/













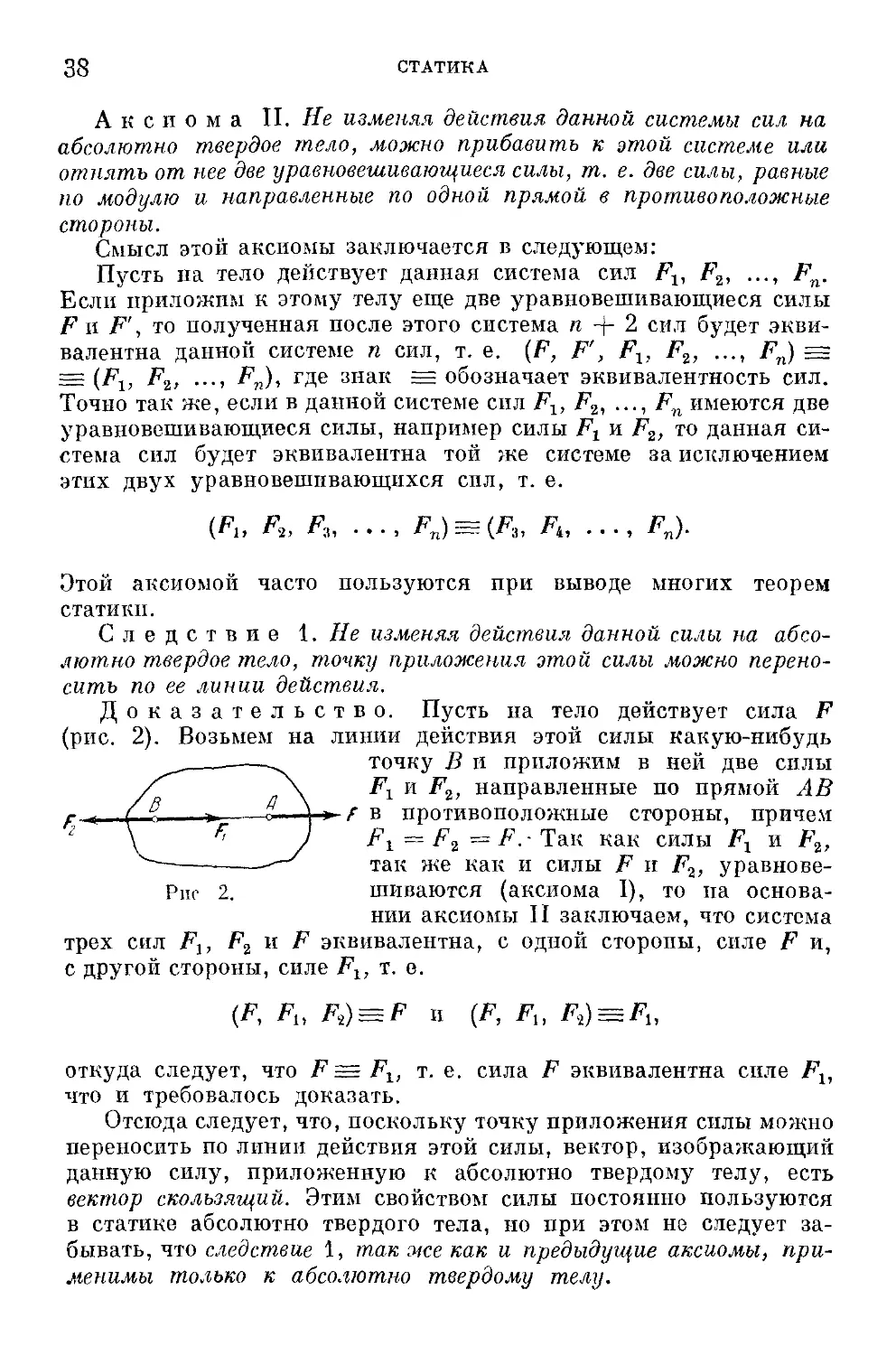












































































































































































































































Author: Воронков И.М.
Tags: общая механика механика твердых и жидких тел механика теоретическая механика
Year: 1964




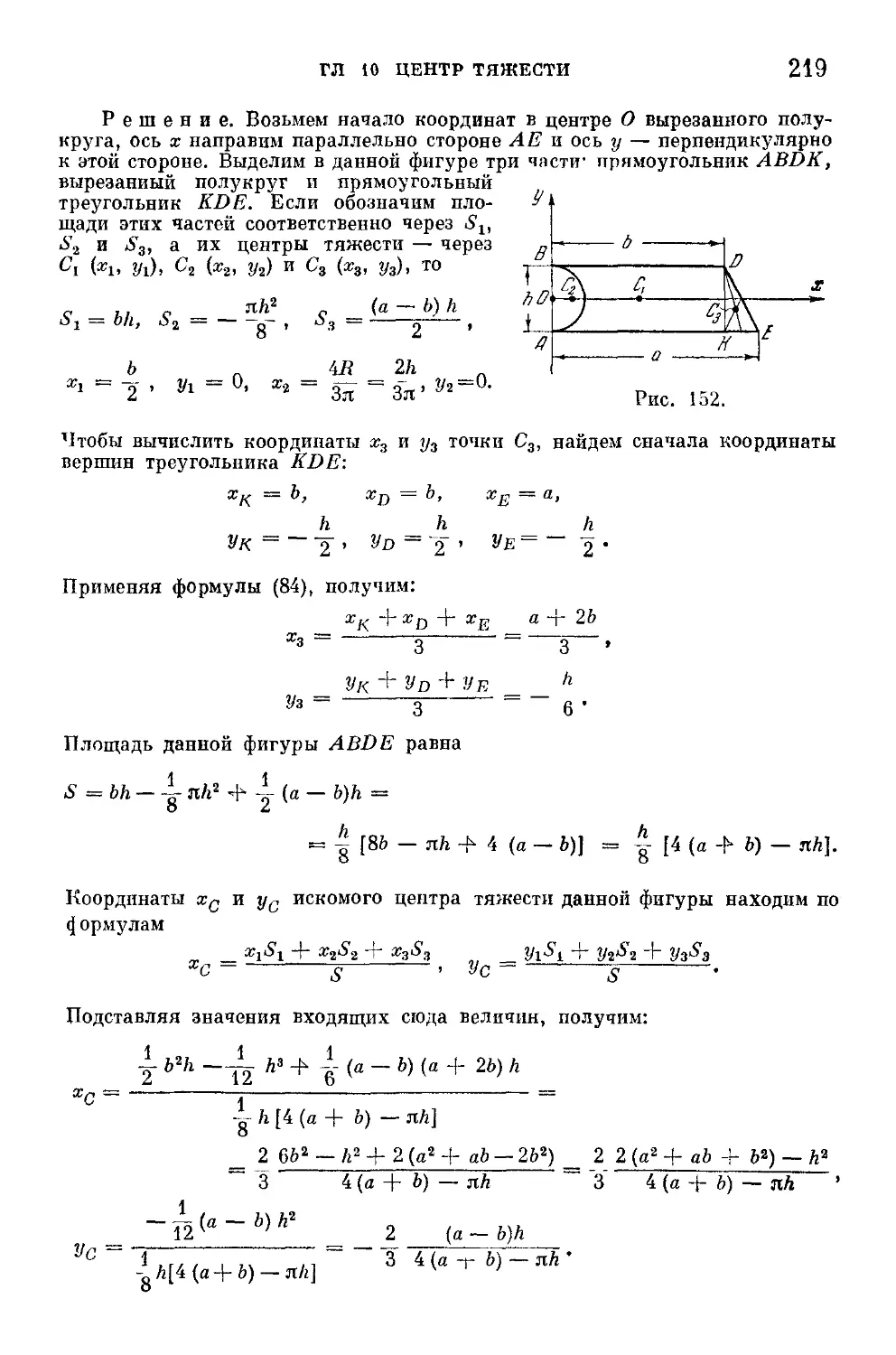
Text
И. М. ВОРОНКОВ
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ИЗДАНИЕ ОДИННАДЦАТОЕ
Допущено Министерство »
высшего и среднего специального образования РСФСР
в качестве учебника для студентов высших
технических учерных заведений
ИЗДАТЕЛЬСТВО «НАУКА»
МОСКВА 1964
531
В 75
УДК 531.01 @75 • 8)
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
Иван Михайлович Воронков
Курс теоретической механики
Ы., 106-4 г., 596 стр. с илл.
Редактор Я. Я Розалъская.
Техн. редактор Л В Лихачева. Корректор А. Д. Халанская.
Сдано в набор 6/XII 1963 г. Подписано к печати 2/IV 1964 г. Бумага 60Х90'(,с.
Физ- печ. л. 37,25. Усл. иеч. л. 37,25. Уч-изд. л. 38,34. Тираж 100 000 экз. Т-04539.
Заказ JS14 743. Цена книги 1 р. 25 к.
Издательство «Наука».
Главная редакция физико-математической литературы.
Москва, В-71, Ленинский проспект, 15.
Ленинградская типография Л'< 1 «Печатный Двор» имени А. М. Горького «Главпо-
лиграфпрома» Государственного комитета Совета Министров СССР по печати,
Гатчинская, 26,
ОГЛАВЛЕНИЕ
Предисловие к одиннадцатому изданию 10
Введение 1'
СТАТИКА
Глава 1. Основные понятия н аксиомы статики 31
§ 1. Абсолютно твердое тело. Материальная точка. Система отсчета 31
§ 2. Понятие силы 33
§ 3. Аксиомы статики 37
§ 4. Связи и реакции связей 41
Глава 2. Сходящиеся силы 43
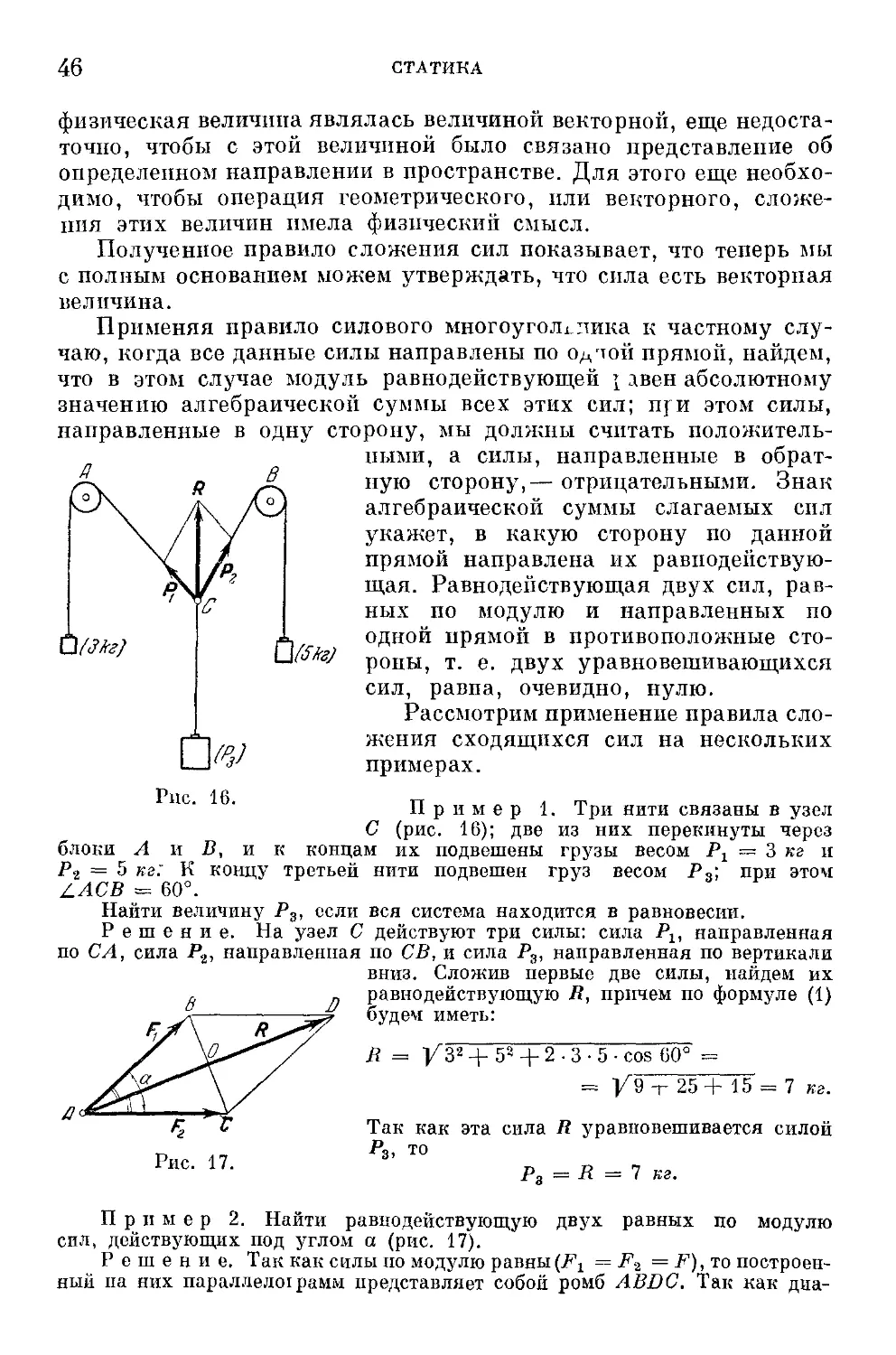
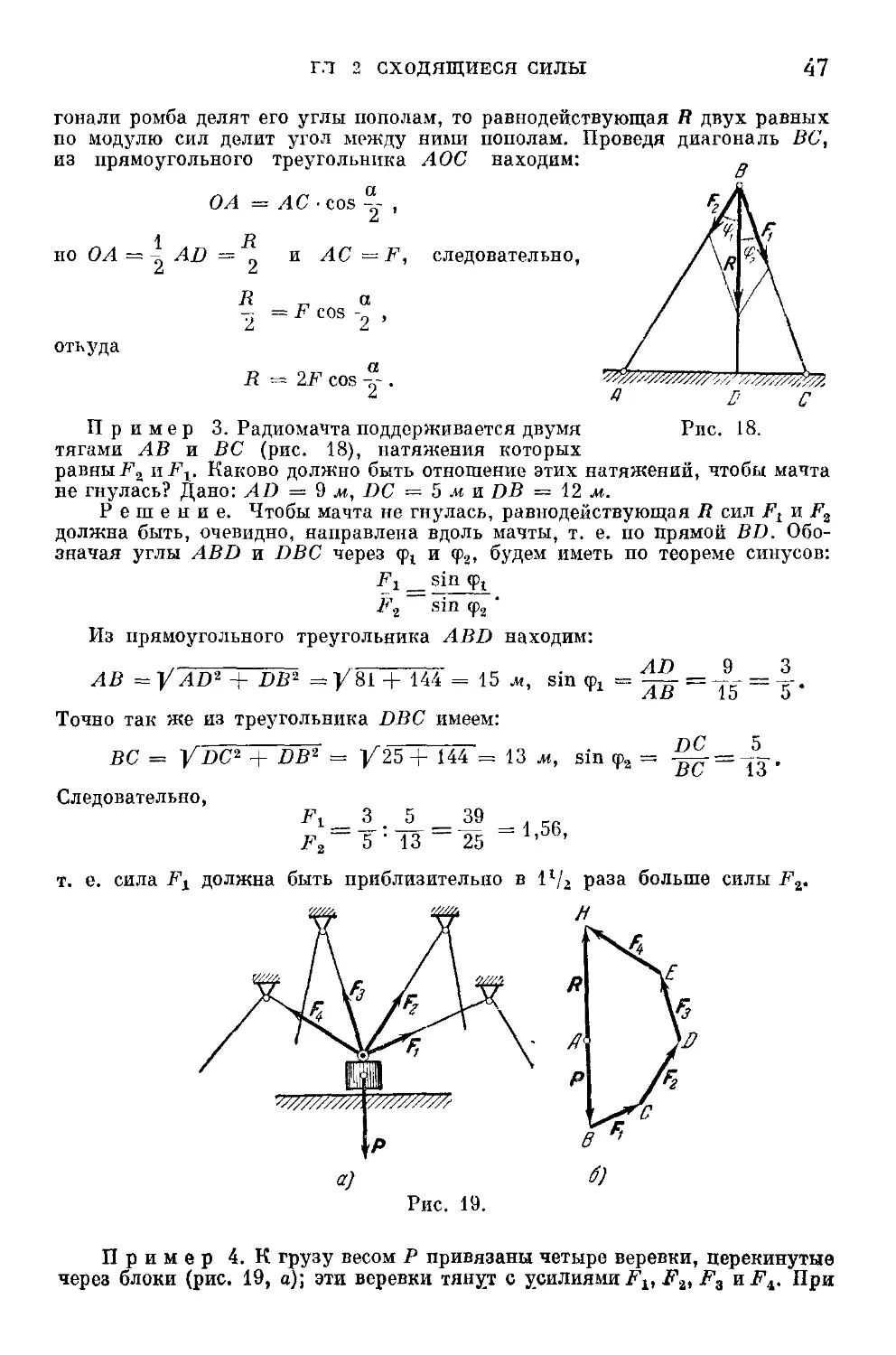
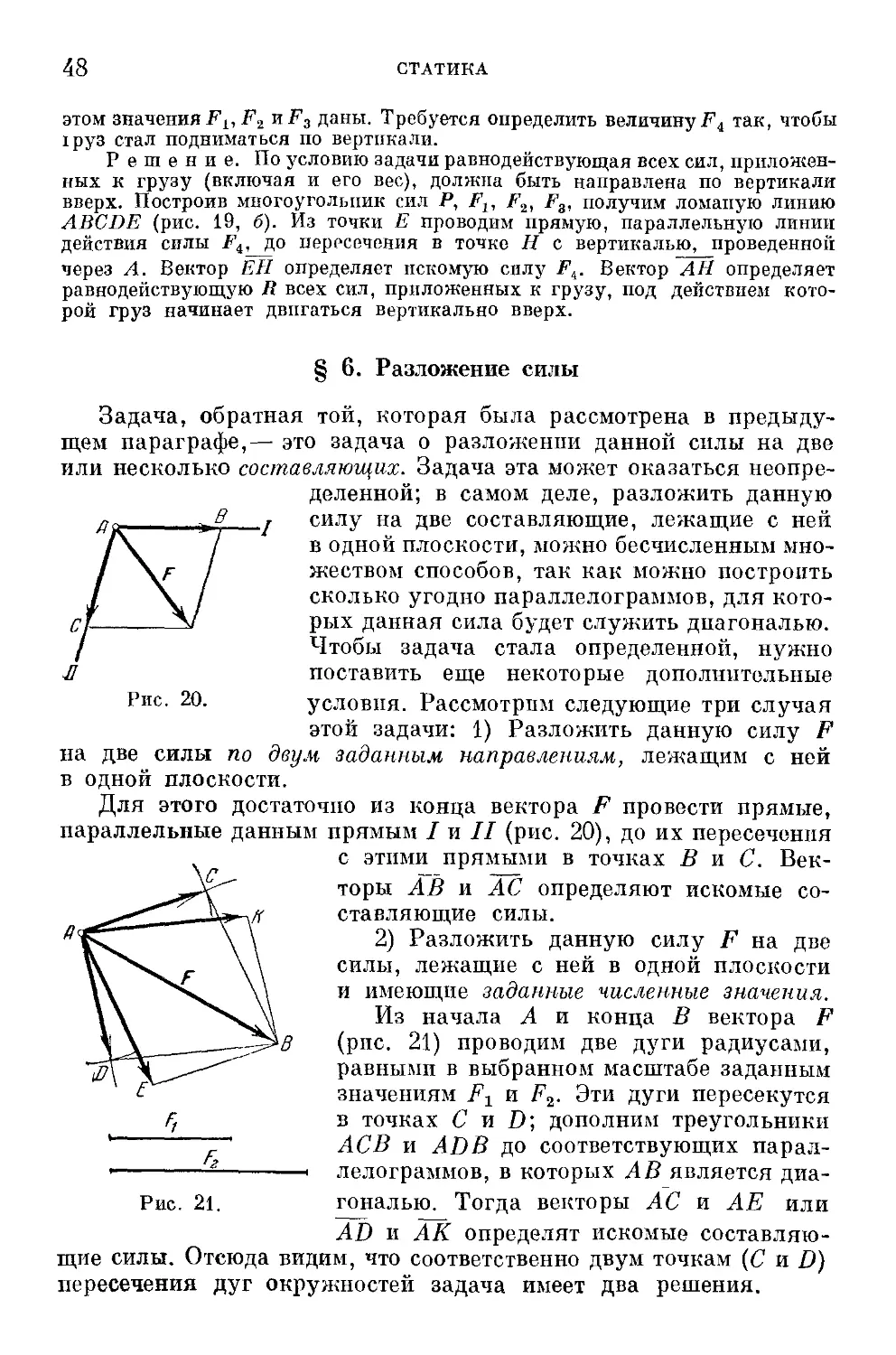
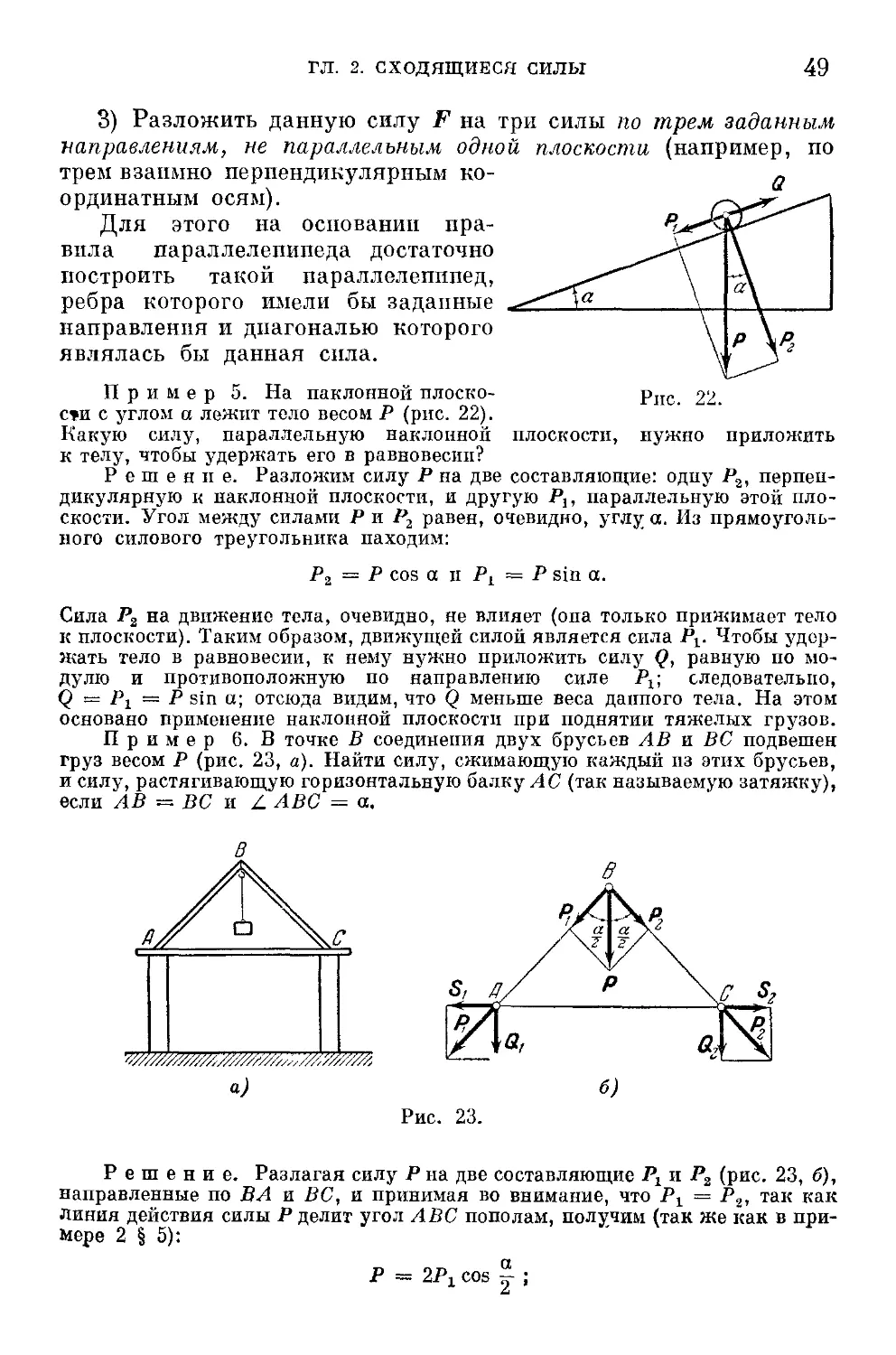
§ 5. Сложение сил, приложенных в одной точке 43
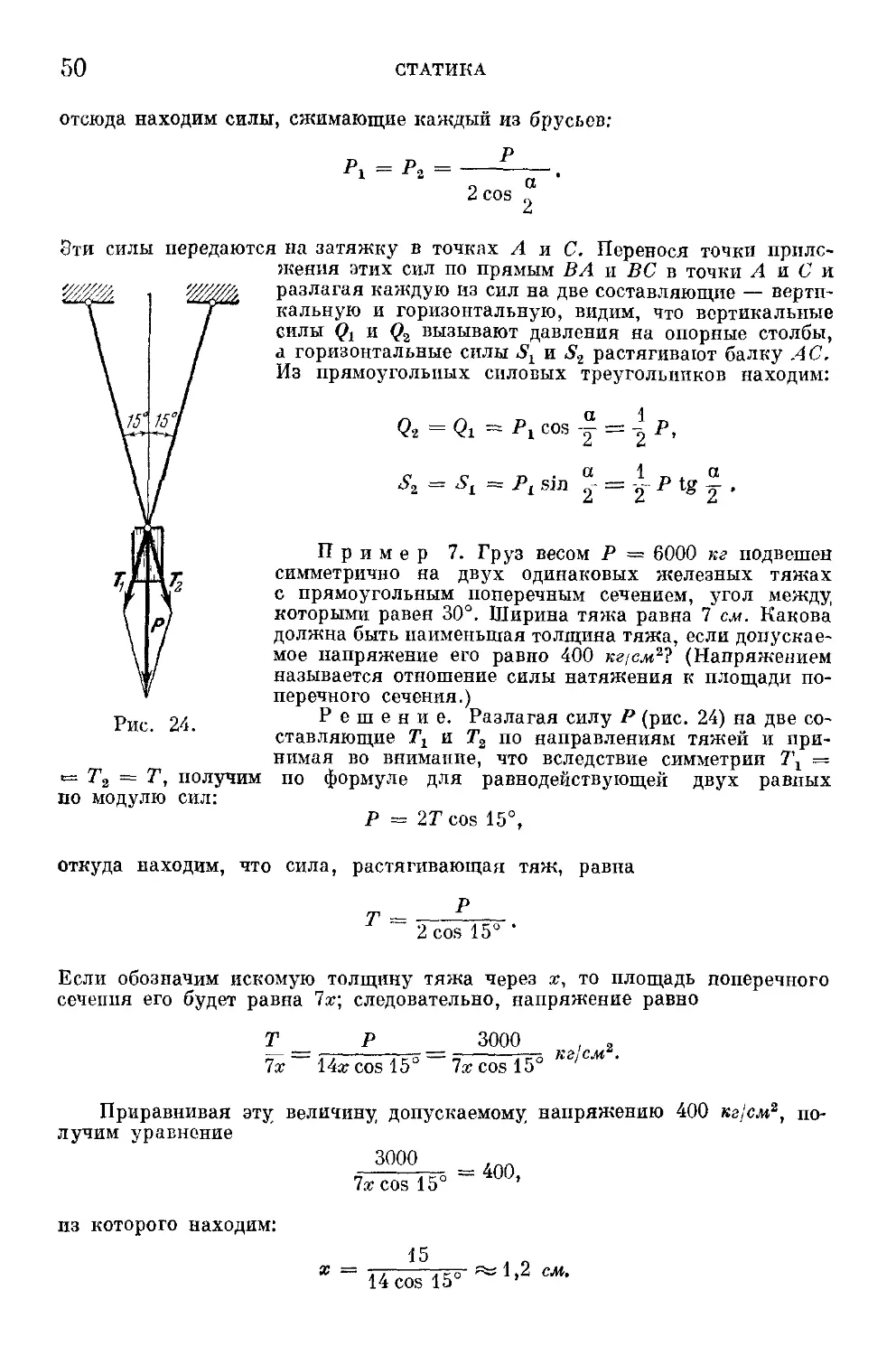
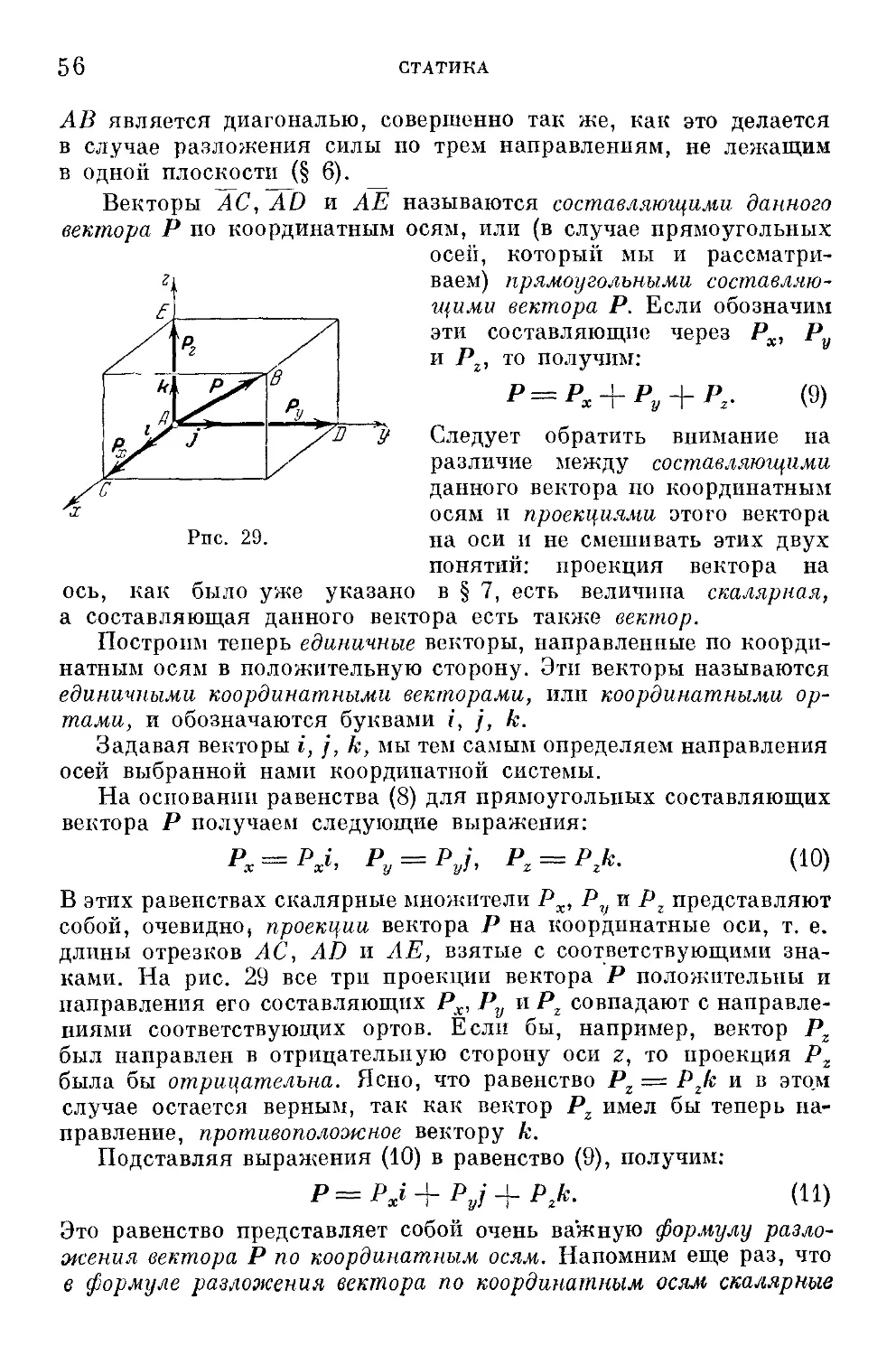
§ 6. Разложение силы 48
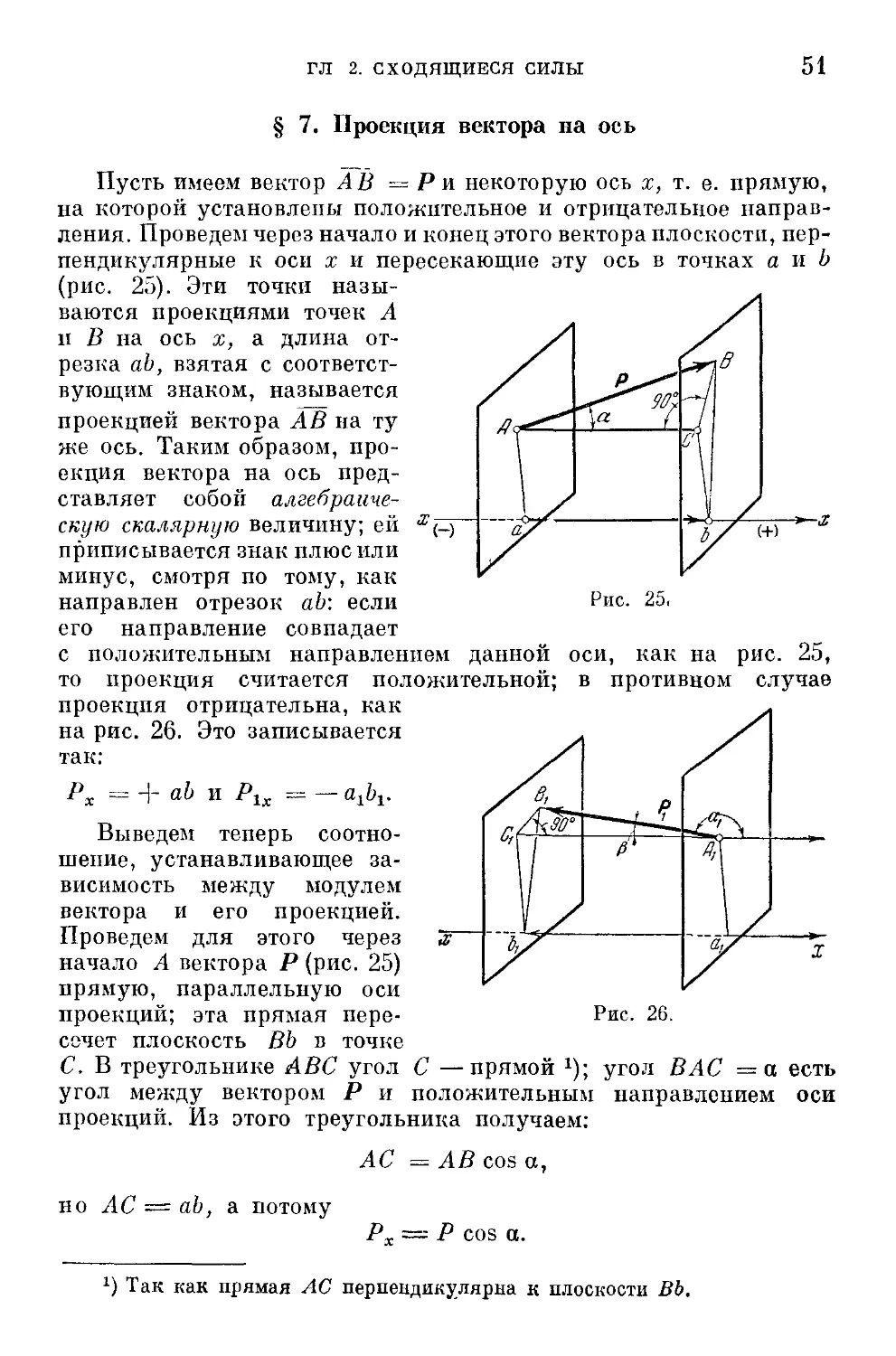
§ 7. Проекция вектора на ось 51
§ 8. Умножение вектора на скаляр. Единичный вектор 54
§ 9. Разложение вектора но координатным осям 55
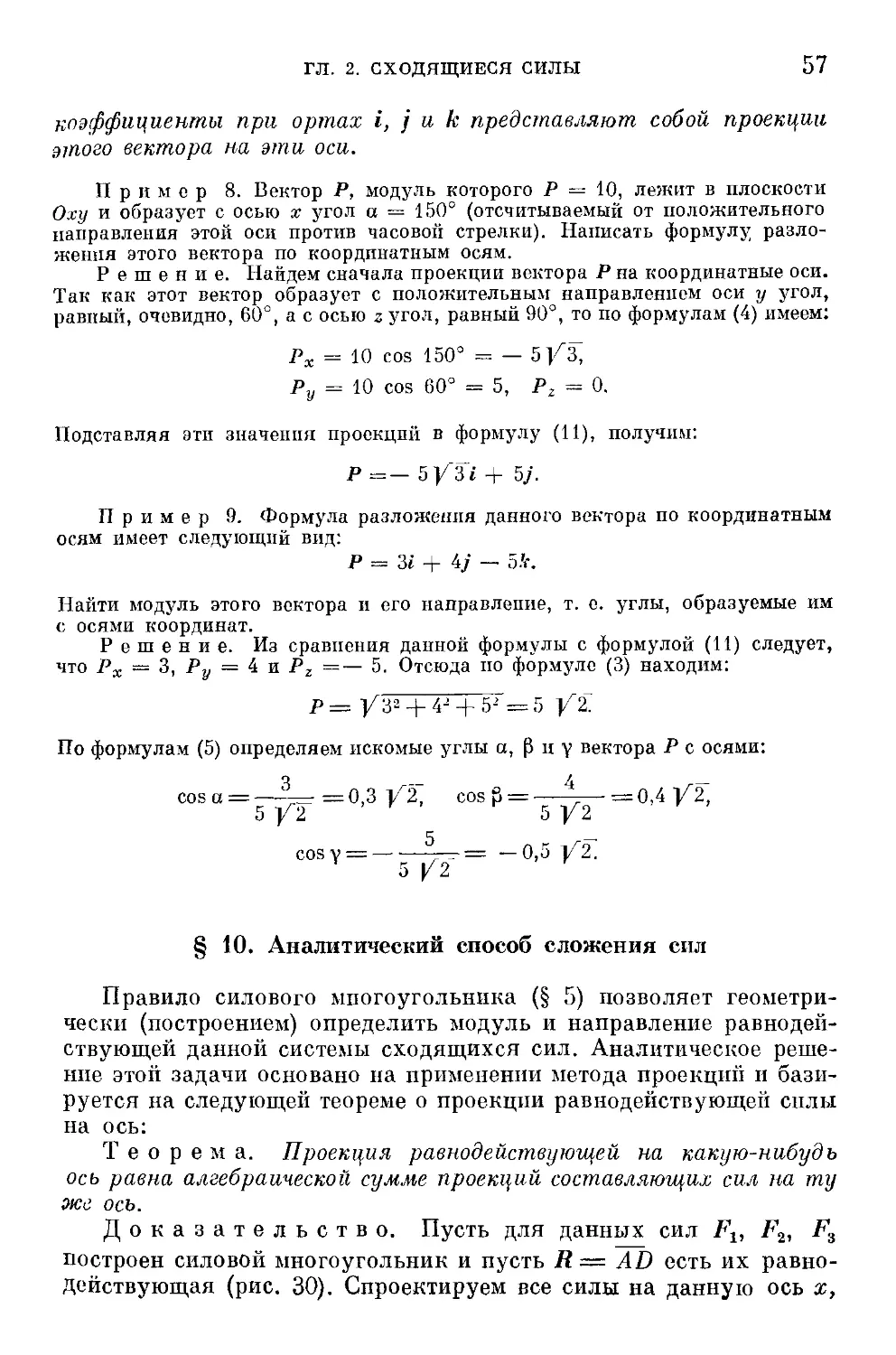
§ 10. Аналитический способ сложения сил 57
§11. Равновесие системы сходящихся сил 62
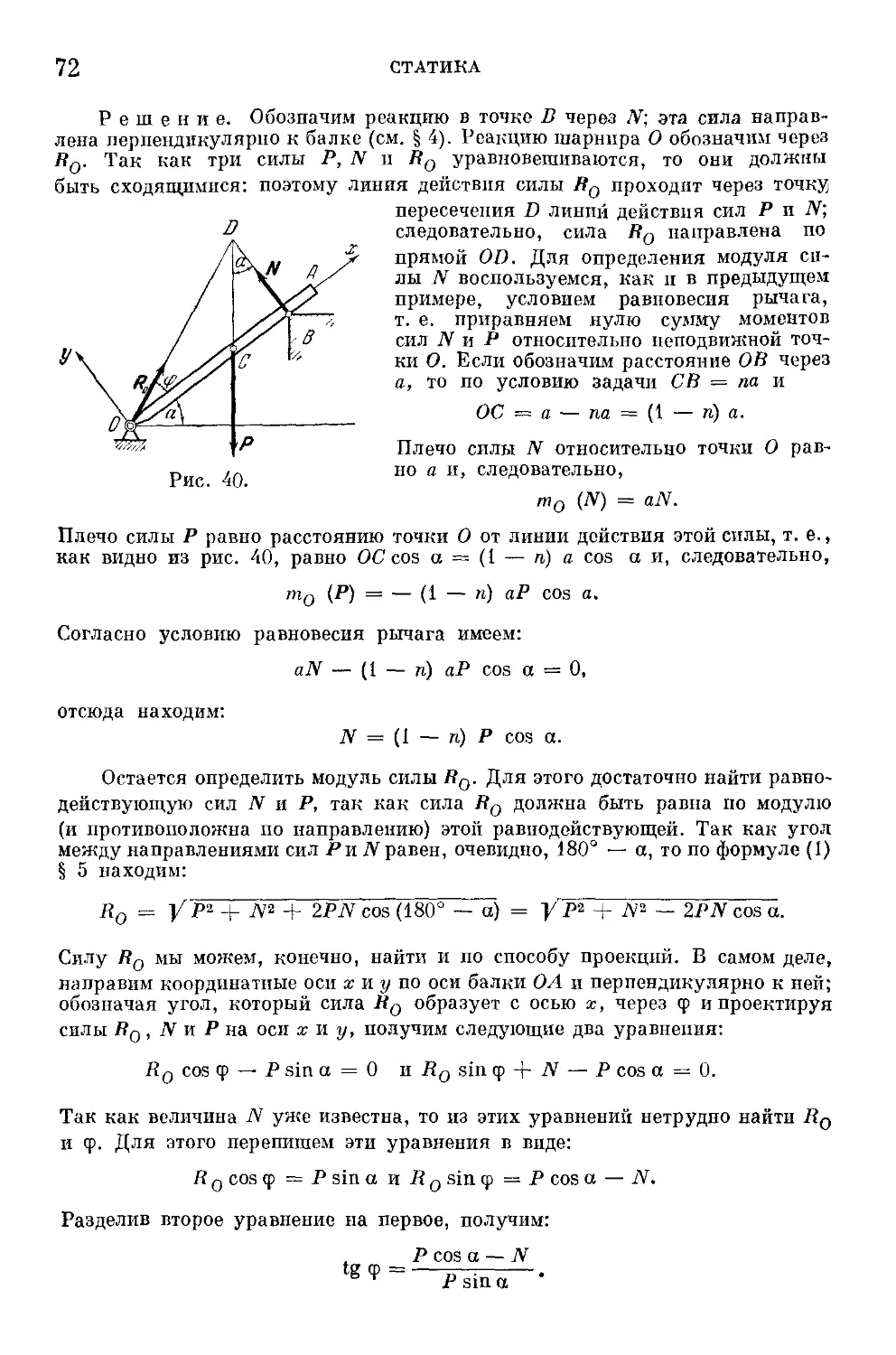
§ 12. Момент силы относительно точки. Условие равновесия рычага 69
Глава 3. Параллельные силы 73
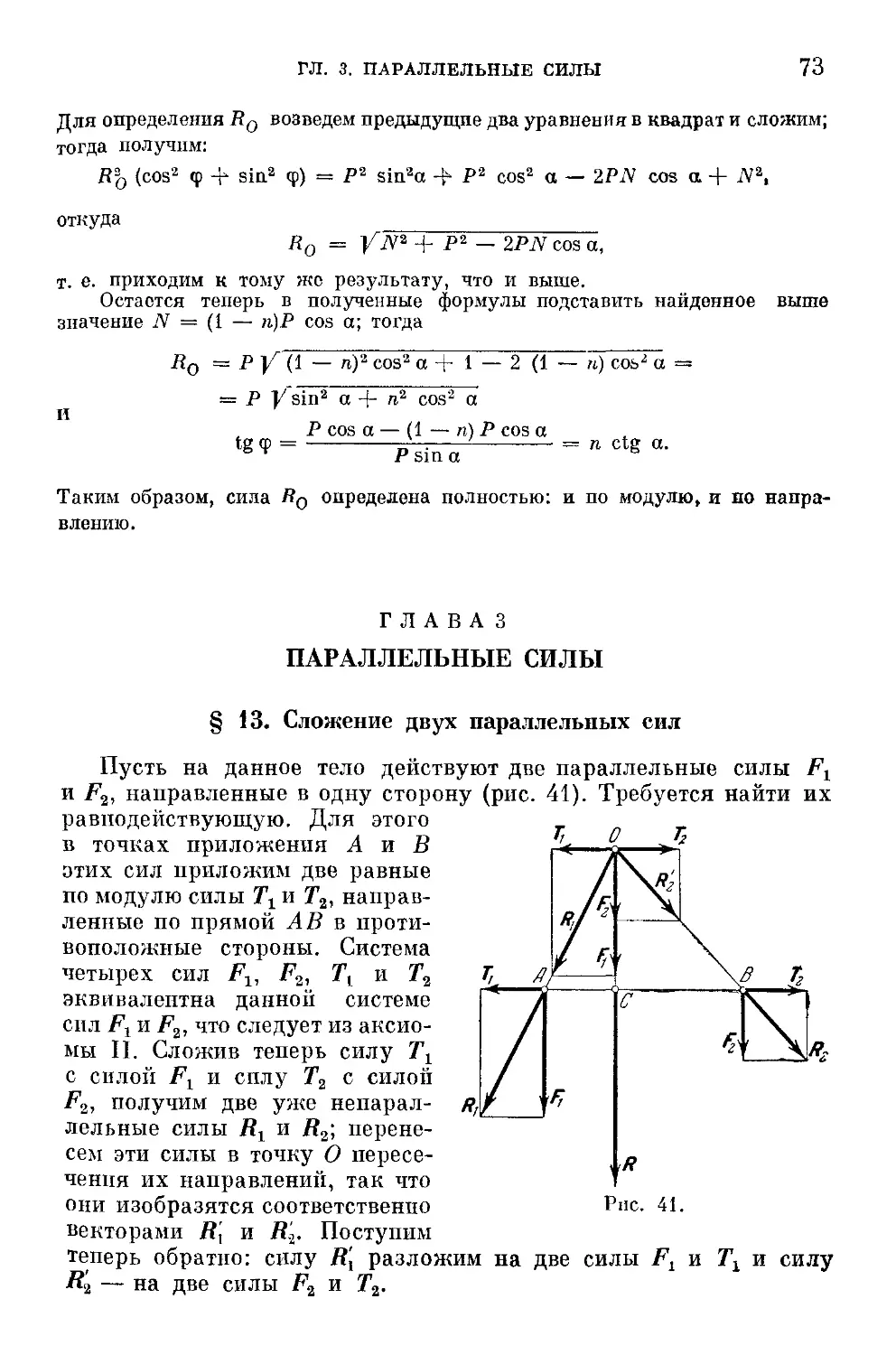
§ 13. Сложение двух параллельных сил 73
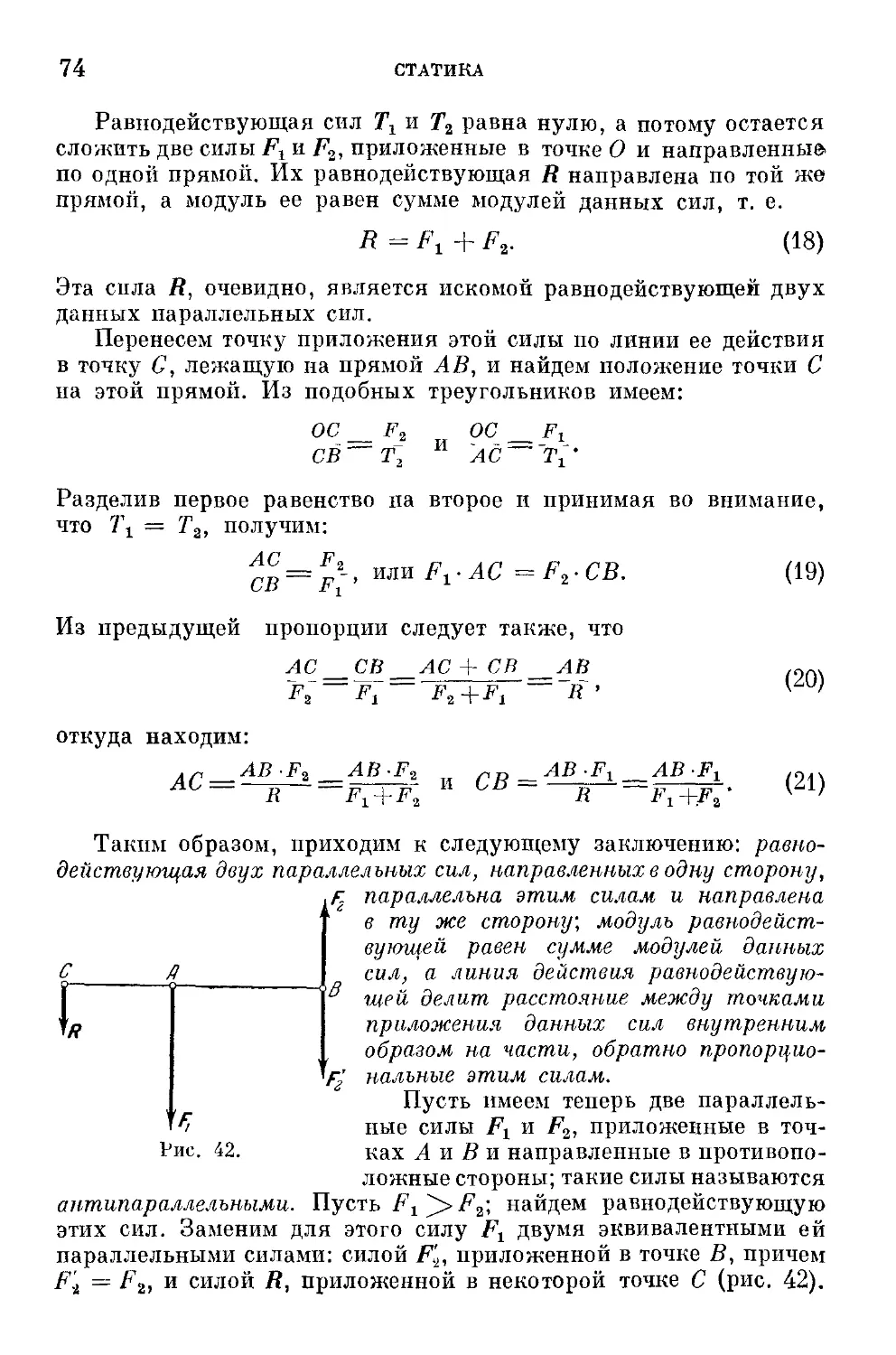
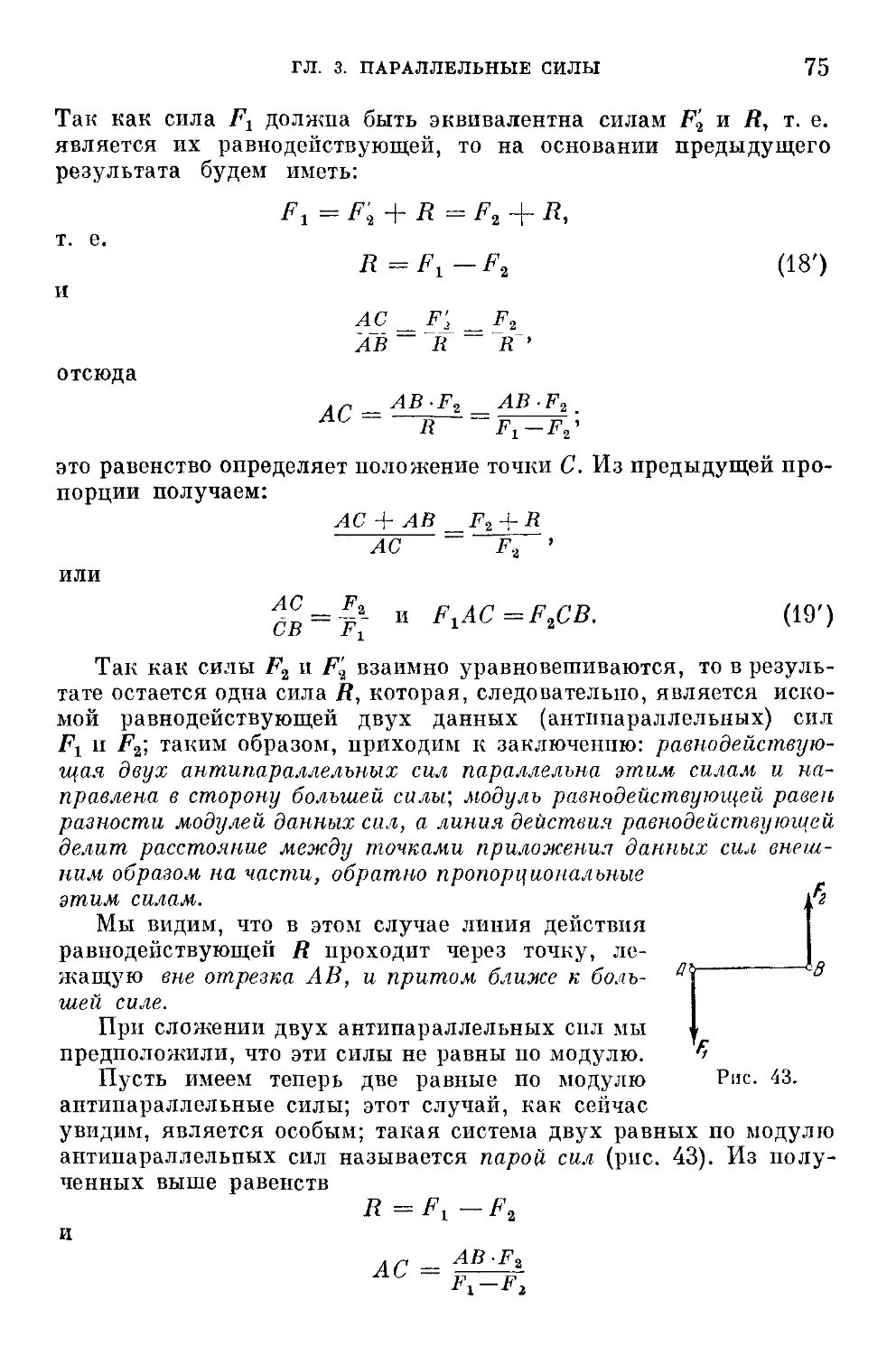
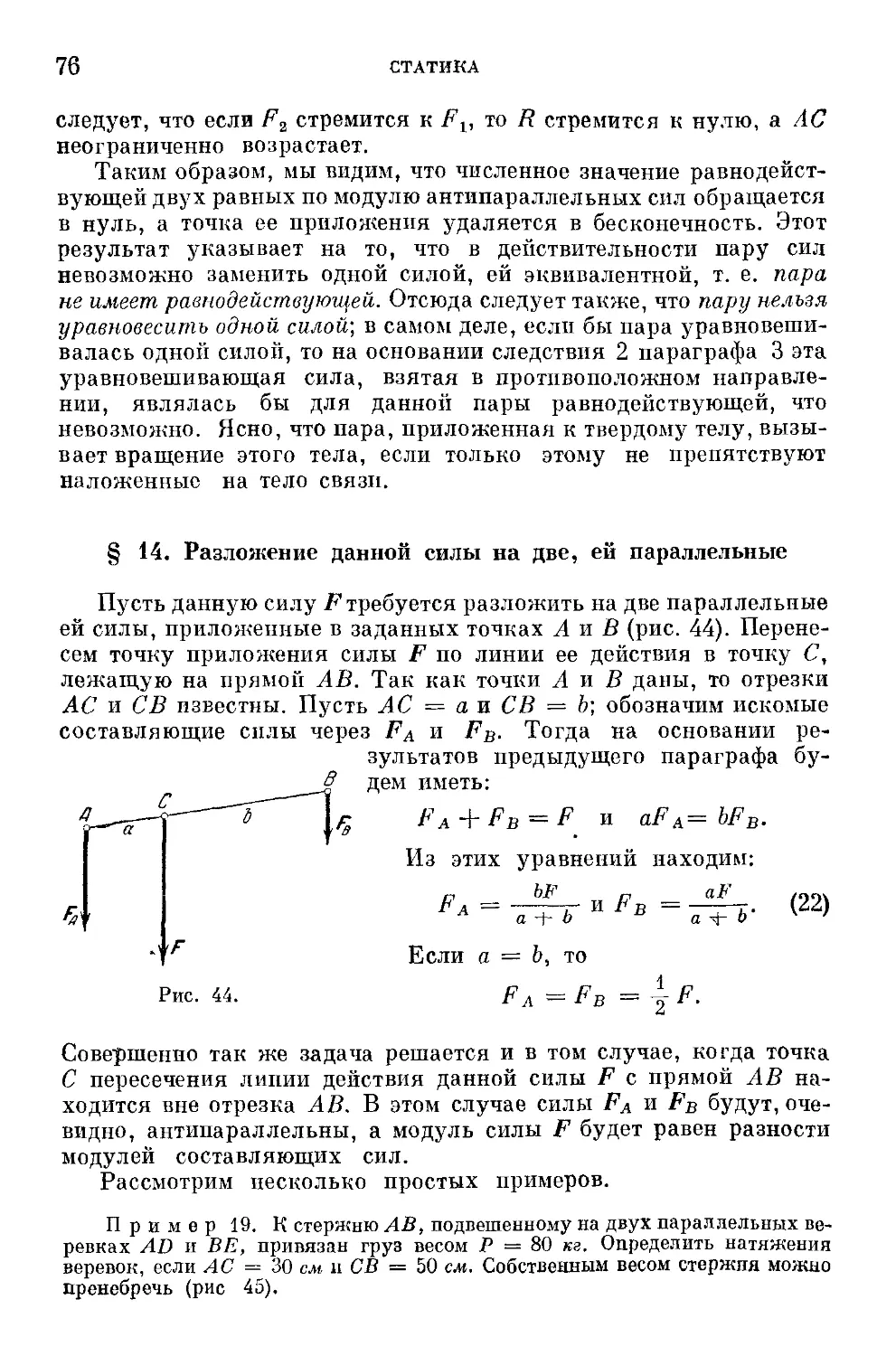
§ 14. Разложение данной силы на две, ей параллельные 76
§ 15. Сложение многих параллельных сил. Центр системы парал-
параллельных сил 78
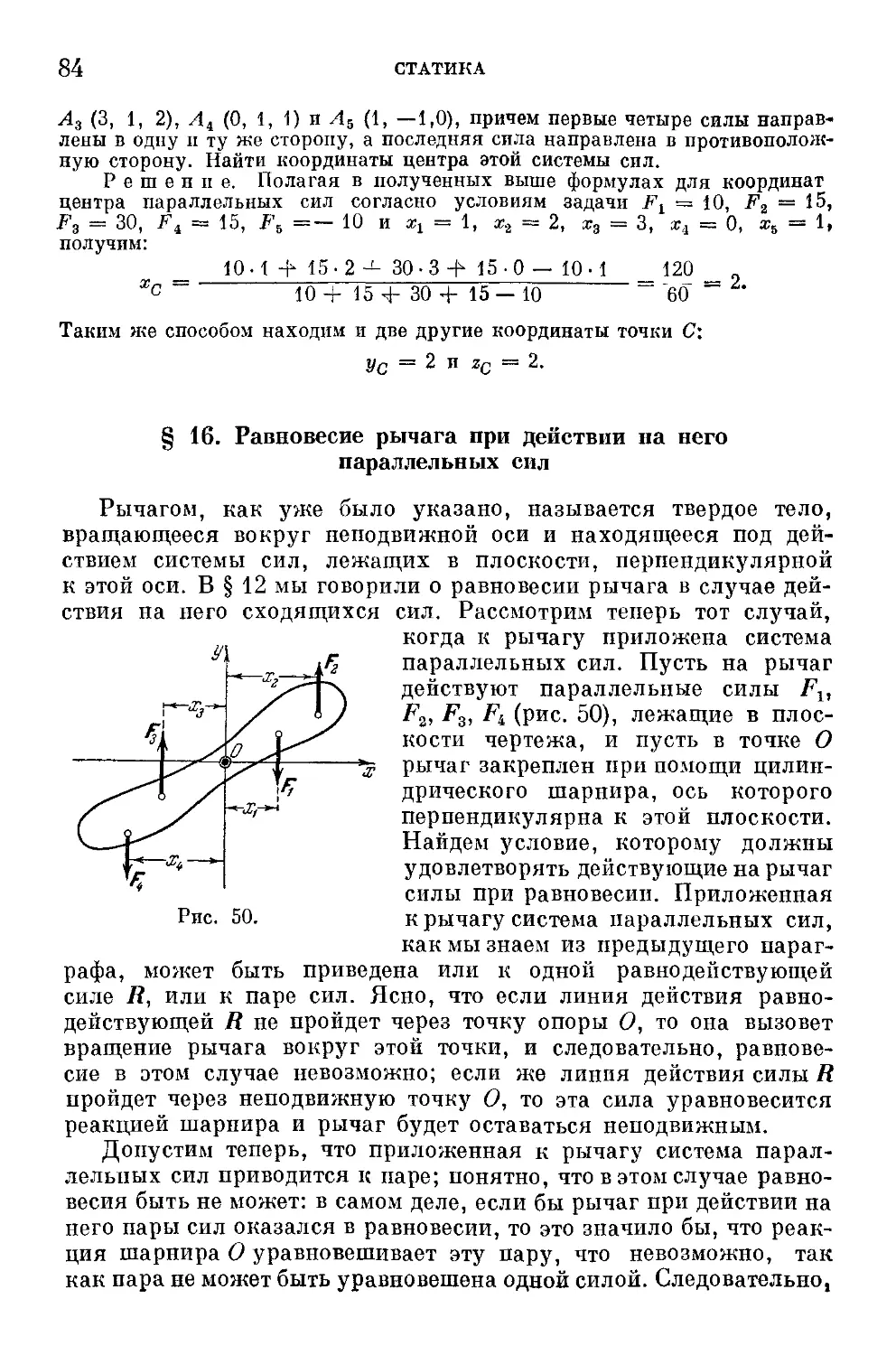
§ 16. Равновесие рычага при действии на него параллельных сил 84
Глава 4. Теория пар 88
§ 17. Момент пары 88
§ 18. Эквивалентные пары. Момент пары как вектор 89
§ 19. Сложение пар 94
Глава 5. Плоская система сил 98
§ 20. Момент силы относительно точки . 98
§ 21. Приведение плоской системы сил к данному центру 99
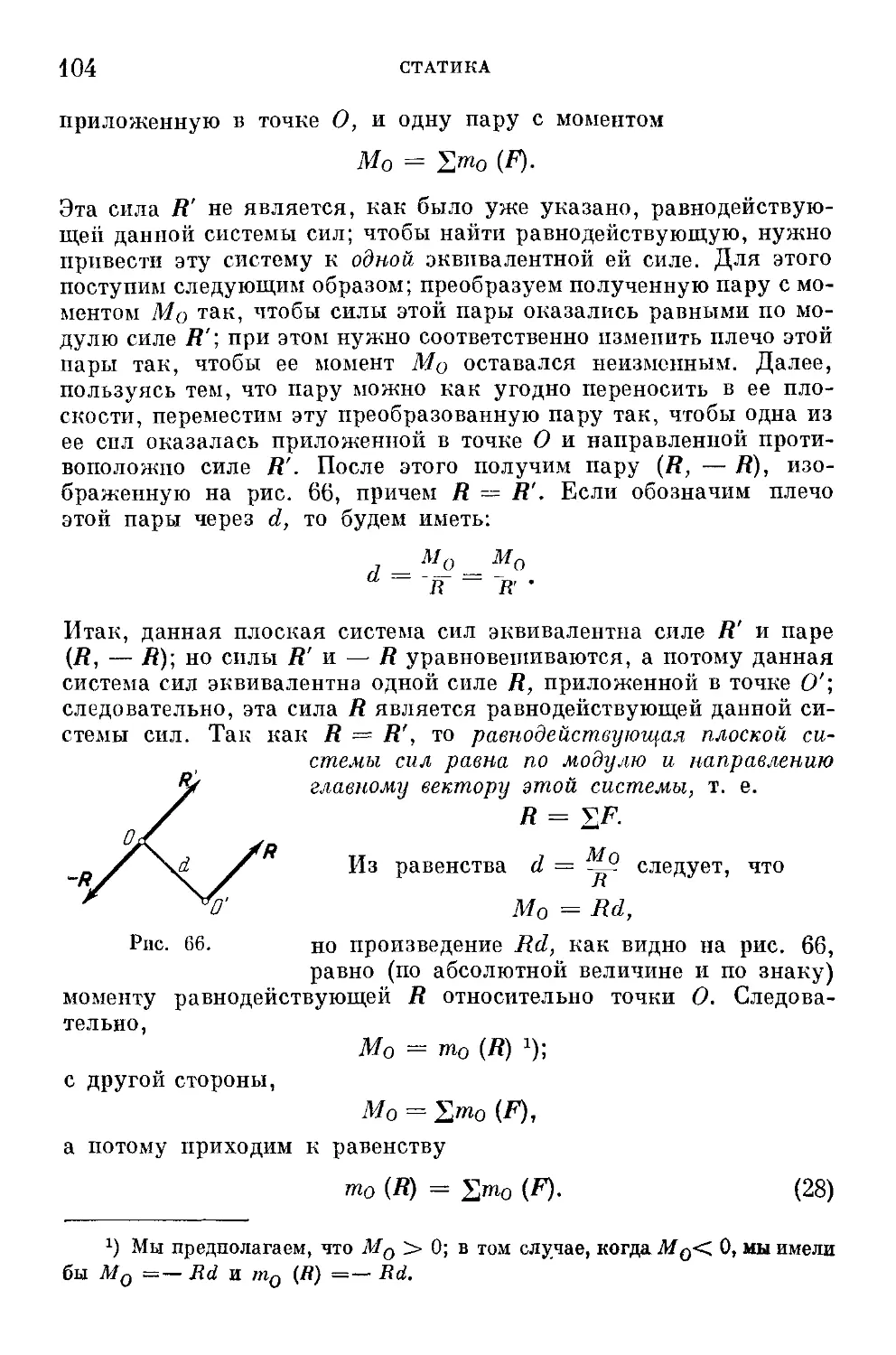
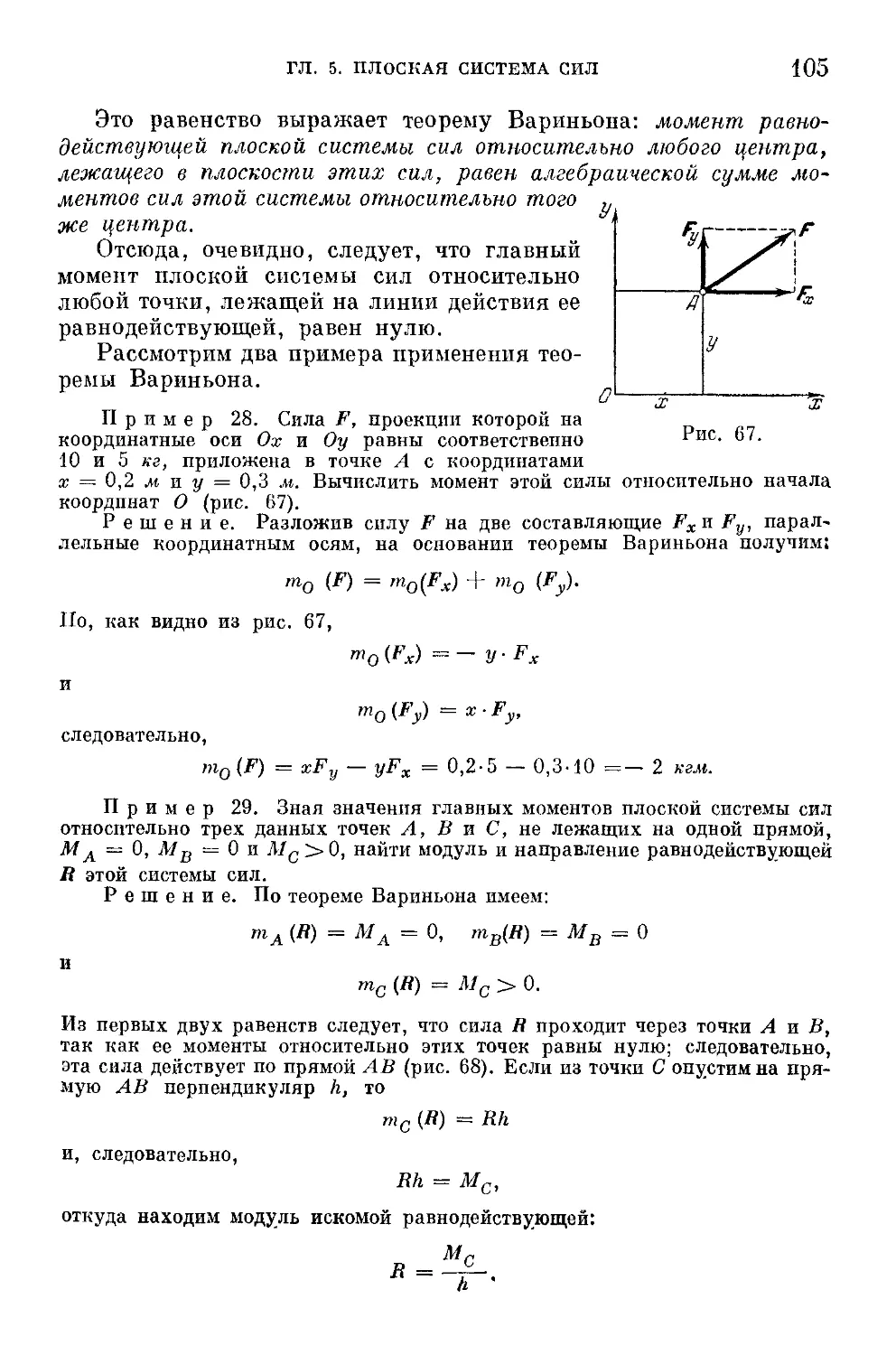
§ 22. Равнодействующая плоской системы сил. Теорема Варииьона 103
1*
4 ОГЛАВЛЕНИЕ
§ 23. Случай, когда плоская система сил приводится к одной паре 107
§ 24. Условия равновесия плоской системы сил 108
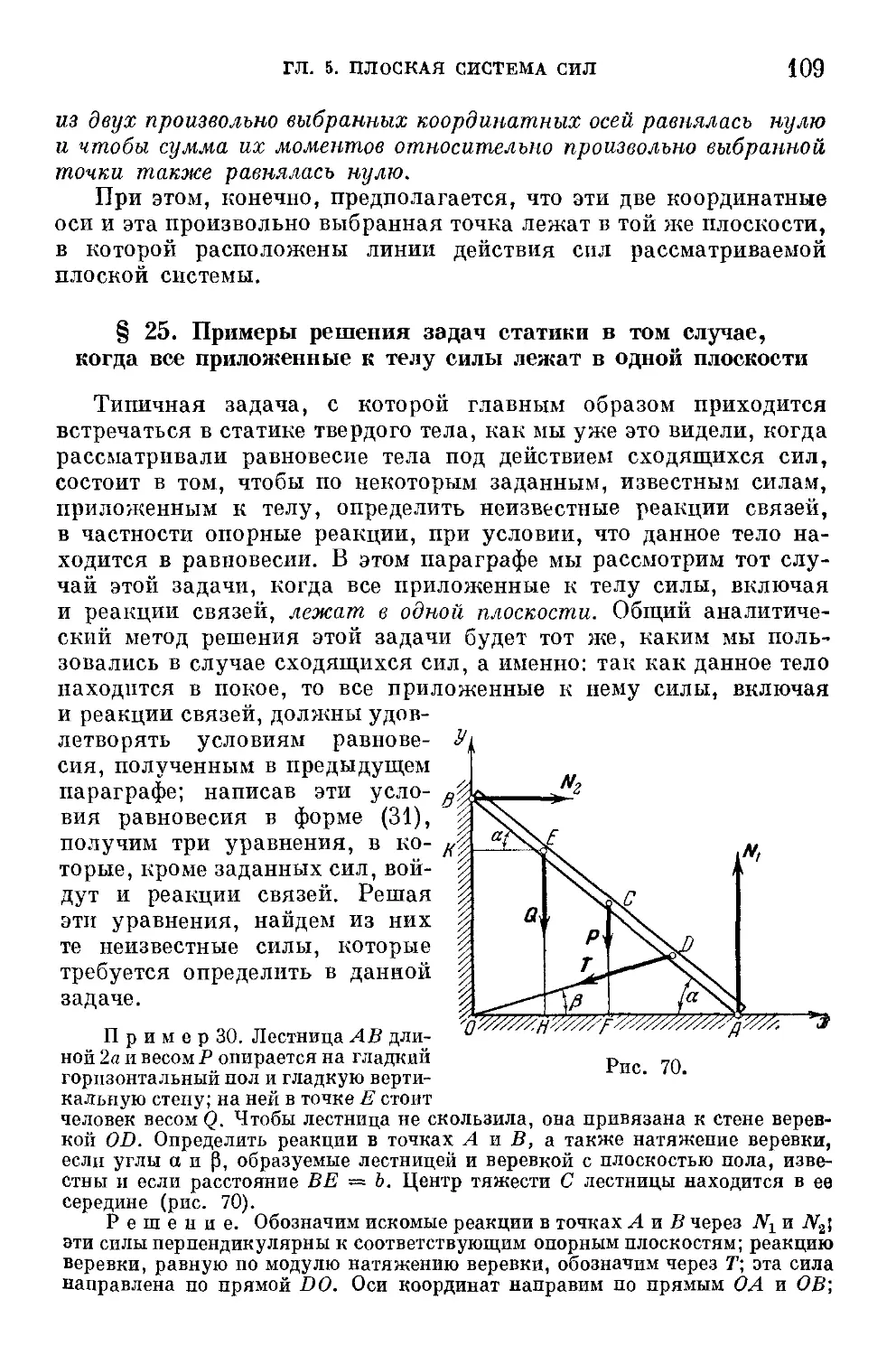
§ 25. Примеры решения задач статики в том случае, когда все прило-
приложенные к телу силы лежат в одной плоскости 109
§ 26. Условия равновесия плоской системы параллельных сил . . 117
§ 27. Понятие о статически неопределенных задачах 118
§ 28. Равновесие системы, состоящей из нескольких твердых тел 119
Глава 6. Трение . 122
§ 29. Трение скольжения 122
§ 30. Трение качения 133
Глава 7. Основные сведения из графостатики 137
§ 31. Сложение сил, лежащих в одной плоскости. Графические ус-
условия равновесия плоской системы сил 137
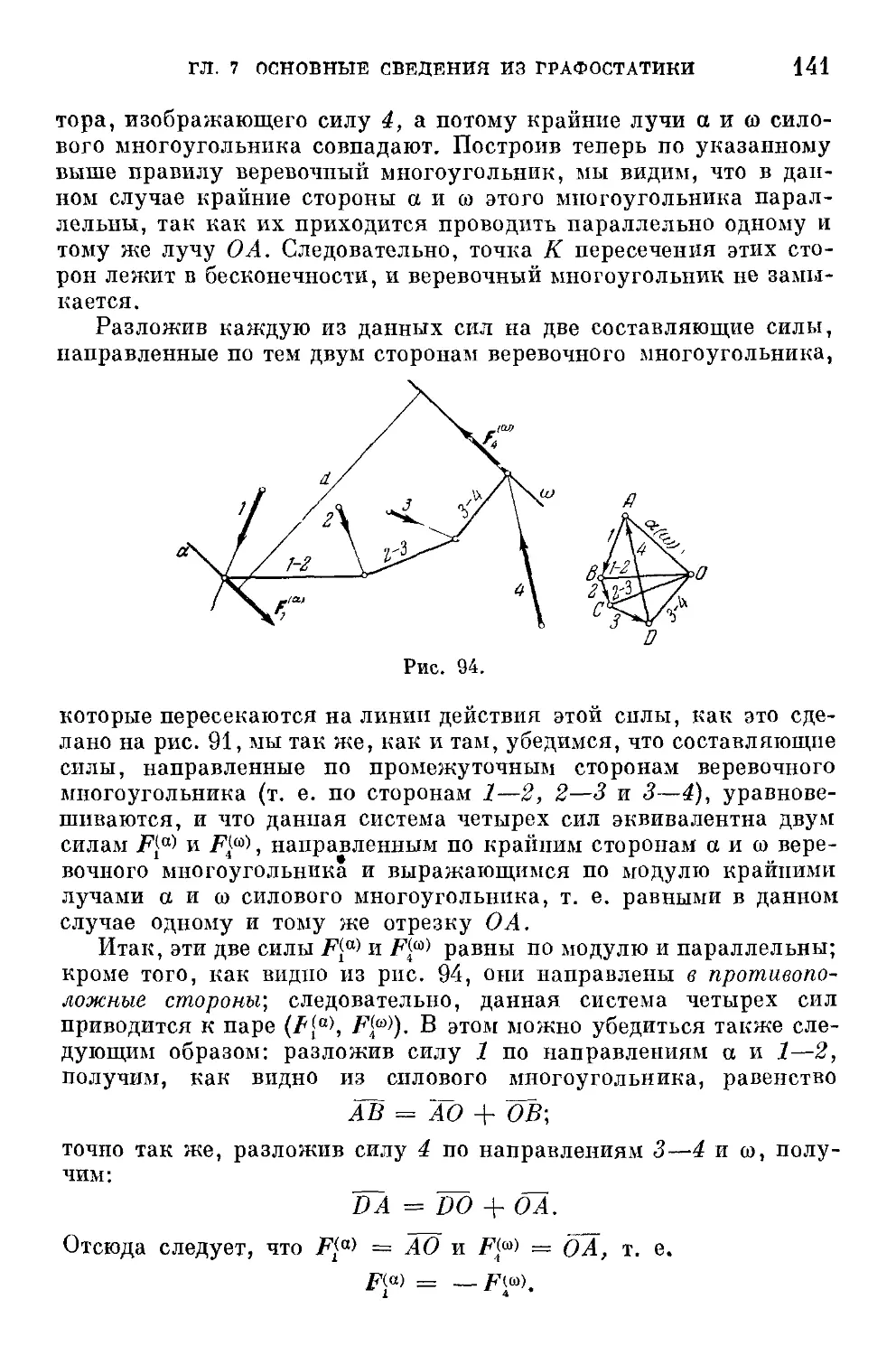
§ 32. Разложение данной силы на две, ей параллельные 143
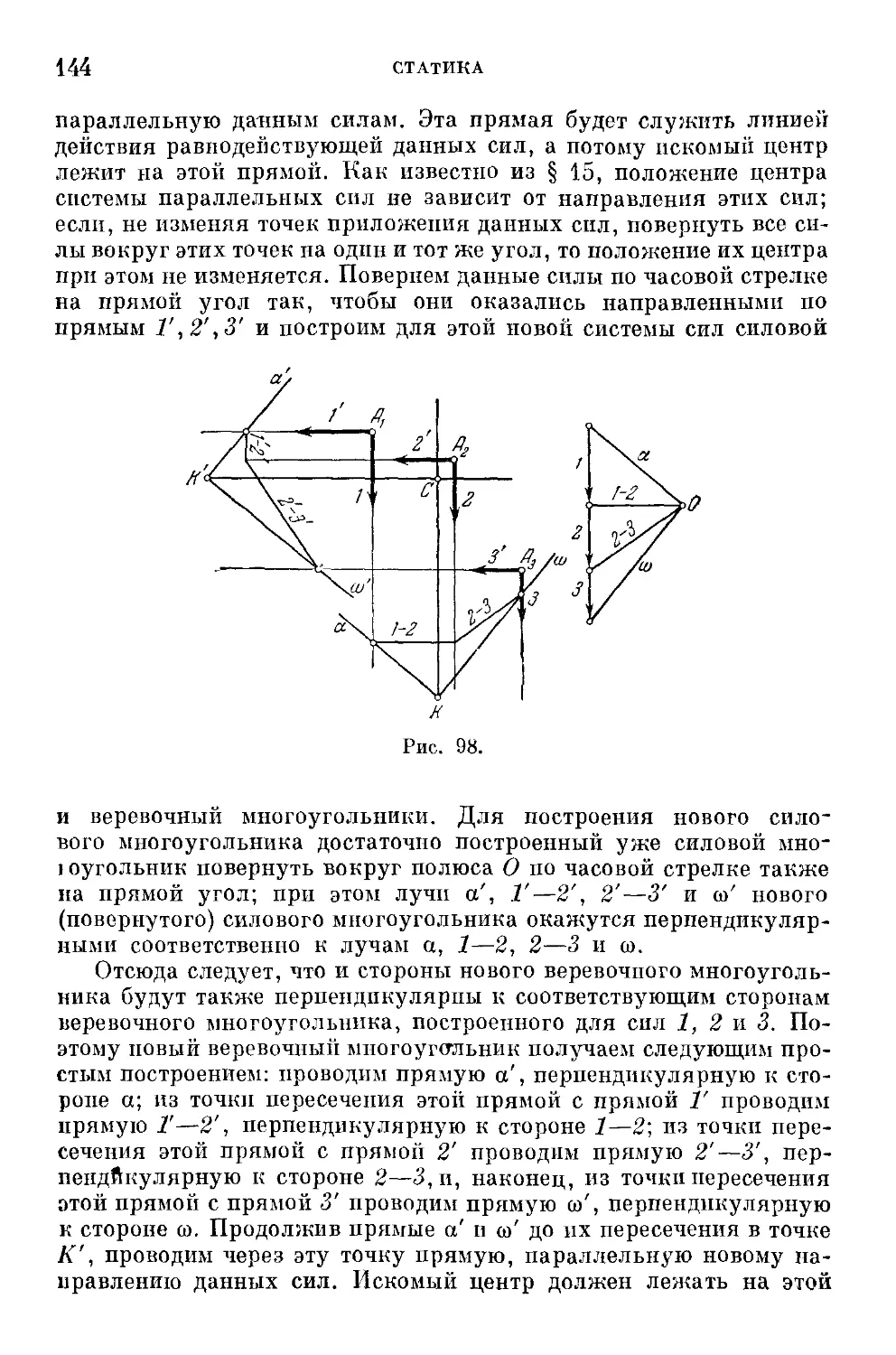
§ 33. Графический способ определения центра системы парал-
параллельных сил 143
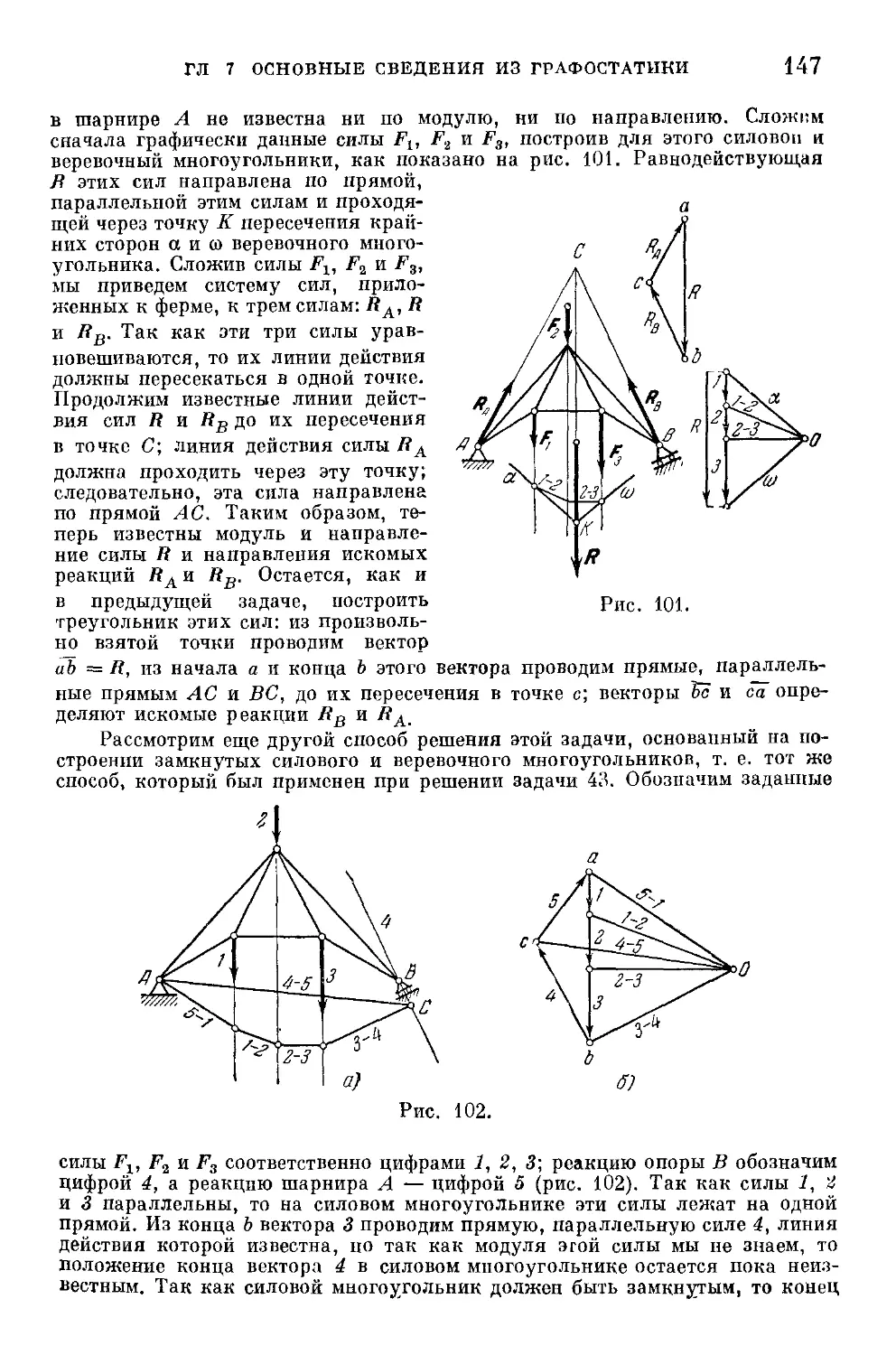
§ 34. Графическое определение реакций в плоской задаче статики 145
Глава 8. Фермы 148
§ 35. Понятие о ферме. Задача расчета ферм 148
§ 36. Способ вырезания узлов 152
§ 37. Способ Кремоны 155
§ 38. Способ Риттера 160
Глава 9. Произвольная система сил 163
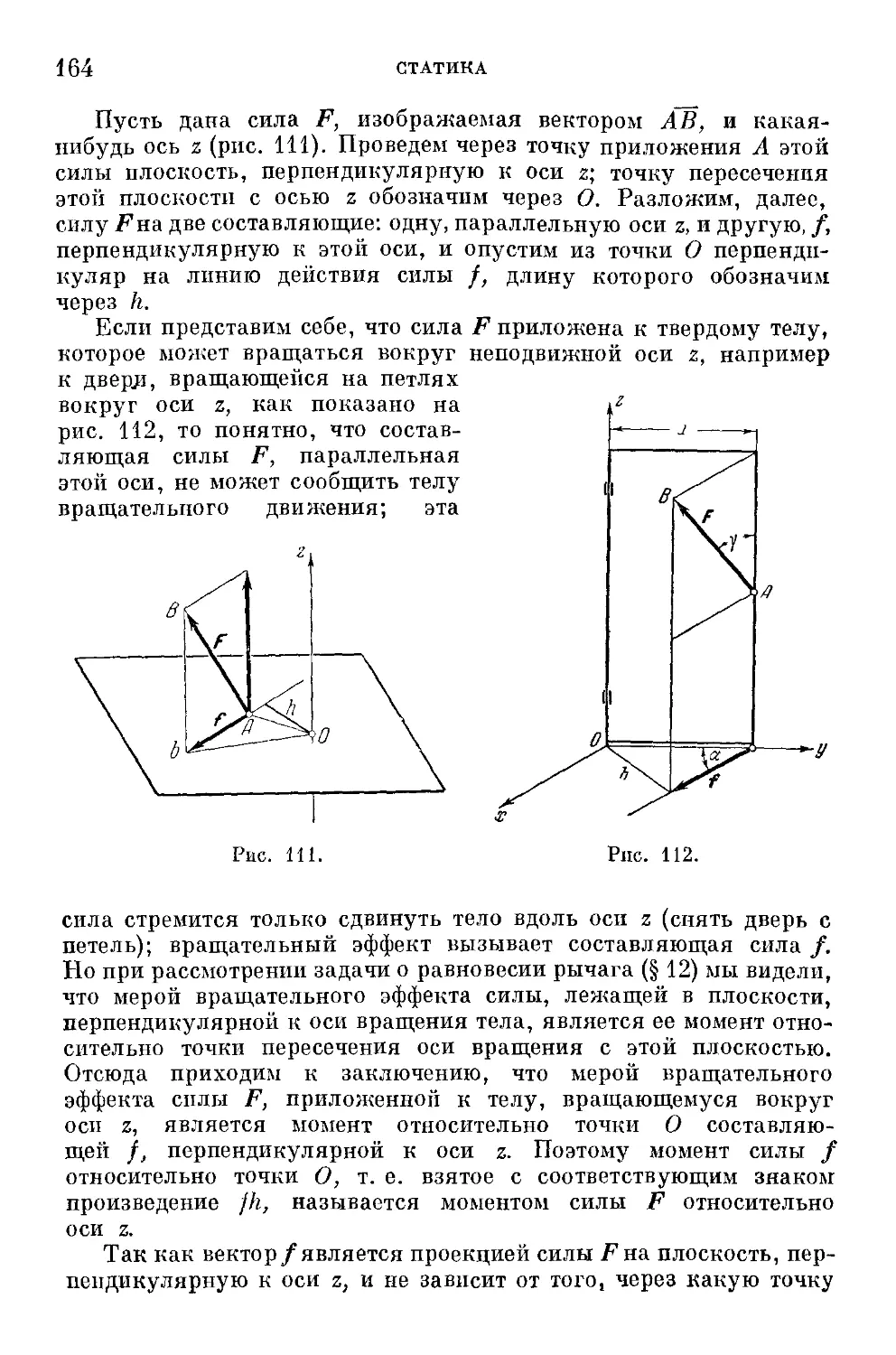
§ 39. Момент силы относительно оси 163
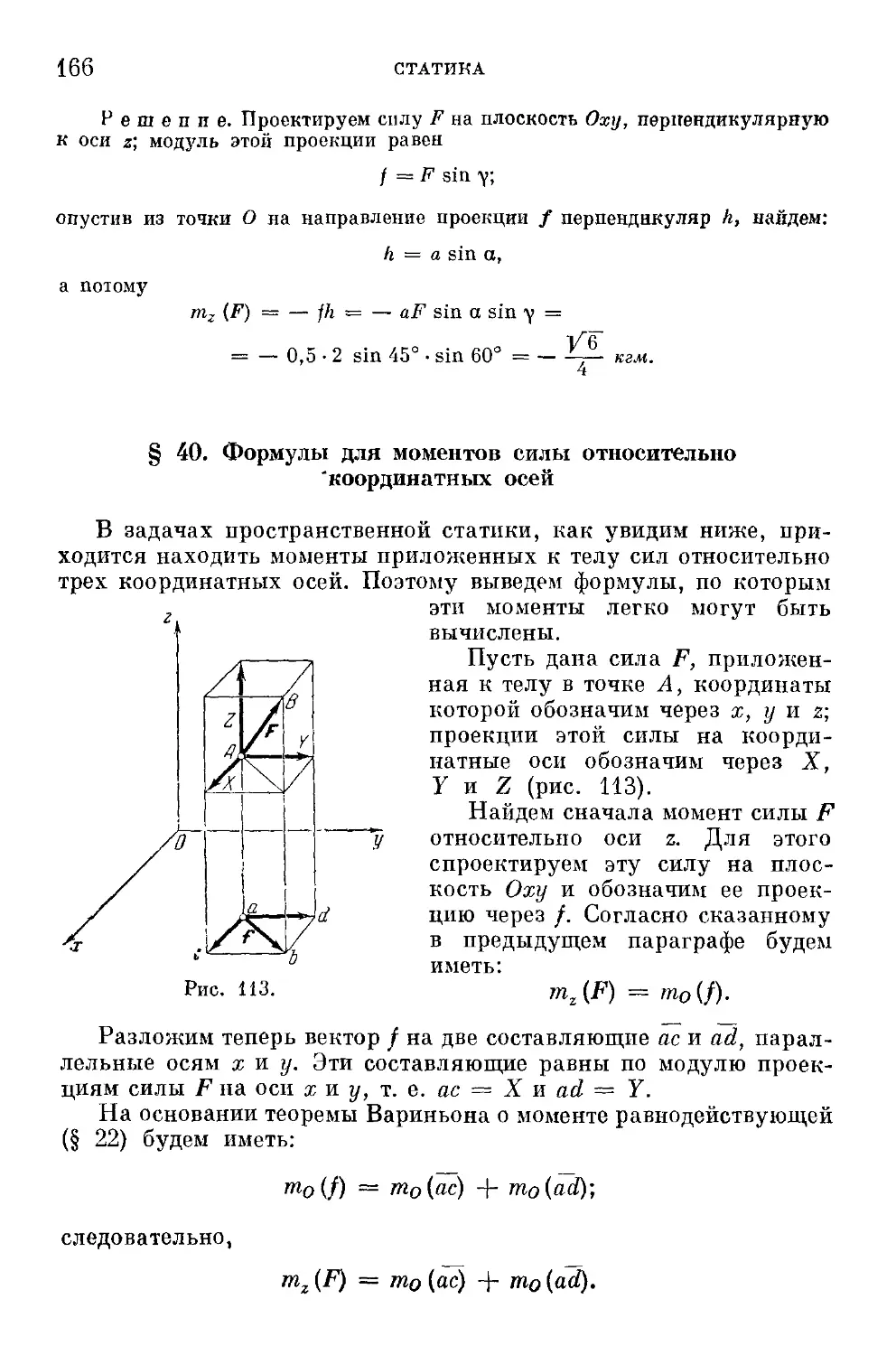
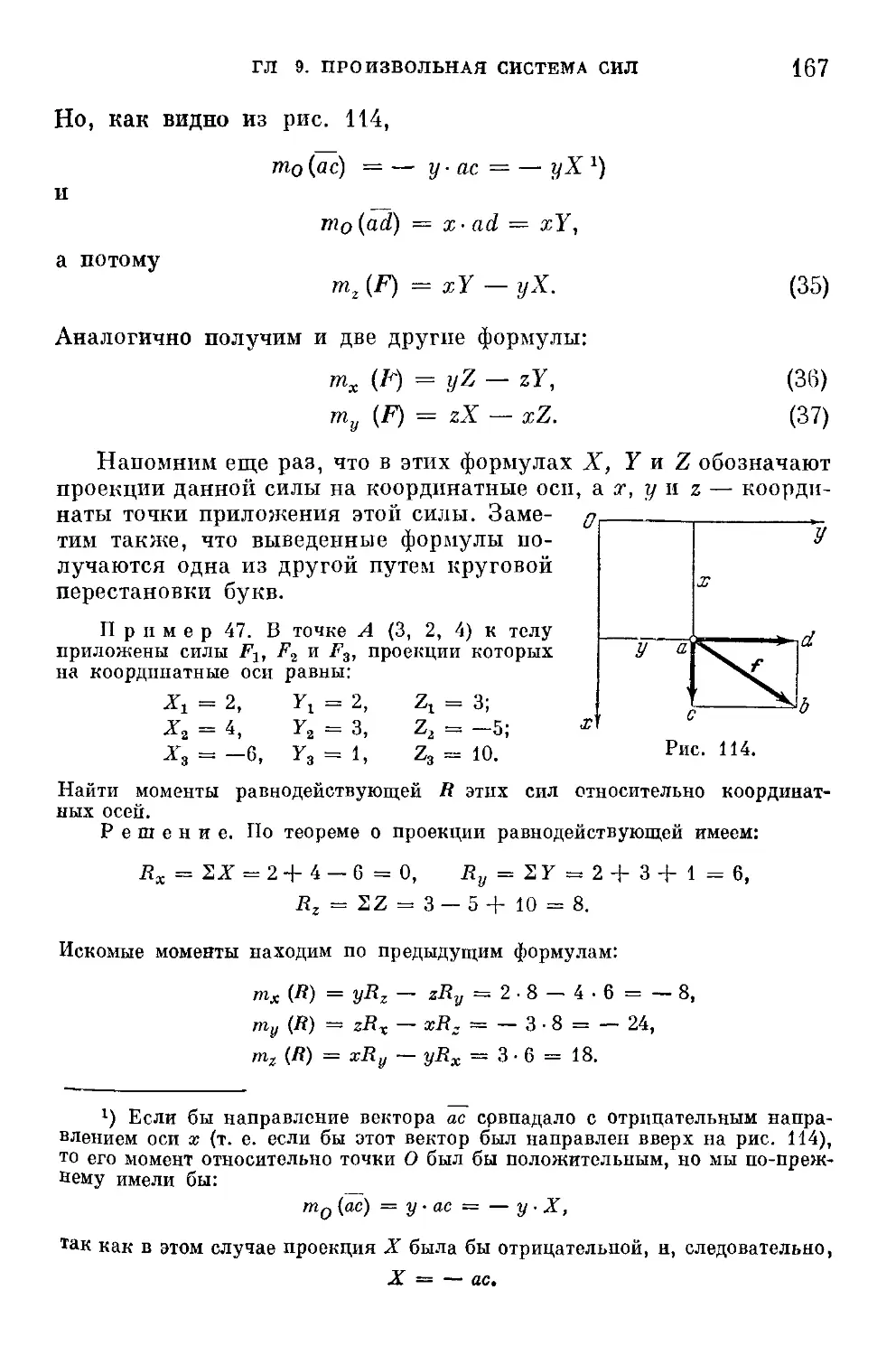
§ 40. Формулы для моментов силы относительно координатных осей 166
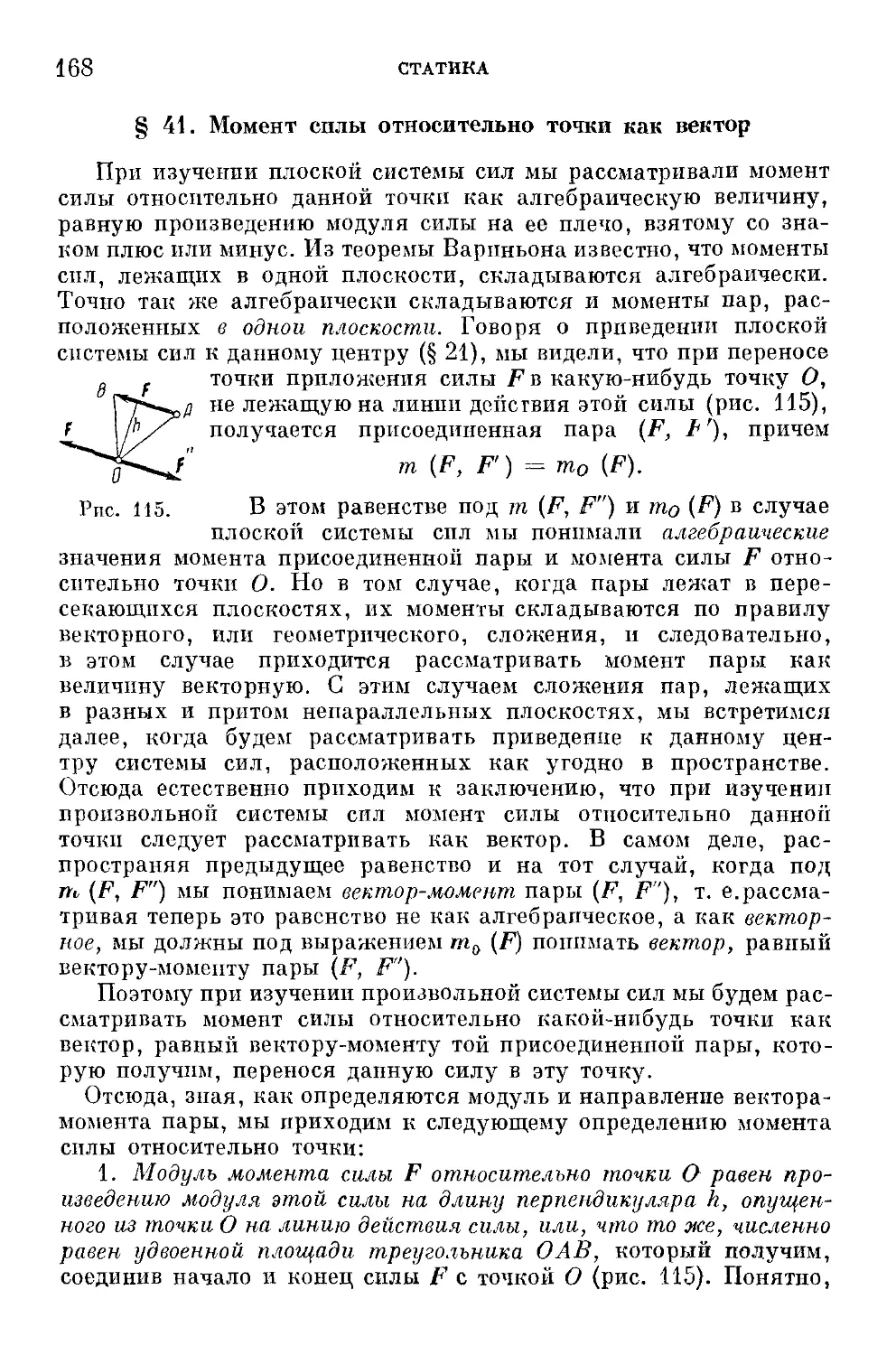
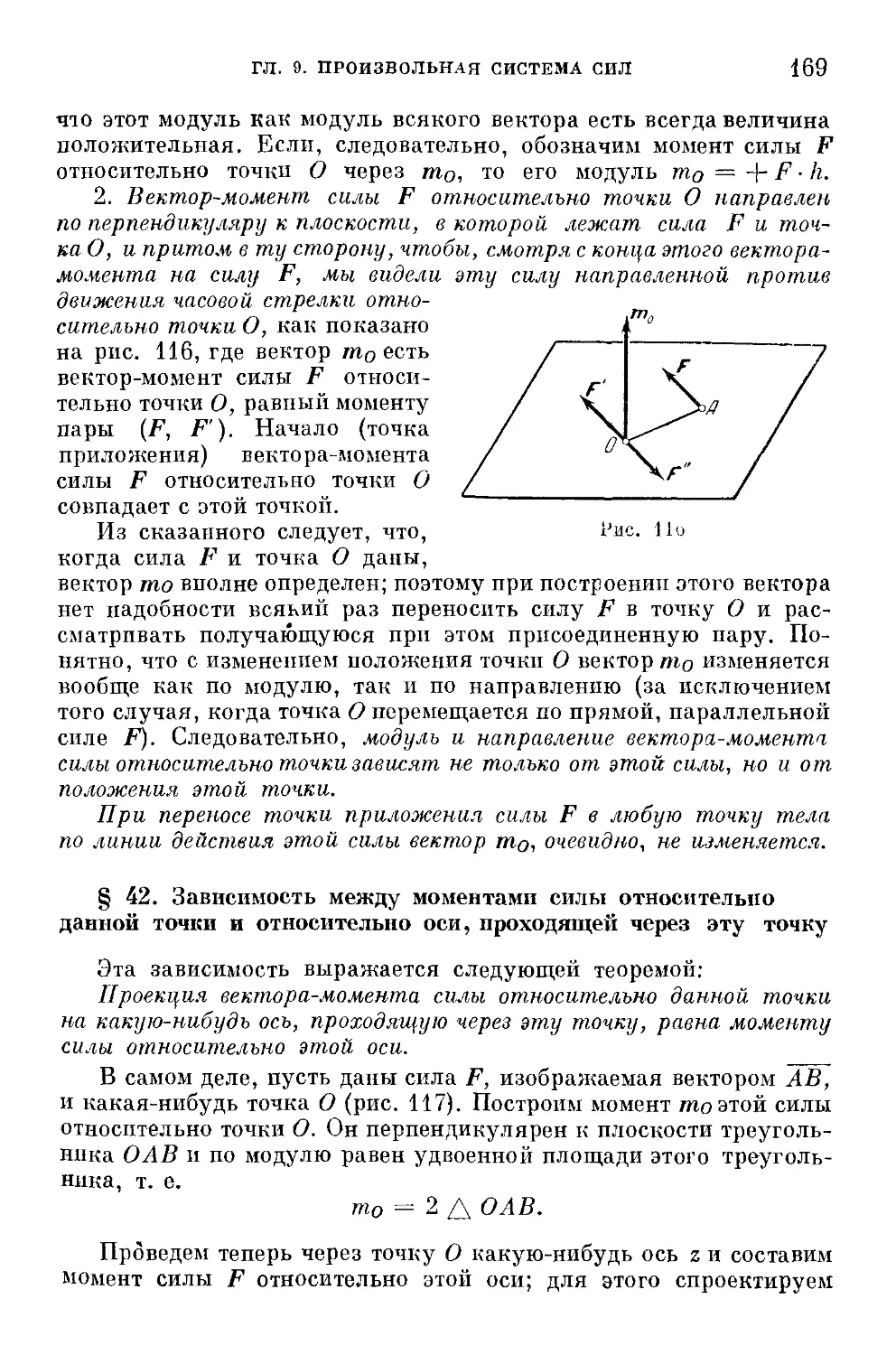
§ 41. Момент силы относительно точки как вектор 168
§ 42. Зависимость между моментами силы относительно данной точки
и относительно оси, проходящей через эту точку 169
§ 43. Векторное н скалярное произведения двух векторов .... 172
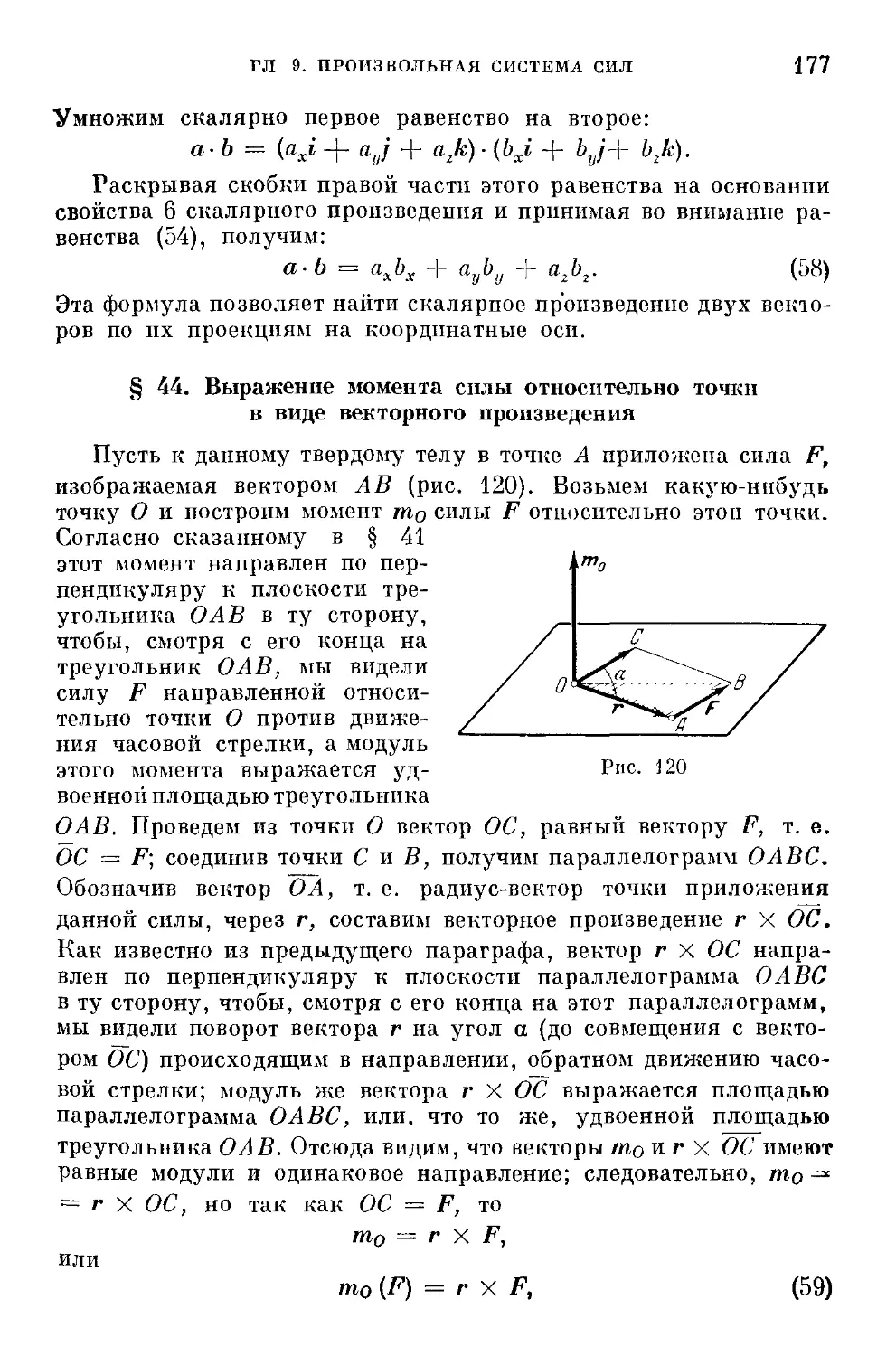
§ 44. Выражение момента силы относительно точки в виде вектор-
векторного произведения 177
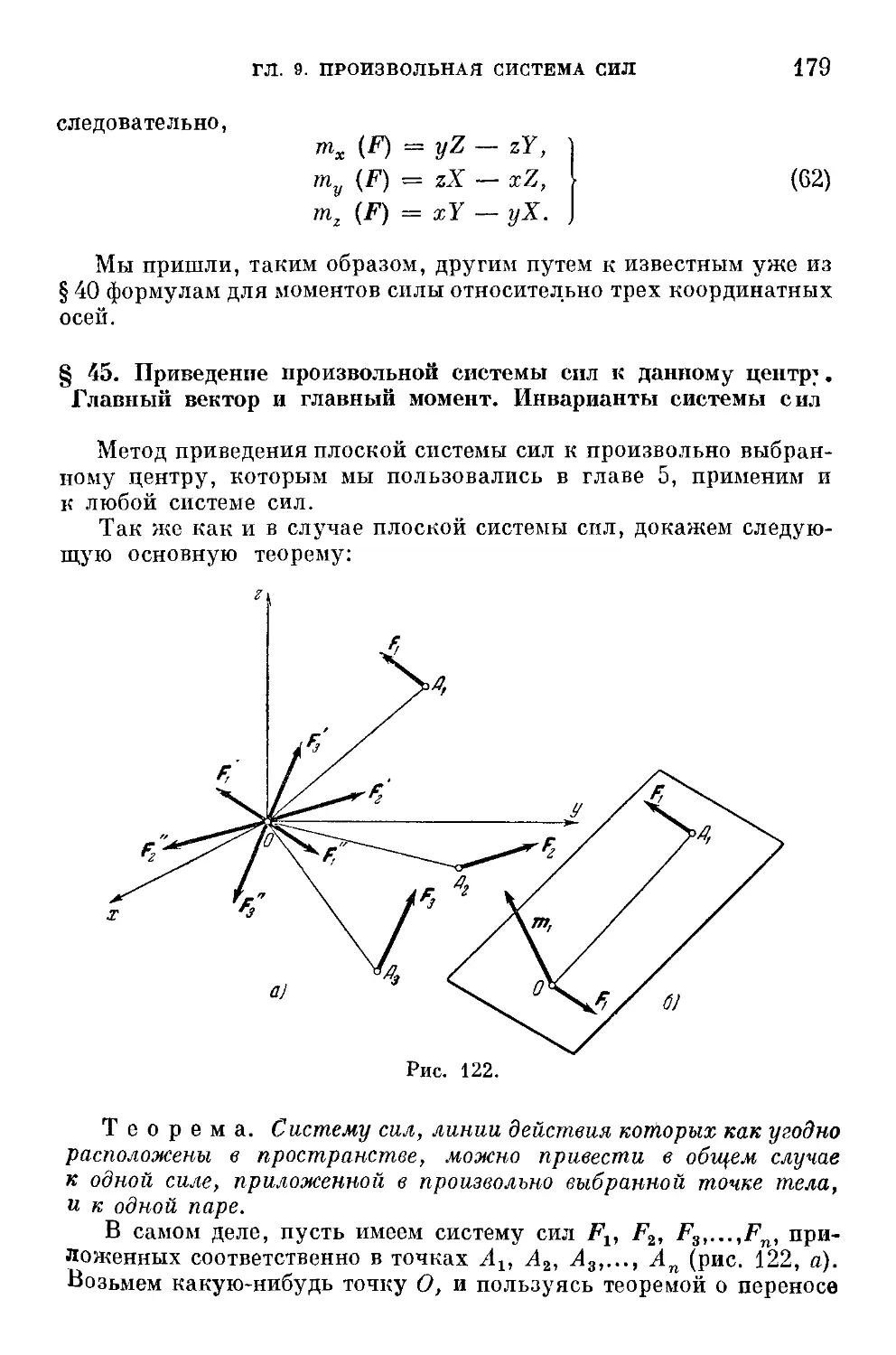
§ 45. Приведение произвольной системы сил к данному центру.
Главный вектор и главный момент. Инварианты системы сил 179
§ 46. Равнодействующая системы сил. Теорема Вариньона .... 185
§ 47. Случай, когда система сил приводится к одной паре .... 187
§ 48. Приведение системы сил к динаме. Центральная ось .... 187
§ 49. Условия равновесия системы сил в общем случае 194
§ 50. Равновесие несвободного твердого тела 196
Глава 10. Центр тяжести 203
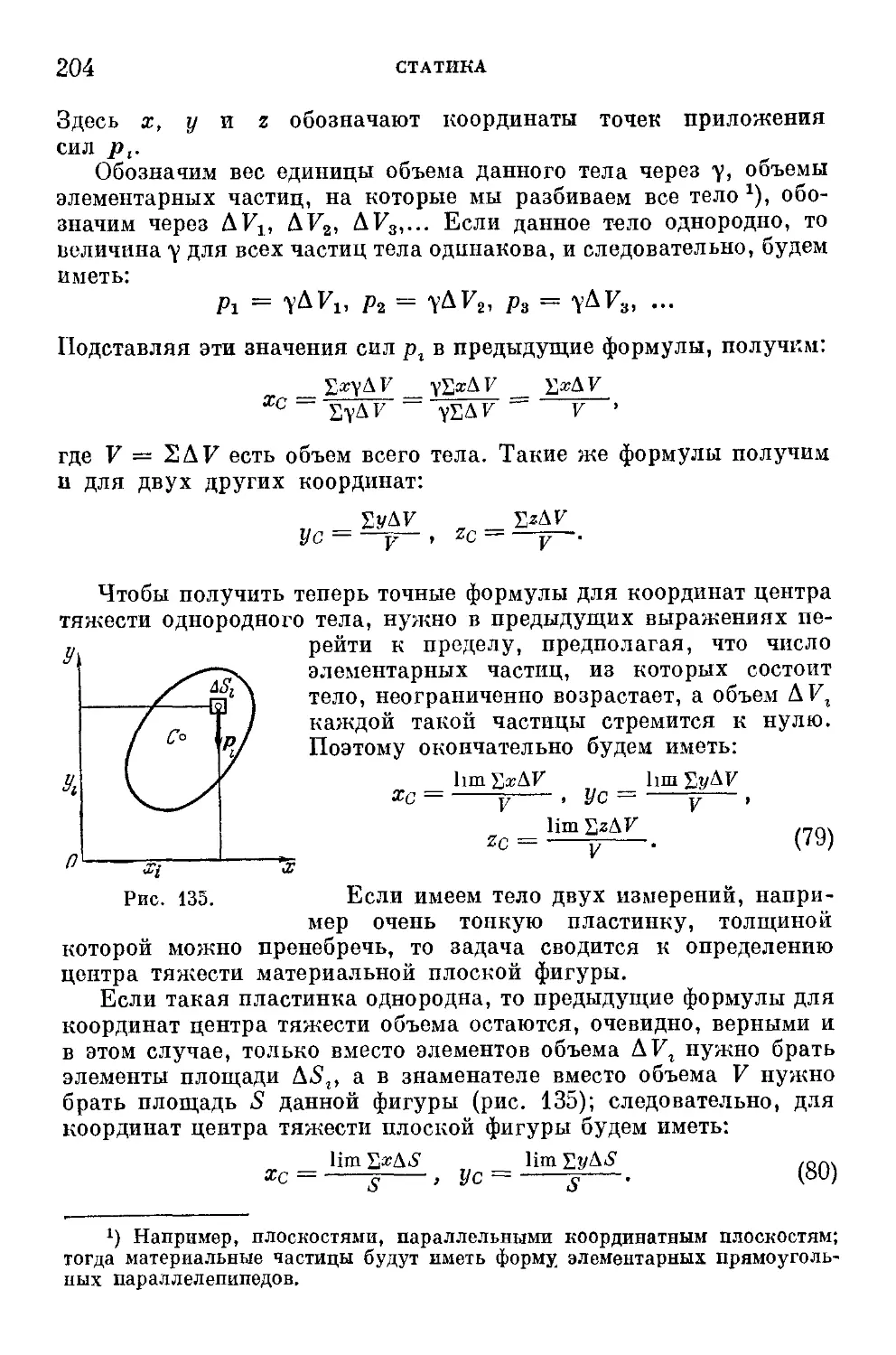
§ 51. Общие формулы для координат центра тяжестп , . 203
§ 52. Положение центра тяжести симметричного тела ....... 205
ОГЛАВЛЕНИЕ 5
§ 53. Теоремы Гюльдепа 207
§ 54. Центры тяжести некоторых простейших однородных тел и фи-
фигур 211
§ 55. Определение центра тяжести тел и фигур сложной формы . 215
§ 56. Применение общих формул к вычислению координат центра
тяжести 220
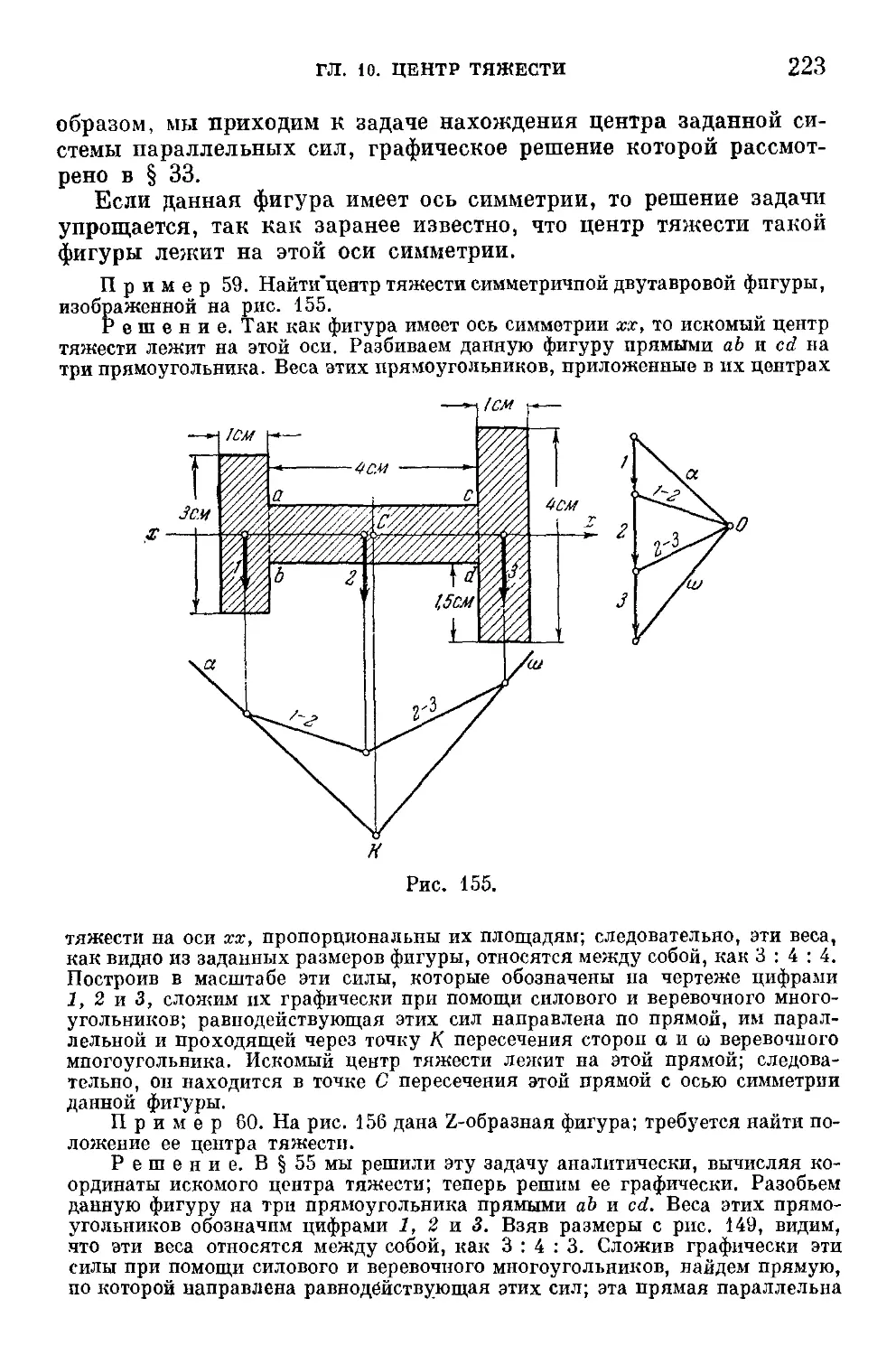
§ 57. Графическое определение центра тяжести плоских фигур . . 222
КИНЕМАТИКА
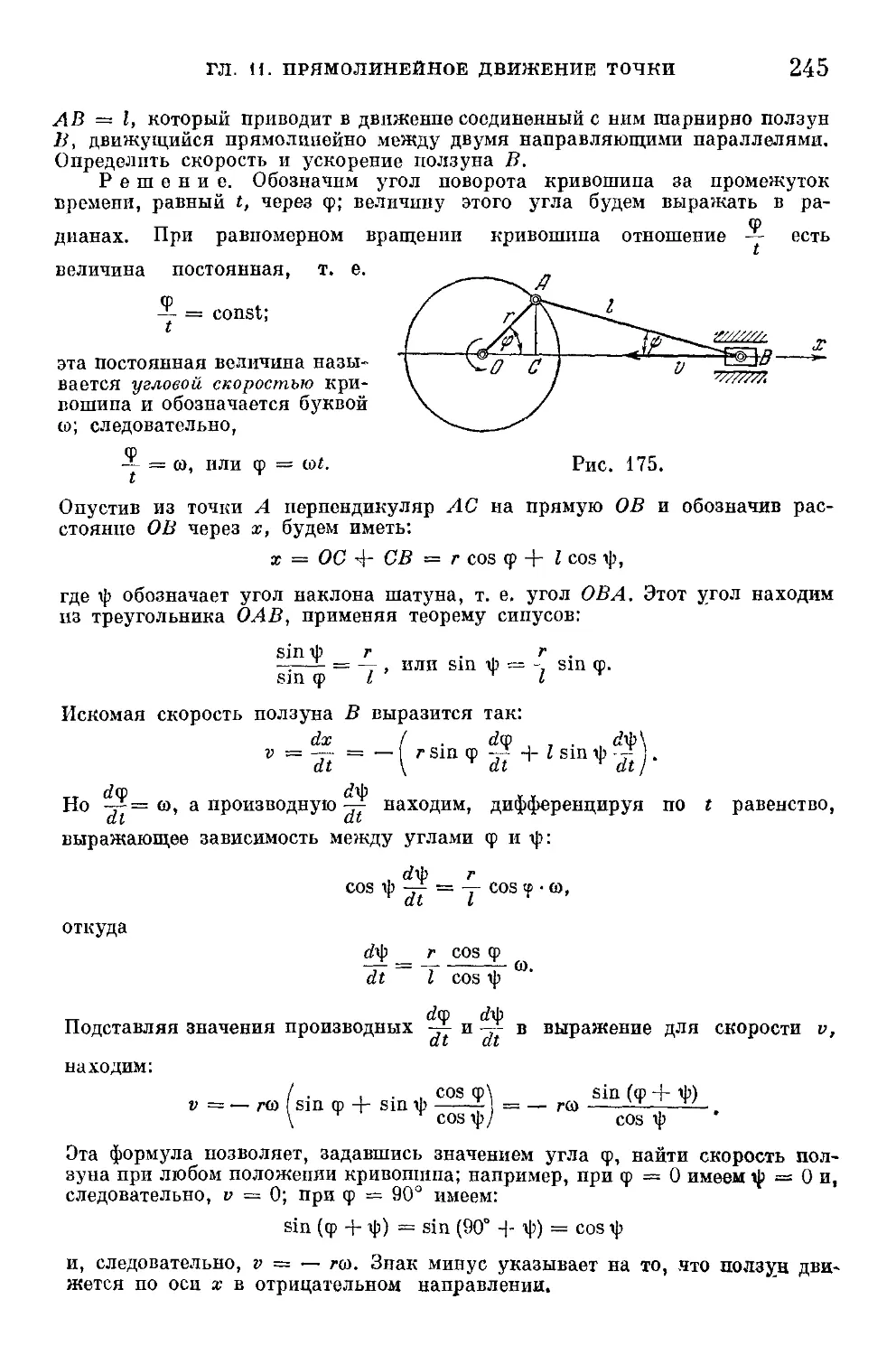
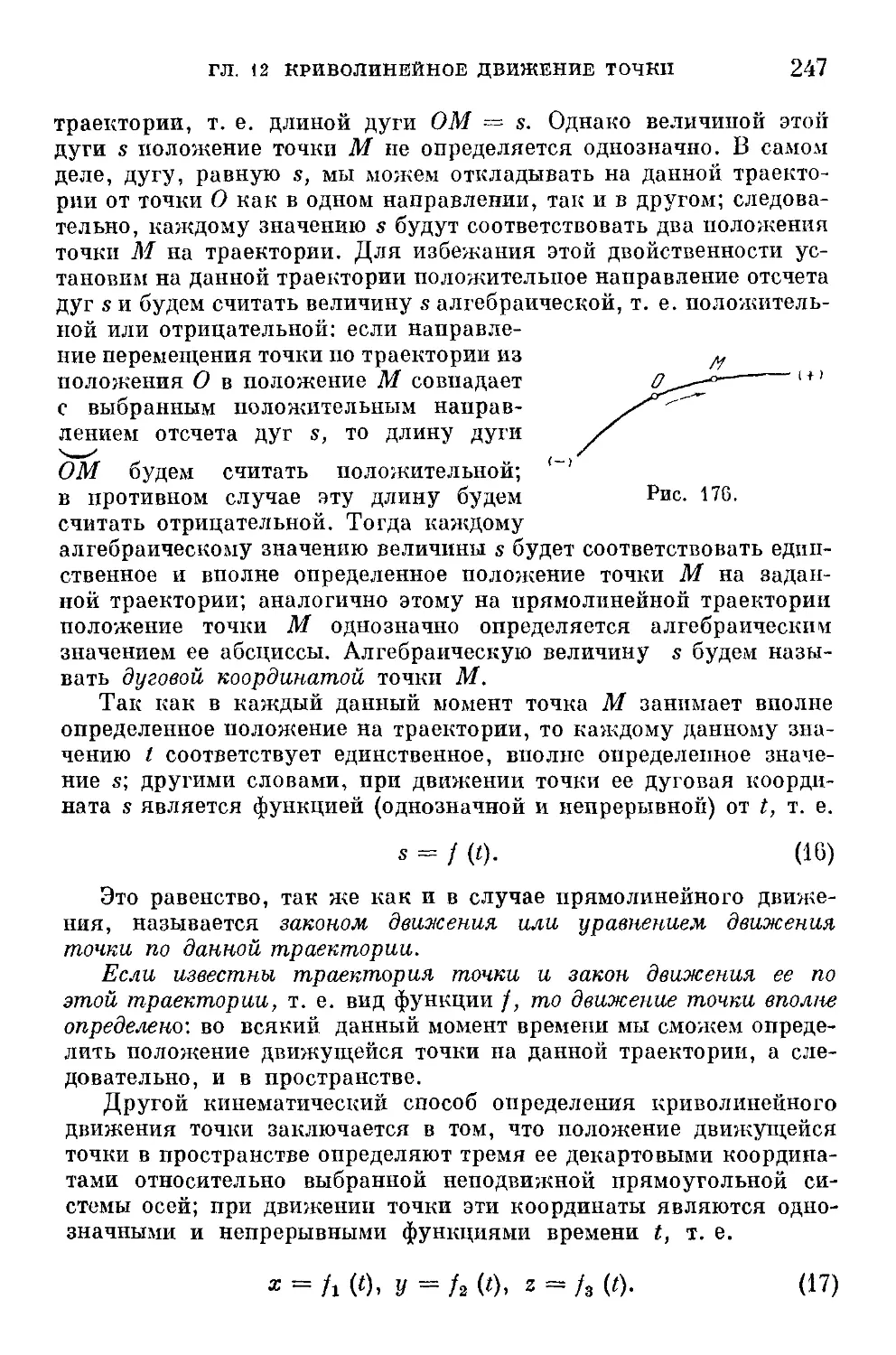
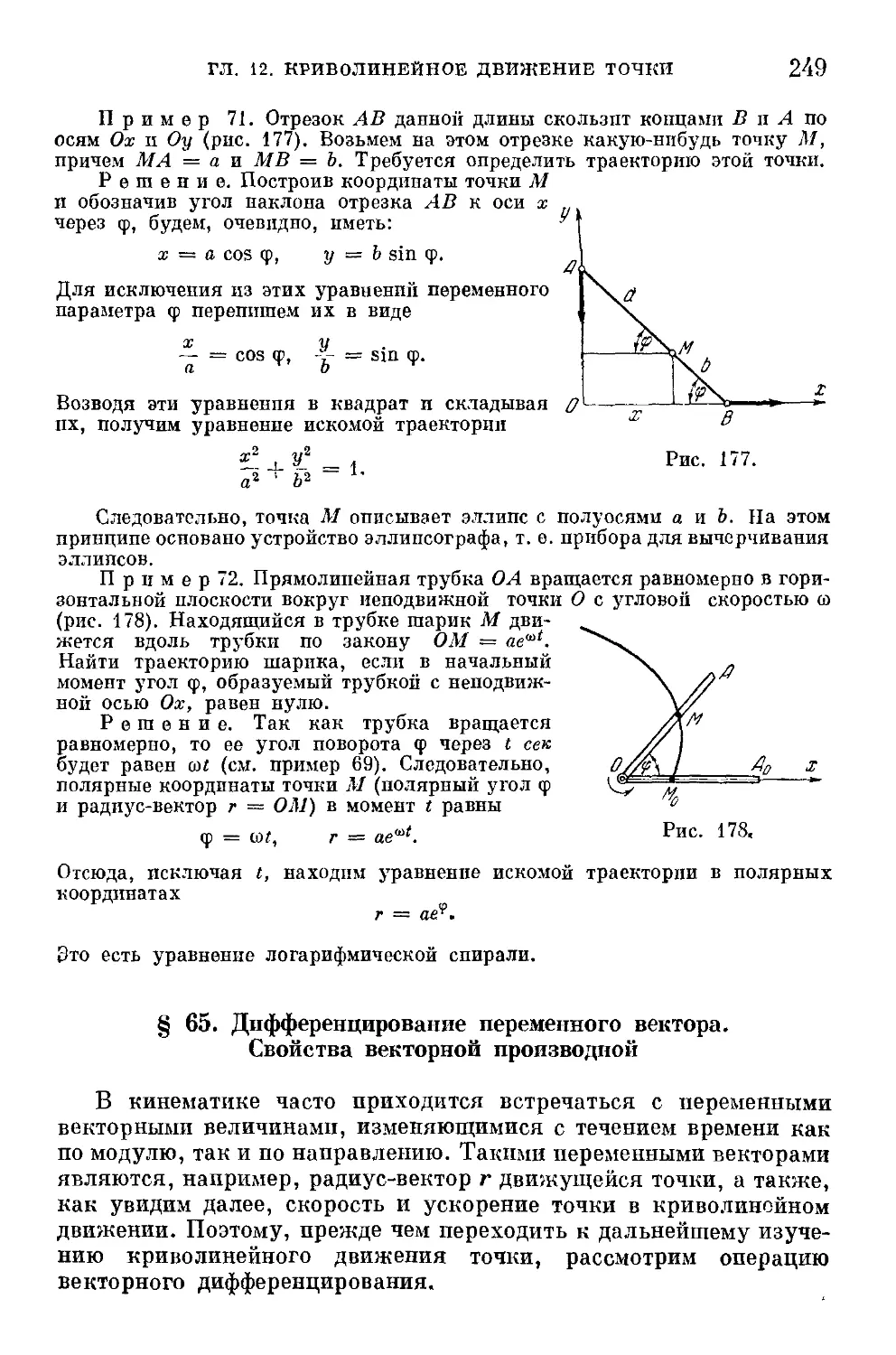
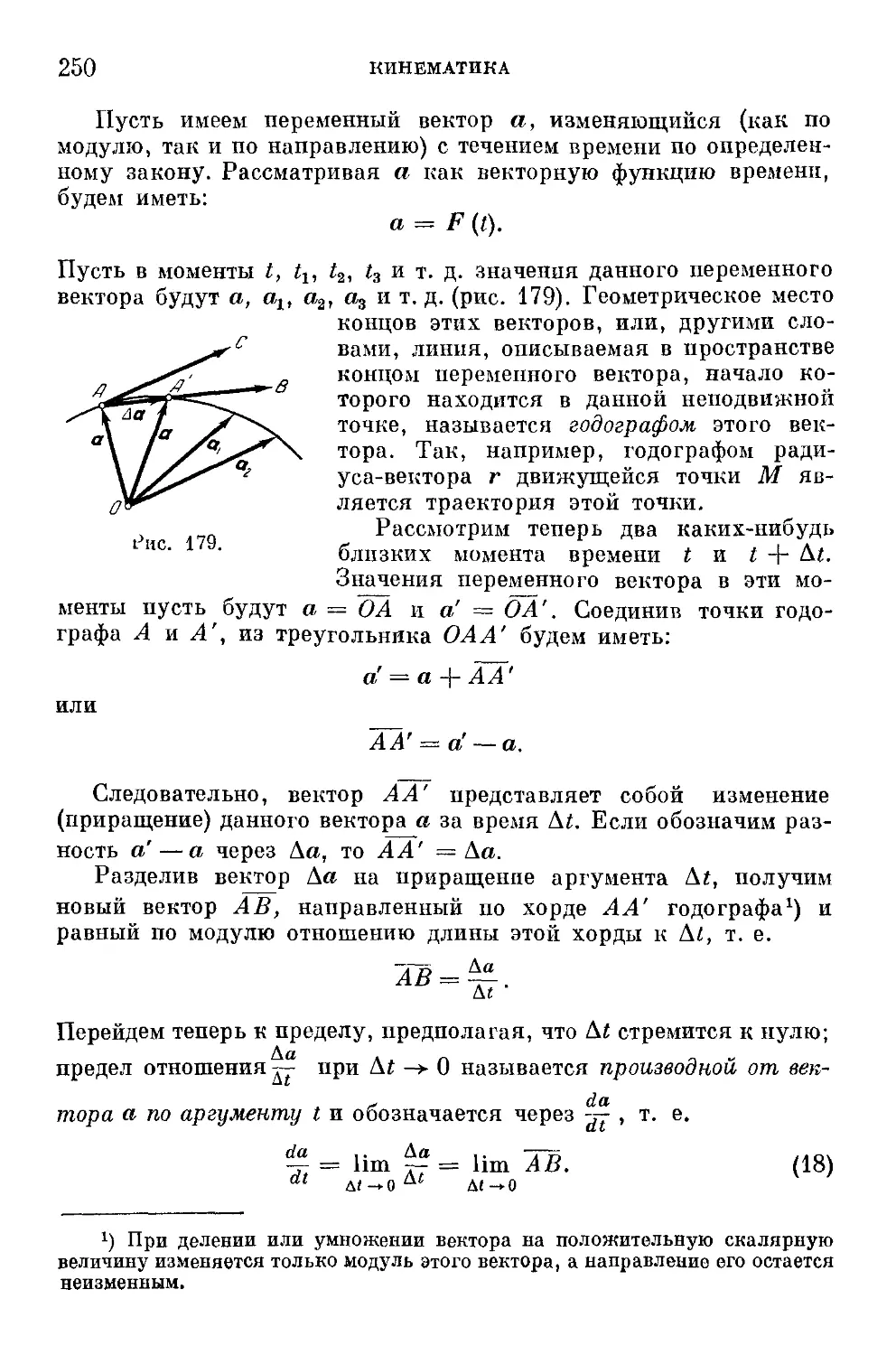
Глава 11. Прямолинейное движение точки 225
§ 58. Введение в кинематику 225,
§ 59. Уравнение движения точки и график движения 227
§ 60. Равномерное движение точки 230
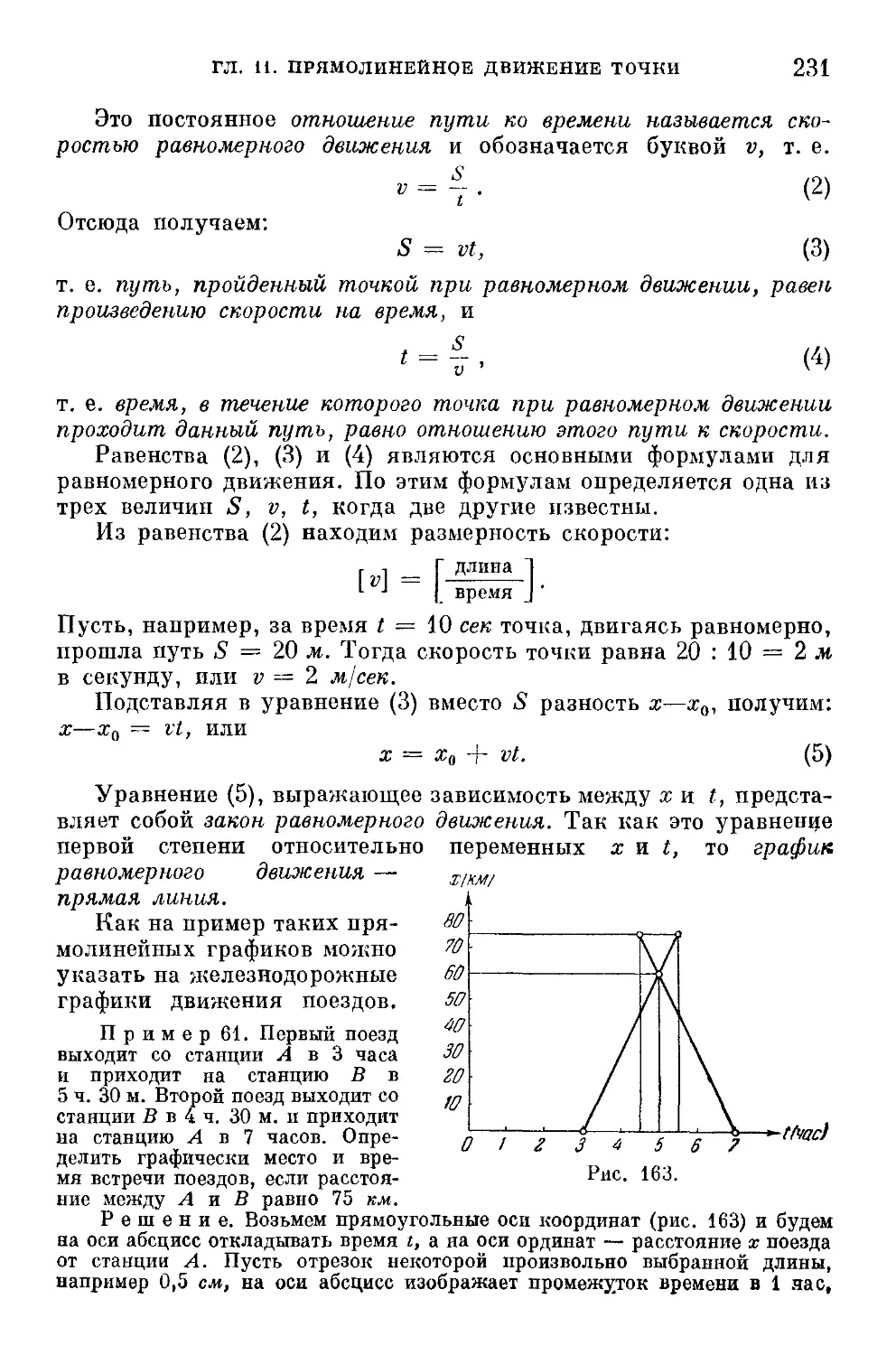
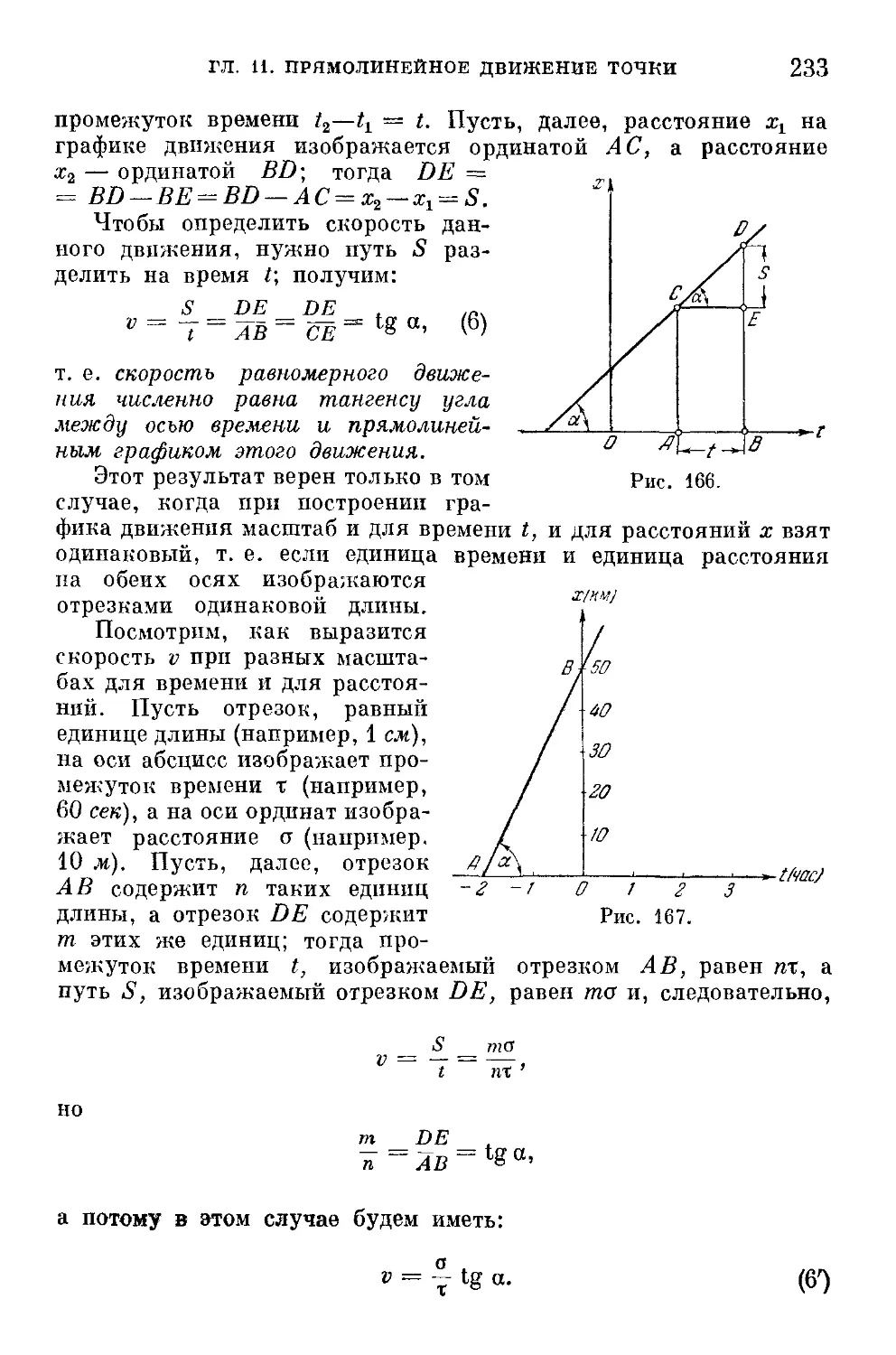
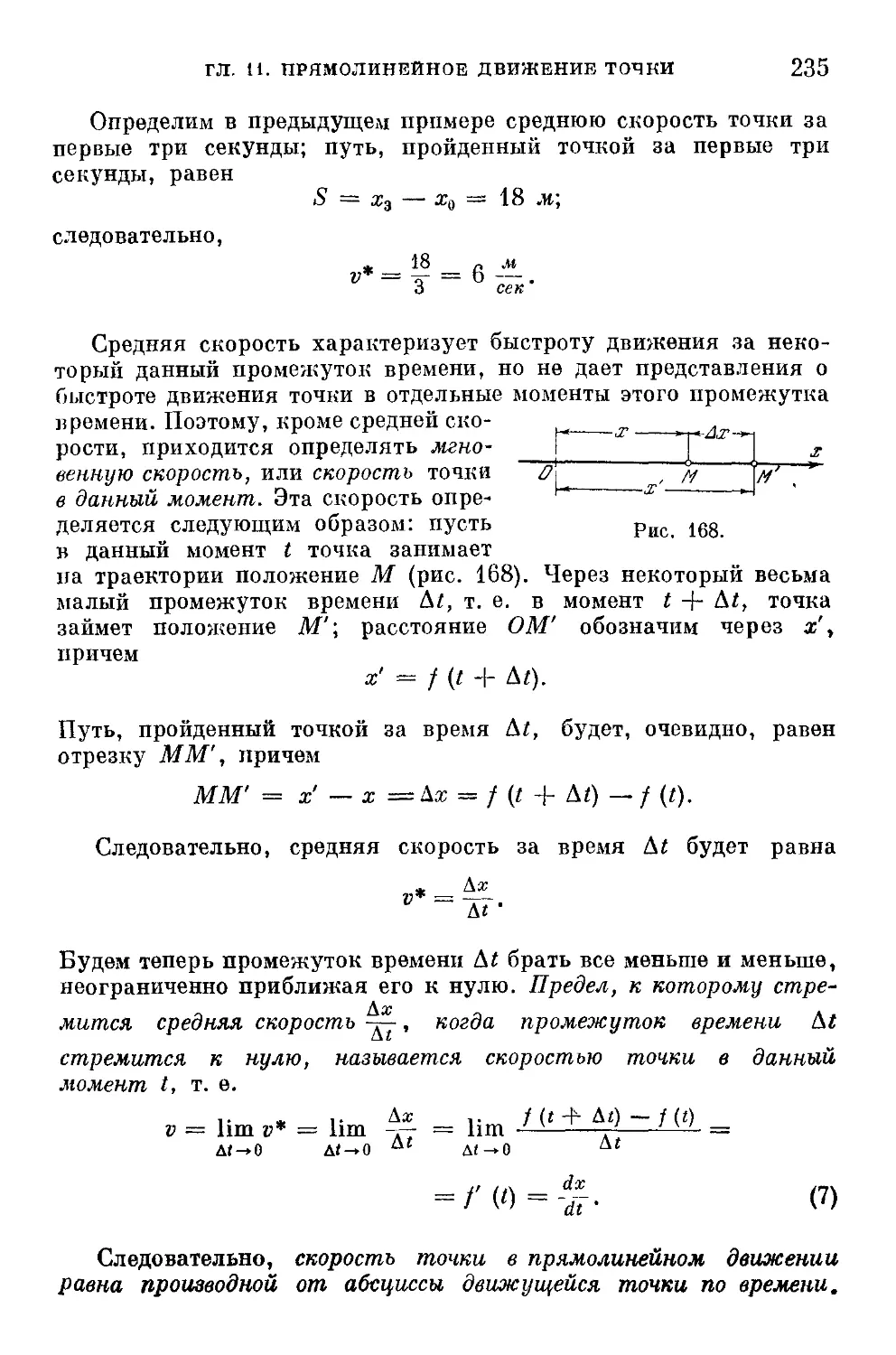
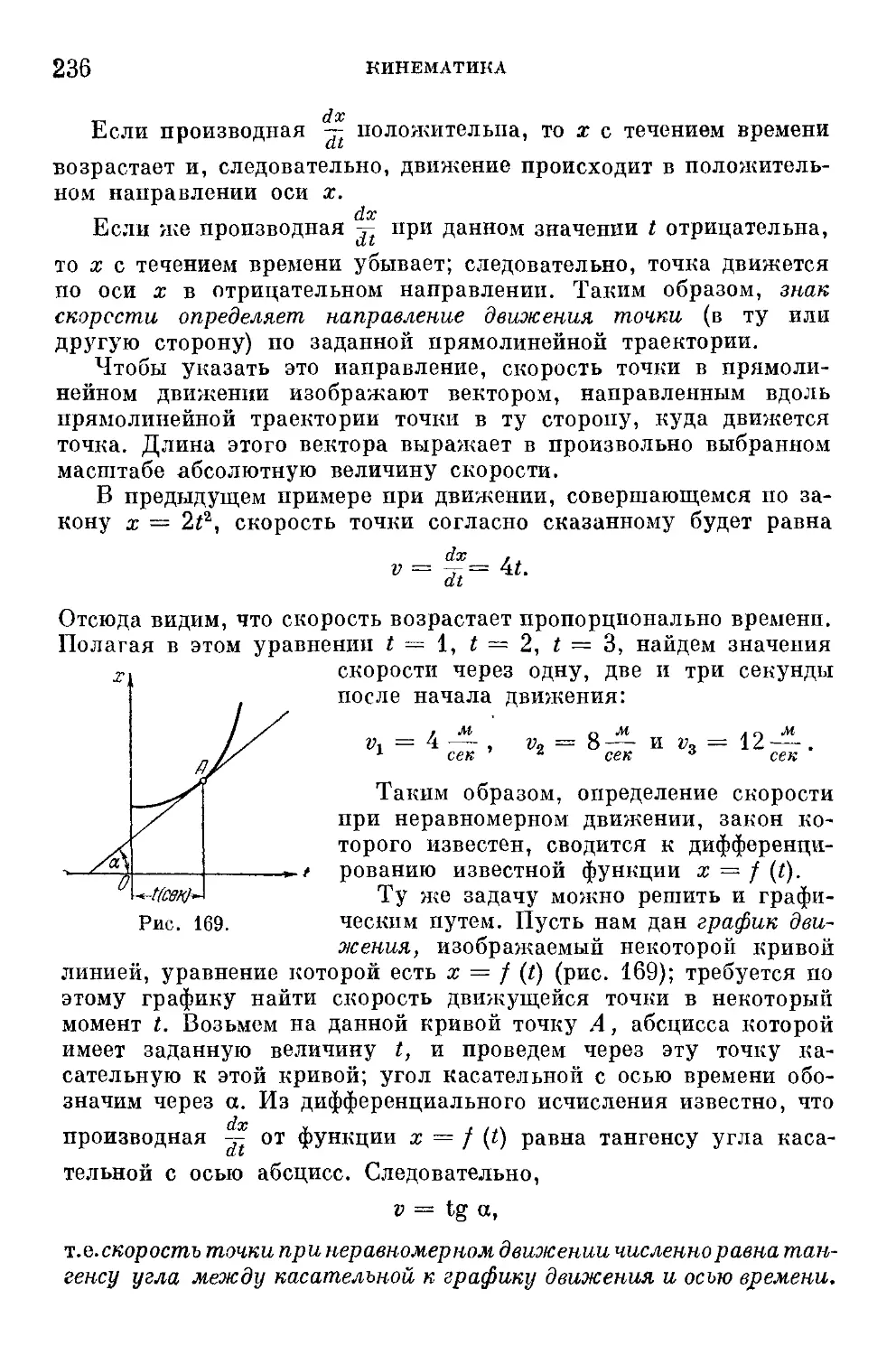
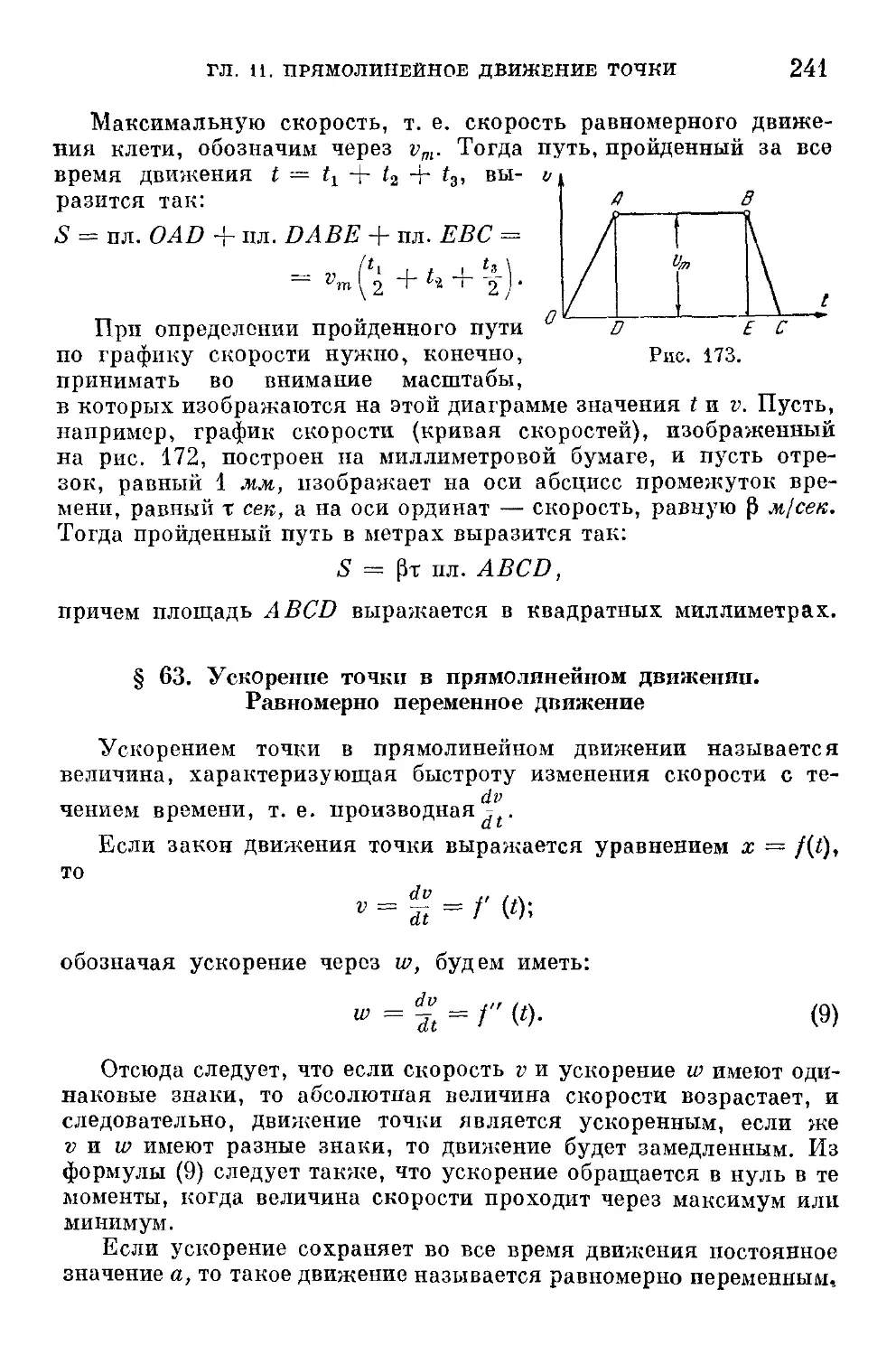
§ 61. Скорость точки при неравномерном движении 234
§ 62. Определение пути, пройденного точкой по заданному закону
изменепия ее скорости 239
§ 63. Ускорение точки в прямолинейном движении. Равномерно пере-
переменное движение 241
Глава 12. Криволинейное движение точки 246
§ 64. Уравнения движения точки 246
§ 65. Дифференцирование переменного вектора. Свойства векторной
производной 249
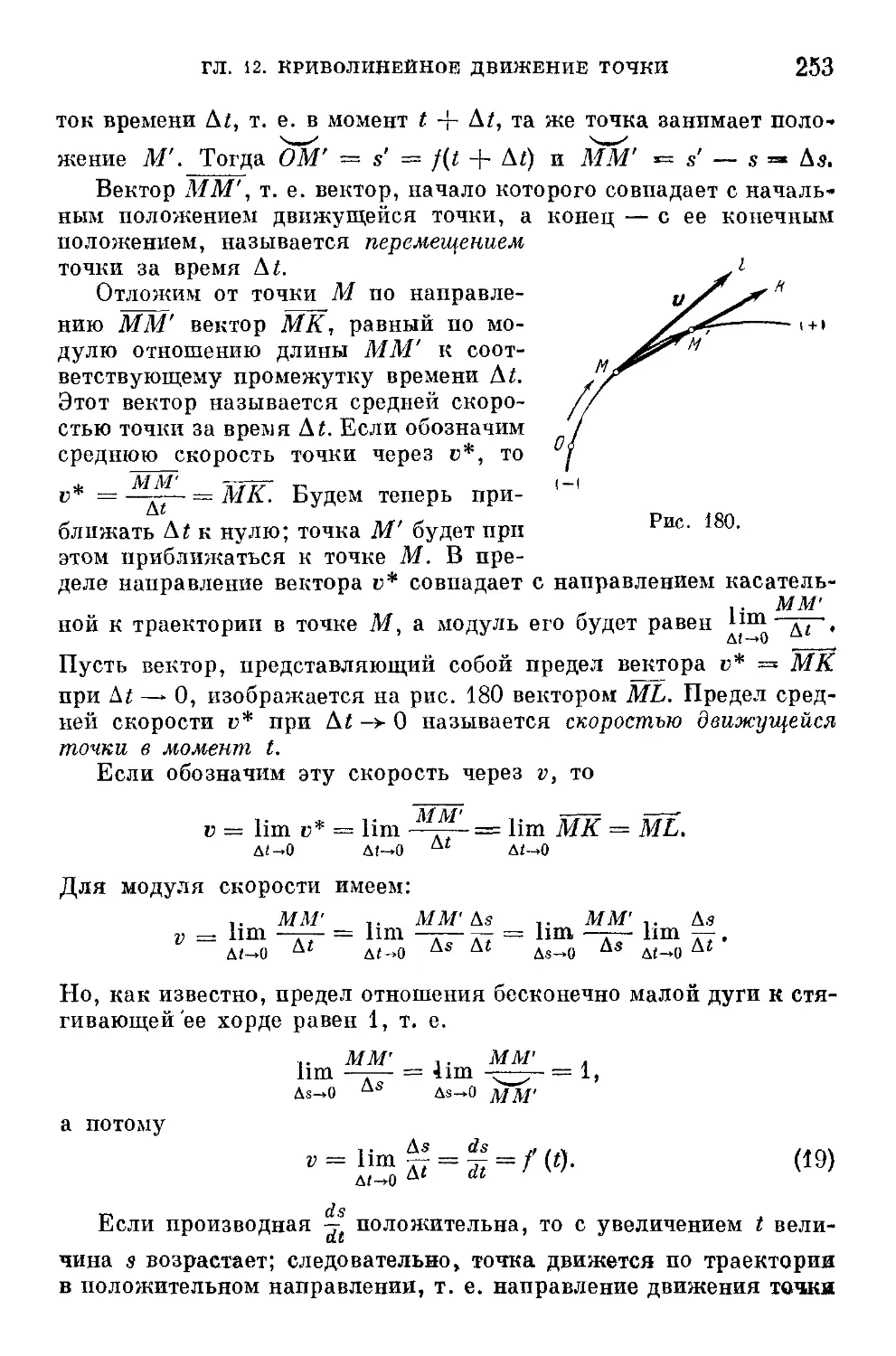
§ 66. Скорость точки в криволинейном движении 252
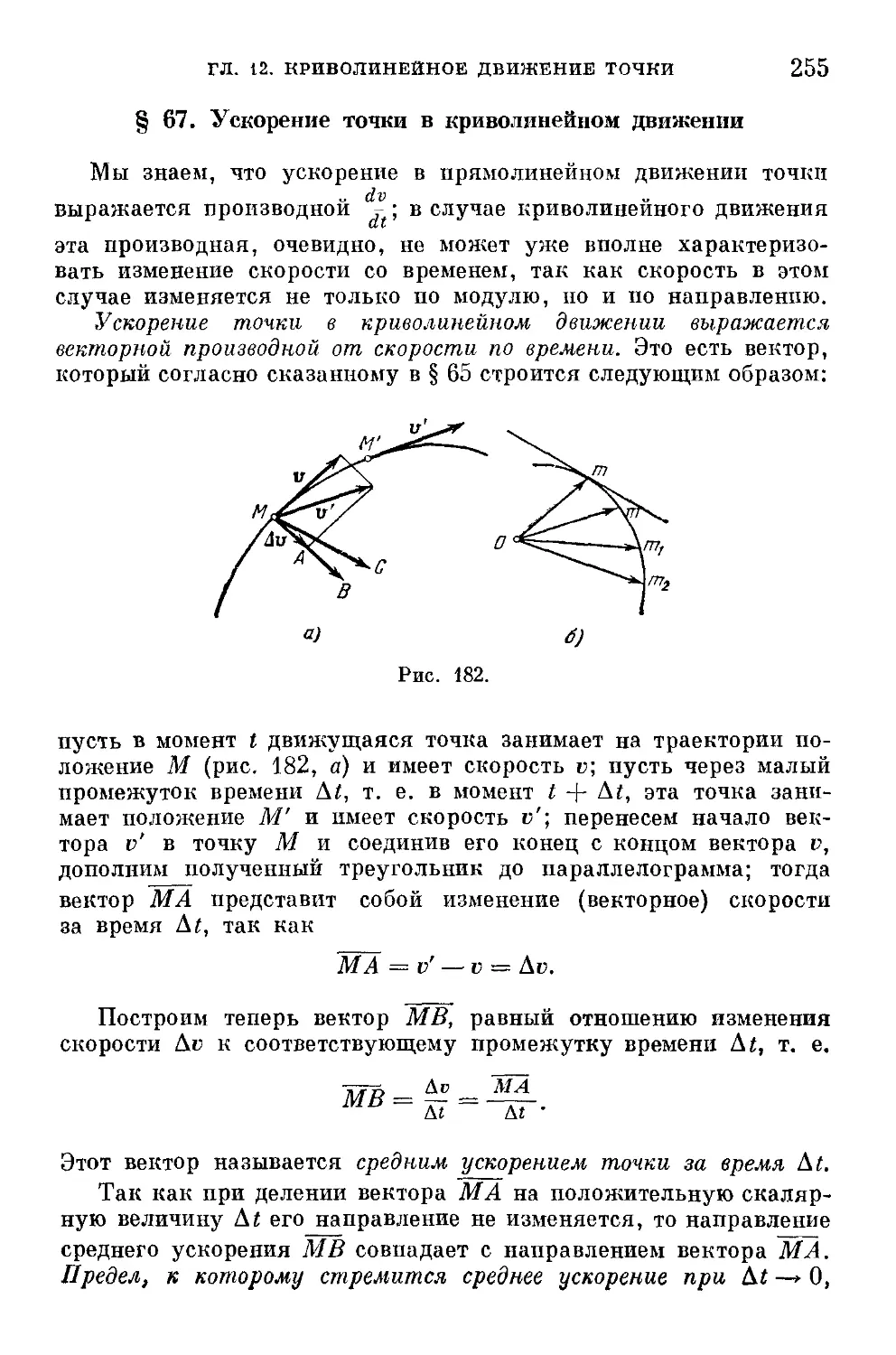
§ 67. Ускорение точки в криволинейном движении 255
§ 68. Определение скорости и ускорения из уравнений движения
точки в декартовых координатах 256
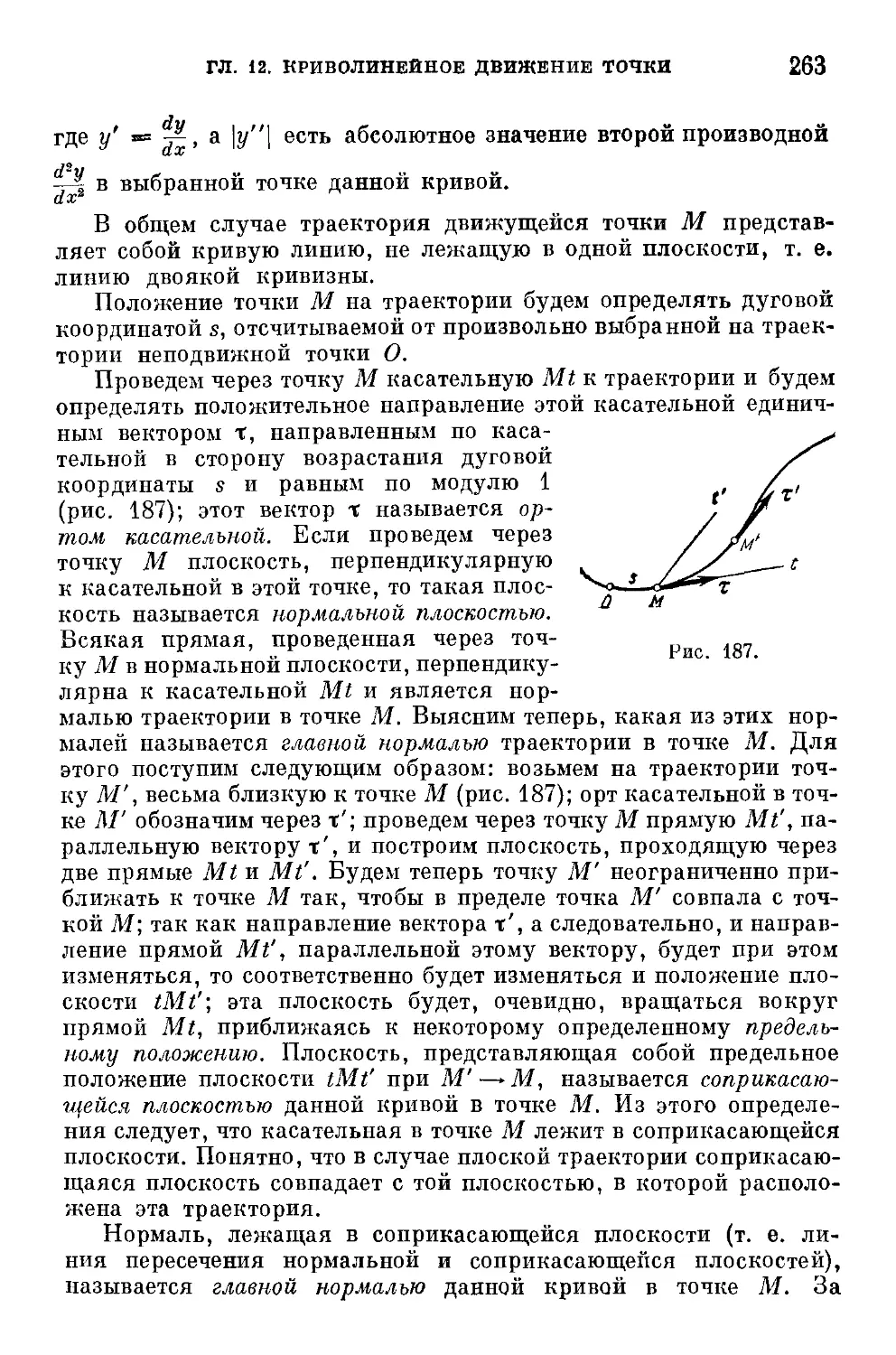
§ 69. Понятие о кривизне кривой линии и о радиусе кривизны.
Естественные оси 261
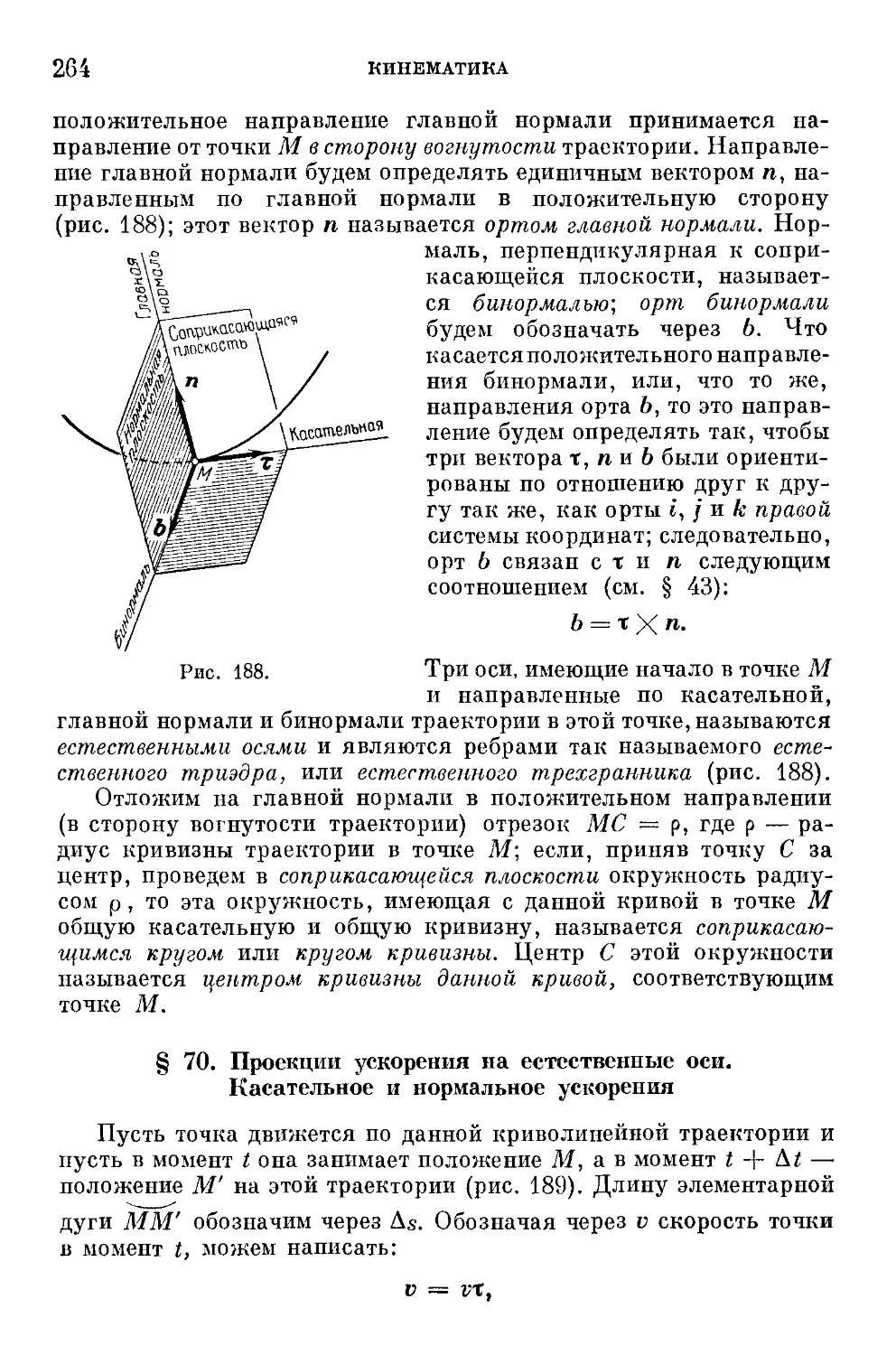
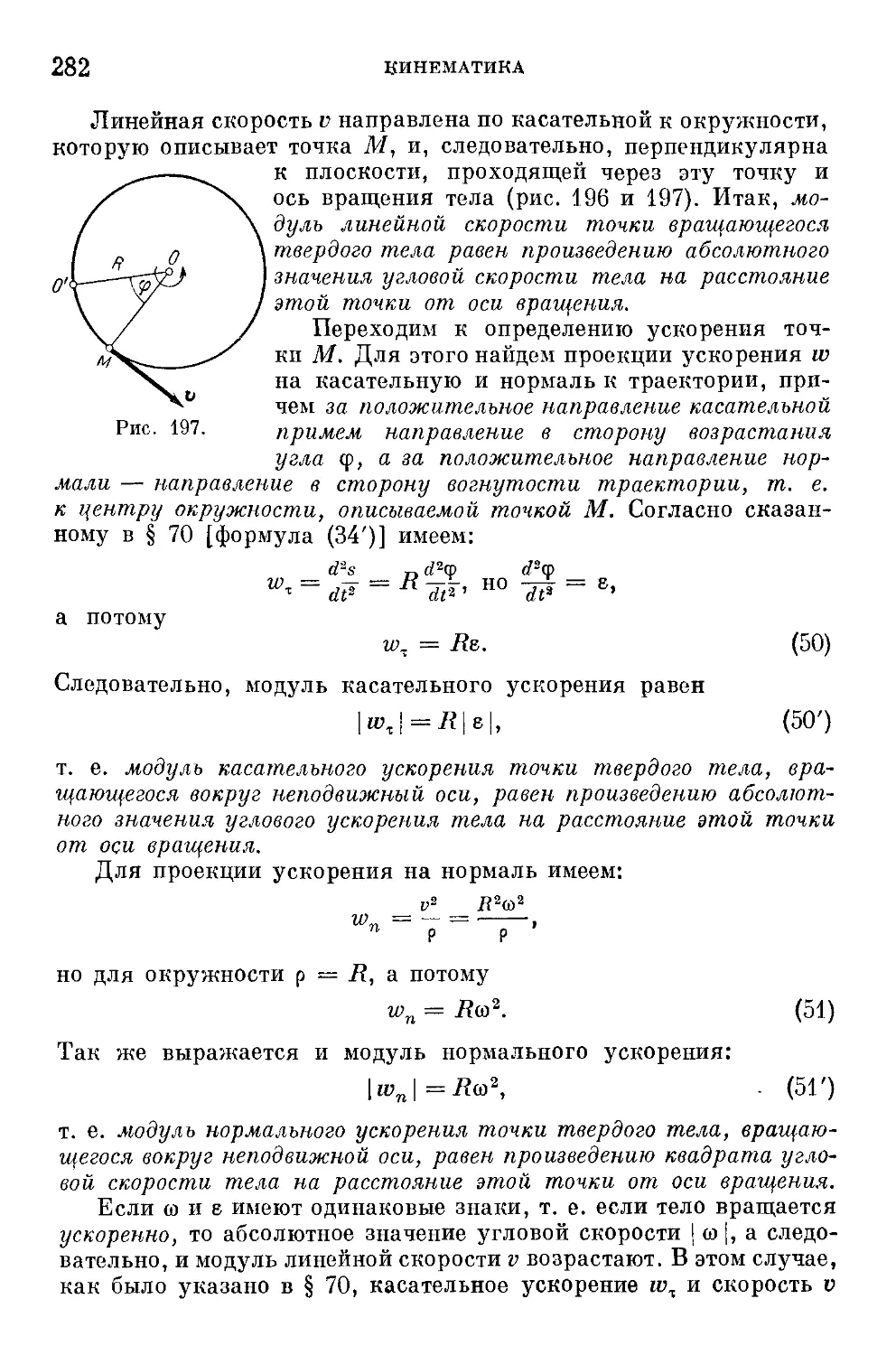
§ 70. Проекции ускорения на естественные оси. Касательное и
нормальное ускорения 264
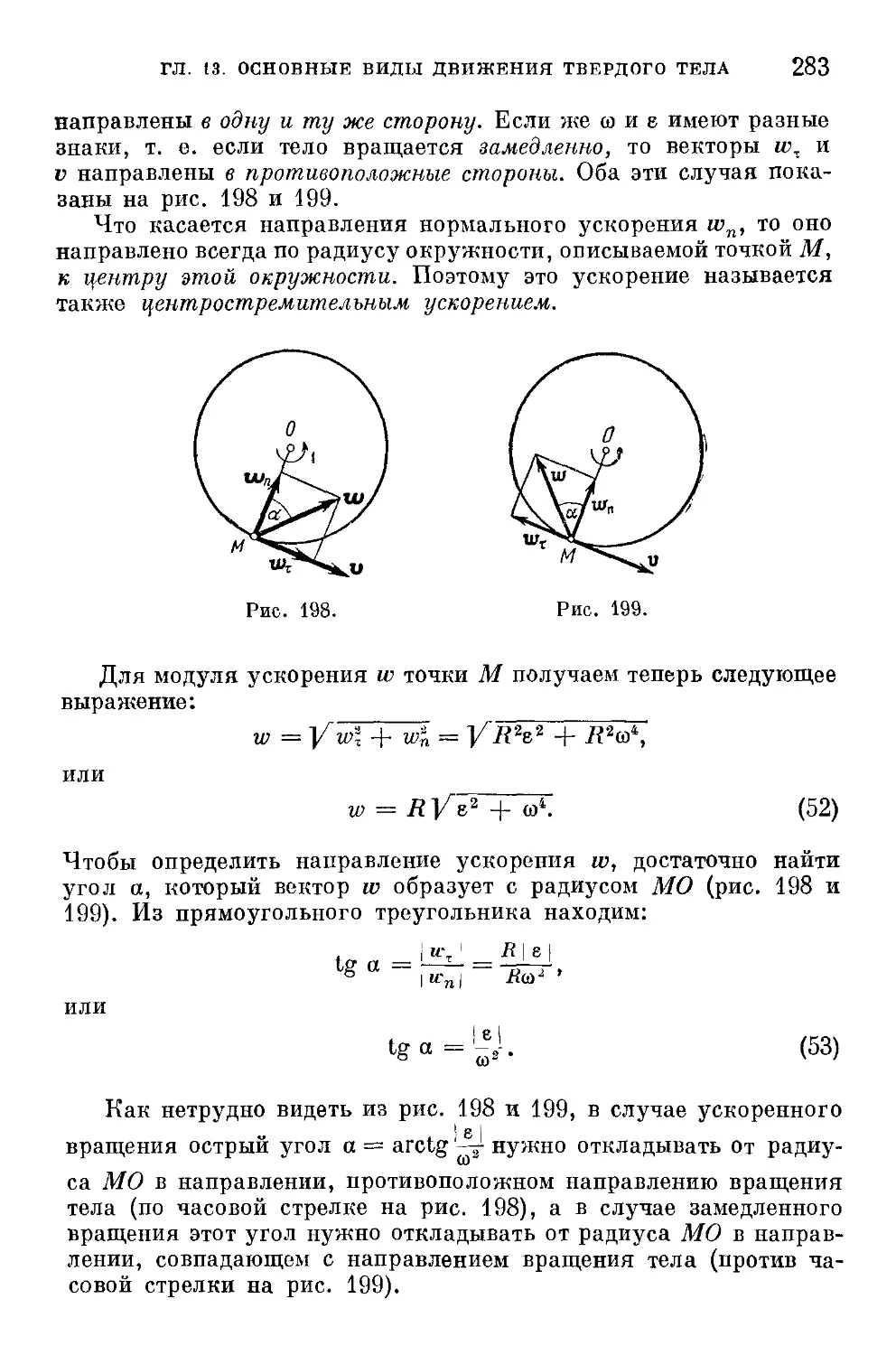
Глава 13. Основные виды движения твердого тела 275
§ 71. Поступательное движение 275
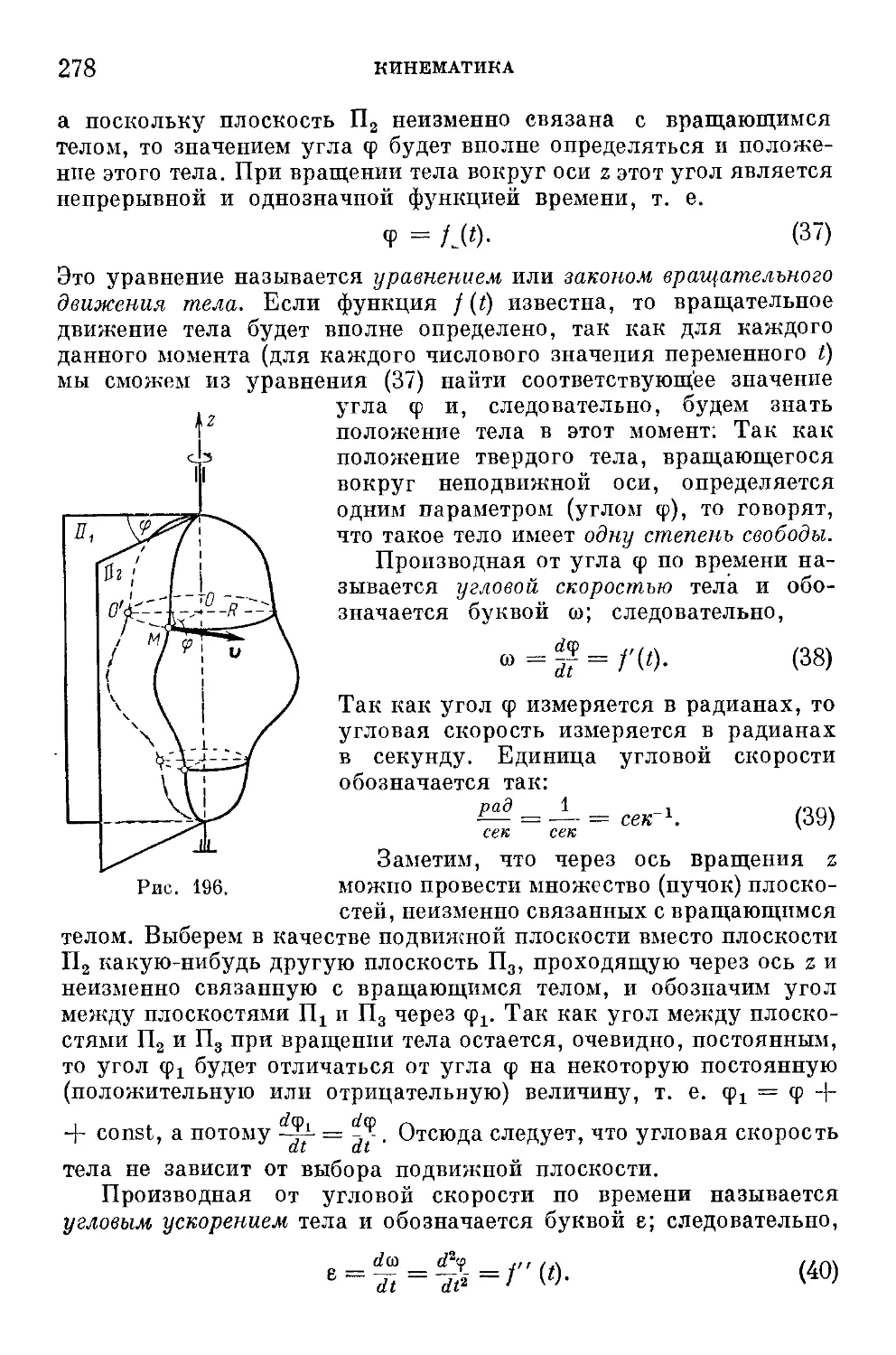
§ 72. Вращение твердого тела вокруг неподвижной оси . . '. . . 277
§ 73. Угловая скорость как вектор. Выражения линейной скорости
и касательного и нормального ускорений в виде векторных
произведений 286
Глава 14. Сложное движение точки 290
§ 74. Относительное, переносное и абсолютное движения 290
§ 75. Относительные, переносные и абсолютные скорость и ускоре-
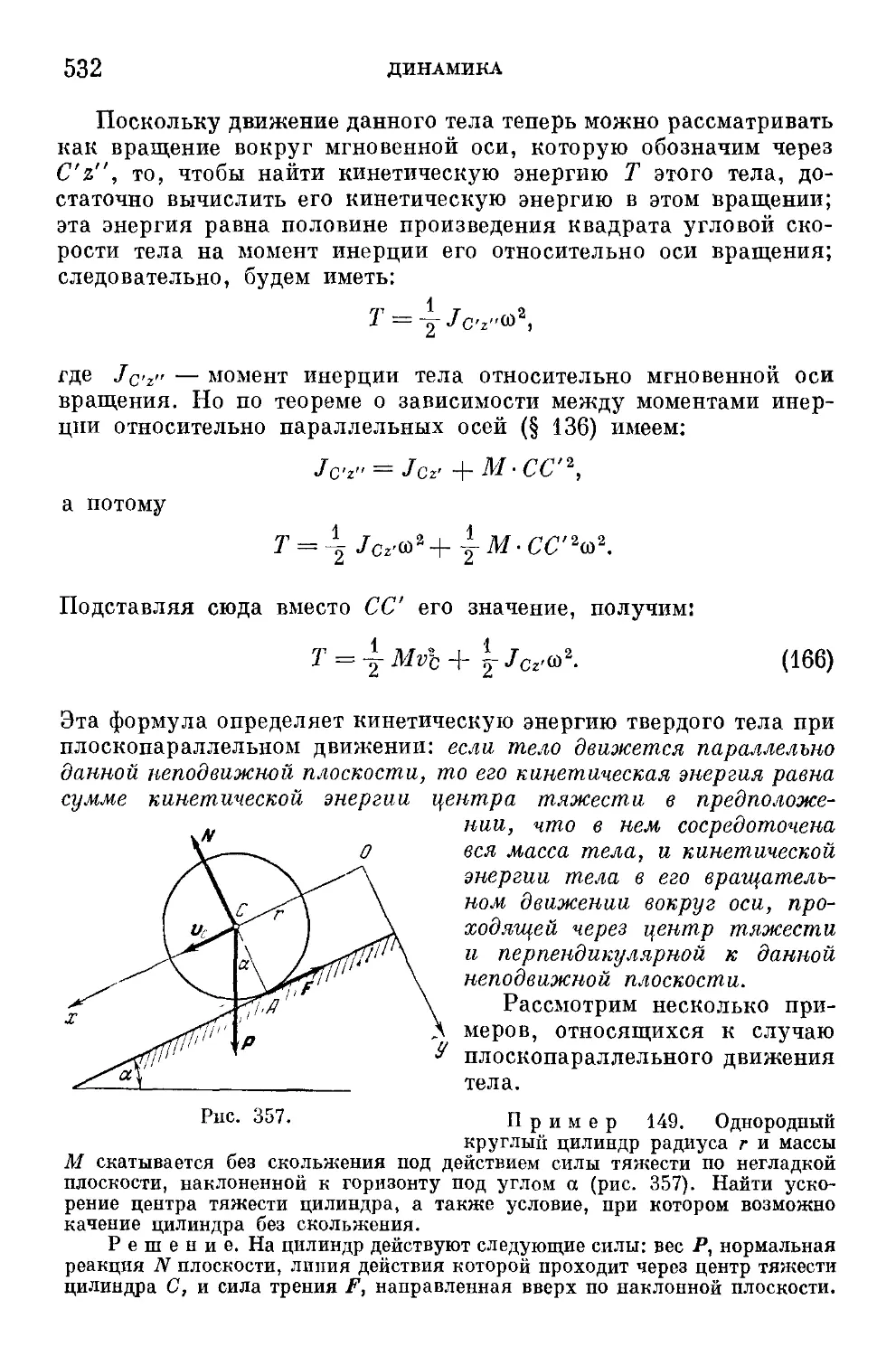
ускорение точки 292
6 ОГЛАВЛЕНИЕ
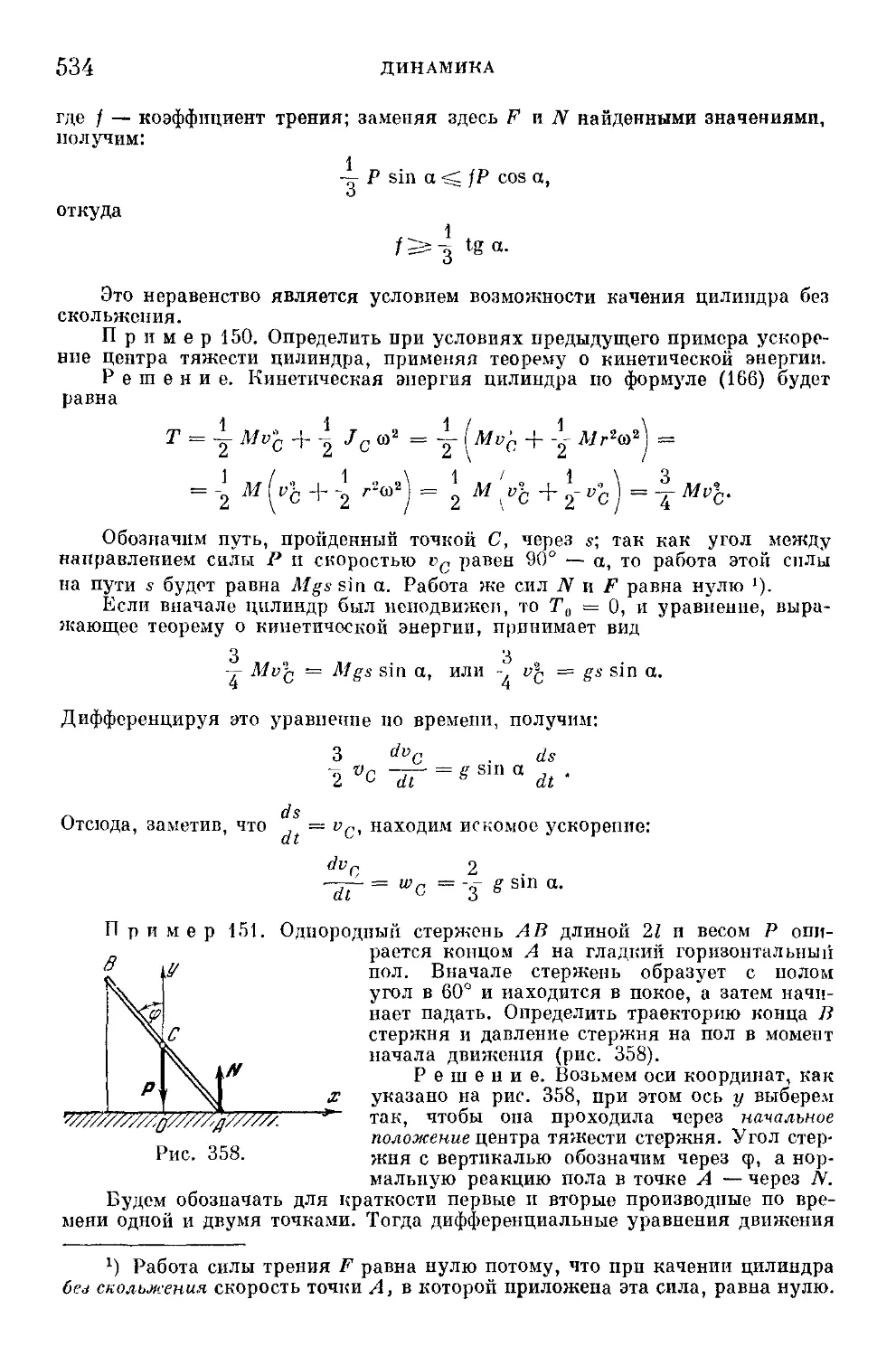
§ 76. Теоремы сложения скоростей и сложения ускорений в том слу-
случае, когда переносное движение является поступательным 294
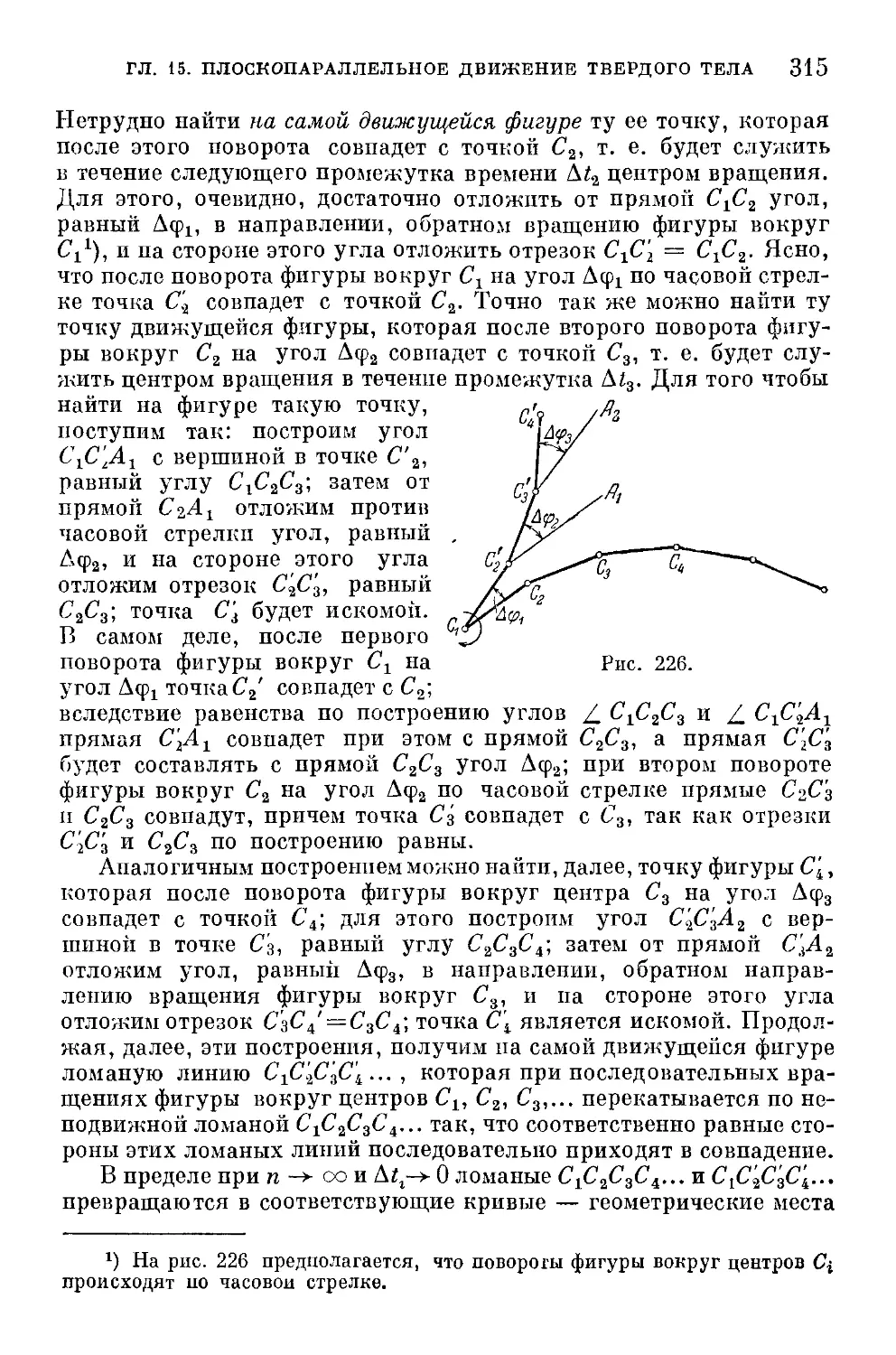
Глава 15. Плоскопараллельное движение твердого тела 299
§ 77. Уравнения шгоскопараллельного движения твердого тела 299
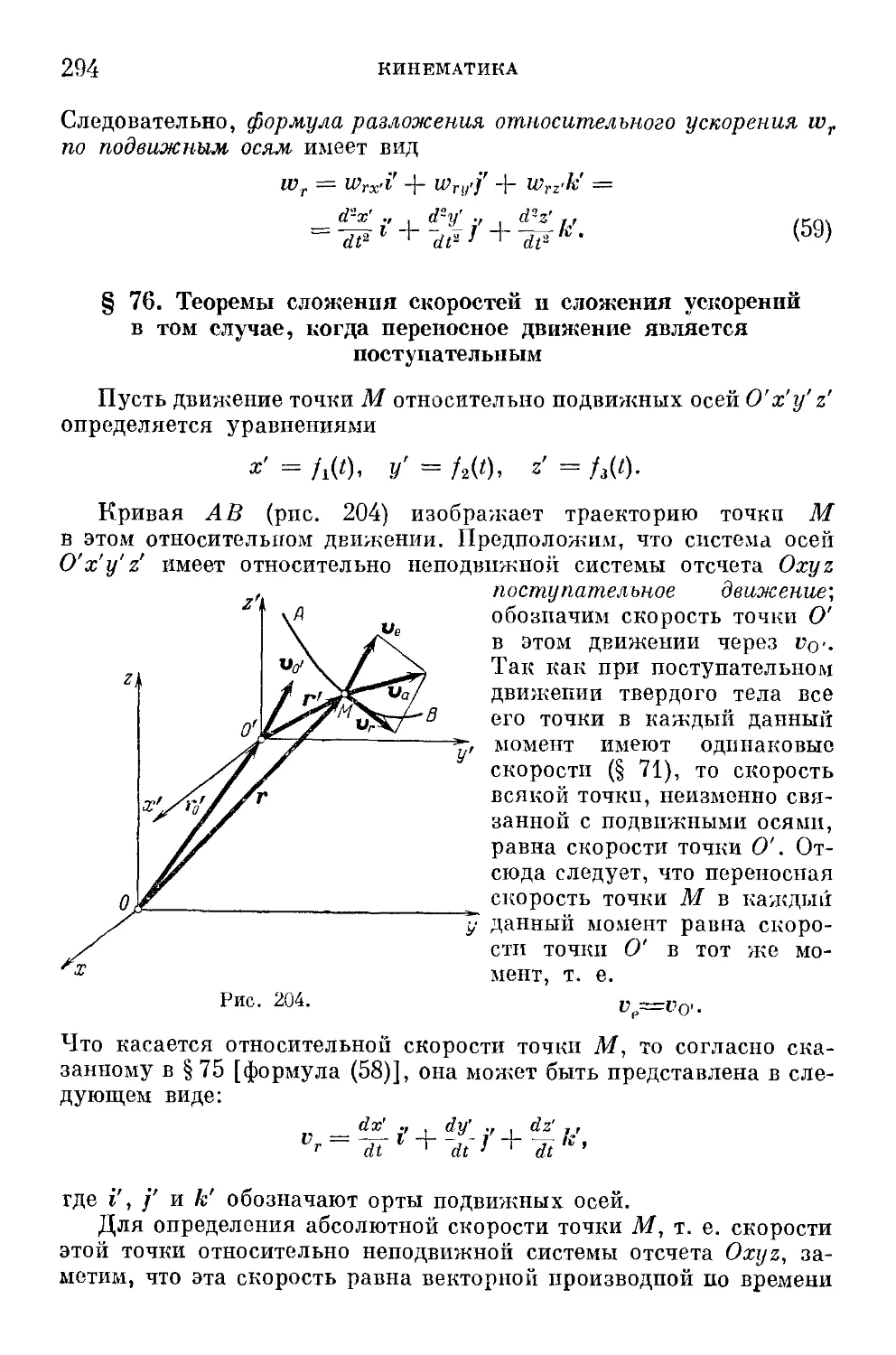
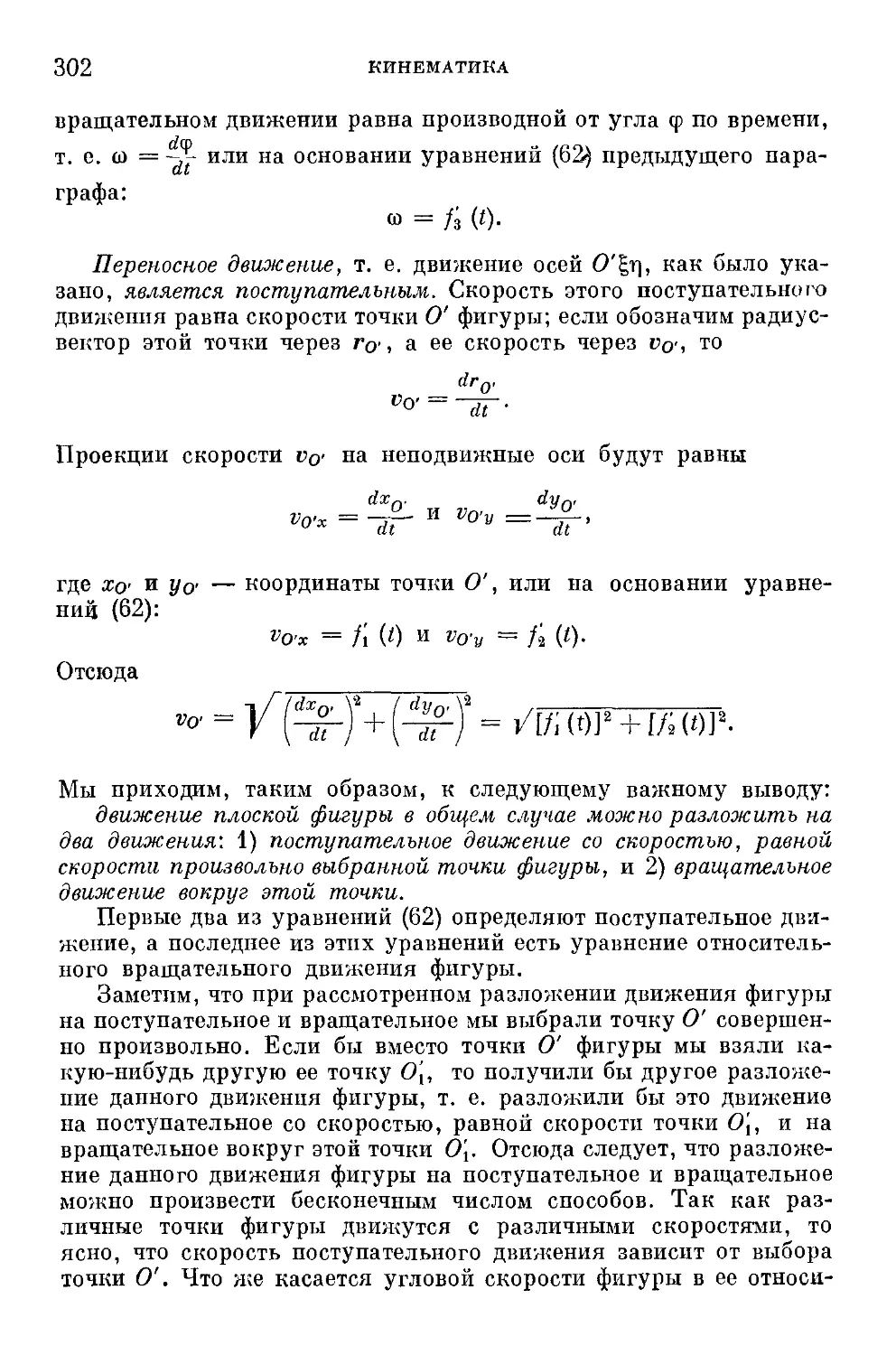
§ 78. Разложение движения плоской фигуры на поступательное
н вращательное 301
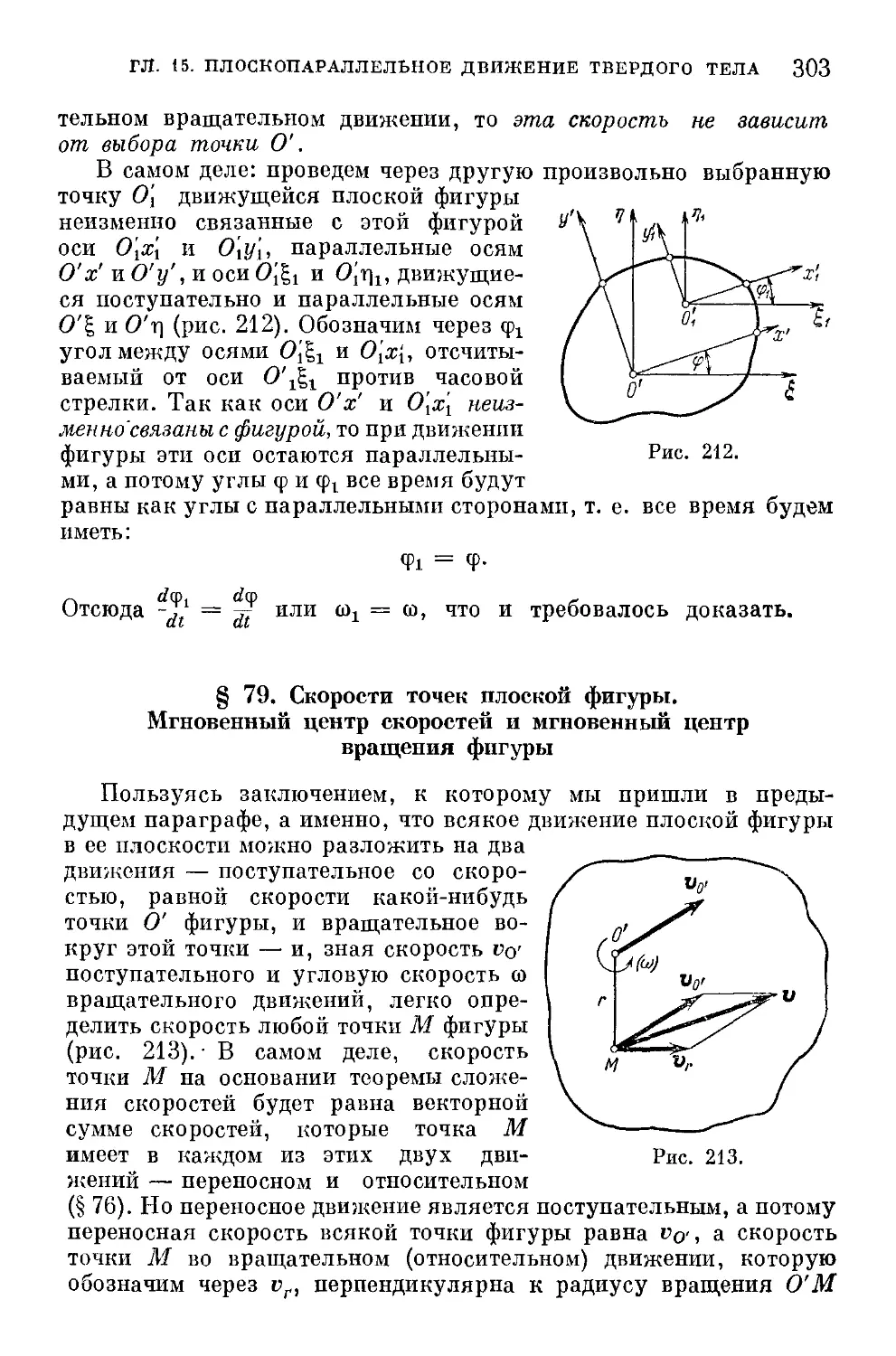
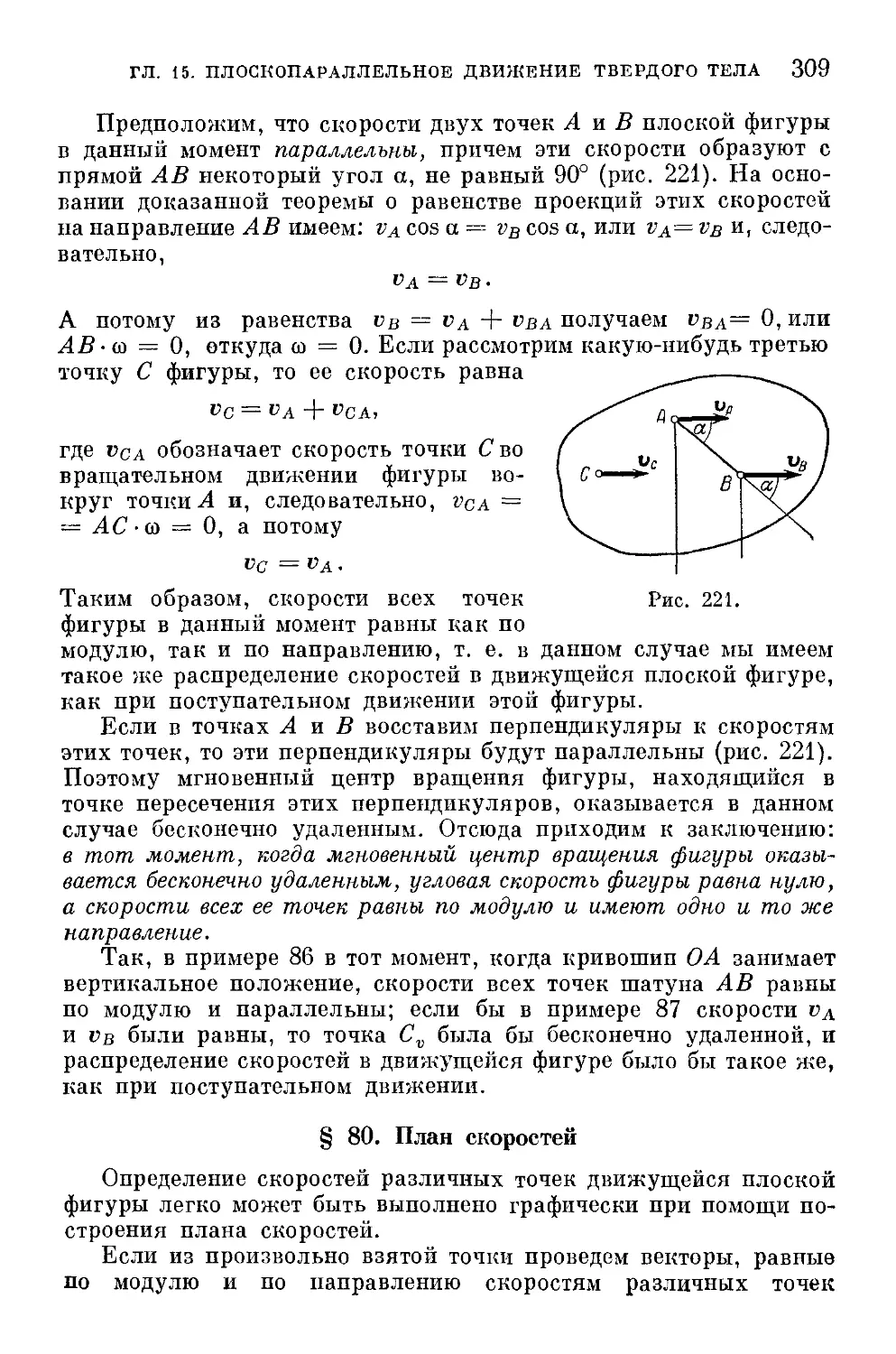
§ 79. Скорости точек плоской фигуры. Мгновенный центр скоростей
и мгновенный центр вращения фигуры 303
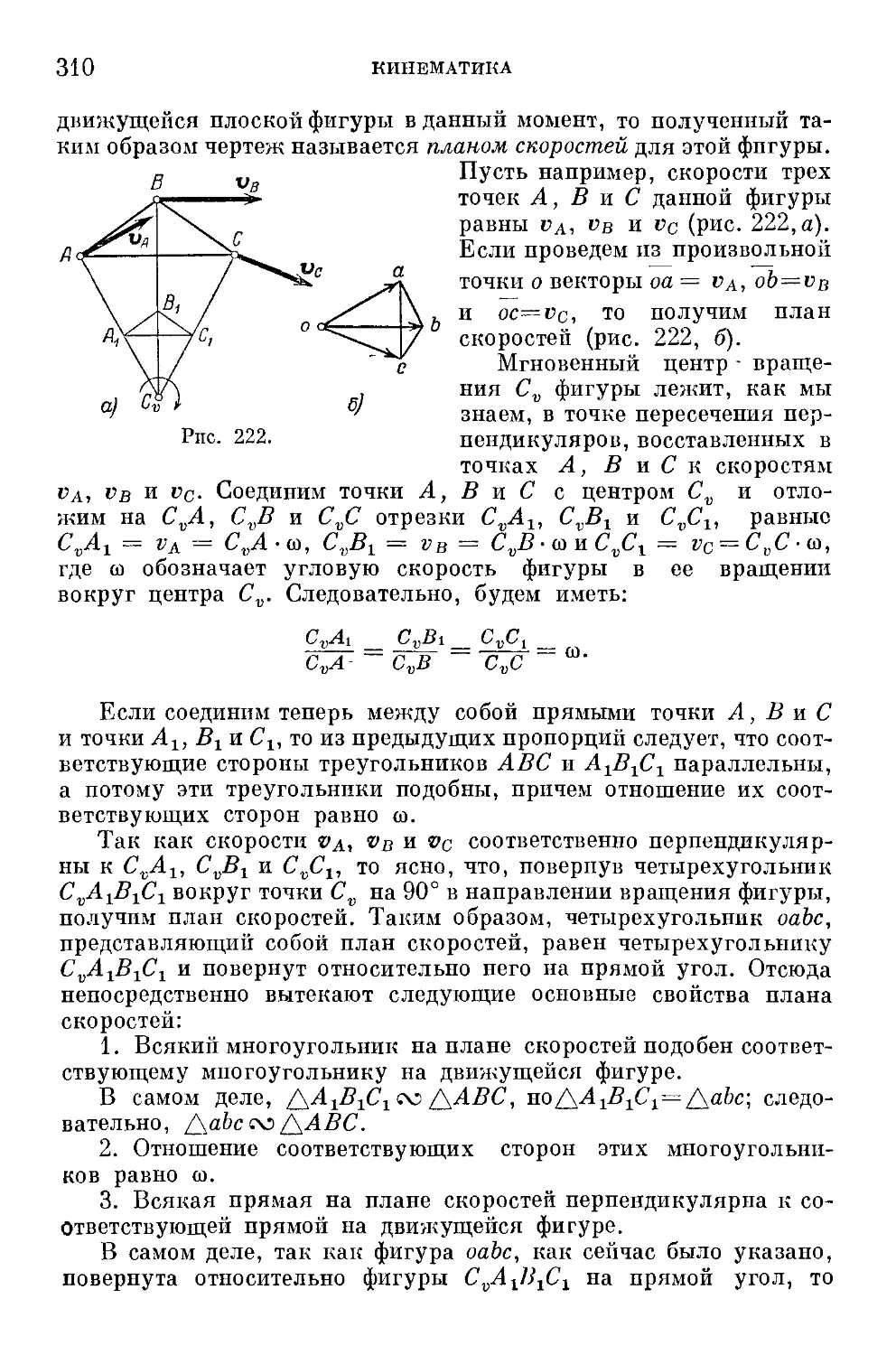
§ 80. План скоростей 309
§ 81. Центроиды 313
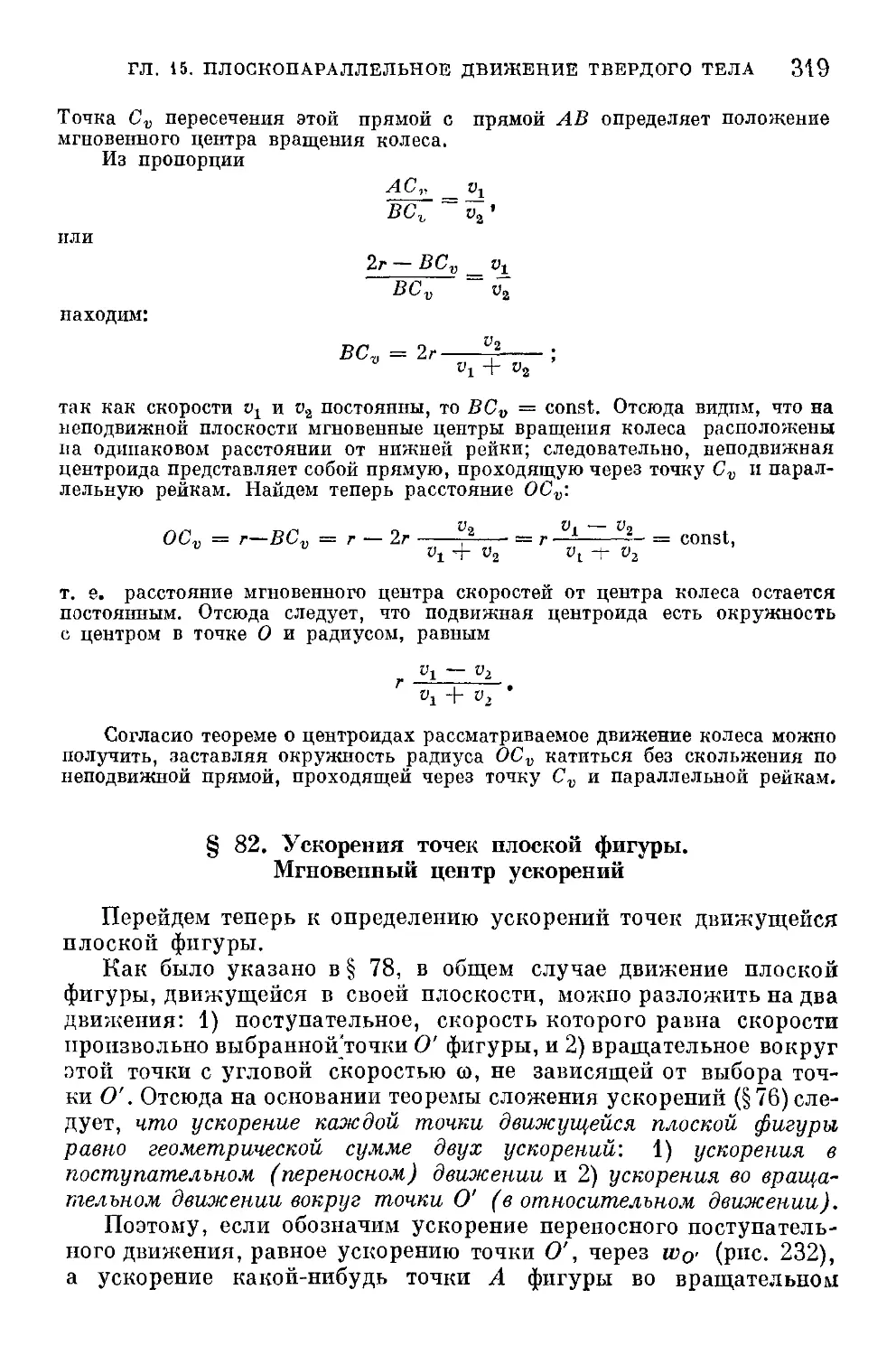
§ 82. Ускорения точек плоской фигуры. Мгновенный центр уско-
ускорений 319
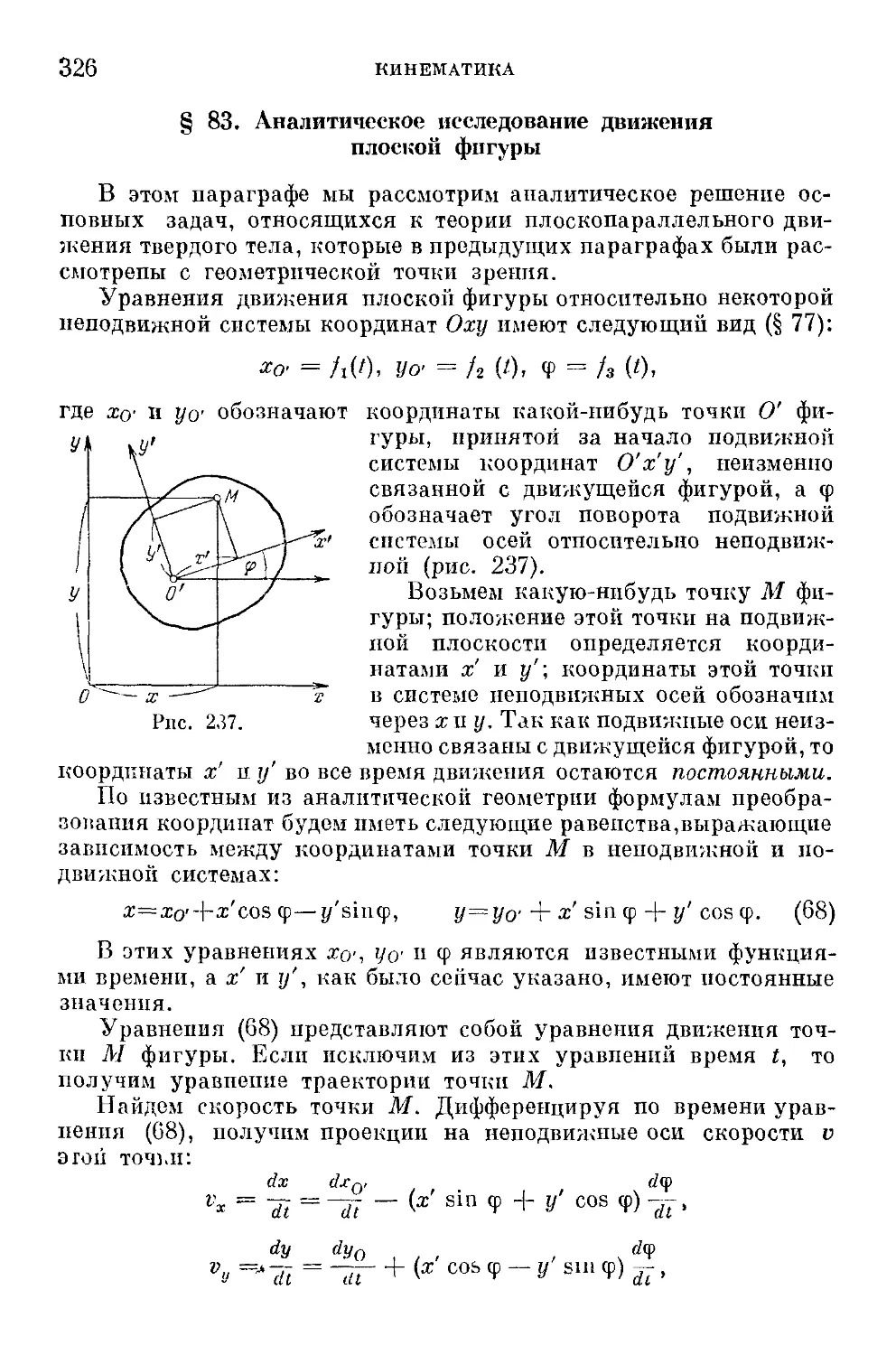
§ 83. Аналитическое исследование движения плоской фигуры . . . 326
Глава 16. Движение твердого тела вокруг неподвижной точки.
Движение свободного твердого тела в общем случае 330
§ 84. Уравнения движения твердого тела, имеющего одну непо-
неподвижную точку 330
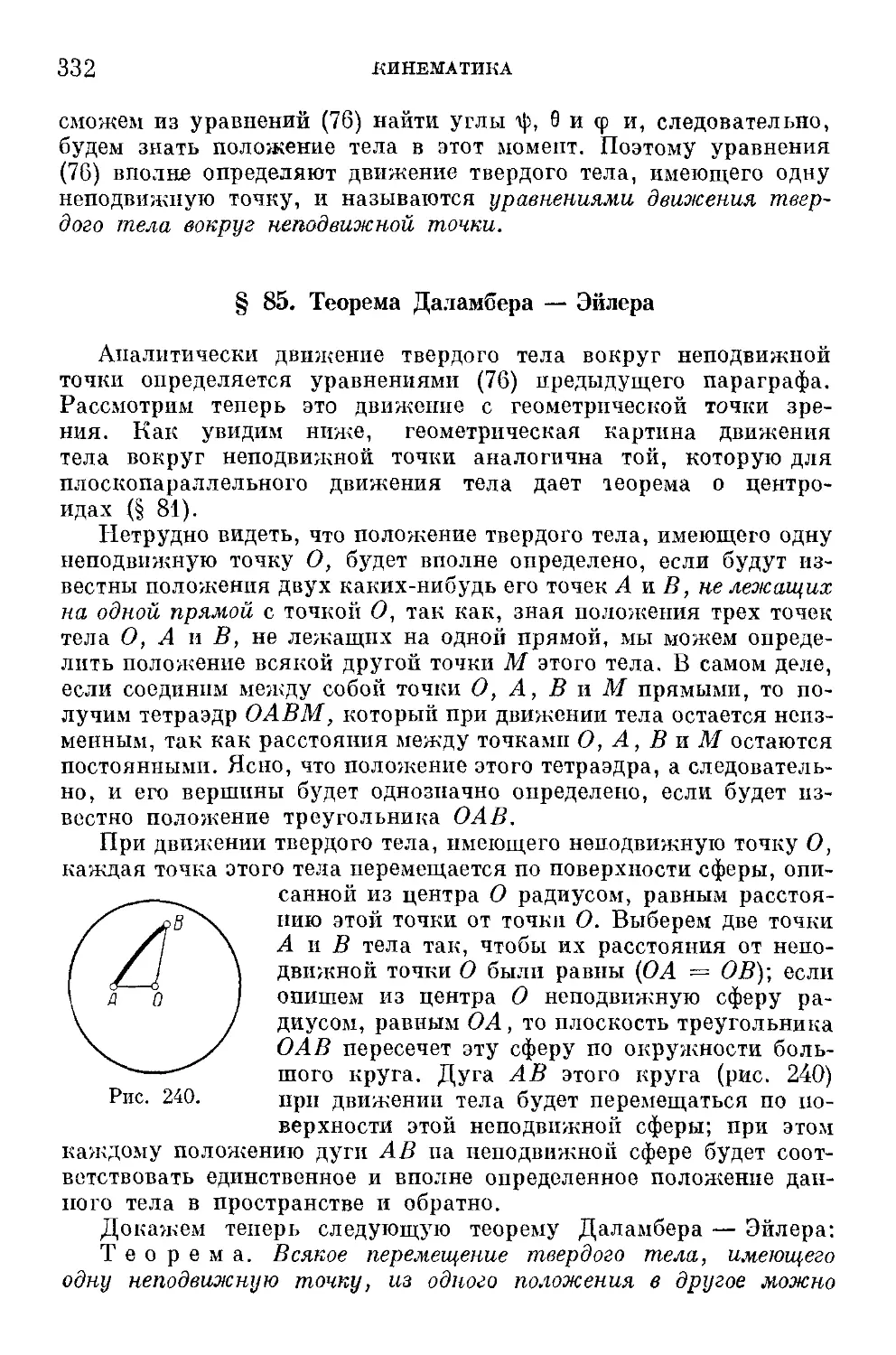
§ 85. Теорема Даламбера—Эйлера 332
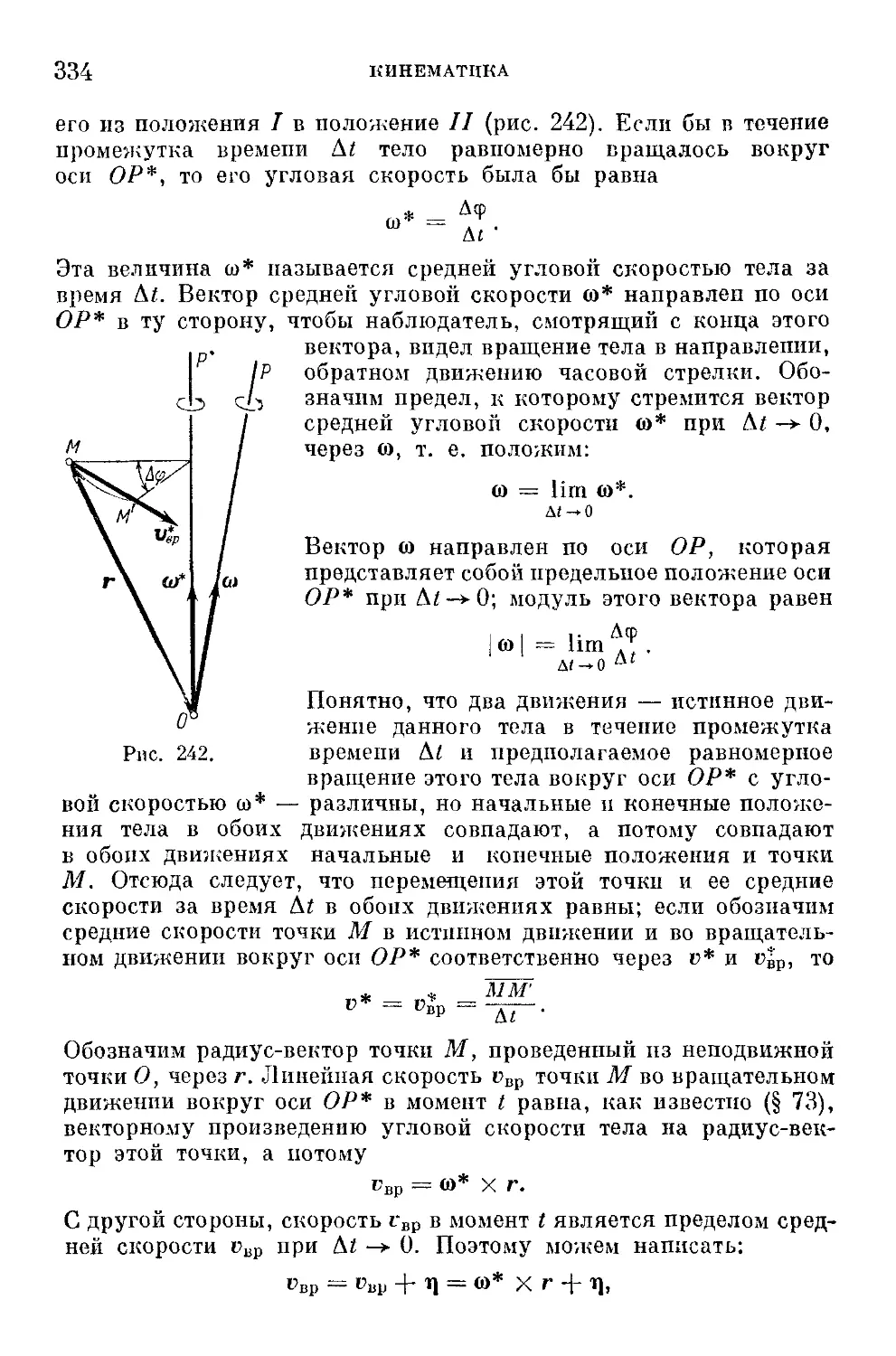
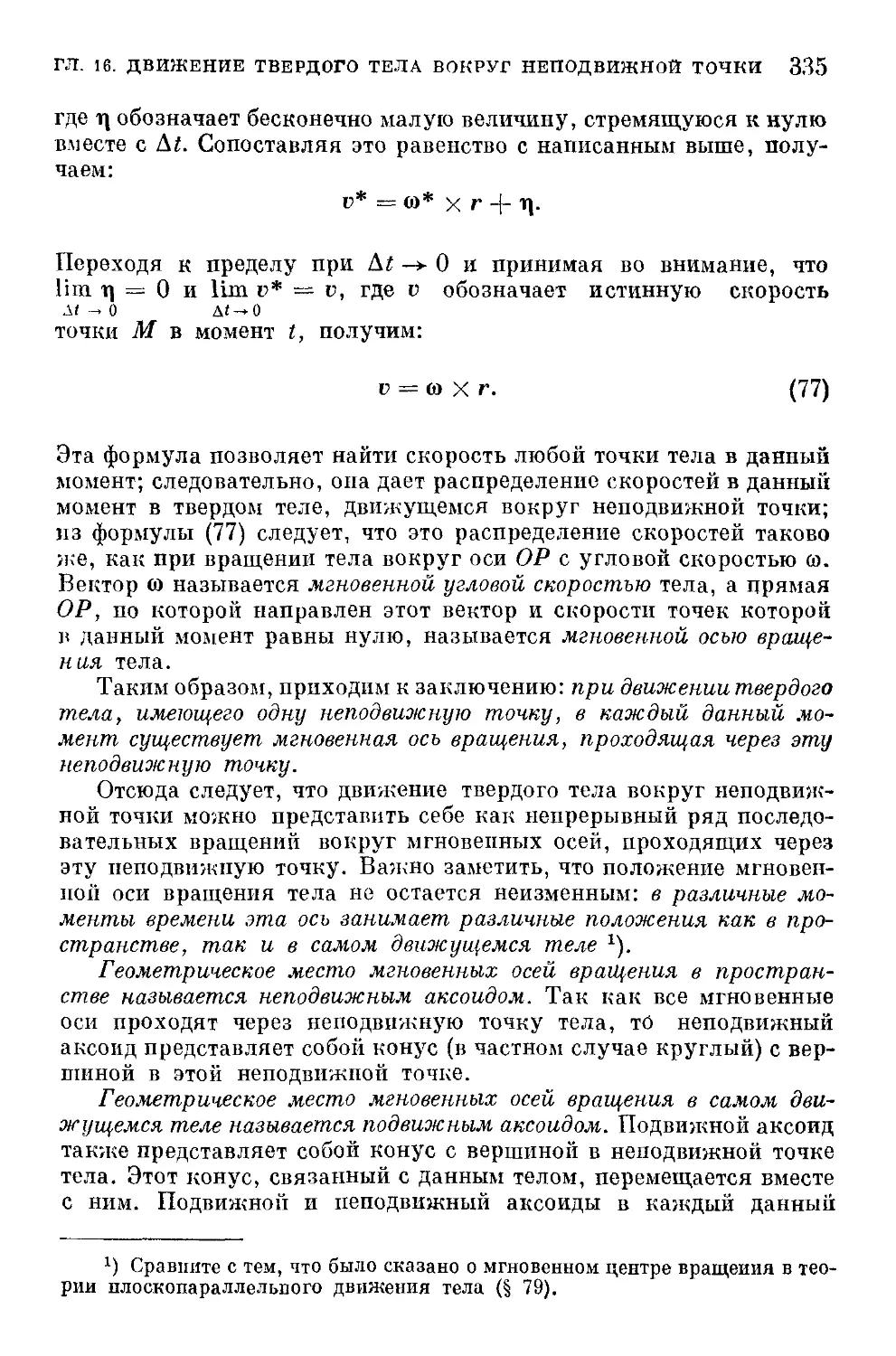
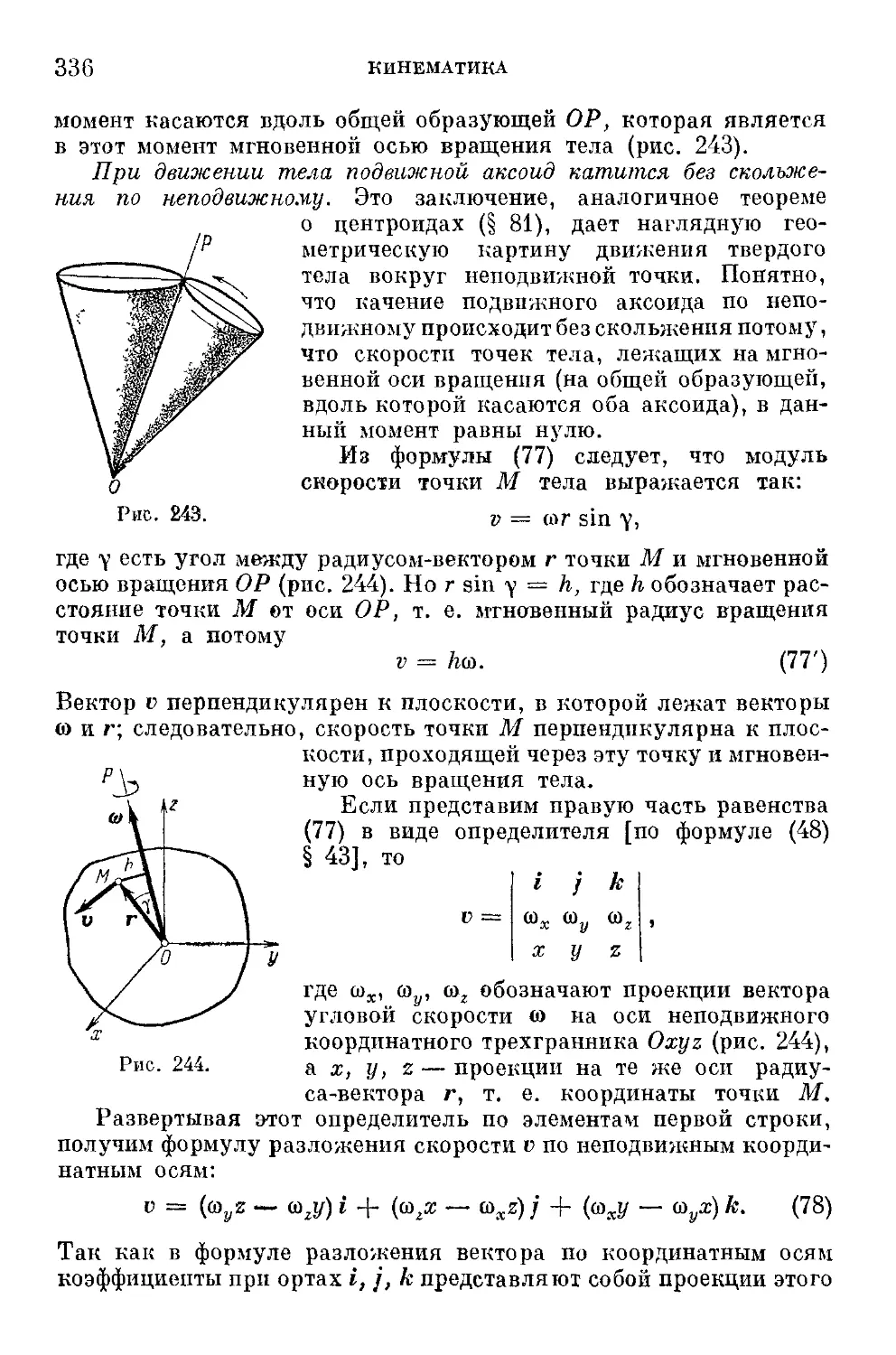
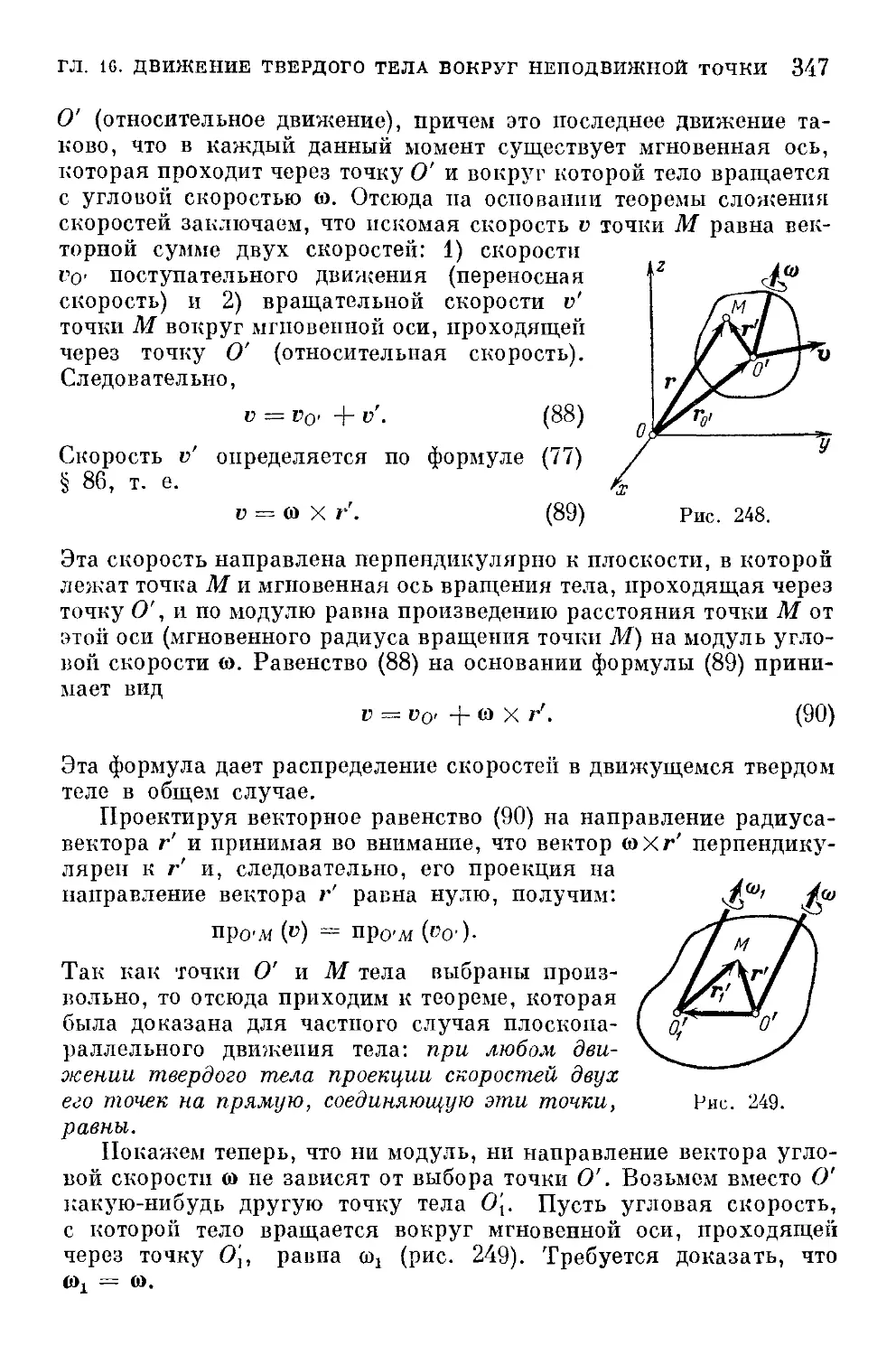
§ 86. Распределение скоростей в твердом теле, движущемся вокруг
неподвижной точки. Мгновенная ось вращения тела 333
§ 87. Распределение ускорений в твердом теле, движущемся вокруг
неподвижной точки 338
§ 88. Уравнения движения свободного твердого тела в общем случае.
Разложение движения твердого тела на поступательное дви-
движение и движение вокруг некоторой точки 344
§ 89. Распределение скоростей и ускорений в твердом теле в общем
случае 346
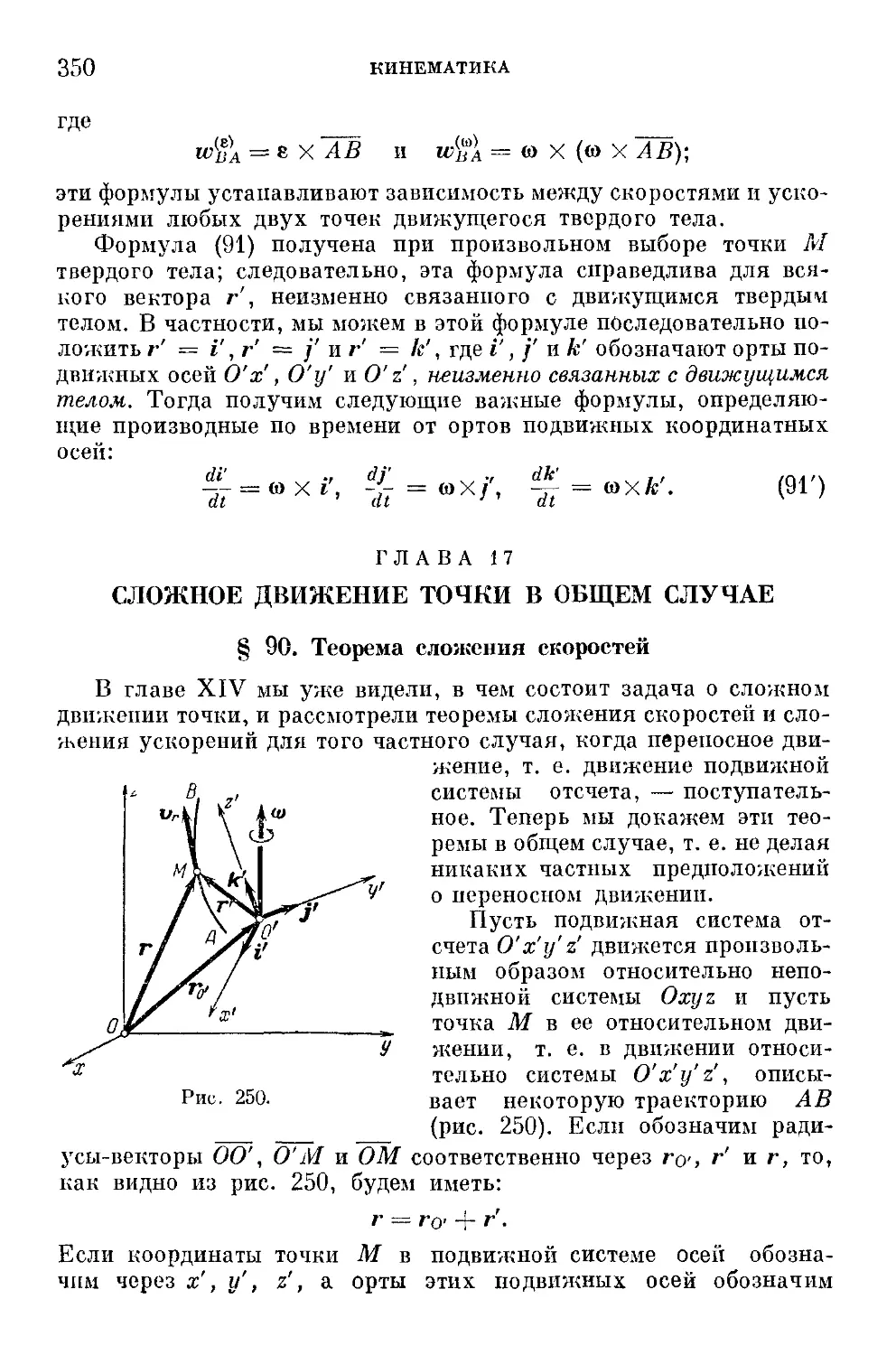
Глава 17. Сложное движение точки в общем случае 350
§ 90. Теорема сложения скоростей 350
§ 91. Теорема Кориолиса 353
Глава 18. Сложное движение твердого тела 359
§ 92. Сложение поступательных движений 359
§ 93. Сложение вращательного и поступательного движений в том
случае, когда скорость поступательного движения перпенди-
перпендикулярна к оси вращения 360
§ 94. Винтовое движение тела 361
§ 95. Сложение вращательного и поступательного движений в том
случае, когда скорость поступательного движения не перпенди-
перпендикулярна к оси вращения 363
§ 96. Сложение двух вращений вокруг параллельных осей .... 363
§ 97. Сложение двух вращений вокруг пересекающихся осей . . . 373
ОГЛАВЛЕНИЕ '
ДИНАМИКА
А. ДИНАМИКА ТОЧКИ
Глава 19. Введение в динамику 378
§ 98. Основные законы динамики. Абсолютная и техническая си-
системы единиц 378
§ 99. Дифференциальные уравнения движения материальной точки 385
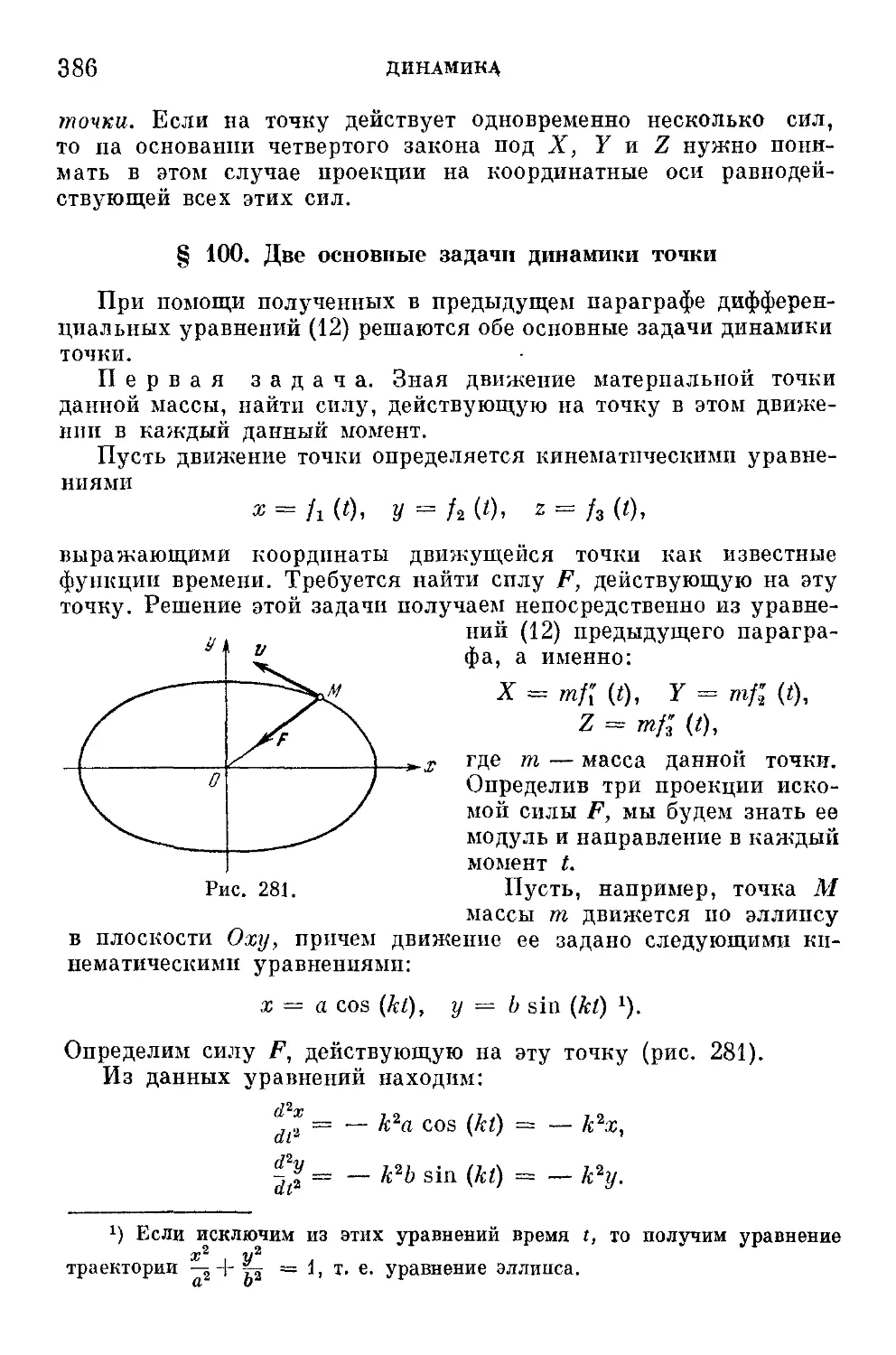
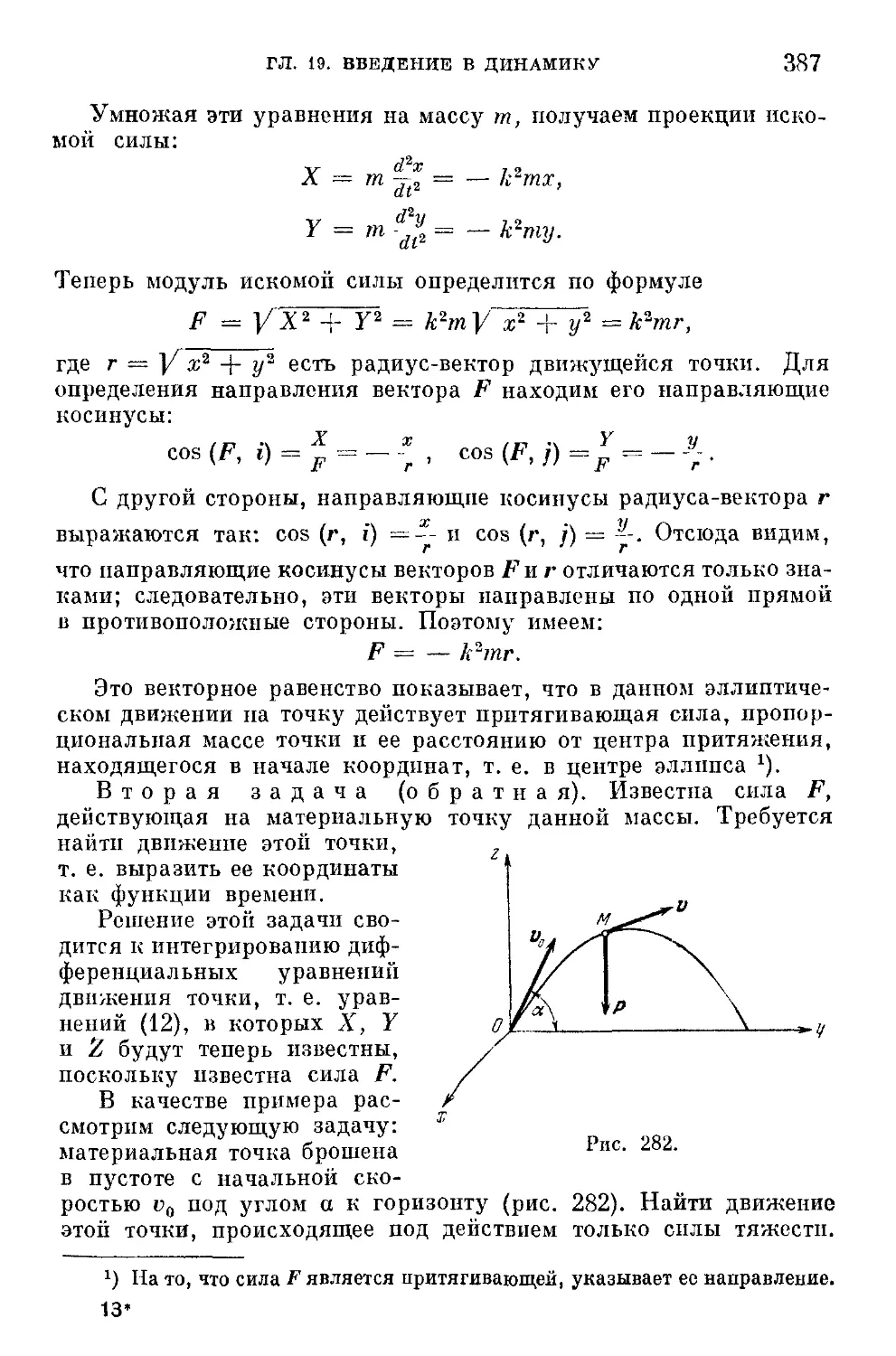
§ 100. Две основные задачи динамики точки 386
Глава 20. Прямолинейное движение материальной точки 390
§ 101. Дифференциальное уравнение прямолинейного движения
точки 390
§ 102. Движение точки под действием силы, зависящей от времени 992
§ 103. Движение точки под действием силы, зависящей от положе-
положения этой точки 394
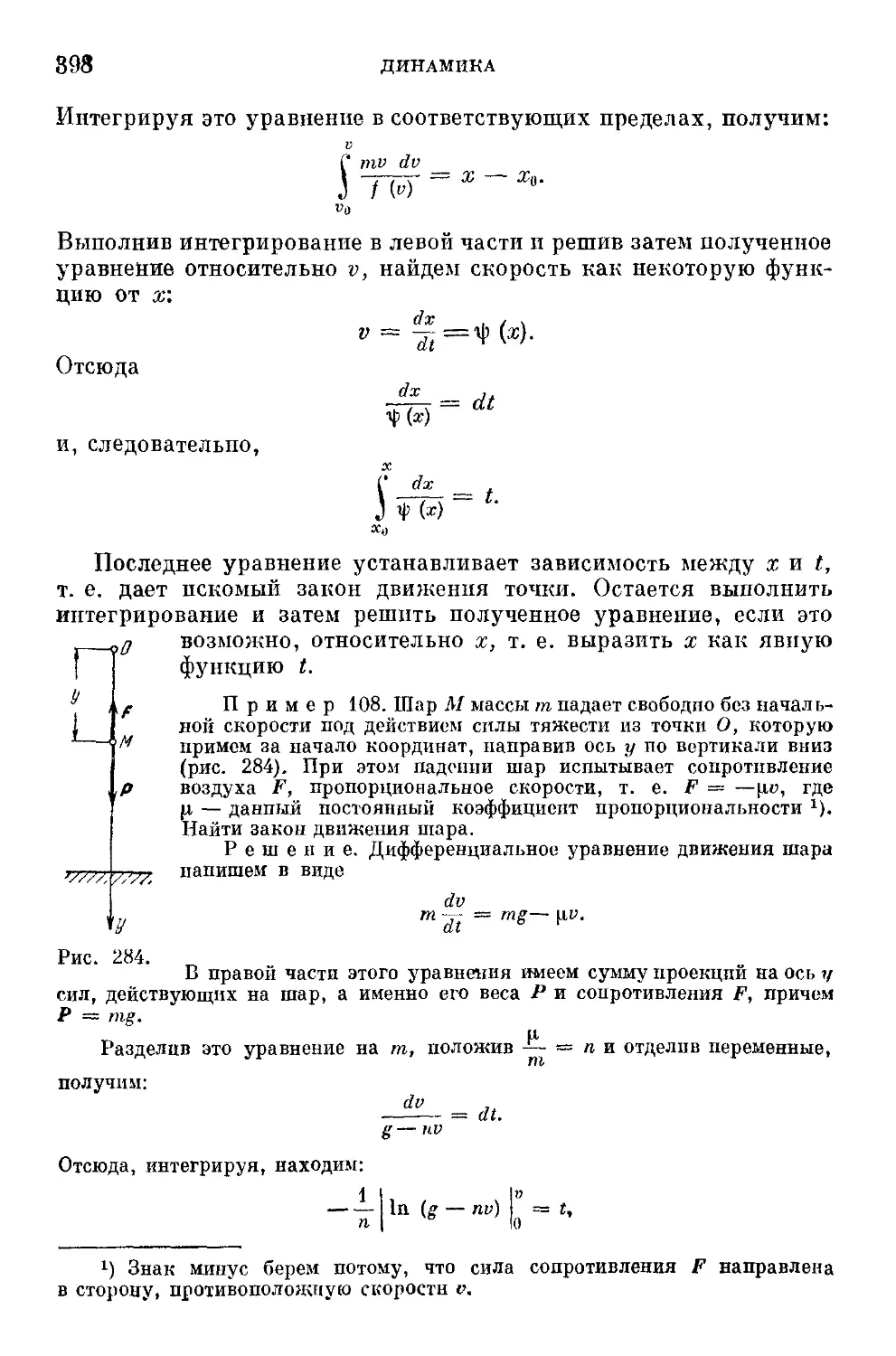
§ 104. Движение точки под действием силы, зависящей от скорости 397
Глава 21. Общие теоремы динамики точки 399
§ 105. Теорема о количестве движения 399
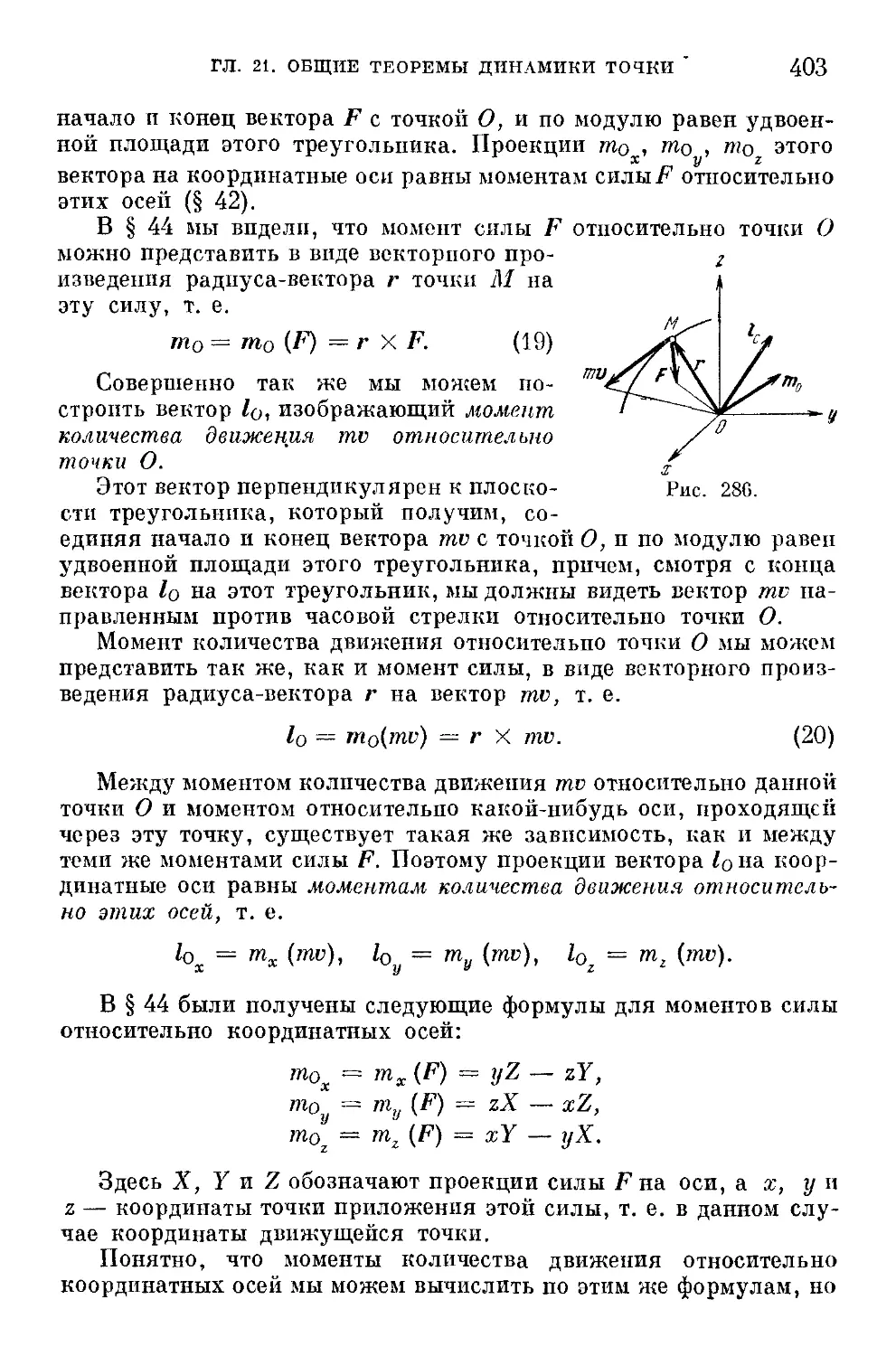
§ 106. Теорема о моменте количества движения 402
§ 107. Работа 400
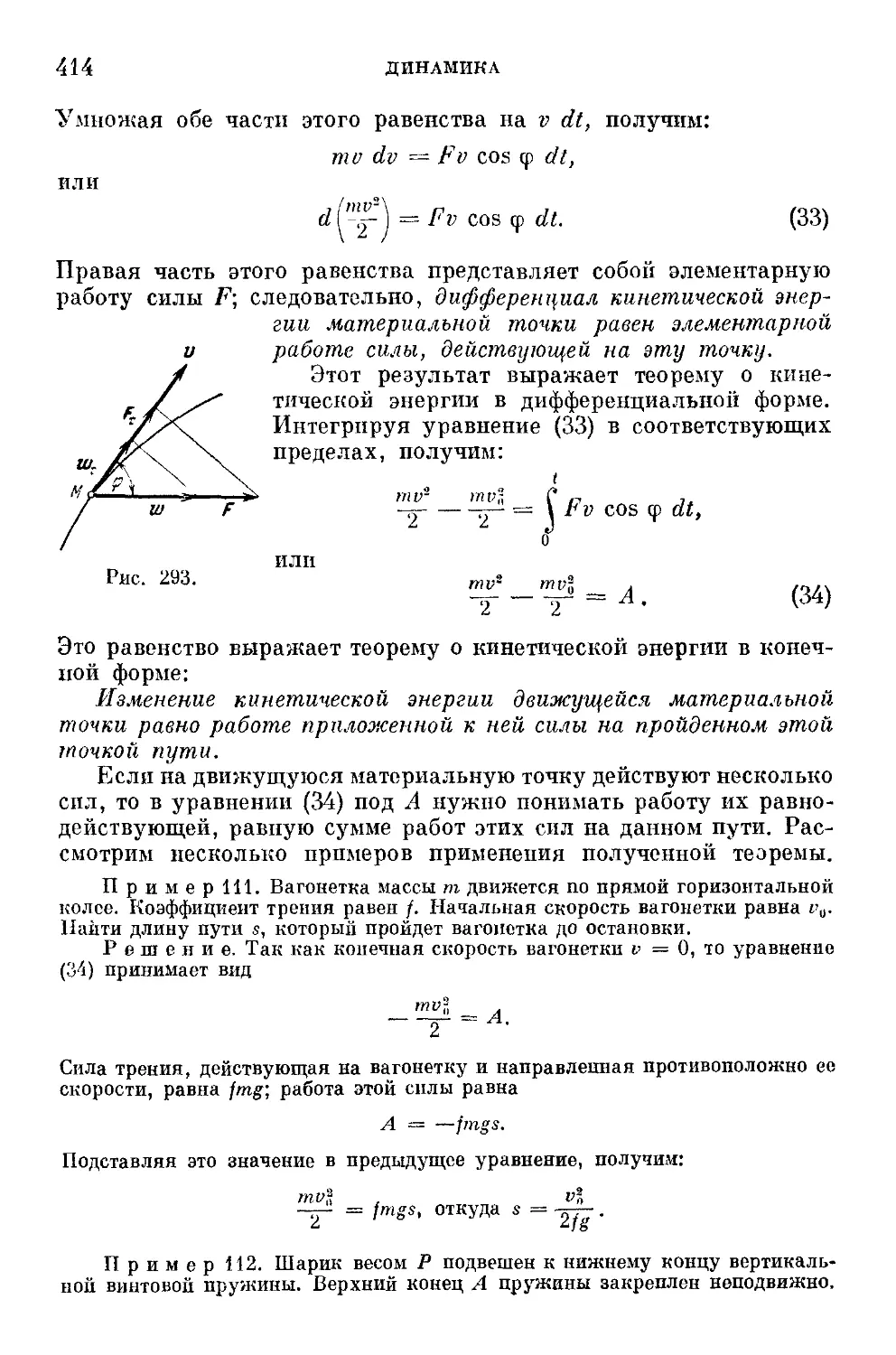
§ 108. Теорема о кинетической энергии материальной точки . . .413
§ 109. Понятие о потенциальном силовом поле 417
§ 110. Понятие о потенциальной энергии 419
§ 111. Закон сохранения энергии 420
Глава 22. Движение несвободной материальной точки 421
§ 112. Дифференциальные уравнения движения несвободной ма-
материальной точки 421
§ 113. Теорема о кинетической энергии для несвободной материаль-
материальной точки 428
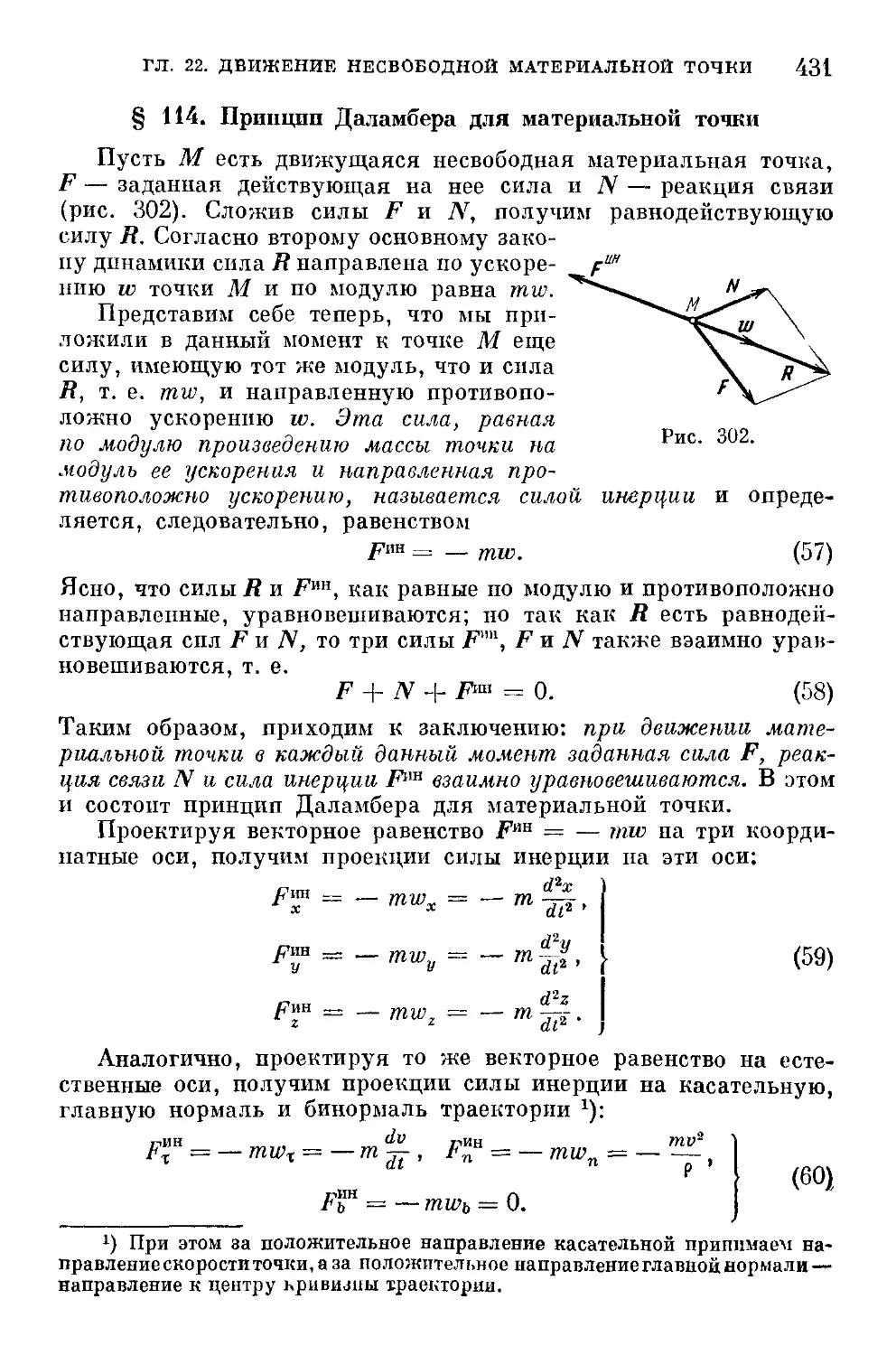
§ 114. Принцип Даламбера для материальной точки 431
Глава 23. Колебательное движение материальной точки 435
§ 115. Гармоническое колебание материальной точки под действием
силы, пропорциональной расстоянию 435
§ 116. Затухающие колебания 440
§ 117. Вынужденные колебания 445
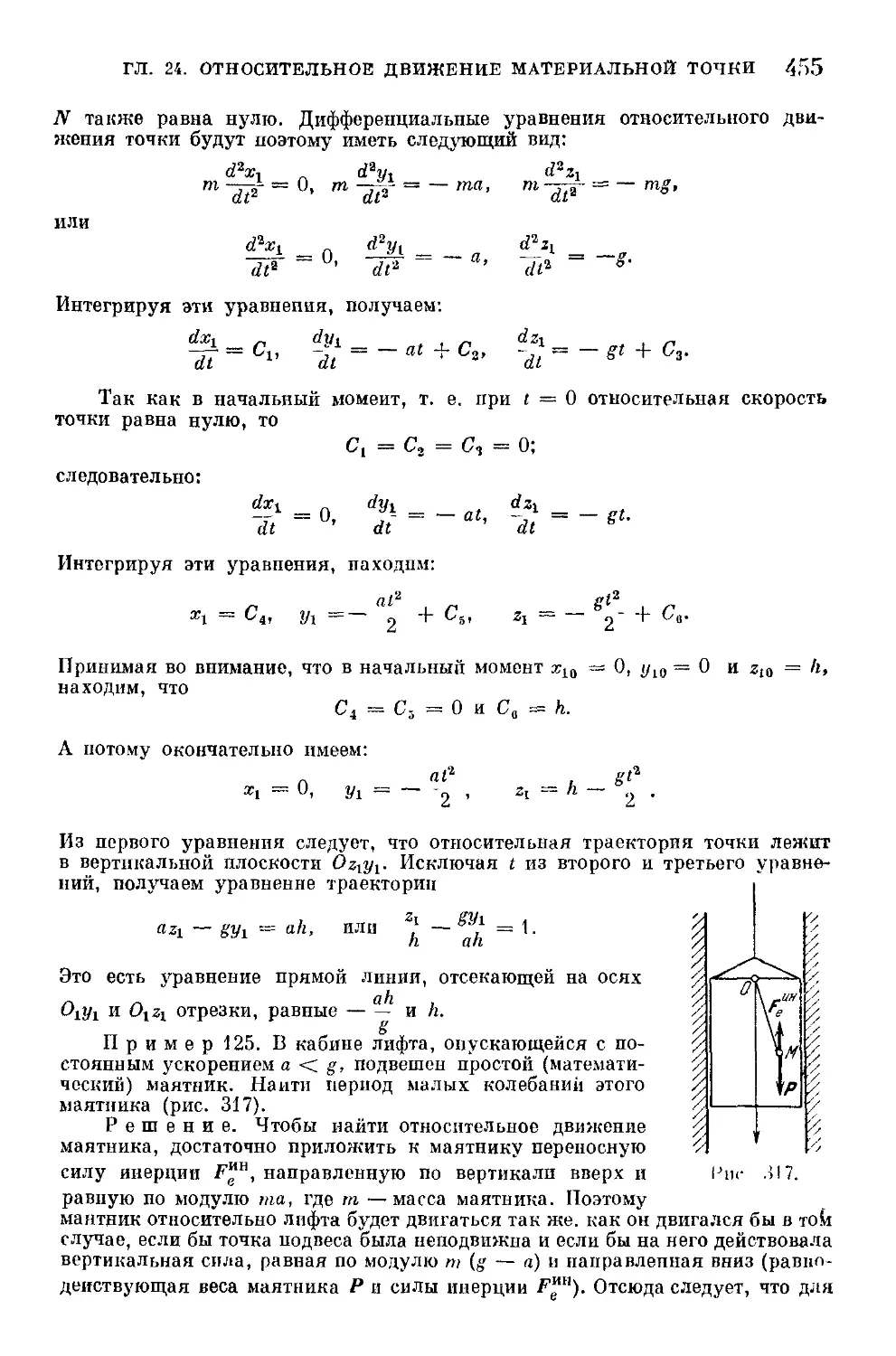
Глава 24. Относительное движение материальной точки 452
§ 118. Дифференциальные уравнения относительного движения ма-
материальной точки 452
§ 119. Теорема о кинетической энергии материальной точки в отно-
относительном движении 456
8 ОГЛАВЛЕНИЕ
Б. ДИНАМИКА СИСТЕМЫ
Глава 25. Принцип возможных перемещений 458
§ 120. Механическая система. Связи 458
§ 121. Классификация сил, действующих на систему 460
§ 122. Понятие возможного перемещения. Число степеней сзободы 461
§ 123. Совершенные связи 464
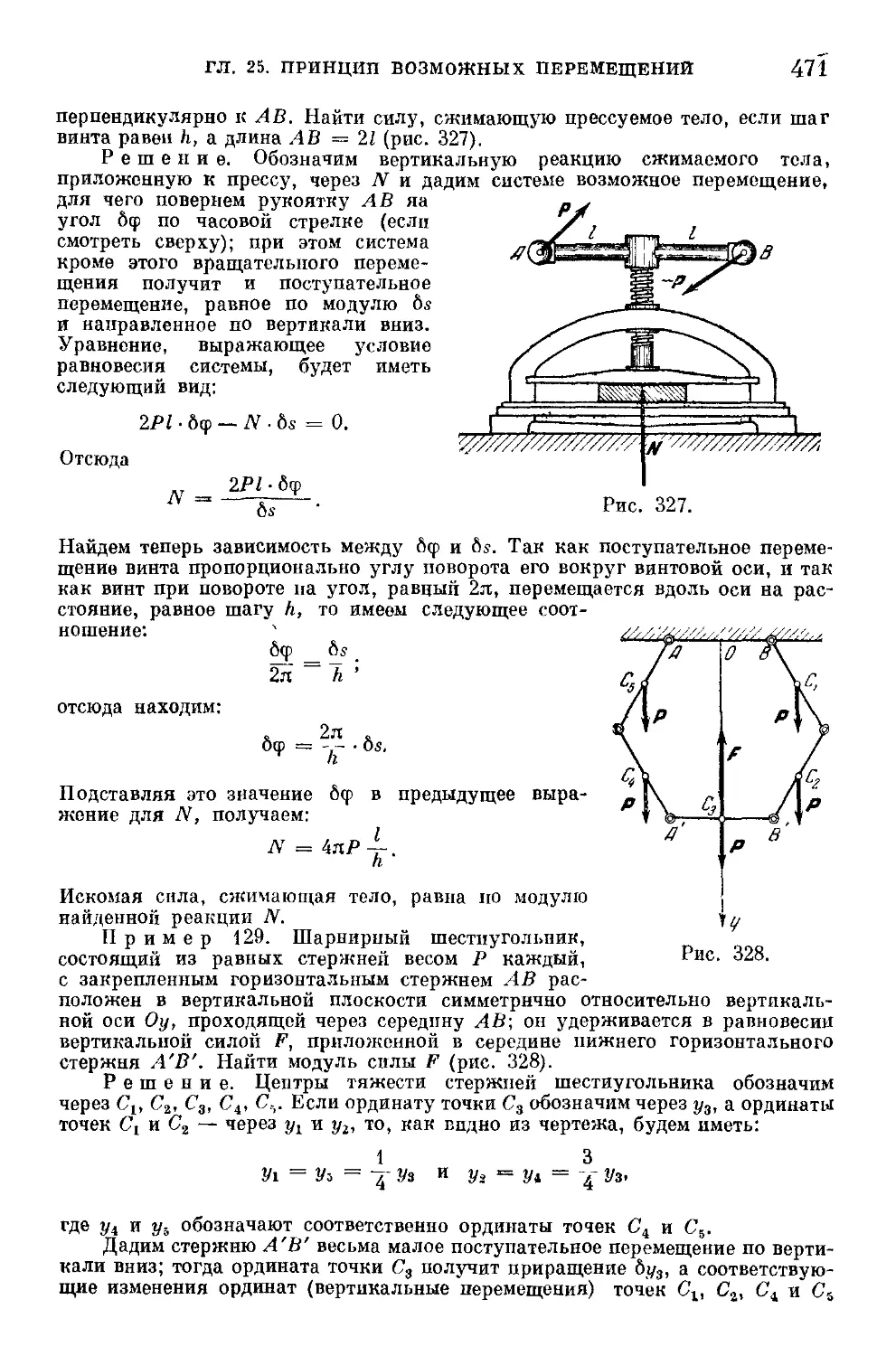
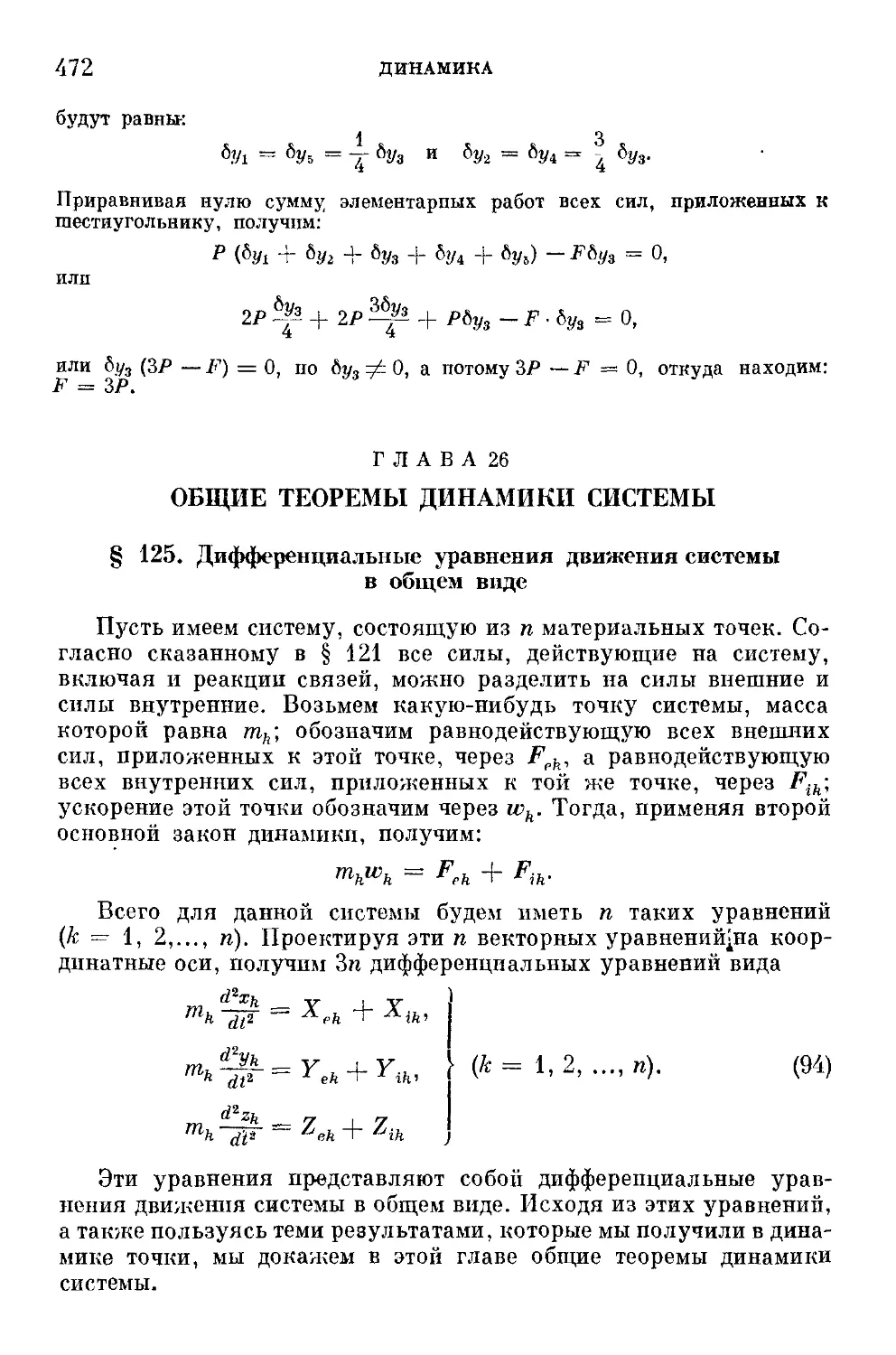
§ 124. Принцип возможных перемещений 466
Глава 26. Общие теоремы динамики системы 472
§ 125. Дифференциальные уравнения движения системы в общем
виде 472
§ 126. Теорема о количестве движения системы 473
§ 127. Теорема импульсов 477
§ 128. Теорема о движении центра масс системы 478
§ 129. Теорема о кинетическом моменте системы 481
§ 130. Теорема о кинетической энергии системы 487
§ 131. Движение системы в потенциальпом силовом поле. Закон со-
сохранения энергии 494
Глава 27. Принцип Даламбера для системы 497
§ 132. Принцип Даламбера 497
§ 133. Общее уравнение динамики 499
Глава 28. Моменты пнерции 501
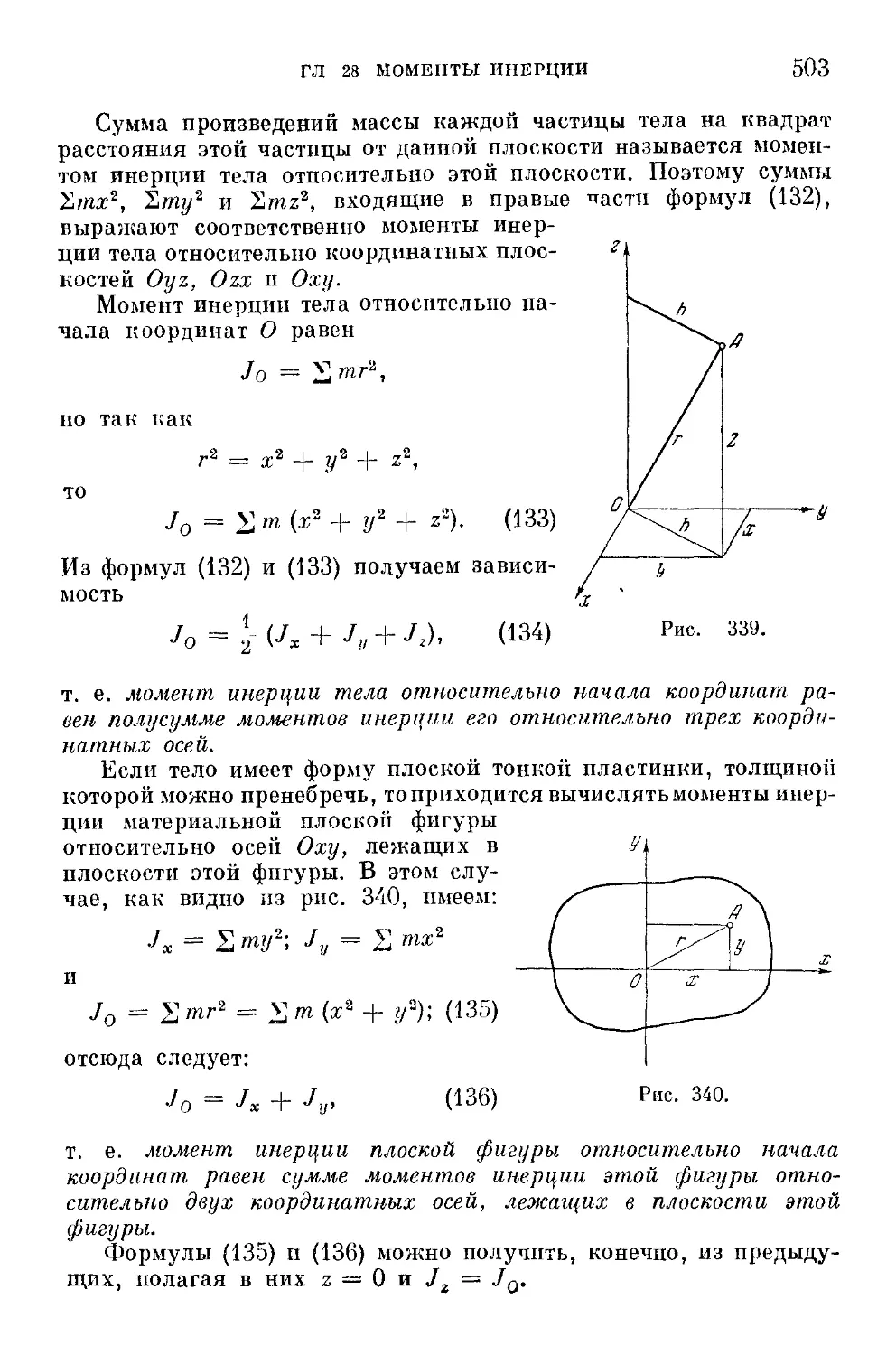
§ 134. Общие формулы для моментов инерции 501
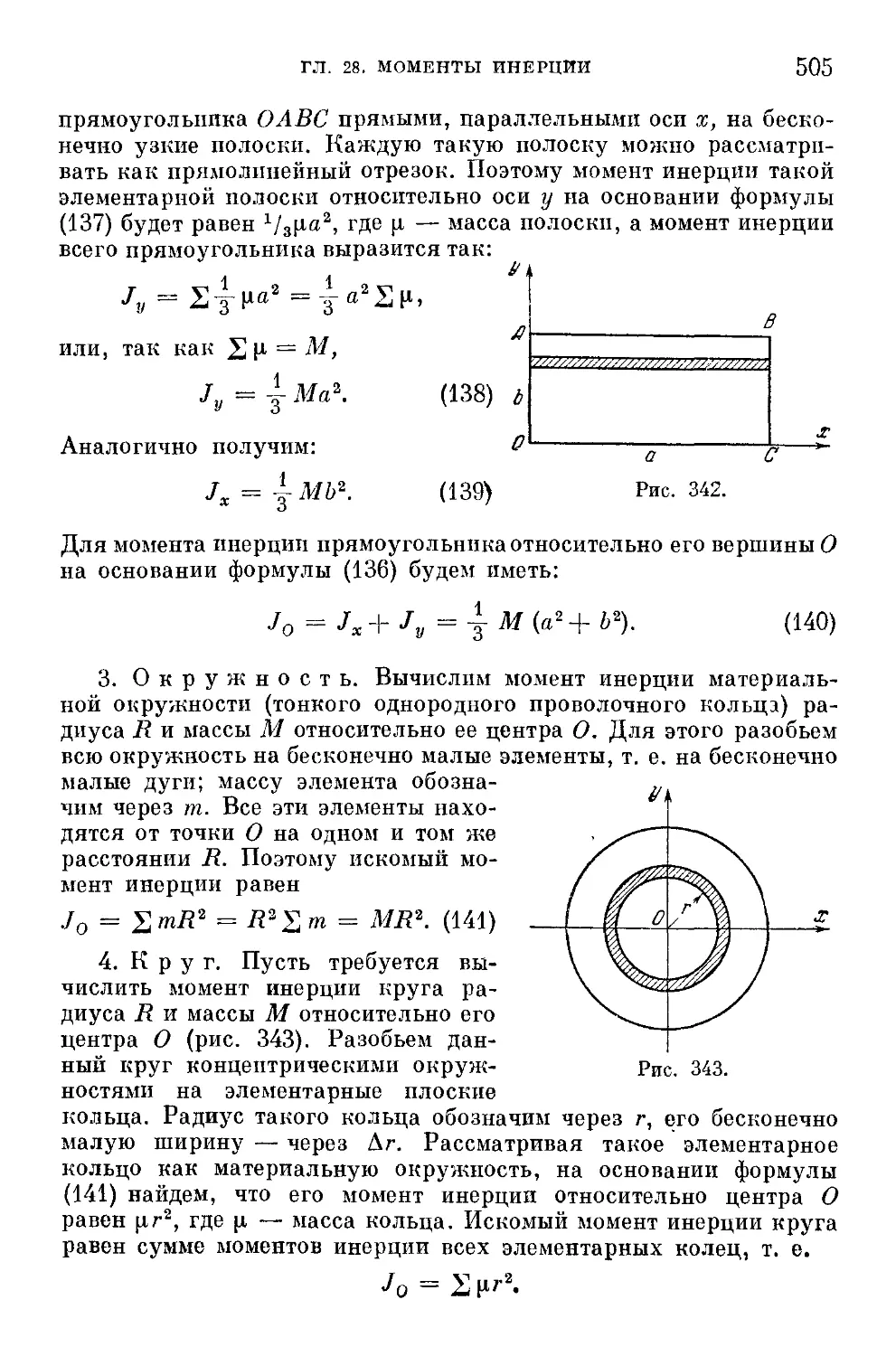
§ 135. Примеры вычисления моментов инерции 504
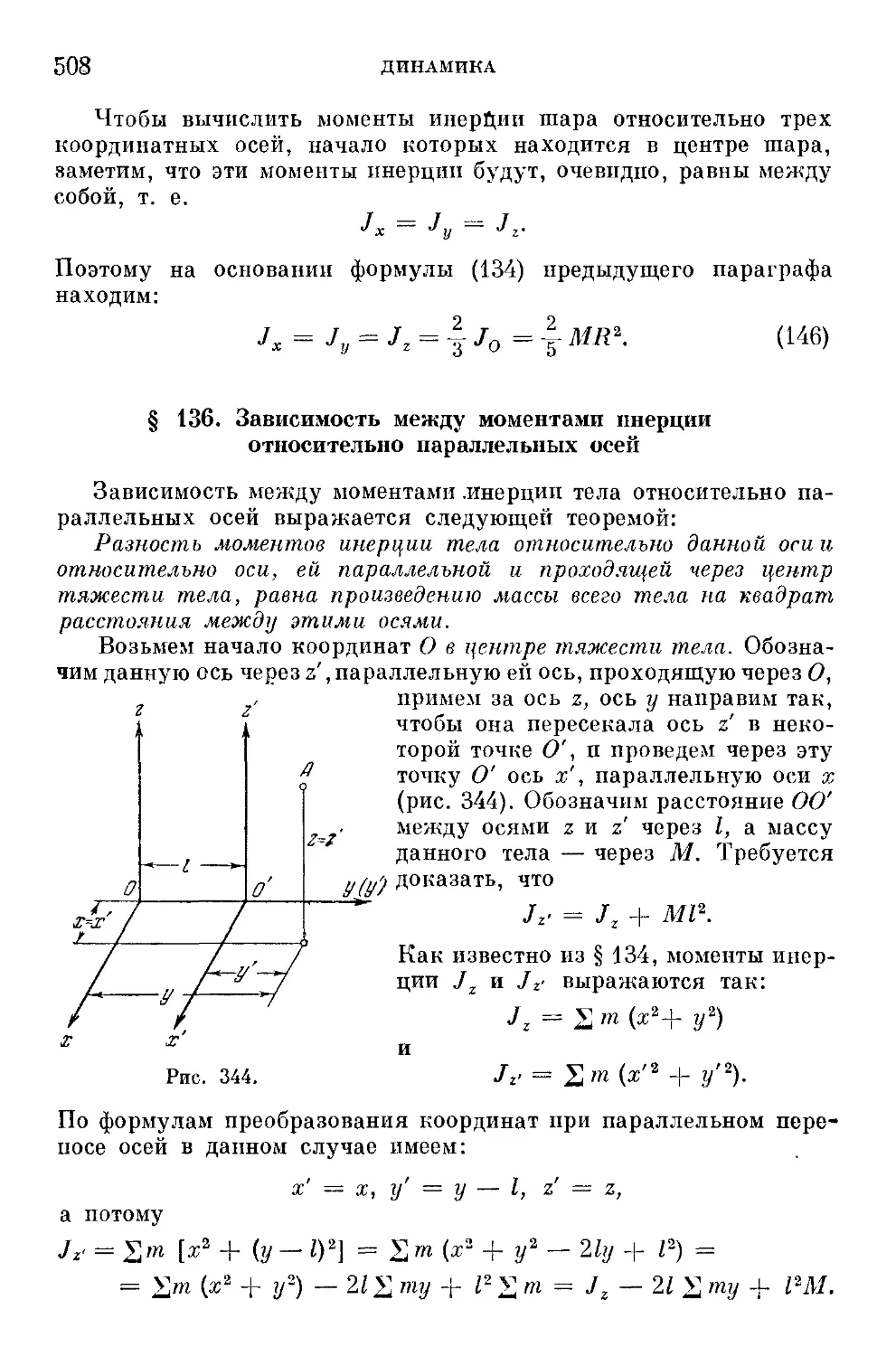
§ 136. Зависимость между моментами инерции относительно парал-
параллельных осей 508
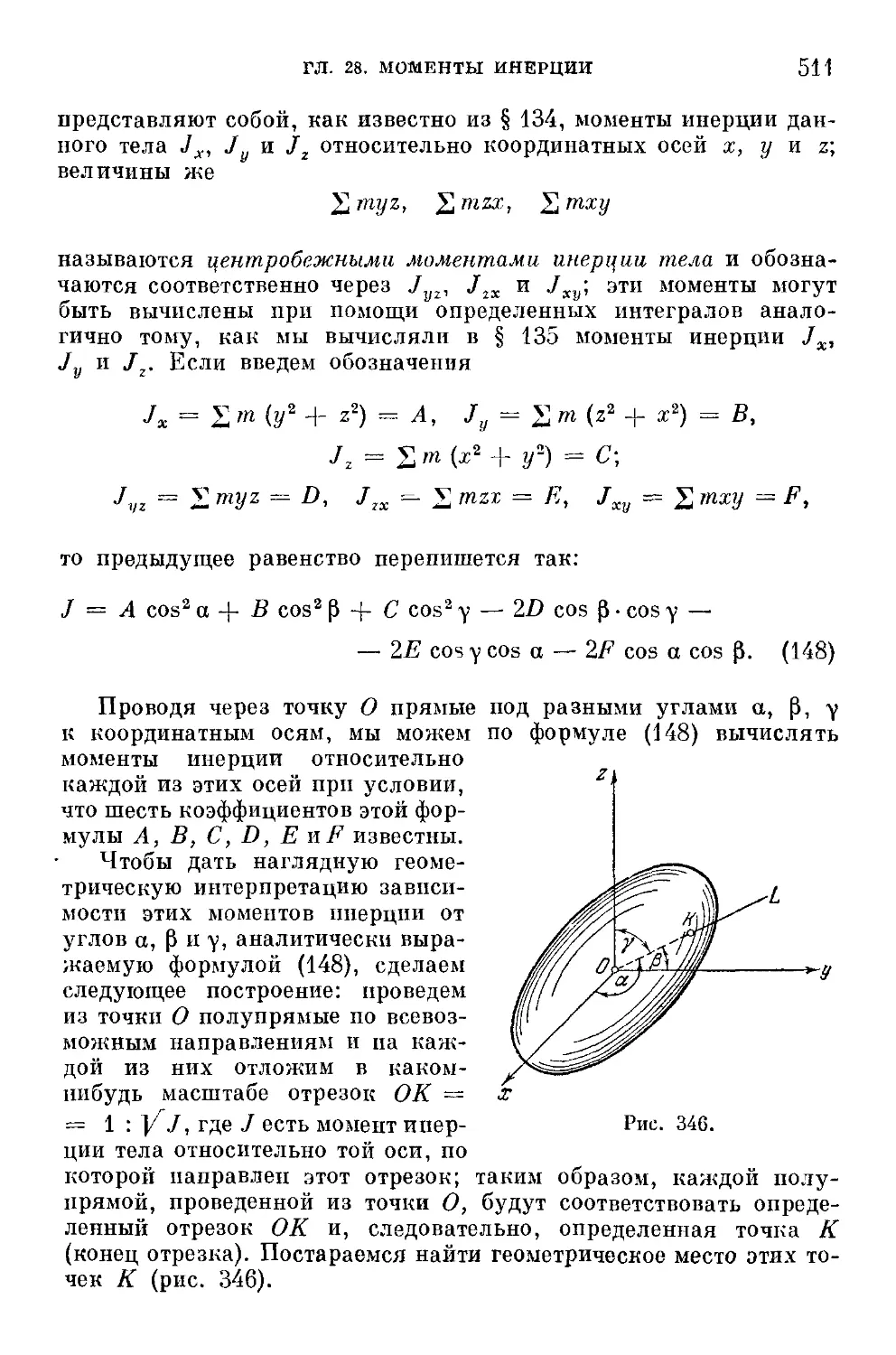
§ 137. Моменты инерции относительно осей, пересекающихся в одной
точке. Эллипсоид инерции 510
§ 138. Главные осп инерции 512
Глава 29. Динамика твердого тела 516
§ 139. Вращение твердого тела вокруг неподвижной оси 516
§ 140. Случай вращения твердого тела вокруг его главной централь-
центральной оси инерции. Изменение кинетической энергии вра-
вращающегося твердого тела 522
§ 141. Плоскопараллельное движение твердого тела 527
Глава 30. Метод обобщенных координат 536
§ 142. Обобщенные координаты системы 536
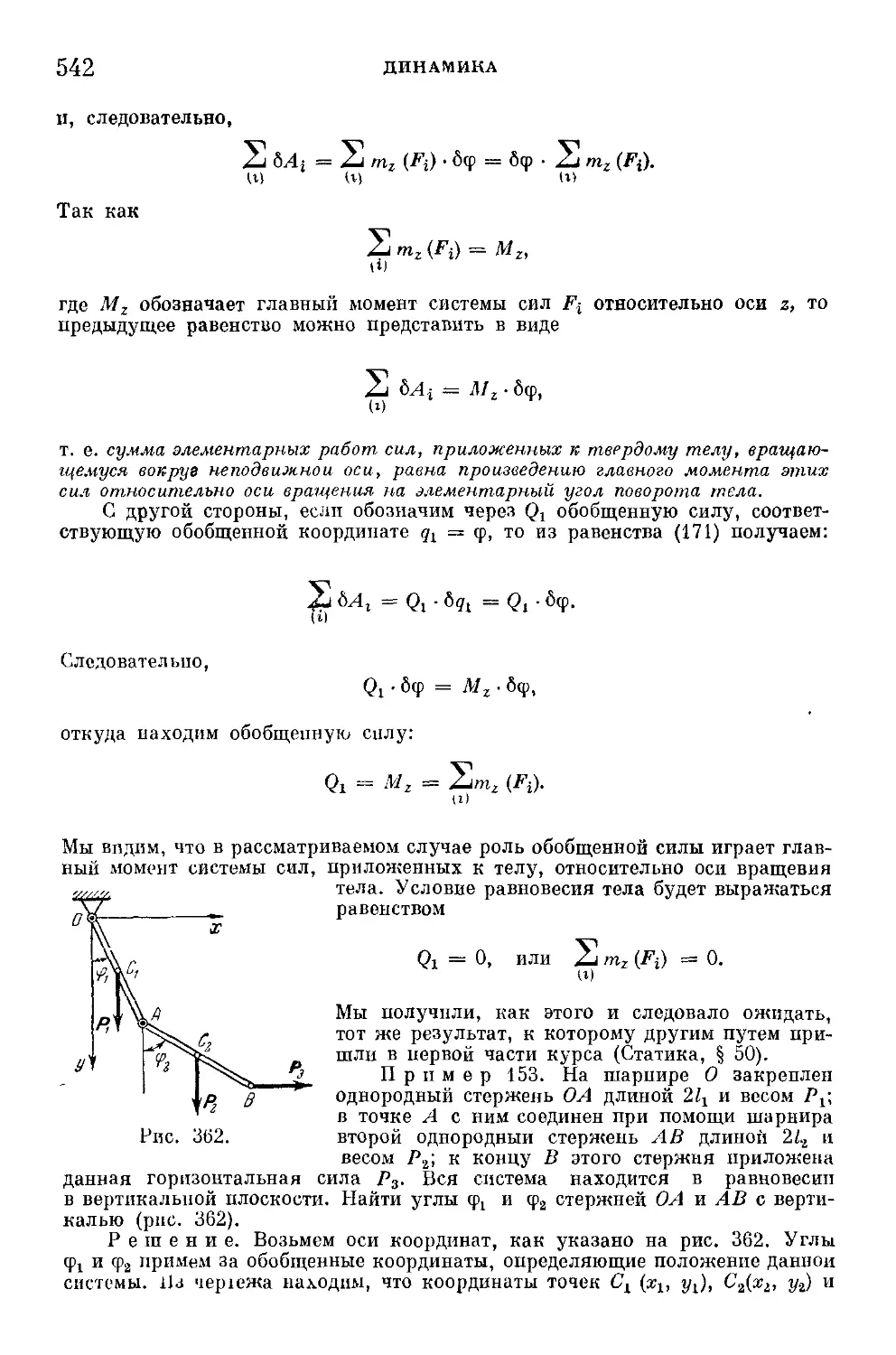
§ 143. Условия равновесия системы в обобщенных координатах . 538
§ 144. Возможные перемещения системы в случае нестационарных
связей 544
ОГЛАВЛЕНИЕ У
§ 145. Дифференциальные уравнения движения системы в обобщен-
обобщенных координатах 549
§ 146. Условия равновесия системы и уравнения Лагранжа в слу-
лае существования силовой функции 558
§ 147. Примеры применения уравнений Лагранжа 560
Глава 31. Теория удара 571
§ 148. Явление удара 571
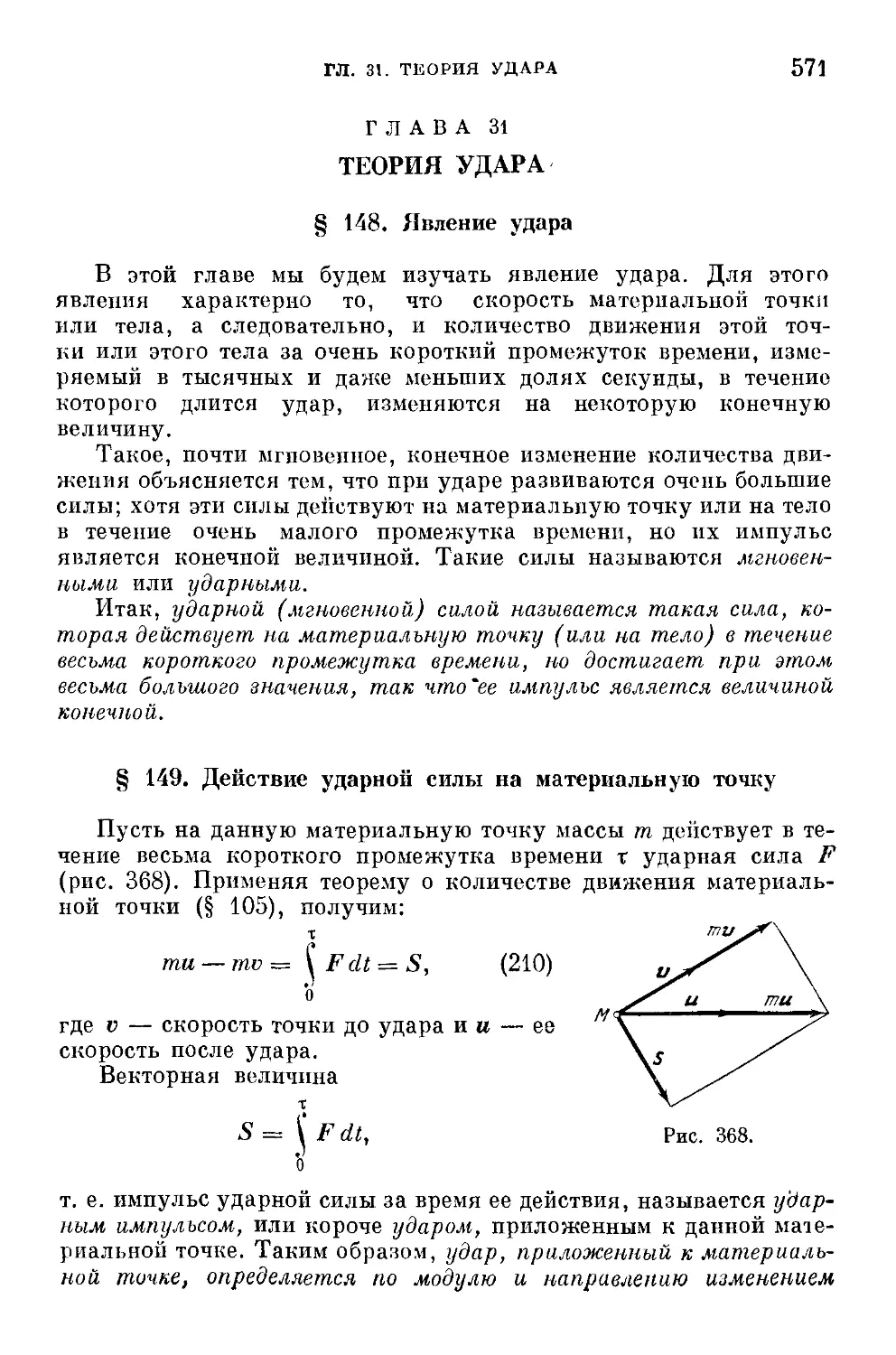
§ 149. Действие ударной силы на материальную точку, 571
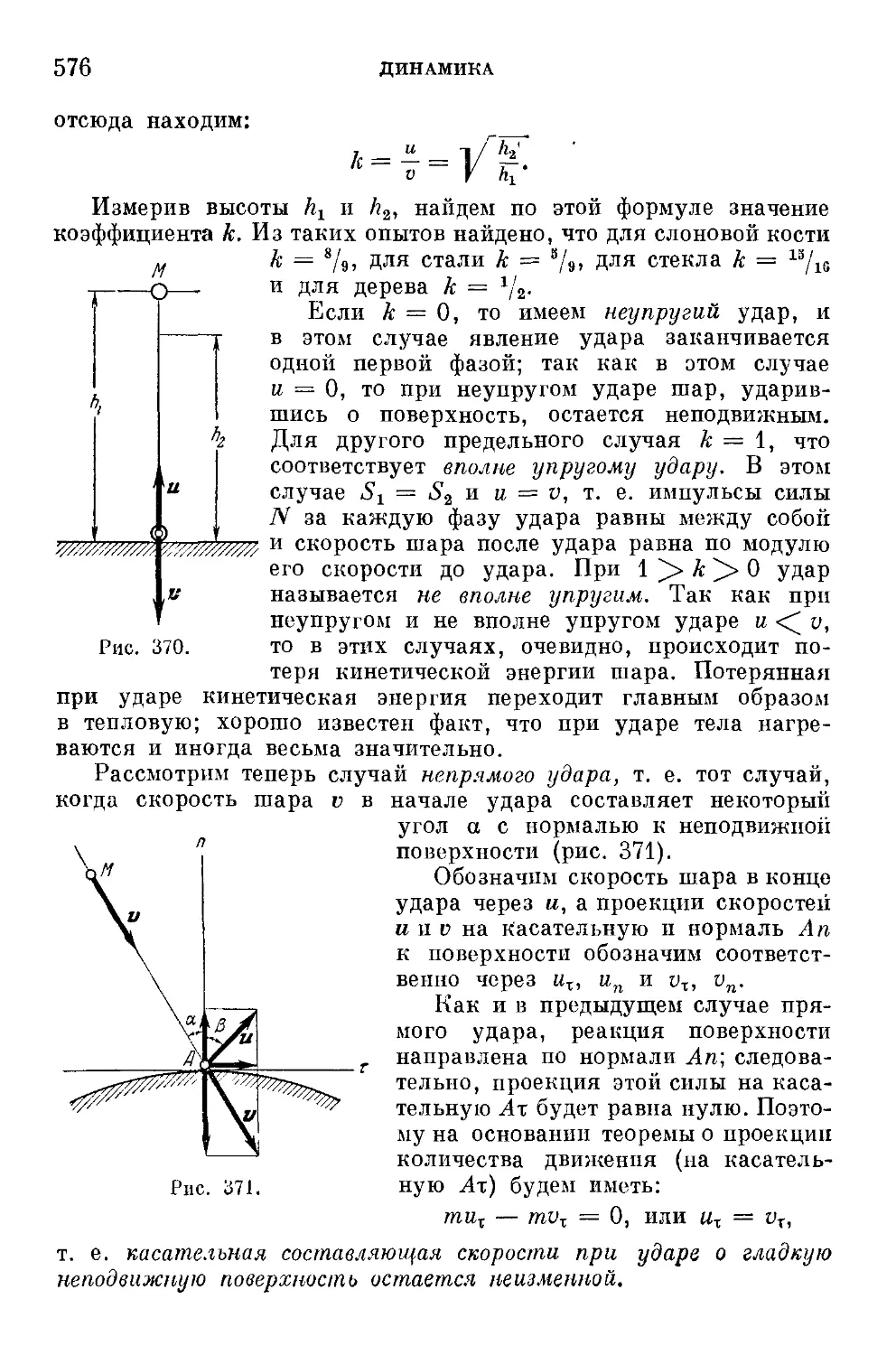
§ 150. Удар шара о неподвижную поверхность 574
§ 151. Прямой удар двух шаров 577
§ 152. Потеря кинетической энергии при ударе двух тел 581
§ 153. Изменение количества движения системы при ударах . . . 584
§ 154, Изменение кинетического момента системы при ударах . . . 586
§ 155, Действие ударной силы на твердое тело, вращающееся вокруг
неподвижной оси 589
§ 156, Центр удара 591
Предметный указатель 593
ПРЕДИСЛОВИЕ К ОДИННАДЦАТОМУ ИЗДАНИЮ
Одиннадцатое издание воспроизводится без изменений с деся-
десятого издания. Исправлены только замеченные опечатки.
И. Воронков
Москва
Октябрь 1963 г.
ВВЕДЕНИЕ
Теоретическая механика является одной из важнейших дис-
дисциплин, изучаемых в высшей технической школе; ее законы и вы-
выводы широко применяются в целом ряде других дисциплин при
решении самых разнообразных и сложных технических задач:
все технические расчеты при постройке различных сооружении,
при проектировании машин, при изучении полета снарядов и т. п.
основаны на законах теоретической механики.
В чем же состоит основное содержание этой науки? Каковы ее
задачи и какими методами пользуется механика при решении
этих задач?
Теоретическая механика есть наука об общих законах механи-
механического движения и равновесия материальных тел.
Движение, понимаемое в широком смысле слова, является
неотъемлемым атрибутом материи и, следовательно, обнимает собой
все происходящие в мире явления. В «Диалектике природы»
Энгельс пишет: «Движение, рассматриваемое в самом общем
смысле слова, т. с. понимаемое, как форма бытия материи, как
внутренне присущий материи атрибут, обнимает собой все проис-
происходящие во вселенной изменения и процессы, начиная от простого
перемещения и кончая мышлением» (Энгельс, Диалектика
природы, 1953, стр. 44).
Таким образом, под движением материи понимается не только
перемещение тел в пространстве, но и любые изменения, происхо-
происходящие в телах при тепловых, электромагнитных, химических
и других процессах. Наконец, под движением материи понимается
и самая высшая форма движения — наше сознание и мысль.
Конечно, между всеми этими формами движения материи су-
существует глубокое качественное различие: чем оно больше, тем
глубже различие в методах их изучения. Однако все эти формы
движения материи находятся во взаимной связи и при соответ-
соответствующих условиях переходят одна в другую. Движение есть
внутренне присущий материи атрибут, так как оно неотделимо от
материи. «Материя без движения,— по выражению Энгельса,—
так же немыслима, как и движение без материи» (Э н г е л ь с,
Антидюринг, 1951, стр. 57).
12 ВВЕДЕНИЕ
Разоблачая идеализм в физике, В. И. Ленин пишет: «В мире
нет ничего, кроме движущейся материи, и движущаяся материя не
может двигаться иначе, как в пространстве и во времени»
(В. И. Лен и н, Материализм и эмпириокритицизм, 1948, стр. 158).
И далее: «...оторвать движение от материи равносильно тому,
чтобы оторвать мышление от объективной реальности, о'торвать
мои ощущения от внешнего мира, т. е. перейти на сторону идеа-
идеализма» (там же, стр. 250). А потому движение, так же как и мате-
материя, существует извечно и не может быть ни создано, ни уничто-
уничтожено. При этом неуипчтожаемость движения нужно понимать
не только в количественном, но и в качественном смысле, т. е.
в том смысле, что не может быть уничтожена ни одна из форм
движения материи.
Теоретическая механика изучает простейшую форму движения
материи — механическое движение. Механическим движением
называется изменение с течением времени положения материаль-
материальных тел относительно друг друга (а также изменение относитель-
относительного положения материальных частиц данного тела, т. е. дефор-
деформация тела).
Так как состояние равновесия тела есть частный случай меха-
механического движения, то в задачу теоретической механики входит
также изучение равновесия материальных тел. Но необходимо
иметь в виду, что абсолютного равновесия в природе не сущест-
существует и что «всякое равновесие лишь относительно и временно»
(Энгельс, Диалектика природы, 1953, стр. 196).
Имея в виду, что механика изучает простейшую форму движе-
движения, Энгельс, классифицируя естественные науки, начинает эту
классификацию с механики, указывая, что такая последователь-
последовательность соответствует и историческому ходу развития естествознания:
из всех естественных наук раньше других возникла и стала раз-
развиваться механика. В «Диалектике природы» (стр. 44) Энгельс
пишет: «Всякое движение связано с каким-нибудь перемещением —
перемещением небесных тел, земных масс, молекул, атомов или
частиц эфира. Чем выше форма движения, тем незначительнее
становится это перемещение. Оно никоим образом не исчерпывает
природы соответствующего движения, но оно неотделимо от него.
Поэтому его необходимо исследовать раньше всего остального».
Поскольку механическое движение мы постоянно и всюду
наблюдаем и в природе, и в технике, становится понятной та огром-
огромная роль, какую играет теоретическая механика для всего совре-
современного естествознания и современной техники. Изучение общих
законов движения материальных тел объясняет нам очень многие
явления, происходящие в окружающем нас мире. Однако необхо-
необходимо иметь в виду, что, поскольку теоретическая механика изу-
изучает только механическое движение, она не может претендовать
на исчерпывающую роль в науке; далеко не все происходящие
ВВЕДЕНИЕ 13
в мире процессы и явления можно объяснять и изучать на осно-
основании только законов механики и при помощи только механи-
механических моделей. Ввиду глубокого качественного различия между
отдельными формами движения материи нельзя все многообразие
явлений природы сводить только к механическому движепию.
Настоящий курс механики посвящен изучению так называемой
классической механики, т. е. механики, основанной на законах,
которые впервые были точно сформулированы в окончательном виде
Галилеем и Ньютоном.
Благодаря блестящим успехам физики в конце XIX и первой
четверти XX в. и новым важнейшим открытиям в области электро-
электродинамики, радиоактивности, учения о строении атома и о движе-
движении составляющих его мельчайших частиц выяснилось, что область
применения законов классической механики ограничена: эти
законы неприменимы к движению микрочастиц, а также к движе-
движению тел, скорость которых близка к скорости света. В связи
с этим в XX в. возникла так называемая релятивистская механика,
основанная на теории относительности А. Эйнштейна. Возникно-
Возникновение этой новой дисциплины является новым важным этапом
в развитии механики.
Теория относительности в отличие от классической механики
установила закономерные связи между пространством и временем
и между массой и энергией. Однако классическая механика пол-
полностью сохраняет свое значение и в настоящее время, так как
различие между результатами, полученными на основании за-
законов классической механики и законов релятивистской механики,
становится значительным только в тех случаях, когда скорость
движущегося тела близка к скорости света; если же этого нет, то
это различие настолько мало, что им вполне можно пренебречь.
Таким образом, областью классической механики является изу-
изучение медленных по сравнению со скоростью света движений
макроскопических тел.
Теоретическая механика связана с техникой с самого начала
своего возникновения. Техническая практика постоянно выдвигала
перед механикой новые задачи, которые способствовали даль-
дальнейшему развитию механики. В свою очередь и механика содей-
содействовала и содействует техническому прогрессу. Современная тех-
техника все чаще и чаще выдвигает перед наукой весьма сложные
проблемы, разрешение которых возможно только на основании
точного эксперимента и глубоких теоретических исследований.
Для советского инженера, который имеет дело с самой передовой
в мире техникой •— техникой страны победившего социализма,
который должен не только в совершенстве владеть этой техникой,
Но и двигать ее вперед, знание теоретической механики как науч-
научной базы современной техники совершенно необходимо. Совет-
Советский инженер должен обладать широким научным и техническим
14 ВВЕДЕНИЕ
кругозором, ибо задача науки состоит не только в том, чтобы объяс-
объяснять мир, но и в том, чтобы изменять его. В настоящее время
нельзя быть образованным инженером без основательного и до-
достаточно широкого знания теоретической механики.
Каждая отдельная наука в зависимости от той области явле-
явлений объективно реального мира, какую она исследует, имеет
свои методы описания и изучения этих явлений. Каковы же ме-
методы теоретической механики?
Как во всякой естественной науке, в механике исходной точ-
точкой исследования являются наблюдения, опыт, практика. Но,
наблюдая какое-нибудь явление, мы не имеем возможности сразу
охватить это явление во всем его многообразии.
Поэтому приходится выделять в наблюдаемом явлении наибо-
наиболее существенные для него черты, отвлекаясь (абстрагируясь)
от того, что является менее существенным, второстепенным.
При первом приближении к действительности, в целях упро-
упрощения исследования в механике часто приходится отвлекаться от
некоторых свойств тех материальных объектов, с которыми она
имеет дело, при условии, что эти свойства не играют существенной
роли в изучаемом механическом явлении или в рассматриваемой
задаче. В результате этого получаются некоторые упрощенные
схемы (упрощенные модели), которые служат механике для по-
построения приближенной теории движения и равновесия реальных
физических объектов. Так, например, абстрагируясь от свойств
всякого реального физического тела изменять свою форму (дефор-
(деформироваться), приходят к понятию абсолютно твердого тела.
К такого же рода упрощенным моделям относятся понятия мате-
материальной точки, идеальной жидкости и т. п. После того как задача
решена в первом приближении при принятых упрощающих усло-
условиях, необходимо сделать следующий шаг в приближении к дей-
действительности, т. е. необходимо перейти к решению более слож-
сложной задачи с учетом тех свойств реальных физических объектов
или тех факторов, которые не были учтены в первом приближе-
приближении. Такой путь исследования от простого к сложному имеет
широкое применение в теоретической механике. После того, на-
например, как изучены законы равновесия абсолютно твердого
тела, переходят к изучению равновесия деформируемых тел;
после того как изучены законы движения идеальной жидкости,
переходят к решению более сложной задачи о движении жидкости
с учетом внутреннего трения.
Метод абстракции, таким образом, играет в теоретической ме-
механике весьма важную роль. Отвлекаясь при наблюдении и изучив
нии единичных предметов и явлений от всего частного, случай-
случайного, индивидуального, свойственного этим единичным явлениям
и предметам, мы получаем возможность подойти к установлению
общих закономерностей, глубже проникнуть в сущность явлений.
ВВЕДЕНИЕ 15
«Мышление, восходя от конкретного к абстрактному,— пишет
Ленин,— не отходит — если оно правильное...— от истины,
а подходит к ней. Абстракция материи, законаприроды, абстракция
стоимости и т. д., одним словом, все научные (правильные, серьез-
серьезные, не вздорные) абстракции отражают природу глубже, вернее,
полнее» (В. И. Лени н, Философские тетради, 1947, стр. 146).
Применение метода абстракции и обобщение результатов мно-
многовекового опыта, непосредственных наблюдений и производ-
производственной деятельности людей позволили установить некоторые
общие простые положения или законы, которые служат фунда-
фундаментом для всего стройного здания классической механики. Эти
основные законы играют в классической механике роль постула-
постулатов или аксиом, т. е. простейших положений, которые являются
исходными предпосылками для всех ее дальнейших выводов.
Ньютон, излагая эти основные законы классической механики,
называет их аксиомами движения. Из этих аксиом при помощи
строгих математических рассуждений и вычислений вытекают
все дальнейшие выводы и результаты классической механики;
таким образом, в теоретической механике находит широкое при-
применение метод математической дедукции. Приступая к изучению
теоретической механики, необходимо иметь в виду, что, поскольку
эта наука рассматривает по преимуществу количественные отно-
отношения, математический анализ играет в ней очень важную роль.
Однако никогда не следует забывать,что аксиоматика теоретической
механики, так же как и все ее основные понятия, имеет опытное
происхождение.
Первоисточником, из которого возникли при зарождении ме-
механики ее основные понятия и основные законы, являлись непо-
непосредственные наблюдения, повседневный опыт и производственная
деятельность человека. Побуждаемая затем к дальнейшему разви-
развитию запросами техники и производства, используя данные новых
опытов и наблюдений, применяя мощные методы математического
анализа, механика постепенно создала свои обширные теории,
охватывающие многочисленные и многообразные механические
явления: теорию движения- и равновесия абсолютно твердых тел
(механика твердого тела), деформируемых тел (теорияупругости
и теория пластичности), теорию движения и равновесия жидких
и газообразных тел (гидро- и аэромеханика):
Понятно, что единственным критерием истинности этих теорий
являются опять-таки опыт, практика; всякая научная теория
только тогда может считаться верной, т. е. достаточно точно отра-
отражающей и объясняющей те или иные явления объективно реаль-
реального мира, если эта теория хорошо согласуется с действитель-
действительностью, с наблюдаемыми фактами.
Таким образом, развитие теоретической механики, как
и всякой истинной науки, идет по тому пути, который указан
16 ВВЕДЕНИЕ
В. И. Лениным для развития нашего научного познания: «От жи-
живого созерцания к абстрактному мышлению и от него к прак-
практике — таков диалектический путь познания истины, познания
объективной реальности» (В. И. Ленин, Философские тет-
тетради, 1947, стр. 146—147),
Обратимся теперь к краткому историческому обзору развития
механики.
Как было уже указано, возникновение механики и ее даль-
дальнейшее развитие теснейшим образом связаны с технической
практикой.
На истории механики вполне подтверждается высказывание
Энгельса о том, что наука многим больше обязана производству,
чем производство — науке.
Возникновение механики уходит в глубокую древность. Уже
в древности при постройке различных, нередко грандиозных соору-
сооружений, например египетских пирамид, строители пользовались не-
некоторыми эмпирически полученными знаниями по механике и для
подъема и перемещения тяжелых грузов применяли простейшие
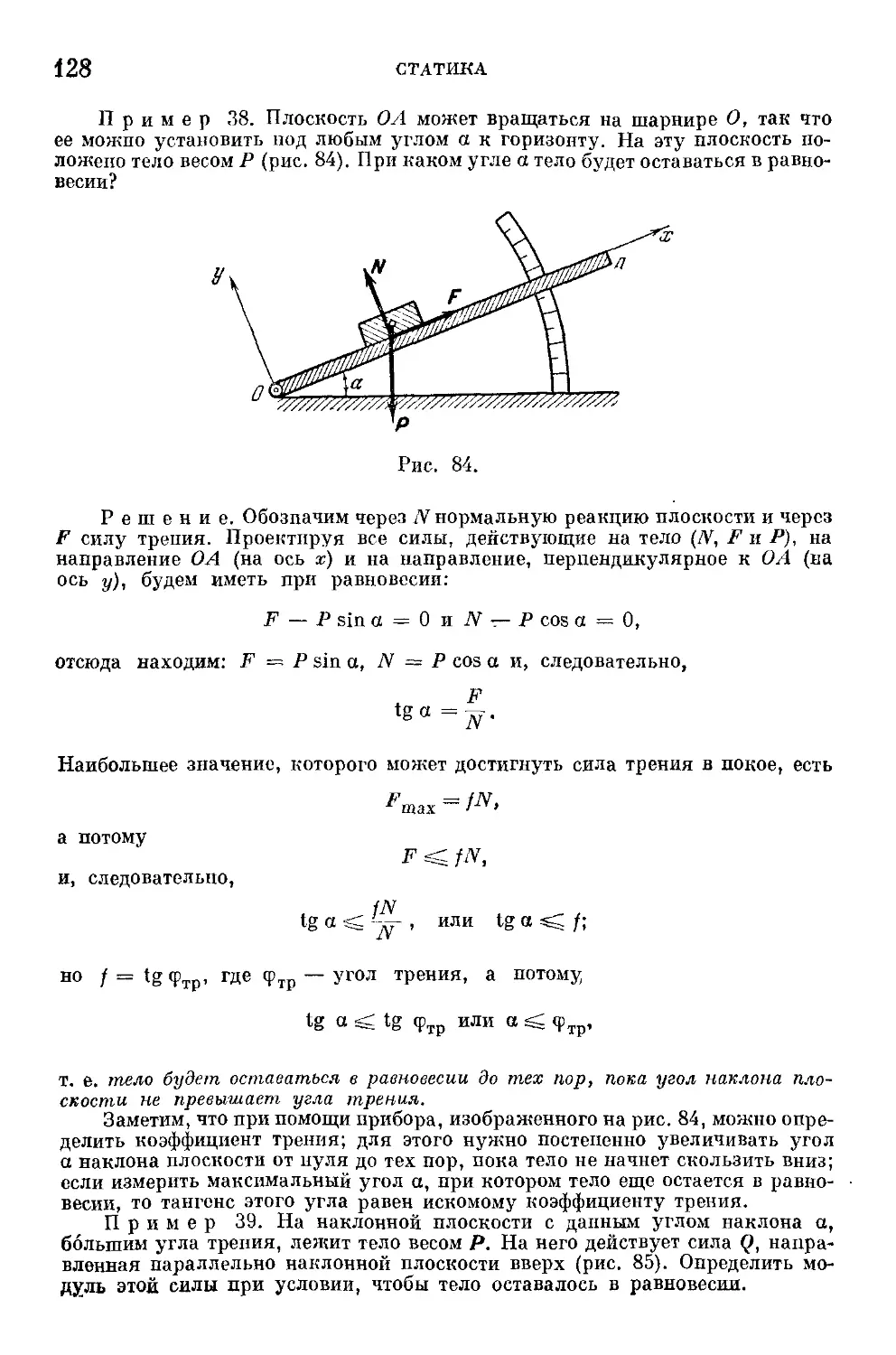
механические приспособления (рычаг, блок, наклонная плоскость).
Однако переход от чисто эмпирических знаний к установлению
общих законов механики не мог, конечно, совершиться сразу,
а потребовал весьма длительного времени, в течение которого
в результате наблюдений, опыта и производственной деятельности
людей, постепенно накоплялся обширный фактический материал.
Потребности земледелия, строительного дела, необходимость точ-
точного взвешивания в связи с развитием торговли — все это вызы-
вызывало развитие механики при ее зарождении.
В «Диалектике природы» Энгельс пишет: «... на известной сту-
ступени развития земледелия и в известных странах (поднимание воды
для орошения в Египте), а в особенности вместе с возникновением
городов, крупных построек п развитием ремесла развилась и
механика. Вскоре она становится необходимой также для судо-
зодства и военного дела» (Энгельс, Диалектика природы,
1953, стр. 145).
Вначале механика, имевшая объектом своего изучения простей-
простейшие орудия и машины, развивалась главным образом в области
статнки, т. е. учения о равновесии материальных тел — этого
наиболее простого раздела теоретической механики.
В самых старинных трактатах по механике встречаются рас-
суждепия о силе и ее основных свойствах.
Знаменитый греческий философ Аристотель C84—322 гг. до
н. э.) уже знал закон сложения сил, приложенных в одной точке
и действующих по одной прямой. Он рассматривал также задачу
о равновесии рычага, однако строгого решения этой задачи он
дать не смог. Кроме того, у Аристотеля мы находим рассуждения
и о движении тел; но эти рассуждения в большинстве случаев
ВВЕДЕНИЕ 17
являются чисто умозрительными, не согласованы с опытом и по-
потому неверны.
Основоположником статики как точной науки следует считать
выдающегося ученого древности Архимеда B87—212 гг. до н. э.).
В своих работах по механике Архимед подытожил знания древних
по статике и заложил ее научные основы. Им дано точное решение
задачи о равновесии рычага и создано учение о центре тяжести.
Кроме того, Архимедом были разработаны основы гидростатики;
ему принадлежит открытие известного закона, носящего его имя,
о гидростатическом давлении жидкости на погруженное в нее тело.
Архимед является величайшим геометром и выдающимся изоб-
изобретателем своего времени. По дошедшим до нас сведениям, ему при-
принадлежит много различных технических изобретений и, в част-
частности, ряд изобретений, относящихся к военной технике того
времени. Но в рабовладельческом обществе механика не могла
успешно развиваться; благодаря дешевому труду рабов и низкому
уровню производства не было надобности в применении машин,
а потому не было и предпосылок к быстрому развитию техники
и механики.
Эпоха средних веков характеризуется в области механики, так
же как и в области других естественных наук, почти полным за-
застоем, что объясняется характером общественных отношений при
феодальном строе и юсподством теологии в философии и науке.
Только в эпоху Возрождения (со второй половины XV в.),
в связи с развитием торгового капитала, ремесла, мореплавания,
военного дела, начинает быстро развиваться и механика.
В эту эпоху, пишет Энгельс, «...были заложены основы для
позднейшей мировой торговли и для перехода ремесла в ману-
мануфактуру, которая, в свою очередь, послужила исходным пунктом
для современной крупной промышленности. Духовная диктатура
церкви была сломлена... Это был величайший прогрессивный пере-
переворот из всех пережитых до того времени человечеством, эпоха,
которая нуждалась в титанах и которая породила титанов по
силе мысли, страсти и характеру, по многосторонности и учености»
(Энгельс, Диалектика природы, 1933, стр. 3 и 4).
Среди этих титанов мысли и разносторонней учености следует
прежде всего назвать знаменитого итальянского художника,
физика и инженера Леонардо да Винчи A452—1519). Леонардо
да Винчи один из первых порывает со схоластикой средневековья.
Он придавал большое значение опыту и применению математики
при решении механических задач. В области механики Леонардо
да Винчи занимался исследованием движения тела по наклонной
плоскости и исследованием трения скольжения. На основании
экспериментов он впервые пришел к выводу, что сила трения
скольжения не зависит от величины поверхности соприкоснове-
соприкосновения трущихся тел. Исследуя равновесие сил, приложенных
18 ВВЕДЕНИЕ
к блоку, он ввел в механику понятие момепта силы. Кроме того,
ему принадлежат многочисленные технические изобретения, в том
числе изобретение эллиптического токарного станка, а также
попытки разрешения проблемы о полете человека при помощи
крыльев,— проблемы, привлекавшей к себе внимание человека
с самых древних времен.
Вскоре после Леонардо да Винчи один из величайших ученых
Николай Коперник A473—1543) создал гелиоцентрическую си-
систему мира, которая сменила геоцентрическую систему Птолемея
и произвела переворот в научном миросозерцании той эпохи.
«Отсюда,— по выражению Энгельса,— начинает свое лето-
летосчисление освобождение естествознания от теологии...» (Энгельс,
Диалектика природы, 1953, стр. 5). Открытие Коперника вызвало
зарождение небесной механики — науки о движении небесных
тел. Иоганн Кеплер A571—1630) на основании учения Коперника
и многочисленных астрономических наблюдений установил три
закона движения планет (законы Кеплера), которые в дальней-
дальнейшем послужили Ньютону основой для открытия закона всемир-
всемирного тяготения.
Новую эпоху в развитии механики открывают работы вели-
великого итальянского ученого Галилея A564—1642).
Галилей в противоположность схоластическим воззрениям
признавал необходимость опыта для обоснования механики и
физики и последовательно проводил эту точку зрения в своих
научных изысканиях. Галилей является основоположником важ-
важнейшего раздела механики — динамики, т. е. учения о движе-
движении материальных тел. Он впервые ввел понятия скорости и уско-
ускорения движущегося тела при неравномерном прямолинейном
поступательном движении и установил на основании своих опы-
опытов точные законы падения тел в пустоте, отметив тот важный
факт, что в данном месте наблюдения все тела падают в пустоте
с одним и тем же постоянным ускорением, не зависящим от веса
падающего тела; тем самым он опроверг неверное воззрение,
твердо державшееся в науке со времен Аристотеля, что из двух
тел, падающих на землю, более тяжелое тело движется быстрее.
Кроме того, Галилей установил один из основных законов ди-
динамики — закон инерции. Исходя из этого закона и из идеи сло-
сложения движений, Галилей первый дал верное решение задачи
о движении в пустоте тела, брошенного под углом к горизонту
(снаряда), и нашел, что траекторией центра тяжести тела в этом
движении является парабола. В то время решение этой задачи
имело первостепенное значение для баллистики.
Оценивая значение работ Галилея по динамике, знаменитый
французский математик и механик Лагранж говорит: «Нужен был
необыкновенный гений, чтобы открыть закон природы в таких
явлениях, которые всегда пребывали перед глазами, но объясне-
ВВЕДЕНИЕ 19
нпе которых тем не менее всегда ускользало от изысканий фило-
философов».
Продолжением работ Галилея по динамике явились исследова-
исследования голландского ученого Гюйгенса, состоявшего членом фран-
французской Академии наук A629—1695), который создал теорию фи-
физического маятника, введя при этом понятия о центре качаний
и о приведенной длине физического маятника. Кроме того, Гюй-
Гюйгенс обобщил введенное Галилеем понятие ускорения на случай
криволинейного движения точки и установил понятие центро-
центробежной силы. Ряд работ Гюйгенса относится к теории удара твер-
твердых тел.
Установление основных законов динамики, начатое Галилеем,
было завершепо крупнейшим английским ученым Ньютоном
A643—1727).
В своем знаменитом сочинении «Математические начала есте-
естественной философии» A687), переведенном на русский язык акад.
А. Н. Крыловым, Ньютон установил основные законы класси-
классической механики п, исходя из этих законов, дал систематическое
изложение динамики. Кроме установления общих законов дина-
динамики, Ньютону принадлежит решение многих новых математи-
математических и механических задач, создание теории движения тела
в сопротивляющейся среде и, наконец, открытие закона всемир-
всемирного тяготения, послужившего основой для дальнейшего блестя-
блестящего развития небесной механики.
В своих естественнонаучных взглядах Ньютон стоял на мета-
метафизической точке зрения. Метафизические взгляды Ньютона вы-
выразились прежде всего в том, что при установлении основных
законов механики он вводит понятия «абсолютного пространства»
и «абсолютного времени», считая их независимыми от материи
и ее движения. Открыв закон всемирного тяготения, Ньютон
не смог дать научного решения вопроса о происхождении солнеч-
солнечной системы; для этого ему пришлось прибегнуть к антинаучной
гипотезе «первоначального толчка», которая по существу содер-
содержит в себе антиматериалистическую идею о сотворении движения
и потому, по выражению Энгельса, «предполагает также и творца»
(Энгельс, Диалектика природы, 1953, стр. 47).
В то время как Ньютон разрабатывал динамику, статика полу-
получила свое дальнейшее развитие главным образом в работах его
современника, французского ученого Вариньона A654—1722).
Вариньои установил в окончательном виде понятие момента
силы относительно точки и доказал теорему о моменте равнодей-
равнодействующей, носящую его имя. В своей работе «Проект новой меха-
механики» A687) Варипьон, пользуясь этой теоремой, а также методом
сложения и разложения сил, дает строгую статическую теорию
простейших машин. В этой работе статика твердого тела полу-
получила почти полное завершение.
20 ВВЕДЕНИЕ
XVII век в истории механики можно охарактеризовать как пе-
период установления основ динамики.
XVIII век характеризуется разработкой общих принципов
механики п важнейшими исследованиями по механике твердого
тела, гидродинамике и небесной механике. При этом развитие
механики идет по пути создания и разработки аналитических
методов, чему способствовало развитие новых мощных методов
анализа бесконечно малых, основы которого были заложены
Ньютоном и Лейбницем. Наиболее крупными учеными-механи-
учеными-механиками XVIII в. являются Иван Бернулли, Эйлер, Даниил Бер-
пулли, Даламбер и Лагранж.
Иван Бернулли A667—1748) впервые сформулировал в общем
виде один из основных принципов механики — принцип возмож-
возможных перемещении, выражающий необходимое и достаточное усло-
условие равновесия механической системы, идея которого в примене-
применении к простейшим машинам была известна уже Галилею. Кроме
того, И. Бернулли исследовал явление удара твердых тел. В этих
работах И. Бернулли, так же как и в работах Гюйгенса и других
ученых по теории удара, получили развитие весьма важные для
механики идеи о сохранении количества движения и живой силы
(кинетической энергии).
Сын Ивана Бернулли Даниил Бернулли A700—1782), состояв-
состоявший членом Петербургской академии наук, в 1738 г. издал свою
фундаментальную работу «Гидродинамика», в которой он выводит
уравнение, носящее его имя и являющееся и до настоящего вре-
времени одним из основных уравнений гидромеханики.
В 1743 г. один из выдающихся французских ученых XVIII в.
Даламбер A717—1785) в своей работе «Трактат по динамике»
установил важнейший принцип механики, носящий его имя, кото-
который дает общий метод решения задач динамики несвободной меха-
механической системы.
До этой работы Даламбера такого общего метода решения этих
задач не существовало. Принцип Даламбера позволяет в динами-
динамических задачах применять методы статики.
Развитие аналитического направления в механике получило
наиболее яркое выражение в работах знаменитого французского
математика и механика Лагранжа A736—1813). В его сочинении
«Аналитическая механика» A788) вся механика изложена
строго аналитически на основе единого общего принципа — прин-
принципа возможных перемещений (указанного Иваном Бернулли
еще в 1717 г.). Лагранжу принадлежат дальнейшее развитие
и математическая разработка методов применения этого прин-
принципа к решению задач механики. При этом Лагранж не ограни-
ограничился применением этого принципа только в статике; объединив
принцип возможных перемещений с принципом Даламбера, он
получил в общем виде дифференциальные уравнения движения
ВВЕДЕНИЕ 21
механической системы, носящие его имя. Эти уравнения Лагранж
применил, в частности, к решению весьма важной задачи о малых
колебаниях механической системы.
Для XIX века характерно быстрое развитие техники, внедре-
внедрение в промышленность паровых машин, строительство желез-
железных дорог, развитие военной промышленности. Все это выдвигало
перед наукой новые проблемы и содействовало успешному разви-
развитию механики. Потребности новой машинной техники вызвали
появление как самостоятельной дисциплины технической или при-
прикладной механики. Это техническое направление в развитии ме-
механики получило свое начало во Франции. В эпоху французской
буржуазной революции 1789—1794 гг., открывшей широкие
пути для подъема производительных сил, в Париже были учреж-
учреждены Высшая политехническая школа и Высшая нормальная
школа, имевшие целью подготовку как инженеров, так и препода-
преподавателей для технических учебных заведений. Основное значение
в создании и дальнейшем развитии технической механики имели
работы французских ученых Понселе A788—1867), Кориолиса
A792—1843), Резаля A828—1896) и других; в этих работах были
заложены основы динамики машин, причем исходным пунктом
в этих исследованиях является энергетический принцип. При-
Применяя этот принцип, Поиселе впервые (в 1829 г.) сформулировал
понятие механической работы.
Развитие техники предъявляло к теоретической механике
требование создания более простых и наглядных методов решения
различного рода технических задач, так как аналитические ме-
методы нередко оказывались весьма сложными и мало пригодными
в инженерной практике. Этим объясняется успешное развитие
в XIX в., главным образом в Германии, графостатики, основные
положения которой и их применение к решению статических
задач были указаны еще Вариньоном, а также дальнейшее разви-
развитие геометрических методов в механике. Из работ этого направле-
направления прежде всего нужно отметить работу французского ученого
Пуансо A777—1859) «Элементы статики» A804), которая явилась
основанием современной геометрической статики твердого тела.
В этой работе Пуансо устанавливает понятие пары сил, разраба-
разрабатывает теорию пар и затем применяет эту теорию к решению в об-
общем случае задачи о приведении к простейшему виду системы
сил, приложенных к твердому телу, и к выводу условий равнове-
равновесия твердого тела.
Пуансо применял геометрические методы исследования также
в кинематике и в динамике твердого тела, где он дал весьма про-
простую и наглядную геометрическую интерпретацию движения твер-
твердого тела.
В XIX в. продолжает развиваться и аналитическая механика,
ведущая свое начало от Лагранжа. Это развитие идет преимуще-
22 ВВЕДЕНИЕ
ственно по двум направлениям: 1) установление так называемых
вариационных принципов механики и 2) усовершенствование и
разработка новых методов интегрирования дифференциальных
уравнений движения механической системы.
Сушность вариационных принципов механики состоит в том,
что некоторая определенная функция координат механической
системы н их производных но времени для действительного движе-
движения системы имеет наименьшее значение по сравнению со всеми
другими движениями, кинематически возможными для данной
системы. К этим принципам относятся:
1) «принцип наименьшего действия», идея которого была впер-
впервые высказана без доказательства французским философом Мопер-
тюи A698—1759); дальнейшее развитие этого принципа, его точная
формулировка и математическое доказательство принадлежат Ла-
гранжу и английскому математику Гамильтону A805—1863);
2) «принцип наименьшего принуждения», установленный вели-
великим немецким математиком Гауссом A777—1855);
3) «принцип прямейшего пути» знаменитого немецкого физика
Герца A857—1894), представляющий собой обобщение закона
инерции Галилея — Ньютона.
Каждый из этих принципов может быть математически выве-
выведен при помощи дифференциальных уравнений движения меха-
механической системы, п наоборот, уравнения движения системы вы-
выводятся как следствие из каждого вариационного принципа.
Разработку новых методов интегрирования дифференциальных
уравнений динамики мы находим главным образом в трудах Га-
Гамильтона, французского ученого Пуассона A781—1840) и выдаю-
выдающегося немецкого математика Якоби A804—1851). В связи с про-
прогрессом машиностроения, железнодорожной и строительной тех-
техники, с необходимостью исследования движения тел в сопротив-
сопротивляющейся среде в XIX в. и в особенности в текущем столетии
весьма быстро и успешно развивается механика сплошной среды —
гидро- и аэромеханика и теория упругости. Развитие этих разде-
разделов теоретической механики, представляющих собой в настоящее
время обширные самостоятельные дисциплины, связано с име-
именами таких крупнейших ученых, как Пуассон, Ляме, Навье,
Коши, Сен-Венан (во Франции), Гельмгольц, Кирхгоф, Клебш,
Мор, Прандтль (в Германии), Стоке, Грин, Томсон, Рэлей
(в Англии) и многих других.
Большой вклад в развитие теоретической механики внесли
наши отечественные ученые, среди которых мы имеем немало
внаменитых имен. Поэтому необходимо отдельно остановиться
на развитии этой науки в нашей стране.
В 1725 г. по указу Петра I, который придавал развитию наук
в России и в особенности техническому образованию государствен-
государственное значение, открывается в Петербурге Российская академия наук.
ВВЕДЕНИЕ 23
Первым русским академиком был гениальный М. В. Ломоносов
A711—1765) — основатель Московского университета. По выра-
выражению нашего великого поэта А. С. Пушкина, Ломоносов был сам
«русским университетом». В своей исключительно широкой и
разносторонней научной деятельности Ломоносов занимался фи-
физикой и химией, русской историей и литературой, горным делом
и металлургией, геологией и географией. Научная деятельность и
методологические взгляды Ломоносова имели огромное влияние на
развитие всей русской науки н, в частности, на развитие механики.
По своему мировоззрению Ломоносов являлся убежденным ма-
материалистом. Он требовал исследования природы не только мате-
математическими методами, но и путем постановки точных опытов,
неразрывно связывая при этом теорию с опытом. «Из наблюдений
установить теорию, через теорию направлять наблюдения есть
лучший всех способ изыскания правды», пишет Ломоносов. Он
считал, что все в природе находится в состоянии непрерывного
изменения, что материя и ее движение не могут ни исчезнуть, ни
возникнуть из ничего.
Исходя из этих взглядов, Ломоносов впервые экспериментально
установил закон сохранения вещества и высказал идею о законе
сохранения движения.
В одной из своих работ он говорит: «Все перемены, в натуре слу-
случающиеся, такого суть состояния, что сколько чего у одного тела
отнимается, столько присовокупляется к другому. Так, если где
убудет несколько материи, то умножится в другом месте... Сей
всеобщий естественный закон простирается и в самые правила
движения, ибо тело, движущее своей силой другое, столько же
оные у себя теряет, сколько сообщает другому, которое от него
движение получает».
Для Ломоносова основной целью всех его научных изысканий
являются благо и польза отечеству. Как великий и горячий патриот,
он упорно и настойчиво боролся за развитие русской отечественной
науки, боролся с сильным в то время немецким влиянием в Петер-
Петербургской академии наук.
Одновременно с М. В. Ломоносовым членом Петербургской ака-
академии наук в течение 35 лет состоял величайший математик и ме-
механик Леонард Эйлер A707—1783), который был приглашен в Рос-
Россию вместе с Д. Бернулли. В то время как Ньютон в своих «Нача-
«Началах» пользовался почти исключительно геометрическим методом,
Эйлер создал аналитические методы решения задач механики.
В своей работе «Механика» A736) он развивает, применяя ана-
аналитический метод, полную теорию свободного и несвободного
движения материальной точки и впервые дает уравнения движения
материальной точки в так называемой естественной форме.
Работа Эйлера «Теория движения твердых тел» A765) отно-
относится к динамике твердого тела. Здесь он дает в общем виде
24 ВВЕДЕНИЕ
дифференциальные уравнения вращательного движения твердого
тела, носящие его имя. В своих многочисленных работах, замеча-
замечательных по мастерству изложения, по новизне идей и методов,
Эйлер, помимо чисто математических исследований, занимался
также и различными техническими задачами, связанными глав-
главным образом с потребностями мореплавания и баллистики. Сюда
относятся его работы по астрономии, по теории морских приливов,
теории движения снаряда, по гидромеханике и многие другие;
в гидродинамике ему принадлежит вывод дифференциальных
уравнений движения идеальной жидкости. Творческий талант
Эйлера и разносторонность его научной деятельности были пора-
поразительны; достаточно сказать, что им написано 865 научных
сочинений.
М. В. Ломоносов высоко ценил труды Л. Эйлера и свою основ-
основную идею о всеобщем законе сохранения вещества и движения
впервые высказал в письме к Л. Эйлеру.
Характерное для XIX в. быстрое развитие техники, внедрение
в промышленность паровых машин, строительство железных
дорог, развитие военной промышленности содействует успешному
развитию механики и в России и кладет отпечаток на содержа-
содержание работ русских ученых.
Выдающимся русским математиком и механиком XIX в. яв-
является М. В. Остроградский A801—1862) — крупнейший пред-
представитель аналитического направления в механике и родона-
родоначальник русской школы аналитиков-механиков. Его главней-
главнейшие работы относятся к аналитической механике и ее основным
принципам. Так, принцип возможных перемещений Остроград-
Остроградский обобщил на случай так называемых иеудерживающих свя-
связей, т. е. связей, выражающихся математически неравенствами,
и впервые применил этот принцип в общей теории удара.
М. В. Остроградский независимо от Гамильтона и в более общей
форме установил один из основных принципов механики — прин-
принцип наименьшею действия. Ряд важных исследований Остро-
^адского относится к гидромеханике, теории упругости и бал-
баллистике. Помимо обширнойиразностороинейнаучной деятельности,
Остроградский вел также большую педагогическую работу, чи-
читая свои блестящие лекции во многих высших учебных заведе-
заведениях. Он поднял преподавание механики и математики в России
на высокий по тому времени уровень. Н. Е. Жуковский по до-
достоинству оценил научные заслуги Остроградского, сказав в
своей речи, посвященной его памяти: «Россия может гордиться
именем Остроградского,- п Москва, сердце России, хранит в сте-
стенах своего университета его высокие научные заветы».
Другим выдающимся русским математиком и механиком
XIX в. является П.Л. Чебышев A821 —1894), работы которого
оказали огромное влияние на развитие математики и механики
ВВЕДЕНИЕ 25
как в России, так и за границей. Его труды по математике
создали новые направления в теории функций, теории чисел и
в теории вероятностей. В области механики Чебышев является
основоположником русской школы теории механизмов и машин.
Придавая огромное значение сближению теории с практикой
и роли математики и теоретической механики в развитии техники,
Чебышев писал: «Сближение теории с практикой дает самые
благотворные результаты, и не одна только практика от этого
выигрывает; сами науки развиваются под влиянием ее: она от-
открывает им новые предметы для исследования или новые стороны
в предметах, давно известных. Несмотря на ту высокую степень
развития, до которой доведены науки математические трудами
великих геометров трех последних столетий, практика явно обна-
обнаруживает неполноту их во многих отношениях; она предлагает
вопросы, существенно новые для науки, и, таким образом, вызы-
вызывает на изыскание совершенно новых метод. Если теория много
выигрывает от новых приложений старой методы или от новых
развитии ее, то она еще более приобретает открытием новых
метод, и в этом случае наука находит себе верного руководителя
в практике». Этот взгляд на связь теории с практикой являлся
для Чебышева руководящим во всей его научной деятельности.
Применяя в теории механизмов новые созданные им методы мате-
математического исследования, Чебышев разработал теоретически и
построил свыше 40 новых механизмов; в том числе он дал новую
теорию и новые конструкции механизмов, преобразующих враща-
вращательное движение в прямолинейно-поступательное, а также меха-
механизмов с остановками, которые находят широкое применение
в современной автоматике.
Одним из наиболее талантливых учеников П. Л. Чебышева
является гениальный русский математик А. М. Ляпунов A857 —
1918).
Почти все работы А. М. Ляпунова относятся к двум трудней-
труднейшим задачам механики: 1) к задаче об отыскании тех форм, какие
может принимать однородная жидкость, равномерно вращающаяся
вокруг некоторой постоянной оси, если частицы этой жидкости
притягиваются по закону Ньютона, и 2) к задаче об устойчивости
движения механических систем.
Первая из этих задач, поставленная еще Ньютоном, имеет
весьма важное значение в астрономии, так как с решением задачи
об устойчивых формах вращающейся жидкости связаны вопросы
о форме звезд и планет, о происхождении солнечной системы.
Мысль заняться этой проблемой была дана Ляпунову его учите-
учителем П. Л. Чебышевым. Вторая задача, т. е. задача об устойчи-
устойчивости движения механической системы, играет первостепенную
роль в современной технике, например, при расчете самолета на
устойчивость во время полета.
26 ВВЕДЕНИЕ
Результаты, полученные А. М. Ляпуновым в его удивительных
по глубине, остроумию и силе математического таланта, исследо-
исследованиях, далеко продвинули решение этих труднейших и важней-
важнейших проблем механики. Идеи Ляпунова, создавшего новое на-
направление и новые методы исследования в теории устойчивости
движения, успешно разрабатываются в настоящее время многими
советскими и зарубежными учеными.
Помимо проблемы устойчивости движения, одной из класси-
классических задач теоретической механики является задача о движении
твердого тела вокруг неподвижной точки, т. е. тела, закреплен-
закрепленного при помощи сферического шарнира. Этой задачей занима-
занимались самые выдающиеся ученые-механики: Эйлер, Лагранж,
Пуансо. Эйлер дал аналитическое решение этой задачи в простей-
простейшем случае, а именно в случае движения тела вокруг неподвиж-
неподвижной точки по инерции. Пуансо для этого же случая движения твер-
твердого тела вокруг неподвижной точки дал наглядную геометри-
геометрическую картину этого движения. Лагранж решил эту задачу
в том случае, когда твердое тело имеет ось динамической симметрии,
проходящую через неподвижную точку. Задача о движении твер-
твердого тела вокруг неподвижной точки имеет первостепенное зна-
значение для теории гироскопов, которая находит широкое приме-
применение в различных областях современной техники. После Эйлера
и Лагранжа многие ученые безуспешно пытались найти новые
случаи решения этой задачи. В 1888 г. Парижская академия
наук объявила конкурс на лучшее теоретическое исследование
движения твердого тела вокруг неподвижной точки. Премию в этом
конкурсе получила первая русская женщина-математик Софья
Васильевна Ковалевская A850—1891). В своей работе «Задача
о движении твердого тела вокруг неподвижной точки» она дала
полное решение этой задачи в новом случае, значительно более
слолшом по сравнению со случаями Эйлера и Лагранжа. Эта ра-
работа доставила С. В. Ковалевской мировую известность и, по вы-
выражению Н. Е. Жуковского, «немало способствовала прославле-
прославлению русского имени».
После Ковалевской задачей о движении твердого тела вокруг
неподвижной точки занимались многие русские ученые: Н. Е. Жу-
Жуковский, Д. Н. Горячев, С. А. Чаплыгин, В. А. Стеклов и др.,
которые получили в своих исследованиях много новых и интерес-
интересных результатов.
В настоящее время в работах советских и зарубежных ученых
эта область динамики твердого тела разрабатывается в направле-
направлении развития теории гироскопов и ее технических применений.
В конце XIX в. в России получил свое начало новый раздел
теоретической механики — механика тела переменной массы. Про-
Профессор Ленинградского университета и Ленинградского политех-
политехнического института, автор известного сборника задач по теорети-
ВВЕДЕНИЕ 27
ческой механике И. В. Мещерский A859—1935) в своей диссерта-
диссертации «Динамика точки переменной массы» A897) впервые поставил
в общем виде задачу о движении материальной точки, масса ко-
которой изменяется с течением времени, и вывел основное дифферен-
дифференциальное уравнение движения такой точки. Кроме того, в этой
работе он рассмотрел решение ряда частных задач о движении
тела переменной массы.
Работы И. В. Мещерского по механике тел переменной массы,
относящиеся к концу XIX и началу XX в., являются ярким при-
примером того, как труды ученых иногда намного опережают техни-
техническую мысль своего времени; исследования Мещерского нашли
широкое применение только в технике нашего времени, много лет
спустя после их опубликования. В настоящее время механика тела
переменной массы является основой теории реактивных двигате-
двигателей и динамики ракет.
Великий русский ученый Николай Егорович Жуковский
A847—1921), профессор Московского университета и Московского
высшего технического училища, является основоположником
современной теоретической п экспериментальной аэродинамики.
Ему принадлежит огромное число работ, имеющих первостепен-
первостепенное значение во всех областях теоретической механики и главным
образом в области аэро- и гидромеханики. Из его работ по гидро-
гидромеханике наиболее крупными являются следующие:
1. «Кинематика жидкого тела» A876).
Эта работа посвящена изучению распределения скоростей и
ускорений в движущейся жидкости.
2. «О движении твердого тела, имеющего полости, наполненные
однородной капельной жидкостью» A885). За эту работу, имеющую
весьма важное значение не только в теоретической механике, но
и в астрономии, II. Е. Жуковский получил от Московского уни-
университета премию имени проф. Брашмана (основателя Москов-
Московского математического общества).
3. «Видоизменение метода Кирхгофа» A890). В этой работе
И. Е. Жуковский дал новый метод исследования струйного тече-
течения капельной жидкости и применил этот метод к решению многих
новых задач.
По поводу этих трех работ сам Н. Е. Жуковский в связи с со-
сорокалетием своей научной деятельности в 1911 г. писал: «Мои
главные работы по гидромеханике представляют три статьи:
„Кинематика жидкого тела", „Движение твердого тела с полос-
полостями, наполненными жидкостью" и „Видоизменение метода Кирх-
Кирхгофа". Во всех своих работах я стремился нарисовать картину
Движения — дать его отчетливый геометрический образ».
Геометрическому методу в механике Н. Е. Жуковский придавал
очень большое значение не только в научных исследованиях, но
и в преподавании теоретической механики.В статье «О значении
28 ВВЕДЕНИЕ
геометрического истолкования в теоретической механике» он
говорит:
«Если могут быть споры о самостоятельной роли геометрии при
решении недоступных до сих пор задач динамики, то ее высокое
значение в преподавании механики не подлежит сомнению. Ум
изучающих весьма склонен к формальному пониманию. Я из
своего педагогического опыта знаю, как часто запоминаются фор-
формулы без понимания стоящих за ними образов. В этом отношении
геометрическое толкование, предпочтение геометрического дока-
доказательства аналитическому всегда приносит пользу. Если фор-
формулы и подстановки некоторыми из изучающих легко запоми-
запоминаются, то так же скоро они исчезают бесследно из памяти; но
раз усвоенные геометрические образы, рисующие картину рас-
рассматриваемого явления, надолго западают в голову и живут
в воображении изучающего».
Весьма важное практическое значение имела работа Н. Е. Жу-
Жуковского «О гидравлическом ударе», которая была написана им
в результате экспериментальных исследований гидравлического
удара в трубах московского водопровода.
В этой работе Н. Е. Жуковский дал строгое математическое
исследование явления гидравлического удара, возникающего при
быстром закрытии задвижки в водопроводной трубе, и выпел
формулу для ударного давления, учитывающую как упругие свой-
свойства воды и стенок трубы, так и скорость движения воды в трубе.
Эта работа, переведенная на многие иностранные языки, доста-
доставила Жуковскому мировую известность. Но все же наиболее важ-
важные его открытия относятся к области аэродинамики. Его глубокие
идеи в этой области являются до сих пор руководящими. Знаме-
Знаменитая теорема Жуковского о подъемной силе служит основой
современной теории крыла самолета.
Н. Е. Жуковский является также автором вихревой теории
гребного винта, на основании которой проектируются и строятся
пропеллеры большей части современных самолетов.
Работы Жуковского дали возможность при конструировании
новых типов самолетов применять строгий математический расчет.
Н. Е. Жуковский был не только выдающимся теоретиком, по п
создателем экспериментальной аэродинамики. Он является основа-
основателем крупнейшего научно-исследовательского института ЦАГИ
(Центральный аэрогидродинамический институт). Советское пра-
правительство высоко оценило труды Н. Е. Жуковского: в постанов-
постановлении, принятом Советом Народных Комиссаров в ознаменование
пятидесятилетия научной деятельности Н. Е. Жуковского и под-
подписанном В. И. Лениным 3 декабря 1920 г., были отмечены огром-
огромные заслуги Н. Е. Жуковского как «отца русской авиации».
Жуковский создал многочисленную и блестящую школу русских
гидро- и аэромехаников. Одним из крупнейших представителей
ВВЕДЕНИЕ 29
этой школы является Сергей Алексеевич Чаплыгин A869—■
1942).
Главные работы С. А. Чаплыгина относятся к динамике твердого
тела и к гидро- и аэродинамике. По динамике твердого тела им
написан ряд работ, относящихся к задаче о катании твердого тела
по шероховатой плоскости, а также к задаче о движении твердого
тела вокруг неподвижной точки, которой, как указывалось выше,
занимались после С. В. Ковалевской многие русские ученые.
Первой работой С. А. Чаплыгина по гидродинамике является
его исследование «О движении твердого тела в жидкости» A893).
Эта работа получила высокую оценку Н. Е. Жуковского, который
особенно отметил найденную Чаплыгиным наглядную геометри-
геометрическую интерпретацию движения твердого тела в жидкости.
Целый ряд важнейших работ Чаплыгина относится к теории
самолета («О давлении плоскопараллельного потока на прегра-
преграждающие тела», «К общей теории крыла моноплана», «Теория ре-
решетчатого крыла», «О влиянии плоскопараллельиого потока воз-
воздуха на движущееся в нем цилиндрическое крыло» и др.).
В этих работах С. А. Чаплыгин дает общие формулы для опре-
определения сил давления воздуха на крыло самолета, применяя эти
общие формулы к определению подъемной силы различного вида
крыльев; устанавливает основы теории составного крыла само-
самолета, выясняя при этом преимущества таких составных крыльев;
исследует вопрос об устойчивости самолета. В последней из ука-
указанных работ, опубликованной в 1926 г., С. А. Чаплыгин впервые
создает общий метод для нахождения сил давления воздуха на
крыло самолета при каком угодно его движении. Во всех прежних
исследованиях по теории крыла предполагалось, что крыло дви-
движется поступательно с постоянной скоростью, что, понятно,
далеко не всегда соответствует действительности, как, например,
в том случае, когда самолет делает мертвую петлю. В этой работе
С. А. Чаплыгин заложил основы нового важного раздела аэро-
аэродинамики и теории самолета. Необходимо особо отметить доктор-
докторскую диссертацию С. А. Чаплыгина «О газовых струях» A903),
в которой он дал метод решения задач, относящихся к струйному
течению газа, учитывая влияние сжимаемости газа на силу его
давления на обтекаемое тело. Эта работа, получившая достойную
оценку и всеобщее признание только через 30 лет после ее опубли-
опубликования, имеет выдающееся значение для современной скорост-
скоростной авиации, так как при тех больших скоростях, которых дости-
достигают современные самолеты, необходимо учитывать сжимаемость
воздуха.
Вместе со своим учителем Н. Е. Жуковским С. А. Чаплыгин
сыграл выдающуюся роль в развитии русской авиации не только
своими теоретическими исследованиями, но и своей организатор-
организаторской и руководящей работой в ЦАГИ.
30 ВВЕДЕНИЕ
Идеи Жуковского и Чаплыгина, оказавшие огромное влияние
на развитие гидро- и аэромеханики не только в нашей стране, но
и во всем мире, успешно разрабатываются в настоящее время
в трудах многих советских и зарубежных ученых.
Конечно, в кратком введении к курсу механики не представ-
представляется возможным сколько-нибудь подробно осветить развитие
механики и в дореволюционной России и в особенности в Советском
Союзе. Мы здесь упомянули только о некоторых наиболее выдаю-
выдающихся представителях русской науки в области механики, науч-
научные труды которых признаны теперь классическими.
В теоретической механике обычно различают три основных раз-
раздела: статику, кинематику и динамику.
Статика есть учение о равновесии материальных тел. Кинема-
Кинематика занимается изучением движения материальных тел, причем
это движение изучается только с геометрической стороны, неза-
независимо от сил, действующих на движущиеся тела.
Предметом динамики является изучение движения материаль-
материальных тел в связи с действующими на них силами.
Первые две части настоящего «Курса теоретической механики»
(статика и кинематика) посвящены механике абсолютно твердого
тела; в третьей части (в динамике) мы будем изучать как движение
отдельной материальной точки, так ц движение системы материаль-
материальных точек и, в частности, движение абсолютно твердого тела.
СТАТИКА
ГЛАВА 1
ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ
§ 1. Абсолютно твердое тело. Материальная точка.
Система отсчета
Первая часть настоящего курса теоретической механики — ста-
статика твердого тела — представляет собой учение о равновесии
сил, приложенных к твердому телу. В статике рассматриваются
следующие две основные задачи: 1) замена данной системы сил,
приложенных к твердому телу, другой системой сил, ей эквива-
эквивалентной, и 2) вывод общих условий, при которых твердое тело
под действием приложенных к нему сил остается в состоянии
покоя или в состоянии равномерного прямолинейного поступа-
поступательного движения (т. е. вывод условий равновесия сил, приложен-
приложенных к твердому телу).
Поэтому основными понятиями, с которыми прежде всего
приходится встречаться при изучении статики, являются понятие
твердого тела и понятие силы.
Необходимо заметить, что в статике твердое тело рассматри-
рассматривается как абсолютно твердое. Абсолютно твердым называется
такое тело, расстояния между каждыми двумя точками которого
остаются всегда неизменными; другими словами, абсолютно твер-
твердое тело всегда сохраняет неизменной свою геометрическую форму
(не деформируется). В действительности, как известно из опыта,
не существует абсолютно твердых тел. Во всяком твердом теле мы
всегда наблюдаем при соответствующих условиях те или иные
деформации. Например, стальная балка, лежащая на двух опорах,
испытывает деформацию изгиба под действием положенного на нее
груза; если возьмем металлический стержень и прикрепим его вер-
вертикально одним концом к потолку, а к другому его концу подвесим
некоторый груз, то длина стержня при этом несколько увеличится;
в данном случае будем иметь деформацию растяжения.
Однако в дальнейшем изложении мы будем все-таки считать
тела абсолютно твердыми. Это объясняется следующими сообра-
соображениями: 1) если деформации, происходящие в твердом теле,
32 СТАТИКА
невелики, как это на самом деле часто и бывает, то в первом при-
приближении ими можно пренебречь; 2) считая рассматриваемые
тела абсолютно твердыми, мы тем самым значительно упрощаем
исследование действия сил на тело и условий, при которых силы
находятся в равновесии. Только изучив статику абсолютно твер-
твердого тела, можно затем перейти (в курсе сопротивления материа-
материалов) к рассмотрению более сложной задачи о равновесии деформи-
деформируемого тела.
Однако, если это упрощение оказывается достаточным для
успешного изучения статики твердого тела, то в динамике иссле-
исследование движения даже такой упрощенной модели, как абсолютно
твердое тело, представляет собой далеко не простую задачу. Как хо-
хорошо известно из повседневных наблюдений, движения отдель-
отдельных точек твердого тела в общем случае неодинаковы (отдельные
точки тела, например точки вагонного колеса, катящегося по
рельсу, движутся по различным траекториям с различными ско-
скоростями). Поэтому изучение динамики приходится начинать
с изучения движения еще более простого объекта — так назы-
называемой материальной точки.
Под материальной точкой в теоретической механике понимают
такое тело, размеры которого по всем направлениям весьма малы,
так что различием в движении отдельных точек этого тела можно
пренебречь.
В теоретической механике иногда и тела конечных размеров
рассматривают как материальные точки; это делают в тех случаях,
когда в условиях данной задачи размеры тела не играют сущест-
существенной роли и потому ими можно пренебречь. Например, в задаче
о движении планет вокруг Солнца планеты рассматриваются как
материальные точки ввиду того, что их размеры весьма малы срав-
сравнительно с их расстояниями от Солнца.
Если твердое тело конечных размеров имеет поступательное
движение, то все его точки движутся одинаково (они описывают
одинаковые траектории и имеют численно равные и одинаково
направленные скорости); примером такого поступательного дви-
движения твердого тела может служить прямолиней юе движение
кузова железнодорожного вагона. Чтобы определить в этом случае
движение твердого тела, достаточно, как увидим в динамике,
найти движение одной его точки — центра тяжести тела, пред-
предполагая при этом, что вся масса тела сконцентрирована в этой
точке. Поэтому в динамике в случае поступательного движения
твердого тела мы можем рассматривать это тело как материальную
точку, совпадающую с его центром тяжести и имеющую массу,
равную массе этого тела.
Если данные материальные точки так или иначе связаны между
собой, так что каждая из этих точек не может двигаться незави-
независимо от остальных, то такие точки образуют, как говорят, меха-
ГЛ i. ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ 33
ническую систему материальных точек, или, короче, просто систему.
Если при движении данной системы расстояния между ее точ-
точками остаются постоянными, то такая система материальных точзк
называется неизменяемой системой.
Всякое механическое движение материальной точки или мате-
материального тела конечных размеров мы можем наблюдать и изучать
только по отношению к какому-нибудь другому физическому телу,
например по отношению к Земле. При этом положение наблюдае-
наблюдаемого движущегося объекта относительно этого другого физиче-
физического тела определяется в механике при помощи некоторой выбран-
выбранной системы координат (большей частью системы декартовых
прямоугольных координат), неизменно связанной с этим физи-
физическим телом (например, с Землей). Система координат, неизменно
связанная с каким-нибудь физическим телом, относительно кото-
которого определяется положение данного движущегося объекта,
называется в механике системой отсчета.
Система отсчета, по отношению к которой являются справед-
справедливыми основные законы классической механики, т. е. основные
законы движения, установленные в точном и окончательном виде
Галилеем и Ньютоном, называется инерциалъной или галилеевой
системой отсчета. Понятно, что в классической механике при
изучении движения материальных тел мы должны пользоваться
ннерциалыюй системой отсчета. Вопрос о том, возможно ли и
каким образом применять законы классической механики к изу-
изучению движения, отнесенного к неинерциальной системе отсчета,
будет выяснен в динамике. Опыт и наблюдения показывают, что
при изучении механического движения в очень многих случаях
и почти во всех случаях технической практики систему отсчета,
связанную с Землей, можно с большой степенью точности считать
пнерциалыюй системой.
Поэтому в статике мы всегда будем пользоваться системой
отсчета, неизменно связанной с Землей.
В связи с этим следует подчеркнуть, что когда в статике мы
говорим, что данное тело находится в равновесии, т. е. что под
действием приложенных к нему сил тело остается в покое или
движется поступательно, равномерно и прямолинейно, то здесь
имеется в виду покой или движение тела по отношению к выбран-
выбранной нами инерциальной системе отсчета, т. е. по отношению
к Земле.
§ 2. Понятие силы
Понятие силы является одним из основных понятий механики.
Хотя это понятие каждому из нас хорошо знакомо из повседнев-
повседневного опыта и наблюдений, но к установлению понятия силы в его
общем виде наука пришла далеко не сразу. В течение долгого
времени не понимали, что сила, вызывающая ускоренное падение
2 И. М. Воронков
34 СТАТИКА
какого-нибудь тела на Землю, есть та же сила тяготения к Земле,
которая удерживает Луну на ее орбите при движении вокруг
Земли.
Первоначально понятие силы возникло из ощущения человеком
своих мускульных напряжений, когда он приводит в движение
какое-нибудь тело, например поднимает груз или бросает камень.
Постепенно это понятие было распространено на обширную об-
область различных механических и физических явлений и из субъек-
субъективного представления превратилось в научное понятие, отра-
отражающее объективное существование механического взаимодей-
взаимодействия материальных тел.
«Взаимодействие,— говорит Энгельс, — вот первое, что вы-
выступает перед нами, когда мы рассматриваем движущуюся
материю в целом с точки зрения теперешнего естествознания»
(Энгельс, Диалектика природы, 1949, стр. 183).
В природе мы наблюдаем различные формы взаимодействия
материальных тел, но в механике рассматриваются только меха-
механические взаимодействия, т. е. такие взаимодействия, в резуль-
результате которых происходит изменение скоростей взаимодействую-
взаимодействующих тел.
Мы постоянно наблюдаем, что окружающие нас тела изменяют
свое кинематическое состояние, т. е. видим, что изменяется не
только положение данного тела в пространстве, но и его скорость.
Так, например, тело, сначала находившееся в покое, в некоторый
момент приходит в движение; скорость тела при падении на Землю
возрастает; при торможении вагона его скорость уменьшается
и обращается в нуль при остановке вагона; при этом скорость дви-
движущегося тела часто изменяется ие только по величине, но и по
направлению. Где же причины этих изменений скорооти тела?
Эти изменения обусловлены механическим взаимодействием
материальных тел.
Взаимодействия материальных тел, в результате которых про-
происходит изменение кинематического состояния этих тел, назы-
называются в механике силами. Например, взаимодействие между
Солнцем и планетами называется силой всемирного тяготения;
взаимодействие Земли и всякого тела, в результате которого дви-
движение падающего на Землю тела ускоряется, мы называем силой
тяжести; когда пар, расширяясь, приводит в движение поршень
паровой машины, мы говорим, что на поршень действует сила
давления пара, и т. д.
Если имеем вообще два взаимодействующих материальных
тела (или две взаимодействующие материальные точки) А и В,
то в результате этого взаимодействия скорости обоих тел будут
изменяться. Наблюдая изменение скорости тела В, мы говорим,
что на него действует с некоторой силой тело А; эта сила, таким
образом, имеет источником тело А и объектом своего действия
ГЛ. i. ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ 35
тело В. Наоборот, наблюдая изменение скорости тела А, мы го-
говорим о силе, с которой на тело А действует тело В; следовательно,
эта сила имеет источником тело В и приложена к телу А.
Энгельс, анализируя понятие силы, подчеркивает, что в при-
природе не существует силы как особого фактора, находящегося вне
материи и не связанного с движением материи. Он указывает,
что к понятию силы мы приходим при наблюдении изменения ско-
скоростей взаимодействующих материальных тел, при «переносе
движения с одного тела на другое>>, т. е. при передаче движения
от одного тела к другому, например при передаче движения от
паровоза к вагону или при ударе двух тел.
Зная изменение скорости данного тела, мы можем определить
действующую на него силу. Поэтому сила является величиной,
характеризующей механическое взаимодействие материальных
тел. Понятие силы в механике оказывается весьма плодотворным
именно потому, что это понятие не только выражает механическое
взаимодействие тел, но и дает меру этого взаимодействия.
Важно заметить, что механическое взаимодействие материаль-
материальных тел может проявляться не только в изменении скоростей этих
тел, но также и в их деформации, т. е. в изменении их внутреннего
состояния, в изменении молекулярного движения частиц этих
тел, как в случае, например, взаимного давления двух тел, на-
находящихся в покое. В этом случае мы имеем, как говорят, стати-
статическое проявление силы.
Как было указано выше, в природе мы встречаемся с различ-
различными силами: силой тяжести, силой давления пара, силой притя-
притяжения или отталкивания наэлектризованных тел и т. д. В теоре-
теоретической механике физическая природа силы не играет роли, так
как здесь нас интересует только тот эффект, который производят
па данное твердое тело или на материальную точку действующие
на них силы независимо от физической сущности этих сил.
Как известно из опыта, действие силы на данное абсолютно
твердое тело, т. е. вызываемое ею изменение кинематического
состояния этого тела, вполне определяется следующими тремя
факторами: 1) точкой приложения силы, 2) направлением силы
и 3) численным значением силы.
Точкой приложения силы называется та материальная ча-
частица данного тела, на которую эта сила действует (которой
непосредственно передается движение от другого тела). Под на-
направлением данной силы понимают направление того перемещения,
Которое получает под действием этой силы материальная точка,
вначале находившаяся в покое. Прямая, по которой направлена
Данная сила, называется линией действия этой силы; так, напри-
например, сила тяжести направлена по вертикали вниз.
Найти численное значение данной силы — это значит срав-
сравнить ее с некоторой силой, принятой за единицу. За единицу силы
2»
36
СТАТИКА
в технической системе единиц принимается килограмм, и числен-
численное значение каждой силы выражается, следовательно, в кило-
килограммах. При статическом способе измерения сил применяют
специальные приборы, называемые динамометрами (силомерами).
Примером простейшего из них могут служить обыкновенные
пружинные весы, принцип действия которых основан на деформа-
деформации (сжатии или растяжении) пружины, принимая во внимание,
что при действии равных сил пружина полу-
получает равные удлинения или сжатия х).
На рис. 1 изображен один из таких динамо-
динамометров. Точка А динамометра закрепляется не-
неподвижно; если к крючку В приложить силу,
численное значение которой нужно найти, то это
численное значение определяется по положению
на циферблате "Конца стрелки, соединенной си-
системой рычагов с пружиной CD. При этом, ко-
конечно, шкала циферблата должна быть предва-
предварительно проградуирована путем подвешивания
к крючку В грузов в 1, 2, 3 и т. д. килограммов.
В механике, так же как в физике и в других
науках, различают два рода величин: векторные
и скалярные; если при определении данной ве-
величины приходится принимать во внимание не
только ее численное значение, но также и ее на-
направление, то такая величина называется вектор-
векторной; если же в характеристике данной величины направление не
играет никакой роли, то эта величина называется скалярной.
Примерами скалярных величин могут служить объем тела, тем-
температура. Численное значение векторной величины называется
также ее модулем. Векторные величины графически изображают-
изображаются в виде отрезков, имеющих определенную длину и определен-
определенное направление, т. е. в виде векторов. Направление вектора
указывается стрелкой, стоящей на его конце. Два вектора счи-
считаются равными, если они имеют равные модули и одинаковое
направление (т. е. параллельны и направлены в одну сторону).
Сила представляет собой векторную величину, так как эффект
действия силы на тело определяется не только ее численным значе-
значением, но также и ее направлением. Поэтому графически силы изо-
изображаются в виде векторов. При этом длина вектора выражает
в произвольно выбранном масштабе численное значение (модуль)
данной силы, прямая, на которой расположен вектор, и его на-
направление указывают линию действия и направление силы, а на-
начало вектора определяет точку приложения силы.
*) Друг°й> динамический, способ определения численного значения
и направления силы будет указан в дашамике.
ГЛ t ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ 37
Мы будем обозначать вектор одной жирной буквой или двумя
светлыми буквами (обозначающими начало и конец вектора) с чер-
черточкой наверху. Модуль вектора мы будем обозначать той же
светлой буквой или теми же двумя буквами, но без черточки
наверху. Например, модуль вектора Р равен Р пли модуль век-
вектора АВ равен АВ.
§ 3. Аксиомы статики
Совокупность сил, приложенных к данному твердому телу,
называется системой сил.
Если под действием данной системы сил твердое тело остается
в покое (по отношению к выбранной инерциальной системе от-
отсчета) или движется поступательно, равномерно и прямолинейно,
т. е. так, что все его точки движутся по прямым линиям с одина-
одинаковой постоянной скоростью, то такое состояние тела называется
состоянием равновесия, а приложенная к нему система сил назы-
называется уравновешивающейся системой. Поскольку такая система
сил не вызывает изменения скорости тела, то можно сказать,
что уравновешивающейся системой сил называется такая система,
которая, будучи приложена к абсолютно твердому телу, нахо-
находящемуся в состоянии равновесия, не нарушает этого состояния
при условии, что все до этого действовавшие на тело силы остаются
без изменения. Если к данному телу приложена уравновешиваю-
уравновешивающаяся система сил, то говорят также, что эти силы находятся
в равновесии, или взаимно уравновешиваются. Одна из сил
уравновешивающейся системы называется уравновешивающей по
отношению ко всем остальным.
Если одну систему сил, приложенных к данному твердому
телу, можно заменить другой системой, не нарушая при этом его
покоя (если под действием первой системы тело находится в по-
покое) или не изменяя его движения (которое оно получает под дей-
действием пернои системы сил), то такие две системы сил называют-
называются эквивалентными. Из этого определения следует, что две см-
стемы сил, эквивалентные третьей, эквивалентны между собой.
Если данная система сил эквивалентна одной силе, то эта
сила называется равнодействующей данной системы сил. В основе
учения о равновесии абсолютно твердых тел лежат некоторые
простые положения, которые являются постулатами или аксио-
аксиомами статики. Эти аксиомы выражают те основные факты, кото-
которые дают нам опыт и наблюдения при изучении действия сил на
абсолютно твердое тело.
Аксиома I. Для равновесия двух сил, приложенных к абсо-
абсолютно твердому телу, необходимо и достаточно, чтобы эти
силы были равны по модулю и направлены по прямой, соединяющей
точки их приложения, в противоположные стороны.
38 статика
Аксиома II. Не изменяя действия данной системы сил на
абсолютно твердое тело, можно прибавить к этой системе или
отнять от нее две уравновешивающиеся силы, т. е. две силы, равные
по модулю и направленные по одной прямой в противоположные
стороны.
Смысл этой аксиомы заключается в следующем:
Пусть на тело действует данная система сил Fx, F2, ..., Fn.
Если приложим к этому телу еще две уравновешивающиеся силы
F и F', то полученная после этого система п -f- 2 сил будет экви-
эквивалентна данной системе п сил, т. е. (F, F', F1} F2, ..., Fn) =
= (F1} F2, ..., Fn), где знак = обозначает эквивалентность сил.
Точно так же, если в данной системе сил Fx, F2, ..., Fn имеются две
уравновешивающиеся силы, например силы Fx и F2, то данная си-
система сил будет эквивалентна той же системе за исключением
этих двух уравновешивающихся сил, т. е.
(Flt F%, Fz, ..., Fn) = (Fa, F4, ..., Fn).
Этой аксиомой часто пользуются при выводе многих теорем
статики.
Следствие 1. Не изменяя действия данной силы на абсо-
абсолютно твердое тело, точку приложения этой силы можно перено-
переносить по ее линии действия.
Доказательство. Пусть на тело действует сила F
(рис. 2). Возьмем на линии действия этой силы какую-нибудь
точку В и приложим в ней две силы
F1 и F2r направленные по прямой АВ
в пРотивоположнь1е стороны, причем
F1 — F2 = F.- Так как силы F1 и F2,
так же как и силы F и F2, уравнове-
шиваются (аксиома I), то на основа-
основании аксиомы II заключаем, что система
трех сил Fj, F2 и F эквивалентна, с одной стороны, силе F и,
с другой стороны, силе Fl7 т. е.
(F, Fb Ft)~F и (F, Fu Ft) = Fu
откуда следует, что F = Flt т. е. сила F эквивалентна силе Fu
что и требовалось доказать.
Отсюда следует, что, поскольку точку приложения силы можно
переносить по линии действия этой силы, вектор, изображающий
данную силу, приложенную к абсолютно твердому телу, есть
вектор скользящий. Этим свойством силы постоянно пользуются
в статике абсолютно твердого тела, но при этом не следует за-
забывать, что следствие 1, так лее как и предыдущие аксиомы, при-
применимы только к абсолютно твердому телу.
ГЛ. I. ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ 39
Следствие 2. Если к абсолютно твердому телу прило-
приложена уравноеешиеающаяся система сил, то одна из этих сил, взя-
взятая в обратном направлении, является равнодействующей для всех
остальных сил.
Доказательство. Пусть данное твердое тело нахо-
находится в равновесии под действием системы сил Fl, F2, F3, ..., Fn
(рис. 3). Заменим систему сил F2, F3, ..., Fn одной силой —• F1 ]),
приложенной в той же точке, что и сила Fx, т. е. силой, рав-
равной но модулю и противоположной по направлению силе F,.
Так как силы Fx и —/*\ согласно аксиоме I
уравновешиваются, то после произведенной за-
замены равновесие тела не нарушается. Отсюда
на основании определения понятия эквивалент-
эквивалентности сил заключаем, что система сил F2>
F3, ..., Fn эквивалентна силе — Fu т. е.
а потому сила — Fx является равнодействую-
равнодействующей системы сил, F2, F3, ..., Fn, что и Рис. 3.
требовалось доказать. Отсюда следует, что
нахождение равнодействующей данной системы сил можно свести
к нахождению силы, уравновешивающей эту систему.
Аксиома III. Равнодействующая двух сил, приложенных
к абсолютно твердому телу в одной точке, равна их геометриче-
геометрической сумме, т. е. выражается по модулю и направлению диагональю
параллелограмма, построенного на этих
силах (рис. 4).
Если обозначим через R равнодейст-
равнодействующую двух данных сил /\ и F2, то
на основании этой аксиомы имеем:
R = Fi -4- F%. .
1 Рис. 4.
Знак -г здесь обозначает операцию гео-
геометрического сложения сил, т. е. сложения двух векторов Fx и
F2 по правилу параллелограмма.
Пользуясь законом параллелограмма сил, докажем следующую
теорему о трех уравновешивающихся силах.
Теорема. Если три непараллельные силы, лежащие в
одной плоскости, уравновешиваются, то их линии действия пере-
пересекаются в одной точвц.
Доказательство. Пусть данное тело находится в
равновесии под действием трех сил Fx, F2 и F3, приложенных
в точках Аг, А.2 и Ая (рис. 5). Продолжим линии действия сил
^i и F2 до их пересечения в точке В; перенесем их точки при-
х) Знак — (минус), стоящий перед вектором, указывает на изменение
направления этого вектора на противоположное.
40 СТАТИКА
ложения в эту точку В и сложим затем эти силы по правилу
параллелограмма; получим равнодействующую силу R.
Если заменим силы Fx и F% одной эквивалентной им силой R,
то равновесие не нарушится; следовательно, силы R и Fs уравно-
уравновешиваются, а потому эти две силы должны быть равны по модулю
и направлены по одной прямой в противоположные стороны
(аксиома I). Поэтому линия действия силы F3 совпадает с линией
действия силы R и, сле-
следовательно, проходит через
точку В, что и требова-
требовалось доказать.
Как было указано в
предыдущем параграфе,
когда мы говорим, что
к даннолгу телу А прило-
приложена некоторая сила, то
Рис. 5. это значит, что на тело А
действует какое-то другое
тело В, причем это действие выражается в изменении скорости
тела А. Но действие одного тела на другое никогда не может быть
односторонним: мы всегда наблюдаем взаимодействие материаль-
материальных тел. Следующий закон устанавливает весьма важный факт,
относящийся к взаимодействию двух тел.
Аксиома IV. Силы, с которыми действуют друг на друга
два тела, всегда равны по модулю и направлены по одной прямой
в противоположные стороны.
Этот закон был сформулирован впервые Ньютоном в его «Нача-
«Началах» и называется законом равенства действия и противодействия.
Если, например, два тела давят друг на друга, то сила давления
(действие) первого тела на второе равна по численному значению и
противоположна по направлению силе давления (противодействию)
второго тела па первое. Если тело А (Земля) притягивает другое
тело В (Луну) с некоторой силой F, то и тело В притягивает А
с силой, численно равной и направленной противоположно силе F.
Важно заметить, что действие и противодействие представляют
собой две силы, приложенные всегда к двум разным телам. По-
Поэтому нельзя сказать, что эти две силы уравновешиваются в том
смысле, как это говорят о двух численно равных силах, приложен-
приложенных к одному и тому же твердому телу и направленных по одной
прямой в противоположные стороны.
Аксиома V. Если деформируемое (не абсолютно твердое)
тело, находящееся под действием данных сил в состоянии равно-
равновесия, станет абсолютно твердым (отвердеет), то его равновесие
не нарушится.
Этот закон называется принципом отвердевания; он имеет важ-
важное значение при изучении равновесия деформируемых тел. Из
ГЛ. 1. ОСНОВНЫЕ ПОНЯТИЯ И АКСИОМЫ СТАТИКИ 41
этого закона следует, что условия, которым должны удовлетво-
удовлетворять при равновесии силы, приложенные к абсолютно твердому
телу, необходимо должны соблюдаться и при равновесии те-
тела деформируемого. Поэтому этот закон устанавливает связь
между статикой абсолютно твердого тела и статикой деформи-
деформируемых тел.
§ 4. Связи и реакции связей
Если данное твердое тело может получить любое перемещение
в пространстве, то такое тело называется свободным. Если же тело
поставлено в такие условия, в силу которых некоторые, переме-
перемещения для него становятся невозможными, то такое тело назы-
называется несвободным. Эти условия, стесняющие свободу движения
тела, называются в механике связями. Связи, с которыми прихо-
приходится встречаться в статике, практически осуществляются при
помощи материальных тел, твердых или гибких. Сила, с которой
тело, осуществляющее связь, действует на данное рассматривае-
рассматриваемое тело, препятствуя его перемещению в том или ином направ-
направлении, называется реакцией (противодействием) этой связи.
Направление реакции связи противоположно тому направлению,
по которому связь препятствует двигаться данному телу.
Из аксиомы IV следует, что сила, с которой данное тело дей-
действует на тело, осуществляющее связь, и реакция этой связи
всегда имеют равные модули и противоположные направления.
В задачах статики почти всегда приходится рассматривать
равновесие несвободного тела, т. е. тела, так
пли иначе закрепленного или имеющего ту пли
иную опору. В зависимости от характера за-
закрепления тела или от вида опоры можно ука-
указать следующие основные типы связей:
1. Тело опирается па неподвижную поверх-
поверхность в точке А (рис. 6); в этом случае реак-
реакция опорной поверхности приложена к телу Рис. 6.
в точке А и направлена при отсутствии трения
по нормали к опорной поверхности в этой точке г). Поэтому эта
сила называется нормальной реакцией и обозначается обычно
через N.
2. Тело опирается на неподвижную точку А (папример, на
острый копец неподвижного стержня, рис. 7); в этом случае
реакция N стержня приложена к телу в точке А и направлена
по нормали к поверхности тела, если трения между телом и
опорой нет.
х) Нормалью к поверхности называется перпендикуляр к касательной
плоскости, проведенный .через точку касания.
42
СТАТИКА
3. Тело опирается на неподвижную линию (например, на
ребро двугранного угла). В этом случае, так же как и в преды-
Рис. 7
■'/////////////Л
Рис. Ь.
Рис. 9.
дущем, реакция опоры при отсутствии трения направлена по
нормали к поверхности данного тела, как указано на рис. 8
(сила Nа)\ реакции Nb и Nq направлены по
нормалям к соответствующим опорным плоско-
плоскостям.
4. Связь осуществляется при помощи гибкого
тела (нити, каната, цепи). Реакция такой связи
(реакция нити) приложена к телу в точке при-
прикрепления к нему нити и направлена вдоль
этой нити, как указано на рис. 9, где 7\ и
Т2 изображают реакции нитей, на которых под-
подвешено данное тело.
5. Связь осуществляется при помощи непо-
неподвижного цилиндрического шарнира. На непо-
неподвижный болт (рис. 10) надевается втулка J), жестко скреплен-
скрепленная со стержнем А В, причем внутренний диаметр втулки равен
диаметру болта. Тело, жестко скрепленное со стержнем АВ,
может, очевидно, только вращаться
вокруг оси шарнира, перпендикуляр-
перпендикулярной к плоскости рисунка.
Если пренебречь трением в шарнире
(между поверхностью болта и поверх-
поверхностью втулки), то реакция неподвиж-
неподвижного болта направлена по нормали
к его цилиндрической поверхности в той точке, где поверхность
втулки прижимается к болту и, следовательно, лежит в пло-
плоскости, перпендикулярной к оси болта. Таким образом, если
связь осуществлена посредством неподвижного цилиндрического
шарнира, вокруг оси которого тело может вращаться, то напра-
Рис. 10.
х) Втулкой называется тело цилиндрической формы, имеющее соосиое
цилиндрическое отверстие.
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ
43
вления реакции такой связи заранее указать нельзя; эта реак-
реакция может иметь любое направление, перпендикулярное к оси
шарнира, в зависимости от положения
данного тела и приложенных к нему
других сил.
6. Связь осуществляется при по-
помощи сферического шарнира (рис. И).
В этом случае тело может перемещаться
так, что точка О (центр сферического
шарнира) остается неподвижной. На-
Направления реакции и в этом случае за-
заранее указать нельзя; эта реакция, ~~ '
нормальная к поверхности сфериче- Рис. 11.
ского шарнира, может быть направлена
по любой нормали к этой сферической поверхности, т. е. по
любой прямой, проходящей черев неподвижную точку О.
ГЛАВА 2
СХОДЯЩИЕСЯ СИЛЫ
§ 5. Сложение сил, приложенных в одной точке
Система сил, линии действия которых пересекаются в одной
точке, называется системой сходящихся сил.
Так как точки приложения сходящихся сил можно пере-
перенести по линиям их действия в точку пересечения этих линий,
то систему сходящихся сил
всегда можно заменить систе-
системой сил, приложенных в одной
точке.
Сложить две или несколь* о
сил
это значит заменить эти
силы одной силой, им эквива-
эквивалентной, другими словами, най-
найти их равнодействующую. За-
Задача о сложении двух сил,
приложенных к твердому телу в одной точке, решается, как мы
знаем из предыдущей главы, на основании закона параллело-
параллелограмма: равнодействующая двух сил, составляющих между собой
некоторый угол, равна по модулю и направлению диагонали
параллелограмма, построенного на этих силах (рис. 12). Обозна-
Обозначим угол между данными силами Fx и F2 через а, а углы, которые
Равнодействующая R образует с этими силами, обозначим соот-
соответственно через срх и ф2.
44
СТАТИКА
Из треугольника ADC находим:
F\ ~
или
откуда
cos A80° — a),
F-^F2 cos a,
R = YF\ -f F^ -j- 2F1Fi cos оп
A)
Далее, из того же треугольника, применяя теорему синусов, по-
получаем:
Fl F3 Л
sm фа
откуда
sm (Pi =-
sm
F« sin a
sin A80° — a) '
Fl sin a
И Sin (ft = -
R
B)
Формулы A) и B) позволяют определить модуль и направление
равнодействующей двух данных сил Fx и F2, образующих между
собой данный угол а.
Применяя последовательно правило параллелограмма, можно
найти равнодействующую скольких угодно сходящихся сил.
Найдем сначала равнодействующую трех сил Fl7 F2 и F3, при-
приложенных в одной точке и не лежащих в одной плоскости (г»ис. 13).
Рис. 13.
Рис. 14.
Сложив по правилу параллелограмма силы F1 и F2, получим их
равнодействующую Дх; сложив по тому же правилу силы В1
и F3, найдем равнодействующую R трех данных сил Flt F2 и F3.
Из рис. 13 видно, что равнодействующая трех сил, приложенных
в одной точке и не лежащих в одной плоскости, равна по модулю
и направлению диагонали параллелепипеда, построенного на этих
трех силах (правило параллелепипеда). Полезно заметить, что
при нахождении равнодействующей двух сил нет надобности
строить весь параллелограмм. Достаточно выполнить лишь сле-
следующее построение: из конца вектора первой силы Fj_ (рис. 14)
проводим вектор второй силы F2; вектор, соединяющий началь-
ГЛ 2. СХОДЯЩИЕСЯ СИЛЫ 45
ную и конечную точки полученной ломаной линии, изобразит,
очевидно, по модулю и направлению равнодействующую R двух
данных сил F1 и F2 (правило треугольника).
Пусть теперь нужно сложить несколько сил, например четыре
силы F1, F2, F3 и Fit приложенных в точке А (рис. 15). Сложим
сначала две первые силы F1 и F2; для
этого, на основании только что сделан-
сделанного замечания, из конца вектора i<\
проводим вектор ВС, равный вектору
F2; вектор АС ипоражает равнодей-
равнодействующую сил Fx и F2. Сложим теперь
силы АС и F3; для этого проведем иэ
точки С вектор CD, равный вектору
F3, и соединим точки А и D. Вектор
AD представляет собой равнодействую-
равнодействующую сил АС и F3 или, что то же, равнодействующую трех данных
сил: F1; F2 и F3. Остается теперь сложить силы AD и Ft; из точки
D проведем вектор DE, равный вектору Fir и соединим точки А и Е;
вектор АЕ изображает искомую равнодействующую R четырех
сил: Fx, F2, F3 и Ft. Выше было указано, что система сходящихся
сил всегда может быть заменена системой сил, приложенных
в одной точке; поэтому мы приходим к следующему заключению:
равнодействующая нескольких сходящихся сил выражается по
модулю и направлению вектором, соединяющим начальную и
конечную точки ломаной линии, стороны которой представляют
собой векторы, равные векторам, изображающим данные силы,
или, другими словами, вектором, замыкающим эту ломаную линию;
линия действия этой равнодействующей проходит через точку
пересечения линий действия данных сил.
Это правило, определяющее модуль и направление равнодей-
равнодействующей, называется правилом силового многоугольника, а лома-
ломаная линия ABCDE (рис. 15) называется силовым многоуголь-
многоугольником.
Сложение сил по правилу силового многоугольника называется
геометрическим сложением этих сил и, как известно из векторной
алгебры, совпадает с общим правилом сложения векторов. Итак,
равнодействующая R системы сходящихся сил равна по модулю
и направлению их геометрической сумме, т. е., другими словами,
изображается вектором, равным сумме векторов, изображающих
данные силы, что записывается так:
В § 2 было указано, что сила представляет собой векторную
зеличину. Однако нужно заметить, что для того, чтобы данная
46
СТАТИКА
физическая величина являлась величиной векторной, еще недоста-
недостаточно, чтобы с этой величиной было связано представление об
определенном направлении в пространстве. Для этого еще необхо-
необходимо, чтобы операция геометрического, или векторного, сложе-
сложения этих величин имела физический смысл.
Полученное правило сложения сил показывает, что теперь мы
с полным основанием можем утверждать, что сила есть векторная
величина.
Применяя правило силового многоугольника к частному слу-
случаю, когда все данные силы направлены по о,цчой прямой, найдем,
что в этом случае модуль равнодействующей \ двен абсолютному
значению алгебраической суммы всех этих сил; иг и этом силы,
направленные в одну сторону, мы должны считать положитель-
положительными, а силы, направленные в обрат-
обратную сторону,— отрицательными. Знак
алгебраической суммы слагаемых сил
укажет, в какую сторону по данной
прямой направлена их равнодействую-
равнодействующая. Равнодействующая двух сил, рав-
равных по модулю и направленных по
одной прямой в противоположные сто-
стороны, т. е. двух уравновешивающихся
сил, равна, очевидно, нулю.
Рассмотрим применение правила сло-
сложения сходящихся сил на нескольких
примерах.
Пример 1. Три нити связаны в узел
С (рис. 16); две из них перекинуты через
блоки А и В, и к концам их подвешены грузы весом Рх = 3 кг и
Рг = 5 кг". К концу третьей нити подвешен груз весом Рч; при этом
ААСВ = 60°.
Найти величину Ра, если вся система находится в равновесии.
Решение. На узел С действуют три силы: сила i\, направленная
по С А, сила Р2, направленная по СВ, и сила Ра, направленная по вертикали
вниз. Сложив первые две силы, найдем их
равнодействующую R, причем по формуле A)
будем иметь:
Я = ]/32 + 52 + 2 • 3 • 5 • cos 00° =
= 1/9-г 25+ 15 = 7 кг.
Так как эта сила R уравновешивается силой
Р3, то
ра = R = 7 кг.
Пример 2. Найти равнодействующую двух равных по модулю
сил, действующих под углом а (рис. 17).
Решение. Так как силы но модулю равны A^ = F2 = F), то построен-
построенный па них параллелограмм представляет собой ромб ABDC. Так как диа-
ГЛ 2 СХОДЯЩИЕСЯ СИЛЫ
47
гонали ромба делят его углы пополам, то равнодействующая Я двух равных
по модулю сил делит угол между ними пополам. Проведя диагональ ВС,
из прямоугольного треугольника АОС находим:
но ОА=4,
откуда
Пример 3. Радиомачта поддерживается двумя
тягами АВ и ВС (рис. 18), натяжения которых
равны ^2 nFv Каково должно быть отношение этих натяжений, чтобы мачта
не гнулась? Дано: AD = 9 м, DC = 5 м и DB = 12 м.
Решение. Чтобы мачта не гнулась, равнодействующая R сил Fl и Fz
должна быть, очевидно, направлена вдоль мачты, т. е. по прямой BD. Обо-
Обозначая углы ABD и DBC через <pt и ф2, будем иметь по теореме синусов:
Fx sin <pt
F« sin ф„ '
ОА =
R
~~ 2
R
R
AC
и
= F
= 2J
■ cos
ЛС
cos ■
4 COS
2" '
= F,
a
'
a
~2 "
следовательно,
Из прямоугольного треугольника ABD находим:
АВ = У AD*
= У"81 + 144 = 15 л, sin <px
Точно так же из треугольника DBC имеем:
ВС
АР
АВ
9
15
yDC2
Следовательно,
DC
DB* = У25+ 144 = 13 м, sin ф2 = 4£. = -°-
39
25
т. е. сила ^х должна быть приблизительно в 11/2 раза больше силы
И
у///////////, уу/////////
Р
Рис. 19.
Пример 4. К грузу весом Р привязаны четыре веревки, церекинутые
через блоки (рис. 19, а); эти веревки тянут с усилиями^, Fit F3 aF^ При
48 СТАТИКА
этом значенияFL,F2 nF3 даны. Требуется определить величину F4 так, чтобы
ipy3 стал подниматься по вертикали.
Решение. По условию задачи равнодействующая всех сил, приложен-
приложенных к грузу (включая и его вес), должна быть направлена по вертикали
вверх. Построив многоугольник сил Р, Ft, F2, F3, получим ломаную линию
ABCDE (рис. 19, б). Из точки Е проводим прямую, параллельную линии
действия силы F4, до пересечения в точке Я с вертикалью, проведенной
через А. Вектор ЕН определяет искомую силу F4. Вектор АН определяет
равнодействующую R всех сил, приложенных к грузу, под действием кото-
которой груз начинает двигаться вертикально вверх.
§ 6. Разложение силы
Задача, обратная той, которая была рассмотрена в предыду-
предыдущем параграфе,— это задача о разложении данной силы на две
или несколько составляющих. Задача эта может оказаться неопре-
неопределенной; в самом деле, разложить данную
силу на две составляющие, лежащие с ней
в одной плоскости, можно бесчисленным мно-
множеством способов, так как можно построить
сколько угодно параллелограммов, для кото-
которых данная сила будет служить диагональю.
Чтобы задача стала определенной, нужно
поставить еще некоторые дополнительные
Рис. 20. условия. Рассмотрим следующие три случая
этой задачи: 1) Разложить данную силу F
на две силы по двум заданным направлениям, лежащим с ней
в одной плоскости.
Для этого достаточно из конца вектора F провести прямые,
параллельные данным прямым I n II (рис. 20), до их пересечения
с этими прямыми в точках В и С. Век-
Векторы АВ и АС определяют искомые со-
составляющие силы.
2) Разложить данную силу F на две
силы, лежащие с ней в одной плоскости
и имеющие заданные численные значения.
Из начала А и конца В вектора F
(рис. 21) проводим две дуги радиусами,
равными в выбранном масштабе заданным
значениям F± и F2. Эти дуги пересекутся
в точках С и D; дополним треугольники
АСВ и ADB до соответствующих парал-
параллелограммов, в которых АВ является диа-
Рис. 21. гональю. Тогда векторы АС и АЕ или
AD и АК определят искомые составляю-
составляющие силы. Отсюда видим, что соответственно двум точкам (С и D)
пересечения дуг окружностей задача имеет два решения.
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ
49
Рис.
плоскости, нужно приложить
3) Разложить данную силу F на три силы по трем заданным
направлениям, не параллельным одной плоскости (например, по
трем взаимно перпендикулярным ко-
координатным осям).
Для этого на основании пра-
правила параллелепипеда достаточно
построить такой параллелепипед,
ребра которого имели бы заданные
направления и диагональю которого
являлась бы данная сила.
Пример 5. На паклонной плоско-
плоскости с углом а лежит тело весом Р (рис. 22).
Какую силу, параллельную наклонной
к телу, чтобы удержать его в равновесии?
Решение. Разложим силу Р на две составляющие: одцу Р2, перпен-
перпендикулярную к наклонной плоскости, и другую Р]т параллельную этой пло-
плоскости. Угол между силами Р и Р2 равен, очевидно, углу а. Из прямоуголь-
прямоугольного силового треугольника находим:
Рг = Р cos а н PL = P sin а.
Сила Р2 на движение тела, очевидно, не влияет (она только прижимает тело
к плоскости). Таким образом, движущей силой является сила i\. Чтобы удер-
удержать тело в равновесии, к нему нужно приложить силу Q, равную по мо-
модулю и противоположную по направлению силе Рх; следовательно,
Q = Рх = Р sin а; отсюда видим, что Q меньше веса данпого тела. На этом
основано применение наклонной плоскости при поднятии тяжелых грузов.
Пример 6. В точке В соединения двух брусьев АВ и ВС подвешен
груз весом Р (рис. 23, а). Найти силу, сжимающую каждый из этих брусьев,
и силу, растягивающую горизонтальную балку А С (так называемую затяжку),
если АВ = ВС и L ABC = a.
S,
б)
Рис. 23.
Решение. Разлагая силу Р на две составляющие Рх и Р2 (рис. 23, б),
направленные по ВА и ВС, и принимая во внимание, что Pt = P2, так как
линия действия силы Р делит угол ABC пополам, получим (так же как в при-
примере 2 § 5):
Р = 2Р,
а
cos 2-,
50
СТАТИКА
отсюда находим силы, сжимающие каждый из брусьев:
Р -Р Р
2 cos „
8ти силы передаются на затяжку в точках А и С. Перенося точки прило-
приложения этих сил по прямым В А и ВС в точки А а С я
'////м '/////////. разлагая каждую из сил на две составляющие — верти-
вертикальную и горизонтальную, видим, что вертикальные
силы Q1 и Q% вызывают давления на опорные столбы,
а горизонтальные силы Sx и S2 растягивают балку АС.
Из прямоугольных силовых треугольников находим:
<?2 = Qi = Рх cos ~ = I Р>
Sz = SL = Pt sin "- = A- P tg |- .
Пример 7. Груз весом Р = 6000 кг подвешен
симметрично на двух одинаковых железных тяжах
с прямоугольным поперечным сечением, угол между
которыми равен 30°. Ширина тяжа равна 7 см. Какова
должна быть наименьшая толщина тяжа, если допускае-
допускаемое напряжение его равно 400 кг/см2? (Напряжением
называется отношение силы натяжения к площади по-
поперечного сечения.)
Решение. Разлагая силу Р (рис. 24) на две со-
составляющие 7\ и Т2 по направлениям тяжей и при-
принимая во внимание, что вследствие симметрии 7\ =
по формуле для равнодействующей двух равных
Р = 2Tcos 15°,
Рис. 24.
с= Т2 = Т, получим
по модулю сил:
откуда находим, что сила, растягивающая тяж, равна
Р
гр
2 cos 15° *
Если обозначим искомую толщину тяжа через х, то площадь поперечного
сечепня его будет равна 1х\ следовательно, напряжение равно
Т
3000
1х 14» cos 15° lx cos 15е
кг/см2.
Приравнивая эту величину допускаемому напряжению 400 кг/см2, по-
получим уравнение
3000 =400,
7rcos 15°
из которого находим:
-г-. тто" *=*» 1,2 CM.
14 cos 15 '
ГЛ 2. СХОДЯЩИЕСЯ СИЛЫ
51
§ 7. Проекция вектора на ось
Пусть имеем вектор А В = Ри некоторую ось х, т. е. прямую,
на которой установлены положительное и отрицательное направ-
направления. Проведем через начало и конец этого вектора плоскости, пер-
перпендикулярные к оси х и пересекающие эту ось в точках а и Ь
(рис. 25). Эти точки назы-
называются проекциями точек А
и В на ось х, а длина от-
отрезка аЪ, взятая с соответст-
соответствующим знаком, называется
проекцией вектора АВ на ту
же ось. Таким образом, про-
проекция вектора на ось пред-
представляет собой алгебраиче-
алгебраическую скалярную величину; ей х~>
приписывается знак плюс или
минус, смотря по тому, как
направлен отрезок аЪ: если Рис. 25,
его направление совпадает
с положительным направлением данной оси, как на рис. 25,
то проекция считается положительной; в противном случае
проекция отрицательна, как
на рис. 26. Это записывается
так:
Рх =+аЪп Р1х =-аА-
Выведем теперь соотно-
соотношение, устанавливающее за-
зависимость между модулем
вектора и его проекцией.
Проведем для этого через
начало А вектора Р (рис. 25)
прямую, параллельную оси
проекций; эта прямая пере- Рис. 26.
сечет плоскость ВЬ в точке
С. В треугольнике ABC угол С —прямой 1); угол ВАС =а есть
угол между вектором Р и положительным направлением оси
проекций. Из этого треугольника получаем:
/
в,
/ —
у
/
"л
а,
/
X
но АС = аЪ, а потому
АС = АВ cos a,
Рх — Р cos а.
х) Так как прямая АС перпендикулярна к плоскости ВЬ.
52 СТАТИКА
Полученное выражение для проекции вектора на ось определяет
не только абсолютную величину, но и знак проекции. В самом
деле, в рассматриваемом случае проекция Рх положительна,
а угол а — острый; следовательно, его косинус также положите-
положителен. Обратимся теперь к случаю отрицательной проекции (рис. 26);
из треугольника А1В1С1 имеем:
А1С1 = А1В1 cos p,
и, следовательно
Р1х = —Р1 cos р,
•но если обозначим угол между вектором Рг и положительным
направлением оси проекций через а17 то cos аг = — cos p, a потому
Р1х = Рг cos av
Мы приходим, таким образом, к заключению, что проекция
вектора на ось равна (по абсолютной величине и по знаку) про-
произведению модуля вектора на косинус угла между этим вектором
и положительным направлением оси проекций.
Рассмотрим два частных случая:
1) Вектор параллелен оси проекций, т. е. а = 0 или а = 180°
в зависимости от того, совпадет ли направление вектора с по-
положительным или с отрицательным направлением оси проекций;
в этом случае, следовательно, cos а = 1 или cos а = —1, а потому
Рх = Р или Рх = —Р. Таким образом, если вектор параллелен
оси, то его проекция на эту ось равна его модулю, взятому со зна-
знаком плюс или минус в зависимости от того, совпадает ли направ-
направление вектора с положительным или с отрицательным направле-
направлением оси проекций.
2) Вектор перпендикулярен к оси проекций; в этом случае
а = 90° и cos а = 0, а следовательно, Рх = 0. Таким образом,
если вектор перпендикулярен к оси, то его проекция на эту ось
равна нулю (в этом случае, очевидно, проекция вектора превра-
превращается в точку).
Из самого определения проекции вектора на ось следует,
что проекция не изменяется, если мы будем переносить вектор
параллельно самому себе или если будем проектировать его
на различные, но параллельные и одинаково направленные оси.
Пусть мы имеем теперь прямоугольную систему осей Oxyz и
некоторый вектор АВ — Р (рис. 27). Проведем через точку А
оси Ах', Ау' и Az', параллельные данным координатным осям,
и построим на этих новых осях прямоугольный параллелепипед,
для которого вектор АВ является диагональю.
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ
53
Из чертежа ясно, что длины выходящих из вершины А ребер
этого параллелепипеда, взятые с соответствующими знаками,
представляют собой проекции вектора Л В на оси Ах', Ау' и Az ,
Рис. 27.
или, что то же, на данные оси Ох, Оу и Oz. Обозначая эти проек-
проекции через Рх> РушРгш принимая во внимание, что квадрат диаго-
диагонали прямоугольного параллелепипеда равен сумме квадратов
трех его ребер, получаем:
откуда
p=ypi+pi+pi C)
Если обозначим углы вектора Р с координатными осями х, у, ъ
соответственно через а, р и у, то будем иметь:
откуда
Рх = р cos а, Ру = Р cos p, Pz = P cos у,
cos а = ■
cos р=-
cos Y =
E)
В формулах C) и E) перед радикалами нужно брать знак
плюс, так как модуль вектора Р является величиной существенно
54 СТАТИКА
положительной. Формулы C) и E) позволяют аналитически опре-
определить величину и направление вектора по трем заданным его
проекциям на координатные оси х).
Заметим, что для нахождения проекций данного вектора на
координатные оси можно применить еще следующий способ:
спроектируем вектор Р на координатную плоскость Оху, для чего
опустим из точек An В перпендикуляры на эту плоскость (рис. 27);
вектор аЪ представляет собой проекцию вектора Р на плоскость
Оху. Спроектируем теперь этот вектор аЪ на оси Ох и Оу, для чего
опустим из точек а и Ъ перпендикуляры на эти оси. Отрезки a1b1
и a2b2 на осях Ох и Оу представляют собой, как видно из рис. 27,
искомые проекции вектора Р на эти оси. Точно так же найдем и
третью проекцию вектора Р на ось Oz: проектируя сначала век-
вектор Р на плоскость xOz, находим его проекцию а'Ь' на эту плос-
плоскость; опустив, далее, из точек а' и Ъ' перпендикуляры на ось
Oz, получим отрезок a3b3, который представляет собой проекцию
вектора Р на эту ось.
§ 8. Умножение вектора на скаляр. Единичный вектор
Как известно из векторной алгебры, умножить данный век-
вектор Р на какой-нибудь положительный скалярный множитель
К — это значит построить новый вектор Рх, модуль которого
равен ХР и который имеет то же направление, что и вектор Р,
что записывается так:
Р, = ХР. F)
Если множитель К отрицателен, то направление вектора Рх будет
противоположно направлению вектора Р, а модуль вектора Pt
в этом случае будет равен \Х\ Р, где \Х\ обозначает абсолютную
величину множителя X. Таким образом, два вектора Рп ХР всегда
параллельны или расположены на одной прямой. Такие векторы
называются коллинеарными.
Найдем теперь зависимость между проекциями векторов Рг
и Рна координатные оси. Если X ^> 0, то параллельные векторы Р1
и Р направлены в одну сторону и образуют с положительным на-
направлением оси х один и тот же угол. Если обозначим этот угол
через а, то будем иметь:
Р1х = Ру cos а = ХР cos а;
но Р cos а = Рх, а потому
Ргх = М>«. G)
г) Три проекции вектора не определяют, конечно, начала (точки прило-
приложения) этого вектора; для этого должпы быть заданы координаты этой
точки.
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ 55
Аналогично этому получим и два других равенства:
Р1у = ЪРи, Plz = Wz. (Г)
Эти равенства, как легко понять, остаются верными и при X <^ 0.
В последнем случае проекции векторов Рг и Р па данную ось имеют
разные знаки.
Иэ полученных равенств следует:
™\х __±У_ >z
и и р >
Г х Гу Г г
т. е. проекции параллельных векторов на координатные оси про-
пропорциональны.
Равенства G) и G') получены из векторного равенства F).
Наоборот, из этих скалярных равенств G) и G') можно вывести
как следствие векторное равенство F); следовательно, соотноше-
соотношение F) между векторами Рг и Р равносильно р
трем соотношениям G) и G') между проекциями
этих векторов на координатные оси.
Вектор, направление которого совпадает с на-
направлением данного вектора Р и модуль кото-
рого равен единице, называется единичным век-
вектором данного вектора Р. Если обозначим этот единичный
вектор через Р° (рис. 28), то Р° = 1. Так как векторы Р и Ра
имеют одинаковое направление, а модули этих векторов равны
соответственно Р и 1, то между этими векторами существует,
очевидно, зависимость
Р = РР\ (8)
Таким образом, всякий вектор можно представить в виде про-
произведения его модуля на его единичный вектор.
Равенство (8) играет важную роль при операциях над вектор-
векторными величинами, так как здесь выделены оба основных элемента,
характеризующие данный вектор Р: скалярный множитель Р опре-
определяет его модуль, а единичный вектор Р' определяет его направ-
направление. Единичный вектор Р», определяющий направление дан-
данного вектора Р, называется также ортом этого вектора (от слова
«ориентация»). Ясно, что все векторы данного направления имеют
один и тот же орт.
§ 9. Разложение вектора по координатным осям
Пусть имеем вектор А В = Р. Построим в точке А систему пря-
прямоугольных координатных осей Axyz (рис. 29). Чтобы разложить
вектор Р но направлениям этих осей, нужно построить на этих
осях такой прямоугольный параллелепипед, для которого отрезок
56
СТАТИКА
г
£,
к,
Д
,
J
'в
/В У
Рпс. 29.
АВ является диагональю, совершенно так же, как это делается
в случае разложения силы по трем направлениям, не лежащим
в одной плоскости (§ 6).
Векторы AC, AD и АЕ называются составляюгцими данного
вектора Р по координатным осям, или (в случае прямоугольных
осей, который мы и рассматри-
рассматриваем) прямоугольными составляю-
составляющими вектора Р. Если обозначим
эти составляющие через Рх, Ру
и Рг, то получим:
Следует обратить внимание на
различие между составляющими
данного вектора по координатным
осям и проекциями этого вектора
на оси и не смешивать этих двух
понятий: проекция вектора на
ось, как было уже указано в § 7, есть величина скалярная,
а составляющая данного вектора есть также вектор.
Построим теперь единичные векторы, направленные по коорди-
координатным осям в положительную сторону. Эти векторы называются
единичными координатными векторами, или координатными ор-
ортами, и обозначаются буквами г", /, к.
Задавая векторы i, j, к, мы тем самым определяем направления
осей выбранной нами координатной системы.
На основании равенства (8) для прямоугольных составляющих
вектора Р получаем следующие выражения:
Р = Р i Р = Р i Р — Р к (\п\
В этих равенствах скалярные множители Рх, Ру и Рг представляют
собой, очевидно, проекции вектора Р на координатные оси, т. е.
длины отрезков AC, AD и АЕ, взятые с соответствующими зна-
знаками. На рис. 29 все три проекции вектора Р положительны и
направления его составляющих Рх, Ру и Pz совпадают с направле-
направлениями соответствующих ортов. Если бы, например, вектор Pz
был направлен в отрицательную сторону оси z, то проекция Pz
была бы отрицательна. Ясно, что равенство Pz = Pzk и в этом
случае остается верным, так как вектор Pz имел бы теперь на-
направление, противоположное вектору к.
Подставляя выражения A0) в равенство (9), получим:
P=Pxi+Pyj-{-Pzk.
Это равенство представляет собой очень важную формулу разло-
разложения вектора Р по координатным осям. Напомним еще раз, что
в формуле разложения вектора по координатным осям скалярные
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ 57
коэффициенты при ортах i, j и к представляют собой проекции
этого вектора на эти оси.
Пример 8. Вектор Р, модуль которого Р = 10, лежит в плоскости
Оху и образует с осью х угол а = 150° (отсчитываемый от положительного
направления этой оси против часовой стрелки). Написать формулу разло-
разложения этого вектора по координатным осям.
Решение. Найдем сначала проекции вектора Р на координатные оси.
Так как этот вектор образует с положительным направленном оси у угол,
равный, очевидно, 60°, а с осью г угол, равный 90°, то по формулам D) имеем:
Рх = 10 cos 150° = — 5/з;
Ру = 10 cos 60° = 5, Рг = 0.
Подставляя эти значения проекций в формулу A1), получим:
Р=- 5/3i + bj.
Пример 9. Формула разложения данного вектора по координатным
осям имеет следующий вид:
р = 3t + 4/ — 5.1г.
Найти модуль этого вектора и его направление, т. е. углы, образуемые им
с осями координат.
Решение. Из сравнения данной формулы с формулой A1) следует,
что Рх — 3, Ру = 4 и Pz = — 5. Отсюда по формуле C) находим:
р= /з" + 4J + 5- = 5 /27
По формулам E) определяем искомые углы а, Р ц у вектора Р с осями:
cosa = —^-==0,3/27 cosp = —^—=0,4/2",
5 ]/2 5/2
§ 10. Аналитический способ сложения сил
Правило силового многоугольника (§ 5) позволяет геометри-
геометрически (построением) определить модуль и направление равнодей-
равнодействующей данной системы сходящихся сил. Аналитическое реше-
решение этой задачи основано на применении метода проекций и бази-
базируется на следующей теореме о проекции равнодействующей силы
на ось:
Теорема. Проекция равнодействующей на какую-нибудь
ось равна алгебраической сумме проекций составляющих сил на ту
же ось.
Доказательство. Пусть для данных сил Flt F2, F3
построен силовой многоугольник и пусть R— AD есть их равно-
Действующая (рис. 30). Спроектируем все силы на данную ось х,
58
СТАТИКА
для чего проведем через начало и конец каждой силы плоскости,
перпендикулярные к оси т. Пусть эти плоскости пересекают
ось х в точках а, Ь, с и d.
Тогда имеем:
Rx = ad, Flx = ab,
F2x = bc, F3x= — cd;
сложив последние три равен-
равенства, получим:
Рис. 30.
= ab -)- be — cd = ad = Rx,
что и требовалось доказать.
Пусть имеем теперь систему сходящихся сил, заданных своими
проекциями на координатные оси. Обозначим эти проекции соот-
соответствующими заглавными буквами:
Требуется определить модуль и направление их равнодействующей.
Обозначив искомую равнодействующую через R и ее проекции
через Rx, R R2, согласно только что доказанной теореме найдем:
Аа+АзН-... + Ап-1А, 1 A2)
Величина R определяется по формуле C):
R =
" A3)
Чтобы определить направление равнодействующей, нужно найти
ее углы с координатными осями. Обозначив эти углы через а, Р и у,
на основании формул E) будем иметь:
R
cosp = ^=-;-, }
A4)
где величина /? известна из предыдущего равенства A3). Равенства
A3) и A4) представляют собой формулы для определения модуля
и направления равнодействующей по заданным проекциям со-
составляющих сил. Так как алгебраическая сумма не изменяется
от перемены порядка слагаемых, то из формул A2) следует,
что проекции равнодействующей, а следовательно, ее модуль и
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ 59
направление не зависят от порядка, в котором производится сложе-
сложение данных сил.
Из равенств A1) и A2) следует также, что формула разложе-
разложения равнодействующей R по координатным осям имеет следую-
следующий вид:
R = Rxi + RJ + R2k = (EX) i + (£У) / + (SZ) k. A5)
После того как найдены модуль и направление равнодействующей
сходящихся сил, можно найти и линию действия этой равнодей-
равнодействующей. Для этого надо составить уравнение прямой, прохо-
проходящей через точку пересечения линий действия данных сил и
имеющей направление их равнодействующей. По правилам ана-
аналитической геометрии получаем это уравнение в виде
X — Xf, У Уо Z—Zn
где х, у, z — текущие координаты, а х0, у0, z0 — координаты точки
пересечения линий действия данных сил.
Рассмотренное сейчас аналитическое решение задачи сложе-
сложения сходящихся сил можно получить еще и другим путем, а именно:
можно сначала вывести для равнодействующей векторную фор-
формулу A5), далее получить из нее формулы A2), а затем вытекаю-
вытекающие из них формулы A3) и A4).
В самом деле, разлагая каждую из данных сил по трем коор-
координатным осям, получим:
F1 = Xj + YJ + ZJc,
F2 = X2i + YJ + Z2k,
Fn=Xni+YJ+Znk.
Складывая эти векторные равенства и принимая во внимание,
что SF = i?, будем иметь:
R = (X, + Х2 + ... + Х„) * + (Ух + Y2 + ... + Yn) j -f-
или
т. е. мы получили формулу A5) разложения равнодействующей
по координатным осям. Но так как в формуле разложения век-
вектора по координатным осям коэффициенты при i, /, k представляют
собой проекции этого вектора па соответствующие оси (§ 9), то
из последнего равенства находим:
т. с. получаем формулы A2). Таким образом, мы другим путем
60
СТАТИКА
доказали теорему о проекции равнодействующей на ось. Из полу-
полученных выражений для проекций равнодействующей непосредст-
непосредственно вытекают, как мы видели выше, формулы A3) и A4), опре-
определяющие модуль и направление равнодействующей.
Понятно, что полученные результаты, в частности теорема
о проекции равнодействующей на ось, применимы не только в ста-
статике и имеют место не только для равнодействующей силы, но и
для всякого вектора, представляющего собой сумму нескольких
векторов. Следовательно, проекция суммы данных векторов на
какую-нибудь ось равна алгебраической сумме проекций слагаемых
векторов на ту же ось. Точно так же формулы A3) и A4) позво-
позволяют аналитически определить модуль и направление суммы
любых векторных величин.
Пример 10. На тело действуют четыре сходящиеся силы, проекции
которых ыа координатные оси даны в следующей таблице:
X
Y
Z
*".
1
10
3
2
15
4
F*
0
-5
1
л 4
2
10
2
Найти модуль их равнодействующей и углы ео с координатными осями.
Решение. Из данной таблицы находим:
SX = 1 +2 + 0 + 2 = 5, £У = 30 и £Z = 6.
Подставляя эти значения в формулу A3), получим:
Л= У'Ъ1 + 303 + & = /961 = 31.
Теперь по формулам A4) находим:
30
6
Отсюда при помощи логарифмических таблиц найдем искомые углы:
а = 80°43', Р = 14°35Г, у = 78°50:.
Если все действующие на тело сходящиеся силы лежат в одной
плоскости, то тогда достаточно проектировать их только на две
координатные оси Ох и Оу, расположенные в той же плоскости.
Модуль равнодействующей в этом случае определяется по формуле
R =
A3')
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ
61
Кроме того, в этом случае, очевидно, cos ft = sin а и направле-
пие равнодействующей определяется по формулам
cos а = -т, и sin а = - -t
A4')
где аир обозначают углы равнодействующей с координатными
осями х и у, причем угол а отсчитывается от положительного на-
правлепия осп х против часовой стрелки, как принято в тригоно-
тригонометрии. Из этих формул следует, что
SY
tg a = yj?-
Если в задаче слагаемые силы известны по модулю и направле-
направлению, но проекции их не даны, то для нахождения их равнодей-
равнодействующей аналитическим способом нужно сначала, выбрав коор-
координатные оси, определить углы каждой силы
с этими осями, далее найти ее проекции на
эти оси по формулам D), а затем выполнить
вычисления так же, как в примере 10.
Пример 11. В точке А к телу приложены
три силы: Fx = 18 кг, F2 = 24 кг и F3 = 30 кг,
лежащие в одной плоскости и образующие между
собой углы в 105°, 135° и 120°. Определить величину
и направление их равнодействующей (рис. 31).
Решение. Направим ось у по линии дейст-
действия силы F3 и ось х перпендикулярно к ней. Тогда,
как легко видеть из чертежа, углы с положитель-
положительным направлением этих осей будут равны 30° и 60°
для силы Flt 135° и 45° для силы F2, 90° и 180° для силы F3. Проектируя
все данные силы на координатные оси, находим:
Y1 = 18 cos 60° = 9, _
F2 = 24 cos 45° = 12/2",
Y3 =- 30.
Рис. 31.
= 18 cos 30° =
= 24 cos 135° =—
X3 = 0,
Следовательно, проекции равнодействующей равны
Rx = £Х = 9]/3~— 12 ]/Т = — 1,380,
Ry = £У-= 9 + 12 УТ— 30 =- 4,032.
Отсюда по формуле A3') находим:
R = у l,3802 + 4,032a = 4,262 кг.
Для определения угла а, который равнодействующая образует с осью х,
по формулам A4') имеем:
1,380 . 4,032
cos а = —гтт^т- и sin а = —
4,262
4,262 '
Так как и косинус и синус этого угла отрицательны, то угол а лежит в
третьей яетверти. При помощи логарифмических таблиц найдем;
а = 251 °6'.
62
СТАТИКА
Таков угол, который равнодействующая образует с положительным на-
направлением оси х\ этот угол, отсчитываемый от оси х в направлении, обрат-
обратном движению часовой стрелки, определяет на-
направление искомой равнодействующей.
Пример 12. В точке А скрепления ipex
брусьев АВ, АС и AD подвешен груз весом
Р — 100 кг (рис. 32). Найти усилия, сжимающие
каждый из этих брусьев, если расстояние точки А
от земли равно АО = 8 м, а длина каждого бру-
бруса I = 10 м. Точки В, С и D образуют равно-
равносторонний треугольник.
Решение. Для определения искомых уси-
усилий достаточно разложить силу Р на три соста-
составляющие, направленные по АВ, АС и AD; вслед-
вследствие симметрии эти составляющие будут иметь
один и тот ?ке модуль; обозначим его через S.
Угол каждого из брусьев с вертикалью обозначим
через \. Проектируя теперь силу Р п составляю-
составляющие силы на вертикаль, получим (по теореме о
проекции равнодействующей):
р
р = 3S cos у, откуда S =
3 cos у
Из треугольника ОАВ найдем:
cos V = -гй = 0,8, откуда
АН
3-0,8
-з кз-
§ И. Равновесие системы сходящихся сил
Пусть данное твердое тело находится под действием п сходя-
сходящихся сил. Сложив по правилу силового многоугольника п—1
из этих сил, мы приведем данную систему сил к двум силам. Но
из аксиомы I известно, что две силы, приложенные к твердому
телу, находятся в равновесии в том и только в том случае, если
эти силы имеют равные модули и направлены по одной прямой в
противоположные стороны, т. е. если их равнодействующая равна
нулю. Следовательно, для равновесия системы сходящихся сил
необходимо и достаточно, чтобы равнодействующая этих сил
равнялась нулю.
Но эта равнодействующая R изображается вектором, замыкаю-
замыкающим силовой многоугольник; следовательно, для того чтобы
равнодействующая равнялась нулю, силовой многоугольник дол-
должен быть замкнутым, т. е. его конечная точка (конец вектора,
изображающего последнюю силу) должна совпадать с начальной
точкой (с началом вектора, изображающего первую силу). Таким
образом, приходим к следующему заключению: для равновесия
системы сходящиеся сил необходимо и достаточно, чтобы сило-
силовой многоугольник, построенный для этой системы, был замк-
замкнутым.
ГЛ 2. СХОДЯЩИЕСЯ СИЛЫ 63
Таково условие равновесия системы сходящихся сил в геоме-
геометрической форме. Выразим теперь то же условие аналитически.
Из предыдущего параграфа известно, что модуль равнодей-
равнодействующей определяется по формуле
R = 1/ (их)* + (ьгу + {zip-
Отсюда следует, что при равновесии должно иметь место равен-
равенство
(SXJ + (£УJ + (SZJ = 0.
Так как ни одно из слагаемых, стоящих в левой части, не может
быть отрицательным, то это равенство возможно в том и только
в том случае, если
SX = 0, £У = 0 и SZ == 0. A6)
Следовательно, для равновесия системы сходящихся сил необ-
необходимо и достаточно, чтобы сумма проекций всех этих сил на
каждую из трех координатных осей равнялась нулю.
Понятно, что, имея плоскую систему сходящихся сил, мы
всегда можем плоскость, в которой расположены все эти силы,
принять за координатную плоскость Оху, и тогда для равновесия
такой системы сил должны быть выполнены только первые два
из условий A6).
Если данное тело несвободпо, т. е. если на него наложены не-
некоторые связи, то необходимо принимать во внимание реакции
этих связей, о которых мы говорили в § 4. В большипстве случаев
в задачах статики по некоторым заданным (известным) силам,
приложенным к данному твердому телу, требуется определить
неизвестные реакции связей, предполагая, что тело находи гея
в покое и что, следовательно, все приложенные к нему силы урав-
уравновешиваются.
Для решения таких задач в том случае, когда линии действия
всех сил, приложенных к телу, включая и реакции связей, пере-
пересекаются в одной точке, нужно воспользоваться полученным усло-
условием равновесия сходящихся сил в геометрической или в аналити-
аналитической форме.
В первом случае искомые силы определяются графически при
помощи построения замкнутого силового многоугольника. Во
втором случае, при аналитическом решении задачи, эти силы
находятся из уравнений A6), в левые части которых войдут,
кроме заданных известных сил, и неизвестные реакции связей.
Рассмотрим несколько примеров.
Пример 13. Шар весом Р опирается в точке А на наклонную пло-
плоскость, образующую с вертикалью угол а, и привязан к стене веревкой,
64
СТАТИКА
которая образует с вертикалью угол р (рис. 33, а). Определить реакцию
плоскости в точке А и натяжение веревки.
Решение. Обозначим искомую реакцию плоскости, направленную
по нормали Ля к этой плоскости, через N, а реакцию веревки, численно рав-
равную ее натяжению, — через Т. Линии действия всех трех сил N, Т и Р
пересекаются в центре шара О. Примем
вертикаль и горизонталь в точке О за ко-
координатные оси. Замечая, что LBOy = C и
L пОх = а (эти углы равны, так как стороны
одного угла перпендикулярны к сторонам
другого), находим проекции сил N, Т и Р
на ати оси:
Nx = N cos a,
Тх =- Т sin p
Ny = Лт sin а,
Ту = Т cos p\
Р„ =- Р.
Условия равновесия A6) имеют, следова-
следовательно, такой вид:
1) N cos а — Т sin Р = О,
2) N sin а + Т cos р — Р = 0.
Умпожая первое уравнение на cos P, а второе на sin C и складывая их,
получим:
N (cos a cos p -^ sin а sin C) = Р sin C,
откуда
Р sin Р
Л7 =
cos(a —
теперь из первого уравнения находим:
_ __ N cos a
Р cos a
sin C cos (a — P)'
Полагая здесь р = a, получим:
Л7 = P sin a и Г = P cos a;
это решение соответствует тому случаю, когда веревка, удерживающая шар,
параллельна наклонной плоскости.
Если положим a = 0, то будем иметь:
эти значения соответствуют тому случаю, когда шар опирается на верти-
вертикальную плоскость.
Решим теперь эту же задачу графически; для этого нужно построить
замкнутый силовой многоу! ольник. Из произвольной точки а (рис. 33, б) про-
проводим вектор ab, параллельный данной силе Р, длина которого в выбранном
масштабе изображает модуль этой силы 1); через точки а и Ь проводим пря-
прямые, параллельные прямым ОВ и An, по которым направлены искомые
силы Т и N; эти прямые пересекутся в точке с; векторы be и са определяют
х) Построение силового многоугольника всегда нужыо начинать с изве-
известных, заданных в задаче сил.
ГЛ 2. 'СХОДЯЩИЕСЯ СИЛЫ
65
искомые силы N пТ. Чтобы найти направление искомых сил па спловом тре-
треугольнике, нужно, как легко понять из рис. 33, б обойти этот треугольник
по его периметру, причем направление этого обхода определяется направле-
направлением данной силы Р. Измерив длину
сторон ас и be и зная масштаб, в
котором построена сила Р, найдем
численные значения сил Т и N.
Пример 14. Фонарь весом Р
подвешен на двух проволоках СА и
СВ, образующих с вертикальными
стенами углы а и р. Найти натяже-
натяжения этих проволок (рис. 34, а).
Решение. Обозначим реак-
реакции проволок, численно равные ис-
искомым натяжениям, через Тх и Т2.
Через точку С проводим оси Сх и
Су в горизонтальном и вертикаль-
вертикальном направлениях; определив углы
сил Т1 и У2 с этими осями (эти
углы указаны па рисунке), находим
проекции трех
эти оси:
сил Т,, У, и Р на
Tlx =— Tt sin a, Tly = 7\ cos a,
Тг sin
0;
Т2у = Т2 cos
Рис. 34.
Так как эти три силы находятся в равновесии, то имеем следующие два
уравнения:
1) Тг sin р — Т1 sin а = 0, 2) 2 cos р + J\ cos а — Р = 0.
Умножив первое уравнение на cos a, a второе на sin а и сложив их, получим:
T2 (sia P cos a + cos p sia a) = P sin a,
отсюда
Р sin a
2 sin (a + P)
Из первого уравнения находим:
sin a sin (a -г Р)'
V,
б)
Графическое решение этой задачи, совер-
совершенно такое же, как и в предыдущем при-
примере, дано на рис. 34, б. Заметим, что най-
найденные выражения для натяжений Тг и Т2
можно полупить и из силового треугольника,
в котором известны сторона Р и углы аир, применяя теорему синусов.
Пример 15. К концу горизонтальной балки, закрепленной на шар-
шарнире О, подвешен груз весом Р. Балка удерживается в равновесии при по-
помощи тяги ВС, закрепленной в точке С и образующей с направлением балки
угол а. Найти натяжеппе Т тяги и реакцию Яо шарнира, если ОА = I и
АВ = — (рис. 35, а). Весом балки пренебрегаем,
о
3 И. М. Воронков
66 СТАТИКА
Решение. Постараемся определить сначала направление реакции
Rq шарнира, которое пока не известно. Так как к балке приложены три
силы (Р, Т и Rq), то мы можем воспользоваться теоремой о трех уравнове-
уравновешивающихся силах. Как известно (§ 3), линии действия таких трех сил
должны пересекаться в одной точке. Поэтому продолжим линию действия
силы Т, т. е. прямую ВС до пересечения в точке D с линией действия силы Р.
Линия действия силы Ro должна проходить через точку D; следовательно,
эта сила направлена по прямой OD.
Теперь задача оче.иь просто решается графически, как это уже известно
из предыдущих примеров: нз произвольной точки а (рис. 35, 6) проводим
вектор, изображающий данную силу Р; из начала а и конца b этого вектора
проводим прямые, параллельные прямым DO и DC. Эти прямые пересекутся
в точке с; векторы be я са определяют искомые силы Т и Rq .
Для аналитического решения задачи возьмем ось Ох, направленную по
балке, и ось Оу, перпендикулярную к ней. Угол силы Rq с осью х обозначим
через <р. Для определения этого угла заметим, что из треугольников ABD
и AOD имеем:
_DA_3DA
_DA_ DA
отсюда следует:
tg Ф = з t8 a-
Проектируя на координатные оси все силы, приложенные к балке, полу-
получим следующие два уравнения равновесия:
Ro cos ф — Т cos a = О,
Т sin а — R о sin ф — Р =0.
Из первого уравнения находим:
r _ -^ cos a
0 COS ф '
подставляя это значение Ro во второе уравнение, получим:
Т (sin а — cos а tg ф) = Р,
или, заменяя tg ф его значением,
= Г sin а = Р;
отсюда
2 sin a
и, следовательно,
„ _ 3 ctgq
2 cos ф
Но
СОЭф Г
tg2 ф = ]Л + tJ~- = ■!■/»+ tg2 a,
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ
67
а потому;
= 2- Vi + 9 ctg2 a.
Полученные численные значения сил Т и /?0 можно было бы также найти
из силового треугольника аЪс (рис. 35, б), применяя теорему синусов и за-
замечая, что в этом треугольнике Lahc — 90° — аи Lacb — а — ф.
Пример 16. Шар весом Р подвешен в углу комнаты на веревке, ко-
которая образует с вертикалью угол у. Определить натяжение веревки Т и
реакции стен N± и iV2 в точках касания
их с шаром (рис. 36).
Решение. В данном случае мы
имеем систему четырех уравновешиваю-
уравновешивающихся сил, не лежащих в одной плоско-
плоскости и сходящихся в центре шара О (на
рис. 36 силы Л^ и N2 перенесены в точ-
точку О). Возьмем начало координат в точ-
точке О; ось z направим по вертикали
вверх, а оси х и у — перпендикулярно
к стенам, т. е. по линиям действия сил
N-l и N2. Чтобы наши проекции реакции
X
Рис. 36.
х
Рис. 37.
веревки Т на координатные оси, перенесем эту силу в точку О и разложим
ее на две составляющие: вертикальную, направленную по оси z, и гори-
горизонтальную, лежащую в плоскости Оху. Если обозначим эти составляющие
соответственно через Т и Т", то Т" «= Т cos у и Т" = Т sin у.
Легко видеть, что вследствие симметрии сила Т" направлена по биссек-
биссектрисе координатного угла Оху (рис. 37). Проектируя теперь все силы на оси
х, у и z, получим следующие три уравнения равновесия:
— Т" cos 45° =0, N2 — Т" cos 45° = 0, Т — Р = 0
или
V2
= ЛГа = ~ Tsiny и Г cos у = Р.
Отсюда находим:
Т = и N. = N2 = -^ Р tg v.
cos у 9
Уг
2
Пример 17. Груз весом Р подвешен на крюке, который поддержи-
поддерживается тросом АВ и двумя стержнями, соединенными шарниром А и закреп-
закрепленными шарнирно в точках С и D. Плоскость треугольника ACD горизон-
горизонтальна. Найти силы, сжимающие стержни АС и AD, и силу, растягивающую
3*
68
СТАТИКА
трос, если Z.ACD — £ADC = а, угол троса с вертикалью БЕ равен Р и
СЕ = ED. Весом стержней пренебрегаем (рис. 38, а).
Решение. Так как весом стержня АС пренебрегаем, то на этот стер-
стержень действуют две силы: реакция шарнира С и реакция шарнира (узла) А;
поскольку стержень находится в равновесии, эти две силы равны по модулю
и направлены по прямой АС в противо-
противоположные стороны, как показано на
рис. 38, а. Под действием этих сил стер-
стержень АС испытывает сжатие.
Сила St, с которой стержень АС
действует на узел Л (реакция этого
стержня), согласно закону равенства
действия и противодействия равна по
модулю и противоположна по направле-
направлению силе, сжимающей стержень АС
(реакции узла А, приложенной к этому
стержню); следовательно, сила S1 на-
направлена так же, как отрезок СА.
Точно так же направление реакции
стержня AD, которую обозначим через
S2, совпадает с направлением отрезка
DA. Реакция троса, которую обозна-
обозначим через Т, направлена вдоль троса.
Кроме этих трех сил, Su S2 я Т, к
узлу А приложена еще сила натя-
натяжения веревки, на которой подвешен
груз, равная, очевидно, по модулю весу
груза Р. Таким образом, узел А нахо-
находится в равновесии под действием че-
четырех сил, не лежащих в одной плос-
плоскости.
Возьмем начало координат в точ! е
А; ось z направим по вертикали вверх,
ось у — по высоте ЕА равнобедренного
треугольника ACD и ось х — парал-
параллельно прямой CD. Силы S± и S2 лежат в координатной плоскости хАу,
углы этих сил с осями Ах и Ау показаны на рис. 38, б. Так как сила Т ле-
лежит в плоскости zAy, то эта сила перпендикулярна к оси х и, следователь-
следовательно, ее проекция на эту ось равна нулю.
Проектируя на координатные оси все силы, приложенные к узлу А,
получим следующие уравнения равновесия:
1) Sa cos a — St cos а = О,
2) S2 sin а + S1 sin. а — T sin 0 = О,
3) Т cos p — Р = 0.
У
Из третьего уравнения находим:
Т =
Из первого уравнения следует, что Sl =
ния получаем:
, sinp
2 s in a
P^
: 2
поэтому из второго уравне-
sin a
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ 69
§ 12. Момент силы относительно точки.
Условие равновесия рычага
Представим себе твердое тело, которое может вращаться вокруг
неподвижной оси, перпендикулярной к плоскости чертежа и пере-
пересекающей эту плоскость в точке О (рис. 39); пусть на это тело дей-
действует система сил, лежащих в одной плоскости, перпендикулярной
к оси вращения (в плоскости чертежа), например две силы Fx и F2.
Такое тело называется рычагом. Эффективность силы, приложен-
приложенной к рычагу и стремящейся, очевидно, повернуть рычаг вокруг
его оси вращения, определяется, как известно из опыта (например,
при отвинчивании или завинчивании гайки ключом), моментом
этой силы относительно точки О. Моментом силы относительно
данной точки называется взятое со знаком
плюс или минус произведение модуля силы
на длину перпендикуляра, опущенного из
этой точки на линию действия силы.
Расстояние данной точки от линии дей-
действия силы называется плечом силы отно-
относительно этой точки; следовательно, аб-
абсолютная величина момента силы относи-
относительно данной точки равна произведению
модуля силы на ее плечо относительно
этой точки. Условившись приписывать мо-
моменту силы знак плюс или минус в зависи-
зависимости от того, в каком направлении эта
сила стремится повернуть рычаг вокруг
точки О, будем считать момент силы поло- Рис. 39.
жителъным, если эта сила вращает рычаг
вокруг точки О в направлении, обратном движению часовой
стрелки; в противном случае будем считать момент силы отри-
отрицательным.
Если линия действия данной силы проходит через точку О,
то плечо, а следовательно, и момент этой силы относительно точки
О будут равны нулю. Такая сила, очевидно, не может вызвать вра-
вращения рычага.
Момент силы F относительно точки О будем обозначать так:
то (F). Тогда, как видно из рис. 39, будем иметь:
mo (Fj) = h1F1 и т0 (F2) = — h%F%.
Если численное значение силы выражено в килограммах,
а длина ее плеча —■ в метрах, то момент силы выражается в кило-
килограммометрах (кем).
Пользуясь понятием момента силы, можно очень просто выра-
выразить условие равновесия рычага, т. е. найти то условие, которому
Должны удовлетворять приложенные к рычагу силы Fx и F2,
70 СТАТИКА
чтобы он оставался неподвижным. В самом деле, пусть рычаг
закреплен в точке О при помощи цилиндрического шарнира
(рис. 39); предполагая, что линии действия сил Fx и F2 не па-
параллельны, продолжим их* до пересечения в точке С; перенося
точки приложения сил Fx п F2 в точку С и складывая эти силы по
правилу параллелограмма, приведем их к одной равнодействую-
равнодействующей R. Теперь рычаг находится под действием двух сил: силы R
и реакции До шарнира О. При равновесии эти две силы должны
быть направлены по одной прямой. Отсюда следует, что при
равновесии рычага линия действия равнодействующей сил Fx и F2
проходит через неподвижную точку О. Опустим теперь из конца D
вектора R перпендикуляры Dax и Dbx на линии действия сил
Fx и F2. Так как площадь параллелограмма, построенного на си-
силах Fx и F2, выражается произведением одной из его сторон на
соответствующую высоту, то
FxDax = F2Dbx,
или
F* Da,'
Так как Dax |] Oa и Dby || Ob, то, как легко понять из рис. 39, эти
отрезки пропорциональны, т. е.
Dbj ОЪ^ А21
DTi —" Oa ~~~ h\ '
следовательно,
т. е. при равновесии рычага численные значения сил Fx и F2 об-
обратно пропорциональны плечам этих сил относительно неподвиж-
неподвижной точки рычага.
В этой форме условие равновесия рычага было впервые дано
Архимедом.
Предыдущее равенство можно переписать в виде
Fxhx — F2h2 = 0,
или
то (Fx) + mo (F2) = 0, A7)
т. е. при равновесии рычага алгебраическая сумма моментов при-
приложенных к нему сил относительно неподвижной точки рычага
равна нулю.
Если это условие пе выполнено, то рычаг не может находиться
в равновесии, так как линия действия равнодействующей R в этом
случае не пройдет через неподвижную точку О, а потому сила R
не может быть уравновешена реакцией Rq шарнира и вызовет вра-
ГЛ. 2. СХОДЯЩИЕСЯ СИЛЫ 71
щение рычага вокруг точки О. Наоборот, если условие A7) выпол-
'нено, то линия действия равнодействующей Д пройдет через
неподвижную точку О и потому не сможет вызвать вращения ры-
рычага; сила Д будет уравновешиваться в этом случае реакцией До
шарнира О и рычаг будет оставаться неподвижным. Таким обра-
образом, мы видим, что равенство A7) выражает необходимое и доста-
достаточное условие равновесия рычага. Этим условием удобно поль-
пользоваться при решении задач статики, относящихся к равнове-
равновесию рычага.
Так как при равновесии рычага силы До и Д равны по модулю,
то в том случае, когда в задаче нужно найти реакцию закреплен-
закрепленной точки рычага (шарнира), для этого достаточно определить
модуль этой равнодействующей Д.
В качестве примера рассмотрим решенную в § 11 задачу 15.
Балка О А представляет собой прямолинейный рычаг с неподвиж-
неподвижной точкой О (рис. 35). Плечо силы Р равно О А — I; чтобы найти
плечо силы Т, опустим из точки О перпендикуляр на линию дей-
действия этой силы; длину этого перпендикуляра /г находим из прямо-
прямоугольного треугольника:
2
h = OB sin a = „ /sin а.
о
Следовательно,
то (Р) = —IP
и
то{Т) = hT = з IT sin a.
Так как балка находится в равновесии, то, приравнивая нулю
сумму этих моментов, получим:
j IT sin a — IP = 0,
откуда находим:
ЗР
Т =
2 sin a '
Сравнивая это решение с тем, которое дано в § И, мы видим, что
в данном случае способ моментов позволяет найти силу Т скорее и
проще, чем способ проекций.
Решим еще следующую задачу того же типа.
Пример 18. Балка О А весом Р, закрепленная на шарнире О, опи-
опирается в точке В на неподвижную опору, как показано на рис. 40. Найти
реакции в точках О и В, если известны угол а наклона балки к горизоцту
СВ
и отношение „_ = п.
ОН
72
СТАТИКА
Решение. Обозпачим реакцию в точке D через N; эта сила направ-
направлена перпендикулярно к балке (см. § 4). Реакцию шарнира О обозначим через
Ro. Так как три силы Р, N и RQ уравновешиваются, то они должны
быть сходящимися: поэтому линия действия силы /?0 проходит через точку
пересечения D линий действия сил Р п N;
следовательно, сила Ro направлена по
прямой OD. Для определения модуля си-
силы N воспользуемся, как и в предыдущем
примере, условием равновесия рычага,
т. е. приравняем нулю сумму моментов
сил N и Р относительно неподвижной точ-
точки О. Если обозначим расстояние ОВ через
а, то по условию задачи С В = па и
ОС = а — па = A — /г) а.
Плечо силы TV относительно точки О рав-
равно а и, следовательно,
т0 (N) = aN.
Плечо силы Р равно расстоянию точки О от линии действия этой силы, т. е.,
как видно из рис. 40, равно ОС cos а = A — я) а cos а и, следовательно,
т0 (Р) = — A — п) аР cos a.
Согласно условию равновесия рычага имеем:
аЛГ — A — п) аР cos a = 0,
отсюда находим:
N = A — п) Р cos a.
Остается определить модуль силы Rq. Для этого достаточно найти равно-
равнодействующую сил N и Р, так как сила Ro должна быть равна по модулю
(и противоположна по направлению) этой равнодействующей. Так как угол
между направлениями сил Рта N равен, очевидно, 180° — а, то по формуле A)
§ 5 находим:
Ro = у Р* + № + 2PN cos A80° — а) = у Р*
2PN cos а.
Силу Rq мы можем, конечно, найти и по способу проекций. В самом деле,
направим координатные оси х и у по оси балки ОА и перпендикулярно к ней;
обозначая угол, который сила Rq образует с осью х, через ф и проектируя
силы Rq , N и Р на оси х ж у, получим следующие два уравнения:
Rq cos ф — Р sin а = 0 и Rq sin ф + N — р cos а = 0.
Так как величина N уже известна, то из этих уравнений нетрудпо найти Ro
и ф. Для этого перепишем эти уравнения в виде:
R 0 cos ф = Р sin а и R 0 sin ф = Р cos а — N.
Разделив второе уравнение на первое, получим:
Р cos a — N
tgq>=:
Р sin а
ГЛ. 3. ПАРАЛЛЕЛЬНЫЕ СИЛЫ
73
Для определения Ro возведем предыдущие два уравнения в квадрат и сложим;
тогда получим:
Д20 (cos2 ф -f sin2 ф) = Р2 sin2a -£ Р2 cos2 a — 2PN cos a + iV2,
откуда
д0 =
+ P2 — 2PN cos a,
т. е. приходим к тому жо результату, что и выше.
Остается теперь в полученные формулы подставить найденное выше
значение N — A — п)Р cos a; тогда
Ло = р у A — nJ cos2 a + 1 — 2 A — п) соь2 a =
= Р У sin2 a + я2 cos2 a
Р cos a — A — n) P cos a
tg ф = ——. = n ctg a.
Таким образом, сила До определена полностью: и по модулю, и по напра-
направлению.
Г Л А В А 3
ПАРАЛЛЕЛЬНЫЕ СИЛЫ
§13. Сложение двух параллельных сил
Пусть на данное тело действуют две параллельные силы Fx
и F2, направленные в одну сторону (рис. 41). Требуется найти их
равнодействующую. Для этого
в точках приложения А и В
этих сил приложим две равные
по модулю силы Тх и Т2, направ-
направленные по прямой А В в проти-
противоположные стороны. Система
четырех сил Fx, F2, 7\ и Т2
эквивалентна данной системе f 7f \C~
сил F1 и F2, что следует из аксио-
аксиомы II. Сложив теперь силу 7\
с силой Fx и силу Т2 с силой
F2, получим две уже непарал- /?;
лельные силы Rt и Д2; перене-
перенесем эти силы в точку О пересе-
пересечения их направлений, так что
они изобразятся соответственно Рис. 41.
векторами R\ и R't. Поступим
теперь обратно: силу R[ разложим на две силы Fl и 7\ и силу
ft'% — на две силы F2 и Тг.
74
СТАТИКА
Равнодействующая сил Т1 и Т2 равна нулю, а потому остается
сложить две силы F1 и F2, приложенные в точке О и направленные
по одной прямой. Их равнодействующая R направлена по той же
прямой, а модуль ее равен сумме модулей данных сил, т. е.
л J 1 Т М1 \1О>
Эта сила R, очевидно, является искомой равнодействующей двух
данных параллельных сил.
Перенесем точку приложения этой силы по линии ее действия
в точку С, лежащую на прямой АВ, и найдем положение точки С
на этой прямой. Из подобных треугольников имеем:
ОС
СВ'
0С
Разделив первое равенство на второе и принимая во внимание,
что 7\ = Т2, получим:
AC F2
Fx• АС = F2■ СВ.
Из предыдущей пропорции следует также, что
АС СВ АС
СИ
АВ
'- R '
откуда находим:
АП AB-J
АВ F,
R
~ и
_AB-Fl
—
A9)
B0)
B1)
Таким образом, приходим к следующему заключению: равно-
равнодействующая двух параллельных сил, направленныхе одну сторону,
параллельна этим силам и направлена
в ту же сторону; модуль равнодейст-
равнодействующей равен сумме модулей данных
сил, а линия действия равнодействую-
равнодействующей делит расстояние между точками
приложения данных сил внутренним
образом на части, обратно пропорцио-
пропорциональные этим силам.
Пусть имеем теперь две параллель-
параллельные силы ^ и F2, приложенные в точ-
точках А и В и направленные в противопо-
противоположные стороны; такие силы называются
аптипараллельными. Пусть Fx ^>F2; найдем равнодействующую
этих сил. Заменим для этого силу F1 двумя эквивалентными ей
параллельными силами: силой Flx, приложенной в точке В, причем
F* = ^2> и силой R, приложенной в некоторой точке С (рис. 42).
Гг
Рис. 42.
ГЛ. 3. ПАРАЛЛЕЛЬНЫЕ СИЛЫ
75
Так как сила Fx должна быть эквивалентна силам Fj и Я, т- е-
является их равнодействующей, то на основании предыдущего
результата будем иметь:
т. е.
и
отсюда
Pi
= р* +
R =
АС
~АВ~
АГ Л-
R =
Pi
Р.
B-F.
= f
— 1
2 ~Г
Р*
~R~'
АВ
■R,
■р*.
A8')
R
это равенство определяет положение точки С. Из предыдущей про-
пропорции получаем:
АС + АВ F2
R
AC
ИЛИ
= §*- и F1AC=FiCB.
A9')
/г
Так как силы /?2 ц /?, взаимно уравновешиваются, то в резуль-
результате остается одна сила R, которая, следовательно, является иско-
искомой равнодействующей двух данных (антипараллельных) сил
Ft и F2; таким образом, приходим к заключению: равнодействую-
равнодействующая двух антипараллельных сил параллельна этим силам и на-
направлена в сторону большей силы; модуль равнодействующей равен
разности модулей данных сил, а линия действия равнодействующей
делит расстояние между точками приложения данных сил внеш-
внешним образом на части, обратно пропорциональные
этим силам.
Мы видим, что в этом случае линия действия I
равнодействующей R проходит через точку, ле- I
жащую вне отрезка АВ, и притом ближе к боль- °\ s
шей силе. I
При сложении двух антипараллельных сил мы *
предположили, что эти силы не равны по модулю. Ъ
Пусть имеем теперь две равные по модулю Рис. 43.
антипараллельные силы; этот случай, как сейчас
увидим, является особым; такая система двух равных по модулю
антипараллельпых сил называется парой сил (рис. 43). Из полу-
полученных выше равенств
R =Fl-Ft
и
76
СТАТИКА
следует, что если F2 стремится к Fv то R стремится к нулю, а АС
неограниченно возрастает.
Таким образом, мы видим, что численное значение равнодейст-
равнодействующей двух равных по модулю антипараллельных сил обращается
в нуль, а точка ее приложения удаляется в бесконечность. Этот
результат указывает на то, что в действительности пару сил
невозможно заменить одной силой, ей эквивалентной, т. е. пара
не имеет равнодействующей. Отсюда следует также, что пару нельзя
уравновесить одной силой; в самом деле, если бы пара уравновеши-
уравновешивалась одной силой, то на основании следствия 2 параграфа 3 эта
уравновешивающая сила, взятая в противоположном направле-
направлении, являлась бы для данной пары равнодействующей, что
невозможно. Ясно, что пара, приложенная к твердому телу, вызы-
вызывает вращение этого тела, если только этому не препятствуют
наложенные на тело связи.
§ 14. Разложение данной силы на две, ей параллельные
Пусть данную силу F требуется разложить на две параллельные
ей силы, приложенные в заданных точках А и В (рис. 44). Перене-
Перенесем точку приложения силы F по линии ее действия в точку С,
лежащую на прямой АВ. Так как точки А и В даны, то отрезки
АС и С В известны. Пусть АС = а и С В = Ь; обозначим искомые
составляющие силы через FA и FB. Тогда на основании ре-
результатов предыдущего параграфа бу-
дем иметь:
aFA= bFB.
= F и
Из этих уравнений находим:
п bF n aF
и FB = ■
ъ-
B2)
Если а = Ъ, то
Рис. 44.
Fa = FB = у
Совершенно так же задача решается и в том случае, когда точка
С пересечения линии действия данной силы F с прямой АВ на-
находится вне отрезка АВ. В этом случае силы FA и FB будут, оче-
очевидно, антипараллельны, а модуль силы F будет равен разности
модулей составляющих сил.
Рассмотрим несколько простых примеров.
Пример 19. К стержню АВ, подвешенному на двух параллельных ве-
веревках AD и BE, привязан груз весом Р = 80 кг. Определить натяжения
веревок, если АС = 30 см и СВ = 50 см. Собственным весом стеряшя можао
пренебречь (рис 45).
ГЛ. 3. ПАРАЛЛЕЛЬНЫЕ СИЛЫ
77
Решение. Стержень находится в равновесия под действием трех
параллельных сил: ТА, Тв и Р, где ТА и Тв — реакции веревок; следова-
следовательно, равнодействующая R сил ТА и Тв уравновешивает силу Р, а потому]
эти две силы имеют равные модули и направлены по одной прямой
в противоположные стороны. Отсюда следует:
= Р> ТА-АС =
или
ЗГ А = 5ТВ.
Т -f- Т =80
Из этих уравнений находим:
ТА = 50 кг и Тв = 30 кг.
Заметим, что тот же результат можно, очевидно,
I
TDC
Рис. 45.
Р
Рис. 46.
получить, разложив данную силу Р на две параллельные ей силы, прило-
приложенные в точках А и В. Эти составляющие силы определяют искомые
натяжения веревок.
Пример 20. Балка весом Р = 100 кг лежит на двух опорах А а В.
На балку положен груз весом Q = 60 кг, причем AD = -тАВ. Определить
давления на опоры А и В (рис. 46).
Решение. Так как в данном случае к балке приложены две силы Р
и Q, то для определения искомых давлений достаточно каждую из этих сил
разложить, как и в предыдущей задаче, на две параллельные ей силы, при-
приложенные в точках А ж В. Предположим, что собственный вес балки прило-
приложен в ее середине; тогда составляющие силы Р будут равны между собой;
следовательно, давление, вызываемое весом балки, на каждую из опор равно
50 кг. Давления на опоры А и В, вызываемые силой Q, находим по форму-
формулам B2). Эти давления равны
Q.DB
= 45 кг (на
QAD и" 4 ""
АВ = 2И = 15 кг (на ОПОру В)-
Полные давления на опоры, следовательно, равны — на опору А: 50 -f* 45 =
= 95 кг и на опору В : 50 -+■ 15 = 65 кг.
Пример 21. Полиспаст состоит из неподвижного блока А и трех
подвижных блоков В, С и D. Груз весом Q, подвешенный к нижнему блоку D,
Уравновешивается вертикальной силой, равной Р и приложенной к свобод-
78
СТАТИКА
иому концу веревки, перекинутой через неподвижный блок А. Пренебрегая
собственным весом подвижных блоков и сопротивлением трения, найти зави-
симость между Р и Q, если веревки, охватывающие все
5локи, параллельны (рис. 47).
Решение. Рассмотрим нижний блок D; так
как сила Q приложена в его центре, то натяжения
обоих параллельных концов веревки, охватываю-
охватывающей этот блок, очевидно, равны между собой и,
Q
следовательно, каждое из них равно у; поэтому ко вто-
второму блоку в точке С приложена сила, равная -У. Так
как эта сила приложена в центре блока, то натяжения
концов веревки, охватывающей блок С, равны ~
каждое; следовательно, к третьему блоку, в точке В
приложена сила, равная ~~ • Отсюда заключаем, что
натяжение веревки, охватывающей блок В, равно -^,
о
Но, с другой стороны, это натяжение равно, оче-
очевидно, Р. Следовательно,
a
Рис. 47.
Если в полиспасте имеется п подвижных блоков, то
?•
§ 15. Сложение многих параллельных сил.
Центр системы параллельных сил
Умея складывать две параллельные силы и применяя способ
последовательного сложения, можно найти равнодействующую
скольких угодно параллельных сил.
Пусть даны параллельные силы /*\, F%, F3 и F4 (рис. 48), при-
приложенные в точках Аи A2i А3 и А4 и направленные в одну сто-
ропу. Сложим сначала силы Ft и F2; получим силу Ru причем
Дх = Fx + P<l> линия действия этой силы пересекает прямую
АХА% в точно С:, положение которой на отрезке АхАг опреде-
определяется по формуле B1) § 13:
^iW — —п ■•
Сложим теперь силы Дх и F3; получим силу Д2, причем 7?2 = 7?, 4-
+ F3 = F1 + F2 + F3; линия действия этой силы проходит через
точку Сг, положение которой на отрезке CtA3 определяется из
ГЛ. 3. ПАРАЛЛЕЛЬНЫЕ СИЛЫ
79
равенства
F3
F3-
Сложив, далее, силы Д2 и Ft, найдем равнодействующую R данноп
системы параллельных сил, причем
R = R2
F3
Ft =
За точку приложения этой равнодействующей может быть принята
точка С, положение которой на отрезке CiAi определяется из
равенства
р р Fa- С-2А 4
°2° R •
Мы видим, таким образом, что равнодействующая системы па-
параллельных сил, направленных в одну сторону, имеет то же на-
направление, что и данные силы;
модуль равнодействующей ра-
равен сумме модулей этих сил.
Кроме того, ясно,что положе-
ния точек С1, Сг и С оста-
останутся неизменными, если, не
изменяя положения точек Аи
А2, А3 и At и модулей данных
сил /*\, F2, F3 и F^, мы из-
изменим только их общее на-
направление, оставляя эти силы
параллельными. Другими сло-
словами, положение точки С
зависит только от модулей
данных параллельных сил и от точек их приложения, но не зави-
зависит от направления этих параллельных сил. Эта точка С назы-
называется центром данной системы параллельных сил. Если изменим
только направление данных сил, оставляя их параллельными, то
при этом соответственно изменится и направление их равнодей-
равнодействующей й, но линия действия этой силы R по-прежнему прой-
пройдет через точку С. Таким образом, центром системы параллель-
параллельных сил, модули и точки приложения которых заданы, назы-
называется такая точка, через которую проходит линия действия их
равнодействующей при любом направлении этих сил.
Определим теперь положение центра С данной системы па-
параллельных сил аналитическим путем. Для этого решим следую-
следующую задачу: дана система параллельных сил Fu F2, F3, ..., Fn,
направленных в одну сторону и приложенных в точках Аи А2,
А3, ..., Ап, причем координаты этих точек (хх, уг, %), (х2, у2, z2),
(х3, ?/3, z3), ..., (xn, yn, zn) известны. Требуется найти координаты
хс> ус, zc Центра С этой системы параллельных сил.
80 статика
Вычислим сначала абсциссу х точки Съ в которой приложена
равнодействующая Я, сил F1 и F2 (рис. 48); заметив, что точка Сх
делит отрезок АхАг на части, обратно пропорциональные силам F1
и F r т. е. что ■r1.1 = If, воспользуемся известной формулой ана-
аналитической геометрии для координат точки, делящей данный
отрезок в данном отношении — = X. По этой формуле имеем:
, ПХХ + ТПХ2 Xj -f- %Х2
Til -\~ и 1 1 А-
где ос1 и х2 обозначают абсциссы концов данного отрезка.
in F2
В рассматриваемом случае нужно, очевидно, положить — = р ;
тогда получим:
ж'= V1+fT'-
Найдем теперь абсциссу х" точки С2, в которой приложена
равнодействующая R2 сил Rt и F3; точка Сг делит отрезок С1А3
на части, обратно пропорциональные силам R1 и F3, т. е. (j-^= j{-
По той же формуле аналитической геометрии имеем:
пх' + тх3
полагая здесь
получим:
т
п
,, _
т -
F3
Rx F
(Fx + F2)
f- ra '
F3
i+ F2'
x' + F3x3
-f 1 ~Г -Г 2 T F3
или, подставляя найденное выше значение х':
Вычисляя, далее, таким же путем абсциссу х'" точки С3, в ко-
которой приложена равнодействующая R3 сил Я2 и F4, найдем:
=
Fx +F2+F3+ Ft
Продолжая эти вычисления до тех пор, пока сложим все дан-
данные силы, и замечая общий закон составления получаемых фор-
формул, для абсциссы хс центра С будем, очевидно, иметь следующее
выражение:
_ FiXl + F2x2 + J>3 + ■ ■ ■ +Fnxn _ ЪРх
ГЛ. 3. ПАРАЛЛЕЛЬНЫЕ СИЛЫ 81
Для двух других координат ус и zc будем иметь два аналогич-
аналогичных выражения. Таким образом, получаем следующие общие
формулы для координат центра системы параллельных сил:
_ ZFx _ ZFy __ ZFz ,9оч
хс ~ ~sF ' Ус — YF > zc — YF • ( '
Рассмотрим теперь задачу сложения параллельных сил в более
общем случае.
Пусть к телу приложена система п параллельных сил, причем
силы Fx, Fit ..., Fh направлены в одну сторону и приложены
в точках Ах (хг, уг, Zj), А2 (ж2, уй, z2), ..., Ak (xh, yh, zh), а силы Fk+U
Fk+i, ..., Fn направлены в противоположную сторону и приложены
в точках Ak+X (xh+u yk+i, zk+i), ..., Ап (xn, yn, zn). Чтобы найти рав-
равнодействующую этой системы параллельных сил, сложим сначала
силы Ft, F2, ..., Fh, направленные в одну сторону. Если обозначим
их равнодействующую через R', а координаты центра С" этих
параллельных сил — через хс>, ус и zc, то на основании преды-
предыдущих результатов будем иметь:
l i
ХС
Затем сложим силы Fk+1, Fk+2, ..., Fn, также направленные в одну
сторону. Пусть R" и С" (хс, Ус, яс) обозначают соответственно
равнодействующую и центр этих параллельных
сил. Тогда
R" = S Рь
хс„ = й~
i=k+l
\R'
Остается теперь сложить две антипараллельные Рис. 49.
силы R! и R" (рис. 49). Здесь могут предста-
представиться следующие три случая: 1) силы R' и R" имеют нерав-
неравные модули; такие силы, как известно из § 13, приводятся к од-
одной равнодействующей силе; 2) модули сил R' и R" равны; в
этом случае данная система параллельных сил не имеет рав-
равнодействующей, а приводится к паре сил; 3) силы R' и Я" имеют
82 СТАТИКА
равные модули и направлены по одной прямой; в этом случае
данная система параллельных сил представляет собой уравно-
уравновешивающуюся систему сил.
Остановимся на первом из этих случаев, т. е. предположим,
что R" Ф R'; пусть, например, R' ~^>R".
В этом случае искомая равнодействующая Д данной системы
параллельных сил совпадает с равнодействующей двух антипа-
антипараллельных сил Я' и Я" и, следовательно, направлена в сторо-
сторону большей из этих сил и имеет модуль, равный разности их
модулей, т. е.
Л = R' — R"
или
или, короче,
R = £ Л. B4)
i= t
где под У^ теперь нужно -понимать алгебраическое значение силы,
т. е. модуль силы, взятый со знаком + или — в зависимости от
того, в какую сторону направлена эта сила.
Таким образом, мы видим, что в общем случае модуль равно-
равнодействующей системы параллельных сил равен сумме алгебраи-
алгебраических значений этих сил; при этом значения сил, направленных
в одну сторону, нужно считать положительными, а сил, направ-
направленных в противоположную сторону, — отрицательными. По-
Понятно, что в том случае, когда сумма алгебраических значений
данных сил окажется отрицательной, модуль их равнодействую-
равнодействующей равен абсолютному значению этой суммы; знак этой
суммы указывает, в какую сторону направлена равнодейст-
равнодействующая.
Линия действия равнодействующей Д проходит через точку С,
лежащую на продолжении отрезка С"С за большей силой, причем
расстояния точки С от С и С" обратно пропорциональны силам
Я' и Я", т. е.
ОС _ JT_
СС" ~ R' '
Эта точка С является центром данной системы параллельных
сил. Найдем координаты этой точки. Для этого воспользуемся
опять формулой деления отрезка в данном отношении. Как из-
известно из аналитической геометрии, в случае внешнего деления
пг »
отношение — = А, в котором делится данный отрезок, является
ГЛ. 3. ПАРАЛЛЕЛЬНЫЕ СИЛЫ 83
отрицательным, а так как точка С делит отрезок С'С" внешним
образом, то в рассматриваемом случае нужно положить А = — ^-;
следовательно,
Xq, -f> Xxq,, R'Xq, — R"Xq,,
•*С 1 + X IV — R"
Подставляя сюда найденные выше значения хс и жс» и заменяя
R' — R" через R, получим:
хс = д
*- 2 **)-i
ИЛИ
n
V
i l
где У?{ опять обозначает алгебраическое значение силы. Такие же
формулы получим и для ус и zc- Таким образом, в самом общем
случае, опуская для краткости индекс i, имеем следующие фор-
формулы для координат центра системы параллельных сил:
r -
С ZF ' Ус ZF ' С ~ Z
Это — те же самые формулы B3), но напомним еще раз, что в общем
случае, когда в данной системе параллельных сил имеются силы,
направленные в противоположные стороны, в этих формулах под F
нужно понимать алгебраическое значение силы. Так как в фор-
формулы B3') входят только алгебраические значения данных сил
и координаты их точек приложения, то отсюда следует, что и в об-
общем случае положение центра системы параллельных сил зави-
зависит только от алгебраических значений этих сил и от координат
их точек приложения.
Если данная система параллельных сил не имеет равнодей-
равнодействующей, а приводится к паре сил, то в этом случае, как было
уже указано, равнодействующая R' сил, направленных в одну
сторону, равна по модулю равнодействующей R" остальных сил,
направленных в противоположную сторону, и следовательно,
сумма алгебраических значений всех данных сил равна нулю,
т. е. £F = 0; точка С в этом случае является бесконечно удаленной.
Пример 22. На тело действуют пять параллельных сил в 10, 15, 30,
15 и 10 кг, приложенных соответственно в точках Ах A, 2, 3,) Аг B, 3, 1),
84
СТАТИКА
A3 C, 1, 2), Л4 @, 1, 1) и Аь A, —1,0), причем первые четыре силы направ-
направлены в одну п ту же сторону, а последняя сила направлена в противополож-
противоположную сторону. Найти координаты центра этой системы сил.
Решение. Полагая в полученных выше формулах для координат
центра параллельных сил согласно условиям задачи Fl = 10, F,
F3 = 30, Ft = 15, Fb =- Ю и i, = 1, х.г = 2, xa = 3, я4 = 0,
получим:
_ 10 .1 -f 15 ■ 2 -L- 30 ■ 3 -f 15 ■ 0 — 10-1 _ 120 _
Жс ~ 10 + 15 4- 30 4- 15 — 10 ~ 0" *
Таким же способом находим и две другие координаты точки С:
= 15,
1,
ус
2 и zc = 2.
§ 16. Равновесие рычага при действии на него
параллельных сил
Рычагом, как уже было указано, называется твердое тело,
вращающееся вокруг пеподвижной оси и находящееся под дей-
действием системы сил, лежащих в плоскости, перпендикулярной
к этой оси. В § 12 мы говорили о равновесии рычага в случае дей-
действия на него сходящихся сил. Рассмотрим теперь тот случай,
когда к рычагу приложена система
параллельных сил. Пусть на рычаг
действуют параллельные силы jFlt
F2, F3, jF4 (рис. 50), лежащие в плос-
плоскости чертежа, и пусть в точке О
рычаг закреплен при помощи цилин-
цилиндрического шарнира, ось которого
перпендикулярна к этой плоскости.
Найдем условие, которому должны
удовлетворять действующие на рычаг
силы при равновесии. Приложенная
к рычагу система параллельных сил,
как мы знаем из предыдущего параг-
параграфа, может быть приведена или к одной равнодействующей
силе R, или к паре сил. Ясно, что если линия действия равно-
равнодействующей Д не пройдет через точку опоры О, то она вызовет
вращение рычага вокруг этой точки, и следовательно, равнове-
равновесие в этом случае невозможно; если же линия действия силы R
пройдет через неподвижную точку (?, то эта сила уравновесится
реакцией шарнира и рычаг будет оставаться неподвижным.
Допустим теперь, что приложенная к рычагу система парал-
параллельных сил приводится к паре; понятно, что в этом случае равно-
равновесия быть не может: в самом деле, если бы рычаг при действии на
него пары сил оказался в равновесии, то это значило бы, что реак-
реакция шарнира О уравновешивает эту пару, что невозможно, так
как пара не может быть уравновешена одной силой. Следовательно,
Рис. 50.
ГЛ. 3. ПАРАЛЛЕЛЬНЫЕ СИЛЫ 85
так же как и в § 12, приходим к заключению, что при равновесии
рычага приложенная к нему систем! заданных параллельных сил
приводится к равнодействующей силе, проходящей через неподвиж-
неподвижную точку рычага.
Выразим теперь это условие в другой форме. Возьмем начало
координат в неподвижной точке О, ось Ох направим перпендику-
перпендикулярно к данным силам, а ось Оу — параллельно им. Если обозна-
обозначим абсциссу центра приложенных к рычагу заданных парал-
параллельных сил через хс, то по формуле B3') имеем:
_ HFx
хс ~"W
Если равнодействующая R этих сил проходит через точку О,
то хс = 0. Отсюда заключаем, что рычаг может находиться в рав-
равновесии только в том случае, если £Fx = 0. В этом равенстве, как
известно из предыдущего параграфа, х обозначает абсциссу точки
приложения данной силы, a F — алгебраическое значение силы,
т. е. модуль силы, взятый со знаком + или — в зависимости от на-
направления этой силы. Будем считать силы, направление которых
совпадает с положительным направлением оси у, положительными,
а силы, направленные в противоположную сторону, отрицатель-
отрицательными. Тогда, как видно из рис. 50, получим:
= 0.
Далее, из рлс. 50 видим, что абсолютное значение абсциссы xL
точки приложения силы Ft равно расстоянию линии действия этой
силы от точки О, т. е. представляет собой плечо hi этой силы
относительно точки О; следовательно,
хх = klt z% = я2, х3 = п3, %4 = «4-
Составляя теперь моменты всех сил относительно точки О и прини-
принимая во внимание знаки этих моментов, согласно сказанному
в § 12 получим:
т0 (Fx) = — FJi! = — Ftxlt то (F2) = + F2h2 = F2x2;
mo {F3) = — F3h3 = Fsx3, m0 (F4) = + FJii = — fitxt.
Поэтому предыдущее равенство, выражающее условие равно-
равновесия рычага, можно представить в виде
т0 (FJ + т0 (F2) + т, {F3) + т0 (F4) = 0
или короче:
%т0 (F) = 0,
т. е. мы получили условие равновесия рычага в той же самой фор-
форме, как и в том случае, когда к рычагу приложены сходящиеся
силы, а именно: при равновесии рычага, находящегося под действием
86
СТАТИКА
системы параллельных сил, алгебраическая сумма моментов этих
сил относительно неподвижной точки, вокруг которой может
вращаться рычаг, равна нулю.
С задачей о равновесии рычага, находящегося под действием
системы параллельных сил, в статике приходится часто встре-
встречаться. Все такие задачи очень просто
решаются при помощи полученного
уравнения моментов, выражающего
условие равновесия рычага.
Рассмотрим несколько примеров.
С
Пример 23. Предохранительный
клапан D парового котла соединен стер-
стержнем AD с рычагом ОБ длиной в 40 см и
UXJ у весом в 1 кг, вращающимся на шарнире О,
I jj L_ причем О А = 5 см, а площадь клапана
равна 25 см2 (рис. 51).
Р"с- 51. В точке С рычага подвешен груз весом
Р — 32,8 кг. Определить расстояние ОС
при условии, чтобы клапан открывался при давлении в котле, большем 10
атмосфер. Атмосферой (технической) называется давление, равное 1 кг
на 1 см2.
Решение. На рычаг ОБ действуют три силы: сила Р, приложенная
к рычагу в точке С, собственный вес стержня Q, приложенный в середине
ОБ, и сила F давления пара, направленная по DA и при-
приложенная к рычагу в точке А х). По условию задачи рычаг
должен находиться в равновесии при давлении в котле в 10
атмосфер. Составив моменты сил Р, Q и F относительно
точки О и приравняв сумму этих моментов нулю, получим
условие равновесия рычага ОБ:
— P-OC — Q- 0,50В +F-OA =0.
Найдем численное значение силы F; при 10 атмосферах
давление на 1 см2 равно 10 кг, а так как площадь клапана D
равна 25 см2, то F = 10-25 кг.
Подставляя в предыдущее уравнение численные значения
сил и расстояний, получим:
32,8 ■ ОС + 1 • 20 — 10 • 25 ■ 5 = 0,
откуда
ОС = 37,5 см.
Пример 24. Дифференциальный блок, схематически
изображенный на рис. 52, состоит из двух неподвижных бло-
блоков радиусов О А и ОБ, жестко соединенных между собой и
вращающихся на общей оси О, и из подвижного блока Ог.
Края блоков снабжены зубцами, на которые надеваются
звенья замкнутой цепи CBDEFA.
Один конец этой цепи свободно свешивается с непо-
неподвижного блока в точке А; к другому концу, свешивающемуся
с неподвижного блока в точке С, приложена сила Р; к блоку О1 подвешен
груз весом Q. Найти зависимость между Р и Q при равновесии, если
OB = R и ОА = г.
Рис. 52.
х) Сила давления пара, действующая на клапан D, передается па рычаг
через стержень DA.
ГЛ. 3. ПАРАЛЛЕЛЬНЫЕ СИЛЫ
87
Решение. Рассмотрим сначала нижний блок Ot; так как сила Q
приложена в центре этого блока, то ясно, что натяжения параллельных це-
цепей EF и DB равны - каждое, а потому на верхний блок действуют три силы:
сила Р и две силы, равные у и приложенные в точках F и В. При равновесии
этого блока сумма моментов этих трех сил относительно неподвижной точки О
равна нулю, а потому получаем следующее уравнение:
откуда находим:
п~г
Пользуясь условием равновесия рычага, можно легко находить
опорные реакции в случае балки, нагруженной параллельными
силами.
Пример 25. К горизонтальной балке, лежащей на двух опорах, при-
приложены вертикальные силы FUF2 и F3, Расстояния точек приложения этих
сил от опор и расстояние между опорами указаны на рис. 53. Найти реакции
опор.
N,
h
F,
Рис. 53.
Рис. 54.
Решение. Устранив мысленно правую опору, мы должны будем
для удержания балки в равновесии приложить к ней в точке В силу, равную
реакции этой опоры; обозначим эту силу через N2. (Мы могли бы, например,
привязать к балке в точке В веревку, перекинутую через блок, и подвесить
к свободному концу этой веревки соответствующего веса груз, как это по-
показано па рис. 54.) Очевидно, мы не нарушим равновесия балки, если в точке А
вместо опоры установим неподвижный шарнир. Тогда мы можем рассматри-
рассматривать балку как рычаг с неподвижной точкой А. Поэтому, поскольку балка
находится в равновесии, сумма моментов всех приложенных к пей сил отно-
относительно точки А должна равняться нулю, т. е.
Отсюда находим реакцию правой опоры:
+ (I - l3) F3 _ 1г
I I
= 0.
-w-
Совершенно так же, обозначая реакцию левой опоры через 7Vt и составляя
08 СТАТИКА
уравнение моментов относительно точки В, получим:
- IN, + (I - у ^ + (I - у F2 + /3^з = 0.
Отсюда находим:
Сумма реакций NL + Nz равна, очевидно, сумме заданных сил/^ -£ F2 -bFa.
ГЛАВА 4
ТЕОРИЯ ПАР
§ 17. Момент пары
Парой сил называется система двух равных по модулю антипа-
антипараллельных сил. В § 13 мы установили, что пара сил не имеет рав-
равнодействующей, т. е. пару сил нельзя заменить одной силой, ей
эквивалентной. Поэтому в статике наряду со свойствами сил,
действующих на твердое тело, приходится рассматривать и свой-
свойства пар. Теория пар позволяет, как
увидим далее, весьма просто разре-
разрешить основной вопрос статики — вы-
вывести условия равновесия системы
сил, приложенных к твердому телу
в самом общем случае.
_ Расстояние между линиями деп-
" ствия сил пары (F, F'), т. е. длина
Рис- 53- перпендикуляра d, опущенного из
точки приложения А одной из сил
пары на линию действия второй силы, называется плечом пары
(рис. 55). Плоскость, в которой расположена данная пара, назы-
называется плоскостью действия этой пары. Основным и важнейшим
понятием в теории пар является понятие момента пары. При
этом численное значение момента пары определяется как произ-
произведение модуля одной из сил пары на плечо этой пары. Обозначая
численное значение момента пары через т, имеем, следовательно,
т = Fd = F'd.
Если численные значения сил пары выражены в килограммах,
а длина ее плеча — в метрах, то численное значение момента
пары выражается в килограммометрах.
Из рис. 55 следует, что момент пары численно равен удвоенной
площади треугольника ABC, т. е. треугольника, который получим,
соединив начало и конец одной из сил пары, например F', с точкой
приложения А второй силы, так как в этом треугольнике отрезок
ВС = F' является основанием, а плечо пары — высотой.
ГЛ. 4. ТЕОРИЯ ПАР
89
18. Эквивалентные пары. Момент пары как вектор
В этом параграфе мы рассмотрим теоремы, выражающие
основные свойства пар и устанавливающие условие эквивалент-
эквивалентности двух пар.
Теорема 1. Две пары, лежащие в одной плоскости и имею-
имеющие численно равные моменты и одинаковое направление враще-
вращения, эквивалентны.
Доказательство. Пусть даны две пары (F, F') и (Flf F[),
лежащие в одной плоскости (рис. 56), имеющие численно равные
моменты и одинаковое направление вращения (по часовой стрелке).
Требуется доказать, что эти пары эквивалентны.
Рис. 56.
Предполагая, что силы f и Fl не параллельны, обозначим точки
пересечения линий действия сил двух данных пар через А, В,
С и D. Если обозначим плечи данных пар через dm dx, то из усло-
условия равенства моментов этих пар имеем: Fd = Fxd±.
Перенесем точку приложения силы F в точку А, а точку при-
приложения силы F' в точку В. Разложив силу Fno направлениям АС
и В А, получим две силы F2 и F3. Точно так же, разложив силу F'
по направлениям BD и АВ, получим силы F\ л Р'Л.
В силовых треугольниках, которые получились при разложе-
разложении сил Fn F', углы попарно равны как углы с параллельными сто-
сторонами; кроме того,/*1 — F'\ следовательно, эти треугольники рав-
равны, а потомуF2 = F!2mF3 = F'3. Силы F3и F3 как равные по модулю
и прямо противоположные уравновешиваются, а потому остаются
только силы F2 и F'2, образующие, очевидно,пару. Следовательно,
вместо данной пары (F, F') мы получили новую, эквивалентную ей
пару (F2, iF2); эти пары имеют равные моменты; в самом деле, мо-
момент иары (F, F') выражается удвоенной площадью треугольника
90 СТАТИКА
АЕВ, а момент пары (jF2, F'2) равен удвоенной площади треуголь-
треугольника АКБ; но эти треугольники равновелики, так как они имеют
общее основание АВ, а вершины Е и К лежат на прямой, парал-
параллельной основанию; следовательно, если обозначим моменты
пар (F, F') и (F2, F'2) соответственно через т1 и т2, то
т1 = т2.
С другой стороны, т (F, F') = Fd и m2 (F2, F2) = F2du а потому
Fd = F%dv Но по условию теоремы Fd = Frdx; отсюда приходим
к равенству F2dx = Fxdx или Рг = Fx. Таким образом, мы видим,
что силы F2 и Fx имеют равные модули и направлены по одной
прямой в одну и ту же сторону; то жег относится и к силам К и
F,. Отсюда, очевидно, следует, что пары (F2, F2) и (Fx, F\) экви-
эквивалентны, т. е.
(F,, F,) = (F2, Г,).
Но выше мы установили, что
(F2, F,) = (F, F').
Отсюда заключаем, что
что и требовалось доказать.
Для доказательства этой теоремы в том случае, когда силы
F и Fx параллельны, достаточно одну из данных пар, например
пару (Fu F[), переместить в ее плоскости так, чтобы ее силы ока-
оказались не параллельными силам пары (F, F'). Так как при таком
перемещении пары ее момент и направление вращения, очевидно,
но изменяются, то, обозначая эту пару р. ее новом положении через
(F2, jFj), на основании предыдущего результата будем иметь:
(Fs, F'J^iFu Fl)
(F*, Ft) = (F, F'),
откуда следует, что
(Fb FJ^iF, F').
Доказанная теорема дает условие эквивалентности пар, лежа-
лежащих в одной плоскости. Отсюда вытекает ряд важных следствий:
1) Данную пару, не изменяя ее действия на тело, можно как
угодно переносить в ее плоскости. Следовательно, действие пары
на тело не зависит от положения пары в ее плоскости.
2) Не изменяя действия данной пары на тело, можно изме-
изменять модуль сил и плечо этой пары, но при условии, чтобы ее
момент и направление вращения оставались неизменными.
3) Две данные пары всегда можно привести к одному плечу.
ГЛ. 4. ТЕОРИЯ ПАР
91
В самом деле, пусть даны две пары (Flt F,') и (F2, Fj). Пусть,
например, F1 = F\ ~ 20 кг и F2 = F\ = 30 кг. Пусть плечо пер-
первой пары с?х *= 1,5 м, а плечо второй пары d2 — 0,5 м. Тогда мо-
момент первой пары равен 30 кгм, а момент второй пары равен
15 кгм. Заменим эти пары двумя парами (F3, F'n) и (F4, F^), им
эквивалентными и имеющими одно и то же плечо, равное, напри-
например, 2 м. Так как момент пары (F3, F3) должен равняться 30 кгм,
то силы этой пары F3 и
нужно, очевидно,
3 % взять равными
30 : 2 — 15 кг. Точно так же момент пары (F4, Fl) должен быть
равным 15 кгм; следовательно, силы этой пары нужно взять рав-
равными 15 : 2 = 7,5 кг.
Таким образом, две или несколько пар мы всегда можем заме-
заменить эквивалентными им парами, имеющими равные плечи,
т. е., другими словами, привести данные пары к одному плечу.
Этим свойством пар мы воспользуемся далее, когда будем рассмат-
рассматривать сложение пар.
Получив условие эквивалентности пар, лежащих в одной плос-
плоскости, естественно поставить такой вопрос: могут ли быть экви-
эквивалентными пары, располо-
расположенные в разных плоскостях,
и можно ли данную пару, не
изменяя ее действия на тело,
переносить в другую плос-
плоскость.
Ответ на этот вопрос дает
следующая теорема:
Теорема 2. Данную
пару, не изменяя ее действия
на тело, можно переносить
в любую плоскость, парал-
параллельную плоскости этой пары.
Доказател ьство.
Пусть данная пара (F, F')
лежит в плоскости / (рис. 57).
Проведем плоскость //, па-
параллельную плоскости /, и
возьмем где-нибудь в этой плоскости отрезок АхВг, равный и
параллельный отрезку А В. Соединив точку А с точкой Ах и
точку В с точкой Ви получим параллелограмм АВАХВХ\ точку
пересечения диагоналей этого параллелограмма обозначим через
О. Разложим теперь силу F' на две параллельные ей составляю-
составляющие силы, приложенные в точках О и Вх. Так как точка А лежит
вне отрезка ОВХ, то эти составляющие силы должны быть анти-
параллельны. В точке О будет приложена большая составляющая
Fj, имеющая то же направление, что и сила F'; в точке Вг будет
приложена меньшая составляющая F'lt имеющая противоположное
Рис. 57.
92 СТАТИКА
направление. Модуль силы F' равен разности модулей этих состав-
составляющих, т. е.
Так как, кроме того, расстояние АВг вдвое больше расстояния АО,
то F'i = 1F\. Отсюда находим модули обеих составляющих:
в\ =f и f; = w.
Итак, силу F' мы заменили двумя эквивалентными ей силами
F'% и F\. Точно так же поступим и со второй силой Жданной пары.
Разложив эту силу на две антипараллельные составляющие, при-
приложенные в точках О и Аи получим силу F2, приложенную в
точке О и направленную в ту же сторону, что и сила F, и силу Fu
приложенную в точке AY и направленную в противоположную
сторону. При этом Рг — IF и Fx = F. Таким образом, данную
пару (F, F') мы заменили четырьмя эквивалентными ей силами:
F2, F2, F1 и Fi Но так как F = F', то
F2 = Fi и Fx =F\.
Отсюда видим, что силы F2 и F£, как равные по модулю и прямо
противоположные, уравновешиваются, а потому остаются только
две силы Fl и F\, образующие пару. Итак, вместо данной пары
(F, F') мы получили эквивалентную ей пару (Fu F[), но эта вто-
вторая пара представляет собой, очевидно, ту же самую пару (F, F'),
перенесенную в плоскость //, и, следовательно, теорема дока-
доказана. Так как перпендикуляры к параллельным плоскостям имеют
одинаковое направление, то из этой теоремы следует, что действие
пары на тело не зависит от положения плоскости этой пары, а
зависит только от направления перпендикуляра к этой плоскости.
Соединяя результаты, полученные на основании доказанных тео-
теорем 1 и 2, мы видим, что действие пары на тело определяется сле-
следующими тремя факторами:
1) численным значением момента пары; 2) направлением пер-
перпендикуляра к плоскости действия пары и 3) направлением враще-
вращения пары *).
Поэтому для полной характеристики пары недостаточно знать
только численное значение ее момента; необходимо знать еще на-
направление перпендикуляра к плоскости действия этой пары и
направление ее вращения (в ту или другую сторону). Отсюда
приходим к мысли о возможности представить момент пары в виде
вектора так, чтобы этот вектор определял все три указанных
фактора, от которых зависит действие пары на тело. Модуль этого
х) Сравните с тремя факторами, определяющими действие силы на тело:
1) численное значение силы, 2) положение линии действия силы в пространстве
и 3) направление силы в ту или другую сторону вдоль этой линии.
ГЛ. 4. ТЕОРИЯ ПАР 99
вектора должен выражать в произвольно выбранном масштабе
численное значение момента данной пары, т. е. произведение мо-
модуля одной из сил пары на ее плечо, а направление этого вектора
должно определять направление перпендикуляра к плоскости
действия пары; следовательно, этот вектор должен быть направлен
по прямой, перпендикулярной к плоскости данной пары. Остается
теперь выяснить, в какую сторону по перпендикуляру к плоскости
пары должен быть направлен ее момент. Понятно, что выбор этого
направления должен быть связан с направлением вращения дан-
данной пары так, чтобы, зная направление вектора-момента, мы
могли бы определить направление вращения пары. Условимся
направлять вектор-момент пары по перпендикуляру к ее плос-
плоскости всегда в ту сторону, чтобы, смотря с его конца на пару,
видеть эту пару вращающей тело против часовой стрелки;
другими словами, при определении направления момента па-
пары мы будем пользоваться так называемым правилом винта
(правого).
Вектор-момент пары будем обозначать через т.
Когда вектор т задан (построен), то мы можем определить вес
три вышеуказанных фактора, которыми характеризуется действие
данной пары на тело, т. е.: 1) плоскость действия пары или любую
параллельную ей плоскость (эта плоскость перпендикулярна
к вектору т), 2) численное значение момента пары (это численное
значение равно модулю вектора т) и 3) направление вращения
пары (это направление определяется по направлению вектора т
согласно правилу правого винта). Отсюда следует, что действие
пары на данное тело вполне определяется модулем и направлением
ее момента. Точка приложения вектора т, как видно из предыду-
предыдущих соображений, в характеристике данной пары никакой роли
не играет и потому может быть выбрана произвольно. За начало
вектора т часто берут середину отрезка, соединяющего точку при-
приложения сил данной пары, хотя этот вектор, повторяем, можно
построить и во всякой другой точке (например, в точке приложе-
приложения одной из сил пары). Такой вектор, который не связан ни с ка-
какой материальной или геометрической точкой и, следовательно,
может быть перенесен параллельно себе в любую точку, назы-
называется свободным вектором.
Следовательно, момент пары есть вектор свободный. На
рис. 58, я и 58, б вектор т изображает момент пары (F, F').
Чтобы иметь право рассматривать момент пары как векторную
величину, нужно еще убедиться согласно сказанному в § 5,
что моменты пар складываются по правилу векторного (гео-
(геометрического) сложения; это будет показано в следующем
параграфе.
Установив на основании теорем 1 и 2, что действие пары на
данное тело определяется ее вектором-моментом, мы можем
94
СТАТИКА
теперь выразить условие эквивалентности пар в следующем
общем виде:
Две пары эквивалентны, если их векторы-моменты равны между
собой, т. е. имеют равные модули, параллельны и направлены
в одну и ту же сторону.
В самом деле, если обозначим моменты данных пар через тх
и т2, то из условия параллельности этих векторов следует, что
Рис. 58.
данные пары лежат в параллельных плоскостях, а потому на осно-
основании теоремы 2 одна из этих пар может быть перенесена в плос-
плоскость второй пары; кроме того, из равенства модулей векторов
т1 и т2 следует, что данные пары имеют численно равные моменты;
так как векторы mx и т2 направлены в одну сторону, то данные
пары имеют одинаковое направление вращения. А если две пары
лежат в одной плоскости и имеют численно равные моменты и
одинаковое направление вращения, то согласно теореме 1 они
будут эквивалентны, что и требовалось доказать.
§ 19. Сложение пар
В этом параграфе мы рассмотрим задачу сложения пар, т. е.
приведения нескольких данных пар к одной равнодействующей
паре. Так как действие пары на данное тело определяется ее
вектором-моментом, то следует ожидать, что операция сложения
пар должна приводиться к векторному сложению моментов этих
пар; это мы сейчас и докажем.
Теорема. Две пары, лежащие в пересекающихся плоскостях,
эквивалентны одной паре, момент которой равен векторной сумме
моментов данных пар.
Доказательство. Пусть данные пары лежат в пересе-
пересекающихся плоскостях I и II (рис. 59). Возьмем на линии пересе-
пересечения этих плоскостей произвольный отрезок АВ = d и приведем
данные пары к одному плечу, равному АВ; далее, пользуясь тем,
что пару мы можем, как угодно, переносить в ее плоскости, пе-
переместим каждую из данных пар в ее плоскости таким образом,
чтобы их плечи совпали с отрезком АВ; после этого получим пары
(F1, Ft) и (jF2, F%), как показано на рис. 59. Пара (t\, FJ) лежит
ГЛ. 4. ТЕОРИЯ ПАР
95
в плоскости /, а пара (F2, F!2) лежит в плоскости //. Сложив
силы Fi и F2, приложенные в одной точке, получим равнодействую-
равнодействующую Д; сложив, далее, силы F,' и Fj, получим равнодействующую
Д'. Следовательно,
но
а потому
и F, =
т. е. силы Д и Д' равны по модулю и противоположны по направ-
направлению; следовательно, эти силы образуют пару. Таким образом,
Рис. 59.
две данные пары мы привели к одной равнодействующей паре
(Д, Д'); остается показать, что ее момент равен векторной сумме
моментов данных пар.
Пусть моменты пар (Fx, F,'), (F2, F%) и (Д, Д') изображаются
соответственно векторами АС, AD и АЕ\ при этом вектор АС пер-
перпендикулярен к плоскости /, вектор AD перпендикулярен к пло-
плоскости //, а вектор АЕ перпендикулярен к плоскости пары (Д, Д').
Так как эти три вектора перпендикулярны к прямой АВ, то они
лежат в одной плоскости. Так как модуль момента пары равен
произведению модуля одной из сил пары на плечо этой пары, то
AC=F1-d, AD=F2-d и AE = R-d.
Рассмотрим два треугольника АСЕ и Асе; в этих треугольни-
треугольниках углы САЕ и сАе равны как углы с перпендикулярными
98 СТАТИКА
сторонами, так как AC lie и АЕ _1_ Ае; стороны этих равных
углов пропорциональны, так как
АС ___ F1 ■ d _F% _ Ac
АЕ ~ ~ТГ^Г ~~ R ~ Ае'
Отсюда следует, что треугольники АСЕ и Асе подобны. Совер-
Совершенно так же можно доказать подобие треугольников ADE и
Ade. Отсюда заключаем, что четырехугольник ACED подобен
параллелограмму Acde и потому является также параллелограм-
параллелограммом. Следовательно, вектор АЕ равен сумме векторов АС и AD,
т. е.
АЁ = АС + AD,
что и требовалось доказать.
Если теперь дано несколько пар, расположенных в непарал-
непараллельных плоскостях, то, складывая эти пары в последовательном
порядке и применяя каждый раз теорему о сложении двух пар,
получим в результате одну равнодействующую пару (R, Я'), мо-
момент которой М равен векторной сумме моментов всех данных
пар, т. е.
или, другими словами, момент равнодействующей пары равен по
модулю и направлению замыкающей стороне многоугольника, по-
построенного на моментах слагаемых пар.
В том случае, когда слагаемые пары лежат в параллельных
плоскостях, мы можем на основании теоремы 2 предыдущего па-
параграфа перенести их в одну плоскость; в этом случае, очевидно,
векторы-моменты слагаемых пар будут направлены по одной
прямой, перпендикулярной к этой плоскости, и будут складываться
как коллинеарные векторы (так же, как силы, действующие по
одной прямой). Так как вершины многоугольника моментов рас-
располагаются в этом случае на одной прямой, то отсюда следует, что
момент равнодействующей пары направлеп по той же прямой,
а его модуль равен абсолютному значению алгебраической суммы
моментов слагаемых пар; при этом моменты слагаемых пар, на-
направленные в одну сторону, мы должны считать положительными,
а направленные в противоположную сторону — отрицательными.
Таким образом, при сложении пар, лежащих в параллельных пло-
плоскостях (или в одной плоскости), мы рассматриваем момент пары
как величину алгебраическую, т. е. берем его со знаком + или — в
зависимости от направления этого момента, или, что то же, от
направления вращения данной пары. Знак алгебраической сум-
суммы моментов слагаемых пар определяет направление вращения
равнодействующей пары.
ГЛ. 4. ТЕОРИЯ ПАР
97
Пример 26. Три пары лежат в координатных плоскостях Oyz,
и Оху, как указано на рис. 60. Момент первой пары тх = 6 кгм, момент вто-
второй пары т2 = 24 кгм и момент третьей пары т3 = 8 кгм. Найти величину
и направление момента равнодействующей пары.
Решение. Из произвольной точки, например из начала координат О,
проводим векторы т1У т2и т3, изображающие моменты данных пар; так как
слагаемые пары расположены в координатных плоскостях, то эти векторы
направлены по соответствующим координатным осям. Искомый момент М
Рис. 60.
Рис. 61.
равнодействующей пары, равный сумме векторов тх, т2 и т3, изобразится
диагональю параллелепипеда, построенного на этих векторах; следовательно,
M = У mi -+■ mi ~г mj = "^676 = 26 кг.
Для определепия направления вектора М находим его направляющие
косинусы:
cos а = * =
12
„ тг 12
cos{5= м=1з-,
Пример 27. Сложить три пары, лежащие в плоскости чертежа
(рис. 61). Дано: Fx = F[ = 20 кг, dx = 0,25 м; F2 = F', = 30 кг, d2 = 0,5 м;
F3 = F[ = 10 кг, d3 = 0,75 м.
Решение. Условимся считать момент пары, вращающей тело про-
против часовой стрелки (для читателя), положительным, а момент пары с об-
обратным направлением вращения — отрицательным. Тогда, обозначая алгеб-
алгебраические значения моментов данных пар через т1у тг и т3, будем иметь
согласно условиям задачи:
тх = 20-0,25 = 5 кгм,
>п2 —— 30 • 0,5 =— 15 кгм
И
т3 =— 10 • 0,75 =— 7,5 кгм.
Складывая эти моменты, получим алгебраическое значение момента равно-
равнодействующей пары:
М = 5 — 15 — 7,5 = — 17,5 кгм.
4 И. М. Воронков
98 СТАТИКА
Так как это значение отрицательно, то равнодействующая пара стремится
вращать тело но часовой стрелке. Модуль момента равнодействующей пары
равен 17,5 кем. Плечо равнодействующей пары можно выбрать произвольно;
если взять, например, это плечо равным 0,5 м, то каждая из сил равнодей-
равнодействующей пары будет, очевидно, равна ■ nV= 35 кг.
Теорема сложения пар позволяет просто решить вопрос об
условии равновесия системы пар; для того чтобы данные пары
уравновешивались, момент М равнодействующей пары (Я, Я')
должен, очевидно, равняться нулю. Это условие не только необ-
необходимо, но и достаточно. В самом деле, если обозначим плечо
равнодействующей пары (Я, Я') через d, то из равенства М =
= Rd = 0 следует, что или R = R' = 0, или d = 0; в послед-
последнем случае данная система пар приводится к двум равным по
модулю силам, направленным по одной прямой в противополож-
противоположные стороны. Понятно, что в обоих этих случаях имеет место
равновесие. Но
М = £т,
а потому условие равновесия системы пар принимает вид
т. е. для равновесия системы пар необходимо и достаточно,
чтобы векторная сумма их моментов равнялась нулю, или, другими
словами, чтобы многоугольник моментов этих пар был замкнутым.
ГЛАВА 5
ПЛОСКАЯ СИСТЕМА СИЛ
§ 20. Момент силы относительно точки
Одним из основных понятий механики наряду с моментом
пары является понятие момента силы относительно данной
точки. С этим понятием мы уже встречались, когда говорили о рав-
равновесии рычага (§ 12 и § 16).
Во всех задачах статики, относящихся к плоской системе сил,
мы будем рассматривать момент силы как величину алгебраиче-
алгебраическую; мы условились считать момент силы относительно данной
точки положительным, если сила направлена относительно этой
точки против движения часовой стрелки, и отрицательным, если
сила направлена по движению часовой стрелки (§ 12 и § 16).
Кроме того, напомним, что абсолютное значение момента силы
относительно данной точки равно произведению модуля силы на ее
плечо, т. е. на длину перпендикуляра, опущенного из этой точки
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ
99
Рис. 63.
на линию действия силы. Поэтому для силы F на рис. 62 будем
иметь:
mn(F) = — F- h;
в случае же, изображенном на рис. 63, имеем:
т0 (F,) = +/?,. kv
Из рис. 62 видим, что абсолютное значение момента силы F
относительно точки О численно равно двойной площади треуголь-
треугольника ОАВ, так как отрезок АВ = F является для этого тре-
треугольника основанием,а пле-
плечо h — высотой. Точно так же
момент силы Fx относительно
точки О (рис. 63) численно
равен удвоенной площади
треугольника ОА1В1.
Из данного определения
момента силы следует:
1) Момент силы относи-
относительно данной точки не изме-
изменяется при переносе точки приложения силы по линии ее действия,
так как при этом не изменяются ни модуль силы, ни её плечо, ни
направление вращения.
2) Момент силы относительно данной точки обращается
в нуль в том случае, когда линия действия силы проходит через
эту точку, так как в этом случае плечо силы равно нулю.
3) Сумма моментов двух равных по модулю сил, направленных
по одной прямой в противоположные стороны, относительно
любой точки равна нулю, так как моменты таких сил равны по
абсолютной величине, но противоположны по знаку.
§ 21. Приведение плоской системы сил
к данному центру
Изучение плоской системы сил, т. е. системы таких сил, линии
действия которых расположены в одной плоскости, мы начнем
с рассмотрения задачи сложения таких сил.
Пусть на данное тело действует плоская система сил Flt F2,
F3, ..., Fn. Применяя способ последовательного сложения сил,
такую систему всегда можно привести или к одной равнодействую-
равнодействующей силе, или к одной паре, если только эта система сил не нахо-
находится в равновесии.
В самом деле, перенося точки приложения сил Fx и F2 в точку
пересечения линий действия этих сил и складывая их по правилу
параллелограмма, получим равнодействующую Дх = F± + F2;
если бы силы Fl и F2 были параллельны, то мы нашли бы их
равнодействующую по правилу сложения параллельных сил.
100 СТАТИКА
Складывая затем таким же способом силы Дх и F3, получим равно-
равнодействующую Д2 = /?! -f- F3 и т. д. В конечном результате мы,
очевидно, всегда получим или равнодействующую силу, или
пару сил, или же две прямо противоположные и равные по моду-
модулю, т. е. две уравновешивающиеся силы. В последнем случае
данная плоская система сил, эквивалентная двум уравновешива-
уравновешивающимся силам, будет находиться в равновесии.
Однако нужно сказать, что этот способ мало удобен, во-первых,
потому, что при значительном числе слагаемых сил он становится
громоздким, и, во-вторых, потому, что точка пересечения линий
действия двух слагаемых сил может оказаться настолько удален-
удаленной, что не будет помещаться на чертеже. Поэтому мы рассмотрим
другой способ приведения плоской системы сил, более простой и
более общий; этот способ применим, как увидим далее, также
в самом общем случае, когда последовательное сложение сил ста-
становится невозможным, так как линии действия данных сил не
будут лежать в одной плоскости и потому могут не пересекаться
и в то же время не быть параллельными.
Этот второй способ называется приведением
системы сил к данному центру (к данной
точке) и основан на следующей простой
теореме.
Теорема. Всякая данная сила эквива-
эквивалентна такой же по модулю и направлению
силе, но приложенной в другой точке тела,
и некоторой паре.
Доказательство. Пусть имеем
Рис. &4. силу F, приложенную к телу в точке А
(рис. 64). В произвольно выбранной точке В
тела приложим две равные по модулю и противоположные по
направлению силы F' и F", действующие по прямой, параллель-
параллельной силе F, причем F' = F" = F. Согласно аксиоме 2 (§ 3) си-
система трех сил F, F' и F" эквивалентна данной силе F; таким
образом, данную силу F можно заменить равной ей силой F',
приложенной в произвольно выбранной точке В, и парой (F, F"),
что и требовалось доказать.
Эта теорема показывает, что данную силу можно переносить
параллельно самой себе в любую точку тела с присоединением соот-
соответствующей пары. Поэтому пару (F, F"), получающуюся при
переносе точки приложения силы F из точки А в точку В, назы-
называют присоединенной парой.
Очевидно, что момент присоединенной пары (F, F") равен
т = Fh,
где h — плечо этой пары, т. е. длина перпендикуляра, опущенного
из точки В на линию действия силы F. С другой стороны, произве-
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ
101
дение Fh представляет собой момент силы F относительно точки В;
следовательно,
т = mB(F).
Мы получили это равенство для случая, представленного на
рис. 64, когда сила F стремится вращать тело вокруг точки В
против движения часовой стрелки, т. е. когда и момент присоеди-
присоединенной пары и момент силы F положительны. Легко видеть, что
Рис. 65.
это равенство будет иметь место и в том случае, когда момент силы
F относительно точки В отрицателен.
Итак, момент присоединенной пары (F, F") равен (по абсолют-
абсолютной величине и по знаку) моменту силы F относительно новой
точки приложения этой силы.
Пусть имеем теперь плоскую систему сил Fx, F2, F3, приложен-
приложенных соответственно в точках Аи А2, А3 (рис. 65) х). Возьмем
в плоскости этих сил какую-нибудь точку О, называемую центром
приведения, и, пользуясь предыдущей теоремой, перенесем точки
приложения всех данных сил в эту точку О; получим силы F[,
F% и F3 и соответствующие присоединенные пары (Fu FJ'), (F2, F'i)
и (F3, F'j). Силы Fj, F2 и Fit как приложенные в одной точке О,
г) На рис. 65 взяты только три силы, но понятно, что все дальнейшие
выводы не зависят от числа сил данной плоской системы.
102 статика
мы можем сложить по правилу силового многоугольника. По-
Получим равнодействующую R', приложенную в той же точке О
и равную их векторной сумме, т. е.
R = F; + F2 + F3,
или, что то же,
R = Fl + F> + F3 = 2F, B5)
так как силы F\, F!2 и F'3 равны соответственно силам Fl} F2 и F3.
Сложив, далее, пары (/*\, F/), (F2, F^') и (F3, Fj), мы получим
согласно сказанному в § 19 о сложении пар, лежащих в одной
плоскости, одну равнодействующую пару, алгебраическую величину
момента которой обозначим через Мо-
Так как при сложении пар, лежащих в одной плоскости, мо-
момент равнодействующей пары равен алгебраической сумме мо-
моментов слагаемых пар, то, обозначая алгебраическое значение
момента присоединенной пары (Ft, Fi) через те,-, будем иметь:
= т1 + т2 + т3 —
Мы видели, что момент присоединенной пары, получаемой при
изменении точки приложения данной силы, равен моменту силы
относительно ее новой точки приложения. Поэтому
т1 = т0
т2 = т0 (F2)
п т. д., а следовательно,
Мо = 2>о (F). B6)
Векторная сумма всех сил системы, т. е. вектор
К =
называется главным вектором данной системы сил.
Сумма моментов всех сил системы относительно какого-нибудь
центра называется главным моментом системы сил относительно
данного центра.
Пользуясь этими терминами, мы можем полученный выше ре-
результат сформулировать так:
Плоскую систему сил в общем случае можно привести к одной
силе R, приложенной в произвольно выбранной точке и равной глав-
главному вектору данной системы сил, т. е.
R' =
и к одной паре, момент которой Мо равен главному моменту
данной системы сил относительно той же точки, т. е.
Мо = %т0 (/?).
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ 103
Важно заметить, что сила R, приложенная в точке О, не яв-
является равнодействующей данной системы сил Fu F2, F3, так как
эта система, как видим, не эквивалентна одной силе R. Так как
главный вектор равен геометрической сумме сил данной системы,
то ни модуль, ни направление его, очевидно, не зависят от выбора
центра приведения; другими словами, если за центр приведения
будем брать различные точки плоскости, то сила R, равная
главному вектору, будет одна и та же как по модулю, так и по на-
направлению. Что же касается главного момента, то его значение
вообще зависит от выбора центра приведения, так как с измене-
изменением центра приведения плечи сил данной системы, а следова-
следовательно, и их моменты изменяются; каждой точке плоскости соот-
соответствует определенное значение главного момента; поэтому,
когда говорят о главном моменте данной системы сил, то всегда
нужно указывать, к какому центру приведения относится этот
момент.
Выведем теперь формулы, определяющие модуль и направле-
направление главного вектора R.
Проведем через центр приведения О координатные оси Ох и
Оу (рис. 65). Проекции данных сил F{ на эти оси обозначим че-
через Хг и Yг, а проекции силы R обозначим через R'x и R'y. Из
векторного равенства R' = £F на основании теоремы о проекции
суммы данных векторов (§ 10) имеем:
Ry=Yt+Y2 + ... + Yn =
отсюда находим:
R' =УЮ + R'J = V(ZX)* + (£YJ. B5')
Эта формула позволяет вычислить модуль главного вектора R'.
Направление же главного вектора определяется углом а между
этим вектором и положительным направлением оси х; этот угол
находится по формулам A4') § 10:
R' ИХ R' 2Y
cos a = -rt = ~rT , sin а = -£ = -^. B7)
§ 22. Равнодействующая плоской системы сил.
Теорема Вариньона
Пусть к телу приложена некоторая плоская система сил
Flt F2, ..., Fn.
Приводя эту систему сил к произвольно выбранному центру О,
получим одну силу
R =
104 статика
приложенную в точке О, и одну пару с моментом
Мо = 1>о (F).
Эта сила R' не является, как было уже указано, равнодействую-
равнодействующей данной системы сил; чтобы найти равнодействующую, нужно
привести эту систему к одной эквивалентной ей силе. Для этого
поступим следующим образом; преобразуем полученную пару с мо-
моментом Мо так, чтобы силы этой пары оказались равными по мо-
модулю силе R'; при этом нужно соответственно изменить плечо этой
пары так, чтобы ее момент Мо оставался неизменным. Далее,
пользуясь тем, что пару можно как угодно переносить в ее пло-
плоскости, переместим эту преобразованную пару так, чтобы одна из
ее сил оказалась приложенной в точке О и направленной проти-
противоположно силе R'. После этого получим пару (R, — R), изо-
изображенную на рис. 66, причем R = R'. Если обозначим плечо
этой пары через d, то будем иметь:
м0 м0
d = ~R~ = ~R' '
Итак, данная плоская система сил эквивалентна силе R' и паре
(R, — R); но силы R' и — R уравновешиваются, а потому данная
система сил эквивалентна одной силе R, приложенной в точке О';
следовательно, эта сила R является равнодействующей данной си-
системы сил. Так как R = R', то равнодействующая плоской си-
системы сил равна по модулю и направлению
главному вектору этой системы, т. е.
R =
Из равенства d = —? следует, что
н
Мо = Rd,
но произведение Rd, как видно на рис. 66,
равно (по абсолютной величине и по знаку)
моменту равнодействующей R относительно точки О. Следова-
Следовательно,
Мо = т0 (R) а);
с другой стороны,
Мо = 2>о (F),
а потому приходим к равенству
то (R) = Zm0 (F). B8)
х) Мы предполагаем, что Мо > 0; в том случае, когда Л/о< 0, мы имели
бы Мо =— Rd и т0 (Д) =— Rd.
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ
105
Это равенство выражает теорему Вариньона: момент равно-
равнодействующей плоской системы сил относительно любого центра,
лежащего в плоскости этих сил, равен алгебраической сумме мо-
моментов сил этой системы относительно того „
же центра.
Отсюда, очевидно, следует, что главный
момент плоской системы сил относительно
любой точки, лежащей на линии действия ее
равнодействующей, равен нулю.
Рассмотрим два примера применения тео-
теоремы Вариньона.
Рис. 67.
Пример 28. Сила F, проекции которой на
координатные оси Ох и Оу равны соответственно
10 и 5 кг, приложена в точке А с координатами
х = 0,2 м и у = 0,3 м. Вычислить момент этой силы относительно начала
координат О (рис. 67).
Решение. Разложив силу F на две составляющие Fx и Fy, парал~
лельные координатным осям, на основании теоремы Вариньона получим:
По, как видно из рис. 67,
=-y-Fx
следовательно,
т0 (F) = xFy — yFx = 0,2-5 — 0,3-10 =— 2 кем.
Пример 29. Зная значения главных моментов плоской системы сил
относительно трех данных точек А, В и С, не лежащих на одной прямой,
М д = 0, Мв = 0 и Л/с;>0, найти модуль и направление равнодействующей
R этой системы сил.
Решение. По теореме Вариньона имеем:
тА (Д) = МА = 0, тв(Д) = Мв = 0
и
тс (Д) = Мс > 0.
Из первых двух равенств следует, что сила Д проходит через точки А и В,
так как ее моменты относительно этих точек равны нулю; следовательно,
эта сила действует по прямой АВ (рис. 68). Если из точки С опустим на пря-
прямую АВ перпендикуляр h, то
и, следовательно,
тс (Д) = Rh
Rh = Mr,
откуда находим модуль искомой равнодействующей:
R =-4-.
106
СТАТИКА
Если бы величина Мс была отрицательной, то сила в была бы направлена
на рис. 68 по прямой АВ в обратную сторону.
В предыдущем параграфе было указано, что главный момент
плоской системы сил зависит от выбора центра приведения.
Выясним теперь, как будет изменяться главный момент данной
системы сил при изменении центра приведения.
Рис. 68.
Рис. 69.
Пусть к телу приложена плоская система сил F1( F2, ..., Fn.
Выберем какой-нибудь центр приведения О и рассмотрим одну
из сил Fi данной системы (рис. 69). Перенося точку приложе-
приложения этой силы в точку О, получим силу FZ = Fi и присоеди-
присоединенную пару (Ft, FI'). Если обозначим плечо силы Fi относи-
относительно точки О через /г4, то
т0 (F{) = FA-
Возьмем теперь в качестве нового центра приведения какую-
нибудь точку О1 и опустим из этой точки перпендикуляр Охаг
на линию действия силы /^; точку пересечения этого перпендику-
перпендикуляра с линией действия силы F[ обозначим через Ь{; понятно,
что агЬг = hx.
Как видно из рис. 69, будем иметь:
, (Ft) =
Ho mOl
= Fi
= Fi •
= F- •
то
= FI .
mOl
а потому
= m0
mOl
Аналогичные равенства будем иметь и для всех других сил данной
системы.
Сложив все эти равенства, получим:
mOl
i
гл. 5. плоская система сил 107
Если обозначим главные моменты данной системы сил относи-
относительно центров О и Ох соответственно через Мо и Мог, то
Мо = 2 т0 (F4) и Мо. = 2 т0 (FJ.
i=i i=i
Так как, далее, сила R', приложенная в точке О и равная главному
ректору данной системы сил, является равнодействующей сил F[,
F\ ,..., F'n, приложенных в той же точке, то по теореме Вариньона
2 mOl {F[) = mOi (R').
i= 1
А потому предыдущее равенство принимает вид
MOi = Мо + mOl (Я'),
или
MOl - Мо = mOl (Д'), B9)
т. е. изменение главного момента плоской системы сил при пере-
перемене центра приведения равно моменту главного вектора этой
системы, приложенного в прежнем центре приведения, относи-
относительно нового центра.
§ 23. Случай, когда плоская система сил
приводится к одной паре
Если геометрическая сумма сил данной плоской системы равна
нулю, т. е. если многоугольник этих сил оказывается замкнутым, то
главный вектор R' этой системы обращается в нуль; следовательно,
приводя данную систему к какому-нибудь центру О, получим
только одну пару с моментом
Мо = 2>0 (F).
Равнодействующей в этом случае не существует. Понятно, что
главный момент остается в этом случае неизменным, к какому бы
центру мы ни приводили данную систему сил.
В самом деле, так как главный вектор R' равен нулю, то из
равенства B9) предыдущего параграфа получим:
MOl — Мо = 0, или MOl = Мо,
где Mot обозначает главный момент данной системы сил относи-
относительно какого-нибудь центра Ov
Это значит, что, приводя последовательно данную систему сил
к двум каким-нибудь центрам О и Ох, получим соответственно две
пары с равными моментами Мо и MoL; следовательно, эти пары
108 СТАТИКА
будут эквивалентны, как это и должно быть, так как каждая из
этих пар эквивалентна данной системе сил.
Итак, если главный вектор дайной плоской системы сил равен
нулю, а ее главный момент относительно какого-нибудь центра
не равен нулю, то эта система эквивалентна паре сил, причем
главный момент системы в этом случае не зависит от выбора цен-
центра приведения.
§ 24. Условия равновесия плоской системы сил
В предыдущих параграфах мы видели, что если главный век-
вектор R' данной плоской системы сил не равен нулю, то система при-
приводится к одной равнодействующей силе; если же R' = 0, а глав-
главный момент системы Мо не равен нулю, то система приводится
к паре сил. Понятно, что в обоих этих случаях твердое тело под
действием данной системы сил не будет находиться в равновесии.
Поэтому для равновесия плоской системы сил необходимо выпол-
выполнение условий
R' = 0 и Мо = 0. C0)
Но эти необходимые условия равновесия являются вместе с тем
и достаточными.
В самом деле, из равенства R' = 0 следует, что все силы
Fj, F2, F'A, ..., Fn, равные данным силам Fu F2,..., Fn и прило-
приложенные в центре приведения О, уравновешиваются; далее, из
равенства Мо = 0 следует, что сумма моментов присоединенных
пар {Fx, Fi), (F2, F'i), ... , (Fn, F'£ равна нулю, а это зна-
значит, как известно из § 19, что эти пары также уравновеши-
уравновешиваются.
Итак, для равновесия плоской системы сил необходимо и доста-
достаточно, чтобы главный вектор этой системы и ее главный момент
относительно произвольно выбранного центра равнялись нулю.
Эти условия равновесия можно выразить еще в другой форме:
из формул § 21 для модуля главного вектора и для главного
момента
R' = У A-Х)8
следует, что R' и Мо обращаются в нуль в том и только в том
случае, если имеют место равенства
= 0, £У = 0 и £m0 (F) - 0, C1)
I. е. для равновесия плоской системы сил необходимо и доста-
достаточно, чтобы сумма проекций всех сил этой системы на каждую
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ
109
из двух произвольно выбранных координатных осей равнялась нулю
и чтобы сумма их моментов относительно произвольно выбранной
точки также равнялась нулю.
При этом, конечно, предполагается, что эти две координатные
оси и эта произвольно выбранная точка лежат в той же плоскости,
в которой расположены линии действия сил рассматриваемой
плоской системы.
§ 25. Примеры решения задач статики в том случае,
когда все приложенные к телу силы лежат в одной плоскости
Типичная задача, с которой главным образом приходится
встречаться в статике твердого тела, как мы уже это видели, когда
рассматривали равновесие тела под действием сходящихся сил,
состоит в том, чтобы по некоторым заданным, известным силам,
приложенным к телу, определить неизвестные реакции связей,
в частности опорные реакции, при условии, что данное тело на-
находится в равновесии. В этом параграфе мы рассмотрим тот слу-
случай этой задачи, когда все приложенные к телу силы, включая
и реакции связей, лежат в одной плоскости. Общий аналитиче-
аналитический метод решения этой задачи будет тот же, каким мы поль-
пользовались в случае сходящихся сил, а именно: так как данное тело
находится в покое, то все приложенные к нему силы, включая
и реакции связей, должны удов-
удовлетворять условиям равнове-
равновесия, полученным в предыдущем
параграфе; написав эти усло-
условия равновесия в форме C1),
получим три уравнения, в ко-
которые, кроме заданных сил, вой-
войдут и реакции связей. Решая
эти уравнения, найдем из них
те неизвестные силы, которые
требуется определить в данной
задаче.
Рис. 70.
Пример 30. Лестница АВ дли-
длиной 2а и весом Р опирается на гладкий
горизонтальный пол и гладкую верти-
вертикальную стену; на ней в точке Е стоит
человек весом Q. Чтобы лестница не скользила, она привязана к стене верев-
веревкой OD. Определить реакции в точках А и В, а также натяжение веревки,
если углы аи р, образуемые лестницей и веревкой с плоскостью пола, изве-
известны и если расстояние BE — Ь. Центр тяжести С лестницы находится в ее
середине (рис. 70).
Решение. Обозначим искомые реакции в точках А и В через Nx и JV2!
эти силы перпендикулярны к соответствующим опорным плоскостям; реакцию
веревки, равную по модулю натяжению веревки, обозначим через Т; эта сила
направлена по прямой DO. Оси координат направим по прямым ОА и ОВ;
110
СТАТИКА
начало координат выберем в точке О. Проектируя все силы, приложенные
к лестнице, на координатные оси, получим:
JS1X = 0, JVly = Л"г, JVix =
0;
у
Рх = 0, Ру =- Р,
Qx = 0, Qy =- Q.
Найдем моменты этих сил относительно точки О. Момент силы Л^ поло-
положителен, так как эта сила направлена относительно точки О против часовой
стрелки; абсолютное значение этого момента равно произведению модуля
силы Ni на плечо ОА, но
ОА = АВ ■ cos a = 2я cos а;
следовательно,
moWi) — 2aiV, cos a;
точно так же найдем:
m0 (JV2) =— А\-ОВ = — 2aNL sin a;
момент силы Т равен нулю, так как ее линия действия проходит через точку О.
Плечо силы Р равно OF, а так как сила Р приложена в середине лестницы,
ОА
то OF =! „ = a cos a; плечо силы О равно ОН — КЕ = Ъ cos a, а потому
т0 (Р) = — аР cos a
и
mO (Q) = — bQ cos a.
Выпишем теперь все полученные значения проекций и моментов в виде
следующей таблицы
X
Y
пг0
0
+ 2a7V1cos a
Л.
0
—2aN2 sin а
Т
—Т cos P
—Г sin P
0
Р
0
—Р
—аР cos а
Q
0
-Q
~bQ cos а
Теперь составляем уравнения равновесия C1). Для данной задачи эти
уравнения имеют следующий вид:
7V2 — Т cos р = 0, A)
TV! — Т sin р — Р — Q = 0, B)
2aJS1 cos a — 2aW2 sin a — аР cos а — bQ cos a = 0. C)
Остается решить эту систему уравнений относительно трех неизвестных
Nlt Nz и Т. Из уравнения A) находим.
7V2 = T cos P;
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ
111
из уравнения B):
Q;
подставляя эти значения Nx и iV2 в уравнение C), получаем:
2а cos а (Г sin р + Р + Q) — 2aT cos P sm а — cos а (аР -ф- bQ) = О,
или
отсюда находим:
2аТ sin (а — Р) = [аР + Bа — 6) Q ] cos а;
/т. (Р к 2а — 6 о \ cos a
~ ' ~2 2a / sin (а — Р)'
Определив силу Т, находим затем и остальные две силы:
i cos a sin |
2
2а / sm (а — |
cos а cos p
sin (а — р) '
Пример 31. Вагонетка весом Р = 1000 кг удерживается на наклонной
плоскости с углом наклона а = 30° канатом, перекинутым через блок и парал-
параллельным этой плоскости. Определить
давления колес вагонетки на плоскость
в точках А и В и натяжение каната,
если AD = DB = а = 0,75 м и СЕ =
= 6 = 0,3 м, причем С обозначает центр
тяжести вагонетки (рис. 71).
Решение. Обозначим реакции
в точках А и В, перпендикулярные
к наклонной плоскости, через Nt и JVS,
реакцию каната, модуль которой равен
его натяжению, обозначим через Т.
Начало координат возьмем в точке Е,
ось х направим параллельно наклонной
плоскости, а ось у — перпендикулярно
к этой плоскости. Составляя, как в
предыдущей задаче, таблицу проекций всех сил на координатные оси и
моментов этих сил относительно точки Е, получим:
Рис. 71.
X
Y
тЕ
0
Ni
—aN1
0
T
—T
0
0
p
P sin a
—P cos a
—ЬР sin a
Далее составляем уравнения равновесия:
— Т + Р sin a = 0,
Nt + Nz — Р cos a = 0,
— аЛ^х -ф аНг — ЬР sin a = 0.
A)
B)
C)
112
СТАТИКА
Из уравнения A) паходим:
Т = Р sin а = 1000 sin 30° = 500 кг.
Умножая уравнение B) на а и складывая с уравнением C), получаем:
2aN.t — Р (a cos а + Ъ sin а) = 0,
откуда
■N» =
a cos a 4- 6 sin а
' Та
Р = 533 кг.
Умножая теперь уравнение B) на а и вычитая из него уравнение C), полу-
получим:
2aN1 — Р (a cos а — 6 sin а) = 0;
отсюда находим:
a cos а — 6 sin а „„„
IV, = г, jP = 333 кг.
1 la
Искомые давления вагонетки на наклонную плоскость в точках А в В
равны, конечно, по модулю силам Л^ и JV2, но направлены в обратную
сторону.
Пример 32. К крану весом Р = 1 т, который может вращаться во-
вокруг вертикальной оси АВ, подвешен груз весом Q = 4 т. Найти реакции
в подпятнике А и подшипнике В, если вылет крана равен 3,5 м, расстояние
А В = 5 м и расстояние центра тяжести С крана от оси вращения равно
1,5 -и (рис. 72).
Решение. В подпятнике А имеем две реакции: вертикальную УА
и горизонтальную ХА, в подшипнике В имеем только одну реакцию Хв,
перпендикулярную к оси вращепия крапа; так как давление крана на
подшипник направлено, очевидно, вправо, то реакция Хв направлена влево.
Приравнивая нулю суммы проекций всех
сил, приложенных к крану, па оси Ах и Ау
и сумму их моментов относительно точки А,
получим следующие три уравнения равно-
равновесия:
х А хв = о,
YA — Р - Q = 0,
ЪХВ— 1,5 Р — 3,5 Q = 0.
Отсюда находим:
YА— Р + Q — 5 т,
Хв = 0,3 Р + 0,7 Q = 3,1 т
х и XА= Xв = 3,1 т.
Рис. 72. Пример 33. К ферме, изображен-
изображенной на рис. 73, приложены заданные силы
Flf Fit F3. Высота фермы равна h и АВ = ВС = CD = I. В ючке D — непо-
неподвижный шарнир, а в точке А ферма опирается катками на гладкую гори-
горизонтальную неподвижную опору. Найти реакции в этих точках.
Решение. Так как в точке А ферма опирается на гладкую горизон-
горизонтальную плоскость, то реакция N в этой точке направлена по вертикали
вверх. Что касается точки D, то заранее указать направление реакции в этой
точке нельзя, так как реакция в шарнире может иметь любое направление.
Поэтому разлагаем эту реакцию на две составляющие: горизонтальную XD
и вертикальную Yq и находим каждую из этих составляющих в отдельности.
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ
ИЗ
Возьмем начало координат в точке В, ось х направим по горизонтали вправо,
а ось у — по вертикали вверх. Проектируя на эти оси все силы, приложенные
к ферме, и составляя сумму моментов этих сил относительно точки D, по-
получим следующие три уравнения равновесия:
YD+ N -F2-F3 =0,
hFi + IF\ + 21F3 — 31JS = 0.
Из первого уравнения получаем:
из третьего уравнения находим:
N = 2i (*^i + '-^ + 2№з) =
Теперь из второго уравнения имеем:
о
7, -fc. _ .
1^г 3
Пример 34. Балка ЛВ подъемного крана длиной 2а и весом Р,
которая может вращаться на шарнире А, удерживается в равновесии гори-
горизонтальной цепью ВС. К концу В балки подвешен i руз весом Q. Определить
Рис. 73.
Рис. 74.
натяжение цепи и реакцию в шарнире А, если угол балки с вертикалью
равен а (рис. 74).
Решение. Возьмем начало координат в точке А. Реакцию цепи,
модуль которой равен се натяжению, обозначим через Т; эта сила направ-
направлена, очевидно, по ВС. Реакцию в шарнире RA разлагаем на две составляю-
составляющие: горизонтальную ХА и вертикальную YA. Определив проекции всех сил
(■Хд, YA, Т, Р и Q) па координатные оси Ах и Ау и моменты этих сил относи-
относительно точки А, получим три уравнения равновесия в следующем виде:
ХА-Т = 0, A)
YA ~ р ~ Q = 0. B)
2arcos a — aPsin a — 2aQ sin а = 0. C)
114 СТАТИКА
Из уравнений B) и C) находим:
Из уравнения A) имеем:
Если сложим силы ДГД и YA, то получим полную реакцию RА шарнира.
Модуль этой реакции находим по формуле
Для определения направления силы Rд достаточно вычислить угол ф,
который эта сила образует с осью х. Из прямоугольного силового треуголь-
треугольника имеем:
YA 2(P+Q)
Из предыдущих примеров мы видим, что при определении
реакции в шарнире эту реакцию обычно разлагают на две состав-
составляющие, направленные по координатным осям жиг/. Но заранее
не всегда бывает известно, в какую сторону (положительную или
отрицательную) направлена составляющая реакции по соответ-
соответствующей оси. В этом случае при решении задачи эти составляю-
составляющие направляют по осям х и у в положительную сторону. Если,
решая уравнения равновесия, мы получим для искомой состав-
составляющей реакции положительное значение, то это значит, что эта
составляющая действительно направлена по соответствующей
оси в положительную сторону; если же из уравнений равновесия
мы получим для искомой составляющей реакции отрицательное
значение, то это указывает на то, что эта составляющая имеет
направление, обратное принятому, т. е. направлена по соответ-
соответствующей оси в отрицательную сторону. Таким образом, истинное
направление составляющей реакции в шарнире определяется по
знаку полученного из уравнений равновесия алгебраического
значения этой составляющей.
Иногда при решении задач бывает удобнее составлять уравне-
уравнения равновесия в иной форме, чем во всех предыдущих примерах.
Так как при равновесии твердого тела сумма моментов всех при-
приложенных к нему сил относительно любой точки равна нулю, то,
выбрав произвольно три точки А, В и С и приравняв нулю сумму
моментов всех сил, приложенных к телу, относительно каждой из
этих точек, получим три уравнения, и задача сводится, как и
в предыдущих примерах, к решению этих трех уравнений.
При этом три точки А, В и С нужно выбирать так, чтобы они
не лежали на одной прямой, так как в противном случае одно из
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ
115
трех уравнений равновесия окажется следствием двух остальных,
и потому будем иметь только два независимых уравнения.
В самом деле, из равенств
Цтл (F) = 0 и £тв (F) = О
следует на основании теоремы Вариньона, что равнодействую-
равнодействующая R данной плоской системы сил, если она существует, имеет
своей линией действия прямую А В (см. пример 29), а потому для
всякой точки С, лежащей на этой прямой, будем иметь:
тс (Я) = О,
и следовательно, согласно той же теореме Вариньона
£тс (F) = 0.
Отсюда видим, что это последнее уравнение является следствием
первых двух.
В качестве примера решим этим способом предыдущую задачу
(пример 34). Выберем за центры моментов точки А, В ж С. Со-
Составив моменты всех сил, приложенных к балке, относительно
каждой из этих трех точек и расположив их в таблице, получим:
тА
тв
тс
ХА
0
2аХА cos a
2аХ А cos а
YA
0
—2аУд sin а
0
Т
2аТ cos а
0
0
Р
—аР sin а
аР sin а
—аР sin а
Q
—2aQ sin а
0
—2aQ sin а
Уравнения равновесия принимают следующий вид:
2аТ cos а — aPsin а — 2aQ sin а = О,
2аХА cos а — 2aY A sin а -{- аР sin а = О,
2аХА cos а — аР sin а — 2aQ sin а = 0.
Из уравнений A) и C) находим:
А а = i — 1
Из уравнения B) имеем:
подставляя сюда найденное значение ХА, получаем:
A)
B)
C)
116 СТАТИКА
Следовательно, мы пришли к тем же результатам, какие име-
имели выше.
Вообще при решении задач статики следует всегда стремиться
к тому, чтобы уравнения равновесия имели наиболее простой вид
и потому могли бы быть решены проще и скорее. Этого упрощения
уравнений равновесия можно достигнуть соответствующим выбо-
выбором направления осей, на которые проектируют силы., приложен-
приложенные к телу, а также выбором точек, относительно которых берут
моменты этих сил.
Наиболее простое решение системы трех уравнений равновесия
мы имеем в том случае, когда каждое из этих уравнений содержит
только одну из неизвестных сил. Так, например, в только что рас-
рассмотренной задаче уравнение моментов относительно точки А со-
содержит только одну неизвестную силу Т, так как моменты двух
других неизвестных сил ХА и YA относительно этой точки равны
нулю, и потому сила Т из этого уравнения сразу определяется.
Точно так же в уравнение моментов относительно точки С входит
только одна из неизвестных сил Хд, так как в этой точке пере-
пересекаются линии действия двух других неизвестных сил Yа и Г и,
следовательно, моменты этих сил относительно точки С равны
нулю. Чтобы получить уравнение, в которое из неизвестных сил
входила бы только одна сила YA, нужно составить уравнение
проекций на ось у: силы Т и ХА, перпендикулярные к этой оси,
в это уравнение не войдут.
Таким образом, приходим к заключению, которое полезно
иметь в виду при решении задач: уравнения равновесия в случае
плоской системы сил можно составлять следующими тремя спо-
способами: 1) составляют два уравнения проекций на две какие-
нибудь оси и одно уравнение моментов относительно какой-нибудь
точки; 2) составляют три уравнения моментов относительно трех
точек, не лежащих на одной прямой, и 3) составляют два уравне-
уравнения моментов относительно двух каких-нибудь точек и одно урав-
уравнение проекций на какую-нибудь ось, не перпендикулярную к пря-
прямой, соединяющей эти две точки. Условие, чтобы ось проекций
не была перпендикулярна к прямой, соединяющей две точки,
относительно которых составляют уравнения моментов, необхо-
необходимо для того, чтобы уравнение проекций не оказалось следствием
этих двух уравнений моментов.
В самом деле, из равенств SmA (F) — О и ~2,mB(F) — О сле-
следует, что равнодействующая R данной системы сил, если она суще-
существует, имеет своей линией действия прямую АВ, а потому, если
ось х перпендикулярна к АВ, то Rx — О и, следовательно,
2* = 0.
Таким образом, последнее уравнение вытекает как следствие из
первых двух.
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ 117
§ 26. Условия равновесия плоской системы параллельных сил
Рассмотрим частный случай равновесия тела, находящегося
под действием плоской системы сил, а именно тот случай, когда
все приложенные к телу силы параллельны.
Пусть к данному телу приложена система параллельных сил
Fu F2, F3, ..., Fn. Через произвольную точку О проведем ось Ох,
перпендикулярную к данным силам, и ось Оу, параллельную этим
силам. Как известно из § 24, при равновесии плоской системы сил
должны выполняться следующие три условия:
£Х = О, £У = 0, 2т0 (F) = 0.
Но первое из этих условий в рассматриваемом случае, очевидно,
всегда будет выполнено тождественно независимо от того, уравно-
уравновешиваются данные силы или нет, так как каждая из этих сил
перпендикулярна к оси х и, следовательно, ее проекция на эту
ось равна нулю.
Так как, далее, все силы параллельны оси у, то проекция каж-
каждой силы на эту ось равна модулю этой силы, взятому со знаком
плюс или минус (в зависимости от направления силы), т. е. У4 =
= Fi или У4 = — Fv Поэтому условия равновесия плоской си-
системы параллельных сил принимают вид
ЦУ = О, V>0 (P) = О, C2)
т. е. для равновесия плоской системы параллельных сил необхо-
необходимо и достаточно, чтобы алгебраическая сумма всех этих сил
равнялась нулю и чтобы сумма их N
моментов относительно произ- *■ ' N>
вольно выбранной точки также
равнялась нулю.
Пример 35. Горизонтальная балка
лежит на двух опорах А и В; к ней .
в точках С, D и Е приложены три ^2 ~ff\ ~fj\ T
вертикальные силы Рх = 150 кг, Р2 =
= 100 кг и Р3 = 60 кг. Определить реак-
реакции опор, если АВ = 3л, АС = 1 м,
AD = 1,5 м и АЕ = 2,5 м (рис. 75).
Решение. Обозначим искомые
реакции опор через Л^ и Л^; эти силы
перпендикулярны к оси балки. Мы Рис. 75.
имеем, следовательно, пять параллель-
параллельных сил: Nlt JV2, /»!, Р2 и Р3, под действием которых балка находится
в равновесии. Приравняв нулю алгебраическую сумму всех этих сил (сумму
их проекций на вертикальную ось у) и сумму их моментов относительно
какой-нибудь точки, например точки А, получим следующие два уравнения:
Nt + 7V2 — 150 — 100 — 60 = 0,
3W2 - 150 • 1 - 100 • 1,5 - 60 • 2,5 = 0,
или
Лх 4- N» = 310, 3iV2 = 450;
I,
118 СТАТИКА
отсюда находим:
ЛГ2 = 150 кг и N,, = 160 кг.
Согласно сказанному в § 25 по поводу составления уравнений равно-
равновесия можно вместо первого уравнения составить уравнение моментов отно-
относительно какой-нибудь второй точки, например относительно второй опоры В.
Тогда мы имели бы два таких уравнения:
37V2 = 450 и 150 • 2 + 100 • 1,5 + 60 ■ 0,5 — Мг = 0.
Эти уравнения имеют то преимущество, что каждое из них содержит
только одну неизвестную величину. Из этих уравнений получаем, конечно,
те же значения искомых сил:
Ny = 160 кг и 7V2 = 150 кг.
§ 27. Понятие о статически неопределенных задачах
Из примеров, рассмотренных в §§ 25 и 26, мы видим, что в
общем случае при равновесии плоской системы сил, приложенных
к данному твердому телу, мы имеем три уравнения; в том же слу-
случае, если к данному телу приложена уравновешивающаяся си-
система параллельных сил, мы располагаем только двумя уравне-
уравнениями. Отсюда следует, что в первом случае задача является
статически определенной, если число неизвестных сил не превы-
превышает трех; во втором же случае число неизвестных сил не должно
быть больше двух. В противном случае задача становится стати-
статически неопределенной, так как число уравнений окажется меньше
числа неизвестных. Так, например, задача определения опорных
реакций в случае балки, нагруженной перпендикулярными к ней
силами и лежащей на трех опорах, является статически неопре-
неопределенной, так как неизвестных реакций будем иметь в этом случае
три, а уравнений только два. Точно так же, если бы ферма,
рассмотренная в примере 33 (§ 25), имела два неподвижных
опорных шарнира А и D, то задача оказалась бы статически
неопределенной, так как мы имели бы в этом случае четыре
неизвестные реакции (по две в каждом шарнире), а уравнений
только три.
Причина этой неопределенности, т. е. недостаточности уравне-
уравнений статики для определения всех искомых величин, заключается
в том, что в статике твердого тела мы рассматриваем тела как
абсолютно твердые, недеформируемые. В действительности же
в твердом теле под действием приложенных к нему сил возникают
соответствующие деформации. Так, например, горизонтальная
балка, лежащая на опорах, под действием приложенных к ней
вертикальных сил испытывает деформацию изгиба; стержни
фермы под действием сил, приложенных к этой ферме, испытывают
деформации сжатия или растяжения. Статически неопределенные
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ 119
задачи могут быть решены, если принять во внимание упругие
свойства тела и возникающие в нем деформации. По решение
этих задач выходит за пределы статики абсолютно твердого тела.
Такие задачи рассматриваются в курсах сопротивления материа-
материалов и строительной механики.
§ 28. Равновесие системы, состоящей
из нескольких твердых тел
Во всех предыдущих задачах мы рассматривали равновесие
одного твердого тела. Если имеем систему, состоящую из несколь-
нескольких твердых тел, то в этом случае приходится рассматривать
равновесие каждого тела в отдельности, учитывая при этом силы,
с которыми действуют друг на друга тела, входящие в эту систему.
Эти силы согласно аксиоме равенства действия и противодей-
противодействия всегда равны "между собой по модулю и противоположны
по направлению. Силы, с которыми тела, входящие в данную си-
систему, действуют друг на друга, называются внутренними силами
этой системы. Все остальные силы, действующие на систему (напри-
(например, сила тяжести, опорные реакции), называются внешними
силами. Если система находится в покое, то силы, приложенные
к каждому из твердых тел, входящих в систему, уравновешиваются,
и, следовательно, для каждого из этих тел можно составлять
уравнения равновесия так же, как в предыдущих примерах (§ 25).
Если составим одно из уравнений равновесия (например, уравнение
проекций на ось х) для каждого тела данной системы в отдель-
отдельности и затем все эти уравнения сложим, то в полученном после
этого уравнении члены, содержащие внутренние силы, сокра-
сокращаются, так как эти силы попарно равны по модулю и противо-
противоположны по направлению и, следовательно, сумма их проекций
на любую ось равна нулю; поэтому в полученное уравнение будут
входить только внешние силы, приложенные к данной системе.
То же самое относится и к уравнениям моментов, ибо, поскольку
гнутренние силы системы попарно равны по модулю и направлены
по одной прямой в противоположные стороны, сумма их моментов
относительно любого центра равна нулю.
Отсюда следует, что при равновесии дайной системы мы можем
составлять для нее уравнения равновесия, так же как мы это
делали для одного твердого тела, причем в эти уравнения войдут
только внешние силы, приложенные к системе, или, другими сло-
словами, если система находится в равновесии, то действующие на
нее внешние силы удовлетворяют условиям равновесия сил, при-
приложенных к абсолютно твердому телу 1).
г) К этому же заключению можно прийти, применяя принцип отверде-
отвердевания (§ 3).
120
СТАТИКА
Пример 36. Лестница-стремянка, состоящая из двух одинаковых ча-
частей АС и ВС, весом Р каждая, соединенных в точке С шарниром и связанных
веревкой DE, стоит на гладком горизонтальном полу. В точке К на лестнице
стоит человек весом Q. Найти реакции в точках А и В, натяжение веревки
и реакцию в шарнире С, если АС = ВС = 11, DC — ЕС = а; ВК = Ъ
и L CAB = а (рис. 76, а).
Решение. Обозначим вертикальные реакции пола в точках А а В че-
через Ni и iV2. Реакции веревки, приложенные в точках D и Е, обозначим че-
через 7\ и Г2, причем 3 = — Т±. В данном случае система состоит из двух
тел АС и ВС; обозначим горизонтальную и вертикальную составляющие
реакции левой части лестницы АС, приложенные к ее правой части в точ-
точке С, через Хс и Yc; составляющие реакции правой части лестницы ВС,
приложенные к ее левой части в той же точке, обозначим через Х'с и Y'c,
при этом
= — Хс
в серединах отрезков АС и ВС.
Y'c =— Yc. Веса Р будем считать приложенными
У
4
Л
х
ni
Л
4
/
У/////7/////У/У////////////.
В б)
Рис. 76.
Сначала напишем уравнения равновесия для всей системы в целом, т. е.
рассматривая эту систему как одно абсолютно твердое тело. Проектируя
все внешние силы, приложенные к системе, на вертикаль и составляя моменты
этих сил относительно точки В, получим следующие два уравнения:
■Wi + Я* — 2Р — Q = 0. 4Z cos а Р + Ъ cos а Q — Ы cos а Nx = 0.
Как было указано выше, внутренние силы (ДГС, Yc, X'c, Y'c, Ty и Т.2)
в эти уравнения не входят. Из этих уравнений находим опорные реакции
в точках А и В:
Рассмотрим теперь в отдельности какую-нибудь из двух частей лестницы,
АС К АС N T Р Х' Y'
р р д ууд ду
например левую часть АС. К телу АС приложены силы Nlt Tu Р,
ц,
Х'с и Y'G
(рис. 76, б). Проектируя все эти силы на горизонтальную и вертикальную
оси х и у и составляя моменты этих сил относительно точки С, получим три
уравнения равновесия для левой части лестницы;
т, - х'с = о,
a sin а ■ Тх -V I cos а • Р — 21 cos а • Nx = 0.
ГЛ. 5. ПЛОСКАЯ СИСТЕМА СИЛ
Из этих уравнений находим:
121
Х'с =
- Р) ctg а = -а
ctg а.
С
Рис. 77.
Понятно, что мы пришли бы к тем же самым результатам, если бы рассмат-
рассматривали равновесие каждой части лестницы АС и ВС в отдельности и для
канадой из них составили бы по три уравнения
равновесия.
Если бы из уравнений равновесия мы полу-
яили для одной из искомых реакций, например
для Y'c, отрицательное значение, то это указы-
указывало бы на то, что сила Y'c имеет направление,
противоположное принятому на рис. 76, т. е. что
вертикальная реакция, приложенная в точке С
к левой половине лестницы, направлена не вниз,
а вверх; понятно, ято реакция Ус, приложенная
к правой половине лестницы, была бы направлена
тогда вниз. То же самое относится и к силе Хс.
Таким же методом могут быть определены реакции в шарнирах А, В а С
трехшарнирной арки, находящейся под действием заданной плоской системы
сил (рис. 77; силы, приложенные к арке, на чертеже не показаны).
В этой задаче мы имеем шесть неизвестных реакций (по две в каждом
шарнире). Составив для каждой из двух частей арки по три уравнения рав-
равновесия (или три уравнения для всей арки в целом и три уравнения для одной
из ее частей, как мы это делали в предыдущей задаче), мы получим всего
шесть уравнений; следовательно,
эта задача является статически оп-
определенной.
Пример 37. Составная
балка состоит из двух балок АС
и CD, соединенных в точке С
шарниром (рис. 78). В точке А —
неподвижный шарнир, в точке ^
В — подвижная опора (на катках),
конец D балки поддерживается
при помощи вертикальной тяги
DE. К балке CD приложена за-
заданная вертикальная сила F.
Найти реакцию в шарнире А, ре-
реакцию опоры В и натяжение тяги
DE. Соответствующие размеры указаны на чертеже, причем Zx = Z4 и Za — 13,
Решение. Неизвестную реакцию в шарнире А разложим на две со-
составляющие: горизонтальную ХА и вертикальную YA; вертикальную реак-
реакцию подвижной опоры обозначим через N, а реакцию тяги — через Т. В дан-
данном случае система состоит из двух тел: балки АС и балки CD. Составим сна-
сначала уравнения равновесия для всей составной балки ACD, рассматривая
ее как одно абсолютно твердое тело. Проектируя все приложенные к ней
внешние силы на оси х и у и составляя сумму моментов этих сил относительно
точки А, получим следующие уравнения:
ХА = 0, A)
N
D
Рис. 78.
YA + N+ Т-F = 0,
-f 2 (lx + l,)T - (lt + 212)F
0.
B)
C)
122 СТАТИКА
Первое уравнение показывает, что в шарнире А мы имеем только вер-
вертикальную реакцию, что и понятно, так как все остальные внешние силы,
приложенные к балке, вертикальны. Уравнения второе и третье содержат
три неизвестные силы: YА, N и Т\ поэтому необходимо составить еще одно
уравнение. Для этого, рассматривая отдельно балку CD, составим для нее
уравнение моментов относительно точки С; получим:
(к + у Т - 12F = 0.
Неизвестная реакция шарнира, приложенная к балке CD в точке С, в это
уравнение не входит, так как ее момент относительно точки С равен нулю.
Из этого уравнения находим:
Т = hF
к + к "
Подставляя это значение в уравнение C), получим:
hW = (к "+■ 2/2) F ~ 212F = kF,
отсюда находим:
N =F.
Теперь из уравнения B) имеем:
знак минус здесь указывает па то, что сила Гд имеет направление, противо-
противоположное принятому на чертеже; следовательно, вертикальная реакция в
шарнире А в действительности направлена вниз. Составляя для балки CD вто-
второе уравнение равновесия (уравнение проекций на ось у или уравнение мо-
моментов относительно точки D), найдем из него вертикальную реакцию в
шарнире С, приложенную к этой балке; горизонтальная реакция в шарнире С
будет, очевидно, равна нулю.
Если данная система состоит из п тел, то в этом случае будем,
очевидно, иметь всего Ъп уравнений равновесия.
Г Л А В А 6
ТРЕНИЕ
§ 29. Трение скольжения
Сопротивление, возникающее при скольжении одного тела по
поверхности другого, называется трением скольжения.
Рассматривая равновесие несвободного твердого тела, мы пред-
предполагали до сих пор, что в том случае, когда тело опирается на
неподвижную поверхность в какой-нибудь точке А (рис. 79),
реакция опорной поверхности направлена по нормали к этой
поверхности. Опыт показывает, однако, что это предположение
не соответствует действительности' реакция Яд неподвижной по-
поверхности образует с нормалью к этой поверхности некоторый
ГЛ. 6. ТРЕНИЕ
123
N
угол ф, так что эту силу можно разложить на две составляющие:
1) силу N, направленную по нормали к опорной поверхности
и называемую нормальной реакцией, и 2) силу F, лежащую
в плоскости, касательной к опорной поверхности, и противодей-
противодействующую скольжению тела по этой поверхности. Эта сила F
называется силой трения скольжения.
Если соприкасающиеся тела достаточно
тверды и хорошо отполированы, то сила F
незначительна и в первом приближении
ею можно пренебречь; так мы и делали до
сих пор, считая тела абсолютно твердыми
и абсолютно гладкими. Но при техниче-
технических расчетах силу трения всегда прихо-
приходится принимать во внимание.
Представим себе следующий опыт: на
неподвижную горизонтальную плоскость
положен брусок весом Р. Приложим к этому бруску горизопталь-
ную силу Q, что можно осуществить, привязав к бруску гибкую
и тонкую веревку, перекинутую через блок, к концу которой
подвешена чашка с гирями (рис. 80). Если бы реакция непо-
неподвижной плоскости сводилась только к нормальной силе N, то
горизонтальная сила Q, как бы мала она ни была, оставаясь
неуравновешенной, заставила бы брусок скользить по плоскости.
Но в действительности брусок остается в покое до тех пор, пока
сила Q не достигнет некоторой опреде-
определенной величины. Это приводит к заклю-
заключению, что, кроме нормальной реакции N,
возникает еще сила F, противополож-
противоположная силе Q и препятствующая сколь-
скольжению бруска. Эта сила F и есть сила
трения между бруском и опорной пло-
плоскостью.
Будем постепенно увеличивать силу Q.
До тех пор пока брусок остается в рав-
равновесии, будем иметь:
N = Р и F = Q;
из последнего равенства видим, что с увеличением силы Q возра-
возрастает и сила трения F. Наконец, наступит такой момент, когда
брусок будет находиться, так сказать, на грани между покоем и
движением, или, иначе, на пороге скольжения. Дальнейшее увели-
увеличение силы Q, хотя бы самое малое, вызовет уже скольжение
его по плоскости. В этот момент сила F достигает максималь-
максимального значения и при дальнейшем увеличении силы Q она уже
не сможет уравновесить эту силу. Сила трения, проявляющаяся
при покое тела, называется силой трения в покое или силой
а
W///////A
Рис. 80.
124
СТАТИКА
статического трения; сила трения, возникающая при скольжении
тела, называется силой трения в движении. Из рассмотренного
опыта мы видим, что модуль силы трения в покое может иметь
любое значение, заключающееся между нулем и некоторым макси-
максимальным значением Fmax, различным в зависимости от различных
условий опыта. Установить факторы, от которых зависит ве-
величина Fo ах, и выяснить характер этой зависимости возможно
только на основании опытов.
Исследованием явления трения впервые занимался еще Лео-
Леонардо да Винчи A452—1519). В конце XVIII в. многочисленные и
но тому времени достаточно точные опыты были проведены извест-
известным французским физиком Кулоном. Ввиду того важного значе-
значения, которое имеет явление трения в технической практике, экспе-
экспериментальное изучение этого явления продолжалось и после
Кулона и в широких размерах проводится и в настоящее время.
лк
Iff,
—/\/\
Г ^г
47 \J w
t-V^—
г з
Рис. 81.
мм
Теоретические и экспериментальные работы многих советских
ученых значительно продвинули вперед современное учение о тре-
трении. Однако нужно заметить, что эта трудная физико-механиче-
физико-механическая проблема и до сих нор еще не вполне разрешена.
Возникновение силы трения скольжения объясняется прежде
всего тем, что поверхности трущихся тел не являются абсолютно
гладкими: как бы хорошо ни была отшлифована поверхность тела,
на ней всегда имеются выступы и углубления, которые вследствие
их малости не могут быть, конечно, обнаружены простым глазом.
На рис. 81 изображена кривая, показывающая в увеличенном виде
микроструктуру поверхности тела (профилограмма). Профило-
грамма дает наглядное представление о степени шероховатости
данной поверхности. Для получения таких профилограмм в на-
настоящее время пользуются специальными приборами (профило-
графы). Для того чтобы заставить одно тело скользить по другому,
необходимо преодолеть возникающее при этом сопротивление
микроскопических выступов (неровностей), имеющихся на сопри-
соприкасающихся поверхностях этих тел. Кроме того, при этом прихо-
приходится преодолевать еще силы молекулярного взаимодействия
между частицами поверхностных слоев соприкасающихся тел.
Таким образом, возникновение трения скольжения объясняется
ГЛ. 6. ТРЕНИЕ 125
двумя причинами: 1) шероховатостью поверхностей трущих-
трущихся тел и 2) проявлением сил молекулярного взаимодействия
этих тел.
На основании многочисленных опытов установлено, что макси->
малъная величина силы трения в покое прямо пропорциональна
нормальному давлению одного тела на другое, или, что то же,
нормальной реакции.
Так, если в предыдущем опыте возьмем два бруска, из которых
одни вдвое тяжелее другого, то при прочих равных условиях мак-
максимальное значение силы трения для этого бруска оказывается
вдвое большим.
Если обозначим через Fmax максимальную величину силы ста-
статического трения и через N — нормальную реакцию опорной по-
поверхности, то будем иметь:
max •—
C3)
где / — коэффициент пропорциональности, называемый стати-
статическим коэффициентом трения скольжения. Величина этого
коэффициента зависит от материала трущихся тел, а также от
состояния их поверхностей (степени шероховатости, влажности,
температуры). Значения коэффициентов трения для разных
материалов и при разном состоянии трущихся поверхностей,
определяемые опытным путем, можно найти в таблицах, помеща-
помещаемых в технических справочниках г). Из равенства
, max
1
1 ~~ N
следует, что коэффициент трения скольжения есть число отвле-
отвлеченное.
Следует иметь в виду, что формула C3) является лишь при-
приближенной формулой, далеко не отражающей в полной мере слож-
сложного физического явления трения твердых тел. Однако ввиду про-
простоты этой формулы и ее достаточной точности во многих случаях
технической практики эта формула имеет широкое применение и
в настоящее время. Применяя эту формулу при расчетах в усло-
условиях производственной практики, нужно возможно точнее опре-
определить значение коэффициента трения. Опыты показывают, что
значение коэффициента трения зависит также и от удельного давле-
давления, т. е. от величины нормального давления, приходящегося на
единицу площади контакта трущихся тел.
х) См., например, Краткий технический справочник, под ред. Вяч. А. Зи-
Зиновьева, ч. I, изд. 2-е, Гоаехиздат, М., 1952, или Технический справочник
железнодорожника и др.
126 СТАТИКА
Приведем значения статического коэффициента трения для
некоторых тел х):
Бронза по чугуну / = 0,16
» » железу / = 0,19
Сталь » стали f = 0,15
Металл » дубу / = 0,62
Дуб по дубу (волокна параллельны) / = 0,62
» » » ( » перпендикулярны) .... / = 0,54
Кожаный ремень по дубовому шкиву / = 0,47
» . » » чугуну / = 0,2в
Камень или кирпич по кирпичу / = 0,50—0,73
» по железу / = 0,42—0,49
» » дереву / = 0,46—0,60
Сталь » льду / = 0,027
Относительно трения в движении опытами установлено сле-
следующее:
1) Сила трения в движении направлена противоположно ско-
скорости одного из трущихся тел относительно другого.
2) Сила трения в движении пропорциональна нормальному
давлению одного из трущихся тел на другое, т. е. F' = f'N, где /'
есть коэффициент трения скольжения в движении.
3) Коэффициент трения в движении несколько меньше статиче-
статического коэффициента трения и зависит от материала трущихся
тел и состояния их поверхностей.
4) Коэффициент трения в движении зависит от относительной
скорости трущихся тел. В большинстве случаев с увеличением ско-
скорости этот коэффициент убывает, стремясь к некоторому постоян-
постоянному значению. Однако наблюдается и обратное явление: при тре-
трении, например, кожи о металл (в ременных передачах) рядом
исследователей установлено, что коэффициент трения возрастает
с увеличением скорости. В некоторых случаях значение коэффи-
коэффициента трения в движении проходит через максимум, т. е. сначала
при возрастании относительной скорости от нуля коэффициент
трения возрастает, при некотором значении скорости он имеет
наибольшее значение и затем при дальнейшем увеличении ско-
скорости начинает убывать.
Разными исследователями предложены многочисленные экспе-
экспериментальные формулы, устанавливающие зависимость коэффи-
коэффициента трения в движении от относительной скорости трущихся
тел; так, например, при торможении железнодорожных вагонов
для определения коэффициента трения скольжения между чугун-
чугунными тормозными колодками и стальными бандажами нередко
пользуются следующей формулой:
,, _ 1 + 0,0112р.,
' ~ 1 + 0,Оби '"'
*) Данные взяты из «Краткого технического справочника» A952).
ГЛ. 6. ТРЕНИЕ
127
где v — скорость скольжения в километрах в час, f'a = 0,45
для сухих поверхностей и /J, = 0,25 для влажных поверхностей.
При изучении трения твердых тел, кроме коэффициента трения,
важную роль играет также угол трения. Пусть твердое тело, нахо-
находящееся в равновесии, опирается на неподвижную поверхность
(рис. 82) и пусть ДА есть равнодействующая сил N и Fmax, т. е.
полная реакция опорной поверхности в точке А. Угол сртр между
силой Да и нормалью к опорной поверх-
поверхности называется углом трения. кг~^ i/V
Из прямоугольного треугольникаимеем:
ЧГфтр
N
т. е. тангенс угла трения равен коэффи- V/////)pZ-
циенту трения.
Геометрическое место прямых линий, Рис. 82.
проведенных из точки А под углом сртр
к нормали п опорной поверхности в точке А, образует коническую
поверхность, которая называется конусом трения (рис. 83). Если
при движении тела по неподвижной плоскости в любом направ-
направлении коэффициент трения скольжения имеет одно и то же зна-
значение, то конус трения будет, очевидно, круглым конусом.
В некоторых случаях при движении тела по неподвижной пло-
плоскости в разных направлениях коэффициент
трения скольжения имеет различные значе-
значения, например при скольжении по дереву
вдоль волокон и поперек волокон. В этих
случаях образующие конуса трения составляют
с нормалью опорной поверхности различные
углы, а потому конус трения не будет круглым
конусом. Так как модуль F силы статического
трения не может быть больше Fmax, то
р < ш Рис 83.
Если обозначим через ср угол полной реакции Дд с нормалью к
опорной поверхности в том случае, когда модуль силы статическо-
статического трения не достиг еще максимального значения i^max (рис. 79), то
Ф =
а потому
- или tgcp ==£/, или tgcp < tgcpTp,
Ф < сртр.
Отсюда следует, что полная реакция опорной поверхности не
может быть направлена по прямой, лежащей вне конуса трения.
Рассмотрим примеры решения задач статики при наличии трения.
128
СТАТИКА
Пример 38. Плоскость ОА может вращаться на шарнире О, так что
ее можпо установить под любым углом а к горизонту. На эту плоскость по-
положено тело весом Р (рис. 84). При каком угле а тело будет оставаться в равно-
равновесии?
^/^////УУУ///у> ^уУУ/у///уу//////У//У/У/^^^
Рис. 84.
Решение. Обозпачим через Анормальную реакцию плоскости и через
F силу трения. Проектируя все силы, действующие на тело (Л', F и Р), на
направление ОА (на ось х) и на направление, перпендикулярное к ОА (ва
ось у), будем иметь при равновесии:
F — Р sin а = 0 и N — Р cos а = О,
отсюда находим: F = Р sin а, N = Р cos а и, следовательно,
- F
iV '
Наибольшее значение, которого может достигнуть сила трения в покое, есть
*тах =' '
а потому
и, следовательно,
fN
tg а ^ '-— , или tg а :
но / = tg фтр, где фтр — угол трения, а потому
tg а gi tg фтр или а sg <pTp,
т. е. тело будет оставаться в равновесии до тех пор, пока угол наклона пло-
плоскости не превышает уела трения.
Заметим, что при помощи прибора, изображенного на рис. 84, можно опре-
определить коэффициент трения; для этого нужно постепенно увеличивать угол
а наклона плоскости от нуля до тех пор, пока тело не начнет скользить вниз;
если измерить максимальный угол а, при котором тело еще остается в равно-
равновесии, то тангенс этого угла равен искомому коэффициенту трения.
Пример 39. На наклонной плоскости с данным углом наклона а,
большим угла трения, лея;ит тело весом Р. На него действует сила Q, напра-
направленная параллельно наклонной плоскости вверх (рис. 85). Определить мо-
модуль этой силы при условии, чтобы тело оставалось в равновесии.
ГЛ. 6. ТРЕНИЕ
129
у///////////////
Решение. Определим сначала наибольшее значение силы Q, при
котором еще возможно равновесие, предполагая, что дальнейшее увеличение
этой силы вызовет уже скольжение тела вверх по плоскости. В этом случае
сила трения F направлена по наклонной плоскости вниз, как указано на
рис. 85. Обозначая нормальную реакцию плоскости через N и проектируя
все силы, приложенные к телу, на оси х и у,
получим:
Q = F + Р sin а, N = Р cos а;
кроме того, имеем:
F <£fN или Fs^fP cos а;
отсюда находим:
Q sg; P (sin а + / cos а),
и, следовательно,
*?max = P (s'n а ~t~ / cos а).
Найдем теперь наименьшее значение Рис. 85.
силы Q, необходимой для того, чтобы тело
не скользило вниз по плоскости. В этом случае сила трения имеет направле-
направление, обратное показанному на рис. 85, т. е. направлена по наклонной
плоскости вверх, что, очевидно, соответствует изменению знака этой силы
в предыдущих уравнениях равновесия.
Поэтому будем иметь:
Qmin = р (sin a — / cos а).
Объединяя оба полученных результата, видим, что тело будет находиться
в равновесии в том случае, если модуль силы Q удовлетворяет условиям
Р (sin a+/ cos а) Г> Q ^5 Р (sin а — / cos а).
Пример 40. Лестница АВ длиной 2а и
весом Р опирается концами на вертикальную
стену и горизонтальный пол. При каком угле
наклопа а лестница будет оставаться в равнове-
равновесии, если коэффициент трения в точках А и В
равен /?
Решение. К лестнице приложены пять
сил: вес Р, нормальные реакции Л^ и N2 в точ-
точках А и В и силы трения Ft и К в тех же точках
(рис. 86).
Проектируя все эти силы на осп Ох и Оу и
составляя уравнение моментов относительно точ-
точки О, получаем следующие три уравнения рав-
равновесия:
N2-F1 = 0,
Wi + Ft — Р = 0,
— 2N2 sin a + 2N-L cos а — Р cos а = 0 J).
Обозначим равнодействующую сил F2 и iV2, т. е. полную реакцию стены
в точке В, через /?2, а угол между /?2 и N2 обозначим через ф2; тогда
F2 = N2 tg ф2.
х) Это уравнение сокращено на общий для всех членов множитель а.
5 Ц. м. Воронкив
130 СТАТИКА
Если положим tg ф2 = к2, то
Так как
то
Аналогично для силы Fx будем иметь:
причем
Подставляя эти значепия Fx и F2 в первые два из уравнений равновесия,
получим:
Из этих уравнений находим:
iV, = , ^-г~ , iV, = . ^f-j- .
1 Л 1,1,' & 4 7. 7«
Подставляя эти значения в уравнение моментов, получим (по освобо-
освобождении от знаменателя и сокращении на Р):
2/tj sin а — 2 cos а + A + Л-аЛ-2) cos а = 0
или
2/fx tga + A-^2 = 1.
Так как на основании написанных выше неравенств
то
2/ tga+ /2=г 1,
откуда
Отсюда следует, что наименьшее значение угла наклона а, при котором
еще возможно равновесие, определяется из равенства
18 «min =
2/ •
Если заменим здесь коэффициент трения / через tg фтр) гдефтр — угол
трения, то
1 - tg2 Фтп
^'2
откуда следует
«min = 90° - 2Фтр.
По смыслу задачи угол наклона а не может быть больше 90° (при a = 90°
лестница стоит у стены в вертикальном положении).
ГЛ. R. ТРЕНИЕ
131
Поэтому приходим к выводу, что лестница остается в равновесии при
угле наклона к горизонту, заключающемся в пределах
90°
'■ 90° -
Пример 41. На рис. 87 показана схема колодочного тормоза. Найти
наименьшее значение силы Р, необходимое для того, чтобы затормозить
шкив Ог. Нужные размеры указаны на чертеже. Коэффициент трения между;
тормозной колодкой и поверхностью шкива равен /.
Решение. Обозначим нормальное давление и силу трения, приложен-
приложенные к шкиву в точке С, через N и F. К тормозной колодке в той же точке С
приложены нормальная реакция шкива N' и сила трения F', равные по мо-
модулю и противоположные по направлению силам N и F соответственно.
Напишем условия равновесия для шкива и для рычага ОАВ в отдельности,
приравнивая нулю сумму моментов всех сил, приложенных к шкиву, относи-
относительно неподвижной точки Ох и сумму моментов сил, приложенных к рычагу,
относительно точки О. Получим, как легко видеть из рис. 87, следующие два
уравнения:
rQ — RF = 0, cF' -f aP — bN' = 0.
Кроме того, как и в предыдущем примере, положим F = kN, где Л г£ /.
Подставляя это значение F в предыдущие уравнения и заменяя N' vlF' через
N и F, получим:
kRN = rQ, aP = bN — ckN = (Ъ — ck) N.
Определяя величину N из первого уравнения и подставляя ее зндчеиие
во второе уравнение, находим:
Р = 9 г ъ~ск -1 L. I ь _
a R к а ' R\k
132 СТАТИКА
Как видно из этой формулы, с увеличением коэффициента к величина Р
уменьшается; когда к достигает наибольшего значения /, сила Р имеет наи-
наименьшее значение; следовательно,
р =9 . ч(Р.-.
тш a R \ f
Из рассмотренных примеров мы видим, что аналитический ме-
метод решения задач статики при наличии трения остается таким же,
как и в тех случаях, когда мы трением пренебрегаем. Различие
состоит лишь в том, что в уравнениях равновесия появляются,
кроме нормальных реакций, силы трения. При этом максимальное
значение силы трения определяется по формуле/^ач = fN; в боль-
большинстве случаев в задачах статики приходится вести расчет именно
на максимальное значение силы трения; в частности, в примере 40
мы могли бы проще определить минимальный угол наклона лест-
лестницы, при котором еще возможно равновесие, если бы с самого
начала в уравнениях равновесия положили F1 = fN1 и F2 = /7V2;
это соответствовало бы предположению, что мы рассматриваем
то положение лестницы, при котором силы трения в точках А и
В достигают максимального значения (когда тело находится на
пороге скольжения). Важно еще заметить, что, как видно из тех
же примеров, условия равновесия тела при наличии трения выра-
выражаются неравенствами. Поэтому при наличии трения имеются не
одно или несколько отдельных положений равновесия, а множе-
множество смежных положений равновесия тела, или так называемая
область равновесия. В примере 40 границы области равновесия
определяются полученными выше неравенствами
90° Sa a Sa 90° — 2 сртр.
Все сказанное до сих пор в этом параграфе относится к так
называемому сухому трению, т. е. к трению сухих или слабо сма-
смазанных твердых тел. Если между твердыми телами, например между
вращающимся валом и подшипником, имеется тонкий слой жидко-
жидкости (смазочного масла), то в этом случае трение называется
жидкостным. Изучение жидкостного трения, имеющее очень
важное практическое значение, относится к области гидродина-
гидродинамики. Основоположником гидродинамической теории смазки яв-
является выдающийся русский ученый — профессор Инженерной
академии Н. П. Петров; он впервые изучил явление жидкостного
трения и теоретически и экспериментально, проведя весьма об-
обширные и точные опыты. Результаты своих исследований Н. П. Пет-
Петров опубликовал в своей классической работе «Трение в маши-
машинах и влияние на него смазывающей жидкости» A883). Даль-
Дальнейшее развитие гидродинамическая теория смазки получила
в трудах Рейнольдса и русских ученых Н. Е. Жуковского,
С. А. Чаплыгина и Н. И. Мерцалова.
ГЛ. 6. ТРЕНИЕ 133
§ 30. Трение качения
Трением качения называется сопротивление, возникающее при
качении одного тела по другому.
Представим себе цилиндрический каток, положенный на гори-
зоптальную плоскость (рис. 88). Пусть Р есть вес катка и пусть
в его центре О приложена некоторая горизонтальная сила ■ Q.
Опыт показывает, что пока сила Q невелика, каток будет оста-
оставаться в покое. Следовательно, действую-
действующие на каток силы Q и Р уравновеши-
уравновешиваются сопротивлением неподвижной
плоскости. В точке А соприкосновения
катка с плоскостью возникают нормальная
реакция Л' этой плоскости, противопо-
противоположная весу катка Р, и сила треппя F,
препятствующая скольжению катка по
плоскости и равная по модулю силе Q, но
направленная в противоположную сто-
рону. Однако если бы сопротивление не-
подвижной плоскости сводилось только к Рис. 88.
силам N и F, то каток не мог бы быть
в равповеспи, так как пара (Q, F) оставалась бы, очевидно, не-
неуравновешенной. Поэтому необходимо допустить, что реакции
неподвижной плоскости приводятся не только к силам N и F, но
еще и к некоторой паре, которая уравновешивает пару (Q, F).
Эта пара, препятствующая качению катка, называется парой
трения качения. Возникновение этой пары объясняется тем, что
вследствие неабсолютной твердости рассматриваемые тела испыты-
испытывают деформацию, так что каток несколько вдавливается в опорную
плоскость и соприкосновение его с этой плоскостью происходит по
некоторой малой площадке около точки А. Приводя реакции,
распределенные по этой площадке, к точке А, получаем силы N и
F, приложенные в этой точке, и пару трения качения 1). Относи-
Относительно пары трения качения Кулон опытным путем нашел, что
момент этой пары пе может превышать некоторого определенного
в условиях данного опыта максимального значения; это макси-
максимальное значение момента пары трения качения не зависит от
радиуса катка и прямо пропорционально нормальному давлению
катка на плоскость, или, что то же, нормальной реакции N.
Таким образом, если обозначим абсолютную величину этого
максимального момента пары трения качения через Мтах, то
Mmax = fKN, где /к — коэффициент пропорциональности, называе-
называемый коэффициентом трения качения. Из предыдущего равенства
х) Согласно теореме о приведении плоской системы сил к данному
центру (§ 21).
134
СТАТИКА
ясно, что этот коэффициент выражается в линейных единицах,
например в сантиметрах, так как он играет роль плеча пары.
Значение коэффициента трения качения определяется опытным
путем и, как показывают опыты, зависит от материала катка и
опорной плоскости. В следующей таблице даны значения этого
коэффициента для некоторых тел:
Трущиеся трла
Дерево по дереву
Мягкая сталь по мягкой стали ....
Дерево по стали
Шарик из закаленной стали по
стали
V01
0,05—0,06
0,005
0,03-0,04
0,001
Рассмотрим теперь более общий случай равновесия катка.
Пусть к катку приложена горизонтальная сила Q в некоторой
точке В, так что АВ = h (рис. 89), и пусть
каток находится в покое. В точке А к
катку приложены сила трения скольже-
скольжения F и нормальная реакция N опорной
плоскости, направленная вертикально
вверх. Кроме того, к катку будет прило-
приложена еще пара трения качения. Сложив
эту пару с нормальной реакцией, полу-
получим, как известно из § 22, одну силу, рав-
ную по МОДУЛЮ этой Реакции и имеющую
то же направление, но приложенную уже
не в точке А, а в некоторой другой точке
С; если расстояние точки С от прямой
АО обозначим через d, то d = ^ , где М есть момент пары тре-
трения качения. Напишем теперь три уравнения равновесия сил,
приложенных к катку, приняв за координатные оси вертикаль-
вертикальную и горизонтальную прямые, а за центр моментов точку А.
Получим:
Q = F, N = Р, Qh = Nd.
Максимальное значение модуля силы F есть
^max = IN = fP,
Рис. 89.
где / — коэффициент трения скольжения; следовательно,
ГЛ. 6 ТРЕНИЕ 135
Кроме того, величина Nd = М есть момент пары трения каче-
качения; эта величина не может быть больше fKN; следовательно,
d «S /ю а потому
iiQ «ё fKN, или hQ < fKP,
т. е.
/к
Итак, при равновесии катка сила Q должна удовлетворять
условиям
Q ^ fP и Q ^ — Р.
Если эти условия выполнены, то не произойдет ни скольжения,
ни качения катка.
Пример 42. На двух цилиндрических катках радиуса г и весом р
каждый лежит доска, на которой находится груз; вес доски вместе с грузом
равен Р. К доске приложена горизонтальная сила Q, под действием которой
доска вместе с грузом перемещается равномерно (с постоянной скоростью).
Определить модуль силы Q, если коэффициент трения качения между катками
и грунтом равен /к, а между катками и доской равен f'K (рис. 90).
Решение. Так как по условию задачи система, состоящая из доски и
катков, движется равномерно, то все силы, приложенные к доске и каткам,
уравновешиваются. К правому катку приложены следующие силы: вес р,
силы трения скольжения Ft и F[, приложенные в точках А к В, нормальная
реакция грунта Nx и нормальная реакция доски N[. Так как между катком и
грунтом возникает трение качения, то, как это было указано в предыдущем
примере, нормальная реакция Nt приложена к катку не в точке А, а в точке А',
причем расстояние линии действия этой силы от точки А равно коэффициенту
трения качения между катками и грунтом, т. е. /к. Точно так же реакция N[
приложена не в точке В, а в точке В', причем расстояние линии действия
этой силы от точки В равно коэффициенту трения качения между катком и
доской, т. е. f'K. К левому катку приложены силыр, F2, Р'г, iV2 и N'3, причем
расстояние линии действия силы N2 от точки С равно /к, а расстояние ли-
нил действия силы N'a от точки D равно /^. Проектируя все силы, прило-
приложенные к правому катку, на вертикаль и составляя сумму моментов этих
сил относительно точки А, получим следующие два уравнения равновесия:
1) Ni - Щ - р = 0, 2) /КЛГХ ^ №\ - 2rF; = 0.
136 СТАТИКА
Точно так же, проектируя на вертикаль все силы, приложенные к левому
катку, и составляя сумму моментов этих сил относительно точки С, полу-
полунаем еще два уравнения:
3) N2 - N'2 - р = 0, 4) fnNz + /;д; - 2rF't = 0.
Спроектируем, далее, на вертикальное и горизонтальное направления все
силы, приложенные к доске; принимая во внимание, что реакции катков,
приложенные к доске, по закону равенства действия и противодействия
равны по модулю и противоположны по направлению силам F[, N[, F'2 и N'%,
получим следующие уравнения:
5) /v; + лг; = р,
6) F\ + F'.2 = Q.
Сложив теперь уравнения первое и третье, получим:
Nt + Л'2 = N[ + N'a + 2р = Р + 2р;
гложив, далее, уравнения второе и четвертое, получим:
2r (F[ + F't) = /к (ivx + лг„) + /;(лг; + Щ) = /„ (р + 2/>) + /,;р,
или, принимая во внимание шестое уравнение,
2'Q = /к (Р + 2р) + /КР,
откуда находим:
/к (р + 2Р) + /;,р
2г
Если, как это обычно бывает, вес катков мал по сравнению с весом груза,
то величиной р можно пренебречь, т. е. можно положить р = 0; тогда
Пусть, например, Р = 1000 кг, г = 7,5 см, /к = 0,2 см и /к = 0,05 см.
Подставляя эти значения в предыдущую формулу, получим:
0,2+0,05 1000 = 16 2
1 о о
Более точные опыты показывают, что коэффициент трения
качения зависит не только от материала трущихся тел и их упру-
упругих свойств, но также и от радиуса катка и от его нормального
давления на опорную плоскость. Поэтому в настоящее время
при определении момента пары трения качения нередко пользу-
пользуются другими, более точными формулами, чем вышеприведенная
формула Кулона, учитывающими все эти факторы.
ГЛ. 7. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ГРАФОСТАТИКИ
137
Г Л А В А 7
ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ГРАФОСТАТИКИ
§ 31. Сложение сил, лежащих в одной плоскости.
Графические условия равновесия плоской системы сил
В этой главе мы рассмотрим графические методы решения
задач статики в том случае, когда все приложенные к телу силы
лежат в одной плоскости. Вообще графические методы имеют очень
широкое применение в технической практике. Хотя эти методы
и менее точны по сравнению с аналитическими, так как точность
результата здесь зависит от точности выполнения чертежа, однако
Рис. 91.
эти методы имеют то преимущество, что дают быстрое и наглядное
решение задачи. Тот отдел статики, в котором излагаются графи-
графические способы решения статических задач, называется графоста-
тикой.
Задача сложения сил, лежащих в одной плоскости, состоит в на-
нахождении равнодействующей этих сил. Эта задача может быть
решена графически путем последовательного сложения данных сил,
но в этом параграфе мы рассмотрим другой, более удобный и бы-
быстрый способ решения этой задачи.
Пусть дана некоторая плоская система сил, напримзр система
трех сил, изображенных на рис. 91; обозначим эти силы цифрами
1, 2 ж 3. Модуль и направление искомой равнодействующей этих
сил найдем по известному правилу силового многоугольника.
138 СТАТИКА
Для этого из произвольно взятой точки А проведем вектор, рав-
равный вектору, изображающему силу 2; в конце этого вектора поста-
поставим букву Б\ далее, из точки В проводим второй вектор, равный
вектору, изображающему силу 2; в конце этого вектора ставим
букву С; из точки С проводим третий вектор, равный вектору,
изображающему силу 3, и в конце его ставим букву D. Вектор
AD, замыкающий полученную ломаную линию, определяет по
модулю и направлению равнодействующую R данной системы сил.
Остается найти точку приложения этой равнодействующей или
же ее линию действия, так как точку приложения силы можно
переносить по липни действия этой силы в любую точку. Для
этого сделаем следующее построение: выберем произвольно какую-
нибудь точку О, называемую полюсом, и соединим эту точку пря-
прямыми со всеми вершинами силового многоугольника; полученные
при этом отрезки называются лучами. Два крайних луча ОА и
OD, направленных в первую и последнюю вершины силового мно-
многоугольника, обозначим через а и со. Луч ОВ, направленный в ту
вершину силового многоугольника, где сходятся векторы 1 и 2,
обозначим через 1—2, а луч ОС, направленный в точку С, общую
для векторов 2 и 3, обозначим через 2—3. Теперь возьмем где-
нибудь недалеко от линии действия данной силы 1 точку Е и
проведем из этой точки прямую, параллельную лучу а, до пересе-
чепия в точке а с линией действия силы 1; эту прямую обозначим
также через а. Из точки а проводим, далее, прямую, параллель-
параллельную лучу 1—2, до пересечения в точке Ъ с линией действия силы 2;
эту прямую обозначим через 1—2; из точки Ь проводим прямую,
параллельную следующему лучу 2—3, до пересечения в точке с
с линией действия силы 3; эту прямую обозначим через 2—3.
Наконец, из точки с проведем прямую, параллельную последнему
лучу со, и обозначим эту прямую через со.
Построенная таким способом ломаная линия EabcF называется
веревочным многоугольником. Продолжим две крайние стороны
веревочного многоугольника аи и до их пересечения в точке К.
Через эту точку К проходит искомая линия действия равнодей-
равнодействующей R. Поэтому остается через точку К провести прямую,
параллельную замыкающей стороне AD силового многоугольника;
эта прямая является липией действия искомой равнодействующей.
Итак, задача решена полиостью; мы нашли модуль, направление
и линию действия равнодействующей данной системы сил.
Теперь нужно доказать, что линия действия равнодействую-
равнодействующей R действительно проходит через точку К. Для доказательства
перенесем точку приложения силы 1 в точку а и разложим эту
силу по правилу параллелограмма на две составляющие, напра-
направленные по сторонам а и 1—2 веревочного многоугольника; эти
составляющие обозначим соответственно через ае и а/. Так же по-
поступим с силами 2 и 3, т. е. перенесем точку приложения силы 2
ГЛ. 7. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ГРАФОСТАТИКИ 139
в точку Ъ и разложим эту силу на две составляющие bg и Ы,
направленные по сторонам 1—2 и 2—3, а силу 3, точку приложе-
приложения которой перенесем в точку с, разложим на две силы cl и сп,
направленные по сторонам 2—3 и со веревочного многоугольника.
Рассмотрим теперь треугольники ade и ОАВ; эти треугольники
имеют соответственно равные углы как углы с параллельными сто-
сторонами. Кроме того, сторона АВ равна стороне ad, так как эти
стороны изображают одну и ту же силу 1; следовательно, эти
треугольники равны, откуда заключаем, что ае = АО и а/ = ОВ.
Совершенно так же убеждаемся в равенстве треугольников bhg
и ОВС и треугольников elm и OCD, откуда заключаем, что bg =
= ВО, Ы = ОС, cl = СО и ел = OD. Из полученных равенств
следует, что а/ = bg и Ы = d.
Итак, силы, направленные по сторонам 1—2 и 2—3 веревочного
многоугольника, взаимно уравновешиваются (эквивалентны нулю)
как силы, попарно равные по модулю и прямо противоположные;
следовательно, остаются только две силы ае и сп, направленные
по крайним сторонам веревочного многоугольника и равные соот-
соответственно АО и OD. Отсюда заключаем, что данная плоская си-
система сил эквивалентна двум силам ае и сп, а потому искомая равно-
равнодействующая R этой системы совпадает с равнодействующей этих
двух сил ае и сп. Но линии действия этих двух сил пересекаются
в точке К; следовательно, через эту точку проходит и их равнодей-
равнодействующая, или, что то же, равнодействующая R данной системы
сил, что и требовалось доказать.
Итак, мы приходим к следующему правилу графического сло-
сложения сил плоской системы.
Обозначив данные силы по порядку номерами 1, 2, 3, 4 и т. д.,
строят многоугольник этих сил. Потом выбирают произвольно
полюс и соединяют его лучами со всеми вершинами силового
многоугольника; эти лучи по порядку обозначают через а, 1—2,
2—3, 3—4, ... , со. Из произвольно взятой точки проводят прямую,
параллельную лучу а; из точки пересечения этой прямой с линией
действия силы 1 проводят прямую, параллельную лучу 1—2;
из точки пересечения этой второй прямой с линией действия силы 2
проводят прямую, параллельную лучу 2—3, до пересечения с ли-
линией действия силы 3 и т. д. Последнюю прямую проводят парал-
параллельно лучу со. Стороны полученного таким образом веревочного
многоугольника обозначают, так же как и параллельные им лучи
силового многоугольника, через а, 1—2, 2—3, ..., со. Про-
Продолжают крайние стороны а и со веревочного многоугольника
до их пересечения в точке К. Через эту точку К проводят
вектор, равный замыкающему вектору силового многоугольни-
многоугольника; этот вектор определяет искомую равнодействующую данной
системы сил.
140
СТАТИКА
Это правило, доказанное для трех сил, применимо, как видно
из предыдущих рассуждений, к системе с любым числом сил. На
рис. 92 показано сложение пяти сил. Заметим, что, выбирая
в качестве полюса О различные точки плоскости, мы будем полу-
получать различные по форме и положению веревочные многоуголь-
многоугольники и соответственно различные точки К пересечения крайних
сторон а и со этих многоуголь-
многоугольников, но все эти точки будут
лежать, конечно, на одной
прямой — на линии действия
равнодействующей данной си-
системы сил.
Указанное правило графи-
графического сложения сил, явля-
являясь вполне общим, примени-
применимо и к частному случаю си-
системы параллельных сил,
Рис. 93. направленных как в одну, так
и в противоположные сторо-
стороны. Сложепие четырех параллельных сил показано на рис. 93.
В этом случае все вершины силового многоугольника лежат на
одной прямой.
Рассмотрим теперь тот случай, когда многоугольник данных
сил является замкнутым, т. е. когда главный вектор данной си-
системы сил равен нулю. Этот случай изображен па рис. 94, где
дана система четырех сил. Так как многоугольник данных четы-
четырех сил замыкается, то начало вектора, изображающего силу 1
иа силовом многоугольнике, совпадает (в точке А) с концом век-
ГЛ. 7 ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ГРАФОСТАТИКИ
141
тора, изображающего силу 4, а потому крайние лучи аи© сило-
силового многоугольника совпадают. Построив теперь по указанному
выше правилу веревочный многоугольник, мы видим, что в дан-
данном случае крайние стороны а и со этого многоугольника парал-
параллельны, так как их приходится проводить параллельно одному и
тому же лучу О А. Следовательно, точка К пересечения этих сто-
сторон лежит в бесконечности, и веревочный многоугольник не замы-
замыкается.
Разложив каждую из данных сил на две составляющие силы,
направленные по тем двум сторонам веревочного многоугольника,
Рис. 94.
которые пересекаются на линии действия этой силы, как это сде-
сделано на рис. 91, мы так же, как и там, убедимся, что составляющие
силы, направленные по промежуточным сторонам веревочного
многоугольника (т. е. по сторонам 1—2, 2—3 и 3—4), уравнове-
уравновешиваются, и что данная система четырех сил эквивалентна двум
силам F[a~> и
направленным по крайним сторонам а и со вере-
веревочного многоугольника и выражающимся по модулю крайними
лучами а и со силового многоугольника, т. е. равными в данном
случае одному и тому же отрезку О А.
Итак, эти две силы F[a> и F^ равны по модулю и параллельны;
кроме того, как видно из рис. 94, они направлены в противопо-
противоположные стороны; следовательно, данная система четырех сил
приводится к паре (F[a\ F^). В этом можно убедиться также сле-
следующим образом: разложив силу 1 по направлениям а и 1—2,
получим, как видно из силового многоугольника, равенство
АВ = АО + ~ОВ\
точно так же, разложив силу 4 по направлениям 3—4 и со, полу-
получим:
Ш = DO + ОА.
Отсюда следует, что jF<a> = АО и F<f>) — ОА, т. е.
142
СТАТИКА
Из этого равенства видим, что силы F^ и F\a> образуют пару Если
обозначим плечо этой пары через d, а ее момент — через М, то
М = F^-d = OA-d. Величина М представляет собой главный
момент данной системы сил
и не зависит от выбора по-
люса О.
Таким образом, приходим
к следующему заключению:
если силовой многоугольник
данной плоской системы сил
является замкнутым, а вере-
веревочный многоугольник не зам-
замкнут, то эта система приво-
приводится к паре сил. Равнодей-
Равнодействующей в этом случае не
существует. Если допустим
теперь, что плечо d пары
(F<a>, /?(<>>)) равно нулю, то силы F[a) и F[a~> будут направлены по
одной прямой и потому будут уравновешиваться. Крайние сто-
стороны а и со веревочного многоугольника в этом случае совпадают
(направлены по одной прямой).
Отсюда получаем графические условия равновесия плоской
системы сил: для равновесия плоской системы сил необходимо и
•Рис. 95.
Рис.
достаточно, чтобы совпадали и крайние лучи а в со силового мно-
многоугольника и крайние стороны а ц со веревочного многоугольника,
или, другими словами, чтобы оба многоугольника, и силовой и вере-
веревочный, были замкнутыми.
На рис. 95 изображена уравновешивающаяся система четырех
сил; крайние стороны а и со веревочного многоугольника соста-
составляют одну прямую; замкнутая площадь, ограниченная сторонами
ГЛ. 7. ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ГРЛФОСТАТИКИ
143
Рис. 97.
веревочного многоугольника 1—2, 2—3, 3—4 и а — со, на рисунке
заштрихована.
На рис. 96 изображена уравновешивающаяся система пяти
параллельных сил.
§ 32. Разложение данной силы на две, ей параллельные
Пусть дана сила F; требуется разложить ее на две параллель-
параллельные ей силы, приложенные в заданных точках А и В (рис. 97).
Проведем через точки А и В прямые, параллельные силе F; эти
прямые представляют собой линии действия искомых составляю-
составляющих сил, которые обозначим
соответственно цифрами 1 и 2.
Построим вектор ah, равный
вектору, изображающему дан- \^
ную силу F, и, взяв произ-
вольно полюс О, проведем лучи
Оа и Ob, которые обозначим
через а и со. Проведем, далее,
прямую, параллельную лучу а;
эта прямая пересечет линию
действия силы 1 в некоторой
точке С и линию действия силы F — в точке К; из точки К про-
проводим прямую, параллельную лучу со, которая пересечет линию
действия силы 2 в некоторой точке D. Соединив точки С и D,
получим сторону 1—2 веревочного многоугольника. Остается
теперь из полюса О провести луч Ос, параллельный CD. По-
Построив в точке А вектор, равный вектору ас, и в точке В — век-
вектор, равный вектору cb, получим искомые составляющие 1 и 2
данной силы F.
Правильность данного решения поставленной задачи очевидна.
В самом деле, если сложить графически по общему правилу при-
приложенные в точках А и В силы 1 и 2, то их равнодействующая,
во-первых, равна по модулю и направлению данной силе F и,
во-вторых, проходит через точку К; следовательно, она совпадает
с силой F.
§ 33. Графический способ определения центра
системы параллельных сил
Пусть дана система параллельных сил 1, 2, 3, приложенных
в точках Аи А2 и А3 (рис. 98); требуется найти центр этих парал-
параллельных сил. Построив силовой и веревочный многоугольники
и продолжив стороны а и со веревочного многоугольника до их
пересечения в точке К, проводим через эту точку прямую,
144
СТАТИКА
параллельную данным силам. Эта прямая будет служить линией
действия равнодействующей данных сил, а потому искомый центр
лежит на этой прямой. Как известно из § 15, положение центра
системы параллельных сил не зависит от направления этих сил;
если, не изменяя точек приложения данных сил, повернуть все си-
силы вокруг этих точек на один и тот же угол, то положение их центра
при этом не изменяется. Повернем данные силы по часовой стрелке
на прямой угол так, чтобы они оказались направленными по
прямым Г,2',3' и построим для этой новой системы сил силовой
и веревочный многоугольники. Для построения нового сило-
силового многоугольника достаточно построенный уже силовой мно-
i оугольник повернуть вокруг полюса О по часовой стрелке также
на прямой угол; при этом лучи а', 1'—2', 2'—3' и со' нового
(повернутого) силового многоугольника окажутся перпендикуляр-
перпендикулярными соответственно к лучам а, 1—2, 2—3 и со.
Отсюда следует, что и стороны нового веревочного многоуголь-
многоугольника будут также перпендикулярны к соответствующим сторонам
веревочного многоугольника, построенного для сил 1, 2 и 3. По-
Поэтому новый веревочный многоугольник получаем следующим про-
простым построением: проводим прямую а', перпендикулярную к сто-
стороне а; из точки пересечения этой прямой с прямой Г проводим
прямую Т—2', перпендикулярную к стороне 1—2; из точки пере-
пересечения этой прямой с прямой 2' проводим прямую 2'—3', пер-
перпендикулярную к стороне 2—3,и, наконец, из точки пересечения
отой прямой с прямой 3' проводил! прямую со', перпендикулярную
к стороне со. Продолжив прямые а' и со' до их пересечения в точке
К', проводим через эту точку прямую, параллельную новому на-
цравлению данных сил. Искомый центр должен лежать на этой
ГЛ 7 ОСНОВНЫЕ СВКДЕНИЯ ИЗ ГРАФОСТАТИКИ
145
пряной, а потому он лежит в точке С, т. е. в точке пересечения
двух прямых, проведенных через К и К', из которых первая па-
параллельна данным силам, а вторая к ним перпендикулярна. Задача,
таким образом, решена.
§ 34. Графическое определение реакций в плоской задаче статики
Как известно из главы 5, в плоской задаче статики по заданным
силам, приложенным к данному твердому телу, находящемуся
в равновесии, приходится определять неизвестные реакции связей;
при этом предполагается, что все заданные силы и неизвестные
реакции связей лежат в одной плоскости; аналитический метод
определения реакций из уравнений равновесия был рассмотрен
в главе 5; теперь мы рассмотрим графический метод решения этой
задачи на следующих простых примерах.
Пример 43. К горизонтальной балке, лежащей на двух опорах, прило-
приложены четыре заданные вертикальные силы. Определить реакции опор (рис. 99).
Рис. 99.
Решение. Данные в задаче силы, приложенные к балке, обозначим
цифрами 1, 2, 3, 4. Реакции опор обозначим цифрами 5 и б; эти силы напра-
направлены перпендикулярно к балке вверх; требуется найти эти реакции. Для этого
строим сначала силовой многоугольник; так как все силы параллельны, то
в силовом многоугольнике они лежат на одной прямой, причем силы 1, 2,
3 и 4 направлены вниз, а силы 5 и в — вверх. Так как при равновесии сило-
силовой MHoroyi ольник должен быть замкнутым, то конец силы в должен совпа-
совпадать с началом силы 1, т. е. с точкой А. Выбрав произвольно полюс О, про-
проведем лучи 1—2, 2—3, 3 — 4 и 4—5; два крайних луча а и со совпадают с лучом
ОА, который обозначим через в—1, так как точка А является концом вектора
в и началом вектора 1. Поскольку силы 5 и б нам не даны, направление
луча 5—в пока неизвестно.
Строим, далее, веревочный многоугольник: из точки а, произвольно взя-
взятой на линии действия силы 6, проводим прямую, параллельную лучу 6—1,
до пересечения с линией действия силы 1; эта прямая представляет собой
сторону 6—1 веревочного многоугольника; из точки пересечения этой прямой
146
СТАТИКА
с линией действия силы 1 проводим прямую, параллельную лучу 1—2, до пе-
пересечения с линией действия силы 2; получаем сторону 1—2 веревочного
многоугольника и т. д. Сторона 4—5 веревочного многоугольника пересечет
линию действия силы 5 в некоторой точке Ь; из этой точки Ь мы должны
провести теперь последнюю сторону 5—6 веревочного многоугольника до
пересечения с линией действия силы 6. Но так как при равновесии веревоч-
веревочный многоугольник должен быть замкнутым, то ясно, что его сторона 5—6
должна проходить через точку а. Поэтому, соединив прямой точки а и Ь, по-
получим эту последнюю сторону 5—6 веревочного многоугольника. Остается
теперь на силовом многоугольнике из полюса О провести луч 5—6, парал-
параллельный аЪ. Определив направление луча 5—6, мы тем самым находим и
модули искомых сил 5 и 6; а именно: сила 5 равна отрезку прямой АВ, за-
заключенному между лучами 4—5 и
5—6, а сила 6 равна отрезку той
же прямой, заключенному между
лучами 5—6 и 6—1 х). Задача,
следовательно, решена.
Пример 44. Балка АВ
подъемного крана весом Р может
вращаться на шарнире А; в точке
В к ней подвешен груз весом Q.
Балка удерживается в равновесии
цепью ВС. Определить натяжение
цепи и реакцию в шарнире А
(рис. 100).
Решение. Реакция цепп
направлена по ВС; реакция в
шарнире не известна ни по моду-
модулю, ни по направлению. Сложим
графически при помощи силового
и веревочного многоугольников
данные в задаче параллельные
силы Р и Q. Их равнодействую-
равнодействующая R проходит через точку пересечения К сторон а и ш веревочного мно-
многоугольника. Продолжим линию действия силы R до пересечения с прямой
ВС в точке D; так как к балке теперь приложены три силы (сила R, реакция
шарнира и реакция цепи), то на основании теоремы о трех уравновешенных
силах2) заключаем, что линия действия реакции шарнира А проходит
через точку D; следовательно, она направлена по прямой AD. Таким
образом, направления обеих искомых сил теперь известны; чтобы найти
эти силы, достаточно построить силовой треугольник: проводим вектор
аЬ, равный силе R; из точек а и 6 проводим прямые, параллельные ВС и AD,
до их пересечения в точке с; векторы Ьс и са определяют искомую реакцию
шарнира RA и реакцию цепи Т, модуль которой и равен искомому натяже-
натяжению цепи.
П р и м е р 45. К ферме, изображенной на рис. 101, приложены три задан-
заданные вертикальные силы Fu F2 и F3. В точке А ферма имеет неподвижную шар-
шарнирную опору, а в точке В — подвижную опору, которая может перемещаться
на катках по гладкой неподвижной наклонной плоскости. Найти реакции
в точках А и В.
Решение. Эта задача решается аналогично предыдущей. Реакция RB
в точке В направлена по нормали к опорной плоскости. Реакция RA
Рис. 100.
х) На рис. 99 для большей ясности чертежа векторы, изображающие силы
5 и 6, отложены не на самой прямой АВ, а рядом.
2) Линии действия таких трех сил пересекаются в одной точке (§ 3).
ГЛ 7 ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ГРАФОСТАТИКИ
147
в шарнире А не известна ни по модулю, ни по направлению. Сложим
сначала графически данные силы Fu F% и F3, построив для этого силовой и
w л w л w *-н w-r> 1Г ->г^^ ^ н-в ^н -г^^Ч -w» т^ **Ч ТТ «■ «"■ W т_ П цщ* •"■" *^ Т*1\ 14 Л Т "*■ **Ч «"■ п w т¥ ™ Л / 1 4 It п 1~* Т* /Л Т» Л ИЛтП ТТТЛ Fifth fV
веревочный многоугольники, как показано на рис
Н этих сил направлена по прямой,
параллельной этим силам и проходя-
проходящей через точку К пересечения край-
крайних сторон а и со веревочного много-
многоугольника. Сложив силы Fx, F2 и F3,
мы приведем систему сил, прило-
приложенных к ферме, к трем силам: RA, R
и Пв. Так как эти три силы урав-
уравновешиваются, то их линии действия
должны пересекаться в одной точке.
Продолжим известные линии дейст-
действия сил R и RB до их пересечения
в точке С; линия действия силы RA
должна проходить через эту точку;
следовательно, эта сила направлена
по прямой АС. Таким образом, те-
теперь известны модуль и направле-
направление силы R и направления искомых
реакций RA и RB. Остается, как и
101. Равнодействующая
Рис. 101.
в предыдущей задаче, построить
треугольник этих сил: из произволь-
произвольно взятой точки проводим вектор
аЪ = Я, из начала а и конца Ь этого вектора проводим прямые, параллель-
параллельные прямым АС и ВС, до их пересечения в точке с; векторы 5с и са опре-
определяют искомые реакции RB и RA-
Рассмотрим еще другой способ решения этой задачи, основанный на по-
построении замкнутых силового и веревочного многоугольников, т. е. тот же
способ, который был применен при решении задачи 43. Обозначим заданные
Рис. 102.
силы Fx, F2 и Fs соответственно цифрами 1, 2, 3; реакцию опоры В обозначим
цифрой 4, а реакцию шарнира А — цифрой 5 (рис. 102). Так как силы 1, X
и 3 параллельны, то на силовом многоугольнике эти силы лежат на одной
прямой. Из конца Ъ вектора 3 проводим прямую, параллельную силе 4, линия
действия которой известна, но так как модуля этой силы мы не знаем, то
положение конца вектора 4 в силовом многоугольнике остается пока неиз-
неизвестным. Так как силовой многоугольник должен быть замкнутым, то конец
148 СТАТИКА
силы 5 в этом многоугольнике должен совпадать с началом силы 1. Выбрав
произвольно полюс О, проводим лучи 5—1, 1—2, 2—3 и 3—4; что касается
луча 4—5, то его направление пока не известно, поскольку неизвестно по-
положение конца силы 4 и совпадающего с ним начала силы 5. Теперь пере-
переходим к построению веревочного многоугольника. Стороны этого многоуголь-
многоугольника параллельны соответствующим лучам, проведенным из полюса О, а его
вершины должны лежать на линиях действия сил, приложенных к ферме
(так же, как в задаче 43). Направления линии действия силы 5 (реакции шар-
шарнира А) мы не знаем, но одна точка, принадлежащая этой линии, — точка А —
известна. Поэтому построение веревочного многоугольника нужно начинать
с построения сторо?1ы 5—1, проводя эту сторону из точки А до пересечения
с линией действия силы 1. Далее строим стороны 1—2, 2—3 н 3—4 веревочного
многоугольника. Обозначим точку пересечения стороны 3—4 с линией дейст-
действия силы 4 через С. Так как веревочный многоугольник должен быть замкну-
замкнутым, то для построения его стороны 4—5 следует, очевидно, соединить точки
С is. А. Построив сторону АС, можем теперь построить луч 4—5 на фигуре
силового многоугольника; для этого нужно из полюса О провести прямую,
параллельную стороне 4—5 веревочного многоугольника, до пересечения
в точке с с прямой, проведенной через точку Ъ параллельно силе 4. Вектор be
определяет силу 4. Так как силовой многоугольник должен быть замкнутым,
то, соединив конец с вектора 4 с началом а вектора 1, получим вектор са,
определяющий силу 5. Таким образом, обе искомые реакции 4 и 5 определены.
ГЛАВА 8
ФЕРМЫ
§ 35. Понятие о ферме. Задача расчета ферм
При постройке мостов, подъемных кранов и других сооруже-
сооружений применяются конструкции, называемые фермами. Фермой
называется конструкция, состоящая из стержней, соединенных
между собой по концам шарнирами и образующих геометрически
неизменяемую систему.
Шарнирные соединения стержней фермы называются ее узлами.
Если оси всех стержней фермы лежат в одной плоскости, то такая
ферма называется плоской. В этой главе мы будем рассматривать
только плоские фермы.
Среди разнообразных типов ферм необходимо различать сле-
следующие два основных вида: 1) фермы без лишних стержней и
2) фермы с лишними стержнями.
Если с фермы нельзя снять ни одного стержня, не лишив ее
свойства геометрической неизменяемости, то такая ферма при-
принадлежит к первому типу, т. е. не имеет лишних стержней. Такой
простейшей фермой является стержневой треугольник с шарнир-
шарнирными соединениями в вершинах. К таким же фермам без лишних
стержней принадлежит четырехугольник с одной диагональю
(рис. 103). Такова же состоящая из треугольников мостовая ферма
(рис. 104, а). Если от фермы, изображенной на рис. 103, отнять
ГЛ 8. ФЕРМЫ
149
один стержень, например стержень, расположенный по диагонали,
то полученная конструкция не будет уже геометрически неизменяе-
неизменяемой системой; в самом деле, так как соединения стержней шарнир-
шарнирные, то ясно, что такая система, состоящая из четы-
четырех стержней с четырьмя узлами, под действием при-
приложенных к ней сил может изменять свою форму.
Если же при снятии одного или нескольких стержней
ферма не теряет свойства неизменяемости, то такая
ферма принадлежит ко второму типу, т. е. является фермой с лиш-
лишними стержнями. Примером такой фермы служит четырехуголь-
четырехугольник с двумя диагоналями (рис. 105). Ясно, что если отнять от
этой фермы одну диагональ, то ферма останется геометрически
неизменяемой; следовательно, вторая диагональ с точки зрения
Рис. 1UJ.
Рис. 104.
обеспечения неизменяемости фермы является излишней; эта ферма
плюет один лишний стержень. Постараемся установить зависи-
зависимость между числом стержней т и числом узлов п фермы без лиш-
лишних ^стержней. Вывод проведем для так называемой простой
фермы, т. е. состоящей из ряда треугольников, сто-
сторонами которых служат стержни фермы и в верши-
вершинах которых находятся ее узлы. Будем рассмат-
рассматривать один из таких треугольников как основ-
основной. При добавлении к этому основному треуголь-
треугольнику каждого нового узла приходится добавлять
два новых стержня, соединяющихся в этом узле х). Таким обра-
образом, при добавлении к трем основным узлам п — 3 остальных
узлов добавляется 2 (п — 3) стержней; следовательно, число всех
стержней фермы (вместе с тремя основными) равно
Рис. 100
т. е.
2 (п — 3) + 3 = 2п — 3,
т = In — 3.
х) Если бы новый узел был присоединен к основному треугольнику при
помощи трех стержней, то ферма имела бы вид, изображенный на рис. 105,
т. е. имела бы один лишний стержень.
150 СТАТИКА
Это равенство выражает искомую зависимость между числом
стержней и числом узлов фермы без лишних стержней. Если
т <^2п — 3, то число стержней недостаточно для обеспечения гео-
геометрической неизменяемости фермы; мы имеем в этом случае
изменяемую стержневую систему. Если же т ]> 2п — 3, то имеем
ферму с лишними стержнями.
В дальнейшем мы будем предполагать выполненными следую-
следующие условия:
1) Все стержни фермы — прямолинейные.
2) Трение в шарнирах отсутствует.
3) Заданные силы, действующие на ферму (нагрузки), лежат
в плоскости этой фермы и приложены только в ее узлах.
4) Собственный вес каждого стержня фермы настолько мал
по сравнению с силами, приложенными в узлах фермы, что им
можно пренебречь.
Нетрудно видеть, что при выполнении этих условий каждый
стержень фермы будет испытывать только сжатие или растяжение
и не будет подвергаться изгибу, в чем состоит основная особен-
особенность и главное преимущество фермы как строительной конст-
конструкции.
В самом деле, при условии, что все нагрузки приложены в уз-
узлах фермы и что трения в шарнирах нет, каждый стержень фермы
будет находиться под действием только двух сил, приложенных
к его концам (реакций шарниров, находящихся на концах этого
стержня); но при равновесии твердого тела под действием только
двух сил эти силы должны быть равны по модулю и направлены
по прямой, соединяющей точки их приложения, в противополож-
противоположные стороны; следовательно, силы, приложенные к стержню
фермы, будут непременно направлены вдоль этого стержня, а
потому будут вызывать только его сжатие или растяжение.
Первая задача при расчете фермы состоит в следующем: к дан-
данной ферме (в ее узлах) приложена система заданных сил /*\, F2,
Fa, ... Требуется определить реакции опор и силы, сжимающие
или растягивающие каждый из стержней этой фермы (усилия
в стержнях фермы). Эту задачу мы и будем рассматривать в этой
главе.
Заданные силы Ft, приложенные к ферме, и опорные реакции
являются по отношению к этой ферме внешними силами; искомые
же усилия в стержнях фермы являются для нее силами внутрен-
внутренними (§ 28).
При расчете ферм приходится различать фермы, статически
определимые и статически неопределимые. Если все неизвестные
силы, которые нужно найти при расчете данной фермы, т. е. реак-
реакции опор и усилия в ее стержнях, могут быть определены мето-
методами статики твердого тела, то такая ферма является статически
определимой; в противном случае мы имеем статически неопре-
ГЛ. 8. ФЕРМЫ 15 t
делимую ферму. Постараемся выяснить, в каком случае ферма
является статически определимой. Для этого заметим прежде
всего, что так как ферма представляет собой неизменяемую си-
систему, то, как мы знаем из главы 5, число неизвестных опорных
реакций не должно быть более трех; в противном случае задача
определения опорных реакций для данной фермы становится ста-
статически неопределенной. Но, кроме трех неизвестных реакций,
требуется определить еще сжимающую или растягивающую силу
для каждого из т стержней фермы; таким образом, мы имеем
всего т -j- 3 неизвестных сил. Посмотрим теперь, сколько же
можно составить независимых уравнений для определения этих
неизвестных сил. Для этого применим так называемый способ
вырезания узлов. Вырежем какой-нибудь узел фермы, изображен-
изображенной на рис. 104, а, например узел С, и рассмотрим этот узел в от-
отдельности (рис. 104, б). К этому узлу С приложены заданная сила
F3 и реакции стержней, соединяющихся в этом узле,1 направлен-
направленные вдоль этих стержней; эти реакции численно равны, очевидно,
искомым усилиям в перерезанных стержнях. Поскольку силы,
приложенные к узлу С, представляют собой плоскую систему
уравновешивающихся сходящихся сил, мы будем иметь для этого
узла два уравнения равновесия, которые получим, приравняв
нулю суммы проекций всех этих сил на оси х и у. Точно так же
мы можем поступить и по отношению к каждому из остальных
узлов фермы. Поэтому получим всего 2п уравнений, где п обо-
обозначает число узлов фермы.
Теперь понятно, что для того, чтобы рассматриваемая задача
была статически определенной, число уравнений должно равняться
числу неизвестных, т. е. мы должны иметь равенство т -\~ 3 = 2/1
или т = 2п — 3. Но это равенство, как было указано выше,
имеет место для фермы без лишних стержней. Отсюда следует,
что ферма без лишних стержней является статически опреде-
определимой.
Ферма, имеющая лишние стержни, является статически неоп-
неопределимой, так как в этом случае число уравнений будет недоста-
недостаточно для определения всех неизвестных сил (в этом случае
2n<^m-j-3). Способы определения усилий в стержнях таких ферм
рассматриваются в курсах сопротивления материалов и строитель-
строительной механики; при этом приходится принимать во внимание
упругие деформации (деформации сжатия или растяжения),
вызываемые в стержнях фермы приложенными к ней внешними
силами.
В этой главе мы рассмотрим следующие способы определения
усилий в стержнях статически определимых ферм:
1) Упомянутый уже способ вырезания узлов.
2) Способ Кремоны.
3) Способ Риттера.
152 СТАТИКА
§ 36. Способ вырезания узлов
При определении усилий в стержнях фермы по способу вы-
вырезания узлов можно решать задачу и аналитически, и графически.
Обычно пользуются графическим способом, так как этот способ
значительно проще, нагляднее и скорее ведет к цели.
Способ вырезания узлов, как указывалось уже в предыдущем
параграфе, состоит в следующем: вырезают в последовательном
порядке каждый из узлов фермы и рассматривают силы, прило-
приложенные к вырезанному узлу; в число этих сил входят, во-первых,
реакции перерезанных стрежней, приложенные к вырезанному
узлу, численно равные искомым усилиям в этих стержнях, и,
во-вторых, могут входить заданные силы, приложенные в узлах
фермы, и опорные реакции. Так
как силы, приложенные к выре-
вырезанному узлу, уравновешивают-
уравновешиваются, то многоугольник этих сил
является замкнутым. Построив
замкнутые силовые многоуголь-
многоугольники для каждого узла фермы,
можно определить графически
усилия в стержнях этой фермы.
При аналитическом решении
Рис. 106. задачи составляют уравнения
равновесия сил, приложенных
к каждому вырезанному узлу, и, решая эти уравнения, нахо-
находят из них неизвестные силы.
В качестве примера применим способ вырезания узлов к ферме,
изображенной на рис. 106. Эта ферма имеет одну неподвижную
шарнирную опору А и одну подвижную опору В; к ферме прило-
приложены заданные вертикальные силы Flt F2 и F3.
Решение задачи начинают всегда с определения опорных
реакций.
В данном случае все заданные силы Рг вертикальны, следова-
следовательно, горизонтальная составляющая реакции в шарнире А
равна нулю. Вертикальные реакции опор А и В графически опре-
определяются построением замкнутых силового и веревочного много-
многоугольников, как это указано в примере 43. Обозначим эти реакции
через На и R^; когда реакции Н\К Ив будут найдены, все внешние
силы, приложенные к ферме, будут известны.
Определив опорные реакции, переходим к вырезанию узлов.
При этом первым нужно вырезать тот узел, в котором соеди-
соединяются только два стержня. Обычно такими бывают узлы на
опорах, что мы и видим в рассматриваемой ферме. Начнем с узла А.
К этому узлу приложены три силы: известная сила Да и две реак-
реакции Бг и S2 перерезанных стержней 1 и 2; линии действия этих
ГЛ. 8. ФЕРМЫ
153
реакций известны (эти силы направлены вдоль соответствующих
стержней), а численные значения их нужно определить. Для этого
строим замкнутый многоугольник этих трех сил: из произвольно
выбранной точки проводим вектор, изображающий силу RA; из
начала и конца этого вектора проводим прямые, параллельные
стержням 1 и 2; точка пересечения этих прямых определяет тре-
третью вершину силового треугольника, а длины его сторон, парал-
параллельных стержням 1 и 2, определяют численные значения St и S2
реакций этих стержней, равные искомым усилиям (рис. 107, А).
Рис. 107.
Напомним, что для определения направления сил Л^ и S2 в сило-
силовом треугольнике нужно обойти этот треугольник по его периметру
в направлении известной силы RA, т. е. в данном случае против
часовой стрелки.
Остается выяснить характер усилий в стержнях 1 и 2, т. е.
определить, будут ли эти стержни сжаты или растянуты. Это легко
сделать, принимая во внимание направления сил St и S2 в сило-
силовом треугольнике, из следующих соображений: сила St предста-
представляет собой реакцию стержня 1, приложенную к узлу А; если
перенесем вектор S1 с силового треугольника на стержень 1, то
увидим, что этот вектор направлен к узлу А; следовательно, стер-
стержень 1 давит на узел А с силой Slt а потому сам испытывает сжа-
сжатие; в самом деле, реакция узла А, приложенная к стержню 1,
равна по модулю и направлена противоположно силе 6\; следова-
следовательно, к стержню 1 в точке А приложена сила — S^, вторая сила
приложена к этому стержню в точке С (реакция шарнира С);
так как стержень 1 находится в равновесии, то эти две силы равны
по модулю и направлены противоположно; таким образом, мы
видим, что стержень 1 находится под действием двух сил, напра-
направленных навстречу одна другой, как показано на рис. 108, а,
и вызывающих, очевидно, сжатие. Рассмотрим теперь стержень 2;
перенося вектор ^2 на этот стержень, видим, что этот вектор будет
154 СТАТИКА
направлен от узла А; следовательно, стержень 2 тянет узел А
с силой S2; отсюда на основании таких же соображений, как и впре-
дыдущем случае, убеждаемся, что стержень 2 находится под дей-
действием двух растягивающих сил, как показано на рис. 108, б.
Таким образом, приходим к следующему заключению, которое
необходимо помнить, при определении характера усилий в стерж-
стержнях фермы: если реакция данного стержня, приложенная к выре-
вырезанному узлу, направлена к этому узлу, то стержень сжат; если
же эта реакция направлена от узла, то стержень растянут.
После узла А нужно вырезать узел С; к этому узлу приложены
четыре силы: из них сила Fx дана, а реакция стержня 1 уже най-
найдена; таким образом, из числа
сил, приложенных к этому узлу,
неизвестны опять только две: ре-
реакции стержней 3 ж 4. Построение
замкнутого многоугольника четы-
четырех сил, действующих на узел С,
нужно начинать с построения
известных сил; при этом необхо-
необходимо обратить внимание на то, что
Рис. 108. реакция S\, стержня 1, приложен-
приложенная к узлу С, очевидно, равна по
модулю и направлена противоположно реакции этого стержня,
приложенной к узлу А. Поэтому £{ = —£,, т. е. реакции каж-
каждого стержня, приложенные к узлам, которые этот стержень
соединяет, всегда равны по модулю и противоположны по направ-
направлению. Чтобы построить теперь силовой многоугольник для узла
С, проводим из произвольной точки вектор, изображающий
силу /*\, из конца этого вектора проводим вектор S{, далее из
начала вектора Fx и из конца вектора S[ проводим прямые,
параллельные стержням 3 и 4, до их пересечения. Длины сто-
сторон полученного замкнутого четырехугольника, параллельных
стержням 3 та 4, определяют численные значения искомых усилий
S3 ж Si в этих стержнях. Обходя этот четырехугольник по его
периметру в направлении одной из известных сил Fr или S\, нахо-
находим направления сил £3 и St (рис. 107, С).
Так как вектор S3, как видим из чертежа, направлен от узла С
(если перенести этот вектор на стержень 3), то отсюда заключаем,
что стержень 3 растянут. Вектор Si направлен к узлу С; следо-
следовательно, стержень 4 сжат. Теперь следует переходить к узлу Н
(рис. 106), так как из четырех сил, приложенных к этому узлу,
две силы (реакции стержней 2 и 3) уже найдены, и, следовательно,
неизвестными остаются только две силы — реакции стержней 5
и 6, которые обозначим через £„ и £6. При построении силового
многоугольника для узла Н опять нужно принять во внимание,
что реакции S% и S'3 стержней 2 и 3, приложенные к узлу Н,
ГЛ. 8. ФЕРМЫ 155
соответственно равны по модулю и противоположны по на-
направлению реакциям этих стержней, приложенным к узлам А и С,
т. е. S'i = —S2 и Sx =— Ss. Этот силовой многоугольник
показан на рис. 107, Н. Принимая во внимание направления
сил S% и S6, видим, что стержень 5 сжат, а стержень 6 растянут.
Всякий раз при переходе к новому узлу нужно следпть за тем,
чтобы в этом узле имелось не более двух стержней, в которых
усилия еще не определены. Поэтому после узла // нужно вырезать
узел D. Затем вырезаем узлы G и Е.
Силовые многоугольники, построенные для этих узлов, пока-
показаны на рис. 107 (D, G, Е). Таким образом, усилия во всех стержнях
данной фермы определены. Понятно, что нет надобности вырезать
последний узел В, так как усилия в стержнях 10 и 11, соединяю-
соединяющихся в этом узле, определены уже ранее при вырезании узлов
G и Е. Но силовой многоугольник для узла В можно построить
в целях контроля правильности произведенных до этого построе-
построений: при построении многоугольника найденных уже сил, прило-
приложенных к узлу В, этот многоугольник должен замкнуться.
Понятно, что вырезание узлов данной фермы можно было бы
начать с узла В, далее вырезать узел Е, затем узел G и т. д.
§ 37. Способ Кремоны
Изложенный в предыдущем параграфе графический способ вы-
вырезания узлов по своей идее очень прост, нагляден и не может
вызвать затруднений, так как всегда легко сообразить, в какой
последовательности следует вырезать узлы данной фермы. Однако
этот способ имеет тот недостаток, что каждую силу (за исключе-
исключением внешних сил) приходится, как мы видели, изображать на
чертеже два раза (в противоположных направлениях), что при
расчете ферм с большим числом узлов усложняет работу и делает
построение менее точным. Кроме того, так как силовые много-
многоугольники строятся отдельно для каждого узла, то мы не получаем
единой, общей картины распределения усилий в стержнях данной
фермы. Поэтому, естественно, возникает стремление усовершен-
усовершенствовать этот способ так, чтобы освободиться от этих недостатков.
Для этого, очевидно, было бы достаточно соединить вместе все
разрозненные силовые многоугольники, изображенные, например,
на рис. 107, таким образом, чтобы они образовали одну геометри-
геометрическую фигуру — единую, общую диаграмму усилий для всей дан-
данной фермы — и чтобы при этом каждая сила на этой диаграмме
встречалась только один раз. Геометрическая теория построе-
построения таких диаграмм была разработана итальянским геометром
Кремоной.
При построении диаграммы Кремоны приходится строить сило-
силовые многоугольники для каждого из узлов фермы совершенно так
156
СТАТИКА
же, как это было указано в предыдущем параграфе. Но для того,
чтобы диаграмма была построена правильно, чтобы эти силовые
многоугольники образовали одну геометрическую фигуру и при-
притом так, чтобы каждая сила на диаграмме встречалась только один
раз, при построении диаграммы Кремоны нужно строго придер-
придерживаться определенных правил. Эти правила мы и рассмотрим на
примере построения диаграммы для симметричной фермы, изобра-
изображенной на рис. 109, а. К этой ферме приложена одна заданная
вертикальная сила F.
Прежде чем приступать к построению диаграммы Кремоны,
определяют сначала опорные реакции. Это можно сделать или ана-
аналитически из трех уравнений равновесия внешних сил, приложен-
приложенных к ферме, в которые, кроме заданных сил, войдут и опорные
реакции, или графически, как это было указано в § 34. В рассмат-
рассматриваемом случае горизонтальная составляющая реакции в
неподвижном шарнире равна, понятно, нулю. Что касается верти-
вертикальных реакций этого шарнира и подвижной опоры, то вследст-
вследствие полной симметрии эти реакции, очевидно, равны между собой
и, следовательно, каждая из них равна по модулю 1/2 F. Обозна-
Обозначим эти реакции через Rx и /?2. Внешние силы будем всегда изоб-
изображать на чертеже так, чтобы они были расположены вне данной
фермы. Поэтому внешняя сила F изображена на чертеже так, что
в узле V находится конец вектора F, а не начало его.
Части плоскости, ограниченные внешним контуром фермы и
линиями действия внешних сил, будем называть внешними об-
областями. В данном случае имеются три внешние области, которые
обозначим буквами А, В ж С. Части плоскости, расположенные
внутри фермы и ограниченные только стержнями фермы, будем
ГЛ. 8. ФЕРМЫ 157
называть внутренними областями. В данном случае имеются три
внутренние области, которые обозначим буквами D, Е, Н. На диа-
диаграмме Кремоны мы не будем ставить стрелок, указывающих
направления сил, а будем обозначать каждую силу двумя буквами,
стоящими в начале и в конце прямолинейного отрезка, изобра-
изображающего на диаграмме эту силу. Заметим, что порядок буквенного
обозначения сил при построении диаграммы Кремоны играет весьма
существенную роль; условимся каждую силу на диаграмме обоз-
обозначать двумя малыми буквами, соответствующими тем большим
буквам, какими обозначены две смежные области, разграничен-
разграниченные линией действия этой силы. Кроме того, необходимо устано-
установить определенную последовательность букв при обозначении
всех внешних сил на диаграмме. Условимся при обозначении
каждой внешней силы на диаграмме ставить буквы в том порядке,
в каком расположены две смежные внешние области, разграни-
разграниченные линией действия этой силы, при обходе фермы по часовой
стрелке х), поэтому сила F должна иметь на диаграмме обозначе-
обозначение аЪ (а не Ьа); при этом первая буква обозначает начало отрезка,
изображающего на диаграмме силу F, а вторая — конец этого
отрезка. Точно так же силы Дх и R2 должны иметь обозначения
соответственно са и be. Определив, как указано выше, опорные
реакции, переходят к построению многоугольника внешних сил,
который всегда будет замкнутым, так как все внешние силы,
приложенные к ферме, находятся в равновесии. Так как в рассма-
рассматриваемом случае все внешние силы параллельны, то на диаграмме
отрезки, изображающие эти силы, расположатся на одной пря-
прямой, как показано на рис. 109, б (отрезки ab, be, са). (Масштаб
сил на этом чертеже взят в четыре раза большим, чем на рис. 109, а.)
Важно заметить, что построение многоугольника внешних сил
можно начинать с какой угодно внешней силы, но все остальные
силы необходимо строить в той последовательности, в какой мы
их встречаем при обходе фермы в установленном направлении,
т. е. по часовой стрелке.
Построив замкнутый многоугольник внешних сил, переходим
к построению на диаграмме силовых многоугольников для каждого
из узлов фермы. При этом, как было указано в предыдущем пара-
параграфе, нужно начинать с такого узла, в котором соединяются
только два стержня. Для рассматриваемой фермы такими узлами
являются узлы / и //; начнем с узла /. К этому узлу приложены
три силы: сила Rx = са и реакции стержней 1 и 5, направленные
вдоль этих стержней. Так как стержень 1 разграничивает смежные
области А и D, то согласно принятому правилу реакция этого
стержня должна быть обозначена на диаграмме буквами а и d;
х) Выбор направления обхода фермы является, конечно, условным.
Можно условиться обходить ферму н против часовой стрелки.
158 СТАТИКА
точно так же реакция стержня 5 должна обозначаться на диа-
диаграмме буквами due. Теперь уже ясно, как нужно строить на
диаграмме треугольник сил, приложенных к узлу /: так как отре-
отрезок' са на диаграмме уже построен, то остается из точки с провести
прямую, параллельную стержню 5 (а не стержню 1, так как буква с
не входит в обозначение реакции этого стержня), а из точки а
провести прямую, параллельную стержню 1; точку пересечения
этих прямых мы должны обозначить буквой d, которая является
общей в обозначениях реакций стержней 1 и 5. Таким образом,
силовой треугольник adca для узла / построен (рис. 109, б). Об-
Обходя этот треугольник в направлении силы Ru т. е. в направле-
направлении от с к а, видим, что реакции стержней 1 и 5, приложенные
к узлу /, изображаются векторами ad и dc. Отсюда приходим
к следующему заключению: для определения направления реакции,
стержня, приложенной к вырезанному узлу, мы должны читать
буквы, обозначающие эту реакцию на диаграмме, в том порядке,
в каком расположены две смежные области, разграниченные этим
стержнем, при обходе вырезанного узла по часовой стрелке. В са-
самом деле, обходя узел / по часовой стрелке, мы должны согласно
этому правилу обозначить реакцию, например, стержня 1, при-
приложенную к этому узлу, вектором ad (а не da), что соответствует
действительному направлению этой силы в силовом треугольнике,
построенном для узла /.
При переходе к новому узлу нужно выбирать всегда такой
узел, в котором имеется не более двух неизвестных сил, т. е. не более
двух стержней, в которых усилия еще не определены. Поэтому
переходим к узлу /77. К этому узлу приложены три уравнове-
уравновешивающиеся силы — реакции стержней 5, 2 и 6. Обходя этот узел
по часовой стрелке, видим, что эти силы на диаграмме должны
изображаться соответственно отрезками cd, de и ее. Но отрезок cd
на диаграмме уже имеется; остается, следовательно, из точки d
провести прямую, параллельную стержню 2, а из точки с — пря-
прямую, параллельную стержню 6; точку пересечения этих прямых
обозначаем буквой е; таким образом, получаем силовой треуголь-
треугольник cdec для узла /77.
Вырезаем теперь узел IV. Обходя этот узел по часовой стрелке,
находим, что три уравновешивающиеся силы, действующие на
этот узел (реакции стержней 6, 3 и 7), должны на диаграмме со-
составлять треугольник со сторонами се, eh и he; поэтому из точки е
проводим прямую, параллельную стержню 3, а из точки с — пря-
прямую, параллельную стержню 7; точку пересечения этих прямых
обозначаем буквой h.
Переходим к узлу //. Из трех сил be, ch и hb, приложенных
к этому узлу, две первые на диаграмме уже имеются; поэтому для
построения силового треугольника для узла // достаточно соеди-
ГЛ. 8. ФЕРМЫ 159
пить на диаграмме точки h и Ь. Понятно, что если построение
диаграммы выполнено достаточно точно, то прямая hb должна ока-
оказаться параллельной стержню 4.
Переходя, наконец, к узлу V, видим, что многоугольник сил,
приложенных к этому узлу, на диаграмме уже построен (много-
(многоугольник abheda). Таким образом, диаграмма Кремоны для данной
фермы построена полностью. Измерив на диаграмме длину отрез-
отрезков ad, dc, ch и т. д. и зная масштаб, в котором построены внешние
силы, приложенные к ферме, находим численные значения усилий
в каждом из ее стержней.
Посмотрим теперь, как по диаграмме Кремоны определить,
какие стержни сжаты и какие растянуты. Из предыдущего пара-
параграфа известно, что характер усилия в данном стержне опреде-
определяется направлением реакции этого стержня, приложенной к од-
одному из узлов, находящихся на его концах; но мы уже знаем,
как найти это направление на диаграмме. Пусть, например, мы
хотим определить, сжат или растянут стержень 3. Для этого
обходим по часовой стрелке один из двух узлов, которые соединяет
этот стержень, например узел V. Реакция стержня 3, приложен-
приложенная к узлу V, изображается на диаграмме вектором he (а не eh);
если перенесем вектор he на стержень 3, то увидим, что этот вектор
направлен от узла V; отсюда на основании сказанного в предыду-
предыдущем параграфе заключаем, что стержень 3 растянут. Легко про-
проверить, что придем к тому же результату, обходя по часовой стрелке
узел IV. При обходе узла V видим также, что реакция стержня 4,
приложенная к этому узлу, изображается на диаграмме векто-
вектором l,h; но этот вектор, если его перенести на стержень 4, будет
направлен к узлу V; следовательно, стержень 4 сжат. На диа-
диаграмме Кремоны сжимающие усилия принято изображать двойными
или жирными линиями.
Две геометрические фигуры, которые изображают ферму вместе
с линиями действия всех приложенных к ней внешних сил (вклю-
(включая и опорные реакции) и построенную для этой фермы диаграмму
Кремоны, называются взаимными. Укажем на следующие основ-
основные свойства таких взаимных фигур:
1. Взаимные фигуры имеют равное число сторон. В самом деле,
каждой прямой линии фермы (линии действия внешней силы или
стержню) соответствует только одна прямая линия на диаграмме
(внешняя сила или реакция стержня) и обратно.
2. Стороны взаимных фигур попарно параллельны или перпен-
перпендикулярны. Действительно, каждую прямую линию на диаграмме
мы проводим параллельно соответствующей прямой линии на
ферме. Чтобы получить две взаимные фигуры с перпендикуляр-
перпендикулярными сторонами, достаточно, очевидно, повернуть диаграмму Кре-
Кремоны вокруг какой-нибудь точки на прямой угол.
160
СТАТИКА
3. Прямым линиям, ограничивающим на одной фигуре много-
многоугольную область, соответствуют на другой фигуре прямые линии,
пересекающиеся в одной точке, и обратно. В самом деле, прямым
линиям на ферме, ограничивающим какую-нибудь область, напри-
например область D, соответствуют на диаграмме прямые линии, имею-
имеющие общую точку d.
§ 38. Способ Риттера
Рассмотренные в §§ 36 и 37 способ вырезания узлов и способ
Кремоны представляют собой графические способы определения
усилий в стержнях фермы. В этом параграфе мы рассмотрим ана-
аналитический способ решения той же задачи.
E S*
4b, x.
6)
Рис. 110.
Применим этот аналитический способ к расчету фермы, изобра-
изображенной на рис. НО, а, состоящей из стержневых равнобедренных
треугольников. Эта ферма имеет неподвижную шарнирную опору А
и подвижную опору В на катках, которые могут перемещаться
по неподвижной горизонтальной плоскости. К ферме приложены
три заданные силы: две вертикальные силы Ft и F3 и одна гори-
горизонтальная сила F2. Размеры фермы указаны на чертеже. Тре-
Требуется найти усилия в стержнях этой фермы.
Определил! прежде всего опорные реакции; в неподвижном
шарнире А имеем две составляющие реакции: горизонтальную Хд
и вертикальную YA; в точке В, считая опорную плоскость глад-
гладкой, имеем только вертикальную реакцию Уд. Для определения
этих реакций составим три уравнения равновесия всех внешних
сил, действующих на ферму. Составляя уравнение проекций внеш-
внешних сил на ось х и два уравнения моментов этих сил относительно
точек А и В, получим:
aFaFhF 0
2aF3
x — hFt — 2>aYA = 0.
ГЛ. 8. ФЕРМЫ 161
Из этих уравнений находим:
Ха = —Р Y = + ^ —^^
Отрицательное значение величины ХА показывает, что реакция ХА
имеет направление, обратное принятому на чертеже, т. е. напра-
направлена влево.
Переходим теперь к определению усилий в стержнях фермы.
Для этого разрежем данную ферму на две части и притом так,
чтобы оказались перерезанными только стержни (а не узлы), но
не более, чем три стержня. Проведем, например, разрез по стерж-
стержням 4, 5 и 6; после этого удалим мысленно одну из отрезанных
частей фермы, например правую, и рассмотрим оставшуюся левую
часть. Эта часть останется в равновесии, если приложить к ней
в узлах Е и С реакции перерезанных стержней, которые численно
равны искомым усилиям в этих стержнях. Обозначим эти реакции
через 54> Ss и 56 (рис. 110, б). Реакция перерезанного стержня
может быть направлена вдоль этого стержня как в ту, так и в дру-
другую сторону в зависимости от того, будет ли этот стержень сжат
или растянут. Так как действительное направление сил St нам
заранее не известно, то для определенности будем предполагать,
что все перерезанные стержни растянуты, и, следовательно, на-
направим каждую из сил 54 вдоль соответствующего стержня от
узла, как показано на рис. 110, б. Таким образом, рассматривае-
рассматриваемая часть фермы находится в равновесии под действием шести
сил: ХА, YA, F3, St, Ss и SR; из них первые три известны, а три
последние нужно определить, что можно сделать, составив три
уравнения равновесия для рассматриваемой части фермы.
Наиболее простое решение этой системы трех уравнений мы
будем иметь в том случае, когда каждое из них может быть ре-
решено независимо от остальных, т. е. когда в каждое из этих урав-
уравнений входр1т только одна неизвестная сила. Чтобы получить
уравнение равновесия, в которое из трех неизвестных сил вхо-
входила бы только Sit нужно, очевидно, составить уравнение момен-
моментов относительно точки С, т. е. точки пересечения линий дейст-
действия двух других неизвестных сил Ss и Sb, так как моменты этих
сил относительно С равны нулю.
Второй аналогичной точкой является, очевидно, узел Н, в ко-
котором пересекаются линии действия сил Ss и 54. Если составим
уравнение моментов относительно точки Н, то величины S$ и ^4
в это уравнение не войдут. Точка пересечения линий действия
сил S4 и Ss является бесконечно удаленной, так как эти силы
параллельны. Поэтому, чтобы получить уравнение, не содержа-
содержащее неизвестных St и S6, нужно составить уравнение проекций
6 и. м. воронков
162 СТАТИКА
на ось, перпендикулярную к направлению сил St и S6, т. е. на ось у,
так как проекции сил S4 и S6 на эту ось равны нулю. Таким обра-
образом, составив два уравнения моментов относительно точек С и
Н и уравнение проекций на ось у, получим следующую, наиболее
простую в рассматриваемом случае систему уравнений равно-
равновесия:
1) уравнение моментов относительно точки С:
— aYA — hSt = 0,
2) уравнение моментов относительно точки Н:
hSt + \ F3 + hXA - | aYA = О,
3) уравнение проекций на ось у:
YA + Ss sin a — F3 = 0.
Из этих уравнений находим:
Остается подставить сюда найденные выше значения Хд и YA.
Что касается угла а, то он определяется по данным размерам фермы
из прямоугольного треугольника с катетами h и - а именно:
. 2h
tga=_.
Таким образом, усилия в стержнях 4, 5 и б найдены. Если Уд^> 0,
то величина 54 получает отрицательное значение; это значит, что
сила St имеет направление, обратное принятому, т. е. она будет
направлена к узлу Е; следовательно, стержень 4 будет сжат.
Отсюда видим, что при определении усилий в стержнях фермы
аналитическим способом характер усилия в стержне определяется
по знаку найденной реакции этого стержня: если из уравнений рав-
равновесия получим для реакции данного стержня отрицательное
значение, то стержень сжат, если же эта реакция имеет поло-
положительное значение, то стержень растянут. Понятно, что это
правило будет верным лишь в том случае, если мы условимся
реакцию перерезанного стержня направлять всегда от соответ-
соответствующего узла.
Если сделаем теперь второй разрез, например по стержням 8,
9 и 10, и составим три уравнения равновесия для одной из отрезан-
отрезанных частей фермы, например для левой части AEHD или для пра»
вой части, т. е. для стержня KB, то найдем из этих уравнений уси-
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 163
лия 58, 59 и Sl0 в стержнях 8, 9 и 10. Чтобы найти усилия в стерж-
стержнях 1 я 2, достаточно перерезать только эти два стержня и соста-
составить два уравнения равновесия для отрезанной правой части
фермы ЕКВС (два уравнения моментов относительно точек Е
и С) или же два уравнения равновесия для отрезанного узла А,
проектируя все силы, приложенные к этому узлу (ХА, YA> S1
и S2), на оси х и у.
В заключение, резюмируя все изложенное выше, укажем еще
раз, как определяются усилия в стержнях фермы аналитическим
способом (по способу Риттера):
1. Определяют сначала опорные реакции, составляя для этого
три уравнения равновесия для всей данной фермы в целом (в эти
уравнения входят только внешние силы, приложенные к ферме,
т. е. заданные нагрузки и опорные реакции).
2. Разрезают ферму на две части, делая при этом первый раз-
разрез не более, чем но трем стержням, и рассматривают одну из
отрезанных частей, удалив мысленно вторую часть фермы. Реак-
Реакцию каждого перерезанного стержня направляют вдоль этого
стержня от узла.
3. Составляют для оставшейся части фермы три уравнения рав-
равновесия: три уравнения моментов относительно трех точек, в ко-
которых попарно пересекаются направления перерезанных стерж-
стержней; если из перерезанных стержней два параллельны, то вместо
третьего уравнения моментов составляют уравнение проекций на
ось, перпендикулярную к параллельным стержням.
4. Из этих трех уравнений находят реакции перерезан-
перерезанных стержней; при этом положительным значениям реакций со-
соответствуют растягивающие усилия, а отрицательным — сжи-
сжимающие.
5. Делая последовательно ряд разрезов фермы по различным
стержням, определяют, таким образом, усилия во всех стержнях
фермы.
ГЛАВА 9
ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
§ 39. Момент силы относительно оси
При изучении плоской системы сил мы видели, какую важную
роль играет понятие момента силы относительно какой-нибудь
точки, лежащей в плоскости этих сил. При изучении системы
сил, линии действия которых расположены произвольным образом
в пространстве, не менее важную роль играет понятие момента
силы относительно оси.
6*
164
СТАТИКА
Пусть дана сила F, изображаемая вектором АВ, и какая-
нибудь ось z (рис. 111). Проведем через точку приложения А этой
силы плоскость, перпендикулярную к оси г; точку пересечения
этой плоскости с осью z обозначим через О. Разложим, далее,
силу Fna две составляющие: одну, параллельную оси z, и другую, /,
перпендикулярную к этой оси, и опустим из точки О перпенди-
перпендикуляр на линию действия силы /, длину которого обозначим
через h.
Если представим себе, что сила F приложена к твердому телу,
которое может вращаться вокруг неподвижной оси z, например
к двери, вращающейся на петлях
вокруг оси z, как показано на
рис. 112, то понятно, что состав-
составляющая силы F, параллельная
этой оси, не может сообщить телу
вращательного движения; эта
Рис. 111.
Рис. 112.
сила стремится только сдвинуть тело вдоль оси z (снять дверь с
петель); вращательный эффект вызывает составляющая сила /.
Но при рассмотрении задачи о равновесии рычага (§ 12) мы видели,
что мерой вращательного эффекта силы, лежащей в плоскости,
перпендикулярной к оси вращения тела, является ее момент отно-
относительно точки пересечения оси вращения с этой плоскостью.
Отсюда приходим к заключению, что мерой вращательного
эффекта силы F, приложенной к телу, вращающемуся вокруг
оси z, является момент относительно точки О составляю-
составляющей /, перпендикулярной к оси z. Поэтому момент силы /
относительно точки О, т. е. взятое с соответствующим знаком
произведение fh, называется моментом силы F относительно
оси z.
Так как вектор/является проекцией силы fHa плоскость, пер-
перпендикулярную к оси z, и не зависит от того, через какую точку
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 165
проведена эта плоскость, то приходим к следующему определению
момента силы относительно оси:
Моментом силы относительно оси называется момент проек-
проекции этой силы на плоскость, перпендикулярную к данной оси,
относительно точки пересечения этой оси с этой плоскостью, или,
что то же, взятое со знаком плюс или минус произведение модуля
проекции силы на плоскость, перпендикулярную к данной оси, на
расстояние этой проекции от точки пересечения данной оси с этой
плоскостью, т. е.
mz (F) = + fh или mz (F) = — fh. C4)
Этот момент считается положительным, если для наблюда-
наблюдателя, смотрящего с положительного конца оси z на перпенди-
перпендикулярную к ней плоскость, в которой лежит сила /, эта сила
стремится повернуть тело вокруг оси z в направлении, обратном
движению часовой стрелки. В противном случае момент силы F
относительно оси z считается отрицательным *).
Так как произведение fh выражает удвоенную площадь тре-
треугольника ОАЬ (рис. 111), то можем также написать:
mz (F) = 2 л ОАЬ.
Из данного определения момента силы относительно оси сле-
следует:
1. Момент силы относительно оси равен нулю в том случае,
когда линия действия силы пересекает ось (в этом случае h = 0)
или когда сила параллельна этой оси (в этом случае / = 0). Объ-
Объединяя эти два случая, можно сказать, что момент силы относи-
относительно оси равеп нулю, если линия действия рилы и ось лежат
в одной плоскости.
2. Момент силы относительно данной оси не изменяется при
переносе точки приложения силы в другую точку по линии ее
действия, так как при таком переносе точки приложения силы,
очевидно, не изменяются ни проекция /, ни длина перпенди-
перпендикуляра /г.
3. Момент силы относительно оси в технической системе единиц
выражается в килограммометрах.
Пример 46. К двери, вращающейся вокруг вертикальной оси г,
п точке А приложена сила F, модуль которой равен '2 кг и которая состав-
составляет угол у = 60° с вертикалью; вертикальная плоскость, в которой распо-
расположена линия действия этой силы, образует с плоскостью двери угол а = 45°.
Определить момент силы F относительно оси z, если ширина двери а = 0,5 м
(рис. 112).
х) Следовательно, для силы F, изображенной на рис. Ill, inz(F)=%fh.
166
СТАТИКА
Решение. Проектируем силу F на плоскость Оху, перпендикулярную
к оси z; модуль этой проекции равен
/ = F sin у;
опустив из точки О на направление проекции / перпендикуляр h, найдем:
h = a sin a,
а потому
mz (F) = — fh = — aF sin a sin у =
= — 0,5 • 2 sin 45° • sin 60° = — У~- кгм.
4
§ 40. Формулы для моментов силы относительно
"координатных осей
В задачах пространственной статики, как увидим ниже, при-
приходится находить моменты приложенных к телу сил относительно
трех координатных осей. Поэтому выведем формулы, по которым
эти моменты легко могут быть
вычислены.
Пусть дана сила F, приложен-
приложенная к телу в точке А, координаты
которой обозначим через х, у и г;
проекции этой силы на коорди-
координатные оси обозначим через X,
Y и Z (рис. 113).
Найдем сначала момент силы F
относительно оси z. Для этого
спроектируем эту силу на плос-
плоскость Оху и обозначим ее проек-
цию через /. Согласно сказанному
в предыдущем параграфе будем
иметь:
mz(F) = то if).
Рис. ИЗ.
Разложим теперь вектор / на две составляющие ас и ad, парал-
параллельные осям х я у. Эти составляющие равны по модулю проек-
проекциям силы F на оси х и у, т. е. ас = X и ad = Y.
На основании теоремы Вариньона о моменте равнодействующей
(§ 22) будем иметь:
следовательно,
mo{f) = то(ас) + mo{ad);
mz (F) = то (ас) + то (ad).
ГЛ 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
167
Но, как видно из рис. 114,
то (ас) = — у- ас = — уХ1)
то (ad) = х-ad = xY,
mz (F) =xY- yX.
Аналогично получим и две другие формулы:
тх (F) = yZ- zY,
ту (F) = zX — xZ.
и
а потому
C5)
C6)
C7)
Напомним еще раз, что в этих формулах X, Y и Z обозначают
проекции данной силы на координатные оси, а х, у и z — коорди-
координаты точки приложения этой силы. Заме-
Заметим также, что выведенные формулы по-
получаются одна из другой путем круговой
перестановки букв.
Пример 47. В точке А C, 2, 4) к телу i i % >
приложены силы Fx, F2 и Fs, проекции которых "
на координатные оси равны:
Хх = 2, Yx = 2, Zx = 3;
Х2 = 4, У2 = 3, Z2 = —5;
X, = -6, У3 = 1, Z3 = 10.
Рис. 114.
Найти моменты равнодействующей R этих сил относительно координат-
координатных осей.
Решение. По теореме о проекции равнодействующей имеем:
Да. = 2Х = 2+4-6=0, Ду = 27 = 2+3+1= 6,
Rz = SZ = 3 — 5+ 10 = 8.
Искомые моменты находим по предыдущим формулам:
mx(R) =yRz- zRv = 2 • 8 - 4 • 6 = — 8,
ту (R) = гЛх _ XR, = — 3 • 8 = — 24,
mz (/?) = z-Ry — 2/Лж = 3-6 = 18.
x) Если бы направление вектора ас срвпадало с отрицательным напра-
направлением оси х (т. е. если бы этот вектор был направлен вверх на рис. 114),
то его момент относительно точки О был бы положительным, но мы по-преж-
по-прежнему имели бы:
т0 (ас) = у-ас = — у-Х,
так как в этом случае проекция X была бы отрицательпой, н, следовательно,
X = — ас.
168 СТАТИКА
§ 41. Момент силы относительно точки как вектор
При изучении плоской системы сил мы рассматривали момент
силы относительно данной точки как алгебраическую величину,
равную произведению модуля силы на ее плечо, взятому со зна-
знаком плюс или минус. Из теоремы Вариньона известно, что моменты
сил, лежащих в одной плоскости, складываются алгебраически.
Точно так же алгебраически складываются и моменты пар, рас-
расположенных б одной плоскости. Говоря о приведении плоской
системы сил к данному центру (§ 21), мы видели, что при переносе
„ , точки приложения силы F в какую-нибудь точку О,
не лежащую на линии действия этой силы (рис. 115),
получается присоединенная пара (F, F'), причем
т (F, F) = m0 (F).
В этом равенстве под пг (F, F") и то {F) в случае
плоской системы сил мы понимали алгебраические
значения момента присоединенной пары и момента силы F отно-
относительно точки О. Но в том случае, когда пары лежат в пере-
пересекающихся плоскостях, их моменты складываются по правилу
векторного, или геометрического, сложения, и следовательно,
в этом случае приходится рассматривать момент пары как
величину векторную. G этим случаем сложения пар, лежащих
в разных и притом непараллельных плоскостях, мы встретимся
далее, когда будем рассматривать приведение к данному цен-
центру системы сил, расположенных как угодно в пространстве.
Отсюда естественно приходим к заключению, что при изучении
произвольной системы сил момент силы относительно данной
точки следует рассматривать как вектор. В самом деле, рас-
распространяя предыдущее равенство и на тот случай, когда под
т (F, F") мы понимаем вектор-момент пары (F, F"), т. е.рассма-
е.рассматривая теперь это равенство не как алгебраическое, а как вектор-
векторное, мы должны под выражением т0 (F) понимать вектор, равный
вектору-моменту пары (F, F").
Поэтому при изучении произвольной системы сил мы будем рас-
рассматривать момент силы относительно какой-нибудь точки как
вектор, равпый вектору-моменту той присоединенной пары, кото-
которую получим, перенося данную силу в эту точку.
Отсюда, зная, как определяются модуль и направление вектора-
момента пары, мы приходим к следующему определению момента
силы относительно точки:
1. Модуль момента силы F относительно точки О равен про-
произведению модуля этой силы на длину перпендикуляра h, опущен-
опущенного из точки О на линию действия силы, или, что то же, численно
равен удвоенной площади треугольника ОАВ, который получим,
соединив начало и конец силы F с точкой О (рис. 115). Понятно,
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 169
что этот модуль как модуль всякого вектора есть всегда величина
положительная. Если, следовательно, обозначим момент силы F
относительно точки О через то, то его модуль то = -\-F • h.
2. Вектор-момент силы F относительно точки О направлен
по перпендикуляру к плоскости, в которой лежат сила F и точ-
точка О, и притом в ту сторону, чтобы, смотря с конца этого вектора-
момента на силу F, мы видели эту силу направленной против
движения часовой стрелки отно-
относительно точки О, как показано
на рис. 116, где вектор т0 есть
вектор-момент силы F относи-
относительно точки О, равный моменту
пары (F, F'). Начало (точка
приложения) вектора-момента
силы F относительно точки О
совпадает с этой точкой.
Из сказанного следует, что, Рис. По
когда сила F и точка О даны,
вектор то вполне определен; поэтому при построении этого вектора
нет надобности всяьий раз переносить силу F в точку О и рас-
рассматривать получающуюся при этом присоединенную пару. По-
Понятно, что с изменением положения точки О вектор т0 изменяется
вообще как по модулю, так и по направлению (за исключением
того случая, когда точка О перемещается по прямой, параллельной
силе F). Следовательно, модуль и направление вектора-момента
силы относительно точки зависят не только от этой силы, но и от
положения этой точки.
При переносе точки приложения силы F в любую точку тела
по линии действия этой силы вектор то, очевидно, не изменяется.
§ 42. Зависимость между моментами силы относительно
данной точки и относительно оси, проходящей через эту точку
Эта зависимость выражается следующей теоремой:
Проекция вектора-момента силы относительно данной точки
на какую-нибудь ось, проходящую через эту точку, равна моменту
силы относительно этой оси.
В самом деле, пусть даны сила F, изображаемая вектором АВ,
и какая-нибудь точка О (рис. 117). Построим момент то этой силы
относительно точки О. Он перпендикулярен к плоскости треуголь-
треугольника ОАВ и по модулю равен удвоенной площади этого треуголь-
треугольника, т. е.
т0 = 2 Д ОАВ.
Проведем теперь через точку О какую-нибудь ось ъ и составим
момент силы F относительно этой оси; для этого спроектируем
170
СТАТИКА
силу F на плоскость, проходящую через точку О и перпендикуляр-
перпендикулярную к оси ъ. Тогда согласно сказанному в § 39 mz (F) = 2 Д Oab,
причем треугольник Oab является проекцией треугольника ОАВ на
эту плоскость. По известной из геометрии теореме площадь проек-
проекции равна площади проектируемой фигуры, умноженной на ко-
косинус угла между плоскостью этой фигуры и плоскостью проек-
проекции; но угол между плоскостями ОАВ и Oab равен углу между
д
н
Рис. 117.
перпендикулярами к этим плоскостям, т. е. углу между вектором
т0 и осью z. Поэтому, обозначив этот угол через Yi получим:
Д Oab = Д ОАВ-cos у и, следовательно,
т2 (F) = 2 Д ОАВ -cos у.
С другой стороны, проекция вектора то на ось z равна
шог ~ т0 cos у = 2 Д ОАВ • cos у.
Отсюда следует, что тог= mz {F), что и требовалось доказать.
Доказательство этой теоремы проведено для случая, предста-
представленного на рис. 117, когда вектор то образует острый угол у
с осью z. В этом случае проекция момента то па ось z положительна,
положителен и момент силы F относительно оси z. Очевидно, что
теорема остается справедливой и в том случае, когда угол у —
тупой. Тогда проекция момента тона ось z будет отрицательной,
но, как легко видеть, в этом случае проекция/ силы Fh& плоскость,
перпендикулярную к оси ъ, будет направлена по движению часо-
часовой стрелки (если смотреть с положительного конца оси z), а сле-
следовательно, и момент силы F относительно оси z будет отрица-
отрицательным. Поэтому равенство
тОг — ТПг (F)
остается верным и в этом случае.
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 171
Вычислив по формулам § 40 моменты данной силы относительно
трех координатных осей, мы сможем на основании доказанной тео-
теоремы найти модуль и направление момента этой силы относительно
начала координат, так как три проекции тОх— mx(F), mOy=mv(F)
и nioz = mz(F) вектора то определяют и модуль, и направление*
этого вектора.
П р и м е р 48. В примере 46 найти модуль и направление момента
силы F относительно начала координат О, если расстояние точки А от пло-
плоскости хОу равно 1 м (рис. 112).
Решение. Если обозначим координаты точки А, в которой приложена
сила F, через х, у и z, то, как видно из рис. 112, х = 0, у = 0,5 м и z = 1 м.
Чтобы найти проекции X и У силы F на координатные оси х п у, доста-
достаточно спроектировать на эти оси вектор /; следовательно,
X = fx = fsina=F sin v sin а = 2 •
Y = fy — — / cos а = — F sin у cos а = — 2 ■ ~~ • -^~ — —-.
Проекция силы F на ось z равна Z = F cos у = 1.
На основании предыдущей теоремы и формул § 40 для моментов силы
относительно координатных осей находим проекции искомого момента т0
на координатные оси:
1/6
тОц = тц (F) = zX — xZ = —2~ ,
mOz = mz (F) = xY ~ УХ = — ■
Отсюда
= 0,5 /l4,5 +2/6 = 0,5- 4,405 = 2,203 кгм.
Для направляющих косинусов вектора т0 имеем:
тп 1 + /6 3,449
cos («01 0 = — = -^05- = 4Ж5 = °-783'
то,, /б" 2,449
cos (т0, у) = -^ = ^^7- = —— = 0,556,
у т0 4,405 4,40Э
«гОг /6" 2,449
cos (т„, А) = —^ = — = - 5-—- = — 0,278.
и т0 2-4,405 8,810
172 статика
§ 43. Векторное п скалярное произведения двух векторов
Момент силы относительно какой-нибудь точки можно пред-
представить в виде векторного произведения. Поэтому напомним из
векторной алгебры, как производится операция векторного умно-
умножения одного вектора на другой.
Пусть имеем два вектора а и Ь. Перенесем начала этих векто-
векторов, не изменяя их направления, в одну какую-нибудь точку О;
угол между этими векторами обозначим через а
(рис. 118). Векторным произведением векторов
а и 6 называется новый вектор, который опреде-
определяется следующим образом:
1. Модуль этого вектора равен площади
параллелограмма, построенного на векторах
аи 6, т. е. параллелограмма О ABC. Так как
площадь этого параллелограмма равна аЪ ■ sin a,
то модуль векторного произведения двух век-
векторов равен произведению модулей этих векто-
векторов, умноженному па синус угла между ними.
2. Этот вектор направлен по перпендикуляру к плоскости па-
параллелограмма О ABC в ту сторону, чтобы, смотря с конца этого
вектора на параллелограмм О ABC, мы. видели поворот первого
сомножителя, т. е. вектора а, на угол, меньший 180° *), до совме-
совмещения его со вторым сомножителем, т. е. с вектором Ь, происходя-
происходящим в направлении, обратном движению часовой стрелки. Следо-
Следовательно, при определении направления векторного произведения
мы пользуемся правилом правого винта.
Мы будем обозначать векторное произведение знаком умноже-
умножения в виде косого креста, т. е.
а X Ь.
Из данного определения векторного произведения вытекает ряд
важных свойств этого произведения, которые мы и рассмотрим.
1. Изменим порядок сомножителей в произведении а X Ъ, т. е.
возьмем произведение Ь X а. Модули этих произведений, очевидно,
равны, но так как направление поворота вектора 6 на угол а про-
противоположно направлению поворота на тот же угол вектора а,
то вектор Ь X а направлен противоположно вектору а X Ь, как
показано на рис. 118. Следовательно,
b X а = — (а X 6), C8)
т. е. при изменении порядка сомножителей векторное произведе-
произведение изменяет свой знак. Мы видим отсюда, что векторное произ-
произведение не обладает свойством переместительности.
То есть на угол а, а не на угол 360°—а.
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 173
2. Если векторы а и Ь параллельны, то угол а между ними
равен 0 или 180°; следовательно, sin а = 0, а потому векторное
произведение этих векторов равно нулю. Итак,
если а || 6, то а X Ь = 0. C9)
Следовательно, равенство нулю векторного произведения двух
векторов является условием параллельности этих векторов.
В частности, имеем:
а X а = 0. D0)
3. Если векторы а и 6 перпендикулярны, то три вектора a, b и
а X Ь будут, очевидно, ориентированы по отношению друг к другу
так же, как оси х, у и z прямоугольной, пра-
правой системы координат. Так как в этом случае
вой системы координат. Так как в этом случае ,
а = 90° и sin а = 1, то модуль произведения I
а X Ъ равен произведению модулей векторов 1
а и Ь, т. е. P
если а _1_ Ь, то \aXb\ = ab. D1) ^*
4. Применяя эти результаты к векторному X
произведению координатных ортов i, j и к, Рис. 119.
т. е. единичных векторов, направленных по
осям координат (рис. 119), получим следующие важные формулы:
iXi = 0, jrxjf = O, kxk = 0; D2)
ixj^k1), jxk=i, lexi=j; D3)
j X i=—k, к xj = —i, i X k = —j. D4)
5. Из определения векторного произведения следует, что для
умножения этого произведения на какой-нибудь скалярный мно-
множитель к достаточно умножить на этот скалярный множитель один
из сомножителей векторного произведения, т. е.
К {а X Ь) = %а X Ъ = а X 1Ь. D5)
6. В векторной алгебре доказывается, что векторное произве-
произведение обладает свойством распределительности, т. е. векторное
произведение суммы двух векторов на третий вектор равно сумме
векторных произведений каждого слагаемого на вектор-множитель.
Следовательно,
(a + b)Xc = aXc + bXc. D0)
х) В самом деле, так как векторы j и у взаимно перпендикулярны и
имеют модули, равпые единице, то модуль произведения i X j равен 1; кроме
того, вектор i X j направлен перпендикулярно к плоскости хОу, т. е. по оси г,
и притом согласно правилу правого винта в положительную сторону этой
оси; следовательно, этот вектор совпадает с вектором к.
174
СТАТИКА
Отсюда сейчас же следует, что при векторном умножении одного
векторного многочлена на другой нужно каждый член множи-
множимого векторно умножить на каждый член множителя и резуль-
результаты сложить.
7. Выведем формулу разложения векторного произведения а X ft
по координатным осям. Согласно сказанному в § 9, формулы раз-
разложения векторов ей 6 по координатным осям имеют вид
а = axi + aj -f- azk и Ь = bxi -f- byj + bzk.
Следовательно,
a X b = (axi + ayj -f- aje) X (bj + bj + bzk).
Умножая векторно в правой части этого равенства каждый член
множимого на каждый член множителя в том порядке, как они
написаны, и принимая во внимание формулы D2), D3) и D4),
получим после приведения членов с одинаковыми ортами:
аХ Ь = (aybz — azby)i + (azbx — axb2)j + {axby — aybx)k. D7)
Этот результат можно также представить в простой для запомина-
запоминания ф°Рме определителя:
i j k
а X Ъ = ах ау аг . D8)
К ъу bz
Легко убедиться, что, развертывая этот определитель по элемен-
элементам первой строки, получим предыдущую формулу D7). Формула
D7), или, что то же, D8), представляет собой формулу разложе-
разложения векторного произведения а X Ь по координатным осям. Но
в формуле разложения вектора по координатным осям, как изве-
известно пз § 9, скалярные коэффициенты при i, j и к являются проек-
проекциями этого вектора на эти оси; отсюда получаем следующие
выражения для проекций векторного произведения а X Ь на коор-
динатныеоси:
(а X Ъ)х = aybz — azby,
(а X Ь)у = агЪх — axbz,
(а X Ь)г = axby — aybx.
D9)
Так как по трем проекциям вектора можно найти и его модуль, и
его направление (направляющие косинусы), то формулы D9)
позволяют, когда проекции векторов а и Ь известны, аналитически
определить модуль и направление векторного произведения
а X Ь.
Кроме векторного произведения, в механике нередко прихо-
приходится встречаться и со скалярным произведением двух векторов.
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 175
Скалярным произведением двух векторов называется скалярная
величина, равная произведению модулей этих векторов, умножен-
умноженному на косинус угла между ними.
Скалярное произведение двух векторов а и Ь мы будем обозна-
обозначать знаком умножения в виде точки, т. е. а- Ь. Если по-прежнему
обозначим угол между векторами а и Ъ через а, то по определению
будем иметь:
ab = ab cos а., E0)
В зависимости от знака cos а скалярное произведение может быть
положительным или отрицательным. Укажем на некоторые основ-
основные свойства скалярного произведения:
1. Так как величина произведения, стоящего в правой части
равенства E0), не зависит от порядка сомножителей, то скалярное
произведение двух векторов обладает свойством переместитель-
переместительности, т. е.
ab = Ъ-а. E1)
2. Если векторы а и Ъ параллельны и направлены в одну сто-
сторону, то а = 0 и cos а = 1, а потому в этом случае
а-Ь = ab.
Если же векторы а и Ъ параллельны и направлены в противо-
противоположные стороны, то а = 180° и cos а =— 1; следовательно,
в этом случае
а-Ь = — ab.
В частности, скалярное произведение двух равных векторов (а = Ь)
равно квадрату модуля одного из этих равных сомножителей, т. е.
а.а = а2 = я2. E2)
3. Если векторы an b перпендикулярны, то а = 90° и cos а =0;
следовательно,
если a J_ b, то a- b = 0. E3)
Таким образом, равенство нулю скалярного произведения двух
векторов выражает условие перпендикулярности этих векторов.
4. Если будем перемножать скалярно координатные орты i, j, k,
то, принимая во внимание, что эти векторы взаимно перпендику-
перпендикулярны и что их модули равны 1, получим:
5. Из равенства E0) следует, что для умножения скалярного
произведения на некоторый скалярный множитель А, достаточно
176 СТАТИКА
умножить на этот множитель один из сомножителей скалярного
произведения, т. е.
К {а-Ь) = lab = alb. E5)
6. Скалярное произведение, так же как и векторное, обладает
свойством распределительности, т. е. скалярное произведение суммы
двух векторов на третий вектор равно сумме скалярных произ-
произведений каждого слагаемого на вектор-множитель.
Следовательно,
(а + 6) ■ с = а ■ с -j- b ■ с. E6)
Отсюда следует, что при скалярном умножении одного вектор-
векторного многочлена на другой нужно каждый член множимого ска-
лярно умножить на каждый член множителя и результаты
сложить.
Пусть, например, вектор R есть равнодействующая двух сил jF\
и F2, приложенных в одной точке и образующих между собой угол а.
То1да R = f\ - F2.
Возводя это равенство в квадрат, получим R2 = (Fx -}- F2J или
Раскрывая скобки в правой части и пользуясь равенством E2),
будем иметь:
Л2 == F\ + F\ + 2FVF2 = F\ +FI + 2F^2 cos a,
откуда
R = YFX + F\ + W^t cos a,
т. е. мы получили известную формулу для модуля равнодействую-
равнодействующей двух сходящихся сил.
7. Если единичный вектор (орт) вектора b обозначим через 6",
то по формуле E0), принимая во внимапие, что 6° = 1, получим
а- й" = a cos a. Но произведение a cos a есть, очевидно, проекция
вектора а на направление вектора Ь; следовательно, скалярное
произведение одного вектора на орт другого равно проекции пер-
первого вектора на направление второго.
В частности, для проекций вектора а на координатные оси
имеем:
ах = ai, ау = a • /', az = a ■ k. E7)
8. Скалярное произведение двух векторов а и b можно просто
выразить через проекции этих векторов на координатные оси.
Применяя формулу разложения вектора по координатным осям
(§ 9), имеем:
а = axi + aj + a2k
а
Ь = bxi + byj + bzk.
ГЛ 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 177
Умножим скалярно первое равенство на второе:
а- Ь = (axi + aj + агк) ■ (bj + bj+ b2k).
Раскрывая скобки правой части этого равенства на основании
свойства 6 скалярного произведения и принимая во внимание ра-
равенства E4), получим:
а-Ь = ахЪх + ауЪи + агЪг. E8)
Эта формула позволяет найти скалярное произведение двух векю-
ров по их проекциям на координатные оси.
§ 44. Выражение момента силы относительно точки
в виде векторного произведения
Пусть к данному твердому телу в точке А приложена сила F,
изображаемая вектором А В (рис. 120). Возьмем какую-нибудь
точку О и построим момент то силы F относительно этой точки.
Согласно сказанному в § 41
этот момент направлен по пер-
перпендикуляру к плоскости тре-
треугольника ОАВ в ту сторону,
чтобы, смотря с его конца на
треугольник ОАВ, мы видели
силу F направленной относи-
относительно точки О против движе-
движения часовой стрелки, а модуль
этого момента выражается уд- Рпс- ^20
военной площадью треугольника
ОАВ. Проведем из точки О вектор ОС, равный вектору F, т. е.
ОС = F; соединив точки С и В, получим параллелограмм О А ВС.
Обозначив вектор О А, т. е. радр1ус-вектор точки приложения
данной силы, через г, составим векторное произведение г X ОС.
Как известно из предыдущего параграфа, вектор г X ОС напра-
направлен по перпендикуляру к плоскости параллелограмма ОАВС
в ту сторону, чтобы, смотря с его конца на этот параллелограмм,
мы видели поворот вектора г на угол а (до совмещения с векто-
вектором ОС) происходящим в направлении, обратном движению часо-
часовой стрелки; модуль же вектора г X ОС выражается площадью
параллелограмма ОАВС, или, что то же, удвоенной площадью
треугольника ОАВ. Отсюда видим, что векторы то и г X ОС имеют
равные модули и одинаковое направление; следовательно, то =
= г X ОС, но так как ОС = F, то
т0 = г X F,
или
т0 (F) = г х F, E9)
178
СТАТИКА
т. е. момент силы относительно какого-нибудь центра равен век-
векторному произведению радиуса-вектора точки приложения силы,
проведенного из этого центра, на эту силу.
Пользуясь этим результатом, легко можем получить формулу
разложения по координатным осям момента силы относительно
начала координат, а следовательно, и проекции этого момента на
координатные оси.
В самом деле, пусть имеем прямоугольную систему осей Oxyz
и силу F, приложенную к телу в точке А (рис. 121). Обозначим
радиус-вектор точки А через г,
а координаты этой точки — через
х, у, z; проекции силы F на ко-
координатные оси обозначим через
X, Y и Z. Построив момент т0
силы F относительно начала коор-
координат, будем иметь:
mo{F) = т0 = г X F.
Принимая во внимание, что проек-
проекции радиуса-вектора г на коор-
координатные оси равны соответствую-
соответствующим координатам точки А, т. е.
•Л/х, у, z)
Рис. 121.
гх = х, г = у и rz = z,
и представляя векторное произведение г X F в виде определителя
по формуле D8) предыдущего параграфа, получим:
т0 (F) = т0 =
i j k
х у z
X Y Z
F0)
или, развертывая этот определитель по элементам первом строки:
т0 (F) =mo = (yZ — zY)i + (zX — xZ)j + (xY — yX)k. F1)
Это есть формула разложения по координатным осям момента
силы относительно начала координат; скалярные коэффициенты
при i, j и к в этой формуле представляют собой проекции вектора
то на координатные оси, следовательно,
тох = yZ — zY, moy = zX — xZ, moz = xY — yX.
По теореме, доказанной в § 42, проекции вектора то на коорди-
координатные оси равны моментам силы F относительно этих осей, т. е.
= mx (F),
= т
= my
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
179
следовательно,
тх {F) = yZ- zY,
ту (F) = zX — xZ,
m2 (F) = xY — yX.
F2)
Мы пришли, таким образом, другим путем к известным уже из
§ 40 формулам для моментов силы относительно трех координатных
осей.
§ 45. Приведение произвольной системы сил к данному центр?.
Главный вектор и главный момент. Инварианты системы сил
Метод приведения плоской системы сил к произвольно выбран-
выбранному центру, которым мы пользовались в главе 5, применим и
к любой системе сил.
Так же как и в случае плоской системы сил, докажем следую-
следующую основную теорему:
а)
Рис. 122.
Теорема. Систему сил, линии действия которых как угодно
расположены в пространстве, можно привести в общем случае
к одной силе, приложенной в произвольно выбранной точке тела,
и к одной паре.
В самом деле, пусть имеем систему сил Fx, F2, F3,...,Fn, при-
приложенных соответственно в точках Alt A2, А3,..., Ап (рис. 122, а).
Возьмем какую-нибудь точку О, и пользуясь теоремой о переносе
180 СТАТИКА
точки приложения силы в любую точку тела (§21), перенесем точки
приложения всех данных сил в эту точку О. При этом получим
новую систему сил F[, F2, F3,...,F'n и присоединенные пары (Flt F[),
(F8, F:), (F,, F'd), .... (Fn, K).
Сложив силы F[, приложенные в точке О по правилу много-
многоугольника, получим одну силу #', приложенную в той же точке О,
причем
Сложив, далее, все присоединенные пары, получим одну пару с не-
некоторым моментом Мо, и теорема, следовательно, доказана.
Так же как и в случае плоской системы сил, точка О назы-
называется центром приведения, а векторная сумма всех сил данной
системы называется главным вектором этой системы сил.
Вектор Мо представляет собой момент пары, которая получи-
получилась при сложении п присоединенных пар (jF\, F"), (F2, F£), ...
..., (Fn, F^). Поэтому он равен векторной сумме моментов этих пар -1);
следовательно, если мы обозначим эти моменты соответственно
через ти т2, ..., тп (на рис. 122, б построен вектор т^, то
Мо = /Wi + ma + . . • + тп
С другой стороны, на основании сказанного в § 41 момент тг
присоединенной пары (Flt F'{) равен моменту силы Fl относительно
точки О, т. е. тх = т0 (jF\), точно так же т2 = то (F2) и т. д.,
а потому
Мо = т0 (fi) + т0 (FJ + .. . + т0 {Fn) = %т0 (F). F3)
В соответствии с тем, что мы имели для плоской системы сил,
векторная сумма моментов всех сил данной системы относительно
точки О называется главным моментом данной системы сил отно-
относительно этой точки.
Поэтому предыдущую теорему можно сформулировать так:
В результате приведения произвольной системы сил к какому-
нибудь центру в общем случае получаем одну силу, приложенную
в втом центре приведения и равную равному вектору данной си-
системы сил, и одну пару, момент которой равен главному моменту
этой системы сил относительно центра приведения.
Выведем теперь аналитические формулы, определяющие модули
и направления главного вектора R и главного момента Мо. Возь-
Возьмем для этого прямоугольную систему координат Oxyz, начало
которой выберем в центре приведения О (рис. 122, а).
Главный вектор R' равен векторной сумме сил Ft, т. е.
R = £F; F4)
х) На основании теоремы сложения пар (§ 19).
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 181
отсюда для проекций вектора R' на координатные оси будем иметь:
1\х —" ZJ^-х — 2jA- > -"у == 2и& у~ 2j* > -"г == Zd^ г == ^^' \""/
Зная все три проекции вектора R, его модуль находим по формуле
f {^Zf. F6)
Для определения направления этого вектора нужно найти его
углы с координатными осями; косинусы этих углов определяются
по формулам § 10:
R' УХ )
cos (Я, 0 = > =ТГ' I
cos (й', ]) = -£ = Щ-, \ F7)
cos(ff, А)-д, =-д,-. I
Из векторного равенства
Мо = 1>
следует, что проекция главного момента Мо на какую-нибудь ось
равна алгебраической сумме проекций на ту же ось слагаемых век-
векторов тп т. е.
МОх = %тх,
MOz = %mz.
Но из § 42 известно, что проекция момента силы Ft относительно
точки О на ось, проходящую через эту точку, равна моменту силы Fx
относительно этой оси, а потому
т1х = тх
miy = mv
ти = mz
Точно так же
т,у - wy (F8),
т2г = mz (F2)
и т. д.
Следовательно, предыдущие равенства принимают вид
F8)
182
СТАТИКА
т. е. проекция главного момента относительно данного центра
на какую-нибудь ось, проходящую через этот центр, равна алге-
алгебраической сумме моментов всех сил данной системы относи-
относительно этой оси.
Сумма моментов сил данной системы относительно какой-ни-
какой-нибудь оси называется главным моментом этой системы сил относи-
относительно этой оси. Поэтому из равенств F8) следует, что проек-
проекция главного момента системы сил относительно данного центра
на какую-нибудь ось, проходящую через этот центр, равна глав-
главному моменту этой системы сил относительно той же оси.
Если воспользуемся формулами § 40 для моментов силы отно-
относительно координатных осей, то для проекций главного момента
получим следующие выражения:
F9)
— zY),
- xZ),
Мог = 2 (xY ~yX).
Определив, таким образом, проекции вектора Мо на коорди-
координатные оси, модуль этого вектора находим по формуле
Мо =
х +
+
{F)f + [£
или
Мо =
G0)
G0')
Направляющие косинусы главного момента Мо находим по форму-
формулам
cos (Mo, i) —
cos
или
Mq
Mq
м0
1
E(z<?
Mq
Mq
S>2 (F)
M0
U- xZ) '
-yX)
G1)
G2)
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
183
о
Так же как и в случае плоской системы сил, из равенства
Ш = 2^слеДУет> чт0 ни МОДУЛЬ> ни направление главного вектора
не зависят от выбора центра приведения: главный вектор данной
системы сил инвариантен по отношению к центру приведение.
Что касается главного момента, то из равенства Мо = £mo(F)
следует, что главный момент свойством инвариантности по отно-
отношению к центру приведения не обладает, так
как при изменении положения центра при-
приведения О моменты данных сил F{ относи-
относительно этого центра, а следовательно, и
сумма этих моментов вообще будут изме-
изменяться. Нетрудно видеть, как изменяется
главный момент системы сил при изменении
центра приведения.
Пусть в результате приведения данной
системы сил Ft (i = 1, 2,..., п) к какому-
нибудь центру О мы получили силу, рав-
равную главному вектору R, приложенную
в центре О, и пару, момент которой равен
главному моменту Мо относительно этого
центра (рис. 123), причем й' = V]/?. и
Мо= ^/^о (Fj). Примем теперь за центр приведения какую-
нибудь другую точку О'. Пусть сила Рг данной системы прило-
приложена в точке Аг; радиусы-векторы этой точки, проведенные из
центров О и О', обозначим соответственно через гг и г[; вектор
(УО обозначим через г' (рис. 123). Тогда, как видно из треуголь-
треугольника АгОО', будем иметь:
Г'г = Г' + Г,.
Составляя моменты силы F4 относительно центров приведения О и
О', на основании формулы E9) (§ 44) получим: т0 (/\) F
ш
= гг X
то, (FJ = г[ х F, = (г' + г4)
Складывая моменты всех сил Fx (i = 1, 2, 3,..., п) относительно
нового центра приведения О', получим главный момент Мо•, данной
системы сил относительно этого центра; следовательно,
X FJ
В первом члене правой части этого равенства общий для всех сла-
слагаемых множитель г' можно вынести за знак суммы, а потому
х
- г' х £ Fx = / X R.
184 СТАТИКА
Но векторное произведение г' X R есть момент главного вектора
R, приложенного в точке О относительно центра О', т. е.
г' xR = mo< (R).
Следовательно, полученное выше равенство принимает вид
G3)
Из этого равенства следует, что для нахождения главного момента
Мо' достаточно вектор Мо сложить с вектором mo' (R), как пока-
показано на рис. 123. Предыдущее равенство можно переписать в виде
M0,-M0 = m0,(R), G3')
т. е. изменение главного момента системы сил при перемене центра
приведения равно моменту главного вектора этой системы, при-
приложенного в прежнем центре приведения, относительно нового
центра.
Так как момент силы й' относительно всякой точки, лежащей
на линии действия этой силы, равен нулю, то из равенства G3)
следует, что при перемещении центра приведения по прямой, имею-
имеющей направление главного вектора, главный момент данной системы
сил остается неизменным.
Проектируя векторное равенство G3) на направление главного
вектора й' и принимая во внимание, что проекция вектора т0' (R)
на это направление равна нулю, так как та (R) _1_ й', получим
Mo- cos q/ = Мо cos ф,
где ф и ф' обозначают соответственно углы, которые векторы Мо
и Мо' образуют с направлением главного вектора R (рис. 123).
Отсюда следует, что проекция главного момента данной системы
сил относительно любого центра на направление главного вектора
есть величина постоянная, не зависящая от выбора этого центра.
Если умножим обе части предыдущего равенства на R', то будем
иметь:
R'Mo' cos ф' = R'M0 cos ф.
Но величина R'Mo cos ф есть скалярное произведение векторов R и
Мо (§ 43). Поэтому из предыдущего равенства следует, что скаляр-
скалярное произведение главного вектора и главного момента данной
системы сил инвариантно по отношению к центру приведения.
Таким образом, для всякой системы сил мы имеем два инва-
инварианта, т. е. две величины, не зависящие от выбора центра при-
приведения; первым (векторным) инвариантом системы сил является
главный вектор этой системы, вторым (скалярным) инвариантом
системы сил является скалярное произведение главного вектора и
главного момента этой системы.
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
185
§ 46. Равнодействующая системы сил:
Теорема Вариньона
Как мы видели в предыдущем параграфе, произвольная система
сил в общем случае приводится к одной силе К, равной главному
вектору этой системы сил, и к одной паре с моментом Мо, равным
главному моменту той же системы сил относительно центра при-
приведения; так же как и в случае плоской системы сил, эта сила I?
не является равнодействующей для данной системы сил. Выясним
теперь, при каких условиях система сил, не лежащих в одной
плоскости, приводится только к одной силе и, следовательно,
имеет равнодействующую.
Прежде всего ясно, что если при приведении данной системы
сил к какому-нибудь центру окажется, что ее главный момент отно-
относительно этого центра равен нулю, то данная система приводится
к одной только силе R, приложенной в центре приведения; следо-
следовательно, сила й' в этом случае представляет собой равнодействую-
равнодействующую данной системы сил.
Итак, если главный момент
системы сил относительно
данного центра равен пулю,
а главный вектор этой си-
системы не равен нулю, то си-
система приводится к равно-
равнодействующей силе, равной
главному вектору R и прило-
приложенной в этом центре.
Если же главный момент
не равен нулю, то система
приводится к одной силе (к
равнодействующей) только Рис. 124. Рис. 125
в том случае, когда Мо .1. К■>
т. е. когда главный момент относительно выбранного центра при-
приведения О окажется перпендикулярным к главному вектору.
Действительно, в этом случае пару, которая получается при
сложении всех присоединенных пар, и момент которой равен Мо,
можно, очевидно, перенести в одну плоскость с силой R', приложен-
приложенной в центре О (рис. 124). Но, как известно из главы 5 (§ 22),
сила и пара, лежащие в одной плоскости, приводятся к одной силе.
В самом деле, преобразуем пару, полученную в результате при-
приведения данной системы сил к центру О, так, чтобы силы этой
пары стали равными по модулю силе й'; далее, переместим эту пару
в ее плоскости таким образом, чтобы одна из ее сил оказалась при-
приложенной в точке О и противоположной силе й'; после этого по-
получим пару (R, — R), изображенную на рис. 125, причем й = й\
Так как при указанном преобразовании пары ее момент должен
186 СТАТИКА
оставаться неизменным, то момент пары (R, —R) равен Мо и, сле-
следовательно, ее плечо 00' — Мо : R — Мо '• R'.
Силы R и — й как равные по модулю и прямо противополож-
противоположные уравновешиваются, а потому остается только одна сила й.
Таким образом, данная система сил привелась к равнодействующей
силе й = й', приложенной в точке О'. Так как R J_ 00' и
Мо _1_ 00', то отрезок 00' будет перпендикулярен к плоскости,
в которой лежат векторы й' и Мо-
Итак, если главный момент Мо системы сил относительно
данного центра О перпендикулярен к ее главному вектору й', то
эта система приводится к равнодействующей силе, равной глав-
главному вектору R, причем линия действия этой равнодействующей
проходит через точку О', лежащую на прямой, перпендикуляр-
перпендикулярной к плоскости, в которой расположены векторы Мо и й', на
расстоянии от точки О, равном 00' — Мо ■ R'-
Понятно, что в этом случае главный момент относительно
центра О', а следовательно, и относительно всякого центра, лежа-
лежащего на линии действия равнодействующей, равен нулю. В самом
деле, если главный момент данной системы сил относительно центра
О' обозначим через Мо, то на основапии теоремы об изменении глав-
главного момента при перемене центра приведения (§ 45) будем иметь:
М0 = М(у +mo(R).
Но момент силы R относительно точки О, как видно из рис. 125,
совпадает по модулю и по направлению с моментом пары (R, — R),
т. е. mo(R) = Мо, а потому предыдущее равенство принимает вид
Мо = Мо -г Мо, откуда Мо- = 0.
Если Мо _1_ й', то проекция главного момента Мо на направление
главного вектора R равна нулю, но эта проекция инвариантна по
отношению к центру приведения; следовательно, если Мо _1_ й', то
проекция главного момента относительно любого центра, не лежа-
лежащего на линии действия равнодействующей, на направление глав-
главного вектора равна нулю, т. е. главный момент относительно лю-
любой точки, не лежащей на линии действия равнодействующей, пер-
перпендикулярен к главному вектору.
Теорема Вариньона о моменте равнодействующей, доказанная
в § 22 для плоской системы сил, имеет место и для системы сил, как
угодно расположенных в пространстве, если эта система приво-
приводится к равнодействующей силе.
Для доказательства этой теоремы возьмем за центр приведения
произвольную точку А и обозначим главный момент данной си-
системы сил относительно этого центра через Ма- Применяя опять тео-
теорему § 45 об изменении главного момента при перемене центра при-
приведения, получим: МА = Мо' + тА (R), но Мо = 0, а потому
МА = тА (й).
ГЛ. 9 ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 187
Но главный момент данной системы сил относительно центра А
есть векторная сумма моментов всех сил этой системы относи-
относительно того же центра, т. е.
МА = 1>А (F).
Следовательно,
тА (R) = £тА (F). G4)
Это равенство выражает теорему Вариньона в общем случае: если
данная система сил имеет равнодействующую, то момент этой
равнодействующей относительно любого центра равен векторной
сумме моментов всех сил этой системы относительно того же
центра.
Если проведем через точку А какую-нибудь ось х и спроекти-
спроектируем на эту ось предыдущее векторное равенство G4), то, прини-
принимая во внимание зависимость между моментами силы относительно
данной точки и относительно какой-нибудь оси, проходящей через
эту точку (§ 42), получим:
тх {Щ = 2mx{F), G5)
т. е. если данная система сил имеет равнодействующую, то момент
этой равнодействующей относительно любой оси равен алгебраи-
алгебраической сумме моментов всех сил этой системы относительно
той же оси.
§ 47. Случай, когда система сил приводится к одной паре
Система сил, не лежащих в одной плоскости, так же как и пло-
плоская система сил, приводится к одной паре, очевидно, в том слу-
случае, когда главный вектор К этой системы равен нулю, а главный
момент относительно произвольно выбранного центра О не равен
нулю. В этом случае силовой многоугольник данной системы сил
является замкнутым, а главный момент представляет собой вектор,
не зависящий от выбора центра приведения. В последнем можно
убедиться на основании равенства G3) § 45, из которого при
R = 0 следует, что М& — Мо.
§ 48. Приведение системы сил к дннаме.
Центральная ось
Приводя данную систему сил к какому-нибудь центру О, мы
получаем в общем случае силу If и пару с моментом Мо, причем век-
векторы If и Мо могут образовать между собой любой угол ф. Если
Ф = 90°, то данная система сил, как было указано в § 46, приво-
приводится к равнодействующей. Если же угол ф окажется равным 0 или
180°, то векторы й' и Мо будут коллинеарпы. Такая система,
188
СТАТИКА
Рис. 126.
состоящая из силы и пары, плоскость которой перпендикулярна
к этой силе, называется динамой, или динамическим винтом.
Нетрудно показать, что если главный момент не перпендику-
перпендикулярен к главному вектору, то данную систему сил можно привести
к динаме.
В самом деле, пусть ф Ф 90° (рис. 126). На основании теоремы
о сложении пар мы можем вектор Мо разложить по правилу парал-
параллелограмма на два составляющих вектора Мо,
и Мо, из которых первый направлен по век-
вектору R, а второй к нему перпендикулярен, т. е.
пару с моментом Мо можем заменить двумя
парами с моментами М'о и М"о.
Модуль вектора М'о равен, очевидно, абсо-
абсолютному значению проекции главного момента
Мо на направление главного вектора, т. е.
М'о — | Мо cos ер].
При этом, если ф<^90° (как на рис. 126), то
проекция главного момента Мо на направле-
направление главного вектора F? положительна, и на-
направления векторов М'о и й' совпадают; если
же ф^>90°, то эта проекция отрицательна, и
направления этих векторов противоположны. Но проекция глав-
главного момента на направление главного вектора есть величина
постоянная, не зависящая от выбора центра приведения; отсюда
следует, что вектор М'о инвариантен
по отношению к центру приведения.
Поэтому в обозначении этого вектора
нижний индекс можно опустить, и
в дальнейшем мы будем обозначать этот
вектор через М.
Так как М'о _L й', то система (R',
М'о) приводится к одной силе й', про-
проходящей через точку О', причем рас-
расстояние 00' = Mb:R' = Mo sin ф : Л").
Следовательно, в результате полу-
получаем силу й\ приложенную в точке О',
и пару с моментом М'о — М', парал-
параллельным этой силе. Перенося свобод-
свободный вектор Мо 2) в точку О', получим дипаму, изображенную на
рис. 127.
Прямая, проходящая через точку О', по которой направлены
сила R? и момент М' динамы, называется центральной осью дан-
данной системы сил.
■
/
М'
* //
// у
Рис. 127.
!) См. § 40.
2) Момент пары есть вектор свободный E 18).
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
189
Так как при перемещении центра приведения по прямой,
имеющей направление главного вектора, главный момент данной
системы сил остается неизменным (§ 45), то, приводя данную си-
систему сил к любому центру, лежащему на центральной оси, полу-
получим ту же динаму (R', М'). Отсюда следует, что центральная ось
данной системы сил есть геометрическое место точек, относительно
которых главный момент этой системы сил направлен или так же,
как ее главный вектор, или противоположно ему.
Так как катет меньше гипотенузы, то, как видно из рис. 126,
будем иметь: Мо< <С Мо, или, что то же,
М' < Мо.
Отсюда следует, что модуль главного момента данной системы
сил относительно всякой точки, лежащей на центральной оси,
имеет одно и то же и притом наименьшее значение. Поэтому эта
ось называется также осью наименьших моментов.
Чтобы найти положение центральной оси аналитически, выве-
выведем уравнения этой оси.
Рис. 128.
Пусть данная система сил Ft (i — 1, 2,..., п) отнесена к прямо-
прямоугольной системе координат Oxyz. Главный момент этой системы
сил относительно начала координат О обозначим через Мо (рис. 128).
Проекции вектора Мо на координатные оси равны главным момеы-
гам данной системы сил относительно этих осей (§ 45), т. е.
v
Мог = IX (F)'
190 СТАТИКА
Проекции главного вектора й' данной системы сил на координат-
координатные оси будут равны
Приводя данную систему сил Fi к какой-нибудь точке А (х, у, z),
лежащей на центральной оси этой системы, получим силу, равную
R, приложенную в точке А, и пару, момент которой равен наи-
наименьшему главному моменту М', причем оба эти вектора й' и М
будут направлены вдоль центральной оси (рис. 128). Так как изме-
изменение главного момента системы сил при перемене центра приведе-
приведения равно моменту главного вектора этой системы, приложенного
в прежнем центре приведения, относительно нового центра (§ 4G;,
то, сравнивая главные моменты Мо и М', будем иметь:
Мо = М + т0 (й').
Проектируя ото векторное равенство на координатные оси и при-
принимая во внимание, что проекция момента силы й' относительно
точки О на любую ось, проходящую через эту точку, равна моменту
этой силы относительно той же оси, получим:
Отсюда
Мох
Моу
Мо.
мх =
М'у =
М' =
- М'х
— Д^'
. 1\1
= Мох
= МОи
= Мо
+ тх
+ ту
+ mz
— тх
— ти
— т,
(и')-
(П
(Д'),
Моменты силы й', приложенной в точке А (х, у, г), относительно
координатных осей можно найти по формулам F2) § 44:
= yR'z — zR'v,
ту (R) = zR'x - xR\,
m2 {R) = xRv — yRx,
а потому
M'x = MOx - (yR'z - zRy),
M'v = MOu ~ (zRx — xR';),
М'г = Moz ~ (XR'U — yRx).
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 191
Так как векторы М vi R направлены по одной прямой, то их проек-
проекции на координатные оси пропорциональны (§ 8), т. е.
или
- (уд; - zR'y) _ мОу
мОу - (ад; - xRlz) . мОг -
Ог
-.G6)
R'x % Rz
Два уравнения G6) представляют собой уравнения прямой ли-
линии. Так как точка А выбрана на центральной оси произвольно, то
значения координат х, у, z всякой точки, лежащей на этой оси, удо-
удовлетворяют уравнениям G6). Следовательно, эти уравнения яв-
являются уравнениями центральной оси данной системы сил. Если
положим последовательно в этих уравнениях х = 0, у = 0 и
z = 0, то найдем из них координаты точек пересечения централь-
центральной оси с координатными плоскостями.
В § 45 мы видели, что для всякой системы сил существуют два
инварианта, т. е. две величины, не зависящие от выбора центра при-
приведения, а именно: главный вектор R данной системы сил и ска-
скалярное произведение главного вектора на главный момент отно-
относительно произвольно выбранного центра О, т. е. произведение
RM0.
Объединяя теперь результаты, полученные в этом параграфе, а
также в §§ 46 и 47, приходим к следующим выводам:
1. Если оба инварианта данной системы сил не равны нулю,
т. е. й' ф 0 и R-Mo ф 0, то эта система сил приводится к ди-
наме.
2. Если R Ф О и R Мо = 0, то в этом случае Мо = 0 или
Мо _L R\ следовательно, система сил приводится к равнодейству-
равнодействующей; в этом случае главный момент относительно каждой точки,
лежащей на линии действия равнодействующей, равен нулю;
главный момент относительно всякой точки, не лежащей на линии
действия равнодействующей, перпендикулярен к главному век-
вектору.
3. Если R = 0 и Мо ф 0, то система сил приводится к одной
паре; в этом случае главный момент не зависит от выбора центра
приведения: относительно любого центра он равен Мо-
Пример 49. В вершинах А, В и С прямоугольного параллелепипеда
приложены три силы Flt F2 и F3, имеющие равные модули и направленные
по его ребрам, как показано на рис. 129.
Ребра О А, ОБ и ОС параллелепипеда равны соответственно а, бис.
Определить, приводится ли эта система сил к равнодействующей силе,
к одной паре или к динаме. В последнем случае найти положение централь-
центральной оси, а также модуль силы и модуль момента пары, составляющих
эту динаму;.
192
СТАТИКА
Решение. Обозначив общий модуль трех данных сил через F, приве-
приведем эту систему сил к какому-нибудь центру, например к вершине О парал-
параллелепипеда, которую примем за начало координат; координатные оси х, у, z
направим по ребрам параллелепи-
параллелепипеда (рис. 129).
Чтобы определить для данпой
системы сил главный лектор R' и
главный момент Мо относительно
точки О, найдем проекции этих век-
векторов на координатные оси.
Для проекций главного вектора
имеем:
z
/
и
С
у
Л/
/
в
ь
л:
= 2У =
= 2Z =
= ^з
= Ft
= Fa
= F,
= F,
— F.
Так как точка приложения силы Ft
лежит на оси х, а сила F3 параллельна
F, этой оси, то моменты этих сил относи-
тельно оси а: равны нулю; точно так же
Рис 129 mv(Fi) = »Ь (рг) = °
и
mz (F2) = mz (F3) = О,
а потому для проекций главного момента Мо на координатные оси имеем:
МОх = Т,тх (F) = тх (F2) = bF,
МОу = £my (F) = ти (F3) = cF,
MOz = Hmz (F) = mz
= aF.
По найденным проекциям главного вектора определим его модуль и напра-
направляющие косинусы:
R' =
R'x
cos (R,i) =-R, =
R'
R'z У'Ъ
cos (R, k) = -R, =—3- .
Из последних равенств следует, что главный вектор образует с координат-
и осями равные углы; каждый из этих углов
Далее, находим модуль главного момента:
1/3
ными осями равные углы; каждый из этих углов равен arc cos -~—• = 54°45'.
о
= V Mox
M>Oz = у*a*
e*F = Fd,
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 193
где d есть длина диагонали OD параллелепипеда. Направляющие косинусы
главного момента равны
cos (Мо, о =
M
... ,. Мог а
С03(Л/0)А)=— = -.
Отсюда следует, что углы, которые вектор Мо образует с координатными
осями х, у, z, равны соответственно углам ВОТ), COD hAOD. Так как главный
вектор данной системы сил не равен нулю, то эта система не может быть при-
приведена к одной паре. Поэтому остается установить, приводится ли полученная
система (Я', Мо), т. е. система, состоящая из силы в', приложенной в точке
О, и пары с моментом Мо, к одной силе (к равнодействующей) или к динаме.
Чтобы ответить на этот вопрос, нужно выяснить, будут ли векторы R'
и Mq взаимно перпендикулярными или нет. Так как условием перпендику-
перпендикулярности двух векторов является равенство нулю их скалярного произведе-
произведения, то составим скалярное произведение векторов Я' и Мо. На основапии
равенства E8) § 43 имеем:
R' ■ Мо = Rx ■ МОх + R'y ■ МОу + Щ ■ MOz.
Подставляя сюда полученные выше значения проекций векторов R' и Mq,
находим:
R'.M0 = bF* + cF* + aF* = (Ъ + с + a)F2.
Так как эта величина не равна нулю, то главный момент Монв перпендику-
перпендикулярен к главному вектору, и следовательно, данная система сил приводится
к динаме.
Чтобы найти положение центральной оси, составим уравнения G6),
которые в рассматриваемой задаче принимают следующий вид:
bF — yF + zF _ cF — zF + xF __ aF — xF + yF
F F F
или
a — x + у = b — у -j- z = с — z -f- x.
Чтобы найти точку пересечения центральной оси с координатной плоскостью
хОу, достаточно в этих уравнениях положить г = 0; тогда получим два
уравнения:
а — х ^г у *= Ъ — у = с -4~ х,
из которых находим:
а + Ь — 2о 26 — в — с
х= , у = .
Так как центральная ось имеет такое же направление, как и главный вектор R',
то в рассматриваемой задаче центральная ось образует с координатными
осями равные углы.
Теперь остается найти модуль М' главного момента данной системы
сил относительно любой точки, лежащей на центральпой оси (наименьший
7 II. М. Воронков
194 СТАТИКА
главный момент). Согласно сказанному в этом параграфе этот модуль равен
абсолютному значению проекции главного момента Мо на направление глав-
главного вектора R', т. е. М' = |Mocos(p|, где ф есть угол между векторами
R' и MQ, или
\R' • Mq cos ф [ | R' • MQ\
M' = ^t = — .
Подставляя сюда найденные выше значения скалярного произведения R' ■ MQ
и модуля главного вектора R', получим:
Так как в данном случае R' • Mq ;> 0, то коллинеарные векторы R' и М' на-
направлены в одну сторону. Если бы проекция главного момента Мо на напра-
направление главного вектора оказалась отрицательной, т. е. если бы имело место
неравешпво R' • MQ < О, то в этом случае векторы М' и R' были бы напра-
направлены в противоположные стороны.
§ 49. Условия равновесия системы сил
в общем случае
Если главный вектор й' данной системы сил и главный момент
ее Мо относительно какого-нибудь центра приведения О не равны
нулю, то эта система приводится к силе и паре, и следовательно,
твердое тело при действии на него такой системы сил не может
находиться в состоянии равновесия, так как пара не может быть
уравновешена одной силой. Если в частном случае окажется, что
Мо _1_ й', то данная система сил приводится к равнодействующей
силе, и равновесие, очевидно, и в этом случае невозможно. Если
жу один из векторов й' или Мо обращается в нуль, а другой не
равен нулю, то данная система сил приводится или к равнодей-
равнодействующей силе, приложенной в центре приведения О (в том случае,
когда R Ф 0 и Мо = 0), или к одной паре (в том случае, когда К — 0
и Мо Ф 0). Ясно, что в обоих этих случаях равновесие также не-
невозможно.
Отсюда приходим к заключению, что для равновесия системы
сил, приложенных к твердому телу, необходимо выполнение усло-
условий: й' = 0 и Мо = 0; эти необходимые условия равновесия си-
системы сил являются, очевидно, и достаточными, так как при этих
условиях будут уравновешиваться и все данные силы, перенесен-
перенесенные в центр приведения О, и все присоединенные пары.
Итак, для равновесия системы сил, приложенных к твердому
телу, в общем случае необходимо и достаточно, чтобы главный
вектор этой системы и ее главный момент относительно произ-
произвольно выбранного центра равнялись нулю.
Полученные условия равновесия можно выразить в аналити-
аналитической форме.
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 195
В § 45 мы видели, что проекции на координатные оси главного
вектора данной системы сил и ее главного момента относительно
начала координат выражаются так:
Отсюда следует, что два векторных равенства К = 0 и Мо — О
равносильны следующим шести алгебраическим равенствам, кото-
которые выражают условия равновесия системы сил в аналитической
форме:
£Х = 0, £У = 0, £Z = 0,
2mx(F) = 0, £my(F) = 0, Zmz(F)^0, G7)
т. е. для равновесия системы сил, приложенных к твердому телу,
в общем случае необходимо и достаточно, чтобы сумма проекций
всех этих сил на каждую из трех произвольно выбранных коор-
координатных осей равнялась нулю и чтобы сумма их моментов отно-
относительно каждой из этих осей также равнялась нулю х).
Рассмотрим некоторые частные случаи.
1) Система сходящихся сил. Пусть на твердое тело
действует система сил, линии действия которых пересекаются
в одной точке. Примем эту точку за начало координат. Так как
каждая из данных сил пересекает все три координатные оси, то,
каковы бы ни были эти силы, последние три из условий равновесия
G7), очевидно, удовлетворяются. Таким образом, для системы
сходящихся сил условия равновесия сводятся к следующим трем:
= 0, £Г = 0, £Z = 0.
Этот результат мы имели уже ранее, в § И.
2) Плоская система сил. Пусть на твердое тело дей-
действует система сил, лежащих в одной плоскости. Примем эту пло-
плоскость за координатную плоскость Оху. Так как каждая из данных
сил перпендикулярна к оси z и, кроме того, каждая из них лежит
в одной плоскости с осями х и у, то ясно, что, каковы бы ни были
зти силы, третье, четвертое и пятое из условий G7) всегда удо-
удовлетворяются; таким образом, для плоской системы сил получаем
только три условия равновесия:
= 0, £У = 0, %Х (П = 0.
Так как в данном случае каждая сила лежит в координатной
плоскости Оху, то ее момент относительно оси z совпадает
г) Понятно, что если эти условия выполнепы относительно одной какой-
нибудь системы декартовых координат, то они будут выполнены и отно-
относительно всякой другой декартовой координатной системы.
7*
196 СТАТИКА
с алгебраическим значением момента этой силы относительно начала
координат О; поэтому последнее из трех предыдущих равенств
можно заменить таким:
2>о (f) = О,
где сумма моментов — алгебраическая.
Мы получили, следовательно, те самые условия равновесия пло-
плоской системы сил, которые уже имели в § 24.
3) Система параллельных сил. Пусть на твердое
тело действует система параллельных сил, не лежащих в одной
плоскости. Направим ось z параллельно данным силам; тогда мо-
момент каждой силы относительно оси z будет равен нулю; так как
оси х и у перпендикулярны к данным силам, то проекции каждой
силы на эти оси будут также равны нулю. Следовательно, из об-
общих шести условий равновесия первое, второе и шестое всегда
удовлетворяются, каковы бы ни были данные параллельные силы,
а потому для системы параллельных сил, не лежащих в одной
плоскости, получаем только три следующих условия равновесия:
£Z = О, 2Х (F) = 0, £ту (F) = 0, G8)
т. е. для равновесия системы параллельных сил, не лежащих в одной
плоскости, необходимо и достаточно, чтобы сумма их проекций
на ось, параллельную этим силам, равнялась нулю и чтобы сумма
их моментов относительно каждой из двух координатных осей,
перпендикулярных к этим силам, также равнялась нулю.
§ 50. Равновесие несвободного твердого тела
Рассмотрим на ряде примеров решение задач статики о равно-
равновесии несвободного твердого тела в общем случае, т. е. в том слу-
случае, когда приложенные к телу силы, включая и силы реакции свя-
связей, не лежат в одной плоскости и их линии действия не пересе-
пересекаются в одной точке.
Метод решения этих задач по существу остается таким же, как
и в случае плоской системы сил, но в общем случае мы имеем шесть
условий равновесия. Поэтому в задаче о равновесии несвободного
твердого тела в общем случае мы можем составить шесть уравнений,
а не три, как в случае плоской системы сил. При этом следует иметь
в виду, что поскольку при составлении уравнений равновесия (урав-
(уравнений G7) предыдущего параграфа) выбор координатных осей
произволен, то при равновесии твердого тела сумма проекций всех
приложенных к нему сил на любую ось и сумма их моментов отно-
относительно любой оси равны нулю. При составлении уравнений равно-
равновесия следует стремиться к тому, чтобы эти уравнения были воз-
возможно проще, т. е. чтобы каждое из них содержало возможно
меньшее число неизвестных сил. Этого можно достигнуть соот-
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
197
ветствующим выбором осей, на которые проектируются силы,
приложенные к данному твердому телу, и тех осей, относительно
которых определяются моменты этих сил.
1. Тело с одной неподвижной точкой. Пусть
имеем твердое тело, одна точка которого закреплена неподвижно,
т. е. тело, закрепленное при помощи
сферического шарнира; примем непод-
неподвижную точку тела за начало координат
(рис. 130). В кинематике мы увидим,
что в этом случае положение тела
может быть определено заданием трех
независимых параметров, например трех
так называемых углов Эйлера; поэтому
говорят, что такое тело обладает тремя
степенями свободы.
Пусть на это тело действуют задан-
заданные силы Fx, F2, F3,..., Fn. Реакцию
неподвижной точки (сферического шар- Рис. 130.
нира) обозначим через Ro; проекции
этой силы на оси координат обозначим через Хо, У о и Zo. Если
данное тело находится в равновесии, то согласно сказанному
в § 49 будем иметь шесть уравнений:
£FX + Хо = 0, %Fy + Yo = 0,
£F2 + Zo = 0, 2Х (F) = 0,
Так как моменты силы Ro относительно всех трех координатных
осей равны нулю, то в последние три уравнения входят только за-
заданные силы /*\. Эти три уравнения представляют собой, следова-
следовательно, те условия, которым должны удовлетворять заданные
силы Fit действующие на тело, чтобы оно могло оставаться в равно-
равновесии.
Из последних трех уравнений следует, что главный момент
системы заданных сил Fi относительно точки О должен равняться
нулю, т. е. эта система должна приводиться к равнодействующей
силе, линия действия которой проходит через точку О.
Таким образом, приходим к заключению, что при равновесии,
твердого тела с одной неподвижной точкой сумма моментов всех
действующих на тело заданных сил относительно каждой из
трех координатных осей, начало которых находится в неподвиж-
неподвижной точке, равна нулю, т. е. что система заданных сил приводится
к равнодействующей силе, проходящей через неподвижную точку.
Если эти условия не выполнены, то тело не может оставаться
в равновесии. Что касается первых трех из предыдущих уравнении,
то они позволяют определить проекции неизвестной силы Rq и,
198
СТАТИКА
следовательно, найти ее модуль и направление (при равновесии).
Из этих уравнений находим:
Если обозначим через R равнодействующую заданных сил
проходящую через точку О, то
Rz ~
отсюда следует:
Y" r> v" D 7 D
Л-0 tfx, I О "y> О —— 1j.
Таким образом, проекции двух векторов Ro и R отличаются
только знаками, а потому эти два вектора равны по модулю и
противоположны по направлению, т. е. Ro —— Д, как это, оче-
очевидно, и должно быть, так как система
сил Fi уравновешивается реакцией До
неподвижной точки.
2. Тело с двумя неподвиж-
неподвижными точками. Рассмотрим твер-
твердое тело, две точки которого О та СУ
закреплены неподвижно (рис. 131).
Ясно, что прямая, проходящая через
эти две точки, остается неподвижной.
Примем эту прямую за ось z; начало
координат возьмем в точке О. Расстоя-
Расстояние между О и О' обозначим через а.
Единственное движение, возможное для
такого тела, — это вращение вокруг
оси z, и положение тела определяется
единственным параметром — углом по-
поворота тела вокруг неподвижной оси;
поэтому мы имеем в данном случае
твердое тело с одной степенью свободы.
Пусть на это тело действует система
сил Flt F3, F9,...,Fn. Требуется, во-пер-
во-первых, определить, какому условию должны удовлетворять эти
силы, и, во-вторых, найти реакции закрепленных точек при равно-
равновесии тела.
Обозначим искомые реакции закрепленных точек О и СУ через
Ro и До-; проекции этих сил на координатные оси обозначим соот-
соответственно через Хо, Yq, Zo и Хо', Yo1, %О' •
Моменты силы Ro относительно координатных осей, очевидно,
равны нулю, так как эта сила пересекает все три оси.
Рис. 131.
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ 190
Моменты силы Ro- относительно тех же осей находим по фор-
формулам F2) § 44:
тх (Ro) = yo'Zo- — zo'Yo-,
тУ (Яо ) = z0X0' —xO'Zo-,
mz (Ro) = xo'Yo- — yo'XO',
где xo', Уо' и го- обозначают координаты точки приложения силы
До1, т. е. точки О'. Как видно из рис. 131, эти координаты соот-
соответственно равны 0, 0, а; поэтому
тх (Д0') =— аУ0-, ту (й0') = аХ0', mz(R0) = 0.
Уравнения G7) предыдущего параграфа принимают следующий вид:
X + Хо + Хо- = 0, %тх (F) - aY0' = 0;
+ Y0 + Y0' = 0, ^my (F) + aX0' = 0;
+ Zo + Zo- - 0, 2X (F) = 0.
В последнее из этих уравнений неизвестные реакции не входят;
это уравнение, следовательно, представляет собой то условие, ко-
которому должны удовлетворять заданные силы Fit действующие на
тело, при равновесии. Если это условие не выполнено, то тело не
может оставаться в равновесии. Таким образом, приходим к за-
заключению: при равновесии твердого тела с двумя неподвижными
точками (с неподвижной осью) сумма моментов всех действующих
на него заданных сил относительно неподвижной оси равна нулю.
Из первых пяти уравнений определяем неизвестные реакции.
Из пятого и четвертого уравнений получаем:
4 2my (F) и Y0' = 4 £тх (F).
Подставляя эти значения в первое и второе уравнения, находим
из них:
i £ту (F)
Наконец, из третьего уравнения имеем:
Zo + Zo'-^
Отсюда видим, что в данном случае мы имеем статически неопреде-
неопределенную задачу: мы ложем найти только составляющие реакций,
перпендикулярные к оси вращения тела: что же касается продоль-
продольных составляющих реакций (направленных вдоль оси вращения),
то мы можем определить только их равнодействующую, но не ка-
каждую из этих сил в отдельности.
200
СТАТИКА
Пример 50. С горизонтальным валом трансмиссии неизменно соеди-
соединены два шкива радиусов R = 0,4 м и г = 0,2 м (рис. 132, а). Даны натя-
натяжения ветвей ремня, охватывающего первый шкив: 2\ = 340 кг и Г2 = 200 кг,
причем сила Тх вертикальна, а сила Г2 образует с вертикалью угол в 45°.
Натяжения ветвей ремня, охватывающего второй шкив, равны Т3 и Т4, при-
причем силы Т7, и Tt параллельны и образуют с вертикалью угол в 30°. Опреде-
Определить реакции подшипников А и В, перпендикулярные к оси вращения вала,
и модули сил Ts и Tit зная, что Т3 = 2Г4 и что реакции подшипников и силы
Рис. 132.
7\, Т„, Т3, Tt уравновешиваются (вал вращается равномерно). Расстояние
между шкивами и расстояния шкивов от подшипников указаны на чертеже.
Весом вала и шкивов пренебрегаем.
Решение. За начало координат возьмем точку А, ось у направим по
оси вала, а ось z по вертикали вверх. Силы Тг, Тг, Т3, Т4 перпендикулярны
к оси у, так как они лежат в плоскостях, перпендикулярных к этой оси;
составляющие по осям жиг реакций подшипников в точках А я В обозна-
обозначим соответственно через Xiy Zl и X,, Z2. Таким образом, в данной задаче
имеем шесть неизвестных, подлежащих определению: Xlt Zt, Хг, Z2, T3 и
714. Для нахождения этих неизвестных имеем шесть уравнений: пять уравне-
уравнений равновесия (уравнение проекций на ось у отпадает; так как все силы
перпендикулярны к этой оси, то это уравнение превращается, очевидно,
в тождество) и еще соотношение, данное в условии задачи: Т3 = 2Г4.
Найдя непосредственно из чертежа (рис. 132, а я б) проекции всех
сил на оси х и г, расположим их в следующей таблице:
X
г
х,
Хг
0
0
Zx
х2
х2
0
0
z2
0
Т2 cos 45°
—Г2 cos 45°
Т3
Т3 sin 30°
—Т3 cos 30°
т*
Ti sin 30°
—Ti cos 30°
Далее, составим моменты всех сил относительно каждой из коорди-
координатных осей. Моменты сил, приложенных в точках А я В, относительно оси
у равны нулю, так как линии действия этих сил пересекают эту ось. Чтобы
получить моменты сил 7\, Г2, Т3 и Г4 относительно осы у, достаточно, как
легко понять из рнс. 132, б, модуль каждой из этих сил умножить на радиус
ГЛ. 9. ПРОИЗВОЛЬНАЯ СИСТЕМА СИЛ
201
соответствующего шкива и взять это произведение с соответствующим зна-
знаком. Моменты силы Т2 относительно осей жиг найдем по формула м
пгх (Г2) = уТ22 - zTiy
И
тг (Тг) = хТ2у - уТ,х.
Так как сила Тг лежит в плоскости, перпендикулярной к оси у и отстоя-
отстоящей от начала координат А на расстояние 0,25 м, то ордината у точки при-
приложения этой силы равна 0,25 м. Проекция Т2у этой силы на ось у равна
нулю. Значения проекций Т2Х и T2Z возьмем из предыдущей таблицы; сле-
довательпо, будем иметь:
»** (Т%) = — °>25 Т2 cos 45°
и
тг (Г,) = — 0,25 Г2 cos 45°.
Аналогично найдем моменты относительно осей жиг всех остальных
сил, заметив при этом, что ординаты точек приложения сил Т3 и Т± имеют
одно и то же значение, равное 0,25 м + 0,75 м = 1 м, а ордината точки В
равна, очевидно, 1,5 м. Полученные значения моментов расположим в виде
следующей таблицы:
)Пу
'Иг
0
0
0
^1
0
0
0
0
0
-1,5Х2
+ 1,5Z2
0
0
-0,25Г,
-0,4^
0
Г,
—0,25r2cos45°
+ 0,4Г2
—0,25r2cos45°
т3
— t • Г3 cos 30°
+ 0,2Т3
—l-r3sin30o
Tt
—l-r4cos30°
-0,2Г4
-l-r4sin30°
Теперь составляем уравнения равновесия, приравняв нулю суммы проек-
проекций всех сил на оси жиги суммы их моментов относительно осей ж, у и z:
X, + Х% + Тг cos 45° + (Г, ■* Г4) sin 30° = 0,
Zt + Z2 - 7\ - Г2 cos 45° - (Т3 -f Г4) cos 30° = 0,
1,5 Z2 — 0,25 7\ — 0,25 Г2 cos 45° — (Т3 + Г4) cos 30° = 0,
- 0,4 G\ - Г2) + 0,2 (Г, - Г4) = 0,
1,5 JTa -^ 0,25 Т2 cos 45° + (Т3 + Г4) sin 30° = 0.
Подставляя сюда значения тригонометрических функций, а также задан-'
ные численные значения сил Тх и Т2 и заменяя везде Т3 через 2Tt, получим
следующие пять уравнений:
1) !! + !,+ 100}/T-h 1,5 Г4 = 0,
2) Zx -f Z2 - 340-100 уТ- 1,5 /3 Tt = 0,
3) — 1,5 Z2 -f 85 -+• 25/2"-h 1,5 ^3 Tt = 0,
4) 56 — 0,2 Г4 = 0,
5) l,5Xg + 25/2"-> 1,5 Г4 = 0.
202
СТАТИКА
Из четвертого уравнения находим: Г4 = 280 кг и, следовательно,
Та = 560 кг. Теперь из третьего и пятого уравнений получаем:
85 + 25 V2 + 420 /З 17 + 5 /2 + 84 /3
т^ = р
= 565
X, = —
25 Vl + 420
1,5
5/2 + 84
0,3
= — 304 кг.
Подставляя полученные значения Zl и Л2 в первое и второе уравнения,
найдем из этих уравнений:
Х1 = 304 — 100 У2 — 420 = — 257 кг,
Zj = 340 + 100 У2 + 420 /3~ — 565 = 643 кг.
Полученные отрицательные значения для Х1 и Х2 показывают, нто на-
направление сил Хх и Х2 совпадает с отрицательным направлением оси х, т. *•.
ито эти силы имеют направление, противоположное принятому на чертеже.
Пример 51. На платформе трехколесной телешки в точке М лежит
груз весом Р = 100 кг. Определить реакции в точках А, В и С, если
О^ = 1 м, KD = 1,6 м, OLE = 0A«
и ЕМ = 0,6 м. Точка D лежит в се-
середине отрезка Ofi^ (рис. 133).
Решение. Направим оси ко-
координат, как указано на чертеже;
искомые вертикальные реакцип обо-
обозначим через Л^, N2 и N3. В данвом
случае все силы, првложелные к те-
тележке, параллельны оси z, и потому,
имеем три следующих уравнения рав-
равновесия (уравнения G8) предыдущего
параграфа):
£Z = Л^-Ь 7V2+ iV3-.P=0,
mx (W2) + mx (N3) + mx (P) = 0,
myGV2) + my (Л'3) + my (P) = 0.
Так как сила iVt проходит через
начало координат Olt то ее моменты
относительно координатных осей равны нулю; поэтому в уравнения моментов
эта сила не входит. Как нетрудно видеть из чертежа, моменты сил N2, N3
и Р выражаются следующим образом:
= 0,
mx(N3) =DK-NS = 1,6 ^3,
mx (P) = — ЕМ ■ Р = — 0,6 .100 = — 60,
«у (ЛУ = - ОхОг ■ N.. = - 1 • N,,
™У (Л'з) = - OXD -N3 = - 0,57V3,
mv (Я) = ОХЕ Р = 0,4 • 100 = 40.
Подставляя эти значения в предыдущие уравнения равновесия, получим:
iV2
100,
1,67V3 = 60,
0,5 N3 = 40.
ГЛ. 10. ЦЕНТР ТЯЖЕСТИ
203
Решая эти уравнения, находим:
JSf2 = 40 — 0,5 N3 = 40—18,75 = 21,25 кг,
iVx = 100 — 7V2 — N3 = 100—21,25 — 37,5 = 41,25 вв.
= 37>5 кг>
О
ГЛАВА 10
ЦЕНТР ТЯЖЕСТИ
§ 51. Общие формулы для координат центра тяжести
Представим себе какое-нибудь твердое тело (рис. 134), находя-
находящееся близ поверхности Земли. На каждую элементарную частицу
этого тела действует сила притяжения к земле, направленная по
вертикали вниз, — вес этой частицы. Строго говоря, эти силы, ко-
которые будем обозначать через ръ р2, р3 ,...,представляют собой
систему сходящихся сил, так как
все они пересекаются в одной
точке — приблизительно в центре
Земли.
Но ввиду того, что расстояние
данного тела от центра Земли
весьма велико сравнительно с рас-
расстояниями между отдельными ча-
частицами этого тела, углы, под
которыми пересекаются силы рг,
весьма малы, и с большой степенью
точности можно считать, что все
эти силы параллельны. Центр С
этой системы параллельных сил
называется центром тяжести дан-
данного тела, а равнодействующая этих сил Р = %Pi, проходящая
через точку С, представляет собой вес этого тела.
В этой главе мы рассмотрим решение задачи, состоящей в опре-
определении положения центра тяжести данного тела. Отнесем это
тело к прямоугольной системе координат Oxyz. Чтобы определить
положение центра тяжести С, нужно найти его координаты, кото-
которые будем обозначать через хс, ус и %с- Так как центр тяжести
тела есть центр параллельных сил, представляющих собой веса эле-
элементарных частиц этого тела, то для вычисления координат центра
тяжести мы можем применить общие формулы, выведенные в § 15
для координат цептра системы параллельных сил. Эти формулы
имеют следующий вид:
Рис. 134.
204
СТАТИКА
Здесь х, у и z обозначают координаты точек приложения
сил pt.
Обозначим вес единицы объема данного тела через у, объемы
элементарных частиц, на которые мы разбиваем все тело *), обо-
обозначим через AFlt AF2, AF3,... Если данное тело однородно, то
величина у для всех частиц тела одинакова, и следовательно, будем
иметь:
р1 = yAFl р2 = \>AF2, р3 =
Подставляя эти значения сил рг в предыдущие формулы, получки:
_ у^х/Ь. V __ Ц
где F = 2AF есть объем всего тела. Такие же формулы получим
и для двух других координат:
_
Чтобы получить теперь точные формулы для координат центра
тяжести однородного тела, нужно в предыдущих выражениях пе-
перейти к пределу, предполагая, что число
элементарных частиц, из которых состоит
тело, неограниченно возрастает, а объем AF,
каждой такой частицы стремится к нулю.
Поэтому окончательно будем иметь:
hm ЕжЛК bin'
хс = у . Ус = —
Рис. 135. Если имеем тело двух измерений, напри-
например очень тонкую пластинку, толщиной
которой можно пренебречь, то задача сводится к определению
центра тяжести материальной плоской фигуры.
Если такая пластинка однородна, то предыдущие формулы для
координат центра тяжести объема остаются, очевидно, верными и
в этом случае, только вместо элементов объема AF, нужно брать
элементы площади Д£г, а в знаменателе вместо объема V нужно
брать площадь S данной фигуры (рис. 135); следовательно, для
координат центра тяжести плоской фигуры будем иметь:
lim ЦжДб1 lim ЕуД^ ,от
хс = р , Ус = с . (Щ
!) Например, плоскостями, параллельными координатным плоскостям;
тогда материальные частицы будут иметь форму, элементарных прямоуголь-
прямоугольных параллелепипедов.
ГЛ. 10. ЦЕНТР ТЯЖЕСТИ
205
Совершенно так же для координат центра тяжести однородной
плоской материальной линии АВ (например, тонкой проволоки,
согнутой в виде некоторой плоской кривой) получим:
I
Ус =
lim £
I
(81)
В этих формулах А/ обозначает длину элементарной дуги дан-
данной линии, а I — всю длину этой линии (рис. 136).
Следует отметить, что центр тяжести С кривой линии вообще
не лежит на этой линии.
Понятно, что формулы (81) остаются такими же и в том слу-
случае, когда данная однородная материальная линия не является
плоской; в этом случае будем иметь:
Хс =
I
zc =
> Ус —
lim £ zA
г
I
(81')
Рис. 136.
Вычисление пределов сумм, входящих
в полученные формулы, производится в
общем случае методами интегрального
исчисления; эти пределы выражаются
определенными интегралами, распростра-
распространенными соответственно на весь объем
данного тела или на всю площадь данной фигуры или же взя-
взятыми вдоль данной линии. Но если тело имеет простую геоме-
геометрическую форму, то, как увидим ниже, положение центра
тяжести такого тела можно определить элементарным путем.
§ 52. Положение центра тяжести симметричного тела
Лемма. Если точки приложения всех данных параллельных
сил лежат в одной и той же плоскости или на одной и той же
прямой, то центр этой системы параллельных сил лежит соот-
соответственно в той же плоскости или на той же прямой.
Доказательство. Примем плоскость, в которой лежат
точки приложения всех данных параллельных сил, за координат-
координатную плоскость Оху; тогда, очевидно, в правой части формулы
мы должны положить все координаты zi равными нулю, а потому
zc = 0, т. е. центр данной системы параллельных сил лежит в
плоскости Оху, что и требовалось доказать.
206
СТАТИКА
Аналогично докажем и вторую часть леммы: примем ту прямук>,
на которой лежат точки приложения всех данных параллельных
сил, за координатную ось г; тоща для всех этих точек будем иметь:
хг — Vi = 0, а потому
— ?-Р? — 0
7
Рис. 137.
т. е. центр данной системы параллельных сил лежит на оси г,
что и требовалось доказать.
Пользуясь этой леммой, нетрудно доказать следующую теорему
о положении центра тяжести тела симметричной формы:
Теорема. Если однородное тело имеет плоскость, или ось,
или центр симметрии, то центр тяжести такого тела лежит
соответственно в этой плоскости, на этой
оси или в этом центре симметрии.
Доказательство. Пусть дан-
данное однородное тело имеет плоскость сим-
симметрии; тогда мы можем разбить все тело
на пары одинаковых элементарных частиц
равного веса, симметрично расположенных
относительно этой плоскости: Аг и А\,
Аг и А\ и т. д. (рис. 137). Отрезки AVA\,
АгА\ и т. д. перпендикулярны к плоско-
плоскости симметрии и в точках пересечения
с ней делятся пополам, так что А1М1 —
= А\Мг, А%М% — А[гМг и т. д. Обозна-
Обозначим веса элементарных частиц через plt
Pi, Рг» Pi и т- Д- Так как веса симметричных частиц равны, то
Pi = Рь Pi = Pi и т- Д. Сложив две равные параллельные силы рг
и р\, приложенные в точках Аг и А\, получим равнодействую-
равнодействующую 2ръ приложенную в точке Мг. Поступив так же с весами
каждой пары симметричных частиц, получим систему парал-
параллельных сил 2plt 2р% и т. д., точки приложения которых М1(
М2,... лежат в плоскости симметрии, а следовательно, на основа-
основании предыдущей леммы в этой же плоскости лежит и центр этой
системы параллельных сил, т. е. центр тяжести данного тела, что
и требовалось доказать.
Аналогично доказывается эта теорема и для тех случаев, когда
тело имеет ось или центр симметрии. Эта теорема имеет частые
применения; так, например, из нее непосредственно вытекает, что
центр тяжести однородной пластинки, имеющей форму параллело-
параллелограмма, лежит в точке пересечения его диагоналей, центр тяжести
однородной эллиптической пластинки лежит в ее геометрическом
центре, центр тяжести однородного тела вращения лежит на оси
вращения, так как эта ось является для такого тела осью сим-
симметрии.
ГЛ. (О ЦЕНТР ТЯЖЕСТИ
207
§ 53. Теоремы Гюльдена
Теорема 1. Площадь поверхности, полученной вращением
некоторой плоской линии вокруг оси, лежащей в плоскости этой
линии и ее не пересекающей, равна длине этой линии, умножен-
умноженной на длину окружности, опи-
описанной ее центром тяжести.
Доказательство. Пред-
Представим себе поверхность, получен-
полученную вращением дуги АВ некоторой
плоской кривой линии вокруг оси
Оу (рис. 138). Пусть центр тяже-
тяжести этой дуги находится в точке С;
обозначим его абсциссу через хс.
Впишем в дугу А В ломаную ли-
линию, состоящую из весьма боль-
большого числа весьма малых прямо-
прямолинейных отрезков. Рассмотрим
одну из сторон этой ломаной ли-
линии, например сторону аЬ. Центр
тяжести прямолинейного отрезка
аЪ находится в его середине —
в точке т; обозначим абсциссу этой
точки через х; при вращении во- -
круг оси Оу отрезок аЬ опишет
усеченный конус; если обозначим
длину отрезка аЪ через АГ, то бо-
боковая поверхность этого конуса будет равна 1лх • AV. Если, да-
далее, обозначим через S' сумму боковых поверхностей всех таких
усеченных конусов, описанных каждой стороной вписанной
ломаной линии, то
S' = 2 2ях- AV = 2я2х-А/'.
С другой стороны, если обозначим через хс абсциссу центра тя-
тяжести С этой ломаной линии, то
О
Рис. 138.
_
ХС ~
отсюда
где V = ЕД/' есть длина ломаной линии; следовательно,
S' = 2лхс-1'.
Перейдем теперь к пределу, предполагая, что число сторон
вписанной ломаной линии неограниченно возрастает, а длина
каждой стороны стремится к нулю; тогда будем иметь:
lim S' = 2л lim (хС'П.
208 СТАТИКА
Но в пределе вписанная ломаная линия совпадает с данной дугой
АВ, ее длина становится равной длине I этой дуги, а ее центр
тяжести С совпадает с точкой С, а потому
lim /' = /, Hm xc = хс и lim (xC'l') — xqI.
Кроме того, предел, к которому стремится величина S', опреде-
определяет площадь S рассматриваемой поверхности вращения, т. е.
lim iS" = S. Следовательно, получаем:
S = 2я хс1, (82)
что и требовалось доказать, так как 2пхс есть длина окружности,
описанной точкой С.
Теорема 2. Объем тела, полученного вращением некоторой
плоской замкнутой фигуры вокруг оси, лежащей в плоскости этой
фигуры и. ее не пересекающей, равен произведению площади этой
фигуры на длину окружности, опи-
описанной ее центром тяжести.
Доказательство. Возьмем
некоторую плоскую фигуру, площадь
которой равна S; пусть центр тяже-
тяжести этой фигуры лежит в точке С
(рис. 139); вращая эту фигуру вокруг
оси Оу, получим тело, объем кото-
которого V нужно определить. Для этого
разобьем площадь данной фигуры па
очень большое число весьма малых
элементов, проводя прямые, параллельные координатным осям х и
у, на весьма близком расстоянии друг от друга. Рассмотрим один
из таких элементов — прямоугольник abed. Центр тяжести этого
прямоугольника лежит в точке пересечения его диагоналей;
обозначим абсциссу этой точки через х. Пусть, далее:
ad = Ах и аЪ = Ау;
тогда площадь этого прямоугольника равна
AS = Ах- Ау;
кроме того, как видно из рис. 139,
ja — x 2" и fd — x + ~z-.
Объем AV тела, полученного вращением прямоугольника abed
вокруг оси Оу, равен, очевидно, разности объемов двух цилиндров,
полученных вращением прямоугольников feed и feba вокруг той же
оси, т. е.
Д V = п (х + 4-V Ау — я [х — к*-\\у = 2пх Ах Ау = 2ях AS.
ГЛ. 10. ЦЕНТР ТЯЖЕСТИ
209
Если обозначим через V сумму объемов всех таких тел, полу-
полученных вращением элементарных прямоугольников, на которые мы
разбили всю данную фигуру, то
Перейдем теперь к пределу, предполагая, что число элементар-
элементарных прямоугольников неограниченно возрастает, а площадь ка-
каждого прямоугольника стремится к нулю; тогда будем иметь:
V = lim V = 2я1пп ^x-AS;
с другой стороны, если обозначим абсциссу центра тяжести С дан-
данной плоской фигуры через хс, то по формуле (80) имеем:
lim £ xl
следовательно,
или lim
V = 2nxcS,
АЬ = хс- о;
(83)
что и требовалось доказать.
Доказанные теоремы позволяют иногда весьма просто находить
положение центра тяжести плоской линии или плоской фигуры,
а также определять поверхность и объем тел вра-
вращения.
Рассмотрим следующие примеры.
1. Возьмем полукруг радиуса R и будем вра-
вращать его вокруг диаметра О А (рис. 140). Получен-
Полученное при этом тело вращения представляет собой
шар радиуса R. Пусть центр тяжести дуги А В
находится в точке Сх, а центр тяжести площади
полукруга — в точке С2; оба эти центра лежат на
оси Ох, являющейся осью симметрии и для полу-
полукруга и для дуги АВ.
Пусть ОСХ = хх и ОС2 = х%. По первой тео-
теореме Гюльдена имеем:
Рис.
где S обозначает поверхность шара, а / — длину полуокружности
АВ; следовательно,
S = 4яД2 и / = яЛ.
Подставляя эти значения в предыдущее равенство, получим:
4яЛ2 = 2пх1 . nR,
откуда находим:
_ 2R
Xl - IT*
210
СТАТИКА
Эта формула определяет положение центра тяжести полуокруж-
22
ности. Если положим приближенно я = -=-, то
По второй теореме Гюльдена имеем:
V = 2kx2S,
где объем шара F= -5-я/?3 и площадь полукруга S = у яД2; под-
подставляя эти значения в предыдущее равенство, получим:
откуда находим:
Зя
Эта формула определяет положение центра тяжести площади полу-
22
круга. Полагая л = -„-, получим при-
приближенно:
3:2 ~" 33 "^ 2 *
2. Возьмем круг радиуса г. Центр
тяжести С круга совпадает с его гео-
метрическим центром. Если будем этот
круг вращать вокруг оси Оу, то по-
получим кольцеобразное тело вращения,
называемое тором (рис. 141). Радиус окружности, описывае-
описываемой при этом вращении точкой С, т. е. расстояние точки С от
оси Оу, обозначим через R. Теоремы Гюльдена позволяют легко
найти поверхность и объем тора.
Так как центр тяжести окружности радиуса г находится,
очевидно, в точке С, то по первой теореме поверхность тора равна
S = 2яг-2яД = 4я2Лг.
По второй теореме объем тора равен
V = яг2 • 2яЯ = 2я2Дг2.
ГЛ. 10. ЦЕНТР ТЯЖЕСТИ 211
§ 54. Центры тяжести некоторых простейших
однородных тел и фигур
1. Центр тяжести площади треугольника.
Найдем центр тяжести тонкой однородной треугольной пластинки
AtA2A3 (рис. 142). Для этого разобьем всю площадь треугольника
прямыми, параллельными основанию АгА3, на большое число
очень узких полосок. Каждую такую полоску, например ata3,
ввиду ее незначительной ширины можно
рассматривать как прямолинейный отре-
отрезок; следовательно, центр тяжести каждой
такой элементарной полоски находится
в ее середине. Но средние точки всех этих
полосок расположены, очевидно, на одной
прямой, а именно на медиане АгМ2 дан-
данного треугольника; следовательно (лемма
§ 52), на этой же медиане лежит и иско-
искомый центр тяжести всего треугольника. Рис- 142.
Разбив площадь треугольника прямыми,
параллельными другой его стороне, например стороне А^^, мы
также убедимся, что искомый центр тяжести треугольника должен
лежать на медиане А3М3. Отсюда заключаем, что центр тяжести С
площади треугольника совпадает с точкой пересечения его медиан.
Так как точка пересечения медиан делит каждую медиану в отно-
отношении 2:1, то полученный результат можно выразить еще так:
центр тяжести площади треугольника лежит на одной из его ме-
медиан на расстоянии 2/3 этой медианы от вершины треугольника.
Если обозначим координаты вершин данного треугольника
через (aj, yt), (хг, г/2), (х3, у3), а координаты его центра тяжести че-
через хс и ус, то по формулам аналитической геометрии для координат
точки пересечения медиан треугольника будем иметь:
> ус=
(84)
2. Центр тяжести площади многоугольника.
Чтобы найти центр тяжести площади какого-нибудь многоуголь-
многоугольника АгА^А3А^п (рис.143),координатывершин которого известны,
разобьем данный многоугольник диагоналями на три треугольника
AtA2A3, A1A3Ai и ЛХЛ4Л5; площади этих треугольников обозначим
соответственно через St, S2 и S3, а их центры тяжести — через
С\ (хс,, г/с,), Сг (хс2, j/c») и С3 (хСз, усд- Зная координаты вершин
каждого из этих треугольников, нетрудно вычислить его площадь (по
известной формуле аналитической геометрии) и координаты его
центра тяжести; так, для абсцисс точек Сг, С2 и С3 будем иметь:
212
СТАТИКА
В точках Сх, С2 и Са приложены веса Р1г Р2 и Р3 соответствую-
соответствующих треугольников. Теперь задача сводится к определению центра
Рис. 143.
системы параллельных сил Рх, Р2 и Р5. Поэтому для координат
хс и ус искомого центра тяжести многоугольника имеем:
Если обозначим вес единицы площади данного многоугольника
через у, то
Рх = ySx, P2 = yS2, P3 = yS3.
Подставляя эти значения в предыдущие формулы и сокращая
на у, получим окончательно:
Ус =
t +
+
S3
(85)
Рис. 144.
дугу А В вокруг
поверхность
3. Центр тяжестидуги
окружности. Пусть требуется
найти центр тяжести дуги А В окруж-
окружности радиуса R с центром в точке О
(рис. 144). Искомый центр тяжести
С лежит на оси симметрии дуги АВ,
т. е. на радиусе, перпендикулярном
к хорде АВ; остается определить рас-
расстояние ОС. Для этого воспользуемся
первой теоремой Гюльдена. Вращая
диаметра, параллельного хорде АВ, получим
LAX, представляющую собой часть поверхности
ГЛ. 10. ЦЕНТР ТЯЖЕСТИ
213
шара и называемую шаровым поясом. Как известно из геометрии,
площадь этой поверхности равна 2яй • А В.
На основании первой теоремы Гюльдена будем иметь:
2nR-AB = 2п-ОС-1,
где I — длина дуги АВ. Отсюда
ОС =
R-AB
I '
Если обозначим половину центрального угла дуги АВ, измеряе-
измеряемого в радианах, через а, то
= 2Яа и АВ = 2R sin а,
а потому
ОС = R
sin а
(86)
4. Центр тяжести кругового сектора. Опреде-
Определение положения центра тяжести кругового сектора ОАВ радиуса R
(рис. 145) можно свести к предыдущей задаче. Обозначим половину
центрального угла этого сектора через а.
Искомый центр тяжести С лежит на оси сим-
симметрии данного сектора, т. е. на биссек-
биссектрисе угла АОВ. Остается найти расстояние
ОС. Разделим дугу АВ на большое число п
весьма малых равных частей и точки деления
соединим с центром О. Тогда данный сектор
разделится на п равных элементарных секто-
секторов; рассмотрим один из таких секторов
ОаЪ. Ввиду малости дуги аЬ этот сектор можно
принять за равнобедренный треугольник;
следовательно, его центр тяжести лежит на
угол аОЬ пополам, на расстоянии 2/з R
сюда заключаем, что центры тяжести всех элелгентарных
секторов расположены на дуге АгВх радиуса ОАг = 2/3 R па равных
расстояниях друг от друга. В этих центрах приложены равные
веса рг элементарных секторов.
Следовательно, искомый центр тяжести С сектора АОВ совпа-
совпадает с центром системы параллельных сил/?г. В пределе при п-усо
задача, очевидно, сводится к нахождению центра тяжести однород-
однородной дуги АгВг. Поэтому на основании результата, полученного
в предыдущем примере, находим:
радиусе, делящем
от точки О. От-
(87)
214
СТАТИКА
С
Рпс. 146.
5. Центр т я ж е с т и п р и з м ы. Чтобы найти центр тя-
тяжести однородной призмы с основанием А1А2А3А4Аб (рис. 14E),
разобьем всю призму на большое число весьма тонких пластинок
плоскостями, параллельными основанию, про-
проведенными на равных весьма малых расстоя-
расстояниях друг от друга (на чертеже изображена
одна из таких пластинок ахага.Аа^а^). Ввиду того,
что толщина этих пластинок очень мала, их
можно принять за плоские многоугольники;
центры тяжести всех этих многоугольников,
в которых приложены их равные веса р{, лежат,
очевидно, на одной прямой CtC2, соединяющей
центры тяжести нижнего и верхнего оснований
призмы. Следовательно, искомый центр тяже-
тяжести призмы совпадает с центром системы парал-
параллельных сил рг, равных между собой и прило-
приложенных в точках, находящихся на прямой
СХС2 на равных расстояниях друг от друга.
В пределе при п->-оо задача, очевидно, сводится
к нахождению центра тяжести однородного
прямолинейного отрезка СгСг. Отсюда заключаем, что центр
тяжести однородной призмы находится в середине отрезка, соеди-
соединяющего центры тяжести нижнего и
верхнего оснований этой призмы.
Этот вывод, а следовательно, и ре-
результат остаются, очевидно, верными и
для какого угодпо однородного ци-
цилиндра.
6. Центр тяжести пира-
пирамид ы. Рассмотрим сначала однород-
однородный тетраэдр, т. е. однородную тре-
треугольную пирамидуЛ1Л2Л344 (рис. 147).
Плоскостями, параллельными основа-
основанию, разобьем всю пирамиду на боль-
большое число весьма тонких треугольных
пластинок. Принимая эти пластинки за
плоские треугольники, замечаем, что
центры тяжести всех этих подобных
треугольников лежат на одной прямой,
соединяющей вершину Ai пирамиды с центром тяжести ее основа-
основания, т. е. с точкой М пересечения медиан треугольника АгАъА3;
следовательно, на этой же прямой лежит искомый центр тяже-
тяжести данной пирамиды. Совершенно так же, разбивая данную
пирамиду плоскостями, параллельными грани Л2Л3Л4, приходим
к заключению, что ее центр тяжести должен лежать на прямой
АгК, причем К есть центр тяжести треугольника А2А3А±, т. е.
Рис. 147.
ГЛ 10. ЦЕНТР ТЯЖЕСТИ 215
точка пересечения его медиан, а потому искомый центр тяжести
пирамиды находится в точке С пересечения прямых А4М и АгК.
Найдем расстояние МС. По свойству медиан треугольника имеем:
LM = A- LAX и LK = | LAt;
из этих двух равенств следует, что
МК || AtAt и МК = -д-^И4-
Но если прямые Л1Л1н ЛГЙГ параллельны, то треугольника
и М(Ж подобны.
А потому
Л/Я 1
= -j-j- = ^ или
но МС + СЛ4 == МЛ4; следовательно, 4AfC = МЛ4; отсюда на-
находим:
МС = ~МЛ4.
Итак, центр тяжести однородной пирамиды лежит на отрезке,
соединяющем вершину пирамиды с центром тяжести ее основа-
основания, на расстоянии 74 этого отрезка от центра тяжести осно-
основания пирамиды.
Этот результат, полученный для тетраэдра, нетрудно распро-
распространить и на однородную многоугольную пирамиду, так как
данную многоугольную пирамиду можно разбить на тетраэдры
плоскостями, проведенными через вершину пирамиды и диагона-
диагонали многоугольника, являющегося ее основанием.
Рассматривая конус как предел вписанных в него пирамид, на
основании предыдущего результата приходим к заключению, что
центр тяжести однородного конуса лежит на отрезке, соеди-
соединяющем вершину конуса с центром тяжести его основания, на
расстоянии а/4 этого отрезка от вершины конуса.
§ 55. Определение центра тяжести тел и фигур
сложной формы
Часто применяемый метод определения центра тяжести тела
сложной геометрической формы состоит в том, что данное тело
разбивают, если это возможно, на такие части простейшей формы,
центры тяжести которых легко могут быть найдены на основании
сказанного в предыдущем параграфе.
Обозначим объемы этих простейших по форме частей данного
тела через Vlt F2, F3,..., а их веса — через Ри Р2, Р3,... Коор-
Координаты их центров тяжести обозначим через (хи уи zx), (x2, j/2* z2),...
Силы Plt />2, P3,... приложены в этих центрах. Теперь задача на-
нахождения центра тяжести тела сводится к определению положения
216 СТАТИКА
центра системы параллельных сил Рг, приложенных в известных
точках. Поэтому, обозначая координаты искомого центра тяжести*
данного тела через хс, ус и zc, будем иметь:
_
Ус-
с,
Если, предполагая тело однородным, обозначим через у вес еди-
единицы объема тела, то Pt = yVu P2 = yF2 и т. д. Подставляя эти
вначения в предыдущие формулы и сокращая на у, получим:
£ Vx %Vy £Fz (9JK.
xc=YV' yc==Yv'' G=lyv- ( '
Знаменатель этих формул 2 V выражает, понятно, объем всего
данного тела.
В тех случаях, когда нужно найти центр тяжести однородной
плоской фигуры или линии, в предыдущих формулах следует вместо
объемов Fj брать соответственно площади Si или
длины li тех простейших по форме частей, на кото-
которые разбивается данная сложная фигура или дан-
данная линия.
-j. Этот способ мы применяли уже в предыдущем
параграфе при нахождении центра тяжести мно-
многоугольника.
Пример 52. Найти центр тяжести фигуры, состоя-
состоящей из полукруга радиуса R и прямоугольника со сторо-
сторонами 2R я h (рис. 148).
Решение. Возьмем начало координат в геоме-
геометрическом центре О полукруга и направим координатные
оси, как указано на чертеже. Так как ось у является для
данной фшуры осью симметрии, то искомый центр тяжести
Р 148 лежит на этой оси и, следовательно, хс = 0. Остается
найти ус. Для этого разбиваем данную фигуру на две
части: полукруг и прямоугольник. Обозначим центры тяжести этих частей
через Сх и С2. Точка С, лежит в середине отрезка О А. Точка С\ находится
от точки О на расстоянии, равном, как мы видели в § 53, ^—. Ординату
искомого центра тяжести С дайной фигуры определяем теперь по формуле
Здесь S1 и S2 обозначают площади полукруга и прямоугольника, а у1 и
ординаты точек Ct и С2. Следовательно,
AR „
V S
3 ' _ 2 BR2-3A2)
ГЛ. 10. ЦЕНТР ТЯЖЕСТИ
217
Если -=-
меньше
-г =1/ у,
i О пол
I ТОЧКИ I
= О, т. е. центр тяжести данной фигуры совпадает
то ус
с центром О полукруга. В противном случае центр тяжести лежит выше
или ниже точки О, смотря по тому, будет ли отношение R : h больше или
тяжести Z-образной
Пример 53. Определить положение центра
фигуры, размеры которой указаны на рис. 149.
Решение. Проведем оси координат, как указано на чертеже, и разо-
разобьем данную фигуру на три прямоугольника (линии разрезов обозначены на
чертеже через аЬ и cd). Центры тяжести этих ,,
прямоугольников обозначим через С1, С2 и
С,, а их площади — через Si, S2 и S3. Коор-
КоорС С б
,,
динаты точек
р i 2 3 р
Со и С3 обозначим соответ-
—Зсм
Рис. 149.
Рис. 150.
ственно через хх и ух, х2 и у2, х3 и у3. Как видно из чертежа, будем иметь:
хх = — 1,5 см,
Ух = 4,5 см,
Si = 3 ■ 1 = 3 см2;
а?2 = 0,5 см,
2/2 = 3,0 см,
,<?, = 1 .4 = 4 см2;
х3 = 1,5 см,
Уз = 0,5 см,
S3 = 3 • 1 = 3 см2.
Координаты xq и ус искомого центра тяжести данной фигуры определяем
по формулам
x3Sa -4,5+2+4,5 . „
ss— = —з+4+з—=°-2с-и.
, yi1 + V22+y9S3 _ 13,5+12 4-1,5
Jc S + ^ + S3 3 + 4 -r 3 ~ '
i + ^ + S3
3 + 4
Л р и м е р 54. Определить положение центра тяжести двойного конуса,
т. е. тела, состоящего из двух конусов, имеющих общие основание радиуса R
и высоты HL и #2 (рис. 150).
218
СТАТИКА
Решение. Искомый центр тяжести лежит на оси симметрии тела, ко-
которую примем за ось Oz. Центры тяжести конусов, из которых состоит данное
тело, обозначим через Ci и Cs, а координаты точек Сх и С2 — через zi и z-2\
объемы этих конусов обозначим через \\ и V2. Тогда
3
V, =
яД'Я,
3
Координату zc искомого центра тяжести данного тела находим теперь по
формуле (88):
или
Ух
i- яЛ2
Н2
Если в данном теле или данной плоской фигуре имеются вырезанные
части (полости или отверстия), то для определения центра тяжести такого тела
или такой фигуры пользуются теми же приемами и теми же самыми форму-
формулами, как и в предыдущих примерах, но только
площади или объемы вырезанных (отнятых) ча-
частей нужно считать отрицательными, т. е. брать
их в этих формулах со знаком минус.
П р и м о р 55. Определить положение центра
тяжести фигуры, представляющей собой круг
радиуса Л, из которого вырезан круг меньшего
радиуса г; расстояние между центрами кругов
ОО1 = а (рис. 151).
Решение. Искомый центр тяжести лежит
па оси симметрии Ох, проходящей через центры
кругов О и Ot; начало координат возьмем в центр о
большого круга. Будем рассматривать данную
фигуру как состоящую из двух кругов радиусов
Лиг. Площадь первого круга Sx = яЛ2; центр тяжести этого круга совпа-
совпадает с началом координат О, следовательно, абсцисса этого центра хх = 0.
Центр тяжести второго круга совпадает с точкой Ох, абсцисса которой
хг = а. Так как площадь S2 этого круга отнимается, то ее нужно брать со
знаком минус; следовательно,
S2 = — яг2.
Абсцисса хс искомого центра тяжести определяется теперь по той же формуле,
как и в примере 53,
Рис. 151.
ИЛИ хг =
Пример 56. Найти центр тяжести фигуры ABDE, представляющей
собой трапецию, из которой вырезан полукруг с центром в точке О и с диа-
диаметром, равным АВ, если АЕ = a, BD = Ь и AD ~ h (рис. 152).
!) Центр тяжести данной фигуры совпадает, очевидно, с центром двух
антипараллельных сил: /\ и —J°2, где Рг — вес большого круга, & Р2 — вес
вырезанного круга.
ГЛ 10 ЦЕНТР ТЯЖЕСТИ
219
Решение. Возьмем начало координат в центре О вырезанного полу-
полукруга, ось х направим параллельно стороне АЕ и ось у — перпендикулярно
к этой стороне. Выделим в данной фигуре три части1 прямоугольник ABDK,
вырезанный полукруг и прямоугольный
треугольник KDE. Если обозначим пло-
площади этих частей соответственно через Sx,
S% и S3, а их центры тяжести — через
ci fo, ух), С2 {х2, уг) и С3 (х3, у3), то
яй2
1 = bh, 62 = g- ,
(a~b)h
=0. x, = з^ = дя, 2/2=O.
Рис. 152.
вычислить координаты х3 и i/3 точки С3, найдем сначала координаты
вершин треугольника KDE:
хк = Ь, xD = b, xE = а,
Л _ Л h
У К ~ 2 ' У° ~ ~2 ' Уе~ 2 *
Применяя формулы (84), получим:
хЕ
2/з =
УК
Уе
-Ь 26
1}
h
6 '
Площадь данной фигуры ABDE равна
S = bh —
Координаты
(} ормулам
+ ~ (а - b)h =
= | [86 - nh -f 4 (а - b)] = ~ [4 (a -f 6) — яЛ].
и i/c искомого центра тяжести данной фигуры находим по
^ Г4 (а
хс _ , ус _ _
Подставляя значения входящих сюда величин, получим:
b)(-a+ 26) h
T2
О
_ 2 662 — h2 + 2 (а2 + аб — 262) _ 2 2 (а2 + аб + №) — ,
~ 3 4 (а + Ъ) — nh ~ ~3 4 (a -J- 6) — яЛ
г/с =
-Г2(а-6)Л2
(a — 6)Л
3 4 (a -r 6) — nh '
220
СТАТИКА
§ 56. Применение общих формул к вычислению координат
центра тяжести
Способ нахождения центра тяжести, рассмотренный в предыду-
предыдущем параграфе, не является общим: он становится неприменимым
в том случае, когда данное тело или данную фигуру нельзя раз-
разбить на несколько частей простейшей геометрической формы, когда,
например, данное тело ограничено криволинейной поверхностью
произвольного вида или данная плоская фигура ограничена каким-
нибудь криволинейным контуром. В этих случаях, чтобы найти
положение центра тяжести, нужно применять общие формулы
G9), или (80), или (81) и входящие в эти формулы пределы интеграль-
интегральных сумм вычислять, как было уже указано в § 51, методами ин-
интегрального исчисления.
Пример 57. Найти центр тяжести параболического сегмента АОВ,
если высота этого сегмента равна h, а уравнение параболы имеет вид
х^
у = s—, где я — параметр параболы (рис. 153).
Решение. Так как ось у является для
сегмента АОВ осью симметрии, то искомый
центр тяжести С лежит на этой оси, а потому
хс = 0, и достаточно найти только ординату,
ус, т. е. расстояние ОС.
Разобьем всю площадь сегмента АОВ
прямыми, параллельными оси х, на большое
число п весьма узких полосок. Если обо-
обозначим ширину такой элементарной полоски
через Лг/, то ее площадь будет равна
У
ff
|\'
V
О
в
1\#
У
ТТ
У
Рис. 153.
= 2x- Ау.
Суммируя эти элементарные площади и переходя затем к пределу при я—со
и Лг/ —<- 0, получим величину площади S сегмента АОВ; следовательно,
S = lim £ 2х ■ Ау.
Но предел этой суммы выражается определенным интегралом, взятым по
переменному у в тех пределах, в которых изменяется у, т. е. в рассматри-
рассматриваемом случае в пределах от 0 до Л, а потому
h
S =2
х dy.
Из уравнения параболы имеем:
и, следовательно,
£ = 2
ft i_
' = 2 \г2р \ у dy =
2 yip ~ h2 = -|- Л \r2ph.
ГЛ. 10. ЦЕНТР ТЯЖЕСТИ
221
Для вычисления искомой ординаты ус центра тяжести сегмента АОВ вос-
воспользуемся формулой (80):
li
В этой формуле AS обозначает площадь элементарной части данной фигуры,
у обозначает ординату центра тяжести этой элементарной площадки, a S
есть площадь всей данной фигуры. Так как величина S уже определена, то
остается найти значение числителя предыдущей дроби.
Принимая за элемент площади AS площадь элементарной полоски, центр
тяжести которой лежит, очевидно, на оси у, и заменяя AS через 2х ■ Ау, по-
получим:
h
lim 2 У ■ AS = lim £ 2ху
Следовательно,
_4_
5
= 0,6/*.
Пример 58. Найти положение центра тяжести однородного полушара
радиуса R (рис. 154).
Решение. Примем ось симметрии полушара за ось z, а начало коор-
координат возьмем в геометрическом центре О полушара. Искомый центр тяжести
С лежит на оси симметрии z, и потому до-
достаточно найти расстояние ОС = zc.
Разобьем данный полушар плоскостя-
плоскостями, перпендикулярнымп к оси z, на боль-
большое число п весьма топких слоев; центр
тяжести каждого такого элементарного
слоя лежит, очевидно, на оси z. Для вычи-
вычисления искомой координаты zc применим
формулу G9):
ZC =
у •
В этой формуле AV есть объем элемен-
элементарной части данного тела, z — коорди- Рис. 154.
ната центра тяжести этого элементарного
объема, а V обозначает объем всего данного тела. Если за элемент объема
AV примем объем элементарного слоя, то
AV = лггАг,
где г есть радиус нижнего основания слоя, а Аз — его бесконечно малая высота;
следовательно,
lim £гД1/ = lim. £я2А
222 статика
Предел суммы 2яг2гАг при п—«оо и Az—О выражается определенным инте-
интегралом, взятым по переменному z в пределах изменения этого переменного,
т. е. в пределах от 0 до Л. А потому
R
HmSzAV = l nrHdz.
Ь
Но, как видно из рис. 154, г2 = Л2 — z2.
Подставляя это значение г2, получим:
R
lim £z AV = С я (Л2 —
b
z2) z rfz =
С zrfz-Я ^ г»</г
О о
^ -1 - я ^ =
О
2
Объем F полушара равен -тг яЛ3. Следовательно,
о
§ 57. Графическое определение центра тяжести
плоских фигур
Графический способ нахождения центра тяжести сложной пло-
плоской фигуры состоит в следующем: данную фигуру разбивают на
несколько таких частей простейшей геометрической формы, поло-
положение центров тяжести которых известно (например, на треуголь-
треугольники или прямоугольники). Обозначим центры тяжести таких ча-
частей через Clf С2, С3,...; положение этих точек может быть легко
найдено (например, центр тяжести треугольника лежит в точке
пересечения его медиан, центр тяжести прямоугольника — в точке
пересечения его диагоналей). В этих точках приложены веса
Plt P2, Р3, ... соответствующих частей, на которые разбивается
данная фигура. Обозначим площади этих частей через Slt S2, S3,...\
поскольку размеры фигуры заданы, эти площади также могут быть
найдены. Если данная фигура однородна, то веса Ри Рг, PSt...
пропорциональны площадям 5Х, S%, Ss,... ; поэтому при изображе-
изображении сил Р1; Р2, Р3, ... на чертеже в произвольно выбранном Maci
штабе длины векторов, изображающих эти силы, нужно брать
пропорциональными площадям S^
В результате получаем систему параллельных сил Ри Р2, Р3,...,
приложенных в известных точках Си С2, С3, ... Центр этих парал-
параллельных сил есть искомый центр тяжести данной фигуры; таким
ГЛ. 10. ЦЕНТР ТЯЖЕСТИ
223
образом, мы приходим к задаче нахождения центра заданной си-
системы параллельных сил, графическое решение которой рассмот-
рассмотрено в § 33.
Если данная фигура имеет ось симметрии, то решение задачи
упрощается, так как заранее известно, что центр тяжести такой
фигуры лежит на этой оси симметрии.
Пример 59. Найти'центр тяжести симметричпой двутавровой фпгуры,
изображенной на рис. 155.
Решение. Так как фигура имеет ось симметрии хх, то искомый центр
тяжести лежит на этой оси. Разбиваем данную фигуру прямыми ab и cd на
три прямоугольника. Веса этих прямоугольников, приложенные в их центрах
/см
Рис. 155.
тяжести на оси хх, пропорциональны их площадям; следовательно, эти веса,
как видно из заданных размеров фигуры, относятся между собой, как 3:4:4.
Построив в масштабе эти силы, которые обозначены на чертеже цифрами
1, 2 и 3, сложим их графически при помощи силового и веревочного много-
многоугольников; равнодействующая этих сил направлена по прямой, им парал-
параллельной и проходящей через точку К пересечения стороп а и со веревочного
мпогоугольника. Искомый центр тяжести лежит на этой прямой; следова-
следовательно, он находится в точке С пересечения этой прямой с осью симметрии
данной фигуры.
Пример 60. На рис. 156 дана Z-образная фигура; требуется найти по-
положение ее центра тяжести.
Решение. В § 55 мы решили эту задачу аналитически, вычисляя ко-
координаты искомого центра тяжести; теперь решим ее графически. Разобьем
данную фигуру на три прямоугольника прямыми аЪ и cd. Веса этих прямо-
прямоугольников обозначим цифрами 1, 2 я 3. Взяв размеры с рис. 149, видим,
что эти веса относятся между собой, как 3:4:3. Сложив графически эти
силы при помощи силового и веревочного многоугольников, найдем прямую,
по которой направлена равнодействующая этих сил; эта прямая параллельна
224
СТАТИКА
данным силам и проходит через точку пересечения К сторон а и » веревоч-
веревочного многоугольника; искомый центр тяжести фигуры лежит на этой прямой.
Так как данная фигура оси симметрии не имеет, то далее поступим согласно
сказанному в § 33, а именно: повернем силы 1, 2 и 3 вокруг их точек при-
приложения на прямой угол, так, чтобы они заняли положения Г, 2' и 3'.
/
Лк
/'
Г
/У
г
2'
С
а
2
А
^. 1
к
Рис. 156.
Построим веревочный многоугольник для этой новой системы сил; стороны
этого многоугольника а', 1'—2', 2'—3' и со' проводим перпендикулярно к со-
соответствующим сторонам а, 1—2, 2—3 и со первого веревочного мпогоуголь-
ника. Искомый центр тяжести лежит на прямой, параллельной силам 1',
2', 3' и проходящей через точку пересечения К' сторон а' и со' второго вере-
веревочного многоугольника; следовательно, он находится в точке С пересечения
прямых КС и К'С.
КИНЕМАТИКА
ГЛАВА И
ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 58. Введение в кинематику
В статике мы рассматривали равновесие абсолютно твердого
тела. Во второй части «Курса теоретической механики» — в Кине-
Кинематике — мы будем изучать движение абсолютно твердого тела.
Кинематика есть часть теоретической механики, в которой изу-
изучается движение механических систем, в частности движение твер-
твердого тела, независимо от сил, действующих на эти системы. По-
Поэтому с такими физическими понятиями, как масса движущегося
тела, действующие на него в данном движении силы, в кинематике
мы встречаться не будем.
Всякое движение происходит в пространстве и во времени.
В. И. Ленин пишет: «В мире пет ничего, кроме движущейся мате-
материи, и движущаяся материя не может двигаться иначе, как в про-
пространстве и во времени» (Ленин, Материализм и эмпириокри-
эмпириокритицизм, 1948, стр. 158).
Пространство и время так же объективно реальны, как мате-
материя, и представляют собой формы существования материи. Энгельс
в «Диалектике природы» указывает, что «обе эти формы существо-
существования материи без материи суть ничто, пустые представления,
абстракции, существующие только в нашей голове» (Энгельс,
Диалектика природы, 1953, стр. 187).
Механика, а следовательно, и кинематика изучают простейшую
форму движения материи — механическое движение. Под механи-
механическим движением понимается изменение с течением времени отно-
относительного положения материальных тел. При изучении движения
данного тела в кинематике его положение определяется по отно-
отношению к некоторой системе координат, связанной с другим телом,
например с землей, и называемой системой отсчета. Если положе-
положение данного тела по отношению к выбранной системе отсчета с те-
течением времени остается неизменным, то это тело относительно этой
системы отсчета находится в покое. Кинематически определить
движение тела — это значит указать его положение относительно
выбранной .системы отсчета в каждый данный момент времени.
8 и. ь... воронков
226 КИНЕМАТИКА
Отсюда следует, что покой и изучаемое в кинематике механическое
движение относительны в том смысле, что и покой и движение тела
мы наблюдаем по отношению к некоторой выбранной системе от-
отсчета. Одно и то же тело может совершать одновременно различные
движения по отношению к разным системам отсчета; так, например,
тело, находящееся в движущемся вагоне, относительно системы
отсчета, связанной с вагоном, может быть неподвижно, а относи-
относительно системы отсчета, связанной с землей, это тело будет дви-
двигаться со скоростью, равной скорости вагона.
Классическая механика рассматривает пространство, в котором
происходят наблюдаемые движения материальных тел, как трех-
трехмерное евклидово пространство и в своих построениях пользуется
евклидовой геометрией. Время в классической механике является
универсальным, т. е. оно предполагается одинаковым во всех си-
системах отсчета и не зависящим от относительного движения этих
систем. С математической точки зрения время рассматривается в ки-
кинематике как непрерывно изменяющаяся величина, играющая
роль независимого переменного (аргумента) и обозначаемая бук-
буквой /.
Практически для измерения времени пользуются часами или
секундомером. За единицу времени в механике принимается 1 се-
секунда =2/ „600 средних солнечных суток.
При измерении времени в кинематике приходится встречаться
с двумя понятиями: «момент t» и «промежуток времени t». В первом
случае под t понимается число секунд, отделяющих данный момент
(данное мгновение) от некоторого начального момента (начала от-
отсчета времени), например, от момента начала движения тела или
от того момента, с которого начали наблюдать это движение. Для на-
начального момента значение переменного t равно, следовательно,
нулю. Переменное t может принимать и отрицательные значения,
которые определяют моменты, предшествующие начальному мо-
моменту. Промежуток времени представляет собой число t секунд,
отделяющих два каких-нибудь последовательных момента времени.
Промежуток времени между двумя данными последовательными
моментами tt и t% равен, очевидно, разности t2—tt.
Все линейные величины, с которыми приходится встречаться
в кинематике (координаты движущейся точки, длина пройденного
ею пути и т. д.), мы будем, как правило, выражать в метрах, как
это принято в технической системе единиц.
В самостоятельный раздел теоретической механики кинема-
кинематика выделилась сравнительно недавно (в первой половине XIX в.)
в связи с развитием техники и машиностроения. Конструирование
новых сложных машин и механизмов ставило перед механикой за-
задачу исследования геометрических свойств движения твердого
тела и тем самым способствовало развитию кинематики. Весьма
ГЛ. 11. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 227
крупные достижения и успехи в области кинематики машип и
механизмов принадлежат русским ученым. Здесь необходимо от-
отметить работы акад. П. Л. Чебышева — основоположника рус-
русской школы теории механизмов и машин, проф. Л. В. Ассура,
создавшего свою известную и получившую широкое распрост-
распространение классификацию механизмов, и многих других выдающих-
выдающихся ученых.
Наблюдая движение какого-нибудь твердого тела, мы очень
часто видим, что движения различных точек этого тела различны;
так, при качении вагонного колеса по рельсу центр колеса дви-
движется по прямой линии, а какая-нибудь точка, лежащая на ок-
окружности колеса, описывает кривую линию (циклоиду); длина
пути, пройденного этими двумя точками за одно и то же время,
например за один оборот колеса, также неодинакова. Поэтому из-
изучение движения тела приходится начинать с изучения движения
отдельной точки, т. е. с кинематики точки.
Линия, описываемая движущейся точкой в пространстве, назы-
называется траекторией этой точки. Если траектория точки — прямая
линия, то движение точки называется прямолинейным; в противном
случае движение называется криволинейным. Мы начнем изучение
движения точки с более простого случая прямолинейного дви-
движения.
§ 59. Уравнение движения точки и график движения
Пусть движущаяся точка М описывает прямолинейную траек-
траекторию (рис. 157). Примем эту прямую за ось х и будем определять
положение точки на траектории ее абсциссой ОМ = х, причем О
есть произвольно выбранная на траектории неподвижпая точка
(начало координат). Так как при
движении точки М каждому данному 0 м
моменту времени (каждому число- " |, х \
вому значению переменного t) соот-
соответствует единственное определенное Рис 157.
положение этой точки на оси х и так
как при перемещении точки М из одного положения в другое она
последовательно проходит через все промежуточные положения,
то абсцисса точки М является некоторой однозначной и непре-
непрерывной функцией времени, что в общем виде можно записать так:
х = / (t). A)
Это уравнение называется уравнением движения или законом
движения точки М по оси х; в зависимости от вида функции / мы
будем иметь различные виды движения точки по данной прямо-
прямолинейной траектории. Если закон движения нам известен, т. е.
известна функция / (t), то для каждого произвольно выбранного
8*
228
КИНЕМАТИКА
момента времени (для каждого числового значения аргумента t)
мы сможем найти соответствующее значение х и, следовательно,
в каждый данный момент будем знать положение движущейся
точки М на ее траектории. Таким образом, уравнение A) вполне
определяет движенце точки по заданной прямолинейной траекто-
траектории. Для того чтобы иметь более наглядное представление о ха-
характере движения точки, часто применяют графический способ;
зависимость между х и t, выражаемую уравнением A), как функ-
функциональную зависимость между двумя переменными, можно изо-
изобразить на чертеже некоторой линией. Эта линия, изображающая
зависимость между абсциссой х движущейся точки и временем t,
т. е. график функции х — f (t), называется графиком движения,
или кривой расстояний.
Для того чтобы построить график движения, возьмем две
взаимно перпендикулярные координатные оси; по оси абсцисс
будем откладывать значения аргумента V, эта ось называется
осью времени; по оси ординат будем откладывать значения х; эта
ось называется осью расстояний. Масштаб для изображения еди-
единиц времени п единиц расстояния можно выбрать произвольно.
Давая t различные числовые значения, мы можем из уравне-
уравнения A) найтп соответствующие значения х; таким образом, зная
ряд значений t и х, можно построить по этим координатам ряд
точек. Соединяя эти точки непрерывной линией, получим гра-
график данного движения.
Рассмотрим в качестве примера движение точки, закон кото-
которого выражается уравнением
х = 0,Ы2-
Как видно из этого уравнения, абсцисса движущейся точки
возрастает пропорционально квадрату времени. Давая t последо-
последовательные числовые значения и находя по данному уравнению
соответствующие значения х, получим следующую табличку:
2 0
, | о
1
0,5
2
2
3
4,5
4
8
График движения представляет собой в данном случае кри-
кривую второго порядка — параболу (рис. 158).
Рассмотрим другой пример. Пусть точка М, выходя из Мо, опи-
описывает окружность радиуса а (рис. 159). Исследуем движение точ-
точки т по оси Ох, т. е. прямолинейное движение проекции точки М на
горизонтальный диаметр Ох. Пусть точка М описывает всю окруж-
окружность, длина которой равна 2па, в течение Т секунд. Если эта точка
движется так, что в равные промежутки времени проходит равные
ГЛ. П. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
229
пути, то длина пути, пройденного точкой М по окружности за
одну секунду, будет равна —ттг-, а угол поворота радиуса ОМ за
Рис. 159.
2я
одну секунду будет равен -^- (в радианах). Тогда угол поворота ф
радиуса ОМ за t секунд будет, очевидно, равен -= t. Полагая0т = а;,
из прямоугольного треугольника ОМт находим: х = a cos op или
х = a cos -=г t.
Это уравнение, выражающее зависимость между абсциссой
точки т и временем, представляет закон рассматриваемого прямо-
т т\
ч
fir 1
h' s
V
t
г
О
га
i
Рис. 160.
линейного движения точки т. Это движение называется гармони-
гармоническим колебанием. Точка О называется центром колебания, ве-
величина а — амплитудой колебания, величина ср = —, t называется
фазой колебания и Г — периодом колебания.
Построим теперь график этого гармонического колебания.
Возьмем координатные оси Oxl (рис. 160) и отложим на оси
230
КИНЕМАТИКА
времени в каком-нибудь масштабе величину периода колеба-
колебания Т. Разделим Т на несколько, например на восемь, равных
частей. В моменты
, _ л , _ Л , - JL t _ 3 т
h — ". Н ~ 8 ' h 4 ' h ~ 8 '
t — — t =- —Т t = — Т t —~Т t —Т
движущаяся точка М занимает положения Мо, Мх, М2, М3, М4,
М5, М6, М7 и М8 (рис. 161), а соответствующие значения х будут:
2
а У 2
г
х3 = —
= 0,
и a:s = а.
Таким образом получаем следующую таблицу:
t
X
0
а
Т
8~
а У~
2
Т
~4~
0
8 Х
a V'l
2
2
—а
а У'2
2
4
0
!-
а |/2
2
а
По координатам Z, а: строим на рис. 160 девять точек. Эти точки
располагаются на кривой линии, называемой косинусоидой; сле-
следовательно, график движения точки m представляет собой коси-
косинусоиду.
§ 60. Равномерное движение точки
Пусть точка, находившаяся в начальный момент (при t = 0)
в положении М„, движется по оси х (рис. 162). Начальное расстоя-
расстояние ОМа обозначим через ж0, переменную абсциссу ОМ обозначим
через х. Тогда расстояние М0М представляет собой, очевидно,
длину пути, пройденного точкой за t ce-
хо— у—s-~-I ^ кунд. Обозначая длину пути через S, бу-
—jf 1 •- дем иметь:
—и. х Л S = х — хп.
Рис. 162.
r
Равномерным движением точки назы-
называется такое движение, при котором
отношение пройденного пути к соответствующему промежутку
времени остается постоянным для любого промежутка времени.
При равномерном движении будем, следовательно, иметь:
S
-г — const.
ГЛ. П. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
231
Это постоянное отношение пути ко времени называется ско-
скоростью равномерного движения и обозначается буквой v, т. е.
v = - B)
t
Отсюда получаем:
S = vt, C)
т. е. путь, пройденный точкой при равномерном движении, равен
произведению скорости на время, и
S
< = Т ' D)
т. е. время, в течение которого точка при равномерном движении
проходит данный путь, равно отношению этого пути к скорости.
Равенства B), C) и D) являются основными формулами для
равномерного движения. По этим формулам определяется одна из
трех величии S, v, t, когда две другие известны.
Из равенства B) находим размерность скорости:
"• * I время
Пусть, например, за время t = 10 сек точка, двигаясь равномерно,
прошла путь S = 20 м. Тогда скорость точки равна 20 : 10 = 2 м
в секунду, или v = 2 м/сек.
Подставляя в уравнение C) вместо S разность х—х0, получим:
х—х0 = vt, или
х = хв + vt. E)
Уравнение E), выражающее зависимость между х и t, предста-
представляет собой закон равномерного движения. Так как это уравнение
первой степени относительно переменных х и t, то график
равномерного движения —
прямая линия.
Как на пример таких пря-
прямолинейных графиков можно
указать на железнодорожные
графики движения поездов.
Пример 61. Первый поезд
выходит со станции А в 3 часа
и приходит на станцию В в
5 ч. 30 м. Второй поезд выходит со
станции В в 4 ч. 30 м. и приходит t i i / . | | | . \
на станцию А в 7 часов. Опре- п 1 % t 1 с ~% ? —ttvaci
делить графически место и вре-
время встречи поездов, если расстоя-
расстояние между А я В равно 75 км.
Решение. Возьмем прямоугольные оси координат (рис. 163) и будем
на оси абсцисс откладывать время t, а на оси ординат — расстояние х поезда
от станции А. Пусть отрезок некоторой произвольно выбранной длины,
например 0,5 см, на оси абсцисс изображает промежуток времени в 1 нас,
XIKM/
3*56
Рис. 163.
232
КИНЕМАТИКА
х/м/
i
Q
g
£
5
4
J<
г
n
В С
/
/
(л
\
\
\
\
V
/ 23456789 Iff
Рис. 164.
t/ce/tf
а на оси ординат — расстояние в 10 км. Построим сначала график движения
первого поезда. Начальная точка этого графика, как видно из условия за-
задачи, имеет координаты 3 и 0; конечная точка его (когда поезд приходит на
станцию В) имеет координаты 5,5 и 7,5. Построив эти точки и соединив их
прямой линией, получим график движения первого поезда. Точно так же на-
начальная точка графика движения второго поезда имеет координаты 4,5 и 7,5,
а его конечная точка (когда поезд приходит на станцию А) имеет координаты
7 и 0; построив эти точки и соединив их прямой линией, получим график
движения второго поезда. Координаты точки пересечения этих прямых опре-
определяют время и место встречи поездов. Как
видно из рис. 163, эта встреча произойдет
в 5 часов на расстоянии 60 км от станции А.
Пример 62. Точка движется равно-
равномерно по оси х в положительном направ-
направлении в течение 4 сек и за это время прохо-
проходит путь, равный 5 м. Затем точка оста-
останавливается; остановка продолжается 3 сек.
После этого точка движется равномерно
в обратном направлении и через 3 сек до-
достигает начала координат. Построить гра-
график этого движения, если в начальный
момент абсцисса точки х0 = 3 м.
Решение. Взяв прямоугольные оси
Oxt (рис. 164), строим первую точку А
искомого графика; так как в начальный
момент при t = 0 по условию задачи ж0 =
= 3 м, то координаты точки А равны 0 и 3. За 4 сек движущаяся точка
проходит расстояние 5 м; следовательно, в момент t = 4 сек ее абсцисса
будет х — 3+5 = 8 л«. На графике строим точку В с координатами 4 и 8.
Соединяя точки А и В, получаем график движения до остановки. Так как
остановка длится 3 сек, и за это время величина х остается без изменения,
то в момент t = l сек абсцисса движущейся точки будет х = 8 м. На графике
получаем точку С с координатами 7 и 8. Периоду остановки соответствует на
графике движения прямолинейный отрезок ВС, параллельный оси времени.
После остановки точка движется в течение 3 сек и за это время достигает на-
начала координат; следовательно, в момент t = 7 + 3 = 10 сек абсцисса дви-
движущейся точки будет х = 0; на графике строим точку D с координатами 10
и 0. Соединив точки С vlD, получаем график движения точки после остановки.
Весь график данного движения изображается, следовательно, ломаной ли-
пией A BCD.
Посмотрим теперь, как по данному графику равномерного
движения определить скорость этого движения. Пусть движущаяся
точка в некоторый момент t1 занимает на
траектории положение Мх, а в момент
t2 — положение М2. Абсциссу ОМ1 обо-
обозначим через #!, а абсциссу ОМ% — через
х2 (рис. 165). Путь М1М2, пройденный
точкой за время t = t2 — tu обозначим
через S; тогда, очевидно, S = х2 — хх.
Пусть график этого движения изображается прямой линией,
образующей с осью времени угол а (рис. 166), и пусть отрезок
ОА на оси абсцисс изображает промежуток времени tu а отрезок
ОВ — промежуток времени t2; тогда отрезок АВ изображает
Рис. 165.
ГЛ. И. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
233
промежуток времени t2—tx — t. Пусть, далее, расстояние xt на
графике движения изображается ординатой АС, а расстояние
х2 — ординатой BD; тогда DE =
21
Чтобы определить скорость дан-
данного движения, нужно путь S раз-
разделить на время t; получим:
S DE DE
V = Т = АВ = СЁ
Рис. 166.
т. е. скорость равномерного движе-
движения численно равна тангенсу угла
между осью времени и прямолиней-
прямолинейным графиком этого движения.
Этот результат верен только в том
случае, когда при построении гра-
графика движения масштаб и для времени t, и для расстояний х взят
одинаковый, т. е. если единица времени и единица расстояния
на обеих осях изображаются
отрезками одинаковой длины.
Посмотрим, как выразится
скорость v при разных масшта-
масштабах для времени и для расстоя-
расстояний. Пусть отрезок, равный
единице длины (например, 1 см),
на оси абсцисс изображает про-
промежуток времени т (например,
60 сек), а на оси ординат изобра-
изображает расстояние а (например.
10 м). Пусть, далее, отрезок
А В содержит п таких единиц
длины, а отрезок DE содержит
Х/ИМ]
в/
1
/
1
L
30
20
/О
-г -г
tfmcj
0 12 3
Рис. 167.
т этих же единиц; тогда про-
промежуток времени t, изображаемый отрезком А В, равен пх, а
путь S, изображаемый отрезком DE, равен та и, следовательно,
но
S то
_DE _
~ АВ ~ 18 а>
а потому в этом случае будем иметь:
v = — tff a.
F0
234 кинематика
П р и si e p 63. На рис. 1G7 прямая А В изображает график равномерного
движения. Найти скорость этого движения.
Решение. Как видно из чертежа, единица длины на оси времени
изображает промежуток времени в 1 час; следовательно, т = 1 час. Та же еди-
единица длины на оси х изображает расстояние в 10 км; следовательно, о* = 10 км.
Из треугольника ОАВ находим: tg а = ^гт, = — . По формуле F') получаем:
1П 5 ,,. км 25 000 м _ м
v = 10 • -к- = 25 = -^гтт^ «s 7 —•.
2 час ЗьОО сек сек
§ 61. Скорость точки при неравномерном движении
Пусть точка движется по оси х по закону х — f (t). Если / (t)
есть линейная функция t, то согласно сказанному в предыдущем
параграфе в этом случае мы имеем равномерное движение; график
этого движения изображается прямой линией. Пусть / (t) есть
теперь какая угодно функция t; график движения изображается
в этом случае некоторой кривой линией. Такое движение назы-
называется неравномерным.
При неравномерном движении отношение пройденного пути
к соответствующему промежутку времени не является постоянной
величиной; другими словами, расстояния, проходимые точкой
за одинаковые промежутки времени, не равны между собой.
Рассмотрим, например, следующее уравнение движения: я=2г2,
где х выражено в метрах, a t — в секундах. При t = 0 имеем
х0 = 0; полагая t = 1, получим хх = 2; следовательно, путь,
пройденный точкой за первую секунду, равен
о^ :z=i x± — х$ = L м.
Полагая, далее, t = 2 и t = 3, получим х2 = 8 и х3 = 18; пути,
пройденные точкой за вторую и третью секунды, будут соответ-
соответственно равны:
52 = х2 — х1 = 6 м,
53 = xs — х2 = 10 м.
Мы видим, таким образом, что за каждую последующую секунду
точка проходит путь, больший, чем за предыдущую; следовательно,
быстрота движения возрастает с течением времени.
Если мы составим отношение пути S, пройденного точкой при
неравномерном движении, ко времени t, в течение которого этот
путь пройден, то это отношение дает нам так называемую среднюю
скорость за данный промежуток времени t или на данном пути S.
Среднюю скорость мы будем обозначать через v*\ следовательно,
ГЛ. И. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 235
Определим в предыдущем примере среднюю скорость точки за
первые три секунды; путь, пройденный точкой за первые три
секунды, равен
S = хэ — ха = 18 м;
следовательно,
v* = »- = 6 —.
о сек
Средняя скорость характеризует быстроту движения за неко-
некоторый данный промежуток времени, но не дает представления о
быстроте движения точки в отдельные моменты этого промежутка
нремени. Поэтому, кроме средней ско-
скорости, приходится определять мгно-
мгновенную скорость, или скорость точки
в данный момент. Эта скорость опре-
определяется следующим образом: пусть Рис 168
в данный момент t точка занимает
на траектории положение М (рис. 168). Через некоторый весьма
малый промежуток времени At, т. е. в момент t -f- At, точка
займет положение М'; расстояние ОМ' обозначим через х\
причем
*' = /(* + Д«).
Путь, пройденный точкой за время At, будет, очевидно, равен
отрезку ММ', причем
ММ' = х' — х = Ах = / (t + At) — / @.
Следовательно, средняя скорость за время At будет равна
Будем теперь промежуток времени At брать все меньше и меньше,
неограниченно приближая его к нулю. Предел, к которому стре-
стремится средняя скорость -г—, когда промежуток времени At
стремится к нулю, называется скоростью точки в данный
момент t, т. е.
,. * ,. Аж .. / It ->r At) — / (t)
v = hm v* = lim -r- = hm -^——— '-^- =
Д(-»0 Д(-.О Л' Д(->0 Дг
Следовательно, скорость точки в прямолинейном движении
равна производной от абсциссы движущейся точки по времени.
236
КИНЕМАТИКА
m dx
Ьсли производная -г положительна, то а; с течением времени
возрастает и, следовательно, движение происходит в положитель-
положительном направлении оси х.
„ dx
Ьсли же производная -^ при данном значении t отрицательна,
то х с течением времени убывает; следовательно, точка движется
по оси х в отрицательном направлении. Таким образом, знак
скорости определяет направление движения точки (в ту или
ДРУГУЮ сторону) по заданной прямолинейной траектории.
Чтобы указать это направление, скорость точки в прямоли-
прямолинейном движении изображают вектором, направленным вдоль
прямолинейной траектории точки в ту сторону, куда движется
точка. Длина этого вектора выражает в произвольно выбранном
масштабе абсолютную величину скорости.
В предыдущем примере при движении, совершающемся по за-
закону х = 2Р, скорость точки согласно сказанному будет равна
dx .
v = -т- = 4г.
dt
Отсюда видим, что скорость возрастает пропорционально времени.
Полагая в этом уравнении f = 1, t = 2, t ~ 3, найдем значения
скорости через одну, две и три секунды
после начала движения:
г;, = 4 — , v2 = 8— и », = 12— .
1 сек * сек Л сек
Таким образом, определение скорости
при неравномерном движении, закон ко-
которого известен, сводится к дифференци-
t рованию известной функции х = f (t).
Ту же задачу можно решить и графи-
графическим путем. Пусть нам дан график дви-
движения, изображаемый некоторой кривой
линией, уравнение которой есть х = f (t) (рис. 169); требуется по
этому графику найти скорость движущейся точки в некоторый
момент t. Возьмем на данной кривой точку А, абсцисса которой
имеет заданную величину t, и проведем через эту точку ка-
касательную к этой кривой; угол касательной с осью времени обо-
обозначим через а. Из дифференциального исчисления известно, что
производная ~ от функции х = / (t) равна тангенсу угла каса-
касательной с осью абсцисс. Следовательно,
v = tg a,
ч.е.скорость точки при неравномерном движении численно равна тан-
тангенсу угла между касательной к графику движения и осью времени.
Рис. 169.
ГЛ. П. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
237
Этот результат верен лишь в том случае, когда на графике
движения величины х и t изображаются в одинаковом масштабе.
При разных масштабах для х и t будем иметь:
v = ~ tg a,
т. е. ту же формулу F'), как и в случае равномерного движения.
Скорость точки при неравномерном движении, определяемая
по формуле v = j- = /' (t), представляет собой переменную величи-
величину, являющуюся функцией времени. Если изобразить функ-
функциональную зависимость между v и t графически, в виде соответ-
соответствующей кривой, то эта кривая называется графиком скорости
пли кривой скоростей. Для построения графика скорости посту-
поступаем следующим образом: берем прямоугольные координатные
оси и на оси абсцисс откладываем в каком-нибудь масштабе зна-
значения времени t, а на оси ординат — значения скорости v. Давая
переменному t в уравнении v = /' {t) какие-нибудь числовые зна-
значения и вычисляя соответствующие значения v, строим на чертеже
по этим координатам t и v ряд точек. Соединяя эти точки непре-
непрерывной линией, получим график скорости.
График скорости равномерного движения изображается, оче-
очевидно, прямой линией, параллельной оси времени.
Пример 64. Точка совершает гармоническое колебание по закону
x — a cos ( -y-
Найти ее скорость и построить кривую скоростей.
Решение. Дифференцируя данпое уравнение движения, находим!
Так как наибольшее значение синуса равно 1, то наибольшая скорость (по
абсолютной величине) равна —=- ; обозначим эту наибольшую скорость че-
через итах, т. е.
_ 2яа
шах ' f •
1 1 3 1 5 3^,7
Давая t последовательно значения О, ~^Т, -тТ, ^Т, —Т, ~qT, -tT,-^T,T
и вычисляя соответствующие значения v, получим следующую таблицу:
t
V
0
0
т
8
/2
Т
4
утах
1Г
8
2 max
Т
2
0
/2
3 т
4 1
утах
8 *
2 шах
Г
0
232
КИНЕМАТИКА
Строим по этим координатам на рис. 170 девять точек. Соединяя их не-
непрерывной линией, получаем синусоиду, которая представляет собой кривую
скоростей для данного гармонического колебания.
Пример 65. Закон движения шахтной клети при так называемом гар-
гармоническом подъеме выражается следующей формулой:
h= у (l-cosq>),
где Н обозначает полную высоту подъема клети,
-, Гы
ф = I/ -= t и а = const.
Найти скорость клети и время Т полного подъема.
— V,
Рис. 170.
Решение. Дифференцируя по t уравнение движения клети, находим:
dh Н . Лр
но
dt
Н'
следовательно,
v =
_ 8Ш ф = у -_ sm
2а
Для определения времени полного подъема клети в уравнении движения
нужно положить h — Н; тогда получим:
Я = ? A - cos ф);
отсюда находим: cos ф = — 1 и, следовательно, q> = я. Искомое время Т
определяется из уравнения
V
н
я,
ГЛ. 11. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 239
откуда
-«/£•
Пример 66. Прямолинейный стержень АВ = I скользит концами
по двум неподвижным прямолинейным направляющим Ох и Оу (рис. 171).
Зная скорость vx точки А, найти скорость v2 точки В.
Решение. Обозначим расстояние О А через х, а расстояние ОВ через
у; тогда
v = - - и v = -у- У
Из треугольника ОАВ имеем: В
Дифференцируя это уравнение по t, получим:
отсюда находим:
.. _ х ,, Рис. 171.
Если обозначим переменный угол наклона стержня через <р, то ctg'cp = --;
следовательно,
У2 = — Vl Ctg ф.
Знак минус указывает на то, что точка В движется по оси у в отрицательном
направлении.
§ 62. Определение пути, пройденного точкой,
по заданному закону изменения ее скорости
Пусть закон изменения скорости с течением времени известен
и выражается уравнением v = f'(t), где f'(t) — известная функция
времени. Предположим, что за данный промежуток времени
t = £2 — tx (от момента ty до момента t2) точка движется по своей
траектории в одном и том же направлении и, следовательно,
функция/' (t) сохраняет постоянный знак; пусть f'(t) ^> 0. Так
dx , ,
как v = -г-, то ах = v at; интегрируя это равенство в соответ-
соответствующих пределах, получим:
\ dx = V г? d£, или £2 — хх =
JO
Но разность ж2 — хх представляет собой путь S, пройденный
точкой за промежуток времени t; следовательно,
S = J »Л = J/'@*- (8)
240
КИНЕМАТИКА
Эта формула позволяет вычислить путь S, когда скорость является
известной функцией времени.
В том случае, когда/' (t) <^0 в промежутке от tt до t2, при опре-
определении длины пути S нужно брать абсолютную величину ско-
скорости, т. е.
S =
(8')
Рассмотрим еще графический способ решения той же задачи.
Построим кривую скоростей (рис. 172) и определим по этой кри-
кривой путь, пройденный точкой за промежуток времени от момента
tl до момента 1г; пусть этот промежуток времени изображается
отрезком AD. Разделим весь этот
промежуток на большое число п
очень малых промежутков Д^. За
весьма малый промежуток времени
Д/г скорость успеет измениться
весьма мало: движение за время
Д/4 можно считать почти равно-
равномерным, а потому путь Д£г, прой-
пройденный точкой за это время, при-
приближенно выразится так:
Д5, ъ vM,
Рис. 172.
где Vi есть скорость точки, которую она имеет в начале проме-
промежутка Д^,. Величина vlS.ti на чертеже изображается площадью
ваштрихованного элементарного прямоугольника.
Длина всего пути, пройденного точкой за время t, равна
В пределе, когда каждый промежуток времени Att стремится
к нулю, а число п стремится к сю, сумма площадей всех элементар-
элементарных прямоугольников представляет собой площадь криволиней-
криволинейной фигуры A BCD и, следовательно,
S = пл. ABCD,
т. е. пройденный путь изображается площадью, ограниченной
осью времени, кривой скоростей и двумя ее крайними ординатами.
Пусть, например, на рис. 173 изображен график скорости руд-
рудничной клети, имеющий вид трапеции О ABC. Пусть время уско-
ускоренного движения клети равно tx, т. е. OD = tu время равно-
равномерного движения равно t2, т. е. DE = t2, и время замедленного
движения равно t3, т. е. ЕС = t3.
ГЛ. И. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
241
Максимальную скорость, т. е. скорость равномерного движе-
движения клети, обозначим через vm. Тогда путь, пройденный за все
время движения £ = tx -}
разится так:
S = пл. ОАО + пл. DABE
Прп определении пройденного пути
по графику скорости нужно, конечно, Рис. 173.
принимать во внимание масштабы,
в которых изображаются на этой диаграмме значения tnv. Пусть,
например, график скорости (кривая скоростей), изображенный
на рис. 172, построен на миллиметровой бумаге, и пусть отре-
отрезок, равный 1 мм, изображает на оси абсцисс промежуток вре-
времени, равный т сек, а на оси ординат — скорость, равную р" м/сек.
Тогда пройденный путь в метрах выразится так:
S = Рт пл. ABCD,
причем площадь A BCD выражается в квадратных миллиметрах.
§ 63. Ускорение точки в прямолинейном движении.
Равномерно переменное движение
Ускорением точки в прямолинейном движении называется
величина, характеризующая быстроту изменения скорости с те-
dv
чением времени, т. е. производная ■=
Если закон движения точки выражается уравнением х = f(t),
то
• - в - Г «:
обозначая ускорение через w, будем иметь:
_ dv _ ,, . .
(9)
Отсюда следует, что если скорость v и ускорение w имеют оди-
одинаковые знаки, то абсолютная величина скорости возрастает, и
следовательно, движение точки является ускоренным, если же
г? и w имеют разные знаки, то движение будет замедленным. Из
формулы (9) следует также, что ускорение обращается в нуль в те
моменты, когда величина скорости проходит через максимум или
минимум.
Если ускорение сохраняет во все время движения постоянное
значение а, то такое движение называется равномерно переменным,
242 КИНЕМАТИКА
При этом, если скорость по абсолютной величине возрастает,
то движение называется равномерно ускоренным; если же ско-
скорость по абсолютной величине убывает, то движение называется
равномерно замедленным.
Из равенства
dv __
dt ~~ a
имеем:
dv = a dt.
Интегрируя это уравнение в соответствующих пределах, находим:
v t
у dv = \ a dt,
ИЛИ
v = v0 -\- at, A0)
где v0 — начальная скорость точки, т. е. скорость в момент t = 0.
Для определения пути S, пройденного точкой за время t при
равномерно переменном движении, на основании формулы (8)
предыдущего параграфа имеем:
t (
S = [ v dt = С (v0 + at) dt = vot + \ at2 A1)
о о
(при условии, что движение за весь промежуток времени t проис-
происходит в одном и том же направлении). Пусть г>0^>0; тогда, если а^>0,
то движение будет равномерно ускоренным; если же а<^0, то дви-
движение будет равномерно замедленным до того момента, когда ско-
скорость v обращается в нуль, т.е. до момента t= . Формула A1)
для пути S будет справедлива только до этого момента.
Формулу A1) можно представить еще в другом виде: вынося
множитель „ за скобки, получим:
S = 2~ Bг>о + at) = { (v0 + v0 + at),
или на основании формулы A0)
S=^L A1')
Из формулы A0) получаем:
/7 :—•
ГЛ 11. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 243
т. е. при равномерно переменном движении ускорение равно от-
отношению изменения скорости к соответствующему промежутку
времени. Из этого соотношения находим размерность ускорения:
г -, , ■■ [скорость"] [длина! г , [д.шна~\
[а] — Г w] = — = : [время] — = .
J L L время J увремя J [времяг \
Если t — 1 сек иг; — v№ = 1 м/сек, то а = 1 м/сек2. Единицей
ускорения является, следовательно, ускорение такого равномерно
переменного движения, при котором скорость в течение 1 сек
увеличивается на 1 м/сек. Эта единица обозначается так: м/сек2
или м ■ сект2.
Из физики известно, что тело, падающее в пустоте, движется
равномерно ускоренно, причем его ускорение, обозначаемое
буквой g, равно 9,81 м/секг. Скорость падающего тела выразится,
следовательно, так:
v = v, + gt, A2)
а путь, пройденный падающим телом, определяется по формуле A1),
в которой нужно положить а = g, т. е.
S=v,t+\gt2. A3)
Если тело начинает падать без начальной скорости, то г;0 = О,
и предыдущие формулы принимают следующий вид:
v = gt и S = * gt*.
Исключая из этих равенств t, находим:
A4)
При движении тела, брошенного вертикально вверх, его ско-
скорость убывает; движение тела является равномерно замедленным;
и этом случае ускорение а = —• g. Поэтому в формулах A2) и A3)
нужно брать в этом случае знак минус, а не плюс.
Аналогично тому, как строится кривая скоростей, можно
построить график ускорения или кривую ускорений, т. е. кривую,
изображающую графически зависимость между w та. t, или, что
то же, график функции w = /" (t).
Мы знаем, что скорость численно выражается тангенсом угла
касательной к графику движения с осью времени; совершенно так
же ускорение численно равно тангенсу угла у, который касателъ-
244
КИНЕМАТИКА
нал к графику скорости образует с осью времени (рис. 174), т. е.
w = tg у. A5)
При разных масштабах для скорости и времени будем иметь:
w — J-tgy, A5')
где Р — масштаб скорости и т — масштаб времени.
Пример 67. Два тела движутся по прямой линии навстречу друг другу
с ускорениями ах = 6 м/сек2 и а2 — ^ м/сек2 и начальными скоростями
v01 = 10 м/сек и v02 = 15 ж/сак. Начальное расстояние между ними I =
= 750 м. Через сколько времени эти тела
встретятся?
Решение. Обозначив путь,
пройденный до встречи первым телом,
через S^ а путь, пройденный вторым
телом, через S2, будем иметь на осно-
основании формулы A1) для пути при рав-
равномерно переменном движении:
Si = Юг 4- Зг2 и S2 = 15г -
Так как
Г* I с* ^^ 7 _^ *7 КГ\
*Jj ~f- u% — L '— IO\Jf
/1
2г2.
О
Рис. 174.
то получаем уравнение
5г2 + 25г - 750 = 0.
Решая это уравнение, находим искомое время г = 10 сек х).
Пример 68. Найти ускорение точки, совершающей гармоническое ко-
колебание по закону
2я
х = a cos -=- и
Решение. Дифференцируя два раза по t данное уравнение движения
точки, находим:
dv
4л2а 2я
' /Т12 C0S "jT
или
4я2
= - -Тг х-
Последнее равенство показывает, что ускорение при гармоническом ко-
колебании пропорционально расстоянию точки от центра колебаний.
4я2а . 4я2а
Это ускоренпе изменяется в пределах от =^- до -|—^- ; в тот момент,
когда точка проходит через центр колебаний, ее ускорение равно нулю.
Если построим кривую ускорений, то получим, очевидно, косинусоиду.
Пример 69. Кривошип ОА = г (рис. 175) вращается вокруг неподвиж-
неподвижной точки О равномерно, т. е. так, что угол поворота ф возрастает пропор-
пропорционально времени. В точке А он соединен при помощи шарнира с шатуном
г) Отрицательный корень этого уравнения по смыслу вопроса задачи,
очевидно, еледует отбросить.
ГЛ. 11. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 245
АВ = I, который приводит в движение соединенный с ним шарнирно ползун
В, движущийся прямолинейно между двумя направляющими параллелями.
Определить скорость и ускорение ползуна В.
Решение. Обозначим угол поворота кривошипа за промежуток
Бремени, равный t, через ф; величину этого угла будем выражать в ра-
Ф
дианах. При равпомерном вращении кривошипа отношение — есть
величина постоянная, т. е.
— = const;
эта постоянная величина назы-
называется угловой скоростью кри-
кривошипа и обозначается буквой
со; следовательно,
— = со, или ф = сог. Рис. 175.
Опустив из точки А перпендикуляр АС на прямую ОВ и обозначив рас-
расстояние ОВ через х, будем иметь:
х = ОС 4- СВ = r cos ф + 2 cos ф,
где ф обозначает угол наклона шатуна, т. е. угол ОБА. Этот угол находим
из треугольника ОАВ, применяя теорему сипусов:
sin гр г . г .
——— = — , или sm \b = - sm ф.
sm ф I т I T
Искомая скорость ползуна В выразится так:
dx I . dw dty
v = —- = — г sin ф -— + I sm ф -т1
dt \ ^ dt Y dt
Ho —= со, а производную -~ находим, дифференцируя по t равенство,
dt ctt
выражающее зависимость между углами ф и if>:
d\b r
cos ф -т1 = у cos if • со,
откуда
<ЙЬ ;• COS |
dt I cos
■ со.
Подставляя значения производных -р и — в выражение для скорости v,
находим:
/ . , . , cos ф\ sin (ф + ф)
г; = — гсо sin ф + sin ф — = — га> ^2——i—
\ cos ф/ cos ф
Эта формула позволяет, задавшись значением угла ф, найти скорость пол-
ползуна при любом положении кривошипа; например, при ф = 0 имеем ij> = 0 и,
следовательно, v = 0; при ф = 90° имеем:
sin (ф + ф) = sin (90° + ф) = cos ф
и, следовательно, v — — гш. Знак минус указывает на то, яю ползун дви-
движется по оси х в отрицательном направлении.
246 КИНЕМАТИКА
Полученную формулу для скорости v можно заменить более простой,
приближенной, формулой; это можно сделать в том случае, когда отноше-
отношение - невелико (обычно длина шатуна в 5—6 раз больше длины кривошипа).
Положим, например, что — = 0,2, тогда
sin ty = 0,2 sin ф и cos ty = У \ — 0,04 sin2 ф;
так как наибольшее значение sin ф равно 1, то
1 5? cos t|) ^~ У~бЖ или 1 52 cos t|) 52 0,98.
Отсюда видим, что с достаточной точностью можно принять cos ip равным 1.
Тогда
v = — rto (sin ф + sin г|з cos ф).
Заменяя здесь sin ty его значением — sin ф, получаем следующую прибли-
приближенную формулу для v, которой часто пользуются в кинематике механизмов:
/ . г .
V = — ГШ [ Sin ф "V "у Sin ф COS ф
или
v = —г® | sin ф -f — j sin 2ф J.
Чтобы определить теперь ускорение ползуна, достаточпо найти производную
dv ,
,-•, пользуясь приближенным выражением для v, получим следующую при-
приближенную формулу для ускорения ползуна:
dv I , г _ \ dm
w = — = — гш cos ф Ч—г cos 2ф ~-,
dt \ I I dt
или
COS ф + -у COS 2ф) .
ГЛАВА 12
КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 64. Уравнения движения точки
Пусть точка М движется по заданной криволинейной траекто-
траектории (рис. 176). Для того чтобы вполне определить движение точки,
недостаточно знать только ее траекторию; нужно еще знать поло-
положение точки на этой траектории в каждый данный момент времени.
Выберем произвольно на данной траектории неподвижную точ-
точку О и будем определять положение движущейся точки М на
траектории ее расстоянием от точки О, отсчитываемым по этой
ГЛ. \2 КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 247
траектории, т. е. длиной дуги ОМ = s. Однако величиной этой
дуги s положение точки М не определяется однозначно. В самом
деле, дугу, равную s, мы можем откладывать на данной траекто-
траектории от точки О как в одном направлении, так и в другом; следова-
следовательно, каждому значению s будут соответствовать два положения
точки М на траектории. Для избежания этой двойственности ус-
установим на данной траектории положительное направление отсчета
дуг s и будем считать величину s алгебраической, т. е. положитель-
положительной или отрицательной: если направле-
направление перемещения точки по траектории из
положения О в положение М совпадает
с выбранным положительным направ-
направлением отсчета дуг s, то длину дуги
ОМ будем считать положительной; '"'
в противном случае эту длину будем Рис. 170.
считать отрицательной. Тогда каждому
алгебраическому значению величины s будет соответствовать един-
единственное и вполне определенное положение точки М на задан-
заданной траектории; аналогично этому на прямолинейной траектории
положение точки М однозначно определяется алгебраическим
значением ее абсциссы. Алгебраическую величину s будем назы-
называть дуговой координатой, точки М.
Так как в каждый данный момент точка М занимает вполне
определенное положение на траектории, то каждому данному зна-
значению t соответствует единственное, вполне определенное значе-
значение s; другими словами, при движении точки ее дуговая коорди-
координата s является функцией (однозначной и непрерывной) от t, т. е.
* = / @- A6)
Это равенство, так же как и в случае прямолинейного движе-
движения, называется законом движения или уравнением движения
точки по данной траектории.
Если известны траектория точки и закон движения ее по
этой траектории, т. е. вид функции /, то движение точки вполне
определено: во всякий данный момент времени мы сможем опреде-
определить положение движущейся точки на данной траектории, а сле-
следовательно, и в пространстве.
Другой кинематический способ определения криволинейного
движения точки заключается в том, что положение движущейся
точки в пространстве определяют тремя ее декартовыми координа-
координатами относительно выбранной неподвижной прямоугольной си-
системы осей; при движении точки эти координаты являются одно-
однозначными и непрерывными функциями времени t, т. е.
* = h @. у = h @. z = /3 (t). A7)
248 КИНЕМАТИКА
Эти уравнения называются уравнениями движения точки в де-
декартовых координатах. Если функции /15 /2 и /3 известны, то
положение точки в пространстве для каждого данного момента
времени вполне определено, а потому предыдущие уравнения вполне
определяют криволинейное движение точки. Исключая из этих
уравнений время t, получим два соотношения между координа-
координатами х, у и z, которые определяют линию, описываемую в про-
пространстве движущейся точкой, т. е. ее траекторию.
Если движущаяся точка остается во все время движения в одной
и той же плоскости, то, приняв эту плоскость за координатную
плоскость Оху, будем иметь только два уравнения движения:
* = Л W, У = h @- A7')
Итак, криволинейное движение точки может быть определено
следующими двумя способами: 1) известны траектория точки и
закон движения ее по этой траектории, т. е. уравнение A6);
2) известны уравнения движения точки в декартовых координа-
координатах, т. е. уравнения A7) или A7').
Для определения положения движущейся точки можно поль-
пользоваться, конечно, не только декартовыми прямоугольными коор-
координатами. Так, если точка описывает плоскую траекторию, то
в этом случае в кинематике нередко пользуются полярными коор-
координатами. Уравнения, выражающие полярные координаты дви-
движущейся точки (полярный угол ф и радиус-вектор г) в функциях
времени, т. е. уравнения
Ф = Fi (О,
г = F2 (t),
называются уравнениями движения точки в полярных координа-
координатах. Исключив из этих уравнений время t, получим уравнение
траектории точки в полярных координатах.
Пример 70. Движение точки определяется уравнениями
х = а + at, у = b -\- $t, z = с 4* yt.
Требуется найти траекторию точки.
Решение. Из данных уравнений находим:
1~1Г 1-Т~ tz=-j-
Отсюда получаем уравнения траектории
х — а _у — Ь _ z—о
Следовательно, в данном случае точка движется по прямой линии.
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
249
Пример 71. Отрезок АВ данной длины скользит концами В а А по
осям Ох ц Оу (рис. 177). Возьмем на этом отрезке какую-нибудь точку М,
причем МА = а и MB = Ъ. Требуется определить траекторию этой точки.
Решение. Построив координаты точки М
и обозначив угол наклона отрезка АВ к оси х
через ф, будем, очевидно, иметь:
х — a cos ф, у = Ь sin ф.
Для исключения из этих уравнений переменного
параметра ф перепишем их в виде
х у
— = COS ф, -tr- = Sin ф.
Возводя эти уравнения в квадрат и складывая О
их, получим уравнение искомой траектории
х- уг
я2 &2
Следовательно, точка М описывает эллипс с полуосями а и Ъ. На этом
принципе основано устройство эллипсографа, т. е. прибора для вычерчивания
эллипсов.
П р н м е р 72. Прямолинейная трубка ОА вращается равномерно в гори-
горизонтальной плоскости вокруг неподвижной точки О с угловой скоростью со
(рис. 178). Находящийся в трубке шарик М дви-
движется вдоль трубки по закону ОМ = aemt.
Найти траекторию шарика, если в начальный
момент угол ф, образуемый трубкой с неподвиж-
неподвижной осью Ох, равен нулю.
Решение. Так как трубка вращается
равномерно, то ее угол поворота ф через t сек
будет равен ш1 (см. пример 69). Следовательно,
полярные координаты точки М (полярный угол ф
и радиус-вектор г = ОМ) в момент t равны
ф = см,
Рис. 178.
Отсюда, исключая t, находим уравнение искомой траектории в полярных
координатах
г = ае9.
Это есть уравнение логарифмической спирали.
§ 65. Дифференцирование переменного вектора.
Свойства векторной производной
В кинематике часто приходится встречаться с переменными
векторными величинами, изменяющимися с течением времени как
по модулю, так и по направлению. Такими переменными векторами
являются, например, радиус-вектор г движущейся точки, а также,
как увидим далее, скорость и ускорение точки в криволинейном
движении. Поэтому, прежде чем переходить к дальнейшему изуче-
изучению криволинейного движения точки, рассмотрим операцию
векторного дифференцирования.
250
КИНЕМАТИКА
Пусть имеем переменный вектор а, изменяющийся (как по
модулю, так и по направлению) с течением времени по определен-
определенному закону. Рассматривая а как векторную функцию врехменц,
будем иметь:
а = F @.
Пусть в моменты t, flt t2, t3 и т. д. значения данного переменного
вектора будут а, ах, а2, az и т. д. (рис. 179). Геометрическое место
концов этих векторов, или, другими сло-
словами, линия, описываемая в пространстве
концом переменного вектора, начало ко-
которого находится в данной неподвижной
точке, называется годографом этого век-
вектора. Так, например, годографом ради-
радиуса-вектора г движущейся точки М яв-
является траектория этой точки.
Рассмотрим теперь два каких-нибудь
близких момента времени t и t -\- At.
Значения переменного вектора в эти мо-
моменты пусть будут а = О А и а' = ОА'. Соединив точки годо-
годографа Л и Л', из треугольника О А А' будем иметь:
179.
или
Следовательно, вектор А А' представляет собой изменение
(приращение) данного вектора а за время At. Если обозначим раз-
разность а'—а через Да, то А А' = Да.
Разделив вектор Да на приращение аргумента At, получим
новый вектор АВ, направленный по хорде АА' годографа1) и
равный по модулю отношению длины этой хорды к At, т. е.
Перейдем теперь к пределу, предполагая, что At стремится к нулю;
предел отношения -;— при At -*■ О называется производной от век-
вектора а по аргументу t и обозначается через -т- , т. е.
da .. Да .. Тг>
-г- = lim -r- = lim AB.
dl д<-ол< Д!-о
A8)
х) При делении или умножении вектора на положительную скалярную
величину изменяется только модуль этого вектора, а направление его остается
неизменным.
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 251
Пусть вектор АВ в пределе займет положение АС. Тогда
-г = АС. Так как точка А' в пределе совпадает с точкой А, то
секущая АВ превращается в касательную к годографу, следова-
следовательно, вектор АС направлен по касательной к годографу вектора а.
Таким образом, мы видим, что операция векторного дифферен-
дифференцирования аналогична дифференцированию скалярной функции,
но производная от данного вектора представляет собой новый
вектор, направленный по касательной к годографу дифференци-
дифференцируемого вектора.
Рассмотрим некоторые основные свойства векторной производ-
производной, которые являются следствием из данного определения опера-
операции векторного дифференцирования:
1. Если а = const, т. е. если вектор а остается постоянным
как по модулю, так и по направлению, то — = 0.
„ d (а + Ь — с) _^da db dc
dt dt dt dt
Эти свойства векторной производной можно доказать совер-
совершенно так же, как доказываются аналогичные теоремы в дифферен-
дифференциальном исчислении. Точно так же нетрудно показать, что при
дифференцировании произведения вектора а на скаляр К или
произведения двух векторов (скалярного или векторного) мы
имеем то же самое правило, как и при дифференцировании произ-
произведения двух скалярных функций, т. е.
., d (ka) dk л da
dt dt *~ dt '
Если X = const, то -у- = 0 и, следовательно, в этом случае
%da
т-, . d (ka) dk
Если а — const, то , = -r- a.
dt dt
, d(a-b) _da ., db^
Разлагая переменный вектор а по трем неподвижным коорди-
координатным осям, будем иметь (§ 9):
а = aj + aj + azk.
В этом равенстве координатные орты i, /и/с представляют собой
постоянные векторы, так как ни их модуль, ни направление с тече-
течением времени не изменяются. Что касается проекций ах, ау и а2, то
из равенства а = F (t) следует, что проекции переменного вектора
о на данные координатные оси, изменяясь с течением времени по
252 КИНЕМАТИКА
определенному закону, являются некоторыми скалярными функ-
функциями от /, т. е.
я* = Ш, % = Ш), az = /,(*).
Дифференцируя предыдущее векторное равенство и принимая во
внимание свойства B) и C) векторной производной, получим:
da dax . . day . , da, ,
Это равенство представляет собой формулу разложения производ-
производной — по координатным осям. Так как в формуле разложения
вектора по координатным осям скалярные коэффициенты при
i, j и к являются проекциями этого вектора на соответствующие
оси, то из полученной формулы следует:
da\ __ dax fda\ _ day fda\ _ doj.
dt)x~~dt' \dljy~~~dt' \dtlz~~~It'
т. е. приходим к следующей теореме: проекция производной дан-
данного вектора на неподвижную ось равна производной от проекции
этого вектора на ту же ось.
Если функции fy{t), f2(t) и /3@, которыми выражаются проек-
проекции переменного вектора а, известны, то, дифференцируя эти
функции, найдем на основании полученной теоремы проекции
„ da
производной -т- на координатные оси, а зная три проекции век-
вектора -г-, можно по известным формулам (§ 7) определить его
модуль и его направление (направляющие косинусы).
Отсюда следует, что производную -£ от вектора а можно опре-
определить как такой вектор, проекции которого на неподвижные коор-
координатные оси равны производным по t от соответствующих проек-
проекций вектора а на те же оси.
§ 66. Скорость точки в криволинейном движении
Скорость точки в криволинейном движении представляет собой
векторную величину, характеризующую для каждого данного
момента быстроту движения точки и направление этого движения.
Пусть точка М описывает данную криволинейную траекторию,
двигаясь по ней по закону s = f(t), где s = ОМ есть дуговая коор-
координата этой точки (рис. 180).
Предположим, что в некоторый момент t движущаяся точка за-
занимает положение М на траектории; пусть через малый про межу-
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 253
ток времени At, т. е. в момент t + At, та же точка занимает поло-
положение М'. Тогда ОМ' — s' = f{t + At) и MM' «= s' — s =* As.
Вектор MM', т. е. вектор, начало которого совпадает с началь-
начальным положением движущейся точки, а конец — с ее конечным
положением, называется перемещением
точки за время At.
Отложим от точки М по направле-
направлению ММ' вектор МК, равный по мо-
модулю отношению длины ММ' к соот-
соответствующему промежутку времени At.
Этот вектор называется средней скоро-
скоростью точки за время At. Если обозначим
среднюю скорость точки через с*, то
ММ'
== МК. Будем теперь при-
приближать At к нулю; точка М' будет при Рис- 80-
этом приближаться к точке М. В пре-
пределе направление вектора v* совпадает с направлением касатель-
.. ММ'
ной к траектории в точке М, а модуль его будет равен um д, ,
Пусть вектор, представляющий собой предел вектора v* = МК
при At —* 0, изображается на рис. 180 вектором ML. Предел сред-
средней скорости и* при At —> 0 называется скоростью движущейся
точки в момент t.
Если обозначим эту скорость через v, то
MM'
v = lim v* = lim -^~-= Hm MK = ML.
At^O AI-^0 Ai Д(-0
Для модуля скорости имеем:
.. ММ' ,. MM' As ,. ММ' .. Аз
v = hm —-;— = lim —г— -г- = lim . lim — ,
д<-о дг д(-о As At дз-о As д(-о дг
Но, как известно, предел отношения бесконечно малой дуги к стя-
стягивающей ее хорде равен 1, т. е.
,. ММ' ,. ММ'
lim-r- iim
Д8-.0
а потому
r=limff = g = /'(f). A9)
т, ds
Если производная -? положительна, то с увеличением t вели-
величина s возрастает; следовательно, точка движется по траектории
в положительном направлений, т. е. направление движения точки
254 КИНЕМАТИКА
по траектории совпадает с положительным направлением отсчета
дуг s; если же эта производная отрицательна, то точка движется по
траектории в отрицательном направлении. В последнем случае
при определении модуля скорости нужно брать абсолютное зна-
„ ds
чение производной -?-
Таким образом, производная ~ определяет алгебраическое
значение скорости, а знак этой производной указывает, в какую
сторону по касательной к траектории (в направлении возрастания
или убывания дуговой координаты s) направлен
вектор скорости v.
Итак, скорость v направлена по касатель-
касательной к траектории, и равна по модулю абсолют-
абсолютному значению производной от дуговой коорди-
координаты движущейся точки по времени.
Если скорость точки остается постоянной
по модулю, т. е. v = const, то мы имеем рав-
равномерное криволинейное движение. В этом
случае, так же как и при равномерном пря-
прямолинейном движении, величина s является
линейной функцией времени, т. е. s = s0 + vt, где s0 — началь-
начальное значение s при t = 0.
Дадим теперь выражение для скорости v в виде векторной
производной. Возьмем какую-нибудь неподвижную точку О
(начало координат) и соединим точку М с О (рис. 181). Радиус-
вектор г = ОМ движущейся точки М, изменяясь с течением вре-
времени, является векторной функцией от t, т. е.
г = F(t).
Проводя радиус-вектор г' точки М', из треугольника ОМЫ'
имеем:
г' = г + ММ', или ММ' = г' — г = Аг,
где Аг есть изменение радиуса-вектора движущейся точки за время
At. На основании предыдущего имеем:
Л ШИТ Лг ,. Дг
Но согласно сказанному в предыдущем параграфе предел отно-
отношения д- при At-^O есть производная -^; следовательно,
» = £, B0)
т. е. скорость движущейся точки равна [по модулю и направле-
направлению) векторной производной от радиуса-вектора этой точки по
времени.
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 67. Ускорение точки в криволинейном движении
255
Мы знаем, что ускорение в прямолинейном движении точки
„ dv
выражается производной =-; в случае криволинейного движения
эта производная, очевидно, не может уже вполне характеризо-
характеризовать изменение скорости со временем, так как скорость в этом
случае изменяется не только по модулю, но и по направлению.
Ускорение точки в криволинейном движении выражается
векторной производной от скорости по времени. Это есть вектор,
который согласно сказанному в § 65 строится следующим образом:
Рис. 182.
пусть в момент t движущаяся точка занимает на траектории по-
положение М (рис. 182, а) и имеет скорость v; пусть через малый
промежуток времени At, т. е. в момент t + At, эта точка зани-
занимает положение М' и имеет скорость v'; перенесем начало век-
вектора v' в точку М и соединив его конец с концом вектора v,
дополним полученный треугольник до параллелограмма; тогда
вектор МА представит собой изменение (векторное) скорости
за время At, так как
МА = v' — v — Av.
Построим теперь вектор MB, равный отношению изменения
скорости Av к соответствующему промежутку времени At, т. е.
Др
м
МА
Дг •
Этот вектор называется средним ускорением точки за время At.
Так как при делении вектора МА на положительную скаляр-
скалярную величину At его направление не изменяется, то направление
среднего ускорения MB совпадает с направлением вектора МА.
Предел, к которому стремится среднее ускорение при At —* О,
256 КИНИМАТИКА
называется ускорением точки в данный момент t. Мы будем обо-
обозначать ускорение через w.
Следовательно,
w = lim Ш= lim — = -/. B1)
Д@ д(->0 Ы dt
Пусть на рис. 182, а вектор МС есть тот вектор, к которому стре-
стремится в пределе при At —* 0 среднее ускорение MB; тогда
Если проведем из какой-нибудь неподвижной точки О векторы
От, От', Оть От2 и т. д. (рис. 182, б), равные скоростям v, v',
vlt v2 и т. д. движущейся точки М в различные моменты времени,
то геометрическое место концов этих векторов представляет собой
годограф вектора v, или годограф скорости. Согласно сказанному
в § 65 заключаем, что ускорение w точки М параллельно каса-
касательной к годографу скорости в соответствующей точке т.
§ 68. Определение скорости и ускорения из уравнений
движения точки в декартовых координатах
Пусть движение точки определяется уравнениями
х = /i@,
у = Ш,
z - /,(«).
Требуется найти ее скорость и ускорение. Для этого найдем
сначала проекции скорости и ускорения на координатные оси,
имея в виду, что если проекции вектора на координатные оси
найдены, то модуль и направление этого вектора уже легко могут
быть определены.
Мы знаем, что скорость движущейся точки равна векторной
производной от радиуса-вектора этой точки по времени, т. е.
dr
Отсюда на основании теоремы о проекции производной от дан-
данного вектора на ось (§ 65) заключаем, что проекции скорости на
координатные оси равны производным по времени от проекций
радиуса-вектора г на те же оси. Но проекции радиуса-вектора г
на координатные оси представляют собой координаты движущейся
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
257
точки х, у и z; следовательно, проекции скорости выражаются так:
dx
Vx==Tt'
Vv=Tt'
= dz
V* dt'
B2)
т. е. проекции скорости на координатные оси равны первым про-
производным от соответствующих координат движущейся точки по
времени.
Эти производные находятся из уравнений движения точки.
Для модуля скорости теперь получаем следующую формулу:
B3)
Чтобы определить направление вектора v, нужно найти его напра-
направляющие косинусы; из равенств
vx = г; cos (v, i), vy = г; cos (v, j), vz = г;cos (v, k)
иолучаем:
cos (v, i) —
cos (v, j) =
cos (v, k) —
dt
v
idx a
Tt)
\ dt)
dji
dt
[dt
-i/ (dx f (dy\*
V [Tt) +Uj
dt
dz
dt
dx\*
■,/~[dx
V [Tt
. (dy\? . idz
B4)
Аналогично определяются модуль и направление ускорения w.
Из равенства w = -£■ на основании той же теоремы § 65 следует,
что проекция ускорения на какую-нибудь неподвижную ось равна
производной по времени от проекции скорости на ту же ось; следо-
следовательно,
dv~ d2x dvv dsy dv, d'2z /nr.
W*=-*=&-; wv = ~di = dt?' w> = -dt=w <25>
т. е. проекции ускорения на координатные оси равны вторым про-
производным от соответствующих координат движущейся точки по
времени.
9 U. М. Воронков
258
КИНЕМАТИКА
Отсюда для модуля и направляющих косинусов вектора w
получаем следующие формулы:
F Vdt2 У ^\dts j ~ ^«2у '
B6)
dt*
dta
B7)
cos (w, i) =
cos (w, j) =
cos (w, k) =
Рассмотрим следующий пример, иллюстрирующий применение
полученных формул. Пусть движение точки М, движущейся в дан-
данной плоскости, которую примем за
плоскость Оху, определяется уравне-
уравнениями
х = a cos (kt), у — 6 sin (hi).
Для нахождения траектории, как
мы знаем, нужно из этих двух уравне-
уравнений исключить время t. С этой целью,
переписав данные уравнения в виде
r
Рис. 183.
- = cos (kt), у = sin (kt),
возведем их в квадрат и сложим. В результате получим:
Следовательно, траектория точки есть эллипс (рис. 183). Проек-
Проекции скорости на координатные оси определяются по формулам B2):
_ L. пУ
— —/С -,-
и
1/л, "~~ J, "*~"
Ъх
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 259
Модуль скорости выразится так:
или
Первая из этих формул определяет модуль скорости как функцию
времени, вторая — как функцию координат движущейся точки.
Если обозначим расстояние касательной к эллипсу, по которой
направлена скорость точки М, от центра эллипса через h, то, как
известно из аналитической геометрии, будем иметь:
У bV + а V
Поэтому величину скорости можно представить в следующем
более простом виде:
аЪк
откуда видно, что модуль скорости изменяется обратно пропор-
пропорционально расстоянию касательной от центра эллипса. В верши-
вершинах большой и малой осей эллипса скорость имеет соответственно
наименьшую и наибольшую величину.
Проекции ускорения на координатные оси равны
wx = -^ = — ак2 cos (kt) = —к2х
Wy=Q. = — bk2 sin (kt) = -k2y.
Модуль ускорения выразится так:
где г есть модуль радиуса-вектора движущейся точки. Отсюда
видим, что модуль ускорения пропорционален расстоянию дви-
движущейся точки от центра эллипса. Для определения направления
вектора ю на основании формул B7) имеем:
cos (ш, i) = — ^ = — —
cos{w, ]) =—klM-=
9»
260 КИНЕМАТИКА
С другой стороны, для косинусов углов радиуса-вектора г с осями
имеем:
cos
(r, i) — — и cos (г, /) = У-.
Следовательно, направляющие косинусы вектора w отличаются
от направляющих косинусов вектора г только знаком, а это значит,
что вектор w имеет направление, противоположное направлению
вектора г, т. е. ускорение точки М все время направлено к центру
эллипса.
Пример 73. Движение точки М определяется уравнениями
х = a cos2 (kt), у = a sin2 (kl).
Найти траекторию точки и закоп движения ее по траектории.
Решение. Чтобы найти траекторию точки, нужно исключить из урав-
уравнений движения время t. Для этого в данной задаче достаточно сложить эти
уравнения, после чего уравнение траектории получаем в виде х + у = а; это
есть уравнение прямой, отсекающей на осях координат отрезки, равные а
(рис. 184). В начальный момент t — 0 имеем: х0 = а и у0 = 0; следова-
следовательно, точка находится в этот момент на оси х в по-
положении Мй. В момент h = кг; имеем:
у =0и j, = j sin2 (-г- ) = а;
следовательно, в момент tl точка находится на оси у
в положении Мх; в момент
0 а м,
б\
Рис. 184. имеем:
х = a cos2 (я) = а, у = a sin2 (я) = 0;
следовательно, в этот момент точка опять находится в начальном положе-
положении Мо, и далее движение повторяется. Отсюда видим, что точка совершает
колебательное движение на отрезке M0Mlt причем период колебания равен
Т = —
Найдем скорость точки.
Дифференцируя по t уравнения движения, получим
dx
vx = — = — 2ak cos (kt) sin (kt) = —a/csin Bkt),
dt
vy = -~- = 2aksin(kt)cos(kt) = aksin Bkt).
Отсюда находим:
v = /2a2A:2sin2 Bkt) = /2 ak\ sin Bkt) |.
Так как траектория точки — прямая линия, то вектор v направлен по этой
прямой в ту или в другую сторону в зависимости от знака sin Bkt). Опре-
Определив скорость точки, нетрудно найти закон движения ее по траектории;
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 261
будем определять положение точки на траектории ее расстоянием s от началь-
ds
ного положения Мо; так как -- определяет алгебраическое значение ско-
скорости, то
~ = /~2 ак sin B*t),
U t
отсюда
ds = /Г a* sin B*г) dt
s = У ак С sin B*0 dt = — п ^ cos B*0 4- С
Для определения постоянной С заметим, что при t = 0 (в начальный момент)
s0 = 0; поэтому предыдущее уравнение для начального момента принимает
вид
откуда
Подставляя это значение С, получаем:
s =
" ^2 [1 — cos B*г)] = /2о sin2 (*0.
Это уравнение, выражающее s как функцию от t, дает искомый закон дви-
движения точки по ее траектории.
§ 69. Понятие о кривизне кривой линии
и о радиусе кривизны. Естественные оси
Криволинейное движение точки, как известно из § 64, может
быть определено или уравнениями движения в декартовых коорди-
координатах, или траекторией и законом движения s = f(t) по этой траек-
траектории. В том случае, когда движение точки определено первым
способом, ускорение w находится по его проекциям на декартовы
координатные оси, как это рассмотрено в предыдущем параграфе.
Когда же движение точки определено вторым способом, ускоре-
ускорение w находится по его проекциям на оси, направления которых
связаны с данной траекторией, а именно: на касательную к траек-
траектории, главную нормаль и бинормаль. Но, прежде чем переходить
к выводу формул для проекций ускорения на эти оси, необходимо
рассмотреть некоторые геометрические понятия.
Пусть нам дана некоторая кривая (траектория точки); возьмем
на ней две близкие точки А и В; длину дуги АВ обозначим че-
через As (рис. 185); проведем в точках А и В касательные к данной
кривой (в направлении от А к В). Угол между этими касательными,
262
КИНЕМАТИКА
называемый углом смежности и измеряемый в радианах, обозна-
обозначим через Дер; отношение -^ называется средней кривизной дуги
АВ. Будем теперь приближать точку В
к точке А. Предел, к которому стремится
средняя кривизна дуги АВ, когда точка В
неограниченно приближается к точке А,
называется кривизной данной линии в точ-
точке А. Если обозначим кривизну через к,
то будем, следовательно, иметь:
*£• B8)
Рис. 185.
Величина, обратная кривизне, называется радиусом кривизны дан-
данной кривой в точке А. Обозначив радиус кривизны через р, получим:
^ = Р и А- = |. B9)
Для прямой линии кривизна, очевидно, равна нулю и, следова-
следовательно, радиус кривизны р = оо.
Найдем кривизну окружности радиуса R. Возьмем на окруж-
окружности (рис. 186) бесконечно малую дугу АВ — As; соединим точки
А и В с центром О и проведем в этих точках касательные к окруж-
окружности. Так как угол смежности Дф и центральный угол АОВ
равны между собой как углы с перпенди-
перпендикулярными сторонами, то Дер = ^- .Отсюда
следует, что для окружности к = =■, а по-
потому окружность представляет собой кри-
кривую линию постоянной кривизны, равной
обратной величине ее радиуса. Для радиуса
кривизны окружности имеем: р = 1: k = R,
т. е. радиус кривизны окружности равен
ее радиусу.
Отсюда заключаем, что радиус кривизны
кривой линии есть радиус такой окруж-
окружности, которая имеет с данной кривой в данной ее точке оди-
одинаковую кривизну.
Если траектория точки есть плоская кривая, заданная урав-
уравнением у = /(ж), то радиус кривизны в какой-нибудь точке этой
кривой можно вычислить по следующей общей формуле, которая
выводится в дифференциальном исчислении:
Рис. 186.
A+У2)
2J
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 263
где у' *= -j-, а \у"\ есть абсолютное значение второй производной
йос
~ в выбранной точке данной кривой.
их
В общем случае траектория движущейся точки М представ-
представляет собой кривую линию, не лежащую в одной плоскости, т. е.
линию двоякой кривизны.
Положение точки М на траектории будем определять дуговой
координатой s, отсчитываемой от произвольно выбранной на траек-
траектории неподвижной точки О.
Проведем через точку М касательную Mt к траектории и будем
определять положительное направление этой касательной единич-
единичным вектором 1, направленным по каса-
касательной в сторону возрастания дуговой
координаты s и равным по модулю 1
(рис. 187); этот вектор t называется ор-
ортом касательной. Если проведем через
точку М плоскость, перпендикулярную
к касательной в этой точке, то такая плос-
плоскость называется нормальной плоскостью.
Всякая прямая, проведенная через точ-
в нормальной плоскости, перпендику-
перпендикулярна к касательной Mt и является нор-
нормалью траектории в точке М. Выясним теперь, какая из этих нор-
нормалей называется главной нормалью траектории в точке М. Для
этого поступим следующим образом: возьмем на траектории точ-
точку М', весьма близкую к точке М (рис. 187); орт касательной в точ-
точке М' обозначим через т'; проведем через точку М прямую Mt', па-
параллельную вектору т', и построим плоскость, проходящую через
две прямые Mt и Mt'. Будем теперь точку М' неограниченно при-
приближать к точке М так, чтобы в пределе точка М' совпала с точ-
точкой М; так как направление вектора т', а следовательно, и направ-
направление прямой Mt', параллельной этому вектору, будет при этом
изменяться, то соответственно будет изменяться и положение пло-
плоскости tMt'; эта плоскость будет, очевидно, вращаться вокруг
прямой Mt, приближаясь к некоторому определенному предель-
предельному положению. Плоскость, представляющая собой предельное
положение плоскости tMt' при М'—*М, называется соприкасаю-
соприкасающейся плоскостью данной кривой в точке М. Из этого определе-
определения следует, что касательная в точке М лежит в соприкасающейся
плоскости. Понятно, что в случае плоской траектории соприкасаю-
соприкасающаяся плоскость совпадает с той плоскостью, в которой располо-
расположена эта траектория.
Нормаль, лежащая в соприкасающейся плоскости (т. е. ли-
линия пересечения нормальной и соприкасающейся плоскостей),
называется главной нормалью данной кривой в точке М. За
264
КИНЕМАТИКА
положительное направление главной нормали принимается на-
направление от точки М в сторону вогнутости траектории. Направле-
Направление главной нормали будем определять единичным вектором п, на-
направленным по главной нормали в положительную сторону
(рис. 188); этот вектор п называется ортом главной нормали. Нор-
Нормаль, перпендикулярная к сопри-
соприкасающейся плоскости, называет-
называется бинормалью; орт бинормали
будем обозначать через 6. Что
касается положительного направле-
направления бинормали, или, что то же,
направления орта Ь, то это направ-
направление будем определять так, чтобы
три вектора т, п и Ь были ориенти-
ориентированы по отношению друг к дру-
другу так же, как орты t, / и к правой
системы координат; следовательно,
орт Ь связан с т и п следующим
соотношением (см. § 43):
Ь = т X га-
Рис. 188. Три оси, имеющие начало в точке М
и направленные по касательной,
главной нормали и бинормали траектории в этой точке, называются
естественными осями и являются ребрами так называемого есте-
естественного триэдра, или естественного трехгранника (рис. 188).
Отложим на главной нормали в положительном направлении
(в сторону вогнутости траектории) отрезок МС = р, где р — ра-
радиус кривизны траектории в точке М; если, приняв точку С за
центр, проведем в соприкасающейся плоскости окружность радиу-
радиусом р, то эта окружность, имеющая с данной кривой в точке М
общую касательную и общую кривизну, называется соприкасаю-
соприкасающимся кругом или кругом кривизны. Центр С этой окружности
называется центром кривизны данной кривой, соответствующим
точке М.
§ 70. Проекции ускорения на естественные оси.
Касательное и нормальное ускорения
Пусть точка движется по данной криволинейной траектории и
пусть в момент t она занимает положение М, а в момент t + At —
положение М' на этой траектории (рис. 189). Длину элементарной
дуги ММ' обозначим через As. Обозначая через v скорость точки
в момент t, ложем написать:
V = VX,
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 265
где v — модуль скорости, а т — ее орт, т. е. орт касательной, на-
направленный в ту же сторону, что и вектор v.
Дифференцируя по t это равенство и принимая во внимание,
что ускорение w точки равно производной от вектора скорости по
времени, получим:
do dv dx
w = = — т -f- v
Найдем вектор ~, т. е. определим его модуль и направление.
Согласно сказанному в § 65 производная j есть предел отно-
отношения изменения вектора т к приращению аргумента At при At -
т. е.
dx ,. Дт
где Дт есть разность векторов т
и т, построенных в точках М' и
М. Чтобы найти вектор Дт, пе-
перенесем вектор т', не изменяя
его направления, из точки М'
Мм
; соединив концы р ,gg
векторов т и т', дополним полу-
полученный треугольник МаЪ до параллелограмма МаЪс. Вектор
Мс представляет собой разность векторов т' и т, т. е.
Мс = т' — т = Дт.
Дт
1 Д7
Разделив Ат на At, получим вектор -г- , направленный по прямой Мс.
Выясним направление этого вектора .— в пределе при At —> 0.
Как было указано в предыдущем параграфе, плоскость парал-
параллелограмма МаЪс в пределе при At —- 0превращается в соприкасаю-
соприкасающуюся плоскость траектории в точке М; отсюда следует, что
вектор т лежит в соприкасающейся плоскости. Найдем, далее,
величину угла между векторами д- и т, т. е. угла аМс. Треуголь-
Треугольник аМЪ является равнобедренным, так как в этом треугольнике
Ма = т = 1 и Mb = х' = 1;
угол при вершине М равен углу смежности (углу между касатель-
касательными в точках М и М'), который обозначим через Дф (в радианах);
отсюда следует, что /_МЬа = /_МаЬ — -* ^, а потому
= £аМЬ +
266 КИНЕМАТИКА
отсюда заключаем, что в пределе при Дф -*■ О угол аМс становится
прямым, и следовательно, направление вектора -г совпадает с по-
dt
ложительньтм направлением главной нормали, т. е. с направле-
направлением орта п.
Остается теперь найти модуль этого вектора. Из равнобедрен-
равнобедренного треугольника аМЪ имеем:
аЪ — 2Mosin -^ ,
но Ма = 1 и аЪ — Мс = |Дт[, а потому
| Дт | =
Отсюда
!_А*] ==
Переходя к пределу, получим:
,. I Дт ,.
= lim —~ = lim
Дг
д«-»о
или
. Дф
, Е1Т\ '
dt
sin — — \
2_Дф As \_ , ,. Дф
= lim. .
д(->о \ Дф As Дг / д?-»о as д«-о
но
lim ЛФ = k = —,
где Аир обозначают соответственно кривизну и радиус кривизны
траектории в точке М 2). Кроме того, согласно сказанному в § 66
(равенство A9)) имеем:
,. As
hm tj = v.
Следо вателыю,
I rfr
dt
„ dX
Итак, мы установили, что вектор ^ направлен по главной нор-
нормали к центру кривизны и по модулю равен -; следовательно,
можем написать окончательный результат в следующем виде:
dx v .„_.
= - п. C0)
j. = —
dt p
На основании равенств B8) и B9).
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 267
Подставляя это значение производной в полученное выше выра-
выражение для ускорения w, находим:
dv
w = atx
Эта формула дает разложение ускорения w по естественным осям.
т, dv „
вектор -г х направлен по той же прямой, что и вектор т, т. е.
dv
по касательной и по модулю равен
dt
; этот
вектор называется касательным или танген-
тангенциальным ускорением и обозначается через и>т ш
(рис. 190); следовательно,
и\ = £т. C2)
■о Vs
Вектор — п направлен по главной нормали
Р . Рис. 190.
и по модулю равен —; этот вектор назы-
называется нормальным ускорением и обозначается через юп (рис. 190);
следовательно,
1гв - ^ п. C3)
Так как оба вектора, и т и п, лежат в соприкасающейся плоскости,
то из формулы C1) следует, что ускорение w также лежит в со-
соприкасающейся плоскости.
Если обозначим проекцию ускорения на касательную, т. е. на
направление скорости (при указанном в начале этого параграфа
направлении ортат), через wv, а его проекцию на главную нормаль
через wn, то из формулы C1) следует:
dv v2 .„,.
w* = Tt и wn = j. C4)
т. е. проекция ускорения на направление скорости равна производ-
производной от модуля скорости по времени, а проекция ускорения на
главную нормаль равна квадрату скорости, разделенному на радиус
кривизны траектории в той ее точке, где в данный момент нахо-
находится движущаяся точка.
Так как ускорение лежит в соприкасающейся плоскости, то
его проекция на бинормаль равна нулю, т. е. wb = 0.
Для модуля ускорения w получаем теперь следующую фор-
формулу:
^l/(S)i (^)i C5)
268 кинематика
Если модуль скорости с течением времени возрастает, т. е.
dv
если точка движется ускоренно, то производная-т- положительна ;
в этом случае касательное ускорение м?т направлено по касательной
в сторону движения точки, т. е. в ту же сторону, что и скорость v.
■п dv
В случае же замедленного движения производная -т- отрицательна,
и ускорение wx направлено по касательной в сторону, противопо-
противоположную скорости. Что касается нормального ускорения wn,
то оно направлено всегда по главной нормали в сторону
а
тости траектории (к центру кривизны), так как величина — всегда
положительна и, следовательно, направление вектора wn сов-
совпадает с направлением орта п.
В формулах C4) величина v обозначает модуль скорости и,
следовательно, всегда положительна. При выводе этих формул
мы предполагали, что направление орта t совпадает с направле-
направлением скорости v. Предположим теперь, что направление орта т
- (положительное направление касательной) совпадает с положи-
положительным направлением отсчета дуговой координаты s движущейся
точки, как это было указано в § 69; найдем проекцию wx ускорения
на касательную при этом предположении. Здесь могут предста-
представиться два случая:
ds
1) Производная -т- положительна; тогда для модуля скорости
имеем: v = ~ и, следовательно, ~ = --^. В этом случае направ-
направления векторов v и т совпадают, а потому
dv dss
w w
2) Производная ,- отрицательна; тогда
,
ds dv
= -dt и dt
Направления векторов v и т в этом случае противоположны,
а потому
dv dss
Таким образом, в обоих случаях независимо от знака производной
ds
~ имеем:
dt
dss
w*=^, C4')
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ 269
т. е. проекция ускорения на касательную, положительное напра-
направление которой совпадает с положительным направлением отсчета
дуговой координаты движущейся точки, равна второй производной
от этой дуговой координаты по времени.
Производная j представляет собой, как было уже сказано
в § 66, алгебраическое значение скорости, т. е. проекцию вектора v
на касательную при вышеуказанном направлении орта касатель-
касательной т.
Так как проекция ускорения на главную нормаль выражается
„ ds
через квадрат скорости, то независимо от знака производной ,-
имеем:
Формулу C5) можно представить теперь в виде
C6)
Рассмотрим некоторые частные случаи движения точки.
1. Прямолинейное движение. В этом случае
wn = v2 : р = 0, так как для прямой линии р = бо; следовательно,
направление ускорения w или совпадает с направлением движе-
движения, т. е. с направлением скорости v, или противоположно этому
„ dv г,-
направлению в зависимости от знака производной - . По модулю
ускорение w в этом случае равно абсолютной величине производ-
„ dv
Н0П df
2. Равномерное криволинейное движе-
н и е. Так как при равномерном движении точки модуль скорости
остается постоянным, т. е. v = const, то в этом случае
dv n
Ускорение w направлено, следовательно, по главной нормали в сто-
рону вогнутости траектории и по модулю равно - .
3. Равномерное прямолинейное движе-
движение. В этом случае wv = wn — 0, а следовательно, и w = 0.
Таким образам, мы видим, что касательное ускорение возникает
в тех случаях, когда изменяется модуль скорости, т. е. при нерав-
неравномерном движении точки, а нормальное ускорение — в том слу-
случае, когда изменяется направление скорости, т. е. при криволиней-
криволинейном движении точки.
270
КИНЕМАТИКА
Отсюда приходим к заключению, что касательное ускорение
характеризует изменение скорости по модулю, а нормальное
ускорение характеризует изменение скорости по направлению.
При неравномерном движении касательное ускорение обра-
ds
щается в нуль, очевидно, в те моменты, когда производная -,-
достигает максимума или минимума, так как в эти
rf2s
моменты вторая производная -,-2 равна нулю.
Нормальное ускорение в криволинейном дви-
движении равно нулю в тех точках траектории, где
р = оо, т. е. в точках перегиба траектории. Кроме
того, нормальное ускорение становится равным
нулю в те моменты, когда изменяется на противо-
противоположное направление движения точки по данной
траектории (например, при колебательном дви-
. ds
жении), так как в эти моменты производная -г,
меняя знак, становится равной нулю.
Рассмотрим теперь примеры применения полу-
полученных результатов к решению задач, относящих-
относящихся к криволинейному движению точки.
Пример 74. На шкив радиуса R, вращающийся
вокруг горизонтальной оси О, навернут канат, к которому,
подвешен груз (рис. 191). Движение груза определяется
уравнением s = - -. Найти ускорение точки М, лежащей на окружно-
окружности шкива.
Решение. Если обозначим скорость груза через и, то •
ds
Рис. 191.
Так как скорость v точки М равна, очевидно, по модулю скорости груза, то
v = at;
отсюда
dv
Так как для окружности радиус кривизны р = R, то
R •
Искомое ускорение точки М равно
W = R
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
271
П р и м е р 75. Материальная точка (пуля) брошена из некоторой точки О,
которую принимаем за начало координат, с данной начальной скоростью г„,
образующей с горизонтальной осью Ох данный угол а (рис. 192). В некото-
некотором положении М скорость точки образует с горизонталью данный угол 9.
Определить траекторию, а также скорость и нормальное и касательное уско-
ускорения точки в положении М, если известно,
.что уравнения движения точки при отсут- У ■
ствии сопротивления воздуха имеют сле-
следующий вид:
х = vut cos а, у = vot sin а _ gt2.
Решение. Для определения траек-
траектории нужно из уравнений движения ис-
исключить время t. Из первого уравнения О
имеем:
t =
Рис. 192.
подставляя это значение t во второе уравнение, получим уравнение траектории
Это — уравнение параболы, имеющей указанный на рис. 192 вид.
Далее, из первого уравнения находим проекцию скорости на ось Ох:
dx
"х = -ji = vo cos a,
откуда видим, что эта проекция есть величина постоянная. Так как, с другой
стороны,
vx = v cos в,
то искомая скорость в точке М равна
v Vx v° cos a
v = =
cos 6 cos 6 '
Для проекций ускорения w на координатные оси имеем:
; = -2- = 0 и wy = -» = - g;
отсюда находим:
Из полученных для wx и wy значений видим, что ускорение w направ-
направлено параллельно оси Оу (по вертикали) вниз а). Проектируя это ускорение
на касательную и нормаль траектории и принимая во внимание, что угол
между w и нормалью равен 6, находим:
wv — —w sin в = — g sin б
и
Wn = W COS в = g COS 6.
a) Так как проекция ускорения на ось х равна нулю, то ускорение пер-
перпендикулярно к этой оси.
272
КИНЕМАТИКА
Пользуясь формулой wn — —, можем найти радиус кривизны траектории
в точке М:
_ v2 _ i>5 cos2 a
Р ~ wn ~~ g cos3 8 '
В частности, в вершине траектории 8 = 0 и, следовательно,
Р =-
vl cos2 a
ё
Проекции ускорения на касательную и нормаль можно найти еще другим
способом: так как vx = у„ cos а и v,, =
dt
v0 sin а — gt, то
v\ = Yvl—2v0sin а • gt
g {va sin a — gt)
Отсюда
Зная w и wv, находим wn из равенства
, sin а ■ t
_ _ g (v0 sin a — gp
откуда
в-' = W — wi = g* — ■
sin a
gtJ
._„.) = £ „. =
gva cos a
M
Пример 76. В § 68 было рассмотрено эллиптическое движение точки М,
определяемое уравнениями
х = a cos (kt), у = b sin (kt).
Мы нашли, что модуль скорости точки
равен
аЬк
„ = _,
а модуль ускорения равен
w = А2/-,
Рис. 193. где ^ есть расстояние ОЯ касательной
к эллипсу в точке М от центра эллип-
эллипса, а г есть радиус-вектор движущейся
точки (рис. 193). Кроме того, мы установили, что ускорение w направлено
по радиусу-вектору точки М к центру эллипса. Выведем теперь формулу для
радиуса кривизны эллипса.
Решение. Пусть ускорение w изображается на рис. 193 вектором МК.
Спроектируем ускорение на нормаль к эллипсу и обозначим эту проекцию
ГЛ. 12. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ ТОЧКИ
273
через MN, так что MN—wn. Тогда из подобных треугольников OHM и KMN
имеем:
ОН_ _ MN_ h_ _ Wn
ОМ ~ МК ' ИЛИ Т ~ w •
hw v2
откуда wn = — и, следовательно, —
v и w, получим:
РА'
hw
Подставляя сюда значения
hk2r
или
Отсюда находим следующую простую формулу для радиуса кривизны
эллипса:
Пример 77. Круглый цилиндр радиуса г
вращается вокруг неподвижной оси 2, причем угол
поворота цилиндра возрастает пропорционально
времени. Точка М, выходя из Мо, движется вдоль
образующей цилиндра с постоянной скоростью и.
Найти траекторию, скорость и ускорение этой точ-
точки, а также определить радиус кривизны траекто-
траектории (рис. 194, а).
Решение. Пусть движущаяся точка в мо-
момент t занимает положение М. Угол поворота
цилиндра за t сек, т. е. угол М0От, обозначим
через ф. Так как по условию задачи этот угол
возрастает пропорционально времени, то отноше-
отношение — есть величина постоянная; если обозначим
Ф
эту величину через <о, то — = <о (угловая скорость
цилиндра); отсюда ф = ы1. Если координаты точки
М обозначим через х, у и г, то, как видно из
рис. 194, 6, будем иметь:
х = г cos ф = г cos (u>t),
у = rsinq) = г sin (ш).
Так как скорость и постоянна, то за t сек точка
переместится вдоль образующей цилиндра на рас-
расстояние юМ = z = ut. Итак, уравнения движения
точки получаем в следующем виде:
1) х = /-cos(cui). 2) у => /•sin(on), 3) z=ut.
Траектория точки в этом движении представляет собой винтовую
линию. Чтобы получить уравнения траектории, нужно из уравнений движе-
движения исключить t. Заменяя t в третьем уравнении через —, получим:
194.
и
= - ф.
ел т
274 КИНЕМАТИКА
Пусть за один оборот цилиндра вокруг оси z точка перемещается вдоль об-
образующей на расстояние Л; это расстояние h называется шагом винтовой
линии. Полагая в предыдущем уравнении ср = 2л (в радианах), получим:
со '
отсюда
<о 2л
и, следовательно,
2л
h 2л
г = ^ ф, или ф = — г.
Подставляя это значение ф в выражения для хжу, получим уравнения траек-
траектории, т. е. уравнения винтовой линии:
х — г cos [ 2л у 1, у = г sin Bл -г).
Найдем теперь скорость точки. Дифференцируя по t уравнения движения,
получим:
vx = —/-со sin (at), vy = rco cos (шг), vz — и;
отсюда
Мы видим, что точка движется с постоянной по модулю скоростью. Если
обозначим углы вектора v с координатными осями через а, В и у, то
cos а = -- = — sin (он),
cos В = у = — - cos Iwt),
V |/г2ш2+ U2
V, U
cos v = - - = -
v
Последнее равенство показывает, что у = const, следовательно, винтовая
линия пересекает осе образующие цилиндра под одним и тем же углом. Этот
угол у называется углом наклона винтовой линии.
Переходим к определению ускорения. Находим проекции ускорения на
координатные оси:
wx = -~ = — no2 cos (шг) = — <о2ж,
wy — -^ = — гоJ sin (ш) = — со2у,
Отсюда
w — Vw% + wt + wl =
ГЛ. 13. ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 275
Что касается направления вектора ю, то из равенства ioz = 0 следует, что
этот вектор перпендикулярен к оси г. Определяя, далее, косинусы углов,
которые вектор w образует с осями хину, легко убедиться, так же как в при-
примере, рассмотренном в § 68, что ускорение w направлено противоположно
радиусу-вектору точки т, как показано на рис. 194, а.
Чтобы найти радиус кривизны винтовой линии, заметим, что точка М
движется с постоянной по модулю скоростью и, следовательно, касательное
ускорение и\ равно нулю; поэтому ускорение ге совпадает с нормальным
ускорением wn; отсюда получаем равенство
из которого находим:
/-со2 /-со2
Полученное выражение для радиуса кривизны можно представить в более
простом виде; в самом деле, из равенства
имеем:
и
sin2 у = 1
отсюда
и, следовательно,
cos
COS2
Г2<
Y =
Y -
]Л/-2ш2
и
/•2Ш2
и2
2 + и2
2
Ь а2
г
+
2
+ »
sin!
Г2
!V
Г2Ш
ш2 Н
- м2
>
sir
Так как угол у во всех точках винтовой линии имеет одно и то же значе-
значение, то р = const; следовательно, винтовая линия есть линия постоянной
кривизны.
ГЛАВА 13
ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§ 71. Поступательное движение
Поступательным движением твердого тела называется такое
движение, при котором всякая прямая, неизменно связанная с этим
телом, остается параллельной своему начальному положению.
Теорема. При поступательном движении твердого тела
все его точки описывают одинаковые траектории и в каждый
276
КИНЕМАТИКА
данный момент имеют одинаковые по модулю и направлению ско-
скорости и ускорения.
Доказательство. Пусть отрезок А В (рис. 195), соеди-
соединяющий две произвольно взятые точки А и В поступательно дви-
движущегося тела, перемещается за время t из положения А В в по-
положение АпВп. Точка А описывает при этом криволинейную
траекторию ААгА2... Ап, точка В—криволинейную траекторию
ВВ1В2.--Вп. Разделим весь промежуток времени t на большое
число п малых промежутков и отметим положения отрезка АВ,
занимаемые им в конце каждого такого промежутка: А^^
Рис. 195.
A2B2 и т. д., причем АВ = А1В1 = А2В2 = ... = АпВп.
Кроме того, все эти отрезки на основании данного определе-
определения поступательного движения параллельны, а потому отрезки
ААЪ Aj^Az,..., Ari_1An соответственно равны и параллельны
отрезкам ВВЪ B±B2, ..., Вп_1Вп. Таким образом, ломаные линии
АА1А2... Ап\г ВВ1В2,... Вп имеют равные и параллельные сто-
стороны и, следовательно, могут быть совмещены друг с другом.
Будем теперь число промежутков п увеличивать неограниченно
так, чтобы каждый промежуток стремился к нулю. В пределе
ломаная ААХА2 ... А „превратится в траекторию точки А, а лома-
ломаная BBj^B^ ... Вп— в траекторию точки В. Отсюда следует, что
эти две траектории также могут быть совмещены одна с другой,
т. е. представляют собой две одинаковые кривые, и следовательно,
первая часть теоремы доказана.
Соединим теперь точки А и В с неподвижным началом коорди-
координат О. Обозначая радиусы-векторы этих точек через Гдигв, будем
иметь: rA — r в + В А.
Так как ни длина, ни направление отрезка В А при движении
тела не изменяются, то В А = const. Дифференцируя предыдущее
равенство по t и принимая во внимание, что производная постоян-
ГЛ 13. ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 277
ного вектора ВА равна нулю, получим:
drA _ drB
dt ~~ dt '
Но
drA drB
4r = vA и 4T
где vA и vB обозначают скорости точек А и В *); следовательно,
vA = vB-
Дифференцируя это равенство по t, получим:,
dvA _ dvB
dt "' dt •
или
где м?а и юв обозначают ускорения точек А я В.
Таким образом, теорема доказана. Из этой теоремы следует,
что поступательное движение тела будет вполне определено, если
известно движение только одной какой-нибудь его точки, например
центра тяжести тела. Поэтому изучение поступательного движе-
движения твердого тела сводится к изучению движения одной какой-
нибудь его точки, т. е. к задаче кинематики точки, рассмотренной
в предыдущей главе.
§ 72. Вращение твердого тела вокруг неподвижной оси
Если твердое тело движется так, что две какие-нибудь его
точки остаются неподвижными, то такое движение называется
вращательным. Неподвижная прямая, проходящая через две
неподвижные точки тела, называется осью вращения тела. Каждая
точка тела, не лежащая на оси вращения, описывает при таком
движении окружность, плоскость которой перпендикулярна к оси
вращения и центр которой лежит на этой оси.
Установив на оси вращения z положительное направление, про-
проведем через эту ось неподвижную плоскость nt; кроме того, через
ту же ось проведем подвижную плоскость П2, неизменно связан-
связанную с телом и вращающуюся вместе с ним. Угол между этими
двумя плоскостями, отсчитываемый от неподвижной плоскости И1
в направлении, обратном движению часовой стрелки, если смот-
смотреть с положительного конца оси z, и измеряемый в радианах,
обозначим через ф (рис. 196); положение подвижной плоскости П2
в пространстве вполне определяется значением этого угла ср,
На основании формулы B1) § 67.
278
КИНЕМАТИКА
а поскольку плоскость П2 неизменно связана с вращающимся
телом, то значением угла ф будет вполне определяться и положе-
положение этого тела. При вращении тела вокруг оси z этот угол является
непрерывной и однозначной функцией времени, т. е.
Ф = Ш- C7)
Это уравнение называется уравнением или законом вращательного
движения тела. Если функция / (t) известна, то вращательное
движение тела будет вполне определено, так как для каждого
данного момента (для каждого числового значения переменного t)
мы сможем из уравнения C7) найти соответствующее значение
угла ф и, следовательно, будем знать
положение тела в этот момент: Так как
положение твердого тела, вращающегося
вокруг неподвижной оси, определяется
одним параметром (углом ф), то говорят,
что такое тело имеет одну степень свободы.
Производная от угла ф по времени на-
называется угловой скоростью тела и обо-
обозначается буквой со; следовательно,
со
= 7 = /'(*)•
C8)
Так как угол ф измеряется в радианах, то
угловая скорость измеряется в радианах
в секунду. Единица угловой скорости
обозначается так:
= _1 = сек-
сек
C9)
Рис. 196.
сек
Заметим, что через ось вращения z
можно провести множество (пучок) плоско-
плоскостей, неизменно связанных с вращающимся
телом. Выберем в качестве подвижной плоскости вместо плоскости
П2 какую-нибудь другую плоскость П3, проходящую через ось z и
неизменно связанную с вращающимся телом, и обозначим угол
между плоскостями И1 и П3 через фг. Так как угол между плоско-
плоскостями П2 и П3 при вращении тела остается, очевидно, постоянным,
то угол фг будет отличаться от угла ф на некоторую постоянную
(положительную или отрицательную) величину, т. е. Ф1 = Ф +
const, а потому
Отсюда следует, что угловая скорость
тела не зависит от выбора подвижной плоскости.
Производная от угловой скорости по времени называется
угловым ускорением тела и обозначается буквой е; следовательно,
da>
D0)
ГЛ. 13. ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 279
Равмерность углового ускорения выражается так:
г , Г угл. скорость _
L время J'
единица углового ускорения обозначается так:
сек~х _о 1 рад 11 л\
=сек 2 = —г = ^—г,. D1)
сек сек' сек-
Если тело вращается в направлении возрастания угла ср, т. е.
против часовой стрелки для наблюдателя, смотрящего с положи-
положительного конца оси вращения, то угловая скорость положительна;
в противном случае угловая скорость отрицательна.
Таким образом, знак угловой скорости определяет направле-
направление (положительное или отрицательное) вращения тела вокруг
данной оси.
Допустим, что со^>О; тогда, если е^>0, то угловая скорость воз-
возрастает, т. е. вращение тела является ускоренным; если же е <^ О,
то угловая скорость убывает — тело вращается замедленно.
Предположим теперь, что со <^ 0; в этом случае при е ^> О абсо-
абсолютная величина угловой скорости убывает — тело вращается
замедленно; если же е <^ О, то абсолютная величина угловой скоро-
скорости возрастает — тело вращается ускоренно.
Отсюда приходим к следующему заключению: если ю и е имеют
одинаковые знаки, то тело вращается ускоренно; если со и е имеют
разные знаки, то вращение тела является замедленным.
Если угловая скорость тела постоянна, т. е. со = const, то
такое вращение называется равномерным; из ревенства
dw
следует:
d(f — со dt.
Интегрируя это уравнение в соответствующих пределах, при
со = const получим:
г , г ,
I йф = (О I Ot,
J J
•Ро О
ПЛИ
ф = Фо + ю*, D2)
где ф0 — начальное значение угла ф, т. е. его значение в момент
t = 0. Разность ф — ф0 представляет собой, очевидно, угол пово-
поворота тела за время t. Будем обозначать этот угол через фПов! тогда
= сог и ш = ^2", D3)
280 КИНЕМАТИКА
т. е. при равномерном вращении угол поворота тела за данное
время равен произведению угловой скорости тела на это время,
а угловая скорость тела равна отношению угла поворота к соот-
соответствующему промежутку времени.
В технической практике при вращательном движении тела
часто приходится встречаться с таким вопросом: тело, вращаясь
равномерно, делает п оборотов в минуту; какова его угловая
скорость?
При одном полном обороте угол поворота тела в радианах
равен 2я, при п оборотах этот угол равен 2яп; поэтому, полагая
Фпов = 2яи и t = 60 сек, получим из равенства D3) следующую
важную формулу:
Ю = 30 • ( ^
При приблизительном подсчете угловой скорости можно при-
принять я%3; тогда со ^ 0,1 п, т. е. угловая скорость тела равна
приблизительно 0,1 числа оборотов в минуту.
Если угловое ускорение тела постоянно, т. е. е = const, то
такое вращение тела называется равномерно переменным.
Из равенства
rfco
следует:
dco = e dt.
Интегрируя это уравнение в соответствующих пределах, при
е = const получим:
«I t
dt
или
со = со0 + si, D5)
где со0 — угловая скорость тела в момент t — 0.
Заменяя со через ~, получим:
отсюда
йф = со0 dt -\- et dt;
интегрируя это уравнение, получаем:
ф = фо + <V + у. D6)
или
Фпов = ф — фо = <<V + "о" ■
ГЛ 13 ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 281
Эту формулу можно представить еще в другом виде:
фшв = у Bс°о + &t) = j (ш0 + ш0 + Bt),
или
фпов = 5^+_^ f. D8)
Если ш0 = 0, то из уравнений D5) и D7) будем иметь:
ш = Bt D5')
и
Фпов = \ U\ D7')
Эти формулы, выражающие угловую скорость и угол поворота
тела в зависимости от времени при равномерно переменном враще-
вращении, вполне аналогичны формулам для скорости и пройденного
пути при равномерно переменном движении точки. Пусть <в0 ^> 0;
тогда при е ^> 0 тело будет вращаться равномерно ускоренно; если
же е <^ 0, то будем иметь равномерно замедленное вращение тела.
Перейдем теперь к определению скоростей и ускорений точек
вращающегося твердого тела. Рассмотрим движение какой-нибудь
точки М тела. Радиус окружности, которую описывает точка М,
равный расстоянию этой точки от оси вращения тела, обозначим
через R (рис. 196); точку пересечения этой окружности с непо-
неподвижной плоскостью И1 обозначим через О', а центр этой окруж-
окружности — через О.
Предположим, что тело вращается в положительном направ-
направлении, т. е. в направлении возрастания угла ф.
Так как угловая скорость тела не зависит от выбора подвижной
плоскости П2, то мы всегда можем выбрать эту плоскость так,
чтобы она проходила через рассматриваемую точку М тела
(рис. 196). Будем определять положение точки М на ее траектории
дуговой координатой s, т. е. длиной дуги О'М, отсчитываемой от
неподвижной точки О', причем за положительное направление
отсчета дуг s примем положительное направление отсчета угла ф
(рис. 196 и 197). Тогда ^ = ф и s=Rq>.
Отсюда
ds г> d(p
но -J? = со, а -£ = v, где v обозначает модуль скорости точки М,
dt
dt
которая в отличие от угловой скорости называется линейной
скоростью точки М- Поэтому предыдущее равенство принимает
вид
» = Д|ш|. D9)
282 КИНЕМАТИКА
Линейная скорость v направлена по касательной к окружности,
которую описывает точка М, и, следовательно, перпендикулярна
к плоскости, проходящей через эту точку и
ось вращения тела (рис. 196 и 197). Итак, мо-
модуль линейной скорости точки вращающегося
твердого тела равен произведению абсолютного
I значения угловой скорости тела на расстояние
этой точки от оси вращения.
Переходим к определению ускорения точ-
точки М. Для этого найдем проекции ускорения w
на касательную и нормаль к траектории, при-
причем за положительное направление касательной
примем направление в сторону возрастания
угла ф, а за положительное направление нор-
нормали — направление в сторону вогнутости траектории, т. е.
к центру окружности, описываемой точкой М. Согласно сказан-
сказанному в § 70 [формула C4')] имеем:
Wt = dW ^ RIt*' н0 ~d? = е>
а потому
wT = Rb. E0)
Следовательно, модуль касательного ускорения равен
|и\| = Д|в|, E0')
т. е. модуль касательного ускорения точки твердого тела, вра-
вращающегося вокруг неподвижный оси, равен произведению абсолют-
абсолютного значения углового ускорения тела на расстояние этой точки
от оси вращения.
Для проекции ускорения на нормаль имеем:
Vs Я2со2
п Р Р
но для окружности р = R, а потому
wn = i?co2. E1)
Так же выражается и модуль нормального ускорения:
\wn\=Ra\ - E1')
т. е. модуль нормального ускорения точки твердого тела, вращаю-
вращающегося вокруг неподвижной оси, равен произведению квадрата угло-
угловой скорости тела на расстояние этой точки от оси вращения.
Если шив имеют одинаковые знаки, т. е. если тело вращается
ускоренно, то абсолютное значение угловой скорости | ш |, а следо-
следовательно, и модуль линейной скорости v возрастают. В этом случае,
как было указано в § 70, касательное ускорение w^ и скорость v
ГЛ. 13. ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
283
направлены в одну и ту же сторону. Если же со и е имеют разные
знаки, т. е. если тело вращается замедленно, то векторы wx и
v направлены б противоположные стороны. Оба эти случая пока-
показаны на рис. 198 и 199.
Что касается направления нормального ускорения wn, то оно
направлено всегда по радиусу окружности, описываемой точкой М,
к центру этой окружности. Поэтому это ускорение называется
также центростремительным ускорением.
Для модуля ускорения w точки М получаем теперь следующее
выражение:
w = yw\ + u£ = VR2b2 + i?2co\
или
w = R Vz2 + и4- E2)
Чтобы определить направление ускорения w, достаточно найти
угол а, который вектор w образует с радиусом МО (рис. 198 и
199). Из прямоугольного треугольника находим:
tg a =
Д|е|
или
tg а = '-.!.
6 со2
E3)
Как нетрудно видеть из рис. 198 и 199, в случае ускоренного
. I e I
вращения острый угол а = arctg -—■ нужно откладывать от радиу-
радиуса МО в направлении, противоположном направлению вращения
тела (по часовой стрелке на рис. 198), а в случае замедленного
вращения этот угол нужно откладывать от радиуса МО в направ-
направлении, совпадающем с направлением вращения тела (против ча-
часовой стрелки на рис. 199).
284 КИНЕМАТИКА
В частном случае, когда тело вращается равномерно, т. е.
при ш = const, угловое ускорение е = 0. В этом случае из формул
E2) и E3) получаем:
го = Ra2 ц а — 0.
Следовательно, при равномерном вращении тела ускорение w сов-
совпадает с нормальным (центростремительным) ускорением.
Так как со и е е данный момент для всех точек тела имеют
одно и то же значение, то из формул D9), E2) и E3) следует:
1. Численные значения скоростей и ускорений точек вращаю-
вращающегося твердого тела в данный момент пропорциональны расстоя-
расстояниям этих точек от оси вращения.
2. Угол а для всех точек вращающегося твердого тела в дан-
данный момент имеет одно и то же значение.
Пример 78. Колесо с диаметром, равным d, вращается равномерно
и делает п оборотов в минуту. Найти скорость и ускорение точек, лежащих
на окружности колеса.
Решение. Полагая в формуле v = R \ а>\ согласно условиям задачи
находим:
_ ndn
v =~w-
Так как колесо вращается равномерно, то е = 0, а потому
= ~2 ~W = 1800 *
Прим ер 79. Колесо, получившее начальную угловую скорость <о0, сде-
сделав всего If оборотов, остановилось вследствие трения в подшипниках. Пред-
Предполагая вращение колеса равномерно замедленным, найти его угловое уско-
ускорение.
Решение. При остановке колеса его угловая скорость со = 0; так как
колесо сделало ./V оборотов, то угол поворота фпов = 2ji/V. Считая, что
<оо>0, и подставляя эти значения в формулы D5) и D7), получим:
оз0 + et = 0
и
2nN = GV+ еу.
Из первого уравнения находим:
подставляя это значение t во второе уравнение, получаем:
откуда
е =
ГЛ. 13. ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА 285
Пример 80. Маятник совершает колебания вокруг неподвижной гори-
горизонтальной оси по закону
/2я \
ф = q^ COS \^jr tj ,
причем ф обозначает угол между неподвижной вертикальной плоскостью,
проходящей через ось вращения маятника, и подвижной плоскостью, прохо-
проходящей через ту же ось и центр тяжести маятника, а Т обозначает полный
период колебаний маятника. Найти скорость и 5'скорение центра тяжести
маятника в начальный момент и в тот момент, когда маятник проходит через
положение равновесия, если расстояние центра тяжести маятника от оси
вращения равно а.
Решение. Дифференцируя уравнение движения маятника по t, по-
получим:
Дифференцируя это уравнение по t, находим:
Следовательно, угловая скорость и угловое ускорение маятника в начальный
момент при t = 0 равны
<0„ = О И 80 = ^Р .
Отсюда для скорости и ускорения центра тяжести маятника в начальный
момент по формулам D9), E0), E1) и E2) получаем:
v0 = а | соо | = 0,
4я2ф0а
won = аа>1 = 0,
о* = а | е0 ]=
Из равенства won = 0 следует, что ускорение м-„ совпадает с касательным
ускорением; так как wOx<.O, то ускорение «•„ направлено по касательной
к окружности, описываемой центром тяжести маятника, в сторону убывания
угла ф. В тот момент, когда маятник проходит через положение равновесия,
угол ф, очевидно, обращается в нуль; следовательно, в этот момент
cos (-=- t) = 0 и sin ~ t] = ± 1.
\Т 7 \Т
Отсюда для угловой скорости и углового ускорения маятника в этот момент
получаем следующие значения:
и е =
286 КИНЕМАТИКА
Для скорости и ускорения центра тяжести маятника в рассматриваемый мо-
момент находим:
п, следовательно,
Ускорение w совпадает с нормальным ускорением.
§ 73. Угловая скорость как вектор. Выражения линейной
скорости и касательного и нормального ускорений
в виде векторных произведений
До сих пор мы рассматривали угловую скорость тела как
величину скалярную; в соответствии с этим формула D9) устанав-
устанавливает зависимость между угловой скоростью и модулем линейной
скорости точки вращающегося тела. Чтобы получить векторную
формулу для линейной скорости, которая определяла бы не только
модуль этой скорости, но и ее направление в каждой точке вращаю-
вращающегося тела, будем теперь рассматривать угловую скорость тела
как вектор. При этом вектор со, изображающий угловую скорость
тела, строят на оси вращения тела, направляя его вдоль этой
оси в ту сторону, чтобы, смотря с его конца на его начало, видеть
вращение тела совершающимся против часовой стрелки *); модуль
этого вектора равен абсолютной величине угловой скорости, т. е.
ltoI=|S
что касается точки приложения этого вектора (начала вектора), то
эту точку можно выбирать на оси вращения произвольно, т. е. уг-
угловая скорость тела есть вектор скользящий.
Зная вектор о), мы сможем, очевидно, найти скорость любой
точки вращающегося тела в данный момент, так как, если этот
вектор задан, то будут известны: 1) положение оси вращения тела
(прямая, на которой расположен вектор <й), 2) направление враще-
вращения тела вокруг этой оси, определяемое направлением вектора со
по правилу правого винта, и 3) абсолютная величина угловой
скорости тела,равнаямодулювекторао). Поэтомуизображение угло-
угловой скорости в виде вектора оказывается полезным и целесообраз-
целесообразным во многих задачах кинематики твердого тела.
') То есть при определении направления вектора угловой скорости мы
пользуемся правилом правого винта.
ГЛ. 13. ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
287
Z
п
Кроме того, как увидим далее, угловые скорости подчиняются
основному требованию, которому должна удовлетворять Есякая
векторная величина, а именно:эти скорости скла- г
дываются по правилу параллелограмма. *
Идя дальше в этом направлении, можно и
угловое ускорение тела представить также в виде
вектора. Производная от вектора угловой скоро-
dm
сти по времени, т. е. -т-, называется вектором
углового ускорения тела и обозначается через е.
Если примем ось вращения тела за ось z и обо-
обозначим через к орт этой оси, то
О
о
•-£*•
а)
б)
Рис. 200.
Так как ось вращения тела неподвижна, то к = const. Дифферен-
Дифференцируя предыдущее равенство по t, получим:
_ da __ d2q> ,
Е~ dt ~ dt2 *
r\ d(p с?*Ш
Отсюда следует, что если производные -~ и -~ имеют одинаковые
знаки, т. е. если тело вращается ускоренно, то векторы ю и е
направлены по оси вращения в одну и ту же
сторону (рис. 200, а); если же производные
dw d-w
-jj и -~ имеют разные знаки, т. е. если тело
вращается замедленно, то векторы шив
направлены в противоположные стороны
(рис. 200, б).
Модуль вектора в равен абсолютной вели-
величине производной -—-
т. е.
в =
dt3
Выведем теперь векторную формулу для
линейной скорости v какой-нибудь точки М
вращающегося твердого тела (рис. 201). По-
Построим вектор о, за начало которого возьмем Рис. 201.
какую-нибудь точку О, лежащую на оси вра-
вращения z, и проведем из этой точки радиус-вектор г точки М;
угол между г и осью z обозначим через у; центр окружности,
описываемой точкой М, обозначим через О1, а радиус этой
окружности — через R. Так как вектор v перпендикулярен
к оси z и к радиусу МОи то он перпендикулярен к плоскости
288 КИНЕМАТИКА
треугольника ОМОХ. Модуль этого вектора определяется по фор-
формуле D9) предыдущего параграфа, т. е.
V =/? |0)|.
Но из треугольника ОМОХ имеем:
R = г sin у.
Следовательно,
v = г| й> |sin у.
Правая часть этого равенства представляет собой, очевидно, мо-
модуль векторного произведения ю X г 1), а потому
V = | О) X г\.
Вектор со X г перпендикулярен к плоскости, в которой лежат век-
векторы миг, т.е. к плоскости треугольника ОМОХ, и направлен так,
чтобы поворот вектора ш на угол у до совмещения его с вектором г
представлялся наблюдателю, смотрящему с конца вектора ю X г на
плоскость ОМОи происходящим против часовой стрелки (рис. 201).
Отсюда следует, что векторы v и ю X г параллельны и направ-
направлены в одну и ту же сторону, а так как, кроме того, эти векторы
имеют равные модули, то они равны между собой. Следовательно,
v = о X г, E4)
т. е. линейная скорость точки твердого тела, вращающегося вокруг
неподвижной оси, равна векторному произведению угловой скорости
тела на радиус-вектор этой точки, проведенный из произвольно
выбранной точки, лежащей на оси вращения тела.
Формула E4) дает распределение скоростей в твердом теле,
вращающемся вокруг данной оси.
Дифференцируя по t равенство E4), получим:
dv dot . . , ^,dr
но производная по времени от радиуса-вектора точки М равна
dr d<a
скорости этой точки; следовательно, -,- = v, а производная —т~
есть вектор углового ускорения е; поэтому предыдущее равен-
равенство принимает вид
Эта формула дает разложение ускорения точки М на две составляю-
составляющие. Рассмотрим каждое из слагаемых в правой части этой формулы
в отдельности. Пусть векторы wz и wn обозначают соответственно
г) Модуль векторного произведения двух векторов равен произведению
модулей этих векторов, умноженному на синус угла между ними (§ 43).
ГЛ. 13. ОСНОВНЫЕ ВИДЫ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
289
касательное и нормальное ускорения точки М (рис. 202, а). При
ускоренном вращении тела векторы со и е направлены по оси враще-
вращения z в одну и ту же сторону (как на рпс. 202, а). Тогда из срав-
сравнения векторов ехгио = шхг следует, что эти векторыпараллель-
ны х) и имеют одинаковое направление. При замедленном вращении
тела, когда векторы ш и г направлены по оси z в противоположные
стороны, векторы е X г и v имеют противоположные направления.
Рис. 202.
Таким образом, направление вектора е X г совпадает с направле-
направлением скорости точки М или противоположно этому направлению
в зависимости от того, движется ли эта точка ускоренно или за-
замедленно; отсюда следует, что направление вектора е X г всегда
совпадает с направлением касательного ускорения wr. Легко убе-
убедиться, что эти два вектора имеют и равные модули. В самом деле,
согласно сказанному в предыдущем параграфе модуль касательного
ускорения равен
или
[wj= r sin
с другой стороны, для модуля векторного произведения е X г имеем;
|е X r\ = |e |rsin у;
следовательно,
|ют|= |е хг|.
г) Оба эти вектора перпендикулярны к плоскости OMOL.
10 И. М. Воронков
290 КИНЕМАТИКА
Итак, приходим к заключению, что векторы шт и ехг, имеющие
одинаковое направление и равные модули, равны между собой:
и\ = £ X г, E6)
т. е. касательное ускорение точки твердого тела, вращающегося
вокруг неподвижной оси, равно векторному произведению углового
ускорения тела на радиус-вектор этой точки, проведенный из
произвольно выбранной точки, лежащей на оси вращения тела.
Рассмотрим теперь вектор вХи. Если перенесем вектор ш
в точку М и построим векторное произведение ш X v, то, как видно
из рис. 202, б, направление вектора ш xv совпадает с направлением
нормального ускорения wn точки М; кроме того, эти два вектора
имеют равные модули. В самом деле, по формуле E1') предыду-
предыдущего параграфа имеем:
с другой стороны, так как угол между ш и v равен 90°, то
| Ш X V | = | Ш | V,
но v = Щ а |, а потому
|шХ v\=R\(o\2=Ra2.
Отсюда заключаем, что векторы wn и шХг равны между собой:
шп= йХр, E7)
т. е. нормальное (центростремительное) ускорение точки твер-
твердого тела, вращающегося вокруг неподвижной оси, равно вектор-
векторному произведению угловой скорости тела на линейную скорость
этой точки.
Из полученных выражений E6) и E7) для касательного и нор-
нормального ускорений мы видим, что формула E5) представляет
собой не что иное, как разложение ускорения w точки вращаю-
вращающегося тела на касательную и нормальную составляющие. Вместе
с тем эта формула дает распределение ускорений в твердом теле,
вращающемся вокруг неподвижной оси.
Г Л А В А 14
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
§ 74. Относительное, переносное и абсолютное движения
До сих пор мы рассматривали движение точки по отношению
к некоторой системе координат Oxyz (системе отсчета), которую
считали неподвижной. Представим себе теперь, что мы наблюдаем
движение точки М по отношению к некоторой системе координат
ГЛ. 14. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ 291
O'x'y'z', которая сама движется относительно осей Oxyz, прини-
принимаемых за неподвижные. Движение точки М по отношению к по-
подвижным осям (к подвижной системе отсчета) называется относи-
относительным. Движение подвижных осей по отношению к неподвижной
системе отсчета называется переносным. Движение точки М отно-
относительно неподвижных осей (неподвижной системы отсчета) назы-
называется в этом случае абсолютным движением. Абсолютное движе-
движение точки (или тела) можно назвать также сложным или резуль-
результирующим движением, поскольку его можно рассматривать как
результат сложения относительного и переносного движений,
которые по отношению к абсолютному движению являются со-
составляющими движениями.
Так, например, если какое-нибудь тело движется по палубе
идущего парохода, то движение тела по отношепию к пароходу
(к предметам, находящимся на палубе) есть движение относитель-
относительное, движение самого парохода есть движение переносное и, на-
наконец, движение тела относительно неподвижных берегов есть
движение абсолютное. В данном случае подвижной системой от-
отсчета является пароход, неподвижной — земля. Движение чело-
человека, поднимающегося по движущейся лестнице эскалатора, по
отношению к эскалатору есть движение относительное; движение
эскалатора является переносным, а движение человека по отноше-
отношению к окружающим неподвижным предметам есть движение аб-
абсолютное.
Итак, укажем еще раз, относительное движение есть движение
по отношению к подвижной системе отсчета, а абсолютным движе-
движением мы будем называть движение относительно неподвижной
системы отсчета. Основная задача кинематики в случае сложного
движения точки состоит в том, чтобы, зная относительное движение
точки и переносное движение, т. е. движение подвижной системы
отсчета, найти абсолютное движение точки и, следовательно, опре-
определить ее траекторию, скорость и ускорение в этом движении.
Обратно, всякое движение точки или тела относительно данной
условно неподвижной системы отсчета можно рассматривать как
сложное и разложить на составляющие движения (относительное
и переносное); для этой цели необходимо выбрать систему подвиж-
подвижных осей, движение которой известно, и найти движение точки
или тела относительно этой подвижной системы. Этот прием раз-
разложения движения точки или тела на составляющие движения
является полезным в тех случаях, когда при соответствующем
выборе подвижной системы отсчета относительное и переносное
движения оказываются более простыми, чем изучаемое движение
точки или тела относительно неподвижной системы отсчета. Мы
воспользуемся этим приемом в следующих главах, где будем изу-
изучать случаи движения твердого тела более сложные, чем те, которые
были рассмотрены в предыдущей главе.
10»
292
КИНЕМАТИКА
§ 75. Относительные, переносные и абсолютные
скорость и ускорение точки
В соответствии со сказанным в предыдущем параграфе при
изучении сложного движения точки приходится различать относи-
относительную, переносную и абсолютную скорости этой точки, а также
ее относительное, переносное и абсолютное ускорения.
Абсолютной скоростью иа и абсолютным ускорением wa точки
называются ее скорость и ее ускорение в абсолютном движении,
т. е. в ее движении относительно неподвижной системы отсчета.
Относительной скоростью vr и относительным ускорением wr точки
называются ее скорость и ускорение в относительном движении,
т. е. в ее движении по отношению к подвижной системе отсчета.
Под переносной скоростью точки понимается та скорость, кото-
которую имела бы эта точка в данный момент, если бы она была неиз-
неизменно связана с подвижными осями. Другими словами, переносной
скоростью точки М называется скорость той точки, неизменно
связанной с системой подвижных осей, с которой в данный момент
совпадает точка М.
Переносную скорость точки М будем обозначать через ve.
Аналогично под переносным ускорением точки, которое будем обо-
обозначать через we, следует понимать то
ускорение, которое имела бы в данный
В момент эта точка, если бы она была неиз-
неизменно связана с подвижными осями и,
следовательно, участвовала бы только
в переносном движении. Иначе, перенос-
переносным ускорением точки М называется уско-
ускорение той точки, неизменно связанной
с системой подвижных осей, с которой
в данный момент совпадает точка М.
Пусть, например, точка М (рис. 203)
движется по некоторой линии АВ относи-
относительно осеяОх'у', вращающихся вокруг не-
неподвижной точки О с угловой скоростью со. Линия АВ представляет
собой траекторию относительного движения точки М. Пусть за-
закон движения точки М по этой траектории выражается уравне-
уравнением s = f{t). Относительная скорость vr точки М направлена по
касательной к кривой АВ и по модулю равна абсолютному зна-
значению производной -г. Переносная же скорость ve точки М есть
скорость той точки вращающейся плоскости Ох'у', с которой в дан-
данный момент совпадает точка М. Эта скорость направлена перпен-
перпендикулярно к радиусу-вектору ОМ и равна по модулю ОМ • со. Абсо-
Абсолютная скорость va точки М есть та скорость, с которой движется
эта точка в данный момент по отношению к неподвижным осям Оху.
Рис. 203.
ГЛ. 14. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ 293
Переносное ускорение гор точки М есть ускорение той точки
вращающейся плоскости Ох'у', с которой совпадает в данный
момент точка М. Поэтому это ускорение определяется как ускоре-
ускорение точки твердого тела, вращающегося вокруг неподвижной оси,
т. е. по формулам E2) и E3) § 72; следовательно,
г2 +ш4;
угол, который вектор we образует с направлением МО, равен
. I 8 I d(x>
а = arctg^, где е = -^ .
Если обозначим координаты движущейся точки в подвижной
системе осей через х , у' и z', то уравнения
х' = к (О, У' = к (t), z' = к (t),
выражающие этп координаты в функциях времепи, представляют
собой уравнения относительного движения точки. Если исключим
из этих уравнений время t, то получим уравнения траектории от-
относительного движения. Понятно, что относительная траектория
точки не остается неподвижной, а перемещается в пространство
вместе с подвижными осями.
Когда уравнения относительного движения точки известны,
то, поступая совершенно так же, как в § 68, мы сможем найти отно-
относительную скорость точки, а именно: дифференцируя по t урав-
уравнения относительного движения, получим проекции относительной
скорости на подвижные оси; определив эти проекции, сможем за-
затем найти величину и направление относительной скорости. Обозна-
Обозначая проекции относительной скорости на подвижные оси через
vrX', vry> и vrZ', будем, следовательно, иметь:
dx'
Vrx' = W'
« -dyl
dz'
Отсюда, обозначая орты подвижных осей через i', /' и к', получаем
формулу разложения относительной скорости vr no подвижным
осям:
vr = vrj + vryff + vrz,k' = % i' + **T f + g W. E8)
Аналогично, дифференцируя два раза по t уравнения относи-
относительного движения точки, найдем проекции относительного ускоре-
ускорения на подвижные оси, т. е.
_ dx _ dy _
Wrx' ~~ dt* ' Wnj' ~ dt* ' Wrz' ~
294
КИНЕМАТИКА
Следовательно, формула разложения относительного ускорения wr
по подвижным осям имеет вид
wr = wrx.i'
wrZ'k' =
d-x' ., d°-y' ., dV ,,
E9)
§ 76. Теоремы сложения скоростей и сложения ускорений
в том случае, когда переносное движение является
поступательным
Пусть движение точки М относительно подвижных осей О'х'у' z'
определяется уравнениями
*' = Л@. у' = Ш, *' = Ш-
Кривая АВ (рис. 204) изображает траекторию точки М
в этом относительном движении. Предположим, что система осей
O'x'y'z' имеет относительно неподвижной системы отсчета Oxyz
поступательное движение;
обозначим скорость точки О'
в этом движении через 1?о>.
Так как при поступательном
движении твердого тела все
его точки в каждый данный
момент имеют одинаковые
скорости (§ 71), то скорость
всякой точки, неизменно свя-
связанной с подвижными осями,
равна скорости точки О'. От-
Отсюда следует, что переносная
скорость точки М в каждый
данный момент равна скоро-
скороО
сти точки О'
мент, т. е.
в тот же мо-
моРис. 204.
Что касается относительной скорости точки М, то согласно ска-
сказанному в § 75 [формула E8)], она может быть представлена в сле-
следующем виде:
их' ., dy' ., . dz' ,,
т dt ' dt ' ' dt ь '
где i', /' и к' обозначают орты подвижных осей.
Для определения абсолютной скорости точки М, т. е. скорости
этой точки относительно неподвижной системы отсчета Oxyz, за-
заметим, что эта скорость равна векторной производной но времени
ГЛ 14. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ 295
от радиуса-вектора г точки М, проведенного из неподвижного на-
„ dr
чала О, т. е. иа = -j .
Если проведем из точки О радиус-вектор гс точки О' и из
начала О' подвижных осей радиус-вектор г' точки М (рис. 204),
то
г = го< + г.
Применяя формулу разложения радиуса-вектора г' по подвижным
осям, получим:
г' = x'i' + г/'/' + z'k',
где х', у' и z' обозначают координаты точки М в подвижной системе
отсчета.
Следовательно,
Г = Го- + x'i' + y'j' + Z'k'.
Дифференцируя это равенство по t и принимая во внимание, что
при поступательном движении подвижных осей орты V, /' и к'
являются постоянными векторами, так как их модули и направле-
направления не изменяются, получим:
_ dr _ dr0, dx> dy м
v* - It ~ ~df + 41l + 4^J + Tt k-
Ho
drO' dx' .; , dy' ., . dz' .,
а потому
va = Ve + Vr. F0)
Это равенство выражает теорему сложения скоростей: абсолютная
скорость точки равна геометрической сумме переносной и отно-
относительной скоростей, или, другими словами, абсолютная скорость
точки равна по модулю и направлению диагонали параллелограмма,
построенного на переносной и относительной скоростях (рис. 204).
Отсюда следует, что если известны переносная и относительная
скорости и угол а между ними, то модуль абсолютной скорости
определяется по известной формуле, выражающей длину диагонали
параллелограмма, т. е.
va = Vvl + v- + 2vevrcosa. F0')
Если а = 0, т. е. если скорости vp и vr направлены по одной прямой
в одну сторону, то cos а = 1 и va = ve + vT. Если а = 180°, т. е. если
скорости ve и vr направлены по одной прямой в противоположные
стороны, то cos а =—-1 и va = | vp — vr\.
Если а = 90°, то va = Vvl+ v*r.
296 КИНЕМАТИКА
Найдем теперь относительное и переносное ускорения точки М.
По формуле E9) предыдущего параграфа имеем:
d2x' ., . dsy' ., , d~z'
Так как при поступательном движении твердого тела ускорения
всех его точек в каждый данный момент равны между собой, то
ускорение всякой точки, неизменно связанной с осями O'x'y'z',
равно ускорению точки О'. Отсюда следует, что в рассматриваемом
случае, когда переносное движение является поступательным,
переносное ускорение wp точки М ъ каждый данный момент равно
ускорению точки О' в тот же момент. Поэтому, обозначая
ускорение точки О' через w<y, имеем: we = и>0', или
dv0,
wp = —гг. Чтобы найти абсолютное ускорение юа точки М,
нужно найти производную -^ от абсолютной скорости этой
точки по времени. Поэтому, дифференцируя по t полученное
выше выражение для абсолютной скорости
ч dx' ., . dy' ., . dz' ,,
находим:
_ dva _ dvo> d2x' ., d-y' ■, d*z' ,,
a ~ dt dt ~i~ dt2 ~"~ dt2 ' ' ~di? '
ИЛИ
wa = we + wr. (Gl)
Это равенство выражает теорему сложения ускорений при посту-
поступательном переносном движении: в том случае, когда переносное
движение, т. е. движение подвижной системы отсчета, является
поступательным, абсолютное ускорение точки равно геометри-
геометрической сумме переносного и относительного ускорений этой точки.
Следовательно, в этом случае абсолютное ускорение точки
может быть найдено по тому же правилу параллелограмма, как и
абсолютная скорость.
Что касается теорем сложения скоростей и сложения ускорений
в общем случае, т. е. в случае произвольного переносного движе-
движения, то мы рассмотрим их в главе 17.
В качестве примера применения полученных теорем рассмотрим
следующие задачи.
Пример 81. Вагонное колесо радиуса R катится без скольжения по
прямолинейному рельсу (рис. 205). Скорость его центра О равна v0. Найти
скорости точек А и В колеса.
ГЛ. 14. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
297
Решение. Проведем через центр О колеса координатные оси Ох' и
Оу' постоянного направления, т. е. оси, связанные с поступательно движущимся
вагоном; эти оси, следовательно, будут двигаться поступательно. Движение
колеса по отношению к этим подвижным осям (по отношению к вагону), т. е.
его относительное движение, является, очевидно, вращательным движением
вокруг точки О. Поэтому скорость всякой точки колеса равна геометрической
сумме двух скоростей: 1) переносной
скорости, равной скорости ооцентра О
колеса, и 2) относительной скорости,
равной скорости этой точки колеса
во вращательном движении вокруг
центра О. Чтобы найти относитель-
относительную скорость какой-нибудь точки
колеса, нужно знать угловую ско-
скорость колеса со в его относительном
вращении вокруг точки О. Для опре-
определения этой угловой скорости рас-
рассмотрим точку С, в которой колесо
касается рельса. Относительная ско-
скорость vCr этой точки направлена,
очевидно, по касательной к окруж-
окружности колеса влево и равна по мо-
модулю Я<о; переносная скорость вСз
точки С равна по модулю и направ-
направлению скорости с0; следовательно, скорости vCr и vCe направлены по
одной прямой в противоположные стороны. Так как колесо катится по
рельсу без скольжения, то абсолютная скорость точки С в данный момент
равна нулю, а потому vCr = vCe, или Ясо = v0,откуда со =
Рис. 205.
VO
Рассмотрим теперь точку А; для относительной и переносной скоростей
этой точки имеем: vAe = vQ и vAr = Ra> = R -=- = v0; скорость vAr направ-
направлена по касательной к окружности
колеса. Так как vAr J_ vAe, то мо-
модуль абсолютной скорости точки А
равен
1 ^
В
с
Из аналогичных соображений най-
найдем, что абсолютная скорость vB
точки В направлена по касательной
к окружности колеса и имеет мо-
модуль, равный 2v0. ряс_ 206.
П р и м е р 82. Клин ABC с уг-
углом а движется поступательно по
горизонтальной плоскости со скоростью и (рис. 206) и толкает верти-
вертикальный стержень DE, проходящий через неподвижную муфту F. Найти
скорость этого стержня.
Решение. Будем рассматривать движение точки D стержня как
сложное, состоящее из двух движений: 1) относительного (движения по
отношению к клину) и 2) переносного (движения вместе с клином).
298 кинематика
Так как относительно клина точка D перемещается, очевидно, по прямой
АВ, то относительная скорость гг этой точки направлена по АВ. Так как клин
движется поступательно, то скорости всех его точек одинаковы; поэтому
переносная скорость се точки D равна и. Принимая во внимание, что
абсолютная скорость va точки D направлена по вертикали вверх, заключаем,
что диагональ параллелограмма, построенного на скоростях vT и ve, должна
быть направлена по DE. Теперь из прямоугольпого треугольпика скоростей
находим:
va = ve tg a = и lg а.
Из того же треугольника определяется и относительная скорость стержня:
' cos a cos a '
Нередко в задачах требуется найти относительную скорость
точки, зная ее абсолютную и переносную скорости. В этом случае
из равенства
Va = Ve + Vr
находим:
vr^va — ve, или vr = va + (—ve).
Отсюда видим, что для того, чтобы найти относительную ско-
скорость точки, нужно к ее абсолютной скорости геометрически при-
прибавить скорость, равную по модулю и противоположную по
направлению переносной скорости этой
&М ТОЧКИ 1).
Пример 83. Вагон движется поступатель-
поступательно со скоростью vt (рис. 207). Скорость дож-
дождевой капли М направлена по вертикали вниз и
равна оа. Найти скорость капли относительно
вагона (относительно подвижных осей, связан-
связанных с вагоном).
Решение. Так как переносная скорость
точки М равна скорости вагона сь то согласно
только что сказанному для решения задачи нужно
к абсолютной скорости с3 этой точки геометриче-
геометрически прибавить скорость, равную —vx. Диагональ
параллелограмма, построенного на векторах с2
и —сх, определяет искомую относительную ско-
скорость vr. Из прямоугольного треугольника ско-
Рис. 207. ростей находим:
Угол наклона ф относительной скорости к вертикали определяется
из равенства tg ф = vt : v2. Этим объясняется то явление, что пассажиру,
едущему в вагоне, вертикально падающий дождь всегда кажется
косым.
Пример 84. На пароходе, движущемся прямолинейно и поступательно
с данным ускорением а, установлена турбина, вал которой вращается равно-
х) На это указывает знак минус, стоящий перед ve в предыдущем ра-
веьстве.
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 299
мерно с данной угловой скоростью со, причем ось вращения турбины пер-
перпендикулярна к направлению движения парохода. Найти абсолютные
ускорения точек Аи А2, А3 и Ai вала
(рис. 208).
Решение. Так как переносное
движение (движение парохода) является
поступательным, то переносные уско-
ускорения всех точек вала одинаковы и
равны а. Относительное движение вала
(движение по отношению к пароходу)
есть вращение вокруг неподвижной оси,
проходящей через О и перпендикуляр-
перпендикулярной к плоскости чертежа, с постоянной
угловой скоростью со. Поэтому относи-
относительное ускорение каждой из точек А^
направлено по соответствующему ра-
радиусу к центру О и по модулю равно
.Rco2, где R есть радиус вала.
Складывая геометрически относи-
относительное и переносное ускорения каждой
из точек А2 и Ait для модуля абсолютного ускорения этих точек получим:
Рис. 208.
Относительное и переносное ускорения каждой из точек At и А3 склады-
складываются, очевидно, алгебраически, так как эти ускорения направлены по
одной прямой. Поэтому для модулей абсолютных ускорений этих точек
получаем:
wai = а + Лео2 и wai = I a — Дсо21.
Если а>Ясо2, то вектор м?аз направлен по радиусу ОА3 от центра О; если жо
а<Л(о2, то этот вектор направлен к центру О.
Г Л А В А 15
ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§ 77. Уравнения плоскопараллельного движения твердого тела
Плоскопараллелъным движением твердого тела называется
такое движение, при котором расстояние каждой точки тела
от данной неподвижной плоскости остается постоянным, или
иначе такое движение, при котором все точки тела дви-
движутся в плоскостях, параллельных данной неподвижной плос-
плоскости.
Примерами такого движения могут служить: 1) движение ко-
конуса, основание которого скользит по данной неподвижной плос-
плоскости; 2) качение колеса по прямолинейному рельсу; 3) движение
шатуна кривошипно-шатунного механизма.
300
КИНЕМАТИКА
Рис. 209.
Если пересечем данное движущееся тело плоскостью //, парал-
параллельной данной неподвижной плоскости /, то в сечении получим
некоторую плоскую фигуру S (рис. 209). Из определения плоско-
плоскопараллельного движения следует, что при таком движении тела
фигура S, перемещаясь вместе с данным телом, остается в плоско-
плоскости //.
Возьмем теперь в теле какой-нибудь отрезок АХА2, перпенди-
перпендикулярный к плоскости сечения S. Так как фигура S во все время
движения тела остается в плоскости //,
то отрезок АХА2 остается перпендикуляр-
перпендикулярным к этой плоскости и, следовательно,
перемещается параллельно самому себе.
Но в таком случае можно показать, совер-
совершенно так же, как это было сделано при
О1 ' рассмотрении поступательного движения
тела (§ 71), что все точки данного тела,
-21 — -. лежащие на прямой АХА2, движутся оди-
II наново — так же как точка а фигуры S
I (т. е. точка пересечения прямой АгА2
с плоскостью //). Точно так же все точки
тела, лежащие на прямой ВгВ2, движутся
так же, как точка b фигуры S. Отсюда
следует, что изучение плоскопараллелъного
движения тела приводится к изучению движения плоской фигуры
(сочепия тела плоскостью, параллельной данной неподвижной
плоскости), движущейся в своей плоскости.
Итак, пусть имеем некоторую плоскую фигуру, движущуюся
в плоскости чертежа (рис. 210). Отнесем это движение к неподвиж-
неподвижной системе координат Оху; кроме того, на самой фигуре возьмем
неизменно с ней связанные и движущиеся вместе с ней координат-
координатные оси О'х'у'. Ясно, что положение дви-
движущейся фигуры на неподвижной плос-
плоскости определяется положением подвиж-
подвижных осей О'х'у' относительно неподвиж-
неподвижных Оху, а это последнее определяется
положением подвижного начала О', т. е.
координатами хо- и г/о' и углом поворота
подвижной системы осей относительно
неподвижной, т. е. углом <р, который будем
отсчитывать от оси Ох в направлении,
обратном движению часовой стрелки.
Отсюда следует, что движение плоской фигуры в ее плоскости
будет вполне определено, если для каждого момента времени будут
известны значения хо>, Уог и <р.
При движении плоской фигуры координаты подвижного
начала xq- и г/о- и угол ср, изменяясь с течением времени,
Рис. 210.
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 301
являются некоторыми однозначными и непрерывными функ-
функциями t, т. е.
*о- = hit), Уо' = h{t), Ф = fa{t). F2)
Если функции /iXO, /2@ и /3(г) известны, то для каждого момента
t можно из уравнений F2) найти соответствующие значения хо',
у о' и ф и, следовательно, определить положение движущейся
фигуры в этот момент. Поэтому уравнения F2) вполне определяют
движение плоской фигуры и называются уравнениями движения
плоской фигуры, движущейся в своей плоскости, или, что то же,
уравнениями плоскопараллелъного движения твердого тела.
В частном случае угол ф может оставаться постоянным, а будут
изменяться с течением времени только координаты xq> и г/о- ; в этом
случае подвижные оси перемещаются, оставаясь параллельными
своему начальному положению, т. е. фигура, а следовательно, и
данное тело имеют поступательное движение. Если же, наоборот,
хо' и г/о' остаются постоянными, а изменяется только угол ф, то
точка О' остается неподвижной, и фигура вращается вокруг этой
точки; следовательно, в этом случае тело вращается вокруг непо-
неподвижной оси, проходящей через точку О' и перпендикулярной
к плоскости чертежа.
§ 78. Разложение движения плоской фигуры
на поступательное и вращательное
Пусть данная фигура движется в плоскости чертежа (рис. 211).
Как и в предыдущем параграфе, отнесем это движение к некоторой
неподвижной системе координат Оху и,
кроме того, возьмем систему подвижных
осей О'х'у', неизменно связанных с дви-
движущейся фигурой, начало которых сов-
совпадает с произвольно выбранной точкой
О' этой фигуры. Проведем, далее, через
точку О' оси 0% и О'ц неизменного
направления, так что эти оси оста-
остаются все время параллельными непод-
неподвижным осям; тогда система подвиж-
подвижных осей О'\х\, перемещаясь вместе с 0й
точкой О' фигуры в плоскости чер-
чертежа, будет двигаться поступательно.
Положение движущейся фигуры по отношению к подвижным
осям О'\х\ определяется углом ср, т. е. углом между осями О'|
и О'х', а движение фигуры относительно этих осей, т. е. ее относи-
относительное движение, есть, очевидно, вращение вокруг точки О'
(вокруг оси 0%, проходящей через точку О' и перпендикулярной
к плоскости чертежа). Угловая скорость со фигуры в этом
Рис. 211.
302 КИНЕМАТИКА
вращательном движении равна производной от угла ф по времени,
т. е. со = -^ или на основании уравнений F2$ предыдущего пара-
параграфа:
(О = /3 (О-
Переносное движение, т. е. движение осей О"Ё,г\, как было ука-
указано, является поступательным. Скорость этого поступательного
движения равна скорости точки О' фигуры; если обозначим радиус-
вектор этой точки через г®, а ее скорость через t>o', то
dr0,
V
Проекции скорости vor на неподвижные оси будут равны
где хо' и у о' — координаты точки О', или на основании уравне-
уравнений F2):
VO'x = 1\ if) И V0'y = /g (t).
Отсюда
Мы приходим, таким образом, к следующему важному выводу:
движение плоской фигуры в общем случае можно разложить на
два движения: 1) поступательное движение со скоростью, равной
скорости произвольно выбранной точки фигуры, и 2) вращательное
движение вокруг этой точки.
Первые два из уравнений F2) определяют поступательное дви-
движение, а последнее из этих уравнений есть уравнение относитель-
относительного вращательного движения фигуры.
Заметим, что при рассмотренном разложении движения фигуры
на поступательное и вращательное мы выбрали точку О' совершен-
совершенно произвольно. Если бы вместо точки О' фигуры мы взяли ка-
какую-нибудь другую ее точку О[, то получили бы другое разложе-
разложение данного движения фигуры, т. е. разложили бы это движение
на поступательное со скоростью, равной скорости точки О\, и на
вращательное вокруг этой точки О\. Отсюда следует, что разложе-
разложение данного движения фигуры на поступательное и вращательное
можно произвести бесконечным числом способов. Так как раз-
различные точки фигуры движутся с различными скоростями, то
ясно, что скорость поступательного движения зависит от выбора
точки О'. Что же касается угловой скорости фигуры в ее относи-
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 303
тельном вращательном движении, то эта скорость не зависит
от выбора точки О'.
В самом деле: проведем через другую произвольно выбранную
точку О\ движущейся плоской фигуры
неизменно связанные с этой фигурой
оси О\х\ и О[у[, параллельные осям
О'х' и О'у', и оси O[li и OJrh, движущие-
движущиеся поступательно и параллельные осям
О'\ и О'х\ (рис. 212). Обозначим через q>x
угол между осями О\\х и О[х{, отсчиты-
отсчитываемый от оси О'£х против часовой
стрелки. Так как оси О'х' и О\х\ неиз-
неизменно связаны с фигурой, то при движении
фигуры эти оси остаются параллельны-
параллельными, а потому углы ф и фг все время будут
равны как углы с параллельными сторонами, т. е. все время будем
иметь:
Ф1 = Ф-
Рис. 212.
Отсюда -?1 = -^
или щ = ш, что и требовалось доказать.
§ 79. Скорости точек плоской фигуры.
Мгновенный центр скоростей и мгновенный центр
вращения фигуры
Пользуясь заключением, к которому мы пришли в преды-
предыдущем параграфе, а именно, что всякое движение плоской фигуры
в ее плоскости можно разложить на два
движения — поступательное со скоро-
скоростью, равной скорости какой-нибудь
точки О' фигуры, и вращательное во-
вокруг этой точки — и, зная скорость vo'
поступательного и угловую скорость оо
вращательного движений, легко опре-
определить скорость любой точки М фигуры
(рис. 213).- В самом деле, скорость
точки М на основании теоремы сложе-
сложения скоростей будет равна векторной
сумме скоростей, которые точка М
имеет в каждом из этих двух дви-
движений — переносном и относительном
(§ 76). Но переносное движение является поступательным, а потому
переносная скорость всякой точки фигуры равна v0', а скорость
точки М во вращательном (относительном) движении, которую
обозначим через vt, перпендикулярна к радиусу вращения О'М
Рис. 213.
304 кинематика
и равна по модулю га, где г = О'М, а под со здесь и в дальнейшем
будем понимать абсолютное значение угловой скорости фигуры,
т. е. со = -ЗГ- . Следовательно, диагональ параллелограмма, по-
построенного на этих двух скоростях, определяет по модулю и направ-
направлению искомую скорость v точки М фигуры.
Итак, скорость всякой точки М движущейся плоской фигуры
равна векторной сумме двух скоростей: 1) скорости произвольно
выбранной точки О' этой фигуры и 2) скорости точки М во вра-
вращательном движении вокруг точки О'.
В связи с этим возникает вопрос, имеет ли фигура такую точку,
скорость которой в данный момент равна нулю, и как найти такую
точку? Это будет, очевидно, такая точка, для
которой переносная и относительная скорости
vrC , с v0' равны по модулю и противоположны по на-
наc l ' ■ * правлению. Эту точку легко найти следую-
следующим простым построением (рис. 214): повер-
повернем полупрямую, по которой направлена
скорость i?o', на прямой угол вокруг точки
vo' О' в направлении вращения фигуры и затем
V_> на этой повернутой полупрямой отложим
Рис. 214. „,п v0,
отрезок О С = — , т. е. отрезок, равный отно-
отношению переносной поступательной скорости к угловой скорости
фигуры. Тогда точка С будет искомой точкой. В самом деле, абсо-
абсолютная скорость vc точки С равна векторной сумме двух скоростей:
переносной скорости vo- и относительной скорости, т. е. скорости
точки С во вращательном движении вокруг точки О'; эта враща-
вращательная скорость перпендикулярна к О'С и по модулю равна
#rc=G> -O'C. Как видно из рис. 214, эти две скорости направлены
по одной прямой в противоположные стороны, а потому
vc = vo'—a-O'C = v0,— со— = 0.
со
Таким образом, скорость точки С фигуры в данный момент рав-
равна нулю. Эта точка С называется мгновенным центром скоростей.
Так как скорость точки С фигуры в данный момент равна нулю,
то распределение скоростей в движущейся плоской фигуре в этот
момент, очевидно, таково же, как при вращении фигуры вокруг не-
неподвижной точки С.
В самом деле, при разложении движения плоской фигуры на
поступательное и вращательное точку О' можно выбрать произ-
произвольно; если при этом разложении вместо точки О' мы выберем
точку С, то согласно сказанному выше для скорости любой точки
М фигуры будем иметь:
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 305
где vmc обозначает скорость точки М во вращательном движении
фигуры вокруг точки С. Но ус = 0, а потому vm — vmc,t:. e. ско-
скорость любой точки фигуры, в данный момент равна по модулю и
направлению той скорости, которую имеет в тот же момент
эта точка во вращательном движении фигуры вокруг точки С.
Поэтому та точка неподвижной плоскости, с которой совпадает
в данный момент мгновенный центр скоростей С, называется
мгновенным центром вращения фигуры. Как было указано в пре-
предыдущем параграфе, угловая скорость фигуры не зависит от выбора
точки О'; поэтому угловая скорость фигуры в ее вращении вокруг
центра С равна той же угловой скорости ш, с которой фигура
вращается вокруг точки О'.
Итак, мы приходим к следующему заключению: при движении
плоской фигуры в ее плоскости в каждый данный момент имеется
мгновенный центр вращения фигуры, так что скорости всех ее
точек в этот момент определяются как вращательные скорости
вокруг этого центра.
Важно заметить, что положение мгновенного центра вращения
не остается неизменным на неподвижной плоскости, по которой
перемещается фигура, так же как и положение мгновенного цент-
центра скоростей на плоскости самой движущейся фигуры; различным
моментам времени соответствуют как различные точки данной
фигуры, которые являются в эти моменты центрами скоростей,
так и различные положения этих точек на неподвижной плоскости,
т. е. различные положения мгновенного центра вращения фигуры.
Таким образом, движение плоской фигуры можно представить
как непрерывный ряд последовательных вращений вокруг мгно-
мгновенных центров, занимающих в разные моменты времени различные,
но вполне определенные положения как на неподвижной плоскости,
так и на плоскости движущейся фигуры. В дальнейшем мгновенный
центр скоростей и совпадающий с ним в дан-
данный момент мгновенный центр вращения
фигуры мы будем обозначать через Cv.
Если положение мгновенного центра вра-
вращения в данный момент найдено и угловая
скорость фигуры в этот момент известна, то Л/. —ъд
скорости всех точек фигуры определяются
весьма просто: как было указано выше, ско- Рис. 215.
рость каждой точки будет равна по модулю
и направлению вращательной скорости этой точки вокруг мгно-
мгновенного центра Cv; так, например, для точек А к В движущейся
фигуры (рис. 215) будем иметь:
vA = CVA ■ ш и vA ±ЩА, vb = CVB• со и vB
Отсюда следует, что 1) мгновенный центр вращения фигуры
лежит в точке пересечения перпендикуляров, восставленных в
306
КИНЕМАТИКА
vA CVA
двух точках фигуры к скоростям этих точек, и 2) — = -^-jr, т. е.
модули скоростей точек движущейся фигуры пропорциональны
расстояниям этих точек от мгно-
мгновенного центра вращения фигуры.
Пример 85. Вагонное колесо
катится без скольжения по рельсу так,
что скорость его центра равна v0. Найти
скорости точек Ах, А2, А3, А4 колеса,
если радиусы R и г известны (рис. 216).
Решение. Так как колесо катит-
катится без скольжения, то скорость точки С
касания колеса с рельсом равна нулю;
следовательно, эта точка С является
мгновенным центром вращения колеса.
Обозначая через со угловую скорость
вращения колеса вокруг точки С (рав-
(равную угловой скорости вращения колеса
вокруг его центра О), будем, очевидно,
v0
иметь: vQ = cor, откуда находим угловую скорость колеса: а> = —. Теперь,
как видно из рис. 216, модули искомых скоростей выразятся так:
uo>
vз = ш • СА3 = Г vc
== ш • СА„ =
Г- 4- г2
иО>
v, = а • С А, =
Направления этих скоростей соответственно перпендикулярны к САи
СА2, СА3 и СА%.
Пример 86. В кривошипно-шатунном механизме длина кривошипа
О А — г, длина шатуна АВ = I. Кривошип вращается вокруг точки О с угло-
С»
вой скоростью ш0. Найти скорость
ползуна В (рис. 217).
Решение. Скорость vA точ-
точки А кривошипа перпендикулярна
к радиусу ОА и по модулю равна
гш0. Скорость точки В направлена
по прямой ВО. Точка Cv пересече-
пересечения перпендикуляров, восставленных
в точках А и В к скоростям этих
точек, определяет положение мгно-
мгновенного центра вращения шатуна.
Так как скорости точек А и В
пропорциональны расстояниям этих точек от мгновенного центра вра-
вращения, то
fR С,В
Рис. 217.
откуда находим:
Or =
VA
VA-
С
с,
И
CVA'
ув
с»в
Оо CVA
ГЛ 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 307
Если в точке О восставим перпендикуляр к ОВ до пересечения его в
точке D с продолжением прямой В А, то из подобных треугольников ODA
и ABCV найдем:
ф _OD
CVA ~ ~7 '
а потому
on = «Do — = <в0 • OD.
Пример 87. Даны по модулю и направлению скорости сАисв двух
точек А ти В фигуры, причем эти скорости параллельны и направлены в одну
сторону, а прямая АВ перпендикулярна к направлению этих скоростей
(рис. 218). Найти мгновенный центр вращения и угло-
угловую скорость фигуры, если
АВ = I.
Решение. Перпендикуляры, восставленные в
точках Л и В к скоростям этих ючек, направлены
в данном случае по одной прямой; положение мгно-
мгновенного центра вращения Cv на этой прямой опре-
определяется из пропорции
шг^Ь Рпс-218-
отсюда следует, что мгновенный центр вращения Cv лежит в точке пересе-
пересечения прямой АВ с прямой, соединяющей концы векторов vA и vB, как по-
показано на рис. 218. Чтобы определить расстояние ACV, перепишем предыду-
предыдущую пропорцию в виде
AC,, v .
. = __*
ACv-l vB
отсюда находим:
Искомую угловую скорость вращепия фигуры вокруг мгновенного центра
находим из равенства
vA = ACv-u>,
откуда
VA VA~VB
со = -TFT- = ~ ; •.
Решение примера 86 показывает, что если нам известна по мо-
модулю и направлению скорость одной точки фигуры (точки А) и
направление скорости какой-нибудь другой ее точки (точки В), то
мы можем найти модуль этой второй скорости. Отсюда заклю-
заключаем, что нельзя задавать произвольно по модулю и направлению
скорости двух точек фигуры; эти скорости находятся между собой
в определенной зависимости, которая устанавливается следующей
теоремой,
308
КИНЕМАТИКА
Теорема. Проекции скоростей двух точек фигуры на прямую,
соединяющую эти точки, равны между собой.
Доказательство. Пусть скорости двух точек А и В фи-
фигуры равны va и vb (рис. 219). Рассматривая движение фигуры
согласно сказанному в § 78
как сложное, которое мож-
можно разложить на поступа-
поступательное движение со ско-
скоростью Фа и вращательное
движение вокруг точки А
с угловой скоростью ш,
заключаем, что скорость
точки В равна векторной сумме двух скоростей: скорости v>a посту-
поступательного переносного движения и скорости этой точки В в от-
относительном вращательном движении вокруг точки А; если
обозначим эту вторую скорость через vba, to эта зависимость
выразится векторным равенством
В
Рис. 219.
vB =
vBA,
причем скорость vBa равна по модулю АВ • со и направлена перпен-
перпендикулярно к АВ.
Проектируя теперь скорости vA и Vb на прямую АВ и обозна-
обозначая их проекции через Аа и ВЪ, из очевидного равенства треуголь-
треугольников АКа и ВЬЪ получим: Аа = ВЪ, что и требовалось доказать.
Пример 88. Вдоль неподвижной прямой хх движутся два ползуна
с данными скоростями vt и v2 (рис. 220). К этим ползунам при помощи шар-
виров присоединены два стержня АС и ВС, которые скреплены друг с дру-
другом шарниром в точке С. Найти скорость точки С.
Рис. 220.
Решение. Спроектируем скорость v1 на направление С А и скорость г>а
на направление СВ; пусть эти проекции изображаются отрезками Аа и ВЬ.
По доказанной теореме проекции искомой скорости точки С на направления
СА и СВ должны быть равны проекциям Аа и ВЬ; поэтому отложим от точки
С отрезки CD = Аа и СЕ = ВЪ; по этим двум проекциям нетрудно построить
искомую скорость; для этого достаточно восставить в точках D и Е перпен-
перпендикуляры к АС и ВС; пусть эти перпендикуляры пересекутся в точке F;
тогда вектор CF определит по модулю и направлению искомую скорость
точки С,
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 309
Предположим, что скорости двух точек А и В плоской фигуры
в данный момент параллельны, причем эти скорости образуют с
прямой АВ некоторый угол а, не равный 90° (рис. 221). На осно-
основании доказанной теоремы о равенстве проекций этих скоростей
на направление АВ имеем: vA cos a = vB cos а, или vA= vb и, следо-
следовательно,
VA = VB •
А потому из равенства vB = Ра + vba получаем Рва= 0, или
АВ-а = 0, откуда ш = 0. Если рассмотрим какую-нибудь третью
точку С фигуры, то ее скорость равна
PC = VA -\~ РСА;
где vqa обозначает скорость точки С во
вращательном движении фигуры во-
вокруг точки А и, следовательно, vca =
— АС-а = 0, а потому
vc = Рд.
Таким образом, скорости всех точек Рис. 221.
фигуры в данный момент равны как по
модулю, так и по направлению, т. е. в данном случае мы имеем
такое же распределение скоростей в движущейся плоской фигуре,
как при поступательном движении этой фигуры.
Если в точках А и В восставим перпендикуляры к скоростям
этих точек, то эти перпендикуляры будут параллельны (рис. 221).
Поэтому мгновенный центр вращения фигуры, находящийся в
точке пересечения этих перпендикуляров, оказывается в данном
случае бесконечно удаленным. Отсюда приходим к заключению:
б тот момент, когда мгновенный центр вращения фигуры оказы-
оказывается бесконечно удаленным, угловая скорость фигуры равна нулю,
а скорости всех ее точек равны по модулю и имеют одно и то же
направление.
Так, в примере 86 в тот момент, когда кривошип ОА занимает
вертикальное положение, скорости всех точек шатуна АВ равны
по модулю и параллельны; если бы в примере 87 скорости vA
и Vb были равны, то точка Cv была бы бесконечно удаленной, и
распределение скоростей в движущейся фигуре было бы такое же,
как при поступательном движении.
§ 80. План скоростей
Определение скоростей различных точек движущейся плоской
фигуры легко может быть выполнено графически при помощи по-
построения плана скоростей.
Если из произвольно взятой точки проведем векторы, равные
по модулю и по направлению скоростям различных точек
310
КИНЕМАТИКА
движущейся плоской фигуры в данный момент, то полученный та-
таким образом чертеж называется планом скоростей для этой фигуры.
Пусть например, скорости трех
точек А, В и С данной фигуры
равны va, vb и vc (рис. 222,а).
Если проведем из произвольной
точки о векторы оа = Va, ob = VQ
и oc=i?c, то получим план
скоростей (рис. 222, б).
Мгновенный центр - враще-
вращения Cv фигуры лежит, как мы
знаем, в точке пересечения пер-
перпендикуляров, восставленных в
точках А, В и С к скоростям
va, vb и vc. Соединим точки А, В и С с центром Cv и отло-
отложим на CVA, CVB и CVC отрезки CVAU CVBX и CVC±, равные
6V*i = vA = CvA-a, CvBt = vB = CvB-anCvCx = vc = CvC-a,
где ш обозначает угловую скорость фигуры в
Рпс. 222.
вокруг центра Cv. Следовательно, будем иметь:
ее вращении
_ CvBi _ CvCl
- cvb - cvc
— @.
Если соединим теперь между собой прямыми точки А, В я С
и точки А1} В1 и Си то из предыдущих пропорций следует, что соот-
соответствующие стороны треугольников ABC и А1В1С1 параллельны,
а потому эти треугольники подобны, причем отношение их соот-
соответствующих сторон равно ш.
Так как скорости »a, vB и vc соответственно перпендикуляр-
перпендикулярны к CVAU CVB1 и CvCt, то ясно, что, повернув четырехугольник
CvAlB1C1 вокруг точки Cv на 90° в направлении вращения фигуры,
получим план скоростей. Таким образом, четырехугольник оаЬс,
представляющий собой план скоростей, равен четырехугольнику
CVA1B1C1 и повернут относительно него на прямой угол. Отсюда
непосредственно вытекают следующие основные свойства плана
скоростей:
1. Всякий многоугольник на плане скоростей подобен соответ-
соответствующему многоугольнику на движущейся фигуре.
В самом деле, ^A1B1C1s>c i\ABC, no/\A1B1C1=/\abc; следо-
следовательно, /\аЬсы/\АВС.
2. Отношение соответствующих сторон этих многоугольни-
многоугольников равно ш.
3. Всякая прямая на плане скоростей перпендикулярна к со-
соответствующей прямой на движущейся фигуре.
В самом деле, так как фигура oabc, как сейчас было указано,
повернута относительно фигуры CvAlH1C1 на прямой угол, то
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 311
ас_\_А1С1, но А1С1 \\ АС; следовательно, ac_LAC. Точно так же
ab'±AB и Ьс±ВС.
Укажем еще на следующее свойство плана скоростей: из тре-
треугольника оаЪ на плане скоростей имеем:
оЬ = оа +
или
= pa
ab.
С другой стороны, как мы знаем, движение плоской фигуры
можно разложить на два движения: 1) поступательное со скоро-
скоростью vA точки А и 2) вращательное вокруг этой точки А с угло-
угловой скоростью ш. Поэтому, обозначая скорость точки В во враща-
вращательном движении фигуры вокруг точки А через vba, будем иметь:
Сравнивая это равенство с предыдущим, получаем:
аЪ = vba,
т. е. вектор аЪ на плане скоростей равен по модулю и направлению
скорости точки В фигуры во вращательном движении вокруг
точки А.
Точно так же
be = vcb,
где Vcb есть скорость точки С во вращательном движении фигуры
вокруг точки В, и т. д.
Для построения плана скоростей достаточно знать модуль и на-
направление скорости одной какой-нибудь точки движущейся фигуры
ипрямую,покоторойнаправлена
скорость какой-нибудь второй ее
точки. Тогда скорости всех то-
чек фигуры могут быть найдены.
В самом деле, пусть известна
скорость »а точки А и направ-
направление скорости точки В, ука-
указанное на чертеже тонкой ли-
линией (рис. 223, а). Проведем
из произвольной точки о вектор оа = vA и прямую оР, парал-
параллельную заданному направлению скорости точки В (рис. 223, б);
вектор оЪ, изображающий скорость точки В, направлен по прямой
ор; следовательно, остается только определить положение точки Ъ
на этой прямой. Для этого заметил!, что по третьему свойству плана
скоростей abJ_AB. Поэтому из точки а проводим прямую, пер-
перпендикулярную к АВ; точка пересечения этой прямой с ор явля-
является искомой точкой Ъ, а вектор оЪ определяет скорость точки В.
Возьмем теперь какую-нибудь третью точку С фигуры. Если
Рис. 223.
312
КИНЕМАТИКА
обозначим конец вектора, изображающего скорость этой точки на
плане скоростей, буквой с, то по указанному сейчас свойству плана
скоростей имеем: ac_LAC и Ъс±_ВС. Поэтому точка пересечения
двух прямых, проведенных из а и Ъ и соответственно перпендику-
перпендикулярных к АС и ВС, определяет на плане скоростей точку с, а век-
вектор ос определяет искомую скорость точки С. Как видим, этим
способом легко может быть определена графически скорость
любой точки фигуры. Заметим, что при рассмотренном способе по-
построения плана скоростей не требуется находить положения мгно-
мгновенного центра вращения фигуры, что практически весьма суще-
существенно, так как мгновенный центр вращения часто оказывается
настолько удаленным, что не помещается на чертеже.
Пример 89. Построить план скоростей для двухкривошипного меха-
пизма, изображенного на рис. 224, а, если известны длина кривошипа СА = г
и угловая скорость со, с которой он вращается вокруг неподвижной точки С.
Рис. 224.
Решение. Так как г и со даны, то модуль скорости точки А известен:
vА= гш; эта скорость направлена перпендикулярно к СА. Из произвольной
точки о проводим вектор оа, перпендикулярный к С А, длина которого в произ-
произвольно выбранном масштабе изображает модуль скорости точки А (рис. 224,6).
Так как точка В принадлежит кривошипу BE, вращающемуся вокруг
неподвижной точки Е, то ее скорость перпендикулярна к BE; относительная
скорость извращения точки В вокруг А перпендикулярна к АВ. Поэтому для
построения на плане скоростей скорости точки В проводим из точки о прямую,
перпендикулярную к BE, а из точки а — прямую, перпендикулярную к АВ;
точку пересечения этих прямых обозначим через Ъ; вектор оЪ определяет
скорость точки В. Далее, для определения скорости какой-нибудь точки М
звена АВ поступаем следующим образом: так как точки А, М и В лежат на
одной прямой, то на основании первого свойства плана скоростей заключаем,
что соответствующие им точки а, той 6 на плане также должны лежать на
одной прямой и, кроме того, должна иметь место пропорция
am _ AM
mb "Шв-
"Швам
Поэтому достаточно разделить отрезок аЪ в отношении ^-^ и точку деления т
соединить прямой с точкой о; тогда вектор от определит скорость точки М.
Таким образом, планы скоростей для звеньев АВ и BE построены. Перехо-
Переходим к шатуну BD. Скорость точки В уже найдена. Направление скорости
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 313
точки D известно, так как эта точка движется по прямой DE. Поэтому про-
проводим из точки о прямую, параллельную DE, а из точки Ь — прямую, перпен-
перпендикулярную к BD. Точку пересечения этих прямых обозначим через d; тогда
вектор od определит скорость точки D. Для определения скорости какой-
нибудь точки N шатуна BD поступаем совершенно так же, как и при опрс-
.. ,, BN
делении скорости точки М: делим отрезок od в отношении -^-=- и точку де-
деления п соединяем прямой с точкой о; вектор on определяет скорость точки N.
Таким образом, получаем план скоростей для всего механизма.
§ 81. Центроиды
Распределение скоростей в движущейся плоской фигуре, полу-
полученное в § 79 и основанное на понятии мгновенного центра враще-
вращения фигуры, относится только к данному моменту времени.
В этом параграфе мы рассмотрим теорему, которая дает нагляд-
наглядное представление о движении плоской фигуры в течение конечного
промежутка времени.
Вывод этой теоремы основан на следующей лемме:
Лемма. Всякое непоступателъное перемещение плоской фи-
фигуры из одного положения в другое можно осуществить при по-
помощи одного поворота на некоторый определенный угол вокруг
некоторой определенной точки.
С J
Рис. 225.
Доказательство. Пусть данная фигура перемести-
переместилась из положения / в положение II так, что произвольно взятый
на этой фигуре отрезок переместился из положения А В в А 'В'
(рис. 225), соединим точку А прямой с точкой А' и точку В с В'
и в серединах отрезков А А' и ВВ' восставим к ним перпендику-
перпендикуляры. Пусть эти перпендикуляры пересекутся в точке С. Соеди-
Соединим точку С прямыми с точками А, В, А' и В'. Два треугольника
ABC и А'В'С имеют, очевидно, по три равные стороны, так как
314 КИНЕМАТИКА
СА = СА', СВ—СВ' и АВ=А 'В', а потому эти треугольники равны;
отсюда следует, что если мы повернем треугольник ABC вокруг
точки С на угол ACA' = q> так, чтобы сторона СА совместилась
с равной ей стороной СА', то треугольник ABC совместится с тре-
треугольником А'В'С; отрезок А В совместится при этом с А В',
а так как положение данной фигуры на плоскости вполне опре-
определяется положением отрезка АВ, то фигура займет положе-
положение //, и лемма, следовательно, доказана.
Предположим теперь, что фигура переместилась из положения /
в положение //, двигаясь как угодно в своей плоскости в течение
времени t. Разобьем весь этот промежуток времени на весьма боль-
большое число п весьма малых промежутков А^, At2, ..., Atn.
В начале промежутка А^ фигура занимает положение I, в конце
его она занимает близкое положение, которое обозначим цифрой 2;
в течение следующего промежутка времени At2 фигура переместит-
переместится в новое положение 3 и т. д. К каждому из этих перемещений мы
можем применить только что доказанную лемму; поэтому каждому
из них будет соответствовать свой определенный центр вращения и
определенный (весьма малый) угол поворота вокруг этого центра.
Обозначим эти центры через Clt ~C2, С3,..., Сп, а углы поворота
обозначим соответственно через Дфи Дф2, Аф3, •■-, Дфп. Таким
образом, данное движение фигуры мы можем с известной степенью
точности заменить рядом последовательных вращений вокруг
центров Сг с угловыми скоростями, соответственно равными -т^-.
Точность этой замены будет тем больше, чем больше будет взято
число п промежутков времени и чем каждый из этих промежутков
Att будет меньше; при возрастании числа п и уменьшении Дг4
ряд указанных последовательных вращений будет все ближе
подходить к истинному движению фигуры. В пределе при п -> со
и Д^ -> 0 мы в точности получим истинное движение фигуры в те-
течение времени t между положениями / и //.
Центры Сг в пределе превращаются в мгновенные центры враще-
вращения фигуры; истинная угловая скорость фигуры при вращении
вокруг мгновенного центра Сы будет, очевидно, равна
со = lim ^.
Д(г-0 Дгг
Мы пришли, таким образом, другим путем к известному уже
нам заключению: в каждый данный момент существует точка,
вокруг которой в этот момент вращается фигура.
Отметив положения центров вращения Си С2, С3, ... на непо-
неподвижной плоскости, по которой перемещается данная фигура,
и соединив их между собой прямыми, получим на этой плоскости
ломаную линию ClC2C3Ci... (рис. 226). В течение промежутка
времени At1 фигура поворачивается вокруг точки Сх на угол A(px.
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 315
Нетрудно найти на самой движущейся фигуре ту ее точку, которая
после этого поворота совпадет с точкой С2, т. е. будет служить
б течение следующего промежутка времени Д£2 центром вращения.
Для этого, очевидно, достаточно отложить от прямой С±С2 угол,
равный Дфь в направлении, обратном вращению фигуры вокруг
С]/), и па стороне этого угла отложить отрезок СхС'г = С^С2. Ясно,
что после поворота фигуры вокруг С1 на угол Acpt по часовой стрел-
стрелке точка С'.г совпадет с точкой С2. Точно так же можно найти ту
точку движущейся фигуры, которая после второго поворота фигу-
фигуры вокруг С2 на угол А<р2 совпадет с точкой С3, т. е. будет слу-
служить центром вращения в течение промежутка At3. Для того чтобы
найти на фигуре такую точку,
поступим так: построим угол
C\C'iA1 с вершиной в точке С,
равный углу СХС2С3\ затем от
прямой C%A± отложим против
часовой стрелки угол, равный
Аф2, и на стороне этого угла
отложим отрезок С'^С3, равный
С2С3; точка Cj будет искомой.
В самом деле, после первого
поворота фигуры вокруг С1 на Рис. 226.
угол Афг точка С2 совпадет с С2;
вследствие равенства по построению углов /_ С1С2С3 и /_ С1С'2А1
прямая С'гА1 совпадет при этом с прямой С2С3, а прямая С'гС3
будет составлять с прямой С2С3 угол Дср2; при втором повороте
фигуры вокруг С2 на угол Аф2 по часовой стрелке прямые С^Съ
и С2С3 совпадут, причем точка С3' совпадет с С3, так как отрезки
С'2С3 и С2СЪ по построению равны.
Аналогичным построением можно найти, далее, точку фигуры С[,
которая после поворота фигуры вокруг центра С3 на угол Аф3
совпадет с точкой С4; для этого построим угол С'%С'3А2 с вер-
вершиной в точке Сз, равный углу С2С3СА; затем от прямой С'ЛА2
отложим угол, равный Аф3, в направлении, обратном направ-
направлению вращения фигуры вокруг С3, и па стороне этого угла
отложим отрезок СзС4'=С3С4; точка С\ является искомой. Продол-
Продолжая, далее, эти построения, получим на самой движущейся фигуре
ломаную линию СХС'^'ЪС\... , которая при последовательных вра-
вращениях фигуры вокруг центров Си С2, С3,... перекатывается по не-
неподвижной ломаной СХС2С3С\... так, что соответственно равные сто-
стороны этих ломаных линий последовательно приходят в совпадение.
В пределе при п -> оо и А^г-> 0 ломаные С^С2С3С4... и С^С'^С^С'^...
превращаются в соответствующие кривые — геометрические места
х) На рис. 226 предполагается, что повороты фигуры вокруг центров
происходят ио часовой стрелке.
316
КИНЕМАТИКА
Рис. 227.
мгновенных центров вращения на неподвижной плоскости, по ко-
которой перемещается фигура, и мгновенных центров скоростей на
плоскости самой движущейся фигуры. Эти кривые соответственно
носят названия неподвижной и подвижной центроид, или поло-
полодий (рис. 227).
Отсюда приходим к следующей теореме:
При движении плоской фигуры в ее плоскости подвижная цент-
центроида катится без скольжения по неподвижной и обратно: всякое
движение плоской фигуры в ее плоскости
можно осуществить, построив подвиж-
подвижную и неподвижную центроиды и заста-
заставив первую катиться без скольжения
по второй с соответствующей в каждый
данный момент угловой скоростью.
В каждый данный момент подвижная
и неподвижная центроиды имеют общую
точку (на рис. 227 — точка Cvl), которая
является мгновенным центром скоро-
скоростей фигуры в этот момент.
Нетрудно видеть, что в этой точке
центроиды имеют общую касательную.
В самом деле, точка Сг (рис. 226) в пре-
пределе становится мгновенным центром скоростей Cvl (и мгновенным
центром вращения), а прямые СХС% и С^С'^ в пределе превра-
превращаются соответственно в касательные к неподвижной и подвиж-
подвижной центроидам в точке Cvl. Но угол Афг между прямыми СгС2
и СХС\ при Д^ -> 0 стремится к нулю, а потому эти касательные
совпадают. Качение подвижной центроиды по неподвижной проис-
происходит без скольжения потому, что скорость точки касания этих
кривых равна нулю, так как эта точка
является мгновенным центром скоростей.
Теорема о центроидах дает наглядное
геометрическое представление о движе-
движении плоской фигуры как о качении без
скольжения одной кривой но другой.
Если построенные центроиды меняются
ролями, т. е. если неподвижную цент-
центроиду сделать подвижной, а подвижную
центроиду — неподвижной, то получим
новое движение плоской фигуры, которое по отношению к первому
называется обращенным движением.
Рассмотрим следующий простой пример. Колесо катится без
скольжения по неподвижному рельсу (рис. 228). Так как каче-
качение происходит без скольжения, то скорость точки Cv касания ко-
колеса с рельсом равна нулю; следовательно, эта точка является
мгновенным центром вращения колеса. Через некоторый промежу-
Рис. 228.
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 317
Рис. 229.
ток времени мгновенный центр вращения переместится в точку
Cvl; с точкой Cvl на рельсе придет в совпадение точка C'vl колеса;
спустя еще некоторое время мгновенным центром вращения коле-
колеса будет служить точка CV2 на рельсе, а мгновенным центром ско-
скоростей — точка C'V2 на колесе (в этот
момент обе эти точки совпадают) и т.д.
Таким образом, неподвижной цен-
троидой является прямая хх (рельс), а
подвижной центроидой — окружность
колеса. Справедливость теоремы о
центроидах в данном случае очевидна.
Так как на рис. 226 соответствен-
соответственные стороны ломаных линий равны,
т. е. Ь]Ь2 = ьхьг, ь2ь3 — ь^з и т. д.,
то отсюда следует, что длины соот-
соответственных дуг неподвижной и под-
подвижной центроид равны. Поэтому на
рис. 227 CvlC'v2 = CvlCv2, CvlC'v3 =
= CvlCv3 и т. д. Точно так же на рис. 228 CvC'n = CvCvl, CVC'V2 =
= CvCv2 и т. д.
Пример 90. Плоская фигура движется так, что две ее точки А и
В, расстояние между которыми равно I, перемещаются по двум непод-
неподвижным прямым Ох и Оу (рис. 229). Найти центроиды для этого движения.
Решение. Скорость vA точки А направлена по прямой Ох, а скорость
vB точки В — по прямой Оу; восставив в А и В перпендикуляры к этим
скоростям, найдем мгновенный центр вращения в точке их пересечения С„.
Разным положениям прямой АВ соответ-
соответствуют различные положения точки Cv, ,,. Cv
но, как видно из рис. 229, расстояние
OCV = АВ = I остается постоянным;
отсюда заключаем, что неподвижная
центроида есть окружность, описанная
из центра О радиусом I. Переходим к
определению подвижной центроиды; по-
положение точки Cv относительно прямой
АВ, т. е. положение на плоскости самой
движущейся фигуры, также изменяется
с течепием времени, но расстояние O'CV= y>
= 5 остается постоянпым (О' есть сере-
середина отрезка АВ); следовательно, под-
подвижная центроида есть окружность ра-
радиуса й С ЦеНтрОМ В О'. vm/mm/////^m////////////m///////^7777?77/////'////m
На основании теоремы о центроидах р „чп
мы получим данное движение фигуры,
если будем меньшую окружность катить
без скольжения по большей. Диаметр АВ меньшей окружности при этом будет
двигаться так, .что его кодцы все время будхт оставаться на прямых Ох и Оу.
318 КИНЕМАТИКА
Пример 91. Стержень АВ (рис. 230) движется в плоскости чертежа
так, что во все время движения он касается неподвижного полуцилиндра
радиуса г, а конец его А перемещается по прямой Ох. Найти центроиды для
этого движения стержня.
Решение. Скорость точки А направлена по прямой Ох, а скорость
точки касания D стержня с цилиндром направлена по касательной к цилиндру,
т. е. вдоль ВА *); восставив в А и D перпендикуляры к этим скоростям,
найдем мгновенный центр вращения стержня в точке их пересечения С„.
Выбрав неподвижные оси Оху, как указано на рис. 230, и обозначив
координаты точки Cv через х и у, будем иметь: х = О А и у = ACV. Из тре-
треугольников ODA и OCVA находим:
Г COS
sin ср
Если из этих уравнений исключить переменный угол <р, то получим уравнение
геометрического места точек Cv, т. е. уравнение неподвижной центроиды.
Для этого перепишем эти уравнения так:
sin ф = — , cos ф = — sin2 ф = -~
x r r T x*
Возведя теперь эти уравнения в квадрат и сложив их, получим:
х^+ ~х^ = 1
или
ж* — г2 (х2 4- у2) = 0.
Таково уравнение неподвижной центроиды; это — кривая четвертого порядка.
Для того чтобы найти уравнение подвижной центроиды, возьмем систему
подвижных осей Ах'у', связанных с движущимся стержнем, причем ось Л у'
направим но стержню, а ось Ах' — перпендику-
перпендикулярно к нему. Построив координаты точки С„
в подвижной системе осей, будем иметь: х' =
=DCV и y'=AD. Но из прямоугольного треуголь-
треугольника OCVA имеем: AD2 = OD -DCvviaiiy'2 = гх'\
следовательно, подвижная центроида есть пара-
парабола.
Пример 92. Две параллельные рейки дви-
движутся поступательно с данными постоянными
скоростями t>! и и2 в противоположные стороны и
2 В силой 1 рения приводят в движение находящееся
рцс 231 между ними колесо радиуса г. Найти для колеса
пеподвижную и подвижную центроиды, предпола-
предполагая, что колесо не скользит по рейкам (рис. 231).
Решение. Так как по условию задачи колесо не скользит по рейкам,
то скорости точек А а В касания колеса с рейками равны соответственно <\
и г>2. Мгновенный центр вращения колеса лежит на общем перпендикуляре А В
к этим скоростям. Так как скорости точек движущейся фигуры пропорцио-
пропорциональны расстояниям этих точек от мгновенного центра вращения, то, чтобы
найти положение этого центра, нужно отрезок АВ разделить в отношении
V,
—; для этого достаточно соединить прямой линией концы векторов vl и v2.
х) В самом деле, если бы скорость vD, кроме касательной составляющий,
имела еще составляющую, нормальную к поверхности цилиндра, то это
означало бы, что стержень либо отделяется от цилиндра, либо проникает
внутрь его, что исключается условием задачи.
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 319
Точка Cv пересечения этой прямой с прямой АВ определяет положение
мгновенного центра вращения колеса.
Из пропорции
АС„ _ 1>!
всь ~ v
или
2г - BCV _ Vl
BCV v2
находим:
BCV = 2r-
i\ + v2 '
так как скорости vt и t>a постоянны, то BCV = const. Отсюда видим, что на
неподвижной плоскости мгновенные центры вращения колеса расположены
па одинаковом расстоянии от нижней рейки; следовательно, неподвижная
центроида представляет собой прямую, проходящую через точку Cv и парал-
параллельную рейкам. Найдем теперь расстояние OCV:
OCV = r—BCv = г — 2г -^—■ = г Vi ~ V* ■ = const,
Vl ~T~ V2 Vl "+" V2
т. е. расстояние мгновенного центра скоростей от центра колеса остается
постоянным. Отсюда следует, что подвижная центроида есть окружность
с центром в точке О и радиусом, равным
Согласно теореме о центроидах рассматриваемое движение колеса можно
получить, заставляя окружность радиуса OCV катиться без скольжения по
неподвижной прямой, проходящей через точку С„ и параллельной рейкам.
§ 82. Ускорения точек плоской фигуры.
Мгновенный центр ускорений
Перейдем теперь к определению ускорений точек движущейся
плоской фигуры.
Как было указано в § 78, в общем случае движение плоской
фигуры, движущейся в своей плоскости, можно разложить на два
движения: 1) поступательное, скорость которого равна скорости
произвольно выбраиной'точки О' фигуры, и 2) вращательное вокруг
этой точки с угловой скоростью ой, не зависящей от выбора точ-
точки О'. Отсюда на основании теоремы сложения ускорений (§76) сле-
следует, что ускорение каждой точки движущейся плоской фигуры
равно геометрической сумме двух ускорений: 1) ускорения в
поступательном (переносном) движении и 2) ускорения во враща-
вращательном движении вокруг точки О' (в относительном движении).
Поэтому, если обозначим ускорение переносного поступатель-
поступательного движения, равное ускорению точки О', через и>0< (рис. 232),
а ускорение какой-нибудь точки А фигуры во вращательном
320
КИНЕМАТИКА
движении вокруг точки О' (относительное ускорение) через wr,
то будем иметь:
w = а>о> + и>„ F3)
где w обозначает абсолютное ускорение точки А. Ускорение wr
можно разложить на два ускорения: нормальное, или центростреми-
центростремительное, ускорение wrn, направ-
направленное по радиусу вращения
точки А, т. е. по АО', и каса-
касательное ускорение wrr, направ-
направленное перпендикулярно к АО'
(рис. 232). Следовательно,
wr = Wrn + №гт. F4)
При этом на основании формул
(§ 72) будем иметь:
-.2
г со*
= г е
Рис. 232.
I wr ] = г у p/
СЙ*
F4')
где г = О'А, а е обозначает угловое ускорение фигуры в ее враща-
вращательном движении, т. е. е —~jr.
При ускоренном вращении фигуры ускорение мз„ будет направ-
направлено по перпендикуляру к АО' в ту же сторону, куда направлена
скорость vr точки А во вращательном движении вокруг точки О';
при замедленном вращении фигуры это ускорение будет направлено
в сторону, противоположную направлению скорости vr. Если обо-
обозначим через а острый угол, который ускорение wr образует
с направлением АО', то, как видно из рис. 232,
tg a =
F5)
Отсюда следует, что этот угол имеет в данный момент одно и
то же значение для всех точек фигуры.
Вектор иог отклоняется от направления АО' всегда в ту сторону,
куда направлено касательное ускорение wrx. Поэтому при ускорен-
ускоренном вращении фигуры вектор wr отклоняется от направления АО'
на угол а в ту же сторону, куда направлена скорость vr точки А
во вращательном движении вокруг точки О'; при замедленном вра-
вращении фигуры вектор wr будет отклонен от АО' на угол а в сто-
сторону, противоположную направлению скорости vr.
Таким образом, при ускоренном вращении фигуры векторы wr
и 1>Л расположены по одну сторону от прямой АО', а при замедлен-
замедленном вращении — по разные стороны от этой прямой. Если е = 0,
то а = 0; в этом случае ускорение wr совпадает с центростремитель-
центростремительным ускорением и направлено по прямой АО',
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 321
Равенство F3) на основании формулы F4) можно переписать
в виде
W = Wo +Wrn + Wn, F6)
или
ica - wQ. + w%- + юао; F6')
где ufflo- и ы/"о' обозначают соответственно касательное и нормаль-
нормальное ускорения точки А фигуры в ее вращательном движении вокруг
точки О', т. е.
= wrx и
Отсюда, принимая во внимание формулы F4') и F5), видим,
что для определения ускорений точек данной фигуры ну7кно
знать ускорение и?о' одной какой-нибудь точки О' этой фигуры,
а также угловую скорость и угловое ускорение фигуры.
При определении скоростей точек движущейся плоской фигуры
мы видели, что в каждый данный момент имеется такая точка С„
фигуры, скорость которой в этот момент
равна нулю и которая называется мгно-
мгновенным центром скоростей.
Аналогично этому нетрудно показать,
что в каждый данный момент существует
такая точка фигуры, ускорение которой
в этот момент равно нулю. Эта точка
называется мгновенным центром ускоре-
ускорений. Посмотрим, как найти эту точку.
Пусть точка Cw будет искомым центром Рис. 233.
ускорений (рис. 233). Предположим, что
ускорение wq какой-нибудь точки О' фигуры нам известно. Мы
найдем положение точки Си, если будем знать направление пря-
прямой O'CW, на которой лежит эта точка, т. е. угол, который пря-
прямая O'CW образует с вектором и>о", и если, кроме того, будем знать
расстояние O'CW.
Ускорение точки Cw, как и всякой другой точки фигуры,
складывается из ускорения wcy и ускорения wcwo:,которое имеет
точка Cw во вращательном движении фигуры вокруг О'; при этом
вектор wCwo' образует с направлением CWO' угол а = arctg Ц. Так
как по условию ускорение точки Сш равно нулю, то векторы гоо1
и Wcwo' должны иметь равные модули и противоположные направ-
направления. Отсюда следует, что прямая О'СШ образует с вектором wo-
угол, равный а. Остается определить расстояние O'CW. Для этого
заметим, что на основании формулы F4') имеем:
>Са0.1= г у е2 + со* = O'CW ■ У е2 + со4
11 II. М. Воронцов
322 КИНЕМАТИКА
по \wcwo'\ — wo1', следовательно,
O'CWV^ + w* = i
откуда
о1 с = w°'
Таким образом, приходим к следующему заключению: чтобы найти
мгновенный центр ускорений, нужно полупрямую, по которой на-
направлен вектор wo-, повернуть вокруг точки О' на острый угол
а = arctg —a и затем отложить на ней от точки О' отрезок, равный
w0,
- ■ ; конец этого отрезка определяет положение искомого
У е2 + со4
центра ускорений в данный момент.
При этом, как нетрудно понять, при ускоренном вращении фи-
фигуры поворот полупрямой, по которой направлен вектор и>о<
вокруг точки О' на угол а нужно производить в направлении враще-
вращения фигуры; при замедленном же вращении фигуры этот поворот
нужно производить в направлении, обратном вращению фигуры.
Если е = 0, то а = 0, и мгновенный центр ускорений лежит на пря-
прямой, по которой направлен вектор w<y. Расстояние O'CW равно в
этом случае —— .
СО"
Положение мгновенного центра ускорений при движении фигу-
фигуры не остается неизменным: различным моментам времени соответ-
соответствуют различные положения центра ускорений как на неподвиж-
неподвижной плоскости, в которой движется данная фигура, так и на по-
подвижной плоскости этой фигуры.
Когда положение центра ускорений для данного момента вре-
времени определено, ускорения точек движущейся фигуры находятся
проще по сравнению с тем, что было сказано в начале этого пара-
параграфа.
В самом деле, ускорение какой-нибудь точки А фигуры опре-
определяется по формуле F3):
где wo- обозначает ускорение произвольно выбранной точки О'
фигуры, a wA0- — ускорение точки А во вращательном движении
фигуры вокруг этой точки О'. Если вместо точки О' возьмем
аочку Cw (мгновенный центр ускорений), то согласно этой формуле
будем иметь:
Н>А = WCw + WACw,
где wAcw обозначает теперь ускорение точки А во вращательном
движении фигуры вокруг точки Cw. Но ускорение wcw точки Cw
равно нулю, а потому
wA = wACw, F7)
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 323
т. е. ускорение всякой точки движущейся плоской фигуры в данный
момент определяется так же, как ускорение этой точки при вра-
вращательном движении фигуры вокруг мгновенного центра ускорений.
Формула F7) дает распределение ускорений в движущейся
плоской фигуре в данный момент времени. Следовательно, это
распределение ускорений такое же, как если бы фигура враща-
вращалась с той же угловой скоростью и с тем же угловым ускорением
вокруг неподвижной точки, совпадающей с точкой Cw — мгновен-
мгновенным центром ускорений (рис. 234).
Так как модуль ускорения wacw как ускорения
во вращательном движении вокруг точки Cw
определяется по формуле F4'), т. е. \wAcw\ =
= CWA ■ j/e2 -|- со4, то на основании равенства F7)
для модуля ускорения wa точки А фигуры полу-
получаем выражение
wA = CWA ■ /е2 4- ы4.
Точно так же модуль ускорения wB точки В фи-
фигуры (рис. 234) равен
wB = CJ3 ■ /е2 + со4 . Рис. 234,
Из равенства F7) следует, что угол а, который ускорение w\
образует с направлением ACW, определяется по формуле F5), т. е.
этот угол, как было уже указано выше, имеет в данный момент
одно и то же значение для всех точек фигуры.
Из полученных результатов следует:
1. Так как
то модули ускорений точек движущейся плоской фигуры про-
пропорциональны расстояниям этих точек от мгновенного центра
ускорений.
2. Мгновенный центр ускорений лежит в точке пересечения
прямых, проведенных из двух каких-нибудь точек А и В фигуры
под одним и тем же углом
к ускорениям этих точек (рис. 234).
3. Если е = 0 и, следовательно, а = 0, то в этом случае прямые,
по которым направлены ускорения всех точек фигуры в данный
11*
324
КИНЕМАТИКА
момент, пересекаются в одной точке — мгновенном центре уско-
ускорений.
Пример 93. Кривошип ОХО = I вращается с постоянной угловой ско-
скоростью шх вокруг пенодвижной точки О1. На палец О этого кривошипа сво-
свободно насажено колесо радиуса г, которое катится при этом без скольже-
скольжения по неподвижному колесу радиуса R = I — г. Найти ускорения точек
А я В окружности колеса, если то'чка А лежит на прямой ОХО, а точка В
лежит на радиусе, перпендикулярном к этой прямой (рис. 235).
Решение. Найдем сначала скорость и ускорение центра колеса О.
Точка О принадлежит кривошипу; следовательно, ее скорость равна по мо-
модулю v0 — Uax. Так как кривошип вра-
вращается равномерно, то ускорение точки
О направлено по ООг и равно по моду-
модулю w0 = Ш\. Теперь определим угло-
угловую скорость колеса со. Так как но
5'словию задачи это колесо катится без
скольжения по неподвижному колесу ра-
радиуса Н, то мгновенный центр вращения
первого колеса лежит в точке касания
С этих колес. Отсюда следует, что
а потому
1D !
Рис. 235.
Так как Ci^ = const, то угловая
скорость ш постоянна; следовательно,
угловое ускорение колеса е = 0, а потому касательпые ускорения точек А
и В во вращательном движении колеса вокруг центра О равны нулю, т. е.
AO — иВО — U-
Нормальные ускорения этих точек во вращательном движении вокруг
центра О направлены по соответствующим радиусам АО и ВО и по модулю
равны
г2
= ГСОа = -- 0J
Теперь согласно формуле F6) остается сложить эти ускорения с ускоре-
ускорением 1С0. Так как w0 и
С0
0
направлены по одной прямой, то эти ускоре-
ускорения складываются алгебраически; следовательно,
у,'.
Так как
_L""o'
т0 М°ДУЛЬ ускорения точки В равен
= Щ
Пример 94. Колесо радиуса г катится без скольжения по рель-
рельсу, причем скорость v0 его центра постоянна. Найти нормальное
ГЛ. 15 ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 325
и касательное ускорения точки М колеса, считая известным Z.MOA = <р
(рис. 236).
Решение. Мгновенный центр вращения колеса лежит в точке С ка-
касания его с рельсом. Поэтому, обозначая угловую скорость колеса через <с,
имеем: v0 = гсо, откуда со = v0 : г = const; следовательно, угловое ускорение
колеса е = 0. Точка-О колеса движется равномерно и прямолинейно; следова-
следовательно, ускорение этой точки равно нулю, т. е. wQ — 0; отсюда видим, что
точка О является мгновенным центром ускорений.
Из равенств wQ = 0 и w<mo~ r'fil — 0 следует, что ускорение точки М
колеса равно центростремительному ускорению k$q этой точки во враща-
вращательном движении вокруг центра О. Поэтому, обо-
обозначая модуль искомого ускорения точка М через w, ^/* Vf>
имеем:
= ,„(.») =
"МО
= г(а
"Ь
Рис. 236.
это ускорение направлено по радиусу МО.
Чтобы найти теперь касательное и нормаль-
нормальное ускорения точки М, нужно ускорение w этой
точки разложить по направлениям касательной и
нормали ее траектории (точка М при качении ко-
колеса описывает циклоиду).
Для того чтобы определить эти направления,
достаточно найти направление скорости точки М.
Но скорость точки М перпендикулярна к прямой
МС, соединяющей эту точку с мгновенным центром
вращения С колеса; следовательно, касательная
к циклоиде, описываемой точкой М, направлена по МА, а нормаль — по МС.
Так как угол ф является внешним углом равнобедренного треугольника
МОС, то LOMC = |, .
Следовательно, искомые ускорения точки М, как видно из рис. 236, по
модулю равны
. Ф иЬ . Ф
и?т = w sin -— = — sm -^r
T VO Y
- Wn = W COS -jr = COS -s- .
£i T l*
В частности, для точки А колеса ф = 0 и, следовательно, ш^ = 0 В
vУА> = — ; скорость этой точки по модулю равна
vA = СА ■ со = 2гш = 2v0.
По известной формуле для нормального ускорения точки имеем!
или
А Р
отсюда находим радиус кривизны циклоиды в ее вершине:
р = 4г.
326
КИНЕМАТИКА
§ 83. Аналитическое исследование движения
плоской фигуры
В этом параграфе мы рассмотрим аналитическое решение ос-
повных задач, относящихся к теории плоскопараллельного дви-
движения твердого тела, которые в предыдущих параграфах были рас-
смотрепы с геометрической точки зрения.
Уравнения движения плоской фигуры относительно некоторой
неподвижной системы координат Оху имеют следующий вид (§ 77):
х0- = А(/), Уо' = h С), Ф = /з (О-
где хо- и г/о' обозначают координаты какой-нибудь точки О' фи-
фигуры, принятой за начало подвижной
системы координат О'х'у', неизменно
связанной с движущейся фигурой, а ср
обозначает угол поворота подвижной
системы осей относительно неподвиж-
неподвижной (рис. 237).
Возьмем какую-нибудь точку М фи-
фигуры; положение этой точки на подвиж-
подвижной плоскости определяется коорди-
координатами х' и у'; координаты этой точки
в системе неподвижных осей обозначим
через хну. Так как подвижные оси неиз-
неизменно связаны с движущейся фигурой, то
координаты х' и у' во все время движения остаются постоянными.
По известным из аналитической геометрии формулам преобра-
преобразования координат будем иметь следующие равенства,выражающие
зависимость между координатами точки М в неподвижной и по-
подвижной системах:
x=xo'-lrx'cos ф—г/'втф, у=Уо- + х &тц> + у' cos ф. F8)
В этих уравнениях хо-, усу и ф являются известными функция-
функциями времени, а х' и у', как было сейчас указано, имеют постоянные
значения.
Уравнения F8) представляют собой уравнения движения точ-
точки М фигуры. Если исключим из этих уравнений время t, то
получим уравнение траектории точки М.
Найдем скорость точки М. Дифференцируя по времени урав-
уравнения (G8), получим проекции на неподвижные оси скорости и
этой to41.ii:
dx d*Q, tfcp
р» = IT, = -7U - (х' sin Ф + У' cos Ф) 7/7'
dlSL
dt
+ {x соь ф — y' sin
ГЛ. 15, ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 327
ИЛИ
vx — vo'X — (х' sin ф + У' cos ф) со,
vy = vo'y + (x cos ф — у' sin ф) со,
где vo'x и vo'u обозначают проекции на неподвижные оси ско-
скорости v0' точки О' фигуры, а со есть алгебраическое значение угло-
угловой скорости фигуры, т. е.
v^x = -^г = /; (о,
dy0,
v f @
Из уравнений F8) имеем:
х' sin ф + у' cos (f = у — уо' и х' cos ф — г/'sin ф = х—хо<;
поэтому предыдущие равенства можно представить в виде
Vx = V0'x — {У — У о) СО, Vy = Vo'y + (X — Же) СО. F9)
Эти формулы определяют проекции скорости точки М на неподвиж-
неподвижные оси, а следовательно, и модуль и направление этой скорости.
При помощи этих формул можно найти положение мгновен-
мгновенного центра скоростей Cv фигуры. Обозначим координаты точки
Cv через хсо и ycv; так как скорость точки Cv фигуры в данный
момент равна нулю, то из формул F9) получаем:
Vox— (У Си — У О ) СО = 0 И Vo-y + (Хсо — Хо) СО = 0.
Отсюда находим координаты xcv и усв, определяющие положение
мгновенного центра скоростей на неподвижной плоскости:
xCv = хо —'- , ус» = У о + -^. G0)
Подставляя сюда значения жо-, уо-, vqx, voy и со, эти формулы
можно представить в виде
328 КИНЕМАТИКА
Исключая из этих уравнений переменное t, получим уравнение
геометрического места точек С„ на неподвижной плоскости, т. е.
уравнение неподвижной центроиды.
Чтобы определить положение мгновенного центра скоростей
на подвижной плоскости (на плоскости движущейся фигуры),
нужно найти координаты x'Cv и y'cv точки Cv в подвижной системе
осей. Из уравнений F8) имеем:
xCv cos ф — у'со sin ф = xcv—хо' и х'св sin ф + ус0 cos ф=г/со—У о-
Подставляя сюда найденные значения хс0 и г/с«, получим:
vO'i, , , ■ vOx
XCv COS ф — ycv Sill ф = — , XCv Sin ф + yCv COS ф = -^— .
Из этих уравнений находим x'cvW-y'cv', умножая первое уравнение
на cos ф и складывая со вторым, умноженным на sin ф, получим:
i Ох т О у ' т 1пл\
xcv= ■• G1)
Умножая теперь второе уравнение на cos ф и вычитая из него
первое, умноженное на sin ф, получим:
Формулы G1) и G2) определяют положение мгновенного центра
скоростей на подвижной плоскости. Исключив из этих уравнений
время t, получим уравнение подвижной центроиды.
Перейдем теперь к определению ускорения точки М движу-
движущейся фигуры.
Дифференцируя по t уравнения F9), получим проекции на не-
неподвижные оси ускорения го точки М:
dvx dvO'x 1йУ йУО' \ i ч dm
(ж
dv dvn,,, Idx dxn. \ dm
или
wx = wo'x — (Vy — vO'y)@ — (y — уо') е,
wv = wO'v + (vx — vq-x)® + (x — xo) e,
ГЛ. 15. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 329
где wo-x и wo-y обозначают проекции на неподвижные оси ускоре-
ускорения wo> точки О' фигуры, а е обозначает угловое ускорение фи-
фигуры, т. е.
°1у
Подставляя в эти равенства значения vx и г;у из формул F9),
получим окончательно:
wx = wo-x — (х — хО')@2 — (у — у о) е,
wy — wo-v — (у
— у о) е, \
— хо>) е. J
По этим формулам можно вычислить проекции ускорения точки М
и, следовательно, определить модуль и направление этого уско-
ускорения.
Если обозначим координаты мгновенного центра ускоре-
ускорений Cw через жсдаН yew, то, принимая во внимание, что ускоре-
ускорение точки Су, в данный момент равно нулю, получим из фор-
формул G3):
W(yx — (xcw — хо-)<а2 — (усш — у о) е = О,
wo'y — (ycw — Ус)"*2 + (xcw — хо') е = 0.
Из этих уравнений находим координаты xCw и yew', для этого пе-
перепишем эти уравнения в виде
(xCw — Ж0')й2 + (УСФ — УО')8 = wO'x,
{xcw — хо)е — (yCw — г/о') = — ">о>
Умножая первое уравнение на со2 и складывая со вторым, умно-
умноженным на е, получим:
(xCw — хо') (со4 + е2) = wo-x- «2 — wo-y-e.
Отсюда находим:
^ G4)
Точно так же, умножая первое из предыдущих уравнений на е и
о второе, умноженн 2
(Усш — */о')(е2 + со4)
вычитая из него второе, умноженное на со2, получим:
откуда
ycw = У о-
Формулы G4) и G5) определяют положение мгновенного центра
ускорений на неподвижной плоскости.
330 КИНЕМАТИКА
ГЛАВА 16
ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ
ТОЧКИ. ДВИЖЕНИЕ СВОБОДНОГО ТВЕРДОГО ТЕЛА
В ОБЩЕМ СЛУЧАЕ
§ 84. Уравнения движения твердогэ тела, имеющего одну
неподвижную точку
Пусть имеем твердое тело с одной неподвижно закрепленной
точкой, вокруг которой это тело может как угодно поворачиваться.
С таким случаем мы встречаемся, например, при движении тела,
закрепленного при помощи сферического шарнира, или при движе-
движении волчка, когда заостренный конец ножки волчка опирается на
подставку (или на горизонтальную поверхностьстола) иостается не-
неподвижным. Будем называть движение такого тела с одной не-
неподвижной точкой движением вокруг этой
неподвижной точки.
Прежде всего постараемся выяснить,
сколько требуется параметров для определе-
определения положения в пространстве твердого тела,
имеющего одну неподвижную точку, а затем
получить в общем виде кинематические урав-
у нения движения такого тела. Отнесем движе-
движение данного тела к системе неподвижных
осей Oxyz, имеющих начало в неподвижной
точке тела О. Кроме того, в самом теле возь-
возьмем систему неизменно связанных с ним по-
подвижных осей Ox'y'z', имеющих начало в той
же точке О (рис. 238). Положение данного
тела в пространстве будет вполне определено, если будет известно
положение подвижной системы осей Ох'у'V; следовательно, чтобы
определить положение твердого тела, имеющего одну неподвиж-
неподвижную точку, достаточно определить положение неизменно связан-
связанной с ним подвижной системы осей, начало которых находится
в этой неподвижной точке.
Из аналитической геометрии известно, что положение подвиж-
подвижной системы Ox'y'z' относительно неподвижной системы Oxyz
можно определить девятью направляющими косинусами подвиж-
подвижных осей, т. е. косинусами тех углов, которые каждая из подвиж-
подвижных осей образует с неподвижными осями. Но значительно проще
и удобнее определять положение системы Ox'y'z' относительно
осей Oxyz при помощи трех так называемых углов Эйлера. Это де-
делается следующим образом. Обозначим линию пересечения коор-
координатных плоскостей Оху и Ох'у' через ON и установим на
ней положительное направление (направление от О к N); эта
ГЛ 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 331
прямая ON называется линией узлов (рис. 239). Угол между осью
Ох и линией узлов ON обозначим через\|); этот угол лежит, очевидно,
в плоскости Оху и отсчитывается от оси Ох в положительном направ-
направлении, т. е. против движения часовой стрелки, если смотреть с по-
положительного конца оси г. Угол между плоскостями Оху и Ох'у',
или, что то же, угол между осями z n z', обозначим через 6; этот
угол отсчитывается от оси z в направлении, обратном движению
часовой стрелки, если смотреть с положительного конца линии
узлов; ясно, что линия узлов ON перпендикулярна к плоскости
Ozz . Угол между линией узлов ON
и осью Ох' обозначим через ср;
этот угол лежит в плоскости Ох'у'
и отсчитывается от линии узлов
в положительном направлении,
т. е. против движения часовой
стрелки, если смотреть с положи-
положительного конца оси z'. Три эйлеро-
эйлеровых угла, г|з, 6 и ф носят следующие
названия: угол \|) называется углом
прецессии, угол 6 — углом нута-
нутации и угол ф — углом собственного
вращения *).
Систему осей Oxyz можно пе-
перевести в положение Ox'y'z' по-
посредством следующих трех враще-
вращений: поворачиваем сначала си-
систему осей Oxyz вокруг оси z на угол \|), тогда ось Ох совпадет
с линией узлов ON; затем производим поворот вокруг оси ON на
угол 6, тогда ось z займет положение оси z'; наконец, производим
поворот вокруг оси z' на угол ф, тогда ось Ох (которая до этого
поворота совпадала с осью ON) займет положение оси х', и, следо-
следовательно, система осей Oxyz перейдет в положение Ox'y'z'. Отсюда
следует, что положение подвижных осей Ox'y'z', а значит, и поло-
положение твердого тела, имеющего неподвижную точку О, вполне
определяется тремя углами Эйлера, т. е. тремя параметрами.
Поэтому говорят, что твердое тело с одной неподвижной точкой
имеет три степени свободы. При движении тела эти углы являются
некоторыми однозначными и непрерывными функциями времени,
т. е.
1> = Л @. 6 = U (t), Ф = /з (*). G6)
Если функцииД (t), /3 (t) и /3 @ известны, то для каждого данного
момента времени (для каждого числового значения аргумента () мы
Рис. 239.
1) Термины «линия узлов», «прецессия» и «нутация» заимствованы из
астрономии.
332 КИНЕМАТИКА
сможем из уравнений G6) найти углы \|), 9 и ф и, следовательно,
будем знать положение тела в этот момент. Поэтому уравнения
G6) вполне определяют движение твердого тела, имеющего одну
неподвижную точку, и называются уравнениями движения твер-
твердого тела вокруг неподвижной точки.
§ 85. Теорема Даламбера — Эйлера
Аналитически движение твердого тела вокруг неподвижной
точки определяется уравнениями G6) предыдущего параграфа.
Рассмотрим теперь это движение с геометрической точки зре-
зрения. Как увидим ниже, геометрическая картина движения
тела вокруг неподвижной точки аналогична той, которую для
плоскопараллельного движения тела дает теорема о центро-
центроидах (§ 81).
Нетрудно видеть, что положение твердого тела, имеющего одну
неподвижную точку О, будет вполне определено, если будут из-
известны положения двух каких-нибудь его точек А и В, не лежащих
на одной прямой с точкой О, так как, зная положения трех точек
тела О, А и В, не лежащих на одной прямой, мы можем опреде-
определить положение всякой другой точки М этого тела. В самом деле,
если соединим между собой точки О, А, В и М прямыми, то по-
получим тетраэдр ОАВМ, который при движении тела остается неиз-
неизменным, так как расстояния между точками О, А, В и М остаются
постоянными. Ясно, что положение этого тетраэдра, а следователь-
следовательно, и его вершины будет однозначно определено, если будет из-
известно положение треугольника ОАВ.
При движении твердого тела, имеющего неподвижную точку О,
каждая точка этого тела перемещается по поверхности сферы, опи-
описанной из центра О радиусом, равным расстоя-
расстоянию этой точки от точки О. Выберем две точки
А и В тела так, чтобы их расстояния от непо-
неподвижной точки О были равны (ОА = ОВ); если
опишем из центра О неподвижную сферу ра-
радиусом, равным О А, то плоскость треугольника
ОАВ пересечет эту сферу по окружности боль-
большого круга. Дуга АВ этого круга (рис. 240)
Рис. 240. при движении тела будет перемещаться по по-
поверхности этой неподвижной сферы; при этом
каждому положению дуги АВ на неподвижной сфере будет соот-
соответствовать единственное и вполне определенное положение дан-
данного тела в пространстве и обратно.
Докажем теперь следующую теорему Даламбера — Эйлера:
Теорема. Всякое перемещение твердого тела, имеющего
одну неподвижную точку, из одного положения в другое можно
Г Л 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 333
Рис, 241.
осуществить поворотом на некоторый определенный угол вокруз
некоторой определенной оси, проходящей через эту неподвижную
точку.
Доказательство. Пусть данное твердое тело, имеющее
неподвижную точку О, переместилось из одного положения в дру-
другое. Предположим, что некоторая точка этого тела переместилась
при этом из положения А в положение Аг, а точка В этого тела,
которая сначала находилась в точке Аи заняла положение Вх
(рис. 241). Понятно, что три точки тела
А, Аг и Вг лежат на поверхности сферы,
описанной из центра О радиусом, равным
ОА. Плоскость, проведенная через эти
три точки, пересекает сферу по окружно-
окружности, центр которой обозначим через Ог;
прямая, соединяющая точки О и О1г пер-
перпендикулярна к плоскости этой окружно-
окружности. Точку пересечения этой прямой со
сферой обозначим через Р. Так как от-
отрезки ААг и А1В1 представляют собой
расстояния между теми же двумя точками
А и В твердого тела, переведенными
только в новое положение, то ААХ — A-JS^,
отсюда следует, что дуги окружности ААг и А1В1 равны между
собой.
Так как положение данного тела однозначно определяется по-
положением двух его точек (А и В), то, для того чтобы перевести тело
из первого положения во второе, ему нужно сообщить такое пере-
перемещение, при котором точка А должна занять положение Al7 a
точка B(A^ — положение Вх. Для этого, очевидно, достаточно
повернуть тело вокруг оси ОР на угол, равный углу АОХАХ\
тогда треугольник АОХВ совместится с равным ему треугольником
A-\O\B\i a ДУга ААХ совместится с равной ей дугой АгВи и, следова-
следовательно, теорема доказана.
§ 86. Распределение скоростей в твердом теле, движущемся
вокруг неподвижной точки. Мгновенная ось вращения тела
Пусть твердое тело, имеющее неподвижную точку О, в момент t
занимает некоторое положение /; в момент t -f- At, т. е. через
весьма малый промежуток времени At, это тело, переместившись,
займет некоторое положение //, близкое к положению /. Пусть
какая-нибудь точка этого тела перемещается при этом из поло-
положения М в положение М'. Применяя теорему Даламбера — Эйлера
к этому перемещению тела, найдем ось ОР*, вокруг которой нужно
повернуть тело на некоторый малый угол Аф, чтобы перевести
334
КИНЕМАТИКА
его из положения / в положение // (рис. 242). Если бы в течение
промежутка времени At тело равномерно вращалось вокруг
оси ОР*, то его угловая скорость была бы равна
Эта величина со* называется средней угловой скоростью тела за
время At. Вектор средней угловой скорости to* направлен по оси
ОР* в ту сторону, чтобы наблюдатель, смотрящий с конца этого
вектора, видел вращение тела в направлении,
обратном движению часовой стрелки. Обо-
Обозначим предел, к которому стремится вектор
средней угловой скорости <о* при At —*■ О,
через to, т. е. положим:
to = lim to*.
Д(-*0
Вектор to направлен по оси ОР, которая
представляет собой предельное положение оси
ОР* при At->-Q; модуль этого вектора равен
м
|©
=lim л!
м^п At
Понятно, что два движения — истинное дви-
движение данного тела в течение промежутка
времени At и предполагаемое равномерное
вращение этого тела вокруг оси ОР* с угло-
угловой скоростью со* — различны, но начальные и конечные положе-
положения тела в обоих движениях совпадают, а потому совпадают
в обоих движениях начальные и конечные положения и точки
М. Отсюда следует, что перемещения этой точки и ее средние
скорости за время At в обоих движениях равны; если обозначим
средние скорости точки М в истинном движении и во вращатель-
вращательном движении вокруг оси ОР* соответственно через v* и vlp, то
>* = 1>вр =
ММ'
Обозначим радиус-вектор точки М, проведенный из неподвижной
точки О, через г. Линейная скорость vBp точки М во вращательном
движении вокруг оси ОР* в момент t равна, как известно (§ 73),
векторному произведению угловой скорости тела на радиус-век-
радиус-вектор этой точки, а потому
пвр = to* х г.
С другой стороны, скорость гвр в момент t является пределом сред-
средней скорости vBP при At ->■ 0. Поэтому можем написать:
1>вР = "up + Ц = @* Xr-f- ц,
ГЛ. 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 335
где г\ обозначает бесконечно малую величину, стремящуюся к нулю
вместе с At. Сопоставляя это равенство с написанным выше, полу-
получаем:
v* — to* х г -f- ц.
Переходя к пределу при At —*■ О и принимая во внимание, что
lira, х\ = 0 и lim v* — v, где v обозначает истинную скорость
At -. О Д(-*0
точки М в момент t, получим:
р = © X г. G7)
Эта формула позволяет найти скорость любой точки тела в данный
момент; следовательно, она дает распределение скоростей в данный
момент в твердом теле, движущемся вокруг неподвижной точки;
из формулы G7) следует, что это распределение скоростей таково
же, как при вращении тела вокруг оси ОР с угловой скоростью со.
Вектор to называется мгновенной угловой скоростью тела, а прямая
ОР, по которой направлен этот вектор и скорости точек которой
и данный момент равны нулю, называется мгновенной осью враще-
вращения тела.
Таким образом, приходим к заключению: при движении твердого
тела, имеющего одну неподвижную точку, в каждый данный мо-
момент существует мгновенная ось вращения, проходящая через эту
неподвижную точку.
Отсюда следует, что движение твердого тела вокруг неподвиж-
неподвижной точки можно представить себе как непрерывный ряд последо-
последовательных вращений вокруг мгновенных осей, проходящих через
эту неподвижную точку. Важно заметить, что положение мгновен-
мгновенной оси вращения тела не остается неизменным: в различные мо-
моменты времени эта ось занимает различные положения как в про-
пространстве, так и в самом движущемся теле 1).
Геометрическое место мгновенных осей вращения в простран-
пространстве называется неподвижным аксоидом. Так как все мгновенные
оси проходят через неподвижную точку тела, то неподвижный
аксоид представляет собой конус (в частном случае круглый) с вер-
вершиной в этой неподвижной точке.
Геометрическое место мгновенных осей вращения в самом дви-
движущемся теле называется подвижным аксоидом. Подвижной аксоид
также представляет собой конус с вершиной в неподвижной точке
тела. Этот конус, связанный с данным телом, перемещается вместе
с ним. Подвижной и неподвижный аксоиды в каждый данный
1) Сравните с тем, что было сказано о мгновенном центре вращения в тео-
теории плоскопараллельпого движения тела (§ 79).
336
КИНЕМАТИКА
момент касаются вдоль общей образующей ОР, которая является
в этот момент мгновенной осью вращения тела (рис. 243).
При движении тела подвижной аксоид катится без скольже-
скольжения по неподвижному. Это заключение, аналогичное теореме
о центроидах (§ 81), дает наглядную гео-
геометрическую картину движения твердого
тела вокруг неподвижной точки. Понятно,
что качение подвижного аксоида по непо-
неподвижному происходит без скольжения потому,
что скорости точек тела, лежащих на мгно-
мгновенной оси вращения (на общей образующей,
вдоль которой касаются оба аксоида), в дан-
данный момент равны нулю.
Из формулы G7) следует, что модуль
скорости точки М тела выражается так:
Рис. 243.
v = cor sin
где у есть угол между радиусом-вектором г точки М и мгновенной
осью вращения ОР (рис. 244). Но г sin у = h, где h обозначает рас-
расстояние точки М от оси ОР, т. е. мгновенный радиус вращения
точки М, а потому
v = /гсо. G7')
Вектор v перпендикулярен к плоскости, в которой лежат векторы
to и /■; следовательно, скорость точки М перпендикулярна к плос-
плоскости, проходящей через эту точку и мгновеи-
P\j ную ось вращения тела.
к? Если представим правую часть равенства
G7) в виде определителя [по формуле D8)
§ 43], то
г I к
(О
v =
0)„ 0)
х у
X у
где сож, (Ву, ш2 обозначают проекции вектора
угловой скорости <о на оси неподвижного
координатного трехгранника Oxyz (рис. 244),
Рис. 244. а х, у, z — проекции на те же оси радиу-
радиуса-вектора г, т. е. координаты точки М,
Развертывая этот определитель по элементам первой строки,
получим формулу разложения скорости v по неподвижным коорди-
координатным осям:
v = (Му2 — azy) i + (согж — axz) j + (аху — аух) к. G8)
Так как в формуле разложения вектора по координатным осям
коэффициенты при ортах i, j, к представляют собой проекции этого
ГЛ. 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 337
вектора на эти оси, то из формулы G8) получаем следующие вы-
выражения для проекций скорости v на неподвижные координат-
координатные ОСИ1
vx - «yz — azy
vy = o)zx — (axz, \ G9)
Эти формулы называются кинематическими формулами Эйлера.
Если проекции угловой скорости со.,., <ву и o)z в данный момент
известны, то по этим формулам легко найти проекции скорости v
любой точки тела в этот момент и, следовательно, определить
модуль и направление этой скорости.
Понятно, что такие же формулы будем иметь и для проекций
скорости г на подвижные координатные оси Ox'y'z', неизменно свя-
связанные с движущимся телом, т. е.
Vx' = <Ву'2' — ©j't/', I
Vy' = u>zrx' — cvz', I G9')
Vz' = CiVJ/' — (Oy'X'. J
Здесь <йх,, ®v, и аг, обозначают проекции угловой скорости (о на
подвижные оси Ox'y'z', а х', у' и z — координаты точки М в этой
подвижной системе осей. Заметим, что координаты х, у и z в фор-
формулах G9) являются функциями времени, так как точка М переме-
перемещается относительно неподвижных осей Oxyz; координаты же х',
у' и z' в формулах G9') имеют постоянные значения, так как по-
подвижные оси Ox'y'z', неизменно связанные с данным телом, пере-
перемещаются вместе с ним и, следовательно, положение точки М
тела относительно этих осей с течением времени не изменяется.
Если возьмем какую-нибудь точку тела, лежащую в данный мо-
момент на мгновенной оси вращения, то радиус-вектор г этой точки
и вектор to будут направлены по одной прямой; следовательно,
проекции этих векторов на оси Oxyz пропорциональны. Поэтому,
обозначая координаты точки, лежащей на мгновенной оси враще-
вращения, через х, у и z, будем иметь:
— = -2- = — . (80)
(Од; (Оу 0J
Этим уравнениям удовлетворяют координаты всех точек тела, лежа-
лежащих в данный момент па мгновенной оси вращения; поэтому урав-
уравнения (80), представляющие собой уравнения прямой, проходя-
проходящей через начало координат, являются уравнениями мгновенной
оси вращения в неподвижной системе осей.
Легко видеть, что правые части формул G9) при значениях х,
у и z, удовлетворяющих уравнениям (80), обращаются в нуль, что
338 КИНЕМАТИКА
и должно быть, так как скорости всех точек тела, лежащих на
мгновенной оси вращения, в данный момент равны нулю.
Аналогично уравнениям (80) получаем уравнения мгновенной
оси вращения в подвижной системе осей:
§ 87. Распределение ускорений в твердом теле,
движущемся вокруг неподвижной точки
Перейдем теперь к определению ускорений точек тела, движу-
движущегося вокруг неподвижной точки О. Так как ускорение w точки М
тела равно векторной производной от скорости v этой точки по
времени, то, дифференцируя по t равенство G7), получим:
dv I dat v, \ , / . dr^
Как было указано в § 73, вектор -^- т. е. производная от вектора
угловой скорости по времени, называется угловым ускорением
тела; следовательно, если обозначим угловое ускорение тела
через к, то
При этом важно заметить, что так как вектор (о изменяется с тече-
течением времени не только по модулю, но и по направлению, то угло-
угловое ускорение 8 = - не будет направлено по одной прямой с векто-
вектором <о, как это имеет место при вращении тела вокруг неподвиж-
неподвижной оси (§ 73). Производная 4- от радиуса-вектора точки М по вре-
dr
мени равна скорости этоп точки, т. е. , = v; поотому полученное
выражение для ускорения w принимает следующий вид:
w = cx/- + «Xi) = 8Xr + (DX(»Xr). (82)
Эта формула дает распределение ускорений в твердом теле, движу-
движущемся вокруг неподвижной точки; она показывает, что ускорение
w можно представить как сумму двух составляющих ускорений.
Обозначим слагаемые этой суммы соответственно через юг и w^,
т. е. пололчим
г х г = w& и вхс=шх((|)Хг) = wm,
и рассмотрим каждое из этих слагаемых в отдельности.
Ускорение wE, равное векторному произведению вхг, направ-
направлено перпендикулярно к плоскости, в которой лежат векторы 8
ГЛ. 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 339
и г, и притом в ту сторону, откуда поворот вектора 8 (на угол,
меньший 180°) до совмещения его с вектором г виден происходящим
в положительном направлении (против часовой стрелки), как это
показано на рис. 245. Модуль этого ускорения равен
w, = |е X г\ = ег sin (е, г).
Если опустим из точки М перпендикуляр Mm' на направление век-
вектора е и обозначим длину этого перпендикуляра через h', то из
прямоугольного треугольника ОМт! имеем
(рис. 245):
Ы ~ г sin (e, г).
Следовательно,
= h'e.
(83)
Рис. 245,
Из тех же соображений, о которых бы-
было сказано в § 73, легко убедиться, что
ускорение юы, равное векторному произ-
произведению (охи, направлено по перпенди-
перпендикуляру Mm, опущенному из точки М на
мгновенную ось вращения (т. е. ио мгновенному радиусу вра-
вращения точки М), от точки М к этой оси, как показано на рис. 245.
Поэтому ускорение гсш по аналогии с тем случаем, когда тело
вращается вокруг неподвижной оси, называется центростреми-
центростремительным ускорением точки М. Поскольку ускорение гсы направ-
направлено к оси вращения тела, его называют также осестремителъным
ускорением. Так как ©_1в, то модуль ускорения гсы равен
wm = | ©х о | == (ov sin 90° = av.
Но так как v — ha, где h обозначает длину перпендикуляра
Mm, опущенного из точки М на мгновенную ось вращения
тела, то
wa = Лео2. (84)
Важно заметить, что хотя формула (82) по своему внешнему
виду совпадает с формулой E5) § 73, однако ускорение we не равно
(ни по модулю, ни по направлению) касательному ускорению wx
точки М; точно так же центростремительное ускорение гсш не со-
нпадает (ни по модулю, ни по направлению) с нормальным ускоре-
ускорением wn этой точки, как это имеет место в том случае, когда тело
вращается вокруг неподвижной осн.
Модуль и направление вектора 8 легко могут быть опреде-
определены, если известны проекции этого вектора на неподвижные оси
Oxyz; из равенства
da
8= л
340
КИНЕМАТИКА
следует, что проекции вектора углового ускорения на неподвиж-
неподвижные координатные оси равны производным по времени от соответ-
соответствующих проекций вектора угловой скорости на те же оси, т. е.
dt ' v~~ dt
_ _
dt •
(85)
Выведем теперь формулы для проекций ускорения w точки М
на неподвижные координатные оси.
Представляя векторные произведения ъ X г и (Л х v в виде
определителей [по формуле D8) § 43], будем иметь:
10.
8 X Г =
i j к
x у z
= to х v =
i j k
йг 0)„ (О,
vz
Развертывая эти определители по элементам первой строки, полу-
получим:
и
h>w = (f»yvt — ®zvy)i
Следовател ьно,
w = ме+и>ы= (euz — ezy
yvz — <azvy) i
exy — eyx) k
(«>xvy — <ayvx)k.
yX + axvy — &vvx)k.
Из этой формулы разложения ускорения w по неподвижным коор-
координатным осям следует, что искомые проекции wx, wy и wz равны
соответственно коэффициентам при ортах i, j и к, т. е.
wv = ezx
— ayvx.
Подставляя сюда значения проекций скорости vx, vy и vz из фор-
формул G9), получим:
Но
= eyz — ггу +
= eyz — егу + <
со у + ®1 = со2, а потому
wx = eyz — ггу + о)ж (хсоя
azz) — x
ooj)
ГЛ. 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 341
Путем круговой перестановки букв получим аналогичные фор-
формулы и для двух других проекций. Таким образом, приходим
к следующим формулам:
wx = eyz — г2у + ах (хих + уау + шг) — ха2, \
wy = ezx — exz + соу (а;сож + уау + zcoz) — г/со2, 1 (86)
wz = гхУ — гуХ + az (х(Ох + У®у + 2WZ) — 2С02. J
По этим формулам нетрудно вычислить проекции ускорения ю и
затем определить модуль и направление этого ускорения.
Пример 95. Твердое тело движется вокруг неподвижной точки О,
принятой за начало координат, причем проекции вектора угловой скорости
тела па неподвижные координатные оси выражаются так:
сож = 5 sin ( -=- t \ , coy = 5 cos ( ~ t) , coz = 5 }^3.
Найти в момент t = 1 сек скорость и ускорение точки М тела, координаты
которой в этот момент равны х = 0, у = 0,2 м и z = 0,3 м.
Решение. По заданным проекциям угловой скорости находим модуль
отой скорости:
О) = l/ о)!, -t- of -j- со; = т/25 + 75 = 10 —.
V х у 1 Y сек
При t = 1 имеем:
сож = 5 sin j = 5, Шу = 5 cos — = 0, coz = 5 ]^3.
Проекции скорости точки М находим по формулам Эйлера:
vx = <x)yz — (»гу = —0,2 •
v,, = со-ж — coj-z = —5 • 0,3 = — 1,5,
v2 = a>xy — <£>yx = 5 • 0,2 = 1.
Отсюда получаем модуль искомой скорости:
v = |/ ^ + г;2 + v\ + -j/ 3 -г 2,25 Т1= |/б,25 = 2,5 ж'сек.
Проекции углового ускорения па неподвижные оси согласно формулам (85)
будут равны
_ dwx _ 5я /я
&х ~ >, ^^ ~>г~ COS ! —
аг 2 \ 2
_ Лоу 5л . In
у dt n
При t — 1 имеем:
5л it „ 5л . it 5я
еж = -0- cos -„ = 0, 8у = sin -- = , ег=0.
Отсюда видим, что угловое ускорение е в момент t = 1 равно но модулю
5 л _.
-у сек д и направлено по оси у в отрицательную сторону. Проекции
342
КИНЕМАТИКА
искомого ускорения точки М на неподвижные оси находятся по формулам (86):
wx = - 0,3--2-+ 5.0,3-5 1/3=1,5
шу = — 0,2-102 = —20,
и>2 = 5 ]/3 .6,3.5/3"— 0,3 ■ 10а = 22,5—30 = —7,5.
По этпм проекциям уже нетрудно вычислить модуль и направляющие коси-
косинусы ускорения w.
Пример 96. Круглый конус с образующей, равной I, катится без
скольжения по неподвижной горизонтальной плоскости; при этом вершина О
конуса остается неподвижной, а центр О1 его основания описывает окруж-
окружность, расположенную в горизонтальной плоскости, с данной постоянной по
модулю скоростью «. Найти ускорения концов А и В диаметра основания
*
конуса, зная, что точка А лежит в данный момент на линии касания конуса
с неподвижной плоскостью и что Z, АОВ = а (рис. 246, а).
Решение. Возьмем систему неподвижных осей Oxyz, причем ось у
направим по образующей О А, вдоль которой в данный момент конус касается
неподвижной плоскости, а ось z направим перпендикулярно к этой плоскости,
как показано на рис. 246, а. Так как конус катится без скольжения, то ско-
скорости всех его точек, лежащих на образующей ОА, равны в данный момент
нулю; следовательно, мгновенная ось вращения конуса направлена но оси у,
но этой же оси направлена и мгновенная угловая скорость <о. Если из точки Ох
опустим перпендикуляр ОгС на ось у, то ОгС есть мгновенный радиус вра-
вращения точки Оц а потому имеем [по формуле G7')]:
и = о) • ОХС;
отсюда ва'ходнм модуль мгновенной угловой скорости конуса:
По
а потому
Ofi = ООг • sin " = ОА ■ cos •" sin " = — sin a,
Л Zt & Л
2u
со = -—.—— = const.
I sin a
ГЛ. 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 343
I, * - dtit
Чтооы найти угловое ускорение копуса е = -,-„ заметим, что производная
dot , „
■j- представляет собой скорость, с которой конец вектора со перемещается
по годографу этого вектора. Так как со = const, то годограф вектора со есть
окружность, описанная в плоскости Оху из центра О радиусом, равным со.
Поэтому вектор е имеет направление касательной к этой окружности, откуда
следует, что этот вектор перпендикулярен к вектору со, т. е. направлен по
оси х. Так как угловая скорость, с которой плоскость 06\С вращается во-
вокруг оси z, равна =-^, то скорость, с которой конец вектора ш движется по
L/C
окружности годографа, равна по модулю уг-^ со. Следовательно,
с/С
по и = Ofi ■ со, а потому
Определив угловую скорость и угловое ускорение конуса, переходим к опре-
определению искомых ускорения точек А и В. Для этого воспользуемся вектор-
векторной формулой (82). Так как точка А лежит на мгновенной оси вращения, то
ее центростремительное ускорепце равно нулю, т. е. w^ = 0. Следовательно,
Из этог о равенства следует:
1) вектор wA направлен перпендикулярно к плоскости Оху, т. е. парал-
параллельно оси z, как показано на рис. 246, б;
2) модуль вектора wA равен
wA = ОА г = to2tg^-.
Центростремительное ускорение точки В направлено по мгновенному ра-
радиусу вращения этой точки, т. с. по перпендикуляру BD, опущенному из
точки В на ось у (рис. 246, б); модуль этого ускорения согласно формуле (84)
равен
wff = BD ■ со2 = lw2 sin a.
Вторая составляющая ускорения точки В. т. е. ускорение u[f, перпенди-
перпендикулярна к плоскости ВОх; следовательно, это ускорение лежит в плоскости
Oyz и перпендикулярно к образующей ОВ. Так как eJ_OB, то модуль этого
ускорения согласно формуле (83) равен
w$= OB-г = /-е = toatg| .
Сложив ускорения ir'g* и ау', получим искомое ускорение м-в точки В.
Так как угол между векторами ic$ п м-^' равен 180° — а, то по известной
формуле для диагонали параллелограмма находим:
g»> cos a.
344 КИНЕМАТИКА
Принимая во внимание, что w^ = le и
w^ = to2 sin а = le ctg — sin а = 2le cos2 -х- = h A 4* cos а),
получаем:
«= 1Ч2 [1 -f A 4- cos а)A—cos а)] = Z2e2 A -f sin2 a).
и>2в = г2е2 [1 -f (I -f cos aJ — 2 A -f cos a) cos а] =
Отсюда
= le У + sin2 a = /со2 tg — - ]/"l + sin2 a.
2
Заметим, что ускорепия точек А и В легко найти и аналитически, пользуясь
формулами (86) и принимая во внимание, что в рассматриваемый момент
времени имеем:
ч>х = 0. «у = ш. wz = °;
б.,. = е = со2 tg у, еу = 0, ег = 0;
хА = 0, уА = г, гА = 0;
хв — 0, Ув ~ 'cosa> 2в = 's'n a-
Так как мгновенная ось вращения конуса во все время движения остается
в плоскости Оху, то неподвижным аксоидом является эта плоскость, по-
подвижным аксоидом является, очевидно, боковая поверхность данного конуса.
§ 88. Уравнения движения свободного твердого тела
в общем случае. Разложение движения твердого тела
на поступательное движение и движение вокруг некоторой точки
До сих пор мы изучали частные случаи движения твердого тела.
Рассмотрим теперь общий случай движения свободного твердого
тела, т. е. такого тела, которое может получить любое перемеще-
перемещение в пространстве. С таким общим слу-
случаем движения твердого тела мы встреча-
встречаемся, например, при изучении движения
артиллерийского снаряда.
Отнесем движение данного свободного
тела к системе неподвижных осей Oxyz.
Кроме того, в самом теле возьмем неиз-
неизменно связанную с ним систему подвижных
/'У осей O'x'y'z, имеющих начало в произ-
произвольно выбранной точке тела О' (рис. 247).
рис 247 Проведем еще через точку О' подвижные
оси |, т), £ неизменного направления, пред-
предполагая, что эти осп, перемещаясь вместе с точкой О', остаются
все время параллельными неподвижным осям х, у и z.
Положение данного свободного тела в пространстве будет
вполне определено, если будет известно положение связанной
с ним системы подвижных осей O'x'y'z'. Но для того, чтобы
определить положение в пространстве системы осей O'x'y'z', не-
ГЛ. 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ S45
обходимо и достаточно знать: во-первых, положение подвижно-
подвижного начала (У, т. е. координаты хо>, уо: и zc, точки О', и, во-вторых,
положение системы O'x'y'z относительно осей О'£т]£, параллель-
параллельных неподвижным осям. Так как две системы осей О'х'у'z' и O'\x\t,
имеют общее начало О', то положение первой из них относительно
второй может быть определено, как указано в § 84, тремя эйлеровы-
эйлеровыми углами г|>, 6 и ф. Отсюда следует, что положение осей О'х'у'z',
а следовательно, и положение свободного твердого тела в прост-
пространстве определяется шестью параметрами: тремя координатами
точки О' и тремя углами Эйлера. Поэтому свободное твердое тело
имеет шесть степеней свободы.
При движении тела в общем случае все эти шесть параметров,
изменяясь с течением времени, являются однозначными и непре-
непрерывными функциями переменного t, т. е.
*о- = к @, уо' = к @. *,• = U @. \ (81)
Если все шесть функций времени, стоящие в правых частях
этих равенств, известны, то положение тела в каждый данный
момент t будет известно, и, следовательно, движение тела будет
вполне определено. Поэтому уравнения (87) являются уравнениями
движения свободного твердого тела в общем случае.
Первые три из уравнений (87) определяют движение точки О'
тела и вместе с тем поступательное движение осей 0'£т]£ (пере-
(переносное движение), а последние три уравнения определяют движе-
движение тела относительно этих осей (относительное движение тела);
так как точка О' занимает в подвижной системе О'£т]£ неизменное
положение, то относительное движение тела представляет собой
движение тела, имеющего одну неподвижную точку, или движение
вокруг точки О', т. е. такое движение, которое было рассмотрено
в предыдущих параграфах этой главы. Скорость переносного
поступательного движения равна, очевидно, скорости Do" точки О';
эту скорость можно определить по ее проекциям на неподвижные
координатные оси, причем эти проекции находятся из первых
трех уравнений (87):
dxQ,
vO'x = ~Jf = /l (t),
dyn.
Таким образом, приходим к следующему заключению: движение
свободного твердого тела в общем случае можно разложить на два
движения: 1) поступательное движение, скорость которого равна
346 КИНЕМАТИКА
скорости произвольно выбранной точки О' тела, и 2) движение
вокруг этой точки О'.
Так как относительное движение тела (движение относительно
осей О'&■){,) есть движение вокруг точки О', то согласно сказан-
сказанному в § 86 это движение таково, что в каждый данный момент
существует мгновенная ось, которая проходит через точку О'
и вокруг которой тело вращается с некоторой угловой скоростью (о.
Как было указано в § 86, это движение можно представить как
качение без скольжения одного конуса (подвижного аксоида),
неизменно связанного с движущимся твердым телом, по другому
конусу, который в данном случае, поскольку мы рассматриваем
движение тела относительно осей О'£т]£, будет связан с этими осями,
а так как система осей O'l,r\Z, движется поступательно, то отсюда
приходим к заключению: движение свободного твердого тела в об-
общем случае можно представить как качение без скольжения одного
конуса по другому, который движется поступательно. Эти два
конуса имеют общую вершину О' и в каждый данный момент
касаются вдоль общей образующей, по которой направлен вектор
мгновенной угловой скорости ю.
Так как за начало О' подвижной системы осей О'%г\£, можно
выбрать произвольную точку тела, то вышеуказанное разложение
данного движения тела на два движения можно произвести беско-
бесконечным числом способов. При этом понятно, что скорость перенос-
переносного поступательного движения, равная скорости точки О', зави-
зависит от выбора этой точки; что же касается угловой скорости (о
относительного вращения тела вокруг мгновенной оси, проходя-
проходящей через точку О', то, как увидим в следующем параграфе, ни
модуль, ни направление вектора (о не зависят от выбора этой
точки *).
§ 89. Распределение скоростей и ускорений
в твердом теле в общем случае
Определим скорость v какой-нибудь точки М свободного твер-
твердого тела в общем случае. Для этого выберем какую-нибудь точку
тела О' и будем определять положение этой точки радиусом-
вектором го', проведенным из начала О неподвижной системы
осей Oxyz (рис. 248). Радиус-вектор точки М, проведенный из
точки О', обозначим через г'.
В предыдущем параграфе мы установили, что движение твер-
твердого тела в общем случае можно разложить на два движения: 1) по-
поступательное движение, скорость которого равна скорости vo'
точки О' (переносное движение), и 2) движение вокруг этой точки
') Сравните с тем, что было сказано о разложении плоскопараллель-
плоскопараллельною движения тела на поступательное и вращательное (§ 78).
ГЛ. 1С. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 347
о
О' (относительное движение), причем это последнее движение та-
таково, что в каждый данный момент существует мгновенная ось,
которая проходит через точку О' и вокруг которой тело вращается
с угловой скоростью ft). Отсюда на основании теоремы сложения
скоростей заключаем, что искомая скорость v точки М равна век-
векторной сумме двух скоростей: 1) скорости
го1 поступательного движения (переносная
скорость) и 2) вращательной скорости v'
точки М вокруг мгновенной оси, проходящей
через точку О' (относительная скорость).
Следовательно,
v = v0- + v'. (88)
Скорость v' определяется по формуле G7)
§ 86, т. е.
v = со х г'. (89) Рис. 248.
Эта скорость направлена перпендикулярно к плоскости, в которой
лежат точка М и мгновенная ось вращения тела, проходящая через
точку О', и по модулю равна произведению расстояния точки М от
этой оси (мгновенного радиуса вращения точки М) на модуль угло-
угловой скорости со. Равенство (88) на основании формулы (89) прини-
принимает вид
v = vo> + т X г\ (90)
Эта формула дает распределение скоростей в движущемся твердом
теле в общем случае.
Проектируя векторное равенство (90) на направление радиуса-
вектора г' и принимая во внимание, что вектор юхг' перпендику-
перпендикулярен к г' и, следовательно, его проекция на
направление вектора г' равна нулю, получим:
прем (v) — про'м (»оО-
Так как точки О' и М тела выбраны произ-
произвольно, то отсюда приходим к теореме, которая
была доказана для частного случая плоскопа-
плоскопараллельного движения тела: при любом дви-
движении твердого тела проекции скоростей двух
его точек на прямую, соединяющую эти точки,
равны.
Покажем теперь, что ни модуль, ни направление вектора угло-
угловой скорости (Л не зависят от выбора точки О'. Возьмем вместо О'
какую-нибудь другую точку тела О{. Пусть угловая скорость,
с которой тело вращается вокруг мгновенной оси, проходящей
через точку О\, равна а^ (рис. 249). Требуется доказать, что
tax = ю.
Рис. 249.
348 КИНЕМАТИКА
Если обозначим через г[ радиус-вектор произвольно взятой
точки М тела, проведенный из точки О[, то скорость точки М будет
равна
V = V0[ + «1 X г[.
Сравнивая это равенство с равенством (90), получим!
vo[ +щ Х/-;=ио'+йХ г'.
Скорость точки О[ можно найти по формуле (90); следовательно,
vo[ —v0- + <о X О'О[.
Подставляя это значение vq\ в предыдущее равенство, получим:
со X O'O'i + (Oj X г[ = о X г',
или
Ш[Хг;=их {г —O'O'i).
Но, как видно из рис. 249, имеем:
О'О\ -\- г[ — г', или г' — О'О\ = г[,
а потому
й, X rj = » X г[,
или
(с^ — со) х г[ = 0.
Это равенство должно иметь место при любом выборе точки М,
т. е. при любом значении вектора г{, но это возможно только
в том случае, когда «^ — со = 0, т. е. (Oj = (о, что и требовалось
доказать.
Чтобы определить теперь ускорение w точки М, достаточно
dv у у
найти производную -у ; дифференцируя по времени равенство
(90), получим:
dv dv0, /dot , \
Производная —т— есть ускорение юо- точки О', или, что то же,
ускорение переносного поступательного движения. Производная
d о)
- есть угловое ускорение тела в его относительном движении
вокруг точки О', т. е. -г- = е. Чтобы выяснить, что представляет
собой производная -т-, соединим точку М с неподвижным началом О
и обозначим радиус-вектор ОМ через г. Тогда (рис. 248) имеем:
ГЛ. 16. ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ТОЧКИ 349
Дифференцируя это равенство по t, получим:
dr dr0, dr'
It = dt ~*~~dt'
dr drni
Ho -r — v и —г- = uor. а потому
at at
Отсюда на основании равенств (88) и (89) следует, что
^ = ^«Хг', (91)
т. е. производная -£- равна вращательной скорости точки М вокруг
мгновенной оси, проходящей через точку О'.
Полученное выше выражение для ускорения w принимает вид
из = wo< + (е X г') + (<о X V) — w0- + (г X г') + о X (ю X г'). (92)
Эта формула дает распределение ускорений в движущемся твердом
теле в общем случае и отличается от формулы (82) только чле-
членом wo-. Члены ехг' и (oxv' представляют собой соответственно
составляющие и>Ё и ю'ы ускорения точки М тела в его относитель-
относительном движении"вокруг точки О'. Модули и направления этих уско-
ускорений определяются так же, как было указано в § 87, при выводе
формулы (82).
Отсюда следует, что ускорение всякой точки свободного твер-
твердого тела в общем случае равно геометрической сумме двух уско-
ускорений: 1) ускорения произвольно выбранной точки О' тела и 2) уско-
ускорения данной точки тела в его движении вокруг точки О'.
Понятно, что этот результат можно было бы получить непосред-
непосредственно из теоремы сложения ускорений в том случае, когда пере-
переносное движение является поступательным (§ 76), аналогично
тому, как формула (90) для скорости v получена из теоремы сложе-
сложения скоростей.
Если возьмем две какие-нибудь точки А и В свободного твер-
твердого тела, то на основании формул (90) и (92), в которых точку О'
можно заменить точкой А, а точку М — точкой В, будем иметь:
где
vBa = (OX.AB,
и
1С в = 1С А 4" ^й + №Й,
" Л ' ВА ' ВА'
350
КИНЕМАТИКА
где
= е X АВ
и
= ю X (со X
эти формулы устанавливают зависимость между скоростями и уско-
ускорениями любых двух точек движущегося твердого тела.
Формула (91) получена при произвольном выборе точки М
твердого тела; следовательно, эта формула справедлива для вся-
всякого вектора г', неизменно связанного с движущимся твердым
телом. В частности, мы можем в этой формуле последовательно по-
положить г' = i', г' — ]' и г' = к', где /', /"' и к' обозначают орты по-
подвижных осей О'х , О'у' и О' т!, неизменно связанных с движущимся
телом. Тогда получим следующие важные формулы, определяю-
определяющие производные по времени от ортов подвижных координатных
осей:
dt
= <ахк'.
(91')
ГЛАВА 17
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ В ОБЩЕМ СЛУЧАЕ
§ 90. Теорема сложения скоростей
В главе XIV мы уже видели, в чем состоит задача о сложном
движении точки, и рассмотрели теоремы сложения скоростей и сло-
сложения ускорений для того частного случая, когда переносное дви-
движение, т. е. движение подвижной
системы отсчета, — поступатель-
поступательное. Теперь мы докажем эти тео-
теоремы в общем случае, т. е. не делая
никаких частных предположений
о переносном движении.
Пусть подвижная система от-
отсчета O'x'y'z' движется произволь-
произвольным образом относительно непо-
неподвижной системы Oxyz и пусть
точка М в ее относительном дви-
движении, т. е. в движении относи-
относительно системы O'x'y'z', описы-
описывает некоторую траекторию АВ
(рис. 250). Если обозначим ради-
радиусы-векторы 00', О'М и ОМ соответственно через го-, г' и г, то,
как видно из рис. 250, будем иметь:
Г = ГО' + Г'•
Если координаты точки М в подвижной системе осей обозна-
обозначим через х', у', z', а орты этих подвижных осей обозначим
Рис. 250.
ГЛ. 17. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ В ОБЩЕМ СЛУЧАЕ 351
через V, /' и к', то
/ = x'i' + y'f + z'k',
а потому
г = г0' + x'i' + у')' + z'k'.
Так как абсолютная скорость va точки М равна производной от
радиуса-вектора г этой точки по времени, то, дифференцируя по t
предыдущее равенство и принимая во внимание, что при неносту-
пательном движении системы осей О'х'у' z' направления ортов i', )'
и к' непрерывно изменяются и что, следовательно, эти орты яв-
являются переменными векторами, получим:
dr drn, dV dj' dk' dx' dy' dz'
Последние три члена этой формулы представляют собой относи-
относительную скорость точки М, так как согласно сказанному в § 75 эта
относительная скорость равна
Покажем, что сумма первых четырех слагаемых, входящих в выра-
выражение, полученное для va, равна переносной скорости точки М.
Переносной скоростью vp точки М называется скорость той
точки, неизменно связанной с подвижным трехгранником О'х'у'z',
с которой в данный момент совпадает точка М (§ 75). Поэтому
при определении переносной скорости точки М нужно эту точку
неизменно связать с подвижным трехгранником О'х'у'' z', т. е. нуж-
нужно считать ее координаты х , у', z' постоянными. Отсюда следует,
что переносная скорость точки М равна производной от радиуса-
вектора г этой точки по времени, причем при вычислении этой
производной координаты х', у', z нужно рассматривать как по-
постоянные, т. е., другими словами, нужно предположить, что отно-
относительное движение точки М остановлено.
Дифференцируя в этом предположении написанное выше выра-
выражение для радиуса-вектора г, получим:
drn, dV dj' dk'
Ve ~ ЧГ + X di + У Si + Z dt •
Из сопоставления полученных выражений для va, vr и ve, очевидно,
следует:
«а = «е + Vr- (93)
Это равенство выражает теорему сложения скоростей в общем слу-
случае: абсолютная скорость точки равна геометрической сумме пере-
переносной и относительной скоростей этой точки.
352
КИНЕМАТИКА
Мы видим отсюда, что абсолютная скорость точки и в общем
случае определяется так же, как при поступательном переносном
движении.
В качестве первого примера применения полученной теоремы
выведем выражение для скорости точки в полярных координатах.
Если точка М движется в данной
плоскости, то ее положение в каждый
данный момент t может быть опреде-
определено двумя ее полярными координа-
координатами: полярным углом <р и радиусом-
вектором г (рис. 251); при движении
точки обе эти координаты являются
однозначными и непрерывными функ-
функциями времени:
Рис. 251.
(94)
Эти уравнения представляют собой уравнения движения точки
в полярных координатах (§ 64).
Будем рассматривать движение точки М по прямой Ох' как
относительное; тогда переносным движением является вращение
этой прямой вокруг неподвижной точки О.
Скорость v точки М равна, следовательно, векторной сумме
двух скоростей: 1) относительной vr, называемой радиальной
скоростью, которая направлена по Ох' и алгебраическое значение
которой равно, очевидно, -г, и 2) переносной ve, представляющей
собой скорость той точки вращающейся прямой
Ох', с которой в данный момент совпадает точка М.
Так как все точки прямой Ох' описывают окружно-
окружноу сти с центром в точке О, то переносная скорость
точки М перпендикулярна к Ох', а ее алгебраиче-
алгебраическое значение на основании сказанного в § 72
dw
-ft.
Отсюда следует, что модуль абсолютной ско-
скорости точки М равен
Рис. 252.
v = V »? + »
! = Y
dt
р
dt
(95)
По этой формуле определяется модуль скорости, когда движение
точки задано уравнениями в полярных координатах.
Пример 97. Центробежный регулятор вращается вокруг неподвижной
вертикальной оси Oz с данной угловой скоростью со. В то же время муфта С
скользит вверх по оси Oz, а шары А и В удаляются от этой оси, так что
углы <р возрастают (рис. 252). Найти абсолютную скорость шаров, если
О А = ОВ = I.
ГЛ. 17. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ В ОБЩЕМ СЛУЧАЕ 353
Решение. Проведем через точку О подвижную горизонтальную
ось Оу', лежащую во вращающейся плоскости ОАВС. Относительное движе-
движение точки В, т. е. движение по отношению к осям Оу'z, представляет собой
dw _ ,
вращение с угловой скоростью coj = ~ вокруг оси Ох , перпендикулярной
к плоскости Оу z.
Предположим, что угловая скорость со, в данный момент известна. То^гда
относительная скорость о'^Р точки В равна по модулю Ыу% направлена перпен-
перпендикулярно к ОВ и лежит в плоскости Оу'z. Переносное движение представляет
собой вращение вокруг оси Oz с угловой скоростью со; следовательно, пере-
переносная скорость i^B* точки В равна по модулю гсо = Ы sin <p и направлена
перпендикулярно к плоскости Оу'z. Отсюда на основании теоремы сложения
скоростей находим, что модуль искомой абсолютной скорости точки В равоы
^B1=V4B)" + vfr* = I \U\ + ^ sin* Ф.
§ 91. Теорема Кориолнса
В предыдущем параграфе мы нашли, что абсолютная скорость
точки М, движущейся по некоторой траектории АВ относительно
подвижной системы отсчета O'x'y'z' (рис. 250), равна геометри-
геометрической сумме относительной и переносной скоростей. Найдем
теперь абсолютное ускорение этой точки.
Как было указано в § 75, формула разложения относительного
ускорения wr точки М по подвижным осям имеет следующий вид:
Переносным ускорением we точки М называется ускорение той
точки, неизменно связанной с подвижным трехгранником О'х'у'z ,
с которой в данный момент совпадает точка М. Поэтому для опре-
определения переносного ускорения точки М нужно найти производ-
производную по времени от переносной скорости этой точки, предполагая
при этом, что точка М неизменно связана с трехгранником О'х'у' z ,
т. е. считая ее координаты х', у', z постоянными. В предыдущем
параграфе мы нашли, что переносная скорость точки М равна
„ _dr°' ,dv df ,dk'
v<- ~ 1Г + * dt + У It +z Hf
Дифференцируя по t это выражение в предположении, что х', у', z'
постоянны, получим переносное ускорение точки М:
Абсолютное ускорение wa точки М равно производной по времени
от абсолютной скорости va этой точки, но
Va = Ve + *V.
12 И. М. Воронков
354 КИНЕМАТИКА
а потому
Wa~~dt ~ ~It ~^~ ~dt '
Найдем производные, стоящие в правой части этого равенства:
- ^21 л. г'dH' _l ,/*■>" _u ,»d"k' jLrfi*j.!^dij. d* dk> -
~~ dt* +Х dt* + У dt* + dt* + dt dt ^ dt dt ^ dt dt ~
dx' dl' dy' dj' dz' dk'
— W<- + ~dtJi+~dt~dl+Tt~di-
Заменим здесь производные от ортов i', /', к' их значениями по фор-
формулам (91') § 89:
dV •> di' v dk' ,,
где ю есть мгновенная угловая скорость, с которой вращается
трехгранник О'х'у'z (твердое тело, с которым связана подвижная
система отсчета) вокруг мгновенной оси, проходящей через
точку О'.
Тогда получим:
dx' di' dy' dj' , dz' dk' _
~dt ~di ~*~ dl ~di ~dt ~dt ~
' ., . du ., , dz' ,,\
(l+JF'f +dTk) =®
где
dx' ., , du' ., , dz' ,,
v = i + £> + k
есть относительная скорость точки М.
Итак,
Далее:
dvr d I dx' ., dy' ., dz'
'dt='dt\~dTl + -dl* +Tt
— dl£- ■' _L dHj' •' I d'2z' h' Л- —— -I- dlJ' dj- 4- dZ' —'
~ ~d~F l ~т~ ~dF J + It*' ~t~ ~dt ~di ~*~ It lit ~т~ dt dt'
= wr -f ft) X ur.
Итак,
ГЛ. 17. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ В ОБЩЕМ СЛУЧАЕ 355
~ dVf, di'r
Складывая полученные выражения для производных - '- и - ',
найдем:
Wa = We + wr + 2(й X lV (96)
Эта формула показывает, что в том случае, когда переносное дви-
движение не является поступательным, абсолютное ускорение точки
складывается из трех ускорений: переносного юр, относительного
и\ и ускорения, равного 2<йХрг, которое называется ускорением
Кориолиса 1). Обозначая ускорение Кориолиса через ick, имеем,
следовагелыю:
roft = 2(юх»г), (97)
т. е. ускорение Кориолиса равно удвоенному векторному произве-
произведению угловой скорости твердого тела, с которым связана подвиж-
подвижная система отсчета, на скорость точки относительно этой
подвижной системы.
Равенство (96), которое можно переписать в виде
н'а = Wp + wr + wk> (98)
выражает теорему Кориолиса: в том случае, когда переносное дви-
движение, т. е. движение подвижной системы отсчета, не является
поступательным, абсолютное ускорение точкч равно векторной
сумме трех ускорений: переносного, относи-
относительного и кориолисова.
Модуль и направление ускорения Корио-
Кориолиса определяются из формулы (97). Если
обозначим угол между векторами (о и vr че-
через 6, то, принимая во внимание, что модуль
векторного произведения (oxvr равен cousin 8,
получим:
wh = 2avr sin 6. (99)
Чтобы определить направление вектора wh,
которое совпадает с направлением векторного
произведения йхиг, нужно перенести вектор (о в точку М
(рис. 253) и восставить в этой точке перпендикуляр к плоскости,
в которой лежат векторы (о и vr; вектор wh будет направлен по
этому перпендикуляру в ту сторону, чтобы наблюдателю, смотря-
смотрящему с его конца, поворот вектора (о на угол б до совмещения его
с вектором vr представлялся происходящим против часовой стрелки.
Для определения модуля и направления кориолисова ускоре-
ускорения удобно пользоваться также следующим правилом: разло-
разложим относительную скорость vr на две составляющие v"r и v'r по
х) Густав Кориолис — профессор Политехнической школы в Париже
A792—1843).
12*
356
КИНЕМАТИКА
направлению вектора <о и по направлению, к нему перпендику-
перпендикулярному (рис. 253); модуль составляющей скорости v'r равен,
очевидно, vr sin 6, а потому
2ti>Vr,
(99')
т. е. кориолисово ускорение равно по модулю удвоенному произведению
модуля угловой скорости со переносного вращения, т. е. вращения,
подвижной системы отсчета, на модуль составляющей относи-
относительной скорости, перпендикулярной к вектору (Л.
Чтобы получить направление кориолпсова ускорения, доста-
достаточно, как видно из рис. 253, повернуть составляющую ку относи-
относительной скорости, перпендикулярную к вектору (о,
вокруг оси, параллельной этому вектору и проходя-
проходящей через точку М, на прямой угол в направлении
переносного вращения.
Рассмотрим два частных случая:
1. Если vr J_ о, то 0 = 90°, sin 0 = 1 и, сле-
следовательно,
wh = 2@ vr.
Рис. 254.
В этом случае три вектора vr, со и wh взаимно пер-
перпендикулярны (рис. 254). Чтобы получить направление вектора ivk,
достаточно в этом случае повернуть вектор относительной ско-
скорости vr вокруг точки М (в плоскости, перпендикулярной к век-
вектору (о) на прямой угол в направле-
направлении переносного вращения.
2. Если vr |; to, то 0 = 0 или
9 = 180° и, следовательно, sin 0 = 0,
а потому wk = 0, т. е. в этом случае
ускорение Кориолиса обращается
в нуль.
Пример 98. Окружность радиуса г
вращается равномерно в своей плоскости
вокруг центра О по часовой стрелке, делая
»х оборотов в минуту; в то же время точка
М движется равномерно по этоц окружно-
окружности в обратном направлении, делая п2 оборотов в минуту. Найти абсолютное
ускорение точки М (рис. 255).
Решение. Переносное движение представляет собой равномерное
вращение вокруг точки О; поэтому переносное ускорение точки М равно по
модулю
we = га>1,
причем
лп1.
Рис. 255.
аналогично выражается и модуль относительного ускорения точки М:
WT = Г(Х>2,
ГЛ. 17. СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ В ОБЩЕМ СЛУЧАЕ 357
причем
0J = 0 '
Ускорения №е и wr направлены по радиусу окружности к центру О. Так как
вектор угловой скорости переносного вращения сох направлен перпендику-
перпендикулярно к плоскости чертежа, то сохХ"/-' Поэтому, повернув относительную ско-
скорость vr на 90° в направлении переносного вращения (по часовой стрелке),
получим направление кориолисова ускорения; это ускорение направлено,
следовательно, по радиусу от центра О; модуль этого ускорения равен
Сложив все три ускорения, получим
Вектор и-а направлен по радиусу окружности к центру О.
П р и м е р 99. Прямая ОА вращается вокруг неподвижной точки О с по-
постоянной угловой скоростью со; точка М движется по этой прямой с посто-
постоянной относительной скоростью vr. Найти
ее абсолютное ускорение (рис. 256).
Решение. Как и в предыдущем
примере, переносное движение есть равно-
мерное вращение вокруг точки О; следова-
следовательно,
we = ОМ ■ со2 = гсо2,
причем ускорение we направлено к центру
вращения О; относительное! движение точ-
к и М есть движение прямолинейное и равно-
мерное; следовательно, Рис. 256.
wr = 0.
Как и в предыдущем примере, (oj__vr; поэтому, чтобы получить направление
кориолисова ускорения, нужно повернуть вектор vr в плоскости чертежа
вокруг точки М на прямой угол в направлении переносного вращения; следо-
следовательно, ускорение tt-^ направлено перпендикулярно к ОА, как указано
па рис. 256, и
wh = 2угсо.
На основании теоремы Кориолиса имеем:
Так как werj_tcfe, то модуль абсолютного ускорения точки М равен
Wa = ]/">е + wh = ш V г2с°2 + 4уг-
Представим себе теперь, что вместо прямой ОА мы имеем вращающуюся
горизонтальную трубку, в которую положен щарик М. Согласно сказанному;
в предыдущем примере заключаем, что кориолисово ускорение шарика будет
направлено перпендикулярно к трубке и равно по модулю 2vru>, где vr есть
скорость движения шарика вдоль трубки. Из физики известно, что произ-
произведение массы т движущейся материальной точки на ее ускорение равно силе,
х) Так как все три ускорения направлены по одной прямой, то они скла-
складываются алгебраически.
358
КИНЕМАТИКА
сообщающей точке это ускорение х). В данном случае силой, сообщающей
шарику ускорение м-й, является нормальная горизонтальная реакция трубки.
И свою очередь шарик давит на степку трубки с такой же по модулю силой,
равной
mwk = 2mvl.(i>.
Эта сила давления шарика на трубку называется иногда силой Кориолиса.
Пример 100. Шар радиуса R вращается вокруг оси z с постоянной уг-
угловой скоростью со (рис. 257). По меридиану АВ движется точка М с постоянной
но модулю относительной скоростью vr. Найти проекции абсолютного ускоре-
ускорения точки М на ось z п на подвижные осп х' и у\ зная широту ф точки М в дан-
данный момент. Ось у' перпендикулярна к оси z и лежит в плоскости меридиана
АВ, ось х' перпендикулярна к этой плос-
yz'lzi кости.
Решение. Так как переносное дви-
движение есть вращение вокруг неподвижной
оси z с постоянной угловой скоростью, то
переносное ускоренно ice точки М направ-
направлено по радиусу МОг параллели аЬ; если
обозначим этот радиус через г, то г =
= Л cos ф; следовательно,
we — гсо2 = R cos фсо2.
В относительном движении точка М дви-
движется по окружности радиуса Я с постоян-
постоянной по модулю скоростью г,.; следователь-
следовательно, относительное ускорение wr направлено
по радиусу МО этой окружности и по
модулю равно
К
Рис. 257, u>r = ~jj.
Кориолисово ускорение tcft перпендикулярно к плоскости, в которой лежат
векторы со и vr; следовательно, вектор w^ направлен перпендикулярно к пло-
плоскости меридиана АВ (но касательной к параллели аЬ) в ту же сторону, что
и ось Ох', как указано на рис. 257 2). Так как угол между векторами а и vr
равен, очевидно, ф, то
м>£ = 2f,co sin ф.
Согласно теореме Кориолпса имеем:
«"а = и'е + «V + «"ft.
Отсюда следует, что проекция абсолютного ускорения ка на какую-нибудь ось
равна алгебраической сумме проекций ускорений ure, wr и w^ на ту же ось.
Проекции этих ускорений на оси х', у' и г легко найти из чертежа:
= 0, w
еу
= 0, wr
— we = — й cos ф- оJ
COS ф = д- COS ф, Wrz =
. = 2vru> sin ф, why' — 0,
= 0;
— wTsin ф = — =- sin i
u)),, = 0.
') 2-й закон динамики.
2) Чтобы получить направление вектора uch, нужно составляющую отно-
сительпой скорости vr, перпендикулярную к оси z, которая, очевидно, на-
направлена по радиусу МОг, повернуть (в плоскости иараллели ab) ыа прямой
угол в направлении переносного вращения.
ГЛ. 18. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 359
Следовательно,
"W = и>ех + Wrx' + «>hx' = 2vr<» sin ф.
I , Vr\
Wat/ = wey' + Mrv> + why' = — I Л@- + ^-I COS ф,
ша2 = ц)Р2 + шГ2 + whz = — -^ sin ф.
По найденным трем проекциям абсолютного ускорения нетрудно определить
его модуль и направление. Кориолисова сила в данном случае равна
2mvru> sin ф и направлена противоположно ускорению и-^.
Действием этой силы Кориолиса, возникающей вследствие суточного
вращения Земли, объясняется так называемый закон Бэра, т. е. размывание
правых берегов рек в Северном полушарии, текущих в направлении меридиана.
Точно так же колеса движущегося в направлении меридиана паровоза
оказывают горизонтальное давление на правый рельс. При вычислении этого
давления в примере 100 под со нужно, очевидно, понимать угловую скорость
суточного вращения Земли, а под ф — географическую широту данпого места
земной поверхности.
ГЛАВА 18
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
§ 92. Сложение поступательных движений
В этой главе мы рассмотрим задачу о сложном движении твер-
твердого тела, аналогичную той, которую мы рассматривали в преды-
предыдущей главе для отдельной точки. Пусть данное твердое тело дви-
движется определенным образом относительно системы осей О'х'у' z',
которая в свою очередь имеет определенное движение относительно
неподвижных осей Oxyz. Требуется найти результирующее, или
абсолютное движение тела, т. е. его движение по отношению к не-
неподвижным осям Oxyz. Мы рассмотрим решение этой задачи в не-
нескольких основных случаях.
В зависимости от того, какими являются относительное движе-
движение тела и движение подвижной системы осей, мы будем иметь
задачи о сложении поступательных движений, или о сложении вра-
вращательного и поступательного движений, или о сложении враща-
вращательных движений.
Начнем со случая сложения поступательных движений, т. е.
с того случая, когда относительное движение тела (движение от-
относительно подвижной системы отсчета) и переносное движение
(движение этой подвижной системы отсчета) являются поступа-
поступательными.
Пусть данное твердое тело движется поступательно со ско-
скоростью к1! относительно некоторой системы отсчета, кото-
которая в свою очередь движется поступательно со скоростью иа
360 КИНЕМАТИКА
относительно другой системы отсчета, принимаемой за неподвиж-
неподвижную. Требуется определить движение тела относительно этой
последней системы.
Абсолютная скорость v какой-нибудь точки тела по теореме
сложения скоростей равна геометрической сумме скоростей отно-
относительной и переносной, т. е. v = vr + oe. Но для всех точек
тела имеем: vr = vt и юе = v2. Это следует из того, что относитель-
относительное и переносное движения являются поступательными. А потому
с = i>j + v2. Из этого равенства видим, что абсолютные скорости
всех точек тела в каждый данный момент одинаковы. Отсюда
следует, что движение тела относительно неподвижной системы
отсчета является поступательным со скоростью v, равной геометри-
геометрической сумме скоростей v1 и и2- Таким образом, приходим к заклю-
заключению: в том случае, когда относительное и переносное движения
являются поступательными, абсолютное движение тела есть
также поступательное, причем скорость этого поступательного
движения равна геометрической сумме скоростей относительного
и переносного движений.
§ 93. Сложение вращательного и поступательного движений
в том случае, когда скорость поступательного движения
перпендикулярна к оси вращения
Пусть движение твердого тела относительно данной системы
отсчета О'х'у'z' есть вращение с угловой скоростью со вокруг оси z'
и пусть эта система отсчета, связанная, например, с движущимся
вагоном, обладает поступательным движе-
движением со скоростью и, перпендикулярной
к вектору о (рис. 258). Требуется найти
абсолютное движение тела. Повернем по-
полупрямую О'х, по которой направлена
скорость и, вокруг оси z на 90° в напра-
направлении относительного вращения так,
чтобы она заняла положение О'у'. Абсо-
Абсолютная скорость какой-нибудь точки Л
тела, лежащей на осп О'у', равна геомет-
геометрической сумме переносной скорости и и
Рис. 258. относительной скорости vr, равной по мо-
модулю О'А ■ со и направленной противопо-
противоположно вектору и. Если выберем точку А так, чтобы имело
место равенство О'А • со = и, т. е. О'А = и : со, то абсолютная
скорость такой точки в данный момент равна нулю 1).
Этот вывод, очевидно, не зависит от положения точки О' на
оси z', а потому абсолютная скорость каждой точки, лежащей на
х) Сравните с тем, что было сказано в теории нлосконараллельного дви-
движения тела (§ 79) нри определении мгновенного центра скоростей."
ГЛ. 18. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 361
прямой АБ, параллельной этой оси, равна нулю. Отсюда следует,
что в абсолютном движении тела прямая А В представляет собой
мгновенную ось вращения тела; найдем угловую скорость Q этого
вращения, причем вектор Q направлен по оси АБ; для этого заме-
заметим, что абсолютная скорость точки О' равна вращательной ско-
скорости этой точки вокруг мгновенной оси АВ; с другой стороны,
абсолютная скорость точки О' равна переносной скорости и, так
как относительная скорость этой точки равна нулю; из этого сле-
следует прежде всего, что вектор Q направлен в ту же сторону, что
и вектор о>; далее, из равенства О'A -Q = и находим:
И = ?г—г = и : — = со;
О А о>
следовательно,
Q = «.
Таким образом, приходим к следующему заключению: при сло-
сложении вращательного движения с угловой скоростью <о и посту-
поступательного движения, скорость которого и перпендикулярна к (Я,
абсолютное движение тела таково, что в каждый данный момент
существует мгновенная ось вращения тела, параллельная оси дан-
и
ного вращения и отстоящая от нее на расстоянии, равном — ,
причем мгновенная абсолютная угловая скорость тела равна ta.
Примером рассмотренного сложного движения тела может
служить движение вращающейся пароходной турбины при посту-
поступательном движении парохода, причем ось вращения турбины пер-
перпендикулярна к направлению продольной оси парохода.
§ 94. Винтовое движение тела
Пусть данное твердое тело вращается вокруг неподвижной оси z
с угловой скоростью ta (относительное движение) и в то же время
перемещается (вместе с подвижной системой отсчета) г
поступательно со скоростью и, направленной вдоль ,.
этой оси (переносное движение). Векторы ш и и в этом
случае направлены по одной прямой (рпс. 259). Такое
движение тела называется винтовым.
Если векторы ш и и направлены по оси г в одну
сторону, то в таком случае мы имеем правый винт;
если же эти векторы направлены в противополож-
противоположные стороны, то они образуют левый винт. Отноше-
Отношение и : со = р называется параметром винтового дви- Рис. 259.
жения или параметром кинематического винта.
Если обозначим угол поворота тела вокруг оси z через ср,
а величину поступательного перемещения тела вдоль этой оси —
через s, то будем иметь:
rfcp ds
362
КИНЕМАТИКА
отсюда находим, что
ds
Допустим, что параметр р есть величина постоянная, как это
имеет место, например, при движении винта в неподвижной гайке
с данной нарезкой. Тогда, интегрируя уравнение ds = p d<p в пре-
пределах от 0 до s и от 0 до ф, получим:
s = р-ср,
т. е. при постоянном параметре кинематического винта посту-
поступательное перемеи^ение тела вдоль винтовой оси пропорцио-
пропорционально углу поворота тела вокруг этой
оси.
Если положим ф = 2л, а величину посту-
поступательного перемещения, соответствующего
этому углу поворота, обозначим через h, то
= 2яр и р =
2я*
Рис. 260.
Эта величина /г, т. е. расстояние, на кото-
которое перемещается тело вдоль винтовой оси
при одном полном обороте вокруг этой оси,
называется шагом винта. Так как при вин-
винтовом движении расстояние каждой точки
тела от неподвижной оси z остается, оче-
очевидно, постоянным, то траектория какой-
нибудь точки М„тела, отстоящей от оси z на
расстоянии г, расположена на поверхности круглого цилиндра
радиуса г (рис. 260).
Абсолютная скорость точки М равна геометрической сумме
двух скоростей: скорости гвр во вращательном движении, причем
#вр = по, и скорости и в поступа-
поступательном движении. А так как эти
скорости взаимно перпендикулярны,
то модуль абсолютной скорости точ-
точки М равен
2кг
V = / U% + Г2СО2 = CO/ р2 + Г2.
Рис. 261.
Угол у, который абсолютная ско-
скорость составляет с осью z, или, что
то же, с образующей цилиндра, определяется по формуле
—
и
ГЛ. 18* СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 363
Отсюда следует, что при р — const угол у остается постоянным,
т. е. траектория точки, называемая винтовой линией, пересекает
все образующие цилиндра под одним и тем же углом. Если по-
поэтому разрежем цилиндр вдоль образующей и развернем его на
плоскости, то винтовая линия изобразится на этой плоскости пря-
прямой линией (рис. 261). Из рис. 261, очевидно, имеем: h = 2лг ctg Y-
§ 95. Сложение вращательного и поступательного движений
в том случае, когда скорость поступательного движения
не перпендикулярна к оси вращения
Пусть вектор относительной угловой скорости ш, направлен-
направленный по оси z', и скорость переносного поступательного движения
и образуют между собой некоторый угол а (рис. 262).
Разложим скорость и на две составляющие скорости: иъ на-
направленную по оси z , причем иг = и cos а, и и2, перпендикулярную
к оси z , причем и2 — и sin а. Поступатель-
Поступательное движение со скоростью к2 и вращение
с угловой скоростью ш вокруг оси z' на
основании сказанного в § 93 приводятся
к одному вращению с угловой скоростью
й = со вокруг мгновепной оси АВ, парал-
параллельной оси z', причем
„, . и, и sin a
Таким образом, мы получаем совокуп-
совокупность мгновенной угловой скорости Q и по-
поступательной скорости щ, направленной
параллельно мгновенной оси вращения АВ; следовательно, рас-
распределение абсолютных скоростей в теле в данный момент в рас-
рассматриваемом случае таково же, как при винтовом движении
с винтовой осью АВ, угловой скоростью ш и скоростью поступа-
поступательного движения, равной щ. Параметр этого винтового движе-
движения равен.
«! и соч а
Р ~~ со ~~ to '
§ 96. Сложение двух вращений вокруг параллельных осей
Рассмотрим тот случай, когда относительное движение тела
и переносное движение, т. е. движение подвижной системы отсчета,
представляют собой вращения вокруг параллельных осей.
Пусть, например, кривошип ОхОг вращается вокруг неподвиж-
неподвижной оси О-у, перпендикулярной к плоскости чертежа, с угловой
364
КИНЕМАТИКА
Рис. 263.
скоростью юг (рис. 263). Предположим, что на ось О2, перпенди-
перпендикулярную к плоскости чертежа и неизменно соединенную с криво-
кривошипом, свободно насажено тело (например, шкив), вращающееся
вокруг этой оси с относительной угловой скоростью ю2.
Следовательно, щ есть угловая скорость тела относительно
кривошипа, т. е. относительно системы отсчета, неизменно связан-
связанной с кривошипом. Сначала допустим, что
оба вращения совершаются в одном на-
направлении (против часовой стрелки). По-
Построив векторы угловых скоростей (ох и щ
(рис. 264), постараемся определить абсо-
абсолютное движение тела, получающееся в ре-
результате сложения этих двух вращений.
Возьмем на прямой ОХО2 в самом теле
или неизменно связанную с ним какую-
нибудь точку С (рис. 263). Абсолютная скорость va этой точки
равна геометрической сумме двух скоростей: относительной ско-
скорости vr точкд С, т. е. ее скорости во вращательном движении
вокруг оси 02, и переносной скорости vp этой
точки, т. е. ее скорости во вращательном движе-
движении вокруг оси Ох.
Эти две скорости перпендикулярны к OtO% и
шг направлены в противоположные стороны, а
потому
va = ve — vr = щ ■ ОХС — щ ■ ОгС.
Если выберем точку С так, чтобы имело место
равенство
<а1 • ОгС — ю2 • О2С или ^— = - ,
осл> tot
с о,
Рис. 264.
то абсолютная скорость такой точки равна нулю. Такова же будет
и абсолютная скорость любой точки, лежащей на прямой CD
(рис. 264), проходящей через С и параллельной векторам и>х и
«2, т. е. перпендикулярной к плоскости чертежа на рис. 263.
Отсюда следует, что в абсолютном движении тела прямая CD
представляет собой мгновенную ось вращения тела. Опреде-
Определим угловую скорость Q этого вращения. Абсолютная скорость
£>О2 точки О2 равна по модулю £2 • СО2; с другой стороны, модуль
этой же скорости равен, очевидно, а1 . О1О2. Принимая во внима-
внимание направление скорости £>ог> видим, что вращение тела вокруг
мгновенной оси происходит в том же направлении, что и вра-
вращения вокруг осей 0^ и О2, т. е. против часовой стрелки (рис. 263);
далее, из равенств
ГЛ. 18. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 365
находим:
заменяя здесь произведение а>г ■ ОХС равным ему произведением
ю2 • СО2, получим:
^-v 0J * СО% ~\- (Oj • СО% ,
Таким образом, приходим к следующему заключению:
При сложении двух направленных в одну сторону вращений
вокруг параллельных осей абсолютное движение тела таково, что
в каждый данный момент существует мгновенная ось вращения
тела, параллельная осям относительного и переносного вращений
и делящая расстояние между ними внутренним образом на части,
обратно пропорциональные относительной и переносной угловым
скоростям. Мгновенная абсолютная угло- ito,
вая скорость тела параллельна относи- Jb or
тельной и переносной угловым скоростям Ь-
и направлена в ту же сторону, а ее мо- '
дуль равен сумме модулей этих угловых
скоростей.
Предположим теперь, что тело вра-
вращается вокруг оси О2 по часовой стрелке,
а кривошип О1О2 по-прежнему вращается *<Чг ш
вокруг Ог против часовой стрелки. Угло- Рис. 265.
вые скорости (дг и <л2 этих вращений пред-
представляют собой два антипараллельных вектора (рис. 265). Пусть
ю2 ^> сог. Совершенно так же, как и в предшествующем случае,
легко убедиться в том, что для точки С тела, лежащей на прямой
OtO2, абсолютная скорость будет равна нулю при условии, что эта
точка лежит вне отрезка Ofi2 за вектором большей угловой ско-
скорости, и что имеет место равенство &1-О1С = а>2-О2С; следо-
следовательно, в абсолютном движении тела прямая CD представляет
собой мгновенную ось вращения тела, параллельную осям данных
вращений (рис. 265). Для определения угловой скорости Q этого
вращения рассмотрим скорость точки О2. Абсолютная скорость
точки О2, очевидно, равна той скорости, которую имеет эта точка
во вращательном движении кривошипа вокруг оси Ог; эта ско-
скорость направлена перпендикулярно к плоскости чертежа 265
(от читателя) и равна по модулю (а1-О1О2; с другой стороны, эта
скорость на основании сказанного об абсолютном движении тела
может быть представлена как скорость во вращательном движении
вокруг мгновенной оси CD. Отсюда заключаем, что вращение
тела вокруг оси CD происходит в том же направлении, что
366 КИНЕМАТИКА
и относительное вращение вокруг оси О2, т. е. в направлении
вращения с большей угловой скоростью. Далее из равенств
vo, = Й • СО, = % . OtOt
находим:
о _ йг°А_ _ coi (OjC—ОгС) __ @|-OiC — (О!-О.гС,
~ О2С ~~ ОгС ~~ ОгС '
заменяя здесь щ-ОхС равным ему произведением щ-О2С, по-
получим :
Q = <в2 — шх.
Таким образом, мы приходим к следующему заключению:
При сложении двух направленных в противоположные стороны
вращений вокруг параллельных осей абсолютное движение тела
таково, что в каждый данный момент существует мгновенная
ось вращения тела, параллельная осям данных вращений и деля-
делящая расстояние между ними внешним образом на части, обратно
пропорциональные относительной и переносной угловым скоростям.
Мгновенная абсолютная угловая скорость тела параллельна отно-
относительной и переносной угловым скоростям и направлена в сторону
большей из них, а ее модуль равен разности модулей этих угло-
угловых скоростей.
Так как в обоих рассмотренных случаях абсолютное движение
тела представляет собой, очевидно, движение, параллельное плос-
плоскости, перпендикулярной к осям относительного и переносного
иращений, то мы можем к этому движению тела применить тео-
теорему о центроидах (§ 81). Геометрическое место мгновенных цент-
центров вращения С на неподвижной плоскости (на плоскости рис. 263)
образует неподвижную центроиду. Геометрическое же место мгно-
мгновенных осей CD в пространстве представляет собой в данном слу-
случае цилиндрическую поверхность, для которой неподвижная цен-
центроида является направляющей и образующие которой парал-
параллельны осям относительного и переносного вращений. Эта поверх-
поверхность называется неподвижным аксоидом.
Геометрическое место мгновенных осей CD в самом движущемся
теле называется подвижным аксоидом. В данном случае подвижной
аксоид представляет собой также цилиндрическую поверхность,
для которой направляющей служит подвижная центроида. В каж-
каждый данный момент эти два цилиндра касаются вдоль общей обра-
образующей, которая является в этот момент мгновенной осью враще-
вращения тела; абсолютное движение тела в обоих рассмотренных слу-
случаях представляет собой качение без скольжения подвижного
аксоида по неподвижному.
В частном случае, когда отношение модулей угловых скоро-
скоростей щ и ю2 является постоянным, расстояния ОХС и О2С будут,
очевидно, постоянными, и, следовательно, оба аксоида в этом случае
ГЛ 18. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
367
представляют собой круглые цилиндры с радиусами Ofi (непо-
(неподвижный аксоид) и О2С (подвижной аксоид). Если относительное
и переносное вращения направлены в одну сторону, то касание
цилиндров будет внешним (рис. 266); при сложении же вращений,
направленных в противоположные стороны, касание цилиндров
U
Рис. 26E.
Рис. 267.
будет внутренним, т. е. один из них будет находиться внутри дру-
юго (рис. 267).
При сложении двух вращений, направленных в противополож-
противоположные стороны, мы предположили, что модули угловых скоростей
этих вращений не равны (со2 ^> ^i)-
Рассмотрим теперь тот случай, когда модули этих угловых ско-
скоростей равны между собой. Такие два направленные в противо-
противоположные стороны вращения во-
вокруг параллельных осей с равными
по модулю угловыми скоростями
называются парой вращений. Век-
Векторы угловых скоростей таких вра-
вращений образуют пару угловых ско-
скоростей 1).
Нетрудно убедиться, что в слу-
случае пары вращении абсолютное
движение тела является поступа-
поступательным.
Пусть имеем пару угловых ско-
скоростей (<йг, щ), так что щ = — ш2
(рис. 268). Найдем абсолютную скорость какой-нибудь точки М
тела. Скорость vt точки М во вращательном движении вокруг
оси Ох может быть представлена в виде векторного произведе-
произведения угловой скорости «j на радиус-вектор гх этой точки,
Рис. 268.
х) Сравните с парой сил в статике.
368
КИНЕМАТИКА
т. е. i\ = (Oj X г\. Точно так же скорость £>2 точки М во враща-
вращательном движении вокруг оси О2 выражается так: v2 = ш2 X г2.
Абсолютная скорость v точки М равна векторной сумме скоро-
скоростей £>! и i>2; следовательно,
(щХг2).
Заменяя здесь «1 через
v = (ю2Хг2) — (щХгг) ■■
Но из рис. 268 имеем:
отсюда
а потому
ю2, получим:
ю2 X (г2 — гх)
= — (г2 —
= (г2 — г2) Х«2
г2 =
v =
Векторное произведение О1О2Х(О2 представляет собой момент
вектора ю2 относительно точки Ог, или, что то же, момент пары
(©!, ю2), а потому
1?= m («j, ш2).
Отсюда следует: 1) абсолютная скорость точки М равна по модулю
ю1 . 0^0г и направлена перпендикулярно к плоскости пары (%, ш2);
2) абсолютная скорость точки М не зависит от выбора этой точки:
все точки тела имеют в каждый данный
момент одинаковые абсолютные скоро-
скорости, равные по модулю и направлению
моменту пары (<йг, <о2), откуда заклю-
заключаем, что абсолютное движение тела
является поступательным.
Таким образом, приходим к выводу:
пара вращений эквивалентна поступа-
поступательному движению, скорость которого
равна вектору-моменту этой пары.
Чтобы еще нагляднее в этом убедиться, рассмотрим опять дви-
движение тела, свободно насаженного на вращающийся кривошип.
Пусть кривошип ОхО2 (рис. 269) вращается вокруг оси Ог по
часовой стрелке с угловой скоростью (ог, а шкив, свободно наса-
насаженный на ось О2, вращается (относительно кривошипа) вокруг
этой оси с относительной угловой скоростью ю2 = (а1 против часовой
стрелки. Возьмем на шкиве какой-нибудь отрезок, который в на-
начальный момент пусть занимает положение О2Л. Через некоторый
промежуток времени кривошии повернется на угол <р, и точка О%
Рис. 269.
ГЛ. 18. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
369
займет положение 0.^. Если бы шкив был жестко соединен с кри-
кривошипом, то отрезок 02А занял бы, очевидно, положение О\АХ.
Но так как шкив вращается относительно кривошипа с угловой
скоростью, равной по абсолютной величине угловой скорости кри-
кривошипа, то за тот же промежуток времени шкив повернется отно-
относительно кривоши'па против часовой стрелки на тот же угол ср,
и, следовательно, отрезок 02А займет положение О'ЪА', причем
/_ А'О'гАх = ф.
Из равенства углов АО1А1 и A'O'iAl следует, что О'.гА' \\ 02А,
т. е. при движении шкива отрезок 02А остается себе параллельным,
а это и значит, что абсолютное движение шкива является поступа-
поступательным.
Для определения скорости этого поступательного движения
достаточно найти абсолютную скорость одной какой-нибудь точки
шкива, например точки 02; абсолютная скорость v этой точки,
очевидно, равна но модулю ОхО2-<ах и направлена перпендику-
перпендикулярно к ОгОг.
Пример 101. Кривошип ОхОг = I вращается вокруг оси Ох по часо-
часовой стрелке с угловой скоростью со; диск радиуса г вращается вокруг оси
О2 по часовой стрелке с той же угловой скоростью <о относительно криво-
кривошипа. Найти величину и направление абсолютных скоростей точек А ж В
диска (рис. 270).
Рис. 270.
Рис. 271.
Решение. Так как угловые скорости переносного и относительного
вращений равны по модулю и направлены в одну сторону, то мгновенный
центр вращения С диска лежит посредине между Ох и О2, т. е. О±С = СОг =
= -=. Модуль абсолютной угловой скорости вращения диска вокруг точки С
равен Q = 2ю.
Отсюда находим:
1) vA = Q ■ С А
= 2со 1/ ^
4- г2 = со
2) vB = Q • СВ = 2ю (~ -f г ) = со (I
Vl* + 4г2 и vA J_ CA,
2r) и vB J_ СВ.
Пример 102. Кривошип ОхОг вращается вокруг оси Ох с угловой ско-
скоростью й>!. На палец Ог кривошипа свободно насажена шестерня радиуса га,
сцепленная с неподвижным зубчатым колесом радиуса гх. Найти абсолютную
угловую скорость Q шестерни и ее угловую скорость о>2 относительно кривоши-
кривошипа (рис. 271).
370
КИНЕМАТИКА
Решение. Так как шестерня сцеплена с неподвижным колесом, то
абсолютная скорость точки С зацепления шестерни с этим колесом равна нулю;
следовательно, точка С является для шестерни мгновенным центром вращения.
Отсюда следует:
О.С со> ^i соч
-~- = или =- ,
СуС/д СО i Гц COj
откуда
«2 = —
Абсолютную угловую скорость шестерни находим из равенства
Q = о)[ \ соа,
ИЛИ
Q =
г,
т.,
Пример 103. На ось АВ свободно насажены два зубчатых колеса / и
/V а рама О1О2О3О4, на которой могут вращаться два жестко связанных
между собой зубчатых колеса // и ///, причем колесо // сцеплено с коле-
колесом /, а колесо /// — с колесом IV. Зная числа зубцов zl} z.2, z3 и z4 этих
колес, а также угловые скорости <о и <о4 рамы и колеса IV, найти угловую
скорость o)j колеса / (рис. 272, а).
Рис. 272.
Р е ш о и и е. В данном случае мы имеем так называемый дифференци-
дифференциальный зубчатый механизм. Этот механизм имеет две степени подвижности,
так как для определения движения всех его звеньев нужно знать угловые
скорости двух звеньев; в задаче даны угловые скорости радгы и колеса IV.
Изобразим схему данного механизма в плане и обозначим точки заце-
зацепления колес / и // и колес /// и IV соответственно через С и D (рис. 272, б).
Предположим, что рама и колесо IV вращаются в одном направлении (про-
(против часовой стрелки на рис. 272, б). Движение колес // и /// можно рассмат-
рассматривать как сложное. Если движение рамы примем за переносное, то движение
этих колес по отношению к раме (к кривошипу ОхОг) является относительным.
Переносное и относительное движения представляют собой соответственно
вращения вокруг параллельных осей O1Oi и ОгО3.
Обозначим алгебраическое значение относительной угловой скорости
колеса /// через а>\; если относительное вращение этого колеса направлено
в ту же сторону, что и вращение кривошипа OjO2, т. е. против часовой стрел-
стрелки на рис. 272, б, то угловую скорость со', будем считать положительной, в про-
противном случае эту угловую скорость будем считать отрицательной.
Переносная скорость точки колеса ///, совпадающей с точкой D,
направлена перпендикулярно к OJD вверх (на рис. 272, 6) и равна по моду-
ГЛ. 18. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 371
лю 0xD(o = г4<о, где г4 есть радиус колеса IV. Если радиус колеса ///
обозначим через г3, то относительная скорость той же точки равна по модулю
r3lcoj| и направлена перпендикулярно к O2D вниз при СО; > 0 или вверх, если
со, < 0. Следовательно, модуль абсолютной скорости рассматриваемой точки
в обоих случаях будет равен
Г4С0 — r3C0j.
С другой стороны, скорость точки колеса IV, совпадающей с точкой D,
направлена перпендикулярно к OXD вверх и равна по модулю г4со4. Так как
эта скорость равна абсолютной скорости точки колоса ///, совпадающей
с D, ю
/■4со—л,со', = г4со4.
Аналогичным образом, приравнивая скорость точки С колеса / и абсолютную
скорость точки колеса //, совпадающей с С, приходим к уравнению
Т^СО—'12Ю2 == rlwl>
где гг и г2 обозначают радиусы колес / и //, а со^ есть алгебраическое зна-
значение относительной угловой скорости колеса //.
Из полученных уравнений находим:
COj = — (СО—С04) И COj = СО COj.
Так как колеса // и III связаны между собой жестко (движутся как одно
твердое тело), го со] =со,, а потому
COj = СО — (СО — С04).
Так как числа зубцов двух сцепленных зубчатых колес пропорциональны
радиусам этих колес, то
-2 = - и -4 = ~ ,
"l "З *3
а потому
<3>L = СО — ^^ (СО— СО,).
z,z3 iJ
Если вычисленное по этой формуле значение а>! окажется положительным,
то колесо / вращается против часовой стрелки, в противном случае колесо /
будет вращаться по часовой стрелке.
Пример 104. На кривошип ОА,
вращающийся вокруг неподвижной оси О
с данной угловой скоростью со, свободно
насажена шестерня IV с числом зубцов z4
и две жестко связанные между собой ше-
шестерни II и III с числами зубцов гг и z3.
Шестерня IV сцеплена с шестерней ///, а
шестерня II — с неподвижной шестерней
У, имеющей zj зубцов. Найти абсолютную Рис. 273.
угловую скорость со4 шестерни IV (рис. 273).
Решение. В данном случае мы имеем так называемый планетарный
зубчатый механизм, т. е. механизм, имеющий несколько сцепленных зубча-
зубчатых колес, из которых некоторые вращаются вокруг осей, закрепленных на
кривошипе (водиле), вращающемся вокруг неподвижной оси. Такой механизм
имеет одну степень подвижности: для определения движения всех его звеньев
достаточно знать угловую скорость одного звена — кривошипа ОА (водила).
372 КИНЕМАТИКА
Пусть кривошип ОА вращается вокруг оси О против часовой стрелки;
примем это вращение за переносное движение. Относительные угловые ско-
скорости шестерен //, /// и IV, т. е. угловые скорости их вращательных движе-
движений по отношению к кривошипу, обозначим соответственно через wj, со', и
со;. При этом, как и в предыдущем примере, под coj будем понимать алгебраи-
алгебраическое значение относительной угловой скорости — положительное, если от-
относительное вращение направлено против часовой стрелки, и отрицательное—
в противном случае. Радиусы шестерен обозначим соответственно через гъ
гг, л, и rt.
Рассмотрим точку В зацепления шестерен / и //. Переносная скорость
точки В шестерни // равна по модулю т-jco и направлена перпендикулярно
к ОВ вверх (на рис. 273). Относительная скорость той же точки равна по мо-
модулю r2 ,wj| и направлена перпендикулярно к О'В вниз, если щ > 0, или вверх,
если со2 <. 0. Следовательно, модуль абсолютной скорости, этой точки равен
I ^ю — г2ю; |.
Так как шестерня II сцеплена с неподвижной шестерней /, то абсолютная
скорость точки В шестерни // равна в данный момент нулю; следовательно,
А ' Г1 Zl
/^со—г2со2 = Ои со2= - со = - со.
Так как шестерни // и /// связаны между собой жестко, то а>\ = w^. Полу-
Полученное для а>2 выражение показывает, что угловые скорости со2 и со имеют
одинаковые знаки; следовательно, относительное вращение шестерен // и ///
направлено в ту же сторону, что и вращение кривошипа ОА, т. е. против
часовой стрелки.
Рассмотрим теперь точку С зацепления шестерен /// и IV. Переносная
скорость точки С шестерни /// равна по модулю ОС ■ со и направлена перпен-
перпендикулярно к ОС вверх; относительная скорость той же точки равна по мо-
модулю г3а>\ и направлена перпендикулярно к О'С вверх, а потому абсолютная
скорость этой точки равна по модулю ОС ■ со + ^ш'^.
Подобным же образом находим, что абсолютная скорость точки, принад-
принадлежащей шестерне IV и совпадающей с точкой С, равна по модулю
ОС- со — r4coj.
Так как эта скорость равна абсолютной скорости точки С шестерни ///, то
получаем равенство
ОС ■ со + r3coj= ОС ■ (о — г±а>1,
или
Wj _ __ П __ _ Ч
«4 Г3 Z3 '
Отсюда видим, что относительные угловые скорости двух сцепленных зуб-
зубчатых колес обратно пропорциональны числам зубцов и при внешнем зацеп-
зацеплении имеют разные знаки. Нетрудно понять, что при внутреннем зацепле-
зацеплении эти угловые скорости будут иметь одинаковые знаки.
Из предыдущей пропорции находим:
Но
0>з = «2 = — СО,
а потому
Ю1 = - —»•
ГЛ. 18. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 373
Абсолютная угловая скорость шестерни IV равна алгебраической сумме от-
относительной и переносной угловых скоростей; следовательно,
= II z Г0'
Рассмотрим еще другой способ решения этой задачи, позволяющий
быстрее решать задачи данного типа.
Если алгебраическое значение абсолютной угловой скорости шестерни
обозначим через со;, то на основании теоремы о сложении вращений вокруг
параллельных осей имеем:
со. = со,' + со.
г 1
Отсюда
COj =С0. —СО.
Но выше мы видели, что относительные угловые скорости сцепленных ше-
шестерен обратно пропорциональны числам их зубцов и имеют одинако-
одинаковые или разные знаки в зависимости от того, является зацепление внутренним
или внешним. Так как в данной задаче оба зацепления внешние, то имеем:
(О { 2а (О} 24
а>а Zi' COj Z3
Так как шестерня / неподвижна, то т1 = 0, и, следовательно,
а>[ = со1—со = —со.
Знак минус здесь указывает на то, что относительное вращение шестерни /
направлено по часовой стрелке. Кроме того, имеем:
U)j = (Bj И fflj = С04—СО.
Поэтому предыдущие пропорции можно переписать в виде
СО Zn CO > Zi
СО 2 Zi С04—СО
Перемножая эти пропорции, получим
СО Zv Zx СО 4 — СО
= -=-= , или — ■
со4—со г^з со
Отсюда находим:
I . ZtZt \
со.
Таким же способом можно было бы решить и задачу, рассмотренную в при-
примере 103.
§ 97. Сложение двух вращений вокруг пересекающихся осей
Пусть относительное движение данного тела есть вращение
вокруг некоторой оси От! с угловой скоростью ш', а переносное
движение есть вращение вокруг неподвижной оси Oz с угловой
скоростью со. Этот случай сложения двух вращений можно
374
КИНЕМАТИКА
осуществить, например, при помощи прибора, изображенного
на рис. 274.
Если диску Ог сообщить вращение вокруг оси z и в то же
время сообщить оси 001, на которую свободно насажен диск, вра-
вращение вокруг осп z, то движение диска можно рассматривать как
сложное, причем ось z' относительного вращения и ось z перенос-
переносного вращения пересекаются в неподвижной точке О.
Изобразив угловые скорости ю и ю' переносного и относитель-
относительного вращений в виде векторов О А и ОБ (рнс. 275), построим на
Рис. 275.
этих векторах параллелограмм ОЛСВ п покажем, что абсолютная
скорость точки тела, совпадающей с точкой С, равна в данный
момент нулю.
В самом деле, переносная скорость этой точки равна по модулю
о) • DC и направлена по прямой, перпендикулярной к плоскости
чертежа (от читателя); относительная скорость точки С равна
но модулю ш' ■ ЕС и направлена по той же прямой в противо-
противоположную сторону. Произведения ю- DC и а'-СЕ равны, так
как каждое из них выражает площадь одного и того же параллело-
1рамма ОАСВ. Отсюда следует, что абсолютная скорость точ-
точки С равна нулю. А так как скорость неподвижной точки Q также
равна нулю, то в данный момент абсолютные скорости двух точек
тела оказываются равными пулю, а потому в абсолютном движе-
движении тела прямая ОС представляет собой мгновенную ось вращения
этого тела. Определим угловую скорость Q этого вращения. Для
этого возьмем в данном теле точку, совпадающую с точкой В;
ее абсолютная скорость по модулю равна Q-FB; с другой сто-
стороны, эта скорость равна, очевидно, но модулю и направлению
переносной скорости точки В, так как относительная скорость
точки В равна нулю. Отсюда прежде всего следует, что вращение
ГЛ 18. СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА 37Г)
тела вокруг оси ОС происходит в направлении, указанном на
рис. 275 стрелкой. Далее, принимая во внимание, что модуль
переносной скорости точки В равен ш • НВ, из равенства й FB —
= со • ИВ находим: Q =^- , но а-НВ = иаОАСВ = OC-FB,
а потому
Таким образом, вектор мгновенной абсолютной угловой скорости
тела направлен по оси ОС, а его модуль равен ОС. Следовательно,
Q = ОС, или п = ft) + ш' г).
Отсюда заключаем, что при сложении двух вращений вокруг
пересекающихся осей абсолютное движение тела таково, что
в каждый данный момент существует мгновенная ось враще-
вращения, проходящая через точку пересечения данных осей, причем мгно-
мгновенная абсолютная угловая скорость тела равна по модулю и
направлению диагонали параллелограмма, построенного на пере-
переносной и относительной угловых скоростях, или, что то же,
равна геометрической сумме переносной и относительной угловые
скоростей.
К этому результату легко прийти также и другим путем. Возь-
Возьмем в движущемся теле какую-нибудь точку М и найдем ее абсо-
абсолютную скорость (рис. 275). Относительная скорость v, точки М,
т. е. ее скорость во вращательном движении вокруг оси z', равна
векторному произведению относительной угловой скорости ft)' на
радиус-вектор г этой точки; следовательно, vr = ft)' Xr;
аналогично выражается и переносная скорость vp точки М, т. е.
ve = tax г. Сложив эти две скорости, получим абсолютную ско-
скорость точки М:
va — vr -{- vp = ta' xr -{- taxr = (ta' -f и)хг.
Так как точка М выбрана произвольно, то эта формула показы-
показывает, что абсолютные скорости всех точек тела в данный момент
определяются так же, как при вращательном движении тела вокруг
оси, проходящей через точку О, с угловой скоростью, равной
42 = ш -f- ш'; следовательно, прямая ОС, по которой направлен
вектор Q, является мгновенной осью вращения тела, а абсолют-
абсолютная угловая скорость тела равна й = ft) + ft)'.
Объединяя этот результат с тем, который мы имели в преды-
предыдущем параграфе при сложении вращений вокруг параллельных
х) Этот результат убеждает нас в том, что угловая скорость есть дей-
действительно векторная величина, так как угловые скорости, как теперь видим,
складываются по правилу геометрического сложения.
376
КИНЕМАТИКА
осей, мы видим, что угловые скорости складываются так же, как
параллельные или сходящиеся силы. Задача кинематики о сложе-
сложении угловых скоростей и задача статики о сложении сил,
приложенных к данному твердому телу, решаются вполне ана-
аналогично.
Выясним теперь, каковы будут в рассматриваемом случае
аксоиды, т. е. геометрические места мгновенных осей ОС в про-
пространстве и в самом движущемся теле. Так
как мгновенная ось ОС все время проходит
через неподвижную точку О, то аксоиды
в данном случае представляют собой два ко-
конуса с общей вершиной О. В частном слу-
случае, когда со = const и ю' = const, углы,
образуемые мгновенной осью ОС с осями Oz
и Oz, будут оставаться неизменными; сле-
следовательно, в этом случае неподвижный и
подвижной аксоиды представляют собой два
круглых конуса. В каждый данный момент
аксоиды касаются друг друга вдоль общей
образующей, которая является для этого мо-
момента мгновенной осью вращения тела, и
абсолютное движение тела представляет собой качение без сколь-
скольжения подвижного конуса по неподвижному (рис. 276).
Пример 105. Горизонтальная огь OOY бегуна вращается с данной угло-
угловой скоростью со вокруг вертикальной оси z, а бегун катится при этом без
скольжения по горизонтальной плоскости (рпс. 277). Определить относитель-
относительную угловую скорость со' бегуна вокруг оси ООХ и его абсолютную угловую
Рис. 276.
at
ш'^
Рис. 277.
Л I С
Рис. 278.
скорость Q вокруг мгновенной оси вращения, если радиус бегуна равен г,
а расстояние OOt ~ I.
Решение. Так как бегун катится без скольжения, то скорость точки
касания С бегуна с неподвижной плоскостью равна нулю; следовательно,
ота точка принадлежит мгновенной оси вращения бегуна; второй точкой,
принадлежащей этой оси, является неподвижная точка О; поэтому мгновен-
нач ось вращения бегуна направлена по прямой ОС; следовательно, по этой
v:e прямой направлен вектор Q. Построив векторы ш, ш' и 12 (рис. 278), из
ГЛ 18 СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО Т]
подобных треугольников находим:
откуда
Кроме того, из прямоугольного треугольника имеем:
со
со
~ОХС
со' =
г
1
г
со.
Q = у соа+ со'2.
Подставляя сюда найденное значение со', получим:
0
=а|/
ДИНАМИКА
А. ДИНАМИКА ТОЧКИ
ГЛАВА 19
ВВЕДЕНИЕ В ДИНАМИКУ
§ 98. Основные законы динамики.
Абсолютная и техническая системы единиц
Динамика есть часть теоретической механики, в которой уста-
устанавливается и изучается связь между движением материальных
тел и действующими на них силами. Из этого определения следует,
что различие между кинематикой и динамикой состоит в том, что
в кинематике движение изучается только с геометрической стороны,
независимо от сил, действующих на движущиеся тела, в динамике
же движение тела (или вообще движение механической системы)
изучается в связи с действующими на это тело (или на эту систему)
силами.
В целях большей систематичности изложения материала дина-
динамика обычно делится на две части: динамику материальной точки
и динамику системы.
В первой части изучается движение простейшего тела — так на-
называемой материальной точки, т. е. такого тела, размеры кото-
которого исчезающе малы, так что различием в движении отдельных
точек этого тела можно пренебречь (см. § 1). Во второй части изу-
изучается движение механической системы, т. е. совокупности мате-
материальных точек, которые благодаря существующим между эти-
этими точками связям не могут двигаться независимо друг от
друга. В частности, в динамике системы рассматривается дви-
движение абсолютно твердого тела, т. е. системы материальных
точек, расстояния между которыми остаются постоянными (неиз-
(неизменяемая система).
Основные задачи динамики состоят в следующем:
1) зная движение данной материальной точки или данной
системы точек, найти силы, действующие на эту точку или на эту
систему;
ГЛ. 19. ВВЕДЕНИЕ В ДИНАМИКУ 379
2) зная силы, действующие на данную материальную точку
или на данную систему, найти движение этой точки или этой
системы.
При решении этих задач динамика устанавливает общие коли-
количественные соотношения между различными физическими величи-
величинами, теснейнпш образом связанными с движением материальных
тел (масса, сила, количество движения, работа, энергия и др.).
В основе классической динамики лежат законы, впервые точно
сформулированные и систематически изложенные Исааком Ньюто-
Ньютоном в его «Математических началах натуральной философии» A687).
Все дальнейшие выводы динамики получаются дедуктивным
путем при помощи математического анализа из этих основных
законов.
С рассмотрения этих основных законов классической механики
мы и начнем изучение динамики материальной точки.
1-й закон (закон инерции). Если на материальную
точку не действуют никакие силы, то эта точка или находится
в покое, или движется прямолинейно и равномерно.
Если обозначим силу, действующую на материальную точку,
через F, а скорость точки — через v, то первый закон можно вы-
выразить так: если F = О, то v = const. В частности, скорость v может
быть равной нулю.
Так как сила выражает механическое действие, оказываемое
на данную материальную точку со стороны других тел, то, чтобы
представить себе точку, поставленную в те условия, о которых
говорится в первом законе, нужно вообразить, что эта точка изоли-
изолирована от всяких воздействий на нее со стороны окружающих тел.
Свойство материальной точки сохранять
свою скорость неизменной как по модулю,
так и по направлению, в частности сохранять
состояние покоя, называется инертностью
пли инерцией. Это свойство было указано
еще Галилеем. >
Таким образом, первый закон динамики /
устанавливает свойство инерции маг1ериаль-
ной точки. С другой стороны, из этого закона Рис- 279-
вытекает, что если точка имеет движение,
отличное от инерциалъного, т. е. прямолинейного и равномерного,
то на нее действует некоторая сила.
2-й закон (закон зависимости между си-
силон и количеством движения). Модуль силы,
действующей на материальную точку, равен произведению массы
точки на модуль ее ускорения, а направление силы совпадает с па-
правлением ускорения.
Пусть материальная точка М движется по некоторой криволи-
криволинейной траектории (рис. 279). Если обозначим массу точки через т,
380 ДИНАМИКА
ее ускорение через w, а силу, действующую на эту точку, через F,
то согласно этому закону имеем:
F = mw. A)
Это векторное уравнение, устанавливающее зависимость между
тремя величинами — силой, массой и ускорением, является
основным уравнением динамики материальной точки и дает дина-
динамический способ определения модуля и направления силы.
Масса т материальной точки представляет собой скалярную
положительную и притом согласно воззрениям классической ме-
механики постоянную для данной материальной точки величину,
остающуюся неизменной при любом движении этой точки.
Из уравнения A) следует, что при одном и том же ускорении
w модуль силы пропорционален массе точки, т. е., другими сло-
словами, чтобы сообщить точке данное ускорение, к ней нужно при-
приложить тем большую силу, чем больше ее масса. Поэтому, чем
больше масса точки, тем больше эта точка как бы сопротивляется
изменению ее скорости (отклонению ее движения от инерциаль-
ного). Таким образом, масса является мерой инертности материаль-
материальной точки.
Если перепишем уравнение A) в виде
w = F-, B)
то отсюда следует, что ускорение, сообщаемое материальной точке
данной силой, равно отношению этой силы к массе точки.
Из скалярного равенства F — mw следует:
т=1' C)
т. е. масса материальной точки равна отношению силы к уско-
ускорению, которое эта сила сообщает данной точке.
Из опыта известно, что при свободном падении всякого тела на
него действует сила тяжести и что в данном месте наблюдения все
тела падают на землю (в пустоте) с одним и тем же ускорением g г).
Величина g различна в разных местах земной поверхиости: она за-
зависит от географической широты данного места, от его высоты над
уровнем моря, а также и от других физических причин.
Если обозначим вес материальной точки через Р, то на основа-
основании равенства C) имеем:
т. е. масса материальной точки равна ее весу, разделенному па
1) Имеется в виду, .что падающее тело движется поступательно.
ГЛ. ifl. ВВЕДЕНИЕ В ДИНАМИКУ 381
ускорение свободного падения (ускорение силы тяжести) в данном
месте земной поверхности.
Из равенства D) следует:
Р = rng, E)
т. е. вес материальной точки равен произведению ее массы на
ускорение свободного падения в данном месте земной поверхности.
Материальное тело конечных размеров мы представляем себе
состоящим из множества элементарных материальных частиц
(материальных точек). Вес тела равен сумме весов всех этих эле-
элементарных частиц, а массой тела называется сумма масс этих
частиц. Тогда, как нетрудно понять, соотношения D) и E) имеют
место и для тела конечных размеров. Поэтому практически масса
тела определяется по его весу на основании равенства D). Масса
тела является мерой инертности этого тела при его поступательном
движении х).
Так как ускорение g различно в разных местах земной поверх-
поверхности, то ц вес данного тела не является постоянной величиной,
тогда как его масса остается всегда неизменной.
Второму закону динамики, выражаемому уравнением A),
можно дать еще другую формулировку, установив предварительно
понятие количества движения.
Количеством движения материальной точки называется век-
векторная величина, равная произведению массы точки на ее скорость,
т. е. величина mv; количество движения, следовательно, всегда
совпадает по направлению со скоростью движущейся точки
(рис. 279).
Как известно из кинематики, ускорение точки равно вектор-
векторной производной от ее скорости по времени, т. е.
dv
Так как масса т является постоянной величиной, то уравнение
A) можно представить в виде
F=§t(mv), F)
т. е. сила, приложенная к материальной точке, равна производ-
производной от количества движения этой точки по времени.
3-й закон (закон равенства действия и
противодействия). Силы, с которыми действуют друг
на друга две материальные точки, всегда равны по модулю и на-
направлены по прямой, соединяющей эти точки, в противоположные
стороны.
1) Ньютон определяет массу как меру количества вещества, заключаю-
заключающегося в теле.
382 ДИНАМИКА
Об этом законе мы говорили уже в статике (§ 3). Если матери-
материальная точка А действует на точку В с силой F, то точка В дей-
действует на Л с силой F', причем F' = — F. Если обозначим массы
точек А и В через т и т', а их ускорения — через шиш',»
согласно второму закону имеем:
F — mw и F' = m'w'.
Из равенства F — F' следует, что
mw — m'w', или — =
то '
т. е. ускорения, которые сообщают друг другу две материальные
точки Л и В, по модулю обратно пропорциональны массам этих
точек. Эти ускорения направлены по прямой АВ в противополож-
противоположные стороны.
4-й закон (закон независимости действия
с и л). Если на материальную точку действуют одновременно
несколько сил, то ускорение этой точки равно геометрической сумме
тех ускорений, которые получает эта точка при действии каждой
из этих сил в отдельности.
Пусть на точку, масса которой равна т, действуют силы Fx,
F2, ..., Fn. Обозначим ускорение точки через и>, а ускорения, ко-
которые имела бы эта точка, если бы каждая из данных сил действо-
действовала на нее отдельно, — через wlt w2, ..., wn; тогда согласно этому
закону будем иметь:
w = wt + w2 + ... + wn. G)
Кроме того, на основании второго закона имеем:
Fx = mwt, F2 = mw2, ..., Fn — mwn.
Сила R, эквивалентная данным силам Fu F2, ..., Fn и назы-
называемая их равнодействующей, сообщает данной точке то же уско-
ускорение w, которое получает эта точка при совместном действии
этих сил.
Следовательно,
R = mw,
или
R = т (wt + w2 + ... +м;п) = mw1 + mw2 + ... + mwn,
откуда
R= F1 + F2 + ...+Fn. (8)
Это равенство выражает известный из статики закон сложения
сил: равнодействующая нескольких сил, приложенных к данной
материальной точке, равна их геометрической сумме.
ГЛ. 19 ВВЕДЕНИЕ В ДИНАМИКУ 383
Если w = 0, т. е. точка движется прямолинейно и равномерно
или находится в покое, то R = О или на основании равенства (8)
~LF — 0. В этом случае система сил Гъ F2, ..., Fn называется урав-
уравновешивающейся системой.
Ньютон, излагая основные законы динамики, указывает, что
эти законы применимы только в случае абсолютного движения
материальной точки; при этом под абсолютным движением Ньютон
понимает движение точки по отношению к абсолютно неподвижно-
неподвижному, безотносительному к материальным телам, «пустому» простран-
пространству. Однако с точки зрения диалектического материализма и
современной физики понимание пространства и времепи как осо-
особых категорий, независимых от материи и ее движения, совер-
совершенно неправильно. Энгельс в «Диалектике природы» указывает,
что «пространство н время — формы существования материи;
без этой материи (они) представляют ничто, только пустое представ-
представление, абстракцию, существующую только в нашей голове».
В начале кинематики было уже указано, что всякое механи-
механическое движение мы можем наблюдать и изучать только по от-
отношению к выбранной системе отсчета, связанной с каким-нибудь
материальным телом. Следовательно, в действительности мы не
можем установить абсолютно неподвижную систему отсчета, по
отношению к которой мы могли бы считать движение с точки зре-
зрения Ньютона абсолютным. Отсюда возпикает весьма важный во-
вопрос, имеющий в динамике основное принципиальное значение,
а именно: в какой системе отсчета применимы к механическому
движению законы Ньютона? Система отсчета, в которой эти законы
справедливы, называется инерциальной или галилеевой системой
отсчета. Следовательно, желая воспользоваться законами клас-
классической механики, мы должны нрежде всего установить такую
систему отсчета, которую можно было бы считать инерциальной,
т. е. должны выбрать систему отсчета, в которой применимы,
по крайней мере с достаточной степенью точности, законы
Ньютона.
Как показывают наблюдения и опыт, в большинстве задач ди-
динамики, относящихся к технической практике, за такую систему
отсчета можно принять систему осей, связанных с Землей. В тех же
случаях, когда приходится учитывать суточное вращение Земли,
за инерциальную систему отсчета принимают геоцентрическую
систему координат, начало которой находится в центре Земли,
а оси направлены к трем выбранным «неподвижным» звездам.
В астрономии пользуются гелиоцентрической системой коорди-
координат, начало которой совпадает с центром Солнца, а оси направлены
к трем выбранным «неподвижным» звездам. Современное состояние
наших знаний показывает, что гелиоцентрическая система отсчета
с весьма большой степенью точности является инерциальной си-
системой.
384 ДИНАМИКА
В дальнейшем изложении, говоря об инерциальной, или услов-
условно «неподвижной», системе отсчета, мы почти везде будем иметь
в виду систему, связанную с Землей. В главе 24 мы рассмотрим
с точки зрения классической механики задачу об относительном
движении материальной точки, т. е. рассмотрим движение матери-
материальной точки относительно системы отсчета, которая сама движется
по отношению к инерциальной системе.
При измерении физических величин, с которыми приходится
встречаться в теоретической механике, пользуются или техниче-
технической системой единиц, или системой CGS (абсолютной системой
единиц).
В технической системе основными единицами являются:
единица длины — метр, единица времени — секунда и единица
силы — килограмм. Все остальные единицы, в которых в техни-
технической системе выражаются различные другие величины, являются
производными от этих трех основных единиц. В этой системе
масса измеряется техническими единицами массы, а размерность
массы выражается так:
. п Г сила I Гсила X время2 ,,,ч
масса! = — = . (9)
1 J | ускорение J L длина J v '
Если в формуле
F
т — —
W
положим ^ = 1кгим; = 1 —г , то т = \ (одной технической еди-
С6К
нице массы). Следовательно, единицей массы в технической си-
системе является такая масса, которой сила, равная 1 кг, сообщает
ускорение, равное 1 м/сек2.
Принимая в формуле D) ускорение g равным 9,81 м/сек2, по-
получим:
следовательно, чтобы выразить массу тела в технических едини-
единицах, нужно его вес, выраженный в килограммах, разделить на
9,81. Отсюда следует, что если Р = 9,81, то т = 1, т. е. техническая
единица массы равна массе тела, вес которого равен 9,81 кг.
В системе CGS основными единицами являются: единица
длины — сантиметр, единица времени —■ секунда и единица
массы — грамм-масса, т. е. масса 1 кубического сантиметра чистой
воды при нормальном барометрическом давлении G60 мм) и при
температуре 4° С. В этой системе единица силы является производ-
пой единицей и размерность силы выражается так:
г I Гмасса X длина I /..,
= [массах ускорение] = [^ ^^ j. (И)
ГЛ. 19. ВВЕДЕНИЕ В ДИНАМИКУ
385
Если в формуле F = mw положить т — 1 г (грамм-масса) и
w = 1 см/сек2, то
F — 1 г • си/сек2!
следовательно, б системе CGS единицей силы является такая
сила, которая массе, равной 1 г, сообщает ускорение, равное
1 см/сек2. Эта сила называется диной.
Так как g = 9,81 м/сек2 = 981 см/сек2, а вес 1 ел3 воды
при 4° С равен 1 г, то 1 грамм-вес = 981 дине и 1 дина = ^
грамм-веса = t^tkkr кг.
_
981
В динамике, так же как в статике и кинематике, мы будем
пользоваться технической системой единиц.
§ 99. Дифференциальные уравнения движения
материальной точки
Пусть материальная точка М (х, у, z) массы т движется по
криволинейной траектории под действием переменной силы F
(рис. 280). Проекции этой силы на
координатные оси инерциальной си-
системы отсчета Oxyz обозначим через
X, Y и Z.
Если обозначим ускорение точки
через w, то на основании второго
закона Ньютона
Г
Рис. 280.
F — mw.
Проектируя это векторное равен-
равенство иа координатные оси, получим: г
X — mwx, Y = mwy, Z = mwz.
Но, как известно из кинематики (§ 68), проекции ускорения
на координатные оси выражаются так:
Подставляя эти значения в предыдущие уравнения, получим:
d2z
d2x у d2y _
A2)
Таким образом, мы получили систему трех дифференциальных
уравнений второго порядка, выражающих в координатной форме
второй закон динамики.
Эти уравнения, являющиеся в динамике точки основными, назы-
называются дифференциальными уравнениями движения материальной
13 U, М. Воронков
386
ДИНАМИКА
точки. Если на точку действует одновременно несколько сил,
то па основании четвертого закона под X, Y и Z нужно пони-
понимать в этом случае проекции на координатные оси равнодей-
равнодействующей всех этих сил.
§ 100. Две основные задачи динамики точки
При помощи полученных в предыдущем параграфе дифферен-
дифференциальных уравнений A2) решаются обе основные задачи динамики
точки.
Первая задача. Зная движение материальной точки
данной массы, найти силу, действующую на точку в этом движе-
движении в каждый данный момент.
Пусть движение точки определяется кинематическими уравне-
уравнениями
х = Л (*), У = h @. z = /3 (О,
выражающими координаты движущейся точки как известные
функции времени. Требуется найти силу F, действующую на эту
точку. Решение этой задачи получаем непосредственно из уравне-
уравнений A2) предыдущего парагра-
параграфа, а именно:
X = mf{ (t), Y = mfl (t),
Z = mfl (t),
где m — масса данной точки.
Определив три проекции иско-
искомой силы F, мы будем знать ее
модуль и направление в каждый
момент t.
Рис. 281. Пусть, например, точка М
массы т движется по эллипсу
в плоскости Оху, причем движение ее задано следующими ки-
кинематическими уравнениями:
х — a cos (kt), у — b sin (kl) l).
Определим силу F, действующую на эту точку (рис. 281).
Из данных уравнений находим:
^ = _ k2a cos (kl) = — к2х,
-Л = — k2b sin (kl) = — к2у.
Если исключим из этих уравнений время t, то получим уравнение
2 2
™2 л.2
траектории —^ + р = 1, т- е. уравнение эллипса.
ГЛ. 19. ВВЕДЕНИЕ В ДИНАМИКУ
387
Умножая эти уравнения на массу т, получаем проекции иско-
искомой силы:
X = пг — = к2тх
Y = т -У = — к2ту.
Теперь модуль искомой силы определится по формуле
F =
+ Y2 = к2тУ х2 + у2 =к2тг,
где г — |/ж2 + у2 есть радиус-вектор движущейся точки. Для
определения направления вектора F находим его направляющие
косинусы:
у- у
С другой стороны, направляющие косинусы радиуса-вектора г
выражаются так: cos (r, i) =-?- и cos (г, /) = --. Отсюда видим,
что направляющие косинусы векторов Fu r отличаются только зна-
знаками; следовательно, эти векторы направлены по одной прямой
в противоположные стороны. Поэтому имеем:
F = — khnr.
Это векторное равенство показывает, что в данном эллиптиче-
эллиптическом движении на точку действует притягивающая сила, пропор-
пропорциональная массе точки и ее расстоянию от центра притяжения,
находящегося в начале координат, т. е. в центре эллипса 1).
Вторая задача (обратная). Известна сила F,
действующая на материальную точку данной массы. Требуется
найти движение этой точки,
т. е. выразить ее координаты
как функции времени.
Решение этой задачи сво-
сводится к интегрированию диф-
дифференциальных уравнений
движения точки, т. е. урав-
уравнений A2), в которых X, Y
и Z будут теперь известны,
поскольку известна сила F.
В качестве примера рас-
рассмотрим следующую задачу:
материальная точка брошена
в пустоте с начальной ско-
скоростью v0 под углом а к горизонту (рис. 282). Найти движение
этой точки, происходящее под действием только силы тяжести.
Рис. 282.
На то, что сила F является притягивающей, указывает ее направление.
13'
888 динамика
Примем начальное положение точки за начало координат,
ось z направим по вертикали вверх, а ось у — по горизонтали
так, чтобы начальная скорость точки v0 лежала в плоскости Ozy.
Так как на точку действует только сила тяжести, то при ука-
ванном выборе осей имеем;
X — У = О, Z = — mg.
Кроме того, в начальный момент при t = 0 имеем»
«о = Уй — z0 = О,
Щх = О,
Щу = Щ cos a,
г?02 = г>„ sin а.
Составляя дифференциальные уравнения движения точки, полу-
получим:
т ^ = 0, т ^ = 0, тТ(г = — mg,
или, сокращая на т:
*!*_ о fy - о dH ~ _ Р
Интегрируя сначала первое уравнение, находим:
Gte ^
заменяя -^- через г^ж, получаем:
т. е. проекция скорости на ось х имеет постоянное значенир.
Остается найти постоянную Сх; так как проекция скорости vx
остается неизменной, то во все время движения она имеет то же
значение, какое она имела в начальный момент. Отсюда следует,
что
а потому
*-«■
откуда находим:
х = С2',
но в начальный момент х = х$, следовательно,
С2 = хо = 0.
ГЛ. 19. ВВЕДЕНИЕ В ДИНАМИКУ 389
Итак, находим решение первого уравнения:
х = О,
откуда следует, что траектория точки лежит в вертикальной пло-
плоскости Oyz.
Из второго дифференциального уравнения получаем:
или
»„ = С3,
т. е. проекция скорости на ось у остается постоянной. Так же как
и в предыдущем случае, находим, что
сз = voy = "о cos a,
следовательно,
dy
f- = v0 cos a.
Интегрируя это уравнение, получаем:
у = vot cos a + C4.
Подставляя сюда для определения постоянной С4 начальные зна-
значения у0 = 0 и t = 0, находим:
С4 = 0.
Итак, получаем решение второго уравнения:
у = vot cos a.
Переходим к третьему дифференциальному уравнепию
dt2 ё'
Интегрируя, находпм:
g = - gt + Ct, или vz = - gt + Съ.
Для определения постоянной Cs нужно обратиться опять
к начальным условиям задачи; подставляя начальные значения
^Oz='yosina и ( = 0, получим:
Следовательно,
dz
sm
откуда, интегрируя еще раз, имеем:
st2
z = — y + *V sin a
390 ДИНАМИКА
Подставляя сюда начальные значения z0 = 0 и t — 0, находим:
С6 = 0.
Итак, получаем уравнения искомого движения точки в плоскости
Ozy в конечном виде
у = vat cos a, z — v№l sin а —-^-.
Исключив из этих уравнений время t, получим уравнение пара-
параболической траектории точки:
Из решения рассмотренной задачи мы видим, что произвольные
постоянные, появляющиеся при интегрировании дифференциаль-
дифференциальных уравнений движения, определяются по начальным условиям,
т. е. по начальным координатам х0, у0, z0 движущейся точки и по
проекциям ее начальной скорости на координатные оси: vux,
vu>J и vOz. Отсюда следует, что для полного определения движения
точки недостаточно знать только силу, действующую на эту точку.
Необходимо еще знать начальные условия движения, т. е. началь-
начальное положение точки и ее начальную скорость v0. Следует заме-
заметить, что в общем случае при интегрировании дифференциальных
уравнений движения точки мы получаем шесть произвольных
постоянных. В случае же плоского движения точки мы имели бы
два дифференциальных уравнения второго порядка и, следова-
следовательно, четыре произвольных постоянных, которые определяются
по четырем заданным начальным значениям координат и проек-
проекций скорости: х0, г/о, vOx и vOy.
ГЛАВА 20
ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
§ 101. Дифференциальное уравнение прямолинейного
движения точки
Пусть материальная точка описывает под действием силы F
прямолинейную траекторию. Примем эту прямую за ось х\ так как
координаты у и z остаются во все время движения равными нулю,
то дифференциальные уравнения движения точки принимают
следующий вид:
mf*= X, 0 = У, 0 = Z.
Из последних двух уравнений следует, что в прямолинейном
движении точки направление действующей силы совпадает с на-
ГЛ. 20. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 391
правлением траектории и, следовательно, X = ± F, причем знак
плюс соответствует тому случаю, когда действующая сила направ-
направлена в положительную сторону оси х, а знак минус — противо-
противоположному направлению этой силы. Таким образом, в случае
прямолинейного движения имеем лишь одно дифференциальное
уравнение
т dJ = X. A3)
В этой главе мы рассмотрим решение второй задачи динамики
для случая прямолинейного движения точки, т. е. рассмотрим,
как определяется закон прямолинейного движения точки, когда
действующая на нее сила известна. В том случае, когда действую-
действующая на точку сила является постоянной, т. е. X = const, точка имеет
постоянное ускорение, проекция которого на ось х равна
X , F
wr— ~ = zL — — const.
* in m
Следовательно, движение точки является равномерно переменным.
В этом случае скорость и пройденный точкой путь определяются
по известным из кинематики формулам равномерно переменного
движения (§ 63). Поэтому останавливаться подробно на этом про-
простом случае нет надобности.
Что же касается переменной силы, то такая сила: 1) может
изменяться по определенному закону с течением времени, 2) может
зависеть от положения точки, определяемого ее координатой х
(например, сила всемирного тяготения обратно пропорциональна
квадрату расстояния точки от притягивающего центра), 3) может
зависеть от скорости движущейся точки (например, сила сопро-
сопротивления окружающей среды — воздуха, воды, — в которой дви-
движется материальная точка). В самом общем случае действующая
на точку переменная сила, или, точнее, равнодействующая несколь-
нескольких сил, приложенных к точке, может зависеть одновременно от
всех трех аргументов: времени I, координаты х и скорости v, т. е.
X = / (I, х, v).
В этом случае интегрирование уравнения A3) может представить
большие математические трудности. В настоящее время нет общих
методов интегрирования этого уравнения при произвольном виде
функции /, и часто приходится ограничиваться приближенным ин-
интегрированием этого уравнения.
Мы рассмотрим способы интегрирования этого уравнения в трех
основных частных случаях: 1) когда действующая на точку пере-
переменная сила является функцией только времени I, 2) когда дей-
действующая сила является функцией только координаты х и 3) когда
эта сила зависит только от скорости v.
892 динамика
§ 102. Движение точки под действием силы,
зависящей от времени
Пусть материальная точка массы т движется по оси х под дей-
действием переменной силы, зависящей от времени, т. е. пусть X = f(l).
Замечая, что
dx 1Ч d2x dv
V ) И
дифференциальное уравнение движения точки можем написать
в виде
т -г — X, или т dv = X dt.
Интегрируя это уравнение в соответствующих пределах, полу-
получим:
— mv0 = f X dt = j / (t) dta).
mv
Так как функция / (t) известна, то последний интеграл можно
вычислить, в результате чего получим некоторую функцию вре-
времени t, которую обозначим через Ф (t), так что можем написать:
mv — mvQ — Ф (l).
Определяя отсюда v, получим:
v = v» + 4г ф (О-
Это уравнение определяет скорость точки как функцию времени t.
Заменяя здесь v через -г~, получим:
и t
Ж = ^о + h ф @. или dx = v, dt + 1 Ф @ dt.
dt
x) Здесь v обозначает алгебраическую величину скорости, т. е. проекцию
вектора v на ось х.
2) При интегрировании мы могли бы брать неопределенные интегралы и
затем определять значение произвольной постоянной С по начальным усло-
условиям движения, как мы это делали в предыдущем параграфе. Вместо этого
в задачах динамики часто бывает несколько проще брать определенные ин-
интегралы в соответствующих пределах.
В данном случае нижними пределами интегрирования являются значения
переменных г и у в начальный момент, т, е. t — 0 и v = v0 (начальная ско-
скорость точки при t = 0).
ГЛ. 20 ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 393
Пусть начальная абсцисса точки при t = О равна ж0. Тогда интегри-
интегрируя последнее уравнение в пределах от ж0 до х и от 0 до t, на-
находим!
t
ФС) dt,
или
I
ф
-|- f
Это уравнение, выражающее а; в функции от t, представляет
собой искомый закон прямолинейного движения точки под дей-
действием данной переменной силы, зависящей от времени.
Пример 106. Пусть X = р sin (kt); найти движение точки, если в на-
нальный момент х = хй и v= v0.
Решение. Дифференциальное уравнение движения точки имеет вид
т.-у- = р sin (kt), или т dv — p sm(kt) dt.
Интегрируя это уравнение в пределах от v0 до v и от 0 до t, имеем:
mv—mva = — -Pj- [cos (kt) — 1], или v = va + — [1 — cos (kt)].
Заменяя здесь v .через j- , получаем:
откуда
dx = (v0 -f- ■=— I с?г — T— cos (&г) с?г.
\ " km / km '
Интегрируя это уравнение в пределах от х0 до х и от 0 до t, находим
закон прямолинейного движения точки под действием заданной периодиче-
периодической силы:
* = *. + (».*■£;
Это уравнение показывает, что в данном случае движение точки можно
рассматривать как результат сложения двух движений:
1) равномерного движения
т— U
km.
и
2) гармонического колебания
х = — ■—- sin (Аг).
394 динамика
§ 103. Движение точки под действием силы,
зависящей от положения этой точки
Пусть X = / (х), где / (х) есть некоторая данная функция от
абсциссы х движущейся точки. В этом случае для интегрирования
дифференциального уравнения движения точки
dv v
X
представим это уравнение в таком виде:
dv dx v-
т j~ ■ j —Л.
dx dl
Заменяя здесь — через v, получим:
dv •.-
mv ,- = А.
dx
Отсюда
mv dv = X dx.
Пусть Жо и va будут соответственно абсцисса и скорость точки
в начальный момент при t = 0; интегрируя предыдущее уравнение
в соответствующих пределах, получим:
X X
—2 rr = \ X dx — \ f (x) dx.
Выполняя здесь интегрирование [а это можно сделать, поскольку
функция /(х) известна], получим некоторую новую функцию пере-
переменного х, которую обозначим через Ф (х). Теперь из предыдущего
уравнения получаем
и, следовательно,
Эта формула определяет скорость точки как функцию ее абсциссы х.
Заменяя v через ~ и умножая обе части последнего равенства
на dt, получим:
+ -Ф(х) dt.
1) Знак перед радикалом выбирается в зависимости от того, в каком
направлении (положительыом или отрицательном) движется точка по оси х.
ГЛ. 20. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 395
Разделяя переменные, будем иметь:
=-= dt.
dx
Vvl
ф
Интегрируя это уравнение в пределах от х0 до х и от 0 до t, получим:
х
Это уравнение устанавливает заЁисимость между х и t. Выпол-
Выполнив интегрирование в левой части и решив полученное после этого
уравнение относительно х, найдем уравнение движения точки
в конечном виде: х = <р (I). Таков общий способ 0 F
интегрирования дифференциального уравнения •—
движения точки в рассматриваемом случае.
Пример 107. К тонкому упругому вертикальному
стержню, закрепленному в нижнем конце Л, прикреп-
прикреплен на верхнем конце шарик М с массой т. Допустим,
что стержень отклонили немного от его вертикального
положения и затем отпустили без начальной скорости.
Шарик М, отклонившись при этом от положения О на
некоторое расстояние а, придет в колебательное дви-
движение (вместе со стержнем). Требуется найти закон
этого движения, пренебрегая массой стержня1) (рис. 283).
Решение. Примем точку О за начало коорди-
координат. На материальную точку М действует реакция
изогнутого стержня, направленная к точке О; модуль
этой силы, как показывает опыт, пропорционален
отклонению ОМ — х точки М от положения равновесия О;
проекция этой силы на ось х выразится так:
X = —сх,
Рис. 283.
следовательно,
где с — положительный коэффициент пропорциональности, постоянный для
данного стержня. В начальный момент по условию задачи имеем:
х0 = а и v0 = 0.
Дифференциальное уравнение движения материальной точки М напишем
в виде
dv
или
mv — = —сх,
dx
mv dv = —сх dx,
х) При небольшом отклонении стержня от вертикального положения дви-
движение точки М можно. с достаточной точностью считать прямолинейным.
896 ДИНАМИКА
откуда, интегрируя, получаем:
V X
m\v dv = ■— с\х их,
О а
ИЛИ
mv2 = с (а2—х2).
Вводя обозначение
- = Р, или к = ']/'—,
т
находим:
v = ±.к У а'1 — хК
(/ж
Заменяя v нерез ~г- , отделяя переменные и взяв знак минус перед радика-
радикалом (так как скорость точки М направлена по оси х влево), получим:
dx
У а? — х'
Отсюда
= к dt.
У
и
или, выполняя интегрирование,
J Уа2—х*
= kt,
arccos —
= kt.
Заметив, нто arccos 1=0, получаем:
(х \
— ] = kt,
a J
или
— = cos (kt),
откуда
х — a cos (kt).
Следовательно, шарик М совершает гармоническое колебание с амплитудой а
и периодом
ГЛ. 20. ПРЯМОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 397
§ 104. Движение точки под действием силы,
зависящей от скорости 1)
Пусть X — f (v). В этом случае можно указать два способа ин-
интегрирования дифференциального уравнения движения точки,
1. Напишем дифференциальное уравнение движения в виде
т—= X = f(v)
т dt л ' (V)-
Отделяя переменные, получим:
т dv ,
/ (у) "
Интегрируя это уравнение в пределах от v0 до v и от 0 до t, полу-
получим:
о
т dv
Выполнив интегрирование и решив полученное после этого
уравнение относительно v, найдем скорость как некоторую функ-
функцию времени:
dx . .
v = Tt = Ф №■
Отсюда вторичным интегрированием находим абсциссу х дви-
движущейся точки как .функцию времени, а именно:
dx = ф (t) dt
и, следовательно,
t
х — х0 + ^ ф (t) dt.
о
2. Напишем дифференциальное уравнение движения в виде
Разделив переменные, получим:
mv dv
dx.
x) Этот случай, как было уже указано, имеет место при движении точки
в сопротивляющейся среде; сила сопротивления среды, как известно из опыта,
зависит от скорости v движущейся точки.
898 ДИНАМИКА
Интегрируя это уравнение в соответствующих пределах, получим:
X — Хо.
S' mv dv
TTv)~
Выполнив интегрирование в левой части и решив затем полученное
уравнение относительно v, найдем скорость как некоторую функ-
функцию от х:
Отсюда
wk=dt
и, следовательно,
f dx - /
Последнее уравнение устанавливает зависимость между х и t,
т. е. дает искомый закон движения точки. Остается выполнить
интегрирование и затем решить полученное уравнение, если это
„q возможно, относительно х, т. е. выразить х как явную
I функцию t.
Пример 108. Шар М массы т падает свободно без началь-
начальной скорости под действием силы тяжести из точки О, которую
примем за начало координат, направив ось у по вертикали вниз
(рис. 284). При этом падении шар испытывает сопротивление
воздуха F, пропорциональное скорости, т. е. F — —[id, где
\а — данпый постоянный коэффициент пропорциональности 1).
Найти закон движения шара.
Решение. Дифференциальное уравнение движения шара
напишем в виде
dv
У dt
Рис. 284.
В правой части этого уравнения имеем сумму проекций на ось у
сил, действующих на шар, а именно его веса Р и сопротивления F, причем
Р = mg.
Разделив это уравнение на т, положив — = п и отделив переменные,
получим:
g—nv
Отсюда, интегрируя, находим:
— — I In (g — nv)
1) Знак минус берем потому, что сила сопротивления F направлена
в сторону, противоположную скорости р.
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ 399
ИЛИ
In 1 = — nt,
g
откуда
_£ _ __ g—nt
g
Решая это уравнение относительно v, получим:
dt n
Из последнего уравнения видно, что при t — со будем иметь:
lira v = JL
|->оо П
Так как функция e~nt с возрастанием t быстро убывает, то практически по
истечении некоторого конечного промежутка времени движение шара стано-
вится равномерным, причем его скорость будет равна Упред=-^-(предель-
Упред=-^-(предельная скорость) г).
Интегрируя уравнение
dy = ~g- (I — e'nt) dt
в пределах от 0 до у и от 0 до t, получим:
t _ JL Г е-т dt t
" ^ n J
о о
или
Если в этой задаче предположить, что сила сопротивления воздуха про-
пропорциональна квадрату скорости, т. е. F = [if2, то решение ее будет анало-
аналогично рассмотренному,.
ГЛАВА 21
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
§ 105. Теорема о количестве движения
Эта теорема устанавливает зависимость между количеством
движения материальной точки и импульсом действующей на точку
силы. Как было уже указано в § 98, количеством движения матери-
материальной точки называется векторная величина, равная произведе-
произведению скорости этой точки на ее массу, т. е. величина mv.
') Если подставить в равенство Упред = g/n вместо п его значение, то
получим: ЦУпред= >ng = Р, откуда следует, что предельная скорость представ-
представляет собой такую скорость тела, при которой численное значение силы со-
сопротивления воздуха становится равным весу этого тела.
400
динамикд
Определим размерность этой величины:
[количество движения] = масса X скорость =
сила
сила X время2
скорость = -
г длина
X
длина
X скорость X
ускорение г длина время
= силах время.
Таким образом, количество движения в технической системе еди-
единиц измеряется в килограммо-секундах (кг сек).
Проекции количества движения mv на оси координат, оче-
очевидно, равны
mv
dx
* =mTt'
dy
m
dz
Ж
Элементарным импульсом силы называется векторная величина,
равная произведению силы на бесконечно малый промежуток вре-
времени, в течение которого действует эта сила, т. е. вектор F&t,
имеющий, очевидно, то же направление, что и сила F. Чтобы найти
импульс силы за конечный промежуток времени t, нужно разделить
этот промежуток на весьма большое число п очень малых интерва-
интервалов Att, составить геометрическую сумму элементарных импуль-
импульсов, соответствующих каждому из этих интервалов, и затем перейти
к пределу, предполагая, что п-+сои Агг ->- 0. Если обозначим им-
импульс силы за время t через S, то будем иметь:
п t
У FiAti = f Fdt. A5)
I °
S — lim
Таким образом, импульс силы за конечный промежуток времени
выражается определенным векторным интегралом.
Так как импульс есть произведение силы на время, то его чис-
численное значение выражается, очевидно, в килограммо-секундах
(кг сек).
Проекции вектора S на координатные оси на основании равен-
равенства A5) выражаются так:
п t
Sx — lim У -Х^Ц = f Xdt,
п—»со .*"K tf
n t
Sy = lim У У,Д*,= С Г ей, \ A6)
п-»оо .~ -'
п
Sz = lim У I
п -► оо ."J
Ati^Ol=l
Здесь X, Y, Z обозначают проекции силы F на координатные оси.
«=) Y dt, }
о
= С Z dt.
о
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
Возьмем теперь основное уравнение динамики
тю — F, или т ~ = F, или -г (mv) = F.
(it &t
401
Отсюда получаем:
d (mv) = F dt,
т. е. дифференциал количества движения материальной точки
равен элементарному импульсу действующей на эту точку силы.
Интегрируя это уравнение в пределах от 0 до t и обозначая
начальную и конечную скорости точки через и0 и v, получим:
t
mv — mu0 = ^ F dt,
о
или
mv — mva = S. A7)
Это равенство выражает теорему о количестве движения: изме-
изменение количества движения материальной точки за некоторый
mv.
Рис. 285.
промежуток времени равно импульсу действующей на эту точку
силы за то же время.
Если известны количества движения материальной точки mv
и mv0, то легко построить вектор S, как указано на рис. 285. Об-
Обратно, если известен импульс S и начальная скорость точки р01
то из предыдущего равенства находим скорость v, а именно:
0 т
402 ДИНАМИКА
Проектируя левую и правую части векторного равенства A7)
на оси координат, получим:
t
mvx — mvox — Sx = ^ Xdt,
и
; (is)
о
t
mvz — mvuz = Sz = \ Z dt,
о >
т. е. изменение проекции количества движения на какую-нибудь
ось равно проекции импульса действующей силы на ту же ось.
Если проекции силы X, Y, Z являются известными функциями
времени t, то, выполняя интегрирование в уравнениях A8), най-
найдем проекции скорости vx, vy и vz и, следовательно, сможем опре-
определить модуль и направление скорости точки для любого момента L
Укажем на некоторые следствия рассмотренной теоремы:
1) Пусть X = 0. Тогда
mvx — mv»x = 0,
или
т. е. если проекция действующей силы на данную ось во все время
движения равна нулю, то проекция скорости движущейся точки
на эту ось остается постоянной.
t
2) Пусть X — const. Тогда ^ X dt — Xt и, следовательно,
о
mvx — mv(sx = Xt.
t
3) Пусть F= const. Тогда S = \F dt = Ft и, следовательно,
о
тс — mv0 — Ft.
§ 106. Теорема о моменте количества движения
Пусть точка М массы т движется по некоторой кривой под
действием силы F (рис. 286). Построим вектор то, изображающий
момент силы F относительно начала координат О.
Из статики известно (§ 41), что этот вектор направлен перпен-
перпендикулярно к плоскости треугольника, который получим, соединив
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
403
начало и конец вектора F с точкой О, и по модулю равен удвоен-
удвоенной площади этого треугольника. Проекции то , то , то этого
х у г
вектора на координатные оси равны моментам силы/' относительно
этих осей (§ 42).
В § 44 мы видели, что момент силы F относительно точки О
можно представить в виде векторного про- г
изведенпя радиуса-вектора г точки М на
эту силу, т. е.
т0 = то (F) — г X F.
A9)
28G.
Совершенно так же мы можем по-
построить вектор 1о, изображающий момент
количества движения mv относительно
точки О.
Этот вектор перпендикулярен к плоско-
плоскости треугольника, который получим, со-
соединяя начало и конец вектора mv с точкой О, п по модулю равен
удвоенной площади этого треугольника, причем, смотря с конца
вектора 1о на этот треугольник, мы должны видеть вектор mv на-
направленным против часовой стрелки относительно точки О.
Момент количества движения относительно точки О мы можем
представить так же, как и момент силы, в виде векторного произ-
произведения радиуса-вектора г на вектор mv, т. е.
lo = mo(mv) = г X mv.
B0)
Между моментом количества движения mv относительно данной
точки О и моментом относительно какой-нибудь оси, проходящей
через эту точку, существует такая же зависимость, как и между
теми же моментами силы F. Поэтому проекции вектора 1оп& коор-
координатные оси равны моментам количества движения относитель-
относительно этих осей, т. е.
lo = mx (mv), l0 = ту (mv), ZOj = mz (mv).
В § 44 были получены следующие формулы для моментов силы
относительно координатных осей:
тох = тх (F) = yZ — zY,
тОу = ту (F) = zX — xZ,
mo — mz (F) = xY — yX.
Здесь X, Y и Z обозначают проекции силы F к& оси, а х, у и
z — координаты точки приложения этой силы, т. е. в данном слу-
случае координаты движущейся точки.
Понятно, что моменты количества движения относительно
координатных осей мы можем вычислить по этим же формулам, но
404 ДИНАМИКА
только проекции X, Y и Z вектора F нужно заменить проекциями
вектора тс на те же оси. Следовательно, будем иметы
B1)
Теорема, доказательство которой мы сейчас изложим, выражает
зависимость между векторами то (mv) и то (F).
Дифференцируя по t векторное равенство B0), получим:
-г то (mv) — -г (г X mv) = ~%~ X mv + г X -г mv,
u6 dt dt dt
но
тх (mv) >= y-mvz — z-mvy = m(y~-z^t
my(mv) = z-mvx — x-mvz = rn[z^t —Xjf},
mz (mv) = x-mvv — y- mvx= m ^ — y^j.
dr d
а потому
d« = u и Тг'
т/»о (mv) = v X mv -\~ г X F.
Но так как векторы v и mv направлены по одной прямой, то
v X mv = 0
и, следовательно,
-т- то (mv) = г X F,
или на основании равенства A9)
-^то (mv) = т0 (F), B2)
т. е. производная по времени от момента количества движения
материальной точки относительно какого-нибудь неподвижного
центра О равна моменту действующей на эту точку силы относи-
относительно того же центра.
Переписав векторное равенство B2) в виде
dl0
спроектируем это равенство на координатные оси; так как проекция
производной от данного вектора на какую-нибудь ось равна
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ 405
производной от проекции этого вектора на ту же ось (§ 65), то
получим:
dl0 dl0 dl0
ЧГ = m°*> ~df = m°v> ЧГ = т°"
или
Ttmx (mv) = mx(F), i
| my (mv) = my (F), \ B2')
Tt mz (mv) = mz (F).
Эти уравнения выражают теорему о моменте количества движения
в координатной форме: производная по времени от момента коли-
количества движения материальной точки относительно какой-нибудь
неподвижной оси равна моменту действующей на эту точку
силы относительно той же оси.
Отметим два следствия доказанной теоремы.
Следствие 1. Пусть момент действующей на материаль-
материальную точку силы относительно оси z во все время движения остается
равным нулю, т. е. mz (F) = 0 х). Тогда будем иметь:
■jt mz (mv) = 0.
откуда следует, что mz (mv) = const, т. е. если момент действующей
силы относительно какой-либо неподвижной оси все время равен
нулю, то момент количества движения материальной точки
относительно этой оси остается постоянным.
Следствие 2. Пусть линия действия силы F все время
проходит через одну и ту же неподвижную точку О. В этом случае
сила называется центральной, а точка О называется центром этой
силы. Тогда то (F) = 0 и, следовательно, наосновании предыдущей
теоремы имеем:
-d- m0 (mv) = 0,
а потому
10 — т0 (mv) — const,
т. е. в случае центральной силы момент количества движения
материальной точки относительно центра этой силы остается
постоянным.
J) Как известно из статики, момент силы относительно оси равен нулю
в том случае, когда сила и ось лежат в одной плоскости.
406 ДИНАМИКА
Отсюда также следует, что под действием центральной силы
точка описывает всегда плоскую траекторию, плоскость которой
проходит через центр этой силы *).
Пример 109. Планета в своем движении вокруг Солнца описывает
эллипс, в одном из фокусов которого S находится Солнце (рис. 287). Пусть
скорость планеты, когда она находится в ближайшей к Солнцу вершине В
эллипса, равна vx; требуется найти скорость vi планеты в противоположной
вершине эллипса А.
Решение. Обозначая большую полуось и эксцентриситет эллипса
соответственно через о и е и принимая во внимание, что фокусное расстояние
OS = ае, получим для модулей момен-
моментов количества движения планеты отно-
относительно фокуса S следующие выра-
выражения:
Шц (mVy) [j = mVy • SB = mVy (a — ae),
\ ms (»ip2) | = mv2 • SA = mvz (о + ae).
Так как действующая на планету
сила F притяжения Солнцем является
Рис. 287. центральной силой, направленной к
центру Солнца, то момент количества
движения планеты относительно S остается постоянным и значения его в
точках В а А равны между собой. Следовательно,
тъ\а A—е) = mv2a A -}- е),
откуда находим:
§ 107. Работа
Рассмотренные в предыдущих параграфах первые две теоремы
относятся к понятию количества движения материальной точки.
Третья теорема, которую мы должны теперь рассмотреть, отно-
относится к понятию кинетической энергии, причем кинетической
энергией или живой силой движущейся материальной точки назы-
mv-
вается скалярная величина, равная -у .
Количество движения и кинетическая энергия, как указывает
Энгельс, являются основными мерами механического движения.
Из теоремы о количестве движения следует, что эффект действия
силы, выражающийся в изменении количества движения материаль-
материальной точки, измеряется импульсом этой силы. Как увидим в следую-
следующем параграфе, эффект действия силы, выражающийся в измене-
изменении кинетической энергии материальной точки, измеряется рабо-
г) Это видно из того, что если l0 = const, то остается неизменпой и
плоскость, проходящая через точку О и перпендикулярная к вектору /д,
в которой лежит радиус-вектор точки М,
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ 407
той этой силы. Всякий раз, когда происходит изменение кине-
кинетической энергии материальной точки, говорят, что действующие
на эту точку силы производят некоторую работу. Поэтому, прежде
чем переходить к изложению теоремы о кинетической энергии
материальной точки, рассмотрим, как выражается количественно
работа силы. Если точка приложения постоянной силы F движется
по прямой, совпадающей с линией действия силы, то работа этой
силы равна произведению ее модуляF на длину пути s, пройденного
точкой приложения силы, взятому с определенным знаком {плюс
или минус).
Если обозначим работу через А, то
А = Fs, или А = —Fs. B3)
Работа считается положительной, если направление силы F
совпадает с направлением движения точки. Если же сила направ-
направлена в сторону, противоположную движению точки, то работа
считается отрицательной и будет равна —Fs.
Размерность работы выражается так:
[А] = [сила X длина],
а потому работа в технической системе единиц измеряется, оче-
очевидно, в килограммометрах (кгм). Так, например, если материаль-
материальная точка весом Р = 5 кг падает по вертикали с высоты h = 4 м,
то работа силы Р на этом пути равна А = Ph = 20 кгм. Если точка
весом Р движется прямолинейно по негладкой горизонтальной
плоскости, то работа силы трения на пути s выразится так:
А = - fPs,
где / — коэффициент трения.
Предположим теперь, что модуль силы F есть величина пере-
переменная. В этом случае для вычисления работы на пути s разобьем
этот путь на большое число п очень малых участков Asx, As2,...
..., Asn. Значения переменного модуля силы в начале каждого из
отих участков обозначим соответственно через Fx, F2, ..., Fn. Так
как участок Д^ очень мал, то величину Fi на этом участке прибли-
приближенно можно считать постоянной (с тем большей точностью,
чем меньше Д${). Поэтому элементарная работа на пути As,
согласно равенству B3) будет равна
FfiSi или — /V4. B4)
Взяв сумму этих элементарных работ и переходя затем к пре-
пределу при Д$,- -> 0 и п -> со, получим работу переменной силы на
конечном пути s. В пределе сумма этих элементарных работ
408 динамика
выразится определенным интегралом, и мы будем, следовательно,
иметь или
П 8
А = Нт У /V4 «= \-^ ds, B5)
ИЛИ
S
^ ^= ~—*■ \jP ds*
о
Для того чтобы вычислить этот интеграл, модуль силы F нужно
выразить как функцию переменного s. В качестве примера вычис-
вычисления работы переменной силы решим сле-
следующую задачу.
Пример НО. В круглом цилиндре под
'X поршнем находится газ. Вначале поршень запи-
» i ' мает положение Мо. Газ, расширяясь, отодвигает
Рис. 288. его в положение Mv Определить работу, совер-
совершаемую при этом силой Р давления газа на пор-
поршень, если ОМ0 — ха, OML — xv и если диаметр поршня равен d (рис. 288).
Решение. Рассмотрим какое-нибудь промежуточное положение
поршня М, причем ОМ = х. Расстояние М0М обозначим лерез s, а расстоя-
расстояние МаМ1 — через «jj тогда
« = X—Х(, И Si = Хх—Г„,
откуда
i = I, + j в % = % + «j.
I
Искомая работа будет равна
= ^ Р ds.
й
Если предположим, что газ расширяется изотермически (при постоянной
температуре), то, обозначая объем, занимаемый газом, через V, по закону,
Бойля — Мариотта будем иметь:
PV = const = PeV0,
где Ро и Vo обозначают соответственно начальные значения давления Р и
объема V, когда поршень занимает положение М„.
Отсюда получаем;
Р V
р га г о.
V >
по так как
XT ___ -v jf ~\Т ——. ^_ л*
то
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
а потому искомая работа равна
409
А =.
ds
*о+ s
In (*, -f »)
В технической практике для вычисления работы часто пользуют-
пользуются графическим способом. Если модульF переменной силы выражен
в функции от s, то эту зависимость F = / (s) мы можем изобразить
в виде некоторой кривой ВС (рис. 289). Разобьем весь путь О А = s,
р
с
в
is,
Рис. 289.
д
Рис. 290.
-+-S'
пройденный точкой приложения силы, на весьма малые участки.
Тогда элементарная работа FiAsi на участке As4 выразится на
чертеже площадью элементарного заштрихованного прямоугольни-
прямоугольника. Сумма элементарных работ выразится суммой площадей
всех таких прямоугольников.
Предел этой суммы равен пло-
площади криволинейной фигуры
ОВСА, и, следовательно, работа
на пути s будет численно вы-
выражаться площадью ОВСА.
Так, например, в предыдущей
задаче работа выразится пло-
площадью ОВСА; эта площадь ог-
ограничена осью абсцисс, ду-
дугой ВС гиперболы, уравнение
которой
0.
р
Рис. 291.
и двумя ординатами ОВ — Ро и АС = Ра -1 (рис, 290).
Рассмотрим теперь, как вычисляется работа в случае криволи-
криволинейного движения точки. Пусть точка приложения М силы F, пере-
переменной как по величине, так и по направлению (рис. 291), описы-
описывает криволинейную траекторию. Требуется определить работу
этой силы на пути М0М1 — s. Разобьем весь этот путь на большое
410 ДИНАМИКА
число весьма малых уЧаСтков; пусть один из таких элементарных
участков есть ММ' = As. Разложим силу F на две составляющие
Fx и Fn, направленные соответственно по касательной и нормали
к траектории в точке М.
Тогда элементарная работа силы F на пути As выражается
произведением \FX | As, взятым, так же как и в случае прямолиней-
прямолинейного движения, со знаком плюс или минус в зависимости от того,
совпадает ли направление силы F, с направлением скорости v
точки приложения этой силы или эта сила направлена в сторону,
противоположную скорости v. Если под Fv будем понимать проек-
проекцию силы F на направление скорости v, то, обозначая угол
между векторами F и v через ср, будем иметь или
FV=F coscp =
или
Fv = F cos Ф =
v
в зависимости от знака cos ср. Следовательно, элементарная работа
в обоих случаях будет равна
FvAs = F cos у As. B6)
Если угол ф острый, как на рис. 291, то элементарная работа
положительна. Если же этот угол тупой (в этом случае касатель-
касательная сила F-. направлена, очевидпо, противоположно скорости v),
то эта работа отрицательна.
Взяв сумму элементарных работ и переходя к пределу в пред-
предположении, что число п участков, на которые была разбита дуга
М0М1, неограниченно возрастает, а длина каждого участка As{
стремится к нулю, получим работу силы F на конечном пути от
Л/о до Мг:
А = lim £*V4 = $/?;*», B7)
n -* со ; _ I
A-,, -> 0
ИЛИ
А = lim JTJ/Л cos 9iAsi = \f cos ф ds. B8)
" - °°„ i = 1 б
Таким образом, работа силы на конечном пути выражается кри-
криволинейным интегралом, взятым вдоль соответствующей дуги тра-
траектории, которую описывает точка приложения силы.
Если сила во все время движения перпендикулярна к направле-
направлению скорости ее точки приложения, то работа этой силы равна
нулю, так как в этом случае ф = 90° и cos ф = 0. Так, например,
при движении материальной точки по горизонтальной плоскости
работа силы тяжести, действующей на эту точку, равна иулю.
ГЛ 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ 411
Выражение работы B8) можно представить еще в другом виде.
Из кинематики известно, что элементарный путь ds, пройденный
движущейся точкой за время dt, равен v dt, а потому
F cos ф ds = Fv cos ф dt; B9)
следовательно, выполняя интегрирование по переменному t, по-
получим:
t
А = \Fv cos ф dt. C0)
о
Этой формулой для вычисления работы можно пользоваться
п том случае, когда скорость точки приложения силы, а также
модуль и направление силы известны для любого момента t (т. е.
определены как функции от t). Выражение Fv cos ф dt, стоящее
под интегралом, представляет собой, очевидно, элементарную ра-
работу силы F за время dt.
Произведение Fv cos ф есть скалярное произведение силы F и
скорости v, а потому
Fv cos ф dt = F • v dt.
Если обозначим радиус-вектор точки М через г (г = ОМ), то по
известной из кинематики формуле имеем (§ 66):
dr
Л'
отсюда
dr = v dt
и, следовательно,
Fv cos <p dt = F ■ dr, C1)
т. е. элементарная работа равна скалярному произведению силы
на дифференциал радиуса-вектора точки приложения этой силы.
Если разложим векторы F и г по координатным осям, то по-
получим:
F = Xi + Yj + Zk и г = xi + yj + zk,
где X, Y и Z обозначают проекции силы F н& эти оси, а х, у, z —
координаты точки М. Из второго из этих равенств следует, что
dr = idx + jdy + k dz.
я F n dr в равенство C1)
ii = j.j = k-k = 1 и ij = j-k= ki = 0 J),
Подставляя значения F \i dr ъ равенство C1) и принимая во вни-
внимание, что
') Скалярное произведение двух взаимно перпендикулярных векторов
равно нулю.
412
ДИНАМИКА
получим следующее аналитическое выражение элементарной ра-
работы:
F-dr == X dx + Y dy + Z dz. C2)
Здесь dx, dy и dz представляют собой дифференциалы коорди-
координат точки приложения силы, т. е.
dx — vxdt, dy = Vydt и dz = vzdt.
Полученным аналитическим выражением C2) для элементар-
элементарной работы часто пользуются при вычислении работы силы на
криволинейном пути.
Докажем теперь теорему о работе равнодействующей силы.
Пусть к материальной точке М приложены две силы Fx и F3,
равнодействующая которых равна R. Обозначим работы сил Fu
F2 и R на пути s соответственно через Аъ А% и А.
Проектируя векторное равенство
R = F, + F2
на направление скорости точки М, получим:
Умножая обе части этого равенства на элемент пути ds и интегри-
интегрируя в пределах от 0 до s (вдоль траектории точки М), получим:
Рис. 292.
или на основании равенства B7)
А = А1 + А,.
Таким образом, приходим к тео-
теореме: работа равнодействующей
на некотором пути равна сумме
работ составляющих сил на том
же пути.
В качестве примера вычисления
работы в случае криволинейного
движения точки приложения силы найдем работу силы тяжести.
Пусть материальная точка М весом Р переместилась по неко-
некоторой криволинейной траектории из положения Мх (xv ух, zx)
в положение М2 (х2, г/2> 2г) (рис. 292). Проекции силы Р на коор-
координатные оси будут равны
X = 0, У = 0 и Z = — Р
(ось z мы берем направленной по вертикали вверх). Следовательно,
элементарная работа этой силы будет равна
X dx + Г dy + Z dz = — Р dz,
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ 413
а работа иа конечном пути МхМг равна
21
Полагая zx — z2 — h, получим:
А = P-h;
отсюда следует, что работа силы тяжести, действующей на ма-
материальную точку, не зависит ни от длины пути, ни от вида
траектории этой точки и равна произведению веса этой точки на
разность ее высот в начальном и конечном положениях, причем
эти высоты отсчитываются от произвольно выбранной горизон-
горизонтальной плоскости.
§ 108. Теорема о кинетической энергии материальной точки
Как уже упоминалось в предыдущем параграфе, кинетической
энергией, или живой силой, движущейся материальной точки
называется скалярная величина, равная —п—, т. е. равная половине
произведения массы движущейся точки на квадрат ее скорости.
Определим размерность этой величины:
[mv3~\ . „ Г сила X время2 длина2"]
-т>- = [масса X скорость2] = ■ х г =
2 J l L длина время2J
= [сила X длина].
Таким образом, кинетическая энергия имеет размерность ра-*
боты, а следовательно, как и работа, в технической системе еди-
единиц измеряется в килограммометрах.
Пусть материальная точка М массы т движется под действием
силы F по некоторой криволинейной траектории (рис. 293).
Напишем основное уравнение динамики точки, выражающее
второй закон Ньютона: F = jnw; проектируя это векторное равен-
равенство на направление скорости с, получим:
mwv = Fv.
Но, как известно из кинематики (§ 70),
dv
следовательно,
mJt = Fv =F cosqj,
где <р есть угол между векторами F и v.
414 ДИНАМИКА
Умножая обе части этого равенства на v dt, получим:
mv dv = Fv cos ф dt,
или
d('-]y-\ = Fv cos ф dt. C3)
Правая часть этого равенства представляет собой элементарную
работу силы F; следовательно, дифференциал кинетической энер-
энергии материальной точки равен элементарной
работе силы, действующей на эту точку.
Этот результат выражает теорему о кине-
кинетической энергии в дифференциальной форме.
Интегрируя уравнение C3) в соответствующих
пределах, получим:
mv- mv?, Г* ,-, ,
-й——п— = \ Jrv cos ф dt,
или
Рис. 293. mvs т„з
О Л /О/\
" ~~ Т = А ' F*>
Это равенство выражает теорему о кинетической энергии в конеч-
конечной форме:
Изменение кинетической энергии движущейся материальной
точки равно работе приложенной к ней силы на пройденном этой
точкой пути.
Если на движущуюся материальную точку действуют несколько
сил, то в уравнении C4) под А нужно понимать работу их равно-
равнодействующей, равную сумме работ этих сил на данном пути. Рас-
Рассмотрим несколько примеров применения полученной теоремы.
ПримерШ. Вагонетка массы т движется по прямой горизонтальной
колее. Коэффициент трения равен /. Начальная скорость вагонетки равна t>0.
Найти длину пути s, который пройдет вагонетка до остановки.
Решение. Так как конечная скорость вагонетки v = 0, то уравнение
C4) принимает вид
mv", .
-—-А.
Сила трения, действующая на вагонетку и направленная противоположно ее
скорости, равна jmg; работа этой силы равна
А = —fmgs.
Подставляя это значение в предыдущее уравнение, получим:
mv\ , v\
~~ = fmgs, откуда s = -jr~.
Пример 112. Шарик весом Р подвешен к нижнему концу вертикаль-
вертикальной винтовой пружины. Верхний конец А пружины закреплен неподвижно.
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ
415
Найти наибольшее расстояние, на которое опускается шарик, если в началь-
начальный момент его скорость равна нулю и пружина не растянута (рис. 294).
Решение. Пусть в начальный момент шарик находится в точке О.
Промежуточное положение шарика обозначим через Л/, а самое нижнее его
положение, соответствующее максимальному удлинению пружины, обозначим
через В. Если удлинение пружины обозначим через Я, а ее ,
максимальное удлинение через Хт, то ОМ = ХшОВ = Хт. '/////. //Щ/////////.
На шарик действуют две силы: вес Р и реакция пружины
F, направленная вверх. Согласно закону Гука г) имеем:
F = сХ,
где с — постоянный для данной пружины коэффициент
пропорциональности (так называемая жесткость пружины).
Так как скорость шарика в точках О и В равна нулю, то
из теоремы о кинетической энергии следует, что работа
сил Р и F на пути ОВ равна нулю. Эта работа, как легко
видеть, выразится так:
Кг \п
= РХт - {f ds = РХт — Г ск (IX = РХт — г
Следовательно,
откуда
Рис. 294.
В положении равновесия шарика силы Р и F равны по модулю; если
обозначим соответствующее этому положению статическое удлинение пру-
пружины через ХСТ, то
сХСТ = Р,
откуда
> Р
и, следовательно,
ПримерПЗ. Материальная точка (пуля) брошева в пустоте из точки О
наклонно к горизонту с начальной скоростью v0. Найти скорость этой точки
в тот момент, когда она поднимется на высоту h.
Решение. При движении в пустоте на материальную точку действует
только сила тяжести, равная Р — mg. Работа этой силы при поднятии точки
на высоту h, как мы уже знаем, равна — Р1ц следовательно, имеем:
IT
откуда искомая скорость равна
—nigh,
= Vv% — 2gh
г) Закон Гука: сила упругости растянутой пружины пропорциональна
ее удлинению X; этот опытный закон верен до тех пор, пока X не превосходит
некоторого определенного значения («предела пропорциональности))).
416
ДИНАМИКД
Пример 114. Тело падает на землю с очень большой высоты Н без
начальной скорости. Определить его скорость при падении на землю, прен е-
брегая сопротивлением воздуха.
Решение. Возьмем начало координат на поверхности земли в точке О;
ось * направим вертикально вверх; радиус земли обозначим через R (рис. 295).
Если высота падения Я очень велика, то силу F, с ко-
которой тело притягивается землей, считать постоянной
вельзя: она будет изменяться по закону Ньютона, т. е.
>-, km
где т •*• масса тела, г — его расстояние от центра зем-
земли и к — коэффициент пропорциональности. У поверх-
поверхности земли, т. е. при г = R, сила F равпа весу; тела
mg; следовательно, имеем:
km
дг = тв>
откуда
Проекции силы F на координатные оси будут рав-
равны (оси хну лежат в горизонтальной плоскости)
X = Y = О,
km
Рис. 295.
„ _ km
Т5"
(R +
Элементарная работа силы F, с которою тело притягивается землей, равна
X dx -{" Y dy + Z dz = — km —^ dz
(R
следовательно, работа на пути Я выразится так:
О
А = —
dz
(R-\
= km
R + z
_ , II
~ Km\R~
1
kmH
R + HJ R(R + H)'
подставляя вместо к его значение, получим:
_ mgHR
R ч- Я*
Принимая во внимание, что начальная'скорость тела va = 0, по теореме
о кинетической энергии имеем:
my2 _ mgHR
~Т~ ~ R + Я'
откуда
" 2gHR
+ IV
Если разделим числитель и знаменатель подкоренной дроби на R, то
получим:
^ R
Если высота Я мала сравнительно с радиусом земли, то дробью H/R
можно пренебречь, и мы приходим к известной формуле Галилея
ГЛ 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ 417
§ 109. Понятие о потенциальном силовом поле
Часть (ограниченная или неограниченная) пространства, в каж-
каждой точке которого на находящуюся там материальную точку дей-
действует некоторая сила, зависящая только от положения этой точки,
т. е. от ее координат х, у и z, называется силовым полем. Проекции
X, Y и Z силы поля на координатные оси являются некоторыми
однозначными и непрерывными функциями от х, у и z, т. е.
X = h (х> У, z). Y = h ix> У, z)> z = /з (я, У, z).
Допустим, что существует такая функция координат U (х, у, z),
частные производные которой по координатам равны проекциям
силы поля на соответствующие координатные оси, т. е.
у аи у эи 7 ди
х г z
Такая функция U называется силовой функцией данного сило-
силового поля, а силовое поле в этом случае называется потенциаль-
потенциальным. Таково математическое определение силовой функции как
функции, удовлетворяющей соотношениям C5). Выясним теперь
ее физическое значение. Для этого найдем выражение элементар-
элементарной работы силы потенциального поля. Эта работа равна
X dx + Y dy + Z dz =-~ dx +-^dy + ^ dz = dU,
т. е. элементарная работа силы потенциального поля равна пол-
полному дифференциалу силовой функции.
Следовательно, работа на конечном пути, когда точка приложе-
приложения силы перемещается из положения Мо в положение М, выразит-
выразится так:
А = J dU=U— ty), C6)
(Mo)
т. е. работа силы потенциального поля равна разности значений
силовой функции в конечной и начальной точках пути и, следова-
следовательно, не зависит ни от вида, ни от длины траектории, по кото-
которой перемещается точка приложения силы из положения Мо в по-
положение М.
Отсюда непосредственно следует, что в случае однозначной
силовой функции U работа силы потенциального поля на всякой
замкнутой траектории равна нулю 2).
1) Uo = U (х0, уа, г„), где х„, л, н г, - координаты точки Мо.
2) В этом случае конечное положение точки совпадает с ее начальным
положением и, следовательно, U = Ua.
14 И. м. Воронков
418 ДИНАМИКА
В качестве примера найдем силовую функцию в следующих
двух случаях:
1) П о л е силы тяжести. Если направим ось z верти-
вертикально вверх, то проекции силы тяжести на координатные оси
будут равны
X = О, Y = О и Z = — mg.
Следовательно,
dU ~ Xdx + Ydy + Zdz = —mg dz,
откуда, интегрируя, находим:
U = — mgz + С. C7)
Постоянная С здесь может иметь произвольное значение.
Если в этом равенстве z = const, то и U — const, откуда сле-
следует, что во всех точках данной горизонтальной плоскости сило-
силовая функция сохраняет постоянную величину. Такая поверхность,
на которой силовая функция имеет постоянное значение, назы-
называется поверхностью уровня или эквипотенциальной поверхностью.
Следовательно, в поле силы тяжести поверхности уровня пред-
представляют собой горизонтальные плоскости.
2) Поле ньютоновой силы. Пусть материальная
точка М притягивается силой F по закону Ньютона к неподвиж-
неподвижному центру О, который примем за начало координат. Тогда
Г ~~ г2 '
где г — радиус-вектор точки М, & к — коэффициент пропорцио-
пропорциональности. Принимая во внимание, что сила Fнаправлена противо-
противоположно радиусу-вектору, можем написать:
F=-~r.
г3
Отсюда следует, что проекции силы F на координатные оси выра-
выразятся так:
Далее, имеем:
dU = Xdx + Ydy + Zdz = —k~{xdx + у dy + z dz) =
km , /x2 -\~ys + z2 \ km,(r2\ km , km ,
d Ш = _ -j. rf _ = __ r dr = - -j dr.
x) Это видно из того, что в формуле
km
множитель з — величина скалярная, а проекции радиуса-вектора г на
координатные оси представляют собой координаты х, у и z точки М.
ГЛ. 21. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ ТОЧКИ 419
Отсюда, интегрируя, находим:
U = - km J У == ^ + С. C8)
Полагая в этом равенстве U = const, получаем г = const. Сле-
Следовательно, поверхности уровня представляют собой в данном
случае сферы с центром в начале координат. В общем случае урав-
уравнение эквипотенциальной поверхности имеет вид
U (х, у, z) = С.
Давая произвольной постоянной С различпые значения, получим
различпые эквипотенциальные поверхности данного силового поля.
Уравнение выражающее теорему о кинетической энергии при
движении материальной точки в потенциальном силовом поле на
основании равенства C6) принимает следующий вид:
Of-Up = U-Ua, C9)
или
4g—U = h, D0)
■ _ mv-n
Л — ~2~
Отсюда
.-у
2(U
следовательно, зная постоянную h, которая определяется по на-
начальному положению движущейся точки (по начальным коорди-
координатам а-0, г/0, z0) и ее начальной скорости v0, можем найти скорость
точки в ее любом положении.
§ НО. Понятие о потенциальной энергии
Пусть материальная точка, движущаяся в потенциальном
силовом поле, находится в точке М (х, у, z), в которой силовая
функция имеет значение U, и пусть M(u) (xi0\ yw, z@)) будет какая-
либо произвольно выбранная неподвижная («нулевая») точка, в ко-
которой силовая функция имеет значение
[/(о) = и (ж@\ у{0), z@)).
Работа, производимая силой поля при перемещении материаль-
материальной точки из положения М в «нулевую точку» М<0), называется
потенциальной энергией в точке М. Обозначая потенциальную
энергию через П, на основании этого определения и формулы C6)
предыдущего параграфа будем иметь:
П = £/■(»> — U. D1)
14*
420 динамика
Ясно, что в нулевой точке М(о) потенциальная энергия равна нулю.
За нулевую точку М(о) мы можем, очевидно, принять любую точку
поверхности уровня, на которой силовая функция имеет значе-
значение U{<>).
Пусть, например, материальная точка находится в поле силы
тяжести. Примем произвольно взятую горизонтальную плоскость
(например, на уровне моря) за «нулевую» и будем считать потен-
потенциальную энергию на этой плоскости равной нулю. Тогда потен-
потенциальная энергия в точке М, находящейся на высоте h над этой
пулевой плоскостью, будет, очевидно, равна Р/г, где Р — вес
данной материальной точки.
Так как [Л0' есть величина постоянная, то из равенства D1)
следует, что
9П___<«7 да____ЗС/ ?5___9С7,
дх ~~ дх ' ду ~ ду' dz й'
отсюда на основании соотношений C5) предыдущего параграфа по-
получаем:
Х to' Г~ ~Ту' Z== — &• <42>
т. е. проекции силы потенциального поля на координатные оси
равны взятым с обратным знаком частным производным от потен-
потенциальной энергии по соответствующим координатам.
§ 111. Закон сохранения энергии
Пусть М^ и М2 будут два различных положения материальной
точки, движущейся в потенциальном силовом поле, и иг и U% —
соответствующие значения силовой функции в этих точках. На-
Напишем уравнение, выражающее теорему о кинетической энергии:
mv\ mv'f .
2~= А>
где v1 и г>2 — скорости движущейся точки в положениях М1 и М2.
Но так как работа А равна разности значений силовой функции
в конечном и начальном положениях движущейся точки, то
Согласно сказанному в предыдущем параграфе, потенциальная
энергия в точках Мх и М2 будет выражаться так:
х — Ux, П2 = U{l>) — U2.
Отсюда
{ - Пх и U2 = f/@) - П2.
ГЛ. 22. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ 421
Подставляя эти значения в написанное выше уравнение по-
получим:
или
т. е.
2
~-+ П = const. D3)
Следовательно, при движении материальной точки в потенциаль-
потенциальном силовом поле сумма кинетической и потенциальной энергии
остается постоянной.
Этот результат, выражающий сохранение механической энер-
энергии, представляет собой частный случай общего физического закона
сохранения энергии.
ГЛАВА 22
ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ
§ 112. Дифференциальные уравнения движения
несвободной материальной точки
Материальная точка называется несвободной, если ее движение
ограничено некоторыми наперед заданными условиями. Эти усло-
условия, стесняющие движение точки, называются в механике свя-
связями. Такой несвободной точкой является, например, материаль-
материальная точка, движущаяся под действием данной силы F по некото-
некоторой неподвижной поверхности (рис. 296), осуществляющей в этом
случае связь. Пусть уравнение этой поверхности есть
/ (х, у, z) = 0.
Это уравнение называется уравнением связи. Во все время движе-
движения, пока точка остается на поверхности, ее координаты должны
удовлетворять этому уравнению. При рассмотрении движения
такой несвободной точки необходимо принять во внимание механи-
механическое действие на нее со стороны неподвижной поверхности,
т. е. реакцию этой поверхности.
Предположим, что данная поверхность совершенно гладкая,
т. е. что трение отсутствует. Тогда реакция, как известно из
статики, будет направлена по нормали к этой поверхности и
422 ДИНАМИКА
называется нормальной реакцией (рис. 296). Обозначив эту реак-
реакцию через iV, на основании второго закона Ньютона будем иметь:
mw = F + N. D4)
Проектируя обе части этого векторного уравнения на неподвижные
оси декартовых координат, получим дифференциальные уравне-
уравнения движения несвободной точ-
точки в следующем виде:
т ,х = Y + NU, \ D5)
о
dt2
<Г9
/ Первые члены в правых частях
/ этих уравнений представляют
Рис. 296. собой проекции силы F, а вто-
вторые члены — проекции нормаль-
нормальной реакции N на координатные оси, причем
Nx = N cos (N, i), Ny = N cos (N, j), Nz = N cos (N, k).
При определении направляющих косинусов нормали данной
поверхности, выражаемой уравнением / (х, у, z) = 0, обозначим
для краткости радикал
дх) ' \ду) ' \dzj
через А/ ]).
Тогда, как известно из дифференциальной геометрии, будем
иметь:
df df df
cos (N, i) = ц, cos (N, j) = lyf, cos (N, k) =~.
Подставляя эти значения в дифференциальные уравнения движе-
движения, приведем их к виду
Tf-ЭуЛ <46>
Д/ д'г"
х) Эта величина называется первым дифференциальным параметром
функции /.
ГЛ. 22. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ 423
Если обозначим отношение -гт через X, то эти уравнения прини-
принимают вид '
dH Y . df dhj v , » df tf2z 711 df i/sl\
m -pi — л. -j- A ~-, m -r-f = У -f- A ~, m ~r^ = Z -f- A .-. D/)
Эти уравнения называются дифференциальными уравнениями
движения несвободной точки в форме Лагранжа.
Из этих трех уравнений и из уравнения связи / (х, у, z) = О
можно определить все четыре неизвестные величины: х, у, z и к
в функциях от t\ тогда движение точки будет определено; кроме
того, определив множитель Лагранжа к, найдем и реакцию по-
поверхности: N = А ■ А/.
Примечание. Заметим, что если точка может сходить
с данной поверхности в одну какую-нибудь сторону, т. е. если по-
поверхность не препятствует такому одностороннему перемещению
точки, то в этом случае связь называется неудерживаюгцей. Реак-
Реакция неудерживающей поверхности будет направлена всегда по
нормали к этой поверхности в одну определенную сторону и именно
в ту сторону, куда точка может беспрепятственно двигаться, т. е.
может сойти с поверхности. Поэтому величина N в уравнениях
движения может иметь в этом случае только один определенный
знак. Если в какой-нибудь момент эта величина, обращаясь в нуль,
изменяет знак, то это указывает на то, что в данный момент точка
покидает поверхность.
Если имеем удерживающую связь, т. е. если точка не может
сходить с данной поверхности ни в ту, ни в другую сторону, то
величина N в уравнениях движения может оказаться как положи-
положительной, так и отрицательной, так как в этом случае реакция IV
может быть направлена по нормали к данной поверхности как
в одну, так и в другую сторону.
Рассмотрим теперь движение материальной точки М по задан-
заданной плоской неподвижной линии (например, движение шарика
в плоской изогнутой трубке). Пусть уравнение этой плоской лп-
нип, отнесенное к осям Оху, лежащим в ее плоскости, т. е. уравне-
уравнение связи, будет:
/ (х, у) = О,
и пусть на точку М действует некоторая заданная сила F, лежа-
лежащая с этой линией в одной плоскости. Тогда, кроме силы F, к точ-
точке М будет приложена еще реакция связи N, направленная в слу-
случае отсутствия трения по нормали к данной линии и лежащая
с ней в одной плоскости (рис. 297).
Дифференциальные уравнения движения точки, как и в пре-
предыдущем случае, будут иметь следующий вид:
т*%= X + N cos (N, /), т % =Y + N cos {N, j), D8)
424 динамика
или
df /in\
k- D9)
Из этих двух уравнений, к которым нужно еще присоединить
уравненпе связи / (х, у) = О, можно определить х, у и к как функ-
функции времени t и, следовательно, найти движение точки М и реак-
реакцию связи N.
При исследовании движения точки по заданной плоской ли-
линии часто бывает удобнее проектировать векторное уравнение
mw = F -f- N не на оси декартовых
У координат, как это только что было
сделано, а на касательную и нормаль
« траектории, т. е. на естественные оси.
Тогда получим следующие два уравне-
уравнения:
= F^ mwn — Fn+ N,
D
где FT и Fn обозначают проекции силы F
на касательную и нормаль, а N есть
Рис. 297. проекция силы N на нормаль. При этом
за положительное направление каса-
касательной мы принимаем направление в сторону возрастания дуго-
дуговой координаты s = О'М, отсчитываемой от неподвижной точки О',
произвольно выбранной на заданной траектории точки М. За
положительное направление нормали принимаем направление
к центру кривизны траектории. Как известно из кинематики,
проекции ускорения на касательную и нормаль выражаются так:'
d'S V2
Подставляя эти значения в предыдущие уравнения, получим
дифференциальные уравнения движения несвободной точки в так
называемой естественной форме или в форме Эйлера:
d2s r, mv2 „ . ..
mJfi = F" — =Fn + N'
Интегрируя первое уравнение, найдем закон движения точки М
по заданной линии и ее скорость. Определив скорость, из вто-
второго уравнения находим реакцию N.
Перейдем к рассмотрению движения материальной точки по
заданной неподвижной поверхности с учетом трения; силу трения
обозначим через F^. В этом случае материальная точка будет
находиться под действием трех сил: F (заданная сила), N (нормаль-
ГЛ. 22. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ 425
пая реакция поверхности) и F^. Дифференциальные уравнения
движения будут иметь следующий вид:
т
d2z
= Z + N, +F?1.
E1)
Проекции силы трения на координатные оси можно предста-
представить в следующем виде:
dx
= fn> cos
P> i) = _ ftp
dt'
(o> £) = _ /Гтр ^ = _
dt
dt
Y
mJ=Y
md!2 = Z
V dt '
dy
dt'
dz
dt '
К
E2)
Подставив в уравнения E1) эти значения проекций силы тре-
трения, а также полученные выше выражения для проекций нормаль-
нормальной реакции, получим дифференциальные
уравнения движения точки в виде
N df
Ifdx
JLdL
А/ ду'
Л дЛ
Д/ dz'
Присоединяя к этим трем уравнениям
уравнение связи / (х, у, z) = 0 и урав-
уравнение, выражающее закон Кулона, т. е. /*тр = fN, где / есть
коэффициент трения, получим пять уравнений, из которых мож-
можно-определить все пять неизвестных величин: х, у, z, N ж Fjp.
В заключение рассмотрим два примера, относящихся к дви-
движению несвободной точки.
1. Пусть точка М массы т (рис. 298) движется под действием
силы тяжести внутри трубки, имеющей форму окружности ра-
радиуса г и расположенной в вертикальной плоскости. Выбрав
координатные оси, как указано на чертеже, находим проекции
силы Р (веса точки М) на оси координат:
X = О, У = Р = mg.
х) Так как сила трения направлена в сторону, противоположную скорости
точки, то направляющие косинусы векторов FTpa v отличаются только знаком.
426 ДИНАМИКА
Уравнение связи (т. е. уравнение окружности) имеет вид
/ (х, у) = х2 + г/2 - т-2 = 0.
Отсюда находим:
%-
*■
Дифференциальные уравнения движения точки М в форме
Лагранжа принимают вид
m-^j= 2kx, m dti = mg + 2ly.
Кроме того,
-Y1ZF+W--2
1ZF+W
и, следовательно, iV = 2rX.
Составим теперь для этой же задачи уравнения движения в фор-
форме Эйлера. Проектируя силу Р на касательную и нормаль, полу-
получим:
Рх = mg cos ф, Рп = — mg sin ф 1),
следовательно, дифференциальные уравнения движения в форме
Эйлера имеют вид
d2s mv'1 . ..
т -j 2 = mg cos ф, = — mg sin ф -f- iV,
где s обозначает длину дуги О'Л/. Так как s = r^p, то
ds dff d2s d2q>
~di~~rTt и Л2 ~ r"d?-
Поэтому первое из дифференциальных уравнений движения
приводится к виду
d2q> g
- , = --COS ф.
at2 r ^
Интегрируя это уравнение, можно найти угол ф как функцию
от t, т. е. найти закон движения точки М.
Из второго уравнения, замечая, что р = г, находим нормаль-
нормальную реакцию:
N — mg sin ф -) .
Из этой формулы видим, что нормальная реакция N трубки яв-
является равнодействующей двух сил, направленных по радиусу
г) За положительное направление касательной примем направление в сто-
сторону возрастания угла ф, а за положительное направление нормали — направ-
направление МО (к центру окружности).
ГЛ. 22. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ 427
МО к центру О окружности: 1) силы, равной по модулю mg sin cp,
которая уравновешивает нормальную составляющую веса Р, и
2) силы, равной по модулю , которая сообщает точке М нор-
нормальное ускорение и которая называется центростремительной
силой. Отсюда следует, что сила давле-
давления точки М на трубку, равная — N,
также слагается из двух сил:
силы, равной нормальной составляю-
составляющей веса Р, и силы, равно]'! по мо-
дулю-
и направленной по радиу-
су ОМ от центра О, называемой цен-
центробежной силой.
2. В качестве второго примера
рассмотрим прямолинейное движение
материальной точки М по негладкой Рис. 299.
наклонной плоскости под действием
силы тяжести (рис. 299). Пусть угол наклона плоскости к гори-
горизонту равен а. Выберем координатные оси так, как указано на
чертеже. Так как точка М движется по оси х, то уравнение
связи имеет вид у = 0. Проекции силы Р (веса точки М) на оси
х и у равны
X = mg sin а, У = — mg cos а.
Составляем дифференциальные уравнения движения точки М:
т -Л- = mg sin a — FT*>,
т -Л = — mg cos а -j- N,
где i^P — сила трения и N — нормальная реакция наклонной
плоскости.
Из равенства у = 0 следует, что —f = 0; поэтому из вюрого
дифференциального уравнения находим:
N = mg cos a.
Далее, согласно закону Кулона имеем:
/тр = /лг,
где / — коэффициент трения. Отсюда
= fmg cos a.
428 ДИНАМИКА
Подставляя это значение силы Frv в первое дифференциаль-
дифференциальное уравнение и сокращая это уравнение на т, получим:
._£. = g (sin a — / cos а),
или
~ = g (sin а — / cos а),
где
_ *?
есть скорость точки М.
Отсюда видим, что ускорение точки М постоянно. Интегрируя
это уравнение и предполагая, что в начальный момент (при t = 0)
скорость точки равна г?0, получим:
v = ^о + S (sin а — / cos а) t- E3)
Эта формула определяет скорость точки М для любого момента t.
Заменяя здесь v через -£, будем иметь:
■£ = Щ + g (sin a ■— / cos а) t.
Интегрируя это уравнение в предположении, что в начальный
момент х = х0, получим:
х = х0 -Ь vot + g (sin a — /cos а) у. E4)
Это уравнение выражает закон движения материальной точки по
негладкой наклонной плоскости под действием силы тяжести.
Из этого уравнения следует, что:
1) если sin а ^> / cos а, т. е. tg а ^> /, то движение при v0 5s 0
(т. е. движение по наклонной плоскости вниз) будет равномерно
ускоренным;
2) если tg a<^/, то движение будет равномерно замедленным;
3) если tg а = / (т. е. если угол наклона плоскости равен углу
трения), то движение точки будет равномерным (при v0 ^> 0).
§ 113. Теорема о кинетической энергии для несвободной
материальной точки
1. Пусть материальная точка движется по неподвижной глад-
гладкой поверхности под действием данной силы F. Применим к этой
точке теорему о кинетической энергии (§ 108):
1 Т~ л>
ГЛ. 22. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ 429
где Л обозначает сумму работ всех сил, приложенных к движу-
движущейся точке. Но так как нормальная реакция поверхности N
образует, очевидно, с направлением скорости v (лежащей в каса-
касательной плоскости) прямой угол, то ее работа равна нулю, и сле-
следовательно, мы будем иметь (§ 107):
S
А = \ F cos ф ds;
внося это значение А в предыдущее уравнение, получим:
S
-^ к1 = \ ^ cos ф ds; E5)
о
отсюда видим, что при движении точки по неподвижной гладкой
поверхности нормальная реакция поверхности в уравнение, выра-
выражающее теорему о кинетической энергии не входит.
Примечание. Теорему о кинетической энергии для
несвободной точки в форме E5) нельзя применять в том случае, когда
гладкая поверхность, по которой движется материальная точка,
сама перемещается в пространстве. В этом случае нельзя ужэ
утверждать, что работа нормальной реакции поверхности равнг
нулю и что изменение кинетической энергии материальной точки
равно работе только заданной силы F. В самом деле, когда точка
перемещается по движущейся поверхности, то ее скорость
складывается геометрически из двух скоростей: относительной
и переносной. Нормальная реакция поверхности N остается
все время перпендикулярной к относительной скорости точки,
но "с переносной скоростью она может образовать любой угол
как острый, так и тупой. Поэтому работа силы N в абсолютном
движении точки не будет уже равна нулю.
2. Пусть точка движется по неподвижной
негладкой поверхности. Так как сила трения
Frv направлена в сторону, противоположную
скорости точки, то уравнение теоремы о ки-
кинетической энергии в этом случае имеет вид
о
= (f cos
ds -
ds. E6)
Модуль силы трения Ftp определяется, как и Рис. 300.
выше, из равенства F™ — fN.
Пример 115. Шарик весом Р подвешен на нити длиной I (рис. 300).
Какую начальную горизонтальную скорость v0 нужно сообщить шарику,
чтобы он отклонился от вертикали па данный угол а?
Решение. Скорость шарика в тот момент, когда угол отклонения «го
от вертикали достигает наибольшего значения а, равна нулю. Работа силы
430
ДИНАМИКА
тяжести на пути М0М равна — mgh, работа реакции N нити равна нулю;
поэтому, применяя теорему о кинетической энергии, получим
mvf,
откуда находим:
Замечая из чертежа, что
va = V 2gh.
Л = I—I cos a = I (I—cos а) = 21 sin2-^ ,
получаем:
а
sin -к .
Пример 116. Санки, выходя из точки А без начальной скорости,
скользят по плоскости, наклоненной под углом а к горизонту, и, пройдя затем
//////////////^
it
\р
'///'/////////У,
в
^ .
'/У/////
Р
С
/////у
Рис. 301.
некоторый путь по горизонтальной плоскости, останавливаются. Длина на-
наклонного пути АВ равна sx; длина горизонтального пути ВС равна *2- Найти
коэффициент трения / (рис. 301).
Решение. Так как кинетическая энергия санок в точках А и С равна
нулю, то по теореме о кинетической энергии сумма работ всех действующих
на санки сил на пути ABC тоже равна нулю. Работа на пути АВ составляется:
1) из работы силы тяжести, равной Ph = Pst sin a, и 2) из работы силы тре-
трения, равной —P\Psi- Но сила трения F^ равна произведению нормальной
реакции А?! = Р сов а на коэффициент трения /. Следовательно, работа этой
силы равна — Pfb\ cos a. Работа силы трения на горизонтальном пути ВС
равна — Pf$2i так как нормальная реакция N2 горизонтальной плоскости
равна, очевидно, весу санок Р, и следовательно, сила трения-Р^ = fP. Таким
образом, получаем уравнение
Psl (sin a — / cos a) — Pfs.2
откуда находим:
0,
/ =
Из чертежа имеем:
OA =
sx sin а
L cos а + s2 '
sin a, OB = st cos a и ВС = s2
подставляя эти значения в предыдущую формулу, получим:
ОА ОА
/==
ОВ + ВС
Отсюда видим, что угол АСО равен углу трения 1).
1) Как известно из статики, тангенс угла трения равен коэффициенту
трения.
ГЛ. 22. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ
431
Рис. 302.
§ 114. Принцип Даламбера для материальной точки
Пусть М есть движущаяся несвободная материальная точка,
F — заданная действующая на нее сила и N — реакция связи
(рис. 302). Сложив силы F и N, получим равнодействующую
силу R. Согласно второму основному зако-
закону динамики сила R направлена по ускоре-
ускорению w точки М и по модулю равна mw.
Представим себе теперь, что мы при-
приложили в данный момент к точке М еще
силу, имеющую тот же модуль, что и сила
R, т. е. mw, и направленную противопо-
противоположно ускорению гю. Эта сила, равная
по модулю произведению массы точки на
модуль ее ускорения и направленная про-
противоположно ускорению, называется силой инерции и опреде-
определяется, следовательно, равенством
F™ = — mw. E7)
Ясно, что силы R и FHn, как равные по модулю и противоположно
направленные, уравновешиваются; но так как R есть равнодей-
равнодействующая сил F и N, то три силы F'm, F и N также взаимно урав-
уравновешиваются, т. е.
F + N + F™ = 0. E8)
Таким образом, приходим к заключению: при движении мате-
материальной точки в каждый данный момент заданная сила F, реак-
реакция связи N и сила инерции i^1H взаимно уравновешиваются. В этом
и состоит принцип Даламбера для материальной точки.
Проектируя векторное равенство F™ = — mw на три коорди-
координатные оси, получим проекции силы инерции на эти оси:
d2x
fmt —
— m
dt2
dP-y
^^ и у
mwy m~dl2' l
E9)
= __ m * ,
Аналогично, проектируя то же векторное равенство на есте-
естественные оси, получим проекции силы инерции на касательную,
главную нормаль и бинормаль траектории *):
т-тин dv „и
Ft = — mWx = —т^т, F™
= — mwb = 0.
F0)
x) При этом за положительное направление касательной припимаем на-
направление скорости точки, а за положительное направление главной нормали —
направление к центру нрцвылш краекторид.
432 динамика
Составляющие силы инерции F™ и F^, направленные по каса-
касательной и главной нормали, называются соответственно касатель-
касательной (или тангенциальной) и нормальной силами инерции. Эти силы
направлены противоположно соответствующим ускорениям гюх
и wn. Нормальная сила инерции иначе называется центробежной
силой.
Для разъяснения термина «сила инерции» укажем на следую-
следующий простой пример: рабочий толкает вагон массы т и сообщает
ему ускорение и>; к вагону в этом случае будет приложена сила
F — mw, направленная в сторону движения вагона. В то же время
рабочий испытывает инерционное сопротивление вагона, равное
по модулю mw, но направленное в противоположную сторону;
это и есть сила инерции вагона, приложенная в действительности
не к самому вагону, а к руке рабочего.
В общем случае согласно закону равенства действия и противо-
противодействия сила инерции является «противодействием» по отноше-
отношению к силе R, следовательно, в действительности сила инерции
приложена не к самой движущейся точке М, а к тому телу, в ре-
результате взаимодействия с которым эта точка получает данное
ускорение.
Вводя при решении задач динамики силу инерции, мы согласно
принципу Даламбера получаем уравновешенную систему сил, а
потому можем воспользоваться
уравнениями статики. Этот метод,
называемый методом кинетоста-
кинетостатики, часто оказывается весьма
удобным при решении динамиче-
динамических задач, в особенности при
определении динамических реакций
связей. Рассмотрим несколько при-
меров.
ПримерИ7. Материальная точка
М массы т движется прямолинейно под
действием силы тяжести по негладкой
плоскости, наклоненной под углом а к горизонту. Коэффициент трения равен /.
Найти ускорение этой точки (рис. 303).
Решение. Если приложим к точке М силу инерции, направленную
противоположно ускорению icu то согласно принципу Даламбера получим
уравновешенную систему следующих сил: веса Р, силы трения Frp, нормаль-
нормальной реакции плоскости N ж силы инерции FUH. При этом
р = mg, i?TP = fN> p«a = теш<
Направим оси координат так, как показано на чертеже, и напишем два урав-
уравнения равновесия. Проектируя все указанные силы на координатные оси, по-
1) mg sin a — fN — mw = 0,
2) N — mg cos а =* 0.
ГЛ. 22. ДВИЖЕНИЕ НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ 433
Из второго уравнения находим:
N
mg cos a;
подставляя это значение в первое уравнение, находим из него!
w — g (sin а — / cos а).
П р и м е р 118. Тележка М массы т скатывается без начальной
с высоты h по гладким рельсам и описывает окружность радиуса г
кальной плоскости («мертвую петлю»). Определить высоту h, при
возможно такое движение тележки (рис. 304).
У
скорости
в верти-
которой
///////f
Рис. 304.
Рис. 305.
Решение. Когда тележка находится в высшей точке С окружности,
то в этой точке согласно принципу Даламбера уравновешиваются нормальная
сила инерции F™, направленная по вертикали вверх, вес тележки Р и нор-
нормальная реакция рельсов ЛГ, направленные по вертикали вниз; следовательно,
F™ - Р - N = О,
откуда
N = F™ - Р,
причем
Fn = — •
Для определения скорости v тележки в точке С применим георему о
кинетической энергии; принимая во внимание, что начальная скорость тележ-
тележки v0 = 0, пренебрегая трением и определяя работу силы Р на пути ABC,
получим:
следовательно,
Для того чтобы тележка прошла всю окружность, необходимо, ятобы
выполнялось неравенство N :> 0 1), следовательно, должно быть:
2/г :> 5г, или h ^ 2,5л
*) Если бы значение величины 7V оказалось отрицательным, то это зна-
значило бы, что реакция направлена в противоположную сторону, т. е. вверх,
что невозможно, так как тележка движется по внутренней стороне окруж-
окружности и, следовательно, тележка в этом случае не могла бы достигнуть
точки С.
434
ДИНАМИКА
Пример 119. Сосуд в форме круглого цилиндра с вертикальной осью
вращается вокруг этой оси с постоянной угловой скоростью со вместе с на-
находящейся в нем жидкостью. Найти форму свободной поверхности жидко-
жидкости (рис. 305).
Решение. Возьмем частицу жидкости М на свободиой поверхности и
проведем через точку М и через ось вращения цилиндра плоскость, которая
пересечет свободную поверхность жидкости по линии АОВ. Найдем уравне-
уравнение этой линии по отношению к координатным осям, выбранным так, как
указано на чертеже. На частицу М действуют сила тяжести Р и реакция N
остальной массы жидкости, направленная по нормали к поверхности жидкости
в точке М. Приложим еще к этой частице нормальную силу инерции, или,
иначе, центробежную силу F1, направленную по радиусу г от оси враще-
вращения у. (Касательная сила инерции, очевидно, равна нулю, так как угловая
скорость вращения жидкости постоянна.) Так как радиус вращения г точки
М равен абсциссе х этой точки, то центробежная сила будет равна
Ira _ mv2 _ mv%
п ^Т = ~'
но екорость частицы v — гш = а*), а потому F™ = та*J.
Проектируя теперь уравновешенные силы Р, N и F"H на касательную
к кривой АОВ в точке М, получим:
тхш2 cos а — mg-sin a = О,
где а — угол наклона касательной к горизонтальной оси х. Отсюда находим:
со2
(////, 'У/////,
dy
заменяя tg а через -г-, получим:
dy (o^
dx g
Интегрируя это уравнение, получим
уравнение кривой АОВ
Так как эта кривая проходит через
начало координат, то С = 0. Уравнение
есть уравнение параболы, и следовательно, свободная поверхность жидкости
представляет собой параболоид вращения вокруг оси Оу.
Пример 120. Материальная точка весом Р подвешена на невесомой
гибкой нити длиной /. Эту точку отводят в положение Мо, причем нить откло-
отклоняется от вертикали на угол ф0, и затем отпускают без начальной скорости.
Найти натяжение нити при движении точки (рис. 306).
Решение. Обозначим через ф угол отклонения нити от вертикали
в некоторый момент, когда движущаяся точка занимает положение Л/.
Согласно принципу Даламбера сила Р, реакция нити N, центробежная сила
/•'™ и касательная сила инерции F™ будут находиться в равновесии. Проек-
ГЛ. 23. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 435
тируя эти уравновешенные силы на нормаль к траектории в точке М, т. е.
на направление радиуса ОМ, получим:
F™ + Р cos ф — N = 0.
Из этого уравнения находим:
iV = f ™ + Р cos ф,
причем
Fn = — •
Так как скорость точки в начальном положении Мо равна нулю, то по тео-
теореме о кинетической энергии имеем:
где
Л = От — Ота = I (cos ф — cos ф0);
отсюда
mv2 = 2Р1 (cos ф — соэфи),
а потому;
F"н = 2Р (cos ф — cos ф„)
и
Л^ = 2Р (cos ф — cos ф0) + Р cos ф = Р C cos ф — 2 cos ф„).
Из полученной формулы видим, что если ф0 = 90°, то в самом нижнем
положении точки М (при ф = 0) натяжение нити в три раза больше веса Р.
ГЛАВА 23
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
§ 115. .Гармоническое колебание материальной точки
под действием силы, пропорциопалыгой расстоянию
Пусть точка М с массой т движется прямолинейно под дей-
действием силы притяжения F к неподвижному центру О (рис. 307).
Предположим, что модуль силы F пропорцпонален расстоянию
точки М от центра О, т. e.F — с-ОМ,
где с ■— постоянный коэффициент про- q p ^
порциональности. Требуется найти ? с j" *~s
закон движения точки М. I-— х —А
Если примем прямолинейную тра- рис 307
екторию точки М за ось х, начало
координат возьмем в неподвижной точке О, абсциссу точки М
обозначим через х, а проекцию силы F на ось х обозначим через
X, то, очевидно, будем иметь:
X - - сх.
436 ДИНАМИКА
Дифференциальное уравнение движения точки М имеет, сле-
следовательно, вид
т -^ = — ex. F1)
Разделив это уравнение на т и вводя обозначение — = к2, при-
приведем его к виду т
g+ к*х = 0. F2)
Это есть линейное дифференциальное уравнение второго по-
порядка с постоянными коэффициентами. и без свободного члена.
Как известно из теории линейных дифференциальных уравнений,
общий интеграл этого уравнения выражается так:
х = a sin (kt + a), F3)
где а и а имеют произвольные постоянные значения г). Это есть
уравнение гармонического колебания; следовательно, в случае пря-
прямолинейного движения под действием притягивающей силы, про-
пропорциональной расстоянию от центра притяжения, материаль-
материальная точка совершает гармоническое -колебание.
Величина а, т. е. наибольшее отклонение точки М от центра О,
называется амплитудой колебания, аргумент (kt + а) называется
фазой колебания, а величина а называется начальной фазой коле-
колебания (значение фазы в начальный момент, т. е. при t = 0).
График гармонического колебания представляет собой, оче-
очевидно, синусоиду.
Скорость точки при гармоническом колебании определяется по
формуле
v = g = ak cos (kt + a). F4)
г, о dx ,
Знак производной -т- определяет, в каком направлении (в по-
положительном или в отрицательном) по оси х в данный момент дви-
движется точка М.
Амплитуда а и начальная фаза а колебания определяются по
начальным условиям движения. Пусть в начальный момент (при
t — 0) абсцисса точки М равна х0, а ее скорость равна v0. Полагая
t — 0 в предыдущих формулах для х я v, получим:
х0 = a sin а и v0 = ak cos а.
Отсюда находим:
а = У$ + % и ье а = ^7- F5)
х) В этом легко убедиться подстановкой выражения F3) в уравнение F2);
при этой подстановке уравнение F2) обращается в тождество; следовательно,
выражение F3) есть действительно решение этого уравнения.
ГЛ. 23. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 437
Найдем теперь полный период колебания Т, т. е. тот промежу-
промежуток времени, по истечении которого точка возвращается в данное
положение с той же самой скоростью. Так как период синуса и
косинуса равен 2л, то по истечении времени Т фаза колебания воз-
возрастает на 2л; следовательно, будем иметь:
к (t + Т) + а — (kt + а) = 2л,
откуда находим:
Т = 1 '
или, подставляя вместо к его значение,
-. F6)
Так как в эту формулу не входят ни х0, ни v0, то период колеба-
колебания не зависит от начальных условий движения.
Из предыдущей формулы имеем: к = Т ; отсюда следует, что
величина к определяет число полных колебаний, которые совер-
совершает точка в течение 2л секунд. Эта величина к называется кру-
круговой частотой колебания.
Уравнение гармонического колебания F3) можно еще пред-
представить в другом виде. Пользуясь известной формулой тригоно-
тригонометрии для синуса суммы двух аргументов, получим:
х = a sin (kt) • cos a -j- a cos (kt) • sin a.
Полагая здесь a cos a = А я a sin a = В, получим:
x = A sin (kt) + В cos (kt). F7)
Но выше мы имели:
a sin a = хй и ak cos a = г?0}
следовательно,
A = -—- и В = #0,
а потому уравнение гармонического колебания можно представить
в виде
х = х0 cos (kt) + -£ sin (kt). F8)
Если г?0 = 0, то
х = х„ cos (kt). F9)
В качестве примера рассмотрим колебание груза, подвешенного
на пружине (или упругом канате). Пусть к вертикальной пру-
пружине, имеющей в естественном состоянии длину АВ — /0 и
438
ДИНАМИКА
закрепленной в точке А, подвешен груз М весом Р. Примем поло-
положение равновесия груза, т. е. то положение, в котором вес груза
уравновешивается реакцией пружины, за начало координат О
(рис. 308). Ось х направим по вертикали вверх. Статическое удли-
удлинение пружины ВО, соответствующее положению равновесия
груза, обозначим через лст. Удлинение пружины
ВЫ, соответствующее положению М груза,
обозначим через %. Тогда, как видно из чертежа,
будем иметь:
Согласно эакону Гука сила упругости (реак-
(реакция) пружины F пропорциональна ее удлине-
удлинению, т. е. F = сХ, где с — коэффициент пропор-
пропорциональности (жесткость пружины). Так как
в положении равновесия модуль силы F равен
весу Р, то
Р = скст.
Отсюда
_ Р
Рис. 308. С ~ Т^ *
Зная из опыта Хст, можно найти по этой формуле коэффициент с г).
Обратно, зная жесткость с пружины, находим статическое удли-
удлинение пружины:
. р
Аст = -.
Дифференциальное уравнение движения груза будет иметь сле-
следующий вид:
ИЛИ
m^ = F~
dT2- = Л — Р.
Заменяя здесь % через Хст — х, получим:
m ^ = сКст — сх — Р,
или, так как сА,ст — Р = 0,
jti = — ex.
г) Этот коэффициент обычно выражается в килограммах на сантиметр
(кг/см).
ГЛ 23 КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 439
Это есть дифференциальное уравнение гармонического колеба-
колебания F1), которое мы рассмотрели выше. Следовательно, груз,
подвешенный на пружине, совершает гармоническое колебание
около положения равновесия. Амплитуда этого колебания опре-
определяется из начальных условий движения груза, а период коле-
колебания находится по формуле
Если подставим сюда значения
Р Р
Ш = — И С = г— ,
8 Кт
то получим:
|/°^т. G0)
Аналогично решается задача и о колебании груза, лежаще-
лежащего на упругой балке, опирающейся на две
неподвижные опоры (рис. 309). ^-^ "Я ---•&"
Так как упругая реакция балки пропор- ~ '
циональна стреле прогиба балки /, то совер- рне- ^09.
шенно так же, как и в предыдущей задаче,
найдем, что груз, положенный на балку, совершает гармони-
гармоническое колебание с периодом
T = 2л 1/ !££,
где /ст — статический прогиб балки, вызываемый данным грузом.
В качестве третьего примера рассмотрим малые колебания про-
простого (математического) маятника, т. е. колебания материальной
точки М, подвешенной на нити длиной / (рис. 306). В примере
120 (§ 114) мы получили уравнение, выражающее теорему о ки-
кинетической энергии для математического маятника в виде
mv2 — 2Р1 (cos ф — cos ф0);
заменяя здесь Р через mg и сокращая на пг, получим:
v2 — 2gl (cos ф — cos ф0).
Если обозначим длину дуги М0М через s, то
V* ={-)',
но, как видно из чертежа,
s = l (фо — ф);
следовательно,
440 ДИНАМИКА
а потому предыдущее уравнение можно представить в виде
/2(-^) = 2g/ (cos ф — cos ф0), или Ibjj) = 2g (cosф — cos ф0).
Дифференцируя это уравнение по t, получим;
Это есть дифференциальное уравнение движения математического
маятника. При малых отклонениях маятника от положения равно-
равновесия с достаточной точностью можно положить sin ф = ф. Тогда
предыдущее уравнение принимает вид
где к2 = -у.
Это есть дифференциальное уравнение гармонического колеба-
колебания; следовательно, при малых колебаниях маятника угол ф из-
изменяется по гармоническому закону и период колебаний маятника
определяется по формуле
т _ 2л
1 ~~ ¥•
Заменяя здесь к его значением, получим!
G1)
§ 116. Затухающие колебания
Пусть материальная точка М движется прямолинейно по оси ж
в сопротивляющейся среде, например в воздухе, под действием
силы притяжения F к неподвижному центру О, пропорциональной
расстоянию точки от этого центра О, который примем за начало
координат (рис. 310). Силу сопротивления среды R будем пред-
предполагать пропорциональной скорости точ-
^ с Ч -, ки; так как эта сила направлена всегда
F R противоположно скорости, то
Рис. 310. R = _ ц«,
где и. — постоянный коэффициент пропорциональности. Следова-
Следовательно, проекция этой силы на ось х будет равна
Проекция силы F на ось х, как мы видели в предыдущем пара-
параграфе, равна —• сх.
ГЛ. 23. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 441
Поэтому дифференциальное уравнение движения точки М будет
иметь следующий вид:
d2x dx /^24
Разделив обе части уравнения на т и вводя обозначения
± = к2 и
т
приведем это уравнение к виду
± = к2 и £ = 2м,
т т
gg O. G3)
Для интегрирования этого уравнения применим способ за-
замены переменного, полагая х = |е~™', где £ — новая переменная.
Дифференцируя по t это равенство, получим:
Подставляя значения функции х и ее производных в дифферен-
дифференциальное уравнение G3) и сокращая его на общий множитель
е"ы, получим:
§-2п§+п>1 + 2п§-2п% + Щ = 0,
или
gJ+(A*_n*)E = O. G4)
Допустим, что к^>п; полагая тогда к2 — гег = к], приведем
предыдущее уравнение к виду
7f5 + A,g = 0.
Это есть дифференциальное уравнение гармонического коле-
колебания, рассмотренное в предыдущем параграфе; интегрируя это
уравнение, получаем: | = a sin {kxt + а) и, следовательно,
х = оег1".sin A^1 + а). G5)
Это уравнение отличается от уравнения гармонического коле-
колебания множителем e"nt; поэтому движение точки представляет собой
колебания около центра О, но размахи этих колебаний, т. е. мак-
максимальные отклонения в ту или другую сторону от точки О, не
сохраняют теперь постоянного значения: они быстро уменьшаются
с течением времени. Поэтому эти колебания называются затухаю-
затухающими.
442 ДИНАМИКА
Если продифференцируем уравнение G5) по t, то получим ско-
скорость точки при затухающих колебаниях:
v = d£ = ae~nt [кг cos (kLt + а) — п sin {kj + а)]. G6)
Постоянные а и а определяются по заданным начальным зна-
значениям абсциссы Zq и скорости vt. Полагая t = О в формулах G5)
и G6), получим:
х9 — a sin а п г'о = а (кх cos а — п sin а) = акх cos а — пха,
или
Отсюда находим:
Г - К1 К, • ' - ' "
G7)
Для более точного выяснения характера рассматриваемого
движения точки М найдем, при каких значениях t скорость точки
будет обращаться в нуль и, следовательно, точка будет достигать
максимального отклонения от центра колебаний О.
Приравнивая нулю скорость v, из уравнения G6) получим:
кх cos (kxt + а) — п sin (kxt + a) = 0, или tg (kxt + a) = -i;
нм:
tg
а =
IX о)'2
Щ
k
+
A'l
ПХо
отсюда находим:
л
т- | arctg -1 — а).
кх\ ь п J
Так как арктангенс является многозначной функцией, после-
последовательные значения которой при данном значении аргумента
отличаются друг от друга на я, то последовательные значения t,
определяемые предыдущим равенством, будут отличаться друг
от друга на -,-. Обозначая эти последовательные моменты через
tu t2, ts, ..., будем иметь:
к — h + k~ > h — h + f = h + -у»
h — h + /" = h г , п Т. Д.
'ч 'ч
ГЛ. 23. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 443
Таким образом, через одинаковые промежутки времени, равные
я/fcj, скорость точки, проходя через нуль, меняет знак, т. е. из-
изменяется направление движения точки. Найдем значения абсциссы
движущейся точки в эти последовательные моменты. Полагая
в уравнении движения G5) последовательно t — tlt t — t2, ...,
получим:
xx = ae'nti sin {к^х + a), x% — ae~nU- sin (ltxt% + a)...
Заменяя t2 через tx + ,", получим:
, ПЛ
—ntt — -- .
x2 = ae *< • sin (ftj^j + a -+- я) =
= — ae~nt' • sin (k1t1 + a) e fti = — e hl xx.
Точно так же найдем, что
11Я
х3 = — е ftl а;2 и т- Д-
Отсюда видим, во-первых, что в моменты tx, t2, t3, ... точка
находится по разные стороны от центра О (так как знаки хх, х.г,
х3, ... чередуются) и, во-вторых, что абсолютные значения ее откло-
отклонений от центра О в эти моменты убывают по закону геометриче-
__ пя
ской прогрессии, знаменатель которой равен е **.
Промежуток времени
гр 2зт 2л
/Cj у К И
называется периодом затухающих колебаний. Так как
кх =■ у^к2 — м2 <^ к,
то
2л -^2л_
следовательно, период затухающих колебаний больше, чем период
гармонического колебания, совершаемого точкой под действием
той же силы F при отсутствии сопротивления.
Отвлеченное число
пя пГ
е *i = е 2
называется декрементом затухающих колебаний; натуральный
v llT
логарифм декремента, т. е. величина ^-, называется логариф-
логарифмическим декрементом.
444 ДИНАМИКА
На рис. 311 изображен график затухающих колебаний с дек-
декрементом, равным 0,5 (при xt^>0 и vg = 0).
Уравнение G5) затухающих колебаний можно представить еще
в другом виде, а именно
х = ae~nt sin (kyt + а) = e~nt[a sin (kxt) • cos а + a cos (kyt) • sin a],
но, как мы видели выше,
a cos a — ^—т—— и a sin a = х0,
а потому, подставляя эти значения в предыдущее уравнение,
получим:
х = е \х0 cos (/Cjг) + ——т—- sin (kj) . Gо)
Пример 121. Материальная точка, масса которой равна единице, дви-
движется прямолинейно под действием силы притяжения к неподвижному центру
О, пропорциональной расстоянию точки от этого центра, причем коэффициент
пропорциональности равен 25. Сила сопротивления окружающей среды про-
пропорциональна скорости точки, причем коэффициент пропорциональности равен
С. Найти закон движения точки, зная, что в начальный момент расстояние
х точки от центра О равно 8 и скорость ее
равна нулю 1).
Решение. Из условий задачи име-
имеем: т = 1, с = 25, ц = 6, следовательно,
к" = — = 25 и 2л = -£ =6;
т т
отсюда
и потому
kt = У к2 — п2 = 4.
Рис. 311.
Кроме того, х0 = 8 и v0 = 0.
Подставляя эти числовые значения в уравнение G8), получим искомый
закон движения точки:
х = 2e~3t D cos At + 3 sin 4г).
гт . „ 2л л
Период этих затухающих колебании равен -=— = — сек, а декремент равен
_3я «1 <2
е 4 «з {гПу7"' Таким образом, через каждые л/4 сек. амплитуда колебаний
' 1
умзньшается приблизительно в Ю^раз. Колебания, как видим, затухают
весьма быстро. ^ "
Мы рассмотрели тот случай движения материальной точки,
когда к ^> п. Не останавливаясь подробно на разборе тех случаев,
когда к <^п или к = п, заметим только, что в обоих этих слу-
случаях движение точки является апериодическим, т. е. оно не
имеет уже характера колебательного движения.
х) Все величины выражены в соответствующих единицах системы CGS.
ГЛ. 23. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 445
§ 117. Вынужденные колебания
Предположим теперь, что на материальную точку М, движу-
движущуюся по оси х, кроме силы F, пропорциональной расстоянию х,
и силы сопротивления среды R, пропорциональной скорости г',
действует еще некоторая, периодически изменяющаяся сила F'
(рис. 312). Допустим, что проекция силы F' на ось х изменяется
со временем по закону синуса, т. е. д м
X' = Я sin pt, '—f *=-?♦ » -*
где Я и р — некоторые данные по-
постоянные числа.Силу F, стремящуюся Рис. 312.
вернуть точку М в положение равно-
равновесия О, называют иногда восстанавливающей силой, а силу F1 —
возмущающей силой. Дифференциальное уравнение движения
точки М имеет в этом случае следующий вид:
т dj*- = - сх - (if + Я sin (pt). G9)
Если разделим это уравнение на т, то, сохраняя обозначения
предыдущего параграфа и полагая еще Н/т = h, приведем урав-
уравнение G9) к виду
g + In -J- + k'x = h sin (pt). (80)
Это есть линейное дифференциальное уравнение второго по-
порядка с постоянными коэффициентами и с правой частью, отлич-
отличной от нуля. На основании теоремы, известной из теории линей-
линейных дифференциальных уравнений, общее рещение этого уравне-
уравнения можно представить в виде
X — Х± -j- Z-2,
где х2 есть какое-либо частное решение данного уравнения, а хх —
общее решение того же уравнения, но без правой части, т. е. урав-
уравнения
Решение этого последнего уравнения было уже рассмотрено в пре-
предыдущем параграфе; его общий интеграл имеет вид
х1 — ae~nt sin (k^t + а),
где а и а — произвольные постоянные, а кх = \f№ — re2.
Таким образом, интегрирование дифференциального уравне-
уравнения (80) сводится к отысканию его частного решения х2.
Предположим, что
х% = Ъ sin (pt + Р),
440 ДИНАМИКА
где Ь и р — некоторые постоянные величины, которые нужпо
подобрать так, чтобы это значение х2 тождественно удовлетворяло
данному дифференциальному уравнению (80). Отсюда находим:
d£=bp cos {pt + р) и ^ = - bp* sin (pt + Р).
Подставляя эти значения производных, а также значение хг
в данное дифференциальное уравнение (80), получим:
— Ьрг sin {pt + р) + ЪпЪр cos {pt + р)+/с26 sin {pt + Р) = h sin (/?«),
или, полагая для краткости pt + р = б,
6 {к2 — р2) sin 6 + 2nbp cos б = h sin (б — P),
или
b {к2 — p2) sin 6 + 2nbp cos б = h sin б cos P — h cos б sin p.
Так как это равенство должно выполняться тождественно
(при всяком значении переменного б), то коэффициенты при sin 8
и cos 6 в левой и правой частях должны быть равны, т. е. мы дол-
должны иметь:
h cos P = Ь {к2 —р2) и h sin p = — 2nbp.
Из этих уравнений находим:
Ь= -— А -=- и tgp = --^-. (81)
Таким образом, общее решение данного дифференциального урав-
уравнения, дающее закон движения точки при наличии возмущающей
силы, выражается так:
х = ae-nt- sin {kxt + а) + b sin {pt + p), (82)
где b и Р определяются по формулам (81).
Первый член правой части этого равенства представляет собой
затухающие колебания, второй же член выражает гармонические
колебания с частотой р и периодом 2 п/р, обусловленные действием
возмущающей силы; эти колебания называются вынужденными.
Постоянные а и а, как обычно, определяются по начальным
условиям движения. График движения материальной точки в дан-
данном случае можно построить сложением графика затухающих
колебаний, рассмотренных в предыдущем параграфе, с графиком
гармонических колебаний, т. е. с синусоидой.
Так как размахи затухающих колебаний быстро стремятся
к нулю, то на практике обычно приходится считаться главным
образом с вынужденными колебаниями. Поэтому рассмотрим
ГЛ. 23. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 447
подробнее изменение амплитуды b вынужденных колебаний в
зависимости от частоты р этих колебаний.
Разделив в формуле (81) для амплитуды b числитель и знамена-
знаменатель на к2, перепишем ее в следующем виде:
Ь =
h_
1?
An2 p2
к2 'к2
Полагая здесь р = 0, получим Ь = h/k2; если обозначим эту ве-
величину h\k% через Ьо, а отношение р//с — через v, то предыдущая
формула получает вид
6=_^==А====. (83)
Отсюда следует, что при заданном отношении п/к амплитуда b
является функцией переменного v. Найдем, при каких значениях v
амплитуда Ь достигает минимального или максимального значения.
Для этого обозначим подкоренную функцию через / (v), т. е. по-
положим:
Первая и вторая производные этой функции выразятся так:
Приравнивая нулю первую производную, получим уравнение
корни которого равны
= 0 и va = |/ I— ftr •
чно и имеет место, так ка
чительно меньше к а), то корень v2 имеет действительное значение.
Если rj- <^1, что обычно и имеет место, так как величина п зна-
зна1) Это имеет место в том случае, когда сопротивление среды, в кото-
которой движется материальная точка, невелико.
448
ДИНАМИКА
Подставляя теперь значения vx и v2 во вторую производную,
получим:
Отсюда заключаем, что при v = 0, или, что то же, при р = О,
функция / (v) достигает максимума, а амплитуда Ь имеет минимум.
При v == v2, т. е. при р = \/к2 — 2м2, функция / (v) достигает ми-
минимума, а амплитуда b достигает максимального значения, равного
—.. Итак, когда частотар вы-
f>a
]/
(!■
-vl)'+4^vl ?
нужденных колебаний изменяется в пределах от 0 доу7с2 — 2м2,
Рис. 313.
амплитуда этих колебаний возрастает от 60 до максимального зна-
значения Ьтах; при дальнейшем увеличении частоты р амплитуда
вынужденных колебаний начинает убывать и при неограниченном
возрастании р она стремится к нулю. График зависимости между Ь
и v (при п/к = 0,25) изображен на рис. 313.
Если дробь п/к невелика, то в формуле
V-2
= 1/ 1
2п*
без существенной погрешности можно пренебречь квадратом этой
дроби в сравнении с единицей и принять, что v2 = 1. Следова-
Следовательно, с достаточной точностью можно утверждать, что наиболь-
наибольшего значения амплитуда вынужденных колебаний достигает
при v2 = 1, или, что то же, при р — к, т. е. в том случае, когда
частота вынужденных колебаний равна частоте свободных коле-
колебаний точки, совершаемых ею под действием только восстанавли-
восстанавливающей силы (при отсутствии сопротивления).
Этот случай совпадения частот вынужденных и свободных
колебаний носит название резонанса. Явление резонанса харак-
ГЛ. 23. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 449
терно тем, что в этом случае амплитуда колебаний точки достигает
значения, близкого к максимальному.
Пример 122. Груз М массы т подвешен на пружине с жесткостью о;
конец А пружины совершает вертикальные гармонические колебания по
закону А,уА = Н sin (pt). Найти закон движопия груза, если сила сопротивле-
сопротивления движению пропорциональна скорости груза, причем
коэффициент пропорциональности равен (х (рис. 314).
Решение. Примем неподвижную точку Ао за начало
координат," ось х направим по вертикали вниз. Дифференци-
Дифференциальное уравнение движения груза в данном случае будет
иметь вид
cl2x . dx
где % — удлинение пружины, а — сХ есть проекция на ось х
реакции пружины.
Если обозначим естественную длину пружины через 1а,
то, как видно из чертежа,
X = х — А0А — 1а = х — Н sin (pi) — l0.
Подставляя это значение X в предыдущее уравнение, получим:
d2x , ,„.,.,,, dx
~T,z ~"m8 — ex + cH sin (pt) + cl0 — ц
dt
Для упрощения этого уравнения сделаем замену переменного, полагая
х — \ + Ху, где | — новая переменная, ai[ — некоторая постоянная вели-
величина. Тогда
dx _ </£; d2x _ d2^
It^llt' It* ~ 1? '
и вместо предыдущего получаем следующее дифференциальное уравнение:
m~ = mg-cl- cxy + cH sin (pt) + cla - ц d}f.
Выберем Ху так, чтобы постоянные члены в правой части этого уравнения
исчезли, т. е. положим:
mg — схх -\г cl0 = О,
отсюда
Ху = 1а +
mg
Но так как согласно сказанному в § 115
mg .
" - лст>
то
= 1а
X ,
где Хс11 — статическое удлинение пружины.
Отсюда видим, что произведенная замена переменной равносильна пере-
переносу начала координат из точки Ао в положение О, которое занимает груз
при равновесии, если конец пружины закрепить в точке Ао. После этой
15 II, М. Воронков
450 ДИНАМИКА
замены полученное дифференциальное уравнение не будет содержать постоян-
постоянных членов, т. е. будем иметь:
т 572 + I1 J + с% = сН sin (pQf
dt2
или
У+2п§ + *Ч = А81п(рО,
где
!Мы получили то самое дифференциальное уравнение (80) вынужденных
колебаний, которое было рассмотрено выше. Общий интеграл этого уравне-
уравнения выражается так:
I = ae~nt sin fat -'г а) -+- Ъ sin (pt -f P).
Так как множитель e~nt быстро стремится к нулю, то через достаточно
большой промежуток времени можно пренебречь членом, выражающим за-
затухающие колебания; тогда будем иметь:
I = 6 sin (pt + Р),
т. е. груз будет совершать только вынужденные колебания около положения
равновесия О.
Амплитуда Ь и начальная фаза Р этих колебаний определяются по фор-
формулам (81).
Если в этих формулах разделить числитель и знаменатель на к2, то по-
получим:
А
< 1—5 9~ /—/ 5~~5 7—5 ~ '
К К w \ К J К
tg р = — 2 ^
к*)
Если р значительно меньше к (это соответствует тому случаю, когда
точка А колеблется медленно), то дробь р/к будет мала; точно так же будет
мала и дробь п/к, так как п обычно значительно меньше к. Поэтому в этом
случае будем иметь:
и, следовательно,
I =« H sin (pt),
т. в. колебания груза почти совпадают с колебаниями точки А.
С увеличением частоты р амплитуда Ь будет возрастать; при
ГЛ. 23. КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 451
наступает явление резонанса: амплитуда колебаний груза достигает макси-
максимального значения. В том случае, когда р значительно больше к (точка А
совершает очень быстрые колебания), амплитуда Ъ ^= 0, т. е. груз остается
почти неподвижным.
Последнее обстоятельство имеет важное значение при устройстве сей-
сейсмографов, т. е. приборов для записи колебаний почвы при землетрясениях.
Из практики известно, что при работе двигателя, установлен-
установленного на фундаменте или на горизонтальных балках, вследствие
неполной уравновешенности движущихся частей мотора возни-
возникают вибрации, которые в зависимости от скоростей этих дви-
движущихся частей становятся иногда весьма значительными, что,
конечно, является ие только нежелательным, но часто и опас-
опасным. Такие скорости движущихся частей мотора, при которых
наблюдаются наибольшие вибрации, называются критическими.
Определение критических скоростей имеет поэтому очень
важное практическое значение. В качестве примера рассмотрим
следующую упрощенную задачу.
Пример 123. На упругой горизонтальной балке, лежащей па двух опо-
опорах, установлен мотор весом Р, приводящий в движение кривошип О А — г,
который вращается с постоянной угловой скоростью со и песет на конце А
небольшой груз массы то. Требуется найти критическую угловую скорость
кривошипа (рис. 315). Массой кривошипа пренебрегаем.
Решение. Кроме веса Р и вертикальной реакции упругой балки,
пропорциональной стреле прогиба /, к мотору приложена еще в точке О цен-
центробежная сила Fa вращающегося груза, рав-
равная по модулю mm2 (точнее реакция кривошипа,
равная центробежной силе груза). Если обо-
обозначим угол поворота кривошипа, отсчитываемый
от горизонтальной оси Ох, через ср, то ф = (at.
Если разложим силу Fn на вертикальную и
горизонтальную составляющие, то проекция вер-
вертикальной составляющей на ось у будет равна
ри =
г. rm «яда *?Ь
Из этого выражения для.Р^ видно, что вертикаль-
вертикальная составляющая центробежной силы играет
роль возмущающей силы, вызывающей вынуж-
вынужденные вертикальные колебания мотора, и что частота этих вынужденных
колебаний р = а>.
Согласно сказанному в § 115 частота свободных гармонических колеба-
колебаний в данном случае равна
к =
где /ст — статический прогиб балки, вызываемый весом мотора Р. Явление
резонанса, когда наблюдаются наибольшие вибрации, наступает при р = к,
т. е. при
ш — ■/ -.
'ст
Эта формула определяет критическую угловую скорость кривошипа.
15*
452 ДИНАМИКА
ГЛАВА 24
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
§ 118. Диффереициальиые уравнения относительного
движения материальной точки
Задача, рассматриваемая в этой главе, состоит в следующем:
пусть система координатных осей Oxxxyxzx (система отсчета) имеет
известное нам движение относительно «неподвижной» системы
отсчета Oxyz 1). Зная силы, действующие на данную материальную
точку М, требуется найти движение этой точки относительно
подвижной системы O1a;1j/1z1, т. е. найти ее относительное движе-
движение. Для решения этой задачи нужно сначала составить диффе-
дифференциальные уравнения относительного движения точки М;
проинтегрировав эти уравнения, найдем искомое движение.
Согласно второму закону Ньютона при движении материальной
точки относительно неподвижной (инерциальной) системы от-
отсчета имеем:
mw = F + N,
где w обозначает абсолютное ускорение точки М, F — действую-
действующую на эту точку заданную силу и N — реакцию связей. Но из
кинематики известно (§ 91), что
w = wr + we + wk,
где wr, we, wh обозначают соответственно относительное, пере-
переносное и кориолисово ускорения точки М. Подставляя это зна-
значение го в предыдущее равенство, получим:
mwr = F + N— тгое — mwh.
Векторная величина — mwe, равная по модулю произведению
массы точки на модуль ее переносного ускорения и направлен-
направленная противоположно переносному ускорению, называется пере-
переносной силой инерции; точно так же векторная величина — mwh
называется кориолисовой силой инерции. Если введем обозначения
— mwe = FT и — mwh = FT,
то предыдущее уравнение примет следующий вид:
mWr = F + N + FT + FT. (84)
1) Согласно сказанному в § 98 под неподвижпой системой отсчета здесь,
г^ак и во всем предшествующем изложении, понимается инерциальная система
отсчета, т. е. такая система, в которой применимы законы Ньютона.
ГЛ. 24. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 453
Это есть дифференциальное уравнение относительного движения
материальной точки в векторной форме. Проектируя это уравне-
уравнение на подвижные оси О&у^ и принимая во внимание, что
получим дифференциальные уравнения относительного движения
в координатной форме:
m^t = X, + NXt + F™t + F1£l, j
^d2Vl V J_ M I FHH _J_ FHU 1 mr\
ml?~ = У1 + NVi + F ei/. + ^*й. } (80)
-—
= Zx t- iv., + Fezi -r FkZl. I
Отсюда приходим к следующему заключению:
Дифференциальные уравнения относительного движения мате-
материальной точки следует писать в том же виде, как и уравнения
ее движения относительно неподвижной системы отсчета, но
только к действующим на точку заданной силе и реакции связей
нужно присоединить еще переносную силу инерции и силу инерции
Кориолиса, или, другими словами: относительно подвижный
осей материальная точка движется так же, как если бы эти оси
были неподвижны и если бы к этой точке, кроме действующих
на нее сил, были приложены еще силы F™1 и F"H.
Рассмотрим некоторые частные случаи относительного дви-
движения точки.
1) Пусть подвижная система отсчета имеет поступательное дви-
движение. В этом случае wh = 0, и следовательно, F™= 0, а потому
будем иметь:
= F+N+FT- (86)
Соответственно упрощаются в этом случае и дифференциальные
уравнения (85), в которых исчезают члены, выражающие проек-
проекции силы инерции Кориолиса на подвижные оси.
2) Пусть подвижная система отсчета движется поступательно,
прямолинейно и равномерно, тогда
wh = we = 0 и ^"=^"" = 0.
В этом случае, следовательно, будем иметь:
mwr = FArN. (87)
Это уравнение показывает, что в системе отсчета, имеющей
относительно неподвижной системы равномерное прямолинейное
поступательное движение, второй закон Ньютона применим в той
454
ДИНАМИКА
же самой форме, как и в неподвижной системе, и что, следова-
следовательно, такая система отсчета является инерциальной. Отсюда
следует, что в системе отсчета, имеющей относительно неподвиж-
неподвижной системы прямолинейное равномерное поступательное дви-
движение, все механические явления происходят совершенно так же,
как и в неподвижной системе, и потому никакими наблюдениями
над этими явлениями такого движения системы отсчета обнару-
обнаружить нельзя. Так, например, наблюдатель, находящийся в трюме
парохода, движущегося поступательно, прямолинейно и равно-
равномерно, не сможет установить, движется ли пароход или стоит на
месте. Этот важный результат, указанный еще Галилеем, выра-
выражает собой принцип относительности классической механики.
Рассмотрим еще случай относительного равновесия матери-
материальной точки, т. е. предположим, что точка под действием прило-
приложенных к ней сил находится в покое относительно движущейся
системы осей O1z1j/1z1. В этом случае, очевидно, vr = wr = О
и, следовательно (§ 91),
Fr = 0.
wh = 0
Поэтому уравнение (84) принимает вид
F + N + FT = 0,
(88)
т. е. в случае относительного равновесия материальной точки
заданная сила, реакция связей и переносная сила инерции взаимно
уравновешиваются.
К этому заключению можно, очевидно, прийти п непосред-
непосредственно из принципа Даламбера.
Пример 124. Вагон движется по прямому горизонтальному пути вправо
с постоянным ускорением а. Материальная точка М, двигавшаяся сначала
вместе с вагоном, в некоторый мо-
момент начинает свободно падать. Най-
тп траекторию точки относительно
вагона (рис. 316).
Решение. Выберем систему
подвижных осей O1x12/1^i, связанных
с вагоном, как показано на рисунке
(ось zj направлена вертикально вверх
и проходит через начальное положе-
положение точки Л/о). Обозначим высоту,
с которой начинается падение мате-
материальной точки, через z[0 = h. По
условию задачи начальная относи-
тельная скорость точки равна нулю.
Переносная сила инерции F"H равна
п0 модулю та и направлена горизон-
горизонтально влево. Так как переносное
движение является поступательным, то сила инерции Кориолиса F™ рав-
равна нулю; так как, кроме того, точка М движется свободно, то реакция связей
'/////////////////'///////////////У;
Рис. 316.
ГЛ. 24. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 455
N также равна нулю. Дифференциальные уравнения относительного дви-
движения точки будут поэтому иметь следующий вид:
или
- - a ^ = -е
~ ' (It* 8
dt
C3.
Интегрируя эти уравнепия, получаем:
§-с" -£--« + *.
Так как в начальный момент, т. е. при t — 0 относительная скорость
точки равна нулю, то
следовательно:
dt ' dt
Интегрируя эти уравнения, находим:
_ а?
х\ = W. 2/1 =— о +
~dt
2~
Принимая во внимание, что в начальный момент xia = О, </10 =0 и zi0 = Л»
находим, что
С4 = С5 = 0 и С„ = fe.
А потому окончательно имеем:
«i=0, ух
= h —
Из первого уравнения следует, что относительная траектория точки лежит
в вертикальной плоскости Oziyi- Исключая t из второго и третьего уравне-
уравнений, получаем уравнение траектории
— gyx = ah,
или
»^1 -I
ah
Это есть уравнение прямой линии, отсекающей на осях
О1у1 и Oxzi отрезки, равные — — и Л.
Пример 125. В кабине лифта, опускающейся с по-
постоянным ускорением а <. g, подвешен простой (математи-
(математический) маятник. Найти период малых колебаний этого
маятника (рис. 317).
Решение. Чтобы найти относительное движение
маятника, достаточно приложить к маятнику переносную
силу инерции F"u, направленную по вертикали вверх и
равную по модулю та, где т — масса маятника. Поэтому
мантник относительно лифта будет двигаться так же. как он двигался бы в том
случае, если бы точка иодвеса была неподвижна и если бы на него действовала
вертикальная сила, равная по модулю т (g — а) и направленная вниз (равно-
(равнодействующая веса маятника Р а силы инерции F"H). Отсюда следует, что для
не .И 7.
456 ДИНАМИКА
того, чтобы найти искомый период Т колебаний маятника, достаточно в из-
известной формуле для периода колебаний простого маятника при неподвиж-
неподвижной точке подвеса ускорение силы тяжести g заменить через g — а, а потому,
rp n _ I / '
где I обозначает длину нити маятника. Если бы лифт поднимался с постоянным
ускорением а, то переносная сила инерции F"H была бы направлена вниз, и
в предыдущей формуле нужно было бы —а изменить на +а. При свободном
падении лифта, т. е. при а = §, силы Р и F1 будут уравновешиваться:
маятник, отведенный от вертикали на любой угол, будет оставаться в отно-
относительном равновесии. Для наблюдателя, находящегося в кабине лифта,
все окружающие тела в этом случае казались бы невесомыми (состояние не-
ьесомости).
§ 11Я. Теорема о кинетической энергии
материальной точки в относительном движении
Мы видели, что дифференциальное уравнение (84) относитель-
относительного движения материальной точки имеет тот же вид, что и диф-
дифференциальное уравнение движения точки относительно неподвиж-
неподвижной системы отсчета; различие между этими уравнениями состоит
лишь в том, что в уравнение относительного движения, кроме
заданных сил и реакций связей, входят еще переносная и корио-
лисова силы инерции. С другой стороны, в главе 21 мы видели,
что все общие теоремы динамики точки (теорема о количестве дви-
движения, теорема о моменте количества движения, теорема о кине-
кинетической энергии) являются следствием основного дифференциаль-
дифференциального уравнения динамики точки, выражающего второй закон Нью-
Ньютона. Отсюда следует, что все эти общие теоремы применимы и
к относительному движению точки, но понятно, что, применяя
эти теоремы к относительному движению, мы должны принять
во внимание переносную и кориолисову силы инерции. В частно-
частности, при решении задач, относящихся к относительному движению
точки, нередко приходится пользоваться теоремой о кинетической
энергии. При составлении уравнения, выражающего эту теорему
в относительном движении, необходимо принять во внимание работу
переносной и кориолисовой сил инерции на относительном пере-
перемещении точки. Но так как ускорение Кориолиса wk всегда пер-
перпендикулярно к относительной скорости vr, то Fl"±_vr; следова-
следовательно, работа кориолисовой силы инерции в относительном
движении равна нулю, и эта сила в уравнение теоремы о кине-
кинетической энергии не войдет. Поэтому это уравнение в дифферен-
дифференциальной форме будет иметь следующий вид:
(Х1 + F™) dXl + (Y, + F'Z) dyx + (Z, + F%t) dZl.
ГЛ. 24. ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ 457
Правая часть этого уравнения выражает элементарную работу
F и FT
сил
на относительном перемещении точки.
Пример 126. Гладкая криволинейная трубка произвольной формы
вращается в горизонтальной плоскости вокруг точки О с постоянной угловой
скоростью v. В трубку положен шарик М массы т. Найти относительную
скорость шарика vr, если известно, что в начальный момент шарик нахо-
находится в точке Мо и его относительная скорость
равна нулю (рис. 318). ет
Решение. Так как переносное движе-
движение есть равномерное вращение вокруг точки N\
О, то переносная сила инерции точки М
представляет собой центробежную силу и,
следовательно,
где г = ОМ. Сила инерции Кориолиса F1^1
равна по модулю
твц = 2тшуг1)
и направлена перпендикулярно к относитель-
относительной скорости (противоположно ускорению Ко-
Кориолиса). Реакция трубки N направлена по
нормали к трубке в точке М.
Для решения поставленной задачи проще
всего воспользоваться теоремой о кинетиче-
кинетической энергии, которая применима и в относительном движении, если, помимо
работы приложенных сил, учесть еще работу сил FHB и F*B па относитель-
относительном перемещении точки. Так как силы, F"H и N перпендикулярны к относи-
относительной скорости, то их работа в относительном движении будет равна нулю.
Остается подсчитать работу центробежной силы F™ на пути М0М. Проекти-
Проектируя силу F"n = ma>2r па подвижные оси Ох1у1, связанные с трубкой, получим:
рис
элементарная работа этой силы в относительном движении находится по фор-
формуле C2) (см. | 107) и будет равна
F™! dxi +Ку{ аУ1 = 'n(°2 fa^i + yidVi) = ^Г" d № + y^ = '^T dr2'
Отсюда, интегрируя, получим работу центробежной силы на пути М0М:
г
А = ~ Г d (г2) = — (г2 - /•§).
*) Так как ось вращения трубки (ось переносного вращения) перпенди-
перпендикулярна к 1>г, то ускорение Кориолиса w^ = 2(nvr (см. § 91).
2) Проекции радиуса-вектора г на подвижные оси равии х1 и у^.
458 ДИНАМИКА
Так как начальная относительная скорость шарика по условию равна нулю, то
уравнение, выражающее теорему о кинетической энергии в относительном
движении, принимает следующий вид:
mvl тш!
Отсюда иаходим:
vr = со)/>а — г*.
Б. ДИНАМИКА СИСТЕМЫ
ГЛАВА 25
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
§ 120. Механическая система. Связи
Механической системой материальных точек, или короче про-
просто системой, в механике называется совокупность конечного или
бесконечного числа материальных точек, известным образом свя-
связанных между собой, так что движение каждой точки не является
независимым от движения остальных точек.
Если все материальные точки системы являются свободными,
т. е. могут иметь любые перемещения в пространстве, то связи,
объединяющие точки в систему, обусловливаются только силами,
с которыми эти точки действуют друг на друга; в этом случае мы
имеем, следовательно, механическую систему свободных мате-
материальных точек. Примером такой системы может служить солнеч-
солнечная система, между членами которой действуют силы всемирного
тяготения.
Если же положение и перемещения точек системы подчинены
некоторым заранее данным условиям геометрического характера,
то в таком случае мы имеем систему с геометрическими связями.
Примером такой системы являются две материальные точки, свя-
связанные между собой твердым невесомым стержнем (пли гибкой
нитью). Такую же систему с геометрическими связями предста-
представляет собой абсолютно твердое тело, расстояния между точками
которого остаются постоянными; такая система называется неиз-
неизменяемой.
Геометрические связи могут быть выражены математически
в виде уравнений между координатами точек данной системы.
Так, например, для системы, состоящей из двух точек Мх (xl7 yu zx)
и М2(Х2, г/г- 22)* соединенных между собой твердым стержнем
длины /, связь состоит в том, что расстояние между этими точками
ГЛ. 25. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
459
остается постоянным, что может быть выражено, очевидно, сле-
следующим уравнением:
(х2 - z,J + (у2 - У1)> + B2 - г,J = I2-
Для кривошипно-шатунного механизма (рис. 319) будем иметь
три уравнения связей между четырьмя координатами точек А (х1, ух)
Рис. 319.
и В (х2, у2) (пальца кривошипа и крейцкопфа); эти уравнения имеют
следующий вид:
х\ + у\ - г* = 0, (х2 - х^ + (у2 - уг)* - /2 = 0, Vi = 0.
В общем случае системы, состоящей из п материальных точек
с Зга координатами, будем иметь s уравнений (уравнений связей)
вида
Л (*i. J/i, h., •-. хп, уп, zn) == 0,
/г (^i. г/i. %, ••■. хп, уп, zn) = 0,
г/i, 2Х, ..., хп, г/„, zn) = о.
(89)
При этом число s должно быть меньше Зге, так как при s = 3/г
координаты всех точек системы определялись бы из уравнений (89)
и, следовательно, имели бы некоторые постоянные значения, а
потому система не могла бы двигаться.
Если в эти уравнения не входит время t, то связи называются
стационарными; если же в число аргументов функций /, входит
время t, то связи называются нестационарными. Уравнения неста-
нестационарных связей имеют, следовательно, вид
Л
/г
Уи
1? ..., хп, уп, zn, t) = 0,
, •••, хп, г/„, zn, t) = 0,
,, ..., жя, уп, 2„, 0 = 0.
(90)
В дальнейшем в этой главе мы будем иметь в виду только стацио-
стационарные связи.
460 ДИНАМИКА
Геометрические связи налагают некоторые ограничения на
положение точек системы, так что это положение не может быть
вполне произвольным. Математически это выражается в том, что
не все 2>п координат точек системы являются независимыми друг
от друга, так как из s уравнений связей, т. е. из уравнений (89),
мы можем s каких-нибудь координат (например, хх, х2, хъ, ... , xs)
выразить через остальные Зи — s координат. Таким образом, только
Зга — s координат можно рассматривать как независимые пере-
переменные, которые могут принимать произвольные значения; осталь-
остальные s координат определяются из уравнений связей как функ-
функции этих независимых координат.
§ 121. Классификация сил, действующих на систему
Все силы, действующие на материальные точки данной системы,
можно разделить на два вида: 1) заданные силы, выражения кото-
которых в зависимости от времени, положения движущихся материаль-
материальных точек системы и от скоростей этих точек известны, так что
для математического выражения этой зависимости нет надобности
знать движение данной системы, и 2) реакции связей (если на си-
систему наложены некоторые связи); например: реакция поверхно-
поверхности, но которой принуждена перемещаться данная материальная
точка системы, реакция нити, которой связаны две точки системы,
реакция шарнира, при помощи которого закреплено твердое
тело, входящее в состав данной системы, и т. п. Эти силы заранее,
до исследования движения системы, неизвестны (в некоторых
случаях, как об этом говорилось в статике, можно заранее ука-
указать только направления этих реакций). С другой стороны, силы,
действующие на материальные точки системы, можно еще класси-
классифицировать по другому признаку, а именно: различать силы
внутренние, т. е. силы, с которыми материальные точки данной
системы действуют друг на друга, и силы внешние, т. е. силы,
с которыми действуют на данную систему тела или материальные
точки, не принадлежащие к этой системе. Эта вторая классифи-
классификация сил имеет, как увидим далее, важное значение в динамике
системы.
Для солнечной системы, состоящей из Солнца, планет и их
спутников, силы всемирного тяготения между членами этой си-
системы являются внутренними силами; силы тяготения членов сол-
солнечной системы к звездам, не принадлежащим к этой системе,
являются силами внешними. Для движущегося поезда, рассматри-
рассматриваемого как одпа система, его вес, нормальная реакция рельсов,
трение колес о рельсы, сопротивление воздуха — все это силы
внешние; давление пара в котле, давление вагонных буферов
друг на друга, трение в подшипниках — эти силы являются
внутренними. Силы, с которыми действуют друг на друга мате-
ГЛ. 25. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 461
риальные частицы твердого тела, являются по отношению к этому
телу внутренними силами.
Поскольку внутренние силы представляют собой взаимодей-
взаимодействия между материальными точками данной системы, эти силы
согласно закону равенства действия и противодействия всегда
попарно равны по модулю и противоположны по направлению.
Если мы выделим из данной системы какую-либо часть ее и
будем рассматривать эту часть как отдельную систему, то силы,
являющиеся внутренними для всей системы, могут оказаться внеш-
внешними по отношению к этой выделенной части. Например, для си-
системы, состоящей из Земли и Луны, силы тяготения к Солнцу
являются внешними силами.
§ 122. Попятие возможного перемещения.
Число степеней свободы
Прежде чем перейти к динамике системы, рассмотрим сначала
задачу о равновесии системы. Для решения этой задачи мы при-
применим принцип, который впервые был сформулирован И. Бернулли
и затем математически разработан в общем виде Лагранжем в его
«Аналитической механике» г). Этот принцип, называемый прин-
принципом возможных перемещений, выражает в общем виде необхо-
необходимое и достаточное условие равновесия механической системы.
Если на данную систему наложены геометрические связи, то
благодаря этим связям некоторые перемещения для точек системы
оказываются невозможными. Так, например, для системы, состоя-
состоящей из двух точек, связанных нерастяжимой нитью данной длины I,
невозможно такое перемещение этих точек, при котором расстоя-
расстояние между ними становится больше I; для того чтобы осущест-
осуществить такое перемещение, пришлось бы нарушить данную связь,
т. е. обрезать нить.
Возможным перемещением данной системы называется всякое
элементарное перемещение ее точек, допускаемое в данный момент
наложенными на систему связями, или, другими словами, всякое
элементарное перемещение точек системы, которое можно осуще-
осуществить без нарушения наложенных на систему связей.
Рассмотрим сначала одну материальную точку, которая при-
принуждена оставаться на данной неподвижной поверхности, задан-
заданной уравнением
/ (ж, у, z) = 0.
Из этого уравнения, представляющего собой уравнение свя-
связи, следует, что две координаты (например, х и у) могут иметь
х) Л а г р а н ж, Аналитическая механика, дерев, с фрапц., т. 1, изд.
2-е, Гостехивдат, М., 1950.
462 ДИНАМИКА
произвольные значения, а третья координата будет функцией
первых двух. Поэтому такая точка имеет две степени свободы.
Возможным перемещением для этой точки является всякое
элементарное перемещение, при котором точка не сходит с данной
поверхности. Представим себе, что точка переместилась по данной
поверхности из положения М (х, у, z) в весьма близкое положе-
положение М' (х + Ьх, у + by, z + 6z). Так как точка М' лежит на дан-
данной поверхности, то ее координаты удовлетворяют уравнению этой
поверхности, и, следовательно, имеем равенство
/ (х + Ьх, у + Ьу, г + 6z) = 0.
Развертывая левую часть этого уравнения в ряд Тейлора и
отбрасывая все члены второго и выше порядка малости, получим:
f(x, у, 4+%Ъх+*Ъу+У-лЬ=0.
Но так как точка М также лежит на данной поверхности, то
/ {х, у, 2) = 0;
из этих уравнений приходим к равенству
левая часть которого представляет собой не что иное, как пол-
полный дифференциал функции / (х, у, г). Величины 6х, 6у, бг, т. е.
изменения координат точки М при ее возможном перемещении,
удовлетворяющие уравнению (91), называются вариациями коорди-
координат этой точки. Возможное перемещение точки М изображается
вектором 6г, проведенным из точки М, проекции которого на ко-
координатные оси равны вариациям координат 6х, 6у, Sz этой точких).
Теперь нетрудно понять геометрический смысл равенства (91):
если обозначим единичный вектор, направленный по нормали
к данной поверхности в точке М (орт нормали), через п, то про-
проекции этого вектора на координатные оси будут равны направ-
направляющим косинусам нормали и, следовательно, будут пропорцио-
пропорциональны частным производным —■, -—, ~ (см. §112). Поэтому ра-
равенство (91) можно представить в виде
п-Ьг = 0,
где левая часть есть скалярное произведение векторов п и 6г.
Но равенство нулю скалярного произведения двух векторов выра-
выражает, как известно, условие перпендикулярности этих векторов.
1) Здесь г есть радиус-вектор материальной точки М, проведенный из
начала координат, а Ьг обозначает изменение (вариацию) этого радиуса-век-
радиуса-вектора при возможном перемещении точки М.
ГЛ. 25. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
463
Поэтому из равенства (91) следует, что вектор бг перпендикулярен
к нормали, т. е. лежит в касательной плоскости.
Таким образом, всякая система значений 6ж, 6у и бг, удовле-
удовлетворяющая уравнению (91), определяет возможное перемещение
точки в рассматриваемом случае, или, что то же, всякое элементар-
элементарное перемещение точки, лежащее в касательной плоскости, яв-
является возможным.
Заметим еще, что возможное перемещение точки не есть непре-
непременно то действительное перемещение, которое точка фактически
получает под действием приложенных к ней сил; возможное пере-
перемещение есть лишь воображаемое перемещение, одно из тех, кото-
которые может получить точка при наличии данной связи.
Рассмотрим теперь общий случай системы, состоящей из п
материальных точек с s стационарными связями. Пусть уравне-
уравнения связей будут:
/i (*i. Уи Ч, •••, хп, уп, zj = О,
h (*i, У\, Zi, ..., хп, уп, zn) = О,
U (хп Уи 2i. ■••. жп. Уп, zn) = О-
Аналогично предыдущему, приравнивая нулю полные диффе-
дифференциалы этих функций от Зп переменных, получим s следующих
уравнений:
(92)
0.
Всякое возможное перемещение данной системы аналитически
определяется значениями вариаций 6х{, Ьу{, bz{ (i — 1, 2, ..., п),
удовлетворяющими этим уравнениям. Из s уравнений (92) мы
можем s каких-нибудь вариаций выразить через остальные Зге—s
вариаций; поэтому только Зге — s вариаций являются независи-
независимыми, которые могут получать произвольные значения; остальные
464
ДИНАМИКА
s вариаций определяются из уравнений (92). Число независи-
независимых вариаций называется числом степеней свободы данной си-
системы. Поэтому, если число степеней свободы обозначим через к,
то к = Зга — s.
§ 123. Совершенные связи
Если сумма элементарных работ реакций связей при всяком
возможном перемещении системы равна нулю, то такие связи
называются совершенными. К таким связям относятся геометриче-
геометрические связи без трения, в чем нетрудно убедиться из рассмотрения
следующих основных типов геометрических связей.
1) Материальная точка, находящаяся на
гладкой неподвижной поверхности. В этом
случае, как известно из предыдущего параграфа, реакция связи
направлена по нормали к поверхности, а возможное перемещение
точки лежит в касательной плоскости; следовательно, реакция
будет перпендикулярна ко всякому возможному перемещению,
а потому элементарная работа реакции будет равна нулю при
любом возможном перемещении точки.
2) Твердое тело, опирающееся на гладкую
неподвижную поверхность. В этом случае, так же
как и в предыдущем, воз-
возможные перемещения точ-
точки тела, в которой оно
касается поверхности, пер-
перпендикулярны к реакции
поверхности в этой точке,
а потому работа этой реак-
реакции при всяком возможном
перемещении тела, при ко-
котором оно не отделяется от
поверхности, равна нулю.
3) Твердое тело, имеющее одну или две
закрепленные точки.В этом случае точка приложения
реакции связи остается неподвижной, и работа этой реакции при
всяком возможном перемещении тела, очевидно, равна нулю.
4) Подвижной шарнир, при помощи кото-
которого соединены два тела, например два стержня
О А и ОВ (рис. 320). Согласно закону равенства действия и проти-
противодействия реакции N и N' этих тел друг на друга в точке О равны
по модулю и противоположно направлены, т. е.
N'=—N, или ^ + ^'=0;
сообщим точке О возможное перемещение 6г. Тогда элементарный
работы сил N и N' будут соответственно равны N cos qp |6rj =
N
Рис. 320.
ГЛ. 25. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
465
= iV-Sr и N' cos A80°—ф) |бг| = N' • бг. Складывая эти
жения, получим:
N-6r + Л^'-бг = (N + Л"), fir = 0,
выра-
вырачто и требовалось доказать.
5) Абсолютно твердое свободное тело. Та-
Такое тело представляет собой неизменяемую систему материальных
точек. Связи, наложенные на эту систему, вы-
выражаются в том, что расстояния между этими
точками остаются постоянными. Покажем, что
при всяком перемещении абсолютно твердого
тела сумма элементарных работ внутренних
сил, т. е. тех сил, с которыми действуют друг
на друга материальные частицы этого тела,
равна нулю. В самом деле, обозначим силы,
с которыми действуют друг на друга две какие-
нибудь частицы тела А и В, через F1 и Fa
(рис. 321).
По закону равенства действия и противо-
противодействия имеем: Fx = —F2. Сообщим телу
какое-нибудь элементарное перемещение. Пере-
Перемещения, которые получат при этом точки А и
В, обозначим через 6rt и бг2. Разложим каждое
из этих перемещений на два составляющих перемещения, направ-
направленных по прямой АВ и перпендикулярно к ней. Обозначим
перемещения, направленные вдоль АВ, через SrJ и 6г'%. Так как
расстояние АВ остается постоянным, то эти перемещения должны
быть равны и по модулю, и по
направлению, т. е.
Если обозначим углы, которые
образуют векторы 6rt и 6г2 с на-
направлением А В, через фх и ф2, то
|Sr;j = |6rj| cos?1)
б/"а | = | 6r21 cos ф2.
Сумма элементарных работ сил Ft
и F2, очевидно, будет равна
Fx cos ф! | Ьгх | ■—F2 cos ф2 | Sr2 | =
Рис. 321.
= 0, Рис322.
что и требовалось доказать.
6) Связь, осуществляемая при помощи
гибкой нерастяжимой нити. Пусть две материаль-
материальные точки Мх и Мъ связаны гибкой нерастяжимой нитью, про-
проходящей через небольшое кольцо О (рис. 322).
466 ДИНАМИКА
Реакции нити 7\ и Г2, приложенные к точкам Л/х и М2, равны
между собой по модулю, т. е. Тх = Т2. Разложим каждое из воз-
возможных перемещений 6rt и бг2 точек Мх и Мг на два составляющих
перемещения, направленных вдоль цити и перпендикулярно
к ней. Так как нить нерастяжима, то составляющие перемещения
Sri и &г^ направленные вдоль нити, равны между собой по модулю,
т. е. | бг,'| = |бга|. Также как и в предыдущем случае, убедимся,
чтб сумма элементарных работ сил 7\ и Т2 выразится так:
Тг\6г[\ - fjflril = 0,
что и требовалось доказать.
§ 124. Принцип возможных перемещений
Принцип возможных перемещений, дающий общий метод ре-
решения задач статики, состоит в следующем:
Для того чтобы система с совершенными связями оставалась
в данном положении в равновесии, необходимо и достаточно,
чтобы сумма элементарных работ всех приложенных к ней за-
заданных сил при всяком возможном перемещении системы из этого
положения равнялась нулю.
Мы покажем сначала, что это условие необходимо, а затем, что
оно и достаточно для возможности равновесия системы в данном
положении.
1) Доказательство необходимости.
Пусть в данном положении система находится в равновесии.
Требуется доказать, что при всяком возможном ее перемещении из
этого положения сумма работ всех заданных
сил равна нулю.
Рассмотрим одну какую-либо материаль-
материальную точку М системы (рис. 323). Так как
эта точка (как и все другие точки системы)
по условию находится в равновесии, то
равнодействующая N реакций связей и равно-
Рис. 323. действующая F всех заданных сил, прило-
приложенных к этой точке, уравновешиваются;
следовательно, эти силы N и F равны по модулю и противопо-
противоположны по направлению. Сообщим системе какое-либо возможное
перемещение. Возможное перемещение, получаемое при этом точ-
точкой М, обозначим через бг, а угол между векторами бг и F —
через ф. Если элементарные работы сил F и N на этом переме-
перемещении обозначим соответственно через 6Af и бЛдг, то
6AF= Fcosq>|6r| = F-6r, bAN = N cos A80° — <p) |бг| = N-br.
ГЛ. 25. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ 467
Сложив эти равенства, получим:
bAF + 6AN = F- 6r + N- 6r = (F + N) ■ fir,
а так как F + N — 0, то 6Af + 6AN — 0.
Такие же равенства будем иметь и для всех остальных точек
системы; сложив их, получим:
%6АР + £6AN = 0.
Но на основании сказанного в предыдущем параграфе о работе
реакций совершенных связей имеем:
У,6АЫ = 0.
Поэтому приходим к равенству
£6AF = 0,
которое и требовалось доказать.
2) Доказательство достаточности. Пусть
сумма элементарных работ всех заданных сил, действующих на
систему, при всяком возможном ее перемеще-
перемещении из данного положения равна нулю т. е.
ZbAf — 0.
Покажем, что если при этом скорости всех
точек системы в данный момент равны нулю,
то система не сможет прийти в движение. Рис. 324.
Будем рассуждать от противного. Допустим,
что система под действием заданных сил пришла в движение из
состояния покоя, а следовательно, нришла в движение и точка М
системы (рис. 324). Равнодействующую приложенных к ней сил F
и N обозначим через R. Наше предположение равносильно тому,
что эта равнодействующая не равна нулю. Так как скорость
точки М в данный момент равна нулю, то под действием силы R
эта точка получит некоторое перемещение Sr, направленное
по линии действия этой силы, и мы будем иметь:
6AF + 6AN = 6AR = Д|6г| >0 !).
Написав для всех материальных точек системы такие же нера-
неравенства и сложив их, получим:
но по свойству совершенных связей
%6AN --= 0,
') Работа равнодействующей на всяком перемещении равна алгебраиче-
алгебраической сумме работ составляющих сил на том же перемещении (§ 107).
468 ДИНАМИКА
а потому приходим к неравенству
SS4F>0,
которое противоречит данному условию:
£ 6AF = 0.
Следовательно, при этом условии система не сможет прийти в дви-
движение, что и требовалось доказать.
Таким образом, принцип возможных перемещений дает необ-
необходимое и достаточное условие того, чтобы данное положение ме-
механической системы являлось положением равновесия этой си-
системы. Если в этом положении скорости всех точек системы равны
нулю, то действующие на систему заданные силы будут уравнове-
уравновешиваться реакциями связей, и система в этом положении будет оста-
оставаться в равновесии.
Пользуясь аналитическим выражением элементарной работы,
полученное условие равновесия можно представить в следующем
виде:
п
(XfiXi + У£Уг + ZM) = 0, (93)
где Х{, Y{ и Z{ обозначают проекции заданных сил, действующих
на систему, а Ьх{, Ьуг и bz{ — вариации координат точек системы
(проекции возможных перемещений Ьгг на координатные оси).
Уравнение (93) называется общим уравнением
статики.
Рассмотрим теперь примеры применения
принципа возможных перемещений к реше-
решению задач статики.
Выведем из принципа возможных переме-
перемещений условие равновесия рычага. Пусть
имеем твердое тело, закрепленное при помощи
цилиндрического шарнира О и находящееся
под действием системы сил F4, расположен-
Рис. 325. ных в плоскости, перпендикулярной к оси вра-
вращения тела (в плоскости чертежа, рис. 325).
Сообщим телу возможное перемещение, т. е. повернем его вокруг
оси О, перпендикулярной к плоскости чертежа, на произволь-
произвольный элементарный угол 6ф. Точка А1 тела получит при этом пере-
перемещение 6гь направленное перпендикулярно к ОАХ и равное по
модулю 0A1-6(f х). Элементарная работа силы Ft, приложенной
в этой точке, будет равна
ЬА1 = F1 cos at |6rj| = F1-OA1-cos
J) Вектор 6г, направлен по касательной к дуге окружности, которую
описывает точка Аи а его модуль равен длине этой элементарной дуги.
ГЛ. 25. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
469
где а! — угол между Fx и 6rt. Если из точки О опустим на линию
действия силы /^ перпендикуляр /гь то
hx = ОАХ cos аъ
а потому
Но произведение F1fe1 представляет собой момент силы Fx
относительно оси О; следовательно,
ЬАХ = т0 (Fj) бф.
Сумма элементарных работ всех сил, приложенных к рычагу,
выразится, следовательно, так:
Приравнивая эту сумму нулю, получим условие равновесия
рычага:
6Ф£т0(^) = 0,
или, так как бф ф 0,
2>о(^) = 0;
следовательно, для того чтобы в данном положении рычаг оста-
оставался неподвижным, необходимо и достаточно, чтобы сумма мо-
моментов всех приложенных к нему сил относительно оси вращения
рычага равнялась нулю.
Пример 127. Найти условие равновесия кривошипно-шатунного
механизма под действием горизонтальной силы Р, приложенной к ползуну В,
и силы Q, приложенной к пальцу кривошипа А и перпендикулярной к ОА
(рис. 326).
Рис. 328.
Решение. Сообщив механизму возможиоо перемещение и приравни-
приравнивая нулю сумму работ сил Р я Q ш& этом перемещении, получим:
- QbsA = 0,
470 ДИНАМИКА
откуда находим:
Р ~ 6sA'
где 6sB и 6sд — модули возможных перемещений точек В и А; при этом
перемещение точки В направлено по прямой ВО, а перемещение точки А —
перпендикулярно к кривошипу О А. Чтобы найти зависимость между 6s д
и 6sB, построим мгновенный центр вращения С шатуна: он лежит на пере-
пересечении перпендикуляров АС а ВС к направлениям возможных перемещений
точек А и В. Эти перемещения пропорциональны расстояниям точек А и В
от мгновенного центра вращения шатуна, т. е.
6sB : 6sА = ВС : АС1),
а потому
9 - вс
Р ~~ АС
Если обозначим угол АОВ через ф, а угол наклопа шатуна — через ф, то
LCAB = ф + гр и А АВС = 90° — ф.
Из треугольника ABC по теореме синусов находим:
ВС _ sin (ф + г|э)
AC cos ф '
следовательно,
Q ^_ sin (ф + Ф)
Р cos -ф
Таково условие, которому, должны удовлетворять силы Q а Р при
равновесии.
Рассмотренную задачу можно было бы, конечно, решить и
иначе, применяя методы статики твердого тела. Для этого нужно
было бы составить уравнения равновесия для каждого звена меха-
механизма (кривошипа, шатуна и ползуна); при этом пришлось бы при-
принять во внимание неизвестные реакции связей (реакции в шарни-
шарнирах А и В и реакцию направляющих, в которых движется ползун).
При решении подобного рода задач, где требуется найти зависи-
зависимость между заданными силами, приложенными к данному меха-
механизму, при равновесии, преимущестио метода возможных переме-
перемещений очевидно; этот метод позволяет исключить из рассмотрения
неизвестные реакции совершенных связей, так как эти реакции
в условие равновесия системы, выражаемое принципом возможных
перемещений, не входят.
Пример 128. К рукоятке АВ винтового пресса приложена пара (Р,—Р),
лежащая в горизонтальной плоскости, причем силы этой пары направлены
') Если обозначим угол поворота шатуна вокруг мгновенного центра
вращения С через 6ф, то 6sА — СА ■ 6i|) и bsB = СВ ■ бф, откуда и получаем
написанную пропорцию.
ГЛ. 25. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЯ
471
перпендикулярно к АВ. Найти силу, сжимающую црессуемое тело, если шаг
винта равен h, а длина АВ = 11 (рис. 327).
Решение. Обозначим вертикальную реакцию сжимаемого тела,
приложенную к прессу, через 7V и дадим системе возможное перемощение,
для чего повернем рукоятку АВ ян
угол бф по часовой стрелке (если
смотреть сверху); при этом система
кроме этого вращательного переме-
перемещения получит и поступательное
перемещение, равное по модулю бя
и направленное по вертикали вниз.
Уравнение, выражающее условие
равновесия системы, будет иметь
следующий вид:
= 0.
Отсюда
N
Рис. 327.
Найдем теперь зависимость между бф и 6s. Так как поступательное переме-
перемещение винта пропорционально углу поворота его вокруг винтовой оси, и так
как винт при повороте на угол, равцый 2я, перемещается вдоль оси на рас-
расстояние, равное шагу h, то имеем следующее соот-
соотношение:
6ф
2я
отсюда находим:
2я
= -,- • б*.
Подставляя это значение
жоние для N, получаем:
7V =
в предыдущее выра-
I
Искомая сила, сжимающая тело, равна но модулю
найденной реакции N.
Пример 129. Шарнирный шестиугольник,
состоящий из равных стержней весом Р каждый,
с закрепленным горизонтальным стержнем АВ рас-
расположен в вертикальной плоскости симметрично относительно вертикаль-
вертикальной оси Оу, проходящей через середину АВ; он удерживается в равновесии
вертикальной силой F, приложенной в середине нижнего горизонтального
стержня А'В'. Найти модуль силы F (рис. 328).
Решение. Центры тяжести стержней шестиугольника обозначим
через С1( С2, С3, С4, С5. Если ординату точки С3 обозначим через у3, а ординаты
точек С[ и С; - через j/t и у2, то, как видно из чертежа, будем иметь:
1
?/i=2/5= -j Уз и Уа
3
г/1 = -4- 2/з.
где j/4 и уь обозначают соответственно ординаты точек С4 и С5.
Дадим стержню А'В' весьма малое поступательное перемещение по верти-
вертикали вниз; тогда ордината точки С, получит приращение Ьу3, а соответствую-
соответствующие изменения ординат (вертикальные перемещения) точек С1, Сг, СА и Сь
472 ДИНАМИКА
будут равны-:
1 3
б?л = бг/5 = -£- 6'л и б?/2 = 6г/4 = ^ 6j/8-
Приравнивая нулю сумму элементарпых работ всех сил, приложенных к
шестиугольнику, получим:
Р (»й + 6</2 + буз + бу4 + йу.) -Fby3 = О,
илп
2jP ^+2^
или б.(/3 (ЗР —if) = 0, по 6г/3 ^г± 0, а потому ЗР — F = 0, откуда находим:
ГЛАВА 26
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ
§ 125. Дифференциальные уравнения движения системы
в общем виде
Пусть имеем систему, состоящую из п материальных точек. Со-
Согласно сказанному в § 121 все силы, действующие на систему,
включая и реакции связей, можно разделить на силы внешние и
силы внутренние. Возьмем какую-нибудь точку системы, масса
которой равна тк; обозначим равнодействующую всех внешних
сил, приложенных к этой точке, через Fph, а равнодействующую
всех внутренних сил, приложенных к той же точке, через Fih\
ускорение этой точки обозначим через wh. Тогда, применяя второй
основной закон динамики, получим:
"Wi = Feh + Fih-
Всего для данной системы будем иметь п таких уравнений
(к — 1, 2,..., п). Проектируя эти п векторных уравнений^на коор-
координатные оси, получим Зга дифференциальных уравнений вида
h dl2 ~~ *
eh+ Г ih'
т tlL— 7 -L 7
h di* ~~ eh ' lh
(к = 1, 2, ..., n). (94)
Эти уравнения представляют собой дифференциальные урав-
уравнения движения системы в общем виде. Исходя из этих уравнений,
а также пользуясь теми результатами, которые мы получили в дина-
динамике точки, мы докажем в этой главе общие теоремы динамики
системы.
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 473
§ 126. Теорема о количестве движения системы
Возьмем уравнения предыдущего параграфа
"Wk = Kk + Fik № = 1, 2, ..., и),
или, что то же,
или
±(mkvh) = Feh + Flh.
Сложив эти п уравнений, получим:
(индекс к для сокращения записи здесь опущен).
Если обозначим главный вектор всех внешних сил через Re, то
У F = R .
Что же касается суммы всех внутренних сил, то эта сумма
всегда равна нулю, так как внутренние силы, представляющие со-
собой взаимодействия материальных точек данной системы, па осно-
основании третьего основного закона динамики всегда попарно равны
по модулю и противоположны по направлению (§ 121). Следова-
Следовательно, yiFi = 0.
Так как, кроме того,
где 2 rnv представляет собой главный вектор количеств движения
материальных точек системы, то предыдущее уравнение принимает
вид
~Zmv = Re. (95)
Величина £mv, т. е. векторная сумма количеств движения ма-
материальных точек системы, называется количеством движения дан-
данной системы.
Если обозначим количество движения системы через К, т. е.
положим
2 mv = К,
то уравнение (95) принимает вид
§ = Re- 06)
474 ДИНАМИКА
Уравнения (95) или (96) выражают следующую теорему:
Производная по времени от количества движения данной си-
системы равна главному вектору всех внешних сил, действующих
на эту систему.
Отсюда следует, что если Re — О, то — = 0 и, следователь-
Об
но, К = const, т. е. если главный вектор внешних сил все вре-
время равен нулю, то количество движения системы остается по-
постоянным.
Проектируя векторное уравнение (96) на координатные оси
и принимая во внимание, что проекция производной от вектора К
равна производной от проекции этого вектора (§ 65), получим:
dt ~П'ХУ dt ~П<"Г dt ~Пе*-
Но из векторных равенств К — Y^mv и Re = Y,FP следует, что
Кх = £mvx, Ky = ^mvu, Кг = Цш2,
а потому уравнения (97) можно переписать в виде '
1 2 mv* = S X?' I Zmvy = Z Yf, j^mv^Z Zp. (98)
Уравнения (97) или (98) выражают теорему о количестве дви-
движения системы в координатной форме, а именно:
Производная по времени от проекции количества движения
системы на какую-нибудь неподвижную ось равна сумме проекций
всех внешних сил на ту же ось.
Отсюда следует, что если У, Хр = 0, то
5> О
и, следовательно,
yimvx — Кх = const,
т. е. если сумма проекций всех внешних сил на какую-нибудь непо-
неподвижную ось все время равна нулю, то проекция количества движе-
движения системы на эту ось остается постоянной.
Эти случаи сохранения количества движения системы или его
проекции на данную ось имеют место, в частности, при отсутствии
внешних сил.
Рассмотрим несколько примерок применения полученной
теоремы.
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 475
Пример 130. Две вагонетки с массами т1 и тг движутся по прямому
горизонтальному пути со скоростями Vj и i'2 (рис. 329), причем vx > v2.
Предполагая удар при столкновении вагонеток неупругим, найти их общую
скорость и после удара.
Решение. Внешними силами в данном случае являются веса вагоне-
вагонеток Р, в Pj i нормальные реакции рельсов; эти силы перпендикулярны
к горизонтальной оси хх). Следовательно, сумма проекций внешних сил
"/////у////////////////////%////////
и
Рис. 329.
«
на эту ось равна нулю, а потому проекция количества движения системы
на ту же ось будет постоянной, т. е. после удара будет оставаться той же, что
и до удара; следовательно, имеем:
Л + nhvt = (mi + тг) и>
откуда находим:
т1 -\- пц
Пример 131. Из орудия, масса которого равна М, вылетает в гори-
горизонтальном направлении снаряд массы т. со скоростью v. Найти скорость и
орудия после выстрела (скорость отката).
Решение. В данном случае, так же как и в предыдущей задаче, все
внешние силы вертикальны 2). Следовательно, проекция количества движения
системы на горизонтальную ось остается неизменной, т. е. остается равной
нулю, так как до выстрела система неподвижна, а потому имеем:
Ми -)- mv = 0,
откуда находим:
Знак минус указывает на то, что орудие откатывается в направлении, проти-
противоположном скорости снаряда.
Пример 132. Через изогнутую трубу, имеющую одно колено верти-
вертикальное, а другое — горизонтальное, протекает жидкость (рис. 330). Зная вес
единицы объема жидкости у, площадь а поперечного сечения трубы у вы-
выхода и секундный расход жидкости Q, т. е. количество жидкости (по объему),
вытекающее из трубы за 1 сек, определить горизонтальную слагающую об-
общего давления жидкости на трубу.
г) Внешней силой трения колес о рельсы пренебрегаем; силы же давле-
давления вагонеток друг на друга, развивающиеся при ударе, являются внутрен-
внутренними силами.
2) Силы давления пороховых газов в канале орудия являются для дан-
данной системы внутренними силами.
476
ДИНАМИКА
Решение. Рассмотрим жидкость, заключенную в объеме ABCD.
Обозначим реакцию стенок трубы на эту жидкость в горизонтальном напра-
направлении через Nx. Искомая горизонтальная сила давления жидкости на трубу
будет равна по модулю этой реакции Л^. Применяя теорему о количестве
движения к рассматриваемому
\ц объему жидкости, получим:
' ■; Е mvx — Nx.
Найдем сначала величину
d £ mvx, т. о. элементарное измене-
изменение проекции на ось х количе-
количества движения рассматриваемой
жидкости за время dt. За это
время сечение струп АВ перейдет
в положение аЬ, а сечение CD
переместится в положение cd.
Предполагая движение жидкости
установившимся, т. е. предпола-
предполагая, что распределение скоростей
в жидкости с течением времени не
изменяется, нетрудно видеть, что
искомое изменение проекции ко-
количества движения жидкости за
время dt будет равно разности
проекций на горизонтальную ось х
количеств движения жидкости, заключенной в объемах CDcd и ABab; но
проекция на горизонтальную ось х количества движения жидкости, за-
заключенной в объеме АВаЬ, очевидно, равна нулю, так как скорость г>,
в сечении АВ вертикальна; следовательно,
Рис. 330.
где rfm2 обозначает массу жидкости в объеме CDcd, а иг — скорость жидкости
в выходном отверстии трубы. Так как вес жидкости, заключенной в объеме
CDcd, равеп yQ dt, то
и, следовательно,
Отсюда
= ^-Qdt
1.
8
а потому
Но Q = и,от, откуда
„ _ Q
п, следовательно,
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 477
§ 127. Теорема импульсов
В предыдущем параграфе мы получили уравнение
выражающее теорему о количестве движения системы. Умножая
обе части этого уравнения на dt, получим:
Интегрируя это уравнение в пределах от 0 до t, находим:
t
о
t
Векторный интеграл \ Fe dt представляет собой, как известно из
б
§ 105, импульс внешней силы Fe; если обозначим этот импульс че-
через 5Р, т. е. положим \ Fe dt = Se, то предыдущее уравнение при-
*о
нимает вид
К —,К0 = £ Se. (99)
Это уравнение выражает теорему импульсов: изменение количества
движения системы за некоторый промежуток времени равно
сумме импульсов всех внешних сил, действующих на систему, за
тот же промежуток времени.
Проектируя обе части предыдущего векторного уравнения на
координатные оси, получим три равносильных ему скалярных урав-
уравнения :
A00)
выражающих теорему импульсов в координатной форме: изменение
проекции количества движения системы на какую-нибудь непо-
неподвижную ось равно сумме проекций импульсов всех внешних сил
на ту же ось.
478 ДИНАМИКА
§ 128. Теорема о движении центра масс системы
Пусть данная система материальных точек находится в поле
силы тяжести. Обозначим веса этих точек через Рк, их массы — че-
через mh и их координаты — через хк, ук, zh (к = 1, 2, 3,..., п).
Распространяя известные из статики формулы для координат
центра С параллельных сил Рк, приложенных к твердому телу, на
изменяемую систему материальных точек, будем иметь:
Эти формулы определяют положение точки С, которая называется
центром тяжести данной изменяемой системы материальных то-
точек. Если в этих формулах вес Рк заменим через mkg, то получим:
_ Е hgh _ £ mhgyh _ S mkgzh
C Tmhg ' yc £ mhg ' Zc ~ E mhg '
или (вынося за скобку общий множитель g и опуская индекс к):
_ __ gUmx _ g £ wy _ g T: таг
Сокращая правые части этих формул на множитель g и обо-
обозначая £пг, т. е. общую массу всей системы, через М, получим:
Эти формулы определяют точку С, положение которой уже не
зависит от сил, действующих на систему, а зависит лишь от
положения материальных точек данной системы и от их масс.
Поэтому такая геометрическая точка С, координаты которой опре-
определяются по формулам A01), называется центром масс системы.
Из сказанного следует, что в том случае, когда система нахо-
находится в иоле силы тяжести, центр масс этой системы совпадает
с ое центром тяжести. Таким образом, понятие центра тяжести
яьляется частным случаем по отношению к понятию центра масс.
Центр ^ тяжести существует только для системы, находящейся
в поле силы тяжести, тогда как положение центра масс можно
найти по формулам A01) для любой системы независимо от сил,
действующих на материальные точки этой системы.
Из формул A01) имеем:
£ тх = Мхс, £ ту = Мус, Цтг = Mzc. A02)
Дифференцируя эти равенства по t, получим:
dx dxr dy dyc dz , dzr
ГЛ. 2в. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 479
ИЛИ
* %mvx, MvCy^ Zmvy, MvCz = Jmr, A03)
Здесь vcx, vcv и vCz обозначают проекции скорости vc, с ко-
которой движется точка С, т. е. центр масс системы.
Согласно сказанному в § 126 равенства A03) можно предста-
представить в следующем виде:
MvCx = Кх, MvCy = Kv, MvCz = Kz,
где Кх, Ку и Kz обозначают проекции количества движения си-
системы на координатные оси. Из полученных равенств между проек-
проекциями векторов Mvc и К вытекает равенство этих векторов; сле-
следовательно,
Mvc = R= y,mv, A04)
т. е. количество движения системы равно (по модулю и по направ-
направлению) количеству движения центра масс этой системы, если
предположить, что в этом центре сосредоточена вся масса системы.
Уравнение A04) позволяет найти скорость vc центра масс си-
системы, когда скорости всех материальных точек системы известны,
и, обратно, позволяет весьма просто найти количество движения
системы К, когда скорость vc известна. Дифференцируя это урав-
уравнение по t, получим:
dvc dK
dt ~~ It'
dvp
Но производная -г- есть ускорение wc точки С, т. е. ускоре-
ускорение центра масс системы. Кроме того, по теореме о количестве
движения системы (§ 126) имеем:
dK = Я =VP
dt e —' «"
Поэтому предыдущее уравнение можно представить в виде
Ми>с — 2 Fe. A05)
Проектируя это векторное уравнение на координатные оси, по-
получим:
MwCx = 2 Хе, MwCy = ЦГе, MwCz = 2 Ze,
или
^ ^ZYe, M-^f = 2Ze. A06)
Уравнения A06), представляющие собой, очевидно, дифферен-
дифференциальные уравнения движения материальной точки С(хс,ус, zc)
с массой М, выражают теорему о движении центра масс системы:
центр масс всякой системы движется так же, как материальная
480 ДИНАМИКА
точка, масса которой равна массе всей системы и к которой
приложены все внешние силы, действующие на эту систему.
Из этой теоремы следует: 1) внутренние силы не влияют на
движение центра масс системы; 2) если внешние силы отсутствуют,
то центр масс системы движется как материальная точка в том слу-
случае, когда на нее не действуют никакие силы; следовательно, он или
остается неподвижным или движется прямолинейно и равномерно.
Доказанная теорема часто позволяет находить движение центра
масс системы, хотя движение отдельных ее точек может быть при
этом неизвестно. Теорема эта имеет многочисленные применения.
Рассмотрим несколько примеров.
1) При полете снаряда единственной внешней силой является
сила тяжести (если пренебречь сопротивлением воздуха). Поэтому
центр тяжести снаряда движется так же, как материальная точка
под действием силы тяжести в безвоздушном пространстве; он опи-
описывает, следовательно, параболу. Если во время полета снаряд раз-
разрывается, то действующие при взрыве силы являются силами вну-
внутренними; они не могут изменить движения центра тяжести снаряда;
поэтому хотя после взрыва осколки снаряда летят по разным на-
направлениям, но их общий центр тяжести продолжает двигаться по
той же самой параболе (до тех пор, конечно, пока хотя бы один
из осколков не упадет на землю).
2) Представим себе человека, стоящего на совершенно гладкой
горизонтальной плоскости. Внешними силами для системы, которую
представляет собой человек, являются его вес и нормальная реак-
реакция опорной плоскости; они направлены по вертикали. Поэтому
если вначале человек стоит неподвижно, то внешние силы могут
переместить его цолтр тяжести только по вертикальному направле-
направлению (человек может, например, подпрыгнуть). Но горизонтальные
перемещения для его центра тяжести невозможны. Следовательно,
хождение по такой совершенно гладкой плоскости оказалось бы
для человека невозможным; в действительных условпях оно воз-
возможно только благодаря внешней горизонтальной силе трения, раз-
развивающейся между опорной плоскостью и подошвами человека.
Точно так же движение поезда возмоншо только благодаря силе
трения между рельсами и ведущими колесами паровоза. На со-
совершенно гладких рельсах центр тяжести поезда оставался бы не-
неподвижным или перемещался бы только по вертикали (при верти-
вертикальных колебаниях вагонов).
Пример 133. Кузов вагона весом Р, укрепленный на рессорах, совер-
совершает вертикальные гармонические колебания с амплитудой а и периодом Т
около положения равновесия. Найти реакцию рессор.
Решение. Пусть О есть положение центра тяжести кузова вагона
при равновесии и С — смещенное положение центра тяжести в некоторый
момент при колебании вагона. Обозначим ординату ОС центра тяжести через
ус, причем ось у направим по вертикали вверх. Искомую вертикальную реак-
реакцию каждой двойной рессоры обозначим через N.
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 481
По условию задачи движение точки С определяется уравнением
ус = a sin f-y-']•
Отсюда находим:
йгус 4я2а ,2л
-Л2--=--гГ8т1т
По теореме о движении центра масс (центра тяжести) имеем:
4я2а
М-~ = 2N — Р или j—'Mainl-jr «I = 2^ - Р,
где М — масса кузова; отсюда, заменяя М через P/g, находим:
Р 2пгаР .
■ sin
2 ^Га \ Г у
Отсюда видим, что наименьшее и наибольшее значения силы N равны
■"мин ~2\ еТ2 ' И ыакс ~ ~2
при
§ 129. Теорема о кинетическом моменте системы
Пусть имеем систему п материальных точек; рассмотрим одну
какую-нибудь из этих точек. Обозначим массу этой точки через mk,
а ее скорость — через vh, внешнюю и внутреннюю силы, действую-
действующие на эту точку, обозначим, как и выше, соответственно через
Feh и Flh. По теореме о моменте количества движения материальной
точки относительно какой-нибудь неподвижной точки О (например,
начала координат), доказанной в § 106, имеем:
~m0 (mhvk) = т0 (Ffh) + mo{Fih).
Написав аналогичные уравнения для всех материальных точек
данной системы и сложив их, получим:
~ т0(mv) = 2т0 (Fe) +%т0 (Ft).
Обозначим ^m,o(Fp), т. е. главный момент внешних сил относи-
относительно точки О, через М$; далее заметим, что Ц/по(^) = 0, так
как внутренние силы попарно равны по модулю и прямо противо-
противоположны по направлению, и следовательно, главный момент этих
сил относительно любой точки будет равен нулю. Так как, кроме
того,
It т° (mv) = Ъ 2 т° (тг)>
16 П. М. Воронков
482 ДИНАМИКА
то предыдущее уравнение принимает вид
^%то(т>) = vmo(Fp). A07)
Если обозначим сумму ^то {mv), т. е. главный момент количеств
дпижения материальных точек системы относительно центра О, че-
через Lq, to уравнение A07) можно представить в виде
^ Щ>. A08)
Вектор Lo — 2то (mv), т. е. главный момент количеств движения
материальных точек системы относительно центра О, называется
кинетическим моментом системы относительно этого центра О.
Уравнения A07) или A08) выражают теорему о кинетическом
моменте системы: производная по времени от кинетического мо-
момента системы относительно какой-нибудь неподвижной точки
равна главному моменту внешних сил, действующих на эту си-
систему, относительно той же точки.
Выразим теперь эту теорему в координатной форме. Для этого
напишем для одной какой-нибудь материальной точки данной
системы уравнение, выражающее теорему о моменте количества
движения этой точки относительно координатной оси Ох; согласно
сказанному в § 106 будем иметь:
Напишем, далее, аналогичные уравнения для всех остальных
материальных точек системы и сложим их. Замечая опять, что
сумма моментов всех внутренних сил Flh относительно любой оси
равна нулю и что
получим:
Присоединяя сюда два таких же уравнения относительно осей у и
г, получим следующие три уравнения:
, } A09)
d
~2mx(mo)=2mt(Fr).
Сумма моментов количеств движения или, что то же, главный мо-
момент количеств движения материальных точек системы относи-
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 483
тельно данной оси называется кинетическим моментом системы
относительно этой оси.
Следовательно, если обозначим кинетические моменты системы
относительно координатных осей х, у, z соответственно через Lx,
Ly и Lz, то будем иметь:
Lx = И mjnw), Ly = V my(mv), Lz= %тг (mv).
Суммы, стоящие в правых частях уравнений A09), представляют
собой главные моменты внешних сил относительно осей х, у и z.
Если обозначим эти главные моменты внешних сил соответственно
через М<£\ Af<*>, М^\ то уравнения A09) можно написать короче
в таком виде:
<-%=М?, ^ = М<;>, % = №». A10)
Уравнения A0У) или A10) выражают теорему о кинетическом
моменте системы в координатной форме: производная по времени
от кинетического момента системы относительно какой-нибудь
неподвижной оси равна главному моменту внешних сил, дейст-
действующих на эту систему, относительно той же оси.
Отметим некоторые следствия, вытекающие из этой теоремы.
1. Пусть
Mtf = 0;
тогда
dL0
= 0
dt
и, следовательно,
Lq = const,
т. е. если главный момент внешних сил, действующих на систему,
относительно данной неподвижной точки все время равен нулю,
то кинетический момент системы относительно той же точки
остается постоянным.
2. Пусть
тогда
и, следовательно,
А* = 2j mx (mv) = const,
т. е. если главный момент внешних сил, действующих на систему,
относительно данной неподвижной оси все время равен нулю, то
кинетический момент системы относительно той же оси остается
постоянным.
16»
484
ДИНАМИКА
Эти случаи сохранения кинетического момента системы имеют
место, в частности, при отсутствии внешних сил. В случае от-
отсутствия внешних сил кинетический момент системы относи-
относительно любой неподвижной точки или любой неподвижной оси
остается неизменным.
Применим теорему о кинетическом моменте системы к случаю
вращения вокруг неподвижной оси z твердого тела, находяще-
находящегося под действием системы заданных сил Fk
(рис. 331).
Разобьем данное твердое тело на элементар-
элементарные материальные частицы, обозначим массу
одной из таких частиц А через т, ее расстоя-
расстояние от оси вращения обозначим через г и ее
скорость через с; угловую скорость тела обо-
значим через со. Составляя сумму моментов
количеств движения всех таких элементарных
частиц тела относительно оси вращения z и
принимая во внимание, что v = по, будем,
очевидно, иметь:
V) mz (mv) =
= 2] mr2a
a
Величина 2тг2, т. е. сумма произведений массы
каждой частицы тела на квадрат расстояния
этой частицы от данной оси z, называется моментом инерции
тела относительно этой оси и обозначается через Jz. Эта вели-
величина играет очень важную роль в динамике твердого тела *). Та-
Таким образом, имеем:
z (mv) =
A11)
т. е. кинетический момент вращающегося твердого тела относи-
относительно оси вращения равен произведению угловой скорости тела
на момент инерции его относительно этой оси.
Применяя теперь теорему о кинетическом моменте системы,
получим следующее уравнение:
ИЛИ J, -rr
A12)
Уравнение A12) называется дифференциальным уравнением вра-
вращательного движения твердого тела вокруг неподвижной оси. Ин-
а) О моментах инерции и способах их вычисления мы будем подробнее
говорить в главе 28.
2) Неизвестные реакции закрепленных точек О ж О' (подшипников), не-
рез которые проходит ось вращения тела, в это уравнение не войдут, так как
их моменты относительно этой оси равны нулю.
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ
485
тегрируя это уравнение, найдем угловую скорость тела со. Из этого
уравнения имеем:
1 тг (F)
A13)
т. е. угловое ускорение твердого тела, вращающегося вокруг не-
неподвижной оси, равно сумме моментов всех приложенных к нему
сил относительно оси вращения, разделенной на момент инерции
тела относительно той же оси.
Если сумму 2mz (^)> т- е- главный момент приложенных к телу
сил относительно оси вращения z, обозначим через Mz, то преды-
предыдущее равенство принимает вид
е=^. (ИЗ')
Эта формула показывает, что при данном моменте Мг угловое
ускорение тела обратно пропорционально моменту инерции тела
относительно оси вращения; отсюда становится по-
понятным физическое значение величины J,. Мы можем
рассматривать момент инерции как меру инертно-
инертности твердого тела при его вращательном движении
вокруг данной оси.
Если представим момент инерции тела относитель-
относительно данной оси z как произведение массы М тела на
квадрат некоторой длины, которую обозначим че-
через г™, т. е. положим
то величина г1™ называется радиусом инерции тела
относительно данной оси z. Радиус инерции будет
определяться, следовательно, по формуле
р1и =
М-
Рис. 332.
Из равенства Jz = M(r^HJ следует, что радиус
инерции представляет собой расстояние от данной
оси такой точки, в которой нужно сосредоточить всю массу тела,
чтобы момент инерции этой сосредоточенной массы был равен
моменту инерции тела относительно данной оси.
Пример 134. На шкив радиуса г весом Q, вращающийся вокруг
неподвижной горизонтальной оси О, навернута веревка, к концу которой
подвешен груз весом Р (рис. 332). К шкиву приложен вращающий момент,
равный Л/цр1). Принимая, что масса шкива равномерно распределена по его
окружности (рассматривая шкив как материальную окружность), найти
ускорение w поднимаемого груза.
х) То есть приложена пара с моментом Л/вр или сила, вращающая шкив,
момент которой относительно оси вращения шкива равен Л/вр
486
ДИНАМИКА
Решение. Обозначим через с' линейную скорость одной из точек
окружности шкива, равную но модулю скорости груза v, и составим кине-
кинетический момент данной системы (груза и шкива) относительно осп враще-
вращения О (относительно оси, проходящей через О и направленной перпендику-
перпендикулярно к плоскости чертежа).
Тогда будем иметь:
Р
U g
Р
mv'r = - it 4- vr S m,
g
где т обозначает элементарную массу материальной частицы шкива; так
к !К Em есть масса шкива, равная - , то
g
Главный момент внешних сил, действующих на данную систему относительно
той же осп О, будет, очевидно, равен
i\Af = — Рг -(- М.
вр
(моментом силы трения в подшипниках пренебрегаем).
Применяя теорему о кинетическом моменте системы, получаем:
dt
r dv
ИЛИ - (Р + (?) "Г =
Рг.
Отсюда находим искомое ускорение груза:
dv __ __ MBV- Pr
dt ~ W ~ r(P + Q) g'
Пример 135. Определить угловое ускорение шкива, зная радиус
niKiina R, его пес Р, радиус инерции лга относительно оси вращения и силы
F1 и Рг, передаваемые шкиву от ремня, при помощи
которого шкив приводится в движение (рис. 333).
Решение. Для решения этой задачи восполь-
з\емгя формулой (НЗ1) для углового ускорения вра-
вращающеюся тела. В этой формуле в данном случае
нужно положить:
Рас. 333.
J, =
Подставив эти значения в формулу A13'), найдем угловое ускорение шкива
Jz
"гй
Пример 136. На рис. 334 изображена упрощенная схема центро-
центробежного регулятора. С горизонтальным стержнем АВ = 2а, который может
вращаться вокруг вертикальной оси z, соединены при помощи шарниров
два вертикальных стержня АС и BD равной длины I; к этим стержням
прикреплены одинаковые грузы С и D весом Р каждый. Вначале грузы
связаны нитью и системе сообщена данная угловая скорость ш0. В неко-
ГЛ 26 ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ
48 7
торый момент нить пережигают. Найти угловую скорость со стержня АН
в тот момент, когда стержни АС и BJJ отклонятся от вертикали на данный
угол а. Массой стержней пренебрегаем.
Решение. Внешними силами для дапной системы являются веса
грузов и реакции подшипника и подпятника, в которых вращается верти-
вертикальная ось регулятора; моменты
этих сил относительно оси z рав- / г
ны нулю; следовательно, * *
М[е) = О,
а потому на основании второго
следствия из теоремы о кинети-
кинетическом моменте имеем:
Lz = Е "»г (тс) — const.
Вначале, когда система вра-
вращается с угловой скоростью со,,,
линейные скорости vc и vD грузов
равны аш0, а сумма моментов ко-
количеств движения грузов относи-
относительно оси z, очевидно, будет равна
2а2й)о»г, где т обозначает массу
каждого груза.
В тот момент, когда угол
отклонения стержней АС и BD
от вертикали равен а, радиус
вращения грузов становится, как видно из чертежа, равным a -f- I
их линейная скорость будет равна (а + I s^n а) ш, a сумма моментов
честв движения грузов отаосительпо оси z будет равна
2 (а -(- I sin аJ кип.
Так как эта сумма во все время движения остается постоянной, то
2 (а + I sin аJ ш»г = 2а2ш0т.
Отсюда находим искомую угловую скорость:
Рис. 334.
sin a;
коли-
коли§ 130. Теорема о кинетической энергии системы
Пусть имеем систему, состоящую из п материальных точек.
Рассмотрим одну из этих точек, массу которой обозначим через mh
и скорость — через vh.
До сих пор, говоря о силах, приложенных к материальным
точкам данной системы, мы разделяли нх на силы внешние и силы
внутренние; теперь будем классифицировать силы, действующие
на материальные точки системы, по другому признаку, а именно:
будем различать силы заданные и реакции связей (§ 121).
Обозначим равнодействующую всех заданных сил как внешних,
так и внутренних, приложенных к рассматриваемой точке системы,
через Fh,a. равнодействующую реакции связей, приложенных к этой
488 ДИНАМИКА
точке, — через Nk. Напишем для этой точки уравнение, выражаю-
выражающее теоре.му о кинетической энергии в дифференциальной форме,
доказанную для отдельной материальной точки в § 108: диффе-
дифференциал кинетической энергии движущейся материальной точки
равен сумме элементарных работ всех сил, приложенных к этой
точке.
Следовательно, будем иметь:
Написав аналогичные уравнения для всех материальных точек
системы и сложив их, получим:
Величина \-£~> т. е. сумма живых сил всех материальных точек
системы, называется живой силой или кинетической энергией дан-
данной системы; мы будем обозначать ее буквой Т; следовательно,
Т = /,-vr . Сумма элементарных работ реакций связей, как мы ви-
видели в § 123, в случае стационарных связей без трения при вся-
всяком перемещении системы, допускаемом этими связями, равна
нулю. Поэтому 2N-v dt = 0, и предыдущее уравнение принимает
вид
dT = ЪР-vdt. A14)
Интегрируя это уравнение по переменному t в пределах от 0 до t,
получим:
t
Т—TQ = ^{F-vdt, или T—TQ = %AF, A15)
о'
где ~LAF есть сумма работ заданных сил при перемещении системы
из ее начального положения в рассматриваемое положение, соот-
соответствующее моменту t, а Го обозначает кинетическую энергию
системы в начальный момент, т. е.
Равенство A15) выражает теорему о кинетической энергии системы:
При стационарных связях без трения изменение кинетической
энергии системы равно сумме работ всех заданных сил, действую-
действующих на эту систему, как внешних, так и внутренних.
Мы видим, таким образом, что в случае стационарных связей
без трения в уравнение, выражающее теорему о кинетической
энергии, реакции связей не входят, так как работа их равна нулю.
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 489
В связи с этим следует обратить внимание на различие между
уравнением A15) и уравнениями, выражающими общие теоремы ди-
динамики системы, рассмотренные в предыдущих параграфах. Как
мы видели выше, в уравнения, выражающие теоремы о количестве
движения, о движении центра масс и о кинетическом моменте си-
системы, внутренние силы не входят, но реакции связей, если они
относятся к внешним силам, из этих уравнений не исключаются;
в уравпение же, выражающее теорему о кинетической энергии
системы, внутренние силы войдут, так как работа внутренних сил
вообще не равна нулю. Чтобы убедиться в этом, достаточно рассмот-
рассмотреть следующий простой пример: пусть имеем систему, состоящую
из двух материальных точек, притягивающихся по какому угодно
закону (например, по закону Ньютона). Силы взаимного притя-
притяжения этих точек являются для рассматриваемой системы внутрен-
пими силами; эти силы равны по модулю и направлены по прямой,
соединяющей данные точки, в противоположные стороны. Ясно,
что если под действием этих сил точки будут сближаться, то работа
каждой силы будет положительна и, следовательно, сумма работ
внутренних сил не будет равна нулю, а будет больше нуля.
В том случае, когда наложенные на систему связи не являются
совершенными, т. е. когда трением пренебрегать нельзя, прихо-
приходится учитывать работу сил трения и, применяя теорему о кинети-
кинетической энергии, в правую часть уравнения A15) в этом случае
нужно включить работу сил трения.
Применяя теорему о кинетической энергии в задачах, относя-
относящихся к динамике системы, очень часто приходится вычислять ки-
кинетическую энергию движущегося твердого тела; найдем выраже-
выражения для кинетической энергии твердого тела в следующих двух
основных случаях:
1) Тело движется поступательно. Так как
скорости всех точек тела при поступательном движении равны
между собой, то в этом случае имеем:
% >j7
> — 9 / — 2 '
где М = 2т есть масса данного тела. Следовательно, в случае по-
поступательного движения твердого тела его кинетическая энергия
вычисляется по той же формуле, что и кинетическая энергия мате-
материальной точки.
2) Тело вращается вокруг неподвижной
осе н угловой скоростью со. Элементарная частица
тела, находящаяся на расстоянии г от оси вращения z, имеет ско-
скорость, равную по модулю v = га.
Следовательно, кинетическая энергия тела равна
V1 тг (д (О
Z 9 =г ~9
490
ДИНАМИКА
ИЛИ
T = JT
A17)
где Jz — Hmr2 есть, как известно, момент инерции тела относи-
относительно оси z. Итак, кинетическая энергия твердого тела, вращаю-
вращающегося вокруг неподвижной оси, равна половине
произведения квадрата угловой скорости тела на
О д \ момент инерции его относительно оси вращения.
Пример 137. На шкив весом Р3 и радиуса R, вра-
вращающийся вокруг горизонтальной оси О, навернут канат
весом Р1 и Рг на концах (рис. 335),
с двумя
грузами
> Р2
Рис. 335.
причем Р1 > Р2. Зная радиус инерции гин шкива относи-
относительно оси вращения, найти ускорение грузов, если
система находится под действием только сил тяжести.
Массой каната и сопротивлениями пренебрегаем.
Решение. Если обозначим скорость на окруж-
пости шкива, равную по модулю скорости грузов, че-
через v, а угловую скорость шкива через со, то кинети-
кинетическая энергия данной системы (двух грузов и шкива)
будет равна
Р Р 1
где J0 обозначает момент инерции шкива относительно оси вращения О,
причем
г -Р± -
Кроме того,
откуда
v — Лео,
v
подставляя эти значения в предыдущее равенство, получим:
Пусть в начальный момент система была неподвижна; тогда 2'0 = 0. Работа
заданных сил, приложенных к данной системе, т. е. сил Р1 и P.z, равна
где s — длина пути, пройденного каждым грузом. Применяя теорему о кине-
кинетической энергии системы, получаем уравнение
откуда можно найти скорость грузов v. Для определения искомого ускоре-
ускорения w достаточно продифференцировать это уравнение по времени; после
L) Работа силы Р3, очевидно, равна нулю, так как эта сила приложена
в неподвижной точке О.
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 491
этого получим:
dv ds
ds
Принимая во впимание, что у=си что искомое ускорение грузов равно
dv
- , из предыдущего уравнения находим:
dv _ _ Рг — Р2
Пример 138. В примере 135 (§ 129) найти угловое ускорение шкива,
применяя теорему о кинетической энергии системы.
Решение. Применяя уравнение A14) и заметив, что сумма элемен-
элементарных работ сил Fx и Fit приложенных к шкиву, равна
F^ds —F2ds = (Fl —F2) ds,
получим:
dT = (i?! — F2) ds.
Кинетическая энергия шкива равна
отсюда
dT = — r*ad(u.
g ин
Поэтому предыдущее уравнение, выражающее теорему о кинетической анер-
анергии в дифференциальной форме, принимает вид
^-г^шЛо = (Fl -F,)ds.
Но ds = v ■ dt, где и есть скорость на окружности шкива, причем v — Ню
и, следовательно, ds = Лш dt. Подставляя это значение ds в предыдущее
уравнение, получим:
— /-jlH0) da = (Fl —F2) йш dt.
s
Отсюда находим угловое ускорение шкива:
_ da R^-FJg
Теорема о кинетической энергии системы играет важную роль
в общей теории машин. Как известно, при работе всякой машины
приходится преодолевать так называемые полезные и вредные сопро-
сопротивления. Если обозначил! работу двигателя (мотора), приводя-
приводящего машину в движение, через Ам, а абсолютные значения работ
полезных и вредных сопротивлений обозначим соответственно
через АП0Л и Авр, то, применяя теорему о кинетической энергии
системы, получим:
ДГ = Ам~Аиоя-Авр, A18)
492 ДИНАМИКА
где AT обозначает изменение кинетической энергии движущихся
частей машины за некоторый промежуток времени х). В период
пуска машины в ход ее кинетическая энергия возрастает, поэтому
AT ^> 0, п следовательно, в течение этого периода на основании
уравнения A18) имеем:
Аи S> А пол тлВр.
Наоборот, при торможении машины AT <^ 0 и, следовательно,
в этом случае
Аш <^ Aao:l -f- ABp.
Наконец, при установившемся движении машины скорости ее
движущихся частей остаются (в среднем) постоянными; точнее, по
истечении некоторого определенного промежутка времени, равного,
например, времени одного оборота главного вала, эти скорости
вновь получают свои первоначальные значения; поэтому за этот
промежуток времени остается неизменной и кинетическая энергия
Т; следовательно, в этом случае имеем:
AT = О
и
Ам = Л пол + Авр. A19)
Отношение полезной работы к работе, произведенной двигателем,
называется коэффициентом полезного действия машины и обозна-
обозначается обычно буквой ц; следовательно,
Л=^Р. A20)
Из уравнения A19) следует, что Аж > АП01[, а потому ц <^ 1.
Величина работы, произведенной двигателем за промежуток
времени t, является некоторой функцией переменного t, т. е.
А = f(t). Работа, отнесенная к единице времени, т. е. производная
-, - , называется мощностью двигателя; следовательно, обозначая
мощность через N, имеем:
Из этой формулы следует, что размерность мощности выражается
так: [N] = — . В технической практике мощность обычно
измеряется в лошадиных силах или в киловаттах, причем 1 л. с. =
= 75 кгм',сек и 1 киловатт = 102 кгм/сек.
') В уравнении A18) члены Аиоп и Авр берем со знаком минус, по-
потому, что работа сопротивлений всегда отрицательна.
ГЛ. 26. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 493
Интегрируя уравнение A21), получаем следующую формулу, выра-
выражающую работу, затраченную двигателем за время t в зависи-
зависимости от его мощности:
А = [ N dt. A22)
В частном случае при постоянной мощности, т. е. при N = const,
из формулы A22) получаем:
А = N-t. A23)
Пример 139. Найти среднюю полезную мощность паровой машины,
если среднее давление пара на поршень в течение всего хода равно 5 кг на
1 см2, площадь поршня S = 300 см2, длина хода поршня I =» 40 см, число
рабочих ходов в минуту п — 120 и коэффициент полезного действия т) = 0,9.
Решение. Полное давление пара на поршень равно 5 • 300 = 1500 кг;
следовательно, работа, совершаемая за 1 минуту, равна
Аи = 1500 • 40 • 120 кгсм = 72 000 кем.
Величину полезной работы находим по формуле A20):
<4пол = ^Аы = °-9 • 72 00° кгм-
Разделив эту работу на промежуток времени t = 60 сек, получим иско-
искомую полезную мощность:
0,9-72 000 ,пап 1080
iVn0JI = кл = Ю80 кгм/сек = -==- л. с. — 14,4 л. с.
Пример 140. Поезд весом Р, отходя от станции, идет по горизонталь-
горизонтальному пути с постоянным ускорением а. Сила сопротивления движению поезда
равна кР, где к — данный постоянный коэффициент. Определить мощность,
развиваемую паровозом.
Решение. Обозначая работу паровоза через А и применяя теорему
о кинетической энергии, получим:
Т — 2'0 = А — кР ■ s,
где s обозначает длину пути, пройденного поездом.
Кинетическая энергия в начальный момент То — 0, так как в началь-
начальный момент скорость поезда равна нулю. Поэтому предыдущее равенство
можно написать в следующем виде:
А = Т + кР ■ s = -j- v2 + кР ■ s,
где v — скорость поезда.
Дифференцируя это уравнение по времени, получим искомую мощнооть
паровоза:
dA Pv dv , , „ds
dv ds
~ = v, а потому
но -j- = о и -ft = v, & потому
494 ДИНАМИКА
Если вес Р выражен в килограммах, а скорость v — в метрах в секунду,
то эта формула дает мощность N в килограммометрах в секунду. Чтобы по-
получить мощность в лошадиных силах, нужно правую часть равенства раз-
разделить на 75:
Так как поезд движется равномерно ускоренно без начальной скорости, то
v = at; поэтому предыдущее равенство можно представить в виде:
N = ~(-+k)at (л. с).
Отсюда видим, что при равномерно ускоренном движении цоезда мощ-
мощность, развиваемая паровозом, возрастает пропорционально времени. Если
dv .
поезд движется равномерно, то в этом случае -^ = 0 и, следовательно,
^ (л. с),
где v имеет постоянное значение.
§ 131. Движение системы в потенциальном силовом поле.
Закон сохранения энергии
Пусть данная система материальных точек Мх (хи уи z,),
М2 (х2, г/а, 5-2),..., Мп(хп,уп, zn) находится в некотором силовом
поле. Предположим, что модуль и направление силы Fh этого
поля, действующей на точку Mk, зависят только от положения мате-
материальных точек данной системы, т. е. предположим, что проекции
силы Fk на координатные оси выражаются однозначными и непре-
непрерывными функциями координат xt, гд, zl, ..., хп, уп, zn; следова-
следовательно, будем иметь:
^к = Хк(Х1' Уи Zl' •••' жп. Уп> Zn)'
*k = Yh (Xi, yt, 2j, ..., Xn, yn, Zn),
zh = zk fa, Уи h, •••. xn, yn, zn)
= 1,2, ..., n).
Сказанное в §§ 109—111 по отношению к отдельной материаль-
материальной точке можно обобщить и на систему точек.
Силовой функцией данного силового поля называется такая
функция U (хъ уи zlt ..., хп, уп, zn) координат точек системы,
частные производные которой по координатам xh, yh, zh равны
проекциям силы Fh на соответствующие координатные оси, т. е.
X Y Z»=dzh (А = 1, 2, .... n). A24)
Если такая функция существует, то силовое поле называется
потенциальным. Тогда сумма элементарных работ сил Fh будет
■ГЛ. 36. ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ СИСТЕМЫ 495
равна
^ (Xhdxh + Ykdyh + Zhdzk) =
dx + dy + d
т. е. сумма элементарных работ равна полному дифференциалу
силовой функции. Отсюда для суммы работ тех же сил при конеч-
конечном перемещении системы из одного положения (/) в другое поло-
положение (//) получаем:
(«>
Ар = \ dU = U2 - Uu A26)
т
где U2 и и± — значения силовой функции, соответствующие конеч-
конечному и начальному положениям системы. Следовательно, при пере-
перемещении системы в потенциальном силовом поле сумма работ
сил этого поля равна разности значений силовой функции, соот-
соответствующих конечному и начальному положениям, системы.
В качестве примера найдем силовую функцию для поля силы
тяжести. Если направим ось z по вертикали вверх, то в этом слу-
случае имеем:
Xk = Yh = 0, Zk = -mkg (к = 1, 2, ..., n).
Следовательно,
n
dU = 2 &kdxk + Ykdyk + Zkdzh) =
n
— 2
Интегрируя это выражение, находим:
п
U = — g У т^к ~Ь
k—i
но, как известно из § 128,
hzh = Mzc,
496 ДИНАМИКА
где М — масса всей системы и zc — координата центра тяжести С
этой системы, а потому
U = —Mgzc + const. A27)
Потенциальной энергией, соответствующей данному положе-
положению системы, называется работа, совершаемая силами поля Fh
при перемещении системы из данного положения в некоторое «ну-
«нулевое» положение. Если обозначим потенциальную энергию через
П, то па основании этого определения и равенства A26) имеем:
П = [Л°> — U, A28)
где U"» =■ U(x<?', y'°u zT, ..., а#\ уТ, 4Г) есть значение силовой
функции, соответствующее нулевому положению системы. Отсюда
следует, что в нулевом положении потенциальная энергия системы
принимается равной нулю. За нулевое положение мы можем,
вообще говоря, принять произвольно выбранное положение данной
системы. Обычно принимают за нулевое такое положение системы,
при ротором силовая функция имеет максимальное значение, так
чтобы разность £Л0) — U при рассматриваемом движении системы
оставалась положительной.
При движении системы в потенциальном силовом поле, когда
система переходит из некоторого положения (/) в положение (//),
уравнение, выражающее теорему о кинетической энергии, на
основании равенств A15) и A26) принимает вид
Г2 - 7\ - иг - U,. A29)
Если обозначим потенциальную энергию при первом и втором
положениях системы соответственно через П,^ и Па, то на основа-
основании равенства A28) будем иметь:
отсюда
и уравнение A29) можно представить в виде
Г2-7\ - 1^-П.или Т2 + П2 = 2\ + Пи
т. е.
Т + П = const. A30)
Это уравнение выражает закон сохранения механической энер-
энергии: при движении системы в потенциальном силовом поле сумма
кинетической и потенциальной энергий, называемая полной механи-
механической энергией системы, остается постоянной.
П, = OW —
ГЛ. 27. ПРИНЦИП ДАЛАМБЕРА ДЛЯ СИСТЕМЫ
497
ГЛАВА 27
ПРИНЦИП ДАЛАМБЕРА ДЛЯ СИСТЕМЫ
§ 132. Принцип Даламбера
Мы уже знаем, в чем заключается принцип Даламбера в приме-
применении к одной материальной точке (§ 114). Этот принцип легко
распространить и на систему материальных точек. В самом деле,
рассмотрим какую-нибудь точку Мк данной системы: на эту точку
действуют заданная сила Fh и реакция связей Nh; если приложить
к этой точке еще силу инерции .F^, равную по модулю произведе-
произведению массы точки на модуль ее ускорения и направленную противо-
противоположно ускорению, то эти три силы, Fh, iV* и Ff1, взаимно уравно-
уравновешиваются. То же самое будет иметь место и для всех остальных
точек системы, т. е. будем иметь:
Fh + Nk + Ffl=0 (k= 1, 2, ..., п).
Отсюда приходим к заключению: если в любой момент к каждой
материальной точке данной системы приложить силу инерции
этой точки, то эти силы инерции будут
уравновешиваться заданными силами, действую-
действующими на систему, и реакциями связей. В этом
и состоит принцип Даламбера для системы.
Таким образом, вводя силы инерции, мы по-
получаем возможность в задачах динамики состав-
составлять уравнения в той же форме, как мы это де-
делали в статике, принимая во внимание, что
поскольку заданные силы, реакции связей и
силы инерции взаимно уравновешиваются, то
сумма проекций всех этих сил на любую ось равна
нулю и сумма их моментов относительно любой
точки или любой оси также равна нулю. При
этом следует иметь в виду, что еслиэти уравнения
составлены для всей системы в целом, то вну-
внутренние силы в них, конечно, не войдут. Прин-
Принцип Даламбера имеет в динамике системы очень
важное значение, так как дает общий метод
решения динамических задач. В особенности
этим методом удобно пользоваться для определения динамиче-
динамических реакций связей, т. е. реакций, возникающих при движении
системы.
Пример 141. Через блок атвудовой мапишы радиуса г, вращаю-
вращающийся вокруг горизонтальной оси О, перекинута нить, к концам которой
подвешены грузы весом Р1 и Р2, причем Рх > Р2. При движении грузов
нить вследствие трения приводит во вращение блок. Определить ускоре-
ускорение, с которым движутся грузы, если вес блока равен Р3 (рис. 336).
Рис. 336.
498 ДИНАМИКА
Решение. Обозначим модуль искомого ускорения грузов через ю.
р
Гила инерции правого груза равна по модулю Р"н = -~1 w и направле-
направлена по вертикали вверх, сила инерции левого груза равна по модулю
р
А'™ = —2 w и направлена по вертикали вниз. Пренебрегая массой спиц
блока, будем считать, что вся его масса равномерно распределена по его
ободу, который для простоты будем рассматривать как материальную окруж-
окружность. Возьмем па ободе материальную частицу с массой т\ так как эта
частица движется по окружности, то ее ускорение равно векторной сумме
двух ускорений: нормального, модуль которого wn — тчо2, и тангенциального,
da
модуль которого wz = г
, где со обозначает угловую скорость блока,
dt
a -,— есть его угловое ускорение. Соответственно этому и сила иперции ча-
частицы будет представлять собой сумму двух сил: нормальной силы инерции,
равной по модулю F™ = m/чо2 и направленной по радиусу от центра О,и
тангенциально» силы инерции, равной по модулю F" = тг -г- и на-
направленной противоположно тангенциальному ускорению частицы. Так как
-т- = w, то F"H— mw. Приложив силы инерции к обоим грузам и ко
всем материальным частицам блока, можем согласно принципу Даламбера
считать всю систему находящейся в равновесии х). Но при равновесии си-
системы сумма моментов всех внешних сил относительно любой оси равна нулю;
составляя сумму моментов внешних сил (в число которых нужно включить,
конечно, и силы инерции) относительно оси О и приравнивая эту сумму нулю,
получим:
Р Р->
—— wr + Р'уГ -(- —- u>r + £ mwr — P,r — 0.
g g
Нормальные силы инерции материальных частиц блока, а также вес блока
и реакции подшипников в это уравнение не войдут, так как их моменты от-
относительно оси О равны нулю. Замечая, что
Y.i>iwr = wr £ т = wrM,
р
где М — масса всего блока, равная — , и сокращая предыдущее уравнение
иа г, получим:
-1- (Р1 + Р2 + Р3) w = Pt - Р2.
Отсюда находим:
" Pi + P.+P-s6'
Чтобы определить натяжение 7\ правого конца нити, достаточно рассмо-
рассмотреть в отдельности правый груз, как находящийся в равновесии под дейст-
действием трех сил: реакции нити Tlt направленной вверх, силы инерции Fhh и веса
Pt. Отсюда получаем:
1) Если представить себе, что система остановлена.
ГЛ. 27. ПРИНЦИП ДАЛАМБЕРА ДЛЯ СИСТЕМЫ
499
Подставляя сюда пайденное значение w, после простых преобразований по-
получим:
Р, BР2 + Ра)
Jl Pr + P, + Р3 ■
Аналогично, рассматривая в отдельности левый груз и составляя для него
уравнение равновесия, найдем из этого уравнения натяжение Тг левого
конца нити.
Пример 142. Стержень CD, весом которого можно пренебречь, дли-
длиной 21, несущий на каждом из своих концов груз весом Р, жестко скреплен
в середине с вертикальной осью, опирающейся
на подпятник А и подшипник В и вращаю-
вращающейся с постоянной угловой скоростью со.
Угол между осью и стержнем равен а, рас-
расстояние АВ = h. Найти горизонтальные реак-
реакции XА и Хв подпятника п подшипника в точ-
точках А и В и вертикальную реакцию У 4 иод-
пятника в точке А (рис. 337).
Р е га е н и е. Приложив к грузам центро-
центробежные силы (нормальные силы инерции), рав-
равные по модулю
11 С = Ь D = ~
= — Isin a ■ ш2
g
и направленные по радиусам вращения грузов
от оси вращения L), составляем три уравнения
равновесия плоской системы сил, которым со-
согласно принципу Даламбера должны удовле-
удовлетворять заданные силы Р, силы инерции и
реакции в точках А и В. Проектируя все эти силы на оси Ах и А у, получим
два уравнения:
Рис. 337.
А ~ *в = О,
2Р = 0.
Составляя затем сумму моментов всех этих сил относительно точки А, по-
получаем уравнение
■ I cos a = 0.
hXB —
Решая эти три уравнения, находим:
YA = 2Р и ХА = Хв =
21 cos a-F1^ P/2sin2a
h
§ 133. Общее уравнение динамики
Согласно принципу Даламбера, как мы видели в предыдущем
параграфе, заданные силы, действующие на механическую си-
систему, реакции связей и силы инерции материальных точек этой
системы в каждый данный момент находятся в равновесии. Отсюда
на основании принципа возможных перемещений (§ 124) следу-
следует, что сумма элементарных работ всех этих сил при всяком
г) Так как грузы вращаются равномерно, то их касательные ускорения,
а следовательно, и их касательные силы инерции равны нулю.
500
ДИНАМИКА
возможном перемещении системы равна нулю. Но если на систе-
систему наложены совершенные связи, то сумма работ реакций таких
связей при всяком возможном перемещении системы равна
нулю. Поэтому в случае совершенных связей сумма элементарных
работ заданных сил и сил инерции будет равна нулю при любом
возможном перемещении системы, т. е. будем иметь:
ЦХ Ъх + Y by + Z bz) + £(F™ Ьх + F™ by + jF™ 6z) = 0,
где Ьх, Ьу и 6z обозначают проекции возможных перемещений точек
системы на координатные оси, X,Y,Z — проекции заданных сил и
F"H, F"a, F™ — проекции сил инерции на те же оси. Но проекции
силы инерции на координатные оси выражаются так (§ 114):
F^ = -mwz=-m^,
где т — масса материальной точки, a w., wy и wz —• проекции ее
ускорения на координатные оси, а потому предыдущее уравнение
принимает вид
Это уравнение, вытекающее из двух основных принципов меха-
механики — принципа Даламбера и принципа
возможных перемещений, — называется
общим уравнением динамики. От общего
уравнения статики (§ 124) оно отличается
только тем, что, кроме проекций задан-
заданных сил на координатные оси, в него вхо-
входят еще проекции сил инерции на те
же оси.
Таким образом, вводя силы инерции
и пользуясь уравнением A31), мы можем
применять принцип возможных переме-
перемещений и в задачах динамики.
Пример 143. Центробежный регулятор
вращается вокруг вертикальной оси Оу с данной
постоянной угловой скоростью ш. Вес каждого
из грузов А и В равен Рх; вес муфты С, кото-
которая может перемещаться вдоль оси Оу, равен Р2.
Все стержни ОА, ОВ, АС и ВС имеют одинако-
одинаковую длину I. Найти угол АОС — а, предпола-
предполагая, что при вращении регулятора этот угол
остается постоянным; весом стержней пренебрегаем (рис. 338).
Решение. Приложив к грузам А я В центробежные силы, равные во
модулю
-Р±- га* =
sin a •
ГЛ. 28. МОМЕНТЫ ИНЕРЦИИ 501
где г — радиус вращения грузов, сообщим системе возможное перемеще-
перемещение, при котором угол а получает элементарное изменение 6а. Приравнивая
нулю сумму работ на этом перемещении всех сил, приложенных теперь к си-
системе (включая и силы инерции), получим следующее уравнение:
РФУА + РфУв + Р**Ус + FT Ь*в -FT ЬхА = 0,
но, как видно из чертежа,
У л ~ У в ~ I cos a> Ус — 21 cos а,
хА =— I sin а и хв = I sin а;
следовательно,
ЬуА = дув =— I sin а 6а, Ьус =—21 sin а 6а,
бяд = — I cos а 6а, 6хв = I cos а 6а,
а потому предыдущее уравнение принимает вид
11 (— /*! sin а — Pt sin а + FBa cos а) 6а — 0.
Отсюда следует, что
B
sin а.
Подставляя сюда значение FBa и сокращая на sin а, получим;
— la>2 cos а = /»! + Рг,
О
откуда находим:
(Р, + Рц) g
cos a = '■J, Г .
ГЛАВА 28
МОМЕНТЫ ИНЕРЦИИ
§ 134. Общие формулы для моментов инерции
Как было уже указано в § 129, моментом инерции системы
материальных точек относительно данной оси называется сумма
произведений массы каждой точки на квадрат ее расстояния от
этой оси.
Поэтому, обозначая момент инерции через /, имеем:
где т — масса материальной точки, а /г — ее расстояние от дан-
данной оси.
502 ДИНАМИКА
Аналогично, моментом инерции системы материальных точек от-
носителоно данной точки О называется сумма произведений массы
каждой материальной точки на квадрат ее расстояния от этой
точки О, т. е.
Jo = £тг2,
где т — масса материальной точки, а г — ее расстояние от данной
точки О.
Если имеем сплошное твердое тело, то для определения момента
инерции этого тела относительно данной точки или данной оси по-
поступаем следующим образом: разбиваем все тело на очень большое
число весьма малых материальных частиц, составляем сумму произ-
произведений массы каждой такой частицы на квадрат ее расстояния от
данной точки или данной оси и затем вычисляем предел этой суммы
в предположении, что число частиц, на которые мы разбили тело,
неограниченно возрастает, а объем каждой частицы, а следова-
следовательно, и ее масса стремятся к нулю. Когда говорят о моменте
инерции сплошного твердого тела, то для краткости слово «предел»
обычно опускают, но его всегда нужно подразумевать.
Размерность момента инерции в технической системе единиц
выражается, очевидно, так:
[J] = [массахдлина2] = ^^—ремя Xдлина2 =
|_ длина |
= [сила х длина X время2].
Единицей измерения моментов инерции в технической системе
единиц является момент инерции материальной точки, имеющей
массу, равную одной технической единице массы, и находящейся
на расстоянии одного метра от данной оси или от данной точки.
Следовательно, единицей измерения моментов инерции служит
1 кгмсек.
Пусть имеем твердое тело, отнесенное к системе координат
Oxyz. Если расстояние одной из материальных частиц А (х, у, z)
этого тела от оси z обозначим через h (рис. 339), а ее массу обо-
зпачим через т, то момент инерции тела относительно оси z выра-
выразится так:
/г = £ mk2,
но, как видно из чертежа,
/г2 = х2 + у\
а потому
/г = 2т(*2 + г/2);
аналогичные формулы будем иметь, понятно, и для Jx и / . Таким
образом;, получаем следующие общие формулы для моментов инер-
инерции тела относительно трех координатных осей:
Jx = 2 т {i/ + z2), Jy = £ т (г2 +х2), У, = £ те (х2 + г/2). A32)
ГЛ 28 МОМЕНТЫ ИНЕРЦИИ
503
Сумма произведений массы каждой частицы тела на квадрат
расстояния этой частицы от дайной плоскости называется момен-
моментом инерции тела относительно этой плоскости. Поэтому суммы
Итх2, limy2 и Hmz2, входящие в правые части формул A32),
выражают соответственно моменты инер-
инерции тела относительно координатных плос-
плоскостей Oyz, Ozx и Оху.
Момент инерции тела относительно на-
начала координат О равен
Jo = 2j гпг'л,
но так как
то
= х2 + f +
y2+
A33)
Из формул A32) и A33) получаем зависи-
зависимость
/ ~ 1 I т л- т л- I \
JО — 2 '</* "+" JV ~г Jz)<
A34)
Рис. 339.
т. е. момент инерции тела относительно начала координат ра-
равен полусумме моментов инерции его относительно трех коорди-
координатных осей.
Если тело имеет форму плоской тонкой пластинки, толщиной
которой можно пренебречь, то приходится вычислять моменты инер-
инерции материальной плоской фигуры
относительно осей Оху, лежащих в
плоскости этой фигуры. В этом слу-
случае, как видно из рис. 340, имеем:
J х
J у
пгх2
и
Jo =
r2 = \>
отсюда следует:
+ if); A35)
A36)
Рис. 340.
т. е. момент инерции плоской фигуры относительно начала
координат равен сумме моментов инерции этой фигуры отно-
относительно двух координатных осей, лежащих в плоскости этой
фигуры.
Формулы A35) и A36) можно получить, конечно, из предыду-
предыдущих, полагая в них z = 0 и Jz = JQ.
504 ДИНАМИКА
§ 135. Примеры вычисления моментов инерции
Вычислим моменты инерции некоторых тел простейшей геомет-
геометрической формы.
1. Прямолинейный тонкий стержень. Рас-
Рассматривая такой стержень как материальный прямолинейный
отрезок АВ = I (рис. 341), вычислим момент инерции этого стержня
относительно его конца А, или, что то же, относительно оси Ау,
перпендикулярной к АВ. Разобьем
для этого весь стержень на бес-
бесконечно малые отрезки; расстоя-
расстояние такого отрезка от точки А
& ? обозначим через х, а его массу —
через т; тогда
—~ JА = £тх2.
Рис. 341. Если обозначим через у линей-
линейную плотность стержня, т. е. мас-
массу, приходящуюся на единицу длины, а длину элементарного
отрезка обозначим через Ах, то его масса будет равна
т — у Ах.
Тогда
Jа = 2yx2Ax.
Предел этой суммы будет выражаться определенным интегра-
интегралом, взятым по переменному х в пределах от 0 до I и, следова-
следовательно,
i
J а = \ ух2 dx.
о
Если стержень однородный, то плотность у остается постоянной
вдоль всего стержня; в этом случае
i
JA = y[x2dx = -^ уР.
о
Если обозначим массу всего стержня через М, то М = yl и,
следовательно,
/а = 4 М1\ A37)
2. Прямоугольник. Пусть имеем тонкую однородную
прямоугольную пластинку О ABC со сторонами а и Ъ и массой М
(рис. 342). Вычислим момент инерции этой пластинки относительно
оси у, т. е. относительно стороны О А. Разобьем для этого площадь
ГЛ. 28. МОМЕНТЫ ИНЕРЦИИ
505
прямоугольника О ABC прямыми, параллельными оси х, на беско-
бесконечно узкие полоски. Каждую такую полоску можно рассматри-
рассматривать как прямолинейный отрезок. Поэтому момент инерции такой
элементарной полоски относительно оси у на основании формулы
A37) будет равен 1I3\ia2, где и, — масса полоски, а момент инерции
всего прямоугольника выразится так:
— ■—. А о 1 9. хгч _ _
или, так как 2 |х = М,
Аналогично получим:
A38) ь
О
A39)
а С
Рис. 342.
Для момента инерции прямоугольника относительно его вершины О
на основании формулы A36) будем иметь:
jo = Jx + Jy = -I M (a2 + b2). A40)
3. Окружность. Вычислим момент инерции материаль-
материальной окружности (тонкого однородного проволочного кольца) ра-
радиуса R и массы М относительно ее центра О. Для этого разобьем
всю окружность на бесконечно малые элементы, т. е. на бесконечно
малые дуги; массу элемента обозна-
обозначим через т. Все эти элементы нахо-
находятся от точки О на одном и том же
расстоянии R. Поэтому искомый мо-
момент инерции равен
/0 = 2 mi?2 = R2%m = MR2. A41)
4. К р у г. Пусть требуется вы-
вычислить момент инерции круга ра-
радиуса R и массы М относительно его
центра О (рис. 343). Разобьем дан-
данный круг концентрическими окруж- Рис. 343.
ностями на элементарные плоские
кольца. Радиус такого кольца обозначим через г, его бесконечно
малую ширину — через Д/\ Рассматривая такое элементарное
кольцо как материальную окружность, на основании формулы
A41) найдем, что его момент инерции относительно центра О
равен fir2, где и. — масса кольца. Искомый момент инерции круга
равен сумме моментов инерции всех элементарных колец, т. е.
508 ДИНАМИКА
Обозначим поверхностную плотность данного круга, т. е. массу,
приходящуюся на единицу площади, через у. Тогда, считая круг
однородным, будем иметь:
м
Так как площадь элементарного кольца можно представить с точ-
точностью до бесконечно малых первого порядка в виде произведения
2лгАг (произведение длины его окружности на ширину), то его
масса выразится так:
fi = 2nr Аг ■ у,
а потому
Jo = £2яу/лД/\
Предел этой суммы выразится определенным интегралом по пере-
переменному г в пределах от 0 до R и, следовательно,
Jo = 2щ I* /•' dr = *- nyR1.
о
Подставляя сюда значение у, окончательно получим:
Jo = \ MR2. A42)
Для того чтобы вычислить моменты инерции круга относительно
осей х и у, направленных по двум его взаимно перпендикулярным
диаметрам, заметим, что для круга моменты инерции относительно
каждого из его диаметров будут, очевидно, равны между собой;
поэтому на основании формулы A36) предыдущего параграфа полу-
получаем:
Jx = J«= !- Jo = J MR2- A43)
5. Круглый цилиндр. Вычислим момент инерции
круглого однородного цилиндра относительно его оси враще-
вращения z. Пусть радиус основания цилиндра равен R, а его масса
равна М. Разобьем весь цилиндр плоскостями, параллельными его
основанию, на бесконечно тонкие круглые пластинки. Момент
инерции каждой такой пластинки относительно оси вращения ци-
цилиндра на основании формулы A42) будет равен 0,5 \iR2, где (X —
масса пластинки.
Искомый момент инерции цилиндра будет равен сумме моментов
инерции всех элементарных пластинок и, следовательно, выра-
выразится так:
"г ~ 7. ^)
ГЛ 28. МОМЕНТЫ ИНЕРЦИИ 507
а так как £\i~ M, то
Jz = \- MR2. A44)
6. Шар. Вычислим момент инерции однородного шара ра-
радиуса R относительно его центра О. Если обозначим массу шара
через М, а его объемную плотность, т. е. массу, приходящуюся на
единицу объема, через у, то
_ м
где объем шара
следовательно,
_ ЗМ
Разобьем данный шар концентрическими сферами на беско-
бесконечно тонкие сферические слон. Такой элементарный слой будет
заключаться между двумя сферами с радиусами г и г + Аг, а тол-
толщина слоя будет равна Аг. Так как все частицы слоя находятся
на одинаковом расстоянии г от центра шара О, то момент инер-
инерции такого слоя относительно точки О равен \хг2, где |х — масса
всего слоя.
Искомый момент инерции шара будет равен сумме моментов
инерции всех элементарных слоев, т. е.
/0 = 1>-2.
Так как объем элементарного сферического слоя можно представить
с точностью до бесконечно малых первого порядка в виде произве-
произведения 4яг2 Аг (произведения его внутренней поверхности на тол-
толщину), то его масса будет равна
(X = Апг2 Аг- у,
а потому
Jo = V 4яуг1 Аг,
или, после перехода к пределу,
к
/0 = Any f rl dr = | nyR5.
6
Подставляя сюда значение у, окончательно получим:
Jo = I MR*. ' A45)
508
ДИНАМИКА
Чтобы вычислить моменты инерции шара относительно трех
координатных осей, начало которых находится в центре шара,
заметим, что эти моменты инерции будут, очевидно, равны между
собой, т. е.
J J. J у J г.
Поэтому на основании формулы A34) предыдущего параграфа
находим:
о о
/ — / = Т — — Т — — Л//?2 A4fU
J х — J у — J г ~ 3 ° — 5 " \'-^и)
§ 136. Зависимость между моментами инерции
относительно параллельных осей
Зависимость между моментами .инерции тела относительно па-
параллельных осей выражается следующей теоремой:
Разность моментов инерции тела относительно данной оси и
относительно оси, ей параллельной и проходящей через центр
тяжести тела, равна произведению массы всего тела на квадрат
расстояния между этими осями.
Возьмем начало координат О в центре тяжести тела. Обозна-
Обозначим данную ось через г', параллельную ей ось, проходящую через О,
, ,, примем за ось z, ось у направим так,
чтобы она пересекала ось т! в неко-
некоторой точке О', п проведем через эту
точку О' ось х', параллельную оси х
(рис. 344). Обозначим расстояние 00'
между осями z и z через I, а массу
данного тела — через М. Требуется
доказать, что
JV = Jz + Ml2.
Как известно из § 134, моменты инер-
инерции Jz и /Z' выражаются так:
Jz = S т. (х2+ у2)
и
Рис. 344. Л'=2т (х'2 + У'2)-
По формулам преобразования координат при параллельном пере-
переносе осей в данном случае имеем:
х' = х, г/ = у — I, z = z,
а потому
Jz, = 2т [Хг +(у- ZJ] =%т (х- + у2 - Ну + Г-) =
= V> (х2 + г/2) —2/2] ту + I2 V т = Jz — 11 V] ту + 141.
О
■*—1 —»-
Д
с
о'
г' /
ГЛ. 28 МОМЕНТЫ ИНЕРЦИИ 509
Но в § 128 мы имели равенство
£ш/ == Мус,
где ус—ордината центра тяжести тела, а так как по условию
центр тяжести тела совпадает с началом координат О, то ус = 0;
следовательно,
и потому
Jz. = JZ + Ml\ A47)
что и требовалось доказать.
Из формулы A47) следует:
Л- > Jj
отсюда заключаем, что из всех моментов инерции относительно
различных осей данного направления наименьшее значение имеет
момент инерции относительно оси, проходящей через центр тя-
тяжести тела.
Доказанной теоремой часто пользуются при вычислении мо-
моментов инерции. Покажем применение этой теоремы на двух про-
простых примерах.
Пример 144. Найти момент инерции тонкого однородного прямого
стержня АВ длины I относительно его центра тяжести (относительно сред-
средней точки С).
Решение. В предыдущем параграфе мы имели формулу A37) для
момента инерции стержня относительно его конца А:
так как расстояние АС = -=-, то, применяя доказанную теорему, полупим:
J -J
J A ~ J С "
отсюда находим:
Ml2 Ml2 Ml2 Ml2
Пример 145. Найти момент инерции однородного круглого тонкого
диска радиуса R относительно какой-нибудь точки А, лежащей на его
окружности.
Решение. По формуле A42) для момента инерции круга относительно
его центра О имеем:
MR*
Jo-~.
Так как расстояние ОА = R, то на основании формулы A47) полуаем:
JA = Jo + MR2 =
510
ДИНАМИКА
§ 137. Моменты инерции относительно осей,
пересекающихся в одной точке. Эллипсоид инерции
Из теоремы, доказанной в предыдущем параграфе, следует, что
для того, чтобы вычислить моменты инерции тела относительно
всевозможных осей, достаточно уметь находить момент инерции
относительно оси любого направления, проходящей через центр
тяжести тела.
Мы приходим, таким образом, к вопросу о вычислении мо-
моментов инерции относительно осей, пересекающихся в данной
точке, в частности в центре тяжести
тела. Примем какую-нибудь точку О
за начало координатных осей Oxyz,
направления которых выберем про-
произвольно (рис. 345).
Проведем через точку О какую-
нибудь ось OL, образующую с ко-
координатными осями данные углы а,
^_ р и у, и вычислим момент инерции
тела / относительно этой оси. Ра-
Разобьем данное тело на элементарные
материальные частицы и обозначим
Р„с. 345. координаты одной из таких частиц а
через х, у и z, ее расстояние от на-
начала О обозначим через г, а расстояние от прямой OL — через к.
Тогда
J = 2 mh2,
где т — масса частицы.
Из аналитической геометрии известно, что расстояние к точки а
от прямой OL, проходящей через начало координат и образующей
с осями углы а, |3 и у, определяется следующей формулой:
к2 = (у cosy — zcos
(z cos а — х cosyJ -j- (x cosp1 —у cos аJ.
Раскрывая скобки и делая приведение, получим:
/г2 = cos2a {у2 + z2) +cos2p (z2 + х2) + cos2-у (х2 + у2) —
— 2 cos p cos у -yz — 2 cos у cos a • zx — 2cos a cos |3 • xy.
Следовательно,
/ = 2жЛ2 = cos2a £m (y2 + z2) + co&2 0 £m (z2 + x2) +
-f- cos2 у Yjn (%2 + У2) — 2 cos P cos у 2 niyz —
— 2 cos у cos a £ mzx — 2 cos a cos p" 2 mxy.
Суммы
%т(у2+ г2), Zm(z2 + x2),
m
г/2)
ГЛ. 28. МОМЕНТЫ ИНЕРЦИИ
511
представляют собой, как известно из § 134, моменты инерции дан-
данного тела Jx, Уу и У2 относительно координатных осей х, у и z;
величины же
называются иентробежными моментами инерции тела и обозна-
обозначаются соответственно через Jyz, J1X и Jsy; эти моменты могут
быть вычислены при помощи определенных интегралов анало-
аналогично тому, как мы вычисляли в § 135 моменты инерции Jx,
Jy и Jz. Если введем обозначения
У* =
(У2 + z2) = Л, Уу =
У, =
m
2 myz =
(z2 + z2) = В,
ху = S тху = F,
то предыдущее равенство перепишется так:
У = A cos2 a + 5 cos2 p -f- С cos2 у — 2D cos p • cos у —
— 2Е cos у cos а — 2F cos а cos p. A48)
Проводя через точку О прямые под разными углами а, р1, у
к координатным осям, мы можем по формуле A48) вычислять
моменты инерции относительно
каждой из этих осей при условии,
что шесть коэффициентов этой фор-
формулы А, В, С, D, E nF известны.
Чтобы дать наглядную геоме-
геометрическую интерпретацию зависи-
зависимости этих моментов инерции от
углов а, Р и у, аналитически выра-
выражаемую формулой A48), сделаем
следующее построение: проведем
из точки О полупрямые по всевоз-
всевозможным направлениям и на каж-
каждой из них отложим в каком-
нибудь масштабе отрезок ОК =
= 1 : У J, где У есть момент инер-
инерции тела относительно той оси, по
которой направлен этот отрезок; таким образом, каждой полу-
полупрямой, проведенной из точки О, будут соответствовать опреде-
определенный отрезок ОК и, следовательно, определенная точка К
(конец отрезка). Постараемся найти геометрическое место этих то-
точек К (рис. 346).
Рис. 346.
512 ДИНАМИКА
Если обозначим через х, у, z координаты точки К, принадлежа-
принадлежащей оси OL, которая образует с координатными осями углы a, (i
и у, то
х = OK- cos а, у — OK-cos p, z = OK-cosy,
или
cos а cos й cos ч
x" yVJ Vi'
Отсюда
cos a = x У~]', cos p = yV~J, cosy =
Подставляя эти значения в уравнение A48) и сокращая его на
общий множитель /, получим:
Ах2 + Вуг + Cz2 — 2Dyz — 2Ezx — IFxy = 1. A49)
Так как координаты х, у, z точки К удовлетворяют уравне-
уравнению A49), то точка К принадлежит поверхности, выражаемой
этим уравнением. Это уравнение является, следовательно, урав-
уравнением искомой поверхности, на которой расположены точки К.
Из уравнения A49) следует, что эта поверхность есть центральная
поверхность второго порядка с центром в начале координат. Из
самого способа построения этой поверхности видно, что радиусы-
векторы всех ее точек имеют конечную величину, так как / Ф О,
и, следовательно, ОК не может обращаться в бесконечность.
Отсюда приходим к заключению, что эта поверхность представляет
собой эллипсоид, который называется эллипсоидом инерции !).
Из равенства
ОК = 4=
VJ
следует, что
г _
J
ОК*
т. е. момент инерции относительно оси, проходящей через точку О,
обратно пропорционален квадрату радиуса-вектора точки пере-
пересечения этой оси с эллипсоидом инерции.
§ 138. Главные оси инерции
Из аналитической геометрии известно, что всякий эллипсоид
имеет три взаимно перпендикулярные оси и что уравнение эллип-
эллипсоида, отнесенное к его осям, не содержит членов с произведе-
произведениями координат. Оси эллипсоида инерции, построенного для
произвольно выбранной точки О, называются главными осями
1) В частном случае эта поверхность может оказаться шаром.
ГЛ. 28 МОМЕНТЫ ИНЕРЦИИ 513
инерции тела в этой точке О. Следовательно, в каждой точке
имеются три взаимно перпендикулярные главные оси инерции.
Если примем главные оси инерции в точке О за координатные оси
ftEjj/jZj, то три последних члена в левой части уравнения A49)
эллипсоида инерции исчезают, т. е. коэффициенты D, E aF обра-
обращаются в нуль; отсюда следует, что если координатные оси сов-
совпадают с главными осями инерции в данной точке, то центро-
центробежные моменты инерции равны нулю, т. е.
•Л/izi = Jz&i = Jxtvi — 0.
Поэтому, если проведем через какую-нибудь точку О ось, обра-
образующую углы а, р, у с главными осями инерции в этой точке, то
момент инерции / относительно этой оси на основании формулы
A48) будет равен
/ = 41cos2a+ Bx cos2p + Ctcos2Y. A50)
Здесь А-у, Вг и Сг обозначают моменты инерции тела относительно
главных осей инерции в точке О.
Эллипсоид инерции, построенный для центра тяжести тела,
называется центральным, а его оси называются главными цент-
центральными осями инерции. Теперь нетрудно показать, что для
вычисления момента инерции тела относительно какой угодно
оси достаточно знать направления трех главных центральных
осей инерции тела, которые мы обозначим через |, г\ и £, и моменты
инерции J JЛ и /,. относительно этих осей. В самом деле,
пусть требуется вычислить момент инерции /' относительно
произвольно выбранной оси Z/, направление которой образует
с главными центральными осями инерции углы а, р1 и у. Прове-
Проведем через центр тяжести тела ось L, параллельную оси L'\ расстоя-
ние*между этими осями обозначим через I. Если момент инерции
относительно оси L обозначим через /, то по теореме предыду-
предыдущего параграфа имеем:
/' = / + Ml2;
с другой стороны, по формуле A50)
/ = /, cos2 a + J^ cos2 p + /c cos2 y,
поэтому предыдущее равенство принимает вид
/' = /£ cos2 a + Л, cosap + /,. cos2v + Ml2. A51)
Мы видим отсюда, какую важную роль играют главные цент-
центральные оси инерции и как важно уметь находить их направ-
направление.
В общем случае определение направления главных централь-
центральных осей инерции тела представляет собой довольно сложную
17 п. м, воронков
514 ДИНАМИКА
задачу. Но если тело имеет симметричную форму, то эта задача
упрощается, что видно из следующих двух теорем.
Теорема I. Если тело имеет плоскость симметрии, то
одна из главных центральных осей инерции перпендикулярна
к этой плоскости (и, следовательно, две другие оси лежат в этой
плоскости).
Действительно, если тело имеет плоскость симметрии, то, как
известно из статики, центр тяжести его лежит в этой плоскости.
Возьмем начало координат О в центре тяжести тела, плоскость
симметрии примем за координатную плоскость Оху, а ось z на-
направим перпендикулярно к этой плоскости. Тогда в силу сим-
симметрии каждой элементарной частице a'k (x'k, Ук, zh) тела с массой
mh соответствует частица а£ (хЦ, у'к, z£) с массой т"к, причем
т'к — ml, Xh = х"к, yh = у"к и zk — — z£.
Разбивая все тело на такие попарно симметричные элементар-
элементарные частицы, составим центробежный момент инерции Jyz, кото-
который будет равен
Jyz = D = £ (m'hyhz'h + m'ky'kZk)
или
D = v; (ntkykzk — m'ky'bZk) = 0;
точно так же докажем, что
J,* = E = 0.
Поэтому уравнение центрального эллипсоида инерции принимает
вид
Ах2 + By2 + Cz2 — 2Fxy = 1.
В этом уравнении нет членов, содержащих z в первой степени,
а это значит, что ось z является осью этого эллипсоида и, следова-
следовательно, является одной из главных центральных осей инерции
тела, что и требовалось доказать.
Аналогично можно доказать и вторую теорему:
Теорема II. Если тело имеет ось симметрии, то эта ось
является его главной центральной осью инерции.
Докажем теперь еще следующую теорему:
Теорема III. Если одна из главных осей инерции тела
в какой-нибудь точке О проходит через центр тяжести этого
тела, то она является главной центральной осью инерции.
Доказательство. Построим в точке О систему коор-
координатных осей xyz, причем ось z направим по одной из главных
осей инерции тела в этой точке О (рис. 347); тогда члены в урав-
ГЛ. 28 МОМЕНТЫ ИНЕРЦИИ
515
нении эллипсоида инерции, содержащие г в первой степени,
должны исчезнуть и, следовательно,
D = £ туг = О
и
Е = % mzx = 0.
Пусть центр тяжести тела О' лежит на оси z, причем 00' = ft.
Построим в точке О' вторую систему осей х', у', z', параллельных
осям х, у, z (ось z' совпадает с осью z), и составим центробежные
моменты инерции:
D' = %my'z' н Е' = Smz'x'.
Так как х' — х, у' = у и z' = z — ft, то
/)' = Ц ro/(z — ft) = £myz — ft J^my =
= D — hVmy =— ft v тег/
и
E' — £
Ho
г(г')
— ft) a; =
= £ — ft 2 mx — — h H mx-
= My (у и
Рис. 347.
где М — масса тела, а х<у и г/о' — координаты его центра тяжести.
Так как центр тяжести тела О' по условию лежит на оси z, то
хо' = I/O' = 0, а потому
D' = 0 и Е' = 0;
отсюда следует, что ось z является главноп осью инерции в точке О',
и теорема доказана.
Если данное однородное твердое тело представляет собой тело
вращения вокруг некоторой оси, то эта ось, являясь осью симмет-
симметрии тела, будет на основании теоремы II одной из его главных
центральных осей инерции; обозначим эту ось через £. Для такою
тела вращения моменты инерции относительно двух его других
главных центральных осей инерции | и г\ будут, очевидно, равны
между собой, т. е. /^ = /г Отсюда следует, что центральный
эллипсоид инерции такого тела есть эллипсоид вращения вокруг
оси £, а потому любая ось, проходящая через центр тяжести тела
и перпендикулярная к его оси вращения £, будет главной цент-
центральной осью инерции, и моменты инерции тела относительно
каждой из таких осей будут равны между собой. Примером такого
аела может служить круглый однородный конус.
Если моменты инерции тела относительно каждой из его глав-
главных центральных осей инерции равны между собой, т. е. /. =
= Jп = /с, то центральный эллипсоид инерции такого тела
17*
516
ДИНАМИКА
превращается в шар; в этом случае любая ось, проходящая через
центр тяжести тела, является его главной центральной осью
инерции, и моменты инерции тела относительно каждой из таких
осей равны между собой. Примером такого тела может служить
однородный куб.
ГЛАВА 29
ДИНАМИКА ТВЕРДОГО ТЕЛА
§ 139. Вращение твердого тела вокруг неподвижной оси
Представим себе твердое тело с двумя закрепленными точка-
точками О и Ог (рис. 348), на которое действует заданная система
сил Flt F2, ..., Fn. Такое тело может иметь только вращатель-
вращательное движение вокруг неподвижной
оси OOV
Задача, которую мы рассмотрим
в этом параграфе, состоит в том,
чтобы: 1) зная силы Fk, найти за-
закон вращательного движения тела и
2) определить реакции закрепленных
точек О и Ov
Для решения этой задачи при-
применим принцип Даламбера. Разбив
данное тело на элементарные части-
частицы, приложим'к каждой частице нор-
нормальную силу инерции F™, направ-
направленную по радиусу вращения частицы
от оси вращения, и тангенциальную
силу инерции F™, направленную
перпендикулярно к радиусу враще-
вращения частицы противоположно тан-
тангенциальному ускорению этой ча-
частицы. Обозначим массу частицы А
через т, а ее радиус-вектор — через
г (рис. 348).
Возьмем начало координат в од-
одной из закрепленных точек О, ось z
направим по оси вращения тела, а оси х и у направим про-
произвольно, причем будем предполагать, что эти оси связаны с дан-
данным телом и, следовательно, вращаются вместе с ним. Расстоя-
Расстояние ООХ между закрепленными точками обозначим через 1г. Реак-
Реакции Rq и Дс^закрепленных точек разложим по осям координат
Рис. 348.
ГЛ. 29 ДИНАМИКА ТВЕРДОГО ТЕЛА 517
и обозначим их составляющие соответственно через Хо, У о, %о и
■Хои Fo,, Zq,.
Если обозначим вектор угловой скорости тела через <о, то,
принимая во внимание, что этот вектор направлен по оси враще-
вращения z, будем иметь:
(о = шк,
где к есть орт оси z. В этом равенстве под со нужно понимать ал-
алгебраическое значение угловой скорости, т. е. проекцию вектора
to на ось z; при вращении тела вокруг оси z в направлении, обрат-
обратном движению часовой стрелки, если смотреть с положительного
конца оси z, со будет больше нуля; в противном случае ю имеет
отрицательное значение.
Дифференцируя предыдущее равенство по времени, получим
угловое ускорение тела:
dto _ da> . _ ,
6 ~ а — ъ к ~е/с>
где Е== Тг
Согласно принципу Даламбера, заданные силы Fk, реакции
закрепленных точек и силы инерции всех материальных частиц
данного тела уравновешиваются. Поэтому составим шесть извест-
известных из статики уравнений равновесия сил, приложенных к твер-
твердому телу; для этого приравняем нулю сумму проекций всех
этих сил на каждую из трех координатных осей и сумму их мо-
моментов относительно каждой из этих осей.
Составим сначала суммы проекций на координатные оси сил
инерции. Если обозначим касательное ускорение точки А через
Как известно из кинематики (§ 73), касательное ускорение ю,
равно векторному произведению векторов в и г, т. е.
wT = eXr;
следовательно, F*a =—m(eXr), или после замены 8 через е&
F"H =— тг(к Хг) == тг (rXft);
но так как
г = xi + yj + zk,
где х, у и z обозначают координаты точки А, т0
/чш= те (х; _j_ yj _|_ ж) а к.
518 ДИНАМИКА
Производя умножение и принимая во внимание, что ixk — —/,
jXk = i и кХк = 0, получим:
FT = тг (yi - xj).
Из этой формулы разложения вектора F^H по координатным
д „ осям следует, что его проекции на эти оси равны
у Fxx = теу, Fxy =— тгх, F хг = 0.
Нормальное ускорение точки А равно по модулю
wn = О'А ■ ю2,
где О'А есть радиус вращения точки А; следо-
следовательно, нормальная сила инерции равна по
модулю
Г1ИН r\/ t О
гп = ти Аи>",
а так как направление этой силы совпадает с направлением век-
вектора О'А, то
FT = ти'СУА.
Если обозначим через а проекцию точки А на плоскость Оху
(рис. 348 и 349), то будем иметь:
О'А = Оа = xi -f- yj;
следовательно,
FT = тш2 (xi + yj).
Из этой формулы следует, что проекции силы F"H на координатные
оси равны
, Z1™ = 0.
Составляя теперь суммы проекций сил инерции на координатные
оси и распространяя это суммирование на все частицы данного
аела, получим:
ZF^ = 0;
=— 2 "«re =— е S тх,
EF» = 0.
Но по формулам A02) (§ 128) имеем:
2 тх = Мхе и Jffli/
ГЛ 29. ДИНАМИКА ТВЕРДОГО ТЕЛА 519
где М — масса данного тела, а хс и ус — координаты его центра
тяжести. Следовательно,
Z = Мхсш2,
Проектируя теперь на координатные оси заданные силы Fk и реак-
реакции в точках О и Ох, получаем первые три уравнения рассматри-
рассматриваемой задачи в следующем виде:
Fy + Yo
Xot
YOl
-f Mi
+ Mj
£F
+ Zo
■ Myce
Mxc&
+ zOl
= 0,
= 0,
= 0.
A52)
Остается составить еще три уравнения, приравнивая нулю суммы
моментов сил Fk, реакций в точках О и Ог и сил инерции относи-
относительно каждой из трех координатных осей. Найдем сначала мо-
моменты сил инерции £JjIH и F1™ относительно этих осей. По известным
из статики (§~40)~$ормулам для моментов силы относительно коор-
координатных осей имеем:
тх (FT) = yF% - zFZ
my (FT) = zFZ - xF™
mz (FT) =0');
mx (F"(f) = yF^ - zF™ = таг,
mv (FT) = zFZ - xF™ = mzye,
m2 (ff) = x/'™ - yF™ = — тгх* - жег/2 =- me, (x2 + if).
Следовательно,
2 mx (O =- S mzya* =- co2^ mzy,
v my (FD = Ц mzxco2 = to2 Ц mzx,
v Wz (FD = 0;
£ »!„ (F?H) = S razxe = e v; mzi,
v mv (FTH") = v; mz?/8 = e £ mzy,
v mz (FT) = -Sme (x2 + if) =- e 2] m (^2 + г/2).
Выражения V]mzy n £mzx представляют собой, как известно
из предыдущей главы, центробежные моменты инерции данного
') Так как сила F™ пересекает ось z, го ее момент относительно этой оси.
равен нулю.
520 ДИНАМИКА
тела / и Jzx (§ 137). Обозначая эти моменты соответственно
через D и Е, получим:
£ тх (FT) =- Dm\ S my (FT)
2 тж (^»н) = Ев, 2 my (F?H) = £»е.
Сумма 2те (#2 ~Ь 2/2) есть момент инерции тела относительно оси ъ
(§ 134), т. е. Ът (х2 -\- у2) = J2, а потому
Smz(KH) =-/2-в.
Моменты реакций, приложенных в начале координат О, и мо-
моменты силы Zot, линия действия которой проходит через точку О,
относительно каждой из координатных осей будут равны нулю,
так как линии действия этих сил пересекают каждую из этих осей.
Моменты же сил Xot и Yo{, приложенных в точке Оъ как легко
видеть из рис. 348, выражаются так:
™* (уод =- hYOl, my (YOl) = mz (YOi) = 0;
my (XOl) = hXOl, mx (XOl) = mz (XOl) = 0.
Таким образом, получаем следующие три уравнения:
£ mx (F) - hYOl - £>ю2 + Ег = 0, \
S my (F) + hXOl + Еа>2 + De = 0, A53)
2 m, (F) - /2е = 0. J
Полученные шесть уравнений A52) и A53) дают решение по-
поставленной в начале этого параграфа задачи.
Так как эти уравнения составлены по отношению к подвиж-
подвижным осям, связанным с телом, то входящие в них величины D, Е,
хс и ус являются постоянными.
Из кинематики известно (§ 72), что положение твердого тела,
вращающегося вокруг неподвижной оси, определяется углом
между произвольно выбранной неподвижной плоскостью, прохо-
проходящей через ось вращения тела, и подвижной плоскостью, свя-
связанной с телом и проходящей через ту же ось. Этот угол, отсчиты-
отсчитываемый от неподвижной плоскости в направлении, обратном дви-
движению часовой стрелки, если смотреть с положительного конца
оси вращения z, обозначим через ср; тогда
йф da> й2ф
Ш — Tt И Е ~~Ъ ~ IP-
Поэтому третье из уравнений A53) можно написать в виде
J^ = Zmz(F)- A54)
ГЛ 29 ДИНАМИКА ТВЕРДОГО ТЕЛА 521
Это дифференциальное уравнение второго порядка называется
дифференциальным уравнением вращательного движения твер-
твердого тела вокруг неподвижной оси.
Если проинтегрируем это уравнение, то сможем найти угловую
скорость тела со, а также найти выражение угла ц> в функции вре-
времени t, т. е. определить закон вращения тела под действием при-
приложенных к нему заданных сил Fk.
Если 2mz (^) =0' т0 е = ^ = 0 и> следовательно, со =
= const = со0, т. е. в этом случае будем иметь равномерное вращение
тела. Если 2 "*2 (F) = const, то
е = 1Пг(- >.= const;
следовательно, вращение тела в этом случае является равномерно
переменным.
Когда е и со найдены, то нетрудно определить реакции в точ-
точках О и Ог. Из первых двух уравнений A53) имеем:
XOl =- 1 [2 ту (F) + £со2 + De]
п
A55)
Подставляя затем эти значения в уравнения A52), определяем
из этих уравнений реакции Хо и Yo:
— Мусе =
Ус*) + -J- [2 ту (F) + Еа
\ A56)
Yo =- SFy - У01 - Мг/соз2 + Мхсе = j
= - i^B - М (г/соJ - хсе) -1 [S mx (F) -Доз2 + Ег]. I
Наконец, из последнего уравнения A52) находим:
20 + ZOl =~£FZ. A57)
Здесь мы встречаемся с той же неопределенностью, как и
в статике в случае равновесия тела с двумя закрепленными точ-
точками, так как мы можем определить лишь сумму величин Zo-\-Zolf
но не каждую из них в отдельности.
При выводе уравнений A52) и A53) мы предполагали, что со-
составляющие сил До и JF?Oi направлены по осям координат в поло-
положительную сторону. Если же при решении этих уравнений мы
получим для некоторых из этих составляющих отрицательные
значения, то это будет указывать на то, что эти составляющие
в действительности имеют направление, противоположное тому,
которое принято на рис. 348.
522 ДИНАМИКА
§ 140. Случай вращения твердого тела вокруг его главной
центральной оси инерции. Изменение кинетической энергии
вращающегося твердого тела
Полученные в предыдущем параграфе формулы, определяющие
реакции Хо, Yo, XOi и YoL закрепленных точек тела, содержат,
кроме членов, зависящих от заданных сил Fh, еще члены, завися-
зависящие от со2 и е. Вследствие зтого при больших значениях со и е эти
реакции (а следовательно, и давления на подшипники, при по-
помощи которых закреплено вращающееся тело) будут достигать
большой величины, что является, конечно, нежелательным. По-
Поэтому представляется весьма важным выяснить, при каких усло-
условиях эти реакции, а следовательно, и давления на подшипники
будут зависеть только от приложенных к телу сил Fh и не будут
зависеть ни от со, ни от е. Для этого, очевидно, в уравнениях A52)
и A53) должны исчезать члены, содержащие (о2 и е, т. е. должны
быть выполнены следующие условия:
D = Е = 0
и
осе = Ус = 0.
Условия D = Е = 0 показывают, что ось вращения z есть одна
из главных осей инерции тела в точке О. Условия хс — ус = 0
показывают, что центр тяжести тела С лежит на этой оси z. Но
если эти условия выполнены, то по теореме III, доказанной в
§ 138, ось z будет являться одной из главных центральных осей
инерции тела.
Следовательно, для того чтобы давления, оказываемые вращаю-
вращающимся твердым телом на подшипники, не зависели ни от угло-
угловой скорости, ни от углового ускорения тела, необходимо и до-
достаточно, чтобы ось вращения тела совпадала с одной из его глав-
главных центральных осей инерции.
Выведем теперь уравнение, выражающее изменение кинети-
кинетической энергии твердого тела, вращающегося вокруг неподвижной
оси; этим уравнением часто приходится пользоваться при решении
задач, относящихся к вращательному движению твердого тела.
Возьмем уравнение A54) предыдущего параграфа:
Jz^ = Zmz(F) или Jzft = Mz.
Так как со = -~, то левую часть второго из этих уравнений можно
преобразовать так:
j A<й __ j day d<f _ j dot
Jt ~dt ~J* Щ ' Tt ~ J*(i> Щ'г
ГЛ 29 ДИНАМИКА ТВЕРДОГО ТЕЛА
следовательно, получаем уравнение
т da>
откуда
или
или
где 1 = Jz -у
— Mz- dq,
A58)
dT =
есть кинетическая энергия вращающегося твер-
твердого тела (§ 130), a Mz-dq> выражает, следовательно, сумму
элементарных работ всех сил, приложенных к этому телу, при его
иовороте на угол dq>. Отсюда, интегрируя, получаем:
ф у
Т—То=\ Мг d(f, или -г Jz (со2 — cog) = [ Мг ■ d(f. A59)
фо
фо
Это и есть уравнение, выражающее изменение кинетической энер-
энергии вращающегося твердого тела.
Если главный момент Мг выражен в функции угла поворота ф,
то, вычисляя интеграл, стоящий в правой части уравнения A59),
найдем из этого уравнения угловую
скорость со как функцию угла ф.
Рассмотрим несколько примеров
применения полученных результатон.
Пример 146. Однородный стержень
ОА длиной I и весом Р = Mg вращается
вокруг неподвижной точки О в вертикаль-
вертикальной плоскости под действием силы тяжести
(рис. 350). Найти угловое ускорение и
угловую скорость стержня, а также реак-
реакцию шарнира О, если в начальный момент
стержень отклонен от вертикали на угол
фо и отпущен без начальной скорости.
Решение. Направим оси координат
Ох и Оу, как указано на рис. 350. Ось вра-
вращения Oz будет перпендикулярна к плос-
плоскости чертежа; за положительное направ-
направление этой оси примем направление к читателю. Так как в данном случае
заданной силой является только сила Р, то
Mz = mz (P) =— Mg -2- sin ф.
Момент инерции сдержия относительно оси вращения Oz равен
Рис.
-3-.
524 ДИНАМИКА
Подставляя эти значения в уравнение A54) предыдущего параграфа, находим
угловое ускорение стержня:
; mz (P)
Для определения угловой скорости стержня применим теорему о кине-
кинетической энергии; так как со0 = 0, то будем иметь:
со2
Jo у = Mgh,
где h — вертикальное перемещение центра тяжести стержня, причем, как
видно из рис. 350,
h = у (cos ф — cos ф0).
Подставляя значения /0 и h, получим:
МРо>2 Mel ,
—g— = -у— (cos ф — cos ф0),
откуда находим:
(О2 = -j- (COS ф — COS фо)
| (О ] = 1/ -j- (COS ф — COS ф0) 1).
Определим теперь реакцию неподвижной точки (шарнира) О. При ука-
указанном на рис. 350 выборе осей Ох и Оу имеем:
Рх = Mg sin ф, Ру — Mg cos ф, хс = 0 и ус = у,
и уравнения A52) предыдущего параграфа принимают вид
Mg sin ф + Хо + еМ у = 0,
Afg cos ф + Yo + »2Л/ у = 0.
Из этих уравнений находим:
Хо =— М ( ^ е + gsiny
Yo = — M I g cos ф + -y-
Подставляя сюда найденные выше выражения для со2 и е, окончательно
получим:
/3 \ Р .
Хо = А/ I _- g sin ф — g sin ф = — г sin ф,
Г 3 1
Yo = — М g cos ф + у g (cos ф — cos фо) =
= — Mg (у cos ф — у cos ф0 j = — - E cos ф — 3 cos ф0).
х) Этот результат можно было бы, конечно, получить и из уравнения A59).
ГЛ. 29. ДИНАМИКА ТВЕРДОГО ТЕЛА
625
Когда стержень проходит через вертикальное положение, то ф = 0;
в этот момент реакция шарнира направлена по вертикали вверх и равна по
р
модулю — E—3 cos ф0). Если ф0 = 90°, то cos ф0 = 0, и реакция шарнира
в этот момент в 2х/2 раза больше веса стержня.
Пример 147. Физическим (или сложным)
маятником называется твердое тело, вращающееся
вокруг горизонтальной оси Oz под действием только
силы тяжести (рис. 351). Найти движение маятника
(ось Oz перпендикулярна к плоскости чертежа).
Решение. Обозначая расстояние ОС центра
тяжести маятника от оси вращения через а и вес
маятника через Р, причем Р = Mg, будем иметь,
как и в предыдущем примере:
Мг = тг (Р) «=— Mga sin q>,
где ф — угол отклонения маятника от вертикали,
отсчитываемый в направлении, обратном движению
часовой стрелки.
Поэтому дифференциальное уравнение A54) в
данном случае принимает вид
Jz -T-j- =— Mga sin ф. A60)
Рис. 351.
Это есть дифференциальное уравнение движе-
движения физического маятника. При малых отклонениях
маятника можно принять с достаточной точностью sin ф = ф; тогда получим
приближенное дифференциальное уравнение малых колебаний маятника
полагая здесь
Mgay,
A61)
Mga
приведем это уравнение к виду
+ /с2ф = 0.
Это есть уже известное нам дифференциальное уравнение гармонических
колебаний (см. § 115).
Интегрируя это уравнение в предположении, что начальная угловая ско-
скорость маятника равна нулю, получим: ф ■= ф0 cos (kt); это уравнение выражает
закон движения маятника при малых колебаниях. Отсюда следует, что пол-
полный период колебаний Т маятника приближенно равен
= ~ = 2я
Mga '
A62)
Так как для простого (математического) маятника период колебания при-
приближенно выражается формулой
Т = 2
526
ДИНАМИКА
где I — длина маятника, то из формулы A62) видим, что если простой маят-
маятник будет иметь длину
I =
Ma1
то он будет колебаться синхронно с данным физическим маятником.
Величина I = - - называется приведенной длиной физического маятника.
Пример 148. Однородное твердое тело, имеющее форму тела вращения
вокруг оси z , вращается с постоянной угловой скоростью со вокруг неподвиж-
неподвижной вертикальной оси z, проходящей через центр тяжести тела С. Опреде-
Определить горизонтальные реакции подпятника О и подшипника Ох, если угол
между осями ли z равен а (рис. 352).
Решение. Возьмем начало координат в центре тяжести тела С; гори-
горизонтальную ось у направим так, чтобы она лежала в одной плоскости с осями
ли z'■ Так как данное тело является телом
вращения вокруг оси z', то ось Сх (как
и всякая другая ось, проходящая через
центр тяжести тела и перпендикулярная
к оси z) будет одной из главных цен-
центральных осей инерции тела, а потому
Я = Е mxz = 0.
Из условия со = const следует, что е = 0;
так как, кроме того, центр тяжести тела
лежит на оси z, то хс = ус = 0.
Если обозначим расстояния СО и
СОХ соответственно через а и Ъ и поло-
положим а -\- Ъ = /;, то четыре пз уравнений
A52) и A53), содержащие искомые реак-
реакции X
О' * 0<
и
принимают в
данном случае следующий вид:
~bY
Oi
-Dn* = 0,
— аХ0 = 0;
Хо
=0,
Yo+ YOl = 0
где D = £ mzy.
Из второго и третьего уравнений
Рис. 352. находим:
Х0 — xOi = °-
следовательно, горизонтальные реакции в точках О и 01 будут параллельны
оси у. Далее, из четвертого уравнения имеем:
отсюда следует, что эти реакции равны по модулю и противоположны по
направлению, т. е. образуют пару сил, как показано на рис. 352. Подставляя
Yq вместо — Уо в первое уравнение, находим из него:
x) Первые два из этих уравнений отличаются от уравнений A53) чле-
членами, содержащими Xq и Yq потому, ято начало координат мы взяли в точке
С, а ие в точке О.
ГЛ 29. ДИНАМИКА ТВЕРДОГО ТЕЛА
527
Для вычисления центробежного момента инерции D проведем главную
центральную ось инерции Су', перпендикулярную к Cz' и лежащую в плос-
плоскости zCy (рис. 353). По известным из аналитической геометрии формулам
преобразования координат при повороте осей на угол а будем иметь:
у = у' cos а — z' sin а, z = у' sin а + z cos а.
Следовательно,
D = £ mzy = sin a ■ cos а £ ту'2 — sin а • cos а £ mz'2 +
+ cos2 а £ mzy' — sin2 а £ mzy'.
Но так как ось Су' является главной осью инерции теля, то £ mzy' = О,
а потому
D = -^ sin 2а (£ ту" — £ mz'2), г у'
или
D = ySi
Принимая во внимание, что
£ т (х'2 + у'2) = Jz, и £ т (х'2 + z'2)=Jy,,
получим окончательно:
D = у sin 2а (/2, — /,,).
Подставляя это значение в полученную выше формулу для Уо, находим:
(J,, — J,.,) sin 2a
Если JZ,<J ,, то направление силы Fo совпадает с отрицательным
направлением оси у.
§ 141. Плоскопараллельное движение твердого тела
Как известно из кинематики, плоскопараллельным движением
твердого тела называется такое движение, при котором расстояние
каждой точки тела от данной неподвижной плоскости остается по-
постоянным и при котором, следовательно, все точки тела движутся
в плоскостях, параллельных этой неподвижной плоскости.
Предположим, что данное твердое тело движется параллельно
некоторой неподвижной плоскости, которую примем за коорди-
координатную плоскость хОу, под действием системы сил Flt F2, ..., Fn')
(рис. 354).
Из кинематики известно также, что при плоскопараллельном
движении положение твердого тела определяется тремя парамет-
параметрами: двумя координатами какой-нибудь точки этого тела и углом
его поворота вокруг оси, проходящей через эту точку и перпен-
перпендикулярной к той неподвижной плоскости, параллельно которой
х) В эту систему, кроме заданных известных сил, могут входить и неиз-
неизвестные реакции связей.
528
ДИНАМИКА
движется данное тело. Будем определять положение движущегося
тела координатами хс и ус его центра тяжести и углом поворота ф
вокруг оси z', проходящей через центр тяжести С и параллельной
оси z1). Для определения плоскопараллельного движения тела
мы должны найти выражения этих трех параметров хс, ус и ф
в функциях времени t, для
чего необходимо составить
три дифференциальных урав-
уравнения.
Эти уравнения мы полу-
, чим, применяя, так же как
~ff и в § 139, принцип Даламбе-
ра. Проведем через центр тя-
тяжести С, кроме оси z', парал-
параллельной оси z, еще две другие
координатные оси х' и у',
предполагая, что эти оси
остаются все время парал-
параллельными неподвижным осям
х я у (рис. 354), так что дви-
движение подвижной системы
осей Cx'y'z', т. е. переносное
движение, будет поступатель-
поступательным. Тогда относительным
движением данного тела, т. е. движением его относительно по-
подвижной системы осей Cx'y'z', будет вращение вокруг оси Cz'.
Как известно из кинематики (§ 82), ускорение w каждой точки
тела при плоскопараллельном движении равно векторной сумме
двух ускорений: 1) переносного ускорения этой точки, равного
ускорению какой-нибудь точки тела, выбранной за начало по-
подвижной системы осей, т. е. в рассматриваемом случае равного
ускорению и>с точки С, и 2) относительного ускорения wT этой
точки, т. е. в данном случае ее ускорения во вращательном дви-
движении вокруг оси Cz'. Это относительное ускорение wr склады-
складывается в свою очередь из двух ускорений — нормального wrn и
касательного югт. Следовательно,
Рис. 354.
Если разобьем данное тело на элементарные материальные
частицы, то сила инерции каждой такой материальной частицы А,
массу которой обозначим через т, будет равна
FI1H = — mw = — т (wc + wrn + wrx) =
l) За положительное направление отсчета этого угла принимаем напра-
направление, обратное движению яасовой стрелки, если смотреть с положительного
конца оси z'.
ГЛ. 29. ДИНАМИКА ТВЕРДОГО ТЕЛА
529
или
Fhh
=
Рис. 355.
где F™ = — ти>с есть переносная сила инерции материальной ча-
частицы A, a Ffn——mwrn и ^Ан = —тюп обозначают соответ-
соответственно нормальную и касательную силы инерции этой частицы
в ее относительном движении, т. е. во
вращательном движении вокруг оси Cz.
Сечение данного тела плоскостью Сх'у'
и проекции этих сил инерции на эту
плоскость показаны на рис. 355; по-
понятно, что все силы инерции парал-
параллельны плоскости Сх'у', а потому их
проекции на эту плоскость равны самим
силам.
Из векторного равенства F"n=—mu>c
следует, что переносные силы инерции
материальных частиц тела параллельны
ускорению we, а следовательно, парал-
параллельны между собой, и, кроме того,
пропорциональны массам этих частиц, а потому эти силы при-
приводятся (так же как силы тяжести) к одной равнодействующей,
линия действия которой проходит через центр тяжести тела С
и которая равна
2 FfH = — £ mwc = -u)CSm = - Mwc,
где М — масса данного тела.
Согласно принципу Даламбера, силы Fk, приложенные к дан-
данному телу, и силы инерции всех его материальных частиц нахо-
находятся в равновесии; поэтому, пользуясь уравнениями статики и
приравнивая нулю суммы проекций всех этих сил на оси х' и у'
и сумму из моментов относительно оси Cz', получим нужные
нам три уравнения, определяющие плоскопараллельное движе-
движение тела.
Как мы видели в § 139, суммы проекций сил инерции F™ и F™
на оси х' и у' выражаются так:
с> 2 (*?■)„. = - Мхсе,
где со и е обозначают угловую скорость и угловое ускорение тела
во вращательном движении вокруг оси Cz'.
Так как начало осей Сх'у' z' совпадает с центром тяжести тела,
то х'с = у'с = 0. Поэтому все эти суммы равны нулю.
Далее, из равенства
530 ДИНАМИКА
следует, что суммы проекций сил F™ на оси х' и у' равны
Таким образом, получаем два следующих уравнения:
= 0,
Так как оси %' и у' параллельны осям х и у, то входящие в эти
уравнения проекции сил Fh и ускорения и>с можем заменить рав-
равными им проекциями на неподвижные оси % ту. Сделав эту замену,
получим:
Но
d-x
c
а потому предыдущие уравнения принимают вид
A63)
Заметим, что эти уравнения мы могли бы сразу получить из
теоремы о движении центра масс системы.
Переходим к составлению уравнения моментов сил относи-
относительно оси Съ'. Моменты сил F™ относительно этой оси равны,
очевидно, нулю, так как все эти силы пересекают эту ось. Сумма
моментов сил F™ по теореме Вариньона равна моменту их равно-
равнодействующей, а так как линия действия этой равнодействующей
проходит через точку С, то ее момент относительно оси Съ равен
нулю, а потому
2 ТПсг' (К") = 0.
Сумма моментов сил F™ относительно оеи Cz' согласно сказанному
в § 139 равна
где Jcz' — момент инерции тела относительно оси Cz'.
Таким образом, приходим к уравнению
2 mCz. (F) - JCz* = 0,
или
A64)
ГЛ. 29. ДИНАМИКА ТВЕРДОГО ТЕЛА 531
Так как со = ^, то это уравнение можно представить еще в виде
Jcz-$ = 2mCz-(F). A64')
Итак, мы получили три уравнения:
^ £ y /c,.-^ = SmC2.(F), A65)
которые представляют собой дифференциальные уравнения пло-
плоскопараллельного движения твердого тела. Интегрируя эти диф-
дифференциальные уравнения второго порядка, найдем хс, у с и ф
в функциях от t и, следовательно, найдем движение тела. Если
в число сил Fh будут входить неизвестные реакции связей, то
для определения движения тела, кроме уравнений A65), нужно
принимать во внимание дополнительные условия, которые данные
связи налагают на движение тела.
Рассмотрим один частный случай. Допустим, что вначале тело
находится в покое, и пусть 2 f^Cz' (F) = 0. В таком случае а>о = 0.
а уравнение A64) принимает вид
Jcz'-dt=O или dt = 0;
из этого уравнения следует, что
со = const = сй„ = 0;
отсюда заключаем, что тело в этом случае движется поступательно.
Выведем теперь формулу для кинетической энергии твердого
тела при плоскопараллельном движении. Для этого найдем мгно-
мгновенный центр вращения С плоской фи-
фигу ры,представляющей собой сечение дан-
данного тела плоскостью Сх'у (рис. 356).
Из кинематики известно, что мгно-
мгновенный центр вращения такой плоской
фигуры лежит на перпендикуляре, вос-
восставленном в точке С фигуры к ско-
скорости vc этой точки, на расстоянии
v с
СС = — от точки С, где w есть угло-
угловая скорость вращения фигуры вокруг Рис. 356.
точки С, или, что то же, угловая ско-
скорость, с которой вращается данное тело вокруг оси Cz', проходя-
проходящей через С и перпендикулярной к плоскости фигуры (§ 79).
Вращение тела вокруг мгновенной оси, проходящей через С и
параллельной оси Cz', происходит с той же угловой скоростью и>,
как и вокруг оси Cz'.
532
ДИНАМИКА
Поскольку движение данного тела теперь можно рассматривать
как вращение вокруг мгновенной оси, которую обозначим через
C'z", то, чтобы найти кинетическую энергию Т этого тела, до-
достаточно вычислить его кинетическую энергию в этом вращении;
эта энергия равна половине произведения квадрата угловой ско-
скорости тела на момент инерции его относительно оси вращения;
следовательно, будем иметь:
где Jc'z" — момент инерции тела относительно мгновенной оси
вращения. Но по теореме о зависимости между моментами инер-
инерции относительно параллельных осей (§ 136) имеем:
а потому
Подставляя сюда вместо СС его значение, получим:
A66)
Эта формула определяет кинетическую энергию твердого тела при
плоскопараллельном движении: если тело движется параллельно
данной неподвижной плоскости, то его кинетическая энергия равна
сумме кинетической энергии центра тяжести в предположе-
предположении, что в нем сосредоточена
вся масса тела, и кинетической
энергии тела в его вращатель-
вращательном движении вокруг оси, про-
проходящей через центр тяжести
и перпендикулярной к данной
неподвижной плоскости.
Рассмотрим несколько при-
примеров, относящихся к случаю
плоскопараллельного движения
тела.
Рис- 357. Пример 149. Однородный
круглый цилиндр радиуса г и массы
М скатывается без скольжения под действием силы тяжести по негладкой
плоскости, наклоненной к горизонту под углом а (рис. 357). Найти уско-
ускорение центра тяжести цилиндра, а также условие, при котором возможно
качение цилиндра без скольжения.
Решение. На цилиндр действуют следующие силы: вес Р, нормальная
реакция N плоскости, линия действия которой проходит через центр тяжести
цилиндра С, и сила трения F, направленная вверх по наклонной плоскости.
ГЛ. 29. ДИНАМИКА ТВЕРДОГО ТЕЛА 533
Взяв координатные оси, как указано на рис. 357, составим три дифферен-
дифференциальных уравнения движения цилиндра:
d2x
1) М -~ = Mg sin a—F,
2) М-£= Mg cos a-N,
3) JC <g- = Fr,
где Jc есть момент инерции цилиндра относительно оси, проходящей нереэ
его центр тяжести С и перпендикулярной к плоскости хОу.
Так как во все время движения ус = 0, то
dt* -"•
следовательно, из второго уравнения получаем:
N — Mg cos a = Р cos a.
Так как цилиндр катится без скольжения, то vc == га и, следовательно,
d*xc = dvC = da
dt2 ~ dt ~ Г dt '
Поэтому первое из дифференциальных уравнений принимает вид
Mr —г— = Mg sin a — F.
Исключая .F из этого уравнения и уравнения 3), получим:
(Mr2 + Jc) -, - = Mgr sin a,
или
Mr1
так как для однородного цилиндра Jс = ——. Отсюда находим:
Следовательно, искомое ускорение центра тяжести цилиндра будет равно
dvc da 2
Из уравнения 3) находим силу трения:
„ ^с da Mr da 1 „, . P .
F = -r~w = т ж =тMgsma = Tsma-
На основании закона Кулона имеем:
534 ДИНАМИКА
где / — коэффициент трения; заменяя здесь F и N найденными значениями,
получим:
-~- P sin a ^ /P cos а,
О
откуда
Это неравенство является условием возможности качения цилиндра бея
скольжения.
Пример 150. Определить при условиях предыдущего примера ускоре-
ускорение центра тяжести цилиндра, применяя теорему о кинетической энергии.
Решение. Кинетическая энергия цилиндра по формуле A66) будет
равна
T = ~MVc + ± Jc со2 = ~ (Mv-C + у
+ i '*<»■) = 2 М Ус + 2" "с
Обозначим путь, пройденный точкой С, через s\ так как угол между
направлением силы Р и скоростью vc равен 90° — а, то работа этой силы
на пути s будет равна Mgs sin а. Работа же сил N п F равна нулю ').
Если вначале цилиндр был неподвижен, то Та = 0, и уравнение, выра-
жающее теорему о кинетичоской энергии, принимает вид
-г Mv°q = Mgs sin а, или - vfc = gs sin а.
Дифференцируя это уравнение по времени, получим:
3 dvc _ ds
-г. vo —,— = g sin a , ,
2 c dt ь dt
r\ ds
Отсюда, заметив, что = vc, находим искомое ускорение:
vc, 2
Г = шс = "з еsln a-
= vc,
dvc
Пример 151. Однородный стержень АВ длиной 21 п весом Р опн-
„ рается концом А на гладкий горизонтальный
" I/ пол. Вначале стержень образует с полом
угол в 60° и находится в покое, а затем начи-
начинает падать. Определить траекторию конца В
стержня и давление стержня на пол в момент
начала движения (рис. 358).
Решение. Возьмем оси координат, как
х указано на рис. 358, при этом ось у выберем
V////)//////,ff/////!/l'//////. *~ так> чтобы она проходила через начальное
положение центра тяжести стержня. Угол стер-
Рис. 358. жня с вертикалью обозначим через q>, а нор-
нормальную реакцию пола в точке А — через N.
Будем обозначать для краткости первые и вторые производные по вре-
времени одной и двумя точками. Тогда дифференциальные уравнения движения
1) Работа силы трения F равна нулю потому, что при качении цилиндра
скольжения скорость точки А, в которой приложена эта сила, равна нулю.
ГЛ. 29. ДИНАМИКА ТВЕРДОГО ТЕЛА 535
стержня напишутся в следующем виде:
1) Л1хС = О,
2) Мус = N - Р,
3) Jc Ц = IN sin ф.
Из уравнения 1) следует:
X(j — Const = Xq',
но так как в начальный момепт стержень неподвижен, то будем иметь:
*с = °
и, следовательно,
Отсюда, интегрируя, находим:
хс = 0.
хс = const = x'q,
но так как по условию в начальный момент центр тяжести стержня лежит
на осч у, то
*с" = 0
и, следовательно,
*с=0.
Этот результат показывает, что при падении стержня его центр тяжести
движется по оси у. Обозначив теперь координаты точки В через х и у, из
чертежа находим:
х = — I sin ф, у = 21 cos ф.
Исключая отсюда ф, получим уравнение траектории точки В:
следовательно, точка В описывает эллипс с полуосями I и 21.
Для определения искомой начальной реакции пола iV0 обращаемся к диф-
дифференциальным уравнениям 2) и 3). Так как в эти уравнения входят три
неизвестные величины: N, у'с и 8, то для решения задачи нужно иметь еще
одно уравнение; это дополнительное уравнение можно получить, установив
зависимость между ус и 5. Из треугольника АСО имеем:
ус = I cos ф;
отсюда дифференцированием по t получаем:
ус = — I sin ф • i и ус = — I (sin ф • (р + cos ф • £2)-
Так как вначале стержень неподвижен, то его начальная угловая ско-
скорость равна нулю, т. е. ^>0 = 0, и, следовательно,
где ф0 обозначает начальное значение угла ф, а <?0 есть начальное значение
углового ускорения стержня. Кроме того, для момента инерции стержня
относительно точки С имеем:
JC = 12 М = ~Г •
х) См. пример 144 в $ 130.
536 ДИНАМИКА
Подставляя эти значения в дифференциальные уравнения 2) и 3), получим:
Ml
Р — Na — Ml sin ф0 ■ tf0, JV0 sin ф0 = -j- tp0.
Отсюда, исключая if0, приходим к уравнению
Р - Nu = Мй sin2 Фо>
из которого находим:
^° = 1 + 3 sin2 ф0*
Так как по условию задачи ф0 = 30° и, следовательно, sin2 ф„ = -т-, то
iV» = у Р-
Таким же по модулю будет и давление стержня на пол в начальный момент.
ГЛАВА 30
МЕТОД ОБОБЩЕННЫХ КООРДИНАТ
§ 142. Обобщенные координаты системы
Обобщенными или лагранжевыми координатами данной меха-
механической системы называются такие независимые друг от друга
параметры, при помощи которых можно в любой момент опреде-
определить положение этой системы и, следовательно, выразить декар-
декартовы координаты всех ее
точек через эти параметры.
Число этих независи-
независимых параметров опре-
определяет число степеней
г£ у * х свободы данной системы.
Рассмотрим, например,
кривошипно-шатунный ме-
Рис. 359. ханизм, состоящий из кри-
кривошипа О А = г, шатуна
АВ = I и крейцкопфа В (рис. 359). Положение этого механизма,
очевидно, вполне определяется одним параметром: углом пово-
поворота ф кривошипа. Координаты точек А и В выражаются через
Ф, как легко видеть из чертежа, следующим образом:
хх = г cos ф, ух = г sin ф,
х2 = г cos ф -f- \Г12 ~~ г2 sin2 ф, уг = 0.
В данном случае мы имеем систему с одной степенью свободы.
ГЛ 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ
537
В качестве второго примера возьмем центробежный регулятор
(рис. 360). Положение этой системы определяется двумя парамет-
параметрами: углом ф поворота регулятора вокруг вертикальной оси z,
отсчитываемым от плоскости zOx, и углом а между этой осью и
стержнями ОМХ или ОМ2. Эта система имеет, следовательно,
две степени свободы. Если длину стержней ОМХ и ОМ2 обозначим
через 1Х, а длину стержней МХМ3 и
М2М3 — через 12, то декартовы коорди-
координаты точек Мх, М2 и М3 будут равны
xx — lx sin a cos ф,
yx = lxsin a sin ф,
zi == h cos a>
x2 —— lx sin a cos ф,
у2 =— lx sin a sin ф,
z2 = lx cos a,
%з = 0, y3 = 0,
z3 = lx cos a -f- У l\ — l\ sin2 a.
Твердое тело, вращающееся вокруг не-
неподвижной точки, представляет собой
систему с тремя степенями свободы, так как положение такого
тела определяется, как известно из кинематики (§ 84), при помощи
трех независимых параметров — трех углов Эйлера.
Рассмотрим теперь общий случай системы, состоящей из п
материальных точек и имеющей к степеней свободы. Обозначим
обобщенные координаты этой системы через qx, q%, ..., qk.
Тогда декартовы координаты каждой точки М{ (х{, yit zt) си-
системы могут быть выражены как функции параметров о,-, т. е.
г (?1, ?2. •••, ?а). Уг = Уг (?1, ?а. •••. ?ft).
z, = Ц (qx, q2,-..,qh) (г = 1, 2, ..., л).
A67)
Так выражаются декартовы координаты точек системы через ее
обобщенные координаты в том случае, когда на систему наложены
стационарные геометрические связи, т. е. такие связи, в уравнения
которых время t не входит (§ 120). Если же связи, наложенные на
систему, являются нестационарными, то в уравнения этих свя-
связей входит в качестве аргумента время t, а потому оно будет
входить и в правые части уравнений A67), т. е. в этом случае
будем иметь:
хг = Xi \4li Чг-i •••■> <7/ti 0> Уг ~ Уг Wb ?2i •••! 4ki 0>
\ = zi (?i, ?2, •••, qh, 0. (* = 1. 2, ..., п). A68)
Если исключим из этих Зп уравнений или из уравнений A67)
538 ДИНАМИКА
к параметров qlt qit ..., qk, то получим Зп — к уравнений между
координатами хи уг, z4, т. е. получим соответственно уравнения
нестационарных или стационарных связей, о которых говорилось
в § 120 [уравнения (90) или уравнения (89)].
§ 143. Условия равновесия системы
в обобщенных координатах
Пусть данная механическая система, на которую наложены
стационарные геометрические связи, имеет к степеней свободы и
находится под действием заданных сил Fi (i = 1,2,..., п), прило-
приложенных в точках Мг (xt, г/;, z;). Обозначая обобщенные координаты
этой системы через qu q%, ..., qk, согласно сказанному в предыдущем
параграфе будем иметь:
Х1 = х\ (?1, ?2. ■••> ?А). Уг = ?/г(?1. <Ь> ••'» ?л).
Ч = Zi (?1. </2.---, <7й) (г = 1» 2,..., П).
Всякой (произвольной) системе значений параметров glt q2, ..., qk
в определенной области их изменения соответствует определенное
положение данной механической системы. При бесконечно малых
изменениях этих параметров данная система получает соответ-
соответствующие возможные перемещения. Если элементарные изменения
(вариации) обобщенных координат обозначим через 6^, bq2,..., bqk,
то вариации декартовых координат точек М{, определяющие
возможные перемещения этих точек, находятся из предыдущих
равенств как полные дифференциалы функций xt, yt, z{ от к неза-
независимых переменных qx, q2, ..., qk, т. е.
Ьх^ ^bq+ ^bq+ + ^bq
A69)
г Oo-t-
- OO2 + ... + „— Oft !
% чг ' dqh ^h )
(i = 1, 2, ..., n).
Если обозначим проекции силы Fi на координатные оси
через Х4, Уг и Zu to, умножая предыдущие равенства соответст-
соответственно на Х{, У{ и Z{ и затем складывая их, получим выражение
элементарной работы этой силы в обобщенных координатах:
ГЛ. 30 МЕТОД ОБОБЩЕННЫХ КООРЛИНАТ
539
Суммируя эти выражения по индексу i и вынося при этом
множители bqL, 6</2, ..., bqh за скобки, найдем сумму элементар-
элементарных работ всех заданных сил, действующих на систему:
Если введем обозначения
п
V / У ^i 1 у
* dq
A70)
то предыдущее выражение элементарной работы в обобщенных
координатах примет следующий вид:
A71)
Выражения Qx, Q2, ■■-, Qh носят название обобщенных сил.
Обобщенные силы определяются или по общим формулам A70),
или еще другим приемом, который часто оказывается более удоб-
удобным при решении задач. Дадим системе такое возможное переме-
перемещение, при котором изменяется только одна какая-нибудь обоб-
обобщенная координата, например gv а все остальные координаты
остаются неизменными; тогда будем иметь:
б^ ф 0, 6<72 = 6#3 = ••• = ^Чь. — 0-
Если сумму элементарных работ сил Fi на этом перемещении
540 ДИНАМИКА
n
обозначим через "S^bA\, то на основании равенства A71) получим:
i
откуда находим:
(I72)
Таким образом, чтобы найти обобщенную силу Qlt нужно дать
системе такое возможное перемещение, при котором только одна
обобщенная координата q1 получает приращение bqu а все осталь-
остальные обобщенные координаты остаются неизменными, затем опре-
определить на этом перемещении сумму элементарных работ всех за-
заданных сил, действующих на систему, и разделить эту сумму на
вариацию 6^х.
Из формулы A72) следует, что размерность обобщенной силы
выражается так:
[(?1]=1^1. A73)
Отсюда видим, что размерность обобщенной силы вообще не совг
падает с размерностью силы. Если, например, обобщенной коор-
координатой qx системы является некоторый угол, то q1 будет выра-
выражаться в отвлеченных единицах (в радианах); тогда соответствую-
соответствующая этой координате обобщенная сила Qx будет выражаться
в единицах работы (кгм). Пользуясь выражением A71) для эле-
элементарной работы, можно получить условия равновесия системы
в обобщенных координатах. В самом деле, если связи, наложенные
на систему, являются совершенными, то на основании принципа
возможных перемещений (§ 124) и равенства A71) условие равно-
равновесия системы принимает следующий вид:
&-в?1 + &'Ч+ - + Qh-bqh = 0.
Это равенство должно выполняться при всяком возможном переме-
перемещении системы, т. е. при любых, независимых друг от друга зна-
значениях вариаций bqv bq2, ..., bqk, а для этого необходимо и доста-
достаточно, чтобы все коэффициенты Qu Q2, ..., Qh при этих вариациях
равнялись нулю; таким образом, условие равновесия, выражаемое
предыдущим равенством, равносильно следующим к условиям:
Qx = 0, Q2 = 0,..., Qh = 0, A74)
ГЛ. 30 МЕТОД ОБОБЩЕННЫХ КООРДИНАТ
541
т. е. для того, чтобы система с совершенными связями оставалась
в данном положении в равновесии, необходимо и достаточно,
чтобы все обобщенные силы, вычисленные для этого положения
системы, равнялись нулю.
Отсюда следует, что число условий равновесия системы в обоб-
обобщенных координатах равно числу степеней свободы этой системы.
Пример 152. Найти условие равновесия твердого тела, имеющего
две неподвижные точки и находящегося под действием заданной системы сил
Fx (рис. 361).
Решение. Возьмем две системы координатных осей: неподвижную
Oxyz, причем ось z проходит через'закрепленные точки тела О и О', и под-
подвижную Ox'y'z, связанную с данным телом.
Угол между неподвижной плоскостью zOx
и подвижной плоскостью zOx' обозначим
через ф, причем будем отсчитывать этот угол
от неподвижной плоскости в направлении,
обратном движению часовой стрелки, если
смотреть с положительного конца оси z. Дан-
Данное тело может получить только вращатель-
вращательное перемещение вокруг неподвижной оси г;
так как его положение вполне определяется
одним параметром — углом ф, то это тело
представляет собой неизменяемую систему с
одной степенью свободы. Примем угол ф за
обобщенную координату этой системы, т. е.
положим qx = ф. Если обозначим координаты
точки Mi тела, т. е. точки приложения силы Fj '-г1
в неподвижной системе осей, через х\ и у>1У Рис. 361.
а в подвижной системе — через х\ и у\, то по
известным из аналитической геометрии формулам преобразования координат
при повороте системы осей на угол ф будем иметь:
х\ cos ф — у\ sin ф,
х\ sin ф + у\ cos ф.
Что касается третьей координаты z-x точки Af $, то при иращении тела вокруг
оси z эта координата, очевидно, не изменяется; следовательно, z% = const.
Из этих равенств находим:
bxi = — (ж| sin ф + y'i cos ф) бф,
6j/i = (r- cos у — y'i sin ф) бф, 6Zi = О1)
или
Ьх{ = — j/j ■ бф, бг/j = х\ • бф, 6.2j = 0.
Отсюда для элементарной работы силы Fj получаем следующее выражение:
бФ.
Но, как известно из статики (§ 40), выражение, заключенное в скобках, есть
момент силы Fj относительно оси z, т. е.
а потому
ЬАХ = тг
■ бф
х) Координаты х'г и у\ — величины постоянные, так как подвижные оси
неизменно связаны с данным телом.
542
ДИНАМИКА
ii, следовательно,
bAi — Zj rnz (F^ ■ бф = бф • Zjmz (Fi).
Так как
2 mz (Fi) = Л*z,
где Mz обозначает главный момент системы сил
предыдущее равенстио можно представить в виде
относительно оси z, то
2j
(l)
i — Mz ■
т. е. сумма элементарных работ сил, приложенных к твердому телу, вращаю-
вращающемуся вокруг неподвижной оси, равна произведению главного момента этих
сил относительно оси вращения на элементарный угол поворота тела.
С другой стороны, если обозначим через Ql обобщенную силу, соответ-
соответствующую обобщенной координате gt = ф, то из равенства A71) получаем:
ЬАг =
= Ql
Следовательно,
Ql . бф = Мг ■ бф,
откуда находим обобщенную силу:
Qi = Мг = 2шг (Fi).
Мы видим, что в рассматриваемом случае роль обобщенной силы играет глав-
главный момент системы сил, приложенных к телу, относительно оси вращевия
тела. Условие равновесия тела будет выражаться
равенством
= 0, или
2 mz
0.
Мы получили, как этого и следовало ожидать,
тот же результат, к которому другим путем при-
пришли в первой части курса (Статика, § 50).
Пример 153. На шарнире О закреплен
однородный стержень ОА длиной 21г и весом Р^
в точке А с ним соединен при помощи шарнира
Рис. 362. второй однородный стержень АВ длиной 11г и
весом Рг; к концу В этого стержня приложена
данная горизонтальная сила Р3. Вся система находится в равновесии
в вертикальной плоскости. Найти углы фг и ф2 стержней ОА и АВ с верти-
вертикалью (рис. 362).
Решение. Возьмем оси координат, как указано на рис. 362. Углы
Ф! и ф2 примем за обобщенные координаты, определяющие положение данной
системы. l\d чер1ежа находим, что координаты точек Cl (xit у±), C2(xlt y^j и
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 543
В (х3, J/з), в которых приложены заданные силы, выражаются через фх и фа
следующим образом:
xl = lt sin фх, ух = lx cos фц
ж2 = 2^ sin ф! + 1г sin ф2, у2 = 2Zx cos ф! + 1г cos ф2,
ж3 = 2^ sin ф, + 21г sin ф2, j/3 = 2^ cos ф! + 2J2 cos ф2.
Отсюда находим:
6xt = 1г COS ф^ф!, бух =— ^ Sin фхбфц
6ж2 = 21г cos ф^ф! + 1г cos ф2бф2, 6у2 =— 2lv sin ф!бфх — Z2 sin Ф26ф2,
Ьх3 — 2^ cos ф^ф! + 2Z2 cos ф2бф2, Ьу3 =— 2lx sin ф^ф! — 2L sin ф26ф2.
Проекции заданных сил на координатные оси равны
Xt =0, Yx = Ри Хг = 0, У2 = Р2, Х3 == -Рз. >"з = 0.
Составляя сумму элементарных работ заданных сил при возможном
перемещении системы, получим:
= Х^ + Y^yi + Х2ба;2 + У26у2 + Хфх3 + Y3bya =
= — Рх1г sin ф!бфх — 2^2^ sin фхбф! — P2Z2 sin ф2бф2 +
+ 2P3h cos ф^ф! + 2P3l.z cos ф2бф2 =
= lx (— />! sin ф! — 2/>2 sin фх + 2/>3 cos ф^ Ь<^х +
+ 'а (— Pi sin Фг + 2Р3 cos ф2Nф2.
В этом выражении коэффициенты при бфг и 6ф2 представляют собой обоб-
обобщенные силы, соответствующие обобщенным координатам <fL и фг; следова-
следовательно,
Qx = /х [2P3cos ф! — (Рх + 2Р2) sin ф^, Q2 = 1г {2Р3 cos ф2 — Рг sin ф,)
Прираинивая нулю эти обобщенные силы, получим следующие два ураине-
ния:
2Р3 cos ф! — (Pi + 2/>2) sin ф! = 0, 2Р3 cos ф2 — Р2 sin ф2 = 0,
из которых находим:
2P3 2P3
Заметим, что обобщенные силы Ql и Q2 можно было бы найти и по общим фор-
формулам A70):
~ з
О - У (х- д~1 +Y-^i-)-P dyi 4-P d-h 4-P дхз
г = 1
= — PJx sin ф! — 2/Vjl sin ф! + 2/>3
= h [2P3 cos ф - (Рг + 2Р2) sin ф1],
з
— Р2/2 sin ф., -\- 2P3l2 cos ф2 = 1г B/>3 cos ф2 — Pz sin ф2).
544 ДИНАМИКА
§ 144. Возможные перемещения системы
в случае нестационарных связей
В задачах статики, решение которых методом обобщенных ко-
координат мы рассмотрели в предыдущем параграфе, связи, нало-
наложенные на механическую систему, всегда являются стационарными.
Но в динамике связи могут быть и нестационарными. Каковы
же будут возможные перемещения точки или системы материаль-
материальных точек в случае нестационарных связей? Чтобы ответить на
этот вопрос, рассмотрим сначала материальную точку М, при-
принужденную перемещаться по заданной поверхности, которая сама
движется определенным образом в пространстве; в уравнение
такой движущейся поверхности, поскольку ее положение в про-
пространстве изменяется с течением времени, будет входить аргумент
t, и, следовательно, это уравнение имеет вид
/ (х, у, г, t) = 0, A75)
т. е. связь является нестационарной.
Представим себе, что в некоторый момент t движение поверх-
поверхности A75) прекратилось; тогда с этого момента связь становится
стационарной, и в уравнении A75) аргумент t нужно будет рас-
рассматривать как постоянный параметр, т. е. полагать t = const.
Под возможным перемещением точки М будем понимать всякое
элементарное перемещение этой точки, допускаемое в данный
момент t связью A75) при условии, что с этого момента связь ста-
становится стационарной. Но если с момента t поверхность A75)
становится неподвижной, то, как мы видели в § 122, всякое воз-
возможное перемещение точки М лежит в касательной плоскости
этой неподвижной поверхности. Следовательно, в рассматривае-
рассматриваемом случае (в случае нестационарной связи) возможное перемеще-
перемещение точки М представляет собой ее любое элементарное переме-
перемещение, лежащее в плоскости, касающейся в точке М поверхности
A75) при том положении этой поверхности, какое она занимает
в данный момент t. Поэтому, обозначая возможное перемещение
точки М через бг, а орт нормали поверхности A75) через п, будем
иметь: га-бг = 0. Это равенство, как было указано в § 122, можно
в координатной форме записать так:
-^6x + #6y+^-6z = 0, A76)
где Ьх, Ьу и bz обозначают проекции возможного перемещения
бг на координатные оси или, что то же, вариации координат
точки М. Левая часть этого уравнения представляет собой диффе-
дифференциал функции / (х, у, z, t) в предположении, что аргумент t
не изменяется, а имеет постоянное значение, соответствующее
рассматриваемому моменту времени. Если же будем рассматри-
ГЛ 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 545
вать действительное перемещение точки М за элементарный про-
промежуток времени dt, то в уравнении A75) необходимо, конечно,
учесть изменение аргумента t, так как поверхность A75) в дей-
действительности движется; тогда из уравнения A75) будем иметь:
д± dx+^dy + ^dz+^dt^O, A77)
где dx, dy и dz обозначают изменения за время dt координат точки
М при ее действительном перемещении, или, что то же, проекции
на координатные оси действительного элементарного перемещения
dr этой точки (dr — дифференциал радиуса-вектора точки М,
проведенного из начала координат). Если бы связь была стацио-
стационарной, то время t не входило бы в уравнение A75), и тогда урав-
уравнения A76) и A77) совпадали бы, а потому в случае стационарной
связи действительное элементарное перемещение точки является
одним из ее возможных перемещений. Но в рассматриваемом слу-
чае производная -± не равна нулю; поэтому, сопоставляя уравне-
уравнения A76) и A77), видим, что проекции dx, dy, dz действительного
перемещения точки М не могут быть равны соответствующим
проекциям ее возможного перемещения; следовательно, в случае
нестационарной связи действительное перемещение точки за
время dt не принадлежит к числу ее возможных перемещений.
Поэтому в отличие от случая стационарных связей возможное
перемещение точки при нестационарной связи будем называть
виртуальным перемещением этой точки. Важно заметить, что при
отсутствии трения реакция поверхности A75) направлена по нор-
нормали к этой поверхности в точке М, а так как виртуальное пере-
перемещение точки М лежит в касательной плоскости, то элементарная
работа реакции нестационарной связи A75) на всяком виртуаль-
виртуальном перемещении точки М равна нулю.
С другой стороны, из уравнения A77) имеем:
dLdx+ f dy + д1 dz = - f dt^o
dx ' dy y ' dz dt
ИЛИ
n ■ dr ф 0.
Отсюда следует, что действительное перемещение dr точки М не
перпендикулярно к нормали поверхности A75) в этой точке (не
лежит в касательной плоскости), а потому работа реакции неста-
нестационарной связи на действительном перемещении точки не равна
нулю, как это было уже указано в § ИЗ. В пояснение сказанного
рассмотрим следующий пример: пусть материальная точка М
под действием некоторой приложенной к ней заданной силы
!/417 И. М. Воронков
546
ДИНАМИКА
перемещается по поверхности движущегося шара радиуса R, при-
причем уравнения движения центра О' этого шара имеют вид
хо> = at, у0' = bt, zo> = ct.
Из этих уравнений следует, что центр О' шара движется по прямой
линии, проходящей через начало координат О (рис. 363), с постоян-
постоянной скоростью
Поскольку точка М принуждена оставаться на заданной сфери-
сферической поверхности, эта точка является несвободной. Уравнение
связи, т. е. уравнение этой сферической
поверхности, имеет вид
или
/ (х, у, z, t) = (x- atJ +{y- btJ +
+ (z — ctJ — R2 = 0. A78)
Отсюда находим:
df df
-4- = 2 (x — at), -^- — 2 (w — bt),
ox ч dy w '
Рис. 363. -^-= — 2a (x — at) — 2b (y — bt) —
— 2c (z — ct).
Следовательно, уравнение A76), которому удовлетворяют проек-
проекции на координатные оси виртуального перемещения точки М,
и уравнение A77), которому удовлетворяют проекции ее дей-
действительного перемещения, принимают соответственно такой вид:
(х — at) дх + (у — bt) 6у + (z — ct) 62 = 0
A79)
(х — at) dx -f- (у — bt) dy + (z — ct) dz —
— [a(x — at) + b(y — bt) -f- с (z — ct)] dt = 0. A80)
Из уравнения A79), как было сказано выше, следует, что всякое
виртуальное перемещение точки М лежит в плоскости, касаю-
касающейся сферической поверхности в той ее точке, с которой совпа-
совпадает в данный момент точка М. Уравнение A80) можно переписать
так:
{х — at) {dx — adt) + (у — bt) (dy — b dt) + [z — ct) {dz — с dl) = 0
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 547
или
(а; — at) (dx - dx0) + (у — Ы) (dy — dy0-) +
4- (z — ct) (dz — dz0) = 0.
Отсюда видим, что уравнение A79) будет удовлетворяться, если
примем
6х — dx — dx0', by = dy — dy0', bz — dz — dzo>;
тогда
dx = bx + <&%', dy = by -\- dy0', dz = bz -\- dzo>.
Из этих равенств следует, что
dr = бг + tfr0',
где cZr есть действительное перемещение точки М за время dtt
бг — ее виртуальное перемещение и с/г0- — перемещение точки О'
за то же время dt.
Таким образом, действительное перемещение точки М за время
dt равно геометрической сумме одного из ее виртуальных переме-
перемещений и действительного перемещения точки О' за то же время
dt (рис. 363).
Изложенные соображения о возможных перемещениях одной
точки в случае нестационарной связи распространяются и на
систему материальных точек.
Пусть на данную систему, состоящую из п материальных
точек Мх (хг, уг, zt), наложены s нестационарных геометрических
связей, уравнения которых имеют вид
U 0*1, 2/i, zj, ..., хп, уп, zn, t) = 0,
U (хъ 2/1, zi, ..., хп, уп, zn, t) == 0,
U (хи 2/1. zlt ..., хп, уп, zn, t) = 0.
A81)
Так же, как и в случае одной материальной точки, виртуаль-
виртуальным перемещением системы при нестационарных связях назы-
называется всякое элементарное перемещение этой системы, допускае-
допускаемое в данный момент t наложенными на нее связями при условии,
что с этого момента связи становятся стационарными.
Если предположим, что с момента / связи, наложенные на
систему, становятся стационарными, и будем поэтому в уравне-
уравнениях A81) рассматривать аргумент I как постоянный параметр,
то, дифференцируя при этом предположении уравнения A81),
548
ДИНАМИКА
получим следующие соотношения, которым удовлетворяют про-
проекции бхг, бг/4, 6zt на координатные оси виртуальных перемещений
материальных точек системы или, что то же, вариации координат
этих точек:
dh
^ = о,
A82)
Это — те же самые уравнения, которые мы имели в § 122 для ва-
вариаций координат материальных точек системы в случае стацио-
стационарных связей [уравнения (92)].
Что касается проекций dxit dyit dzi действительных переме-
перемещений точек системы за время dt, то эти проекции удовлетворяют
соотношениям, которые мы получаем, дифференцируя уравнения
A81) с учетом изменения аргумента t, т. е. следующим соотноше-
соотношениям:
дх1
4_ 9
' ду
■ + - + ЯГ
^ dXl+
p! dzn
A83)
Из сравнения уравнений A82) и A83) видим, что в случае неста-
нестационарных связей действительное перемещение системы за время
dl не совпадает ни с одним из ее виртуальных перемещений.
В § 123 было приведено определение стационарных совершен-
совершенных связей, как таких связей, сумма элементарных работ реак-
реакций которых на всяком возможном перемещении системы равна
нулю, и рассмотрены примеры таких связей.
Аналогично, нестационарные связи называются совершенными,
если сумма элементарных работ реакций этих связей при всяком
виртуальном перемещении системы равна нулю.
Примером системы с такой совершенной нестационарной связью
может служить твердое тело, закрепленное на абсолютно гладком
сферическом шарнире О', который движется по определенному
закону. Так как при определении виртуальных перемещений
системы нужно рассматривать связь с данного момента t как ста-
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 549
ционарную, то нужно мысленно остановить движение шарнира,
и, следовательно, виртуальным перемещением тела в данном слу-
случае является его поворот на любой элементарный угол бф вокруг
любой оси, проходящей через неподвижную точку О'. Ясно, что
элементарная работа реакции шарнира при таком перемещении
тела будет равна нулю, как работа силы, приложенной в непо-
неподвижной точке.
§ 145. Дифференциальные уравнения движения системы
в обобщенных координатах
В § 143 мы получили условия равновесия системы в обобщен-
обобщенных координатах. Теперь, пользуясь методом обобщенных ко-
координат, обратимся к выводу дифференциальных уравнений
движения системы, которые находят широкое применение в ди-
динамике.
Представим себе систему п материальных точек Мг (хг, уг, %г),
на которую наложены совершенные геометрические связи и ко-
которая имеет к степеней свободы. Пусть на эти материальные точки
действуют заданные силы, проекции которых на координатные
оси обозначим черех Xit Y{, Zx. Если положение данной системы
будем определять обобщенными координатами q1: q2, ..., qh, то
согласно сказанному в § 142 декартовы координаты материальных
точек системы могут быть выражены как функции независимых
переменных qx, g2, ..., qk. Если связи, наложенные на систему,
являются нестационарными, то в эти функции будет входить в ка-
качестве аргумента еще и время t. Следовательно, предполагая связи
нестационарными, будем иметь:
Хг =
Уг =
(i= 1, 2, .... n).
A84)
В случае стационарных связей аргумент t в правые части этих
уравнений не войдет.
Как мы видели в предыдущем параграфе, при определении
виртуальных перемещений системы время t в уравнениях связей
нужно рассматривать как постоянный параметр. Поэтому и
в уравнениях A84) при определении виртуальных перемещений
системы нужно положить t = const. Тогда, дифференцируя эти
уравнения в предположении, что t сохраняет постоянное значе-
значение, а изменяются только переменные glt q2, ..., qh, получим для
проекций на координатные оси виртуальных перемещений точек
18 П, М, Воронков
550 ДИНАМИКА
системы следующие выражения через вариации 6qlt 6q2, ..., 6qk
обобщенных координат:
A85)
(i = 1, 2, ..., n).
Эти уравнения имеют такой же вид, как и в случае стационарных
связей [§ 143, уравнения A69)]. Применяя теперь принцип Да-
ламбера и принцип возможных перемещений, приходим, как
было сказано в § 133, к заключению, что сумма элементарных
работ заданных сил, приложенных к материальным точкам дан-
данной системы, сил инерции этих точек и реакций связей при вся-
всяком возможном (в случае стационарных связей) или при всяком
виртуальном (в случае нестационарных связей) перемещении
системы равна нулю. Если нестационарные связи являются, как
мы предполагаем, совершенными, то сумма элементарных работ
реакций этих связей при всяком виртуальном перемещении си-
системы равна нулю, и мы приходим к тому же общему уравнению
динамики, которое в § 133 мы имели для случая стационар-
стационарных связей
=0.
Первая сумма в левой части этого уравнения есть сумма вир-
виртуальных работ, т. е. работ на виртуальном перемещении системы,
заданных сил, а вторая — есть сумма виртуальных работ сил
инерции. Так как здесь рассматриваются виртуальные перемеще-
перемещения системы, то вариации Ьхг, Ьу{, bzi (i — 1, 2, ..., п) имеют
значения, определяемые уравнениями A85). Подставляя эти
значения и выполняя преобразования, указанные в § 143, будем
иметь:
.1} {ХМ + УгЬУ1 + 2,вг4) = Q^q, + <?26g2 + ... + Qhbqk, A86)
где Qlt Q2, ■■-, Qh представляют собой обобщенные силы, опреде-
определяемые по формулам A70) параграфа 143. Аналогично получаем
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ
551
выражение суммы виртуальных работ сил инерции в обобщенных
координатах:
zi)= Q"abqt + <?"H6g2 + • • •
, A87)
причем
г==1
n
VI /рв
A88)
Эти выражения называются обобщенными, силами инерции. Следо-
Следовательно, общее уравнение динамики в обобщенных координатах
принимает вид:
QD
(Qh
= 0.
Это уравнение должно выполняться при всяком виртуальном
перемещении системы, т. е. при любых, независимых друг от друга
значениях вариаций bqu bq2, ..., bqk, а это возможно только в том
случае, когда коэффициент при каждой из этих вариаций равен
нулю. Таким образом, получаем к следующих уравнений:
— Vi = Qv —Qi = V2. •••. — Qk = Qh.
Так как проекции силы инерции F"H на координатные оси равны
= — miWix = — m{Xi,
= — mtwiy = —
iji i)v 2j обозначают вторые дроиаводные от х, у, z по времени.
18»
552
ДИНАМИКА
то, принимая во внимание равенства A88), приводим предыдущие
уравнения к виду
(.. dxi i .• дул , .. dzi \ r\
1=1
„ 5ж4 .. дуг
A89)
Преобразуем теперь левые части этих уравнений, причем эти
преобразования достаточно рассмотреть только для первого урав-
уравнения; для остальных будем иметь, понятно, совершенно анало-
аналогичные результаты.
Обозначая первые производные по времени от %и yit z, через
Л{, уг и 24и дифференцируя по t произведение хг ^ двух функций
и -^ , получим:
oql
dxt
.d(*H
откуда
.. дщ_
A90)
Так как при движении системы ее обобщенные координаты qlt
q2, ..., qh являются некоторыми определенными функциями вре-
времени, то из равенства
Ъ = хг {qu q2, ...» qh, t)
видим, что xi есть сложная функция времени; эта функция за-
зависит явным образом от t и от аргументов qu q2, ..., qh, которые
сами представляют собой некоторые функции независимого пере-
переменного t. Поэтому, дифференцируя х{ по t как сложную функцию
переменного t, находим:
. дхг . . dxi ■ . dxt • . дхг
где
It
dt
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 553
Производные дъ Qi-, •••, Яь. от обобщенных координат по времени
называются обобщенными скоростями. Так как производные
■г^-1 -г1) •••> д-1. --г зависят только от переменных qx, g2, ...
..., qk, 1ине зависят, очевидно, от обобщенных скоростей qlt g2, ...
..., qk, то из равенства A91) следует, что хг является линейной
функцией обобщенных скоростей. Поэтому частная производная
от хг по </i равна коэффициенту при </i B равенстве A91), т. е.
*£ = ?*. A92)
При нахождении же частной производной от хг по д1 необходимо
иметь в виду, что qt входит в качестве аргумента в функции -~,
dx; dxi dx, i, r\i\
■^-L, ..., -г-—, 5-1 , а потому из равенства A91) получаем:
дщ _ д*хг ■ , d2Xj . d2Xj . d2xt
dx-
Найдем теперь полную производную по времени от — , которая
1
входит в равенство A90); учитывая, что -/- представляет собой
сложную функцию независимого переменного t, содержащую,
кроме t, аргументы qlt g2, ..., qk, которые при движении системы
сами являются функциями этого переменного t, получим:
d (дхЛ д2хг . d'zxi . , дгхг ■ , д2х;
По известному свойству частных производных имеем:
■ ' dq^dt dtdq{
А потому, сравнивая равенства A93) и A94), видим, что
d /дхА dbi
dt [dqj ~~ 9ft*
На основании полученных равенств A92) и A95) равенство A90)
перепишем теперь так:
- с)щ _ d I . длЛ . дщ
554 ДИНАМИКА
Совершенно так же получим два других аналогичных равенства
.. дуг _ d I . дуЛ . dVi ,,qi.
Умножая обе части каждого из равенств A96), A97) и A98) на
т1 и складывая их, находим:
. дщ . d'zi
Так как
xi + Ш + А = п,
где vi есть скорость i-й точки системы, то
г ^_ - ш. I _ . ~ .V I. \ ~ — /.1 ■'■ ~ t '■"!■
dtldqi \ 2 jj dqx \ 2
Полагая i = 1, 2, ..., п, будем иметь п таких равенств; суммируя
их, получим:
щ[*№+№ + :&) = 4,УЯ° РЙ -#-У¥ =
г \ г dqL ' "ldql ' l dq^l dt^dq^K I ] d^iJ 2
1 i l
d I д
It \Wl
По сумма / —^— есть кинетическая энергия Т системы, а по-
_ 2
i=l
тому
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 555
и аналогично
дх{ . ~ dVi . .. дц\ _d_(dT\ дТ
W* + ^ + Z^dJJ - dt WJ dq, '
d
dt
d
dt
d
dt
idT\
\dqi-
!дТ\
Ydql)
>ат
[ffk
дТ п
dqx ~ Vb
дТ 0
\ дТ П
J ~~ dq~l — VV
dxt , _ 5j/j .. dzi \ __ d !дТ \ дТ
Таким образом, левые части уравнений A89) могут быть выражены
через производные от одной функции Т, и, следовательно, эти
уравнения принимают вид
A99)
Эти к уравнений представляют собой дифференциальные уравнения
движения механической системы в обобщенных координатах; они
впервые были получены Лагранжем в его «Аналитической меха-
механике» и потому называются уравнениями Лагранжа. Важно обра-
обратить внимание на то, что, во-первых, число уравнений Лагранжа
равно числу независимых обобщенных координат данной си-
системы, т. е. равно числу ее степеней свободы, и, во-вторых, что
неизвестные реакции совершенных связей, наложенных на си-
систему, в эти уравнения не входят. Уравнения Лагранжа представ-
представляют собой систему к дифференциальных уравнений второго по-
порядка с к неизвестными функциями qlt q2, ..., qk. Если проинтегри-
проинтегрируем эти уравнения, то найдем координаты механической системы
9и ?2i •••, <3^как функции времени t, а потому будем знать поло-
положение этой системы в любой момент времени, и, следовательно,
движение системы будет полностью определено. Таким образом,
когда уравнения Лагранжа для данной механической системы
составлены, то решение второй основной задачи динамики, т. е.
.определение движения системы под действием заданных сил,
сводится к математической задаче интегрирования этих урав-
уравнений.
Если система имеет одну степень свободы, то будем иметь для
нее одно уравнение Лагранжа, причем в случае совершенных
стационарных связей ото уравнение можно вывести из теоремы
об изменении кинетической энергии системы. Рассмотрим этот
556 ДИНАМИКА
вывод. В случае системы со стационарными связями и с одной
степенью свободы имеем:
(i = 1,2, ...,n).
Отсюда, имея в виду, что при движении системы qt есть некоторая
определенная функция времени, находим:
. dxi dqi dxi • • dyi dq± dy^ .
* dqi dt dqi "l! "' dqx dt dqt "*•'
. dz\ dqx dz\ •
1 dot dt dqi
Сумма в правой части последнего равенства не зависит, очевидно,
от обобщенной скорости qx и является функцией только коорди-
координаты qv Поэтому для краткости обозначим эту сумму через Ф (qj.
Тогда
?1=уФ(д1)-^. B00)
Продифференцируем это равенство по t, принимая во внимание,
что в правой части мы имеем произведение двух функций Ф (qj
и д\, причем qx и qx при движении системы являются функциями
независимого переменного t; тогда, замечая, что
получим:
[j ]u B01)
do,
где 9i = -fr.
С другой стороны, рассматривая Т как функцию двух пере-
переменных дхи qu из равенства B00) находим:
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 557
Отсюда
i (S3 - *Р''+ф <*> * - ф '<*>й+ф <*>5i
и, следовательно,
1 = ф'<*>й+ *<*>*
Поэтому равенство B01) принимает вид:
qx' {202)
Применяя теперь теорему об изменении кинетической энергии
системы в дифференциальной форме, согласно которой дифферен-
дифференциал кинетической энергии системы в случае совершенных ста-
стационарных связей равен сумме элементарных работ всех задан-
заданных сил, действующих на эту систему, имеем:
Выражая, далее, сумму элементарных работ заданных сил в обоб-
обобщенных координатах и принимая во внимание, что при стацио-
стационарных связях действительное перемещение системы за время dt
является одним из ее возможных перемещений, в случае системы
с одной степенью свободы получим:
Ц + YxdVi + ZtdzJ = Qldqu
где dq1 есть дифференциал обобщенной координаты qlt т. е. ее
изменение за время dt при действительном перемещении системы.
А потому
dT = Q.dq,.
Отсюда
Сравнивая это равенство с равенством B02), приходим к урав-
уравнению Лагранжа
dt WqJ dqi Vl«
558 ДИНАМИКА
§ 146. Условия равновесия системы и уравнения Лагранжа
в случае существования силовой функции
Предположим, что для заданных сил Ft, действующих на ма-
материальные точки Мг (хг, уг, Zj) данной системы, существует сило-
силовая функция U, зависящая от положения системы, т. е. от коор-
координат точек Мг, так что
U = U (хи уъ zu ..., хп, yn, zn). B03)
Тогда согласно сказанному в § 131 для проекций сил Fi на коор-
координатные оси будем иметь:
X,=f , у1 = ^, Zi = f B04)
1 дхг' * dyi г dzi v '
(i = 1,2, ...,п).
Если в равенстве B03) вместо декартовых координат хь уг, zi
подставим их выражения через обобщенные координаты q1, g2> •••
..., qh, то получим выражение силовой функции в обобщенных коор-
координатах. Тогда, дифференцируя частным образом U по q1, как
сложную функцию, зависящую от аргументов xt, уг, гг, которые
являются функциями переменных qlt q2, ..., qh, находим:
аи _ аи дх1 .аи ау± . эи_ azx . . ди__ aZn _
дд^ dxt dg1 ду1 ддг dz\ dqx '" dzn dq^
_ у ldU_ dx± 9U_ дщ дЦ_ дц
~ L \djci ' ~agi + а~щ ' ~aqi + dz\ ' ai
i = l
или на основании равенств'B04)
и аналогично
W __\!v дхг ,v dyt . „ dZi
дхг , y dyi „ dzi \
Щ + Yi hh + ^ dqh) •
Но правые части этих равенств представляют собой обобщенные
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 559
силы <?!, Q2, ..., Qk (§ 143), а потому
О -д± п - — О - — B05}
т. е. обобщенная сила равна частной производной от силовой функ-
функции по соответствующей обобщенной координате.
Потенциальная энергия П системы, как было указ1но в § 131,
связана с силовой функцией равенством
П = Z7(«) — U,
где C/W есть значение силовой функции, соответг гвующее тому
положению системы, в котором ее потенциальная энергия прини-
принимается равной нулю.
Так как £/<0) = соаьЬ, то отсюда получаем:
дП _ __dU дП _ __8U_
d?i ~ dq1 ' '" ' dqh ~ dqh
и, следовательно,
т. е. обобщенная сила равна взятой с обратным знаком частной
производной от потенциальной энергии системы по соответствую-
соответствующей обобщенной координате.
Условия равновесия системы в обобщенных координатах,
полученные в § 143, на основании равенств B0G) принимают
вид:
f = 0, f =0, ..., f =0. B07)
dq1 dqL ' dqk v '
Если функция П независимых переменных gb g2, ..., qk при неко-
некотором положении системы, т. е. при некоторых определенных
значениях этих переменных, достигает максимума или минимума,
то ее частные производные по этим переменным будут равны
нулю, и, следовательно, условия равновесия B07) будут выпол-
выполнены. Отсюда приходим к заключению:
если в данном положении системы, находящейся в потенциаль-
потенциальном силовом поле, ее потенциальная энергия достигает экстре-
экстремального значения, то это положение является положением рав-
равновесия системы.
Заметим, что обратное предложение не всегда справедливо,
так как равенство нулю частных производных функции П является
необходимым, но еще недостаточным условием экстремума этой
функции.
В качестве примера рассмотрим систему, находящуюся в по-
поле силы тяжести. В § 131 мы видели, что в этом случае, если
560
ДИНАМИКА
координатную ось z направить по вертикали вверх, силовая функ-
функция выражается так:
U = — Mgzc + const,
где М есть масса системы и %с — координата ее центра тяжести С.
Следовательно, потенциальная энергия системы равна
П = UW — U = Mg (zc — zg)).
Отсюда видим, что потенциальная энергия П достигает экстре-
экстремума одновременно с %с, а потому то положение системы, находя-
находящейся в поле силы тяжести, при котором ее центр тяжести за-
занимает наивысшее или наинизшее из всех возможных положе-
положений, является для этой системы положением равновесия. Этот из-
известный результат называют иногда принципом Торичелли.
Дифференциальные уравнения движения системы в обобщен-
обобщенных координатах, т. е. уравнения Лагранжа, в случае существо-
существования силовой функции принимают на основании равенств B05)
и B06) следующий вид:
B08)
ИЛИ
d ! дТ \ дТ
dt \dqi) dq±
d (дТ\ дТ
dt \ dq2 j dqs
d !дТ\ дТ
dt \dqbl dqh.
d 1дТ\ дТ
dt \dq~J d<h~
dU
_ dU
dq% '
_ dU
an
dqi'
dT
an
dt\dqh)
B09)
§ 147. Примеры ирименения уравнений Лагранжа
При решении задач динамики методом обобщенных координат,
т. е. при помощи уравнений Лагранжа, нужно в последователь-
последовательном порядке выполнять следующее:
1) установить, сколько степеней свободы имеет данная меха-
механическая система, и выбрать для нее столько же независимых
обобщенных координат;
2) составить кинетическую энергию Т системы и затем выра-
выразить ее через обобщенные координаты и обобщенные скорости;
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ
561
3) найти обобщенные силы; при этом обобщенные силы можно
находить по одному из следующих трех способов: а) по общим фор-
формулам A70) или по формуле A72) § 143; б) как коэффициенты
при вариациях обобщенных координат в выражении суммы эле-
элементарных работ заданных сил через обобщенные координаты;
в) как частные производные по соответствующим обобщенным
координатам от силовой функции или от потенциальной энергии
системы, т. е. по формулам B05) или B06) предыдущего параграфа
(в случае существования для заданных сил силовой функции);
при этом нужно предварительно составить выражение силовой
функции или потенциальной энергии в обобщенных координатах;
ЛТ1 AT1 ЯТ
4) ВЫЧИСЛИТЬ ПрОИЗВОДНЫе -щ-,
> 2' "■> кУ'
дТ d ,'дТ\ . .
тт _ I | у -—
dqj dt\dqjj ч/
5) подставить найденные выражения этих производных и
обобщенных сил в уравнения A99) § 145, т. е. составить для дан-
данной системы уравнения Лагранжа (или одно уравнение в случае
системы с одной степенью свободы);
6) из этих уравнений определить искомые ускорения (или
искомое ускорение) или же, если это требуется в задаче, интегри-
интегрируя эти уравнения, найти движение системы, т. е. найти ее обоб-
обобщенные координаты как функции времени t. Число уравнений
Лагранжа, которые являются дифференциальными уравнениями
второго порядка, равно числу степеней
свободы к данной механической систе-
системы. Поэтому при интегрировании этих
уравнений будем иметь 2к произволь-
произвольных постоянных; эти постоянные опре-
определяются, как всегда в задачах дина-
динамики, по начальным условиям дви-
движения системы, т. е. по начальным
значениям обобщенных координат и
обобщенных скоростей.
Рассмотрим несколько примеров.
Рис. 364.
Пример 154. В механизме, расположен-
расположенном в горизонтальной плоскости (рис. 364),
рукоятка OjOa, вращающаяся вокруг непод-
неподвижной вертикальной оси О1ч приводит в дви-
движение свободно насаженное на нее колесо // радиуса г2. Это колесо сцеп-
сцеплено с колесом / радиуса гх, вращающимся вокруг той же оси Оц не непод-
неподвижным колесом ///. К рукоятке приложен заданный вращающий момент
М = const, а к колесу / известный момент сопротивления Мх => const.
Пренебрегая массой рукоятки, найти ее угловое ускорение, если известны:
длина I рукоятки, веса Рх и Рг колес / и //, радиус инерции кгг колеса /
относительно оси Ох и радиус инерции кг2 колеса // относительно оси Ог,
параллельной оси Ои причем — = 1,5.
Решение. В этой задаче мы имеем систему с одной степенью свободы,
так как положение данного механизма определяется одним параметром —■
562 ДИНАМИКА
углом поворота ср рукоятки. Этот угол и примем за обобщенную координату q
данной системы, т. е. положим q = ср. Тогда
где ш есть угловая скорость рукоятки. Искомое угловое ускорение рукоятки
равно
Так как рассматриваемая система имеет одну степень свободы, то мы будем
иметь для нее одно уравнение Лагранжа. Прежде чем составлять это урав-
уравнение, нужно вычислить обобщенную силу Q и кинетическую энергию системы
Т = Тх + Тг, где Тх есть кинетическая энергия колеса /, а !Га — кинети-
иеская энергия колеса //. Если угловую скорость колеса / обозначим через Oj,
а его момент инерции относительно оси вращения Ох — через Jt, то
Г — ! г-2.3 и 71 — Т Ш' — l Л-2г"т2
' ft r и J^ ГГ А rw
но скорость точки В зацепления колес I ж II равна vB = т^Шц а потому
р
1 ~ 27 в-
о
Движение колеса // является плоскопараллельным; следовательно, его
кинетическая энергия равна кинетической энергии его центра тяжести О2
в предположении, что в этом центре сосредоточена вся масса колеса, плюс
кинетическая энергия колеса в его вращательном движении вокруг верти-
вертикальной оси, проходящей через центр тяжести О2, т. е.
где иОзесть скорость точки О2, <в2 — угловая скорость колеса II и J2 — мо-
р
мент инерции этого колеса относительно оси О2, равный — к?г\. А потому
г = гх + r2 = A wB + g (^s + *«г;ш».
Так как колесо // сцеплепо в точке /1 с неподвижным колесом ///, то эта
точка А является для колеса // мгновенным центром вращения; отсюда сле-
следует, что
vOs = г2ш2 и vB = 2г2ш2 = 2vOi,
а потому
Т = [№рх + A + ft2) P,] *£*.
Так как точка О2 принадлежит и рукоятке, то vQ^ — to = Zf- Таким образом,
окончательно получаем следующее выражение кинетической энергии дан-
данного механизма через обобщенную скорость $, т. е. через угловую скорость
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 563
рукоятки:
Отсюда находим:
Так как кинетическая энергия Т не зависит от координаты ф, то
% = °-
Перейдем теперь к вычислению обобщенной силы Q. Для этого рассмотрим
перемещение системы, соответствующее измепению координаты ф на весьма
малую величину бф, т. е. перемещение, при котором рукоятка поворачивается
вокруг оси Ох против часовой стрелки на элементарный угол бф. Колесо /
поворачивается при этом вокруг той же оси в том же направлении, т. е. против
часовой стрелки, на некоторый угол бф1# Сумма элементарных работ дви-
движущих сил, приложенных к рукоятке, и сил сопротивления, приложенных
к колесу /, при этом перемещении будет равна
С другой стороны, та же сумма элементарных работ равна
Qbq = <5бф.
Следовательно,
<56ф = Л/бф — Л/1бф1,
откуда
^^бф-м1бж = м_ бф
х бф * бф
Так как углы поворота колеса / и рукоятки пропорциональны их угловым
бф, СО, тт
скоростям, то - = - . Но
Г бф СО
to!
а потому
бф >ч
Следовательно,
Уравнение Лагранжа
VB
П + rt)
Q
d 1
dt\
'I
1 — 2 ('
V
= M -
dT\
;д})
vo2
I
I ■ ГЛ 2(
"^ rxj \
- 5Afj.
дТ
Cm. § 143, пример 152.
564 ДИНАМИКА
для рассматриваемой системы принимает, таким образом, следующий вид:
— [ft2 DPj + Р2) + Р2] Ц = М — 5MV
Отсюда находим искомое угловое ускорение рукоятки:
(М — ЪМУ) g
е = 3 = —s-P ^-^ = const.
т [ft2 DPj + Р2) + Р2]^
Если М = бМц то е = 0, т. е. рукоятка будет вращаться равномерно.
Пример 155. Однородный цилиндр радиуса г и весом Р катится без
скольжения по внутренней поверхности неподвижного полуцилиндра радиуса
R под действием только силы тяжести
(рис. 365). Составить дифференциальное
уравнение движения этого цилиндра
(уравнение Лагранжа), принимая за
обобщенную координату угол ф пря-
прямой ОС с вертикальной осью у. Най-
Найти затем период малых колебаний ци-
цилиндра около положения равновесия.
Решение. Так как по условию
задачи цилиндр катится без скольже-
скольжения, то скорости всех его точек, лежа-
лежащих на образующей, проходящей через
точку А, равны нулю, а потому эта
образующая является для цилиндра
вращения. Следовательно, кинетическая энергия ци-
мгновеннои осью
линдра равна
Т =
Г ^
А 2
где JА — момент инерции цилиндра относительно мгновенной оси вращения,
а со — его угловая скорость. По теореме о зависимости между моментами инер-
инерции тела относительно двух параллельных осей имеем:
J л — Jc + mr2,
где Jс — момент инерции цилиндра относительно оси, перпендикулярной
к плоскости чертежа и проходящей через центр тяжести С цилиндра, am —
масса цилиндра. Но
а потому
~2
И Г = -г
Так как скорость vc точки С равна гш, то
Т
3
Остается теперь выразить скорость vc через обобщенную скорость
Выражая для этого координаты точки С через угол <р, имеем:
%с= (R — г) sin ф, ус = (Л — г) cos ф.
Ж
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 565
Отсюда
dxr
dyc
Ус = — = -(R-r) sinip.j,
v*c = j£ + у}, = (Л — гJ ?2.
Следовательно,
Г = -| m (Л — гJ <р.
Отсюда находим:
37" 3 ._ ., . d IдТ\ 3
Так как работа силы трения, приложенной к цилиндру в точке А, при каче-
качении цилиндра без скольжения равна нулю, то для вычисления обобщенной
силы Q нужно найти только элементарную работу силы тяжести Р при пере-
перемещении цилиндра, соответствующем изменению угла ф на весьма малую
величину бф. Эта работа равна
ЬА = РЬус = Р • б [(Л — г) cos ф] = — Р (.Л — г) sin ф • бф.
С другой стороны, эта же работа равна ()бф. Следовательно,
<5бф = — Р (Л — г) sin ф • бф,
откуда
Q —— Р (Л — г) sin ф = — mg (Л — г) sin ср.
Заметим, что этот результат можно было бы получить и по общей формуле
для обобщенной силы (§ 143):
Отсюда, принимая во внимание, что
fyc
находим:
Q = — Р (Л — г) sin ф.
Подставляя теперь в уравнение Лагранжа
dt\dfj Зф
вышенайденные значения производных, стоящих в левой части этого урав-
уравнения, и значение Q, получаем искомое дифференциальное уравнение движе-
движения цилиндра:
-^m(R — гJ ? = — mg (Л — г) sin <p,
или
566
ДИНАМИКА
В случае малых колебаний цилиндра около положения равновесия, т. е,
того положения, при котором <р = 0, угол <р все время остается малым, а
потом}' приближенно можно положить sin <p =к <р. Тогда предыдущие урав-
уравнение принимает вид:
„ , 2е
¥ + <WR .4 Ч5 = ° ИЛИ ¥ ■
г)
/с2ф = О,
где
Это есть дифференциальное уравнение гармонических колебаний с частотой к.
Период этих колебаний равен
2я
х =2я
V
3 (Д - г)
Пример 156. Через неподвижный блок О перекинута нерастяжимая
нить, несущая на одном конце груз А весом Р3 = 3 кг, а на другом конце —
блок Оу. Через этот второй блок перекинута нерастяжимая нить, к концам
которой прикреплены груз В весом Рг = 2 кг. и
груз С весом Р1 = 1 кг. Пренебрегая массой бло-
блоков, найти ускорения грузов А, В -а С (рис. 366).
Решение. Общую длину обеих частей нити,
свешивающихся с блока О, обозначим через llt a
общую длину частей нити, свешивающихся с блока
Оу, — через 1г. Так как нити нерастяжимы, то 1± --=
= const и l2 = const. Выбрав начало координат в
точке О и направив ось у по вертикали вниз, орди-
ординаты точек А, В ж С обозначим соответственно через
г/з, у2 и у1. Если длину правой части нити, свешиваю-
свешивающейся с блока Ох, обозначим через \, а ординату
точки Оу — через у0 , то будем, очевидно, иметь:
2/01 = г1 ~ г/з. г/i = Уо1 + к = к — Уз + К
г/г = Уо: + к — ^ = к + к — Уз — *<•
Отсюда видим, что четыре переменные ух, уг, у3 и
К связаны между собой двумя уравнениями, а по-
потому только две из них являются независимыми;
чтобы определить ординаты всех трех грузов, т. е. определить положение
данной системы, Достаточно знать значения двух величин: X и у3. Отсюда сле-
следует, что данная система имеет две степени свободы. Выберем за обобщенные
ьоординаты независимые переменные X и у3, т. е. положим q± = к и q2 = у3.
Кинетическая энергия данной системы, состоящей из трех тел, движу-
движущихся поступательно, равна
Pi
■fS= 2i"K +
-е-! + 3oJ),
где vL, v2 и v3 — скорости грузов. Но
0I = U*J
Щ
dt
dt
"dt - {% ~ УЗ) '
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 567
а потому
Отсюда находим:
-г- = —V = - ЗА. + Уз), —=- = -тг- = — (^ + 6t/3),
э?1 ая г а?2 аУз s
a i дт\ d I зт\ i ,„-.• , ■•. d / ar \ rf / дт \ l v . fi~.
ЪШ = « W = 7 (% + Уз)> 7гШ = *fe) = V (X + 6%)'
ar _ ar_ _ зг_ _ ar _
a^ ~ a ~ • a?2 ~ at/3 ~ "
Сумма элементарных работ заданных сил, т. е. сил Рг, Р2 и Р3, при возможном
перемещении данной системы равна
ZbA = Рхбух + Р.26г/2 + Р3буз-
Ио
6j/! = б (lL — з/з + *•) = S^ — б2/з»
Sj/2 = б Ci + h — Уз — X) = —^ — 6Уз-
а потому
IM = Рх (ЬХ ~ Ьу3) - Р, (Ы + бу3) + ^з^г/з =
== (Pi - Р2) Ы + (Р, - Р, - Рх) ЬУз.
В этом выражении коэффициенты при 6^, и бу3 представляют собой обобщенные
силыфх и Q2, соответствующие обобщепным координатам X и у3. Следовательно,
Qi = Л - ^2 = -1 «г, Q2 = Р3 - Р* ~ Л = 0.
Уравнения Лагранжа
d ( дТ \ дТ _ d /дТ \ дТ л
dt\dq1/ dqx dt\dq%j dq2
для данной системы принимают вид
^ (зх + Уз) = — 1, ~ а + бу3) = о
или
35С + 'уа = —g, X + 6у3 = 0.
Отсюда находим:
1 .. 6
Уз = |у gi л = — |^ g.
Искомые ускорения грузов /}, 5 и С соответственно равны
-1 •• - 5
W3 == Уз = J7 ?> ^ =У2 = ~ Уз ~ ~ 17 S>
.* .. .. 7
П = У\ = ^ — Уз = — yj g-
Отрицательное значение ускорения щ указывает на то, что это ускорение
имеет направление, противоположное положительному направлению оси у,
I. с. что оно направлено по вертикали вверх.
568
ДИНАМИКА
Пример 157. Два груза весом Ру и Р2, связанные между собой пру-
пружиной, жесткость которой равна с, могут двигаться прямолинейно поступа-
поступательно по наклонной плоскости, составляющей с горизонтом угол а, в направ-
направлении линии наибольшего ската этой
плоскости (рис. 367). Пренебрегая тре-
трением, найти закон движения каждого
из этих грузов, если в начальный мо-
момент их скорости равны нулю и пружина
имеет длину, равную ~ , причем 10 есть
длина пружины в ненапряженном со-
состоянии.
Решение. Примем прямолиней-
прямолинейную траекторию грузов за ось х; тогда
положения первого и второго грузов
определяются соответственно коордииа-
Рис. 36/. тами хх и ж2, отсчитываемыми от про-
произвольно выбранного начала О. Если
точку О выберем так, чтобы в начальный момент абсцисса х± равнялась
нулю, то начальные значения координат ху и ж2 будут:
Силы Ft и Fit с которыми растянутая пружина действует соответственно
на первый и второй груз, пропорциональны удлинению пружины К, причем
коэффициент иропорциоиальности есть жесткость с. Поэтому
Если длину деформированной пружины обозначим яерез I, то
% = I — 10 = хг — хх — 10.
Поскольку положение данной системы, состоящей из двух грузов, Опреде-
Определяется двумя независимыми координатами х1 и хг, мы имеем здесь, как и в
предыдущем примере, систему с двумя степенями свободы. Независимые
переменные хх и хг примем за ее обобщенные координаты.
Если скорости грузов обозначим через vt и У2> т0
~dt
= I ii I и v2 =
dt
а потому кинетическая энергия рассматриваемой системы равна
Т
где
_ тхх\
Отсюда получаем:
дТ
дТ
mi = -г и
d 1дТ
d 1дТ
дТ
дТ
ГЛ. 30. МЕТОД ОБОБЩЕННЫХ КООРДИНАТ 569
Чтобы найти обобщенные силы, нужно составить сумму элементарных работ
заданных сил Plt Р2, Fy, F2 при возможном перемещении данной системы.
Так как возможные перемещения первого и второго грузов равны соответствен-
соответственно вариациям Ьху и Ьх2 координат х± и х2, то
£6Л = (Ру sin a + Fy) 6xt + (P2 sin а — FJ 6xz =
= (Ру sin а 4- сХ) дху + (P-i sin а — сХ) Ьх2.
Отсюда находим искомые обобщенные силы Qy и Q2, соответствующие обоб-
обобщенным координатам хх и х2, как коэффициенты при вариациях dxL и Ьх2 в полу-
полученном выражении суммы элементарных работ заданных сил; следовательно,
Qx = Pi sin а -\- сХ = mxg sin a + сХ,
<?2 = Рг sln а — сХ = m^g sin а — сХ.
Теперь составляем два уравнения Лагранжа для рассматриваемой системы:
= mvg sin a + сХ,
= m2g sin а — сХ.
Остается эти уравнения проинтегрировать, т. е. найти ху и хг как функции
времени t. Для этого, умножив первое уравнение на — пи, а второе на ту,
сложим их; тогда получим
отсюда
с (/% + ma) 2
Х% — Х\ =^ ■—• К — — К Л,
где
„ с (nil ~Ь т2) т. 1 / '
-, т.е. ft- |/ -
Но из равенства
Л = х% ху /q
следует:
Х = х1 — х\,
а потому предыдущее уравнение принимает вид
X + к*Х = 0.
Это есть дифференциальное уравнение гармонических колебаний с круговой
частотой к; его общее решение имеет вид
X = Су sin (kt) + C2 cos (kt).
Следовательно,
хг — хх = h + X = Zo + Су sin (Лги) + С2 cos (kt).
Отсюда
х2 — 'xi = AC! cos (Лг) — кС2 sin (Лг).
Постоянные Сх и С2 находим из начальных условий движения грузов. По-
Полагая в предыдущих уравнениях t = 0, имеем:
x(li — ха1 = 10 + С2, (x.iH — (ijH = ftCj..
570 ДИНАМИКА
Принимая во внимание, что х01 = 0 и х02 = -^ , из первого равенства находим:
Так как в начальный момент скорости грузов равны нулю, то
(»i)o = (i2)o = °i
а потому Cj = 0. Следовательно,
х2 — хх = 10 — -|- cos (fa)- (a)
Топерь для определения хх и г2 нужно найти второе соотношение между ними.
Сложив для этого дифференциальные уравнения движения грузов (уравнения
Лагранжа), получим:
mi Xi + 'Щ хг = (т1 + m2) g sin a
нлп
— (m^i + m.Jcz) = (mx + то2) g sin а.
Это уравнение выражает теорему о проекции количества движения расемчт-
риааемой системы на ось х; проекции внутренних сил Ft и F2 в это уравнение
не входят, как это и должно быть. Интегрируя это уравнение, находим:
2ж> = {тх + пц) sin а • gt + С3.
Так как согласно начальным условиям движеппя при t = 0 левая часть этого
уравнения равна нулю, то С3 — 0; следовательно,
+ i ( + ) ( + ) i г
Отсюда, интегрируя, получаем:
miri "Ь >щх% = (пц + m2) sin a •
В начальный момент имеем:
или
С, = тД
а потому
= т2 -£- + ("Н + т2) sin а ■ -=-. (б)
Из уравнений (а) п (б) паходим закон движения каждого из грузов:
Отсюда видим, что движение каждого груза слагается из двух движений:
1) равномерно ускоренного движения с ускорением g sin a, обусловлен-
обусловленного силой тяжести, и
2) гармонического колебания с частотой к, обусловленного действием
пружины.
ГЛ. 31. ТЕОРИЯ УДАРА
571
ГЛАВА 31
ТЕОРИЯ УДАРА
§ 148. Явление удара
В этой главе мы будем изучать явление удара. Для этого
явления характерно то, что скорость материальной точки
или тела, а следовательно, и количество движения этой точ-
точки или этого тела за очень короткий промежуток времени, изме-
измеряемый в тысячных и даже меньших долях секунды, в течение
которого длится удар, изменяются на некоторую конечную
величину.
Такое, почти мгновенное, конечное изменение количества дви-
движения объясняется тем, что при ударе развиваются очень большие
силы; хотя эти силы действуют на материальную точку или на тело
в течение очень малого промежутка времени, но их импульс
является конечной величиной. Такие силы называются мгновен-
мгновенными или ударными.
Итак, ударной (мгновенной) силой называется такая сила, ко-
которая действует на материальную точку (или на тело) в течение
весьма короткого промежутка времени, но достигает при этом
весьма большого значения, так что'ее импульс является величиной
конечной.
mv
§ 149. Действие ударной силы на материальную точку
Пусть на данную материальную точку массы т действует в те-
течение весьма короткого промежутка времени т ударная сила F
(рис. 368). Применяя теорему о количестве движения материаль-
материальной точки (§ 105), получим:
т
mu — mv= [ Fdt = S, B10)
о
где v — скорость точки до удара и и — ее м*
скорость после удара.
Векторная величина
т
S = \ F dt, Рис. 368.
о
т. е. импульс ударной силы за время ее действия, называется удар-
ударным импульсом, или короче ударом, приложенным к данной мате-
материальной точке. Таким образом, удар, приложенный к материаль-
материальной точке, определяется по модулю и направлению изменением
572
ДИНАМИКА
количества движения этой точки. Обратно, если удар S, подей-
подействовавший на материальную точку, известен, то из равенства
и = v 4- —
т
определяется скорость, которую получит точка после удара.
Модуль удара (ударного импульса) S измеряется, очевидно,
в килограммо-секундах {кг сек).
Проектируя векторное равенство B10) на координатные оси,
получим три следующих равносильных ему скалярных уравнения:
ти.
muy — mvy = \ Y dt = Sy,
mu.
— mvz = С Zdt = Sz,
B11)
т. е. изменение проекции количества движения материальной
точки на какую-нибудь неподвижную ось равно проекции на ту
же ось удара, приложенного к этой точке.
Предположим, что на материальную точку в течение времени т
действует, кроме ударной силы F, еще «обыкновенная» (не ударная)
сила F' (какой является, например, сила тяжести). Обозначая
проекции этой силы на координатные оси через X', У и Z', бу-
будем иметь:
J X'dt =
Но так как для неударной силы X'* имеет конечное значение,
а т является величиной весьма малой, то произведение X'* т бу-
будет тоже величиной очень малой, и этим произведением в сравне-
сравнении с конечной величиной Sx можно пренебречь. Поэтому эффект
неударных сил, т. е. влияние их на изменение количества
движения точки за время удара, практически можно считать рав-
х) По известному свойству определенного интеграла имеем:
X' dt = X'* х,
где X'* есть некоторое среднее значение фувкции X' в промежутке от 0 до Т.
ГЛ. 31. ТЕОРИЯ УДАРА 573
ным нулю, и при решении задач, относящихся к явлению удара,
эти силы обычно в расчет не принимаются. Пусть материальная
точка за время действия на нее ударной силы переместилась из
положения М в положение М', тогда
ММ'
где v* обозначает среднюю скорость точки за время т. Отсюда
ММ' = v*%,
но v* — величина конечная, а т весьма мало; следовательно, пере-
перемещение точки ММ' будет весьма малым, и им можно пренебречь;
поэтому считают, что за время удара точка не успевает переме-
переместиться и, следовательно, координаты ее в начале и в конце удара
имеют одни и те же значения.
Рассмотрим теперь, как изменяется под действием удара, при-
приложенного к данной материальной точке, момент количества дви-
движения этой точки относительно какого-нибудь неподвижного
центра О. Обозначим радиус-вектор данной точки, проведенный
из центра О, через г. Согласно только что сказанному, положение
точки за время удара х будет оставаться неизменным; следова-
следовательно, за это время не будет изменяться и ее радиус-вектор г.
Поэтому моменты количества движения материальной точки в на-
начале и в конце удара будут выражаться так:
то (mv) = г X mv и то (ти) = г X ти.
Отсюда получаем:
то (ти) — то (mv) — (г X ти) — (г X mv) = г X (ти — mv),
или на основании равенства B10):
т0 (ти) — т0 (mv) =rXS — mo(S). B12)
Это равенство выражает теорему об изменении момента количества
движения материальной точки при ударе: изменение момента коли-
количества движения материальной точки относительно какого-ни-
какого-нибудь неподвижного центра равно моменту удара, приложенного
к этой точке, относительно того же центра.
Проектируя векторное равенство B12) на координатные оси и
принимая во внимание, что проекция момента данного вектора
относительно какой-нибудь точки на ось, проходящую через эту
точку, равна моменту этого вектора относительно той же оси,
получим:
тх (ти) — тх (mv) = тх (S),
ту (ти) — ту (mv) = my(S),
mz (ти) — mz (mv) = mz (S).
B13)
574 ДИНАМИКА
Эти равенства выражают теорему об изменении момента количе-
количества движения в координатной форме: изменение момента коли-
количества движения материальной точки относительно какой-нибудь
неподвижной оси равно моменту удара, приложенного к этой
точке, относительно той же оси.
§ 150. Удар шара о неподвижную поверхность
Пусть шар М движется поступательно со скоростью v, направ-
направленной по нормали An к данной неподвижной поверхности
(рис. 369). Когда шар достигает точки А, то происходит удар,
называемый в этом случае прямым, В конце удара шар получает
скорость и, направленную по нормали An противоположно ско-
„ рости v. Опыт показывает, что величина
и будет меньше v, так что
)м и = ко, B14)
у где к — некоторая правильная дробь. Этот
множитель к, равный отношению скоростей
и/у, называется коэффициентом восста-
восстановления при ударе и зависит от упругих
N свойств соударяющихся тел.
Рассмотрим подробнее, что происходит
с шаром за время удара. Обозначим про-
) __ должительность удара по-прежнему через
т; в течение этого промежутка времени
па шар будет действовать ударная реак-
Рпс. 369. ция N неподвижной поверхности, направ-
направленная в случае гладкой поверхности по
нормали An и достигающая весьма большого численного значе-
значения. При этом приходится различать две фазы удара: в течение
первой фазы, продолжительность которой обозначим через Tj,
шар деформируется (сжимается) до тех пор, пока скорость его
не станет равной нулю; в течение второй фазы удара, продолжи-
продолжительность которой обозначим через т2, форма шара вследствие
его упругости восстанавливается, хотя и не вполне; за эту
вторую фазу удара скорость шара возрастает от нуля до и.
В тот момент, когда шар отделяется от поверхности, явление
удара заканчивается.
Приняв направление внешней нормали An к данной поверх-
поверхности за положительное и применяя к первой фазе удара теорему
о проекции количества движения, получим:
0 — (— mv) = \ N dt, или mv — Sx,
i
ГЛ. 31. ТЕОРИЯ УДАРА 575
причем
Tl
Si = \ N dt
о
есть модуль удара (импульса ударной силы N) за первую фазу.
Точно так же для второй фазы удара будем иметь:
X
ти — 0 = \ N dt, или та = S2,
причем
S2 = \ N dt
Tl
есть модуль ударного импульса за вторую фазу. Отсюда на осно-
основании равенства B14) получаем следующее соотношение между
ударными импульсами St и 52:
S2 = kSu или к —-~, B15)
т. е. коэффициент восстановления при ударе равен отношению
модулей ударных импульсов за вторую и первую фазы удара.
Модуль ударного импульса за все время удара будет равен
S = St + S2 = mv + mu = m (v + u) = A + k) mv. B16)
Из равенства
S =
b
находим среднее значение ударной реакции поверхности:
_/V* = ^ = A + к) тХ>
х х
Коэффициент восстановления к может быть найден из следую-
следующего опыта: возьмем неподвижную горизонтальную плоскую
плиту, сделанную из того материала, для которого хотят найти
коэффициент к, и заставим падать на эту плиту с высоты Лх без
начальной скорости шарик М (из того же материала); отскочив
после удара от плиты, шарик поднимется до некоторой высоты
К < К (рис- 370)-
Обозначив скорости шарика в начале и в конце удара через
v и и, будем иметь (по известной из кинематики формуле):
v = /2фх и и = /2gh2
576
ДИНАМИКА
отсюда находим:
*-т-/&
м
У///////////////
Измерив высоты hx и /г2, найдем по этой формуле значение
коэффициента к. Из таких опытов найдено, что для слоновой кости
к = */9, для стали к = s/9, для стекла к = 13/ю
и для дерева к = 1/2.
Если к = 0, то имеем неупругий удар, и
в этом случае явление удара заканчивается
одной первой фазой; так как в этом случае
и = 0, то при неупругом ударе шар, ударив-
ударившись о поверхность, остается неподвижным.
Для другого предельного случая к = 1, что
соответствует вполне упругому удару. В этом
случае S1 = S2 и и = v, т. е. импульсы силы
N за каждую фазу удара равны между собой
и скорость шара после удара равна по модулю
его скорости до удара. При 1 ^> к ^> 0 удар
называется не вполне упругим. Так как при
неупругом и не вполне упругом ударе и <^v,
Рис. 370. то в этих случаях, очевидно, происходит по-
потеря кинетической энергии шара. Потерянная
при ударе кинетическая энергия переходит главным образом
в тепловую; хорошо известен факт, что при ударе тела нагре-
нагреваются и иногда весьма значительно.
Рассмотрим теперь случай непрямого удара, т. е. тот случай,
когда скорость шара v в начале удара составляет некоторый
угол а с нормалью к неподвижной
поверхности (рис. 371).
Обозначим скорость шара в конце
удара через и, а проекции скоростей
и и v на Касательную и нормаль An
к поверхности обозначим соответст-
соответственно через их, ип и vx, vn.
Как и в предыдущем случае пря-
прямого удара, реакция поверхности
направлена по нормали An; следова-
следовательно, проекция этой силы на каса-
касательную Ах будет равна нулю. Поэто-
Поэтому на основании теоремы о проекции
количества движения (на касатель-
касательную Ах) будем иметь:
тих — mvx — 0, или их = vr,
т. е. касательная составляющая скорости при ударе о гладкую
неподвижную поверхность остается неизменной.
Рис. 371.
ГЛ 31. ТЕОРИЯ УДАРА 577
Проекция же скорости на нормаль Ап, очевидно, изменяется так
же, как в случае прямого удара; поэтому на основании сказанного
о прямом ударе будем иметь:
\un\ = k\vnl ИЛИ "«=— kvn1)-
Если обозначим угол скорости и с нормалью An через р, то
ип = и cos P и их = и sin P;
точно так же
vn — — v cos а и yT == v sin а.
Внося эти значения в предыдущие равенства, получим:
и sin p = v sin а и и cos p = kv cos а.
Возводя эти уравнения в квадрат и складывая, находим:
и2 — v2 (sin2 a + к2 cos2 а),
откуда
и = z>]/sin2 a + к2 cos2 а, B17)
а разделив первое уравнение на второе, получаем:
tgP = {tga. B18)
Формулы B17) и B18) определяют модуль и направление ско-
скорости и.
Из равенства B18) следует:
k - tga
т. е. коэффициент восстановления при ударе равен отношению
тангенса угла падения к тангенсу угла отражения. Если к = 1,
то tg a = tg р и, следовательно, a = р\ т. е. при вполне упругом
ударе угол падения равен углу отражения.
§ 151. Прямой удар двух шаров
Пусть два шара с массами тх и т2 движутся поступательно со
скоростями vt и i?2, направленными по прямой, соединяющей их
центры, которую примем за ось х (рис. 372).
Предположим, что в некоторый момент шары сталкиваются и
происходит удар. В конце удара шары будут иметь уже другие ско-
скорости щ и м2! направленные по той же прямой, т. е. по оси х.
Задача об ударе двух шаров состоит, во-первых, в определении
1) Знак минус здесь пишем потому, что vn < 0, а ип > 0.
578
ДИНАМИКА
этих скоростей щ и и2 и> во-вторых, в определении ударного им-
импульса.
Рассмотрим сначала случай неупругого удара, т.е. предполо-
предположим, что шары совсем лишены упругости. Обозначим удар (удар-
(ударный импульс), сообщаемый первым шаром второму, через S;
Рис. 372.
этот удар будет направлен по общей нормали к шарам в точке их
касания, т. е. по оси х в положительную сторону. Удар же, по-
лучаелшй первым шаром от второго, имеет по закону равенства
действия и противодействия тот же самый модуль S, но противо-
противоположное направление (рис. 373). Вследствие взаимного давления
шары будут деформироваться (сжи-
(сжиматься) до тех пор, пока скорости
их не сравняются. В этот момент
сжатие достигает наибольшей ве-
величины, но так как шары совсем
лишены упругости, то это сжатие
полностью останется, т. е. обрат-
обратная деформация (восстановление
первоначальной формы шаров) не будет иметь места; следова-
следовательно, для неупругих шаров явление удара заканчивается
в тот момент, когда их скорости становятся равными; таким об-
образом, в этом случае и, = н2 = и.
Применяя теперь к каждому шару теорему о количестве дви-
движения, будем иметь:
Рис. 373
Сложив эти уравнения, получим:
— m2v2= S.
m2v2,
т. е. сумма количеств движения шаров в начале удара и в конца
удара остается неизменной.
Проектируя это векторное равенство на ось х, получим:
т^и + тги = mxv± -f- m2v2 x).
1) Здесь vu v2 и и обозначают проекции скоростеГ! на ось х; эти проек-
проекции могут быть как иоложшельными, гак и отрицательными в зависимости
от направления движеиия шаров.
ГЛ. 31. ТЕОРИЯ УДАРА 579
Отсюда находим алгебраическое значение общей скорости неупру-
неупругих шаров после удара:
M = Wl0|+ «,»,_ B19
Предположим, что
m1v1 + m2v2 = 0
п, следовательно,
v± =- _ 'Jh
т. е. что шары движутся навстречу друг другу (на это указывает
знак минус) со скоростями, обратно пропорциональными их мас-
массам; тогда и = 0, т. е. в этом случае шары после удара остановятся.
Перейдем теперь к случаю упругого удара. Упругость тел при
ударе, как было уже указано выше, характеризуется коэффициен-
коэффициентом восстановления к. При столкновении упругих шаров явле-
явление удара протекает в две фазы; в течение первой фазы шары сжи-
сжимаются до тех пор, пока скорости их не станут равными; после
этого начинается вторая фаза удара, в течение которой вследствие
упругости происходит восстановление (неполное) первоначальной
формы шаров; при этом скорость центра масс одного шара уве-
увеличивается, а скорость центра масс другого — уменьшается. Явле-
Явление удара заканчивается в тот момент, когда шары отделяются
друг от друга, имея неравные скорости.
Обозначим проекции скоростей шаров на ось х в начале удара
через v1 и va, проекцию общей скорости шаров на ту же ось в конце
первой фазы удара обозначим через и, а проекции их скоростей
на ось х в конце второй фазы — через щ и иг. Модуль удара за
первую фазу обозначим через S', а модуль удара за вторую фазу —
через S". Так же как ив предыдущем параграфе при ударе упру-
упругого шара о неподвижную поверхность, и здесь будем иметь:
S" = kS'.
Применяя теорему о проекции количества движения на ось х
к обеим фазам удара, получим четыре уравнения (по два уравне-
уравнения для каждого шара):
1) тп, (и - Vl) = -S',
2) внК- и) = -S",
3) тп2 {и — v2) = S',
4) т.г(и2- и) = S".
Таким образом, вместе с предыдущим уравнением, выра-
выражающим зависимость ме-кду ударными импульсами S' и S",
имеем пять уравнений, из которых можно определить все пять
580 ДИНАМИКА
неизвестных величин: и, ии и2, S' и S". Найдем сначала и. Для
этого сложим уравнения 1) и 3), в результате чего получим:
т1 (и — г^) + т2 (и — г;2) = 0;
отсюда
и = ———: -.
Умножая уравнения 1) и 3) на А; и принимая во внимание соотно-
соотношение между ударными импульсами S' и S", получим на основа-
основании уравнений 2) и 4) два следующих уравнения:
5) к (и — vx) = мх — и, 6) к (и — v2) = и2 — и.
Вычитая из уравнения 5) уравнение 6), получаем:
III ^2 ^^ ^ \^1 * ^2/'
откуда
Эта формула для коэффициента восстановления является обоб-
обобщением формулы B14) предыдущего параграфа на случай прямого
удара двух шаров.
Значения щ и и2 определяются теперь из уравнений 5) и 6):
щ = A + к) и — kvj_ = A + к) и — A + к) г?! + vt =
= i?! + A + к) (и - Vl),
и2 = A + к) и — kv2 = A + к) и — A + к) v2 + v2 =
= v2 + A + к) (и - »,).
Подставляя сюда значение и, получим окончательно:
Ul=v1-(l+ к) ™? (v, - v2),
mi+m* \ B20)
и, = », - A + k)-j^r^-{v2 - v,). j
Если положим здесь А; = 0, то после простых преобразований
найдем:
М, = Wo =
1 *
т. е. придем к результату, полученному уже ранее для неупругого
удара, чего и следовало ожидать, так как равенство нулю коэффи-
коэффициента восстановления соответствует случаю удара неупругих тел.
Если же положим к = 1, то будем иметь вполне упругий удар;
тогда формулы B20) примут следующий вид:
u1=v1--^^-(v1-v2), u2=v2-1^^(v2-v1). B21)
ГЛ. 31. ТЕОРИЯ УДАРА 581
В частном случае, когда ту = т2, получаем: щ = v2 и и2 = vl,
т. е. в этом случае шары после удара обмениваются скоростями.
Найдем теперь модуль ударного импульса S за обе фазы удара;
так как S = S' + S", то, складывая уравнения 3) и 4), получим:
S = т2 (и2 — г7а).
Подставляя сюда значение и2, находим:
V ^1 ^2/' \£i£iu)
Если А; = 0, то
,С — т,гоа . . /99Ч\
О —' ^F \ 1 —" 2V' \£i£iO)
если же А: = 1, то
■(»i-»a). B24)
mx^
Следует иметь в виду, что формулы B19), B20), B21) и B22),
полученные для прямого удара двух шаров, применимы и в случае
прямого центрального удара двух поступательно движущихся
твердых тел произвольной формы, так как все соображения, ко-
которыми мы пользовались при выводе этих формул, остаются вер-
верными и в этом случае. При этом под прямым центральным ударом
двух поступательно движущихся тел понимается такой удар,
при котором общая нормаль к поверхностям соударяющихся тел
в точке их соприкосновения в начале удара проходит через их
центры тяжести и скорости обоих тел в начале удара направлены
по этой нормали.
§ 152. Потеря кинетической энергии при ударе двух тел
Выше было указано, что при неупругом и не вполне упругом
ударе происходит потеря кинетической энергии. Вычислим эту
потерю кинетической энергии сначала для случая неупругого
прямого центрального удара двух твердых тел.
Обозначив общую кинетическую энергию ударяющихся тел
в начале удара через Т9 и в конце удара через Т и сохраняя для
скоростей обозначения предыдущего параграфа,- будем иметь:
= 2 [mi (V1 + ) — ^тп-^и1 + m2 (v* + и2) —2тги2] =
= { [Щ. К + и2) + ^2 (»! + ) - 2 К + тг) и*],
19 И. М. Воронков
582 ДИНАМИКА
где и — общая скорость обоих тел в конце удара; но по формуле
B19) имеем:
и =
следовательно,
2 (т1 -\- т2) и2 = 2 (m1v1 -\- m2v2) и,
а потому
Го — Т — -g- [пг, (i7j -f- и2) -}- Аг>2 (г^ + и2) — 2 (то^ -)- m.2V2) и] =
~ о f! (yi + ^2 — 2ггхм) + т2 (vl + м2 — 2v2u)],
ИЛИ
71 71 т- Iv и\2 -4- m"i Iv r»N2 109^
Если разности vi — и и v2 — и будем называть потерянными
при ударе скоростями первого и второго тела, то равенство B25)
выражает теорему Карно х): потерянная при неупругом ударе ки-
кинетическая энергия равна кинетической энергии, соответствую-
соответствующей потерянным скоростям.
Рассмотрим частный случай, когда одно из ударяющихся тел
находится до удара в покое; в этом случае имеем:
г __ т{0\ r _ m1 + w2 2.
х о — ~о ^ — о '
подставляя в последнее выражение значение и, получим:
„ _ m\v\ _ mx т _ 1 т
1 — с\ / " г" — ; / 0 — 1 п.
I (»ц 1 »i) mi f m »Ь
" mt
Допустим, что m1 значительно больше пи, тогда дробь —- бу-
дет мала в сравнении с единицей и Т будет почти равно То, т. е.
после удара почти вся кинетическая энергия сохраняется; такой
случай мы имеем, например, при забивке свай. Если, наоборот, пг%
во много раз превосходит ml, то множитель, стоящий при 7,
будет мал, а потому и Т будет мало, т. е. почти вся кинетическая
энергия при ударе теряется, и тела после удара остаются почти
неподвижными; такой удар мы имеем, например, при ковке ме-
металла.
') Л. Карно A753—1823) — выдающийся французский ученый и обще-
общественный деятель эпохи Великой французской революции.
ГЛ 31 ТЕОРИЯ УДАРА 583
Перейдем теперь к случаю упругого удара. В этом случае
будем иметь:
— ^~ (vi ~ ui) (vi + ui) + ~f" ^2 ~~" и^ ^2 ^ U2^
из формул B20) предыдущего параграфа находим:
и
подставляя эти значения разностей г^ — щ и v2 — и2 в преды-
предыдущее равенство, получим:
Т Т — l\ _L h\ _
Но в предыдущем параграфе мы имели равенство
следовательно,
или окончательно:
Если А = 1, то
Го — Г --= 0 илп Г = Го,
т. е. при вполне упругом ударе кинетическая энергия не теряется:
энергия, потерянная за первую фазу удара, полностью восстанав-
восстанавливается в течение второй фазы.
Полагая к = 0, получим выражение для потерянной кинети-
кинетической энергии при неупругом ударе в ином виде, чем мы имели
выше по теореме Карно, а именно:
Пример 158. Вес парового молота Р1 = 1 т. Общий вес поковки и
наковальни Р„ = 15 т. Коэффициент восстановления к = 0,6. Найти коэффи-
коэффициент полез/шго действия молота х).
х) Коэффициентом полезного действия называется огношеиие полезной
работы к затраченной энергии (работе).
19*
584 ДИНАМИКА
как
Решение. Обозначим скорость молота в начале удара через ох. Так
наковальня и поковка до удара неподвижны, то уг = 0; следовательно,
где т, обозначает массу молота.
Потерянную при ударе киногическую энергию находим по формуле B26)
То~ Т = A - Р) - т1г -'
2 (гщ -J- т2) '■
Эта энергия затрачивается на работу деформации поковки, которая
в данном случае является полезной работой, а потому искомый коэффициент
полезного действия равен
_ То - Т _ A - *2) та _1~кг
Подставляя сюда данное значение к и заменяя отношение масс отношением
данных весов, получим:
^=0,6.
1+Г5
§ 153. Изменение количества движения системы
при ударах
Пусть данная система п материальных точек испытывает дей-
действие некоторых ударных сил. Посмотрим, как изменится при этом
количество движения системы. Так же как при доказательстве
общих теорем динамики системы, разделим все ударные силы,
действующие на материальные точки данной системы, на силы
внешние и силы внутренние. Если обозначим скорость /г-й точки
системы в начале удара через vk, скорость той же точки в конце
удара через uh, а количества движения системы в начале и в конце
удара обозначим соответственно через К{0) и К, то
Применяя теорему импульсов (§ 127), получим:
J^Seh, B28)
ГЛ 31 ТЕОРИЯ УДАРА 585
где Sph обозначает внешний удар (импульс внешней ударной силы),
приложенный к к-й точке системы, т. е.
J
о
Из § 127 известно, что в уравнение, выражающее теорему импуль-
импульсов, импульсы внутренних сил не входят. Поэтому уравнение
B28) не содержит внутренних ударов, т. е. импульсов внутренних
ударных сил. Заметим, что эти импульсы на основании закона
равенства действия и противодействия попарно равны по модулю
и противоположны по направлению, а потому их сумма всегда
равна нулю, т. е., обозначая внутренний удар через Slh, всегда
будем иметь:
Уравнение B28) выражает теорему об изменении количества дви-
движения системы при ударах, т. е. изменение количества движения
системы равно сумме всех внешних ударов, приложенных к этой
системе.
Эту теорему можно выразить еще и в другой форме. Как из-
известно из § 128, количество движения системы равно количеству
движения центра масс этой системы, в котором сосредоточена вся
ее масса; следовательно,
К = Мис и К"**» = Mvc,
где к с и ис обозначают скорости центра масс С системы в начале
и в конце удара, а М есть общая масса всей системы. Поэтому
уравнение B28) принимает вид
Мис - Mvc = £Se'), B29)
т. е. изменение количества движения центра масс системы, в ко-
котором сосредоточена вся ее масса, равно сумме всех внешних уда-
ударов, приложенных к этой системе.
Отсюда следует, что внутренние удары, возникающие, напри-
например, при столкновении тел, входящих в данную систему, не изме-
изменяют скорости центра масс системы.
При отсутствии внешних ударов будем иметь:
и, следовательно, на основании уравнения B28) в этом случае
1) В правой части этою уравнения индекс к для сокращения записи
опущен.
586 ДИНАМИКА
т. о. при действии только внутренних ударных сил количество
движения системы остается неизменным.
Проектируя векторное равенстно B29) на координатные оси,
получим:
MvCx — Mvcx=i:SeX,
B30)
т. е. изменение проекции на какую-нибудь ось количества дви-
движения центра масс системы, в котором сосредоточена вся ее
масса, равно сумме проекций на ту же ось всех внешних ударов,
приложенных к этой системе.
§ 154. Изменение кинетического момента системы при ударах
Постараемся выяснить теперь, как изменяется кинетический
момент системы материальных точек при действии на эту систему
ударных сил. Сохраняя обозначения предыдущего параграфа и
применяя к каждой точке системы теорему об изменении при ударе
момента количества движения материальной точки относительно
какого-нибудь неподвижного центра О (§ 149), будем иметь:
т0 (mhuh) — т0 (mhvh) = т0 (Sek) + т0 (Slh) (к = 1, 2, ..., п).
Сложив эти п уравнений, получим:
2 т0 (/ив) — 2 то (то) = £ т0 (Se) + Цт0 Et).
Так как внутренние удары попарно равны по модулю и прямо про-
противоположны по направлению, то сумма их моментов относительно
любого центра равна нулю; следовательно,
%т0 (St) = 0.
Поэтому предыдущее уравнение принимает вид
e). B31)
Если обозначим кинетический момент системы относительно центра
О в начале удара через Lq , а в конце удара — через Lo, т. е.
положим
2 т0 (mv) = LS>
ii
%т0 (ти) = Lo,
то будем иметь:
Lo-L'S =:5>o(Se), B32)
ГЛ 31. ТЕОРИЯ УДАРА 587
т. е. изменение кинетического момента системы относительно
какого-нибудь неподвижного центра равно сумме моментов всех
внешних ударов, приложенных к этой системе, относительно
того же центра. '
При отсутствии внешних ударов (при действии только внутрен-
внутренних ударных сил)
и, следовательно,
т. е. при действии только внутренних ударных сил кинетический
момент системы относительно произвольно выбранного неподвиж-
неподвижного центра остается неизменным.
Рассуждая так же, как при выводе уравнения B31), но рас-
рассматривая теперь моменты количеств движения и ударных импуль-
импульсов относительно координатных осей и пользуясь уравнениями
B13) § 149, получим теорему об изменении кинетического момента
системы при ударах в координатной форме, а именно:
У] тх (ти) — V] тх (mv) = У] тх (Se),
У] ту (ти) — %ту {mv) = £ ту (Se),
У] тг (ти) -Sm2 (mv) = У] mz (Se),
B33)
или, обозначая кинетические моменты системы относительно осей
х, у, z в начале и в конце удара соответственно через Lx', L',J', Lz0)
и Lx, Ly, Lz:
B34)
т. е. изменение кинетического момента системы относительно
какой-нибудь неподвижной оси равно сумме моментов всех внеш-
внешних ударов, приложенных к этой системе, относительно той
же оси.
Пример 159. Однородная квадратная пластинка со стороной а и мас-
массой М движется поступательное данной скоростью v, параллельной сгоронеЛВ
(рис. 374). Точка А мгновенно закрепляется, и пластинка начинает вращаться
вокруг этой точки. Определить угловую скорость со пластинки и импульс
реакции закрепленной точки.
Решение. Внешним ударным импульсом S, приложенным к пластинку,
является в данном случае импульс реакции закрепленной точки А; обозначим
проекции этого импульса на координатные оси через Sx и Sy, причем эти
оси направим по сторонам пластинки, как указано на "рис. о74. Разобьем
пластинку на бесконечно малые элементы; массу такого элемента
обозначим через т, а его расстояние от точки А — через г. Тогда модуль
588
ДИНАМИКА
кинетического момента пластинки относительно точки А до закрепления
этой точки, когда пластинка двигалась поступательно, будет равен
L'A = ) 2 тА (то) j = 2 mvy = v 2 ту = Mvyc = — Mva,
причем ус обозначает ординату центра тяжести С пластивки, равную, оче-
очевидно, —.
Принимая во внимание, что скорость и элемента при вращении пла-
пластинки вокруг точки А равна по модулю гсо и направлена перпендикулярно
к радиусу вращения этого элемента, найдем, что модуль кинетического мо-
момента пластинки относительно точки А после
закрепления этой точки будет равен
LA — | 2 '«а (ти) | = 2 тиг =
= 2 тг2а> = со 2 ттг = JАи>,
где JA есть момент инерции пластинки отно-
относительно точки А, причем
J А ~ "о"
а потому
Рис. 374.
^А — "о"
Так как удар S приложен в точке А, то его момент относительно этой точки
равен нулю, а потому на основании только что доказанной теоремы заклю-
заключаем, что кинетический момент пластинки относительно точки А остается
неизменным, т. е.
LA =
j Ma*u> = -i Mva;
отсюда находим искомую угловую скорость пластинки:
3 v
(о = -.- - .
4 а
Обозначим скорость центра тяжести С пластинки после закрепления
точки А через ис; эта скорость направлена перпендикулярно к АС, т. е. по
диагонали DB. Применяя теорему предыдущего параграфа об изменении
проекции количества движения центра масс на осп х и у, получим,два урав-
уравнения:
1) Мис cos 45° — Mv = Sx,
2) — MuG cos 45° = Sy.
Отсюда, принимая во внимание равенство
"С = АС-ы = j— ,
х) Это значение JA находим из формулы для момента инерции прямо-
прямоугольника (см. § 135), в которой нужно положить Ь — а.
ГЛ. 31. ТЕОРИЯ УДАРА 589
находим:
По этим проекциям можем вычислить модуль вектора S и его углы о коор-
координатными осями.
§ 155. Действие ударной силы на твердое тело,
вращающееся вокруг неподвижной оси
Представим себе твердое тело, вращающееся вокруг неподвиж-
неподвижной оси z. Допустим, что на это тело в течение весьма короткого
промежутка времени т действует ударная сила F; иначе говоря,
допустим, что к телу приложен удар
т
S = \Fdt.
к
Выясним, как изменится под влиянием этого удара угловая
скорость тела. Применяя доказанную в предыдущем параграфе
теорему об изменении при ударе кинетического момента системы
относительно данной оси, получим:
Lz - Lf = тг (S) !).
Но кинетический момент вращающегося твердого тела относительно
оси вращения равен произведению угловой скорости тела на мо-
момент инерции его относительно этой оси (§ 129); следовательно,
обозначая угловую скорость тела в начале и в конце удара соот-
соответственно через соо и со, имеем:
Lz = /2@,
LT = /гсо0.
Поэтому предыдущее уравнение принимает вид
Jг (со — со0) = тг (S).
Отсюда находим
со-соо = ^^-, B35)
') Ударные импульсы реакций закреплепных точек тела (подшипников)
в это уравнение не входят, так как моменты этих импульсов относительно
оси вращения тела равны нулю.
590
ДИНАМИКА
т. е. изменение угловой скорости твердого тела, вращающегося
вокруг неподвижной оси, вызываемое приложенным к нему ударом,
равно моменту этого удара относительно оси вращения, разде-
разделенному на момент инерции тела относительно той же оси.
Пример 160. К однородному прямолинейному стержню О А = 2, кото-
который может вращаться на шарнире вокруг горизонтальной оси О, приложен
в его середине удар S, перпендикулярный к оси вращения и к направлению
стержня. Предполагая, что в начале удара стержень паходится в покое,
п определить его угловую скорость в конце удара, а
_„ также модуль и направление ударного импульса, кото-
который передается при этом на шарнир О. Масса стержня
равна М (рис. 375).
Решение. Искомую угловую- скорость нахо-
находим по формуле B35), в которой согласно условию
ucj задачи пужно положить соо = 0, следовательно,
со =
mo(S)
Jr
Д
X
Рис
375.
В
а
данном
потому
случае
т0 (S)
= S
со
_ Ml2
2MV
Обозиачим ударный импульс реакции шарнира О через Sq ; скорость цен-
центра тяжести С стержня в конце удара обозначим через кс ; эта скорость на-
направлена перпендикулярно к ОС и по модулю рашт
"С = •
Применяя теорему об изменения проекций количества движения центра
масс на оси х и у (% 153) и принимая во внимание, что скорость центра тяжести
стержня в начале удара vc = 0, получим:
1) SQu+ S = Мас
2)
Из первого уравнения находим:
?
Из второго уравнения следует, что удар So нанравлен по оси у, а потому
П I О I С
Так как SOy < 0, то удар $0 нанравлен по осп у влево. Удар, передающийся
на шарнир, будет равен но модулю So, но направлен в противоположную сто-
сторону, т. е. по оси у вправо.
ГЛ. 31. ТЕОРИЯ УДАРА
591
§ 156. Центр удара
Пусть имеем твердое тело, которое может вращаться вокруг
неподвижной оси Oz, перпендикулярной к плоскости чертежа;
предположим, что эта плоскость является для тела плоскостью
симметрии, и пусть С есть центр тяжести этого тела, причем
ОС = а (рис. 376). Допустим, что к этому телу приложен удар S,
лежащий в плоскости чертежа, т. е.
в плоскости симметрии тела. Поста-
Постараемся выяснить, при каких усло-
условиях приложенный к телу удар не
будет передаваться на подшипники,
при помощи которых закреплено
данное тело.
Примем неподвижную точку О
пересечения осп вращения с плос-
плоскостью симметрии тела за начало
координат и направим оси хну так,
чтобы ось х проходила чорез центр
тяжести тела. Предположим, что до
удара тело находилось в покое; тогда
<в0 -— 0. Угловую скорость тела в конце удара обозначим через
to, а скорость его центра тяжести в тот же момент обозначим
через ис. Эта скорость будет равна по модулю ясо и будет на-
направлена перпендикулярно к ОС, т. е. параллельно оси у; обо-
обозначим, далее, проекции удара 5 на координатные оси через Sx и
Sy, а проекции на те же оси ударного импульса So общей реак-
реакции подшипников, приложенной к телу в точке О, обозначим
через Sox и SOy г).
Так же как и в предыдущем параграфе, применяя теорему об
изменении проекций количества движения центра масс на оси
хну, получим два уравнения:
1) Sx + SOx = 0,
2) Sy + SOy = MuG.
Так как согласно условию подшипники не должны испытывать
удара, то удар So должен быть равен нулю, а потому
Sox — Soy = 0,
и предыдущие уравнения принимают вид
Sy = Мис, Sx = 0.
1) Мы предполагаем, что подшипники расположены симметрично относи-
относительно плоскости чертежа. Тогда вследствие полной симметрии ударные реак-
реакции подшипников будут равны и приведутся к одной силе, приложенной
к телу в точке О.
592 ДИНАМИКА
Второе уравнение показывает, что удар S, приложенный к телу,
должен быть направлен перпендикулярно к оси х, т. е. к прямой,
соединяющей центр тяжести с точкой пересечения оси вращения
с плоскостью симметрии тела, как это показано на рис. 376.
Но в таком случае Sy = S и, следовательно,
S = Мис,
а так как ис = аи, то
S = Маа.
Угловая скорость тела в конце удара определяется, как известно
из предыдущего параграфа, по формуле
mz (S) Sh
СО = = -у- ,
где /, — момепт инерции тела относительно оси вращения и h —
расстояние прямой, по которой направлен удар S, от этой осп.
Подставляя это значение угловой скорости в предыдущее
равенство, получим:
откуда находим:
г, ., Sh
S = Ma j- ,
h- J*--
Ma'
следовательно, прямая, по которой направлен приложенный к телу
удар, должна находиться от оси вращения тела на расстоянии,
Jz
равном .. .
Точка К, в которой эта прямая пересекает ось х, называется
центром удара. Заметим, что расстояние ОК равно приведенной
длине того физического маятника, который представит собой дан-
данное тело, если оно будет качаться на оси Oz под действием соб-
собственного веса.
В качестве примера найдем центр удара для однородного, пря-
прямолинейного стержня О А длиной / (рис. 375). В этом случае
1 I
Jz = -тг Ml2 и а = ~2 ,
а потому по предыдущей формуле находим:
Ма 3
2 ,
т. е. центр удара находится на расстоянии ^ I от оси вращения
стержня.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аксиомы статики 37
Аксоид неподвижный 335, 366
— подвижной 335, 366
Амплитуда колебания 229, 436
Бинормаль 264
Вариации координат 462
Вектор 36
— главный системы сил 102, 180
— единичный 55, 56
— свободный 93
— скользящий 38, 286
— углового ускорения 287
— угловой скорости 286
Векторы коллинеариыс 54
Величина векторная 36, 45
— скалярная 36
Винт динамический 188
— кинематический 361
Вращение вокруг неподвижной оси
277, 516
— — — — равномерно переменное
280, 521
— — — — равномерное 280, 284,
521
Вырезание узлов 152 и д.
Годограф 250
— скорости 256
График движения 228
— скорости 237
— ускорения 243
Графостатчка 137 и д.
Движение 11
— абсолютное 291, 383
— апериодическое 444
— винтовое 361
— вращательное 277
— колебательное 229, 435 и д.
— криволинейное 227, 246
— механическое 12
— неравномерное 234
— обращенвое 316
— относительное 291, 452
Движение переносное 291
— илоскопараллельное 299, 527
— поступательное 32, 275, 309, 344
— прямолинейное 225—227, 390
— равномерно ускоренное 242
— равномерное 230
— сложное 290 и д.
— тела вокруг неподвижной точки
330 и д.
Декремент 443
— логарифмический 443
Диаграмма Кремоны 155
Дина 385
Динама 188
Динамометр 36
Дифференцирование векторное 249
Длина приведенная физического
маятника 526
Задача магически неопределенная
118
— — определенная 118
Закон вращательного движения тела
278
— движения 227, 247
— Гука 415, 438
— инерции 379
— независимости действия сил 382
— равенства действия и противодей-
противодействия 40, 381
— сохранения механической гшер-
гии-421, 496
Значение силы численное 35
Изменение кинетического момента си-
системы при ударе 586
— количества движения системы ири
ударе 584
Импульс силы 400
— ударный 571
— элементарный 400
Инерция 379
Киловатт 492
Килограмм 36, 384
594
предметный указатель
Кинетостатика 432
Колебание вынужденное 446
— гармоническое 229, 435
— затухающее 440
Количество движения 381, 473
Конус трения 127
Координата дуговая 247
Координаты обобщенные (лагранже-
вы) 536
Коэффициент восстановления 574, 575
— полезного действия 492, 583
— трения качения 133
— — скольжения 125
Кривая расстояний 228
— скоростей 237
— ускорений 243
Кривизна 262
Круг соприкасающийся (круг кри-
визпы) 264
Линия винтовая 363
-- действия силы 35
— узлов 331
Лошадиная сила 492
Масса 380, 381
Метод кинетостатики 432
Многоугольник веревочный 138
— силовой 45
Множитель Лаграижа 423
Модуль вектора 36
Момент времени начальный 22E
•— главный системы сил 102, 180,
182
— инерции относительно начала ко-
координат 502
оси 483, 485, 501 и д.
— — — параллельных осей 508
— ■— — плоскости 503
— — центробежный 511, 513
— кинетический 482, 483
— количества движения 393, 403
— пары 88, 89, 93, 96
— силы 69, 98, 163, 168, 177
Мощность 492
Направление вектора 54
— силы 35
Независимость действия сил 382
Нормаль главная 263
Окружность, момент инерции 505
Орт 55
— бинормали 264
— главной нормали 264
•— касательной 263
— координатный 56
Оси естественные 264
Ось вращения 277
•— — мгновенная 335
— времени 228
— инерции главная 512
— — — центральная 513, 522
— наименьших моментов 189
•— расстояний 228
— центральная системы сил 18S
Пара вращений 367
— сил 75, 88
— — присоединенная 100
— трения качения 133
■— угловых скоростей 367
Параллелограмм сил 39
Перемещение 253, 545
— виртуальное 545, 547
— возможное 461, 538, 544
— действительное 463
Период колебания 229, 437
План скоростей 310
Плечо пчры 88
— силы 69
Плоской ь действия пары 88
— соприкасающаяся 263
Поле силовое 417
— — потенциальное 417, 495
Полодия неподвижная 3J6
— подвижная 316
Полюс 138
Правило параллелепипеда 44
— параллелограмма 39
— силового многоугольника 45
Приведение системы сил к данному
центру 100, 179
Принцип возможных перемещений
461, 466
— Даламбера 431, 497
— отпердевания 40
— относительности классической ме-
механики 454
— Торичелли 560
Произведение векторное 172
— скалярное 175
Производная векторная 249
Промежуток времени 226
Путь, пройденный точкой 239
Работа 406 и д.
— равнодействующей 412
— силы тяжести 413
— элементарная 407
Равновесие 37
— относительное 454
Равнодействующая 37, 103, 185
Радиус инерции 485
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
595
Радиус кривизг:ы 262
Разложение движения точки 290
— силы 48
Реакция связи 41, 122, 421, 460
Резонанс 448
Рычаг 69, 84
Связь 41, 421
— геометрическая 458
— нестационарная 459, 537
—• неудерживающая 423
— совершенная 464, 548
— стационарная 459, 537
— удерживающая 423
Сила 33 и д.
— внешняя 119, 460
— внутренняя 119, 460
— возмущающая 445
— восстанавливающая 445
— всемирного тяготения 34
— «живая» 406, 413
— , зависящая от времени 392
— , — от положения точки 394,
435
— , — от скорости 397
— заданная 460
— инерции 431
— — касательная (тангенциальная)
432
— — кориолисова 452
— — нормальная (центробежная)
432
— обобщенная 551, 559
— — переносная 452
— обобщенная 539
— трения в движении 123
— — в покое (сила магического тре-
трения) 123
— — скольжения 123
— тяжести 34
— ударная (мшовепная) 571
— уравновешивающая 37
— центральная 405
— центробежная 427
— центростремительная 427
Силомер 36
Силы антипараллелышс 74
— параллельные 73 и д.
— сходящиеся 43 и д.
Система единиц абсолютная 384
— — техническая 384
— координат гелиоцентрическая 383
— — геоцентрическая 383
— механическая 458
— — неизменяемая 458
— отсчета 33, 225
инорциальная 33, 383, 454
Система сил 37, 188
— — плоская 98 и д.
— — сходящихся 43
Система сил уравновешивающаяся
37
Системы сил эквивалентные 37
Скорость абсолютная 351
— критическая 451
— обобщенная 553
— переносная 292
— потерянная при ударе 582
— радиальная 352
— средняя 234
— точки 235, 252
— у1ловая 278, 286
— — мгновенная 335
Сложение двух вращений вокруг пе-
пересекающихся осей 373
— геометрическое 39
— нар 94
— поступательных движений 359
— сил 1рафическое 139
— скоростей 351
Сопротивление вредное 491
— полезное 491
Составляющая 48, 56
Состояние равновесия 37
Способ вырезания узлов 152 и д.
— Кремоны 155
— Риттера 160
Степень свободы 461
йержень прямолинейный тонкий, мо-
момент инерции 504
Тело абсолютно твердое 31
— — — несвободное 41, 196
— — — свободное 41
Теорема Вариньона 105, 186
— Гюльдена 207
— Даламбера — Эйлера 332
— импульсов 477
— Карно 582
— Кориолиса 355
— о кинетическом моменте системы
482
■— о количестве движения 399
— о моменте количества движения
481
■— о работе равнодействующей силы
412
— сложения скоростей 350
Точка материальная 32, 413
— — net вободная 421
— приложения силы 35
Трение жидкостное 132
— качения 133
— скольжения 122
596
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Трехгранник естественный 264
Тяготение всемирное 34, 418
Углы Эйлера 330
Угол нутации 331
— прецессии 331
— собственного вращения 331
— трения 127
Удар 571 ид.
— внешний 585
— внутренний 585
— вполне упругий 576
— не вполне упругий 576
— непрямой 576
— прямой 574
Узел фермы 148
Уравнение вращательного движения
тела 278
— движения точки по прямой 227
— дифференциальное вращательного
движения тела вокруг неподвиж-
неподвижной оси 521
— общее статики 468
Уравнения движения тела вокруг
неподвижной точки 332
— — — нлоскопараллольного 301
— — точки в декартовых координа-
координатах 248
— ■— — в полярных координатах
248
— — — относительного 293
— дифференциальные движения в
обобщенных координатах (уравне-
(уравнения Лагранжа) 555, 558
— — — материальной точки 385
— — — — — в форме Лагранжа
423
-— — — — — — — Эйлера (в есте-
естественной форме) 424
— — нлоскопараллельного движе-
движения твердого тела 531
Усилия в стержнях фермы 150
Ускорение 255
— Кориолиса 355
— нормальное 267
— осестремительное 339
— переносное 292
— тангенциальное 267
— угловое 278
— центростремительное 283, 339
Условия начальные 390
Условия равновесия системы в обоб-
обобщенных координатах 538
— — — в случае существования си-
силовой функции 558
Фаза колебания 229, 436
— — начальная 436
Ферма 148
— статически неопределимая 150
— статически определимая 150
Фигуры взаимные 159
Формулы Эйлера кинематические 337
Функция силовая 417, 494, 558
Центр колебания 229
— кривизны 264
— масс 478
— мгновенный вращения 305
— — скоростей 304
— — ускорений 321
— тяжести 203 и д.
— — дуги окружности 212
— — кругового сектора 213
— — многоугольника 211
— — пирамиды 214
— — полукруга 210
— — призмы 214
— — симметричного тела 205
— — треугольника 211
Центроида неподвижная 316
— подвижная 3]6
Цилиндр круглый 506
Частота круговая колебания 437
Число степеней свободы 461
Шаг винта 362
Шарнир сферический 43
— цилиндрический 42
Эквивалентность пар 90
Эллипсоид инерции 512
— — центральный 513
Энергия кинетическая 406, 413, 428
— — материальной точки в отно-
относительном движении 456
.потерянная при неупругом уда-
ударе 582
■— — твердого тела, вращающегося
вокруг неподвижной оси 490
— потенциальная 419, 495, 559