/


























































































































































































































Author: Петров В.А.
Tags: детали машины технология строительного производства строительство инженерия машиностроение механика инженерное дело
ISBN: 5-217-00282-4
Year: 1988




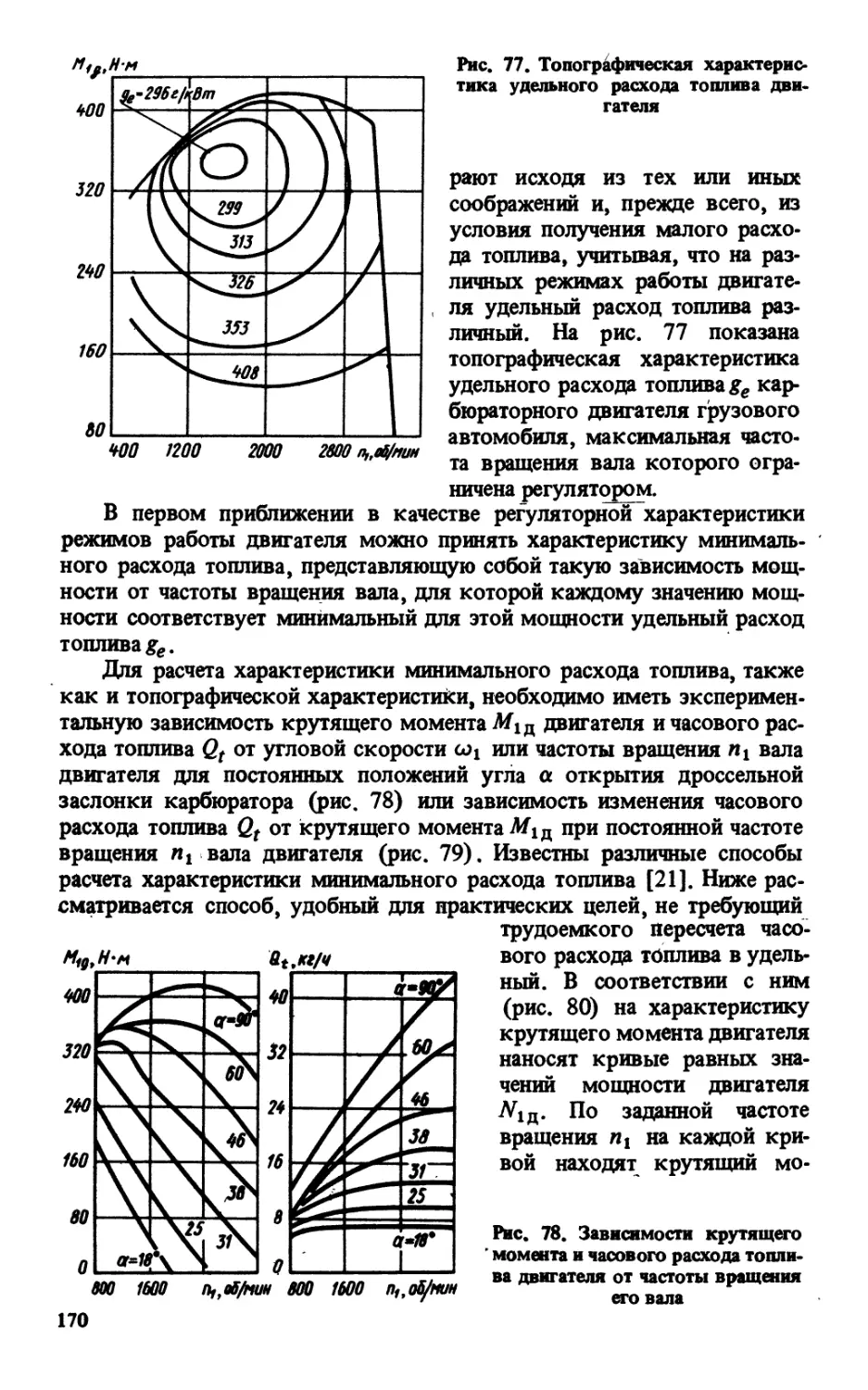
Text
В. А. Петров
ГИДРООБЪЕМНЫЕ
ТРАНСМИССИИ
самоходных машин
В. А. Петров
ГИДРООБЪЕМНЫЕ
ТРАНСМИССИИ
самоходных машин
МОСКВА
«МАШИНОСТРОЕНИЕ»
1988’
ББК38.6-5
пзо£
Рецензент д-р техн.наук проф. ТА» Сырицын
Петров В А.
ПЗО Гидрообъемные трансмиссии самоходных машин. — М,:
Машиностроение, 1988. — 248 с.: ил.
ISBN 5-217-00282-4
Обобщен и систематизирован материал по разработке гидрообъ-
емных трансмиссий строительных, дорожных, транспортных, сельско-
хозяйственных и других самоходных машин. Изложены методы вы-
бора типов гидромашин и принципиальных схем трансмиссий, расче-
та параметров и рабочих характеристик. Рассмотрены вопросы созда-
ния систем автоматического регулирования оптимальных режимов
работы двигателя с использованием гидрообъемной трансмиссии,
совместная работа двигателя и трансмиссии при наличии автоматичес-
кой системы.
Для инженерно-технических работников, занимающихся разработ-
кой строительных, дорожных, сельскохозяйственных машин, автомо-
билей и тракторов.
П
3204010000-264
038 (01)-88
264-88
ББК 38,6—5
ISBN 5-217-00282-4
© Издательство ’’Машиностроение” 1988
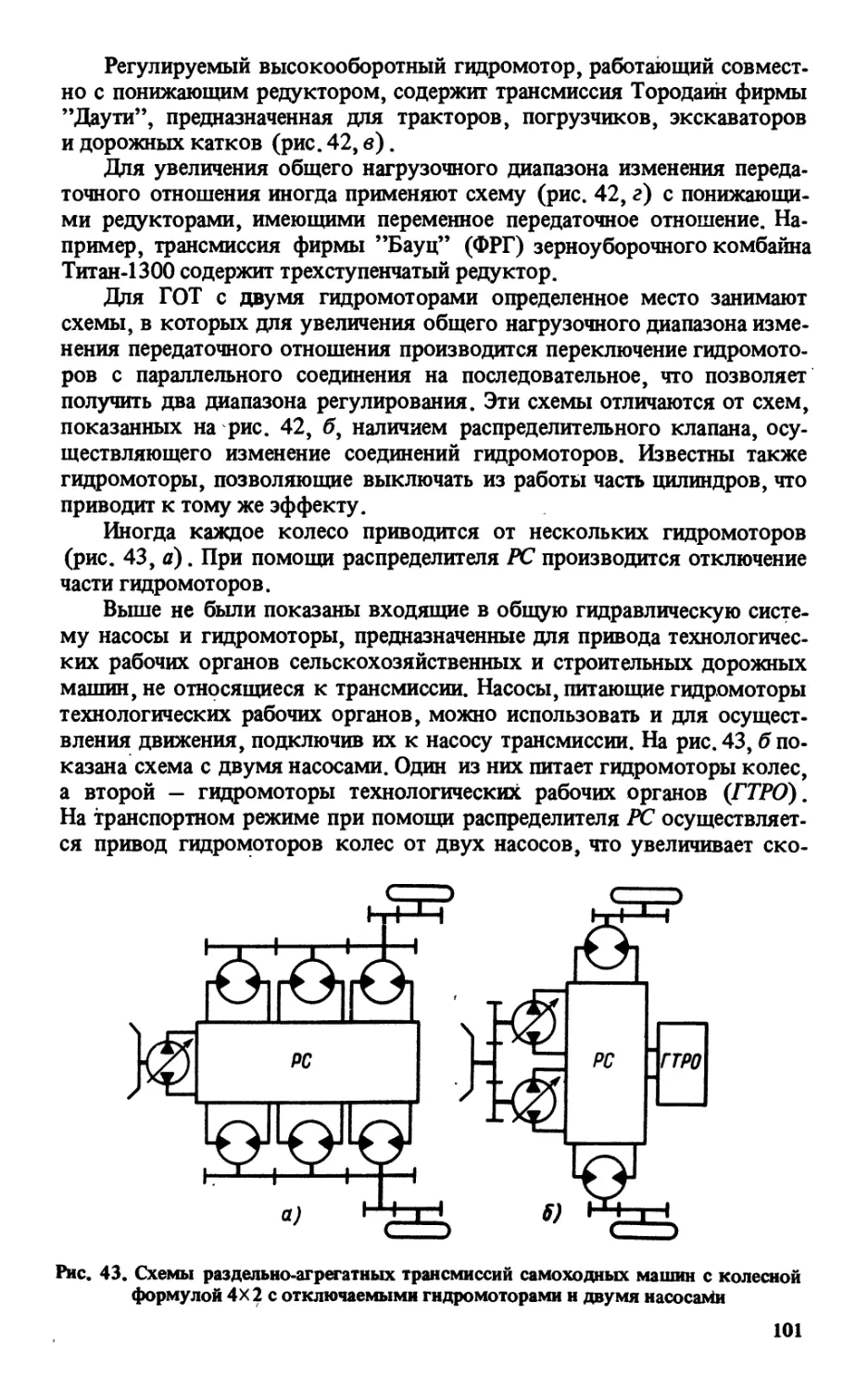
ВВЕДЕНИЕ
В принятой на XXVII съезде КПСС новой редакции программы Ком-
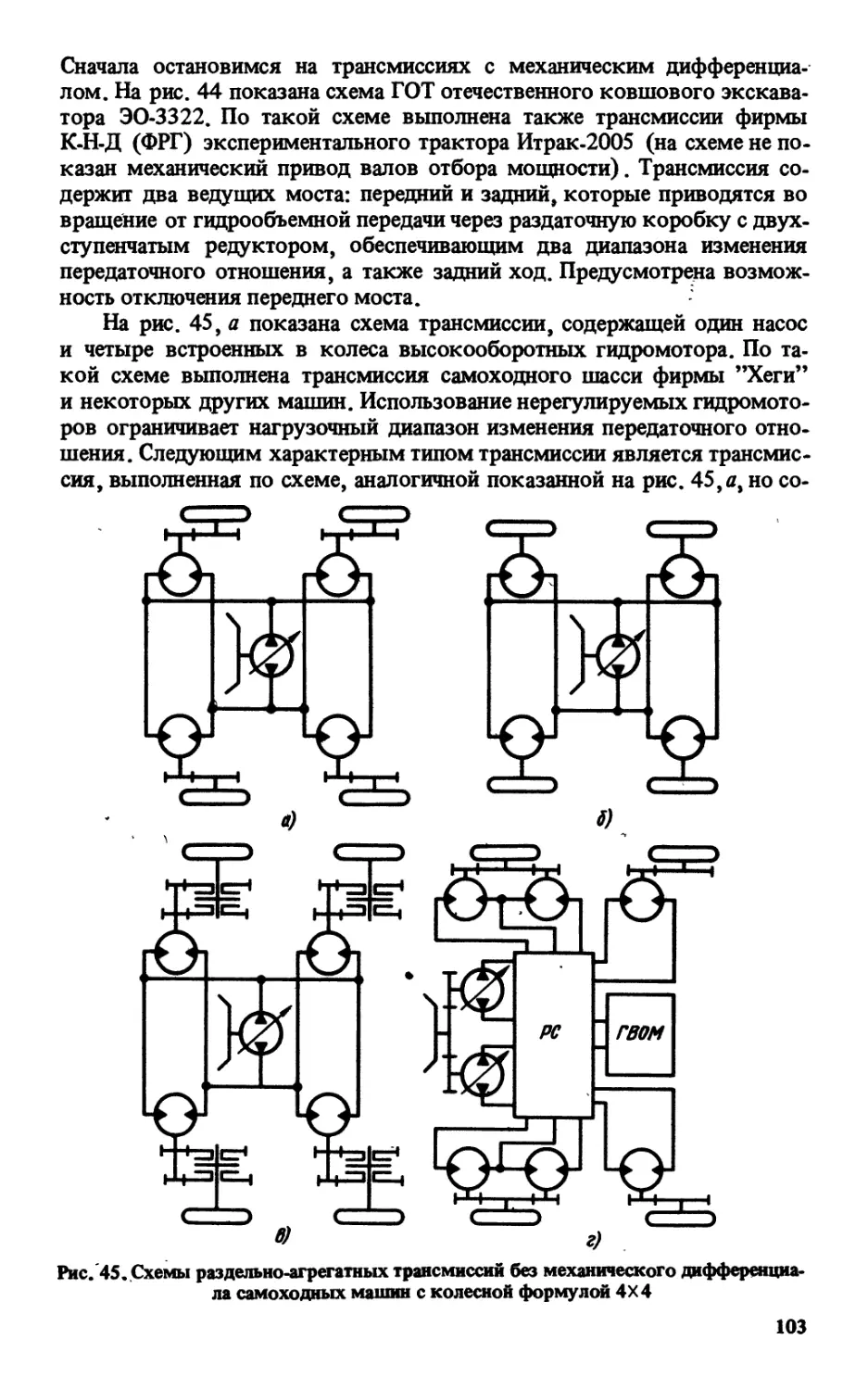
мунистической партии Советского Союза сказано: ”На основе ускорения
научно-технического прогресса, коренных преобразований в технике и
технологии... предстоит добиться значительного повышения производи-
тельности труда...” Применение гидрообъемных трансмиссий является
одним из способов повышения производительности труда при работе
на самоходных машинах.
Под трансмиссией понимают всю совокупность передаточных
устройств — от вала двигателя до рабочих органов машины. Гидро-
объемные трансмиссии (ГОТ) содержат объемную гидропередачу
(ОГП), зубчатые цередачи и другие передаточные устройства, в различ-
ных сочетаниях работающие друг с другом. Передача является частью
трансмиссии. Если объемная гидропередача содержит насос, непосред-
ственно соединенный с двигателем, и высокомоментные гидромоторы,
установленные в колесах самоходной машины, термины гидрообъем-
ная трансмиссия (ГОТ) и объемная гидропередача (ОГП) выражают
одно и то же понятие.
Первая попытка использования ГОТ на самоходной машине отно-
сится к концу прошлого столетия, когда Ч. Мэнли в США установил та-
кую трансмиссию на грузовой автомобиль грузоподъемностью 5 т с бен-
зиновым двигателем, развивающим мощность 17,6 кВт. Практическое
применение ГОТ на самоходных машинах связано с ОГП ’’Дженни-
Вильямс”, которая в период с 1914 по 1918 гг. устанавливалась на
английских танках и позднее на грузовых автомобилях, автомотрисах и
маневровых тепловозах.
Основным недостатком первых ГОТ была большая масса объемной
гидропередачи (удельная масса передачи ’’Дженни-Вильямс” составляла
8,3 кг/кВт). Потребовался долгий путь развития гидромашин, прежде
чем ГОТ смогли получить широкое применение на некоторых самоход-
ных машинах. В настоящее время их можно рассматривать как перспек-
тивные трансмиссии для ряда самоходных машин.
Механические трансмиссии обычно производят заводы, выпускаю-
щие самоходные машины. Для производства ГОТ гидромашин нужны
специализированные заводы со своими разработчиками конструкций,
своей технологией и оборудованием. Перспективы применения ГОТ за-
висят от номенклатуры, совершенства конструкций и качества выпус-
каемых специализированными заводами гидромашин. На Московском
машиностроительном заводе имени Калинина, Одесском заводе ’’Строй-
гидравлика”, Свердловском производственном объединении ’’Пневмо-
3
строймашина” и на Кировоградском заводе гидравлических силовых
машин ’Тидросила” для ГОТ самоходных машин налажен выпуск сов-
ременных аксиально-поршневых гидромашин с наклонным блоком ци-
линдров, аксиально-поршневых гидро машин с наклонным диском и
высокомоментных радиально-поршневых гидромашин с качающимися
поршнями.
Современные ОГП при нагрузочном диапазоне изменения переда-
точного числа, равном шести (относящемся к передаче максимальной
мощности), без механических агрегатов трансмиссии имеют удельную
массу 1 кг/кВт при мощности двигателя самоходной машины 75 кВт и
2 кг/кВт при мощности двигателя 400 кВт. Срок службы ОГП обычно
превышает срок службы двигателя самоходной машины. КПД ОГП в
широком диапазоне изменения частоты вращения валов гидромашин не
ниже 0,8. ОГП проста в эксплуатации. Обслуживание ее сводится к про-
верке уровня рабочей жидкости, замене или промывке фильтрующих
элементов и замене рабочей жидкости приблизительно через 3,5 ... 4тыс.ч
работы. ОГП располагает большими компоновочными возможностями.
Насос можно установить непосредственно за двигателем, а гидромотор
(гидромоторы) разместить в любом удобном (в том числе в колесах
самоходной машины) месте. Просто осуществить автоматизацию управ-
ления ОГП. При наличии автоматического управления ОГП обеспечи-
вает работу двигателя на оптимальных режимах, что значительно повы-
шает производительность самоходных машин и в отдельных случаях за-
метно уменьшает расход топлива.
ОГП имеет относительно высокую стоимость, связанную прежде
всего с высокой точностью изготовления Деталей и высоким качеством
применяемых материалов гидромашин. Для ОГП характерен повышен-
ный уровень шума, что может ограничить ее применение на некоторых
самоходных машинах.
Эффективность использования ГОТ зависит от типа самоходной ма-
шины, для которой она предназначается.
1. ОБЛАСТИ ПРИМЕНЕНИЯ
ГИДРООБЪЕМНЫХ ТРАНСМИССИЙ
Маневровые тепловозы. На маневровых тепловозах, движущихся
с небольшой скоростью, частыми остановками и непрерывным измене-
нием направления движения, ГОТ получила небольшое распростране-
ние. Она обеспечивает их плавное трогание с места, простоту получения
заднего хода (для этого достаточно повернуть люльку насоса в противо-
положную сторону) и перемещение с ’’ползучей” скоростью, что позво-
ляет свести к минимуму удары при сцепке.
Сложность создания ГОТ для маневровых тепловозов связана с
необходимостью использования гидромашин большой мощности. Такие
гидромашины имеют большую удельную массу, отнесенную к единице
передаваемой мощности, так как при увеличении передаваемой мощ-
ности их масса увеличивается в большей степени. Для получения прием-
лемой массы необходимо обеспечить работу гидромашин с очень высо-
кими значениями давления и частоты вращения (для данного рабочего
объема гидромашины).
Эта задача успешно решена фирмой ’’Секмафер” (Франция) . Выпус-
каемая ею ГОТ для тепловоза с дизелем мощностью 643 кВт с частотой
вращения 1800 об/мин содержит два регулируемых насоса?каждый с ра-
бочим объемом 1220 см3, установленные на обоих концах коленчатого
вала дизеля. От каждого насоса получают вращение четыре нерегули-
руемые гидромотора, которые установлены на тележке и имеют цеп-
ной привод к осям колесных пар. Гидромоторы работают с частотой вра-
щения, достигающей 3000 об/мин. Нагрузочный диапазон изменения
передаточного числа ГОТ составляет 5,5. Давление жидкости в гидрома-
шинах может достигать 60 МПа. Нормальное давление, рассчитанное на
продолжительную работу гидромашин, составляет 45 МПа. Срок службы
гидромашин под нагрузкой 20 тыс.ч. Благодаря применению ГОТ вместо
электрической трансмиссии масса тележки тепловоза снизилась на 7 т,
а неподрессоренная масса, приходящаяся на ось колесной пары, умень-
шилась на 2 т.
Этой же фирмой создана ГОТ для тепловоза с дизелем мощностью
6400 кВт. ГОТ содержит четыре регулируемых насоса каждый с рабочим
объемом 3200 см3, работающие с частотой вращения 1250 об/мин при
давлении 58 МПа, и два гидромотора.
Тракторы. ГОТ тракторов выполняют по раздельно- или нераздель-
но-агрегатной схеме. Первые содержат отдельно размещенные насосы
и гидромоторы. При этом используются один или два регулируемых
аксиально-поршневых насоса и два или четыре радиально-поршневых
высокомоментных нерегулируемых гидромотора, встроенные в колеса
5
трактора. Такие экспериментальные ГОТ созданы в научно-исследова-
тельском тракторном институте (НАТИ) и на Харьковском заводе
тракторных самоходных шасси. Иногда вместо высокомоментных гид-
ромоторов применяют высокооборотные гидромоторы, работающие
совместно с зубчатым понижающим редуктором. Высокооборотные
гидромоторы содержит экспериментальная ГОТ Всесоюзного научно-
исследовательского института механизации сельского хозяйства (ВИМ) .
Для расширения нагрузочного диапазона изменения передаточного
числа при наличии нерегулируемых гидромоторов применяют их частич-
ное отключение. Так, например, экспериментальная ГОТ Липецкого
тракторного завода благодаря возможности отключения гидромоторов
и изменения их соединения с параллельного на последовательное имеет
четыре диапазона изменения передаточного чисяа, при этом суммарный
рабочий объем гидромоторов может быть равен четырем, трем, двум и
одному рабочему объему насоса (насос один).
ГОТ, выполненные по нераздельно-агрегатной схеме, содержат раз-
мещенные в одном кожухе насос и гидромотор. Этот агрегат, унифици-
рованный по посадочным меЬтам, устанавливают на трактор вместо
сцепления и коробки передач. Такая схема позволяет комплектовать
один и тот же трактор с механической или с гидрообъемной трансмис-
сией.
Примером ГОТ, выполненной по нераздельно-агрегатной схеме, мо-
жет служить экспериментальная конструкция Минского тракторного
завода, содержащая регулируемой аксиально-поршневой гидронасос
с наклонным блоком цилиндров и такой же гидромотор.
Серийно выпускаемые за рубежом тракторы в большинстве случаев
имеют ГОТ, выполненную по нераздельно-агрегатной схеме. Иногда за
гидрбмотором устанавливают двухступенчатый зубчатый редуктор. Дав-
ление рабочей жидкости составляет 30 ... 40 МПа.
Главная цель применения ГОТ на тракторах — повышение их про-
изводительности в результате увеличения коэффициента загрузки двига-
теля, облегчения управления трактором (нет трудоемких операций, свя-
занных с управлением сцеплением и коробкой передач) и обеспечения
лучшей маневренности, что вызывает уменьшение затрат времени на по-
вороты. Причем производительность повышается несмотря на меньший
(приблизительно на 10 %) КПД ГОТ по сравнению с КПД механической
трансмиссии. Так при установке на трактор МТЗ-50 ГОТ вместо меха-
нической, трансмиссии коэффициент загрузки двигателя увеличился на
пахоте от 0,827 до 0,894, на уборке картофеля от 0,791 до 0,947, а на
посеве зерна от 0,626 до 0,765. В результате этого производительность
трактора возрасла при пахоте, дисковании, культивации и посеве на
6... 18%, при скашивании трав и зерновых культур на 16 ... 18 %, при
уборке кукурузы, свеклы, картофеля и перевозке грузов на 18 ...30%.
Затраты времени на повороты трактора уменьшаются на 30 ... 35 %.
В результате проведенных фирмой ’’Интернэшнл Харвестр” (США)
сравнительных испытаний универсально-пропашного трактора класса
1,4 с гидрообъемной и механической трансмиссиями получено, что ГОТ
увеличивает производительность трактора при подборе и брикетирова-
6
нии сена на 28,9 %, на погрузочных работах до 24,9 %, при заготовке
фуража до 25,4 % и при пахоте до 7,4 %.
Несмотря на изложенные преимущества на сельскохозяйственных
тракторах ГОТ не нашли широкого применения. За рубежом выпуск
тракторов с ГОТ составляет 2 ... 3 % от общего их выпуска. Широкое
применение ГОТ на тракторах сдерживает только одна причина — их
высокая стоимость (трактор с ГОТ по данным фирмы ’’Интернэшнл
Харвестр” на 20 % дороже трактора с обычной механической трансмис-
сией) . Высокая стоимость объясняется тем, что трактор имеет двигатель
сравнительно высокой мощности и вся она передается через ГОТ, а так-
же тем, что для трактора требуется ГОТ с большим диапазоном измене-
ния передаточного числа, — все это вызывает необходимость применения
гидромашин большого рабочего объема.
Наиболее распространены ГОТ на малогабаритных колесных маши-
нах, используемых в качестве садово-огородных тракторов, газоноко-
силок, тягачей, подборщиков, машин для уборки снега и мусора и тд.
Масса этих машин составляет 170 ... 600 кг, а мощность их двигателей
6 ... 15 кВт. В США 40 ... 50 % садово-огородных тракторов выпускают
с ГОТ. Широкому применению на них ГОТ способствовало то, что с
уменьшением мощности двигателя трактора масса и стоимость ГОТ,
отнесенная к единице передаваемой мощности, уменьшаются, а также
то, что для таких тракторов требуется ГОТ с малым диапазоном изме-
нения передаточного числа.
На гусеничном тракторе при раздельном приводе ведущих звездо-
чек левого и правого бортов возможно не только изменять крутящий
момент на ведущих звездочках, но и осуществлять поворот машины,
причем плавно, без рывков, свойственных применению обычного меха-
низма поворота. При этом вместо рычагов можно использовать руле-
вое колесо, применяемое на колесных машинах. Однако необходимо
учитывать, что при повороте машины вся мощность двигателя поступает
на звездочку забегающей гусеницы. При этомТю-за возникновениящир-
куляции мощности передаваемая через ОГП одного борта мощность
может в 3 раза превысить мощность двигателя. Таким образом ОГП
каждого борта гусеничной машины приходится рассчитывать на переда-
чу мощности, значительно превышающую мощность двигателя. Поэтому
применение ГОТ на гусеничных тракторах связано с определенными
сложностями.
Большинство выпускаемых серийно ГОТ тракторов имеет ручное
управление, при котором не представляется возможным использовать
двигатель на оптимальных режимах.
При установке на трактор вместо ГОТ с ручным управлением ГОТ
с автоматическим управлением, по данным ИД. Серебрякова, произ-
водительность машинно-тракторного агрегата на культивации кукурузы
повышается на 23 %, а расход топлива снижается на 18,3 %. При замене
механической трансмиссии на ГОТ с автоматическим управлением про-
изводительность машинно-тракторного агрегата на этом виде работ
повышается на 32,4 % и расход топлива снижается на 6,4 %, При замене
механической трансмиссии на ГОТ с ручным управлением производитель-
7
ность повышается всего на 7,2 %, а расход топлива увеличивается на
8,2 %,т.е. эффективность внедрения ГОТ сомнительна.
По тем же данным при замене механической трансмиссии ГОТ с
автоматическим управлением производительность прй уборке трав по-
вышается на 30 ... 35 % и при посеве — на 28 %.
По данным ЛЛ. Гром-Мазничевского, .при замене механической
трансмиссии на ГОТ с автоматическим управлением производительность
трактора на основных работах увеличивается на 15 ... 20 %, а расход
топлива снижается на 7 ... 11 %.
Как следует из изложенного, при использовании автоматического
управления можно окупить повышенные затраты на установку ГОТ.
Сельскохозяйственные машины. Благоприятные условия склады-
ваются для применения ГОТ на зерноуборочных комбайнах. Значитель-
ная часть мощности двигателя комбайна затрачивается на привод моло-
тильного барабана, транспортера хлебной массы и других агрегатов,
меньшая, равная 30 ... 45 %, — на перемещение комбайна [8]. Рассчитан-
ная на небольшую мощность ГОТ имеет небольшую стоимость при отно-
сительно высокой стоимости комбайна. ГОТ позволяет плавно и непре-
рывно изменять скорость в соответствии с плотностью зерновых на поле
й в результате этого максимально загрузить молотильный барабан, т.е.
увеличить производительность комбайна.
Благоприятны условия использования ГОТ на комбайнах для других
сельскохозяйственных культур, а также и на таких самоходных сельско-
хозяйственных машинах как подборщики, косилки-плющилки и тд.
Важное значение для этих машин имеют компоновочные преимущества,
которыми обладает ГОТ, а также возможность использования гидравли-
ческой системы, в том числе насосной установки, как для передвижения,
так и для привода технологических агрегатов, который трудно осущест-
вить механическим путем из-за удаленности этих агрегатов от двигателя.
В результате в ряде случаев удается значительно снизить массу самоход-
ной машины.
В Советском Союзе ГОТ применяют на зерноуборочном комбайне
”Дон-1500” производства Ростсельмаш, на кукурузоуборочном комбай-
не ”Херсонец-200” Херсонского комбайнового завода, свеклоуборочном
комбайне КС-6Б Тернопольского комбайнового завода им. XXV съезда
КПСС, кормоуборочном комбайне КСК-100 ПО ’Томсельмаш”, карто-
фелеуборочном комбайне КСК4 Рязанского комбайнового завода, ко-
силке-пйющилке КСП-5Г Люберецкого завода сельскохозяйственного
машиностроения им. Ухтомского и на других сельскохозяйственных са-
моходных машинах. В дальнейшем намечается установить ГОТ на все
зерноуборочные комбайны с мощностью двигателя более 75 кВт.
Чем больше мощность комбайна, тем больше его стоимость и мень-
ше относительная стоимость ГОТ.
В США 80 % комбайнов оборудуют ГОТ, причем практически все с
двигателем мощностью более 80 кВт. В странах, где много выпускается
маломощных комбайнов, ГОТ используют меньше; например, в ФРГ
на 38 % комбайнов, в Англии на 25 % комбайнов.
ГОТ отечественных сельскохозяйственных машин, как и болыпин-
8
ство зарубежных, выполнены по раздельно-агрегатной схеме, что облег-
чает компоновку гидроагрегатов на машине. Все отечественные ГОТ со-
держат один аксиально-поршневой регулируемый с наклонным диском
и гидростатической разгрузкой башмаков поршней насос и один такой
же, но нерегулируемый, гидромотор. В трансмиссии сохраняются меха-
нический ведущий мост с главной передачей и дифференциалом, а также
бортовые редукторы колес. ГОТ кормоуборочного комбайна КСК-100
содержит трехступенчатую шестеренчатую коробку передач, установлен-
ную за гидромотором.
Следует указать, что более широкий нагрузочный диапазон непре-
рывного изменения передаточного числа, более высокий КПД, меньшую,
сообщаемую самоходной машине устойчивую скорость движения и
меньшую металлоемкость имеет ГОТ, состоящая из регулируемого на-
соса с наклонным диском и регулируемого гидромотора с наклонным
блоком цилиндров без поворотной люльки.
Большинство ГОТ сельскохозяйственных машин не имеет автомати-
ческого управления. Его применение позволяет увеличить производи-
тельность зерноуборочного комбайна на 15 ... 20 %.
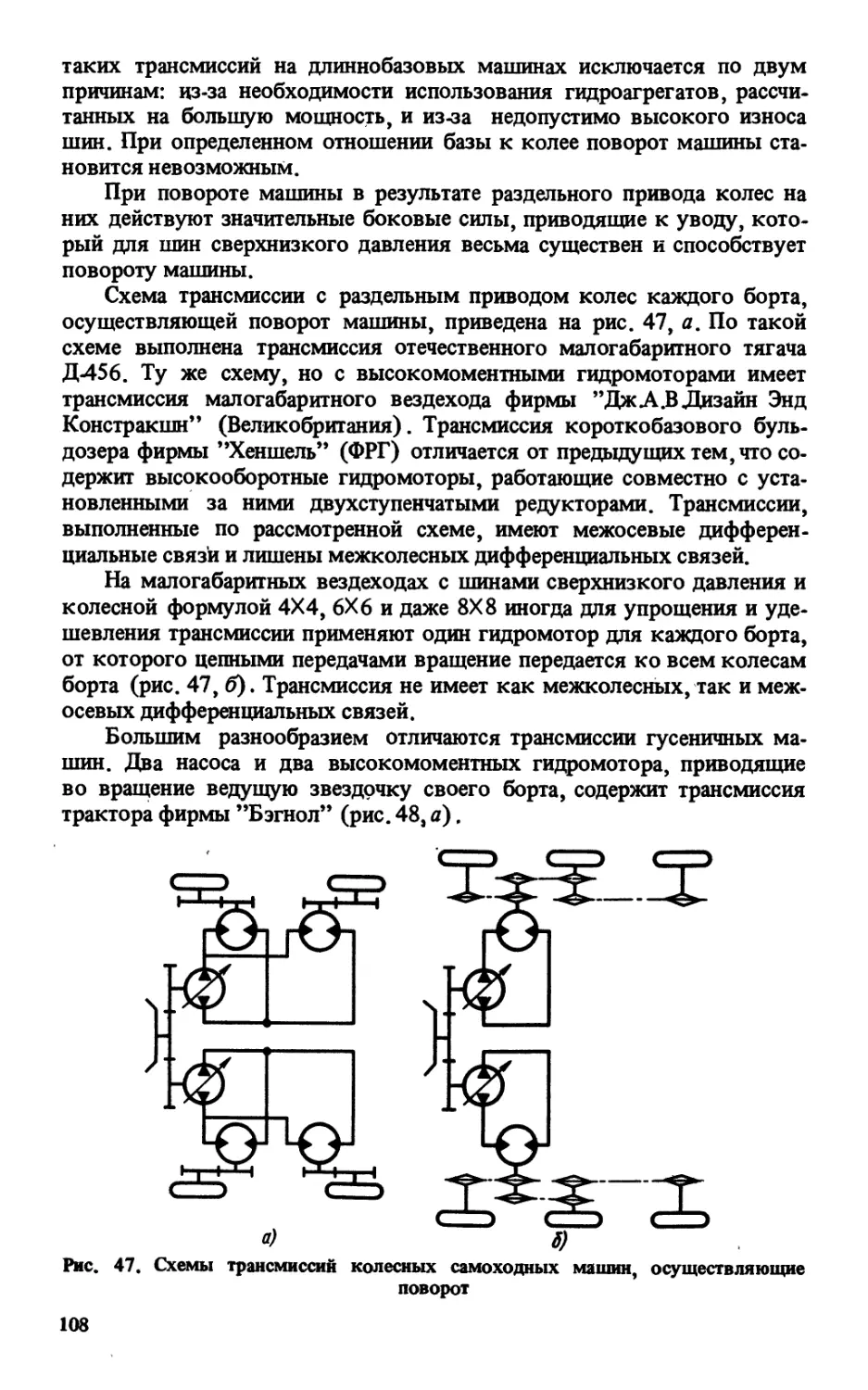
Строительные и дорожные машины. Значительное распространение
ГОТ нашли на одноковшовых экскаваторах. Для них возможно создать
единую гидравлическую систему для привода колес или гусениц, пово-
рота платформы, управления стрелой и ковшом, а также некоторыми
другими агрегатами. На гусеничных машинах ГОТ обычно выполняет
функции механизма поворота. При этом в 2 ... 3 раза сокращаются зат-
раты времени на передвижение в забое и повышается мобильность экска-
ватора при длительных переездах.
В СССР ГОТ устанавливают на колесные и гусеничные экскаваторы,
выпускаемые различными заводами. ГОТ колесного экскаватора
ЭО-4321 содержит двухсекционный аксиально-поршневой регулируемый
насос и четыре нерегулируемых радиально-поршневых высокомомент-
ных гидромотора.
Широко распространены ГОТ на роторных и цепных траншейных
экскаваторах, которые для максимальной загрузки двигателя и получе-
ния высокой производительности должны непрерывно и плавно изме-
нять скорость движения в зависимости от твердости копаемого грунта.
Через ГОТ таких машин передается меньшая часть мощности двигателя,
а большая через механическую передачу подается к ротору, транспорте-
ру и метателю грунта. В связи с этим ГОТ рассчитывают на мощность,
значительно меньшую мощности двигателя, а следовательно, для нее
используют недорогие гидромашины. Условия применения ГОТ на зем-
леройных машинах непрерывного действия аналогичны условиям их
применения на зерноуборочных комбайнах.
ГОТ устанавливают на роторно-траншейные экскаваторы ЭТР-204
с двигателем мощностью 103 кВт и роторно-траншейные экскаваторы
Дмитровского экскаваторного завода с двигателем мощностью 370 кВт,
а также на шнекороторный экскаватор ЭТР-301, предназначенный для
строительства оросительных каналов глубиной до 3 м. Основные рабо-
чие органы экскаватора ЭТР-30 приводятся от дизель-генератора. Инте-
9
ресно, что, несмотря на наличие дизель-генератора и возможности его
использования в создании электрической тяги, для передвижения экска-
ватора применена ГОТ, которая содержит один регулируемый насос и
один нерегулируемый гидромотор. От гидромотора вращение переда-
ется через понижающий редуктор к сдвоенным колесам. Рабочая ско-
рость экскаватора изменяется от 5 до 50 м/ч, а транспортная — от 3 до
4,8 км/ч.
ГОТ широко применяют на созданных в нашей стране ледорезных
машинах, имеющих аналогичные условия работы с траншейными экска-
ваторами — на передвижение затрачивается незначительная часть мощ-
ности, а основная поступает к ледорезной фрезе. На фрезу действует
переменная нагрузка (из-за переменной толщины прорезаемого льда),
что в свою очередь требует непрерывного изменения скорости движе-
ния. На некоторых ГОТ ледорезных машин применяют автоматическое
управление [18].
ГОТ оснащают самоходные дорожные катки, ковшовые и вилочные
погрузчики. Эти машины имеют сравнительно большую массу и малую
мощность двигателя (вилочный погрузчик при общей массе 3 ... 5 т ра-
ботает с двигателем мощностью 10 ... 20 кВт); для них требуется транс-
миссия с небольшим диапазоном изменения передаточного числа (около
четырех), что позволяет применять гидромашины с малыми рабочими
объемами.
По своеобразной конструктивной схеме выполнена ГОТ фирмы
’’Линде АГ” (ФРГ), предназначенная для вилочных погрузчиков грузо-
подъемностью 2 и 2,5 т. ГОТ представляет собой гидравлический веду-
щий мост, который можно вместо механического ведущего моста приме-
нить как на погрузчике, так и на других самоходных машинах. В центре
полой балки ведущего моста расположен?’регулируемый с наклонным
блоком цилиндров аксиально-поршневой насос, и по бокам насоса, под
углом 90° к нему, размещены нерегулируемые с наклонным блоком
цилиндров аксиально-поршневые гидромоторы, соединенные с ведущи-
ми колесами при помощи зубчатых редукторов.
На бульдозере ГОТ не получила широкого применения, несмотря
на его работу в челночном режиме при непрерывно и резко изменяющей-
ся нагрузке, когда могут наиболее полно проявиться преимущества ГОТ.
Это объясняется большой мощностью, передаваемой через ГОТ, и, сле-
довательно, ее высокой стоимостью. Экономически оправдано примене-
ние ГОТ, выполняющей функции механизма поворота, что позволяет
улучшить маневренность бульдозера и повысить его производительность.
Такая ГОТ установлена на колесном короткобазовом бульдозере фирмы
’’Хеншель” (ФРГ) с колесной формулой 4X4 общей массой 28 т с двига-
телем мощностью 224 кВт. Насосная установка ГОТ применяется также
для гидравлического привода отвала, противовеса, вентилятора. Уста-
новленная на гусеничном бульдозере фирмы ’’Джон Дир” (США) ГОТ
также используется для поворота. Она имеет автоматическую систему
управления, которая может значительно повысить производительность
бульдозера и сократить расход топлива.
Ю
г
За рубежом ГОТ с гидромашинами различных фирм применяют
на многих других строительных и дорожных машинах [12].
Автомобили. Огромный интерес вызывает вопрос о возможности
использования ГОТ с автоматическим управлением на наиболее рас-
пространенных самоходных машинах — автомобилях. ГОТ обеспечивает
плавное трогание автомобиля с места и непрерывный, осуществляемый
без разрыва потока мощности, разгон. В результате использования дви-
гателя в режиме максимальной мощности и непрерывного ее поступле-
ния к колесам ГОТ, несмотря на меньший КПД, уменьшает время разго-
на автомобиля до заданной скорости на 10 ... 20 %.
Значительную часть времени, в отличие от многих других самоход-
ных машин, автомобиль работает с частичной нагрузкой на невыгодных
по расходу топлива режимах. ГОТ позволяет обеспечить работу двига-
теля на оптимальных режимах и в результате на 10 ... 15 % сократить
расход топлива. При наличии ГОТ двигатель совершает меньшее коли-
чество оборотов на 1 км пути и работает на более стабильных режимах
без частых разгонов и замедлений; это заметно увеличивает его срок
службы. В результате дросселирования жидкости на выходе из гидромо-
тора ГОТ можно использовать в качестве тормоза на затяжных спусках.
Применение небольшого гидроаккумулятора позволяет использовать
ГОТ в качестве стартера. Гидравлический стартер обеспечивает прокру-
чивание двигателя продолжительное время с высокой частотой враще-
ния, что облегчает пуск двигателя в холодное время года, когда резко
падает емкость аккумуляторной батареи. Применение специальных ре-
гулирующих устройств позволяет автоматически ограничить поступле-
ние жидкости к гидромотору буксующего колеса и тем самым устранить
дифференциальные связи и повысить проходимость автомобиля. В ре-
зультате равномерного вращения колес с малой скоростью ГОТ повы-
шает проходимость автомобиля по сыпучим и мягким грунтам. Это бы-
ло отмечено автором во время ходовых испытаний автомобиля с экспе-
риментальной ГОТ.
Несмотря на указанные преимущества, ГОТ не применяют ни на
одном серийно выпускаемом легковом автомобиле, ее использование
на обычных грузовых автомобилях весьма ограничено. Это объясняется
большой массой и высокой стоимостью ГОТ, что вызвано применением
на автомобилях двигателей большой мощности при их относительно не-
большой массе и необходимым большим нагрузочным диапазоном изме-
нения передаточного числа. Применение ГОТ на легковых автомобилях
может сдерживать шум. Уровень шума аксиально-поршневого насоса
общего назначения мощностью 15 ... 20 кВт составляет 80 ... 90 дБА, в
то время как уровень шума в салоне автомобиля малого класса при ско-
рости движения 100 км/ч не превышает 78 дБ А.
Экономически оправдано применение ГОТ на самосвалах грузо-
подъемностью 75 т и выше (на которых устанавливается электричес-
кая трансмиссия), что позволяет значительно уменьшить материалоем-
кость конструкции и не применять дефицитную медь. Фирма ’’Секма-
фер” (Франция) выпускает ГОТ для самосвала грузоподъемностью 120 т
(полная масса 308 т), имеющего двигатель мощностью 985 кВт, разви-
вающего скорость 50 км/ч и преодолевающего подъем 25 %. П
Важными преимуществами обладает ГОТ при ее применении на
многоприводных автомобилях с колесной формулой 8X8, для которых
механическая трансмиссия имеет сложную конструкцию, высокую
стоимость и низкий КПД. В этих условиях ГОТ, выполненная по раз-
дельно-агрегатной схеме, не уступает механической трансмиссии по мас-
се, стоимости и КПД, сообщая машине ряд дополнительных преиму-
ществ, о которых говорилось раньше. В СССР на базе автомобильного
шасси с колесной формулой 8X8 создан самоходный кран грузоподъем-
ностью 25 т, снабженный ГОТ.
ГОТ незаменима для самоходных тележек грузоподъемностью до
1000 т (самоходйых трайлеров), предназначенных для перевозки круп-
ногабаритных неделимых грузов (атомных реакторов, корпусов судов,
блоков обжиговых печей, буровых установок и т д.). Самоходные те-
лежки сверхбольшой грузоподъемности с ГОТ выпускают фирмы ”Шу-
ле” (ФРГ), ’’Камаг” (ФРГ),’’Николас” (Франция) и др. Тележки содер-
жат большое количество колес. Например, тележка ’’Отомас” фирмы
’’Николас” грузоподъемностью 500 т имеет 192 колеса; все колеса или
значительная часть из них1 выполняются ведущими. Обычно каждая
пара двухскатных колес имеет общую независимую йодвеску и один,
приводящий их во вращение, гидромотор, расположенный между коле-
сами? ГОТ содержит несколько насосов. Для расширения диапазона
изменения передаточного числа применяется отключение части гидромо-
торов. Максимальная скорость движения тележек обычно не превышает
20 км/ч [32].
Использование ГОТ на городских автомобилях является перспектив-
ным с точки зрения экономии эйергетических ресурсов. В результате
применения гидроаккумулятора ГОТ позволяет осуществить рекупера-
цию энергии при торможении автомобиля и благодаря этому уменьшить
расход топлива (для городского автобуса, по данным Л. Брука, на 30 %
[2]). Одновременное снижение расхода топлива в результате использо-
вания двигателя на оптимальных режимах и рекуперации энергии, по
данным Дж. Хартли, составляет 40 %. С. Шибер считает, что при примене-
нии специальной ГОТ можно снизить расход топлива при движении в
городе на 50 %. Принципиальная схема такой ГОТ показана на рис% 1
[40]. Управление работой двигателя и ГОТ осуществляется с помощью
микрокомпьютера. Мощность двигателя автомобиля с ГОТ в 2 раза
меньше мощности двигателя автомобиля с механической трансмиссией.
Опытный образец ГОТ испытан на легковом автомобиле ’’Фольксваген
Иетта”. ГОТ содержит регулируемый аксиально-поршневой насос 2 с
наклонным диском, управляемый гидроусилителем 7, и регулируемый
аксиально-поршневой гидромотор 9 с наклонным блоком цилиндров,
гидроусилитель управления которым на рисунке не показан. Гидромо-
тор приводит во вращение шестерню 10, выполняющую также функции
упорного диска гидромотора, от которого вращение через шестерню
11 передается к корпусу дифференциала 12 и далее через полуоси к ко-
лесам автомобиля. Блок цилиндров удерживается в неподвижном по-
ложении ленточным тормозом 5. На блоке цилиндров укреплена шестер-
12
Рис. 1. Схема ГОТ, осуществляющей реку,
перацию энергии торможения и обеспечи-
вающей работу двигателя на оптимальном
режиме
ня 5, соединенная с блоком при помощи роликового механизма свобод-
ного хода 4. Диапазон изменения передаточного числа ГОТ равен 10.
При движении в городе двигатель.работает на постоянном режиме,
которому соответствует минимальный расход топлива, и при этом раз-
вивает сравнительно высокую мощность. Избыток энергии накаплива-
ется в гидроаккумуляторе 7. После того как гидроаккумулятор пол-
ностью зародится, двигатель останавливается, и автомобиль движется
за счет энергии, накопленной в гидроаккумуляторе. При неработающем
двигателе рабочая жидкость от гидромотора поступает в накопительный
бак 6. Когда гидроаккумулятор окажется разряженным на 90 %, угол
наклона диска насоса изменится на 180°, в результате чего насос, рабо-
тающий в режиме гидромотора и приводимый в действие от гидро-
аккумулятора, запустит двигатель. В дальнейшем описанный цикл рабо-
ты трансмиссии и двигателя повторяется.
Во время торможения автомобиля изменяется угол наклона блока
цилиндров гидромотора. Последний начинает работать в режиме насоса
и заряжает гидроаккумулятор, используя кинетическую энергию тор-
можения автомобиля.
При движении по шоссе отключается ленточный тормоз, удерживаю-
щий блок цилиндров насоса, управляемый электромагнитом гидрорас-
пределитель 8 отключает гидроаккумулятор от системы привода. ГОТ
13
работает в режиме дифференциальной передачи с внутренним разветвле-
нием потока мощности.
Одна часть мощности от двигателя к шестерне 10 передается меха-
ническим путем через блок цилиндров насоса, механизм свободного
хода 4 и шестерню 5, а другая — гидравлическим путем через насос и
гидромотор. Использование дифференциальной схемы позволяет увели-
чить КПД ГОТ и расширить диапазон изменения ее передаточного числа.
Предусмотрено непосредственное соединение наклонного диска насоса
с его блоком цилиндров при помощи расположенных на них кулачков,
что обеспечивает передачу энергии только механическим путем и исклю-
чает ее потери в гидросистеме.
На автомобиле отсутствует стартер. Для пуска двигателя, привода
генератора системы электрооборудования и питания усилителя рулево-
го управления используется энергия гидроаккумулятора.
При движении в городских условиях с частыми остановками 30 %
экономии топлива предполагается получить за счет рекуперации энергии
торможения и 20 % за счет использования двигателя на режиме с мини-
мальным удельным расходом топлива.
Приведенную конструкцию, естественно; не следует рассматривать
как образец, предназначенный для производства. Она показывает лишь
возможные пути более эффективного использования ГОТ на легковых
автомобилях и городских автобусах.
X ГИДРАВЛИЧЕСКИЕ СИСТЕМЫ
ГИДРООБЪЕМНЫХ ТРАНСМИССИЙ
2Д. СИСТЕМЫ, ОБЕСПЕЧИВАЮЩИЕ
ФУНКЦИОНИРОВАНИЕ ОБЪЕМНОЙ ГИДРОПЕРЕДАЧИ
Гидравлические системы ОГП содержат механизмы и устройства,
ограничивающие максимальное давление жидкости, управляющие гидро-
машинами (изменяющие их рабочие объемы), осуществляющие охлаж-
дение и фильтрацию рабочей жидкости и др. Иногда они содержат устрой-
ства переключения передач в механических редукторах, распределители,
позволяющие отключать гидромоторы или переключать их с параллель-
ного соединения на последовательное, регуляторы расхода, ограничи-
вающие подачу жидкости к гидромотору буксующего колеса, и др. На
строительно-дорожных и сельскохозяйственных машинах применяют
общую гидравлическую систему управления ГОТ и технологическими
агрегатами.
Основное требование, предъявляемое к гидравлической системе, —
минимальное число гидравлических элементов, через которые проходит
поток жидкости под максимальным давлением, так как эти элементы
имеют значительные размеры, массу и стоимость.
Ниже рассмотрена типовая гидравлическая система ГОТ, обеспечи-
вающая нормальное функционирование ОГП (рис. 2). Подобная система
14
использована в отечественной косилке-плющилке (только имеет нерегу-
лируемый гидромотор), зерноуборочном комбайне Е-516 (ГДР) и дру-
гих машинах. Главный контур содержит регулируемые насос 1 и гидро-
мотор 16, всасывающую (нижнюю) и напорную (верхнюю) гидролинии.
При реверсировании, а также при движении самоходной машины по
инерции или на спуске всасывающая линия выполняет функции напор-
ной, а напорная — всасывающей. Для предохранения ОГП от перегрузок
установлены клапаны 9 и 10, ограничивающие максимальное давление.
При давлении выше допустимого один из клапанов открывается и пере-
пускает жидкость из напорной линии во всасывающую.
Для снижения стоимости ОГП садово-огородных тракторов их не
снабжают предохранительными клапанами. Максимальное давление в
системе ограничивается буксованием ведущих колес, т.е. определяется
силой сцепления колес с грунтом.
Общая гидравлическая система включает систему подпитки^ обеспе-
чивающую создание подпора во всасывающей линии для устранения
кавитации и, следовательно, для повышения частоты вращения
насоса и уменьшения проходных сечений его каналов. Система подпитки
объединена с системой охлаждения жидкости и содержит шестеренный
насос 5 подпитки, гидравлически управляемый распределитель 12, пере-
ливной клапан 11, предохранительный клапан 6 и обратные клапаны 7
и 8. Насос 5 забирает охлажденную жидкость из общего бака системы и
подает ее через клапан 8 во всасывающую линию ОГП. Здесь охлажден-
ная жидкость, увлекаемая общим потоком, поступает к насосу 1. Часть
жидкости компенсирует утечки, имеющие место в ОГП. Так как подача
насоса 5 больше утечек, образовавшийся во всасывающей линии изли-
шек жидкости (нагретой после выхода из гидромотора) через золотни-
ковый распределитель 12 и переливной клапан 11 поступает к охладите-
Рис. 2. Гидравлическая схема ОГП с регулируемыми насосом и гидромотором и
двумя предохранительными клапанами
15
лю 17 и далее на слив. Переливной клапан 11 ограничивает давление
подпитки, а распределитель 12 обеспечивает соединение клапана 11 со
всасывающей линией и блокирует поступление к нему жидкости из
напорной линии. Золотник распределителя перемещается под действием
давления жидкости, подводимой к его торцам.
Таким образом вся жидкость от насоса подпитки (кроме утечек)
проходит через охладитель 77. Предохранительный клапан 6 предотвра-
щает случайное повышение давления. Систему охлаждения рассчиты-
вают так, чтобы температура охлаждающей жидкости не была более
82 °C. В трансмиссиях самоходных машин обычно используют воздухо-
масляные охладители, способные отводить в виде теплоты около 20%
энергии*, передаваемой трансмиссией.
Часто на выходе клапана 77 устанавливают распределитель с ручным
управлением, перепускающий жидкость на слив, минуя охладитель 77.
Это позволяет поддерживать необходимую температуру жидкости в
зимнее время. Проходящая через переливной клапан 11 жидкость теряет
свою энергию, что приводит к дополнительным.потерям в передаче. По-
этому следует стремиться к минимальному расходу жидкости и мини-
мальному давлению в системе подпитки.
По данным фирмы ’’Секмафер” (Франция), подача насоса подпитки
должна составлять 12 ... 15 % максимальной подачи насоса 7 ОГП. Такая
подача компенсирует утечки в передаче и обеспечивает прохождение че-
рез охладитель определенного количества жидкости. Иногда насос под-
питки используют для управления различными дополнительными агрега-
тами. При этом его подача должна быть несколько большей. Известны
гидравлические системы,содержащие два насоса подпитки: один, имею-
щий привод от двигателя, и второй — от ведомого вала ОГП. Второй на-
сос поддерживает давление в системе подпитки при движении самоход-
ной машины с неработающим двигателем. Иногда (значительно реже)
вместо шестеренного насоса подпитки применяют шиберный.
Давление в системе подпитки выбирают в зависимости от скорости
жидкости в окнах распределителя гидромашины. Оно также зависит от
совершенства форм гидролиний. Обычно для гидромашин, используе-
мых в ОГП транспортных машин, давление подпитки составляет 0,6 ...
0,4 МПа. При высоких скоростях жидкости (высокооборотные гидро-
машины) давление подпитки достигает 1,5 МПа.
В некоторых ОГП применяют нулеустановители, которые при паде-
нии давления в системе подпитки устанавливают блок цилиндров насоса
или его наклонный диск в нейтральное положение. Благодаря этому
предотвращается работа ОГП при неисправной системе подпитки, что
исключает разрушение деталей распределителя из-за кавитации.
Для очистки жидкости имеется фильтр 18 тонкой очистки, установ-
ленный на входе в насос подпитки. Жидкость через фильтр подводится
во всасывающую линию, а отработанная жидкость с частицами износа
отводится через клапан 77. Иногда в обводном канале фильтра устанав-
ливают переливной клапан, рассчитанный на давление 0,2 ... 0,3 МПа,
обеспечивающий подачу жидкости в линию подпитки при засорившемся
фильтре.
16
В современных конструкциях фильтр часто устанавливают не на вса-
сывающей, как показано на рисунке, а на напорной линии подпиточного
насоса. Его выполняют съемным и размещают снаружи передачи.
Иногда кроме фильтра тонкой очистки применяют и фильтр грубой
очистки.
Системы управления насосом 1 и гидромотором 16 содержат гидро-
усилители с жесткой обратной связью, обеспечивающие следящее дейст-
вие, т.е. пропорциональность между перемещением органа управления
усилителем и углом поворота наклонного диска или блока цилиндров
гидромашины. Гидроусилитель насоса состоит из золотникового распре-
делителя 3 и гидроцилиндра 2, а гидроусилитель гидромотора — из зо-
лотникового распределителя 14 и гидроцилиндра 15. Механическая об-
ратная связь между перемещениями поршня гидроцилиндра и золотника
распределителя на рисунке не показана. Жидкость подается из системы
подпитки через дроссели 4 и 13. Иногда для питания гидроусилителей
применяется отдельный насос.
При помощи специального устройства обеспечивается определенная
последовательность управления насосом и гидромотором: сначала от ну-
ля до максимального значения увеличивается рабочий объем насоса,
после чего при постоянном максимальном рабочем объеме насоса произ-
водится уменьшение рабочего объема гидромотора.
Срабатывание предохранительных клапанов 9 и 10 приводит к рез-
кому увеличению температуры рабочей жидкости, несмотря на то, что
вся жидкость от предохранительных клапанов поступает во всасываю-
щую линию и далее через распределитель 72, клапан 11 подается в охла-
дитель 17. По имеющимся данным для ОГП с насосом подачей 151 л/мин
при максимальном давлении 35 МПа и объеме масла в баке 3,8 л сраба-
тывание предохранительных клапанов вызывало повышение температу-
ры масла на17ъСв1с. Если трансмиссия работает с частыми перегруз-
ками, то для защиты системы от перегрева применяют специальный зо-
лотниковый распределитель, к которому через обратные клапаны посту-
пает жидкость под давлением нагнетания. Как только это давление пре-
высит заданное значение, подача жидкости в гидроусилитель управления
насосом прекращается, и он соединяется со сливной линией, при этом
на наклонный диск насоса действуют только собственные силы, возни-
кающие в результате его взаимодействия с башмаками поршней и пово-
рачивающие наклонный диск в нейтральное положение.
Задний ход самоходных машин получают двумя способами. При
первом используют распределитель с ручным управлением, осуществля-
ющий подвод жидкости от насоса к разным штуцерам гидромотора.
Однако вследствие того, что распределитель имеет большие размеры и
массу (так как его устанавливают в напорной линии) и создает допол-
нительное сопротивление движению жидкости, такой способ получения
заднего хода транспортных машин широкого распространения не по-
лучил.
Чаще для получения заднего хода переводят блок цилиндров (на-
клонный диск) насоса через нулевое положение. При этом напорная ли-
ния становится сливной, а сливная — напорной. Для перевода блока ци-
2 —Зак. 1159 ' . 17
линдров в противоположную сторону при ручном управлении насосом
необходимо переместить орган управления гидроусилителем за положе-
ние, соответствующее нулевой подаче насоса. При автоматическом
управлении насосом при прямом и заднем ходах увеличению рабочего
объема насоса должно соответствовать одно и то же направление пере-
мещения органа, управляющего гидроусилителем. Поэтому в гидравли-
ческую систему необходимо ввести дополнительный распределитель,
меняющий местами подвод жидкости к цилиндру гидроусилителя. При
изменении подвода жидкости поршень гидроусилителя перемещается
в противоположную сторону при прежнем направлении перемещения
органа, управляющего гидроусилителем.
В ОГП самоходных машин для разгрузки главного контура часто
применяют устройство, соединяющее между собой всасывающую и на-
порную гидролинии. Обычно для этого используют клапаны 9 и 10,
снабжаемые специальными механизмами. При помощи этих механизмов
освобождают запорно-регулирующие элементы клапанов от действую-
щих на них усилий. Устройствами управляет жидкость, подаваемая к
ним от насоса подпитки через распределитель с ручным управлением.
Разгрузку главного контура применяют для переключения передач
в механическом редукторе, если такой имеется в трансмиссии, и для
других целей. Нейтральное положение ГОТ можно также получить в
результате принудительной установки наклонных дисков или блоков
цилиндров насоса и гидромотора в нулевое положение.
ГОТ целесообразно использовать для торможения самоходной ма-
шины на затяжных спусках, когда из-за нагрева тормозных накладок
нельзя применять тормозные механизмы, а использование сопротивле-
ния проворачиванию двигателя малоэффективно и приводит к значи-
тельному износу его деталей.
Возможны различные способы торможения машин. При одном из
них наклонный диск насоса устанавливается в нейтральное положение,
в результате чего жидкость под максимальным давлением перепускает-
ся через один из предохранительных клапанов 9 или 10. Тормозной мо-
мент на колесах увеличивается при увеличении рабочего объема гидро-
мотора от нуля до максимального значения.
В зарубежной литературе предлагается для торможения автомоби-
лей с ГОТ использовать специальный клапан, через который жидкость
из напорной линии гидромотора, работающего в режиме насоса, прохо-
дит в его всасывающую линию. При этом перекрывается подача жидкос-
ти от гидромотора к насосу. Гидромотор работает при постоянном мак-
симальном рабочем объеме. Тормозной момент на колесах изменяется
в результате изменения силы поджатия пружины клапана, на которую
действует давление жидкости из системы подпитки, причем устройство
поджатия пружины рекомендуется выполнят^ так, чтобы падение давле-
ния подпитки, вызванное теми или иными неисправностями, приводило
к торможению автомобиля.
Для торможения самоходной машины при помощи ГОТ можно так-
же использовать регулируемый дроссель.
В гидравлическую систему должны входить приборы контроля. К
18
ним относятся электротермометры, измеряющие температуру жидкос-
ти в гидролинии, по которой она поступает из основного контура в сис-
тему охлаждения, а также манометры для измерения давления в системе
подпитки и в напорной гидролинии.
Предохранительные клапаны 9 и 10, расположенные в главном кон-
туре, имеют большие размеры и высокую стоимость; они должны со-
держать устройства для предотвращения колебаний запорно-регули-
рующего элемента и для освобождения его от действия пружины. Поэто-
му иногда применяют один предохранительный клапан и три обратных
клапана более простой конструкции. Такую систему имеет ОГП фирмы
’’Секмафер” (Франция) (рис. 3), которая состоит из регулируемого
насоса и нерегулируемого гидромотора. При увеличении давления в на-
порной гидролинии выше установленного значения через один из обрат-
ных клапанов 5 или 6 жидкость подводится к предохранительному кла-
пану 4 и через него и один из обратных клапанов 2 или 3 системы под-
питки поступает во всасывающую линию. Обратный клапан 1 предотвра-
щает поступление жидкости к насосу 14 подпитки и далее на слив. Рас-
пределитель 7 с ручным управлением обеспечивает свободный проход
жидкости через предохранительный клапан из напорной линии во всасы-
вающую для получения нейтрального положения трансмиссии. Перелив-
ной клапан 15 устанавливает давление во всасывающей гидролинии, а
предохранительный клапан 13 ограничивает максимальное давление
в ней.
Для питания гидроцилиндра 12 применен отдельный насос 9. Распре-
делитель 11 при нейтральном положении золотника и неподвижном
поршне гидроцилиндра 12 обеспечивает поступление жидкости от насоса
9 на слив. В этом случае на выходе из распределителя целесообразно
установить дополнительный охладитель 10. Он обеспечивает дополни-
тельное охлаждение рабочей жидкости, практически не вызывая увели-
чения потребляемой мощности, в то время как повышение подачи на-
Рис. 3. Гидравлическая схема ОГП с регулируемым насосом, нерегулируемым
гидромотором и одним предохранительным клапаном
2*
19
coca 9 и расхода жидкости через охладитель 8 связано с увеличением не-
производительных затрат мощности.
Гидравлические системы тракторов, сельскохозяйственных, строи-
тельных и дорожных машин содержат устройства отвода жидкости к
гидромоторам и гидроцилиндрам, управляющим различными агрегата-
ми. Часто для этой цели применяют дополнительные насосы. В садовых
тракторах для привода технологических агрегатов обычно используют
насос подпитки, давление которого при помощи дополнительного пере-
ливного клапана повышают до 3,5 ... 5 МПа. Вся система представляет
собой устройство, условно называемое гидравлическим валом отбора
мощности.
Выше рассматривались гидравлические системы простых ОГП с
одним насосом и одним гидромотором. ОГП с несколькими гидромото-
рами иногда содержат распределители, отключающие часть из них или
изменяющие их соединение с параллельного на последовательное. Извест-
но применение распределителей для питания всех гидромоторов от всех
насосов или раздельного питания части гидромоторов от отдельных на-
сосов с целью устранения эффекта механического дифференциала. Сле-
дует отметить, что эти распределители существенно усложняют ОГП и
создают дополнительные сопротивления рабочему потоку жидкости.
Важное значение для надежной работы передачи имеет качество ра-
бочей жидкости. Требования, предъявляемые к рабочим жидкостям
ОГП, их свойства подробно рассмотрены в литературе [5,14].
Заводы-изготовители гарантируют надежную работу аксиально-
поршневых гидромашин при кинематической вязкости жидкости 8 ...
1500 мм2/с. Оптимальная кинематическая вязкость при тонкости очист-
ки 25 мкм составляет 16 ... 25 мм2/с и при тонкости очистки 40 мкм
27 ...33 мм2/с.
Из отечественных рабочих жидкостей наиболее подходящей по
своим качествам для самоходных машин является загущенное мине-
ральное масло АМГ-10. Оно представляет собой раствор полимерной
вязкой присадки в маловязкой легкой масляной основе. Легкие масля-
ные фракции имеют пологую вязкостно-температурную характеристику
и низкую температуру застывания, но их вязкость при высоких темпе-
ратурах оказывается недостаточной. Вязкостная присадка к маловязкой
основе повышает только уровень вязкости с сохранением или улучше-
нием крутизны вязкостно-температурной кривой. Поэтому загущенные
масла способны обеспечить работу ОГП самоходной машины в широком
диапазоне температур.
Кинематическая вязкость масла АМГ-10 при изменениии темпера-
туры от +50 до -50 °C изменяется от 10 до 1250 мм2/с. Масло АМГ-10
содержит присадки, обеспечивающие антикоррозионную защиту и хоро-
шие смазывающие свойства, предотвращающие разрушение резиновых
и других изделий. К недостаткам этого масла следует отнести резкое
ухудшение смазывающих свойств при повышенных температурах и вы-
падение смолистых осадков. Препятствием к использованию масла
АМГ-10 в ОГП самоходных машин может служить его очень высокая
стоимость.
20
Для ОГП строительных, дорожных и других самоходных машин соз-
даны и рекомендуются в качестве основных две рабочие жидкости:
ВМГЗ (при отрицательных температурах окружающего воздуха) и
МГ-ЗО (при положительных температурах).
Жидкость ВМГЗ используют в качестве всесезонной для районов
крайнего севера и в качестве зимней для районов с умеренным клима-
том. Она обеспечивает длительную работу гидромашин в диапазоне тем-
ператур —40 ... +65 °C и кратковременную в диапазоне —50 ... +70 °C.
В Диапазоне температур +50 ... —40 °C кинематическая вязкость жидкос-
ти изменяется от 10 до 1500 мм2/с. При температуре воздуха ниже
-40 °C необходимо на малых оборотах двигателя без нагрузки путем
дросселирования прогреть систему, повысив температуру рабочей жид-
кости До 10 ... 15 °C. Для повышения температуры применяют также
специальные подогреватели.'
Жидкость ВМГЗ относится к загущенным маслам на нефтяной осно-
ве и содержит присадки, обеспечивающие антиокислительные, противо-
износные, антикоррозионные и антипенные свойства.
Рабочую жидкость МГ-ЗО используют в качестве всесезонной для
южных районов и в качестве летней для районов с умеренным клима-
том. Она обеспечивает длительную работу гидромашин в диапазоне тем-
ператур +5 ... +70 °C и кратковременную в диапазоне —10 ... +70 °C. В
диапазоне температур +50 ... —15 °C кинематическая вязкость жидкости
изменяется от 28 до 4000 мм2/с. Рабочая жидкость МГ-ЗО, как и ВМГЗ,
содержит различные присадки, обеспечивающие ее необходимые
свойства.
Заменителями рабочей жидкости ВМГЗ и МГ-ЗО являются масла
соответственно АУ и И-ЗОА. Срок службы жидкостей ВМГЗ и МГ-ЗО
составляет 3500 ... 4000 ч работы и в 2 ... 3 раза превышает срок службы
других нестандартных масел [5]. Известны гидромашины ОГП самоход-
ных машин, в которых в качестве рабочей жидкости используют дизель-
ное топливо.
К присадкам рабочей жидкости следует относиться с определенной
осторожностью [36]. Высокое давление способствует разрушению загу-
щающих присадок минеральных масел, а моющие присадки не дают
частицам загрязненной среды оседать в баке или фильтре, увеличивая их
вредное воздействие на систему.
Важным свойством рабочей жидкости является ее сжимаемость,
которая снижает КПД гидромашин. Увеличение рабочего давления лими-
тируют не механическая прочность гидромашин и не герметичность, а
сжимаемость жидкости. В настоящее время имеются рабочие жидкости,
обеспечивающие нормальное функционирование ОГП при давлении до
75 МПа [27].
Работоспособность гидромашин существенно зависит от чистоты
рабочей жидкости [17]. Повышение тонкости фильтрации от 20 до 5 мкм
увеличивает срок службы насосов в 10 раз и гидроаппаратуры в 5 ...
7 раз. Чем выше тонкость фильтрации жидкости, тем больше гидравли-
ческое сопротивление фильтров и выше стоимость фильтрующего мате-
риала.
21
22. ГИДРОАППАРАТЫ
Типичными гидроаппаратами являются обратные, переливные и пре-
дохранительные клапаны. Особенно важно выбрать конструкцию пре-
дохранительного клапана, расположенного в напорной гидролинии.
Для ОГП, работающей при пиковом давлении 40 ... 50 МПа, использо-
вать клапан прямого действия нерационально, так как он должен со-
держать несоизмеримо больших размеров пружину, рассчитанную на
значительную силу сжатия (например, при площади запорно-регулирую-
щего элемента 2 см2, равную 8 ... 10 кН).
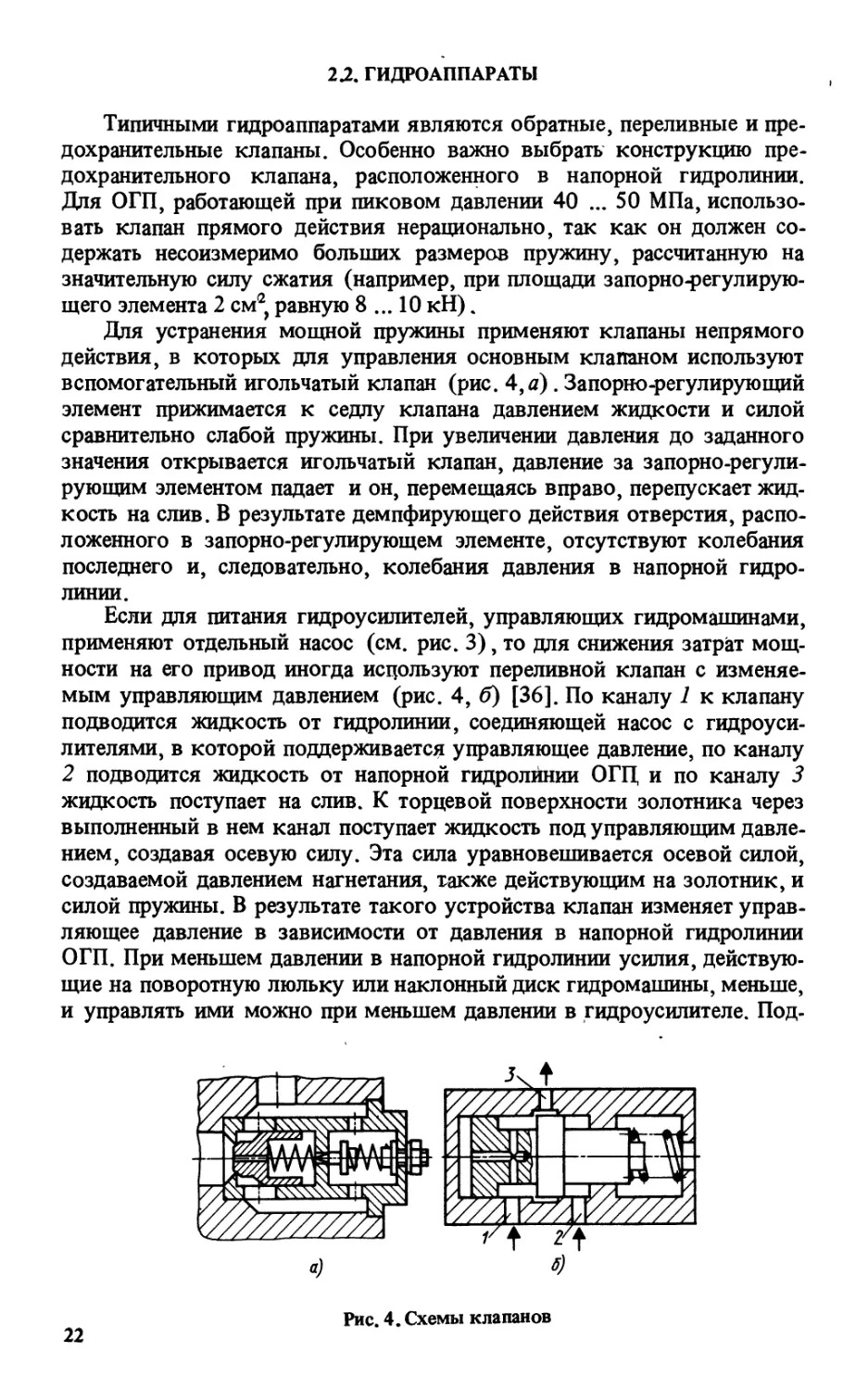
Для устранения мощной пружины применяют клапаны непрямого
действия, в которых для управления основным клапаном используют
вспомогательный игольчатый клапан (рис. 4,а). Запорно-регулирующий
элемент прижимается к седлу клапана давлением жидкости и силой
сравнительно слабой пружины. При увеличении давления до заданного
значения открывается игольчатый клапан, давление за запорно-регули-
рующим элементом падает и он, перемещаясь вправо, перепускает жид-
кость на слив. В результате демпфирующего действия отверстия, распо-
ложенного в запорно-регулирующем элементе, отсутствуют колебания
последнего и, следовательно, колебания давления в напорной гидро-
линии.
Если для питания гидроусилителей, управляющих гидромашинами,
применяют отдельный насос (см. рис. 3), то для снижения затрат мощ-
ности на его привод иногда исцользуют переливной клапан с изменяе-
мым управляющим давлением (рис. 4, б) [36]. По каналу 1 к клапану
подводится жидкость от гидролинии, соединяющей насос с гидроуси-
лителями, в которой поддерживается управляющее давление, по каналу
2 подводится жидкость от напорной гидролинии ОГЦ и по каналу 3
жидкость поступает на слив. К торцевой поверхности золотника через
выполненный в нем канал поступает жидкость под управляющим давле-
нием, создавая осевую силу. Эта сила уравновешивается осевой силой,
создаваемой давлением нагнетания, также действующим на золотник, и
силой пружины. В результате такого устройства клапан изменяет управ-
ляющее давление в зависимости от давления в напорной гидролинии
ОГП. При меньшем давлении в напорной гидролинии усилия, действую-
щие на поворотную люльку или наклонный диск гидромашины, меньше,
и управлять ими можно при меньшем давлении в гидроусилителе. Под-
Рис. 4. Схемы клапанов
22
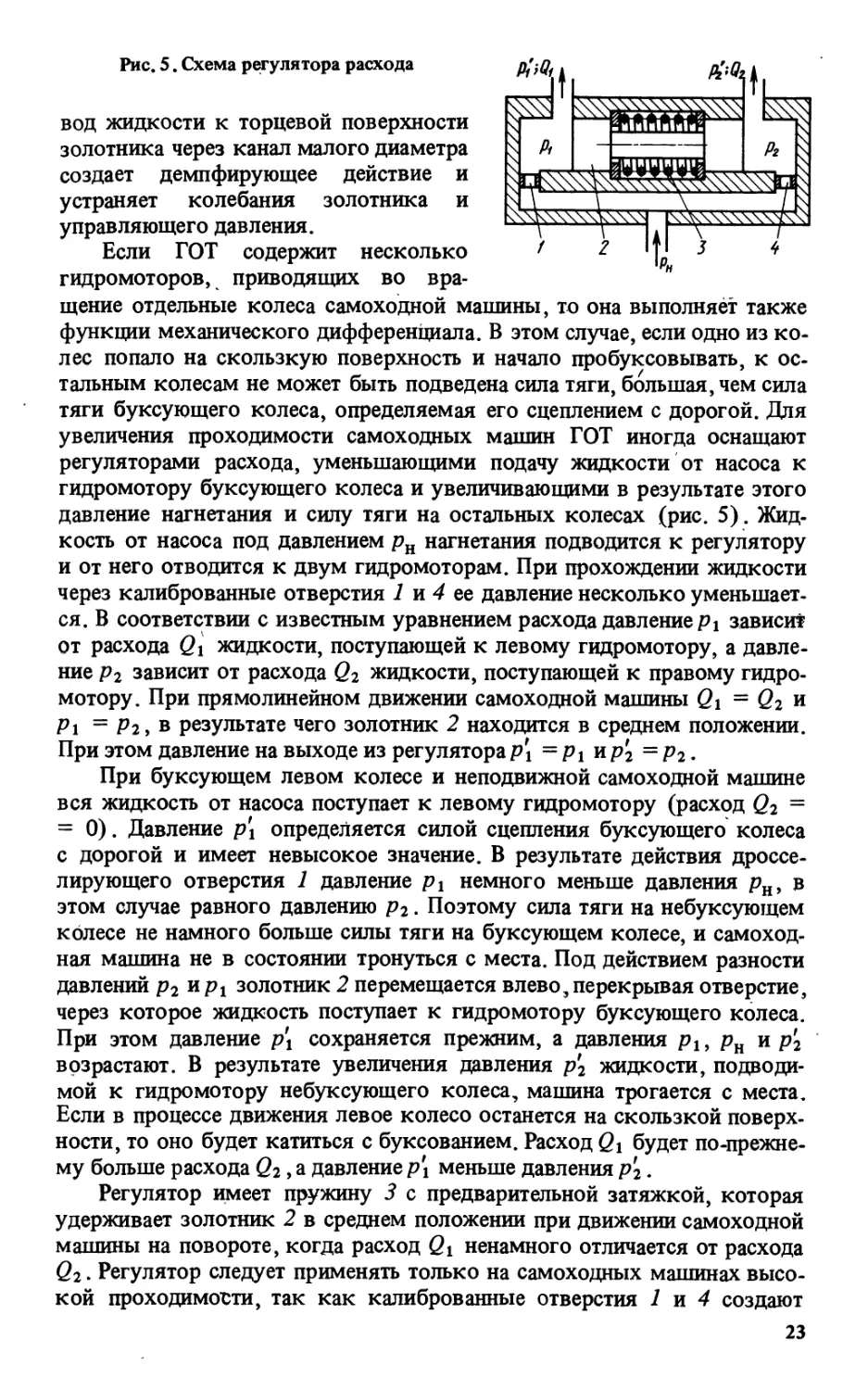
Рис. 5. Схема регулятора расхода
вод жидкости к торцевой поверхности
золотника через канал малого диаметра
создает демпфирующее действие и
устраняет колебания золотника и
управляющего давления.
Если ГОТ содержит несколько
гидромоторов, приводящих во вра-
щение отдельные колеса самоходной машины, то она выполняет также
функции механического дифференциала. В этом случае, если одно из ко-
лес попало на скользкую поверхность и начало пробуксовывать, к ос-
тальным колесам не может быть подведена сила тяги, большая, чем сила
тяги буксующего колеса, определяемая его сцеплением с дорогой. Для
увеличения проходимости самоходных машин ГОТ иногда оснащают
регуляторами расхода, уменьшающими подачу жидкости от насоса к
гидромотору буксующего колеса и увеличивающими в результате этого
давление нагнетания и силу тяги на остальных колесах (рис. 5). Жид-
кость от насоса под давлением рн нагнетания подводится к регулятору
и от него отводится к двум гидромоторам. При прохождении жидкости
через калиброванные отверстия 1 и 4 ее давление несколько уменьшает-
ся. В соответствии с известным уравнением расхода давление рх зависит
от расхода Qi жидкости, поступающей к левому гидромотору, а давле-
ние р2 зависит от расхода Qz жидкости, поступающей к правому гидро-
мотору. При прямолинейном движении самоходной машины Ол = Q2 и
Pi = Р2, в результате чего золотник 2 находится в среднем положении.
При этом давление на выходе из регулятора р\ —р^ и pi = р2.
При буксующем левом колесе и неподвижной самоходной машине
вся жидкость от насоса поступает к левому гидромотору (расход Q2 —
— 0). Давление р\ определяется силой сцепления буксующего колеса
с дорогой и имеет невысокое значение. В результате действия дроссе-
лирующего отверстия 1 давление Р\ немного меньше давления рн, в
этом случае равного давлению р2. Поэтому сила тяги на небуксующем
колесе не намного больше силы тяги на буксующем колесе, и самоход-
ная машина не в состоянии тронуться с места. Под действием разности
давлений р2 ирг золотник 2 перемещается влево, перекрывая отверстие,
через которое жидкость поступает к гидромотору буксующего колеса.
При этом давление р\ сохраняется прежним, а давления ри и р2
возрастают. В результате увеличения давления р2 жидкости, подводи-
мой к гидромотору небуксующего колеса, машина трогается с места.
Если в процессе движения левое колесо останется на скользкой поверх-
ности, то оно будет катиться с буксованием. Расход Q\ будет по-прежне-
му больше расхода Q2, а давление р\ меньше давления р'2.
Регулятор имеет пружину 3 с предварительной затяжкой, которая
удерживает золотник 2 в среднем положении при движении самоходной
машины на повороте, когда расход Q\ ненамного отличается от расхода
Q2. Регулятор следует применять только на самоходных машинах высо-
кой проходимости, так как калиброванные отверстия 1 и 4 создают
23
дополнительное сопротивление движению жидкости и снижают КПД
трансмиссии.
Для управления регулируемыми насосами и гидромотором исполь-
зуют различные гидроусилители. Гидроусилитель содержит распредели-
тель и управляемый им гидродвигатель и может иметь обратную связь
выходного звена гидродвигателя с входным звеном гидрораспредели-
теля. Если этой связи нет, то любому перемещению входного звена рас-
пределителя соответствует непрерывное перемещение (до максималь-
ного значения) выходного звена гидродвигателя. При наличии обратной
связи гидроусилитель представляет собой следящий гидропривод (сле-
дящую систему), в котором перемещение выходного звена пропорцио-
нально перемещению входного звен^. При автоматическом управлении
гидромашинами ОГП можно применять усилители как с обратной
связью так и без нее.
Ниже рассмотрены усилители только с обратной связью.
На рис. 6, а показана схема гидроусилителя 452 с поршнем типа
’’тандем”, применяемого для управления аксиально-поршневой с пово-
ротной люлькой гидромашины 207.20, выпускаемой Московским маши-
ностроительным заводом имени МЛ. Калинина. Рабочая жидкость систе-
мы управления через отверстие в неподвижном поршне 5, установленном
в корпусе 4, подается в правую полость цилиндра. При перемещении зо-
лотника 1 влево левая полость цилиндра соединяется с правой, и корпус
2 гидроусилителя перемещается влево до тех пор, пока не закроется
открывшееся окно распределителя. Закрытие этого окна, вызванное
перемещением корпуса, представляет собой обратную связь выхода
гидроусилителя с его входом. При перемещении золотника вправо ле-
вая полость цилиндра сообщается со сливом, и корпус гидроусилителя
перемещается вправо, пока не закроется окно распределителя. Корпус
гидроусилителя соединен с цапфой (укрепленной на люльке гидромаши-
ны) и осуществляет ее поворот.
На рис. 6, б показана схема гидроусилителя, предназначешгого для
управления аксиально-поршневой гидромашиной с наклонным диском
фирмы ’’Лукас” (Великобритания). Поршень 6 типа ’’тандем” располо-
жен в цилиндрах корпуса 9 гидромашины. В средней части поршень
при помощи сухаря 7 соединен с наклонным диском 8 гидромашины.
Жидкость от насоса подпитки подводится в верхний цилиндр. При пере-
мещении золотника 5 вверх жидкость по каналу в поршне из верхнего
цилиндра поступает в нижний цилиндр большого диаметра, и поршень
движется вверх до тех пор, пока золотник не перекроет окна.
При перемещении золотника вниз открывается окно, соединяющее
нижний цилиндр со сливной линией (слив осуществляется внутрь гидро-
машины) . Поршень перемещается вниз, пока не закроется открывшееся
ранее окно распределителя.
На рис. 6, в показана схема гидроусилителя, предназначенного для
управления нереверсивным насосом с наклонным диском типа ”Вер-
дис”, отличающаяся от предыдущих наличием устройства ’’сопло-за-
слонка”, позволяющего просто осуществить обратную связь. Жидкость
24
под давлением по каналу 14 поступает внутрь цилиндра сервомотора и
через сопло 10 в поршне 11 свободно вытекает внутрь насоса. Поршень
11 соединен с наклонным диском 15. Заслонка 12 перемещается при по-
мощи кулачка 13. При работе гидромашины в режиме насоса наклонный
диск под действием приложенных к нему сил со стороны поршней блока
цилиндров насоса стремится занять вертикальное положение. При этом
сопло приближается к заслонке, давление в цилиндре возрастает, и
наклонный диск останавливается. Сила давления жидкости, действую-
щая на поршень, уравновешивает силу, приложенную к поршцю со сто-
роны наклонного диска. При повороте кулачка и перемещении заслонки
давление в гидроцилиндре изменяется, и поршень перемещается вслед
за заслонкой.
При движении самоходной машины по инерции или на спуске с при-
крытой дроссельной заслонкой карбюратора двигателя насос работает
в режиме гидромотора. Наклонный диск в этом случае стремится повер-
нуться на максимальный угол. Гидроусилитель не препятствует этому.
В ОГП устанавливается минимальное передаточное число, в результате
чего не происходит резкого торможения самоходной машины. Недостат-
ком усилителя является то, что его можно использовать только с нере-
версивным насосом.
Для управления насосом фирмы ’Тидроматик” использован гидро-
усилитель с возвратной пружиной (рис. 7). Распределитель гидроусили-
теля содержит поворачивающийся золотник З3 помещенный в свободно
25
укрепленной гильзе 2. Поршень 1 управляет наклонным диском насоса.
При повороте золотника 3 по часовой стрелке жидкость от насоса под-
питки поступает в верхнюю часть цилиндра, в результате чего поршень,
сжимая нижнюю пружину, опускается вниз. Перемещаясь, поршень при
помощи рычага 4 жесткой обратной связи поворачивает гильзу 2. Дви-
Рис. 7. Гидроусилитель с возвратной пружиной
26
жение поршня продолжается до тех пор, пока повернувшаяся гильза не
закроет окно для прохода жидкости в цилиндр.
В обратную сторону поршень перемещается под действием силы
пружины. При этом жидкость из верхней части цилиндра через распре-
делитель поступает на слив.
Поршень показан в положении, которому соответствует вертикаль-
ное положение наклонного диска насоса. При повороте золотника 3
против часовой стрелки жидкость поступает в нижнюю часть цилиндра,
и поршень поднимается вверх, поворачивая наклонный диск в проти-
воположную сторону, что обеспечивает задний ход самоходной машины.
Максимальный угол поворота золотника в каждую сторону от
нейтрального положения составляет 30°.
3. ВОПРОСЫ ТЕОРИИ
ГИДРООБЪЕМНЫХ ТРАНСМИССИЙ
3.1. СИЛОВЫЕ И КИНЕМАТИЧЕСКИЕ ЗАВИСИМОСТИ ПАРАМЕТРОВ
ГИДРООБЪЕМНЫХ ТРАНСМИССИЙ
Для всех бесступенчатых передач, в том числе ОГП, полный КПД
N2 М2Ы2
п =----- = ------ , (1)
N1 *М J си 1
где N, М и w - соответственно мощность, крутящий момент и угловая скорость
входного и выходного валов бесступенчатой передачи; индекс 1 относится к пара-
метрам входного вала передачи (насосу), а индекс 2 - к параметрам выходного
вала (гидромотору).
Запишем полный КПД в виде
= гк/гс> (2)
где кинематическое передаточное отношение бесступенчатой передачи
ZK= ^2/^1, (3)
а силовое передаточное отношение
' ic = MvIM2. (4)
Величины, обратные zK и zc, называют соответственно кинематичес-
ким и силовым передаточными числами:
мк = о>1/<х>2; (5)
. ис=М2/М1. (6)
Передаточное число ГОТ представляет собой произведение переда-
точных чисел ОГП и зубчатых передач, входящих в трансмиссию, а пере-
27
даточное отношение ГОТ - произведение соответствующих передаточ-
ных отношений.
Назовем передаточное отношение при отсутствии потерь (т? = 1)
расчетным и определим его по выражению
гр=«1/?2, (7)
где и q2 - рабочий объем соответственно насоса и гидромотора.
Расчетное передаточное отношение можной найти также экспери-
ментально в результате холостого вращения ОГП с частотой = 30 ...
50 об/мин (замеряют суммарное количество оборотов валов насоса и
гидромотора).
Расчетное передаточное отношение является функцией положения
s органа управления передачей (вала, рычага, штока): zp = f(s), который
непосредственно или через гидроусилитель поворачивает наклонный
диск или блок цилиндров гидромашины.
Потери в ОГП можно разделить на объемные, уменьшающие кине-
матическое передаточное отношение zK по сравнению с расчетным zp,
и механические, увеличивающие силовое передаточное отношение zc по
сравнению с расчетным zp. Первые оцениваются объемным КПД
^о“гк/гр> (8)
а вторые механическим КПД
^М “ *р/гС’ (9)
При наличии длинных трубопроводов, соединяющих насос с гидро-
мотором, передаточное отношение zc увеличивается также в результате
гидравлических потерь в трубопроводах, уменьшающих давление жид-
кости при ее поступлении от насоса к гидромотору и от гидромотора к
насосу. В этом случае потери, уменьшающие передаточное отношение
zc по сравнению с расчетным zp, оценивают гидромеханическим КПД
1?гм, вычисляемым по выражению (9).
Полный КПД объемнойтидропередачи
1к zp 1к
4 = —= — --------- = (10)
1с 1с 1р
Подача насоса с учетом утечек
21=91«1По1, (11)
где - частота вращейия вала насоса; л01 “ объемный КПД насоса, учитываю-
щий все факторы, снижающие подачу Q\ и, следовательно, частоту вращения п2
Вала гидромотора.
Перепад рабочего давления (МПа)
М1^М1
Р=Р2 ~Pl = ----------
0,159?!
где Р2 - давление на выходе из насоса (давление нагнетания); рг - давление на
28
входе в насос (давление всасывания, равное давлению, развиваемому насосом
подпитки); Мх - крутящий момент на валу насоса, Н-м; т?м1 ~ механический КПД
насоса, учитывающий все факторы, снижающие давление р2 и, следовательно,
крутящий моментМ2 на валу гидромотора; - в см3.
. Крутящий момент (Н-м) на валу насоса
O,159^ip
Mi = -------- = ---------
2ЯТ}М1 ”mi
Мощность (кВт) насоса
(13)
1гМ1п1 QiniP
Ni = ----i-2— = . (14)
30-1000 60 000nM1
В ГОТ самоходных машин, как указывалось, используют гидрома-
шины, выпускаемые специализированными заводами. Они устанавли-
вают для гидромашин номинальное и максимальное давление рабочей
жидкости и номинальную, а иногда и максимальную, частоту вращения.
При этом имеют в виду или перепад давления жидкости или давление
жидкости на выходе из насоса.
В ГОТ самоходных машин гидромашины работают на переменных
режимах с различными давлением и частотой вращения. В этих условиях,
исходя из обеспечения необходимого срока службы гидромашин, разра-
ботчики ГОТ задают определенные предельно допустимые давление и
частоту вращения.
Для более четкого изложения материала будем разделять давление
и частоту, вращения на номинальные каталожные рн к и nR к, максималь-
ные каталожные ртахк и итахк и предельно допустимые ртах и итах.
Под номинальным каталожным давлением и номинальной каталож-
ной частотой вращения понимают такое давление и такую частоту враще-
ния, при которых гидромашина по данным завода-изготовителя должна
работать в течение установленного срока службы с сохранением пара-
метров в пределах установленных норм (обычно завод-изготовитель
указывает допустимое уменьшение объемного или полного КПД за срок
службы гидромашин).
Срок службы, соответствующий работе гидромашины на постоян-
ном режиме с номинальным давлением при номинальной частоте враще-
ния, будем называть номинальным каталожным сроком службы.
Под максимальным каталожным давлением (частотой вращения)
понимают такое наибольшее давление (наибольшую частоту вращения),
с которыми заводом-изготовителем допускается периодическая рабо-
та гидромашины в течение определенного времени.
Максимальное давление меньше давления, ограниченного предохра-
нительным клапаном.
Под предельно допустимым давлением и предельно допустимой час-
тотой вращения будем понимать такое наибольшее давление и такую наи-
большую частоту вращения, с которыми гидромашина работает в транс-
29
(15)
(16)
(17)
миссии самоходной машины при эксплуатации. Предельно -допустимые
давление и частота вращения используются в расчетах при определении
рабочих объемов гидромашин. Поэтому их можно также рассматривать
как исходные, расчетные значения давления и частоты вращения.
Мощность, потребляемая насосом и создаваемая гидромотором
при их наибольших рабочем объеме, давлении и частоте вращения, на-
зывается установочной. Она может быть номинальной каталожной, мак-
симальной каталожной и предельно допустимой.
Расход (см3/мин) гидромотора
Q1 = ^2«27?О2.
Крутящий момент (Н-м) на валу гидромотора
М2 = 0,159<72р7?М2.
Мощность (кВт) на валу гидромотора
Я2п2Р'Пм2
уу- —
60 000
Полный КПД объемной гидропередачи 7? = т?0 Лм Лог^мз • Рабочий
объем аксиально-поршневой гидромашины с наклонным блоком ци-
линдров
ird2
q = -----£ zsin(p6, (18)
4
где d - диаметр поршней; - диаметр заделки поршней шатунов в наклонном
диске; z - число поршней гидромашины; щ - угол поворота блока цилиндров.
Рабочий объем аксиально-поршневой гидромашины с наклонным
диском
ird2
Q=-------(19)
4
где D$ - диаметр делительной окружности блока цилиндров; <рд - угол поворота
наклонного диска.
Относительный рабочий объем (параметр регулирования) регули-
руемого насоса (cj) и гидромотора (е2):
ei “4iA7imax> е2 ”^/^2тах» (20)
где max и 42тах - максимальный рабочий объем соответственно насоса и гид-
ромотора.
Расчетное передаточное отношение
/р = Се1/е2? (21)
где С = ^1тах/^2тах-
При работе двигателя самоходной машины на режиме максимальной
мощности Лгдтах, определяемой значениями ЛГ1тах ия1тах, уменьше-
но
ние рабочего объема qt насоса приводит, в соответствии с уравнением
(12), к увеличению перепада давления р. Наименьший рабочий объем
насоса, при котором перепад давления равен заданному предельно до-
пустимому значению, называется критическим:
^imax^M 1
q 1 jz ——————
0>159pmax
ИЛИ
60 0007V lmaxnM1
<Лк = -------------- • <22)
nimax^max
Критическому объему насоса соответствует критическое значение
относительного рабочего объема насоса er к = Q i к/# i m ах •
Введем понятие минимального расчетного нагрузочного переда-
точного отношения [21]
zp.Hmin = #1к/^2тах
понимая под ним такое передаточное отношение, с которым передача
может работать при подводе к насосу максимальной мощности двига-
теля.
Максимальное расчетное нагрузочное передаточное отношение
гр.нтах “ #imax/#2min*
Расчетный нагрузочный диапазон изменения передаточного отно-
шения
_ zpjimax #1 max# 2 max
DP.H = ------- = -------------• (23)
zp.Hmin #2min#iK
Расчетный холостой диапазон изменения передаточного отношения
^imax^max
. ^Р.х = ------------• (24)
#2min#imin
Так как обычно = 0, х = Для удобства практических
расчетов следует ввести также понятия минимального силового нагру-
зочного передаточного отношения
zc.Hmin # 1к/(#2 тах^м)
и силового нагрузочного диапазона изменения передаточного отноше-
ния [21]
_ ^2шах # 1 m ax# 2 m ах1?м
£>сл = ------- = ----------7---, (25)
^2 min
где M2max и M2mjn - максимальный и минимальный крутящие моменты гидро-
мотора при работе двигателя на режиме максимальной мощности; т?м и Лм _ меха-
нический КПДОГПсоответственно приqi = <71к и #1 = #imax-
31
Если примем = 1?" (погрешность составляет 5 %), то получим
Dp н = DCM. Отсюда следует, что преобразующие свойства ОГП доста-
точно полно можно оценивать расчетным нагрузочным диапазоном изме-
нения передаточного отношения Dp н.
Нагрузочный диапазон изменения передаточного отношения ОГП
^р.н —^рлх^рлз “ l/(eiKe2min) > (26)
где РрЛ1 = tfimax/tfiK “ Нагрузочный диапазон изменения передаточного отноше-
ния, обеспечиваемый насосом; £рл2 = <72max/fl2min ~ нагрузочный диапазон
изменения передаточного отношения, обеспечиваемый гидромотором.
Установочная мощность насоса 7Vlmaxy больше максимальной мощ-
ности двигателя 7Удтах самоходной машины в D Н1 раз. Максимальная
мощность двигателя равна критической мощности Л1К насоса, вычислен-
ной по^1к,«1тах иртах.
Таким образом,
т ах у — ^р л х^дт ах ^р ле2 т пЛдт ах • (27)
Для регулируемого и нерегулируемого гидромоторов установочная
мощность больше максимальной мощности двигателя самоходной ма-
шины:
N =D N
JV2maxy p.ir дтах*
' (28)
Наибольшая допустимая частота вращения вала гидромашины огра-
ничивается максимальной скоростью поршня и скоростью подвижных
деталей распределителя. Так как скорость деталей распределителя свя-
зана со скоростью поршня, расчеты можно вести по скорости поршня.
Способность гидромашины работать с высокой частотой вращения оце-
нивается коэффициентом быстроходности Сп, пропорциональным макси-
мальной скорости поршня (м/с):
vnmax (я/^)Л^тах>
, где Лтах ~ максимальный ход поршня, м; п - в об/мин.
Обозначим отношение максимального хода поршня к его диаметру
d через а(а = hmSLX/d). Запишем формальное равенство
fl max _ 7r6?2/zmaxz _ ffZ
Лтах 4Amax 4д2
Ill ал IIldA.
где z - число поршней гидромашины.
Тогда ход поршня (м)
п Л з/4<?тахв2
^тах 0,01у ,
itz
где flmax - в см3/об.
32
Подставив Лтах в выражение для vnmax, получим
з / т axtf
vnmax = 0,000565иу-----—
Тогда коэффициент быстроходности
п
vnmax______
0,000565 Ifa^Tz
пу/Ятах •
Отсюда следует, что коэффициент быстроходности, определенный
по частоте вращения и рабочему объему при заданных значениях я и z,
имеет размерность скорости и пропорционален максимальной скорости
поршня. Поэтому он может оценивать способность гидромашины рабо-
тать с высокой частотой вращения: чем выше этот коэффициент, тем
больше для заданного рабочего объема допустимая частота вращения:
п = /V^max • , (29)
Так же как и частота вращения, коэффициент быстроходности
может быть номинальным каталожным, максимальным каталожным и
предельно допустимым. До тех пор, пока предельно допустимый коэф-
фициент быстроходности, обозначаемый С*, неизвестен, будем прини-
мать ёго равным максимальному каталожному коэффициенту, а следо-
вательно, будем считать,что nmax = nmaxK.
Для заданного типа геометрически подобных гидромзшин величины
a, z'h vnmax одинаковы, а следовательно,,одинаков для них и коэффи-
циент быстроходности. Зная для данного типа гидромашины номиналь-
ный или максимальный коэффициент быстроходности, можно для по-
добной гидромашины с другим рабочим объемом определить номи-
нальную или максимальную частоту вращения.
Из выражения (29) следует, что чем больше рабочий объем гидро-
машины, тем с меньшей максимальной частотой вращения она способна
работать.
Коэффициент быстроходности, кроме как по указанным в катало-
гах значениям частоты вращения и рабочего объема гидромашин, можно
приближенно найти по приведенной выше формуле. Для современных
аксиально-поршневых гидромашин а = 1,1 ... 0,9, для отдельных образ-
цов он достигает 0,65 [насос Вердис фирмы ’’Даути” (Великобритания)].
Для старых конструкций это отношение составляло приблизительно
1,25. При продолжительной работе допускается скорость поршня 3,5 м/с
и при периодической - 5 м/с. Число цилиндров колеблется от 5 до 11 и
в отдельных случаях выше. Для z = 7, а = 1 подсчитанный по приведен-
ной выше формуле коэффициент быстроходности для vnmax = 3,5 м/с
Сп « 12000 см/мин, и для vnmax = 5 м/с Сп » 17000 см/мин. Получен-
ные значения коэффициента быстроходности примерно равны значениям
номинального каталожного и максимального каталожного коэффициен-
тов быстроходности современных аксиально-поршневых гидромяшин
3 —Зак. 1159 • 33
32. КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ
ОБЪЕМНОЙ ГИДРОПЕРЕДАЧИ
Рассмотрим три вопроса: как изменяется КПД насоса, гидромотора
и передачи в целом, как выразить это изменение и как расчитать значе-
ние КПД новой гидромашины, используя для этого результаты испы-
таний подобной гидромашины.
Режим работы ОГП полностью определяют три независимые пере-
менные Мх, п i и /р. Поэтому в общем случае
Ч0=Я^1,и1,гр); (30)
В приведенных функциональных зависимостях параметр zp можно
заменить на s или ег и е2, или углы поворота наклонного диска (блока
цилиндров) насоса и гидромотора <Pi и <р2; - на М2 или р и на
со2 или Q.
КПД гидромашин и ОГП на различных режимах принято выражать
с помощью универсальных характеристик, получаемых эксперименталь-
но. Универсальная характеристика насоса (рис. 8, а) представляет собой
график, построенный в координатах подачи Q и перепада давления р
(или давления на выходе из насоса р2), на котором изображены топо-
графические кривые равных значений полного КПД щ насоса и линии,
выражающие изменение подачи Q от изменения давления р при постоян-
ной частоте вращения пг. Обычно на универсальную характеристику на-
носят кривые постоянных значений мощности. Показанная на рис. 8
характеристика относится к аксиально-поршневому насосу с наклонным
диском фирмы ’’Лукас” (Великобритания).
Универсальная характеристика насоса, представленная одним графи-
ком, позволяет для различных значений Q, р, Nr найти полный КПД
насоса, объемный КПД т?01 и по ним подсчитать механический КПД
т?м х. Объемный КПД для заданного режима
т?о1 ~
где Q3 - эффективная подача насоса на данном режиме; 2Т - теоретическая пода-
ча прир = 0.
Поскольку бэ от 2Т отличается несколькими процентами, опреде-
лить объемный КПД по рассмотренной характеристике с высокой точ-
ностью трудно, а следовательно, по нему трудно точно найти механичес-
кий КПД. Поэтому иногда на характеристику наносят дополнительные
кривые, относящиеся к различным постоянным значениям т?01.
Характеристику строят для определенной вязкости рабочей жидкос-
ти и ее температуры.
Универсальная характеристика гидромотора (рис. 8, б ь гидромотор
того же типа) представляет собой график, построенный в координатах
крутящего момента М2 на валу гидромотора и частоты вращения его ва-
34
О»
t)
Рис. 8. Размерные универсальные характерис-
тики гидромашин с наклонным диском
ла п2, на котором нанесены кривые равных значений полного КПД т?2
гидромотора и кривые постоянных перепадов давления р (или давления
на выходе р2), а также кривые постоянных расходов Q, Так как КПД
т?М2 переменный, кривые р = f(n2) не являются горизонтальными
прямыми.
Обычно на универсальную характеристику наносят кривые постоян-
Рис. 9. Безразмерные универсальные характеристики гидромашин с наклонным
блоком цилиндров
36
ных значений мощности N2. По Q определяют для различных режимов
объемный КПД т?02 (ПРИ ^2 = О 1?О2 = более точного отобра-
жения объемного КПД иногда приводят кривые его постоянных зна-
чений.
Часто на универсальной характеристике расход С,частоту вращения
п9 мощность N,момент М выражают в безразмерных величинах, т.е. как
отношения абсолютных значений к максимальным Gmax, nmax>Mnaxy>
Mmax (на Рис- показана характеристика насоса с наклонным блоком
цилиндров типа ’Тидроматик”, выпускаемого рядом отечественных за-
водов, а на рис. 9, б - характеристика гидромотора того же типа) .
Насосы с наклонным диском и с наклонным блоком цилиндров
имеют приблизительно одинаковый полный КПД на всех режимах (см.
рис. 8, а и 10, а). Максимальный КПД равен 0,94 а на режиме максималь-
ной мощности 0,83 ... 0,85. Гидромоторы имеют одинаковый максималь-
ный КПД, равный 0,94 ... 0,95. Однако при отклонении режима работы
от оптимального для гидромотора с наклонным диском КПД падает
более резко, чем для гидромотора с наклонным блоком цилиндров, и на
режиме максимальной мощности для первого гидромотора он составля-
ет 0,83, а для второго 04915. Это важное обстоятельство следует учиты-
вать при выборе типа гидромотора разрабатываемой ГОТ.
Универсальная характеристика регулируемой ОГП (рис. 10) пред-
ставляет собой построенный в координатах М2 ип2 график, на котором
нанесены кривые постоянных значений общего КПД т? ОГП, постоянной
мощности Ni, а также кривые изменения п2 от М2 для постоянных зна-
чений передаточного отношения zp. В качестве примера использована
характеристика ОГП HW 10 вильчатого погрузчика, содержащая регу-
лируемый насос с наклонным блоком цилиндров типа ’’Линде АГ” и
такой же, но нерегулируемый, гидромотор. По приведенной зависимости
п2 от М2 можно рассчитать ,
объемный КПД передачи
т?0. Характеристика от-
носится к работе переда-
чи с постоянной частотой
вращения насоса «1 =
- 2200 об/мин? Вместо
значений zp на кривых
можно указать значения
и е2 (для рассматриваемой
ОГП е2 = 1).
Верхняя предельная
кривая значений М2 соот-
ветствует постоянному
максимальному перепаду
Рис. 10. Универсальная харак-
теристика объемной гидропе-
редачи
37
давления pmax. В связи с изменением т?м от п2 она не является горизон-
тальной прямой.
Универсальные характеристики насоса и гидромотора не отражают
влияние на КПД параметров регулирования и е2. Универсальную ха-
рактеристику насоса можно построить для различных значений . Одна-
ко такая характеристика будет относиться к постоянному значению «1.
Универсальная характеристика ОГП, отражающая влияние на КПД
zp, также относится к постоянному значению пх = «1тах. Поэтому
только внешняя характеристика соответствует реальному использова-
нию ОГП на самоходной машине, когда двигатель работает с максималь-
ной частотой вращения. На остальных режимах двигатель работает с
меньшей частотой вращения.
Таким образом, ни одна из рассмотренных выше характеристик не
выражает КПД как функцию (30) трех независимых переменных Мх,
пг и fp и не позволяет выполнить расчеты, связанные с использованием
объемной гидропередачи на самоходной машине.
Графическое отображение КПД как функции (30) трех переменных,
ранее использованное в работе [24], будем называть всережимной харак-
теристикой КПД гидрообъемной передачи. Ее можно представить различ-
ным образом, например в виде ряда графиков, относящихся к различ-
ным постоянным значениям передаточного отношения zp, каждый из ко-
торых содержит кривые изменения КПД т?о и т?м от частоты вращения
«1 для нескольких постоянных значений крутящего момента Мх . Все-
режимные характеристики можно строить как для ОГП в целом, так и -i
отдельно для насоса и гидромотора.
Обширные экспериментальные исследования по определению КПД
выполнены. С. Милидрагом (Югославия) и связаны с созданием опыт-
ного трактора, содержащего ГОТ. На рис. 11 показана снятая им всере-
жимная характеристика насоса типоразмера S-21, фирмы ’’Зауэр” (ФРГ),
выражающая изменение объемного и механического КПД от частоты
вращения для шести (приведено только для трех) значений давления
и для семи (приведено только для трех) значений угла поворота
наклонного диска насоса.
Всережимная характеристика требует построения большого коли-
чества кривых. Однако других, более простых, способов отображения
КПД как функции трех переменных нет. Всережимная характеристика
КПД не заменяет универсальных характеристик. Последние позволяют
выявить в координатах Q - р и М2 - п2 области наименьших значений
кПД и решить некоторые другие задачи.
Рассмотрим расчет объемного и механического КПД отдельно для
насоса и гидромотора. Известны два метода, расчета: первый основан
на определении потерь в отдельных звеньях конкретной гидромашины,
а второй - на использовании уравнений подобия гидромашин. Первый
метод расчета применяют при создании новых гидромашин. Его разви-
тию посвящены работы ИИ. Зверева, Ю.Ф. Пономаренко, ЮИ. Багина,
ЮИ. Ловцова, Л.У. Мальца, А.Ф. Данилина, А.М. Швецова и др.
В соответствии со вторым методом КПД рассчитывают на основании
теории подобия гидромашин, основы которой заложил в 1938 г. проф.
38
Рис. 11. Зависимости объемного i?oi и механического 1?м1 КПД насоса от частоты
его вращения (р' = 7 МПа; р” = 21 МПа; р"’ = 35 МПа)
В.В. Мишке. Позднее к этой теории обращались и другие исследователи
(В.Н. Прокофьев, Б.Б. Некрасов, КИ. Городецкий, BJE. Вильсон,
В.М. Шлессер, И. Тома, Г. Римгоф и др.).
По данным BJB. Мишке, объемный, механический и полный КПД
насоса
е-К'уМ (31)
**О1 е >
е
^М1 ~ е + + *тр1 (32)
е — К*1а*
V1 = е + ^Ж1а* + ^тр 1 (33)
а объемный, механический и полный КПД гидромотора
(34)
(35)
39
е ^Ж2а2 ~ ^Тр2
Т?2 = ----------------
e+K*2/<j$
где К* - коэффициент утечек в гидромашине; - коэффициент учета гидрав-
лического трения; А?тр - коэффициент учета сухого трения; а* - коэффициент
изогональности (критерий Зоммерфельда), учитывающий режим работы гидро-
машины:
а* = (37)
где д - динамическая вязкость рабочей жидкости; - угловая скорость вала
гидромашины; р - перепад давления в гидромашине.
Для геометрически подобных гидромашин разного размера коэффи-
циенты К*, Кж и К_у одинаковы, а-следовательно, при одинаковых ре-
жимах работы (о*, е) эти гидромашины имеют одинаковый КПД.
Если гидромашины работают на одной и той же жидкости, имеющей
одну и ту же вязкость д, то в расчетные формулы целесообразно под-
ставить выражения
/С;=д^у;7С* = Кж/р,
что позволит исключить часто неизвестное значение д.
Коэффициенты Ку, Кж и £тр находят по результатам испытаний
подобной гидромашины. При этом принимают условия работы гидро-
। машины, при которых = 1 и е2 = 1.
Для насоса, на Основании выражения (31),
ку х =(1 (38)
а для гидромотора, на основании выражения (34),
^У2=(1/По3-1)^, (39)
где i?oi и Я02 выбирают для любого произвольного режима работы гидромашины
(р, cj) и соответствующего ему коэффициента 04 и о2.
Коэффициенты £Ж1, £Ж2, #тр1 и ^тр2 можно найти различными
способами. Наиболее удобной для этой цели является общая методика
[3], в соответствии с которой используются значения максимальных
КПД т?1тах и т?2тах и соответствующие им коэффициенты 04 и о2.
В указанной работе сделан вывод о высокой точности, с которой фор-
мулы (31) ... (36) описывают зависимость КПД от передаточного отно-
шения ip ОГП. В других работах указывается, что приведенные форму-
лы обладают достаточной точностью, когда коэффициент изогональности
изменяется не более чем в 2 раза.
В действительности, как нетрудно убедиться, приведенные формулы
не только количественно, но и качественно не дают правильного пред-
ставления об изменении КПД. В соответствии с ними при е = 1 для дан-
ной гидромашины объемный, механический и полный КПД зависит
только от о; Следовательно, кривые всех КПД в координатах со - р,
Q - р или М2 — со для насоса и гидромотора будут представлять собой
семейство лучей, выходящих из начала координат. Как видно из рис. 8,
40
9, равным значениям полного КПД соответствуют не прямые линии,
выходящие из начала координат, а сложные, обычно замкнутые, кривые.
На основании универсальной характеристики, приведенной на
рис. 8, а, на рис. 12, а,построена зависимость объемного КПДт?о1 насоса
от частоты вращения при постоянном перепаде давления р = 36 МПа
рабочей жидкости (сплошная кривая ab) и на рис. 12, б — от перепада
давления р для различных частот вращения пх.
Если формула (31) справедлива, т.е. отражает общую физику явле-
ний, то подсчитанный по выражению (38) коэффициент утечек будет
более или менее одинаковым для всех режимов работы гидромаши-
ны. Рассмотрим два режима работы насоса: для первого (точка а на
рис. 12, а) пг = 500 об/мин,р = 36 МПа, т.е. ах = 1,45 1/(МПа-с),т?О1 =
= 0,88, и для второго (точка б) пх = 2000 об/мин, р = 36 МПа, т.е.
ах = 5,81 1/(МПа с), т?о1 = 0,934. Второму режиму соответствует опре-
деленный по формуле (38) коэффициент утечек Кух = 0,172 1/(МПа-с),
а первому режиму Ку1 = 0,384 1/(МПа-с). Полученное существенное
различие в Kyi свидетельствует о неточности формулы (31), т.е. о том,
что кроме утечек существуют другие виды потерь, оказывающие су-
щественное влияние на т?о1 и не являющиеся обратно пропорциональ-
ными а.
На рис. 12, а по формулам (31) и (37) для указанных значений
Kyi построены кривые т?о1 = f(nx) Эти кривые кроме исходной точки
резко отходят от экспериментальной сплошной кривой ab.
Столь же неточно определяет формула (32) механический КПД на-
соса с входящими в нее коэффициентами £Ж1 и t, найденными по
указанной ранее методике [3]. Погрешность получается уже в% начале
расчета при определении Кж t и t по Ку t, который в данном случае
не является постоянным.
Рассмотрим более подробно потери, имеющие место в гидромаши-
нах, и запишем более точные формулы для расчета КПД. При этом бу-
Рис. 12. Зависимости объемного КПД насоса от его частоты вращения и перепада
давления
41
дем исходить из положения, что оптимальной инженерной расчетной фор-
мулой является та, которая обеспечивает приемлемую точность и не тре-
бует излишне трудоемких расчетов.
Объемный КПД насоса является результатом в основном двух ви-
дов потерь: утечек жидкости (из напорной гидролинии во всасываю-
щую) и сжатия жидкости. Объемный КПД может снизиться из-за недос-
таточного заполнения рабочих объемов насоса вследствие гидравличес-
кого сопротивления входных каналов и из-за кавитации. Поскольку
ОГП самоходных машин снабжают насосами подпитки, эти потери
можно не учитывать.
Объемный КПД насоса
*?о i “ (Gt ~ Gy ~ Qc-j&lIQf, (40)
где gT - теоретическая подача; Qy - утечки жидкости; 2СЖ - потери подачи,
вызванные сжатием жидкости.
При расчете КПД принято вместо частоты вращения п гидромашины
пользоваться угловой скоростью со, а вместо рабочего объема q — харак-
терным объемом
И/ = ^/(2тг).
Теоретическая подача насоса
Gt “ •
Предполагая ламинарный режим течения жидкости в зазорах, выра-
зим утечки в виде
еу=***83р/д, (41)
где Ку* - коэффициент пропорциональности, одинаковый для всей серии геомет-
рических подобных насосов; 6 - эквивалентный зазор, потери энергии в котором
равны потерям во всех зазорах рассматриваемого насоса.
Для геометрического подобия гидромашины необходимо, чтобы
отношение 53/Wmax = аь было одинаковым.
Увеличение размеров сопрягаемых деталей приводит к увеличению
зазоров между ними. Этим объясняется подобие насосов различных раз-
меров, т.е. примерно одинаковое значение коэффициента аь. На основа-
нии принятой системы допусков периметр зазоров увеличивается в не-
сколько меньшей степени, чем рабочий объем насоса. В результате рас-
сматриваемое подобие для гаммы насосов данной серии, как указыва-
лось, не является точным. С увеличением Wlmax коэффициент аь умень-
шается, поэтому объемный КПД насосов с большим рабочим объемом
Wimax будет несколько выше, чем объемный КПД насосов с малым ра-
бочим объемом.
Поскольку в регулируемых насосах периметр зазоров при регули-
ровании не изменяется, утечки жидкости через зазоры сохраняются
практически постоянными при различных объемах W, Таким образом
Qy не зависит от .
42
Потери расхода (см3/с), вызванные сжатием,
^сж ~ ^сж 1 ) >
(42)
где Рсж - сжимаемый объем жидкости в насосе за один оборот вала; - мо-
дуль упругости жидкости, равный 1300 .. 1900 МПа (большие числа относятся к
жидкостям гидромашин высокого давления) .
Для насоса сжимаемый объем складывается из мертвого П и рабо-
чего qi объемов. Мертвый объем заключен между поршнем, находящим-
ся в верхней мертвой точке, и распределительным устройством. При ре-
гулировании насоса положение поршня в верхней мертдой точке изме-
няется, поэтому объем Vi зависит от На основании простых рас-
суждений
П:ж1 + 0>5#imaxG + е1) >
(43)
где V\ - мертвый объем насоса при 41 шах-
Используя выражения (40) ... (43), получаем
где Xyj = аХу*/д - коэффициент утечек при заданной динамической вязкости,
одинаковый для подобных насосов, не зависящий от ei; Ьг = V\ /q! max - отноше-
ние объемов, одинаковое для геометрически подобных гидромашин.
Для различных гидромашин с плоским днищем поршня можно при-
нять Ьг = 0,4 и для машины с полым поршнем, обращенным полостью
в сторону распределителя, bt = 1,0.
Иногда для уменьшения мертвого объема V\ и, следовательно,
отношения Ъх (гидромашины типа ’’Стандстрэнд”) полые поршни запол-
няют легким жестким материалом. Это позволяет при высоком давле-
нии увеличить КПД на 2 %.
Запишем выражение (44) в виде
(45)
где на основании уравнения (44) коэффициенты пропорциональности, учитываю-
щие потери на сжатие жидкости в насосе,
^Ж1=(*1 + 0,5)/ЕСж и
Я" =0,Яж-
иж 1 7 9 иж
Если рассматривать нерегулируемый насос или не учитывать влия-
ние в! на сжимаемый объем Ксж х [выражение (43)], то можно записать
*У1Р ^СЖ1Р
(46)
43
где
v- = К* +
ЛСЖ1 ЛСЖ1 ЛСЖ1
= (Z>1 + 1)/FC3K.
(47)
К выражению (46) в своих работах приходит ВБ. Вильсон. Исполь-
зование упрощенного выражения (46) вместо (45) при изменении
от 1 до 0,25 приводит к погрешности в определении утечек из-за сжатия
жидкости, достигающей 20 %.
Выражение (45) отличается от выражения ,(31) наличием двух
последних членов. Поскольку они не зависят от , для учета сжатия
жидкости нельзя использовать увеличение коэффициента Ку t.
В.М. Шлёссер предлагает при определении объемных потерь учиты-
вать турбулизацию потока жидкости с помощью выражения
ще Суур - коэффициент пропорциональности, постоянный для геометрически
подобных гидромашин; р - плотность рабочей жидкости.
Обычно насосы выполняют так, чтобы отсутствовали критические
скорости течения жидкости и турбулизация потока. По этой причине
потерю расхода Стур, как это делают многие другие авторы, учитывать
не будем.
Коэффициент Кур входящий в выражения (45) и (46), для геомет-
рически подобных насосов находят по экспериментально полученным
зависимостям изменения КПД при = 1 и по формуле
fr'oi
Ку । _
(ш'1 - Ш1)р
(48)
где ло1 и Яо1 ~ значения КПД для произвольных режимов работы насоса, значи-
тельно отличающихся по угловой скорости и си'/ и относящихся к одному и
тому же значению перепада давления р (максимальному или близкому к макси-
мальному) .
Коэффициент, учитывающий сжатие жидкости, находят по выра-
жению
(49)
_ 1 Ку1
^сж1 — ~
Р
Входящие в формулу (49) параметры т?о1 и Wj относятся к любо-
му режиму работы передачи, т.е. и т/о1 или со/ и .
Наличие газовой фазы в рабочей жидкости увеличивает объемные
потери, учитываемые последним членом в выражении (46), т.е. приво-
дит к увеличению коэффициента Ксж х. Поэтому последний желательно
определять на основании экспериментальных данных по значениям КПД
геометрически подобных насосов [выражения (48) и (49) ].
Определение коэффициентов Ку1 и Кёж1 по приведенным выше
уравнениям требует наличия достаточно точных экспериментальных зна-
44
чений КПД для двух различных режимов работы передали. Если такие
данные отсутствуют, коэффициент А’сж1 можно рассчитать по уравне-
нию (47).
Зная величину Ксж х, находим
(1
р
где 1?О1 следует выбрать для малого произвольного значения а>х.
По данным, относящимся к двум точкам: а и б (рис. 12, а), и
формулам (48) и (49) для насоса типа иЛукас” найдено Ку1 =
= 0,105 1/(МПа-с) и ксж1 = 0,00133 1/МПа. Для режима работы переда-
чи, относящегося к точке б, потери мощности на утечки жидкости сос-
тавляют 1,8 % и на Сжатие жидкости 4,8 % от мощности на валу насоса.
Для гидромашин, работающих при высоком давлении, как видим,
потери из-за сжатия жидкости значительно превосходят утечки.
По полученным значениям £у1 и А’сж1 и формуле (46) на рис. 12, а
построена штриховая кривая изменения т?о1 от пх. Она весьма точно (в
пределах погрешности определения КПД по графикам) совпадает со
сплошной экспериментальной кривой. На рис. 12, б приведены рассчи-
танные по формуле (46) и экспериментальные зависимости т?о1, кото-
рые при Л1 = 500 и п2 = 2000 об/мин точно совпадают. При пх = 1000
и «1 = 1500 об/мин они лежат близко друг от друга.
Таким образом, расчетные формулы с высокой точностью описы-
вают изменение объемного КПД насоса при изменении как р, так и пх,
т.е. во всей области характеристики пх -pnQ-p.
По полученному значению Ксж * и формуле (47) модуль упругости
сжатия жидкости составил Есж = 1504 МПа. Этой величиной можно
пользоваться при расчете Ксж х по выражению (47).
При вычислении объемного КПД насоса по экспериментальным дан-
ным, относящимся к подобному насосу, может возникнуть некоторая
неточность, вызванная тем, что, как указывалось, площадь поперечного
сечения зазоров увеличивается в меньшей степени, чем рабочий объем
насоса. Поскольку основной составляющей объемного КПД являются
потери на сжатие жидкости, то это, очевидно, не вызовет существенной
погрешности. Для более точных расчетов в приведенные формулы мож-
но ввести члены, зависящие от рабочего объема гидромашины. Этот
вопрос требует отдельного исследования.
Объемный КПД гидромотора
= <?т
' + бу2 + бСЖ2
где теоретический расход
Ст — ^2maxe2W2 •
45
Аналогично предыдущему для регулируемого гидромотора
'<•> —........---------------- (50)
КУ2Р КСЖ2Р
1 + + + ^СЖ2^
в2<*>2 е2
где
^СЖ2 ~ (^2 +
и (51)
^сж2 = 0>5/#сж. л
Упрощенно
-------TV—ГТ • (52>
Лу2Р ЛСЖ2”
1 + ---- + ------
^2W2 ^2
где
^СЖ2 ~ ^СЖ2 + ^СЖ2 == ^2 + D/^СЖ’
Использование упрощенного выражения (52) вместо (50) для регу-
лируемого гидромотора приводит к погрешности определения потерь
на сжатие, которая при е2 - 0,33 может достигать 80 %.
На основании имеющихся экспериментальных данных по значениям
^о2 и ^02 КПД, относящимся к различным значениям со2 и оУ2 и одина-
ковому значению давления р,находят коэффициенты
(Чо2 ~ ч'О2)^2^2
F = -------------------- ;
(и2 - W2)P
г - 1 ~~ Л°2 Ку2
^СЖ2 — “
РЧО2
Входящие в выражение (53) значения^ исо2 относятся к любому
режиму работы передачи (т.е. ы>2 и Г]'О2 или со2 и г?"2).
Если значение КСЖ2 получено расчетным путем по Е’сж, то коэффи-
циент утечек находят по формуле
1 “* ^02
&У2 ~ ” ^сжг)^ >
^02
где i?o2 следует выбрать для произвольного режима работы передачи, желательно
соответствующего малому значению uj2 t
Для удобства выполнения практических расчетов в формулах КПД
перепад давления р следует выразить через крутящий момент из
46
формулы (12), а угловую скорость гидромотора со2 - через угловую
скорость насоса расчетное передаточное отношение zp и КПД ??о из
выражений (3) и (8). Следует задаться приблизительными значениями
КПД 7?м j и т?о или принять их равными единице.
Регулирование ОГП разделяется на два диапазона. В первом диапа-
зоне происходит изменение рабочего объема насоса при постоянном
максимальном рабочем объеме гидромотора, т.е. ех изменяется от 0 до 1
при е2 = 1. Во втором диапазоне происходит изменение рабочего объе-
ма гидромотора при постоянном рабочем объеме насоса, т.е. е2 изменя-
ется от 1 до e2min при ei= 1. При записи выражения объемного КПД
передачи величины и е2 целесообразно выражать через zp. Для этого в
расчетную формулу следует ввести величины а и /?. На первом диапазоне
(при изменении еО а = 1 и /? = zp/C и на втором диапазоне (при измене-
нии е2) а = C/z’ и /? = 1.
Объемный КПД насоса можно записать так:
%! =1-т0,
а объемный КПД гидромотора
ПО2 = V(1 + т'о).
Коэффициенты т0 и т'о для насоса и гидромотора описываются
одним и тем же по структуре выражением, входящим в уравнения (45)
и (50). Доказано, что для одной и той же гидромашины, работающей в
режиме насоса и гидромотора, то = т'о при заданных значениях р и со.
Отсюда следует, что
V(2 Т?О1) •
Нетрудно установить, что *?о 2 > i •
На рис. 13 приведена полученная на основании универсальной харак-
теристики (см. рис. 8, а) зависимость механического КПД насоса от
давления и частоты вращения. Параметры nY = 600 об/мин ир = 8,5 МПа
Рис. 13. Зависимости механического КПД насоса от его частоты вращения и пере-
пада давления
47
Механические потери при заданном давлении приводят к увеличению
крутящего момента на валу насоса и к уменьшению его на валу гидро?
мотора. Механические потери момента состоят из потерь на сухое и гид-
равлическое трение, привод насоса подпитки, а также включают чисто
гидравлические потери, вызывающие падение давления при перемеще-
нии жидкости в каналах.
Рабочий объем подобных гидромашин оценивают линейной вели-
чиной
^^тах- ।
Сила гидравлического трения в насосе, по закону Ньютона, пропор-
циональна динамической вязкости жидкости Д, площади поверхностей
трения (~ D* ) и градиенту скорости (~ D i иi /61.
Для пары трения поршень-цилиндр градиент скорости обратно про-
порционален et, для деталей распределителя и других работающих в
масле деталей он не зависит от ej. В связи с этим силу гидравлического
трения следует разделить на две составляющие: зависящую и не завися-
щую от . Поскольку крутящий момент является произведением силы
на плечо (~ D) 9 то составляющая потерь момента гидравлического тре-
ния, не зависящая от et,
^Ж1 “ 1^1 тах>
а зависящая otcj ,
=^ж1с°1 ^1тахе1,
где и - коэффициенты потерь на гидравлическое трение, постоянные
для геометрически подобных насосов и одинаковой вязкости д рабочей жидкости.
Учитывая, что нормальные усилия, действующие на детали, прибли-
зительно пропорциональны pD2, на основании закона Кулона получаем,
что момент, затрачиваемый на сухое трение, при постоянном коэффи-
циенте потерь на сухое трение А^р
AfTp — k TpP^i mах •
В работе [10] рекомендуется учитывать изменение коэффициента
к тр в зависимости от скорости пар трения, так как оно определяет па-
дение механического КПД (рис. 13, б) при малой частоте вращения.
В соответствии с формулой Боше коэффициент сухого трения
/=^/(1 + 7V),
где af и 7 - коэффициенты пропорциональности; v - скорость перемещения пар
трения.
С учетом переменности коэффициента трения момент, затрачивае-
мый на преодоление сухого трения,
__ ^трР^хтах
= ----------------у
48
где Срр - коэффициент пропорциональности, постоянный для геометрически
подобных машин.
Строго говоря, скорость пар трения зависит не только от угловой
скорости coj насоса, но и от его характерного объема ^imax- Кроме
того, для пары поршень-цилиндр она зависит от параметра регулиро-
вания ег, а для деталей распределителя от него не зависит.
Поскольку изменение коэффициента трения оказывает существен-
ное влияние на ЛМ1 только при малой частоте вращения, влиянием
H'lmax и на коэффициент трения будем пренебрегать. В более точных
расчетах это можно сделать, воспользовавшись данными работы [10].
При изменении ег и, следовательно, угла наклона диска или блока
цилиндров при одном и том же перепаде давления р номинальные силы,
действующие на отдельные детали, будут изменяться, нарушая модель
подобия. В связи с этим параметр регулирования будет оказывать до-
полнительное влияние на момент AfTp. Поскольку это влияние учесть
сложно, им будем также пренебрегать.
Кроме потерь момента на сухое трение, зависящего от давления р,
имеет место постоянная потеря момента на прокручивание Мп, основной
составляющей которой является момент, необходимый для привода
насоса подпитки. В момент, затрачиваемый на прокручивание гидрома-
шин, также входят небольшие потери момента в уплотнениях валов и
момент силы трения блока цилиндров о распределитель под действием
пружины. Влияние момента прокрутки на КПД возрастает на частичных
режимах работы насоса. Потери мощности на привод насоса подпитки
составляют 1,0 ... 0,5 % максимальной мощности, передаваемой ОГП.
Момент, затрачиваемый на привод насоса подпитки, приведенный к
валу насоса передачи,
"”(0,01 ... 0,005)pmaxWlmax — ^п^1тах.
При ртах = 40 МПа коэффициент Кп = 0,4 ... 0,2. Будем учитывать
коэффициентом Кп и другие постоянные потери крутящего момента.
Гидравлические потери на трение жидкости в каналах насоса, при-
водящие к уменьшению дайления на выходе из него, относительно не-
велики, и ими можно пренебречь. Вызванное гидравлическими поте-
рями уменьшение момента В.М. Шлессер выражает формулой
Мг = Сгр^^^
где Сг - коэффициент пропорциональности.
Гидравлические потери значительно усложняют нахождение коэффи-
циента пропорциональности. Отсутствие их учета приводит к некоторому
увеличению определяемого по экспериментальным данным коэффи-
циента Кж t.
Механический КПД насоса
Мт1
„ = -----------------------. (54)
^т1+Лж1 + ^тр1 + ЛЛи
4 —Зак. 1159
49
Входящий в это уравнение теоретический крутящий момент на валу
насоса
Afri = ^imaxeiP-
Введя развернутые выражения моментов, определяющих потери,
получаем
т?м 1 = -~, (55)
(1 -ак)КЖ1со1 акКЖ1<^1 ^тр1 ^п1
1 + + —————— + 1 + 1"
Р е1Р (1 *" £рр । w 1 )в 1 е iP
где ак = ^ж1/^ж1 “ отношение коэффициента потерь на жидкостное трение,
зависящего от ei, к общему коэффициенту этих потерь.
По экспериментальным данным для аксиально-поршневых быстро-
ходных гидромашин с наклонным диском и гидростатическими опора-
ми башмаков поршней ак « 0,5.
Необходимо найти четыре постоянных коэффициента ^ж1, ^трр
Стр t и Х’п1, входящие в уравнение (55). Это можно сделать различными
способами. Вначале рассмотрим общую методику, изложенную в работе
[10], в соответствии с которой уравнение (55), приняв в нем = 1 и
ак = 1, записывают в виде
1 1 ' ^тп 1
----1= _(^1W1 + Jtni)+ ——^1—. (56)
’’mi Р 1 +
Для насоса прототипа по экспериментальным данным (рис. 13, а)
строят для двух постоянных значений зависимости А = /(1/р)
(рис. 14, а). Указанные зависимости, как показано в работе [10], пред-
ставляют собой наклонные прямые, при пересечении которых с осью
ординат получают два значения: А'о и А'о'.
1/р 0 20 40 № К
a)
Рис. 14. К расчету коэффициентов потерь
50
В соответствии с формулой (56)
,, КТР1 ,,, _ *ТР1
4о — ~ ~ > Ао — - - — ,
1 + ^тр | w 1 1 + ^тр 1 W 1
откуда
А о — А о
С = ------------------;
Р1 А о си У — А о си 1
А о А о (и> 1 — о> 1)
^тр1~ “77 7, т ; •
^0и1 “ ^0и1
Тангенсы углов ai и а2 наклона прямых Л =/(1/р)
tgoti R + /Сп1;
tga2 = R = Хж1а>1 +
откуда
Я" - R'
*ni & ^bKi6-^-
Часто кривая КПД т?м1 = f(p) имеет участок с приблизительно
постоянным его значением (см. рис. 13, а). В этом случае зависимости
А = /(1/р) при средних и малых значениях 1/р будут представлять собой
горизонтальные прямые tga = 0, и найти коэффициенты /Сж1 и lfnl не-
возможно.
Иногда оказывается, что при Aq > Aq AqO)" < AqOJi. В этом случае
прямые А = /(1/р) не пересекаются, а коэффициент Стр1 имеет отрица-
тельное значение. При этом нельзя описать нарастание т?М1 при увеличе-
нии Их, как показано на рис. 13,6.
Рассмотрим еще один способ определения коэффициентов потерь,
существенно отличающийся от предыдущего. В соответствии с этим спо-
собом для различных постоянных значений р по экспериментальным
данным (см. рис. 13, б) строят две зависимости А = /(а^) (рис. 14,6).
Продлевая кривые до пересечения с осью ординат, находят два значения
Aq и А о . При этом коэффициенты потерь
(57)
_ Л о - А о
Р -Р
£ =Л^- —i
Е Р
Для определения коэффициентов Стр1 и А^Ж1 найдем значения a?i
и со1/, соответствующие минимумам значений Л на кривых Л =/(gjj).
4* 51
Для этого продифференцируем уравнение (56) по сл и, приравняв про-
изводную нулю, получим
^Ж1 ^Tpi^Tpi
р (1 - СТр । 1)
откуда ____
_ 1 - -Jv'!р"
''тр 1 — ____-
(w'i - u>i)vy//'
_ р ^Tpi^Tpi
АЖ1 “ Z1 , Л2 •
(1 + Cj.p j w 1)
Найдем коэффициенты потерь, воспользовавшись последним спосо-
бом. В рассматриваемом случае (рис. 14, б) А'о = 0,0548; р = 32 МПа;
col = 78,5 1/с; Aq = 0,0526; р" = 8,5 МПа; со'/ = 52,4 1/с. На основании
расчета получаем /СП1 = 0,00009 с;ктр1 = 0,0537 (среднее значение для
двух точек); Стр1 = 0,0236 с и /Сж1 = 0,00358 c/МПа (среднее значение
для двух точек).
На рис. 13 штриховыми кривыми показаны зависимости КПД
i?Mi = f(p) и *?Mi = Лп1), йолученные по формуле (55) с использова-
нием указанных выше коэффициентов потерь (штриховая линия на
рис. 13,а относится к = 600 об/мин и на рис. 13, б - к р = 8,5 МПа).
Экспериментальные кривые хорошо совпадают с расчетными, следо-
вательно, общая структура формулы (55) способна выражать сложные
процессы, происходящие при работе насоса.
Задача расчета сводится прежде всего к подбору коэффициентов
потерь, обеспечивающих наибольшее совпадение кривых, относящихся
к различным режимам. Экстраполяция кривых КПД (см. рис. 13, б)
дает определенную неточность в определении Л о и Aq .
Для практических расчетов нет необходимости строить зависимость
А = f(&i) (рис. 14, б). Входящая в выражение (57) разность членов
, „11
Aq-A0 = ------- - — .
4mio ^мю
Значения КПД ^10 и т?" 10 определяют по рис. 13, 0. Значения а//
и wj минимума кривых А = j(coi), входящие в вьфажение (58), соот-
ветствуют значениям п\ и п" максимума кривых т?м 1 =/(a?i), которые
также находят по рис .13,6.
Коэффициент Стр1, как указывалось, зависит от характерного раз-
мера D насоса. Если известен характерный размер Dn насоса—прототипа, -
к которому относятся экспериментальные зависимости КПД, то для
нового насоса с характерным размером £>н можно получить более точное
значение коэффициента Стр1 по формуле
С*тр 1 “ ^тр А ,
где C^pi — коэффициент потерь насоса-прототипа, найденный рассмотренным ра-
нее способом.
52
Механический КПД гидромотора
^М2 = ^Т2 _;^Ж2 “ ^тр2 _^П2^^Т2-
Аналогично предыдущему, учитывая что МТ2 = Wt тахе2Р, получаем
(1 - ак)/СЖ2^2
-------------------(59)
И - CTp2W2)e2 е2Р
Коэффициенты потерь гидромотора находят так же, как коэффи-
циенты потерь насоса.
Механический КПД насоса
1 “ 1/(1 + ™м) >
а механический КПД гидромотора
^мг — 1 “ тм •
Коэффициенты тм и т'м для насоса и для гидромотора описывают-
ся одним и тем же выражением, вошедшим составной частью в выраже-
ния (55) и (59). Как показали экспериментальные исследования [10],
зависимости А от р и со для гидромашины, работающей в режиме насоса
и гидромотора, одинаковы. Отсюда следует, что для них будут одинако-
выми коэффициенты потерь Кж, Стр, и без учета привода насоса
подпитки, будет также одинаковым коэффициент Кп. В результате
получим
^?М2 ~ 2 — 1/т?М1, (60)
откуда следует, что т?м i > 7?м 2 •
Для практических расчетов, связанных с использованием ГОТ на
самоходной машине, в формулах (55) и (59) давление р следует выра-
зить через крутящий момент Мх, согласно формуле (12), а ц выражении
(59) угловую скорость со2 выразить через а?!, согласно выражениям (3)
и (8). При записи< общего механического КПД ОГП целесообразно выра-
зить ei ие2 через/р.
При определении КПД раздельно-агрегатной ОГП с отдаленными
от насоса гидромоторами следует учесть потери, возникающие при те-
чении жидкости по трубопроводам, которые приводят к падению давле-
ния жидкости, поступающей от насоса к гидромотору ц к увеличению
давления на выходе гидромотора по сравнению с давлением жидкости,
подводимой к насосу. Эти потери целесообразно учитывать в виде от-
дельного гидравлического КПД т?г. Произведение гидравлического и
механического КПД представляет собой гидромеханический КПД т)гм =
= (полный КПД передачи т? = т?гм т?0 ).
Потери давления в трубопроводах для турбулентного потока
где Аг _ гидравлическое сопротивление трубопроводов, которое, зная длину L
53
трубопроводов и задавшись скоростью уж течения в них жидкости, можно подсчи-
тать на основании известных работ по гидравлике.
При определении значения Яг необходимо учитывать длину трубо-
проводов высокого и низкого давления.
Полученные потери давления на основании выражения (16) экви-
валентны уменьшению момента на валу гидромотора:
^9<72п1ах^м2^г б •
Гидравлический КПД
Мт2~Мг , Лг^2тахгр^1 ч
т?г = -------- = 1--------------— . (Ы)
Мт2
4. ВЫБОР ТИПА ГИДРОМАШИН
4.1. НАСОСЫ И БЫСТРОХОДНЫЕ ГИДРОМОТОРЫ
С НАКЛОННЫМ БЛОКОМ ЦИЛИНДРОВ
В ГОТ самоходных машин используют гидромашины различных
конструкций [35]. Качество ГОТ в первую очередь зависит от правиль-
ного выбора типа гидромашин. Прежде чем сделать вывод о целесооб-
разности применения тех или иных типов гидромашин, рассмотрим их
конструктивные особенности и технические характеристики.
В настоящее время на самоходных машинах, как правило, исполь-
зуют аксиально-поршневые насосы, которые совместно с понижаю-
щим редуктором применяют и в качестве гидромоторов. Такие гидро-
машины допускают большое давление рабочей жидкости, имеют высо-
кий КПД, относительно небольшую массу и достаточный срок службы.
Различают аксиально-поршневые гидромашины с наклонным блоком
цилиндров и с наклонным диском. В первых ось блока цилиндров нахо-
дится под углом к оси приводного вала, а во вторых она совпадает с
осью приводного вала. В гидромашинах с наклонным блоком цилинд-
ров рабочий объем изменяется в результате поворота блока цилиндров
относительно оси вала, а в гидромашинах с наклонным диском — в ре-
зультате поворота наклонного диска относительно оси вала.
Гидромашины с наклонным блоком цилиндров, в свою очередь,
разделяют на гидромашины с несиловой карданной передачей и бескар-
данные (те и другие предложены Тома).
На рис. 15 показана схема гидромашины с несиловой карданной пе-
редачей. Она содержит блок цилиндров 4, в котором перемещаются
поршни 6, соединенные шатунами 5 с упорным диском 3, выполненным
как одно целое с валом, укрепленным в подшипниках качения 1 в кор-
пусе гидромашины. Блок цилиндров размещен в наклонной люльке
9, которая может поворачиваться в корпусе гидромашины 10, Упорный
54
А-А
Рис. 15. Схема гидромашины с наклонным блоком цилиндров и несиловой кардан-
ной передачей
диск соединен с блоком цилиндров при помощи вала 2, снабженного
двумя карданными шарнирами.
При работе гидромашины в режиме насоса и вращении блока ци-
линдров от приводного вала поршни совершают возвратно-поступатель-
ное движение. Жидкость по всасывающему каналу в люльке и имею-
щейся в ней сегментообразной выточке подается к цилиндрам на всасы-
вание. Через вторую сегментообразную выточку и напорный канал жид-
кость поступает в гидролинию высокого давления. Торцевая поверх-
ность блока цилиндров и сопрягаемая с ней торцевая поверхность люль-
ки с сегментообразными выточками образуют распределитель. Блок ци-
линдров относительно люльки центрируется осью 7 и прижимается к
люльке при помощи пружины 5.
Рабочий объем насоса и, следовательно, его подача изменяются в
результате изменения угла поворота люльки. При повороте люльки
на отрицательный угол всасывающий канал становится напорным, а на-
порный — всасывающим. Изменение направления потока жидкости не-
обходимо для реверсирования ОГП. Люлька поворачивается при помощи
гидроусилителя, не показанного на схеме.
В рассмотренной конструкции карданный вал оказывается разгру-
женным от рабочего момента. Он передает лишь момент потерь на тре-
55
ние, возникающих при вращении блока цилиндров. Рабочий крутящий
момент с вала передается на упорный диск и уравновешивается момен-
тами, создаваемыми на определенных плечах силами Р, действующими
на упорный диск со стороны шатунов поршней. Силы Р действуют на
одну половину упорного диска, которая контактирует с’ шатунами
поршней, находящимися под давлением жидкости. Эти силы возникают
в результате разложения нормальных сил N на вертикальные Р и гори-
зонтальные Т. Подшипники гидромашйны работают в тяжелых усло-
виях: они воспринимают осевую нагрузку от сил Г, радиальную нагрузку
от тех же сил, создающих момент, стремящийся изогнуть вал гидропере-
дачи, и радиальную нагрузку от сил Р.
При подаче к гидромашине жидкости под давлением она работает
в режиме гидромотора. Силы Р, вызванные давлением жидкости на
поршни, создают на упорном диске крутящий момент, который пере-
дается к выходному валу. Гидромашины с несиловой карданной переда-
чей не нашли распространения в современных ГОТ самоходных машин.
Исключение составляют гидромашины фирмы ’’Секмафер” (Франция),
предназначенные для ГОТ тепловозов, самосвалов сверхбольшой грузо-
подъемности и других машин, снабженных мощными двигателями.
Установочная мощность выпускаемых гидромашин достигает несколь-
ких тысяч киловатт^ Их отличительной особенностью является работа
при высоком номинальном давлении жидкости (55 МПа). При таких
значениях мощности и давления потери на трение, возникающие при вра-
щении блока цилиндров, значительны, и для их преодоления и синхрон-
ного с валом ведения блока цилиндров применена несиловая кардан-
ная передача.
Обеспечение надежной работы гидромашины с высоким давлением
потребовало длительной их доводки и использования ряда новых конст-
руктивных решений [27]. В гидромашинах фирмы ’’Секмафер”
упорный диск, выполненный как одно целое с приводным валом, уста-
новлен в корпусе гидромашины в сложном подшипниковом узле, сос-
тоящем из двух сдвоенных роликовых, двух конических (воспринимаю-
щих осевые силы) и одного шарикового подшипциков. Карданный вал
имеет два карданных шарнира с игольчатыми подшипниками, смазывае-
мыми под давлением. Блок цилиндров изготовлен из стали с высоким
пределом прочности. Он содержит 11 цилиндров, обеспечивающих рав-
номерную подачу жидкости, а следовательно, малую вибрацию и ма-
лый шум.
При создании гидромашин, работающих при высоком давлении,
большое внимание было уделено уменьшению потерь. Для снижения
утечек в паре поршень—цилиндр жесткие поршни были заменены на
поршни с эластичной головкой из бронзы. При рабочем ходе поршня
головка под давлением масла деформируется и плотно прижимается к
стенкам цилиндра, а при холостом — принимает первоначальную форму.
В зазор между поршнем и цилиндром попадает небольшое количество
масла для смазывания. Утечки рассчитывают из условия обеспечения
необходимого количества смазочного материала.
Использование поршней с эластичной головкой привело к уменыпе-
56
1. Потери мощности (%) в гидромашинах
Потери Гидромашина
неусовершен- ствованная усовершен- ствованная
На сухое трение 1,5 1,5
На утечки в зазорах и гидравлическое 10 2,5
трение
На сжатие жидкости 22 2
Гидравлические,вызывающие умень- 1 1
шение давления
На привод насоса подпитки 2Л 1
Общие потери 37 8
Полный КПД передачи при изменении 0,63 0,92
частоты вращения от 0,1 номинальной
до номинальной
нию и механических потерь. При отсутствии эластичной головки возни-
кают большие утечки, образующие вокруг поршня масляный клин
и затрудняющие его перемещение.
Путем выбора соответствующих геометрических форм каналов,
по которым проходит жидкость, удалось снизить вероятность возник-
новения кавитации и уменьшить давление насоса подпитки, а следова-
тельно, затрату мощности на его привод.
Введено автоматическое запаздывание открытия отверстий распреде-
лителя. Запаздывание продолжается до тех пор, пока давление в цилинд-
ре не станет равным давлению в распределителе. Это привело к тому,
что рабочая жидкость из распределителя не ’’врывается” со сверхзвуко-
вой скоростью в цилиндр, что резко снижает потери полезной мощности,
нагрев жидкости и шум. В результате использования автоматического за-
паздывания открытия отверстий распределителя резко сократились
потери на сжатие жидкости.
В табл. 1 показано, какие потери и насколько удалось снизить в
процессе доводки, а какие нет. Представляет также большой интерес
распределение потерь в гидромашине данного типа.
Выпускают несколько типоразмеров насосов и гидромоторов, рас-
считанных на установочную мощность до 4400 кВт. Некоторые из них
работают при давлении 65 МПа. В дальнейшем предполагается увеличить
давление до 80 МПа. Срок службы гидромашин составляет 20 000 ч.
Основным препятствием для повышения давления является не механи-
ческая прочность деталей агрегатов и не герметичность соединений, а
сжимаемость рабочей жидкости. Предполагается использовать малосжи-
маемые жидкости.
В результате использования большого давления и высокой частоты
вращения удельная масса ОГП, состоящей из регулируемого насоса с
рабочим объемом 275 см3 и нерегулируемого гидромотора при нагрузоч-
ном диапазоне изменения передаточного числа около четырех, равна
1,15 кг/кВт.
57
Ниже приведены параметры насосов ’’Секмафер” нескольких типо-
размеров.
Рабочий объем, см3/об 275 800 1600 1000*
Номинальная частота вращения, об/мин 2500 1800 1250 2200
Коэффициент быстроходности, см/мин 16300 16800 14800 22000
Номинальная мощность, кВт . . . 618 1294 1804 1977
Удельная масса, кг/кВт — 0,38 — 0,35
* Специального назначения.
Нерегулируемые гидромоторы того же рабочего объема, что и на-
сосы, имеют на 11 — 20 % большую частоту вращения и на 45 % меньшую
удельную массу.
Более широкое распространение нашли аксиально -поршневые гидро-
машины с наклонным блоком цилиндров и шатунным ведением порш-
ней без силовой карданной передачи. Такие гидромашины серий 200 и
300 для строительных, дорожных и коммунальных машин выпускает
Московский машиностроительный завод имени МЛ. Калинина, Одес-
ский завод ’’Стройгидравлика” и Свердловское производственное объе-
динение ’’Пневмостроймашина”.
Допустимое давление жидкости гидромашин серий 200 и 300 зависит
от применяемого блока цилиндров. При бронзовом блоке номинальное
давление составляет 20 МПа (в ранних конструкциях 16 МПа), а макси-
мальное — 25 МПа. Для повышения максимального давления до 32 МПа
применяют стальной блок с вставленными в его цилиндры бронзовыми
гильзами (втулками) и с привареной со стороны распределителя брон-
зовой пятой.
На рис. 16 показана конструкция регулируемого насоса типа 207.
В корпусе насоса на трех подшипниках установлен приводной вал Ди
на двух подшипниках — люлька 2, которая может поворачиваться в обе
стороны на 25°. К крышке 4 люльки, имеющей две дугообразные проре-
зи, примыкает неподвижный сферический распределитель 3, также имею-
щий две дугообразные прорези. К распределителю при помощи тарель-
чатых пружин 7, упирающихся в центральный шип 6, прижимается блок
цилиндров 5, имеющий семь поршней. В сферических гнездах упорного
диска, выполненного как одно целое с ведущим валом, укреплены го-
ловки шатунов поршней и головка центрального шипа, прижимаемая к
упорному диску штампованной пластиной.
При вращении вала шатуны прилегают к юбкам поршней и, действуя
на них, приводят во вращение блок цилиндров. Юбки поршней выполне-
ны длинными, а шатуны снабжены точными конусными шейками. При
расположенных под углом осях вала и блока цилиндров поршни совер-
шают возвратно-поступательное движение. Рабочая жидкость по кана-
лам в люльке поступает из всасывающей гидролинии в напорную.
С правой стороны насос закрыт кожухом (на рисунке не показан).
Поворот люльки для изменения рабочего объема насоса осуществляется
58
Рис. 16. Регулируемый насос с наклонным блоком цилиндров типа 207
при помощи укрепленной на ней цапфы, соединенной с гидроусилителем,
схема которого показана на рис. 6, а, или с регулятором мощности. На-
сосы типа 207 применяют в ГОТ экскаваторов ЭО-5122, ЭО-6122 и др.
На рис. 17 показана конструкция нерегулируемой гидромашины
типа 210, которая может использоваться в качестве насоса и гидро-
мотора.
На рис. 18 показана конструкция сдвоенного двухпоточного регу-
лируемого насоса типа 223. Он содержит два унифицированных с насо-
сом типа 207 качающихся узла, включающих в себя блок цилиндров 5,
Рис. 17. Нерегулируемая гидромашина с наклонным блоком цилиндров типа 210
59
Рис. 18. Сдвоенный регулируемый насос типа 223
поворотную люльку 4 и другие детали, установленные в одном корпусе
3 параллельно друг другу. Валы качающихся узлов приводятся во враще-
ние при помощи механического редуктора с центральной шестерней 2,
выполненной за одно целое с входным валом 1. Насосы выпускают с
редуктором, имеющим различное передаточное число, что позволяет
при одной и той же частоте вращения валов качающихся узлов получить
различную частоту вращения входного вала. Насосы работают на само-
всасывании. Поворот люлек качающихся ^узлов осуществляет регулятор
мощности, подробно рассмотренный дальше. Насосы типа 223 исполь-
зуют в ГОТ ковшовых экскаваторов ЭО-5115А, ЭО-4321, ЭО-3322А,
ЭО-4122и др?
Аналогичные гидромашинам типа 207 и типа 210 гидромашины ти-
па A2V и типа A2F выпускает фирма ’Тидроматик”. Они рассчитаны на
несколько большее давление: номинальное 32 МПа и максимальное
40 МПа. Угол наклона блока цилиндров нерегулируемого гидромотора
удалось увеличить до 40° [35].
Специалистами Московского машиностроительного завода имени
МЛ. Калинина была предложена принципиально новая схема аксиально-
поршневой гидромашины с наклонным блоком цилиндров [А.с.
№ 568737 (СССР)], позднее получившая название ’’Тримот”. Выпол-
ненные по такой схеме регулируемый насос типа 313 и регулируемый
60
гидромотор типа 312 выпускает отечественная промышленность и соот-
ветственно насос A7V и гидромотор A6V — фирма ’Тидроматик”. На
рис. 19 показана конструкция гидромотора. Новым решением является
отказ от применения поворотной люльки, свойственной гидромашинам
с наклонным блоком цилиндров. Изменение угла наклона блока 1 ци-
линдров осуществляет гидроусилитель, перемещающий установленный
в проточке корпуса 3 распределитель 2. Конструкция гидроусилителя
подробно рассмотрена дальше. Распределитель со стороны, прилегаю-
щей в корпусу, имеет цилиндрическую поверхность, ограниченную че-
Рис. 19. Регулируемый гидромотор с наклонным блоком цилиндров без поворот-
ной люльки
61
тырьмя гранями. Со стороны, прилегающей к блоку цилиндров, распре-
делитель имеет сферическую поверхность, по которой центрируется
блок цилиндров. Перемещение распределителя приводит к перемещению
блока цилиндров. Рабочая жидкость подводится и отводится через окна
и каналы, выполненные непосредственно в корпусе гидромотора. Макси-
мальный угол поворота блока цилиндров составляет 25°, минимальный
7°. Устранение поворотной люльки позволило уменьшить массу гидро-
мотора приблизительно на 40 %.
По схеме ”Тримот” отечественная промышленность выпускает
сдвоенные регулируемые насосы типа 323 и строенные регулируемые
насосы типа 333. Третий качающийся узел строенного насоса имеет ра-
бочий объем блока цилиндров приблизительно в 3 раза меньший рабо-
чего объема блока цилиндров двух других качающихся узлов. На рис. 20
показана конструкция сдвоенного насоса типа 323. Приводной вал 1 вы-
полнен торсионным, что обеспечивает прямое соединение насоса с двига-
телем без промежуточной компенсирующей муфты, демпфирование
пульсации крутящего момента, снижение вибрационных нагрузок на под-
шипники, разгрузку подшипников приводного вала от влияния несоос-
ности присоединения валов. Распределитель 3 перемещается при помощи
регулятора мощности и поворачивает блок цилиндров 2. Устройство ре-
гулятора мощности рассматривается дальше. Наибольший угол наклона
Рис. 20. Сдвоенный насос типа 323
62
блока цилиндров 25°, наименьший угол несколько больше нуля и выб-
ран таким, чтобы ограничить давление рабочей жидкости заданной мак-
симальной величиной. Насосы типа 323 устанавливают на экскаватор
ЭО-3323.
Насосы типа 323 по сравнению с насосами типа 223 имеют в 1,5 -
2 раза больший срок службы. Срок службы качающихся узлов определя-
ется сроком службы подшипниковых опор. В насосах типа 323 примене-
ны усиленные подшипники и уменьшено плечо их консольной нагрузки
путем нарезания шестерни на фланце вала. При среднем давлении рабо-
чей жидкости за цикл копания 16 МПа, частоте вращения качающихся
узлов 1500 об/мин, тонкости фильтрации 25 мкм и оптимальной вязкос-
ти рабочей жидкости 16 ... 25 мм2/с срок службы насосов типа 323 сос-
тавляет не менее 6000 ч. В тех же условиях срок службы насосов типа
223 равен 4000 ч. При давлении 20 МПа их срок службы составляет соот-
ветственно 4000 и 2000 ч.
Наряду с регулируемыми гидромашинами серии 300 выпускают
нерегулируемые насосы типа 311 и нерегулируемые гидро моторы ти-
па 310.
Гидромашины серий 200 и 300 выпускают как с чугунным корпу-
сом, так и с корпусом из высокопрочного алюминиевого сплава, что
позволяет уменьшить массу гидромашины приблизительно на 30 %,
Гидромашины серии 300 в основном имеют стальной с тонкими бронзо-
выми гильзами блок цилиндров, рассчитанный на номинальное давле-
ние 20 МПа и максимальное 32 МПа. В дальнейшем предполагается уве-
личить номинальное давление до.32 МПа и максимальное до 40 МПа.
В табл. 2 приведены основные параметры гидромашин серии 200 и 300
нескольких типоразмеров (первые три цифры определяют тип гидро-
машины, а две следующие — диаметр поршней в мм).
2. Основные параметры гидромашин серий 200 и 300
Типоразмер гидромашины Рабочий объем, см3 Частота вращения, об/мин Номинальная мощность, * ** кВт Масса, *** кг
номи- нальная макси- мальная*
Серия 200
207.12 11,6 2400 5000 9,8 5,5
207.16 28,1 1920 4000 18,9 12,5
207.20 54,8 1500 3150 28,8 39
* При номинальном давлении.
** В числителе указана мощность нерегулируемых насосов, в знаменателе -
нерегулируемых гидромоторов. Мощность насосов и гидромоторов соответствен-
но расчитана по выражениям (14) и (17), при этом принято 1?м1 = Лм2 = 0,95,
для сдвоенных насосов потери в зубчатом редукторе не учитывались.
*** Для насосов типа 207 без кожуха и гидроусилителя управления, для гид-
ромоторов типа 312 и насосов типов 223, 323 и 333 с кожухом и гидравлическим
регулятором рабочего объема.
63
Продолжение табл, 2
Типоразмер гидромашины Рабочий объем, см3 Частота вращения, об/мин Номинальная мощность, *♦ кВт Масса, *** кг
номи- нальная макси- мальная*
207.25 107 1200 2500 45,0 75
207.32 225 960 2000 75,8 140
210.12 И,6 2400 5000 9,8 / 8,8 4,4
х 210.16 28,1 1920 4000 18,9/17,0 9
210.20 54,8, 1500 3150 28,8 / 26,0 25
210.25 107 1200 2500 45,0/40,0 52
210.32 325 960 2000 75,8/68,2 100
223.20 2X54,8 1500 3150 57,6 162
Серия 300
312.20 56 1500 - 3000 26,5 30
312.25 112 1200 2400 42,4 77
312.32 224 960 1920 67,9 116
311.20; 310.20 56 1500 3000 29,4 / 26,5 23
311.25; 310.25 112 1200 2400 47,1 / 42,4 41
311.32; 310.32 224 960 1920 75,4 / 67,9 86
323.20 2X56 1500 3000 58,8 90
333.20 2X56+28 1500 3000 77,7 100
Примечание. Угол поворота блока цилиндров гидромашин серии 300
несколько отличается от 25° для получения рабочих объемов по ГОСТ 13824-80.
На рис. 21 показана конструкция сдвоенного насоса ’Тидроматик”
(ФРГ) типа A8V. Распределитель перемещается в плоскости, перпенди-
кулярной плоскости чертежа. Подвод и отвод рабочей жидкости осу-
ществляются по каналам в крышке корпуса насоса. Подшипниковый
узел имеет подшипники одинакового диаметра. Насос не обладает пре-
имуществами насоса типа 323 (согласование допустимой частоты враще-
ния блока цилиндров с частотой вращения вала двигателя и возможность
перекосов и несоосности насоса с валом двигателя). Использование
только двух пар шестерен и в результате этого отсутствие центрального
вала со своим подшипниковым узлом и шестерней позволяет получить
меньшую массу.
Некоторые фирмы, например ’’Брюнингхаух” (ФРГ),, выпускают
гидромашины,рассчитанные на различное давление рабочей жидкости:
Серия гидромашины....... А
Давление, МПа
длительное............. 8
при перегрузках...... 30
В С D Е
15 18 18 40
40 40 60 60
Характерным является то, что с увеличением давления уменьшается
угол наклона блока цилиндров: для серии А он равен 25°, для серии
Е—9°.
64
Рис. 21. Сдвоенный насос типа A8V
5 — Зак. 1159
65
В нерегулируемых гидромашинах с наклонным блоком цилиндров
для вращения последнего иногда используют коническую зубчатую
передачу (рис. 22). Конические зубчатые венцы У и 2 прикреплены к
упорному диску и к блоку цилиндров. Использован плавающий распре-
делительный диск 4, прижимаемый давлением рабочей жидкости к
блоку цилиндров 3. Благодаря синхронности вращения вала и блока
цилиндров угол наклона блока цилиндров составляет 40 ... 45°, что
позволяет получить большой рабочий объем гидро машины при ма-
лых ее размерах и массе.
42. НАСОСЫ И БЫСТРОХОДНЫЕ ГИДРОМОТОРЫ
С НАКЛОННЫМ ДИСКОМ
Гидромашины с наклонным диском разделяют на гидромашины
с силовой карданной передачей и бескарданные. Аксиально-поршневой
насос с силовой карданной передачей использован в ГОТ самоходных
шасси 1П102 и Ш104, разработанных ХЗТСШ. Для гидромашины с сило-
вой карданной передачей подшипниковый узел и силовая карданная
передача имеют весьма большие размеры и массу по сравнению с разме-
рами и массой основного узла — блока цилиндров. В настоящее время
из-за большой массы такие насосы и гидромоторы в трансмиссиях само-
ходных машин не применяются.
Бескарданные гидромашины с наклонным диском разделяют на гид-
ромашины, имеющие точечный контакт поршней с наклонным диском,
и на гидромашины, содержащие гидростатические опоры башмаков
поршней. Гидромашины первого типа, отличающиеся простотой конст-
рукции, не нашли распространения в трансмиссиях самоходных машин,
так как они рассчитаны на небольшую мощность и работают при макси-
мальном давлении жидкости, не превышающем 25 МПа, что объясняется
высокими контактными напряжениями в местах соприкосновения порш-
ней с наклонным диском.
В ГОТ самоходных машин нашли применение только гидромашины
с гидростатическими опорами башмаков поршней. Первая такая конст-
рукция была создана фирмой ’’Денисон” (США) в сороковых года.
Для ГОТ сельскохозяйственных машин гидромашины с наклонным
диском и гидростатическими опорами типа ’’Зауэр” производит Кирово-
градский завод гидравлических силовых машин ’’Гидросила” [И]. Фир-
ма ’’Зауэр Гетрибе” выпускает гидромашины, разработанные фирмой
’’Санстрэнд Юнайтид Кингдом Лимитид” (США). Поэтому указанные
гидромашины иногда называют гидромашинами типа ’’Санстрэнд”, а не
типа ’’Зауэр”. На рис. 23 показана конструкция регулируемого насоса.
На приводной вал 3 насоса посажен блок цилиндров 8, который центри-
руется по валу и опирается на него. На поршни 1 блока щлиндров на-
деты башмаки 2 (этот узел хорошо показан на следующей конструк-
ции) , которые опираются на наклонный диск 6. Последний вместе с его
опорой 5, выполненной в виде поворотной люльки, закрепленной на ко-
нических подшипниках в корпусе насоса, может поворачиваться в обе
66
Рис. 23. Регулируемый насос с наклонным диском и блоком цилиндров, укреплен*
ным на валу
стороны. Через отверстия в поршнях к башмакам под давлением посту-
пает рабочая жидкость из цилиндров, создавая гидростатическую опору.
Поясок башмака, представляющий собой гидростатический подшипник
скольжения, воспринимает 2 ... 4 % общей силы. При вращении вала и
блока цилиндров башмаки ’’плывут” по неподвижному наклонному
диску. При этом поршни совершают возвратно-поступательное движение,
нагнетая через распределитель 10 рабочую жидкость из линии низкого
давления передачи в линию высокого давления. Со стороны блока
цилиндров на распределитель действует такая же большая продольная
сила, что и со стороны башмаков поршней на наклонный диск. 96 ... 98 %
этой силы воспринимается гидростатической опорой, которую создает
давление рабочей жидкости в пространстве, заключенном между диском
9 и распределителем. Неуравновешенная часть силы воспринимается
гидродинамическим подшипником — опорными поясами диска 9.
Рассматриваемый насос имеет ряд конструктивных особенностей.
На вал со стороны блока цилиндров действует большая радиальная сила,
стремящаяся его прогнуть. Для ее восприятия вал имеет значительный
диаметр и опирается на подшипники со значительной несущей способ-
ностью. Посадка блока цилиндров на шлицах вала выполнена с зазором,
который обеспечивает самоустановку блока цилиндров торцевой поверх-
ностью к распределителю. Блок цилиндров выполнен из стали и имеет
вставные гильзы из специальной латуни. Блок цилиндров не контакти-
рует непосредственно с распределителем. К торцевой поверхности блока
цилиндров при помощи штифтов прикреплен диск из латуни, который
5* 67
контактирует с неподвижным стальным диском распределителя. Каза-
лось бы, что диск распределителя можно сделать из бронзы или латуни,
с тем чтобы он непосредственно контактировал со стальным блоком
цилиндров. Есть несколько причин заставляющих отказаться от такого
решения и одна из них гидравлическая эрозия диска распределителя в
местах, где происходят перелом и отсечка жидкости. Башмаки принуди-
тельно прижимаются к наклонному диску через сферический подпятник
4 и обойму 7 несколькими пружинами малого диаметра, размещенными
в сверлениях, выполненных в блоке цилиндров. Центральная пружина
прижимает блок цилиндров к распределителю. Полые поршни насоса
заполнены легким и жестким материалом — феноловым пластиком для
уменьшения мертвого пространства в цилиндрах. Это снижает объемные
потери, вызванные сжатием жидкости, на что указывалось ранее, приво-
дит к уменьшению шума, устраняет кавитацию и обеспечивает более
спокойную работу гидромашины. С правой стороны к корпусу насоса
прикреплен корпус 77, в котором расположен насос подпитки,приводи-
мый во вращение от ведущего вала. Срок службы насоса составляет
12 000 ч.
Выпускаются и нерегулируемые насосы подобной конструкции.
Насос и гидромотор с рабочим объемом 89 см3, применяемые в ГОТ
отечественных сельскохозяйственных машин, имеют максимальную
частоту вращения 2590 об/мин и максимальное давление рабочей жид-
кости 35 МПа. Масса насоса с насосом подпитки, фильтром и другой
гидроаппаратурой составляет 77 кг. Масса гидромотора равна 46,5 кг.
Гидромашины, аналогичные рассмотренным выше, выпускает фир-
ма’’Итон” (США) [11 ].
Гидромашины с наклонным диском отличаются по способу центри-
рования и крепления блока цилиндров, а также по расположению нак-
лонного диска и распределителя. На рис. 24 показана конструкция гид-
ромотора фирмы ’’Лукас” (Великобритания), в которой блок цилинд-
ров опирается не на приводной вал, как в предыдущей конструкции, а
на корпус с помощью роликового подшипника. Зазор в подшипнике,
центрирующем блок цилиндров относительно корпуса, обеспечивает
самоустановку блока цилиндров, т.е. его плотное црилегание по всей
поверхности к распределителю. В отличие от предыдущей конструкции
распределитель расположен со стороны приводного вала, а наклонный
диск — с противоположной стороны. Наклонный диск установлен в кор-
пусе гидромотора на подшипниках скольжения, что позволяет снизить
массу гидромотора. Подшипники скольжения имеют вкладыши из сталь-
ной ленты с антифрикционным покрытием типа нейлона. Угол наклона
диска изменяется при помощи гидроусилителя.
Чтобы на перекос блока цилиндров не влияла деформация привод-
ного вала, последний установлен на подшипниках качения в корпусе
и соединен с блоком цилиндров при помощи тонкого шлицевого вала,
работающего только на кручение. В ранее рассмотренной конструкции
(см. рис. 23) для уменьшения прогиба вал имеет достаточно большой
диаметр и не является консольным. Применение дополнительного вала
(рис. 24) не является лучшим решением. На сферические поверхности
68
поршней надеты башмаки гидростатических опор. Башмаки соединены
между/собой обоймой, опирающейся на сферическую пяту, укреплен-
ную на шлицевом вале. Одна пружина, действующая на сферическую
пяту и блок цилиндров, прижимает башмаки и поршни к наклонному
диску, а блок цилиндров — к распределителю. Это прижатие предвари-
тельное. Основное прижатие осуществляется давлением жидкости. Внут-
ри поршней имеются отверстия, через которые жидкость под давлением
подводится к башмакам, создавая гидравлические опоры.
Гидромотор имеет только один разъем корпуса, что снижает требо-
вания к точности его изготовления. Блок цилиндров выполнен из брон-
зы с напрессованным стальным кольцом, являющимся внутренней обой-
мой подшипника. Торец блока имеет серебряное покрытие. Башмаки
поршней бронзовые с серебряным покрытием. Корпус выполнен из
алюминиевого сплава.
Рассматриваемая конструкция гидромашины имеет один важный
недостаток — ее неудобно использовать в качестве насоса. Насос в отли-
чие от гидромотора для получения компактной конструкции ОГП дол-
жен включать в себя насос подпитки. В предыдущей конструкции гид-
ромашины (см. рис. 23) имеется проходной вал, от которого приводит-
ся во вращение насос подпитки. Гидромашины рассматриваемого типа
(рис. 24) не имеют проходного вала, что усложняет привод насоса под-
питки.
Гидромашины фирмы ’’Лукас” работают при номинальном давлении
28 МПа и при максимальном 35 МПа. В зависимости от типоразмера ко-
69
Рис. 25. Регулируемый насос с наклонным диском, опирающимся на корпус
эффициент быстроходности лежит в пределах от 9900 до 13 500 см/мин.
Масса нерегулируемых гидромашин по сравнению с массой регулируе-
мых гидромашин в 2,2 — 2,4 раза меньше. Подобные гидромашины,
выпускаемые другой фирмой, имеют коэффициент быстроходности
около 16 000 см/мин.
На рис. 25 показана одна из последних конструкций регулируемого
насоса фирмы ’Тидроматик”, отличающаяся от выпускаемого насоса
A4V наличием на ведущем валу двойного сферического подшипника
вместо роликового. Особенностью насоса является простота крнструк-
ции, малое число деталей и небольшая масса. Блок цилиндров опирается
на приводной вал. Одни и те же пружины осуществляют прижим башма-
ков к наклонному диску и блока цилиндров к распределителю. Блок
цилиндров стальной с гильзами из цветного металла. В отличие от рас-
смотренных конструкций, в которых наклонный диск поворачивается
на цапфах в корпусе, в данной конструкции диск опирается через иголь-
чатые подшипники, находящиеся в специальном сепараторе, на цилинд-
рическую поверхность корпуса насоса. Это позволяет заметно уменьшить
массу гидромашины. Поворотом диска управляет гидроусилитель, по-
казанный на рис. 7. От ведущего вала приводится шестеренный насос
подпитки с внутренним зацеплением шестерен.
Насосы A4V выпускают четырех типоразмеров с рабочим объемом
от 40 до 125 см3, рассчитанные на номинальное давление 35 МПа и мак-
симальное 40 МПа.
В настоящее время наметилось новое направление создания гидро-
машин малой удельной массы и низкой стоимости, работающих при
низком давлении. Указанное направление отражает конструкция насоса
’’Вердис” (рис. 26),выпускаемого в Англии и ФРГ для ГОТ самоходных
машин. Номинальное и максимальное давление насоса одинаково и сос-
70
Рис. 26. Регулируемый быстроходный насос ”Вердисм ограниченного давления с
наклонным диском
тавляет 21 МПа. В алюминиевом корпусе на подшипниках скольжения
установлен стальной блок цилиндров с алюминиевыми поршнями. Тор-
цевой распределитель имеет одно окно, соединенное с линией высокого
давления. Рабочая жидкость подается в цилиндры непосредственно из
корпуса насоса. Насос нереверсивный (в этом его недостаток); он име-
ет усилитель управления, показанный на рис. 6,а.
Использование низкого давления снижает требования к точности
изготовления деталей и качеству применяемых материалов. При малом
давлении можно принять небольшое отношение хода поршня к его диа-
метру и за счет этого при допустимой максимальной скорости поршня
получить высокий коэффициент быстроходности, а следовательно,
уменьшить удельную массу насоса. Кроме того, при малом давлении
уменьшаются нагрузки, действующие на детали, что позволяет умень-
шить их размеры, а следовательно, дополнительно снизить массу насоса.
Ниже приведены параметры двух насосов ’’Вердис”, выпускаемых
фирмой ’’Паркер Ханнифин - НМФ” (ФРГ).
71
Тип насоса
Рабочий объем, см3...................
Частота вращения, об/мин
номинальная.........................
максимальная....................
Коэффициент быстроходности, см/мин:
номинальный.........................
максимальный....................
Мощность, кВт:
номинальная.........................
максимальная....................
Масса, кг............................
Удельная масса, кг/кВт
номинальная.........................
минимальная.....................
033 32,8 055 57,4
3000
4000
9600 11600
12800 15500
34 58,8
45 78,8
12
0,35 0,20
0,27 0,15
Несмотря на небольшое рабочее давление, насосы для заданной
мощности имеют весьма малую массу.
Все сказанное не исключает развития первого направления совер-
шенствования гидромашин, т.е. повышения их рабочего давления.
Некоторые модели аксиально-поршневых гидромашин с наклонным
диском работают при очень высоком давлении. Так, например, одна из
нерегулируемых гидромашин фирмах ’’Дайнекс Ко” (США) работает
при максимальном давлении 56 МПа. Нерегулируемые гидромашины
фирмы ”Ледюк” (Франция) работают при максимальном давлении
60... 70 МПа.
4.3. СРАВНЕНИЕ И ОЦЕНКА
РАЗЛИЧНЫХ ТИПОВ ГИДРОМАШИН
Прежде всего следует по различным показателям сравнить между
собой гидромашины с наклонным блоком цилиндров и с наклонным
диском. Гидромашины с наклонным диском (см. рис. 16 ... 22) имеют
мощный подшипниковый узел, габаритные размеры и масса которого
равны, а иногда и превосходят размеры и массу блока цилиндров. Кроме
того, гидромашины, показанные на рис. 16 и 18, имеют сложную систему
подвода и отвода рабочей жидкости через поворотную люльку. В таких
гидромашинах необходимо предусмотреть свободное пространство для
перемещения люльки, что приводит к увеличению размеров корпуса
гидромашины. Все это повышает массу и стоимость гидромашин.
Гидромашины с наклонным диском и гидростатическими опорами
башмаков поршней не содержат громоздких подшипниковых узлов,
имеют меньшую стоимость и значительно меньшую удельную массу
(отнесенную к единице установочной мощности) по сравнению с гидро-
машинами с наклонным блоком цилиндров и поворотной люлькой.
Однако удельная масса гидромашин с наклонным блоком цилиндров
без поворотной люльки, выполненных по схеме ”Тримот”, меньше, чем
удельная масса гидромашин с наклонным диском. Этот важный показа-
тель подробно будет проанализирован дальше.
72
На поршень гидромашины с наклонным блоком цилиндров со сто-
роны шатуна действует сила, направление которой почти совпадает с
осью поршня. Боковая составляющая этой силы мала, что обусловли-
вает небольшие силы трения поршня о стенку цилиндра [7]. В гидрома-
шинах с наклонным диском поршень шарнирно опирается на наклон-
ную поверхность, реакция которой имеет осевую и боковую составляю-
щие. Приложенная консольно боковая составляющая приводит к воз-
никновению боковых сил, действующих со стороны цилиндра на пор-
шень, которые при движении поршня вызывают значительные силы тре-
ния. Поэтому механический КПД и, прежде всего, гидромоторов с на-
клонным блоком выше, чем гидромашин с наклонным диском.
При малой частоте вращения, когда скорость поршней мала, между
ними и цилиндром возникает граничное трение, сопровождающееся
неравномерным вращением вала гидромотора. При значительной боко-
вой силе граничное трение наступает раньше. Поэтому минимальная
частота вращения гидромотора с наклонным диском составляет 25 ...
50 об/мин, а гидромотора с наклонным блоком 1 об/мин.
Срок службы гидромашин с наклонным блоком цилиндров обычно
определяется сроком службы подшипникового узла, а гидромашин
с наклонным диском — сроком службы пары поршень — цилиндр.
Из-за увеличения контактных напряжений угол поворота наклонного
диска не превышает 20° (обычно этот угол составляет 18°); при увели-
чении давления он уменьшается. Угол поворота наклонного блока регу-
лируемых гидромашин достигает 30° (обычно он составляет 25°) и не-
регулируемых — 40°.
Увеличение угла наклона блока и диска приводит к уменьшению
размеров и массы гидромашины. Большой угол наклона блока по срав-
нению с углом наклона диска не компенсирует того увеличения габарит-
ных размеров и массы гидромашины, которое вызывает применение под-
шипникового узла и поворотной люльки.
Поскольку поршни гидромашин с наклонным блоком нагружены
небольшой боковой силой, они имеют большую допустимую линейную
скорость, а следовательноЛ коэффициент быстроходности таких машин
выше (примерно на 10 %) коэффициента быстроходности гидромашин
с наклонным диском.
Для гидромотора с наклонным блоком при максимальном угле
поворота блока 25° и минимальном угле поворота 7° диапазон регули-
рования (изменения рабочего объема) составляет 3,5 (е2 = 0,286). Для
гидромотора с наклонным диском при максимальном и минимальном
угле поворота блока соответственно 18 и 7° диапазон регулирования
составляет 2,6 (е2 = 0,379). Меньший диапазон регулирования является
существенным недостатком последнего гидромотора.
Для нерегулируемых гидромоторов по сравнению с насосами иногда
рекомендуют на И - 20 % более высокую частоту вращения и, следова-
тельно, более высокий коэффициент быстроходности. Для регулируе-
мых гидромоторов при заданной частоте вращения и уменьшения угла
наклона блока цилиндров линейная скорость поршня уменьшается. Это
позволяет при уменьшении угла наклона блока цилиндров до минималь-
73
ного значения увеличить максимальную частоту вращения, по данным
фирмы ’’Линде АГ” на 28 % и по данным фирмы ’Тидроматик” на
32 ... 34 %, что имеет важное значение при выборе параметров ГОТ.
Важнейшим показателем гидромашины являются ее номинальная
и максимальная удельные массы, т.е. массы, отнесенные к номинальной
и максимальной установочной мощности (при максимальном рабочем
объеме). На основании уравнений (14) и (29) удельная масса (кг/кВт)
60000л qm ах
m = -------------------, (62)
спР
где Kq - коэффициент металлоемкости конструкции, представляющий собой от-
ношение массы гидромашины к ее максимальному рабочему объему.
В соответствии с формулой (62) удельная масса зависит от четырех
параметров: Сп, р, Kq и <7тах. Проанализируем влияние на них типа
гидромашины.
Гидромашины с наклонным блоком и наклонным диском обычно
имеют одинаковое номинальное и максимальное давление рабочей
жидкости р.
Коэффициент быстроходности выполненных гидромашин не зави-
сит от их рабочего объема. Наибольшее достигнутое значение Сп
= 22 000 см/мин относится к гидромашинам с наклонным блоком,
несиловой карданной передачей и высоким рабочим давлением. Для спе-
циальных гидромашин с наклонным блоком и шатунным ведением
поршней транспортного назначения он достигает 16 000 см/мин. Для
гидромашин указанного типа общего назначения этот коэффициент
значительно меньше - 14 500 см/мин.
3. Основные параметры гидро
Параметр Типоразмер
12 28 55
Рабочий объем, см3 11,6 28,1 54,8
Максимальная частота вращения, об/мин при#>,°: 25 6000 4750 3750
7 6250 5000
Мощность, кВт: номинальная 37 71 110
максимальная 46 ' 89 138
Коэффициент быстроходности, см/мин 13700 14500 14300
Масса, кг: гидромотора A2F 5,5 12,5 23
гидромотора A6V — 18 27
насоса A2V — 29 56
насоса A7V — 19 28
Удельная минимальная масса, кг/кВт: гидромотора A2F 0,116 0,141 0,166
гидромотора А6 V — 0,204 0,155
насоса A2V — 0,329 0,405
насоса A7V — 0,215 0,203
74
Коэффициент металлоемкости Kq зависит от наличия оборудования,
которое имеет гидромашина (насос подпитки, гидроусилитель и тд.),
а также от материала кожуха (из алюминиевого сплава или из чугуна).
Различная комплектация гидромашин не позволяет их сравнить (иногда
приводят значение массы качающегося узла гидромашины с наклонным
блоком цилиндров без кожуха). Для большинства гидромашин при ра-
бочем объеме более 100 см3 коэффициент металлоемкости сохраняется
примерно постоянным. При уменьшении рабочего объема от указанного
значения коэффициент металлоемкости обычно резко возрастает. Это
объясняется тем, что размеры некоторых деталей (например, толщину
литого корпуса) трудно выполнить меньше определенных значений.
Поэтому уменьшение рабочего объема гидромашины не приводит к про-
порциональному уменьшению размеров и массы отдельных деталей.
Для насосов с наклонным блоком цилиндров (в кожухе, с насосом под-
питки и гидроусилителем) при рабочем объеме 100 см3 и выше коэффи-
циент металлоемкости равен 0,95 ... 0,85 кг/см3. Для насосов с наклон-
ным диском при той же комплектации этот коэффициент равен 0,60 ...
0,55 кг/см3, а для насоса с наклонным блоком цилиндров без поворот-
ной люльки — приблизительно 0,5 кг/см3. Для нерегулируемого гидро-
мотора с наклонным блоком цилиндров коэффициент металлоемкости
составляет 0,4 кг/см3, для нерегулируемого гидромотора с наклонным
диском он достигает иногда 0,2 кг/см3. Меньший коэффициент металло-
емкости насоса с наклонным блоком цилиндров без поворотной люль-
ки по сравнению с коэффициентом металлоемкости насоса с наклонным
диском можно объяснить большим углом наклона блока по сравнению
с углом наклона диска.
Для сравнения и оценки гидромашин различного типа, находящихся
машин фирмы ’Тидроматик’*
80 107 160 225 468 915 1830
80 107 160 225 468 915 1830
3350 3000 2650 2350 1900 1500 1200
4500 4000 3500 3100 2500 - -
143 171 226 282 474 732 1171
179 214 283 353 594 915 1464
14400 14300 14300 14400 14700 14600 14700
33 44 63 88 200 408 915
39 52 74 103 223
— 100 — 200 —
44 53 76 105 - — -
0,184 0,205 0,223 0,249 0,337 0,446 0,460
0,218 0,243 0,262 0,292 0,376 —
0,468 — 0,567 — — —
0,245 0,248 0,269 0,300 — — —
75
4. Основные параметры насоса A4V
Параметр Типоразмер
40 56 90 125
Рабочий объем см3 40 56 90 125
Максимальная частота вращения, об/мин 3700 3400 2900 2600
Мощность, кВт:
номинальная 80 102 139 173
максимальная 100 128 174 216
Коэффициент быстроходности,см/мин 12700 13000 13000 13000
Масса, кг 29 35 51 70
Удельная минимальная масса, кг/кВт 0,290 0,273- 0,294 0,324
на одном и том же техническом уровне и выпускаемых в одно и то же
время, в табл. 3 приведены параметры гидромашин производства фирмы
’Тидроматик”: нерегулируемого гидромотора A2F с наклонным блоком
цилиндров, регулируемого насоса A2V с наклонным блоком цилиндров
и поворотной люлькой, регулируемого насоса A7V с наклонным блоком
цилиндров без поворотной люльки и такого же гидромотора A6V. В
табл. 4 приведены параметры насоса A4V с наклонным диском. Все
гидромашины имеют кожух, регулируемые гидромашины снабжены гид-
роусилителем, а насосы - насосом подпитки. Гидромашины работают
при номинальном давлении 32 МПа и максимальном 40 МПа. Удельная
минимальная масса относится к максимальной мощности, т.е. к макси-
мальному давлению рабочей жидкости.
На основании данных табл. 3 и 4 на рис. 27 построены зависимости
удельной мощности гидромашин от их установочной мощности. С увели-
чением мощности от определенного значения удельная масса гидрома-
шин возрастает, что объясняется увеличением рабочего объема, входя-
щего в формулу (62). При малой мощности и рабочем объеме удельная
масса также возрастает (это хорошо прослеживается для других гидро-
машин) , что объясняется увеличением коэффициента Kq при уменьше-
нии <7тах. Таким образом,наиболее благоприятно создание ГОТ опреде-
ленной передаваемой мощности.
Рис. 27. Зависимость удельной массы гидромашин от их установочной мощности
76
Удельная масса насосов с наклонным блоком цилиндров без пово-
ротной люльки на 35 .. 48 % меньше, чем удельная масса насосов с нак-
лонным блоком цилиндров и поворотной люлькой. Удельная масса
гидромотора с наклонным блоком без поворотной люльки приближа-
ется к удельной массе нерегулируемого гидромотора. Удельная масса
насоса с наклонным блоком без поворотной люльки на 23 % меньше
удельной массы насоса с наклонным дисков, что вызвано меньшим
коэффициентом металлоемкости из-за разных углов наклона блока и
диска.
Весьма низкую удельную массу имеют гидромашины с наклонным
блоком цилиндров, несиловой карданной передачей и большим давле-
нием рабочей жидкости (прямая 1 — регулируемый насос и кривая 2 —
нерегулируемый гидромотор). Это достигнуто в результате высоких
значений величин Сп и р и малого значения коэффициента Kq9 для регу-
лируемого насоса равного 0,5 ... 0,6 кг/см3. Малая удельная масса харак-
терна для быстроходных насосов с наклонным диском, работающих
при небольшом максимальном давлении (прямая 5), вследствие высо-
кого коэффициента быстроходности, равного 15 500 см/мин и очень ма-
лого коэффициента металлоемкости, равного 0,20... 0,35 кг/см3.
Теперь можно сделать выводы о целесообразности применения гид-
ромашин того или иного типа в ГОТ тех или иных самоходных машин.
Для самоходных машин небольшой стоимостью с малой мощностью
двигателя (установочная мощность гидромашин до 80 кВт), не требую-
щих большого диапазона изменения передаточного числа, целесообразно
применять простой по конструкции регулируемый быстроходный насос с
наклонным диском и такой же нерегулируемый быстроходный гидро-
мотор с наклонным диском, работающие при небольшом номинальном
и максимальном давлении (около 20 МПа).
Для самоходных машин с большей мощностью двигателя и боль-
шим диапазоном изменения передаточного числа целесообразно исполь-
зовать в ГОТ регулируемый насос с наклонным диском и регулируе-
мый гидромотор с наклонным блоком цилиндров без поворотной люль-
ки, рассчитанные на максимальное давление около 40 МПа. Насос с нак-
лонным диском по сравнению с насосом с наклонным блоком цилинд-
ров является более простым и дешевым. Гидромотор с наклонным бло-
ком цилиндров по сравнению с гидромотором с наклонным диском
имеет больший диапазон изменения рабочего объема, более высокий
КПД и другие указанные ранее преимущества.
Установочная мощность насосов с наклонным диском достигает
750 кВт, а насосов с наклонным блоком цилиндров — 1500 кВт. Приме-
нение последних оправдано в том случае, когда частота вращения колен-
чатого вала двигателя при максимальной мощности больше допустимой
частоты вращения вала насоса с наклонным диском и равна или меньше
допустимой частоты вращения вала насоса с наклонным блоком, т.е. тог-
да, когда не требуется установка понижающего редуктора.
Поскольку с увеличением мощности удельная масса гидромашин
возрастает, в ГОТ самоходных машин большой мощности с целью сниже-
ния массы может оказаться целесообразным применение нескольких
77
насосов и гидромоторов (масса четырех регулируемых гидромоторов
с наклонным блоком цилиндров без поворотной люльки мощностью
по 150 кВт каждый приблизительно в 2 раза меньше массы одного тако-
го же гидромотора мощностью 600 кВт). Применение нескольких гидро-
машин, как указывалось, часто диктуется условиями компоновки са-
моходной машины и использованием ГОТ для поворота самоходной
машины.
В ГОТ самоходных машин с особо большой мощностью двигателя
следует использовать гидромашины с наклонным блоком цилиндров и
несиловой карданной передачей, рассчитанные на максимальное давле-
ние рабочей жидкости около 60 МПа.
5. ВЫБОР ТИПА МОТОР-КОЛЕС
5Д.МОТОР-КОЛЕСА
С ВЫСОКОМОМЕНТНЫМ ГИДРОМОТОРОМ
Мотор-колеса содержат высокооборотный гидромотор (иногда его
называют низкомоментным) э работающий совместно с понижающим
редуктором, или высокомоментный гидромотор, ротор которого не-
посредственно соединен со ступицей колеса.
Высокомоментные гидромоторы выполняют радиально- и аксиально-
поршневыми. Те и другие могут быть с вращающимся и невращающимся
блоком цилиндров. Радиально-поршневые гидромоторы, применяемые
в мотор-колесах, разделяют на четыре основные группы: 1) с шатунной
связью между поршнями и эксцентриковым валом; 2) с поршнями,
опирающимися на внутренний кулачок (или эксцентрик) или же на
внешнюю кулачковую (или эксцентриковую) обойму через вращаю-
щиеся детали (ролики, укрепленные на осях, шарики, ролики без осей);
3) с качающимися цилиндрами; 4) с плоскими направляющими
поршней.
Высокомоментные аксиально-поршневые гидромоторы обычно вы-
полняют с поршнями, опирающимися через вращающиеся детали на
наклонной или профилированный диск.
Радиально-поршневые гидромоторы второй группы, а также аксиаль-
но-поршневые гидромоторы могут иметь сферические поршни, непо-
средственно опирающиеся на кулачок, кулачковую обойму или нак-
лонный диск.
Все высокомоментные аксиально- и радиально-поршневые гидро-
моторы делятся на гидромоторы однократного и многократного дей-
ствия. В гидромоторе однократного действия за один оборот вала порш-
ни совершают один двойной ход, а в гидромоторе многократного дейст-
вия несколько двойных ходов. Рабочий объем гидромоторов много-
кратного действия не равен геометрическому объему всех цилиндров, а
равен произведению этого объема на число ходов за один оборот. Кроме
78
Рис. 28. Мотор-колесо с высокомо-
ментным радиально-поршневым гид-
ромотором
того, гидромоторы могут быть с
однорядным и многорядным
расположением поршней.
Рассмотрим, а в дальнейшем
постараемся оценить, гидромо-
торы различных типов.
На рис. 28 показано экспе-
риментальное мотор-колесо
МРО-1,6 конструкции HATH.
Оно содержит высокомомент-
ный гидромотор с шатунной
связью между поршнями и внут-
ренним эксцентриковым валом.
Гидромотор имеет неподвижный
блок цилиндров 2, укрепленный
на остове трактора, и вращаю-
щийся эксцентрик 5, вал кото-
рого жестко соединен с ободом
колеса 1. В блоке цилиндров
размещены поршни 3 с чугун-
ными уплотнительными коль-
цами. Усилие от поршней к
эксцентрику передается через
шатуны 4 с гидростатическими
опорами. Для создания гидро-
статической опоры рабочая жид-
кость через отверстие в поршне подается к головке шатуна и далее через
отверстие в шатуне к ’’плавающим” по эксцентрику башмакам, выпол-
ненным как одно целое с шатунами.
Мотор-колесо имеет клапанный распределитель. Рабочий объем гид-
ромотора 1600 см3, номинальное давление 16 МПа, номинальный крутя-
щий момент 3700 Н.м, максимальная частота вращения 200 об/мин, мас-
са 130 кг. Иногда в подобных конструкциях блок цилиндров выполня-
ют вращающимся, часто используют цапфенный или плоский торцовый
распределитель.
Гидромоторы первой группы с внутренним эксцентриковым валом
и невращающимся блоком цилиндров получили широкое распростране-
ние. В СССР такой гидромотор с пятью поршнями используется на
ковшовом экскаваторе ЭО-5015А для поворота платформы. В отличие
от рассмотренного он имеет цапфенный распределитель, вставные гильзы
поршней отсутствуют, усилена шаровая опора шатуна, ширина эксцент-
рика увеличила до диаметра цилиндров, что позволяет уменьшить давле-
ние на указанные детали [4]. За рубежом выпускают гидромоторы
первой группы с однорядным и двухрядным расположением цилиндров,
79
Рис. 29. Схема радиально-поршнево-
го гидромотора с роликами, укреп-
ленными на осях
число которых в каждом ряду
колеблется от пяти до девяти, и
с цапфенным распределителем.
Наряду с рассмотренными
большое распространение полу-
чили высокомоментные радиаль-
но-поршневые гидромоторы
однократного и многократного
действия с поршнями, опираю-
щимися на внутренний ку-
лачок или внешнюю кулачковую обойму через ролики, укрепленные на
осях (рис. 29). В блоке цилиндров 5 размещаются поршни 4, упираю-
щиеся в ползуны 5, на которых укреплены ролики 2. Ползуны имеют
прямоугольную форму и перемещаются в пазах блока цилиндров. Роли-
ки на осях можно непосредственно крепить к поршням, однако ползу-
ны воспринимают реактивные силы и разгружают от них поршни. Роли-
ки упираются в эксцентриковую (в гидромоторах однократного дейст-
вия) или в кулачковую (в гидромоторах многократного действия)
вращающуюся обойму 7. Распределитель цапфенного типа. Цапфа 6 рас-
пределителя через кулачковую муфту приводится во вращение от экс-
центриковой обоймы. При четном числе поршней гидромотор много-
кратного действия, содержащий кулачковую обойму, гидравлически
уравновешен, и поэтому силы от поршней не действуют на подшипники
корпуса.
Гидромоторы второй группы с поршнями, опирающимися на ку-
лачковую обойму через ролики, созданы в Институте горного дела
им. АА. Скочинского для горных самоходных машин. Поршневые
группы этих гидромоторов содержат по два поршня, соединенные между
собой осью, на которой размещены два ролика, обкатываемые по кулач-
ковой обойме [13].
Мотор-колеса типоразмеров 3160 и 1155 с гидромоторами второй
группы серийно выпускает фирма ’’Хегглунд Энд Сонер” (Швеция).
Их применяют на контейнеровозах фирмы ’’Волво” и других самоход-
ных машинах. Гидромоторы многократного действия, их ролики обка-
тываются по вращающейся кулачковой обойме, соединенной с ободом
колеса. Для сокращения наружного диаметра гидромотора оси роликов
укреплены в поршнях (ползуны отсутствуют). Мотор-колесо типораз-
мера 3160 имеет обод колеса диаметром 20” и передает радиальную
нагрузку 180 кН. Для его гидромотора характерно ступенчатое измене-
ние общего рабочего объема (3400 и 1700 см3), что достигается отклю-
чением или последовательным соединением части цилиндров. При этом
цапфенный распределитель имеет три отдельные гидролинии (две подво-
дящие и одну отводящую), что позволяет осуществить независимое пи-
тание двух групп цилиндров. В отключенных цилиндрах рабочая жид-
80
5. Параметры гидромоторов фирмы ’’Поклен”
Параметр Ступень регулирования
первая вторая третья
Рабочий объем, см3 3800 2800 1500
Максимальное давление, МПа 45 40 40
Крутящий момент, Н-м 25 600 18 500 10 200
Частота вращения, об/мин 82 92 105
кость циркулирует под небольшим давлением. При рабочем объеме
3400 см3 и максимальном давлении 35 МПа гидррмотор развивает кру-
тящий момент около 17 500 Н-м, а при рабочем объеме 1700 см3 ЗТот
момент в 2 раза меньше. Максимальная частота вращения гидромотора
200 об/мин, его наружный диаметр без колодочного тормоза 437 мм и
масса 290 кг, а с тормозом диаметр 569 мм и масса 365 кг.
Мотор-колесо типоразмера 1155 содержит гидромотор с рабочим
объемом 855 см3 и передает радиальную нагрузку 80 кН. При давлении
35 МПа гидромотор развивает крутящий момент 4500 Н-м, максималь-
ная частота вращения 300 об/мин, наружный диаметр гидромотора без
тормоза 338 мм и масса 98 кг, а с тормозом диаметр 394 мм и мас-
са 116 кг.
Гидромоторы имеют восемь поршней, что позволяет уравновесить
создаваемые поршнями усилия и разгрузить подшипники. На свободном
ходу в корпус гидромоторов подается рабочая жидкость под давлением
0,2 МПа, что устраняет контакт роликов с обоймой. Гидромоторы отли-
чаются малой массой, малым диаметром и высокой частотой вращения.
Мотор-колеса, содержащие радиально-поршневой гидромотор с
поршнями, снабженными роликами, укрепленными на осях, выпускает
также фирма ”Поклен” (Франция). Их применяют на различных само-
ходных машинах. В отличие от гидромоторов фирмы ’’Хегглунд Энд
Сонер” они содержат вращающийся блок цилиндров и неподвижную
кулачковую обойму, обеспечивающую восьмикратное действие гидро-
мотора. Гидромоторы имеют 30 цилиндров и три ступени регулирования
рабочего объема (табл. 5).
В конструкции мотор-колес предусмотрено отсоединение при помо-
щи пружин роликов от дорожек качения при движении накатом.
Простую компактную конструкцию имеет гидромотор фирмы ”МП
Моторе” (Англия) (рис. 30, а). Гидромотор двухрядный, четырехкрат-
ного действия. На наружной части каждый поршень имеет цилиндричес-
кую проточку, в которую вставлен ролик, контактирующий с внешней
кулачковой обоймой. Предусмотрено гидростатическое уменьшение на-
грузки на ролик и поршень. Гидромотор развивает крутящий момент
2760 Н-м при частоте вращения 300 об/мин и имеет массу 36,6 кг.
Своеобразную конструкцию, получившую название ’’Ректагон”
имеют гидромоторы фирм ”Кэм Роторе” и ’’Ренольд” (Великобритания)
с прямоугольными поршнями [29, 34]. В блоке гидро мотора фирмы
”Кэм Роторе” (рис. 30, б) выполнены радиальные пазы, закрытые
6 —Зак. 1159 81
a) б) . ,
Рис. 30. Схемы радиально-поршневых гидромоторов с роликами, опирающимися
на поршни
крышками, в которые вставлены квадратные поршни и ролики, обкаты-
ваемые по кулачку вращающегося вала (блок неподаижен). Выпуска-
ют также гидромоторы с наружной кулачковой обоймой, имеющие
меньшую нагрузку на ролики и кулачковую обойму при одинаковом
передаваемом крутящем моменте. Предусмотрена гидростатическая
разгрузка ролика и поршня. Для этого в поршне сделано отверстие,
чбрез которое рабочая жидкость давит на ролик. Для лучшего удержива-
ния жидкости в проточке поршня, обращенной к ролику, сделаны ка-
навки. Гидромотор шестикратного действия, номинальное давление
рабочей жидкости 17,8 МПа и максимальное 21 МПа. Для подвода и
отвода жидкости использован цапфенный распределитель.
Гидромотор фирмы ’’Ренольд” имеет неподвижную кулачковую
обойму и вращающийся блок цилиндров, выполненный как одно целое
с валом (13], и цапфенный распределитель. Номинальное рабочее давле-
ние жидкости 21 МПа и максимальное 35 МПа. Гидромоторы выпуска-
ют трех типоразмеров с рабочим объемом 280; 558; 1177 см3, макси-
мальной частотой вращения 600; 500 и 400 об/мин наружным диаметром
215; 263 и 340 мм, с максимальным крутящим моментом 1480; 2950 и
6222 Н.м и массой 27; 45 и 84 кг.
Гидромоторы типа МР с качающимися цилиндрами (иногда их на-
зывают гидромоторами с полыми поршнями) для использования в ГОТ
строительных и дорожных машин выпускает Одесский завод ’’Строй-
гидравлика” (рис. 31). В корпусе 7 гидромотора на двух подшипниках
установлен вал 8 с эксцентриком. Поверхность эксцентрика путем на-
пыления покрыта молибденом, что не только обеспечивает ее высокую
твердость, но и создает микропористую структуру, улучшающую усло-
вия граничной смазки и повышающую износостойкость. На эксцентрик
опираются пять полых поршней 2 со сферическими поверхностями.
Поршни перемещаются в цилиндрах 1. Последние опираются на сфери-
ческие опоры 5, позволяющие цилиндрам совершать угловые колебания.
Для исключения перекоса поршня относительно цилиндра предусмотрен
направляющий стержень. Предварительное прижатие каждого поршня к
82
Рис. 32. Качающаяся поршневая группа гид-
ромотора
сферической поверхности эксцентрика
и каждого поршня к сферической
поверхности опоры осуществляется при
помощи пружины. В результате качания
поршня его ось всегда проходит через
центр окружности эксцентрика.
Гидромотор имеет плоский рас-
пределитель торцевого типа, состоя-
щий из вращающегося распределитель-
ного диска 5, расположенного между
реактивным диском б, упирающимся в
корпус распределителя, и опорным
диском 4. Распределительный диск
приводится во вращение от эксцент-
рикового вала при помощи промежу-
точного вала 9.
Поскольку цилиндр и поршень
представляют собой два полых ци-
линдрических стакана с отверстиями,
рабочая жидкость действует непо-
средственно на сферическую по-
верхность эксцентрика и сферическую
поверхность опоры. В результате такого устройства сила от поршня к
эксцентрику и от цилиндра к сферической поверхности передается в
основном через жидкость и лишь небольшая часть силы прижатия этих
деталей передается через кольцевую металлическую поверхность (обод).
На рис. 32 показана качающаяся поршневая группа. Общая сила дав-
ления поршня на эксцентрик
ird 2
R= ~P-S
4
П’
где d2 - диаметр цилиндра; р - давление жидкости в цилиндре; Sn - сила пру-
жины.
6. Параметры гидромоторов
Параметр МР-450 МР-700 МР-1100
Рабочий объем, см 452 707 1126
Номинальный крутящий момент, Н-м 1343 2124 3384
Номинальная мощность, кВт Частота вращения, об/мин: 19,3 26,17 ? 7,74
минимальная 1,5 1 1
номинальная 140 120 100
максимальная 400 340 280
Масса (без рабочей жидкости), кг, не более 85 105 150
84
Часть этой силы, передаваемая через жидкость,
7Г&1
где di - внутренний диаметр обода поршня.
Вторая часть этой силы, передаваемая в результате непосредственно-
го контакта материала поршня с эксцентриком,
я(с?з - с?1)
Т2 — ---------
4
где d3 - внешний диаметр обода поршня; q - контактное напряжение при взаимо-
действии поршня и эксцентрика.
Конструкция гидромотора с полым поршнем позволяет получить
любое малое контактное напряжение
45п
<7 = [(<*!-<*?)₽-------V(dl-dl).
It
Выпускают гидромоторы семи типоразмеров, работающие при мак-
симальном давлении нагнетания 25 МПа и пиковом в момент пуска и
торможения 32 МПа. Номинальный перепад давления 21 МПа. Давление
в сливной гидролинии, обеспечивающее безотказное движение поршня
при работе гидромотора в режиме насоса, составляет 0,6 ... 0,7 МПа
при номинальной и 1,5 ... 1,9 МПа при максимальной частоте вращения.
При номинальной частоте вращения и номинальном перепаде давления
механический КПД гидромоторов равен 0,9, а полный 0,85. Остальные
параметры отечественных гидромоторов приведены в табл. 6.
Аналогичные гидромоторы выпускает фирма ”Рива Кальцони”
(Италия).
Гидромоторы с плоскими направляющими поршней выпускает
фирма ’’Гидростатик трансмишинз” (Великобритания) и по ее лицен-
зии ряд других фирм в различных странах. На эксцентрик 3 гидромотора
(рис. 33) надето кольцо 4 с наружными гранями, в которые вставлены
подпятники 2. Поршни 1 опираются на подпятники кольца эксцентрика
и при вращении вала скользяивправо и влево относительно их. Поршни
полые, это обеспечивает передачу значительной части усилия к кольцу
типа МР эксцентрика через жидкость. От кольца эксцентрика к эксцент- рику большая часть усилия так- же передается через жидкость (плавающий эксцентрик). Жидкость подводится к ци- линдрам и отводится от них через эксцентриковый вал, а также через отверстия в кольце эксцентрика, в подпятниках и в поршнях. Гидромотор имеет цап- фенный распределитель. Извест-’ ны отдельные образцы рассмот-
МР-1800 МР-2800 МР-4500 МР-7000
1809 5436 44,65 1 80 220 220 2780 8354 51,46 1 60 170 320 4503 13532 55,57 1 40 120 560 6995 21020 64,74 1 30 80 760
85
Рис. 33. Радиально-поршневой гидромотор с плоскими направляющими поршней
ренных гидромоторов, предназначенные для использования в мотор-ко-
лесах самоходных машин.
Большие трудности возникают при создании мотор-колес для авто-
мобилей: требуются гидромоторы малой массы, малого наружного
диаметра, развивающие высокую частоту вращения. Существенный инте-
рес представляют конструктивные разработки фирмы ’’Натионел Энги-
ниринг Лаборатори” (NEL, Великобритания) по созданию недорогих
высокомоментных мотор-колес с малыми массой и габаритными разме-
рами гидромоторов, способных вписаться в обод колеса легковых и
грузовых автомобилей.
На рис. 34 показано мотор-колесо с аксиально-поршневым гидро-
мотором фирмы NEL, предназначенное для гидрообъемной трансмис-
сии легкового автомобиля. На неподвижном валу 5 укреплены два
наклонных диска 1 и 4 (или два профилированных диска — в гидромо-
торе многократного действия). На вал свободно посажен блок цилинд-
ров 2, к которому жестко прикреплена ступица колеса 3. Последняя
опирается на два роликовых подшипника. Каждый поршень снабжен
шариком, упирающимся в наклонный диск. Предусмотрена подача жид-
кости к шарикам. Использован цапфенный распределитель. В результате
подачи рабочей жидкости под небольшим давлением в корпус гидромо-
тора по центральной трубке 6, расположенной в цапфе 7 распределителя,
поршни перемещаются навстречу друг другу, и гидромотор выключает-
ся. В отличие от предыдущей конструкции блок цилиндров выполнен
вращающимся.
Рис. 34. Мотор-колесо с высокомоментным аксиально-поршневым гидромотором,
передающим усилие от поршней через шарики
87
Передняя и задняя подвески автомобиля имеют одинаковую конст-
рукцию. Их направляющими элементами являются верхние и нижние
поперечные качающиеся рычаги, выполняющие одновременно функции
трубопроводов для подачи и отвода рабочей жидкости от гидромоторов.
Применение сдвоенных гидромоторов позволяет повысить переда-
ваемую мощность без существенного увеличения массы и размеров
гидромотора. Упрощается получение жесткой конструкции и устраняет-
ся необходимость в опорном подшипнике, который воспринимает
осевые усилия, действующие на наклонный диск и на блок цилиндров,
поскольку они взаимно уравновешиваются.
Фирма NEL создала серию мотор-колес с радиально-поршневыми
гидромоторами для грузовых автомобилей (рис. 35). Блок цилиндров
7 гидромотора неподвижен. Через промежуточную деталь 8 он соединен
с тормозным щитом 5 колеса. Цилиндры в блоке расположены в два
ряда. На блоке цилиндров на двух роликовых подшипниках насажена
вращающаяся ступица колеса, состоящая из боковой крышки 7, двух
обойм 2 и 3 гидромотора и тормозного барабана 4. К тупице кйлеса
прикреплен обод колеса. Размеры гидромотора позволяют разместить
в колесе колодочный тормоз.
Рис. 35. Мотор-колесо с высокомоментным радиально-поршневым гидромотором,
передающим усилие от поршней через шарики
88
Каждый поршень на наружной стороне имеет сферическое углубле-
ние, в которое вставлен шарик. К шарику через отверстие в поршне по-
дается жидкость под давлением. Шарик проворачивается в поршне и
обкатывается по обойме.
Особенностью гидромотора является возможность ступенчатого ре-
гулирования его рабочего объема в результате отключения группы ци-
линдров, что возможно благодаря специальному устройству цапфенного
распределителя. Цапфа 6 распределителя, расположенная внутри блока
цилиндров, приводится во вращение через кулачковую муфту от крыш-
ки ступицы колеса. Для отключения цилиндров необходимо подать жид-
кость под небольшим давлением в цилиндр, расположенный внутри
цапфы распределителя. Поршень цилиндра перемещает шток, который
перекрывает окна распределителя. Конструкция позволяет также пол-
ностью отключить гидромотор при подаче жидкости в его корпус под
небольшим давлением. В результате этого поршни перемещаются к цент-
ру блока цилиндров, перестают контактировать с кулачковыми обойма-
ми и позволяют колесу вращаться с высокой частотой (до 1000 об/мин).
Рассмотренные мотор-колеса с гидромоторами четырехкратного
действия выпускает фирма ’’Кэррон Хайдролик Мотор Дивижен” (Вели-
кобритания) с рабочим объемом 400; 800; 1200 и 1600 см3,числом ря-
дов цилиндров 1; 2; 3 и 4, максимальной частотой вращения 640; 320;
220 и 160 об/мин, с максимальным крутящим моментом 1550; 3350;
5000 и 6700 Н.м и массой 64; 82; 100 и 118 кг. Все гидромоторы имеют
одинаковый наружный диаметр 330 мм, номинальное давление рабочей
жидкости 14 и максимальное давление 35 МПа.
Наряду с радиально-поршневыми высокомоментными гидромотора-
ми выпускают различные по конструкции высокомоментные аксиально-
поршневые гидромоторы, которые не получили столь широкого рас-
пространения . Аксиально-поршневой высокомоментный гидромотор
фирмы ’’Кэррон Лэнгдейл” (Великобритания), предназначенный для
использования в мотор-колесах самоходных машин, содержит два ряда
аксиально расположенных цилиндров различного диаметра. Роль порш-
ней выполняют помещенные в каждом цилиндре друг за другом два ша-
рика, действующие на многопрофильные диски, расположенные с двух
сторон от блока цилиндров. Гидромотор работает при давлении 21 МПа.
Компактные гидромоторы с шариками, опирающимися на поршни,
имеют точечный контакт с внешней кулачковой обоймой, внутренним
кулачком или кулачковым диском, что предъявляет высокие требова-
ния к качеству материалов этих деталей. При использовании вместо
поршней шариков для создания необходимой герметичности требуется
высокая точность изготовления сопрягаемой пары поршень - шарик.
Контактные напряжения смятия и герметичность могут ограничивать
максимальное давление рабочей жидкости.
89
5.2. МОТОР-КОЛЕСА
С ВЫСОКООБОРОТНЫМ ГИДРОМОТОРОМ
На рис. 36 показано мотор-колесо MRH фирмы ’’Сума Еуроп Транс-
мишэн” (Франция). Мотор-колесо рассчитывают на эксплуатацию в сис-
темах с рабочим давлением 22 МПа (максимально допустимое давление
32 МПа); передаваемая мощность 41,8 ... 157 кВт. В мотор-колесе ис-
пользован аксиально-порщневой нерегулирующий гидромотор 4 с на-
клонным блоком цилиндров, приводящий во вращение вал 7, укреп-
ленный в роликовых подшипниках в неподвижном корпусе 5. Вращение
от вала 7 передается на вал 8 солнечной шестерни первого планетарного
ряда. Коронная шестерня планетарного ряда, соединенная с корпусом
неподвижна. Вращение с водила 9 сателитов передается на вал 10
солнечной шестерни второго планетарного ряда. Коронная шестерня
планетарного ряда неподвижна. Вращение от водила 11 сателлитов пере-
дается на барабан 7, жестко соединенный со ступицей 2 колеса, которая
через роликовые подшипники опирается на корпус 3. Мотор-колесо
снабжено дисковым тормозом, имеющим гидравлическое управление.
Сжатие дисков 6 тормоза осуществляется поршнем 5.
Мотор-колеса с высокооборотными гидромоторами и понижающим
редуктором содержат нерегулируемые и регулируемые аксиально-порш-
невые гидромоторы. Иногда применяют двухступенчатый планетарный
редуктор, управляемый многодисковыми сцеплениями. Известно мотор-
колесо, которое содержит два регулируемых гидромотора, способные
работать одновременно или совместно (имеется в виду их последова-
90
тельное соединение), суммирующий и понижающий редукторы и уста-
новленный за ними двухступенчатый редуктор, управляемый многодис-
ковыми сцеплениями с гидравлическим нажатием.
Объединение ”Рексрот” (ФРГ) выпускает для различных самоход-
ных машин мотор-колеса Ротатрик GFR шести типоразмеров с крутя-
щим моментом на ступице до 50 000 Н-м, содержащие планетарный ре-
дуктор и нерегулируемый (типа A2F) или регулируемый (типа A6V)
гидромотор. Схема такого мотор-колеса приведена на рис. 37, а. Кар-
тер 2 мотор-колеса, в котором установлен гидромотор 5, жестко укреп-
лен на раме 1 самоходной машины. Гидромотор посредством вала 75
приводит во вращение солнечную шестерню 13 первого планетарного
ряда планетарной передачи. Солнечная шестерня обкатывает сателлит
77 по коронной шестерне 70, укрепленной в ступице колеса 74.Ступица
через подшипники качения 4 упирается на рукав картера 2. Вращение от
водила сателлитов первого планетарного ряда передается солнечной
шестерне 72 второго планетарного ряда. Сателлит 9 этого планетарного
ряда с неподвижной осью, установленной на рукаве картера 2, через
коронную шестерню 8 приводит во вращение ступицу колеса 14. Послед-
няя вращается в направлении, противоположном направлению вращения
вала гидромотора и солнечных шестерен 13 и 72. К ступице прикреплены
обода 7 двухскатных шин. С левой стороны мотор-колеса размещен
барабанный тормоз с тормозным барабаном 6 и тормозной колодкой 5.
Планетарная передача является дифференциальной (двухпоточной).
От сателлита 77 один поток мощности поступает на коронную шестерню
70, а второй поток от водила поступает ко второму планетарному ряду
и передается на коронную шестерню 8. На ступице колеса оба потока
Рис. 37. Схемы мотор-колеса с высокооборотным гидромотором и понижающим
планетарным редуктором
91
мощности складываются. Использованная схема планетарной передачи
позволяет получить ее большое передаточное число при компактной
конструкции и высокий КПД.
Для определения передаточного числа планетарной передачи на осно-
вании формулы Виллиса, относящейся к первому и второму планетар-
ным рядам, запишем систему уравнений
13 - 12
---------= -А1;
w ю ~ W 12
^12/^10 =
me w - угловая скорость шестерен (индекс при w соответствует номеру шестер-
ни на рис. 37, а); A i = z^/z^ иА2 = z$/zi2 - постоянные первого и второго пла-
нетарных рядов, определяемые по числам z зубьев соответствующих шестерен или
по диаметрам делительных окружностей шестерен.
Решая систему уравнений, получим передаточное число планетарной
передачи
w = с^1з/с^ю == — В1(1 + Л2) — А 2.
Для рассмотренной передачи делительные окружности одноименных
шестерен одинаковы и, следовательно, А х = А2. Тогда
М = -2Л1-Л?.
Представляет интерес мотор-колесо фирмы ”Джон-Дир” (США),
предназначенное для активного привода передних ведущих колес трак-
тора (рис. 37, б). Рабочая жидкость подводится к гидромотору и отво-
дится от него через отверстия в шкворне. Два планетарных ряда приво-
дят во вращение от гидромотора колесную ступицу с передаточным чис-
лом 25 : 1. На коронной шестерне правого планетарного ряда установле-
но гидравлическое зажимное устройство, управляемое рабочим давле-
нием жидкости в гидрообъемной передаче. При отсутствии рабочего дав-
ления гидромотор автоматически отсоединяется от ступицы колеса.
Мощность от солнечной шестерни 16 передается на ступицу колеса
по дифференциальной схеме двумя потоками: первый идет через сател-
лит 17 на коронную шестерню /^укрепленную на ступице колеса, а вто-
рой — через водило сателлита 17 на солнечную шестерню 19 и далее на
сателлит 20. Последний обкатывается по неподвижной солнечной шестер-
не 21. С водила сателлита 20 мощность передается на ступицу колеса.
Для определения передаточного числа планетарной передачи запишем
16 - 19
---------= -А;
W 18 -> 19 I
о>19 -> о>18
--------- =-^2,
ц>18------'
где Л 1 — Z is/z 16 И Л 2 = ^21/z19*
92
Рис. 38. Схемы редукторов мотор-колес
Откуда передаточное число
и = gj16/w18 = (Лх + 1)(Л2 + 1) - Ах.
В настоящее время на тракторах ’’Джон Дир” активный гидравличес-
кий привод передних колес заменен на механический. Однако это не
снижает интереса к рассмотренной схеме мотор-колеса, способного при-
меняться на других машинах.
На рис. 38 приведены схемы редукторов некоторых мотор-колес. Ре-
дукторы, выполненные по схемам, показанным на рис. 38, а и б, имеют
передаточное число, равное 5 ... 6. Передаточное число редукторов, изоб-
раженных на рис. 38, в иг, достигает 25. Высоким КПД обладает редук-
тор, выполненный по схемам, показанным на рис. 38, д и е. Передаточ-
ное число первого редуктора достигает 36. На рис. 38,ж показана схема
двухступенчатого редуктора, управляемого ленточным тормозом и сцеп-
лением.
5.3. СРАВНЕНИЕ И ОЦЕНКА МОТОР-КОЛЕС
Как было рассмотрено, существуют два принципиально различных
типа мотор-колеса — с высокомоментным или с высокооборотным гид-
ромотором.
Коэффициент быстроходности высокомоментных гидромоторов
однократного действия обычно составляет 2800 ...3000 см/мин и в 4-
5 раз меньше, чем высокооборотных. Существенно меньше также и отно-
93
Пупа*, об/нин
симальная скорость поршня vnmax = 0,000565Cw\4?/z высокомомент-
ных гидромоторов значительно меньше, чем высокооборотных. Это
позволяет форсировать по частоте вращения отдельные высокомо-
ментные гидромоторы.
Для сравнения по основным показателям гидромоторов различных
групп и различного конструктивного исполнения на рис. 39, а приведены
зависимости их максимальной частоты вращения от максимального (при
максимальном давлении) крутящего момента (кривая 1 — гидромотор
первой группы однократного действия типа ’’Пауль Плягер”, 2 - второй
группы многократного действия типа ’’Ренольд”, J - второй группы
многократного действия типа ”Хегглунд”, 4 — второй группы много-
кратного действия типа ’Поклен” и 5 - третьей группы однократного
действия типа ”Рива Кальцони”. На рис. 39, б для тех же гидромоторов
показано изменение их удельной массы, отнесенной к единице крутя-
щего момента, в зависимости от максимального крутящего момента, а
на рис. 39, в - наружного диаметра в зависимости от максимального
крутящего момента.
Допустимая частота вращения гидромотора первой группы одно-
кратного действия выше частоты вращения гидромотора третьей группы
94
однократного действия (кривые 1 и 5). Однако удельная масса второго
гидромотора значительно меньше удельной массы первого.
Некоторые гидромоторы многократного действия второй группы
имеют более высокую частоту вращения, чем гидромоторы однократно-
го действия первой и третьей групп. Допустимая частота вращения гид-
ромоторов второй группы уменьшается с увеличением числа ходов
поршня за один оборот вала. Она наиболее низкая для гидромотора
фирмы ’’Поклен” восьмикратного действия.
Выбор того или иного гидромотора-зависит от условий его исполь-
зования в мотор-колесе. Он должен удовлетворять трем требованиям:
развивать заданный максимальный крутящий момент, определяемый
максимальной силой тяги, иметь частоту вращения, не меньшую частоты
вращения, соответствующей заданной максимальной скорости движения
самоходной машины, и вписываться в обод колеса. Из гидромоторов,
удовлетворяющих указанным требованиям, наилучшим, прежде всего,
будет тот, который имеет меньшую массу. Необходимо также учитывать
и срок службы гидромоторов, который должен быть соизмерим со сро-
ком службы самоходных машин.
Допустимая частота вращения и наружный диаметр при заданном
крутящем моменте большинства гидромоторов позволяют использо-
вать их на дорожных, строительных и сельскохозяйственных машинах.
Грузовые автомобили грузоподъемностью 4 ... 8 т при различном наруж-
ном диаметре колеса имеют одинаковый, сравнительно небольшой диа-
метр обода колеса, равный 508 мм (диаметр гидромотора должен быть
значительно меньше), и в связи с высокой скоростью автомобилей их
колеса вращаются с большой частотой: 400 ... 500 об/мин. Выпускаемые
гидромоторы обычно не отвечают требованиям их использования на гру-
зовых автомобилях. Только гидромотор фирмы ’’Ренольд” можно при-
менять на автомобилях. Однако неясно, насколько предельно простая
конструкция такого гидромотора способна обеспечить высокие срок
службы и КПД.
Следующий вопрос — это сравнение и выбор мотор-колес с высоко-
моментным или с высокооббротным гидромотором. Этому вопросу
посвящены различные исследования.
На рис. 40 показаны для сравнения контуры мотор-колес с высоко-
оборотным гидромотором и редуктором (штриховая линия) и мотор-
колеса с высокомоментным гидромотором (сплошная линия) (по дан-
ным фирмы NEL). Рассматриваемые мотор-колеса предназначаются для
получивших широкое распространение легких вездеходов с шинами
сверхнизкого давления и жесткой подвеской. Высокооборотный гидро-
мотор имеет рабочий объем 80 см3, а высокомоментный гидромотор
800 см3.
В табл. 7 приведены параметры мотор-колес обоих типов, рассчитан-
ных на низкий и высокий крутящий момент и соответственно предназ-
наченных для легких и тяжелых самоходных машин.
Для вездехода (легкой самоходной машины) при одинаковых кру-
тящем моменте на колесе и рабочем давлении оба мотор-колеса имеют
приблизительно одинаковые объем и массу. Для тяжелой самоходной
95
Рис. 40. Контуры мотор-колес с высо-
кооборотным и высокомоментным
гидромоторами
машины объем мотор-колеса с высокомоментным гвдромотором на
25 %, а масса на 32 % меньше аналогичных параметров мотор-колеса с
высокооборотным гидромотором. В обоих случаях мотор-колесо с вы-
сокомоментным гидромотором имеет значительно большую максималь-
ную частоту вращения и меньшее число основных деталей.
В соответствии с рекомендациями фирмы NEL следует отметить
следующее:
1) для легковых автомобилей малого класса с упруго подрессор-
ными, управляемыми и в то же время ведущими колесами целесообраз-
но применять мотор-колеса только с высокомоментными гидромотора-
ми, так как высокооборотные гидромоторы, работающие с понижаю-
щим редуктором, имеют большие габаритные размеры и массу;
2) для легковых вездеходов с шинами сверхнизкого давления
нельзя дать столь категорические рекомендации - на этих машинах
может быть оправдано применение обоих типов мотор-колес (см.
табл. 7);
3) на тяжелых самоходных машинах с крутящим моментом на
колесах до 40 000 Н.м также возможно и целесообразно применение
обоих типов мотор-колес (см. табл. 7).
Специалисты фирмы ’’Линде АГ”, выпустившей семейство мотор-
колес с высокооборотными гидромоторами, на основании проведенного
исследования считают, что такие гидромоторы по большинству показа-
телей превосходят мотор-колеса с высокомоментными гидромоторами.
Одно из основных преимуществ заключается в массовом производстве
аксиально-поршневых высокооборотных гидромоторов для различных
областей промышленности. Механический редуктор увеличивает число
деталей. Однако мотор-колеса фирмы ’’Линде АГ” по сравнению с мо-
96
7. Параметры мотор-колес
Параметр Тип самоходной машины
Легкий Тяжелый
Гидромотор
высоко- оборотный высоко- момент- ный высоко- оборотный высоко- момент- ный
Максимальный крутящий 3060 3460 22900 20600 момент на колесе, Н-м Максимальная частота 280 400 75 120 вращения, об/мин Максимальное рабочее 35 32,5 32,5 32,5 давление, МПа Число основных деталей 21 10 21 10 Занимаемый объем, дм3 14 13 100 80 Масса,кг 77,5 77,5 545 408
тор-колесами, содержащими высокомоментные гидромоторы, имеют
меньшую массу и такие же габаритные размеры. Преимущества мотор-
колес с высокооборотным гидромотором и механическим редуктором
возрастают с увеличением передаваемой мощности.
Важнейшим преимуществом мотор-колеса с высокооборотным гид-
ромотором следует считать возможность использования регулируемого
гидромотора, что является решающим при создании трансмиссии с боль-
шим непрерывным нагрузочным диапазоном изменения передаточного
отношения. Долгое время не удавалось получить удачного конструктив-
ного решения системы управления регулируемыми гидромоторами,
расположенными в колесах, поэтому мотор-колеса с регулируемыми
высокооборотными гидромоторами применяли редко. Для расширения
общего диапазона изменения передаточного отношения, как было указа-
но, в мотор-колесо устанавливали механический редуктор с переменным
передаточным числом. Это не только значительно усложняло и удорожа-
ло конструкцию, но и превращало трансмиссию в ступенчато-бесступен-
чатую с несколькими диапазонами бесступенчатого изменения передаточ-
ного отношения.
В настоящее время задача управления регулируемыми высокообо-
ротными гидромоторами, расположенными в колесах, успешно решена
(этот вопрос рассмотрен дальше), что должно способствовать более ши-
рокому распространению мотор-колес с высокооборотными гидро-
моторами.
Учитывая изложенное, не следует забывать об успехах, достигну-
тых в создании простых и дешевых мотор-колес с высокомоментными
гидромоторами. Как было отмечено, такие гидромоторы в первую оче-
редь найдут применение на легких самоходных машинах, а также на ти-
хоходных. При использовании высокооборотного гидромотора на тихо-
ходной машине необходим понижающий редуктор с большим переда-
7 —Зак. 1159 97
точным числом, а следовательно, сложной конструкции и большой мас-
сы. В этом случае более рациональным может быть применение высоко-
моментного гидромотора многократного действия с отключаемыми
цилиндрами (для расширения диапазона изменения передаточного отно-
шения). Гидромоторы такого типа фирмы’’Поклен” широко исполь-
зуют на плодоуборочных, виноградоуборочных, свеклоуборочных и
других сельскохозяйственных машинах, а также на некоторых строи-
тельных и дорожных машинах. Широкое распространение получил гидро-
мотор фирмы ’’Хегглунг Унд Сонер” (Швеция), обладающий более вы-
сокой быстроходностью.
В работе [5] приводится анализ двух типов приводов экскаватора с
высокомоментным гидромотором и с высокооборотным механическим
редуктором. Указано, что для высокооборотного гидромотора с редук-
тором, имеющим передаточное число 20 ... 30, удельная масса при номи-
нальном давлении составляет 10 ... 22 кг/кВт и в 1,8 ... 2,3 раза больше
удельной массы высокомоментного гидромотора типа МР. Этот вывод
справедлив лишь в том случае, если в качестве понижающего редуктора
применяется крупногабаритный, четырехвальный редуктор с тремя
парами шестерен, подобный редуктору, устанавливаемому в гидрообъ,-
емной трансмиссии экскаватора ЭО-4121 [4]. Если же применить плане-
тарный редуктор, то высокооборотный гидромотор будет иметь сум-
марную массу на 215 кг меньшую, чем гидромотор МР-7000 при прибли-
зительно равных крутящем моменте и частоте вращения на выходе (см.
табл. 6 и 7). Если снизить в высокооборотном гидромоторе рабочее
давление с 32,5 до 25 МПа, то его удельная масса вместе с редуктором
приблизится к удельной массе гидромотора МР-7000. Использование
планетарного редуктора вместо непланетарного удорожает конструк-
цию. Однако освоение производства нового высокомоментного гидро-
мотора МР нескольких типоразмеров потребовало значительных затрат,
которые вряд ли могут окупиться.
Как следует из табл. 6 и 7, гидромоторы МР меньшего рабочего
объема по весовым показателям также уступают высокооборотным
гидромоторам, снабженным планетарным редуктором.
Следует указать, что применение высокооборотного гидромотора
с редуктором является единственно возможным вариантом в том случае,
когда высокомоментный гидромотор, непосредственно соединенный
с колесом самоходной машины, не может обеспечить заданных значений
М2max и n2max>а также когда гидромотор не вписывается в обод коле-
са. Высокооборотный гидромотор с редуктором, как будет показано
дадее, при заданном крутящем моменте ^2тах имеет более высокую
частоту вращения л2тах. Габаритный диаметр планетарного редуктора
меньше габаритного диаметра высокомоментного гидромотора, который
иногда вынуждены выносить за пределы обода колеса.
98
6. ВЫБОР СХЕМЫ И РАСЧЕТ ПАРАМЕТРОВ
ПОЛНОПОТОЧНЫХ ГИДРООБЪЕМНЫХ ТРАНСМИССИЙ
6.1. ВЫБОР СХЕМЫ ПОЛНОПОТОЧНОЙ
ГИДРООБЪЕМНОЙ ТРАНСМИССИИ
Гидрообъемным трансмиссиям свойственны различные принципиаль-
ные схемы, характеризующие использование в них тех или иных агрега-
тов и их взаимное расположение в силовом потоке. От принципиальной
схемы зависят главные качества трансмиссии: возможный нагрузочный
диапазон изменения передаточного отношения, масса, стоимость, удоб-
ство компоновки агрегатов на самоходной машине и др. Выбор схемы
зависит от типа самоходной машины.
Первую группу составляют нераздельно-агрегатные трансмиссии са-
моходных машин с колесной формулой 4X2, содержащие механический
дифференциал (рис. 41, дифференциал обозначен буквой Д).
По схеме, изображенной на рис. 41, а,содержащей регулируемый
насос и нерегулируемый гидромотор, выполнены почти все трансмис-
сии садово-огородных тракторов и подобных им машин. Такую транс-
миссию целесообразно применять на машинах небольшой массы и мощ-
ности, не требующих большого диапазона изменения нагрузочного пере-
даточного отношения.
По схеме, показанной на рис. 41, б, содержащей регулируемый на-
сос и регулируемый гидромотор, выполнена трансмиссия ’’Лукас Т-100”
(Великобритания), рассчитанная на передачу мощности до 75 кВт, ис-
пользуемая в трансмиссиях тракторов, дорожных катков и экскавато-
ров. Такая схема по сравнению с предыдущей позволяет значительно
увеличить нагрузочный диапазон изменения передаточного отношения
при прежнем рабочем объеме гидромашин.
Схема, изображенная на рис. 41, в, содержит регулируемый насос и
нерегулируемый гидромотор и двух- или трехступенчатый зубчатый ре-
дуктор. По такой схеме выполнены ГОТ различных зерноуборочных
Рис. 41. Схемы раздельно-агрегатных трансмиссий с механическим дифференциа-
лом самоходных машин с колесной формулой 4X2
99
комбайнов (в том числе отечественных), сельскохозяйственных под-
борщиков и некоторых других самоходных машин. Редуктор позволяет
увеличить общий диапазон изменения передаточного отношения, разде-
лив его на несколько диапазонов.
Схема, показанная на рис. 41,г с регулируемым насосом, регули-
руемым гидромотором и ступенчатым зубчатым редуктором, использо-
вана в трансмиссиях семейства тракторов ”Интернейшнл Харвестр”
(США) и в трансмиссиях некоторых других машин. Такая схема явля-
ется более совершенной, поскольку обеспечивает более широкий диапа-
зон бесступенчатого изменения передаточного отношения. Передаточное
отношение редуктора выбирают так, чтобы на каждой передаче в тех
или иных условиях можно было продолжительно работать, не произво-
дя переключений. Для трактора одну передачу обычно используют в
качестве рабочей, а другую в качестве транспортной. В этом случае
применение ступенчатого редуктора йе лишает ГОТ ее важнейшего ка-
чества — бесступенчатого изменения передаточного отношения.
На рис. 42 показаны схемы раздельно-агрегатных трансмиссий,
характерные тем, что имеют два параллельно соединенные гидромотора
и не содержат механического дифференциала. При такой схеме, как и
при наличии механического дифференциала, колеса самоходной машины
могут вращаться с различной частотой. Трансмиссии этой группы, как и
предыдущей, предназначены для самоходных машин с колесной форму-
лой 4X2.
По схеме, показанной на рис. 42, а, с высокооборотным нерегули-
руемыми гидромоторами, работающими совместно с понижающими ре-
дукторами, выполнена тракторная трансмиссия Тородрайв фирмы
’’Даути” (Великобритания), а также одна из трансмиссий фирмы ’’Лин-
де АГ” (ФРГ), представляющая собой гидравлический ведущий мост,
предназначенный для различных самоходных машин. Иногда гидромо-
тор размещают в колесе, т.е. используют конструкцию мотор-колесо.
По схеме, показанной на рис. 42, б, с мотор-колесами, содержащими
высокомоментный гидромотор, выполнялись первые ГОТ тракторов.
Рис. 42. Схемы раздельно-агрегатных трансмиссий без механического дифференциа-
ла самоходных машин с колесной формулой
100
Регулируемый высокооборотный гидромотор, работающий совмест-
но с понижающим редуктором, содержит трансмиссия Тородаин фирмы
’’Даути”, предназначенная для тракторов, погрузчиков, экскаваторов
и дорожных катков (рис. 42, в).
Для увеличения общего нагрузочного диапазона изменения переда-
точного отношения иногда применяют схему (рис. 42, г) с понижающи-
ми редукторами, имеющими переменное передаточное отношение. На-
пример, трансмиссия фирмы ”Бауц” (ФРГ) зерноуборочного комбайна
Титан-1300 содержит трехступенчатый редуктор.
Для ГОТ с двумя гидромоторами определенное место занимают
схемы, в которых для увеличения общего нагрузочного диапазона изме-
нения передаточного отношения производится переключение гидромото-
ров с параллельного соединения на последовательное, что позволяет
получить два диапазона регулирования. Эти схемы отличаются от схем,
показанных на рис. 42, б, наличием распределительного клапана, осу-
ществляющего изменение соединений гидромоторов. Известны также
гидромоторы, позволяющие выключать из работы часть цилиндров, что
приводит к тому же эффекту.
Иногда каждое колесо приводится от нескольких гидромоторов
(рис. 43, а). При помощи распределителя PC производится отключение
части гидромоторов.
Выше не были показаны входящие в общую гидравлическую систе-
му насосы и гидромоторы, предназначенные для привода технологичес-
ких рабочих органов сельскохозяйственных и строительных дорожных
машин, не относящиеся к трансмиссии. Насосы, питающие гидромоторы
технологических рабочих органов, можно использовать и для осущест-
вления движения, подключив их к насосу трансмиссии. На рис. 43, б по-
казана схема с двумя насосами. Один из них питает гидромоторы колес,
а второй — гидромоторы технологических рабочих органов (ГТРО).
На транспортном режиме при помощи распределителя PC осуществляет-
ся привод гидромоторов колес от двух насосов, что увеличивает ско-
Рис. 43. Схемы раздельно-агрегатных трансмиссий самоходных машин с колесной
формулой 4X2 с отключаемыми гндромоторами н двумя насосаМи
101
рость движения машин. Подключение одного насоса к гидромотору
правого борта, а второго — к гидромотору левого борта дает возмож-
ность устранить дифференциальную связь, что требуется для увеличения
проходимости машины.
Трансмиссии, выполненные по схемам, показанным на рис. 42, а
и б, имеют небольшой нагрузочный диапазон изменения передаточного
отношения. Для его увеличения применяют схемы, изображенные на
рис.42,в иг.
Суммарный объем трех гидромоторов (см. рис. 43, а), вращающих-
ся с большой частотой, меньше рабочего объема одного гидромотора
(рис. 42, а).
Сравнивая между собой нераздельно- и раздельно-агрегатные транс-
миссии применительно к тракторам, отметим следующее. После того
как в 1954 г. институтом NIAE в Англии была разработана конструкция
первого трактора с гидрообъемной трансмиссией, выполненной по схе-
ме, показанной на рис. 42, б, стали считать, что преимущества примене-
ния ГОТ на тракторах будут получены только при использовании высо-
комоментных гидромоторов, расположенных непосредственно в веду-
щих колесах, так как при этом не надо применять дополнительные агре-
гаты и устройства. По такому пути шло дальнейшее развитие ГОТ.
В 1963 г. на Минском тракторном заводе была создана опытная
нераздельно-агрегатная объемная гидропередача. Такая передача устанав-
ливается вместо обычного сцепления и коробки передач, так что сохра-
няется часть механической трансмиссии (главная передача, дифферен-
циал) . Это позволяет по желанию устанавливать гидрообъемную и меха-
ническую трансмиссию на один и тот же трактор.
Начиная с 1965 г. фирма ’’Айхер” (ФРГ) выпустила около 300 трак-
торов с рассмотренной передачей, после чего прекратила их выпуск.
Успех выпал на долю фирмы ”Интернейшнл Харвестр”, которая в 1967 г.
в содружестве с фирмой ”Сандстрэнд” (США), выпускающей гидрома-
шины, создала трактор модели 656 с гидрообъемной нераздельно-агре-
гатной трансмиссией. До настоящего времени фирма ’’Интернейшнл
Харвестр” устанавливает на различные модели тракторов такую транс-
миссию. В определенной степени успеху способствовало то, что были
использованы гидромашины с наклонным диском, имеющие меньшую
стоимость и массу.
Создание компактной передачи, заменяющей сцепление и коробку
передач, является важным
этапом в развитии ГОТ са-
моходных машин.
Рассмотрим ГОТ са-
моходных машин с ко-
лесной формулой 4X4.
Рис. 44. Схема нераздельно-
агрегатной трансмиссии с мех?
ническим дифференциалом са-
моходных машин с колесной
формулой 4X4
102
Сначала остановимся на трансмиссиях с механическим дифференциа-
лом. На рис. 44 показана схема ГОТ отечественного ковшового экскава-
тора ЭО-3322. По такой схеме выполнена также трансмиссии фирмы
К-Н-Д (ФРГ) экспериментального трактора Итрак-2005 (на схеме не по-
казан механический привод валов отбора мощности). Трансмиссия со-
держит два ведущих моста: передний и задний, которые приводятся во
вращение от гидрообъемной передачи через раздаточную коробку с двух-
ступенчатым редуктором, обеспечивающим два диапазона изменения
передаточного отношения, а также задний ход. Предусмотрена возмож-
ность отключения переднего моста.
На рис. 45, а показана схема трансмиссии, содержащей один насос
и четыре встроенных в колеса высокооборотных гидромотора. По та-
кой схеме выполнена трансмиссия самоходного шасси фирмы ”Хеги”
и некоторых других машин. Использование нерегулируемых гидромото-
ров ограничивает нагрузочный диапазон изменения передаточного отно-
шения. Следующим характерным типом трансмиссии является трансмис-
сия, выполненная по схеме, аналогичной показанной на рис. 45,а, но со-
Рис. 45. Схемы раздельно-агрегатных трансмиссий без механического дифференциа-
ла самоходных машин с колесной формулой 4X4
103
держащая мотор-колеса с регулируемыми высокооборотными гидро-
моторами. Долгое время применению регулируемых гидромоторов,
расположенных в подрессоренных колесах, перемещающихся относи-
тельно рамы, мешали трудности, связанные с созданием системы их
следящего управления. В настоящее время эта задача успешно решена:
управление гцдромоторами осуществляется при помощи изменения
управляющего давления жидкости, подаваемой в гидроусилители гидро-
моторов. Применение трансмиссий с регулируемыми, расположенными в
колесах, гидромоторами технически оправдано и перспективно.
Получила распространено также схема трансмиссии с высокомомент-
ными мотор-колесами (рис. 45, б). По такой схеме выполнена трансмис-
сия трактора фирмы ’’Родес Тракшн” (Великобритания), виноградо-
уборочной машины фирмы ’’Бэнак э Фис” (Франция), эксперименталь-
ного автобуса фирмы ’Теодор Клятт” (ФРГ) и др. Иногда высокомо-
ментные гидромоторы выполняют регулируемыми, например в Чранс-
миссии, разработанной в МВТУ им. Н.Э. Баумана для трактора К-700 с
ломающейся рамой и всеми ведущими колесами. В трансмиссии исполь-
зованы мотор-колеса с оригинальными высокомоментными гидромото-
рами, регулирование которых осуществляется в результате поворота де-
тали распределителя.
Иногда для увеличения диапазона изменения силы тяги на колесах
и частоты их вращения применяют гидромоторы, работающие совместно
с редукторами, имеющими несколько передач (рис. 45, в). Переключе-
ние передач, как указывалось, обычно производится при помощи фрик-
ционных сцеплений, имеющих дистанционное гидравлическое управле-
ние. Такие трансмиссии со сдвоенным насосом и четырьмя гидромото-
рами, снабженными двухступенчатыми редукторами, устанавливают на
отечественном ковшовом экскаваторе ЭО-4321 и на некоторых тракто-
рах, выпускаемых за рубежом.
ГОТ самоходных машин с колесной формулой 4X4, содержащие
четыре гидромотора, имеют большие возможности для отключений части
гидромоторов и переключения их с последовательного соединения на
параллельное (по сравнению с ГОТ самоходных машин, имеющих колес-
ную формулу 4X2). Гидромоторы отключаются при помощи распреде-
лителя, который отсоединяет вход гидромотора от гидролинии высо-
кого давления и соединяет его с гидролинией низкого давления. Для
прекращения движения поршней при отключении высокомоментных
гидромоторов иногда жидкость под небольшим давлением подают в
корпус гидромотора, что приводит к утапливанию поршней. Полное
отключение высокооборотных гидромоторов Мотор-колес осуществля-
ется при помощи гидравлически управляемых сцеплений.
Отключаемые гидромоторь! содержит, например, трансмиссия
аэродромного тягача фирмы ’Тар Вуд Индастриз” (США) с одним на-
сосом и четырьмя гидромоторами. Трансмиссия обеспечивает три бес-
ступенчатых диапазона изменения передаточного отношения. На первом
диапазоне работают все гидромоторы, на втором отключаются два гид-
ромотора, на третьем отключается часть цилиндров оставшихся вклю-
ченными гидромоторов.
104
В одной из первых гидрообъемных трансмиссий, разработанных для
трактора в НАТИ, предусмотрено для расширения общего диапазона
изменения передаточного отношения отключение гидромоторов перед-
них колес.
Интересна схема трансмиссии, разработанная в ВИМе для тракторов
класса 1,4 типа ’’Беларусь”. Трансмиссия (рис. 45, г) содержит два насо-
са, каждое заднее колесо приводится во вращение от одного высоко-
оборотного гидромотора через понижающий редуктор, а каждое перед-
нее колесо — от двух высокооборотных гидромоторов через понижаю-
щий редуктор (колеса одинакового размера). Жидкость от насосов к
гидромоторам поступает через сложный распределитель PC, состоящий
из гидравлического устройства (контроллера) и переключателя. От рас-
пределителя жидкость подается также к гидравлическому валу отбора
мощности (ГВОМ). Схема обеспечивает следующие режимы работы
трактора.
1) Жидкость от двух насосов подводится к параллельно соединен-
ным гидромоторам всех колес. Максимальное тяговое усилие состав-
ляет 18 кН, максимальная скорость движения 9 км/ч.
2) Жидкость от одного насоса подводится к параллельно соединен-
ным гидромоторам всех колес. Второй насос подает жидкость к гидрав-
лическому валу отбора мощности. Максимальное тяговое усилие то же,
максимальная скорость движения 4,5 км/ч.
3) Жидкость , подводится от двух насосов к четырем гидромоторам
передних колес. Гидромоторы задних колес отключены (закольцова-
ны) . Тяговое усилие до 9 кН, скорость движения до 18 км/ч.
4) Питание гидромоторов передних колес производится от одного
насоса, второй подает жидкость к гидравлическому валу отбора мощ-
ности. Тяговое усилие до 9 кН, максимальная скорость до 9 км/ч.
5) Оба насоса подают жидкость только к одному гидромотору
каждого переднего колеса. Тяговое усилие до 4,5 кН, скорость движе-
ния до 36 км/ч.
6) Только один насос подает жидкость к одному гидромотору каж-
дого переднего колеса. Скорость движения до 18 км/ч.
При подводе жидкости ко всем колесам трансмиссия эквалентна
механической трансмиссии с межколесными и межосевыми дифферен-
циалами, что исключает возможность появления циркуляции мощности.
Распределитель позволяет для улучшения проходимости трактора под-
ключить один насос к гидромоторам передних колес, а другой — к гид-
ромоторам задних колес. Это приводит к блокировке межосевой гидро-
дифференциальной связи.
Подключение одного насоса к гидромоторам правого переднего
колеса, а второго — к гидромоторам левого переднего колеса обеспечи-
вает блокировку межколесной дифференциальной связи. Распредели-
тель позволяет осуществить соединение напорной и всасывающей магист-
ралей и тем самым получить нейтральное положение трансмиссии, необ-
ходимое, например, при буксировке трактора.
При установке наклонного блока цилиндров в нейтральное положе-
ние осуществляется торможение трактора при помощи трансмиссии.
105
Жидкость проходит через предохранительный клапан. Тормозная сила
не регулируется и равна максимальному тяговому усилию.
В ВИМе создан трактор с трансмиссией подобной, схемы, в которой
вместо высокооборотных гидромоторов с понижающими редукторами
применены высокомоментные гидромоторы. В передних колесах разме-
щены гидромоторы, позволяющие отключать половину цилиндров.
Гидромоторы задних колес снабжены специальным устройством, обес-
печивающим при их отключении прекращение движения поршней, что
устраняет помехи их свободному вращению и снижает потери в транс-
миссии. Прекращение движения поршней достигается подачей в корпус
гидромотора жидкости под давлением подпитки. Это приводит к пере-
мещению всех поршней к центру ротора гидромотора и прекращению их
связи с реактивной обоймой.
Особое внимание следует обратить на применение во многих схемах
трансмиссий двух насосов. В трансмиссиях тракторов, сельскохозяйст-
венных, строительных и дорожных машин насос, предназначенный для
привода гидромоторов технологических агрегатов, используют для пи-
тания гвдромоторов трансмиссии, в результате чего повышается ско-
рость движения машины на транспортном режиме. Кроме того, два на-
соса позволяют блокировать дифференциальные связи между колесами
и осями. Суммарный рабочий объем двух насосов, допускающих боль-
шую частоту вращения, меньше рабочего объема одного насоса.
Схемы с двумя насосами распространены на машинах с колесной
формулой как 4X4 так и 4X2. В трансмиссиях некоторых самоходных
машин применяют специально разработанные двухсекционные насосы,
непосредственно присоединяемые к двигателю без использования зубча-
того редуктора.
В первые годы создания гидрообъемных трансмиссий для тракторов
широко использовалось отключение гидромоторов, в настоящее время
большое внимание обращается на разработку конструкций с многосту-
пенчатыми редукторами. На самоходных машинах с колесной формулой
4X4 оправдано применение тех и других схем.
Индивидуальный привод каждого колеса от отдельного гидромотора
(см. рис. 45) позволяет устранить многие агрегаты механической транс-
миссии и снизить ее массу по сравнению с массой трансмиссии, выпол-
ненной по схеме, показанной на рис. 44, содержащей обычные ведущие
мосты с главными передачами и дифференциалами. Схемы, изображен-
ные на рис. 45, безусловно целесообразны, когда требуется свобода
компоновки агрегатов трансмиссии (сельскохозяйственные и некоторые
строительные и дорожные машины). Схему, показанную на рис. 45, б,
рационально использовать для трансмиссии легкового автомобиля.
Применение схемы, изображенной на рис. 44, может снизить стоимость
трансмиссии в результате применения только двух, объединенных в од-
ном корпусе, гидромашин и использования стандартных ведущих мос-
тов. В настоящее время нельзя отдать абсолютное предпочтение той или
иной схеме.
Для самоходных многоколесных тележек единственно целесообраз-
ной является схема трансмиссии с индивидуальным приводом каждого
106
колеса (или, как обычно принято делать, — пары колес) от отдельного
гидромотора (рис. 46). При этом широко используют отключение гидро-
моторов для увеличения общего диапазона изменения передаточного
отношения.
Обычно применяют несколько быстроходных насосов, имеющих
меньший суммарный рабочий объем по сравнению с рабочим объемом
одного тихоходного насоса большого рабочего объема. Использование
нескольких насосов позволяет при необходимости устранить дифферен-
циальные связи для улучшения проходимости машины.
Трансмиссия, выполненная по схеме, показанной на рис. 46, имеет
три диапазона регулирования. На первом диапазоне жидкость от насосов
подводится ко всем гидромоторам, на втором — к половине гидромото-
ров и на третьем — к одной четвертой гидромоторов.
Подача жидкости от четырех насосов, в общую магистраль и питание
от нее всех гвдромоторов обеспечивает дифференциальную связь всех
колес. Питание групп гидромоторов (по четыре в каждой) от отдельного
насоса позволяет устранить дифференциальные связи между этими
группами.
На рис. 46 для простоты показана схема трансмиссии самоходной
тележки, содержащей 32 колеса. Как указывалось, число колес некото-
рых самоходных тележек достигает 192. Каждая пара колес выполняет-
ся управляемой. Поворот всех колес на 90° обеспечивает боковое пере-
мещение самоходной тележки.
Известны трансмиссии, осуществляющие вследствие раздельного
привода колес правого и левого бортов поворот короткобазовых машин
или машин, снабженных шинами сверхнизкого давления. Применение
Рис. 46. Схема трансмиссии многоколесной самоходной тележки
107
таких трансмиссий на длиннобазовых машинах исключается по двум
причинам: из-за необходимости использования гидроагрегатов, рассчи-
танных на большую мощность, и из-за недопустимо высокого износа
шин. При определенном отношении базы к колее поворот машины ста-
новится невозможным.
При повороте машины в результате раздельного привода колес на
них действуют значительные боковые силы, приводящие к уводу, кото-
рый для шин сверхнизкого давления весьма существен и способствует
повороту машины.
Схема трансмиссии с раздельным приводом колес каждого борта,
осуществляющей поворот машины, приведена на рис. 47, а. По такой
схеме выполнена трансмиссия отечественного малогабаритного тягача
Д-456. Ту же схему, но с высокомоментными гидромоторами имеет
трансмиссия малогабаритного вездехода фирмы ” Дж А.В Дизайн Энд
Констракшн” (Великобритания). Трансмиссия короткобазового буль-
дозера фирмы ’’Хеншель” (ФРГ) отличается от предыдущих тем, что со-
держит высокооборотные гидромоторы, работающие совместно с уста-
новленными за ними двухступенчатыми редукторами. Трансмиссии,
выполненные по рассмотренной схеме, имеют межосевые дифферен-
циальные связи и лишены межколесных дифференциальных связей.
На малогабаритных вездеходах с шинами сверхнизкого давления и
колесной формулой 4X4, 6X6 и даже 8X8 иногда для упрощения и уде-
шевления трансмиссии применяют один гидромотор для каждого борта,
от которого цепными передачами вращение передается ко всем колесам
борта (рис. 47, б). Трансмиссия не имеет как межколесных, так и меж-
осевых дифференциальных связей.
Большим разнообразием отличаются трансмиссии гусеничных ма-
шин. Два насоса и два высокомоментных гидромотора, приводящие
во вращение ведущую звездочку своего борта, содержит трансмиссия
трактора фирмы ’’Бэгнол” (рис. 48, а),
108
Отечественные гусеничные ковшовые экскаваторы 30-4121 и
ЭО-4123 и некоторые зарубежные содержат ГОТ, в которых высоко-
оборотные гидромоторы работают совместно с понижающими редукто-
рами (рис. 48, б). Обычно используют сдвоенные насосы (два насоса
вместе с редуктором, размещенные в одном корпусе). Аналогичную
трансмиссию (с двумя приводимыми во вращение через конический
редуктор насосами) и двумя высокооборотными, работающими с пони-
жающими редукторами, гидромоторами, имеет малогабаритный гусе-
ничный снегоход (мотонарты) фирмы ’’Кашман моторе” (США).
Дальнейшим усовершенствованием этой схемы является установка
за каждым гидромотором редуктора с переменным передаточным отно-
шением (рис. 48, в). Примером такой трансмиссии является трансмис-
сия отечественного экскаватора 30-5122, в которой за гидромоторами
установлены трехступенчатые редукторы.
Если необходимо иметь большой нагрузочный диапазон бесступен-
чатого изменения передаточного отношения или несколько таких диапа-
зонов, то применяют регулируемые гидромоторы.
Как и в трансмиссиях колесных машин, в трансмиссиях гусеничных
машин можно использовать несколько бесступенчатых диапазонов изме-
нения передаточного отношения, получаемых в результате отключения
109
части гидромоторов. Известно несколько вариантов решения этой зада-
чи, в одном из которых вращение передается к ведущим звездочкам
каждого борта от нескольких гидромоторов. На первом диапазоне ра-
ботают все гидромоторы, на втором — часть из них. В соответствии с
другим вариантом в трансмиссии используют гидромоторы с группой
отключаемых цилиндров. Наконец, возможна трансмиссия, при которой
каждая гусеница приводится в движение двумя ведущими звездочками
(расположенными в передней и задней частях машины), получающими
вращение от гидромоторов. На первом диапазоне работают четыре гид-
ромотора четырех ведущих звездочек, а на втором — только два гидро-
мотора.
Выше рассматривались трансмиссии, не имеющие дифференциаль-
ной связи между гусеницами. На рис. 48, г показана схема трансмиссии,
обеспечивающая дифференциальную, связь между гусеницами. Особен-
ностью ее является применение одного насоса. Поворот машины осу-
ществляется в результате уменьшения рабочих объемов гидромоторов
одного борта и увеличения рабочих объемов гидромоторов другого
борта. Привод каждой ведущей звездочки от двух гидромоторов и от-
ключение одного из них обеспечивают получение двух диапазонов бес-
ступенчатого изменения передаточного ошошения. Такая трансмиссия
по сравнению с трансмиссией, содержащей два регулируемых насоса и
два регулируемых высокооборотных гидромотора, позволяет умень-
шить суммарную установочную мощность гидромашин на 40 ... 45 % и
значительно повысить КПД трансмиссии [6].
Во всех предыдущих схемах ГОТ использовалась для поворота гу-
сеничной машины. Возможно применение ОГП совместно с обычным
механическим механизмом поворота (МП) (рис. 48, д). Такую передачу
можно устанавливать на стандартную машину вместо обычного сцепле-
ния и коробки передач. ОГП рассчитывают на передачу максимальной
мощности двигателя. В рассмотренных ранее трансмиссиях ОГП каждого
борта рассчитывается на мощность, большую максимальной мощности
двигателя. Несмотря на указанные преимущества, ГОТ с механическим
механизмом поворота не получили широкого распространения, так как
поворот гусеничной машины с использованием ОГП происходит весьма
плавно, при этом увеличиваются маневренность и скорость самоходной
машины.
На гусеничных машинах с двигателем большой мощности целесооб-
разно иметь две ОГП (рис. 48, е): одну, рассчитанную на максимальную
мощность двигателя и предназначенную для обеспечения прямолинейно-
го движения машины, а вторую, входящую в бесступенчатый механизм
поворота, рассчитанную на меньшую мощность. Механизм поворота
кроме ОГП содержит планетарные механические передачи (по одной на
каждый борт).
Бесступенчатые гидрообъемные механизмы поворота применяют
также и с обычной или гидромеханической, содержащей гидротрансфор-
матор, трансмиссией.
Как следует из изложенного, выбор схемы трансмиссии зависит от
типа самоходной машины, который определяет ее допустимую стои-
110
мость, необходимый диапазон изменения передаточного отношения,
возможность разбивки этого диапазона на отдельные диапазоны со сту-
пенчатым переходом с одного на другой при продолжительной работе
на каждом из них.
62. СХЕМЫ СИЛОВЫХ УСТАНОВОК
С АККУМУЛИРОВАНИЕМ И РЕКУПЕРАЦИЕЙ ЭНЕРГИИ
Для уменьшения расхода жидкого топлива экономически оправда-
но использование на автомобилях более сложных силовых установок,
осуществляющих аккумулирование энергии, когда имеется запас мощ-
ности двигателя, и рекупирацию ее при торможений автомобиля. Одна
из таких установок, разработанная С. Шибером и содержащая гидро-
объемную трансмиссию, рассмотрена раньше (см. рис. 1). Наряду с
экспериментальными разработками проводятся теоретические исследо-
вания в этой области [39].
Опытные силовые установки, осуществляющие аккумулирование
энергии, создавали с бесступенчатыми трансмиссиями и других типов.
Исследовательская лаборатория ’’Муллард” (фирма’’Филипс Индастриз”,
Нидерланды) оборудовала легковой автомобиль сухой массой 1270 кг,
с двигателем рабочим объемом 2 л установкой, состоящей из маховика,
предназначенного для аккумулирования энергии, и фрикционной бес-
ступенчатой передачи. При скорости движения машины менее 72 км/ч
одна часть мощности затрачивалась на движение автомобиля, а другая —
на раскручивание маховика. Благодаря использованию бесступенчатой
передачи двигатель работал на постоянном режиме в зоне максималь-
ного КПД. После того как угловая скорость маховика достигала некото-
рого определенного значения, двигатель отключался от трансмиссии, и
автомобиль перемещался, используя запасенную маховиком энергию.
Теоретическая экономия топлива с учетом рекуперации энергии тормо-
жения составляла 38 %.
Ниже приводится дальнейшее развитие исследований в этом направ-
лении. Причем как и в силовой установке С. Шибера, предусматривается
снижение мощности двигателя с учетом того, что для легкового автомо-
биля и городского автобуса максимальная мощность необходима только
для получения интенсивного разгона. Время работы легкового автомоби-
ля в городе с максимальной мощностью менее 1 %, поэтому на легковых
автомобилях малого класса можно применить силовые установки с дви-
гателем мощностью около 20 кВт и аккумулированием энергии, осу-
ществляемым при стоянке у светофора и при равномерном движении с
небольшой скоростью. При интенсивном разгоне к мощности двигателя
добавляется энергия, запасенная в гидроаккумуляторе.
При разработке силовой установки с малоразмерным (малой мощ-
ностью) двигателем, гидрообъемной передачей, аккумулированием и ре-
куперацией энергии необходимо удовлетворить следующие требования.
1. Гидроаккумулятор (гидроаккумуляторы) заряжается тогда,
когда имеется избыток мощности двигателя. Отвод от двигателя части
111
мощности для зарядки гидроаккумулятора не должен приводить к
изменению мощности и силы тяги на колесах автомобиля.
2. При зарядке гидроаккумулятора должна сохраняться пропорцио-
нальность между силой тяги на колесах автомобиля и положением пе-
дали управления.
3. При использовании энергии гидроаккумулятора сила тяги долж-
на плавно изменяться при изменении положения педали управления.
4. При использовании энергии гидроаккумулятора к колесам авто-
мобиля через ОГП должна подводиться максимальная мощность дви-
гателя.
5. При рекуперации энергии торможения и зарядке гидроаккуму-
лятора тормозная сила на колесах автомобиля должна изменяться плав-
но, пропорционально силе нажатия на педаль тормоза.
6. Силовая установка должна содержать автоматическую систему
управления, осуществляющую без участия водителя переход с одного
режима работы на другой.
Возможно различное устройство силовых установок. Показанная на
рис. 49, а установка содержит двигатель 1 и ОГП с регулируемыми на-
сосом 2 и гидромотором 9. Вращение от гидро мотора через главную
передачу и дифференциал передается к колесам автомобиля. От вала
двигателя приводится во вращение регулируемый насос 5, используе-
мый для зарядки гидроаккумулятора 4. От регулируемого гидромотора
8 вращение передается к ведущим колесам автомобиля.
Рис. 49. Схемы силовых установок
с малоразмерным двигателем, ак-
кумулированием н рекуперацией
энергии
112
На схеме гидромашины 2 и 3, а также 8 и 9 связаны между собой
зубчатыми передачами. В реальной конструкции гидромашины 2 и 3
могут иметь один общий проходной вал. То же самое относится и к гид-
ромашинам 8 и 9.
При движении в обычных условиях с заряженным гидроаккумуля-
тором наклонные диски гидромашин 3 и 8 должны находиться в нейт-
ральном положении (рабочие объемы гидромашин равны нулю). В этом
случае вся мощность от двигателя через гидрообъемную передачу с
насосом 2 и гидромотором 9 поступает к ведущим колесам автомобиля.
При движении с разряженным гидроаккумулятором 49 когда имеет-
ся запас мощности двигателя, автоматическая система управления пово-
рачивает наклонный диск насоса 3 и увеличивает его рабочий объем,
что приводит к зарядке гидроаккумулятора 4. Одновременно с этим
автоматически увеличиваются подача топлива в двигатель и развивае-
мая им мощность. Мощность ЛГД, развиваемая двигателем, равна сумме
двух мощностей N2 и 7V3, затрачиваемых на привод соответственно
насосов 2 и 3. Автоматическая система управления при зарядке гидро-
аккумулятора 4 должна изменять рабочий объем насоса 3 и, следователь-
но, потребляемую им мощность 7V3 так, чтобы мощность сопротивления
вращению двигателя N3 + N2 была равна его максимальной мощности
^дтах- Имеющий внешнее^управление распределитель 7 препятствует
подаче жидкости в гидроаккумулятор 6.
После того как гидроаккумулятор 4 зарядится* и давление в нем
станет максимальным, наклонный диск насоса 3 повернется в нейтраль-
ное положение, и подача топлива в двигатель уменьшится.
При сбросе педали управления (педали мощности) наконные диски
насоса 2 и гидромотора 9 устанавливаются автоматической системой
в нейтральное положение. При нажатии на педаль тормоза поворачивает-
ся наклонный диск гидромашины 89 работающей в режиме насоса, за-
ряжающего гидроаккумулятор 6. Когда угол его поворота станет макси-
мальным, начинается поворот наклонного диска гидромашины 9, рабо-
тающей в режиме насоса. Гидромашина 9 из бака через два обратных
клапана нагнетает жидкость в гидроаккумулятор 6. Использование
гидромашины 9 позволяет увеличить тормозную силу на колесах. Нажа-
тие на педаль тормоза после поворота наклонного диска гидромашины
9 на максимальный угол приводит к включению колесных тормозных
механизмов.
При нажатии на педаль управления, после того как мощность двига-
теля достигнет максимального значения, поворачивается наклонный
диск гидромашины 8, и она начинает работать в режиме гидромотора под
давлением жидкости, поступающей от гидроаккумулятора 6.
После понижения давления в гидроаккумуляторе 6 до заранее за-
данного значения, специальный датчик подает сигнал к распределителю
7, соединяющему гидромотор 8 с гидроаккумулятором 4. Гидрораспре-
делитель 7 позволяет сохранить разряженным гидроаккумулятор 6 до
момента его зарядки гидромашинами 9 и 8 в процессе торможейия авто-
мобиля.
Использование гидромотора 8 увеличивает силу тяги на колесах
8 —Зак. 1159 ИЗ
автомобиля и его ускорение. Пропорциональность между углами поворо-
та педали управления и наклонного диска гидромотора 8 обеспечивает
пропорциональность между углом поворота педали управления и силой
тяги на колесах автомобиля.
При помощи распределителя 5 жидкость от насоса 2 подается к гид-
ромотору 83 наклонный диск которого при этом поворачивается на мак-
симальный угол. Это приводит к увеличению силы тяги на колесах авто-
мобиля, что необходимо для преодоления крутых подъемов, когда раз-
ряжены гидроаккумуляторы 4 и 6.
Рассмотренное управление насосом 3 позволяет максимально ис-
пользовать резерв мощности двигателя для зарядки гидроаккумулятора.
Такую систему рационально применять при малой мощности двигателя.
Если двигатель имеет относительно большую мощность, можно
использовать силовую установку с нерегулируемым насосом (рис. 49, б),
напорная линия которого при помощи распределителя 10 соединяется
или с гидроаккумулятором 4 (насос включен), или со сливной линией
(насос выключен). Рабочий объем насоса 3 выбирают приблизительно
в четыре раза меньше рабочего объема насоса 2. Насос 3 включается тог-
да, когда разряжен гидроаккумулятор 4 и мощность, затрачиваемая на
преодоление сопротивления движению, меньше определенного, заранее
заданного, значения.
Распределители 10 и 7, кроме рассмотренного ранее назначения,
предотвращают медленную разрядку гидравлических аккумуляторов 4
и б, вызванную утечками жидкости в гидромашинах 3 и 8.
В городских условиях движения, по экспериментальным данным,
легковой автомобиль 30 ... 40 % времени работает на холостом ходу
(стоянки у светофора, движение накатом). Поэтому зарядку гидроакку-
муляторов можно производить тогда, когда к колесам автомобиля
не требуется подводить мощность. Это приводит к наиболее простой схе-
ме силовой установки (рис. 49, в) и системе ее автоматического управ-
ления. Силовая установка содержит только один насос. При отпущенной
педали управления автоматическая система увеличивает подачу топлива,
поворачивает на максимальный угол наклонный диск насоса 2 и при по-
мощи распределителя 11 соединяет его с гидроаккумулятором 4, одно-
временно отсоединив от гидромотора 9. В результате гидроаккумулятор
заряжается при работающем на максимальной мощности двигателе.
Распределитель 12 с гидравлическим управлением нужен для того, чтобы
при использовании гидромашины 9 для зарядки гидроаккумулятора б
отсоединить напорную линию от сливной. Для устранения кавитации и
увеличения частоты вращения насоса в баке следует поддерживать по-
вышенное давление. При этом необходимо устранить непосредственный
контакт рабочей жидкости с находящимся под давлением воздухом.
Как указывалось, установки с аккумулированием энергии позво-
ляют потенциально сократить расход топлива на 38 ... 50 %. Реальная
экономия топлива, очевидно, будет меньше, поскольку необходимо
учитывать большие потери, возникающие при зарядке гидроаккумуля-
торов и при реализации энергии, запасенной в них. Этот вопрос требует
выполнения соответствующих расчетов и исследований.
114
63. РАСЧЕТ РАБОЧИХ ОБЪЕМОВ ГИДРОМАШИН
И ПЕРЕДАТОЧНЫХ ЧИСЕЛ РЕДУКТОРОВ ТРАНСМИССИЙ
Получаемые в результате расчета максимальные (при е = 1) рабочие
объемы ?1тах и tfjmax гидромашин зависят от общей схемы трансмис-
сии. Все многообразие рассмотренных ранее схем сводится к несколь-
ким типовым, которые содержат следующие гидромашины:
1) регулируемый насос и нерегулируемый гидромотор (гидромото-
ры) , работающий с понижающим редуктором (редукторами);
2) регулируемый насос и нерегулируемые высокомоментные гидро-
моторы, непосредственно соединенные с колесами самоходных машин;
3) регулируемый насос и регулируемый гидромотор (гидромото-
ры) , работающий с понижающим редуктором (редукторами);
4) регулируемый насос и нерегулируемый или регулируемый гидро-
мотор (гидромоторы) 4 работающий совместно со ступенчатым редукто-
ром (редукторами);
5) регулируемый насос и нерегулируемые, частично выключаемые
гидромоторы;
6) два регулируемых насоса, каждый из которых питает гидромотор
(гидромоторы) одного борта, что позволяет осуществить поворот ма-
шины при помощи ОГП.
Передача с регулируемым насосом и нерегулируемым гидромото-
ром. Выходная характеристика такой передачи приведена на рис. 50. При
этом здесь и далее предусматривается автоматическое управление регу-
лируемыми гидромашинами, обеспечивающее работу двигателя на пос-
тоянном режиме максимальной мощности. На выходной характеристике
показано изменение крутящего момента М2 на валу гидромотора, мощ-
ности двигателя , подводимой к насосу, перепада давления р, расхода
Q и параметров регулирования насоса et и гидромотора е2 в зависимости
от частоты вращения п2 вала гидромотора. Эти кривые строят по форму-
лам, приведенным в п. 3.1. Максимальный момент ЛГ2тах ограничивает-
ся предельно допустимым перепадом давления ртах. При л2к рабочий
объем насоса, а следовательно, и параметр регулирования насоса дости-
гают критических значений ^1К и е1к, при которых передача способна
передавать максимальную мощность.
При работе насоса с постоянной частотой вращения, равной частоте
вращения nlN вала двигателя при его максимальной мощности, кинема-
тическое передаточное отношение zK
будет пропорционально п2, что позво-
ляет рядом со шкалой п2 построить
шкалу zK.
Параметр регулирования насоса ег
линейно при (т?0 = const) возрас-
тает от нуля до е1тах обеспечивая
заданный нагрузочный диапазон изме-
Рис. 50. Выходная характеристика передачи
с регулируемым насосом и нерегулируе-
мым гидромотором
8*
нения передаточного отношения DpjI [выражение (26), в котором
^2min == 1]. В диапазоне частоты вращения п2 от нуля до и2к увеличи-
вается частота вращения вала двигателя от до пlN. Поэтому зави-
симость = f(n2) нелинейна. Она определяется видом регуляторной
характеристики режимов работы двигателя, о котором будет сказано
дальше. При построении выходных характеристик ОГП во всем диапа-
зоне частоты вращения п2 для удобства частота вращения вала двигате-
ля принята постоянной и равной nxN. Поэтому показанное на рис. 50
изменение ех в диапазоне п2 от нуля до пг к линейно. *
Максимальный рабочий объем насоса, необходимый для передачи
заданной максимальной мощности 7Vlmax и обеспечения заданного
диапазона изменения передаточного отношения Ррн, полученного при
перепаде давления Ртах и частоте вращения и1тах, которой соответ-
ствует максимально допустимый коэффициент быстроходности C*w,
является наименьшим допустимым максимальным рабочим объемом.
Его рассчитывают по формуле
6000(Wi тах1?м 1^р.н ~
----------------— )3, (63)
^Тл^тах
где Qi max - в см3; 7Vlmax - в кВт; С$п - в см/мин; ртах - в МПа.
Выражение (63) получено из выражений (14) и (29) с учетом того,
что при max давление р равно pmin = Pmax/^р.н-
Рабочий объем насоса ОГП с Dp.H = 1 при Cfn и ртах (в данном
случае равный его критическому объему)
/ eOOOOAfimax^Mi
^Тк=У(—----------------
^in^max
Тогда
#lmax Я 1кч/^р<н«
(64)
(65)
Предельно допустимую частоту вращения насоса находят из выра-
жения
^in^max
60000WlmaxnMi#pjI
(66)
Если насос непосредственно соединен с двигателем и его максималь-
ная частота вращения, равная частоте вращения nlN вала двигателя при
максимальной мощности, меньше предельно допустимой, максимальный
рабочий объем насоса находят из выражения
60000TV imax^Mi^pji
^imax
"lAfPmax
(67)
116
или
(68)
_ ^imax^M 1^р.н
44 max _ ,
0>159Pmax
где ^imax ~ крутящий момент на валу насоса, соответствующий максимальной
мощности двигателя, Н-м.
При установке на транспортной машине излишне тихоходного дви-
гателя рабочий объем насоса можно уменьшить, установив между двига-
телем и насосом повышающий редуктор с передаточным числом
wp wiAf/wimax* (69)
На самоходной машине может быть установлен быстроходный дви-
гатель, частота вращения вала которого nlN > и1тах. ® этом случае
между двигателем и насосом необходимо установить понижающий ре-
дуктор с передаточным числом, определяемым выражением (69).
На рис. 51 приведены рассчитанные по формуле (66) (кривые А)
зависимости и1тах от 7У1тах для трех значений РрД1 (в расчетах приня-
то Ртах = 42 МПа, С*п =16 000 см/м). Зная максимальную мощность
7Vlmax двигателя самоходной машины и его частоту вращения nlN при
этой мощности, на основании приведенных кривых можно сразу опре-
делить, требуется или нет перед насосом установить повышающий или
понижающий редуктор.
Наиболее подходящим для использования с ГОТ двигателем явля-
ется такой, который развивает максимальную мощность 7Vlmax при час-
тоте вращения, приблизительно равной и1тах, определяемой кривыми
А, В этом случае без использования редуктора насос будет иметь наи-
меньший предельный рабочий объем q *max.
Рис. 51, Зависимость предельно допустимой частоты вращения насоса от переда-
ваемой мощности
117
Если использовать zt насосов, соединенных с двигателем зубчатым
редуктором, наименьший предельный объем каждого насоса будет
1 m ах “ 1 к y/(PpjJzi)3 •
Суммарный объем tfsimax всех насосов меньше объема одного
насоса в x/z раз.
Рабочий объем нерегулируемого высокооборотного гидромотора
выбирают из условия обеспечения заданного значения коэффициента
быстроходности С*п, Часто при одинаковом рабочем объеме для гидро-
мотора допускают большую частоту вращения, чем для насоса, а следо-
вательно, более высокий коэффициент быстроходности.
Введем параметр 0Н = C*w/C*w, характеризующий возможность
увеличения частоты вращения нерегулируемого гидромотора по сравне-
нию с частотой вращения насоса. Для выполненных гидромашин (см.
гл. 4) 0Н = 1,1 ... 1.2. На основании уравнений (17) и (29), учитывая,
что прии2тах pmin = Ртах/^р Л > запишем
_ / бОООО^тах^м^Р-Н ~
Чгтах VI )
С2ИРтах
ИЛИ
• . / п°др-н
^2тах . ) • ('О
Поскольку гидромотор соединен с колесами самоходной машины
зубчатым редуктором, всегда можно осуществить его работу с предель-
но допустимой частотой вращения. Поэтому гидромотор всегда имеет
наименьший предельный рабочий объем.
Для указанных выше значений 0Н и принятого т?о = 0,98 рабочий
объемгидромотора?*тах =(0,83 ... 0,73)#*тах.
При расчете гидрообъемной трансмиссии должны быть заданы мак-
симальная сила тяги, определяющая максимальный крутящий момент
7Иктах на ведущих колесах самоходной машины, и максимальная ско-
рость движения самоходной машины, определяющая максимальную
частоту вращения иктах ведущих колес самоходной машины. Для обес-
печения заданных значений 7Иктах и иктах расчетный нагрузочный диа-
пазон изменения передаточного отношения должен быть равен
^р.н ~ ^ктахлктах/95607У1тах«
По этому диапазону на основании выражения (70) или (71) находят
рабочий объем гидромотора #*тах.
Для обеспечения заданных значений ЛГктах иикфах общее переда-
точное число зубчатых передач трансмиссии, соединяющих гидромотор
с колесами самоходной машины, должно составлять
wiu.n wimax^imax/(WKmax^2max) •
118
Таким образом, при соответствующем диапазоне изменения переда-
точного отношения и соответствующем передаточном числе зубчатых
передач можно обеспечить заданные максимальную силу тяги и макси-
мальную скорость движения самоходной машины.
Для передачи, содержащей z2 гидромоторов с одинаковым рабочим
объемом, рабочий объем каждого из них
. - z,* / ПОРРЛ
^2max ^1к v( ) . (72)
Суммарный рабочий объем всех гидромоторов в \/z^раз меньше
объема одного гидромотора.
Гидромотор, установленный в колесе самоходной машины без по-
нижающего редуктора, должен развивать заданный максимальный кру-
тящий момент Л/2тах, определяемый заданной максимальной силой тяги
на колесах самоходной машины, и иметь заданную максимальную часто-
ту вращения и2тах, определяемую заданной максимальной скоростью
движения самоходной машины. Одновременное удовлетворение этих
требований не всегда возможно. Как видно из рис. 44, б9 для применяе-
мых гидромоторов увеличение крутящего момента приводит к умень-
шению частоты вращения.
Для получения заданного максимального крутящего момента рабо-
чий объем гидромотора должен быть равным
^зтах • (73)
ОЛ^Ртах^мз
При этом в соответствии с выражением (29) максимально допусти-
мая частота вращения вала гидромотора может оказаться меньше задан-
ной, обеспечивающей максимальную скорость движения самоходной
машины.
Для получения заданной максимальной частоты вращения рабочий
объем гидромотора должен быть
^2тах = (^2«/л2тах) • (74)
Этот объем может оказаться меньше объема ?2тах и не обеспечит
необходимой максимальной силы тяги на колесах самоходной машины.
Если tf2max < ?2max, то оба указанных требования удовлетворяют-
ся. Если #2max > tf2max, указанные требования не удовлетворяются;
при этом необходимо выяснить, что является более важным — обеспе-
чение заданного максимального крутящего момента или заданной макси-
мальной частоты вращения. В первом случае рабочий объем гидромотора
рассчитывают по формуле (73) и находят соответствующую ему макси-
мальную частоту вращения и максимальную скорость движения само-
ходной машины, во втором случае рабочий объем гидромотора опреде-
ляют по формуле (74) и находят соответствующий ему крутящий мо-
мент и максимальную силу тяги на колесах самоходной машины.
119
Для передачи с регулируемым насосом и нерегулируемым гидромо-
тором весь диапазон изменения передаточного отношения Рр н в соот-
ветствии с выражением (26), где e2min = 1, обеспечивается в результате
изменения параметра регулирования насоса от е1к до = 1. Предель-
ное значение е1к, ограничиваемое падением КПД, может достигать 0,1.
Ему соответствует Dp н = 10.
Передача с регулируемыми насосом и гидромотором. Сначала рас-
смотрим передачу, для которой принято 4lmax = q1K и, следовательно,
е1к = 1. Выходная характеристика такой передачи приведена на
рис. 52, а. Согласно выражению (26) нагрузочный диапазон изменения
передаточного отношения D? н обеспечивается только путем изменения
параметра регулирования гидромотора от е2 = 1 до e2min.
Передаче с выходной характеристикой, показанной на рис. 50,
свойственна продолжительная работа гидромашин, с малым перепадом
давления р и большим расходом Q. Для передачи с выходной характе-
ристикой, приведенной на рис. 52, а, перепад давления р во всем диапа-
зоне частоты вращения п2 сохраняется максимальным, а расход Q после
достижения частоты вращения и2к перестает увеличиваться. Высокое
давление при малом расходе обеспечивает последней передаче более
высокий КПД. Малый расход позволяет выполнить трубопроводы и
клапанные устройства малого проходного сечения.
Для передачи с регулируемыми насосом и гидромотором максималь-
ный рабочий объем рассчитывают следующим образом. Сначала рассмат-
ривают возможность непосредственного соединения вала насоса с валом
двигателя. Для этого no7Vlmax находят предельно допустимую частоту
вращения вала насоса, соответствующую CJn:
_ / ^iH^max
wimax “
(75)
60000ATlmaxi?Mi
На основании формулы (75) на рис. 51 построена кривая Б измене-
ния п J тах от max.
Если оказалось, что л1тах > n1Ny и двигатель можно непосредствен-
Рис. 52. Выходные характеристики передачи с регулируемыми насосом и гидро*
. мотором
120
но соединить с насосом без редуктора, то рабочий объем насоса опреде-
ляют по формуле
6OOOO7VlmaxnMi
4imax -----------------• <76)
п lAf^max
Если оказалось, что и1тах < niN и необходим редуктор, рабочий'
объем 4*тах рассчитывают из условия получения заданного значения
С*п. В этом случае наименьший предельный рабочий объем насоса будет
равен критическому объему, вычисленному по выражению (64), т.е.
4*тах = 4iK*
Передаточное число понижающего редуктора, установленного между
двигателями и насосом, определяют по формуле (69).
Диапазон изменения передаточного отношения ОГП находят по зна-
чению e2min [см. выражение (26), в котором е1к = 1].
При уменьшении е2 до определенного значения гидромотор начи-
нает работать неустойчиво, после чего превращается в самотормозящий
механизм. Как было указано, для аксиально-поршневых гидромоторов
с наклонным диском допускается e2min = 0,333. Ему соответствует
Dp н = 3. Для гидромоторов с наклонным блоком цилиндров допуска-
ется e2mjn = 0,25,чему соответствует DpJI = 4.
Путем изменения е2 нельзя обеспечить большой диапазон DpJI.
Для его увеличения необходимо наряду с регулированием гидромотора
применить нагрузочное (при максимальной мощности) регулирование
насоса.
На рис. 52, б приведена характеристика передачи с регулируемыми
насосом и гидромотором, для которой th шах > 41к и, следовательно,
elK > 1. В диапазоне частоты вращения от и2к до п2 изменяется
параметр регулирования насоса при максимальной мощности
^imax> а от Д° w2max изменяется параметр регулирования гидромо-
тора е2.
Для рассмотренной передачи максимальный рабочий объем насоса
находят по выражению
6(№00WlmaxTiMiDp<He2min
<71тах= ------------------------. (77)
wi/VPmax
где < л1тах.
Наименьшее предельное значение рабочего объема, которому соот-
ветствует С*п,
41 max 41 к V(^p.H^2min)3 (78)
При этом предельно допустимая частота вращения насоса
/ г * 3 п
/ с iw^max
wimax — v 1 • (79)
60000WlmaxnMi#p He2min
121
По этой формуле на рис. 51 построено семейство кривых В, относя-
щихся к различным значениям £>р н (принятое e2min = 0,333).
Для передач, внешние характеристики которых приведены на рис. 52,
наименьший предельный рабочий объем регулируемого гидромотора
находят по формуле (70), которую для данного случая можно полу-
чить на основании выражений (17) и (29) с учетом того, что ?2min =
“ ^2maxe2min H^min ~^тахе1к-
Входящий в формулу (79) коэффициент быстроходности гидро-
мотора С*п можно принять значительно большим, чем коэффициент
быстроходности С*п такого же насоса. В отличие от насоса гидромотор
при максимальной частоте вращения и2тах не работает при максималь-
ном рабочем объеме. <?2тах. Максимальную частоту вращения и2тах
гидромотор развивает только при минимальном рабочем объеме </2min.
Уменьшение рабочего объема регулируемого гидромотора при заданной
частоте вращения приводит к уменьшению скорости поршня, поэтому
при g2min допускается большая частота вращения гидромотора и2тах,
чем при #2тах. Отсюда следует, что для регулируемого гидромотора
предельно допустимый коэффициент быстроходности значительно боль-
ше, чем для насоса.
Введем параметр 0р = С*п1С*п> характеризующий возможность уве-
личения частоты вращения регулируемого гидромотора по сравнению
с частотой вращения насоса. Тогда для передач, внешние характеристики
которых приведены на рис. 52, получим
?*тах . (®®)
Максимальный рабочий объем гидромотора можно выразить фор-
мулой
п imax^imax^o 4
#2 m ах • (81)
w2maxe2min «
Если примем
^2max “^imax/e2min> (82)
чему из формулы (81) соответствует и1тах =w2min (при % = 0,то
на основании уравнений (80) и (78) получим
@р ““ ^"^2min‘
При min ““ 0,883 0р — 1,45.
В данном случае скорость поршня гидромотора будет постоянной
при изменении его рабочего объема от #2тах Д° ^2min и приблизитель-
но в 2 раза меньшей скорости поршня насоса, т.е. поршневая группа
гидромотора будет работать в облегченных условиях. Однако скорость
деталей распределителя гидромотора будет больше скорости деталей
распределителя насоса приблизительно в 1,45 раза. Обычно ограничи-
вающим фактором для аксиально-поршневых гидромашин с торцовым
распределителем является скорость поршня. Поэтому допустимы даль-
122
нейшее уменьшение рабочего объема гидромотора 4*тах и его работа
с частотой вращения п2 m ах, превышающей п t m ах. /:
Как показывает практика создания трансмиссий фирмами ’’Линде
АГ” и ’’Гидроматик” 0р принимают равным 1,28 ... 1,34. '
Рассмотрим возможность дальнейшего увеличения-этого коэффи-
циента. Если считать, что для применяемых трансмиссий частота враще-
ния вала двигателя при максимальной мощности n1N равна предельно
допустимой частоте вращения пх тах вала насоса, то получим
e2min ^2max
Для передачи Тородаин фирмы ’’Даути” (Великобритания) 44 max =
= 77 см3 и t?2max = 187 см3, чему соответствует 0р = 1,65. Для передачи
фирмы ’’Сандстрэнд” (США), установленной на тракторе ’’Интернэшнл
Харвестр”, 44 max = см3 и 44тах = 89 см3, чему соответствует 0р =
= 2,59.
Для передач транспортных машин будем считать приемлемым коэф-
фициент 0р = 1,45, чему соответствует значение 4f*max, вычисленное
по формуле (82).
Если примем 0р = l/e2min>T0 получим 4r2max =^imax-
В этом случае максимальные линейные скорости поршней гидромо-
тора и насоса будут равны, а окружная скорость деталей распределителя
гидромотора будет в 3 раза больше скорости деталей распределителя
насоса. Равные скорости поршней насоса и гидромотора позволяют
принять 44max = 44 max- Для того чтобы это было возможным, необ-
ходимо обеспечить работу распределителя при высокой частоте враще-
ния гидрЬмотора. Здесь могут быть использованы различные решения:
совершенствование обычного для аксиально-поршневых гидромашин
торцевого распределителя, применение клапанного или цапфенного
распределителя, расположенного на малом радиусе, и др. Известны
регулируемые гидромоторы [экспериментальная автомобильная гидро-
объемная трансмиссия НМТ-250 (США)] с радиально-поршневыми
гидромашинами, имеющими цапфенный распределитель, позволивший
Принять 44max “44 max-
Таким образом, одним из важнейших направлений совершенствова-
ния гидромашин является обеспечение работы их распределителей при
высокой частоте вращения гидромашин.
При нескольких регулируемых гидромоторах рабочий объем каж-
дого из них
^тах=^кЛ-Г'— )3- (83)
V2
Следует указать, что при применении двух гидромоторов и их сум-
марном объеме 4^2max = 44max максимальные окружные скорости
деталей распределителя гидромотора и насоса будут равны.
Сравнительная оценка передач. Как следует из рис. 51, в передаче
123
с регулируемыми насосом и гидромотором насос имеет более высокую
предельно допустимую частоту вращения и1тах, т.е. такую передачу без
понижающего редуктора между двигателем и насосом можно устанавли-
вать на самоходные машины с более быстроходными или более мощны-
ми двигателями.
Максимальный суммарный объем гидромашин, работающих с задан-
ными предельно допустимыми значениями С*и и С*w, можно рассчитать
по формуле
________ / %
^=^KV(£pJAmin)3[l + V(;-----------)3L (84)
Pe2min
где для передачи с нерегулируемым гидромотором надо принять 0 = 0Н и для пере-
дачи с регулируемым гидромотором 0 = 0р.
В приводимых ниже сравбительных расчетах будем принимать
т?0 = 1. Для передачи с нерегулируемым гидромотором e2min == 1. Для
передачи с регулируемым гидромотором при е1к = 1 принимают
^p.He2min ~ 1 и прив1к < 1 берут заданные значения £>р н и e2min-
Особое внимание следует обратить на выбор величины 0. Для пере-
дачи с нерегулируемым гидромотором принимают |3Н = 1. Для передачи
с регулируемым гидромотором следует различать два случая. Для пер-
вого случая #2max = #imax> чему соответствуют 0р = l/e2min и ВТ0Р°й
член в квадратных скобках,равный единице. Для второго случаяи2тах =
= п 1 max5 чему соответствует 0р = \/l/e2min и второй^шен в квадратных
скобках,равный l/e2min.
Для передачи с z2 гидромоторами
t__________ I % i
4 =^KVPp.H^min)3[l + Ж’-----------)3---] • (85)
0e2min гг
Введем понятие относительного объема гидромашин q* и q*9 пред-
ставляющего собой отношение максимального объема гидромашин к
критическому объему насоса ОГП с Dp n = 1 [формула (64)], и понятие
относительного суммарного объема всех гидромашин передачи q%,
также выраженного в единицах критического объема насоса.
На рис._53, а приведена полученная по формуле (84) зависимость
изменения от £>р н для передачи с нерегулируемым (кривая 1) и с
регулируемым (кривая 2) гидромотором при л2тах = и1тах и кривая 5
при <72max = 41 max (принято e2min = 0,333).
Выше рассматривались передачи, насосы которых работают при
различной предельно допустимой частоте вращения, определяемой в
соответствии с выражением (29) заданным предельно допустимым
коэффициентом быстроходности и различным для различных передач
рабочим объемом насоса.
Если сравниваемые передачи предназначаются для заданного двига-
теля, то частота вращения насоса, соединенного с двигателем без редук-
тора, для всех передач будет одинаковой. В этом случае с уменьшением
рабочего объема насоса будет уменьшаться коэффициент быстроходнос-
124
Рис. 53. Зависимость относительного суммарного объема гидромашины от диапа-
зона регулирования
ти Cin. Рабочий объем насоса следует определять по одной из формул
(67), (76) и (77). Для расчетов необходимо знать частоту вращения
вала двигателя при его максимальной мощности.
Для исследования влияния на относительный Объем гидромашин
диапазона регулирования и схемы передачи, предназначенной для данно-
го двигателя с определенной частотой вращения n1N9 условно примем,
что при Dp н =9 предельно допустимая частота вращения насоса стано-
вится равной частоте вращения n1N двигателя и, следовательно, коэффи-
циент быстроходности насоса достигает значения . В этом случае для
рассматриваемых передач, работающих при одинаковой частоте враще-
ния насоса, равной ^17v, относительный суммарный рабочий объем
гидромашин будет
— / ^о^р.н
= 3Dp He2mjn + v( ~ . (86)
При расчете по формуле. (86) для различных передач коэффициент
$ определяют так же, как и при расчетах по формуле (84). На основании
формулы (86) на рис. 53, б построены зависимости изменения от
Dp н. Как следует из рис. 53, суммарный объем гидромашин, а следова-
тельно, и масса ОГП резко увеличиваются при увеличенииDp н. Поэтому
гидрообъемную трансмиссию целесообразно прежде всего устанавливать
на такие самоходные машины, для которых не требуется большое зна-
чение Dp н.
Из рис. 51 следует, что при непосредственном соединении вала дви-
гателя с валом насоса ОГП с нерегулируемым гидромотором, например,
при DpH = 6, можно использовать с дизелем, максимальная мощность
которого при частоте врашения 2600 ... 2000 об/мин не превышает
52 ... 110 кВт, а передачу с регулируемым гидромотором — с дизелем
мощностью 180 ... 375 кВт. Допустимая максимальная мощность более
быстроходного карбюраторного двигателя при частоте вращения 5000 ...
125
4000 об/мин с нерегулируемым гидромотором будет 18 ... 30 кВт, а с
регулируемым 55 ... 92 кВт.
Указанные мощности соответствуют высоким принятым значениям
С*. Чтобы между двигателем и насосом не устанавливать понижающий
редуктор, который приводит к увеличению массы трансмиссии, целе-
сообразно применять гидрообъемные трансмиссии на самоходных маши-
нах с двигателями, имеющими относительно небольшую частоту враще-
ния, или с высокооборотными двигателями, имеющими относительно
небольшую мощность.
Применение регулируемых гидромоторов, по сравнению с нерегули-
руемыми, позволяет не только значительно сократить массу гидрома-
шин, но и увеличить допустимую частоту вращения насоса. Трансмиссию
с нерегулируемым гидромотором из-за большого суммарного объема
гидромашин (см. рис. 53, кривая 1) нецелесообразно использовать в не-
раздельно-агрегатной конструкции. Нерегулируемые гидромоторы мож-
но применить в мотор-колесах. Однако даже в этом случае при значи-
тельном диапазоне регулирования целесообразно использовать регули-
руемые гидромоторы, несмотря на то, что для каждого гидромотора
потребуется создание самостоятельной системы управления. Увеличе-
ние числа гидромоторов повышает их предельно допустимую частоту
вращения и снижает суммарный объем qz гидромашин.
Дальнейшее снижение массы гидрообъемных трансмиссий, а также
их использование с двигателями большей мощности и большей макси-
мальной частоты вращения возможно путем применения ОГП, рабо-
тающих по дифференциальной схеме с разветвленным потоком мощ-
ности.
6.4. РАСЧЕТ ПАРАМЕТРОВ ТРАНСМИССИЙ
С МНОГОСТУПЕНЧАТЫМИ РЕДУКТОРАМИ
И ОТКЛЮЧАЕМЫМИ ГИДРОМОТОРАМИ
Если необходимо иметь значительный диапазон регулирования Рр н
для уменьшения суммарного объема гидромашин qz, целесообразно
применить ступенчато-бесступенчатое изменение передаточного отноше-
ния, разбив общий диапазон регулирования на несколько бесступенча-
тых диапазонов со ступенчатым переходом от одного диапазона к друго-
му. Это можно осуществить, установив за гидромотором зубчатый ре-
дуктор (коробку передач) с несколькими ступенями передаточных
чисел или применив несколько гидромоторов с отключением части
из них.
Передачу, содержащую многоступенчатый редуктор или отключае-
мые гидромоторы, можно выполнить с перекрытием и без перекрытия
диапазонов. Для передачи, не содержащей перекрытия диапазонов, ми-
нимальное передаточное число одного диапазона равно максимальному
передаточному числу соседнего с ним диапазона. Для передачи, содержа-
щей перекрытие диапазонов, минимальное передаточное число одного
диапазона больше максимального передаточного числа второго диа-
пазона.
126
Рис. 54. Выходные характеристики передач с двухступенчатым редуктором и с
отключаемыми гидромоторами
Общий диапазон изменения передаточного числа для передачи, не
содержащей перекрытия диапазонов,
л = Г)п
^р.нЕ р.н>
где Dp л - диапазон изменения передаточного числа собственно ОГП; п — число
диапазонов (число передач редуктора).
В качестве примера рассмотрим передачу, для которой £>р н = 3,
и = 2и£рн2 = 9. Передаточные числа редуктора Mi = 3ии2 = 1.На пер-
вом диапазоне передаточное число изменяется от 9 до 3 и на втором
от 3 до 1.
На рис. 54, а показана выходная характеристика передачи с двух-
ступенчатым редуктором. Частоте вращения п2 соответствует переклю-
чение передач и переход с одного диапазона на другой. Относительный
суммарный объем гидромашин передачи с регулируемыми насосами и
гидромотором при и1тах = и2тах без редуктора q^ = 20,8 и с двухсту-
пенчатым редуктором = 4.
Переключение зубчатых передач лишает гидрообъемную трансмис-
сию ее главного преимущества — непрерывности действия.
Передачу с отключенными гидромоторами можно выполнить по раз-
личным схемам, которым соответствует одна общая внешняя характе-
ристика (рис. 54, б). При частоте вращения п2 происходит отключение
части гидромоторов.
Рассмотрим передачу самоходной машины с колесной формулой
6X6, содержащую мотор-колеса с высокооборотными гидромоторами
и понижающими редукторами. Для передачи с шестью постоянно рабо-
тающими гидромоторами суммарный относительный объем всех гидро-
машин_для н = 9 на основании формулы (85) (т?0__= 1, /?н = 1) сос-
тавит q% = 38 (для передачи с одним гидромотором = 54). Относи-
тельный объем насоса </* = 27 и относительный суммарный объем гидро-
моторов q2Z = 11.
Теперь рассмотрим передачу с отключаемыми гидромоторами
(рис. 55, а). Примем общий ступенчато-бесступенчатый диапазон регу-
127
PC
PC
•хн±-' hr*--1-1 hr1-
£w5f
PC PC
vfeM *oM ‘v1
НЧ—|—I M-t-j—I |T । ।—। |Д_|—p_। |J_|—।—i H-i—
a) i)
Рис. 55. Схемы передачи с отключаемыми гидромоторами одинакового и разного
рабочего объема
пирования DpHS = 9 и составляющие его бесступенчатые диапазоны
регулирования* DpjI = 3. На правом диапазоне работают все гидромото-
ры, на втором диапазоне — только два. Рабочие объемы всех гидромото-
ров одинаковые.
Если передачу используют с заданным двигателем и между насосом
и двигателем не устанавливают редуктор, то рабочий объем насоса на-
ходят по формуле (67), в которой Dp н = 3. Он будет в 3 раза меньше,
чем для предыдущей передачи, работающей без отключения гидромото-
ров. Относительный объем насоса <71=9.
Если частоту вращения вала насоса можно увеличить до предельно
допусимого значения (при использовании передачи с более быстроход-
ным двигателем или наличии между двигателем и насосом редуктора),
то рабочий объем насоса, рассчитываемый по формуле (65), будет в
5,2 раза меньше объема насоса передачи, в которой не производится
отключение гидромоторов. Относительный объем насоса составит =
= 5,2. Суммарный относительный рабочий объем гидромоторов тот же,
что и для передачи с постоянно работающими гидромоторами (?*s =
= 11).
Суммарный объем гидромашин передачи, в которой частота враще-
ния насоса не достигает предельно допустимого значения, = 20, а
передачи, в которой частота вращения насоса достигает предельно допус-
тимого значения q^ = 16,2.
Как видим, уменьшение рабочего объема гидромашин происходит
в результате уменьшения объема насоса.
Большой интерес представляет передача, выполненная по схеме,
показанной на рис. 55, б. В отличие от предыдущей в ней частота враще-
ния четырех отключаемых гидромоторов к моменту отключения дости-
гает предельно допустимого значения и2тах. Предусмотрено устрой-
ство, прекращающее движение поршней отключенных гидромоторов.
Для этого используется или сцепление, управляемое давлением жидкос-
ти и отсоединяющее вал гидромотора от ступицы колеса, или механизм
128
свободного хода (его применение препятствует использованию гидро -
объемной передачи или двигателя в качестве тормоза). В высокомо-
ментных гидромоторах движение поршней обычно прекращается в ре-
зультате подачи жидкости под небольшим давлением в корпус гидро-
мотора, что приводит к ’’утапливанию” поршней в цилиндрах. В высо-
комоментных мотор-колесах фирмы ’’Поклен” (Франция) для устране-
ния движения поршней предусмотрено отсоединение опорных роликов
от дорожек качения при помощи пружин.
Отключаемые гидромоторы рассматриваемой передачи (см. рис. 55,
б) по сравнению с предыдущей передачей (см. рис. 55, а) имеют мень-
ший рабочий объем. Их соединяют со ступицей колеса при помощи
зубчатого редуктора, имеющего большее передаточное число, чем зубча-
тый редуктор неотключаемых гидромоторов. При этом для колес одина-
кового диаметра выдерживается отношение
мо/мН “ ^2н^20,
где Uq и ин - передаточное число редуктора отключаемого и неотключаемого
гидромоторов соответственно; <720 и ^2н “ рабочий объем одного отключаемого
и неотключаемого гидромоторов соответственно.
Рабочий объем неотключаемых гидромоторов тот же, что и рабочий
объем гидромоторов, использованных в передаче, выполненной по схе-
ме, показанной на рис. 55, а. Относительный рабочий объем одного гид-
ромотора рассчитывают по формуле (72), где z2 равно числу z2H неот-
ключаемых гидромоторов (z2H = 2, Dp л = 3).
При определении объема отключаемых гидромоторов следует учиты-
вать, что при отсутствии перекрытия передач все гидромоторы разви-
вают одинаковую мощность. При этом мощность, развиваемая отклю-
чаемыми ^идромоторами,
N20 (87)
где Z20 - число отключаемых гидромоторов; z2^ - число всех гидромоторов.
На основании выражений (17), (29), (64) и (87) объем одного от-
ключаемого гидромотора
<7 2 О “ 1 )3 • (88)
^HZ2S
В рассматриваемом случае, принимая т?0 = 1 и 0Н = 1 на основании
формулы (88), получаем относительный суммарный объем четырех
отключаемых гидромоторов ^2*os = 2,6. Суммарный относительный
объем двух отключаемых гидромоторов ^*hs “ 3,67. Относительный
объем насоса на основании формулы (65) = 5,2. Относительный сум-
марный объем всех гидромашин = 11,47.
Изложенное выше относится также к передаче, показанной на
рис. 43, а, в которой одно колесо самоходной машины приводится во
вращение от нескольких гидромоторов, часть из которых отключается»
Рабочие объемы высокомоментных гидромоторов мотор-колес
9 - Зак. 1159
129
выбирают одинаковыми. Вместо отключения части гидромоторов иногда
применяют отключение части цилиндров в отдельных гвдромоторах.
В табл. 8 для сравнения приведены относительные рабочие объемы
гидромашин различных двухдиапазонных передач с общим диапазоном
регулирования Dp я Е =9.
Наименьший суммарный рабочий объем гидромашин имеет транс-
миссия с регулируемыми насосом и гидромотором и двухступенчатым
редуктором, выполненная по нераздельно-агрегатной схеме.
Среди агрегатно-раздельных трансмиссий, содержащих мотор-коле-
са, наименьший суммарный объем гидромашин имеют трансмиссии с
двухступенчатыми редукторами, установленными в мотор-колесах.
Такие трансмиссии в последнее время находят все большее применение,
так как объем гидромашин в них приблизительно в 2 раза меньше объе-
ма гидромашин трансмиссий с отключенными гидромоторами равного
объема с неотключаемыми гидромоторами.
Мотор-колеса, содержащие двухступенчатые редукторы, управляе-
мые сцеплениями с гидравлическим нажатием фрикционных элементов
имеют сложную конструкцию. Поэтому необходимо уделить внимание
возможности использования рассмотренной трансмиссии с отключае-
мыми гидромоторами, объем которых меньше объема неотключаемых
гидромоторов. Суммарный объем гидромашин такой трансмиссии
приблизительно равен объему гидромашин трансмиссии с мотор-коле-
сами, снабженными двухступенчатым редуктором.
Недостатком трансмиссии с отключаемыми гидромоторами являет-
ся использование на одной самоходной машине различных по конструк-
ции мотор-колес.
Выше рассматривались передачи без перекрытия диапазонов. Целе-
сообразно один диапазон подобрать для одних характерных условий
движения и второй — для других. Небольшое перекрытие диапазонов
необходимо в том случае, когда оба диапазона используются в обычных
условиях движения и применено автоматическое переключение диапа-
зонов на ходу самоходной машины.
8. Относительные рабочие объемы гидромашин
Трансмиссия Относительные рабочие объемы гидромашин
Q*
С одним регулируемым гидромо- 1 3 4
тором и двухступенчатым редуктором С одним нерегулируемым гидромо- 5,2 5,2 10,4
тором и двухступенчатым редуктором С шестью нерегулируемыми гидромо- 5,2 2,1 8,5
торами и двухступенчатыми редукторами С отключаемыми и неотключаемыми 5,2 11,0 16,2
гидромоторами одинакового объема С отключаемыми и неотключаемыми 5,2 6,27 11,47
гидромоторами разного объема
130
Наряду с отключением гидромоторов можно использовать их пере-
ключение с параллельного соединения на последовательное. Такое пере-
ключение можно применить, например, в передаче, имеющей общий
ступенчато-бесступенчатый диапазон регулирования £>р н2 = 16 и бес-
ступенчатый диапазон регулирования £>р н = 4, предназначенной для са-
моходной машины с колесной формулой 4X4. На первом диапазоне
работают гидромоторы всех колес, на втором — гидромотор одного
колеса или, что более целесообразно, гидромоторы двух колес, соеди-
ненных между собой последовательно.
В рассматриваемых передачах при всех работающих гидромоторах
к различным колесам подводится одинаковый крутящий момент. В за-
висимости от числа колес и диапазонов регулирования Z>pjlS иГ>р н к
одним колесам может подводиться большой крутящий момент, а к дру-
гим — меньший.
При использовании гидрообъемной трансмиссии для поворота гусе-
ничных или колесных короткобазовых машин применяют две отдельные
передачи, одна из которых приводит во вращение ведущие звездочки
(ведущие колеса) одного борта, а другая — другого борта.
Прй прямолинейном движении каждая из передач передает половину
мощности двигателя. При повороте самоходной машины в результате
циркуляции мощности через передачу забегающего борта передается
примерно трехкратная мощность. ' ’
Таким образом, в том случае, когда ОГП используется для поворо-
та самоходной машины, передачу каждого борта следует рассчитывать
на мощность, приблизительно равную l,57Vlmax.
6Л. ВЫБОР ПРЕДЕЛЬНО ДОПУСТИМЫХ РАБОЧЕГО ДАВЛЕНИЯ
И ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА ГИДРОМАШИНЫ
Заводы-изготовители для выпускаемых гидромашин, как указы-
валось, устанавливают номинальное давление и номинальную частоту
вращения, которым соответствует определенный гарантируемый (номи-
нальный) срок службы. Для вновь разрабатываемых гидромашин на ос-
новании испытаний (а на стадии проектирования по аналогии с выпол-
ненными конструкциями), также можно установить номинальные дав-
ление и частоту вращения, соответствующие определенному сроку служ-
бы. При заданном сроке службы эти параметры зависят от конструктив-
ного совершенства гидромашины, качества применяемых материалов,
точности изготовления деталей, тонкости очистки рабочей жидкости и
тд. Вопросы обеспечения работы гидромашин с заданными номиналь-
ными (и максимальными) давлением и частотой вращения относятся к
разработке и расчету гидромашин, и в книге не рассматриваются.
Здесь ставится задача — для данной гидромашины с известными но-
минальными давлением рн к и частотой вращения ппк найти предельно
допустимые давление Ртах и частоту вращения лтах, обеспечивающие
заданный срок службы гидромашины. Если двигатель самоходной ма-
шины все время работает на постоянном режиме, например при макси-
Q* 131
мальной мощности, и требуемый срок службы должен быть равен номи-
нальному, указанному в каталоге, то при расчете рабочих объемов гид-
ромашин следует принять рт ах = Рн ,к и пт ах = пн .к •
Возможен случай, когда срок службы самоходной машины и, сле-
довательно, требуемый срок службы гидромашин значительно меньше
их номинального значения. При этом, учитывая, что срок службы гидро-
машины зависит от давления, в расчетах следует принять ртах >рн к,
что позволит получить гидромашины меньшего рабочего объема, а сле-
довательно, меньшей массы и меньшей стоимости. Определение необ-
ходимого значения ртах требует знания зависимости срока службы
гидромашины от рабочего давления.
В ряде случаев приходится решать значительно более сложную за-
дачу — учитывать работу самоходной машины на переменных режимах,
а следовательно, работу гидромашин при переменных давлении и часто-
те вращения. При этом для определения значений Ртах и итах необхо-
димо знать не только зависимость срока службы гидромашины от дав-
ления и частоты вращения, но и время работы ее на различных режимах. ;
Определение предельно допустимых давления и частоты вращения,
обеспечивающих заданный срок службы гидромашин при их использо-
вании на той или иной самохрдной машине, представляет сложную за-
дачу. Далее даны лишь ее постановка и общая методика решения.
По литературным данным срок службы аксиально-поршневых гид-
ромашин определяет долговечность подшипниковых узлов.
Долговечность (Ч) подшипников качения
£ = С/(Рши),
где С - коэффициент работоспособности подшипника; Р - приведенная сила,
учитывающая радиальную и осевую силы, действующие на подшипник; т - пока-
затель степени, равный для шариковых подшипников 3 и для роликовых - 3,33.
Приведенная сила изменяется обратно пропорционально рабочему
давлению в гидромашине и зависит от угла поворота блока цилиндров
или наклонного диска. Для постоянного максимального угла поворота
блока цилиндров можно записать зависимость долговечности подшипни-
кового узла гидромашины от давления и частоты вращения в виде
L = Cr/pmn,
где Сг - коэффициент работоспособности гидромашины, который находят по но-
минальным значениям ее параметров, указанным в каталоге (например, для гидро-
машины 323.20,сведения о которой приведены в п. 5.2,СГ = 4,8-1010 МПа*Ноб/мин.
На рис. 56, а показаны зависимости срока службы аксиально-порш-
невых гидромашин с наклонным блоком цилиндров типа ’’Брюнин-
гхауз” от рабочего давления р(А, В, С, D, Е — серии гидромашин, см.
с. 64). Между собой серии гидро машин отличаются допустимым длитель-
ным давлением и давлением перегрузки, а также углом наклона блока
цилиндров. На рис. 56, б приведены зависимости срока службы высоко-
моментных радиально-поршневых гидромоторов многократного дейст-
вия типа ’’Поклен” от рабочего давления и частоты вращения, отнесен-
ной к номинальному значению ин дс. Как следует из рисунка, срок службы
132
Рис; 56. Зависимости срока службы гидромашин от рабочего давления и частоты
вращения
различных гидромашин, так же как и по приведенной выше формуле,
зависит от давления в степени 3 ... 333 (для всех прямых на рис. 56, я,
срок службы обратно пропорционален давлению в степени 3 и для всех
прямых на рис. 56, б — в степени 3,33).
Полученная зависимость позволяет для случая, когда гидромашина
работает на постоянном режиме, найти предельно допустимое рабочее
давление Ртах, обеспечивающее заданный срок службы £, отличающий-
ся от номинального значения ZH K, указанного в каталоге, соответст-
вующего номинальному давлению рн к. Если принять, что срок службы
гидромашины изменяется обратно пропорционально давлению в третьей
степени, то предельно допустимое давление
Ртах =^£Рн.к,
где
Согласно рис. 56, б срок службы гидромашины изменяется обратно
пропорционально частоте вращения во второй степени. Степенную зави-
симость срока службы от частоты вращения косвенно подтверждает
рис. 56, а. Показанные на нем прямые относятся к различным углам
наклона блока цилиндров. Чем больше срок службы при данном давле-
нии, тем меньше угол наклона блока цилиндров и, следовательно, ско-
рость поршней, что равноценно уменьшению частоты вращения. Если
бы срок службы гидромашины определялся только долговечностью
подшипникового узла, то согласно приведенной выше формуле он дол-
жен изменяться обратно пропорционально частоте вращения в первой
степени. Вопрос этот сложный и недостаточно ясный. Очевидно, при оцен-
133
Рис. 57. Время работы самоходной машины
в различных диапазонах силы тяги и ско-
х роста движения
ке срока службы нельзя не учитывать
износ пар трения поршневой груп-
пы » распределителя, который приво-
дит к снижению КПД гидромашины.
Зависимость износа пар трения от
частоты вращения, возможно, может
быть иной, чем подшипников качения.
Важнейшая задача — найти экспе-
риментально вполне достоверную
зависимость срока службы гидромашины от частоты вращения, а также
от, угла наклона блока цилиндров или параметра регулирования, кото-
рое при данном рабочем давлении определяют силы, действующие на
подшипники и детали поршневой группы. Последняя зависимость важна
для расчета срока службы регулируемых гидромашины. '
Зависимости срока службы от давления и частоты вращения сохра-
няют неразрывность и действительны до определенных значений, пре-
вышение которых приводит к резкому нарастанию износа и к потере
работоспособности гидро машины. Предельно допустимые давление и
частоту вращения будем ограничивать максимальными каталожными
значениями, с которыми допускается кратковременная периодическая
работа гидромашин.
Для учета влияния переменных режимов работы самоходной маши-
ны на определение предельно допустимых значений ртах и «тах необ-
ходимо экспериментально для различных типов самоходных машин
найти относительное (к общему /времени работы) время т их работы
в различных областях тяговой характеристики (рис. 57), ограниченных
определенными диапазонами силы тяги и скорости движения. При этом
можно использовать аппаратуру, применяемую для определения харак-
терных режимов работы двигателя. Эта аппаратура при помощи спе-
циальных счетчиков фиксирует время работы самоходной машины в
различных скоростных и силовых диапазонах. Силу тяги Рт и скорость
движения v задают в относительных величинах Рт = Рт/Рттах и v =
= v/vmax, чтобы полученную зависимость можно было с некоторым
приближением распространить и на другие самоходные машины подоб-
ного типа.
Для средних значений каждого диапазона находят отдельно для на-
соса и отдельно для гидромотора значения относительного давления
Р = Р/Ртах> относительной частоты вращения п = л/лтах и параметра
регулирования е. Для определения относительных величин Р и «не тре-
буется знать абсолютные значения р, Ртах, « и «тах. Их находят по зна-
чениям относительной силы тяги Рт и относительной скорости движения
v. На основании полученных данных рассчитывают коэффициент недоис-
пользования давления
134
1
Т1Р1 + T2P2 + 73P3 + ••• + TnPn
и определяют предельно допустимое давление
Pm ах “ Kp^bPiA .к •
Если требуется обеспечить срок службы гидромашины, равный сро-
ку службы при ее работе с номинальным каталожным давлением, то сле-
дует принять = 1.
Если на основании рис. 56, б условно допустить, что срок службы
гидромашины изменяется обратно пропорционально частоте вращения
во второй степени, то можно рассчитать коэффициент недоиспользова-
ния частоты вращения
1
Кп^~————-------------------Г-
Т1Л j + Т2Л2 + Т3Л3 + ... + ТпП^
и определить предельно допустимую частоту вращения
wmax =^tiwh.k‘
Предельно допустимая частота вращения «тах насоса может ока-
заться значительно больше частоты вращения двигателя nlN, с которым
насос непосредственно соединен. Это создает ’’избыток” срока службы
и позволяет увеличить расчетное максимальное давление (уменьшив
рабочий объем насоса) в Кп^ раз:
= V(wijv7wmax)2-
Когда будет известно влияние на срок службы параметра регулиро-
вания гидромашины е, предельно допустимое давление можно будет
уточнить при помощи дополнительного коэффициента Ке.
Условия работы гидромашины на стенде при определении ее номи-
нального срока службы отличаются от условий работы на самоходной
машине, когда действуют динамические нагрузки и происходят непре-
рывные колебания давления. Поэтому, возможно, потребуется ввести
дополнительный коэффициент динамической нагрузки, несколько
уменьшающий предельно допустимое давление.
Поскольку значение коэффициентов Кр и Кп еще не найдены, для
автомобилей, работающих на режиме максимальной мощности относи-
тельно редко, предельно допустимые давление и частоту вращения сле-
дует принимать приблизительно равными максимальным значениям,
указанным в каталогах Ртахк и итахк.
Тракторы, ковшовые экскаваторы и другие подобные машины
значительное время работают при максимальной мощности. Поэтому
их гидромашины должны работать при давлении и частоте вращения, зна-
чения которых близки к номинальным каталожным значениям рн к
и«нк-
При проектировании гидрообъемных трансмиссий с новыми гидро-
135
машинами следует ориентироваться на достигнутый уровень их созда-
ния. Ранее для различных гидромашин были приведены значения номи-
нального и максимального давления и коэффициента быстроходности
С*, по которому рассчитывают предельно допустимую частоту вращения.
Ограничение работы гидромашины с предельно допустимым давлением
при малой скорости движения самоходной машины, когда сила тяги
максимальна (см. рис. 57), представляет собой непростую техническую
задачу. Иногда для ограничения давления заданным значением ртах
ограничивают рабочий объем насоса значением ^1к. Это неприемлемо
для транспортных машин. Более удачное решение этой задачи рассмотре-
но в гл. 9.
Пиковое давление, при котором работают предохранительные кла-
паны, должно быть больше предельно допустимого. С целью предотвра-
щения срабатывания этих клапанов фирма ’’Сандстрэнд” при максималь-
ном давлении 35 МПа рекомендует настраивать предохранительные
клапаны на давление, в 1,5 раза превышающее предельно допустимое,
и так выбирать параметры трансмиссии, чтобы пробуксовка колес само-
ходной машины начиналась при 75 % давления, на которое рассчитаны
предохранительные клапаны.
7. ВЫБОР СХЕМЫ И РАСЧЕТ ПАРАМЕТРОВ
ДИФФЕРЕНЦИАЛЬНЫХ ГИДРООБЪЕМНЫХ ТРАНСМИССИЙ
7Д. ОБЪЕМНЫЕ ГИДРАВЛИЧЕСКИЕ ПЕРЕДАЧИ
С ВНУТРЕННИМ РАЗВЕТВЛЕНИЕМ ПОТОКА МОЩНОСТИ
Современные ОГП с внутренним разветвлением потока мощности
содержат гидромашины, имеющие наклонный диск. Наклонный диск
и блок цилиндров могут вращаться независимо друг от друга. Дейст-
вующие на них моменты равны по значению, но направлены в противо-
положные стороны. Для передачи мощности механическим путем один
из вращающихся элементов насоса (блок цилиндров, наклонный диск)
должен быть соединен с одним из вращающихся элементов гидромото-
ра, а один из элементов насоса или гидромотора должен быть непод-
вижным и воспринимать реактивный момент всей передачи.
Существуют две группы ОГП с внутренним разветвлением потока
мощности. К первой группе относятся передачи, в которых неподвижен
один из элементов гидромотора (блок цилиндров, диск), а ко второй —
передачи, в которых неподвижен один из элементов насоса.
Рассмотренные выше положения дают ограниченное количество раз-
личных сочетаний соединений элементов насоса и гидромотора и позво-
ляют выявить все ОГП с внутренним разветвлением потока мощности.
Воспользуемся системным подходом к выявленйю типов передач.
На рис. 58, а - г показаны структурные схемы передач всех возможных
типов, относящихся к первой группе, а на рис. 58, д - з — ко второй.
136
На схемах окружностью большого диаметра условно изображен блок
цилиндров, а окружностью малого диаметра — наклонный диск. Частота
вращения элемента, соединенного с входным валом, , а элемента, сое-
диненного с выходным валом, — п2. Как видим, существует всего во-
семь типов передач. Передачи каждого типа могут существенно отличать-
ся конструктивным оформлением. Каждая передача явилась предметом
отдельного изобретения и носит имя ее разработчика. Однако все воз-
можные схемы можно выявить при помощи рассмотренного здесь струк-
турного анализа.
По схеме, показанной на рис. 58, а, выполнена первая дифферен-
циальная ОГП с внутренним разветвлением потока мощности, разрабо-
танная в 1899 г. Хеллом. Она содержит радиально-поршневые гидрома-
шины с эксцентриковым валом типа гидромашин передачи Ч. Мэнли.
Вращение от двигателя передается к валу насоса. Вал гидромотора сое-
динен с корпусом и неподвижен. Блок цилиндров насоса жестко соеди-
нен с блоком цилиндров гидромотора, на котором укреплена ведомая
звездочка цепной передачи. При вращении вала насоса к блоку цилинд-
ров передается крутящий момент, равный крутящему моменту на валу
насоса. Передача крутящего момента осуществляется в результате боко-
вого давления поршней насоса на его цилиндры. Крутящий момент, не-
посредственно передаваемый блоку цилиндров, складывается с крутя-
щим моментом, который создает гидромотор в результате давления
жидкости на его цилиндры. При нагрузочном передаточном числе собст-
Рис. 58. Структурные схемы дифференциальных передач
137
венно объемной гидравлической передачи, равным четырем, крутящий
момент на блоке цилиндров в 5 раз больше, чем на валу насоса.
Таким образом к блоку цилиндров мощность поступает двумя пу-
тями (потоками): механическим (20 %) и гидравлическим (80 %).
Рассмотрим другие дифференциальные ОГП в хронологическом по-
рядке по мере их совершенствования.
На рис. 59, а показана принципиальная схема дифференциальной
передачи Тома, получившей применение в общем машиностроении. Ее
структурная схема изображена на рис. 58, в.Вал 1 передачи (см.рис. 59,
а) соединен с двигателем и приводит во вращение наклонный диск 8
насоса. Поршни 7 насоса, перемещаясь возвратно-поступательно, подают
под давлением рабочую жидкость через торцовый распределитель 6 к
цилиндрам соосно расположенного гидромотора. Жидкость, воздействуя
138
на поршень 5 гидромотора, приводах во вращение наклонный диск
гидромотора. Крутящий момент от диска 3 через штырь 12 и корпус
4 передается ведомому валу 10. Реактивный момент гидромотора вос-
принимается через опорную чашку 2 опорой 75, жестко закрепленной
на неподвижном основании 77.
Разветвление потока мощности происходит следующим образом:
часть мощности потребляет насос, передающий ее через жидкость гидро-
мотору. От гидромотора эта часть мощности поступает на корпус 4 и
далее на ведомый вал 10. Другая часть мощности непосредственно пере-
дается на ведомый вал 10 механическим путем за счет реактивного дей-
ствия наклонного диска 8 насоса на опорную чашку 9, которая через
шарнир связан с корпусом 4 и служит опорой для насоса. При этом диск
9 и соединенный с ним ведомый вал 10 могут вращаться с угловой ско-
ростью, отличной от угловой скорости ведущего вала 7 и диска 3.
Изменение крутящего момента гидромотора по отношению к крутя-
щему моменту насоса осуществляется изменением углов наклона дисков
3 и 8 (угол наклона диска 8 изменяется при помощи вспомогательного
гидромотора, не показанного на рисунке).
Рис. 59. Конструктивные схемы дифференциальных передач первой группы
139
В последние годы создано много новых дифференциальных передач.
На рис. 59, б показана конструктивная схема передачи ’’Бадалини”,
предназначенной для автобуса с двигателем мощностью 96 кВт. Габарит-
ные размеры передачи 480X760 мм, максимальный КПД 96 % и в широ-
ком рабочем диапазоне 90 %. Масса передачи, несмотря на сравнительно
малое рабочее давление (11 МПа), приблизительно равна массе обычного
сцепления и коробки передач. Первый образец передачи имел нагрузоч-
ный диапазон изменения передаточного отношения от 3,5 до 1, а разрабо-
танный позднее — от 5 до 1. Создана также передача для мотоцикла.
Передача имеет структурную схему, показанную на рис. 58, г. Вход-
ной вал 1 (см. рис. 59, б) приводит во вращение блок цилиндров 16
насоса. Реактивный момент от наклонного диска 8 насоса передается
на корпус 17 гидромотора. На тот же корпус передается крутящий мо-
мент от гидромотора. Оба момента суммируются на корпусе и передают-
ся на выходной вал 10. Опорная чашка 14 наклонного диска блока ци-
линдров 15 гидромотора неподвижна и прикреплена к картеру транс-
миссии.
Для нормального функционирования трансмиссии распределители
насоса и гидромотора должны быть ориентированы относительно их
наклонных дисков. Распределитель насоса выполнен плоским и жестко
соединен с корпусом гидромотора, в котором укреплен наклонный
диск насоса. Распределитель гидромотора выполнен цапфовым и жестко
соединен с картером трансмиссии, в котором укреплен наклонный диск
гидромотора. Насос и гидромотор регулируемые.
На рис. 59, в показана схема передачи фирмы ’’Альгаер” (ФРГ),
которой соответствует структурная схема, изображенная на рис. 58, в.
Выпускают передачи пяти типоразмеров, рассчитанные на мопщость дви-
гателя 7,5 ... 81 кВт, диаметром 135 ... 300 мм и длиной 238 ... 636 мм.
Передачу применяют на тракторах с двигателем мощностью 35 ... 40 кВт
фирмы ’’Фендт”, а также на грузовых автомобилях и автопогрузчиках.
Наклонные диски 3 и 8 установлены во вращающемся корпусе 17.
Вращение от двигателя через вал 1 передается блоку цилиндров 15 на-
соса. Блок цилиндров 16 гидромотора неподвижен. Передаваемая меха-
ническим и гидравлическим путем мощность суммируется на вращаю-
щемся корпусе, на котором установлена шестерня 18 для отвода мощ-
ности. Насос и гидромотор выполнены регулируемыми. Рабочий объем
гидромотора в 2 раза больше рабочего объема насоса.
Передача ’’Альгаер” имеет более удачную компоновку по сравнению
с передачей ’’Бадалини”.
На рис. 59, г приведена схема передачи ’’Молли”, которой соответ-
ствует структурная схема, показанная на рис. 58, в. Наклонные диски
3 и 8 насоса и гидромотора укреплены не на вращающемся корпусе, а
на вращающемся валу 10.
На рис. 59, в показана схема передачи ”Марголин” фирмы ’’Интёр-
нзйшнл Харвестер” (США) (структурная схема изображена на рис. 58, а).
Блок цилиндров 20 насоса и гидромотора выполнен как одно целое и
соединен с выходным валом 10, а последний — с наклонным диском 19.
140
Потоки мощности складываются на- блоке цилиндров. Насос и гидро-
мотор выполнены регулируемыми.
Рассматриваемые передачи относятся к первой подгруппе первой
группы. Если в них жесткую мехническую связь между вращающимися
элементами насоса и гидромотора заменить механической связью через
шестеренчатую передачу, то получим четыре передачи данной группы
и второй подгруппы. На рис. 60, а показана конструктивная схема одной
из таких передач (структурная схема изображена на рис. 60, б). Свобод-
но вращающийся блок цилиндров 3 насоса соединен с блоком цилинд-
ров 7 гиДромотора при помощи понижающей шестеренчатой передачи.
При вращении блока цилиндров насоса приводится во вращение солнеч-
ная шестерня 4, которая обкатывает сателлиты 5 по неподвижной корон-
ной шестерне 6. Вращение с водила сателлитов передается блоку цилинд-
ров 7 гидромотора. На входном валу 1 закреплен наклонный диск 2 на-
соса. Наклонный диск 9 гидромотора закреплен в картере 10 передачи.
Гидравлический и механический потоки мощности суммируются на бло-
ке цилиндров гидромотора. От блока цилиндров мощность отводится
при помощи укрепленной на нем шестерни £.
Распределитель насоса закреплен на входном валу, что обеспечивает
его ориентирование относительно своего наклонного диска. Распреде-
литель гидромотора закреплен на валу, жестко соединенным с картером
передачи, что обеспечивает его ориентирование относительно своего
наклонного диска.
На основании структурных схем (см. рис. 58, а - г) можно соста-
Рис. 60. Конструктивная и структурная схемы дифференциальной передачи пер-
вой группы второй подгруппы
141
вить три другие структурные схемы передач, относящиеся к первой
группе второй подгруппы.
Передачи второй подгруппы по сравнению с передачами первой под-
группы имеют больший нагрузочный диапазон изменения передаточного
числа при заданном нагрузочном диапазоне изменения передаточного
числа собственно ОГП.
Все известные передачи второй группы выполнены по схеме, пока-
занной на рис. 58, д. К ним относится передача фйрмы ’’Борг Варнер”
(США), рис. 61. Крутящий момент от двигателя через входной вал 1
подводится к блоку цилиндров 4 насоса, жестко соединенному с блоком
цилиндров 5 гидромотора. Гидравлический и механический потоки
мощности подводятся к наклонному диску 6 гидромотора, укрепленно-
му на выходном валу 7. Наклонный диск 3 насоса укреплен в картере 2
передачи и неподвижен.
В работе [1, рис. 190] приведена схема другого конструктивного
выполнения дифференциальной ОГП рассмотренного типа.
Если в передачах второй группы жесткую связь между элементами
насоса и гидромотора заменить на связь, осуществляемую при помощи
шестеренчатой передачи, то можно получить четыре передачи второй
группы второй подгруппы. Выполненные передачи, относящиеся ко вто-
рой группе второй подгруппы, неизвестны. Они выявлены в результате
структурного анализа.
Как видно, дифференциальные передачи имеют более сложное
устройство по сравнению с полнопоточными, что вызвано двумя обстоя-
тельствами. Наклонный диск одной гидромашины (см. рис. 59, б, д,
60 и 61) или двух гидромашин (рис. 59, а, в, г) прикреплен к вращаю-
щимся деталям, что затрудняет их управление. Необходимость ориента-
ции относительно наклонных дисков усложняет подвод жидкости от на-
соса к гидромотору и обратно. Из-за увеличенного числа вращающихся
деталей, через которые подается жидкость, увеличивается утечки. Изло-
женное относится к передачам, показанным на рис. 59, б,д и 61.
Рис. 61. Схемы дифференциальной передачи фирмы "Борг Варнер”
142
Если наклонные диски насоса и гидромотора прикреплены к одной
и той же детали (см. рис. 59, в, г), то дифференциальная и полнопоточ-
ная трансмиссии имеют одинаковые распределители.
72. СИЛОВЫЕ И КИНЕМАТИЧЕСКИЕ ЗАВИСИМОСТИ ПЕРЕДАЧ
С ВНУТРЕННИМ РАЗВЕТВЛЕНИЕМ ПОТОКА МОЩНОСТИ
Рассмотрим сначала передачи первой группы первой подгруппы
(см. рис. 58, а - г), для которых свойственны одни и те же силовые и
кинематические зависимости.
Подача насоса (см3/мин) для всех передач данной группы
30(71
Q1 = ----(^1 - “2^,0
1Г
где wi и - угловая скорость соответственно входного и выходного валов пере-
дачи, 1/с; Лн.о - объемный КПД насоса.
Расход гидромотора
_ 30fl2 ь>2
С/2 >
я ^М.О
где 1?м о - объемный КПД гидромотора.
Из условия (21 = С?2 и учитывая, что
Q2 мг.р
” — ^г.к»
tfl^r.O ^г.о
получаем
“д.к= — = — +1 = «г,к + 1. (89)
Ь>2 ^Г.О
где ит р — расчетное передаточное число собственно ОГП; ид к и ит к - кинемати-
ческое передаточное число соответственно дифференциальной и объемной передач
ОГП; лг.о - объемный КПД.
Для всех передач данной группы момент на выходном валу
=Мм +М1,
где Мм - момент на валу гидромотора; - момент на входном валу, равный
моменту на валу насоса.
Так как М1 = Мн, силовое передаточное число дифференциальной
передачи
М2
Мд,с ~ ~М ~~ Мг-Р^г-м + 1 ~ Мг-С + 1’ (90)
где т?г.м ~ механический КПД ОГП; иг с — силовое передаточное число ОГП.
143
(91)
(92)
(93)
(94)
(95)
(96)
На основании выражения (89) или (90) при отсутствии потерь
(^г о = 1 и м = О запишем выражение расчетного передаточного
числа дифференциальной передачи:
“д.р “г.р + 1 •
Мощность на входном валу дифференциальной передачи
Nt = ь>1М1л
Мощность на выходном валу дифференциальной передачи
Мощность, передаваемая механическим путем,
^мех — .
Мощность; передаваемая через ОГП,
^гид=Л/1(^1- “2) = А\(1- — ).
, “д.к
Относительная мощность, передаваемая через ОГП,
^гид 1 “г.р
^гид “ 77 — 1 — —
“д.к “г.р+ ^г.о
Полный КПД дифференциальной передачи можно определить различ-
ными способами, например разделив мд с [выражение (90) ] на ид к, т.е.
“д.с “г.р^г + 77 г. о
т?д =----- = ------------- .
“д.к “г.р + ^г.о
Объемный КПД дифференциальной передачи на основании выраже-
ний (89) и (91)
“д.р (“г.р + 1) ^г.о
о — — — —• ,
“д.к “г.р + ^г.о
а механический КПД на основании выражений (90) и (91)
“д.с “г.р^г.м + 1
^д.м — —— — —-— .
“д.р “г.р + 1
Полученные формулы КПД справедливы для работы передачи без
циркуляции мощности, когда мощность от насоса передается к гидро-
мотору. Если мощность передается в обратном направлении (от гидро-
мотора к насосу) в выражении (89) КПД т?г 0 будет стоять в числителе,
а в выражении (90) КПД т?г м — в знаменателе. Поэтому при передаче
мощности в обратном направлении рассчегные формулы КПД будут
другими.
144
_Полный КПД дифференциальной передачи можно определить также
по^гид:
*1-*7
“ n — I “^гидО “^г)» (97)
где NT - мощность потерь; т?г - полный КПД ОГП.
При изменении иг от 0 до — 1 мощность через гидрообъемную пере-
дачу передается в_ обратном направлении, т.е. от гидромотора к насосу,
поэтому 2УГИД и ^гид имеют отрицательный знак. Для того чтобы выра-
жение (97) определяло действительные значения КПД на всех режимах,
в нем необходимо принимать абсолютное значение 7УГИД.
Следует различать пять характерных режимов работы передачи.
На первом режиме передаточное число иг ОГП изменяется от беско-
нечности (наклонный диск насоса занимает вертикальное положение)
до максимального нагрузочного ит р н, при котором на вал насоса дейст-
вует максимальный момент и насос развивает максимальное давление.
На рис. 62, а показаны силы, действующие на наклонный диск, и поток
передаваемой мощности (для примера использована конструктивная
схема передачи, приведенная на рис. 59, г).
В соответствии с выражением (91) передаточное число ид диффе-
ренциальной передачи изменяется от бесконечности, до максимального
нагрузочного передаточного числа мдрл, которое на единицу больше
мг.р.н. При изменений мг р от бесконечности до ит р н крутящий момент
Mi9 подведенный к насосу, должен изменяться от нуля до Л/1тах. При
этом крутящий момент на наклонном диске гидромотора постоянен и
равен моменту Л/мтах, ограниченному максимальным давлением. Для
указанного .диапазона изменения мг>р рабочее давление жидкости в ОГП
максимальное.
Момент на выходном валу передачи изменяется в соответствии с
выражением
Мг =^1тах(мг.рл^г.м + )• (98)
“г.р
При ит р, равном бесконечности, момент. М2 равен максимальному
моменту Ммтах на валу гидромотора. При нг р =«г рд1 М2 =Ммтах +
+ ^Лтах*
На втором режиме передаточное число иг р ОГП изменяется от
мг.р.н Д° 0, что вызывает изменение передаточного числа мдр дифферен-
циальной передачи от мд рД1 до 1. Второму режиму соответствует та же
схема сил и потоков мощности, что и первому (см. рис. 62, а).
В соответствии с выражениями (94) и (95) механическим (участок
вала от одного наклонного диска до другого) и гидравлическим путем
передается мощность, меньшая мощности, подведенной к входному
валу дифференциальной передачи.
При иг р = 0 наклонный диск гидромотора занимает вертикальное
положение, при котором мд р = 1,0^ = о>2. Черёз ОГП мощность не пе-
редается, КПД т?д — 1.
10 —Зак. 1159
145
Линейную скорость поршней и деталей распределителя насоса опре-
деляют по расчетной угловой скорости
WO=W1”W2. (")
При работе дифференциальной передачи на рассматриваемом режиме
Рис. 62. Схемы сил, действующих на наклонные диски, и передачи потоков мощ-
ности
146
линейная скорость поршня и деталей распределителя насоса меньше,
чем в полнопоточной передаче в о>0 = =М’ид раз. Это позволяет
применить дифференциальную передачу с более быстроходным двига-
телем.
На третьем режиме передаточное число ит р изменяется от 0 до — 1,
чему соответствует изменение передаточного числа мд р от 1 до 0. На
рис. 62, б показаны схема сил* действующих на наклонные диски* и пото-
ки мощности для этого случая.
Для получения отрицательного значения ит р (реверса) наклонный
диск гидромотора надо повернуть на отрицательный угол. Момент на
наклонном диске насоса = 7ИН больше момента 7ИМ на наклонном
диске гидромотора и направлен в противоположную сторону. В этих
условиях насос работает в режиме гидромотора и приводит выходной
вал передачи, а гидромотор работает в режиме насоса. Благодаря пере-
мещению поршней насоса, работающего на режиме гидромотора, его
наклонный диск и выходной вал вращаются с угловой скоростью, превы-
шающий . Передача работает с циркуляцией мощности. Поскольку
а>2 > o>i, в соответствии с уравнением (94) механическим путем пере-
дается мощность7VMex, большая максимальной мощности двигателя.
При изменении игр от 0 до — 0,5 через ОГП в соответствии с уравне-
нием (96) передается мощность, меньшая максимальной мощности дви-
гателя (Угид изменяется от 0 до — 1). Вычисленная по этому уравнению
мощность имеет отрицательный знак, что свидетельствует о ее передаче
в противоположном направлении (от гидромотора к насосу).
При иг.р = — 0,5 передаваемая мощность равна максимальной.
В этом случае Мм = 0,5^, а>2 = hN2 = 1. При изменении иг р от
— 0*5 до — 1 через ОГП передается мощность* большая максимальной.
Это объясняется тем, что возрастают момент Мм и угловая скорость а>2,
Для дифференциальной и полнопоточной передач с регулируемым
гидромотором имеет место одинаковая максимальная угловая скорость
^2max3 определяемая линейной скоростью деталей распределителя.
Поэтому для обеих передач минимальное передаточное число одинаково
(Mr.pmin = мд.рт1п) •
На четвертом режиме ит р изменяется от — 00 до - иг р н> что вызы-
вает изменение ид р от — 00 до — ^д.р.н- Передача обеспечивает задний
ход. Схема сил, действующих на наклонные диски, и потоки мощности
показаны на рис. 62, в. Поскольку момент на наклонном диске гидромо-
тора больше момента на наклонном диске насоса, ведущим является
гидромотор, причем выходной вал передачи вращается в направлении,
противоположном направлению вращению входного вала. Происходит
циркуляция мощности. При этом в соответствии с выражением (96)
через ОГП передается мощность, большая максимальной мощности
двигателя.
Из выражения (94) следует, что мощность, передаваемая механичес-
ким путем, имеет отрицательный знак. Это свидетельствует о передаче
ее в противоположном направлении (от наклонного диска гидромотора
к наклонному диску насоса).
Так как угловая скорость со2 имеет отрицательный знак, в соответ-
ю* 147
Рис. 63. Характеристики диф-
ференциальной передачи с внут-
ренним разветвлением потока
мощности
ствии с формулой (99)
относительная угловая ско-
рость насоса больше, чем
для обычной однопоточной
передаче. Это свидетельст-
вует о повышенной ско-
рости поршней и деталей
распределителя. Для полу-
чения рассматриваемого ре-
жима двигатель должен ра-
ботать при угловой скорос-
ти меньшей, чем а>1тах,
т.е. развивать мощность,
меньшую максимальной.
Относительная угловая
скорость входного вала
дифференциальной пере-
дачи не должна превышать величины = 1/а>0 = Х/М’ид»
При иг>р = - ©о 7УГИД = 1, чему соответствует максимальная относи-
тельная угловая скорость Wj = max.
Чтобы давление жидкости в ОГП не превышало максимального зна-
чения, крутящий момент двигателя необходимо изменять от Мг =0
приыг.р = - 00 до Mi =Mlmax при1/г.р = - wnp H.
На пятом режиме крутящий момент двигателя поддерживается
постоянным и максимальным. Передаточное число иг р изменяется от
— мг.р.н Д° — 1,что вызывает изменение ид р от — иг р н до 0. Схема сил,
действующих на наклонные диски, и потоков мощности та же, что и в
предыдущем случае (см. рис. 62, в).
На рис. 63 сплошными кривыми в качестве примера построена ха-
рактеристика дифференциальной передачи, имеющей регулируемый
насос и гидромотор (^тах = 2^1тах, мг.рл = 2, wr.p.min = 0^666,
Рг.р.н ~ 3). Характеристика выражает зависимости мдр,7Угид, о>0 =
= Wo/^i и г?д от мг р (принято т?г 0 = 0,9 и ?7Г = 0,8).
Римскими цифрами обозначены диапазоны изменения иг р соответ-
ствующие рассмотренным ранее пятью режимами работы дифферен-
циальной передачи (крайние границы диапазонов I и VI соответственно
равны+ °°и-<»).
На рис. 64 сплошными кривыми показана зависимость относитель-
ного крутящего момента от относительной угловой скорости выходного
вала дифференциальной передачи, пропорциональная тяговой характе-
ристике самоходной машины, штрихпунктирными кривыми изображена
выходная характеристика полнопоточной передачи, содержащей ту
же ОГП.
148
Во многих работах главным преимуществом дифференциальных
передач с внутренним разветвлением потока мощности считают возмож-
ность увеличения максимального нагрузочного передаточного числа
Ид.р.11 на единицу по сравнению с максимальным нагрузочным переда-
точным числом иг р н использованной ОГП и, как следствие, увеличе-
ние нагрузочного диапазона изменения передаточного числа Рдрд по
сравнению с диапазоном Dr р н и увеличение момента Af2max при одном
и том же моменте M2mjn. Увеличение момента М2тах позволяет само-
ходной машине преодолевать с места более крутой максимальный
подъем. Если же момент Af2max сохранить прежним, то применение диф-
ференциальной передачи позволяет уменьшить нагрузочный диапазон
изменения передаточного числа использованной ОГП, а следовательно,
уменьшить ее размеры и массу. Такой вывод ошибочен. Он был сделан
без подробного рассмотрения работы гидрообъемной передачи в диф-
ференциальной схеме. Как было показано выше, из-за необходимости
ограничения максимального давления жидкости и уменьшения разви-
ваемого двигателем крутящего момента момент М2тах при со2 =
= 0 с полнопоточной и дифференциальной передачами одинаков. Поэто-
му будет одинаков и преодолеваемый самоходной машины с места мак-
симальный подъем. При о>2 > 0 момент М2тах для дифференциальной
передачи значительно^ольше, чем для ОГП, что объясняется как увели-
чением максимального нагрузочного передаточного числа дифферен-
циальной передачи на единицу, так и более высоким ее КПД.
Допускаемая максимальная частота вращения входного вала диф-
ференциальной передачи значительно выше частоты вращения однопо-
точной передачи. Это позволяет использовать дифференциальную пере-
дачу на самоходных машинах с двигателями, имеющими высокую час-
тоту вращения (легковые автомобили).
Основным преимуществом дифференциальной передачи по сравне-
нию с полнопоточной следует считать увеличение КПД (см.рис. 63),что
сокращает расход топлива и увеличивает выходной крутящий момент
М2 (от = 0,45 и выше, рис. 64), улучшая тем самым тяговые ка-
чества самоходной машины.
Дифференциальная передача по сравнению с полнопоточной имеет
ряд существенных недостатков. Она является более сложной и имеет
большую массу. У нее меньше
крутящий момент на заднем ходу,
что может потребовать примене-
ния дополнительной механической
передачи заднего хода.
Теперь рассмотрим дифферен-
циальные передачи с внутренним
Рис. 64. Зависимости относительного
крутящего момента от относительной
угловой скорости выходного вала диф-
ференциальной и полнопоточной пе-
редач
разветвлением потока мощности, относящиеся ко второй подгруппе
первой группы (см. рис. 60).
Расчетное передаточное число дифференциальной передачи
мд.р = мг.р +мм>
где мм - передаточное число механической передачи.
Кинематическое передаточное число
мд.к “ мг.р/^г.о +мм-
Силовое передаточное число
мд.с “ Мг.р^г.м + Мм •
Абсолютная мощность, передаваемая гидравлическим путем,
^ГИД “^1(^1 ^2^м) -^1(1 “ .к) •
Относительная мощность, передаваемая гидравлическим путем,
^гид “ мг.р/ (wr.p + мм^г.о) •
Полный КПД дифференциальной передачи находят по выраже-
нию (97). _
Относительная частота вращения насоса соо = Агид.
При = 0 момент на выходном валу рассматриваемой диффе-
ренциальной передачи, как и предыдущей, равен моменту 2Имтах на
валу насоса полнопоточной передачи. С увеличением угловой скорости
момент на валу дифференциальной передачи возрастает, достигая
при определенном значении а>2 максимальной величины ТИ2тах =
= ^Лтахмд.с.н-
Максимальная угловая скорость выходного вала дифференциальной
передачи, ограничиваемая окружной скоростью распределителя гидро-’
мотора, равна максимальной угловой скорости выходного вала полно-
поточной передачи:
^2дтах = ^2 г. max-
На рис. 63 для передачи второй подгруппы первой группы штрихо-
выми линиями построены зависимости изменения мд р, ^Гид,_ро, ^и
т?д от мгр, а на Рис- 64 — штриховой кривой зависимость М2 от а>2
(принято т?г 0 — 0,9, т?г = 0,8, #2тах = 2#imax, мг.р.н ~ 2, ^r.p.min =
= 0,666, Рг‘р.н = 3, им = 2,666). Значение им выбрано из условия, что
Mr.p.min достигается при мг.рл = — 2. Это обеспечивает максимальное
использование ОГП для расширения диапазона изменения передаточного
числа дифференциальной передачи.
Для получения заднего хода необходима установка дополнительной
механической передачи.
Передачи второй подгруппы по сравнению с передачами первой под-
группы имеют большее передаточное число мд р н и, следовательно,
более высокий момент ТИ2тах. Однако при малых значениях ид р резко
падает КПД (при ид р = 0,666 т?д = 0), что приводит к резкому падению
150
М2 при высоких значениях (см. рис. 64). По указанной причине пере-
дачи рассматриваемой группы не нашли применения на самоходных
машинах.
Для передачи первой подгруппы второй группы расчетное переда-
точное число
Ид.р ” мг.р/(мг.р + 0 •
Передача не обеспечивает ид р = 00 (при иг р = °° ид р = 1), которое
необходимо для плавного трогания самоходной машины с места. Поэто-
му такие передачи не применяют на самоходных машинах. Область их
использования — привод машин с малым диапазоном изменения переда-
точного числа. Цель использования — увеличение КПД по сравнению с
КПД полнопоточной передачи.
Для передач второй подгруппы второй группы
мд.р = иг.рим1 (^г.р + им) •
Эти передачи по той же причине, что и передачи второй группы пер-
вой подгруппы, не применяют на самоходных машинах.
В заключение необходим® указать, что приведенное выше обоснова-
ние невозможности увеличения выходного крутящего момента в пер-
вый момент трогания самоходной машины с места, несмотря на увели-
чение нагрузочного передаточного числа на единицу, имеет чрезвычайно
важное значение и заставляет иначе подойти к оценке дифференциальных
гидрообъемных передач § внутренним разветвлением потока мощности.
7.3. ОБЪЕМНЫЕ ГИДРОПЕРЕДАЧИ
С ВНЕШНИМ РАЗВЕТВЛЕНИЕМ ПОТОКА МОЩНОСТИ
Дифференциальная передача с внешним разветвлением потока мощ-
ности представляет собой зубчатый дифференциальный механизм, два
звена которого связаны между собой при помощи гидрообьёмной пе-
редачи. При этом часть мощности передается механическим путем, а
часть — гидравлическим — через ОГП.
Простейший дифференциальный механизм с внутренним зацепле-
нием шестерен имеет три звена: солнечную шестерню, коронную шестер-
ню и водило. Одно из этих звеньев может быть соединено с двигателем,
т.е. является ведущим, а одно из двух других — с колесами самоходной
машины, т.е. является ведомым. Третье свободное звено соединяют
через гидрообъемную передачу с ведомым или с ведущим звеном (гид-
рообъемная передача замыкает дифференциал).
Таким образом, имеют место две группы дифференциальных передач
с внешним разветвлением потока мощности: с замыканием на ведущий
вал (с ОГП на входе дифференциальной передачи) и с замыканием на
ведомый вал (с ОГП на выходе дифференциальной передачи).
В зависимости от того, какое звено принято в качестве ведущего, ве-
домого и свободного, каждая группа содержит шесть различных типов
151
Рис. 65. Схемы одноконтурных диффе-
ренциальных передач с замыканием на
ведущий вал (первая группа)
дифференциальных передач, которым свойственны определенные кине-
матические схемы.
На рис. 65 показаны все возможные схемы передач первой группы,
а на рис. 66 — второй. Одна из гидромашин принята регулируемой; в
принципе обе гидромашины могут быть регулируемыми. Передачи вто-
рой группы являются зеркальным отображением передач первой группы.
Насос и гидромотор меняются местами. *
На рис. 67 показаны различные возможные направления потоков
мощности передач первой и второй групп. В соответствии с рис. 67, а
одна часть мощности от двигателя поступает к дифференциалу Д, а дру-
гая — к ОГП. В дифференциале оба потока мощности складываются и
передаются на выходной вал. Дифференциальная передача работает без
циркуляции мощности. Через ОГП передается мощность, меньшая мощ-
ности двигателя.
В соответствии с рис. 67, б вся мощность от двигателя подводится
к дифференциалу. Часть мощности от дифференциала поступает к ОГП
и от нее снова подается на вход дифференциала. Дифференциальная
передача работает с циркуляцией мощности. Через объемную гидропере-
дачу может передаваться мощность, как меньшая, так и большая мощ-
ности двигателя.
Рис. 66. Схемы одноконтурных диффе-
ренциальных передач с замыканием на
ведомый вал (вторая группа)
е)
д)
152
Первая группа
Рис. 67. Потоки мощности в одноконтурных дифференциальных передачах с замы-
канием на ведущий (первая группа) и ведомый (вторая группа) валы
На рис. 67, в показана схема, в которой вся мощность от двигателя
поступает к ОГП, а от нее — к дифференциалу. От дифференциала часть
мощности йередается на выход, а часть — снова к ОГП. Дифференциаль-
ная передача работает с циркуляцией мощности. Через ОГП проходит
мощность, большая мощности двигателя.
В зависимости от направления передачи через ОГП мощности каждая
гидромашина может работать в режиме как насоса, так и гидромотора.
При передаче через ОГП мощности, меньшей мощности двигателя,
можно для дифференциальной передачи получить более высокий КПД,
чем для полнопоточной ОГП, а также уменьшить рабочий объем гидро-
машин.
По схеме, изображенной рис. 65, в, выполнена дифференциальная
передача Бильхеймера (рис. 68), применяемая на улицеуборочных и
других самоходных машинах, а по схеме, показанной на рис. 65, б, —
передача НМТ-250, разработанная в США, предназначающаяся для грузо-
вых армейских автомобилей. Конструктивная схема этой передачи по-
казана на рис. 69. Ведущий вал 1 соединен с блоком цилиндров 2 одной
гидромашины и с солнечной шестерней 8 планетарного ряда. Блок ци-
линдров 5 второй гидромашины
соединен с коронной шестерней 6.
Водило сателлитов 7 соединено с
выходным валом 9. Передача
содержит
гидромашины, каждая из которых
вместо поршней имеет шарики,
радиально-поршневые
Рис. 68. Схема одноконтурной диффе-
ренциальной передачи Бильхеймера .
153
4 5 6
Рис. 69. Конструктивная схема одноконтурной дифференциальной передачи
НМТ-250
обкатываемые по эксцентрично установленным обоймам 3 и 4. Обе
гидромашины регулируемые. Передаточное число изменяется путем
изменения эксцентриситета обойм. Гидромашины имеют цапфовый
распределитель. Рабочий объем гидромашин одинаковый.
Для получения передачи с большим диапазоном изменения переда-
точного числа и малым рабочим объемом гидромашин можно за диффе-
ренциальной передачей, так же как и за обычной полнопоточной, уста-
навить шестеренчатый редуктор с переменным передаточным числом.
При переключении передач в редукторе необходимо производить пере-
регулирование исходной ОГП, т.е. уменьшать или увеличивать ее пере-
даточное число. Этого недостатка лишены специальные — многодиапазон-
ные дифференциальные передачи, в которых переключение с одного диа-
пазона на другой производится без перерегулирования исходной ОГП.
Главным преимуществом многодиапазонных передач является то,
что за одно переключение диапазон изменения передаточного отношения
в них увеличивается более значительно, чем за одно переключение, уста-
новленного за полнопоточной передачей редуктора. Другими словами,
многодиапазонная передача по сравнению с полнопоточной, снабженной
редуктором, при заданном диапазоне регулирования ОГП имеет боль-
ший диапазон регулирования всей передачи или же при одинаковом диа-
пазоне всей передачи имеет меньшие рабочие объемы гидромашин. Кро-
ме того, многодиапазонная передача может иметь более высокий КПД.
На рис. 70 показана схема двухдиапазонной дифференциальной
передачи Дьюэл Моуд, разработанной фирмой ’’Сандстрэнд” для тракто-
ров и других самоходных машин. На первом диапазоне выключено ле-
вое многодисковое сцепление и выключено первое многодисковое
сцепление С2. Вращение от входного вала 1 через ОГП, вал 5 и пару
шестерен 4 передается на выходной вал 2. Передача работает как полно-
поточная. Передаточное отношение ОГП при разгоне самоходной маши-
154
Рис. 70. Схема двухдиапазонной дифференциаль-
ной передачи Дьюэл Моуд
ны изменяется от нуля до максимального
значения.
При максимальном передаточном от-
ношении выключают сцепление С2 и
включают сцепление С\. Один поток
мощности от входного вала через ОГП и
пару шестерен 4 поступает к солнечной
шестерне планетарного ряда, а второй
поток через пару шестерен 3 и сцепление — к водилу планетарного
ряда. На коронной шестерне оба потока мощности складываются. Пере-
дача работает по дифференциальной схеме, соответствующей рис. 65, д.
При этом уменьшению передаточного отношения ОГП соответствует
дальнейшее увеличение передаточного отношения всей передачи, которое
продолжается после того как передаточное отношение ОГП, достигнув
нуля, приобретает отрицательные значения (этот вопрос подробно рас-
смотрен дальше).
Для получения заднего хода включают сцепление С2 и выключают
сцепление С\ , в ОГП устанавливается отрицательное передаточное
отношение.
ОГП содержит регулируемый насос и нерегулируемый гидромотор.
Нагрузочный диапазон изменения передаточного отношения дифферен-
циальной передачи равен девяти. Передача рассчитана на мощность
184 кВт, ее удельная масса составляет 1,63 кг/кВт.
На рис. 71 показана схема трехдиапазонной дифференциальной пе-
редачи ХНМ-1500, созданной в США для танка полной массой 55 т, раз-
вивающего максимальную скорость 72 км/ч [6]. Дифференциальная
передача содержит ОГП с регулируемым насосом и нерегулируемым
гидромотором, два дифференциала Д1 иДг) многодисковые сцепления
Рис. 71. Схема трехдиапазонной дифференциальной передачи ХНМ-1500
155
Ct и C2 и ленточные тормоза Л и Т2. Танк имеет две подобные переда-
чи, каждая из которых приводит во вращение свою ведущую звездочку
гусеничного движителя. При прямолинейном движении передаточное
отношение обеих передач одинаковое. Поворот танка осуществляется
путем уменьшения передаточного отношения передачи одного борта
при сохранении прежним передаточного отношения передачи другого
борта.
При трогании танка с места сцепления С\ и С2 и тормоз Л выклю-
чены, тормоз Т2 включен (первый диапазон). Передаточное отношение
zr>p ОГП изменяют от 0 до + 1. Вся передача работает как полнопоточная,
причем второй дифференциал выполняет функции понижающей переда-
чи. Передаточное отношение дифференциальной передачи z д р изменяет-
ся от 0 до 0,4 (здесь и далее приводятся параметры дифференциальной
передачи, рассчитанные д-ром техн .наук Г.В. Герасимовым). Постоянная
А2 второго планетарного ряда, обеспечивающая передаточное отношение
0,4, принят^ равной 1,5.
При передаточном отношении zrp ОГП, равным + 1, выключается
тормоз Т2 и включается сцепление €\ (второй диапазон). Вся передача
работает как дифференциальная по схеме, показанной на рис. 65, е,
причем используется только первый дифференциал . При постоянной
первого планетарного ряда А х = 4 и передаточном числе двух пар шесте-
рен 7 и 2, равным 1,93, передаточному отношению ОГП гг р = 1 соответ-
ствует передаточное отношение дифференциальной передачи zд р = 0,4.
Сцепление €\ включается без пробуксовки, т.е. при равной угловой ско-
рости его дисков. На втором диапазоне передаточное отношение ОГП
изменяется от + 1 до — 1, чему соответствует изменение передаточного
отношения всей передачи от 0,4 до 0,91.
При гг р = - 1 включается сцепление С2 и выключается сцепление
С\ (третий диапазон). Так же, как и в предыдущем случае, сцепление
С2 включается при равной угловой скорости дисков, т.е. без их пробук-
совки. Передаточное число двух пар шестерен 1 и 3 равно 0,44. На треть-
ем диапазоне трансмиссия работает так же, как дифференциальная по
схеме, показанной на рис. 65, а, причем используется только второй
дифференциал Д2. Передаточное отношение ОГП изменяется от — 1 до
+ 1, чему соответствует изменение передаточного отношения всей переда-
чи от 0,91 до 1,79. На заднем ходу выключаются сцепления Сг и С2 и тор-
моз Т2 и включается тормоз 7\, Передаточное отношение ОГП изменяет-
ся от 0 до + 1. Вся передача работает как полнопоточная. Первый плане-
тарный ряд Д1 используется в качестве понижающей передачи обратного
хода.
Гидравлическая дифференциальная передача ХНМ-1500 имеет сис-
тему автоматического управления. Удельная масса передачи равна
1,66 кг/кВт и составляет 57 % массы серийной гидромеханической пере-
дачи, содержащей гидротрансформатор.
Выше рассматривались одноконтурные дифференциальные передачи.
Для большего уменьшения рабочих объемов гидромашин и повышения
КПД применяют двухконтурные дифференциальные передачи, для ко-
торых характерно большое разнообразие возможных схем [26]. Эти пере-
156
Первая группа
Рис. 72. Схемы двухконтурных дифферен-
циальных передач с параллельным (первая
группа), последовательным (вторая группа)
и параллельно-последовательным (третья
группа) соединением дифференциалов
дачи разделяют на три группы: с параллельным, последовательным и па-
раллельно-последовательным соединениями дифференциалов (рис. 72).
Первая и вторая группы содержат три типа передач и третья - два типа.
Каждый тип данной группы отличается определенным расположением
ОГП среди дифференциалов Дх и Д2. Стрелками показано направление
потоков мощности при работе передач без циркуляции мощности.
В зависимдсти от того, какими звеньями дифференциалов (корон-
ная, солнечная шестерни и водило) осуществляются те или инь1е соеди-
нения, каждый тип насчитывает 36 различных дифференциальных пере-
дач. Таким образом, существует 288 схем двухконтурных дифферен-
циальных передач.
На рис. 73 показана схема двух-
контурной передачи МИРА с парал-
лельным расположением дифферен-
циалов и симметричным расположе-
нием ОГП (см. рис. 72, а). Передача
разработана английской Научно-ис-
следовательской ассоциацией авто-
мобильной промышленности на
Лу к
Рис. 73. Схема двухконтурной диффе-
ренциальной передачи МИРА
157
основании патента Джиля применительно к легковому автомобилю с
двигателем мощностью 37 кВт. Буквы Н и М обозначают соответственно
насос и гидромотор ОГП. Наибольшая мощность, передаваемая через
ОГП, соответствует передаточному отношению zr р = 0,7 и составляет
35 % мощности двигателя. При zr.p = 0,333 и iT р = 1,42 мощность через
ОГП не передается. При КПД объемной гидропередачи 0,8 КПД диффе-
ренциальной передачи не ниже 0,92. При zr р = 0,333 и zr р = 1,42 КПД
дифференциальной передачи приближается к единице.
Дифференциальная передача работает в режиме переднего хода без
циркуляции мощности, а в режиме заднего^хода — с циркуляцией мощ-
ности. Через ОГП передается мощность, большая мощности двигателя.
В связи с этим для получения заднего хода в передаче МИРА применена
дополнительная шестеренчатая передача.
Продолжают создаваться новые дифференциальные передачи для
легковых автомобилей. Одна из последних передач, разработанная
Научно-исследовательским институтом IRT (Франция) при содействии
фирмы ’Тено”, имеет две гидромашины с рабочим объемом 22 см3,
работающих с частотой вращения 6000 об/мин (Сп = 16 800 см/мин) при
давлении 36 МПа. Проведены сравнительные испытания автомобиля
’’Рено R20TC”, имеющего двигатель мощностью 75 кВт, с четырехсту-
пенчатой коробкой передач и с дифференциальной передачей. Последняя
несколько повысила интенсивность разгона автомобиля и в широком
диапазоне скорости в среднем уменьпшла расход топлива на 17 % и при
европейском городском цикле движения на 23 %. При использовании
дифференциальной передачи на 8 % уменьшается максимальная сила
тяги на колесах, на 2 % - максимальная скорость (которая составила
150 км/ч), и на И % увеличивается расход топлива при максимальной
скорости.
7.4. СИЛОВЫЕ И КИНЕМАТИЧЕСКИЕ ЗАВИСИМОСТИ ПЕРЕДАЧ
С ВНЕШНИМ РАЗВЕТВЛЕНИЕМ ПОТОКА МОЩНОСТИ
Выявим принципиальные возможности одноконтурных дифферен-
циальных передач, приведенных на рис. 65 и 66. Кинематическую зависи-
мость звеньев дифференциального механизма определяет формула
Виллиса:
лс-"в
--------- — А
"к" "в
где пс, йд и лк - частота вращения соответственно солнечной шестерни водила и
коронной шестерни; А - постоянная дифференциала (принимаемое положитель-
ным передаточное число от солнечной шестерни к коронной при остановленном
водиле, равное отношению числа зубьев коронной шестерни к числу зубьев солнеч-
ной шестерни).
При исследовании гидрообъемных дифференциальных передач с
внешним разветвлением потока мощности удобно оперировать не пере-
даточным числом и, а передаточным отношением i (это приводит к ли-
158
(100)
нейной зависимости изменения передаточного отношения дифферен-
циальной передачи от передаточного отношения ОГП).
Кинематическое передаточное отношение дифференциальной переда-
чи, схема которой приведена на рис. 65, а
'а.к=пв1пк- (101)
Кинематическое передаточное отношение ОГП, входящей в диффе-
ренциальную передачу,
*Г.К~Пс/ПК- (102)
В результате совместного решения уравнений (100), (102) получим
’д.к=0г.к+Л)/а+^). (103)
Кинематическое передаточное отношение дифференциальной переда-
чи, схема которой показана на рис. 65, б9
*д.к “ пв1пс,
при этом кинематическое передаточное отношение ОГП
*Г.К “ Пк1ПС*
На основании совместного решения двух последних уравнений с
уравнением (100) получим
^д.к=(1 + ^)/а+^). (104)
Если не учитывать гидравлические потери, т.е. принять т?г о = 1,то
в выражениях (103) и (104) можно заменить ir к на /г.р, а *д.к нал’д р.
В частности, при принятом допущении на основании выражения (104)
запишем
/д р = (1 +/г рЛ)/(1 + Л). (105)
Подобным образом можно для всех дифференциальных передач
первой (см. рис. 65) и второй (см. рис. 66) групп найти зависимости
передаточного отношения /др от передаточного отношения гг р:
для передач первой группы:
Ог.р + А)
о = ~~....г (см. Рис- 65, а);
F (1 + Л)
(1 + *г.р4)
/ = --------- (СМ. рИС 65 б) ;
д,р (1+ А)
*г.р(1 + Л) - 1
L 0 --------- (см. рис. 65,в);
F А
'д.р = fr.p (1 + А~) - А (см. Рис-6?» г);
'д.р = 1 + ^(1 - /г.р) (см. рис, 65,д);
159
1 + Л - /г р
/др = --------------- (СМ. рис. 65, е);
для передач второй группы:
(1 + л)
/„ о = ------------- (см. рис. 66, а);
Р 1 + л‘г.р
(1 + -4)/г.р
/„ о = ---------:— (см. рис. 66, б);
А + ‘г.р
А ‘г.р
/п о = ------------- (см. рис. 66, в);
1 + л + zr р
/г.р
/п п = ---------------- (см. рис. 66, г);
д‘р 1 +Л(1 -/гр)
‘г.р
/п п = ---------------- (см. рис. 66, д);
д-р (1 + Л)/гр-Л г .
лг.р
*д.р= 7—77----------Г (см. рис. 66, в);
(1 + Л) *г.р “* 1
Для простейшего дифференциального механизма, учитывая его
конструктивные возможности, постоянная А лежит в пределах от 1,4 до
5. На рис. 74 приведена зависимость /д р от /г р для передач первой груп-
пы. Ограничивающие кривые каждого зашрихованного поля соответст-
вуют крайним значения Л, равным 1,4 и 5. Для всех передач при /г р =
= 1 гд.р ~ 1-
В принципе дифференциальные передачи для самоходных машин
можно выполнить по схемам, изображенным на рис. 65, а, б, в и г. В диф-
ференциальных передачах, схемы которых показаны на рис. 65, я, б> зна-
чению /д р = 0 соответствует отрицательное значение /г р. В передачах,
схемы которых изображены на рис. 65, д и е, передаточное отношение
/д.р увеличивается при уменьшении передаточного отношения /г<р, что
позволяет использовать их в качестве составной части многодиапазонной
передачи.
В отличие от дифференциальных передач первой группы (см.
рис. 65), для которых зависимость /д р от /г р линейная, для дифферен-
циальных передач второй группы она нелинейная. Так же, как и для пере-
дач первой группы, для передач второй группы при /г р = 1 /д р = 1. Для
всех передач второй группы при /г р = О /д р = 0. При определенном зна-
чении /г р величина /д р становится равной бесконечности. Как показы-
вает предварительный анализ, дифференциальные передачи второй груп-
пы мало пригодны для использования на самоходных машинах.
Учитывая важные преимущества многодиапазонных дифференциаль-
но
Рис. 74. Зависимость передаточного отношения одноконтурных дифференциальных
передач первой группой передаточного отношения ОГП
ных передач, рассмотрим их основные свойства более подробно на при-
мере передачи, показанной на рис. 70. Для простоты примем т?г о = 1.
Передаточное отношение этой передачи на первом диапазоне
гД.Р1 =И2/"1 =/Г.р/“4, (106)
где ni и п2 - частота вращения соответственно входного и выходного валов диф-
ференциальной передачи; - передаточное число пары шестерен 4.
Передаточное отношение передачи на втором диапазоне при ее работе
по дифференциальной схеме
гд.р2 = "г/"! = ис/(мз«в) > (107)
где и$ - передаточное число пары шестерен 3.
11—Зак. 1159
161
Передаточное отношение ОГП
'г.р = "s/”i = (w2«K)/(“i«B) > (108)
где ni и п5 - частота вращения валов соответственно насоса (2) и гидромото-
ра (5).
Подставив выражения (107) и (108) в уравнение (100), получим
'Д.Р2 = С1 + - 'г.рЛ/М4 • (109>
На основании выражения (106) при zr р = + 1 на первом диапазоне
*д.рхтах = (НО)
Чтобы на втором диапазоне при zr р - + 1 было то же передаточное
отношение zfl>p2mjn = /д pimax, в соответствии с выражениями (109) и
(110) должно обеспечиваться равенство и3 = и4. В этом случае при пере-
ключениях не происходит разрыва передаточного отношения, причем
переключениям соответствует одинаковая частота вращения дисков
сцепления Q. Поскольку переключения происходят при одинаковой час-
тоте вращения соединяемых элементов, сцепление С2 может быть заме-
нено механизмом свободного хода, а сцепление — кулачковой
муфтой.
На втором диапазоне при изменении передаточного отношения ОГП
от zr.p = + 1 до zr п = - 1в соответствии с выражением (109) передаточ-
ное отношение дифференциальной передачи /др2 изменяется от /д p2min
до
'д.ргтах = С + 2Л)/И4. (111)
Минимальное нагрузочное расчетное передаточное отношение диффе-
ренциальной передачи
*д.р.нтш — zn.pi тах/^гл.р V(^rji >
где £>гл р - нагрузочный расчетный диапазон изменения передаточного отноше-
ния ОПЕ
Полный нагрузочный диапазон изменения передаточного отношения
многодиапазонной дифференциальной передачи
^д.р.н “*д.р 2 max Ад .pi min “0 + 2^)^г н р. 012)
Диапазон Рд<н#р не зависит от передаточного числа и4. Его выбирают
таким, чтобы гд.р2тах было равно или незначительно превышало едини-
цу, т.е. чтобы максимальная частота вращения выходного вала передачи
в конце регулирования не была существенно больше частоты враще-
ния вала двигателя. Для А = 1,5 в соответствии с выражением (111)
zfl.p2max = 1 при и4 = 4.
На основании выражения (112) при £>грл = 1, Л = 1,5иЛ=4
соответственно Г)д р н = 4 и Рд р н = 9. При Dr рд = 2, Л = 1,5иЛ = 4
соответственно 2)д рл = 8 и^дрд1 = 18. Таким образом рассматривае-
мая дифференциальная передача в принципе может иметь в 4 и 9 раз
162
Рис. 75. Зависимость передаточного отно-
шения двухдиапазонной дифференциаль-
ной передачи от передаточного отношения
ОГП
больший диапазон изменения переда-
точного отношения по сравнению
с диапазоном изменения передаточ-
ного отношения используемой ОГП.
На рис. 75 показана зависимость
*д.р от fr,p (принято = и3 = 4
и Дчн.р ~ 2).
Для полнопоточной передачи с
^г.р.н = 2, работающей совместно с
двухступенчатым редуктором, нагрузочный диапазон изменения пере-
даточного отношения будет всего DSr р н 4. Это наглядно характе-
ризует преимущества многодиапазонной дифференциальной передачи.
Здесь следует указать, что циркуляция мощности может ограничить
силовой диапазон изменения передаточного отношения многодиапазон-
ной дифференциальной передачи. Их окончательная оценка требует даль-
нейших более подробных исследований.
Подобным образом нетрудно описать работу трехдиапазонной пере-
дачи (см. рис. 71), а также составить новую многодиапазонную передачу,
на первом диапазоне работающую, например, по схеме, показанной на
рис. 65, а или б (см. также j>hc. 71), а на втором — по схеме, изображен-
ной на рис. 65,д или е.
Теперь на примере передачи, показанной на рис. 65, б и 69, рассмот-
рим общую методику подробного исследования дифференциальных пе-
редач, включающую построение их основных зависимостей.
На оснований выражения (104) с учетом объемного КПД запишем
зависимость кинематического передаточного отношения дифференциаль-
ной передачи от расчетного передаточного отношения ОГП:
п 1 + ^г.о'г.р24
где Пг.о ~ объемный КПД ОГП.
Эта и приводимые далее формулы относятся к работе передачи без
циркуляции мощности.
Для определения силовых зависимостей запишем уравнения равно-
весия звеньев дифференциальной передачи при ее работе без циркуля-
ции мощности:
~ ^г.М^Г.р ’
-ПТ + ДП — ^2 >
(ИЗ)
11*
163
^г^кдп»
где М! - момент на ведущем валу дифференциальной передачи; Мн - момент на
валу насоса ОГП; Мс - момент на солнечной шестерне дифференциала; Мт - мо-
мент на валу гидромотора ОГП, равный моменту на коронной шестерне дифферен-
циала; nrjH “ механический КПД ОГП; tjcjn ~ КПД, учитывающий потери в полю-
се зацепления солнечной шестерни с сателлитом; пкдп ~ КПД в полюсе зацепления
коронной шестерни с сателлитом; М2 -момент на вторичном (ведущем) валу
дифференциальной передачи, равный моменту на водиле дифференциала.
Потери в полюсах зацепления шестерен планетарного ряда зависят от
соотношениях скоростей относительного и переносного движения. При
этом
Л(1 -/гк)
^С.Ш “ 1 “(1 “^н) л ’
1 + А
1 “* *г.к
^кдп 1 — G -^в) п .. . >
(1 + Л)1Г к
где Пн = 0,98 и т}в = 0,99 - КПД соответственно наружного и внутреннего зацеп-
ления шестерни.
В результате решения системы уравнений (113) получим силовое
передаточное отношение дифференциальной передачи:
Ml ^с.ш^г.м + ^г.р^с.ш
(1 + Л )Пу щ^сдп^г.м
Объемный (кинематический) КПД дифференциальной передачи
Механический (силовой) КПД дифференциальной передачи
*д.р !<1 + * г.р^)+ ^к.ш^сдп^г.м
^д.м "" ~ ~ .
*д.с ^к.ш^г.м + л Ччр^сдп
Полный КПД дифференциальной передачи
*Д.К О + ^Г.р^Г.о) ^с.ш^к.ш^г
»?д - ~ ^д.о^д.м= ~~ . > (114)
*Д.с ^к.ш^г + л Ч’.р^г.о^с.ш
где пг - полный КПД ОГП.
При работе дифференциальной передачи с циркуляцией мощности
(см. рис. 67, б), когда насос начинает выполнять функции гидромотора,
а гидромотор функции насоса, т.е. мощность через ОГП передается в
обратном направлении, кинематическое передаточное отношение диффе-
ренциальной передачи
164
пг.о + ^г.р^4
/д-к (1+Л)пг0
Поскольку зависимость между моментами имеет вид
Мт ~ Ми/(Zr pi?r м),
силовое передаточное отнощение определяется формулой
^кдп + ^г.р^г.м^с.ш
(1 + ^^клп^сдп
Полный КПД дифференциальной передачи при прохождении мощ-
ности через ОГП в обратном направлении
^Г.О + ^г.р^4 1Т7К.ШТ7С.Ш
Чд ’»Г.о”к.Ш+Л/ Г.р^Д^С.Ш
На основании уравнений (113) относительный момент на валу на-
соса ОГП
(115)
^^с.ш^г.р
(П6)
(Н7)
мн
M1N ^к ли77 г.м + ^сли’г.р
Относительная мощность, передаваемая через ОГП,
nh мнп1
^гид = ------- = -------=Мн»
^imax MiNni
где JVimax _ максимальная мощность, развиваемая двигателем; - крутя-
щий момент при максимальной мощности двигателя.
В отличие от дифференциальных передач с внутренним разветвле-
нием потока мощности, в которых передаваемая через ОГП мощность
уменьшается в результате уменьшения частоты вращения вала насоса,
в дифференциальных передачах с наружным разветвлением потока мощ-
ности мощность, передаваемая через ОГП, уменьшается в результате
уменьшения крутящего момента, подводимого к насосу.
Относительный момент на валу гидромотора при работе без цирку-
ляции мощности
- Мг ^н1,г.м
Мг --------- —------
М iN *г.р ^к.ш^г.м+ ^с.иРг.р
Относительный момент на выходном валу дифференциальной пере-
дачи приЛ/ц = 1
- М2 пд.м
——— — 1
M1N *д.р
-<4т7с.шт7г.м '
(118)
^ддл (1 + ^4)
1 + zr.p^
(Н9)
165
A - 1
Относительная частота вращения сателлитов дифференциала диффе-
ренциальной передачи
лсат zcon . 2(1 ~ *к.д)
= О —гд.к) =
"1 2сат
где и геол - число зубьев соответственно сателлита и солнечной шестерни.
Методику расчета дифференциальной передачи удобно иллюстриро-
вать конкретным примером. По рассмотренной схеме на заводе-втузе
при ЗИЛ была спроектирована дифференциальная ОГП для грузового
автомобиля ЗИЛ-130. Числа зубьев коронной шестерни, сателлита и
солнечной шестерни составляли соответственно zK^ 104, zcaT = 17 и
2сол = 70, при этом постоянная дифференциального механизма А = 1,48.
Обе гидромашины выполнены регулируемыми. Нагрузочный диапазон
регулирования гидромотора Dip# = 3 (e2mjn = 0,333), а дифферен-
циальной передачи Рдрл = 5,5.
На основании выражений (105), (114), (116)х (117)^ (118) и (119)
на рис. 76 построены зависимости /др, т?д, Мн, 7VriIfl, Мт и М2 от zr>p.
При расчете зависимости г?д «) полный КПД ОГП принят т?г = 0,8.
При изменении /г.р от — 0,676 (чему соответствует /д>р = 0) до 3
дифференциальная передача работает в режиме переднего хода. При
изменении /г р от 0 до 3 дифференциальная передача работает без цирку-
ляции мощности по схеме, показанной на рис. 67, а. При изменении /г.р
от — 0,676 до 0 дифференциальная передача работает с циркуляцией
мощности по схеме, изображенной на рис. 67, б. При этом гидромотор
выполняет функции насоса, а насос функции гидромотора. При подроде
к входному валу_ дифференциальной передачи полного крутящего мо-
мента двигателя= ^соответствующего его максимальной мощности,
в диапазоне изменения ir>p от 0 до — 0,338 мощность, проходящая через
ОГП, меньше мощности двигателя (при iT р — - 0,338 NT = 1, штрихо-
вая кривая на рис. 76) и в диапазоне изменения /гр от = - 0,338 до
— 0,676 мощность, проходящая через ОГП, больше мощности двигателя.
На участке изменения /г>р от - 0,676 до 0 КПД дифференциальной
передачи рассчитывают по формуле (115).
При регулировании гидромоторов, чему соответствует изменение
/г.р от 1 до 3, передаточное отношение дифференциальной передачи изме-
няется от 1 до 2,19 в диапазоне 2>д рЛ2 == 2,19. При заданном общем
диапазоне Рд р н = 5,5 диапазон изменения /д р, полученный в результа-
те регулирования насоса, будет
^д.р.н1 =^д.рд/^д.рл2 = 2,5.
Этому диапазону соответствует изменение момента М2 от ^?2тах =
= 2,5 доЛГ2 = 1 и изменение передаточного отношения/д р от 0,4 до 1.
При изменении гг.р от — 0,676 до 0 моменты М2 и Мт поддержи-
ваются постоянными и максимальными. Им соответствует максималь-
ное допустимое давление жидкости в ОГП. Если бы ограничение давле-
ния жидкости отсутствовало, то моменты М2 иМт изменялись бы в соот-
ветствии с штриховыми кривыми на рис. 76.
166
При работе дифференциальной передачи в режиме ограничения дав-
ления и крутящего момента величиной Л/2тах расчетные формулы будут
другими. На основании уравнений (113) в общем случае для Мг
мт м2а
мг = ------- ----------. (120)
M1N ’’к.щО+Л)
Откуда для Ягmах = 2,5 Мгтах = 1,48.
Для поддержания постоянных моментов 3f2max и Л/гшах и постоян-
кого максимального давления рабочей жидкости необходимо уменьшать
подводимый к входному валу дифференциальной передачи момент в
соответствии с выражением
_ Мх _ ^г.м^кдп+ ^г.р^с.ш
~ Пьг ~ ( л ) ’
М1N ^^г.м^с.ш
(121)
где Мр —
167
Момент М1 уменьшают путем уменьшения подачи топлива в двига-
тель внутреннего сгорания самоходной машины.
При fr<p = — 0,676 Мг = 0. На режиме поддержания постоянного
давления момент на валу насоса ОГП
О22)
где Мр — -Лаппах»
При /г р = - 0,676 «1 = е1к = 0,676, Мн = 1 и р = Ртах. Этому
режиму соответствует критический объем насоса
^1к — eiK^imax»'
при котором насос нагружен максимальным моментом Мнтах и рабо-
тает при максимальном давлении pmax. С учетом записанного выраже-
ния на основании формулы (13) максимальный рабочий объем насоса
^н-^iinax’’Mi
*71 max ~ ,о (123)
0Д59ртахе1к
Максимальный рабочий объем Qlmax больше критического qiK в
1,48 раз (для рассматриваемого случая при ртах = 35 МПа Qimax =
= 42тах = 160 см3). Для полнопоточной ОГП с тем же диапазоном регу-
лирования DrpjI = 5,5 максимальный рабочий объем насоса следует
рассчитывать по формуле (123), принимая в ней e1K = l/(Drл.рвцпт) =
= 0,545. При этом максимальный рабочий объем насоса max — l,834iK.
Таким образом, максимальные рабочие объемы гидромашин дифферен-
циальной передачи составляют 80 % рабочих объемов гидромашин полно-
поточной передачи.
При отрицательных значениях zr<p, меньших - 0,676>дифференциаль.
ная передача обеспечивает задний ход машины. При этом момент М2
имеет отрицательный знак, а следовательно, в соответствии с выраже-
нием (120) отрицательный знак имеет и момент Мт. При движении ма-
шины задним ходом будут те же по значению максимальные крутящие
моменп»! Л?2щах = — 2,5 и Mrmax = “ 1,48, что и при движении машины
передним ходом. Момент AfH в соответствии с выражениями (116) и
(122) имеет положительный знак. В соответствии с выражением (122)
при изменении /г<р от -0,676 до - 1 момент Л?н изменяется от 1 до 1,48.
Увеличение момента АГН сопровождается пропорциональным увеличе-
нием относительного и абсолютного 41 рабочего объема насоса, в свя-
зи с чем рабочее давление жидкости поддерживается постоянным и мак-
симальным. При iT р = - 1 рабочий объем насоса достигает максимально,
гр значения. Поэтому дальнейшее увеличение /г р приводит к увеличению
рабочего давления выше максимального. Чтобы этого не произошло,
момент Л7Н надо ограничить максимальной величиной Мнтах = 1,48. Это
осуществляется в результате соответствующего ограничения подводи-
мого от двигателя к входному валу передачи крутящего момента .
На основании уравнения (122) для ЛГнтах рассчитывают момент
Л7Г. По уравнению (121) определяют зависимость момента от /г<р,
168
которая приjr p больше — 1 имеет нелинейный характер. Зависимость
момента — М2 от /г р находят по известным значениям из выражения
(121) или по известным значениям из выражения
^2 = ^17?ДЛ«//Д.р-
При движении машины задним ходом дифференциальная передача
работает с циркуляцией мощности. При изменении iT р от — 0,676 до — 2
рабочее давление жидкости имеет максимальное значение.
Подобным образом можно выполнить расчет других, как однокон-
турных, так и двухконтурных дифференциальных передач и сравнить
их между собой.
На основании изложенного следует сделать некоторые общие выво-
ды. Нераздельно-агрегатные передачи целесообразно выполнять диффе-
ренциальными с внешним разветвлением потока мощности. Это не толь-
ко позволяет уменьшит^ рабочие объемы гидромашин, но и повысить
КПД передачи. Одноконтурная дифференциальная передача снижает
объемы гидромашин на 20 %. При необходимости дальнейшего снижения
рабочего объема гидромашин и повышения КПД следует применяв
двухконтурные дифференциальные передачи. При большом диапазоне
регулирования передаточного отношения, что приводит в полнопоточной
передаче к неприемлемо большим рабочим объемам гидромашин, значи-
тельный эффект можно получить при использовании многодиапазонных
дифференциальных передач, обеспечивающих большой диапазон регули-
рования при малом объеме гидромашин.
8. СОВМЕСТНАЯ РАБОТА ГИДРООБЪЕМНОЙ ТРАНСМИССИИ
И ДВИГАТЕЛЯ ПРИ НАЛИЧИИ
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
8.1. РАСЧЕТ РЕГУЛЯТОРНОЙ ХАРАКТЕРИСТИКИ
РЕЖИМОВ РАБОТЫ ДВИГАТЕЛЯ
Как указывалось, основное назначение ГОТ - обеспечить работу дви-
гателя на том или ином режиме. Управление ГОТ, т.е. изменение рабочих
объемов ее гидромашин, может быть ручным или автоматическим. ГОТ
составной частью входит в систему автоматического регулирования ре-
жимов работы двигателя, Объектом регулирования этой системы служит
двигатель; ГОТ является вспомогательным элементом, осуществляю-
щим изменение момента нагрузки двигателя и обеспечивающим его ра-
боту на заданном режиме.
Графическая зависимость изменения мощности или крутящего
момента М1л двигателя от частоты вращения л t его вала, определяющая
режимы, на которых работает двигатель при наличии ГОТ, и системы
автоматического регулирования, называется регуляторной характеристи-
кой режимов работы двигателяД’егуляторную характеристику выби-
169
Рис. 77. Топографическая характерис-
тика удельного расхода топлива дви-
гателя
рают исходя из тех или иных
соображении и, прежде всего, из
условия получения малого расхо-
да топлива, учитывая, что на раз-
личных режимах работы двигате-
ля удельный расход топлива раз-
личный. На рис. 77 показана
топографическая характеристика
удельного расхода топлива^ кар-
бюраторного двигателя грузового
автомобиля, максимальная часто-
та вращения вала которого огра-
ничена регулятором.
В первом приближении в качестве регуляторной характеристики
режимов работы двигателя можно принять характеристику минималь-
ного расхода топлива, представляющую собой такую зависимость мощ-
ности от частоты вращения вала, для которой каждому значению мощ-
ности соответствует минимальный для этой мощности удельный расход
топлива ge.
Для расчета характеристики минимального расхода топлива, также
как и топографической характеристики, необходимо иметь эксперимен-
тальную зависимость крутящего момента М1Д двигателя и часового рас-
хода топлива Qt от угловой скорости сох или частоты вращения пг вала
двигателя для постоянных положений угла а открытия дроссельной
заслонки карбюратора (рис. 78) или зависимость изменения часового
расхода топлива Qt от крутящего момента М1Д при постоянной частоте
вращения nt вала двигателя (рис. 79). Известны различные способы
расчета характеристики минимального расхода топлива [21]. Ниже рас-
сматривается способ, удобный для практических целей, не требующий
трудоемкого пересчета часо-
вого расхода топлива в удель-
ный. В соответствии с ним
(рис. 80) на характеристику
крутящего момента двигателя
наносят кривые равных зна-
чений мощности двигателя
ЛГ1Д. По заданной частоте
вращения пх на каждой кри-
вой находят крутящий мо-
Рис. 78. Зависимости крутящего
' момента и часового расхода топли-
ва двигателя от частоты вращения
его вала
170
Рис. 79. Зависимость часового рас-
хода топлива от крутящего момен-
та двигателя
Рис. 80. Расчет характеристики ми-
нимального расхода топлива
мент ^1Д. По значениям nt и М1Д на характеристике расхода топлива
(см. рис. 79) находят расход топлива Qt. В результате полученных дан-
ных на рис. 80 строят кривые изменения расхода топлива Qt в зависи-
мости от частоты вращения пг для заданных постоянных значений мощ-
ности Мд- При построении этих кривых необходимо использовать зна-
чения расхода топлива (точки к') соответствующие внешней кривой кру-
тящего момента двигателя (точки к$. Расход топлива при работе двига-
теля по внешней характеристике крутящего момента приведен на рис. 78.
Точки минимума кривых Qt = f(nt), снесенные на кривые постоян-
ных значений мощности, позволяют получить кривую аб минимального
расхода топлива. Точка б соответствует максимальной мощности двига-
теля. Следует обратить внимание, что минимуму расхода топлива Qt при
заданной мощности соответствует также минимум удельного расхода
топлива^.
'Использование характеристики минимального расхода топлива
ограничивается минимальной устойчивой частотой вращения вала дви-
гателя nimin> а также режимами, при которых начинается повышенный
износ двигателя. Режимы с повышенным износом двигателя наблюдают-
ся при малой частоте вращения и большом крутящем моменте, когда
создаются неблагоприятные условия для образования масляного клина
между парами трения, а также при высокой частоте вращения, когда
имеют место значительные линейные скорости пар трения и высокие
171
Рис. 81. Оптимальная регуляторная
характеристика режимов работы
карбюраторного двигателя
инерционные нагрузки, дейст-
вующие на детали двигателя.
Поэтому оптимальные режимы
работы двигателя определяют-
ся некоторой кривой АБ
(рис. 81), на значительном
участке совпадающей с кривой
аб (см. рис. 80).
Точка А (см. рис. 81) соот-
ветствует частоте вращения,
приблизительно на 30 ... 40 %
превышающей частоту враще-
ния холостого хода двигателя,
а точка Б — частоте вращения,
приблизительно на 10 % мень-
шей частоты вращения двигате-
ля при его максимальной мощ-
ности. В рассматриваемом слу-
чае для точки Б принята частота
вращения, равная 3100 об/мин,
при которой включается в ра-
боту регулятор, ограничиваю-
щий частоту вращения вала двигателя (характеристики на рис. 78 и 80
построены при отсутствии на двигателе регулятора). В точке Б макси-
мальная мощность двигателя приблизительно на 2 % меньше максималь-
ной, что мало отражается на тяговых качествах самоходной машины.
В нижней половине рис. 81 приведены зависимости часового расхода
топлива и угла открытия дроссельной заслонки карбюратора, соответ-
ствующие работе двигателя по заданной регуляторной характеристике
АБ. Первая зависимость необходима для расчета топлийно-экономичес-
кой характеристики самоходной машины с ГОТ, а вторая — для разра-
ботки системы автоматического управления.
Работа двигателя по характеристике минимального расхода топлива
обеспечивает самоходной машине наименьший путевой (в литрах на
100 км) расход топлива только в том случае, если КПД гидрообъемной
трансмиссии постоянен. При переменном КПД для получения в эксплуа-
тации наименьшего расхода топлива необходимо, чтобы минимум расхо-
да топлива Qt соответствовал не заданной мощности двигателя д, а за-
данной мощности на колесах самоходной машины ТУ2д. Для получения
наибольшей силы тяги при переменном КПД необходимо обеспечить
работу двигателя не при максимальной мощности двигателя АГ1таХ) а
при максимальной мощности на колесах самоходной машины Л^тах.
Расчет регуляторной характеристики с учетом переменности КПД рас-
172
. 82. Топографическая характе-
ристика тракторного дизеля
смотрен в литературе [21, 22].
Как было установлено, влияние
изменения КПД на регулятор;
ную характеристику невелико'
Поэтому в первом приближе-
нии можно принять регулятор-
ную характеристику, показан-
ную на рис. 81.
На рис. 82 приведена топо-
графическая характеристика
тракторного дизеля с всере-
жимным регулятором (регуля-
торные ветви кроме ветви,
ограничивающей максимальную частоту вращения не показаны). На ее
основании при помощи кривых равной мощности построена оптимальная
по расходу топлива регуляторная характеристика режимов работы дви-
гателя АБ. Для дизеля, в отличие от карбюраторного двигателя, центр
наименьшего расхода топлива располагается в глубине графика.
Как следует из рисунка, при наличии обычной механической транс-
миссии, работе двигателя по регуляторной ветви и уменьшении мощ-
ности двигателя до 25 кВт удельный расход топлива становится равным
273 г/ (кВт-ч). При наличии ГОТ с системой автоматического управления
при уменьшении мощности двигателя до 25 кВт расход топлива стано-
вится равным 231 г/ (кВт-ч), т.е. на 18 % меньше.
Рассмотренные регуляторные характеристики режимов работы дви-
гателя можно получить только при наличии в автоматической системе
астатического регулятора, точно поддерживающего заданный режим
работы двигателя. При статическом регуляторе, поддерживающем за-
данный режим работы двигателя с определенной статической погреш-
ностью, регуляторные характеристики режимов работы двигателя имеют
несколько иной вид. Для регулирования режимов работы двигателя
можно использовать регуляторы различных типов. На рис. 83 приведена
статическая характеристика регулятора, реагирующего на отклонение
Д/li частоты вращения вала двигателя от заданного значения п 10. Харак-
теристика показывает из-
менение положения s што-
ка поршня гидроусилителя
регулятора, соединенного с
органом управления пере-
дачей, от частоты вращения
Рис, 83. Статическая характе-
ристика регулятора
173
nt (или от угловой скорости cjj) вала двигателя, соединенного с валом
регулятора.
Положению поршня гидроусилителя smjn =0 соответствует мини-
мальное расчетное передаточное отношение передачи /pmin = 0, а макси-
мальному положению $тах — максимальное расчетное передаточное от-
ношение передачи /ртах. Зависимость zp от s обычно стремятся сделать
близкой к линейной.
Каждая кривая s = /(«i) относится к определенному положению
h органа изменения настройки регулятора. В соответствии с этой харак-
теристикой при заданном Л, например h = Лтах> и увеличении частоты
вращения до значения «imin поршень гидроусилителя находится в пос-
тоянном положении $min. При достижении заданной частоты вращения
nimin и дальнейшем ее увеличении происходит перемещение поршня от
положения smjn до положения smax.
Регулятор, воздействуя на передачу, в определенном диапазоне
Ит min - max (т.е. с определенной статической погрешностью) поддер-
живает заданную частоту вращения двигателя п^. Значение и1Б может
располагаться внутри области «imjn - Wimax или» как показано, на ее
границе, что предотвращает увеличение частоты вращения двигателя вы-
ше значения nN. Относительная статическая погрешность регулирования
оценивается степенью неравномерности регулятора
nimax~wimin wlmax ~ ^imin
6 .
л1ср wicp
При использовании астатического регулятора 6 = 0, следовательно,
регулятор точно поддерживает постоянной заданную частоту вращения
и10. На статической характеристике такого регулятора прямые измене-
ния пх располагаются вертикально.
При положении ftmin органа изменения настройки регулятор под-
держивает частоту вращения вала двигателя, лежащую в пределах
wimin — wlmax« 1
Следует так рассчитать систему, чтобы частоте вращения и1пнп
соответствовала частота враще-
ния (см. рис. 81). Это пре-
дотвратит работу двигателя под
нагрузкой с частотой, меньшей
niA-
На рис. 84 приведена ре-
гуляторная характеристика режи-
мов работы двигателя со ста-
тическим регулятором, реагирую-
щим на отклонение частоты вра-
щения вала двигателя. Предпо-
лагается, что в системе регули-
Рис. 84. Регуляторная характеристика
режимов работы двигателя со статичес-
ким регулятором
174
рования педаль управления соединена с органом изменения настройки
регулятора и с дроссельной заслонкой карбюратора двигателя. Для раз-
личных значений h показаны границы изменения частоты вращения
wimin - wimax. При hf двигатель работает на режимах, определяемых
отрезком т - п кривой крутящего момента двигателя, относящейся к
некоторому постоянному углу а открытия дроссельной заслонки кар-
бюратора. В общем случае двигатель может работать на режимах, опре-
деляемых областью АбБа, внутри которой находится кривая АБ опти-
мальных режимов его работы.
82. РАСЧЕТ ТЯГОВОЙ И ТОПЛИВНО-ЭКОНОМИЧЕСКОЙ ХАРАКТЕРИСТИКИ
САМОХОДНОЙ МАШИНЫ ПРИ РАБОТЕ ДВИГАТЕЛЯ
НА ЗАДАННЫХ РЕЖИМАХ
В дальнейшем для простоты рассуждений будем считать, что в транс-
миссии отсутствуют шестеренчатые редукторы, поэтому ее передаточное
отношение равно передаточному отношению ОГП, а частота вращения и
крутящий момент гидромотора (гидромоторов) равны соответственно
частоте вращения и крутящему моменту на колесах самоходной маши-
ны. При необходимости учет передаточных отношений зубчатых редукто-
ров не вызывает каких-либо затруднений.
Различным самоходным машинам свойственна различная тяговая
характеристика. Для автомобиля и подобных ему транспортных машин
она представляет собой зависимость силы тяги на колесах и силы сопро-
тивления движению от скорости движения, для трактора — зависимость
мощности на крюке, скорости движения, удельного расхода топлива
двигателя и коэффициента буксования от силы тяги на крюке.
Тяговую характеристику (рис. 85, а) автомобиля с ГОТ и системой
автоматического . управления, содержащей астатический регулятор,
строят для работы двигателя на различных режимах, определяемых
Рис. 85. Тяговые характеристики автомобиля и трактора
175
произвольными точками регуляторной характеристики режимов работы
двигателя АБ (см. рис. 81). Поскольку работу двигателя на режиме
постоянной мощности обеспечивает регулятор, то такая характеристика
является регуляторной тяговой характеристикой. При ее расчете следует
произвольно задаться значениями *р и по /р, Мх и пх сначала определить
объемный КПД т?0 трансмиссии и скорость движения, а затем найти ме-
ханический КПД т?м трансмиссии и рассчитать для этой скорости силу
тягиРт.
Расчет можно выполнить более просто (с некоторым приближе-
нием), используя выражение
Рт = 3600ЛГ1дп/у,
где Рт - в Н; Niд - в кВт; v - в км/ч.
При расчете задаются различными значениями скорости v автомоби-
ля. Определяют для него кинематическое передаточное отношение
2,65v
*к >
И1гк
где гк - радиус качения колеса, м (v - в км/ч и - в об/мин).
По п х и /р, принятому с некоторым приближением, равным /к,
находят значение полного КПД т?.
Внешняя гиперболическая кривая силы тяги относится к максималь-
ной мощности на регуляторной характеристике режимов работы двига-
теля (точка Б на рис. 81), а промежуточные кривые относятся к другим
режимам работы двигателя, соответствующим этой характеристике.
Предельно допустимое давление ртах определяет максимальное
значение крутящего момента М2 и силы тяги Рт [выражение (16)]. По-
скольку механический КПД т?М2 гидромотора переменный, то при
постоянном давлении ртах сила Рт с изменением скорости v несколько
изменяется (различным точкам кривой максимальных значений Рт соот-
ветствуют различные значения пг, Мх и /р).
Кривая АА относится к = 1 ие2 = 1, т.е. к прекращению регули-
рования насоса и началу регулирования гидромотора. Кривая ББ отно-
сится к Ci = 1 и е2 = e2min, т.е. к прекращению регулирования гидро-
мотора. Дальнейшее изменение силы Рт при увеличении v возможно при
постоянном максимальном расчетном передаточном отношении транс-
миссии в результате увеличения частоты вращения вала двигателя (штри-
ховые кривые). Для предупреждения вращения гидромоторов и насоса
с высокой частотой целесообразно установить предельный регулятор,
ограничивающий максимальную частоту вращения двигателя и, следова-
тельно, скорость движения самоходной машины. Датчик регулятора
должен вращаться от вала гидромотора и уменьшать подачу топлива при
достижении заданной частоты вращения.
На тяговую характеристику нанесены кривые Рс сопротивления рав-
номерному движению на горизонтальной дороге полностью груженого
автомобиля (<7Н = 100%) и без груза (GH = 0).
176
На тяговую характеристику можно нанести топографические кривые
общего КПД силовой установки = тте, являющегося произведением
полного КПД ОГП т? и эффективного КПД двигателя т?е, показывающие
предпочтительные области работы автомобиля.
При построении тяговой характеристики автомобиля и подобной
ему самоходной машины, снабженной различными технологическими
агрегатами, в том числе валом отбора мощности, необходимо знать
потребляемую этими агрегатами мощность в зависимости от скорости
движения машины (как частный случай она может не зависеть от скорос-
ти движения машины). Тяговую характеристику рассчитывают по фор-
муле
Рт = 3600
(JV । д — Nт/ят) Л
v
где 7VT - мощность, потребляемая технологическими агрегатами; т»т - КПД приво-
да технологических агрегатов.
Для определения топливно-экономической характеристики автомо-
биля необходимо регуляторную характеристику АБ режимов работы
двигателя (см. рис. 81) перестроить в координатах 7У1Д - nt (штрих-
пунктирная кривая АБ'). После этого следует для некоторых значений
скорости подсчитать мощность сопротивления N2c и привести ее к дви-
гателю, т.е. определить мощность — ЛГ2с/т?. По Nlc = АГ1Д на регуля-
торной характеристике находят режимы работы двигателя и соответст-
вующие им часовые расходы топлива Qt (показаны в нижней части на
рис. 81).
Расход топлива (л/100 км), отнесенный к 100 км пути, пройденному
самоходной машиной,
Qt
QS = \W-----, (124)
vpt
где рт - плотность топлива.
После этого строят топливо-экономическую характеристику, т.е.
зависимость Qs = /(v).
На рис. 85, б показана тяговая характеристика трактора, снабженно-
го ГОТ и системой автоматического управления, относящаяся к движе-
нию по определенной опорной поверхности. Сначала известным методом
с использованием экспериментальных данных строят кривую изменения
коэффициента буксования ведущих колес 8 от силы тяги Ркр на крюке
трактора. После этого задаются произвольными значениями скорости
движения v и определяют для них кинематическое передаточное отноше-
ние ГОТ:
2,65v
/ = -------------->
"i'k.c*1-*)
где гк с - радиус качения колеса в свободном режиме, примерно равный радиусу
качения колеса в ведомом режиме.
12-Зак. 1159
177
Поскольку тяговая характеристика строится для работы двигателя
на постоянном режиме максимальной мощности, принимают пг = п1Ъ.
По 7И1тах, лцб и /р, принимаемому равным zK, находят КПД 77. Взяв
определенное значение коэффициента f сопротивления качению трактора
или КПД 77^, учитывающего потери на качение, и задаваясь произвольны-
ми значениями v, находят для этих значений силу тяги на крюке:
36007У1дп(1 - 6) ЗбООЛ^дпп/и - 6)
^кР =--------——+ Gf= ; *
где G - вес трактора.
По полученным данным строят кривую Ьс изменения скорости трак-
тора от силы тяги на крюке. Точке b соответствует максимальное расчет-
ное передаточное отношение zpmax, а точке с — минимальное расчетное
нагрузочное передаточное отношение zpmm, которые определяют поло-
жения этих точек.
Кривая cd относится к работе ОГП с постоянным предельно допусти-
мым давленной при уменьшающейся мощности двигателя в результате
уменьшения подачи топлива и уменьшающимся расчетном передаточном
отношении ОГП. При расчете силы тяги на крюке на участке cd определя-
ют, как было рассмотрено раньше, силу тяги на колесах (аналогичный
участок на рис. 85, а) и вычитают из нее силу сопротивления качению.
Участку ab (рис. 85, б) соответствует постоянное передаточное от-
ношение ОГП /ртах и работадвигателя по регулярной ветви, ограничи-
вающей его максимальную частоту вращения. Для точки а мощность
двигателя равна мощности, затрачиваемой на преодоление сопротивле-
ния качению. При расчете участка ab на регуляторной ветви двигателя
задаются произвольными значениями А/1Д и пг. По этим значениям и
zpmax находят пм и рассчитывают силу тяги на крюке:
м 1д”м
Ркр=7------
'ргк.с
~Gf,
В работе [25] дано обоснование использованию в подобных расче-
тах радиуса качения колеса в свободном режиме вместо, казалось бы,
необходимого динамического радиуса.
По частоте вращения пх д определяют скорость v движения трактора.
Удельный расход топлива ge на участке Ь'с' соответствует работе двига-
теля на режиме максимальной мощности Nt Б. На участке a'b' расход
топлива соответствует работе двигателя по регуляторной ветви на задан-
ных в процессе расчета режимах (/И1Д, п1д).
Выше при построении тяговых характеристик автомобиля и тракто-
ра предполагалось использование астатического регулятора, управляю-
щего ОГП. Рассмотрим методику построения тяговой характеристики
автомобиля со статическим регулятором, относящейся к заданному по-
ложению органа изменения настройки регулятора, например кй =
~ ^тах. Каждому значению h на основании рис. 84, полученного в ре-
зультате статического расчета системы регулирования в целом, соответ-
178
ствует определенное значение угла а открытия дроссельной заслонки
карбюратора двигателя. Для заданного значения h и соответствующего
ему значения а в верхней части вспомогательного графика (рис. 86)
строят кривую изменения крутящего момента М1Д двигателя от частоты
вращения пх. В нижней части графика на основании рис. 82 для заданно-
го h строят зависимость s = /(«1). В верхней части графика проводят
вертикальные прямые, соответствующие определенным значениям s, а
следовательно, определенным значениям передаточного отношения /р.
Эти прямые, как будет показано дальше, являются прямыми моментами
нагрузки двигателя Aflc. Для каждой прямой, характеризуемой величи-
нами «1 и г’р, находят частоту вращения
”2 =«1^0-
Для точек пересечения кривой Мх д = f(nv) с указанными прямыми
находят значения д и по ним значения крутящего момента на колесах
автомобиля:
^2 Д = ^1 Д^М^р •
По полученной частоте вращения п2 определяют скорость v автомо-
биля, а по крутящему моменту 2И2д — силу тяги Рт.
На рис. 87 показан вспомогательный график, необходимый для опре-
деления топливно-экономической характеристики автомобиля, содержа-
щей статический регулятор. В верхней его половине для различных зна-
Рис. 86. К построению тяговой харак-
теристики самоходной машины со ста-
тическим регулятором
Рис. 87. К построению топливно-эконо-
мической характеристики самоходной
машины со статическим регулятором
12*
179
чений h и соответствующих им значений а строят кривые изменения кру-
тящего момента /И2Д, а также момента М2С сопротивления движению
автомобиля от частоты вращения п2. Отдельным точкам каждой кривой
ЛГ2д соответствует определенная частота вращения nl9 полученная при
построении этих кривых. По характеристике 'расхода топлива (см.
рис. 78, б) в нижней половине графика на рис. 87 для заданных значений
а и Пх строят кривые изменения расхода топлива Qt. Для точек пересе-
чения кривых М2д с кривой Мас определяют п2 и Qt. По частоте враще-
ния п2 рассчитывают скорость v и по формуле (124) определяют расход
топлива Qs.
Как показывают расчеты, статический регулятор (по сравнению
с астатическим) при относительно большой степени неравномерности 6,
равной 0,15 (для Лтах), уменьшает силу тяги самоходной машины с
карбюраторным двигателем на 3,5 % и с дизелем на 2,5 % и при обоих
двигателях увеличивает расход топлива приблизительно на 1 %. В при-
ближенных расчетах при S <0,15 можно пользоваться методикой опре-
деления тяговой и топливно-экономической характеристик, относящих-
ся к астатическому регулятору.
8.3. РАСЧЕТ ДИАПАЗОНА ИЗМЕНЕНИЯ
ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ ГИДРООБЪЕМНОЙ ТРАНСМИССИИ
При использовании на транспортной самоходной машине (автомо-
биль и др.) ГОТ очень важно правильно выбрать ее максимальное пере-
даточное отношение /ртах. В идеальном случае оно должно при движе-
нии машины без груза на горизонтальной дороге обеспечивать работу
двигателя по регуляторной характеристике АБ (см. рис. 81). При этом
кривая Рс = /(v) при GH = 0 на рис. 85, а на всех участках должна лежать
выше кривой ББ. Для определения такого максимального передаточно-
го отношения ГОТ необходимо рассмотренным ранее методом построить
тяговую характеристику автомобиля (см. рис. 85, а). Для точек пересе-
чения кривых Рт = /(v) с кривой Рс = /(v) при GH = 0 определяют зна-
чения Л/1Д и Пх и рассчитывают по ним максимальное передаточное от-
ношение
*ртах = v/^>^77h1Z'kT70,
где п0 - приближенно заданный объемный КПД ГОТ.
Из полученных значений /ртах выбирают наибольшее. По нему рас-
считывают кривую ББ, которая будет касаться кривой Рс = /(v) в одной
точке, не пересекая ее.
Кривую ББ рассчитывают с использованием значений М1Д и пг,
относящихся к регуляторной характеристике Л Б (см. рис. 81) по фор-
мулам
/^1дЧм
~ ;
'к.с'ршах
180
v 0,377 z’p m ахгкт/ои i.
Аналогичным образом рассчитывают кривую АА на рис. 85, а, прини-
мая в приведенных выше формулах вместо z'pmax передаточное отноше-
ние ГОТ, соответствующее прекращению изменения рабочего объема
насоса.
Минимальное нагрузочное передаточное отношение zpjimin ГОТ
можно принять равным передаточному отношению обычной механичес-
кой трансмиссии на первой передаче.
Диапазон изменения передаточного отношения ©рД1 ГОТ, соответ-
ствующий полученным значениям zpmax и zpHmin, будет значительно
больше диапазона изменения передаточного отношения механической
трансмиссии и для легкового автомобиля составит примерно 8 и для
грузового 11.
Увеличение диапазона н вызывает значительное увеличение ра-
бочих объемов гидромашин ГОТ, а следовательно, ее массы и стоимос-
ти. Поэтому необходимо исследовать возможность уменьшения переда-
точного отношения Zpmax, построив для различных значений zpmax
топливно-экономические характеристики автомобиля и выявив влияние
zp mах на расход топлива.
Поскольку грузовой автомобиль основное время движется с полной
нагрузкой, целесообразно рассмотренным выше способом определить
Zpmax, обеспечивающее для груженого автомобиля работу двигателя по
заданной регуляторной характеристике АБ (см. рис. 71). Это переда-
точное отношение будет значительно меньше полученного ранее. Наи-
меньшим допустимым передаточным отношением zpmax будет такое,
которое не вызывает уменьшения максимальной скорости движения
груженого автомобиля. Ему соответствует прохождение кривой Рс =
= /(v) черех точку Б, как показано на рис. 85, а.
Если zpmax принять равным передаточному отношению обычной
механической трансмиссии, то улучшение топливной экономичности
автомобиля, вызванное применением ГОТ, будет незначительным. При-
чем, из-за более низкого КПД ГОТ расход топлива с ГОТ может оказать-
ся даже более высоким, чем с механической трансмиссией.
Для трактора целесообразно иметь два диапазона изменения пере-
даточного отношения: один транспортный, другой рабочий. Рабочий диа-
пазон должен быть примерно таким же, как и рабочий диапазон механи-
ческой трансмиссии. Для уменьшения расхода топлива на транспортных
работах передаточное отношение zpmax транспортного диапазона ГОТ,
аналогично автомобилю, должно быть больше, чем максимальное пере-
даточное отношение механической трансмиссии.
181
9. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
КЛАССА ПОСТОЯННОЙ МОЩНОСТИ
9.1. ПРИНЦИПЫ ДЕЙСТВИЯ СИСТЕМ РЕГУЛИРОВАНИЯ
Задача системы автоматического регулирования состоит в том, что-
бы для заданных положений педали управления при всех внешних возму-
щениях поддерживать постоянными те или иные режимы работы двигате-
ля, лежащие на заданной регуляторной характеристике АБ (см. рис. 81).
Работе двигателя на постоянных режимах соответствует регуляторная
тяговая характеристика самоходной машины, показанная на рис. 85.
Все системы регулирования для поддержания постоянным заданного
режима работы двигателя используют одно и то же регулирующее воз-
действие — изменение передаточного отношения гидрообьемной транс-
миссии. На рис. 88 показана характеристика двигателя постоянной мощ-
ности, содержащая кривые крутящего момента двигателя при пос-
тоянном положении а органа управления прибором подачи топлива (угле
поворота дроссельной заслонки карбюратора ил** перемещении рейки
топливного насоса) и момента М1С статического сопротивления, приве-
денного к двигателю при постоянном передаточном отношении zp транс-
миссии, от угловой скорости вала двигателя.
Момент является моментом сопротивления, приведенным к
двигателю от ведущих колес машины и от рабочих органов землеройных
и других технологических^агрегатов, если ими снабжена машина.
.Предположим, двигатель работал на заданном режиме с параметра-
ми с^ю, M1Q (точка Ко) при zp0 и «о. Затем произошло возмущение -
увеличение коэффициента сопротивления дороги от Фо до ,что вызва-
ло увеличение момента сопротивления М2с на колесах самоходной ма-
шины и, следовательно, момента Mic сопротивления двигателя. В ре-
зелътате двигатель стал работать на новом режиме (точка К).
Для сохранения прежнего режима работы двигателя (точка Ко)
необходимо обеспечить прежнее значение момента сопротивления двига-
теля М! с = М10. Поскольку МJ с = М2 cip, нужно уменьшить передаточное
отношение /р во столько раз, во сколько раз увеличился момент Af2c.
Таким образом, заданный режим работы двигателя при изменении
момента сопротивления М2с на колесах машины поддерживается по-
стоянным в результате обеспечения постоянства момента сопротивления
Mic двигателя путем изменения передаточного отношения fp транс-
миссии.
Существует несколько принципов регулирования режимов работы
двигателя. Их определяет параметр, на который реагирует регулятор,
изменяющий передаточное отношение трансмиссии, и параметр, по кото-
рому производится изменение настройки регулятора на новый регули-
руемый режим.
Регулирование режимов работы двигателя по отклонению угловой
скорости вала двигателя. На рис. 89 показана принципиальная схема
регулирования по отклонению угловой скорости вала двигателя.
182
Рис. 88. Характеристики равновесных
состоянии двигателя
Рис. 89. Схема системы регулирования по
отклонению угловой скорости вала дви-
гателя
Она содержит астатический (со сте-
пенью неравномерности 8 = 0) регу-
лятор трансмиссии непрямого дейст-
вия, состоящий из механического
центробежного (маятникового)
измерителя угловой скорости, при-
водимого во вращение от вала двига-
теля, и гидродвигателя без обратной
связи, содержащего гидроцилиндр и распределитель. При наличии обрат-
ной связи гидро двигатель называется гидроусилителем. Конструкции
различных гидроусилителей были рассмотрены в п. 2.2. Гидродвигатель
изменяет передаточное отношение гидрообъемной трансмиссии. Изме-
нение настройки регулятора на заданную угловую скорость осуществля-
ется при помощи перемещения h органа настройки регулятора, изменяю-
щего силу сжатия пружины измерителя. Изменение силы сжатия произ-
водится кулачком. Последний поворачивается педалью управления,
соединенной также с органом управления прибором подачи топлива (с
дроссельной заслонкой карбюратора двигателя). Увеличению перемеще-
ния s поршня гидродвигателя соответствует увеличение передаточного
отношения fp.
При работе двигателя на постоянном режиме с параметрами сс10,
7И10 золотник распределителя гидродвигателя находится в нейтральном
положении, прикрывая каналы, ведущие к цилиндру. При изменении
момента сопротивления М2С на колесах самоходной машины возникает
отклонение Да>1 = cci - со1О угловой скорости вала двигателя от задан-
ного значения со1О (см. рис. 88). Отклонение Дс^ служит сигналом к
началу процесса регулирования. Измеритель регулятора, реагируя на
183
отклонение Awi, перемещает золотник распределителя гидродвигателя.
Поршень гидродвигателя изменяет передаточное отношение трансмиссии
до тех пор, пока не устранится отклонение AtOi и, следовательно, пока
не восстановится прежняя угловая скорость двигателя а>ю. При о>ю
золотник гидродвигателя снова занимает нейтральное положение, и про-
цесс регулирования заканчивается. Двигатель продолжает работать на
прежнем режиме (со10, ^Ло), в трансмиссии устанавливается новое пере-
даточное отношение /р.
Переход с одного постоянного режима работы двигателя на другой
осуществляется путем изменения угла т поворота педали управления
(педали настройки системы). При изменении угла у изменяются переме-
щение h и сила сжатия пружины измерителя угловой скорости, а также
угол а открытия дроссельной заслонки карбюратора двигателя. Золот-
ник занимает нейтральное положение при новом значении регулируемой
угловой скорости. Угол а и эта угловая скорость определяют новое зна-
чение крутящего момента и, следовательно, новый регулируемый режим
работы двигателя.
Кулачок изменения настройки регулятора обеспечивает определен-
ную связь между регулируемой угловой скоростью и углом а, при кото-
рой параметры Mw и с^ю регулируемых режимов работы двигателя
лежат на кривой АБ заданной регуляторной характеристики (рис. 81).
При разгоне самоходной машины, т.е. при непрерывном увеличении
угловой скорости а>2 ее колес, происходит непрерывное отклонение
Acoi угловой скорости двигателя от заданной сою и непрерывная ликви-
дация этого отклонения путем непрерывного изменения передаточного
отношения /р, в результате чего двигатель работает на постоянном режи-
ме, развивая постоянную мощность.
На рис. 90 показана нагрузочная характеристика двигателя с астати-
ческим регулятором, управляющим ОГП и реагирующим на отклонение
угловой скорости его вала. Она представляет собой прямые момента
М1с статического сопротивления двигателя при различных перемеще-
ниях h органа изменения настройки регулятора, нанесенные на характе-
ристику крутящего момента Mi д двигателя. Нагрузочная характеристи-
ка относится к равномерному движению машины. Точки пересечения
прямых момента определяют ре-
гулируемые (поддерживаемые
постоянными) режимы работы
двигателя, соответствующие кри-
вой АБ (см. рис. 81). Нагрузоч-
ная характеристика для точек,
лежащих на кривой АБ устанав-
ливает зависимость между пере-
мещением h органа измене-
Рис. 90. Нагрузочная характеристика
двигателя с регулятором трансмис-
сии, реагирующим на отклонение
угловой скорости вала двигателя
184
ния настройки регулятора и углом а открытия дроссельной заслонки
карбюратора, по которой производится расчет профиля кулачка измене-
ния настройки регулятора [21, 22].
В общем случае равномерного и неравномерного движения переда-
ваемый от двигателя к колесам самоходной машины крутящий момент
ТИ2Д уравновешивается моментом статической « динамической нагрузки:
dw2
= *^2 + -^2с>
dt»
где /2 _ момент инерции условной маховой массы, учитывающий инерцию поступа-
тельно движущейся массы самоходной машины и вращающихся ее колес.
Так как
О>2 = wUp
И
-М1Н=^2н*р,
момент статической и динамической нагрузки, приведенный к дви-
гателю,
„ dw 1 ^ Р
^1н=^р—1 +М2С1Р.
r dt at
Уравнение динамического равновесия моментов на валу двигателя
(уравнение движения двигателя) имеет вид
dt
где Ji - момент инерции двигателя (маховика и жестко связанных с ним деталей).
Подставив в полученное уравнение выражение Л/1н, запишем урав-
нение движения двигателя в виде
du 1 . dip *
2 —— = Afj д — J2 О} fp — М2 cip, (125)
где приведенный к двигателю суммарный момент инерции
A s = А + *^2^р-
Как 9идим, производная dipldt создает дополнительный динами-
ческий момент нагрузки
dip
Мц = А^1^р •
В равновесном состоянии, т.е. при установившемся режиме,
^1Д = ^1С ~ М\ ; Л/2д = ^2С = ^2 •
185
Система регулирования режимов работы двигателя является свое-
образной, что выражается в следующем. Момент инерции Л s объекта
регулирования является функцией регулирующего воздействия zp, т.е.
изменяется в процессе регулирования [выражение (125)]. На объект
регулирования, кроме регулирующего воздействия Zp, определяющего
статический момент нагрузки, в процессе регулирования действует про-
изводная регулирующего воздействия di^/dt9 создающая временный
динамический момент нагрузки. Эти особенности отличают рассмотрен-
ную систему регулирования от многих других.
Так, например, для системы регулирования угловой скорости вала
двигателя при постоянном передаточном отношении трансмиссии, на
основании уравнения (125) уравнение двигателя имеет вид
dw 1
A s - = М i д — Mi с.
dt
Крутящий момент двигателя Л/1д является функцией двух пере-
менных — угловой скорости и положения а органа управления прибо-
ром подачи топлива, изменение которого регулятором является регули-
рующим воздействием. В приведенном уравнении величина Jt s постоян-
ная. Производная dafdt регулирующего воздействия не создает какого-
либо дополнительного момента, действующего на двигатель.
Входной координатой регулятора двигателя является угловая ско-
рость , а выходной - положение а. Уравнение регулятора легко под-
ставить в уравнение двигателя и получить уравнение системы регулиро-
вания в целом.
При регулировании режима работы двигателя с использованием
ОГП по отклонению угловой скорости вала двигателя входной коорди-
натой регулятора является угловая скорость , а выходной — переда-
точное отношение zp. Совместное решение уравнений регулятора и урав-
нения объекта регулирования (125) в данном случае является более
сложной задачей и приводит к более сложному нелинейному уравнению
системы регулирования в целом.
При более точном математическом описании системы необходимо
использовать не расчетное передаточное отношение zp, а кинематическое
zK (при связи угловых скоростей) и силовое zc (при связи моментов),
т.е. необходимо учитывать потери в трансмиссии, являющиеся функцией
нескольких независимых переменных. Также надо учитывать скручива-
ние валов трансмиссии и сжимаемость жидкости в ОГП. Решение этой
задачи требует специального математического описания ОГП, приведен-
ного в работе [23].
При угловой скорости вала двигателя, меньшей заданной, т.е. при
<^i < на нагрузочной характеристике момент сопротивления двига-
теля = 0, чему соответствует zp = 0 (см. рис. 90). При
с = с m ах, чему соответствует zp = zp m ах.
При интенсивном разгоне самоходной машины с места и мгновенном
увеличении угла поворота педали управления до 7тах увеличивается
угол открытия дроссельной заслонки карбюратора двигателя до атах.
186
В первый момент двигатель, не испытывая нагрузки (Mic = 0 и zp = 0),
разгоняется до угловой скорости после чего увеличивается пере-
даточное отношение ip. Началу изменения передаточного отношения
соответствует трогание самоходной машины с места. Если бы система
была идеальной, безынерционной, то момент сопротивления увеличи-
вался бы до Мхс = после чего двигатель стал бы работать на режи-
ме максимальной мощности.
Поскольку система инерционна, угловая скорость вала двигателя
превысит значение Затем суммарный момент статической М1С и
динамической ЛГП- нагрузок превысит крутящий момент двигателя М1Д
и угловая скорость вала двигателя начнет уменьшаться. При этом регуля-
тор будет уменьшать передаточное отношение zp, что вызовет уменьше-
ние момента М1С и перемену знака производной Л*р/Л, сопровождаю-
щуюся появлением динамического момента который будет склады-
ваться с крутящим моментом двигателя.
Как видим, яри резком увеличении угла поворота педали управле-
ния происходят сложные явления, которые могут привести к резким
колебаниям угловой скорости вала двигателя и угловой скорости колес
машины, а следовательно, ее поступательной скорости.
Поскольку момент нагрузки двигателя зависит от производной
dipldt, на характер переходного процесса системы регулирования су-
щественное влияние должна оказывать скорость перемещения поршня
гидроусилителя, зависящая от проходных сечений, через которые жид-
кость поступает в цилиндр.
При заданной разности между крутящим моментом двигателя и
моментом нагрузки интенсивность изменения угловой скорости вала
двигателя определяется моментом инерции A s. С увеличением скорос-
ти движения самоходной машины возрастают передаточное отношение
ip и момент инерции A s, поэтому характер и качество переходного про-
цесса, возникающего, например, при увеличении момента сопротивления
на колесах самоходной машины, будут зависеть от начальной скорости
ее движения. С увеличением скорости качество переходного процесса
улучшается.
Если при движении с высокой скоростью отпустить педаль управле-
ния (у = Уд), то заданная регулируемая угловая скорость сою - с^хд
будет меньше текущей од, и в трансмиссии установится максимальное
передаточное отношение zpmax (см. рис. 90). Такое передаточное отно-
шение способствует благоприятному движению самоходной машины на-
катом с минимальным сопротивлением проворачиванию двигателя.
При постоянном передаточном отношении zp уменьшению линейной ско-
рости v самоходной машины и, следовательно, угловой скорости а>2 ее
колес соответствует пропорциональное уменьшение угловой скорости
о?! вала двигателя. Как только угловая скорость вала двигателя coi
окажется больше заданной , в трансмиссии установится передаточ-
ное отношение zp = 0. Это позволит остановить самоходную машину с
работающим двигателем на холостом ходу.
При выключенном двигателе передаточное отношение zp = 0 обеспе-
чивает эффективное торможение самоходной машины на стоянке за счет
187
высокого, приведенного к колесам, сопротивления проворачиванию
двигателя (на крутом спуске возможно медленное перемещение само-
ходной машины из-за утечек в ОГП).
. При наличии всережимного регулятора угловой скорости крутящий
момент двигателя на нагрузочной характеристике .изменяется аналогич-
но моменту сопротивления, что мешает образованию устойчивых равно-
весных состояний. Поэтому при наличии системы регулирования режи-
мов работы двигателя по отклонению его угловой скорости с двигателя
следует снять всережимный регулятор.
Регулирование режимов работы двигателя по отклонению момента
его нагрузки. На рис. 91 показана принципиальная схема системы регу-
лирования по отклонению ДЛ/щ момента нагрузки двигателя. Она со-
держит астатический регулятор трансмиссии непрямого действия, состоя-
щий из механического измерителя момента нагрузки М1п и гидродвига-
теля, изменяющего передаточное отношение ГОТ. В качестве измерителя
момента нагрузки можно применять различные устройства. На рис. 91
показан простейший измеритель, представляющий собой винтовой ме-
ханизм (резьба левая), на гайку которого, являющуюся одновременно
подвижной в осевом направлении муфтой, действует пружина. Измери-
тель момента нагрузки соединяет коленчатый вал двигателя с валом на-
соса ГОТ. Он перемещает дифференциальный рычаг, средняя точка ко-
торого соединена с золотником распределителя гидродвигателя, а ниж-
няя точка через кулачок — с дроссельной заслонкой карбюратора с
педалью управления. Кулачок осуществляет связь положения h штока
изменения настройки регулятора с углом открытия дроссельной за-
слонки карбюратора двигателя и тем самым обеспечивает работу двига-
теля на режимах, соответствующих кривой АБ (см. рис. 81).
Для работоспособности системы необходимо так присоединить
регулятор к передаче, чтобы увеличению момента нагрузки ЛГ1Н соот-
ветствовало уменьшение передаточного отношения /р.
При нарушении заданного режима работы двигателя (w10,Mi0) (см.
Рис. 91. Схема системы регулирования по отклонению момента нагрузки двигателя
188
рис. 88), вызванного внешним возмущением — изменением момента
статического сопротивления М2 с на колесах самоходной машины, возни-
кает отклонение А/И1С момента статического сопротивления, приведен-
ного к двигателю, от заданного значения М10. Поскольку самоходная ма-
шина начинает перемещаться неравномерно, на измеритель регулятора
действует момент статической и динамической нагрузки, равный крутя-
щему моменту двигателя, за вычетом инерционного момента вращаю-
щихся масс двигателя.
Регулятор реагирует на отклонение момента нагрузки Д/И1Н и изме-
няет передаточное отношение zp трансмиссии до тех пор, пока не устра-
нится отклонение Д/И1Н и не восстановится заданный режим работы
двигателя.
Как только регулятор начнет изменять передаточное отношение
zp, на его измеритель и двигатель будет действовать момент, пропорцио-
нальный производной di^dt. В предыдущей систейе регулирования
этот момент может достигать весьма высокого значения (при скачко-
образном изменении передаточного отношения он равен бесконечности).
В данной системе регулятор непосредственно реагирует на момент Л/1н,
в который входит и динамический момент, пропорциональный di^dt*
Поэтому, как только начнет возникать этот момент, регулятор прекра-
тит резкое изменение передаточного отношения /р и увеличение мо-
мента, пропорционального di^ldt. В процессе регулирования регулятор
будет стремиться поддерживать суммарный момент нагрузки М1Н> рав-
ный заданному моменту М10.
Поскольку в данной системе отсутствуют резкие колебания момен-
та М1Н> а следовательно, угловой скорости Wi вала двигателя и поступа-
тельной скорости v машины, система регулирования по отклонению
Д/И1н обеспечивает значительно лучшее качество переходных процессов
по сравнению с системой регулирования по отклонению .
На рис. 92 показана регуляторная нагрузочная статическая харак-
теристика двигателя при наличии астатического регулятора трансмис-
сии. Регулятор для каждого угла у поворота, педали управления на уста-
Рис. 92. Нагрузочная характеристика двигателя с регулятором трансмиссии, реа-
гирующим на отклонение момента нагрузки двигателя
189
повившемся режиме поддерживает постоянным тот или иной момент
сопротивления Aflc, равный крутящему моменту двигателя. Точки пере-
сечения прямых момента сопротивления с кривыми, крутящего момента
определяют регулируемые режимы работы двигателя (со1О,Л/1О).
При увеличении угла 7 до 7тах увеличиваются угол а и перемеще-
ние h (см. рис. 91). При этом золотник распределителя гидродвигателя
движется вправо, что приводит к увеличению передаточного отношения
/р от первоначального значения zp = 0 и к троганию самоходной машины
с места. Вызванное увеличением zp возрастание момента М1н препят-
ствует резкому увеличению zp до значения /ртах- Возросший момент
М1Н стремится переместить золотник распределителя снова в левое по-
ложение и тем самым прекратить интенсивное нарастание zp. В переход-
ном процессе, как было указано раньше, регулятор стремится поддер-
живать постоянным момент нагрузки Af1H, равныйс при Лтах -
Под действием сравнительно небольшой разности моментов -
- М1н угловая скорость вала двигателя увеличивается до ыБ. При этом
приблизительно плавно увеличивается передаточное отношение zp. После
достижения двигателем угловой скорости ыБ регулятор поддерживает
заданный режим работы (со^,ЛГ^), что сопровождается дальнейшим
увеличением передаточного отношения zp и разгоном машины до макси-
мальной скорости.
В рассматриваемой системе при резком нажатии на педаль управле-
ния отсутствуют резкие колебания момента нагрузки и угловой скорос-
ти вала двигатели. z
Вцше на основании простых рассуждений сделана попытка объяс-
нить влияние различных факторов, в том числе общей структуры (об-
щего принципа действия) системы на качество переходных процессов.
Разработка систем требует их подробного математического, описания и
всестороннего исследования переходных процессов, рассмотренных в
работах [21j 22].
Если при высокой скорости движения отпустить педаль управления
(7 = 0), то дроссельная заслонка карбюратора повернется на угол ах х ,
двигатель будет развивать отрицательный тормозной момент, а в транс-
миссии установится максимальное передаточное отношение/ртах,кото-
рое сохраняется постоянным в процессе снижения скорости самоходной
машины. При уменьшении угловой скорости вала двигателя до значения
скорости холостого хода момент становится равным нулю, а затем
приобретает некоторое положительное значение. В результате этого
происходит уменьшение передаточного отношения от rpmax до zp = 0.
У дизеля с восходящими кривыми крутящего момента при постоян-
ном моменте нагрузки могут возникнуть неустойчивые равновесные
состояния. В этом случае следует установить на двигатель всережимный
регулятор угловой скорости.
Регулирование режимов работы двигателя по изменению угловой
скорости колес самоходной машины. Для сохранения постоянной задан-
ной угловой скорости со ю вала двигателя необходимо изменять переда-
точное отношение /р в зависимости от угловой скорости co2’*konec само-
ходной машины в соответствии с уравнением
190
fp = W2T?K/W1O . (126)
Такое изменение передаточного отношения обеспечивает постоян-
ство не только угловой скорости coj, но и момента сопротивления дви-
гателя Aflc. Работе двигателя на заданном режиме соответствует равен-
ство
Если момент М2с увеличился, например, в 3 раза, то при сохранении
заданного режима работы двигателя угловая скорость со2 должна умень-
шаться в 3 раза. На основании выражения (126) этому соответствует
уменьшение передаточного отношения zp в 3 раза. При увеличении мо-
мента М2С в 3 раза и уменьшении передаточного отношения zp в 3 раза
сохраняется прежний момент нагрузки двигателя:
^ic
Система регулирования (рис. 93) содержит регулятор-компенсатор,
который изменяет передаточное отношение трасмиссии /р в зависимости
от угловой скорости о)2 в соответствии с выражением (126). Регулятор-
компенсатор состоит из измерителя угловой скорости ы2, перемещаю-
щего в продольном направлении пространственный кулачок. Шток ку-
лачка через гидродвигатель с жесткой обратной связью (гидроусили-
тель) изменяет передаточное отношение ГОТ. Каждое сечение простран-
ственного кулачка имеет профиль, обеспечивающий поддержание пос-
тоянной той или иной угловой скорости вала двигателя <л>10.
Изменение настрой-
ки регулятора-компенсато-
ра производится при по-
мощи устройства удлинен-
ная шестерня — зубчатая
рейка, поворачивающего
пространственный кулачок.
Зубчатая рейка перемеща-
ется плоским кулачком,
соединенным с педалью
управления и с дроссельной
заслонкой карбюратора
двигателя.
Нагрузочная характе-
ристика двигателя с рас-
смотренным регулятором-
компенсатором аналогична
приведенной на рис. 90.
Рис. 93. Схема системы регули-
рования по изменению угловой
скорости колес самоходной ма-
шины
191
Регулирование режимов работы двигателя по изменению момента
нагрузки на колесах самоходной машины. Для сохранения заданного
постоянного момента нагрузки двигателя М1Н = необходимо изме-
нять передаточное отношение zp в зависимости от момента нагрузки
М2п на колесах самоходной машины в соответствии с уравнением
fp = /Л/2Н. (127)
Поддержание постоянным момента нагрузки двигателя М1Н обеспе-
чивает работу двигателя на постоянном режиме (w10,Af10).
Система регулирования содержит регулятор-компенсатор, изменяю-
щий передаточное отношение трансмиссии zp в зависимости от момента
нагрузки М2Н в соответствии с выражением (127). Момент нагрузки
Af2H равен подведенному от двигателя к колесам самоходной машины
крутящему моменту Af2д. Если регулятор-компенсатор измеряет момент
нагрузки не на колесах самоходной машины, а на валу гидромотора
ОГП, то в уравнении (127) момент М2н является моментом нагрузки
на валу гидромотора, равным его крутящему моменту, а передаточное
отношение zp является передаточным отношением не всей трансмиссии,
а ОГП. В этом случае систему регулирования можно назвать системой
регулирования по изменению крутящего момента на валу гидромотора.
Показанный на рис. 94 регулятор-компенсатор системы регулирова-
ния содержит пружинно-винтовой измеритель крутящего момента. Он
установлен за гидромотором и измеряет крутящий момент на его валу
(момент, создаваемый давлением жидкости, за вычетом инерционного
момента вращающихся масс гидромотора). Измеритель крутящего мо-
мента перемещает в продольном направлении пространственный кула-
чок, толкатель которого управляет гидроусилителем с жесткой обрат-
ной связью, изменяющим передаточное отношение ОГП. Пространствен-
ный кулачок при помощи механизма удлиненная шестерня - зубчатая
рейка поворачивается плоским кулачком, изменяя настройку регуля-
192
тора-компенсатора. Педаль управления осуществляет поворот кулачка
и дроссельной заслонки карбюратора двигателя.
Нагрузочная характеристика двигателя с таким регулятором-ком-
пенсатором аналогична приведенной на рис. 92.
Выше были рассмотрены наиболее распространенные принципы ре-
гулирования режимов работы двигателя и автоматические системы,
использующие их. Во всех системах изменение настройки регуляторов
и регуляторов-компенсаторов произврдилось в зависимости от угла по-
ворота педали управления, соединенной с дроссельной заслонкой карбю-
ратора двигателя. Возможно изменение настройки регуляторов и регуля-
торов-компенсаторов в зависимости и от других параметров. Двигатель
внутреннего сгорания может быть снабжен всережимным регулятором
угловой скорости. В этом случае регулирование можно осуществить
по отклонению положения рейки топливного насоса двигателя [А.с.
204922 (СССР)]. Такая система при участии автора была создана для
роторного траншейного экскаватора Дмитровского завода [21]. На не-
большой партии экскаваторов она нашла практическое применение.
Регулирование по отклонению положения рейки топливного насоса
двигателя позволяет получить простую конструкцию, но не обеспечи-
вает высокого качества переходного процесса, и по этой причине здесь
не рассматривается.
Использование для изменения настройки регуляторов различных
параметров, а также всережимного регулятора двигателя расширяет
возможные принципы регулирования режимов работы двигателя.
92. СИСТЕМЫ РЕГУЛИРОВАНИЯ, РЕАГИРУЮЩИЕ
НА ИЗМЕНЕНИЕ ДАВЛЕНИЯ НАГНЕТАНИЯ НАСОСА
Такие системы нашли широкое применение на различных самоход-
ных машинах, в том числе на отечественных экскаваторах с ОГП, содер-
жащей регулируемый насос и нерегулируемый гидромотор (гидромото-
ры) . Общий принцип действия систем тот же, что и рассмотренной ранее
системы (см. рис. 94), осуществляющей регулирование заданного режи-
ма работы двигателя по изменению Крутящего момента на валу гидро-
мотора. Основное отличие заключается в устройстве регулятора-компен-
сатора, который в данном случае*принято называть регулятором мощ-
ности. Регуляторами мощности снабжаются отечественные насосы типов
207; 223; 323 (см. рис. 16,18 и 20).
Основное назначение регулятора мощности — поддерживать постоян-
ным один режим работы двигателя, соответствующий его максимальной
мощности для обеспечения наибольшей производительности самоходных
машин, снабженных технологическим оборудованием (тракторов,
строительных, дорожных и др.). Поскольку ОГП таких машин исполь-
зуется и для их передвижения, рассмотрим более общий случай работы
регулятора, а именно в транспортном режиме машины, когда необходи-
мо изменять регулируемую мощность двигателя для изменения скорос-
ти движения машины. Поддерживая постоянным режим работы двига-
13 —Зак. 1159
теля, регулятор мощности изменяет рабочий объем насоса в зависимости
от давления нагнетения.
Необходимый закон изменения рабочего объема от давления можно
найти, рассуждая различным образом. На основании выражений (11) и
(14) мощность на валу насоса, равная мощности двигателя на установив-
шемся режиме,
кт Q(P2-P1)
Ni = -------------.
бООООчм 14 о 1
Отсюда следует, что для поддержания постоянной мощности двига-
теля подачу насоса необходимо изменять обратно пропорционально пере-
паду рабочего давления. Подача насоса зависит от его рабочего объема
и частоты вращения. Последняя определяется нагрузочной характеристи-
кой двигателя, т.е. точкой пересечения кривой крутящего момента дви-
гателя с прямой момента нагрузки. Поэтому удобно сразу воспользо-
ваться нагрузочной характеристикой (см. рис. 92). Для работы двигате-
ля на режиме максимальной мощности его необходимо нагрузить момен-
том М\б^ соответствующим точке Б. На основании выражения (13) ра-
бочий объем насоса в зависимости от давления р2 необходимо изменять
согласно выражению
М15”м1
Q1 = ------------- .
0,159(p2-pi)
Если выразим в этой формуле через передаточное отношение
ОГП, то получим необходимый закон изменения передаточного отноше-
ния от давления:
М1Б4М1
iр = -------------- .
0,159^2(Р2 - Р1)
Это же уравнение можно получить, если в выражении (127) момент
М2Н заменить на перепад давления из выражения (16).
На основании приведенных уравнений строят зависимость рабочего
объема насоса и передаточного отношения передачи от давления нагнета-
ния (рис. 95, а, кривая 1). Под шкалой давления построена шкала мо-
мента М2 на валу гидромотора. При использовании рассматриваемых
регуляторов мощностии’иперболическая зависимость рабочего объема
насоса от р2 аппроксимируется двумя ломаными линиями 2.
Систему регулирования можно применять с карбюраторным двига-
телем и с дизелем, снабженным всережимным регулятором частоты
вращения. На рис. 95, б показана нагрузочная характеристика дизеля с
насосом ОГП при наличии регулятора мощности. Если бы изменение
передаточного отношения осуществлялось по гиперболе 7, то момент
нагрузки определяла бы одна верхняя прямая. Поскольку передаточное
отношение изменяется по ломаной линии, нагрузку двигателя определя-
ет семейство прямых, относящихся к различным передаточнымхотноше-
ниям. Эти прямые строят на основании рис. 90 и выражения = M2ip.
194
<b
treat, Lfaa*
М,
g/r, ifjwu
fy. if
Mft
btb
Фянл
ip cMic
hmin)
9 Pt*i* Рг
} мг,м;
Ptatax Pi
Ml пи Ml
S)
nn rif
Mi
M&
l*t
Рис. 95. Графики, иллюст-
рирующие рабочий про-
цесс системы регулирова-
ния по изменению давле-
ния на выходе из насоса
i) n'
Mu
nt9 nt
0
0
В данном случае нагрузочная характеристика одновременно являет-
ся регуляторной характеристикой режимов работы двигателя. Точки
пересечения прямых крутящего момента, относящиеся к различным по-
ложениям рычага всережимного регулятора, с прямыми момента нагруз-
ки определяют режимы работы двигателя. На основании нагрузочной
характеристики строят регуляторную характеристику изменения крутя-
щего момента на валу гидромотора от частоты его вращения, пропорцио-
нальную тяговой характеристике самоходной малины (рис. 95, в). С
этой целью для точек а/, относящихся к углу поворота <Ртах рычага все-
режимного регулятора двигателя, записывают величины М19 zp, по
которым находят М2 и п2. После того как регулятор мощности ОГП
установит максимальное передаточное отношение, момент М2 изменя-
ется в соответствии с регуляторной ветвью крутящего момента двига-
теля. Аналогично расчитывают кривые М2 для других значений <р.
На рис. 96 приведена конструкция регулятора мощности типа 400,
предназначенного для управления насосом типа 207. Изменение рабо-
чего объема насоса производится пггоком 5, связанным с цапфой 2 по-
воротной люльки насоса. Давление нагнетания действует на плунжер,
выполненный как одно целое со пггоком. По мере увеличения давления
(начиная от значения Р2min) и перемещения штока сначала сжимается
пружина 5, а затем пружина, 4, что обеспечивает изменение рабочего объе-
ма насоса в соответствии с ломаной линией, изображенной на рис. 95,а.
Упор 1 фиксирует максимальный угол поворота люльки насоса и соот-
ветствующий ему максимальный рабочий объем ^imax насоса. Упор 6
фиксирует угол поворота люльки, которому соответствует критический
13*
195
Рис. 96. Регулятор мощности прямого действия
рабочий объем q 1К насоса. При критическом объеме и заданном крутя-
щем моменте Л/10 насос развивает заданное максимальное давление
Ргтах.
Аналогичным образом устроен регулятор мощности сдвоенного на-
соса 223 (см. рис. 18). Поскольку имеются два насоса, плунжер регуля-
тора выполнен типа ’’тандем*. Жидкость под давлением нагнетания от
каждого насоса подводится к своей плунжерной полости.
Сдвоенный 323 и строенный 333 насосы Московского машинострои-
тельного завода имени Калинина (см. рис. 20), а также насос A7V фир-
мы ’’Гидроматик” содержат регулятор давления непрямого действия,
схема которого показана на рис. 97. Регулятор хорошо вписывается в
конструкцию насоса. Перемещение блока цилиндров насоса осуществля-
ет гидро двигатель, содержащий поршень 1 типа ’’тендем”. К верхней
поверхности поршня подводится жидкость под давлением нагнетания
насоса, стремящаяся опустить поршень вниз, что соответствует макси-
мальному рабочему объему насоса. Гидродвигателем управляет распре-
делитель с золотником 5, к верхней торцовой поверхности которого под-
водится жидкость из гидролинии нагнетания насоса. При давлении наг-
нетания Р2 min золотник опускается вниз, преодолевая силу основной
пружины 2 и настроечной пружины 6. Распределитель из гидролинии
нагнетания подводит жидкость к нижней поверхности поршня большего
диаметра, и он поднимается вверх. При этом цапфа 4 сжимает пружину
2, в результате чего золотник 5 поднимается вверх, занимает нейтраль-
ное положение, и поршень останавливается. Увеличение давления приво-
дит к дальнейшему перемещению поршня и его остановке. Таким обра-
зом, регулятор представляет собой следящую систему, входной коорди-
натой которой является давление жидкости, а выходной — перемещение
поршня. При определенном положении поршня вступает в работу пружи-
на 3. Это приводит к изменению коэффициента усиления следящей сис-
темы и к перелому прямой 2 на рис. 95,а. При уменьшении давления зо-
лотник 5 под действием пружин поднимается вверх. Нижняя полость
поршня сообщается со сливной линией, и поршень опускается вниз.
Регулируемые упоры, установленные в корпусе насоса, ограничи-
вают углы поворота блока цилиндров и рабочие объемы q j max и q i к на-
соса. Пружина 6, затяжку которой изменяет регулировочный винт,
обеспечивает начало перемещения поршня регулятора при заданном
давлении Pi min.
196
Рис. 97. Регулятор мощности непрямого действия
По сравнению с предыдущим рассмот-
ренный регулятор более компактен (отсут-
ствуют мощные пружины), и имеет мень-
шую зону нечувствительности, так как на
нее не влияет трение, возникающее при по-
вороте блока цилиндров.
Система регулирования с обоими регу-
ляторами работает следующим образом.
Возмущающим воздействием системы, вы-
зывающим процесс регулирования, являет-
ся изменение момента нагрузки на валу
гидромотора, возникающее в результате
изменения сопротивления копанию, а на
транспортном режиме - в результате изменения сопротивления движе-
нию. Предположим, самоходная машина двигалась с максимальной ско-
ростью на дороге с коэффициентом сопротивления (см. рис. 95, в).
Точка а3 пересечения кривой крутящего момента М2 на валу гидромото-
ра с кривой момента сопротивления М2с определяет параметры M2Q
и «го, которым соответствует (см. рис. 95, а) /ртах, Ргтт (см.'
рис. 95, б), 7И10, «ю. Предположим, что произошло увеличение коэф-
фициента сопротивления движению до значения ф' (машина движется на
подъем). Вызванное этим увеличение момента сопротивленияМ2с пер-
воначально при прежнем значении передаточного отношения приводит
к увеличению момента нагрузки двигателя и момента на валу насоса,
что сопровождается повышением давления р2. Регулятор мощности,
реагируя на это повышение, уменьшает передаточное отношение zp, что
при новом моменте сопротивления М2С приводит к уменьшению момен-
та нагрузки двигателя приблизительно до значения ЛГ10. Увеличение пере-
даточного отношения ip сопровождается увеличением крутящего момен-
та М2 на валу гидромотора. Новое равновесное состояние наступает в
точке а2 (см. рис. 95, в). Этой точке и точкам а2 на рис. 95, а и б соот-
ветствуют новые значения параметров M2i п2, qi9 zp, р2, Мх « Л/10,
«1 ««ю.
Как следует-из изложенного, для поддержания постоянного режима
работы двигателя передаточное отношение ip изменяется по определен-
ному закону (см. рис. 95, а) в зависимости от давления р2, пропорцио-
нального крутящему моменту М2, Поэтому основное различие рассмат-
риваемых систем от системы, показанной на рис. 94, состоит лишь в
том, что регуляторы мощности измеряют момент М2 по давлению р2.
Вторым возмущающим воздействием рассматриваемой системы ре-
гулирования является изменение угла поворота рычага всережимного
регулятора двигателя. Предположим, что для уменьшения скорости са-
моходной машины на дороге с коэффициентом сопротивления угол
поворота рычага уменьшен от <Ртах до <£mjn. Первоначально двигатель
14-Зак. 1159 197
работал на режиме, определяемом точкой а3 (см. рис. 95, б). После из-
менения угла поворота рычага двигатель будет работать на режиме,
определяемом точкой Ь3, которой соответствуют меньшие частота вра-
щения вала двигателя, подача насоса и частота вращения вала гидромо-
тора. Значению на рис. 95, в принадлежит левая крайняя ломаная,
линия изменения крутящего момента М2 от частоты вращения п2. Систе-
ма регулирования ограничивает рабочий объем насоса величинойqiK и в
результате этого осуществляет ограничение максимального давления
Ргтах.
Наряду с преимуществами системе свойственны недостатки. Во-
первых, в отличие от всех рассмотренных ранее систем она не может
обеспечить управление ОГП, содержащей регулируемый гидромотор.
Во-вторых, система не поддерживает точно работу двигателя на режиме
максимальной мощности. В-третьих, система не обеспечивает работу дви-
гателя на частичных нагрузках по характеристике минимального расхо-
да топлива. В-четвертых,при неработающем двигателе и, следовательно,
при р2 = 0 регулятор мощности устанавливает рабочий объем насоса
*71 max и передаточное отношение /ртах, поэтому для пуска двигателя
его необходимо отсоединить от насоса при помощи фрикционного сцеп-
ления или соединить между собой напорную и всасывающую гидролинии.
После пуска двигателя при возрастающем давлении р2 устанавливается
критический объем ?1к насоса. Для облегчения уменьшения рабочего
объема насоса до #1к применяют механические (насос типа 224) или гид-
равлические устройства, перемещающие плунжер 3 (см. рис. 96) в край-
f нее левое положение [5]. Пятым недостатком системы является то, что
минимальная регулируемая мощность двигателя ограничивается точками
b (см. рис. 95,6). Область ocde (рис. 95, в) соответствует меньшей мощ-
ности, и в ней ОГП не в состоянии изменить крутящий момент. Трогание
самоходной машины с места и ее движение с малой и средней скоростью
(на горизонтальной дороге до скорости, соответствующей частоте враще-
ния п2) можно осуществить только в результате перевода в тепло части
мощности двигателя в буксующем сцеплении или при перепуске с дрос-
селированием части рабочей жидкости из напорной гидролинии во всасы-
вающую. х
Система регулирования, показанная на рис. 94, изменяющая мощ-
ность в соответствии с регуляторной характеристикой АБ (см. рис. 81),
начиная от мощности, равной нулю, при передаточном отношении, рав-
ном нулю, не имеет перечисленных выше недостатков.
Из-за последнего недостатка регуляторы мопдеости, показанные на
рис. 96 и 97, не нашли применения на транспортных самоходных ма-
шинах. Их можно с определенным успехом использовать на самоходных
машинах, снабженных технологическим оборудованием для обеспече-
ния работы двигателя в режиме максимальной мощности.
198
9.3. ОПЫТ СОЗДАНИЯ СИСТЕМ РЕГУЛИРОВАНИЯ
ПО ОТКЛОНЕНИЮ УГЛОВОЙ СКОРОСТИ
ВАЛА ДВИГАТЕЛЯ
Одна из первых систем автоматического регулирования режимов
работы двигателя класса постоянной мощности колесной самоходной
машины с ГОТ создана в начале шестидесятых годов автором совместно
с ВЗ. Калинниковым. Система испытана на автомобиле ”Москвич-410”,
снабженном ГОТ. Автомобиль о ГОТ создавался как объект для иссле-
дований.
Трансмиссия (рис. 98) содержит регулируемый насос 72, приводи-
мый во вращение от двигателя через понижающий редуктор 77, и нере-
гулируемый гидромотор 74, приводящий во вращение через главную
передачу 75 колеса автомобиля. В гидравлическое оборудование транс-
миссии входит шестеренный насос 24 подпитки гидромашин, предохра-
нительный клапан 25, фильтр 22, переливной клапан 27, перепускные
клапаны 77, через которые масло поступает в гидролинию низкого дав-
ления, и ограничивающие максимальное давление клапаны 76, соединяю-
щие гидролинии высокого и низкого давления. При движении машины
задним ходом гидролиния низкого давления становится гидролинией
высокого давления, и наоборот, что обусловливает применение двух кла-
панов 17 и 16, Давление в гидролиниях высокого и низкого давления
измеряется манометрами 13 п19.
Регулятор автоматической системы имеет стандартный измеритель
угловой скорости 9, снабженный золотниковым распределителем. Изме-
нение настройки регулятора осуществляется при помощи механизма
шестерня-зубчатая рейка. Гидроусилитель 8 регулятора питается от на-
соса 18, давление которого ограничивает сливйой клапан 20, Поршень
гидроусилителя поворачивает люльку насоса 72, изменяя тем самым пе-
редаточное отношение трансмиссии.
Регулятор выполнен статическим с силовой обратной связью, пред-
ставляющей собой систему рычагов. При перемещении поршня гидро-
усилителя 8 рычаг 5 поворачивается вокруг точки Б, Это вызывает по-
ворот вокруг точки В рычага 2. Рычаг 2 через механизм настройки изме-
няет силу сжатия пружины регулятора.
Статическая характеристика такого регулятора аналогична приве-
денной на рис. 83.
Опора рычага 5 (точка Б) может изменять свое положение при
помощи механизма 6 винт-гайка. Изменение положения опоры приво-
дит к изменению степени неравномерности 8 регулятора. При L = 0 регу-
лятор превращается в астатический (8 = 0). Прямые на рис. 83 прини-
мают вертикальное положение.
Изменение настройки регулятора осуществляет педаль 3 управле-
ния, которая поворачивает дроссельную заслонку карбюратора 4 и ку-
лачок 7. Шток кулачка поворачивает рычаг 2 вокруг точки А, изменяя
тем самым настройку регулятора.
Кулачок, осуществляя определенную связь между углом а открытия
дроссельной заслонки карбюратора и углом h поворота шестерни изме-
14*
199
нения настройки, обеспечивает работу двигателя по заданной регулятор*
ной характеристике (см. рис. 84).
Перед троганием автомобиля с места двигатель работает с угловой
скоростью холостого хода. Золотник регулятора опущен вниз (см.
рис. 98), масло прижимает пггок поршня гидроусилителя 8 к упору 10.
В этом положении угол поворота люльки насоса равен нулю, автомо-
биль неподвижен. В применении специальных нулеустановителей насоса
необходимость отсутствует.
Рис. 98. Система регулирования по отклонению угловой скорости вала двигателя
предназначенная для автомобиля
200
Задний ход автомобиля осуществляется при повороте люльки на*
coca в противоположную сторону. Для этого необходимо при помощи
кранов 7 поменять местами линии подвода жидкости от золотникового
распределителя к гидроусилителю 8, а также изменить точку опоры
10 штока его поршня.
В первоначальном варианте при использовании стандартных элемен-
тов регулятора система оказалась неработоспособной. При нажатии на
педаль управления автомобиль трогался с места, однако возникали не*
затухающие колебания моментов и М2 и частоты вращения пх. При
каждом колебании скорость автомобиля возрастала до 3,5 км/ч после
чего резко уменьшалась до нуля. Автомобиль, несмотря на постоянное
положение педали управления, перемещался скачками, полностью оста-
навливаясь после каждого скачка. Период всех колебаний был одинако-
вым и равным 1,5 с, .частота вращения вала двигателя пх уменьшалась
до 950 об/мин и снова возрастала до 1700 об/мин. Процесс регулирова-
ния был неустойчивым.
На рис. 99, а показана осциллограмма переходного процесса, полу-
ченная при ходовых испытаниях автомобиля и иллюстрирующая опи-
санное явление.
В результате исследования математической модели системы регули-
рования с использованием критериев устойчивости Рауса—Гурвица и
моделирования переходных процессов на ЭВМ было установлено, что
при высокой скорости движения система должна быть устойчивой.
При испытаниях автомобиль разгонялся до скорости около 25 км/ч
при отключенной автоматической системе регулирования, после чего
производилось ее подключение. Система работала нормально, поддержи-
вая постоянным режим работы двигателя. При движении со скорость^)
25 км/ч и резком отпускании педали управления поддерживались по-
стоянными моменты Мх и М2 и частота вращения пх, плавно уменьша-
лись цередаточное отношение и скорость автомобиля. При скорости
12 км/ч плавное протекание переходного процесса нарушалось и начи-
нались расходящиеся колебания параметров М2, М2 и заканчиваю-
щиеся остановкой автомобиля.
В результате теоретических исследований было установлено, что для
обеспечения устойчивого переходного процесса при малой скорости дви-
жения необходимо уменьшить постоянную времени гидроусилителя ре-
гулятора. Это было осуществлено за счет уменьшения ширины окон
гильзы его распределителя. На рис. 99, б приведена осциллограмма пере-
ходного процесса с уменьшенной шириной окон. Переходный процесс
относится к троганию автомобиля с места и дальнейшему его разгону
с небольшой интенсивностью. Осциллограмма свидетельствует о хоро-
шем качестве переходного процесса.
Работа системы исследовалась как при изменении настройки регуля-
тора (изменение положения педали управления), так и при изменении
нагрузки. Нагрузка увеличивалась нажатием педали тормоза до спе-
циального упора, имитирующего движение автомобиля на подъеме
постоянной крутизны. На рис. 99, в показан переходный процесс при
таком возмущении. Момент нажатия на педаль обозначен линией 77.
201
Все приведенные осциллограммы переходных процессов относятся
х степени неравномерности регулятора 6 = 0. Степей» неравномерности
регулятора обычно сильно влияет на переходной процесс различных
автоматических систем. Как показали теоретические и эксперименталь-
ные исследования, для систем регулирования режимов работы двигате-
ля с ГОТ степень неравномерности регулятора мало влияет на переход-
ный процесс. На рис. 99, г приведена осциллограмма переходного про-
цесса, вызванного нажатием на педаль тормоза, при степени неравномер-
ности регулятора 6 =0,3. Она практически не отличается от осцилло-
граммы, изображенной на рис. 99, в.
б)
Рис. 99. Характеристика переходных процессов системы регулирования по откло-
нению угловой скорости вала двигателя
202
После доводочных испытаний система исследовалась в различных
эксплуатационных условиях: при движении по городу, шоссе, проселоч-
ной дороге, грязи, глубокому снегу и т д. Во всех случаях наблюдались
вполне удовлетворительные переходные процессы. Исключение состав-
лял интенсивный разгон автомобиля с места при резком нажатии на пе-
даль управления. По причине, рассмотренной в предыдущем параграфе,
в этом случае возникали большие по амплитуде колебания момента
нагрузки двигателя и момента нагрузки на колесах автомобйля. Ука-
занное обстоятельство заставляло при трогании автомобиля с места
столь же осторожно нажимать на педаль управления, как и отпускать
педаль сцепления на автомобиле с обычной механической трансмиссией.
Автором предложено устройство, позволяющее устранить повышен-
ную чувствительность системы регулирования к резкому нажатию на
педаль управления [21]. Такое устройство было экспериментально иссле-
довано АД. Травкиным с подобной системой регулирования и показало
хорошие результаты.
Как следует из изложенного, успешное создание автоматической
системы требует ее математического описания и исследования переход-
ных процессов на ЭВМ с целью определения оптимальных конструктив-
ных параметров, обеспечивающих высокое качество переходных про-
цессов.
Своеобразно устроена система автоматического регулирования ре-
жимов работы двигателя с гидрообъемной трансмиссией ’Тидроматик”
[35], нашедшей применение на различных самоходных машинах. Транс-
миссия ’Тидроматик” выполнена по раздельно-агрегатной схеме и со-
дежит регулируемые аксиально-поршневые насос с наклонным диском
и гидромотор с наклонным блоком цилиндров, от которого вращение
передается к главной передаче и дифференциалу механической части
трансмиссии. Регулятор этой системы реагирует На отклонение
угловой скорости вала двигателя, однако использован не механический
маятниковый измеритель угловой скорости, а гидравлический, содержа-
щий насос, разгружаемый через дросселирующее отверстие. Применение
такого измерителя не является новым. Он был использован в 1937 г.
для управления бесступенчатой трансмиссией с переменной амплитудой
колебаний на легковом автомобиле ’’Минерва Империал” (Бельгия).
В данном случае заслуживает внимание то обстоятельство, что вместо
отдельного насоса для измерения угловой скорости применен насос
подпитки ОГП.
Схема регулятора показана на рис. 100. Жидкость, подаваемая от
насосах подпитки к золотнику измерителя 1 угловой скорости, проходит
через дросселирующее отверстие с проходным сечением площадью А.
В результате дросселирования давление жидкости падает от рн до рх.
Давление Pi подпитки устанавливается с достаточной точностью постоян-
ным при помощи переливного клапана подпитки, размещенного вверху
регулятора.
Подача насоса подпитки через отверстие с проходным сечением
QH=f1H\/2(pn-pl)lPx, (128)
где д - коэффициент расхода; рж - плотность жидкости.
203
Уравнение равновесия золотника имеет вид
PhF! = Pifi + PyF2 + Т, (129)
где Fx = я£>1/4 - рабочая площадь золотника; F2 = ir(Pl - D^/A - площадь не-
уравновешенной поверхности золотника; ру - управляющее давление жидкости,
поступающей к гидроусилителю насоса; Т - сила сжатия пружины.
Без учета незначительного перемещения золотника в процессе регу-
лирования сила сжатия пружины
r = (X1 + y)ci,
(130)
где Xi - предварительная затяжка пружины при у = 0; у - перемещение винто-
вой муфты настройки регулятора; Ci - жесткость пружины.
Перемещение
y = (131)
где г - радиус нарезки винтовой муфты; ав - угол подъема нарезки винтовой
муфты; h - угол поворота рычага изменения настройки регулятора, рад.
Рис. 100. Система регулирования "Гидроматик” по отклонению угловой скорости
вала двигателя
204
Подача насоса подпитки
(132)
QH
где uij — угловая скорость вала насоса, равная угловой скорости вала двигателя;
qH - объемная постоянная насоса; Пол - объемный КПД насоса.
Решив совместно уравнения (129) ... (131), получим
Рн - Pi =(PyF2 + (133)
Подставив выражения (133) и (132) в формулу (128),найдем
Ру ------гч------ и>1-------------------h •
У 2/?д2Р2 F2 F2
(134)
Жидкость под давлением ру управления подводится к гидроусили-
телю 4 насоса. Поршень, сжимая пружины, опускается вниз, увеличи-
вая угол наклона диска насоса. На входе и выходе жидкости из цилинд-
ра установлены дроссели, ограничивающие максимальную скорость
перемещения поршня. Для прлучения заднего хода гидроусилитель снаб-
жен золотниковым распределителем, обеспечивающим перемещение
поршня вверх (в выполненной конструкции гидроусилителем управ-
ляют два электромагнитных клапана).
На основании равновесия сил, действующих на поршень, с учетом
того, что одновременно работают две пружины, найдем его перемещение:
(135)
Si — ру - Х2,
2с2
где F$ = я£>з/4 - рабочая площадь поршня; \2 - предварительная затяжка пружи-
ны (одной); с2 - жесткость пружины (одной).
Подставив выражение (135) в формулу (134), получим уравнение
статической характеристики перемещения гидроусилителя регулятора
от угловой скорости и угла h поворота рычага изменения настройки
регулятора:
S\ — А J со 1 ~
где Ai = -----—----------;
4/iM F2c2
(136)
*1 =
2F2c2
+ Х2; Ci =
rcitgaB
2с2
Поршень начинает перемещаться (st =0) при некотором заданном
начальном давлении РуЛ (рис. 101, а), чему соответствует определяе-
мое из выражения (135) необходимое значение Х2. Поршень доходит до
своего конечного положения [sx тах при давлении Ру к, определяемом
из выражения (135) ].
На основании выражения (136) рассчитывают статическую характе-
205
ристику перемещения з поршня регулятора от для различных значе-
ний/г (рис. 101).
При более точном расчете необходимо учесть некоторое увеличение
давления Pi при увеличении расхода жидкости через переливной клапан.
При повороте наклонного диска насоса на угол, равный или несколь-
ко меньший максимального, при начальном давлении управления Ру н,
равном Ру к или несколько меньшем Ру.к, в работу вступает гидроуси-
литель 3 гидромотора (см. рис. 100), поворачивающий его блок цилинд-
ров. Гидроусилитель представляет собой следящую систему с обратной
связью. Входной координатой гидроусилителя является давление управ-
ления ру, а выходной — перемещение з2 поршня. Поршень гидромотора
типа ’’тандем” перемещается под давлением р2 жидкости в напорной
гидролинии ОГП. Для того чтобы, как на переднем, так и на заднем ходу
к гидроусилителю подводилась жидкость под давлением р2 нагнетания,
применен гидравлический управляемый распределитель 2. На золотник t
распределителя действует сила давления управления, уравновешиваемая
силами двух пружин. При давлении управления, равном Ру л, золотник
опускается вниз. Жидкость под давлением р2 поступает в нижний ци-
линдр поршня, и он поднимается вверх. При этом сжимается наружная
пружина, в результате чего золотник возвращается в нейтральное поло-
жение и дальнейшее перемещение поршня прекращается. Увеличение
давления ру вызывает дальнейшее перемещение поршня. При уменьше-
нии давления ру под действием пружин золотник поднимается вверх.
При этом нижний цилиндр сообщается со сливной линией и поршень
опускается вниз. Перемещение поршня вызывает уменьшение силы на-
ружной пружины, возвращенйе золотника в нейтральное положение и
прекращение движение поршня. Сила внутренней пружины, затяжка ко-
торой регулируется винтом, обеспечивает начало перемещения поршня
при заданном давлении Ру л.
Уравнение равновесия золотника гидроусилителя имеет вид
PyF4 =R + (Х3 + s2)c3, (137)
где F4 = яР4/4 - площадь верхней торцовой поверхности золотника; R - сила
внутренней пружины; Хз - предварительная затяжка наружной пружины; з2 - пе-
ремещение поршня; с3 - жесткость наружной пружины.
Рис. 101. Статическая характеристика регулятора
206
где А2 =
В2 =
С2 =
Совместив уравнение (134) измерителя угловой скорости с уравне-
нием (137) гидроусилителя, получим уравнение регулятора, описываю-
щее его статическую характеристику при управлении гидромотором:
S2 =Л2со? - В2 - C2h, (138)
2fh2F2c3
R
-------- + — + ;
C3F2 Сз
rc 1F 4 tgaB
C3F2
На основании уравнения (138) строят верхние кривые на рис. 101, б.
Наружная пружина гидроусилителя осуществляет обратную связь. Если
ее удалить, регулятор при управлении гидромотором из статического
превратится в астатический. При необходимости гидроусилитель гидро-
мотора можно выполнить аналогичным гидроусилителю насоса (с порш-
нем, нагруженным пружиной).
Для более четкой работы регулятора может потребоваться в процес-
се регулирования соединение цилиндра гидроусилителя со сливом. Не-
сколько видоизмененный регулятор, осуществляющий такое соедине-
ние, показан на рис. 102. Он описывается тем же уравнением (134), что
и предыдущий регулятор.
Наряду с рассмотренной известны и другие системы регулирования,
реагирующие на отклонение угловой скорости вала двигателя, в кото-
рых в качестве измерителя угловой скорости использован насос подпит-
ки ОГП или специальный насос системы автоматического управления,
приводимый во вращение от коленчатого вала двигателя [38].
Разработаны также различные электронные системы автоматическо-
го регулирования, в частности реагирующие на отклонение угловой ско-
рости вала двигателя [30, 33, 37]. Указывается на неблагоприятные усло-
Рис. 102. Измеритель угловой скорости
207
вия использования электроники: значительные колебания напряжения
от 10 до 16 В при номинальном напряжении 12 В, тряска, вибрации, воз-
можность изменения температуры от -40 до + 85 °C. Фирма ’’Дойтц”
(ФРГ) при разработке системы автоматического управления гидро-
объемной Трансмиссией трактора ’’Итрак 2006” на одной из эксперимен-
тальных машин использовала вариант электронной системы регулирова-
ния фирмы ”Бош” (ФРГ). Однако от него из-за высокой стоимости и
малой надежности пришлось отказаться. На тракторах ’’Итрак 2006”
была принята автоматическая система регулирования фирмы ’’Линде
АГ” по отклонению угловой скорости вала двигателя, в которой в ка-
честве датчика угловой скорости использован отдельный насос, приводи-
мый во вращение от вала двигателя. Таким образом электроника не
всегда может оказаться лучше традиционных средств регулирования.
При наличии системы регулирования по отклонению угловой ско-
рости вала двигателя, как было показано выше, в первый момент проис-
ходит интенсивный разгон двигателя, что задерживает разгон самоход-
ной маШины, так как мощность затрачивается на увеличение кинетичес-
кой энергии маховика двигателя. Для скоростных самоходных машин,
таких как автомобили, это является серьезным недостатком. Выше упо-
миналось об устройстве, задерживающем разгон двигателя в результате
соответствующего изменения момента нагрузки. И. Фрэнкеном [31] рас-
смотрена система регулирования, в которой решаются две задачи опти-
мизации: обеспечение минимального расхода топлива (так же как и в
других системах) и минимального времени разгона машины. Система
регулирования содержит два датчика: один замеряет угловую скорость
вала двигателя, а второй — крутящий момент на валу двигателя.
9.4. ОПЫТ СОЗДАНИЯ СИСТЕМ РЕГУЛИРОВАНИЯ
ПО ОТКЛОНЕНИЮ МОМЕНТА НАГРУЗКИ ДВИГАТЕЛЯ
<
Как показали теоретические и экспериментальные исследования
[21, 22], системам регулирования по отклонению АМ1Н свойственно
более высокое качество переходных процессов по сравнению с система-
ми регулирования по отклонению Acjj.
Создание системы регулирования по отклонению А/И1Н осложняет-
ся трудностью измерения момецта нагрузки двигателя. Устройства, по-
добные показанному на рис. 91, требуют определенного пространства
для их размещения между двигателем и насосом ОГП, значительно
уменьшают жесткость трансмиссии, увеличивая вероятность возникно-
вения колебаний и из-за значительного трения имеют существенную зону
нечувствительности.
Автором совместно с Б.В. Туранским создана автоматическая сис-
тема регулирования по отклонению АМ1Н (рис. 103), в которой момент
нагрузки двигателя 7И1Н измеряется по реактивному моменту Мр зуб-
чатого редуктора, соединяющего двигатель с насосом гидрообъемной
трансмиссии. Система опробована на опытной колесной самоходной
машине. Машина имеет собственную массу 1350 кг, грузоподъемность
208
8
Рис. 103. Система регулирования по отклонению мо-
мента нагрузки двигателя, предназначенная для ко-
лесной машины
2000 кг, карбюраторный двигатель, развивающий мощность 22 кВт при
частоте вращения 4200 об/мин. Максимальная скорость машины
25,8 км/ч. ГОТ состоит из регулируемого аксиально-поршневого насоса
и двух нерегулируемых аксиальночюршневых гидромоторов, соединен-
ных с задними ведущими колесами при помощи бортовых шестеренча-
тых редукторов. Максимальное давление жидкости в напорной линии
25 МПа.
Установленный за двигателем зубчатый редуктор необходим не
только для измерения момента нагрузки двигателя, но и для уменьше-
ния частоты вращения насоса 12 ГОТ до максимально допустимого зна-
чения. Редуктор укреплен балансирно. Он выполнен двухступенчатым,
соосным, с передаточным числом иш р = 1,25. Реактивный момент на
корпусе редуктора
^р = («ш.р-1Ж1. (139)
К корпусу редуктора прикреплен зубчатый венец 10, в зацепление с
которым входит зубчатая рейка 6, перемещающаяся на роликах. Реак-
тивный момент 7Ир, пропорциональный моменту нагрузки двигателя
Af1H, воспринимается пружиной 5. Натяжение пружины изменяется при
изменении угла поворота педали управления 2 с помощью кулачка 5,
гидроусилителя 4 и рычага. Педаль управления при помощи тяг соеди-
нена также с дроссельной заслонкой карбюратора 9 двигателя.
Зубчатая рейка соединена с золотником распределителя 8 гидроуси-
лителя 11. Гидроусилитель не имеет обратной связи. Регулятор является
астатическим. Шток поршня гидроусилителя поворачивает рычаг, с по-
мощью которого изменяется передаточное отношение трансмиссии.
Жидкость подается в гидроусилитель насосом 15, который также исполь-
зуется в качестве подпиточного насоса ОГП.
Для гашения колебаний применено гидравлическое демпфирующее
устройство 7, представляющее собой поршень, помещенный в цилиндр
с дросселирующим отверстием.
Настройка системы на заданный момент нагрузки М1Н, а следова-
тельно, на заданный режим работы (М10, а?ю) двигателя производится
путем изменения натяжения пружины 5, уравновешивающей реактив-
ный момент редуктора. Натяжение пружины изменяется гидроусилите-
лем 4 с жесткой обратной связью, питающимся от насоса 1. Гидроусили-
телем управляет кулачок 3 изменения настройки регулятора, соединен-
ный тягами с педалью управления 2 и с дроссельной заслонкой карбюра-
тора 9 двигателя.
Реверсирование хода машины осуществляется при помощи распре-
делителя 13, изменяющего направление подачи жидкости к распреде-
лителю 8, При длительной стоянке машины с работающим двигателем,
а также при пуске и прогреве двигателя автоматическая система регули-
рования отключается при помощи распределителя 14.
Общий принцип работы системы был рассмотрен подробно в п. 9.1.
При внешнем возмущении — изменении момента сопротивления на коле-
сах машины, момент нагрузки двигателя на величину Д/И1Н отклоняет-
ся от заданного значения 7Й1Н, и, следовательно, изменяется реактивный
210
момент на корпусе редуктора. Зубчатая рейка перемещается, увлекая
за собой золотник распределителя гидроусилителя. Выйдя из нейтраль-
ного положения, золотник осуществляет подачу жидкости к цилиндру,
поршень которого, перемещаясь, изменяет передаточное отношение
трансмиссии. В результате изменения передаточного отношения момент
нагрузки двигателя принимает первоначальное значение. Золотник рас-
пределителя возвращается в прежнее нейтральное положение, и процесс
регулирования заканчивается.
До разработки системы регулирования было неясно: возможно ли
получить высокое качество процесса регулирования при большой инер-
ционной массе измерителя момента нагрузки двигателя (редуктора),
вызовет ли существенное ухудшение переходного процесса использова-
ние балансирного редуктора, несколько увеличивающего податливость
трансмиссии, в какой степени переходный процесс можно улучшить за
счет применения демпфирующего устройства, допустимо ли использо-
вание в данной системе астатического регулятора, т.е. можно ли на пред-
ложенном принципе действия измерителя момента создать успешно ра-
ботающую систему регулирования.
Ответы на эти и другие вопросы были получены в результате моде-
лирования системы на ЭВМ при широком варьировании различными ее
параметрами. Кроме того, в схему системы вводились новые элементы.
Окончательные выводы были сделаны при ходовых испытаниях самоход-
ной машины.
Выполненные теоретические и экспериментальные исследования по-
казали, что общей структуре данной системы свойственны настолько
высокие динамические качества, что она позволяет получить удовлетво-
рительный переходный процесс при значительной инерционности изме-
рителя регулятора, при увеличении податливости трансмиссии, при от-
сутствии демпфирующего устройства, гасящего колебания трансмиссии,
и при наличии астатического регулятора. Для данной системы, как и для
предыдущей, степень неравномерности регулятора мало влияет на пере-
ходный процесс, что позволяет использовать простой астатический ре-
гулятор, поддерживающий постоянным заданный режим работы двига-
теля. Постоянная времени гидроусилителя, определяемая шириной
окон распределителя регулятора, существенно влияет на переходный
процесс. Однако даже при относительно большой ширине окон качество
переходного процесса вполне удовлетворительно.
На рис. 104, а приведена полученная во время ходовых испытаний
осциллограмма переходного процесса при резком нажатии на педаль
управления и разгоне машины с места, а на рис. 104, б - при переезде
машины через единичное искусственное препятствие в виде выступа на
поверхности дороги. Осциллограммы показывают изменение во времени
момента нагрузки двигателя М1Н, давления р2 в напорной гидролинии
передачи, пропорционального моменту М2 нагрузки на колесах машины,
угловых скоростей и вала двигателя и колес машины и переме-
щения s поршня гидроусилителя регулятора. В обоих случаях демпфи-
рующее устройство не включалось и был использован распределитель с
наибольшей шириной окон.
211
Рис. 104. Характеристика переходных процессов системы регулирования по откло-
нению момента нагрузки двигателя
Как следует из рис. 104, а, переходный процесс регулирования апе-
риодический. Плавно изменяются положения поршня гидроусилителя,
частоты вращения вала двигателя машины и ее колес. Разгон машины до
максимальной скорости происходит за 9 ... 10 с.
Высокочастотные колебания момента и давления зависят от меха-
нической и гидравлической жесткостей трансмиссии и возникают в ре-
зультате различных возмущений. Эти колебания свойственны также
гидрорбьемной трансмиссии, работающей без регулятора.
При переезд^ машины через препятствие (см. рис. 104, б) имеют
место незначительные колебания измеряемых параметров. После шести
колебаний в течение 5 с в системе устанавливается стационарный режим
работы.
Уменьшение ширины окон распределителя (конструктивно распре-
делитель выполнен иначе — с вставными гильзами, имеющими окна раз-
личной ширины) улучшав^ переходный процесс системы — при переезде
через препятствие число колебаний до затухания уменьшается в 1,5 ...
2 раза. Однако это приводит к некоторому увеличению времени разгона
машины до максимальной скорости, а также при резком отпускании
педали управления вызывает остановку двигателя, а затем и машины,
так как гидроусилитель к моменту остановки машины не успевает пере-
местить орган управления насосом в положение, соответствующее его ну-
левой подачи.
Проведенные исследования свидетельствуют о возможности созда-
ния сравнительно простой системы автоматического регулирования,
содержащей в качестве измерителя момента нагрузки балансирный
редуктор.
Когда нет необходимости в применении понижающего редуктора
насоса или же когда редуктор нельзя сделать балансирным в системе
регулирования по отклонению момента Д/Ищ, можно использовать
предложенный автором регулятор, содержащий устройство сопло-
заслонка. На рис. 105 показана система регулирования с таким редукто-
212
Рис. 105. Система регулирования по отклонению момента нагрузки двигателя,
предназначенная для гусеничной машины
ром, предназначенная для применения на легкой скоростной гусеничной
машине с карбюраторным двигателем мощностью 76 кВт и с опытной
гидрообъемной трансмиссией, используемой как для регулирования
мощности двигателя, а также для поворота машины. Регулятор содержит
упругий вал 19 (торсион), передающий крутящий момент. Одним кон-
цом упругий вал через обойму 9 соединен с коленчатым ^алом двига-
теля, а другим концом через обойму 16 - с валом редуктора, распреде-
ляющего крутящий момент по двум насосам трансмиссии. Муфта 18 ко-
сыми шлицами входит в зацепление со шлицами обоймы 9. Та же муфта
прямыми шлицами входит в зацепление со шлицами обоймы 16. При
скручивании вала муфта перемещается в осевом направлении и через
подшипник поворачивает рычаг 10. Верхний конец рычага является за-
слонкой механизма сопло—заслонка. Пружина 17 рычага устраняет за-
зоры во всех подвижных соединениях, обеспечивая высокую чувстви-
тельность устройства. Корпус 15 сопла свободно размещен в неподвиж-
ном кожухе. К соплу от насоса подпитки гидромашин подводится жид-
кость под постоянным давлением Pi. Жидкость проходит через два дрос-
селирующих отверстия с площадями проходных сечений Л и/х; Площадь
/1 постоянна, а площадь fx зависит от расстояния х между соплом и за-
слонкой. Внутри корпуса сопла между указанными дросселирующими
отверстиями устанавливается давление управления;
Pl
Pyr у -
y 1+ (fxlf l)2
При увеличении момента нагрузки 7И1Н муфта 18 смещается влево,
уменьшаются расстояние между соплом и заслонкой, площадь fx и
возрастает давление ру. Таким образом, давление ру является функцией
момента нагрузки двигателя н.
Жидкость под давлением ру подается в цилиндр 77, поршень которо-
го нагружен пружиной. Пружина подобрана так, что при заданном давле-
нии Руо золотник распределителя 8 гидродвигателя 5 занимает нейтраль-
ное положение. При отклонении давления ру от заданного руо золотник
распределителя выходит из нейтрального положения, что приводит к
перемещению поршня гидро двигателя 5, который при помощи механиз-
ма 2 зубчатая рейка—шестерня поворачивает вал 7, последовательно
управляющий насосами и гидромоторами трансмиссии при помощи
рассмотренного дальше устройства „
Регулятор выполнен астатическим. Его можно упростить, устранив
цилиндр 77 и распределитель 8 и соединив трубопроводом корпус 75
сопла непосредственно с гидродвигателем 5. Под поршнем которого
следует установить пружину. Такой регулятор будет статическим. Из-за
механического трения в приводе управления гидромашинами в этом слу-
чае появится значительная степень нечувствительности регулятора, влия-
ние которой на качество переходного процесса не исследовано.
Изменение настройки регулятора на ту или иную регулируемую
величину момента Mi и, следовательно, на той или иной регулируемый
режим работы двигателя (Mr, а^) осуществляется путем осевого пере-
мещения корпуса сопла при помощи гайки 14, имеющей на наружной по-
верхности зубчатый венец. Гайка поворачивается зубчатой рейкой 75,
перемещаемой кулачком, который осуществляет необходимую кинема-
тическую связь между углом открытия дроссельной заслонки карбюра-
тора 4 и настройкой регулятора (положением h рейки 75).
Корпус сопла фиксирован от поворачивания в кожухе и отжимается
в осевом направлении пружиной 12 до упора шестерни 14 в кожух.
Пружина 12 не только фиксирует корпус сопла, но и устраняет люфты в
винтовом соединении, а также дает возможность перемещаться соплу,
когда в него при увеличении крутящего момента упирается золотник.
Подробный статический и динамический расчет регулятора данного типа
описан в работе [22].
Для рассматриваемого регулятора длина упругого вала 19 равна
50 мм и диаметр составляет 20 мм. Максимальное напряжение кручения
составляет 149 МПа. При таких размерах упругого вала измеритель
регулятора можно выполнить достаточно компактным. Под действием
максимального крутящего момента упругий вал закручивается на угол,
равный всего 0,5 . При таком угле закручивания регулятор практически
не изменяет податливость трансмиссии. Возможность использования ма-
лого угла обеспечена пружинами 7 7 и 72, устраняющими зазоры.
При" наличии в трансмиссии одного насоса регулятор можно распо-
ложить в его корпусе. Он хорошо вписывается в сдвоенный насос типа
332, содержащий упругий вал.
214
Система регулирования содержит
устройство, ограничивающее максималь-
ное давление р2тах жидкости в напорной
гидролинии ОГП без перепуска жидкости
на слив через предохранительный клапан.
Перепуск жидкости вызывает дополни-
тельные потери мощности, т.е. снижает
КПД трансмиссии, а также резко повыша-
ет температуру рабочей жидкости и явля-
ется недопустимым для нормальных
условий работы.
Как следует из характеристик ОГП
(см. рис. 50, 52), в диапазоне частоты
вращения вала гидромотора от п2 = 0 до
Рис. 106. Схема для расчета
профиля кулачка
п2 ~ п2к имеют место максимальный момент ЛГ2тах и максимальный
перепад давления ртах.
Применительно к рассматриваемому случаю на основании выраже-
ния (13) можно записать
0,159(р2тах ~ Р1)<?2*р
= ----------------------, (141)
где т?ш и иш - соответственно КПД и передаточное число шестеренчатого редукто-
ра привода насосов.
Это уравнение устанавливает связь между крутящим моментом
двигателя и передаточным отношением zp ОГП, при которых давле-
ние нагнетания имеет заданное максимальное значение р2тах.
Устройство ограничения давления (рис. 105) представляет собой ку-
лачковый упор 3 и пружинный механизм 6, которые при полном нажа-
тии на педаль 7 и разгоне машины устанавливают определенную зависи-
мость между углом а открытия дроссельной заслонки карбюратора и
передаточным отношением ОГП. Поскольку двигатель работает по за-
данной регуляторной характеристике, угол а определяет момент М2 и
мощность TVi, необходимые для поддержания постоянного давления
Р2тах« После увеличения частоты вращения до и2к (см. рис. 52) кула-
чок перестает касаться своего толкателя и не мешает двигателю разви-
вать максимальную мощность.
В системе сохранен предохранительный клапан, который срабаты-
вает при несколько большем давлении, чем р2тах.
Профиль кулачка рассчитывают графически (рис. 106). В верхнем
левом квадрате по выражению (141) строят зависимость Мх = /(zp).
В нижнем левом квадрате строят зависимость угла поворота кулачка от
передаточного отношения: fa = f(zp). В правом верхнем квадрате на
основании регуляторной характеристики режимов работы двигателя
АБ (см. рис. 81) строят зависимость Мх = f(a), в нижнем правом - по
трем указанным зависимостям находят зависимость а = /(0), по которой
определяют профиль кулачка. Последней рабочей точке кулачка соответ-
ствует а = атах.
215
10. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
КЛАССА ПОСТОЯННОЙ СКОРОСТИ
10.1. ПРИНЦИП ДЕЙСТВИЯ
СИСТЕМ РЕГУЛИРОВАНИЯ
На тракторах и некоторых других самоходных машинах желательно
иметь систему автоматического регулирования класса постоянной ско-
рости, при которой двигатель работает на оптимальных режимах (см.
рис. 81) и каждому положению педали управления соответствует по-
стоянная скорость движения машины. Поскольку системы класса по-
стоянной-скорости, с одной стороны, обеспечивают работу двигателя на
заданных режимах, а с другой - поддерживают постоянную скорость
движения машины, они являются системами связанного регулирования.
На рис. 107 показана регуляторная тяговая характеристик^ транс-
портной машины, снабженной такой системой регулирования. Для
каждого угла у поворота педали управления сила тяги изменяется при
постоянной или приблизительно постоянной скорости движения
машины.
Когда мощности двигателя недостаточно для поддержания заданной
скорости движения, сила тяги изменяется по внешней кривой, соответ-
ствующей максимальной мощности двигателя. При угле поворота
педали управления и разгоне машины сила тяги изменяется по линии
abed, при ymax = 7s - по линии dbcef.
Следует обратить внимание на то, что системы класса постоянной
скорости мало пригодны для применения на транспортных машинах,
работающих в условиях, при которых водитель непрерывно изменяет
скорость движения (автомобиля и др.), так как при любом незначитель-
ном увеличении скорости машины водителем интенсивно увеличиваются
частота вращения двигателя и его мощность до максимальных, а затем
частота вращения снижается и мощность уменьшается до необходимой
в заданных условиях движения. Например, при увеличении угла поворо-
та педали настройки системы от 72 до 7з и скорости движения от v' до
ч" (точки d и g) сила тяги изменяется с выходом на внешнюю характе-
ристику, соответствующую максимальной мощности двигателя (пока-
зано стрелками). При уменьшении
угла 7 и скорости движения v час-
тота вращения двигателя умень-
шается до минимальной, а затем
снова увеличивается. При этом
сила тяги снижается до нуля
(показано стрелками).
Рис. 107. Регуляторная тяговая харак-
теристика самоходной машины
216
Резкое увеличение, как и резкое уменьшение силы тяги и мощности
двигателя, вызывает повышенные износ двигателя и расход топлива.
Возникающий при этом переходный процесс характеризуется большими
колебаниями параметров самоходной машины, ее двигателя и ГОТ.
Рассмотренных явлений не происходит при изменении скорости дви-
жения машины, снабженной системой регулирования класса постоянной
мощности (см. рис. 85,а).
Системы класса постоянной скорости следует применять только на
машинах, для которых установившиеся режимы работы нарушаются в
основном в результате изменения внешнего сопротивления движению.
Каждая система класса постоянной скорости, как было установлено
[21], состоит из системы класса постоянной мощности (основанной
на любом, рассмотренном ранее, принципе действия), настройка которой
изменяется регулятором настройки, реагирующим на отклонение Да>2
угловой скорости колес транспортной машины, регулятором-компенса-
тором настройки, реагирующим на изменение момента Л/2н нагрузки
на колесах транспортной машины, или жестким функциональным зве-
ном настройки, реагирующим на перемещение $ органа управления пе-
редачей.
Рассмотрим общий принцип действия системы регулирования клас-
са постоянной скорости на примере конкретной системы (рис. 108).
Система состоит из рассмотренной ранее системы класса постоянной
мощности (см. рис. 89)* и регулятора настройки прямого действия реа-
гирующего на угловую скорость w2 колес самоходной машины. Регу-
лятор присоединен к исходной системе класса постоянной мощности
в том месте, где находилась педаль управления. Для удобства компо-
новки кулачок, связывающий перемещения h и а, расположен несколько
иначе, что не имеет принципиального значения. Регулятор настройки
содержит собственный орган изменения настройки, положение Ы кото-
рого изменяется при помощи педали управления.
Перемещения Лн исполнительного органа регулятора настройки и
h штока регулятора передачи имеют противоположные направления
отсчетов. Это значит, что увеличению угловой скорости а>2 и перемеще-
ния Лн соответствует уменьшение регулируемой угловой скорости coj
двигателя и перемещения h.
Для пояснения принципа действия системы построим для исходной
системы класса постоянной мощности регуляторную характеристику
крутящего момента М2 для нескольких положений h штока настройки
регулятора передачи (рис. 109). При постоянном положении педали
управления и увеличении коэффициента сопротивления дороги от Фг до
ф2 уменьшается угловая скорость а>2. П|>и отсутствии регулятора на-
стройки угловая скорость снижается от со2 до с*У2. Регулятор настройки,
реагируя на возникшее отрицательное отклонение До;2 угловой скорос-
ти, уменьшает перемещение Лн. В результате этого увеличиваются пере-
мещение h и угол а поворота дроссельной заслонки карбюратора двига-
теля. Исходная система регулирования класса N переходит с работы по
кривой hf регуляторной характеристики М2 на кривую h". При этом
(с точностью неравномерности регулятора настройки) устраняется от-
15 — Зак. 1159
217
Рис. 108. Система автоматического регули-
рования класса постоянной скорости
Рис. 109. Регуляторная характеристика
крутящего момента
и)?
клонение угловой скорости До>2, и
процесс регулирования заканчивается.
Самоходная машина при заданном
постоянном угле у' педали управле-
ния продолжает перемещаться со ско-
ростью, приблизительно соответст-
вующей первоначальной угловой ско-
рости^ (точки а и Ь).
Каждому положению h штока настройки регулятора передачи соот-
ветствуют определенный режим работы двигателя (кривая АБ, рис. 81)
и его мощность. В процессе регулирования режим работы двигателя
меняется.
При максимальном нажатии на педаль управления и разгоне маши-
ны муфта регулятора настройки неподвижна. Система работает в режи-
ме системы класса постоянной мощности, обеспечивающая изменение
силы тяги по всей внешней кривой be (см. рис. 107). При меньшем на-
жатии на педаль муфта регулятора настройки неподвижна только до
определенной скорости, зависящей от угла у поворота педали управле-
ния. После достижения этой скорости резко уменьшается сила тяги.
Как показали проведенные с помощью ЭВМ исследования, системы
регулирования класса постоянной скорости имеют более низкие динами-
ческие качества по сравнению с системами класса постоянной мощности
[22]. Рассмотренная система (см. рис. 108) с астатическим регулятором
настройки неустойчива. Удалось добиться ее устойчивости и удовлетво-
рительного переходного процесса путем применения рассмотренного
ранее корректирующего устройства, задерживающего во времени изме-
нение настройки регулятора передачи, соответствующего подбора степе-
ни неравномерности и фактора демпфирования регулятора настройки,
а также путем использования второго корректирующего устройства,
осуществляющего дополнительное корректирующее воздействие по про-
изводной угловой скорости а>2.
218
Те же исследования показали: систему регулирования, содержащую
регулятор передачи, реагирующий на отклонение момента нагрузки дви-
гателя ДЛ/\Н, по сравнению с рассмотренной системой проще выполнить
устойчивой и легче обеспечить удовлетворительное качество ее переход-
ного процесса.
Из-за низких динамических качеств, а также из-за менее благоприят-
ных условий работы двигателя при изменении настройки там, где воз-
можно, необходимо избегать применения систем регулирования класса
постоянной скорости и стремиться использовать системы регулирования
класса постоянной мощности.
Системам регулирования класса постоянной скорости свойственно
большое количество разнообразных принципиальных схем. Некоторые
из них приведены в работе [21].
102. ОПЫТ СОЗДАНИЯ СИСТЕМ РЕГУЛИРОВАНИЯ
Рассмотренная ранее система регулирования с регулятором переда-
чи, реагирующим на отклонение угловой скорости двигателя, и с регу-
лятором настройки, реагирующим на отклонение угловой скорости ко-
лес самоходной машины (см. рис. 108), в электронном исполнении соз-
дана в Кубанском сельскохозяйственном институте для трактора ГТ-55
Липецкого тракторного завода, оборудованного экспериментальной
ГОТ [15].
Первые системы регулирования класса постоянной скорости у нас
созданы ЛЯ. Гром-Мазничевским. Он разработал сложные алгоритмы
функционирования таких систем в то время, когда многие элементар-
ные вопросы автоматического управления гидрообъемных трансмиссий
еще не были известны широкому кругу специалистов.
В первой системе Л Л. Гром-Мазничевского, испытаной на тракторе
ДТ-14Б, снабженным экспериментальной-гидрообъемной трансмиссией,
в качестве регулятора передачи использовался всережимный регулятор
двигателя этого трактора, который управлял топливным насосом и пода-
вал сигнал к изменению передаточного отношения гидрообъемной транс-
миссией. Настройка системы на заданную регулируемою скорость движе-
ния трактора осуществлялась при помощи регулятора, приводимого во
вращение от вала гидромотора ОГП. Такая система не смогла обеспечить
высокое качество переходных процессов. Позднее под руководством
Л.И. Гром-Мазничевского для тракторов ГТ-50, МТЗ-50Б и МТЗ-80Б,
снабженных экспериментальными ГОТ, создано несколько систем регу-
лирования, регуляторы передачи которых реагируют на отклонение
момента нагрузки двигателя [9]. На основании испытаний был сделан
вывод о том, что системы регулирования по моменту обладают лучши-
ми динамическими качествами, по сравнению с системами регулирова-
ния по угловой скорости. Это определило дальнейшую направленность
работ.
Наряду с механическими системами регулирования, в которых при-
менялся простейший пружинный измеритель крутящего момента (по-
добный показанному на рис. 91), соединяющий двигатель с насосом
ОГП, создана электрическая система, в которой применен измеритель
крутящего момента, основанный на использовании магнитоупругих
свойств материала вала, возникающих при его закручивании, а в качест-
ве измерителя частоты вращения применен тахогенератор.
На рис. ПО показана система регулирования Л Л. Грома-Мазничевс-
кого, предназначенная для колесного трактора, снабженного гидро-
объемной трансмиссией с регулируемым насосом и нерегулируемым
гидромотором. Исходная система класса постоянной мощности осу-
ществляет регулирование заданных режимов работы двигателя по изме-
нению момента М2 нагрузки на колесах трактора, который замеряется
по давлению р2 в напорной гидролинии ОГП [выражение (16)], так же
как и в системах с регуляторами, показанными на рис. 96 и 97.
Регулятор-компенсатор исходной системы класса постоянной мощ-
ности (cmj рис. ПО) содержит распределитель 6, на золотник которого
сверху действует жидкость под давлением р2, а снизу - пружина. Распре-
делитель управляет гидродвигателем 7. Шток поршня гидродвигателя
через механизм 8 состоящий из зубчатой рейки, цилиндрической шестер-
ни и пары конических шестерен, поворачивает пространственный кула-
чок 5, толкатель которого изменяет силу сжатия пружины распределите-
ля. Одновременно с этим шток поршня гидродвигателя поворачивает
люльку насоса 9, изменяя передаточное отношение трансмиссии zp. Регу-
лятор-компенсатор имеет оригинальное устройство. Его пространствен-
ный кулачок расположен не в цепи последовательно передаваемых сиг-
налов от измерителя к органу управления передачей, как показано на
рис. 94, а в обратной связи.
ПО) находится в равновес-
ном нейтральном положен-
ии под действием давления
р2 • и силы пружины. При
увеличении момента М2 и
давления р2 золотник, пере-
мещается вниз, поршень
гидродвигателя 7 начинает
двигаться вверх, уменьшая
передаточное отношение zp.
При этом кулачок 5, пово-
рачиваясь, увеличивает си-
лу сжатия пружины рас-
пределителя . Золотник
снова занимает нейтральное
положение при определен-
ном положении s штока
поршня. Таким образом,
Золотник распределителя 6 (см. рис.
Рис. ПО. Система регулирова-
ния класса постоянной скорос-
ти Л Л. Грома-Мазничевского
220
каждому давлению р2 соответствует определенное перемещение s,
следовательно, каждому значению момента М2 соответствует определен-
ное передаточное отношение zp. Кулачок 5 спроектирован так, что между
М2 и z’p соблюдается зависимость (127).
Изменение настройки регулятора-компенсатора на заданный регули-
руемый режим работы двигателя осуществляется при помощи измене-
ния положения рычага 4, который перемещает кулачок 5 в осевом на-
правлении и через систему тяг поворачивает рычаг управления регулято-
ра 1 топливного насоса двигателя.
Для получения системы класса постоянной скорости изменение на-
стройки исходной системы класса постоянной мощности (поворот ку-
лачка 5) производится при помощи регулятора-компенсатора, также
реагирующего на изменение момента нагрузки М2. Регулятор-компен-
сатор настройки содержит пространственный кулачок 5, угол поворота
которого зависит от давления р2 и, следовательно, от момента М2.
Толкатель кулачка 3 поворачивает рычаг 4. В осевом направлении кула-
чок 3 перемещается при помощи рычага 2 управления. Для каждого по-
ложения рычага 2 имеет место своя постоянная скорость движения
трактора.
Каждому постоянному положению h рычага настройки соответству-
ет определенное изменение крутящего момента (см. рис. 109). Чтобы
при изменении коэффициента сопротивления дороги от Ф1 до ф2 ско-
рость трактора v и угловая скорость колес не уменьшались (последняя
от со2 до w2), а были приблизительно постоянными, необходимо при
изменении момента от М2 до М2 (точка а и Ь) изменять настройку h
исходной системы класса N от h' до h”. Это и делает кулачок 5, повора-
чиваемый при изменении моментаМ2 (см. рис. 110).
Рассматриваемую систему регулирования нельзя использовать с
ОГП, содержащей регулируемые насос и гидромотор, поскольку при
регулировании гидромотора давление р2 не изменяется пропорциональ-
но моменту М2н.
На рис. 111 показана предложенная автором комбинированная сис-
тема регулирования класса постоянной скорости, предназначенная для
колесного трактора К-700, снабженного экспериментальной гидрообъем-
ной трансмиссией. Система отличается простотой конструкции и тем,
что ее можно применять с трансмиссией, содержащей регулируемые
насос и гидромотор.,Трансмиссия трактора К-700 содержит два спарен-
ных регулируемых насоса и два встроенных в ступицы колес регулируе-
мых гидромотора.
Комбинированная система в диапазоне малых скоростей движения
поддерживает заданную постоянную скорость за счет всережимного ре-
гулятора двигателя при постоянном передаточном отношении трансмис-
сии. При этом управление регулятором двигателя и трансмиссией произ-
водится вручную. Автоматическое регулирование режимов работы дви-
гателя и скорости машины осуществляется только в диапазоне средних
и высоких скоростей движения.
На рис. 112, а приведена регуляторная характеристика оптимальных
режимов работы двигателя ЯМЗ-238 НБ, установленного на тракторе
221
Рис. 111. Система комбинированного регулирования класса постоянной скорости
К-700. На участке АВ она соответствует минимальной используемой
частоте вращения вала двигателя и на участке аБ — минимальному рас-
ходу топлива. На регуляторную характеристику нанесены кривые изме-
нения крутящего момента двигателя для различных углов а поворота
рычага настройки всережимного регулятора двигателя. На этих режимах
работает двигатель при отсутствии автоматической системы управления
трансмиссией.
При угле 7 = 0 поворота штурвала 5 (см. рис. 111) управления ку-
лачок 4 при помощи гидроусилителя 3 с жесткой обратной связью уста-
навливает люльки насосов 2 в горизонтальное положение (<pi = 0),
чему соответствует fp = 0. Кулачок 6, воздействующий на кулачок 7,
устанавливает угол ахх поворота рычага настройки всережимного регу-
лятора 1 двигателя, при котором последний работает на холостом ходу
(прямая ГД на рж;. 112, а).
При некотором угле 71 поворота штурвала 5 (см. рис. 111) положе-
ние люлек насосов сохраняется прежним (<Pi = 0, zp = 0), рычаг регуля-
тора двигателя поворачивается на угол «1, при котором двигатель рабо-
тает на повышенной частоте вращения (прямая Л В, см. рис. 112, а).
Трактор стоит на месте. <
Первый режим движения. При увеличении угла поворота штурвала
(см. рис. 111) кулачок 4 начинает поворачивать люльки насосов, в
результате чего трактор трогается с места. При этом кулачки 6 и 7
сохраняют прежний угол «1 поворота рычага регулятора двигателя. Так
продолжается до тех пор, пока люльки насосов не повернутся на макси-
мальный угол max. Этому режиму движения на регуляторной характе-
222
ристике момента М2 (см. рис. 112, б) пропорциональной регуляторной
тяговой характеристике трактора, соответствует область ЖЗИК. Двига-
тель работает на режимах, определяемых прямой АВ (см. рис. 112, а).
Второй режим движения. При дальнейшем повороте штурвала 5
(см. рис. 111) кулачки 6 и 7 постепенно поворачивают рычаг регулятора
двигателя до максимального угла атах. При этом угол <pi люльки насо-
сов сохраняется равным <р1тах. Двигатель работает в области аВБа (см.
рис. 112, а), расположенной между регуляторной характеристикой аБ
и внешней характеристикой ВБ двигателя. Рассматриваемому режиму
движения на регуляторной характеристике крутящего момента (см.
рис. 112, б) соответствует область кимл. Кривая лм строится для пос-
тоянного передаточного отношения трансмиссии zp при ^imax и для
изменения крутящего момента двигателя по кривой АаБ. Кривая им
строится для того же передаточного отношения /р и для изменения кру-
тящего момента двигателя по кривой ВБ (см. рис. 112, а).
На первом и втором режимах движения рабочий объем гидромото-
ров сохраняется постоянным, максимальным (<р2 = <р2тах).
Третий режим движения. Как только двигатель выйдет на режим
работы по регуляторной характеристике АБ (см. рис. 112, а), чему на
характеристике М2 соответствует кривая лле, в действие вступает систе-
ма регулирования оптимальных режимов работы двигателя и скорости
трактора класса постоянной скорости. Ее исходная система класса
постоянной мощности осуществляет регулирование режимов работы
двигателя по отклонению ДЛГщ момента его нагрузки. При постоянном
рабочем объеме насосов qx момент нагрузки двигателя прямо пропор-
ционален давлению р2 в напорной линии передачи [выражение (13), где
р = р2 - Pi ]. В связи с этим измеритель 11 момента (см. рис. 111) пред-
ставляет собой измеритель давления р2. Измеритель 11 управляет рас-
пределителем гидроусилителя 10. Поршень гидроусилителя изменяет
рабочие объемы,гидромоторов 12 мотор-колес, а следовательно, и пере-
момента на колесах трактора
223
Золотник распределителя гидроусилителя 10 при помощи диффе-
ренциального рычага 9 соединен с измерителем И и со штоком 8 изме-
нения настройки регулятора передачи. На первом и втором режимах дви-
жения золотник распределителя все время находится'в верхнем положе-
нии и соединяет левую полость цилиндра гидроусилителя с насосом пи-
тания, устанавливая тем самым максимальный рабочий объем гидромо-
торов “ <02 max). При выходе двигателя на регуляторную характерис-
тику АБ (см. рис. 112,а) кулачок 6 (см. рис. 111) сообщает левой точке
рычага 9 такое перемещение Л, а измеритель момента 11 сообщает пра-
вой точке рычага 9 такое перемещение х, при которых золотник распре-
делителя занимает нейтральное положение.
В дальнейшем каждому положению h штока настройки соответст-
вует определенное регулируемое значение момента нагрузки М10. Откло-
нение момента нагрузки ДЛГ1Н от заданного значения Л/10, вызванное
внешним возмущением, приводит к выходу золотника из нейтрального
положения и к процессу регулирования, сопровождающемуся измене-
нием передаточного отношения /р трансмиссии в результате изменения
рабочих объемов гидромоторов при постоянных максимальных рабочих
объемах насосов. Процесс регулирования заканчивается после устране-
ния отклонения момента нагрузки АЛАН и установления прежнего ре-
жима работы двигателя (w10, М10 ).
Соединение штока 8 через кулачок 7 с рычагом регулятора 1 двига-
теля обеспечивает работу последнего на заданных режимах АБ (см.
рис. 112,а).
Для получения системы класса постоянной скорости настройка
исходной системы класса постоянной мощности изменяется жестким
функциональным звеном, реагирующим на перемещение s поршня гид-
роусилителя, управляющего гидромоторами передачи. Таким функцио-
нальным звеном является пространственный кулачок б, перемещаемый в
осевом направлении поршня гидроусилителя. Штурвал 5 не мешает осе-
вому перемещению штока поршня.
Для исходной системы класса постоянной скорости каждому пос-
тоянному положению h штока настройки 8 соответствует изменение мо-
ментаМ2 по определенной кривой (см. рис. 109). Чтобы при изменении
коэффициента сопротивления движению от до скорость трактора
не уменьшилась, необходимо изменить положение h штока настройки
исходной системы класса постоянной мощности от h' до Лп,т.е. перейти
от режима работы, определяемого точкой а, на режим работы, опреде-
ляемой точкой б. Точкам а и б соответствует определенное передаточ-
ное отношение /р трансмиссии и, следовательно, определенное переме-
щение s поршня гидроусилителя. Поэтому изменение положения h што-
ка настройки можно осуществить в зависимости от перемещения 5, что и
выполняет кулачок 6 (см. рис. 111).
При повороте штурвала 5 на максимальный угол 7тах кулачок 6
поворачивается профилем, представляющим собой горизонтальную пря-
мую. Система работает на режиме постоянной мощности, обеспечивая
изменение момента М2 по внешней кривой мн (см. рис. 112,6).
Третьему режиму движения соответствуют, как указывалось, работа
224
двигателя на оптимальных режимах и изменение момента М2 в области
лмнп (см. рис. 112,6). Кривая пн относится к минимальному углу пово-
рота <Р2max органа управления гидромоторами и, следовательно, к мини-
мальному передаточному отношению /pmin трансмиссии.
Использование на третьем режиме программирующего устройства,
изменяющего настройку h регулятора трансмиссии в зависимости от пе-
ремещения s поршня гидроусилителя [А.с. 207047 (СССР)], можно при-
менять с регуляторами трансмиссий различных типов, что открывает
новую группу систем регулирования класса постоянной скорости.
Четвертый режим движения. Рассматриваемому режиму на регуля-
торной характеристике М2 соответствует область пнр. В трансмиссии
сохраняется постоянное передаточное отношение zpmax. Скорость трак-
тора поддерживается постоянной в результате работы всережимного ре-
гулятора двигателя. Двигатель работает на режимах, располагаемых в
области АаБЕ (см. рис. 112, а). ч
Комбинированная система управления предназначается для транс-
миссий, содержащих регулируемые насос и гидромотор, причем для та-
ких трансмиссий, в которых нагрузочный диапазон регулирования Z>p н
обеспечивается путем изменения параметра регулирования е2 гидромо-
тора (см. рис. 65).
Преимущетвом комбинированной системы является ее простота
конструкции и то, что она исключает автоматическое изменение переда-
точного числа гидрообъемной трансмиссии в диапазоне малых скорос-
тей, когда трудно обеспечить удовлетворительное качество переходных
процессов. Работе, двигателя на оптимальных режимах соответствует
наибольшая и часто используемая область тяговой характеристики, что
сообщает трактору хорошую топливную экономичность.
11. ВСПОМОГАТЕЛЬНЫЕ
АВТОМАТИЧЕСКИЕ СИСТЕМЫ И УСТРОЙСТВА
11.1. НАЗНАЧЕНИЕ
ВСПОМОГАТЕЛЬНЫХ СИСТЕМ И УСТРОЙСТВ
Самоходная машина с гидрообъемной трансмиссией, кроме системы
автоматического регулирования оптимальных режимов работы двига-
теля, обычно содержит дополнительные вспомогательные системы и
устройства. К ним относятся, прежде всего, различные корректирующие
устройства, улучшающие переходной процесс, в том числе упомянутое
ранее устройство, устраняющее резкие колебания параметров системы
регулирования по отклонению угловой скорости при быстром нажа-
тии на педаль управления [21, 22].
Как было рассмотрено раньше, при движении самоходной машины,
снабженной системой регулирования по отклонению угловой скорости
Да>1 или по отклонению момента нагрузки Д/И1Н, при отпускании пе-
225
дали управления устанавливается и длительное время поддерживается
максимальное передаточное отношение zpmax, что обеспечивает движе-
ние машины накатом. Непосредственно перед остановкой машины пере-
даточное отношение начинает быстро уменьшаться, что сопровождается
интенсивным торможением машины при помощи двигателя. При пере-
даточном отношении, равным нулю, трансмиссия приходит в исходное
положение, при котором можно снова завести двигатель и начать дви-
жение.
Если в процессе движения машины двигатель заглохнет, то вращение
ему и насосу питания автоматической системы будет передаваться от ко-
лес движущейся по инерции машины. Автоматическая система к момен-
ту остановки машины установит в трансмиссии передаточное отношение,
равное нулю (это наблюдалось на практике). Однако не во всех случаях
есть полная гарантия^ что при малой частоте вращения насоса питания
автоматической системы его подачи хватит для перевода поршня гидро-
усилителя в положение s = 0, когда zp = 0. Перевод поршня в положение
s = 0 гарантирует только система регулирования, показанная на рис. 100,
в которой поршень гидроусилителя, управляющего насосом, в исходное
положение возвращается пружиной. Такую пружину, как указывалось,
можно применить и в системе регулирования, показанной на рис. 105.
В рабочем объеме насоса, большем нуля ($ > 0), при остановленной
машине нельзя снова завести двигатель. Чтобы это сделать, следует пре-
дусмотреть или дублирующее ручное управление насосом передачи или
же применить устройство, гидравлически разобщающее насос с гидромо-
тором, например, при помощи поднятия затвора предохранительного
клапана, соединяющего между собой магистрали высокого и низкого
давления.
При заводке и прогреве холодного двигателя частота вращения его
вала может оказаться выше той, которая соответствует троганию маши-
ны с места. Для того чтобы машина не тронулась, необходимо предус-
мотреть отключение автоматической системы управления. Это можно
сделать при помощи кранов 7 (см. рис. 98), распределителя 14 (см.
рис. 103) или же механического устройства, рассмотренного дальше.
Для эффективного использования двигателя в качестве тормоза
на затяжных спусках необходимо иметь малое передаточное отношение
/р. Рассматриваемые системы регулирования, как указывалось, в этом
случае устанавливают максимальное передаточное отношение zp. Пере-
даточное отношение <р при движении на спусках можно уменьшить и ре-
гулировать различным способом, в том числе при помощи устройства,
принудительно изменяющего силу сжатия пружины измерителя регуля-
тора [22].
Более целесообразно для длительного торможения на спусках при-
менить устройство, осуществляющее дросселирование жидкости при
выходе ее из гидромотора, работающего в режиме насоса.
Задний ход машины обеспечивается при помощи распределителя,
перераспределяющего подвод жидкости к цилиндру гидроусилителя,
управляющего насосом (см. рис. 89,100,103), или при помощи электро-
механического устройства [21] [А.с. 166212 (СССР)]. Важно, чтобы в
226
обоих случаях при остановленной машине четко фиксировалось нейт-
ральное положение наклонного диска или люльки насоса (см. рис. 89).
Все автоматические системы регулирования должны иметь рассмот-
ренное ранее автоматическое устройство (см. рис. 105) Ограничивающее
максимальное давление в ОГП [А.с. 451553 (СССР) ].
Для улучшения проходимости самоходной машины с гидрообъем-
ной трансмиссией можно использовать регуляторы расхода (см. рис. 5),
которые в равной степени относятся как к гидравлической системе пере-
дачи, так и к ее управлению.
Пуск двигателя машины можно осуществить при помощи гидроак-
кумулятора, подающего жидкость к насосу передачи.
Отключение и подключение части гидромоторов трансмиссии для
расширения ее общего диапазона изменения передаточного отношения
можно производить вручную или при помощи специальной системы
автоматического управления [21] [А.с. 179626 (СССР)]. Такая система
должна на тяговой характеристике самоходной машины обеспечивать
наибольшую область, в которой машина может работать, как на одном,
так и на другом диапазоне. Это сокращает число переключений диапазо-
нов. Для удовлетворения указанного требования отключение части гидро-
моторов следует производить при положении поршня гидроусилителя
s = smax, а подключение гидромоторов при максимальном давлении
Ргтах-
Ту же систему управления можно использовать для переключения
шестеренчатых передач, имеющихся в некоторых гидрообъемных транс-
миссиях. Для автоматического переключения передач не обязательно
применять сцепления. Вместо них можно использовать кулачковые об-
гонные муфты типа Майбах. При этом синхронизация частот вращения
валов достигается в результате изменения передаточного отноше-
ния ОГП.
Для поворота гусеничной машины посредством ГОТ применяют
специальную систему управления. В связи с важностью и новизной этот
вопрос подробно рассмотрен дальше.
11.2. КИНЕМАТИКА ПОВОРОТА ГУСЕНИЧНОЙ МАШИНЫ
С ГИДРООБЪЕМНОЙ ТРАНСМИССИЕЙ
ГОТ гусеничной машины часто используют для поворота. При этом,
как правило, применяют ручное управление трансмиссией при помощи
двух рычагов, один из которых управляет гидроагрегатами правого бор-
та машины, а другой - левого.
. Впервые в СССР гидрообъемная трансмиссия с системой автомати-
ческого управления, осуществляющая поворот гусеничной машины,
была создана АД. Травкиным. В качестве базовой машины использо-
вался экспериментальный гусеничный тягач массой 8000 кг с дизелем,
развивающим мощность 81 кВт.
Принципиальная упрощенная схема системы управления поворотом
показана на рис. ИЗ. Передаточное отношение всей трансмиссии изме-
няется в результате перемещения $ штока 3 регулятора 4, осуществляю-
227
Рис. 113. Система управления поворотом
гусеничной машины
щего регулирование режимов работы
двигателя. При этом дифференциаль-
ные рычаги 2 и 5 поворачиваются вок-
руг неподвижных точек Л, и на рав-
ную величину $л и sn перемещаются
тяги, управляющие объемными гидро-
передачами правого и левого бортов
машины. При повороте рулевого ко-
леса 1 автомобильного типа по часо-
вой стрелке и неподвижном штоке 3
рычаг 2 сохраняет свое прежнее положение, а рычаг 5 поворачивается
вокруг неподвижной точки Б. При этом перемещение sn уменьшается на
Д$, в результате чего уменьшается передаточное отношение передачи
правого борта, и машина поворачивает вправо. Аналогичным образом
выполняется поворот машины влево.
При движении задним ходом идентичность управления нарушается.
На заднем ходу увеличению передаточного отношения трансмиссйи
соответствует перемещение штока 4 в направлении, противоположном
направлению стрелки s. Поэтому при повороте рулевого колеса по часо-
вой стрелке возникшее перемещение As вычитается из перемещения $л
и увеличивается передаточное отношение передачи правого борта маши-
ны. В результате этого машина поворачивает влево.
Как видим, при постоянном угле поворота рулевого колеса и движе-
нии передним и задним ходом центр поворота машины переходит с одно-
го борта на другой. Для движения по кругу взад и вперед водителю при
включении заднего хода кавдый раз придется поворачивать рулевое ко-
лесо в противоположную сторону, что противоречит его навыкам.
Вторым недостатком системы управления является то, что при дви-
жении задним ходом во время поворота увеличивается суммарное пере-
даточное отношение трансмиссии, и в результате ^ого уменьшается сила
тяги, в то время как из-за возросшего сопротивления движению маши-
ны необходимо, чтобы сила тяги возрастала или сохранялась прежней.
Таким образом обнаружено явление неидентичности работы систе-
мы управлений поворотом при движении машины передним и задним
ходом. 1
При движении передним ходом и повороте рулевого колеса на
постоянный угол 0 наблюдалось явление ’’закручивания” машины, т.е.
ее движение с непрерывно уменьшающимися радиусом поворота и по-
ступательной скоростью, заканчивающееся вращением машины вокруг <
своей вертикальной оси. При ручном управлении трансмиссией ‘’закру-
чивания” машины не происходило. Для объяснения явления ’’закручива-
ния” рассмотрим кинематику поворота машины.
На основании геометрических соотношений (рис. 114, а).
228
где v3 и v0 - линейная скорость соответственно забегающей (левой) и отстающей
(правой) гусеницы; Rn - наружный радиус поворота (по забегающей гусеницы);
В - колея машины.
Тогда
Лн = v35/(v3 -vo). < (142)
Подставим в это выражение линейные скорости гусениц:
V3 ~ ^УмЬ *зв
и
VO “ WflZMZ0r3B ,
где о?д - угловая скорость вала двигателя; iM - общее передаточное отношение
механических редукторов трансмиссии; i3 - и z 0 — передаточное отношение ОГП
соответственно забегающего и отстающего бортов; r3fc - радиус ведущей звездоч-
ки гусеничного двигателя.
В результате подстановки получим
Z?H = i3B/a3-io). (143)
Для рассматриваемой системы управления поворотом
Z3 “ zo =
где С - приблизительно постоянный коэффициент пропорциональности; $ - угол
поворота рулевого колеса.
На основании двух предыдущих выражений получим
ЛН=/3В/(ОД. (144)
Предположим, что рулевое колесо находится в нейтральном положе-
нии (/3 = 0), машина в соответствии с выражением (144) движется пря-
молинейно (Ян = °°), в обеих объемных гидропередачах установлено
передаточное отношение zp. Допустим, после этого производится пово-
рот рулевого колеса и в дальнейшем его угол /3 поворота сохраняется
постоянным. В первый момент передаточное отношение i3 постоянно
Рис. 114. Планы скоростей гусеничной машины при повороте
229
и равно z’p. В соответствии с выражением (144) машина стремится пере-
мещаться с определенным радиусом поворота RH.
При повороте машины возникает дополнительное сопротивление
ее движению, в результате чего регулятор 4 (см. рис. ИЗ) перемещает
шток 5, уменьшая тем самым передаточные отношения z3 и /0. Умень-
шение передаточного отношения z3 при заданном угле 0 в соответствии
с выражением (144) приводит к уменьшению радиуса поворотами-
Уменьшение радиуса Мн вызывает дальнейшее увеличение сопротив-
ления движению машины, дальнейший процесс регулирования, сопро-
вождающийся уменьшением z3 и Мн. Из-за непрерывно увеличивающего-
ся сопротивления движению машины скорость ее поступательного дви-
жения непрерывно падает, радиус поворота уменьшается.
Таким образом, происходит ’’закручивание” машины.
При ручном управлении трансмиссией в процессе поворота машины
водитель сохраняет постоянным положение s органа управления транс-
миссией, а следовательно, передаточное отношение z3.
В соответствии с выражением (144) машина движется с постоянным
радиусом Мн поворота, явления ее закручивания не происходит.
На рис. 114, £ показан план скоростей движения машины при ручном
управлении трансмиссией. До поворота имеет место начальная линейная
скорость машины vM н. При повороте рулевого колеса и уменьшении
передаточного отношения z0 передачи правого отстающего борта умень-
шается линейная скорость v0 отстающей гусеницы. Передатдчное отно-
шение z3 передачи забегающего борта и линейная скорость v3 забегаю-
щей гусеницы сохраняются неизменными. Машина поворачивается вок-
руг точки О по окружности с радиусом RH. В связи с возросшим при по-
вороте сопротивлением движению машины уменьшается угловая ско-
рость вала двигателя. Это приводит при заданных постоянных передаточ-
ных отношениях z3 и z0 к пропорциональному уменьшению линейных
скоростей v3 и v0 до значений v3 к и v0 к. Машина поворачивается вокруг
той же точки О по окружности с тем же радиусом Ru, сохраняющимся
неизменным в процессе дальнейшего движения. Скорость центра масс
равна vMK.
На рис. 114, в показан план скоростей движения машины при авто-
матическом регулировании режимов работы двигателя. В первый мо-
мент поворота, как и в предыдущем случае, изменяются передаточное
отношение z0 и скорость vo, в результате чего машина поворачивается
по окружности радиусом RH вокруг точки О. Увеличивается сопротив-
ление движению. Начинает работать система регулирования режимов
работы двигателя, которая поддерживает постоянной угловую скорость
сод вала двигателя, и последняя не влияет на скорости v3 и v0. В процессе
регулирования на одну и ту же величину уменьшаются передаточные от-
ношения z3 и z0, что приводит к уменьшению на одну и ту же величину
линейных скоростей гусениц. В определенный момент поворота линей-
ные скорости гусениц становятся равными v3 hVq. Им соответствует
поворот машины вокруг точки О' по окружности с меньшим радиу-
сом R'H.
Уменьшение радиуса, как указывалось, приводит к дальнейшему
230
увеличению силы сопротивления движению, к уменьшению передаточных
отношений передач, что в свою очередь вызывает дальнейшее уменьше-
ние радиуса поворота машины.
Следует обратить внимание на то, что уменьшение передаточных
отношений i3 и i0 приводит к увеличению силы тяги на гусеницах. Одна-
ко, как можно заключить на основании тяговой характеристики, это не
останавливает начавшийся процесс непрерывного уменьшения i3, г0 и Ru.
В определенный момент машина будет поворачиваться вокруг точ-
ки О" по окружности радиусом при скорости забегающей гусеницы
n3 . В дальнейшем (если позволят энергетические ресурсы) радиус пово-
рота может уменьшиться до Ru = 0,5В (поворот вокруг центра массы).
Для того чтобы система управления поворотом исключила явление
’’закручивания” машины, т.е. чтобы постоянному углу р поворота руле-
вого колеса соответствовал постоянный радиус поворота Вн машины,
система должна для каждого заданного радиуса поворота устанавливать
определенную зависимость между передаточным отношением z0 и Пере-
даточным отношением z3. Эта зависимость на основании выражения
(143) имеет вид
Уравнение (145) является программой (законом) системы управ-
ления поворотом.
z 11.3. СИСТЕМЫ УПРАВЛЕНИЯ
ПОВОРОТОМ ГУСЕНИЧНОЙ МАШИНЫ
На рис. 115 показана схема предложенной автором системы управ-
ления поворотом, исключающей ’’закручивание” машины и сохраняю-
щей идентичность работы при включении заднего хода (сохранение не-
изменным центра поворота, осуществление поворота в результате умень-
шения передаточного отношения передачи одного из бортов). Регуля-
тор 9 системы регулирования режимов работы двигателя при помощи
зубчатой рейки 8, находящейся в зацеплении с удлиненной шестерней 7,
поворачивает пространственный кулачок 4. Последний перемещается
в осевом направлении х при повороте рулевого колеса 7, вал которого
имеет шестерню 2, находящуюся в зацеплении с цилиндрической зубча-
той рейкой 3,
При движении передним ходом машины и нейтральном положении
рулевого колеса (0 — 0) положительное перемещение $ штока регулято-
ра 9 вызывает поворот против часовой стрелки кулачка 1 и подъем его
толкателей 5 и 6, поворачивающих рычаги управления ОГП. При этом
увеличиваются передаточные отношения обеих передач.
Если повернуть рулевое колесо по часовой стрелке на некоторый
угол 0, то толкатель 5 кулачка будет работать по прежнему профилю, а
толкатель 6 по новому. Кулачок спрофилирован так, что при заданном
231
Рис. 115. Система управления поворотом с кулачковым устройством, исключаю-
щая закручивание машины
угле 0 и любом перемещении $ отношение sn/su и, следовательно, отно-
шение /3//0 сохраняется постоянным, удовлетворяющим выраже-
нию (145).
При линейных зависимостях sn = /0л) и sn = f(in) на участке 12
профиль кулачка следует очертить по спирали Архимеда:
где К - постоянный коэффициент пропорциональности; X - угол поворота
кулачка.
Поперечные сечения кулачка на участках и 13 также очерчиваются
по спирали Архимеда, но с непрерывно убывающими коэффициентами
Кх при переходе от одного сечения к другому.
Осевое перемещение кулачка и соответствующее ему отношение
коэффициентов спиралей Архимеда работающих сечений определяют
радиус Ru поворота машины:
кх _ ~ В
• *н ’
полученного на основании уравнения (145).
При движении машины задним ходом шток регулятора 9 переме-
232
щается вверх (отрицательное перемещение), кулачок 4 поворачивается
по часовой стрелке, его толкатели опускаются вниз (отрицательные пе-
ремещения) . При движении машины передним ходом кулачок повора-
чивается на пол-оборота в одну сторону (работает правая половина его
профилей), а при движении задним ходом — на пол-оборота в другую
сторону (работает левая половина его профилей). В том и другом слу-
чае сохраняется идентичность работы системы управления поворотом.
Постоянному отношению /3Д’О, обеспечиваемому системой управле-
ния при измененном положении рулевого колеса, соответствует постоян-
ное отношение скоростей v3/v0, при котором (см. рис. 114, б) радиус
Ян поворота неизменен. В процессе поворота в результате изменения
сопротивления движению (например, возникшего при повороте подъе-
ма дороги или ее спуска), скорость машины vM может как угодно изме-
няться, однако постоянными остаются отношение скоростей v3/v0 и ра-
диус поворота .
Не обязательно в системе управления поворотом использбвать
пространственный кулачок. На рис. 116, а показана схема системы, не
содержащей кулачка. Регулятор 1 поворачивает рычаги 2 и 3 вокруг то-
чек А и Б управления ОГП правого и левого бортов машины. При пово-
роте рулевого колеса 4 по часовой стрелке и соответственно повороте
машины вправо точка А опоры сохраняет свое прежнее положение, а
точка Б смещается вправо. При этом изменяются передаточные отноше-
ния рычагов привода управления ОГП правого и левого бортов и удов-
летворяется зависимость (145). Аналогичным образом осуществляется
поворот машины влево.
При з = 0 (рис. 116, а) машина остановлена. Поворот рулевого ко-
леса по часовой стрелке не вызывает принудительного перемещения
Д$п рычага управления правой ОГП, так как рычаги 2 и 3 расположены
параллельно осям, на которых закреплены их опоры.
При з > 0 (рис. 116, б) машина движется передним ходом. Поворот
рулевого колеса по часовой стрелке вызывает дополнительное переме-
Рис. 116. Схема системы управления поворотом с рычажным устройством, исклю-
чающая ’’закручивание” машины
16-Зак. 1159
233
б—б
234
щение Д$п рычага управления правой гидрообъемной передачей. Машина
поворачивает вправо.
При отрицательном перемещении $ (рис. 116, в) машина движется
задним ходом. При этом работа системы управления идентична ее работе
при движении машины передним ходом.
На рис. 117 показана конструкция системы управления поворотом,
предназначенная для гусеничной машины. Использованная в ней система
регулирования режимов работы двигателя приведена на рис. 105. Систе-
ма управления поворотом отличается от системы, показанной на рис. 115,
тем, что при движении машины передним и задним ходом кулачок пово-
рачивается в одном направлении на полную окружность. Это позволяет
значительно сократить его размеры. Такая работа кулачка обеспечена
в результате применения устройства (состоящего из двух реек и шестер-
ни) , осуществляющего движение машины задним ходом. При этом не
применяется распределитель, изменяющий направление движения порш-
ня гидроусилителя регулятора. При движении машины передним и зад-
ним ходом поршень перемещается в одном направлении s (см. рис. 105).
Все механизмы системы управления (см. рис. 117) скомпонованы
в одном блоке. Кулачок 17, управляющий поворотом машины, насажен
на неподвижную в осевом направлении втулку 13. Втулка поворачи-
вается зубчатой рейкой гидроусилителя (на рисунке не показан) регу-
лятора при помощи шестерни 11. Рядом с шестерней на втулке укреплен
кулачок 12 механизма ограничения давления, развиваемого насосом
ОГП. Кулачок 17 системы управления перемещается в осевом направле-
нии от рулевого колеса штоком 16. Пружины 14 и 15 фиксируют кула-
чок в нейтральном положении и создают на рулевом колесе усилие
20 ... 30 Н, необходимое для удобства управления. Кулачок 17 переме-
щает толкатели 9 и 10. Толкатель 9 пружиной 8 поджимается к кулач-
ку 17. При помощи рычага толкатель 9 может поворачиваться. В зависи-
мости от направления поворота толкатель имеющимся на нем выступом
упирается в зубчатую рейку 4 и 5 (толкатель показан в нейтральном
положении). При перемещении толкателя вверх и вниз перемещается
одна из реек. Рейки поджимаются к упору на толкателе пружинами 1 и
2. В зависимости от того, какую рейку перемещает толкатель, обеспечи-
вается передний или задний ход машины. Перемещаемая толкателем
рейка поворачивает шестерню 3, на валу которой укреплен кулачок 6,
управляющий насосом передачи одного борта машины, и кулачок 7,
управляющий гидромотором передачи того же борта машины.
Аналогичным образом осуществляется управление насосом и гидро-
мотором передачи другого борта машины.
11.4. СИСТЕМЫ АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ
РАДИУСА ПОВОРОТА
На гусеничных машинах нашли применение гидрообъемные меха-
низмы поворота, работающие совместно с различными типами трансмис-
сий, в том числе и с ГОТ (см. рис. 48, г). При ручном управлении гидро-
16* 235
объемной трансмиссией для каждого положения рулевого колеса пово-
рот машины происходит с постоянным радиусом. При использовании
автоматического управления ГОТ будет наблюдаться ’’закручивание”
машины. Его можно устранить, применяя специальную систему автома-
тической стабилизации радиуса поворота машины.
Выразив в уравнении (142) линейные скорости v3 и v0 гусениц через
угловые скорости и со0 их ведущих звездочек, получим
В
/?н — ------— .
1 - GJ0/U>3
На основании формулы (99) отношение угловых скоростей
о>о _ - гп
(146)
(147)
w3
м т *п
где iM - передаточное отношение ГОТ машины на участке от двигателя до корон-
ной шестерни планетарногд ряда (см. рис. 54, г); /п - передаточное отношение
ГОТ механизма поворота от двигателя до солнечной шестерни планетарного ряда.
Решая Совместно уравнение (146) и (147), получаем
АВ
— В)
(148)
Для поворота машины с заданным постоянным радиусом Ru необ-
ходимо поддерживать постоянным заданное отношение угловых скорос-
тей со0/со3 [выражение (146)] или, что то же самое, отношение /пАм
[выражение (148)].
Известны два общих способа регулирования (поддержание постоян-
ным) того или иного параметра, в данном случае отношения со0/со3 или
*п_/(м> по отклонению регулируемой величины и по возмущению. Оба
эти способа "можно использовать при создании систем автоматического
регулирования (стабилизации) радиуса поворота. Регулирование по
отклонению регулируемой величины осуществляется при помощи регу-
лятора, а по возмущению — при помощи программирующего устройства.
Регуляторы, а следовательно, и системы стабилизации могут быть
механическими, гидравлическими и электрическими. Рассмотрим две
первые из них.
На рис. 118 показана схема системы стабилизации, содержащая ме-
ханический регулятор. Последний состоит из фрикционной передачи 2
с двумя шкивами и роликом. Правый шкив приводится во вращение
через цепную передачу от правой ведущей звездочки машины. Левый
шкив вращает правую коническую шестерню дифференциала 3. Левая
коническая шестерня дифференциала приводится во вращение через
цепную передачу от левой ведущей звездочки машины. Чашка дифферен-
циала жестко соединена с винтом механизма 4 винт-гайка. Гайка этого
механизма при помощи тяг поворачивает орган управления ОГП 5 ме-
ханизма поворота. Шкиф фрикционной передачи 2 перемещается руле-
вым колесом при помощи механизма, состоящего из зубчатой рейки и
236
Поборот
направо
Поборот
налево
Рис. 118. Механическая система стабилиза-
ции радиуса поворота
шестерни. Положение шкива определяет настройку регулятора на задан-
ное регулируемое отношение угловых скоростей (о>0/а>3)0 и, следова-
тельно, на заданный радиус поворота Rn.
Объемной гидропередачей 6 трансмиссии управляет регулятор 7.
При передаточном отношении фрикционной передачи /ф = 1 кони-
ческие шестерни дифференциала вращаются с равной угловой скоростью.
В этом случае чашка дифференциала неподвижна, передаточное отноше-
ние /п передачи механизма поворота равно нулю, солнечные шестерни
планетарных рядов неподвижны, машина движется прямолинейно.
При повороте рулевого колеса по часовой стрелке увеличивается
угловая скорость правой конической шестерни дифференциала, и начи-
нает вращаться его чашка. Гайка механизма 4 изменяет передаточное
отношение in. В результате этого начинают вращаться в противополож-
ные стороны солнечные шестерни планетарных рядов правого и левого
бортов машины (направление вращения показано штриховыми стрелка-
237
Рис. 119. План скоростей гусеничной машины, снаб-
женной системой стабилизации радиуса поворота
ми). Угловая скорость левой ведущей звездоч-
ки увеличивается, а правой — уменьшается.
Это происходит до тех пор, пока не сравняют-
ся угловые скорости конических шестерен и
не прекратится вращение чашки дифференциа-
ла, чему соответствует заданное отношение
(сйо/^з)о- Это отношение, согласно выраже-
нию (146), обусловливает поворот машины с
заданным радиусом Ru вокруг точки О (рис. 119).
Движение на повороте вызывает увеличение сопротивления движе-
нию машины. Регулятор уменьшает передаточное отношение /т транс-
миссии. Скорости забегающей и отстающей гусениц уменьшаются на
одинаковое значение. Машина стремится поворачиваться вокруг точ-
ки О' по окружности с радиусом R'n. При этом происходит «откло-
нение Д(со0/со3) отношения угловых скоростей от заданной величины
(w0/co3)0. Регулятор, реагируя на это отклонение, изменяет передаточ-
ное отношение zn до тех пор, пока не восстановятся заданное значение
(со0/со3 )0 и заданный радиусЯн (штриховая прямая).
При движении машины по кругу может встретиться подъем или
спуск. Это также вызовет отклонение Д(а;0/со3) и процесс регулиро-
вания, восстанавливающий заданное отношение угловых скоростей
(с^о/а>з)о-
Изменение передаточного отношения zT и угла Р поворота рулевого
колеса являются внешними возмущениями системы. Изменение переда-
точного отношения /п является регулирующим воздействием, осущест-
вляемым регулятором.
Рис. 120. Гидравлическая система стабилизации радиуса поворота
238
Система регулирования сохраняет идентичность работы при движе-
нии машины передним (+ zT) и задним (- zT) ходом: при Д = const
центр поворота лежит в одной точке, поворот осуществляется в результа-
те увеличения угловой скорости ведущей звездочки одного борта и
уменьшения угловой скорости ведущей звездочки другого борта.
На рис. 120 показана система стабилизации радиуса поворота, снаб-
женная гидравлическим регулятором. Регулятор состоит из двух не-
больших насосов 1 и 5 изменяемого рабочего объема, один из которых
вращается от левой, а другой от правой ведущей звездочки машины.
Напорная линия насоса 5 соединена с всасывающей линией насоса 1. При
равных рабочих объемах qx и qs насосов и прямолинейном движении
машины подаваемое насосом 5 количество жидкости полностью потреб-
ляется насосом 1.
При повороте рулевого колеса 4 по часовой стрелке на определен-
ный угол Д увеличивается рабочий объем насоса 5 и уменьшается рабо-
чий объем насоса 1. Баланс между подачей жидкости насосом 5 и по-
треблением ее насосом 1 нарушается. Избыток жидкости поступает в
цилиндр 2, поршень которого поворачивает орган управления ОГП 3
механизма поворота, изменяя передаточное отношение zn и угловые
скорости w3 и w0 до тех пор, пока не установятся заданное отношение
(со3/со0)о и заданный радиус Ян.
На рис. 121 показана система стабилизации радиуса поворота, осно-
ванная на принципе регулирования по возмущению. Регулятор-компен-
сатор системы изменяет передаточное отношение zn в зависимости от пе-
редаточного отношения zM согласно формуле (148). Регулятор-компен-
сатор содержит пространственный кулачок 2, поворачиваемый при по-
мощи механизма удлиненная шестерня - зубчатая рейка гидроусилите-
лем регулятора 5. Регулятор 5 служит для управления объемной гидропе-
редачей 4, изменяющей передаточное отношение трансмиссии. Тол-
катель кулачка 2 управляет объемной гидропередачей 3 механизма по-
ворота, изменяющей передаточное отношение zn. При повороте рулевого
колеса 1 кулачок перемещается в осевом направлении.
При прямолинейном движении машины zn = 0 толкатель работает
по профилю кулачка, описываемо-
му окружностью. При повороте
рулевого колеса против часовой
стрелки увеличивается передаточ-
ное отношение /п (при zT > 0),
причем между /м и *п устанавлива-
ется отношение, определяющее сог-
ласно выражению (148) заданный
радиус поворота .
При линейной зависимости
между перемещением штока регу-
Рис. 121. Система стабилизации радиуса
поворота с программирующим устрой-
ством
239
лятора 5 передачи 4 и передаточным отношением /т в поперечных сече-
ниях кулачок 1 описывается по спирали Архимеда. В продольных сече-
ниях профиль кулачка линейный.
При движении машины передним ходом кулачок 2 поворачивается
на три четверти оборота в одну сторону, а при движении задним ходом -
на одну четверть оборота в противоположную сторону. При движении
машины задним ходом передаточное отношение zT не достигает своего
максимума. В остальном сохраняется идентичность работы системы
управления при движении машины передним (+ гт) и задним (— /т)
ходом.
Рассмотренный вопрос является новым. Автору не известны гусе-
ничные самоходные машины с гидрообъемным механизмом поворота и
гидрообъемной трансмиссией, имеющей автоматическое управление.
240
СПИСОК ЛИТЕРА ТУРЫ
1. Башта ТЛ. Объемные насосы и гидравлические двигатели гидросистем.
М.: Машиностроение, 1974. 607 с.
2. Брук Л. Регенеративная тормозная система автобуса // Автомобильная про-
мышленность США. 1987. № 1. С. 9—11.
3. Беленков ЮА., Некрасов БЗ., Фатеев ИЗ. Определение КПД объемной
гидропередачи // Автомобильная промышленность. 1975. № 8. С. 16—18.
4. Беркман ЛИ., Раннее А.В., Рейш AJC. Универсальные одноковшовые строи-
тельные экскаваторы. М.: Высшая школа, 1977. 384 с.
5. Васильченко В А. Гидравлическое оборудование мобильных машин: Спра-
вочник. М.: Машиностроение, 1983.301 с.
6. Герасимов ГЗ. Бесступенчатые передачи тракторов. М.: МАМИ, 1975.174 с.
7. Гидравлика, гидромашины и гидроприводы: Учебник для вузов. 2-е изд.,
переработ. / Т.М. Башта, С.С. Руднев, Б.Б. Некрасов и др. М.: Машиностроение,
1982.423 с.
8. Гловацкий ЕЛ. Анализ режимов работы объемных гидротрансмиссий зер-
ноуборочных комбайнов иностранных фирм // Тракторы и сельск ох оз машины.
1984. №5. С. 37-39.
9. Гром-Мазиичевский Л.И^ Харагоргиева С.С. Анализ некоторых схем авто-
матической системы управления двигателем и гидростатической трансмиссией
трактора МТЗ-80Б // Механизация и электрификация сельского хозяйства. Киев:
Урожай, 1976. Вып. 36. С. 76-86.
10. Городецкий КЛ. Механический КПД объемных гидромашин // Вестник
машиностроения. 1977.№7. С. 11-13.
И. Детина А.Ф., Куранов ВX. Гидропривод машин для животноводства и кор-
мопроизводства. М.: Колос, 1984.224 с.
12. Дзильно А А., Полянин В А. Гидрообъемные трансмиссии зарубежных
строительных машин // Строительные и дорожные машины, 19ЗД. № 6. С. 21-22.
13. Докукин AJB^ Рогов А.Я., Фейфец Л.С. Радиально-поршневые гидромото-
ры многократного действия. М.: Машиностроение, 1980. 288 с.
14. Кондаков ЛА. Рабочие жидкости и уплотнения ..гидравлических систем.
М.: Машиностроение, 1982. 216 с.
15. Лихачев Ю.В. Автоматическое электронное устройство для управления
гидрообъемной трансмиссией трактора // Тр. Куб. с.-х. ин-та. 1973. Вып. 55.
С. 76^80.
16. Исследования и оптимизация гидропередач горных машин / АЗ. Докукин,
В.М. Берман, АЛ. Рогов и др. М.: Наука, 1978.196 с.
17. Машиностроительный гидропривод / Л.А. Кондаков, ГА. Никитин,
В.Н. Прокофьев и др.; Под ред. В.Н. Прокофьева. М.: Машиностроение, 1978.
495 с.
18. Николаев А.Ф., Худяков ВЛ., Малыгин АЛ. Малогабаритная ледорезная
установка СЛУ-119 с роторно-винтовым движителем // Строительные и дорожные
машины. 1981. № 4. С. 21—22.
19. Объемные гидравлические приводы / Т.М. Башта, И.З. Зайченко, В.В.Ерма-
ков, Е.Й. Хаймович; Под ред. Т.М. Башты. М.: Машиностроение, 1969. 628 с.
20. Основы теории и конструирования объемных гидравлических передач /
Под ред. В.Н. Прокофьева. М.: Высшая школа, 1969.400 с.
241
21. Петров В Al Автоматическое управление бесступенчатых передач самоход-
ных машин. М.: Машиностроение, 1969. 384 с.
22. Петров ВА. Автоматические системы транспортных машин. М.: Машино-
строение, 1974.336 с.
23. Петров В А. Исследование гидрообъемной передачи с ограниченной мощ-
ностью на входе // Автоматика и телемеханика. 1966. № 12. С. 144-151.
24. Петров В А., Калинников BJB. Экспериментальное определение коэффи-
циента полезного действия гидрообъемной передачи // Тр. НАМИ. 1969. Вып. 92.
С. 72-77.
25. Петров В А. Узловые вопросы теории качения пневматического колеса //
Тракторы и сельхозмашины. 1986. № 8. С. 18-22.
26. Шабанов КД. Замкнутые дифференциальные передачи. М.: Машинострое-
ние. 1972. 282 с.
27. Bouer Jean - Jacques. Les transmissions hydrostatiques de puissance // Ing.
automob. 1975. N 10. P. 267-274.
28. Bradshaw K.R. Les moteurs lents dans les transmissions hydrostatique pour
vehicules // Energ. fluide Hydraul., pneumat., asserv., lubrific. 1973. 12, N 57. P. 41-44.
29. Design Evalution of the Renold low speed Hydraulic motor // Engineering
Material and Design. 1978. 22, N5. P. 38-43.
30. Eckhart E. Steuer-und Regeleinri'chtungen in der Mobility draulik // Olhydraulik
und Preumatik. 1978. 22, N 12. S. 683-688.
31. Franken L Anpassungsregelung eines stufenlosen Fahrzeugantriebes // kraftfa-
hrzeugtechnik. 1975. N 4. S. 224-228.
32. Goto Werner. 160 - Tonner fahut hydrostatisch // Fluid. 1972. N 9. S 49-5
33. Haney Robert M., Ashly Edward H. Electronic control for hydrostatic transmis-
sions. // Diesel and Gas Furbine Progress. 1974. 40, N 12. P. 36-37.
34. Hydraulic motors // Engineering. 1978. 218, N 2. P. 27-31.
35. Mayr A Hydrostatiche Tahrantriebe // Olhydraulic und Pneumatik. 1985. 29,
N 7. S. 516-525.
36. Meisel William H. Controls for hydrostatic transmissions - present and future:
SAE Preprint. 1976. 15 p.
37. Neal T.P. Electrohydraulic control of hydroshatic transmissions: SAE Preprint.
1976. 16 p.
38. Nicolas H. Hydrostatische Mobilantriebe mit servohydraulischer Grenzlastrege-
lung//Olhydraulik und Pneumatik. 1975. 19, N 11. S. 563-578.
39. Rydbery Karl - Erin. Teoria ed impiego degli accumulatori idraulicl nelle trans-
missions idrostatiche per veicoli // Fluid. Appar. idraul. e pneum. 1985. 25, N 258.
S. 57-63.
40. Wobben D. Fahrzeugantriebe mit Bremsenergieriickgewinnung dutch Gyros--
peicher, Hydrospeicher und elektrochemische Speicher // Automibil - Industrie. 1982.
Nl.S. 71-75.
242
ОГЛАВЛЕНИЕ
Введение............................................................ 3
1. Области применения гидрообъемных трансмиссий..................... 5
2. Гидравлические системы гидрообъемных трансмиссий'................14
2.1. Системы, обеспечивающие функционирование объемной гидропе-
редачи .........................................................14
2.2. Гидроаппараты............................................ 22
3. Вопросы теории гидрообъемных трансмиссий.........................27
3.1. Силовые и кинематические зависимости параметров гидрообъемных
трансмиссий.....................................................27
3.2. Коэффициент полезного действия объемной гидропередачи......34
4. Выбор типа гидромашин...........................................54
4.1. Насосы и быстроходные гидромоторы с наклонным блоком ци-
линдров ........................................................54
4.2. Насосы и быстроходные гидромоторы с наклонным диском.......66
4.3. Сравнение и оценка различных типов гидромашин..............72
5. Выбор типа мотор-колес..........................................78
5.1. Мотор-колеса с.высокомоментным гидромотором................78
5.2. Мотор-колеса с высокооборотным гидромотором ...............90
5.3. Сравнение и оценка мотор-колес.............................93
6. Выбор схемы и расчет параметров полнопоточных гидрообъемных транс-
миссий..............................................................99
6.1. Выбор схемы полнопоточной гидрообъемной трансмиссии........99
6.2. Схемы силовых установок с аккумулированием и рекуперацией
энергии....................................................... 111
6.3. Расчет рабочих объемов гидромашин и передаточных чисел редукто-
ров трансмиссий................................................115
6.4. Расчет параметров трансмиссий с многоступенчатыми редукторами
и отключаемыми гидромоторами.........................1.........126
6.5. Выбор предельно допустимых рабочего давления и частоты вращения
вала гидромашины...............................................131
7. Выбор схемы и расчет параметров дифференциальных гидрообъемных
трансмиссий........................................................136
7.1. Объемные гидропередачи с внутренним разветвлением потока мощ-
ности..........................................................136
7.2. Силовые и кинематические зависимости передач с внутренним развет-
влением потока мощности........................................143
7.3. Объемные гидропередачи с внешним разветвлением потока мощ-
ности...................................................../ ... 151
7.4. Силовые и кинематические зависимости передач с внешним развет-
влением потока мощности . ................................... 158
8. Совместная работа гидрообъемной трансмиссии и двигателя при наличии
системы автоматического регулирования..............................169
8.1. Расчет регуляторной характеристики режимов работы двигателя. ... 169
8.2. Расчет тяговой и топливно-экономической характеристик самоходной
машины при работе двигателя на заданных режимах................175
243
8.3. Расчет диапазона изменения передаточного отношения гидрообъем-
ной трансмиссии...................................................180
9. Система автоматического регулирования класса постоянной мощности . . . .182
9.1. Принципы действия систем регулирования......................182
9.2. Системы регулирования, реагирующие на изменение давления нагне-
тания насоса .....................................................193
9.3. Опыт создания систем регулирования по отклонению угловой скорос-
ти вала двигателя.................................................199
9.4. Опыт создания систем регулирования по отклонению момента нагруз-
ки двигателя.....................................................208
10. Системы автоматического регулирования класса постоянной скорости . . .216
10.1. Принцип действия систем регулирования.....................216
10.2. Опыт создания систем регулирования.........................219
И. Вспомогательные автоматические системы и устройства...............225
11.1. Назначение вспомогательных систем и устройств..............225
11.2. Кинематика поворота гусеничной машины с гидрообъемной транс-
миссией .........................................................227
11.3. Системы управления поворотом гусеничной машины............231
11.4. Системы автоматической стабилизации радиуса поворота.......235
244
ПРОИЗВОДСТВЕННОЕ ИЗДАНИЕ
Петров Вячеслав Александрович
ГИДРООБЪЕМНЫЕ ТРАНСМИССИИ САМОХОДНЫХ МАШИН
Редактор И.Н. Якунина
Переплет художника Н<А. Игнатьева
Художественный редактор В Л Лыськов
Технический редактор HJB. Павлова
Корректор Л.В. Тарасова
Оператор ФД1. Зайцева'
ИБ№5620
Сдано в набор 19.08.87. Подписано в печать 25.04.88. Т-05195.
Формат 60X90 1/16. Бумага офсетная № 2. Гарнитура Пресс Роман.
Печать офсетная. Усллеч.л.15,50. Услд<р.-отт.15^50. Уч.-издл.17,09.
Тираж 4100 экз. Заказ 1153 Цена 1р. 30 к.
Ордена Трудового Красного Знамени издательство ’’Машиностроение”,
107076, Москва, Стромынский пер. 4
Отпечатано в московской типографии № 6 Союзполиграфпрома
при Государственном комитете СССР по делам издательств,
полиграфии и книжной торговли
109088, Москва, Ж-88,Южнопортовая ул., 24
с оригинала-макета, изготовленного в издательстве ’’Машиностроение”
на наборно-пишущих машинах