлет сложное движение, которое
можно разложить на относительное движение
по отношению к вагону, т. е. к точке Л, л
переносное движение вместе с вагоном согласно
уравнению jc,,= ii = a s\npt.
Запишем начальные условия относительного
движения груза:
при ,< = 0 Хг = хГл = 0, хг = хГл = 0.
Для определения уравнения относительного
дпижепия груза используем уравнение динамики
относительного движения материальной точкг:
К задаче 259.
A)
k=\
И.чобразим груз смещенным из начала отсчета на хг вниз. При
этом пружина оказывается растянутой па ДЛГ = &ст-\-хп и упругая
сила пружины F направлена по вертикали вверх. Ее проекция ил ось
х равна
Fx=-cbx=-c^ + xr). B)
Кроме веса груза Р и yimyrott силы пружины F, надо к грузу,
в соответствии с уравнением A), приложить силы инерции Je и Jc.
Зная уравнение переносного движения вагона: хе = * = а sin pt,
вычислим: хе=—ар1 sin pt. Сила инерции в переносном движении
имеет вид: Je= —mwc. Ее проекция па ось х равна
р
ex g
Так как переносное движение вагона является поступательным,
то ускорение Кориолиса wc и, следовательно, кориолисова сила инер-
инерции Jc равны нулю.
§ 5| ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 133
Запишем уравнение A) в проекции на ось дг:
тхг ~ Р-\- Fх -'- Jex.
Использовав формулы B) и C), находим:
g *r = Р — сДст — схг -|- ^ ар1 sin pt, D)
причем
Р — сЬ„ = 0. E)
Использопап формулу E), запишем дифференциальное уравнение
о шоси тельного движения груза D) в виде
Xr-\-k'lx,-= ар* sin pt, F)
где
Общее решение хг этого дифференциального уравнения имеет вид
лг -М I xri> С)
где xri — общее решение соответствующего однородного дифферен-
дифференциального уравнения
т. с.
xri = Q cos kt -у- С., sin kt, (8)
a xri — частное решение уравнения F). Так как
_L— = 10 сек'1, a /?=16ir сек'\ то р -ф. k,
и, следовательно, резонанса нет.
чВвиду отсутствия резонанса, ищем частное решение xri в виде
хн = A sin pt -j~ Z? cos pt. (9)
Дли определения A v\ В вычислим:
xr, = — Ар1 sin /7/ — Z?/>2 cos pi.
Подстзпмв хл и хгч в дифференциальное уравнение относитель-
относительного движения груза F), приравняв соответствующие коэффициенты
и левой и правой частях этого уравнения при синусе и косинусе,
получим:
А-—р-'
134 ДИФФЕРЕНЦИАЛЬНЫ!'. УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
Слсдопателыю, частное решение (9), соответствующее вынужден-
вынужденным колебаниям груза и относительном движении имеет ннд
*,s==p^sin/rf. A0)
Это уравнение вынуждеш ых колебаний груза в относительном
движении было нами найдено и задаче 254 (формула 12) более длин-
длинным путем. Применяя уривпегие динамики относительного диижении
материальной точки, мы непосредственно получили уравнение отно-
относительного движения хл, минуя определение его абсолютного движе-
движения. В решении же задами 254 было предварительно определено аб-
абсолютное движение х« груза в формуле G) и затем вычислены коор-
координаты точки в относительном движении по формуле A2): хг=-
= Хо — S. Если требуется определить уравнение абсолютного дпи-
жения груза, то более целесообразным являечея метод решения за-
задачи 254. Лели же требуется найти уравнение относительного дви-
движения точки, то предпочтительнее пользоваться уравнением динамики
относительного днижепия, примененным в этой задаче.
Находим общее решение дифференциального уравнения F) по
формуле G), использовав уравнения (8) и A0):
Хг = С, cos kt -f- С, sin kt -\- jrzri sin pt. A1)
Для определения постоянных интегрирования d и С9 вычислим:
хг = — Qk sin kt -j- Qk cos kt -f- j?zr-a cos pt. A2)
Внеся в A1) ? = 0 xr — 0, а в A2) r = 0 ^ = 0, получаем,
что
С о Г р ар'
Подставив эти значения С\ и d в формулу A1), получим урав-
уравнение относительного движения груза со стрелкой
х = — {'i^j^ sin kt + J^ sln PL
Использопав численные данные: k =10 сек~1, р=16тс сек~1,
a = 0,5 см, находим:
xr = (— 2,64 sin 1 Ot -|- 0,52 sin 16irO см. A4)
Первые слагаемые в уравнениях A3) и A4) определяют колеба-
колебания в относительном движении груза со стрелком, с круговой часто-
частотой свободных колебаний, а вторые слагаемые — их вынужденный
колебания в относительном движении.
§ 5]
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
135
Задача 260. Для регистрации колебаний станка на горизонталь-
горизонтальной идеально гладкой плоскости его станины А установлен груз В
веса Р, соединенный со станиной пружиной С (см. рисунок). Коэф-
Коэффициент жесткости пружины равен с. При колебаниях станины А
груз приходит в движение относительно станины. Стрелка D, при-
прикрепленная к грузу В, регистрирует горизонтальные колебания ста-
станины по шкале, изображенной на станине.
Определить амплитуду колебаний станины, если стрелка D дви-
движется относительно станины, согласно уравнению % = а cos pt, где \
отсчитывается по горизонтали налево от положения конца недефор-
мировапной пружины. В начальный момент станина и груз находились
е покое.
Л
j ^w-^WNiililil
Р'
III:!
R
1П1
р
8 f с
-'VVVWi/WWVVVVWWW^-
III llt4^4*44^4^4 wwwwwwwwx
А
К задаче 260.
Решение. Направим неподвижную ось х по горизонтали на-
налево, взяв начало отсчета в положении груза при недеформирован-
ной пружине. Движение груза В по отношению к неподвижной оси х
является сложным. Разложим его па относительное по отношению
к станине А и переносное (в данном случае поступательное) вместе
со станиной.
Задача сводится к определению переносного движения по задан-
заданному относительному движению груза.
Изобразим груз в положении, смещенном относительно станины
на хг = 1.
Начальные условия переносного движения груза имеют вид:
при ? = 0 л;г = 0, ^ = 0.
К грузу приложены следующие силы: Р — вес груза, R — нор-
нормальная сила реакции горизонтальной плоскости, F—упругая сила
пружины, растянутой па ДЛГ = д-/. = ^, при этом направлена по гори-
горизонтали направо. Ее проекция па осе> х равна
Fx = — Л = -г-са cos pt.
(У)
Для определения переносного движения груза надо ко всем силам,
приложенным к грузу, добавить силу инерции в относительном дви-
движении Jr и кориолисову силу инерции Jc. Так как ? определяет
закон относительного движения гру:!а, т. е. хг =; = a cos pt, то
136 ДИФФЕРЕНЦИАЛЬНЫ!'. УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VIII
хг =— ар1 ¦ cos pt. Сила инерции в относительном движении Jr--
= — mwr. Ее проекция на ось х равна
Jrx = — mxr = ~ ар* cos pt. C)
Тлк как переносное движение станины является поступательным,
то ускорение Кориолиса и, следовательно, кориолисонн сила инерции
Jc равны пулю.
Состапим дифференциальное уравнение переносного движения
грула в проекции па ось х:
mxe — Fx-\-Jrx.
Учитывая формулы A) и B), представим это уравнение тлк:
Р
-
p .. p
— X\ = — ca cos pt — - ap cos pt
Vi.TH
i де обозначено:
Интегрирование дифференциального уравнения C) не представ-
представляет затруднений:
'Гик кяк при ^^0 ^ = 0, ю G, =0.
Следовательно,
Проинтегрирован это дифференциальное уравнение, находим:
Jf(, — -j;J cos pt -|- C;2.
/}/ b- n2\
Использонав, что при t = Q xe = 0, найдем, что С\ = ——- .
Слсдошггельпо, переносное днижепие станины происходит согласно
уравнению
1. с. станина сопершает гармонические колебания круговой частоты р.
,, а (р- — й-)
Искомая амплитуда колебаний станины равна —-—., .
Для того чтобы регистрация колебаний станины совершалась
возможно точнее, надо, чтобы амплитуда колебаний X груза по отно-
§51
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ
137
шепию к станине и амплитуда колебаний хе станины по отношению
к неподвижной оси х были примерно равны, т. е. а;
aip'
¦'
или
Учитывая, что
что следует
1. Для выполнения этого условия надо принять
ныбирагь
замечьем,
пружину
с малым коэффициентом жестко- о)
сти с
Задача 261. Исследовать сио-
бодпос падение материальной точки
вблизи земной поверхности.
Решение. Начало неподвиж-
неподвижной системы координатных осей \-rfc
возьмем в центре Земли, направим
оси па отдаленные «неподвижные»
звезды. 11ачало подчижной системы
oceti координат, связанных с Зем-
Землей, выберем в начальном положении
материальной точки 7И0. Напрапле-
пие подвижных осей х, у и z уточ-
уточним и последующем изложении. fjj
Свободное падение материальной
точки иблизи земной поверхности
можно разложить на простейшие
движения: относительное динжоиие
по отношению к Земле и перенос-
переносное суточное вращательное движе-
движение Земли покруг споей оси с угло-
угловой скоростью
о) = 0,00007 секл.
Ю\
К задаче 261.
Свободным называется падение
материальной точки на Землю из
состояния относительного покоя, т. е. при следующих начальных ус-
условиях:
х = хо = О, у=5'о=О> г = го = О (при ^ = 0).
К материальной точке приложена сила F притяжения к Земле,
n n ктМ
направленная к центру Земли: /- = —L.-, где т — масса материаль-
материальной точки, М—масса Земли, г — расстояние материальной точки до
центра Земли, k — гравитационная постоянная.
138 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. V!»
Нам предстоит исследовать свободное падение материальной
точки па Землю, т. е. ее относительное движение. Запишем уравнение
динамики относительного движения материальной точки:
п.
mwr = 2 Fk ~j- Je -\- Jc.
* = i
n
В данной задаче ^Fk является силой притяжения F к Земле,
поэтому
mwr = F+Je-{-Je. A)
Определим силу инерции материальной точки в переносном вра-
вращательном движении (Je) и кориолисову силу инерции (Jc).
При вращении вокруг неподвижной оси сила инерции материаль-
материальной точки в переносном движении Je равна сумме переносной центро-
центробежной Jen и переносной вращательной силы инерции Jez, т. е.
B)
Так как вращение Земли происходит с постоянной угловой ско-
скоростью со = 0,00007 сек'1, то угловое ускорение ? Земли равно нулю.
Следовательно,' wez = lie = 0 и переносная вращательная сила инер-
нии также равна нулю:
7„ = 0. C)
Центростремительное ускорение материальной точки wen направ-
направлено по перпендикуляру, опущенному на ось вращения, а его модуль
wen = hwl. Следовательно, переносная центробежная сила инерции Jen,
направленная противоположно wen, т. е. от оси вращения Земли
(см. рис. а), раина по модулю:
Jen= mhm*.
Модуль Jen составляет примерно лишь 1/290 величины силы притя-
притяжения F. Сумма сил F и Jen называется силой тяжести Р; таким
образом,
P = F-\-Jrn. D)
Отношение модуля силы тяжести Р к массе материальной точки иа-
Р
зыиается ускорением силы тяжести: g=—-, т. е.
P = mg. E)
Направление линии действия силы тяжести Р называется вертикаль-
вертикальным направлением в данной точке земной поверхности. Угол а,
образуемый вертикальным направлением с экваториальной плоскостью.,
называется географической широтой в данной точке земной поверх-
§5] ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ 139
пости (см. рис. а). Горизонтальной называется плоскость, перпенди-
перпендикулярная к вертикальному направлению с данной точке.
Ускорение Кориолпса wc определяется но формуле iii(. = 2(uX'lV-
Следовательно, кориолисона сила инерции:
X vr. F)
Выше Оыло указано, что начало подвижных осей координат xyz,
спязанпых с Землей, выбрано в начальном положении материальной
точки Мй. Направим ось г по вертикали мкерх (см. рис. rf), ось л-—
по касательной к окружности радиуса h, т. е. перпендикулярно
к плоскости рисунка на нас, ось у расположена в плоскости меридиана,
т. е. в плоскости рисунка.
Так как свободное падение материальной точки рассматривается
вблизи земной поверхности, то считаем ускорение силы тяжести g
и широту ср постоянными. Воспользовавшись формулами B), C), D),
запишем уравнение A) в виде
mw, = P + Je. G)
(На рисунке кориолисова сила инерции не изображена. Мы не мо-
можем сейчас указать ее направление, так как Jc = —2 та» X *V> a на"
правление скорости материальной точки в относительном движении
<vr нам пока неизвестно.)
Подставив в уравнение G) значения Р и Jc из формул E) и F)
и сократив на массу точки т, имеем:
wr = g-'2<aX'Vr- (8)
Проектируя (8) на подвижные оси х, у, z, получаем:
х = — 2 (myvrz — azvr>), \
У —2(V«-V«). (9)
z = — g — 2 (uxvry — <*>yvrx). J
В пашем случае:
шх = 0, со^, = — со cos <р> шг == ш s'n ?> \
vrx = x, vrv=y, г.„ = Д j (
т. е. (9) принимает вид:
X = 2co(i cos <f-\-y sin <p), \
y = — 2coxsincp, 1 A1)
2 = — g — 2coi cos tp. J
Будем искать решения уравнений A1) в виде рядов по степеням
безразмерной переменной со^. 13 силу начальных условий.
< = 0 x=y = z=Q, x=y = Z— О
140 ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДИНАМИКИ ТОЧКИ [ГЛ. VI»
искомые разложения начинаются с членов, содержащих (utf, т. е.
х = ai W л-а3 №)* + ...
A2)
где aq, ая, Ъъ Ья, сг и с3 подлежат последующему определению.
Подставляя выражения A2) в уравнения1 A1) и затем сравнивая
коэффициенты при одинаковых степенях t в правых и левых частях
уравнений, получаем:
я., = 0, ая = — -3 ?- cos <р, Й4 = О, А;) = 0, <:2 =— ^.:, с3 = 0.
Внося эти значения п A2), приближенно находим искомые уравне-
уравнения движения:
х = — у ugl* cos ?, j/ = 0, г ——-,,-g-f2. A3)
Так как j/ = 0, то траектория материальной точки, совершающей
свободное падение, лежит в плоскости, перпендикулярной к меридиану.
Если бы х равнялось пулю, то z определило бы свободное падение
материальной точки по вертикали. Уравнение х^ .у cog-/3 cos -? ука-
указывает па отклонение материальной точки от вертикали в сторону,
противоположную положительному направлению оси х, т. е. с запада
на восток. Это восточное отклонение материальной точки, совершаю-
совершающей свободное падение вблизи земной поверхности, обусловлено на-
наличием кориолисовой силы инерции: Jc = —'2mui\vr.
Вычислим восточное отклонение материальной точки при свобод-
свободном падении с высоты h. Из уравнения движения z = — Stj- опреде-
определим продолжительность падения -: па Землю. Так как при ?=-
z = -h, то . = )/--.
Теперь из уравнения движения х = —¦„- wgt* cos 9 определим но-
сточное отклонение материальной точки Д, подставив в это уравн;-
иие ^ =-: = I/ — . Величина отклонения
При сиободпом падении с высоты /г=100 м па широте Ленин-
Ленинграда, т. е. при <р = 60\ ^=:9,81 м^сек1 (со = 0,00007 сек~1), мате-
материальная точка отклонится в восточном направлении на Д=1,1 см.
Г Л Л В Л [X
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
§ 1. Дифференциальные уравнения движения системы
материальных точек
В отличие от статики твердого тела и динамики материально»
точки, где силы разделены на задаваемые силы и силы реакций связей,
и этой главе при рассмотрении систем материальных точек приме-
применяется классификация сил па внутренние (/•"') и пмешмие (Fe).
Внутренними называются силы взаимодействия между материаль-
материальными точками, входящими в состав рассматриваемо» системы. В соот-
соответствии с принципом равенства действия и противодействия, внутрен-
внутренние силы существуют попарно. При этом главны» вектор V и глав-
главны» момент т\ внутренних сил системы равны пулю, т. с.
v! = ? ^ = о, < = 2] «о (П) = о.
Следует иметь в виду, что, несмотря па выполнение этих усло-
условий, система внутренних сил, вообще говоря, не является уравнове-
уравновешивающейся, так как внутренние силы приложены к разным мате-
материальным точкам.
Внешними называются силы, приложенные к материальным точкам
рассматриваемо» системы со стороны точек и тел, не «ходящих
в состав это» системы. Внешние силы могут переходить п разряд
сил внутренних и, наоборот, внутренние силы могут переходить rf раз-
разряд внешних при изменении состава системы. Так, если рассмат-
рассматривать систему, состоящую из двух соприкасающихся шаров, то
давления первого шара на птороП и второго шара на нервы» явля-
являются внутренними силами. Если же рассматривать систему, состоящую
из одного первого шара, то давление второго шара па первый явля-
является внешней силой.
Уравнение динамики для k-\\ точки материально!) системы имеет
вид
142 ОПЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
где Fek — равнодействующая всех внешних сил, a F'k — равнодейст-
равнодействующая всех внутренних сил, приложенных к k-й материальной
точке.
Ниже рассматриваются как системы, состоящие из конечного
числа материальных точек, так и системы тел с непрерывным рас-
распределением масс.
Все теоремы формулируются для систем материальных точек, по
без труда могут быть распространены па системы тел.
Дифференциальные уравнения движения А-й материальной точки
в проекциях на оси декартовых координат имеют вид:
kx
система трех уравнений.
Дифференциальные уравнения движения системы п материаль-
материальных точек в проекциях на оси декартовых координат записываются
и форме
система 3// уравнении,
где k= I, 2, 3, ..., п.
Итак, для определения движения системы п материальных точек,
входящих в состав системы, следует решить систему 'in обыкновен-
обыкновенных дифференциальных уравнений второго порядка с Зи неизвест-
неизвестными функциями одной независимой переменной t. Для нахожде-
нахождения 6я постоянных, интегрирования должны быть заданы On началь-
начальных условий движения. При этом следует иметь в пиду, что внеш-
внешние и внутренние силы могут зависеть как от времени, так и от
положений, скоростей и ускорений точек системы. Решение подобных
задач оказывается трудным и громоздким.
В некоторых задачах динамики материальной точки и системы
.материальных точек можно значительно упростить решение путем
применения так называемых общих теорем динамики.
§ 2. Теорема о движении центра инерции системы
материальных точек
1°. Центр инерции системы материальных точек.
Центром инерции (центром масс) системы материальных точек
называется точка, положение которой определяется вектор-радиусом rQ
§ 2| ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ
по формуле
143
г — *
'с
где Ж=
— масса системы материальных точек.
Декартовы координаты центра инерции системы материальных
точек даются формулами:
хс "
М
Л-1
.ft,
С(*сУс.*с)
±=1
Понятие центра инерции является
обобщением понятия центра тяже- /-
п ^t
'Л
Рис. 125.
сти твердого тела I гс = р /
для случая системы материальных точек. Заметим, что положение
центра тяжести твердого тела неизменно по отношению к точкам
тела, в то время как положение центра инерции системы, вообще го-
говоря, меняется относительно отдельных материальных точек системы.
. Зависимость между скоростью центра инерции и скоростями точек
материальной системы имеет вид
т. е.
М
Здесь
хс~ м ' ^с
vc = xci+ycjJr2ck.
4=1
м
Зависимость между ускорением центра инерции и ускорениями
точек материальной системы выражается соотношением
l
м
1 44 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ, IX
т. е.
п п. п
С М ' уС М ' С М
Здесь
Решение задач, в которых требуется определит!,
уравнение траектории центра инерции, следует про-
проводить в следующем порядке:
1) выбрать систему координат;
2) записать координаты центров тяжести каждой из масс системы,
пиразин их и виде функций времени:
хк = <?к @. У к = Ък @. 2ц = I * @. гДе Л = 1, 2, ..., п;
3) определить координаты искомого центра инерции системы
материальных точек по формулам:
п
2 '"*г*
ZC
при этом хс, ус, zc окажутся функциями премени, т, е. полученные
формулы будут параметрическими уранпепиями дпижсния центра
инерции;
4) для млхождеиия явных уравнении траектории центра инерции
системы материальных точек надо из последних уравнений исключить
иремя.
Задача 262. Определить уравнение траектории центра инерции
кулисного механизма, изображенного на рисунке, если пес крипа-
шипа ОЛ ранен Plt нес камня Л кулисы ранен А, а пес кулисы и
штанги ВО равен Р3. Крипошин, вращающийся с постоянной угловой
скоростью ш, считать топким однородным стержнем, а камень А —
точечной массой. Центр тяжести кулисы и штанги расположен
и точке Q), причем ОА = ВСЛ = 1. В начальный момент камень ку-
кулисы А занимал крайнее правое положение.
Решение. Выбираем оси декартовых координат, указанные па
рисунке, па котором положение кулисного механизма соответствует
моменту времени t. Так как кривошип вращается равномерно, то его
угол поворота у ранен O
§ 21
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ
145
Для определения положения центра инерции системы С надо
найти его координаты хс и ус по формулам:
xc = -
М
v —
где М— 2mft — масса системы.
s\\\\\
К задаче 262.
Так как рассматриваемая система состоит из трех тел: криво-
кривошипа О А, камня А и кулисы со штангой BD, то
-* с /и, -i- ш, + Hij * *¦ '
Здесь индексы 1 соотнетстиуюг крииошицу, индексы 2 — камню А,
индексы 3 — кулисе со штангой.
Как видно из рисунка:
cos
yt = -- sin cat,
2 = { Sin
146 ОПЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Подстаиляя знамения хх, уь л^, у-ь л-;„ уъ в формулу A) и выра-
выражая массы зкспьев механизма через их веса, получаем:
Pi -„- cos at + PJ cos at + /y (I -b cos "><)
P,/ , P, + 2P., ¦ Ь 2P, ,
p + P + -ПРЙнГТОZ cos
^
Для нахождения уравнения траектории центра инерции в япном
виде надо из этих уравнений движения исключить время. Разреши»
оба уравнения относительно cos tut и sin tat, возведя их затем в квад-
квадрат и сложил, получим:
г> i о J v2*
3) /
Итак, траекторией центра инерции кулисного механизма является
эллипс с полуосями:
Центр эллипса лежит на оси х и отстоит от начала координат О
PJ
ппрано па расстоянии -^—j—,y~r~r>~-
" 1 t г; + ' I
2°. Теорема о движении центра инерции системы
материальных точек. Центр инерции системы материальных
точек движется как материальная точка, масса которой равна массе
материальной системы и к которой приложены все внешние силы,
действующие па систему:
Та же теорема, записанная в проекциях па оси декартовых коор-
координат, имеет вид:
к -М
Движение центра инерции системы материальных точек зависит
от внешних сил; приложенных к данной системе. Внутренние силы,
которые отсутствуют в формулировке теоремы, непосредственно па
§ 2| ТПОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ 147
движение центра инерции системы не влияют. Это обстоятельств
значительно облегчает решение задач, так как внутренние силы
системы большей частью бывают неизвестны.
Задачи динамики поступательного движения твердого тела решаются
посредством теоремы о движении центра инерции системы материаль-
материальных точек. Действительно, применив эту теорему, мы определим
уравнение траектории, скорость и ускорение центра тяжести твер-
твердого тела. При поступательном же движении твердого тела траекто-
траектории всех точек одинаковы, а скорости и ускорения их соответственно
раины.
Если при решении задачи динамики движение точки системы раз-
разлагается на переносное поступательное вместе с полюсом и относи-
относительное по отношению к полюсу, то целесообразно принять за полюс
центр инерции системы материальных точек. Тогда, применив теорему
о движении центра инерции, можно определить переносное поступа-
поступательное движение точек системы.
Посредством теоремы о движении центра инерции можно решать:
1) прямые задачи, в которых заданы законы движения отдельных
материальных точек и их массы, а ищутся внешние силы;
2) обратные задачи, в которых заданы законы движения всех
точек системы, кроме одной (либо законы движения некоторых из
точек выражены через неизвестный закон движения этой точки),
массы точек системы и определяется движение одной точки.
Задачи с помощью теоремы о движении центра
инерции системы материальных точек рекомен-
рекомендуется решать в следующей последовательности:
1) изобразить на рисунке все внешние силы системы;
2) выбрать систему осей координат;
3) записать теорему о движении центра инерции системы мате-
материальных точек в проекциях на оси декартовых координат:
4) вычислить сумму проекций исех внешних сил системы па оси
декартовых координат;
5) записать координаты центров инерции всех п масс системы
хь> Ук> zk> гДе А=1, 2, ..., я, и, продифференцировав их дважды
по времени, определить Мхс, Л\ус и Mzq по формулам:
п п п
Мхс=^ т„хк, Мус=У, ткук, Мгс=У1 от,Л-
к—\ к^\ *^1
Если в состав системы входят тела с непрерывным распределе-
распределением масс, то следует записывать координаты xk, ук и zk центров
148
ОБЩИЕ TROPEMU ДИНАМИКИ
[ГЛ. IX
тяжести этих тел и затем пычислить Мхе, Мус, Mzq по упомянутым
формулам (в которых под т,, уже надо понимать массу Дг-го тела);
6) воспользовавшись полученными результатами, записать диффе-
дифференциальные уравнения днижепия центра инерции системы (трети»
пункт) применительно к данной системе;
7) определить искомые внешние силы системы при решении пря-
моп задачи либо найти искомый закон движения * центра тяжести
одиоИ из масс системы при решении обратной задачи.
Задача 263. При полете снаряда и безвоздушном, пространстие
центр инерции снаряда описывает параболу. Изменится ли траектория
центра инерции, если снаряд во время полета разорвется на несколько
осколков?
Решение. Разрыв снаряда происходит под действием внутрен-
внутренних сил, которые непосредственно не влияют па движение цеигри
инерции системы. Следовательно, осколки снаряда должны двигаться
так, чтобы центр инерции разорвавшегося снаряда двигался по то'1
же траектории, т. е. по параболе.
Задача 264. Какая сила приводит в движение центр инерци;!
втомашины, движущейся по негладкой горизонтально» дороге?
Р
К задаче 2G4.
Решение. Часто ошибочно полагают, что центр инерции авто-
автомашины непосредственно приводится в движение силой давления газои
в цилиндрах двигателя. Эта с яла, являясь внутренней, на движсиио
центра инерции автомашины грямо не влияет. Под действием этой
силы возникают вращающие моменты пар сил, приложенных к веду-
ведущим колесам. В результате появляются силы трения /\р между по-
покрышками ведущих колес автомашины и земле», направленные по
горизонтали в сторону движения автомашины (силами трения между
покрышками ведомых колес и землей пренебрегаем).
Сила трения, являясь внешней по отношению к автомашине, при-
приводит в движение его центр инерции С. Действительно, записав тео-
теорему о движении центра инерции системы в проекции па ось х
(см. рисунок), получим Mxc=-Fi? (внешние силы Я, R\ и #.2 пер-
перпендикулярны к оси х, и их проекции на эту ось равны нулю), т. е.
хс^>®', если в начальный момент центр инерции С был в покое, то
он будет перемешаться ускоренно по горизонтали направо.
21
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ
149
Задача 265. Определить главный вектор Vе внешних сил, при-
приложенных к однородному диску, вращающемуся вокруг неподвижной
оси, если центр тяжести диска расположен на его оси «ращении.
Решение. Применяем теорему о движении центра инерции
п.
системы материальных точек Mwc='?l Fek. Так как центр тяжести
ft ^ 1 я
диска неподвижен, то и>с = 0 и, следовательно, ^] f« = V = О, т. е.
глаиный вектор внешних сил (в которые пходят и силы реакции сия-
зеИ), приложенных к диску, равен пулю.
Задача 266. Тонкий, однородный стержень ОА длины / и веса Р
вращается вокруг вертикальной оси О\Ог с постоянном углоной ско-
скоростью и). Определить главный вектор внеш-
пих сил. Массой оси ОхО.г пренебречь. л\\' О?
Решение. В соответствии с теоремой
о движении центра инерции системы мате-
риалышх точек Л1а>с = ^] Fek; для onpt-
деления главною кекюра нпешнпх сил cu-
cuсте.мы Vе'=
Достаточно найти
к-.Л
Так как центр инерции стержня находится
и точке С на расстоянии от оси «раще-
«ращения и имеет, в силу постоянства вектора о),
только центростремительное ускорение wn=
^ ОСш1^ -^ to'2, которое направлено идоль
стержня от С к О, то главный вектор внеш-
внешних сил системы Vе имеет то же направление и равен по модулю
L
I
Z
О
С
'О,
К задаче 260.
(В данном случае главный вектор внешних сил является векторной
суммой веса стержня и сил реакций опор Ot и 0.2.)
Задача 267. Машина для ковки металла (см. рис. а) приводится
в действие посредстном кривошипио-шатунного механизма ОАВ.
Определить давление машины на фундамент при работе вхолостую,
если вес станины с наковальней I) равен Рь вес кривошипа ОА
длины г равен /\ нес молога В ранен Р. Кривошип ОА считать
однородным стержнем.
Кривошип, вращающийся с постоянной угловой скоростью oj
прогни часовой стрелки, п начальный момент занимал вертикальное
нижнее положение. Массой шатуна ЛВ длины I пренебречь.
150
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Решение. Рассматриваемая система состоит из трех масс:
1) станины с наковальней D; 2) кривошипа ОЛ; 3) молота Б.
Изобразим внешние силы, приложенные к машине: Р, — пес сто-
стопины с наковальней, Р., — вес криношипа О А, Ря — пес молота И,
R—суммарная нормальная сила реакции фундамента (все силы тяже-
тяжести приложены и соответствующих центрах тяжести Ct, Cq, С;1 от-
отдельных масс рассматриваемо;! системы), #'— суммарная тангенциаль-
тангенциальная сила реакции фундамента.
К задаче 267.
Направим ось у по вертикали вниз, взяв ее начало отсчета на
оси вращения кривошипа ОА.
Применив теорему о движении центра инерции системы матери-
материальных точек в проекциях па ось у:
Сумма проекций всех внешних сил системы па ось у равна
=^+/>,+/>.-к.
Следовательно,
откуда сила реакции фундамента
(О
§21 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ 151
Для решения задачи остается определить М$с-
п
Как известно, Му~с = ^] ткУк- В данной задаче
* = i
Мус = тху i -|- mfa -f т$ъ. B)
Рассмотрим крипошишю-шатунный механизм в момент времени /,
когда кривошип ОА повернулся из нижнего вертикального положе-
положения на угол ср = <о/. Координаты yt, уь у3 центров тяжестей Clt C2,
С3 масс системы изображены на рис. б). Нетрудно видеть, что
ОА г
yl — OCu Уъ = -у- cos «>? = у cos mi,
у3 = ОА coswt-}- AB cos ty-{-BCa = r cos wt -f- / cos ф -|- BC3,
где ty=/. ABO. Зависимость между углами wt и ty определяем по
теореме синусов из треугольника ОАВ:
sin 6 г . , г .....
где -т-1^^- Тогда cos^ = V"l—sin9i}):=y"l—X.9 sinsa>f; теперь уъ
принимает вид
y3 = r cos co^-L -^ cos ^ = г cos mt -\- -j ]/l — X2 si
Разложим выражение V 1—V2 sin2 со/ в ряд. Учитывая, что \ —
правильная дробь, отбросим все члены ряда, содержащие X в степени
выше второй, т. е.
1 ,
|/l—>-'2sin-2co/=(l — I'sin^iI ^ 1 — i- X2 sin* to/.
Следовательно, ,v3 = r cos ш/ -|- / И — -- >.3 sin2 со/j -[- ДС3; замечая,
что sin2t«/= -л A—cos 2ш/) и ). = --, получим:
У* = 1 — Гл] + г !cos и
Вычислим вторые производные от уи уь уъ по времени /:
р, = 0, у., = — ~ cos ш/, уа = — rco2 (cos со/ -р >. cos 2co/).
Теперь находим Мус, подставив jj,, j/j, 3?a в формулу B):
Мус = — '!- гш2 cos u)/ — Р" Ы1 (cos со/ - -). cos 2шО.
или
ус = — rf~ [(Л, -;- 2Р3) cos t»/ - - '2).Яа cos '
152
ОЬ'ЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Внося полученное выражение М'$с
нормальную силу реакции фундамента:
u формулу A), определяем
-f 2P3) cos
cos
которая зависит от времени t.
Искомое давление коночном машины на фундамент папраплепо
противоположно силе нормальной реакции R и раино eit по модулю.
Задача 268. Груз Л весом Р\ сопершает колебания па пружине,
UTopolt конец котором прикреплен к пеполпижпому i'py:<y И не-
несом А,. Гру.ч В лежит па горизонтально!! п::о-
скости.
Определить закон колебаипО груза А, если
экспериментально определенная нормальная сила
реакции горизонтально!! плоскости fi = Pl ¦'¦-
W
¦
и
В
Р2
-'¦- А2-4- Нcos ш1. 13 начальный момент пружина
была сжата из положения статического раппоне-
сия груза Л па х и отпущена без иачалыюЛ
скорости. jMaccoii пружины пренебречь.
Р е ш г и и с. Рассмат ринаемпя система состоит
из л пух масс Л и В. Изображаем внешние си.тм:
Pt — нес груза А, приложенный и его центре гя-
жести Ci,P.> — вес груза Л, приложении it м его нет ре
тяжести Сь и R — нормальная сила реакции гори-
зоптальпоИ плоскости.
Выбираем начало отсчета О неподвижно!! иер-
тнкалыюМ оси is положении статического равно-
равновесия груза А.
Запишем теорему о движении центра ииерипи
системы материальных точек в проекции на ось у:
и "
" Мус = \\ Fr
К задаче 268. к^\ 1у'
В данном случае сумма проекции всех внешних сил системы на ось
л
S^ I
Следопательно,
Так как fi^=Pl~\-P.2-\-Hcos ш1, то
Мус = — И cos mt.
§ ¦->] ТЕОРГ.МЛ О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТНММ 153
я
Вычисляем Му*с по формуле Мус = 2 mk9k- В данном случае
к 1
Мус = т^'уу -L-тгуъ
где j'i — искомая величина, а _>'.2==ОС2 — постоянная. Поэтому
M?c = ^yi. B)
Подставип значение Мус из формулы B) в уравнение A), нахо-
находим:
Р-1 yl = —H cos шг1,
т. е.
Pi = —^совшЛ (Л)
Зю — дифференциальное уравнение дппжеиия груза Д. Как следует
пз условия задачи, начальные услоиия движения груза имеют пид:
при ? = 0 yl==a, j';, = 0.
Лроиитегриропав дифференциальное уравнение C), получим:
Пос.че подстапооки начального условия движения / = 0, J'i = 0
имеем Dt = 0, т. е.
Вторично проинтегриропап, находим:
/Л?
Подстановка начального условия движения ZL = 0, j'| = a дает:
Итак, груз А сопершаст колебания по закону
Амплитуда колебаний раина р-~т> а 1Ч'Угоиая частота колебаний
равна со.
154
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. [X
Задача 269. Эпициклический механизм, расположенный в верти-
вертикальной плоскости, установлен на горизонтальной идеально гладкой
плоскости и прикреплен к пей болтами К и L
Зубчатое колесо / радиуса г, неподвижно. С% — центр тяжести
зубчатого колеса 2 веса Р2 и радиуса r2. Q — центр тяжести ста-
щ
К задаче 260.
пипы А и колеса /, общий вес которых равен Р,. Массой криво-
кривошипа QCa, вращающегося с постоянной угловой скоростью ш, пре-
пренебречь. В начальный момент кривошип занимал правое горизонталь-
горизонтальное положение.
Определить: 1) силу нормального давления механизма на плос-
плоскость, 2) угловую скорость со вращения крипошипа, при которой
механизм в условиях отсутстпия болтов начнет подпрыгииать над
горизонтальной плоскостью, 3) наибольшее горизонтальное усилие,
действующее па болты; 4) движение центра тяжести С\ станины меха-
механизма после среза болтов К и L.
§ 1\ ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ 15 5
Решение. Материальная система состоит из двух масс: непо-
неподвижного колеса / со станиной и подписного колеса 2. Изобразим
внешние силы этой системы: Pt—вес станины и неполиижпого ко-
колеса /, Pi — вес подпижного колеса 2, Ry— суммарная нормальная
сила реакции плоскости, Rx — суммарная тангенциальная сила реак-
реакции болтов К и L.
Направим ось у по вертикали через точку С„ а ось х — вдоль
горизонтальной плоскости направо.
Запишем теорему о движении центра инерции системы и проек-
проекциях на оси х и у:
В данной задаче
Следовательно,
Mxc = Rx, Мус = Ry — Pi— A,
т. e.
Rx = Mxc, A)
Ry = A^c^-Pl-L-Pt. B)
Для определения сил Rx и Ry остается подсчитать МХ'с и Мус-
Вычисление Мхе и Му"с ведется по формулам:
Мхс= 2 mkxk и 2
В данном случае
Мхе = OTi-Vi -j- /Ko-Vj и
где Xi и ух — координаты центра тяжести Q станины механизма
и неподвижного колеса 1, а лг2 и у^ — координат!»! центра тяжести d
подвижного колеса 2.
Как видно из рисунка, Х\ = 0, у\ = ОС\ — постоянная,
лго= С\С% cos wt = (rt -j-rj) cos wt (угол поворота кривошипа QC»
равен (p = ixit, так как, но условию, ш постоянна), у.г= ОС\-\-
-\- C|Q Sin mt= OCi+ijx-^-rd Sin at.
Вычислив вторые производные от xi7 ylt xit y^ по времени /,
находим: X| = 0, y, = 0,
.V.i = (Г1~Г Г*) W* C0S Ш^ Vi == (rI ~\~ r'l) Ш* S'n Ш^'
Внеся эти значения в формулы C), получим:
Mxq = — tni(r1-\-r2)ш'! cos ud, D)
Жрс = — пЧ (ri + гг) <°'2 sin <оЛ E)
156 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
После подстановки D) с A) и E) в B) находим:
Ял = —?(ri-t-rO«)'cos< F)
R — Pi -- А, — -' (г, -г Го) ш* sin mt. G)
Давление механизма на горизонтальную плоскость направлено
противоположно силе реакции Ry и но модулю равно ей:
ту
Ny — Pi -j - Рг 'J (rj - - г2)оM sin iot.
о
О)*.
Наибольшее давление
Наименьшее давление
В услоииях отсутстния болт oi! механизм может начать подпрыгии.ггь
над горизонтальной плоскостью. Это будет иметь место при /^.min<'0,
т. е. при P,-f-P.2 = (rl 4~ r2)ш2 <С 0> откуда следует, что углоная
скорость (о вращения кривошипа QQ, при которой происходит под-
подпрыгивание механизма, должна удовлетворять неравенству
Горизонтальное даилеппе, действующее на Оолты, направлено про-
противоположно #v (см. формулу F)), причем
Наибольшее давление равно
р
Допустим, что под дейстнием силы Nx произошел срез болтол.
Тогда весь механизм начнет двигаться по идеально гладкой горизон-
горизонтальной плоскости.
Па рис. б изображен механизм в положении, когда точка С( сме-
сместилась с оси у направо па л\. Так как станина .механизма находится
в движении относительно оси х, то л"! является функцией времени t.
Из чертежа пидпо, чго р данном случае
Х-1 = Ху-\- Q С-1 COS wl = Xi - j - (Г! -[- Г*) COS lilt.
§ 21 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ 157
Следовательно,
Мхе = m{xi -f- т.}Х.1 = («, -r т.,).?, — т., (rY -j- г.,) ш9 cos ojA (8)
Теорема о движении центра инерции системы материальных точек
и проекции на ось х имеет вид
Так как после среза болтоп сила реакции Rx отсутствует,. a miein-
п
пме силы Я,, Р,2 и Ry перпендикулярны к оси х, то VJ F%x = 0 и
Мхс = 0. Подставив u это уравнение значение Л1л~с пз формулы (8),
получим:
('"i -г mi) -"\ ~ m-i (ri ~г rt) <°2 cos Ы = О,
т. е.
х, = р~-рг(г 1 + г-г) W" cos ш^. (9)
Это — дифференциальное уравнение движения центра тяжести С\
станины механизма по идеально гладкой горизонтальной плоскости
при отсутствии болтов. Для интегрирования уравнения (9) должны
быть известны начальные условия движения точки Q. Так как в
момент среза болтов точка С находилась на оси у и была в покое,
то начальные условия движения записываются в виде:
при ^ = 0 xt = 0 и i, = 0.
Проинтегрировав дифференциальное ураипспие (9), получим:
*i = Т\^1к (г' + ri) ш sin ^ + Di'
После подстановки начального условия движения ( = 0 и х1 =
имеем: D, = 0, т. е.
и 1 Р
' 1 "Г ' а
sin
р
Вторично проинтегрировав, находим: xt = —¦ -р—^-р- (''i ~\- г2) cos tot -|-
4-D-2- Использовав то, что при ^==0 х! = 0, имеем:
т. е.
Х1 = ъ—гтг(г1~{~ гаH —
158 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Итак, центр тяжести Ск станины механизма в случае отсутсгпия
болтов совершает гармонические колебания с амплитудой
и круговой частотой, рапной угловой скорости ш вращения криво-
кривошипа dC2.
Эту задачу можно решить также с помощью урапнения динамики
переносного движения. Как известно, переносное поступательное
движение системы происходит как движение абсолютное под дейст-
действием всех внешних сил системы и сил инерции масс в их относи-
относительном движении, т. е.
где Fek — внешние силы, a Jrk — силы инерции в относительном дви-
движении.
В проекциях на оси декартовых координат имеем:
к=\
^=2'•'?,+ 2 Jrur
fc=I ft=I
В данной задаче колесо 2, участвуя в переносном поступательном
движении вместе с колесом 1 и станиной, совершает относительное
вращательное движение вокруг оси, проходящей через центр тяже-
тяжести С) колеса 1 и станины перпендикулярно к плоскости ху.
Изобразив все внешние силы системы Ръ Рь Rx и Ry (см. рис. в),
добавляем центробежную силу инерции и относительном движении
р
Jrn — 2 wrn- Так как точка С2 и относительном дпижении они-
смиает окружность с центром Q радиуса C]C^ = ri-\-ri, то центро-
центростремительное ускорение 1?>гп направлено от Сг к С, и, следовательно,
центробежная сила инерции в относительном движении Jrn направ-
направлена противоположно. По модулю
Вращательная сила инерции в относительном движении Jn =
Р
= ~ wr% равна нулю, гак как криоошии вращается равномерно.
§ 2| ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСЛЕД1Ы 159
Применил дифференциальные уравнения переносного поступатель-
поступательною движения материальной системы в проекциях на оси х и у:
получим:
Мхе = RX + Jrn cos at, Mye = Ry — Я, — P3 -\- Jrn sin ш^.
-lrri)Mi, то
A0)
Так как xe = xu yc=yh Jrn — -hri-lrri)Mi, то
о
^У. =^ - Л - />¦ + j (rt -r rO «* sin cof. A1)
В случае механизма, закрепленного болтами, центр тяжести d
колеса / и станины неподвижен, т. е. jL*1=j7i:=0, и дифференциаль-
дифференциальные уравнения припимаЕот вид:
^ 0, A2)
о
R, — Pi — Pt + Ц (rt + г,)«' sin ш^ = 0, A3)
о
откуда вытекает, что проекция нормальной силы реакции плоскости
равна
Проекция на ось х горизонтальной силы реакции болтов раина
Условие подпрыгивания определяем из A4), считая Rvmm отрица-
отрицательным. Так Как R\mm=:: Р\~\- Р<1— 2 (rl -f- ri) ш\ a Rymin^O, ТО
;>
Р,-\-Рп (Г, - - Го) С
откуда
160
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Для определения закона дпижения центра тяжести Q колеса /
и станины механизма после среза болтов надо в формуле A0) поло-
положить /"^ = 0. Тогда
Р«
Mxi = — (г, -р гг) ш cos cor,
i. e. приходим к уравнению (9):
Х\ = тт—
Р,
cos
решение которого было получено выше.
Задача 270. Решить предыдущую задачу п предположении, что
эпициклический механизм установлен па упругой балке, которая про-
прогибается па 1 см под действием силы, равной с кг.
а)
К задаче 270.
При определении силы реакции балки эпициклический механизм
счиiaiь материальной чочкой, сосредоточенной в середине балки ого
приближение гшконно, если размеры механизма малы по сравнению
с длиной балки).
Определить закон колебании центра тяжести С\ станины меха-
механизма, предполагая, что в начальный момент точка Q находилась
и положении статического равновесия, а скорость ее, ранная по вели-
величине vu, была направлена иннз. Массой балки и сопротивлением дин-
женшо пренебречь. Кривошип пращается по часовой стрелке с по-
постоянной угловой скоростью со. В начальный момент он занимал пра-
пое горизонтальное иолО/Кеппе.
Решение. Изобразим внешние силы, приложенные к механизму:
Р, — нос станины А и иеподиижчюго колеса /, Ра — вес подвижного
колеса 2, R—суммарная упругая сила балки.
§2] ТЕОРЕМА О ДВИЖЕНИИ ЦЕ1НТРА ИНЕРЦИИ СИСТЕМЫ 161
Выбираем начало отсчета О на неподвижной вертикальной осп у
r положении статического равновесия центра тяжести d станины
механизма, т. е. при прогибе середины балки на
(I)
Ось у направим вниз.
Теорема о движении центра инерции системы материальных точек
проекции на ось у в данном случае имеет вид
На рис. а изображено положение точек С) и Cq в момент времени t,
когда точка С\ переместилась вниз из положения статического равно-
равновесия. При этом кривошип CtC<i иоиернулся па угол ср = и^ (так как и>
постоянно). Нетрудно видеть, что
y^=y1Jr(r)-\-ri)smmt. C)
13 этот момент времени балка прогнулась па Ay = Дст-]-_у, и, следо-
пательпо, проекция упругой силы балки рапна
Я„ = —cAj. = —с(Д„+.У|). D)
Подставив это выражение Rv и ураинение (С2) и приняв во вни-
внимание, что из формулы (I) следует Р\-\-Рч—сДст = 0, получим:
~cyt. E)
я
Значение Alyc определяем по формуле Афс = 2 /ПЛ- ^ данном
случае
Воспользовавшись формулой C), найдем:
Мус = ^±i^y. - ~? (ri + г,) ш5 sin ш^. F)
После подстановки значения Мус из формулы F) в уравнение E)
получим:
У +У ( ^) 'sin
Это — дифференциальное уравнение вынужденных колебаний центра
тяжести С\ станины механизма.
После введения обозначений
6 Теоретическая механика, том II
162 ОБШИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
уравнение принимает вид
У\ -\- &У\ = h sin mt. G)
Общее решение дифференциального уравнения G) будет:
У\ = У\ оди + У\ част > (8)
где_у1одн— общее решение соответствующего однородного уравне-
уравнения, а _у, част — частное решение уравнения G). Решение у{ одн опре-
определяем из дифференциального уравнения j/, ~\- klyY = 0. Характери-
Характеристическое уравнение имеет и ид /-2-|-?2 = 0. Корми характеристиче.-
ского уравнения равны rx n = ^zki. Следовательно,
У\ одн = Л, cos kt -\- Dt sin kt, (9)
где D\ и Dj, — постоянные нптегриронаиия.
При нахождении частного решения следует различать два вари-
варианта: а) случай отсутствия резонанса (со z/z k), б) случай резонанса
A0= к).
Рассмотрим вариант а): если ш гф к, то мастное решение ищется
и виде ух част— ^ sin mt-\- Я cos шг, где Л и Д—постоянные коэф-
коэффициенты, подлежащие последующему определению. Подставив _у, ча,.т
в дифференциальное уравнение G), получим:
— Аш* sin wt — Sto'2 cos co^ ~ Ak2 sin mt -\- Bli1 cos mt = // sin <o?.
Приравняв коэффициенты, стоящие и левой и правой частях уравне-
уравнения соответственно при sin м? и cos at, находим:
так как ш ^ к, то Л=р—-^ и В=0, т. е. частное решение
имеет вид
У\ част г= fe2 _!. цд sin м^ A0)
Подставив значения j/j оди и _Vi4acr из формул (9) и A0) в общее
решение (8), находим:
У\=У\ одн "Г-УI част= Л, COS A* -f О2 Sin Af + fe2_!^ Sin (Of. A 1)
Для определения постоянных интегрирования надо записать на-
начальные условия движения точки Су В условии задачи указано, что
в начальный момент точка С\ была в положении статического
равновесия и скорость ее, по величине равная va, была направлена
вниз, т. е. при ? = 0 _у,=0 и _i"'i = I'n- Подстанив в A1) начальное
условие ^ = 0, _у! = 0, находим, что D1==0.
§ 21 ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ 163
Для определения D.2 продифференцируем по времени ylt опреде-
определенное формулой A1),
Oi = — D,k sin kt -4- Dak cos kt 4- ., " . cos wt.
-' ' I 'ft- — u)a
Подставив в j> начальное условие t = 0, yi=zvu, находим:
Dt=-. Vu — тт.
Теперь решение дифференциального уравнения вынужденных
колебаний центра тяжести Ct станины механизма в случае отсутствия
резонанса принимает вид
У\:3= ь ( v0 — ht— "а) S'n ^ ~Ь pTZ—г S'n ш*'
где
k =
Рассмотрим вариант б): если w = k, т. е. имеет место явление
резонанса, то частное решение ищется в виде ^1част= Д^ sin ш^-|-
-\- Bt cos wt, где А и В — постоянные коэффициенты, подлежащие
последующему определению. Вычисляем:
$\част = Asm <s>t-\- Awt cos wt-\-В cos wt — Bwt sin wt,
У1част — ^Aw cos wt— Aw'*t sin wt — 2fico sin wt — BwH cos wt.
Подставив _У1част и yi4acT в дифференциальное уравнение G), по-
получим:
2Aw cos (at — AwH sin u)? — 2flw sin w/ — ВшЧ cos w? -)- ДА9/ sin tot 4-
-)- Z?^9^ cos tot = h sin u>?.
Приравняв коэффициенты, стоящие в левой и правой частях уравне-
уравнения соответственно при sin wt и cos wt, находим (напомним, что при
резонансе ш = А):
откуда следует, что Л = 0 и В = — /г/2со, т. е. частное решение
имеет вид
-У1част = — J^t COS wt. A2)
Подставив значения yioM и _у, чит из формул (9) и A2) в (8), на-
находим:
J'i=.Vi<WH+J'i41,CT = A cos (o^4-04 sin (в^ — 2-<cosu)^. A3)
Воспользовавшись начальным условием движения, т. е. тем, что при
t = 0 _yi = O» получаем: Д = 0.
6*
164 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. ГС
Для определения О2 продифференцируем но времени уъ записан-
записанное формулой A3):
j>! = — Dito sin at -|- D^co cos ш? — ,j- cos u>i -|- ^- ? sin urf.
Подставив в jJj начальное условие днижения ? = 0,_р1=г>0,имеем:
Теперь решение дифференциального уравнения вынужденных ко-
колебаний центра тяжести С\ станины механизма при резонансе прини-
принимает вид
Ух = I- (*а + ^) sin "* - 2« l C0S "'•
где /г =73—г~б~ (ri "I" ra) ^ Переменная амплитуда вынужденных ко-
лебамий точки Ct paiuia a=,^ ^ и растет прямо пропорционально
иремепи.
Эту задачу, подобно прел [идущей, можно решить также и с по-
помощью уравнения динамики переносного поступательного движения.
Колесо 2, участвуя и переносном поступательном днижепии имеете
с центром тяжести С\ колеса / и станины, совершает относительное
нратательное движение вокруг оси, проходящей через центр тяже-
тяжести С; колеса / и станины, перпендикулярной к плоскости симметрии
механизма.
Изобразив dcc внешние силы: Р1; Рь R (см. рис. б), добавляем
центробежную силу инерции в относительном движении Jrn = —
р
wrn. 'Гак как точка С2 описывает в относительном движении
окружность с центром С, ридиуса гх -\- г<А, то центростремительное
ускорение wrn напраплеис) от С.2 к С, и, следовательно, центробежная
сила инерции и относительном движении Jrn направлена противопо-
противоположно. По модулю:
, Р.2 Р*, \ \ "
Вращательная сила инерции и относительном днижепии J,^ =
Р
= wr. раина пулю, так как кривошип вращается равномерно.
Применив дифференциальное уранпепие переносного поступатель-
поступательного движения материальной системы в проекции на ось у:
получим:
We = A "I" А "Г Ry "I" Jrn Sin «Л A 4)
§ 2) ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ 165
Подставив в уравнение A4)
М = , уе=уи Jn 4ri + rJ<»\
а также выражение Ry = —с (Дст —{-З'О из формулы D), находим:
^V^5'. = A-f^-^cT-O'1-f5('-I-f rJJslnwt. A5)
Учитывая, что на основании формулы A), Pi-j-P^ — сДст = 0,
получим дифференциальное уравнение G) в виде
-h sin Ы,
где /г* = 'f и h= ' * (r, -j- r.2)wa. Интегрирование диффе-
репциального уравнения G) было выполнено н первом варианте реше-
решения этой задачи.
Задачи 269 и 270 были решены двумя способами: применением
теоремы о движении центра инерции системы материальных точек и
с помощью уравнения динамики переносного поступательного движе-
движения. Степень трудности решения задач этими способами следует счи-
считать примерно равноценной.
3. Случай сохранения скорости центра инерции
системы материальных точек. Если главный вектор внешних
п
сил системы равен нулю (Vе = V /^ = 0), то скорость центра ипер-
нпи системы пеизменга по величине и направлению {рс — постоянно),
т. е. центр инерции системы материальных точек движется равно-
равномерно и прямолинейно либо находится и покое.
Если в частном случае скорость центра инерции равна нулю:
фс = 0 (что, например, имеет место при покое системы в начальный
момент), то, несмотря па состояние покоя центра инерции, материаль-
материальные точки системы могут перемещаться, и притом только так, что
сумма произведения масс точек па векторы их перемещений раина
п
нулю, т. е. ^ тк&гк = 0.
п
Аналогично в проекции на ось х: если ^ ^lx==^' т0 -*с —п0"
к=\
п.
стояпная. Если же в частном случае хс = 0, то ^ mkt±xk = Q.
к = \
Задача 271. Может ли ч«лопек ходить по идеально гладкой гори-
горизонтальной плоскости?
Решение. Внешними силами, приложенными к человеку, являются
его вес Р и суммарная нормальная сила реакции земли /?. Горизон-
166
ОГ.ЩИН ТЕОРНМЫ ДИНАМИКИ
[ГЛ. IX
тальпая сила реакции отсутствует, ибо плоскость япляется идеально
гладкой.
Напраиив ось х по горизонтали направо, запишем теорему о дии-
жеиии центра инерции материальных точек в проекции на ось х:
п.
Так как силы Р и R перпендикулярны к оси х, то ^ Fekx = 0 п,
следовательно, А1хс = 0, откуда Mxq= Сх = const. Так как в началь-
начальный момент человек находился в покое, то Q = 0 и Мх'с = 0. Зна-
Значит, AIjcc ^ C9 ^ const, т. е. абсцисса центра инерции С человека
У
е)
б)
Чг
К задаче 271.
остается неизменной и челопек по гладкой горизонтальной плоскости
не может ходить. F-сли бы челопек псе же попытался пойти, подняв и
выстапив, например, левую ногу вперед, то правая нога его перемести-
переместилась бы назад настолько, что абсцисса центра инерции хс осталась бы
неизменной.
Человек мог бы переместиться по гладкой горизонтальной пло-
плоскости, бросии какой-нибудь предмет вперед (или назад); тогда бы он
начал двигаться в противоположном напраилении, т. е. назад (или
вперед).
Если бы человек, стоящий на гладкой горизонтальной плоскости,
хотел подпрыгнуть, то он мог бы это сопсршить. Действительно,
теорема о движении центра инерции системы материальных точек
в проекции па ось у дает;
§ 2| ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА ИНЕРЦИИ СИСТЕМЫ 167
при отталкивании от земли за счет деформации мышц получим
R~^>P, т. е. ус^>0. следовательно, центр инерции человека будет
перемещаться по вертикали вверх.
Человек может ходить по негладкой горизонтальной плоскости,
так как в этом случае к упомянутым внешним силам добавляется
сила трения скольжения /\ е подошп человека о землю, направленная
в сторону движения (см. рис. б). В этом случае получим Mxc = t\.c>
т. е. лгс^О, и центр инерции человека С будет ускоренно переме-
перемещаться по горизонтали направо.
Задача 272. По наклонной плоскости KL усеченной четырех-
четырехугольной призмы DEKL опускается груз А веса Рд=10 кг, приводя
в движение посредством невесомой перастяжимой нити груз В веса
Рв=6 кг.
Найти перемещение призмы DEKL веса Р=20 кг по идеально
гладкой горизонтальной плоскости, если груз А переместился по на-
наклонной плоскости KL вниз
на 1 м. В начальный момент
система находилась в покое.
Решение. Изобразим все
внешние силы, приложенные
к материальной системе, состоя-
состоящей из призмы и двух грузов.
Внешними силами являются: Р —
вес призмы, Р — вес груза А; К задаче 272.
Рд — вес груза В и R~ сум-
суммарная нормальная сила реакции горизонтальной плоскости. Так как
горизонтальная плоскость идеально гладкая, то сила трения сколь-
скольжения между призмой DEKL и горизонтальной плоскостью отсутст-
иует.
Направим ось х по горизонтали направо и запишем теорему о
движении центра инерции системы материальных точек в проекции
па эту ось:
я
Мхг= V. F* .
С ^J кх
п
Так как все внешние силы перпендикулярны к оси х, то
Следовательно, 7WJcc = 0. Тогда
Мхс — Q.
В начальный момент времени система находилась в покое; поэтому
q = 0 и Мхс = 0. Отсюда следует, что
Мхс = Сь
f
D
В
|
Р
•
R
И
\V
168 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
т. е. абсцисса центра инерции системы, независимо от перемещений
отдельных масс, входящих в систему, остается постоянной. Из опре-
определения центра инерции системы материальных точек вытекает, что
л
Мхс= 2 щихк.
Обозначим индексами I координаты материальных точек системы,
соответствующие моменту 1{ начала перемещений, и индексами 2 —
координаты, соответствующие моменту tt окончания перемещении.
Тогда
п
при t = t, Mxc= У
k
п
при г=/.2 Mxc= ^
к--\
Вычитая из второго соот юиюния перпое, имеем:
и
0 = У] тк (хгк — х1к).
Обозначив хи — Х\ь = &хк, получим, что за промежуток време-
времени Af = f2 — ^i »ри неизменной абсциссе хс центра инерции систе-
системы материальных точек осуществились такие перемещения точек
материальной системы, что сумма произведений масс точек па проек-
п
ции их перемещении на ось х раина нулю: ^] тккхк = 0. Примсни-
к^ I
те.чьпо к данной задаче запишем:
тАЬ.хА -|~ т^хв -'- tnhx — О,
где Дх — искомое перемещение призмы по горизонтальной плоскости.
Пиразин массы тел через их веса, получим:
10(Дл--;- 1 -cos 60е) — 6(Ддг+ 1) ~20Дх = 0.
(При решении подобных затач часто допускается грубая ошибка:
проекции перемещений масс, входящих в систему, записываются не
для абсолютного, а для относительного днижепия. Переносным
является движение призмы по горизонтальной плоскости, а относи-
относительным — движения грузов Л и В по отношению к призме.)
Решив уравнение относительно Ддг, находим: Длг=; — ^. м. Знак
минус указывает, что призма перемещается в сторону, противополож-
противоположную положительному направлению осп х, т. е. палево.
§ 3] ТГ.ОРГ.МА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ 1 69
§ 3. Теорема об изменении главного вектора количеств
движения системы материальных точек
1°. Импульс силы. Глаппый вектор количеств дви-
движения системы материальных точек. Импульс силы F,
действующей в течение промежутка времени t% — tlt определяется
формулой
/о
В частном случае постоянной по величине и направлению силы
импульс постоянной силы
5 = 74*, — *,).
Проекции импульса силы па оси декартовых координат равны:
Sx = \Fxdt, Sv:=\Fydt, S2 = \F,dt,
ti it h
где S = Sxi-\-Syj-j-S2k, a Fx, Fy, /v,— проекции силы F. Модуль
импульса силы
Направляющие косинусы определяются по формулам:
cos (xTs) = S*, cos (у, S) = |*, cos (zTs) = %.
Единица импульса силы: кг-сек.
Теорема об импульсе равнодействующей силы. Импульс равно-
равнодействующей силы за некоторый промежуток времени равен векторной
сумме импульсов составляющих сил за тот же промежуток времени
Та же теорема в проекциях па оси декартовых координат имеет
вид:
Sx (R) =^SX (Fk), Sy (R) = ? S, W' •*, (*) = S S, (Fk).
Количество движения q материальной точки массы т, дви-
движущейся со скоростью v, определяется формулой
т. е. количество движения — вектор, пропорциональный скорости
точки.
170 ОКЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Количество движения является одной из мер движения материаль-
материальной точки.
Проекции количества движения материальной точки на оси де-
декартовых координат имеют вид:
или
qx = mx, qy = ту, qz = mi.
Модуль количества движения материальной точки
Направляющие косинусы:
) = ^, cos (уТд)=^, со8(гГ9) = у.
Единица количества движения: кг-сек.
Главный вектор количеств движения системы материаль-
материальных точек: п п
япляющийся векторной суммой количеств движения точек материальной
системы, рапен произведению массы системы па скорость ее центра
инерции.
Проекции главного вектора количеств движения системы матери-
материальных точек на оси декартовых координат даются формулами;
п л п
k = Mxc, Qv=
где Q =
Модуль главного вектора количеств движения системы матери-
материальных точек
Направляющие косинусы:
Задача 273. Диск вращается вокруг неподвижной оси. Центр
тяжести диска лежит на оси вращения. Как изменится главный
вектор количеств движения диска, если углопая скорость диска упе-
личится в два раза?
Решение. Так как центр тяжести диска лежит на оси враще-
вращения, то *>с = 0 и, следовательно, Q = Jl1vc = Q. Поэтому главный
вектор количеств движения в данном случае от угловой скорости
не зависит и равен пулю.
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
171
Задача 274. Определить главный вектор количеств движения
колеса ьеса Р, катящегося по прямолинейному рельсу, если центр
тяжести колеса движется по за-
закону xr = af.
Решение. Главный вектор
котичеств движения колеса
Q = Mvc
где М — масса, a <vQ — скорость
центра тяжести колеса.
R рассматриваемом случае |
vc = хс = а, т." е. о
q __ Р а К задаче 274.
Вектор Q коллинеареп vc> т. е. направлен по горизонтали направо.
Задача 275. Валка А веса Р1 перемещается по горизонтали
направо посредством двух катушек Б и D веса Р9 и радиуса г
\\\\\ \\\\\\J\\\\\\\\\\\\\\\\V.\\ v
\\\\\Ч\\\\\\\\\
n ^\\
К задаче 275.
каждая, катящихся по земле без скольжепия. Скорость центра
тяжести каждой из катушек равна V. Определить главный вектор
172 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
количеств движения системы. Балка находится от земли па расстоя-
расстоянии г-\-а (см. рисунок).
Решение. Гласный вектор количеств движения системы:
где QA — главный вектор количеств движения балки A, QD и <?D--
главные векторы количеств движения кагушек S и D,
Имеем:
Учитывая, что мгновенный центр скоростей ёТ5 каждой из кату-
катушек находится в точке касания катушки с землей (см. рис. б), на-
находим: '
г -|-л
Итак,
в л ' S S \ г ¦
Таким образом, направление главного вектора количеств движения
системы совпадает с направлением движения балки.
Задача 276. Определить глапный вектор количеств движения
кулисного механизма, рассмотренного п задаче 262.
Решение. Проекции главного нектора количестп движения
механизма на оси декартовых координат даются формулами:
где
При решении задачи 262 были определены координаты центра
инерции механизма:
Находим:
$ 31 ТЕОРЕМЛ OR ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ 173
Следовательно,
Qx = Мхс = — -' + 2^"+ 2Рз До sin <
/о) COS arf.
Модуль главного вектора количеств движения кулисного механизма
Q = \/Q%+Qi = .? /(Pi + 2Р, + 2Я»I sm' oj/ + (Я, -f 2P,J coss!«./.
Косинус угла, котормй образует вектор Q с осью х
cos (*Г0) = ^ = --т g^'.^!L^l- -
2°. Теорема об изменении количества движения
материальной точки (в интегральной форме). Изме-
Изменение количества движения материальной точки за некоторый про-
промежуток времени равно векторной сумме импульсов сил, приложен-
приложенных к точке за тот же промежуток времени:
где 9i соответствует начальному моменту времени tu a q.2 — конеч-
конечному моменту времени /.2. Та же теорема в проекциях па оси декар-
декартовых координат имеет кид:
я
тх.г — mxi= ^]
— myx =^Sy (Fk),
С помощью теоремы об изменении количества движения матери-
материальной точки можно решать аадачи, в которых в число данных и не-
неизвестных входят: масса т материальной точки, скорость точки
в начальный и конечный моменты времени {Vi и v.2), силы, прило-
приложенные к материальной точке, и промежуток времени их действия.
Для вычисления импульса силы по формуле S= \Fdt должна
й
быть известна зависимость силы от времени, т. е. в случае сил, зави-
зависящих от координат и скоростей, надо знать закон движения.
174 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. [Ж
Задачи на применение теоремы об изменении кол н-
чества движения материальной точки следует решать
в следующей последовательности:
1) изобразить на рисунке все силы, приложенные к материальной
точке, т. е. задаваемые силы и силы реакций связей (применить прин-
принцип освобождаемости от связей);
2) выбрать систему координат;
3) записать теорему об изменении количества движения матери-
материальной точки в проекциях на эти оси:
тх.г — тхх — 2j ^
п
п
mil — 'nii—YiSz С7*)!
4) а) если в задаче требуется определить начальную или конеч-
конечную скорости точки при заданном законе изменения сил и проме-
промежутке времени их действия, то, вычислив проекции импульсов сил
по формулам
Sx= \Fxdt, Sy=\ F/t, S2= \Fzdt
ti ti t{
и подставив их значения в з'равнения предыдущего пункта, опреде-
определяют искомые проекции скорости точки;
б) если по условию задачи требуется определить одну из по-
постоянных сил, приложенных к материальной точке, то ее можно
легко получить из уравнений пункта 3), так как в этом случае
о С" D 4- \ О Г? D- 4- \ О }^ (i i \
О .? -^— i j^ yj' ^ ~—~ L j \f о о - / у V 1/J 2 ' Z V Й ]/•
Задача 277. Материальная точка массы т движется равномерно
по окружности со скоростью v под действием некоторой системы сил.
Определить импульс равнодействующей этой системы сил при
перемещении материальной точки по дуге четверти окружности из
точки А в точку В.
Решение. Применяем хеорему об изменении количества дпи-
жения материальной точки:
, — mv, = S.
Так как /йф2 = /й1ой, a mvx -= m<vA, то
S -- mvB — mvA.
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
175
и mvA из одной то:ки
Построив векторы количеств движения т
(см. рис. б), находим их разность, равную импульсу раинодеМстную-
тей силы 5. Так как точка движется равномерно, т. е. |©д| = \<vA | =
= v, то \S\ = mv /27
mv.
К задаче 277.
Задача 278. Груз спускается вниз по шерохоиатой наклонной
плоскости, расположенной пол углом а к горизонту;/—коэффици-
горизонту;/—коэффициент трения скольжения груза о
наклонную плоскость. В начальный
момент времени скорость груза рав-
равнялась V.
Через какой промежуток времени
скорость груза удвоится?
Решение. Изобразим силы, при-
приложенные к грузу: Р — чес груза,
R—нормальная сила реакции пло-
плоскости, /\ с — сила трения скольже-
скольжения груза о плоскость, причем
F7.c=fN=fPcos ai.
Направляем ось х вдоль наклонной плоскости вниз.
Запишем теорему об изменении количества движения материальной
точки в проекции па ось х:
п.
— mvlx = 2 Sx (Fk).
К задаче 278.
Согласно условию задачи, vlx = v,
ложенные к груну, постоянны, то
= 2v. Так как все силы, при-
приSx (FM) =
= (Р sin i - FJu c) M = P (sin я —j cos a) \t,
1 76 ОГЛЦИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
где М— искомый промежуток времени. Следовательно,
Imv — mv-= P(sin a —/cos a) Af,
откуда
g( Sin a—/ COS a) '
Задача 279. Твердое тело веса Р начинает двигаться ил состоя-
состояния покоя по шероховатой горизонтальной плоскости под действием
силы /•", пропорциональной времени: F=^at, где а — постоянная. Кл-
кую скорость приобретет тело
через t секунд после начала дви-
движения, если коэффициент трепня
Г~ 1 F скольжения тела о горизонталь-
\\"\\\\\j\\\\\\\\\\\\\\ х пую плоскость равен /?
Р е in e п и е. Изобразим силы,
приложенные к телу: Р — нес
К задаче 279. тела, F—движущая сила, равная
по модулю F—at, Л—нормаль-
Л—нормальная сила реакции горизонтальной плоскости, Frc — сила трения
скольжения тела о горизонтальную плоскость, причем FTC=fP.
Направим ось х но горизонтали направо.
Запишем теорему об изменении количества движения материаль-
материальной точки и проекции па ось х:
п
mvix — mvlx— 2 Sx(Fk).
k=\
•alj[: = 0, так как и начальный момент тело находилось в покое;
vix = vx, где г^ — проекция искомой скорости па ось х. Сумма
проекций импульсов всех сил на ось х равна
? Sx (Fk) = \Fdt-1\. c-t = { atdt -fPt = ~ -/Pt.
ft=l 0 0
Следовательно,
?.,_?-/*.
откуда
3°. Теорема об изменении главного вектора ко-
количеств движения системы материальных точек
(в интегральной форме). Изменение главного вектора коли-
количеств движения системы материальных точек за некоторый промежу-
§ 31 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ 177
ток времени равно векторной сумме импульсов всех внешних сил си-
системы за тот же промежуток времени:
Та же теорема в проекциях па оси декартовых координат имеет
пид:
Qtx- Qi, = ? Sx (/=!), Qb-Qly = ?j 5,(/*),
т. e.
MX - MX = ? 5, (/*), ^Ci - Mj> = J] Sv
*=1 ft=L
Следует обратить внимание на то, что сумма импульсов впутрен-
них сил системы всегда равна пулю: ^ 5(/^) = 0, т. е. внутренние
силы непосредственно не влияют на изменение главного вектора ко-
личестн движения системы материальных точек.
Отсутствие внутренних сил в формулировке теоремы об измене-
изменении главного вектора количеств движения системы материальных то-
точек значительно упрощает решение соответствующих задач.
Эта теорема обычно применяется в случае сплошных сред (см.
ниже теорему Эйлера).
Случай сохранения главного вектора количеств движения си-
системы материальных точек.
Если векторная сумма импульсов внешних сил системы равна пулю,
то главный вектор количеств движения системы материальных точек по-
71
стоянен, т. е. если ? 5(/7р = 0, то Qi = Ql.
Если сумма проекций импульсов внешних сил на некоторую ось
равна нулю, то проекция на эту ось главного вектора количеств дви-
движения системы неизменна. Например,если
к- I
178 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ 1ГЛ. IX
Закон сохранения главного вектора количеств движения системы
материальных точек или сохранения его проекции чаще всего приме-
применяется при решении задач, в которых в число данных и искомых ве-
величин входят массы материальных точек и их скорости в начальный
и конечный моменты времени.
Решать задачи с помощью закона сохранения
главного вектора количеств движения надо в сле-
следующей последовательности:
1) изобразить на рисунке все внешние силы;
2) выбрать систему координат;
3) записать теорему об изменении главного вектора количеств
движения системы материальных точек в проекциях на оси координат;
4) если сумма проекций импульсов внешних сил на ось оказы-
л
вается равной нулю, например: У_] Sx(F*k) = О, то следует прирав-
приравнять между собой проекции па эту ось главного вектора количеств
движения системы п начальный и конечный моменты времени, т. е.
я п
Q+х = Q,х, где Q.ix = У] 1пкХк„ и Qix= У^ mhxitv и из полученного
уравнения определить искомую величину.
Задача 280. Материальная система состоит из груза А веса РА>
лежащего на наклонной плоскости клина В веса Р/(, расположенной
под углом а к горизонту. В начальный момент система находилась в
покое; затем груз А начал скользить по наклонной плоскости с от-
относительной скоростью и.
6)
В
Л >n\\\\\\\nn\\\\\\\N\V4\\V\\\\V4\\N X
К задаче 280.
Определить скорость движения клина В. Силой трения скольжения
клина о горизонтальную плоскость пренебречь.
Решение. В состав рассматриваемой материальной системы
входят дпа тела: груз Л и клин В.
Изобразим все внешние силы системы: РА — вес груза, Рц— вес
клипа, R—нормальная сила реакции горизонтальной плоскости (было
бы ошибочным изображение нормальной силы реакции наклонной
плоскости, приложенной к грузу, так как эта сила по отношению
к системе, состоящей из груза и клипа, янляегся внутренней).
Направим ось х по горизонтали направо.
§ 3| . ТЕОРЕМА 0Г> ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ 179
Запишем теорему об изменении главного вектора количеств дви-
движения системы материальных точек в проекции на ось х:
Так как сумма проекций всех внешних сил па ось х равна нулю:
п
^ Fkx = 0, то и сумма проекций импульсов всех внешних сил на
* =- г
эту ось тоже равна нулю:
* = I * = I ft C( ft = I
Тогда
Qb-Qlx=0,
т. e. Qix = Qix.
Следовательно, имеет место случай сохранения проекции на ось х
главного вектора количеств движения системы.
В начальный момент система находилась в покое, т. е. Qix^=0.
Вычислим проекцию на ось д: главного вектора количеств дви-
движения системы в рассматриваемый момент времени. Допустим, что
клин В движется направо с искомой скоростью Фд. Для нахождения
скорости груза А надо применить теорему о сложении скоростей
точки 11 п = ve -I- <Dr. Груз А совершает переносное поступательное
движение вместе с клином В, т. е. Фе = Фл, и относительное движе-
движение по отношению к клину В, т. е. ч)г = и.
Следовательно, фд=гфд-[- и (см. рис. б) и
¦vax = vHx -\- их = vBx -\- и cos а.
Теперь можно вычислить проекцию главного вектора количеств дни-
жепия системы на ось х:
р. Рв
Qix = mAvAx -J- mBvBx = -— (vBx + и cos a) -|- — vBx;
как было показано, Q^x==Qix, т. е.
-*- (vBx + и cos a) + ^ vRx = 0,
откуда
Знак минус указывает, что в дейстпителыюсти клин В движется на-
налево, т. е. вектор ч>в направлен не так, как было предположено шише.
(При решении подобных задач не следует забывать, что в выражение
180 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
главного вектора количеств движения системы материальных точек
входят абсолютные скорости материальных точек.)
Задача 281. Решить предыдущую задачу в предположении, чго
в начальный момент клин В перемещался направо со скоростью vfi,
а груз А находился в относительном покое.
Определить скорость клина Б в момент, когда груз А начал дви-
двигаться по наклонной плоскости клипа с относительной скоростью и.
Решение. Аналогично выкладкам предыдущей задачи запишем:
4ix — Vl.vr = /j "-** Vk)> У, ^x l~W == u>
=-1 ft
откуда следует, что Qix=Q[x.
Проекция главного вектора количеств движения после начала от-
относительного движения груза определяется формулой
Qix == mAvAx-\-
где VfiX — проекция на ось у искомо» скорости клина.
В соотнетствни с теоремой о сложении скоростей точки, va = i>b -f- и
(см. рис. б, к задаче 280); имеем: vAx =г<вх-г-и cos а. Таким образом,
Q =^.A. +Hcosa)J P'iVDx
Проекция главного нектора количеств движения в начальный момент
времени имеет вид
{-. 'A ~l~ r В -ь
lx g
Из условия равенства проекций на ось х главных векторов ко-
количеств движения системы материальных точек в конечный и началь-
начальный моменты нремепи находим:
vox = -- (vl{x — « соь а) -р - - vDx,
откуда
1)йх = v'hv г:—,—тг- ч Cos a.
Ра
4°. Теорема об изменении глаи-
]9б ног о вектора количеств движения
системы материальных точек в при-
приложении к сплошным средам (теорема Эйлера). Рас-
Рассматривается объем жидкости (или газа), ограниченный бокопоИ
поверхностью трубы и дпу\м плоскими поперечными сечеии51ми 1 и 2,
перпендикулярными к стенкам трубы (рис. 126).
§ 3|
ТЕОРЕМА ОГ» ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
181
Пусть з, и з.2 — площади плоских поперечных сечений / и 2;
р, и р2— плотности жидкости в сечениях / и 2, соответственно <vt и ф2—
скорости жидкости в сечениях / и 2.
При стационарном течении секундная масса Мс, т. е. масса жидкости
(или газа), протекающая в единицу времени через любое сечение
трубы, постоянна:
¦ секундные количества движения жидкости
Векторы Mc<Vi и Mj
в сечениях / и 2.
Внешние силы, действующие на рассматриваемый объем жидкости,
разделяются па объемные и поперхпостпые.
Объемными пазыпаются силы, которые действуют на ьсе частицы
жидкости, расположенные как пп}три, так и па поверхности рассмат-
рассматриваемого объема (например, силы тяжести частиц жидкости).
Поверхностными пазыпаются силы, действующие на частицы
жидкости, лежащие па пиешпей поверхности объема (например, силы
реакций стенок трубы, приложенные к частицам жидкости, соприка-
соприкасающимся со стенками трубы).
Теорема Эйлера. Сумма главных векторов обьемпых и поверхност-
поверхностных сил, а также пекторов секундных количеств движения жидкости,
протекающей через дна сечения трубы, равна пулю, если векторы
секундных количеств движения направить шгутрь выделенного сече-
сечениями объема
(т. е. векторы V0(i, VII0B, McVi и
угольник (см. рис. 127)).
у- М. V
—McQi образуют замкнутый много-
многоРис. 127.
Теоремой Эйлера в приложении к сплошным средам (жидкостям
и газам) удобно пользоваться при решении задач, в которых в число
данных и искомых величин входят: площади плоских поперечных се-
чепий, ограничивающих рассматриваемый объем (с1 и а.Д плотности
182
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
жидкости (газа) в этих сечениях (р, и р9), скорости жидкости (газа)
в этих сечениях (<Vi и ф9). объемные и поверхностные силы.
Задачи с помощью теоремы Эйлера рекомен-
рекомендуется решать в следующей последовательности:
1) изобразить на рисунке объемные и поверхностные силы;
2) изобразить па рисунке векторы секундных количеств движения
жидкости (газа), протекающей через дна сечения, Ограничивающие
рассматриваемый объем жидкости (газа); при этом векторы секундных
количеств движения надо направлять внутрь этого объема;
3) выбрать систему координат;
4) записать теорему Эйлера в проекциях на оси декартовых коор-
координат:
К)б х ~Ь ^пов х ~\~ McVt v — /WCT>9 v = О,
где
5) из уравнений, составленных в предыдущем пункте, определить
искомые величины.
Задача 282. Струя воды протекает по изогнутой трубе, прямо-
прямолинейные участки которой образуют угол 120'% со скоростью 10 м/сек.
б)
К задаче ^Я2.
Ось трубы, изображенная на рис. а, расположена в горизонтальной
плоскости. Сечение трубы — круг, диаметр которого 10 см.
Определить главный пектор сил добавочных динамических давле-
давлений воды на стенки трубы.
S 3| ТЕОРЕМА ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ 183
Решение. Используем теорему Эйлера в приложении к сплош-
сплошным средам. На рис. а изображен вид трубы в плане.
Объемной является сила тяжести воды, которая перпендикулярна
к плоскости рисунка. Поверхностными являются силы реакции стенок
трубы, приложенные к частицам воды. Определив главный вектор
сил реакций стенок трубы, найдем искомый главный вектор добавоч-
добавочных динамических давлений воды на стенки трубы по принципу ра-
равенства действия и противодействия.
Изображаем векторы секундных количеств движения воды, про-
протекающей через сечения трубы / и 2, направив их внутрь рассматри-
рассматриваемого объема (см. рис. б).
Секундная масса воды, т. е. масса воды, протекающей через се-
сечение трубы в одну секунду,
где •[ — удельный вес поды, а — плогцадь поперечного сечения трубы,
v — модуль скорости движения воды по трубе.
Направим ось х по горизонтали направо, а ось у по вертикали
вверх.
Запишем теорему Эйлера в проекциях на оси х и у:
Vo6 x Л- ^пов л- + McVlx — MCVU = О,
Mf)ly — McViy = 0.
В данном случае, поскольку вектор Vo6 перпендикулярен к осям х
и у, получим:
^пов х — McV COS 60° — MCV COS 60" = О,
^пов «— Mzv cos 30° -f Mcv cos 30° = 0
(индексы при скоростях отброшены, так как в нашем случае
\<Oi\ = \4)i\ = v), откуда
Упов .г = 2ЖС^ cos 60°, VnoB у = 0.
Итак, главный вектор добавочных динамических реакций стенок
трубы направлен параллельно оси х (см. рис. б). Так как Жс = ¦¦ ох»,
а
ТО
Vn0B =
n0B
По условию 7—1 кг/дм3, а==^—— = 0,79 дмъ, щ=100 дм/сек,
^=98,1 дм/сек4. Подставив эти значения, получим, что Vn0B= 80,6 кг.
Главный вектор сил добавочных динамических давлений воды па
стенки трубы N равен по модулю и направлен противоположно VnoB,
т. е. по горизонтали налево.
184
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ IX
J
¦li
-¦*/>--_¦
Задача 283. Из резервуара, наполненного водой, вытекает струя
воды со скоростью ^=12 м/сек. Диаметр выходного отверстия d = 4 см.
Определить суммарную добавоч-
добавочную горизонтальную реакцию сте-
стенок резервуара. Понижением
уровня воды в резервуаре пре-
пренебречь.
Решение. Используем тео-
теорему Эйлера в приложении к
сплошным средам. Объемными
являются силы тяжести частиц
поды. Поверхностными — силы
реакции стенок резервуара.
Так как скоростью понижении
уровня воды в резервуаре мы
пренебрегаем, то секундное колч-
Ь) .••-."¦ честно движения воды в сечении /
равно нулю.
Вектор секундного коли'е-
ства движения воды, проходятся
— через сечение 2, направляем внутрь
рассматриваемого объема поды,
*г т. е. по горизонтали палено.
Выбранные оси декартовых
координат ху изображены па ри-
рисунке б.
Теорема Эйлера в проекции на ось х имеет вид
В данном случае, так как Vo5x и Mcvlx равны нулю, получим:
*пов л JVI^V и, Г. е. Упонл tVlcV.
Секундная масса воды равна Л1,. = "* av, где f-—удельный пес
воды, а-—площадь поперечного сечения 2, v — модуль скорости те-
течения воды, т. е. VII0njt = -1 ащ*. В данной задаче
7=1 кг [дм3, а = - ' =0,13 дм*, т;—120 дм/сек,
#=98,1 дм/сек\
Подставив численные значения, получим модуль искомой суммар-
суммарной добавочной горизонтальной силы реакции стенок резервуара
d =^= 1/ 19 1 ice
К задаче 28,4.
§ 4] ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 185
§ 4. Теорема об изменении главного момента количеств
движения системы материальных точек.
Моменты инерции твердых тел
1°. Главный момент количеств движения системы
материальных точек. Моментом 10 количества движения
(кинетическим моментом) материальной точки относительно
центра О называется вектор, определяе-
определяемый формулой /V А10
Модуль этого вектора рапсп |/0| =
= mvh, где h — плечо (рис. 128).
Единица момента количества движе-
движения: кгм- сек.
Момент количества движения /, мате- Рис. 128.
риалыюй точки относительно оси равен
проекции на эту ось момента количества движения материальном
точки относительно любого центра, лежащего па оси:
Разложение вектора Iq по ортам имеет вид
Его модуль дается формулой
\lo\=V
а соответствующие папракляюшис косинусы будут:
cos (х, 1п) = ту1^, cos {у, /0) = -/-, cos (z, l0) = —
Моменты количества дпижеиия материальной точки относительно
осеИ декартовых координат даются формулами:
1Х = т (у? — zy), ly = т (гх — х?), 1г ^ т (ху —ух),
где х, у, z— координаты материальной точки в системе осей, имеющей
начало в центре О; х, $, z — проекции скорости точки на эти оси.
Главный момент Lq количеств движения системы (кинетиче-
(кинетический момент) материальных точек относительно центра О рапе»
пекторпой сумме мо.мептоп количеств движения относительно того же
центра материальных точек системы, т. е.
л л
Lo = ?1 tko = Ц (гк X mkvk)
186 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ |ГЛ. IX
(было бы ошибочным считать, что Lo = rc\ Mvc, так как момент
главного вектора количеств движения относительно центра, вообще
говоря, не равен главному моменту количеств движения всех матери-
материальных точек системы относительно того же центра).
Главные моменты количеств движения системы материаль-
материальных точек относительно осей декартовых координат определяются
формулами:
ft ^ 1 * = I k = \
Нетрудно проследить полную аналогию между понятием момента
силы в статике и момента количества движения в динамике, выте-
вытекающую из сопоставления соответствующих формул:
Ото (И = г X F> h = г X w и т- Д-
2°. Теорема об изменении момента количества
движения материальной точки. Производная по времени
от вектора момента количества движения материальной точки относи-
относительно неподнижпого центра равна векторной сумме момент?
относительно того же центра всех сил, приложенных к материаль-
материальной точке:
Та же теорема, записанная относительно осей декартовых коорди-
координат, имеет вид:
Задачи с помощью теоремы об изменении мо-
момента количества движения материальной точки
рекомендуется решать в следующей последова-
последовательности:
1) выбрать систему координат (при движении точки по дуге ок-
окружности следует одну из осей направить через центр окружностл
перпендикулярно к ее плоскости и выбрать положительное направ-
направление отсчета угла поворота <р);
2) изобразить на рисунке силы, приложенные к материалыю.1
точке, т. е. задаваемые силы и силы реакций связей (применив прин-
принцип освобождаемости от связей);
ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
187
3) вычислить суммы моментоп сил, приложенных к материальной
точке относительно осей координат;
4) изобразить вектор количества движения материальной точки,
записать выражение его моментов относительно осей координат и
изять от них пронзподпые по времени;
5) подстапнть результаты подсчетов двух предыдущих пунктов
решения задачи в уравнения теоремы об изменении момента коли-
количества движения материальной точки;
6) решить в соответствии с условием прямую либо обратную
задачу динамики точки.
Пункт 4) решения задачи можно, минуя 2) н 3), выполнять после 1).
Задача 284. Найти закон и период колебаний математического
маятника, длина нити которого равна /. В начальный момент маятнику,
нить которого занимала отвесное положение,
была сообщена посредством толчка начальная
угловая скорость <ро_
Решение. Математическим маятником
называется материальная точка, подвешенная
посредством псиссомоИ перастяжимой нити
к неподвижной оси и движущаяся в верти-
вертикальной плоскости.
На рисунке маятник изображен в откло-
отклоненном положении от вертикали на угол ср.
Направление положительного отсчета угла
поворота ¦ с? указано на рисунке. Маятник
совершает качания около оси z, перпенди-
перпендикулярной к плоскости рисунка и проходя-
проходящей через точку привеса О. Траекторией мате-
материальной точки является дуга окружности,
расположенная в вертикальной плоскости с центром в О и радиусом /.
Для решения задачи применяем теорему об изменении момента
количества движения материальной точки относительно оси z:
К задаче 284.
dt
A)
Изображаем 'вес материальной точки Р и силу реакции нити Ц.
Момент силы реакции нити R относительно оси z равен нулю, а
момент веса Р равен —Ph =— PI sin ср. Момент отрицателен, так
как его направление противоположно направлению положительного
отсчета угла поворота ср.
Итак, сумма моментов всех сил, приложенных к маятнику, раина
188 0Г.1ЦИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. 15:
Рисунок сделан в предположении, что маятник движется в сто-
сторону увеличения угла попорота 9. Момент количества движения маят-
маятника относительно оси z равен lz = mvl; так как u = /f, то /г=:/я/'29 и
¦ ?- = mP'-f. C)
Подставив значения ^ mz(Fk) и —тг- из формул B) и C) в уравне-
уравнение A), получим:
тр"\ = — PI sin 9.
или
9 -~ -g- sin 9 = 0. D)
Решение этого нелинейного дифференциального уравнения коле-
колебании маятника представляет известные трудности. Поэтому решим
з.чдачу приближенно, считая колебания маятника малыми. Разложим
sin 9 в ряд
и пренебрегая членами разложения порядка выше первого, получим
sin 9 ^ '-?¦ Тогда дифференциальное уравнение колебаний маятника
примет «ид
fp + f 9 = 0-
Обозначив -^:=?2, запишем окончательно:
Для решения этого линейного однородного дифференциального
уравнения второго порядка с постоянными коэффициентами составим
соответствующее характеристическое уравнение >.2-j-?i = 0. Корни
характеристического уравнения раниы X|i2 = zt: /г/, и решение уравне-
уравнения запишется в виде
9 = С cos kt -|- Q sin kt. E)
Для определения постоянных интегрирования С\ и Q воспользу-
воспользуемся заданными начальными условиями движения. В условии задачи
указано, что в начальный момент маятнику, пить которого занимала
отвесное положение, была сообщена посредством толчка начальная
угловая скорость фо. т. е. при f=0 cp = O, <j> = (iv
Дифференцируя 9- определенное уравнением E), по времени,
находим:
$ = — C{ksin kt^- Сгк cos kt. F)
§ 4| ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 189
Подставив в E): ? = 0, ср = О, а в F) / = 0, <р = ф0, получим:
С| = 0, Сд^у. Теперь уравнение (о) принимает вид
¦У. ,,
f = у sin kt,
где k = 1/ у. Обозначим t° = *; тогда окончательно:
ф ^ a sin kt.
Итак, маятник совершает гармонические колебания с угловой ампли-
амплитудой а и с круговой частотой А=1/ у. При малых колебаниях
маятника (sincp^?) оказывается, что круговая частота колебаний не
зависит от начальных условий движения, т. е. колебания маятника
обладают свойством изохронности.
Период колебаний маятника равен
Масса материально!! точки не входит в выражение периода коле-
колебаний Т. Следовательно, материальные точки, несмотря па различные
массы, имеют при одинаковой длине нити маятника / один и тот же
Т f I
период колебании. (В «секундном маятнике» у= 1 сек, т. ц. г. А/ --=1,
откуда длина нити «секундного маятника» равна /=-^„я^1 м.)
Переходим к определению периода колебаний Т из точного диф-
дифференциального уравнения колебаний математического маятника D):
? +7 sin 9 = 0.
Обозначив ^ =ki, умножив почленно уравнение на di? и учи-
.. > d'i . ...
тыпая, что о ау = ¦ '- аср = ф "?» получим:
ф di = — k'1 sin <?d'?.
Проиптегрпропав, находим:
92 = 2AJ cos w -|- С;
так как при ср = а <^ = 0, то имеем С= — 2k* cos а и, следовательно,
ф = k у '2 (cos <? — cos я).
Так как <? = .-'-, то
Ф? == k dt.
у 2 (cos if — cus a)
190 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Воспользовавшись тождеством cos 9— cos а = 2 f sin2 „~ — s'ni \ )>
получим:
- '2' =kJt C)
Сделаем подстановку
2
откуда
sin 7, cos u
sin <¦¦ = sin -су sin и, ('¦))
cos Д-
Теперь уравнение (8) принимает иид
= k dt,
f
cos ,,
или
du
: = kdt.
л- sinz u
В силу условия, что при ? = 0 ф = 0> из формулы (9) вытекает,
Т
что ь начальный момент н== 0, а из условия, что при t== ^ <f> = <х,
следует, что и = |-. Поэтому
da
1/ 1 —
о г
sin2 t, sins u
2
Итак, период колебаний маятника равен
7=4
где
— sin2 _ sin2 и
§4] TROPRMA ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТй ДВИЖЕНИЯ 191
является эллиптическим интегралом первого рода. Разлагая
I
V
1 — sin2 - sin2 и
в ряд и почленно интегрируя, получим:
/ sin2-^ 9 sin1 ™
После подстановки полученного значения К в формулу A0) прихо-
приходим к искомому выражению периода колебаний маятника:
г р- \ I 4 *2 64 '2 ' * * * у» \ /
т. е. колебания маятника при конечной угловой амплитуде а свойством
изохронности не обладают — его период зависит от угловой ампли-
амплитуды колебаний а.
Считая а малой величиной и пренебрегая в формуле A1) членами
разложения, содержащими а во второй и более высоких степенях,
получим приближенную формулу G):
7=2*у?. A2)
При угловой амплитуде колебаний а ^20° период колебаний,
подсчитанный по формуле A1) или по более точной формуле A0),
больше периода колебаний маятника, определенного по приближенной
формуле A2), всего лишь па 0,8%, по при а = 60' — соответственно
уже на 3,5%.
3:. Случай сохранения момента количества движе-
движения материальной точки. Если векторная сумма моментов
относительно неподвижного центра всех сил, приложенных к мате-
материальной точке, равна пулю, то момент количества движения мате-
материальной точки относительно того же центра постоянен, т. е. если
я
^ то (Fk) = 0, то Iq постоянен.
*= i
Аналогично, если сумма моментов сил, приложенных к материаль-
материальной точке, относительно оси равна пулю, то момент количества дви-
движения этой точки относительно той же оси постоянен. Например,
п.
если У] tnx(Fk) = Q, то 1Х — постоянная величина.
k^ i
Этими частными случаями теоремы об изменении момента коли-
количества движения материальной точки удобно пользоваться при изу-
изучении движения материальной точки под действием центральной силы.
192
ОЫЦИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Задачи с помощью закона сохранения момент;)
количества движения материальной точки можно
решать, придерживаясь следующей последователь-
последовательности д е й с т в и й:
1) выбрать центр, относительно которого следует применить тео-
теорему об изменении момента количества движения материальной
точки (при движении точки под действием центральной силы сле-
следует брать центр силы);
2) изобразить па рисунке все задаваемые силы и силы реакций
связей, приложенные к материальной точке;
3) определить вектор количества движения материальной точки
и найти момент количества движения этой точки относительно центра;
4) применить теорему об изменении момента количеств движе-
движения материальной точки относительно центра и, проверив, что сумма
моментов всех сил относительно центра равна нулю, приравнять
моменты количеств дмижения мате-
материальной точки в ее начальном и ко-
конечном положениях: /2о = Ло- Из этс-
го уравнения определить искомую нс-
личипу.
В некоторых задачах приходится
пользоваться этой теоремой относи-
относительно одной из осей координат.
Задача 285. Материальная точка
движется под действием центральной
силi,i F, линия действия которой неиз-
неизменно проходит через точку О.
Найти скорость точки в положе-
положении /'
К задаче 285.
если в
ОМ, _
ОМ„ ~~ 2
положении М\ ее
угол, образуч-
-*- И
скорость vt равнялась 4 м\сек, причем
мый скоростью ф5 с линией действия силы, а = 60° (см. рисунок).
Лесом точки М пренебречь.
Решение. Применяем теорему об изменении момента количества
движения материальной точки относительно оси z, проходящей через
точку О перпендикулярно к плоскости рисунка (на рисунке эта ось
не показана):
dt
Так как к материальной точке приложена только сила F, момент
я
которой относительно оси равен пулю, то ^] >nz(Fll)=^Q и, следэ-
§ 41 ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 193
вательно, 1г — постоянная величина, т. е. llz = liz. Момент количестпа
движения материальной точки в положении М^ относительно оси г
Момент количества движения материальной точки в положении
Л1, относительно оси z
li: = tnv^h = mv-i • ОМ.г • sin a.
Так как /, =/2 то mv: ¦OMx = mvi-OMc> sin a, откуда v.,=
OM
==virj~n—r—• После подстановки численных значений получим, что
t)j = G,9'2 мсек.
4:. Теорема об изменении главного момента коли-
чести движения системы материальных точек. I[ро-
и.-нюдная по времени от главного момента количесги движения системы
материальных точек относительно неподвижного центра равна век-
векторной сумме моментов всех внешних сил системы относительно того
же центра, т. е.
ж- 1
(Следует обратить внимание на то, что, подобно теоремам о движе-
движении центра инерции, об изменении главного вектора количеств дви-
движения системы материальных точек, в формулировку данной теоремы
также не входят внутренние силы системы, определение которых
обычно связано со значительными трудностями.)
Та же теорема, записанная относительно осей декартовых коор-
координат, имеет вид:
п. п п
-d=LmAFk)> -df=Lm>{Fk)' ~ж=ЪтЛРк)-
k = \ * = i *=i
C>'J. Случай сохранения главного момента коли-
количеств движения системы материальных точек. Если
векторная сумма моментов всех внешних сил системы относительно
неподвижного центра равна пулю, то главный момент количеств дви-
движения системы относительно того же центра постоянен, т. е. если
то вектор Lo постоянен.
Аналогично, если сумма моментов всех внешних сил системы отно-
относительно неподвижной оси равна пулю, то главный момент количеств
7 Теоретическая {механика, том II
194 ОПЩИЕ ТЕОРЕМЫ ДИНАМИКИ |ГЛ. IX
движения системы относительно той же оси постоянен. Например,
я
если ^ тх (Fk) = 0, то Lx — постоянная величина.
к -= I
Теорему об изменении главного момента количеств движения
системы материальных точек относительно неподвижной оси рекомен-
рекомендуется применять при рассмотрении движения материальной системы,
и состап которой входит нодпижпая среда, вращающаяся вокруг згой
оси. Если сумма моментов всех внешних сил системы относительно
оси равна пулю, то можно получить соотношение между массами
материальных точек, их скоростями и угловой скоростью вращения
подвижной среды.
Задачи с помощью теоремы о сохранении глас-
гласного момента количеств движения рекомендуется
решать в следующей последовательности:
1) выбрать координатные оси, направив одну из них вдоль не-
неподвижной оси вращения;
2) изобразить па рисунке, все внешние силы системы;
3) записать теорему об изменении главного момента количеств
движения системы материальных точек относительно выбранной оси,
например:
к — I
4) показать, что сумма моментов нсех внешних сил системы
относительно оси равна нулю;
5) вычислить и приравнять главные моменты количеств движения
системы материальных точек относительно оси в начальный и коне1:-
л я
ный моменты времени: Ц2—-Ц2, где ?.)г= ^] Цкг и Liz= У] lu/,
k = i * ¦-1
п) решив уравнение L\z==Liz, определить искомую величину.
Главный момент количеств движения твердого тела, вращаю-
вращающегося вокруг неподвижной оси, относительно оси вращения рамен
произведению момента инерции твердого тела относительно этой оси
па проекцию угловой скорости вращения:
Моментом инерции твердого тела \z относительно оси называется
сумма произведений масс материальных точек, из которых состоит
твердое тело, па квадраты их расстояний до оси, т. е.
ч
ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
19,1
Момент инерции твердого тела относительно оси характеризует
распределение масс его материальных точек относительно этой оси.
Момент инерции псегда положителен. Единица измерения момента
инерции кгм-сек1.
При непрерывном распределении масс материальных точек в твер-
твердом геле момент инерции определяется формулой
/,= \ г* dm.
(Ж)
В случае однородного твердого тела имеем:
(V)
где М — масса твердого тела, V — объем твердого тела, d V — элемент
объема.
Теорема Штейнера о зависимости между моментами инерции
твердого тела относительно параллельных осей формулируется так:
момент инерции твердого тела относительно оси равен сумме его
момента инерции относительно параллельной оси, проходящей через
центр тяжести тела С, и произ- г
недения массы твердого тела па
квадрат расстояния между парал-
параллельными осями (рис. 129), т. с.
Радиусом инерции р твердого
тела относительно оси называется
неличина, произиедепие киадрата
которой на массу твердого тела
рапно моменту инерции твердого
тела относительно этой оси, т. е.
Так, для шара / = ~/Иг'2 —
= JVIp1, откуда р = 0,63 г.
Если в ходе решения задачи требуется вычислить момент инерции
твердого тела относительно оси, не проходящей через центр тяжести,
то проводят параллельную ось через центр тяжести твердого тела и
применяют теорему Штейнера (при этом момент инерции твердого
тела относительно оси, проходящей через центр тяжести, масса твер-
твердого тела и расстояние между параллельными осями должны быть
известим).
Рис. 129.
196 ОЫЦИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Если надо вычислить момент инерции материальной системы, со-
состоящей из нескольких твердых тел, причем момент инерции каж-
каждого из порознь взятых твердых тел известен, то определяют момент
инерции системы относительно некоторой оси как сумму момен-
моментов инерции всех твердых тел, входящих в систему, относительно
той же оси.
При вычислении момента инерции однородной плоской фигуры
относительно некоторой оси выделяют в плоской фигуре такую эле-
элементарную площадь, момент инерции которой относительно соот-
соответствующей оси известен, либо легко может быть подсчитан.
Затем определяется искомый момент инерции однородной плоской
фигуры путем суммирования моментов инерции всех элементарных
площадей.
При вычислении момента инерции однородного трехмерного тиер-
дого тела относительно некоторой оси выделяют в твердом теле-
такой элементарный объем, момент инерции
которого относительно соответствующей осп
известен, либо легко может быть определен.
Затем вычисляется искомый момент инерции
однородного твердого тела путем суммиро-
суммирования моментов инерции всех элементарных
объемов.
Задача 286. Вычислить момент инерции
и радиус инерции однородного круглого
диска веса Р и радиуса г относительно
оси L, лежащей п его плоскости и отстоя-
отстоящей от центра тяжести С диска на расстоя-
расстоянии, равном четверти радиуса.
К задаче 286. Решение. Проводим ось Lc через
цетр тяжести С диска параллельно оси /,.
Как известно, момент инерции однородного круглого диска отпо-
УИга
сительно оси, проходящей вдоль одного из его диаметров, IL =-^-.
Применив теорему Штейпера, находим:
'l — ''-с ' M \A ) — ~A~ — T6~ — T6g *
p
Воспользовавшись формулой // = -? p-[t определяем радиус инерции рг
диска относительно оси L. Имеем:
Р „ TtPr- r У'Г>
VPi=W' откуда ?l=-^-
4[ ТЕОРЕМА OG ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 197
Моменты инерции некоторых однородных твердых тел
Наименование : Схема те.ы
.WtnienT
Тонки!) прямолинейный
стержень
Кольцо (материальная
окружность)
Тонкий круглый диск
Круглый цилиндр
Шар
х
_.A
/га , Г- \
'-=Л-Г
198
ОГЛЦИЕ ТЕОРЕМЫ ДИНАМИКИ
1171.
Задача 287. Даны моменты инерции твердого тела /V| и /Vi отно-
относительно двух параллельных осей yt и уь отстоящих друг от друга
ва расстоянии d, причем
/у,
/,.,,.
Центр тяжести твердого тела
массы М расположен между
осями ух и _Va. Которая из осей
расположена ближе к центру
тяжести С твердого тела и на-
насколько?
Решение. Проводим че-
через центр тяжести С твердого
тела ось ус, нараллельн>ю
осям _у, и_у.2. Применив дваждм
теорему Штейпера, находим:
hi = hc+Md» A)
!ул = !УС-\-ЛЫ\. B)
Так как по
К задаче 287.
/¦
¦>,,,, то d,
расположена
тяжести С.
Вычитая из равенства A) равенство B), получим:
условию /,•, ^>
b т. с. ось j'j
ближе к центру
h*=
так как d\-\- d.x^
Следопагельно, ось
то
^
расположена ближе к центру тяжести С,
^i__^ ^ чем ось уи па величину
Задача 288. Вычислить
момент инерции относи-
относительно оси вращения г вала
К задаче 288. веса 100 кг и радиуса
10 см с насаженным па
пего маховиком веса 1 т и радиуса 1 м. Вал считать однород-
однородным сплошным цилиндром, маховик — однородным кольцом.
Р е ш е и и е. Момент инерции системы, состоящей из вала и махо-
маховика, равен сумме их моментов инерции, т. е.
~ ~ o,<> i ?. • a,a I
Так как момент инерции вала составляет всего лишь 0,05% от
момента инерции махопика, то им можно пренебречь.
ТЕОРЕМА OS ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
199
круглой пластинки радиуса г,
Г
Задача 289. Вычислить моменты инерции относительно осей коор-
координат х, у, z топкой однородной
внутри которой вырезан квадрат
с длиной стороны, равной г. Центры
квадрата и круга совпадают; М —
масса пластинки без выреза.
Решение. Момент инерции
пластинки с вырезом относительно
некоторой оси равен разности мо-
моментов инерции круга /(" и киа-
драта /(i) относительно той же оси,
т. е.
'у— 'у 'у •
У
К задаче 289.
Из соображений симметрии следует, что /у = /г. Воспользуемся
формулами:
<_Мг* ,„._..„_ Air „.,
— ~2~> У — г — 4~~' —
6
\1
(где масса вырезанного киадрата Ж1 '==-¦, 'r ~Г
Следонателыю,
окончательно получим:
= -г~- Mr1 = 0,446 Mr%,
= ;-j7-Mr2 = 0,223 Mr.
К задаче 2Я0.
Задача 290. Вычислить мо-
момент инерции тонкой однород-
однородной параболической пластинки массы М относительно оси у. Осно-
Основание пластинки параллельно оси у и отстоит от пего на расстоя-
расстоянии а. Уравнение параболы, ограничивающей пластинку, имеет вид
у1 = 4х.
200 ОПЩИР. ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Решение. Проведем на пластинке две прямые, параллельные
оси у и отстоящие от нее из расстояниях х и x-\-dx.
Вычислим момент инерции относительно оси у массы площадки,
заштрихованной на рисунке, ограниченной этими прямыми и парабо-
параболическим контуром пластинки: dlv = xidm, где элементарная масса
злштрнхонаиной площади пластинки равна dm = 7ds. Здесь у — плот-
плотность пластинки, ds — плошадь заштрихованной площадки, причем
ds = 1y dx.
Следовательно, dm = 2-^y dx и dlv = 2^xL1y dx. Так как по усло-
условию у2 = 4л', т. е. j'=2]/jc, то dlv = 4-рг2 Ух dx. Момент инернии
пластинки относительно оси у
а
iS) it
Так как масса пластинки равна М = ~,S, где площадь пластинки
8 - 8
У M
— 8 - 8
= A ^ \/xdx= -5- аУ а, то M = -g
-5
а.
Учптыпая выражение массы пластинки М, запишем искомый момент
инерции в форме /,,= уУИа2.
Задача 291. Вычислить моменты инерции относительно осей х,
у, г однородного круглого конуса массы М, с нысотоп h и радиусом
основания г (см. рисунок).
Р с in e и и е. Рассекаем конус диумя плоскостями, параллельными
плоскости ху и отстоящими от нее на расстояниях z и z -\-dz.
Вычислим момент инерции массы элементарного объема, ограни-
ограниченного этими плоскостями и боковой поверхностью конуса.
Дифференциал объема тела определяем как объем кругового
цилиндра с радиусом основания у и высотой dz, т. е. dv = r.yidz.
Следовательно, масса выделенного элемента объема равна dm =
= ~'ldv^-^i:yidz, где f — плотность конуса.
Момент инерции выделенного элементарного объема относительно
оси z пычислясм по формуле момента инерции цилиндра:
Обозначив а половину угла при вершине конуса, получим j' = z tg я
и, следовательно, dlz= !" ^ '-z'1 dz. Тогда момент инерции конуса
относительно оси z равен
(ъ)
ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
201
Учитывая, что объем конуса ^=т- w2ft =-., лг3 ctg а и, следо-
следовательно, масса конуса М =^ 1 ¦ v = ^-т.^гл ctg а., окончательно получим:
Нетрудно видеть из соображений симметрии, что 1Х
Для иычисления 1у опреде-
определим момент инерции выделенг
пого элементарного объема от-
относительно оси у. Для этого
через его центр тяжести прове-
проведем ось уь параллельную оси у.
Воспользовавшись формулой мо-
момента инерции диска относительно
экваториальной оси у\, имеем:
Применив теорему Штейнера,
находим:
Воспользовавшись ранее пы-
численным значением dm=~(i:yidz,
получим: rf/j.^
^f^y (-
\
Вычисление момента инерции конуса относительно оси у лает:
G1) II
Учитьшая, что масса конуса равна М=-.;-^г9Ь и ¦= tg а, на-
находим:
Так как /х = 1у, то окончательно имеем:
202 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ |ГЛ. IX
Задача 292. вычислить главный момент количеств движения от но-
носи гельио оси нращепия /и'ска массы М и радиуса г, эксцентрично
насаженного на ось вращения и вращающегося с углопой скоростью со.
Плоскость диска перпендикулярна к оси нращепия. Эксцентриситет
ранен половине радиуса.
Решение. Направим идоль оси вращения координатную ось г.
Главный момент количеств лиижепия твердого тела относительно
оси вращения ?., = /гсог, где 1г— момент инерции твердого тела отно-
относи ie.4i.no оси нращепия. Длл вычисления 1г применяем теорему Штсй-
нера. Мысленно проведя через центр тяжести С
диекг- ось, параллельную оси г, найдем:
\ Итак, искомый главный момент количеств дви-
движения рассматриваемого диска относительно оси
вращения z дается формулой
Задача 293. Может ли повернуться чело-
век, стоящий на идеально гладкой горизопталь-
К задаче 292. ной плоскости, если он начнет вращать р>ку
над головой?
Решение. Направим через центр тяжести С человека ось z пер-
перпендикулярно к неподвижной плоскости, изобразим внешние силы,
приложенные к человеку: Р—вес человека и R—нормальная сила
реакции плоскости (так как плоскость идеально гладкая, то сила
трения отсутствует).
Применяем теорему об изменении главного момента количеств
движения системы материальных точек относительно оси z:
4r
к— 1
л
Так как внешние силы Р v\ R лежат на оси z, то "^ tnz (Fl) = 0,
т. е. - ": — 0 и L, — постоянная; следовательно,
Итак, имеет место случай сохранения главного момента количеств
движения системы материальных точек относительно оси z.
Человек находился в начальный момент в покое; поэтому ?1г==0.
Затем человек поднял руку над головой и начал ею вращать вокруг
оси z с относительной угловой скоростью coV1 *. Допустим, что при
ТЕОГЕМА ОГ> ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
203
этом туловище человека начинает вращаться и ту же сторону с угло-
угловой скоростью ш'];'. Теперь главный момент количеств движения си-
системы относительно оси z будет L,z — /-1-" -- /.*'¦ причем
где I'?' — момент инерции руки относительно оси вращения г,
момент инерции туловища относительно
оси вращения z, wj —абсолютная угловая
скорость руки.
Учиилвая, что рука человека совершает
сложное движение (относительное но о i но-
ношению к туловищу и переноснее имеете
с туловищем), получим: coL,1 =шУ' * -j- т'г14, и
следовательно,
Toi да
Цг = Li' + 1Г = Г? (ц)-"
Учитывая, что Lu— Liz и ?1г =
лучим:
// —
со-') -f
по-
пооткуда
/.1.
1 г
Знак минус указывает, что человек
Судет вращаться вокруг оси z в сторону, К залачс 293
противоположную вращению руки.
Итак, человек, стоящий на идеально гладкой горизонтальной
плоскости, может повернуться вокруг оси, проходящей через его
пептр тяжести перпендикулярно к этой плоскости.
Задача 294. На боковой поверхности кругового конуса симмет-
симметрично расположены два груза, соединенные между собой тонкой нитью
и отстоящие от оси вращения конуса на расстоянии одной трети
радиуса основания конуса. Конус вместе с грузами вращался с угло-
поп скоростью to. После внезапного разрыва нити грузы начали
опускаться по бокопой поверхности конуса. Определить угловую ско-
скорость конуса в момент, когда грузы достигнут основания конуса.
Вес каждого из грузов в четыре раза меньше веса конуса. Силами
сопротивлений движению пренебречь. Грузы считать точечными массами.
Решение. Взяв начало координат в нижней опоре Л оси конуса,
направим ось z по оси вращения конуса. Обозначим: Р—нес конуса,
г — радиус основания конуса.
204
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
ГЛ. ГХ
Изобразим внешние силы материальной системы, состоящей из
конуса и двух грузов: Р — вес конуса, Pt и Р., — носа грузов, RAxi
/?Л1,, /?д,, RRx, RRv — составляющие сил реакций опор А и В.
Применим теорему об изменении главного момента количеств дви-
движения системы материальных точек относительно осп г:
к=\
Так как псе внешние силы либо параллельны, либо пересекают
ось крашения z, то сумма моментов нсех внешних сил относительно
\к—А
оси z равна пулю:
г (/>)== 0,
т. е. jf
К задаче 294.
H L2 — постоянная, сле-
следовательно, ?.|, = Z..2,. Итак, имеет
место случай .сохранения проекции
главного момента количеств движе-
движения системы материальных точек.
Воспользовавшись формулой L,=
= lzmz, запишем:
где /(. и Iiz — соответственно мо-
моменты инерции системы в первом и
во втором положении грузов. Так как
/.1, = ?аг. т0 Лгм1г = /агйLг. Откуда
Остается вычислить /1г и /,;,. Так
как материальная система состоит из
конуса и двух грузом, то момент
инерции системы равен сумме мо-
моментом инерции конуса и грузом.
3 Р
' - г'2,
3 Р
Момент инерции конуса относительно оси вращения z рапеп 'Q -
грузы считаем точечными массами. В соответствии с начальными и
конечными положениями грузов запишем:
3
mlz in Л ' , - л* ' п.
u 10 g *" ' ' 4g \'3J 45 g Г ' '*- 10 g
Использовав найденные значения llz и /»,, получим:
4
4 Р
г\
ТЕОРЕМА ОГ, ИЗМЕНЕНИИ МОМЕНТА КОЛИЧГ-.СТП ДВИЖЕНИЯ
203
Задача 295. По хорде A4N диска радиуса г, вращающегося вокруг
неподвижной вертикальной оси, совершает колебание гру.-i, коюрый
при прохождении среднего положения О имеет относительную ско-
скорость н. В момент времени, когда i рул находится п крайних поло-
положениях М и N, углоиая скорость диска равна и>,. Определить угловую
скорость о).2 диска п моменты прохождения трупом среднего положе-
положения О. Вес груза и четыре раза меньше веса диска. Хорда MN от-
отстоит от центра диска на расстоянии, равном полопипе радиуса. Груз
считать точечной массой. Силами сопротивления пренебречь.
К задаче 295.
Решение. Выбрав начало координат в нижней опоре А, напра-
направим ось z по оси вращения диска. Изобразим псе ппешние силы мате-
р
риалыюй системы, состоящей из диска и груза: Р—пес диска, 4 —
пес груза, RAx, RAv, Rл_, RBx, RBv—составляющие сил опорных
реакций (см. рис. а).
Применим теорему об изменении глашюго моментя коли чести дви-
движения системы материальных точек относительно оси прошения Z:
dt ~ 2j
h-= I
206 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Так как моменты всех ипешних сил относительно оси сращения
—?
п
раины нулю, то ^] mz(Fi) = Q, т. е. —? =0 и Lz— постоянная.
Следовательно, Llz = Liz.
Итак, имеет место случай сохранения главного момента количеств
движения системы материальных точек относительно оси z.
В моменты времени, когда груз занимает крайние положения
(/И или А'), скорость его относительно диска равна пулю и, следо-
пательно, ?1-г = /[гы>1г, где I\z— момент инерции материальной системы,
состоящей из диска и груза, находящегося в положении М или N.
Следовательно,
Здесь Z^11 — момент инерции диска, //' — момент инерции rpy:ta.
Итак, глаппый момент количеств движения системы Цг относи-
относительно оси z при крайнем положении груза ранен
Главный момент количеств движения системы L4z относительно
оси z при среднем положении груза равен сумме момента количества
движения диска L'" и момента количества движения груза относи-
относительно той же оси L'z':
¦Цг=1$ж + 1--& B)
Имеем:
Кроме того,
где v'a — абсолютная скорость груза, а т'й) — масса груза. Так к.чк
груз совершает сложное движение (относительное по отношению к
диску и переносное вместе с диском), то, примени» теорему о сло-
сложении скоростей точки <va -¦= <ve-{-vr (см. рис. б и в), в проекции на
ось т, направленную вдоль MN, имеем:
следовательно,
S 4] ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ЛПИЖРЛ1ИЯ 207
Подставляя L'^z и ?« из формзм C) и D) R формулу B), находим
главный момент количестп движения системы относительно оси z при
среднем положении груза:
Uz = Цг i- L'iz = -- -2 »>22 + -4- .у 2 «Чг -|- Нт | -2- ,
т. е.
, 9 Р , . Рг
Так как L\z^Li!S, то, использопаи формулы A) и E), получим:
3 Р .2 9Р j . Яги.
-4Угш"=1б?г<0*' + -8^,
откуда
4 2 нт
Итак, при колебаниях груза по хорде MN диска, в связи с по-
постоянством главного момента количеств движения системы материаль-
материальных точек относительно оси вращения, изменяется угловая скорость
нратения диска. В момент прохождения грузом среднего положения
проекция на ось z угловой скорости диска равна
4 Ь,
В случае совпадения направлений очмосителмюго движения груза
и вращения диска (рис. в) и^ = и, т. е.
Л_ _ '2 и_
°Чг з и>1г '9 V '
В случае противоположных направлений относительного движения
груза и вращения диска (рис. б) и. = — н, т. е.
4 I 2 а
10а -^^ -Г" О)т _ —'— "..~ ,
О у f
6°. Д и ффе р е и и и а л ь и о е уравнение вращения т и ер-
лого тела вокруг неподвижной оси. Дифференциальное
уравнение вращения твердого тела вокруг неподвижной осп имеет вид
г,
'гЧ= ? »
k=-\
где <р — угол поворота твердого тела, /г — момент инерции твердого
тела относительно оси вращения, тг (Fh) — момент А-й внешней сплы
относительно оси z.
208 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Из сопостапления этого дифференциального уравнения с теоремой
о движении ueinpa инерции системы материальных точек:
Mwc= ? Fl
к = \
применяемой при решении задач о поступательном движении твердого
тела, следует, что масса М твердого тела, движущегося поступательно,
п момент инерции 12 твердого тела, пращаюшегося вокруг неподниж-
noti оси г, имеют аналогичны» смысл: масса М — мера инертности
твердого тела, дппжущегося поступательно; момент инерции /г —
мера инертности твердого тела, вращающегося покр>1' неподвижной о:п.
С помощью дифференциального уравнения вращения тиерлого пела
покруг пеподвпжиоП оси можно решать как прямые, так и обратные
задачи динамики.
В прямых задачах но заданному моменту инерции тперлого тела !2
относительно оси вращения и закону вращения твердого тела ? =f(t)
определяется главный момент относительно этой оси внешних сил,
приложенных к твердому телу.
В обратных яадачах пд заданным моменту инерции твердого тела Iz
относительно оси вращения и моментам внешних сил относительно
этоп оси определяется уравнение вращения твердого тела y^ft't).
При этом должны быть заданы начальные условия движения: поло-
положение и угловая скорость твердого тела в начальный момент вре-
времени, т. е. ч
при t = 0 <р = (?о- ф = ф0-
Решение обратных задач часто представляет значительные труд-
трудности, так как при этом приходится интегрировать дифференциальное
уравнение вращения твердого тела вокруг неподвижной оси. Моменты
ннешпих сил относительно осп вращения могут яависеть не только
о г времени, по также от угла поворота » и угловой скорости » твер-
твердого тела, т. с.
? /иг (/=*)=/(?. о, 1).
к—- I
Легко решаются задачи в случаях, когда моменты внешних сил
постоянны либо являются функциями только времени.
3 адачи динамики о праще пи и твердого тела
вокруг п е и о д и и ж и о fi о с и надо решать в следующей
последовательное г и:
I) выбрать оси декартовых координат и направить одну из них
(ось г) по оси вращения твердого тела;
'2) изобразить вес ипсипше силы, приложенные к твердому толу;
S 4] ТЕОРЕМА ОВ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 209
3) пычислить сумму моментов всех инешмих сил относительно оси
п
иращения ^] mz
4) записан дифференциальное уравнение пращепия тиердого тела
иокруг неподвижной осп
'*?=]>>* СИ.
подставить и него выражение суммы моментов псех внешних сил,
значение момента инерции lz тпердого тела относительно оси враще-
вращения и решать, в зависимости от условия, прямую либо обритую
задачи.
Залача 296. Твердое тело прашаетси вокруг неподвижной оси
под действием приложенной к нему chcjcmu сил.
Чему должен быть рапен главный момент внешних сил относи-
относительно оси пращепия для чого, чтобы тнердое тело вращалось: а) рамио-
мерно, 0) равнопеременно?
Решение. Направив ось z по оси вращения твердого тела,
запишем дифференциальное уравнение вращения твердого те.та вокруг
неподвижной оси:
*;= I
а) в случае ралномерпого вращения угловая скорость <? тиерлого
тела постоянна; следовательно, ? — 0 и
у; «
к = I
1. е. гланпый момент внешних сил относительно оси иратепия равен
нулю;
б) в случае равнопеременного вращения угловое ускорение 1вер-
дого тела ^ постоянно, следовательно,
я
\] т., (/=•;') = const,
к= 1
т. е. глаппый момент nneiumiv сил относительно оси вращении по-
с гониеп.
Задача 297. Определить величину прощающего моменга ///, гюд
деНстмием которого диск веса 20 кг и радиуса 1A см вращается
вокруг неподвижной оси по закону о = 4t2.
Решение. Направляем ось ^ по оси вращения диска.
210
ОБЩИР. TF.OPFMbI ДИНАМИКИ
| Г .'I. IX
Дифференциальное уравнение вращении диска вокруг иеподкижмоП
оси z имеет иил
п
'*? = ^т, (Ki-
(Kill =i
К диску и его оси приложены внешние силы: силы реакций опор,
пес диска и мара сил, момент которой требуется определить.
Так как моменты сил опорных реакций и веса диска относительно
его оси вращения z равны нулю, то сумма моментов всех внешних
сил равна искомому вращающему моменту пары сил относительно оси
вращения z. Следовательно,
Момент инерции диска отпосителыю оси вращения z равен
Pr- 20-О,I2
2-9,81
= 0,01 кг-м-сек\ а Зр = ~| = Я —:
тогда искомый вращающий момент /и7 = 0,08 кг-м.
Задача 298. Кольцу А радиуса R, насаженному па неподвижную
горизонтальную ось В радиуса г, в начальный момент была сообщена
угловая скорость со0. Сколько оборотов сделает колыю до остановки,
исли коэффициент трения скольжения кольца об ось равен /?
е)
К задаче 298.
Решение. Допустим, что кольцо А при вращении соприкасается
с. осью В в точке С. К кольцу приложены внешние силы: Р — нес
кольца, ./V—нормальная сила реакции оси, /^ с — сила трения сколь-
скольжения кольца об ось: b\. t = fN = fP, направленная перпендикулярно
к нормальной силе реакции N п сторону, противоположную движе-
движению, т. е. по горизонтали налево.
§ f| ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМР.ПГЛ КОЛИЧЕСТВ ДВИЖЕНИЯ 21 1
Выберем направление отсчета угла поворота ср и сторону иращепия
кольца, т. е. по часовой стрелке (ось z папраплеыа от пас за пло-
плоскость рисунка).
Запишем дифференциальное уранмепие крашения твердого тела
вокруг неподвижной оси:
'*?=?>, ей- о)
*.-.-1
Для определения числа оборотов, которое сделало кольцо до
остановки, фебуется проинтегрировать это уравнение, предварительно
определив 1г—момент инерции кольца относительно оси вращения
z и ^j тг (Fl) — главный момент внешних сил относительно оси z.
Так как моменты сил Р и N относительно оси z равны нулю, то
= mz (Fr. c) = — FT. cr = ^- fPr B)
к=\
(момент силы трения скольжения FT- c отрицателен, так icai< его на-
направление противоположно направлению положительного orcieia
угла поворота ср).
Момент инерции кольца вычислим как разность моментов инерции
большого диска радиуса R и малого диска радиуса г (см. рис. б):
, _/Ш?2 тгй
где М — масса диска радиуса R, а иг — масса диска радиуса г.
Обозначив f плотность кольца, получим: М = -(г:^ и т = ^т.г*.
Тогда
'z — 2 2 — 2 ''
Учитывая, что вес кольца P=~[gr.(R'i — гг), имеем:
л
7)
Подставив значения ^ тг С7*) и ^ из Ф°РМУЛ B) » C) в уравнение
*=|
(I), находим:
откуда
v ~~ А:2
212 ОБЩИЕ "ЕОРЕМЫ ДИНАМИКИ [1VI. IX
Начальные условия движения имеют вид:
при ^=0 <р = 0, ф^ш(|.
Проинтегрирован дифферептмлыюе урапмеипе D), по.чучнм:
А-_ ^ I I Г
подстапив / = 0, & = ш0, пайлем, что С|=ш(|; следовательно,
Решив дп(|)([1сремЦ1[альиое уравнение E), имеем:
, . j far fl , г
Иолстпрляи ^^0, 9 = 0> имеем С2 = 0; итак,
(S = о),/ — у^^г ^2. (б)
Для того чтобы определить угол поворота s, на который повер-
повернулось кольцо до остановки, следует предварительно вычислить соот-
иетстнующип момент времени. В момент остановки f = t угловая
скорость кольца сЬ = О. Подставив эти значения п уравнение E),
получаем: т = —" \)fr —-. Для определения срт — угла поворот;!
кольца н момент остаиопки, остается полстакить полученное значение
•с в уравнение (в). Находим:
„ . < (Я1 + г")
Число оборотов, которое сделало кольцо до останоики,
Эту задачу можно решить также и с помощью теоремы об изме-
изменении кинетическом анергии системы материальных точек (см. реше-
решение .чадачи 349. Там же приведена сравнительная оценка обоих мето-
методов решения).
Задача 299. Твердое тело начинает вращаться нз состояния покоя
под действием пары сил с моментом, зависящим от угловой скорости <5>
вращения тела: щ2 = тй — аф-, где от,, и а — постоянные. Здесь т„ —
пращающи!* момент, a a-^1 — тормозящим момент.
Определить углоную скорость вращения твердого тела, если его
момент инерции относительно оси крашения z равен lz. Центр тяже-
с in гиердого тела расположен на оси вращения.
§ 1| TEOPLMA ОП ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 213
Решение. Дифференциальное уравнение вращения твердого
тела вокруг неподвижной оси имеет вид
к—А
К твердому телу приложены внешние силы: Р — вес тела, силы
опорных реакций и пара сил с моментом mz. Тлк как моменты веса
тела и сил опорных реакций относительно оси вращения z раины
нулю, то сумма моментов внешних сил относительно оси вращения
z равна моменту mz, т. е.
Итак, дифференциальное уравнение вращения принимает вид
'*<? := mo —'
или
.. _ ,1 (т„
заменив ср па -j и отделив переменные, получим:
Hip ._2 iz
Проинтегрировав это уравнение, найдем:
Wk
При ? — 0 ф = 0; следопательно, С=0, т. е.
I/ —- -{¦ &
, } a i. / ,
lnT71T =;-.V ат»*-
2
Решив это уравнение относительно ф, получим искомую угловую
скорость вращения твердого тела
¦=/?
*
214 ОГ.ШИГ. TFOPF.MM ДИНАМИКИ |П. IX
Допустим, что твердое тело иращается длительное время под дей-
действием пращающею момента tnz. Вычислим его угловую скорость
при t —> со; получим:
т. е. вращение тпе-рдого тела стремится к равномерному с постоян-
постоянной уГЛСМЮИ СКОРОСТЬЮ О)= 1/ —- .
Задача 300. Твердое тело начинает прятаться вокруг поип-
дпижной оси г нл состояния покоя под действием пары сил с момен-
моментом, зависящим от угла попорота <о вращающегося тела: тг = а-$--
— #'f3, где а и b — постоянные.
Определить угловую скорость твердого тела в зависимости от
угла поворота о, если его момент инериип относительно оси враще-
вращения z равен \г. Центр тяжести твердого тела расположен на оси
пращенпи.
Решение. Решая задачу аналогично предыдущей, получим диф-
дифференциальное уравнение вращения твердого тела вокруг неподвиж-
неподвижной оси:
умножив уравнение почленно па d<o и заметив, что <fd<p= dy =
= 'f c?<y, находим:
Проинтегрировав это уравнение, имеем:
hf ar °r I г*
2 — ~2 4" I С>
При / = 0 ср = О, !f = 0; следовательно, С=0, т. е.
/j?2 оср- bf4
Решив уравнение относительно ф, получим искомую угловую ско-
скорость вращения твердого тела:
2п — Ь-с*
Нетрудно видеть, что и момент, когда (р= 1/ -г-, угловая скорость
ср = 0, т. е. в этот момент тело меняет направление своего враще-
вращения па обратное.
Задача 301. К твердому телу, вращающемуся вокруг неподвиж-
неподвижной оси г, приложена пара сил с моментом пгг = A sin kt, где А и
§ 41 ТЕОРЕМА OR ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 21.1
к —постоянные. Момент силы сопротивления движению пропорцио-
пропорционален углоиой скорости вращения твердого тела т*. = — а», где
а —постоянная (а^>0).
Найти ураппение вращения твердого тела, если его момент инер-
инерции относительно оси крашения г район lz. Центр тяжести твердого
тела лежит на оси вращения. В начальный момент твердое тело
находилось в покое.
Решение. После записи дифференциального уравнении ира-
тения твердого тела вокруг неподвижной осп г:
вычисляем сланный момент внешних сил относительно оси г. Так
k.ik моменты сил опорных реакций и веса твердого тела раины
пулю, то
я
^ пгг (/¦"?) = tnz -f- m* = Д-sin kt — ai.
k= i
Следовательно,
1,Ц= A sin kt — acp;
запишем это уравнение так:
Tsin«, A)
где Р=/- и y=7~- Общее решение этою дифференциального ураи-
'2 'г
пения равно сумме общего решения ср, соответствующего однород-
однородного уравнения «р -[— рф == 0, и мастного решения ср2 уравнения (I),
т. е. ? = ?1+<рв.
Для решения уравнения ср~рф=^О запишем его характеристи-
характеристическое уравнение Ла —|— ^Х = 0, откуда X, = 0 и Х8 = — Р; следова-
следовательно,
Т, = С, + С^Л (Ч)
Ищем частное решение уравнения A) в виде tp2 = M sin kt 4-
-1- /V cos kt. Для определения М и N подставляем ера в дифферен-
дифференциальное уравнение A):
— Mk! sin kt — Nk'1 cos kt -f р7И/г cos kt — $Nk sin ^ = T sin A<.
Приравняв коэффициенты при sin kt и cos kt в лево» и правой частях
уравнения, получим систему уравнений:
— 7ИА2 — pW* = i, — Л/А'2 + ?МА = 0.
216 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ.
Решмп эту систему, найдем:
A/='i
Следовательно, частное решение имеет пил
¦^= М sin kt-\-N cos kt ~ — — ?¦—sin kt — ,,?,,, cos kt. CNi
k~ ¦ j" ;j- ll{k- ~ Л') V '
Найдем теперь, воспользовавшись формулами B) и C), общее реше-
решение дифференциального уравнения A):
sin
---^ cos kt. D)
Остается определить постоянные интегрирования d и Сг. Для
этого продифференцируем соотношение D) но времени:
cos ki.i J? sin
! ft t ;ij
После подстаноики начальных услоний движения: f = 0, -f = 0 n
D) и i = 0, 9 = 0 и (Г>), получим систему ураипении:
Решип эту систему уравнений, найдем:
Подставив значения Q и С^ в уравнение D), получаем уравнение
вращения рассматриваемого твердого тела вокруг неподвижной оси:
где
а
==/7 и
Задача 302. Груз А весл Р, спускаясь по наклонной плоскости
вниз, приводит но вращение барабан В посредством намотанной па
него веревки; г—радиус барабана", /—коэффициент трения сколь-
скольжения груза о наклонную плоскость, расположенную под углом а
к горизонту; 1Z — момент инерции барабана относительно его осп
вращения z, нернепдикуляргоп к плоскости рисунка. Определить
угловую скорость вращения барабана. Массой вереики пренебречь.
Решение. Задачу можно решать с помощью дифференциаль-
дифференциального урапиеиия вращения барабана В вокруг неподвижной оси г:
§ 4|
ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
217
К барабану приложены внешние силы (см. рис. б): Q — пес бара-
блня, A?j и А>,— составляющие силы реакции оси барабана, Т—сила
реакции перепки.
(Иногда ошибочно иключают в число внешних сил вес груз;!.
П действительности же барабан приводится но крашение силон реак-
реакции перепки Т, являющейся по отношению к барабану внешней силой.
Величина силы реакции веревки Т, естественно, зависит от неса
груза Р, но по модулю, вообще говоря, не равна Р.)
К задаче .402.
Моменты сил Q, Я, и Rq относительно оси z равны нулю. Сле-
лопательно, гласный момент внешних сил относительно оси z равен
моменту силы Т, и дифференциальное уравнение вращения барабана
относительно оси вращения z имеет вид
I?--=Tr, A)
где Т— сила реакции веревки, пока нам неизвестна. Для исключения
Т следует составить дифференциальное уравнение дпижепия груза
по наклонной плоскости.
Направляем вдоль наклонной плоскости ось х (см. рис. в).
К грузу А приложена одна задаваемая сила — вес Р и силы реак-
реакции связей: R—¦ нормальная сила реакции наклонной плоскости,
F,-c — сила трения скольжения груза о наклонную плоскость и 7"—
сила реакции веревки. (Па основании принципа равенства действии
и противодействия Т = —Т.)
218 ОБЩИЕ ТР.ОРЕМЫ ДИНАМИКИ |ГЛ. IX
Составим дифференциальное урлшепие движения груза А и про-
проекции на ось л::
р
— х == Р sin а. — Т — Гт с;
так как
го
— X = P(sina — /cos*) — 7'. . B)
У'штыиая, что скорость веревки при сходе с обода бараб.ша
равна скорости груза, имеем го = х. Следовательно,
Рассмотрим систему уравнений A), B), C), учитывая при эюм,
что I Г I = I ТI = Г = 7:
р
— I" = P(sin а —/cos я) — Т\
исключив Г, 7"' и А", имеем:
Т \'г -f- 7 ^) ? = P(sin 1 -/cos а),
откуда получаем дифференциальное уравнение вращения барлбапа
«округ неподпижпой оси z:
.. ГР( Sin a —/COS а) ш ...
т — р ' ^ /
из этого уравнения видно, что барабан нращается равноускоренно.
Проинтегрирован, находим:
ГР ( Kin 2 — / COS a) . _
?= р ^ Ч- с;
при ^^0 ф = 0, следовательно, С=0. Итак, углоиая ско[юсть мра-
шеиия Оарабапа равна
rP( sin а —/ cos з)
5 41 ТЕОРГ.МА ОЕ ИЗМЕНЕНИИ MOMF.HTA КОЛИЧГ.СТП ДВИЖЕНИЯ '2 И)
Эту задачу можно решить и другим способом, применим теорему
06 изменении главного монету количеств движения системы Maiepn-
альных точек относительно оси z:
Так как данная материальная система состоит ил барабана В и
груза А, то сила реакции веревки Т, будучи силой внутренней, и
уравнение E) не входит. Это упрощает решение задачи, ибо не
приходится использовать систему уравнений A), B), C) для исключе-
исключения Т и х.
Изобразив все внешние силы системы: Р, R, Fr c, Q, Ri и /f.t
(см. рис. г), составим сумму моментов внешних сил относительно оси z:
п
У^ тпг (Fk) = Pr sin a -- FT cr = Pr (sina — /cos a). (ft)
* = i
(В уравнение (б) пошел момент составляющей песа Р, направлен-
направленный вдоль веревки и равный по модулю Psina; соааклякиная же
веса Р, перпендикулярная к направлению неревки, ракиая по модулю
/Jcosa, и нормальная сила реакции наклонной плоскости R = Pcosa
в уравнение F) не вошли, так как они по модулю равны » проти-
противоположно направлены.)
Главный момент количеств движения системы, состоящей из бара-
барабана и груза, относительно оси z дается формулой
г fill I г '21
Здесь L'J' — момент количеств движения барабана, а /_/'—момент
количества движения груза относительно оси z. Имеем:
р р
L'f = — vr = — г'ф (так как v = vx = r$).
& о
Кроме того, L'J'= 1гу. Следовательно,
Подставив значения ^] niz(Fek) и Lz из формул F) и G) в ураи-
пение E), получим:
]z-\- Pr гА Щ — Рг (sin а —/cos a),
о /
220 ОБЩИЕ ТЕОРР.МЫ ДИНАМИКИ [ГЛ. IX
о.ткуда следует уравнение D). Повторив далее решение задачи, как
и в первом варианте, находим:
. rP( sin а — / cos a)
Если па oci. г рядом с барабаном насадить последовательно гиер-
дос тело, момент инерции которого неизвестен, то, замерив путь ^,
пройденный грузом по наклонной плоскости и соответствующий про-
промежуток времени т, можно определить неизвестный момент инерции.
Это — один из экспериментальных методов определения моментов
инерции твердых чел.
Действительно, умножив уравнение (8) па г и учтя, что ri —х,
найдем проекцию скорости груза па ось х:
._ Pr ( sill a— f cos я)
Проинтегрировав ато дифференциальное уравнение, получим:
Pr" ( Sin я —/ COS з) 2 _.^
Так как при ^ = 0 х~0, то имеем С=0, и следовательно, уравне-
уравнение движения груза запишется в виде
Яг3 ( sin а — / гos a) j
X — - р Г .
2 /,+ — г-\
\ g I
Подставив в это уравнение х = я и г = - и решив уравнение от-ю-
сителыю lz, находим:
, Р ,2 j д-т2 ( sin а —-/ COS я) "|
Полученное значение Iz ранио сумме момента инерции барабана и
искомого момента инерции твердого тела, насаженного па одну оп,
с барабаном. Следовательно, из полученного значения \z надо вычесть
момент инерции барабана относительно оси z.
Задача 303. Физический маятник состоит из однородного стержня
длины /, к копну которою прикреплен круглый однородный диск
радиуса г = -8-. Определить макои колебаний маятника и положение
его центра качаний, если он подиешеп за свободный конец стержни.
ТЕОРЕМА OG ИЗМЕНЕНИИ МОМЕНТА КОТИЧЕСТП
221
В начальный момент .маятник был отклонен от вертикального поло-
положения па угол о0 и ему была сообщена начальная угловая скорость ф0.
Пес лиска в дни раза больше веса
пержия.
Решение. Физическим маятником
называется твердое тело, подвешенное
к неподвижной осн.
Изобразим физический маятник в от-
отклоненном от вертикали положении.
Выберем направление положительного
отсчета угла поворота о от вертикали
против часовой стрелки, папрппим ось z
вдоль оси принеса маятника п точке О
перпендикулярно к плоскости рисунка
па пас.
Внешними силами, приложенными
к маятнику, являются: Р—¦ вес стержня,
Q — вес диска, #t и #2 — составляю-
составляющие силы реакции оси привеса маят-
маятника.
Применяем дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси:
О
К палаче ЗОЯ
Моменты сил
следовательно,
относительно оси привеса z равны нулю,
г (Ft) = тж (/>) -f
- Q (/ + г) sin
(знаки минус указывают, что направления моментов сил Р и Q про-
противоположны направлению положительного отсчета угла поворота щ).
Учитывая, что Q — IP и г =-!;¦, получим, что сумма моментов
внешних сил относительно оси z оудет
Вычисляем момент инерции маятника относительно оси прнпесл z
как сумму моментов инерции стержня /г" и диска //' ошосшелыга
топ же оси: 1г =
= Гг" -J- //'
222 ORIUHil ТЕОРЕМЫ ДИНАМИКИ [Г.Г1. IX
Применил теорему [ 1Jiеииера и учитыная, что Q = 2P и г =
I
— <,-, находим:
.„_/>/« , Р ¦: I 2_Р/« ,.„_(?. г' , О,, , rti_l63Prt.
'- ~ ? 12 "!" g \ 2 ; — g 3 ' h — g ~Г z ^ ~Г П — 64 V -
следовательно, момент инерции маятника относительно оси прииеса z
Подстапип У] mz(Fb) и /г из формул B) и C) в ураинепие A),
* -[
по.чуш.ч:
ГюЛ Р ,о„ 11 ... .
J92ff^ = — 4"//Sln<?'
или
.. , 528 л-
«рт-у81"^0
Рассмотрим малые колебания маятника, предположи!!, что sin у ««
я«а. Тогда дифференциальное уравнение качаний мая тика принимает
нид
Обозначив
528 g_
553 / ~~
перепишем полученное ураннение так:
Характеристическое уравнение имеет пнд Ха -|— Ла = 0. Его корни:
>¦! 2 = _li Лг. Следовательно,
¦?—Q cos ki-\-CiSin kt. F)
Нычислим:
6 = — С,A sin Л/ -j- Сой cos /г/. G)
Начальные условия дпиження маятника имеют пид: при ^==0
9 = ¦?,.• ? = !?о-
Подставив t = 0, <f>=='-f,i в F) и ^ —0, у = §0 в G), имеем: Q = ^0,
С2 =-Т". Внеся эти значения п уравнение @), находим:
<р =^: <pu cos Л< -(- ^ sin tit.
5 4| ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 223
Введем обозначения:
«0 = asina, тг = а cos a; (8)
тогда
<р = а sin (kt -\-a),
т. е. физический маятник совершает гармонические колебания.
Угловая амплитуда колебаний а, определенная из системы уравне-
уравнений (8), равна
Г , . а»
Она зависит от начальных условий движения и кругопой частоты
колебаний. Начальная фаза колебаний а, находимая из той же системы
уравнений, имеет вид
а = arctg kJ°.
fo
Она также зависит от начальных условий движения и кругопой
частоты колебаний.
[{руговая частота колебаний А=1/ г-з f- (см. формулу (о)) от
начальных условий движения не зависит, т. е. и случае малых коле-
колебаний (sirr-p^cs) физический маятник обладает свойством изохрон-
изохронности. (При рассмотрении задачи 284 о колебаниях математического
маятника была получена формула для крзтовой частоты колебаний
маятника с конечной угловой амплитудой. В этом случае маятник
спойстпом изохронности lie обладает и его период зависит от угло-
ной амплитуды колебаний.)
Для определения положения центра качаний данного физического
маятника следует учесть, что центр качаний отстоит от точки
привеса О на расстоянии приведенной длины физического мая-шика
(напомним, что приведенной длиной физического маятника называется
длина нити математического маятника, кругопая частота качаний ко-
которого раипа круговой частоте качаний данного физического маятник,!).
В ходе решения задачи о колебаниях математического маятника
(см. задачу 284) была определена его круговая частота колебаний
k = 1/ - -. Для рассматрииаемого физического маятника /е= I/ '_-,,, .
Приравняв квадраты круговых часгот, находим приведенную длину
физического маятника /пр = ^о'-
Следовательно, центр качаний К данного физического маятника
_ 553 , . .
отстоит от точки прииеса О на расстоянии ^/ (см. рисунок).
224
0БЩИ2 ТЕОРЕМЫ ДИНАМИКИ
'ГЛ. IX
Задача 304. Определить момент инерции твердого тела Eicca
Р отиоамелыю оси, проходящей через центр тяжести перпендику-
перпендикулярно к плоскости его .\iaicpna.-ihnon симметрии, зная период малых
качаний этго тела при подвесе сто в
ючке О; ОС=а.
Решение. Метод качаний является
одним из наиболее распространенных
экспериментальных приемов определения
момепюн инерции твердых тел. Пошорпп
рассуждения предыдущей задачи, запишем
дифференциальное уравнение колебаний
маяшика:
//3 = — Pa sin =;
считая колебания малыми (мП5«;э), по-
тушм:
К задаче •101.
Га
Так как коэффициент, стоящий при угле поворота э,
рптом круговом частоты колебании, то k=.~\/ -.—.
круговая частота колебаний k и период колебаний Т
' i О Г Г Ч _
т.е. /, =
япляется киад-
Как известно,
связаны зависи-
местью
¦1т. п 1т. л[Ра
«=¦_. Следовательно, у = I/ ~г,
с теоремой Шгейиери, 1г = 1с-
кулярпы к плоскости рнсуньа), откуда
а,- (оси г и с перпеиди-
И гак,
формуле
искомый .момент
Р j РаТ* Р 2
пие])ции твердого тела вычисляется по
\4г.» g I'
где /', а и Т определяются экспериментально.
Задача 305. Однородный круглый диск веса Р п радиуса г
подвешен к топкой упругой проволоке в одной из точек, лежащих
па его ободе (см. рисунок). При повороте диска па угол у вокруг
оси z, проходящем вдоль проволоки и першкалыюго диаметра диск,!,
и проволоке возникает пара сил с упругим моментом, пропорциональ-
пропорциональным >'1лу закручниаппя с: шг = — со, i де с -- момент пары, необхо-
необходимом для закручивания нро'.юлоки па один ради;ш.
Определить движение диска, если в начальный момент диску, на-
находящемуся р. покое, была сообщена па 1алымя yi ловая скорость id,,.
Сопротивлением воздуха пренебречь.
ТЕОРЕМА OD ИЗМЕНЕНИИ МОМЕНТА КОТИЧГ.СТВ ДВИЖЕНИИ
225
P e hi e н и е. Применяем дифференциальное уравнение вращения
твердого тела вокруг неподвижной оси z:
К диску приложены внешние силы: Р— вес диска, R—сила реак-
реакции проволоки, тг — упругий момент проволоки, направление которого
противоположно направлению угла закручивания проволоки э. Поэтому
главный момент внешних сил относительно
оси z имеет вид
B)
Момент инерции диска относительно оси г ра-
исп
1* = -?. C)
Подставив значения ^ m^(F^) ;\ J2 из фор-
ft=i
мул B) и C) в уравнение A), находим:
Рг-..
-€ ? =
D)
т. е.
v ' Pr- y К задаче 305.
Это — дифференциальное уравнение свободных крутильных колеба-
колебаний диска па проволоке, которое после обозначения -.f--, — kl при-
принимает вид
Запишем соответствующее характеристическое ураипепие ).'2 -¦- к1 =
= {). Корни характеристического уравнения равны ).[ .2 = ±^i. Сле-
Следовательно, уравнение движения диска запишется в виде
<f=Q cos kt - ¦- d sin kt. E)
Угловая скорость диска par.i-a
4> = — QA- sin Id -f Cik cos kt. F)
Начальные условия движения диска имеют вид: при ^ = 0 ср = О,
^=г(п0. Подстановка начальных условий движения в E) и F) дает;
8 Теоретическая механика, том II
220 ОБШИР. TF.OPF.VUJ ДИНАМИКИ |ГЛ. IX
С, = 0, Cq = ° Следовательно, диск па проволоке совершает кру-
крутильные колебания по закону:
<я = '-^ sin kt,
k
где k = 1/ р — круговая частота колебаний, а й.°— угловая ам-
амплитуда колебаний диска.
Если вместо диска к проволоке подвешено твердое тело, момент
инерции которого неизвестен, то этот момент инерции можно экспе-
экспериментально определять методом крутильных колебаний. Для этого
надо знать коэффициент упругости проволоки с и измерить период
колебаний Т подвешенного твердого тела.
Действительно, в этом случае уравнение D) примет вид
1$ — — cv,
где 1'z — искомый момент инерции твердого тела. Это уравнение
можно записать так:
?-!-*¦? = о,
где (?=-.-. Так как круговая частота колебаний k и период коло-
I z
9Я 4л2 с
баний Т связаны с формулой я = ~-, то получим: т-а-= -.-, откудя па-
ходим искомую пеличипу момента инерции твердого тела:
Задача 306. Решить предыдущую задачу п предположении, что
диск совершает колебания п пязкой жидкости, причем момент силы
сопротивления диижению пропорционален угловой скорости диска:
)п\=—Рф, где р — постоянная ф ^> 0). Определить закон колебании
диска.
Решение. По отношению к предыдущей задаче добавляется мо-
момент силы соиротипления /я*, знак которого противоположен знаку
углопой скорости ф. Следомтсльпо, в правую часть дифференциаль-
дифференциального уравнения D) предыдущей задачи входит слагаемое: /n| = — ^,
и уравнение принимает иид
Обозначив ^5 = ^ и j~z=2n, получим дифференциальное урап-
нение свободных крутильных колебаний диска при наличии мо-
§ 4] ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 227
мента сопротивления движению, пропорционального угловой скорое i и
диска:
$ 4- 2л? -f A2cp = 0. B)
Характеристическое уравнение имеет вид X* -)- Чпк -\- k'1 = 0, его
корпи раины
\ii = — nzLVrii — ki. C)
Здесь нозможпы три случая:
а) n<^k — случай малого сопротивления,
б) n^>k — случай большого сопротивления,
и) n = k — предельный случай.
Рассмотрим последовательно все три случая:
a) n<^k (случай малого сопротивления). При этом формула C)
принимает вид Х. = — nzLl^/k1 — ri1.
Закон движения запишется а виде
<р == e~nt (С, cos [f?-^n*t + Q sin Vk* — n' t). D)
После вычисления производной ср по i:
4> = — nf""' (C, cos i/kl — rft -|- C, sin j/V — л20 -(-
4- /A" — и2 e-"' (— d sin /A1 — и" 14- C2 cos /As— nL t) E)
и подстановки начальных условий движения: ? = 0, ср = О в D) и
t = Q, <у = <о0 и E) найдем: С,=0, С.2 = ——"° - Внося получен-
полученные значения Q и Q в уравнение D), получим:
F)
w
где
Коэффициент, стоящий при синусе, является переменной угловой
амплитудой крутильных колебаний диска при наличии момента со-
сопротивления движению, т. е.
G)
Коэффициент, стоящий при аргументе t под знаком синуса, является
круговой частотой крутильных колебаний диска при наличии момента
сил сопротивления движению:
228
ОБЩИЕ TEOPF.Mhl ДИНАМИК»
(ГЛ. IX
т. е. kcanp<^k. Так как период колебаний 7 = -~ ,то при наличии мо-
9™ 9т
мента силы сопротивления Т =—^-=—-ф==, т. е. 7"СО)ф> Т.
йсопр ]/ К" — И"
Итак, при наличии момента силы сопротивления пропорционального
углоиой скорости диска, круговая частота свободных крутильных коле-
колебаний уменьшается, и следовательно, период колебаний увеличипается.
К задаче 306.
Рассмотрим закон изменения переменных углопых амплитуд. Вы-
Выражение для переменной угловой амплитуды дается формулой G).
Допустим, что ак соответствует моменту премени tt\ тогда
Следующее наибольшее отклонение о,,, наступает через нолмо
риода, т. е. соответствует моменту премени г,- -|
этому
Разделин A0) па (9), находим:
(см. рис.), по-
A0)
пГсопр
т. с. отношение величин дну* смежных наибольших углопых откло-
отклонении постоянно. Следовательно, они убывают по закону геометриче-
геометрической прогрессии со знаменателем, ранным
пТсоп
§ 4\ ТЕОРЕМА ОГ. ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 229
Итак, в случае малого сопротивления (n<^k) диск совершает
затухающие крутильные колебания.
б) я^>А (случай большого сопротивления).
R соответствии с (формулой C), корни характеристического уран-
нения являются вещественными:
>м = — п — |/'п' — /г-, ^ = — я -j- i'ii! — k\
Закон движения запишется и виде:
't = Cle^t-^-Cie'< (И)
После вычисления производной от <р по t
$ = \lCvc'S-\-KCie'-*t A2)
и подстановки 'начальных условий движения ^ = 0, ? = 0 в A1) и
? = 0, ф = со0 в A2) найдем:
Внося полученные значения Сх и С2 в уравнение A1), получим:
<? = т-^'--(с^'-с^), A3)
где
}ч = — п— /п> — 'к'1, )., = —п-\- уп1 — к-,
k — V V р " п — 7-V5--
Так как при t—.>¦ со величина ср стремится к пулю, то дпижепие
затухает.
Итак, в случае большого сопротивления (п^>к) диск совершает
затухающее апериодическое дпижепие.
п) п = к (предельный случай).
В соответствии с формулой C), корни характеристического урап-
нения раипы Х,=Ха = — п. Закон движении запишется в виде
<p=C1e-I"+Cite-'". (И)
После вычисления производной от э по t
$ = — nCte-nt -f C2e-nl — nC4e-nt A5)
и подстановки начальных условий движения: ? = 0, ср = О и A4) и
j! = 0, ф = ш0 в A5),'найдем С, ^0 и С2 = ш0.
Внося полученные значения С, и d в A4), имеем:
? = %««-"', A6)
230 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ]ГЛ. IX
Гак как при t—>-oc выражение A6) становится неопределен-
неопределенностью вида со • 0, то для раскрытия неопределенности применим
правило Лопиталя
П.п о= lim «Je-a'= lim *? = lim Ш= lim ^ = 0,
т. е. п предельном случае (n = k) диск совершает за:ухающее апе-
апериодическое движение.
Итак: а) в случае малого сопротивления (n<^k) диск совершает
затухающие колебания по закону:
где А = г- [/ ^ и п = ^;
б) в случае большого сопротивления (n^>k) диск совершает
затухающее апериодическое движение по закону:
- *-¦ I с- Yn* - *2 А
где A = |
и) в предельном случае (n = k) диск совершает затухающее апе-
апериодическое днижепие по закону:
Задача 307. Диск, подношенный к упругой проволоке, совершает
крутильные колебания. При этом нижнее основание диска соприка-
соприкасается с неподвижной горизонтальной плоскостью (см. рисунок).
Наибольшее значение момента силы трения нижнего основания диска
0 неподвижную плоскость ранио /я1™ах=10 кг-см. Упругий момент
проколоки пропорционален ее углу закручииапин о, т. е.: wz== — со,
где с — коэффициент упругости проколоки — величина упругого мо-
момента, необходимою для закручивания проволоки на 1 рад; с =
= 50 кг-см. В начальный момент диск повернут па угол, равный
1 рад и отпущен без начальной скорости.
Определить число и величины угловых амплитуд колебаний диска
до остановки, если его момент инерции относительно оси z, прохо-
проходящей вдоль проволоки, равен /2=г0,5 кг¦ см- сек1.
Р е ш е и ие. Ввиду наличия момента силы трения, крутильные
колебания диска будут затухать. Движение прекратится в том край-
крайнем положении диска, в котором момент силы трения окажется
больше или равным упругому моменту проволоки.
i'l
TF.OPEMA ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
231
Решение задачи осложняется тем, что при переменах направле-
направления цращения диска меняется направление момента силы трения, ко-
который, будучи величиной постоянной, должен и дифференциальном
уравнении колебаний лиска менять знак. Поэтому приходится соста-
илять дифференциальные уравнения колебаний диска при движении
и каждом из направлений (по и против часовой стрелки) и отдель-
отдельности. При этом значения угла поворота и угловой скорости диска
в моменты, когда данное дифференциальное уравнение утрачипаег
силу, оказываются начальными
условиями для последующего диф-
дифференциального уравнения.
Начало отсчета угла пово-
поворота ср диска взято в положении,
в котором упругий момент про-
проволоки равен нулю. Будем считать
положительным отсчет угла по-
поворота ф диска в направлении про-
против часовой стрелки (полагаем,
что наблюдатель смотрит с конца
оси z иниз на диск).
К диску приложены: Р—вес
диска, R—сила реакции прово-
локи, тг — упругий момент проволоки и момент силы трения
нижнего основания диска о неподвижную горизонтальную плоскость.
Наибольшее значение модуля этого момента равно \тг\тях.
Для решения задачи воспользуемся дифференциальным уравне-
уравнением вращения твердого тела вокруг неподвижной оси г:
К задаче 307.
к = I
В начальный момент диск был повернут на угол <ро=1
против ч-асовой стрелки и отпущен без начальной скорости. При
этом момент трения относительно оси z, действующий прогип часовой
стрелки, входит в дифференциальное уравнение со знаком плюс.
Запишем: 1? — т.г-\-\П1г\тю.=—ttp — |OT*imax> Т- е. 0,5ф =
= — 50ср+ Ю или
?|Ю0 20. A)
Дифференциальное уравнение A) описывает движение диска по
часовой стрелке при начальных условиях движения: при ( = 0
9о = 1 рад, ф0 = 0-
Общее решение этого дифференциального уравнения равно сумме
общего решения соответствующего однородного уравнения и част-
частного решения уравнения A), т. е. ср = ср,[
232 ог.щип тг.орр.мы динамики |гл. ix
Состапим характеристическое уравнение л2— ]00 —0. Корпи
характеристического уравнения раины X.i. 2 = dz 10/. Следовательно,
решение однородного уравнения ?-}-100ср = 0 имеет вид
<р, = С, cos 10/ -f. C9 sin 1 Of.
Ишем частное решение ер., в виде постоянного: «.2=Л. Подста-
1U1B <?2=Л в урапнёпие (I), находим, что о., = 0,2.
Следовательно, общее решение дифференциального уравнения A)
имеет вид
о = С, cos 10t + С, sin 10/ -;- 0,2. B)
Вычислив производную от ср по времени t:
<j = —10d sin lOf-flOCjCos 10/ C)
и подставив начальные услог.ия: f = 0, о—1 рад и B) и ^ = 0,
? = О и C), имеем: С, = 0,8 и С, = 0. Внося эти значения d и С2
в уравнение B), получим:
о = 0,8 cos I Of -p 0,2. D)
Эчо — уравнение вращение диска но часоной ст])елкс па первом
этапе движения. Угловая скороаь диска &=—8 sin 10/. Перемена
направления движения произойдет в момент времени, соответствую-
соответствующий 6 = 0. При этом —8 sin 10t = 0, откуда находим, что t = {) и
t = '" сек. Значение / = 0 соотнетствует началу дпижеиия диска
из состояния покоя, а значение t=i:n. сек соответствует первой пе-
перемене направления движения.
Подставив в уравнение D) t = ~~- сек, получим угловую ампли-
амплитуду диска а, = 0,6 рад. В этом крайнем положении диска упругиИ
момент равен | тг \ = 50 • 0,6 ==30 кг-см. Так как | т\ 'тях= '0 кг-см,
т. е. | тг | ^> j /я* |таХ) то начинается движение диска против часовой
стрелки. При этом упругий момент направлен против часовой стрелки,
а момент трения — по часовой стрелке. Теперь дифференциальное
уравнение вращения диска принимает вид
0,5?== — 50э— 10.
Итак, движение диска против часовой стрелки описывается диф-
дифференциальным уравнением
ф - J- 100? = — 20 E)
при начальных условиях движения: при t = Q ^ = 0,6 рад, ф = 0.
(Отсчет времени опять начинаем сначала.)
§ *]
TEOPF.MA ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
233
Решин дифференциальное ураинение E) аналогично дифферен-
дифференциальному уравнению A), получим:
«= —0,4 cos 10^ — 0,2.
F)
Это — урапнеыие вращения диска против часовой стрелки. Углопая
скорость диска: <j> = 4 sin 1(№. Перемена иалраплепия движения диска
произойдет в момент времени, соответствующий <? = 0. При этом
4 sin 10^=0, откуда находим, что 1=0 nt=?~ сек. Значение t = 0
соответствует началу движения диска против часовой стрелки, а зна-
значение t=-.v. сек соответствует перемене направления движения.
Подстапив п F) ^ = у0 сек, получим угловую амплитуду а.1 =
= 0,2 рад. В этом крайнем положении диска at оду ль упругого мо-
момента ранен | тг | = 50-0,2 = 10 кг-см. Так как | от* |тм= 10 кг-см,
т. е. | тг | = | m*z |mas, то н этом крайнем положении диска его дпк-
жение прекратится.
Итак, диск, будучи в начальный .момент понернут па 1 рад про-
тин часовой стрелки и отпущен без начальной скорости, диижется
по часоно!) стрелке вплоть до поворота в отрицательном направле-
направлении отсчета на 0,6 рад (следовательно, размах колебаний по часовой
стрелке равен 1,6 рад); затем диск меняет
направление вращения и движется против
M.icoiiOii стрелки инлоть до поворота и поло-
положительном направлении отсчета па 0,2 рад
(следопателыю, размах колебаний против ча-
часоиой стрелки равен 0,8 рад). В этом поло-
положении диска его движение прекратится.
Задача 308. Однородный круглый диск
веса Р и радиуса г, прикрепленный к по-
потолку и полу посредством диух упругих
проволок, расположенных па одной верти-
вертикали (см. рисунок), совершает крутильные
колебания. При повороте диска и проволо-
проволоках возникают упругие моменты, пропорцио-
пропорциональные углу закручивания; сх—коэффи-
сх—коэффициент упругости верхней проволоки, <г3—
нижней проволоки. К диску приложена пара
сил с моментом тг = та sin <at, где тп и
<о — постоянные. Определить закон движения диска, если в начальный
момент он находился в покое при ненапряженном состоянии пропо-
прополок. Силой сопротивления движению пренебречь. Ось г направлена
вдоль проволок.
К задаче 308.
234 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Решение. К диску приложены: Р—пес диска, R—суммарная
сила реакции двух проиолок, т'?' и т'? — упругие моменты прово-
лок, направленные и сторону, противоположную их закручиванию,
т, — момент вращающей пары сил.
Применяем дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси г:
k= 1
Pr-
Так как момент инерции диска I, относительно оси z равен -т> — , а
главный момент внешних сил относительно оси z равен
п.
^ д wz {JFk) == ffi'z ~\~ ш? ~~\~ mz z=~= — ?\f? — c*ip —|— /?^o sin co^,
k= i
то дис|)ференциалыюе уравнение вращения принимает вид
-ту— ч? = — (ci -\- css) rf -(- ^о s'n ш^
или
Обозначив - AT " =^'j и -5^-= А, запишем полученное
уравнение в виде
¦p-;-^?==fcsiniu^. ¦ A)
Это дифференциальное уравнение пыпужденпых крутильных ко-
колебаний диска.
Общее решение дифференциального уравнения A) равно сумме
общего решения ¦^1 соответствующего однородного уравнения ф -)-
-rk\ = 0 и частного решения ^ уравнения A), т. е. '¦p = cpi +?«.
Решив характеристическое уравнение Ха-|-Ла = О, получим Х[ й =
= ±ki, следовательно, региение однородного уравнения запишется
и виде
ср, =. С, cos kt -у d sin kt, B)
где
При определении частного решения следует рассмотреть два ва-
варианта: а) со ф k и б) со==й.
Рассмотрим вариант а) со ф k, т. е. случай отсутствия резонанса.
Ищем частное решение в виде
<ps= A sin wt -\- В cos iot.
5 4| TFOPF.MA OR ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТП ДВИЖЕНИЯ 235
После подстановки этого значения ср.2 в уравнение A) приравняем
коэффициенты, стоящие соответственно при синусе и косинусе в ле-
пой и правой частях уравнения. Получим:
А (к1 — ...") = h, Я {kl — со) = 0.
Так как <о ф k, то А=-г?—- и ? = 0. Теперь частное решение
принимает вид
где № — "—'"у 2 и И = -~-^. Запишем общее решение ди(|)фе-
репциалыюго уравнения A):
ср = <р, -|- ср-2 = С| cos А^ -L- С2 sin &? -j- -.д _ а sin ш*. (,Ч)
Для определения постоянных Су и С^ вычислим производную от ^ но Z:
ф = — С, k sin kt -j- C.,A cos A^ -j- -^rr^j- cos toj!. D)
После подстановки начальных условий: ^ = 0, со = 0 в (8)
и f = 0, ф = 0 в D), найдем, что С, = 0 и С.2 = ь7ь*~" ш'\ '
Следовательно, уранпепие движения диска C) имеет вид
Лш ,, , л
Ф = — -r—ri —„т SII1 ЙГ 4- -г:;
Sin O)t.
Рассмотрим вариант 0) w = ?, т. е. случай резонанса. Ищем
частое решение в виде
<fi = At sin wt ¦-'- Fit cos u>t. (."))
После подстановки (о) в уравнение A) приравняем коэффициенты,
поящие соответственно при синусе и косинусе в леиой и правой
частях уравнения. Получим: Д = 0 и 13 = —-., -, следовательно,
<Pi = — т2ш- ^ cos ш*, F)
ые я — "Tv3"'
Учитывая формулы B) и F), запишем общее решение дифферен-
дифференциального уравнения A) и ьиде
<р = С\ cos kt -j- d sin kt — ..- i cos cat. G)
23в ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ |ГЛ. IX
Взяв производную от о по t, имеем:
§ — — Ctk sin kt -\- dk cos kt — ?- cos iot -¦- * / sin nit; (8)
иодстапив начальные условия движения: t = Q, c = 0 в G) и г=^0,
0 = 0 и (8), найдем: C'j = O и С^^-гг-тг (так как w = k). Внося
С, и Со и уравнение G), окончательно получим уравнение движения
диска в случае резонанса:
9 = -,-r sin u)^ — -'7- ^ cos ш^>
1 /Ш Zfli
где ю = А' = —
Переменная амплитуда вынужденных колебании, равная •„-¦(, не-
неограниченно позрастает пропорционально времени.
Задача 309. Шар веса Р и радиуса г совершает крутильные
колебания на двух последопательно соединенных упругих проволоках
(см. рисунок); с, — коэффициент упругости верх-
верхней проволоки, с2 — нижней проволоки. К шару
приложена пара сил с вращающим моментом
/пг = ш9 sin iot, где т0 и со постоянны. Момент
силы сопротивления движению пропорционален
ynioisofi скорости тара: т* = — |3ф, где р — по-
постоянная (|3^>0). Определить закон вынужденных
колебании тара. Ось г направлена вдоль упру-
упругих проволок.
Р е ш с и и е. К шару приложены: Р — вес шара,
/?—суммарная сила реакции двух проволок,
шг—npuniaionuitl момент пары силы, т*—момент
сил сопротивлении и Шг+'' — суммарны!! упругий
момент двух проволок. Для определения суммар-
суммарного упругого момента т'г'~' двух прополок паН-
дем кочффициепт ynpyiocin с проволоки, экпива-
леитно!' двум данным последовательно соединен-
соединенным проволокам с коэффициентами упругости сл
и с.,, т. е. приведем данную задачу к обычной
схеме крутильных колебаний твердою тела па
упругой проволоке.
Допустим, что к шару приложен момент т, под действием кото-
т
рого проволока повернулась па угол з; тогда !?=: — , где с — иско-
искомый эквивалентный коэффициент упругости. В рассматрипаемом слу-
случае угол поворота <? шара равен сумме углов поворота <{1 и <?а —
К задаче 309.
I 4| ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДПИЖЕНИЯ 237
нижних сечений соотпетствепно верхней и нижней проволок, т. е.
<P = ?i-f ?*•
„, т т т т , т 1 1,1
Так как у. = — и <pt = - , то - — — , т. е. - = - -4- ¦ -,
откуда коэффициент упругости эквивалентной проволоки с = —~—.
Итак, суммарный упругий момент двух последовательно соединенных
проволок
A+91
т, =— С9== —
Запишем дифференциальное уравнение вращения шара вокруг
оси z:
п
После подстановки \z = -^-—¦ и У] tnz (Fek) = /иУ+21 -\- т*
= —^—<f — Зф -f- m0 sin co^ это уравнение примет вид
5|? = —Ci+2Co (P —P? + fflo sin arf
или
ф -|- 2лф -)- А9 = /г sin cuf, A)
где
_5й__?1?е__а« М —2« и 5g/"" —/г
2Рга с,-И, ~~ ' 2Рл2~//г и 2Рг2~"
Ураппепие A) — дифференциальное уравнение вынужденных кру-
крутильных колебаний шара на проволоке при наличии момента силы
сопротивления движению, пропорционального угловой скорости.
Так как требуется определить только вынужденные крутильные
колебания шара, то решение задачи сводится к отысканию частного
решения уравнения A). Ищем частное решение в пиде
<р = A sin Ы-\- В cos tat. B)
Для нахождения коэффициентов А и В подставляем ср из фор-
формулы B) в уравнение A):
— Аи>'! sin wt — jy«r cos (o^ -\~ 2 Anw cos a>t — 2Впш sin wt --
-J- Ak'1 sin o)j! -|- Bkl cos at = /г sin mt.
2.38 ОБЩИЕ ТР.ОРГ.МЫ ДИНАМИКИ [ГЛ. IX
Приравняв коэффициенты при синусе и косинусе в левой и прамой
частях уравнения, получим систему:
A (k'1 — со2) — 2Bnw = h,
, . h (k- — <&'-) „ 2пш/г
откуда А = .... ¦ у .v, , ' — и В = — -^ .„., ,,¦,.. .
Подстанив полученн1>1е значения А и В в уравнение B), найдем:
9 = ; sin at — —. .,.., ,..,., cos (or.
т (к2 — ")'!)-! + 4П-1Л- (й3 — а-)» -|-4я-(й2
Для опреде1епия амплитуды вынужденных крутильных колебаний
обозначим:
h (k2 — a2)
7F^-o^^4,T^" = acoS?'
= a sin e.
C)
(ft- — ы1')- -)- 4п-'ш-
Теперь <р принимает вид
<p = asin(cu? — в), D)
где а — угловая амплитуда, а е — сдвиг фаз между возмущающим
моментом и вынужденными колебаниями; а и г определяем из си-
системы уравнений C):
h , 2п<л
а И tg ? = -гт, j .
ш-)- | 4п'2и>- ft2 —ш-1
Итак, вынужденные крутильные колебания шара происходят но
гармоническому закону:
h . I . . 2лш
э = —, sin I шг — arctg -гг.
У (к- — «л'-1M-(-4h3oK \ « —и
где
В случае резонанса, т. е. при w = k, углоная амплитуда вынуж-
вынужденных крутильных колебаний шара равна -.—.
Задача 310. Твердое тело, подвешенное па упругой проволоке,
совершает крутильные колебания под действием пнешнего момента
m =f(t), где f(t) — однозначная периодическая функция периода т;
с — коэффициент упругости проволоки, упругий момент которой про-
пропорционален углу закручивания: шг = — сер.
Определить закон вынужденных крутильных колебаний твердого
тела, если его момент инерции относительно оси г, направленной
S 41
ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
239
идоль проиолоки, равен \г. Силой сопротивления движению пре-
пренебречь.
Решение. Разложим m—f(t) в ряд Фурье (предпарителыю
проверив выполнение условий Дирихле):
/"(О =
где
2,- COS ,
2ти
bi sin
0)
Как известно, коэффициенты рада Фурье вычисляются по фор-
формулам:
cos /o)^ dt
й; = 4 f f{t)smmtdt,
Т о
m=fft)
G
К задаче 310.
где / = 0, 1, 2, ...
Запишем дифференциальное уравнение вращения твердого тела
вокруг оси г.
Так как моменты силы веса твердого тела и силы реакции пропо-
локи относительно оси z равны нулю, то
% mz (Ft) = mz + т = - со + f{t).
Воспользонаишись формулой A), получим:
п
2,
тг
= — c<p 4- ао + ^ (a,- cos
«= i
sin
Следовательно, дифференциальное уравнение вынужденных кру-
крутильных колебаний твердого тела имеет вид
= — с<р
cos
sin
i=- I
2 40 ОБЩИЕ ТЕОРЕ.ЧЫ ДИНАМИКИ [Г.". IX
со
^ -j- k°~y = -wr- -J- -j— У (ai cos iiol -j- ?,• sin /««O. (.-)
' ' i - i
где AJ==---. Для определения закона вынужденных крутильных ко-
колебаний требуется найти только частное решение дифференциального
уравнения B), которое ищем и виде
<р = Ао-\- 2_i (^; cos 'ш^ ~г В» s'n 'ш0- (^)
Для вычисления коэффициентов Ло, Лг и 5,- (/ = 0, 1, 2,...) под-
стаппм апачепие о из формулы C) в уравнение B):
со
¦— '2и>* X (^'cos '|0' ~^ ^' :'in 'uH ~Ь ^2-^° ~i~
со
4- Л2 У, (A; cos fW4- /?; sin ЫЛ) =
а 1 V
= ,jf -j- r- / (^,- cos /со/ -¦- о,- sin /u)f). D)
Приравняв постоянные слагаемые, а также коэффициенты, стоящие
при соответствующих синусах и косинусах и левой и правой частях
уравнения D), получим:
v4j (A — гю) = -г- > &i (« —' °>) = > »
откуда
где i = 0, 1, 2, ...
Подставив вычисленные значения Л,-, Д,- в уравнение C),"находим
уравнение вынужденных крутильных колебаний твердого тела
со
<? = .7 4" ~Т~ / i "ьг ~^~" cos Zu)' ~Г ~h" ^3"~ Sln @)'
где
t
2- .„ с 7 С ....
COS
= i , a,- = - f f(t)
U
i = 0, 1,2,...).
§4] TEOPF..MA ОГ, ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 241
Тнердое тело попадает и резонанс при услоиии: !r — /V = 0,
где /= 1, 2, 3, ... , т. е. при к = ш.
Так, при /=1, т. е. А = <о, имеют место резонансные колебания
первого порядка,
при i—'2, т. е. Л = 2ш, имеют место резонансные колебания пю-
рого порядка
при i = n, т. е. к = пт имеют место резонансные колебания я-го
порядка.
При одном порядке величин а; и bt по мере попышеиия поряд-
порядка резонансных колебаний их амллитуды уменьшаются, поэтому наиболее
опасными являются резонансные колебания низших порядком.
1°. Теорема об изменении г л an по го момента ко-
количеств движения системы материальных точек
и относительном движении по отношению к центру
инерции. Разложим движение материальных точек системы на пе-
переносное поступательное имеете с осями декартовых координат,
начало которых совмещено с центром инерции системы, и относи-
относительное движение по отношению к центру инерции. При этом тео-
теорема об изменении главного момента количеств движения системы
материальных точек в относительном движении по отношению к
центру инерции имеет вид, тождественный аналогичной чеоре.ме
в абсолютном движении:
т. е. производная по времени от главного момента количеств дии-
жения системы материальных точек относительно центра инерции
системы в их относительном движении в системе координат, дви-
движущихся поступательно вместе с центром инерции, равна век-
векторной сумме моментов внешних сил системы относительно центра
инерции.
Та же теорема в проекциях па оси декартовых координат, начало
которых совмещено с центром инерции системы и движущихся по-
сгуиателыю вместе с центром инерции, имеет вид
п п п
df.rx -у. , „*>. dLj.y VI е ?Lsi_ V /ре\
(it ^н fit ^^ у ' (it ^
* ^ 1 к = I к --. I
Случаи сохранения главного момента количеств движения
системы материальных точек в относительном движении по
отношению к центру инерции системы.
Если векторная сумма моментов внешних сил относительно центра
инерции равна нулю, то главный момент количеств движения системы
242 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ (ГЛ. IX
материальных точек относительно центра инерции н системе псеи
координат, движущихся поступательно имеете с центром инерции,
сохраняется неизменным, т. е.
п
если ^ mc{Fk) = Q, то Lc постоянно.
k-^ 1
Та же теорема и проекциях на оси декартовых координат, начало
которых сопмещено с центром инерции системы и днижущихся
поступательно вместе с центром инерции, имеет вид:
л
если У] тсх(Fk) = 0, то Lcx постоянно и т. д.
k--+ 1
Теорема об изменении главного момента количеств движения
системы материальных точек (со случаем сохранения) в относитель-
относительном движении по отношению к центру инерции системы широко
применяется в задачах динамики плоского движения твердого тела
(см. следующий параграф) и движения свободного твердого тела,
т, е. в тех случаях, когда движение твердого тела можно разло-
разложить на переносное вместе с осями координат, движущимися посту-
поступательно с центром инерции, и относительное по отношению к этим
осям.
Задача 311. Акробат, совершая сальто, отталкиваясь ногами от
земли, сообщает себе в начальный момент угловую скорость о>, =
= 1 об/сек вокруг горизонтальной оси, проходящей через его центр
тяжести. При этом момент инерции акробата относительно оси рамен
/, = 1,5 кг-м-сек1. Для того чтобы в полете увеличить угловую ско-
скорость, акробат поджимает ноги и руки к туловищу, тем самым
уменьшая момент инерции до пеличииы /2 = 0,5 кг-м-с.ек*.
Определить угловую скорость вращения щ акробата вокруг
горизонтальной оси в полете. Силами сопротивления движению пре-
пренебречь.
Решение. Единственной внешней силой, действующей па акро-
акробата в полете, является его вес.
Движение акробата в процессе выполнения сальто является слож-
сложным. Разложив его на переносное поступательное движение вместе
с центром инерции и относительное вращательное вокруг горизон-
горизонтальной оси х, проходящей через центр инерции, можно восполь-
воспользоваться теоремой об изменении главного момента количеств дкиже-
пия системы материальных точек в относительном движении но
отношению к этой оси:
ТЕОРР.МЛ ОП ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
243
Так как горизонтальная ось х проходит через центр тяжести
акробата, то момент силы веса акробата относительно этой оси равен
нулю. Следовательно, —-^-' = 0 и Lcx постоянно, т. с. LWx = Llrx.
Итак, имеет место случай сохранения главного .момента количеств
движения системы материальных точек в относительном движении.
Так как Z.ifv=/1co1 и Licx=- /^о,, то 11ш1 = 1^о.2, откуда o>i=-'-oI.
Подставив численные значения, получим их, —3 об/сек.
83. Моменты инерции и эллипсоид инерции. Момент
инерции твердого тела относительно оси L, проходящей через дан-
данную точку, определяется формулой
1L = !х cos- a ~\- Iy, cos'2? -j- /^cos-f — 21 уг cos ? cos 7 —
— '21,x cos -; cos a —-2Ixy cos я cos fl,
где a, p и -у— соотпетстпенно углы между координатными осями
х, у, г и осью /,, относительно которой нычислеп момент- инерции
твердого тела (рис. 130), /(, /v, lz — осе- ?
вые моменты инерции твердого тела, 1ху,
1у., 1гх — центробежные моменты инерции
твердого тела, определяемые формулами
к = I
= I
lzx =
R отличие от осевых моментов инер-
инерции твердого тела 1Х, !у, 1г. которые
всегда положительны, центробежные мо-
моменты инерции могут быть также отри-
отрицательными и в частных случаях могут
оказаться рапными нулю.
В случае непрерывного распределения масс в однородном твер-
твердом теле центробежные моменты инерции вычисляются по фор-
формулам
\yzdV,
не. 130.
где М — масса твердого тела, V—его объем, dV — элементарный
объем. Интегрирование распространено по исему объему твердого тела.
В случае непрерывного распределения масс п однородной пла-
пластинке:
(S)
(S)
IS)
244
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
|ГЛ. IX
где М — масса пластинки, .S—площадь пластинки, dS—элементар-
dS—элементарная площадка. Интегрирование распространено по всей площади пла-
пластинки.
Эллипсоидом инерции в данной точке твердого тела назы-
называется геометрическое место точек, отстоящих от данной точки на
расстояние OD — —-.
Vh.
Отрезок OD откладывается по оси L, проходящей через дан-
данную точку О, относительно которой определен момент инерции
твердого тела li (рис. 131).
tji Уравнение эллипсоида инер-
f ции в данной точке твердого
тела имеет вид
— 212Хгх — 11хуху = 1,
*? где х, у и z — текущие коор-
координаты точек, лежащих па по-
поверхности эллипсоида.
Через любую точку твердого
тела можно провести пучок
осей L и построить соответст-
соответствующий эллипсоид инерции.
Рис. 13]. Если координатные оси х,у
и z направить по осям эллип-
эллипсоида инерции, то уравнение эллипсоида принимает каноническую
форму:
т. е. центробежные моменты инерции обращаются в нуль:
Оси эллипсоида инерции в данной точке твердого тела назыгаются
главными осями инерции. Следовательно, в каждой точке твердого
тела имеются три главные оси инерции, являющиеся осями соответ-
соответствующего эллипсоида инерции.
Если оси декартовых координат направить по главным осям инер-
инерции, т. е. по осям эллипсоида инерции в данной точке твердого
тела, то, учитывая, что 1уг = !2Х = !xv = 0, получим в данном случае
следующую формулу для момента инерции твердого тела относи-
относительно оси L:
h = lx cos'2a -f-1у cos'2 p -f- 1г cos2 у,
где cos а, cos р и cos ^ — направляющие косинусы оси L.
§41
ТГ.ОРЕМЛ ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ЛВИЖР.ПИЯ
245
Любая ось, не проходящая через центр тяжести твердого чела,
является главной только в одной точке, т. е. oci> яиляетси осью только
того эллипсоида инерции, цетр которого совпадает с данной точкой;
эллипсоида инерции
инерции с центрами
так, главная ось г в точке О будет осью
с центром и О; при этом для эллипсоидов
в других точках, лежащих па оси z,
например в Ot и О.„ ось z не яв-
является осью эллипсоида (рис. 132).
Если оси х и у, проходящие че-
через точку О, не являются осями
эллипсоида, то 1Х), ф 0, т. е. если
только одна из осей будет главной
осью инерции в данной точке твер-
твердого тела, то в пуль обращаются
лишь два центробежных момента
инерции относительно осей, одной
и.ч которых является главная ось
инерции; например, если z — глав-
главная ось инерции в точке О, ю
lzx=^tzv=zQ (следует помнить, что
оси хну проходяс через то'!ку О
и образуют совместно с осью z
ортогональную систему осей коор-
координат).
Главная ось инерции, проходя-
проходящая черия центр тяжести тнердого
тела, называется главкой централь-
центральной осью инерции и является глав-
главной в любой своей точке.
Если в твердом теле имеется плоскость материальной симметрии,
то любая ось, перпендикулярная к этой плоскости, будет главной
в точке пересечения с плоскостью.
Если в твердом теле имеется ось материальной симметрии, то она
является главной осью инерции твердого тела.
Если при решении задачи приходится пользоваться формулами,
содержащими центробежные моменты инерции твердых тел (например:
в задачах на определение давлений вращающегося твердого тела на
ось вращения (глава X, § 3), и задачах об ударе по телу, вращаю-
вращающемуся вокруг неподвижной оси (глава XII, § 1), в задачах динамики
твердого тела, вращающегося вокруг неподвижной точки (глава X, §8)),
то для упрощения решения задач следует специально выбрать направ-
направление осей декартовых координат. Для этого требуется выяснить,
нет ли в твердом теле оси материальной симметрии либо плоскости
материальной симметрии. При наличии в твердом теле оси материаль-
материальной симметрии надо одну из координатных осей направить по этой
Рис. 1.U
246 0П1ИИГ. TEOPP.MIJ ДИНАМИКИ |ГЛ. IX
оси, которая и япится главной осью инерции. При наличии в твердом
теле плоскости материальной симметрии надо одну из координатных
осей папрапить перпендикулярно к плоскости материальной симметрии.
Эта координатная ось является главной осью инерции твердого тела
и точке пересечения с плоскостью материальной симметрии. При нали-
наличии главной оси инерции в данной точке твердого тела два центро-
центробежных момента инерции относительно осей, одной из которых
является главная ось инерции, обращаются в нуль, и остается вычислить
только третий центробежный момент инерции, не равный нулю. Так,
если идоль главной оси инерции направлена ось z, то fzx^I2Y = 0
и остается вычислить только Jxr
Иногда при вычислении центробежного момента инерции, например
Ixv, бывает удобно осуществить поворот координатных ocett x и у.
.-)iим приемом целесообразно пользоваться в тех случаях, когда повер-
повернутые оси jt, и j'j оказываются главными и осеиые моменты инерции
твердого тела относительно них, т. е. 1Х1 и /,,,, известны, так как
тогда искомый центробежный момент инерции оказывается функцией
величин JXl и /,.,.
Для определения уравнения эллипсоида инерции
в дайной точке твердого тела следует:
1) выбрать координатные оси, взяв начало координат в данной
точке; если положение главных осей инерции можно легко опреде-
определить благодаря наличию и твердом теле плоскости либо оси мате-
материальной симметрии, то координатные оси следует направлять вдоль
главных осей инерции;
2) иычислить моменты ипериин !х, /у, \z и центробежные моменты
инерции твердого тела 1ху, 1хг, /,.г;
3) определить уравнение эллипсоида инерции, воспользовавшись
формулой
]хх* -j- /,./ -J- 1гг* - 2!иу, - 11zxzx - 21хуху= 1.
Задача 312. Па рисунке изображена схема коленчатого пала четы-
рехцилипдрового двигателя внутреннего сгорания. Колена А и И рас-
расположены в горизонтальной плоскости yz. Колена В и D располо-
расположены в вертикальной плоскости xz. Вычислить центробежные моменты
инерции коленчатого пала 1ХУ, 1хг, /,..,, приближенно считая его массу
сосредоточенной в точках А, В, U и D, причем mA = mb^mF=
= тп = т. Размеры указаны н.а рисунке.
Решение. По определению центробежных моментов инерции
твердого тела получаем:
ft =
§ 4| ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 247
Распространив суммирование на четыре точечные массы тА, шlh
тЕ и mD, имеем:
!ПпУпгв +
k = i
= ,/гд • 2a (_ 6a) + mE(~ 2a) 2a = —l 2mAa* — Ari^a1 = — 16tna\
П
! }] = тАхлУл "Г M + °
В
1j
/
/
/
4
/ в ,
'/аЛ/ Е ).'2а
0 \*-Za —
D
*aba^
2a L
К задаче 312.
hz =
ft -= I
= ЛХАгА
^mEXEZE~i
— тц (— 2Д) 2a -[- mD6a (— 2a) = — \т.в<г —
(напомним, что _ув=_уо = лг, =jc?^O, а тл = тн =
12mDdl
Итак, /==/ =—
/,„ = 0.
Интересно отметить, что при
диух центробежных моментах
инерции /гг и 1уг, отличных от
пуля, центр тяжести коленчатого
вала лежит на оси вращения z.
Задача 313. Вычислить цен-
центробежные моменты инерции ]ху,
1хг и lyz однородной пластинки
ОАВ иесэ Р. Катет прямоуголь-
прямоугольного равнобедренного треуголь-
треугольника ОАВ равен а. Оси коорди-
координат изображены па рисунке.
Решение. Ось х, перпенди-
перпендикулярная к плоскости материаль-
материальной симметрии пластинки, является главной осью инерции в точ-
точке О. Известно, что центробежные моменты инерции относительно
К задаче 313.
248
ОБЩИЕ ТР-ОРЕМЫ ДИНАМИКИ
[ГЛ. IX
осей, одна из которых является гласной осью инерции, равны
нулю, т. е.
/„=/«=о.
Переходим к вычислению центробежного момента инерции / ¦
'v*= \yzdm,
Ш)
где dm^-\dydz, a -j — плотность пластинки.
Следовательно,
а а — у а
on
так как -' - =
Р
= —, то окончательно получим:
2
Задача 314. Прямой однородный круглый цилиндр веса Р, длины 2/
и с радиусом основания, рапным г, прикреплен к горизонтальной оси z,
проходящей через его центр тяжести О. Ось z образует с осью
К задаче 314.
цилиндра С угол а. Вычислить центробежные моменты инерции ци-
цилиндра !ху, 1хг, Iyz. Ось х расположена и вертикальной плоскости.
Решение. Координатная плоскость xz сопмещена с плоскостью
материальной симметрии цилиндра. Поэтому ось у, перпендикулярная
к плоскости материальной симметрии, является главной осью инерции
S 4) Tr.OPF.MA OB ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ 249
цилиндра и точке пересечения с этой плоскостью, т. е. и точке О.
Как изиестпо, центробежные моменты инерции твердого тела относи-
относительно осей, одной из которых является главная ось инерции, равны
пулю. Следовательно,
Остается вычислить центробежный момент инерции
п
Виедем новую систему координатных осей \т{. так, чтобы ось tj
совмещалась с осью у, а оси \ и С были пояернуты соответствен по
относительно осей х и z на угол о. в направлении по часовой стрелке.
Формулы преобразования координат для случая их поворота па угол а
в направлении против часовой стрелки имеют вид
2 = Ccosa — ij sin а и х = С sin а -|-$ cos a. B)
Так как \\ данной задаче поворот на угол а совершен по часовой
стрелке, то, заменив в формулах B) а на —а, получим:
г = ? cos a -j-1 sin а и jc: = — С sin a -\~ \ cos a. C)
Подставляя значения z и х из формул C) в A), имеем:
п
1хг= ^mkxkzk= VJ mft(Cft cos о.+ Sft sin a) (— Cft sin a-flfr cos a) =
~ 2. "l" ^ * ~^~ Г^ \ ~^~
k i
= — sin a cos a ^ m^% -\- cos-a ^ mk4k%k — sin4 а ^
n n n
-¦¦ sin a cos a \ m^.% = —j— ( 7 /я*?| — \ /я*С| |
n n n
. о V re sin 2a
-j— cos 2.0, 7 Mik^tfk — —^>—
ft™" i ~kl= i ft=i
-f/ucos2a. D)
Ось S перпендикулярна к плоскости материальной симметрии ци-
цилиндра и, следовательно, является главной осью инерции в точке О.
Поэтому /се = О, и формула D) принимает вид
'хг=='—2 I 2-1 mk К?>~к ~ W — 2-i M»W I WJ1 (°J
Так как Е| _!_ ^ ^^ rf= с> где dK — расстояние от k-t\ материальной точки
до оси С и Cft-'|-T|ft = rfJ.c, где </&: — расстояние от k-ti материальной
250 ОРШИР. ТР.ОРЕМЫ ДИНАМИКИ
точки до оси ?, то
[ГЛ. IX
ft = I
*= I
k--= I ft;
Теперь формула (о) принимает пид
. _ sin 2з ,
Для круглого однородного цилиндра
Подставив значения Д и Д. п формулу F), окончательно получим:
Р '-2
F)
Задача 315. Написать уравнение эллипсоида инерции, построен-
построенного в центре тяжести однородного круглого цилиндра массы т
высоты 11 с радиусом основания, ран-
ранным г. Координатные оси изображены па
рисунке. Начало координат О совпадает
с положением центра тяжести цилиндра.
Решение. Урапнение эллипсоида
инерции п данной точке твердого тела
имеит пид
..—
0
/
/
/
1
г
У
г
и
L
Как известно, для круглого цилиндра
/д = [у = М (^ -[- ~) и 1г = ~ . Так как
К задаче 315 оси х' У и z являются главными осями
инерции цилиндра, то 1уг = lxz = Ixv ^= 0.
Теперь уравнение эллипсоида инерции для центра тяжести цилиндра
Полуоси эллипсоида инерции равны
1
1 -,/
= 7У
М-
§41
ТЕОРЕМА ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВ ДВИЖЕНИЯ
251
Задача 316. При каком соотношении между радиусом основа-
основания г однородного круглого конуса и его высотой h эллипсоид инер-
инерции, построенный для вершины конуса О, обратится в сферу. Коорди-
Координатные оси изображены на рисунке (с.ч. рисунок к задаче 291).
Решение. Запишем ураинепие эллипсоида инерции однородного
круглого конуса для его вершины О. Для этого в ураинепие эллип-
эллипсоида инерции
1Iyyz - 21гягх ~ 2Ixvxy = 1
= /у=' М [ й''-j--^-! и /^ = --^ уИга (см. реше-
решеследует подставить:
ние задачи 291), 1ху=1хг = 1гг:=0 (оси х, у, г япляютси главными
осями инерции конуса в точке О).
Получим:
Следовательно, полуоси эллипсоида инерции конуса в точке О раины
1 1 ч/По"
Эллипсоид обращается в сферу при условии: а = Ь — с, т. е.
Задача 317. Определить положение точки в тиердом теле и на-
направление оси, проходящей через эту точку, если известно, чго мо-
момент инерции твердого тела относи-
относительно этой оси является наименьшим.
Эллипсоиды инерции для всех точек
твердого тела считать заданными.
Р е ш е и и е. Применение теоремы
Шгейпера показывает, что при на-
наличии системы параллельных осей
момент инерции твердого тела яв-
является наименьшим относительно
оси, проходящей через центр инер-
инерции С твердого тела. Остается вы-
выбрать направление оси, проходящей
через эту точку. Построим эллипсоид инерции с центром в точке С.
По определению эллипсоида инерции, расстояние от центра эллипсоида
до точки, лежащей на его поверхности, равно СВ= -г— , где /,—
К задаче 317.
252
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
момент инерции твердого тела относительно осп, проходящей через
центр эллипсоида и точку, лежащую на его поверхности. Для чого
чтобы момент инерции /; был наименьшим, расстояние CD должно
быть наибольшим. Следовательно, искомая ось L проходит через центр
инерции С твердого тела пдоль наибольшей оси CD эллипсоида инер-
инерции, построенного в этой '..очке.
§ 5. Динамика плоского движения твердого тела
Как известно из кинематики, уравнения плоского движения твер-
твердого тела имеют вид
*С =/> @: УС =/« @. ? =/* @-
Разложив плоское движение твердого тета на переносное посту-
поступательное имеете с поступательно движущимися осями координат,
начало которых расположено в центре инерции твердого тела, и па
относительное вращательное движение вокруг осп, проходящей через
центр инерции С перпендикулярно к неподвижной плоскости (рис. 133),
напишем дифференциальные уравнения плоского движения твердого
тела в форме
4=t «с
к=\
Первые два уравнения (теорема о движении центра инерции системы
материальных точек, записанная в проекциях па оси декартовых коор-
координат х и у) описывают перенос-
переносное поступательное движение
имеете с поступательно движу-
движущимися осями координат, начало
которых расположено в центре
инерции С твердого тела.
Третье уравнение (теорема об
изменении главного .момента коли-
количеств движения системы мате-
^ риальных точек в относительном
движении по отношению к центру
инерции, записанная для случая
вращения твердого тела вокруг
подвижной оси, движущейся поступательно) описывает относительное
нращателыюе движение вокруг осп, проходящей через центр инер-
инерции С твердого тела перпендикулярно к неподвижной плоскости.
В то время как в кинематике за полюс можно принять любую
точку плоской фигуры, в динамике ма полюс следует брать только центр
инерции С. Иной выбор полюса приводит к усложнению уравнений.
§51 ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 2ГK
С помощью дифференциальных уравнений плоского движения твер-
твердого тела можно решать как прпмме, так и обратные задачи дина-
динамики плоского движения.
При решении обратных задач динамики (определение движения по
заданным силам) приходится интегрировать систему дифференциаль-
дифференциальных уравнений плоского движения твердого тела. Для определения
шести постоянных интегрирования должны быть заданы шесть началь-
начальных условий движения, имеющих вид:
при / = 0 *с = *Со> ус=уСв, *с = *Са, Ус=УС1)> <P = V* ? = ?<>•
Решение задач динамики плоского движения твер-
твердого тела рекомендуется выполнять в следующей
последовательности:
1) изобразить на рисунке все внешние силы, приложенные к твер-
твердому телу;
2) выбрать систему координат и тем самым определить направле-
направление положительного отсчета угла поворота ср;
3) составить дифференциальные уравнения плоского движения твер-
твердого тела (не следует забывать, что в третьем уравнении /С9 =
п.
= ^ тс (Fek) момент инерции твердого тела 1С и сумма моментов
всех внешних сил: sPimc(F$ вычисляются относительно оси, про-
ходящей через центр инерции С твердого тела, перпендикулярно к
неподвижной плоскости);
4) а) п случае решения прямой задачи искомые внешние силы и
их моменты определяются из составленной в предыдущем пункте
системы дифференциальных уравнений;
б) в случае решения обратной задачи интегрированием системы
дифференциальных уравнений движения определяют уравнения пло-
плоского движения твердого тела:
xc=A(t), yc=ft(t), <?=/а@-
Если по условию задачи известна зависимость двух координат от
третьей (например, xc — F\ (<р), _VC == ^s> (<?)) либо некоторые коорди-
координаты заданы, то, проинтегрировав систему дифференциальных уравне-
уравнении плоского движения твердого тела, можно определить искомую
координату (например о) и, кроме того, найти величины двух неиз-
неизвестных внешних сил (или силы и момента).
Задача 318. Колесо веса Q и радиуса г катится прямолинейно без
скольжения по горизонтальной плоскости под действием горизонтально
направленной силы S, приложенной к колесу в центре тяжести С.
254
ORIUHF. ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Дли закон движения центра тяжести С: хс = -.у, где а — постоянная
(ось х направлена по горизонтали в сторону движения). Определить
пелпчипу силы S, величину нормальной силы реакции И, а также
модуль силы трения F^p колеса о горизонтальную плоскость. Колесо
считать сплошным одно-
однородным диском.
Р е ш е п и е. Направ-
Направление осп х задано. На-
Направляем ось у по верти-
вертикали вниз. Угол поворота
колеса <р отсчитываем в
направлении по часовой
стрелке.
К колесу приложены
внешние силы: Q — вес
К задаче 318. колеса, S — движущая си-
сила, /f—нормальная сила
реакции плоскости, Frp — сила трения колеса о горизонтальную пло-
плоскость, направленная в сторону, противоположную движению колеса.
Дифференциальные уравнения плоского движения твердого тела
имеют вид:
В данном случае получим:
g
A)
При движении колеса J'c = —г постоянно, т. е. j;c = 0. Из второго
уравнения системы A) находим: ft = Q.
При качении колеса без скольжения мгновенный центр скоростей
расположен в точке $> касания колеса с горизонтальной плоскостью,
следовательно, vc—rw. Так как скорость центра параллельна оси х,
то
Формула B) определяет условие качения колеса без скольжения.
Воспользовавшись формулой B), вычислим:
хс = г$. C)
at*
Так как движение центра тяжести С колеса задано: xc = -j-, то
D)
§ 51 ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Из формул C) и D) находим:
хса
с
255
E)
Использовав формулу E) из третьего уравнения системы A), опре-
определим искомый модуль силы трения
с __0а
Остается из первого уравнения системы A) найти 5. Принимая
по внимание формулы D) и F), получаем:
Задача 319. Решить предыдущую задачу, учитывая тремие каче-
качения колеса о горизонтальную плоскость; коэффициент трения каче-
качения равен /к.
в)
•1- А
L
f
: \
v, 1 S
<¦ 4\N4
-< —
К заца-.е 319.
Решение. При качении колеса но плоскости, в результп re
деформации колеса и плоскости, соприкосновение их происходит не
и одной точке еТ\ а по небольшой дуге aPAi. Суммарная сила реак-
реакции R, подсчитанная по дуге соприкосновения аРМ, разлагается на
нормальную и касательную составляющие. Касательная составля-
составляющая является силой трения Нтр. Нормальная составляющая силы
реакции оказывается смещенной относительно центра тяжести колеса
С в сторону движения. Вес колеса и нормальная сила реакции пло-
плоскости образуют пару сил — пару трения качения. Плечо этой пари
/к (см. рисунок а) называется коэффициентом трепня качения. Сле-
Следовательно, в отличие от коэффициента трения /, который явля-
является безразмерной величиной, коэффициент трения качения /к изме-
измеряется в сантиметрах (при качении колеса железнодорожного вагона
2.16
01ЛЦИГ. ТЕОРР-МЫ ДИНАМИКИ
[ГЛ. IX
по рельсу коэффициент трения качения/к имеет порядок сотых долей
слппметра).
Мри решении предыдущей задачи с учетом пары трения качепля
черное и торос уравнения системы A) остаются без изменения.
В прапую часть третьего уравнения добавляется отрицательный мо-
момент пары трения качения: /«т к =— Rfk = — QfK (момент отрицате-
отрицателен, так как направление крашении пары противоположно папранле-
[ЦИО положительного отсчета yi ла поворота ?).
(Следовательно, система дифференциальных уравнений движения
колеса принимает пил:
Из пторого уравнения системы находим величину нормально!!
силы реакции: # = Q; таким образом, па нее наличие пары трепня
качения не влияет. Из третьего уравнения системы, после использо-
использования формулы (о) пре-
х
I .
г\
—+*¦-
— L
дыдущей задачи, находим:
>_ После подстановки по-
¦У лученного значения Fip и
значения хс из фор-
формулы D) предыдущей за-
задачи в иериое уравнение
системы получим:
— i —H
6)
Как и следовало ожи-
ожидать, для получения того
:ке самого закона движе-
движения центра тяжести С ко-
колеса, при наличии пэры
трения качения, следует
прикладывать большую
по модулю силу 5.
Задача 320. Бревно
веса Р длины 2/ с ра-
радиусом основания г опиралось своими концами па диа кирпича.
Внезапно правый кирпич был выбит из-под бревна. Определить силу
реакции левого кирпича, полагая, что в начальный момент падения
бревна ею ось остался горизонтальной. Бреппо считать однород-
однородным круглым цилиндром.
К задаче 320.
§ 51 ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 257
Решение. При наличии двух опор (см. рис. а) сила реакции каж-
р
дой из них равна -^-.
На рис. б изображено бревно в начальный момент своего падения
после внезапного удаления правого кирпича. Падая, бревно совершает
плоское движение. К брепну приложены внешние силы: вес бревна Р и
сила реакции левого кирпича RA,
Начало осей координат выбираем в центре тяжести С бревна.
Оси х и у располагаем в вертикальной плоскости материальной сим-
симметрии бревна, паправип ось х по вертикали вверх.
Составим дифференциальные зфаннепия плоского движения бренча,
спраиедливые для малых углов поворота балки:
При составлении третьего уравнения A) использовано, что момент
инерции бревна относительно горизонтальной оси, проходящей через
его центр тяжести, равен —\-т-]- о).
Искомая сила реакции FZA входит в правые часги первою и треть-
третьего уравнений системы A), в левых частях которых стоят л"с и ср.
Для исключения хс и ср следует найти заиисимость между ними. Так
как г>с=Ло, т. е. хс =—/<? (мы пренебрегаем толщиной Ореина и счи-
считаем опору точечной), то
Разделив первое уравнение системы A) на третье и использовао
формулу B), получим: —^ — == , откуда определим искомую
3 ~1~ 4
реакцию левого кирпича:
Задача 321. Определить закон движения центра тяжести С ведо-
ведомого колеса автомашины, поднимающейся в гору, склон которой рас-
расположен под углом а к горизонту. К оси ведомого колеса приложена
постоянная сила S. Колесо считать однородным кольцом веса Р.
В начальный момент автомашина находилась в покое. Колесо катится
без скольжения. Сопротивлением качению пренебречь.
Решение. При движении автомашины за счет работы двигателя
создается вращающий момент, приложенный к ведущей паре колес
(обычно задней). Сила трения, возникающая при соприкосновении ве-
ведущих колес с дорожным покрытием, направлена в сторону движения
9 Теоретическая механика, том И
258
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
и является той внешней силой, которая движет автомашину. При
отдельном рассмотрении двикения ведомого колеса надо считать, что
к его оси приложена сила S, о которой говорится в условии задачи.
На ведомое колесо действует также сила трения, возникающая в точках
его соприкосновения с дорогон. Эта сила напрэнлена в сторону, про-
противоположную силе 5, и тем са-
самим и сторону, противоположную
силе трения ведущею колеса.
Итак, к ведомому колесу при-
приложены внешние силы: Р — вес
колеса, S — движущая сила, R—¦
нормальная сила реакции наклон-
ыоИ иоперхности дороги,/7^ — сила
трения колеса о дорожное покры-
покрытие. В случае псдомого колеса сила
трения направлена в сторону, про-
противоположную движению колеса.
Радиус колеса обозначим г.
К задаче 321. Координатные оси изображены
на рисунке. В соответствии с на-
направлением осей считаем положительным направление отсчета угла
попорота <р но часовой стрелке.
Запишем дифференциальные уравнения плоского движения тпердого
тела:
к=\
которые для рассматриваемой задачи принимают вид:
Р Р
— xc = S—Psina— FTp, — ус = Р cos a —
о &
A)
Момент силы трения в последнем уравнении системы A) поло-
положителен, так как его направление совпадает с направлением положи-
положительною отсчета угла поворота ср.
Так как при движении колеса ус = — f постоянно, т. е. J}c = 0,
то из второго уравнения системы A) находим: R = Pcos а. (тот же
результат получается и при покое колеса).
Для определения уравнения движения центра тяжести С колеса
следует проинтегрировать первое уравнение системы A). Однако в
правую часть этого уравнения входит неизвестная по модулю сила
трения Fxg. Для исключения FTp следует обратиться к третьему урав-
§ 51 ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 259
нению системы (I), одиоиремеппо использовав условие качения колеса
без скольжения:
(мгновенный центр скоростей колеса находится в точке еР соприкос-
соприкосновения колеса с дорогой). Вычисляя производную по времени от
хс, получим:
Подставив C) в первое уравнение системы A) и разделив первое
уравнение па третье, находим:
S_ps,,,g_/-Tp
г.- ' >
откуда
/\P=2"(S—/>slna). D)
Теперь первое уравнение системы A) после подстановки в него
значения /\р из формулы D) принимает нид
*с ~ fp ^ — Рsin а)"
Интегрируя это дифференциальное уранпеиие для начальник усло-
условий движения: при f —О, хс=0, х(. = 0 (по услоиию задачи в на-
начальный момент колесо находились и покое), получим искомый закон
движения центра тяжести С недомого колеса:
xc = ffi(S—Psin т.)?.
Нетрудно установить, что колесо будет катиться вверх при выполне-
выполнении условия S— Psina^>0, т. e. S^> P sin a.
Часто, решая подобные задачи, ошибочно полагают, что может
происходить качение колеса без скольжения при отсутствии силы
трения Fr~. Нетрудно видеть, что при этом предположении третье
уравнение системы A) принимает вид г2ф^0, т. е. ? — 0- Учи-
Учитывая, что при ? = 0 у = 0 и <f^0, получим ф=:0. Это означает,
что при отсутствии силы трения качение колеса невозможно.
Задача 322. Решить предыдущую задачу с учетом трения каче-
качения колеса о дорогу; коэффициент трения качения равен /к. Радиус
колеса г.
Решение. В схему расположения внешних сил вносится только
одно изменение: нормальная сила реакции R оказывается смещенной
относительно центра тяжести С колеса в сторону его движения на /к.
9*
260
ОБЩИЕ ГЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
На первых двух дифференциальных уравнениях движения системы (I)
предыдущей задами это изменение не отражается, а в правой части
третьего уравнения добавляется момент пары трения качения:
отт к = — N/K = — PfK cos а (мо-
(момент отрицателен, так как его на-
направление противоположно поло-
положительному направлению отсчета
угла попорота <?). Итак, система
гт дифференциальных уравнений пло-
плоского движения ведомого колеса
принимает вид:
- Уc = — R~ P cos я,
^r«? = fTpr —P/Kcosa. A)
s
Воспользовапшись формулой C) предыдущем задачи и разделив
первое уравнение системы A) на третье, определяем силу трения
B)
Первое уравнение системы A) после подстановки в него значе-
значения /\р из формулы B) принимает вид
/к
=$i\S— P(sin а
cos
Интегрируя последнее дифференциальное уравнение при начальных
условиях движения ? = 0 лгс=0, хс = 0, находим искомый закон
движения центра тяжести С ведомого колеса:
C)
Из формулы C) следует, что движение колеса вверх может про-
происходить при выполнении условия
f*- cosaj>0,
т е.
D)
Однако качение колеса без скольжения может иметь место npii
значениях силы .S, не превосходящих определенного предела, соответ-
соответствующего предельному значению силы трения fN. Последнее уело-
§ 51
ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
261
пие приводит к неравенству /\р«с/Л/. Так как сила нормальной реак-
реакции /V=Pcosa, то t\^<ifP cos а. Подставив в левую часть этого
неравенства значение 1\р из формулы B), получим:
откуда
— Я i sin a — -Iе cos a
cos a,
5< Pfsin a -|- ':2f— f-*\ cos a I.
Сопоставив неравенства D) и E), запишем:
pU\m-\-ff
'~f-f\. cos о
].
E)
F)
Значение .S, улоплетпоряющее двойному неравенству F), обеспе-
чипает кячеине внерх ведомого колеса без скольжения. При
> p[sin a -1- B/ —"?) cos a]
колесо начинает скользить.
Задача 323. При движении апго.машииы и гору, склон котором
рпсноложен под углом а к горизонту, к ведущему колесу приложена
пара сил с постоянным пращающим моментом т. К оси С ведущего
колеса приложена со стороны ве-
ведомых частей автомашины по-
постоянная сила S. Определить закон
движения центра тяжести С ко-
колеса. Колесо считать однородным
кольцом веса Р и радиуса г.
R начальным момент автомашина
находилась в покое. Колесо ка-
катится без скольжения. Трением
качения пренебречь.
Решение. Па колесо леи- О
ствуют внешние силы: Р—вес
колеса, S — сила, приложенная со
стороны ведомых частей автома- К задаче 323.
шины, R—нормальная сила реак-
реакции ноперхности Земли, пара сил с вращающим моментом т;
FT? — сила трения ведущего колеса о поверхность Земли — направ-
направлена и сторону дпижепия и является движущей силой (у ведомого
колеса, рассмотренного в днух предыдущих задачах, сила трения /^р
направлена п сторону, про пиюположную движению).
Оси координат изображены на рисунке. В соответствии с направ-
направлением осей считаем положительным направление отсчета угла пово-
поворота 9 по часовой стрелке.
262 ОБЩИР. Tf.OPF.MbI ДИНАМИКИ [ГЛ. IX
Запишем дифференциальные уравнения плоского движения твер-
твердого тела:
принимающие для рассматрипаемой калачи иид
^ *c = f-lp — Р sin а - 5, Pg yc = — R -|- /> cos a,
¦¦y!rlf = 'n — Frpr- 0)
Так как yc =— г постоянно, то j/c:=0 и из второго уравнения
системы следует, что R = P cos. я.
Разделив мерное уравмепгс системы A) на третье и иснользопав
при этом иытскакицсе из услопия качения колеса без скольжения
хс = г$ соотношение хс = г§ (см. решение дпух предыдущих задач),
получим:
/•¦,,, — Л sin X — S _ t
откуда
(" ) B)
После подстановки значения /•' из формулы B) в правую часть
мерного ургишепип системы A) ii;iitiL-M:
Интегрирование этого дифференциального уравнения при начальных
условиях движения 1 = 0, хс = 0, хс — 0 приводит к выражению
Как следует из полученного результата, движение колеса вверх
из состояния покоя может происходить только при выполнении ус-
условия
~ — Psina — S>0,
т. е.
»i>(Psina-f- S)r. C)
Однако качение ведущего колеса без скольжения может происхо-
происходить лишь при значениях вращающего момента т, не превосходящих
определенного предела. Действительно, так как сила трения должна
ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
263
удовлетворять неравенству FrpsszfM, т. е. FTp «? fP cos а, то, подстаиип
в левую часть этого нерлпенстна значение /\р из формулы B), находим:
~'^- -1- P sin а -|-
cos a,
откуда
/л =s= fPB/cob а — sin а) — S] г.
D)
Сопоставив неравенстиа C) и D), запишем:
(Р sin a -f- 5) г < от ==? [РB/cos а — sin а) — S] г.
Если величина вращающего момента удовлетворяет этому двой-
двойному неравенству, то качение ведущего колеса осуществляется без
скольжения.
При т^>|РB/cos a — sin a) — S\r колесо начинает скользить.
Задача 324. Однородный круглый диск А веса Р и радиуса R
подвешен на диух нерастяжимых пигях, намотанных па его горизон-
горизонтальную ось В радиуса г. Под
действием силы тяжести диск
опускается вниз. При этом нити
.разматынаютсн до полной длины.
При дальнейшем вращении диск.1
в тол» же направлении шин нама-
наматываются па ось В, а сам диск
поднимается виерх. Подъем кон-
кончается, когда нити полностью на-
намотаются на ось. Затем снопа
начинается разматывание нитей л
опускание диска нпи.ч и т. д. Этот
прибор пазьшается маятником Макс-
Максвелла. Определиrii натяжение ни-
нитей и скорость центра тяжести С
диска. R верхнем крайнем поло-
положении скорость нентра тяжести С
равна нулю. Массой оси В и ни-
нитей пренебречь; силы трения не
учитывать.
Решение. К диску прило-
приложены внешние силы: вес диска Р и
две силы реакций нитей F. Координатные оси л: и у и направление
положительного отсчета угла поворота ф указаны па рисунке.
Составим дифференциальные уравнения плоского движения диска А-
*
264 ОБЩИЕ TROI'F.MU ДИНАМИКИ [ГЛ. IX
Из первого уравнения системы при нулевых начальных условиях
находим хс = 0. Это указывает на движение центра тяжести С диска
по вертикали.
Использовав зависимость между угловой скоростью диска и ско-
скоростью его центра тяжести 'ос = гш, т. е. _ус = г?, вычислив затем
ус = ''? и разделив второе уравнение системы па третье, находим:
Чг Р --1F ,,
t-j =—гут-—. Из этого соотношения определяем нелпчипу силы реак-
реакции пищ
F__ PR-
Второе уравнение, системы после подстановки и пего полученного
значения F принимает «ид
Так как в крайнем верхнем положении диска при ^ = 0 j/c = 0, то
h = 2# 7^-+2FL
Это уравнение соответствует опусканию диска вниз.
Интересно отметить, что независимо от направления движения
центра тяжести С диска его ускорение ус остается неизменным.
В краПмих нижних положениях диска происходит удар, скорость
ueinpa тяжести С обращается и пуль и затем меняет свое направ-
направление.
Задача 325. Катушка веса Р и радиуса г2 скатывается, скользя
под дсМстпием силы тяжести, с наклонной плоскости, расположенной
под углом а к горизонту. При этом разматываются две нити, намо-
намотанные па ось катушки радиуса г, симметрично ее вертикальной пло-
плоскости материальном симметрии (па рисунке прямолинейные участки
нитей изображены одной прямой). При движении катушки се ось
остается горизонтальной. Определить силу реакции нити и скорость
центра тяжести С катушки; р — радиус инерции катушки относительно
оси, проходящей через ее центр тяжести С перпендикулярно к непод-
неподвижной плоскости. В начальный момент катушка находилась и покое.
Коэффициент трения скольжения катушки о наклонную плоскость
ранен /.
Р е hi е н и е. К катушке приложены ипешпие силы: Р — вес катушки,
IT—суммарная сила реакций нитей, R—нормальная сила реакции
наклонной плоскости, FTp — сила трения скольжения катушки о на-
наклонную плоскость. Так как катушка? скатываясь, поворачивается по
часопоп стрелке, то F1V направлена вдоль наклонной плоскости вверх.
§5|
ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
265
Выбираем оси координат ху, изображенные на рисунке. Положи-
Положительным считаем направление отсчета угла ср по часовой стрелке.
Составим дифференциаль-
дифференциальные уравнения плоского дни- v'/
жепия катушки:
р
- хс = Р sin а — 2 Т — /:тр,
= П —Pens а,
хс
о
р
|р1? = 2Гг,-/-трг* (О
При движении катушки
ус = r>t постоянно, т. е. ус = 0.
Из пторого уравнения систе- >,
мы A) находим величину пор- ^
малыюй сил!,1 реакции нло- \
скости:
B)
Для определения силы реак-
реакции нити '/' надо из первого и
третьего уравнений системы A)
исключить хс и ср. Для этого ' к задаче 325.
следует установить зависимость
между ними. Заметим, что мгновенный центр скоростей & расположен
в точке схода нити с оси катушки (см. рисунок), запишем vQ = rI<o,
т. е. xr = r1cp, и следовательно,
Разделив перное уравнение системы A) на третье и использовав
зависимость C), находим:
откуда
rt Р sin а — 27— h\j,
Р2~ 2Гг, — F,pr, "'
J Рр2 sin а + /Чр (г,г2 —
'— 2 94-П "
D)
Так как сила трения равна Г.ф=//?, то FTp^/Pcosa и в соот-
соответствии с формулой B) формула D) принимает вид
т Р f sin а -\- f (Гtr3 — ра) COS а
2" г + П
Таково значение модуля силы реакции нити.
266
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Остается определить скорость центра тяжести С катушки. Для
этого, подставив в первое уравнение системы A) значения 1\р и Т,
находим:
.. г, sin a—/(г, -|- г..) cos а
С 1 р- -f /-jf
Так как при ^ = 0 j?c = 0, го
? =(ГГ ri sin a—f(ri -I ra) C0Sa/
Для того чтобы катушка скатывалась по наклонной плоскости,
необходимо выполнение условия хс^>0, т. е.
Следовательно,
sin a —f(rt -\- г2) cos a ^> 0.
Если
, + г.
то катушка остается п покое.
Задача 326. Лестница Afi, опирающаяся концом А о гладкую
степу и концом В о гладки» пол, начинает падать под действием
своего веса. В начальный мо-
момент лестница находилась в по-
покое и составляла со стеной
угол ср0. При каком значении
угла с? конец А лестницы от-
отделится от стены? Лестницу
считать однородным топким
стержнем.
Решение, Обозначим вес
лестницы Р и длину ее '2/;
если С—центр тяжести лест-
лестницы, то АС— СВ=1.
К лестнице приложены внеш-
внешние силы: Р — вес лестницы,
RA — нормальная сила реакции
0 ^\\\\\>\\^^ч\Ч\Ч\\ч\\\ч -з стены и Яв - нормальная сила
реакции пола.
К задаче 326. Напомним, что по условию,
стена и пол являются гладкими.
Выбранные координатные оси ху изображены па рисунке. Отсчет
угла ср считаем положительным в направлении против часовой стрелки.
Лестница совершает плоское движение в вертикальной плоско-
плоскости ху. Составим дифференциальные уравнения плоского движения
« 5] ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 267
лестницы: р
Pgyc = -P-VRa, B)
I l"^ = Rnl sin 9~RAUos9. C)
Для пыражения фиф через а исключаем RA и RB из составленной
системы уравнений. Подставив в уравнение C) значение RA из уран-
нения A) и значение Rn из уравнения B), после несложных вычис-
лениИ находим:
¦у ? = Сс -I" S) sin 9 — хс cos ср. D)
Как видно из рисунка, jcc = /sincp, yc = I cos у. Дифференцируя
по времени, находим:
хс = /<р cos ср, Jcc — Щ cos о — /ср9 sin <p, E)
j"'c ^ — /ф sin ?> Ус== — '? sin f — ty* cos '¦?• (^)
После подстановки значений хс и ^с из формул (о) и (G) r фор-
формулу D) и простых преобразовании получим выражение ф через ср:
? = 4-f-sln9. G)
Для определения зависимости <р от -f умножаем почленно диффе-
дифференциальное уравнение G) на d<? и, учитывая, что фй?ср= -- dy = yd<?,
находим: з р- ,
ср fif(p = -- -°- sm »стер.
Интегрирование дает: ср9:=—-- у cos ср-|- С. При ^^0 <р = ср0,
ср = 0. Следовательно, С== у у cos cpfl. Итак,
Ф9 = | f (cos ?0 — cos cp). (8)
(Уравнение (8) можно было получить короче, применив теорему об
изменении кинетической энергии системы материальных точек, рас-
рассмотренную в следующем параграфе.)
Теперь можно определить значение угла ср, при котором конец
лестницы А отделится от степы. В момент отделения от степы RA
обратится в нуль. Тогда из уравнения A) следует, что в этот момент
хс = 0. Применив формулу E), получим, что в момент отделения
лестницы от стены:
ср COS ср — ср4 Sill ср = 0. (9)
268
ОБЩИЕ ГЕОРЕМЫ ДИНАМИКИ
(ГЛ IX
Подставляем в формулу (9) значения Ц и ф2 соответственно из фор-
формул G) и (8). После простых преобразований получим:
[cos о — 2 (cos ф0 — cos tp)] sin ср = 0.
Из условия задачи Следует: ср^>ср0, т. е. что sin о ф 0. Следова-
Следовательно, cos о — 2 (cos 9о — cos ?)= 0- Из этого уравнения определяется
значение угла ср. при котором лестница отделяется от стены:
9 = arccos I -„¦ cos tp0
Задача 327. Определить закон диижспия турбинного диска веса Р,
эксцентрично насаженного и середине пертикалыюго упругого вала.
К задаче 327.
Упругая сила пала пропорциональна его прогибу. Коэффициент
упругости ранен с; с — эксцентриситет турбинного диска. В начальный
момент диску была сообщена угловая скорость ш. Силами сопротии-
леиии движению пренебречь.
§ 5| ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 2G9
Решение. При вращении турбинного диска вал изгибается. Так
как диск насажен в середине вала без перекоса, то его движение
будет происходить в горизонтальной плоскости, и поэтому следует
применить дифференциальные уравнения плоского движения твер-
твердого тела.
Проведем вертикальную ось г через опоры упругого пала, т. е.
совместим ее с геометрической осью вращения диска. Выберем начало
осеп координат в точке пересечения оси z с горизонтально» плоско-
плоскостью диска. Осп хну расположены в плоскости диска. Пусть, далее,
А {х, у) — точка пересечения изогнутой оси вала с плоскостью диска,
С(хс, ус) — центр инерции диска, ОА = г— прогиб вала, ЛС—е —
эксцентриситет.
Обозначим: а — угол между осью х и направлением ОА,<? — угол
между осью х и прямой, проходящей через точку А крепления диска
к осп и его центр тяжести (рис. б).
На турбинный диск действуют две внешние силы: Р—вес диска
и упругая сила вала F, приложенная в точке А и направленная от /V
к О, причем /7=ст.
Составим дифференциальные уравнения плоского движения диска:
jJtc = — F cos a, jyc = — Fsina, I^ = F-\KC\, A)
причем
F=cr, rcosa = jc, rsina=y, | KC\ = \ AC\ sin ij> = e sin (9 — а), B)
где ф= Z CAK=q — а.
Воспользовавшись формулами B), запишем систему уравнений A)
в инде:
|хс = — ex, ~yc = — cy, lc!? = cre sin (<?— a). C)
Как следует из рис. б, имеет место следующая зависимость между
координатами точек С и А:
хс = х-|-е cos <p, yc—y-\-e sin ?.
Следовательно,
хс = х — еу sincp — e<j>'' cos cp,
_УС = у -f- еЦ cos 9 — еф9 sin ср.
Подставив эти значения хс и ус в уравнения C), находим:
Р Р Р ч
— х еср sin 9 е\' cos о = — сх,
? Р + ? е? cos f — J e'i'sin f = — СУ'
Jc§ = cre sin (cp — a),
270 ОЫЦИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
откуда
х-\-с~х = е$ sin э -|- ei>1 cos э,
у-\-с?-у = — е'с cos >?-\- е? sin cp, D)
= j r sin (о — я),
'с
Интегрирование системы дифференциальных уравнений D) весьма
затруднительно. Поэтому мы будем решать ее приближенно.
В правой части третьего уравнения стоит произведение эксцентри-
эксцентриситета е на sin G — а). Считая это произведение малым, приближенно
приравняем его нулю (ниже будет показано, что совершаемая при
этом ошибка невелика). Теперь третье уравнение системы D) прибли-
приближенно принимает вид 3 = 0, откуда, учитывая начальные условия
движения: при ^^0 о = 0, ? = ш, находим: <5=ш и
• ? = <и<, E)
т. е. вращение диска совершается равномерно.
Использовав формулу (Г>), запишем первые два уравнения си-
системы D) в форме
х -f- klx = h cos u>t, у -j- /г*у = к sin wt, F)
где c-fj = №¦ и ew2 ^ h.
Интегрирование дифференциальных уравнений F) осуществляется
независимо друг от друга. Общие решения этих уравнений имеют оид:
х = С[ cos kt -'¦-- С2 sin kt -\~ -p cos <x>t,
у = Сл cos Id -•- C4 sin kt -~ j-z — sin co^, G)
где k =
= ~l/ c% и /; =
V p
Как известно, первые дка слагаемых описывают колебания, зату-
затухающие при наличии сил сопротивления, а третье слагаемое — уста-
установившиеся пынуждепные колебания. Поэтому в дальнейшем первые
два слагаемых отбросим.
Тогда
=ft«U>a coswt> У=
т. е. точка А совершает гармонические колебания круговой частоты со
|?С02
и амплитуды . . __ , . После возведения каждого из уравнений G)
в квадрат и суммирования находим:
,2
Х
§ 51 ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 27 L
Так как хг -~у* = г9, то прогиб вала будет
Как следует из рис. б, координаты точки Л равны: jc=rcosa,
y = rs\na. Подставив вместо х и у их значения из формул (8) и
значение г из формулы (9), имеем: a = wt. Сопоставив этот резуль-
результат с формулой E), получим:
При выполнении условия а = ср точки О, А и С лежат на одной
прямой.
(При а = ср прапая часть третьего уравнения системы D) оказы-
оказывается точно pamioff пулю. Поэтому ошибка, которую мы совершаем,
приближенно считая правую часть третьего уравнения системы D)
рапной пулю, получается за счет пренебрежения первыми днумя сла-
слагаемыми н каждом из уравнений системы G). Учитыпая затухание
свободных колебании под действием сил сопротивления движению,
подобное приближение следует считать вполне допустимым. При точ-
точном решении системы дифференциальных уравнений D) угловая ско-
скорость диска ф не оказалась бы постоянной и не равнялась бы ш.)
Теперь рис. а п б принимают более простой вид, так как точки О,
А и С лежат на одной прямой (см. соответственно рис в и г).
Вычислим смещение центра тяжести С диска от точки О: ОС—
= г-\-е. Подставив значение г из формулы (9), находим:
JP^r + e = 1^r. (П)
#J 01* ' It- СП" V
В случае вынужденных колебаний малой частоты,, т. е. при ^
на основании формул (9) и A1) получим | ОС|^>г^>0 (см. рис. в и г).
В случае вынужденных колебаний большой частоты, т. е. при ш^>к,
г^>|ОС|^>0, что соответствует изображению па рис. д.
По мере увеличения угловой скорости вращения ш диска, расстоя-
расстояние ОС (см. формулу A1)) по модулю уменьшается, т. е. диск, наса-
насаженный на упругий нал, самостоятельно центрируется (при ш—>оо
|ОС|—>0), и его центр тяжести С приближается к геометрической оси
вращения.
4 ОС \ k2
Перепишем формулу A1) в виде ¦ = _ , t. Если угловая
скорость вращения турбинного диска значительно больше его круго-
круговой частоты собственных колебаний, т. е. ш^>к, то —- оказывается
I ОС'
весьма малой величиной. Например, при ш = Ьк получим: ¦ г =
= 0,029. (При этом следует иметь в виду, что при насадке турбин-
турбинных дисков на вал эксцентриситет е измеряется микронами.)
272 ОПЩИЕ ТЕОРЕМЫ ДИНАМИКИ . [ГЛ. IX
Явление самостоятельного центрирования диска на упругом валу
било пперные обнаружено в конце XIX пека Лапалем и использовано
им в конструкции паровой турбины, диск которой совершал до
30 000 об!мин.
В случае ш = ? имеет место яплепие резонанса и расстояние ОС
неограниченно возрастает. Конечно, в действительности ОС так не
растет, ввиду наличия сил сопротивления движению. Однако вели-
величина ОС становится значительной, что угрожает надежности работы
конструкции. Резонансная углопая скорость пращения турбинного
диска, при которой прогиб пала достигает больших значений, насы-
насыпается критической угловоп скоростью гибкого вала, а соответствую-
соответствующее число обороти пала п минуту—критическим числом оборотов.
Так как при резонансе окр==А, а /г=~|/ ~, то шкр="|/ с^.
Следовательно,
Я0 30 -, Г сц
§ 6. Теорема об изменении кинетической энергии системы
материальных точек
1°. Работа с и л 1>1. Работой постоянной силы на прямолиней-
прямолинейном перемещении пазыиается скалярное произведение пектороп силы
и перемещения, т. е. работа равна произведению модуля силы на мо-
модуль перемещения и на косинус угла между ними:
F -— Л — F- Аг=РЛг cos (/Ои
jr ' м (Mi и Mi — соочпетстпсипо начальное и конечное по-
положения точки М, Дг — вектор перемещения точки
Рис. 134. (рис. 134, 135) при переходе из М{ в М^).
Единица измерения работы: кг-м.
Элементарная работа переменной силы- равна скалярному про-
пзпедению векторов силы и элементарного перемещения SA = F-c/r.
90°
Рис. 135.
Элементарное перемещение dr направляется по касательной к тра-
траектории в данной точке (рис. 136). Элементарная работа обозна-
обозначается ЬА, а не dA, так как только в частных случаях элементарная
6[
ТЕОРЕМА ОП ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
273
работа силы является полным дифференциалом некоторой функции
координат (см. ниже случай потенциального поля).
Выражение элементарной работы переменной силы через проекции
с и л i,i на оси декартовых координат имеет вид
bA = F-dr = Fxdx -\- Fydy 4- Fzdz,
где
F=Fxi^-Fvj-'rF,k и dr=dxi + dyj-'rdzk.
Работа переменной силы но конечном перемещении по криво-
криволинейной траектории раина криволинейному интегралу, взятому
ндоль дуги кривой от М\ до М.ь от скаляр-
скалярного произведении некторои силы и элемен-
элементарною перемещения:
Ша) (AU) ^
А= \ F-dr= \ Fdr cos (F, dr).
(MO iMi)
(Интеграл называется криволинейным, так
как осуществляется суммирование идоль кри-
иолипейной траектории, в разных точках
которой касательные элементарные пере-
метения dr различны по направлению.)
Выражение работы переменной силы па конечном перемещении
но криволинейной траектории через проекции силы па оси декарто-
иых координат имеет вид:
А=
При приложении системы сил к точкам материальной системы
работа равна сумме работ всех сил, т. е.
ЪА= %ЪЛк= |] Fkxdxk-f Fhydyk + Fll2dzk
ft ^ i * = i
Рис. 136.
k --¦- 1 (Mxk\
где Fkx, Fky, Fkz — проекции глаииого лектора сил, действующих на
/е-ю точку системы.
Теорема о работе равнодействующей силы: работа равнодей-
равнодействующей сил, приложенных к точке, на некотором перемещении
равна сумме работ составляющих сил на том же перемещении
=yi A(Fk), где /t= ? Fk.
274
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Элементарная работа си, приложенных к твердому телу,
находится по следующим формулам:
а) при поступательном движении: IA=V-dr, где V — глав-
пыИ вектор системы сил, dr— элементарное перемещение любой из
точек твердого тела;
б) щи вращении вокруг неподвижной о<и: bA=in2d<?, где тг —
главный момент системы сил эшосшельно оси вращения z, dy — эле-
элементарное угловое перемещение твердого тела;
в) при плоском, движении: ЪА = V-dro~\-mzOd^, где V—глап-
ны?1 вектор системы сил, dr() — элементарное перемещение полюса
О, тг0 — главный момент системы сил относительно ' оси г, прохо-
проходяще» через полюс О перпендикулярно к неподвижной плоскости,
df — элементарное углоиое перемещение вокруг этой оси. (Полюс О
иыбирается произвольно.)
Элементарная работа внешних сил, приложенных к неизме-
неизменяемой системе, вычисляется по приведенным выше фор-
формулам.
Элементарная работа внутренних сил неизменяемой системы
материальных точек (например, абсолютно тиердого тела) равна
нулю: У] 8/1
к---\
= 0. Подчеркнем, что работа внутренних сил п упру-
упругом теле (изменяемой системе) не
М,(х„у„г,) Равча "У-110-
В ряде случаев для вычисле-
вычисления работы сил удобнее исполь-
использовать готовые формулы, некото-
Pi \мг1хг-Уг-Ег) рые из которых приводятся ниже.
Работа силы тяжести мате-
материальной точки равна произведе-
"у пию силы тяжести на разность
высот конечного и начального
положений точки (Д/(). т- е. А —
= Р- Д/г. Если материальная точка
приближается к земной поверх-
Рис- 137-
ности, то Л(Р)^>0. Если материальная точка отдаляется от земной
поверхности, то А(Р)<^0. Если высоты начального и конечного по-
положений материальной точки равны (в частности, при движении точки
по замкнутому контуру), то Л(Р) = 0.
Следовательно, работа силы тяжести материально!) точки зависит
от высот ее начального и конечного положений и не зависит от
формы кривой, по которой перемещается материальная точка (см.
ниже 5е).
В случае системы материальных точек работа сил тяжести равна
произведению силы тяжести всей системы на разность высот
§61
ТЕОРЕМА OR ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
275
конечного и начального положений центра инерции системы.
A=~P(z2c-z[C),
где P=
а ось z направлена вертикально.
Работа упругой силы (Fx—:—сх) па прямолинейном перемеще-
перемещении по линии деИстпия силы из точки с абсциссой jt, в точку с абс-
абсциссой x<i (рис. 138) определяется формулой
(при х=0 упругая сила равна нулю, т. е. Тфужипа не напряжена).
ч«*
с
УУуУуУу/ У у
X
У У У У У У
Рис. 138.
Работа упругой силы отрицательна, если точка движется в сто-
сторону возрастания модуля упругой силы; работа упругой силы поло-
положительна, если точка движется в сторону убынапия модуля упругой
силы. Работа упругой силы F= — cr на конечном перемещении по
криволинейной траектории пропорциональна разности квадратов ко-
печного и начального радиусов-векторов точки: А = —iy(t"l — f[)>
т. е., подобно работе силы тяжести, работа упругой силы записит
от начального и конечного положении точки и не записит от формы
кривой, по которой перемешается мате-
материальная точка.
Работа момента упругих сил тг = — г<р
PaDMa . с , . '
Л = —2- (<?: — ?;>•
Мощность N характеризует б1лстроту
совершения работы с гечением времени и
определяется формулой
В случае силы Р, приложенной • к некоторой точке, мощность
равна N=P-<v, где <v — скорость точки. В случае момента т, прило-
приложенного к твердому телу, вращающемуся с угловой скоростью со
вокруг неподвижной оси, мощность будет N=tna>. Единицами изме-
измерения мощности являются кг-м/сек и ватт = 0,102 кг-м/сек.
276 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ |ГЛ IX
s
Вычисление суммы работ сил, приложенных к материальной точке
либо к системе материальных точек, является одним из этапов реше-
решения задач, в которых применяется теорема об изменении кинетической
энергии, либо составляются уравнения Лаграпжа второго рода (см.
ниже, главу X, § 6).
Вычисление суммы работ сил надо выполнять в
следующей последовательности:
1) изобразить па рисунке силы, приложенные к материальной
точке либо к системе материальных точек;
2) изобразить элементарные перемещения точек системы;
3) вычислить элементарную работу сил, т. с. сумму работ всех
сил па элементарных перемещениях точек системы;
4) вычислить искомую сумму работ сил па конечных перемещениях
как сумму определенных иптггра.тов, взятых в соответствующих пре-
долах от элементарных работ, вычислен-
вычисленных п предыдущем пункте.
При наличии сил тяжести и упругих
сил можно, минуя три последних пункта,
ныбрав систему координат, вычислить ра-
работу этих сил на конечных перемещениях
по вышеприведенным формулам.
Заяача 328. При движении математи-
математического маятника нить его в начальном по-
положении составляла с вертикалью угол <э1г
а в конечном положении—угол ср (при-
(причем ср2]>ср,). Вычислить сумму работ
сил, приложенных к точечной массе маят-
К задаче 328. пика, па этом угловом перемещении, если
Р—пес его точечной массы и /—длина
нити. Направление положительно! о отсчета угла поворота ср указано
па рисунке.
Решение. К точечной массе маятника приложены две силы:
вес Р и сила реакции нити R. Следовательно, искомая сумма работ
сил имеет вид
п
ХЛ»=А(Р) + А(Й). . (.1)
ft=I
Так как сила реакции нити R направлена вдоль нити и во время
движения маятника перпендикулярна к элементарному перемещению
dr, направленному по касательной к траектории и данной точке, то
работа силы реакции нити равна пулю:
Л (/?) == 0. B)
Работа силы тяжести Р отрицательна, так как точечная масса
маятника поднимается вверх А(Р) = — PLh. Разность высот копеч-
§ 61
ТЕОРЕМА ОП ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕДШ
277
ного и начального положений точечной массы маятника:
Дй= AiAi= OAi — ОЛ.2 = /(cos <?, — cos ?.2),
следовательно,
А(Р)= — Pi (cos <р, — cos os).
C)
Подставив значения Л (Л) и Л (Р) из формул B) и C) в фор-
формулу ([), находим искомую сумму работ сил:
^ Ак = — p/(cos <?i — cos ер,.)
Эту задачу можно било также решить, пмчмсляя сумму работ сил
при вращении маятника вокруг оси г, проходящей через точку нри-
tieca О перпендикулярно к плоскости рисунка. В этом случае эле-
элементарная работа сил рапиа bA—-mz-d<s, где mz — главный момент
относительно оси прэщепия z сил, приложенных к точечной массе.
Учитывая, что момент силы реакции нити R относительно оси z
равен пулю, а момент силы веса Р относительно оси z равен — /'/sin о
(момент отрицателен, так как его напраплсние противоположно
направлению положительного отсчета угла поворота ср), получим
mz = — PI sin cp и, следовательно, ЬА = тг dr^ = — PI sin cs rfcp.
Для вычисления искомой работы следует взять определенный ин-
интеграл по » в пределах от ср, до <р-/-
А =
= — Pl^ Sin
= —: PI (COS cp, — COS cpj).
Задача 329. Груз А удерживается в равновесии на наклонной
плоскости, расположенной под углом я к горизонту, посредством
пружины, ось которой параллельна
линии наибольшего ската ппклоп-
мой плоскост и (см. рисунок). Вслед-
Вследствие полученного толчка груз
переместился лпи.ч вдоль наклон-
наклонной плоскости на /. Вычислить
сумму работ сил, приложенных к
грузу Л на этом перемещении,
если коэффициент упругости (же-
(жесткости) пружины равен с. Силой
трепня скольжения груза А о на-
наклонную плоскость пренебречь.
Решение. К грузу прило- К задаче 3'iO.
жены следующие силы: Р — его
пес, F—упругая сила пружины, R—сила нормальной реакции наклон-
наклонной плоскости.
278 ОПЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Направим параллельно линии наибольшего ската наклонной пло-
плоскости ось х, выбрав начало отсчета О в конце недеформироваппоН
пружины.
В положении равновесия груза пружина растянута па Дст. Запи-
Записав сумму проекций всех сил, приложенных к грузу, на ось х, нахо-
находим Psina — /7ст = 0. Так как величина упругой силы при растяже-
растяжении пружины на Дст равна /;ст=сДст, то Я sin а — <Дст=0, т. е.
. A)
Искомая сумма работ сил имеет вид
2Д4=.4(Р)-г-Д(Л+Л(Л). B)
Работа силы тяжести положительна, так как груз А приближается
к земной поверхности: Л(;Р)=РД/г; учитывая, что A/; = /stna,
находим:
A(P) = Fls\na. C)
Работа упругой силы пружины определяется формулой
Учитывая, что л;, —Дст, а дг2 = хх -j- / = Дст -|- /, находим:
Л(/0=—^BД„-|-/). D)
Работа нормальной силы реакции R равна нулю, так как эта сила
перпендикулярна к перемещению груза, направленному вдоль наклон-
наклонной плоскости
Д(Я) = 0. E)
Подставляя выражения работ из C), D) и E) в формулу B) и
учитывая зависимость A), находим искомую сумму работ сил, прило-
приложенных к грузу:
2л Ак — — 2 •
Задача 330. Кабестан, изображенный на рисунке, применяется
для перемещения тяжелых грузов. К валу кабестана А при пуске п
ход был приложен созданный электромотором вращающий момент
тг = а<р -\- by1, где 9 — угол поворота вала кабестана, а а и Ъ —
постоянные. При вращении вала кабестана веса Q и радиуса р на его
боковую цилиндрическую поверхность наматывается иеревка, которая
приводит в движение по горизонтальной плоскости груз В.
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТР.ИЫ
2/9
Вычислить сумму работ всех сил, приложенных к рассматривае-
рассматриваемой системе, за два оборота вала, если Р—вес груза В, а /—коэф-
/—коэффициент трения скольжения груза о горизонтальную плоскость. Мас-
Массой веренки пренебречь. Ось z направлена вдоль оси вала.
Решение. Изобразим нес силы и моменты, приложенные к си-
системе: Q— ьес вала кабестана, Rt, Цг, /i3, #4 и #s — составляющие
ЯЗО.
сил реакций опор М и N, Р — Eiec груза, Frc — сила трения сколь-
скольжения груза о горизонтальную плоскость, К—сила нормальной
реакции горизонтальной плоскости, тг — вращающий момент относи-
относительно оси z.
Вал кабестана вращается вокрз'г неподвижной оси z, следовательно,
элементарная работа сил вычисляется по формуле
ЬА = tn/1-s — (яср -^- Ьу'г) d<?. A)
(Моменты сил Q, ^?,, /?.2, Rj, Rt и R$ относительно оси вращения z
равны пулю.)
Груз В совершает поступательное движение, следовательно, эле-
элементарная работа сил имеет вид ЪА= V- dr. Силы Р и # перпенди-
перпендикулярны к перемещению груза dr, и элементарная работа этих сил
равна нулю. Таким образом,
B)
280
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
П формулах A) и B) мы не учитывали работу сил реакций пе-
персики, так как при недеформируемоп и постоянно натянутом вереске
сумма работ этих сил равна пулю.
Складывая A) и B), находим:
о.4 = [av -j- bf) do —fPdr.
Учитыпая снязь между элементарными перемещениями dr и rf-p,
т. е. dr = pd'f, получим выражение элементарной работы псех сил,
приложенных к рассматриваемой системе:
8 Л = (я? -:~ bf — /
т
Дли пычисления искомой суммы работ псех сил при двух оборо-
оборотах пала кабестана следует, посполыоиаишись формулой C), пзигь
определенный интеграл п пределах от 0 до 4-:
А = \ (я? -|- bf —fP?) d--s = ^,F~я + 16я*й — З/Рр).
II
Задача 331. Колесо радиуса г катится без скольжения по пря-
прямолинейному горизонтальному рельсу иод действием приложен-
приложенной в центре тяжести С колеса по-
постоянной силы F, параллельной рель-
рельсу, и постоянного вращающего мо-
момента т. Вычислить сумму работ всех
внешних сил, если ось колеса С
переместилась па 5. Трением прене-
пренебречь.
Реше и ие. Обозначим пес ко-
колеса Р. К колесу приложены внешние
силы: Р — пес колеса, R— нормальная
сила реакции рельса, F—движущая
сила, пара сил с моментом т.
К задаче 331. Так как колесо сопершает плоское
движение, то, приняв точку С за по-
полюс, вычислим элементарную работу всех внешних сил по формулам
8 Л = V ¦ drc -\- mszC d-f. A)
Учитывая, что R= — Р, получим, что главный вектор Ve = /? и,
следовательно, Vе -drc = I'drc. Так как моменты сил Р, F и R отно-
относительно оси z, проходящей через точку С перпендикулярно к
плоскости материальной симметрии колеса, равны нулю, то главным
момент внешних сил относительно оси z равен тегС = т. Теперь
формула A) принимает вид
8.4 = Fdrc -j- in d-f. B)
§6j ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 281
Согласно условию задачи, колесо катится без скольжения. Поэтому
его мгновенный центр скоростей находится в точке касания аР колеса
с рельсом и drc связано с </? зависимостью
drc -= г d-?.
Соответственно формула B) запишется так:
bA = !F~'nXdrr. C)
Для вычисления искомой суммы работ всех внешних сил остается
взять от 8Д определенный интеграл в пределе от 0 до s:
Г /г? i »'А .1.. ! ,¦ i Ш\ .
В обзоре теории было отмечено, что за полюс может быть при-
принята произвольная точка тмердого тела, совершающего плоское дни-
жепие. Для иллюстрации этого положения попьмем за полюс вместо
точки С мгновенный центр скоростей аТ3. Тогда элементарную рабочу
всех внешних сил следует вычислять по фор.муле
X\=Ve-dr^-y,,f^. E)
Так как скорость точки 5s колеса равна нулю: vep = Q, angs =
= —^-, то drgi = 'V<rpdt = O, и формула E) примет вид
Главный момент внешних сил т^ф относительно оси z, проходя-
шей через мгновенный центр скоростей перпендикулярно неподвиж-
неподвижной плоскости, ранен:
m"z?p> = F-r-r m.
Поэтому формулу F) можно записать в виде:
bA = (F-r-\~m)do.
Приняв во внимание, что drc = rdo, находим:
Это же выражение элементарной работы было получено выше
(см. формулу C)), когда за полюс была влята точка С.
Сопоставление обоих вариантов вычисления ЬА показывает, что
целесообразнее принимать за полюс точку оР колеса, так как при
282
ОЫЦИГ. ТЕОРЕМЫ ДИНАМИКИ
1Гл. IX
этом отпядает необходимость и определении главного вектора Vе
ипешиих сил" системы.
Задача 332. Ведомое колесо неса Р и радиуса г катится без
скольжения по прямолинеп ю.му i оризонталыюму рельсу направо.
Вычислить сумму работ си мы греиия и пары трения качения, если
центр тяжести С колеса переместился па s; f—коэффициент трения,
/к—коэффициент трения качения.
Решение, Сила трения приложена в точке касания колеса с
рельсом и папраплепа ндоль рельса с сторону, противоположную
движению. Нормальная сила реакции рельса R при наличии трения
da=6
г
\
с
V
\
г \\\\\ЛЧ
ггр р'
—>-
я \
drc__
1
у
ч\\\\\\\\
л задаче .132.
качения сметается п сторону днгижепия и отстоит от силы нормаль-
нормального давлении (и данной .плаче сила нормального дапления раина
несу колеса Р) на расстошыи, ранном коэффициенту трения качения
/к, образуя с несом колеса пару трения качения (см. рисунок а).
Элементарная работа силы греиия FTp=//V=/P рапна пулю.
Дейстпителыю, при качение колеса без скольжения его мгпопенный
центр скоростей аТ3 находится и точке касания колеса с рельсом.
Сила трения FTp исегда приложена к колесу в точке, сонпэдакмцеИ
с мгновенным центром скоростей, и перемещается вместе с ним.
Поэтому мощность силы трения, вычисляемая по формуле N=Fjp-v<frt
равна нулю, так как
получим
dA
-=0. Приняв во ппимание, что N=--r,
ЗЛ(/чр) = 0. A)
Элементарная работа пары трения качения отрицательна, так как
момент пары трения качения, направленный против часовой стрелки,
§ 6| ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 283
противоположен направлению угла поворота колеса (при качении
колеса направо оно поворачивается по часовой стрелке):
Так как силы, входящие п пару трения качения, равны но модулю Р,
а плечо пары равно коэффициенту трепня качения /к, то /птк = Р/к
и, следовательно, 8ЛТ.К =—PfKd<z.
Так как drc = r d<? (см. решение предыдущей ладачи), то находим:
Итак, учитыпая формулы A) и B), получим сумму элементарных
работ силы трения и пары трения качения:
ЬА = ЬА (FTP) + U,K = -ff Pdrc. C)
Лля определения суммы работ па конечном перемещении я центра
тяжести С колеса вычислим от ЬА определенный интеграл в пределах
от 0 до 5. Окончательно:
а = —7; ps.
Если бы колесо скользило по рельсу без качения, то оно совер-
совершало бы поступательное дпижение. При этом da = Q, a dr<p = drc
(см. рис. б).
Следовательно,
R рассматриваемом случае сумма элементарных работ равна
ЬА = 8ДТ.С-[-8ДТ.К -\--fPAгс.
После интегрирования в пределах от 0 до s находим:
A = —fPs.
Задача 333. Определить мощность заряженной частицы, летящей
со скоростью ^ = 60 000 км/сек., под действием силы электромаг-
электромагнитного поля /г=5-10~10 г.
Решение. Мощность частицы вычисляем по формуле N=Fv.
Выражая скорость частицы в м/сек и силу в кг, имеем:
v = 6 ¦ IО7 м/сек, F—5- 10'13 кг,
т. е.
N=6- 107-5 - 10-1э = 3 - 10 кгм.
284 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
2°. Кинетическая энергия материальной точки и
системы м а т с р и а л ь и ы х точек. Кинетическая энергия мате-
материальной точки раина полопине произведения массы точки па квад-
рат ее скорости: Т=~. mvl.
Единица» кинетическом энергии кг • .и. Кинетическая энергия яв-
является одной из мер движения материальной точки.
Кинетическая энергия системы материальных точек раина
сумме кинетических энергий всех материальных точек системы:
V 1
Кинетическая энергия положительна, за исключением случая, когда
скорости нсех точек одиоиргменпо равны пулю.
По теореме Кента кинетическая энергия системы материальных
точек ранпа сумме кинетической энергии мсеИ ее массы, движущейся
со скоростью центра инерции, и кинетической энергии системы в ее
относительном движении по отношению к поступательно движущимся
осям координат с началом е центре инерции:
п
Т= 2 Mv\. + 7> где 'г = у ^ 1ПЛс
(t'ft(. — относительная скорость k-l\ .материальной точки по отношению
к цетру инерции).
Кинетическая энергия твердого тела вычисляется по формулам:
а) при поступательном движении: /'= ,, Акт1, где М — масса
тиердого тела, a v — скорость любой его точки;
б) при вращении вокруг неподвижной оси: Т= -у 1.<х?, где /г —
момент инерции твердого тела относительно оси пращеиин z, а и> —
угловая скорость крашения;
в) при плоском движении: I —-¦) Afti^-j- -,г 1гС<^, где М — масса
твердого тела, vc — скорость ею центра инерции, 1г(. — момент инер-
инерции твердого тела относительно оси z, проходящей через центр инер-
инерции перпендикулярно к неподвижной плоскости, ш — величина мгно-
мгновенной угловой скорости вращения.
Н случае плоскою движения кинетическую энергию можно также
вычислять по формуле 7'= у/^(u'2, где I^ — момент инерции твер-
твердого тела относительно оси щ/5, проходящей через мгновенный центр
скоростей перпендикулярно к неподвижной плоскости.
§ 61 ТЕОРЕМА OG ИЗМЕНЕНИИ КИНКТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 285
Поэтому при движении твердого тела момент инерции 1дь, вообще
говоря, является переменным.
г) При вращении вокруг неподвижной точки: Т= 2 /<о2, где
/— момент инерции твердого тела относительно мгновенной оси,
ю — величина мгновенной угловой скорости (так как мгновенная ось
меняет свое положение при вращении твердого тела покруг непо-
неподвижной точки, то / является величиной переменной).
Если выбрать начало подвижных координатных осей дг, у, г, свя-
связанных с твердым телом, в неподвижной точке О, то
Т= у С Ух + 1уЩ "Г 'У — ^^гa)J)a^г ~ ^^t0A: ~ ^'хушхшу1
где шх, шу и шг — проекции мгновенной угловой скорости па соот-
соответствующие оси координат.
Если оси х, у, z являются главными осями инерции твердого тела
в неподвижной точке О, то 1у2 = 1гх = 1ху = 0 и, следовательно,
Т= 2" Охшх + !уШУ ~\- !гш"Й-
д) В общем случае движения твердого тела: Т= -}- Mv-Q -\-
-\- ту I^, где М — масса твердого тела, vc ¦+- модуль скорости его
центра инерции, /с — его момент инерции относительно мгновенной
оси, проходящей через центр инерции, ш — величина мгновенной угло-
пой скорости. 4
Если выбрать начало подвижных координатных осей х, у, z в
центре инерции С, то
где шх, (оу, тг — проекции мгновенной угловой скорости па соответ-
соответствующие координатные оси.
Если оси х, у, z являются главными центральными осями инер-
инерции, то 1гг = 1гх = 1ху = 0 и, следовательно,
Т= 1 Mvl -f у (^««i + /у*} + 'У')-
Вычисление кинетической энергии системы материальных точек
является одним из этапом решения задач при использовании теоремы
об изменении кинетической энергии системы материальных точек,
либо при составлении уравнений Лаграпжа иторого рода (см. ниже,
главу X, § 6), либо при вычислении потери кинетической энергии
при ударе (см. ниже, главу XII, § 1).
При вычислении кинетической энергии системы материаль-
материальных точек следует суммировать кинетические энергии псех масс,
286
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
входящих в систему, вычисляя кинетическую энергию каждой из масс по
формуле, соответствующей движению данной массы (поступательное
движение, вращение вокруг неподвижной оси, плоское движение
и т. д.). Следует помнить, что кинетическая энергия является величи-
величиной положительной независимо от напранлений движений масс, вхо-
входящих в систему.
Задача 334. Вычислить кинетическую энергию колеса, катящегося
без скольжения по прямолинейному рельсу, если Р— «ее колеса и
1>с — скорость его центра инерции. Колесо считать сплошным одно-
однородным диском.
Решение. Так как колесо совершает плоское движение, то его
кинетическую энергию можно вычислить двумя способами но фор-
формулам:
а) т= 4 Mv'c + \ '*<»*> б) 7== ¦•! 13»»*,
где lg* — момент инерции твердого тела относительно оси, проходя-
проходящей через мгновенный центр скоростей еТ5 перпендикулярно к пло-
плоскости материальной симметрии тела.
При беглой оценке степени сложности
подсчета можно отдать предпочтение ва-
варранту б). Однако, как показывают после-
дуютие вычисления, объем вычислений но
обоим вариантам примерно одинаков.
Вариант а):
7 = '¦
А
Момент инерции диска относительно
К задаче 334. оси z, проходящий через центр тяжести С
перпендикулярно к плоскости материальной
симметрии колеса, равен: 12С=: —}—, где радиус колеса обозначен г.
Следовательно,
При качении колеса без скольжения мгновенный центр скоростей
расположен в точке касания аТ3 колеса и рельса, поэтому г»?.= г<и и
формула кинетической энергии принимает вид
Т— 3 Р t»2
l—4-?vC-
Вариант б):
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
287
1дь — момент инерции колеса относительно оси, проходящей через
мгновенный центр скоростей З1 перпендикулярно к плоскости мате-
материальной симметрии колеса. Так как оси zc и с?5 параллельны, то,
применив теорему Штсйнера, получим:
1&> = 1гС-\- МГ'1 = % ~\ - Pg Г* = 2 Pg Л
Теперь находим:
Учитывая, что гш^ис, окончательно имеем:
У —4'ff Не-
Незадача 335. Груз А веса А опускаясь по наклонной плоскости
внии со скоростью <о приводит во вращение барабан В ueca Q посред-
посредством намотанной па него ,
веревки. Барабан считать
однородным круглым ци-
цилиндром. Массой веревки
Пренебречь. Вычислить
кинетическую энергию си-
системы, выразив ее через
скорость груза А.
Решение. Система
состоит из двух масс: I
груза А и барабана В. К задаче 335.
Следовательно, кинетиче-
кинетическая унергия системы равна сумме кинетических энергий груза 7'A)
и барабана Г('2):
A)
Кинетическая энергия груза, движущегося поступательно,1 вычис-
вычисляется по формуле
¦ р
-„ Л B)
Кинетическая энергия барабана, вращающегося вокруг неподвижной
оси z, перпендикулярной к плоскости рисунка, находится по фор-
формуле
7-<i> = .J./у, C)
где 12 — момент инерции барабана относительно оси вращения z,
?i to — угловая скорость вращения барабана. Барабан считаем
288
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
сплошным однородным круглым цилиндром, поэтому
D)
где радиус барабана обозначен г. Подставил значение Iz из фор-
формулы D) п формулу C), имеем: Tw = — — г2ш2. Учитывая, что ско-
скорость точки па ободе барабана равна скорости груза, получим:
v — гш и, следовательно,
1
4 ff
E)
После подстановки значений 7"A) и 7h) из формул B) и E)
и A) находим искомую кинетическую энергию системы:
2P±Q
Задача 336. Вычислить кинетическую энергию механизма, изобра-
изображенного на рисунке. Колесо 2 веса Р и радиуса г находится по
внутреннем зацеплении с не-
неподвижным колесом / радиуса
f? = 3r. Колесо 2 приводится
п днижепие посредством кри-
кривошипа ОС веса Q, вращаю-
вращающегося вокруг неподвижной
оси О, перпендикулярной к
плоскости рисунка, с постоян-
постоянной угловой скоростью со0.
Колесо 2 считать однородным
круглым диском, а криво-
кривошип ОС — тонким однородным
стержнем. Кинетическую энер-
энергию выразить через угловую
скорость ш0 кривошипа ОС.
Решение. R рассматри-
рассматриваемую систему входят три
массы: колесо /, колесо 2 и
кривошип ОС. Поэтому кинетическая энергия системы раина сумме
кинетических энергий этих масс
где 7'(|) — кинетическая энергия колеса /, ГB) — колеса 2, 743' —
крииошипа ОС.
Колесо / неподвижно, поэтому
Г11' = 0. B)
К задаче 336.
§ fi[ ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 289
Колесо 2 совершает плоское движение. Его кинетическая энергия
будет:
7™=4^+i/c<oj. C)
Длина кривошипа равна ОС — OSP — С& = R — г = 2г. Следо-
Следовательно,
^с=ОС-(о0 = 2гш0. D)
Мгновенную угловую скорость колеса 2 определяем, учитывая,
что точка с? является мгновенным центром скоростей, т. е. vc = ru).2t
откуда
v~
щ = у = 2(о0. E)
Так как колесо 2 является однородным круглым диском, то
Воспользовавшись при подсчете Г'3) по форлуле C) выражениями
D), E) и F), получим кинетическую энергию колеса 2:
7<« = з?гЧ G)
Кривошип ОС вращается вокруг неподвижной оси О, перпенди-
перпендикулярной к плоскости рисунка. Поэтому его кинетическая энергия
вычисляется по формуле
Так как кривошип ОС является однородным тонким стержнем, то
/О=^-(ОС)*= ., -¦ г'' и, следовательно,
d8 d S
r4 ^ ()
После подстановки выражений B), G) и (8) в формулу A) нахо-
находим искомую кинетическую энергию механизма
Задача 337. Вычислить кинетическую энергию кривошипно-шатун-
ного механизма, у которого нес и длина кривошипа О А соответ-
соответственно равны весу и длине шатуна АВ. Кривошип О А веса Р и
длины г вращается с угловой скоростью ш0. Вес ползуна В равен Q.
10 Теоретическая механика, том II
290
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Кривошип и шатун считать тонкими прямолинейными однородными
стержнями.
Решение. Взяв начало координат на оси кривошипа О, направ-
направляем ось х вдоль направляющей ползуна В. Будем отсчитывать угол
попорота ср кривошипа ОА от оси х в направлении против часовой
стрелки.
К задаче 337.
Кинетическая энергия системы равна сумме кинетических энергий:
7(п — кривошипа О А, Т^ — шатуна АВ и ГC) — ползуна В:
Кривошип ОА вращается вокруг неподвижной оси О, перпенди-
перпендикулярной к плоскости рисунка, следовательно,
, Р г-
тэк как /<э=—-г, то
S а
Шатун АВ совершает плоское движение. Вычисляем его кинети-
кинетическую энергию по формуле
7-»» = 1/<КГ| C)
где 1ср — момент инерции шатуна относительно оси ё?5, проходящей
через мгновенный центр скоростей перпендикулярно к плоскости
материальной симметрии. Мгновенный центр скоростей ?Р лежит в
точке пересечения перпендикуляров, восставленных к скоростям
из точек Л и В.
§ 6] ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 291
Нетрудно видеть, что А& = О А = г. Скорость точки Л как конца
кривошипа дается формулой
vA= О A ¦<ofl = r<ofl. D)
Скорость точки А как точки, лежащей на шатуне АВ, совершаю-
совершающем плоское диижепие, равна
А МГ Ml" "¦ '
Сопоставив формулы D) и E), находим мгновенную угловую ско-
скорость шатуна:
<V = °>0- F)
Для вычисления момента инерции lgs, применим теорему Штейнера:
>& = 1с^'}(С&)\ G)
где /с — момент инерции шатуна АВ относительно оси, проходящей
через центр тяжести С шатуна перпендикулярно к плоскости его
материальной симметрии:
?
Расстояние между параллельными осями &Р вычисляем из тре-
треугольника АСсР; имеем (CSPJ = г2 -f- j — 2r ~ cos 2<p, т. е.
= ?(o — 4 cos 29). (9)
Подставив выражения (8) и (9) в формулу G), находим:
/^ = -^|r*D-3cos2?). A0)
Подставив выражения F) и A0) в формулу C), получаем выра-
выражение кинетической энергии шатуна АВ:
которое после несложных преобразований можно представить в виде
Г«» = ¦'-? г* 0+6 sin»9) а,;. A1)
Вычисление кинетической энергии шатуна А В, совершающего
плоское движение, можно также произвести по формуле
7*>=iAtfc-i-i'c«C A2)
10»
292 ОГ.ЩИЕ ТЕОРЕМЫ ДИНАМИКИ |ГЛ. IX
Мгновенная угловая скорость шатуна юмг определяется, как и
в первом варианте подсчета (шмг = ш0).
Для вычисления скорости центра тяжести С шатуна АВ запишем
координаты точки С. Нетрудно видеть из рисунка, что хс = у г cos со,
р
Ус = ~2 sin?- Взяв производные от хс и ус по времени, получим
проекции скорости точки С:
3 . . 3
vCx = хс = — 2" rc? sm f = — rco0 sin 9,
vcy =Ус — J <? cos 4 = y шо cos -s.
Следовательно,
= 4 r*< Sin'': ? + Г4" шо COS3 cp =
^ Xsin4?. A3)
VC = VCx + VCy = 4
Подставив выражения (б), (8) и A3) в формулу A2), имеем:
Объем вычислений, необходимых, для подсчетов кинетической
энергии шатуна п каждом из вариантов, примерно одинаков.
Переходим к вычислению кинетической энергии ползуна В. Так
как ползун движется поступательно, то
7'C1=i-k. A4)
Зная положение мгновенного центра скоростей аР шатуна ЛВ,
легко находим скорость пол.зуиа В:
так как vA = r<au, АаР = г, л Z?Sf5 = 2r | sin о |, то
щв = 2г(о0| sin? | A5)
(vn можно было определить и иначе: записать абсциссу точки В:
хв — 2r cos rf и, ваяв производную от xR по нремепи, найти проекцию
скорости точки В па ось дг; vfiv = xl) = —2r?sin'f=—2гш„ sin у)-
Внося значение vn из формулы A5) в формулу A4), находим ки-
кинетическую энергию ползупг В:
25-rXsinJ<p- A6)
§ 6] ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 293
После подстановки выражений B), A1) и A6) в формулу A)
получим искомую кинетическую энергию кривошишю-шатунного меха-
механизма:
^(P-f 2Q)s!n«?l.
Задача 338. Вьшести выражение кинетической энергии твердого
тела, вращающегося вокруг неподвижной точки, пользуясь выраже-
выражениями проекций скоростей точек твердого тела на оси декартовых
координат, связанные с твердым телом (формулы Эйлера).
Решение. Если начало координат О расположено в неподвижной
точке, а оси декартовых координат х, у и z связаны с твердым
телом, то, как известно из кинематики, формулы Эйлера "имеют вид
Ч>х = шу2 — шгУ> Vy = ta..X — WxZ, Х12:=Шху — ю^Х, A)
где х, у, z — координаты точки твердого тела, а сог, со,, и шг — про-
проекции угловой скорости тлердого тела, вращающегося вокруг непо-
неподвижной точки, па соответствующие оси декартовых координат.
Кинетическая энергия твердого тела вычисляется по формуле
rdm, B)
где интегрирование распространено по всей массе твердого тела.
Посте замены vl па v-x-\-vy-\~v\ и использования формулы A) выра-
выражение B) принимает вид
Т= ~ J [(<v - **УУ' I" (U)^ - ш*г)* -г К.У - «WJ dm. C)
(Л1)
Собрав в формуле C) слагаемые, содержащие квадраты и произ-
произведения проекций угловых скоростей, имеем:
Т= j I ш^ (у2 -L- г*) dm + ^ J (х* + г1)dm -\- «,J J (^ -f у") dm -
(Л1) W (Л1)
— '2шушг ^ yz dm — '2^гых \ zx dm — 2шхшу ^ ху dm]. D)
(Л1) (Л« (Л1)
Так как сумма кнадрятов двух координат точки определяет квад-
квадрат расстояния от этой точки до третьей оси, то
(/ -\ zl) dm = \ hxdm = /Л, \ (х* -\ - z*) dm — ^ hylm = ly,
i) (ii) сл1) (М)
(о)
294 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ (ГЛ. IX
Кроме того, по определению
\ yz dm = 1,г, \zxdm — f2x, \ ху dm = Ixy. F)
(М) (М) (Л1)
Подставив значения 1Х, 1у, 1г, 1ху, 1Х2, /(,г из E) и F) в формулу
D), получим искомое выражение кинетической энергии твердого тела,
вращающегося вокруг неподвижной точки
Задача 339. Однородный круговой конус веса Р высоты h
с радиусом основания г = -г катится без скольжения по неподвижной
К задаче 339.
горизонтальной плоскости, имея неподвижную точку в своей вер-
вершине О. Вычислить кинетическую энергию конуса, если он делает
покруг вертикальной оси один оборот в секунду.
Решение. Выбираем начало осей координат х, у, z в непо-
неподвижной точке О. Ось у направим по оси симметрии конуса. Ось z
расположим в вертикальной плоскости. Горизонтальная ось х тогда
перпендикулярна к плоскости рисунка.
Так как конус вращается вокруг неподпижной точки О, а оси х,
у, z являются главными осями инерции конуса в точке О, то 1KZ^=
= lzx = lxy = 0, т. е. кинетическая энергия конуса вычисляется по
формуле
где 1Х, 1у, 12 — моменты инерции конуса относительно соответствую-
соответствующих координатных осей, a tox, wy, со, — проекции мгновенной (абсо-
(абсолютной) угловой скорости конуса на соответствующие оси координат.
§ G] TFOPF.MA OG ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 295
Моменты инерции конуса 1Х, }у, /, были найдены в задаче 291:
4 / v /
Так как конус, вращаясь вокруг неподвижной точки О, участвует
в двух вращениях вокруг пересекающихся осей (переносное вращение
совершается вокруг вертикальной оси, а относительное — покруг оси
симметрии конуса у), то, применив теорему о сложении вращений
твердого тела вокруг пересекающихся осей: соа = шг-!-а)/., построим
параллелограмм угловых скоростей. Вектор мгновенной (абсолютной)
угловой скорости конуса лежит на мгновенной оси, направленной
горизонтально вдоль лгнии касания боковой поверхности конуса
с неподвижной плоскостью.
Нсли угол при першипе конуса обозначить 2а, то нетрудно пидеть,
что
Вычислим проекции о>0 на оси х, у, z\
о),. = — (оа cos а, ик = (Ba sin я, a <ov = 0 m D)
(параллелограмм углоных скоростей лежит и плоскости yz).
Использовав пыражепии B), C) и D), запишем формулу (I) n иидс
г=-5о7(пг'ЗЙ +~ cos
Так как cos а = —, а, согласно условию задачи, г— .,- и
|//12-,-г-' ^
сое=^2г сек ', то окончательно получим:
Т= % к» - /г'2.
Задача 340. Диск D веса Я и радиуса г, свободно сидящий на
оси ВС, приводится и движение посредством ломаного рычага ABC.
Диск катится без скольжения по. неподвижной горизонтальной пло-
плоскости. Кривошип ABC вращается вокруг вертикальной оси с угло-
угловой скоростью оH. Вычислить кинетическую энергию диска.
Решение. В общем случае движения твердого тела кинетиче-
кинетическая энергия вычисляется по формуле
г= i Mvh -t- ~ (iyx+/уШ; -!¦- /х -
- 2/y,(,yi>, — 2/«шлш, — Vx}f»x<oy), A)
где /И — масса твердого тела, ис — скорость его центра тяжести С;
Аи fyi h — осевые моменты инерции, 1ху, 1уг, 1Х2 — центробежные
моменты инерции твердого тела относительно осей, спяпаниых с диском,
начало которых совмещено с центром тяжести С твердого тела, iax,
296
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
<bv, uiz — проекции мгновенной (абсолютной) угловой скорости твердого
тела па соответствующие оси декартовых координат.
Направляем ось у вдоль ВС, ось z — перпендикулярно к непо-
неподвижной плоскости. Так как оси х, у, z являются главными централь-
центральными осями инерции диска D, то
/« = /«='„ = °- B)
Кроме того,
C)
Диск D участвует в двух вращениях вокруг пересекающихся
с точке В осей (переносное вращение соисршается вокруг оси ЛВ
с углопой скоростью <о0, а относительное вращение — вокруг оси ВС).
К аадаче 340.
Мпюпеиияя ось (ось абсолютного вращения) проходит череп
точку В пересечения осей переносного и относительною вращений
и через точку & касания диска с неподвижной плоскостью. Примени»
теорему о сложении вращений твердого тела вокруг пересекающихся
осей: ша = ше — о),., построим параллелограмм угловых скоростей,
являющийся в рассматриваемой задаче прямоугольником. Обозначив
угол СВд* через а, нетрудно найти, что
Sin a
Sill
Так как из треугольника
sin а== ¦
«61
то
ТЕОРЕМА ОЕ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
297
Определяя проекции <ла на оси х, у, z, т. е. cox, шу, со.., имеем:
wy = — 0)а cos а = —
_ «а У г* + Р
г
D)
(прямоугольник углопих скоростей лежит п плоскости уг).
Скорость точки С определяется по формуле
©с =ZJOo0 = /uH. E)
Использолап выражения B), C), D), E) и формулу A), получим
искомое выражение кинетической энергии диска:
Г= 1|-F/*+/¦*)<
Задача 341. По горизонтальной плоскости прямолинейно со ско-
скоростью v движется куб массы М. С кубом соединена ось привеса О
математического маятника массы т при длине нити /. Вычислить кинетиче-
кинетическую энергию материальной си-
системы, предполагая известным за-
закон движения маятника: <р = <з(<).
(Вектор v лежит п плоскости
качаний маятника.)
Р е ш е п и е. Рассматриваемая
система состоит из куба и мате-
материальной точки А; следовательно,
искомая кинетическая энергия Т
равна
7'^ТШ+Г12', A) К задаче 341.
где 7A)—кинетическая энергия куба, а 712) — кинетическая энергия
материальной точки А.
Куб движется поступательно, поэтому
Кинетическая энергия точечной массы А
где Фд — абсолютная скорость точки А. Точка А совершает сложное
движение: переносное вместе с кубом и относительное по отношению
к кубу, т. е. ve = v и vr=l<f (здесь <р — угол поворота маятника).
298
0П1ЦИЕ TF.OPEMH ДИНАМИКИ
|ГЛ IX
Применив теорему о сложении скоростей va = ve~\-vr, построим
параллелограмм скоростей (см. рисунок). Из параллелограмма скоро-
скоростей, используя теорему косинусов, находим:
v1 = ¦»'' -1- т)'3 -4- 1v v cos <p.
Подставив значения ve и щ„ имеем: •
v\ = г? -f
cos <р,
следовательно,
Tw = ~ mv\ =\m (v*
ф» cos ср). C)
Внося значения У'11' и Т^ из формул B) и C) в A), получим ис-
искомую кинетическую энергию системы:
Т= }j (M -f m) v* -f ?f
cos
Следует обратить внимание на то, что кинетическая энергия данной
системы зависит не только от скоростей точек, но и от положения
точек системы (п третьем слагаемом имеется множитель cos о).
Задача 342. Па упругий горизонтальный вал насажены три диска
/, 2 и 3, моменты инерции которых относительно оси вала соответ-
соответственно распы /,, /о и /3.
Вследствие упругости вала
и в результате его враще-
вращения диски попорачиваются
па разные углы.
Зная зависимость углов
поворота дисков ср,, о.2 и
?з от времени, вычислить
кинетическую энергию си-
К задаче 342. стемы. Массой вала прене-
пренебречь.
Решение. Кинетическая энергия Т системы равна сумме кине-
кинетических энергий трех дисков, т. е.
Т—. ти) -\- T(i) -4- ГC).
Так как диски вращаются вокруг неподвижной оси, то
Следовательно, искомая кинетическая энергия равна
§ й]
ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
299
Задача 343. Груз массы М, подвешенный на однородной пру-
пружине массы т, совершает свободные колебания. Вычислить кинети-
кинетическую энергию системы, состоящей из груза и пружины.
При подсчете кинетической энергии пружины предположить, что
смещения точек пружины пропорциональны их расстояниям ог точки
привеса О.
Решение. Направим вдоль оси пружины ось s, взяв начало
отсчета в точке привеса пружины к потолку. Так как рассматриваемая
система состоит из груза и пружины, то ее кине-
кинетическая энергия равна
Т=
A)
где ГA) — кинетическая энергия груза, 7"B) — кине-
кинетическая энергия пружины.
Обозначив через х смещение груза, запишем его
кинетическую энергию
ГA) = 1 Мх\
B)
Остается вычислить кинетическую энергию пру-
пружины. Введем обозначения: / — длина недеформиро-
ванной пружины, f — плотность пружины.
Выделим на расстоянии s элемент пружины
длины ds. При свободных колебаниях системы все
точки пружины и груз получают смещения. Обозна- к задаче 343
чим через ? — смещение элемента пружины ds, отстоя-
отстоящего от точки привеса О на расстоянии s. В соответствии с условием
задачи, смещения точек пружины пропорциональны их расстояниям от
точки привеса О, т. е. — = у , откуда ; = -|- х. Взяв производные
по времени, найдем: ? = ух.
Кинетическая энергия элемента пружины длины dx равна dPi) =
= -^dm^, где масса элемента пружины dm = ~[ds, т. е.
Кинетическую энергию всей пружины получим, взяв определенный
интеграл в пределах от 0 до /:
i
D)
так как масса пружины т = -{1, то
Г<»> = i mx\
300 ОБШИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. !Х
После подстановки значений Тм и Г(9) из формул B) и D) в (I)
получим искомое выражение кинетической энергии системы:
Итак, при приближенном учете массы пружины следует к массе
груза добавлять одну треть массы пружины (приближение Рэлея).
3:. Теорема об изменении кинетической энергии
материальной точки. Изменение кинетической энергии мате-
материальной точки при ее перемещении равно сумме работ, совершенных
силами, приложенными к точке, на этом перемещении:
т т V A (F \
или
л
-2- mv\ — -2 mv\ — У A (Fk).
С помощью теоремы об изменении кинетической энергии мате-
материальной точки следует решать задачи в тех случаях, когда в число
данных и искомых величин нходят: масса т (или вес Р), скорости
точки Ф| и V., — соответственно в начальный и конечный моменты
иремени, силы, приложенные к точке, и перемещение точки.
Легко решаются задачи при постоянных силах и силах, зависящих
от положения точки.
Решение задач с помощью теоремы об изменении
кинетической энергии материальной точки реко-
рекомендуется проводить в следующей последователь-
последовательности:
1) изобразить на рисунке силы, приложенные к материальной
точке, т. е. задаваемые силы и силы реакций связей;
2) вычислить сумму работ псех сил, приложенных к материальной
точке, па ее перемещении;
3) вычислить кинетическую энергию материальной точки в ее
начальном и конечном положениях;
4) использопав результаты вычислений двух предыдущих пуиктоп,
применить теорему об изменении кинетической энергии материальной
точки и определить искомую величину.
Задача 344. Материальная точка, начав двигаться из состояния
покоя по криволинейной траектории, через некоторое время замедлила
свое движение и остановилась. Вычислить сумму работ сил, прило-
приложенных к точке па этом перемещении.
.6]
ТЕОРЕМА OR ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
301
Решение. Применяем теорему об изменении кинетической энер-
энергии материальной точки:
-2 mv\ — j mv\ = ^ A (Fk)."
О)
Так как в начале и конце движения материальной точки скорость ее
равна нулю, т. е. х>1 == г)9 = 0, то из уравнения A) получается, что
сумма работ всех сил, приложенных к материальной точке, на соот-
соответствующем перемещении равна нулю:
Задача 345. Груз веса Я=20 кг поднимается по наклонной
плоскости носредстиом веревки, расположенной под углом а = 30°
К падаче 345.
к плоскости. Наклонная плоскость образует угол [3 = 30° с горизон-
горизонтом. Натяжение веревки 5= 15 кг. В начальном положении груз на-
находился в покое. Найти величину перемещения /груза вдоль наклон-
наклонной плоскости R момент, когда груз имеет скорость г» = 2 м/сек.
Коэффициент трения скольжения груза о наклонную плоскость /
равен 0,2.
Решение. Применим теорему об изменении кинетической энер-
энергии материальной точки:
1 1
? mv\ — т,- mv\ = У A (Fh).
0)
302 ОКЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
К грузу приложены: Р — нес груза, S — сила реакции веревки,
R—нормальная сила реакции наклонной плоскости, FT с — сила тре-
трения скольжения груза о наклонную плоскость, причем /\ С=/М, где
нормальное давление равно A/ = PcosC— 5 sin а; таким образом,
FTC=/(Pcosp —5sin a).
Вычислим сумму работ этих сил на перемещении груза, равном /:
^ A (Fk) =A(P)+A(S) + A (R) + A {F, с). B)
Работа силы тяжести отрицательна, так как груз поднимается вверх:
А (Р) = — РДй = —/V sin |3. * C)
Работа силы реакции веревки 5 раина
A [S) = Sl cos a. D)
Работа нормальной силы реакции R наклонной плоскости равна пулю,
так как сила R перпендикулярна к перемещению /:
A(R) = 0. E)
Работа силы трения скольжения FT c отрицательна, так как угол
между направлениями силы Fr-e и перемещения / равен 180°:
Л (fT.e) = — FT. cl=—f(Pcos^ — S sin a) I. F)
После подстанопки знамений A (P), A (S), A (R), A (FT-l.) из формул
C), D), E) и F) u B) находим сумму работ исех сил, приложенных
к грузу, на перемещении /:
^ A(Fk)^=[S(cosi+fcotia) — P(sm$-\-fco$$)\l. G)
Переходим к вычислению изменения кинетической энергии груза
на его перемещении /. В начальном положении груз находился н покое,
следовательно, Tt^0. В конечном положении груз приобрел ско-
скорость v, т. е. rj=2- г»4.
Итак, 1 р /о\
Подставив значения ^ A (Fk) и Т%—7, из формул G) и (8)
о уравнение A), определим искомое перемещение:
. /V
2g[S(cosa+/ sin а) — Р (sin fi + / cos ?)] '
После подстановки численных данных находим, что / = 3.54 м.
§ 6]
ТЕОРЕМА ОН ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
303
Задача 346. Груз веса Р совершает свободные колебания па
подвешенной к потолку пружине, коэффициент упругости (жесткости)
которой равен с. Грузу, находившемуся в положении статического
равновесия, сообщена посредством толчка скорость v0.
Определить скорость груза v в зависимости от его смещения из
положения статического равновесия и амплитуду колебаний груза.
Решение. Применяем теорему об изменении
кинетической энергии материальной точки:
п
-2 ти\ — т mv\ = ^ A (Fk).
0)
Ось х направляем вдоль оси пружины вниз, вы-
выбрав начало отсчета в положении статического рашю-
весия груза, т. е. когда пружина имеет статическое
удлинение:
Аст = т- B)
Изображаем груз в положении, смещенном из па-
чала отсчета на х. К грузу приложены: Р — вес груза,
F — упругая сила пружины F=c\A\. Так как удли-
удлинение пружины при данном положении груза равно
ш
C)
У У
то
К задаче 346.
Вычислим сумму работ сил, приложенных к грузу на его переме-
перемещении, равном х:
Работа силы тяжести при перемещении груза из нуля вниз па х
равна
А (Р)=Рх.
E)
Работа упругой силы F отрицательна, так как при перемещении
груза из начала отсчета вниз на х пружина удлиняется. В начальном
положении груза пружина деформирована на Дсг, а в конечном поло-
положении груза, смещенном из начала" отсчета на х вниз: Д = Дст-(-х
(см. формулу C)). Следовательно, работа упругой силы равна А (/0 =
= — %г (Да — ДС2Т). Использовав формулу C), получим:
F)
304 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Подставив значения А (Р) и A (F) из формул E) и F) в D), на-
находим сумму работ сил, приложенных к грузу, на его перемещении
от пуля на х вниз:
Учитывая формулу B), получим:
-с-т- ' СП
Переходим к вычислению изменения кинетической энергии груза.
В начальном положении грузу была сообщена скорость v0, т. е.
г. =4 f*
В конечном положении груз приобрел скорость v, поэтому
Т — ' Р «»
J*—2TV-
Следовательно, изменение кинетической энергии груза раипо
Tq — Tt = —^ (vl — vl). (8)
После подстанонки значений ^] A (fft) и 'Л,— Г| из формул G)
и (Я) в уравнение A) определяем скорость груза и заииспмости от его
смещения дг:
Как известно из теории колебаний материальной точки, Щ = kq,
где к — кругоная частота колебании груза. Итак, окончательно:
Амплитуда а свободных колебаний груза легко определяется и:-;
формулы (9), так как при отклонении груза п крайнее положение
х = ±а его скорость обращается в нуль.
Подставляя эти значения в формулу (9), находим амплитуду сво-
свободных колебаний груза:
©о
а — ~к '
где
§ 6| ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 305
4°. Теорема об изменении кинетической энергии
системы материальных точек. Изменение кинетической
энергии системы материальных точек при ее перемещении равно
сумме работ всех ннешпих и внутренних сил системы на этом пере-
перемещении: „ „
7^-Г, = ? А (К) + 2 Л (Fi).
Это — единственная из четырех общих теорем динамики, п
формулировку которой входят не только внешние, но и внутренние
силы. Наличие в формулировке теоремы внутренних сил несколько
усложняет решение задачи. Если, однако, требуется определить вну-
внутреннюю силу, то решение задачи с помощью общих теорем динамики
возможно только при применении теоремы об изменении кинетической
энергии системы .материальных точек.
В случае неизменяемой системы материальных точек, например,
абсолютно твердого тела, сумма работ внутренних сил раина пулю
и теорема об изменении кинетической энергии системы материальных
точек принимает вид „
7*-7i = E A
Теорему об изменении кинетической энергии системы материаль-
материальных точек следует применять в тех случаях, когда в число данных
и искомых величин входят: инерционные характеристики системы
(млссы и моменты инерции), скорости (линейные и угловые), силы и
моменты пар сил, перемещения (линейные и угловые).
Легко решаются задачи, в которых силы и моменты пар сил по-
постоянны либо зависят от положений точек системы.
Решение задач с помощью теоремы об изменении
кинетической энергии рекомендуется проводить в
следую щей последовательности:
1) изобразить на рисунке псе внешние и внутренние силы системы
(в случае неизменяемой материальной системы — только внешние
силы);
2) вычислить сумму работ всех внешних и внутренних сил на пе-
перемещениях точек системы (в случае неизменяемой материальной систе-
системы — только сумму работ внешних сил);
3) вычислить кинетическую энергию системы материальных точек
в начальном и конечном положениях системы;
4) воспользовавшись результатами вычислений пунктов 2) и 3),
записать теорему об изменении кинетической энергии системы мате-
материальных точек:
я п.
T<i— Т, = 2 А (/=*)-\- ^] A (F'k),
ь=1 ft=i
306 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
или в случае неизменяемой материальной системы:
Ъ-Т1=21А (К),
и определить искомую величину.
Задача 347. Машинный агрегат работает под действием системы
приложенных к нему сил.
Определить знак суммы работ этих сил при: а) пуске в ход,
б) остановке, в) установившемся режиме работы.
Решение. Запишем теорему об изменении кинетической энергии
системы материальных точек:
A)
Все силы, приложенные к системе, разделим на: силы движущие
(например, момент, создаваемый электроприподом), работа которых по-
п
лОжительна (^ A (Fk дв) ^> 0), и силы сопротивления (силы полез-
иогО сопротивления: например, сила резания при снятии резцом струж-
стружки с болванки, сила давления штампа и т. п. и силы вредного сопро-
сопротивления: например, силы трения скольжения валов о вкладыши под-
подшипников, силы трения в зацеплениях зубчатых передач и т. д.),
п
работа которых отрицательна (^ A(Fhtm^<^JS). Запишем уравне-
fc=i
ние A), учитывая эту классификацию сил:
П - Тх = ? A {FkJ + 2 A (Fk сопр). B)
а) При пуске машинного агрегата в ход скорости его материаль-
материальных точек, которые в начальных положениях были равны нулю, воз-
возрастают. Следовательно, 'Л = 0, Т* Ф 0, но кинетическая энергия
положительна, т. е. 7'9^>0. Поэтому изменение кинетической энергии
системы 7'2— 7i ^> 0, и из уравнения B) находим:
Так как первая сумма положительна, а вторая отрицательна, то при
пуске в ход модуль суммы работ движущих сил больше модуля
суммы работ сил сопротивления.
б) При остановке машинного агрегата скорости его материальных
точек, которые в начальных положениях (в момент выключения дви-
I 6] ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 307
гателя) не были равны нулю, уменьшаются и в конечных положениях
(в момент остапопки) обращаются в нуль. Следовательно, Tt ^ О
7*2 = 0i Поэтому изменение кинетической энергии системы Тг— Т}
и из уравнения B) находим:
Так как первая сумма положительна, а вторая отрицательна, то при
остановке машинного агрегата модуль суммы работ движущих сил
меньше модуля суммы работ сил сопротивления.
и) При установившемся режиме работы скорости точек являются
периодическими функциями. Периодом может, например, оказаться
промежуток времени, в течение которого нал двигателя делает один
оборот, дна оборота и т. д., т. е. 7'(?) = 7(у -(-2Ая), где k=\,
1,...,п. Взяв начальные положения материальных точек системы
соответственно углу поворота <р вала двигателя, а конечные — углу
поворота tp-(-2feir, где k=\, 2,...,n, находим: Tt (<p) = 1\ (у -j- 2k-x).
Поэтому изменение кинетической энергии системы равно пулю:
7а— 7\ = 0, и из уравнения B) получим:
к =--1 * -= 1
Так как первая сумма положительна, а торая отрицательна, то
при установившемся режиме работы машинного агрегата модуль суммы
работ движущих сил равен модулю суммы работ сил сопротивления
на том же угловом перемещении нала (при подсчете этих величин
за промежуток времени, равный периоду процесса).
Задача 348. Дне трети однородной цени АВ длины / лежат на
наклонной плоскости призмы, расположенной иод углом а к горизонту,
а одна треть цепи свисает вдоль вертикальной грани призмы (см. ри-
рисунок). Под действием своего веса цепь, находившаяся в начальный
момент в покое, начинает соскальзывать по наклонной плоскости
вниз.
Определить скорость цепи в тот момент, когда конец А ее сви-
свисавшей части поднимется на наклонную плоскость в точку О; /—
коэффициент трения скольжения цепи о наклонную плоскость.
Решение. Направим ось х из точки О вдоль наклонной пло-
плоскости вниз. Изобразим цепь во время движения; обозначим ОВ через х,
тогда ОА = 1 — х. Запишем теорему об изменении кинетической энергии
системы материальных точек
7"» - П = ? А (/$ + S А С*)- 0)
308
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Считая цепь недеформнруемой, получим неизменяемую систему.
Тогда сумма работ внутренних сил системы равна нулю, и уравне-
уравнение A) принимает вид
Обозначим вес цепи Р. Изобразим внешние силы системы: Рх —
пес части цепи ОВ, лежащей на наклонно» плоскости, Р1_х — вес
свисающей части пепи, R—суммарная сила нормальной реакции
части цепи 0,4, FT с — сила трения скольжения части цепи ОВ о
наклонную плоскость.
1-х
\W\\\C
К залачо 348.
Дадим копну цепи В элементарное перемещение dx вдоль на-
наклонной плоскости вниз. При этом конец цепи А поднимается па dx
вверх.
Вычисляем элементарную работу внешних сил на перемещении dx:
U = S 8 A (Ft) = 8 А (Рх) + ЬА (/>,_,) + Ь А (/?) + ЬА (УТш е). C)
Так как
TO
Рх = у- х, FT c =fN=fPx cos a ==/ ? х cos а, Р,_х = ^ (/ — л-),
ЬА [Рх) = Pxdh = Pxdx sin a = ^ sin a xdx, D)
*А (pi-x) = — pi-*dx = —jV-x) dx, E)
ЬА (/?) = Rdx cos ~ = 0, F)
ЬА (/=;. c) = — FTic dx = — / -t cos a xdx. G)
<S 61 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 309
Подстапив значения ЪА(РХ), ЬА{Рг_х), bA{R), 8-4 (/у с) из D), E),
F) и G) п формулу C), находим:
ЬА= ^ 8Л (/=*) = у A — sin a— /cos a)хdx — Pdx. (8)
Для вычисления суммы работ внешних сил па перемещении цепи
при подъеме ее конца А в положение О следует взять определен-
определенный интеграл от выражения ЬА, записанного п формуле (8), п пре-
2
делах от ^ I до / (в начальный момент на наклонной плоскости
о
2
была расположена часть цепи 0/3= ;;• /, в конечный момент на на-
наклонной плоскости должна находиться вся цепь, т. е. при совмещении
точек Л и О должно выполняться равенство ОВ = 1).
Вычислив определенный интеграл, находим сумму работ всех внеш-
внешних сил па заданном конечном перемещении цени:
? И (tf) = fg [5 (sin a-/cos а)—1]. (9)
Переходим к вычислению кигетической энергии цепи. В началь-
начальный момент цепь находилась в покое, г. е.
Г, = 0. A0)
В конечный момент все материальные точки цепи (учитывая ее пе-
деформируемость) имели искомую скорость v, следовательно,
г, = -'¦?*«. (и)
Подставив значения ^ A (F^), Tt и 7's из формул (9), A0) и A1)
и ураинеиие B) и решив это уравнение относительно v, имеем:
I
т)= -.- у gl\f) (sin a —/cos a) — 11.
Дпижение цегш по наклонной плоскости нтгз возможно
только при условии, что v~^>Q, т. е. при выполнении неравенства
о (sin а —/cos а) — 1 ^> 0 или
-.
U COS а
Задача 349. Решить задачу 298 с помощью теоремы об изме-
изменении кинетической энергии системы материальных точек.
Р е hi e н и е. Эта задача была решена с помощью дифференциаль-
дифференциального уравнения вращения твердого тела вокруг неподвижной оси.
При этом пришлось дважды интегрировать дифференциальное уравне-
310 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ |ГЛ. 11
ние вращения кольца, определять две постоянные интегрирования и
вычислять промежуток времени, п течение которого кольцо праща-
лось до остановки.
Применением теоремы об изменении кинетической энергии
*=1 *=1
можно объем вычислений сократить в несколько раз.
Изобразив все внешние силы, вычислив момент инерции кольца
относительно оси вращения z: h=z-r (R1^^) и главный момент
внешних сил относительно этой же оси: тег =—/Рг, как это было вы-
выполнено при решении задачи 298, переходим к вычислению суммы
л
работ всех внешних сил системы ^ A (F?) = mez Д<р, где Дф— иско-
мое угловое перемещение кольца до момента остановки. Таким образом
S A(Ff)=-fPrb<?. • B)
4=1
Кольцо является абсолютно твердым телом, следовательно,
Кинетическая энергия в начальном положении кольца дается фор-
формулой
г, =4/,«8. D)
Кинетическая энергия в конечном положении, т. е. в момент оста-
остановки, равна
Г9 = 0. E)
л я
Подставив значения ^ A (F0, ^ A (F?), Ti и 72 из формул B),
ft=i *=i
C), D), E) в уравнение A) и решии это уравнение относительно Дер,
U» Iff _L Г2) Oj (f?S -\ Г2) ,.
получим: Ду= , —- или л = —' —- оборотов.
Следует отметить, что задача оказалась столь просто решенной
с помощью теоремы об изменении кинетической энергии потому, что
требовалось получить зависимость между угловой скоростью (равной
в момент остановки нулю) и углом поворота кольца.. Если бы по
условию задачи требовалось определить <о=/(^) либо <р = <))(?), то
пришлось бы решить дифференциальное уравнение.
> «1
ТЕОРЕМА ОГ» ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
311
Задача 350. Какой путь .s прошла по прямой дороге до оста-
остановки автомашина, если в момент выключения мотора она двигалась
со скоростью v = 11 км/час. Вес кузова автомашины с шофером и
пассажирами рапен Р, = 1000 кг, вес каждого из четырех колес
Pq =- 20 кг. Радиус инерции
колеса относительно оси, про-
проходящей через его центр инер-
инерции перпендикулярно к пло-
плоскости материальной симмет-
симметрии, рапен р —20 см, радиус
колеса г = 25 см. Коэф-
Коэффициент трения качения ко-
колес о шоссе /к = 0,1 см.
Колеса аитомашины катятся
без скольжения. Силой сопро- К задаче 350.
тивлепия воздуха пренебречь.
Решение. При движении автомашины направо направление по-
положительного отсчета угла поворота ср колес выбираем по часоиой
стрелке.
Запишем теорему об изменении кинетической энергии системы ма-
материальных точек:
—T1=^t A{F<k)
A
@
Изображаем внешние силы, приложенные к автомашине (см. рису-
рисунок): Pi и 4Р4 — силы тяжести, IR^ и IRi — нормальные силы реак-
реакций, смещенные относительно центров тяжести колес в сторону дви-
движения па величину коэффициента трения качения /к, 2/71тр и 2Fp—
силы трения колес о шоссе, направленные в сторону, противополож-
противоположную движению (после выключения мотора все колеса автомашины
оказываются ведомыми). Внутренние силы не изображаем, считая авто-
автомашину неизменяемой системой и пренебрегая силами внутреннего
трения. Следовательно, сумма работ всех внутренних сил системы
равна нулю. Теперь уравнение A) принимает вид
B)
Сумма работ всех внешних сил системы на искомом перемещении
5 равна
п
2 A (F$ = А (Р.) + 4Л (Р2) + A A (FTP) + 4 Л (mTJ C)
(коэффициенты «4» соответствуют числу колес автомашины).
312 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Так как разность высот Д/г при перемещениях точек приложения
сил Рл и 4Р2 равна нулю, то
А(Р,) = 4А(Р0 = О. D)
При качении колес без скольжения их мгновенные центры скоро-
скоростей ЗР Находятся в точках касания. Силы трения всегда приложены
к колесам и точках, совпадающих с мгновенными центрами скоростей
с?5 и перемещаются вместе с ними. Мощность этих сил трения, вычис-
вычисляемая по формуле N=Frp-i)cp,, равна нулю, так как <иа^ = 0. Сле-
Следовательно, работа сил трения на конечном перемещении, равная ин-
интегралу от мощности по времени, тоже равна пулю:
iA(FTp) = 0. E)
Учитывая, что радиусы колес и коэффициенты трения качения
для псех четырех колес одинаковы, приводим вычисление суммы рл-
Оот пар трепня качения к одному колесу, считая нормальное давле-
давление равным jV=P|-)-4Pa. Так как коэффициент трения качения /к яи-
ляется плечом пары трения качения, то момент пары трении качения
будет m1K = NfK — (Pi -|-4Я4)/к. Элементарная работа пары трения
качения равна
43 Л (/ит.к) = - ттл d<p = -(/>, -J- 4Р2)/К *р F)
(работа отрицательна, так как направление момента пары трения ка-
качения противоположно направлению угла поворота ср колес), где
rfcp — элементарное угловое перемещение колеса вокруг мгновенного
центра скоростей И\ Учитымая, что «^связано с элементарным переме-
перемещением ds центра тяжести С колеса зависимостью ds = rdy, получим
Подставляя значение df из формулы G) п F), находим:
4ZA («,.„) = — (Р, -f 4P»)-^ ds. (8)
Для вычисления суммарной работы пары трения качения па конеч-
конечном перемещении центра тгжести С колеса остается ваять от выра-
выражения S.4 по формуле (8) определенный интеграл в пределах от 0 до s.
После вычислений получим:
4А (/«,.„) =-(PH-4Pe) A .,. (9)
Подставляя значения А{Р,), 4А(Р,2), 4A(Frp), 4Л(оттк) из фор-
формул D), (о) и (9) п C), находим сумму работ псех внешних сил, при-
приложенных к автомашине па ее перемещении, равном s:
? A (FQ = - (Р, -|- 4Р„)^ s. A0)
$ fi] TEOPF.MA ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 313
Переходим к вычислению кинетических энергий автомашины п ее
начальном и конечном положениях. Так как в конечном положении,
т. е. з момент остановки, скорости всех точек равны пулю, то
Г2 = 0. A1)
Запишем кинетическую энергию Т\ аптомашипы, состоящей из
пяти масс: кузова с шофером и пассажирами и четырех колес, в пиле
Т1=Т[1)~\-4Т[\ A2)
Кузов с шофером и пассажирами совершает поступательное дви-
движение, поэтому
i
Колеса совершают плоское движение, поэтому
Рс 57
так как vc = v, /с = -2р, «> = ¦.-, т0 формула A4) принимает вид
4 Л2' = 2 --2 ¦' 1 4- р" ^ t/2 П 5}
1 ,? \ ' г2 у * к >
Внося значения Г|') и 4ТJ> va формул A3) и A5) в A2), нахо-
находим кинетическую энергию автомашины в ее начальном положении:
A6)
Подставляя значения ^ Л (Fjp, 7"s и 7\ из формул A0), A1) и
A6) в уравнение B) и решив это уравнение относительно s, получим:
га2 Р, + 4Р„ 1 + „- i
Д= W/-HP/ А'=53,4 ^
Задача 351. Катушка веса Р и радиуса г приводится в движе-
движение посредством сматываемой с нее нити, расположенной под углом
о к горизонту. К нити приложена постоянная сила F. Определить
скорость центра инерции С катушки в момент, когда он переместится
на расстояние s. Радиус инерции катушки относительно оси, прохо-
проходящей через ее центр инерции С перпендикулярно к плоскости мате-
материальной симметрии, равен р, /к — коэффициент трения качения катуш-
катушки о горизонтальную плоскость.
314
ORIHHF- ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
Катушка катится без скольжения. Массой нити пренебречь, г, —
радиус оси катушки, па которую намотана пить. В начальный мо-
момент система находилась п покое.
Решение. Катушка совершает плоское движение. Так как каче-
качение происходит без скольжения, то мгновенный центр скоростей ?Р
расположен н точке касания обода ка-
катушки с горизонтальной плоскостью.
Направим ось s по горизонтали па-
праио. В соответстнии с направлением
оси s, принимаем положительное па-
правление угла поворота ср но часовой
стрелке.
Запишем теорему об изменении ки-
кинетической энергии системы мате-
S рмальпых точек:
к -¦-¦ 1
к ¦_-1
Так как катушка является неизменяемой материальной системой, то
сумма работ внутренних сил равна нулю, и поэтому
• - 7. =
(Ft).
0)
Изобразим внешние силы, приложенные к катушке (см. рисунок):
Р — ее вес, R—нормальная сила реакции плоскости, смещенная отно-
относительно центра инерции С катушки па величину коэффициента тре-
трения качения /к в сторону движения, F—сила реакции нити, равная
но модулю силе, приложенной к нити, F.rp — сила трения катушки о
горизонтальную плоскость.
Дадим центру инерции С катушки элементарное перемещение ds,
направленное по горизонтали направо. Учитыная положение мгновен-
мгновенного центра скоростей сТ5, имеем:
da = r d<?.
B)
Вычислим работу внешних сил па элементарном перемещении ds:
8Д = 8Д (Р) +8ДТ.К + 84 (f)-J-M (/=;,,). C)
Так как перемещение центра инерции С происходит по горизонтали,
то
ЬА (Р) = 0. D)
§61 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИШ'.ТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 315
Элементарная работа пары трения качения: 8ЛТ.К = — m^^dy.
Работа пары трения качения отрицательна, так как направление мо-
момента пары противоположно направлению поворота колеса.
Тач как /итк = УУ-/к = (Р—/-sina)/K, то, принимая во внимание
формулу B), находим:
8/lT.K=-(.D-Fsina)/K?. E)
Сила трения FTp, как и в предыдущей задаче, не совершает ра-
работы. Действительно,
(при качении без скольжения <vgi-=Q).
Остается вычислить элементарную работу силы F. Выбрав за по-
полюс точку С, запишем: ЬА (/7) = /7 •</$-[- mcd<f, где ds — вектор эле-
элементарного перемещения центра инерции С, а тс — момент силы F
относительно оси, проходящей через точку С перпендикулярно к
неподвижной плоскости, т. е. mc — Frv. Следовательно,
ЬА (F) = Fds cos a -|- Frx </<?•
Учитывая формулу B), получим:
8i4(f)=^(r1 + rcosa)ds. G)
При вычислении работы силы, приложенной к твердому телу,
совершающему плоское движение, за полюс можно принимать произ-
произвольную точку твердого тела. При этом следует помнить, что эле-
элементарное угловое перемещение dy от выбора полюса не зависит.
После подстановки формул D), E), F) и G) в B) получим эле-
элементарную работу внешних сил, приложенных к катушке, па элемен-
элементарном перемещении ds:
8Л = [F (г, + г COS а)—/K(P—F sina)]^. (8)
Для определения суммы работ внешних сил на перемещении
центра инерции s следует, воспользовавшись формулой (8), взять оп-
определенный интеграл в пределах от 0 до s. Сделав это, получим:
? A(/?p=[F(r1 + rcosa)-/K(P-Fsina)lf. (9)
Вычислим кинетическую энергию кагушки. В начальном положе-
положении катушка была в покое, т. е.
7\ = 0. A0)
316 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Кинетическая энергия в конечном положении катушки равна
где
Р Р 1>г
g с g] г
Следовательно,
Подставив (9), A0) и A 1) в уравнение A) и решив это уравне-
уравнение относительно vc, находим искомую скорость центра инерции
катушки С:
%^/к1. A2)
Ил (|>ормулм A2) видно, что катушка находится в движении, если
модуль силы F удовлетворяет условию
-"^ Г, -\ Г COS a -f fit sill a
Задача 352. Грузы A v\ В приводятся в движение посредством
двух блоков: подвижного К и неподвижного /. (см. рис. а). В резуль-
результате толчка, сообщенного грузу А, он начал опускаться со скоро-
скоростью v0. Па какое paccroKi.HL: должен опуститься груз Л для того,
чтобы его скорость увеличилась п два раза?
Грузы А и И — одинакового веса. Блоки К и /, считать однород-
однородными круглыми дисками одинакового веса Q. Коэффициент трения
скольжения груза В о горизонтальную плоскость равен /. Массой
веревки пренебречь. .
Решение. Направим ось .ч через центр инерции С подвижного
блока К по вертикали вниз. Соответственно с направлением оси s,
считаем положительным направление угла попорота блока К по часо-
часовой стрелке, а блока L — против часовой стрелки. Радиусы блоков
обозначим г.
Запишем теорему об изменении кинетической энергии системы
материальных точек:
л и
к =-. [ * _ I
Так как веревка, охватывающая блоки К и L и приводящая в дви-
движение груз В, не деформируется и при движении системы находится
в натянутом состоянии, чо рассматриваемая материальная система
ТЕОРЕМЛ ОЕ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ
317
является неизменяемой. Следовательно, сумма работ внутренних сил
системы р^вна нулю. Поэтому уравнение A) принимает вид
7-9—7-,= ? A(Fl).
B)
Изобразим внешние силы системы: силы тяжести грузов А п В
и блоков К и L, R—нормальную силу реакции горизонтальной пло-
плоскости, FTZ — силу трения скольжения груза В о горизонтальную
плоскость, Rt и #2 — составляющие силы реакции оси блока L, S —
силу реакции веревки.
о)
К задаче 352.
Дадим элементарное перемещение ds центру инерции С блока К
по вертикали вниз. При .этом блок К получит угловое перемещение
по часовой стрелке. Учитывая, что блок К, осуществляющий плоское
движение, имеет мгновенный центр скоростей $> в точке касания обо-
обода блока с левой ветвью веревки, находим перемещение точки обода
D, равное Ids (см. рис. б). Следовательно, элементарное перемещение
груза В направлено по горизонтали налево и равно 2ds, а угловое
перемещение блока L направлено против часовой стрелки.
318 ОПЩИИ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Вычислим элементарную работу всех внешних сил системы:
+ ЬА (R) -\- ЬА (S) + ЬА (Я,) + 8Л (Яг) + *А (/="т.с). C)
Находим:
tP D)
E)
8M(Qt) = 0 F)
(точка приложения веса Q/. неподвижна),
8Д(Ро)=0 G)
(груз В перемещается по горизонтали),
(сила реакции веревки S всегда приложена в мгновенном центре ско-
скоростей 5s),
8.4 (Л) = 0 (9)
(нормальная сила реакции R перпендикулярна к элементарному пере-
перемещению груза В),
ЬА (/?!)== 8Д (/?.2)=: О A0)
(точка приложения сил ^4 и #,2 неподвижна),
Так как перемещение груза drfl, направленное налево, равно 2ds,
a FIC=fP, то
84(FT.e)=—2/Prfs. (II)
После подстановки выражений D), E), F), G), (8), (9), A0) и A1)
в формулу C) находим:
bA=2lbA(FQ = [Q + P(\—2f)\ds. A2)
Для вычисления суммы работ на искомом перемещении груза А,
равном s, следует, воспользовавшись формулой A2), взять определен-
определенный интеграл в пределах от 0 до s. Тогда будем иметь:
A3)
§6) ТЕОРЕМА ОГ. ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 3 1 О
Переходим к вычислению кинетической энергии системы, в состав
которой входят массы двух грузоп и диух блоков. Запишем:
T=TA-\-Ta-{-TK-\-TL. A4s)
Обозначим через <v скорость груза А. Тогда vc=:v. Учитывая,
что мгновенный центр скоростей блока К находится в точке е7\ по-
получим: vD = 2v (см. рис. б). Так как веревка нерастяжима, то ско-
скорость груза В равна скорости точки D, т. е. vB = 2v.
Мгновенная угловая скорость блока /('¦ (Од-= — = ~ > угловая
скорость блока L: <°L = — = ¦ - (скорость точки па ободе блока L
равна скорости груза Б).
Грузы А и В движутся поступательно, поэтому
TA=\P-v\ A5)
TB=i~g-vsB=2j^. A6)
Блок К совершает плоское движение, т. е.
Q i Or- v r,
где M = --, Ic ^ -j—, шк = — . Поэтому
Блок L вращается вокруг неподвижной оси, т. е.
где 1г=^Ц—, u>L= — . Следовательно,
7i=|^. A8)
Подставии выражения A5), A(>), A7) и A8) п формулу A4), нахо-
находим кинетическую энергию системы:
7"=?" A0P-|-7Q). A9)
Согласно условию задачи, скорость груза А в начальном положении
системы равнялась va, т. е.
7Q). B0)
320
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
[ГЛ. IX
В конечном положении системы скорость груза А удвоилась,
следовательно,
vh B1)
Подставив формулы A3), B0) и B1) в уравнение B), решив это
уравнение относительно s, определим искомое перемещение груза А:
Задача 353. К оси С( катка А веса Р] и радиуса г, привязан
копен однородной педеформируемой веревки, переброшенной через
блок Б веса Р.2 и намотанной на цилиндр D веса Р3 и радиуса г3
6)
S
а) - ¦ ^ ' ^
(см. рис. а). Под деИстнием вращающего момента, пропорционального
углу монорота катка, т — а<р, где а — постоянная, каток А, катясь
бея скольжения, поднимается по наклонной плоскости, расположенной
под углом а к горизонту, и посредством верепки приводит в дпи-
жение цилиндр D, который, катясь без скольжения, поднимается вверх
по наклонной плоскости, расположенной под углом р к горизонту.
Коэффициент трения качения катка А о наклонную плоскость равен
/,к, коэффициент трения качения цилиндра D с намотанной на пего
перепкой о наклонную плоскость равен /Зк.
Определить скорость оси С\ катка А в положении системы, при
котором ось Ci переместится параллельно линии наибольшего ската
§ Gj TF.OPRMA ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 321
наклонной плоскости на расстояние s. В начальном положении си-
система находилась в покое. Каток А, блок В и цилиндр D считать
сплошными однородными цилиндрами. Массой веревки пренебречь.
Решение. Направим ось а1 через центр инерции С\ катка А
параллельно линии наибольшего ската верхней наклонной плоскости.
В соответствии с положительным папранлепием оси s, углы пово-
рота катка А, блока В и цилиндра Д соответственно равные <рц ?*
9з, имеют положительное направление отсчета против часовой стрелки.
Задачу решаем с помощью теоремы об изменении кинетической
энергии неизменяемой системы материальных точек (веревка при дви-
движении системы натягивается):
т* - Ту = X A (fp. A)
к = 1
Изобразим внешние силы системы: Рх — пес катка А, Р,2 — лес
блока В, Рл — вес цилиндра D, m — вращающий момент, приложен-
приложенный к катку А; Я, и R3 — нормальные силы реакций наклонных пло-
плоскостей, смещенные в сторону движения относительно нейтрон инер-
инерции С\ и С3 соответственно катка А и цилиндра D; #> и Hi — со-
составляющие силы реакции оси блока В, FJP — сила трения катка А
о наклонную плоскость, направленная и сторону движения, F%p — сила
трения скольжения веревки, намотанной па цилиндр, о наклонную
плоскость, направленная в сторону движения.
Дадим элементарное перемещение ds центру инерции С( катка А
параллельно наклонной плоскости вверх. Ввиду педеформируемости
веревки точка обода блока В и точка К нерепки, намотанной на
обод цилиндра D, также получают перемещение da. Следовательно,
ds = rl d(ff =ridy.i—2rid<?3, где dyb d<?.2 и t/»3 — .элементарные уг-
угловые перемещения соответстве! по катка А, блока В и цилиндра D.
Перемещение ds точки К цилиндра D следует рассматривать но
отношению к мгновенному центру аР3 цилиндра. Как видно из рис. б,
перемещение центра инерции Q цилиндра D в два раза меньше пе-
перемещения точки К, т. е. dsc =--^. Поэтому
ds = rid'fr = r td-.pi = 2r3d<?3 = 2dsCi. B)
Вычислим элементарную работу всех внешних сил системы:
8Л = 8Л (/>,) -L- ЬА (Pj) -;- ЬА (Р,) -f ЪАТЛА + IA1-KD +
+ 8Л (/?,) + ЪА (/?4) + ЬА («) + ЬА (FJP) + ЬА (Fjv). (Я)
Имеем:
8Л (Pi) = — /V/*i = — P\ds sin a, D)
8A(P«) = 0 E)
11 Теоретическая механика, том II
322 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
(точка приложения силы тяжести Р2 неподвижна),
ЗД (Р3)= —Pidlh= —Р^Сл sin p.
Поэтому, на основании формулы B), получаем:
bA(P,)=-Pids™? . F)
Далее: '
Так как ттлл = R,/lK= Pt cos а/ш, то, воспользовавшись формулой
B), находим:
M^^-P.^cosarfs. G)
Затем
Вычисляя момент тт.кп= R-ifi^:±= Рз cos Р/зк н использовав формулу
B), получаем:
8ЛТ.„П= -/*,?? cos ?</л (8)
Далее:
8Д№)==0 (9)
(точка приложения сил R^ и Rt неподвижна).
Наконец, имеем:
ЬА (m) —
Так как от = ау„ то, опять воспользовавшись формулой B), запишем:
8A(«)=^'-rfs. (Ю)
Затем
bA(FlP) = bA(F]P) = 0. A1)
(Каток Л и цилиндр D катятся беи скольжения).
Подстаиип D), E), F), G), (8), (9), A0) и A1) и формулу C), на-
находим выражение элементарной работы внешних сил системы:
sin я "г т;-cos a) -
_^'(sin3 -i-^"K cos $) \ds. A2)
Для пычислепип суммы работ внешних сил системы па конечном
перемещении s остается, воспользовавшись формулой A2), взягь оп-
4 61 ТЕОРЕМА ОВ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 323
ределеппый интеграл от выражения A2) в пределах от 0 до s. При
этом rifl = s. Произведя интегрирование, получим:
А = .'¦ [Ц - 2Р, (sin a + f* cos a ] -
— A (sin р + "^ cos p )] я. A3)
Переходим к вычислению кинетической энергии данной системы,
состоящей из трех масс (катка .4, блока В и цилиндра D):
В начальном положении система находилась в покое, т. е.
Ti = 0. A4)
Кинетическая энергия в конечном положении:
Обозначим через v искомую скорость точки С\. Так как вереска
не деформируется, то скорость оси Q равна скорости точки па ободе
блока В и скорости точки К на ободе цилиндра D, т. е.
где (ol7 о>.2 и о>з — углопые скорости соответственно катка А, блока В
и цилиндра D. (Скорость <v точки К цилиндра D следует рассмат-
рассматривал, по отношению к мгновенному центру &3 цилиндра. Как видно
из рис. в, скорость центра инерции Са цилиндра D в два раза
меньше скорости точки К).
Кинетическая энергия катка А, совершающего плоское движение,
вычисляется по формуле
Учитывая, что М{ — - -, v,. —v, lr =¦ ,'г'-, ш, = —, находим:
6 Ll ' 4ff 'i
Кинетическая энергия блока В, 1фащаю1цегося вокруг неподвиж-
неподвижной оси, будет
где /г=у^, ш2=— (см. формулу A6)). Следовательно,
11»
324 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Кинетическая энергия цилиндра D, совершающего плоское дви-
жепие, вычисляется по формуле
где Мл = Zl , vCa = | , lCt = Щ-, ш3 = JL (см. формулу A6)).
Следовательно,
Внося A7), A8) и A9) к формулу A5), находим выражение кине-
кинетической энергии системы в ее конечном положении:
Тч = -Д— A2/>i -\- АРг -\~ 3/^я). B0)
Остается подставить A3), A4) и B0) в уравнение A) и опреде-
определить искомую скорость v центра инерции С\ катка А:
/%—2рА*пи-\- f-f-K cos ч) — Р3 ( sin Э + ^пк- cos
Движение возможно, если подкоренное выражение ¦ положительно.
Задача 354. На рис. а изображен узел автоматического устрой-
устройства, состоящий из двух спаренных кривошипно-шатунпых механиз-
механизмов OlA1Bi и О^АъВъ, имеющих общий ползун D веса Q, который
движется в вертикальных направляющих. Кривошипы О\А\ и О^А^ и
шатуны А[В[ и АгВ$ одинакового веса Р и длины г. Оси кривоши-
кривошипов О, и 0.2, перпендикулярные к плоскости рисунка, отстоят от
вертикальной оси симметрии механизма па расстоянии -к-. Для при-
придания механизму жесткости концы кривошипов А\ и А.г соединены
между собой пружиной, коэффициент упругости которой равен с.
В начальном положении механизма кривошипы и шатуны были рас-
расположены вертикально, а пружина не деформирована (см. рис. б).
Под действием постоянных вращающих моментов ш кривошипы
отклоняются от сноих вертикальных положений, поднимая ползун I).
Определить угловую скорость вращения кривошипов О\АХ и О2Л.2
в положении механизма, когда кривошипы отклонены от вертикали
на угол ср. В начальном положении механизм находился в покое.
Кривошипы и шатуны считать однородными тонкими стержнями.
Массой пружины пренебречь.
Решение. Направим ось х из точки Ot по вертикали вниз.
Положительное направление отсчета угла ср: для правого криво-
кривошипа—против часовой стрелки, для левого кривошипа—по часовой
стрелке.
§ 61 TF.OPF.MA OR ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 325
Запишем теорему об изменении кинетической энергии системы
материальных точек:
fe=l
Данный механизм не является 'неизменяемой материальной систе-
системой выйду наличия пружины А-iAy. Поэтому при вычислении суммы
К задаче 3">4.
работ сил надо учесть не только внешние силы (силы тяжести диух
кривошипои, диух шатунов и ползуна D, состапляющпе силы реак-
реакций осей крпиошипов Jt[t R.it R^.Rb вращающие моменты mQ и /«0>)
которые приложены к кривошипам), но и внутренние упругие силы
пружины F, и F-i (прочие внутренние силы можно не учитывав,
так как крипошппы и шатуны япляются абсолютно тнердыми те-
телами, и следовательно, сумма работ соотпетстиующих внутренних си.т
равна нулю). Все указанные выше силы изображены па рпс. а.
Дадим элементарные углоные перемещения dy кривошипам О\А\
и О.2Д-2 ч положительных напранлеииях отсчета углов в и вычислим
сумму элементарных работ внешних и внутренних сил системы па
326 ОЬЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
этих перемещениях:
ЬА (Л,) - г ЪА (Я2) -- ЬА (/?3) + ЪА №
При учете симметрии механизма и системы приложенных сил
относительно вертикальной оси выражение элементарной работы
упрощается:
ЪА= S «
-j. 8Л (Q) + 28Л (/?,) -|- 28Л (tfj)-f 28Л (от) -f- 28Л (/?). B)
Криношип О]Л( пращается вокруг неподвижной оси Оъ перпен-
перпендикулярной к плоскости рисунка. Поэтому
Работа отрицательна, так как направления момента силы и угло-
углового перемещения dy противоположны. Учитывая, что mQ
= —/>{-sin <?</<?. C)
у
:=Р~2 sin ?> находим:
Шатун AtBi coaepuiaeT плоское движение. Мгновенный центр
скоростей еТ4, находится в точке пересечения перпендикуляром,
восставленных из точек А\ и Z?( к скоростям ч>А и 0fl (см.
рис. в). Так как ОХАХ^= A&'i=r, то ^г,^ ОИi^cp= Лi#V<?,~, и,
следоиательно, rfcp^, =dy, причем rf^ направлено по часовой
стрелке. Далее,
Работа отрицательна, так как напраиления момента силы Рд р
и углового перемещения dyep противоположим. Учитывая, что
тЗ\ {.PAii\)=zP \ r sin ?¦ находим:
^A{PAiRl) = —'\-Pr^9db D)
§6] ТПОРЕМЛ ОГ. ИЗМПНЕННИ КННЕТИЧР.СКОЙ ЭНЕРГИИ СИСТЕМЫ 327
Вычислим элементарную работу силы тяжести Q ползуна D:
ЬА (Q) = Q dxn ,
Определим dxR из пропорции:
Учитывая, что dr л = Ot A idr± = r d<o, Д|531 = 2г sin о, А^{-=г,
находим: dxn = — '2r sin у dv, так как элементарное перемещение
dx[h при sin ^ rfcp^> 0 направлено иверх. Теперь получим:
do. (о)
Мы определили dxn , поспользопапшись мгновенным центром
скоростей сУ5,, который квели выше. Если Оы п условии данной
задачи было указано, что массой шатупол можно пренебречь, то нам
не пришлось Оы вычислять работу Силы Р-л,:^ и, следовательно,
определять положение мгновенного центра скоростеИ е?^ шатуна.
В этом случае элементарное перемещение точки /V, и, следовательно,
ползуна D можно было бы определить так: 1) записать зависимость
между координатами хн, и ср и 2) продифференцировать этот резуль-
результат. Действительно, из треугольника OXAXRX находим: хП1=О\Вх =
= 2rcos:p, откуда dxgl =—2г sin ср t/»» где знак минус указывает,
что элементарное перемещение точки В папраилено imepx (при
sm <pc?<p^>0). В данной задаче второй париапт определения dxni
оказался проще благодаря тому, что удалось легко записать ана-
аналитическую записи.мость между хП[ и у.
Точки приложения опорных реакции Rv и ^.2 при угловом пере-
перемещении dy неподвижны, т. е. ^
bA(Rt) = bA(Ri) = 0. F)
Вращающий момент т приложен к кривошипу О\АЬ получив-
получившему элементарное угловое перемещение dy, поэтому
bAw) = md<?. G)
Внутренняя упругая сила пружины Т7, приложена к концу Л,
кривошипа О|Л|, поэтому
oA(Fy)==— m
Работа отрицательна, так как направления момента силы и угло-
углового перемещения с/ср противоположны.
В положении механизма (см. рис. а), когда его кривошипы откло-
отклонены от вертикали на угол <с, пружина растянута на
Д = AiK-r LAX = 2LA, = '2r sin о.
328 ОБЩИЕ ТЕОГГ.МЫ ДИНАМИКИ [ГЛ. IX
Так как упругая сила пропорциональна деформации пружины, то
F, =- сД = Ire sin о.
Момент упругой силы F относительно точки О! равен
OTOi (Fl) = Tr 0{L, где OJ. —- г cos ср, т. е.
Oi (Fi) = F\i' cos y = 2cr'2 sin a cos <p. @)
Внося (9) в формулу (8), находим:
ЬА (/=¦,) = — с'2 яп 2?аГ?.
После подстановки выражений C), D), (о), F), G) и A0) и фор-
формулу B) получим:
8А = ^ 8A (FjJ) ¦';- V 8^ С7-') = — Рг sin 9 tfcp — 3/-V sin ?rf<p —
— 2Qr s-in 'f (/^ -j- 2/и do — Icr1 sin 2cp rfcp =
= 2|/я — (Q-;-2P)rsin? — cr9sin 2-f]do. A1)
По условию задачи, в начальном положении механизма 9 = ()-
Следовательно, для вычисления суммы работ ппешмих и внутренних
сил системы па конечном углопом перемещении крииошипов надо
взять определенный интеграл от значения §А из формулы A1)
и пределах от 0 до ср:
u-i-2 л (*¦*)=
= 2 ^ [т — (Q -1- 2Р) г sin ср — crq sin 2'f] rfcp =
и #
= 2 I nv-f — 2 (Q -j- 2P) r sin2 ¦* — cr1 sin'cpl. A2)
Переходим к вычислению кинетической энергии механизма, п со-
став которого входят пять масс (два кривошипа, два шатуна и ползун)-
Учитывая симметричность расположения масс механизма относи-
относительно вертикальной оси, имеем:
В начальном положении механизм находился в покое, т. е.
Г, = 0. A3)
В конечном положении механизма, когда кривошипы отклонены о г
вертикален па угол ср, кинетическая энергия равна
7"»=272о1д1-|-27м,в1-|- TiD. A4)
§ 61 ТЕОРЕМА ОГ, ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНКРГИИ СИСТЕМЫ 329
Кинетическая энергия крииошипа, вращающегося вокруг иепо-
дпижпой оси, определяется формулой
Рг-
где /Ol = ——, a м— искомая угловая скорость. Следовательно,
Кинетическая энергия шатуна А\В\, совершающего плоское дви-
движение, раина
Ти,В, = 2 Mvh-j- Tj" ic^'iiBr A6)
В данном случае
Af = ^, /c=tJ. A7)
Скорость центра инерции С шатуна Alf3l находим с помощью
мгновенного центра скоростей ИРХ (см. рис. в):
В треугольнике A^iC: AlC=-, A\Qpi = AlOl = r. Следовательно,
= |/ г1 -f- ^- — 2r -^ cos 29 = -^У о — 4 cos 2cp =
Подставип значения А^х и C^i в формулу' A8) и учитыпая
при этом, что va, = О,Л|Ш = гш, находим:
y • С9)
Угловая скорость шатуна А\В\ определяется легко:
т. е.
"М !«,=«>. B0)
Направления co^^j и со противоположны (см. рис. в).
Иодстлнип A7), A9) и B0) \\ формулу A6), получаем выражение
кинетической энергии шатуна Л\В\.
330 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Кинетическая энергия ползуна D, движущегося поступательно,
вычисляется по формуле:
Tw=\Q-vb. B2)
При поступательном движении фо = фЙ1. Скорость точки В\ нахо-
находим с чпомощью мгновенного центра скоростей аТ3, (см. рис. 8):
Так как vAl = OlAi(a = r<a. A\&\ = 0^, = г, Biafiy=^0\
= 2r sin o, io
Vd-^Vi^ = 2rco sin cp. B3)
Подстапив формулу B3) в B2), имеем:
T2D = 2^- rVsinV B4)
Скорость точки Л, можно было определить, не пользуясь мгпо-
г.еппым центром скоростей o/V Для этого следовало записать урав-
уравнение движения точки Д,: л'н, —2reoscp и затем взять производную
по времени:
i/j, = Vux = — 2/'4> sin r. = — 2гш sin <р-
Подстаннп выражения A5), B1) и B4) п формулу A4), находим
кинетическую энергию механизма в его конечном положении:
Т = '2 — [Р4- 3 (Р— Q) sin^l. BГ>)
Остае1ся подставить формулы A2), (КЗ) и B5) в уравнение A) и
.";мем определить искомую угловую скорость вращения кривошипа.
Получим:
ш? — 2 (Q f 2Р) г &\п- 9} — сг2 sin-<p
Л Я |-3(Р j- Q) siri^ip
•ri". Потенциальная энергия. Если на систему материаль-
материальных точек действуют силы, однозначно определяемые положениями
точек, то система движется в силовом поле.
Силовое поле называется потенциальным (консервативным), если
работа сил поля определяется начальными и конечными положе-
положениями точек системы и не .чависит о г вида траекторий этих точек.
Потенциальная энергия материальной точки определяется
работ oil, которую совершает сила поля при перемещении этой точки
и:) данного положения в лучевое.
Потенциальная энергия :>аписит от положения точки и поле:
П=11{х,у, 2).
§ G1 ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕМЫ 331
Потенциальная энергия системы материальных точек является
функцией от координат всех п точек системы, т. е.
П = П (ЛГ„ уи Zi,..., Xk, yk, Zk,..., Xn, _Vn, Zn).
Эквипотенциальной поверхностью (поверхностью уровня) назы-
называется геометрическое место точек поля, в которых потенциальная
энергия имеет одинаконое значение:
II {х, у, z)=C.
Работа силы поля при перемещении материальной точки и потен-
потенциальном поле равна разности потенциальных энергий начального
и конечного положений точки:
А = П, — Щ.
Сила, действующая в потенциальном поле, направлена по нормали
к эквипотенциальной поверхности в данной точке в сторону убыва-
убывания потенциальной энергии.
Проекция па ось этой силы раина частной производной потен-
потенциальной энергии по^ соответствующей координате, взятой с обратным
знаком: __^1Г р — — дп Г — —'-П
1'х ~дх ' у 'ду' ''* д'г'
Здесь F^FJ-l-Fyj-^F.k, т. е. F= — grad II.
В случае системы п материальных точек
дП с dll ,, дП «. , о
F**=—drb> Р«> = -Ж' *-» = —aiT' гле А=|' 2) •¦¦'п-
Если даны проекции силы Fx, Fv n Fг на оси декартовых коор-
координат и надо определить, является ли сила F—FJ-\Fy,j-\-F;k
силой, действующей в потенциальном поле (потенциальной силой),
то следует проверить, имеют ли место равенства
d_Fx__d_Fy dJF^ ___dF^ dFy __ dj\_
ду дх~' дг дх ' di ду '
r Если эти равенства тождественно удонлеткорены, то сила F по-
потенциальна. В противном случае сила не потенциальна. Элементарная
работа потенциальной силы раина полному дифференциалу потен-
потенциальной энергии, взятой с обратным знаком:
8/1= — dll.
Итак, is случае потенциальных сил элементарная работа силы ЬА
может быть обозначена dA.
Вычисление потенциальной энергии системы материальных точек
янляется одним из этапов решения задач при использовании теоремы
об изменении кинетической энергии, уравнений Лаграпжа второго
рода и т. д.
332 ОГ.ЩИК ТЕОРЕМЫ ДИНАМИКИ [ГЛ. IX
Задача 355. Груз веса Р, лежащий посередине упругой балки,
соиершаст свободные колебания. Упругая сила балки пропорциональна
ее прогибу и направлена по вертикали. Проекция упругой силы на
пер шкальную ось х равна: Fх = —сАх, где Д — прогиб балки в ее
середине, ас — коэффициент упругости, численно равный силе, кото-
которую пало приложить в середине балки для того, чтобы прогнуть ее
па единицу длины.
'I
,Р
'¦2
К задаче 355.
Вычислить потенциальную энергию системы, пренебрегая массой
ба.'исп.
Решение. Возьмем напало отсчета оси х в середине недефор-
мироиапноп балки.
Изобразим силы, приложенные к грузу: Р — пес груза, F—упру-
F—упругая сила балки.
Обе силы потенциальны. Для вычисления потенциальной эпер[ии
груза надо сложить потенциальные энергии силы 1яжестм П"' и упру-
упругой силы И(г':
и = ПЧ» + П(*\ A)
Так как потенциальной энергией называется работа потенциальной
силы при перемещении материальном точки из данного положения
в нулевое, то
ПA| = — Рх. B)
Потенциальная энергия силы тяжести Р отрицательна при х^>0,
так как груз для перемещения из данного положения в пулевое
должен подняться внерх.
Далее находим:
ПЧ'= ¦'-?. C)
Потенциальная энергия упругой балки положительна.
Подстании формулы B) и C) в A),-находим искомое выражение
потенциальной энергии системы:
II = «-_/*.
§61
ТР.ОРПМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ СИСТЕДШ
333
Задача 356. На горизонтальный упругий вал, коэффициент упру-
упругости которого на кручение равен с, насажены три диска. Вследствие
упругости вала, по время
пращемия системы около
оси нала диски оказыиаются
повернутыми па разные
углы ср,, fq, ср3. Вычислить
потенциальную энергию си- —
стемы. Центры тяжести дис-
ков лежат на оси враще-
вращения.
Решение. Вычислим К задаче 356.
углы закручипапия нала. I la
участке между дисками У и 2 угол закручивания нала ранен с., — :$>,,
а па участке между дисками 2 и 3—соотнетстпеино <р3 — »*.
Поэтому потенциальная энергия системы, слагающаяся из энергии
отдельных участков, будет
п = ¦?(?,-?,)*-{-?(?,-
6°. Закон сохранения механической энергии. Если
все силы, приложенные к системе материальных точек, потенциальны,
то сумма кинетической и потенциальной
энергий системы постоянна:
7Н-П, = 7^-1-11,.
\
Так как в механизмах и машинах дей-
действуют силы сопротивления, которые не по-
потенциальны, то происходит уменьшение
механической энергии. Эта энергия расхо-
расходуется на работу непотенциальных сил и
переходит в другие виды энергии (например,
1) тепловую). Следовательно, закон сохране-
сохранения механической энергии в этих случаях
неприменим, и для поддержания установив-
установившегося режима работы машины или меха-
механизма необходим приток механической энер-
энергии извне.
Задача 357. Вычислить полную механи-
механическую энергию физического маятника веса Р
и записимости от угла отклонения <р (см. рисунок), если центр тяже-
тяжести С маятника отстоит от оси привеса па расстоянии а; 1С — мо-
момент инерции маятника относительно оси, проходящей через центр
тяжести С перпендикулярно к плоскости материальной симметрии.
К задаче Л57.
33 4 01ИЦИЕ ТЕОРЕМЫ ДИНАМИКИ |ГЛ. IX
Решение. Ыапрапим ось у из точки привеса О по вертикали
ппиз. Положительное направление oicieia угла <р указано на рисунке.
Механическая энергия маятника раина сумме его кинетической
и пО1епн.иалы1Ой энергий:
?=Г+П. (I)
Потенциальной силой являйся вес маятника Р. Следовательно,
потенциальная энергия маятника определяется формулой
II = — Ph = — Pa cos о. B)
Кинетическая энергия маятника, качающегося вокруг неподвижной
оси О, перпендикулярной к плоскости рисунка, раина
7 = ' /оф«.
Так как по теореме Штейпсра
то
ГГодстаиив B) и C) в формулу A), получим искомое выражение
полной механической энергии физического маятника:
ГЛАВА X
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ
ТОЧЕК
§ 1. Классификация связей. Число степеней свободы.
Классификация сил
Несвободной называется система материальных точек, па движение
которых (координаты, скорости и ускорения) наложены некоторые
ограничения (связи).
Всядий механизм является примером несвободном системы матери-
материальных точек.
Связями называются физические тела, налагающие ограничения
на координаты, скорости и ускорения точек материальной системы.
Связи делятся на двухсторонние и
односторонние.
Связи называются двухсторон-
двухсторонними (удерживающими), если они пре-
препятствуют перемещениям материаль-
материальных точек в некоторых направле-
направлениях, а также в направлениях прямо
противоположных.
Примером двухсторонней спязи
служит идеальный (невесомый, педе-
формируемый) стержень, по концам
которого размещены две материаль-
материальные точки. Эти материальные точки
не могу г ни приблизиться друг к
другу, ни отдалиться друг от друга.
Если одну из материальных точек,
например точку О (рис. 140), закрепить, то вторая точка А может
перемещаться по кривой, лежащей на сфере радиуса, равного
длине / идеального стержня, т. е. координаты точки А оказываются
связанными зависимостью: х\ -\-у\ + г\ — I1 = 0. Таким р
днухсторопния геометрическая связь выражается соотношением
не. 140.
336
ДИНЛМИКЛ НЕСВОБОДНОЙ СИСТР.МЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
координатами точек материальной системы:
Уи
х
к, ук,
уп,
Сиязи называются односторонними (неудержипающпмн), если они пре-
препятствуют перемещениям материальных точек п некоторых направлениях,
но допускают перемещения п прямо противоположных направлениях.
Такую снизь можно получить, если и предыдущем примере идеаль-
идеальный стержень ОА заменить питью. Тогда точки О и Л отдалиться
друг от друга не могут, но прибли-
приблизиться имеют иозможиость, так как
при этом произойдет смятие нити
(рис. 141).
Уравнение односторонней связи
имеет иид
х'л -\~Ул - г 2~л —
0.
не. 141.
(Знак ргшснстпа соответствует па-
тянутому состоянию нити.) Таким
образом, односторонняя связь выражается неравенством вида
/(*i> Уи ги ..., xk, уь, гк, ..., хп, уп, zn)<0.
(л*язи делятся также па нестационарные (зависящие от времени)
и стационарные (не зависящие от иремепи).
Связь называется нестационарной, если в уравнение связи в явном
виде входит время, т. с.
/(¦*!. Уь гь ..., х.„ ук, г„, ... , ха,уп, zn, 0 = 0.
(R неявном виде время входит в большинство уравнений связей, так
как координаты точек при дьижепии системы, вообще говоря, являются
У////}'///////////////////////////
Рис. 1-12.
функциями времени). В случае подъемного крана, поднимающего
груз А (материальную точку), связь, зависящая от времени, со-
здс!стся тросом (рис. 142). При равномерном наматывании троса на
§ 1] КЛАССИФИКАЦИЯ СВЯЗЕЙ. ЧИСЛО СТЕПЕНЕЙ СВОБОДЫ 337
барабан со скоростью v длина свисающей части троса изменяется
по закону
где /0 — длина свисающей части троса в начальны!! момент. Так
как груз может раскачиваться, то уравнение этой связи имеет
иид х% -\-у\ -\- г\ — (/0 — vt)'l = Q, т. е. содержит время в явном
пиде.
Связь называется стационарной, если время в явном виде в урав-
уравнение связи не входит (но всех рассмотренных выше примерах, кроме
последнего, связи не записях от нремепи).
Сиязи делятся также па голономные и неголономные. Го^лопом-
иыми (интегрируемыми) называются связи, которые накладывают огра-
ограничения па положения точек материальной системы (конечно, после
дифференцирования уравнения связи по времени можно получить
также занисимость между координатами и скоростями точек си-
системы).
Неголономпыми (неинтегрируемыми) называются сиязи, которые на-
накладывают ограничения на скорости точек системы. Они вырмжишт ааии-
симость между координатами и скоростями точек системы. Незави-
Независимо от дифференциальных уравнений движения системы уравнения
этих связей не могут быть проинтегрированы.
Примером нсголопо.мпой системы является шар, катящийся но ше-
шероховатой плоскости.
Числом степеней свободы системы материальных точек, под-
подчиненной голономпым снязя.м, называется число независимых парамет-
параметров, однозначно определяющих положения точек системы.
Так, твердое тело, вращающееся вокруг неподвижной оси, имеет
одну степень свободы, так как положение этого твердого тела вполне
определяется углом поворота ср вокруг оси нращеиия.
Твердое тело, совершающее плоское движение, имеет три степени
свободы, так как положение любого его сечения, проведенного парал-
параллельно неподвижной плоскости, определяется двумя координатами
центра тяжести сечения хс и ус и углом поворота э.
Системой с тремя степенями свободы является твердое тело, вра-
вращающееся вокруг неподвижной точки. Его положение, определяется
тремя углами Эйлера ?, ф и 6.
Системой с шестью степенями свободы является свободное твер-
твердое тело, так как ею положение определяется шгетыо независимыми
параметрами: тремя координатами центра тяжести хс, ус, zc и тремя
углами Эйлера <р, (Ji и 0.
Упругое тело и.меет бесчисленное множество степеней свободы.
Подавляющее большинство механизмов является системами с од-
одной степенью свободы. Так, положение любой точки криьшшиппо-
338 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
шатунного механизма определяется углом поворота 9 кривошипа
(рис. 143).
Диск К, вращающийся вокруг оси АВ, которая в свою очередь
вращается вокруг оси CD (рис. 144), является системой с двумя сте-
степенями свободы. Для определения положения диска К следует задать
Рис. 143.
два независимых параметра: угол поворота диска вокруг оси АВ и
угол поворота вилки ADB вокруг оси CD.
Связи, ограничивая перемещения материальных точек системы, дейст-
действуют па эти точки посредством сил, называемых силами реакций связей.
В динамике несвободной системы материальных точек, как пра-
правило, силы удобно разделять на задаваемые (активные) силы и силы
реакций связей (пассивные силы).
Следует иметь и виду, что к «задаваемым» относятся псе силы,
не являющиеся силами реакций связей. Таким образом, задаваемой
может быть какая-либо неизвестная — искомая сила, не входящая
и число сил реакций связей (это показывает условность термина
«задаваемые силы»).
Принцип освобождаем ости от связей. В задачах ди-
динамики несвободной системы .материальных точек пользуются прин-
принципом освобождав мости от связей, который уже применялся в за-
задачах статики. Отбрасывая мысленно связи, наложенные на систему,
включают силы реакций связен в число задаваемых сил. При этом
несвободная система материальных точек рассматривается как система
свободная, движущаяся под действием задаваемых сил и сил реакцш!
связей.
При движении системы силы реакций связей являются, вообще
говоря, переменными. Они зависят от положений точек, их скоростей,
ускорений и времени. Это значительно усложняет решение обратных
задач, и которых движения точек системы определяются в записимосш
от приложенных сил, т. е., в частности, or сил реакций связей.
В подобных задачах приходится из системы дифференциальных урав-
уравнений движения исключать силы реакций связей. После нахождения
движения точек системы и, следовательно, их скоростей и ускорений
можно пайгм величины сил реакций связей.
§2|
МЕТОД КИНЕТОСТАТИКИ
339
§ 2. Метод кинетостатики
1°. Силы инерции. Приведение сил инерции к глав-
главному вектору и главному моменту. При взаимодействии
двух свободных материальных точек к одной из них приложена сила Fb
называемая действием, а к другой — сила Fit называемая противо-
противодействием. Материальная точка А (рис. 145), к которой приложено
действие со стороны материальной точки В, приобретает ускорение w
и впредь именуется «ус-
Г, w А в F?J
коряемои».
Материальная точка 5,
сообщившая ускорение
материальной точке Д, на- Рис. 145.
зывается «ускоряющей».
К «ускоряющей» точке В приложено противодействие со стороны
«ускоряемой» точки А.
На основании принципа равенства действия и противодействия,
Ускоряемая
точна
Ускоряющая
точка
В соответствии с основным законом динамики, действие равно
Fi = mw, следовательно, противодействие равно/79 = —/nw. Противо-
Противодействие именуется силой инерции и обояначается J.
Итак, в случае свободной материальной точки сила инерции равна
по модулю произведению массы «ускоряемой-» точки А па модуль ее
ускорения, направлена в сторону, противоположную ускорению точки А
и приложена к «ускоряющей» точке В.
Если при движении несвободной материальной точки ее траектория
предопределена связью, наложенной на эту точку, то к материальной
точке, являющейся «ускоряемой», приложено действие со стороны
наложенной связи, которая в данном случае
заменяет «ускоряющую» точку.
На основании принципа равенства дей-
действия и противодействия, к связи приложено
со стороны материальной точки противодей-
ствие, именуемое силой инерции J. Так как
Fi = mw, a F.i — — Fit то 7 = /79 = — тт.
Так, при равномерном движении колечка А
по проволоке В траектория колечка А, яв-
являющегося «ускоряемой» точкой, предопре-
предопределена проволокой, являющейся связью. Ко-
Колечко А приобретает центростремительное ускорение под действием
силы Д, приложенной к нему со стороны проволоки —связи. На
основании принципа равенства действия и противодействия, к соот-
соответствующем точке проволоки приложено противодействие /7, именуе-
именуемое силой инерции J (ряс. 140).
Рис.
340
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
Риг. 147.
Если на несвободную — ускоряемую материальную точку наложены
сгсязи, а также действуют ускоряющие точки, то силы инерции ча-
частично приложены к связям и частично к «ускоряющим» точкам.
Как известно из статики, систему сил можно привести к силе,
пекторно равной главному вектору, и к паре сил с моментом, век-
торио равным главному моменту. Приведение сил инерции дает сле-
следующие результаты (ниже в i 2е при
изложении метода кинетостатики пояс-
поясняется, что силы инерции услопио при-
прилагаются «к ускоряемому» твердому
телу):
а) при поступательном движении
твердого тела силы инерции приво-
приводятся к равнодействующей, приложен-
приложенном к центру тяжести С твердого тела. Равнодействующая RW равна
по модулю произведению массы твердого тела на ускорение любой
его точки и направлена противоположно этому ускорению: ^(у) =
= — Mw (рис. 147);
б) при вращении плоской фигуры вокруг перпендикулярной к ней
неподвижной оси силы инерции приводятся к равнодействующей
т (рис. 148), приложенной в центре
"X ^ Я качаний соответствующего физи-
N "**^ ческого маятника, ось привеса
которого совмещена с неподвиж-
неподвижной осью данного твердого тела
(центр качаний К отстоит от оси
привеса на расстоянии, равном
приведенной длине физического
маятника: /пр = = ?-, где 1г — мо-
момент инерции твердого тела отно-
относительно оси привеса, М — масса
твердого тела, а — расстояние от
оси привеса до центра тяжести).
Равнодействующая сил инерции
#(у) равна по модулю произведе-
произведению массы твердого тела на ускорение его центра тяжести и на-
направлена в сторону, противоположную этому ускорению
= — Mwc,
Риг. 148.
так как "Wq = а \/г1 ~\- <о4, то R^ = Ma j/s'2 -\- со4; направление
ределяется углом а, находимым из уравнении
оп-
опft 21
МЕТОЛ КИНЕТОСТАТИКИ
341
Если за центр прииедепия выбрать центр тяжести С твердого
тела, то силы инерции приводятся к силе, векторно ранной главному
вектору V(y>, и к паре сил с моментом, равным главному моменту тс
(рис. 149).
Главный вектор сил инерции V<y) равен по модулю произведению
массы твердого тела на ускорение его центра тяжести и направлен
в сторону, противополож-
противоположную этому ускорению:
= — Mw,
С:
причем
= Ма /е> -j- со\
Главный момент сил
инерции т^ относитель-
относительно оси, проходящей через
центр тяжести A парал-
параллельно оси вращения, ра-
равен по модулю произве-
произведению момента инерции Рис. 1<9.
твердого тела относи-
относительно оси С на модуль углового ускорения твердого тела 8. Знак
главного момента сил инерции противоположен знаку проекции угло-
углового ускорения: т|/' = —/сег {вг—проекция углового ускорения в
на ось вращения г).
Если за центр приведения выбрать точку О, лежащую па непо-
неподвижной оси, то силы инерции приводятся к силе, равной главному
вектору V{J\ и паре сил, момент которой ранен главному моменту т$.
По-прежнему V( '=—Alwc, а в выражение главного момента сил
инерции вместо \(. входит IQ, т. е.
m(? = —lozz, где 10 = 1с-\- Ма1.
В случае, когда центр тяжести С
лежит па оси вращения плоской фи-
фигуры, главный нектор сил инерции У(/'
обращается в пуль, и следовательно,
система сил инерции приводится к паре
сил с моментом т[о = — /йег.
в) При движении плоской фигуры Риг. 150.
силы инерции приводятся к силе, рав-
равной главному вектору V7', приложенной в центре приведения, и
к паре сил, момент которой равен главному моменту относительно
342 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
оси, проходящей через центр приведения перпендикулярно к непо-
неподвижной плоскости. Так, если за центр приведения сил инерции вы-
выбрать центр тяжести С твердого тела, то
Приведение сил инерции к силе, равной главному пектору, и паре
сил, момент которой ранен главному моменту, является одним из важ-
важных этапов решения задач динамики несвободной системы материаль-
материальных точек и случае применения метода кинетостатики, либо общего
уравнения динамики (см. ниже § 5), а также при определении дина-
динамических давлений на ось вращающегося твердого тела (см. ниже
§ 3). Отметим, что с силами инерции связаны формальные методЕл
решения задач. Все упомянутые далее задачи могут быть решены
несколько проще без применения сил инерции. В этой книге изла-
излагаются методы решения задач с использованием сил инерции лишь
потому, что эти методы, в силу сложившихся исторических традиции,
еще довольно распространены в инженерной практике. В динамике
пег таких задач, которые не могли бы быть решены без применения
сил инерции. В дальнейшем неоднократно дается сравнение методов
решения задач с использованием и без использования сил инерции.
Глапный вектор и главный момент сил инерции, условно прило-
приложенных к ускоряемому твердому телу, следует определять по приве-
приведенным выше формулам, и соответствии с видом движения твердого
тела (поступательное д!1иженне, вращение вокруг неподвижной оси,
плоское движение). Если с помощью готовых формул главный вектор
и главный момент вычислить нельзя, то в случае непрерывного рас-
распределения масс надо вычислить силы инерции для выделенного эле-
элемента и затем распространить суммирование по всему твердому телу,
вычислив определенный интеграл в соответствующих пределах.
В следующем параграфе будут рассмотрены методы приведения
сил инерции материальных точек твердого тела, вращающегося вокруг
неподвижной оси.
Задача 358. Определить главный момент сил инерции т^] отно-
относительно точки R колеса 3 эпициклической передачи, изображенной
на рис. а. Колесо 1 неподвижно. Радиусы колес / и 3 равны. Пере-
Передача приводится в движение посредством кривошипа ОАВ, вращаю-
вращающегося вокруг оси О, перпендикулярной к плоскости, в которой рас-
расположен механизм, с постоянной угловой скоростью ш0. К чему при-
приводятся силы инерции колеса 3?
Решение. Главный момемгг сил инерции колеса 3 относительно
точки В определяется по формуле
Крипошип вращается равномерно, колеса передачи круглые. По-
Поэтому угловые скорости всех KO.iec с течением времени не меняются.
( 21
МЕТОД КИНЕТОСТАТИКИ
343
В силу этого, углоиые ускорения колес раины нулю, т. е. ?1г = 0 и,
следовательно, /«Й = 0.
Наблюдателю, вращающемуся вместе с криволипом, oil кажется
неподвижным, а неподвижное колесо — вращающимся с угловой ско-
скоросгью со0 в направлении,
(рис. б). Запишем зависи-
зависимости между относитель-
относительными угловыми скоро-
скоростями колес и их радиу-
радиусами:
противоположном
кривошипа
Го
Перемножил пропорции,
U
= -. Так
получим: -?,= -.
как по условию г3 ^= г(,
то «.<? = ««'?.
Согласно теореме о
сложении вращений твер-
дого гела вокруг парал-
параллельных осей, «У = <Л{р -\- ик\
w\rJ
К задаче 358.
Т. е. ОIЛ' = О)'/1 и?'.
В ДЭППОЙ ЗЭ-
даче w\rJ и ш{? — относительные углоные скорости, ш1г и и>3, — абсст-
лютиые угловые скорости, а переносной угловой скоростью служит е>ог.
Поэтому
>
п.. = со.,, — ш. „
О*- ¦*? U,i
Учитывая, что (о^}=Щ|9. находим: m-i2==iolz. но, по условию,
колесо / неподвижно, т. е. оIг = 0, следовательно, о>,, ^= 0. Это зна-
значит, что колесо 3 совершает круговое поступательное движение.
Как известно, при поступательном движении твердого тела силы
инерции приводятся к равнодействующей, приложенной к центру
тяжести твердого тела: /?G> = —Mw, где w — ускорение любой точки
твердого тела. Легко определить ускорение точки В колеса И, так
как точка В одновременно является концом криюшипл ОАВ. Если
ш„ — постоянная, то wn = wni~ \ ЛВ' щ. Ускорение wn направлено
от В к О (рис. а). Следовательно, равнодействующая сил инерции /?'у',
приложенная н центре тяжести /? колеса <3, направлена вдоль ОВ от
оси крашения О и по модулю равна /^''= -~ \ OB \ соЦ.
IS
344
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Задача 359. Плоская фигура пращается вокруг неподвижной оси О,
перпендикулярной к плоскости рисунка. Определить главный вектор
н главный момент сил инерции материальных точек плоской фигуры,
взяв за центр приведения точку О.
Вектор ? направлен перпендику-
перпендикулярно к плоскости рисунка от нас.
Решение. Направляем ось z и
сторону 8, т. е. перпендикулярно
к плоскости рисунка от нас.
Возьмем произвольную точку К
на плоской фигуре. Ускорение wk
точки К складывается из его центро-
центростремительной wnk и вращатель-
вращательной w.k составляющих, причем
wnh = i'hHii, wzk=^rksz, где rh =
= OK—расстояние от точки К до
оси вращения О (направлении oceii т
и и показаны па рисунке).
Соответственно ускорениям wnk,
w,k и wk изображаем направленные
в противоположные стороны силы
инерции &-й материальной точки: Jnll,
J.k и Jk. Центробежная сила инер-
инерции: Jnk =— тктпк. Ее проекция на
ось и: Jnh = — mkrkwl. Вращатель-
Вращательная сила инерции J-k = —mkWT.k-
Ее проекция на ось х: Jzk-=—ткгкг2. Суммарная сила инерции:
Jk = — mkwk- Ee модуль: Jk==mkrk i/e^-j-w4.
По определению главного вектора сил инерции: VU)^^Jk\ учи-
К задаче 359.
тывая, что Jk = —tnhwk, запишем: V<y> = — ^] >пктк.
к = 1
Воспользовавшись формулой, приведенной в 1° § 2 главы IX.
п
wc=——тт , где М — масса системы материальных точек, a wc
ускорение центра инерции системы, получим:
* - i
т. с. главный вектор сил инерции направлен противоположно ускоре-
ускорению wc центра тяжести С плоской фигуры. Учитывая, что но усло-
условию задачи за центр приведения взята точка О, силу V{J) надо при-
приложить в этой точке (см. рисунок). Так как по модулю wc =
§ 21 МЕТОД КИНЕТОСТАТИКИ 345
= гс ]/?''-[-оL, где гс — расстояние от оси вращения О до центра
тяжести С плоской фигуры, то модуль главного вектора сил инерции
ранен
Переходим к вычислению главного момента сил инерции матери-
материальных точек плоской фигуры п$ относительно точки О. Он равен
сумме моментов всех сил инерции относительно этой точки:
т$= j] mo(Jk)= j] mQ(Jnk)-\- j] mo{J^).
k=i а= i *=i
Моменты центробежных сил инерции относительно точки О равны
пулю:
Поэтому:
= 2 «о (А*)= S ЛЛ.
*= i k = 1
Так как Jxl{ = — mkrkez, то
n
где /o= ^ wv! — момент инерции плоской фигуры относительно
* = i
оси О, перпендикулярной к ее плоскости. Итак,
то z~— /о?г-
Знак глаииого момента т^ противоположен знаку проекции угле-
углевого ускорения гг.
Задача 360. Использонан результат предыдущей задачи, опреде-
определить главный вектор и главный момент сил инерции плоской фигуры,
приняв ла центр приведения центр тяжести С плоской фигуры.
Решение. На рис. а изображена сила V^J\ равная главному век-
вектору сил инерции и приложенная в точке О. В решении предыдущей
задачи было получено:
3-16
ДШШШКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
Совершим переход от старого центра приведения О к новому
центру приведения С. Для этого изобразим н точке С два уравнове-
уравновешивающихся вектора: VG> и V'u\ при-
причем V(V| = —V'{J>. Теперь сила инер-
инерции V<7) приложена п центре тяжести
С плоской фигуры. При этом появи-
появилась присоединенная пара сил инерции
в составе силы V<y>, приложенном в
точке О, и силы V''y). Плечо присо-
присоединенной нары сил инерции hc =
= гс sin а. Следовательно, момент при-
присоединенной пары сил инерции равен
¦ sin a =
= Mr"c )/s -}- to4 sin a.
Главный момент сил инерции отно-
относительно нового центра припедения С
ранен сумме г.чашюго момента сил
инерции относительно старого центра
приведения О и момента присоединен-
присоединенной пары сил инерции, т. е.
¦пр -
К задаче 3tiO.
Воспользовавшись, рис. б, находим:
= — /os, -1~ Mrb /e" -U ш'* sin a.
w.
.r
у-у.
Следовательно,
—
У t-
= —(/о —
Применив теорему ШтеИиора: /0 = /с -[- Л1 г~с, находим, что /0 —
- МгЬ = 1С.
Итак, гланпып момент сил инерции отпосителыго центра тяжести С
р.чпеп
шс =¦ — lc°-z-
Задача 361. ЛипеИка эллипсографа АП приводятся в движение
посредством кривошипа ОС, вращающегося с постоянной уг.ювоН
§2]
МЕТОД КИНЕТОСТАТИКИ
3-17
Определить главный вектор и главный момент сил инерции ли-
линейки АВ веса Р и длины /, считая ее однородным прямолинейным
стержнем; ОС=АС= CB=j.
Решение. Линейка АВ совершает плоское движение. Поэтому
ее силы инерции приводятся к силе, ранной главному вектору Vl/), и
паре сил, момент которой ра-
i /I V
вен главному моменту тс .
Сила, ранная главному век-
вектору сил инерции У(Л, прило-
приложена в центре тяжести линейки
и направлена в сторону, про-
противоположную ускорению wc
центра тяжести С: V(y) =
= — Mwc. Так как центр тя-
тяжести С линейки АВ одновре-
одновременно являемся концом криво-
кривошипа ОС, то wc = wCn-\-wCz.
При постоянной угловой ско-
скорости нращепия кривошипа К задача 361.
о»Сх = О, итак, wc = и>Сп. Уско-
Ускорение wc, будучи центростремительным, направлено от С к О. Сле-
Следовательно, главный вектор сил инерции V'7' направлен вдоль криво-
кривошипа ОС от оси вращения О. По модулю он ранен И7'= УИдос. Учн-
/
тывая, что Tt'c = wQn = \ОС\ со^ = ~) шп> находим:
• Главный момент сил инерции линейки АВ определяется по фор-
муле /?гс'= — 1сгг, где /с= о момент инерции линейки АН от-
относительно оси, проходящей через ее центр тяжести С перпендику-
перпендикулярно к неподвижной плоскости, а е2 — проекция углового ускорения
линейки АВ на ось z, перпендикулярную к плоскости рисунка.
Определив положение мгновенного центра скоростей ^ линейки
как точку пересечения перпендикуляров, восставленных из точек Л и В
к соответствующим скоростям, находим углоную скорость линейки АВ.
Точка С как конец крипошина ОС имеет скорость г»с= | ОС, ш,,;
с другой стороны, скорость точки С, лежащей также на линейке АВ,
дается формулой vq = \ С& [ ш. I Icmuvy \ СаР | и> = ' ОС | сои, т. е.
о) = —-г.-Л'¦; сои. Так как ОС= С±Р = -г , то угловая скорость липой-
ки АВ раина со = со0. Значит, угловое ускорение линейки равно нулю:
348 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧПК [ГЛ. X
е=-^°- = () и, следовательно, е2 = 0. Итак, главный момент сил инер-
инерции линейки ранен пулю:
Значит, силы инерции точек линейки Пршюдятся к равнодействующей
силе, раиной главному вектору сил инерции.
Задача 362. Определить главный вектор и главный момент сил
инерции зубчатого колеса 2, находящегося но внутреннем зацеплепги
с неподвижным зубчатым коле-
колесом /. Колесо 2 неса Р и ра-
радиуса г приводится и движение
крниошипом ОА = 1г, имеющим
и данным момент угловую ско-
скорость о>0 и угловое jCKopeni-е etf.
Колесо 2 считать сплошным одно-
однородным диском.
Решение. Колесо 2 сопер-
шает плоское движение. При этом
главный вектор сил инерции У(У'
направлен противоположно уско-
ускорению wA и
А
равен по модулю
Так как w A =
,*, а О А = '2г, то
(см. рис. а).
Главный момент сил инерции
колеса 2 имеет знак, противопо-
противоположный знаку проекции углового
ускорения, причем
Для определения углогого
ускорения ei2 колеса 2 восполь-
воспользуемся его мгновенным центром
скоростей &, который, как изве-
известно, имеет только касательное ускорение. Траекторией точки аР
является гипоциклоида, касательная -с к которой в точке аТ3 направ-
направлена вдоль кривошипа.
Направим ось i вдоль кривошипа 0.4 и ось я — перпендикулярно
к оси -.. Так как w<p лежит па оси т, то проекция wgi на ось п
равна нулю: л ,,.
— =0. B)
К задаче 362.
§ 21 МЕТОД КИНЕТОСТАТИКИ 349
Определяем теперь ускорение wgi, приняв за полюс точку А, т. е.
&
Спроектировав это векторное равенстио (см. рис. б) па ось и и
использовав формулу B), получим:
Так как «$>и„=| АР\цг = гг.ь, а о»-д„ = —|ОА|е0, = —2геол,
то, подставив эти значения в формулу C), имеем:
4,= —2ew. D)
Момент инерции колеса 2 относительно оси А, перпендикулярной
к его плоскости,
После подстановки е4г из формулы D) и /д из формулы E)вA),
находим:
2°. Метод кинетостатики. Методом кинетостатики назы-
называется формальный прием, дающий возможность записать уравнения
движения в ииде уравнений ргжпонесия.
Применяя метод кинетостатики к движущейся материальной точке,
следует записать условие ее «равновесия» под действием задаваемых
сил, сил реакции связей, а также фиктивных сил инерции:
F+R ~>J— О,
где F—равнодействующая задаваемых сил, приложенных к матери-
материальной точке, К—равнодействующая сил реакций связей, наложен-
наложенных на материальную точку, J — сила инерции материальной точки,
рапная по модулю произведению массы точки на модуль ее ускорения
и направленная противоположно ускорению: ./== — mw.
В формулировке метода кинетостатики сила инерции именуется
фиктивной, так как она к данной материальной точке не приложена.
(В действительности гта сила инерции приложена к «ускоряющим»
материальным точкам и к связям, наложенным на данную точку.)
Добавление к силам F и R силы инерции J, не приложенной к данной
точке, приводит, естественно, к тому, что уравнения движения прини-
принимают вид уравнений равновесия.
При движении материальной точки по кривой силу инерции можно
разложить па две составляющие, соответствующие касательному и
350
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
нормальному ускорениям точки: касательную силу инерции У, и нор-
нормальную силу инерции Jn (рис. 151), причем
По модулю
= — mw = Jz-\-Jn.
.-= т
w"n.
Метод кинетостатики и приложении к несвободной системе мате-
материальных точек приводит к системе урапнений:
Число векторных уравнений равно числу материальных точек
системы.
Если изучаемым объектом является твердое тело, то, применяя
метод кинетостатики, надо составить уравнения «равновесия» этого тела,
включив в них задаваемые силы,
силы реакция связей и фиктивные
,'' силы инерции.
Методом кинетостатики можно
пользоваться при решении прямых
задач динамики несвободной си-
системы материальных точек, т. е.
при решении задач, в которых
по заданному движению опре-
определяются неизвестные силы. Одна-
Однако все эти задачи несколько
менее громоздко могут быть реше-
решены обычным путем — посредст-
посредством применения оспоипого урав-
уравнения динамики к каждой из материальных точек системы, т. е.
mkwk = Fk-\-Rk, где А=1, 2, ..., п.
При решении же обратных задач, т. е. таких, в которых по задан-
заданным силам определяется движение, применение метода кинетостатики
нецелесообразно.
Мы излагаем в этой книге метод кинетостатики, как уже упоми-
упоминалось выше, лишь потому, что им, в силу установившихся традиций,
еще довольно часто пользуются в различных инженерных дисципли-
дисциплинах. (При этом иногда метод кинетостатики ошибочно именуют «прин-
«принципом Даламбера», который в этой книге не излагается.)
F
§2) МЕТОД КИНЕТОСТЛТГКИ 351
Методом кинетостатики можно пользоваться в случаях, когда в
число заданных и неизвестных величин входят: .массы материальных
точек, моменты инерции твердых гел, скорости и ускорения точек,
угловые скорости и угловые ускорения твердых тел, силы и момен-
моменты сил.
Решение задач с помощью метода кинетостатики
рекомендуется выполнять в следующей последова-
последовательности:
1) изобразить на рисунке задаваемые силы, приложенные к каждой
из материальных точек;
2) применив принцип оспобождаемости от связей, иЛЬрТСЗить
силы реакций связей, наложенных на каждую из материальных точек
системы;
3) добавить к задаваемым силам и силам реак- /У-'/'^' ¦ j 2<й
пий связей фиктивные силы инерции материаль- ^>
ных точек системы; <^
4) выбрать систему координат; <
5) составить уравнения «.равновесия» для каж- ;>
дой из материальных точек системы; <.
6) решив составленную систему уравнений,
определить искомые величины.
Задача 363. Груз веса Р совершает колеба-
колебания па пружине, поднешенпоИ верхним концом
к потолку, но закону Jt = asinwf. Определить
силу натяжения пружины. Массой пружины пре-
пренебречь. Начало оси х, направленной но нерти-
кали вниз, находится п положении равновесия
груза.
Решение. К грузу приложены две силы—
его вес Р и упругая сила пружины, проекция ко-
которой Па ось х равна Fx.
Для решения задачи методом кинетостатики к задаче ЗСЗ.
прикладываем к грузу еще фиктивную силу инео-
ции У— w. (Сила инерции названа фиктивной, так как она п
действительности к грузу не приложена.)
Зная закон движения груза х= a sin <at, определяем проекцию его
ускорения на ось л':
wx = х = — аы2 sin uit.
Следовательно, проекция на ось х силы инерции J имеет вид
р Ра
J.. = —• - w.. = -- аш' sin ш/.
"А р- А р
Запишем уравнение «равновесия» груза и проекции на ось х.
Мы можем уравнению движения формально придать вид уравнения
'?
352 ДИНА.ЧИКЛ НЕСВОБОДНОЙ СИС1ЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. X
рапповесия, потому что силу инерции J приложили к грузу, в то
время как и действительности она па груз не действует:
Из этого уравнения находим:
п
Учитывая, что Jx= - аи? sin u>?, получим:
h
-awsmMt).
' g J
Искомая сила Т натяжения пружины равна упругой силе F по
модулю и направлена противоположно, т. е.
Т=-Р~\ am' sin <ot.
в
Нетрудно определить максимальное и минимальное значения силы Т:
7'тах = Р-!- 'I а>о\ 7шш = Р— --а(о2.
Итак:
р _ Р- Д@« < 7'ss; Р -'- ~ auA
Так, в частности, при Р = 2 кг, а = 2 см, о> = 100 сек~х нахо-
находим: — 38,8 «ass; 7'sS —42,8 кл В случае же равновесия груза
па пружине Г^ '2 кг.
Не прибегая к методу кинетостатики, эту прямую задачу можно
О мл о решить с помощью дифференциального ураинепия движения
груза в проекции па ось _v:
Р. р — Р-' - F
Из последнего уранпепич при учете соотношения х — —aa>2sino)i
легко находится
FX = —{P— Р ашг sin ut).
Таким образом, применение в этой задаче метода кинетостатики
несколько более громоздко (приходится дополнительно определить
и изобразить силу инерции) и никаких преимуществ перед использо-
использованием дифференциального уравнения движения материальной точки
не имеет.
Задача 364. При исполнении циркового аттракциона мотоциклист
диижеяся с постоянной но величине скоростью v по внутренней по-
поверхности полусферы радиуса г. Он оиисыиает в горизонтальной
плоскости окружность радиуса Л/У == р. Схематизируя мотоциклиста
S 21
МЕТОД КИНЕТОСТАТИКИ
353
с мотоциклом в виде точечной массы веса Р, вычислить давление на
полусферу и максимальную скорость движения. Коэффициент трения
резиновых покрышек о внутреннюю поверхность полусферы равен /.
Решение. Проведем вертикальную плоскость через центр О
и точку Л, изображающую произиольное положение точечной массы.
Оси т, и i?i обозначены на рисунке. Обозначим а—угол, образуемый
касательной т, с вертикалью. К точке А приложена задаваемая
сила — вес Р. Силами реакций связей являются: нормальная сила
П
реакции поверхности полусферы R и сила трения
А
мерном движении точки А
ее нратателыюе ускорение
равно пулю. Поэтому и
вращательная сила инерции
раина нулю:
У, = — mw. = 0.
Центробежная сила инер-
инерции точечной массы А на-
направлена противоположно ее
центростремительному уско-
ускорению wn, т. е. по горизон-
горизонтали направо. По модулю
, Р Р ь-
Frp.
При равно-
равноК задаче 364.
Сила трения /^р направлена вдоль оси т4 вниз (см. рисунок).
Применяя метод кинетостатики, запишем уравнения «равновесии»
точки А в проекциях на оси хх и пх:
— Р cos
sin а =
Fkn, =R~ Psinn — Jn cos a = 0.
Учитывая, что Kp'1" =/R, a Jn==
запишем эту систему
уравнений в виде:
—/R —
Р «шах
S Р
sin a = 0,
R — Р Sin а — — ^^- cos а = 0.
ё Р
Решив систему уравнений, получим:
,_ Р -.1 .1 -1-/1^
К sin I— /COS a ' Vm™ У & lga—~T~
12 Теоретическая механика, том II
354 ДИНАМИКА НЕСВОБОДНОМ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК |ГЛ. X
Из треугольника ОАВ имеем: cosa = - , т. е.
sina=-у г1 —Р" и tga = -^—
После подстановки этих значений окончательно получим:
™ i/^L±LyEzIE r Pr
^I/
\ Vr' — f—f? уг- -p-'—fy
Ид<о^ая нормальная сила давления па внутреннюю поверхность
полусферы равна по модулю нормальной силе реакции R и направ-
направлена противоположно. ч
Центробежная сила инерции Jn, которой мм пользовались при
решении задачи методом кинетостатики, в действительности не при-
приложена к точке А. (Условное приложение этой силы инерции к рас-
рассматриваемой материальной точке привело пас к уравнениям «равно-
«равновесия» этой точки, которая в действительности движется с ускоре-
ускорением wn.)
Поэтому при решении данной задачи с помощью основного закона
динамики следует, естественно, учитывать только те силы, которые
действительно приложены к материальной точке, т. е. Р, R и FTp:
В проекциях на оси я, и '( находим:
mwn cos а = R — /J sin а,
— tnwn sin a = — /-™ax — P cos я.
Учитывая, что m = —, wn = , F™*x=fR, получим после
& P
решения этой системы уравнений искомые величины R и vm3x.
Решение задачи методом кинетостатики несколько более громоздко,
так как приходится дополнительно определять и изображать силу
инерции Jn. Следовательно, целесообразнее решать задачу с помощью
основного закона динамики.
Задача 365. Ведущее звено О1В шарнирного четырехзвеппика
О\ОгАВ совершает качания вокруг горизонтальной оси Оъ перпен-
перпендикулярной к плоскости механизма, по закону ср = ср0 sin kt.
Определить добавочные давления на шарниры А и В от сил
инерции звена АВ веса Р, если О\В=О^А = 1, О\О-г= ВА.
Звено АВ считать тонким однородным стержнем.
Решение, Четырехзвенпик OiOqAB является параллелограммом,
так как по условию O1Oi= BA и O\B = O-LA. Следовательно, зве-
звено ВА будет перемещаться, оставаясь все время параллельным не-
неподвижному звену OiOit т. с. будет совершать поступательное дви-
движение.
МЕТОД КИНЕТОСТАТИКИ
При поступательном движении твердого тела силы иперпии при-
приводятся к равнодействующей #<у>=:—Mw, приложенной в центре
тяжести. При поступательном диижении тнердого тела ускорения всех
его точек пекторно рав-
пы. Поэтому достаточно "/^
«аределить ускорение лю-
бюй точки стержня А В.
Найдем ускорение точки
В, являющейся одповре-
меппо концом звена ОХВ:
По модулю
К задаче 365.
Ускорение wB образует со звеном ОХВ угол a=arctge-^.
Зная угол поворота 9 звена 0{В, определяем шг и вг:
=-j{ = <?0k cos kt< гг = J§ = —
' sin
Следовательно,
<f 0 COS" kt
Модуль равнодействующей сил инерции звена А В:
Р Р
= --- Wn^ —
sin'2 kt
cos4 Ar<.
A)
B)
Равнодействующая сил инерции приложена в центре тяжести зве-
звена А В, т. е. в его середине. Поэтому искомые давления на шар-
шарниры А и В от сил инерции звена АИ оказываются векторно рав-
равными
По модулю
При вертикальных положениях знепьев О,/? и О.2Л угол попо-
попорота 9 равен нулю. Так как <? = yas\n kt, то это соответствует
моменту нремепи ^ = 0. Подставляя / = 0 it формулу C), получим:
Эти добавочные давления направлены по вертикали вниз.
12*
356
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
Задача 366. Однородный круглый диск веса Р и радиуса г под
действием пары сил с моментом т вращается вокруг неподвижной
вертикальной оси z, перпендикулярной к его плоскости. Проекция на
ось г угловой скорости диска рапна: ш2 = а(, где а — постоянная. Центр
тяжести С диска отстоит от оси вращения на расстоянии ОС=а.
Определить динамические силы реакций подпятника А, полтин-
полтинника В и величину врашателыюго момента, если AO = h и OB=2h.
Силами сопротивления движению пренебречь.
Решение. Изобразим подвижные оси координат, связанные
с вращающимся диском. Ось г направим по оси вращения, ось у —
вдоль линии, соединяющей
точку О с центром тяже-
тяжести С диска, ось jc — так,
чтобы она имеете с осями у
и г образовала правую си-
систему осей координат.
Задаваемыми силами яв-
являются: сила тяжести диска Р
и пара сил с вращающим
моментом т. Составляющие
динамических сил опорных
—^ реакций обозначены Rax,
Ras, RAz, RBx, Rnv. Решаем
задачу методом кинетоста-
кинетостатики.
Для составления уравне-
уравнений «равновесия» диска сле-
следует к задаваемым силам и
силам реакций связей доба-
добавить силы инерции диска.
Эти силы инерции приво-
приводятся к силе, равной главному вектору, и паре сил, момент которой
равен главному моменту. Приняв за центр приведения сил инерции
центр тяжести С диска, изобразим составляющие главного вектора
сил инерции "Vn\ v[J); /Яс" — главный момент сил инерции отно-
относительно оси, проходящей через центр тяжести С перпендикулярно
к плоскости диска.
Разложим ускорение центра тяжести С диска Wq па его центро-
центростремительную wcn и вращательную и>сх составляющие.
Так как V(y' = — MWq, to V(n7) = — Mwcn, v\J) = —.
причем
V\P = V(yJ) = MwCn = ~ a«?, V[J) = V(/> = MwCz = ? az2
К задаче t366.
,7
Учитывая, что (ог =
(/«1,
получим: E^ = -—^ = a.
§ 21 МЕТОД КИНЕТОСТАТИКИ Зо7 ,
Итак, сила У„ , равная центробежной составляющей главного
вектора сил инерции диска, приложена в центре тяжести С диска,
напраплена вдоль оси х от оси вращения, и ее проекция на ось у
дается формулой
V и — аа. A)
Сила V\ \ равная вращательной составляющей главного вектора сил
инерции диска, приложена также в центре тяжести С диска, направ-
направлена противоположно вращательному ускорению wcz точки С, т. е.
параллельно положительному направлению оси х, н ее проекция па
ось х равна
у<': = |йа. B)
Главный момент сил инерции диска относительно оси, проходя-
шей через центр тяжести диска С перпендикулярно к его плоскости
Так как /с=^—, a s^=a, то
>п(с] = — нг- а- C)
Знак главного момента сил инерции тс' противоположен знаку про-
проекции углового ускорения гг.
Переходим, согласно методу кинетостатики, к составлению урав-
уравнений «равновесия» диска при наличии задаваемых сил, сил реакций
С!!язей и фиктивных сил инерции. Следует составить шесть уравне-
уравнений «равновесия».
Ц тх (Fk) = - Ра -1- RAy h - RRy 2h = О,
2 «, (Fb) = - RAxh -|- R,iy2h = 0,
2 /и, (ffc) = ж -f /«[/' - V[J)a = 0.
Подставив сюда значения Vj/', Vi7), «сУ) из формул A), B), C)
и решив систему уравнений, имеем:
^ = - ih № "Г «АЛ'). '« - 27 ^ + 2) Х'
358 ДИНАМИКА ННСВОПОДПОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Как следует из полученных результатов, только составляющая
силы опорной реакции подпятника ИЛг не зависит от состояния диска,
т. е. остается неизменной как при покое, так и при вращении диска.
Совершая в этой задаче приведение сил инерции диска, можно
было за центр приведения выбрать любую точку диска. Так, если
за центр приведения взять точку О, то силы V}/' и V[J\ оставаясь
неизменными по величине и направлению, окажутся приложенными
в точке О. Главный момент сил инерции т\' относительно оси z
изменится по величине:
Учитывая, что г = а, а
находим:
При этом первые пять уравнений остаются неизменными, а шестое
уравнение принимает вид
Решая это уравнение, получаем:
что совпадает с полученным прежде результатом.
Заметим, что если бы в данной задаче требовалось определить
только величину вращающего момента т, то это можно било бы
осуществить значительно проще, составил дифференциальное уравне-
уравнение вращения диска вокруг неподвижной оси z:
Так как
? тг (Fek) = т, 1г = 1с+Р-сР=?- (га + 2а»)
и ср = гг = а, то уравнение принимает вид
121
МЕТОЛ КИНЕТОСТАТИКИ
ЗГ>9
Следовательно, шестое уравнение в системе, составленной при ргшс-
пии этой задачи методом кинетостатики, является, по существу, диф-
дифференциальным уравнением вращения твердого тела покруг непо-
неподвижной оси.
Задача 367. Однородное круглое колесо веса Р и радиуса г
катится без скольжения по горизонтальному рельсу Определить нели-
чииу момента пары сил, которую
нужно приложить к колесу для
того, чтобы центр тяжести С ко-
колеса двигался со скоростью vc=at,
где а — постоянная. Найти также
пеличину нормальной силы реак-
реакции R рельса и модуль силы тре-
трения /\р колеса о рельс, если коэф-
коэффициент трения качения равен/к.
Решение. К колесу прило-
приложены задаваемые силы: вес коле-
колеса Р и пара сил с искомым вра- ' к задаче 367.
тающим моментом т. Силами
реакций связей являются: нормальная сила реакции R рельса, выне-
вынесенная в сторону движения па расстояние /к от центра тяжести С
колеса, и сила трения FTp, напранлеииая вдоль рельса в сторону движения.
Добавляем силы инерции колеса, совершающего плоское движе-
движение, приняв за полюс точку С. Силы инерции приводятся к силе,
равной главному вектору V(J\ и паре сил, момент которой равен
главному моменту тс'\
Сила инерции V<7> приложена в центре тяжести С колеса, направ-
направлена в сторону, противоположную его ускорению wc, т. е. налепо,
и равна взятому с обратным знаком произведению массы колеса на
ускорение его центра тяжести С, т. е. V(J> =—Mwc.
Выберем систему неподвижных осей координат ху, изображенных
на рисунке.
По условию vCx = at, тогла wCx=^ ^x = a. Следовательно,
(О
'/)
Знак главного момента сил инерции колеса тс противоположен
знаку проекции углового усксрения ег на ось z, причем
Так как
Cx
360 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК ' [ГЛ. X
ТО
B)
Решаем задачу методом кинетостатики. Учитыная, что все зада-
задаваемые силы, силы реакций связей и силы инерции лежат в одной
плоскости, составим три уравнения «равновесия»:
VF — F J-И'1- 0
^/j rkx ~тр I vx и>
C)
? тс (Fk) = m + »#' -FTpr- RfK = 0.
Воспользовавшись формулами (I) и B), запишем систему C) в виде:
Р )
тр~ ga • j
P-R = 0, } D)
Рг& I
Решив систему уравнений «равновесия» D), получим: *
' ТР а ' \2g i jk i й j •
Эту задачу можно также решить с помощью дифференциальных
уравнений плоского движения твердого тела:
п. я п.
Действительно, изобразив на рисунке псе силы и моменты, кроме
главного вектора и главного момента сил инерции колеса, запишем:
Мхс = 7"-'7|))
>С9 — т — Fivr — Я/к-
Учитывая, что
С Lx С • Y" у С '^
получим:
Рт
§ 21
МЕТОД КИНЕТОСТАТИКИ
361
Эта система уравнений тождественна системе уравнений D).
Решение задачи методом кинетостатики оказалось более громозд-
громоздким, так как пришлось определять главный вектор и главный момент
фиктивных сил инерции колеса. Применение же дифференциальных
уравнений плоского движения твердого тела короче и естественнее,
чем использование метода кинетостатики.
Задача 368. Грузы А и В соединены топкой перастяжимой питью,
переброшенной через блок D. При опускании вниз груза А веса 1\
блок D веса Р3 вращается во-
вокруг своей неподвижной оси,
а груз В веса Р9 поднимается
кперх по наклонной плоскости,
расположенной под углом а
к горизонту. Определить уско-
ускорения грузов А и В и силы
реакций левой и праиой пет-
вей нити. Коэффициент трения
скольжения груза В о наклон-
наклонную плоскость равен /. Блок D
считать однородным круглым
диском. Массой нити прене-
пренебречь.
Р е ш е п и е. Система со-
состоит из трех масс: груза Л,
груза В п блока D.
Pt'iuaeM задачу методом ки-
кинетостатики. Применив принцип
освобождаемости от связей,
рассмотрим каждую из масс
в отдельности.
Груз А, опускаясь уско-
ускоренно вниз, движется поступа-
поступательно с искомым ускоре-
ускорением w.
К грузу А приложены (см.
К задаче 368.
рис. б): одна задаваемая сила —
его вес Ри и сила реакции правой истин нити 7\. Ускорение груза
направлено вниз, поэтому равнодействующая его сил инерции Jt па-
пауз
правлена вверх: 7j = L w, или в проекции на ось х:
е
Запишем уравнение «равновесия» груза А в проекции на вертикаль-
вертикальную ось х:
362 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
т. е.
р — т — .Jw = о. л 1
Груз В, поднимаясь по наклонной плоскости вверх, движется по-
поступательно с тем же ускорением w.
К грузу В приложены: одна задаваемая сила — его вес Pit нор-
нормальная сила реакции R наклонной плоскости, сила трения скольже-
скольжения FT. с груза В о наклонную плоскость, сила реакции левой ветни
нити Т-1 (см. рис. в).
Ускорение w груза В направлено вдоль наклонной плоскости
вверх. Поэтому равнодействующая сил инерции Jq груза В направлена
параллельно линии наибольшего ската наклонной плоскости вниз:
Р Р
Ji= -W. Ее проекция: J.is — —-sws (направление оси s указано
па рис. в).
Составим уравнение «равновесия» груза В в проекции на ось s:
72 — Р^ sin a — 1-\_ с -(- Jis = 0.
р
Учитывая, что J^s = ws, FT c = fN = fP^ cos а, запишем это
уравнение в виде
р
Тч — Р9 sin а—/Р9 cos а ws = 0. B)
Переходим к рассмотрению блока D, вращающегося вокруг непо-
дпижной оси z.
К блоку D приложены: одна задаваемая сила — его вес Р^, сила реак-
реакции правой ветви нити Т\, сила реакции левой ветви нити Т'.г, состав-
составляющие силы реакции неподвижной оси R, и R% (см. рис. г).
Силы инерции блока приводятся к паре с моментом /и'/', обратным
по знаку проекции углового ускорения tz и ранным произведению
момента инерции блока lz относительно оси г вращения блока, на-
направленной за плоскость рисунка, па проекцию его углового ускоре-
ускорения ?,, т. е. m,'^—/jSz.
Обозначив радиус блока г, запишем: 1г = -1^—. Следовательно,
Рассматривая «равновесие» блока D под действием задаваемых сил,
сил реакций связей и фиктивных сил инерции, запишем уравнение
моментов относительно оси вращения z:
§ 2| МЕТОД КИПКТОСТАТИКИ 363
(так как ось z направлена за плоскость рисунка, то положительным
для читателя является направление по часовой стрелке, а отрицатель-
отрицательным — против часовой стрелки).
На основании принципа равенства действия и противодействия:
T'i = — 7„ 7^ = —Г2, т. с. по модулю: Т\ = Г, и Т.г= 74. После
подстановки в уравнение моментоп значения /я1/1 и сокращения па г
находим:
7'*+^-7'1=0. C)
Проекция ускорения точки нити, лежащей на ободе блока, равна
wx=ws — r^ D)
(проскальзыванием нити по ободу блока мы пренебрегаем).
Остается решить систему уравнений A), B), C) и D):
— Р2 sin а —/Р2 cos а - ws = О,
E)
Гг. = Wx = Ws.
Определяя из этого уравнения неизвестные wx, Tt и 7"а, получим:
_ 2 Р, -Ра( si»a -I-/ COS:-)
""¦* «• 2Р,+2ЯаН-Ра
2PtP., (I + sin а -|-/ cos a)
/] — 'Wy. + 2P2 + P» '
T 2Р,Р„ A-|- Sin a + / сой a) — P., |P, — Pg ( sin a + / COS a)]
2~ 2Р—\-2Ря + Рл • ,
При Р, ^> A2(sin a -\~fcos a) имеем а^ 0, т. е. ускорение груза А
направлено вниз.
Если решать эту задачу, пренебрегая массой блока D по сравнению
с массами грузов А и В, то, считая Ря = 0, находим:
vm _ п Р, - Р,( Я'Ч а 4-/COS а) _ _ Р,Р, A + sin а + / COS а)
Итак, величины сил реакций лепой и праиой пегвей нити, пере-
переброшенной через блок, различны при учете массы блока и одинаковы,
если массой блока пренебречь.
Если в данной задаче требовалось бы определить давление блока D
на его ось, то при рассмотрении равновесия блока (см. рис. г) сле-
следовало бы, кроме уравнения моментов относительно оси z, составить
364 ДИНАМИКЛ НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
также ураннепия проекций всех сил па горизонтальную и вертикаль-
вертикальную оси:
R, — Т'г cos а = О,
R.i — P3— 7,— r2sina = 0,
откуда
??, = Т'г cos а = Тг cos а,
Я, = Р3 + '/¦; + 7', sin а = Я3 — Г, -f 71, sin а.
После подстановки значении 7'i и 7'а из формул E) мм получим
величины составляющих сил реакции оси блока R{ и R^. Искомые
составляющие давлений блока О па ось противоположим по направ-
направлению соответствующим составляющим сил реакций оси Rx и Rt и
равны им по модулю.
Если в данной задаче требовалось бы определить только ускоре-
ускорение w груза А, то значительно проще получить результат, применив
общее уравнение динамики (см. ниже задачу 390) или уравнение
Лаграпжа второго рода.
Задача 369. Топкий однородный стержень KOL, изогнутый под
прямым углом, шарнирпо прикреплен и точке О к вертикальному
валу АВ. Найти величину постоянной угловой скорости о) вращения
пала, при которой сторона стержня ОК отклонена от вертикали на
угол а (см. рис. а). Определить также силу реакции в шарнире О и
опорные реакции подпятника А и подшипника В, если ОА'^а,
О/=й, 0.4= 2/z, OB = h; 7 — масса единицы длины стержня.
Решение. Подвижные оси ху.г свяжем с изогнутым стержнем
и палом. 1 (а.'гало координат возьмем в шарнире О. Оси у и г напра-
направим соответственно вдоль ОК и OL. Ось х изобразим так, чтобы
пмесче с осями у и z она образовала правую систему осей декарто-
декартовых координат.
Вес части стержня ОК равен f\ = fga, вес части стержня OL
ряпсп Pz — ^gb.
Кроме задаваемых сил Р, и Рь следует изобразить силы реакций
связей. Для стержня KOL связью является шарнир О.
Изобразим составляющие силы реакции шарнира О: ROx, Ro ,, Rnz
(см. рис. б).
Для применения метода кинетостатики следует к задаваемым силам
и силам реакций связей добавить силы инерции стержня.
Выделим па стороне стержня ОК элемент длины dy на рас-
расстоянии у от точки О, а па стороне стержня OL — элемент длины dz
па расстоянии z от точки О. Массы этих элементов равны
dmOL = ^dz. ' A)
i Л
МЕТОД КИНЕТОСТАТИКИ
3G5
Приложим к выделенным элементам стержня фиктивные центро-
центробежные силы инерции, направленные противоположно соответствующим
ПВ
К задаче 369.
центростремительным ускорениям, т. е. по горипонталп направо.
По модулю
dJn0K = dmOKwn = dmoJl^> dJn0L = diaOLh^.
306 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Подставив значения dtn0K и dm0L из формулы (I), а также ht=y sin я
и ft2 = .zcosa, махолим:
rfJnOA. = 7J"°9 sin а((У' dJnOL = iztoq cos adz. B)
Вращательные силы инерции выделенных элементов равны нулю, так
как угловая скорость со вращения вала постоянна.
Приложив мысленно к к.зждому из элементов стержня KOL соот-
соответствующие фиктивные центробежные силы инерции,составим шесть
уравнений «равновесия» стержня KOL:
] F"y = Roy + Pi cos я И- A cos a -f $ dJn0K sin я +
(ОАГ)
(Oi)
(ОАГ)
+ \ dJn0LC0Sa = °'
@/.)
= — pi 1 sina —P9-|cosa +
+ 5 dJnOK\OM\~ \ dJnO,\ON\=0,
CO/O (Of.)
Подставляем в систему уравнений «равновесия»: 0М=у cos a,
OA/=zsina, Pl = iga, P%-=-^gb и значения ^./П(Ж и ^„Oi из фор-
формулы B). Получим:
°
Oy i
о, —'
]ga cos a-p
fga sin a — ¦
-[gb cos a-|-
fgb sin a-J-
- -fCO2 Sin2
¦уш* sin a
a^_vrfy-|-7o)9 sin
0
cos а\ З'ф'-^Т01
0
a cos
>¦' cosa
b
a \ z dz = 0,
ii
b
a.^zdz = Q,
0
^- sin a — Щу- cos a -|- -[-со'' sin a cos a ^ _y2 afy —
ft
— 701* sin a cos a \ zidz = 0,
и
I 2) МЕТОД К1ШР.ТОСТАТИКИ 3G7
т. е.
ROv -\--\ga cos а + -rg* cos а-j- -—— sin12a —j- —— sin a cos a = 0,
/?Ог — iga sin a — fg» sin a ~j- ~~ sin a cos я -p -4^— cos2 я = 0,
га . гб , ыа . oi6 .
— ~ sin а — -.у cos °H—о" sin a cos а q~ 31n a cos a= 0.
Решив эту систему уравнений, получим:
3g as sin i-!-J! cos a
2 (U'1 — Йл) Sin a COS а '
. 3 (a2 Sin a + b- COS
cos а + ^ L___^
3 (a2 sin
Так как ш'г^>0, то сращение стержня KOL, описанное в
задачи, ноа.можно только при а^>Ь. В случае а^с.1) стержень при-
примет положение, изображенное на рис. в.
Перехолим к определению сил опорных реакций подпятника А
и подшипника В (см. рис. г). К шарниру О со стороны стержня KOL
приложено давление Nlt составляющие которого направлены проти-
противоположно составляющим сил реакций ROx, Ro , ROz и раины им но
модулю, т. е.
Изобразим новую систему подвижных осей х^у\г\, также спязан-
jiejx со стержнем и палом. Начало координат пыбираем в подпят-
подпятнике А, ось z1 направляем вдоль оси вала АВ, ось хг параллельно
оси х. Ось j/j изображаем так, чтобы имеете с осями л^ и гх она
образовала праиую систему осеп координат.
К валу АВ приложены задаваемые силы NQv и N0;z (NOx=0)
и состаиляющие сил реакций подпятника А и подшипника В: R.Ajst
^lAy' ^lAz' R\Bx> R\liy
Составляем шесть уравнений «равновесия» вала АВ:
2 />, = R, Ay + «,«, +NOy sin а - No, cos a =. 0,
X ^ = ^1Л, - Noy t:os а - Notsin а =: °-
3G8 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
X «,» (fb)=NOl 2ft cos a — NOy 4h sin a — RlRyU = 0,
Pemnn эту систему уравнений, получим:
Ям, = Я1Я, = °- *,**=<% cos я + ^ sin а,
m» = з- (^о, cos а — ло, sin а)' Ria,. = J Wo* cos а — Noy sin *)•
Так как
i 3 (rt'sin a-)-ft3 COS а)а
osa + (
1
J,
Oz i°\y i ¦ 4 (a3 — 6я) m
то окончательно находим:
_n _0 p ___J
: t%-\Bx U' Ai/v 4
4 '^ (U'1 — ftn) SIII 2 COS 2 '
cos яJ _ . ,.
Задача 370. Вибрационная машина приводится в дииженис по-
средстпом кулисы, изображенной па рис. а. Крииошип кулисы ОЛ
веса Р| и длины г вращается в направлении по часовой стрелке
С ПОСТОЯННОЙ угЛОВОЙ СКОРОСТЬЮ (О.
В начальный момент- крмпошми занимал верхнее вертикальное
положение. Определить вертикальное давление машины па фундамент
и вертикальную составляющую данлеиин на ось О кривошипа ()А,
если вес рамки кулисы В и штока D равен Р.2, вес станины К равен Рл.
Всеми остальными массами машины пренебречь.
Р е ш е 11 и е. Изучаемая система состоит из трех масс: криможнпа,
рамки кулисы и папины. Применяя метод кинетостатики, рассмотрим
движение каждой из трех масс в отдельности.
К кривошипу О А приложена одна задаваемая сила — его вес Р^
На кривошип наложены связи: ось кривошипа О и рамка кулисы В.
Па рис. б изображены две составляющие силы реакции #, и Rt
оси О и две составляющие силы реакции рамки кулисы R3 и Rt.
Для применения метода кинетостатики остается добавить силы
инерции кривошипа ОА. Взяв за центр приведения сил инерции
центр тяжести Ct кривошипа, находим силу, равную главному пек-
тору сил инерции Vй' = — Mwc . Угловая скорость ш вращения
о
5
370 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
криношипа постоянна, поэтому е = 0 и ускорение точки С\ является
центростремительным:
Итак, главный вектор сил инерции V( ' кривошипа направлен вдоль
кривошипа от оси О и равен по модулю \/7)=—'-~шг. Глаимый мо-
момент сил инерции равен нулю: отс) = — 1сгг=0 (так как ег = 0).
Следовательно, система сил инерции приводится к равнодействующей,
равной силе V(J).
Взяв начало координат на оси О кривошипа О А, направим ось у
по вертикали ввер'й.
В соответствии с методом кинетостатики, запишем уравнение «.рав-
«.равновесия» кривошипа в проекции на ось у:
9
=0.
Учитывая, что V^J)=—-y «о*, а угол поворота кривошипа 9 »ри
равномерном его вращении пропорционален времени 9 = M^i получим:
-Я,+«, + /?»+^«4 cos arf = 0. (I)
Переходим к рассмотрению рамки кулисы В и штока D (рис. в).
К ним приложена одна задаиаемая сила — их вес Яа. Связями яи-
ляются кривошип А и вертикальная памравляюи|,ая штока. Изобразим
на рис. в соответствующие силы реакций связей: #;'„ ^j и &я № =
= ^3i ^4= #4).
Так как рамка кулисы В со штоком Z) сопершает поступательное
движение, то силы инерции приводится к равнодействующей $ '==
= —-,у w, приложенной в центре тяжести Q. Для определения
ускорения w запишем уравнение движения точки Сг:
уСа = OL -\- LQt — г cos iot -f- LC\,
где LCi — постоянная. Находим:
?с2 = — ru? cos iot.
Проекция ускорения па ось у оказалась отрицательной, следова-
следовательно, ускорение при cos<o?]]>0 направлено вниз, а равнодействую-
равнодействующая сил инерции направлена вверх и равна
ft'-^^Wcosutf.
Применив мегод кинетостатики к кулисе В и штоку Д запишем
S 2] МЕТОП КИНЕТОСТАТИКИ 371
уравнение их «равновесия» в проекции на ось у:
т. е.
— Pi — R'i -f- — rv>* cos iot = 0. B)
К станине К (рис. г) приложена одна задаваемая сила — ее вес Рл.
Па станину наложены связи: неподвижная горизонтальная плоскость
и ось О кривошипа ОА. Изображаем на рис. г соответстпующие силы
реакций связей R, R* и R[, R'^ (R[ =— Ri, R'i = — #2). Силы инер-
инерции станины равны нулю, так как она находится в покое.
Составим уравнение равновесия станины в проекции на ось у:
— P3-\-R — R'* = 0- C)
Итак, рассмотрев «равновесие» каждой из трех масс в отдель-
отдельности, мы получили систему трех уравнений A), B) и C):
— Pi — R'i + — ™9 cos wt == 0,
Учитывая, что по модулю /^j = R9 и R[ = Ri, из этой системы
уравнений находим:
\- Рг - Р' +g2P» по* cos lot,
Rt = Pl-\-Pi — Pt + 2Pg no* cos «f.
Искомые вертикальные давления равны по модулям реакциям R
и Rq и направлены противоположно.
Решение этой задачи методом кинетостатики является довольно
громоздким.
Целесообразнее решать подобные задачи, применяя теорему о дни-
жепии центра инерции системы материальных точек. Так, для опреде-
определения силы реакции R надо рассмотреть всю систему в целом. При
этом силы реакции Rit #<>> ^з " #i оказываются силами внутренними
и r соответстпующее уравнение не нходят.
Запишем теорему о дпижении центра инерции системы материаль-
материальных точек в проекции на ось у:
Внешними являются пять сил: три силы тяжгсти Р„ Р2, Р3, со-
стапляющие силы реакции горизонтальной плоскости R и /?* и сила
372 ДИНАМИКА ПЕСВОВОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
реакции направляющей штока Ks (см. рис. д). Получим:
Мус = — Л) — Я9 — Р3 -}- R,
откуда
R = Л -|- Я9 -f- Рг -\- Щг. D)
Остается определить Мус:
где уь Уъ и у3 — ординаты центров тяжести масс Ct, C2 и С3. Так
как
Ух = у cos <x>t, y<t = r cos at-\-LC, y3 = — OC3 = const,
то
у I = -= UJ COS @^, V2 = ПО2 COS «tf, J.*3 = O7
и формула E) принимает вид
Му'с = \— (Р\ -\- 2Р$) cos u)t. F)
После подстановки формулы F) в уравнение D) находим:
R = Я, -j- Р^ -f- Р3 — -у~ (А + 2f>2) cos {at-
Исключив из всей системы станину К и вновь применив теорему
о движении центра инерции в проекции на ось у, найдем Rt.
R последнее время в инженерной практике происходит постепен-
постепенное вытеснение метода кинетостатики применением основного закона
и общих теорем динамики.
§ 3. Давление вращающегося твердого тела
на ось вращения
При вращении твердого тела вокруг неподвижной оси возникают
дополнительные давления на опоры 7вердого тела.
Пусть подвижные оси xyz связаны с твердым телом (рис. 152);
О—произвольная точка на оси вращения, ось z направлена вдоль
оси вращения. Оси х и у введены так, чтобы вместе с осью z обра-
образовать правую систему осей координат. М — масса твердого тела,
(О — угловая скорость твердого тела, е — угловое ускорение твердого
тела, С(хс, ус, zc) — центр тяжести твердого тела, [хг, 1уг — центро-
центробежные моменты инерции твердого тела, a, b — расстояния от опор
А, В до начала координат О; N'Ax, №ау, N\z, N)\x, N'uy, N'n~ —
составляющие дополнительных динамических давлений на опоры;
§ 31 ДАВЛЕНИЕ ВРАЩАЮЩЕГОСЯ ТВЕРДОГО ТЕЛА НА ОСЬ 373
^Ах' ^Ау' ^Аг' ^Вх' ^'Bv> ^'Rz — составляющие динамических давлений
на опоры, равные суммам соответствующих статических и дополни-
дополнительных динамических давлений.
N.
Рис. 152.
Эту задачу можно решить методом кинетостатики. IB результате
приведения фиктивных сил инерции твердого тела к центру О полу-
получается сила, равная главному вектору V^J\ и пара сил, момент ко-
которой равен главному моменту /я1/1 сил инерции.
Проекции главного век гора V[J\ V^\ l4/J сил инерции твердого
тела па подвижные оси координат х, у, z, связанные с твердым те-
телом, имеют вид
37 t ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Модуль главного вектора сил инерции равен
где рс = у х~с — у'с —это эксцентриситет, т. е. расстояние от центра
тяжести С твердого тела до оси иращения.
Главный вектор сил инерции обращается в нуль, когда рс = 0,
т. е. центр тяжести С тпердого тела лежит на оси сращения z.
Главные моменты сил инерции твердого тела относительно по-
подвижных осей координат х, у, z, связанных с твердым телом, запи-
записываются в форме:
!«'¦" = _/Л.
Введем вспомогательный момент /и(д'*, отличающийся от главного
момента . сил инерции относительно центра О отсутствием состав-
составляющей главного момента сил инерции относительно оси вращения z.
Модуль этого момента равен
Момент tn(oY обращается в нуль, если 1хг = 1уг = 0, т. е. когда
ось вращения z является главной осью инерции в точке О.
Для того чтобы силы инерции твердого тела, вращающегося
вокруг неподвижной оси, были уравновешены в смысле \ЛУ) = 0,
т0 =0, необходимо и достаточно, чтобы ось вращения z была
главной центральной осью инерции твердого тела (рс = 0, Ixz =
При выполнении этих условий боковые дополнительные динами-
динамические давления на опоры равны нулю: N'Ax = NAv^N'i)X = N'nv = Q.
(Составляющие дополнительных динамических давлений, направлен-
направленные вдоль оси вращения z, всегда равны пулю: №дг = N/зг = 0.) При
этом динамические давления на опоры равны соответствующим ста-
статическим давлениям.
Если силы инерции вращающегося твердого тела не уравнове-
уравновешены, то величины составляющих дополнительных динамических
боковых давлений Л^*, N'Ay, N'Ox, N'ny находятся из системы урав-
уравнений:
N'ax -|- N'ltx = Мхси? -j- Мусгг,
N'Ay -\- N'ny — MycV -\- Мх(лг,
N'Aya — N'n,b= — /,,X -L- !xzsz,
§3[
ДАВЛЕНИЕ ВРАЩАЮЩЕГОСЯ ТВЕРДОГО ТЕЛА IFA ОСЬ
375
Величины составляющих динамических давлений Nax, NAv, NAz,
Nbx, ^Ву, Ndz, равные суммам соответствующих статических и до-
дополнительных динамических давлений, определяются из системы урав-
уравнений:
? Fkx,
NByb = ~ 'у* <
k= I
B*)
где Z7!, /^a, ..., /^ — задаваемые силы.
Из третьего уравнения системы B*), аналогичного соответствую-
соответствующему уравнению статики, может быть определена сумма величин
составляющих давлений N&2 и Nqz. Каждая из них в отдельности
не может быть вычислена. Если опора В выполнена в виде цилин-
п
дрического подшипника, то Л/В;г = 0 и, следовательно, NAz= ^ Fkz.
k = i
Задачи, в которых требуется определить боковые дополнитель-
дополнительные динамические даилсния на опоры, решаются с помощью системы
уравнений A*).
Задачи, в которых требуется определить динамические давления
па опоры, решаются посредством системы уравнений B*).
Задачи па определение динамических давлений
вращающегося твердого тела на ось вращения ре-
рекомендуется решать в следую и; ем порядке:
1) выбрать подвижные оси х, у, z, связанные с вращающимся
твердым телом, направив ось г вдоль оси вращения (если центр
тяжести С лежит па оси вращения, то удобно начало координат О
совмещать с центром тяжести С; если центр тяжести С не лежит
на оси вращения, то начало координат следует брать в основании
перпендикуляра, опущенного из центра тяжести С на ось враще-
вращения z, либо в одной из опор твердого тела);
2) изобразить на рисунке систему задаваемых сил;
3) иычислить координаты центра пшести С твердого тела хс и_у •
376 ДИНАМИКА HF-СВОПОДНОЙ СИСТР.МЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
4) вычислить центробежные моменты инерции твердого тела 1Х2
и /V2;
5) а) если неизпестными величинами являются боковые дополни-
дополнительные динамические давления па опоры, то составить систему урав-
уравнений A*); б) если неизвестными величинами являются динамические
давления на опоры, то составить систему уравнений B*);
6) решин систему уравнений A*) или B*), определить искомые
величины.
При решении задач, в которых определяются боковые дополни-
дополнительные динамические давления на опоры, второй пункт решения
задачи следует опустить.
Задача 371. Однородный круглый диск вращается вокруг непо-
неподвижной оси. Как следует расположить ось вращения диска по отно-
отношению к его оси симметрии для того, чтобы дополнительные дина-
динамические давления на опоры были равны нулю?
Решение. Для того чтобы отсутствовали дополнительные дина-
динамические давления на опоры, главный вектор VG) и вспомогательный
момент сил инерции то должны быть равны пулю: V =0,
j»o''=0. Так как
то
Величины М, ш и е не равны нулю, поэтому рс=:0, Ixz = Jyi!=zQ,
т. е. ось вращения z должна быть главной центральной осью инерции
диска.
Для выполнения полученных условий ось вращения диска следует
совместить с его осью симметрии. Действительно, ось симметрии одно-
однородного круглого диска проходит через его центр тяжести, т. е.
рс = 0, и, следовательно, главный вектор сил инерции Viy) равен
нулю. Кроме того, ось симметрии диска перпендикулярна к плоскости
его материальной симметрии, т. е. является его главной осью инерции
в точке пересечения с этой плоскостью, т. е. /^ = /„ = 0. Следова-
Следовательно, вспомогательный момент сил инерции равен нулю.
Итак, для того чтобы дополнительные динамические давления па
опоры были равны пулю, ось вращения диска должна совместиться
с его осью симметрии, т. е. должна проходить через центр тяжести
диска перпендикулярно к плоскости его материальной симметрии
(см. рис. а).
Если ось вращения диска z перпендикулярна к его плоскости
материальной симметрии ху, по не проходит через центр тяжести С
диска (см. рис. б), то эксцентриситет рс не равен нулю. Следова-
Следовательно, главный вектор сил инерции У^> не равен нулю. При этом
§31
ДАВЛЕНИЕ ВРАШАЮШР.ГОСЯ ТВПРДОГО ТЕЛА ПА ОСЬ
377
возникают дополнительные динамические боковые давления па опоры А
и-В, которые даже при малой величине эксцентриситета рс, но боль-
большой угловой скорости со во много раз превосходят соответствующие
статические давления.
Подобная неуравновешенность называется статической, так как
может быть обнаружена при отсутствии вращения диска.
Если ось вращения диска проходит через ею центр тяжести С,
по не перпендикулярна к плоскости материальной симметрии (см.
рис. в), т. е. a rjL О, то ось z не является главной (!хг ^Ои /уг ф 0).
6)
К задаче 371.
JJ)*
Следовательно, вспомогательный момент сил инерции то не рапеп
пулю и возникают дополнительные динамические боковые давления
па опоры А и В, которые даже при малых величинах угла а, но
большой угловой скорости to достигают больших значений. Такая
неуравновешенность называется динамической, так как она обнару-
обнаруживается только при вращении диска.
Практически невозможно насадить диск на ось вращения так,
чтобы она совместилась с его осью симметрии, т. е. чтобы рс и а не
равнялись пулю (см. рис. г). Следовательно, гламный вектор и вспо-
вспомогательный момент сил инерции не равны нулю и возникают допол-
дополнительные динамические боковые давления на опоры Л и В, которые
значительно больше соответствующих статических давлений.
378 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ X
Проблема устранения дополнительных динамических давлений
И1рает большую роль в современной технике, гак как в конструк-
конструкциях машин-двигателей и производственных машин обычно имеется
деталь (либо узел деталей), которая с большой угловой скоростью
вращается вокруг неподвижной оси (турбинный диск, ротор электри-
электрическою мотора или генератора, шпиндель токарного или расточного
станков и г. д.).
Задача 372. Определить дополнительные динамические, давления
на подшипники К и L коленчатого вала конструкции, описанной
в задаче 312. Вал пращается с постоянной угловой скоростью со.
Решение. Координаты центра тяжести вала определяются по
формулам (см. рисунок к задаче 312):
_ ? ткх„
тлл'л+ твл'в+ тЕхе+
"iA+mB+"lE+rnD
тА+»1В+"*Е+тО
тд ¦ 2<2 -f- тр(—2а)
= 0
(напомним, что хА =xE=yn=yD^0).
Итак, центр тяжести С коленчатого вала лежит на оси г.
Воспользовавшись этим результатом, а также значениями центро-
центробежных моментов инерции, подсчитанными в задаче 312: 1УХ^ 1хг-=
¦=— 16/7za9, составим систему уравнений A*) для определения проек-
проекций дополнительных динамических боковых давлений N'kx, М'ку, N[x>
N'Kx-\-N'Lx = 0,
— N'kx ¦ 9a -1- N'Lx • 9a = —
8
Решив эту систему уравнений, получим: N'kx = — NLx = -K
о
'kv = — Niy = -g niaw1. Следонательно:
N'K = УИкх-\-Ы& = if >Л2
i = V N'l\ -r ^Ly = -й V 2"
§31
ДАВЛЕНИЕ. ВРАЩАЮЩЕГОСЯ ТВЕРДОГО ТЕЛА НА ОСЬ
379
Дополнительные динамические боковые силы давлений поворачи-
поворачиваются вместе с твердым телом. Они образуют пару сил с плечом
KL — 18а.
Задача 373. Маятник веса Р, сопершающий качания около гори-
горизонтальной оси, имеет плоскость материальной симметрии, перпенди-
перпендикулярную к этой оси.
Определить дополнительные давления на опоры А и В, отстоящие
от плоскости материальной симметрии соответственно па расстояниях
а и b; I—расстояние от центра тяжести маятника до оси привес.-,
1г — момент инерции маятника относительно оси привеса. В началь-
начальный момент маятник был отклонен от вертикали на угол ср0 и отпу-
отпущен без начальной скорости.
1—.
К задаче 373.
Решение. Направления выбранных неподвижных осей Х\,уь zt
и подвижных осей х, у, z, связанных с маятником, указаны на ри-
рисунке. Координаты центра тяжести С маятника равны
х —/и—О (V\
лс — ''Ус— • \ >
Так как ось привеса z перпендикулярна к плоскости материаль-
материальной симметрии маятника, то она является главной осью инерции в
точке О пересечения с этой плоскостью. Следовательно,
/„ = /j* = 0. B)
Единственной задаваемой силой является вес Р маятника. Опорами
служат подшипники А и В. Поэтому составляющие давлений вдоль
оси привеса z отсутствуют: Naz — Nu* = 0.
380 ДИНАМИКА ПЕСВОПОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Учитывая формулы A) и B), составляем систему уравнений B*)
для определения величин составляющих динамических давлений:
Л/уи -р Мцх = — l(f-\-P cos ?, C)
Р
N\v~NBv = Щ — Р sin 9, D)
E)
F)
G)
(8)
После подстановки значения Nax из формулы (8) в уравнение C),
а значения Л/л г из формулы G) в уравнение D) получаем:
Л^ = ^ !¦(/$» + * cos?), (9)
^ ! n?). (Ю)
Из уравнения
и из F) имеем:
N.4 (Л — N/iyb
— NAxa -\- Naxb
E) находим:
Л'д,
= 0,
= 0.
_ b
а
Ь
а
Остается в формулы (9) и A0) модстаиить выражения ф и ф че-
через угол поворота <р. Для этого составим дифференциальное уравне-
уравнение качаний маятника:
/_.? = — Я/sin ?,
или
? = -^ sin?. A1)
Умножив левую и правую части уравнения A1) па of? и проин-
проинтегрировав его, получим:
-,у = ,- cos ?-р С.
Воспользопашпись начальными условиями движения: при ? = 0
ср = ?0, ? = 0, находим, чго
С=— ,-¦ cos -j0.
Итак,
?»=~'(cos(p-cos?e). A2)
«3]
ДАВЛЕНИЕ ВРАЩАЮЩЕГОСЯ ТВЕРДОГО ТЕЛА НЛ ОСЬ
381
Подставив значение <?2 из формулы A2) в формулу (9) и значе-
значение f из A1) в A0), получим величины jVBv и Nb . Затем с помощью
формул G) и (8) находим NДх и NАу.
Окончательно:
cos ч ~
cos
cos т ~
cos
л/,
Задача 374. Определить динамические давления однородной тре-
треугольной пластинки ОАВ веса Р па подпятник О и подшипник А.
Пластинка вращается с постоянной угловой скоростью ш. Размеры
пластинки указаны на рисунке.
Решение. Начало подвижных
осей координат, связанных с пла-
пластинкой, выбираем в подпятнике О,
ось z направляем по оси вращения
пластинки, ось у — вдоль горизон-
горизонтального кагета пластинки, а ось х
обозначаем так, чтобы вместе с ося-
осями у и z она образовала правую
систему координат.
Задаваемой силой является нес
пластинки Р. Центр тяжести тре-
треугольной пластинки расположен в
точке пересечения ее медиан. Сле-
Следовательно,
Лгс = 0, ус=-^а. К задаче 374.
Центробежные моменты инерции пластинки ОАВ были вычислены
при решении задачи 313:
Угловое ускорение пластинки равно пулю, так как угловая ско-
скорость (о постоянна.
382 ДИНАМИКА HF-СВОБОДНОН СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧР.К |ГЛ. X
Составим систему уравнений B*) для определения величин со-
составляющих динамических давлений па опоры:
N -\~N = О,
_1_Р 2
— 3 g aw '
NOz = -P>
V а = —Р^«? — Р-а-
Ау \2g и 3 '
N Аа = 0.
NAz = 0, так как опора А является подшипником.
Решив систему уравнений, определим искомые величины состав-
составляющих динамических давлений пластинки на подпятник О и под-
подшипник А:
При враисении пластинки АОВ вокруг оси z с постоянной угловой
скоростью (о появляются силы инерции, которые создают дополни-
дополнительные давления на опоры:
Статические давления пластинки на опоры ранпы
Р р
™Ог ' > JVAy 3' Oj; 3"
Задача 375. Прямом однородный круглый цилиндр веса Р, ра-
радиуса г и длины 2/ вращается с постоянной угловой скоростью ш
вокруг оси z, проходящей через его центр тяжести С. Ось враще-
вращения z цилиндра образует с его осью симметрии С угол а. Определить
дополнительные динамические боковые давления па опоры А и В,
если OA = OB = h.
Решение. Подвижные оси х, у, z, связанные с цилиндром, изо-
изображены на рисунке. Центробежные моменты инерции цилиндра были
подсчитаны и задаче 314:
/,, = 0, /„ = ?(?-?¦) sin 2а. A)
Центр тяжести С цилиндра лежит па оси г, следовательно,
§ 31 ДАВЛЕНИЕ ВРАЩАЮЩЕГОСЯ ТВЕРДОГО ТЕЛА ПА ОСЬ 383
Так как цилиндр вращается равномерно, то
е = 0. C)
Воспользовавшись формулами A), B) и C), составим систему
уравнений A*) для определения величин составляющих дополнитель-
дополнительных боковых давлений N'Лх, N'Av, Nrnx, N'B :
-^H-ATto* = ?(?-?)«• sin 2*.
Решив эту систему уравнений, получим:
"'л, = N'sy = О- ^в, = - ЛГДх = ^ (? —J) »' sin
Итак, при вращении цилиндра создаются дополнительпые боковые
давления на опоры А и В, образующие пару сил с плечом AB = 2h.
Боковые дополнительпые динамические силы реакций опор А и В
равны по модулю соответствующим давлениям и направлены проти-
противоположно.
Эта задача может быть решена значительно короче с помощью
теории регулярной прецессии симметричного твердого тела, нрягцаю-
щегося вокруг неподвижной точки (см. ниже, решение задачи 428).
Задача 376. Решить предыдущую задачу, предполагая, что цилиндр
насажен на ось z с эксцентриситетом ОС=рс.
Решение. Подвижные оси х, у, z расположены как и в преды-
предыдущей задаче. На рисунке введены также вспомогательные коорди-
координатные оси 5, % (. так, что ось ц совмещается с осью у, а оси $ и (.
384
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
оказываются повернутыми относительно осей л- и z на угол а в на-
пранлепип но часовой стрелке.
Центр тяжести С цилиндра лежит на оси ? и отстоит от начала
координат О па расстоянии ОС=рс Координаты центра тяжести С
цилиндра:
xc=OD — — |OC|cosa = — рс cos а, j/c = 0. A)
Центробежные моменты инерции цилиндра были подсчитаны
в задаче 314 для случая, когда начало координат помещено в центре
тяжести цилиндра:
lyz = U' 'хг = К1: ~ '?) 2~
(см. формулу F) в решении задачи 314), где / = - (г¦-)- ).
А аъ
К задаче 376.
Вычислим момент инерции цилиндра относительно оси С. Для этого
промелем через центр тяжести С ось Сс, параллельную оси С, и при-
Я „ Рг-
мепи.м теорему LLIreitiiepa: L = Irr-\—р?. Так как /_=,.-, то
т Рг~ , Р -
А: = '2ё~~ р Рс-
Следовательно,
—// , ч sin 2д _ /Ягэ , Я
'л-.- — ('с - УЕ) "ПГ~ — V2ff "Г g
Итак,
Яг-
Я /- \ sin
~g 3 I ^
P/r- ,
Цилиндр вращается равномерно, поэтому
? = 0.
/2 \ sill 2a
B)
C)
§ <1 ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 385
Воспользовавшись формулами A), B) и C), составим систему
уравнении A*) для определения величин составляющих дополнитель-
дополнительных динамических боковых давлений N'Лх, N'Av, N'nx, N'u :
- N'Ji -f N'Ji --= | ? -:- P^ - ?} „« Sin 2a.
Решив эту систему уравнений, получим:
" и, = N ny = °- N д, = - 2ff [x 4 -i- Pc - 3" i -j/— ¦:- Pc cos a I
ЛГ ^.f-r^J-p» ._(;) " _prcosa col
' -.? l\ 4 ' r<- S ) Ah rc-
Боковые дополнительные динамические силы реакций опор Л и Р>
раоиы по модулю сооп:егстпую:цим д^илепиям и направлены проти-
противоположно им.
§ 4. Принцип возможных перемещений
1°. Возможные перемещения. Идеальные связи.
Вариацией функции Ьу называется приращение функции, обусловлен-
обусловленное изменением пида функции, при фиксированном значении аргу-
аргумента. Так, при переходе от функции _у, =/( (х) к функции j/4=/.j(a')
вариация функции Ьу будет:
by =yt —_у, =/а (л-) — /, (л-).
В отличие от вариации функции Ьу, дифференциал функции dy
янляется главной частью приращения функции, образуемого за счет
приращения аргумента dx.
На рис. 153 изображен отрезок ММЬ численно равный вариации
функции Ъу, которая соответствует фиксированному значению аргу-
аргумента х. На том же рисунке показано, что отрезок, численно равный
дифференциалу функции dy, соответствует приращенному значению
аргумента x^-dx.
Правила варьирования функций ииешне подобны соответствующим
правилам дифференцирования функций. Так, 8(су) = с8у, где с — по-
постоянная, 8(_у, -]-yi) = byl -j-8у.г, В(_у, ¦yo)=y\i\yi—y.ibyi и т. л.
Если рассматривать варьирование сложной функции z = o(y), где
y=f{x), то ее вариация определяется по формуле bz=-^-by. Пусть,
например, z = a sin by, где у — функция от дг. Вариация функции z
13 Теоретическая механика, том II
386
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
равна Ъг = ab cos by by. Таким образом, установлена связь между ва-
вариациями функций z и у.
Возможным называется перемещение точки из данного ее поло-
положения, допускаемое связями, наложенными на эту точку.
Так, если материальная точка находится на неподвижной горизон-
горизонтальной плоскости, то возможным является любое воображаемое
перемещение точки из данного положения по плоскости. Если же эта
материальная точка дополнительно связана с абсолютно жестким стерж-
стержнем, второй конец которого закреплен на плоскости, то возможным
является воображаемое пере-
перемещение точки на плоско-
плоскости, осуществляемое и лю-
любом направлении по дуге
окружности. Центр этой
окружности расположен в
закрепленном конце стержня,
а радиус окружности равен
длине этого стержня.
Возможное перемещение
является ноображаемым пе-
перемещением в данный мо-
момент (т. е. при фиксирован-
фиксированном значении аргумента —
времени i). В отличие от
этого действительное пере-
I>I!C- lOli- мещение ючкп происходит
в определенном направлении
под действием системы приложенных сил при иепрерышюм измене-
изменении аргумента — иремени. I («этому возможное перемещение точки
является париаинеп, а действительное перемещение — дифференциалом.
Если г—нектор-радмус точки, то Ъг—возможное перемещение
точки, a dr—дсКстщггелыгое перемещение точки. В разложении но
ортам осей декартопых координат возможное перемещение имеет «ид
br=bxi--byj-:rbzk, где Ьх, ly, Zz — проекции возможного пере-
перемещения Ъг точки на соотнетстпующие оси декартопых координат.
Действительное перемещение дается формулой dr = dxiJ\-dyj-^rdzk,
где dx, dy, dz — проекции действительного перемещения dr точки
на эти оси, причем dx = xdt, dy ^ydt, dz = 2dt.
Действительное перемещение точки является одним из числа воп-
можиых перемещений этой точки (для стационарных связей).
Для нестационарных связей (спязен, явно зависящих от времени) воз-
возможное перемещение точки рассматривается при мгновенно останов-
остановленных связях (т. е. при фиксированном значении момента времени).
В этом случзе действительное перемещение уже не является частным
случаем возможного.
§ 41
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
387
Рассмотрим материальную точку, которая находится на некоторой
поверхности (рис. 154). Возможным является перемещение в касатель-
касательной плоскости к поверхности п данной
точке (направление возможного пере-
перемещения точки в этой плоскости, ко-
конечно, может быть любым).
Аналогично, если материальная точка
находится на крииой, которая является
связью, наложенной на точку (рис.. 155),
то возможное переметение направлено
но касательной к крииой в данной топке.
Идеальные связи. Идеальными на-
зываются связи, сумма работ сил реак-
реакций которых на любых возможных перемещениях
равна пулю, т. е.
Рис.
точек системы
где Rk — равнодействующая сил реакций связи, действующих па /г-ю
точку, Ъгк — возможное перемещение к-й материальной точки системы.
Примеры идеальных сняаьй: идеально х
гладкие плоскости и поверхности, абсо- „-'"
лютпо жесткий стержень, абсолютно твер-
твердое тело и г. д. Дли жесткого стержня (аб-
(абсолютно твердого тела) пулю равны суммы
работ сил реакций, с которыми один точки
ciepKisH (тела) действуют па другие.
Негладкая плоскость не янлкется иде- Рис. 135.
алыюй связью. Действительно (рис. 156),
сило реакции R плоскости является суммой двух ее составляющих:
нормальной R/r перпендикулярной к плоскости в данной точке, и ка-
касательной, являющийся силой трения сколь-
скольжения FTC точки о плоскость. Оставляя и
стороне случай отрыва материальной точки
от плоскости, надо возможное перемеще-
перемещение or точки направить вдоль плоскости.
При вычислении суммы работ составляющих
сил реакции связей Rn и Fr с па возможном рис |^
перемещении or работа силы Rn оказывается
ранной пулю, в то время как работа силы трения скольжения FT с не
равна нулю. Следовательно, условие, определяющее идеальность связи,
не выполняется.
2°. Принцип возможных перемещений. Для равнове-
равновесия системы материальных точек, подчиненной идеальным стационарным
13*
388 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
связям, необходимо и достаточно, чтобы сумма работ задаваемых сил
на любых возможных перемещениях точек системы равнялась пулю:
Аналогично, и проекциях на оси дскартопмх координат имеем:
2 (Ftxbxh + FhM -|- FkM) = О-
ft = i
Достоинством принципа возможных перемещений является отсут-
спше и его формулировке сил реакций идеальных связей.
ГГрипннп возможных перемещений широко применяется в меха-
механике. С его помощью можно достаточно просто решать задачи о рав-
равновесии твердого тела и систем твердых тел, а также определять
паиисимостп между величинами задаваемых сил. Особенно эффективно
применение принципа возможных перемещений при решении задач
о равновесии систем твердых те.ч.
Исходя из принципа возможных перемещений, можно вывести
уравнения равновесия твердого тела при наличии как плоской, так
и пространственном системы сил.
Если не все связи, наложенные на систему, являются идеальными,
например, имеются негладкие опорные плоскости и поверхности, то
к задаваемым силам следует добавлять силы трения и, следовательно,
приравнивать пулю сумму работ не только задаваемых сил, по и сил
трения, на любых позможпых перемещениях точек системы. Составлен-
Составленное уравнение определяет зависимость между задаваемыми силами и
силами трения.
Если требуется определить какую-либо силу реакции идеальной
связи, для которой #-Вг=О, то счедует, применяя принцип освобож-
;иемости от связей, Отбросип. соответствующую связь и заменить ее
искомой силой реакции. При составлении уравнения равновесия пало
к задаваемым силам добавить эту силу реакции снязи. Такой метод
решения задач о равновесии систем твердых тел является чрезвы-
чрезвычайно эффективным, так как искомая сила реакции связи непосред-
непосредственно определяется из составленного уравнения равновесия. (При-
(Применяя же обычные приемы статики, приходится составлять систему
уравнений равновесия и определять искомую силу реакции связи
в результате решения этой системы уравнений.)
Задачи о равновесии твердых тел и систем твер-
твердых тел с помощью принципа возможных переме-
перемещений рекомендуется решать в следующем порядке:
1) изобразить на рисунке задаваемые силы;
2) при наличии иеидеа.тьпых связей добавить соответствующие
силы реакций связей (например, силы трения);
§ 4J ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 389
3) в случае необходимости определить силу реакции связи мыс-
мысленно отбросить соответствующую связь и заменить ее искомой силой
реакции связи (если #-8г=0).
Дальнейшие действия следует осуществлять в зависимости от того,
имеет система одну степени свободы или же несколько.
а) В случае системы с одной степенью свободы:
4) дать возможное перемещение одной и:) точек системы и выра-
выразить возможные перемещения точек приложения сил в зависимости
от заданного возможного перемещения;
5) вычислить сумму работ всех сил, указанных в пунктах 1), 2)
и 3), на соответствующих возможных перемещениях их точек прило-
приложения, и приравнять эту сумму пулю;
(i) решив составленное уравнение равновесии, определить искомую
величину;
6) В случае системы с несколькими степенями
свобод ы:
4) выбрать независимые возможные перемещения точек системы
в числе, равном числу степеней свободы этой системы;
о) дать возможное перемещение, соответствующее одной из сте-
степеней свободы системы, считая при этом возможные перемещения,
соответствующие остальным степеням свободы, равными нулю. Выра-
Выразить возможные перемещения точек приложения сил через это воз-
возможное перемещение;
б) вычислить сумму работ всех сил, указанных в пунктах 1), 2)
и 3), па соответствующих возможных перемещениях их точек прило-
приложения, и эту сумму приравнять нулю;
7) последовательно произведя выкладки пунктов 5) и 6) для
каждого из независимых возможных, перемещений, составить систему
уравнений равновесия в числе, равном числу независимых возможных
перемещений, т. е. числу степеней свободы системы;
8) решив системы составле тих уравнений равновесия, определить
искомые величины.
Задача 377. На рисунке изображена система рычагов, применяемая
для подъема груза /с", подвешенного к нижнему рычагу в точке D.
Подъем совершается посредством силы F, направленной по верти-
вертикали вверх и приложенной в точке В верхнего рычага. Определить
вес Р поднимаемого груза К, если р—\0 кг, а -- = 10 (см. рисунок).
Решение. При решении эгой задачи методами статики надо,
применив принцип освобожлаемости от связей, мысленно разорвать
тягу АС, заменить ее действие па рычаги соответствующими силами
реакций связей и рассмотреть отдельно равновесие верхнего и ниж-
нижнего рычагов. После исключения из составленных уравнений равно-
равновесия силы реакции тяги ЛС можно определить вес Р поднимаемого
груза К.
390
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. К
Значительно проще можно решить эту задачу с помощью прин-
принципа возможных перемещений.
Изобразим на рисунке задаваемые силы Р и F. Дадим точке В
верхнего рычага возможное перемещение Ьгд = ВВЬ направленное по
вертикали вверх. При этом верхний рычаг повернется вокруг точки О
по часовой стрелке и повернет в том же направлении нижний рычаг.
IF
A
~Н #
К задаче 377.
Выразим возможное перемещение <irD = DDi точки D нижнего рычага
в зависимости от Ьгп (на рисунке ноиые положения рычагои изобра-
изображены пунктирными линиями). Воспользовавшись подобием треуголь-
треугольников, построенных на верхнем рычаге, можно записать: 8гл = -,~ огй.
Так как тяга Л С является абсолютно жестким стержнем, то огс =
= ЬгА, т. е.
Ьгс=аьЫв. A)
На основании подобия треугольников, построенных па нижнем
рычаге, получил: Зло = -г- Ьгс. Подстаивв значение 1гс из формулы A),
находим:
Применим принцип возможных перемещений к системе рычагов,
т. е. сумму работ задаваемых сил F и Р на возможных перемещениях
Ьгв и lrD их точек приложения В и D приравняем нулю:
= 0. C)
§ 41 ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 391
Воспользовавшись формулой B), после сокращения уравнения C)
па огв получим:
Р=[±) F. D)
Подстановка численных значений дает результат: Р= 1000 иг.
Если бы, решая эту задачу, мы дали возможное перемещение 3rfl
точке В не вверх, а вниз, то в уравнении C) знаки изменились бы
па обратные.
Можно было вместо возможного линейного перемещения Ьгв
точки В дать возможное угловое перемещение 8<р0 и вычислить в за-
писимости от него возможное угловое перемещение 8сэ? нижнего
рычага. Для этого следует воспользоваться возможными перемеще-
перемещениями точек Л и С абсолютно жесткого стержня АС:
Так как ЪгА = Ъгс, то аЪ-ол = Ь&уЕ, т. е.
Применив принцип возможных перемещений, находим:
следовательно,
Ь Ъ-fQ
откуда Р= F- . Воспользовавшись формулой (о), получим:
т. е. результат, записанный в формуле D).
Задача 378. На рисунке изображена ременная передача, соеди-
соединяющая шкины А и D. Определить момент м0 пары сил, которую
нужно приложить к шкиву А радиуса rt для того, чтобы урашюве-
си1ь груз В веса Я4. Груз В привязан к концу каната, намотанного
па барабан С радиуса гь связанный со шкивом D радиуса г3. Мас-
Массой ремня и каната пренебречь.
Решение. Для решения этой задачи методами статики надо
мысленно разорвать верхнюю и нижнюю ветви ремня и заменить их
действие соотпегсгвующими силами реакций связей. Затем рассмотреть
равновесие шкива А, составив для него уравнение мо.ментоп относи-
относительно точки О, и шкива D совместно с барабаном С и грузом В,
записав для них уравнение моментов относительно точки О\. Для
определения искомого момента /и0 надо, решая полученную систему
392
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК |1Л. X
уравнений равновесия, исключить силы реакций верхней и нижней
нетвей ремня.
Значительно проще решается эта задача посредством принципа
возможных перемещений. Искомая величина момента т0 непосредст-
непосредственно определяется из одного уравнения равновесия.
Обозначим: Pt — вес шкива А, Р.2 — вес барабана С, Ря — вес
шкива D. Изобразим на рисунке задаваемые силы системы: Рь Ръ
Рл, Р4 и пару сил с моментом тй.
К затачс 378.
Дадим возможное угловое перемещение о», шкнпу А в направле-
направлении против часовой стрелки. При этом шкив D получит в том же
направлении возможное угловое перемещение 8-р3. Учитывая перасш-
жи.мость ремня м отсутствие проскальзывания, запишем:
г№1 = г3Ъъ. (I)
Груз В получит возможное nepeiMemeime 8г4 по вертикали ввер*с,
примем
3/-i = r,8?J. A!)
Применим принцип возможных перемещении, т. е. сумму работ
задаваемых сил па соответс7вующих возможных перемещениях их
точек приложения приравняем пулю:
w0S'-:i — Л48г4 = 0. C)
(Работа сил тяжести Рь P.t и Рл ранпа пулю, так как точки их при-
приложения неподвижны.) Воспользовавшись формулами (I) и B), после
почленного сокращения уравнения C) па o-sl находим:
«41
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
393
Задача 379. Пользуясь принципом возможных перемещений, вы-
вывести уравнения равновесия свободного твердого тела, находящегося
под Действием произвольной плоской системы сил.
Решение. Изобразим систему осей координат ху в плоскости
действия сил. Обозначим задаваемые силы: Fh F.b ... , Fn.
Выбраи за полюс произвольную точку А в плоскости действия
задаваемых сил, разложим возможное
перемещение твердого тела на пере-
поеное поступательное ЬуА имеете с по-
полюсом А и относительное вращатель-
вращательное Ър вокруг оси, проходящей через
точку А перпендикулярно к плоскости
действия сил.
Примепин принцип возможных пе-
перемещений, имеем:
ft ¦¦-:
-\- ? тА (Fk) 8? = 0. A)
к ^ 1
п-
К задаче 379.
Записав силы Fu Fit ... , Fn и возможное перемещение lrk а раз-
разложениях по ортам осеп координат х и у:
где А=1, 2, ... , /2, получим урлвиеиие A) R виде
п п
\^ /Р й V-, —!_ Р, mi, "\ - I . \ *fi (р \ ?,'2 — О
т. e.
?>? = 0-
Так как переносное движение поступательное, то
и, следовательно, 8лГд,
ствующих сумм:
к = I
причем 8дгЛ, 8уд и
можно вынести за знаки соответ-
соответ= 0.
ft -= I
— независимые нозможпые перемещения.
394
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Поэтому левая часть уравнения B) тождественно обращается в нуль
и л л
лишь при условии, если коэффициенты ^ Fkx, ^] Ffcj), ^] /яЛ (/',,),
ft=i k=\ k=i
стоящие при этих возможных перемещениях, равны нулю, т. е.
Tt fl П
{ I kx * f j ky * s ,i д V* к) * \ /
Как известно из статики, уравнения C) являются уравнениями
равновесия свободного твердого тела, находящегося под действием
произвольной плоской системы сил.
Аналогично можно вывести шесть уравнений равновесия свобод-
свободного твердого тела при наличии произвольной пространственной си-
системы сил.
Полученные выше результаты убедительно подчеркивают степень
общности принципа возможных перемещений, являющегося мощным
средством для решения любых задач ста-
статики.
Задача 380. При вращении круглого
эксцентрика А веса Рх и радиуса г вс-
круг неподвижной горизонтальной оси О,
перпендикулярной к плоскости рисунка,
стержень В веса А2 совершает в верти-
вертикальных направляющих возвратно-посгу-
иателыюе движение. К эксцентрику при-
А ложен момент /и0, направленный против
часовой стрелки. Механизм находится п
рапмопссии при наличии вертикальной
силы F, действующей па стержень Н.
Определить величину силы F в положе-
положении эксцентрика, укапанном па рисунке.
Эксцентриситет ОС равен а.
Решение. Направим ось х по вер-
вертикали nisepx, взяв начало отсчета is точ-
точке О. Угол поворота о эксцентрика Л
отсчитываем от оси х в направлении по
часовой стрелке.
К задаче 380. Изобразим задаваемые силы: Р,—вес
эксцентрика A, Pt — пес стержня В, F —
вертикальную силу, приложенную к стержню В, пару сил с мо-
моментом /и0.
Дадим возможное угловое перемещение 8;р эксцентрику А в на-
направлении возрастания угла <р, т. е. по часовой стрелке. При этом
точка D стержня В получит вертикальное возможное перемеще-
перемещение 8лго. Для определения bxD в зависимости от 8у выразим абсциссу
« 41 ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ ' 395
xD точки D в функции от угла поворота 9 эксцентрика А:
xD—OD= OK-\-KD = a cos <?-\-г cos ^, A)
где угол CDO обозначен через ty. Установим теперь связь между
углами (Ь и 9- Из треугольника OCD получим: s'n v = -, откуда
sin ty = л sin 9, где л = -. Следовательно, cos ^ = \^ 1 — sill'16 =
= l/l —a2 sin''ср. Вычисляя cos <f с точностью до слагаемых, содер-
содержащих л. в квадрате (л — правильная дробь), находим:
cos ф = A — К' sin'' ср)~2~ ^ 1 — ~ л2 sin9 ср = 1 — 1 а*1 A — cos 2-f) =
Подставпи полученное значение cos ф в формулу A), получим:
*о = г A - \ X1} + a cos 9 + -[ rX« cos 2?. B)
Учитывая, что возможное перемещение точки янляется иаркацпей
соответствующей координаты, нычислим вариацию функции B):
ьхо = — a sin с? Scp — ;) га'2 sin 2cp Й9,
т. е.
ZxD = — a sin ф A -j- I cosepjoa- C)
<1>ормула C) устапавлииаст паиисимость между по:1МО"Л!1Ыми переме-
перемещениями oxD и Sa.
Применим к рассматриваемому механизму принцип возможных
перемещении, т. е. сумму работ всех задаваемых сил па погнюлпы:;
перемещениях точек системы приравняем пулю:
I\a sin 98? — ЩЦ -г р%кЪхо — FxbxD = °- ^4)
Подстапив в уравнение D)значение ZxD из формулы C), почленно
сократив на Sea и приняв во внимание, что Рцх— —1\ и 1'л = 17.1,
определяем искомую величину силы F:
р_ Щ — \Р, + Ps С + >>-ct>s у)|д sin у
a(l -|- >. cos tfi sin
где
r '
396
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Задача 381. Па рисунке изображена качающаяся кулиса, приводя-
приводящая в движение стол поперечно-строгального станка. К рачке кулисы
ц точке В приложена горизонтальная сила F. Определить пеличичу
момента т0 пары сил, которую надо
приложить к крипошипу ОА для
того, чтобы механизм находился в
равновесии в положении, указанном
па рисунке. Весами деталей меха-
механизма пренебречь; OA=r, OC = d,
СВ=1.
Решение. Оси координат ху
изображены па рисунке. Угол а, об-
образуемый осью v и кривошипом ОА,
отсчитываем в направлении но часо-
nofi стрелке. Угол между осью у и
кулисой СВ обозначим а.
Изобразим задаваемые силы: F и
пару сил с моментом /w0.
Дадим крипошипу ОА иозмож-
ное угловое перемещение 5? и на-
направлении возрастания угла о, т. е.
по часовой стрелке. При этом
точка В получит возможное пере-
перемещение Згя, направленное перпен-
перпендикулярно к СВ.
возможных перемещении, запишем уравнение
К задаче 381.
Применив принцип
рашюиесия качающейся кулисы:
Учитывая, что F- сги = LxoxB-~Fyoyu, где
репишем уравнение A) к ви;1е
= F и F^ = 0, пе-
пеоткуда
/72,,
B)
Для решения задачи остается установить зависимость между иоз-
можпыми перемещениями 8jrfl и 2'р. Для этого пало вычислить ва-
вариацию координаты х0, выраженной в виде функции от угла 9. Из
треугольника CBD находим:
= BD=l sin a.
(а)
§ Ц ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 397
А К
Из треугольника САК определим: sina = --^, где АК=Г $м <?,
а ЛС= ]/~АК1-гКС*= /г1 sin'2? — (d — r cos *)\ Следовательно,
Г Sin <j) ,
sin а = —7==,==—-===-=-. D)
У Г- SHI" <f -г (С/ -\- Г COSCf)"
Подстанив полученное значение sin а и формулу C), имеем:
rl sin к
j^ .— I
Л У?г-Y"d^'Id~r"cosV '
Нмчвслнп париацию lxR> определяем занисимость между возмож-
мыми перемещениями Sjc^ и 8'j:
ЪХ = rlir~ ~ d"~ + 'Л/Г a'S ^} C0S У 4' rrf S'""" ? S-; E)
/; (г- Ч- //-' -|-'^tfr cos?/1 - r<
Внося значение 8.tfi из формулы (о) и B), после сокращения па Зср
найдем искомое значение момента /и0 naju.i сил:
г. , (г- -j- d" 4- '^rfr cos <f) cos a + rrf sin" cp
/?2n III ' ~- #
(r^ + rf'-l-'^r cos?K 2
Работу силы Т7 можно было пычислить как пронзпедепие мо-
момента силы F относительно точки С на возможное углопое переме-
перемещение 8а, т. е. 8Д (/7) = /7/c(/7)8a = /-7cos а За. Следопателыю, урав-
уравнение A) приняло бы кид
— «O8'f -1- 14 cos я 8а = 0. @)
Для определения множителя cos а8а надо иычнелить париаиию
sin а, определенного формулой D). Решив затем уравнение @) отно-
относительно /л0, мы получили бы искомый результат.
Задача 382. Через блок А иеса Р переброшена ним,, к концам
которой привязаны груз В и каток С песа РА, лижшцшт па идеально
гладкой наклонной плоскости. Через каток С в спою очередь пере-
переброшена пить, к концам которой привязаны груз 1) песа Ра и груз И
носа Р\, лежащий на параллельной идеально гладкой плоскости (см.
рисунок). Определить вес Рл груза В и угол я, образуемый наклон-
наклонными плоскостями с горизонтом, если система находится к равнове-
равновесии. Весом нитей пренебречь.
Решение. Рассматриваемая система имеет две степени свободы,
так как для определения положения всех ее точек надо задать два
независимых параметра. Один параметр должен определять положение
груза В, а пторой — положение грузом D и В по отношению к катку С.
Изобразим задапаемые силы: Р — вес блока А, Р{—нес груза Е,
Р., — вес груза D, Р3 — искомый пес груза В и Р-к — пес катка С.
Силы реакций связей изображать не следует, так как все связи,
398
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
наложенные на систему, являются идеальными (нити натянуты и не-
нерастяжимы, наклонные плоскости идеально гладкие).
Дадим системе два независимых иозможпых перемещения (число
независимых возможных перемещений равно числу степеней свободы
системы): 8г/; — возможное перемещение груза В, направленное по
вертикали вниз, и brD — возможное перемещение груза D, также
направленное по вертикали вниз.
К задаче 382.
Применим принцип возможных перемещении для составления
уравнений равновесия системы. Число уравнений должно быть равно
¦нхлу ее степеней свободы. Поэтому для данной систем и составим
два уравнения равновесия.
Для составлении уравнения равновесия системы, соответствующего
вочможно.му перемещению 8rfi, будем считать возможное перемещение
Sr/( ранным нулю, т. е. 2;'л ^: 0, 8rfl=0 (это допустимо, гак i<.;ik
возможные перемещения 8гй и Ъгп являются независимыми). При эп>м
груз В и каток С останутся в покое, груз D переместится па '&¦ п
по вертикали вниз, а груз Е переместится на brD параллельно наклон-
наклонно» плоскости вверх.
Применив принцип возможных перемещении, получим:
откуда
sin a= ь?
A)
Для составления уравнения равновесия системы, соответствующего
возможному перемещению 8rfl, будем считать возможное перемеще-
§ 4] ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 399
ние orD равным нулю, т. е. 8rfl:^0, 8rD = 0. При этом грузы D и Е
по отношению к катку С останутся в покое, груз В переместится на
Ьгв по иертикали вниз, а каток С с грузами D и Е переместится па
Ьгв параллельно наклонной плоскости вверх. Примепцв принцип воз-
возможных перемещений, имеем:
Р-$гв — /\6rB sin a — P?rD sin a — Рцогв sin a = О,
откуда
na. B)
Подставив в формулу B) знамение sin а из формулы A), найдем
искомую величину веса 1\ груза В:
Задача 383. Составная балка AD, лежащая на трех опорах, состо-
состоит и:1 двух балок АС и CD, шарнирпо соединенных в точке С.
К б^лке АС приложены вертикальные силы Р1 = 8т и А2=6/и,
а к балке CD — пара сил с моментом /м==4а т-м, направленным
против часовой стрелки. Размеры указаны на рис. а.
Определить силы опорных реакции в А, В и D. Весом балок
пренебречь.
Решение. Составная балка AD представляет собой систему двух
Ti;ep,iM?i тел — балок АС и CD, находящихся в равновесии.
i4-:unn эту задачу методами статики, надо, мысленно разорван ш?.р-
iwp С, отбросить одну из бижж, наменять действие (пброгиешюИ fia.iun
i:;; остгг'ауюся балку двумя состап.яющими силы реакции шарнира С
V (cnsi'inii ураппеиия р;;ы;свесия для оставшейся балки. Затем, при-
у- п. п те же рассуждения к о^брешеппей балке, записать для нее
Y[M!'.!.i'n:5i paiiiioiieci;fl. 1-1аконец, peiiinii систему уравнений ранноиссин,
(¦¦ ("i ii-eimiiix для каждой и^ балок, определить искомые спорные
]u i;i;i'i. 'I'si-'oe решение яиляет дсяо.миго громоздким.
i !{»!¦"т^-ияч принцип ног'можпых переплетений, можно люСую искомую
си.:у опорной реакции определить из одного соотвпешующим обри-
зо",г есстг.плешюго уравнения. Это значительно упрощает решение
з.'Алчи. Особенно в тех случаях, когда требуется определить только
одну силу опорной реакции.
i [роиллюстрируем это утверждение последовательным и притом
друг от друга независимым определением опорных реакций А, В и
D с помощью принципа возможных перемещений.
Изобразим па рис. а задаваемые силы Р1; Р.2 и пару сил с мо-
метом т.
Для определения силы опорной реакции RA отбрасываем мыслен-
мысленно опору Л, компенсируя отсутствие этой связи силой опорной реак-
реакции /?л.
400 ДИНАМИКА НЕСВОВОДПОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Дадим возможное перемещение 8гд точке А по вертикали вверх.
При этом балка примет положение, изображенное па рис. б.
Обозначим через Ъгк и Ьг, возможные перемещения точек прило-
приложения К и L сил Я, и Pt и через 8э — углоиое перемещение балки CD.
\р> с
,1 Г
Г
К задаче 38.'-!.
dM, воспользонанш[-сь подобием треугольников, 3auncHi\iocTb
между линейными возможными перемещениями:
(О
Применив принцип возможных перемещений, приравняем сумму
работ всех задаваемых сил и силы реакции RA на соответствующих
возможных перемещениях нулю:
= 0. B)
§ Ц ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 40 [
Воспользовавшись формулой A), после почленного сокращения
уравнения B) па ЬгА находим:
откуда после подстановки численных значений получим:
RA = \,bm.
Для определения силы опорной реакции Rn мысленно отбрасы-
наем опору В, компС1гсируя отсутстнующуго связь силой опорной
реакции RB.
Дадим иозможпое переменимте Ъгс шарниру С по вертикали
вверх. При эго.м балка примег положение, указанное \ш рис. в.
Обозначив через Ьг^ Sr; п Ьгп возможные перемещения точек
приложения К, L и В сил Р,, Р2 и Rn и возможное угловое пере-
перемещение балки CD через Ъ, выразим снязь между ними:
8гс=^г?=^-8гя = 38гА.= 2а8?. C)
Применив принцип возможных перемещений, запишем:
- PfirK -f RBlrR - P,brL - mo-f = 0. D)
Восиользоппвшись формулой C), после почленного сокращения
уравнения D) па 8гс, находим:
— -3 нх -,- -у кв — -fi- / 4 — т2~ _ и,
откуда после подстановки численных значений получим:
Яд =14,5 т.
Остается определить силу опорной реакции Rn. Вновь применяя
принцип освобождаемости от связей, мысленно отбрасыиаем опору D,
возмещая ее отсутствие силой опорной реакции RD.
Дадим возможное перемещение Ьгп точке D по вертикали вверх.
При этом балка CD повернется против часовой стрелки па угол
Ьгп
*? = -?• V)
Положение балки АС остается неизменным (см. рис. г).
Записал принцип возможные перемещений, получим:
RDbrn-\-mb? = 0. (б)
После подстановки численных значений, использования формулы E)
и почленного сокращения уравнения F) на brD находим:
402
ДИНАМИКА НКСВОПОДНОЙ СИСТЕМЫ МАТЕРИЛПЬНЫХ ТОЧЕК [ГЛ. X
о)
Знак минус указывает, что опорная реакция RD направлена по вер-
вертикали ШШЗ.
Задача 384. На рис. а изображена стремянка АСВ. Две одинако-
одинаковые стороны .4С и СВ стремянки шарнирно соединены в точке С, а
коппы А и В упираются в выступы
пола. Вес каждой стороны стремянки
paisen P. В точке D стоит человек
веса /-,.
Определить силу опорной реак-
ци-и в точке П, если АС= СВ =
Решение. Задаваемыми силами
являются: Р — пес каждой стороны
стремянки, Pi — вес человека. Обо-
Обозначим д.чину каждой стороны стре-
стремянки 21. Тогда AK=KC=CL =
Для определения вертикальной со-
станляютей Rm силы опорной реак-
реакции и точке И дадим опоре В isoa-
можность двигаться в вертикальном
направлении. С этол це.тыо, применим
принцип освобождаемостм от связей,
.членим выступ no:ia is точке В опо-
])Oii па катках, которая .может пере-
переметаться в вертикальном пнпраме-
ннп (см. рис. (i).
Приложим в точке В соотнет-
CTnyi liiiyii) ci'.iy pe.iKiir и /?!,(. j[ivi:3M
iio;^Mir,i;i:oe nept^euixnne orn точке
В но вертикали ш-ерх. При аюм прп-
кяя полотна CTpt-мчмкн совершит
H."ocs.4ie д1::-;же!!ие, а левам полошша
повернется вокруг оси А, перпенди-
перпендикулярной к плоскости рисунка. На-
Направив возможное перемещение о/*с
точки С перпендикулярно к А С, най-
найдем положение мгновенного центра
вращения стороны СВ в точке А
(в точке А пересекаются перпенди-
перпендикуляры, восставленные из точек С
и В к ore и Зг;;). Итак, в точке Л
совмещаются: центр вращения левой стороны АС стремянки, вращаю-
вращающейся вокруг неподвижной оси, и мгновенный центр вращения правой
К задаче 384.
§ 4] ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 403
стороны СВ стремянки, совершающей плоское движение. Следова-
Следовательно, вся стремянка получает возможное угловое перемещение 8'f
вокруг точки А, в плоскости рисунка, против часовой стрелки.
Применим принцип возможных перемещений, т. е. сумму работ
задаваемых сил и вертикальной составляющей силы реакции RlB
на возможных перемещениях их точек приложения приравняем нулю:
-lr R[B\ АВ\Ъ? = 0. A)
Учитывая, что
АМ= АКcos 60°=-?,
AS=AT^ TS=AC cos 00°-j- CD cos 60°= |/,
AN=AT-\~ 77V= ЛСcos 60°-fC/.. cos (Ю'= j /,
А В =21,
после сокращения уравнения (L) на 8'р находим:
Для определения горизонтальной составляющей Rw силы опор-
опорном реакции о точке /? д?днм опоре В подвижность и горизонталь-
горизонтальном направлении. С этой целью, применив принцип освобождаемое™
oi связей, заменим выступ пола в точке В опорой па катках, кою-
рая может перемещаться п горизонтальном направлении (см. рис. в).
Приложим в точке В соошетешующую силу реакции R2H.
Ладим возможное перемещение 8r;j точке В по горизонтали направо.
При этом правая половина стремянки совершит плоское движение,
а пеная половина стремянки повернется вокруг готкгг А. Направив
и точке С возможное перемещение Ьгс перпендикулярно к АС, опре-
определим положение мгновенного центра вращения стороны СВ в точке 5s
пересечения перпендикуляров, поставленных ин точек С и В к соот-
соответствующим возможным перемещениям Ъгс и Ъгв. Итак, левая поло-
половина АС стремянки поворачивается вокруг А па угол 8срд по часо-
часовой стрелке, а правая половина СВ стремянки — вокруг if1 на угол
bftf/i против часовой стрелки.
Определим зависимость между возможными угловыми перемеще-
перемещениями 8-.рд и 8co^s. Для этого заметим, что шарнир С принадлежит
обеим сторонам стремянки, и поэтому
Ьгс = А СооА, Ьгс =
404 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. X
Следовательно,
С&Щ>=АСЪ<?А, т. е. 8э^ =
Нетрудно пидет!>, что так как СаР— АС (треугольник BGP является
равнобедренным), то
fcp^ = *?A- B)
Применив принцип возможных перемещений, запишем:
Р | А М! Цл -\-Pl\SB\b4& + P\NB\b4fr + R2B\&B\big> = a. C)
Учитывая формулу B), прсдстапим уравнение C) после сокраще-
сокращения па Ъ(?А в виде
Р\АМ\ -^PY\SB\ -\-P\NB | -'r Rw \?PB[ = 0. D)
Так как
А М = А К соч 60° = j, SB= BD cos 60° = -J /,
NB=LB cos 60° = ~, ^5" = ^Ccos30o-f СД cos 3CF = //IT
то после подстапопки этих значений в уравнение D), решив его от-
относительно R2U, находим:
Итак, данная задача о раннопесии системы тверлых тел, состоящей
из диух половин АС и СИ ст[)емяпки АСВ, нами решена с помощью
принципа возможных перемещений. В ходе решения задачи мы опре-
определяли каждую искомую составляющую силы реакции в точке В из
одного уравнения независимо лруг от друга. Так, вертикальная состав-
составляющая R{B силы реакции в точке В была найдена пз уравнения (I),
а горизонтальная составляющая Л,в — из уравнения C).
При решении же этой задачи методами ставки мы должны были
бы составить три уравнения равновесия для всеИ стремянки, затем
три уравнения равновесия для правой половины стремянки и затем
решить систему этих уравнении.
Преимущество применения принципа возможных перемещений
к задачам о равновесии систем твердых тел по сравнению с методами
статики совершенно бесспорно.
Задача 385. Две балки АВ и ВС соединены шарниром в точке В.
Балка ВС шарнирпо прикреплена концом С к вертикальной стойке СО,
защемленной в сечении D. Валка АВ шарниром А прикреплена
к земле.
Определить горизонтальную составляющую силы реакции RD и
реактивный момент т. в защемленном сечении D. Силы Pi и Рг по-
§41
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
405
казаны на рис. а. Весом балок пренебречь; BC=CD = 2a, ВК—КС,
CL=LD.
Решение. Для определения горизонтальной состапляющег) силы
реакции в защемленном сечении D применим принцип оспобождаемости
а)
К залачс 385.
от связей. Сообщим стойке CD в сечении D подвижность п горизон-
горизонтальном направлении, мысленно заменив опору в точке D на опору,
расположенную на катках (см. рис. б). Приложим в точке D горизон-
горизонтальную составляющую силы реакции R{[>, соответствующую отбро-
отброшенной спязи.
Дадим возможное перемещение Ъгп точке D по горизонтали на-
направо. При этом стойка CD получит поступательное возможное пере-
перемещение, т. е.
brc^brL = brD. A)
406 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. Ч
Балка АВ получит возможное угловое перемещение 8срл, а Ьгв
будет направлено перпендикулярно к АВ, т. е. вдоль ВС. Балка ВС
при наличии возможных перемещений Ъгв и Ьгс совершает плоское
движение. Мгновенный центр вращения Ф балки ВС находится в точке
пересечения перпендикуляров, поставленных из точек В и С к 3rfl
и Ьгс. Итак, балка ВС совершает поворот па угол 8^ в направле-
направлении против часовой стрелки вокруг мгновенного центра вращения SP.
Применяя принцип возможных перемещений, вычислим сумму ра-
работ задаваемых сил Pj и Р2 и горизонтальной составляющей силы
реакции Rw на возможных перемещениях их точек приложения и
приравняем ее нулю:
Р, | М& ! Ь9& + P,brL + RlDbrD = 0. B)
Из треугольника &ВС находим:
Тогда
Учитывая формулм A) и C), после почленного сокращения уран-
пения B) па 8го, получаем:
Заметив, что
М& = NC= КС cos 30° = 2J?I E)
и решен уравнение' D) относительно Rw, паНдем:
Знак минус указывает, что горизонтальная составляющая силы
реакции #|о направлена по горизонтали налево.
Переходим к определению величины реактивного момента т
в защемленном сечении D. Для этого заменим защемление в сечении Л
неподвижным цилиндрическим шарниром, приложив к нему реактив-
реактивный момент т в направлении против часовой стрелки (см. рис. fi).
Дадим возможное угловое перемещение 8;ро стойке CD вокруг
шарнира D по часовой стрелке. Обозначив возможные перемещения
в точках В и С соответственно Ъгв и 8гс, определяем, как и ранее,
§ *1 ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 407
положение мгновенного центра вращения $* балки ВС. При заданном
возможном угловом перемещении 8;ро стойки CD вокруг точки D
балка ВС совершает поворот на угол 8-р^ вокруг мгновенного центра
вращения 3" в направлении против часовой стрелки.
Применив принцип возможных перемещений, получаем:
Р, | М& | Щ& + А,! LD! 8?о - тЦв = 0. F)
Для установления зависимое™ между Щп и Ъуср рассмотрим воз-
возможное перемещение Ьгс точки С, одновременно принадлежащей
балке ВС и стойке CD:
Ъгс = &(&?&, brc=CDb?D.
CD
Следовательно, ?РСЪ'эдь = CD 8?о, откуда 8?ер = -щ? 8'fo- Так как
;=4a, то 8-p^s=-- 8-ро = - osjp. Теперь уравнение F) после
почленного сокращения на b'fD принимает вил
lfPl\M^\-irP.ia — m = 0.
Учитывая формулу E), получим:
IP. Рычаг Жуковского. Использование аналитических мето-
методов при решении задач на раипешесие плоских многозвенных меха-
механизмов с помощью принципа возможных перемещений связно с вы-
вычислительными трудностями. Эти трудности возникают при с остаиле-
иии зависимоеieti между координатами точек приложения зал.-мшемых
сил. Вычисление вариаций этих координа!, определяющих возможные
перемещения соответствующих точек системы, полет к дальнейшему
усложнению вычислений (см., например, решение палачи 381, и кото-
которой рассмотрен сравнительно npocioti .механизм качающейся кулисы).
В 1912 г. Н. Е. Жуковский предложил графоаналитический метод
решения задач на равновесие плоских многозвенных механизмов, по-
получивший название «рычага Жуковского». Метод решения задач осно-
основан на принципе возможных скоростей.
Так как скорости точек системы в действительном движении име-
имеют направление drk, а при стационарных связях действительное
перемещение является одним из возможных, то можно дать частную
формулировку принципа нозможпых перемещений, заменив возможные
перемещения Ьгк па «возможные скорости» vk — величины, пропорцио-
пропорциональные действительным скоростям --=*.
408 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Принцип возможных скоростей в случае равновесия системы
материальных точек дается формулой
*=i
или
2 FkVh C0S iFW *>!<) = °.
где Fk — задаваемая сила, приложенная к k-ti точке системы, tok —
возможная скорость этой точки. Все связи, наложенные па систему,
являются идеальными и стационарными.
Удобство применения «рычага Жуковского» при решении задач
на равновесие плоских многозвенных механизмов заключается в том,
что в уравнение равновесия не входят силы реакций идеальных связей.
Решив уравнение равновесия, можно определить одну из задавае-
задаваемых сил (движущую силу, силу полезного сопротивления, силу вред-
вредного сопротивления и т. д.). Благодаря применению «рычага Жуков-
Жуковского» даже исследование равновесия сложных механизмов не оказы-
оказывается громоздким.
Недостаток «рычага Жуковского» заключается в том, что постро-
построение приходится повторять для каждого положения механизма.
Решение задач с помощью «рычага Жуковского»
рекомендуется проводить в следующей последова-
последователь и о с т и:
1) нычертить схему механизма в рассматриваемом положении;
2) изобразить па чертеже задаваемые силы;
3) задавшись скоростью одной из точек механизма, построить для
данного положения механизма план скоростей;
4) приложить все задаваемые силы на плане скоростей к концам
соответствующих векторов скоростей их точек приложения. При этом
все задаваемые силы надо повернуть по часовой стрелке, либо против
часовой стрелки, на угол 90°;
5) представить план скоростей в виде неизменяемой фигуры с не-
неподвижной точкой в полюсе, т. е. в виде рычага с точкой опоры
и полюсе плана скоростей. Записать уравнение равновесия рычага,
т. е. сумму моментов относительно полюса плана скоростей нсех
задаваемых сил, повернутых на 90°, приравнять пулю. Это уравнение
равновесия «рычага Жуковского» одновременно является уравнением
равновесия данного механизма;
О) решив полученное уравнение равновесия, определить величину
искомой задаваемой силы.
Задача 386. На рис. а изображен шарнирный четырехзвенник ОЛВС.
К шарниру А приложена сила FA, перпендикулярная к кривошипу ОА.
§4|
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
409
Определить величину силы FD, направленной перпендикулярно
к звену АВ в точке D при равновесии механизма с положении, ука-
указанном па рис. а.
Решение. Применение аналитического метода при решении этой
задачи нецелесообразно, так как выражение координат точки D к за-
пнсимости от угла поворота <р крииошипа ОА и размеров звеньев
механизма оказыпается громоздким. Еще более сложными будут пмра-
же'ния вариаций координат точки D, т. е. проекций возможного пере-
перемещения точки D на оси координат. Поэтому для решения дайной
задачи воспользуемся «рычагом Жукопского».
К задаче 386.
На схеме механизма (см. рис. а) изображены падапаемые силы Ffl
и FD.
Построим план скоростей, соответствующий рассматриваемому
положению механизма. Дадим точке А скорость ф, в направлении
крашения кривошипа ОА по часовой стрелке (модуль скорости выби-
выбирается произвольно, а направление скорости можно изменить па про-
противоположное). Вмбраи иие схемы механизма полюс р, строим вектор
скорости ч>А=ра в принятом масштабе скоростей (см. рис. б).
Скорость точки В должна быть направлена перпендикулярно
к звену ВС, качающемуся вокруг точки С. Проведем через полюс р
вспомогательную прямую, перпендикулярную к ВС.
На этой прямой располагается вектор скорости точки В. Для
определения положения конца чза проведем через точку а прямую,
перпендикулярную к АВ, которая в пересечении с первой вспомога-
вспомогательной прямой определяет конец Ъ вектора скорости точки В
(vB = vА -)- 1!вл; па плане скоростей: pb=pa~ab). Следовательно,
vn=::pb. На прямой ab располагаются концы векторов скоростей
точек звена АВ. Положение копна d скорости точки D определяется
410 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
AD ad r „ .
из пропорции: у^к^^Тн' ^оединив полюс р с точкой а, определяем
скорость точки D:
Теперь в точках and следует приложить задаваемые силы FА и
FD, предварительно повернув их па угол 90° в одном направлении,
например, против часовой стрелки. Повернутые силы обозначим F'A и
F'D (так как направления FA и <ил совпадают, то F'A направляем пер-
перпендикулярно к ра. Учитывая, что по условию Fp перпендикулярно
к ЛВ, направляем F'D перпендикулярно к ab).
Представим план скоростей п пиле неизменяемой фигуры с непо-
неподвижной точкой и полюсе р, т. е. п пиде pi.iqjra с опорой в точке р.
Запишем уравнение равновесия этого рычага под действием сил F'A
и F':
т. е. F'A\pa\— F'Dhn = 0, i-де hD— перпендикуляр, опушенный из
полюса р па линию депегпня F'[y Имеем: Г^=р ]-"л, т. е. FD =
= ''-/',. Измерим па рис. б длину отрезков ра и hD и опрелелии их
отношение, пахолим искомую иеличпиу сипы Fpm
При илменеипи положения мехлшама псе построения следует no-
noli гори п>.
Задача 387. Па рис. а изображен многозвенный шарнирный пло-
CKHii мехмппям, который приводится в движение силой FA, ириложен-
1 idи is гочке А перпендикуля^/по к кривошипу ОА. Прп вращении
кривошипа ОА звено BD кмчастся вокруг иеноднижпой оси С и по-
посредством тяги DB привод1.- г и uoaispaiiio-iKiciynnTe.ii.Hoe движение
ползун /:'. К ползуну Е приложена горизонтальная сила полезного
сопротивления Рр. Определ.ш. величину силы FE при раиновесии
мехипи.чма в положении, укапанном на рис. а.
Решение. Равновесие механизмов, подобных дпниону, не сле-
следует изучать аналитически панну неизбежной громоздкости вычисле-
вычислений.
Для решения этой задача воспользуемся «рычагом Жуковского*.
1!а схеме механизма (см. рис. а) изображены задаваемые силы F^ и
Гг Построим план скоростей, соответствующий рассматриваемому
положению механизма.
Дадим скорость vA точке А, направив ее перпендикулярно к кри-
кривошипу ОА в сторону FA, т. е. против часовой стрелки (модуль
8*1
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
411
скорости выбирается произвольно, направление скорости можно изме-
изменить на противоположное). Выбрав н стороне от схемы механилма
полюс р плана скоростей, строим скорость <vA=pa в принятом мас-
масштабе скоростей (см. рис. б).
На плане скоростей необходимо определить скорости точек меха-
механизма, к которым приложены задаваемые силы. Следовательно, кроме
скорости точки А, надо найти скорость точки Е. Для этого предва-
предварительно определяем скорости точек В и D.
в)
К задаче 3S7.
Скорость точки В направлена нерпечли-султрно к звену ВО, ка"а-
[ОН!., муся нокруг неподвижно!! оси С. Проводил! через полюс р
п.помогите'iFjiiyto прямую, перпеьднкулчрнуы к ВО. Напраинв черои
точку а прямую периенличулярпо к АИ, пахоярл » пересечении этих
прямых точку Ь, яилякицуюся концом некторз скорости точки /}
{1)[1—-Ч)л -г^дд! Iia ii-iaiie ci<opocicii pb = pa--аи). Следовательно,
vn—--pb. Теперь легко определяется скорость точлИ D, так как ско-
скорости va и <ип параллельны п направлены и разные стороны. На при-
примой, проведенной вдоль рЬ п пратииоположпую сторону, откладыиаем
, vn СП
отрезок ра, величину которого вычисляем из пропорции = .
vit СИ
Следовательно, lDD = pd. Остается найти скорость точки IS, которая
направлена по горизонтали. Проводим через полюс р горизонталь.
Затем через точку d направляем вспомогательную прямую, перпенди-
перпендикулярную к звену DE, которая а пересечении с горизонталью опре-
412 ДИПЛМПКЛ НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
дсляст положение точки е (vE — 'VD-\-'VED)- Па плане скоростей
pe^pd-^-de. Итак, vr=pe.
Задаваемые силы FD и F? приложены в точках Л и Е механизма.
Для решения задачи с помощью «рычага Жуковского» следует эти
силы, предварительно повернув их па 90° и одну сторону, прило-
приложив к копнам векторов скоростей vA и vE на плане скоростей.
Приложим п точке а, являющейся концом vA, силу F\, полученную
путем noBOpoia силы FA против часовоп стрелки (так как FA пер-
перпендикулярно к О А, то F'A параллельно О А, т. е. F'^ перпендикулярно
к ра). В точке е, являющейся концом я>Е, приложим силу F'F, получив
ее nyieM поворота силы Ff против часовой стрелки (так как Fi: на-
направлена горизонтально, то F'E имеет вертикальное направление, т. е.
F'E перпендикулярно ре).
Теперь представим план скоростей в виде неизменяемой фигуры
с неподвижной точкой в полюсе р, т. е. в пиле рычага с опорой
в чочке р. Запишем уравнение равновесия этого рычага под действием
сил F'A и F'E:
пли
откуда
е ре А'
Отношение ра к ре легко находим, определив длины этих отрез-
отрезков на рис. б.
При изменении положения механизма псе построения следует по-
повтори 1Ь.
§ 5. Общее уравнение динамики системы материальных точек
При движении системы материальных точек, подчиненной идеаль-
идеальны ч связям, сумма работ задаваемых сил и сил инерции на любых
возможных перемещениях точек системы равна нулю:
Если
Щ = ?к1 -1 - hJ -г 5**. К = bxki
§5] ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 413
то общее уравнение динамики имеет вид
X 1(/%, - mkxk) bxk + (/%, - OT<4yft) 8Л + (Fll2 - ткгк) bzk\ = 0.
Обшее уравнение динамики является аналогом принципа возмож-
возможных перемещений для случая движения системы материальных точек.
Как изиестпо, при движении системы силы реакций связей, вообще
гопоря, переменны. Они могут быть функциями времени, координат
материальных точек, их скоростей и их ускорений. Поэтому при ре-
решении обратных задач динамики, в которых движение определяется
по заданным силам, приходится исключать силы реакций связей из
составленных уравнений движения.
Большое преимущество общего уравнения динамики по сравнению
с другими теоремами динамики заключается и том, что в его форму-
формулировке отсутствуют силы реакций идеальных связей. Если не псе
спязи являются идеальными, например имеются связи с трением, то,
применяя общее уравнение динамики, следует к задаваемым силам
добавлять силы реакций, соответствующие пеидеальпым связям.
Исчисление суммы работ сил инерции на возможных переме-
перемещениях точек твердого тела производится по формулам:
а) При поступательном движении:
где Р* ' — равнодействующая сил инерции (#' '== — Мщчо — ускоре-
ускорение любой точки чпердого телу), or—возможное перемещение любой
точки твердого тела.
б) При вращении вокруг неподвижной оси:
где /я(/'—главный момент сил инерции относительно оси вращения z
(м(;'|== — 1л.), Ь-р — возможное угловое перемещение твердого тела.
в) При плоском движении:
где V^1 — глампый нектор сил инерции (Vr^'/) = — Mwc, wc — уско-
ускорение центра тяжести твердого тела), т^ — главный момент сил
инерции относительно оси, проходящей через центр тяжести С твер-
твердого тела перпендикулярно к пло:кости его материальной симметрии
(/л^7)== — ^сгг)> ^гс — возможное перемещение центра тяжести С твер-
твердого тела, o-f — возможное угловое перемещение твердого тела.
С помощью общего уравнения динамики можно решать задачи
динамики системы материальных точек в случаях, когда в число зада-
414 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
ваемых и искомых величин входят: инерционные характеристики
(массы и моменты инерции), ускорения точек системы (линейные и
угловые), задаваемые силы и пары сил, коэффициенты трения (сколь-
(скольжения и качения), коэффициенты упругости пружин.
Из общего уравнения динамики вытекают дифференциальные урав-
уравнения движения системы материальных точек, в которые не входят
силы реакции идеальных связей. Возможно решение как прямых
(определение сил по заданному движению), так и обратных задач
(определение движения по заданным силам) динамики. При решении
обратных задач приходится интегрировать составленную систему диф-
дифференциальных уравнений движения. Заметим, что использование обще-
общего ураппения динамики является формальным методом составления
дифференциальных уравнений движения системы. Этот метод является
менее удобным и менее эффекгиппмм по сравнению с применением
уравнении Лаграпжа второго рода (читатель сможет и этом убедиться,
ознакомившись с содержанием следующего параграфа).
Задачи с помощью общего уравнения динамики
рекомендуется решать в следующей последователь-
пост и:
1) изобразить па рисунке задаваемые силы и силы реакций, соот-
соответствующие неидеальпым связям (например, силы трения);
2) определить главные векторы и главные моменты сил инерции
масс системы.
Дальнейшие действия следует осуществлять и зависимости от того,
имеет система одну степень свободы или же несколько.
а) Для системы с одной степенью свободы:
Н) дать возможное перемещение одной из точек системы и m.ipn-
нить возможные перемещения точек приложения г.сех сил, указанных
в первых днух пунктах, через это возможное перемещение;
4) вычислить сумму работ всех сил, указанных в первых двух
пунктах, на возможных перемещениях точек системы; составить общее
уравнение динамики, приравняв вычисленную сумму работ сил нулю;
5) после сокращения полученного ураппения на заданное возмож-
возможное перемещение определить искомую величину либо провести инте-
интегрирование дифференциального уравнения движения.
б) Для системы с несколькими степенями сво-
свобод ы:
3) дать независимые возможные перемещения и числе, равном
числу степеней свободы рассматриваемой системы; выразить возмож-
возможные перемещения точек приложения всех сил, указанных в первых
двух пунктах, через указанные независимые возможные перемещения;
4) составить систему уравнений в числе, рашюм числу сте-
степеней свободы рассматриваемой системы (каждое из полученных
уравнений соответствует одному из независимых возможных переме-
перемещений), при этом все остальные возможные перемещения следует
§ 5] ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 415
считать рапными нулю; для составления уравнения надо вычислить сумму
работ всех сил, указанных в первых диух пунктах, па возможных пе-
перемещениях точек системы, соответствующих данному независимому
возможному перемещению; вычисленную сумму работ сил следует
приравнять нулю;
5) после сокращения каждого из составленных уравнений па соот-
соответствующее независимое возможное перемещение надо определить
из полученной системы уравнений искомые величины.
При применении общего уравнения динамики
к системам с двумя и ббльшим числом степеней сво-
свободы, в связи с громоздкостью выкладок, удобнее
пользоваться следующими правилами:
а) сделать предположение о наиравлепии ускорений точек системы;
6) направить па рисунке силы инерции в стороны, противополож-
противоположные избранным направлениям соответствующих ускорений;
в) записать алгебраические величины главных векторов и главных
моментов сил инерции по формулам:
w,
где w и s — соответственно алгебоанческие величины векторов w и е;
г) определить знаки работ сил инерции и моментом сил инерции
и соответствии С их направлениями па рисунке и избранными нлпраи-
ленпнмн возможных перемещений точек системы;
д) если искомые ускорения оказываются положительными, то сде-
сделанные предположения о направлениях ускорений подтверждаются,
если — отрицательными, то соответствующие ускорения направлены
в другую сторону (см. решение ялдач 396, 397 и 1-598).
Конечно, этот прием может быть использован и при решении задач
о движении системы с одной с iei опыо свободы.
Задача 388. Воспользовавшись общим уравнением дпнамгши,
вывести теорему об изменении ki петической энергии системы мате-
материальных точек.
Решение. При наличии стационарных связей действительные
перемещения drk точек материальной системы входят в число соот-
соответствующих возможных перемещений Ьгь, где п — чисто мм герца ль-
ных точек в системе, а А=1, 2,..., п.
Подставив и общее уравнение динамики вместо возможных пере-
перемещений действительные, получим:
X (^-«*«»*)-rfrfc = О,
*= i
или
п п
2 mkwb-drb= ? Fb-drk- С)
л = i k = i
^ d .,- mkv-k \ = У, Fir dr,.. B)
416 ДИНАМИКА НЕСВОБОДНОЙ СИСТГ.МЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
(Напомним, что действительные перемещения при стационарных связях
иходят в число возможных.)
Учитывая, что
mkwh ¦ dr,, = т„ -^"- • dru = m,<vk ¦ dvk = d I .f t/i,/vlj,
п[>едставим уравнение A) в виде
/ 1
¦ -г
к — I •' к
Заменив в левой части уравнения B) сумму дифференциалов функ-
Kiili лнфферепциалом суммы функций и учитывая, что -.. У] viuV%=T
и11л>1С1Си кинетической эпер1ией системы материальных точек, имеем:
* = i
Возьмем определенные интегралы: в левой части от 7\ до Т.ь где
7'( и 7'2 — кинетические энергии, соответствующие начальному и ко-
конечному положениям точек системы, а в правой части — по траекто-
траекториям точек системы от их начальных до конечных положений:
и = i
Заменив и правой части уравнения C) интеграл от суммы суммой
1Л12*>
интегралов и учитывая, что ^ Fk- dru= Л{Рк) выражает paOciy
задапаемоН силы Fk на нерометении ее точки приложения от началь-
начального положения до конечного, будем иметь:
^-7-,= ? A{Fk). D)
п = 1
Уравнение D) выражает теорему об изменении кинетической энергии
материальной системы, подчиненной идеальным связям: изменение
кинетической энергии системы материальных точек па конечном пере-
перемещении системы раппо сумме работ всех задаваемых сил па соответ-
соответствующих перемещениях точек системы.
Эта формулировка имеет преимущества по сравнению с той, ко-
которая была приведена в § 6 предыдущей главы:
П-П=^ A{Fek)^- ? A (Ft), .
*=I к=I
§51
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ
417
так как отпадает необходимость вычислять сумму работ тех внеш-
внешних и внутренних сил, которые являются силами реакций идеальных
связей. Если не все связи, наложенные на систему, являются идеаль-
идеальными, то следует еще дополнительно вычислять сумму работ сил Rk
реакций неидеальных связей и пользоваться теоремой в виде
T,~Tl = jj A(Fk)-\- 2 A(Rk).
к = 1 к = 1
Задача 389. Два зубчатых колеса / и 2 радиусов тх и г2 нахо-
находятся но пнешнем зацеплении. Моменты инерции колес относительно
их осей крашения соответственно ранпы /0, и /о„.
Определить угловое ускорение колеса /, если к нему приложена
пара сил с вращающим момен-
моментом /я0. Силами сопротивления
пренебречь.
Решение. Направим ось z
перпендикулярно к плоскости
рисунка на пас.
Пара зубчатых колес яв-
является системой с одной сте-
степенью свободы, так как угол
поворота одного из колес опре-
определяет положение второго ко-
колеса.
Склы тяжести колес обо- К задаче 389.
значим через Pi и Р4. Изобра-
Изобразим задаваемые силы: Р1( Рг, пару сил, приложенную к колесу /,
с вращающим моментом тй.
Займемся приведением сил инерции масс, входящих в систему. При
вращении колес вокруг неподвижных осей их силы инерции приво-
приводятся к парам сил, моменты которых противоположны по знаку зна-
знакам соответствующих проекций угловых ускорений и рапны по мо-
модулю произведениям моментов инерции колес относительно осей вра-
вращения па модули соответствующих проекции угловых ускорений.
Проекции угловых ускорений связаны очевидным соотношением
(минус введен потому, что колеса вращаются в разные стороны).
Момент пары сил инерции колеса 1 равен
а момент пары сил инерции колеса 2
14 Теоретическая механика, том II
418 ДИНАМИКА ЫЕСПОБОЛНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. X
или с учетом формулы A):
Дадим возможное углопое перемещение 8<pt колесу 1. При этом
колесо 2 получит возможное угловое перемещение Ъу%. Зависимость
между 8?] и 3<р9 легко может быть получена с помощью возможного
перемещения 8г точки К касания колес. Так как точка К принадлежит
обоим зубчатым колесам, то
Ьг =
(знак минус введен, ибо возможные угловые перемещения направлены
в разные стороны), откуда
Для составления общего уравнения динамики следует вычислить
сумму работ задаваемых сил и сил инерции на возможных переме-
перемещениях точек системы и приравнять эту сумму нулю:
(Работа сил тяжести Р\ и Р$ равна нулю, так как точки приложения
этих сил неподвижны.)
Воспользовавшись формулами B), C) и D), после почленного
сокращения уравнения на Вз>| получим:
откуда определим проекцию па ось г искомого углового ускорения
зубчатого колеса /:
Задача 390. Определить ускорение w грузов А и В, рассмотрен-
рассмотренных в задаче 368.
Решение. При решении задачи 368 методом кинетостатики
пришлось для определения ускорения w грузов рассмотреть каждую
из трех масс системы (груз А, груз В и блок D) в отдельности,
составить уравнения «равновесия» этих масс и решить систему трех
уравнений с тремя неизвестными.
Значительно проще решается эта задача применением общего
уравнения динамики. Вместо системы уравнений приходится решать
лишь одно уравнение.
Направим ось z вдоль оси вращения блока D за рисунок. Радиус
блока обозначим г.
SSI
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ
419
Изобразим задаваемые силы, приложенные к данной системе:
Pi — вес груза А, Р2 —вес груза В, Р3 — вес блока D. При наличии
идеальных связей, наложенных на систему, силы реакций связей
в общее уравнение динамики не входят.
Добаиив силу трения скольжения FTC груза В о наклонную пло-
плоскость, мы считаем, что на данную систему наложены только идеаль-
идеальные снязи (нить при движении системы считается натянутой и нера-
нерастяжимой). Остается прибавить силы инерции материальных точек
системы. Пусть груз А опускается с искомым ускорением w.
К задаче 390.
К грузам А и В, совершающим поступательное движение, прило-
приложим равнодействующие сил инерции, направив их противоположно
ускорениям соответствующих грузов, т. е. 7j — вверх, а Уа — парал-
параллельно наклонной плоскости вниз, причем
Рр р
i W Jn —• W W~ш (II
S S a
К блоку D, вращающемуся вокруг неподвижной оси, приложим
главный момент сил инерции п^г\ знак которого противоположен
знаку проекции углового ускорения ег:
Так как 1г =
то
.У.
г
B)
14*
420 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. X
(Главный вектор сил инерции блока V(-'' = — Mwc равен нулю, ибо
центр тяжести блока расположен па оси вращения.)
Мысленно остановив систему, дадим одной из ее материальных
точек возможное перемещение. Можно сообщить линейное возможное
перемещение грузу А вверх или вниз, либо грузу В — по наклонной
плоскости вверх или вниз, либо блоку D — угловое возможное пере-
перемещение по или против часовой стрелки.
Дадим грузу А возможное перемещение §г по вертикали вниз.
(Не следует считать, что направления движения какой-либо материаль-
материальной точки и ее возможного перемещения должны обязательно совпа-
совпадать. Направление движения точки зависит от системы сил, которые
к пей приложены, возможное же перемещение точки, рассматриваемое
из данного положения, зависит только от связей, наложенных на эту
точку, в остальном оно произвольно.) При этом, в силу нерастяжи-
нерастяжимости нити, груз В получит равное по модулю возможное перемеще-
перемещение, направленное вдоль наклонной плоскости вверх, а блок D по-
получит угловое возможное перемещение 8?. Взяв точку нити на ободе
блока, получим зависимость между линейным и угловым возможными
перемещениями
Ьг = гЬъ C)
где г — радиус блока.
Применим к данной системе материальных точек общее уравне-
уравнение динамики, т. е. приравняем нулю сумму работ задаваемых сил
(включая силы реакции иеидеальных связей) и сил инерции на воз-
возможных перемещениях точек системы
PiSr -|- Jixbr -;- /я(/'8<р — Я28г sin а — FTJr -+- Jisbr == 0. D)
Подстапин в уравнение D) значение силы трения Frc =_/УУ=/Я4 cos a
и воспользовавшись формулами A), B) и C), после сокращения на Ьг
получим:
Р Р Р
р1 J Wx ?и)л — р.2 sin a—/Я, cos a -wx = 0,
с> S &
откуда находим проекцию искомого ускорения грузов Ли/?:
При wx~^>0, т. е. при Р!^>Р2(sin a-|-/cos а) ускорение груза
направлено вниз.
Если бы по условию задачи требовалось также определить какие-
либо силы реакций связен либо давлений на связи, то пришлось бы
применить принцип освобождаемое™ к связи, силу реакции которой
требуется найти, и к соответствующей массе системы применить
основной закон динамики или метод кинетостатики. При наличии
вычисленных ускорений это не представляет затруднений.
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ
421
Так, если требуется определить силу реакции правой ветви нити,
мы мысленно обрываем нить вблизи груза А, прикладываем к грузу
три силы (см. рис. б): Pi — вес груза, 7, — силу реакции hhih,
Jt — силу инерции груза А.
Записываем уравнение «равновесия» груза А в проекции на верти-
вертикальную ось х:
Так как Jlx = l wx, то
= P,~-^
где wx — ускорение груза, определенное по формуле E). После под-
подстановки значения wx получим:
Задача 391. При движении кулака А веса Pt по горизонтальной
плоскости направо стержень Б веса Рг поднимается в вертикальных
направляющих вверх.
К задаче 391.
Какое ускорение приобретает кулак А, боковая поверхность ко-
которого образует угол а с горизонтом, если к нему приложена слева
направо горизонтальная сила F1 Коэффициент трения скольжения
кулака А о горизонтальную плоскость равен/.
422 ДИНАМИКА HECBOr.OftHOfl СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Решение. Рассматрипаемая система имеет одну степень сво-
свободы, так как положение кулака А на горизонтальной плоскости
определяет положение стержня В.
Неподвижные координатные оси ху изображены на рисунке.
К системе приложены задаваемые силы: Р1 — вес кулака, Рг — вес
стержня, F—движущая сила. Добавляем к задаваемый силам силу
трения скольжения Fr c кулака А о горизонтальную плоскость, направ-
направленную в сторону, противоположную движению кулака, т. е. налево.
Приложим силы инерции масс рассматриваемой системы. Так как
кулак А и стержень /i движутся поступательно, то к каждому из
них приложена равнодействующая сил инерции, направленная проти-
противоположно ускорению данного твердого тела и равная по модулю
произведению его массы на модуль ускорения.
Обозначив абсциссу точки D кулака хо (см. рисунок), выразим
ординату точки К стержня через xD:
где а и а — постоянные неличины.
Взяв вторую производную от ук по времени, определим зави-
зависимость между проекциями ускорений стержня и кулака:
^ = xDtga. B)
Если ускорение кулака А направлено по горизонтали направо,
то ускорение стержня В направлено по вертикали вверх. Поэтому
проекция на ось х равнодействующей силы инерции кулака Jt дается
формулой
/ — — ^х
а проекция па ось у равнодействующей сил инерции стержня Jt
имеет вид
b p^ C)
Дадим кулаку А возможное перемещение Ьхо по горизонтали
направо. При этом стержень В получит возможное перемещение Ьук
по вертикали вверх. Зависимость между Ьхо и Ьук определяем варьи-
варьированием выражения A):
Ьк=^о{ёа- D)
Составляем общее уравнение динамики для данной системы, т. е.
приравниваем пулю сумму работ задаваемых сил, сил трения и сил
инерции на возможных перемещениях точек системы:
F/oxD -1- JlxbxD -|- (Гг-е), 8*D + Рь$ук - \- JiybyK = 0,
§51
где
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ
423
Воспользовавшись формулами C) и D), после почленного сокра-
сокращения уравнения на Ьхо получим:
F-'g *d ~f(pi + Р* + J ¦% *g a) - A tg a - J лЪ tg' * = 0,
откуда определяем искомое ускорение кулака:
tg а, то
то -vn<0, т. е. ускорение кулака А
находится
Из найденного выражения следует, что если
a) F~^>f(Pt -j-P2) + ^tga, то Jco^> 0, т. е. ускорение кулака А
направлено направо;
нанраьлено на лене;
II почое, либо движется
равномерно направо или на-
налево (в зависимости от за-
заданных начальных условий
движении).
Задача 392. При враще-
вращении круглого эксцентрика А
теса 1\ и радиуса гх вокруг
неподвижной горизонтальной
оси О приводится в движе-
движение рамка В веса А,. Центр
тяжести С эксцентрика А от-
отстоит от оси вращения на
расстоянии ОС=а. К экс-
эксцентрику приложена пара,
момент которой равен т0.
Написать дифференци-
дифференциальное уравнение движения
эксцентрика.
Решение. Рассматри-
Рассматриваемая система имеет одну
степень свободы, так как положение
углом поворота эксцентрика.
Выбрав начало координат па оси О, направим ось х по вертикали
вверх. Угол, образуемый прямой ОС с осью х, обозначим ср.
К задаче 392.
всех ее точек определяется
424 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Задаваемыми силами япляются: Pt — вес эксцентрика A, Pq — вес
рамки В, пара сил с моментом mQ.
Силы инерции эксцентрика, вращающегося вокруг неподвижной
оси, приводятся к паре сил с моментом т^\ знак которого противо-
противоположен знаку проекции углового ускорения г2:
" О — 'О г
Момент инерции /0 эксцентрика относительно оси О, перпендику-
перпендикулярной к его плоскости, вычисляем по теореме Штейнера:
Р г2
Так как /0 = -у- и ОС=а, то
/о = ?
Следопательно,
К рамке В, движущейся поступательно, приложим равнодейству-
равнодействующую сил инерции J, направленную противоположно ускорению
рамки В:
Р
Для определения ускорения рамки В запишем уравнение движения
любой ее точки, например точки D:
xD =--OD = a cos tp + г, B)
откуда
xD = — аф2 cos <p — ay sin '¦?.
Следовательно, проекция на ось х силы инерции J равна
Jx= - ?а(»2 cos f-\-<i sin <?). C)
Дадим возможное угловое перемещение 8в эксцентрику в направ-
направлении возрастания угла ср. Возможное перемещение Ьхо точки D
выразим через 89. Для этого вычислим вариацию xD, воспользовавшись
формулой B)
lxD = — a sin 'f Sep. D)
Знак минус указывает, что Ъго направлено вниз при sin rp Scp^> 0.
Составим общее уравнение динамики для данной системы, т. е.
приравняем нулю сумму работ всех задаваемых сил и сил инерции
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ
425
па возможных перемещениях точек системы:
«О
lXD = °-
Учитывая, что mQ (Р,) = Pta sin cp и Рчх —— P4, воспользовавшись
формулами A), C) и D), после сокращения на 8ср, получим искомое
дифференциальное уравнение движения эксцентрика:
[Я, (г1 -{- 2аа) + 2^* sin'2 7] Ц -f
2gw0 = 0.
sin 2<p —
sin
Задача 393. К оси С катка А веса Pt и радиуса rt прикреплен
конец тонкой нерастяжимой нити, намотанной па блок В веса Ра и
К задаче 393.
радиуса г2. К блоку В приложена пара сил с моментом т(У При
этом нить наматывается на обод вращающегося вокруг неподвижной
оси блока В, а каток А катится без скольжения вверх по наклонной
плоскости, расположенной под углом а к горизонту.
Определить ускорение центра тяжести С катка, если коэффициент
трения качения катка о наклонную плоскость равен /к. Каток А и
блок В считать однородными круглыми дисками. Массой нити пре-
пренебречь.
Решение. Рассматриваемая система имеет одну степень свободы,
так как положение блока В, заданное посредством его угла поворота,
определяет положение катка А.
Изобразим задаваемые силы: Pt — вес катка А, Р2 — вес блока В,
пару сил с вращающим моментом tnQ.
426 ЯИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. X
Наклонная плоскость, по которой катится каток А, не является
идеальной связью. Поэтому к задаваемым силам добавляем силу
трения /^р катка о наклонную плоскость (FTp =/7V—/Pt cos а), на-
направленную вдоль наклонной плоскости вниз (/— коэффициент трения
скольжения). Так как имеется трение качения, то нормальная сила
реакции R наклонной плоскости смещена в сторону движения катка на
расстояние/к, равное плечу пары трения качения, mrK=RfK=fkPiCOs a.
Переходим к рассмотрению сил инерции системы. Направим
ось z перпендикулярно к плоскости рисунка от пас, а ось л;— вдоль
нити вверх. Ускорение wQ центра тяжести С катка направлено парал-
параллельно линии наибольшего ската наклонной плоскости. Вниду того,
что нить нерастяжима, wCx = rieiz. При качении катка беи сколь-
скольжения мгновенный центр скоростей находится в точке аР касания
катка с наклонной плоскостью, поэтому wCx^riBi2, где е,г—npoei,-
ция углового ускорения катка. Следовательно,
wcx = riz\2 — rfoz. A)
К блоку В, вращающемуся вокруг неподвижной горизонтальной
оси О, перпендикулярной к плоскости рисунка, приложим пару сил
инерции с моментом т^\ знак которого противоположен знаку
проекции углового ускорения s2/.
Учитывая, что блок рассматривается как круглый однородный
, Р..г?.
диск, т. е. /():=¦--, получим:
< = -™*и- B)
Силы инерции катка А, совершающего плоское движение, при-
подятся к силе, равной главному вектору V'7) и паре сил, момент
которой равен глапному моменту /я(с'>. Сила инерции V(y> приложена
в центре тяжести С катка и направлена противоположно ускорению
wc, причем
^ C)
Главный момент сил инерции т^ относительно оси С, проходящей
через центр тяжести катка перпендикулярно к его плоскости мате-
материальной симметрии, имеет знак, противоположный знаку проекции
углового ускорения е1г катка: т^ = —1С&1 . Учитывая, что !с =
Р г2
= ¦¦.'' запишем:
2g '
§ 5] ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 427
Итак, силы инерции данной системы приводятся к паре сил
с моментом т$ (блок В), а также к силе V*7) и паре сил с мо-
моментом /и^> (каток А).
Дадим возможное угловое перемещение 8ср2 блоку. При 3iom
точка нити, лежащая на ободе блока, получит возможное перемещение
г98о2. В связи с нерастяжимостью нити такое же возможное переме-
перемещение имеет центр тяжести С катка: 8гс = г28'х>2.
Точка о?5 является мгновенным центром скоростей катка, поэтому
8/"c = r,S<pI, где 8'fi—возможное угловое перемещение катка А. Итак,
8rc = r,8?I=r,8<p,. E)
Составим общее уравнение динамики для рассматриваемой системы:
т0Ьъ -L- т^ъ ~ Я,8гс sin a +¦ vy>8rc +
J_ да.7«?| _(_ /Ят_к 8?| + ЗЛ (FTp) + 8А (Р,) = 0.
РаОота силы тяжести Р9 равна нулю, так как точка приложения
этой силы неподвижна.
Выберем теперь в качестве возможного перемещения действитель-
действительное перемещение rf'fss (эт0 можно сделать, так как в нашем случае
связи стационарны). Тогда работа силы трения 8Л(/7тр) будет равна
пулю, ибо при действительном перемещении точка приложения силы
трения всегда совпадает с мгновенным центром скоростей.
Учитывая, что /ят. к = —/KR = —fvP\ cos a' a также восиользо-
папшись формулами B), C) и D), находим:
«О8?» — Щ- ^ Ь'Ъ — Р^ГС Sl" Я - J WCxbrC ~
С помощью формул A) и E) выразим Scpj и §'f2 через Ьгс, а Е1г
и еа, через wCx. После почленного сокращения ураппепия па 8гс по-
получим:
откуда определим проекцию на ось х искомого ускорения центра
тяжести катка А:
7--Pi (sma+f-Kcosa)
Если -- ~^>Р\ (sin a-j- ¦- cos a), то wCx~^>Q, т. е. wc направлено
параллельно линии наибольшего сказа наклонной плоскости вверх.
428
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Задача 394. На рис. а изображен дифференциальный блок, упо-
употребляемый для подъема тяжестей. Сила F приложена к концу не-
невесомой иерастяжимой нити. Нить, переброшенная через блок А
радиуса R, охватывает нижний подвижной блок В веса Pt. Второй
конец нити намотан на блок D радиуса г. Блоки А и D образуют
К задаче 394.
ступенчатый барабан веса Р с радиусом инерции р относительно
горизонтальной оси вращения барабана. Радиус инерции подвижного
блока В относительно оси, проходящей через центр тяжести С блока
перпендикулярно к плоскости его материальной симметрии, равен р,.
К оси С блока В подвешен поднимаемый груз К веса Рг.
Определить угловое ускорение s ступенчатого барабана. Массой
нити пренебречь.
«51 ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 429
Решение. Дифференциальный блок является системой с одной
степенью свободы. Действительно, угол поворота 9 барабана опре-
определяет положение всех точек системы.
К данной системе приложены задаваемые силы: F— сила, дей-
действующая на конец нити; Р — вес ступенчатого барабана, Pi — вес
подвижного блока В, Р2 — вес поднимаемого груза К- Связи, нало-
наложенные на систему, являются идеальными (нить считается натянутой
при работе дифференциального блока).
Добавляем силы инерции материальных точек системы.
Проекцию на ось z (ось z направим перпендикулярно к плоскости
рисунка на нас) искомого углового ускорения ступенчатого барабана
обозначим гг. К ступенчатому барабану, вращающемуся вокруг не-
неподвижной оси z, приложим пару сил, момент которой раяен глав-
главному моменту сил инерции т^: Знак этого момента противоположен
знаку е^:
<) = -/Л = -|р*?г (О
Рассмотрим нижний блок, совершающий плоское движение. Сила
инерции блока В, равная главному вектору сил инерции VlJ\ при-
приложена в его центре тяжести и направлена противоположно ускоре-
р
пию wc, т. е. V|y) = -' wc. Его проекция па ось х (см. рис. а)
раина
№ = -¦%¦ wCx. B)
Главный момент сил инерции блока В относительно оси, про-
проходящей через его центр тяжести С перпендикулярно к плоскости
материальной симметрии, равен
^ = -р?е' C)
В формулы BХ и C) входят и<сх и е1г> которые надо выразить
через проекции углопого ускорения ступенчатого барабана е2. Заметим,
что точки L и М нити имеют равные по модулю ускорения. Точка L
расположена па ободе блока D радиуса г, вращающегося с угловым
ускорением е, т. е.
Точки N к S нити также имеют равные по модулю ускорения.
Точка S расположена на ободе блока А радиуса R, вращающегося
с угловым ускорением гг, т. е.
430 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК |ГЛ. X
Изобразим ускорения точек М и N нити на рис. б.
Проекцию wQx ускорения адс центра тяжести С блока В на ось х
можно легко определить рассуждением, законность которого обо-
обоснована в кинематике. Для этого соединим концы векторов ускорений
wm и wn пРям°й- Центр тяжести С блока В движется по вертикали.
Поэтому ускорение wc также направлено по вертикали.
Конец wc лежит на прямой аЗ. Так как отрезки нити Л1..', и i\/S
расположены вертикально, то диаметр блока В рягим;
MN=R-\-r. F)
Пользуясь подобием треугольников аРМа. и §РЩ, запишем
W ы W \г
—¦'¦ = —'ф. Учитывая формулы D), E) и F), находим М& = г,
= R. Следовательно, СУ = МС — МаР = R^r r = A?~r
Из пропорции ^L = -^t „олучим: wCx = - gj wMx, т. е.
= -^— tz. G)
Проекция углопого ускорения блока В равна
wMx __ wNx _ WCx^
Тогда получим:
Учитывая знаки wCx и ег, направим на рис. о глапмый вектор
' сил инерции блока В цо вертикали вниз. Внося и B) значение
х из G), определяем:
y\J) — _' ° г - /qi
После подстановки в формулу C) значения е1г из (8) находим:
т1.П Р\ «О.
Груз /<¦ веса Рг движется по вертикали вверх. Проекция на ось л-
его ускорения wCx = —т^~^г- Поэтому равнодействующая сил инер-
инерции груза К
S51 ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 431
направлена по вертикали вниз и ее проекция
Итак, в результате приведения сил инерции дифференциального
блока мы получим пару сил с моментом т^ (ступенчатый барабан),
силу V\J) и пару сил с моментом mS?\ (блок В) и силу /4 (груз /О.
Дадим возможное угловое перемещение 8ср ступенчатому барабану,
направив 5ф против часовой стрелки. Вычислим возможные переме-
перемещения точек приложения задаваемых сил и сил инерции, выразив их
через 8<р. Точки L и М нити имеют равные возможные перемещения.
Точка L расположена па ободе блока П радиуса г, получившего
возможное перемещение В;р против часопоН стрелки. Поэтому возмож-
возможное перемещение точки Л1 направлено по вертикали шшз, причем:
Ьг,л = Ьг1 = гЦ. A2)
Точки N и S нити также имеют равные возможные перемещения.
Точка 5 нити расположена на ободе блока А радиуса R, получив-
получившего возможное перемещение <5<р против часовой стрелки. Поэтому
возможное перемещение точки N направлено по вертикали вверх,
причем
8^ = 8^=^89. A3)
Изобразим возможные перемещения точек М и N па рис. в.
Осуществив построение, аналогичное тому, коюрое было сделано
Ъг м 8Гд,
для ускорений этих точек на рис. б, запишем: 7Jit~~(JKj- Восполг,-
зовавшись формулами A2) и A3), из пропорции получим МО = г,
OtV=R (т. е. точка 5s рис. б совмещена с точкой О рис. в). Сле-
Следовательно, ОС = МС — МО--¦-' ^~Г — г= ~"г. Из пропорции
—рг = 75Ж находим> чт0 возможное перемещение центра тяжести С
нижнего блока В равно
« Ы — г л
A1)
и направлено по вертикали вьерх. Возможное угловое перемещение
Ьгм Ъг., Ъгс
5«1 = -гг7т=-ггтг = -гт7г блока В направлено против часовой стрелки,
" ОМ UN VL
причем
ЬЬ = Ц. A5)
432 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Переходим к составлению общего уравнения динамики. Для этого
надо сумму работ задаваемых сил и сил инерции иа возможных пе-
перемещениях точек системы приравнять нулю. Имеем
т2 (Г) Йср -|- т^Щ + Р1хЬгСх + VWrCx -f «#%, -f
(Работа веса Р равна нулю, так как точка приложения этой силы
неподвижна.) Учитывая, что !nz(F) = FR, Р\х =—Р\, Р-гх = — Р*>
8гГл. = 8гс, а также принимая во внимание формулы A), (9), A0),
(li), A4) и A5), после почленного сокращения уравнения A4) на Ьу
получим:
Р Л _ D R — r P^ IR --?у _ Р, » _
" ~? — г
Решив это уравнение относительно ег, находим:
2 s 4Рр2 + 4Р,р;+ Pi(R — Г)'2 \-P-AR— Г)*'
Груз К поднимается из состояния покоя ускоренно вверх при
> 0, т. е. при выполнении условия
Груз /('опускается из состояния покоя ускоренно вниз при
т. е. при выполнении условия
Если F = (Pt -f-Pg) .... , то ег = 0. При этом груз находится
п покое либо движется равномерно вверх или вниз (в зависимости
от начальных условий движения).
Задача 395. Каток А и барабан D связаны тонкой перастяжимоп
питью. Нить, привязанная своим конном к оси d катка А, перебро-
переброшена через блок В и намотана на барабан D. К катку А веса /Ji
и радиуса г, приложена пара сил с моментом т, заставляющая каток А
катиться вверх без скольжения по наклонной плоскости, расположен-
расположенной под углом а к горизонту. При этом блок В веса Р9 вращается
вокруг неподвижной оси О, а барабан D веса Р3 и радиуса г3 катится
без скольжения вверх по наклонной плоскости, расположенной под
углом р к горизонту.
Определить ускорение и>С;, центра тяжести С\ катка А, если
коэффициент трения качения катка и веревок, намотанных на барабан,
§5]
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ
433
о наклонные плоскости равен fh. Каток, блок и барабан считать
однородными круглыми цилиндрами. Массой нити и ее проскальзы-
проскальзыванием по ободу блока пренебречь.
Решение. Ось z направим перпендикулярно к плоскости ри-
рисунка на пас.
Рассматриваемая система имеет одну степень свободы, так как
положение катка А на наклонной плоскости определяет положение
блока и барабана. Обозначим: г, — радиус блока В.
г,
К задаче 395.
К системе приложены задаваемые силы и моменты; Рх — вес катка,
Р.г — вес блока, Р3 — вес барабана и пара сил с вращающим момен-
моментом т.
Наклонные плоскости не являются идеальными связями. Поэтому
изобразим силы трения. При наличии пары сил с вращающим момен-
моментом т каток А является ведущим и сила трения F^p катка А о на-
наклонную плоскость направлена вдоль наклонной плоскости в сторону
движения. Сила трения /^тр нити, намотанной па барабан, о наклонную
плоскость, также направлена вдоль наклонной плоскости в сторону
днижения, т. е. вверх.
Ввиду наличия трения качения нормальные силы реакций наклон-
наклонных плоскостей Rt и #а смещены вперед в сторону движения па ве-
величину плеча пары трения качения, равного коэффициенту трения
качения /к.
Для определения модулей сил инерции и моментов пар сил инер-
инерции масс системы найдем зависимость между ускорениями центров
434 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
тяжести катка А и барабана D и угловыми ускорениями катка, блока
и барабана. (Оси х и s изображены на рис. а.)
Направим Wd параллельно линии наибольшего ската наклонной
плоскости в сторону движения катка, т. е. по оси х. Ввиду нерас-
нерастяжимости нити wc x — w ?_ = а>л, причем wI, = riBiz . Учитывая,
что мгновенные центры скоростей катка и барабана соответственно
расположены в точках <^i1 и ё?я, получим:
wKs
(см. рис. б). Следовательно,
=2wc_iS, A)
где е^, е2г и взг — соответственно проекции па ось z угловых уско-
ускорений катка, блока и барабана.
Переходим к приведению сил инерции материальных точек си-
системы.
Силы инерции катка А, совершающего плоское движение, прино-
дятся к силе, равной главному вектору V( ' и паре сил, момент ко-
которой равен главному моменту т'^. Сила приложена в центре тяже-
тяжести С] катка и направлена противоположно ускорению его центра
тяжести, т. е. параллельно наклонной плоскости вниз ( V\JI = — ~-fwcl),
поэтому
Vu) Pi
Главный момент сил инерции катка т(с' относительно оси, прохо-
проходящей через его центр тяжести Q перпендикулярно к плоскости
материальной симметрии, имеет знак, противоположный знаку проек-
проекции углового ускорения sIz, т. е.
C)
Силы инерции блока В, вращающегося вокруг неподвижной оси,
приводятся к паре сил, момент которой равен главному моменту от-
относительно оси вращения О. Знак момента противоположен знаку
проекции его углового ускорения:
<) = -/Ова, = -Ще2г. D)
Силы инерции барабана D, совершающего плоское движение, при-
приводятся к силе, рапной главному вектору V,' и паре сил, момент
которой равен главному моменту /п^\ Сила V^ ( приложена в его
§ 51 ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 435
центре тяжести С3, направлена противоположно ускорению wc,> т. е.
параллельно линии наибольшего ската наклонной плоскости вниз, и
проекция это1 силы на ось s равна
V3s=-^Wc,B. E)
Глапнмй момент сил инерции тс барабана D относительно оси,
проходящей через его центр тяжести С3 перпендикулярно к плос-
плоскости материальной симметрии, имеет знак, противоположный знаку
проекции углового ускорения e3z:
т^-ГСлв,2 = -^г32. F)
Итак, силы инерции материальных точек рассматриваемой сис-
системы оказались приведенными к силе V[J) и парс сил с моментом
/н'с' (каток А), к паре сил с моментом т{? (блок В), к силе V^y) и
паре сил с моментом т{р (барабсн/3).
Дядим возможное перемещение Вгс, центру тяжести С\ катка А
параллельно наклонной плоскости вверх. Учитывая перастяжимосчь
нити, имеем: 8гс,=&О. =Ъгк. Кроме того, 8/-? =г$у.х, где 5tp* —
возможное угловое перемещение блока В. Принимая во внимание, что
мгновенные центры скоростей катка А и барабана D соответственно
расположены в точках &{ и аРл, получим: Ъгс, =J"|2'fi, 8rA- = '2r;io'fr =
= 28лс., (см. рис. в), где о?, и 8^я — соответственно возможные углоиые
перемещения катка и барабана. Следовательно,
brCl = r,Scp, = rjft = 2гя8?3 = 2 8гСя. G)
Составим общее уравнение динамики:
т &р, — P,8rCl sin a + V flrClX + ffl(c^8?1 — «1т. К8?, +
+ т^Ьъ — Pa8rC3sin р-1- V.'/'Src,, -j- т(сУ;а?з —
— тЗТш К8ср3 + 8Л (Я2) + 8Л (flTp) + 8Л (FjTp) = 0. (8)
Работа веса Р9 блока В равна нулю, так как точка приложения
этой силы неподвижна.
Выберем теперь в качестве возможного перемещения действитель-
действительное перемещение <tfrC| (это допустимо, ибо в данном случае связи
стационарны). Тогда работа сил трения bA(FlTp) и %A(F^p) будет
равна нулю, так как при действительных перемещениях точки при-
приложения сил трения Fu? и F3tv всегда совпадают с соответствую-
соответствующими мгновенными центрами скоростей.
Учитывая, что модули моментов пар трения качения равны ти. к =
= /яР! cos a, /M3T.K=/KP3cosp, 8rCl* = 8rCl, SrCas = 8rCe и, вое-
436 ДИНАМИКА НР.СВОВОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК |ГЛ. X
пользовавшись формулами B), C), D), E) и F), запишем уравне-
уравнение (8) в виде
т 8?] — Р, 8/-С, sin а — % wClxtrCl — Щ ^Mi ~
—APi cos а.ЬЪ - Щ- ЧгЬЪ - Я3ЗгСз sin ? —^- wCaMCi ~
^ = 0. (9)
Выразив с помощью формулы A) е,г, е2г, еЯг и г»сз5 через а'с,*,
a 8<pi, §9-2> ^?з и ^""Сл с помощью формулы G) — в зависимости
от 8гсц представим уравнение (9) после почленного сокращения па
8гс, в виде
?. _ Pl sin a - 11' г»С1Я - -f;- Pi cos а - ,g- «,<:„ -
p яр f
— 2 sinP—^™с1Л— 2^-P»cosp = 0. (Ю)
Из уравнения A0) определяем проекцию искомого ускорения
центра тяжести катка А:
— —Pj Sin a +f-« COS a) — Р? fsin ? + f-K COS $)
Если
|^-> P, fsin a +/« cos a) -f ^ fsin p 4-^K-cos
to ffi'Ci^^>0, т. е. ускорение центра тяжести С\ катка А направлено
параллельно липни наибольшего ската наклонной плоскости вверх.
Задача 396. К копнам тонкой нерастяжимой нити привязаны
груз А веса Р, и груз В веса /V Нить переброшена через блоки D
и ? и охватывает снизу подвижной блок К. К оси О5 подвижного
блока К прикреплен груз /. веса /°е; Рл — вес блока Д Р4 — нес
блока Е, Рк — вес блока К- Грузы А и В движутся по наклон-
наклонным плоскостям, соответственно расположенным под углами а и р
к горизонту.
Определить ускорений грузов А, В и L. Блоки считать однород-
однородными круглыми дисками. Силами трения скольжения грузов о наклон-
наклонные плоскости и массой нити пренебречь.
Решение. Данная материальная система имеет две степени сво-
свободы. Действительно, задав положения грузов А и В па наклонных
плоскостях, мы определим положение всех остальных масс системы:
блоков Д Е и К и груза L.
Изобразим па рис. а все задаваемые силы: Р, — вес груза А,
Р2—вес груза В, Рл — вес блока D, Р4 — вес блока Е, Р5—вес
блока К, Рй—вес груза L
§51
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ
437
Все связи, наложенные на систему, являются идеальными (наклон-
(наклонные плоскости — идеально гладкие, нить предполагается нерастяжимой
и при движении системы натянутой). Поэтому при составлении общего
уравнения динамики силы реакций связей рассмотрению не подлежат.
Обозначим через гл, г4 и гв — радиусы блоков D, Е и К соотиет-
ственно, через idj и и>2 — ускорения грузов А и В. Предположим,
что оба ускорения направлены параллельно линиям наибольшего ската
соответствующих наклонных плоскостей вниз. Так как нить нерастя-
нерастяжима, то модуль ускорения точки М нити равен модулю ускорения
груза А, а модуль ускорения точки N нити — модулю ускорения
груза В (wM = wt, wN = wJ.
К залаче 306.
Из рис. б можно найти ускорение центра тяжести 0^ блока К:
Для определения углового ускорения е3 блока К примем точку N
за полюс и воспользуемся тем, что проекция ускорения точки М па
вертикальную ось рапна
Так как W*N = 7ИЛ/ев = 2гвев, то
При
Wt—W,
в~ 2г, "~ 2гь ' ^>
блок К вращается ускоренно по часовой стрелке.
438 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Ускорение точки нити на ободе блока D равно W{, следовательно,
угловое ускорение е3 блока D будет
и-а. C)
(Блок D вращается ускоренно против часовой стрелки).
Аналогично, блок Е вращается ускоренно по часовой стрелке,
причем
— а. D)
Переходим к приведению сил инерции материальных точек данной
системы.
Силы инерции грузов А и Б, движущихся поступательно, приво-
приводятся к равнодействующим J, и Л. направленным соответственно
противоположно ускорениям isix и wq, т. е. параллельно линиям наи-
наибольшего ската наклонных плоскостей вверх:
Р Р
7i = — -' wv Л = — -t w.h
s s
причем
A = jWi> Ji=j®>* E)
Силы инерции блоков D и Е, вращающихся вокруг неподвижных
осей, приводятся к парам сил с моментами /и^> и /й^>, причем по
модулю
Блоки D и Е являются однородными круглыми дисками, поэтому
Принимая во внимание формулы C) и D), получим модули главных
моментов сил инерции:
(ЛЬ.
Ол— ty ' g
Силы инерции блока К, совершающего плоское движение, приво-
приводятся к силе, равной главному вектору Ув и паре сил, момент кото-
которой равен главному моменту т^_ относительно оси, проходящей че-
через его центр тяжести Оа перпендикулярно к плоскости материальной
симметрии. Сила У5 приложена в центре тяжести Об блока К и на-
направлена противоположно его ускорению w0 , т. е. по вертикали вниз:
§ 5| ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 439
Учитывая формулу A), получим:
Л- — 2—. G)
Модуль главного момента /м^1 сил инерции блока К имеет вид
тоъ — /о5ев — 4g " W
Силы инерции груза L, движущегося поступательно, приводятся
к равнодействующей Уе, направленной противоположно его ускоре-
р
нию wQ_, т. е. по вертикали вниз: У6 = Lwo-- ^ Учетом форму-
формулы A) получаем:
./. = -§-(u>, + nu,). @)
Итак, силы инерции рассматриваемой системы оказались приве-
приведенными к силам У,, Уа, У3 и J6 и парам сил с моментами 7/г'^>, т^\
<[¦
Дадим данной материальной системе, имеющей две степени сво-
свободы, два независимых возможных перемещения 8г, и 8г2 (соответ-
(соответственно грузам А и В), направив их параллельно наклонным пло-
плоскостям вниз.
Учигыпая независимость этих возможных перемещений, будем при
составлении каждого из дифференциальных уравнений движения да-
нать одно возможное перемещение, считая при этом другое возмож-
возможное перемещение равным нулю.
а) Дадим грузу А возможное перемещение 8гь считая при этом
8гг равным нулю, т. е. о/*! ф 0, 8га = 0.
Это значит, что груз А переместится вдоль наклонной плоскости
вниз на &/",. Учитывая нерастяжпмость нити, отметим, что равное воз-
возможное перемещение получит точка М нити, расположенная на ободе
блока К, т. е. brM=brt. Блок D повернется против часовой стрелки
на угол
Так как 8га = 0, то груз В, блок Е и правая ветвь нити до точки N
останутся в покое.
Пользуясь рис. в, нетрудно найти возможное перемещение центра
тяжести Об блока Л':
ЬгОь = Ь^ = ^-. (П)
440 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Рассматривая возлюжиое перемещение Ъгм по отношению к непо-
неподвижной точке N, имеем: Sr^ = 2гв8срв, откуда
Возможное угловое перемещение 8ср3 блока К направлено почасо-
почасовой стрелке.
Составим общее уравнение динамики, т. е. вычислим сумму работ
всех задаваемых сил и сил инерции материальной системы на пол-
можпых перемещениях, соответствующих 8г,, и приравняем ее нулю:
sin а — У,8г, — т?Ъъ ??в
-J-MOb-PubrO:-J,bro% = Q. A3)
Работа сил Рь У2 и пары сил инерции с моментом т1^ равна
нулю, так как груз В, блок Е и правая ветвь нити до точки N при
br<i = Q являются неподвижными. Работа сил Рл и Р^ равна нулю,
так как их точки приложения неподвижны.
Подставим в уравнение A3) значения: Jj из формулы E), mS? — из
формулы F), т^} — из формулы (8), J8—из G), ./6—из (9), 8ср3 — из
A0), brQ —из A1), 8срв — из A2). После почленного сокращения
уравнения A3) на Ьг\ находим:
- -g (щ -f wt) - -Pf - Ц- (щ + w,) = 0
или
— -J- (8A + 4рз + ЗЯ8 -1- 2Pe) — j|? (P, -f 2P6) -|-
-f Ptsina — P5+Po = O. (H)
б) Дадим грузу В возможное перемещение 8г2, считая при этом
o/*i равным нулю, т. е. brl = Q, 8г2 =? 0.
Это значит, что груз Л' переместится вдоль наклонной плоскости
вниз на Ьгг. В связи с нерастяжимостыо нити возможное перемеще-
перемещение точки /V нити, лежащей на ободе блока К, равно возможному
перемещению груза В, т. е. 8rjV=8r2. Блок Е повернется по часовой
стрелке па угол
§ SI ОВЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 441
Так как 6г1 = 0, то груз А, блок D и левая ветвь нити до
точки М находятся в покое. При этом
brOi=--~ = -2- A6)
(см. рис. г).
Рассматривая возможное перемещение brN по отношению к. не-
неподвижной точке М, запишем: &rflr = 2rs8'f5> откуда
Возможное угловое перемещение 8у5 блока К направлено против
часовой стрелки.
Составим общее уравнение динамики, т. е. вычислим сумму работ
всех задаваемых сил и сил инерции материальной системы на воз-
возможных перемещениях, соответствующих 8га, и приравняем ее пулю:
/'»8/ч sin р — Л8г» — т$Ъп + т^ЬЪ — РаЪгОз —
— У,ВгОа - kbrOi - У,8го, =0-
Работа сил Р1; Ji и пары сил инерции с моментом т^ равна
пулю, так как груз А, блок D и левая ветвь нити до точки Л1 ис-
поднижиы (bri = 0). Работа сил Ра и Р4 равна нулю, так как точки
приложения этих сил неподвижны.
Воспользовавшись формулами E), F), G), (8), (9), A5), A6) и
A7), после почленного сокращения уравнения A8) па 8га получим:
или
- g (8Р2 + 4Я, + ЗЯВ + 2Р6) - f А (Я3 + 2Р6) +
-^±^==O. A9)
Уравнения A4) и A9) образуют систему дифференциальных урав-
уравнений движения:
- g (8P, + 4P3 + 3P, + 2P6) - g (/
-|-Pi Sin a — Ps + P' = 0, A4)
— ®; (8P2 + 4P4 -f 3P6 -f 2Р6) — ^ (PB + 2P6) +
-4- P, sin 3 — Ps "tP' = 0. A9)
442 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Решив эту систему уравнений, находим модули искомых ускоре-
ускорений грузов А и 5:
o D (С — А) + А -Р„ sin p — С- Р, sin a } B0)
™2=8? ^ir^
где
8д2_|_ 4Р4-]- ЗРВ + 2PU = В, Рь^-2Ръ=С
и
Р» + Ро —д.
При решении задачи мы предположили, что грузы А и В дви-
движутся ускоренно вниз вдоль наклонных плоскостей с ускорениями
Если значения wx и тг.2, подсчитанные по формулам B0), ока-
окажутся положительными, ю сделанное предположение подтверждается.
Если же эти значения окажутся отрицательными, то это означает,
что ускорения грузов направлены вдоль наклонных плоскостей вверх.
Для определения ускорения груза L, т. е. wQ , надо в A) под-
подставить значения wt и w.i из формул B0). Находим:
w . D BC — А — И) + (А — С)Р., sin В + (В — С) Р, sin a
о, '^ ЛВ — С-
Если значение w0 , подсчитанное по этой формуле, положительно,
то ускорение груза L направлено вверх, если же отрицательно, то
ускорение груза L направлено вниз.
Данную задачу, подобно всем предыдущим задачам этого пара-
параграфа, можно решить с помощью уравнений Лагранжа второго рода.
Это решение приведено н задаче 414. Там же дана сравнительная
оценка обоих методов решения задачи.
Задача 397. На рис. а изображен центробежный регулятор,
который приводится во вращение вокруг вертикальной неподвижной
оси наро!) сил с моментом тв? = т. Шары регулятора М и N,
веса Р, каждый, укреплены па концах стержней ОМ и ON, шар-
нирно соединенных в точке О. Муфта В веса Р2 шарнирно соеди-
соединена со стержнями ВА и BD, которые в свою очередь соединены
шарнирами А и, D со стержнями ОМ и ON. Муфта В отжимается
вниз пружиной, коэффициент упругости которой равен с. При отвес-
отвесном положении стержней ОМ и ON пружина недеформирована ОМ —
= ON=a, ОА = АВ= BD = OD=l. При изменении нагрузки ма-
машины изменяется угол а, образуемый стержнями ОМ и ON с вер-
вертикалью.
§ 5]
ОБЩР.Р. УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ
143
Составить дифференциальные уравнения движения регулятора,
если момент инерции муфты В относительно вертикальной оси ра-
равен /. Шары /И и Л/ считать точечными массами. Массами стержней и
пружины пренебречь.
К задаче 397.
Решение. Регулятор представляет систему с двумя степенями
свободы. Действительно, для определения положения всех его точек
надо знать два независимых параметра: угол поворота 9 регулятора
вокруг вертикальной оси и угол отклонения а, образованный стерж-
стержнями ОМ и ON с вертикалью (см. рис, а).
Задаваемыми силами и моментами являются:
Р, — вес каждого из шаров, Р^—вес муфты, упругая сила пру-
пружины F и пара сил с вращающим моментом т.
444 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
При увеличении угла а муфта В поднимается вверх, пружина растя-
растягивается и, следовательно, упругая сила пружины F направлена вер-
вертикально вниз. Модуль этой силы равен F = c\h\, где Д — удли-
удлинение пружины. (Силы изображены на рис. в.) Для вычисления удли-
удлинения . пружины направим ось х из точки О вдоль оси вращения
вниз. Воспользовавшись равнобедренным треугольником ОАВ (О А =
= АВ = 1), имеем:
ATfl=Ofl = 2/cosa. A)
По услопию задачи пружина педеформирована при отвесном поло-
положении стержней, т. е. при ОД =2/. Удлинение пружины &х =
=— 2/A — cosa). Следовательно, проекция на ось х упругой силы
пружины F равна
Fx = — cAx==2cl(l — cosa). B)
Для определения сил инерции шаров М и N и муфты В рас-
рассмотрим их ускорения. Муфта В движется поступательно вдоль вер-
вертикальной оси. Взяв вторую производную от хв по времени и вос-
воспользовавшись при этом формулой A), получим:
Хп = — 2/х* cos a — 2/a sin а
(при вычислении производных следует иметь в виду, что а является
функцией времени). Знак минус указывает, что ускорение wB муфты Б
при а^>0 направлено по вертикали вверх. Итак,
-j- Ssina). C)
Так как тары М и N имеют одинаковые по модулю ускорения,
то достаточно рассмотреть ускорение одного ил них.
Шар М, принимаемый за материальную точку, участвует п слож-
сложном движении: в переносном вращательном движении вокруг верти-
вертикальной оси регулятора и в относительном движении вместе со
стержнем ОМ, который вращается вокруг горизонтальной оси О, пер-
перпендикулярной к плоскости рис. б. Следовательно, абсолютное ус-
ускорение точки /И можно определить но теореме о сложении уско-
ускорений точки при переносном вращательном движении:
1Л} ж* ^^ 7S) —1— еШ —i— еШ —1— 1Л} — IS) . D)
Нее состанляющие ускорения точки М изображены па рис. б.
Ускорения wen, wrn, wr_ лежат в плоскости рисунка, ускорения w^ и
wc направлены перпендикулярно к плоскости рисунка от пас. Вели-
Величины ускорений определяются следующими формулами:
wen=\ МК\§* = я<?'2 sin a, we. = \ MK\ cp=a? sin а,
wrn = аа2, wr- = ao., wc = 2т^г sin (<ae, vr) = 2a$i cos а.
E)
§ 51 . ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 445
Переходим к определению сил инерции шаров М и Л/ и муфты В
(см. рис. в). Сила инерции шара М, принимаемого за точечную массу:
Учитывая формулу D), получим:
JM = Jen + J
где
, _p±
Силы инерции Jen, Jrn и Уг. лежат в плоскости рисунка, а силы
инерции Je. и Jc направлены перпендикулярно к плоскости рисунка.
В соответствии с формулами E) получим:
р, . 9 . _ Р, ..
„-aTS.no, ar_ -„-^-.j ^
Муфта 5 участвует в двух движениях: переносном поступатель-
поступательном вдоль вертикальной оси с ускорением и>я и относительном вра-
вращательном с угловым ускорением ф вокруг вертикальной оси. Соот-
Соответственно этим движениям силы инерции муфты приподятся к силе,
равной главному вектору Уд, и паре сил, момент которой равен глав-
главному моменту mf-Ji.
р
Главный вектор Уд = Wr. Так как wb направлено вверх, то
Уд имеет направление по вертикали вниз. В соответствии с форму-
формулой C):
JB = 2 — /(<i2 cos a -p а sin а). G)
о
Главный момент сил инерции
/И(У> := Щ, (8)
где / — момент инерции муфты В относительно вертикальной оси
регулятора.
Так как независимыми координатами, определяющими положение
точек регулятора, являются углы поворота «р и а, то для решения
задачи следует дать два возможных угловых перемещения 8ср и 8а.
Направим их в сторону возрастания углов поворота ср и а.
Соответственно двум возможным перемещениям о? и 8а соста-
составим два уравнения движения. При получении каждого из уравнений
446 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
движения удобно дать возможное перемещение, соответствующее дайной
координате, а второе возможное перемещение считать равным пулю.
Так, составляя уравнение движения, соответствующее координате ср,
надо сообщить системе возможное угловое перемещение 8;р, а воз-
возможное угловое перемещение 8а считать равным нулю. При выводе же
уравнения движения, соответствующего координате а, надо сообщить
системе возможное угловое перемещение 8а, а возможное угловое
перемещение 8а считать равным нулю.
Переходим к составлению уравнений движения регулятора:
а) Составляем уравнение движения, соответствующее координате ср.
Считаем 8э Ф О, 8а =0.
Это значит, что при неизменных углах а, образованных стерж-
стержнями ОМ и ON с вертикалью, происходит поворот регулятора вокруг
вертикальной оси па угол Ь-о в сторону т. Вычислив сумму работ
всех задаваемых сил и сил инерции на возможном угловом переме-
перемещении By, приравняем ее нулю:
тЦ — 2Je, | МК\Ц — '1-1 с I МК\ Ц -\~ /я(У>3? = 0 (9)
(коэффициенты 2 получились из-за наличия в регуляторе двух шаров
М и N).
Работа сил Jen, Jrn, Jrv Р,, Рь F, Jr равна нулю, так как моменты
этих сил относительно вертикальной оси регулятора, равны пулю
(напомним, что работа силы при вращении вокруг неподвижной оси
раина произведению момента силы относительно этой оси па угловое
перемещение).
Подставив в уравнение (9) AiK=asm а значения Je% и Jc из
формул F), значение /я(У> из формулы (8), после сокращения уравне-
уравнения па So получим:
rn — z. — и » ли j. — 2
т. e.
« — 2 ^ a»? sin2 а-2| а^Ь- sin 2а — /? = 'О,
, J -'аЧт2а|ср-!-2^-а^а5ш2а--/и = 0. A0)
б) Составим уравнение движения регулятора, соответствующее
координате а. Считаем: 8а ф 0, 8ср = 0.
Это значит, что при отсутствии поворота регулятора вокруг вер-
вертикальной оси, стержни ОМ и ON отклоняются от вертикали па
угол 8а, поворачиваясь вокруг горизонтальной оси О, перпендику-
перпендикулярной к плоскости рисунка.
При этом муфта В получит возможное переметение Ъхо вдоль
вертикальной оси, которое можно определить, вычислив вариацию Хд.
Воспользовавшись формулой A), получим:
Ъх[} = — 2/Sin a 8a. A1)
§ 5| ОБЩР.Е УРАВНЕНИИ ДИНАМИКИ СИСТЕМЫ 447
Знак минус указывает, что возможное перемещение муфты В при
sin я 8а ^> О направлено вверх.
Вычислив сумму работ исех задаиаемых сил и сил инерции па
возможном угловом перемещении 8а, приравняем ее нулю:
PixlxD + Fxbxe + Jb?xb — 2Pt | MK| 8a -j- 2 Jen | OK \ 8a —
— 2У,,|'СШ|За = О A2)
(коэффициенты 2 при трех последних членах урапнепия A2) возникли
из-за наличия в регуляторе двух шаров М и Л/).
Работа сил Jс„ Jrn, Jc, пары сил с моментом т и пары сил инер-
инерции с моментом тC) ранпа пулю, так как моменты этих сил относи-
относительно горизонтальной оси О, перпендикулярной к плоскости рисунка,
равны пулю.
Подстапип а уравнение A2) МК= a sin a, OK=a cos а, ОМ = а,
значение Fx из формулы B), Ув из формулы G), Jen и Угт из ((>),
Ьхп из A1), приняв во ипимапие, что Pix = Pb Jax = Уд, после сокра-
сокращения уравнения на 8а получим:
Г)
— 2Р.2/ sin a — 4с/2 A — cos a) sin а — 4 -^ /"i* sin a cos a —
— 4 ^/'2asin2a — 2P,a sin a-!-2 ^ a4»* sin a cos a —2 -1-a°-a = 0
или
—J = й — ,-, ¦' аг<?' sin 2a н /'a' sin 2a 4-
e ^ g
-\- 2c/9 A — cos a) sin a -'- (P,a -j- A2/) sin а = 0. A3)
Итак, искомая система дифференциальных уравнений диижспия
регулятора имеет пид
^a2 sin--!a](p-|-2^rt^asin2a — /я = 0, A0)
. Р. „., . ,, , ЛР« ,».в . „ i
— ' а1а* sin 2a + 2 — /V sin 2a +
g
-f- 2c/2 A — cos a) sin a + (P,a -f A,/) sin a = 0. A3)
При установившемся режиме работы регулятора /72 = 0 и ф = <в
постоянно.
В этом случае система уравнений движения A0) и A3) принимает
вид
2^-a*u)asin 2я = 0,
.. р, 9 2 . о . ора .8.а . Л .
a — ri- a <" sin 2a -f- 2 — /2a2 sin 2a -4-
2g g ~
-j- 2c/2 (I — cos a) sin я -f- (^a -|- P2/) sin a = 0.
448
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК |ГЛ. X
Из первого уравнения системы получим а = 0, т. е. а постоян-
постоянно. Следовательно, при установившемся режиме работы регулятора
угли а, образуемые стержнями ОМ и O/V регулятора с вертикалью,
остаются постоянными. При этом второе уравнение системы запишет-
запишется в виде
— -<l a2co9 sin a cos а-J- 2<г/2 A — cos а) sin а -(- (P,a -|- ^У) sin а = 0.
Отбросив корень уравнения а = 0, соответствующий неустойчи-
неустойчивому положению равновесия системы, получим зависимость между
угловой скоростью ш вращения регулятора вокруг вертикальной оси
и углом отклонения а стержней ОМ и ON от вертикали:
о __ P^aJ Ptl + 2с/3 A - cos а)
~S P,a- cos«
Рассматриваемую задачу, подобно предыдущей, можно решить
с помощью уравнений Лагранжа второго рода. Это решение приве-
приведено в задаче 415. Там же дана сран-
нительная оценка обоих методов ре-
решения.
Задача 398. На рисунке изобра-
изображена система, состоящая из трех бло-
блоков: верхнего неподвижного веса Л и
двух подвижных. Оси О, и О* подвиж-
подвижных блоков соединены тонкой перастя-
жимой питью, переброшенной через не-
неподвижный блок. Р, — вес правого
подвижного блока, Р^ — вес левого
подвижного блока. Через подвижные
блоки переброшены топкие нерастяжи-
нерастяжимые нити, к копнам которых прикреп-
прикреплены грузы: справа — веса Р3 и 1\,
слепа — веса Р5 и Р6. Определить уско-
репие w нити, переброшенной через
неподвижный блок. Блоки считать одно-
однородными круглыми дисками. Массой
нитей и их проскальзыванием по обо-
дам блоков пренебречь.
Решение. Рассматриваемая си-
система блоков и грузов имеет три сте-
степени свободы. Действительно, для опре-
определения положения всех точек системы следует задать три независи-
независимых параметра (например, углы поворота каждого из трех блоков).
К системе приложены семь задаваемых сил: Р, Р,, Р.} — силы тя-
тяжести блоков, Р3, Р4> Рл и Р& — силы тяжести грузов.
К задаче 308.
§ 51 ОБЩЕЕ УРАВНЕНИЕ ДИНЛМИКИ СИСТЕМЫ 449
Все спязи, наложенные на систему, являются идеальными (нити
считаются нерастяжимыми и натянутыми).
Для определения сил инерции рассматриваемой системы обо-
обозначим: w — величину ускорения любой точки нити, переброшенной
через неподвижный блок, wx — величину ускорения точек нити, пере-
переброшенной через правый нижний блок, и>а — через левый нижний блок.
Направим ускорения точек правых ветвей нитей вниз.
Так как ускорения точек правой ветви нити по предположению
направлены вниз, то верхний блок вращается ускоренно по часовой
w
стрелке, причем е = — , где г— радиус верхнего блока. Блок счи-
считается однородным круглым диском. Поэтому главный момент /и^>
сил кнерции верхнего блока относительно неподвижной горизонталь-
горизонтальной оси вращения О, перпендикулярной к плоскости рисунка, равен
по модулю:
i им , РГ*w Prw /1 ч
\т^\ = 10в==2- r- = -^. A)
Оба нижних блока совершают плоское движение. Поэтому силы
инерции этих блоков приводятся к силе, равной главному вектору,
и паре сил, момент которой равен главному моменту. Силы инер-
инерции Ji и Jq приложены в центрах тяжести блоков d и Oj и на-
направлены противоположно их ускорениям, т. е. Jt — вверх и У2 —
вниз, причем но модулю:
Jt=!fw, J, = ^w. B)
Ускорения точек правых ветвей нитей Wi и и>а направлены вниз,
поэтому оба нижних блока вращаются ускоренно по часовой стрелке,
причем ?, = -'-, е.2= -^, где Т\ и г2 обозначают радиусы правого
г, г2
и лепого подвижных блоков. Поэтому главные моменты сил инерции
подвижных блоков относительно их осей вращения по модулю равны
igi
2g r,
r»
C)
Четыре груза, подвешенных на нитях, совершают сложное движе-
движение: переносное поступательное движение вместе с осями подвижных
блоков О\ и 0<i и относительное движение — по вертикалям пперх
либо вниз, по отношению к осям Oi и О-к блоков.
Для определения ускорении грузоп применяем георему о сложении
ускорений точки при переносном поступательном движении:
15 Теоретическая механика, том II
450 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК ]ГЛ. X
Обозначая ускорения грузов соответствующими индексами, получим:
тъ = Wy -J- w, Wt^Wi — w, wi = wi — w, w6 = w<i-\-w. D)
(Заметим, что w3 и и>й направлены вниз, a w4 и wu — вверх, если
|«1, |>|О»| И |О»,|>|«»|.)
Силы инерции грузов равны:
Js = — -~ъ ws, J6 = — -jj¦ w6.
В соответствии с направлениями ускорений грузов выясняем, что J-^
и 7„ направлены вверх, а /( и У, — вниз. Воспользовавшись форму-
формулами D), запишем модули сил инерции:
Л=7(«»1-1-о»)> J, = 5(®i —w),
Ji, = 5(w, — w), ./e = ^(w,-|-w). E)
S S
(При решении подобных задач часто допускается ошибка; в выраже-
выражения сил инерции подставляют, вместо абсолютных, относительные уско-
Р Р
рения грузов, считая, таким образом, что Ji=-iW\,Ji,-=—W\, J&^=
Р Р \
= -"wi и У6=-'я>4.)
Так как рассматриваемая система имеет три степени свободы, то
следует ввести три независимых возможных перемещения. Дадим
ъозможное перемещение Ьг точке правой ветви верхней нити по
вертикали вниз, возможные перемещения brt и 8га точкам правых
ветвей нижних нитей — также по вертикалям вниз (см. рисунок).
Учитывая независимость этих возможных перемещений, будем
при составлении каждого из дифференциальных уравнений движения
сообщать одно возможное перемещение точкам системы, считая при
этом два других возможных перемещения равными нулю. Таким обра-
образом мы составим три дифференциальных уравнения-движения системы.
а) Дадим точкам правой ветви верхней нити возможное переме-
перемещение Ьг вниз, считая при этом два других возможных перемещения
равными нулю, т. е. ЬгфО, 8г1 = 8/'з=0.
Это значит, что верхний блок повернется по часовой стрелке на
8 F)
а нижние блоки переместятся поступательно: правый блок на 8г вниз,
а левый блок па Ьг вверх.
Грузы по отношению к подвижным блокам будут находиться
в покое, т. е. грузы веса Р3 и /\ переместятся вместе с правым бло-
§ ?>] ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ СИСТЕМЫ 451
ком на Ьг вниз, а грузы веса Р„ и Р6 поднимутся вверх на Ьг вместе
с левым блоком.
Составим общее уравнение динамики, т. е., вычислив сумму работ
задаваемых сил и сил инерции материальных точек системы на
возможном перемещении Ьг, приравняем ее пулю:
— | m{d] | 8? -|- Р& — Лог — Р23г — 728г + Р38г ~ JM -f Я43г -f-
г —Рв3г —Р,8г—У,8г = 0. G)
Работа пар сил, моменты которых равны главным моментам сил
инерции нижних блоков mty и т$ на возможном перемещении Ьг
равна нулю, так как блоки перемещаются только поступательно.
Работа силы тяжести Р верхнего блока равна нулю, так как точка
приложения этой силы неподвижна.
Воспользовавшись формулами A), B), E) и F), после почленного
сокращения уравнения G) на Ьг получим:
- | (Р + 2Pt + 2Ра + 2Р3 + 2Р, + 2Р8 + 2Р6) - f (P, - Pi) -
f P»+P«-P,-P.-P. = 0. (8)
б) Дадим возможное перемещение ort точке правой ветви нити,
переброшенной через правый нижний блок, считая при этом два дру-
других возможных перемещения равными нулю, т. е.
Это значит, что верхний блок и левый нижний блок находятся
в покое, а нижний правый блок повернется по часовой стрелке па
груз веса Ря перемещается на Sr, вниз, а груз веса Я4—IIa &ri вверх.
Вычислив сумму работ задаваемых сил и сил инерции материаль-
материальных точек системы на возможном перемещении 8Г|, приравняем ее
нулю:
— | т{о\ | 8<р, + P3Sr, — J3br% ~ Pfirt — Jtbrx = 0. A0)
Работа сил Р,, Jlt P9, Jb PB, У„, Р6, У6 и пар сил инерции с мо-
моментами т^) и /я^' равна пулю, так как возможные перемещения
верхнего и нижнего левого блоков равны нулю.
Воспользовавшись формулами C), E) и (9), после почленного
сокращения уравнения A0) па 8г, получим:
- ™,;. (Pi -I- 2Ра + 2Р4) - * (Р, - Л) + Ра - Р4 = 0. A1)
-га. Ь
15*
452 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
в) Дадим возможное перемещение 8г2 точке правой ветви нити,
переброшенной через лепый нижний блок, считая при этом дна дру-
других возможных перемещения ранными нулю, г. е.
Это значит, что иерхний блок и нижний правый блок находятся
в покое, а нижний левый блок повернется по часовой стрелке на
8?4=~?, A2)
груз веса Р3 перемещается на 8г.2 вниз, а груз веса Р6 — па 8/"а
виерх.
Вычислим сумму работ задаваемых сил и сил инерции материаль-
материальных точек системы па возможном перемещении 3/-9 и приравняем ее
пулю:
— | та] 1 8?2 -f Р,Ьг.г — Уя8г4 — Я63г, — yB3rs = 0. A3)
Работа сил Pt, Jb Р2, Jb P3, J^ P4, Jk и пар сил инерции с мо-
моментами гп{(^) и tn^i рампа нулю, так как иозможиые перемещения
верхнего и нижнего правого блоков рапны пулю.
Воспользовавшись формулами C), E) и A2), после почленного
сокращения уравнения A3) па Ьг.-, получим:
Уравнения (8), A1) и A4) образуют систему дифференциальных
уравнений дчижения:
2Р, -f 2Я, -;- 2Р3 J- 2P4 -i- 2ЛВ -f 1Р6) - ^ (Р3 - Р4) -
- .7; (л -;- 2ря -(- 2р4)—?- (р3 - pt)+р„ - р*=о, (и)
-1 (Р* + 2Р„ J- 2Р6) - ^ (Рв - Р„) -|- Рв - Р, = 0. A4)
Исключив из этой системы уравнений o>i и иL, определим величину
искомого ускорения w нити, переброшенной через неподвижный блок:
Здесь
И = Р-1- 2Р, -f 2Р, -|- 2Р* + 2р4 + 2Р» -г 2рб. Л = pi + 2РЯ -f 2Pt,
С= Р, + 2Р, + 2Р6, 0= р, 4- Ря -|- Р* — Р, — Р, — Р6, С= Ря - 1'ь
К=Р« — Р..
§6]
УРАВНЕНИЯ ЛАГРЛНЖА ВТОРОГО РОДА
453
§ 6. Уравнения Лагранжа второго рода
1°. Обобщенные координаты. Обобщенные силы.
Рассматривается система материальных точек, подчиненная идеальным
голономным связям.
Обобщенными координатами называются независимые параметры,
однозначно определяющие положения точек материальной системы.
Число степеней свободы системы материальных точек, подчинен-
подчиненной идеальным и голономным связям, равно числу независимых обоб-
обобщенных координат.
Тач, кривошипно-шатунный механизм
является системой с одной степенью сво-
свободы. В качестве обобщенной координаты
может быть взят угол поворота криво-
кривошипа, значением которого однозначно
определяются /положения всех материаль-
материальных точек системы.
Механизм конического дифференциала
(рис. 157) является системой материальных
точек с двумя степенями свободы. В ка-
качестве независимых обобщенных коорди-
координат можно избрать угол поворота <р, веду-
ведущего колеса 1 и угол поворота ер»
водилу ADC, вращающегося вокруг вер-
вертикальной оси. .Значения углов поворота ?,
и ср0 однозначно определяют положение
ведомого колеса 3.
Вектор-радиус rk, дающий положе-
положение А-й материальной точки системы с s
степенями свободы, является в случае нестационарных связей функ-
функцией обобщенных координат и времени:
где 9i- <?«>¦••> qs — обобщенные координаты, a k=\, 2,..., п
(п—число материальных точек системы).
Скорость этой точки равна
дгь • i дгь . I дгк • , дгк
^k == "i— qi ~,~ л" Чъ ~Т~ • ¦ ¦ ~1~ а~ Я а ~Л— ч/ *
Возможное перемещение этой точки, выражаемое вариацией пек-
тор-радиуса rk, имеет вид
Рис. 157.
где 871, 8<7s,,..., bqs — обобщенные возможные перемещения, т. е.
вариации обобщенных координат.
454 ДИНАМИКА НЕСВОПОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Обращаем внимание читателя на то, что и формуле, определяющей
возможное перемещение brk, на одно слагаемое меньше по сравнении)
с формулой, дающей скорость точки <vk. Это получается потому,
что возможное перемещение является вариацией функции, т. е. опре-
определяется при фиксированном значении аргумента t.
Обобщенными силами Qit где i= 1, 2,..., s, называются коэф-
коэффициенты, стоящие в выражении суммы работ задаваемых сил при
соответствующих обобщенных возможных перемещениях. Число обоб-
обобщенных сил равно числу обобщенных координат, т. е. числу степеней
свободы системы (связи, наложенные на систему, предполагаются
идеальными и голопомными). Размерность обобщенной силы:
т. е. она может быть различной в зависимости от выбора обобщен-
обобщенной координаты, например если обобщенная координата — объем, го
обобщенная сила имеет размерность напряжения.
Обобщенная сила Q; вычисляется по формуле
2
где п — число материальных точек, 5 — число степеней свободы,
Fk — равнодействующая задаваемых сил, приложенных к А-й точке
системы.
Выражение обобщенной силы Qt через проекции задаваемых сил
на оси декартопых координат имеет вид
я
.— \ (г U^A l
'~ L \tkxd4i ¦
k i
( р d_z_k\
= i
где
Если не все связи, наложенные на материальную систему, являются
идеальными, например имеются негладкие опорные поверхности, то при
вычислении обобщенной силы по формуле
п.
к = I
надо под Fk понимать не только задаваемые силы, но и силы трения.
Если силы, действующие на систему, имеют потенциал, то обоб-
обобщенные силы равны взятым с обратным знаком частным производ-
«61 УРАВНЕНИЯ ЛАГРЛНЖА ВТОРОГО РОДА 455
ным от потенциальной энергии системы по соответствующим обоб-
обобщенным координатам, т. е.
О — ™
Qi - dqi•
где i= 1,р2,..., 5.
Вычисление обобщенных сил материальной системы является одним
из существенных этапов решения задач с помощью уравнений Лаг-
рапжа второго рода.
Определение обобщенных сил можно проводить
двумя способами:
а) Наиболее распространенным приемом является вычисление обоб-
обобщенных сил как коэффициентов в выражении суммы элементарных
работ задаваемых сил при соответствующих обобщенных возможных
перемещениях. В этом случае вычисление обобщенных сил следует
проводить в следующем порядке:
1) выяснить число степеней свободы рассматриваемой системы
материальных точек, выбрать соответствующие обобщенные коор-
координата;
2) изобразить все задаваемые силы системы;
3) если не все связи, наложенные на материальную систему, явля-
являются идеальными, то добавить к задаваемым силам соответствующие
силы реакций связей (например, силы трепня);
4) дать независимые обобщенные возможные перемещения системе
в числе, равном числу обобщенных координат, т. е. числу степеней
свободы материальной системы;
5) для определения обобщенной силы Q,-, соответствующей г-й
сообщенной координате qt, надо вычислить сумму работ всех зада-
задаваемых сил, включая силы реакций неидеальных связей, на обоб-
обобщенном возможном перемещении bqt. При этом все остальные обоб-
обобщенные возможные перемещения bqt, bq^,..., bqt_u bqiJglt..., Zqs надо
счита iь равными нулю, т. е. bqt^O, bq{ = 8<y.2 = ... = 8^1-_, ^8<у1+1 =
= .. . = 8д5:= 0. Тогда обобщенная сила Q,- будет равна коэффици-
коэффициенту при 8<7,-. Аналогично определить все остальные обобщенные силы.
б) Если все силы, действующие на материальную систему, потен-
потенциальны, то после выбора обобщенных координат надо вычислить
потенциальную энергию П системы, выразив ее в зависимости от обоб-
обобщенных координат. Обобщенная сила определяется как взятая с обрат-
обратным знаком частная производная от потенциальной энергии по соот-
соответствующей обобщенной координате, т. е.
П — дП
где 2= 1, 2,..., s.
Этот способ определения обобщенных сил в случае систем с не-
несколькими степенями свободы эффективнее предыдущего способа.
Однако он пригоден лишь, когда все задаваемые силы потенциальны.
456
ДИНАМИКА НЕСВОБОЛНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Принцип возможных перемещений в обобщенных координатах
формулируется так: для равновесия системы материальных точек, под-
подчиненной идеальным и стационарным связям, необходимо и достаточно,
чтобы сумма работ обобщенных сил на соответствующих обобщенних
возможных перемещениях системы равнялась нулю:
+ Qfot 4- • • • + Qfai+¦ • • + Qs^s = о.
где Qi — обобщенная сила, соответствующая 2-й обобщенной коор-
координате.
Так как Ьди Ьдь..., Ьд, являются независимыми обобщенными
возможными перемещениями, то равенство оказывается справедливым
лишь при условии
Итак, в случае равновесия системы материальных точек все обоб-
обобщенные силы равны нулю.
Задача 399. Определить обобщенную силу в случае движения
математического маятника веса Р, если длина нити равна /. За обоб-
обобщенную координату взять угол отклоне-
отклонения ср.
Решение. Математический маятник яв-
является системой с одной степенью свободы,
так как для определения положения маят-
маятника достаточно задать один параметр, на-
например угол «р, образуемый нитью маятника
с вертикалью. В соответствии с условием,
в качестве обобщенной координаты выби-
выбираем угол поворота ср.
Единственной задаваемой силой является
вес маятника Р. Так как нить нерастяжима
и при движении маятника натянута, то она
является идеальной связью.
Дадим маятнику обобщенное возможное
К задаче 399. перемещение 8ср в сторону возрастания угла
9, т. е. против часовой стрелки.
Для определения обобщенной силы Q9 вычисляем работу веса Р
маятника на обобщенном возможном перемещении 8ср:
ЪА——
(О
Работа отрицательна, так как направления момента силы Р отно-
относительно оси привеса 2, перпендикулярной к плоскости рисунка, и
возможного перемещения &р противоположны. Обобщенной силой Qv
является коэффициент, стоящий в формуле A) при 8ср, т. е.
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
457
(индекс ср при обобщенной силе Q указывает, что эта сила соответ-
соответствует обобщенной координате <р).
Рассмотрим теперь второй способ вычисления обобщенной силы.
Сила тяжести Р потенциальна. Для вычисления потенциальной
энергии маятника направим ось х по вертикали вниз, взяв начало
отсчета в точке О привеса маятника. Потенциальная энергия маятника
раина работе силы тяжести Р при перемещении маятника из данного
положения в нулевое, т. е. П= — Рх. Учитывая, что jc = /cos<p,
ползучим: П = — Pi cos о. Для определения обобщенной силы надо
взять с обратным знаком произиодпую от потенциальной энергии по
обобщенной координате <р> т. е.
Задача 400. Груз А песа Р движется под действием силы F иперх
по негладкой наклонной плоскости, расположенной под углом а к гори-
горизонту. К грузу А привязан копен нити, намотанной на барабан 13
S ¦
Sr,
К з.шче 400.
радиуса г. Барабан вращается вокруг неподвижной оси С, перпенди-
перпендикулярной к плоскости рисунка. К барабану приложена пара сил полез-
полезного сопротивления с моментом тс, направленным в сторону, проти-
противоположную вращению барабана.
Выбрать обобщенную координату и определить соответствующую
еП обобщенную силу. Нить считать нерастяжимой и массой ее пре-
пренебречь. Коэффициент трения скольжения груза о наклонную пло-
плоскость равен /.
458 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Решение. Рассматриваемая система имеет одну степень свободы,
так как положение па наклонной плоскости груза А определяет по-
положение барабана В.
Выберем координату 5 груза А в качестве обобщенной коорди-
координаты, направив ось я вдоль наклонной плоскости вверх.
Обозначим вес барабана Р,.
К системе приложены задаваемые силы: Р — вес груза А, Р\ —
вес барабана В, F—сила, приложенная к грузу, пара сил полезного
сопротивления с моментом тс.
Негладкая наклонная плоскость не является идеальной связью.
Поэтому к задаваемым силам следует добапить силу трения сколь-
скольжения /^ с груза о наклонную плоскость, направленную в сторону,
противоположную движению, т. е. вдоль наклонной плоскости вниз и
равную по модулю FT-c==fN:=fP cos а.
Дадим грузу А обобщенное возможное перемещение brs в сто-
сторону возрастания s, т. е. параллельно наклонной плоскости вверх.
При этом барабан В получит возможное угловое перемещение
8-р, связанное с brs зависимостью
8r, = r8T. A)
Вычислим сумму работ задаваемых сил и силы трения скольже-
скольжения FT_ c на возможных перемещениях точек системы, соответствующих
обобщенному возможному перемещению $rs:
IА = ЬА (Р) + ЬА (F) + 8Л (fT. е) + 8Л (/>,) + ЬА (/и?). B)
Находим:
ЬА (/>)= — Pbrs sin a, C)
bA(F) = Fbrs, D)
ЬА (/v с) = — /\. А, = —/Р cos a.brs, E)
8А(Р,) = 0, F)
так как точка приложения силы Рх неподвижна,
ЬА(тс)= — «С89. G)
Воспользопапшись формулами A), C), D), E), F) и G), пред-
представим B) в виде
8A=[f-"— P(sina-|-/cosa)— y]brs. (8)
Обобщенной силой Qs является коэффициент, стоящий в фор-
формуле (8) при обобщенном возможном перемещении brs, т. е.
Qs = /-' — P(sin a -L/cos а) — ™с.
5 61
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
459
Если бы к качестве обобщенной координаты мы выбрали угол пово-
рота барабана ср> считая его положительным по часовой арелке, го
мы дали бы обобщенное возможное угловое перемещение 8? в том
же направлении. При этом формулы C), D), E), F) и G) приняли
бы соответственно вид
ЬА(Р) = — РгЪ? sin a,
8 А (fT. с) = — fPr 8? cos а,
После подстановки этих значений в формулу B) мы получили бы:
8Л = \Fr — Pr (sin a -\-f cos я) — тс] 8ср.
Обобщенной силой Qv явился бы коэффициент, стоящий при 8ср,
т. е.
Qv = Fr — Pr (sin a-|-/cos a) — mc.
Задача 401. Выбрать обобщенную координату и определить соот-
соответствующую ей обобщенную силу в случае кулисного механизма,
У\
К задаче 401.
изображенного па рисунке. К концу D штока ВО кулисы прикреп-
лепа пружина, коэффициент жесткости которой равен с. ГГри край-
крайним правом положении кулисы пружина не деформиропана. Вес криио-
шила О А равен Ри г—длина кривошипа. Массами камня А кулисы
и пружины пренебречь. Кривошип ОА считать однородным стержнем.
Механизм расположен в вертикальной плоскости. Силами сопро-
сопротивления пренебречь.
Решение. Оси ху изображены па рисунке.
Кулисный механизм имеет одну степень свободы, так как положе-
положение всех его точек однозначно определяется одним параметром,
например, углом поворота 9 кривошипа ОА, отсчитываемым от оси х
против часовой стрелки. Выберем в качестве обобщенной координаты
угол ср.
460 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
К механизму приложены три задаваемые силы: Р, — вес криво-
кривошипа, Р<ь—вес рамки и штока, F—упругая сила пружины.
В положении механизма, указанном на рисунке, пружина растянута.
Следовательно, упругая сила /' пружины напраплена по горизонтали
направо. Она раина по модулю произведению коэффициента жест-
жесткости с па модуль удлинения Д пружины, т. е. F^c | Д |. Удлинение Д
пружины рашю разности абсиисс точки D в ее начальном и проме-
промежуточном положениях: kx = xD — jc0O. Так как хю = г -\-BD, a
лго = ОЯ+ /??> = г cos <р + ЯЦ A)
то
Д, = -ГA-СО8<?). B)
Следовательно,
Fx = -cbx = cr(\-cos?). C)
Для вычисления обобщенной силы Qf дадим обобщенное возмож-
возможное перемещение 8? в направлении возрастания угла <р, т. е. против
часовой стрелки.
Найдем возможное перемещение Ьхо точки D пружины, выразив
его через &?. Для этого вычислим вариацию абсциссы xD, определен-
определенной формулой A):
&*о = —rsiny&p. D)
Знак минус указывает, что направление возможного перемещения охд
точки D при sin 9 Ъу ^>0 противоположно положительному направле-
направлению оси х, т. е. направлено налево.
Вычислим сумму работ задаваемых сил Р( и Ра и упругой силы F
па возможном перемещении 8<р:
(Работа силы веса Рц при горизонтальном перемещении ее точки
приложения С равна пулю.)
Подставив в формулу E) значение Fx из C) и значение %xD из D),
получим:
ЬА = — 2 [Picos t? -f Icr A — cos tp) sin 9] Ц. F)
Искомой обобщенной силой Qf является коэффициент, стоящий в вы-
выражении элементарной работы в формуле (G) при 8?, т. е.
Qf = — у [Pi cos cp + 2rr A — cos 9) sin 9].
Приведем второй вариант вычисления обобщенной силы Q9.
Так как все задаваемые силы, включая упругую силу F, потен-
потенциальны, jo можно определить обобщенную силу по формуле
§6] УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА 46 L
Qv = — -p. Для этого следует пычислить потенциальную энергию
рассматриваемой системы, которая слагается из потенциальных энер-
энергий сил Ри Р2 и F, т. е.
G)
Потенциальная 'энергия П1" веса Рх равна ПA) = Р|>у, где
_V = " sin cp — ордината центра тяжести кривошипа О А. Следовательно,
n(I)=.P,|-smcp. (8)
Потенциальная энергия П('2' силы неса Рг раипа пулю, так как ее
точка приложения С перемещается по горизонтали, т. е.
П'2) = 0. (9)
Потенциальная энергия. П13' упругой силы F пружины будет
ПC) = -.,- Д>. Подставив значение Д^ из формулы B), находим:
П(я) = -2-гвA —cosoL. (Ю)
Воспользовавшись формулами (8), (9) и A0), запишем формулу B)
в виде
n^P^Sino-L-yrHl — COS=p)9. A1)
Для вычисления искомой обобщенной силы остается ваять с обрат-
обратным знаком производную от потенциальной энергии II, определяемой
формулой (II), по обобщенной координате ср:
Qlf = —~[Pi coscp-)-2cr(l — cos?) sin 9].
Объем вычислений, проведенных при подсчете обобщенной силы
Q9 и каждом из вариантов примерно равноценен. Однако следует
иметь в виду, что первым вариантом можно пользоваться независимо
от характера задаваемых сил, и то нремя как второй нариапт при-
пригоден только в случае потенциальных задаваемых сил.
Задача 402. Криношипно-шатунный механизм, расположенный
в вертикальной плоскости, приводится в движение посредством пары
сил с моментом т, приложенной к кривошипу О А веса Ру и длины г,
Ра — вес шатуна AD, I—длина шатуна.
]3ыбрать обобщенную координату и определить соответствующую
ей обобщенную силу. Кривошип и шатун считать топкими однород-
однородными стержнями. Силами сопротивления пренебречь.
Решение. Оси декартовых координат ху изображены на ри-
рисунке.
462
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Кривошипно-шатунный механизм является системой с одной сте-
иеш.ю свободы. В качестпе обобщенной координаты ныбираем угол
попорота ф кривошипа О А, отсчитываемый от оси х против часовой
стрелки. Вес ползуна В обозначим через Р3.
Изобразим задаваемые силы системы и моменты сил: Р] — нес
кривошипа, Рг — вес шатуна, Р3 — вес ползуна, пэру сил с момен-
моментом т.
Все связи, наложенные па систему, являются идеальными. Дадим
механизму обобщенное возможное перемещение ?Ц> в направлении
возрастания угла <р, т. е. против часовой стрелки.
К задаче 402.
Вычислим сумму работ задаваемЕлх сил па возможных перемеще-
перемещениях, соответствующих обобщенному возможному перемещению 8с?:
8А = ЬА (т) 4- ЬА (Р,) + ЬА (/»,) + ЬА (Р3). A)
Элементарная работа пары сил с вращающим моментом т рапна
ЬА (т) = /и8?. B)
Элементарная работа веса Рх кривошипа равна
ЬА (Р1) = —Р1 Чу cos 9 So. C)
Элементарная работа веса Р3 ползуна Б равна пулю, так как пол-
ползун В получает возможное перемещение по горизонтали, а сила Р3
вертикальна:
8Л(Р3) = О. D)
Для вычисления элементарной работы веса Р2 шатуна АВ, совер-
совершающего плоское движение, онределяе.м положение его мгновенного
? «1 УРАВНЕНИЯ ЛЛГРЛНЖЛ ВТОРОГО РОДА 463
центра скоростей ?Р как точки пересечения перпендикуляров, вос-
восставленных к скоростям точек А и В. Имеем:
8Д(Р,)=—«0s(P4)8?0s. E)
Работа отрицательна, так как направления момента веса Р2 отно-
относительно оси &Р и возможного перемещения Щ$> противоположны.
Находим:
е>)=^4cos ь w
где угол А ВО обозначен ф (см. рисунок).
Для вычисления 8ср^ воспользуемся возможным перемещением
8гд точки А, принадлежащей одновременно кривошипу ОА и ша-
шатуну АВ. Для точки А кривошипа имеем: ЬгА=гЪ<р. Для точки Л
шатуна получаем: огд = Дг^Вср^. Следовательно, г 89= AzPbygb, от-
откуда
Воспользовавшись формулами F) и G), запишем E) в виде
4^ (8)
Проведем вспомогательную горизонталь черен точку А. Из тре-
треугольника А8*Н получим: А&ъ=——. Так как АЕ=АВ cos ф =
= / cos ф (из треугольника ABIT), то
COS<f
Подставив это значение АаР в формулу (8), имеем:
8/4(Pii) = —/>e-^co
Этот результат можно было получить более коротким путем,
вычисляя элементарную работу силы тяжести Р2 по формуле
bA{P<i) = Piybyc, где Ьус — вариация ординаты точки С приложения
неса Р2. Так как точка С расположена посередине шатуна АВ, то
ус= -л AD= ~2 r sin tp. Вычислив вариацию ус, находим:
Ъус —: ~2 г cos ? 8<Р-
Следовательно, приняв во внимание, что P<jv = — Р4, получим:
ЬА (Р,) = P4>8,vc = —Р91 cos cp 8«р.
464 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Подставляя выражения элементарных работ пары сил с момен-
моментом т и сил Р|, Рь Р3 из формул B), C), D) и A0) в A), имеем:
о А = т ой — Pi ¦„ cos о 8э — Р2 о cos cp ода,
т. е.
ЬА = Гот — ~ г (Р, -+- Р4) cos <pl 8?. A1)
Искомой обобщенной силой Q? является коэффициент, стоящий
в формуле (И) при обобщенном возможном перемещении оу, т. е.
Qf = m — ^r(P, + PJcos?.
Применение в этой задаче формулы Q,-;=—-,— невозможно, так
как не все задаваемые силы потенциальны. В этом случае можно
воспользоваться указанной формулой для определения обобщенной
силы, соответствующей потенциальным силам Р1( Р2 и Р3. Вторую
часть обобщенной силы, соответствующую паре сил с моментом /?/,
пришлось бы подсчитать так, как это было сделано выше. Затем
для определения искомой обобщенной силы надо было бы сложить
вычисленные в отдельности выражения.
В задачах динамики курса «Теория механизмов и машин* обоб-
обобщенная сила механизма носит название «приведенной силы».
Задача 403. Катушка веса Р и радиуса R катится прямолинейно
без скольжения по горизонтальной плоскости. На средней цилиндри-
цилиндрической части катушки радиуса г намотана нить. Катушка приводится
в движение посредством силы F, направленной вдоль нити под
углом а к горизонту.
Определить обобщенную силу, приняв за обобщенную координату
абсциссу центра тяжести С катушки. Коэффициент трения качения
катушки о горизонтальную плоскость равен /к.
Решение. Катушка, катящаяся без скольжения по плоскости,
имеет одну степень свободы, так как положение всех точек катушки
однозначно определяется положением ее центра тяжести С по отно-
отношению к неподвижной оси х, направленной вдоль горизонтальной
плоскости.
Приняв х за обобщенную координату, дадим центру тяжести С
катушки возможное перемещение Ьгс по горизонтали иапраио.
К катушке приложены две задаваемые силы: Р — вес катушки,
F—сила, направленная вдоль нити.
Добавим к задаваемым силам силу трения Fw, направленную по
горизонтали палено. Ввиду наличия трения качения нормальная сила
реакции N горизонтальной плоскости смещена па величину плеча
пары трения качения, являющегося коэффициентом /L.
S6|
УРАВНЕНИЯ ЛЛГРАПЖА ВТОРОГО РОДЛ
465
Мгновенный центр скоростей аР расположен в точке касания ка-
катушка с горизонтальной плоскостью. Точка еР является мгновенным
центром скоростей. Поэтому
8rc=--R89. A)
Вычислим сумму работ задаваемых сил Р и F, силы трения /^
и пары трения качения па возможных перемещениях, соответствую-
соответствующих обобщенному возможному перемещению Ьгс:
8.4 = ЬА (Р) -f ЬА (fтр) + ЬА (т1Л) + 8Д (F). B)
Работа силы тяжести Р равна нулю, так как точка С переме-
перемещается по горизонтали, т. е.
ЪА{Р) = 0. C)
Выберем теперь в качестве позможного перемещения действи-
действительное перемещение drc (это допустимо, так как в данной задаче
'ТР
К задаче 403.
связи стационарны). Тогда работа силы трения ЬА (/\р) будет равна
нулю, ибо при действительных перемещениях скорость точки прило-
приложения силы трении FT? перемещается вместе с мгновенным центром 5s,
скорость в котором равна нулю, т. е. в нуль обращается мощность
силы трения, а следовательно, и работа. Итак,
8Д (/*,„) = 0. D)
Работа пары трения качения равна но модулю произведению
момента пары трения качения (/мт к — NfK = PfK) иг. возможное угло-
угловое перемещение о? катушки. Эта работа отрицательна, так как
466 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
направления момента пары трения качения и возможного углового
перемещения противоположны:
гл(«т.к)=-рлг? = -р/к^-. E)
Для вычисления работы силы F применим формулу
где Ьг0 — возможное перемещение точки О плоской фигуры, приня-
принятой за полюс. Выберем за полюс центр тяжести С колеса. Тогда
Ь A (F) = F- Ьгс + тс (/=•) Scp = [*Ъгс cos а + F | СМ | 8<р.
Так как СУИ —г, а 89=:——, то
А;
bA(F)=
Применив формулы C), D), E) и (G), запишем B) в виде
Обоби1енпой силой Q является коэффициент пропорциональности,
стоящий в формуле G) при Src, т. е.
п_ F
У—
Задача 404. Груз А иеса Р, движется по гладкой наклонной
плоскости, расположенной под углом а к горизонту. К грузу Л при-
прикреплен математический маятник веса Ps. Длина нити маятника
равна /. •
Выбрать обобщенные координаты и найти им соответствующие
обобщенные силы.
Решение. Рассматриваемая система имеет дне степени снободы,
так как для определения положения ее масс надо задать дпа неза-
независимых параметра. Один параметр должен определить положение
груза А на наклонной плоскости, а второп дает положение матема-
математического маятника В по отношению к грузу А.
Направим ось s вдоль наклонной плоскости вниз, взяв па пей
произвольно начало отсчета О. Из точки О направим по вертикали
вниз ось х. Угол, образуемый нитью маятника с вертикалью, обозна-
обозначим через 9> считая его положительным в сторону отклонения нити
маятника от вертикали против часовой стрелки.
Выбираем для данной материальной системы две обобщенные
координаты: s n у. Соответственно этим обобщенным координатам,
имеются две обобщенные силы: Qs и Q9.
161
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
41O
Изобразим задаваемые силы системы: Р( — вес груза, Р^ — нес
маятника В.
Силы реакций соязей изображать не следует, т,зк как все связи,
наложенные на систему, являются идеальными (плоскость гладкая,
а нерастяжимая нить при движении системы натянута).
Дадим системе два независимых обобщенных возможных переме-
перемещения: 8s, направленное параллельно наклонной плоскости в сторону
возрастания координаты s, т. е. шшз, и 8ср — в сторону возрастания
угла о, т. е. против часовой стрелки.
К задаче 404.
Учитывая независимость возможных перемещений 8s и 8ср, мы
при сычисленни суммы работ задаваемых сил будем давать системе
иозможкое перемещение, соответствующее искомой обобщенной силе,
а второе возможное перемещение будем при этом считать равным
пулю.
Тлк, для определения обобщенной силы Qs дадим системе воз-
возможное перемещение 8s, a 8? будем считать равным нулю:
8я -ф 0, о? = 0.
Это значит, что при фиксированном значении угла поворота маят-
маятника сэ вся система, состоящая из груза А и маятника В, переме-
перемещается поступательно па Bs.
Сумма работ задаваемых сил Р, и Р2 на возможном перемеще-
перемещении <)s имеет иид
8Л = P,8s • sin a -{- P48s • sin a = (Р, -L- Р9) sin a Zs. A)
Обобщенной силой Qs является коэффициент пропорциональности,
стоящий при о*- в формуле A), т. е.
468 ДИНАМИКА НЕСООПОЩОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК 1ГЛ. X
Для определения обобщенной силы Q9 дадим системе возможное
перемещение оср, a 8s будем считать равным нулю: о? Ф О, 8s = 0.
Это значит, что груз А находится на наклонной плоскости
в покое, а пить маятника отклоняется на угол о? против часопой
стрелки.
Сумма работ задаваемых сил Pt и P.t на возможном перемеще-
перемещении оср равна:
ЬА = тл (Р\) 8» = — Р4 / s i n ср оу. B)
Обобщенно!! силой Qv япляетсн коэффициент, стоящи!! при 8а в
формуле B), т. е.
Эти же обобщенные силы можно найти иначе. В обзоре теории
было указано, что в системах с несколькими степенями сиободы при
потенциальных задапаемых силах проще определять обобщенные
силы, пользуясь формулой Q; = =—, где f=l, 2,..., s.
В данном задаче обобщенные силы Q_, и Qs находим по форму-
лам: Q9 = -^, Q, = -Gv.
Для этого прелпарителыю следует вычислить потенциальную энер-
энергию П материальной системы:
П = ПA) + ПA). C)
Потенциальная энергия П(", соотпетстнующая силе Р{, раппа ра-
работе силы Р, при перемещении груза А из данного положения
п нулепое, т. е. пперх на xt (см. рисунок), следоиателыю, ПA) =
= — PtXi. Так как jr1 = .ssina, то
П("= — P,s sin а. D)
Аналогично получим: П('2) = — Ргх* Так как x,l=OE=OD-\~
~\- DE=s sin a~lcos <p, то
). E)
Применив формулы D) и E), запишем C) в пиде
П = — (Р, -\- Я4) 5 sin а — Р4 cos v.
Теперь легко определяем искомые обобщенные силы:
Ш Hi [— (р' "Ь А) * sin a — Д2/ cos tf = (Р, + Ps) sin a,
= — ?¦ = — §9 [— (Pi -r P*) 5 sin а - P,/ cos <?j = - A/ sin ?.
61
УРАВНЕНИЯ ЛАГРАНЖА ПТОРОГО РОДА
469
Целесообразность применения этого способа вычисления обобщен-
обобщенных сил в случаях систем с несколькими степенями свободы при
наличии только потенциальных задаваемых сил может быть проиллю-
проиллюстрирована решением следующей задачи.
Задача 405. На горизонтальный упругий вал, заделанный одним
концом в степу, насажены три диска. Выбрать обобщенные коорди-
координаты и определить им соответствующие обобщенные силы, если
центры тяжести дисков расположены на геометрической оси враще-
вращения. Коэффициент упругости
вала равен с. Л I 2 3
Решение. Данная система
имеет три степени свободы.
Обозначим углы поворота дис-
дисков соответственно <р,, ср9 и <р3.
Возьмем эти углы поворота
за обобщенные координаты.
Вычислим углы закручива-
закручивания вала. На леном участке
вала (от стены до диска /) его угол закручивания равен
следующем участке угол закручивания равен 92— 9i> участок между
дисками 2 и 3 закручен на угол <^з — <р* На правом крайнем участке
вала угол закручивания равен нулю.
Тогда потенциальная энергия системы имеет вид
К задаче 405.
на
п =
2 с
Т с
Зная выражения потенциальной энергии системы, легко опреде-
определяем искомые обобщенные силы Qft, Q9i и Qfi:
Задача 406. Наклонная призма А веса Рх движется под дейст-
действием горизонтальной силы F по гладкой горизонтальной плоскости.
Вдоль гладкой наклонной плоскости призмы, расположенной под
углом а к горизонту, скользит доска В веса Р^. По доске В катится
без скольжения цилиндр D веса Р3. Силами трения пренебречь.
Выбрать обобщенные координаты и найти им соответствующие
обобщенные силы.
Решение. Данная материальная система имеет три степени сво-
свободы, так как для определения положения всех ее материальных
470
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТГРИЛЛЬНЫХ ТОЧЕК
|ГЛ X
точек следует задать три независимых параметра. Эти параметры
должны определить: 1) положение призмы А по отношению к гори-
горизонтальной плоскости, 2) положение доски В по отношению к призме,
3) положение цилиндра D по отношению к доске В.
Направим неподвижную ось х по горизонтальной плоскости на-
направо, ось s, связанную с призмой А,— вдоль ее наклонной грани
вниз и ось п, связанную с доской В,— параллельно доске вниз.
Выбираем обобщенные координаты в числе, равном числу степе-
степеней свободы данной системы, т. е. введем три обобщенные коорди-
координаты: х, s и п. (Обобщенные координаты можно было бы избрать и
другие. Так, для определения положения цилиндра D по отношению
к доске В можно было выбрать угол поворота <р цилиндра.)
К задаче 406.
Соответственно трем обобщенным координатам х, s и п пало
вычислить три обобщенные силы: Qx, Qs и Qn.
Изображаем задаваемые силы системы: /*, — вес призмы А, Р^ —
вес доски В, Рл — вес цилиндра D, F—силу, движущую призму Л.
Дадим системе три незанисимых обобщенных возможных переме-
перемещения Ьх, bs и 8я, соответствующих вариациям обобщенных коор-
координат 8лг, 8s и 8л и направленных вдоль ортов осей координат в
сторону их возрастания.
Для определения обобщенной силы Qx будем считать, что 8лг ф О,
Это значит, что цилиндр по отношению к доске и доска по от-
отношению к призме находятся в покое. Таким образом, вся материаль-
материальная система перемещается вправо на 8лг.
Вычислим сумму работ всех задаваемых сил па возможном пере-
перемещении 8дг:
ЬА=РЬх. A)
Работа сил тяжести Рх, Р2 и Рз равна нулю, так как точки при-
приложения этих сил перемещаются горизонтально. Коэффициент пропор-
S 8| УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА 471
циональности, стоящий в формуле A) при Ьх, является обобщенной
силой Qx, т. е.
Для определения обобщенной силы Qs будем считать, что 8s ф О,
а 8л:==8я = О.
Это значит, что призма по отношению к горизонтальной плоскости
и цилиндр по отношению к доске находятся в покое. Лишь доска,
связанная с цилиндром, перемещается вдоль боковой наклонной грани
призмы на bs вниз.
Прл этом сумма работ исех задаваемых сил на возможном пере-
перемещении bs запишется в виде
8^=(P, + /3j)85Sina. B)
Работа сил F и Р4 равна пулю, так как точки приложения этих
сил неподвижны. Обобщенной силой Qs является коэффициент, стоя-
стоящий п эй bs в формуле B), т. е.
Q, = (P, + P3) sin а.
Переходим к вычислению обобщенной силы Qn. Для этого будем
считать, что Ьп ф О, а 8je = 8s = ().
Это значит, что доска по отношению к призме и призма по от-
отношению к горизонтальной плоскости находятся в покое и лишь
цилиндр совершает движение по отношению к доске, так что его
центр тяжести С перемещается вдоль оси п вниз на Ьп.
Вычислим сумму работ задаваемых сил на возможном перемеще-
перемещении Ьп:
ЬА = Р3Ьп sin а. C)
Работа сил F, Р4 и Р.2 равна нулю, так как точки приложения
этих сил неподвижны. Обобщенной силой Qn является коэффициент,
стоящий при 8л в формуле C), т. е.
Qn = P3 sin a.
Итак, искомые обобщенные силы имеют значения:
QX = F, 0, = (Р,4-Р1)81па, Qn = Pz sin a.
2\ Общее уравнение динамики в обобщенных
координатах. Уравнения Лагранжа второго рода.
Общее уравнение динамики системы материальных точек
472 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК 1ГЛ. X
в обобщенных координатах имеет вид
й дТ _ д1 _ о ] - О
где <7i> Ч<*> •••¦> 4s — обобщенные координаты, qb q^ qs —
обобщенные скорости, 8^,, bq.h ..., 8^ — обобщенные возможные
перемещения системы, являющиеся вариациями соответствующих
обобщенных координат, Q,, Q.2, ..., Qs — обобщенные силы системы,
Т—кинетическая энергия системы.
Так как bql7 bqit ..., 3^ в случае системы, подчиненной голо-
помным связям, являются независимыми обобщенными возможными
перемещениями, то общее уравнение динамики удовлетворяется лишь
при условии, что коэффициенты, стоящие при возможных перемеще-
перемещениях, равны пулю, т. с.
- дТ-— d-- = Q
dt dq, dq,
d
dt
дТ
d дТ
dt dq's
]1
dqs
(I*)
Уравнения A*) называются уравнениями Лаграижа второго рода *)•
При наличии голономных связей, наложенных на систему, число
уравнений Лагранжа равно числу независимых обобщенных коорди-
координат, т. е. числу степеней свободы. Система A*) состоит из s обыкно-
обыкновенных дифференциальных уравнений второго порядка.
Если задаваемые силы системы потенциальны, то уравнения Ла-
Лагранжа можно записать в виде:
d дТ _dT__dU_
dt dql dqj dqt'
d дТ _ дГ_ _й?
dt д/}^ dq2 ~dqa'
d дГ
dt ~Sq~s'
B*)
¦*) Уравнения Лаграижа первого рода в настоящей книге не рассматри-
рассматриваются. Поэтому ниже уравнения Лагранжа второго рода просто называются
уравнениями Лаграпжг.
«6] УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОЛА 473
Если ввести функцию Лагранжа L, равную разности кинетической
и потенциальной энергий, т. е. L=T—П, то уравнения B) при-
примут вид:
d dL dL n
d d_L__ dL
dt da, да*
C*)
rf dL _ dL 0
dt dqs dqs
Трудность решения задач динамики систем материальных точек
с одной степенью свободы заключается, между прочим, и п удачном
выбсре соответствующей общей теоремы динамики. В случаях систем
с несколькими степенями свободы решение задач значительно услож-
усложняется, так как при этом требуется совместное применение некото-
некоторых общих теорем и других соотношений динамики, выбор которых
обычно представляет значительные трудности. В подобных случаях
наиболее удобно использование уравнений Лагранжа, являющееся уни-
универсальным методом составления систем дифференциальных уравнений
движения систем материальных точек.
ЕЗольшое достоинство уравнений Лагранжа заключается в том, что
при наличии идеальных и голономных связей в них не входят силы
реакций связей. (При применении других методов решения задач при-
приходится в ходе решения исключать силы реакций связей из системы
сост.звленных уравнений.)
Полученные выше при решении подавляющего большинства задач
динамики системы уравнений могут быть непосредственно выведены
с помощью уравнений Лагранжа. Если по условию задачи требуется
найти силы реакций связей, то, определив с помощью уравнений Лаг-
Лагранжа ускорения точек системы, применяют принцип освобождаемости
от связей к соответствующей массе системы с последующим использо-
использованием одной из общих теорем динамики либо метода кинетостатики.
Если при решении задачи динамики отсутствует ясный план при-
применения тех или иных теорем, то следует остановиться на использо-
использовании уравнений Лаграпжа.
Все сказанное выше не умаляет значения общих теорем, которыми
целесообразно пользоваться при решении ряда простых задач динамики
(см. ниже главу XI).
Составление уравнений Лагранжа надо прово-
проводить в следующей последовательности:
I) определить число степеней свободы материальной системы;
'}) выбрать систему координат и ввести независимые обобщенные
координаты в числе, равном числу степеней свободы;
474 ДИНАМИКА НЕСВОВОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
3) определить обобщенные силы системы Q,, Q9, ..., Qs, соот-
соответствующие избранным обобщенным координатам. (Последователь-
(Последовательность вычисления обобщенных сил детально разобрана в пункте 1
этого параграфа);
4) вычислить кинетическую энергию Т рассматрипаемой системы
материальных точек;
5) найти частные производные от кинетической энергии по обоб-
обобщенным скоростям #,, <7.2, ..., q т. е. -rv, ¦,.- 7ГА~> а затем
Oqt oq« oqs
вычислить производные от них по времени:
d( дТ\ d( дТ\ d ! дт
j
G) определить частные производные от кинетической энергии Т
по обобщенным координатам: qlt qit ..., qs, т. е.
дТ дТ д?ш
dqf dq\' •••' ~dqsi
7) полученные в пунктах 3, 5 и 6 результаты подставить в урап-
нсиия Лагранжа.
Задача 407. Вывести дифференциальное уравнение вращения твер-
твердого тела вокруг неподвижной оси, воспользовавшись уравнениями
Лагранжа.
Решение. Твердое тело, вращающееся вокруг неподвижной
оси, имеет одну степень свободы. Действительно, для определения по-
положения всех его точек достаточно задать один параметр, напри-
например его угол поворота 9. Выберем ср в качестве обобщенной ко-
координаты.
Направим ось z вдоль оси вращения твердого тела. Обозначим:
!г — момент инерции твердого тела относительно оси вращения,
/•'i, Ft, ..., Fn — задаваемые силы.
Так как число уравнений Лагранжа при наличии идеальных и
голономпых связей равно числу степеней свободы системы, т. е. числу
обобщенных координат, то в данном случае следует записать одно
уравнение Лагранжа для обобщенной координаты ср:
ddT_dl_
dt д$ df~4f ( '
Дадим твердому телу обобщенное возможное перемещение 8э
и вычислим сумму работ задаваемых сил на этом возможном
перемещении:
§ 61 УРАВНЕНИЯ ЛЛГРЛНЖА ВТОРОГО РОДЛ 475
Обобщенной силой Q9 является коэффициент, стоящий при 8-р
в уравнении B), т. е.
к =-= I
Кинетическая энергия твердого тела, вращающегося вокруг пепо-
двикной оси, имеет вид
Вычислим частную производную от кинетической энергии по обоб-
обобщенной скорости &:
дТ . .
1&
а затем возьмем производную от полученного результата по времени:
Учитывая, что в выражение кинетической энергии Т не входит
обобщенная координата ср, имеем:
?-«¦ <5>
После подстановки формул C), D) и E) в уравнение Лагранжа
второго родя (I) находим дифференциальное уравнение нращепин
твердого тела вокруг неподвижной оси:
Нетрудно видеть, что п прапой части уравнения F) вместо суммы
моментов всех задаваемых сил Fk относительно оси вращения z
можно подставить сумму моментов всех внешних сил F\ относительно
той же оси. Действительно, в число внешних сил входят, кроме за-
давгемых сил, только силы опорных реакций, моменты которых отно-
относительно оси вращения z равны нулю (опорные реакции приложены
к оси вращения г). Следовательно,
и уравнение F) примет вид
476 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Задача 408. Вывести дифференциальные уравнения движения
свободной материальной точки, воспользовавшись уравнениями
Лагранжа.
Решение. Свободная материальная точка имеет три степени
свободы, так как ее положение в пространстве определяется тремя
независимыми параметрами.
Изобразим систему неподвижных осей декартовых координат и
ныберем декартовы координаты х, у, z точки в качестве ее обобщен-
обобщенных координат.
Число уравнений Лагранжа второго рода равно числу степеней
свободы материальной точки, т. е. числу ее обобщенных координат.
Уравнения Лагранжа для обобщенных координат х, у, г запишутся
в инде:
dt дх дх ^х>
dt ду ду ^у'
d_ дТ _ дТ _ п
dt di dz ^'
Переходим к вычислению обобщенных сил Qx, Qy, Q2. Дадим
материальной точке независимые возможные перемещения 8дг, Ьу и bz.
При определении Qx считаем: 8л: ф 0, 8_\' = 8г = О. Сумма работ за-
задаваемых сил, приложенных к материальной точке, имеет вид
ЪА = 2 F*Ax = ( 2 Fk*)bx- О
Обобщенной силой является коэффициент, стоящий при 8л: в урав-
уравнении A), т. с.
л
XT' р о\
х / i 1 яхш \ )
ft = I
Аналогично находим две другие обобщенные силы:
k = I
C)
§ 61 УРАВНЕНИЯ ЛЛГРЛНЖА ВТОРОГО РОДА 477
Зг пишем выражение кинетической энергии материальной точки:
7"= ;}- hiv*, где т — масса материальной точки, а Ф — ее скорость.
Учитывая, что v* = х1 -\-jl* -\- i2, получим:
Взяв частные производные от кинетической энергии по х, j>, z, на-
находил:::
дТ . дТ . дТ
дх ду - oz
Вычислим производные от полученных результатов по времени:
d дТ .. d дТ .. d дТ .. ...
- -=г.=тх, -.; ,-.-=mv, л тг = отг. D)
dt d.i dt ду J dt oz v
Заметив, что кинетическая эгергин Т материальном точки не за-
зависит от обобщенных координат х, у, z, имеем
дх ду dz
E)
После подстановки формул B), C), D) и (о) в систему уравнений
Лагргнжа получим искомые дифференциальные уравнения движения
свободной материальной точки:
тх= У^ Fkx, ту— ^] Гку, mz = ^] Fkz.
к = \ к -= I А: ^ 1
Задача 409. Доказать изохронность колебаний циклоидального
маятника.
Р е ш е и и е. Циклоидальным называется маятник, который может
быть схематизирован в ииде материальной точки, движущейся по дуге
ЦИКЛОИДЫ.
В решении задачи 284 был рассмотрен математический маятник,
у которого траекторией была дуга окружности. Дифференциальное
уравг ение колебаний математического маятника, записанное форму-
формулой D) задачи 284, имело вид
ср -|—-- sin у = 0,
где о — угол отклонения нити маятника от вертикали, а /—длина
нити.
В формуле A1) той же задачи было показано, что период коле-
колебаний математического маятника равен
478
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
где а — угловая амплитуда колебаний. Таким образом, колебания ма-
математического маятника свойством изохронности не обладают, так как
его период колебаний зависит от начальных условий движения — от
угловой амплитуды а. Лишь в случае малых колебаний маятника при
замене в его дифференциальном уравнении движения sin у на 9 М1Л
получали свойство изохронности колебаний маятника. При этом период
колебаний математического маятника был приближенно равен
Покажем, что колебания циклоидального маятника в отличие от
колебаний математического обладают свойством изохронности, т. е.
его период колебаний не зависит от начальных условий движения.
\1
К задаче 409.
Обычное представление о циклоиде связано с траекторией точки А,
лежащей на ободе колеса, которое катится без скольжения по пря-
прямолинейному рельсу (см. рис. а).
На рис. б изображено это колесо, катящееся без скольжения
снизу по рельсу, расположенному над колесом. Покажем, что движе-
движение точки А является колебательным движением, период колебаний
которого не зависит от начальных условий движения (конструкция
циклоидального маятника будет описана ниже).
Выберем в качестве обобщенной координаты угол ср, образуемый
радиусом АС точки А с вертикалью.
Как известно, уравнения циклоиды в параметрической форме
имеют вид
лг^гдер — a sin <р, _У = аA — cos <?)> 0)
где а — радиус колеса.
§ 6] УРАВНЕНИЯ ЛАГРАИЖА ВТОРОГО РОДА 479
Запишем соответствующее ураннение Лаграижа:
d дТ дТ_
Единственной задаваемой силой является вес материальной точки,
который мы обозначим Р.
Потенциальная энергия П материальной точки выражается фор-
формулой
П = — Ру = — Ра{\ — cos 9)- C)
Обобщенная сила Qv имеет вид Qv = —з-. Внося в эту формулу
выражение П из C), имеем:
Qv = Pa sin 9. D)
Вычислим кинетическую энергию Т материальной точки:
Т= \ mv1 =.= -J m {x* -\-f). E)
Использовав формулу A), находим:
jc = а<у — аф cos 9. >> = ai|>sincp.
Теперь формула E) принимает вид
Т= та* 0 — cos9)<f. (б)
Вычислим частную производную от кинетической энергии Т по
обобщенной скорости ф:
дг- = 2/иа9 A — cos 9) ф-
Возьмем производную от полученного результата по времени:
~ д~ = 1тй9 A — cos ср) ф + 2/яаV sin ср. G)
Найдем теперь частную производную от выражения F) кинетиче-
кинетической энергии Т по обобщенной координате ср:
^ = дааУ sin 9. (8)
Подставив формулы D), G) и (8) в уравнение Лаграижа B),
получим:
ср A — cos 9) + о ф'2 sin <р = J^ sin <?• (9)
480 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Вводя тригонометрические функции половинных углов и сокращая
in| + ^.fcos| = 2gflcos^ (Ю)
на sin у, имеем:
Нетрудно видеть, что
3S т)= — т1 ? sin ? ~Ь"/ 'г'3 cos ~f)#
Следовательно, дифференциальное уравнение (9) можно записать так:
SL(cosl\\Z cos-9- —О
dti ^cos 2 ji-4acos 2 —и.
Обозначив cos-^- = z, находим:
5-{-*»* = О, A1)
где
4B
Таким образом, точное дифференциальное уравнение A1) колеба-
колебаний циклоидального маятника тождественно приближенному диффе-
дифференциальному уравнению колебаний математического маятника:
¦р 4- k\ = о.
Это значит, что колебания циклоидального маятника обладают свой-
свойством полной изохронности, т. е. период его колебании не зависит
от начальных условий движения.
Воспользовавшись формулой A2), можно записать период колеба-
колебаний в виде
где /=4а.
Эволюта циклоиды также является циклоидой, тождестпеммоН
с исходной. Поэтому для осуществления рассматриваемого маятника
следует вырезать шаблон, изображающий дпа участка дуг циклоиды,
примыкающие к ее точке позврата О (рис. в). Нить длины /=4а
при колебаниях частично накладывается то па левую, то на правую
части шаблона, а материальная точка, находящаяся на конце нити,
при этом движется по циклоиде.
Дифференциальное уравнение (9) можно также получить, восполь-
воспользовавшись уравнением Лаграпжа в форме C*), т. е.
ddL_dL=Q
di di д-f
ifi]
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
481
В данном случае функция Лагранжа L в соответствии с форму-
формулами (G) и C) имеет вид
L= Т — II = та1 A — cos <p) <f* + mga A — cos ?).
Предоставляем читателю подстзвить функцию Лагранжа L в уран-
пение A3) и получить дифференциальное ураннепие (9).
Задача 410. Зубчатое колесо / оеса Я, и радиуса г, электриче-
электрической лебедки приводится в движение парой сил, момент которой
равен /л0. Колесо 2 веса
1\ и радиуса гь находя-
находящееся во внешнем зацеп-
зацеплении с колесом 1, свя-
связано с. барабаном Л неса
1\ и радиуса г3, па кото-
pi.itt намотана пить. К кон-
концу нити привязан груз В
веса Рк, который при
пключении мотора подни-
поднимаете? вверх. Определить
ускорение груза В, счи-
считая зубчатые колеса 1 и 2
и барабан А сплошны-
сплошными круглыми цилиндрами.
Массой пиги пренебречь.
Рсшение. Электри-
ческа? лебедка является
системой с одной сте-
степенью свободы, так как положение зубчатого колеса 1 определяет
положение всех материальных точек рассматриваемой системы.
Выберем в качестве обобщенной координаты угол поворота с^
зубчач"Ого колеса /, считая epi положительным в направлении по часо-
часовой стрелке.
Уравнение Лагранжа для обобщенной координаты sp, имеет вид
К задаче 410.
dt
A)
К лебедке приложены задаваемые силы и моменты: Pt — вес ко-
колеса I, P.1 — вес колеса 2, Р3 — вес барабана А, Рк — вес груза В, пара
сил с моментом шй.
Все связи, наложенные на систему, являются идеальными (пить
считается перастяжимой и натянутой).
Дмдим зубчатому колесу 1 возможное перемещение 8-fj в направ-
направлении возрастания угла у,, т. е. но часовой стрелке. При этом зуб-
зубчатое колесо 2 с барабаном А повернется против часопой стрелки на
16 Теоретическая механика, том II
482 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
угол Вср2, а груз В поднимется вверх на Ъг. Нетрудно видеть, чго
4i = — ~4i, a
8r = -ri8(p, = ^-r18<Pl. B)
"а
Для определения обобщенной силы Q?1 вычислим сумму работ всех
задаваемых сил на возможных перемещениях точек системы, соответ-
соответствующих обобщенному возможному перемещению 891'.
Работа сил Рь Р9 и Ръ равна нулю, так как точки приложения этих
сил неподвижны. Использонав формулу B), имеем:
Следовательно, обобщенная сила Q9l, являющаяся коэффициентом
в выражении суммы элементарных работ задаиаемых сил при обоб-
обобщенном возможном перемещении 8cpi, имеет вид
Of, = Щ — Г гзр4- C)
' 2
Переходим к вычислению кинетической энергии материальной
системы, состоящей из двух зубчатых колес, барабана А и груза В:
Т= уч.) _|_у1*) + 7<з)_|_:г<4). И)
Кинетическая энергия зубчатого колеса /
E)
Кинетические энергии зубчатого колеса 2 и барабана А, учиты-
учитыF)
вая, что &ч = —— ?i. соответственно можно представить в виде
Кинетическая энергия груза В, движущегося поступательно,
Так как •и1=г3<р<! = —Гз~Ъ>
т0
§ 61 УРАВНЕНИЯ ЛАГРЛНЖА ВТОРОГО РОДА 483
После подстановки в формулу D) значений Тп), 7(а), ГC) и Pi}
из формул E), F) и G) получим выражение кинетической энергии
электрической лебедки:
Частная производная от кинетической энергии Т по обобщенной
скорости $! запишется в виде
+2Pi) r° fe
Находим производную от полученного результата по времени:
^i [ <*+^ Л+(Р+2Р^ г
Частная производная по 91 °т кинетической энергии Т системы,
в выражение которой не входит обобщенная координата <р„ равна
нулю: ат
Е> результате подстановки формул C), (9) и A0) в уравнение
Лагранжа A) получим дифференциальное уравнение движения лебедки
для обобщенной координаты <р(:
2^ [(/>, + А) г? + (А, + 2Р,)г: (?) ]91 = «,-^-гЛ,
откуда определим искомое угловое ускорение зубчатого колеса /:
ma — Pt -г га
? = 2^. A1)
Или /и0 ^> Л4 - Гз, то ускорение груза В направлено вверх. Если
тй <^ Pir- г3, то ускорепие груза В направлено вниз. Если /мо =
= Г-\ —- rit то лебедка находится в покое, либо все ее массы движутся
равномерно. При этом направление движения зависит от начальных
условий движения.
Зту задачу можно было решить также с помощью дифференци-
дифференциального уравнения вращения твердого тела вокруг неподвижной оси:
которое следовало составить дважды: один раз для зубчатого колеса /
и fitopoh раз — для остальной части электрической лебедки. Для
16*
484
ДИНАМИКА ПЕСООГ.ОЛНОП СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОМГ.К
|ГЛ. X
этого нужно было мысленно разорвать данную систему па дне части
и точке сцепления зубчатых колес / и 2, заменив действие отбро-
отброшенной часги конструкции соответствующей силой реакции связи.
R составленную систему дифференциальных уравнений движения войдет
сила реакции связи. Лишь после исключения этой силы реакции из
полученной системы уравнений можно прийти к формуле A1). Пре-
Преимущество уравнений Лагранжа, не содержащих сил реакций связей,
совершенно очевидно.
Задача 411. Определить угловое ускорение кривошипа О Л
планетарной передачи, расположенной в вертикальной плоскости.
К задаче 411.
Зубчатое колесо 2 находится во внутреннем зацеплении с непод-
неподвижным зубчатым колесом /. Колесо 2 приводи гея в движение по-
посредством кривошипа О А, к которому приложена пара сил с вр.т-
таюшнм моментом тй. Вес кривошипа ОЛ равен Р, Pt — пес колеса 2,
r<i — радиус колеса 2, г, — радиус неподвижного колеса J.
Колесо 2 считать однородным круглым диском, и кривошип ОА —
топким однородным стержнем. Силами сопротивления движению пре-
пренебречь.
Решение. Планетарная передача имеет одну степень свободы,
так как yi ол поворота tp кривошипа О Л определяет положение bl-v=x
S 61 УРАВНЕНИЯ ЛЛГРЛНЖА ВТОРОГО РОЛЛ 485
точек механизма. В качестве обобщенной координаты выбираем угол
tp, отсчитываемый ог горизонтальной оси против часовой стрелки.
Уравнение Лагранжа для обобщенной координаты <р имеет пил
~dt d? ~~ д~ — Qr Ух>
Задавае.мы.ми силами являются: Р—вес кривошипа, Р.2 — вес ко-
колеса 2 и пара сил, приложенная к кривошипу ОА, с вращающим
моментом /и0. Все связи, наложенные на систему, идеальны.
Д.)дим кривошипу ОА возможное угловое перемещение S-f в на-
направлении возрастания угла со, т. е. против часовой счрелки.
Для определения обобщенно» силы Q9 вычислим сумму работ за-
задаваемых сил па возможном перемещении 8»:
ЬА = /яо8э — Р\0С\ cos з Ц — Рг \ О А \ cos о fia.
Так как ОА = 0& — А® = г, — га, а ОС = ^2- = Г'~г> , то
8 А = Y [21Яв - (Я -Н 2Р,) (г, - гJ cos ?| 8?.
Учитывая, что 8А = Qf8s>, нгходим o6o6uieiiHyio силу, соответ-
соответствующую обобщенной координате $:
Q, = ^ [2ио - {Р + 2Р,) (г, - г4) cos -f ]. B)
Переходим к вычислению кинетической энергии Т механизма, в со-
состав которого входят массы кривошипа ОА и аубчатого колеса 2
(зубчатое колесо / неподвижно), т. е.
-7('21. C)
Кинетическая энергия кривошипа ОА, вращающегося вокруг
неподвижной оси О, перпендикулярной к плоскости рисунка, опреде-
определяется формулой 7(П = 2 /0^, где
— момент инерции кривошипа. Следовательно,
Т<»=^(г,-г4)Ч«. D)
Кинетическая энергия зубчатого колеса 2, совершающего плоское
движение, равна
486 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК !ГЛ. X
Найдем скорость точки А, являющейся концом кривошипа О А:
г»д = | О Л 1 ф = (rt — г,) ф. F)
Рассмотрим скорость той же точки А, принадлежащей зубчатому
колесу 2, по отношению к мгновенному центру скоростей еР колеса:
vA = Да75-и>2 = г9ш2. G)
Сопоставляя формулы F) и G), находим:
CL=?. (8)
Момент инерции зубчатого колеса 2 вычисляется по формуле
Р 1-2
@)
После подстановки значений vA, щ и /д соответственно из фор-
формул F), (8) и (9) выражение E) принимает вид
7"W) (rr)V
Воспользовавшись формулами C), D) и A0), запишем выражение
кинетической энергии планетарного механизма:
Т=— Hp-i'i-rtf?' СО
Вычислим частную производную от кинетической энергии Т но
обобщенной скорости <f:
дТ
п ьозьмем производную от полученного результата по времени:
Заметив, что кинетическая энергия Т системы, определенная оор-
мулой (И), не зависит от обобщенной координаты <р, находим:
После подстановки выражений B), A2), A3) в уравнение Лагэап-
жа A) получим дифференциальное уравнение движения механизма
для обобщенной координаты ср:
-
1 - r,f ? = I [2m, - (Р + 2/у (Г! -
cos
S 6] УРАВНЕНИЯ ЛАГРЛНЖА ВТОРОГО РОДА 487
откуда определяем искомое углоное ускорение 5р кривошипа ОА:
- —д„ 2то~(P + 2Pg)(rt-r2) cosy
Равномерное вращение кривошипа осуществляется при выполнении
условия
= j (P+ 2Я0 (г,
cos ср.
Задача 412. Кривошипно-шатунный механизм ОД/?, расположен-
расположенный и вертикальной плоскости, приводится в движение посредством
криьошипа О А, к которому приложена пара сил с моментом т. Най-
Найти закон изменения момента т, при котором осуществляется рав-
равномерное вращение кривошипа; Pt — вес кривошипа О А, г — длина
К задаче 412.
кривошипа, Р9 — вес шатуна АВ, I — длина шатуна, Ря — вес ползу-
па. Кривошип О А и шатун АВ считать тонкими однородными стерж-
стержнями, а ползун — точечной массой. Силами сопротивления движению
пренебречь.
Решение. В решении задачи 402 в качестве обобщенной коор-
координаты был введен угол поворота ср кривошипа и была определена
обобщенная сила Qf:
A)
Уравнение Лагранжа для обобщенной координаты ср имеет вид
d дТ дТп
488 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Вычислим кинетическую энергию 7 механизма, в состав которого
ьходят массы кривошипа, шатуна и ползуна, по формуле
C)
Кинетическая энергия Г11* кривошипа ОА, вращающегося вокруг
неподвижной оси О, перпендикулярной к плоскости рисунка, равна
7"'" = -к 1о<?1- Так как кривошип считается однородным тонким
стержнем, то /о= о —> и- следовательно,
d S
Кинетическая энергия Tw шатуна АВ, совершающего плоское
движение, имеет вид
Выразим теперь vc и ш9 через обобщенную координату ср я обоб-
обобщенную скорость ф.
В решении задачи 402 было определено положение мгновенного
центра скоростей аР шатуна АВ и был вычислен мгновенный радиус
точки А, равный А<&=-^-^-.
COS 'р
Учитывая, что точка А одновременно принадлежит кривошипу О А
и шатуну АВ, получим: vA = r<p = | Atfi \ ш.2, откуда
где \ = у.
Установим связь между cos ф и углом ср. Из треугольника ОАВ
S1U <5 /
находим, что -—т = —, откуда
sin ф=). sin ср. G)
где Х.= ¦ , следовательно,
cos Ф = V l — ¦
1 - } \* ¦ U1 - cos 2cp) ^1—1- ^ -I- ' Г cos 2э.
4
Итак,
COb 9 яа 1 — 4 Л -j- Л' СОЬ 2'f
§ 6| УРАВНЕНИЯ ЛАГРШЖА ВТОРОГО РОДА 489
Подставив значение cos <j) из формулы (8) в F), получаем:
к cos <f .
(9)
В первое слагаемое формулы E) входит квадрат скорости центра
тяжести С шатуна, который можно вычислить по формуле
Нетрудно видеть, что хс = \ О А | cos 9 -f-1 <4 С | cos <J> = r cos 9 -j-
у cos <Ji. Подставляя значение cos ^ из формулы (9), имеем:
хс = г cos ср + -2 A - -' ^ +1 ^ cos 2?),
т. е.
хс = 1 - j W + г cos ср + -J- X1/ cos 2?,
откуда
хс = — r(sin9 + ^ sin 2?Ч- С1')
Центры тяжести кривошипа ОА и шатуна Л?? расположены в их
серединах и по конструкции имеют раипые ординаты
Jfc =УС1 = 2" Sin *•
откуда
J>c=-]-cos<?-t. A2)
Внося в формулу A0) значения ^с н J)c соответственно из фор-
формул A1) и A2), находим:
4 = r2|( sin 9 + ^- X sin 2ч» )*-|-^J- cos»<p] фа. A3)
Подстапляем в формулу F) пыражения щ и v2c из формул (9) и A3)
Р /-'
и, принимая во внимание, что /с^т-|—, получаем:
:=Й? {3 [4 (sin ? + Т Х sin
Кинетическая энергия 7(Г1) ползуна Д, движущегося поступательно,
находится по формуле
490 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Для определения vB вычислим абсциссу хв ползуна:
ха = г cos '¦?-}-1 cos ф.
Использовав формулу (8), запишем:
ха — г cos <р + / A — -г ^9 -f- х ^а cos
откуда
vb = ¦*« = —г ( sin ? + Т Х sin 2tP
Теперь формула A5) принимает вид
Г<3> = ^5l! (' sin ? + 1 X sin 2ср У ф9. A6)
Кинетическая энергия кривошипно-шатупного механизма вычис-
вычисляется по формуле C) после подстановки в нее значений 7"(|), 12)
и 7~C' соотпетстпенпо из D), A4) и A6):
Т= ,-? J4P, -\- Рг 12 i' sin 9 -f j ^ sin 2q> V + 3 cos9 cp -}-
fsin v + ix sin
V 4" ' 4
Если ввести обозначение
[ 2 (sin ? + тx sin 2? f +3
4 >¦ sin 2cp Л A8)
то кинетическая энергия крикошишю-шатунного механизма записы-
записывается и форме
4
т. е. получает пил кинетической энергии твердого тела, вращаю-
вращающегося вокруг неподвижной оси с угловой скоростью, равной обоб-
обобщенной скорости ф системы. Таким образом, все массы системы
оказываются приведенными к обобщенной координате <р. Коэффи-
Коэффициент /пр носит в курсе теории механизмов и машин название при-
приведенного момента инерции системы (если бы к качестве обобщен-
обобщенной координаты была избрана какая-либо линейная координата s, то
кинетическая энергия системы получила бы вид 7"= т,- УИ1фл'9, где
Ма9 — приведенная масса системы).
УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА
491
Громоздкость выражения приведенного момента инерции /лр, опре-
определенного формулой A8), наглядно иллюстрирует вычислительные
трудности, с которыми приходится сталкиваться при определении
выражения кинетической энергии механизма аналитическим путем
(не менее громоздким, как показывает решение задачи 402, получа-
получается и выражение обобщенной силы Qv, именуемое в курсе теории
механизмов и машин приведенной силой). При этом следует иметь в
виду, что в этой задаче рассматривается сравнительно несложный
механизм. Поэтому в задачах динамики курса теории механизмов и
машин при определении приведенных инерционных коэффициентов
(т. е. приведенных моментов инерции и приведенных масс), а также
приведенных сил широко применяются графоаналитические методы.
Возвращаясь к составлению уравнения Лагранжа для рассматри-
рассматриваемого кривошиппо-шатунного механизма, вычислим частную произ-
производную от кинетической энергии Т, определенной формулой A7),
по обобщенной скорости ф, т. е. -р-. Взяв затем производную от
9 d дТ
полученного результата по времени, т. е. yiry, и вычислил частную
производную д- от кинетической энергии Т по обобщенной коорди-
координате <р> находим:
(sin
?+
щ{Р* [24 ( sin <? + i * sin 2=? ) (cos ? -J- jl cos 2? ) -
3 l-|x4-lx-'
_ Sin 2?
24P3 ( sin 9 -(- -,^ X sin 2cp j(cos ? + X cos 2<p)| ф*. B0)
После подстановки значений Ош, -..-^- и д— соответстпепно из
т at O'y C<p
формул A), B0) и B1) в уравнение Лагранжа B) получим:
/пр определено формулой A8). Уравнение B1) является диф-
дифгде р
ференциальным
низма.
уравнением движения кривошипно-шатунпого меха-
меха492
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
В случае решения обратной задачи, т. е. при определении движе-
движения по заданным силам ввиду сложности решения дифференциального
уравнения B1), часто применяется численное интегрирование.
По условию задачи требуется определить закон изменения вра-
вращающего момента т, обеспечивающий равномерное враичение криво-
кривошипа, т. е. постоянство ср. При этом 3 = 0 и решение уравнения B1)
относительно т приводит к результату:
_ 1
2
где
S1H ср -р- -
(}—- ХЗ
¦ 4
— sin 2сэ
. sin 2с? j I cos <p -f- -.у k cos 2c?
!- X2 cos2?V+ 1 — -*!-Ха — -' V- cos2?
sin<?-f у X sin
здесь Х^-т-.
Задача 413. Тележка приводится в движение посредством кана-
каната, намотанного на барабан веса Р и радиуса г. На платформе ie-
лсжки лежит бревно веса Р3, которое при дкнженни тележки катит-
катится без скольжения по платформе. Вес каждого из четырех колес
тележки равен Рь rt — радиус колеса, Р% — вес платформы.
К задаче 413.
Определить ускорение центра тяжести С3 бревна и угловое уско-
ускорение барабана, к которому приложена пара сил с вращающим мо-
моментом тй. Коэффициент трения качения колес тележки о землю ра-
равен /к. Барабан, колеса и бревно считать однородными круглыми ни-
§ 6] УРАВЕ1ЕНИЯ ЛЛГРЛИЖЛ ВТОРОГО РОДЛ 493
липлрами. Массой каната и сопротии.чсмием движению бревна по плат-
платформе пренебречь. Колеса тележки катятся без скольжения по лемле.
I» е ш е и и е. Рассматриваемая система имеет дне степени свобо-
свободы. Дейстпителыю, один параметр нужно задать для определения
положения барабана и тележки, а второй—для определения положе-
положения бревна по отношению к тележке.
Выберем в качестве обобщенных координат угол поворота <р бара-
барабана и линейную координату s, полагая, что ось s связана с тележкой.
Соответственно двум принятым обобщенным координатам запи-
запишем два уравнения Лагранжа:
d дТ_дГ__
dt д§ df~^f
й_дТ_дТ_п
dt ds ds ~ У-' •
К системе приложены задаваемые силы:/*—вес барабана, четыре
силы Я, — веса каждого из четырех колес тележки, Pt — вес плач-
формы, Р3— вес бревна, пара сил с вращающим моментом т0 (см.
рисунок).
Добавляем к задаваемым силам четыре силы трения FTV колес
о землю (по числу колес тележки). R связи с наличием трения каче-
качения две нормальные реакции V?, и две R\ смешены от центров
тяжести колес в сторону движения па /к (силы реакций обозначены R%
и R\, так как по модулю они различны).
Дадим системе два независимых обобщенных возможных переме-
перемещения 8ср и Ьгс , направив их к сторону возрастания обобщенных
кооэдииат (р и л-.
Для вычисления обобщенной силы Qv будем считать, что ою не
равно нулю, а Ъгс равно нулю: (8у ^z. 0, §гс =0).
Это значит, что бревно по отношению к тележке находится в
покое, а барабан попорачиваетсл по часовой стрелке на угол 2». При
этом каждая точка каната получает возможное перемещение /За.
Рассмотрим любое из четырех колес тележки. Колесо катится по
земле без скольжения, причем возможное перемещение его центра
тяжести Ci равно возможному перемещению любой точки каната:
Ьгс =го<?. Мгновенный центр скоростей находится и точке е?5, по-
поэтому Ьгс =ri8<pi, где 8?! — угол попорота колеса. Следовательно,
r,8?1=r81?, откуда .г. ,ол
8 S'f B)
Вычислим сумму работ всех задаваемых сил и сил трения па воз-
возможных перемещениях, соответствующих обобщенному возможному
перемещению b'f.
494 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧР.К [ГЛ. X
Учитывая, что 2Rt -)- 1R\ = $Pt -\- P9 -\- Ра> и принимая во внима-
внимание формулу B), получим:
ЬА
= [щ -А ? (Щ + я, + р3)] Ц- C)
Работа сил тяжести Ри Р$ и Р3 равна нулю, так как точки при-
приложения этих сил перемещаются по горизонтали. Работа силы тяже-
тяжести Р равна нулю, так как ее точка приложения неподвижна.
Выберем теперь в качестве возможного перемещения действитель-
действительное угловое перемещение барабана d<p (это допустимо, ибо в данной
задаче связи стационарны). Тогда работа силы трения (FTp) будет
равна нулю, ибо при действительном перемещении ^ср сила трения /'тр,
приложенная в мгновенном центре, не перемещается.
Обобщенной силой Q является коэффициент, стоящий при 8:р
в формуле C), т. е.
Для вычисления обобщенной силы Qs дадим обобщенное возмож-
возможное перемещение Ьгс центру тяжести бревна, считая при этом, что
8<р равно нулю:
Ь
Это значит, что барабан и тележка находятся и покое, а центр
тяжести бревна перемещается по горизонтали направо па Ьгс . При
этом горизонтальном перемещении работа силы тяжести Рл бреиш
равна нулю. Работа всех остальных сил также равна пулю, так как
их точки приложения неподвижны. Следовательно, сумма работ всех
задаваемых сил и сил трения на возможном перемещении Ьгс обра-
обращается в нуль: 8Д^0, т. е. обобщенная сила Qs, соответствующая
обобщенной координате s, равна нулю:
Qs = 0. E)
Займемся вычислением кинетической энергии Т материальной си-
системы, состоящей из барабана, четырех колес, платформы и бревна,
т. е.
7= ги) + 4 7-B) + ГC) + Тш. F)
Кинетическая энергия Ти) барабана, вращающегося вокруг непо-
неподвижной оси, вычисляется по формуле
$ 61 УРАВНЕНИЯ ЛАГРЛНЖА ВТОРОГО РОДА 495
J ак как 'о==ш~7Т~> то
G)
Кинетическая энергия платформы, движущейся поступательно,
имеет вид
7-<з>_._1_Л^
Учитывая, что ввиду нерастяжимости каната v = r§, находим:
Р3) == ~1- -а гЧ\ (8)
2 g T v '
Колеса тележки совершают плоское движение. Поэтому
ТМ -'- —' V* -I- — / ОK
— 2 ^ с' ' '2 с> ''
Р г™
Момент инерции колеса равен /(,= -^-i. Учитывая, что при качении
бсз скольжения <в, = —-, а скорость г/с центра тяжести колеса С\
равна скорости платформы и тем самым скорости точек на ободе
барабана, получим ^с =гф и, следовательно,
7-(J) = -J5^«. (9)
Остается вычислить кинетическую энергию бревна, совершающего
сложное движение: переносное поступательное вместе с платформой
и относительное по отношению к платформе. Кинетическую энергию
бреяна находим по формуле
Момент инерции бревна относительно его центра тяжести равен
Р г2
/с =-^-2, где через г3 обозначен радиус бревна. При качении бревна
без скольжения о>а= —, где s — скорость vr центра тяжести бревна
по отношению к платформе. Теперь формула A0) принимает вид
Для определения абсолютной скорости vc центра тяжести бревна
применим теорему о сложении скоростей точки:
49fi ДИНАМИКА НЕСВОБОДНОМ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
В данном случае скорости к переносном и относительном движе-
движениях напраилены по горизонтали, значит: ve = г?, vr = s. Следоиа-
тельпо,
vr =vr ==v. -\-vr = гф -'- s.
После подстановки этого значения vc в формулу A1) находим:
ти) = 1. €i. rV j_ з_ | s, + I ^5. (j 2)
Внося значения 7(l), 7'u), Г1'1-1 и 7D) из формул G), (8), (9)
и A2) n F), получим выражение кинетической энергии 7" рассматри-
рассматриваемой материальной системы:
Переходим к составлению уравнений Лагранжа. Для этого вычис-
вычислим частные производные от кинетической энергии Т но обобщен-
обобщенным скоростям ср и 5:
дТ _ Р+12Р,+2Ра4-2Р;, „ Ра ИГ _ 3 Рл Р..,
Взяв нроизподпые по времени, находим:
d 12 Р,
идтя
Кинетическая энергия Т материальной системы, определенная фор-
формулой A3), не зависит от обобщенных координат ср и $, поэтому
После подстановки D), E), A4) и A5) в уравнения Лагранжа A)
получим:
Р + 12Р, 4
2? + v г 3 = «о _/ Г. Dр, _;- Р2 л- Р3),
S ' 1
3 Р Р
4} L» s _|- --* гф = 0.
A6)
Решив систему уравнений A6) относительно ? и s, находим:
г- C/» -h 3UP,
2 -f 2I\)
УРАПНЕНИЯ ЛЛГРЛНЖЛ ВТОРОГО РОЛА
497
Знак минус с пыражепии S указыпает, что ускорение центра тя-
тяжести Q бревна направлено п стропу, противоположную положи-
положительному направлению оси 5, т. е. налево. Произиодпые 3 и я по-
постоянны. Поэтому, если система в начальный момент находилась
в покое, то вращение барабана по часовой стрелке и движение
центра тяжести Са бревна палево совершаются равноускоренно
в соответствии с уравнениями:
-\ ¦ Ж1\
1!
(при ныводе этих формул предположено, что при t = 0 ® = s=:0).
Задача 414. Решить задачу 396 с помощью уравнений Лаграпжа.
Решение. При решении задачи 396 было показано, чго рас-
рассматриваемая система имеет две степени свободы.
о)
К задаче 414.
В качестве обобщенных координат выберем линейные коорди-
координаты s, и sb направленные вдоль наклонных плоскостей вниз.
Згпишем уравнения Лаграпжа для обобщенных координат Sj и sa;
dtdli d's] ^н' dibs' ds2 yV *• >
Задаваемыми силами являются: Pj — вес груза А, Рч — пес груза В,
Ря — вес блока D, Я4 — иес б.юь а Е, Р& — нес блока К, Р6 — иес
груза L.
498 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК |ГЛ. X
4
Силы реакций связей учитывать не следует, так как «все свя.чи,
наложенные на систему, идеальны (наклонные плоскости идеально
гладкие, трение в осях блоков отсутствует, нити предполагаются
нерастяжимыми и натянутыми).
Для определения обобщенных сил QSl и QifJ дадим грузам А и В
соответственно возможные перемещения 8.S, и bsit направленные па-
параллельно линиям наибольшего ската наклонных плоскостей в сто-
сторону возрастания координат s{ и s9.
Для вычисления обобщенной силы QS{ дадим системе обобщенное
возможное перемещение 8s,, считая при этом 8s9 равным нулю, т. е.
8s, zfi. О, 8s9 = O. (Это осуществимо, так как sx и д'2 являются неза-
независимыми обобщенными координатами.)
Таким образом, груз В, блок Е и правая ветвь нити от груза В
до точки N находятся в покое. При возможном перемещении груза А
вниз на Ssj, ввиду нерастяжимости нити, точка М нити получит воз-
возможное перемещение Ъгм по вертикали вверх, равное по модулю 8s,.
Учитывая, что точка N нити остается при этом в покое, определим
возможное перемещение оси блока lrQr (см. рис. б), равное по мо-
модулю половине модуля возможного перемещения Sr^, т. е.
8го5 = ? = Т- B)
Вычислим сумму работ задаваемых сил на возможных перемеще-
перемещениях точек системы, соответствующих обобщенному возможному
перемещению 8s( груза А:
ЬА = Р, sin a8s, — (Р„ -f- P6) 8rOj.
Принимая во внимание формулу B), находим:
ЬА =\Pi sin а— тт^Я,,+ />«)] 8s,. C)
Работа силы тяжести Р.2 равна пулю, так как 8s2 = O, работа сил
тяжести Р3 и Pi равна нулю, так как точки приложения этих сил
неподвижны. Обобщенной силой QSl является коэффициент, стоящий
при обобщенном возможном перемещении в уравнении C), т. е.
Q4l = P,sin<i —i(P,+ P,). D)
Для вычисления обобщенной силы QSu дадим системе обобщенное
возможное перемещение 8.99, считая при этом Bst равным нулю:
Ssa^0, Ss, = O.
Это значит, что груз А, блок D и левая ветвь нити от груза А
до точки М нити находятся в покое. При возможном перемещении
груза В па 8s2 вниз, ввиду нерастяжимости нити, точка N нити но-
§61 УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА 499
лучит возможное перемещение brN по вертикали вверх, равное по
величине модулю возможного перемещения 8s3. Учитывая, что точ-
точка М нити остается при этом в покое, находим (см. рис. в):
8' ? ! <5)
Вычислим сумму работ задаваемых сил на возможных перемеще-
перемещениях точек системы, соответствующих обобщенному возможному
перемещению 8s2:
ЬА = Я,8$, sin 8 — (Я,
Учитывая формулу E), имеем:
ЬА = [я, sin р - i (Я, -f Я,)] 8sa. F)
Работа силы тяжести Я, равна нулю, так как 8s! = 0. Работа
сил тяжести Р3 и Я4 равна нулю, так как их точки приложения
неподвижны.
Обобщенной силой QJa является коэффициент, стоящий при 8s4
в формуле F), т. е.
Q», = Р» sin p— !(/>, +Я,). G)
Переходим к вычислению кинетической энергии Т материальной
системы, состоящей из шести масс: грузов А, В и L блоков D, Е
и К:
Т= Ти) -j- Tw -f- 7C) -f 7"u) + 7ЧВ) -f- ГF). (8)
Грузы А и В имеют скорости <vA и <vB, направленные параллель-
но линиям наибольшего ската наклонных плоскостей. Проекции этих
скоростей па оси s, и s4 соответственно равны st и s4.
<")бозначим радиусы блоков D, Е и К через гл, г± и гв. При этом
угловые скорости блоков D и Е выразятся так:
Ввиду перастяжимости нити, скорость Vm точки Л1 нити равна по
величине скорости vA груза А, т.е. г»ди = в|. Аналогично: iijVje = ss.
Нетрудно, воспользовавшись рис. г, найти скорость оси Ов блока К,
совершающего плоское движение:
500 ДИИЛМИКЛ НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Для определения угловой скорости <?8 блока К найдем скорость
точки М, приняв за полюс точку N:
т. е.
Так как (vMV)x — ] MN\ »в = 2гвз>в, т0 2га?3 = л', — sa, откуда угло-
угловая скорость блока К'-
Кинетические энергии грз'зов Л и 5, совершающих поступатель-
поступательное движение, имеют пид
уA)— ' 'Э| с9 Т(а> — ^ v- П91
Вычислим кинетические энергии блоков D и Е, вращающихся
вокруг неподвижных осей:
(Р f~ P Г"
и воспользовавшись формулами (9), находим:
Кинетическую энергию блока К, сонершающего плоское движе-
движение, определим по формуле
Иолстанип значение лгомента инерции блока К [1п =—г-Ч и восполь-
зоиавшись формулами A0) и A1), получим:
Кинетическая энергия груза L, движущегося поступательно, имеет
вид
Применив формулу A0), определяем:
уЧС) __ ) Р± /g _[_ ?¦ \1
§ 6) УРАПНЕНИЯ ЛАГРАНЖА ВТОРОГО РОЯА 501
Для вычисления кинетической энергии Т материальной системы
подставляем в формулу (8) выражения кинетических энергий масс
системы A2), A3), A4) и A5). В итоге получаем:
1 — 2" f Si + Y * ' 4" У ' ~~ 4" "g7 * + '16
J** + <*
-J-7*«*
у <*«
J7«*• + * у <*«
т. е.
.3
Лля составления системы урапнений Лагранжа второго рода сле-
дуе; начислить частные произнодные от кинетической энергии Т по
обобщенным скоростям Sj и к{.
дТ _ 8Р, + 4Р, 4- ЗР, 4- 2Р8 . . Р5
. i РЙ
и взять производные от полученных результатов по времени:
d_ ОТ _8Р1+4Р, + НРТ+2Р„ .. | Рг, +2Рп ~ ч
d дТ _8РЭ + 4P, 4- 3Pf + 2Р„ ¦¦ , Рй + 2P8 ¦¦ f
dtds,— Sg ia"T 8^ S'- J
Учитипая, что кинетическая энергия Т, определенная формулой A6),
не зависит от обобщенных координат st и s2, имеем
После подстановки формул D), G), A7) и A8) в уравнение (I)
получим уравнения Лагранжа второго рода для обобщенных коорди-
координат ij и s2:
Нетрудно видеть, что дифференциальные уравнения A9) и B0)
тождественны дифференциальным уравнениям A4) и A9) задачи 396.
Определение из этой системы уравнений s\, i'2 и wQ = ' ^ '
приводит к результатам, полученным при решении задачи 396.
502
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
Итак, уравнения движения рассматриваемой системы были состав-
составлены двумя способами: с помощью общего уравнения динамики в за-
задаче 396 и уравнений Лагранжа в данной задаче.
Сопоставление двух указанных методов показывает преимущества
использования уравнений Лагранжа. Вместо формального введения
сил инерции материальных точек .системы, приведения их к простей-
простейшему виду, вычисления работ сил инерции и пар сил инерции на
возможных перемещениях точек системы мы при решении задали
с помощью уравнений Лагранжа
должны лишь составить выраже-
выражение кинетической энергии мате-
материальной системы с последующим
вычислением ее производных и
найти обобщенные силы.
Задача 415. Решить за-
задачу 397 с помощью уравнений
Лагранжа.
Решение. При решении па-
дачи 397 было показано, что peiy-
лятор имеет две степени свободы.
Примем в качестве обобщенных
координат угол поворота ср стерж-
стержней ОМ и ON с шарами М и N
н горизонтальной плоскости (при
вращении вокруг вертикальной
оси регулятора) и угол а отклоне-
отклонения стержней ОМ и ON от верти-
К задаче 415. кали. Положительные направления
отсчета углов указаны на рисунке.
Запишем уравнения Лагранжа для обобщенных координат « и а:
d дТ дТ ^
~dt Щ Щ ^ f
d дТ__дТ_0 О
eft da да а"
Задаваемыми силами системы являются: Р\ — нес каждого из ша-
рои, Рг— вес муфты В и пара сил с вращающим моментом та,
а также упругая сила F пружины, направленная по вертикали вниз.
Проекция упругой силы па ось х была определена формулой B)
задачи 397:
Fx = 2cl(\ — cos a). B)
Дадим регулятору независимые обобщенные возможные перемеще-
перемещения 8ср и Sa, направленные в сторону возрастания соответствующих
углов поворота.
§ 61 УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОЛА 503
Для вычисления обобщенной силы Qy сообщим регулятору воз-
возможное перемещение 89, считая при этом возможное перемещение 8а
равным нулю: 8-f -ф 0, 8а=0.
Это значит, что при неизменной величине углов а, образуемых
стержнями ОМ и ON с вертикалью, регулятор получил вокруг вер-
вертикальной оси угловое перемещение 89.
Вычислим сумму работ задаваемых сил на обобщенном возможном
перемещении 8ср:
ЬА = т0Ъ<р.
Учитывая, что ЬА = Qfty, находим:
\уг<р IllQ* \О f
(Работа сил тяжести Р, равна нулю, так как их точки приложения
перемещаются в горизонтальной плоскости. Работа сил Рй и F равна
нулю, ибо их точки приложения неподвижны.)
Для вычисления обобщенной силы Qa дадим регулятору возмож-
возможное перемещение 8а, считая при этом возможное перемещение 89
равным нулю: 8а ф 0, 89 = 0.
Это значит, что при фиксированном значении угла поворота tp
стержни регулятора ОМ и ON отклоняются от вертикали па угол 8а.
Для определения возможного перемещения Ьхв муфты В надо
вычислить вариацию выражения координаты xR муфты В через
угол а. Из треугольника ОАВ видно, что хв = ОВ = 11 cos 1. Сле-
Следовательно,
Ьхв = —11 sin a 8a. D)
Знак минус указывает, что при sin а 8а ^>0 возможное перемеще-
перемещение муфты В направлено вверх.
Вычислим сумму работ задаваемых сил па возможных перемеще-
перемещениях точек системы, соответствующих обобщенному возможному пере-
перемещению 8а:
ЬА = — 1Рха sin a 8a -f- Р$хй -\- FxbxB
(коэффициент 2 в первом слагаемом обусловлен наличием у регуля-
регулятора двух шаров). После подстановки значений Sjc^ и Fx из фор-
формул D) и B) находим:
8Л = — 2[Р,а + Р.2/-|-2с/2A — cosa)l sin a 8a. E)
Обобщенная сила Qa является коэффициентом при обобщенном
возможном перемещении 8а в уравнении E), т. е.
Qa = — 2 [Pta -f- /У -f 2c/2 A — cos a)] sin а. F)
04 ДИНАМИКА НЕСВОБОЛНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Переходим к пычислению кинетической энергии Т регулятора,
состоящего из трех масс: двух шаров М и N и муфты В:
J pi) _!_ fi-2) _l
Кинетическая энергия шаров, являющихся точечными массами, вы-
вычисляется по формуле
где vM — модуль абсолютной скорости каждого из шаров М и N.
Каждый шар участвует в сложном движении: переносном лращатель-
ном вокруг вертикальной оси регулятора с угловой скоростью ф и
относительном вращательном вокруг горизонтальной оси О, перпен-
перпендикулярной к плоскости рисунка, с угловой скоростью а. Применяем
теорему о сложении скоростей точки:
Е данном случае скорость шара в переносном движении veM на-
направлена перпендикулярно к плоскости рисунка, причем v м =
= | ЖАТ!«)<, = аф sin а. Скорость шара в относительном движении vrM
перпендикулярна к стержню ОМ, расположена н плоскости рисунка,
причем vrM = | ОМ | шг = аа. Учитывая, что скорости <vrM и <оеМ вза-
взаимно перпендикулярны, найдем квадрат модуля скорости шара в абсо-
абсолютном движении:
vIm=vIm -I- Км=di W2 sin9 a+*')•
Теперь кинетическая энергия шаров М и N, согласно формуле (8),
принимает вид
74" = Г('2) = -У. A a* (f sin'2 a -j- а'2). (9)
Кинетическая энергия муфты В, участвующей в переносном пра-
шателыюм дпижении с угловой скоростью 6 вокруг вертикальной
оси регулятора и относительном днижеиии вдоль этой ос», запишется
по формуле
¦T^^YfK^i'f- ПО)
Для определения проекции <vn па ось х позьмем произиодную по
времени от выражения координаты хп муфты В через угол попо-
попорота я. Так как лгл = 2/cos ос, то г»Л(, = хл = —11 sin a -L Теперь
формула A0) примет вид
У±1*Яь\п**+\щ\ A1)
§ 61 УРАВНЕНИЯ ЛАГРАНЖА ВТОРОГО РОДА 505
Кинетическая энергия Т регулятора находится после подстановки
в формулу G) значений 7"u), Tm и ГC), определенных п (9) и A1);
sin2a^. A2)
Вычислим частные производные от кинетической энергии Т по
обобщенным скоростям <р и а:
дТ /, , 2Р, о о \ дГ Л Р,аа 4- 2Р„/3 sin2 a .
з^= / + ¦—La sinJa и, 5.- = 2—! ¦ = а.
&1 \ ' g I т оя g
Возьмем производные от полученных результатов по времени:
d дТ fj , 2р, о ,2 \„ п"
A3)
аа9 sin 2a.
Вычислим частные производные от кинетической энергии Т, опре-
определенной формулой A2), по обобщенным координатам 9 и «¦¦
,—= 0, -,-=—1— &г sin 2a H — а^ sin 2a. A4)
д<? да g Y 1 g v ;
После подстановки в уравнения A) Лагранжа выражений C), F),
A3) и A4) получим дифференциальные уравнения движения регуля-
регулятора для обобщенных координат <р и а:
-|-^-aVsin2a==OTo, A5)
P,a2..2 . о , 2Р.,/2 .„ . о
а ;¦'— о2 sin 2a-J —а- sin 2а =
4' r ' g
A/4- 2c^(l — cosa)|sina. A6)
Нетрудно видеть, что дифференциальные урампепия A5) и A6)
тождественны дифференциальным уравнениям A0) и A3) задачи 397.
Подобно предыдущей, данная задача была решена двумя спосо-
способами: с помощью общего уравнения динамики (см. задачу 397) и
уравнений Лагранжа. Сопоставление обоих решений показывает, что
применение уравнений Лагранжа является более эффективным и при-
притом не требует использования формальных приемов, связанных с вве-
введением сил инерции.
Задача 416. На рис. а изображен механизм станочного дифф§-
ренцкалн. Ведущее коническое зубчатое колесо 1 и иедомое кониче-
коническое зубчатое колесо 2 вращаются вокруг неподвижных осей. Кони-
Коническое мубчатое колесо 3, называемое сателлитом, перелает вращение
oi колеса / к колесу 2 Колесо 3 свободно посажено на ось ОС,
ивияюшуюся частью изогнутого кривошипа АОС, который вращается
506
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
вокруг неподвижной вертикальной оси. Сообщая разные угловые ско-
скорости кривошипу АОС и колесу У, можно получить любую необхо-
необходимую угловую скорость колеса 2. К кривошипу АОС приложена
пара сил с вращающим моментом /я0, к валу колеса 1 — пара сил
с вращающим моментом /и, и к валу колеса 2 — пара сил с момен-
моментом полезного сопротивления /и2 (см. рис. а). Колеса /, 2 и 3 счи-
тзть круглыми однородными дисками соответственно веса Pf, Р9 и Р3
и радиусов гь г% и г3 (в рассматриваемой конструкции т^ равно г2).
Г
шг 0
К задаче 416.
Определить углопые ускорения кривошипа АОС и конических
зубчатых колес / и 2. Массой кривошипа АОС и силами сопротив-
сопротивления движению пренебречь.
Решение. Из условия задачи следует, что станочный дифферен-
дифференциал является системой с двумя степенями, свободы.
В качестве независимых обобщенных координат выберем угол по-
попорота сро кривошипа АОС покруг вертикальной оси АО и угол по-
поворота <р! колеса / вокруг соответствующей неподвижной оси. Угол
поворота ведомого колеса 2 обозначим через <f>%.
Уравнения Лагранжа в обобщенных координатах ср0 и срf имеют
вид
dt
§ б) УРАВНЕНИЯ ЛАГРА НЖА ВТОРОГО РОДА 507
Изобразим на рис. а задаваемые силы: />„ Р.ь Рг — силы тяжести
конических колес 1, 2, 3 и пары сил с моментами тй, мх и т$. Силы
реакций связей изображать не следует, так как все связи, наложен-
наложенные па дифференциал, являются идеальными.
Дадим дифференциалу независимые обобщенные возможные пере-
перемещения 8ф0 и &Р| в направлении возрастания углов ф0 и ср,.
Для вычисления обобщенной силы Qn сообщим дифференциалу
возможное перемещение 8ср0, считая при этом 8<р, равным нулю:
Stpo^O, &p, = 0.
Это значит, что при неподвижном колесе / кривошип получил
возможное углопое перемещение 3;р0 вокруг оси АО. При этом поа-
можпое перемещение точки С кривошипа 8гс = ОС8ф0= rtb<?0. Так
как точка С одновременно принадлежит колесу 3, имеющему при
8»! = 0 неподвижную точку Е, то нетрудно видеть (см. рис. б), что
возможное перемещение точки D третьего колеса 8ro=28rc = 2r18?0.
Учитывая, что точка D одновременно принадлежит колесу 2, выразим
8го через 8;р2; тогда имеем: 8го=г28ср2. Следовательно, r2Scpa = 2r,8:p0,
откуда
8?2==28сро B)
(по условию г2 = г,).
Вычислим сумму работ задаваемых сил на возможных перемеще-
перемещениях точек системы, соответствующих обобщенному возможному пере-
перемещению 8ф0: 8Д = то8;ро — /И98ср9.
Работа пары сил с моментом /и2 отрицательна, так как направле-
направления от2 и 8951 противоположны. Учитывая формулу B), получим:
8Д = (от0 —2от9)8?0. C)
Работа пары сил с моментом mt равна пулю, так как колесо /
неподвижно. Работа сил Pt и Р% раина пулю, ибо их точки приложе-
приложения неподвижны. Работа силы Р3 равна нулю, так как ее точка при-
приложения перемещается в горизонтальной плоскости, а сила Рл вер-
вертикальна. Обобщенной силой Q«p0 является коэффициент, стоящий при
S'f0 в формуле C), т. е.
Q?o = OTo — 2w2. D)
Для вычисления обобщенной силы QVl дадим обобщенное возмож-
возможное перемещение 8<pii считая при этом 890 равным нулю: 8<р, ф О,
8<?, = 0.
Это значит, что при неподвижном кривошипе АОС колесо /
получило возможное перемещение 8:pi. При этом колесо 2 через
посредство колеса 3 получит равное по величине возможное переме-
перемещение 8ср2, направленное и противоположную сторону: З'-р^^З^. Сле-
Следовательно, направления пц и 8--р2 совпадают.
508 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Вычислим сумму работ задаваемых сил на обобщенном возможном
перемещении 8<pi:
E)
8А =
Учитывая, что bA = Qfibou находим:
Переходим к вычислению кинетической энергии Т станочного
дифференциала, в состав которого входят три конических зубчатых
колеса 1, 2 и 3 (массой кривошипа АОС, по условию, мы прене-
пренебрегаем):
Кинетическая энергия колеса 7, вращающегося вокруг неподвиж-
неподвижной вертикальной оси, дается формулой
Т^ = ~1^[, G)
где /| — момент инерции колеса 1 относительно его оси вращения.
Кинетическая энергия колеса 2, вращающегося вокруг неподвиж-
неподвижной вертикальной оси, равна
ТЫ = ±1#1 (8)
где 1.2 — момент инерции колеса 2 относительно его оси вращения.
Для вычисления кинетической энергии колеса 3 применяем фор-
формулу:
где <vc — скорость центра тяжести С колеса 3, шх, со,,, шг — проекции
абсолютной угловой скорости <оа колеса 3 на подвижные коорди-
координатные оси х, у, г, с ним жестко связанные, !3х, l3v, /Яг — осевые
моменты инерции, I3vz, Jizx, I3xy — центробежные моменты инерции
колеса 3 относительно соответствующих осеИ координат.
Выберем начало осей координат в центре тяжести С колеса 3.
Направим по вертикали ось г, по горизонтали направо вдоль оси
относительного вращения колеса 3 направим ось у и, следовательно,
перпендикулярно к плоскости рисунка ось х. Нетрудно видеть, что
при подобном располож&нии осей координат они являются главными
осями инерции колеса 3 (колесо 3, подобно колесам / и 2, мы счи-
считаем однородным круглым диском). Следовательно, 13уг = 13гх =
§ 61 УРАШ1Г.ИИЯ ЛЛГРА11ЖА ВТОРОГО РОДЛ 509
= /Яп, = 0, и формула для подсчета кинетической энергии 7"C) ко-
колеса 3 упрощается:
7-<» = 1Ь- vl + \ (/м«? + /3V«.» - /3i«i). (9)
Для вычисления шх, шу и шг надо определить абсолютную угло-
угловую скорость (йа колеса 3. Колесо участнует и переносном враща-
вращательном движении с угловой скоростью ше=§0 вокруг вертикальном
оси и п относительном вращательном дпиженпи с углоиой скоростью
wr вокруг оси симметрии колеса <3.
Для определения шг представим себе наблюдателя, расположен-
расположенного па критюшипе АОС. Этому наблюдателю крипошип кажется не-
неподвижным. Следоиателыю, глазам наблюдателя представится относи-
относительная картина движений. Ему будет казаться, что колеса 7, 2 и 3
вращаются вокруг неподвижных oceii (см. рис. в). Запишем зависи-
зависимости между относительными угловыми скоростями колес и их ра-
радиусами:
JP г, ' jn Гл •
где ш[г\ ш1/), со','") обозначают углежые скорости колес /, 2 и 3 но
отношению к кривошипу АОС, вращающемуся с угловой скоростью со0.
Во второй пропорции стоит знак минус, который при совместном
рассмотрении пропорций должен указывать на различные направле-
направления относительных угловых скоростей колес 1 а 2. Действительно,
перемножив пропорции, получим: —-?—== "L. Учитывая, что по
условию г2 = г,, находим-. <в'р = — «></¦>. Так как ы*р = щ — со0, а
@^)=: шл — со0, то ш.2 = 2ш0 — Ш|, т. е.
6., = 26„ —7,. A0)
Из первой пропорции определим относительную углопую ско-
скорость ш'Р колеса 3:
Ч"=-!> •»1.г)= г: к —шо).
откуда
«"'/'=>' (*1-фо)- (И)
Направление етг указано на рис. в.
Применим 1С колесу 3 icopevy о сложении пращепий твердого
тела вокруг пересекающихся п гочке О oceil: ыа =^ ше Л- <аг (см.
рис. я). Теперь нетрудно вычислить проекции абсолютной угловой
скороещ (ла колеся of на оси х, у, z, с ним жестко связанные:
5 10 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК (ГЛ. X
Учитывая формулу A1) и замечая, что (ов = ф0, имеем:
Внося эти значения шх, <оу, шг в формулу (9) и принимая во вни-
мание, что vc = \ OC\u>l> = ri$(l, получим:
2 g ' itu л^ 2 3^ /^ VT1 Y0' ' 2 «то»
т. e.
VJ>y№- A2)
Кинетическая энергия станочного дифференциала
Y 7*'1' 4- 7"^ 4- Т^
после подстановки значений Т^\ Г(а) и Г13' из формул G), (8) и
A2) при одновременном учете соотношения A0) принимает вид
7 = 2 D/* + Узг + ~g Г» + /зУ г'» ) *» + 2" (;i + 7« + Ьу -Гг\) Ф? —
|>а-)<Ы>1- A3)
Для составления уравнений Лагранжа второго рода вычислим
частные производные от кинетической энергии Т по обобщенным
скоростям ф0 и $1, а затем возьмем производные от полученных ре-
результатов по времени. Находим:
Vt д*- = \*
Учитывая, что выражение для кинетической энергии Т станочного
дифференциала не зависит от обобщенных координат ср0 и <pi» имеем:
?=0, ^=0. A6)
После подстановки формул D), E), A4), A5) и A6) в уравне-
уравнения A) получим уравнения Лагранжа для обобщенных координат
-'
Щ ?о =
§7] ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПОВ 511
По условию задачи колеса У, 2 и 3 считаются однородными
круглыми дисками; поэтому:
. _Pj\ , _Р,г\ , _PjA_ . _Р3п
Теперь уравнения движения A7) дифференциала принимают вид:
-L [8Р,г] + Р3 Fг1 + rj)] ?0 - 2f4+P* г??, = «о -
2Р„
2g
Решив систему уравнений A8) относительно ф0 и ?i> определим
искомые угловые ускорения кривошипа АОС и колеса /:
_ I.N+MS .. _KS + .
й KL — M" ' cpI KL — М" '
здесь
Воспользовавшись формулой A0), найдем: ^9 = 2^0 — $,. После
подстановки в эту формулу выражений ^0 и ф] получаем искомое
угловое ускорение колеса 2:
.. N BL — М) + S BУИ — /f)
* KL — УИ-
где A', L, At, N a S имеют значения, указанные выше.
Решение этой задачи посредством использования общих теорем
динамики представило бы значительные трудности. Применение урав-
уравнений Лаграпжа дает возможность сравнительно просто получить
уравнения движения дифференциала и вновь демонстрирует удобство
применения уравнений Лагранжа при решении сложных задач дина-
динамики систем с несколькими степенями свободы.
§ 7. Приближенная теория гироскопов
1°. Г и р о с к о п с тремя степенями свободы.
Гироскопические явления наблюдаются при быстром вращении твер-
твердых тел, сопровождающемся изменением направления оси вращения.
Гироскопом называется тяжелое твердое тело, имеющее ось сим-
симметрии и совершающее вокруг точки, лежащей на этой оси, враща-
вращательное движение.
512
ЯИПЛМИКА НЕСВОБОДНОЙ СИСТЕМЫ .МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
Оа> симметрии
Рассмотрим сначала случай, когда гироскоп движется около не-
неподвижной точки.
Если выбрать начало координат в этой точке О и направить
ось z по оси симметрии гироскопа, то оси х, у, z оказываются глав-
главными осями инерции гироскопа к неподвижной точке (рис. 158). Мо-
Момент инерции !г является полярным моментом
инерции гироскопа, а \х и /,,— экваториаль-
экваториальными моментами инерции. В связи с наличием
в твердом теле оси симметрии имеем Jx = ly.
Пусть гироскоп вращается с угловой ско-
скоростью о) вокруг оси симметрии, которая в свою
очередь вращается вокруг неподвижной точки
(рис. 159) с угловой скоростью щ. В соответ-
соответствии с теоремой о сложении вращений твер-
твердого тела вокруг пересекающихся осей, абсо-
абсолютная угловая скорость <аа равна векторной
сумме угловых скоростей переносного и отно-
относительного вращений:
Рис. 158. о) —о
Если гироскоп вращается с большой относительной угловой ско-
скоростью о), а ось симметрии гироскопа z медленно изменяет свое
положение в пространстве (т. е. ш,<^0)),
то, пренебрегая движением оси, можно
считать, ч;о абсолютная угловая ско-
скорость (йа направлена по оси симметрии z
гироскопа и главный момент количеств
движения гироскопа Lu относительно не-
неподвижной точки О направлен по его оси
симметрии, причем |?0| = /г<о. На этом
допущении основана приближенная (эле-
(элементарная) теория гироскопов.
Рассмотрим теперь случай, когда все
точки оси симметрии гироскопа находятся
в движении. Разложим абсолютное дви-
движение гироскопа па переносное поступа-
поступательное движение вместе с центром инерции и на относительное
вращательное по отношению к центру инерции. 13 этом случае глав-
главный момент количеств движения гироскопа относительно его центра
инерции приближенно также направлен по оси симметрии и равен по
модулю /г(о.
При решении задач с помощью приближенной теории гироскопом
удобно пользоваться теоремой об изменении главного момента коли-
чести движения системы ма1ериальпых точек в ее кинематической
Рис. 159.
§71 ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПОВ 513
интерпретации — теоремой Резаля (рис. 160): скорость а*) конца
главного момента количеств движения системы материальных точек ?0,
определенного относительно неподвижной точки, векторпо равна глав-
главному моменту внешних сил системы те0
относительно той же точки: rodoapatpL
(скорость и конца LQ направлена по
касательной к годографу LQ в соот-
соответствующей точке).
Оспонное свойство гиро~скопа с тре-
тремя степенями свободы в случае, когда Рис 160.
главный момент тс0 инешпих сил отно-
относительно неподвижной точки равен пулю, заключается в сохранении
неизменного направления оси гироскопа по отношению к иперциаль-
пым осям (см. задачу 417).
Быстро вращающийся неуравновешенный гироскоп с тремя сте-
степенями свободы обладает тем свойством, что при действии на его
ось силы эта ось перемещается в направлении, перпендикулярном
к направлению приложенной силы (наложение связей, уменьшающих
число степеней свободы, лишает гироскоп указанного свойства), и со-
совершает так называемые «прецессионные движения» (см. задачи 418
и 419).
Задачи на определение движения оси гироскопа
с помощью приближенной теории рекомендуется
решать в следующей последовательности:
1) проверить, имеет ли гироскоп или гироскопическая система
три степени свободы;
2) выбрать систему координат;
3) изобразить на рисунке внешние силы, приложенные к гиро-
гироскопу;
4) определить главный момент внешних сил mFu относительно не-
неподвижной точки;
5) найти главный момент количеств движения гироскопа относи-
относительно неподвижной точки Lo;
6) применив теорему Резаля и = т?0, определить движение оси
гироскопа.
Задача 417. Па рисунке изображен гироскоп в кардановом под-
подвесе. Гироскоп А выполнен в виде уравновешенного массивного круг-
круглого цилиндра, вращающегося вокруг оси K.L. Ось KL укреплена
*) Вектор и называется скорое! ью условно, так как размерности ско-
скорости не имеет.
17 Теоретическая механика, том II
514
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
во внутреннем кольце В, вращающемся вокруг подвижной оси MN.
Ось MN в свою очередь укреплена во внешнем кольце С, вращаю-
вращающемся вокруг неподвижной оси SQ. Ось SQ закреплена в стойке
прибора. Оси KL, MN и SQ пересекаются в центре тяжести О гиро-
гироскопа. Гироскопу А сообщена большая угловая скорость вокруг
оси Д^-
Определить изменение положения оси KL, пренебрегая трениями
в опорах осей KL, MN и ЭД и массами колеи В и С.
О
К задаче 417.
Решение. Гироскоп А в кардаповом подвесе имеет три степени
свободы, так как его положение определяется тремя независимыми
углами поворота вокруг осей KL, MN и SQ, пересекающихся в центре
тяжести О. Таким образом, гироскоп вращается вокруг неподвижной
точки О, совмещенной с центром тяжести. При этих условиях глав-
главный момент внешних сил относительно центра тяжести О гироскопа
равен нулю:
т?, = 0. A)
§7]
ПРИБЛИЖЕННАЯ ТЕ.ОРИЯ ГИРОСКОПОВ
515
Главный момент количеств движения гироскопа LQ приближенно
направлен вдоль оси KL. Конец вектора LQ обозначим D (см. рису-
рисунок).
Применив теорему Резаля и = тс0, в соответствии с формулой (I),
находим и = 0, т. е. скорость точки D равна нулю. Значит, при вра-
вращении гироскопа ось KL сохраняет неизменное направление в про-
пространстве. Этим свойством можно пользоваться для доказательства
вращения Земли (олыт Фуко). Действительно, наблюдатель, находящий-
находящийся на Земле, меняет свою ориентировку по отношению к звездам
за счет вращения Земли. При этом ему
кажется, что меняется направление
оси KL, которая неизменно напраилеиа
на отдаленную неподвижную звезду.
Задача 418. Гироскоп совершает
быстрое вращение вокруг своей верти-
вертикально направленной оси симметрии,
имея неподвижную точку О. Выяснить
направление движения оси гироскопа,
если к ней приложена горизонтальная
сила F.
Решение. Данный гироскоп имеет
три степени свободы. Его положение
определяется тремя углами Эйлер.1.
Начало осей координат расположим
в неподвижной точке О, ось z напра-
направим по оси симметрии гироскопа, плос-
плоскость yz совмещаем с плоскостью ри-
рисунка.
К гироскопу приложены инеишие
силы: Р — вес гироскопа, Rv Riy R3 —
составляющие силы опорной реакции,
F—параллельная оси у горизонтальная
сила, действующая на ось гироскопа.
Определяем главный момент внеш-
внешних сил относительно точки О. Так
как моменты сил Р, Rt, Rq и R3 относительно точки О равны
'нулю, то главный момент инешпих сил относительно точки О век-
торно равен моменту силы F относительно точки О, направленному
вдоль оси х (напомним, что момент силы относительно точки напра-
направляется перпендикулярно к плоскости, проходящей через силу и
точку так, что с его конца сила видна направленной вокруг точки
против часовой стрелки).
Главный момент количеств движения гироскопа LQ относительно
точки О приближенно направлен по оси симметрии в сторону
17*
К задаче 418.
616
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[гл. х
вектора угловой скорости вращения. Конец вектора Lo обозначим бук-
вбй D.
Применив теорему Резаля и=^те0, направляем скорость и точки D
параллельно meQ. Следовательно, ось симметрии гироскопа будет
отклоняться в плоскости xz, т. е. в плоскости, перпендикулярной
к направлению силы F. Если бы вращение гироскопа отсутствовало,
то он находился бы в положении неустойчивого равновесия, и под деп-
ствием силы У7 его ось симметрии совершила бы падение в плоскости у г.
Задача 419. После отклонения под действием силы F оси сим-
симметрии гироскопа, рассмотренного в предыдущей задаче, вес гиро-
гироскопа Р дает момент относи-
относительно точки опоры О.
Определить движение оси ги-
гироскопа, если со — угловая ско-
скорость его вращения вокруг оси
симметрии, /—момент инерции
гироскопа относительно оси сим-
симметрии, а—расстояние от центра
тяжести С до точки опоры О-
Решение. Оси xyz изобра-
изображены и соответствии с располо-
расположением осей координат на ри-
рисунке предыдущей задачи.
К гироскопу приложены внеш-
внешние силы: Р — иес гироскопа, #i, /?2,
#з — составляющие опорной силы
реакции.
Так как моменты сил #1; /f;
и #3 относительно точки равны
нулю, то главный момент внеш-
внешних сил те0 векторно равен мо-
К задаче 419. менту веса Р относительно точки
опоры О.
Обозначив через 0 угол между осью симметрии гироскопа и
осью z, находим:
те0 I = Pa sin ]
A)
причем вектор те0 направлен по оси у.
Главный момент количеств движения Lo гироскопа относительно
точки О направлен по оси симметрии в сторону вектора угловом
скорости о) и равен по модулю:
B)
§7] ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПОВ 517
Обозначим через D конец вектора LQ. Согласно теореме Резаля,
и = тр0; поэтому и — скорость точки D — направлена перпендикулярно
к оси симметрии (параллельно оси у), причем, как это следует из
формулы A),
и = Pa smb. C)
Вес Р в любом положении гироскопа создает момент /я^ относитель-
относительно точки О. Следовательно, точка D имеет постоянную по модулю
скорость и, направленную перпендикулярно к вертикальной плоско-
плоскости, содержащей ось симметрии гироскопа. При этом ось гироскопа
оиисыпает боковую поверхность кругового конуса, поворачиваясь
вокруг вертикальной оси с некоторой угловой скоростью 0)j. Это
дпижемие называется регулярной прецессией оси гироскопа.
Вычислим угловую скорость coL регулярной прецессии:
i
Из треугольника OAD имеем: AD = OD sin 9 = i0 sin 0. Подставив
значение \L0\ из формулы B), получим:
и = /охи, sin 9. D)
Внося выражение и из формулы D) в C), находим угловую ско-
скорость регулярной прецессии оси гироскопа:
Ра
(Bi = т—.
1 /<¦>
Чем меньше углоиая скорость ш вращения гироскопа вокруг его
оси симметрии, тем больше углов.чя скорость прецессии ш1 (от вели-
величины угла б угловая скорость прецессии не зависит).
Скорость и можно записать и виде векторного произведения двух
пекторов, воспользовавшись формулой ф = о)Хг- В данном случае
оектор-радиусом г служит главный момент количеств движения гиро-
гироскопа LQ относительно неподвижной точки О, а вектором угловой
скорости является вектор угловой скорости прецессии o)t. Следова-
Следовательно,
Так как 10 = /ш, то « = ю, X/**• По теореме Резаля имеем: и = т'п.
Поэтому главный момент внешних сил тг0 относительно неподвиж-
неподвижной точки О запишется в виде
«о = toi X «¦
Этот момент те0 стремится опрокинуть ось симметрии гироскопа.
2°. Гироскоп с двумя степенями свободы. При
изменении направления оси симметрии гироскопа с двумя степенями
618 ДИНАМИКА НЕСВОЕОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
свободы возникает пара сил, создающая дополнительные динамиче-
динамические реакции опор. Момент пары дополнительных динамических
давлений оси на опоры называется гироскопическим моментом (сле-
(следовательно, гироскопический момент является моментом сил инерции
гироскопа). Появление гироскопического момента носит название
гироскопического эффекта.
Задачи с помощью приближенной теории гиро-
гироскопов рекомендуется решать в следующей после-
последовательности:
1) проверить, имеет ли гироскоп или гироскопическая система
две степени свободы;
2) выбрать систему координат;
3) изобразить на рисунке внешние силы, приложенные к гироскопу;
4) определить главный момент количеств движения LQ гироскопа
относительно неподвижной точки;
5) найти скорость и конца LQ;
6) применил теорему Резаля u=meQ, определить главный момент
внешних сил относительно неподвижной точки и дополнительные
динамические силы реакций опор.
Задача 420. Ротор электромотора, подключенного к компрессору,
установленному на корабле, имеет горизонтальную ось вращения АВ.
Ось АВ расположена перпендикулярно к продольной оси корабля
О\Ог. Оси АВ и О\Ог пересекаются в центре тяжести О ротора.
Момент инерции ротора относительно оси АВ равен /, о)—угловая
скорость вращения ротора.
Определить наибольшее значение добавочных динамических сил ре-
реакций опор А и В при установившейся бортовой качке корабля, проис-
происходящей вокруг оси О\Оъ по гармоническому закону cp1 = 9Osin^?
с угловой амплитудой фо- Расстояние между опорами AB = h.
Решение. При бортовой качке корабля ось АВ ротора электро-
электромотора изменяет свое направление. Следовательно, имеют место
гироскопические явления.
Ротор электромотора является гироскопом. Гироскоп вместе с ко-
кораблем образует гироскопическую систему с двумя степенями свободы,
так как его положение определяется двумя независимыми параметрами:
углом поворота ротора вокруг оси АВ и углом поворота оси АВ
вокруг оси О\О-1- Осью симметрии гироскопа является ось АВ.
Пользуясь приближенной теорией гироскопов, направляем главный
момент количеств движения ротора LQ относительно его центра тяжести
О вдоль оси АВ в сторону ш (см. рисунок). Конец вектора LQ обозна-
обозначим буксой D. При бортовой качке корабля, происходящей вокруг
оси OjOi, конец пектора LQ — точка D — приобретает скорость и, на-
направленную перпендикулярно к Ln.
§7]
ПРИБЛИЖЕННАЯ ТНОРИЯ ГИРОСКОПОВ
519
В момент, соответствующий горизонтальному положению оси АВ,
скорость и направлена вверх либо вниз. Рассмотрим случай, когда
скорость о иапраплена вверх. Точка D движется по дуге окружности
К задаче 420.
радиуса LQ с угловой скоростью <«! борювой качки, т. е. ti = Lq
Так как 10 = /со, то
A)
Для определения угловой скорости и>, бортовой качки корабля
вокруг оси OiOq воспользуемся соответствующим уравнением движе-
движения <3i = сро s'n y ^ Тогда
d<fy 2тсш0 2тс ,
«I=Ж==Т-СО5Т^
и u>imax =—^ . Теперь формула (I) принимает вид
B)
Применив теорему Резаля и = те0, направляем главный момент
внешних сил параллельно и, т. е. но вертикали вверх. Принимая но
внимание формулу B), находим:
C)
520
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК
[ГЛ. X
Величина те0 является моментом пары, образованной дополнитель-
дополнительными динамическими силами реакций опор Лий. Эти реакции
лежат в плоскости, перпендикулярной к т^, т. е. в горизонтальной
плоскости, и направлены так, что с конца т вращение пары видно
против часовой стрелки. Так как через половину периода поворот
корабля будет происходить в противоположном направлении, то ско-
скорость и будет направлена вертикально вниз, a RA и RB получат про-
противоположные направления. Таким образом, при бортовой качке
корабля, за счет изменения направления оси А В ротора электромо-
электромотора, появляются дополнительные динамические реакции опор RA и
RB, переменные по величине и направлению. Наибольшие значения
дг модулей этих сил, соответ-
соответствующие горизонтальному
положению оси АВ, равны
В моменты перемены на-
направления вращения корабля
вокруг оси О\Ог> т. е. при
(О! = 0, эти силы реакций
обращаются в нуль.
Задача 421. Определить
гироскопические давления нл
опоры А и В оси ротора
электромотора, рассмотрен-
рассмотренного н предыдущей задаче,
если при отсугстиии борто-
бортовой качки корабль совер-
совершает циркуляцию вокруг
вертикальной оси KL с угло-
угловой скоростью о),.
Решение. Определяем
LQ так, как это было сде-
сделано в предыдущей задаче.
К задаче 421. При повороте корабля во-
вокруг оси KL с угловой ско-
скоростью о)( точка D приобретает скорость и, направленную парал-
параллельно оси OiO^n равную по модулю и= LQ^\. Так как L0 = /m, то
11 = /(ОСО[.
В соответствии с теоремой Резаля, направляем те0 параллельно и,
т. е. вдоль оси ОХОЯ. Гироскопический момент /я^р направлен про-
противоположно. Гироскопические давления Мд и NB оси АВ ротора на
S 71
ПРИБЛИЖЕННАЯ ТЕОРИЯ ГИРОСКОПОВ
521
опоры А и В лежат в вертикальной плоскости и образуют пару сил.
С конца /я™р пара видна направленной против часовой стрелки.
Так как н =/@@!, a |/m?j!p \==\meQ\ = \u\, то т^Р=/<ош1 и, сле-
следовательно, искомые давления рлвны
AB
Т
Задача 422. Коническое зубчатое колесо 2 радиуса г9 = 20 см
свободно насажено на стержень ОА, жестко соединенный в точке О
с вертикальным валом ОО\. При вращении вала OOf с угловой ско-
скоростью ш=4тс \\сек коническое колесо 2 катится по неподвижной
конической шестерне / радиуса г, = 1,2 м.
К задаче 422.
Определить отношение дополнительной динамической силы реакции
шестерни / к ее статической силе реакции, если радиус инерции
колеса 2 равен р=18 см. Массой стержня О А пренебречь.
Р е in e н и е. Для определения положения колеса 2 достаточно
задать два независимых параметра: угол поворота стержня ОА вокруг
вертикальной оси и угол поворота колеса 2 вокруг стержня ОА.
Следовательно, коническое зубчатое колесо 2 является гироскопом
с двумя степенями свободы. Ось симметрии гироскопа совмещена
с осью стержня ОА.
Зубчатое колесо 2, участвуя во вращении вокруг двух пересе-
пересекающихся осей ОД и OOV совершает вращение вокруг неподвижном
точки О. Направление осей координат xyz указано на рисунке. Вес
колеса 2 обозначим буквой Р.
К колесу 2 приложены внешние силы; Р — вес колеса, #t, R«,
J?! — составляющие силы реакции шарнира О (эти силы не показаны
на рисунке) и нормальная сила реакции R, направленная перпенди-
перпендикулярно к ОВ.
522 ДИНАМИКА НЕСВОПОДПОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Определим статическую опорную реакцию #ст. С этой целью
рассмотрим равновесие шестерни 2 и составим уравнение моментои
относительно точки О:
RCT-OB~P-OA=Q,
откуда находим:
RtT = P°? = P—r-+~. A)
OB Vrl + r'i
Дополнительная динамическая опорная реакция R пояиляется при
изменении направления оси-ОД колеса 2.
Предварительно определим угловую скорость вращения колеса 2
вокруг оси ОА. Колесо 2 совершает переносное крашение вокруг
вертикальной оси с заданной угловой скоростью со,, =: со := 4т сек'1.
Ось симметрии О А колеса 2 является осью относительного пращения.
Мгновенная ось проходит через точки О и В. Применив теорему
о сложении ирашепип твердого тела вокруг пересекающихся осей:
ша = (лс -\- <яг, строим параллелограмм угловых скоростей, который
в данном случае оказывается прямоугольником. Из пропорции -г = - -
определим: «),. = —cor
Пользуясь при решении задачи приближенной теорией гироскопов,
папрапляем главный момент количеств движения LQ колеса 2 отно-
относительно неподвижной точки О в сторону <яг, т. е. по оси симмет-
симметрии ОА колеса 2 налево. Конец вектора LQ обозначим буквой D.
При качении колеса 2 по колесу / точка D описывает окружность
радиуса Lo с угловой скоростью со,,, т. е. u=Lou>e. Так как L0^=!u)r,
где I—--?1 и сог = -!¦ ше, то
б 'а
Скорость й точки D направлена параллельно оси х.
В соответствии с теоремой Резаля и^те0, изображаем дополни-
дополнительный момент те0 на оси х. Приняв во внимание формулу B),
запишем:
Дополнительная динамическая опорная реакция #логт колеса /,
моментом которой относительно неподвижной точки О является век-
вектор те0, определяется из формулы tne0 = RJ0n0B, т. е.
§ 81 ТЕЛО, ВРАЩАЮЩЕЕСЯ ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 523
Воспользовавшись формулой A), определим отношение дополни-
дополнительной динамической опорной реакции колеса / к статической:
Г)
?[до \
После подстановки численных значений: ше = ш = 4тс \\сск, р= \8 см,
п
/"i = 20 см, получим: -т?°-*=«2 6. Следовательно, динамическая реак-
А'ст
ция колеса / при движении колеса 2 в 3,6 раза больше соответ-
соответствующей силы реакции при покое.
Формула C), которая определяет модуль дополнительного мо-
момента те0, может быть получена короче с помощью динамических
уравнений Эйлера (см. ниже задачу 427).
§ 8. Динамика твердого тела, вращающегося вокруг
неподвижной точки
1°. Движение по инерции твердого тела, имеющего
неподвижную точку. Твердое тело, вращающееся вокруг непо-
неподвижной точки, имеет три степени свободы. Его положение опреде-
определяется тремя углами Эйлера.
Главные моменты количеств движения твердого тела относительно
координатных осей, начало которых находится в неподвижной точке,
даются формулами:
Lz = lzu>2~ Г2хшх — 1угш v.
Если оси х, у, z являются неподвижными, то осевые и центро-
центробежные моменты инерции твердого тела переменны. Если оси х,у и z
жестко связаны с движущимся твердым телом, то его осепые и центро-
центробежные моменты инерции постоянны. В случае, когда оси х, у, г
являются главными осями инерции твердого тела в неподвижной точке,
т. е. при lvz — lzx—lxv = Q, формулы принимают вид
Lx = /А, ?„=/,01 у, Lz = /,ш,.
Здесь lx, Ay, lz — главные моменты инерции твердого тела относи-
относительно неподвижной точки.
Динамические уравнения Эйлера для твердого тела, вращаю-
вращающегося вокруг неподвижной точки, в проекциях на оси х, у, z,
524 ДИНАМИКА НЕСВОБОДНОЙ СИСТ1_МЫ МЛТР.РИАЛЬНЫХ ТОЧЕК 1ГЛ. X
связанные с движущимся твердым телом, имеют вид:
dLr , , е
-dfJTW<Lz-{*'L»=m*'
dL.. , , , е
где mex, m%, mez — главные моменты внешних сил относительно осей
координат, шх, cov, u^ — проекции угловой скорости твердого тела иа
оси координат.
Если оси х, у, z, связанные с твердым телом, являются главными
осями инерции в неподвижной точке, то динамические уравнения
Эйлера записываются так:
/*<-г ('* — /,.) «У0* =
1^у "Г С'* — >г) ШЛ = т<у>
1гш2 + (/„ — 1Х) свгш(, = т\.
Добапив к этим трем дифференциальным уравнениям кинематиче-
кинематические уравнения Эйлера, выражающие зависимости между проекциями
угловой скорости па соответствующие оси координат, углами Эйлера
и их производными по времени:
шх = <j) sin fl sin 9 -|- б cos ср,
cov = ф sin 0 cos <э — б sin 9.
шг^=ф cos G —j— <5>,
получим систему шести обыкновенных дифференциальных уравнений
движения.
Проинтегрировав эту систему уравнений (при наличии заданных
начальных условий движения), определяют со^, <в,„ <ог, а также урав-
уравнения вращения твердого тела вокруг неподвижной точки
Решение обратных задач динамики твердого тела, вращающегося
вокруг неподвижной точки, сопряжено с большими трудностями и
приводится к квадратурам только в исключительных случаях.
Обобщенные динамические уравнения Эйлера для подвижных,
осей Zrfi, не связанных с твердым телом, имеют вид:
i4
dt
§8]
ТЕЛО. ВРАЩАЮЩЕЕСЯ ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
525
где mit тп и /м; — главные моменты внешних сил относительно по-
подвижных осей \, % С, не связанных с твердым телом, Z.?, Ln и Z.c —
главные моменты количеств движения твердого тела относительно
осей \, т], С, а ш^, соп, ш^ — проекции угловой скорости вращения три-
триэдра подвижных осей ?, tj, С на эти оси.
Задача 423. Исследовать движение по инерции симметричного
твердого тела, центр тяжести которого совмещен с неподвижной точ-
точкой (случай Эйлера).
Мгнобенная ось
Мгновенная ось \ ,
о)
К 31 даче 423.
Решение. Твердое тело совершает движение по инерции вокруг
неподвижной точки О при наличии двух внешних сил: песа тела,
приложенного в центре тяжести О, ч силы реакции опорной точки О.
Применяем теорему об изменении главного момента количеств
движения системы материальных точек относительно точки О:
Так как обе внешние силы приложены в неподвижной точке О, то
m^ = 0, т. е. —j^=0, и Lo оказывается постоянным. Итак, при дви-
движении по инерции симметричного твердого тела вокруг неподвижной
точки имеет место случай сохранения главного момента количеств
движения твердого тела относительно этой точки.
526 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Выбрав начало системы неподвижных осей координат в неподвиж-
неподвижной точке О, направим ось Z\ ндоль вектора Lo, папрапление которого
при движении твердого тела остается неизменным. Затем обозначим
пеподпижные оси дг( и j/| так, чтобы они вместе с осью zt образо-
образовали правую систему осей координат.
Начало системы подвижных осей координат х, у, z, связанных
с твердым телом, выберем в той же точке О. Ось z направим по
оси симметрии твердого тела. Затем введем подвижные оси х и у,
которые являются главными осями инерции в точке О (см. рис. а).
Так как оси х и у перпендикулярны к оси симметрии тела z, то
1Х = 1У
Запишем динамические и кинематические уравнения Эйлера для
случая, когда 1х = ]у и ml = теу = mez = 0 (напомним, что то = 0):
'А+ (/,-/>,«>,= О, B)
/,й, = 0, C)
шд. = ф sin 0 sin 9 + 9 cos 9, D)
и,, = ф sin 6 cos 9 — б sin 9, E)
<ог = ф cos 9-]-ф. F)
Из уравнений A), B) и C) находим два первых интеграла. Умно-
Умножив уравнение A) на wx, уравнение B) па wy, уравнение C) на сог
и затем сложив их, получим:
т. е.
откуда
/! +• + /,«,• = с„ G)
где С] — постоянная величина.
Так как кинетическая энергия твердого тела, вращающегося
вокруг неподвижной точки, имеет вид
то из первого интеграла G) следует постоянство кинетической энер-
энергии твердого тела (этот результат легко получить с помощью тео-
теоремы об изменении кинетической энергии системы материальных
точек, так как внешние силы приложены к твердому телу в непо-
неподвижной точке и, следовательно, сумма работ внешних сил равна
нулю).
§ 8] ТЕЛО. ВРАЩАЮЩЕЕСЯ ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 527
Для определения другого первого интеграла умножим уравнение
A) на 1хшх, уравнение B)—на lvmy, уравнение C) — на 1гшг. После
сложения этих уравнений получим:
т. е.
¦^№ + />5+ ?«!) = о,
откуда
/^ + />; + /|ш» = С„ (8)
где С9 — постоянная величина.
Нетрудно сидеть, что первый интеграл, записанный в формуле (8),
свидетельствует о постоянстве модуля главного момента количеств
движения твердого тела относительно неподвижной точки О. Действи-
Действительно, так как оси х, у и z являются главными осями инерции
твердого тела в точке О, то
Lx = Ix®x> Lv=Ivmy, Lz = lzmz, (9)
откуда
lWx + П < + /X = Li + Vy + Vz = Lh = C,
Для упрощения интегрирования системы дифференциальных уран-
нений C), D), E) и F) запишем проекции главного момента коли-
количеств движения твердого тела Lx, Lv, Lz на подвижные оси х, у и z,
связанные с твердым телом, учитывая при этом, что пектор LQ рас-
расположен на оси Zi (см. рис. а). После проектирования Ln на оси
хуг находим:
Z.^ = Zosin 6 sin 9, LV==LQ sin 9cos 9, Z.z = Z.0cos6. (Ю)
Воспользовавшись формулами (9), перепишем выражения A0) в виде:
/хшх = LQs in 6 sin ср, (И)
/v(ov = Z.osin8cos'f) A2)
Из дифференциального уравнения C) находим, что шг постоянна.
Если в начальный момент ш, ==сого, то и при движении <ог = <ого.
Теперь из уравнения A3) получим:
cos6 = -^l, A4)
где LQ = /Li-i-IJ+/.J = //J< + /f<4-/X. — постоянная.
Следовательно, -^-— — тоже постоянная величина и угол нутации 0
528 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
при движении твердого тела остается постоянным:
0 = 60, A5)
откуда вытекает, что
6 = 0.
Теперь уравнения D), E) и F) можно записать короче:
со^=-ф sin 6„ sin <p, A6)
(оу = ф sin 90 cos <р, A7)
«го = ф cos вв + t- (IS)
Подстановка значения шх из уравнения A6) в формулу A1), а
также значения шу из уравнения A7) в формулу A2) приводит к
результату ф = -^- = ¦—, т. е. ф постоянна (предполагается, чю
'х 'v
sin 0о т^ 0, а угол с? можег принимать различные значения). Обозна-
Обозначим: ° = —- = ш1. Итак,
ф = «о„ A9)
откуда, если ф = ^0, при ? = 0 имеем:
ф = т,г + ф0, B0)
т. е. прецессия совершается с постоянной угловой скоростью м,.
Подставив в уравнение A8) вместо ф величину со,, получим:
? = 10.?о — Ш1 Cos %•
Таким образом, ф постоянно; после ппедепия обозначения
СОго (Dj COS 60 = Ui.t
находим:
ср = ш,, B1)
откуда, если ф = ср0, мри ? = 0 получаем:
f = м^ + ^о.
т. е. собственное вращение твердого тела совершается с постоянной
уГЛОВОЙ СКОРОСТЬЮ ОJ.
Итак, при движении по инерции симметричного твердого тела,
центр тяжести которого совмещается с неподвижной точкой, имеет
место движение, называемое регулярной прецессией. Оно описывается
уравнениями:
0 = 0(|, ^ = (Ulf-|-^0, <р = <V-f-<?e-
Oci> симметрии z твердого тела описывает круговой конус с уг-
углом при вершине О, равным '2%, равномерно вращаясь вокруг пеиз-
»el
ТЕЛО, ВРАЩАЮЩЕЕСЯ ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
529
менного по направлению вектора LQ, расположенного на оси z1(
с угловой скоростью со,. При этом твердое тело вращается вокруг
своей оси симметрии z с угловой скоростью со9. Вектор мгновенной
угловой скорости о), изображаемый диагональю параллелограмм^
построенного на векторах (о, и ша (см. рис. а), лежит на мгновен-
мгновенной оси.
При движении твердого тела параллелограмм угловых скоростей,
оставаясь неизменной фигурой, поворачивается вокруг оси Z\ с посто-
постоянной угловой скоростью со,, т. е. ось симметрии твердого тела г
описывает круговой конус
ВОКРУГ ОСИ 2|.
Неподвижным аксоидом
является круговой конус,
описываемый мгновенной
ОСЬЮ ВОКруГ ОСИ Z\ (СМ.
рис. б). Подвижным аксои-
аксоидом является кругопой ко-
конус, описываемый мгновен-
мгновенной осью вокруг оси г. Дви-
Движение твердого тела можно
интерпретировать посредст-
посредством качения бел скольжения
подвижного аксоида по не-
неподвижному.
23. Регулярная пре-
прецессия симметрич-
симметричного твердого тела,
имеющего неподвиж-
неподвижную точку. Симметрич-
Симметричное твердое тело вращается
с постоянной угловой скоростью о) вокруг оси, которая в свою оче-
очередь вращается вокруг другой оси с постоянной угловой скоростью <я{.
В результате сложения вращений вокруг двух пересекающихся осей
твердое тело совершает вращение вокруг неподвижной точки. Это
прощение называется регулярной прецессией. Угол 0 между векто-
векторами ш и о), называется углом нутации (рис. 161). При этом <i)[—
угловая скорость прецессии, ш—угловая скорость собственного вра-
вращения.
Начала подвижных осей ?т? и неподвижных осей xyz взяты
в неподвижной точке О. Ось z направлена вдоль вектора и,. Оси
хну выбраны гак, чтобы совместно с осью z образовать правую
систему осей. Ось С направлена вдоль вектора и, т. е. вдоль оси
симметрии твердого тела. Ось 5 направлена вдоль линии узлов
(т. е. ось \ перпендикулярна к плоскости векторов ш и ш,), ось tj
выбрана так, чтобы совместно с осями \ и С образовать правую
- линия у ялов
Рис. 161.
530 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК 1ГЛ. X
систему осей координат. Подчеркнем, что подвижные оси $т)? не свя-
связаны с движущимся твердым телом.
Для того чтобы симметричное твердое тело совершало регуляр-
регулярную прецессию, к нему должны быть приложены внешние силы, глав-
главный момент которых относительно точки О лежит на оси ; и равен
по алгебраической величине:
т{ = ти sin 0 [/^ -)- (/,. — /,,) Щг cos 8|.
Если 1ш -\-A—/^)ы>1г cos 0^>0, то т'о совпадает с положительным
направлением оси t
Гироскопический момент /w?J'p направлен противоположно моменту
/»?, т. е. тчр = — т'о.
В случае быстро вращающегося гироскопа со^^ш^. Пренебре-
Пренебрегая при этом вторым слагаемым в квадратной скобке, получим выра-
выражение главного момента внешних сил, уже найденных по приближен-
приближенно!) теории гироскопов:
т{ = /сшссо1г sin 6.
Если векторы и и ш, взаимно перпендикулярны, то 8 = -»-, и это
выражение те является точным.
Обычно приходится решать задачи па регулярную прецессию твер-
твердого тела, в которых требуется:
а) по заданным о>, a>i, Q, 1^ /^ определить главный момент внеш-
внешних сил либо какую-либо внешнюю силу;
б) по заданным о), те0, О, /С и 1^ вычислить угловую скорость
регулярной прецессии ш,.
Решать задачи на регулярную прецессию твер-
твердого тела рекомендуется в следующем порядке:
1) выбрать неподвижные оси координат xyz и подвижные оси IvjC,
не связанные с твердым телом;
2) изобразить па рисунке внешние силы, приложенные к твер-
твердому телу;
3) а) если даны ш, <ль 6, /, 1^, то по формуле
/М; = cousin 6 [/,.@^ -j-(I: —^)«11г COS 9]
определить главный момент те. внешних сил относительно оси Е,
либо одну из внешних сил;
б) если даны внешние силы, а также <й(, 6, / , 1п, то, определив
главный момент внешних сил относительно неподвижной точки, из
той же формулы найти проекцию па ось z угловой скорости регу-
регулярной прецессии Wj.
ТЕЛО, ВРЛЩЛЮЩЧЕСЯ ВОКРУГ НЕПОДПИЖНОЙ ТОЧКИ
531
Задача 424. Вывести формулу, выражающую алгебраическую пели-
чипу главного момента внешних сил:
т\ = (о1г sin 8 [/са)с -|- (/с — !п) ш1г cos 0|,
при регулярной прецессии симметричного твердого тела.
Решение. Неподвижные xyz и подвижные irf, координатные
оси направляем так, как
было указано выше, в
обзоре теории. Следует
помнить, что подвижные
оси %% с твердым телом
не связаны. В то время,
как подвижные оси $т,?
иращаются вокруг оси z
С уГЛОВОЙ СКОРОСТЬЮ <0|,
твердое тело вращается
вокруг мгновенной оси
с угловой скоростью
o)a = <»-f <»„ где о> —
угловая скорость относи-
относительного вращения, <в, —•
угловая скорость пере-
переносного вращения.
При вычислении про- \?-линия узлов
екций <ла и «в, на оси I, К задаче 424.
¦ц, С следует иметь в пиду,
что параллелограмм угловых скоростей лежит в плоскости rfi. Как
видно из рисунка,
|? = 0, и,,, = aiu sin 6, u)i; = ш12 cos 6.
A)
Используя эти выражения, имеем:
= Ш1г sin
C0S
Следовательно, главные моменты количеств движения симметрич-
симметричного твердого тела относительно осей ;, ц, ч, являющихся главными
осями инерции в неподвижной точке О, имеют вид:
и Z.c постоянны, то
Так как ? ,
rfi:
Л"
B)
C)
532
ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Для определения главного момента внешних сил относительно
точки О воспользуемся динамическими уравнениями Эйлера:
После подстановки знамений co?l, colrj, cof?. из формул (I), выражений
h L".' L<. ~~из Ф°РМУЛ B) и ~di
нения Эйлера примут вид
/я? = и>|г sin ^[/,.0^
ml = 0,
ml = 0.
dt
, ^-из формул C) урав-
урав/,) м„ cos в],
Следовательно, главный момент внешних сил те0 относительно
неподвижной точки О лежит на линии узлов % и совпадает с поло-
положительным направлением оси
S> если
/сшс + (/с —/,)<plzcose>o.
Задача 426. Вычислить
угловую скорость регуляр-
регулярной прецессии симметрич-
симметричного твердого тела, центр
тяжести которого располо-
расположен в неподвижной точке,
если 0 — угол между осью
симметрии и осью прецессии,
1Г — момент инерции твер-
твердого тела относительно оси
симметрии, /с = 1п — эквато-
экваториальные моменты инерции
твердого тела, и> — угловая
скорость собственного вра-
вращения (вокруг оси симмет-
симметрии С).
Решение. Начала подвижных StjC и неподвижных xyz осей нахо-
находятся в неподвижной точке О. Неподвижная ось z направлена по оси
прецессии, а оси х и у — так, чтобы вместе с осью z образовать
правую систему осей координат. Подвижная ось С направлена по оси
?- линия //злой
К задаче 425.
§8]
ТЕЛО, ВРАЩАЮЩЕЕСЯ ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
533
симметрии твердого тела, ось ? — по линии узлов, ось i] выбрана так,
чтобы имеете с осями 5 и С, образовать правую систему осей координат.
На твердое тело действуют дне силы: вес тела и сила опорной
реакции. Так как центр тяжести совмещен с неподвижной точкой О,
то обе внешние силы приложены в точке О и их глакный момент
относительно точки О ранен пулю, следовательно, те; = 0.
Поэтому формула, определяющая алгебраическую величину глав-
главного момента:
т\ = ми cos 6 [/со, -j- (/ — / ) со1г cos 0],
принимает вид
cos 0 [1^ + (/,. —
cos 0] = О,
откуда находится искомая угловая скорость регулярной прецессии:
1г (/<-/,)cos (Г
Подобная регулярная прецессия твердого тела при отсутствии
других внешних сил, кроме веса и силы опорной реакции, является
движепиелг по инерции.
Итак, регулярная прецес-
прецессия по инерции возможна
нокруг любой оси, про-
проходящей через неподвиж-
неподвижную точку, за исключе-
исключением осей, перпендику-
перпендикулярных к оси симметрии
(в этом случае 0= " и
ш,г обращается в беско-
бесконечность).
Задача 426. Опреде-
Определить угловую скорость
регулярной прецессии ш,
симметричного твердого
тела веса Р, происходя-
происходящей под действием силы
тяжести. Расстояние от
центра тяжести С твер-
твердого тела до неподвиж-
неподвижной точки О равно а.
Даны моменты инер- К задаче 426.
ции твердого тела отно-
относительно главных центральных осей инерции, угловая скорость вра-
вращения о) вокруг оси симметрии и угол 0 между осями симметрии и
прецессии.
534 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Решение. Неподвижные xyz и подвижные ?т)С координатные
оси направлены так, как в предыдущей задаче.
К твердому телу приложены внешние силы: Р—вес твердого
тела, /?,, Rit R3 — состаиляющие силы опорной реакции в точке О.
Вычислим главный момент внешних сил относительно оси %:
т\=Ра sin 0.
Подставив это значение т\ в формулу
т\ = Mi, sin 6 [/с<ос -f- (/? — IJ ю1г cos 6],
получим кладратное уравнение относительно проекции на ось z иско-
искомой угловой скорости регулярной прецессии <о,г:
(/с — /,.) <о?, cos 0 -f I^o^ ~Ра = 0.
Решив квадратное уравнение относительно ш1г, находим два его корпя:
— ha» ±l 1/1{<*1 +4 (/с — М Z^acos О
'* 2 (/,. — /,.) cos в ' 1 '
т. е. твердое тело может совершать регулярные прецессии с разными
угловыми скоростями (конечно, это движение возможно только при
выполнении условия l"ix>l — 4 A^ — ln) Pa cos 0 ^> 0; при достаточно
больших значениях проекции угловой скорости шс это неравенство
всегда выполняется.
Вычислим величины ш[г в случае вращения твердого тела с боль-
большой угловой скоростью собственного вращения ш?.
Приближенное определение дискриминанта квадратного уравне-
уравнения дает:
/ и Г1 + likz-JJ
L J
Внося это значение в формулу (I), находим искомые приближен-
приближенные значения проекции угловой скорости регулярной прецессии:
угловую скорость медленной прецессии
Ра
и угловую скорость быстро!! прецессии
(/с —/ч) cose1
Значение проекции углоной скорости быстрой прецессии совпа-
совпадает со значением проекции угловой скорости регулярной прецессии
по инерции, полученной в предыдущей задаче.
§8]
ТЕЛО. ВРАЩАЮЩЕЕСЯ ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ
535
Значение проекции угловой скорости медленной прецессии сов-
совпадает с результатом, подсчитанным при решении аналогичной за-
задачи 419 с помощью приближенной теории гироскопов.
Задача 427. Вычислить дополнительный динамический момент,
возникающий при движении системы, описанной в задаче 422.
Решение. Направления неподвижных xyz и подвижных Цс осей
координат указаны па рисунке.
Колесо 2 совершает регулярную прецессию с угловой скоростью о),
вокруг оси z. Угол нутации б равен -„¦.
К задаче 427.
Вычислим главный момент внешних сил по формуле
т
\ = со,, sin в 1/сшс + (/с - /,) ш„ cos в].
A)
При 9 = 4 находим: /й| = /с<о,и>,„ что соответствует результату,
р
полученному в формуле C) задачи 422, так как /,. = -— р3, со^ =
Использование формулы A) быстрее приводит к результату, чем
применение теоремы Резаля, с помощью которой была решена
задача 422, но требует наличия у читателя сведений по динамике
твердого тела, вращающегося вокруг неподвижной точки.
Формулу A) можно также с успехом применить при решении
задач 420 и 421.
Задача 428. Решить задачу 375, воспользовавшись теорией регу-
регулярной прецессии симметричного твердого тела.
536 ДИНАМИКА НЕСВОБОДНОЙ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК [ГЛ. X
Решение. Решение задачи 375, основанное на методе кинето-
кинетостатики, было довольно громоздким. Оно сводилось к системе четы-
четырех уравнений:
Nax + N'bx = Мхе w* -f- Мус г,
N'Ay -f- Ы'ву = Мус ш2 — Мхе е,
N'Aia — N'By b = — Iyzwq -f- Ixye,
— N'Axa -f N'exb = lxy -f- lyzz.
При этом предварительно были определены центробежные моменты
инерции 1хг и 1уг. Вычисление 1Х2 и Ivz потребовало ряд выкладок,
выполненных в решении задачи 314.
Эту задачу можно решить значительно короче, если рассматривать
вращение цилиндра вокруг оси z как частный случай регулярной
прецессии при отсутствии его собственного вращения вокруг оси с.
Для этого достаточно определить гироскопический момент шг"р
цилиндра, являющийся моментом его сил инерции, которые приво-
приводятся к паре искомых боковых дополнительных динамических давле-
давлений на опоры А и В: mr"p = — meQ.
Угол нутации 6 в данной задаче обозначен а, следовательно,
/MrMP = (olzsina[/ccoc + (/c-/r])(olzcosa|. A)
Ввиду отсутствия собственного вращения шс = 0, а <о1г следует
заменить па со, так как угловая скорость вращения цилиндра вокруг
оси z является угловой скоростью регулярной прецессии. Теперь
формула A) принимает вид
т"'р = (/„ — !Т) (oj- sin a cos a.
Для цилиндра /с = ^: и V=f ("Г J~ т)> т" е"
Гироскопический момент является моментом пары дополнительных
боконых давлений на опоры Л и В с плечом АВ = 21г. Поэтому
,.,. ,.,, , wir"P Р (г- 1-\ „ . л
\NA\ = \NB[ = -ж = _ДТ _ -з ) со, sin 2а.
Метод решения этой задачи может быть с успехом использован
при решении ряда задач на определение дополнительных динамических
боковых давлений, приложенных к опорам твердого тела, вращаю-
вращающегося вокруг неподвижной оси.
ГЛАВА XI
КРАТКИЙ ОБЗОР МЕТОДОВ РЕШЕНИЯ ЗАДАЧ ДИНАМИКИ
§ 1. Вводные замечания
При решении задач динамики часто возникают затруднения, свя-
связанные с выбором соответствующих теорем и уравнений. Эти затруд-
затруднения можно успешно преодолеть лишь при наличии достаточных
навыков в решении задач динамики. Для приобретения подобных нашл-
ков мало практики в решении задач, нужно еще продумать и сопоста-
сопоставить различные методы и приемы. Для облегчения этого сопоставле-
сопоставления ниже сделана попытка систематизации методов решения задач
динамики.
Задачи динамики можно разбить на три группы: задачи дина-
динамики материальной точки, задачи динамики системы материаль-
материальных точек, задачи динамики твердого тела.
Задачи всех трех групп делятся па прямые (определение сил по
заданному движению) и обратные (определение движения по задан-
заданным силам). При сравнительной простоте прямых задач решение
обратных задач подчас связано с большими трудностями.
§ 2. Задачи динамики материальной точки
Наиболее общим приемом решения задач динамики материальной
точки является применение дифференциальных уравнений, движения
точки в проекциях па орты различных систем координат.
Чаще других применяются дифференциальные уравнения движения
в проекциях на оси декартовых координат.
При сложном движении материальной точки пользуются уравне-
уравнениями динамики относительного движения (либо переносного движе-
движения) в проекциях на орты различных систем координат.
При движении несвободной материальной точки по заданной кри-
кривой удобно пользоваться дифференциальными уравнениями в проек-
проекциях на оси натурального триэдра.
При движении несвободной материальной точки по заданной
поверхности целесообразно применять дифференциальные уравнения
538 КРАТКИ» 0R30P МЕТОДОВ РЕШЕНИЯ ЗАДАЧ ДИНАМИКИ (ГЛ. XI
движения в проекциях на орты цилиндрических, сферических или
иных криволинейных координат.
Если равнодействующая сил, приложенных к материальной точке,
расположена при движении точки в одной плоскости с ее начальной
скоростью, то движение точки происходит и этой плоскости. При этом
можно ограничиться применением двух дифференциальных уравнений
движения в проекциях на две оси декартовых координат или на оси
полярных координат, расположенных в этой плоскости, или па
иные оси.
Для определения траектории материальной точки, движущейся под
действием центральной силы, удобно пользоваться формулой Бине.
Если равнодействующая сил, приложенных к материальной точке,
расположена при движении точки на одной оси с ее начальной ско-
скоростью, то движение точки происходит прямолинейно вдоль этой
оси. При этом следует ограничиться применением одного дифферен-
дифференциального уравнения движения в проекции на эту ось.
Дифференциальные уравнения движения материальной точки под-
поддаются сравнительно просто интегрированию в задачах, где равнодей-
равнодействующая сил, приложенных к точке, постоянна либо зависит только
от: 1) времени, 2) положения точки, 3) скорости точки. Труднее
решать обратные задачи, если рапнодействующая сила одновременно
зависит от времени, положения, скорости и ускорения материальной
точки. В этих случаях легко решаются задачи, которые приводятся
к линейным дифференциальным уравнениям.
Иногда, используя общие теоремы динамики, можно сразу полу-
получить первые интегралы дифференциальных уравнений движения и
тем самым упростить решение задачи.
Теорему об изменении количества движения Материальной
точки применяют в задачах, где силы постоянны либо являются
известными функциями времени, а в число данных и неизвестных
величин входят: масса (вес) материальной точки, силы, приложенные
к точке, промежуток^ времени действия сил, скорости материальной
точки в начале и в конце этого промежутка времени.
Теорему об изменении момента количества движения мате-
материальной точки преимущественно применяют при движении точки
под действием центральной силы, когда в число данных и искомых
величин входят: масса (вес) точки, положения точки в некоторые фи-
фиксированные моменты времени, скорости точки в эти моменты времени.
Теорему об изменении кинетической энергии материальной
точки применяют в задачах, где силы, приложенные к точке,
постоянны либо зависят от положения точки, а в число данных
и неизвестных величии входят: масса (вес) точки, силы, приложенные
к точке, перемещение точки и ее скорости в начале и в конце этого
перемещения. Подчеркнем, что эту теорему удобно использовать и
тогда, когда на систему действуют постоянные силы трения.
§ 3] ЗАДАЧИ ДИНАМИКИ СИСТЕМЫ МАТЕРИАЛЬНЫХ ТОЧЕК 539
§ 3. Задачи динамики системы материальных точек
Наиболее общим приемом составления дифференциальных уравне-
уравнений движения системы материальных точек япляется применение
уравнений Лагранжа либо общего уравнения динамики.
При наличии идеальных связей, наложенных на систему, в состав-
составленные дифференциальные уравнения не иходят силы реакций связей.
При наличии голопомных связей, наложенных па систему, число состав-
составленных дифференциальных уравнений движения системы равно числу
ее степеней свободы.
Если по условию задачи требуется определить силы реакций сня-
зей, то задачу следует решать в два этапа: 1) с помощью уравнений
Лагранжа или общего уравнения динамики определить ускорения точек
системы, 2) применив принцип освобождаемости от связей, использо-
использовать дифференциальные уравнения движения соответствующей мате-
материальной точки, либо применить, метод кинетостатики.
Если по условию задачи требуется определить законы движе-
движения точек системы, то приходится интегрировать систему дифферен-
дифференциальных уравнений движения.
В некоторых задачах удобно пользоваться общими теоремами
динамики:
а) Если в число данных и неизвестных величин нходят: массы
материальных точек, внешние силы и уравнения движения точек
системы, то можно, применив теорему о движении центра инерции
системы материальных точек в проекциях на оси координат, соста-
составить дифференциальные уравнения движения, и которые войдут те
силы реакций связей, которые для рассматриваемой системы являются
внешними силами. Эти дифференциальные уравнения движения дагог
возможность, помимо решения обратных задач, определять искомые
силы реакций связей непосредственно wa составлеинглх уравнений
(выше было указано, что в подобных случаях после применения урав-
уравнений Лаграпжа либо общего уравнения динамики приходится допол-
дополнительно пользоваться дифференциальными уравнениями движения
соответствующей материальной точки либо применять метод кинето-
кинетостатики).
б) Если внешние силы постоянны либо зависят от времени,
а в число данных и неизвестных величин входят: массы материаль-
материальных точек, внешние силы, промежуток времени действия внешних сил
и скорости точек системы в начале и конце этого промежутка,
то следует применить теорему об изменении главного вектора
количеств движения системы материальных точек.
в) Если в состав системы материальных точек пходит твердое
тело, вращающееся вокруг неподвижной оси, а в число данных
и искомых величин — инерционные характеристики системы (массы,
моменты инерции), уравнения движения точек системы и уравнение
540 КРАТКИЙ OG3OP МЕТОДОВ РЕШЕНИЯ ЗАДАЧ ДИНАМИКИ [ГЛ. X]
вращения твердого тела (либо скорости точек системы и угловая
скорость твердого тела), а также внешние силы системы, то можно
применить теорему об изменении главного момента количеств
движения системы материальных точек.
г) Если внешние силы постоянны либо зависят от положений
точек системы, а в число данных и искомых величин входят: инер-
инерционные коэффициенты системы (массы, моменты инерции), пнешние
и внутренние силы системы (и случае неизменяемой материальной
системы—только внешние силы), перемещения точек системы и ско-
скорости этих точек и начале и в конце этих перемещения, то следует
применять теорему об изменении кинетической энергии системы,
материальных точек.
д) Если рассматриваемая система материальных точек является
сплошной средой — жидкостью (газом), а в число данных и неизвест-
неизвестных величин входят: секундные массы жидкости (газа), скорости
капель жидкости (газа), проходящих через крайние поперечные сече-
сечения рассматриваемого объема жидкости (газа), объемные и поверхно-
поверхностные силы, то следует применять уравнение Эйлера, т. е. теорему
об изменении главного вектора количеств движения системы ма-
материальных точек в приложении к сплошным средам.
§ 4. Задачи динамики твердого тела
1°. Поступательное движение твердого тела. Наибо-
Наиболее общим приемом составления уравнений динамики поступательного
движения твердого тела является применение теоремы о движении
центра инерции системы материальных точек. Теорема преиму-
преимущественно используется в проекциях на оси декартопых координат.
В число данных и искомых величин должны входить: массы мате-
материальных точек, их уравнения движения, внешние силы системы. Ре-
Решение обратных задач упрощается в случаях, когда главный вектор
ппешних сил, приложенных к твердому телу, постоянен либо зависит
только от: 1) времени, 2) положений точек системы, 3) скоростей
точек системы. Труднее решать обратные задачи, в которых главный
вектор внешних сил одновременно зависит от времени, положения и
скоростей точек системы.
В некоторых случаях, используя общие теоремы динамики, можно
сразу получить первые интегралы дифференциальных уравнений дви-
движения и тем самым упростить решение задачи.
Теорему об изменении количеств движения применяют в задл-
чах, где силы или их проекции постоянны либо зависят от вре-
времени, а в число данных и искомых величин входят: масса (вес) тнер-
дого тела, внешние силы, приложенные к твердому телу, промежуток
г.ремени действия сил, скорости центра инерции (либо любой другой
точки) в начале и в конце этого промежутка времени.
§4| ЗАДАЧИ ДИНАМИКИ ТВЕРДОГО ТЕЛА 541
Теорему об изменении кинетической энергии применяют в за-
задачах, где силы постоянны либо зависят от положений точек
твердого тела, а в число данных и неизвестных величин входят:
масса (вес) твердого тела, внешние силы, приложенные к твердому
телу, перемещение центра инерции (либо любой другой точки), ско-
скорости центра инерции (либо любойч другой точки) в начале и
в конце этого перемещения.
2°. Вращение твердого тела вокруг неподвижной
оси. Наиболее удобно при решении задач пользоваться дифферен-
дифференциальным уравнением вращения твердого тела вокруг неподвиж-
неподвижной оси. В число данных и неизвестных величин должны входить:
момент инерции твердого тела относительно оси вращения, уравне-
уравнение вращения твердого тела, внешние силы, приложенные к твер-
твердому телу.
Решение обратных задач упрощается в случаях, когда главный
момент внешних сил относительно оси вращения постоянен либо
зависит только от: 1) времени, 2) угла поворота, 3) угловой скорости
твердого тела. Труднее решать задачи, в которых главный момент
внешних сил одновременно зависит от времени, угла попорота и
угловой скорости твердого тела. В этих случаях легко решаются
задачи, которые приводятся к линейным дифференциальным урав-
уравнениям.
Л\ожно получить первые интегралы дифференциального уравнения
вращения твердого тела вокруг неподвижной оси, используя теорему
об изменении кинетической энергии системы материальных точек.
Это осуществимо в задачах, где главный, момент внешних сил
постоянен либо зависит от угла поворота твердого тела, а в
число данных и неизвестных величин входят: момент инерции твер-
твердого тела относительно оси вр.эщения, внешние силы, приложенные
к твердому телу, угловое перемещение, углопые скорости твердого
тела в начале и в копне этого углового перемещения.
При определении динамических давлений на ось твердого т#ла,
вращающегося вокруг неподвижной оси, целесообразно применять
теоремы об изменении главного вектора и главного момента коли-
количеств движения системы материальных точек либо пользоваться мето-
методом кинетостатики.
3°. Плоское движение твердого тела. Наиболее общим
приемом составления уравнений в задачах, где определяются силы
реакций связей либо закон движения, является применение диффе-
дифференциальных уравнений плоского движения твердого тела.
В число данных и неизвестных величин должны входить: масса и
момент инерции твердого тела относительно оси, проходящей через
его центр инерции перпендикулярно к неподвижной плоскости,
уравнения движения центра инерции, уравнение вращения тнердого
тела вокруг оси, проходящей через центр инерции перпендикулярно
542 КРАТКИЙ 0R30P МЕТОДОВ РЕШЕНИЯ ЗАДАЧ ДИНАМИКИ (ГЛ. XI
к неподвижной плоскости, внешние силы, приложенные к твердом)'
телу.
Решение обратных задач упрощается в случаях, когда главный
иектор внешних сил и главный момент внешних сил относительно
оси, проходящей через центр инерции твердого тела перпендикулярно
к неподвижной плоскости, являются постоянными либо зависят только:
1) от времени, 2) от положения точек, 3) от скоростей точек.
Труднее решать задачи, в которых главный вектор и главный момент
внешних сил одновременно зависят от времени, положения и ско-
скоростей точек.
Если требуется определить только закон плоского движения
твердого тела, то для составления дифференциальных уравнений
движения, не содержащих сил реакций связей, следует при наличии
идеальных связей, наложенных на тпердое тело, применять уравне-
уравнения Лаграпжа или общее уравнение динамики.
Можно упростить интегрирование дифференциальных уравнении
движения, используя теорему об изменении кинетической энергии
системы материальных точек а задачах, где главный вектор
и главный момент сил, приложенных к твердому телу, постоянны
либо зависят от положений точек (угла поворота) твердого
тела, а в число данных и неизвестных величин входят: масса и мо-
момент инерции твердого тела относительно оси, проходящей через его
центр инерции перпендикулярно к неподвижной плоскости, силы,
приложенные к твердому телу, перемещения точек твердого тела
(угловые перемещения), скорости точек твердого тела (угловые ско-
скорости) в начале и в конце этих перемещений.
4°. Вращение твердого тела вокруг неподвижной
точки. Наиболее общим приемом составления исходных уравнений
является применение динамических уравнений Эйлера. В число дан-
пых и неизвестных величин должны входить: главные моменты инер-
инерции твердого тела относительно главных осей инерции, проходящих
через неподвижную точку, проекции угловой скорости па эти оси,
главные моменты внешних сил относительно этих осей.
Решение обратных задач динамики твердого тела, вращающегося
вокруг неподвижной точки, представляет значительные трудности.
Дифференциальные уравнения дпижения, т. е. динамические урав-
уравнения Эйлера, решаются r квадратурах только в исключительных
случаях.
Кроме динамических уравнений Эйлера, можно решать задачи
с помощью уравнений Лагранжа, отнесенных к обобщенным коор-
координатам —углам Эйлера.
Если внешние силы, приложенные к твердому телу, постоянны
либо зависят от положений точек твердого тела, то можно получить
первый интеграл динамических уравнений Эйлера, применяя теорему
об изменении кинетической энергии системы материальных то-
§ 1] ЗАДАЧИ ДИНАМИКИ ТВЕРДОГО ТЕЛА 543
чек. Это осуществимо в задачах, где в число данных и неизвестных
величин входят: главные моменты инерции твердого тела относительно
подвижных осей, проходящих через неподвижную точку, внешние
силы, приложенные к твердому телу, перемещения точек (угловое
перемещение твердого тела) и их скорости (угловые скорости твер-
твердого тела) в начале и в конце, этих перемещений.
В случае симметричного твердого тела (гироскопа), угловая ско-
скорость вращения которого вокруг осп симметрии значительно больше
угловой скорости вращения вокруг других осей, можно при прибли-
приближенном решении задач применять теорему Резаля. С помощью эле-
элементарной теории гироскопов возможно определение угловых ско-
скоростей вращении либо дополнительных динамических давлений па
сняли.
5°. Движение свободного твердого тела. Общим
приемом составления уравнений движения свободного твердого тела
является совокупное применение теоремы о движении центра инер-
инерции и динамических уравнений Эйлера, выражающих теорему об
изменении главного момента количеств движения твердого тела в от-
относительном движении по отношению к центру инерции.
Обратные задачи динамики свободного твердого тела относятся
к числу наиболее трудных задач механики (например, задачи внешней
баллистики).
Для определения уравнений движения свободного твердого тела
приходится интегрировать систему шести дифференциальных уравне-
уравнений второго порядка. Задача решается в квадратурах только в исклю-
исключительных случаях.
Для составления дифференциальных уравнений движения свобод-
свободного твердого тела можно пользоваться уравнениями Лагранжа, отне-
отнесенными к обобщенным координатам: трем координатам центра инер-
инерции твердого тела и трем углам Эйлера.
Для определения дополнительных динамических давлений твер-
твердого тела на связи рекомендуется пользоваться сочетанием теоремы
о движении центра инерции либо метода кинетостатики (для
переносного поступательного движения вместе с центром инерции)
с теоремой Резаля (для относительного вращательного' движения
по отношению к центру инерции).
Пели внешние силы постоянны либо зависят от положений
точек твердого тела, то можно упростить интегрирование системы
дифференциальных уралненпп движения, применяя теорему об изме-
изменении кинетической энергии в задачах, где в число данных и иско-
искомых величин входят: масса, главные центральные моменты инерции твер-
твердого тела, внешние силы, приложенные к твердому телу, перемеще-
перемещения точек (угловое перемещение) твердого тела, скорости центра
инерции и угловые скорости твердого тела в начале и в конце этих
перемещений.
544 КРАТКИЙ ОБЗОР МЕТОДОВ РЕШЕНИЯ ЗАДАЧ ДИНАМИКИ (ГЛ. XI
§ 5. Общие замечания- по решению задач динамики
1. Эффективность решения задач динамики в значительной мере
зависит от удачного выбора системы координат.
2. Осноиными и вместе с тем наиболее трудными являются обрат-
обратные задачи динамики, в которых по заданным силам определяется дви-
движение. При этом приходится интегрировать систему дифференциаль-
дифференциальных уравнении движения. Эти задачи редко удается решить в квад-
квадратурах. Иногда приходится применять приближенные методы инте-
интегрирования или пользоваться математическими машинами.
3. Удобство применения общих теорем динамики заключается в воз-
возможности упростить интегрирование дифференциальных уравнении
движения системы. Однако эти общие теоремы могут (как показано
выше) применяться только в некоторых случаях. Удобно и то, что
в формулировки обших теорем динамики не входят внутренние силы,
определение которых обычно связано со значительными трудностями
(это замечание о внутренних силах в равной мере относится к: диф-
дифференциальному уравнению крашения твердого тела вокруг неподвиж-
неподвижной оси, дифференциальным уравнениям плоского движения твердого
тела и динамическим уравнениям Эйлера). Лишь в формулировку
теоремы об изменении кинетической энергии системы материальных
точек входят не только внешние, по и внутренние силы (в частном
случае неизменяемой материальной системы, например абсолютно
твердого тела, и в этой теореме фигурируют только внешние силы).
4. Наиболее общим приемом составления дифференциальных урав-
уравнений движения системы материальных точек ппляется применение
уравнений Лагранжа или общего уравнения динамики. (Применение
общего уравнения динамики является менее удобным и притом фор-
формальным методом в связи с использованием сил инерции.)
Вместо искусственного сочетания некоторых общих теорем и урав-
уравнений динамики, выбор которых представляет значительные трудности,
указанные методы быстро и естественно приводят к составлению
дифференциальных уравнений движения. Удачный выбор обобщенных
координат обеспечивает простоту и изящество решения задачи. Удобно
и то, что * составленные дифференциальные уравнения движения не
входят силы реакций идеальных связей, определение которых обычно
сиязапо с большими трудностями (силы реакций связей при движении
системы являются функциями от времени, положения, скоростей и
ускорений точек системы).
5. Применяя общие теоремы динамики, дифференциальное уравне-
уравнение вращения твердого тела вокруг неподвижной оси, дифференци-
дифференциальные уравнения плоского движения твердого тела, динамические
уравнения Эйлера, уравнения Лаграпжа, часто в число рассматривае-
рассматриваемых сил ошибочно включают силы инерции. Следует помнить, что
силами инерции следует пользоваться только в случае применения:
« 51 ОБЩИЕ ЗАМЕЧАНИЯ ПО РЕШЕНИЮ ЗАДАЧ ДИНАМИКИ 54Г)
а) метода кинетостатики, б) общего уравнения динамики, в) исследо-
исследования относительного (либо переносного) движения материальной
точки или системы материальных точек.
6. При решении задач с помощью общих теорем динамики, а также
при применении дифференциального уравнения вращения твердого
тела покруг неподвижной оси, дифференциальных уравнений плоского
движения твердого тела и динамических уравнений Эйлера силы
разделяются па внешние и внутренние.
При решении задач с помощью уравнений Лагранжа, общего
уравнения динамики и метода кинетостатики силы разделяются па за-
задаваемые и силы реакций связей.
18 Теоретическая механика, том II
ГЛАВА XII
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
§ 1. Удар
1°. Удар двух тел. Удар тела о неподвижную пре-
преграду. Удар есть процесс, при котором в течение очень мало-
малого промежутка времени действуют очень большие силы. Промежу-
Промежуток времени часто равен тысячным и даже десятитысячным долям
секунды.
Величина силы, приложенной к телу во время удара, может в
тысячи и даже в десятки тысяч раз превосходить вес тела.
1 В теории удара классической механики вводится следующая иде-
идеализация этого процесса — совершается предельный переход к беско-
бесконечно большим силам, действующим бесконечно малое время (мгно-
(мгновенные силы) и имеющим конечный импульс S.
Пусть сила F действует в течение времени -с, начиная свое дей-
действие в момент времени t. Тогда ее импульс будет:
^ Fdt.
i
Для определения ударного импульса S, соответственно со сказан-
сказанным выше, совершаем предельный переход, устремляя F—-оо, а
х —¦ 0, т. е.
S=lim \ Fdt.
т~0 \
Здесь предполагается, что бесконечно большая мгноненная сила
действует бесконечно малый промежуток времени; при этом считается,
что ударный импульс S имеет конечную величину.
Применяя теорему об изменении количества движения при уд,1ре,
следует учитывать только импульсы мгновенных сил.
5 Ч
УДАР
547
Рис. 162.
При действии мгновенной силы перемещение топки приложения
силы равно нулю, а скорость точки скачкообразно меняется:
v __ф ,5
« '2 ' ' т'
В действительности скачок скорости происходит в течение очень
малого промежутка времени.
Линией центров назы-
называется ось, проходящая че-
через центры тяжести соуда-
соударяющихся тел.
Удар называется цеп-
тральным, если точка К со-
соприкосновения соударяю-
соударяющихся тел лежит па линии
центров CiGj, а касательная
плоскость, проведенная в точке соприкосновения к поверхностям этих
тел, перпендикулярна к линии центров (рис. 162).
Удар называется прямым, если скорости центров тяжести соуда-
соударяющихся тел в начале удара лежат па линии центров (рис. 163).
Если хотя бы одна из ско-
скоростей центров тяжести соуда-
соударяющихся тел в начале удара не
лежит па линии центров, то удар
назы!!ается косым (рис. 164).
Рассмотрение процесса уда-
удара по существу требует выхода
за рамки классической меха-
пики — отказа от схемы абсо-
абсолютно твердого тела и пере-
перехода к схеме деформируемого тела. В зависимости от степени вос-
восстановления недеформированного состояния удары разделяются на не-
неупругие, частично упру-
упругие и упругие.
Удар называется не-
упругим, если недеформи-
рованное состояние со-
соударяющихся тел не вос-
восстанавливается. В копне
удара центры тяжести тел
движутся с одинаковыми
скоростями.
Удар называется частично упругим, если недеформированпое со-
состояние не полностью восстанавливается. В конце удара центры тяжес-
тяжести тел движутся с разными скоростями.
18*
Рис. 163.
Рис. 164.
543
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
(ГЛ. XI!
Удар называется упругим, если недеформированное состояние пол-
полностью восстанавливается.
Для рассмотрения прямого центрального неупругого удара двух
тел введем обозначения:
•Vs тела
1
2
Масса
тела
»'l
т„
Скорости
в начале
удара
«1
в конце
удара
} •
Тогда проекция на ось п (рис. 165) общей скорости соударяю-
соударяющихся тел в конце удара равна:
_
(ось я проведена вдоль линии центров).
Импульс мгновенной силы определяется формулой
Для рассмотрения прямого центрального частично упругого удара
двух тел разделим процесс удара на два этапа.
/ 2
Риг. 165.
В течение первого этапа совершается деформация соударяющихся
тел. В течение второго этапа — частичное восстановление недеформи-
ровапного состояния. В момент окончания первого этапа и начала
второго центры тяжести тел обладают одинаковыми скоростями, ко-
которые они имели бы в конце соответствующего неупругого удара.
В конце второго этапа центры тяжести тел имеют уже различные
скорости их и и.г. Коэффициентом восстановления педеформированного
состояния k называется отношение импульса мгновенной силы второго
этапа к импульсу мгновенной силы первого этапа:
Введение в это определение мгновенных сил возвращает нас в
теорию удара классической механики.
УДАР
Коэффициент восстановления, являющийся безразмерной величиний,
изменяется в пределах от 0 до I (O
при иеунругом ударе & = 0,
при частично упругом ударе k<^
при упругом ударе &=1.
Е!всдем обозначения:
Масса
«1
(Скорости
удара
п конце
1 этапа
н конце
удара
«1
И,
1 этап
II этап
Тогда проекции па ось я скоростей соударяющихся тел в копне
удара раины:
где
"in = "п -\- k ("n — ""in),
ц ! l-iz—:
(ось И проведена вдоль линии центров С|С2). Из этих формул можно
получить выражение коэффициента иосстаповлеиия
хп— "п
которое иногда используется в качестпе определения этого понятия.
Ц случае упругого удара, т. е. при k=U
Для рассмотрения прямого частично упругого удара тела о непо-
неподвижную плоскость введем обозначения:
So
тела
1
2
Масса
лела.
т,
со
Скорости
в начале
удара
Vi
0
в конце
[ этапа
1 »
в конце
удара
«1
0
550
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
[ГЛ. XII
Тогда проекция на ось п скорости центра тяжести падающего
тела в конце удара равна н(„= —kvln, причем A=l/ Л где hx—
У "I
высота свободного падения тел па неподвижную плоскость, /г2 —
высота отражения тела после частично упругого
удара (рнс. 166).
При рассмотрении косого центрального ча-
стичпо упругого удара двух тел поперхно-
сти соударяющихся тел считаются абсолютно
т
• V,
Рис. 166.
>/
Рис. 167.
гладкими. Ось п проводится вдоль линии центров С{Сг (рис. 167). Ось -с
перпендикулярна к оси п. Проекции скоростей центров тяжести со-
соударяющихся тел в начале удара имеют вид:
vln = Vi cos аь vin = v$ cos a2, V[. = v{ sin a,, \ = B,sina,.
Проекции скоростей центров тяжести соударяющихся тел в копке
удара (рис. 168) равны.
«U = vlv "I-. = v*v "in = "л "I" k A1 п — '
"ы = ип-тк ("п. — vin)>
где
«in "я-f k(Un—Vln) '
^ ' Q It'll «n i *(«я — ^ая) '
Модули скоростей центров тяжести соударяющихся тел в копне
удара равны:
Я| = V7"!; ~\- "Гл. "i = Ит -\- lt:2n-
При изучении косого частично упругого удара тела о неподвиж-
неподвижную плоскость поверхности тела и неподвижном плоскости считаются
абсолютно гладкими.
Направления осей лиг указаны па рис. 169.
§11
УЯАР
551
Проекции скорости центра тяжести падающего тела в начале уда-
удара имеют вид: ^ = щ CQS a> ^ = ^ sin а
Проекции скорости центра тяжести падающего тела в конце удара
равны: „ «,„.
Модуль скорости центра тяжести падающего тела в конце удара
определяется формулой
tff a
Коэффициент восстановления вычисляется по формуле к= —^,
где а—угол падения, р — угол отражения.
Рис. 168.
Задачи об определении скоростей соударяю-
соударяющихся тел в конце центрального косого частично
упругого удара рекомен-
рекомендуется решать в следую-
следующей последовательности:
1) направить ось п вдоль ли-
линии центров, ось ¦z — перпендику-
перпендикулярно к ней;
2) вычислить проекции на оси п
и т скоростей vln, vin, vu, vix со-
соударяющихся тел в начале удара;
3) вычислить проекцию общей
скорости ип соударяющихся тел
па ось п в конце
удара по формуле
т,у,„ -\- т
неупругого
2
п
V,
и„
Рис. 169.
4) вычислить проекции скоростей ы1я, щ„, i
тел на оси л и -с в конце удара по формулам:
^ соударяющихся
552
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
[ГЛ. XII
5) определить скорости обоих тел в конце удара.
Модули скоростей равны:
Направления скоростей определяются формулами:
tg h =
= tg (пГ«,) = ^ .
2
При ударе тела о неподвижную плоскость следует считать массу
неподвижной плоскости бесконечно большой, а скорость до удара
рапной нулю (wz5s = oo, г»а:=0).
В случае центральных прямых ударов двух тел вычисления уиро-
титтсчг, так как проекции скоростей на ось т обращаются в нуль.
Задача 429. Шар веса Р, = 10 к?.
ударяется о неподвижный шар веса
Рг = 20 кг. Какую скорость vx дол-
должен иметь центр тяжести neprsoro шара
до удара, д,гя того чтобы после ii-j-
умругого удара их общая скорость
равнялась в м!сек?
Решение. Ось п направим вдоль
линии центров С\С.г палено, как по-
показано на рисунке.
Проекции скоростей центров тяжести шароп на ось п в начале
удара имеют 'вид:
Проекция общей скорости шаров на ось п в конце неупругого
удара равна ^ = м,»,,+ «.рм
" Hti -j- III.2
Из этого соотношения находим проекцию искомой скорости vln цен-
центра тяжести первого шара в начале
неупругого удара:
К знлачс 429.
К задаче 4.40.
i
_ (Р, 4- Р..,) н„ — Psvsn
A0 4- 20) в — 20-0
= гтч =18 м/сек.
Задача 430. Скорости центров
тяжести двух шароп, двигаишихся па-
пстречу друг другу, рампы: d, = 6 м'.сек, т>2 = 10 м[сек. Вес пер-
первого шара равен /'1=10 кг. Определить нес второго шара и вели-
величину ударного импульса 5, если после неупругого удара шары оста-
остановились.
удар
553
Решение. Направляем ось п вдоль линии центров С,С^.
Проекции скоростей центров тяжести шаров на ось п в начале
удара будут:
^,„ = 6 М/'сек, vin= — 10 М/'сек.
Так как, по условию, проекция общей скорости на ось а после пе-
унругого удара равна нулю, то
ml
т. е.
оiкуда
mivtn-\-mivin = 0,
== _^1п = б кг.
]3еличипа ударного импульса будет:
м,ш., _ ( 10-6
10)=: 60 кг-сек.
Задача 431. Определить скорости центров тяжести двух шароп
песа /°i=12 кг и />9—Ю кг б конце частично упругого удара, если
их скорости в начале удара
были равны соответственно: /
Vi =¦-10 MJceK и vi=6 м/сек.
Шары дпигались и одном
направлении. Коэффициент /
восстановления k при ударе ~г
равен 0,8. \
Р е ш е п и е. Направляем
ось п вдоль линии центров
CxCi в сторону движения
шаров. Проекции скоростей К задаче 431.
на ось п центров тяже-
тяжести шаров в начале удара раины: а1п=Ю м/сек, vin = 6 м/сек.
Проекция общей скорости на ось п в случае неупругого удара
равна:
_ т.р.я + 'п^я _ 12-10+10-6 о. g ,
Проекции искомых скоростей центров тяжести шароп на ось п
в конце упругого удара даются формулами:
uln = un + k(un— vln) = 8.18 + 0,8(8,18— 10) = 6,72 м/сек,
u,ln = ап + k (ая — vln) = 8,18 + 0,8 (8,18 — G) = 9,92
554
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
[ГЛ. XII
Положительные значения иы и щп указывают, что в конце упру-
упругого удара шары будут двигаться в том же направлении. Первый
шар, двигавшийся до удара
быстрее второго, после
удара будет от него отста-
отставать.
Задача 432. Решить
предыдущую задачу в пред-
предположении, что до удара
шары двигались навстречу
друг другу.
К задаче 432. Решение. Ось п на-
праилепа вдоль линии цент-
центров направо. Проекции скоростей на ось п центров тяжести шаров
в начале удара будут: vln= Ю м/сек, vin= —6 м/сек.
Проекция общей скорости на ось п в случае неупругого удара
равна
W|i»iB + ffloOon _ 12-10—10-6 . ,
Un~ mt + т, '—" 12+10 —2>'6 MlceK-
Проекции искомых скоростей центров тяжести шаров на ось п
в конце упругого удара определяются формулами:
Щп = н„ -f k {nn — vXn) = 2,73 -)- 0,8 B,73 — 10) = — 3,07 м/сек,
"in = "п -г k («n — Vin) = 2,73 -(- 0,8 B,73 -|-6) = 9,65 м'сек.
Знаки Н|„ и uin указывают, что после удара шары будут дви-
двигаться в разные стороны, т. е. первый шар палево, а второй шар
направо.
Задача 433. С какой высоты 'ht падает шарик на неподвижную
горизонтальную плиту, если после частично упругого удара он под-
поднимается на высоту /22=81 см. Коэффициент восстапонления ра-
равен 0,9.
Решение. Ось п направим по вертикали вниз. Скорость центра
тяжести шарика в начале удара обозначим <О\. Скорость неподвижной
плоскости равна пулю: ф2 = 0. Масса ее /м2 бесконечно велика, т. е.
/я2 = оэ. Проекция обшей скорости и на ось п в случае иеупругого
удара равна
т, .
щ +
Проекция скорости центра тяжести шарика на ось п в конце
удара равна н1п = nn-\-k (яя — vin). Так как ип = 0, то uin = — kvla.
«HI
УДАР
555
Знак минус указывает, что скорость шарика и конце удара па-
пранлена вверх. Зависимость между модулями скоростей центра тя-
тяжести шарика в начале и в конце удара имеет вид
!!,=*©,. A)
Так как шарик совершал свободное падение, то
щ =-¦ /2ghl.
B)
После частично упругого удара шарик начинает подъем вверх
со скоростью Н]. В наивысшей точке подъема 1ц скорость шарика
равна пулю. Следовательно,
Hi = V^gth. C)
После подстановки значений vt и ut из фор-
формул B) и C) в формулу A) находим:
j//j3 =k -\/hx, D)
откуда
и ''9 ^J_
1 ft2 0,92
M.
Формула D), записанная в виде
E)
К задаче 433.
дает иозможность экспериментально определить
коэффициент восстановления при частично упру-
гом ударе.
В случае неупругого удара шарик от плоскости не отскакивает,
т. ii. /;9=0. Из формулы E) получим: ?=:0.
В случае упругого удара шарик должен отскочить в исходное
положение, т. е. /?2 = /?]. Из формулы E) находим: к=\.
При частично упругом ударе Нг<^\ц и, следовательно, 0<^?<^ 1.
Так, при ударе деревянного шарика о стальную плиту й = 0,55, при
ударе шарика из слоновой кости о плиту из того же материала k =
= 0,90, при ударе стеклянного шарика о стеклянную плиту k =
= 0,94 и г. д.
Задача 434. В момент столкновения двух одинаковых поступа-
поступательно движущихся шаров скорость центра тяжести левого шара /
была направлена вдоль линии центров направо, а скорость центра
тя-жести правого шара 2 была перпендикулярна к линии центров.
Определить скорости центров тяжести шароь в конце удара, счи-
считая удар упругим.
Решение. Направим ось п вдоль линии центров C\d и ось
* — к ней перпендикулярно. Вычислим проекции скоростей ii, и v.t
на оси п и г.
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
vu=vx, vu = 0, vin = 0, г>9. = т>2.
[ГЛ. XII
Проекцию общей скорости шаров на ось п в случае пеупругого
удара вычисляем по формуле
п
" /«! 4- пи
Так как происходит удар двух одинаковых шаров, то m^=mi-=
и, следовательно,
Проекции скоростей центров тяжести шаров на касательную -с в на-
начале и в конце удара равны, т. е.
г
К задаче 434.
ifi. = z»| T = 0, ni. = vi^ = vi. B)
Проекции скоростей центров
тяжести шарон на нормаль и в
" копне удара вычисляем по фор-
формулам:
"in = "n-\-k ("п. — *«„)•
^ Учитывая значение ип, опре-
*"п деленное формулой A), и то, что
удар является упругим, т. е. k =
= 1, .находим:
Теперь определим модули скоростей центров тяжести шаров п
конце удара по формулам:
Воспользопаишись формулами B) и C), получим:
и, = 0, int = i/v* -\- v'i
т. е. после упругого удара левый шар остается п покое. Направле-
Направление скорости иг определяется с помощью угла j32 (см. рис. б):
Задача 435. В момент столкновения днух одинаковых поступа-
поступательно движущихся шаров скорости нх центров тяжести были равны
§ ч
УДАР
557
по модулю |«j | = |я91 = а. Шары были расположены симметрично
относительно оси т, причем а, =--180° — а2 (см. рис. а). Определить
скорости центров тяже-
тяжести шаров в конце удара,
считая удар упругим. Оси
лит обозначены на
рис. а.
Решение. Вычислим
проекции ф, и ф2 на оси
лит:
Vi.^v sin a1?
vin = — v cos at,
(при вычислении этих
проекций скоростей учи-
тыпаем, что | да, | = | ©ч ] = К задаче 435.
= г» и о, = 180° — а,).
Проекцию общей скорости шаров на ось п в случае их неупру-
гого удара вычисляем по формуле
.. _"'^,n4-m^sn
После подстановки: wt = m.1-=in, vhl^v cos а1? и5,„=—щ cos а,
находим:
«« = 0. A)
Проекции скоростей центров тяжести шаров на касательную т в
начале и в конце удара:
т. е.
'W sin а[, и^ = viz = v sin
i^.^ui. = v sin Kj.
Проекции скоростей центров тяжести на нормаль л в конце уда-
удара вычисляются по формулам:
«in = ип + к{ип — vln), щп ==un-\-k(ип — vw).
ВоспользоваВ1пись значением ип из формулы A), для случая упругого
удара, т. е. при А=1, находим:
щп = — v cos a1( и3п ^ v cos
C)
558
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
[ГЛ. XII
Модули скоростей центров тяжести шаров в конце удара вычис-
вычисляются по формулам:
Использовав формулы B) и C), получим:
Hi = Hg = V.
Направления этих скоростей определяются с помощью углов Ct
и C9 (см. рис. б):
т. е.
В1== 180= — а, =а3, р, =
Итак, рассматриваемый косой удар не изменяет модулей скоро-
скоростей центров тяжести шаров, а углы, которые векторы скорости об-
образуют с осью п, меняются местами.
Задача 436. Свободно падающий шарик ударяется о неподвижную
наклонную плоскость, расположенную под углом а к горизонту.
Определить направление скорости ша-
шарика в конце частично упругого удара, если
коэффициент восстановления равен k.
Решение. Направим ось т вдоль на-
наклонной плоскости, а ось п к ней перпенди-
перпендикулярно в точке падения шарика на наклон-
наклонную плоскость.
Углы аи^, обозначенные при вершине О,
соответственно называются углом падения и
углом отражения.
Определим проекции скорости центра тя-
тяжести шарика г>1 в начале удара па оси
п и т:
К задаче 436.
= vtcos a, vu =
sin a.
Проекция на ось п общей скорости шарика и наклонной плоско-
плоскости в случае неупругого удара вычисляется по формуле
Масса неподвижной плоскости бесконечно велика, а скорость ее равна
нулю, т. е. щ = со, ^j = 0. Следовательно,
ия = 0. A)
§ И 5'ллр 550
Проекции скорости центра тяжести шарика на ось т п начале и
в конце упругого удара рапны, т. е.
uu—vu = vi sin a. B)
Проекция скорости центра тяжести шарика па ось п в конце
упругого удара определяется выражением
Воспользовавшись формулой A), находим:
»,„ = — kvu = — A^cosa. C)
Искомый тангенс угла отражения р дается формулой
tgf^l^LS^0'8'"" =:%?. D)
6 ' , «lT I kvl cos aft v '
Формула D) указывает удобный способ экспериментального опре-
определения коэффициента восстановления k при частично упругом ударе.
Схема прибора основана на идее рассмотренной задачи. Наклонная
плоскость может устанавливаться под разными углами а к горизонту,
поворачиваясь вокруг оси О, перпендикулярной к плоскости рисунка.
Свободное падение шарика обеспечивается вертикальными направляю-
направляющими (см. рисунок). Угол падения а и угол отражения р измеряются
с помощью угломера, установленного па приборе.
Из формулы D) получим:
В случае упругого удара угол падения а равен углу отражения р,
откуда k= I.
2°. Теорема об изменении главного момента коли-
количеств движения системы материальных точек в
приложении к мгновенным силам. Приращение главного
момента количеств движения системы материальных точек относи-
относительно неподвижного центра при ударе равно векторной сумме мо-
ментоп относительно того же центра импульсов внешних мгновен-
мгновенных сил: я
или в проекциях на оси декартовых координат:
560 СПР.ЦИЛЛЬМЫЕ ЗАДАЧИ ДИНАМИКИ [ГЛ XII
Та же теорема для тела, вращающегося вокруг неподвижной
оси z, выражается формулой
Итак, действие ударного импульса на тело, пращающееся вокруг
неподвижной оси, проявляется в скачкообразном изменении его уг.чо-
иой скорости.
Этой теоремой следует пользоваться в задачах об ударе по телу,
вращающемуся вокруг неподвижной оси, когда в число данных и
искомых величин входят: ударные импульсы, момент инерции тела
относительно оси вращения, углоная скорость тела в начале и в конце
удара.
Задачи с помощью теоремы об изменении глав-
главного момента количеств движения в приложении
к мгновенным силам рекомендуется решать п сле-
следующей последовательности:
1) изобразить на рисунке внешние ударные импульсы;
2) вычислить сумму моментов ударных импульсов (т. е. импульсов
всех внешних мгновенных сил) относительно оси z вращения тела;
3) подставив результат, полученный в предыдущем пункте, в уран-
пение
к-=\
определить искомую величину.
Задача 437. На рис. а изображен штамп В веса Рь коюрый
приводится в движение посредством кулака А веса Ръ вращающе-
вращающегося вокруг неподвижной оси z.>. После удара выступа кулака
о штамп в точке D штамп В поднимается, вращаясь при этом вокруг
неподвижной оси zt. После прохождения выступа кулака штамп падает
па обрабатываемую деталь Е. Оси Z\ и z2 перпендикулярны к пло-
плоскости рисунка. Расстояния точки D до этих осей вращения равны
соответственно dt и d%. В момент начала удара выступа кулака о
штамп в точке D кулак имел угловую скорость co.i0, а штамп нахо-
находился в покое. Радиус инерции штампа относительно оси z, равен р|,
р9—радиус инерции кулака относительно оси гг.
Определить угловую скорость штампа utL в конце удара, считая
d,
удар неупругим, если . =К.
Решение. Данная материальная система состоит из двух тел:
кулака А и штампа В. Рассмотрим движение каждого из тел в от-
отдельности.
Во время удара к кулаку А в точке D со стороны штампа В
приложен ударный импульс S. При этом в опоре возникает реактив-
ЬДАР
561
ный ударный импульс, составляющие которого S2 и S'.2 изображены
на рис. б.
Применим к движению кулака А теорему об изменении главного
момента количеств движения системы материальных точек в прило-
6)
- _ ¦ _ __-^—U-
~—\ ~^ I— 1-^—^
К задаче 437.
жении к мгновенным силам (относительно оси вращения гу):
В данном случае (L^a), = /г„со.20^ (^2J =/г2о).2,, где ох2, — проек-
проекция па ось z угловой скорости <о.2 кулака в конце удара, а
Следовательно,
h, (ш.2г — ш.2Ог) ^ — Sdi.
A)
562 СПЕЦИАЛЬНЫЙ ЗАДАЧИ ДИНАМИКИ [ГЛ. XIT
Переходим к рассмотрению движения штампа В. Во иремя удара
к штампу В приложен в точке D со стороны кулака А ударный
импульс S', причем на основании принципа равенства действия и
противодействия, S' = — S. При ударе и опоре возникает реактивный
ударный импульс, составляющие которого 5, и SJ изображены па
рис. в.
Применим к движению штампа В теорему об изменении главного
момента количеств движения системы материальных точек в прило-
приложении к мгновенным силам (относительно оси z{):
В данном случае (?,,), = (), так как штамп в начале удара был
в покое, (Ln)i= 1-гхЩг> где a'i.' — проекция на ось z искомой угловой
скорости о)| штампа в конце пеуиругого удара, а
Следовательно,
Учитывая, что ao = di<0,z =— Aгщ2, т. е.
щг = — ?ш1г = — Xi»u, a
исключаем из системы уравнений A) и B) величины 5 и 5" и опре-
определяем проекцию на ось z искомой угловой скорости (а1 штампа В
и конце удара:
7+М
Р Р
Так как /г, = —- р,, Угз=—а р.], то окончательно:
Задача 438. Груз веса Pt, движущийся направо по горизонталь-
горизонтальной плоскости, в момент столкновения с висящим вертикальным
стержнем ОА имеет скорость <v. Определить величину ударного им-
импульса S и наибольший угол отклонения а от вертикали стержня ОА,
который подвешен к неподвижной горизонтальной оси О, перпенди-
перпендикулярной к плоскости рисунка. Вес стержня 1\, длина стержня /. Удар
rpyja о стержень считать неунругим.
§1]
УДАР
563
Решение. Направим ось х по горизонтали направо. Данная ма-
материальная система состоит из двух тел: груза и стержня. Рассмотрим
движение каждого из тел в отдельности.
При ударе к грузу со стороны стержня приложен ударный
импульс S, направленный справа налево (см. рис. б). Применим к
Ч.
К задаче 438.
движению груза теорему об изменении количества движения материаль-
материальной точки в приложении к мгновенным силам в проекции на ось х:
В данном случае
ъ-ь=-*
0)
где vt — скорость груза в копне неупругого удара.
Рассмотрим стержень О А. При ударе к стержню О А в точке А
со стороны груза приложен ударный импульс S', причем па основа-
основании принципа равенства действия и противодействия, S' = —S. При
ударе в опоре О возникает реактивный ударный импульс, составляю-
составляющие которого S, и S2 изображены на рис. в.
Применим к движению стержня теорему об изменении главного
момента количеств движения системы материальных точек r прило-
приложении к мгновенным силам относительно оси вращения О, перпепди-
564 СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ [ГЛ. XII
кулярпой к плоскости рисунка:
В данном случае
Следовательно,
Учитывая, что vl = lwl, и |S| = |S'|, исключаем v, S и S' из си-
системы урапнений A) и B) и определяем проекцию на ось z угловой
скорости (Oi стержня ОА в конце удара:
р I-
Момент инерции стержня /Q^= „2r . Поэтому
Ударный импульс «S определяется п результате подстановки зна-
значения (о1г из C) в (I) либо в B). Находим:
С* 1 2
6 = " eiap. + p.) v-
Для вычисления наибольшего угла отклонения а стержня от вер-
вертикального положения применяем теорему оО изменении кинетической
энергии системы материальных точек:
Углоиая скорость стержня <я{ в конце удара является в данном
случае для последующего дплжения начальной, а углоиая скорость
при наибольшем отклонении равна пулю.
Работа составляющих опорных реакций Р^ и Л2 равна нулю,
работа силы тяжести />2 дается формулой A(Pi)= —PJi, где
h— -J A — cos a)
(см. рис. г). Следовательно,
-/j§! = -/i/0-cosa). D)
S И УДАР 565
Воспользовавшись формулой C) и решив уравнение D) относительно
а, получим:
З
Если бы в данной задаче не требовалось вычислить величину
ударного импульса S, то угловую скорость ш, стержня в конце пе-
уиругого удара можно было бы определить проще. Для этого, вместо
применения теорем динамики системы материальных точек к движе-
движениям груза и стержня в отдельности, можно было бы использовать
теорему об изменении гласного момента количеств движения к си-
системе, состоящей из груза и стержня:
R этом случае ударные импульсы S и У оказываются внутренними
и в урлннепие не входят, т. е. ^ тг [S (Fek)] = 0, где z—ось, про-
ходящая через точку О перпендикулярно к неподвижной плоскости.
Следовательно, LZa_ — LZl = Q, откуда Lz2= L!r Значит, имеет место
случай сохранения главного момента количеств движения системы
относительно оси z. Главный момент количеств движения системы
в начале удара ?г, = — о/, а в копне удара равен ?Ja = f--—|—- 1*)ш1г.
Приравняй эти значения LZl и LZv получим определенное выше
формулой C) значение ш1г.
3'. Потеря кинетической энергии при ударе
лвух тел. При пеупругом ударе двух тел происходит потеря ки-
кинетической энергии, которая расходуется па остаточную деформацию
и нагревание тел.
При частично упругом ударе двух тел на первом этапе при воз-
возрастании деформации кинетическая энергия переходит в другие формы
энергии. На втором этапе в процессе восстановления недеформпро-
нанного состояния снова приобретается кинетическая энергия. При
частично упругом ударе потеря кинетической энергии меньше чем
при соответствующем неупругом ударе.
При упругом ударе происходит полное восстановление недефор-
мироваппого состояния и, следовательно, потеря кинетической энергии
раина пулю.
Пусть Т\ — кинетическая энергия системы в начале удара, Т^ —
кинетическая энергия системы в копне удара, /я, и т? — массы со-
соударяющихся тел, ф[ и ф9 — скорости тел в начале удара, k — коэф-
коэффициент восстановления педеформиронанпого состояния при ударе.
Чогда потеря кинетической энергии при прямом центральном частично
566 СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ [ГЛ. XII
упругом ударе двух поступательно движущихся тел вычисляется по
формуле
При неупругом ударе k==Q и, следовательно,
При упругом ударе 6=1 и, следовательно, 7*,— Г9 = 0.
Если до удара второе тело было и покое, т. е. ^.2 = 0, то кине-
кинетическая энергия системы в начале удара раьна Ту = -j- т^щ, а по-
потеря кинетической энергии при ударе дается выражением
Т. ~ Г9 =.- A — /г2) ^— • Г,.
Решение задач на подсчет потери кинетической энергии при
ударе двух тел следует выполнять по приведенным иыше формулам.
Задача 439. а) К какому соотношению масс молота и наковальни
следует стремиться при ковке металла?
б) К какому соотношению масс копра и сваи следует стремиться
при забивке свай?
Решение, а) Обозначим: Ш\— масса молота, /и.г — масса . нако-
наковальни и покопки, т»1 — скорость молота в начале удара, скорость
наковальни в начале удара равна нулю.
Потерю кинетической энергии вычисляем по формуле
r.-r^d-^-^f^T-, ¦ A)
Так как при ковке целесообразно получить большую остаточную
деформацию отковынаемого металла, то необходимо иметь большую
потерю кинетической энергии. Для этого величина дроби ^—
/Wj —J— //(о
должна быть близка к единице, т. е. масса наковальни и поковки
должна быть значительно больше массы молота: т^^т^.
Коэффициентом полезного действия •») молота называется отноше-
отношение полезной работы, затрачиваемой на деформацию металла, к ра-
работе, затрачиваемой на поднятие молота, т. е. отношение потери
кинетической энергии при ударе к кинетической энергии системы
в начале удара:
Воспользовавшись формулой A), находим:
§ il удар 567
Так, если вес молота> равен 2 т, вес накопальни с поковкой ранен
40 т, коэффициент восстановления равен k = 0,6, то коэффициент
полезного действия т] = 0,(Н.
б) Обозначим: тх — масса копра, /я9 — масса забиваемой сваи.
Скорость и.) сваи в начале удара равна пулю. Следовательно, можно
воспользоваться формулой A).
Так как при забивке сваи следует стремиться к меньшей дефор-
деформации сваи, то необходимо иметь малую потерю кинетической энер-
энергии. Для этого величина дроби -^— должна быть близка к нулю,
т. е. масса сваи должна быть значительно меньше массы копра:
Т
Коэффициент полезного действия при забивке свай равен -ц= ..-?,
так как полезным является запас кинетической энергии, которая
остается в системе в конце удара.
Задача 440. Шар веса Pt = 2 кг, падая с высоты h=\ м на
неподвижную плиту веса /- = 20 кг, отскакивает вверх на нысоту
/г2 = 25 см. Вычислить потерю кинетиче-
кинетической энергии при ударе.
Решение. Потеря кинетической
энергии при ударе тела о неподвижную ГТ7Г^^
плоскость вычисляется по формуле ''мла
¦A)
V,
Для подсчета по формуле A) надо пред- К задаче 4-40.
варителыю найти величину коэффициента
восстановления k. Направим ось п перпендикулярно к неподвижной
плоскости.
Проекцию скорости шара их на ось п вычисляем по формуле
где проекция общей скорости и па ось п равна
Так как плита в начале удара была неподвижна, т. е. ^,„ = 0,
то ип=—'"'"'" ¦. Теперь формула B) принимает вид
"'» m1 + mt -•»•
откуда
k = — '¦ -1Л . C)
'"а '"г »in v
568
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
[ГЛ. XII
Учитывая, что шар совершает свободное падение, запишем: vln =
= Vl = [/ 2ghi. Аналогично: uin = —гга = — Y'lgK- Внося эти значе-
значения vln и н,„ в формулу C),
имеем:
, = "Ji + Hh±
m, ' m.
т„
V
или
А,'
После подстановки числен-
численных значений получим: к = 0,65.
Вычислив значение к, можно
определить потерю кинетиче-
кинетической энергии при ударе по
формуле A).
Учитывая, что v\ = 2ghi,
запишем эту формулу в виде
^1 Ь г'м
Используя численные зна-
значения, получим:
7', ~Т^=\,05 кг • м.
4°. Удар по телу, в р а-
щаютемуся вокруг не-
Гис. I/O. п о дв и ж но \\ о с и. При ударе
по телу, вращающемуся вокруг
неподвижной оси, в опорах возникают реактивные ударные импульсы S,\
и Stf. Пусть ось z подвижной системы координат, связанной с телом,
направлена вдоль оси вращения. Плоскость xz проведена через ось
вращения и центр тяжести С тела. Ось у образует вместе с осями х
и г правую систему осей координат (рис. 170). Предположим, что
ударный импульс S приложен в точке D, лежащей па оси х. (Для
этого достаточно найти точку D пересечения линии действия ударного
импульса S с плоскостью xz, провести ось х через точку D перпен-
перпендикулярно к оси вращения г и перенести ударный импульс S по его
линии действия в точку D.) Пусть, далее: OD = d, OA=a, OB = b,
-\-Sij.k, <al — угловая скорость тела в начале удара, ш.г—угловая
скорость тела п копне удара.
Для определения проекций реактивных ударных импульсов S
а '
SOx, SB ,
на подвижные оси декартовых координат,
свя-
§ 11 уя\р 569
занные с телом, вращающимся вокруг неподвижной оси г, следует
решить систему уравнений:
SAy -T SBy = MXC К* — Ш1«) — '
г, о t г / • \
A*)
(Эта система уравнений является результатом применения теорем
об изменении главного вектора количеств движения и об изменении
глаипого момента количеств движения в приложении к мгновенным
силам в проекциях на поднижиме оси декартовых координат.)
Проекции реактивных ударных импульсом на ось вращения Saz и
Sin входят только в третье уравнение системы. Поэтому может быть
вычислена только их сумма, а каждая из этих величин в отдельности
не определяется. Если же верхняя опора В выполнена в пиде под-
подшипника, то 5/)г = 0, и из третьего уравнения системы вычисляется Sa;-
Для того чтобы при ударе по телу, вращающемуся вокруг непо-
неподвижной оси, реактивные ударные импульсы ?д и Sr обращались в нуль
(что является весьма существенным при выполнении конструкций, ра-
работающих на удар), должны быть удовлетворены следующие условия:
1) ударный импульс S должен быть направлен перпендикулярно
к плоскости хг, проходящей через ось вращения и центр тяжести
тела, т. е. SX = SZ = Q и S = Syj;
2) ось вращения тела z должна быть главной осью инерции
в точке пересечения с перпендикулярной плоскостью ху, содержащей
ударный импульс S, т. е. 1хг = 1уг = 0;
3) точка приложения D ударного импульса S должна отстоять
от оси вращения z на расстоянии приведенной длины физического
маятника, ось привеса которого совпадает с осью вращения данного
тела, т. е. d = ~—.
Мхс
При отсутствии реактивных ударных импульсов SA и 5Д точка
D приложения ударного импульса 5 называется центром удара.
Решение задач об определении положения центра удара сводится
к выполнению трех указанных выше условий.
Задачи, в которых по заданным скоростям соуда-
соударяющихся тел и начале удара, силам тяжести, момен-
моментам инерции этих тел и положениям их центров тяже-
тяжести требуется определить реактивные ударные им-
импульсы, рекомендуется решать в следующем порядке:
1) направить подвижные координатные оси, связанные с телом:
ось г выбрать вдоль оси вращения, плоскость xz провести через
570 СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ |ГЛ. XII
ось вращения и центр тяжести С тела, ось х направить через точку
D пересечения линии депстиия ударного импульса S с плоскостью xz.
Ось у выбрать так, чтобы имеете с осями х и z она образовала
правую систему осей координат;
2) рассмотрев каждое из соударяющихся тел в отдельности, изобра-
изобразить импульсы внешних мгновенных сил и применить теорему об
изменении главного момента количеств движения в приложении к мгно-
мгновенным силам к движению тела, вращающегося вокруг пеподнижной
оси; в случае поступательного движения одного из соударяющихся
тел применить к этому телу теорему об изменении главного вектора
количеств движения в приложении к мгновенным силам;
3) решив систему уравнений, составленных в предыдущем пункте,
определить величину ударного импульса S в конце удара;
4) составить систему уравнений A*) применительно к телу, вра-
вращающемуся вокруг неподвижной оси;
5) решив систему уравнений A*), определить проекции искомых
реактивных ударных импульсов.
Если и условии задачи заданы ударный импульс S и угловая ско-
скорость ш.2 тела в конце удара, то второй и третий пункты решения
задачи следует опустить.
Задача 441. По телу, вращающемуся вокруг неподвижной оси,
нанесен удар, создающий реактивные ударные импульсы в опорах.
Как известно, при вращении неуравновешенного тела создаются
дополнительные силы реакций в опорах.
Можно ли найти условия, при выполнении которых ударные
импульсы в опорах и дополнительные силы реакций в опорах обра-
обратятся и нуль?
Решение. Для того чтобы дополнительные опорные реакции
обратились в нуль, ось вращения твердого тела должна быть главной
центральной осью инерции. При этом центр тяжести С лежит на оси
вращения, т. е. эксцентриситет ранен нулю:
Pt. = 0. A)
Для того чтобы ударные импульсы в опорах были равны нулю,
должны быть выполнены три условия, изложенные в обзоре теории.
Согласно третьему условию, точка приложения ударного импульса,
называемая центром удара, должна отстоять от оси вращения па рас-
расстоянии d, равном приведенной длине физического маятника, ось при-
привеса которого совмещена с осью вращения тела, т. е. d = * , где
хс—расстояние от центра тяжести С тела до оси вращения, т. е.
эксцентриситет рс. Следовательно,
'-¦к- B)
УДЛР
571
Нетрудно видеть, что условия A) и B) несовместимы, так как
при рс = 0 получим d = oo, т. е. точка приложения ударного
импульса должна быть бесконечно удалена от оси вращения, что прак-
практически неосуществимо.
Итак, избавиться одновременно от реактивных ударных импульсов
и ог дополнительных сил реакций в опорах невозможно.
Залача 442. Пуля весом Рх попадает в центр тяжести С непо-
неподвижной круглой мишени веса Рп и радиуса г со скоростью ф1; направ-
направленной перпендикулярно к плоскости ми-
мишени. Мишень может вращаться вокруг не-
неподвижной вертикальной оси, лежащей в ее
плоскости и отстоящей от центра тяжести С
мишени на расстоянии, равном половине ра-
радиуса. Определить величины реактивных
ударных импульсов п подпятнике А и под-
подшипнике В, считая удар неунругим: АС =
=ВС= h. Мишень считать однородным
круглым диском.
Решение. Выбираем подвижные оси h
координат, связанные с вращающейся ми-
шеныо; ось z совмещаем с осью вращения.
Плоскость xz проводим через ось враще-
вращения z и центр тяжести С мишени. Ось х
направляем через центр тяжести С, в кото-
котором приложен ударный импульс S. Ось у выбираем так, чтобы вместе
с осями х и z она образовала правую систему координат.
Изображаем ударные импульсы внешних сил: S — ударный им-
импульс, приложенный в центре тяжести С мишени, SAxt S4)i, SAit SHitt
SBv — составляющие реактивных ударных импульсов.
Так как' величина ударного импульса S и угловая скорость ш.г
мишени и конце пеупругого удара неизвестны, го для определения
их рассмотрим в отдельности движение пули и мишени.
К пуле приложен ударный импульс S' со стороны мишени. При-
Применим к движению пули теорему об изменении количества движения
и приложении к мгновенным -силам:
К задаче 442.
%
(О
где Vi—заданная скорость пуля в начале удара, %<г — неизвестная
скорость пули в конце удара.
Запишем для движения мишени теорему об изменении главного
момента количеств движения в приложении к мгновенным силам отно-
относительно оси z:
572 СПЕЦИАЛЬНЫ?. ЗАДАЧИ ДИНАМИКИ [ГЛ. XII
В начале удара мишень была в покое, т. е. ш^ = 0. Момент инер-
инерции мишени относительно оси z равен
'* — ^+ g\2
Следовательно,
S
Учитывая, что -^-@2, = ^, находим:
?»<=§•
Решив систему уравнении (I) и B) (|S| = |S'|), определим .S1
И V-i.
'IP P
s=-^v ' I3)
Так как v.x = -j щ, то
2Р,я,
Для определения величин составляющих реактивных ударных им-
импульсов запишем для мпшепи систему уравнений A*):
SAV ~\~ Sllv = МХС ((()^ — 101г) — Sy, |
^ A)
Ил* = 52rf - /„ («fa - со, J.
Ударный импульс S параллелен оси у. Следовательно,
5^ = 0, 5, = 5, 5, = 0. E)
Координаты центра тяжести С мишени, лежащего па оси х,
равны:
хс=Г2' Ус = 0- F)
Опора В является подшипником, т. е.
5я, = 0. G)
Ось у перпендикулярна к плоскости материально!! симметрии xz
мишени. Следовательно,
/,, = 0. (8)
§ i] удар 573
Ось х является осью симметрии мишени. Следовательно,
1хг==0. (9)
Угловая скорость мишени в начале удара равна нулю:
(Hi — O. A0)
Воспользовавшись формулами C), D), E), F), G), (8), (9) и A0)
и учитывая, что a = b = h, представим систему уравнений (I) в виде:
sir + sn=o, )
sA,= o, \ (»)
•V--V=0'
Решив эту систему уравнений, находим искомые величины со-
составляющих реактивных ударных импульсов и подпятнике А и под-
подшипнике В:
0 5
*Вх — и' *Ву — -2ё (Р, + 2Р„)'
Задача 443. В какой точке мишени, рассмотренной в предыду-
предыдущей задаче, должен быть приложен ударный импульс S, для того
чтобы он не передавался на опоры?
Решение. Для того чтобы ударный импульс 5 не передавался
на опоры, должны быть выполнены три условия:
1) ударный импульс S должен быть направлен перпендикулярно
к плоскости, проходящей через ось вращения z и центр тяжести
тела. Это условие удовлетворяется;
2) ось вращения z должна быть главной осью инерции в точке
пересечения с перпендикулярной плоскостью, в которой лежит удар-
ударный импульс S. Это условие также удовлетворяется, так как \хг =
= /„ = 0;
3) точка приложения ударного импульса S, называемая центром
удара, должна отстоять от оси вращения z на расстоянии d, равном
приведенной длине физического маятника, ось привеса которого сов-
совпадает с осью вращения тела: d — j^r—.
Р г- Р г
Так как 1г = -^—, М=— и хс= .г, то d=r.
Итак, ударный импульс S должен быть приложен в точке, от-
отстоящей от оси вращения z на расстоянии т.
574
СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ
[ГЛ. XII
Эют результат можно непосредственно получить из решения
предыдущей задачи.
Действительно, если расстояние от точки приложения ударного
импульса S до оси вращения г вместо -^ обозначить d, то vi = du)i
и формулы C) и D) предыдущей задачи принимают вид
о
A)
О).2 = ;
27V
Эти значения S и ш.2 следует подставить в правую часть пторого
уравнения Системы (I) и потребовать, чтобы она обратилась в нуль
(при этом правые части всех уравнений системы A1) обратятся
в нуль и, следовательно, реактивные ударные импульсы будут ранни
нулю):
Afjfc(Mb —ш„)-5у = 0. C)
После подстановки в уравнение C) значений S и ш.2 из формул
A) и B) и решения уравнения C) относительно d (при этом сле-
Y Р
дует иметь в виду, что хс = ,,-, УИ= — и оI = 0), находим онре-
о
деленное выше значение: d = г.
Задача 444. Прямой однородный круглый цилиндр веса Р,
длины 11 и с радиусом основания, рапным г, может вращаться во-
вокруг горизонтальной пси г, проходящей через его центр тяжести О.
S,
К задаче 444.
Ось z образует с осью симметрии цилиндра С угол а. Плоскость xz
совмещена с плоскостью материальной симметрии цилиндра. По бо-
5 1] УДАР Г) 7 5
копой поверхности цилиндра, находившегося п покое, наносится удар,
причем ударный импульс 5 = — Sj. Томка D приложения ударного
импульса S лежит на боковой поверхности цилиндра в плоскости ху,
причем лгй = 0,5 г. Определить реактивные ударные импульсы в под-
подшипниках А и В, считая удар неупругим; АО = 05=/г. Подвижные
оси координат xyz связаны с цилиндром.
Решение. Изобразим импульсы внешних мгновенных сил: S—¦
ударный импульс, приложенный к боковой поверхности цилиндра,
^лх' ^л\'> ^Пх' S[}V — составляющие реактивных ударных импульсов
в подшипниках А и Б.
Так как угловая скорость щ цилиндра в конце удара не задана,
то для ее определения применим к движению цилиндра теорему оо
изменении главного момента количеств движения в приложении
к мгновенным силам относительно оси вращения z\
2 - О)
* = I
В данном случае
п
Поэтому уравнение A) принимает вид
Pr- Sr
откуда
Для определения величин составляющих реактивных ударных им-
импульсов составим для цилиндра систему уравнений A*):
SA -j- S/lv = Л1хс (ш.2г — oj,z) —,
(I)
SAya — SISyb = — JX! ^iz — <*u\
— SAxu -Г Sl,xb = S>d ~ ]У (Wfe — Mlr)
По условию S= — Sj. Следовательно,
5^ = 0, Sv = — S, Sz = 0. C)
Центр тяжести С цилиндра расположен в начале координат О,
т. е.
хс = 0. D)
576 СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ [ГЛ. XII
Ось у перпендикулярна к плоскости материальной симметрии xz
в точке О, т. е.
/уг = 0. E)
Центробежный момент инерции цилиндра 1хг был вычислен в ре-
решении задачи 314:
/« = ?(?-?) sin 2а. F)
В начале удара цилиндр находился в покое, т. е.
«, = 0. G)
Опоры А и В являются подшипниками, поэтому
SAt = SBt = 0. (Я)
Воспользовавшись формулами B) — (8) и учитывая, что a = b — h и
rf —хо— .., запишем систему уравнений A) » виде:
Решив эту систему уравнений, находим искомые проекции со-
составляющих реактивных ударных импульсов и подшипниках А и В:
SAX = 0. SAx =- - |. [^ (? _ .J) s!d 2. + 1J,
§ 2. Динамика материальной точки переменной массы
Если масса материальной точки изменяется в результате пепре-
рыпного присоединения или отделения частиц бесконечно малой
массы, то уравнение движения этой точки имеет вид (уравнение
И. В. Мещерского)
Здесь т — мгновенное значение массы материальной точки; <v —
скорость материальной точки; и — скорость присоединяющихся или
§ 2[ ДИНАМИКА МАТЕРИАЛЕ.НОЙ ТОЧКИ ПЕРЕМЕННОЙ .МАССЫ 577
уходящих частиц; F—главный вектор внешних сил, действующих
па точку переменной массы: ф=--- (и — ii) — реактивная сила.
Задача 445. Реактивный снаряд летит по прямой. Относительная
скорость истечения газов из сопла снаряда постоянна и равна с.
Зная массу начального запаса горючего mf и массу корпуса сна-.
ряда т0, определить его скорость в момент сгорания последней пор-
порции горючею. Силой сопротивления воздуха пренебречь; в началь-
начальный момент скорость снаряда равнялась пулю.
Решение. Масса снаряда т и данный момент равна сумме пе-
переменной массы горючего w, и массы корпуса снаряда
т = тл — т,;
так как //?0 постоянна, то
dm dm,
dt (IL '
Относительная скорость истечения газоп
С —- U — <V.
Запишем теперь уравнение И. В. Мещерского и проекции из
ось х (вдоль которой летит снаряд):
i i \ uvx dm, dm, ,,ч
(»>o + Mi) dt=c'~dt' = ~c~dti' ( }
ибо
где с—модуль пектора относительной скорости.
Преобразуя A), получаем уравнение с разделяющимися перемен-
переменными:
, dm.
dvx = — с —¦—,
решая которое, имеем:
vx = — с In (т0 -|- /«,) ~- D.
Постоянную интегрирования D определяем из начального усло-
условия: при ? = 0 vx = 0, ml = ni\, и окончательно получаем:
ух=с1ппи±"Ч B)
В момент окончания сгорания горючего /«i = 0 и
(формула К. Э. Циолковского).
19 Теоретическая механика, том [I
578 СПЕЦИАЛЬНЫЕ ЗАДАЧИ ДИНАМИКИ (ГЛ. XII
Задача 446. Висящая ни нити однородная материальная точка,
япляющаяся в начальный момент времени шариком радиуса г0, имею-
имеющим массу /и0) качается без трения и постепенно обмерзает.
Составить и решить уравнение движения маятника, предполагая,
что вследствие обмерзания материальная точка испытывает непре-
непрерывное приращение массы, пропорциональное в единицу времени
площади поверхности шарика (а — коэффициент пропорциональности).
Массой нити пренебречь.
Решение. Уравнение движения маятника переменной массы
получим, приравняв произведение мгновенного значения момента инер-
инерции маятника относительно оси подвеса / = /и/9 на проекцию углового
d\
ускорения ег = т-J, где <р — угол отклонения нити от вертикали,
сумме моментов относительно оси подвеса силы тяжести и реактив-
реактивной силы:
Здесь второе слагаемое представляет момент реактивной силы Ф,
причем в нашем случае ее модуль
dm \d<f
~di I \di
ибо при обмерзании скорость присоединяющихся частиц равна пулю.
Замечая, что массы шарика в разные моменты времени относятся
как кубы радиусов, имеем:
¦ г\*
т. е.
г\з
'о /
dm „ г- dr
Тогда A) принимает вид
\3 d-<f I г \з , . ,„ г2 dr
По условию приращение массы, отнесенное ко времени, т. е. про-
dm
изводная -ГТ-, пропорциональна площади поверхности шарика в дан-
данный момент:
S 2] ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ ПЕРЕМЕННОЙ МАССЫ 579
Сравнивая B) и C), получаем:
'dt—Зто—*'
где f — новая постоянная.
После интегрирования имеем:
r = ro + Tt. D)
Е^водя вместо t в качестве независимой переменной величину
t=l-|--ltf, перепишем A) в виде
Общее решение уравнения E) может быть выражено через функ-
функции Бесселя и Неймана *) и записано в форме
Постоянные Ci а С2 подлежат определению из начальных ус-
условий.
*) См., например, Е. Я н к е и Ф. Эмде, Таблицы функций с формулами
и кривыми, Гостехиздат, 1948.
ГЛАВА ХШ
ТЕОРИЯ МАЛЫХ ДВИЖЕНИЙ СИСТЕМЫ
С КОНЕЧНЫМ ЧИСЛОМ СТЕПЕНЕЙ СВОБОДЫ.
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И ДВИЖЕНИЯ СИСТЕМЫ
§ 1. Устойчивость равновесия системы
Равпопесие системы материальных точек называется устоНчипым,
если после сообщения точкам системы весьма малых начальных откло-
отклонений от положения равновесия и весьма малых начальных скоростей
система в споем последующем движении будет весьма мало откло-
отклоняться от рассматриваемого равновесного положения.
Ограничимся изучением устойчивости равнопссин системы, подчи-
подчиненной голономным, стационарным и идеальным связям. Если такая
система находится в консервативном силовом поле, то устойчивость
равновесия системы определяется согласно теореме Лагранжа—Ди-
Лагранжа—Дирихле или теоремам Ляпунова. Теорема Лаграижа—-Дирихле гласит:
если в положении равновесия системы потенциальная энергия имеет
минимум, то положение равновесия устойчиво.
Потенциальная энергия системы может быть разложена в ряд по
степеням обобщенных координат. Это разложение начинается с чле-
членов не ниже второго порядка относительно координат, если за начало
отсчета координат принято положение равновесия и потенциальная
энергия в положении равновесия считается ранной пулю
П = —17—^ • --' %( д'П -\ -'- -I-'—^ 21-1- A*)
Если в положении равновесия значение потенциальной энергии не
является минимальным, то для суждения об устойчивости равновесия
следует применить теоремы А. М. Ляпунова, которые формулируются
следующим образом.
а) Равпопесие системы неустойчиво, если отсутствие минимума
потенциальной энергии может быть определено по членам второго
порядка и разложении потенциальной энергии (I*), без рассмотрения
членов пыеших порядков.
§ и
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ СИСТЕМЫ
581
fi) Равновесие системы неустойчиво, если потенциальная энергия
имеет и положении равновесия максимум, который может быть уста-
установлен из рассмотрения членов паимизшего порядка, дейстнительно
имеющихся в разложении нотепиналыюй энергии в ряд A*).
При решении задач па устойчивость равновесия
системы с одной степенью свободы, находящейся
под действием потенциальных сил, рекомендуется
следующий порядок д е и с т в и и:
1) выделяем тело пли систему тел, равновесие которых подлежит
рассмотрению, и выбираем сбебдепную координату, задание которой
определяет положение системы;
2) составляем гыраженне потенциальной энергии сипемы;
3) вычисляя производную от потенциальной энергии системы по
обобщенной координате п приравнивая ее пулю, находим возможные
положения равновесии системы;
4) вычисляя значение mopoft ирокзводгой от потенциальной энер-
энергии по обобщенной координате для каждого из возможных положений
равновесия, находим знак этой производной, но которому судим об
устойчивости.
Задача 447. Однородный призматический брус веса Р квадратного
сечения со стороной, равной а, опирается своими боковыми гранями
па параллельные ребра двух опор, лежащие в одной горизонтальной
плоскости на расстоянии b одно эт другого, причем /><[я|/ (рис. а).
К задаче 417.
Предполагая грани бруса гладкими, найти возможные положения
равновесия и опорные реакции, соответствующие этим положениям.
Определить условия устойчивости положении равновесия.
Решение. Рассмотрим равновесие призматического бруса, нахо-
находящегося в консервативном силовом поле тяжести. Отбрасываем мыс-
мысленно опоры и заменяем их действие реакциями Ra и Rn (рис. б).
582 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Выбираем далее обобщенную координату, определяющую поло-
положение бруса. За обобщенную координату принимаем угол 6, образо-
образованный диагональю вертикального поперечного сечения бруса с верти-
вертикалью.
Находим высоту п центра тяжести над прямой АВ (рис. б):
u = -j=cosQ — bs\n%cosQ0, A)
или
zi = — - cos 0 sin 26n. 1'2)
/2 2
Но углы 9 и 00 связаны зависимостью
2(H = |-2е C)
и, следовательно,
п = —. cos 8 — A sin 2 f? — 6^,, D)
уо 2 И I
или
н = -A- cos 8 — A cos 26. E)
Так как потенциальная энергия силы тяжести равна произведению
веса на высоту
10, учитывая E), имеем:
\\ = Р {-- cos б — A Cos 26V
I (аходи.м производную от П по 6 и приравниваем ее нулю:
}. ЛХУ={ ^г.А-ЧЬ cos 6^1 sin 6 = 0. ((>)
Р dd \ у-1 ' 1 х
Из этого уравнения следует, что возможны два положения равнове-
равновесия. Первое положение равновесия будет при sin 0 = 0, или 0=0.
Второе положение равновесия будет при
— Ч-2й cos 6=0, G)
У'1
или
(«)
Ято положение равновесия возможно, если
l^kbV*. (9)
§ 1| УСТОЙЧИВОСТЬ РАВНОВЕСИЯ СИСТЕМЫ 583
Найдем теперь вторую производную:
Для решения вопроса об устойчивости равновесия следует найти знак
этой производной для каждого из возможных положений равновесия.
В первом положении 0 = 0, = О. Подставляя это значение в уравне-
уравнение A0), имеем:
}-.dJ =_«+2Ь (II)
Следовательно, по теореме Лагрлнжа— Дирихле это положение рав-
равновесия устойчиво, если
В противном случае положение равновесия неустойчиво.
Но втором положении равновесия
A3)
Подставляя это значение угла в уравнение A0), находим:
~Р ' <263 (о =еа Ь~\4 )' * '
Но, согласно (9),
Следовательно, заключаем, что
A6)
т. е. положение равновесия 8 = 92, по второй теореме Ляпунова, не-
неустойчиво. Исключение составляет случай, когда 0 = 0 и
~ — 2й9 = 0, A7)
что соответствует первому положению равновесия, рассмотренному
ранее.
Возможные положения равновесия твердого тела могут быть опре-
определены и другим путем. Составим три уравнения равновесия для про-
произвольного положения бруса (рис. б), определяемого углом 6.
Первое уравнение — равенство нулю суммы проекций всех сил на
горизонтальную ось:
584 УСТОЙЧИВОСТЬ РЛПНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. ХШ
Второе уравнение — равенство нулю суммы проекций всех сил па
вертикальную ось:
/?л sin в0 -|- ^я cos в0 — Я= 0. A9)
Третье урапнепие — равенство нулю суммы моментов сил относительно
точки А:
RB¦ b cos 00 — р(~ sin 0 -f b sin26„) = 0. B0)
Из уравнений A8) и A9) находим:
Ru = P cos 60. B1)
Подставляя это знамение п уравнение B0), имеем:
Pb cos* % — pf ф, sin 0-\-bs\n4u) = 0, B2)
или
?cos200 — -^r sin 0 = 0, B3)
*-— o\ j- sin O=0, B4)
b sin 20 ^sin0==0 B5)
и окончательно
sin 0 hb cos 0 ^-) = 0, B6)
откуда находятся значения 0, соответствующие диум возможным поло-
положениям равновесия:
1) sin 0 = 0 и, следовательно, Q = Oi = Q;
2) cosO = -^-t и, следовательно, 6 = 02 = arccos -^- • . ).
Первое решение соответствует симметричному положению бруса,
при котором его грани наклонены под углом 45° к горизонту.
Второе решение возможно, если а<^1Ь у/' 1. При a = 2ftj/2 на-
находим cos02=l, т. e. sinfl.2 = O, и мы возвращаемся к первому
случаю.
Находим значения реакций и первом возможном положении равно-
равновесия:
RA==Ra=Vlp- B7)
I 21 СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С 1 СТЕПЕНЬЮ СВОБОДЫ 585
во втором положении равновесия:
Ra = -|f V№ — aj/ 8b> — a1 P,
Сопоставляя оба способа решения, видим, что первый способ
позволяет прямым путем определить возможные положения рашюиесия
системы и характер устойчивости этих положений равновесия. Одна-
Однако этот способ не приводит к нахождению реакций опор. Второй
способ позволяет непосредственно определить возможные положе-
положения равновесия системы и соответствующие им реакции опор, по не
оценивает устойчивости равновесия системы и характер устойчивости
этих положений равновесия.
Конечно, после определения реакций и положений равновесия по
этому способу для ответа на вопрос об устойчивости равновесия
надо вернуться к теореме Лаграшка — Дирихле.
§ 2. Свободные колебания системы с одной степенью свободы
Механическая система называется системой с одной степенью сво-
свободы, если ее положение в пространстве может быть однозначно
определено заданием одной величины q, называемой обобщенном ко-
координатой. Движение системы в пространстве при этом описывается
зависимостью обобщенной координаты от времени.
Принимая положение устойчивого равновесия за начало отсчета
обобщенной координаты и за нулевой уровень потенциальной энергии,
рассмотрим малые движения системы около этого положения равно-
равновесия. Отклонение системы от положения равновесия при таком вы-
выборе начала отсчета будет определяться значением обобщенной коор-
координаты.
Полагая при составлении дифференциальных уравнений малых дви-
движении обобщенные координаты (отсчитываемые от положения равно-
равновесия) и обобщенные скорости малыми величинами, ограничимся в диф-
дифференциальных уравнениях движения линейными членами. Этот прием,
заключающийся в отбрасывании в нелинейных дифференциальных
уравнениях членов, содержащих квадрат и более высокие степени
обобщенных координат и скоростей, называется линеаризацией ураи-
ненип. Такая линеаризация, естественно, в известной мере искажает
действительную картину движений, однако чем меньше отклонения
системы от положения устойчиюго равновесия, тем точнее будут
описывать линеаризованные уравнения движение системы. Линеариза-
Линеаризация дифференциальных уравнении позволяет получить замкнутое реше-
решение для таких систем, для которых нахождение интегралов точной,
586 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. ХШ
нелинейной системы уравнений в конечном виде, как правило, невоз-
невозможно.
Удобным способом составления дифференциальных уравнений
малых колебаний системы является использование уравнений Лаграпжа.
Эти уравнения для системы с одной степенью свободы имеют вид
d fdT\ дТ_
где Т—кинетическая энергия системы, выраженная через обобщенную
координату q и обобщенную скорость q; Q — обобщенная сила.
Кинетическая энергия системы, подчиненной стационарным связям,
выражается через обобщенные координаты и скорости формулой
Т=±Л(д)?, B*)
где А (<у) является положительной функцией обобщенной координаты q.
Далее, для линеаризации выражения кинетической энергии разлагаем
A (q) в ряд Маклорена
^<79+>.. (з*)
Внося это значение в формулу B*), имеем:
Т= 1 А @) if -f \ [а> @) q + ^p- q* +...] 7а- D*)
Тогда, полагая <? и q малыми величинами, приближеиЕЮ принимаем
T=~A@)p=~aif, (Г)*)
где для краткости постоянная Л @) обозначена а.
Эта постоянная всегда положительна. Ее называют инерционным
коэффициентом. Для линейных обобщенных координат инерционный
коэффициент а имеет размерность массы, для угловых координат —¦
размерность момента инерции твердого тела.
Потенциальная энергия системы является функцией обобщенной
координаты
F*)
Разложим эту функцию в ряд Маклорепа около положения устойчи-
устойчивого равновесия
П:Г1«Ч- G*)
В этом выражении
П@) = 0, (8*)
S 2| СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С ! СТЕПЕНЬЮ СВОБОДЫ 587
так как положение равновесия выбрано за нулевой уровень потен-
потенциальной- энергии. Обобщенная сила в положении равновесия также
равна пулю, следовательно,
(f\ =0, (9*)
и поэтому ряд G*) начинается с. третьего слагаемого. Отбрасывая
члены более высокого порядка и обозначая для краткости П"@) = с,
имеем:
Щч)=\сЯ\ A0*)
где постоянная с называется квазнупругим коэффициентом. В случае
устойчивого равновесия с^>0. Внося значения кинетической E*) и
потенциальной A0*) энергий в уравнение Лагранжа A*), получаем
дифференциальное уравнение малых свободных колебаний системы
с одной степенью свободы
aq-\-cq = 0. (N*)
Это уравнение имеет структуру, аналогичную дифференциальному
уравнению свободных колебаний материальной точки, возникающих
под действием линейной восстанавливающей силы. Общий интеграл
уравнения A1*) имеет вид
<?= Л sin (« + *), A2*)
где для краткости обозначено k'1 — —. Здесь А — амплитуда колеба-
колебаний, а — начальная фаза, kt-\-a — фаза колебаний, k — частота коле-
колебаний.
Амплитуда и начальная фаза колебаний определяются по началь-
начальным условиям. Обозначая начальные значения обобщенной координаты
и ее производной при ^ = 0 через <7 = <7о> q = l/0, имеем:
У + % ^. A3*)
Период колебаний
Свободные, или, иначе, собственные колебания системы, опреде-
определяемые уравнением A2*), являются гармоническими колебаниями. Их
частота и период не зависят от начальных данных—это свойство
называется изохронностью малых колебаний.
Следует заметить, что дифференциальное уравнение свободных
колебаний A1*) может быть, конечно, составлено и без применения
уравнений Лагранжа.
588
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ |ГЛ. XIII
При решении задач па свободные колебания си-
системы с одной степенью свободы рекомендуется сле-
следующий порядок действии.
Первый способ — применение уравнений Л а г р а и ж а:
1) выбираем обобщенную координату q;
2) составляем выражение кинетической энергии Т;
3) находим потенциальную энергию П (только в случае, если си-
система является консервативной) или вычисляем значение обобщенной
силы;
4) подставляя 7 и И (или выражение обобщенной силы) в урав-
уравнение Лагранжа, получаем дифференциальное уравнение малых ко-
колебаний;
5) интегрируя это уравнение и определяя произвольные постоян-
постоянные интегрирования, находим уравнение движения системы;
0) определяем период колебаний и другие искомые величины.
Второй способ — применение ос по в"и ого уравне-
уравнения динамики или одной из общих теорем динамики
системы:
1) исходя из условий задачи, выбираем путь составления диф-
дифференциального уравнения — основное уравнение динамики, теорему
о движении центра инерции, теорему об изменении кинетической
энергии, теорему об изменении главного мо-
момента количеств движения;
2) применяя избранную теорему, составляем
дифференциальное уравнение малых колебаний
системы;
3) интегрируя это дифференциальное урав-
уравнение, определяем по начальным данным произ-
произвольные постоянные интегрирования;
4) находим далее период колебаний и осталь-
остальные искомые величины.
Задача 448. Груз веса Р подвешен к не-
нерастяжимой нити АИ, перекинутой через блок
с неподвижной осью О. Вес блока F. Его масса
распределена равномерно по поверхности круга
радиуса г. Конец нити В прикреплен к верти-
вертикальной пружине, коэффициент жесткости ко-
которой равен с. Определить колебания груза,
если в начальный момент груз находился в покое, его вес уравно-
уравновешивался натяжением пружины и ему сообщили начальную скорость
фи, направленную по вертикали пниз. Трением между осью блока и
подшипниками пренебречь. Весом нити пренебрегаем.
Решение. Воспользуемся уравнениями Лаграпжа второго рода.
Выбираем ось х с началом в положении равновесия груза и направ-
направляем ее по вертикали вниз. Тогда координата х груза в произволь-
К задаче 448.
§ 21 СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С I СТЕПЕНЬЮ СВОБОДЫ 589
ныИ момент времени полностью определяет положение системы и
может быть принята за обобщенную координату.
Кинетическая энергия системы складывается из кинетической энер-
энергии груза и кинетической энергии блока:
Напоминаем, что /, = —=:—.
Скорость груза равна по величине скорости точки па ободе
блока
л- = г-(о,. B)
Следовательно, окончательно выражение кинетической энергии си-
системы через обобщенную скорость принимает вид
Для определения обобщенной силы дадим системе позможное пе-
перемещение ох и состапим элементарную работу задаваемых сил.
Элементарная работа складывается из работы силы тяжести груза и
работы упругой силы пружины
= (Р — с\ — с-х)Ьх = — сх-Ьх, D)
ибо в положении равновесия с\-=Р. Буквой Д обозначено статиче-
статическое удлинение пружины. Обобщенной силой является коэффициент
при возможном перемещении Ьх в выражении для элементарной ра-
работы
Q=r — ex. (б)
Заметим, что в этой задаче обобщенная сила Q может быть легко
вычислена и другим путем. Составим выражение потенциальной энер-
энергии системы, выбрав за нулевой уровень положение равновесия
груза Р. Тогда
1
и обобщенная сила равна
ц— дх— сх,
что совпадает с E).
Составляем уравнение Лагранжа. Так как
дТ !п . F\Jt дТ
то
590 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
ил»
Решение этого однородного линейного дифференциального уравнения
с постоянными коэффициентами имеет вид
x = asin(kt-\-$, (9)
где частота k находится из равенства
<% (\Q\
Произвольные постоянные интегрирования аир определяются из
начальных условий:
при ? = 0 лго=О, jco = ifo. A1)
Подставляя эти значения в (9), находим:
0 = asinp или р = 0. A2)
Далее, из (9) имеем:
x — ak cos kt, A3)
и, следовательно, при
= ak или а — -?. A4)
Внося значения произвольных постоянных в (9), получаем оконча-
окончательно:
x = v°smkL A5)
R
Период свободных колебаний груза
Задача 449. Полушар веса Q и радиуса г удерживается в равно-
равновесии на абсолютно гладкой горизонтальной плоскости нитью АВ.
При этом плоская часть поверхности полушара составляет угол т.
с горизонтом (рис. а). Определить после обрыва нити АВ скорость
центра О и ее максимальное значение, наибольшее давление полу-
полушара на горизонтальную плоскость. Найти также, полагая угол а ма-
малым, приведенную длину эквивалентного математического маятника.
Решение. После обрыва нити (рис. б) на полушар действуют
две силы, вес Q и реакция гладкой плоскости N. Обе силы направ-
направлены по вертикали. Согласно теореме о движении центра инерции
ускорение центра тяжести С будет также направлено вертикально.
Так как начальная скорость точки С, так же как и остальных точек
полушара, равнялась нулю, то центр инерции будет двигаться прямо-
i 21
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С I СТЕПЕНЬЮ СВОБОДЫ
591
линейно по вертикали. Центр полушара О находится от гладкой пло-
плоскости на постоянном расстоянии г. Следовательно, точка О переме-
перемещается по горизонтальной прямой, параллельной опорной плоскости.
Таким образом, скорость точки С направлена по вертикали, скорость
точки О — по горизонтали. Восставляя к скоростям этих двух точек
перпендикуляры, находим мгновенный центр скоростей с?5.
D
б)
К задаче 449.
Применяя теорему об изменении кинетической энергии к переме-
перемещению полушара из начального положения, определяемого углом а,
в произвольное положение (угол 9). имеен!, обозначая ОС через /:
1
— Igb<f* = mgl(cos cp — cos a). A)
В левой части равенства стоит выражение кинетической энергии
в конце перемещения (в начальный момент кинетическая энергия полу-
полушара равнялась нулю, так как он находился в покое). В правой части
подсчитана работа силы тяжести при переходе полушара из началь-
начального положения в конечное. Работа реакции N равна нулю, так как
эта реакция направлена перпендикулярно к перемещению точки D.
Момент инерции полушара относительно мгновенного центра ско-
скоростей 3* может быть выражен па основании теоремы Штейнера сле-
следующим образом:
Таким образом, Jgs, является известной функцией угла 9- Опре-
Определим /с — момент инерции полушара относительно горизонтальной
оси, проходящей через центр инерции и перпендикулярной к пло-
плоскости чертежа. Момент инерции однородного шара 2/0 относительно
любой центральной оси равен
9 9
где М = 2т — масса однородного шара.
592 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Тогда момент инерции однородного полутара относительно гори-
горизонтальной оси, перпендикулярной к плоскости чертежа и проходя-
проходящей через точку О, будет
т 2 i
/о= 5 mr ¦
Расстояние центра инерции полушара от точки равно /=--г. Вос-
Воспользовавшись теоремой Штейпера, находим:
/с = /о — ml* -= -.-¦ ""¦"' — ..- mfl = ,,.,^ mr*. C)
Внося это значение в формулу B), находим:
I& - II, mr* Ч- mf- sin5 о = ml* (g -f sin3 ?). D)
\45 ' T/
Обозначая для краткости j=^s2, из A), име;м:
) —COS a)
Скорость точки О — центра иолушара равна по величине
ZU = OP'iH., = l COS а- о = -]т- Г COS Э- ф =
1 , /г; ¦ -1 /cos о-cos а ,.,ч
= , )/,igr cos ?y s^.sma? • F)
Скорость точки О будет максимальной при 3 = 0
1 , г г, ¦ / 1 — cos а т / 1.ЧГ) . а _.
*0ггии=-тК J?r |/ ¦ ^ = |/ 16fi^rSin ¦ (?)
Для определения давления полушара па горизонтальную плоскость
составим дифференциальное уравнение днпжения центра инерции
в проекции на вертикальную ось у:
wyc = l\'—Q. (8)
С другой стороны, ордината центра инерции равна
ус = г — I cos у. @)
Вычисляя вторую производную от у , имеем:
Пользуясь E), находим вторую ироизиодпую от угла о по вре-
времени
S — _ Я. sin о s4- ' -cos-? — '1 cos у cos а
' / ' (s- -f- sin- уK '
§ 2| СВОГЮДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С I СТЕПЕНЬЮ СВОБОДЫ 593
Внося в ураинеиие A0) значения первой и второй производнмх от
углл со и подстаиляя знамение уг в (8), после несложных преобразо-
преобразований находим:
N = г^—, т.—т, (s4 -- 2s9 — s9 • sin'1 со — 2s2 cos о ¦ cos a).
Учитывая, далее, равенства C) и D), получаем окончательно
Ar= Q -?- [L -!- ml1 A -- cos2 ? — 2 cos <? cos a)]. A1)
Наибольшее дапление полушара па плоскость будет при э = 0
= Q 1 -I—^ sm^ -9- = Q 1 -1- -= -s!ni Т | A 2)
Дифференциальное уравнение колебаний полушара находится из
A) дифференцированием но времени
или
/^ср-|- ml* sin cp cos cp- cp9 = — mgl sin cp. A4)
Для перехода от составленного уравнения к уравнениям малых
движении подсчитаем нее члены с точностью до иеличип первого
порядка малости включительно Получим:
/сср -(- tngl<? = 0. A5)
Приведенная длина эквивалентного математического маятника
/ — ^.г <\в\
'прив [20'• *• и>
Переходим ко второму сгособу составления дифференциального
уравнения малых колебаний при помощи уравнении Лаграижа. Выби-
Выбираем угол 9 за обобщенную координату системы. Тогда кинетическая
эиер! ия системы может быть представлена формулой
Т= у 1 д*§1 == у (/с -•- mP sin- cp) cp'2. A7)
Для составления урашаениИ Лаграижа вычисляем
дТ
и далее
-~ ~ = (Гс -L ot/j sina cp) cp -L- ф3 • wz/2 ¦ 2 sin cp cos cp. A9)
694 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Производная от кинетической энергии по обобщенной координате
будет:
¦— = тР • <р2 sin <p cos <p. B0)
Для нахождения обобщенной силы даем системе возможное пере-
перемещение 8ср и вычисляем работу всех сил на этом перемещении
Qbtp = mgl [cos (<p -f- Вер) — cos 9] *=« — mglsln 9 Stp. B1)
Ввиду малости 8ср принято sin S9 *=« S<p, cos 8<p^« 1. Внося полученные
значения в уравнение Лагранжа:
Л д1-дТ-п
dt dq dq—У>
находим:
(!с -f- ml1 sin2 9) «р -г w/Ч2 sin "Р cos ? = — OT^ sln Ъ
что соответствует уравнению A4), выведенному ранее другим путем.
Первый метод решения данной задачи несколько быстрее ведет
к цели, но правильный выбор той или иной общей теоремы дина-
динамики существенно зависит от содержания задачи и требует некото-
некоторого навыка. Второй путь — составление уравнений Лагранжа — не-
несколько более длинный, но является универсальным способом, при-
применимым к любым системам, подчиненным идеальным голопомпым
связям.
§ 3. Свободные колебания системы с двумя степенями свободы
Рассмотрим малые колебания механической системы с двумя сте-
степенями свободы, подчиненной голоно.мным, идеальным и стационарным
связям. Обозначим обобщенные координаты, определяющие положе-
положение системы в пространстве, через qf, qt. Кинетическая энергия та-
такой системы будет однородной квадратичной формой обобщенных
скоростей
[Aq\ + '2A + A\\ A*)
В етой формуле коэффициенты Ли, А и, Л22 являются функциями
обобщенных координат.
Положение устойчивого равновесия, около которого происходят
малые движения системы, примем за начало отсчета обобщенных
координат. Следовательно, в положении равпонесия все обобщенные
координаты равны пулю. Раскладываем каждый коэффициент о ряд
Маклорепа по степеням обобщенных координат:
§ 31 СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С 2 СТЕПЕНЯМИ СВОБОДЫ 595
Ограничиваясь в разложении первым слагаемым, так как обобщенные
координаты и скорости считаются малыми величинами, и обозначая
лля краткости постоянные коэффициенты
А,к@) = аш C*)
находим окончательное выражение для кинетической энергии системы:
7" = 4 (а»^ + 2а«^» "Г *»«#)• D*)
Величины ап,а14, а94 называются инерционными коэффициентами. Если
система движется в потенциальном силовом поле, то потенциальная
энергия системы может быть разложена по степеням обобщенных
координат в ряд Маклорена
Так как выбор начала отсчета потенциальной энергии произволен,
то положим потенциальную энергию системы в положении равнове-
равновесия равной нулю:
П@) = 0. F*)
В положении равновесия в нуль обращаются все обобщенные силы:
и, следовательно, в разложении E*) исчезают члены, содержащие
обобщенные координаты в первой степени. Тогда потенциальная энер-
энергия системы, совершающей малые движения около положения устой-
устойчивого равновесия, будет однородной квадратичной формой обобщен-
обобщенных координат:
4 (8*)
где для краткости постоянные коэффициенты обозначены
Коэффициенты сп, с,2, см называются кназиупругими коэффициентами.
Внося полученные значения кинетической и потенциальной энергий
в уравнения Лагранжа
d (дТ\ ОТ _ <И1 .
~dt Wi) ~ <ffi ~ ~ ~dq> ( ~" ' )( (
596 УСТОЙЧИВОСТЬ РАСНОВГг.СИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
находим дифференциальные уравнения движения системы:
в которых a2i = Д|2, C|j = f2|.
Частное решение уравнений A1*) ищем в виде
<7i = Я sin (Atf-;-«), ?9=/)sin (A/-(-a), A2*)
где В, D, а—неизвестные постоянные. Для их определения пносим
значения A2*) обобщенных координат в систему уравнений A1*) и
сокращаем на общий множитель чт (kt-\-а). Тогда получаем:
В (с„ — *%,) -f D (г,, — *»а,«) = О,
Я (с21 — ?%,) -f- D (с« — Ааам) = 0. A3*)
Эта система линейных однородных алгебраических уравнений всегда
имеет тривиальное решение B=D = 0, соответствующее равновесию
системы. Система уравнений A3*) может иметь другие, отличные от
нуля решения, если определитель системы будет равен нулю:
и— а-п, Сп— ап _^ ^14^
Из уравнений A3*) находится отношение амплитуд
D~~ cn-^?a^t ~cl3 — k-als-
Определитель A4*) выражает равенство отношении амплитуд, най-
найденных независимо из первого и второго уравнений A3*). Следова-
Следовательно, если условия A5*) выполняются, то уравнения A3*) являются
зависимыми и из них может быть определено только отношение
амплитуд.
Раскрывая определитель A4*) или из A5*) находим уравнение
частот, иначе называемое вековым уравнением:
(апап — айп) А4 — (а„сй -\- апси — 2г14а,9) А'2 -\- (спсп — q2) = 0. A6*)
Исследуемые движения будут малыми и, следовательно, равнове-
равновесие устойчиво, если корни этого уравнения положительны:
Если же k\ или k\ отрицательны или являются комплексными вели-
величинами, то решение A2*) будет включать гиперболические функции
и движения около положения равновесия не будут малыми. Корни k\
и k\ будут положительными при удовлетворении неравенств
а,,>0, а«>0, ацДи
с,, > 0, f5,5,;> 0, cucn —
§ 3[ СВОБОДНЫЕ КОЛЕБЛНИЯ СИСТЕМЫ С 1 СТЕПЕНЯМИ СВОПОДЫ 597
Могут встретиться дна особых случая. Перныи случай, когда
a(C|.l\ = o, A:'f--'j = O. (i9f)
При этом обеим координатам соответствуют гармонические колебания
одинаковой частоты:
k = lA1-1- =-- l/^- = V~~ • B0*)
У «11 У "V2 У "аа V ;
Второй случай, когда
^^„-^ = 0. B1*)
В этом случае один из корней уравнения частот обращается п нуль.
После того как найдены корни уравнения частот k{ и ?2, опре-
определяются главные колебания системы. Периое главное колебание опи-
описывается урапнепиями:
?1 = Я, sin (*,* + a,), qi=D1 sin fat 4-ад, B2*)
a иторое глаипое колебание — формулами:
q1 = ?iis\n(kit-]-a1), дг = Ог sin (k2t -f ers). (i^1)
Общее решение в силу линейности ураннений япляется суммой част-
частных решений:
7, = В, sin {kxt 4- а,) 4- fi2 sin (A4t + «g, B4*)
92 = D, sin (A,/ -|~ aO 4- D2 sin (^ -|- a,). Bo ¦)
Подставляя it (lo*) значения k\ и загем Л.2, определяем отношения
амплитуд:
Тогда
?, = Р.Й! sin (A,< -I- a,) -I- 3,Z), sin fat -!,- а.,), B7*)
<7з = Д Sin (/е^ -f- aj) 4- D2 sin (/л/ -|- а2). B3Л)
Произвольные постоянные интегрирования Db Db a,, a.» после этого
находятся по начальным услоплмм движения.
Наряду с уравиениядш Лагрэпжа, для составления дифференциаль-
дифференциальных уравнений малых колебаний системы с двумя степенями сио-
боды могут быть применены общие деоремы динамики.
При решении задач па исследование малых коле-
колебаний к онсерватинноп системы с двумя степенями
с п об оды рекомендуется следующий порядок деи-
деист i в и п.
598 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Первый способ — использование уравнений Л а-
r p а н ж а:
1) выбираем обобщенные координаты q^ и q^;
2) составляем выражение кинетической энергии Т\
3) определяем потенциальную энергию системы П или вычисляем
обобщенные силы;
4) внося выражения Т и II (или обобщенные силы) в уравнения
Лагранжа, получаем систему двух дифференциальных уравнений ма-
малых колебаний;
5) задаваясь частным решением этой системы, подставляем частное
решение в систему дифференциальных уравнений движения;
6) исключая из полученной системы алгебраических уравнений
амплитуды колебаний, находим уравнение частот;
7) решая уравнение частот, определяем собственные частоты
системы;
8) внося найденные частоты в частное решение, получаем фор-
формулы, описывающие два главных колебания;
9) складывая уравнения главных колебаний для каждой обобщен-
обобщенной координаты, находим общее решение;
10) определяем четыре произвольные постоянные, из начальных
условий движения.
Второй способ — использование общих теорем
динамики:
1) исходя из условий задачи, выбираем путь составления диффе-
дифференциальных уравнений — основное уравнение динамики или какую-
либо из общих теорем динамики;
2) применяя избранную теорему, составляем дифференциальные
уравнения малых колебаний системы;
3) задаваясь частными решениями системы, вносим эти частые
решения в систему дифференциальных уравнений;
4) решая полученную систему уравнений, находим уравнение ча-
частот, из которого определяем собственные частоты системы;
5) внося найденные частоты в частное решение, находим уран-
нения главных колебании;
6) складывая уравнения главных колебаний для каждой обобщен-
обобщенной координаты, находим общее решение системы;
7) пользуясь начальными условиями движения, определяем произ-
произвольные постоянные интегрирования.
Задача 450. На абсолютно гладкой горизонтальной плоскости
лежат два тела, массы которых ш^ и /яв. Периое тело прикреплено
к стене пружиной, коэффициент жесткости которой равен с,. Второе
тело присоединено к первому пружиной, коэффициент жесткости
которой с9 (рис. а). Определить уравнения движения системы, если
в положении, когда обе' пружины не растянуты, второму телу сооб-
сообщили скорость va. Найти собственные частоты системы.
г 31
СВОБОДНЫЕ КОЛЕБАНИЯ СИСТЕМЫ С 2 СТЕПЕНЯМИ СВОБОДЫ
599
Решение. Система имеет две степени свободы. Ее положение
может быть определено двумя обобщенными координатами. Первая
обобщенная координата </i определяет перемещение первого тела
от начального положения, вторая обобщенная координата q^ измеряет
перемещение второго тела от его начального положения (рис. а).
|www
%
|=^Л-~п
-й
////////////////////////
i
///////////////////////,
К задаче 450.
Применим уравнения Лагранжа для составления дифференциальных
уравнений малых колебаний системы. Находим выражение кинетиче-
кинетической энергии системы
г. nh4\ i тгд\
A)
Потенциальная энергия системы складывается из потенциальных энер-
энергий двух пружин:
B)
2
2
так как qx является удлинением первой пружины, а (цг — <7i)—удли-
<7i)—удлинением второй пружины.
Переходим к составлению дифференциальных уравнений Лагранжа
dt \ 64с
дГ
дП
dqt '
C)
где i=l, 2, так как система имеет две степени свободы. Поскольку
дТ • d I дТ \ у, дТ
D)
dt
дП
—
— qt),
то первое дифференциальное уравнение движения системы принимает
вид
Так как
дТ ¦ d I дТ\ ... ¦:. дТ
d I дТ \
¦ = 0,
F)
600 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. ХП1
то второе дифференциальное уравнение движения запишется так:
f»iqi = — ci(qi—qi). G)
Таким образом, получена система двух дифференциальных уравне-
уравнений движения E) и G).
С целью нахождения общего интеграла этой системы линейных,
однородных дифференциальных уравнений с постоянными коэффи-
коэффициентами будем искать частные решения в виде
ql = Bsin(kt-\-a.); q% = D sin (ki -fa). (8)
Для этого внесем значения (8) в уравнения E) и G). Сокращая па
общий множитель sin(&?-j-a), находим:
-f- c.i(Я — fl) = О, \
l-ci(D-B) = O. j
BC\ 'p^-n" "/ "> | /g\
В этих двух уравнениях три неизвестных В, D и k. Из них опре
деляется отношение амплитуд; из периого уравнения
А — с-' '
D ~с,+ са —/«,йа '
из второго уравнения
ГТриравпииая правые части двух последних равенств, находим
уравнение частот
oiкуда получаем:
v т. ' я, j ' т,/н„
Из этого биквадратного уравнения определяются собственные частоты
системы:
А, = 1/о,5 f ^
') - ]/ 0,25 (^
hi, j т,ш2
5+H
\тц ini I
Таким образом, существуют две вещественные частоты k, и A.j.
Ввиду линейности системы уравнений E) и G), общий интеграл
может быть найден как сумма двух частных решений (8) с различ-
различными частотами, амплитудами и начальными фазами.
Ъ = Bi sin (kj-l-а,)+ В^т (Ы+ aj, I
Яг = D, sin (*^ -|- a,) ^- a2 sin (kt ) a) J
§ 3[ СВОБОДНЫЕ КОЛЕПАНИЯ СИСТЕМЫ С 2 СТЕПЕНЯМИ СВОБОДЫ 601
где
?, = fl, sin(V-fa,); ?» = D, sin (*,< + <*,) A6)
описывают первое главное колебание системы, а
qt = Z32 sin fat -f- a*); ^ = D4 sin (A^-(-as) A7)
— второе главное колебание.
С другой стороны, отношение амплитуд в первом главном коле-
колебании находится из A0) подстановкой А = Аг:
Ь7=Ч =&
Аналогично получаем для второго главного колебания:
где обозначения C,, fj9 введены для краткости записи. Следовательно,
общее решение A5) принимает вид
Произвольные постоянные D,, D2, a,, а4 определяются по начальным
условиям движения. Согласно условиям задачи при ^ = 0
9i = 0, <7, = 0, 9, = 0, *, = ©„. B1)
Внося эти значения переменных в уравнения B0), находим:
(BiD, sin ctj -j- p2D2 sin a.> = 0, Dt sin a, -)- ZJ sin a2 =
cos ai-j-fijDaA^ cos a2=0, D^! cos а,-)-/?^ cos a4T/ /
= 0, 1
откуда определяются все произвольные постоянные интегрирования:
а!^а.2 = 0, т. е. начальные фазы обоих главных колебаний раппи
нулю, а амплитуды главных колебаний будут:
D'=ra^j' °^ш^у B3)
Движение системы, согласно B0), представляет наложение двух
гармонических колебаний с разными частотами.
Для составления дифференциальных уравнений движения можно
применить и другой способ, используя основной закон динамики.
Рассмотрим произвольное положение системы, определяемое обоб-
обобщенными координатами qit qt (рис. б). Тогда, учитывая упругие силы
пружин, составляем дифференциальные уравнения движения каждого
груза:
% = — с.^— qx). B4)
602 " УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Эти уравнения идентичны уравнениям E) и G), полученным при по-
помощи уравнений Лагранжа.
Применение основного закона динамики ведет в данной задаче
быстрее и проще к составлению дифференциальных уравнений дви-
движения, однако первый путь — использование уравнений Лагранжа
в обобщенных координатах является более общим методом.
§ 4. Вынужденные колебания системы с одной и двумя
степенями свободы под действием синусоидальных
возмущающих сил
Если на систему действуют внешние возмущающие силы в тече-
течение всего процесса колебаний, то возникают сложные колебании,
являющиеся результатом наложения вынужденных и свободных коле-
колебаний системы. Дифференциальные уравнения движения системы мо-
могут быть составлены применением уравнений Лагранжа
где qt — обобщенные координаты системы, Т—кинетическая энергия
системы, П — потенциальная энергия, Q,- @ — возмущающие силы.
Если система имеет одну степень свободы, то 1=1, если две, то
i=l, 2.
Для случая двух степеней свободы подстановка Т и П в уравне-
уравнения A *) приводит к системе дифференциальных уравнений:
= Ht sin (pt
i + aii % + СцЦ\ + са4ч= ^a sin (pt -+- S)
';} B*>
где возмущающие силы Q,- (t) взяты изменяющимися по синусоидаль-
синусоидальному закону (часто встречающийся случай, рассмотрением которого
мы ограничимся пвиду сравнительной простоты математических пы-
кладок и в то же время значительного практического значения):
Ql{t) = Htsln(pt-\-b), Q2@ = tf9sin(^4-8)- C*)
Общее решение системы B*) дифференциальных уравнений скла-
складывается из общего решения однородной системы уравнений и част-
частного решения неоднородной системы. Общее решение однородной
системы представляет ранее рассмотренные свободные колебания и
находится согласно методам, приведенным в §§ 2 и 3 этой главы.
Поэтому мы остановимся на определении частного решения этой си-
системы, представляющего вынужденные колебания системы.
Частное решение ищем в виде:
l = Dls\n{pt-\-b), tf,= D,sin(pf + 8). D*)
§ 41 ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМЫ 603
Внося эти значения в уравнения B*), приходим к системе алгебраи-
алгебраических уравнений
(с,, — Аи) Oi -Mfn— А1з),Д)= И
откуда определяются неизпестныс D\, D$.
Определитель этой системы обращается в пуль:
(си — р*аи) (fи -/»%,) - {с» - Ai«)' = 0.
при резонансе, когда p=:k^ или /? = ?а. В этом случае частное ре-
решение системы не может быгь найдено в форме D*).
Дифференциальные уравнения движения системы могу г быть также
составлены с помощью общих теорем динамики.
При решении задач на определение вынужден-
вынужденных колебаний рекомендуется следующая последо-
последовательность действии.
Первый способ — использование уравнений Л а-
г р а н ж а:
1) выбираем обобщенные координаты и составляем выражение
кинетической энергии системы;
2) находим выражение потенциальной энергии или вычисляем
обобщенные силы;
3) составляем дифференциальные уравнения движения системы,
внося значения кинетической и потенциальной энергий (или обоб-
обобщенных сил) в уравнения Лагранжа;
4) ищем частные решения дифференциальных уравнений движения
Системы и находим значения амплитуд обобщенных координат;
5) приравнивая пулю знаменатель в выражениях амплитуд, нахо-
находим значения частот возмущающей силы, при которых позиикает ре-
резонанс.
Второй способ — применение общих теорем дина-
динамики: после выбора обобщенных координат системы непосредственно
составляются дифференциальные уравнения движения, исходя из избран-
избранных теорем динамики. Дальнейший ход решения тот же, что и при
первом способе.
Задача 451. Квадратный ящик А массы от, лежит па горизон-
горизонтальной, абсолютно гладкой плоскости. Внутри ящика в цилиндри-
цилиндрическом отверстии радиуса г поьоится шарик В (рис. а) массы /«2.
размерами которого можно пренебречь.
Яшик соединен с вертикальной стеной пружиной, коэффициент
жесткости которой равен с. Пренебрегая трением между шариком и
внутренней поверхностью ящика, определить вынужденные колебания
системы, возникающие иод действием периодической горизонтальной
силы F—]-\ sin со/.
604 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Решение. Выберем ось х с началом r положении равновесия
центра О ящика и обозначим через о угол отклонения радиуса ОВ\
от вертикали. Обозначая через N давление шарика па ящик, направ-
леппое по радиусу ОВХ, напишем дифференциальное уравнение дви-
движения ящика:
w,.? = Fosin со/ — сх-\- Л/sin 9- A)
Дифференциальные урагшенпя абсолютного движения шарика со-
составим в проекциях на OBi и па перпендикуляр к ОВ\. Абсолютное
движение шарика складывается из переносного поступательного дви-
движения имеете с ящиком и относительного вращения вокруг центра О.
К задаче 4о1.
Кориолисово ускорение шарика рапно пулю, так как переносное дви-
движение является поступательным. Дифференциальное уравнение движе-
движения шарика в проекции на перпендикуляр к ОВХ будет:
т.2 (гЗ -— х cos 9) = — m.ig sin 9; B)
дифференциальное уравнение движения в проекции на UBl имеет вид
т.,, (г$1 — „V sin ») = N — m«g cos э. C)
Решая совместно эги трл уравнения, исключаем Л/:
(nil ¦ гт.г sin-'f)-v -;~ сх — т./Ь'1 sin ср — т.?sin 9 cos о = Го sin wt, A)
ro-'-x cos э --|- Д"siii 9 = 0. E)
Яга система нелинейных дифференциальных ураппепий не может быть
пронигегриронана к замкнутом виде. Ограничиваясь малыми колебани-
колебаниями, для которых можно положить приближенно sincp^?. cos 9^1.
и пренебрегая малыми величинами ныше первого порядка малости,
представим уравнения D) и E) в виде
mtx - \- сх — /1ц gy = Fo sin tot,
CO
G)
5 41 ВЫНУЖДЕННЫЕ КОЛКБЛНИЯ СИСТЕМЫ 605
Обозначая для краткости — = ki; -3 = Х; — = /г, имеем:
х -j- fix — X g'-f = h sin wt, (8)
Вынужденные колебания определяются частным решением этой си-
системы. Ищем частное решение и виде
x=Dx sin cot, <p = DtSmm>t. A0)
Внося эти значения в (8) и (9), после несложных преобразований
находим:
откуда
k- — ш1') (g — Гы-) — Agio1' •
A3)
Резонанс наступит при значениях частоты возмущающей силы, отве-
отвечающих обращению и нуль зна-
знаменателя в A2) и A3): ''""''/'
(А«_ ш*) (g — гш4) — /.?-ш* = 0. A4)
у////
'///////.'////Л
О, Л -
~г
При и>9^ ^- ящик остается п
покое (D[ = 0), шарик колеб- ^
лется один.
Задача 452. Груз Р, (рис. а)
подвешен к неподвижной точке А
при помощи пружины, коэффи-
коэффициент жесткости которой с,.
К грузу Pi приложена вертикаль-
вертикальная возмущающая сила Q = i
= Q,,sinto*. Груз Рг, япляющийся
ииброгасителем, подвешен к гру-
грузу Pi при помощи пружины , -, ^
с коэффициентом жесткости сг l_ITj
Пренебрегая массами пружин, 6)
определить коэффициент жестко- К задаче 452.
сти сг и вес второго груза Р±.
при которых амплитуда пыпужденных колебаний первого груза будет
равна пулю.
Решение. Выберем положение равновесия грузов за начало от-
отсчета (рис. б). Система имеет две степени свободы. За обобщенные
606 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ (ГЛ. ХШ
координаты принимаем отклонение первого груза от положения рав-
понесия х, и смещение второго груза от своего положения равно-
равновесия хг. Тогда к первому грузу будут приложены три силы: упру-
упругая сила верхней пружины
A)
упругая сила нижней пружины
/="» = <:,(*, —*,), B)
возмущающая сила
Q = Q0 sin urf. C)
Ко иторому грузу приложена одна сила: упругая сила нижней пру-
пружины
Составляем дифференциальные уравнения движения грузов
р
-_! хх = — с,*! -f- c9 (xt — Xi) -f- Qo sin <at, E)
p
J X
Частное решение этой системы, определяющее вынужденные колеба-
колебания грузов, ищем в виде
д-] = Di sin шг, х9 ^ Di sin wt. G)
Подставляя значения переменных G) в уравнения E) и F), находим:
2 = 0. (8)
Из этих уравнений определяются величины амплитуд вынужденных
колебаний
?h =
Согласно уравнению (9), амплитуда вынужденных колебаний первого
груза обращается в нуль, если выбрать коэффициент жесткости вто-
второй пружины са и вес Ра так, чтобы
с,-5«' = 0. (И)
§ 51 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 607
Таким образом, при заданной частоте возмущающей силы м можно
всегда подобрать коэффициент жесткости добавочной пружины и вес
второго груза так, чтобы погасить вынужденные колебания первого
груза. При этом следует остерегаться резонанса, который наступает
при обращении в нуль знаменателя в (9) и A0)
('. + Ч - ? со«) (ct - ? ш») - с\ = 0. A2)
Значение угловой скорости м, определяемой из равенства A1), не об-
обращает в нуль знаменатель в (9) и A0) и, следовательно, не удов-
удовлетворяет A2). Однако, не всегда удается точно поддерживать одно
и то же значение со. При случайном изменении угловой скорости и
возможно возникновение опасных резонансных колебаний.
§ 5. Влияние гироскопических сил и сил вязкого сопротивления
на свободные и вынужденные колебания твердого тела
с двумя степенями свободы
1°. Влияние гироскопических сил на свободные
колебания системы с двумя степенями свободы. При
составлении дифференциальных уравнений малых колебаний с учетом
гироскопических сил можно применять теорему об изменении глав-
главного момента количеств движения относительно неподвижных осей
координат
lit
(F*Y ~L-"= У m (F'Y dL*= У
где Lx, Ly, Lz — главные моменты количеств движения относительно
п
неподвижных осей координат х, у, z; У] >n{Feh) — главные моменты
*=i
внешних сил относительно тех же осей.
Если осесимметричное твердое тело, имеющее неподвижную точку,
вращается с большой угловой скоростью <о вокруг оси симметрии,
которая совпадает при равновесии тела с неподвижной осью х, то
с точностью до величин первого порядка малости гласные моменты
количеств движения относительно неподвижных осей координат будут.
где А — момент инерции твердого тела относительно оси симметрии,
В — момент инерции относительно любой оси, перпендикулярной к оси
симметрии и проходящей через неподвижную точку, р — малый угол
поворота оси симметрии, отсчитываемый от неподвижной оси х 6 пло-
плоскости ху, *f — малый угол поворота оси симметрии, отсчитываемый
от неподвижной оси х в плоскости xz.
608
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДПИЖЕИИЯ СИСТР..\Ш [ГЛ. XIII
При решении задач и а свободные колебания твер-
твердого тела, вращающегося вокруг своей оси, реко-
рекомендуется следующий порядок действий:
1) выбираем дие системы координат — неподвижную и подвиж-
подвижную — с началом в неподвижной точке;
2) вычисляем главные моменты исех внешних сил относительно
неподвижных осей х, у, z и главные моменты количеств движения
относительно этих осей;
3) пользуясь теоремой об изменении главного момента количеств
движения относительно осей х, у, z, находим дифференциальные
уравнения малых колебаний системы;
4) задаемся частным решением системы и подстапляем его н диф-
дифференциальные ургвиепия движения. Находим уравнение частот, из
которого определяем собственные частоты системы;
5) находим, далее, отношение амплитуд колебаний, соотпетстную-
щих каждой частоте;
6) состапляем уравнения первого и пторого главных колебаний и
общее решение как сумму главных колебаний.
Задача 453. Pomp, имеющий не'поднижпую точку О, пращается
с углоиой скоростью ш вокруг оси симметрии Ос и совершает ма-
малые колебания вокруг неподвижных oceit
у, z. Найти главный момент количести
движения ротора с точностью до величин
первого порядка малости. Момент инер-
инерции ротора относительно оси Ос равен Л,
а относительно главных осей инерции а
и Ъ равен В.
Решение. Выберем неподвижную
систему координат xyz с гачалом в не-
неподвижной точке О и подг.ижную систему
осей а, Ь, с, являющихся главными осями
инерции тнердого тела is точке О. Най-
Найдем пересечение плоскости ас с пло-
плоскостью ху — линию узлен ON и будем
определять положение hcbiivi пой системы
осей при помощи углов J3 и -/•
Тогда составляющие угловой скорости ротора будут: ш, направ-
направленная по оси Ос, р, направленная по оси z, \, направленная в отри-
отрицательную сторону оси Ob. Находим проекции углопой екгрости ро-
ротора на главные оси инерции а, Ь, с:
К задаче 453.
шс = со -\- 3 Sin
»о = 3 cos
(I)
Полагая углы [i n f> я также их производные малыми величинами
первого порядка, найдем значения проекций угловой скорости на глав-
§ 51
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
609
ные оси инерции с томностью до малых величин первого порядка
включительно. Тогда sin у *=« у, cos 7^1 и, далее.
юс = <° -f- ? ¦ Т *»ш. шд = ?. 0)л=—Т- B>
Главные моменты количеств движения относительно главных осей
инерции abc будут:
I-a = B$, Lb^—B\, L€=Am. C)
Далее находим проекции главного момента количестн движения па
неподвижные оси:
1.х = ?с cos 7 cos 3 — /.а sin 7 cos 3 — ?,, sin 3 я
<^ Ло>~- Л ?7-|-/*-3
L^, = /.,. cos 7 • sin 3 — Lu sin 7 sin 4 ¦ ¦•- /_,, соя Я я
= A.,, sin 7 -;- /.„ cos 7
- '¦- /il
/4л
Отбрасмкая члены, порядок малости которых ныше периого, окон-
окончательно получаем:
Lx=A<a, /.,.= ЛшЯ — П~, I.z = A^-\-B}. (о)
Задача 454. Шпиндель веретена закреплен неподвижно в точке
О и вращается и упруго закрепленном подшипнике А. Центр тяжести
шпинделя находится и точке С (рис. а) на расстоянии /2 от точки О.
Расстояние между спорами /. Коэффициент жесткости с упругого поля,
в котором переметается нижняя опора Л, одинаков в любом гори-
горизонтальном направлении.
Зная моменты инерции А, В относительно главных осей инерции,
проходящих через точку О, найти малые колебания шпинделя около
положения равновесия. Угловая скорость ш вращения шпинделя во-
вокруг оси сим.метрии постоянна по величине.
Р е ш е и и е. Выберем неподвижные оси координат xyz (рис. а)
с центром в неподвижной точке О, направим вертикальную ось х по
оси симметрии шпинделя в положении равновесия.
На шпиндель действуют внешние силы: реакция R опоры А, ре-
реакция опоры О и сила тяжести Q. Составим главные моменты всех
внешних сил относительно осе:1 х, у, z, дакая шпинделю малые от-
отклонения на угол р вокруг оси z и соответственно па угол 7 вокруг
оси у.
Главный .момент внешних сил относительно оси у равен
lf
fc- =1
ту (F*) = — Qzc - elzy = QlfZl- dz
(I)
20 Теоретическая механика, том II
610
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ |ГЛ. XIII
где zx— координата точки A, a zQ — координата центра тяжести
(рис. б).
Из рис. б определяется и значение угла Х-
1 Г
B)
Далее находим главный момент внешних сил относительно оси z
(рис. в).
? = Qyc + clyi = -Q !j- yi + clyv C)
Угол р определяется формулой (см. рисунок):
D)
Так как согласно условию шпиндель вращается равномерно вокруг оси
симметрии: ш = const,TO главный момент внеш-
z
i
них сил относительно оси х равен нулю.
a)
i
6)
К задаче 454.
Пользуясь теоремой об изменении главного момента количеств
движения шпинделя относительно осей у, z, находим:
E)
§51 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 611
Преобразуем эти уравнения, подстапив вместо C и f их выраже-
выражения через j/j и 2j. Тогда получаем:
i + Л«>*1 -г О''2 - Q'OJ'i = О-
Таковы дифференциальные уравнения малых колебаний шпинделя.
Решение этой системы однородных линейных дифференциальных
уравнений с постоянными коэффициентами ищем в виде
j/j = a sin (ptJ- а), г, ==# cos (/?/ -j-a). G)
Подставляя эти значения переменных в уравнения F) и сокращая
затем соответственно на sin (pt~-%) и cos (pt-{-т.), получаем систему
алгебраических уравнений для определения постоянных:
— Аира — [сР— Q/j — Bp*]b = 0, \
\cl* — Q4 — Вр*]а — Aupb = 0. J (8)
Исключая из этих уравнений а и Ь, получаем частотное уравнение
Л'2шу — I сР — Q/, — Вр* \* = 0. (9)
Корпи этого уравнения определяют собственные частоты малых
колебаний шпинделя. Если подставить эти корни в уравнения (8),
то можно найти отношение амплитуд колебаний ,-.
Проще исего найти корпи уравнения частот (9) следующим обра-
образом. Складывая и вычитая равенства (8), имеем:
(сР ~ Qlt — Ир* — ,4(о/7) (а + b) ~ 0, 1
(сР — Q/.2 — Врг -}- А ш/7) (а — &) = 0. | (! 0)
Отсюда следует, что сущестпует два рода главных или нормаль-
нормальных колебаний шпинделя.
Частоты первого главного колебания определяются.из уравнения
Пр'1 — Лшр — (с/2 — Q4) =0. A1)
Решая это квадратное уравнение, находим частоты
„ _ Am + У(Аш? + 4Д (Cl (?f.) ,,
/7,i4 — ^ . A2)
Так как значения частот A2) не обращают в пуль первый со-
сомножитель в первом из уравнений A0), то им соответствует равенство
а -\-Ь = 0 или а = — Ь. A3)
20*
612 УСТОМЧИПОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ CHCTF.MM [ГЛ. XIII
Частоты второго главного колебания находятся из уравнения
Вр1 -\-Amp — (г Г1 — QL) = О, A4)
откуда
"- Ql.,) r
Так как значения частот A5) не обращают к пуль первый сомно-
сомножитель во втором уравнении A0), то этим частотам соответствует
равенство
а — Ь = 0 или a = b. AG)
Замечая, что
Р\ = —Р:\. Р* = — Рь A7)
заключаем, что существует два типа главных колебаний ротора.
Первый тип главных колебаний характеризуется формулами
у, = a, sin (р^ -f a,), 1
Zj = ax cos(/^-i-ai)- /
Второй тип главных колебаний определяется выражениями
ух = а.г sin (p}t -\- я2), zx= — о-2 cos (p:t -[- а.2). A9)
При колебаниях первого типа точка А будет описыпап> окруж-
окружность вокруг центра, расположенного па оси х. Вращение точки А
будет совпадать по направлению с собственным вращением ротора.
Эго движение называется прямой регулярной прецессией. При втором
типе колебаний точка А описывает окружность вокруг центра, нахо-
находящегося на оси х, в направлении, обратном собственному вращению
ротора. Такое движение называется обратной прецессией.
Общее решение дифференциальных уравнений, определяющих сво-
свободные колебания ротора, складывается из диух главных колебаний
/ . i ч , , , л , B0)
cos (Pit —i - a.i) — a;, cos [pit — аг). J
Четыре произвольных постоянных интегрирования аи о.,, а1? оц опре-
определяются по начальным данным — значениям уи zt, yu it при ^ = 0.
Если положить в уравнениях A1) и A5) угловую скорость соб-
собственного вращения ротора ш равной нулю, то эти уравнения при-
примут вид
Корпи уравнения частот невратающегося шпинделя B1) будут:
Pt = =tV '-^^. B2)
§ 51
ПЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
G13
Срапнипая положительные значении собстиенных частот нращаю-
щегосч ротора со значением собственной частоты певращающегося
роторл, находим, что они располагаются в следующем порядке:
B3)
увеличением угловой скорости шнинде-
К задачи 451.
Таким образом, наличие гироскопических сил приводит к удвоению
числа собственных частот. С
ля значения частот р{ и p,t
все больше и больше отли-
отличаются от пеличины ^0
(рис. г).
Следует заметить, что
отрицательные значения кор-
корней частотных урамиепнИ
приводят к решениям, ли-
линейно зависимым от иыше
найденных, и, таким обра-
образом, не вносят ничего но-
нового.
L)J. Влияние п я л-
к о г о т р е и и я и г и р о-
сконических сил па свободные колебания твер-
твердого тела с двумя степенями свободы. В пункте 1°
этого параграфа было рассмотрено влияние гироскопических сил па
свободные колебания системы с дпумя степенями свободы. При эюм
не учитывались диссипатинные силы, которые в виде вязкого сопро-
сопротивления среды, сухого трения и внутреннего трения в материале
всегда сопутствуют диижению. Из всех разновидностей диссинагипных
сил, учитывая сравнительную простоту математических выкладок и зна-
значительное распространение этих сил и технике, мы рассмотрим толь-
только силы низкого трения.
В добавление к тому, что бы;ю сказано в пункте 1 ; относительно
составления дифференциальных ураннепий малых колебании системы,
следует учесть при составлении главного момента внешних сил и
момент сил низкого трения. Эш силы считают пропорциональными
первой степени скорости и направленными прямо противоположно
скорости.
Покажем, как учитывается ллияние вязкого трения па примере
решения задачи о малых колебаниях шпинделя иеретеиа.
Задача 455. В условиях задачи 4ГL определить малые колебания
шпинделя веретена, полагай, что силы низкого трения создают мо-
моменты: относительно оси у равный (— -.-2\\
' п \
j'lj
и относительно оси z
ранный
( ¦-
где п — некоторый постоянный коэффициент.
614 УСТОЙЧИВОСТЬ Р\ВПОВР.СИЯ И МАЛЫЕ ДВИЖР.ПИЯ СИСТЕМЫ |ГЛ. XIII
Р е ш е н и е. Согласно теореме об изменении главного момента
количеств движения шпинделя относительно осей у, г, имеем:
ddt I Ло,3 - В \\ = '- cl + Q f гх - ¦'; i»
Внося в эти ураипеппя значения р и -у, полученные в предыдущей
влдаче, получаем дифференциальные уравнения малых колебаний
шпинделя и пнде
Hz, - A«yt -f nix -г (^ ~ ОД ^ = 0, |
Для интегрирования этой системы дифференциальных уравнений
рнедем комплексную переменную \ = zt -j- iyK. Умножая второе урав-
уравнение из B) па i и складывая его с первым уравнением B), находим:
M'-;-(rt-!-i.4co)X-i-<W'2 — Q/t)\ = 0. C)
Составляем характеристическое уравнение
/is* 4- (и Ч-М(р))«-f (c/'2 - ОД = °- D)
Находим корпи характеристического уранпеиия:
— (и -i M..>) _•_ У 7» -fi/lo))" ¦
Сокращенно эти корни могуг быть записаны в виде
— (п \-i/U) i- у«,-!-,*,
где
а, = л- — /W — 4S (с/2 — Q/,,), й, = 2/г.-1ю.
Согласно формуле Муакра для дробного показателя можно оп-
определить два значения \/af -j ¦ ib{.
l/^^Fb] = ±. i/''p (cos -^ -L j sin -!j), G)
где
?=V<TK=VW-~aw -
§ 5| ВЛИЯНИЕ ГИРОСКОПИЧР.СКИХ СИЛ . ГIГ>
Таким образом,
}/аЁ -j- ib\ = Oj -L- j#2 =
==У 4 ^ /l"a — Л2"* — 4S (f/* — УУр-МлМ^+л2—А3*3—46 (cP—Ql.,)} f
•
Следовательно, корни характеристического уравнения могу г быть
представлены в виде
— (я — о..) — / (Ис. — />а) — (п + а-)—i (/1..'-f Л,) ,q
S, = -—.?} ¦, St — - jjj . (i>)
Тогда общее решение уравнения D) будет:
}. = С1е"'-\- С#'*К (Ю)
Здесь d и C.j — комплексные постоянные величины вида
Cl = Dl-lrlD3, C, = D,-i-lD4. (П)
Подставляя эти значения произвольных постоянных в A0), получим:
Х = (О, + Ш3),-<—»''"« (cos ^-^ ¦!-/ sin ^ /) +
*+p). A2)
Отделяя в этом ураниении вещественную и мнимую части, находим
исходные переменные уь Z\.
Zx=t
Замечая, что всегда п^>аъ что следует из (8), заключаем, что коор-
координаты нижнего конца шпинделя убывают с течением времени. Сво-
Свободные колебания шпинделя под влиянием вязкого трения затухают.
3°. Вынужденные колебания твердого тела с двумя
степенями свободы с учетом гироскопических сил.
При составлении дифференциальных уравнений п этом случае дви-
движения может быть использована теорема об изменении главного
6 1Г) УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТПМЫ [ГЛ. XIII
момента количеств дпиження. Выражения для главного момента количеств
движения, приведенные в пункте 1° этого параграфа, определенные
уравнениями B*), сохраняют силу. В отличие от ранее рассмотренных
случаев малых колебаний, и главный момент пнешних сил относи-
относительно неподвижных осей входит момент возмущающих сил.
Наиболее распространенным в технике нидом возмущающих сил,
действующих на твердое тело, вращающееся вокруг осп, являются
силы, вызванные неуравновешенностью ротора.
При решении задам па определение вынужденных
колебаний твердого тела с двумя степенями спободы
при д е й с ти ни гироскопических с и л рекомендуется
следующая последовательность действий:
1) выбираем неподвижную и подвижную системы координат;
2) составляем выражении для главного момента количеств движе-
движения тела и главного момента внешних сил относительно неподвиж-
неподвижных осей коордшкп;
3) находим дифференциальные уравнения малых колебании, поль-
пользуясь теоремой об изменении главного момента количеств движения;
4) ищем частное решение системы дифференциальных уравнений,
определяющее вынужденные колебания системы;
о) определяем критические угловые скорости ротора, при которых
возникает явление резонанса;
6) находим предельные значения искомых переменных при неогра-
неограниченном возрастании угловой скорости вращения ротора.
Покажем, как исследуются иыпуждешшс колебания ротора, вызван-
вызванные собственной неуравновешенностью, па следующих примерах.
Задача 456. Определить вынужденные колебания шпинделя вере-
веретена в условиях задачи 454, если па высоте Ъ над неподвижной
точкой О (рис. а), па расстоянии с от геометрической оси к ротору
прикреплена малая масса т. Нвиду малости массы т, пренебречь
ее влиянием на изменение положения центра тяжести ротора и на
изменение его моментов инерции.
Р е ш е и и е. Составим дифференциальные уравнения движения
ротора, пользуясь теоремой об изменении главного момента количеств
движения. Моменты относительно неподвижных oceti дают реакции
нижней упругой опоры, сила тяжести и сила F, реакция связи,
удерживающей массу т па роторе. Сила F но величине раппа
/•• = ти?е. A)
Она лежит в плоскости, параллельной yz, составляя угол <p = u>t
с осью, параллельной Оу и проходящей через точку, где находится
масса т. Моменты этой силы относительно неподвижных осей yz
будут:
ту (F) = — пш*еЬ sin utf, m, (F) = muPeb cos tat. B)
§51
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
617
Тогда, согласно теореме об изменении главного момента количеств
движения, находим:
~ {Дш|3 — В\] = ' ~ cl -f Q -f) 2l ~ wcoa eb sin urf,
щ-'-
C)
|= \cl — 'Q~f Wi -f отю'ей cos orf.
Внося ранее полученные значения ?, f B эти уравнения, имеем:
B'zi — A&$i -\-{cl — Q/j) ~i = — muPebl sin «rf, 1
fiy, -f ^mij -f (c/- — Q/4)j/j = — /KoiVft/ cos mt. ) *^4)
Частное решение системы линейных неоднородных дифференциальных
i Асимптота
»нр
6)
Ы
1-1
\',\
*р
Асимптота mebl_
в)
и)
К задаче 456.
уравнений, определяющее вынужденные колебания ротора, ищем в
виде:
j/t = /г, cos erf, Z\ = dx sin wt. E)
Подставляя эти знамения yt, zt в уравнения D) и сокращая соответ-
соответственно в первом уравнении на sin at, а во втором уравнении па
cos (at, получаем:
— Qlt — Вш1\ lh -|- Аш% = —
F)
Й18 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ (ГЛ. XIII
Решая полученную систему линейных ураинений, определяем неиз-
неизвестные т^еЫ
Таким образом, при вынужденных колебаниях точка А будет описы-
нать окружность радиуса г = hx =db вращаясь с угловой скоростью о>
и направлении собственного вращения ротора. Ось ротора при этом
будет описывать круговой конус с вершиной в неподвижной точке О.
Вынужденным колебаниям, вызванным неуравновешенностью ро-
ротора, соответствует прямая прецессия ротора с угловой скоростью со,
равной по величине собственной угловой скорости ротора. Если
Ifa? ¦\-Ql.i~^> А<&г-\-с1*, то вынужденные колебания нижнего конца
ротора и возмущающая сила совпадают по фазе, если же Z?<o2-|-
+ Ql-i <С Аш2 -j- cl%, то они находятся в противоположных фазах.
В условиях задачи неуравновешенность ротора не может вызвать
вынужденные колебания, соответствующие обратной прецессии ротора.
Если неограниченно увеличивать углорую скорость собственного
вращения ротора, то из уравнения G) определится предельное зна-
значение радиуса окружности, описываемой нижним концом ротора:
,. mebl
Iirar>=77^V (8)
СО ->ОЭ
Зависимость величины амплитуды колебаний нижнего конца ро-
ротора от угловой скорости ротора представлена на рис. б (для случая,
когда Л^>.4) и рис. в (для случая, когда А ^> В). При построении
графикой принято (гГ1 ¦-- QL2)^> 0.
Зная радиус окружности, описываемой нижним концом ротора,
можно найти радиус окружности (амплитуду колебаний), описываемой
любой точкой оси ротора. Так, например, для центра тяжести имеем:
rc = rtlj. (9)
Общее решение дифференциальных уравнений D) складывается
из общего решения этих уравнений без прамой части и частного
решения неоднородного уравнения. Общее решение системы однород-
однородных ураииеиий было найдено в задаче 454. Складывая это решение
с частным решением (о) и учитывая G), находим уравнения движения
нижнего конца ротора под действием возмущающей силы вызванной
неуравновешенностью
ух =п\ sin (pit -|- я,) -J-a9 sin (ptt -j- a.2)-|-
1-_/^_п/л cos <
1 (й —/\)
i = ах cos (р^ -j- a-i) — a9 cos (pj
тю'еЫ . ,
-|- —T г-—;—j—-, ... sin u>(.
1 {B A)i {cl! Ql)
A0)
§5] ПЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СПЛ 619
Это решение получено без учета сил сопротивления, препятствую-
препятствующих колебаниям ротора. Как бы малы ни были силы сопротивления,
они ведут к быстрому затуханию свободных колебаний, определяемых
первыми двумя слагаемыми в правой части уравнений A0). Поэтому
при изучении колебаний, вызванных неуравновешенностью ротора,
в установившемся режиме можно опустить первые два слагаемых
в правой части уравнений A0).
Рассмотрим критические скорости вращения ротора. Приравнивая
пулю определитель системы уравнений (б), находим частотное уравнение
(Лео2 -\- сР — Ql.t — Вш>) (Дсо9 — сР -f- Qk -\- fico1) = 0, A1)
откуда получаем два уравнения:
(A—B)«?-\-cP — Qk = Q, (A-\-B)wi—cliArQl.i = $. A2)
Эти уравнения не имеют общих корней (за исключением и> = 0, что
соответствует отсутствию гироскопических сил), в чем легко убе-
убедиться, сложив их.
Из уравнений A2) определяются критические угловые Скорости
вала:
Таким образом, у ротора две критические скорости вращения. Срав-
Сравнивая значения этих критических скоростей со значением собственной
частоты певращающегося роторе (задача 454), находим: со, ^>/)«^> ш.2.
Вращение ротора, удваивая число критических скоростей, делает
одну из них меньше, а вторую больше собственной частоты певра-
певращающегося ротора.
Если числитель в подкоренном выражении для критических ско-
скоростей положителен
сР— Q/2>0, A5)
то при В~^> А существуют две критические скорости. Если же
В<^А, то одно значение критической скорости остается веществен-
вещественным, второе становится мнимым.
Как следует из уравнения G), при вынужденных колебаниях ро-
ротора, вызванных неуравновешенностью, возникают резонансные коле-
колебания, соответствующие только одной критической скорости. Эта
скорость отвечает обращению в нуль знаменателя правой части G)
(В— Л)«)9 — (_cP — Qli) = 0. A6)
620
УСТОЙЧИПОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. ХпГ
Это значение критической скорости идентично ш1 A3). Резонансных
колебаний, соответствующих второму значению критической скорости
A4), при условиях настоящей за-
задачи возникнуть не может.
Задача 457. В условиях за-
задачи 454 определить вынужденные
колебания ротора, если на пего дей-
действует возмущающая сила F, направ-
направленная параллельно оси у и прило-
приложенная па расстоянии а от непо-
неподвижной точки О. Проекция возму-
Y тающей силы па ось у изменяется
согласно формуле
F = Fo cos mt, A)
где Fo — наибольшее значение воз-
возмущающей силы, а> — угловая ско-
скорость собственного вращения ротора.
К задаче 457. Решение. Составим дифферен-
дифференциальные уравнения движения ро-
ротора, воспользовавшись теоремой об изменении главного момента
количеств движения:
B)
В2у — Am'i — Icl- — QL)zt=0, \
} C)
Вуу-\~ Лсог[-}-(с/-—Q/i)yl =— Foal cos uit. J
Частное решение уравнений (З), определяющее вынужденные коле-
колебания ротора, ищем к виде
у, = by cos (at, z, =dy sm wt. D)
Подставляя D) в уравнения C) и сокращая соответственно на cos mt
и sin wt, получаем:
A^bx -j- (с/9 — Q4 — Bui*) di = 0, \
(C(>- — Q[— ?¦«)*) b -l- A«?d — — F "' ' ^
Из уравнений E) определяю ich значения rf, и by.
~l j •г"
уi -f- Foa cos at.
Внося в уравнения B) значения C и у, находим:
"ш* — (d- — Qh — Bu>-f'
Foal (cl- — Ql., — Да-)
2и4 — (с/2 — Ql<,—Bu-y2 '
F)
S51 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 621
Резонанс наступит, когда знаменатель п этих равенствах обрати гея
п нуль:
д V — (г/9 — Q/, — Бш-)- = 0. G)
Отсюда находятся два значения критической скорости:
\
а —а
Таким образом, » отличие от рассмотренных п предыдущей задаче
вынужденных колебаний, вызванных неуравновешенностью ротора,
и данном случае резонанс наступает при любом из двух значений (Я)
угловой скорости вращения ротора.
Найдем отношение амплитуд вблизи резонанса, соответствующего
второму значению критической скорости. Из (в) имеем:
Н+,\ __. „
• 1 >
_
Н + Л"
Из уравнения (9) следует, что при этих колебаниях ось ротора
опнсынает круговой конус в исправлении, обратном собственному
вращению шпинделя. Такое движение называется обратной прецессией
ротора.
Мапдем далее отношение амплитуд вблизи резонанса, соответ-
соответствующего первому значению критической скорости. Имеем:
b, __ f/2 — Qt, — Нч>* __ v"' " Н—Л _
В этом случае движение оси ротора соответствует прямой прецессии.
Итак, если вынужденные колебания вызываются силой постоянной
по направлению, величина которой меняется с частотой собственного
вращения ротора, то возможно появление колебаний двух видов,
соответствующих обоим значениям (8) критической скорости. Первые
колебания соответствуют прямой прецессии, а вторые обратной пре-
прецессии ротора.
4°. Влияние вязкого трения на вынужденные коле-
колебания твердого тела с двумя степенями свободы.
Рассмотренная в предыдущем пункте 3е теория вынужденных коле-
колебаний системы хорошо согласуется с действительностью но всем,
за исключением одного результата. Хотя при резонансе и наблюдается
E22 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
рост амплитуды колебаний, но этот рост никогда не становится
неограниченным, как это получалось в диух предыдущих задачах.
Объяснение этога несоответствия кроется в наличии сил сопротивле-
сопротивления, которые не учитывались в пункте 3°. Поэтому мы рассмотрим
ниже задачу 456, по с добаночпым учетом сил сопротивления.
Задача 458. В условиях задачи 456 определить вынужденные
колебания шпинделя веретена, учитывая силы вязкого трения, которые
создают моменты: относительно оси у равный (—r^i) и относительно
оси z ранный (-(- — уЛ, где k — постоянный коэффициент (характе-
(характеристика трения).
Решение. Согласно теореме об изменении, главного момента
количесш движения, имеем:
^ \ Лео? — В\] = (—cl-\-Q '-'Л 2l — * ii — tm^eb sin ш/,
~ [ЛшТ + Щ = (cl—Qlf\yi + ^-j>H-w«A* cos
a'eb cos to/.
Внося r эти уравнения значения J3 и у, находим:
/?г, — Лео)), -|- ?i, -f- (с/2 — Q/,) г, = — /исо'2,??/ sin со/, 1
Zip! -j- Лсо^[ -|- ky>l -j- (с/2 — Qh)}'\ = — m^ebl cos м/. J
Общее решение этой системы неоднородных линейных дифферен-
дифференциальных уравнений складывается из общего решения системы бе:»
правых частей (однородная система уравнений) и частного решения
неоднородной системы. Первое решение определяет затухающие сво-
свободные колебания системы н было получено в задаче 455. Второе
частное решение, определяющее вынужденные колебания системы,
будем искать в виде:
_у, = й| cos co/-|-Z>( sin со/, zx =as, sin co/-|- b.t cos со/. (Ii)
Подставим эти значении в уравнения B). Имеем:
¦— а^ш'В sin со/ — Ьц<х?В cos со/ -j- Лсо^а, sin со/ — АЬ\<&* cos со/ -[-
-j- ka^ta cos to/ — kb^ia Sin со/ -)- (с/2 — Qh) a<i sin со/ -j-
-j- (f/' — QA2) b<i cos со/ = — muPebl sin со/, D)
•— a^B cos u)/ — b\is>lB sin to/ -|- й2Лсй'2 cos со/ — ^Лчи'1 sin to/ —
— OjAco sin со/ -L- btkw COS со/ -{- {cl1 — Q/2) ui cos со/ -f-
-) (c/'2 — Q/2) &! sin со/ = — tnuPebl cos to/. E)
§51 ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 623
Приравнивая нулю отдельно члены, содержащие sin <ot, и члены,
содержащие cos utf, находим:
— Q/3) = — muPeb/, (б)
УЫ -\- ак (сР —"<%) = — mv?ebl, G)
— Й2Ш9 — ?»i Лш'2 -f- М» -+- йа (?Р — Q^) — °. (8)
Из этой системы алгебраических уравнений определяются a,, #i, а.>, й2:
__ нкоУМКй —Л)*' —(f/'-Q/,.)!
._ А)ш* — (с/-—C?/a)Ja'
А А — ты-еЬЫк .
O\— vi— ш°.к* + [(й — A) u>a — (с/*—Q/a)|a" l '
П-режде чем по этим значениям а,, Ьь ait Ьг найти _у,, z{ со-
согласно C), введем для упрощения выкладок новые постоянные р и f>
равные
pcosY = (fl — Л)со2 — (сР~ Q/jj), p sin т = — шА. A2)
Тогда, исходя из C), получим:
mic2eb! . , .
V, = cos Ш — 7),
г. —--= -= _ ¦sin(ai^~r). A3)
Следовательно, амплитуда вынужденных колебаний равна
r.= -mmtgW ¦ A4)
Сдвиг фазы возмущающей силы по отношению к вынужденным
колебаниям определится уравнением
Рассмотрим, какова, будет амплитуда колебаний и сдвиг фаз при
резонансе, когда
(В— Л) оJ — {сГ- — Q/q) = 0. A0)
Из A4) определяем значение амплитуды
Г\ = -. web/. A7)
Из A5) находим сдвиг фаз
7 = 0,5 it. A8)
624 УСТОЙЧИВОСТИ РЛВ!ГОПГ;СИЯ И МАЛЫЕ ДШ1ЖКНПЯ СИСТЕМЫ (ГЛ. ХШ
Таким образом, при резонансе амплитуда вынужденных колебаний
с учетом сил трения не растет неограниченно, а принимает конечное зна-
значение. Фаза колебаний отличается от фазы возмущающей силы на 0,5 я.
Найдем, далее, значение амплитуды вынужденных колебаний и
слпига фаз при неограниченном росте угловой скорости крашенин
ротора. Из A4) и (L5) имеем:
^ limtgT = 0. A9)
Сопоставляя эти значс'пия с результатами, полученными в задаче 456,
где вынужденные колебания рассматривались без учета сил сопротив-
сопротивления, пидим, что при неограниченном росте углоной скорости ротрэ
предельные пеличипы амплитуды колебаний не отличаю iс я друг or
друга, а сдвиг фаз и обоих случаях стреми гея к нулю. Вдали or
резонанса вынужденные колебания с учетом сил сопротивления мало
отличаются от вынужденных колебании без учета сил вязкого трения.
5°. В л и я и и е гироскопических сил на свободные
колебания твердого тела с четырьмя степенями сво-
свободы. Для составления дифференциальных уравнений малых колеба-
колебаний твердого тела при наличии гироскопических сил следует приме-
применять теорему о движении центра инерции системы материальных точек
имеете с теоремой «б изменении главного момента количеств движе-
движения системы материальных точек п относительном движении по отно-
отношению к центру инерции.
Согласно первой теореме имеем:
где М — масса твердого тела; xQ, yc, zQ — координаты центра инер-
инерции (тяжести) твердого тела в сипеме неподвижных осей коорлш-ш;
Rex, R\,, Rl — проекции главного вектора внешних сил, приложенных
к твердому телу.
Вторая теорема приводи г к соотношениям
где /-Cv, LCv, Lc,-—главные моменты количеств движения относи-
относительно осей, движущихся поступашлыю вместе с центром инерции
п
(тяжести) твердого тела; ^] m{Fek) — главные моменты внешних сил
А; —
относительно тех же осей.
Если осесимметричное твердое тело вращается с большой угло-
угловой скоростью (о вокруг оси симметрии, которая совпадает при
О1сутствии малых колебаний хела с осью х, то с точностью до вели-
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
62П
чин первого порядка малости главные моменты количеств движения
относительно осей координат, движущихся поступательно вместе с
центром инерции твердого тела, будут:
C*)
где А — момент инерции твердого тела относительно оси симметрии;
В— момент инерции твердого гела относительно любой оси, перпен-
перпендикулярной к оси симметрии и проходящей через центр инерции
тела; [3 — малый угол поворота оси симметрии, отсчитываемый от
оси х в плоскости ху; ¦у — малый 1угол поворота оси симметрии,
отсчитываемый от оси х is плоскости xz.
При изучении поперечных колебаний обычно пренебрегают малыми
продольными перемещениями твердого тела, т. е. полагают коорди-
координату хс неизменной. Тогда первое уравнение A*) отпадает. Если,
кроме того, рассматривается равномерное вращение твердого тела,
ю отпадает и первое уравнение системы B*).
Для решения задач о свободных колебаниях твер-
твердого тела, в которых возможны вышеуказанные
допущения, может быть рекомендован следующий
порядок действий:
1. Выбираем две системы координат: первую систему — жестко свя-
связанную с твердым телом и вторую — неподвижную систему координат.
2. Применяя теорему о движении цешра инерции, составляем два
дифференциальных уравнения движения центра тяжести.
3. Пользуясь теоремой об изменении главного момента количеств
движения в относительном движении по отношению к осям, движу-
движущимся поступательно вместе с центром инерции, составляем осталь-
остальные дна дифференциальных
уравнения малых колебаний
твердого тела.
4. Интегрируя полученную
систему дифференциальных
уравнений движения твердого
тела, находим частоты свобод-
свободных колебаний, главные коле-
колебания ротора и общее реше-
решение задачи.
Задача 459. Жесткий ро- К задаче 459.
тор массы М вращается к двух
упругих опорах .4, и В\. Коэффициенты жесткости левой опоры с,,
правой сг (рис. а). Расстояние между опорам» равно /. Центр тяжести С
G26
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ XIII
ll\
ротора вместе с подшипниками находится на расстоянии 1Х от опоры
А\ и на расстоянии /.2 от опоры В\. Ротор вращается вокруг осп
симметрии с постоянной угловой скоростью о». Момент инерции роюра
относительно оси симметрии
равен А, относительно оси,
перпендикулярной к оси вра-
вращения и проходящей через
центр тяжести ротора, равен В.
Найти свободные колебания
ротора.
Р е ш е н и е. Рассмотрим
малые колебания ротора около
положения равновесия (равно-
(равномерного вращения около гори-
['_ / / , _ зомталыюй оси). Неподвижную
°М,1 х сцстему координат хуг выби-
6) раем так (рис. б), чтобы ее на-
начало совпало с левой опорой
в положении равновесия.
Дадим ротору произволь-
произвольное перемещение (рис. б). Ко-
Координаты левой опоры оОозна-
г-= "-|- 1 j % чим yh zu координаты пра-
U— а —-;— l —4- 1,-\ вой опоры уь zb координаты
центра тяжести ус, zq. Изме-
Изменением координат X,, хь хс
как величинами более высо-
высокого порядка малости будем
пренебрегать. Угол между про-
проекцией оси ротора па пло-
плоскость ху и осью х назовем Р;
угол между осью ротора и ее
проекцией на плоскость ху
обозначим ¦[¦•
На рис. в, г ось ротора
спроектирована па координат-
координатные плоскости ху и Х2.
Выразим координаты центра тяжести и углы % fi через незави-
независимые координаты ух, zb yit zv вполне определяющие положение
ротора. Имеем на основании рис. б, в » г:
i
/.
(О
B)
§ 5| ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ 627
Р=*^. C)
Нп основании теоремы о движении центра инерции можно написать
два дифференциальных уравнения:
Мус = — с,_у, — сф, • ("))
(б)
где в правой части стоят проекции па соответствующие оси упругих
реакций пружин.
Переходим к составлению дифференциальных уравнений малых
колебаний ротора вокруг oceii параллельных у, z и проведенных
через центр инерции колеблющейся системы.
Главные моменты количеств движения системы с точностью до
малых величин первого порядка малости включительно будут:
Lx=Aio, G)
Ly=A^ — Bj, (8)
Ц = Ащ-\-Щ. (9)
Главные моменты внешних сил относительно осей, проведенных
через центр инерции, легко находятся из рис. а:
V тСу (/=р = — z^h ~ zxc\h, A1)
Используя теорему об изменении главного момента количеств дпи-
жепия в относительном днижеиии по отношению к центру инерции
и выражения (8) — A2), имеем
A3)
A4)
Подставляя в уравнения E), F), A3), A4) значения ус, zc, |3, у,
получим длн нахождения уи yit zf, 22 систему четырех линейных
однородных дифференциальных уравнений:
Л1(/о>, —/J,) + c,/yi + c,/y, = 0, A5)
Л1 (/,*„ —/А)+ *,&! +csfea= 0, A6)
Лш (у, -ух) - В (z, - г,) + cAlz.2 + ciV*, = 0. ('7)
л ш (*, - г,
628 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ |ГЛ. ХШ
Частное решение этой системы будем искать в виде
J'i= A s'n 0^ + a)>
г, = A cos 0^ 4- a),
г2 = D4 cos (pt -\- a),
A9)
где Д, D2, D3, D,-, p, a— постоянные, которые должны быть опре-
определены так, чтобы A9) удовлетворяло системе дифференциальных
уравнений A5) — A8). Внося A9) в A5) — A8), имеем, после сокра-
сокращения соответственно па s\n'(pt-\-л) и cos (pt 4- а) и приведения
подобных членов, однородную систему четырех алгебраических урав-
иений относительно Д, Д, А> Di.
(cj -
Dx -\- (i\l — MliP'2) Di = 0,
D4 = 0,
— Bp*) Оъ-\
-|-Z^D4 = O, j
B0)
Легко показать, что система B0) распадается на дне. Действительно,
складывая и вычитая перпые дпа и последние двп уравнения, получаем:
) (D, + Д) = 0,
) (А - А) = о,
(D, + А) = 0,
— А) = 0.
(сх1 -1- Ж/,/.-) (А 4г D,) -f (с,/ -
(cti -f ж/, р'2) (D, - A) -f (с,/ -
— cjxl) (А -Ь А) — (Я/>2 +
; — с,/,/) (А — А) — (V —
Группируя уравнения, имеем систему для нахождения D,-\-D3 и
(с,/ + МЦ?) (А + Да) + fa/ - Л*V) (О» + А) = °>
4- я*) = °.
B1)
и систему для нахождения Di — D3 и А — Dt:
(cj 4- >И/,/»«) (А - Яз) + (^ — Mltp*) (А — О4) = 0, "I
- Aw - с,//,) (А. - А) — B2)
>„ - А) = 0. j
ПЛИЯПИЕ ГИРОСКОПИЧЕСКИХ СИЛ
629
Приравнивая определители систем B1) и B2) пулю, получаем ч;;а
частотных уравнения *):
(Вр* -{- А<*р ~ с4\ - с^1) (с, -f с2
)г = 0 B3)
(Вр* — Ашр — л2/.] - г,/?) (г, -г л2 - уИя") -г (fi/, -!- cJrf = 0. B4)
Докажем, что уравнения B3) и B4) не имеют общих корней.
Предположим, что общий корень /?, существует. Тогда при р = р^
оба урапнеипя удоплетноряются одновременно. Вычитая из перкою
уравнения второе, получаем:
2/b/j, (с, -! - сг — Мр\) = 0,
т. е. общими корнями могли бы быть
но оба эти значения не удовлетворяют исходным уравнениям. Пока-
Покажем теперь, что корни частотных уравнений вещественны. Для этого
рассмотрим функции
/. (Р) = (Вр* -\-Ашр — с.2П — cj|) (с, -|- с2 — Мр*) - \- {t\ly -L- с&)\ B3)
U (Р) = (Вр* - Ашр - С& - г,/;) (г, + с, - Мр*) + {сА + V/ B6)
и найдем их значения для некоторых характерных значений аргу-
аргумента р:
р
— оо
¦|/f'-!-f*
К Л[
0
, -1/ г,-1-е»
/i (Я)
— оо
(с./, + с2/»J
— c,cJa
O-i'i + с./.)'
¦—оэ
Л(р)
-- оо
(e./i-r-^)'
— c,eaZ9
(cji + etl.y
— оэ
*) Но существ)', опмса/Тиая операция означает разложение на множи-
множители частотного уравнения системы B0).
630 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫР. ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. Х1П
Из таблицы видно, что непрерывные функции /, (р) и fi(p) при
изменении аргумента р от —оо до -J- оо четыре раза меняют знак.
Вспоминая, что B3) и B4) являются уравнениями четвертой степени,
можно утверждать, что каждое из уравнений B3) и B4) имеет по
два отрицательных и два положительных корпя, т. е. корни обоих
уравнений вещественны. Отметим, что рассматриваемые корни обла-
обладают интересным свойством: отрицатель-
отрицательные корпи одного уравнения равны по
абсолютной величине положительным кор-
корням другого, и наоборот.
При угловой скорости (о, равной нулю,
уравнения B3) и B4) совпадают и при-
принимают вид
К задаче 459.
-M<V,-i-fA>2 = 0. B7)
Корни уравнения B7) определяют ча-
частоты свободных колебаний невращающе-
гося ротора. На рис. д представлены
графики функций /,(/?), /2(/>) и /„(/>),
причем через /0 (р) обозначена левая
части B7).
Как видно из графика положительные корпи этих уравнений,
т. е. частоты свободных колебаний ротора, располагаются в сле-
следующем порядке:
/>»OoOiOiOoOi- B8)
Здесь р0, р'и — частоты свободных колебаний невращагсмцегося ротора.
Из уравнений B1) и B2) видно, что для корпеП первого частот-
частотного \равнения частное решение будет иметь вид
yi = Dl sin (pt-\-a.), j
г, = Л, cos (pt -г a), !
3^ = 0, sin (/»* +а), "
Zi = D.t cos (pt-[-а),
так как система B2) и атом случае имеет только травиальпое решение
Л, — Л3 = 0 и Л2 — Л4 = 0. Аналогично для корней второго частот-
частотного уравнения получаем:
y,=Dl sin (pt -)- а),
zx= — D, cos (pt-\- a),
y<i = D<l sin (pt -\- a),
гг = — ZJ cos (pt -f- a).
B9)
C0)
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
G31
Легко проверить, чго вследствие указанной выше особенности кор-
корней частотных уравнений можно ограничиться подстановкой в B9)
и C0) лишь положительных корней соответствующих частотных
уравнений, ибо отрицательные корни не приведут к новым линейно
независимым частотным решениям.
В итоге корням рх и р\ отвечают первое и второе главные коле-
колебания, при которых ось ротора описывает круговой конус, вращаясь
и том же направлении, что и ротор. Эти движения называются «пря-
«прямой» прецессией ротора. При «прямой» прецессии вектор угловой
скорости твердого тела (при вращении вокруг оси симметрии) и век-
вектор угловой скорости оси ротора образуют острый угол.
Корням Pi и p't отвечают третье и четвертое главные колебания,
при которых ось ротора описывает круговой конус, вращаясь в на-
направлении, обратном вращению
ротора.
Эти движения называются
«обратной» прецессией ро-
ротора. При «обратной» прецес-
прецессии Гектор угловой скорости
твердого тела (при вращении
вокруг оси симметрии) и век-
вектор угловой скорости оси ро-
ротора образуют тупой угол. с)
Таким образом, свободные
колебания ротора складыва- К заДаче 459-
ются из четырех гармониче-
гармонических колебаний, два из которых соответствуют «прямой» прецес-
прецессии и два «обратной».
Подчеркнем, что частоты свободных колебаний вращающегося
ротора, как видно из уравнений B3) и B4), зависят от его угловой
скорости.
Заметим еще, чт задача решена для горизонтального ротора,
центр тяжести рогора лежит вне участка между опорами. Если же
центр тяжести ротора лежит между опорами (рис. с), то во всех
уравнениях надо изменить знак перед 4 "а противоположный.
6°. Влияние гироскопических сил на вынужденные
колебания твердого тела с четырьмя степенями сво-
свободы. Самоцентрирование. При составлении дифференциаль-
дифференциальных уравнений малых движений твердого тела можно применить
теорему о движении центра инерции системы материальных точек
и теорему об изменении главного момента количеств движения си-
системы материальных точек в относительном движении по отношению
к центру инерции.
Указанные теоремы используются в форме пункта 5° настоящего
параграфа (уравнения A*), B*), C*)).
632 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Дифференциальные уравнения вынужденных колебаний отличаются
от рассмотренных в пункте 5° этого параграфа уравнений свободных
колебаний наличием в правых частях возмущающих сил и их момен-
моментом. К весьма распространенной в технике категории возмущающих
сил относятся силы, вызванные статической и динамической неуран -
нонешенностыо ротороп.
Статическая неуравновешенность обусловливается смещением
центра инерции ротора or геометрической оси вращения. Динами-
Динамическая неуравновешенность является следствием наклона главной
оси инерции твердого тела по отношению к геометрической оси вра-
вращения.
П р и решении задач на определение и ы и у жде и и ы х
колебаний твердого тела с четырьмя степенями сво-
свободы рекомендуется следующая последователь-
последовательно с i ь действий:
1) выбираем обобщенные координаты;
2) пользуясь теоремой о движении центра инерции, составляем
два дифференциальных уравнения движения центра инерции твердого
тела;
3) составляем выражения главного момента количеств движения
сисями в относительном движении по етношению к центру инерции
и выражение главного момента внешних сил относительно осей, дви-
движущихся поступательно вместе с центром инерции твердого тела;
4) пользуясь теоремой об изменении главного момента количеств
движения в относительном днижении по отношению к центру инер-
инерции, выписываем еще дна дифференциальных ураниения малых коле-
колебаний;
Г») находим частное решение неоднородной системы дифферен-
дифференциальных уравнений, определяющее вынужденные колебания.
Задача 460*). Горизонтальный жесткий ротор массы М вра-
вращается с постоянной угловой скоростью о) в диух упругих опорах Л±
и В\. Опоры перемещаются в однородном упругом поле. Коэффи-
Коэффициенты жесткости опор: левой cit правой сг Расстояние между опо-
опорами /. Расстояние от центра тяжести ротора С до опоры Д[ равно /,,
до опоры Bi равно Л2. Далее, А — момент инерции ротора относи-
относительно оси симметрии, В—момент инерции роюра относительно оси,
перпендикулярной к оси вращения и проходящей через его центр.
Определить вынужденные колебания ротора, вызванные его ста-
статической и динамической неуравновешенное гыо, если центр тя-
тяжести ротора отстоит от 1еометрической оси на расстояние е, а
главная ось инерции ротора, близкая к геометрической оси, обра-
*) Л. С. К е л ь з о и, Самоцентрирование и уравновешивание жесткого
ротора, вращающегося в диух упругих опорах. Доклады АН СССР, т. НО,
иын. I, 1956.
§ В] ВЛИЯПНТ. ГИРОСКОПИЧЕСКИХ СИЛ 633
зует с последней угол 8. Плоскости, проведенные через геометриче-
геометрическую ось и центр тяжести, а также через геометрическую ось и глав-
главную ось инерции, образуют двугранный угол, равный е.
Найти также закон вынужденного движения ротора и определить
предельные значения координат центра тяжести ротора и угла откло-
отклонения главной оси инерции от геометрической оси ротора при не-
неограниченном увеличении угловой скорости ротора.
Решение. Будем исходить из дифференциальных уравнений
движения ротора, полученных в предыдущей задаче:
Мгс = — CiZ, — coZj.
I I ° ^ У-ri'Z . _У1ЧЧ*
Если обозначить через у, z координаты точки геометрической
оси ротора, лежащей на пересечении этой оси с плоскостью, пер-
перпендикулярной к оси вращения и проходящей через центр тяжесш
ротора, то координаты центра тяжести будут:
ус=у -\-е cos vat,
z^ = z — е sin uit.
Обозначим через 3 угол между проекцией главной центральной оси
пл плоскость ху и осью х. Угол между проекцией геометрической оси
па плоскость ху и осью х обозначим З.а. Эти угли связаны соотно-
соотношением ' q__u _ls со&Ш — s), C)
где (<x>t — е) — угол между плоскостью, в которой лежит угол 5
и плоскостью ху.
Обозначая аналогично через f угол между проекцией главной
центральной оси инерции на плоскость xz и осью х, и у угол между
проекцией геометрической оси па плоскость xz и осью х, находим:
7 = f.i 4- 2 sin (Ы — s). D)
Подставляя найденные значения ус, zQ, В, у в дифференциальные
уравнения движения ротора A), имеем:
Щ ~i~ t'iJ'i + с-1У-2 = Meui1 cos wt,
Мг ~ CtZ, -L- aZi= Жеш- sin wt,
AiuS^j—fi"f j- l-c^l^z^-^-Cii'fZf = —(B — А) со 8 sin (tor — t),
Am^-i f Др2 — c.ihy.1 — Cilji =(B — A) «)"S cos (urf — t).
Правые части этих уравнений представляют возмущающие факторы,
вызванные статической и динамической неуравновешенностью ротора.
634 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ (ГЛ. XIII
Используя установленные в предыдущей задаче соотношения
и систему уравнений (о), находим:
¦М {hy-i — Uyi) ~\~
М (/ji — /92|) -|- с [/г, -[
= —(Д-
/4 «| (i4 — i|) -j- Д (j-'a —j'O — C-iLilyt — i
(fi)
ce/y9 = Mefa? cos aif,
sin to/,
L-e),
sin
cos («)/ —
G)
Полученная система линейных, неоднородных дифференциальных урав-
уравнений с постоянными коэффициентами описывает малые колебания
ротора, вызнанные статической и динамической неуравновешенностью.
Решение атой системы складывается из общего решения системы
без припой части и частного решения полной системы.
Общее решение системы без npaison части найдено и предыдущей
задаче, — оно отвечает свободным колебаниям ротор,!.
Частое решение полной системы, которое будем искать в виде
yl=al cos u>t-\-by sin iot,
Zi = <2.2 Sill U)? -J- b% COS (lit,
y.t = Ba cos wt -\- b3 sin tot,
z~. = aL sin vd 4- b: cos utf,
определяет искомые вынужденные колебания.
Для того чтобы найти значения постоянных ah bL, подставим ре-
пиние (8) и уравнения движения G). Так как ути уравнении должны
быгь удовлетиорепы в пронзиольный момент времени, то необходимо
раздельно приравнять пулю сумму всех членов, содержащих множи-
множителем cos w/, и сумму всех члепон, содержащих множителем sin wt.
li more получаем две системы алгебраических уравнении:
, — /,a3) -f- c,/a, -)- с4/а3 = Melw*,
-j- с2/а4 = Melur,
— Аш1 (а3 — ау) Л- В<х? (а4 — а.г) -f-
— а,) —
= — (/? — A) /W cos e,
/аз — cvlxlax =
= E — A) /Sto2 cos г
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
635
/Им*
Mm* (
= 0,
~ с,/А„ ¦-¦- c/bi = 0,
— bK) \-
Л ш*
— A4) -j-
— bt) -f
A0)
= — (й—Л) 8/ш* sin e.
Из этих двух систем могут быть найдены значения всех восьми
постоянных а,, й5, йа, а4, />,, й5, Ая, й4 так> чтобы частное решение
удовлетворяло исходной системе дифференциальных уравнений.
Проще нсего эти постоянные определяются, если сложить и пи-
честь перпыс дна и последние дна уравнения каждой системы. Тогда
из первой системы имеем:
-;- cj) (a, — а,) — (
— сг1) (а3 — а4) = 0, A1)
;-^2|(а,-а4) = 0) A2)
(дя -:- at) = '2Melu>\ A3)
- Л) .о» -
= 2(fl—Л)/8щ-'соке. A4)
Аналогично ия птороН системы находим:
|- с,/) (AL — &j) — (/М/,.02 — ctl) (A3 — Л4) = 0. A5)
/,l (ft, - А,) - |(« - Л) с.,'2 ! - г//| (А, - *t) =
— '2 (В— Л)/3(,J sin s, A6)
'2 -1- с,/) (А, -|- й4) — (/И/,со2 — ,:4/) (ft, -¦- А4) = 0, A7)
\{ByA)^-clll[](bl^b.l)-\(B-\-A)^~c.iL1l\(b,-\-bi) = O. A8)
Рассмотрим совместно уравнения A1), A2), A7), A8), представляю-
представляющие по существу две группы однородных уравнений, относительно
гумм и разностей искомых величин.
Если
/, (.о) = [(в -!¦- л) ш2 + л//,1 (Mi.^ ¦!-1-,/) -
- ](s -j- Л) ш2 - - f,//,] (Ai/.oi* - с,/) т'. о, A flj
то эти системы однородных алгебраических уравнений имеют только
Тривиальное решение
„, = *„ *, = -*» j
636 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Подсыпан найденные значения искомых постоянных в оставшиеся
урапмепия A3), A4), A5), A6), получаем:
— с ,2/) а3
ь -\- с,/) а, —
(AL>- -f f i/) й, — (Miy — г,,/) /»л = О,
- Л) м» - с,//,] *i - L(/J — Л) (о2 -j- c,/,/J Ья =
= (? — Л) Ш-cose,
г. у
Теперь легко находятся псе искомые величины.
Ест, кроме того,
А (ш) = [(« - л) «* + <¦ 4У1 (Af/X -г ^0 -
- - [(В — А) со'2 — с,//,] (,И/,о/2 — Cil) г? 0, B2)
то постоянные будут рапны
— ОИ/,».1 — с4)(В— Л) «со2 cose}, B3)
й, = —
[(В - Д) м* -
jl— (М/у — с/){В —А)/аш- sin e,
— Л)/ош-сохг}, B4)
B6)
Вподя пместо постоянных ах, а.ъ ая, ait Ъь b.v Ьл, bk новые поао-
яппые Г), гь X' т1' связанные с ними соотношениями:
a i = л j, = г i cos /_, b\= — b.1 = rl sin /,
ая = ак = г-i cos <]>, й3 = — *i:^ ''i sin ф,
перепишем уранпепия (8) и виде
B7)
— (J)),
B8)
Па оспомании уравнений B8) заключаем, что вынужденные коле-
колебания ротора, вызванные его статической и динамической неуравно-
неуравновешенностью, представляют «прямую» прецессию с угловой скоро-
скоростью со, равной угловой скорости ротора.
§51
ВЛИЯНИЕ ГИРОСКОПИЧЕСКИХ СИЛ
637
Заметим, что статическая и динамическая неуравновешенность
в данной системе не могут вызвать вынужденных колебаний, соответ-
соответствующих «обратной» прецессии ротора.
Найдем теперь предельные значения постоянных, определяемых
равенствами B3) — B6) при неограниченном возрастании угловой
скорости:
lim Д| = /[ 8 cos в — е,
и> -> со
lim a-, =
ш —¦ со
— e,
lim
ш —> со
lini
ш —¦ со
», = /, 8 sin e,
ft., = 48 sin е.
B9)
C0)
Внося предельные значения постоянных в уравнения (8), находим
выражения координат при ш = ох
lim yi= — е cos otf -|- /, 8 cos (wt — e),
ш —* 00
lim zt = — e sin tut -(- /, 8 sin (at ¦— s),
lim у3 = — e cos co^ ~|-/2 8 cos (о)/ — s),
ш —¦ 00
lim z.j^= — с sin u>/ -[- /9 8 sin (ш/ — e).
<o —¦ 00 j
Для определения предельных значении координат центра тяжести
ротора и угла отклонения его главной оси инерции от геометрической
оси ротора, подстапим предельные значения координат C0) а уравне-
уравнения B), C), D). Используем аанисимосги @). В итоге получаем:
lim yc = 0, lim zc = Q,
СО —+ СО Ш —¦ СО
lim [5 = 0, lim T = 0.
C1)
Следовательно, при неограниченном увеличении угловой скорости
«ращения неуравновешенный статически и динамически ротор стре-
стремится совместить ось вращения с главной центральной осью инерции.
При неограниченном увеличении угловой скорости, жесткий ротор,
вращающийся в двух упругих опорах, располагается так, что устра-
устраняется его статическая и динамическая неуравновешенности.
Ротор с четырьмя степенями свободы (не считая вращения вокруг
оси) обладает замечательным свойством самоцентрирования. Это свой-
свойство находит широкое применение при конструировании современных
высокооборотпых машин.
038
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Задача 461. В условиях предыдущей задачи определить крити-
критические угловые скорости ротора (при отсутствии сил трения).
Критическими называются значения угловых скоростей ротора,
при которых ампли1уды вынужденных колебаний неограниченно воз-
возрастают.
Решение. Как следует из уравнений (8) предыдущей задачи,
координаты точек ротора неограниченно возрастают одновременно
с коэффициентами a,, bt.
Из равенств B3) — B6) видно, что это будет при
/j(ie) = [(a — а) ш2 -f с.
— \(B—A)ix?~
Предстаиим функцию /9(ю) в виде
(M/,u>* — c.J) = 0.
сil
С| 7.с"
B)
оо,
ft (ш) = (^? — Л) СО2/ [С, -f- Ct —
и исследуем ее. Для этого для значений со, равных: 0, 1/
находим значения /2(ш). При этом следует различать два случая:
и А^>R.
Результаты вычислений сведем в таблицу:
со
0
1/ ^Jr.fi.
Л Н
— с, с,/-1
/ (с,/, - Cilsy
— оо
А>В
ЛИ
/(с./.-с/.)'
+ СО
Из таблицы видно (см. стр. 629), что при В^> А уравнение A) имеет
дна положительных вещественных корпя а>! и со.2, т. е., что резонанс
наступает при этих двух значениях угловоИ скорости ротора. В этом
случае имеется два значения критической угловой скорости, причем
Во втором случае, при А^> В, уравнение (I) имеет один поло-
положительный вещественный корень иц, т. е. у ротора одна критическая
угловая скорость, причем o>i
I/
с, -4- с.
Упомянутые критические угловые скорости жесткого ротора
и двух упругих опорах определяются как корни биквадратного урав-
5 51 ВЛИЯНИЕ ГИРОСКОПИЧР.СКИХ СИЛ 630
нения A):
где
Sl = (c1-\-c^(B—A) — .
При Д = 0 формула C) дает значение критической углопой ско-
скорости без учета гироскопического эффекта.
До сих пор при определении вынужденных колебаний ротора
мы предполагали, что /, (ш) ф 0. Рассмотрим теперь особый случай,
когда
/!(ш) = 0. D)
Найдем разность
/-, (ш) _ /2 (ю) = 2 А ш2/ (с, -f- сг — Мшг). E)
Из E) следует, что при условии D), функция /Д<о) не обращается
в пуль, если с, -)- л2 ^- УИш2 и со .-/-¦ 0. Найденные и предыдущей за-
задаче значения а,-, Ьг и при услОЕши D) удовлетпоряют исходным диф-
дифференциальным уравнениям движения. Значит, п этом случае мы имеем
те же резонансные колебания и критические угловые скорости, кото-
которые уже определены уравнением C). На этом основании можно за-
заключить, что при воздействии на ротор возмущающих сил, ве.шзнных
его статической и динамической неуравновешенностью, резонансных
колебаний, соотиетст кующих обращению в нуль, функции /, (со) воз-
возникнуть не могут. Однако при действии других возмущающих сил,
изменяющихся с частотой, рапной угловой скорости рогора со, резо-
резонансные колебания, соответствующие обращению п нуль /j (<o), могут
возникнуть. Доказательство этого утверждения приводится в следую-
следующей задаче.
Задача 462. В условиях задачи 460 определить криттеские
угловые скорости ротора, если возмущающая сила равна
F= Fo cos wt.
Возмущающая сила с постоянной амплитудой приложена в центре
тяжести ротора и сохраняет неизменное направление, параллельное осн_у.
Решение. Дифференциальные уравнения движения ротора будут
(см. уравнения E), F), A3), A4) задачи 459):
А1ус -{- c±yv -\- Съуъ = Fo cos mt, )
= 0, I
} 0)
, = o,
640
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕЛ1Ы |ГЛ. XIII
Подставляя выражения для ус, zQ, 3, 7 (см. уравнения A)—D) за-
задачи 459) в эти уравнения, находим:
М A\У'-1 — {-У\) — C\ly\ ~'~ City-i== I~a t cos ш^,
М (/,".Л — 1,гх) -- г,/г, — rjz., = 0,
[?г — i,) -; - В (у.. — у\) — Cj/j/j'a — <•,/,(!'[ = 0. J
Решение этой системы линейных неоднородных дифференциальных
уравнений с постоянными коэффициентами складывается из общего ре-
решения системы без правой части и частного решения полной системы.
B)
U^
|
/"-=-
К -«да'ic -162.
это
Общее решение системы без правой части уже найдено, —
уравнение свободных колебаний ротора (см. задачу 459).
Частное решение полной системы, определяющее вынужденные
колебания ротора, будем искать в виде
виде
V, —a, cos wt- z, = До sin со/;
у., = аясо$оI; z.l = ai sin tof,
Г.\)
Подставляя C) n дифференциальные уравнения движения B) и
сокращая соответственно на sin ml или cos шг, получаем систему
алгебраических уравнении для определения постоянных аи а.,, дя, а4:
Дсо2а;, — (г,/,/ — /
Дш5я.2 — (с,/!/ — So/2) й! —
) а4 = 0,
',/ -L- Вт1) ая — 0.
$ 51 n/'lffllHF. niPOCKOmiMF.CKHX СИЛ 641
Складывая и вычитая первые два и последние два уравнения, находим:
(с,/ ¦ г М1&>*) (а, -| - a,) -f (^_ /И/,со2) (а, -| - а,) = /у, J
— A) «i2 — с^1\ (а, -
- [(В - А) ш»
[(/?-!- ^l) «>* — c././l (a, — ae) —
- | (Я -f A) ш'2 -f
Из угмх урампепий получаем:
| (аз + fli) = 0.
- a,) = 0.
E)
откуда
_FJ
_>V
FJ
\(Ii- -А),л- -
\(B~A)<o°- <
ub~:C-
2/.. i..))
_Fal[(B — A)<** —
/i (ш)
Г„/ [Ш -|- Л)м2- ¦
! cj.i] . /¦¦„/ |(/M-
1 2j
¦¦c,/,/| FJ\(B j-
^,/|'
A) „"¦->- r/./|
aHL- гЛ/|
/1)>.r -C,/,/|
F)
Формулы F) показыпяют, что а,, й.а, а.,, а4 неограниченно возра-
возрастают, когда/[ («>) приблия^ается к пулю. При решении предыдущей
аалачи было устапоилсмо, что /, (со) и /^ (ю) не имеют общих корней.
Следовательно, когда /L (w) -*¦ 0, то /i(to) принимает отличное от пуля
значение. Поэтому при малых /\ (ш) первые слагаемые н формулах @)
пренебрежимо малы по сравнению со вторыми.
Следовательно, для приближенного определения постоянных можно
в F) отбросить первые части.
Тогда
G)
21 Теоретическая механика, том II
642 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ |ГЛ. ХП1
Поэтому уравнения движения точек ротора, совпадающих с цен-
центрами нижней и верхней опор, будут иметь вид:
у, = a, cos uif, V> = a-, cos u>f, \
г, =—a, sm cor, Zi = — o;t sin юг. J
Из уравнений (8) видно, что характер колебаний, вызываемых си-
силой F вблизи резонанса при соответствующей критической угловой
скорости, определяемой из уравнения /j (m) = 0, отвечает синхронной
«обратной» прецессии ротора.
Значения критических угловых скоростей «обратном» прецессии
находятся из уравнения (см. задачу 4(Ю)
h М = 1(« ~Г А) м* -1- с,//,)| (Л'1/.V -1- с,/) —
— \(Н- г А) ш- — г,//,] (Л1/,(и^ — г./) = 0, (9)
откуда ^ _ _ _
"''4 |/ 2Л1 (Д + Л)
где '
/?, —ff, _!_ сЛ f/?.J... Д1 . '_ М (г,/- . '_ Г./-Л
и
s.2 = (Ci-;-г4)(й ¦;- А)-\-м(t-i/'i Lс'../л)
при>1ем эти значения всегда вещественны.
Таким образом, при действии возмущающей силы постоянного
направления, изменяющейся по синусоидальному закону с частотой,
раиной угловой скорости ротора, существуют четыре или три кригп-
ческис угловые скорости ротора (в зависимости от соотношения мо-
'меитов инерции А и В).
7'. В ы и у ж д е и н r>i е к о л е б а и и я твердого т с л а и р и
резонансе. Дифференциальные уравнения движения твердого тела
составляются в соответствии с общими правилами, указанными в § -1
и Г), пунктах 3 , fi' настоящей главы.
При решении задач на определение вынужден-
вынужденных колебании твердого тела при резонансе реко-
м с п д у е г с я следу ю щ а я л о с л е д о и а г е л ь и о с т ь д е И с т и п U:
1) выбираем обобщенные координаты;
2) пользуясь уравнениями Лаграпжа или общими теоремами дина-
динамики, составляем дифференциальные уравнения движения твердого 1ела;
'Л) рассматривая задачу о свободных колебаниях тела, находим
частоты свободных колебаний (резонансные частоты);
4) для случая резонанса i-аходим частное решение неоднородной
системы дифференциальных уравнений движения и накладывая па пего
общее решение однородной системы, получаем искомое общее реше-
решение задачи.
Задача 463. Определить вынужденные колебания шпинделя вере-
веретена, закрепленного шарпирпо в точке О и имеющего в точке А
51
ВЛИЯНИИ ГИРОСКОПИЧЕСКИХ СИЛ
643
"'Г
L
г
упругую опору с коэффициентом жесткости с, в любом горизонталь-
горизонтальном направлении. Центр тяжести шпинделя находится и точке С Угло-
иая скорость вращения шпинделя ш ио-
круг оси симметрии постоянная по вели- tJ
чипе. Главные моменты инерции шпинделя
относительно осей, проведенных через не-
неподвижную точку О, соответственно равны:
осевой момент инерции А, момент инер-
инерции относительно любой оси, перпендику-
перпендикулярной оси симметрии В. Расстояния
О.4 = /, АС = 1\, 0С=/.2. 1'а иысоте b
над неподвижной точкой О, на расстоя-
расстоянии е от оси симметрии, находится не-
уравнонешепнап малая масса т (рмс.
к задаче 463). Ввиду малости массы т и
расстояния е пренебречь ее влиянием па
положение центра тяжести и моменты
инерции.
Определить вынужденные колебания
шпинделя при резонансе.
Р е ш с п и е. Воспользуемся некоторыми
результатами, полученными при решении
задачи 456, когда для этого же шпинделя были определены иыпу-
ждеипые колебания при значениях угловой скорости вращения, отлич-
отличных от резонансных.
Дифференциальные ураппения движении имели вид
/Уг, — Лшу, -; - (с,/2 — Qlt) 2, = — murbel sin ш/1, 1
_|_ (с,/2 — Q(i)yl = — iiv^bel cos oif, J
/
IS
К задаче 103.
где ух, г, — координаты точки шпинделя, соприкасающейся с
опорой.
Частное решение системы, определяющее вынужденные колебания,
дается формулами
т<л-Ьс1 .
У\ = ~, 7T-J —ггт,—тттт cos mt,
as- Л)<о---(с./---о/,.)
(U — Л) м- - (c,l- -
Sin cu/.
B)
Это решение удовлетворяет системе дифференциальных урапнеиий
дпижепия при всех значениях угловой скорости вращения шпинделя,
кроме критического (резонансного), рапного
B — A '
для которого знаменатель в B) обращается в пуль.
21'
C)
644 УСТОЙЧИВОСТЬ РЛМЮВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Из ypanireniitt B) следует, что при вынужденных колебаниях
точка с координатами уи г, будет описывать окружность радиусом
тш-bpl ..
с угловой скоростью, рапной по пеличиые угловой скорости враще-
вращения шпинделя вокруг оси симметрии. При этом угол между направле-
направлениями угловых скоростей меньше - 2. Следовательно, вынужденным
колебаниям шпинделя, вызванным неуравновешенное!ыо, соответствует
«прямая» прецессия его оси с угловой скоростью, равной по модулю
угловой скорости вращения шпинделя. При вынужденных колебаниях,
вызванных неуравпопешеппос'ыо шпинделя, резонансные колебания,
соответствующие второму значению критической скорости
li (-Л ' ( >
возникнуть не могут.
Перейдем к определению закона вынужденных колебаний шшш-
деля при резонансе, когда угловая скорость шпинделя равна кришче-
ской.
Тогда частное решение системы дифференциальных уравнений A)
вследствие ее структуры следует искать в виде
cos
\
s wt. J
>— Лшо?,] sin u>t — |—
(fi/4 — Q/-2>'/'il cos <»'= —mwPbel sin wi,
cos oi/ \-\--1HJ]wi — ^A//[O)--j-
Q*i) tdf 1 sin at = — umHwl cos u>/.
Вычисляя первую п вторую производные от \i\ и <i по премеип,
подставляем полученные выражения в систему A)
G)
Так как эти равенства должны быть справедливы в любой мо-
момент времени, то необходимо приравнять коэффициенты при sin ш/,
cos wf, t sin wt и t cos со/ и правой и левой частях. В результате полу-
получаем четыре уравнении для определения двух неизвестных:
>"/ii — Au>V, -¦ - (<V'~ — Ql>) /i] = О,
i -\- Atollt = — mtsPbel,
¦ — /b'lii -I- U'll1 — Qlq)dt = 0.
<s С) устойчивость движения fi4T)
Особенность системы состоит п там, что решение первых двух
уравнении тождественно удовлетворяет остальным. Полному
, , m^bel mbel -i / с,I- — (JL, ,n.
Следовательно, уравнения вынужденных колебании нижнего копна
шпинделя при резонансе будут:
mbel -, Г г,/- - Ql~ , .
Из этих ур.чннсипи следует, что при ре.юпапсе вынужденным ко-
колебаниям соотпетстпует -«обратная» прецессия оси шпинделя.
Пели углопая скорость шишпелч меньше критической C), то, как
видно ил ураписпнМ B), знаменатель и нраных чааях отрицателен.
Таким образом, ось шпинделя совершает «п])чмую» прецессию. При
резонансе возникают нарастающие колебания, соогпстстпуютне «обрат-
«обратном» прецессии оси шпинделя.
Далее, с ростом угловом скорости шпинделя знаменатель и урав-
уравнениях B) становится положительным и, таким образом, после резонанса
шювь возникают колебания, соотпетстнующие ««прямой» прецессии
шпинделя.
§ 6. Устойчивость движения
1'. II р я дг о И .метол и с с л едоиаи п я. Для изучения устойчи-
устойчивости движения системы материальных точек запишем систему диф-
дифференциальных уравнении движения и виде системы первого порядка
~ = У„ O-i. У* .... У п. О (А = 1, 2, ... ,2и), A *)
где у„ — обобщенные координаты или обобщенные скорости систе-
системы, являющиеся функциями времени /.
Если
yi=A(t), у*=Л(<)>...,Уп = /п(П (^*)
является частным решением cucicmi.i A*), соответствующим заданным
начальным условиям движения:
Vi=J'io. У-1=У.*» •... Уп=Упо >ФИ ' = °. I3*)
то решение B1") определяет нетозмутепное движение системы.
Невозмущеппое движение (истсмы называется устойчивым, если
при малом изменении начальных услонн!) решения системы B*)
046 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. X1I1
переходят в решения, мало отличающиеся от исходных для сколь угод-
угодно больших знамении /. Такое певозмущеппое движение называют
также движением устойчивым п малом.
Если отклонения от певозчушенпого движения, кроме того, при
неограниченном возрастании времени стремятся к нулю, то такое не-
невозмущенное дпижеиие называется асимптотически устойчивым.
В некоторых технических задачах недостаточно исследовать ус-
устойчивость дпнжепня в малом. Тогда следует отбросить ограничения,
наложенные на отклонения начальных условий возмущенного движе-
пия, от начальных условий пепозмущенпого движения.
Певозмущенное движение системы называется асимптотически ус-
устойчивым п большом, если при любых иных начальных условиях,
чем C*), решение системы ураннений A*), начиная с некоторого
определенного знамения иремени, будет отклоняться от решения B*)
на пеличипу, меньшую наперед заданном.
Отклонения начальных условий движения от заданных уравнени-
уравнениями C*) называются возмущениями.
Возможны и другие определения устойчивости движения. В част-
частности, ко многих задачах современной техники важно обеспечить ма-
малые отклонения и решении дифференциальных уравнений возмущен-
возмущенного движения от решения пепозмущенпого движения на конечном
интервале времени.
При решении задач на устойчивость движения и этом пункте бу-
будет применен прямой метод интегрирования дифференциальных урав-
уравнений возмущенного движения. Этот метод наиболее эффективен по
споим результатам, однако ею применение ограничено небольшим
числом возможных приложений вниду математических трудностей, свя-
связанных с получением решения и замкнутом виде.
При р е in е и и и и а дач на устой ч и в ость д и и ж синя
прям ым методом и и т е г р и р о в ан и я д и ф ф е р е п ц и а л ь -
пых уран п е и п II в о з м у ш. е п и о г о движения р е к о м е и д у -
е г с я еле д у ю ш. и I! и о р я д о к л е И с т в и ii:
1) составляем дифференциальные уравнения пенозмущеппого дви-
движения системы;
2) находим частное решение этой системы дифференциальных
уравнений, соответствующее заданным начальным условиям и опре-
определяющее певозмутеииое движение системы;
3) задаемся другими начальными условиями движения;
4) составляем дифференциальные уравнения возмущенного дви-
движения;
5) интегрируя дифференциальные уравнения возмущенного движе-
движения, находим их решение;
()) сопостапляя решения дифференциальных уравнений иепозму-
щеппого п позмутенпого дги жеппй, судим об устойчивости неиоз-
мушенного движения.
устойчивость движения
647
Задача 464. Точка А движется равномерно м прямолинейно со
скоростью vs. Точка В находилась и начальным момент на расстоя-
расстоянии а0 от точки А. Прямая АВ, соединяющая обе точки, и началь-
начальным момент образовывала угол 00 с перпендикуляром, восставленным
к прямолинейном траектории топки А (рис. а).
К :i;i;ui4o Hi I.
Угол -у, образованный скоростью точки В с линией АИ, называ-
называется углом упреждения. Точк;. В будет сближаться с точкой Л,
иплотъ до точного попадании, по прямолинейно!) относительной тра-
траектории, если пыбрать угол упреждения -]¦„ согласно равенству
sin -f0 = —- cos 6n = It cos 60, A)
так как при этом относительная скорость точки В будет направлена
но ВЛ (рис. а).
Рапепству A) соответствуют два значения yr.Ta:L6,, (рис. б):
sin 6(i=l/ I —- —j^r1- i
sin
sin (— фо) =
sin ,,
B)
Таким образом, прямолинейное движение точки В возможно при
подходе к точке Л с передней полуплоскости и с задней полупло-
полуплоскости, по прямым ВЛ и Н\А.
Определить устойчивость движения точки В по ВЛ и ВХА.
648 УСТОЙЧИВОСТЬ РЛПНОВССИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Решение. Рассчатрнная движение точки В как сложное движе-
движение, складывающееся из переносного движения имеете с точкой А и
относительного движении по отношению к точке А, замечаем, чш
при соблюдении равенства A) вектор относительной скорости точки В
направлен в точку А (рис. в). Наблюдатель, движущийся вместе с
точкой А, пил"! точку В, дп гжущейся по прямолинейной относитель-
относительной траектории В А с постоянной скоростью Dr. Эю и будет пеиоз-
мущешюе движение точки В.
Рассмотрим теперь возмущенное движение точки В, полагая, что
угол упреждения ~[ не удовлетворяет равенству A). Обозначая рассто-
расстояние АВ через а, находим проекции относительной скорости па А В
и на ось, перпендикулярную < АВ:
a = —vcos~[ — vs sin ф, C)
a'l = vi\n'[—vs cos 6. D)
В этих ураипениях через ty обозначен угол между осью х и пря-
прямом ЛЯ н дампы!! момент времени.
Разделим уравнение C) на равенство D) и помножим обе части па
dfy. Тогда на Идем:
da_ __ t/cos-f-f atsin у ^. ,.
a vs ens^—v sm -( ^'
При интегрировании этого уравнения с разделенными переменны-
переменными необходимо рассмотреть три частных случая:
2) smL; = k-; 3) sin
Первый случай: (малый угол упреждения: sin'2-,' <^кг). Интегрируя
E), находим:
/ sin 7 ¦ - ft ens -I \\
\ —k-\- sin 7 ens fy -)- У ft2— swi-7 sin u /'
/N sin 7 — ft eos '
где С—иронзвол[|Иая постоянная, а через k обозначено отношение
скоростей /,; = — .
Освобождаясь от логарифмов и определяя С по начальным усло-
условиям (при ^ = 0 а = а0, ^ = ^0), имеем:
cos y
sin [Cos'y,,-I- |-Aft- s!iiJ7 sin 60 sin 7 — ftcosy'
а —Г '"kJr
"о [ -к-\
sin [Cos 6 -\- V It-— sm-7 sin 6 sirlT — It cos f u
sin 7 — ft cos -\
' sin 7 - ¦ ft ens j
¦ s...r X
/
Это уравнение опюситетыюй траектории точки 5 в возмущенном
движении.
i fi| УСТОЙЧИВПСТ!» ДВИЖЕНИЯ 649
Заметим, что при разных k показатель степени различен:
cos 7
\r'k- — siri-7
^> 1 при k<^ 1
= 1 при k=l (8)
<^ ] при k^> 1.
Если k<^\, то точка В настигнет точку А при угле <J*2, опреде-
определенном рапепстпами
«>su, = —', .iin^ = -y 1 pi, (9)
так как тогда а обратится и нуль, что следует из G). Сопоставляя
значения О.Д'9) с рапепстпами (i) и B), заключаем, что угол $* —— '¦!>„
для угла упреждения у. Иначе гопоря, и конце движения точка В
выходит на траектории» певозмущепиого диижепия, находящуюся
и задней полуплоскости. Следопательпо, движение по относительной
траектории АН, находящейся под углом (—t|»u) к оси х, устоИчипо
и больиго.м. Какой» бы ни бмло начальное во.чмущепне, точка В
ь конце движения пернет ся па прямую А В.
С другой стороны из раиеистиа D) имеем:
^in-f-o.cosO
a v '
Следовательно, при переходе через прямую, расположенную под
углом ф|, определяемым равенствами (рис. г)
--^т1. (И)
угловая скорость притеки я линии А В меняет знак.
Если начальный угол >!H меньше &, и больше йо, то и процессе
движения угол 0 монотонно уменьшается вплоть до (|j — ^.2, когда
точка В совмещается с точкой А.
Если же угол 60 больше 6,, по меньше <ЬЬ то угол п процессе
дпижепия монотонно упеличнплется вплоть до <|) = с]л2, при котором
опять-таки точка Я совмещается с точкой А (рис. г). Следовательно,
пепозмущепное движение по относительной траектории АВ, располо-
расположенной и передней полуплоскости, неустойчиво и малом.
Как бы мало пи было отклонение точки от траектории иевозму-
шеппого дпижепия, находящемся в передней полуплоскости, она при
дальнейшем движении будет иге дальше отклоняться от негю.чмушен-
ной траектории, приближаясь к другой прямолинейной траектории
певозмущепиого движения, расположенной в надпей полуплоскости.
Второй случай: (siirY = k'1). Интегрируя уравнение (Г») и определяя
произвольную постоянную ишегрировапия по начальным условиям
650 УСТОЙЧИВОСТЬ РЛП1ЮВРХ.ИЯ И М\МЬ1Е ДВИЖЕНИЯ CHCTF.MM [ГЛ. XIII
(при t = О лг = ап, 0^(|j0), находим уравнение относительном траек-
траектории возмущенного дшгжепня
Уравнение A0) и :-лом случае принимает вид
ф=-^A — cos^). A3)
Следовательно, yi лопая скорость попорота .^ипии ПА всегда положи-
положительна.
Из ураипспия A2) следует, что расстояние а обращается и пуль
при if —»¦ 0 с отрицательной стороны. Таким образом, п этом случае
ode траектории ненозмущеппо! о диижепия (рис. г) с.ншаЕотси и одну
прямую Лх, углы tyi и ifi обращаются соотметстмепно к пуль. П этом
случае следует судить об устойчпиости диижеиич по прямой Ах на
основании знака попмущспия. Если начальное отклонение находится
и нериой четперти, то точка В будет отклоняться все дальше от пря-
.\iofi Ах и совпадет с точкой А при «JJ —>- 0 с отрицательном стороны.
Если начальное отклонение лежит и четвертой четнерти, то точка В
будет приближаться к примой Лх, усол (^0 будет стремиться к нулю.
В этом случае движение усгойчнио а большом.
Третий случай: (siu4-y^>#2). Интегрируя урапнепне E) и опреде-
определяя произиольную постоянную нитегрироиаиия по начальным условиям
(a = an, !jj=;'Jj0 при ^=0), находим ураинеиие относительной траек-
траектории возмущенного диижения
a0 \ sin ¦' -—It cos i
a / sin -j - ft cos ¦
- — It cos-
2 cos 7
A4)
Из этого уравнения следует, что расстояние до точки А обращается
и пуль при неограниченном возрастании угла <Jj.
Из ураипспия D) находим угловую скорость поворота прямой
6= - (sin -j- — k cos if), A5)
откуда следует, что yi лопая скорость не меняет знаки. Ее знак сои-
надает со знаком sin у.
Таким образом, возмущенная' траектория точки В — спираль, про-
проходящая через точку .4.
Из уравнения A5) следует, что углопая скорость вращения
примой ВА но мере приближения точки В к А неограниченно воз-
возрастает.
§ fil устойчивость движении G51
2°. Устойчивость движения по первому прибли-
приближению. Решение задач па определение устойчивости движения пря-
прямым методом интегрирования дифференциальных уравнений возмущен-
возмущенного движения is большинстве случаен не может быть осуществлено
шшду невозможности получения решения в замкнутом виде.
В свями с этим широкое распространение получил способ опре-
определения устойчивости движения но первому приближению. Этот способ
был известен задолго до появления классического груда А. М. Ляпу-
Ляпунова (Общая задача об устойчивости движения, 1892 г.). Однако имен-
именно А. М. Ляпунов впервые установил условия, при которых первое
приближение позволяет судить об устойчивости движения исходной
системы, движение которой описьцаегся нелинейными дифферепциальны-
дги уравнениями.
Способ определения устойчивости движения по первому прибли-
приближению заключается в следующем.
Пус гь
.vi=/i@. у* = Ш y,,=--f,,(t) 0*)
является частным решением системы дифференциальных уравнении пер-
первого порядка:
-/ir=K*O'i.j's. ..-jv о B*)
при заданных начальных'условиях движения
У\=Уы, J'a =_Vai>. ••¦. Уп—Упп при 1 = 0. C*)
Решение A*) определяет пепозмутенпое движение системы. При
других начальных условиях движения значения переменных ук, опре-
определяющие движение системы, можно представить в виде
1'*=/*@ + **- D*)
Тогда уравнения B*) примут вид
dJ±. - j_ i^"- = yh I/, @ -f x,, f, (t) 4- x,, ..., /„ @ + .*„,< |. E*)
Вычитая из каждого соответственного уравнения Cs) уравне-
уравнение B*), найдем
, П- 16*)
Обозначая правую часть этих уравнений для краткости:
(xi, х.г, ..., х„, 0 =
G*)
652 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
получим систему дифференциальных уравнении возмущенного движения
—^- — лк(Х1, л-1, ..., хп, I). (8)
Из G*) следует, что
Х„@, 0, ..., О, 0 = 0 (П*)
и, следовательно,
х, =х2 = ...=л-„ = 0 A0*)
является частным решением системы (8*), соответствующим певозму-
шенному движению.
Для рассмотрения устойчивости но первому приближению в систе-
системе уравнении (8*) в правой части выделяются линейные слагаемые.
При аюм ограничимся случаем, когда время не входит явно в правую
часть уравнении
У/7~= °*'iJrl "Г a>i-jxi Т- ¦ -~'Г "*,1Л"л "Г ''к\х\> xi> •••> хп)< С11 )
'дХк.\
где а*5 = ;^;Л1-...д-2=... =л ,о> а ^Л-^Т. ••¦- хп) содержит слагаемые
ыорого и более высоких порядков относительно переменных хк.
Тогда для исследования устойчивости по первому приближению
составляют систему, получаемую из A1*) отбрасыванием нелинейных
слагаемых (уравнения в вариациях)
-* fr ~ у. ! ~ у. \ _! _/> у- ^1*^*1
!1 пахо.чят XcipiiK'iepHi'iH'ieCKOi: уравнение системы A2::)
Согласно мерной теореме Ляпунова, невозмущепиое движение,
определяемое уравнениями AЧ:), устойчиво, если все корни xapaKie-
рпстического уравнения A-4*) имеют отрицательную нетсстнеипую
часть. R этом случае отброшенные нелинейные слагаемые и припой
части уравнении A1*) не влияют па устойчивость движения.
Согласно второй теореме Ляпунова, neno:«iymennoe движение,
определяемое уравнениями A*), неустойчиво, если среди корней ха-
характеристического уравнения A3*) имеется хотя Гил одни корень с
положительной вещественной частью. И в этом случае отброшенные
нелинейные слагаемые в правой части уравнении A1*) не Moryi вли-
влиять на устойчивость движения.
Таким образом, исследование по первому приближению позволяет
окончательно ответить па иолрос on устойчивости движения и тех
случаях, когда корни характеристического уравнения и.мекм отрица-
отрицательную или положительную вещественную часть.
Если и числе корней характеристического уравнения имеются
корпи, вещественная часть которых равна пулю, то есть пулевые или
УСТОЙЧИВОСТЬ ДВИЖЕНИЯ
653
чисто мнимые корни, то судить об устойчивости движения по пер-
первому приближению нельзя. В эгих случлях, насыпаемых «.критиче-
«.критическими», как показал Л. М. Ляпунов, необходимо учитывать в диф-
дифференциальных уравнениях члены порядка выше первого.
О знаке корнем характерисшческого уравнения можно судить
на основании теоремы Гурвина, которая формулируется следующим
образом. Уравнение л-it степени с нечцесчионными коэффициентами
К>0
алхп -;-
- г ап = 0
имеет все корни с отрицательной вещественной чясшо, если все
определители вида
, о„ О
!=а;! а.х я,
(If)*-)
1*1
о о
«Jn- 1
¦1*п -i ¦
есл!
i^> п. .'-)го условие является
положительны. При этом и-, = О,
необходимым и достаточным.
При решении задач и а исследование устойчи-
устойчивости л в и ж е н и я си с т е м ы но не р в о м у и р и б л и ,:•" е и и ю
р е к о м е п дует с я с л е д v ю щ и it и о р я д ч к д е Н с т в и it:
1) определяем число скпеней свободы системы и выбпр;,ем обоб-
обобщенные координаты;
2) пользуясь уравнениями Лаграпжа, состав.тяем дифференциаль-
дифференциальные уравнения певозмущеипого движения;
'.'i) составляем дифференциальные уравнения возмущенного дви-
движения, полагая, что обобтеппье координаты и обобщенные скорости
в возмущенном движении отличаются от значений в невозмущеппом
движении на величины первого порядка малости;
4) в полученных дифференциальных уравнениях отбрасываем сла-
слагаемые второго и более высоких порядков малости;
о) вычитаем из дифференциальных уравнений возмущенного дви-
движения соответственные дифференциальные уравнения певозмутенпого
движения;
В) для случая системы линейных дифференциальных уравнений
к вариациях с постоянными коэффициентами составляем характеристи-
характеристическое уравнение;
7) пользуясь теоремой Гурвица, определяем знаки вещественных
частей корней движения характеристического уравнения и затем
судим об устойчивости движения исходной системы.
654 устойчивость равновесия и малые движения системы [гл. хш
Задача 465. Центробежный регулятор Уатта прел назначен для
поддержания равномерного вращательного движения. Он состоит из
двух стержней 0.4 и ОБ одинаковой длины /, шарннрно укреплен-
укрепленных в неподвижной точке О. Па копнах стержни несут два шара
массы ш каждый (рис. а). При помощи двух стержней 01: и DC
муфта С, которая может ско.ть-
i зим> по вертикальной оси,
шарпнрпо соединена со стерж-
стержнями, несущими шары. Шары
считать материальными точка-
точками. При увеличении yr.ionoft
скорости вращения шары рас-
*- холятся, муфта С подымается,
" уменьшая впускное отверстие
для пара. При уменьшении
угловой скорости шары ебтп-
жаюкя, муфта С опускается и
и) увеличивает отверстие для впу-
. ска пара.
' г _ Пренебрегая млесамн стерж-
К тллачс 46х Iie(j и MyCj,ThI] a -акже силами
трения, определить устойчи-
устойчивость движения регулятора. Момент инерции вращающихся частей
относительно вертикальной оси ранен /„ (без учета шаре и).
Восстанавливающий момент, пызлаииый
псиозмущешюго значения ^0, ранен
/., =-- — к (? - ?|1),
отклонением угла о от
где /;—постоянный положительный коэффициент.
Решение. Регулятор и целом представляет собой систему
с дпумя степенями свободы. Выбираем обобщенные координаты: угол
поворота вокруг оси ОС, который обозначим Й, и угол поворота
стержней ОЛ и ОВ вокруг •оринонталыюй оси, перпендикулярной
к плоскости ОАВ, который назовем ср. Определим знамение угла ^0,
соответствующее вращению системы с постоянной заданной* угловой
скоростью fjo = u)n. Для чтого достаточно рассмотреть опюсителыюе
равновесие одного из uiapon (рис. б). К шару приложены: вес Р (/i—ing)
и реакция стержня N. Присоединяя к этим силам нормальную силу
•ипернии Jn {J,, = ml sin уи<и|;'), можем рассматривать совокупность трех
сил как уравновешенную сис1сму.
Проектируя все силы на направление, перпендикулярное к N,
имеем:'
./„cos
/H?Sinao =
A)
« «1 УСТ0ЙЧИВ0С'1> ДВИЖЕНИЯ 655
откуда
0 /cosy/ v '
Таким образом, заданной угловой скорости вращения системы соот-
соответствует вполне определенный угол <рп- Это установившееся движе-
движение систем!.! па;1ывае1ся невозмупиппим движением.
Дли составления дифференциальных уравнения движения системы
воспользуемся уравнениями Лаграпжа. Кинетическая энергия системы
равна
Т f/Q- I 'r-\ /41
¦/ L 1| ~7~ 2Y г * v /
Момент инерции /[ относительно оси z (рис. а) складывается из
момента инерции /0 всех вращающихся частей, кроме шаров (эюг
мочит инерции опается неизменным при изменении угла <р), и из
момента инерции шаров, зависящего от yi ла ср:
Момент инерции /,2 шаров относительно осп х (риса) равен
/4=2/н/4. E)
Таким образом, кинетическая энергия системы выражается в обоб-
обобщенных координатах в виде
Переходим к определению обобщенных сил. Первая обобщенная
сила <Э. iiaxo.'inicii как ко-ффициепг при соответс! ну кинем возмож-
возможном пере-мещенни в пыражеппи дчя элементарной работы:
С.тедовате.т[)НО, обобщенная сила будет
д. = /.,= -А(?-?0). (8)
Вторая обобщенная сила Qi находится ' как частная производная
от потенциала по углу *. Действительно, при изменении угла cs рабо-
работу coiiepniaer только сила тяжести шаров, так как центр тяжести
остальных вращающихся частей системы остается неизменным, а рабо-
работа момета /._. при изменении угла -f равна нулю. Тогда с точностью
до произвольном постоянной потенциальная энергия шаров равна
U— --hnKUosy. (9)
Составляем, далее, уравнения Лагранжа:
'L(!J.) = Qr (Ю)
656 УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XIII
Рассматривая малые колебания системы около положения певоз-
муичеппого движения B), полагаем:
Внося значения переменных и уравнение A0), находим:
ЧтР sin :p cos з ¦ $ • З' \-1$ = — k (:? — сз0) A3)
или, учитывая A2),
ЪпС1 sin (з„ — 8») cos (sn -L 8:o) 8i (8„ -- 83) ¦ \-
¦¦! ¦ [/0 —¦ 2/wf sin'2 (<pn -^- 8?I оЗ = — k- 89. A4)
Для составления уравнения малых движений подсчитаем все члены
С точностью до величии первого порядка малости включительно,
полагая sin о'-р я» З'-р, cos о'?-^ 1. Находим после несложных преоб-
преобразований:
(/„•'- '2ml'1 sinb0) 8 [:i -|- /я/2 sin 2cp0 ¦ ,30оф — k ¦ Ц = 0 A5)
Второе дифференциальное уравнение малых движений находим из(И):
1$ — 3 • т1г ¦ 2 sin у cos 9 = — '2ing/ sin 9. A6)
Внося в это уравнение значения A2) и (о), получаем:
83 ---2-C0-;-8^JsinBcf,, — 2о--р)-: - ^ sin (э„ ;-й») = (). A7)
Раскрываем скобки и подсчитываем для малых движений все члены
с точностью до величин первого порядка малости включительно.
После несложных преобразований, учитииан равенство B), имеем:
о* — J30 sin 2?0• 33' -[- (Я соъ ?0 — ё= cos 2?0) 3? = 0. A8)
Таким образом получена система двух дифференциальных урав-
уравнений A5), A8) малых движений системы.
Для получения характеристического уравнения этой системы линей-
линейных уравнений с постоянными коэффициентами ищем решения в миде
8'f = С\в'", 83 = Сге >", A9)
где С], Сц, р — постоянные иеличипы. Подставляя эти значения в урав-
уравнения A5), A8) и сокращая па общий множитель е1'1, получаем ха-
характеристическое уравнение
I 2и|/2 1^ ТО ¦ г I ГО ¦"" ,0 I t JJ ТО I
Кратко это уравнение маписыпаегся в виде
B1)
s «I
где
устойчивость движения
a, = 3=sin590^l —2 cos'2?,,— j^j , а3 = —, % sin 2=?0.
057
4 B2)
.Vc.Toniie Гурийца отрицательности вещественной масти Kopneit
ураинсппя грегьей степени имеет uii;i:
a, a»
";i аг \
ax «„ 0
0 0 a.
B3)
J
Так как п данном случае <7„^>0, а2^>0, а:,^>0, at=0, то услопия
Гурпина не улоплетиоряются, и, следешателыю, малые дпижеинн регу-
регулятора пиустоМчшш. Этот (|)акт, устамоплепмыП сраимите.'м.мо давно
экспернмепгалыю, нримодмт к необходимости инодип, дополнитель-
дополнительные .чпенья в систему регу.-тнронаиия.
3°. У с т о Я ч и н о с т i> д и и ж е 11 и я при наличии г и р о с к о-
п и м е с к и х с и л. Система, неустойчивая сама по себе, может быть
сделана устойчивом но первому приближению путем введения гиро-
гироскопических сил только и том случае, если число пеустоПчшшх сте-
степенен свободы четно. Эта теорема была доказана Кельвином.
Гироскопическая стабилизация движения возможна только для
консервативной системы. Диссипагиипые силы, как бы малы им были,
леИсшуи достаточно долго, упичтжат устойчивость, созданную гиро-
гироскопическими силами. Поэтому устойчивость, созданная гироскопиче-
гироскопическими силами, называется «временной», в то время как устойчивосп.
uoiicepiiaiHiiiioii системы является «вековоц>.
Таким образом, диссипатипные силы усиливают устойчивость дви-
движения при действии одних консервативных сил и разрушают- усгоИчи-
вость, если она достигнута благодаря добавлению гироскопических сил.
При решении задач на исследование у с т о it ч и is ости
движения и [> и действии гироскопических сил реко-
рекомендуется следу к) щ а я последовательность л е й с т н п й:
1) определяем число степеней свободы системы и выбираем обоб-
обобщенные координаты;
2) находим иеиозмущеппое движение системы;
3) задаваясь малыми отклонениями начальных условий движения,
составляем дифференциальные уравнения возмущенного движения,
пользуясь уравнениями Лаграижа и .ми общими теоремами динамики;
4) полагая, что обобщенные координаты и обобщенные скорости
в возмущенном движении отличаются от значений ь иевозмущешюм
658
УСТОЙЧИВОСТЬ РАВНОВЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [ГЛ. XI11
движении на величины мерного порядка малости, линеаризируем диф-
дифференциальные уравнения, отбрасывая слагаемые второго и более
высоких порядков малости, вычитаем из дифференциальных уравнений
.возмущенного движения соответствующие уравнения невозмущснпого
движения;
5) исследуем устойчивость системы по первому приближению не-
непосредственным интегрированием дифференциальных уравнений воз-
возмущенного движения или применяя критерий Гурннца к дифферен-
дифференциальным уравнениям в вариациях.
Задача 466. Ротор веса Q вращается с постоянной угловой ско-
скоростью (а вокруг собственной оси симметрии, совпадающей с пепо-
х движиой вертикальной осью х. Точ-
: ка О, являющаяся центром сфери-
сферической опоры ротора, неподвижна.
Центр тяжести ротора С находится
на высоте ОС = 1г. Расстояние
0.4, = /; буквой ,4, обозначена край-
крайняя нижняя точка ротора. Момент
инерции ротора относительно оси
симметрии равен Л, а момент нпер-
/'\ . ,.„ -7 нии относительно осп, проходящей
через точку О и перпендикулярной
к оси симмефпи ротора, равен В.
Исследовать устойчивость верти-
вертикального положения осп ротора.
Решение. Ротор представляет
собой систему с двумя степенями
свободы. Выберем в качестве обоб-
\!д щенных координат координаты уь
Z] крайней точки ротора Л,. Для
К з.-.лачс K)'(i. составления дифференциальных урав-
уравнений движения применим теорему
количеств движении относительно
об изменении главного момента
неподвижных осей _у, ,г.
Сохраняя обозначения, принятые в задаче 454, находим:
Внося и sin уравнения значения углов $ и -р
получаем:
6 — — ^ -, = — ?•
Р— i ' \ i
Bz, — Am$i\ = р/.ггь
(О
B)
C)
«в| устойчивое.™ движения 659
Кососимметричные члены (— Л<оу,) п (,4o)i() соответствуют гиро-
гироскопическим силам.
Решение этой системы однородных линейных ураннеииИ с посто-
постоянными коэффициентами найдем, иводя комплексную переменную
'>- = Z\-'riyi. E)
Умножая уравнение D) па i и складыиая его с ураипеппим C),
имеем:
Составляем характеристическое ураипепие
BS'! + LAfoS — Q/.j = 0. G)
Определяем корни этого уранмемия:
_ — i,Uo — j/— /I-'oj- -;- AHQI,
6,_ .—B
Если liiJHO.'ineno ус.Ю[!::о
,rV>4/"yQ/,, A0)
то корни янляютсм чисто мнимммм неличипами и могуч бып. для
краткости записаны в ииде
S, = iku ^ = i/г.,, (И)
где
—- пешеетпепмые числи. П этом счучае решение урапиеиня (G) будет
/. = /V";'' —Д.*?''*2', A4)
где /7] и /* — комплекспыь-пропзиол1.иые иосгояпиме нида Di=B\ '-
-: ¦ f/)';i, l).,^IU '-i/?j. Тогда ураипепие A4) примет пид
;. ^=(й, -!- i/)':1)(cos /г-,Г -;- i sin Л,0-|-(Л.24- t//t) (cos Л.,г1 -| i sin /e.,r). (I о)
Далее находим исходные переменные _у( и Z\, отлелм» и ураппе-
пии Aо) нещеппенную часи. от миимоП:
yi=^Hly,\nl{it- -Нл cos k,l -И* sin fij ;-/ijCos//./,
i-[ = /i{ cos k{t -- /i, sin V ¦ |- Lh cos kJ — />', sin /,¦.,/. A 7)
H этих уравнениях li\, /h, 11Л. И-и — проилнол^ные ногто.пшые ито-
грнронанпя, определяемые по начальным данным yl0, j'll}, »I0. iltl [ipn
660 УСТОЙЧИВОСТЬ РАВНОПЕСИЯ И МАЛЫЕ ДВИЖЕНИЯ СИСТЕМЫ [171. Х1П
1 = 0. Так как _у, и 2^ япллются линейными функциями косинуса и
синуса, то координаты нижнего копна ротора не растут с течением
времени.
Итак, при выполнении условия A0) точка А\ совершает перио-
периодическое движение (полагаем, что Л, и А\2 соизмеримы), складыва-
складывающееся из четырех гармонических колебаний. Следовательно, если
угловая скорость ротора
Ж, A8)
что вытекает из A0), то вертикальное положение осп ротора устой-
устойчиво, несмотря па то, что центр тяжести занимает наивысшее поло-
положение и равновесие такого же певращающегося стержня неустойчиво.
Гироскопические силы стабилизируют неустойчивую консервативную
систему. Рассмотрим далее случай, когда
. A9)
Корин характеристического уравнении G) будут комплексными чис-
числами вида
.<?,= —я-j-ift, H = a-\ W, B0)
B1)
В этом случае общее решение уравнения F) будет
X = D,es''-~ZVSl!'. B2)
Здесь, так же как и и первом случае, /), = /?, — \ВЛ, О.2 = Я, -|- iBt.
Следовательно, ургишеппе B2) после чтой замены примет инд
X = (Я, -j- 'Д1) е~а' (cos Ы -|- i sin bt) -j- (B.z — iB{) cat (cos bt Л- i sin bl).
B3)
Исходные переменные j>, и 2, получим, отделяя вещественную часть
от мпимоМ:
_у, = e-nt (B\ sin bt -|- /?3 cos Af) — са/ (В* sin W — Z^4 cos *?). B4)
г, =е'"' (/?, cos */ — Д, sin bt) — eat (Д2 cos W — Д4 sin W). B5)
Вторые слагаемые в этих уравнениях содержат множитель с"' и, сле-
следовательно, им соответствуют все возрастающие колебания. Верти-
Вертикальное положение оси ротора и этом случае неустойчиво.
ПРИЛОЖЕНИЕ !
МЕЖДУНАРОДНАЯ СИСТЕМА ЕДИНИЦ (СИ)
И декабре 1!N0 г. XI Генеральная конференция по мерам п песам при-
приняла единую Международную сметем/ единиц (СИ), которая должна приме-
применяться как предпочтительная по псеч областях пауки, техники и народного
хозяпстна.
Процесс внедення згой системы н практику (и особенно тех ее единим.,
которые еще не получили широкою распространения) будет осуществляться
постепенно и течение ряда лет — и переходной период, конечно, будут со-
сохрани] ься и традиционнее едннниьг систем СГС п МкГС, пенользонаниие
и настоящей книге.
Приведем для енранок таблицу Международной системы единиц но
ГОСТу 0867-61:
Наименование величины
l..iuiuuia измерения
Спкр.нгкмпн.м'
обомичгнпн гдшпшм
-1Лiнпские или
I
! Т.лппа
! Масса
iВремя
1 Температура
| Сила -мектрическоготока
j Сила смета
Основные единицы
Метр
Килограмм
Градус Келннниа
Ампер
(-меча
' Плоский угол
ТслееныП угол
Дополнительные единицы
| Радиан
| Стерадиан
| Обч.см
Частота
|Обьемная масса (плог-
| ПОСТЬ)
Скорость
j.^'r.ionan iKopociii
Производные единицы
Киадрап ыA метр
1\\бичес1с:п1 метр
Герц A срк)
Киюграчм на куб. метр
Метр и секунду
Радиан г: гскупду
м
кг
сек
"К
а
се
1>ид
с те;)
л-
м-
•"П
к,- л;'
м сек
1A <ТХ
П1
°к
А
сA
rail
т5
т-1
Н/.
kg пг1
m's
rad/s
662
приложение i
Наименование величины
Ускорение
Угловое ускорение
Сила
Давление ("механическое
напряжение)
Динамическая вязкость
Кинематическая вязкость
Работа, энергия, количе-
количество теплоты
Мощность
Количество электриче-
электричества
Электрическое напряже-
напряжение, разность потен-
потенциалов, электродвижу-
электродвижущая сила
Напряженность электри-
электрического поля
Электрическое сопроти-
сопротивление
Электрическая емкость
Поток магнитной индук-
индукции
Индуктивность
Магнитная индукция
Напряженность магнит-
магнитного ноля
Светоной поток
Яркость
Освещенность
Ндимица измерения
Метр на секунду в ква-
квадрате
Радиан иа секунду и ква-
квадрате
Ньютон (кг ¦ м.'сек')
Ньютон на кв. метр
Ньютон-секунда на кв.
метр
Кв. метр на секунду
Джоуль (н ¦ м)
Ватт (дж'сек)
Кулон (а ¦ сек)
Волы (вт.а)
Вольт на метр
Ом (в/а)
Фарада (лг.'в)
Вебср (к;ом)
Генри (вб а)
Тесла (вб'М-)
Лмнер на метр
Люмен {ев ¦ стер)
Свеча на кв. метр
Люкс (лм'-м°)
Про
Л о л ж е и и с
( окр.ицошп.ю
р\ с.ские
м сек2
рлд, сек?
н
н м-
н сек м-
м- сек
дж
вт
к
в
в 1м
ом
Ф
а5
гн
тл
а.м
св:М'
л к
-l.iTHItCKHU МЛН
греческие
rad/s2
N
iVm2
X s m"
m-/s
J
W
С
V
V/m
Q
P
Wb
H
T
Am
1171
cd ni-
lx
Определения основных единиц
M ст р--длина, ранная I 650 763,73 длины воли н вакууме излучения, со-
OTBCicTnyminero переходу между уровнями '2pi0 и 5rf-, атома криптона-Sfi.
К п л о гр а м м—единица массы — представлен массой международного
прототипа килограмма.
Секунда - 1.31556925,9747 часть тропического года для 1900 г.
яннари 0 и \'2 часов эфемеридного времени.
Ампер—сила неизменяющегося тока, который, проходя по двум па-
параллельным прямолинейным проводникам бесконечной длины и ничтожно
малого кругового сечения, расположенным на расстоянии 1 м один от дру-
другого в вакууме, пылвал бы между этими проводниками силу, равную 2- 10~7
единиц силы Международной системы на каждый метр длины.
ПРПЛ-ТЖР.НИГ П
6G3
Г р я л у с К с л ь R м и а—единица измерении температ\ры по термоди-
термодинамической температурной шкале, н которой дли температуры тройной точки
воды установлено значении 27.3,16° К (точно).
С и е ч а-- единица гили счета, значение которой принимаете si таким,
чтобы яркость полного излучатели при TeMnepmvpe затвердевания плаишы
была ранни 40 ев па 1 см'-.
Некоторые переводные множители
1 к"Г=0,Н00A5 н я= 9,81 к
1 Ohhu=U) ¦' н
1 кГ см- = !AS0(>C,5 н м-
1 дина см- = 0,1 н/м-
1 кГм = 9,80005 гЪл: ^=0,81 Ож
1 э/),.- = 10 '• дж
дж
ПРИЛОЖЕНИЕ IT
СПИСОК НОМЕРОВ ЗАДАЧ ИЗ СБОРНИКА ЗАДАЧ
ПО ТЕОРЕТИЧЕСКОЙ МЕХАНИКЕ
И. В. МЕЩЕРСКОГО (ИЗДАНИЯ 18—27),
РЕКОМЕНДУЕМЫХ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
Ilovrp
1 |Л"М
11.U UV,)IHi
\ III
IX
X
XII
XIII
1
1
Номер
и;1р;|['рлфл
II KIU'l 11
¦)
'Л
-1
2
¦л
4
5
6
2
3
\
5
0
7
1
')
1
2
3
4
5
С
Номера ч:пач по сборнику П. В. Мориер^кого
63!), 6-15, 0-16, 651,
677, 678, 682, («8,
825. 820, 828, 832,
60S!
0,89, 690, 091, 694, 710, 711, 720, 725
833, 834, 837, 838, 843, 84 4, 848, 840,
851, 85'», 853, 851, 855 856 859
802, «03, S6 7, N08
001, 800, К71', 952,
733, 734, 743, 970,
730, 081, <)Я~>, !W9
1000, 1007, 101
1081, 1085, 1080,
800, «70, 871
953, 955 95S 950, 902, i)C3
973, A7,5, 970, A7Й. 980
901, 993, 904, i)95 990, 1002, 10<>3,
1, 101 1, 1010, 1017, ' lOl'.l. 1020, 1021
087, 1088 1090, I0&1, 1092, 1095 1090
784. 785, 786, 787, 788 Wr\ 1053, 1054, 105E, 1060.
10E1, 100'2, 10E
1070, 107-1, 1075
879, 880, 881, 880,
l!00, HOI, 1102,
144. 903, 905 t'00,
92.5, 920, 927, 028,
1, I00.5, 1066, 1067, HlfiN, 106Я, 1071,
, 1078, 1079, 1080, 1081
890, 89! 891, 897, 898 899, 900, 001
103, ПОЛ, I 106, II09
900, 911, 915, 010, 917, 020, 921, 021
929, 930, 931, 932, 9;-,3, !K5, !Kii, 9.<7,
940, 941, 942, 943, 941, 94.5, 940, 947
931, 940, 9-11, 942,
1121, 1 181, ilS(
l0'7, 1028 1029,
I 127, (I2!>,
1150, 1151,
1171, 1172,
12-13, 1241,
1290 1301,
1277, 1278,
1293, 1294,
1348, 1351,
133,
153,
173,
245,
302,
279,
2.П5,
ЗГ-2,
945, !M0, 947, 1091, 1090, ill t, 1120,
, 1 187, 1218, 1219, 1220
0,30, 1031, 1031, 1035 1030. 1039
1.46, 11.47, 1 141, 11-12, ll-l;i, 1 M-i, 1 1.E
155, 1157
117,5, 1177, 1178
240, 12-17, 1253, 1273
303, 1301, 1305, 1313, 1316
280, 1281, 1282, 128;',, КШ, '330, 1331
332, 1333, 1331, 1341
1353, 1356, 1358, 1350, 1363
Бать Моисей Иосифович,
анелаизс Георгий Юстинович,
Кельэсн Анатолий Саулович
Георетическач механика н примерах и сдачах
Том II
М , 1066 г Г)М стр с in л
Редактор Маркузон If А
Тсхн редактор А кссльрод If 111
Корректор Страуони Т С
Печать с матрич Подписано к печати 0,[Х
U66 г Envtara бОхУО'.'и Фнз печ л A,3
Услоон пет л 41 5 Уч изд л 411 П2 Тнэзж
10A 000 эк] Цена книги 1 р 24 к .Чакяз .Ns> 6fi8
Издгтельстпо «11а\гка»
|"лапнан редакция
фпзпко маюматпчРскоИ литературы
Моск»а, В 71, Ленинский проспект 15
Ленинградская типография К° I «Печатшн
Дпор» имени Л М Горького Глапполиграф
прома Комитета по печати при Совете Мини-
строп СССР Гатчинская 2G