/


















































Author: Фролов К.В.
Tags: общее машиностроение технология машиностроения машиноведение машиностроение механика
ISBN: 5-217-01956-5
Year: 1997
Similar



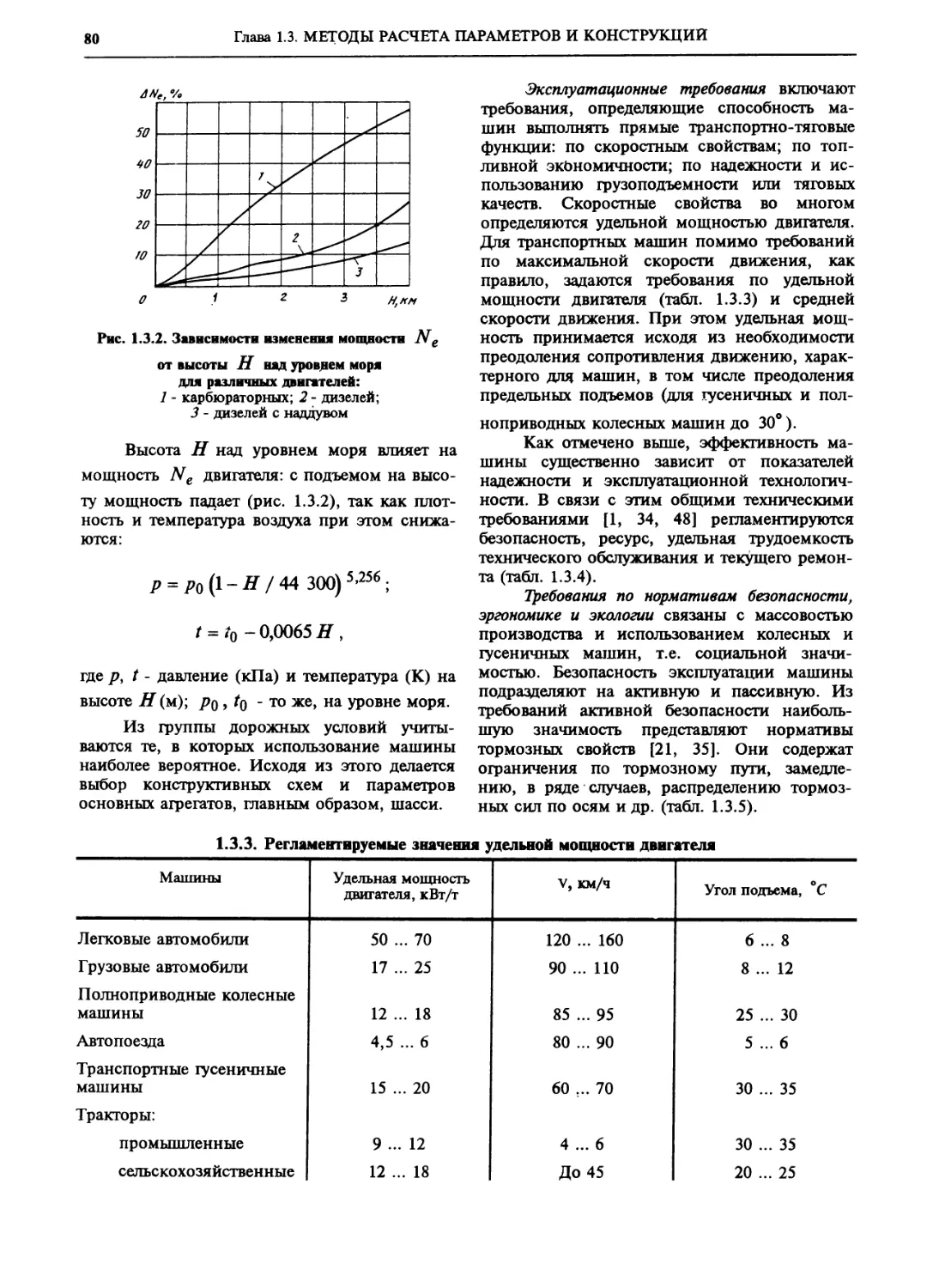
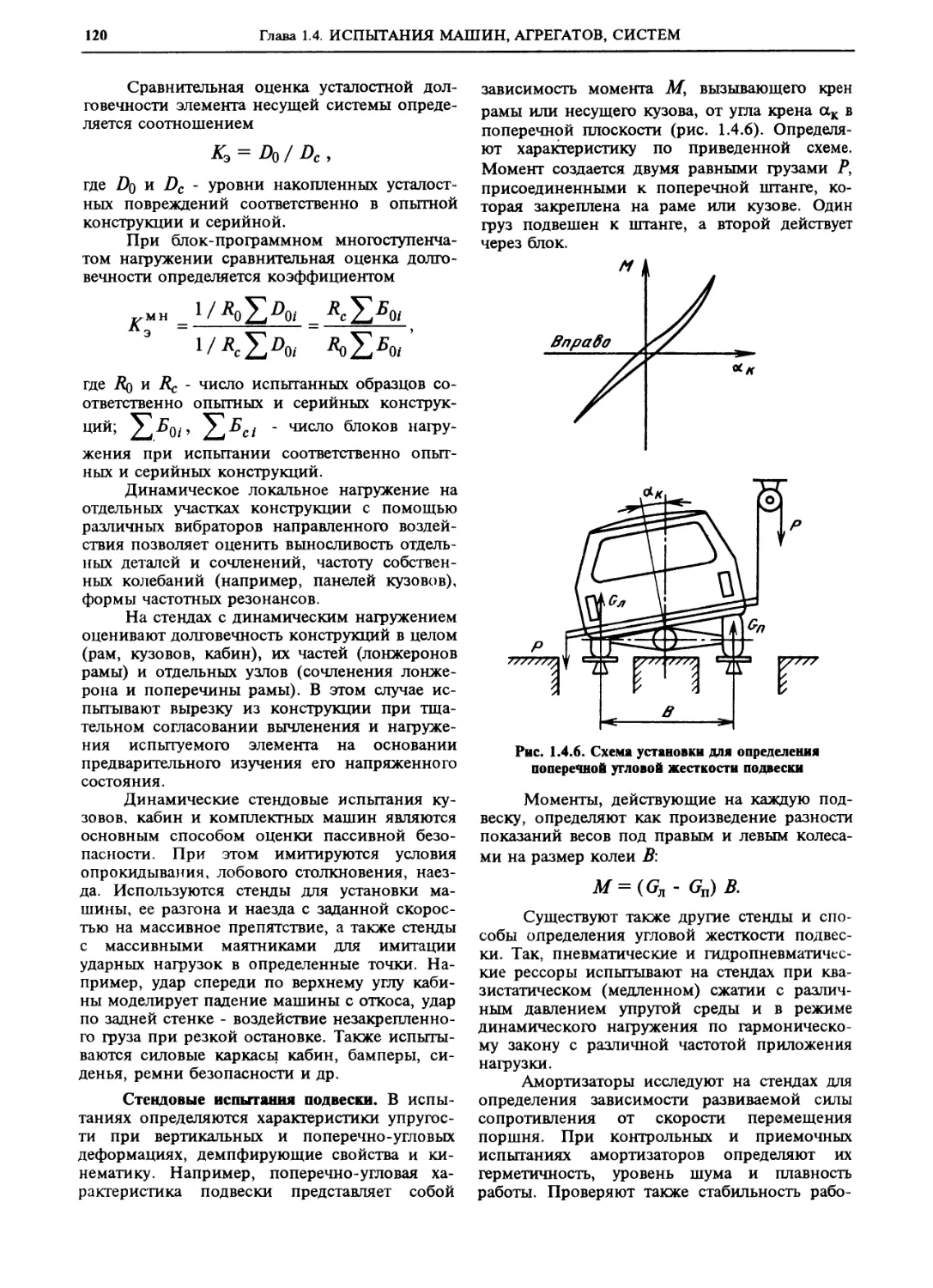
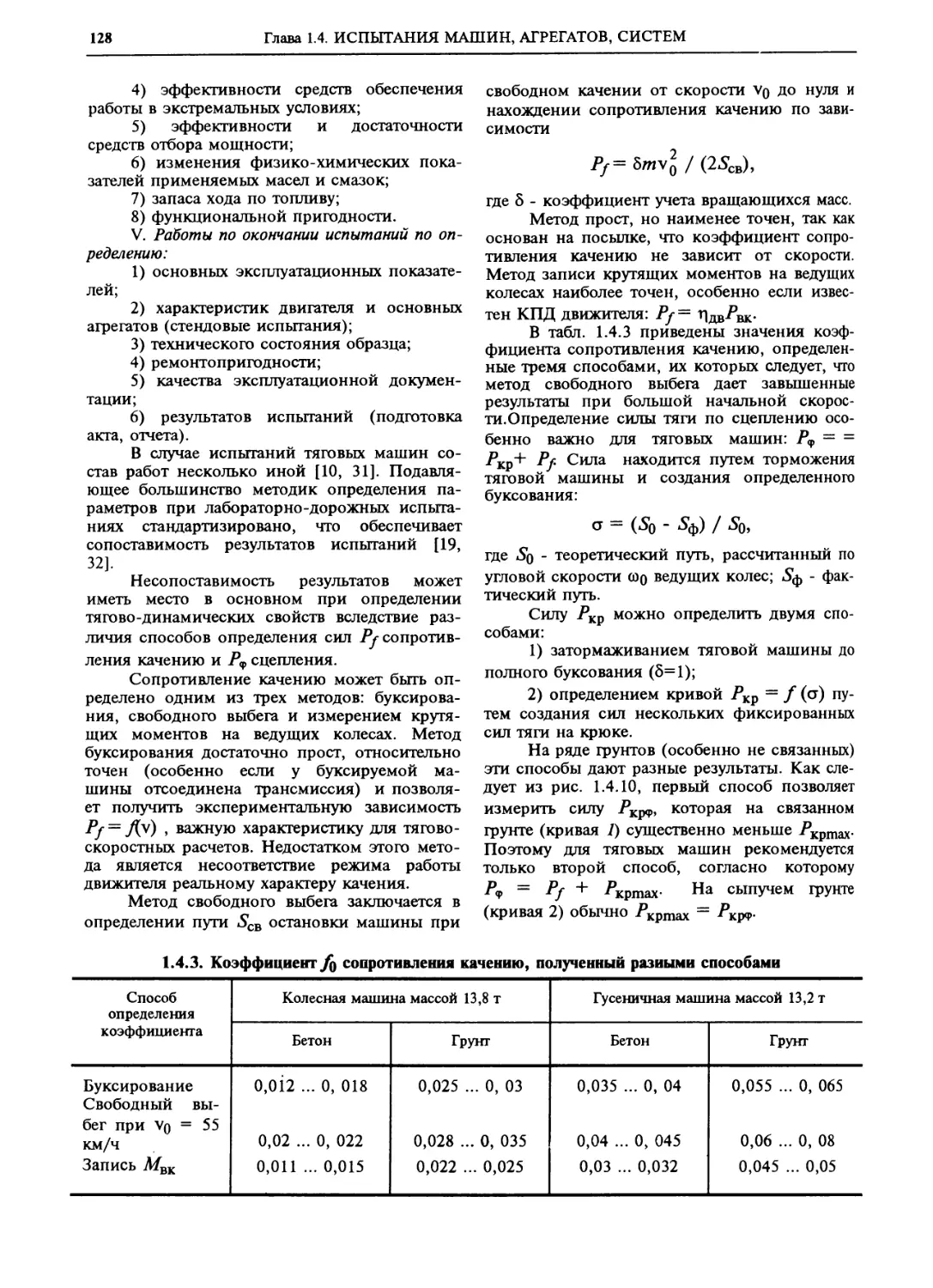
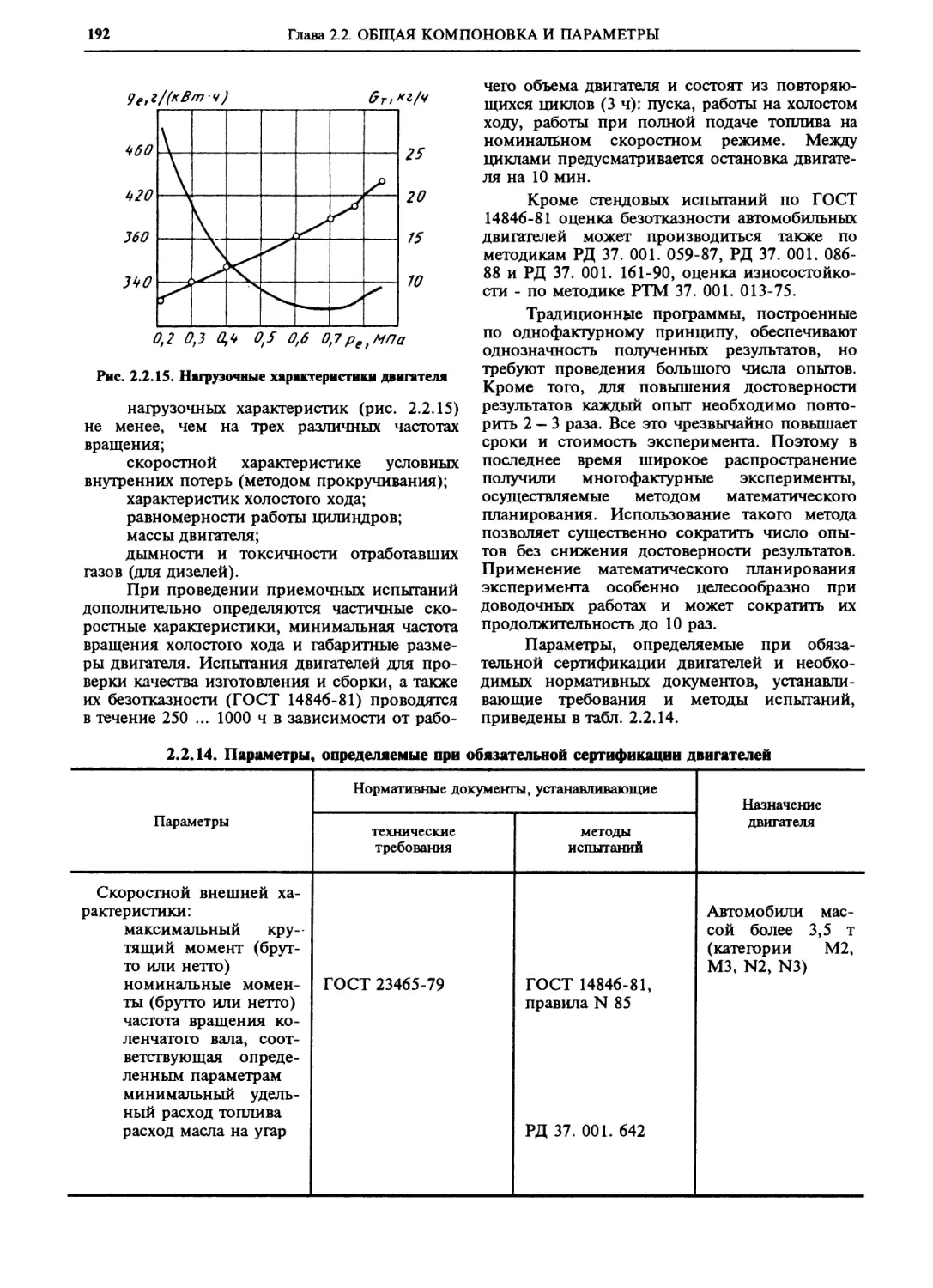
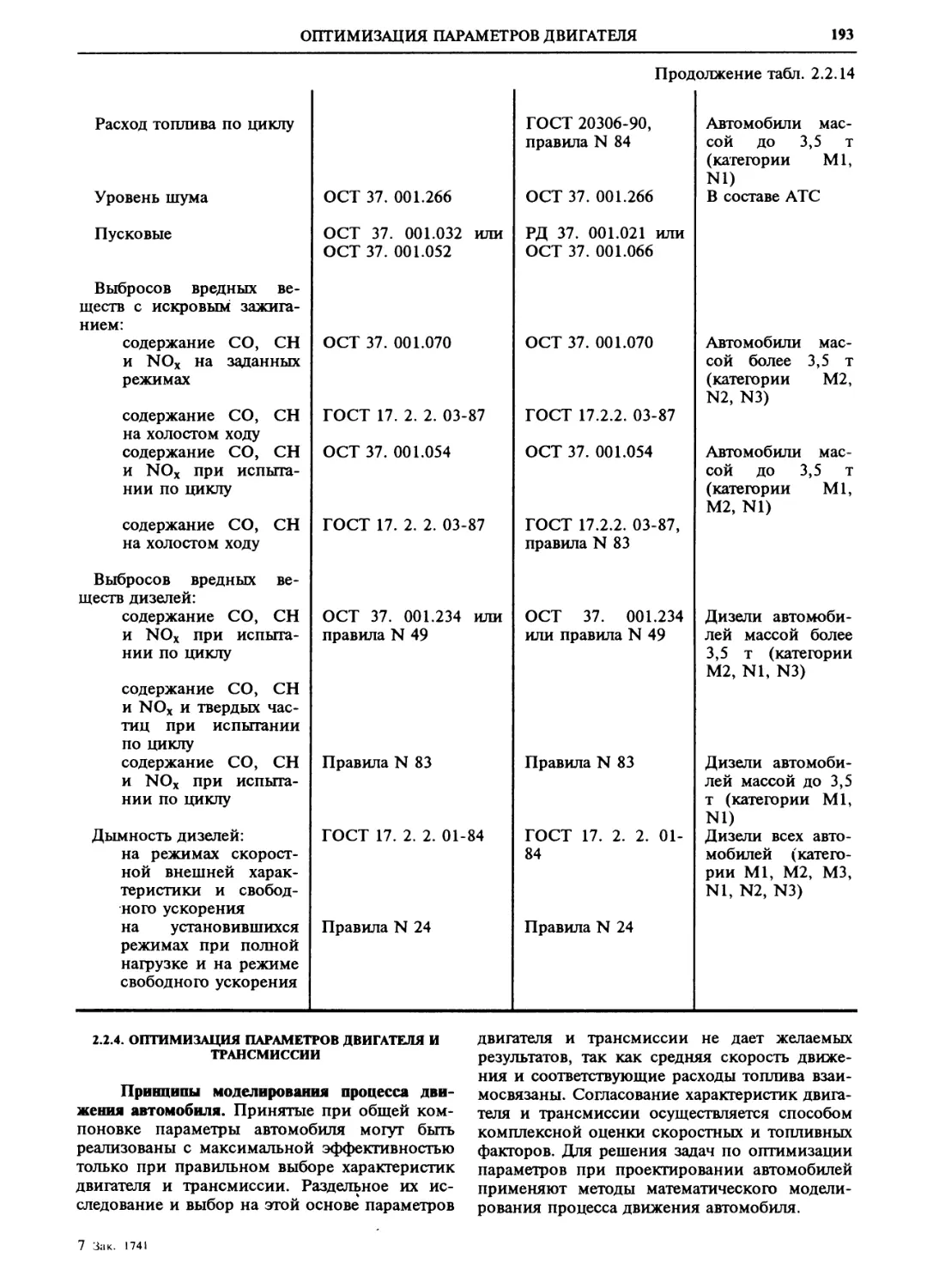
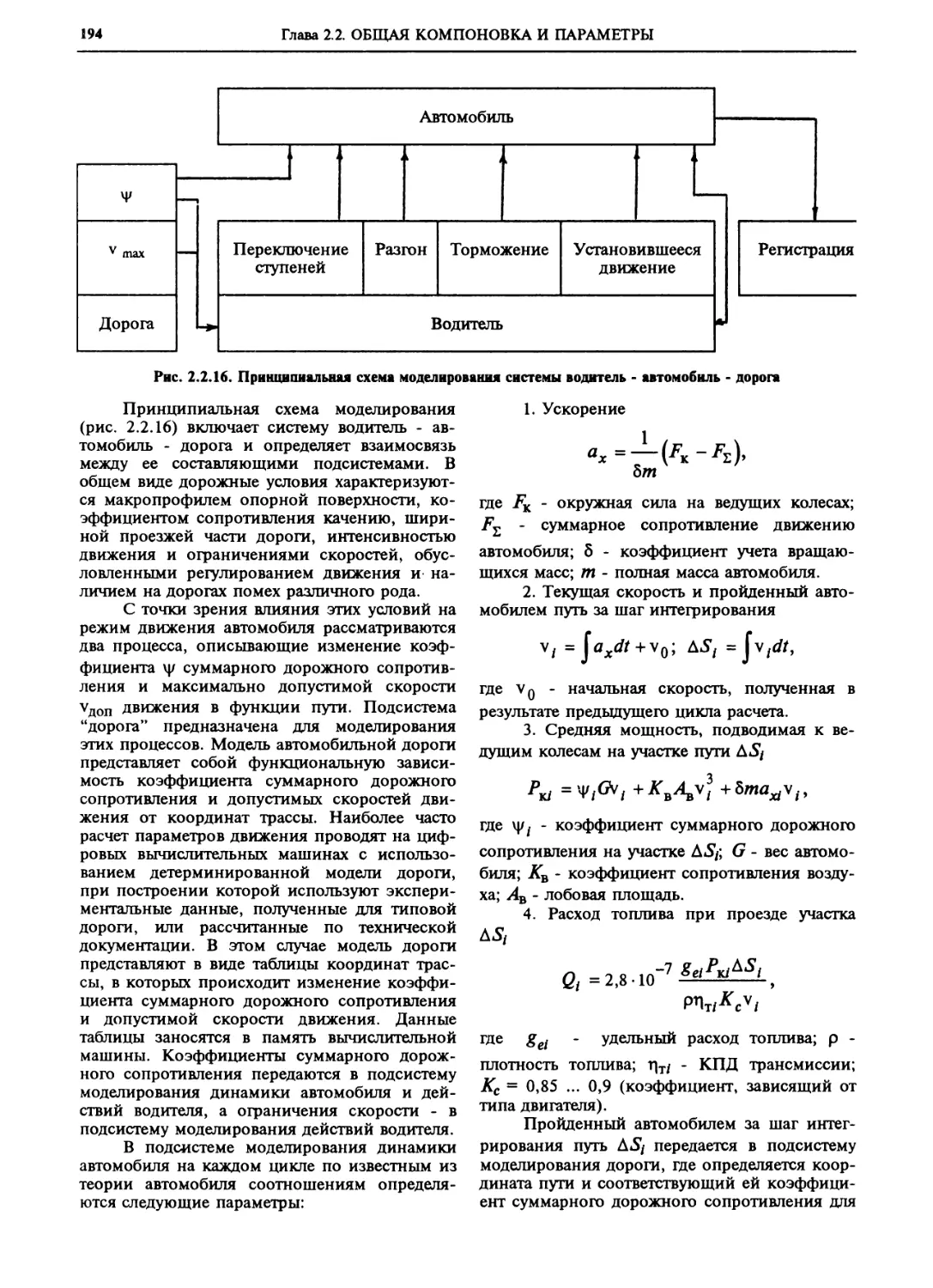
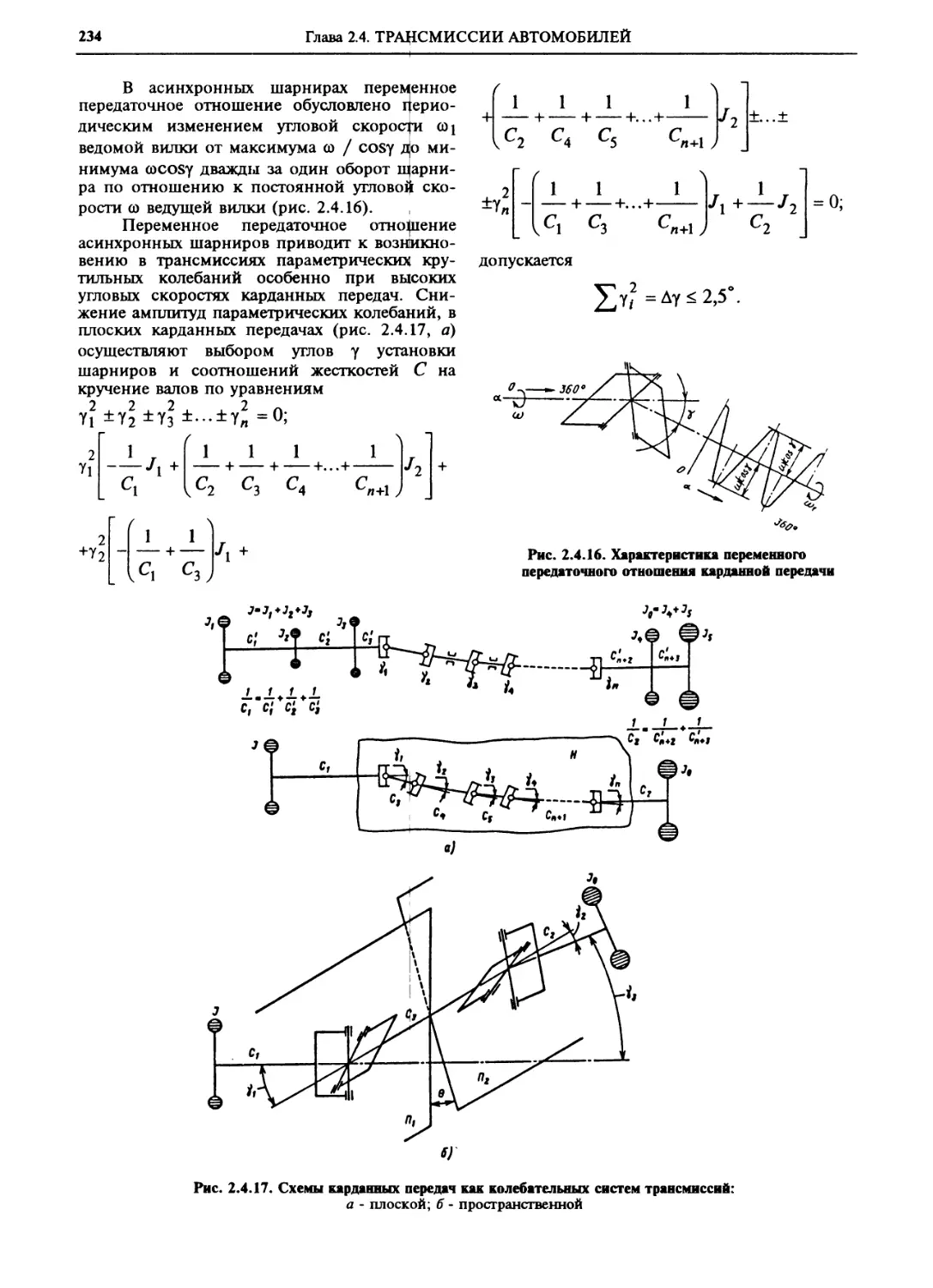
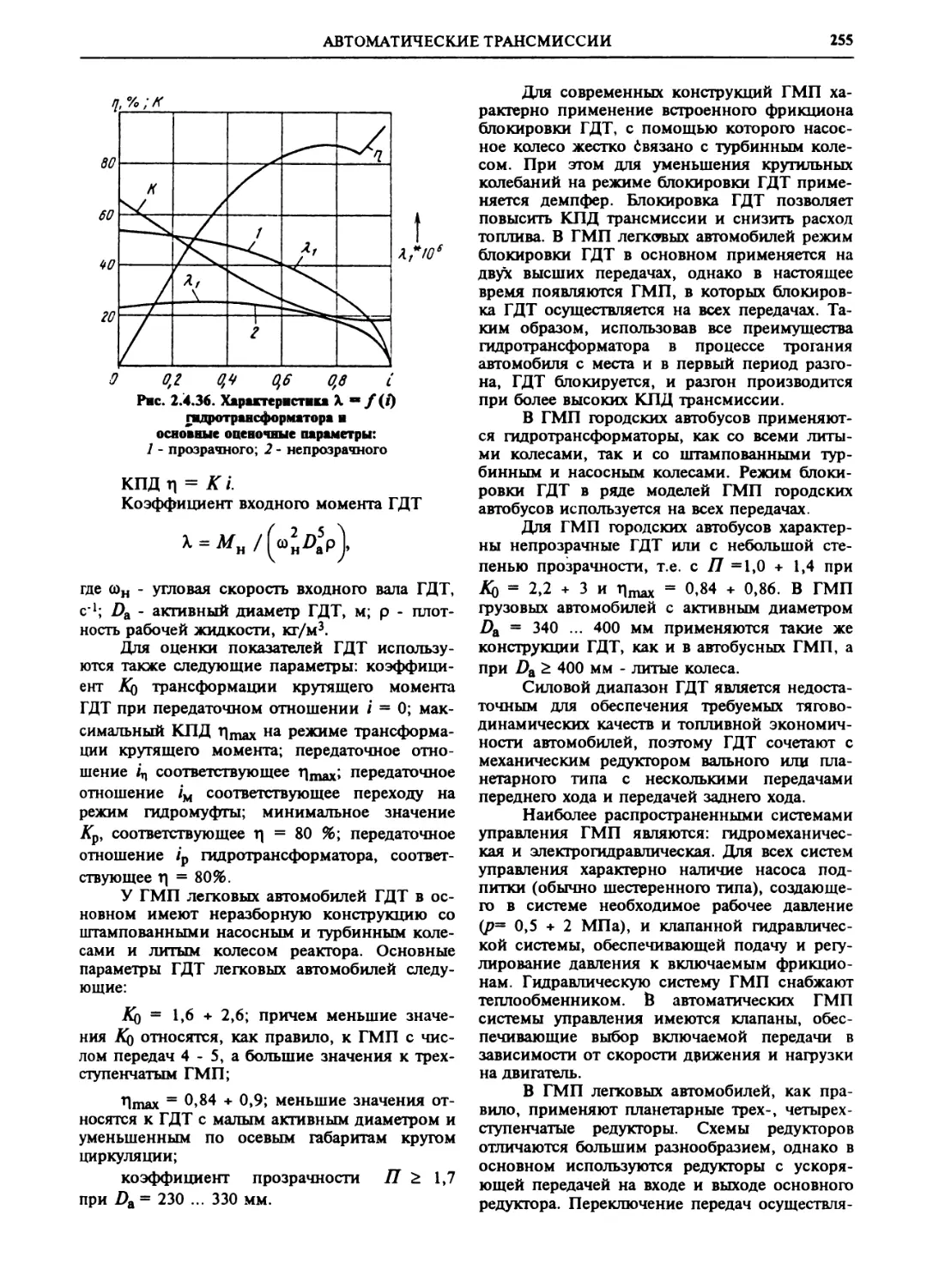
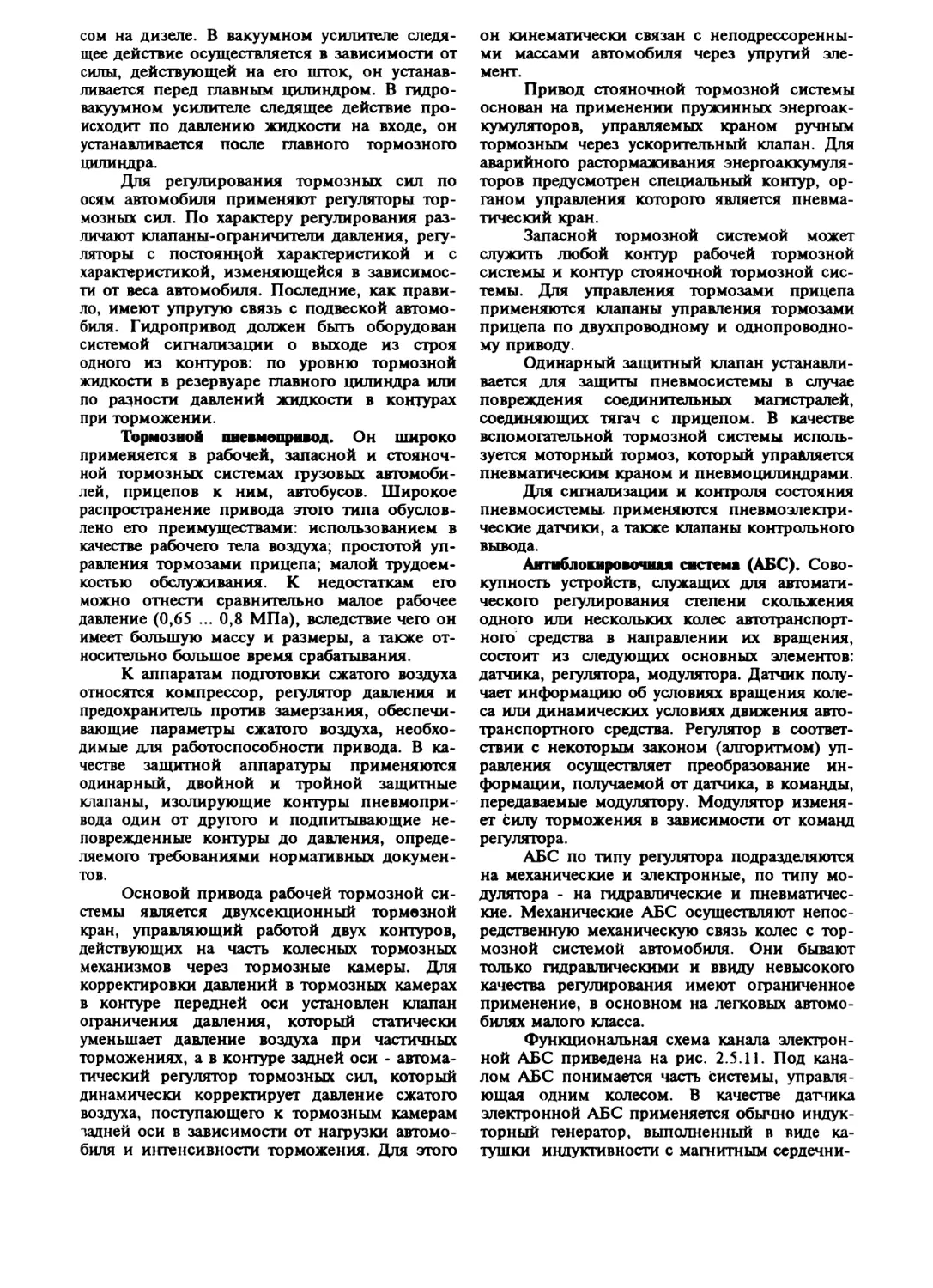
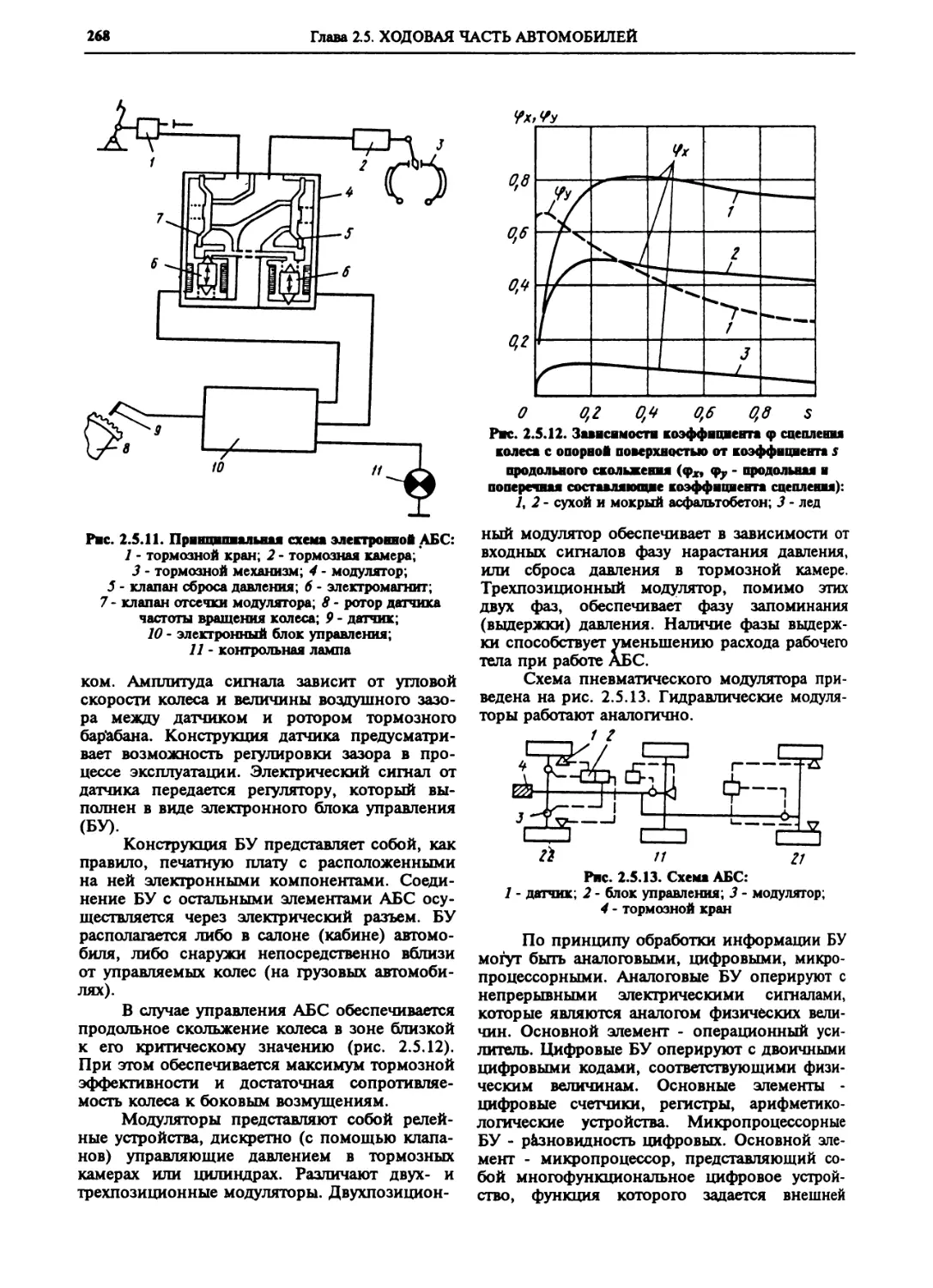
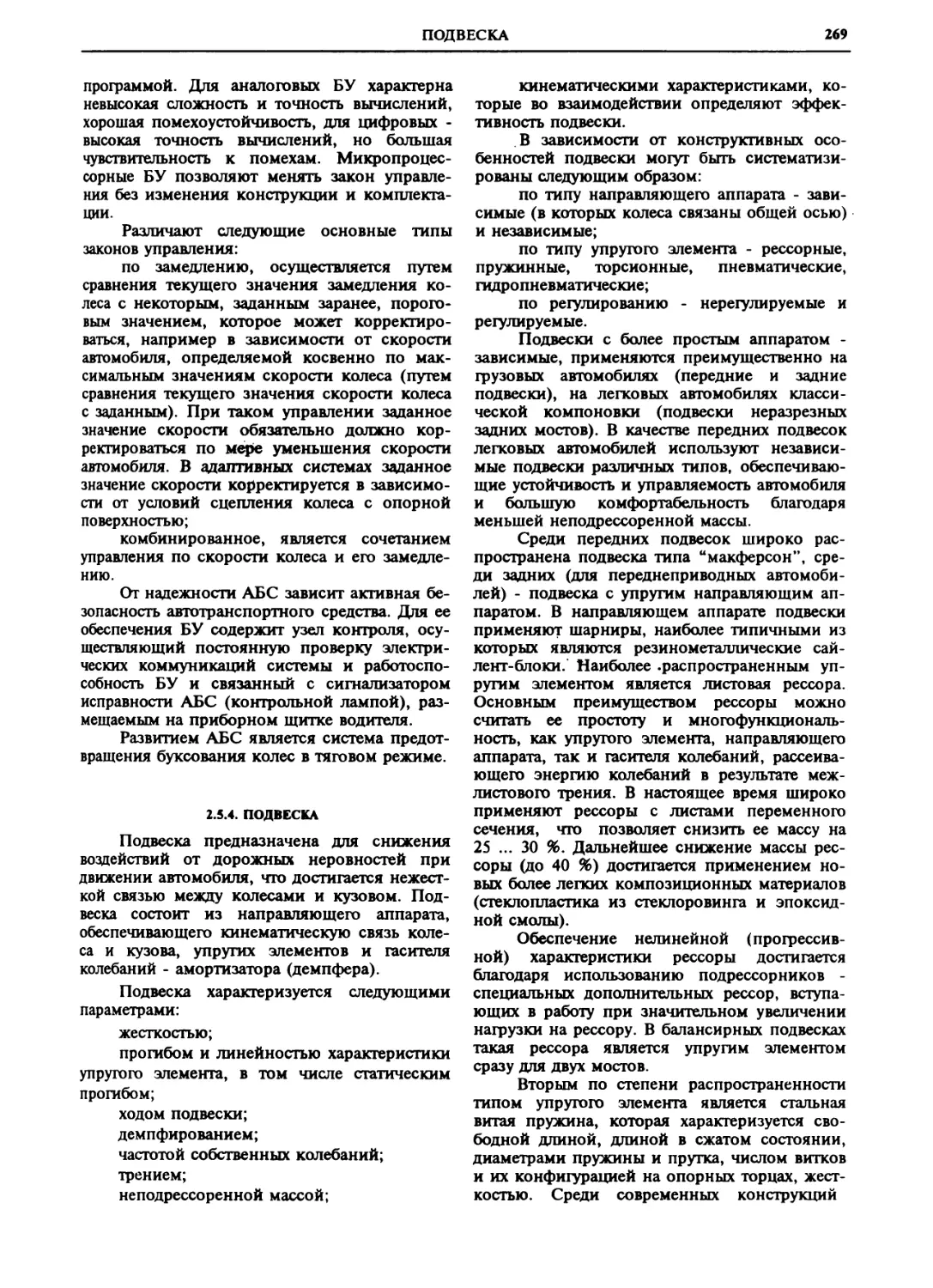
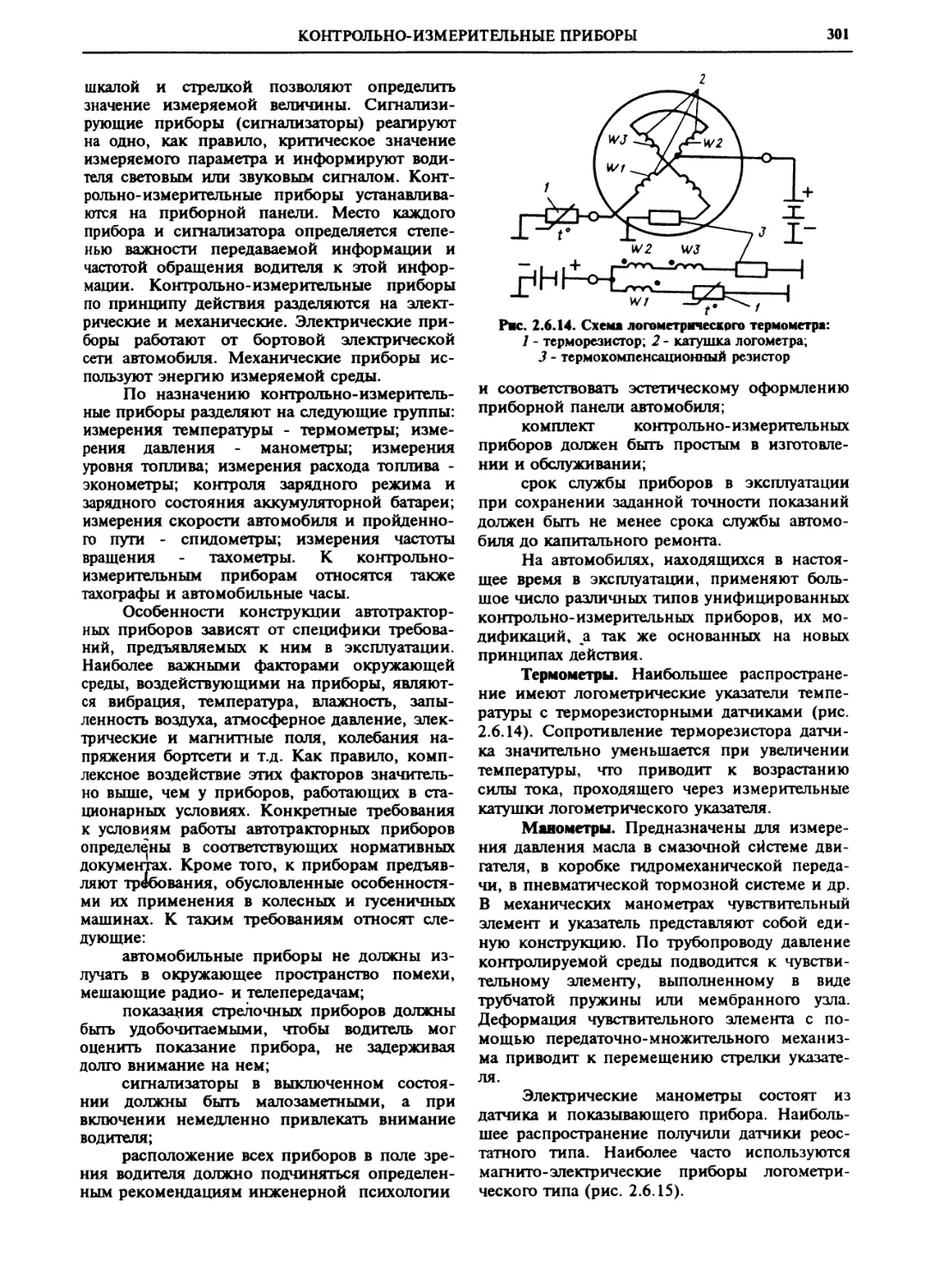
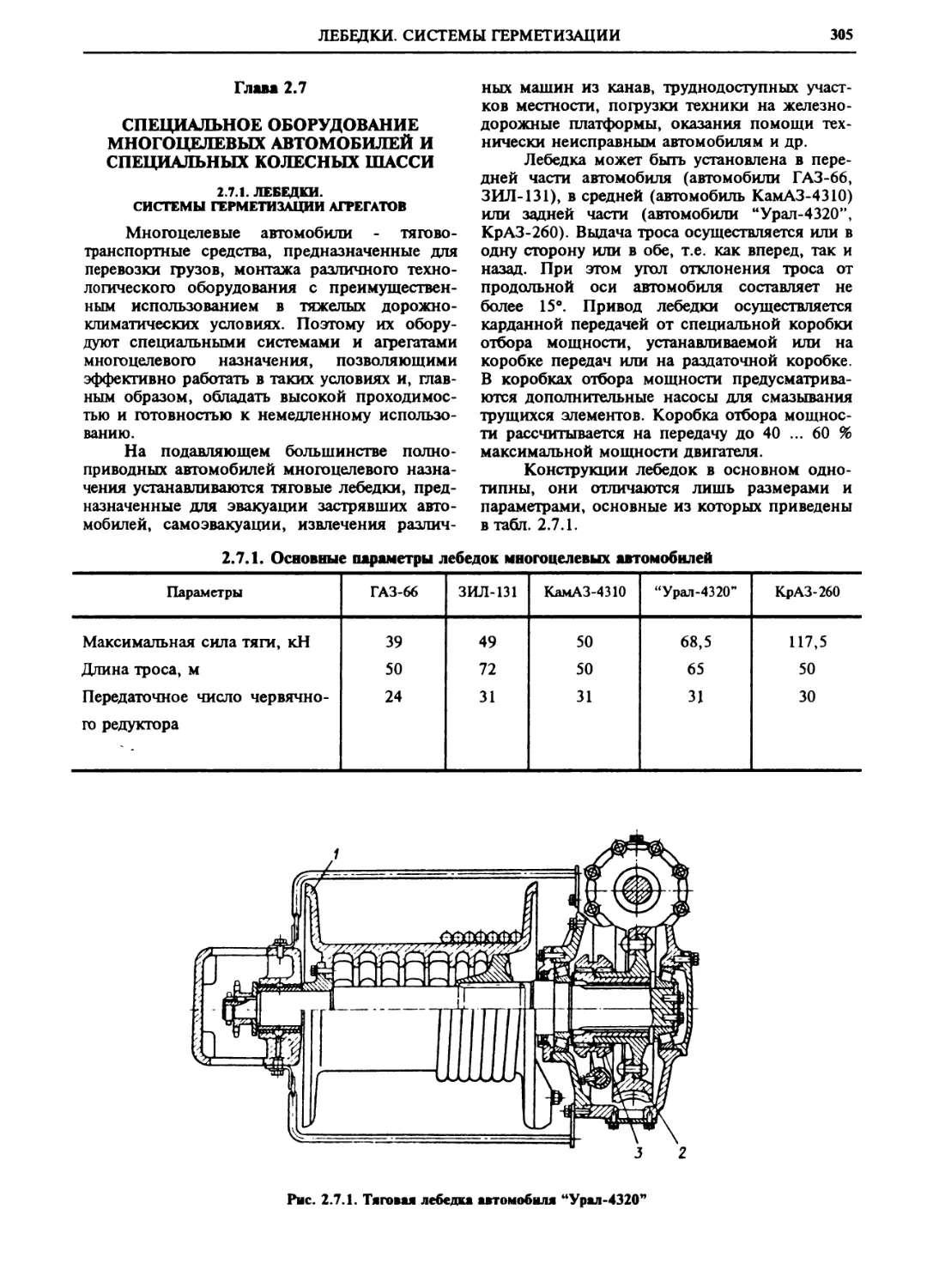
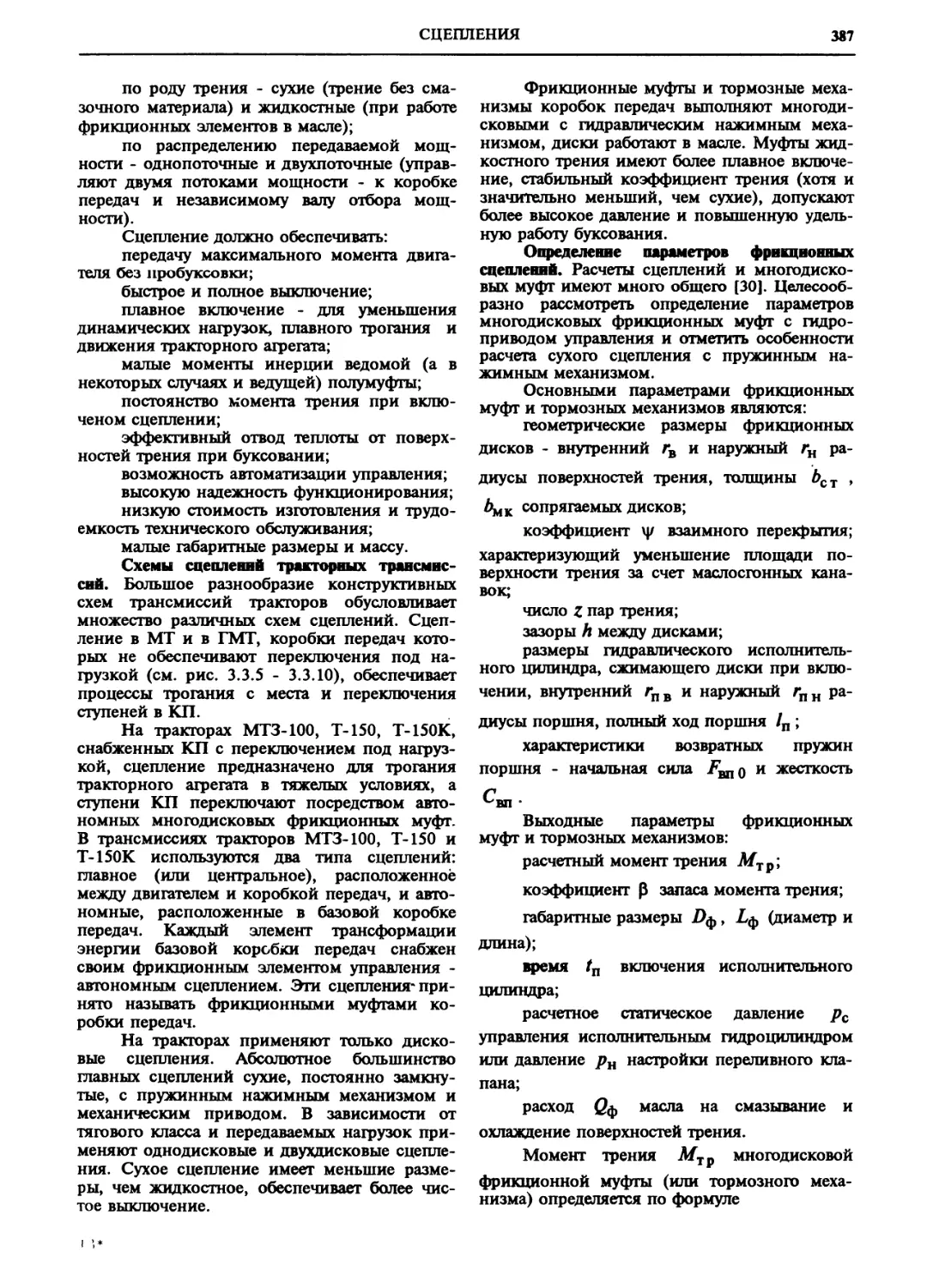
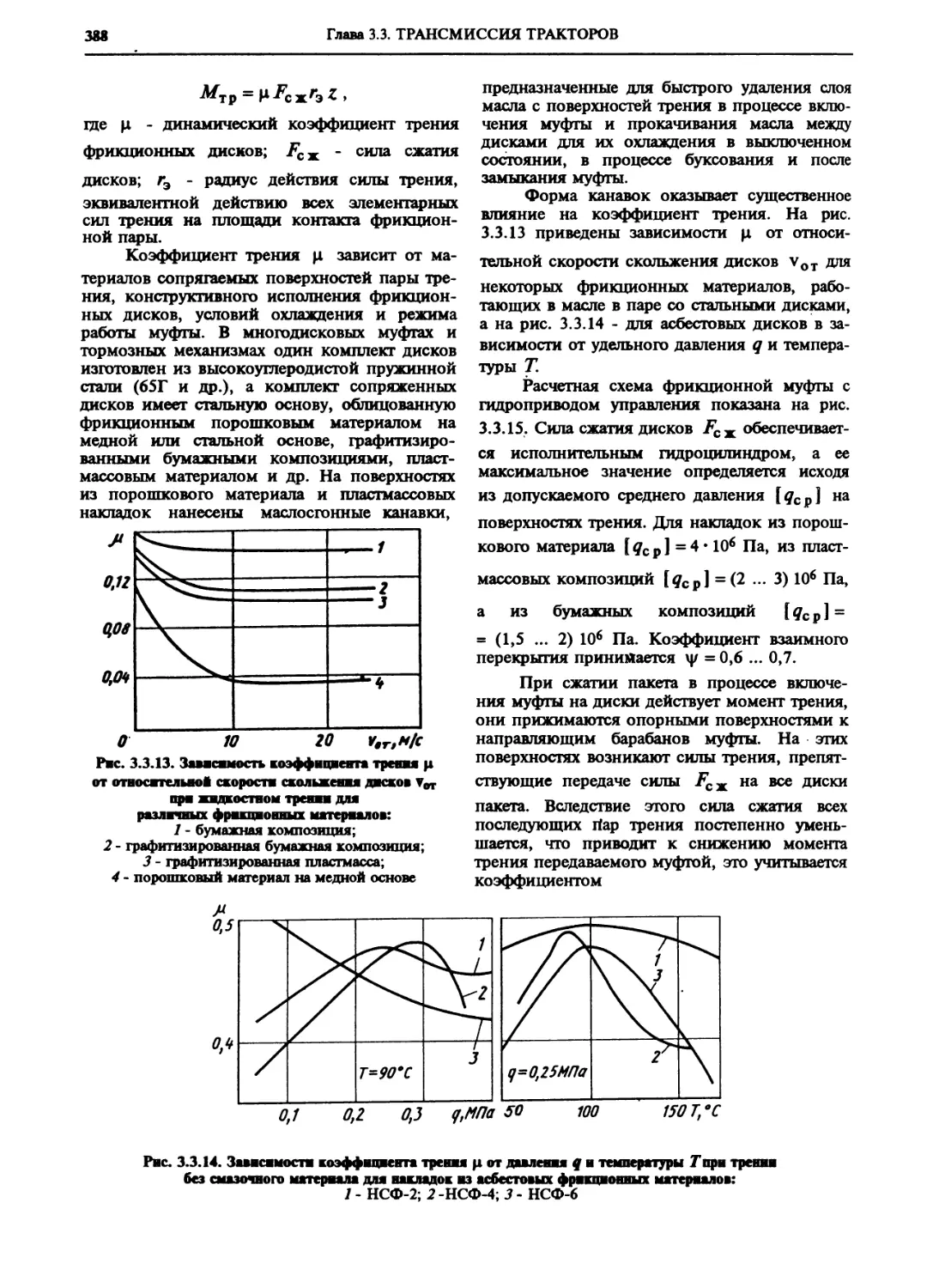
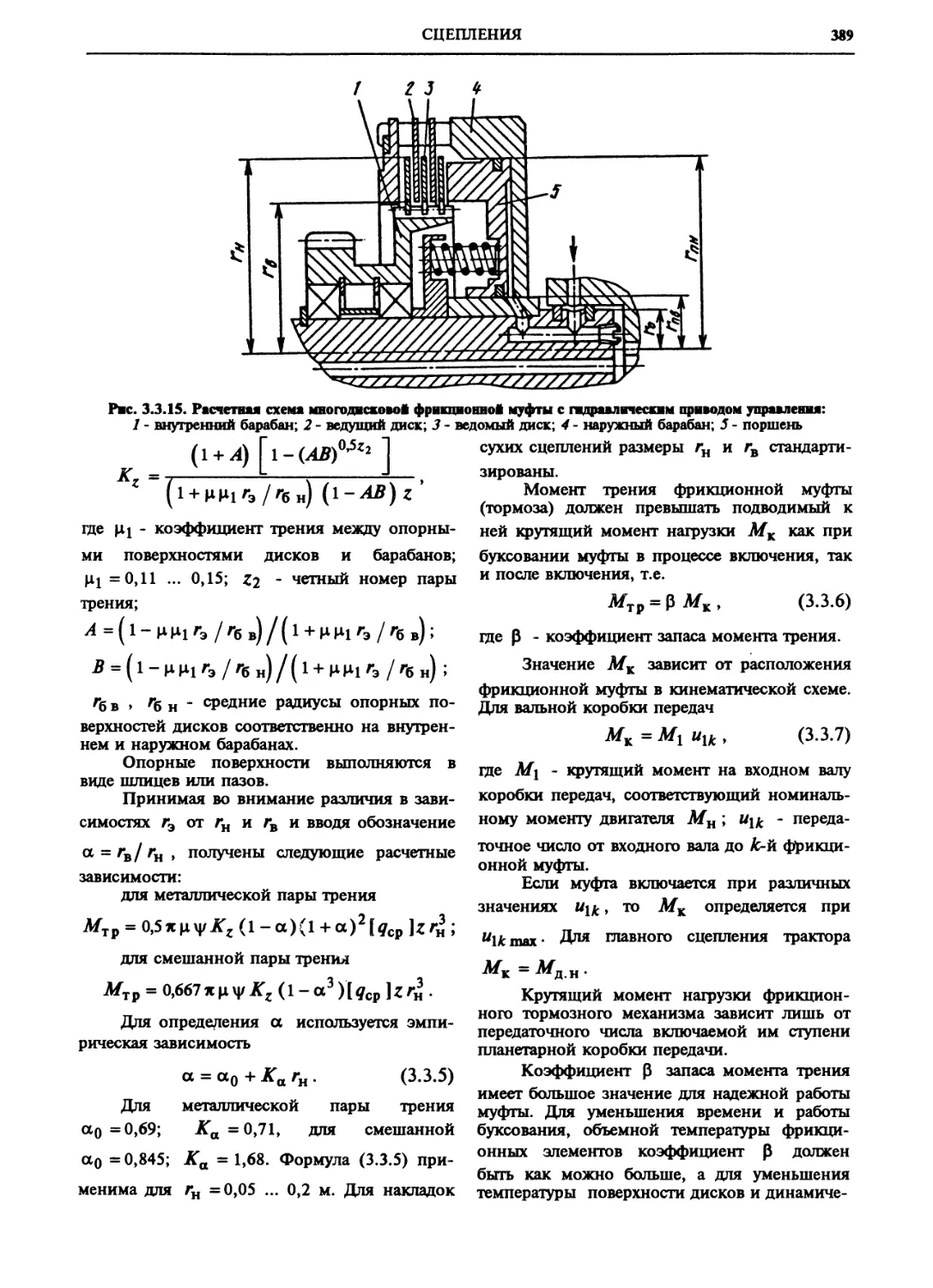
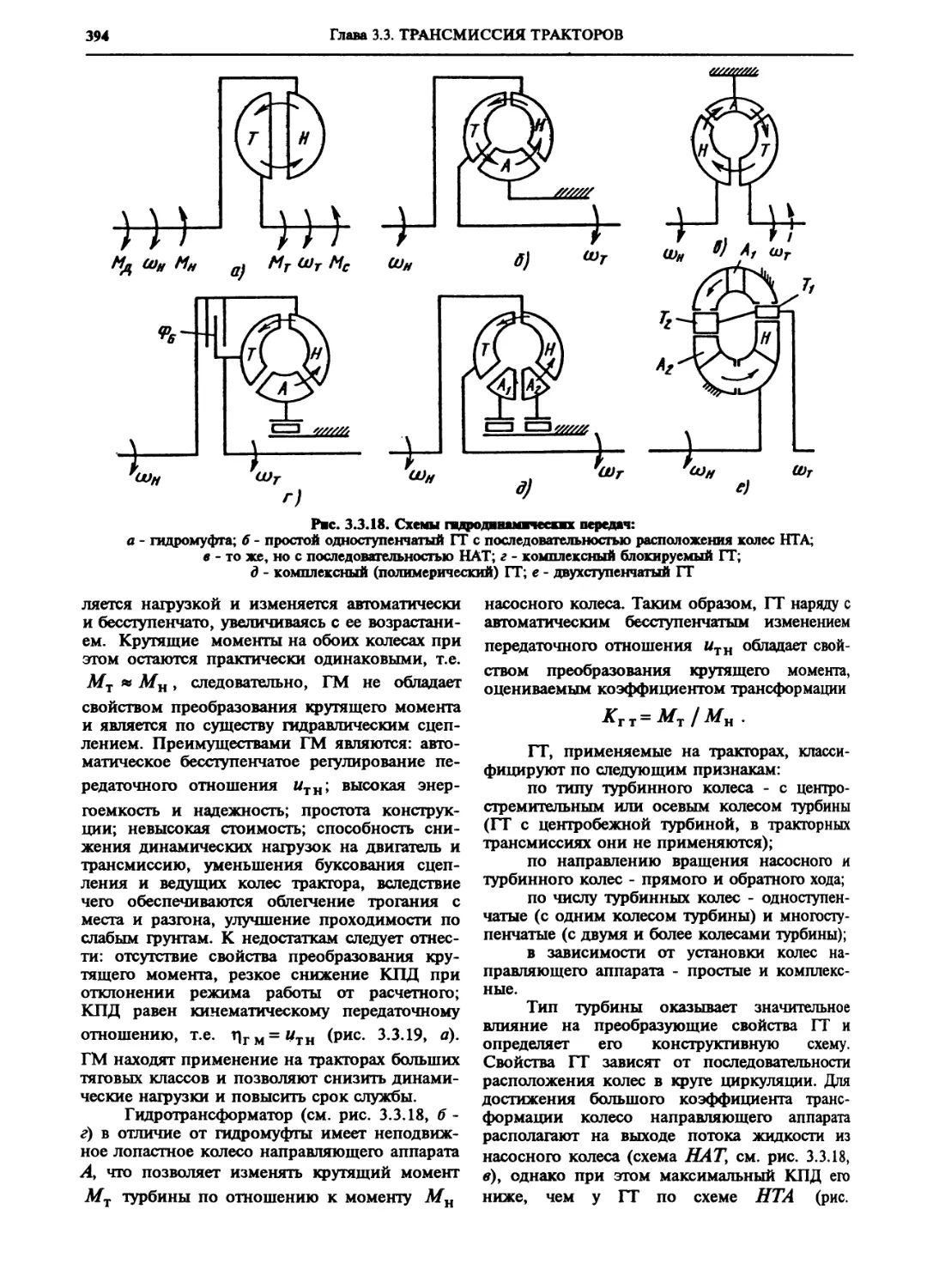
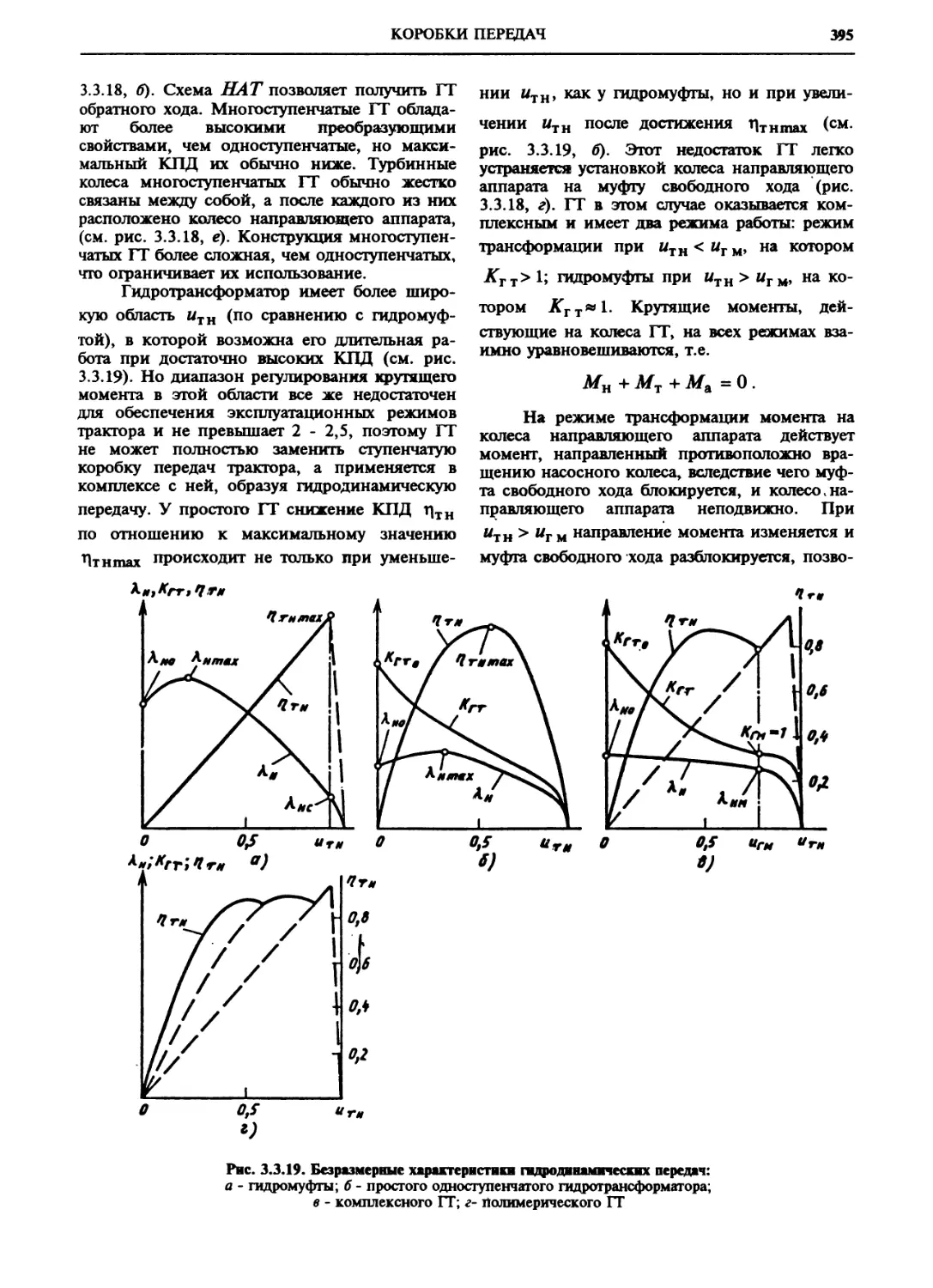
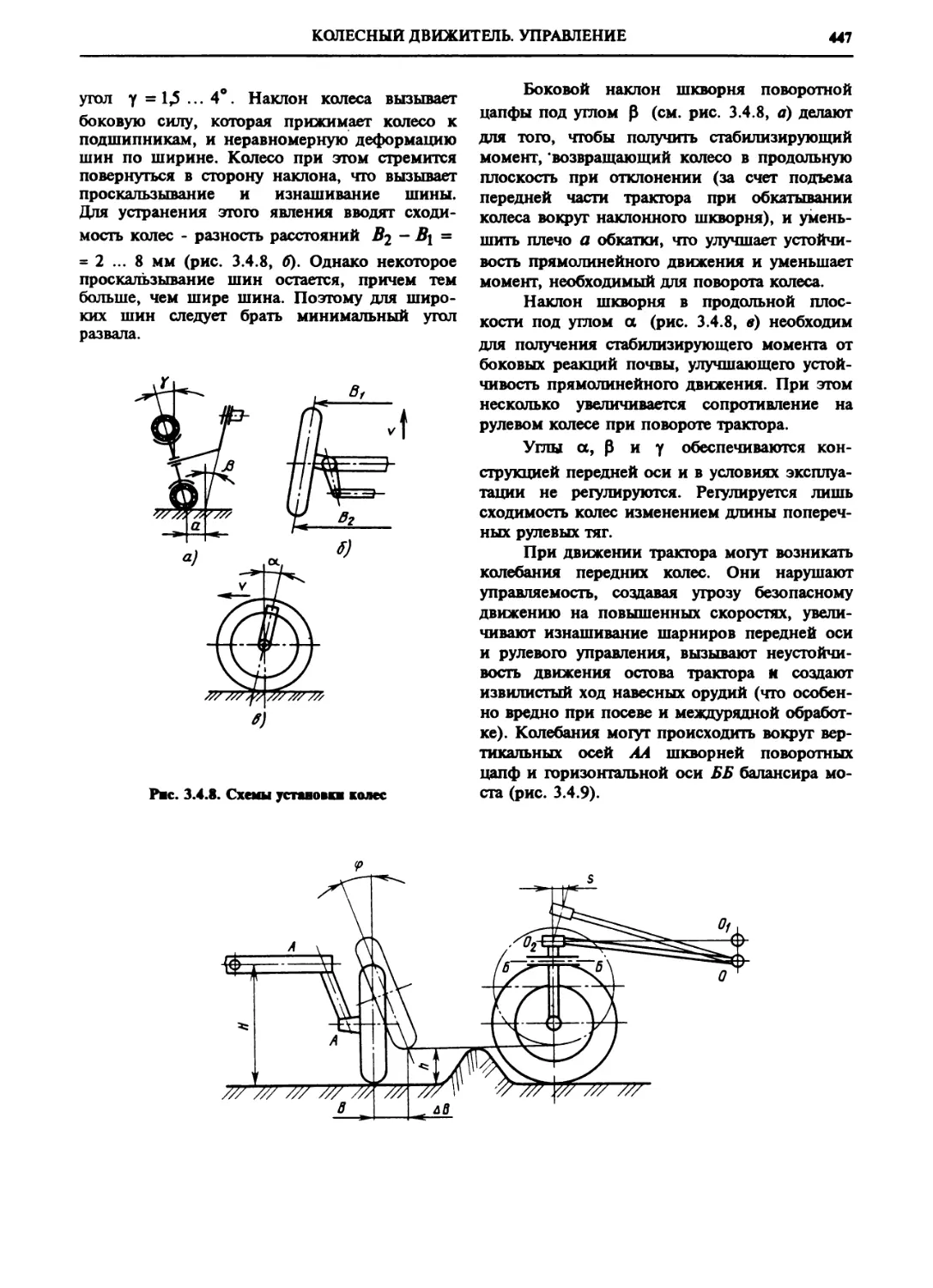
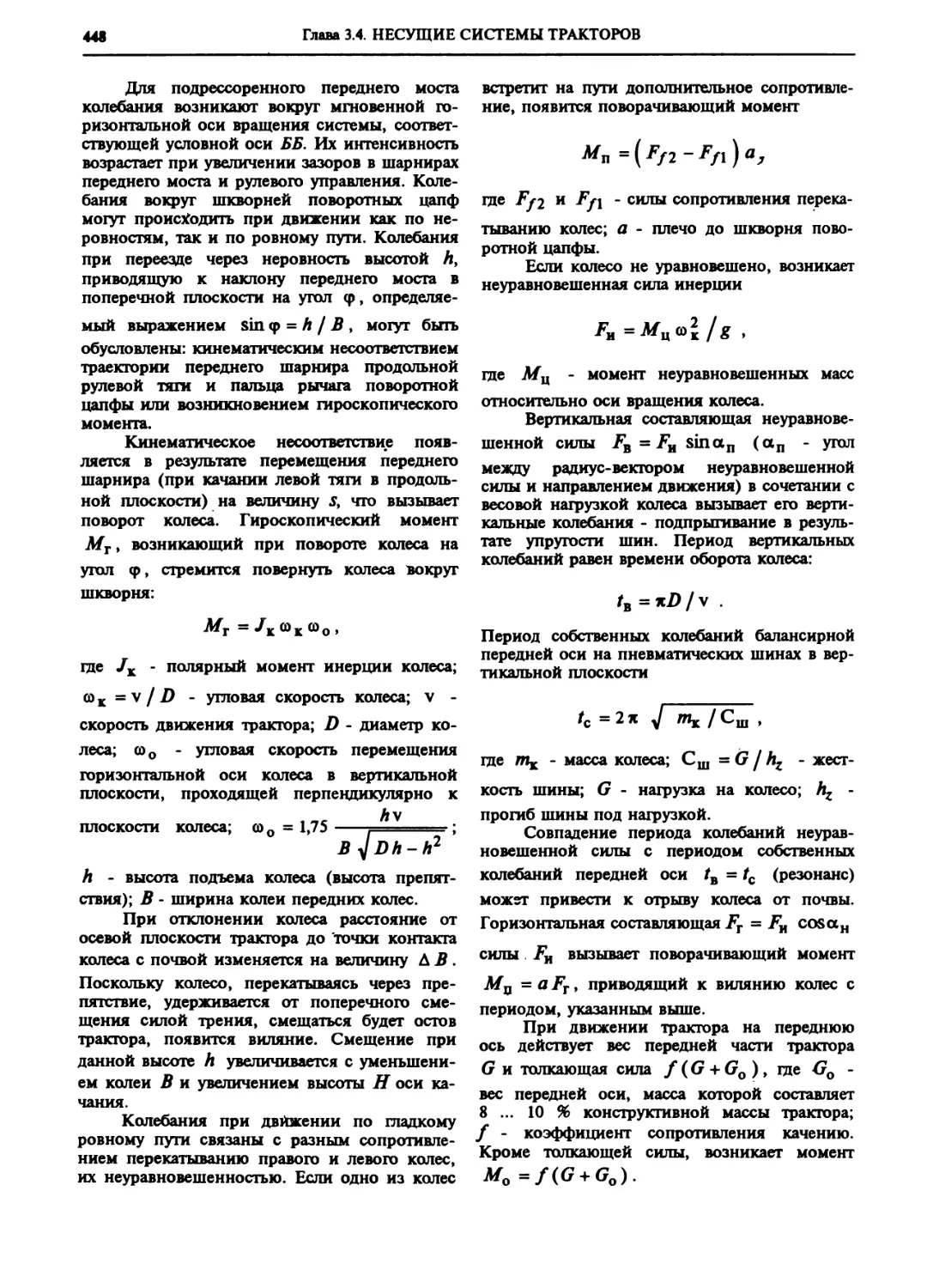
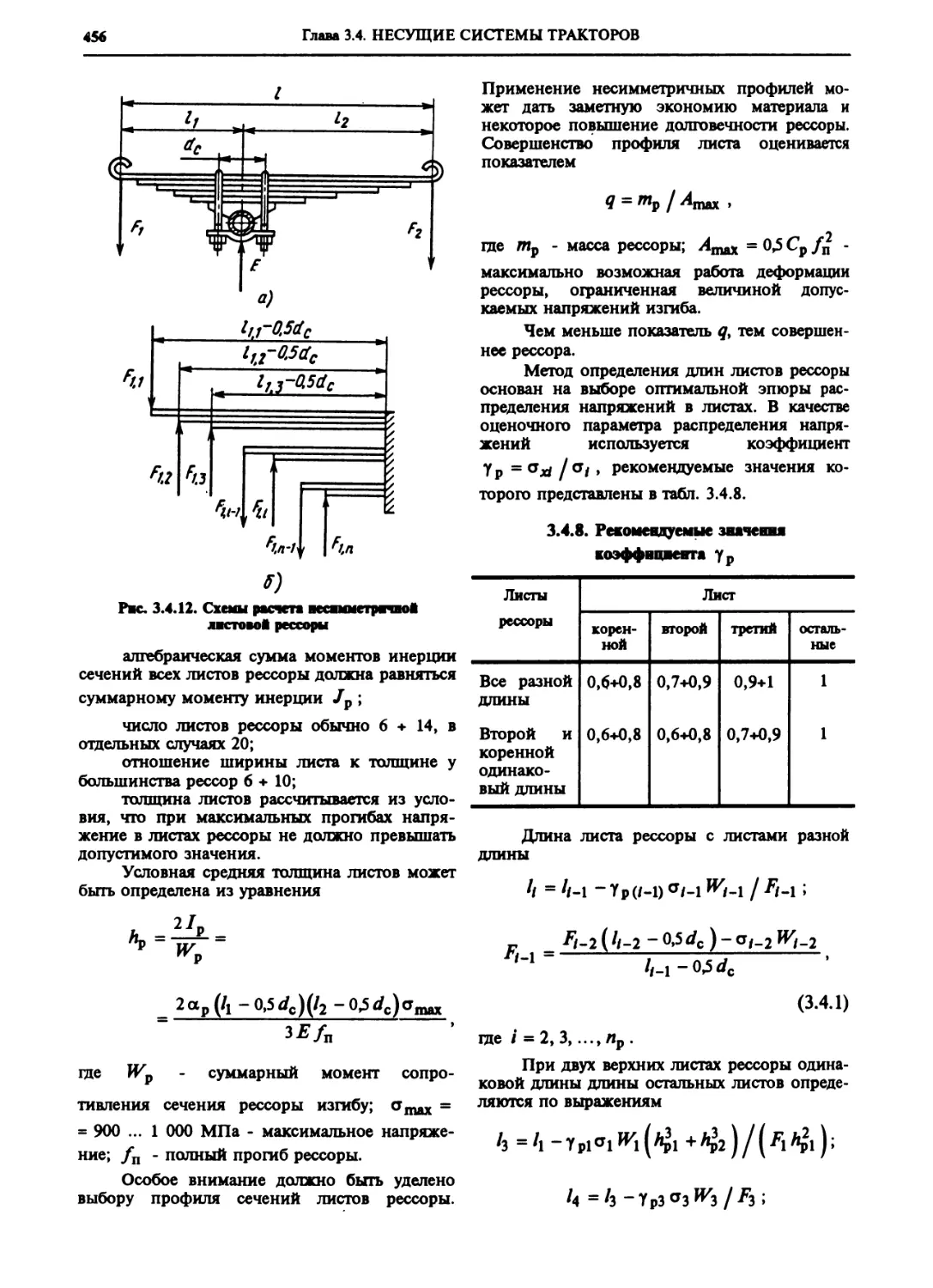
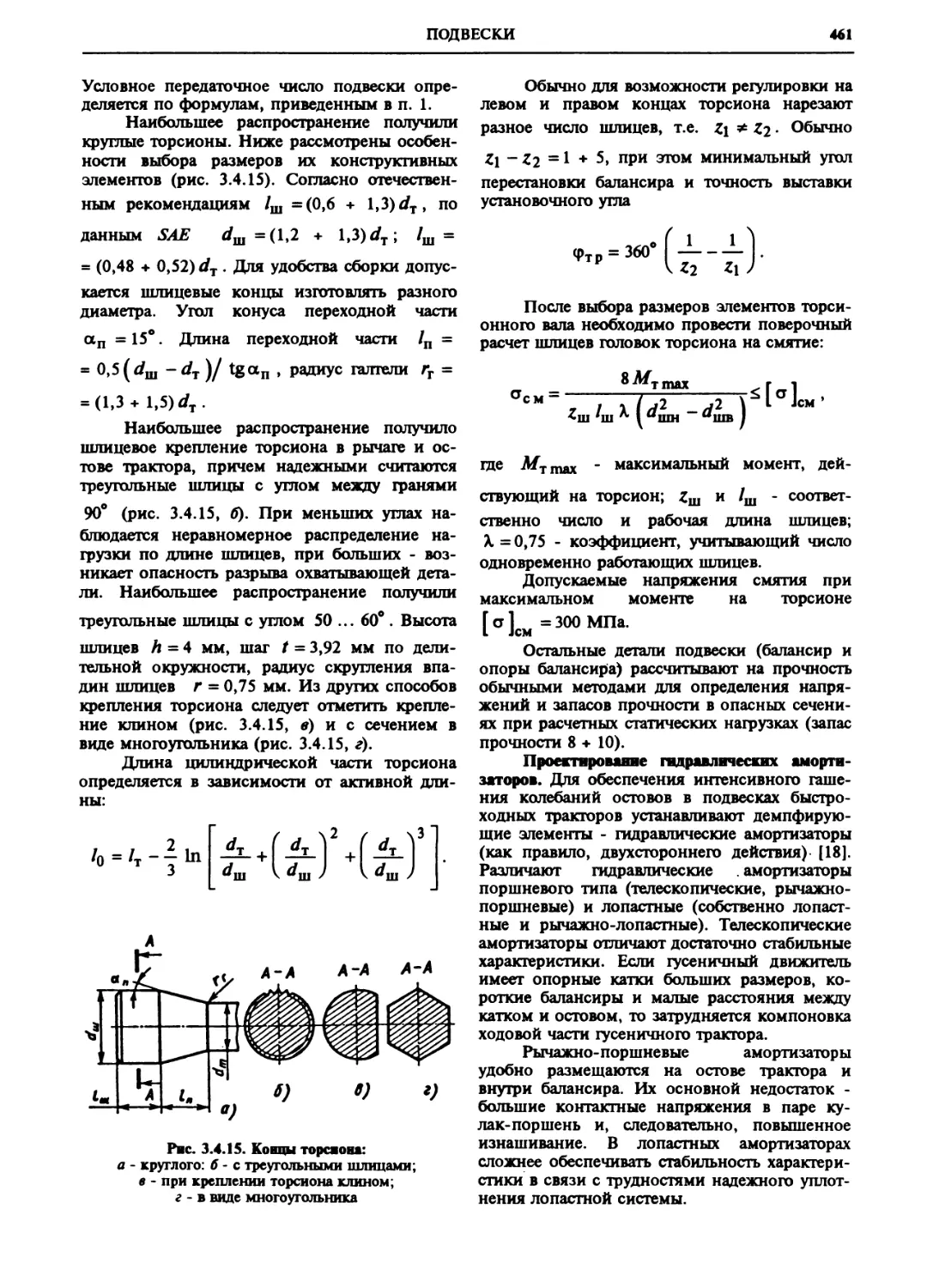
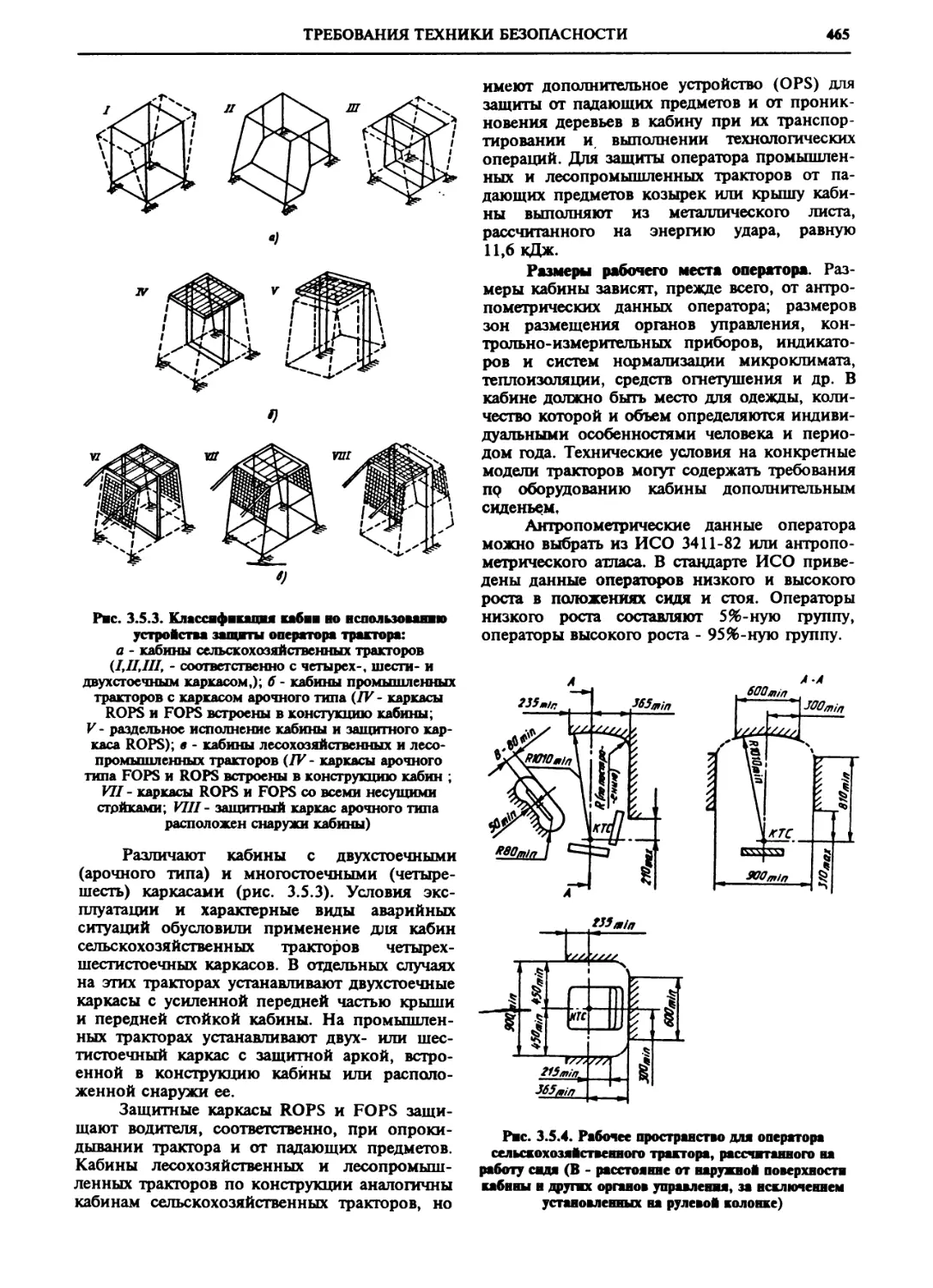
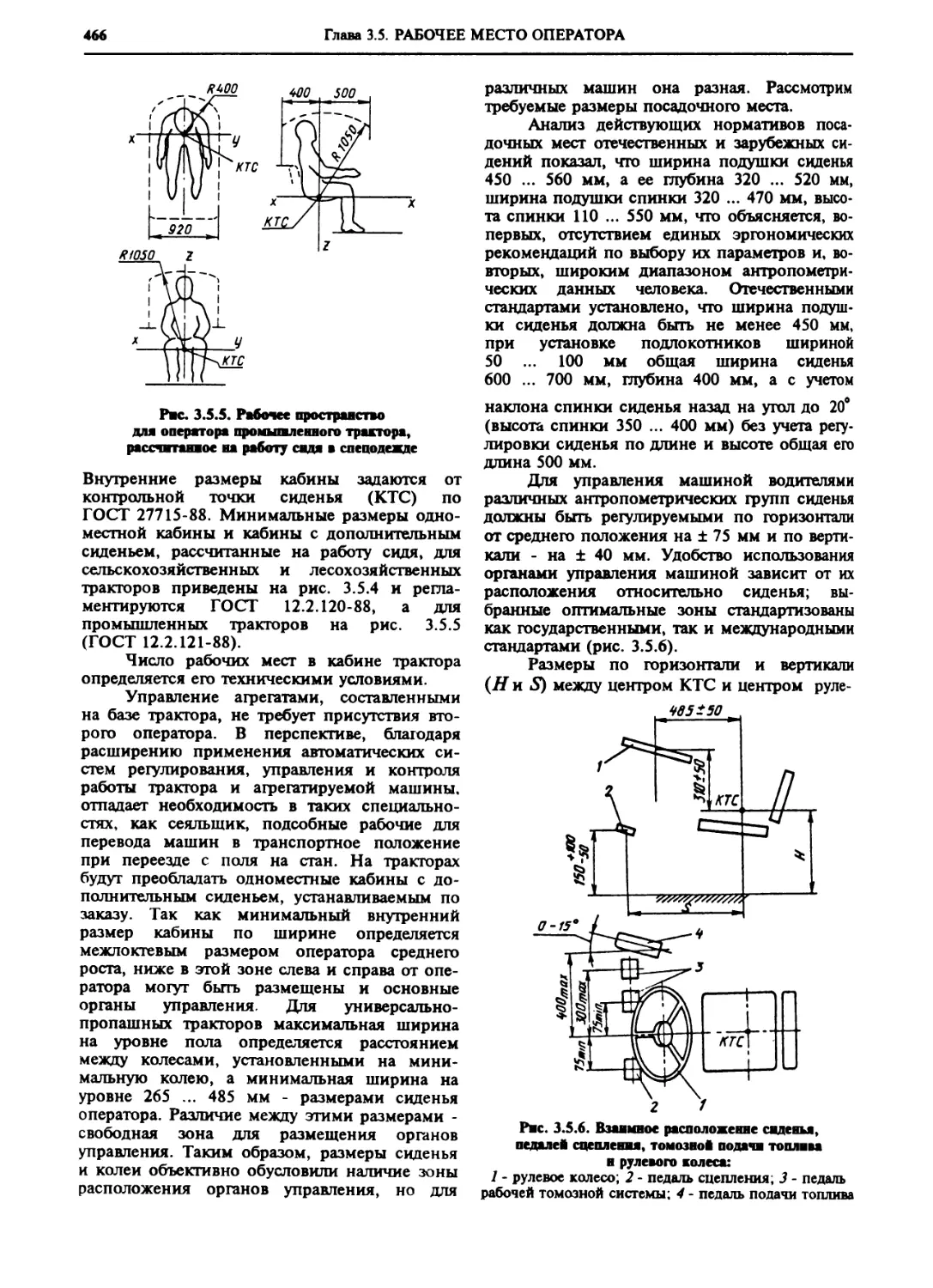
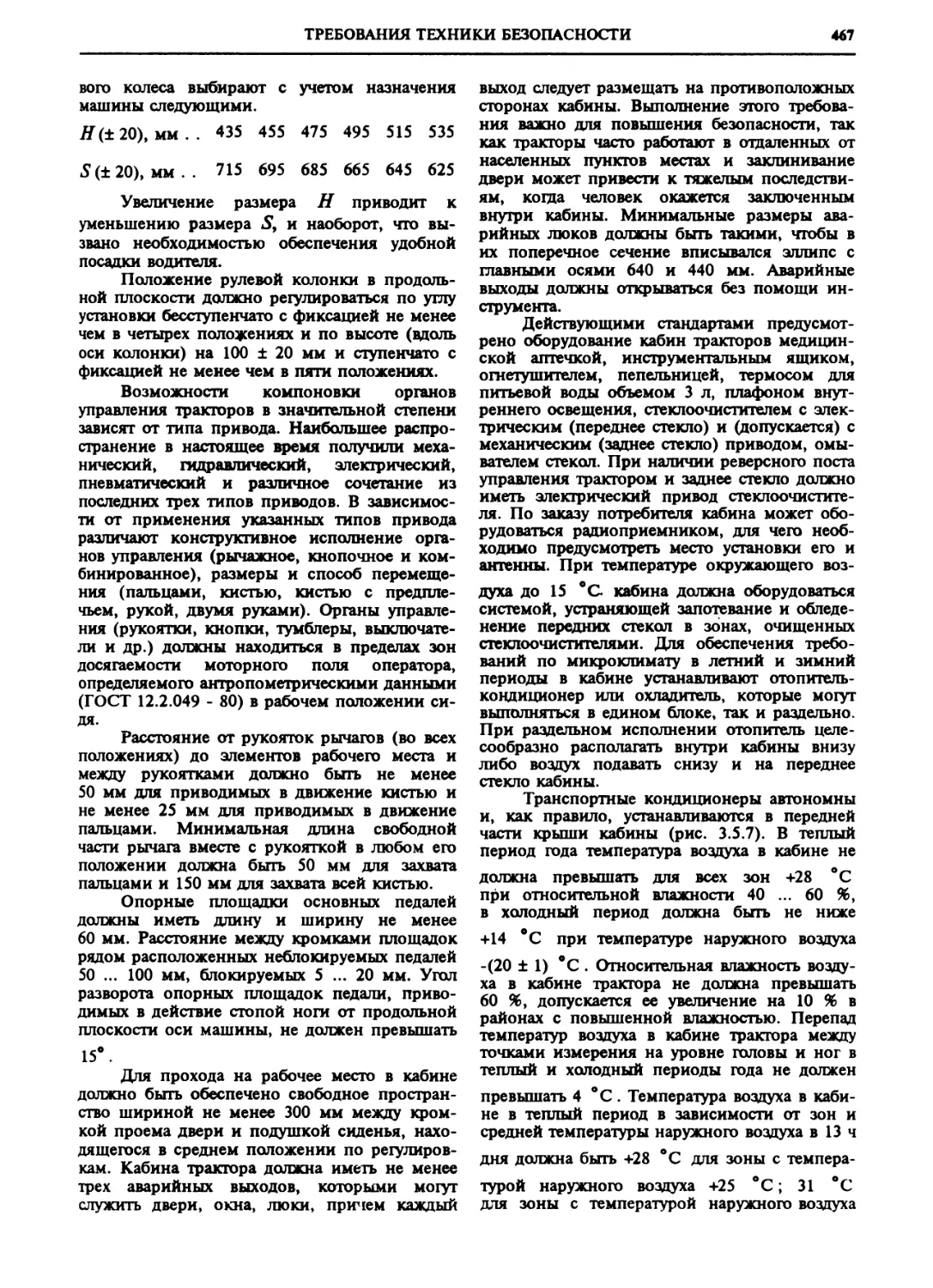
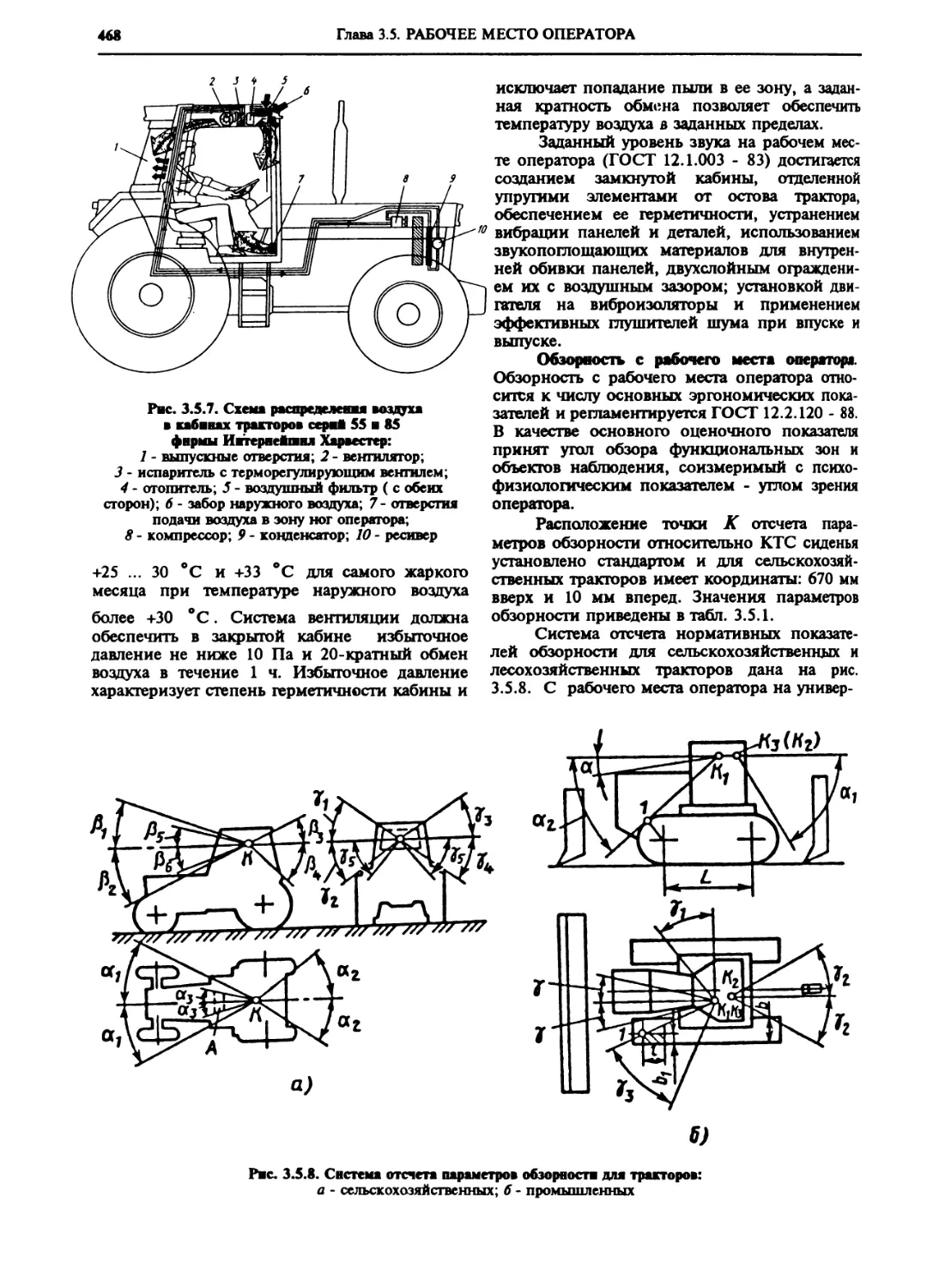
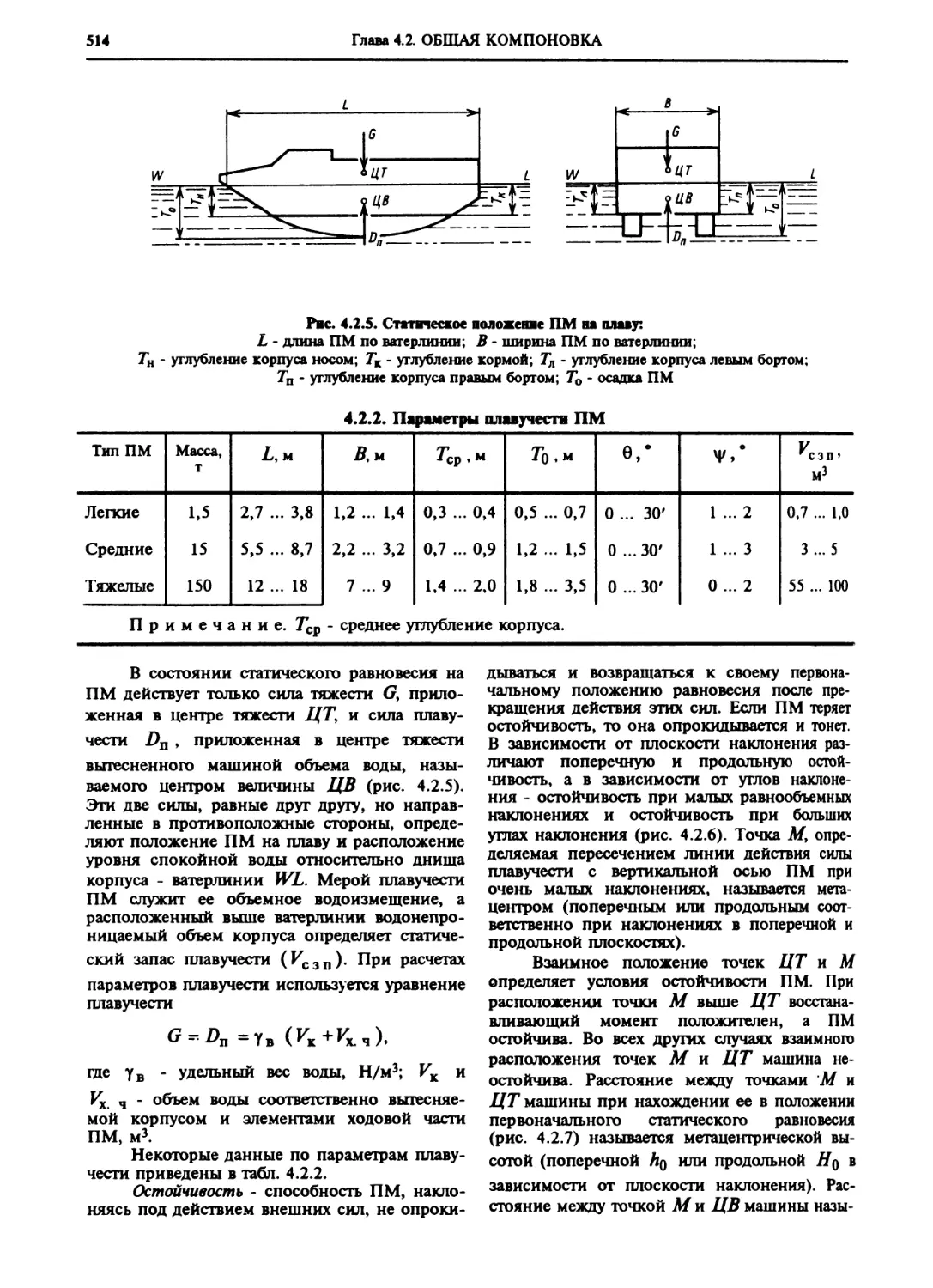
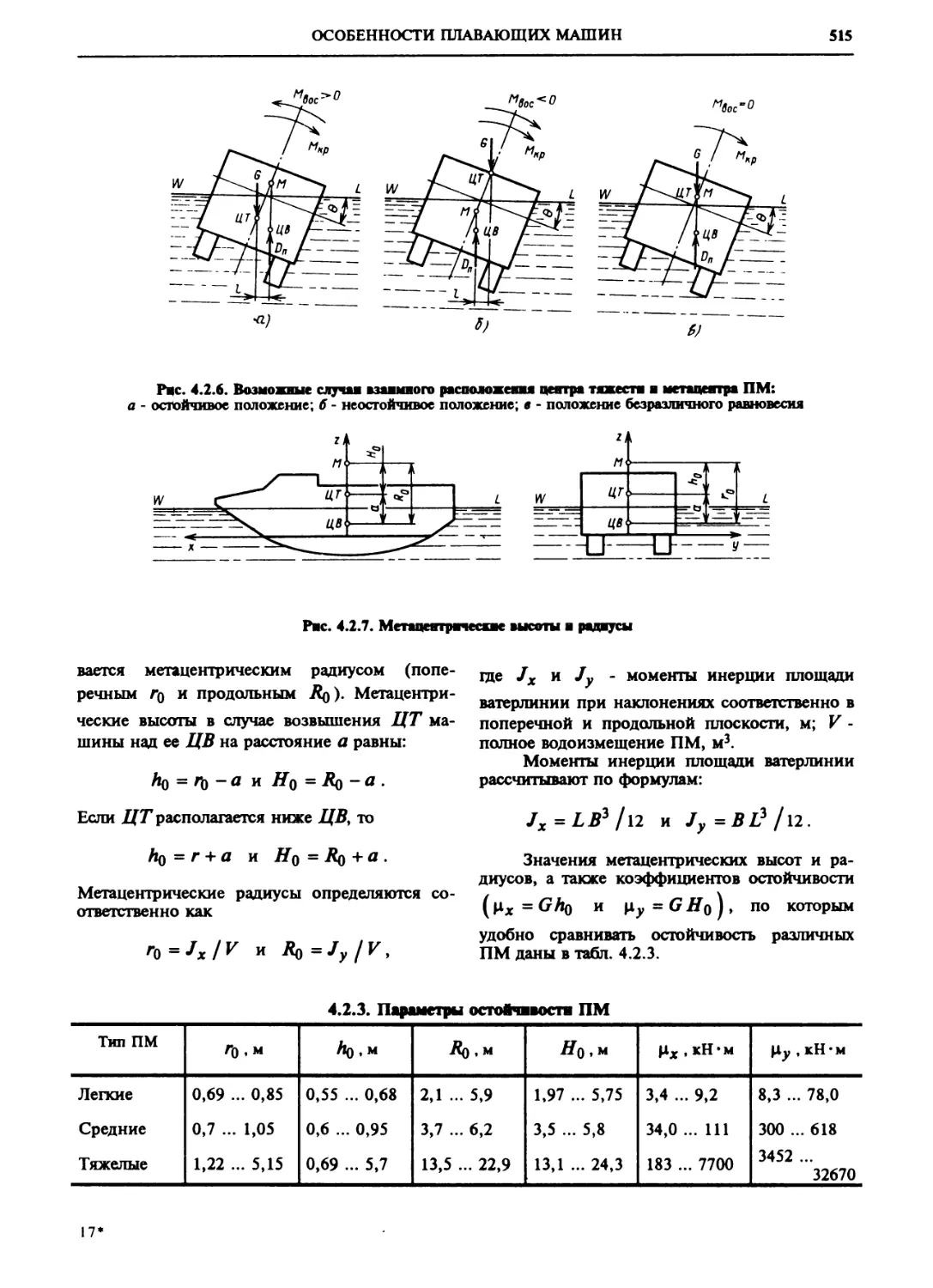
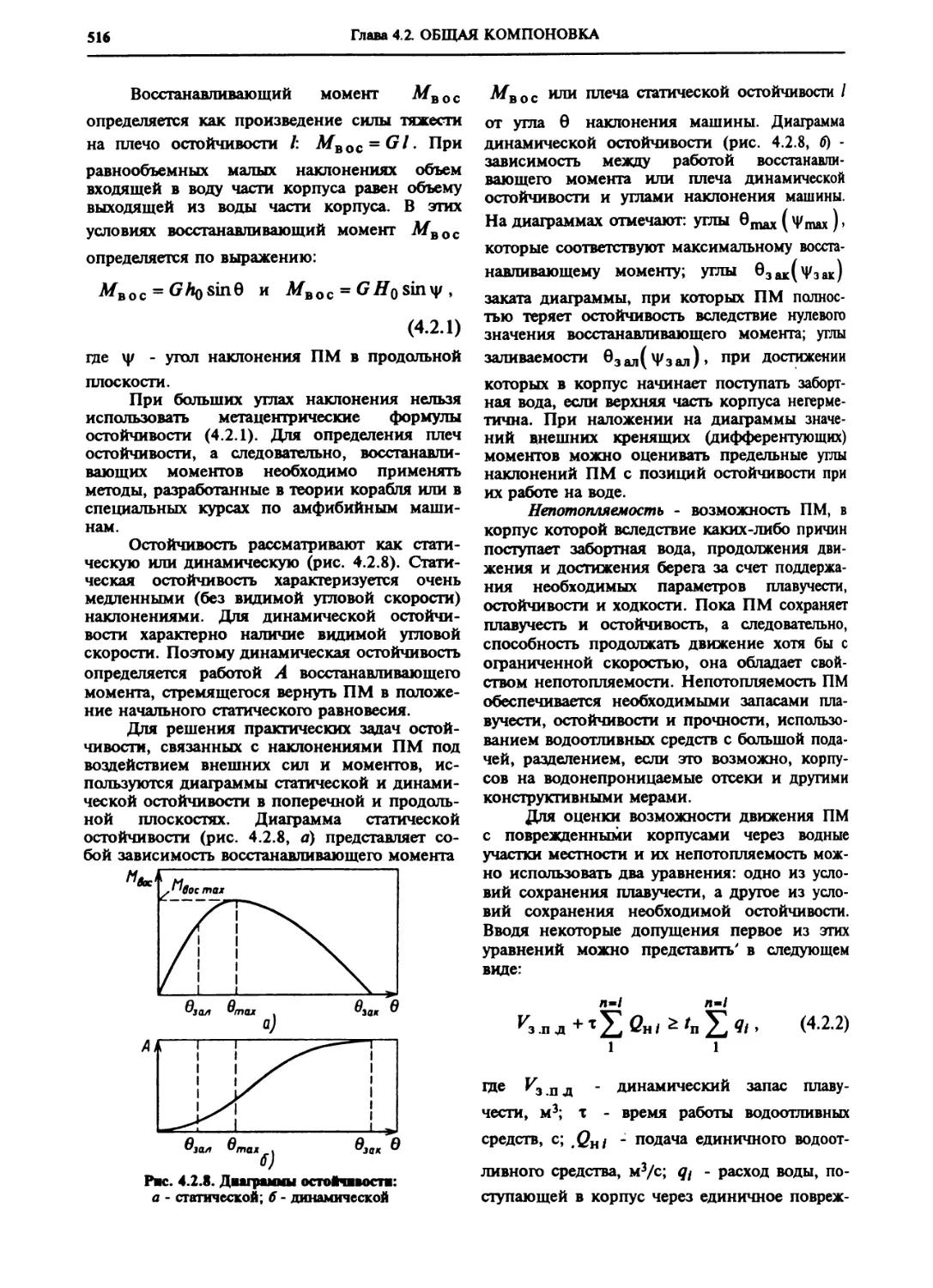
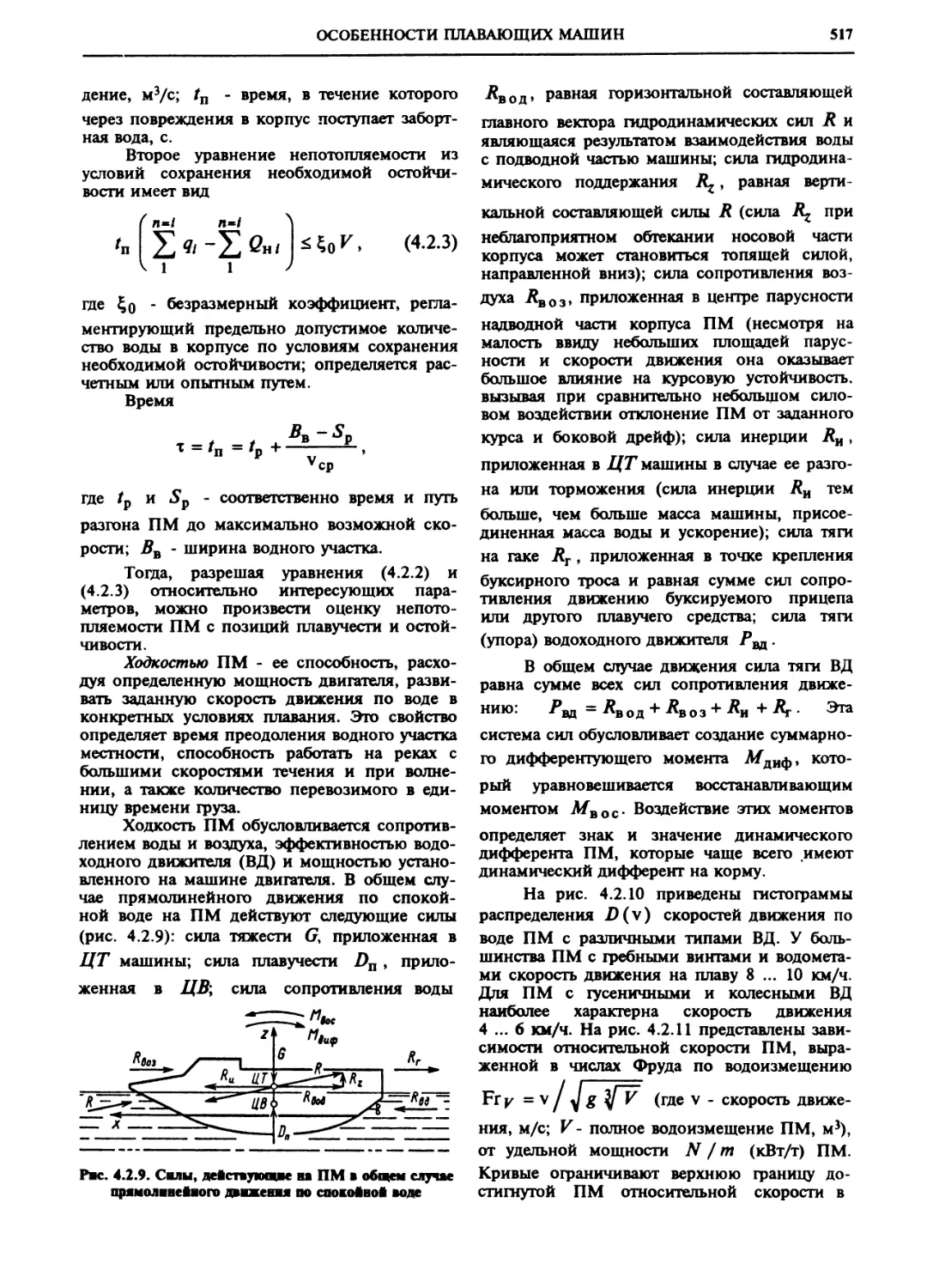
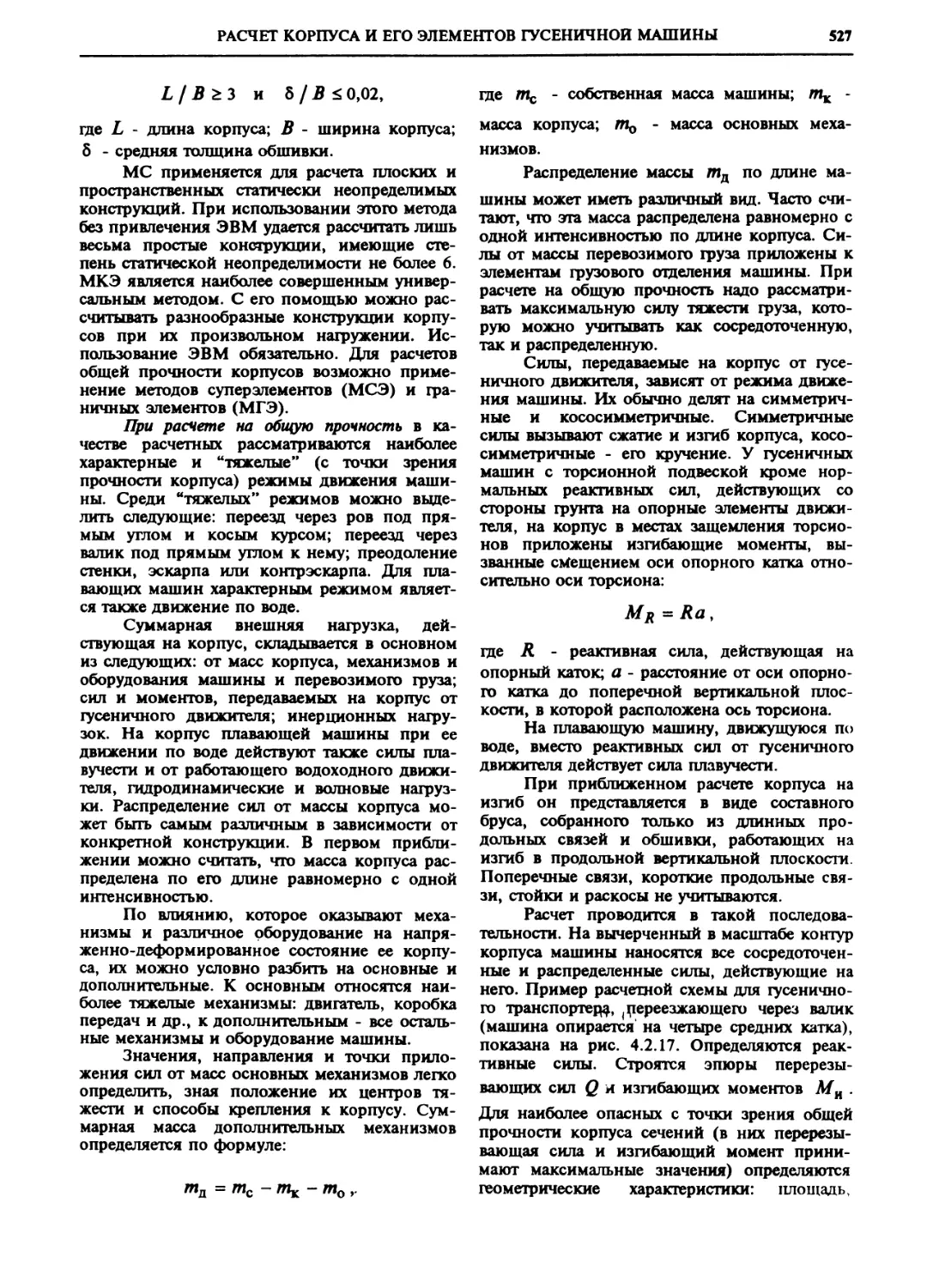
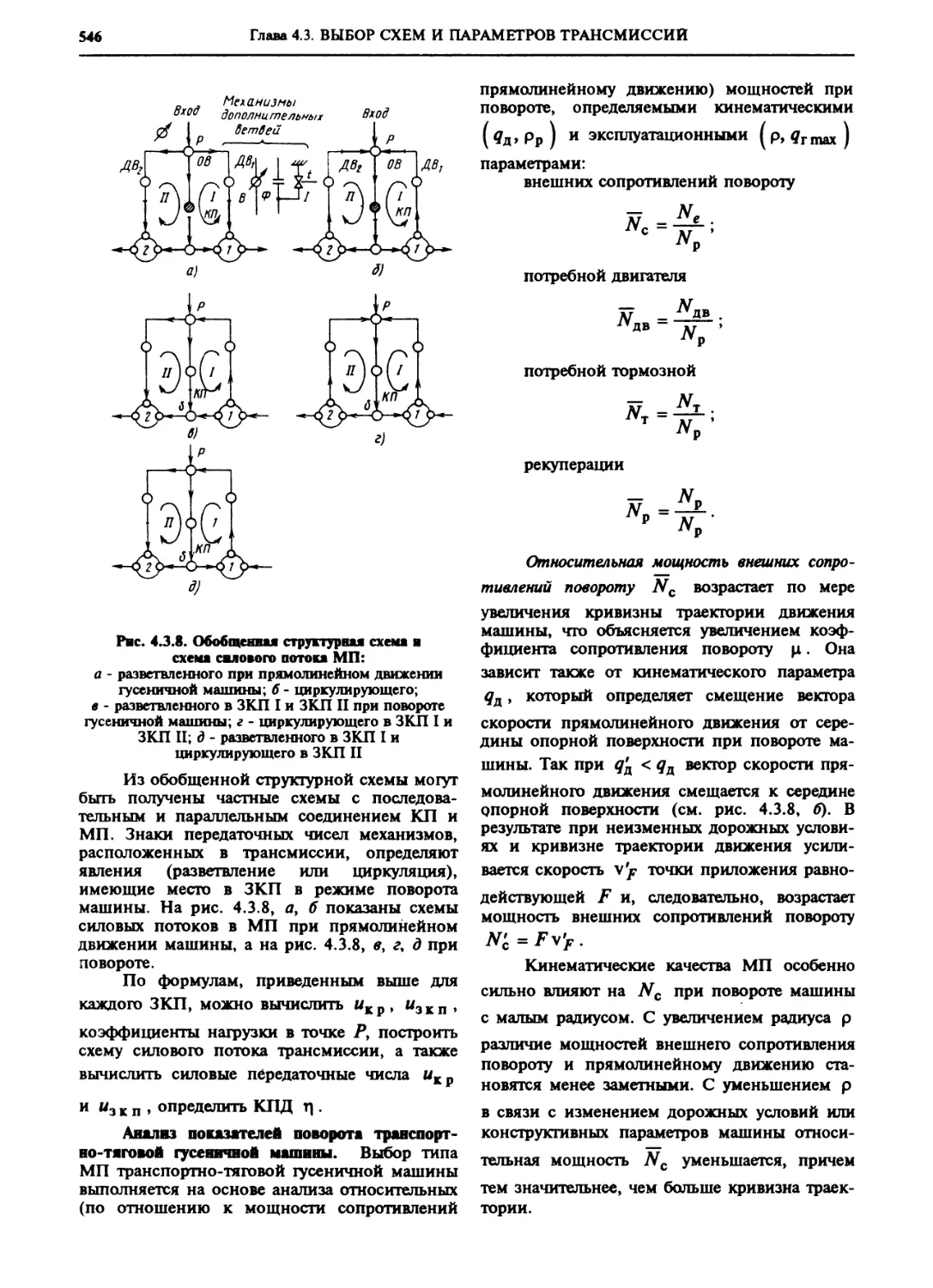
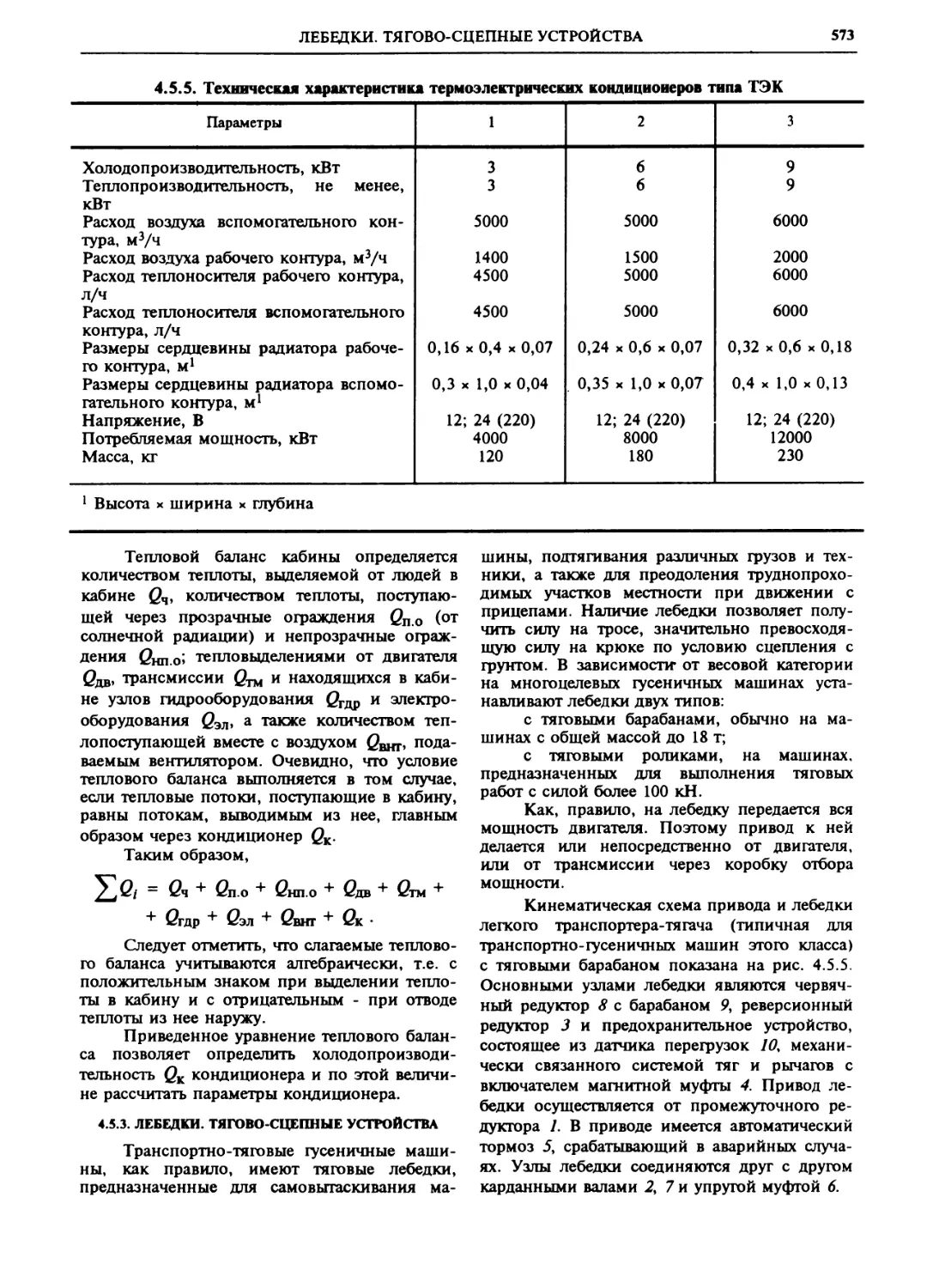
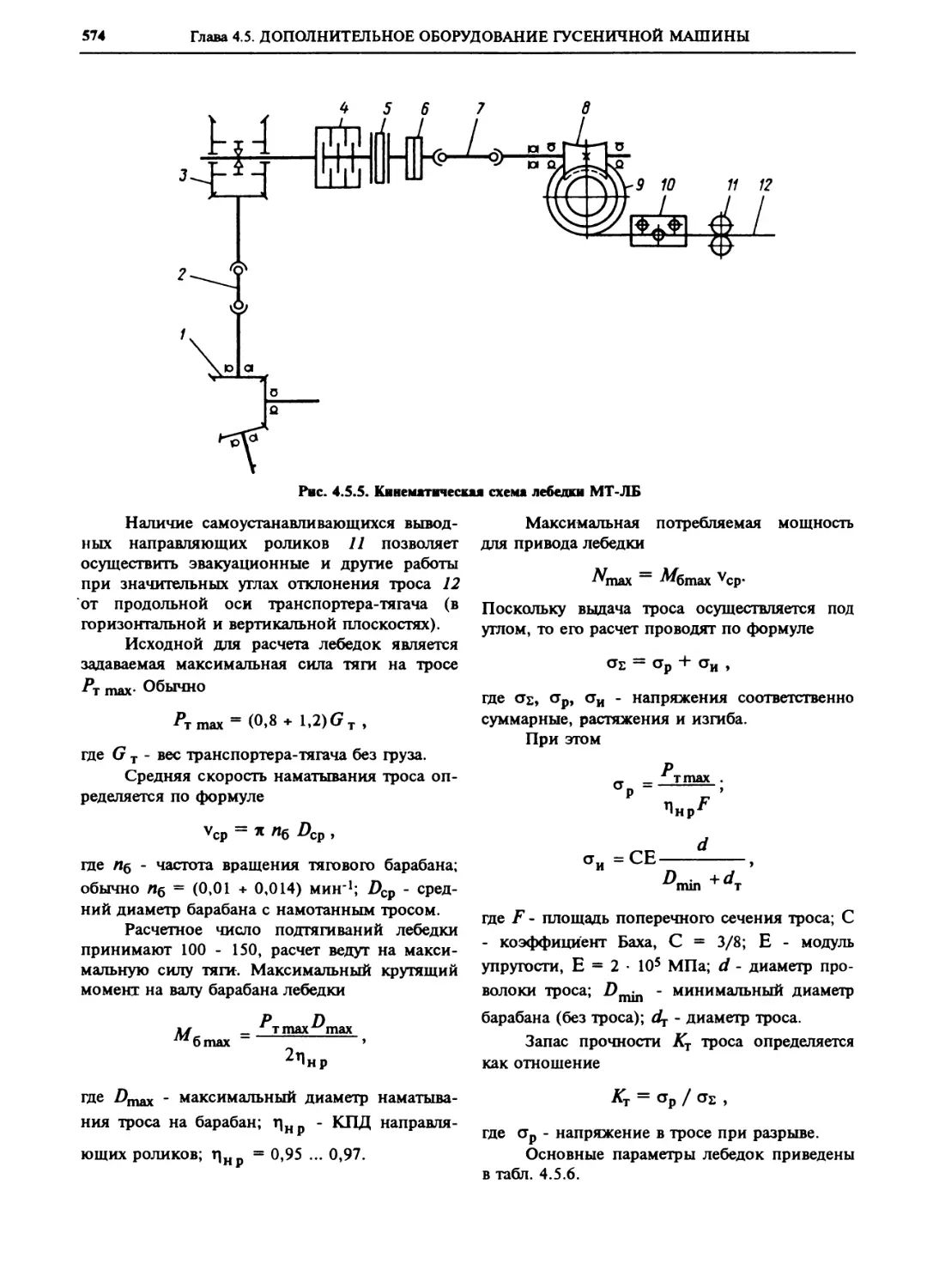
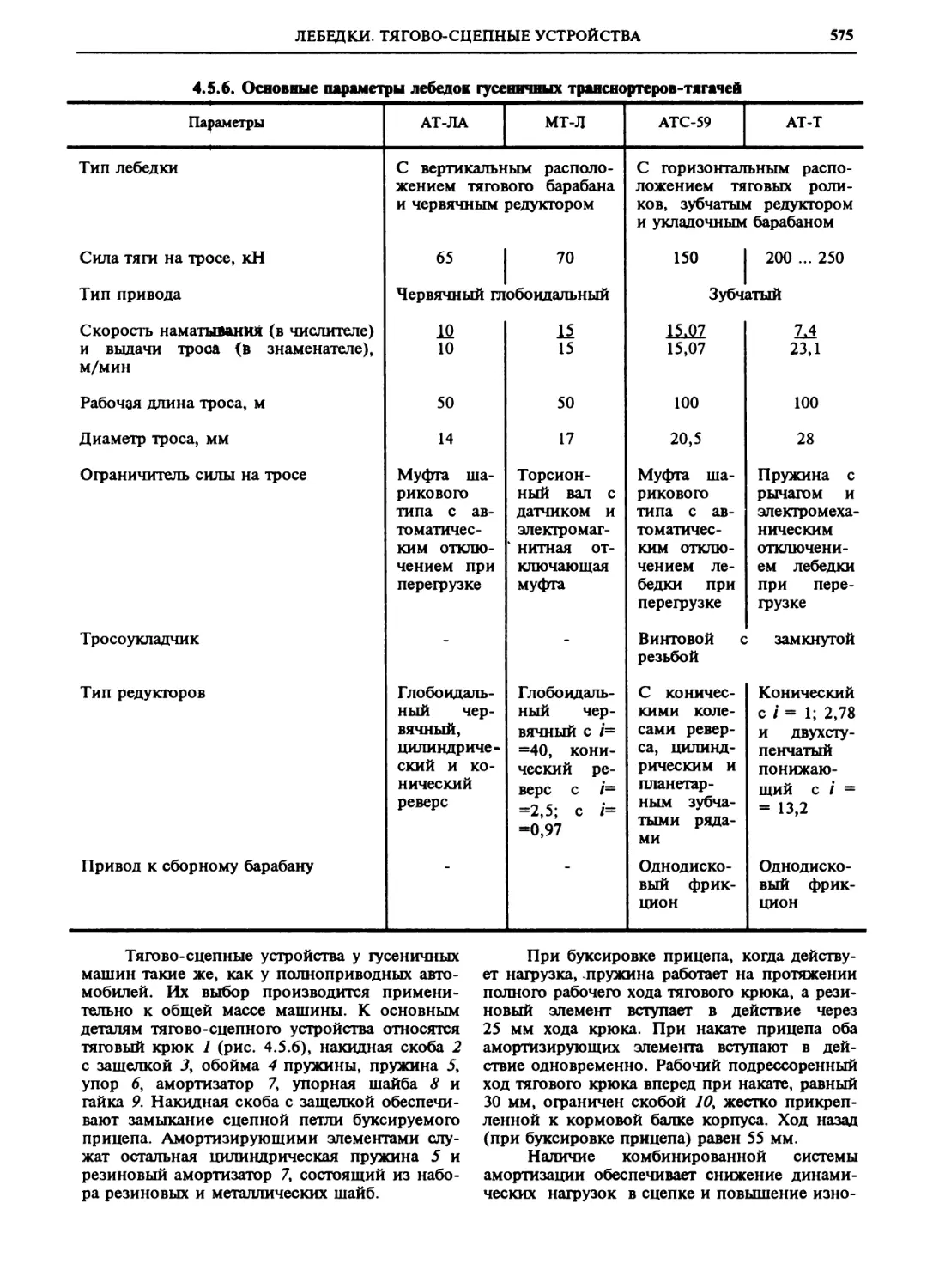
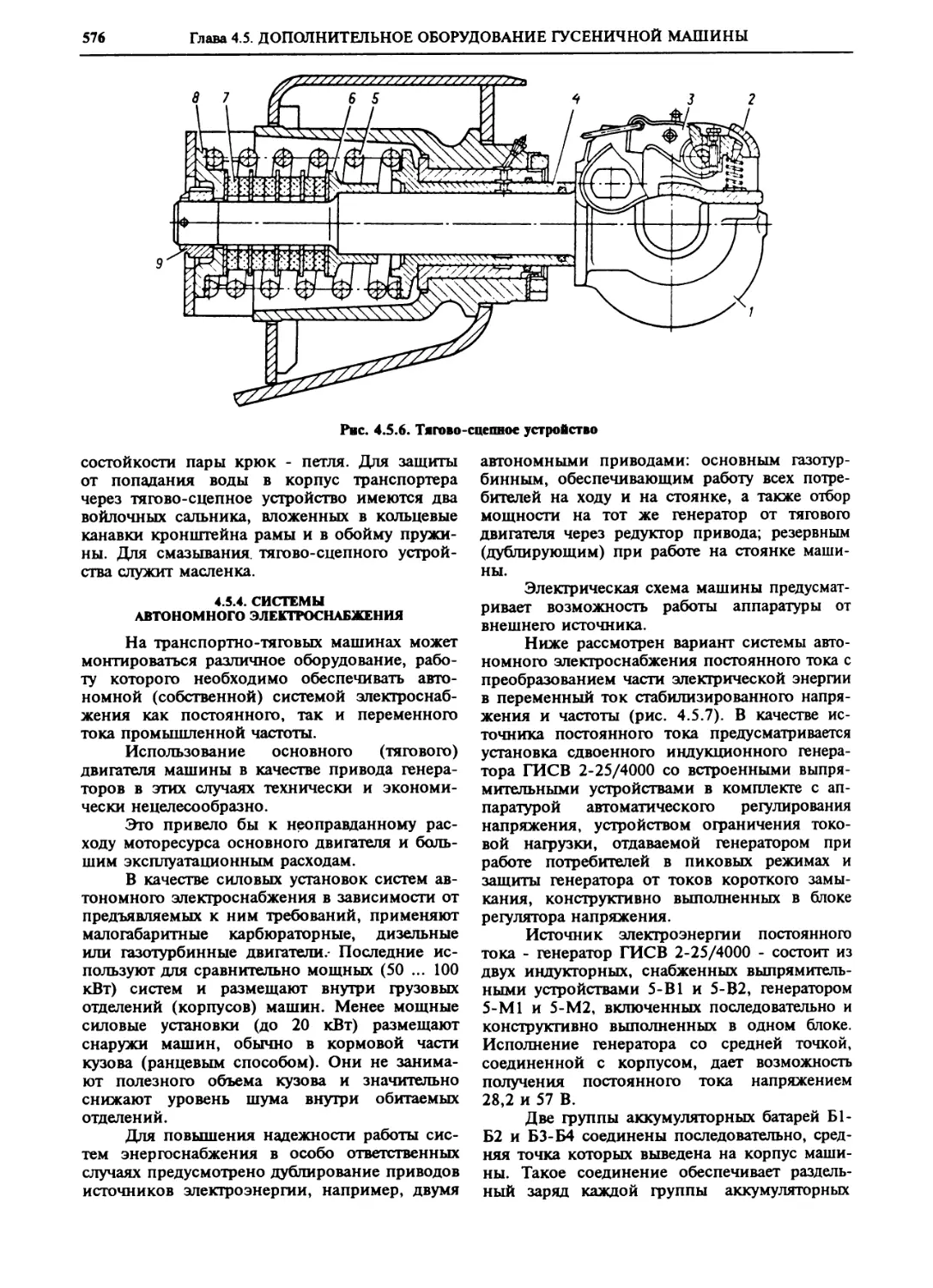
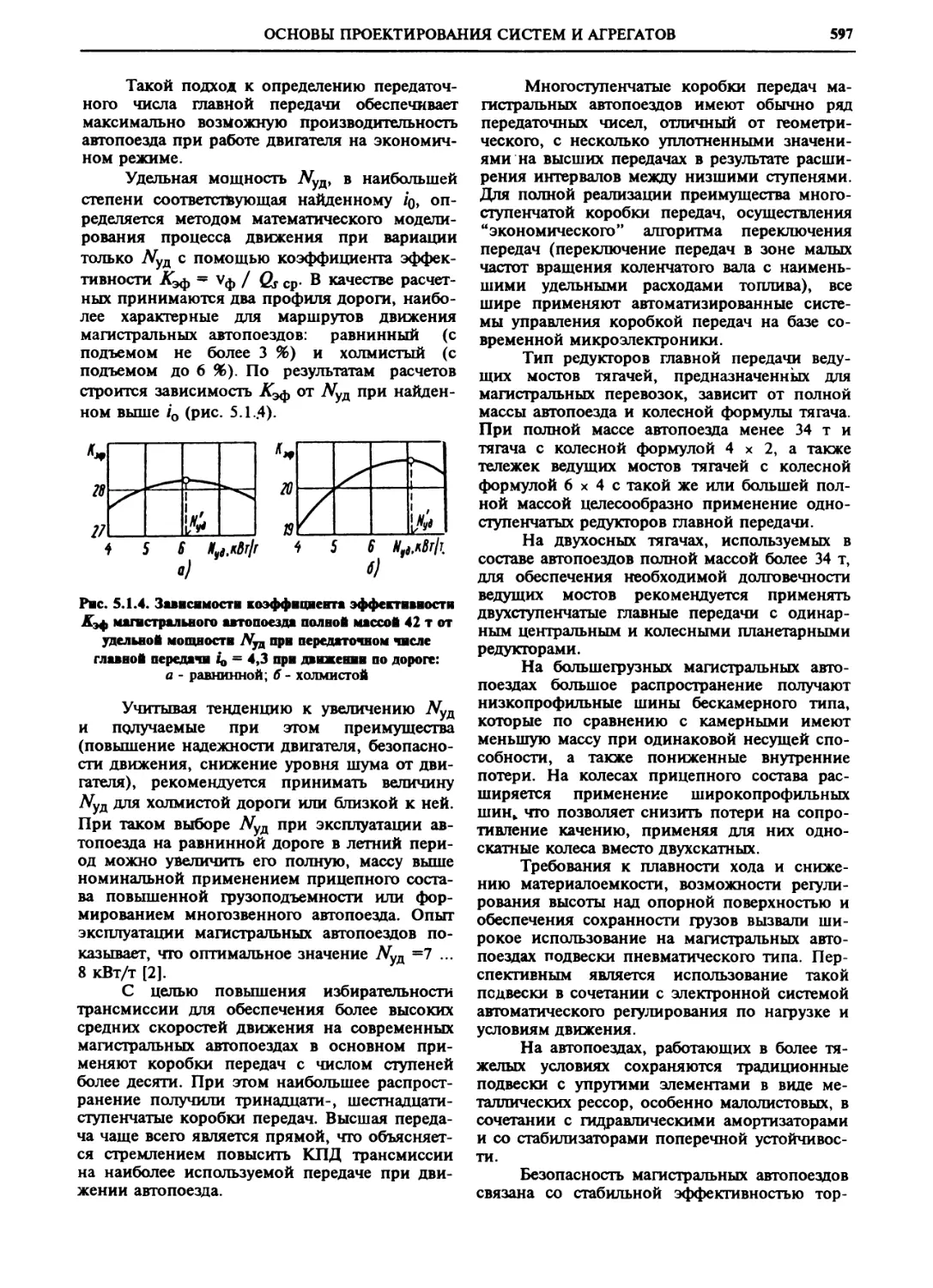
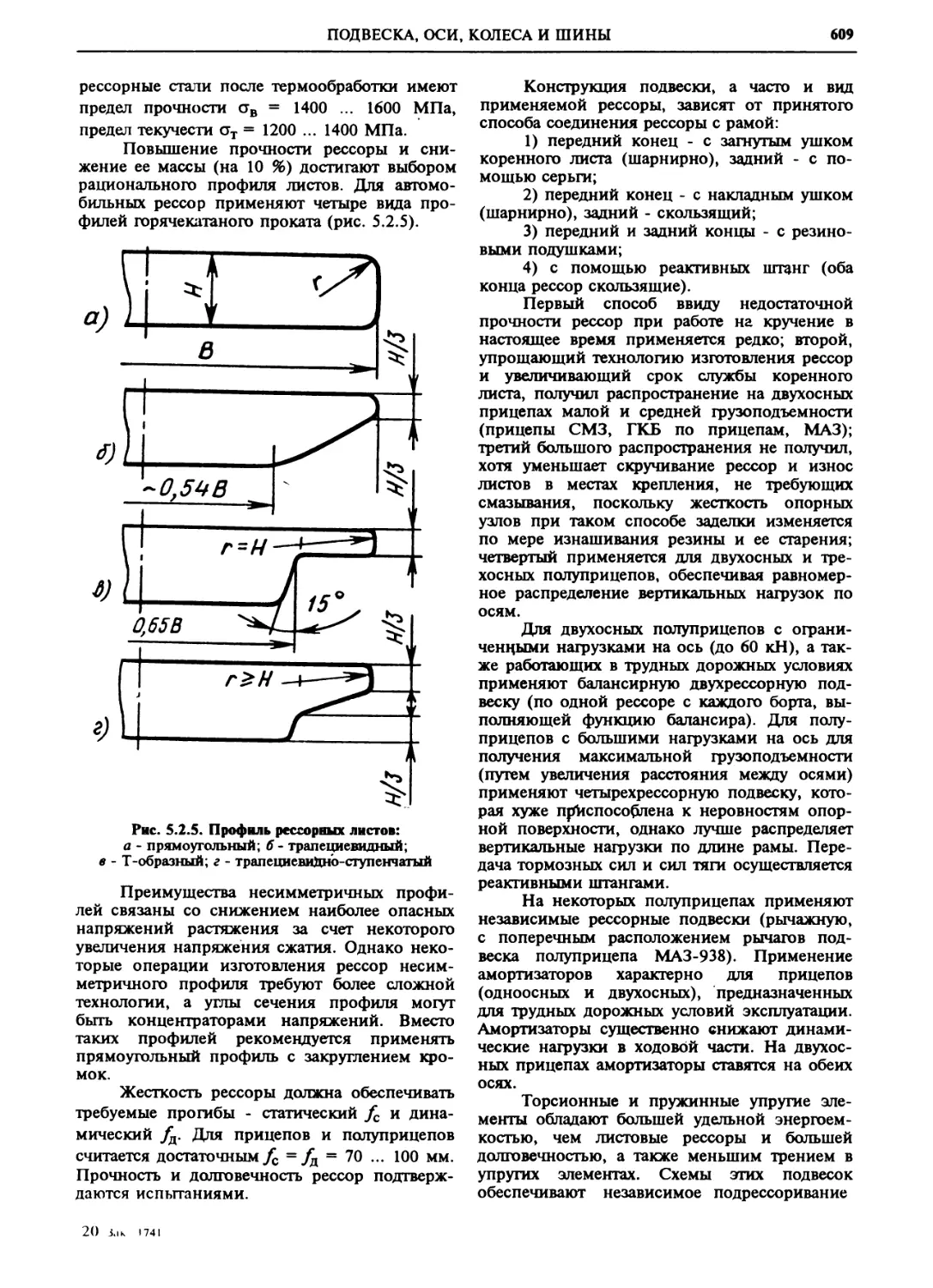
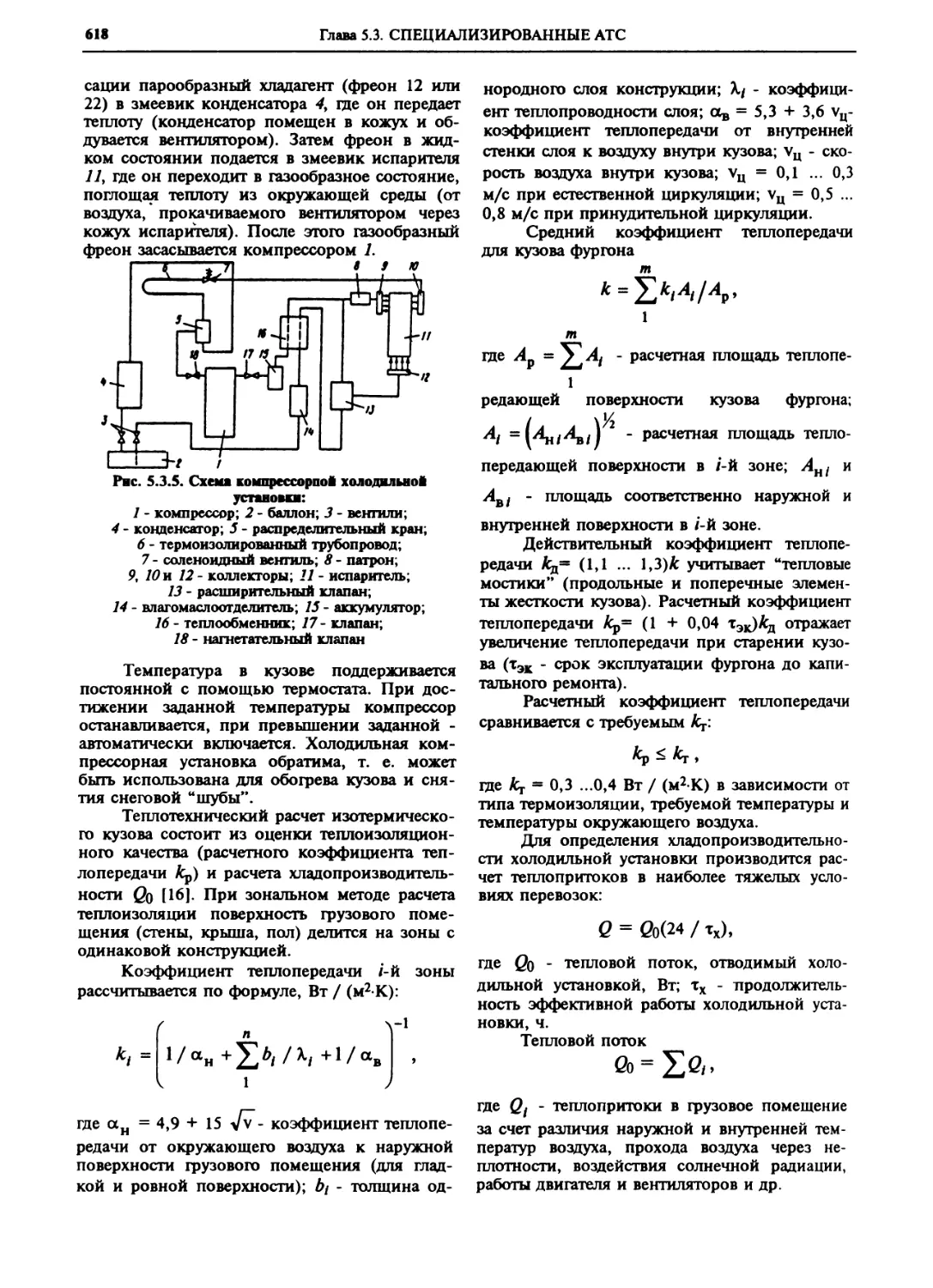
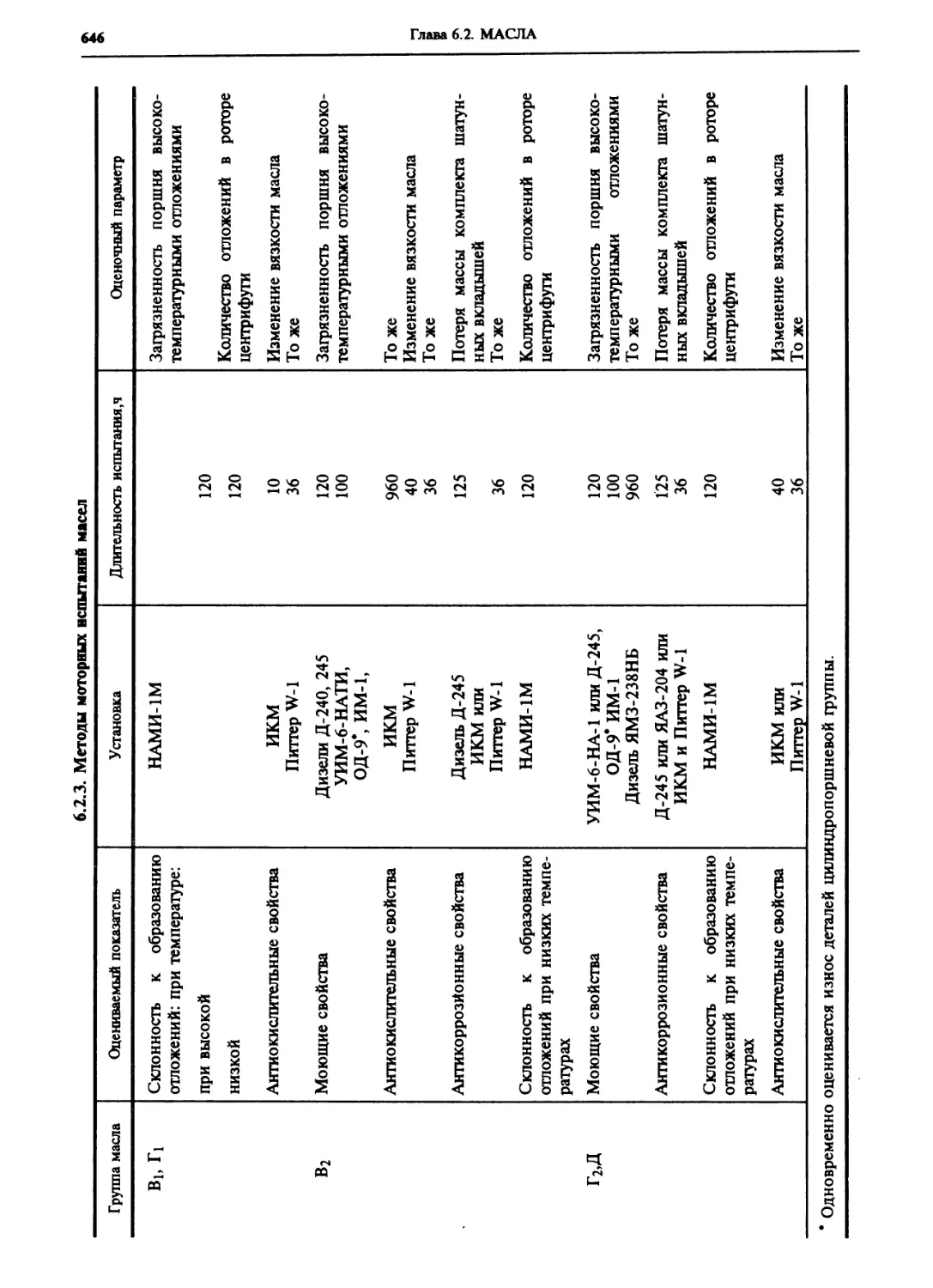
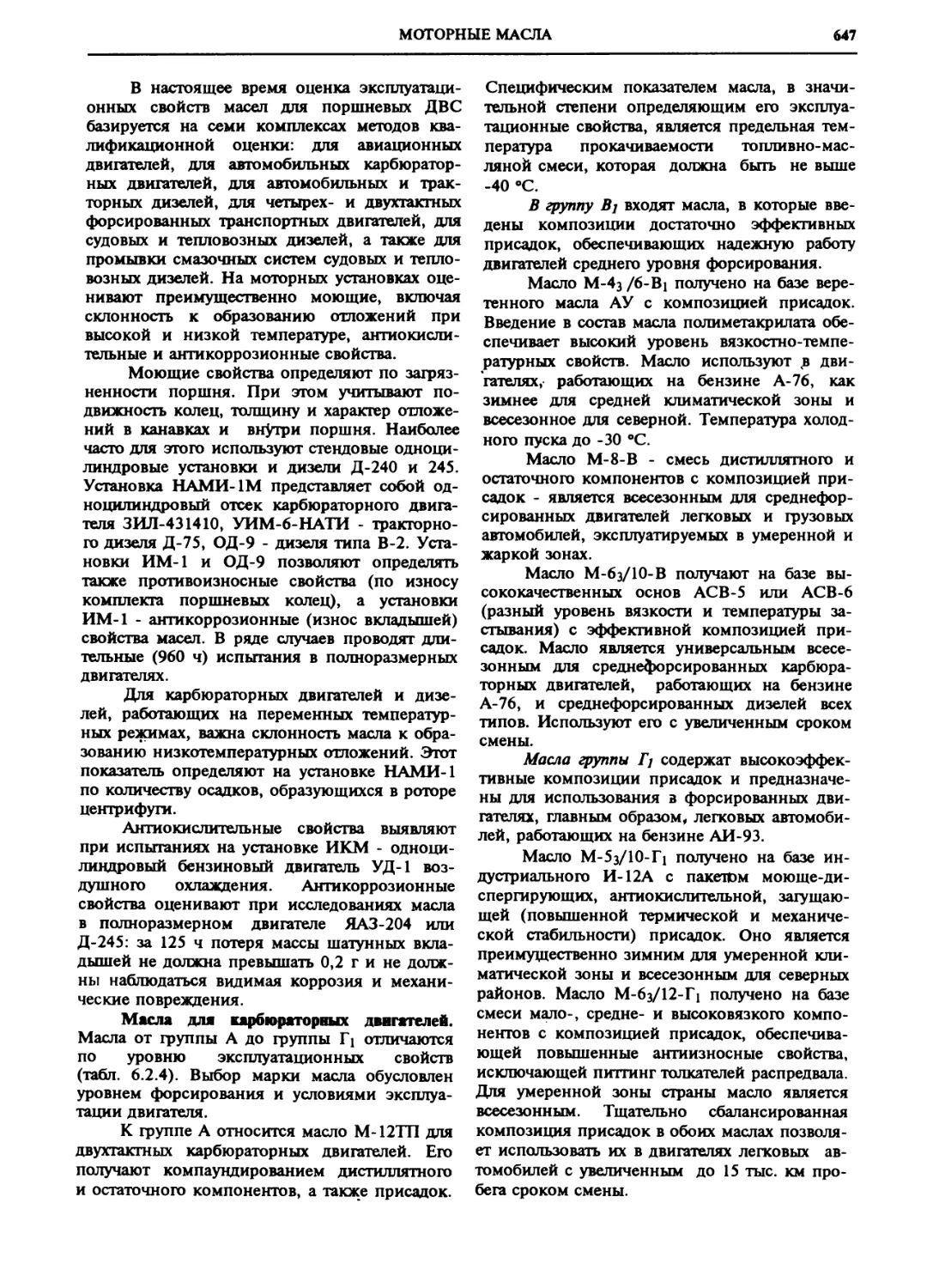
Text
МАШИНОСТРОЕНИЕ
ЭНЦИКЛОПЕДИЯ
МЕСНАМСАЬ ЕЫОШЕЕКШС
Епсус1ораесИа
100-летию Российского
автомобиле-,
тракторостроения
Главный редактор академик РАН
К.В. Фролов
м
МАШИНОСТРОЕНИЕ
ЭНЦИКЛОПЕДИЯ
В СОРОКА ТОМАХ
РЕДАКЦИОННЫЙ СОВЕТ
ФРОЛОВ К.В.
Председатель редакционного совета
Члены совета:
Белянин П.Н. (зам. Председателя редсовета и главного
редактора), Колесников К.С. (зам. Председателя редсовета
и главного редактора), Адамов Е.О., Антонов Б.И.,
Анфимов Н.А., Асташов В.К., Березовский Б.А.,
Бессонов А.П., Васильев В.В., Глебов И.А.,
Долбенко Е.Т., Жесткова И.Н., Ковалевский М.А.,
Коптев Ю.Н., Ксеневич И.П., Михайлов В.Н.,
Новожилов Г.В., Носов В.Б., Образцов И.Ф.,
Огурцов А.П., Панин В.Е., ПаничевН.А.,ПатонБ.Е.,
Петриченко В.Н., Пугин Н.А., Салтыков Б.Г.,
Свищев Г.П., Силаев И.С, Сосковец О.Н.,
Туполев А. А., Федосов Е. А., Фокин А. В.,
Фортов В.Е., Черный Г.Г., Шемякин Е.И.
МОСКВА "МАШИНОСТРОЕНИЕ'' 1997
Раздел IV
РАСЧЕТ
И КОНСТРУИРОВАНИЕ МАШИН
Том 1У-15
КОЛЕСНЫЕ
И ГУСЕНИЧНЫЕ МАШИНЫ
Редактор-составитель д-р техн. наук
проф. В.Ф. Платонов
Ответственный редактор академик РАН
К.С. Колесников
Редакторы тома: В.Ф. Платонов (Основы теории,
конструирования и производства колесных и гусеничных машин.
Гусеничные транспортно-тяговые машины),
О.И. Гируцкий, Ю.К. Есеновский-Лашков (Автомобили),
И.П. Ксеневич (Тракторы),
Я.Е. Фаробин, М.С. Высоцкий (Автомобильные
и тракторные поезда. Специализированные автотранспортные средства),
С.Г. Арабян (Эксплуатационные материалы)
МОСКВА "МАШИНОСТРОЕНИЕ" 1997
ББК 34.44
М38
УДК 621.01/.03
Авторы: В. Ф. Платонов, В. С. Азев, Е. Б. Александров, С. Г. Арабян, Ю. Е. Атаманов,
М. М. Бахмутский, С. Ф. Безверхий, С. В. Белов, Н. Ф. Бочаров, Н. М. В&рыпаев,
А. Н. Вержбицкий, А. В. Вихров, А. Н. Вознесенский, Е. Ф. Волобуев, Н. И. Воронцова,
М. С. Высоцкий, Л. С. Гаронин, В. С. Герасимов, Л. Е. Гилелес, Л. Л. Гинцбург,
Л. Е. Глинер, Г. А. Голов, А. Ф. Горенков, М. А. Григорьев, М. И. Грифф, Н. Н. Гришин,
А. А. Гуреев, В. В. Гуськов, Б. Н. Давыдков, С. И. Дорменев, Н. К. Дьячков,
Ю. К. Есеновский-Лашков, В. Г. Желтяков, Е. И. Зайцев, О. Д. Златоврацкий,
А.М.Иванов, С. Н. Иванов, Б. В. Кисуленко, В. Г. Коваленко, М. Н. Коденко,
В. С. Кожевников, К. С. Колесников, Ю. А. Корольков, А. А. Крылов, И. П. Ксеневич,
Н. А. Кузнецов, В. Л. Лашхи, С. Р. Лебедев, Н. И. Левитин, Н. И. Леонов, В. С. Лукинский,
В. А. Лушко, Б. А. Любимов, Е. А. Малинин, А. Ф. Мельников, В. И. Миркитанов,
В. Н. Наумов, А. П. Недялков, В. В. Немцов, Я. Н. Нефедьев, В. А. Павлов,
А. П. Парфенов, Ю. В. Перчатников, И. П. Петров, Ю. В. Пирковский, Д. Г. Поляк,
Е. П. Серегин, В. В. Соколов, В. И. Соловьев, А. П. Степанов, В. П. Тарасик,
Г. Т. Тер-Мкртичьян, А. А. Трикоз, В. С. Устименко, Я. Е. Фаробин, Д. Е. Флеер,
К. А. Фрумкин, С. Г. Херсонский, Г. Д. Цейтлин, В. П. Шалдыкин, В. М. Шарипов,
Л.С. Шпак, А.Л. Эйдельман, А.А. Эйдинов, А.И. Яковлев, Н.Н. Яценко, СЕ. Либцис
Рецензент академик РАН К.С. Колесников
Машиностроение. Энциклопедия. Ред совет: К .В. Фролов (пред.) и др. М.: Машиностроение.
М 38 Колесные и гусеничные машины. Т IV-15 / В. Ф. Платонов, ВС. Азаев, Е. Б. Александров и др.;
Под общ. ред. В. Ф. Платонова. 1997. - 688 с, ил.
15ВЫ 5-217-01949-2
15ВЫ 5-217-01956-5 (Т. 1У-15)
Приведены методы расчета и испытаний ходовых качеств автомобилей и гусеничных
машин, взаимодействие их с опорной поверхностью, характеристики всех систем, прицепов
и полуприцепов, а также дополнительного оборудования.
Даны сведения по эксплуатационным материалам: топливу, охлаждающим жидкостям
и смазочным материалам.
М 2702000000-037 о&иал ББК мм
038(01) - 97
15ВЫ 5-217-01949-2
15ВЫ 5-217-01956-5 (Т. 1У-15)
© Издательство "Машиностроение", 1997
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ 12
Раздел 1. ОСНОВЫ ТЕОРИИ,
КОНСТРУИРОВАНИЯ И
ПРОИЗВОДСТВА
КОЛЕСНЫХ И
ГУСЕНИЧНЫХ МАШИН 13
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ
МАШИНЫ 13
1.1.1. Опорная поверхность
(В. Ф. Платонов) 13
1.1.2. Тяговая динамика
машины (В. Ф. Платонов) 18
1.1.3. Колесный движитель
(Ю. В. Пирковский) 24
1.1.4. Гусеничный
движитель (В. Ф. Платонов) 30
1.1.5. Поворот колесной
машины (Я. Е. Фаробин) 37
1.1.6. Поворот гусеничной
машины (В. Ф. Платонов) 42
1.1.7. Колебания машины
(В. Ф. Платонов) 45
1.1.8. Колебания
управляемых колес (К. С.
Колесников) 50
Глава 1.2.
ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И
ЭФФЕКТИВНОСТЬ 53
1.2.1. Эффективность
машин (В. Ф. Платонов) 53
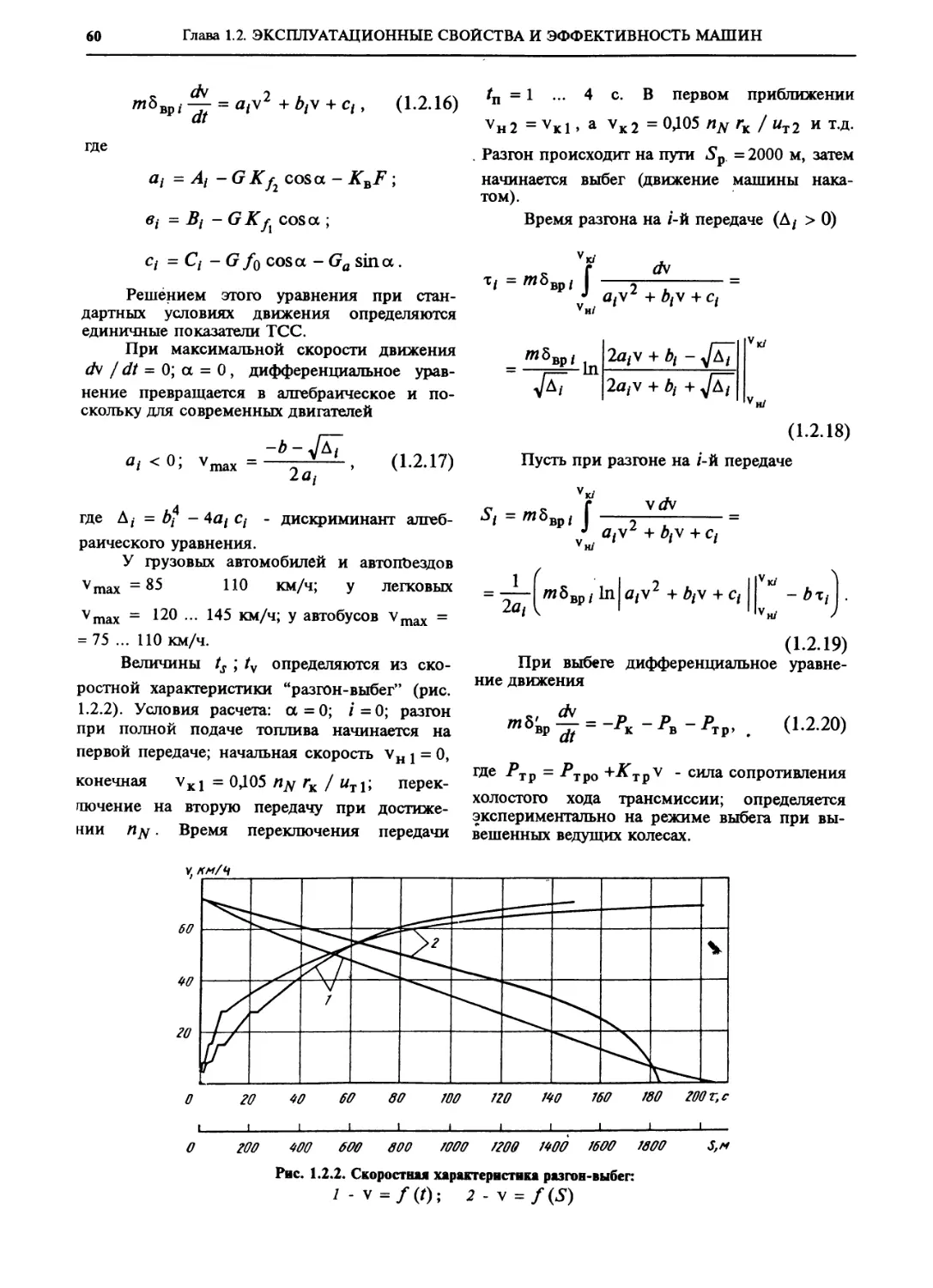
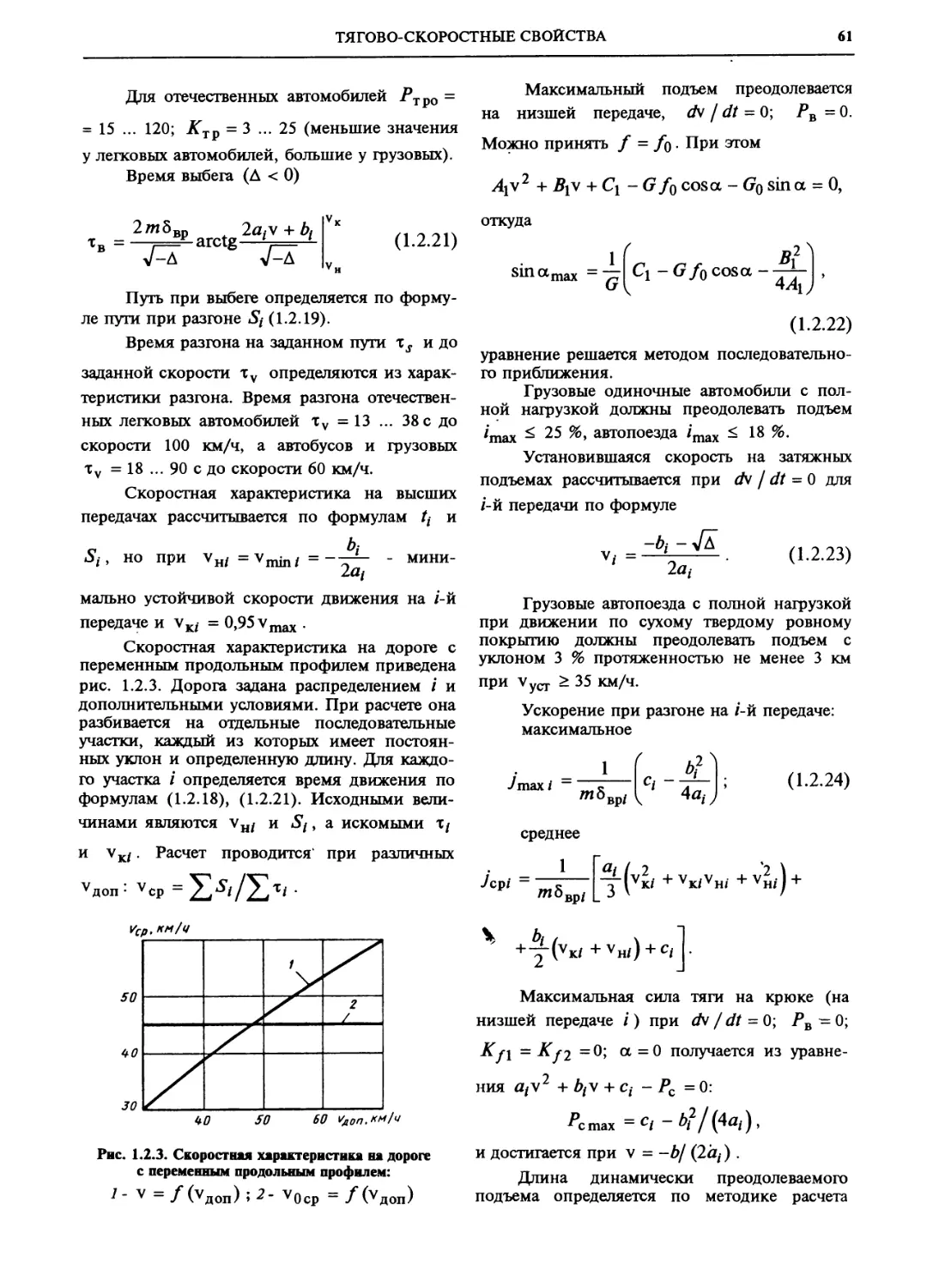
1.2.2. Тягово-скоростные
свойства (Я. Е. Фаробин) .... 56
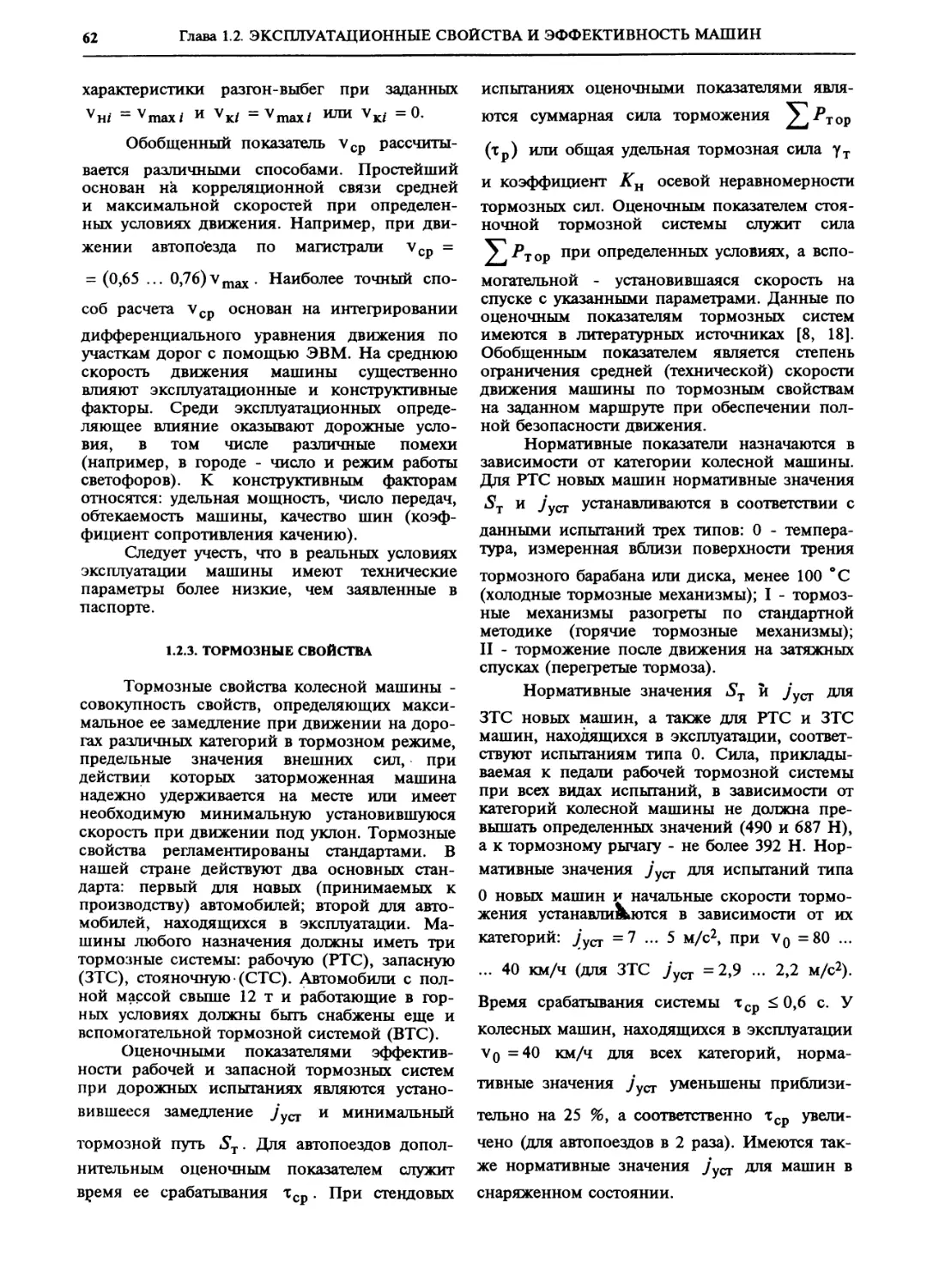
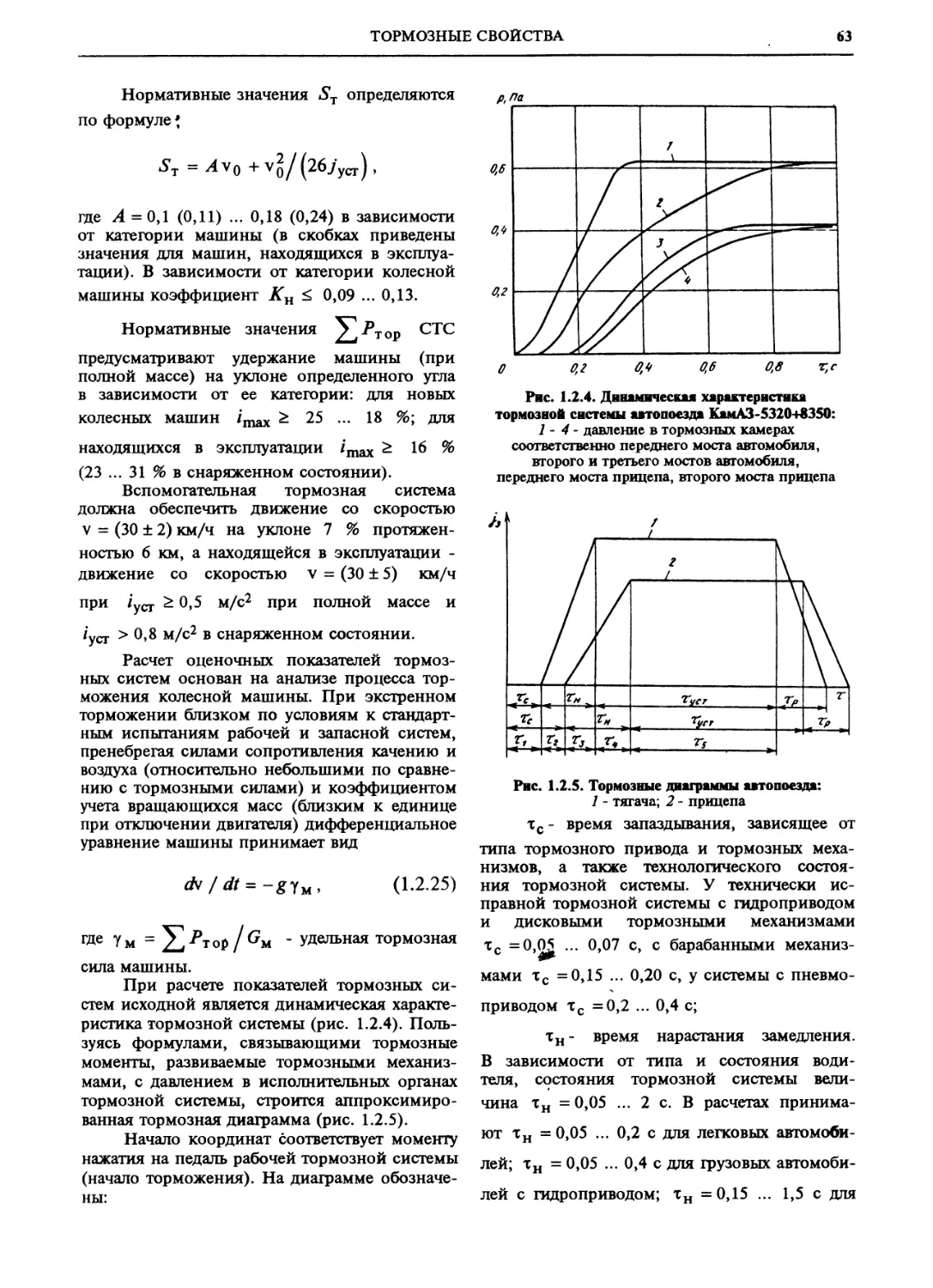
1.2.3. Тормозные свойства
(Я. Е: Фаробин) 62
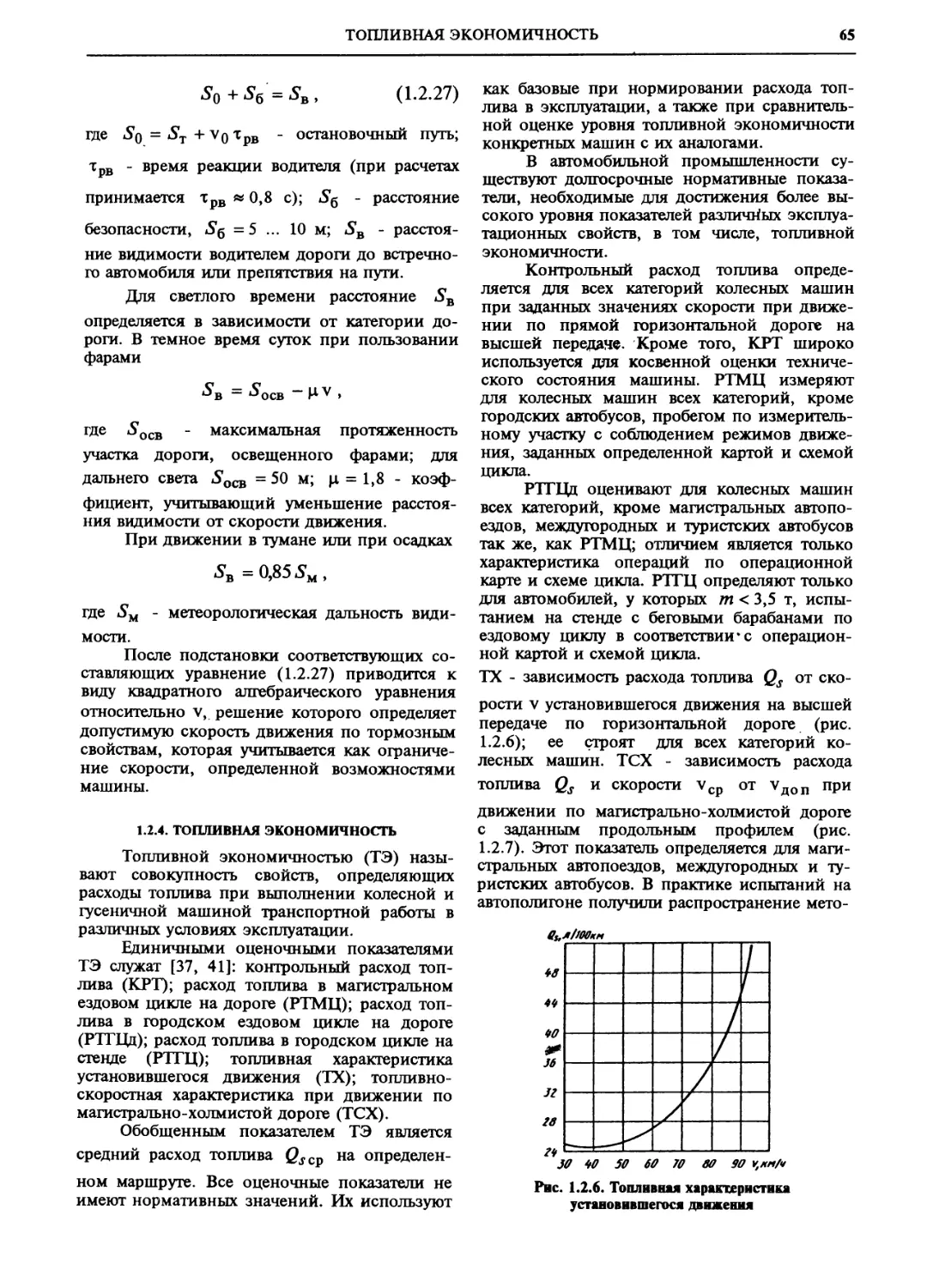
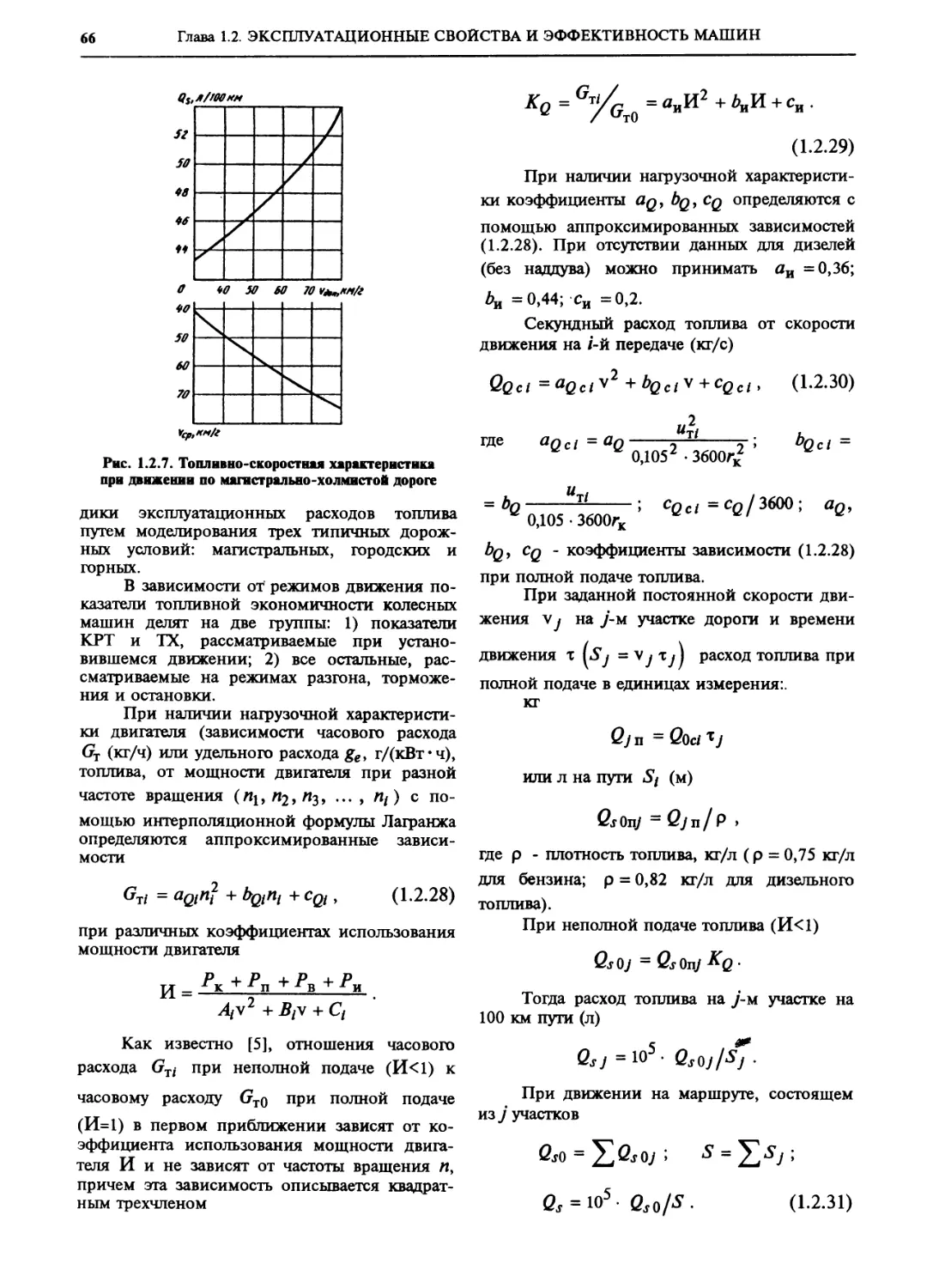
1.2.4. Топливная
экономичность (Я. Е. Фаробин) ... 65
1.2.5. Управляемость (Я. Е.
Фаробин) 67
1.2.6. Устойчивость (Я. Е.
Фаробин) 69
1.2.7. Маневренность (Я. Е.
Фаробин) 71
1.2.8. Плавность хода (Я. Е.
Фаробин) 73
1.2.9. Проходимость (Я. Е.
Фаробин) 75
Глава 1.3. МЕТОДЫ РАСЧЕТА
ПАРАМЕТРОВ И
КОНСТРУКЦИЙ 78
1.3.1. Общие технические
требования к конструкции
(В. Ф. Платонов) 78
1.3.2. Формирование
нагрузочных режимов (Н Ф.
Бочаров, В. В. Немцов) 83
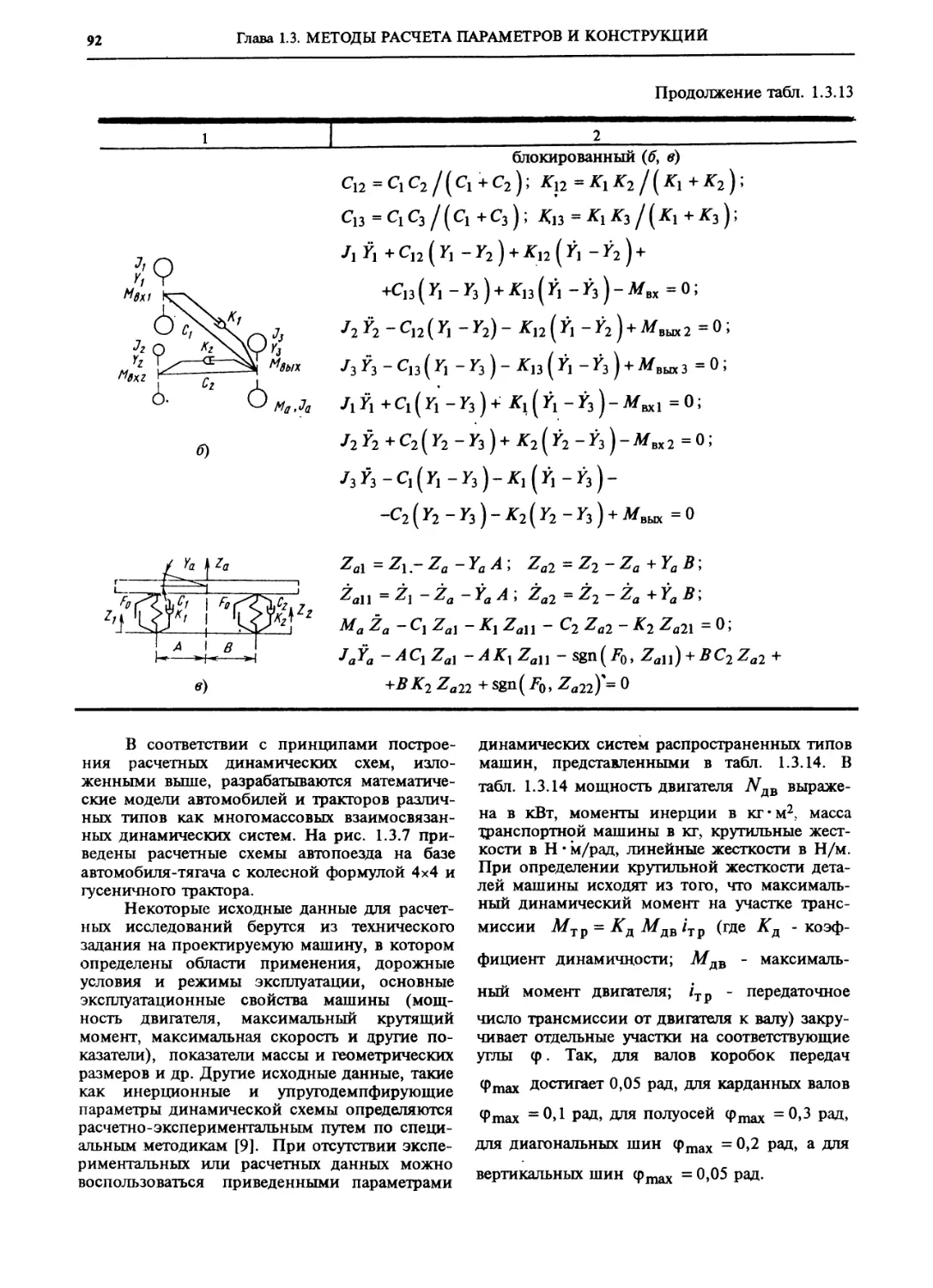
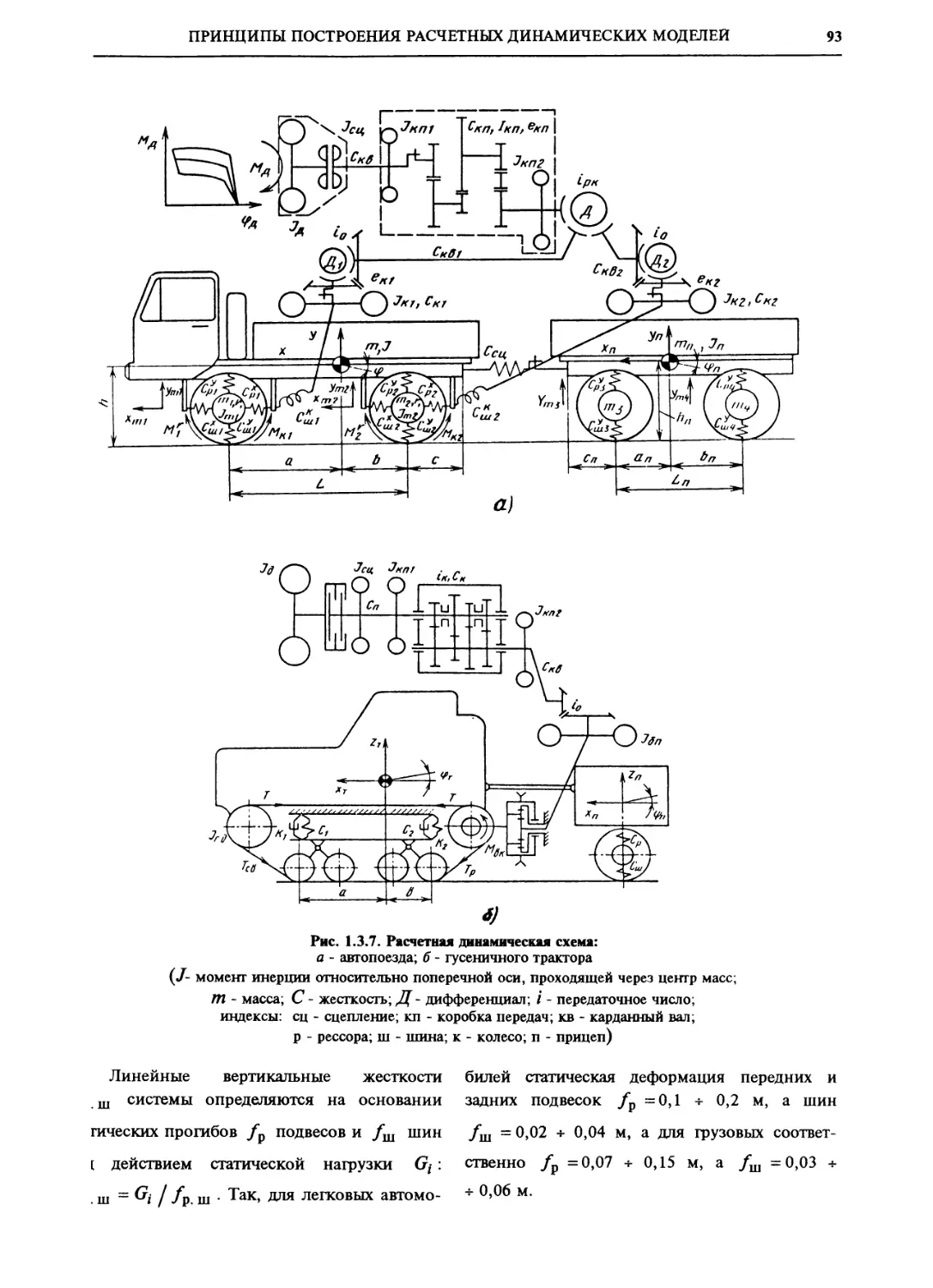
1.3.3. Принципы
построения расчетных
динамических моделей (В. В. Немцов,
Е. Ф. Волобуев) 88
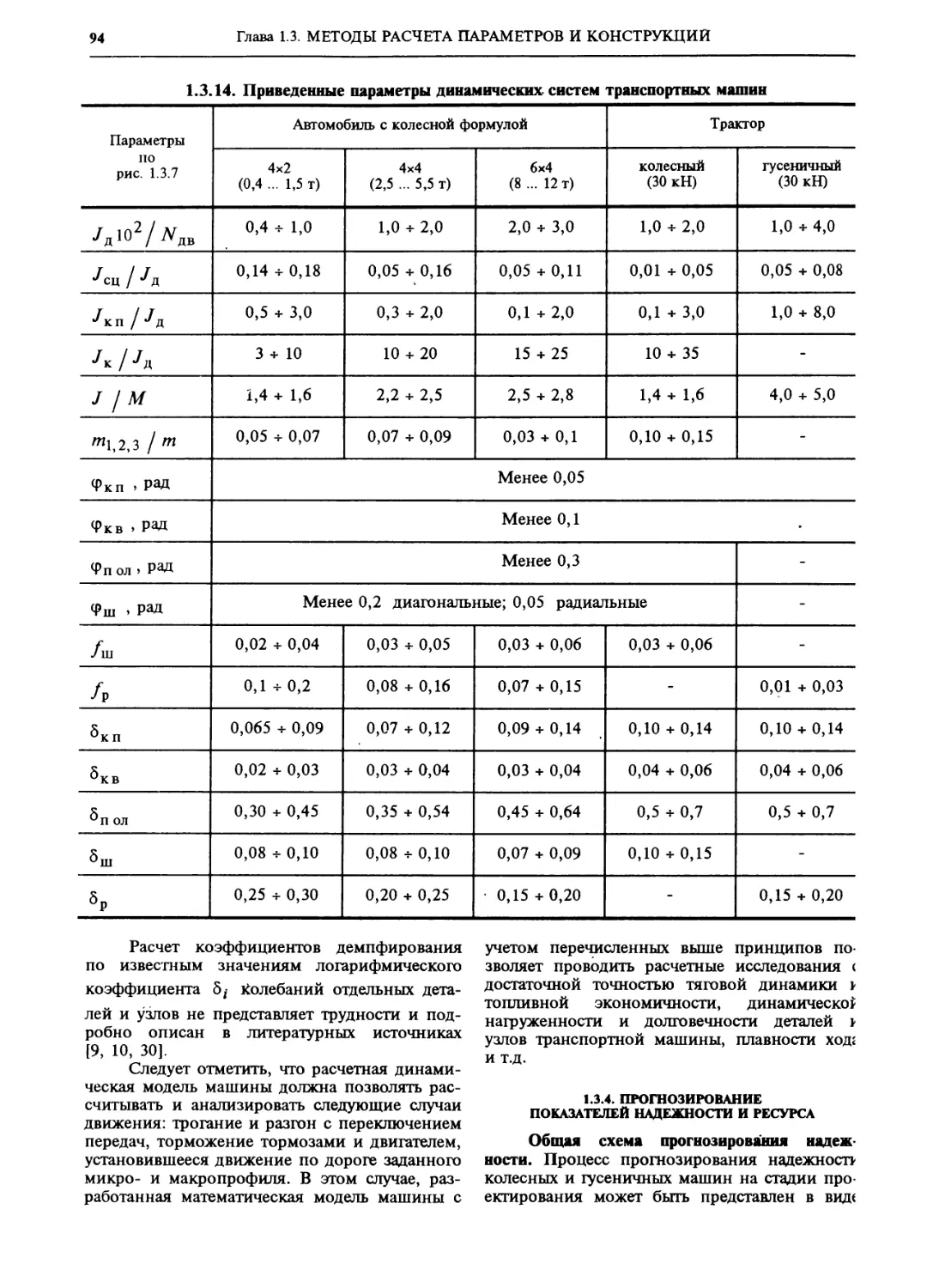
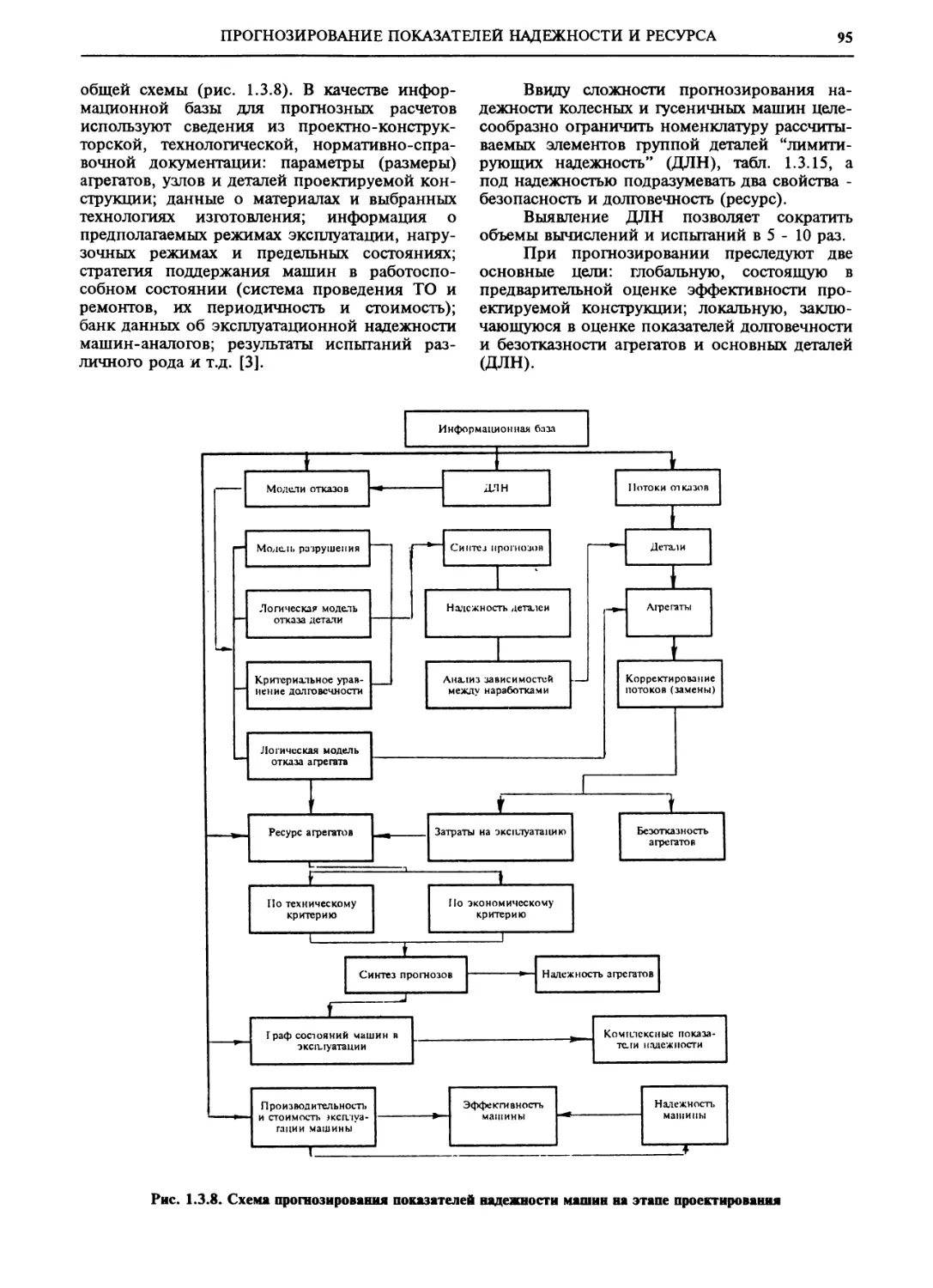
1.3.4. Прогнозирование
показателей "надежности и ресурса
(В. С. Лукинский, Е. И. Зайцев) 94
1.3.5. Поддержание
надежности машин в процессе
эксплуатации (В. Ф.
Платонов) ПО
Глава 1.4. ИСПЫТАНИЯ
МАШИН, АГРЕГАТОВ,
СИСТЕМ 112
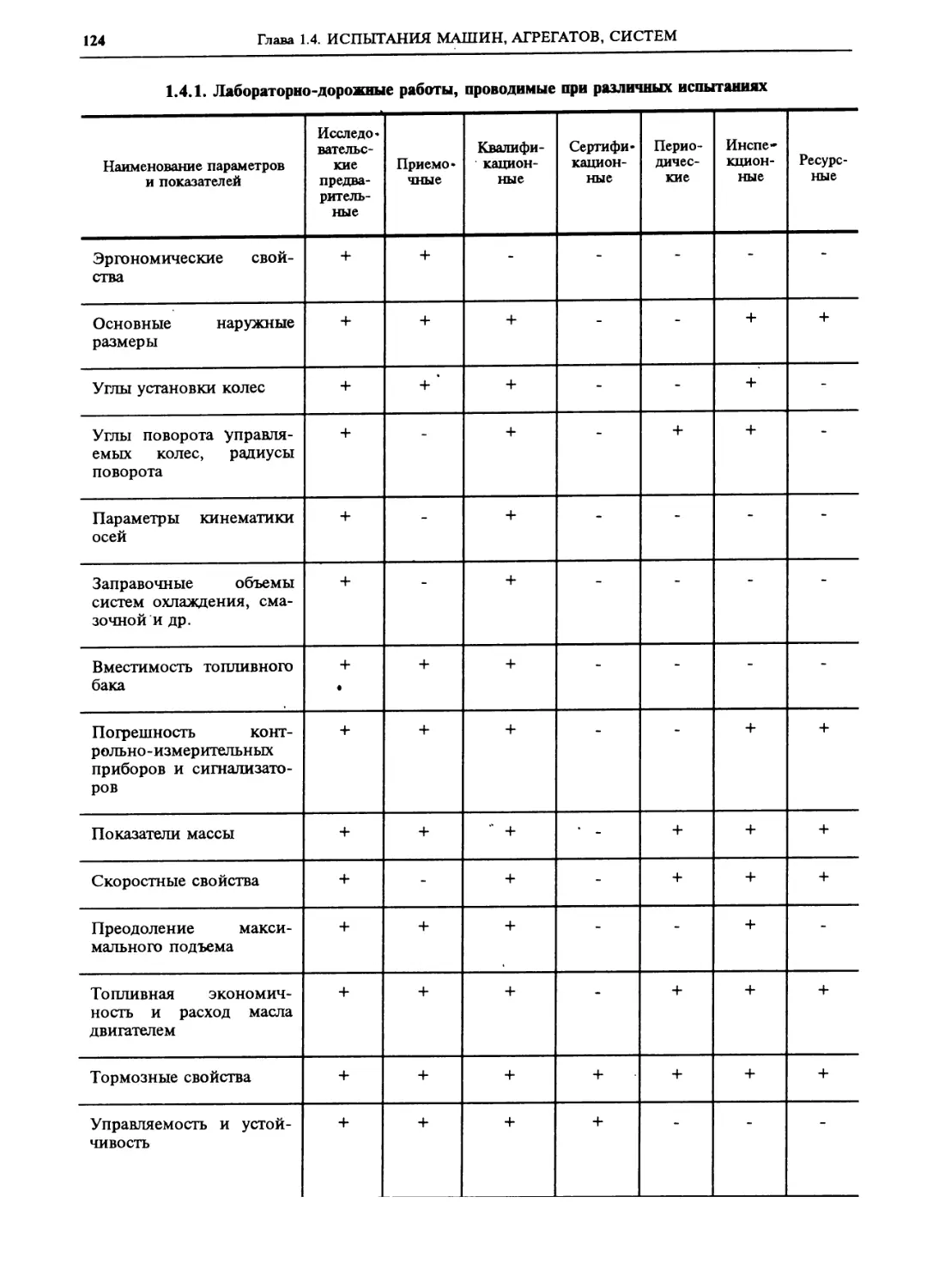
1.4.1. Виды и организация
испытаний (Н. Н Яценко,
С. Ф. Безверхий) 112
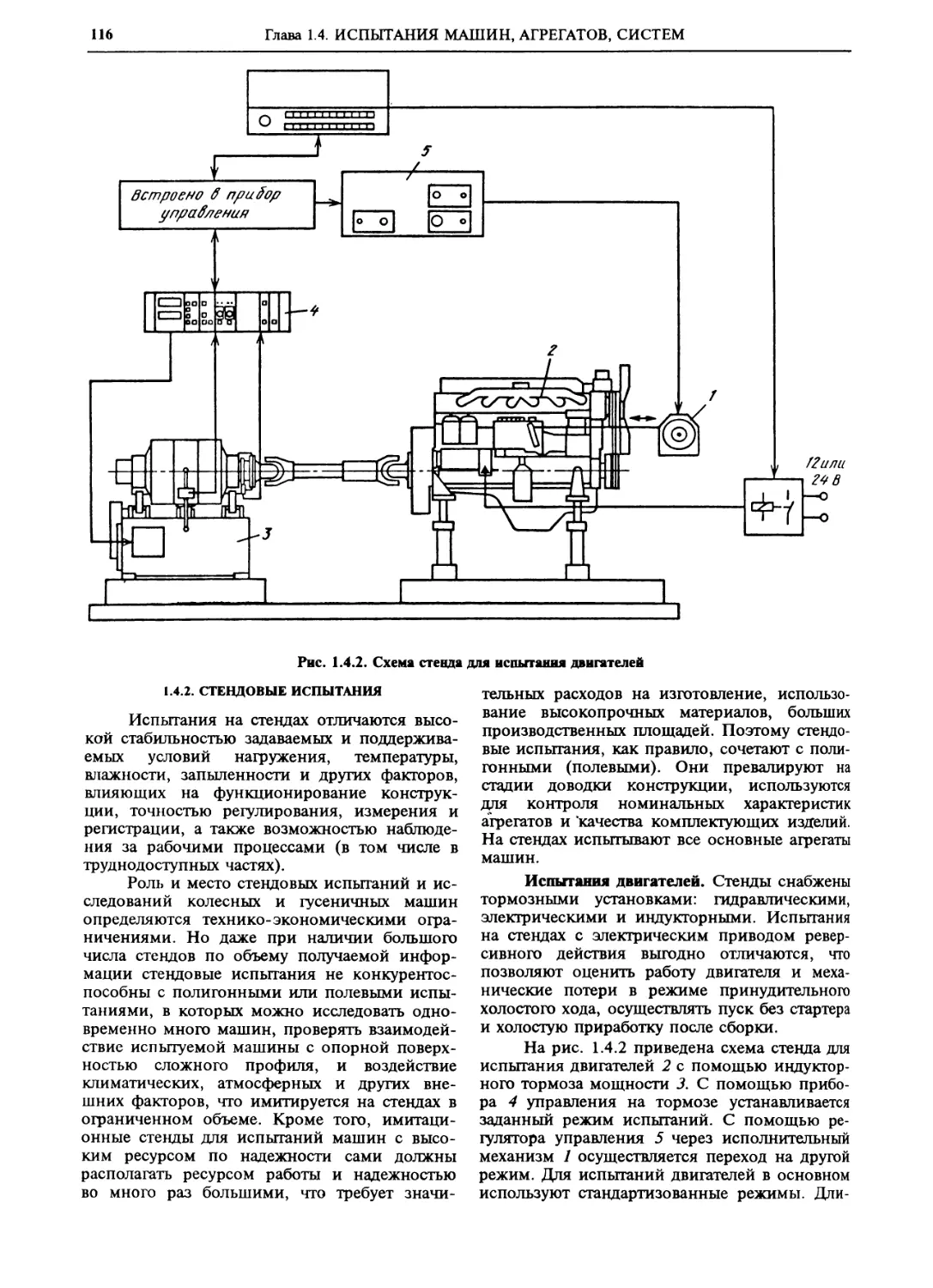
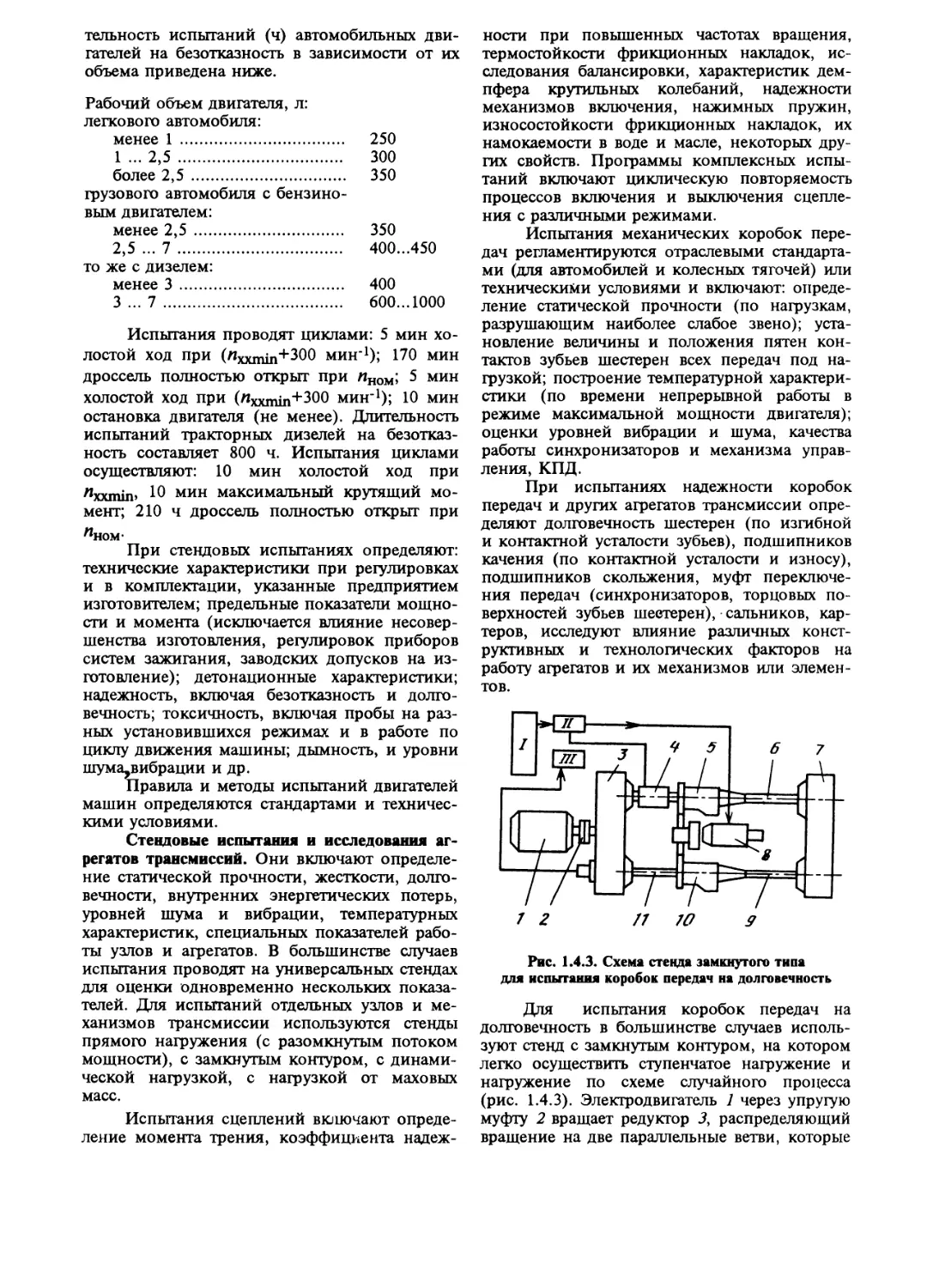
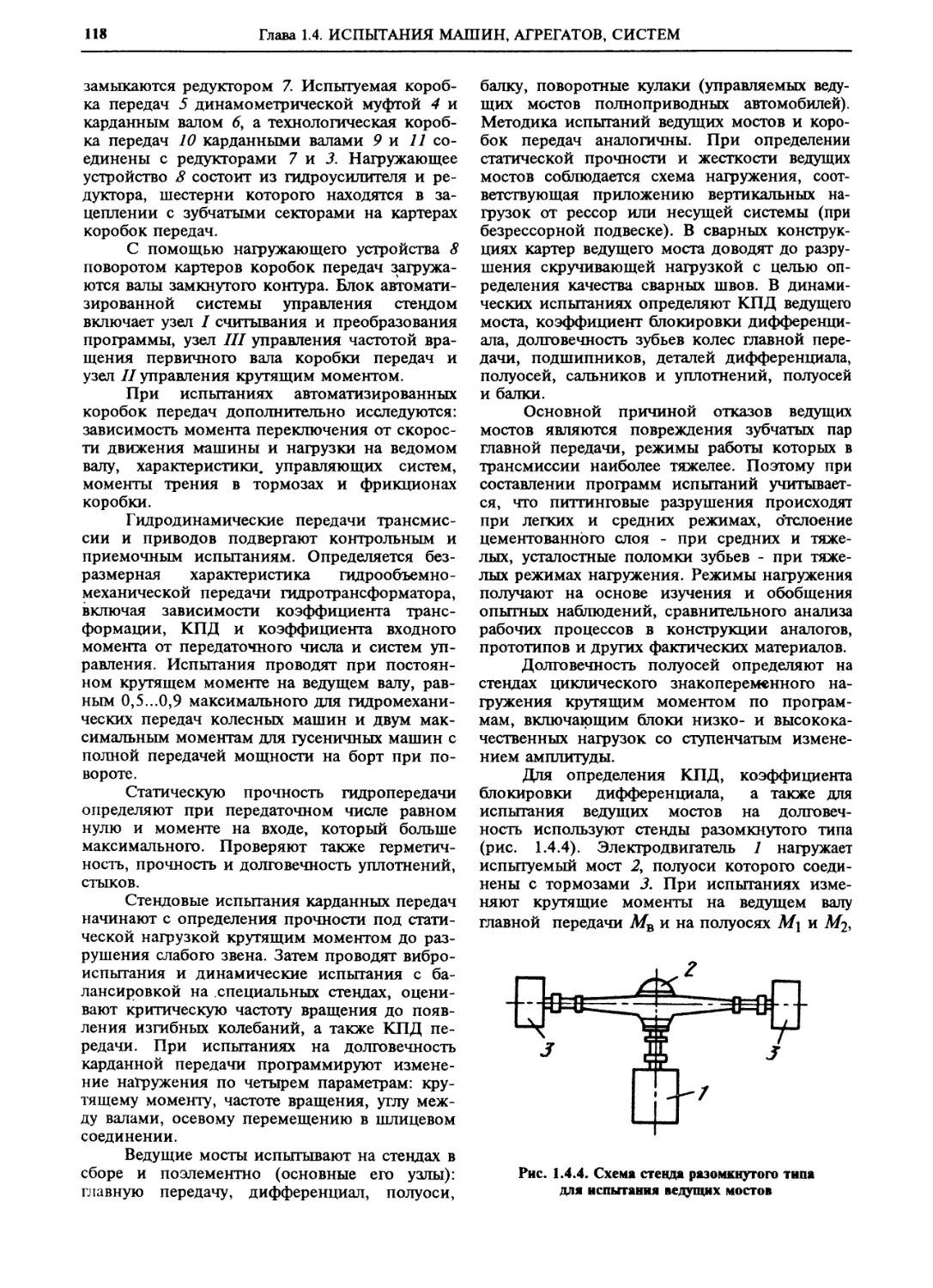
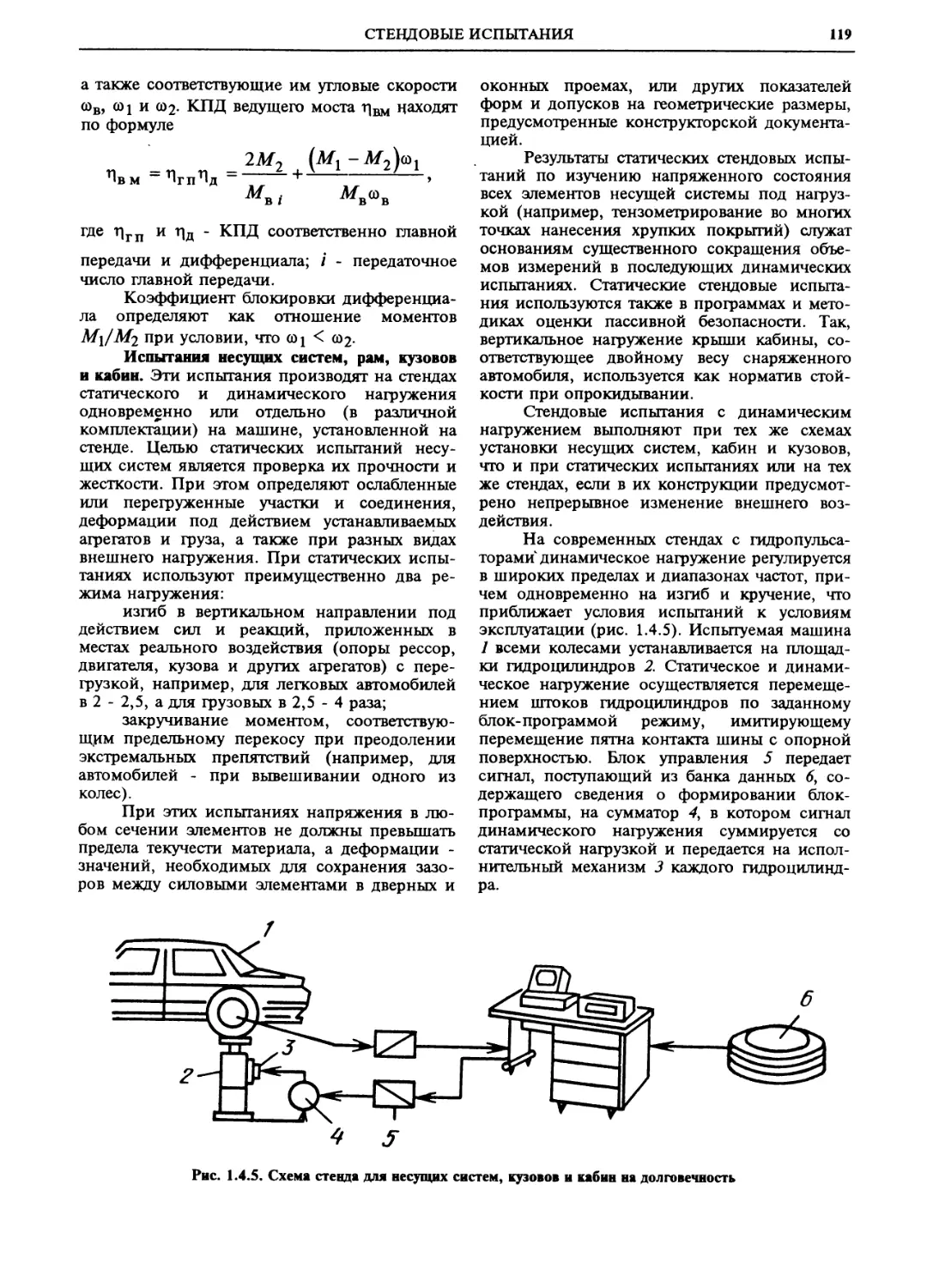
1.4.2. Стендовые испытания
(В. П. Шалдыкин) 116
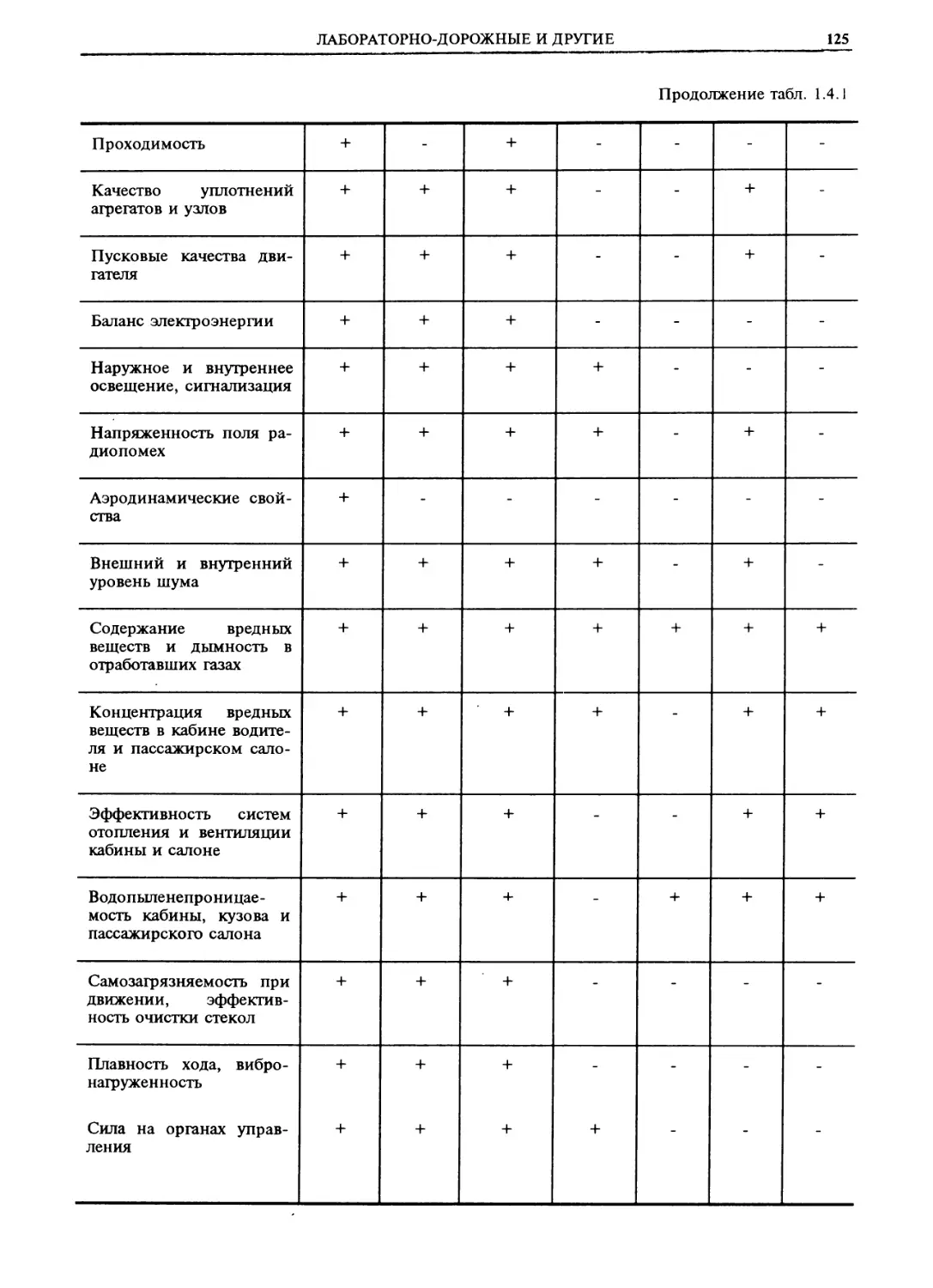
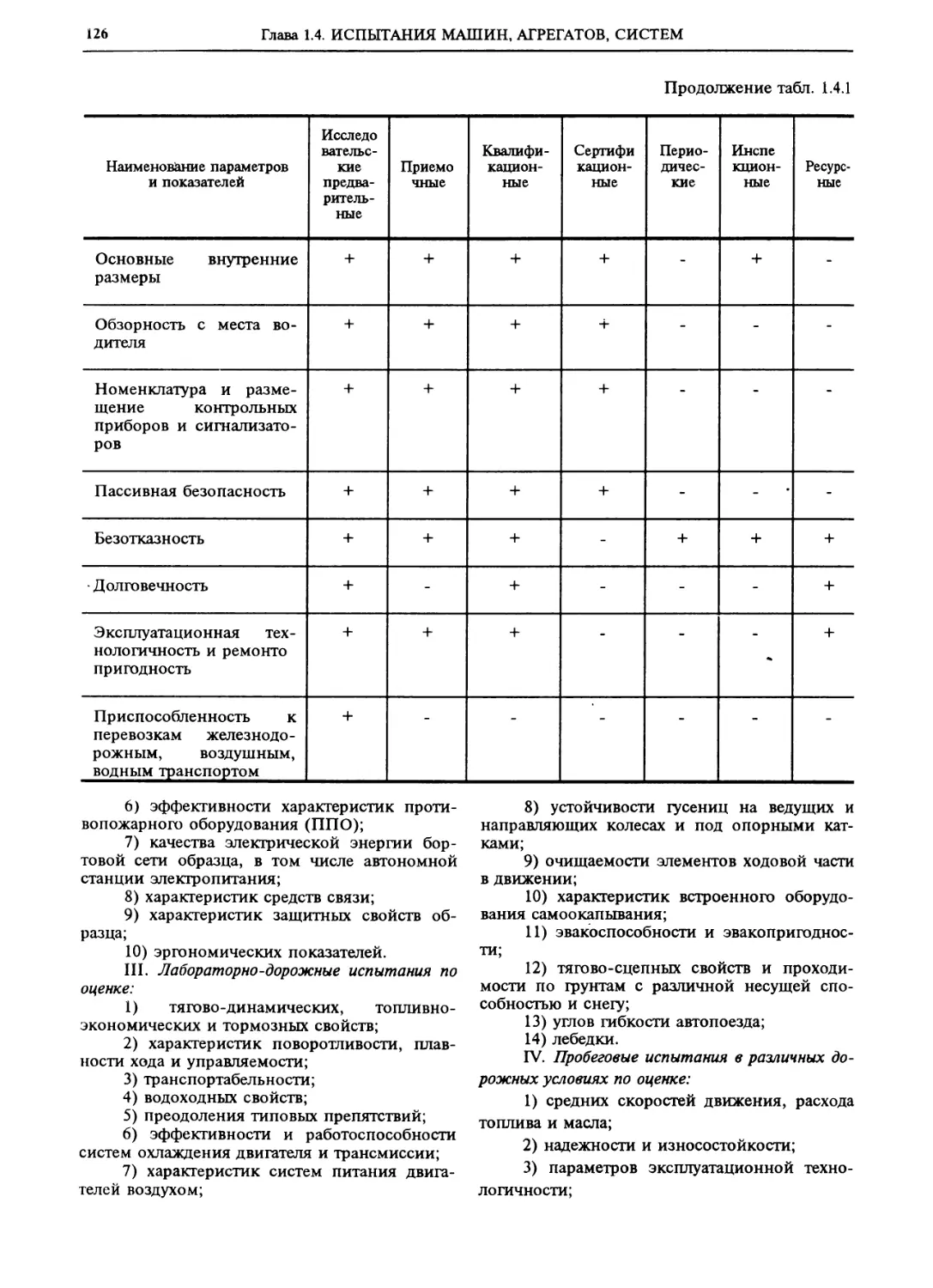
1.4.3. Лабораторно-дорож-
ные, приемочные и
инспекционные испытания
(В. Ф. Платонов) 123
1.4.4. Ускоренные и
форсированные испытания (Н. Н.
Яценко) 131
1.4.5. Испытательные
сооружения и оборудование
(В. И Шалдыкин) 135
1.4.6. Автоматизация
испытаний и обработки их
результатов (В. П. Шалдыкин,
В. С. Устименко) 138
СПИСОК ЛИТЕРАТУРЫ 140
6
ОГЛАВЛЕНИЕ
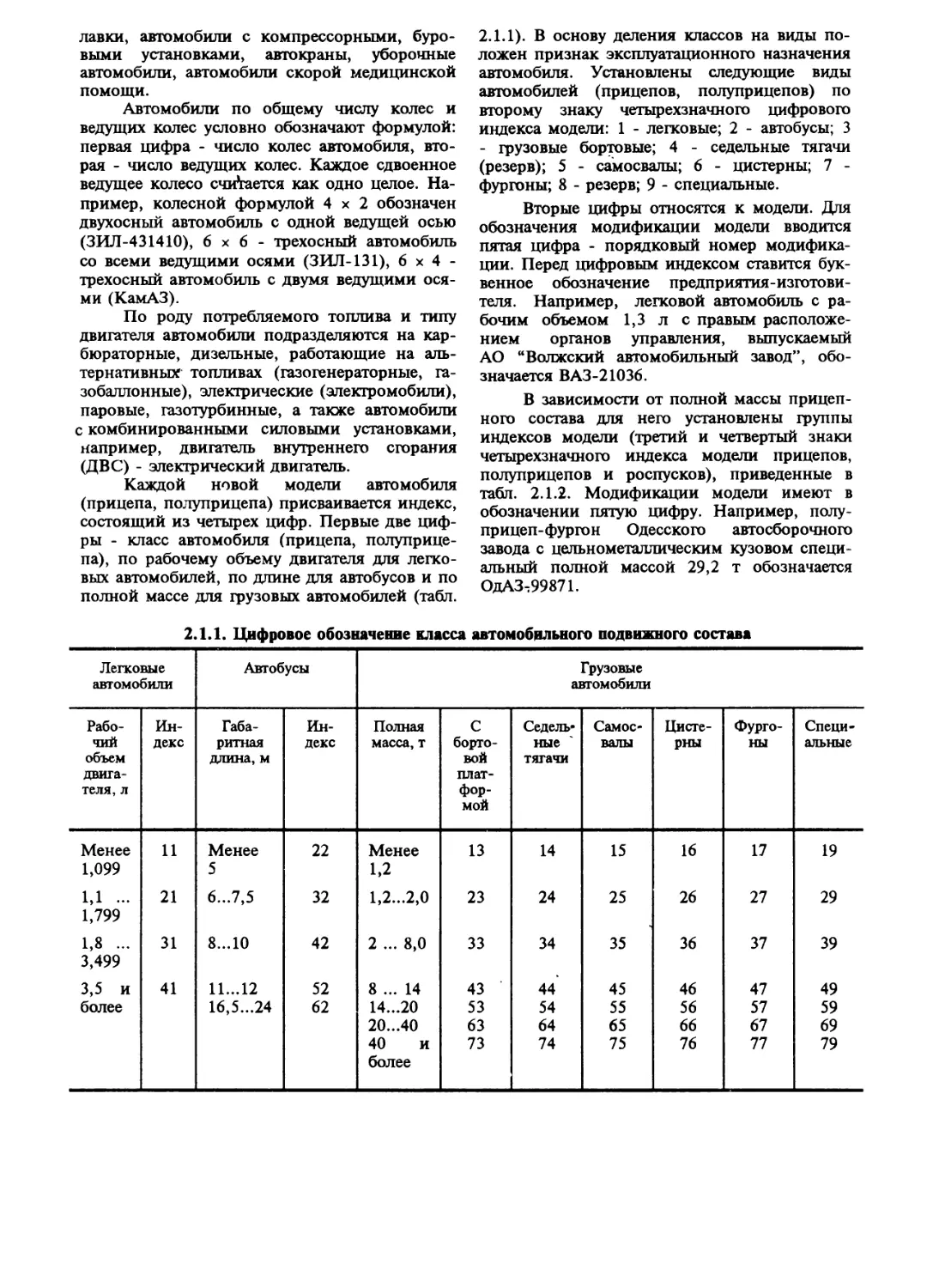
Раздел 2. АВТОМОБИЛИ 142
Глава 2.1. ТИПЫ АВТОТРАНС-
ПОРтаЫХСРВДСТБ 142
2.1.1. Классификация
автотранспортных средств
(Ю. А. Корольков) 142
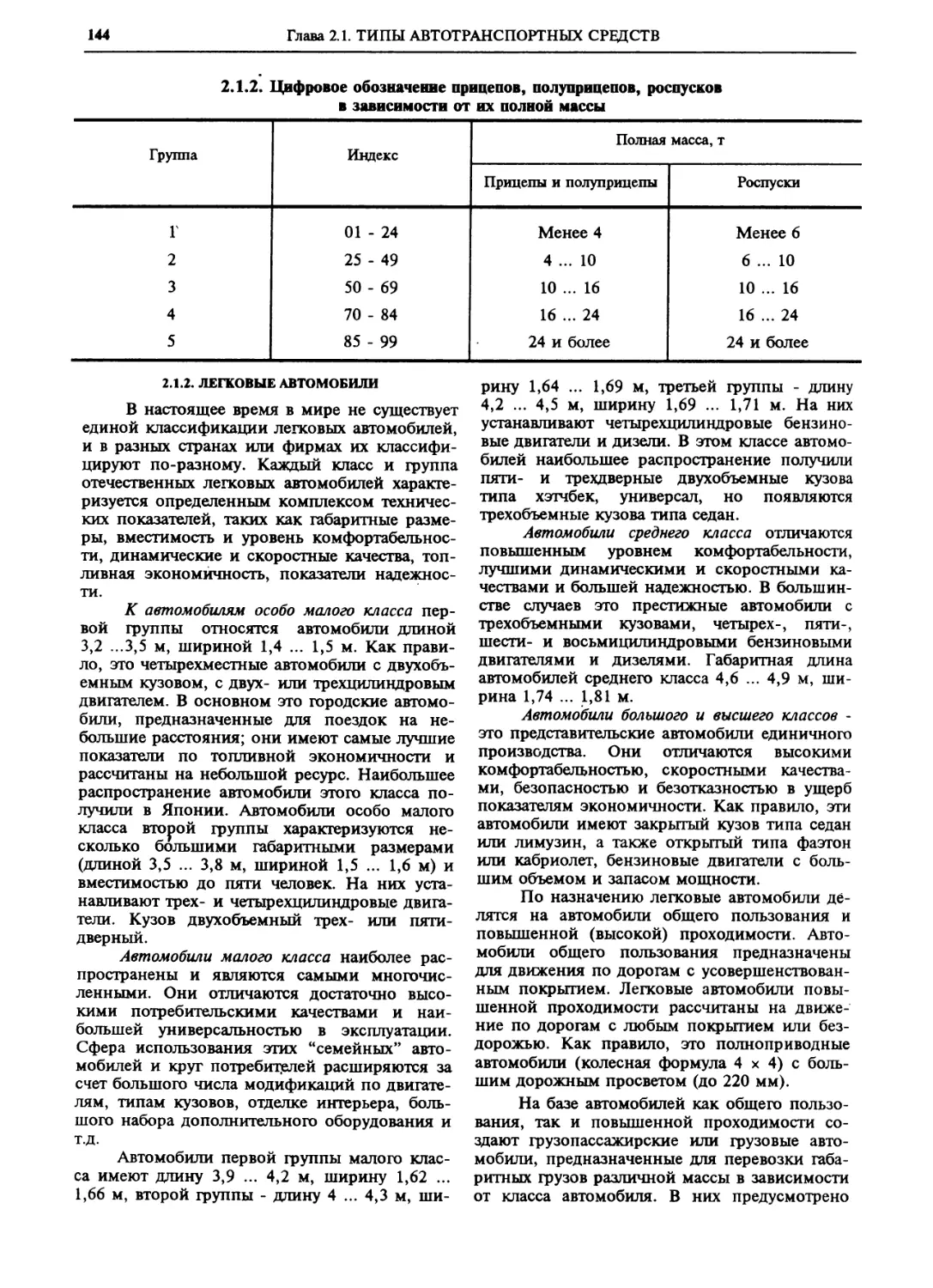
2.1.2. Легковые автомобили
(С. В. Белое) 144
2.1.3. Автобусы (Л. С. Гаро-
нин) 145
2.1.4. Грузовые автомобили
(Л. Е. Глинер) 146
2.1.5. Специализированные
и специальные автомобили
(Я. М. Варыпаев) 148
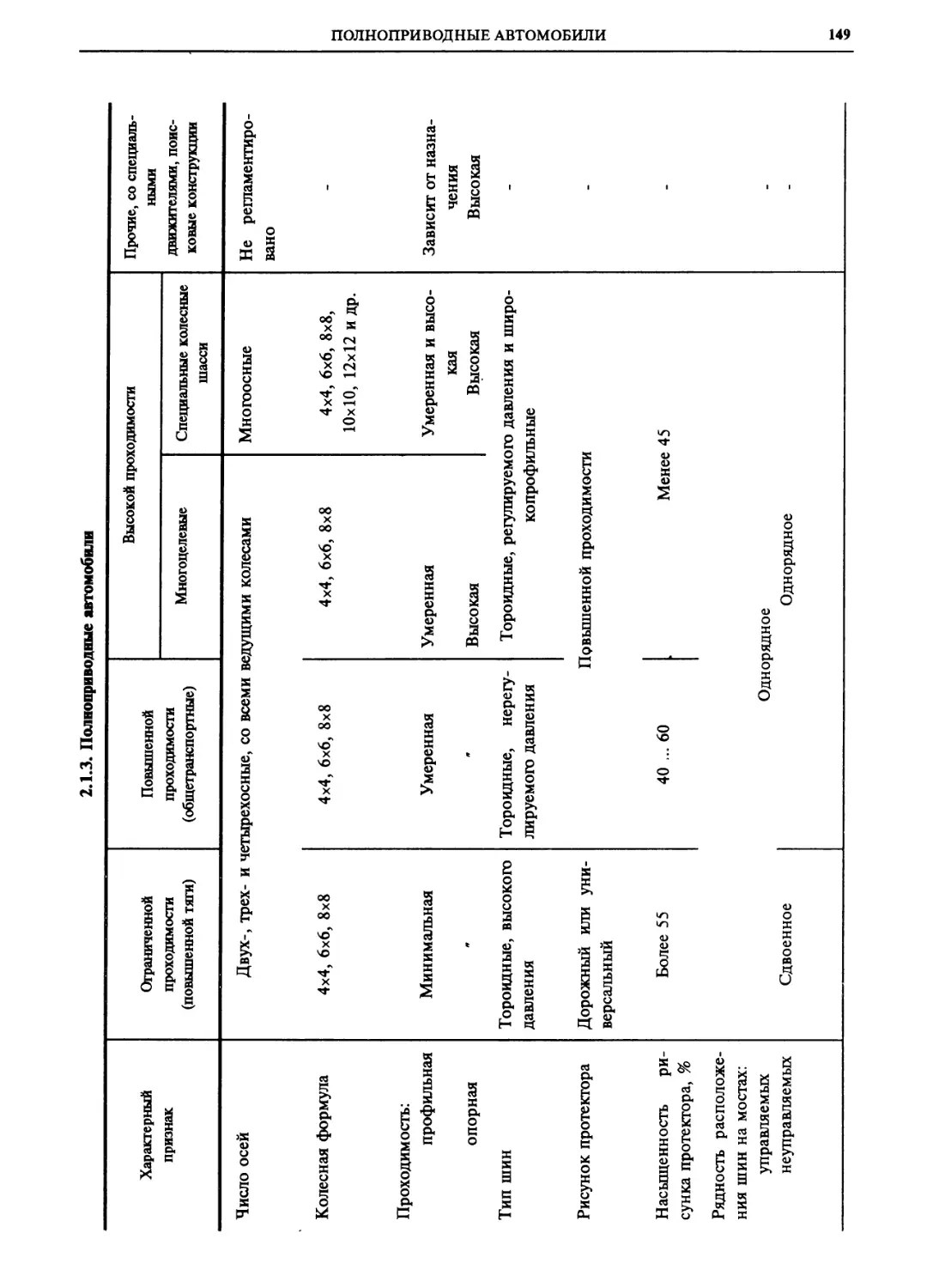
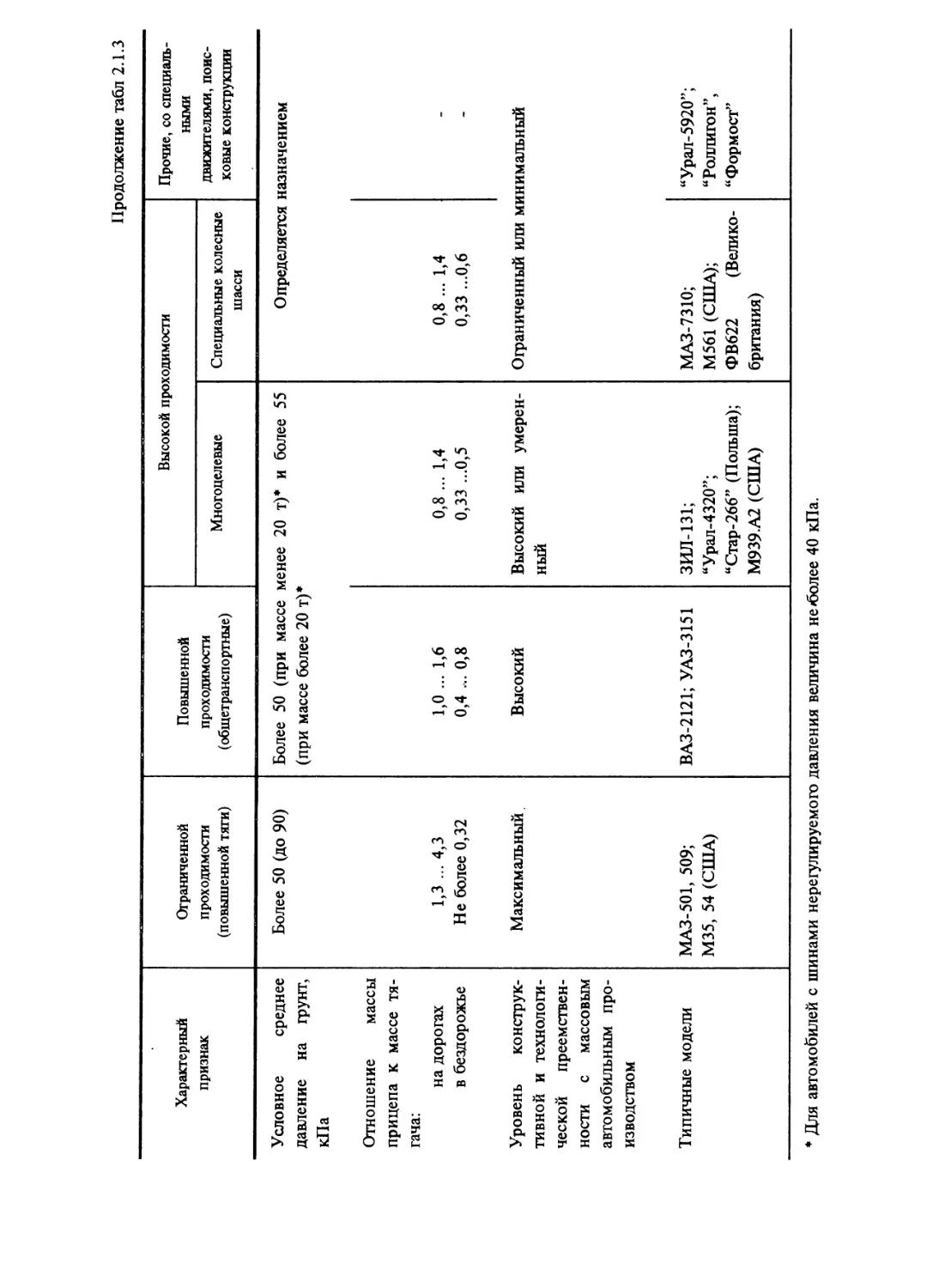
2.1.6. Полноприводные
автомобили (А. Н. Вержбиц-
кий) 148
2.1.7. Автомобили,
работающие на альтернативных
топливах (В. А. Лушко) 152
2.1.8. Электромобили (А. И.
Яковлев) 154
2.1.9. Автомобили с комби- •
нированными
энергетическими установками (А. И.
Яковлев) 156
Глава 2.2. ОБЩАЯ
КОМПОНОВКА И ОСНОВНЫЕ
ПАРАМЕТРЫ 157
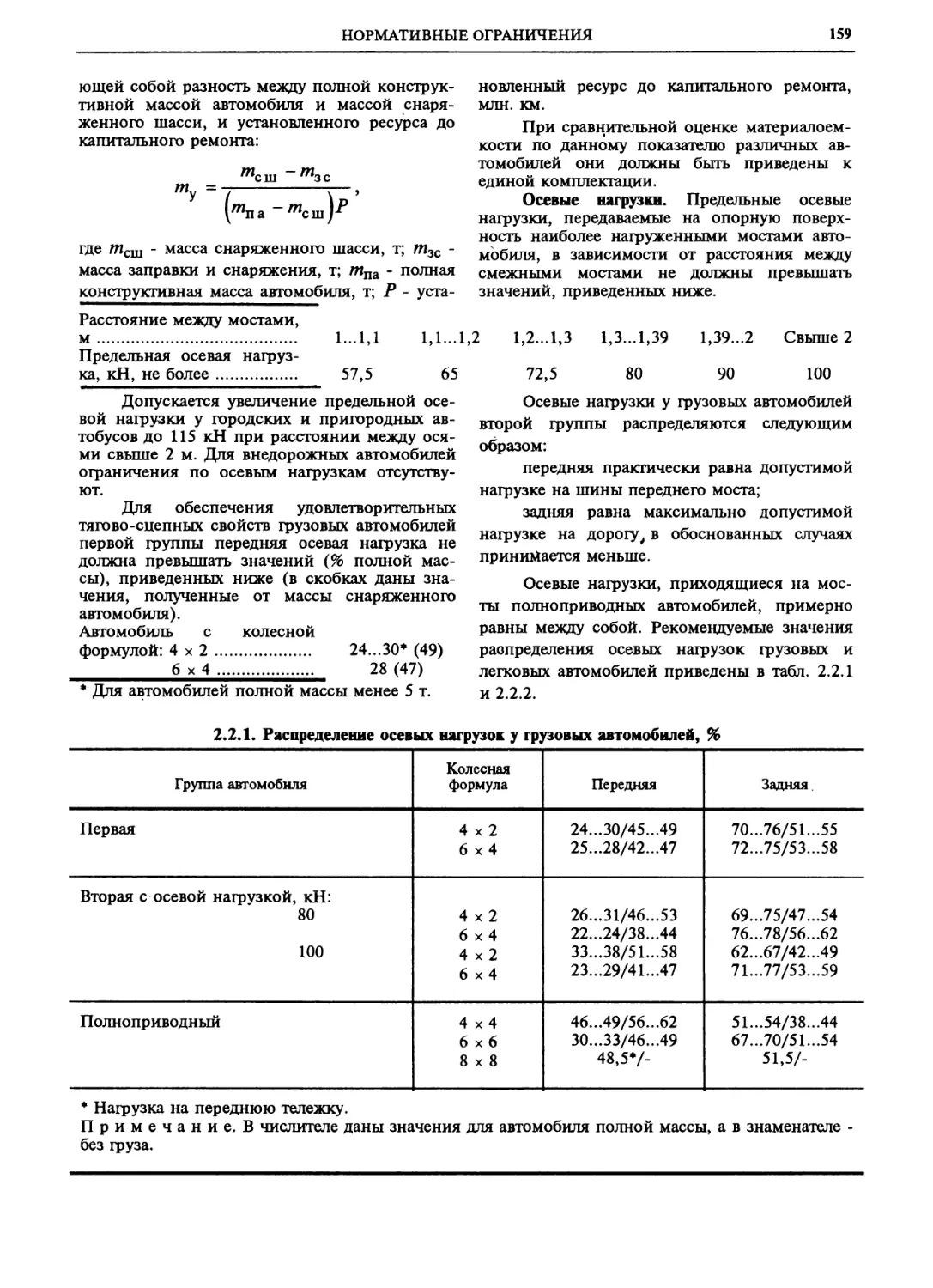
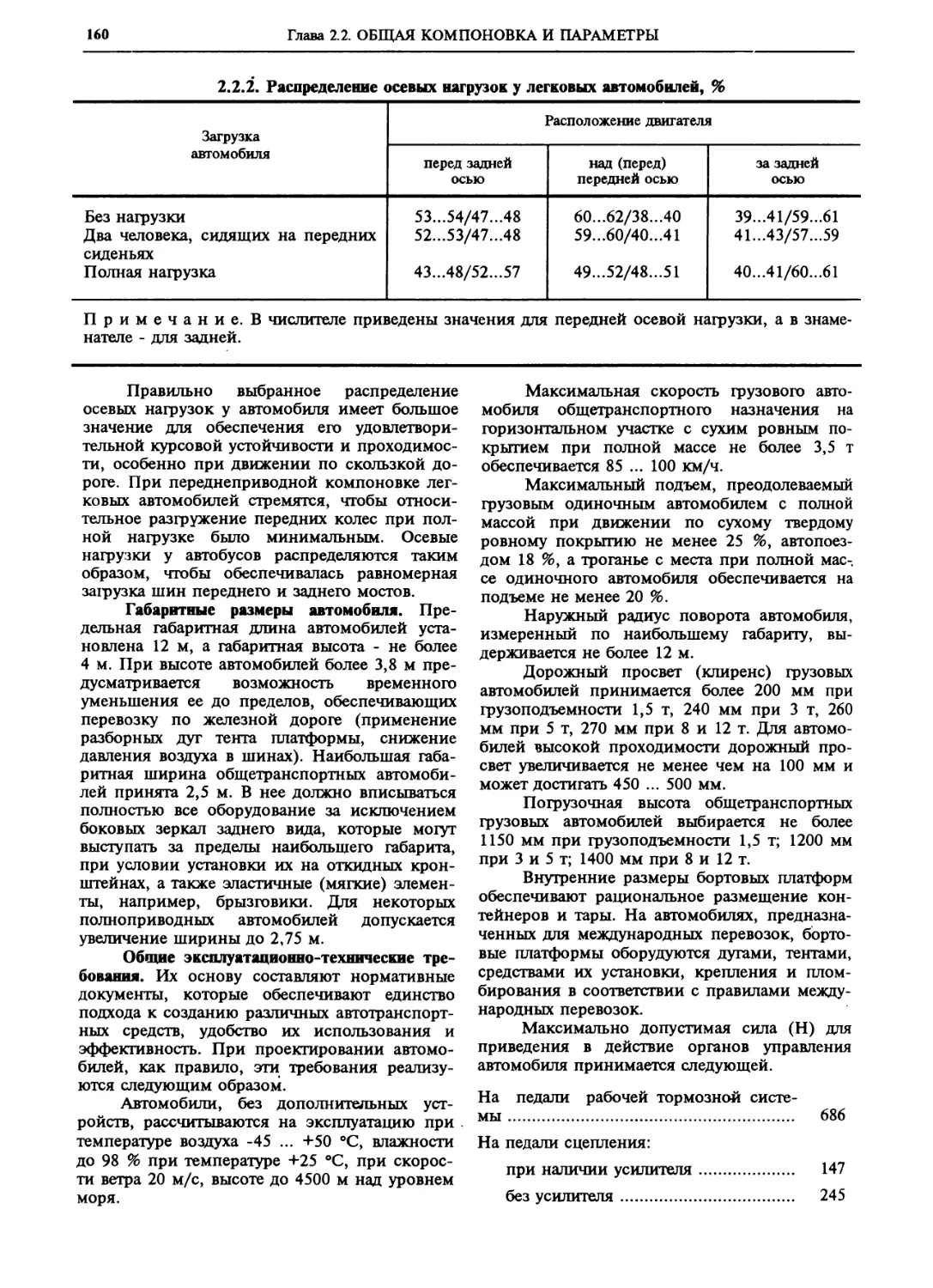
2.2.1. Нормативные
ограничения, эксплуатационно-
технические требования и
параметры (Б. В. Кисуленко) 157
2.2.2. Общая компоновка
автомобилей (Л. Е. Глинер) 163
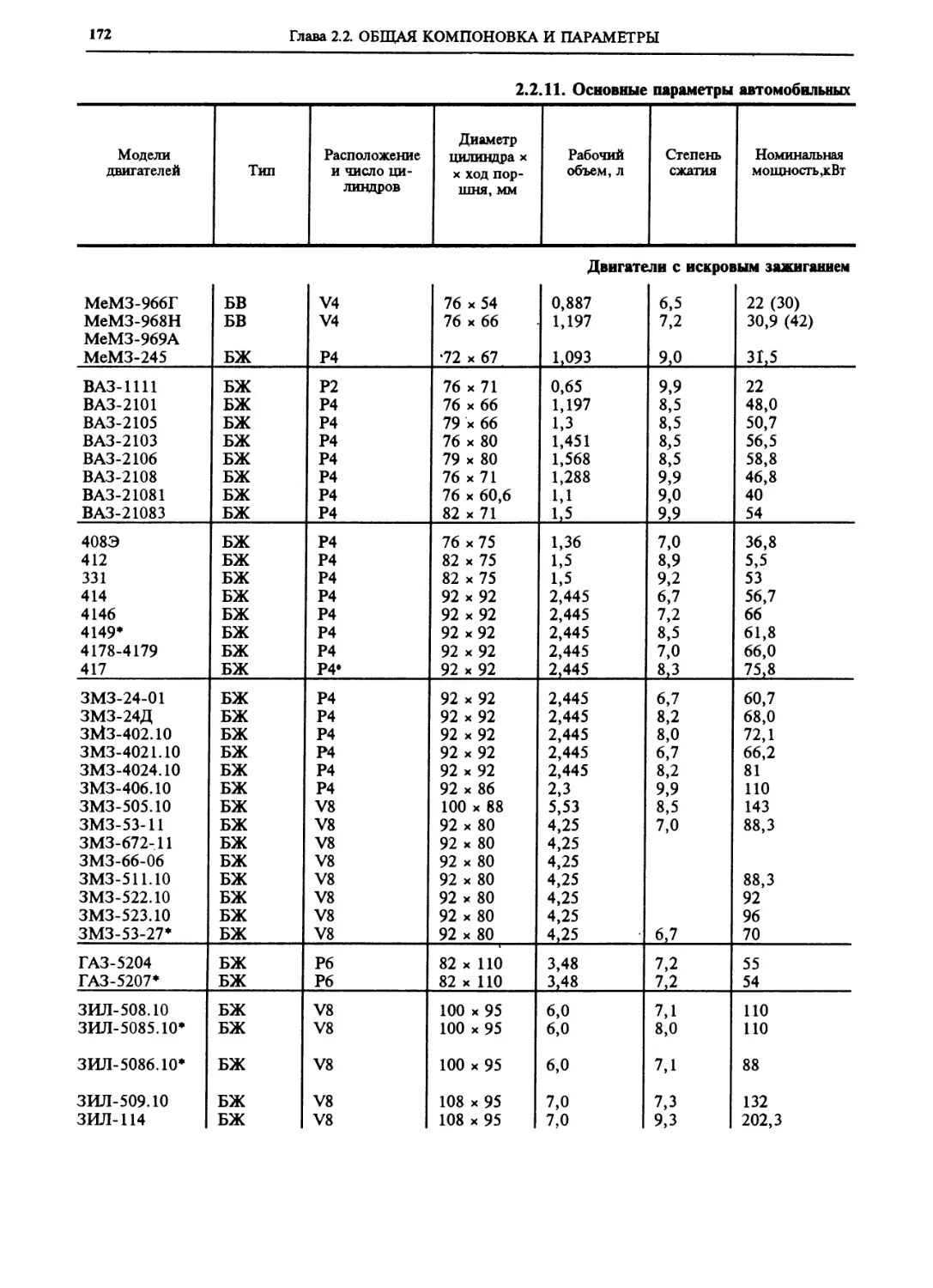
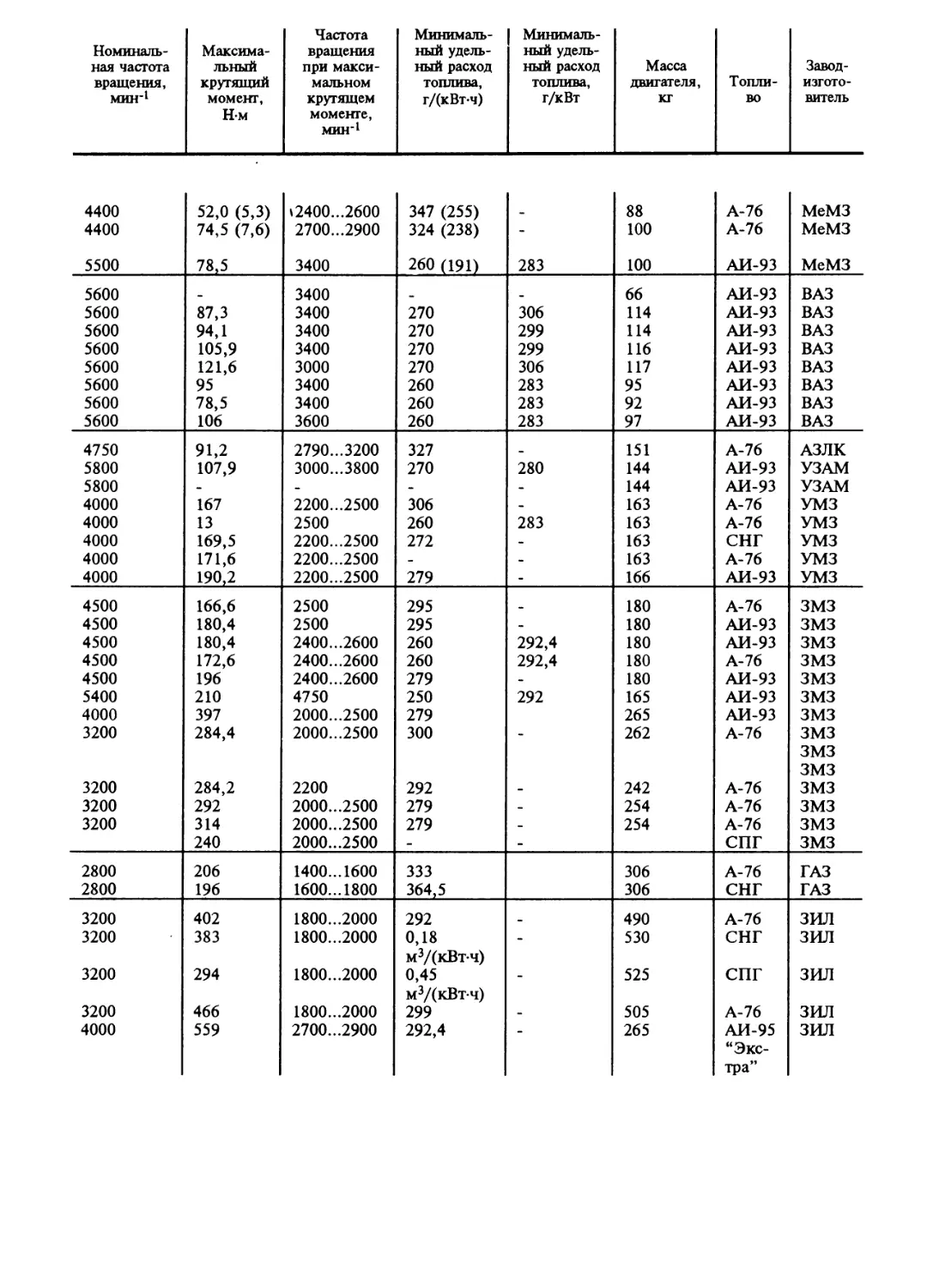
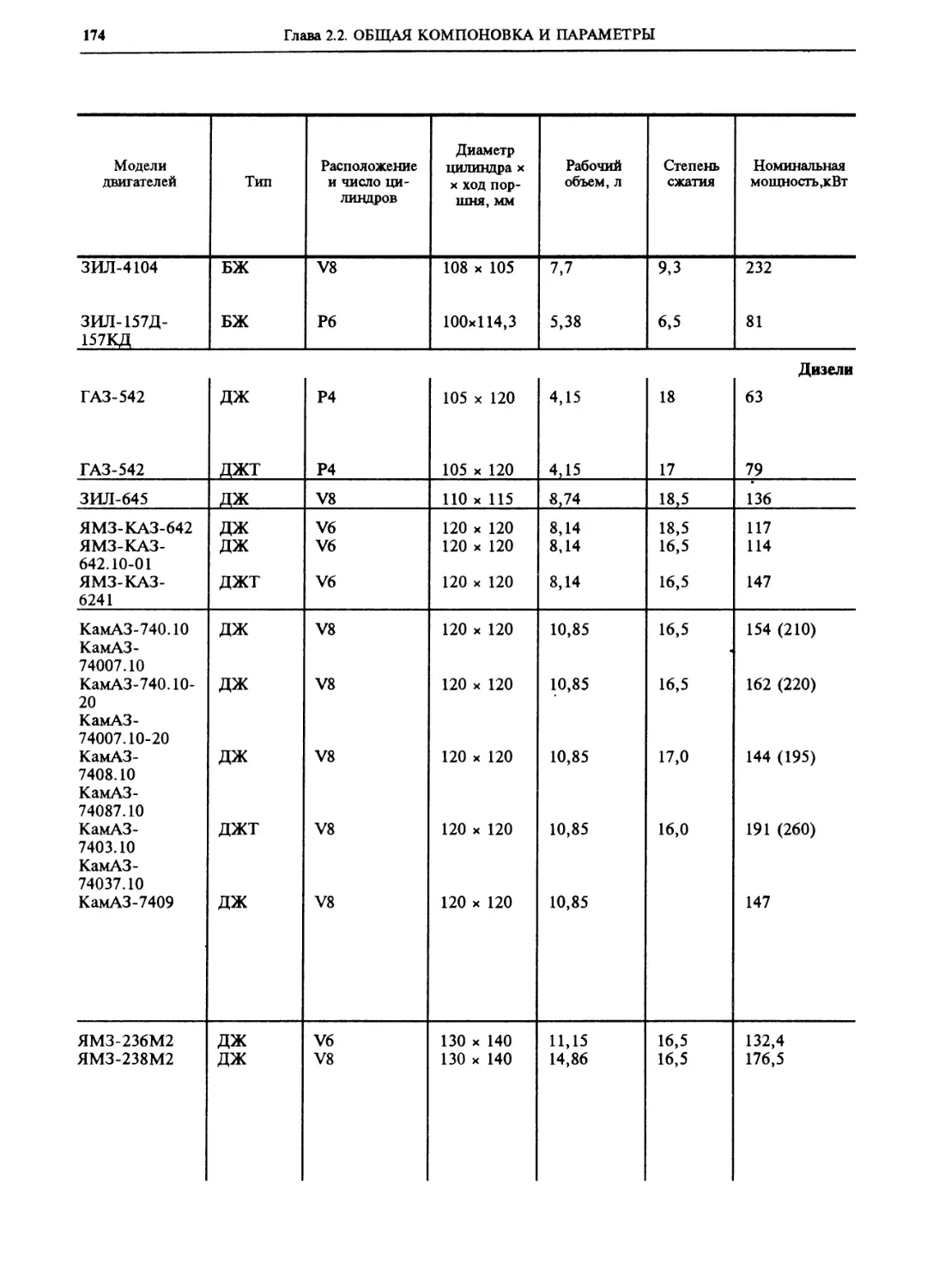
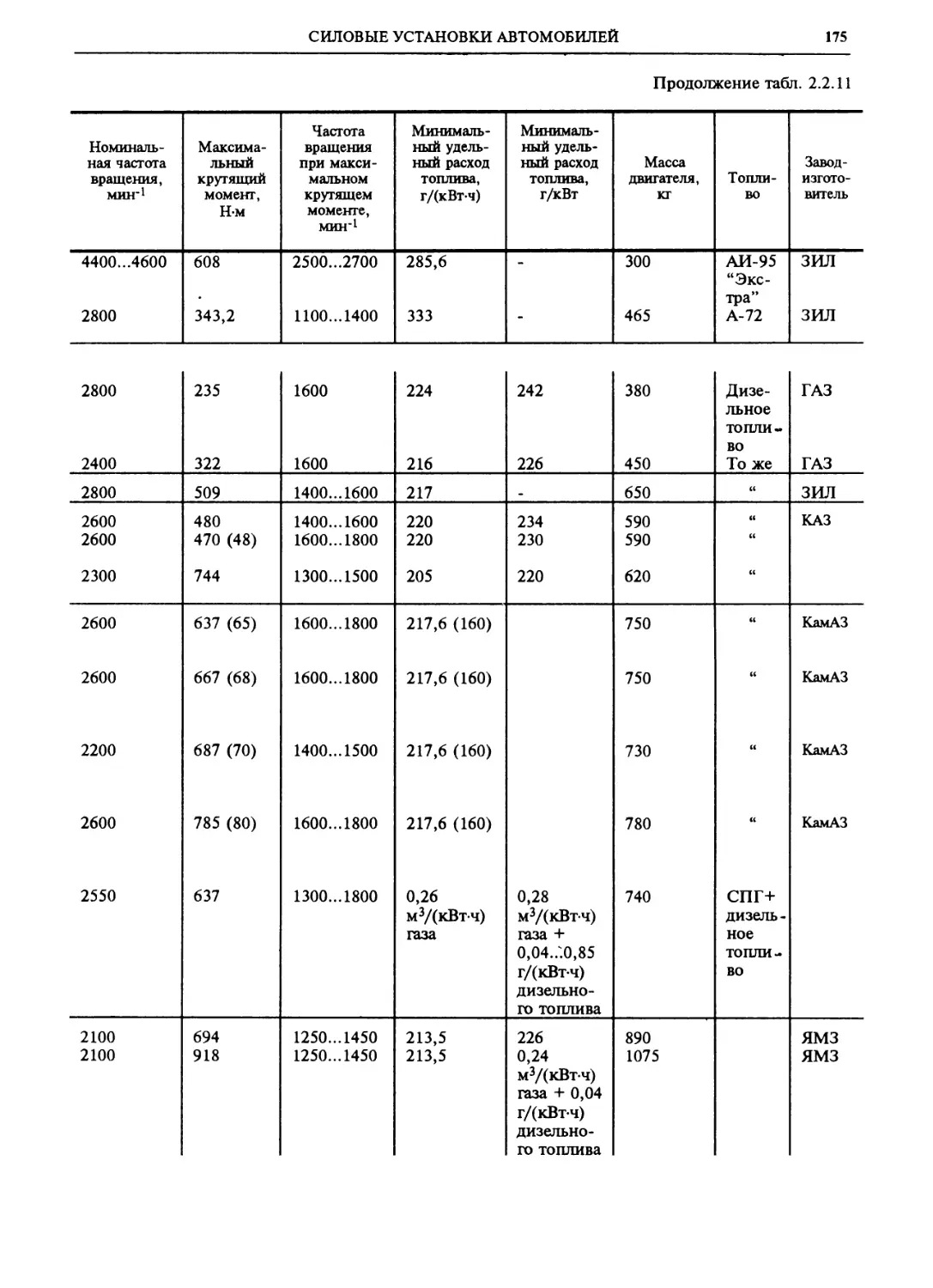
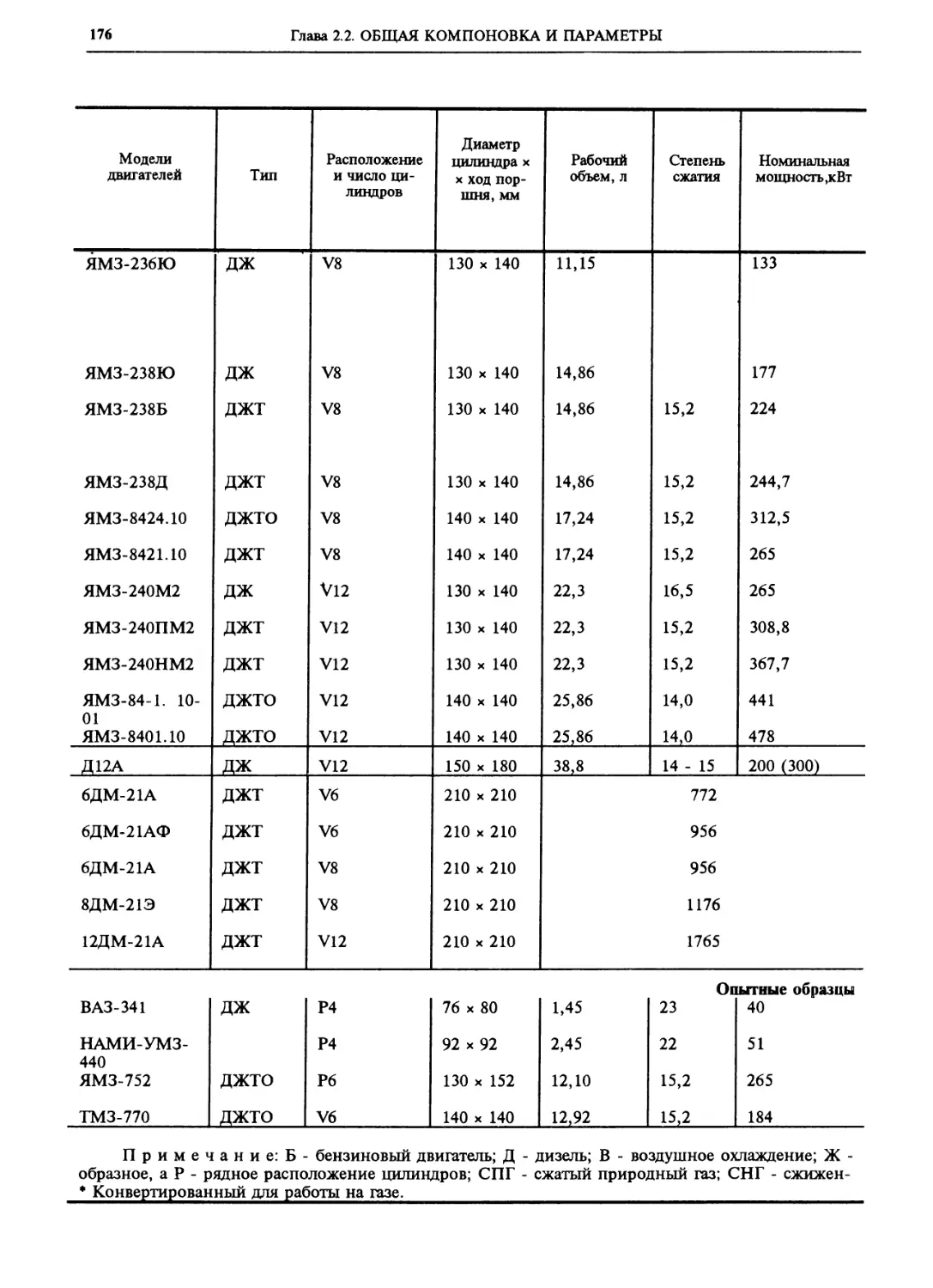
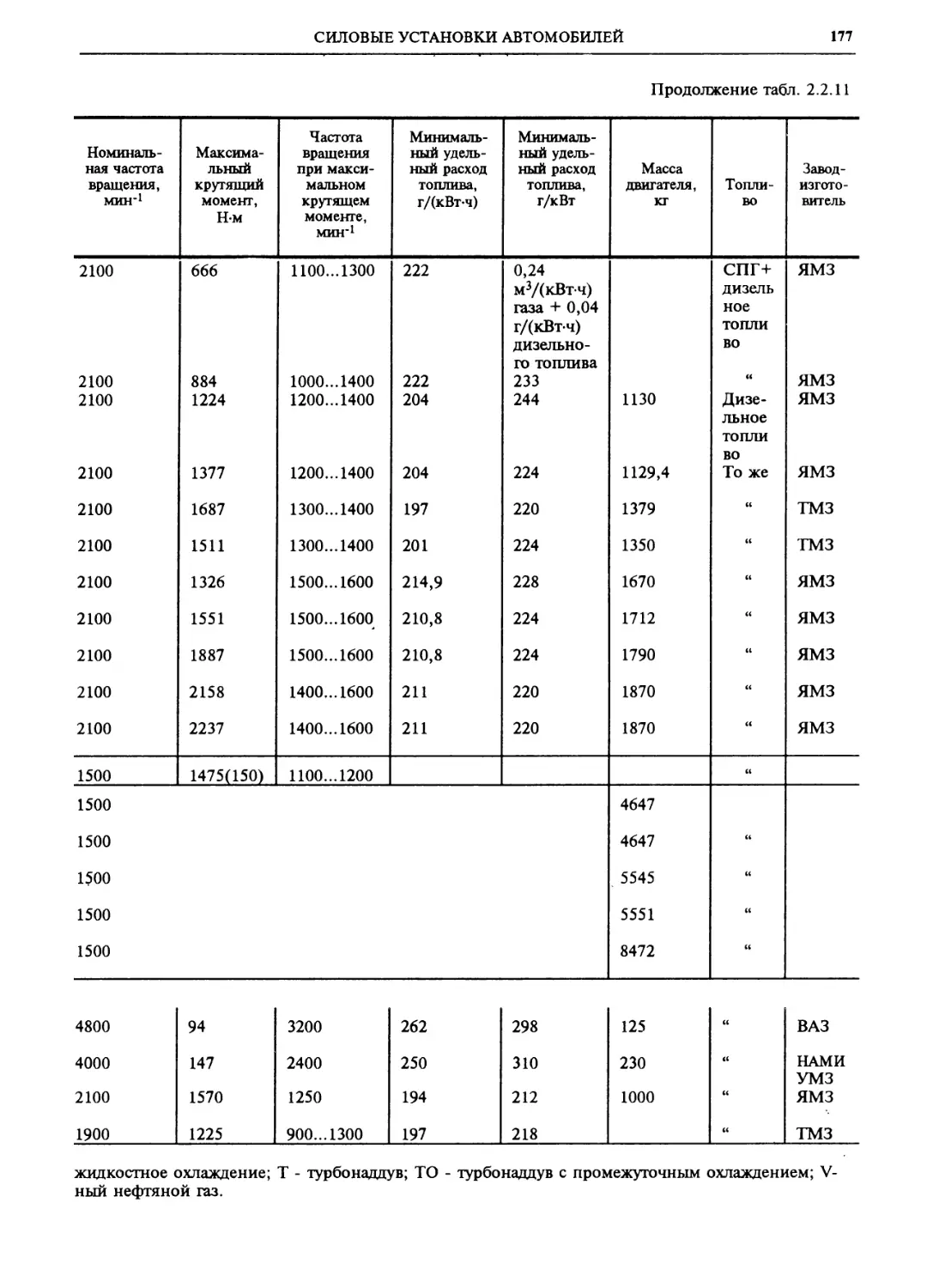
2.2.3. Силовые установки
(Г Т. Тер-Мкртичьян, М. А.
Григорьев, В: Г. Желтяков) 171
2.2.4. Оптимизация
параметров двигателя и
трансмиссии (Л. Е. Глинер) 193
Глава 2.3. НЕСУЩИЕ
СИСТЕМЫ И КУЗОВА ? 197
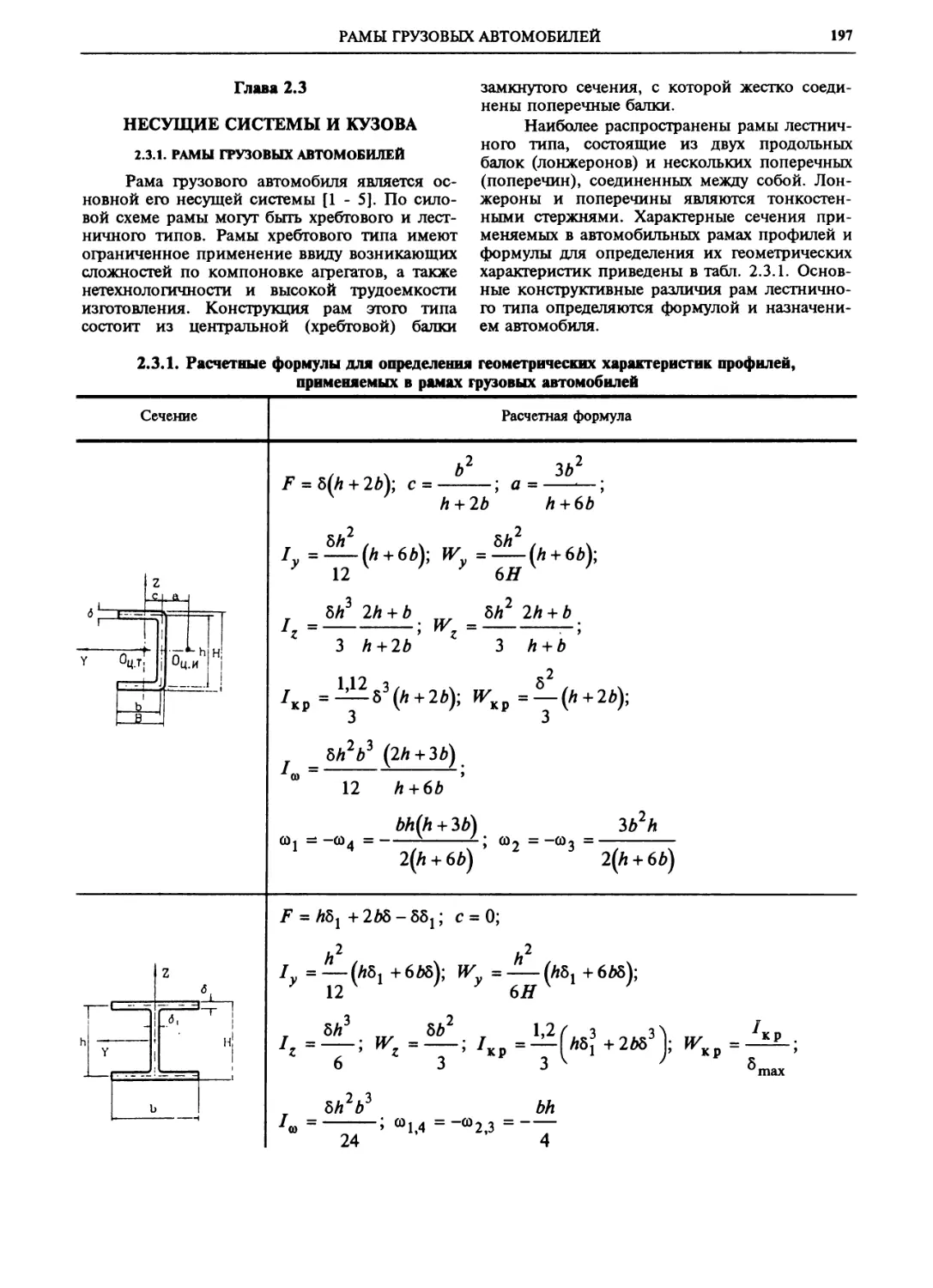
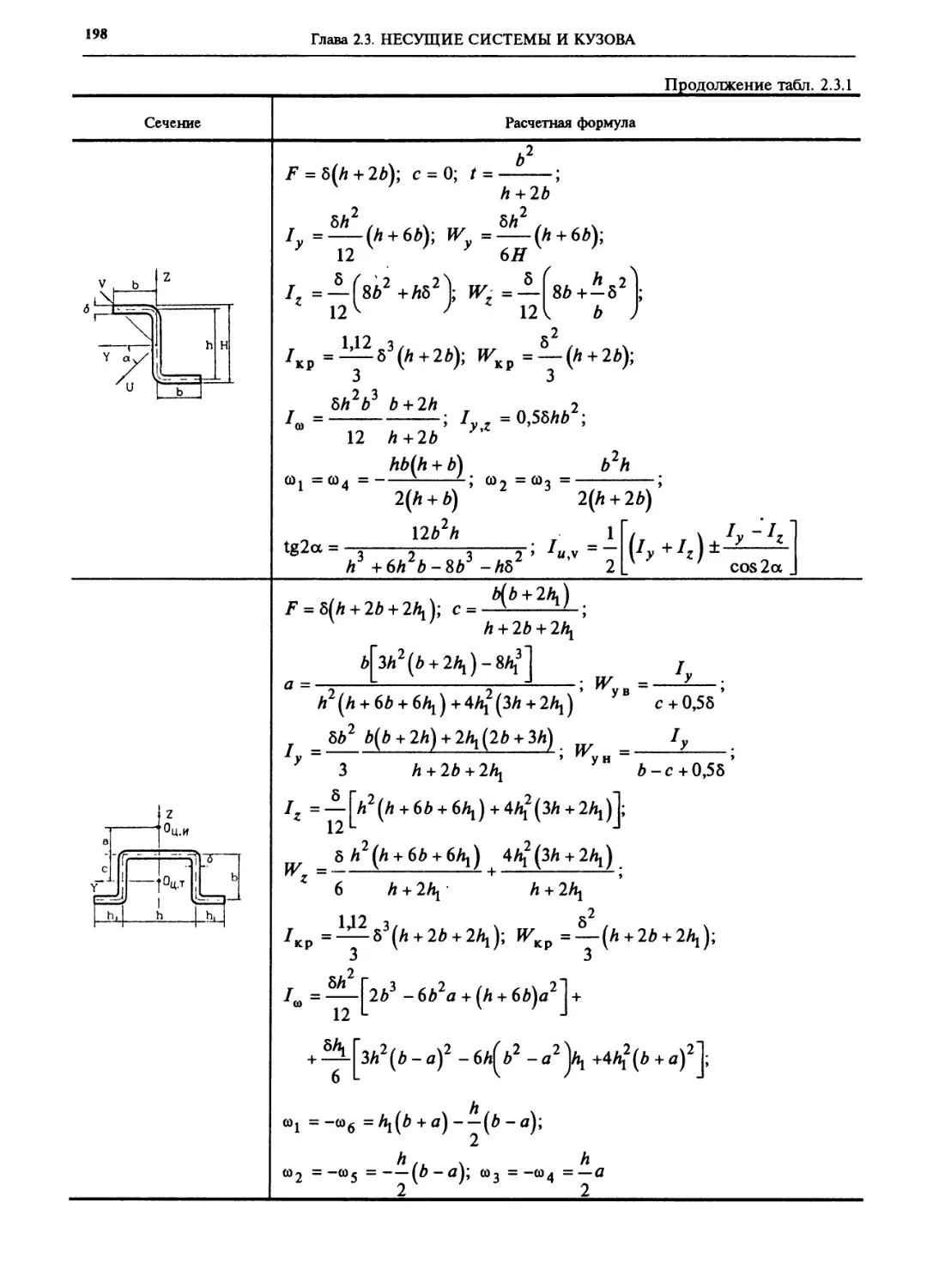
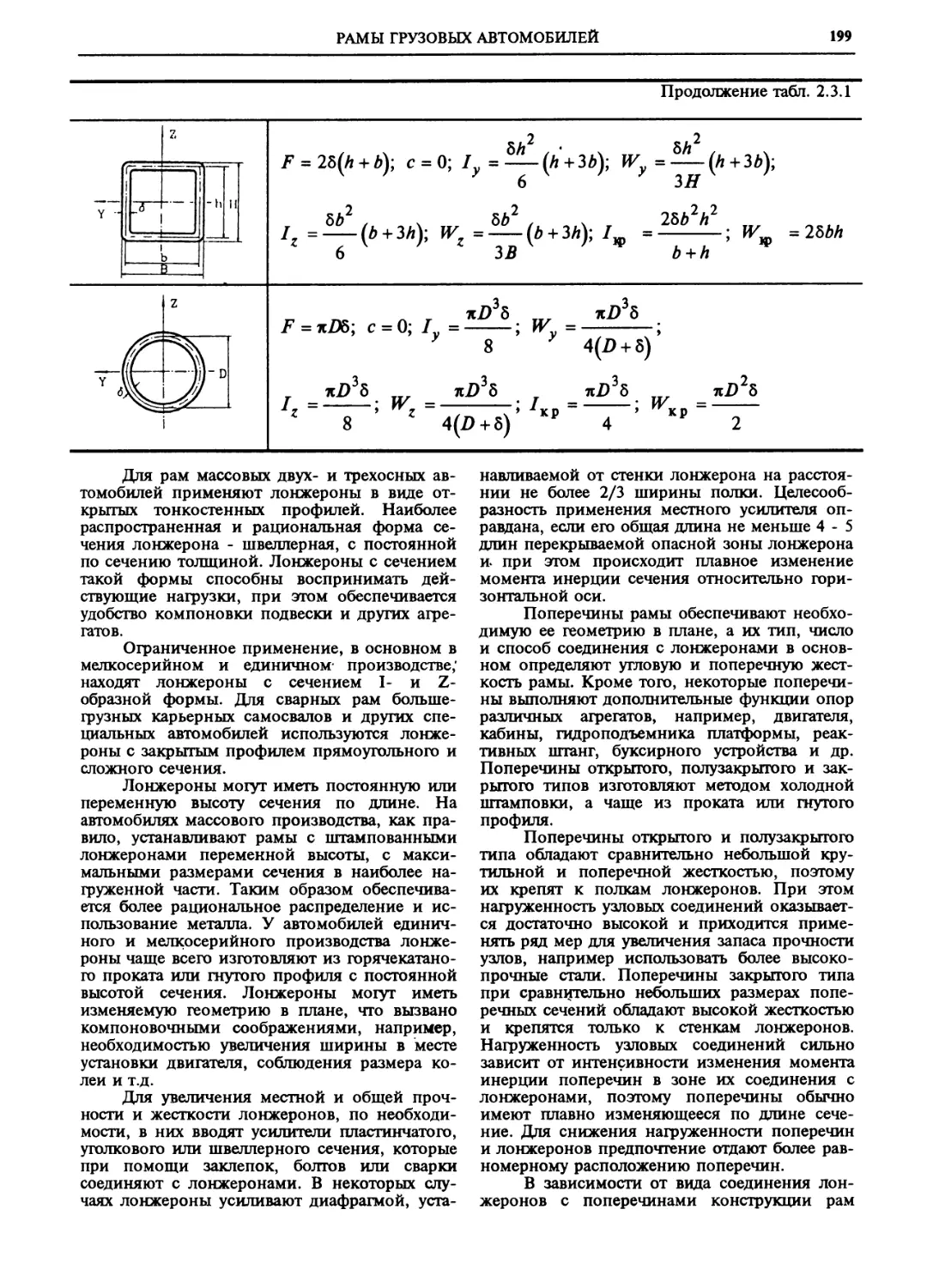
2.3.1. Рамы грузовых
автомобилей (А. Л. Эйдельман) 197
2.3.2. Кузова легковых
автомобилей (А. А. Крылов) ... 202
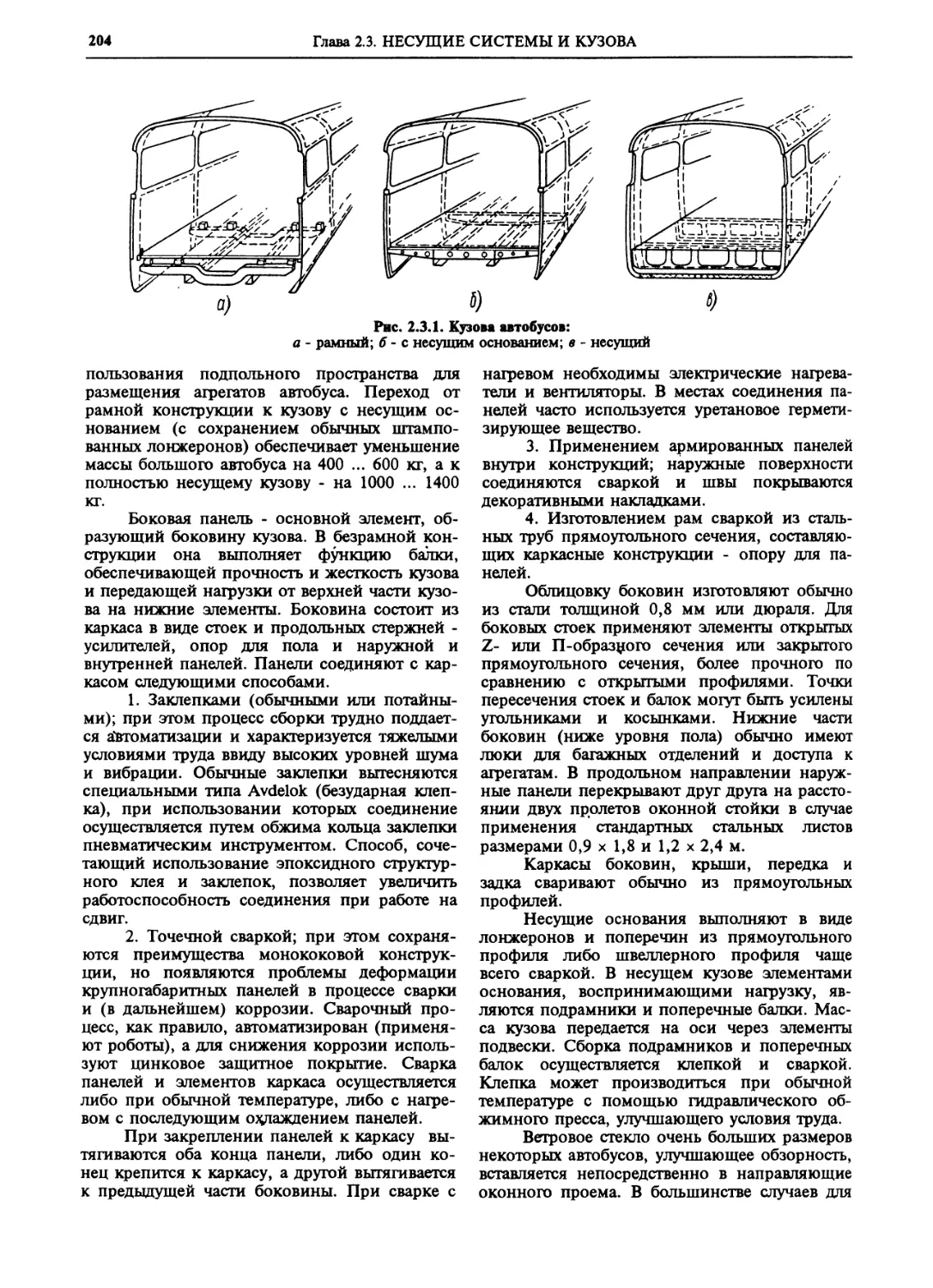
2.3.3. Кузова автобусов
(Я. И Воронцова) 203
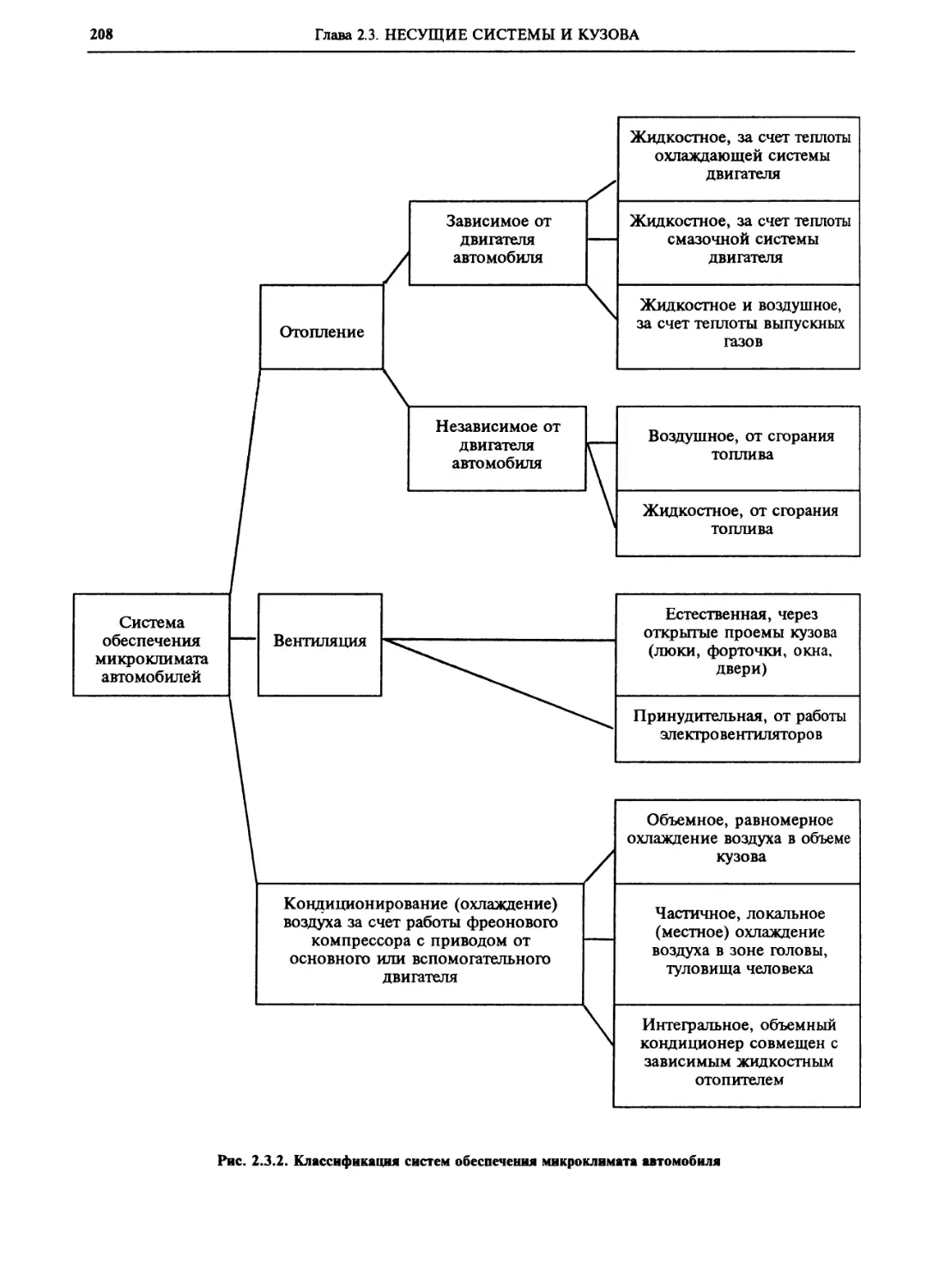
2.3.4. Системы обеспечения
микроклимата автомобиля
(Е. А. Малинин) 207
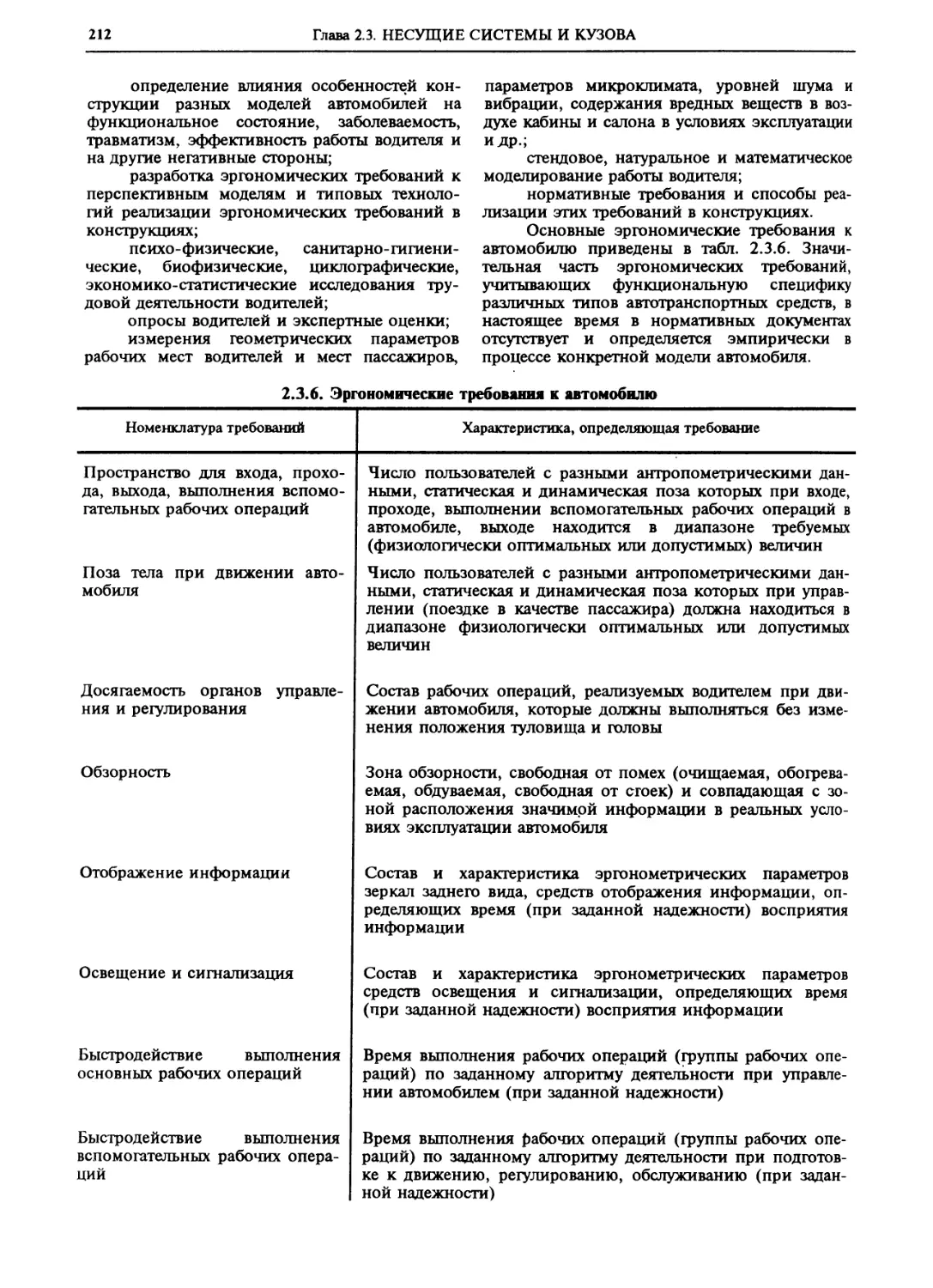
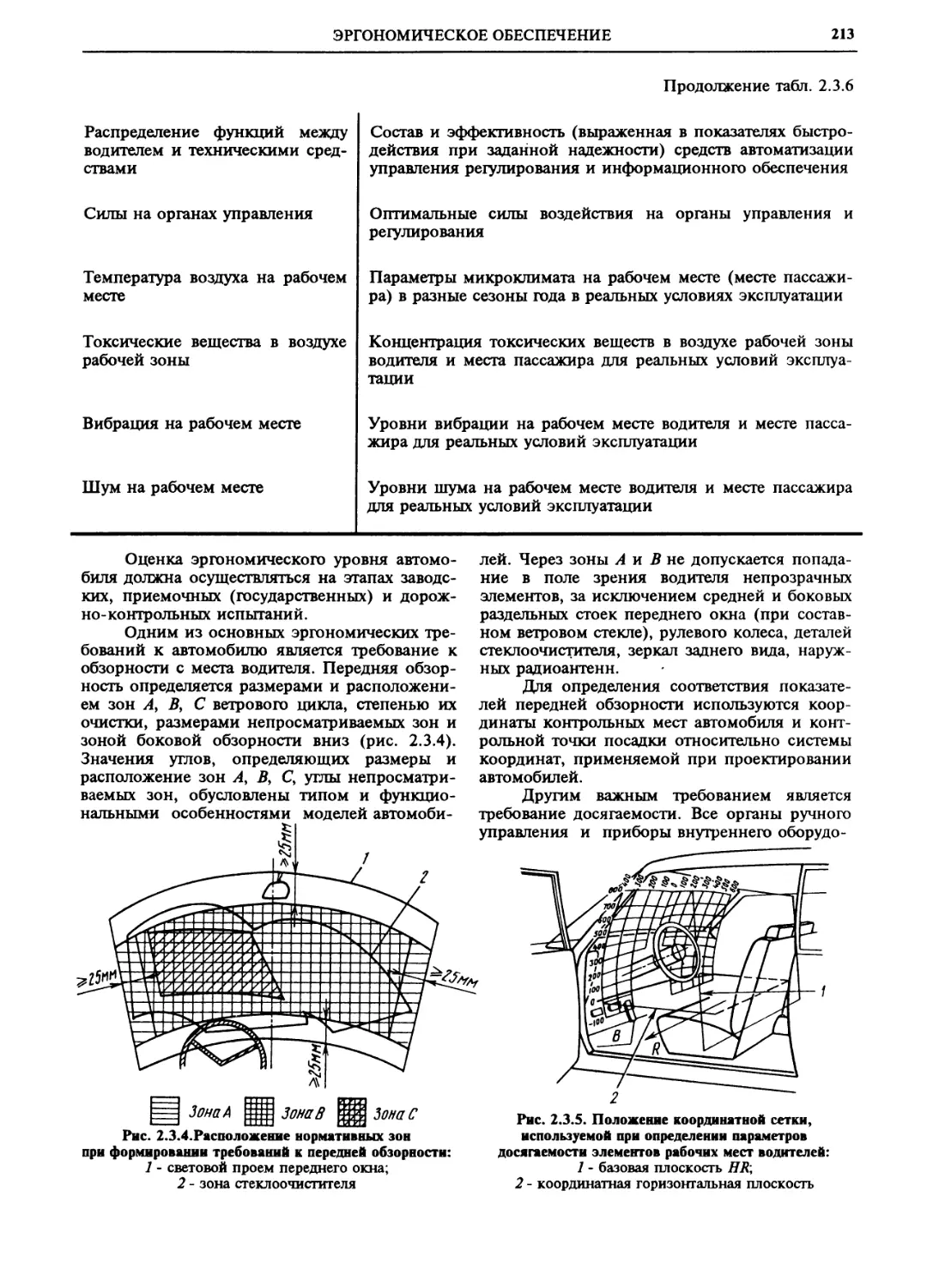
2.3.5. Эргономическое
обеспечение создания
автомобиля (Г А. Голов) 211
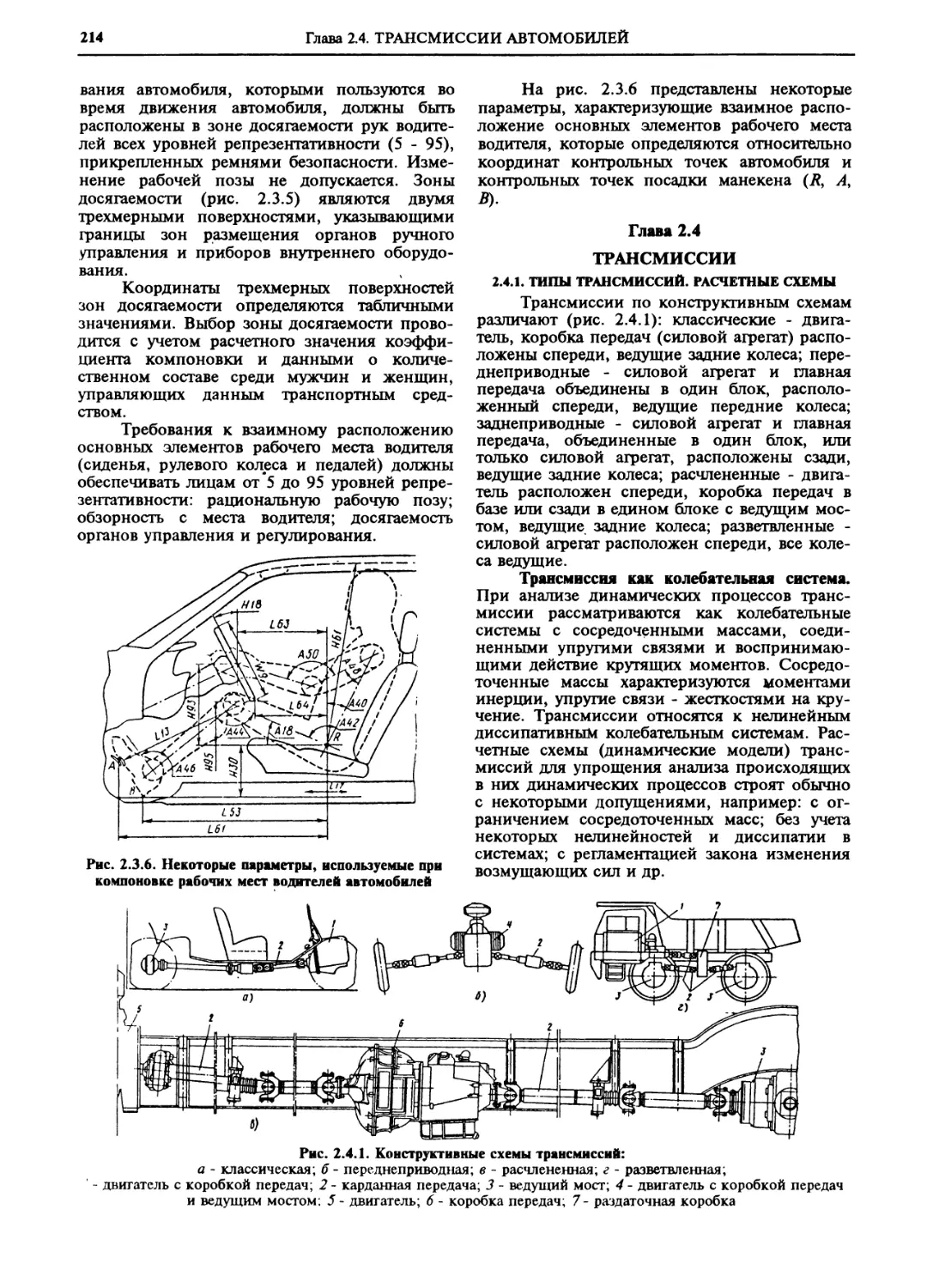
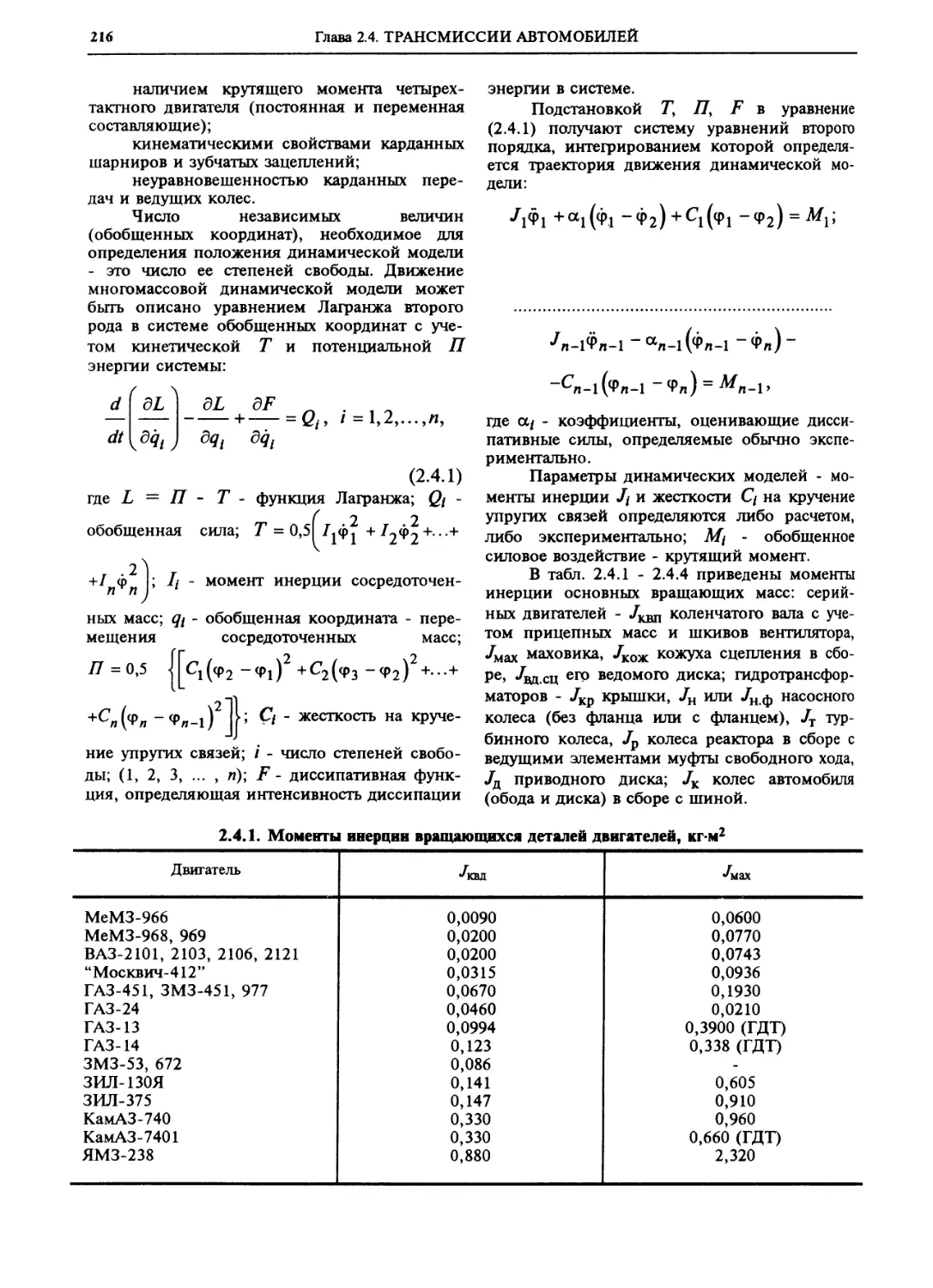
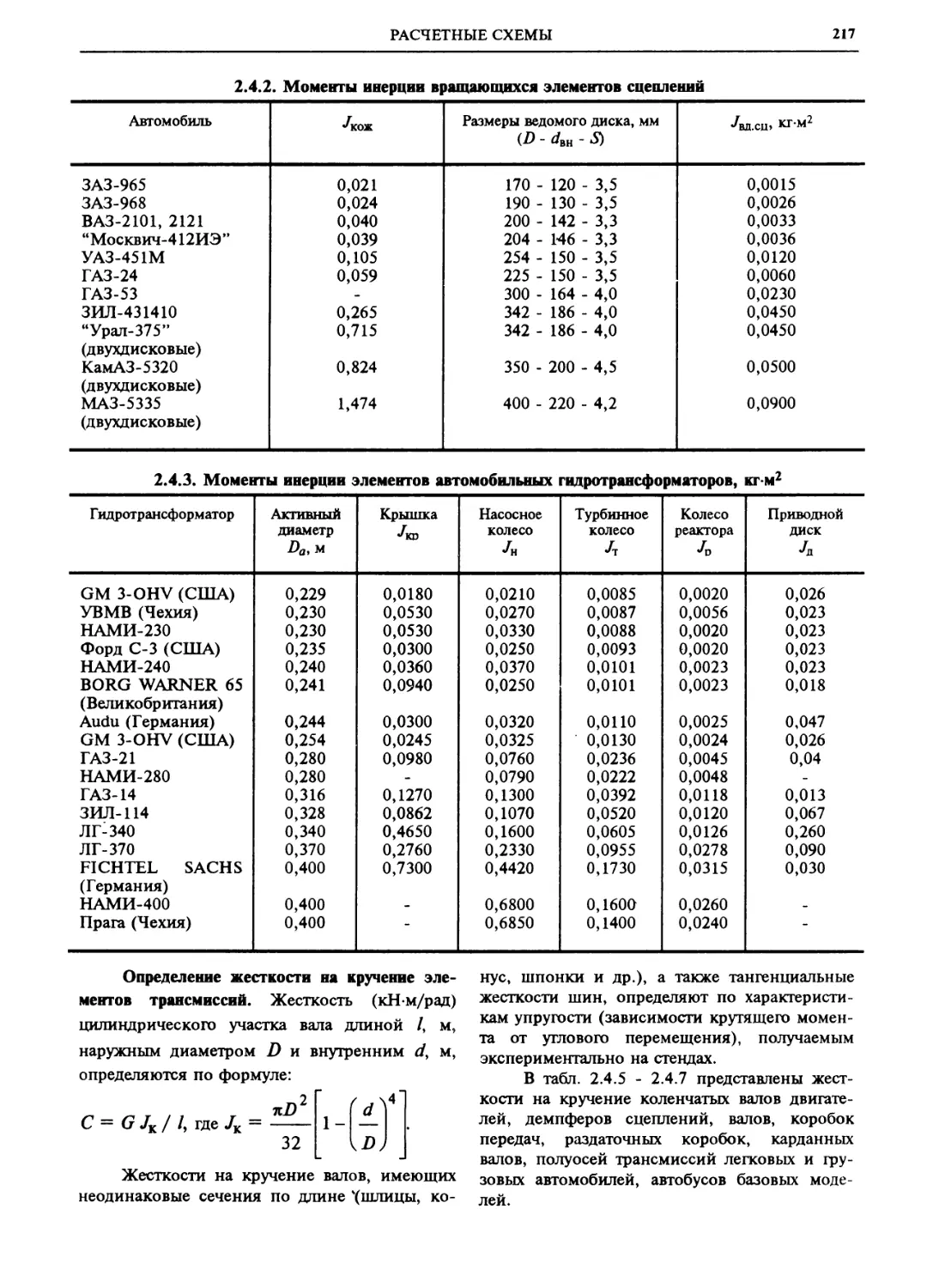
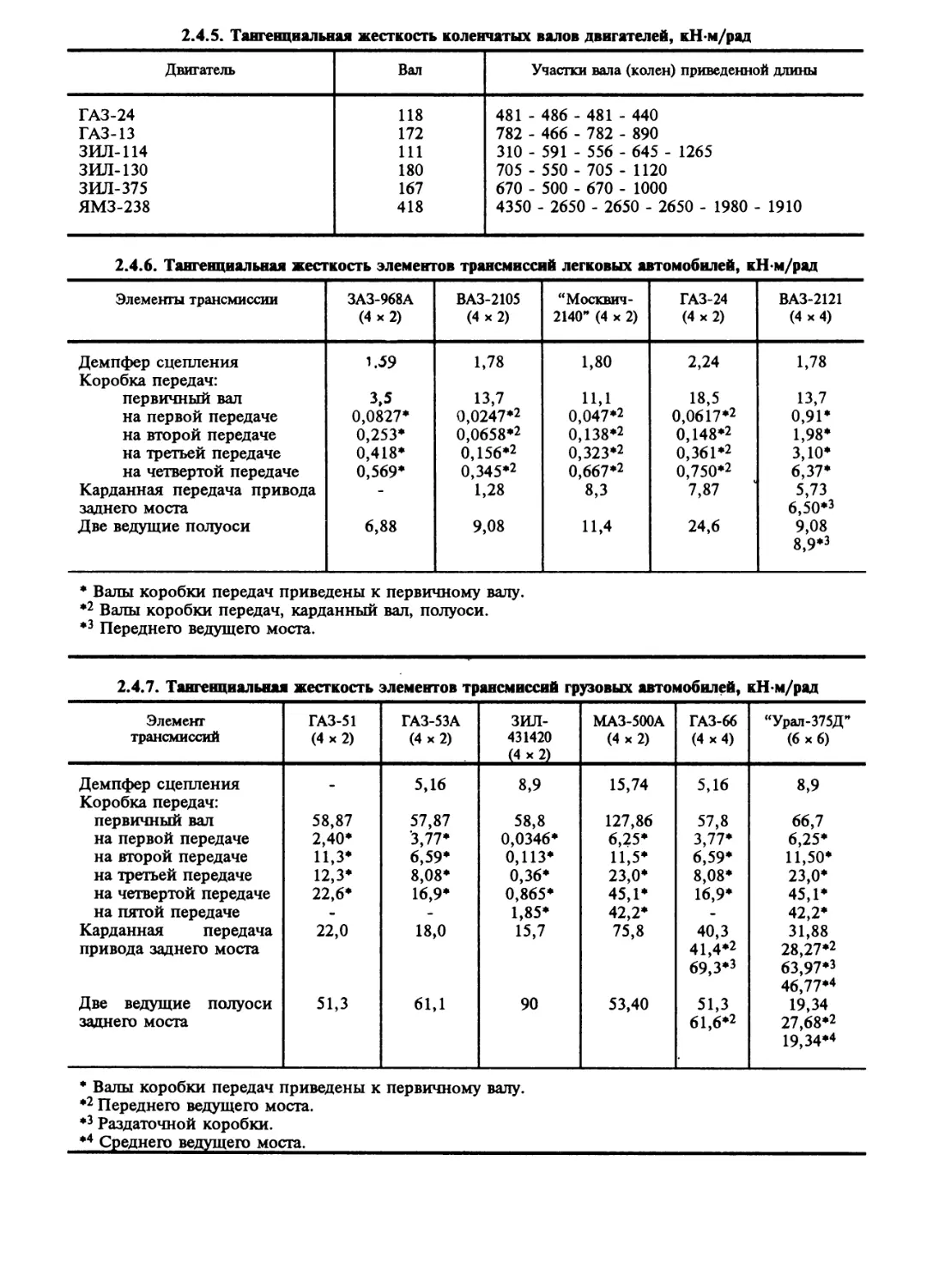
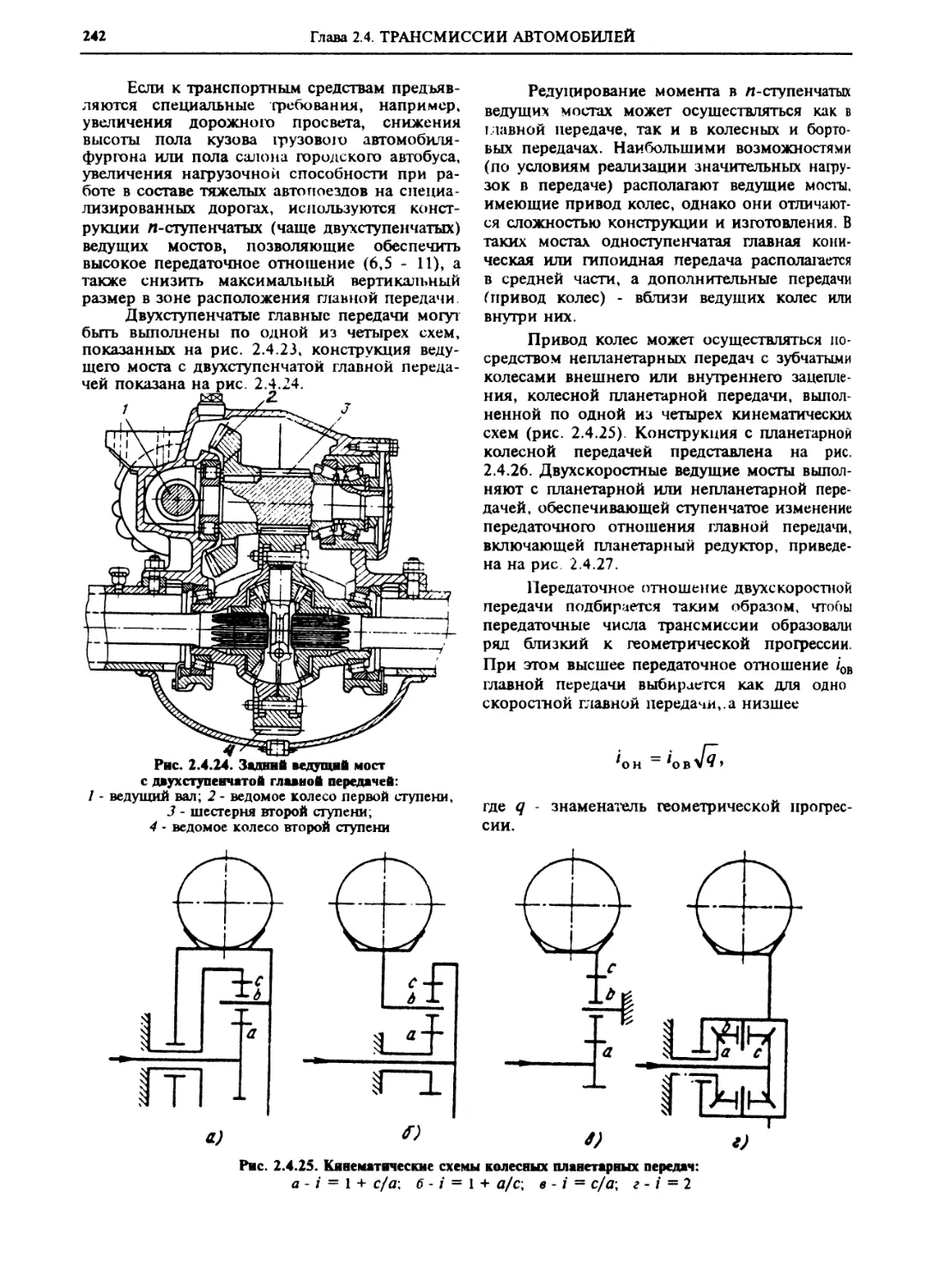
Глава 2.4. ТРАНСМИССИИ 214
2.4.1. Типы трансмиссий.
Расчетные схемы (С. Н.
Иванов) 214
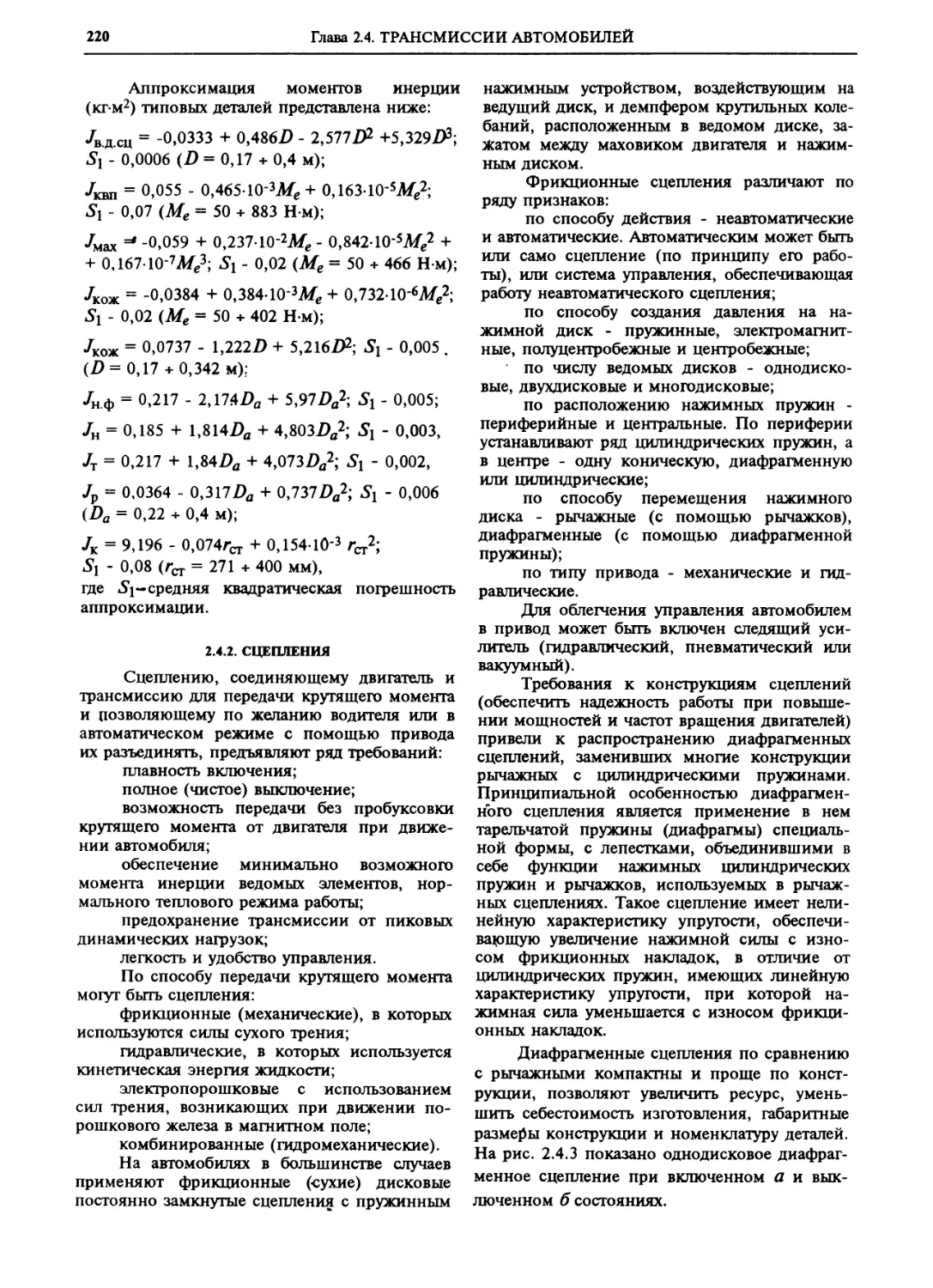
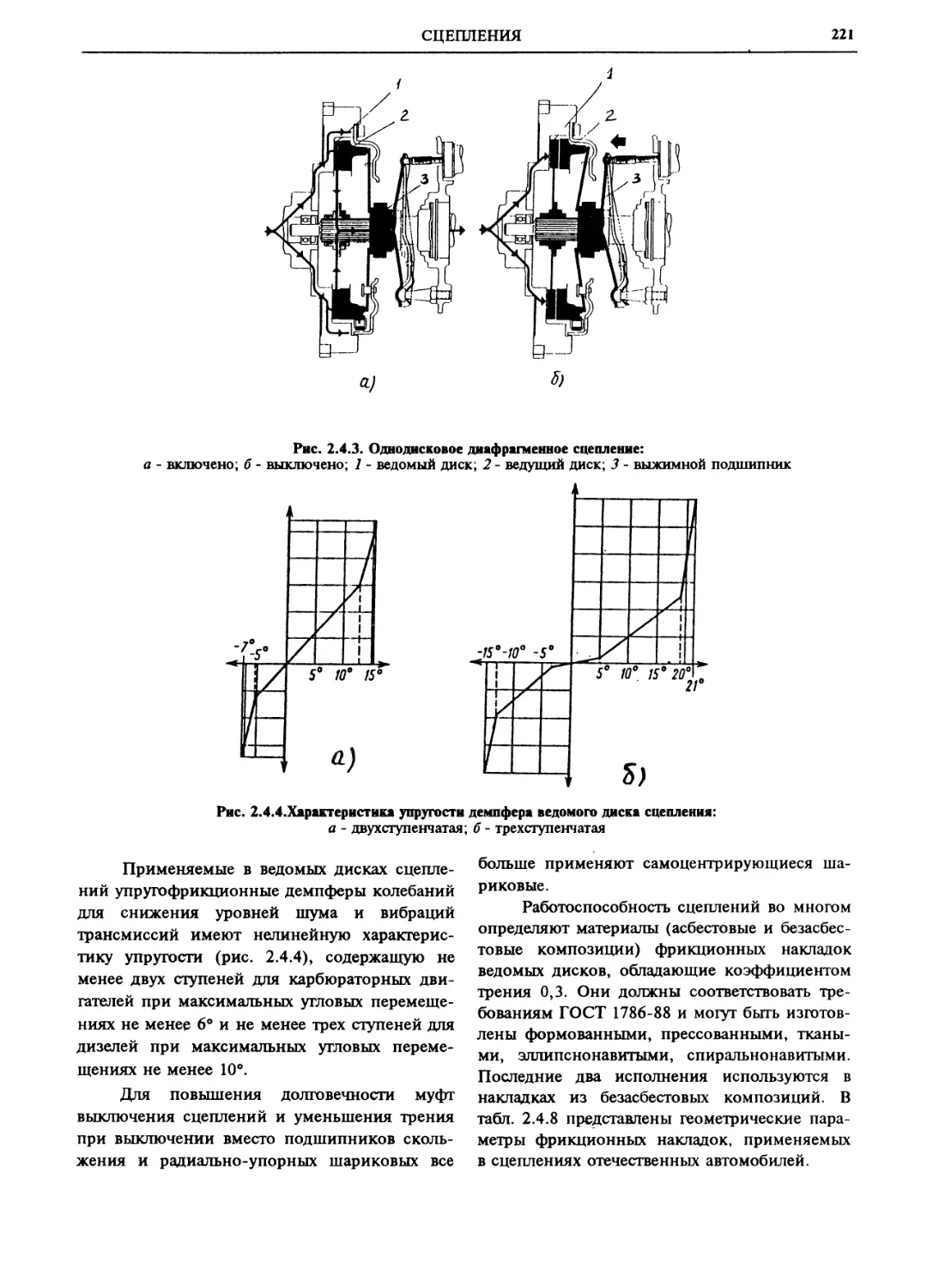
2.4.2. Сцепления (С. Н.
Иванов) 220
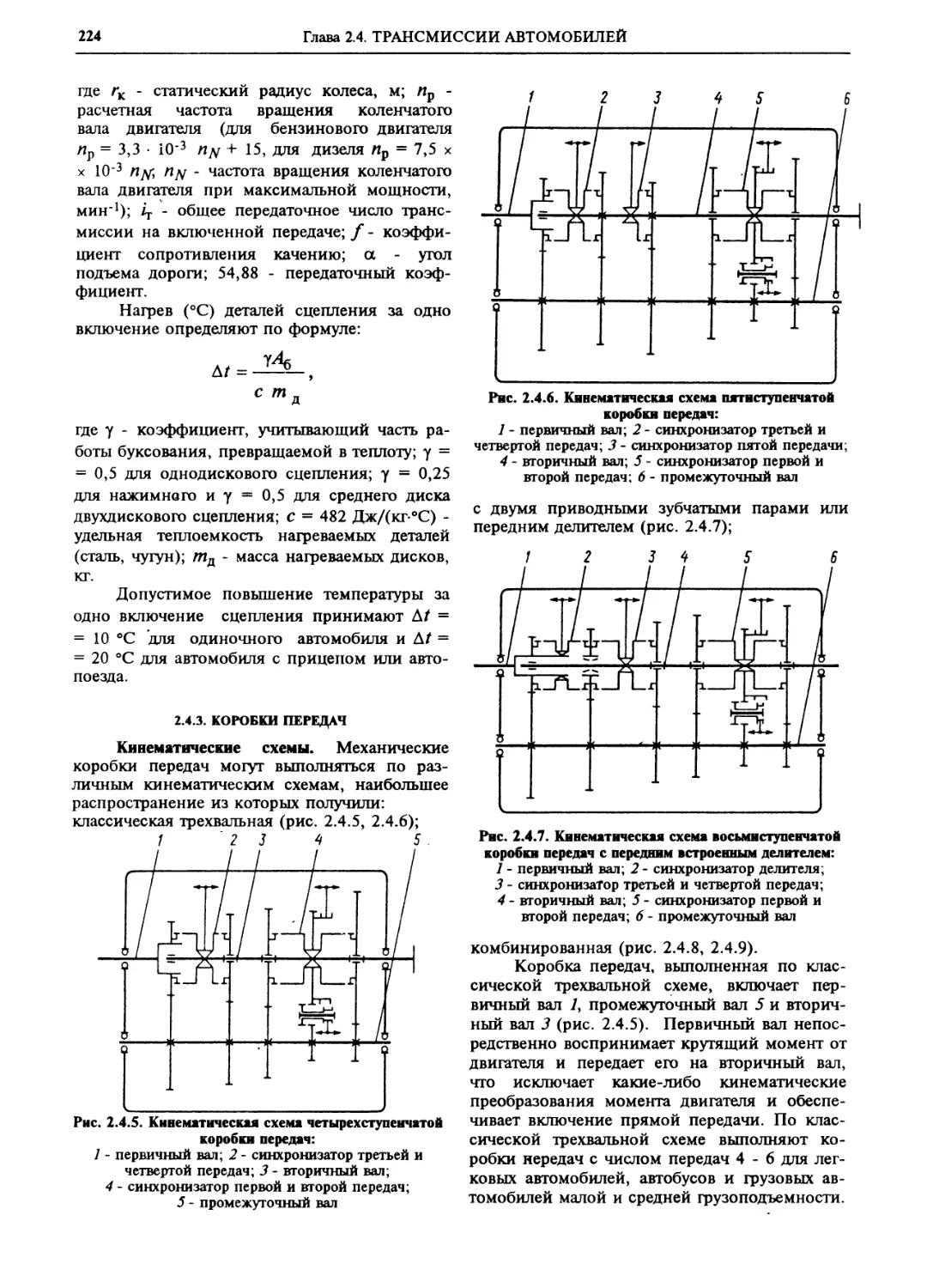
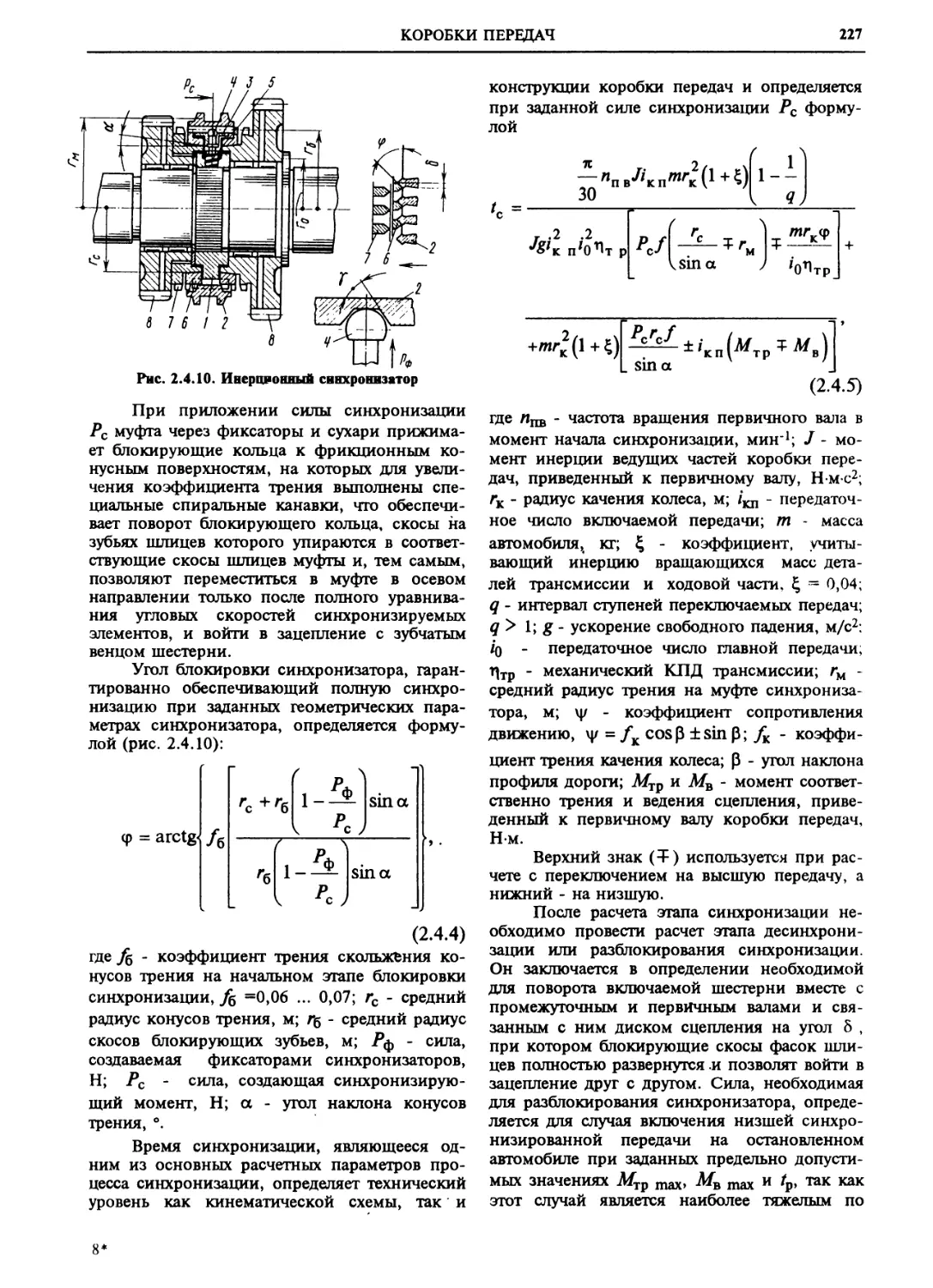
2.4.3. Коробки передач
(А. П. Недялков) 224
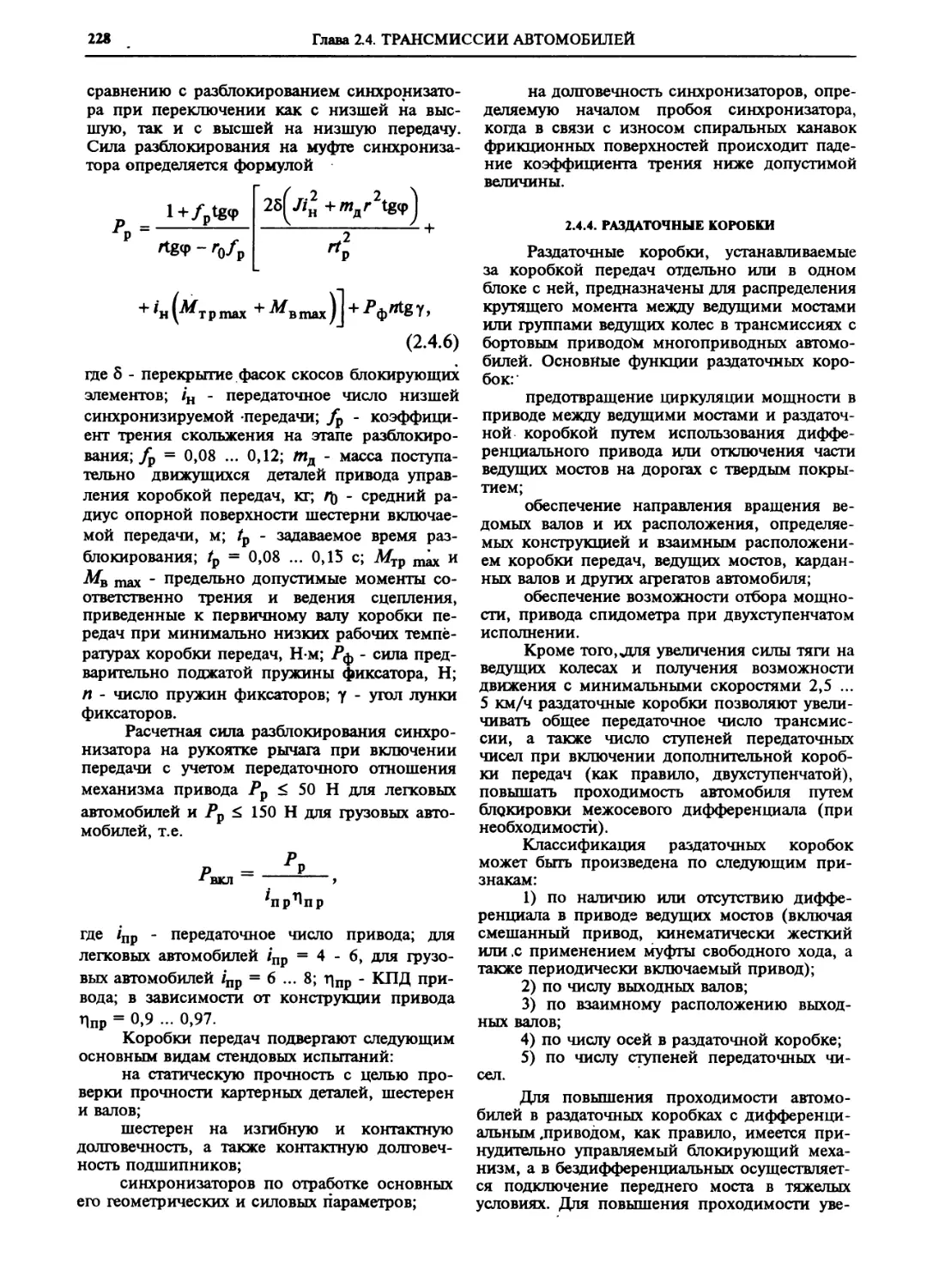
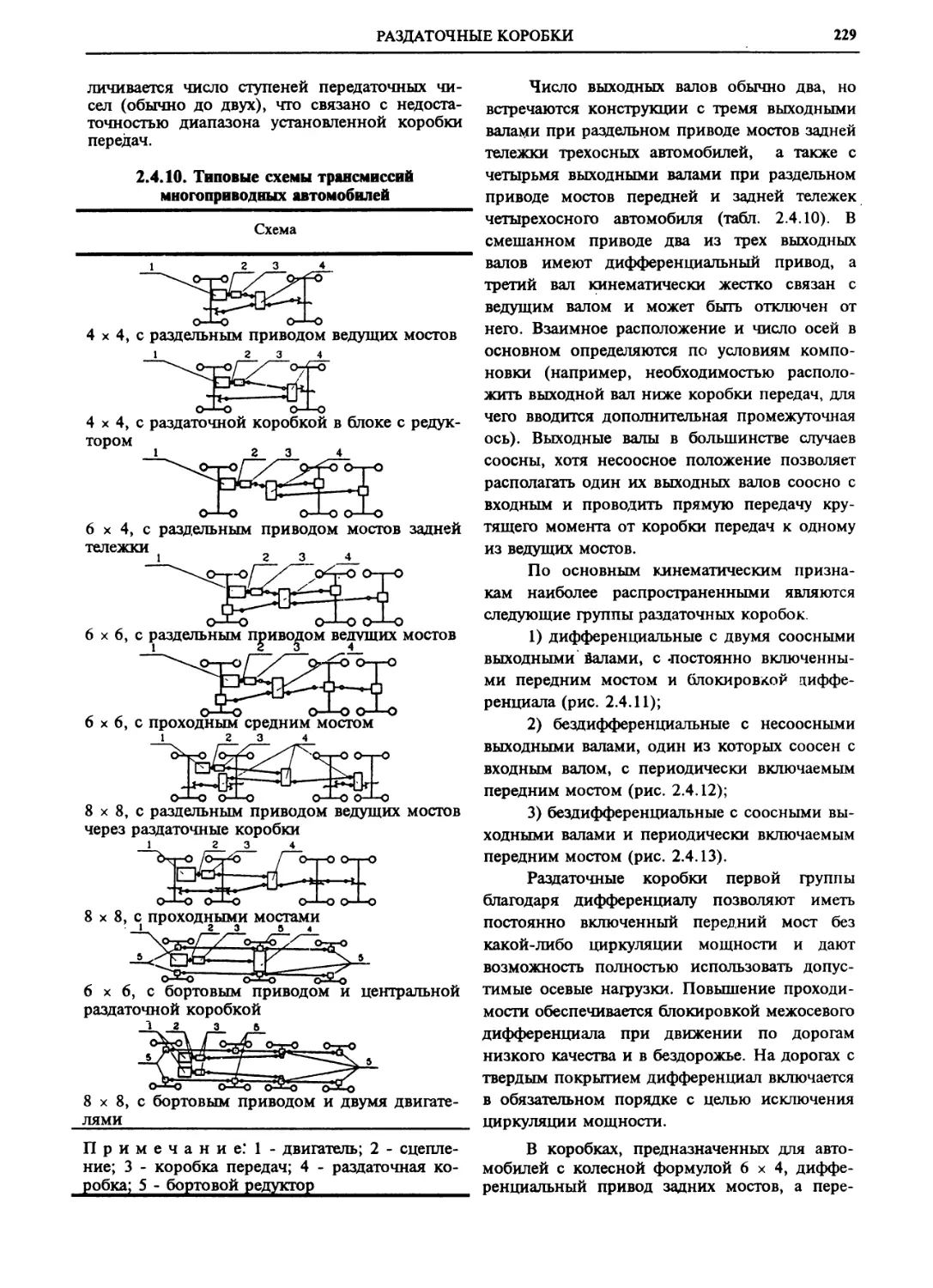
2.4.4. Раздаточные коробки
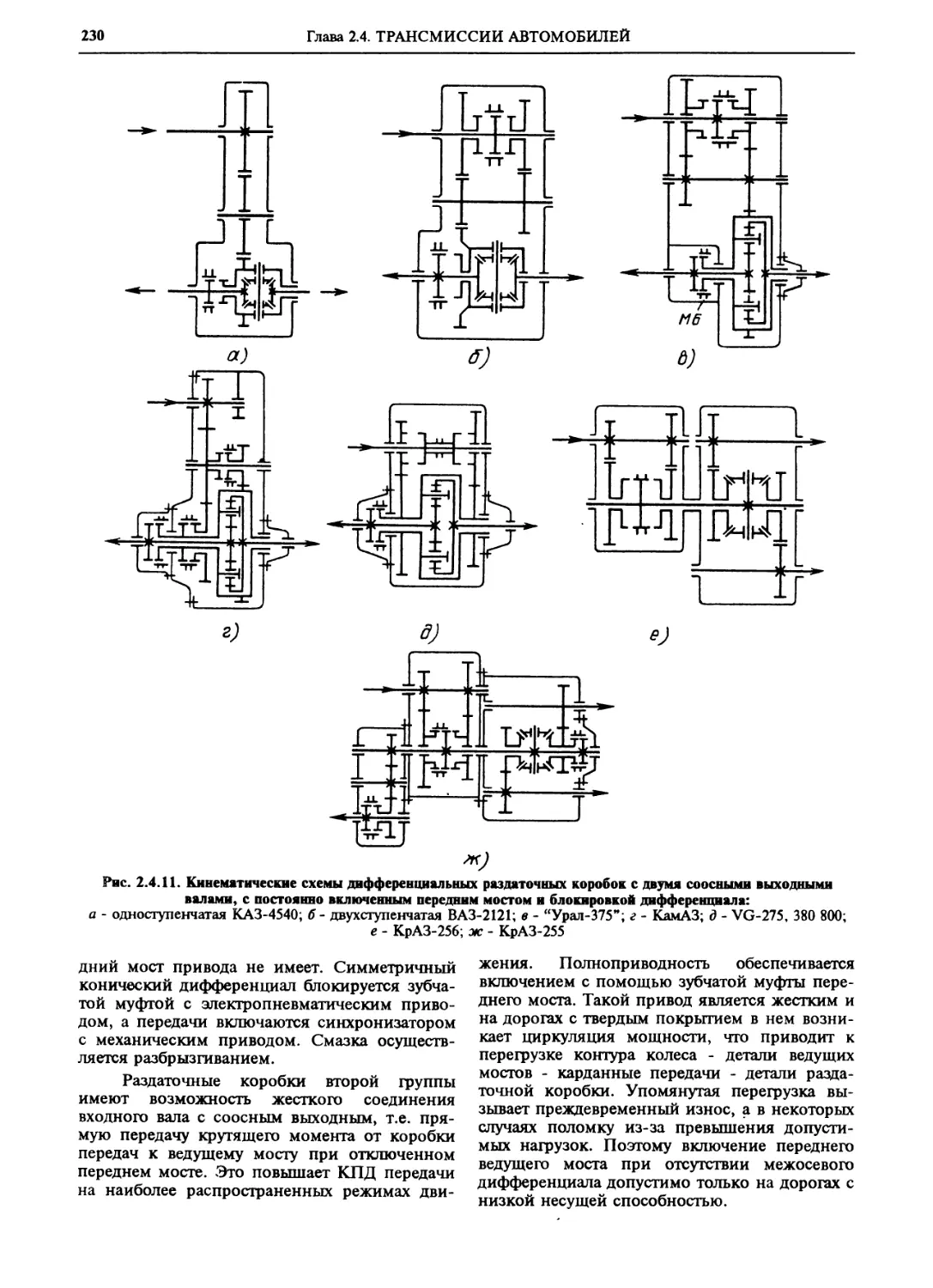
(К А. Фрумкин) 228
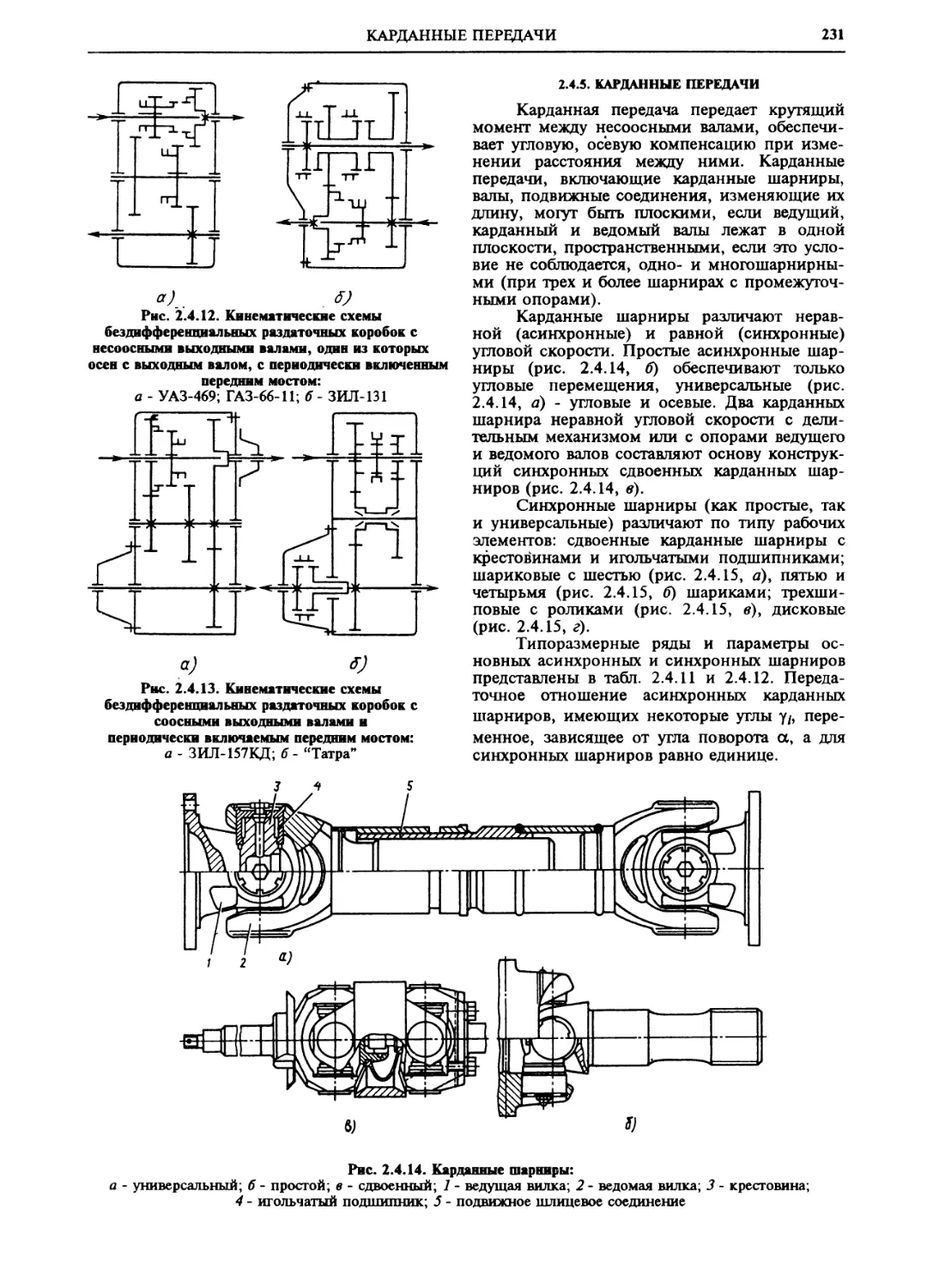
2.4.5. Карданные передачи
(С. Я. Иванов) 231
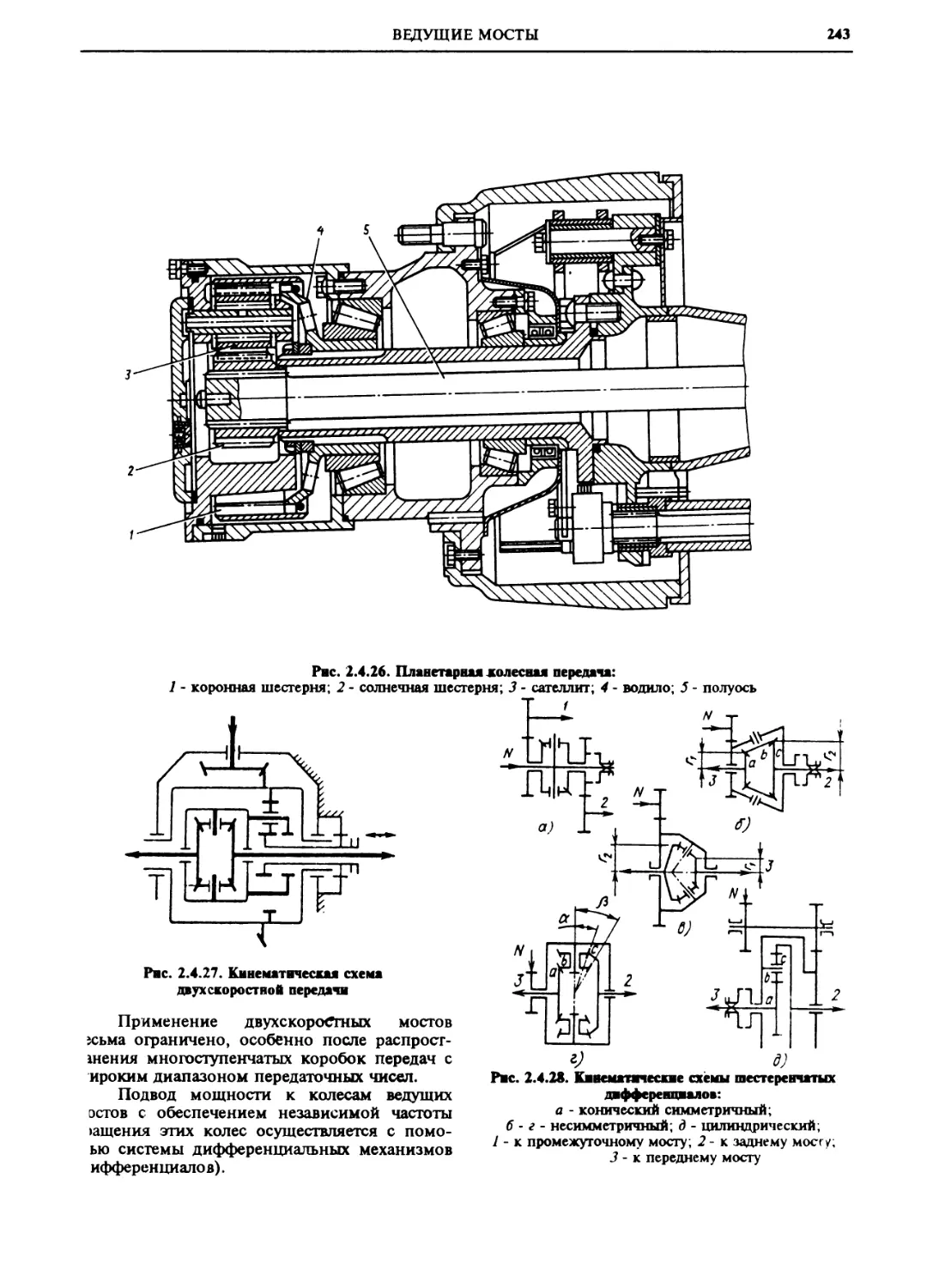
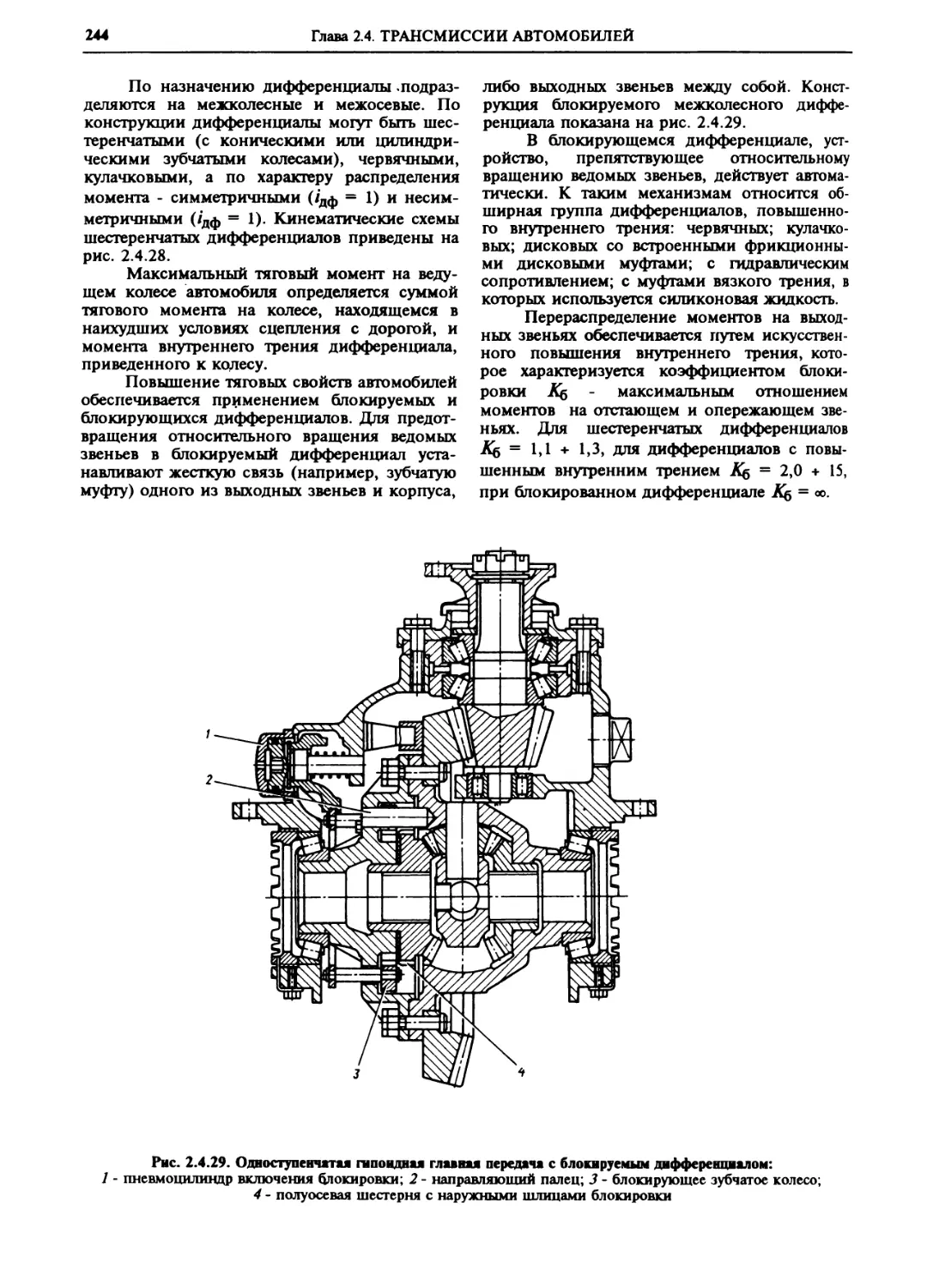
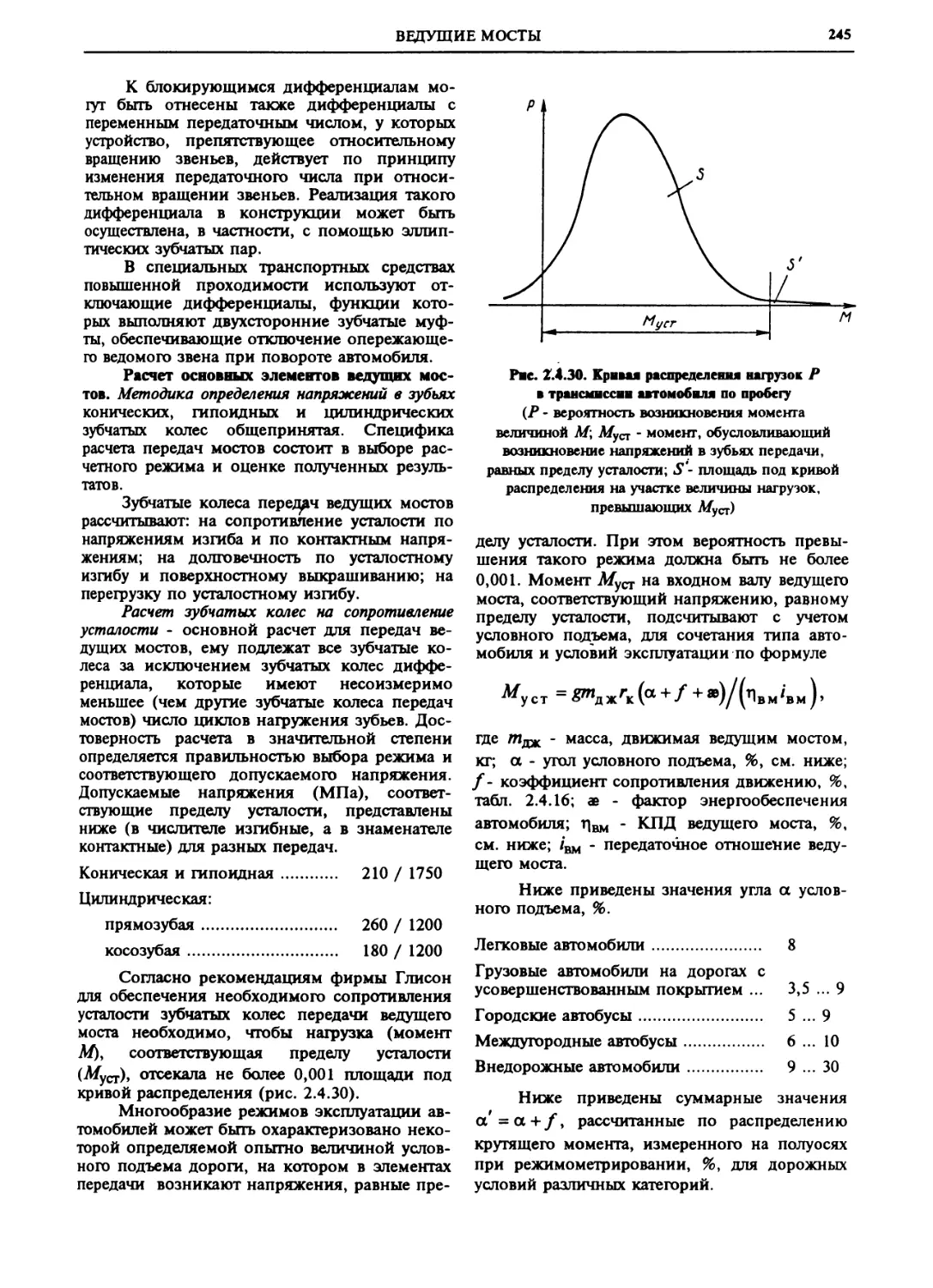
2.4.6. Ведущие мосты (А. А.
Трикоз, Е. Б. Александров) 230
2.4.7. Электромотор-колеса
(А. И. Яковлев) 248
2.4.8. Автоматизация
управления ступенчатыми
механическими трансмиссиями (Д. Г. Поляк) 251
2.4.9. Автоматические
трансмиссии (Ю. К. Есенов-
ский-Лашков) 254
Глава 2.5. ХОДОВАЯ ЧАСТЬ 257
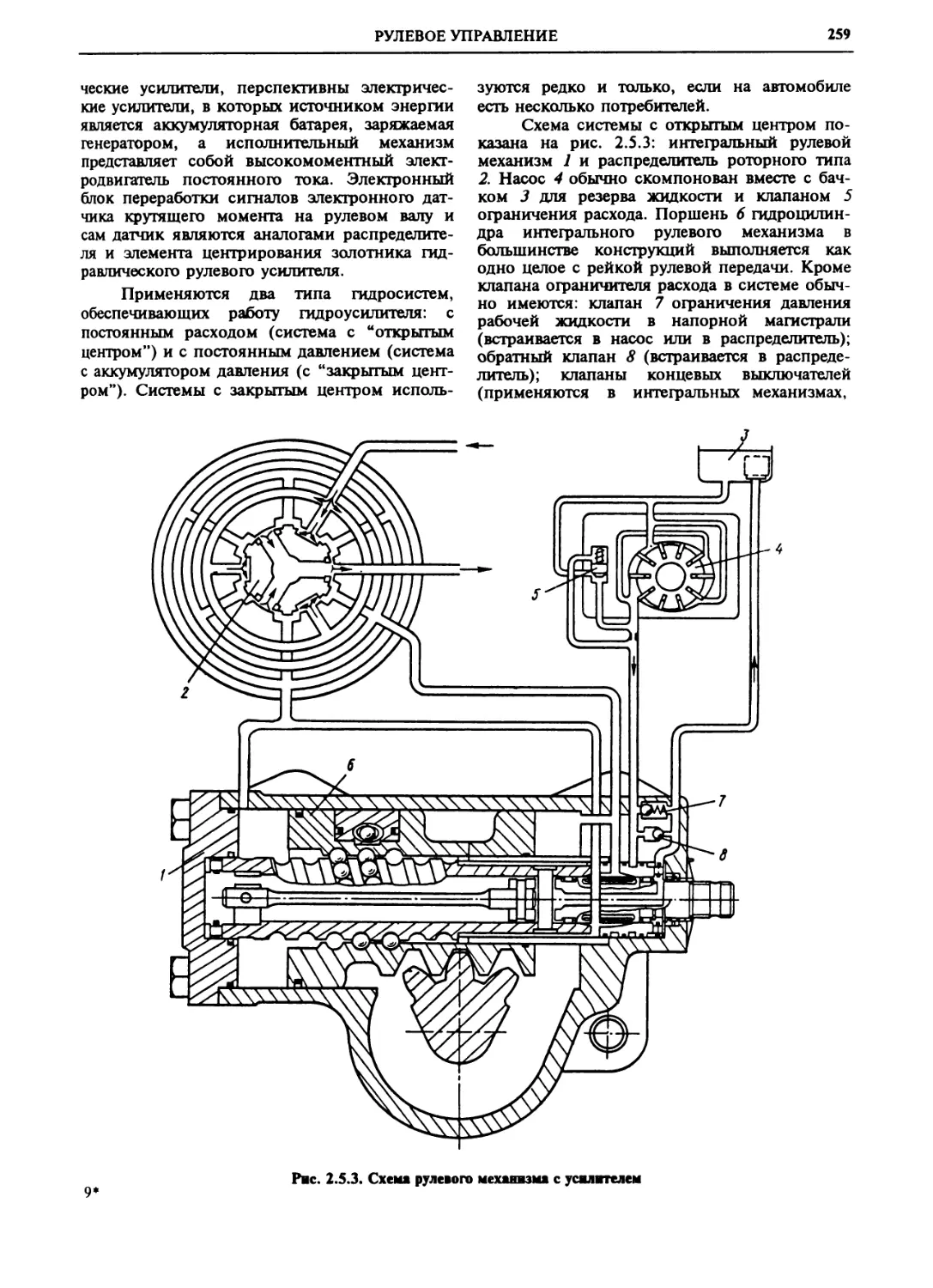
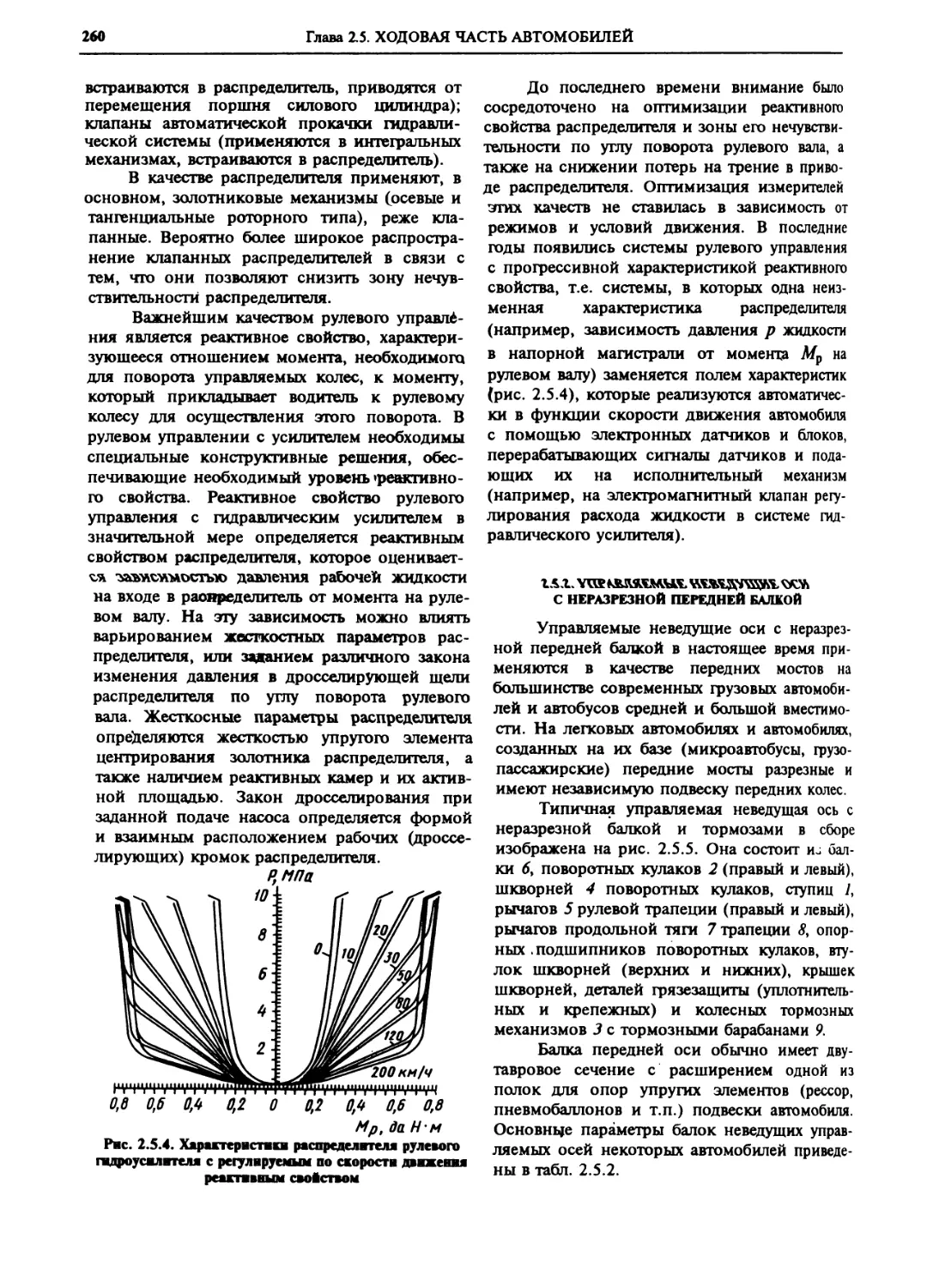
2.5.1. Рулевое управление
(Л. Л. Гинцбург, А/. М. Бах-
мутский) 257
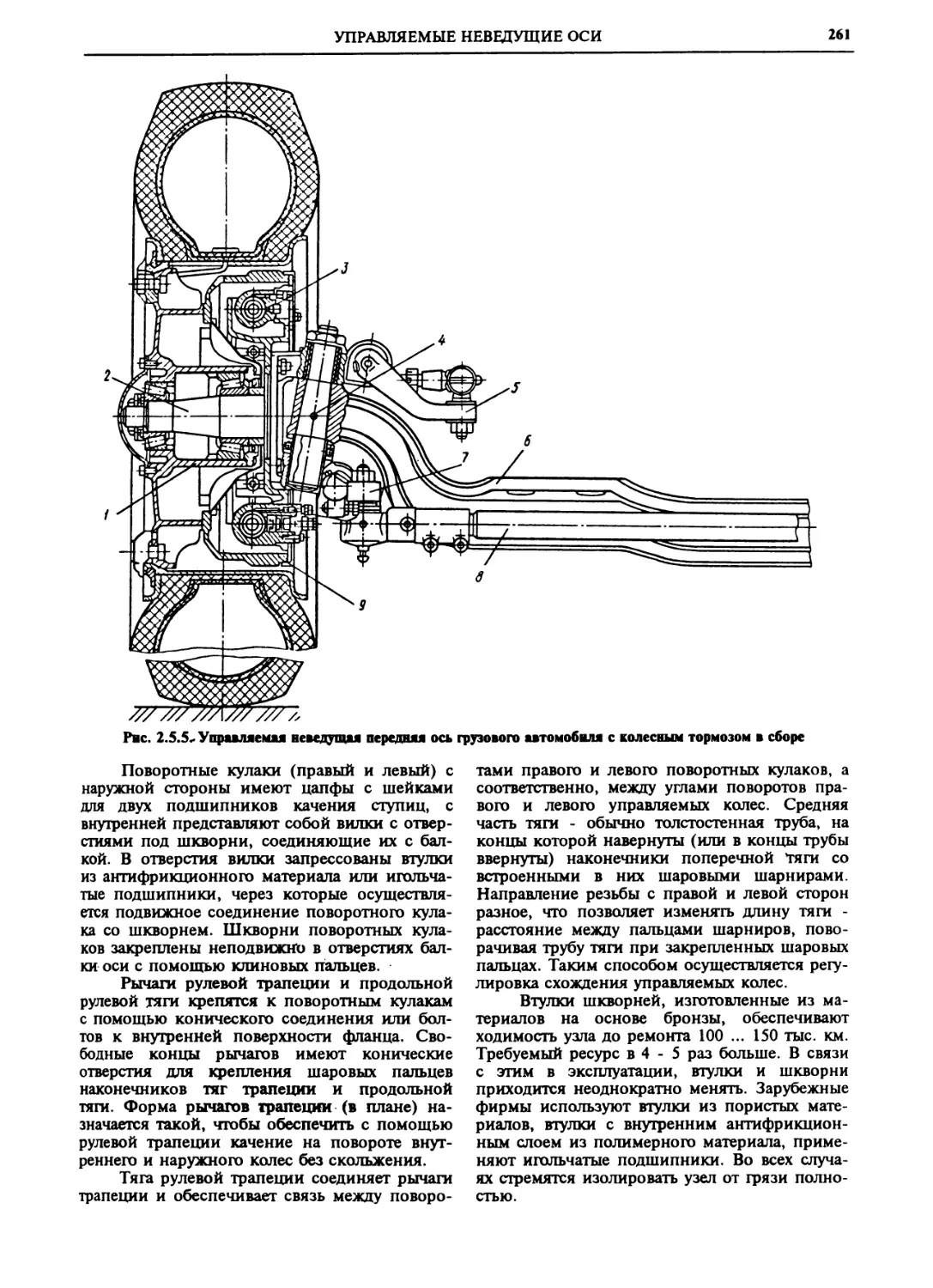
2.5.2. Управляемые
неведущие у оси с неразрезной
передней балкой (М. А/.
Бахмутский) 260
2.5.3. Тормозные системы
(Н. К Дьячков, Я. Н. Нефе-
дьев) 263
2.5.4. Подвеска (О. Д. Зла-
товратскии) 269
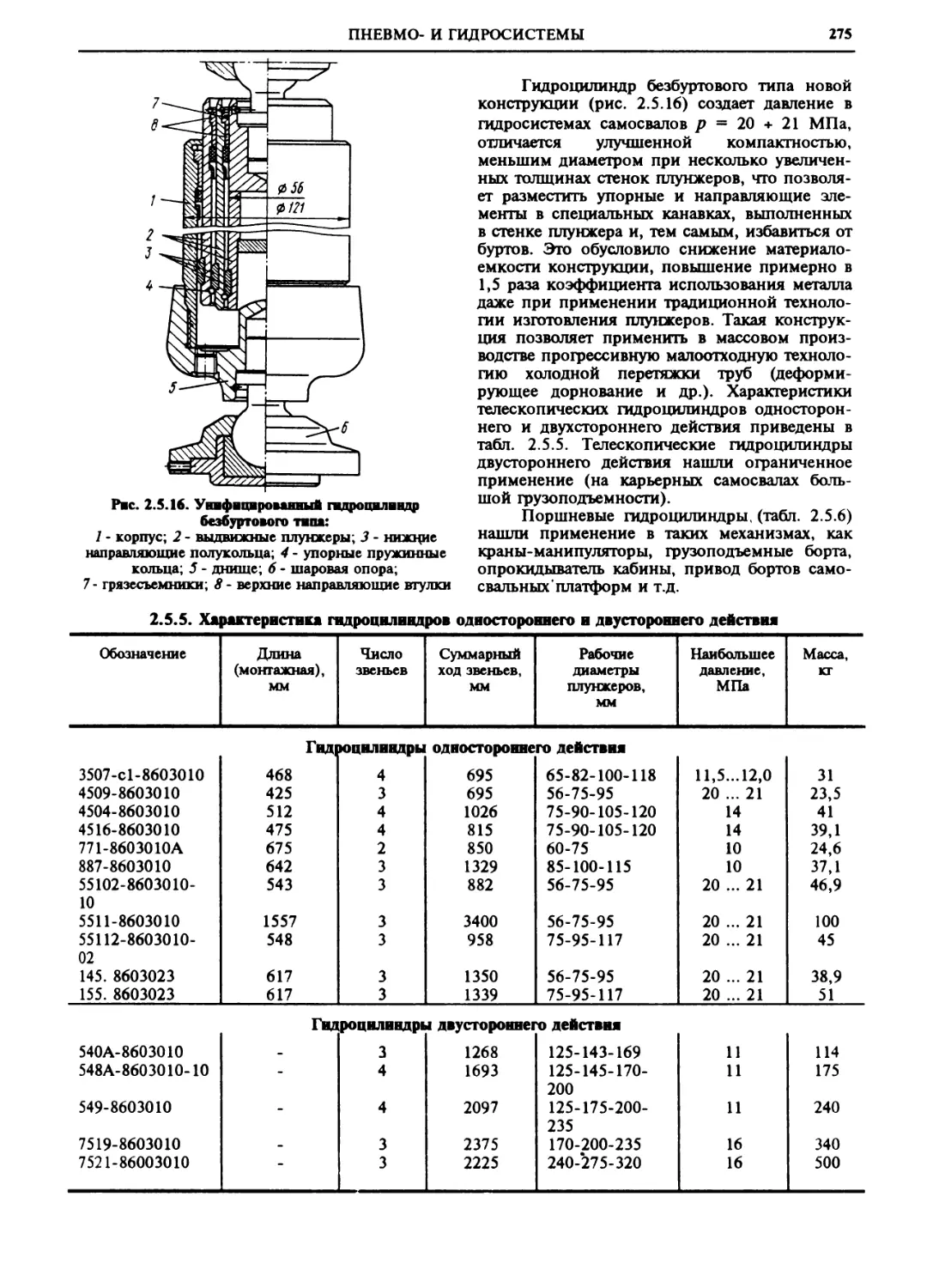
2.5.5. Пневмо- и
гидросистемы (Л. С. Шпак) 271
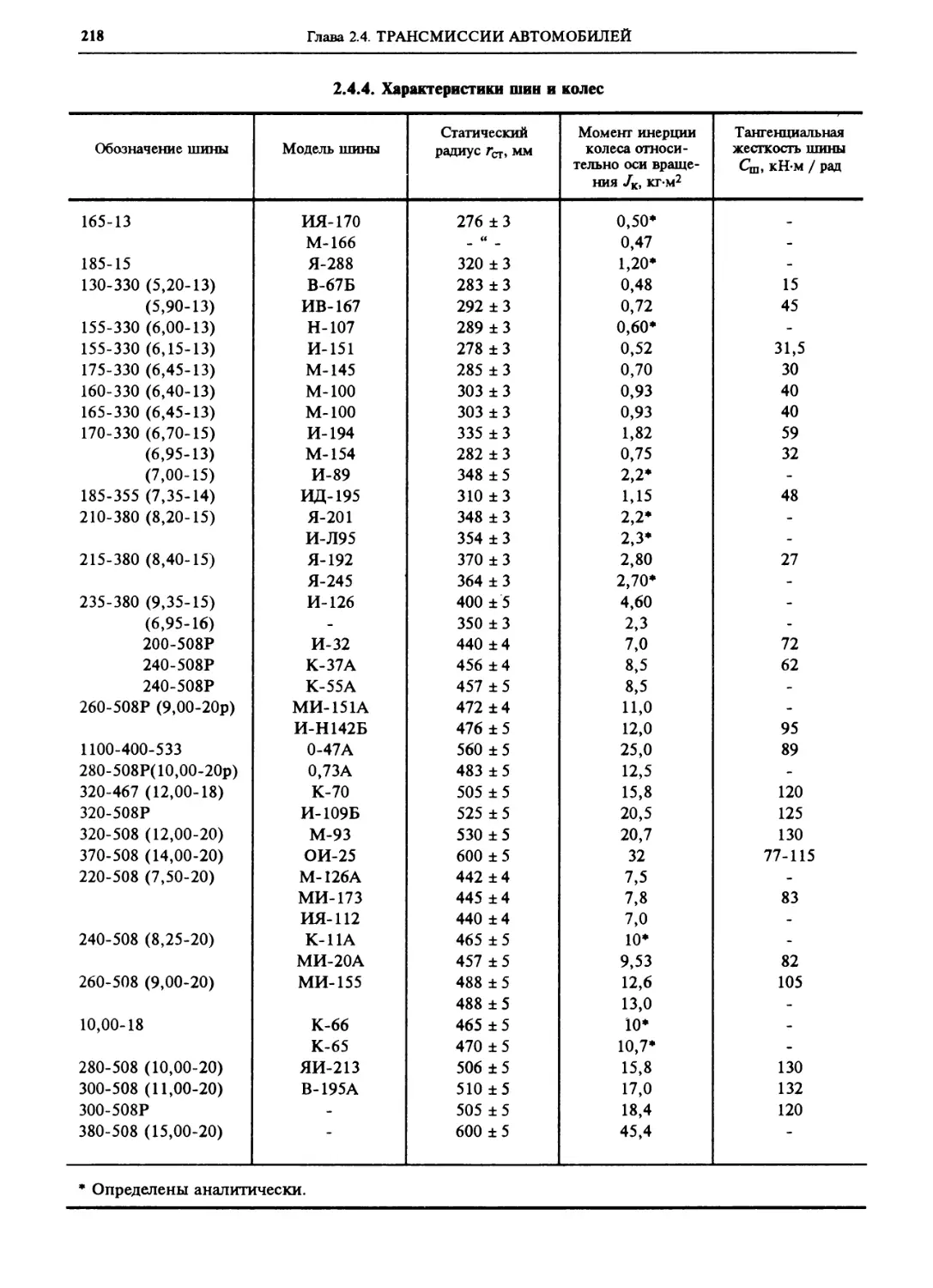
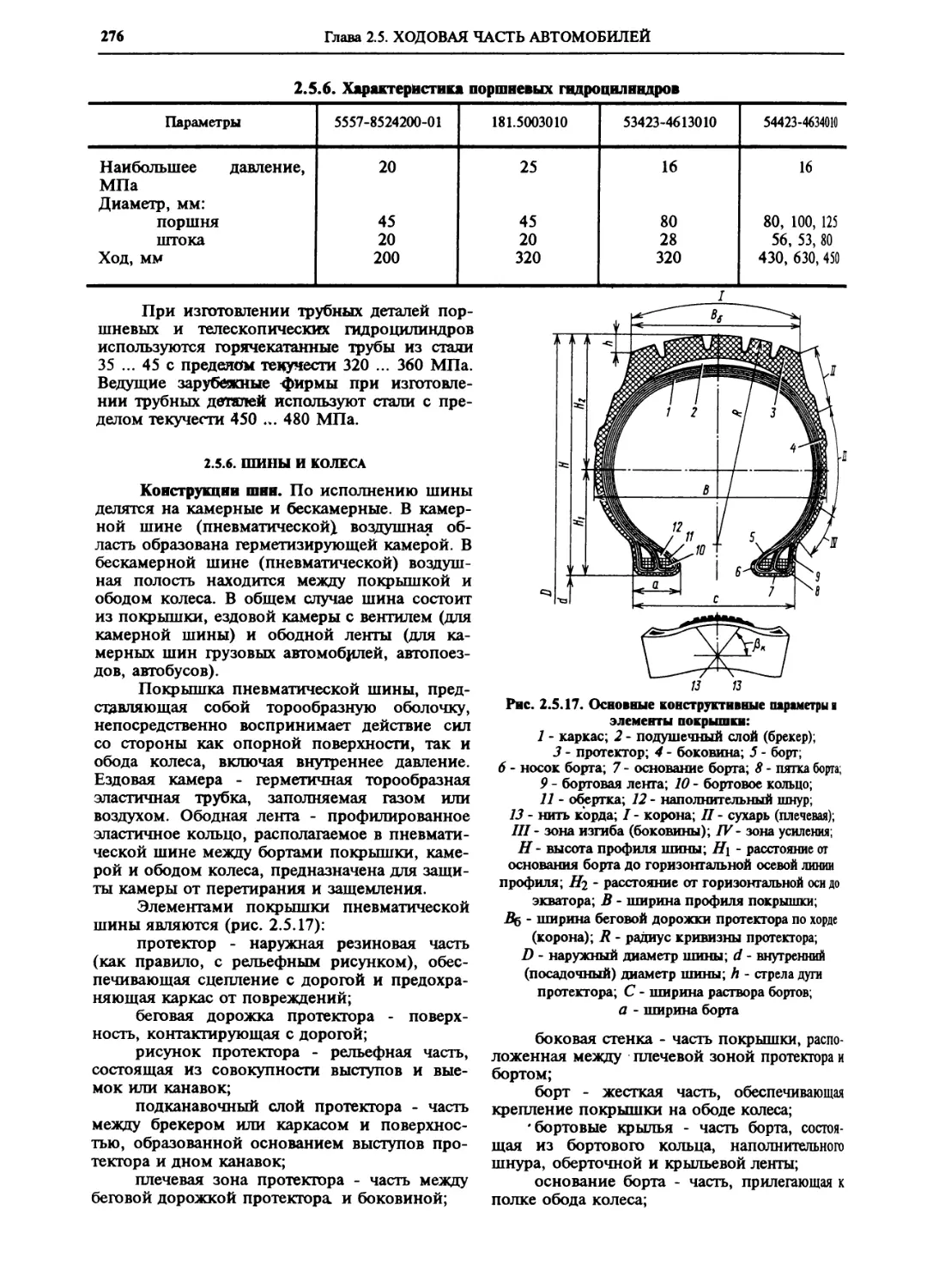
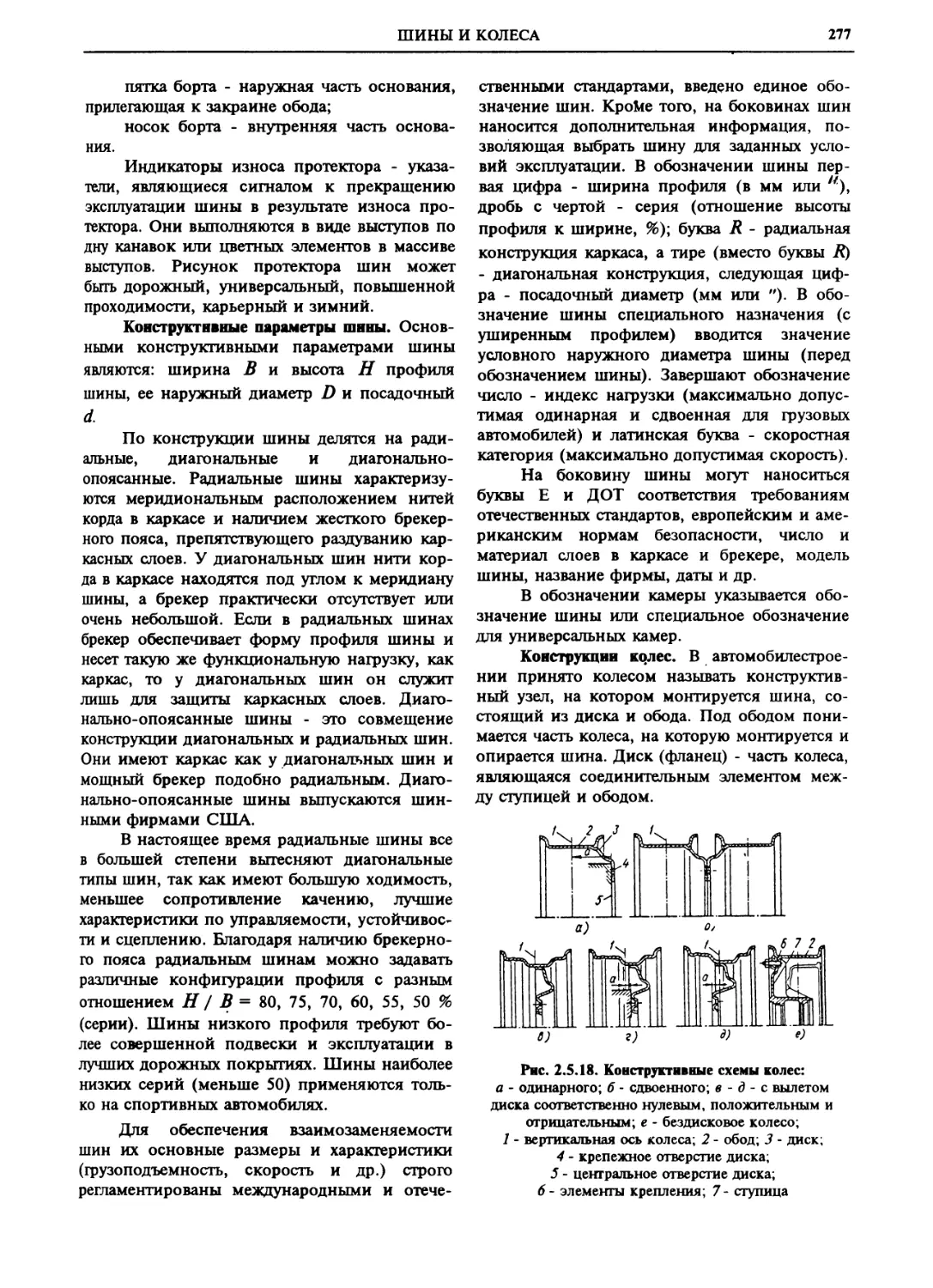
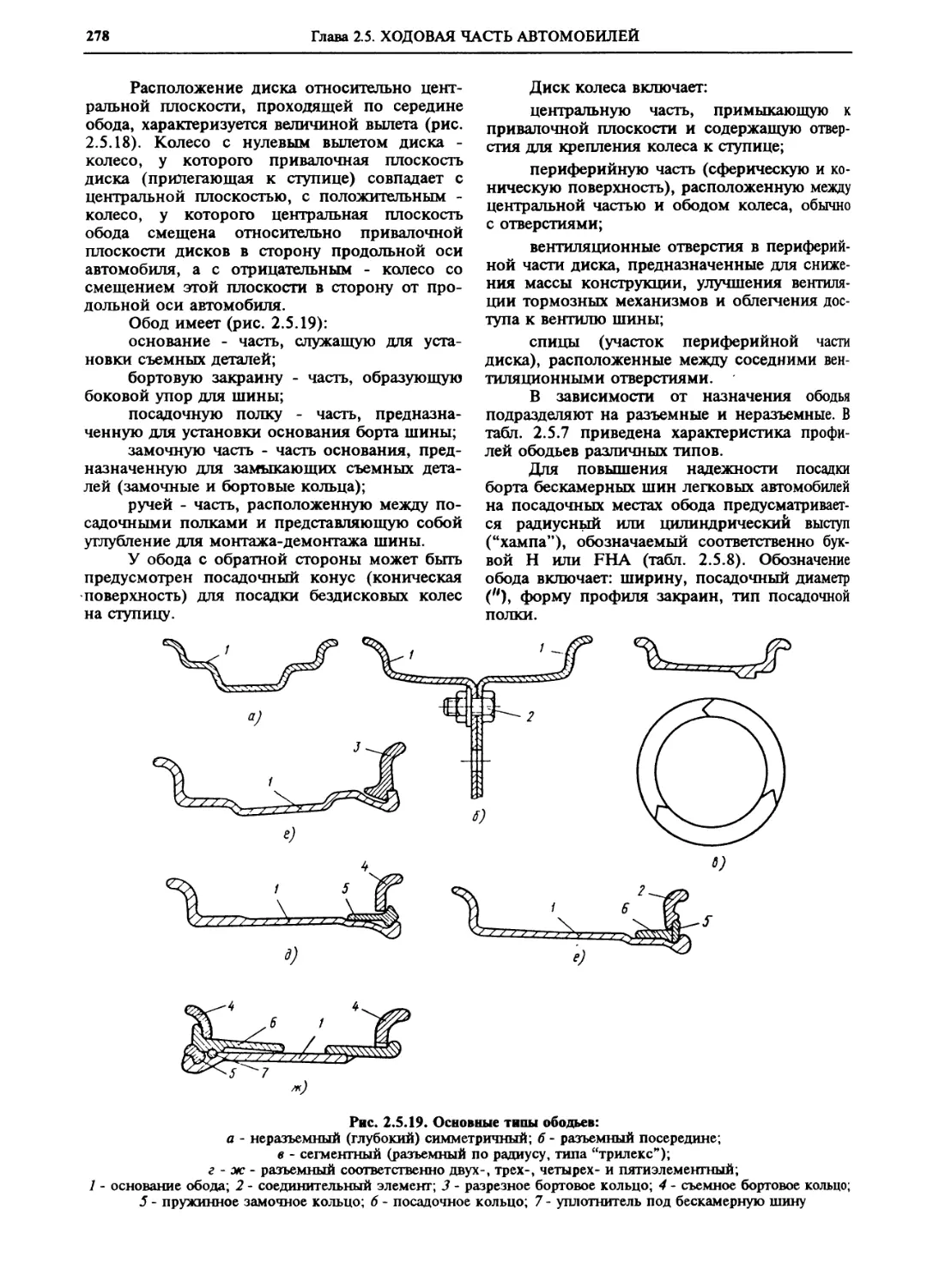
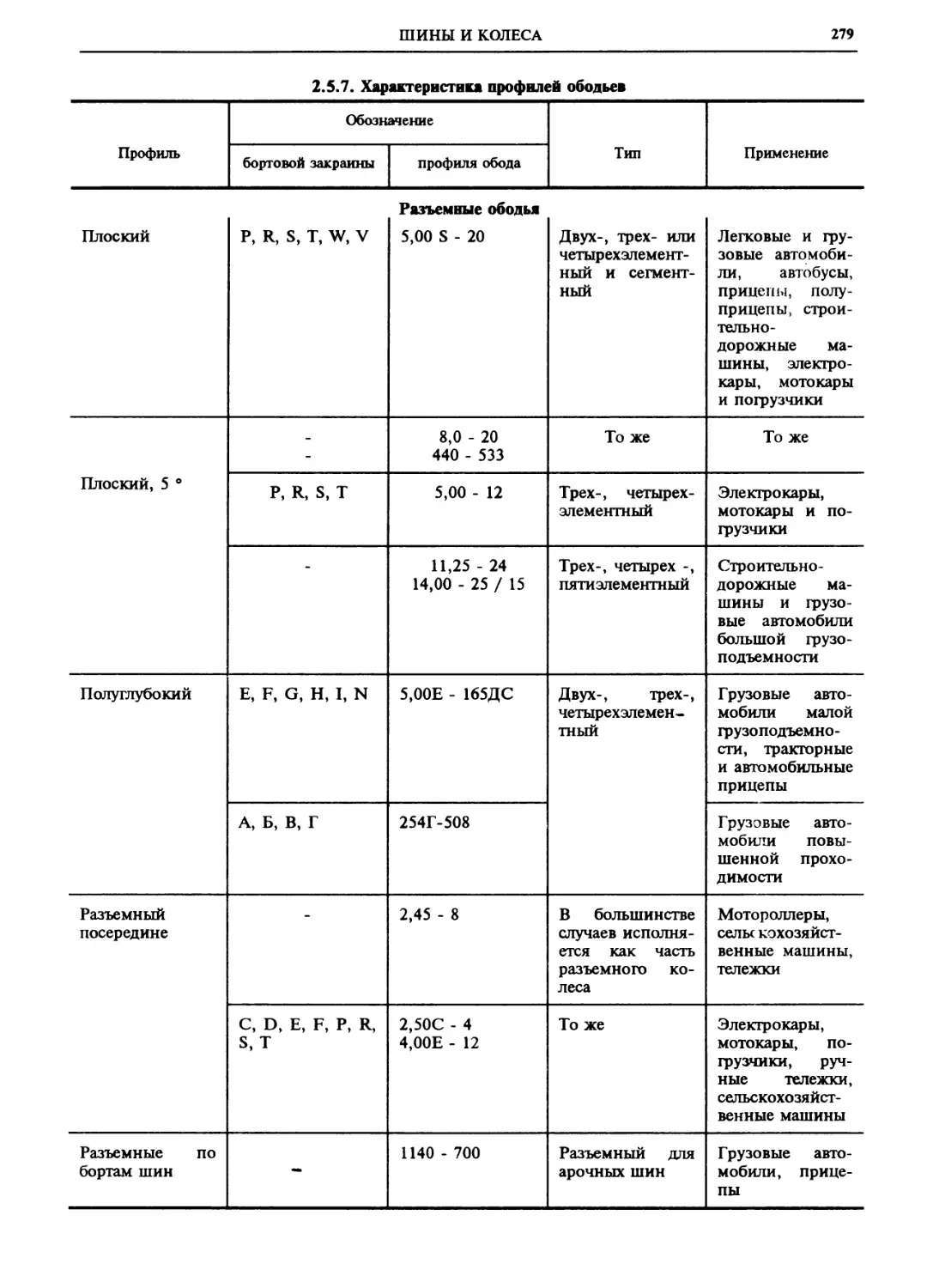
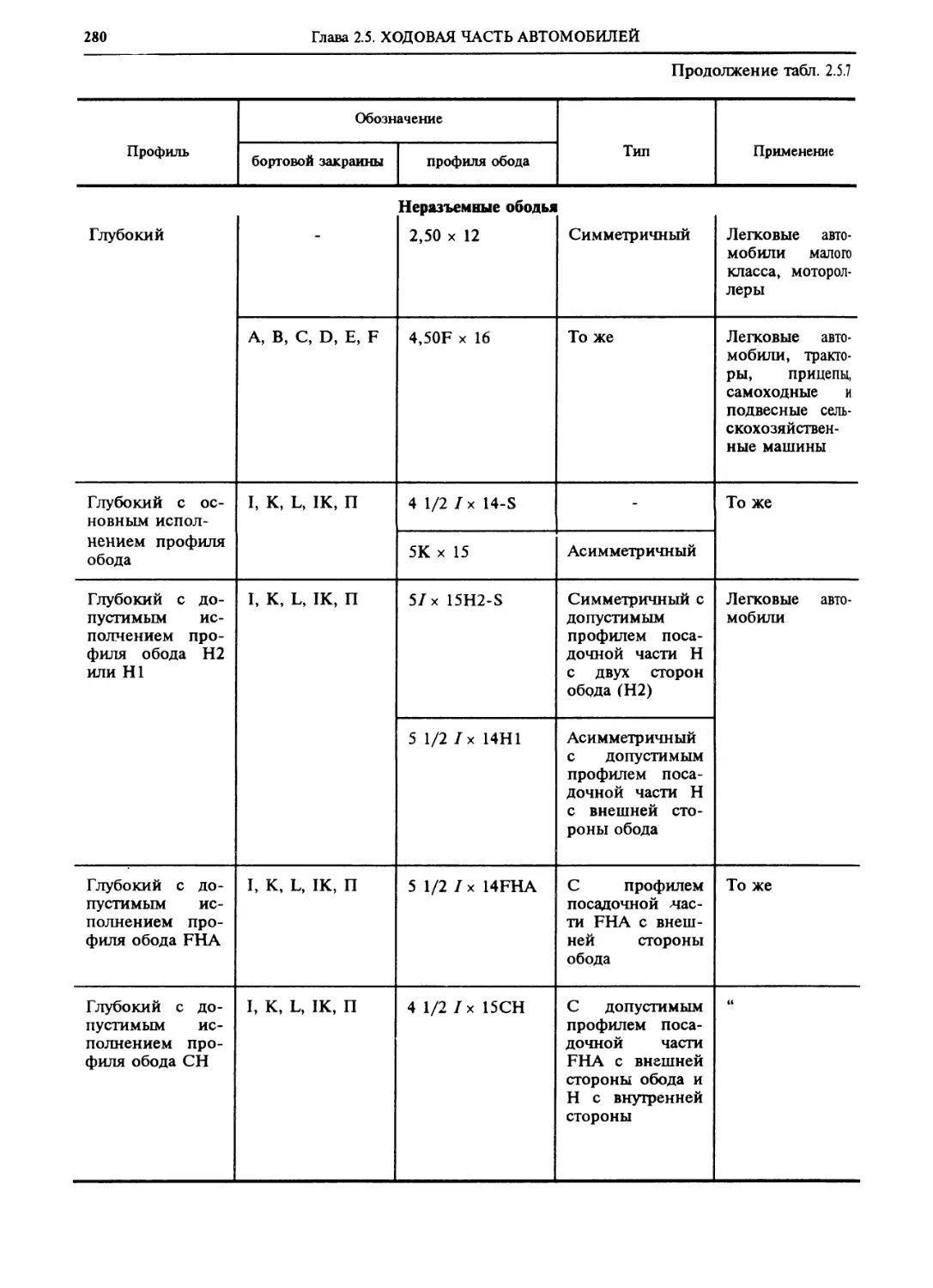
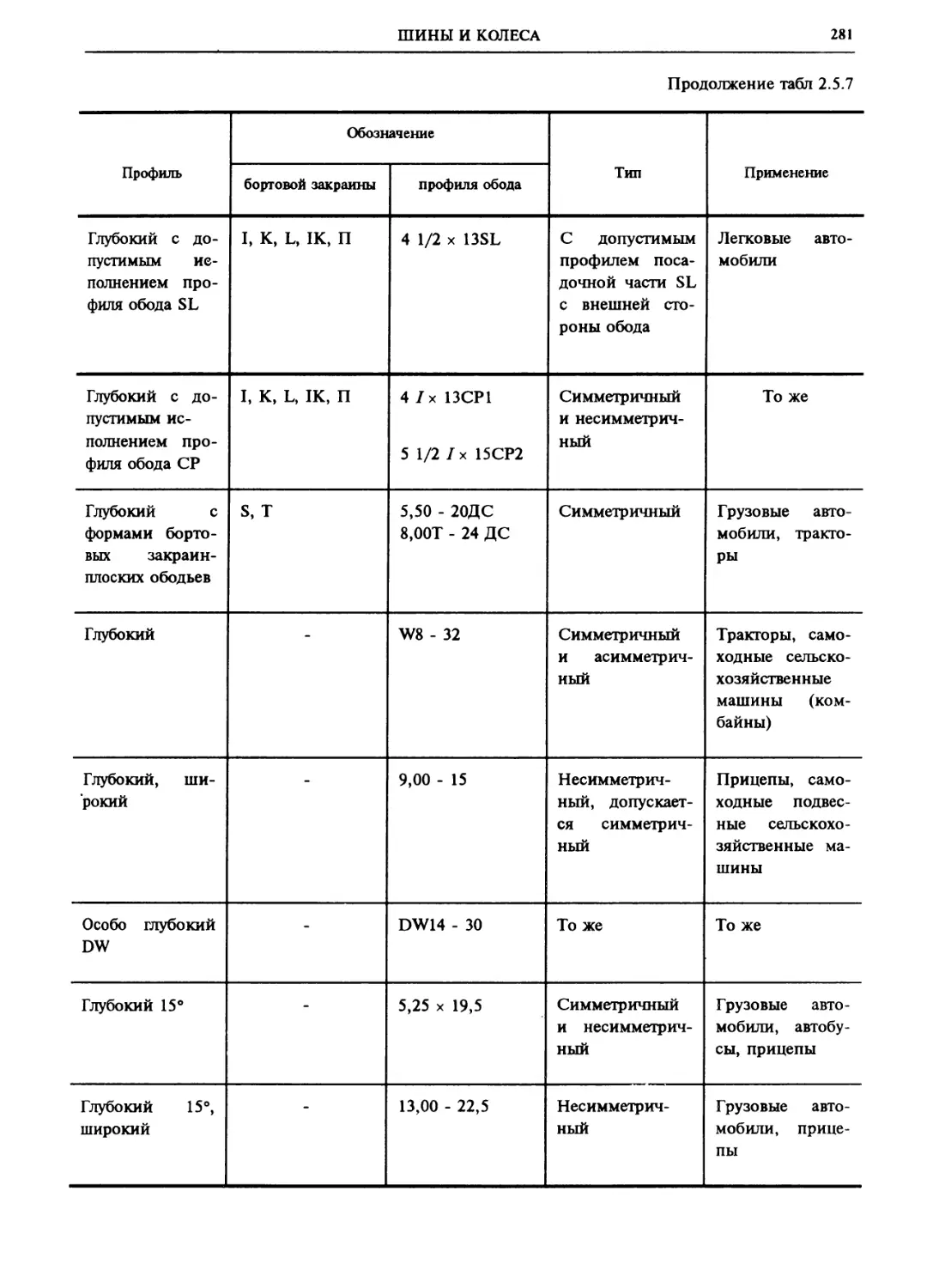
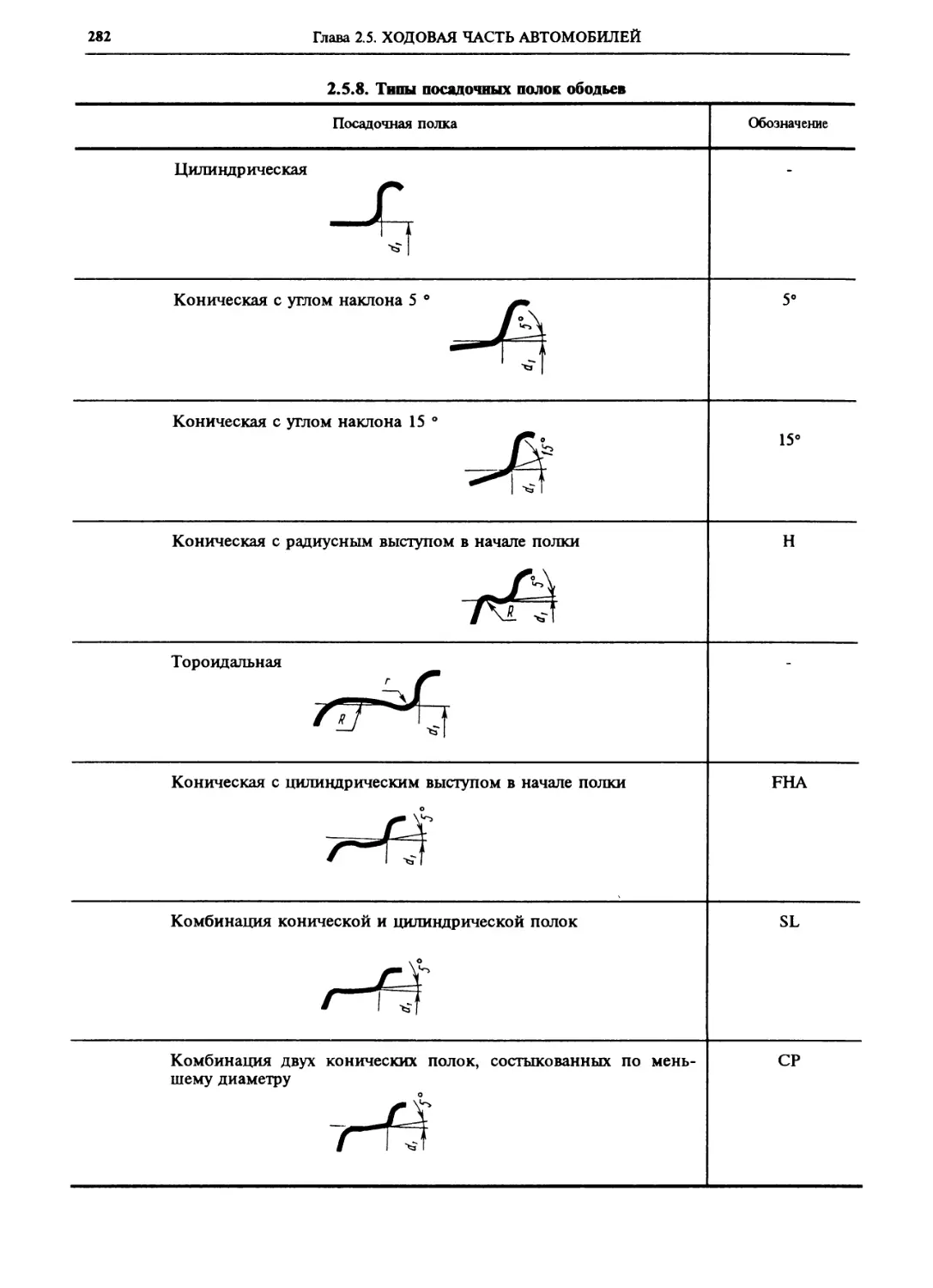
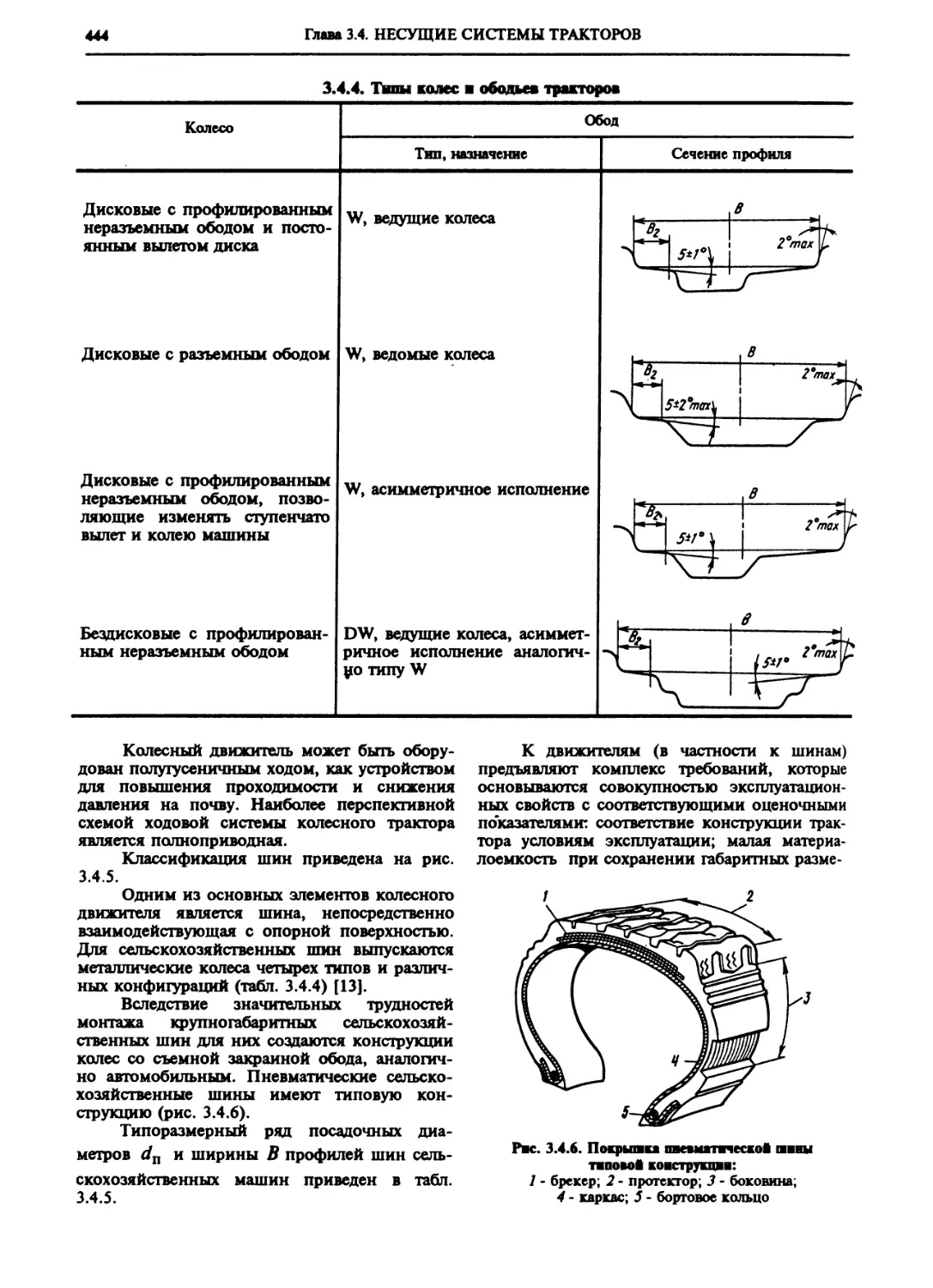
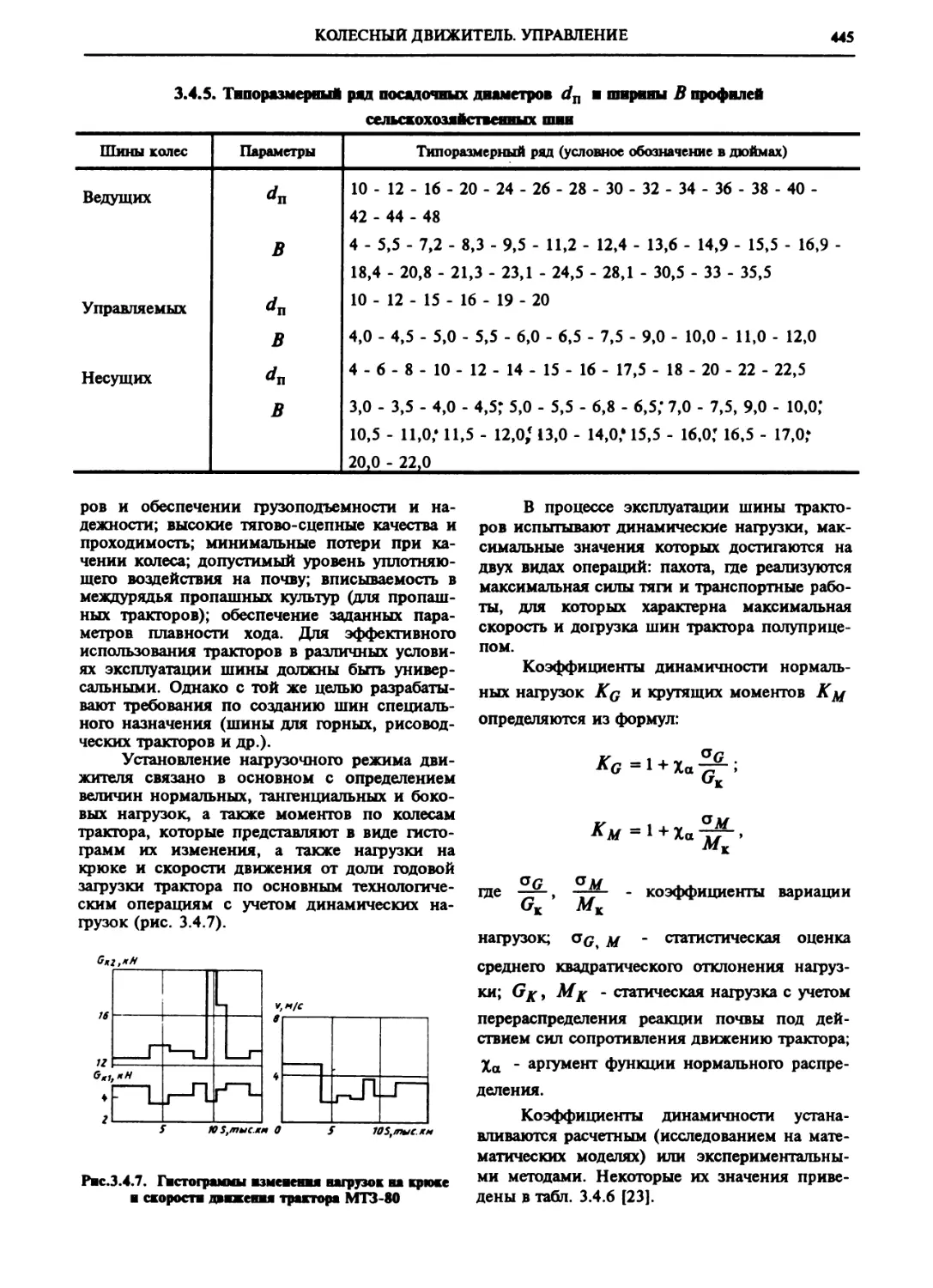
2.5.6. Шины и колеса
(И. П. Петров) 276
Глава 2.6.
ЭЛЕКТРООБОРУДОВАНИЕ КОЛЕСНЫХ И
ГУСЕНИЧНЫХ МАШИН 286
2.6.1. Принципиальные
электрические схемы {А. А.
Эйдинов) 286
2.6.2. Генераторы (А. А.
Эйдинов, Н. И. Леонов) 287
ОГЛАВЛЕНИЕ
7
2.6.3. Регуляторы
напряжения (А. А. Эйдинов) 289
2.6.4. Стартеры (А. А.
Эйдинов, Я. И. Леонов) 290
2.6.5. Системы зажигания
(А. А. Эйдинов, Я. Я.
Леонов) 292
2.6.6. Аккумуляторные
батареи (А. А. Эйдинов) 295
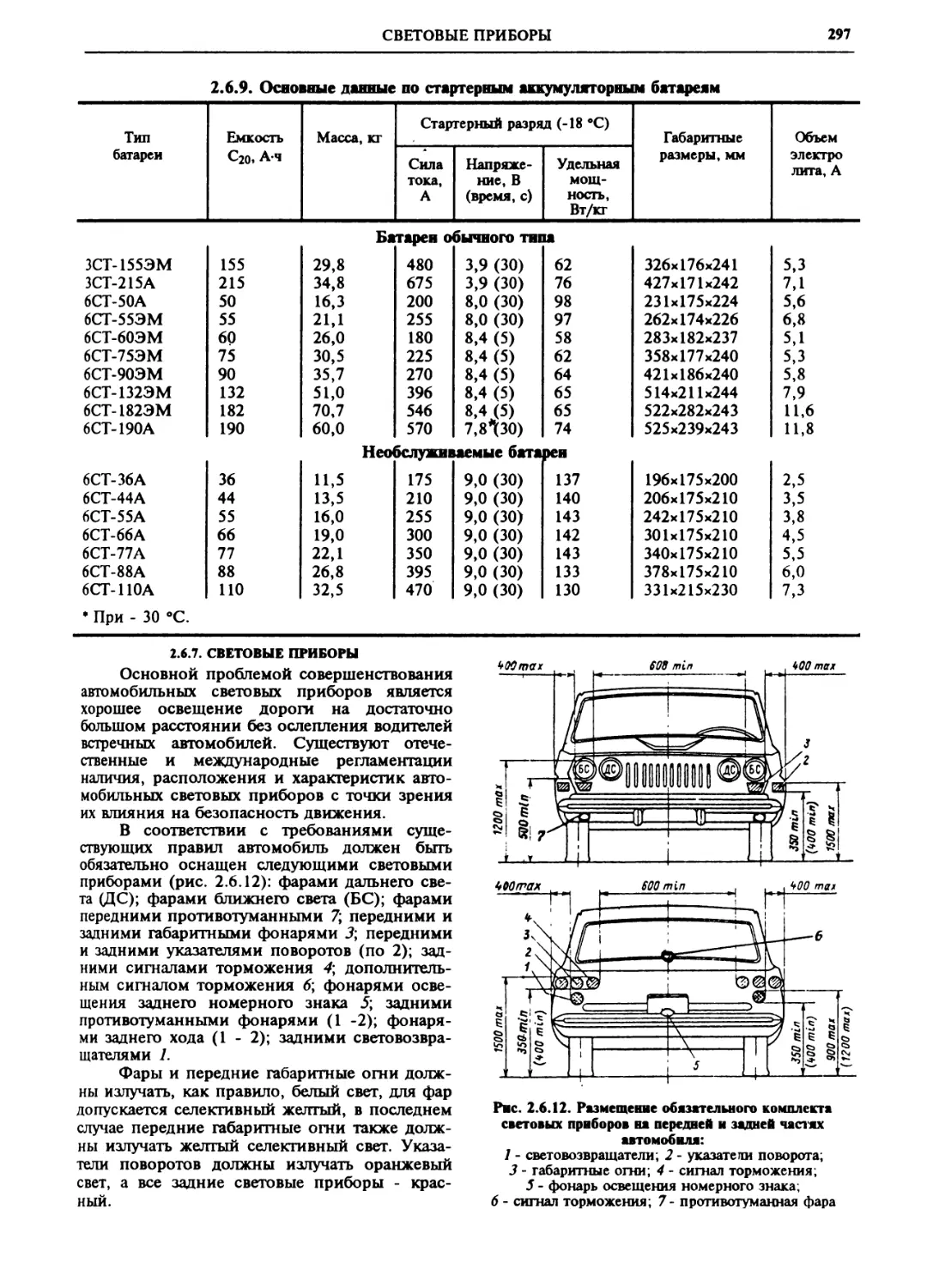
2.6.7. Световые приборы
(А. А. Эйдинов, Н. И.
Левитин) 297
2.6.8.
Контрольно-измерительные приборы (А. А.
Эйдинов, А. Ф. Мельников) 300
2.6.9. Автомобильная
электроника (А. А. Эйдинов) 303
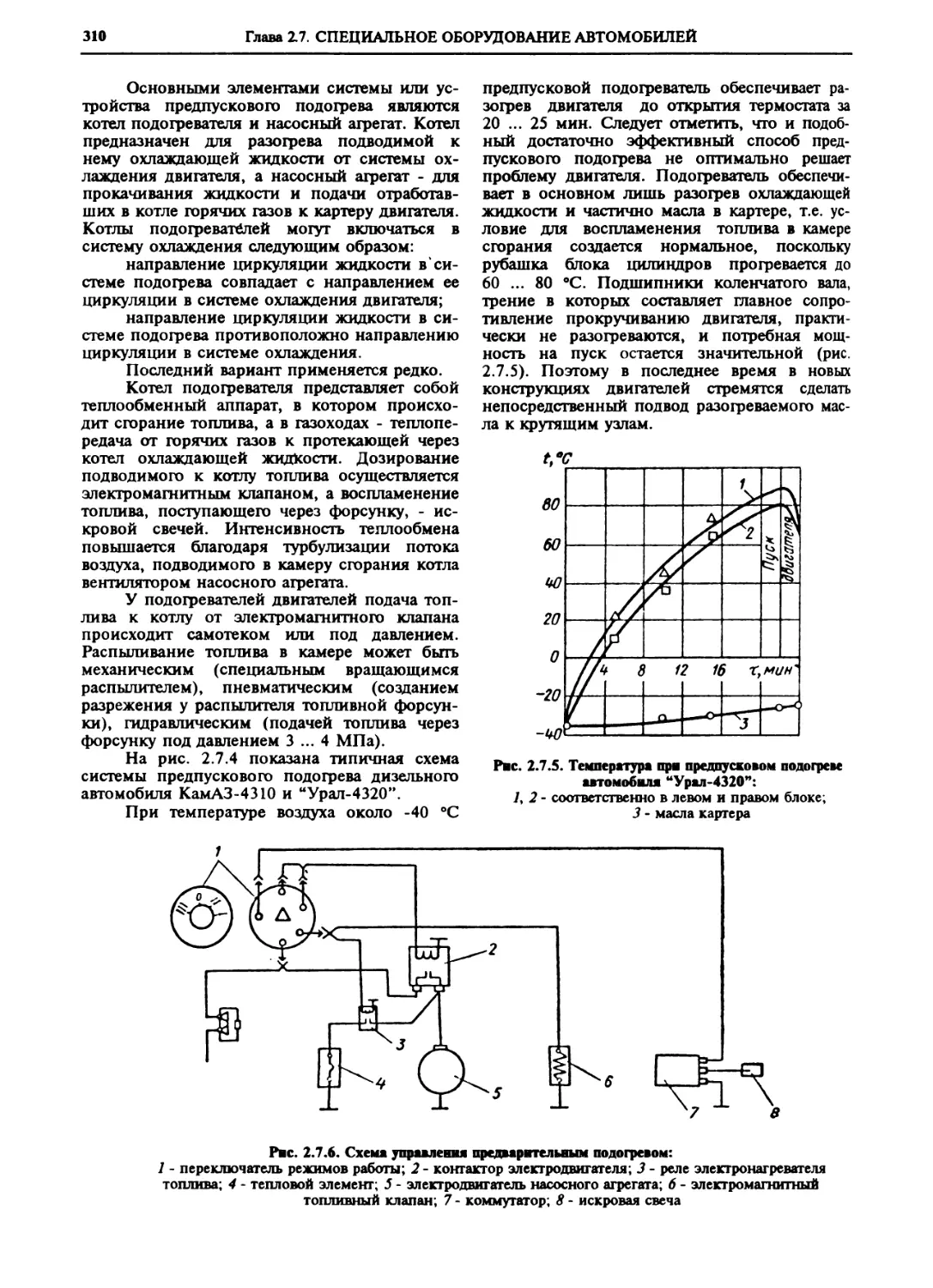
Глава 2.7. СПЕЦИАЛЬНОЕ
ОБОРУДОВАНИЕ
МНОГОЦЕЛЕВЫХ
АВТОМОБИЛЕЙ И
СПЕЦИАЛЬНЫХ КОЛЕСНЫХ
ШАССИ (В. Ф. Платонов) 305
2.7.1. Лебедки. Системы
герметизации агрегатов 305
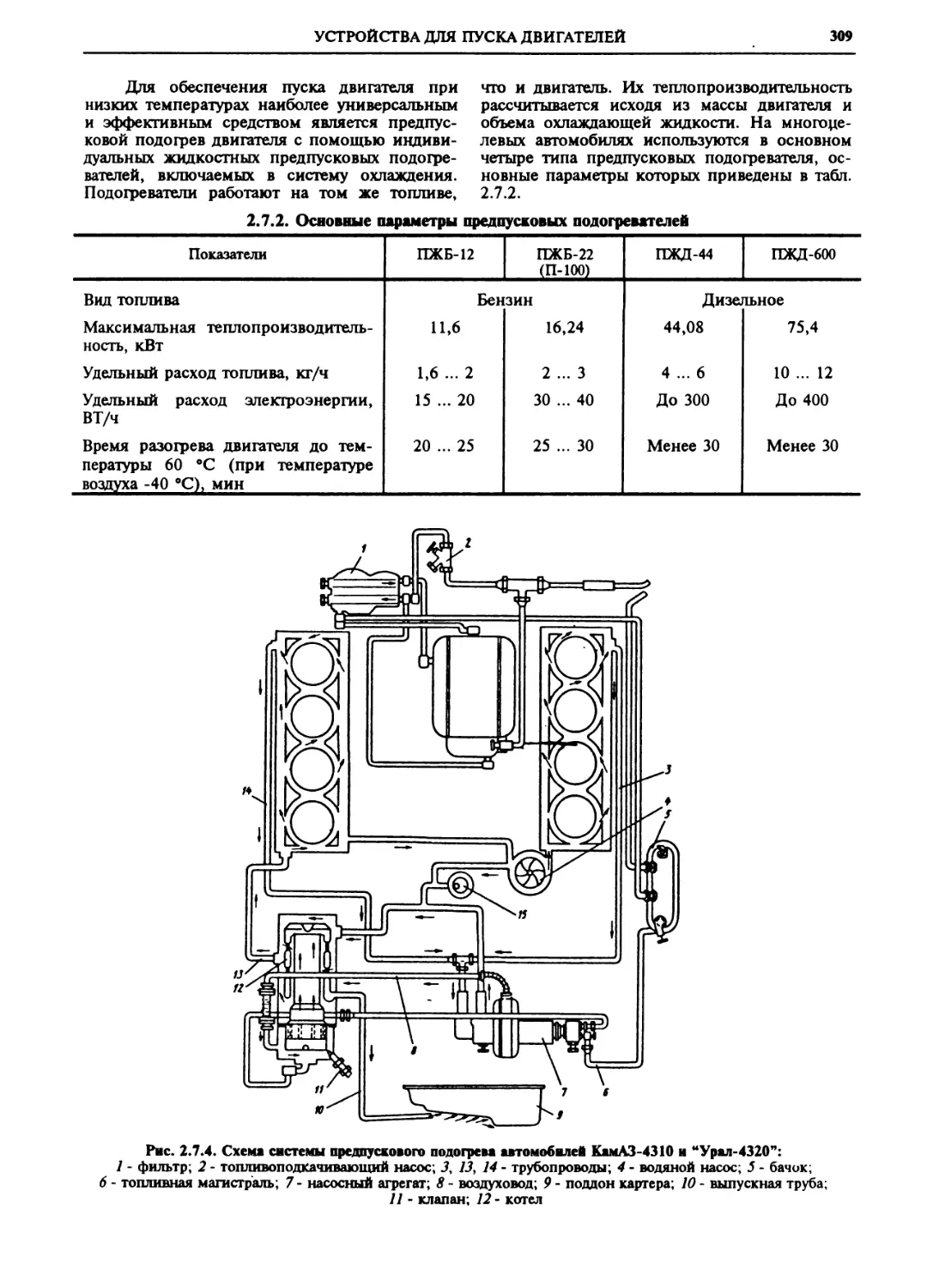
2.7.2. Устройства для
подогрева и пуска двигателей
при низких температурах ... 308
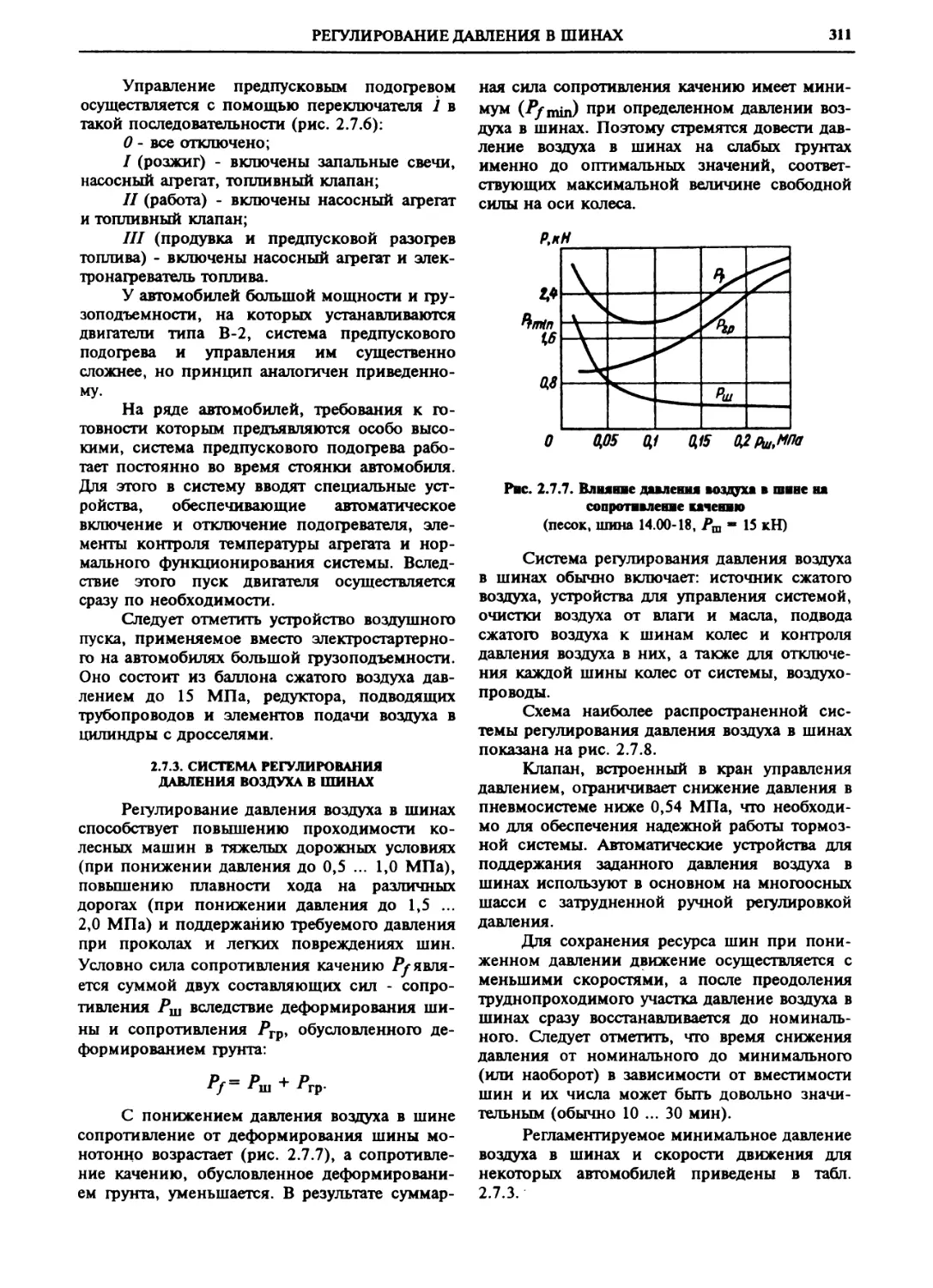
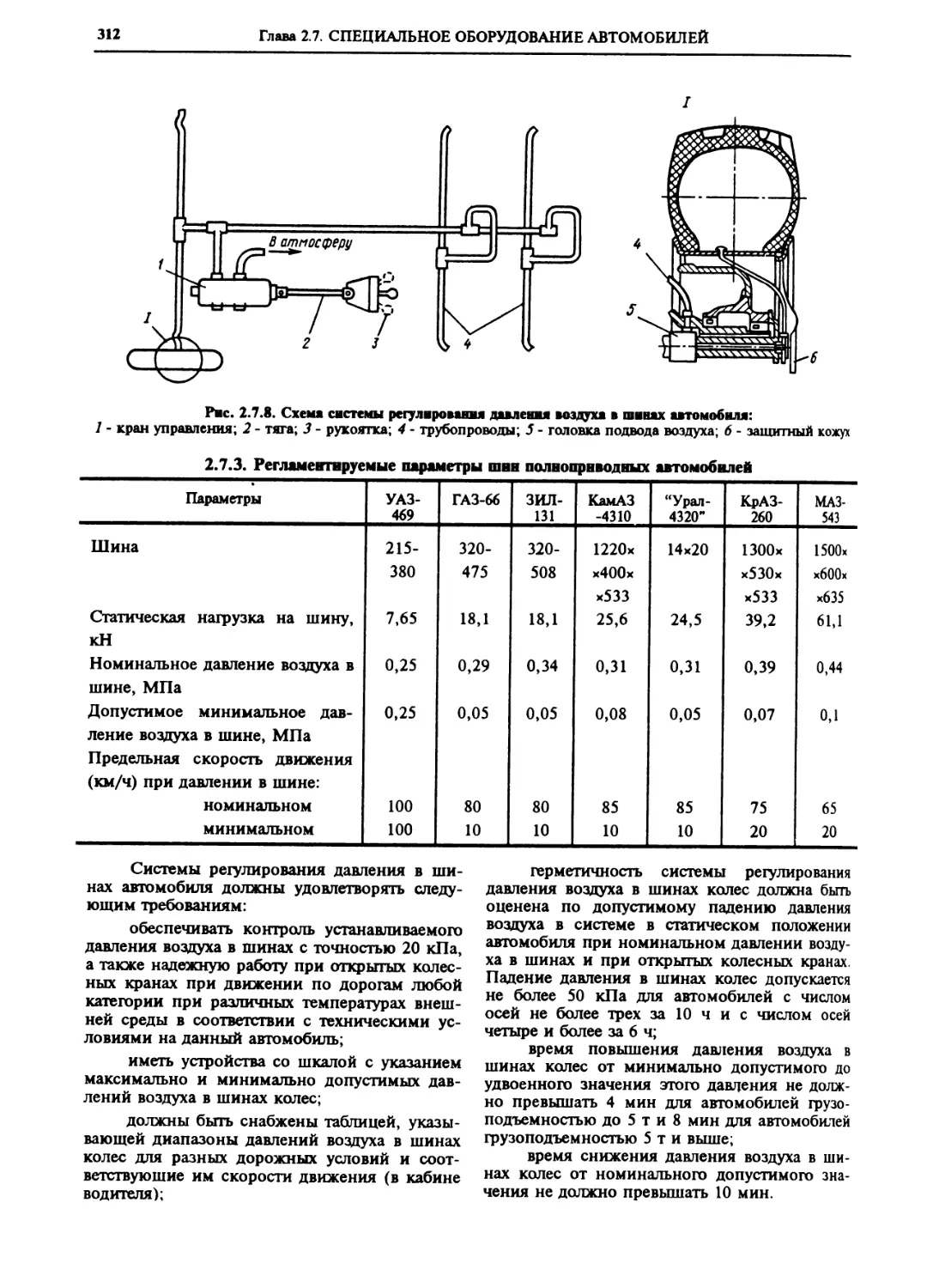
2.7.3. Система
регулирования давления воздуха в
шинах 311
СПИСОК ЛИТЕРАТУРЫ 313
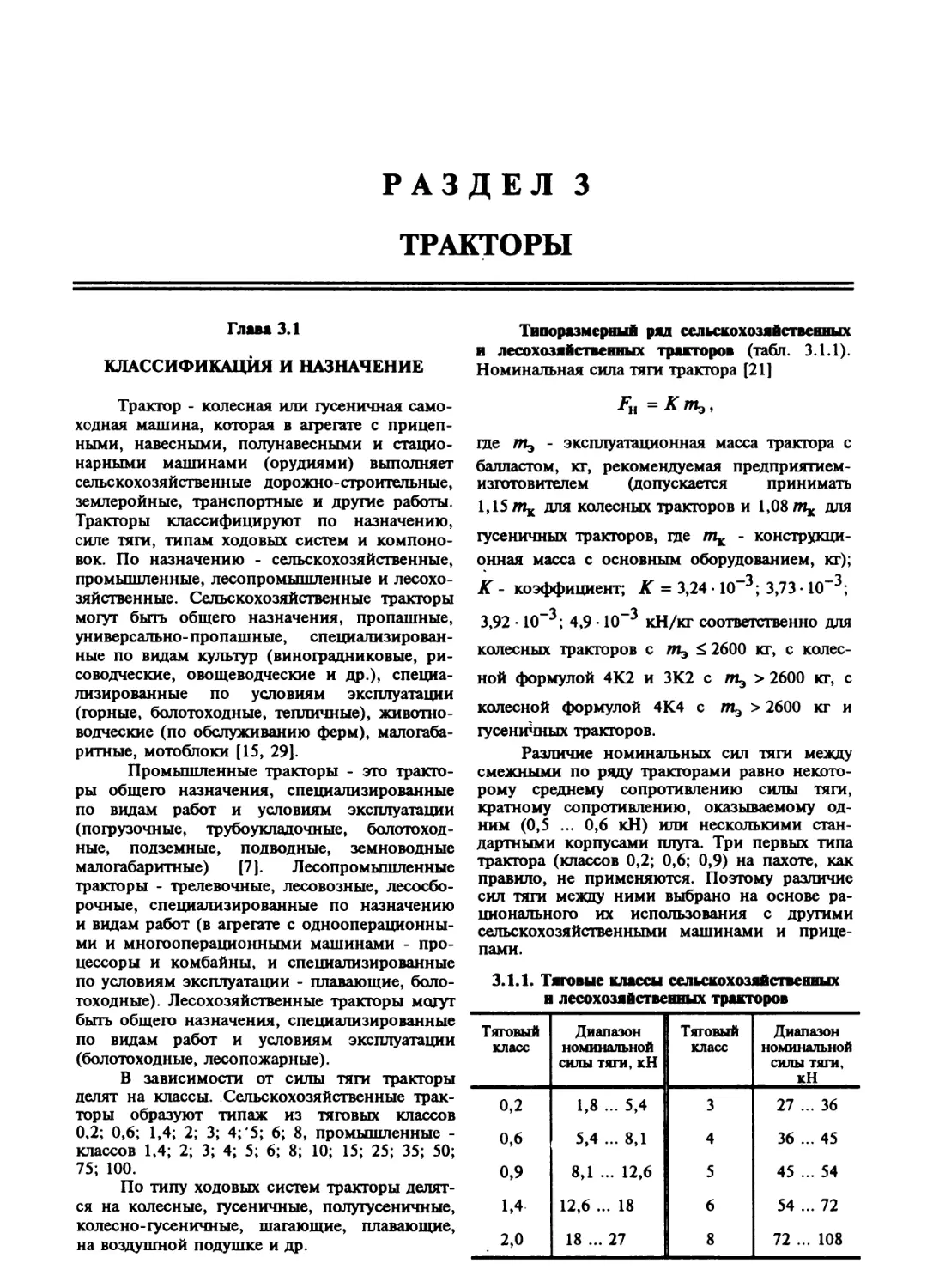
Раздел 3. ТРАКТОРЫ 315
Глава 3.1. КЛАССИФИКАЦИЯ И
НАЗНАЧЕНИЕ (А Л.
Парфенов, СЕ. Либцис) 315
Глава 3.2. КОМПОНОВКА И
ОСНОВНЫЕ
ПАРАМЕТРЫ 318
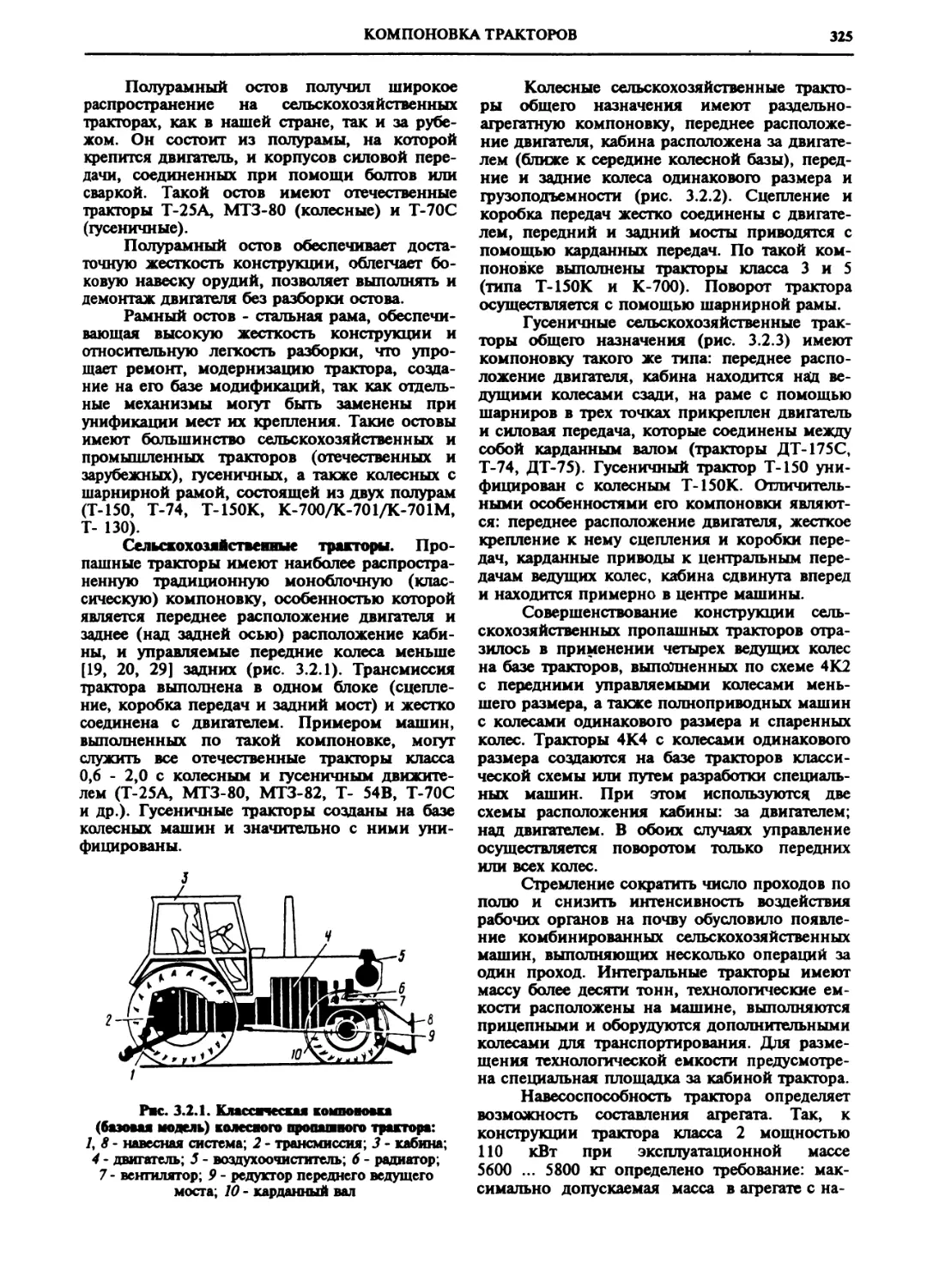
3.2.1. Требования к
конструкции (И. П. Ксеневич) 318
3.2.2. Система управления
качеством тракторов (А. П.
Парфенов) 320
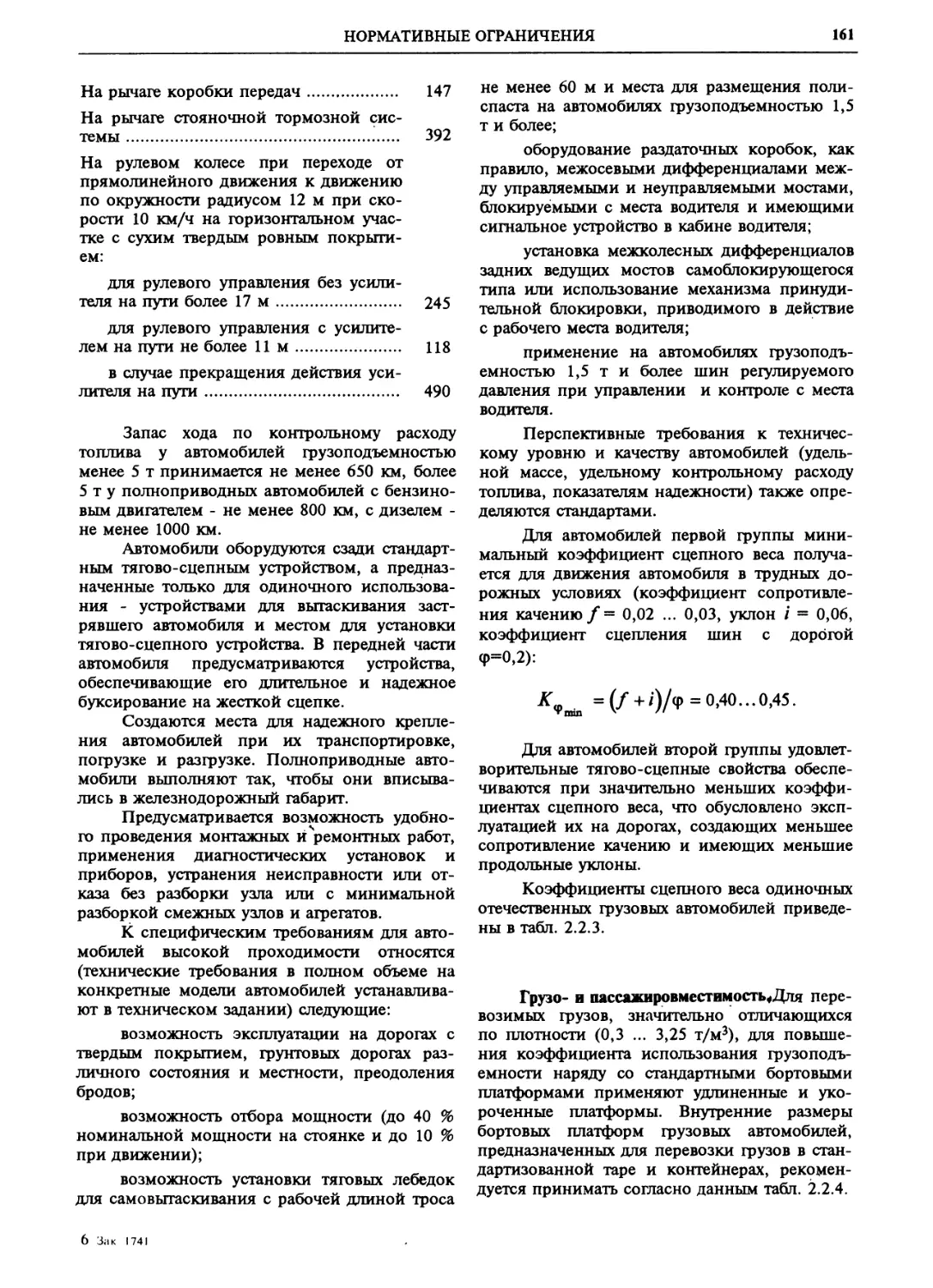
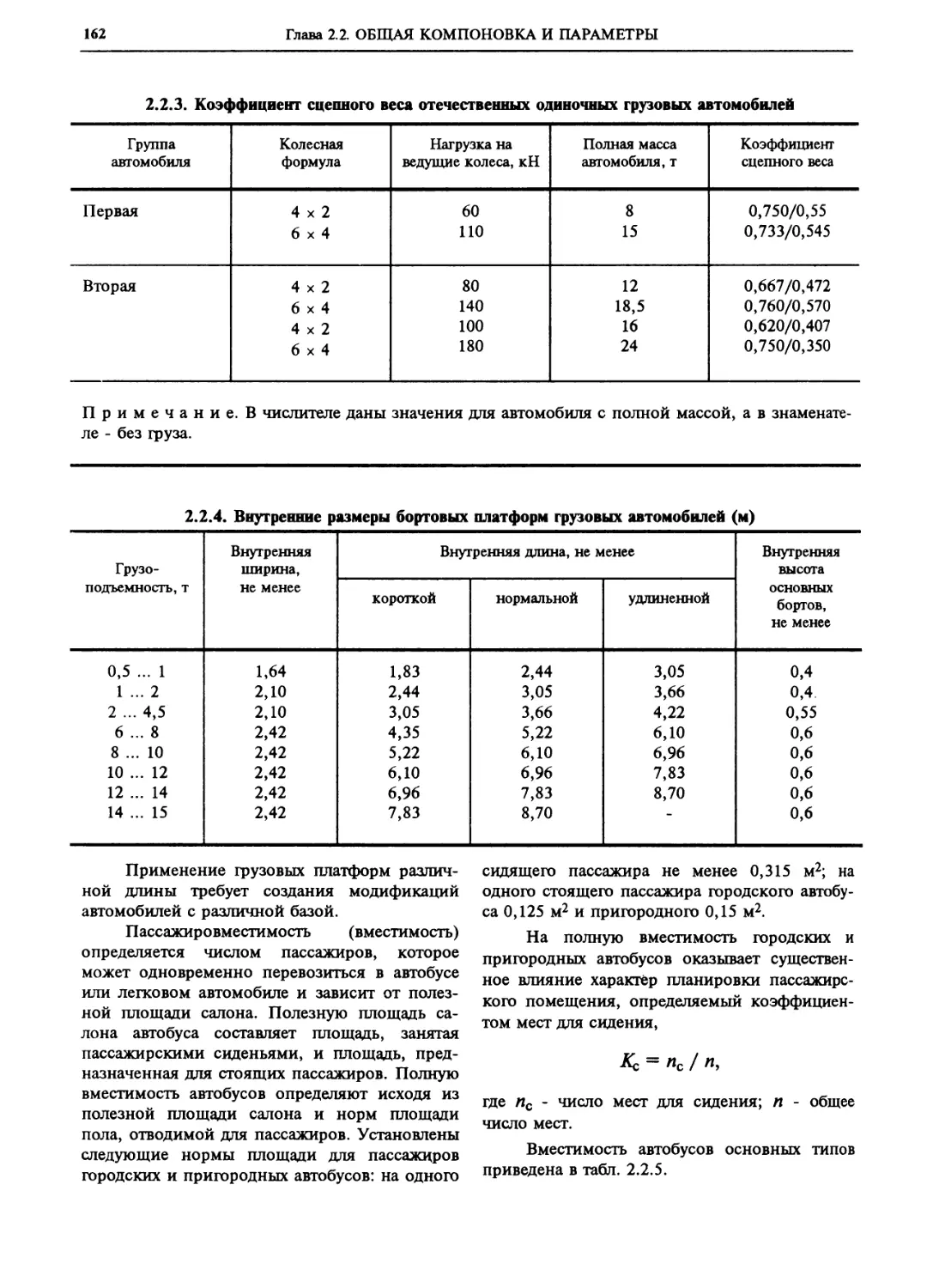
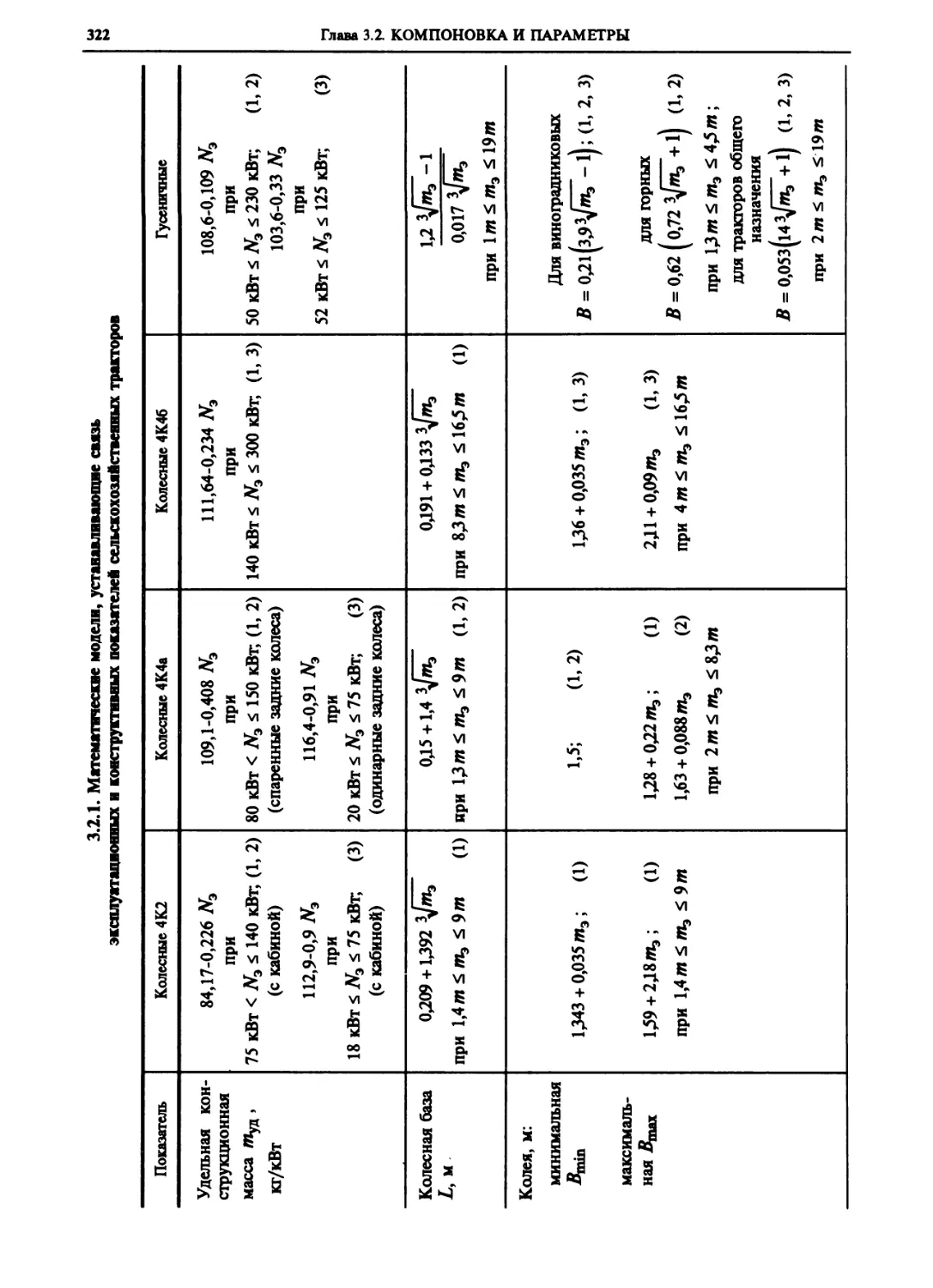
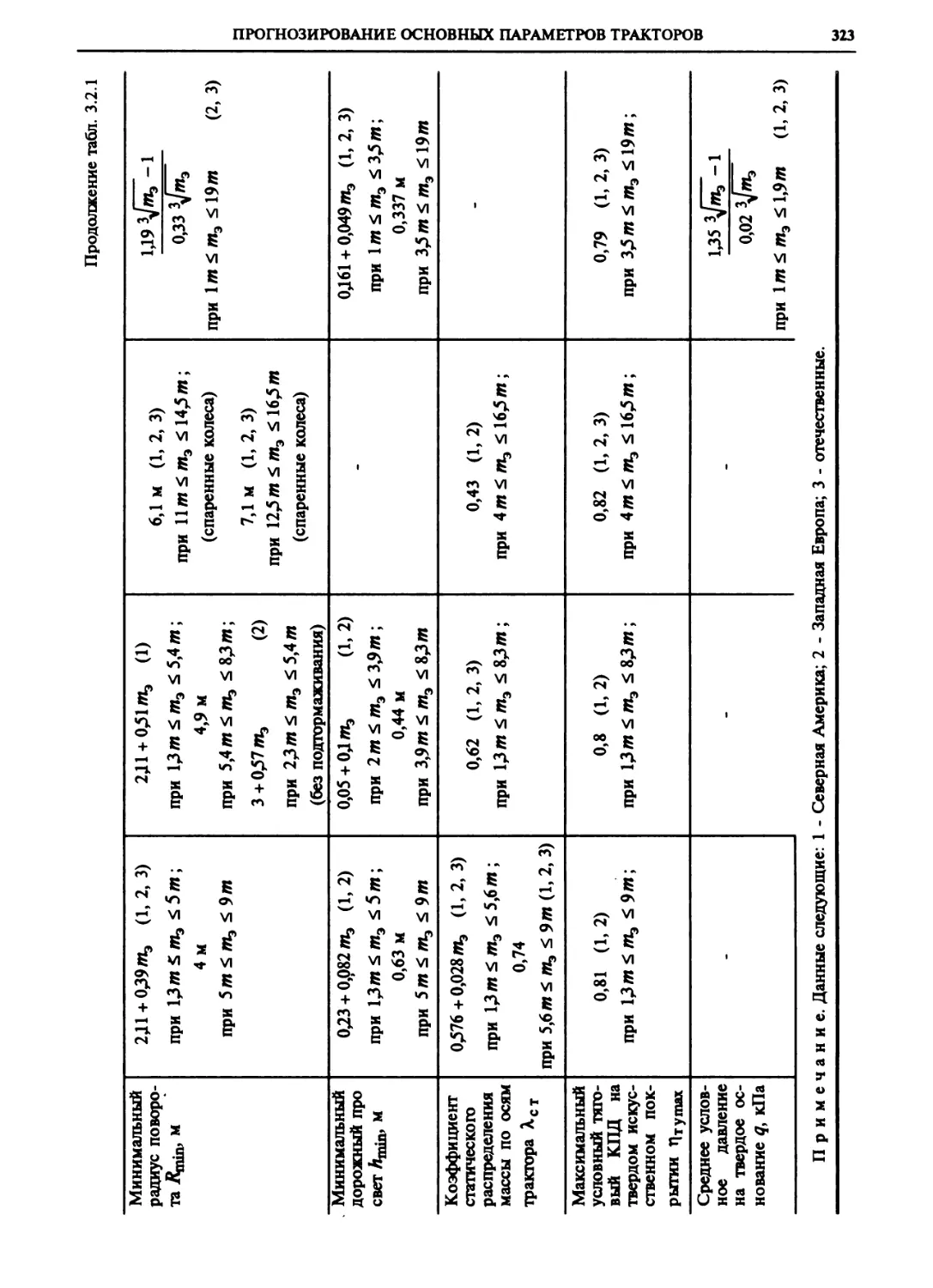
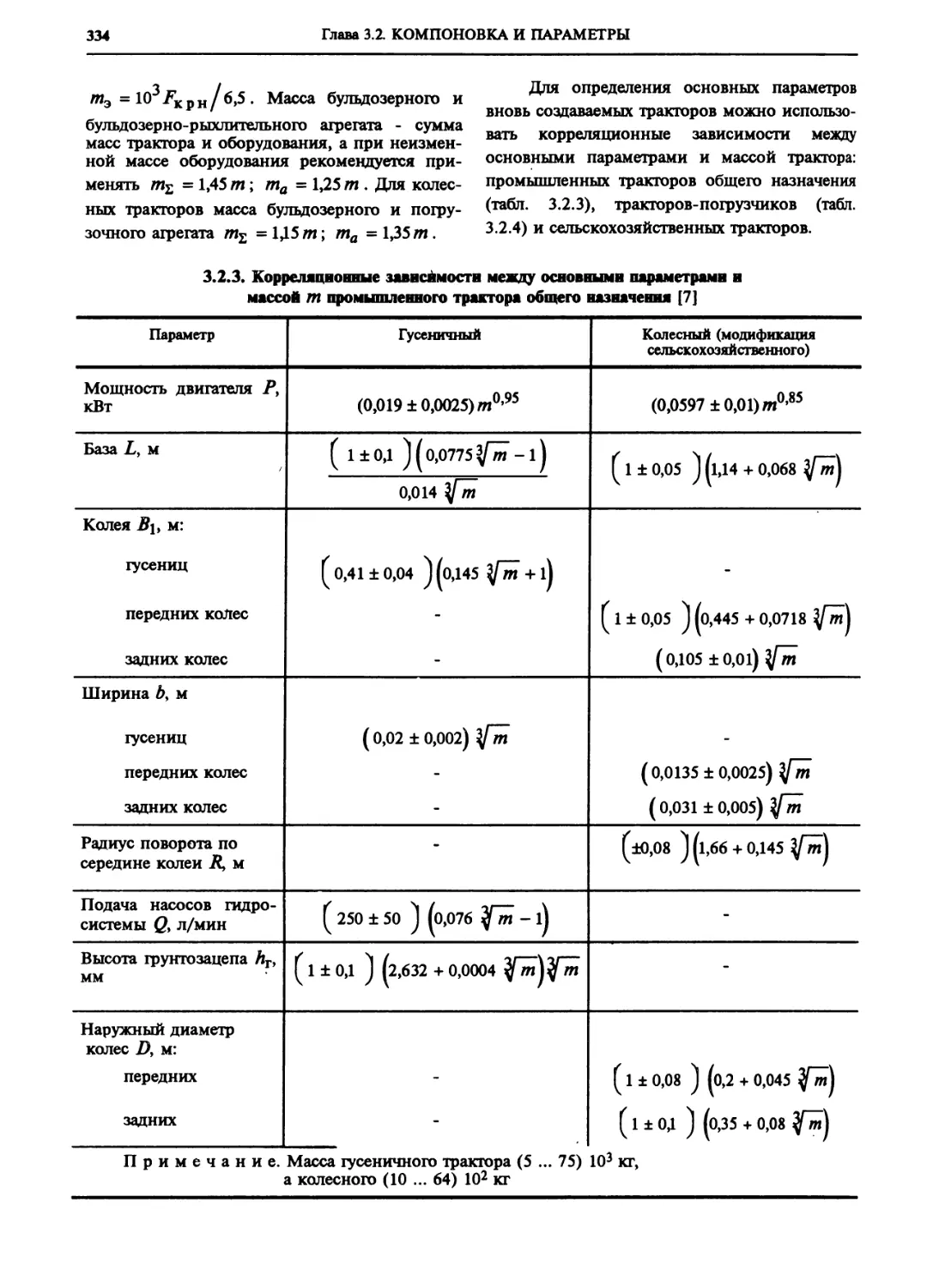
3.2.3. Прогнозирование
основных параметров {И. И
Ксеневич, А. И Парфенов) 321
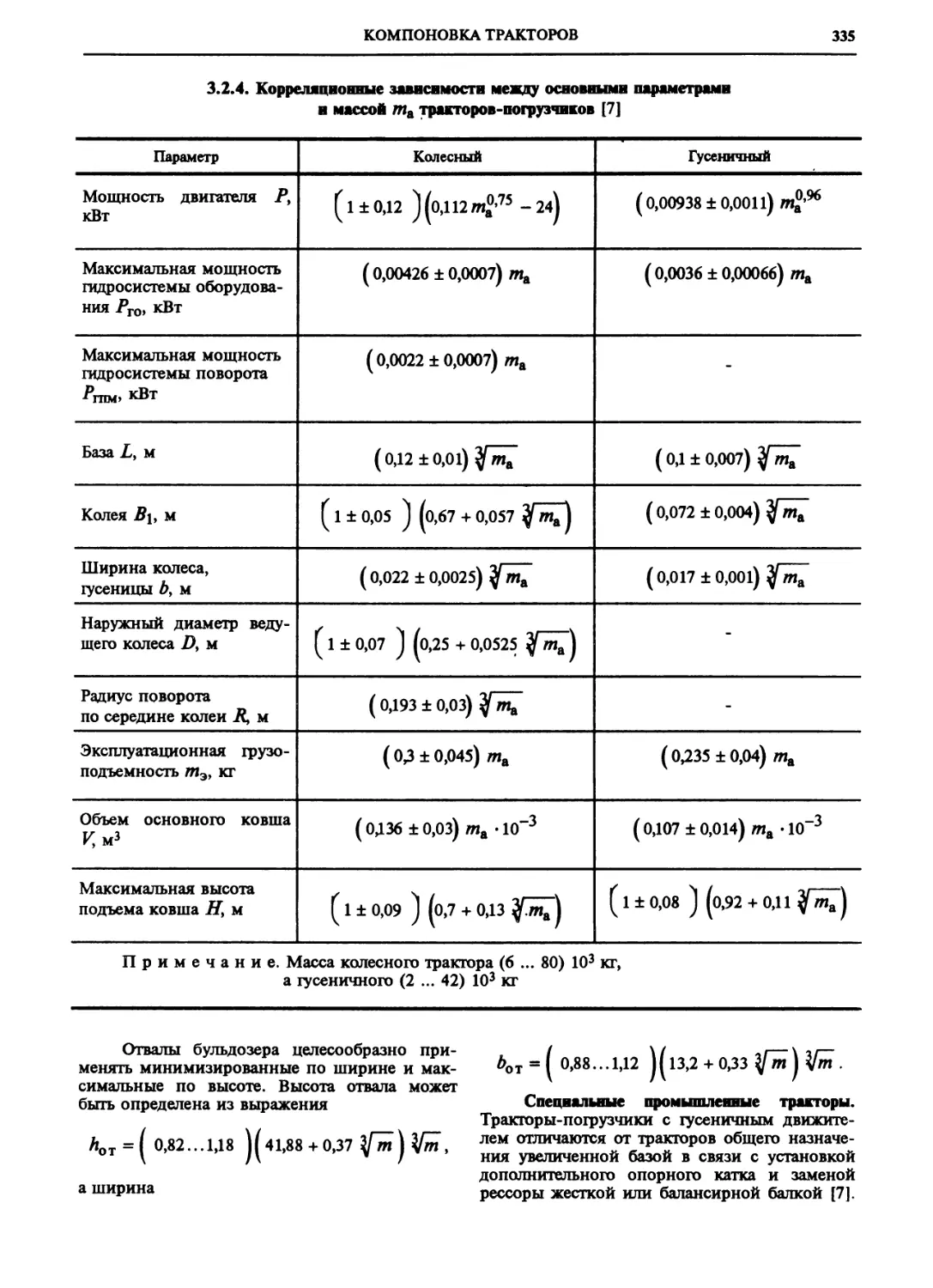
3.2.4. Компоновка
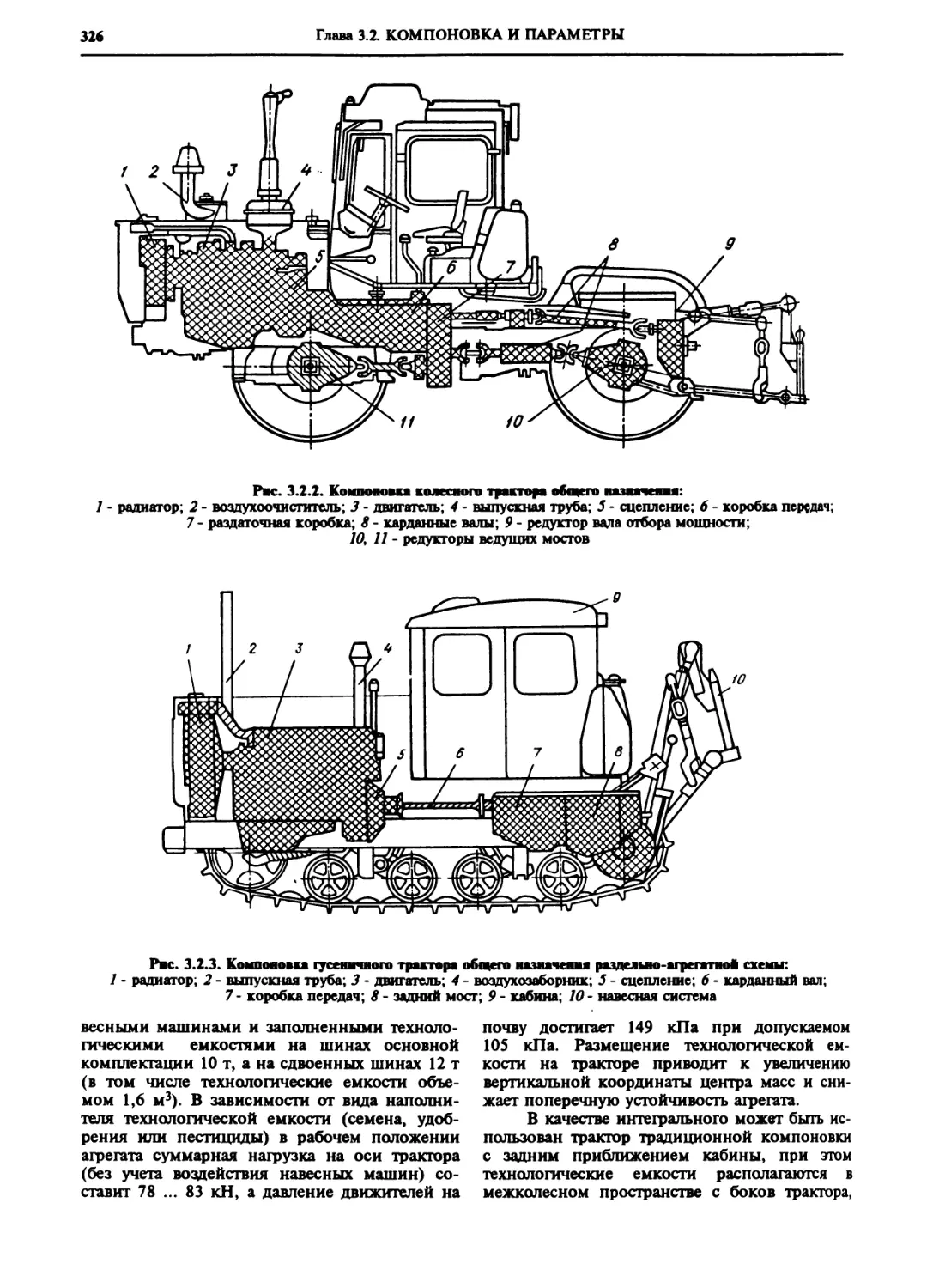
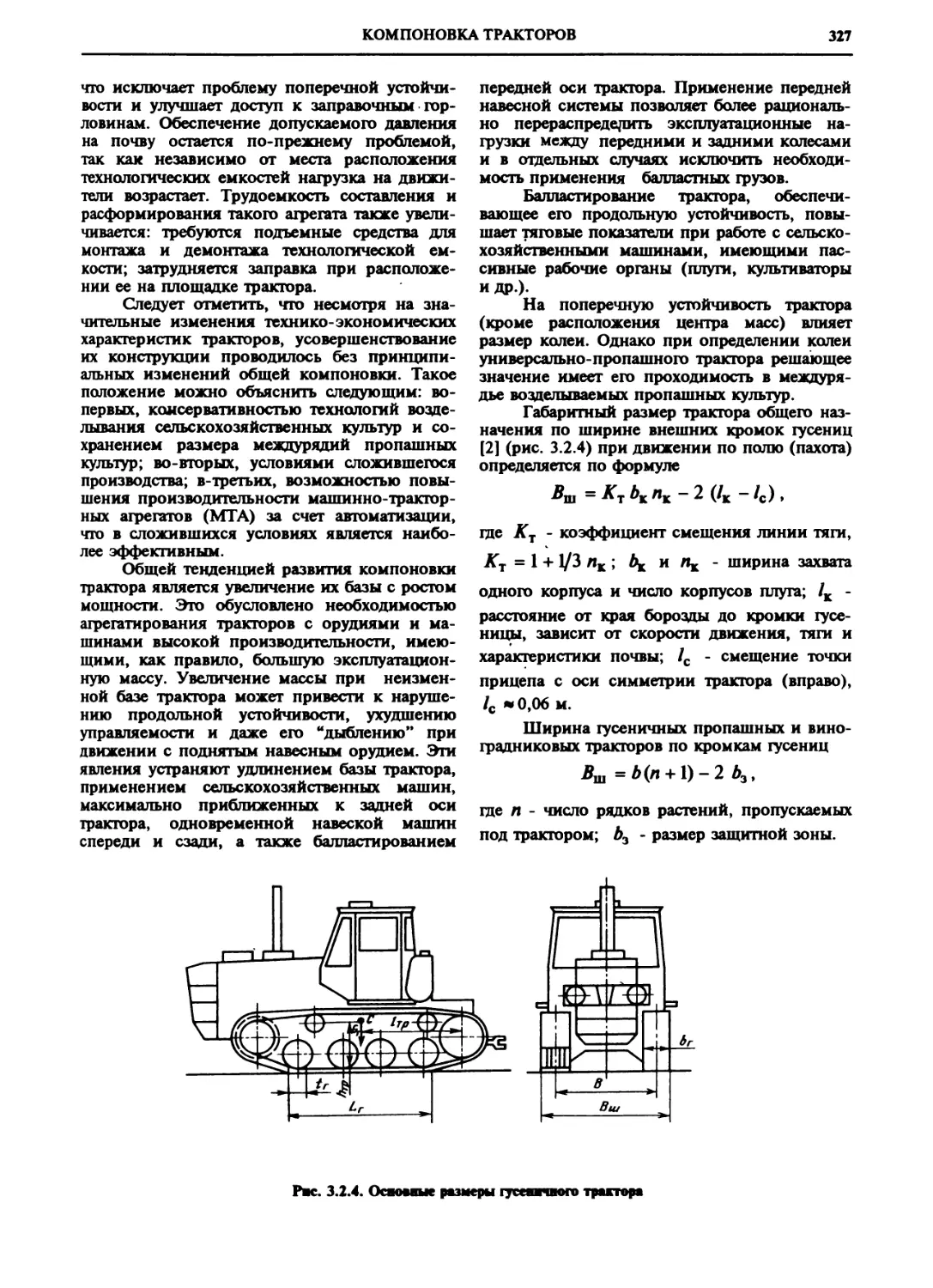
тракторов (И. П. Ксеневич) 324
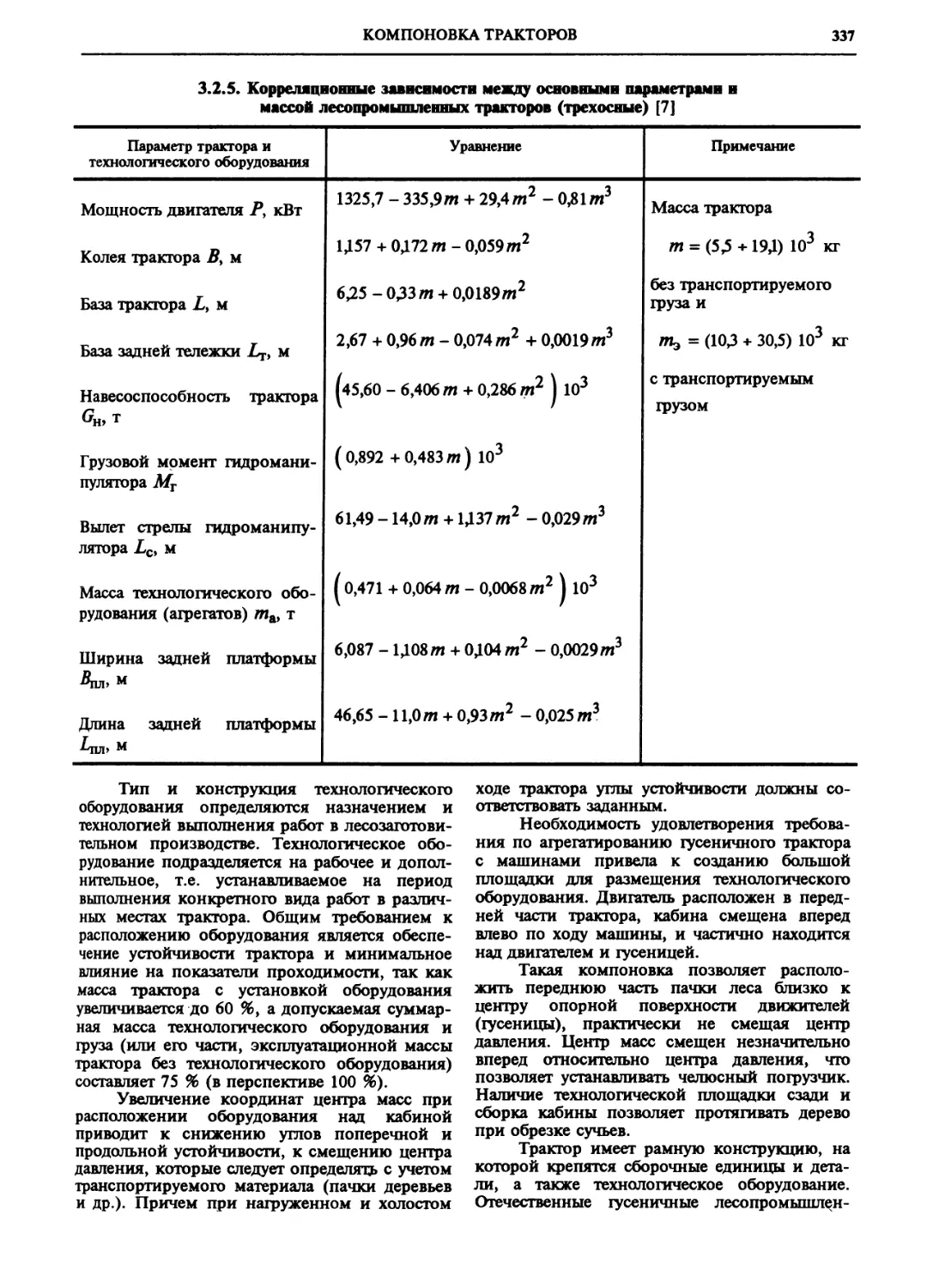
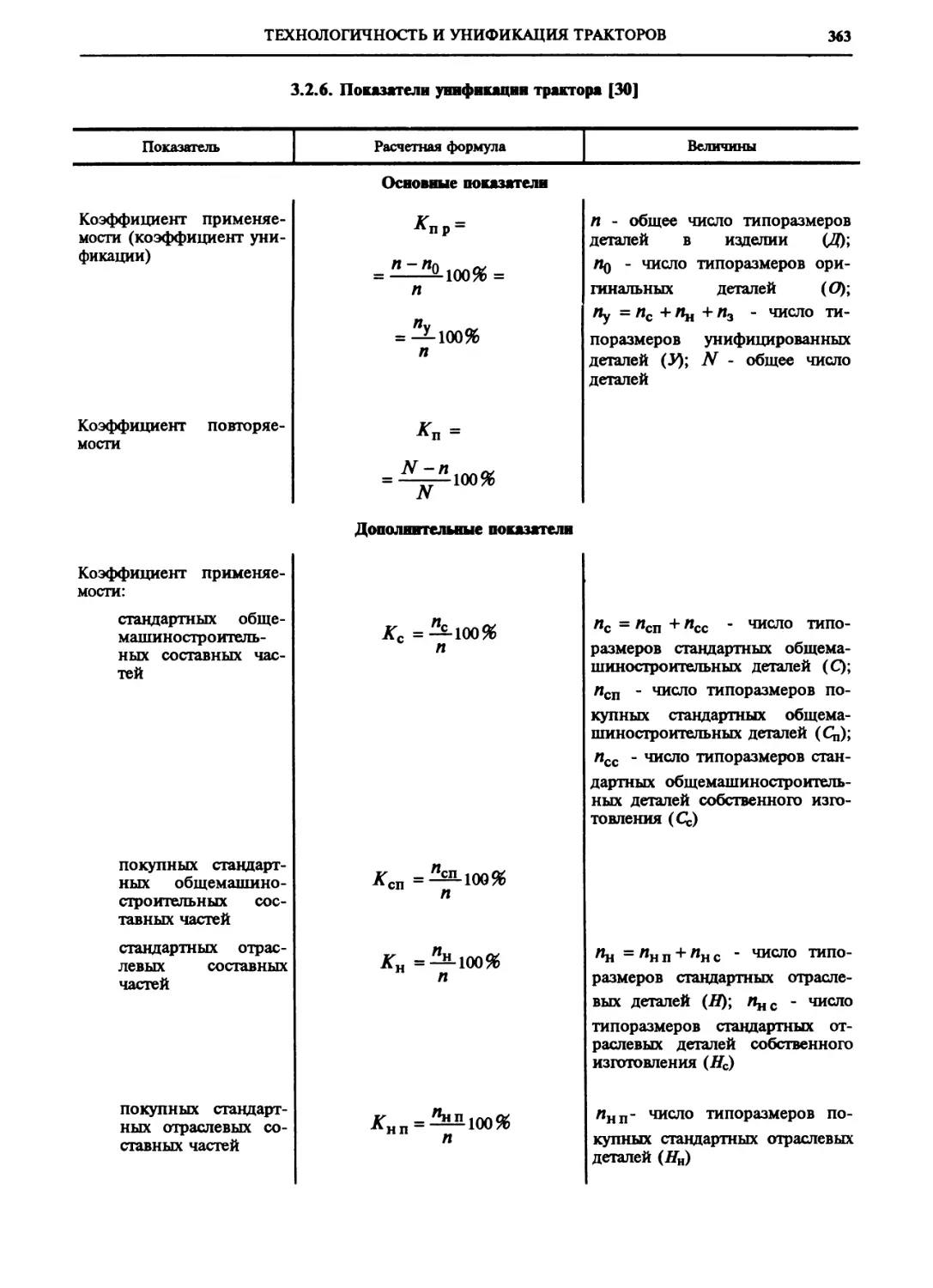
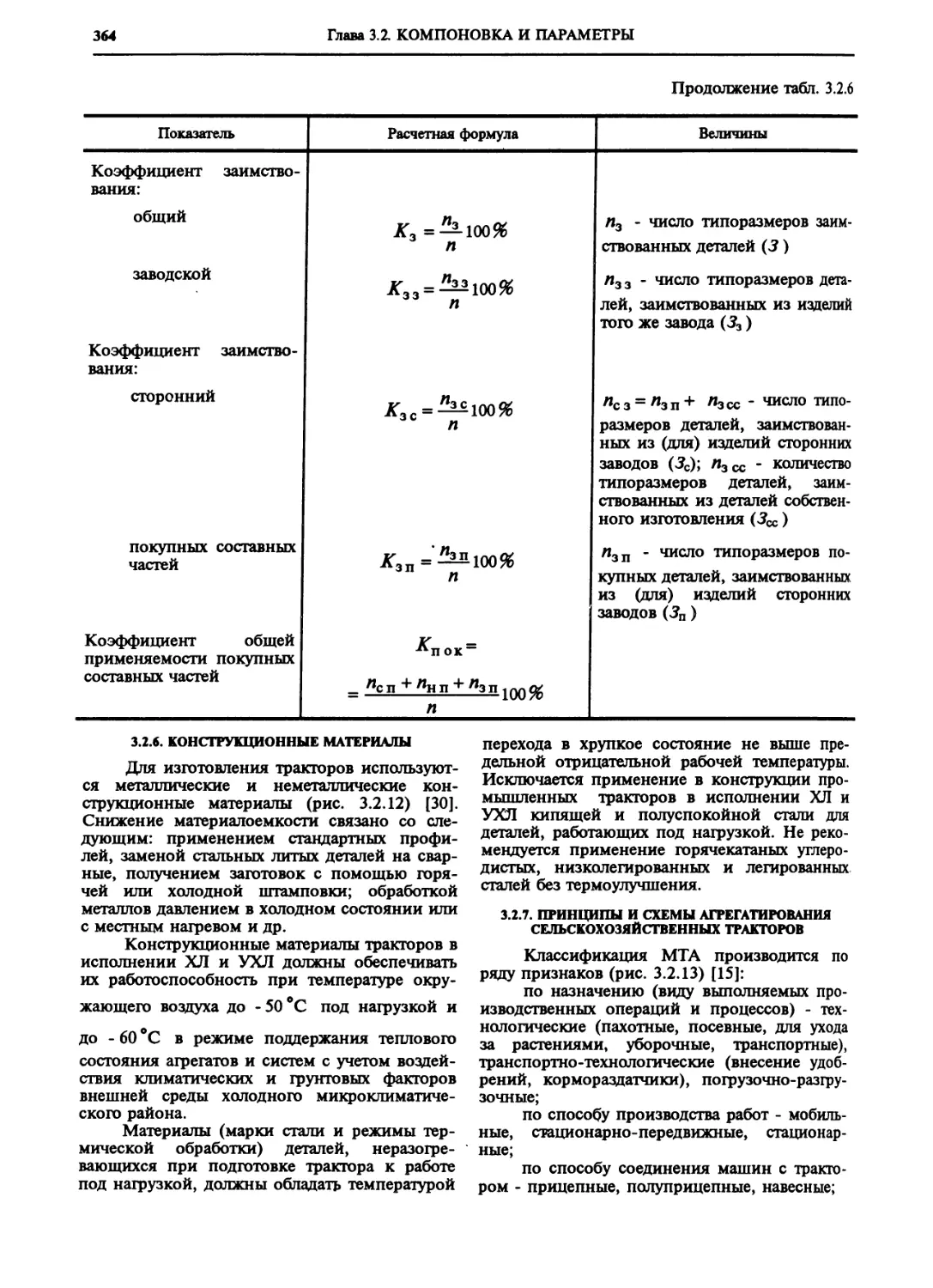
3.2.5. Технологичность и
оценка показателей
унификации тракторов (И. И
Ксеневич) 359
3.2.6. Конструкционные
материалы (И. П. Ксеневич) 364
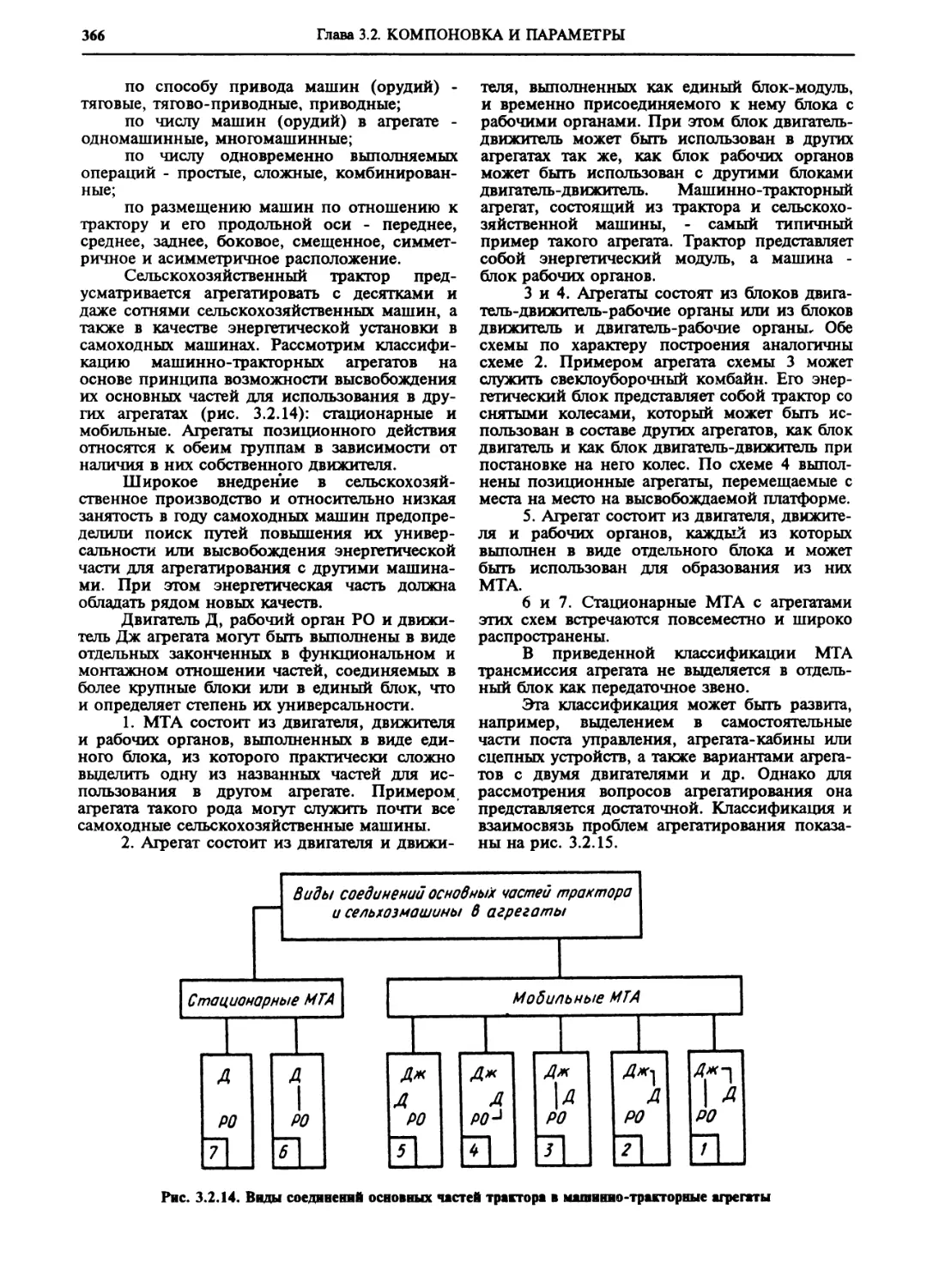
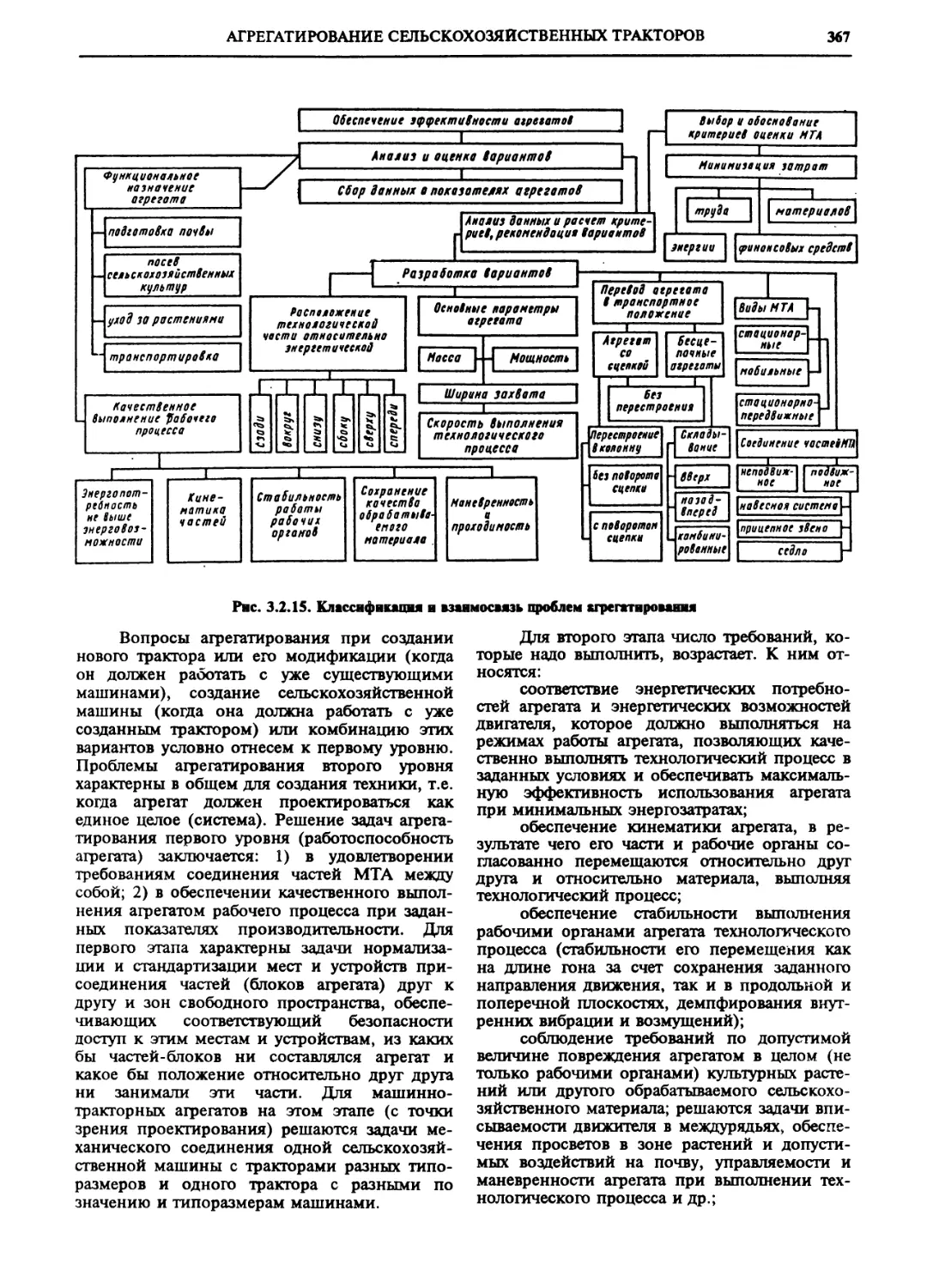
3.2.7. Принципы и схемы
агрегатирования
сельскохозяйственных тракторов
(И. П. Ксеневич) 364
3.2.8. Тенденции развития
конструкций тракторов
(Я. Я. Ксеневич, А. Я.
Парфенов) 369
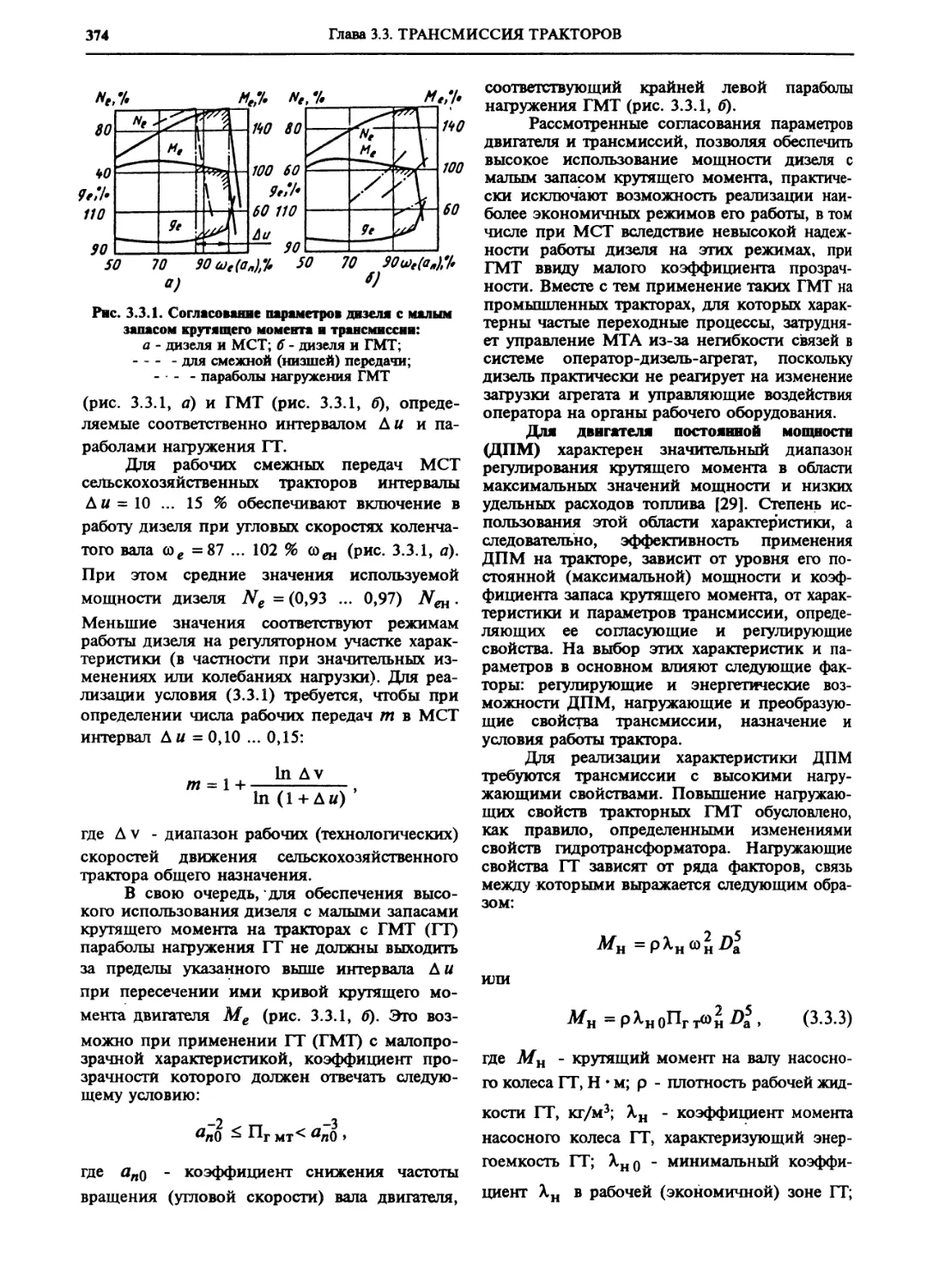
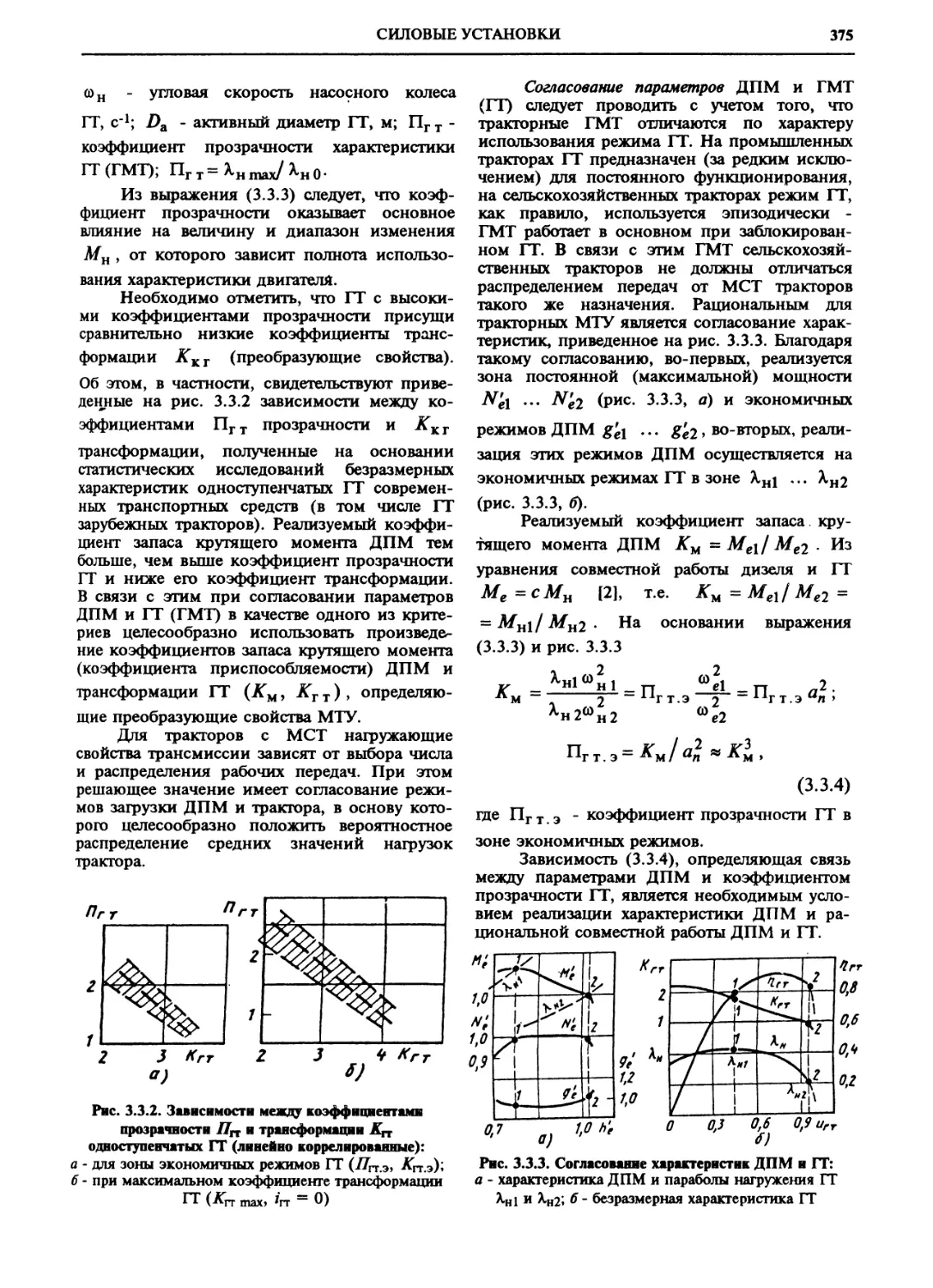
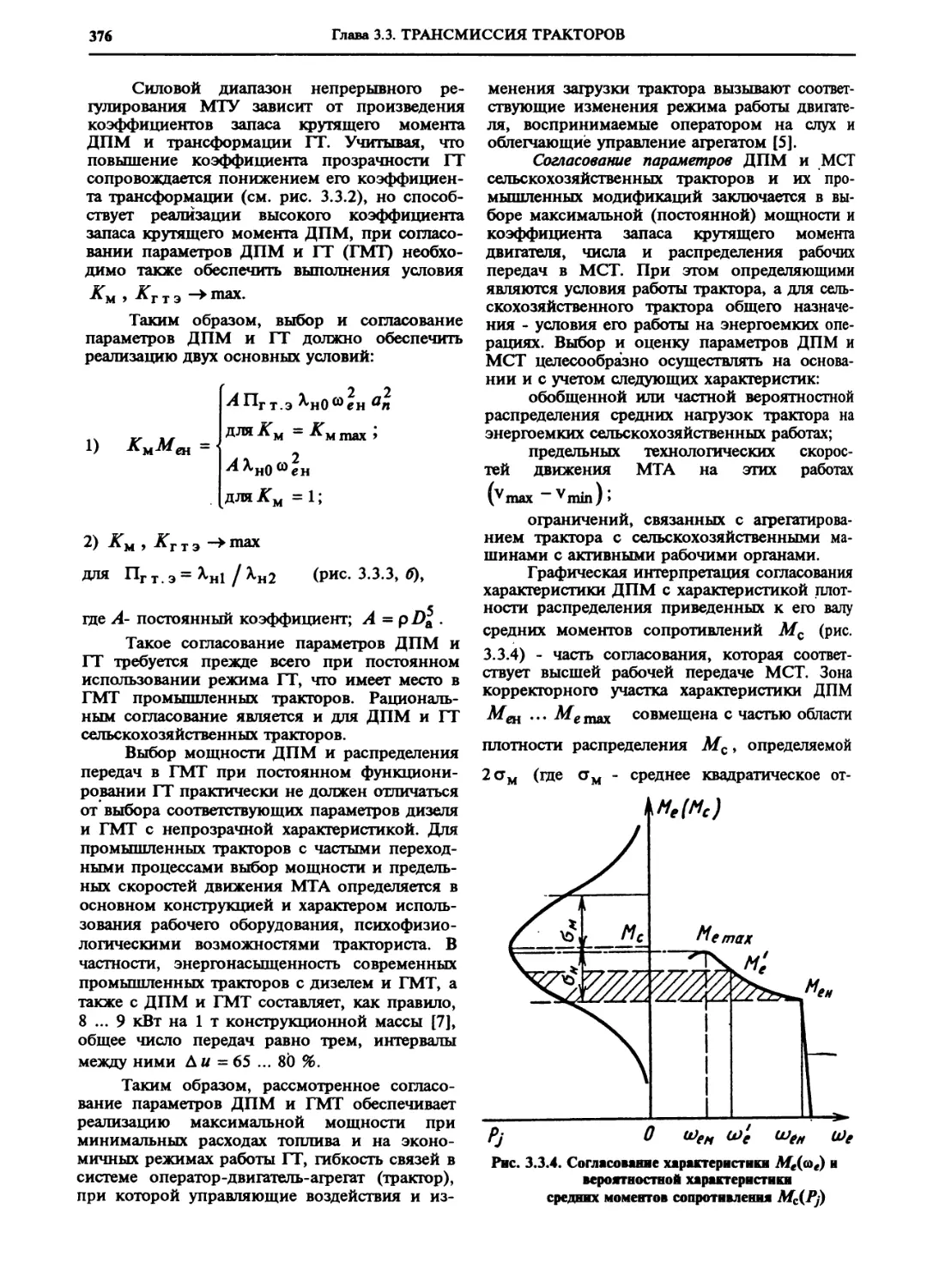
Глава 3.3. ТРАНСМИССИЯ 371
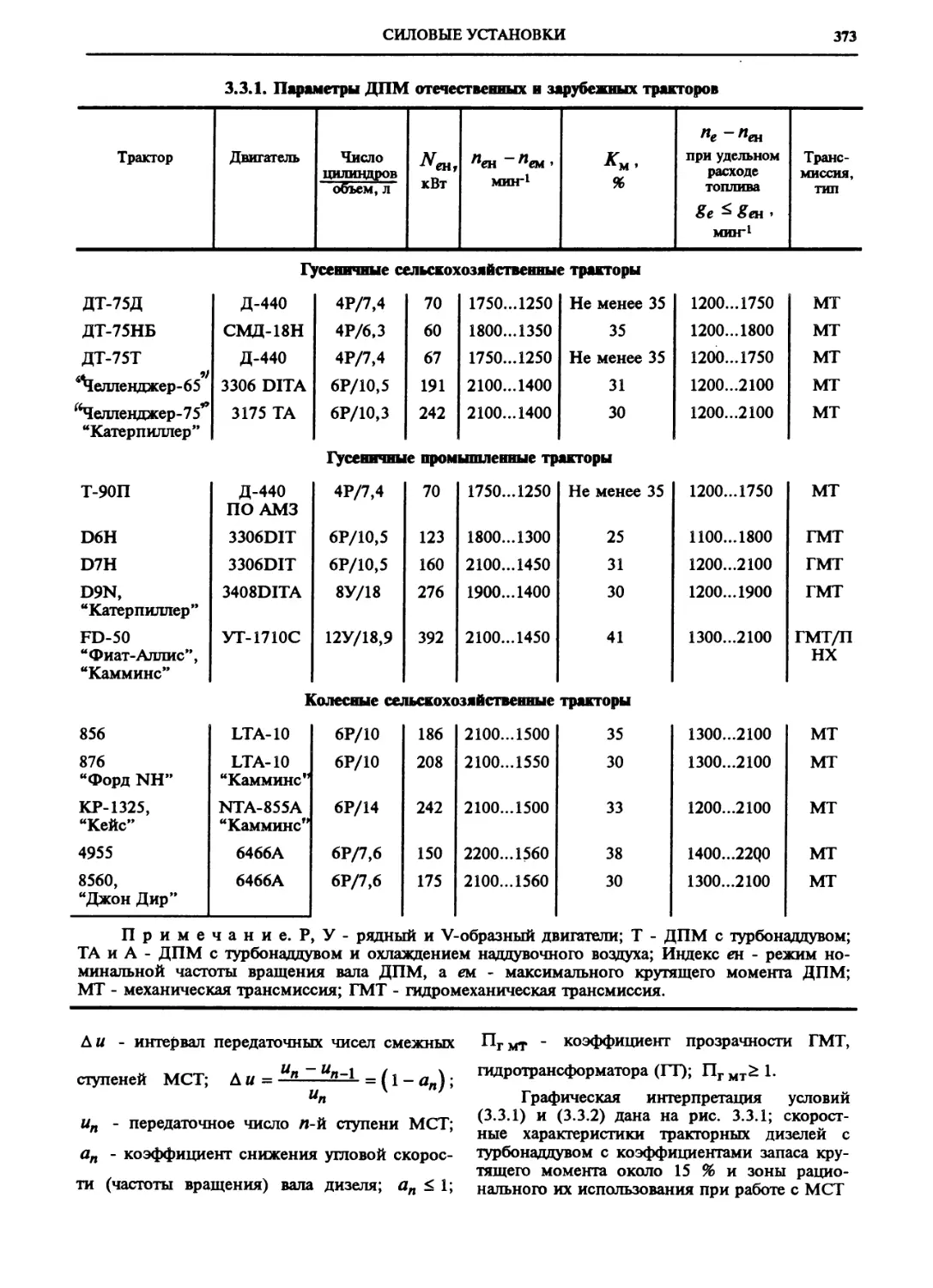
3.3.1 Силовые установки
(С И. Дорменев, Б. Н. Да-
выдков) 371
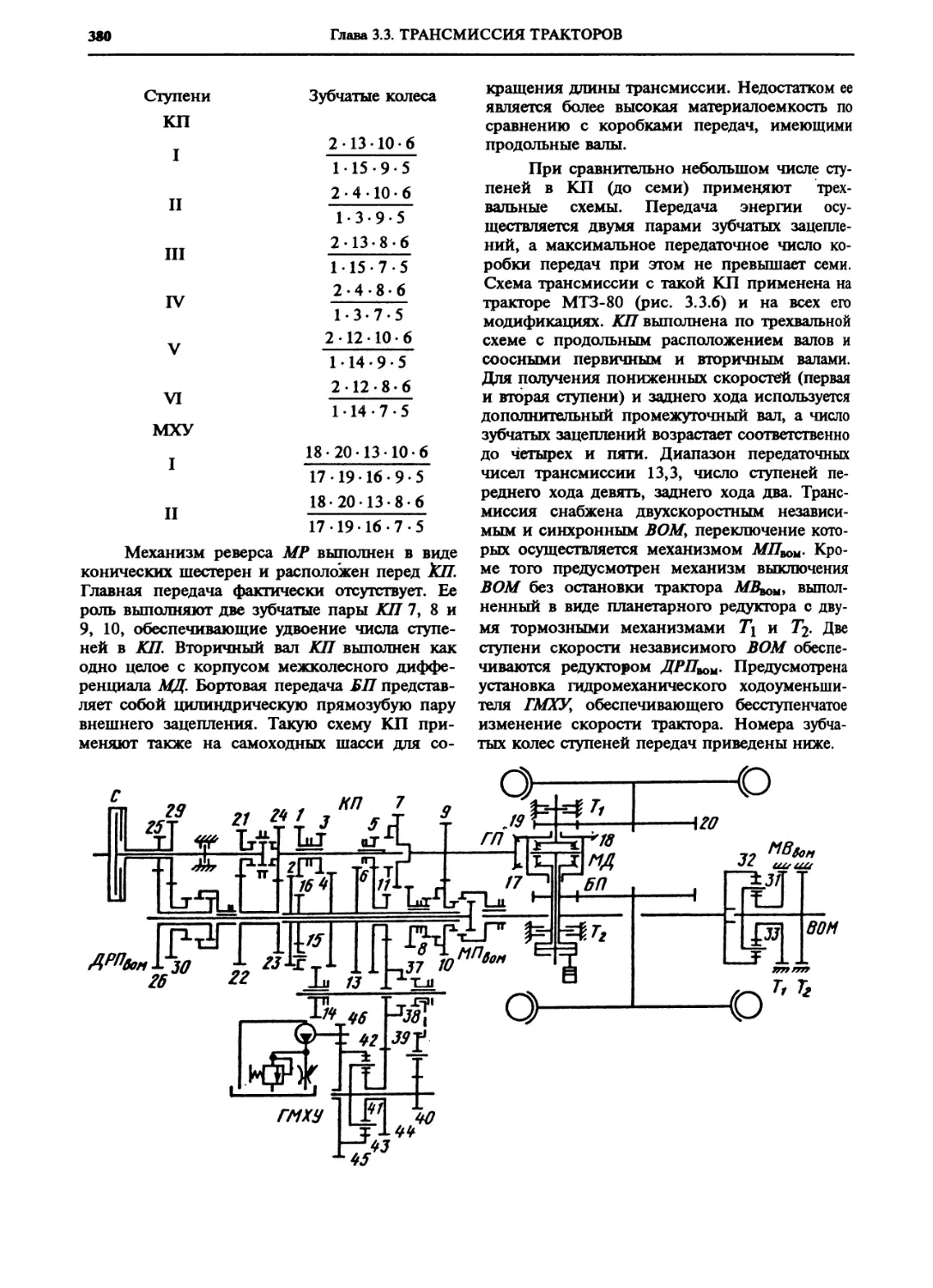
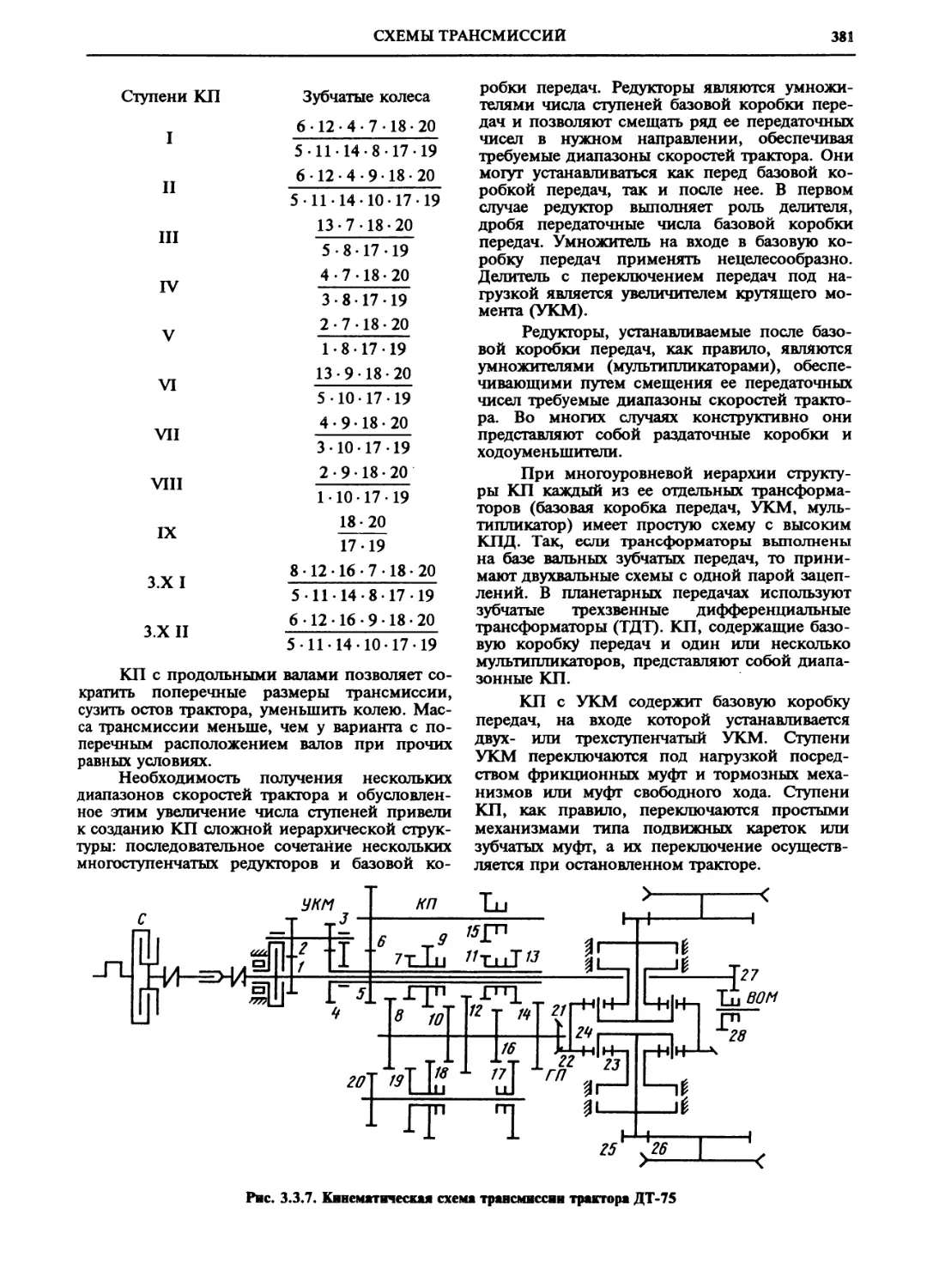
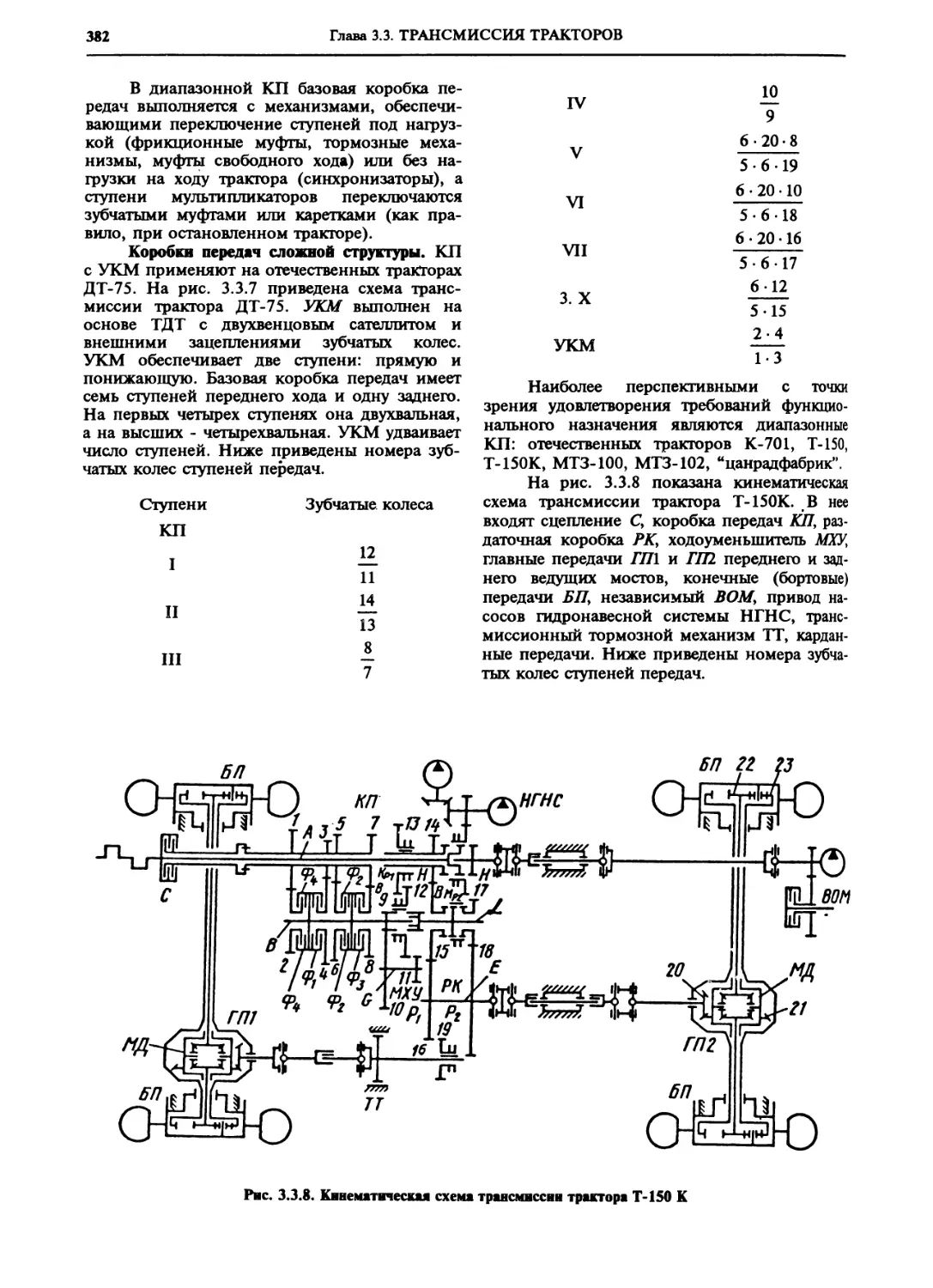
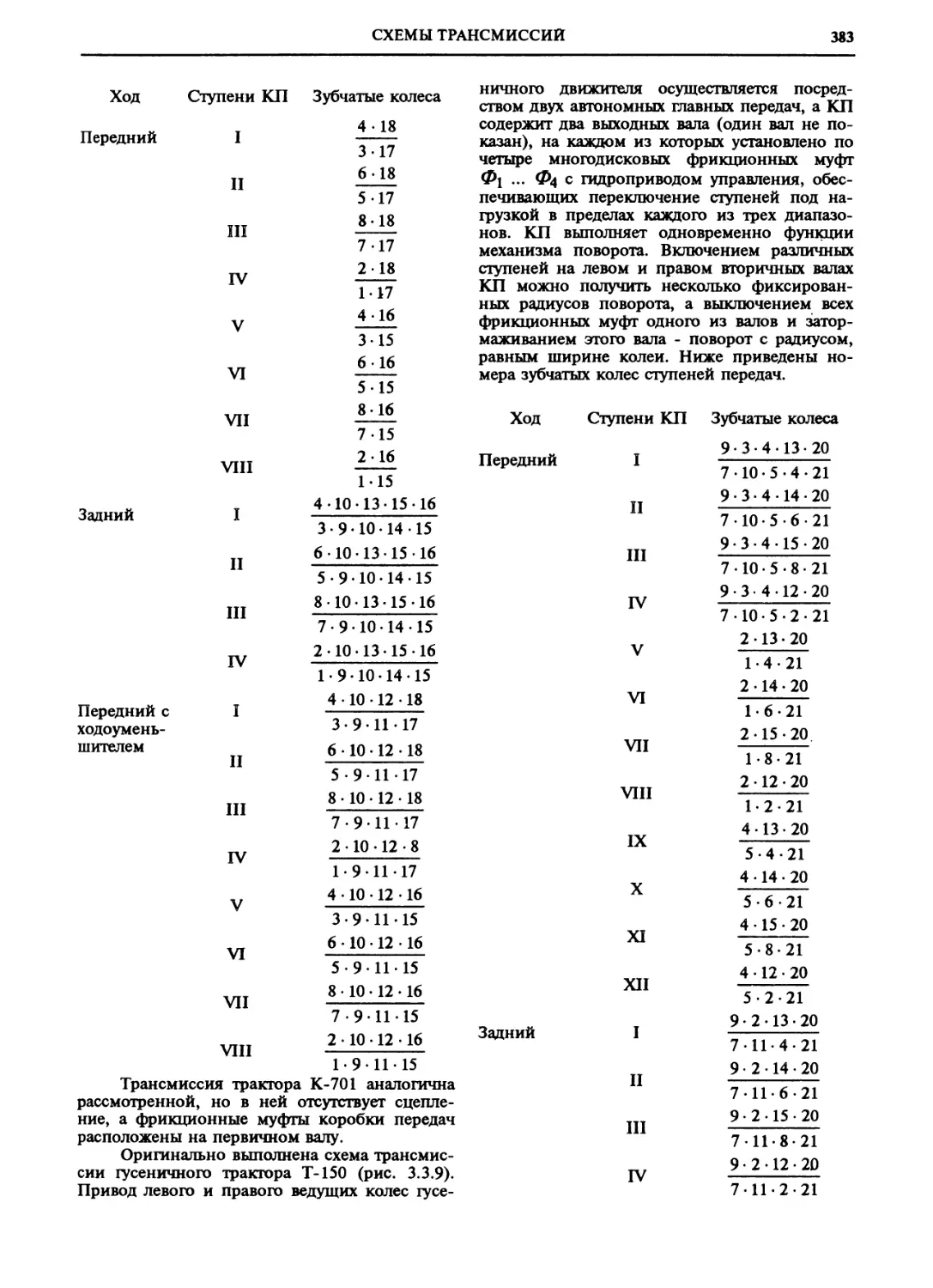
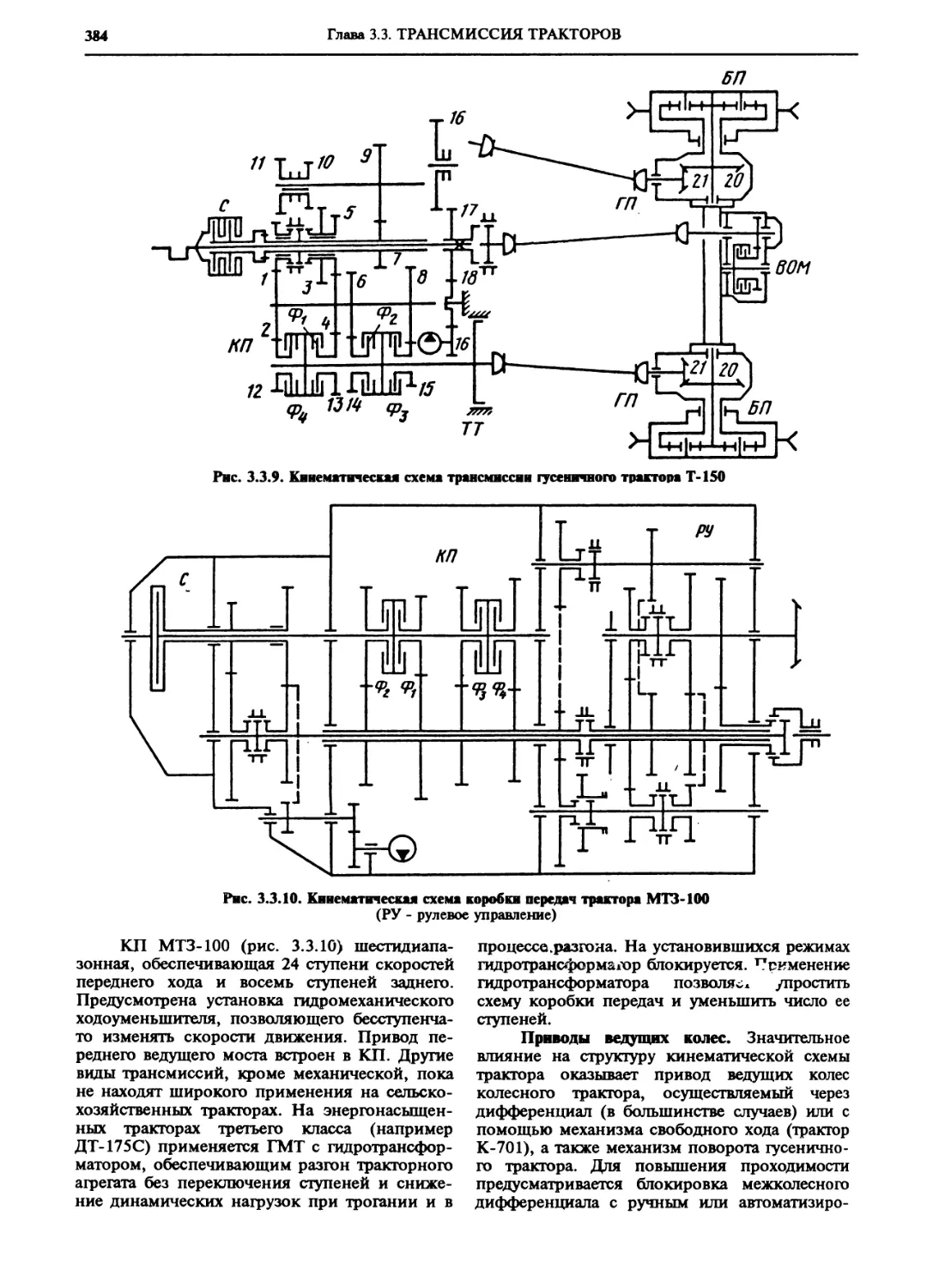
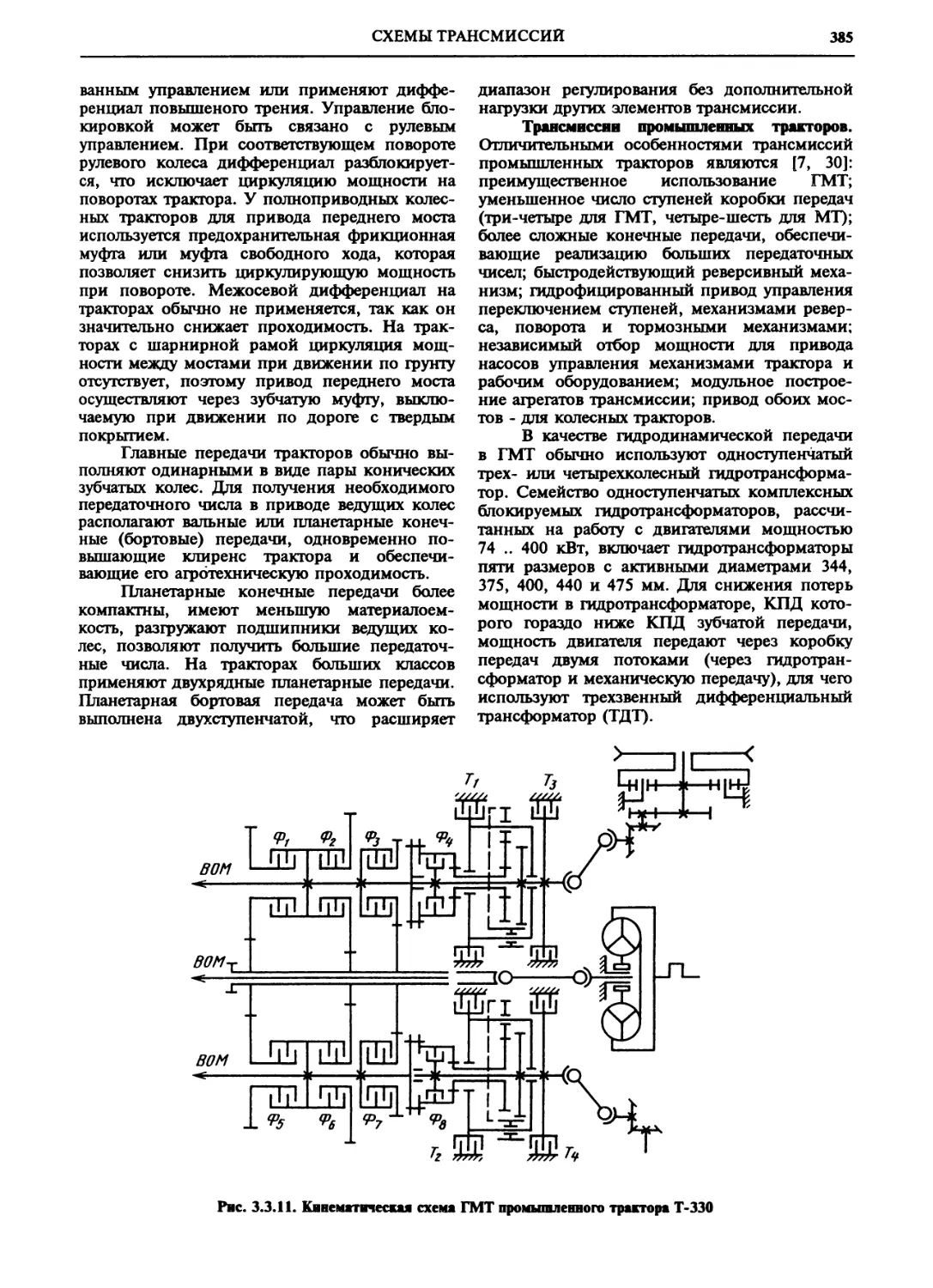
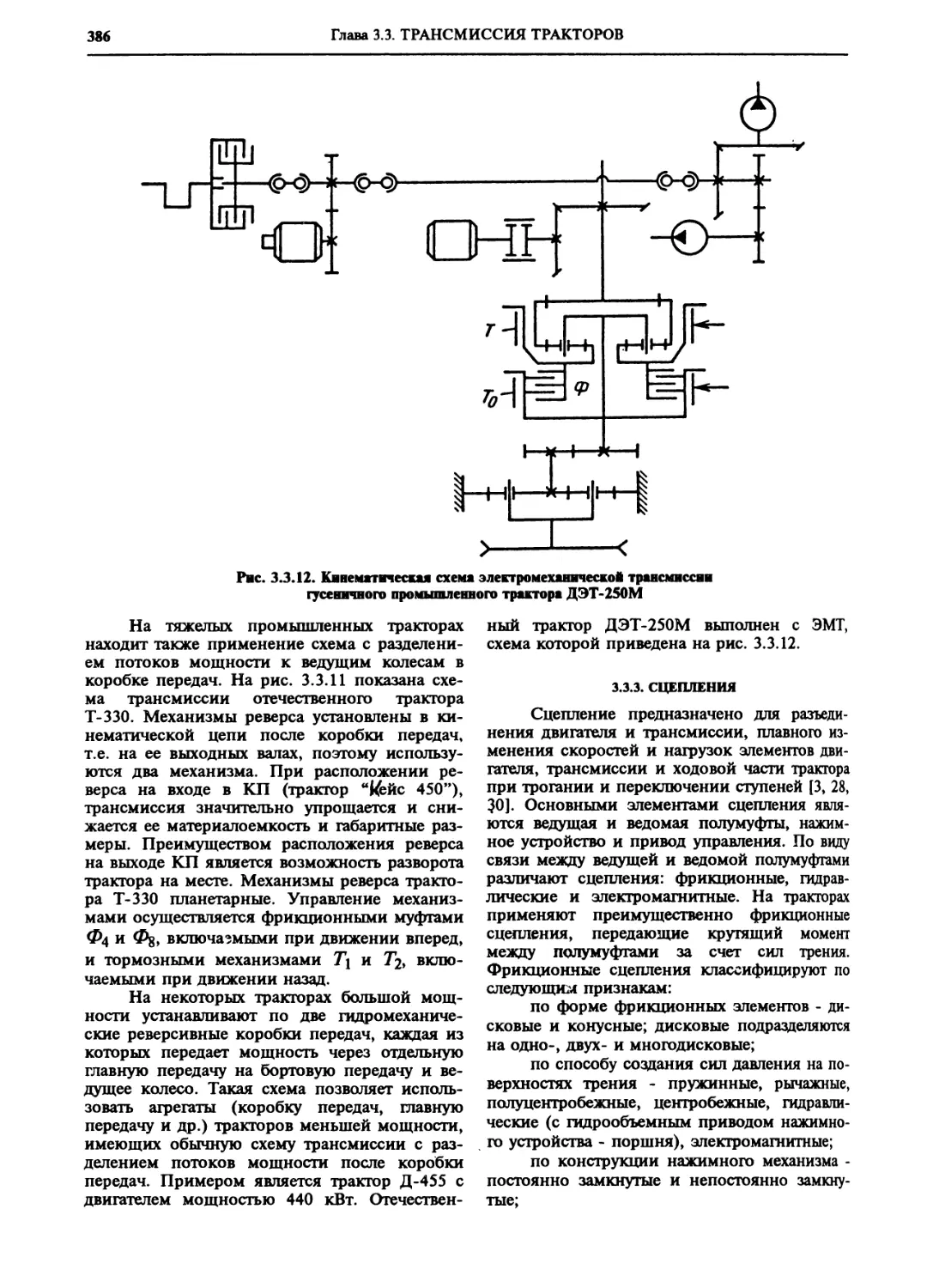
3.3.2. Схемы трансмиссий
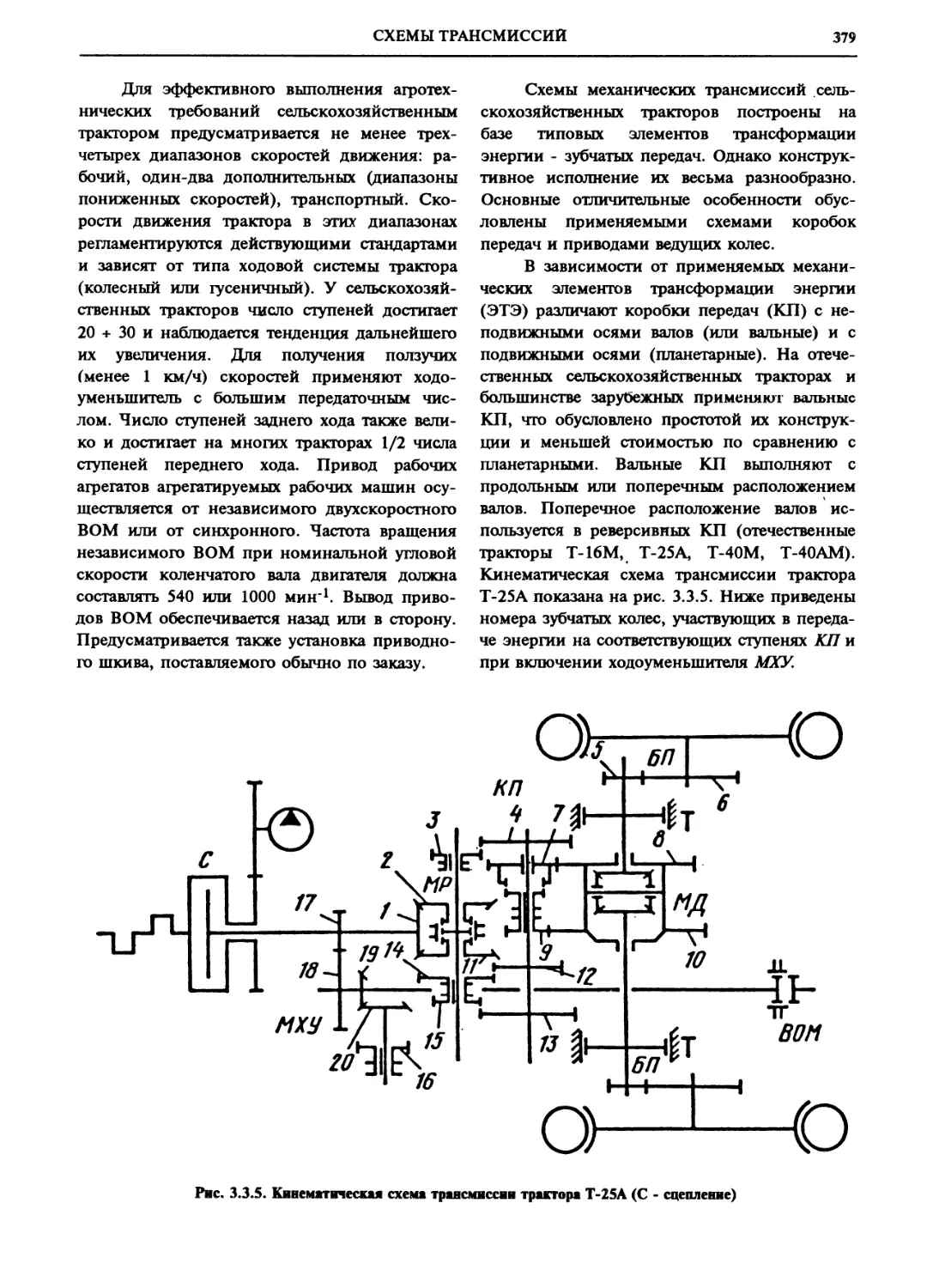
тракторов (Я. Я. Ксеневич) . 377
3.3.3. Сцепления (Я. Я.
Ксеневич, В. И Тарасик) 386
3.3.4. Коробки передач.
Элементы трансформации
энергии (Я. Я. Ксеневич,
В. И Тарасик) -Ж2
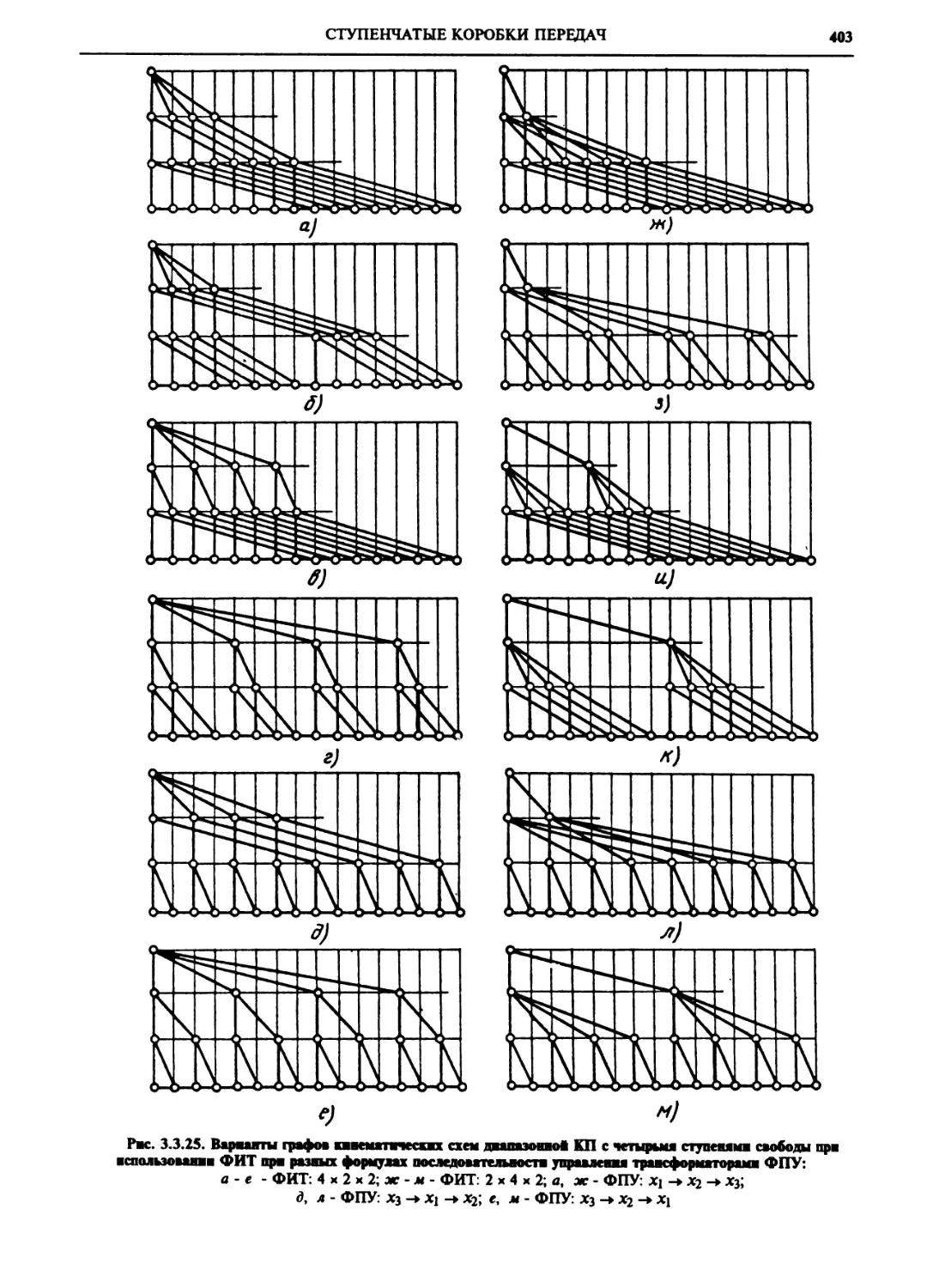
3.3.5. Ступенчатые коробки
передач (Я. Я. Ксеневич,
В. И Тарасик) 398
3.3.6. Гидромеханические
коробки передач (В. П. Тарасик)
3.3.7. Главные передачи
(В. Я. Тарасик) Ц10
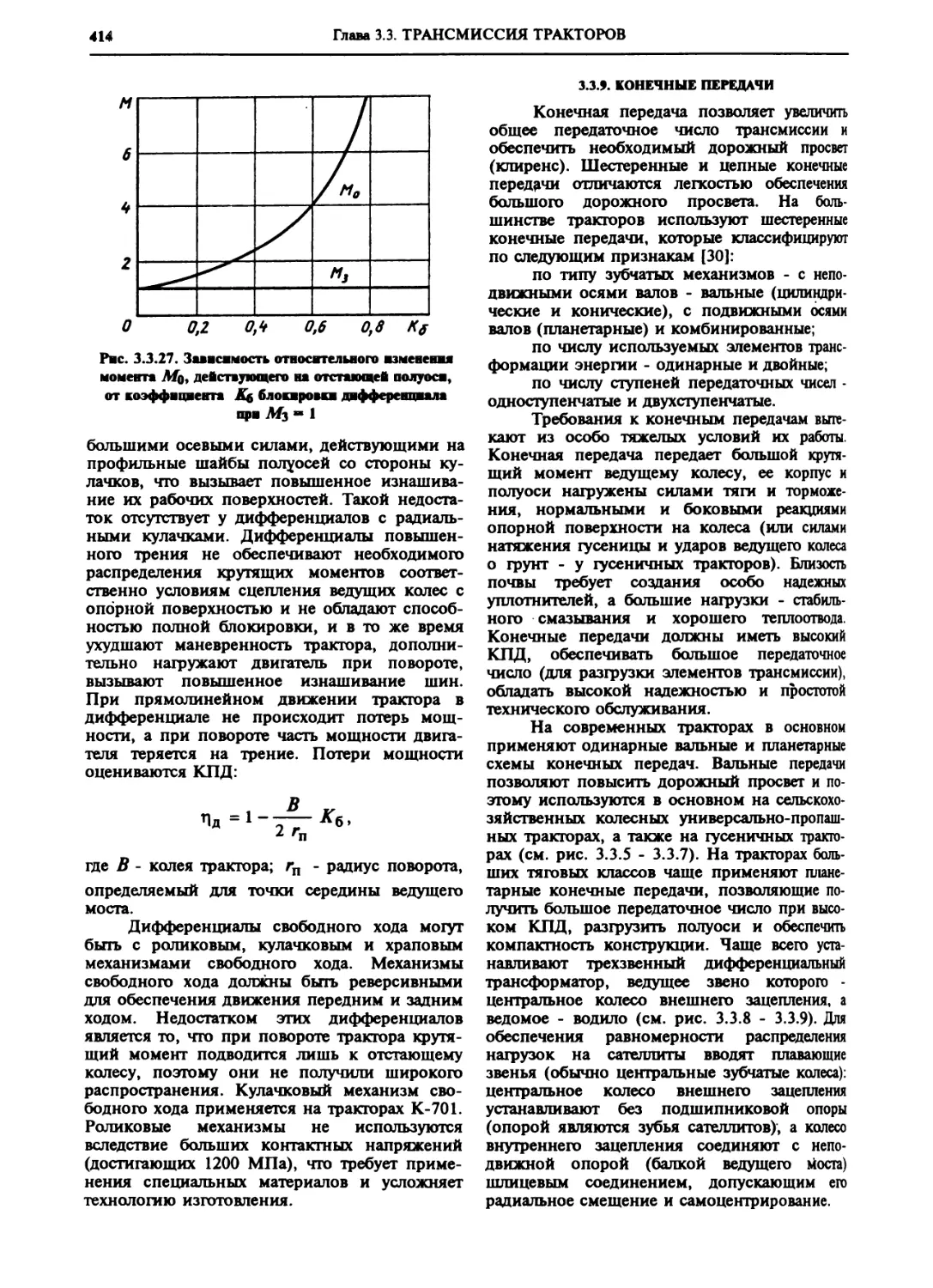
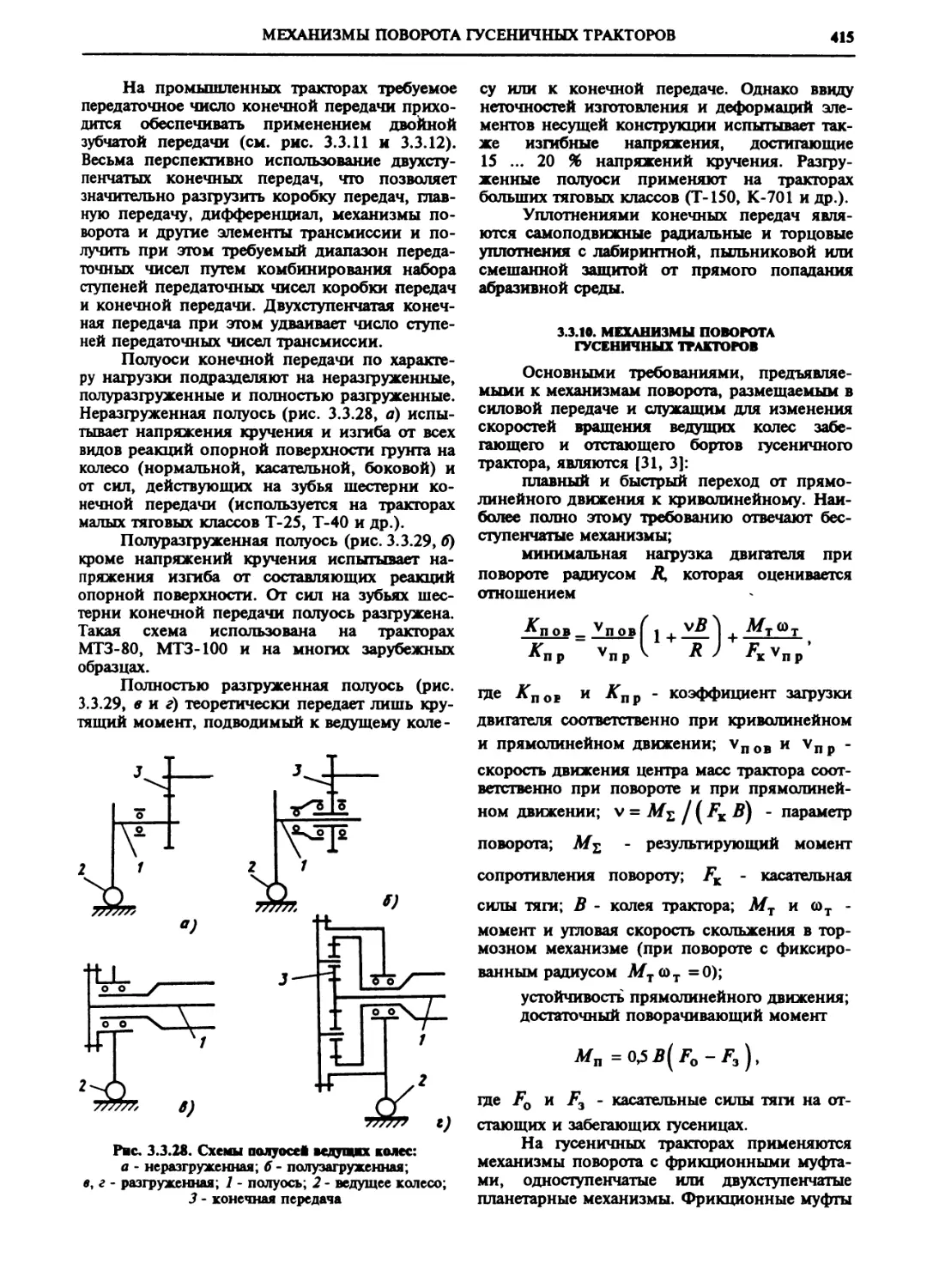
3.3.8. Дифференциалы
(Я. Я. Ксеневич) 412
3.3.9. Конечные передачи
(В. Я. Тарасик) 414
3.3.10. Механизмы
поворота гусеничных тракторов
(В. В. Гуськов) 415
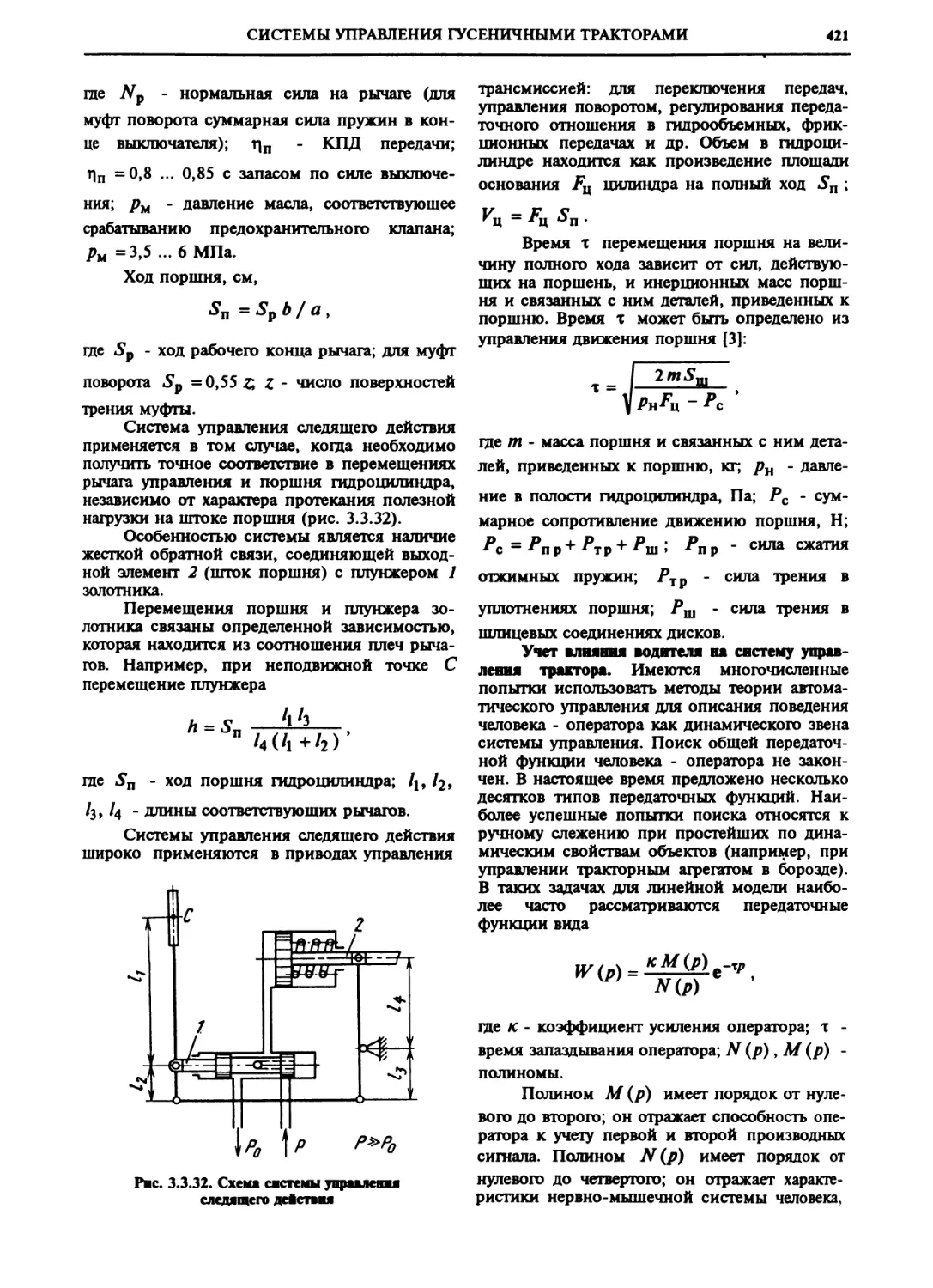
3.3.11. Системы управления
гусеничными тракторами
(М. Я. Коденко) 419
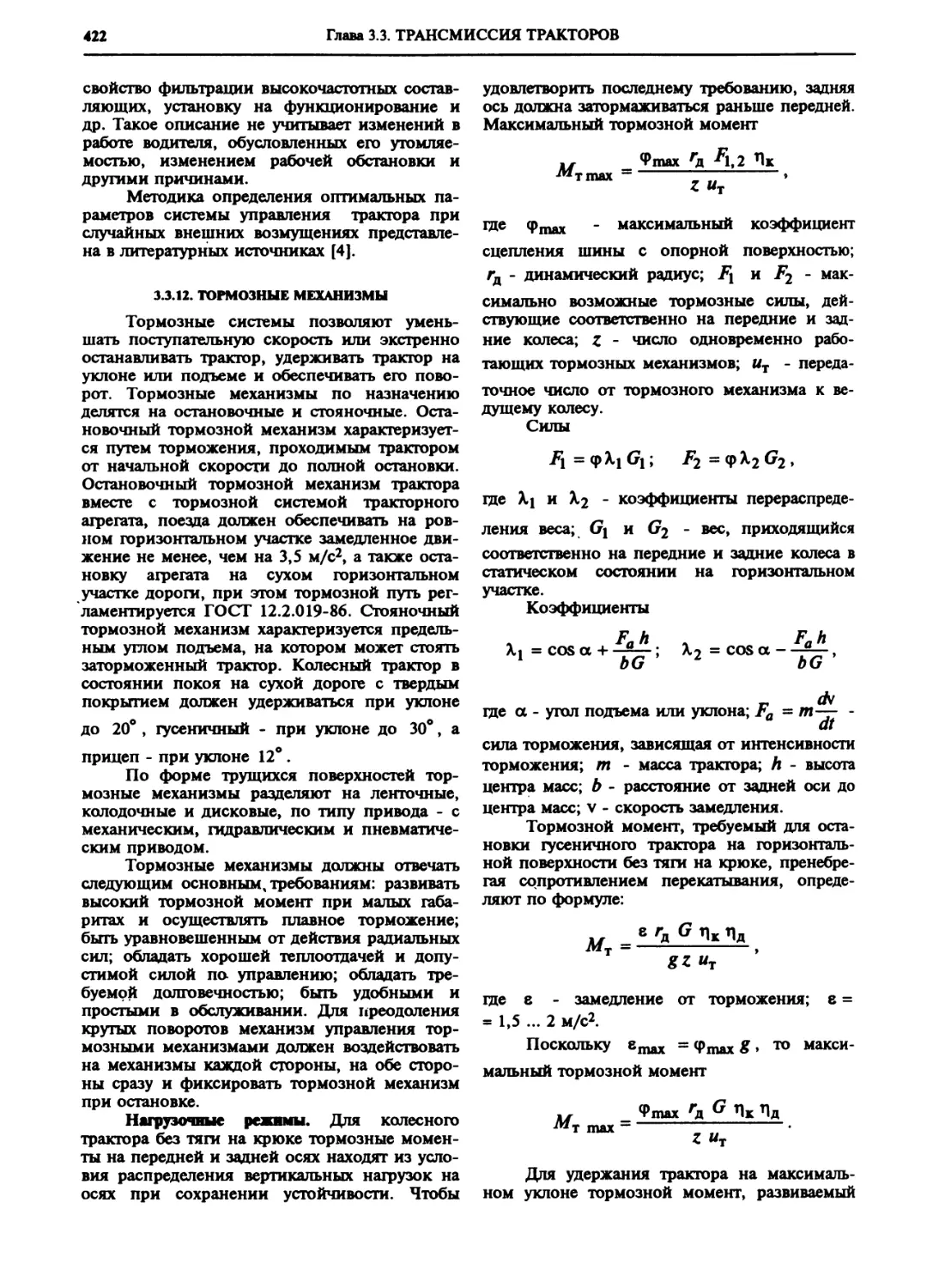
3.3.12. Тормозные
механизмы (В. В. Гуськов, И. И
Ксеневич) 422
3.3.13. Материалы
основных деталей трансмисссии
(Я. Я. Ксеневич) 431
Глава 3.4. НЕСУЩИЕ
СИСТЕМЫ ТРАКТОРОВ 4з2
3.4.1. Особенности и
методы расчетов (А/. Я. Коденко) 432
8
ОГЛАВЛЕНИЕ
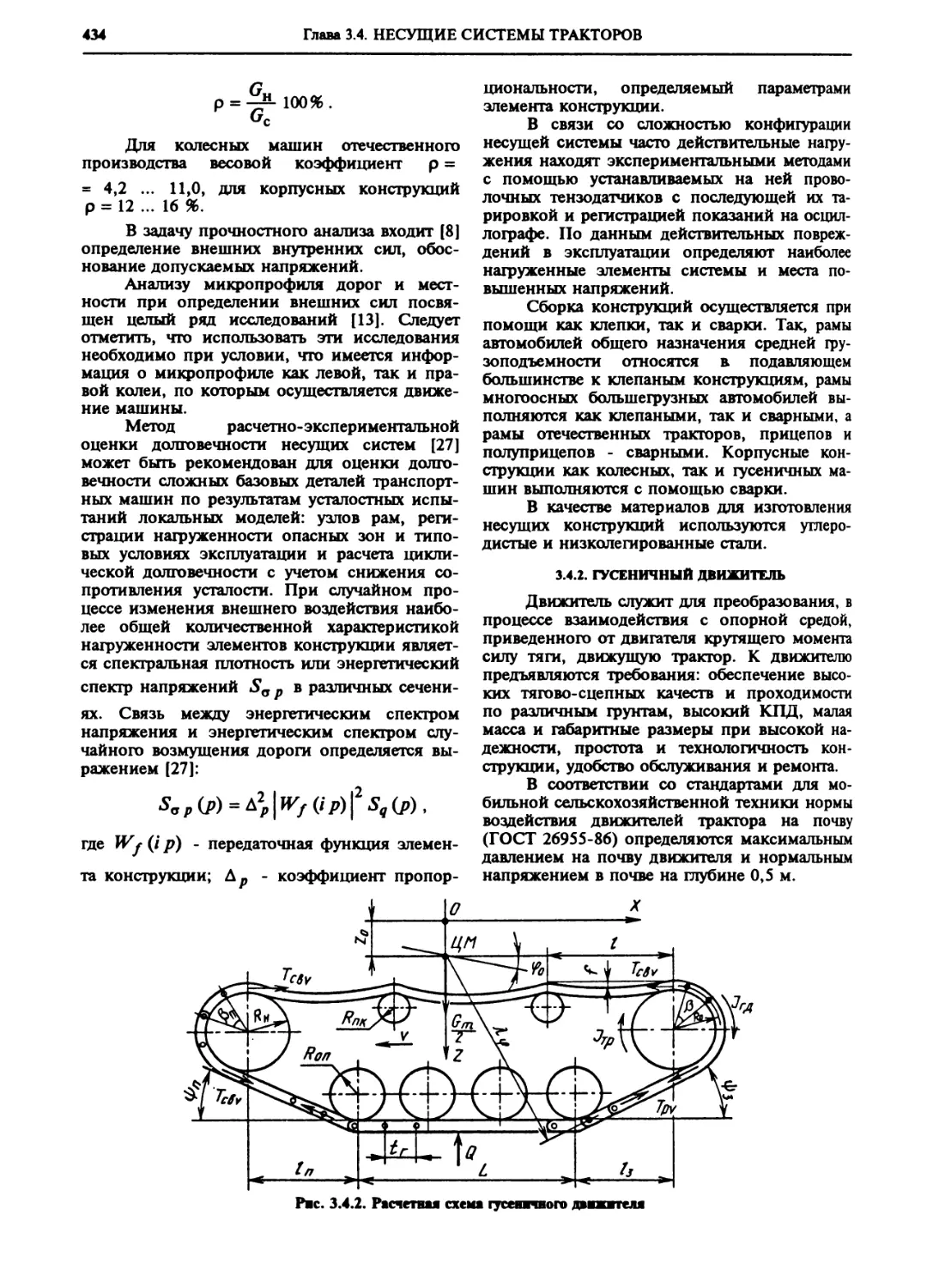
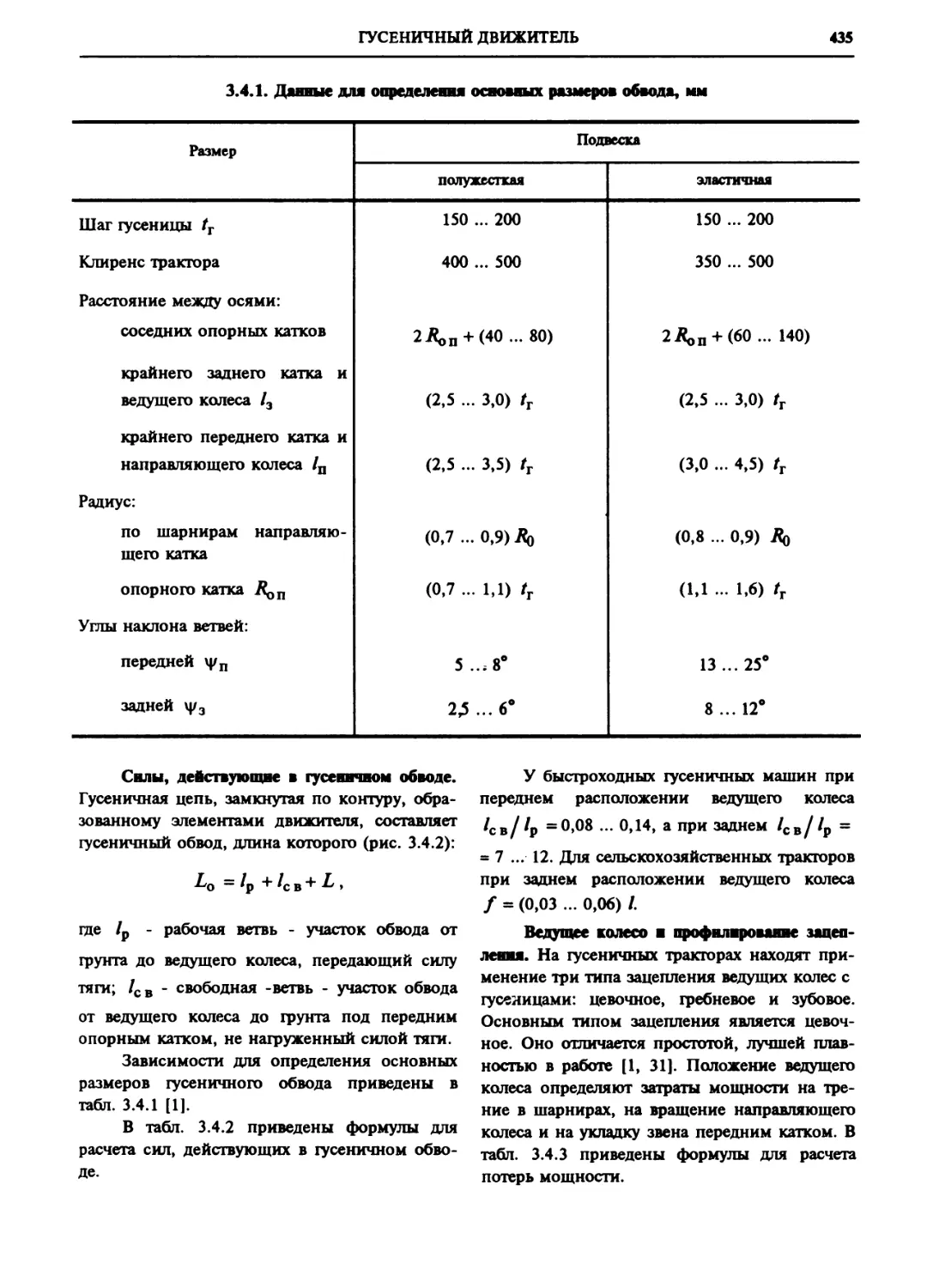
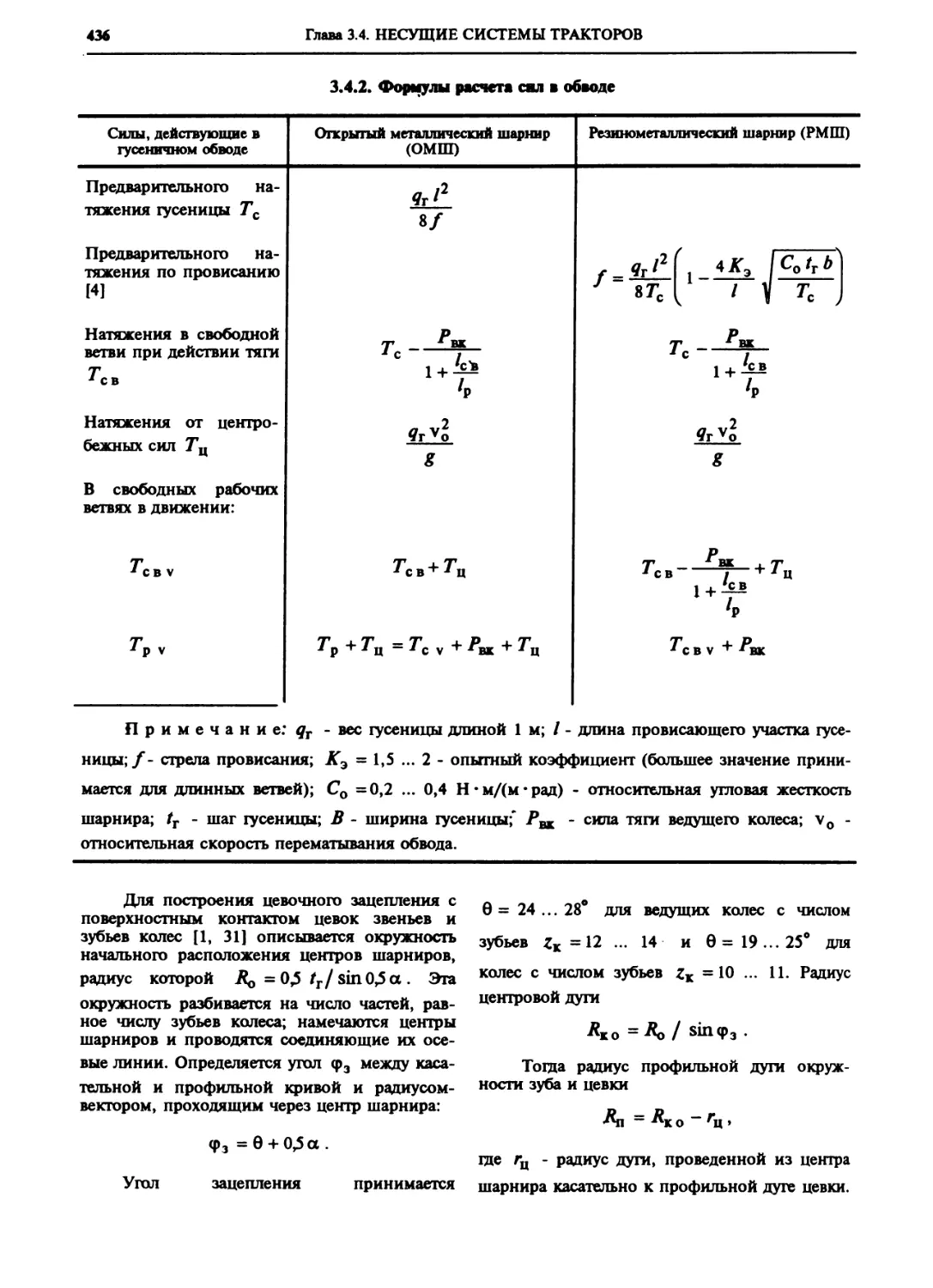
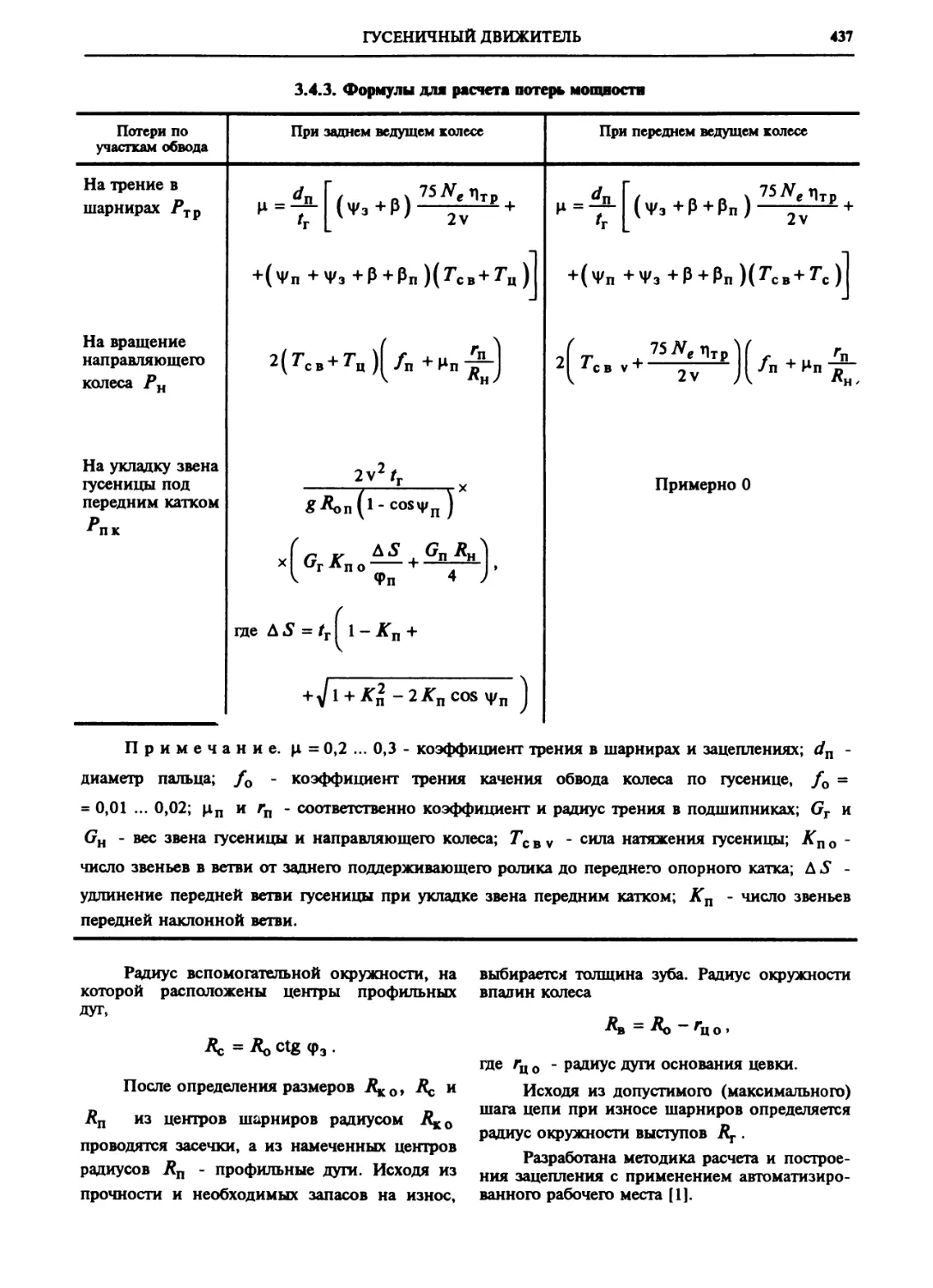
3.4.2. Гусеничный
движитель (А/. Я. Коденко) 434
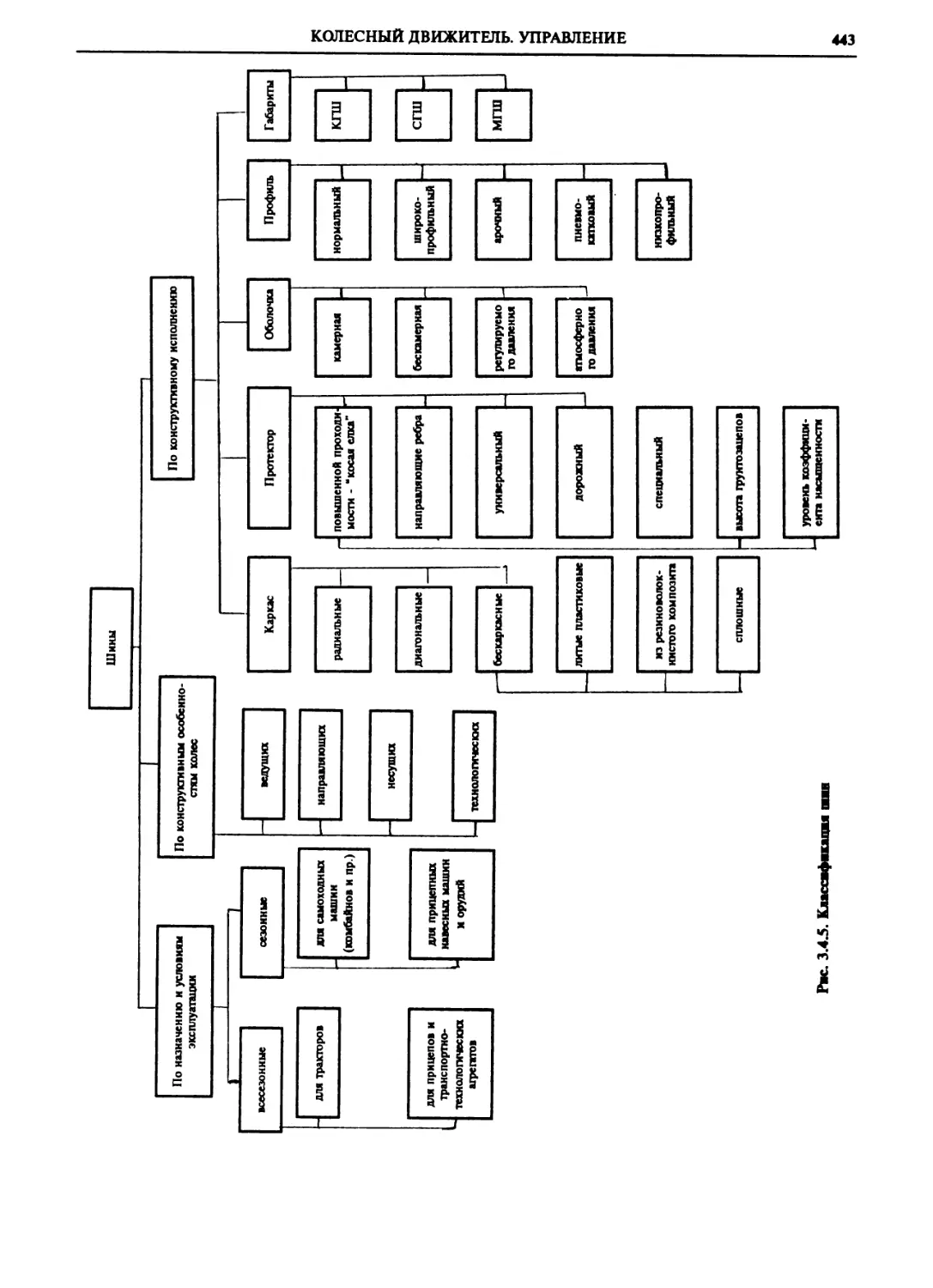
3.4.3. Колесный движитель.
Система управления (А В.
Гуськов) 442
3.4.4. Подвески колесных и
гусеничных тракторов
(Ю. Е. Атаманов) 453
Глава 3.5. РАБОЧЕЕ МЕСТО
ОПЕРАТОРА.
ТРЕБОВАНИЯ ТЕХНИКИ
БЕЗОПАСНОСТИ И ОХРАНЫ
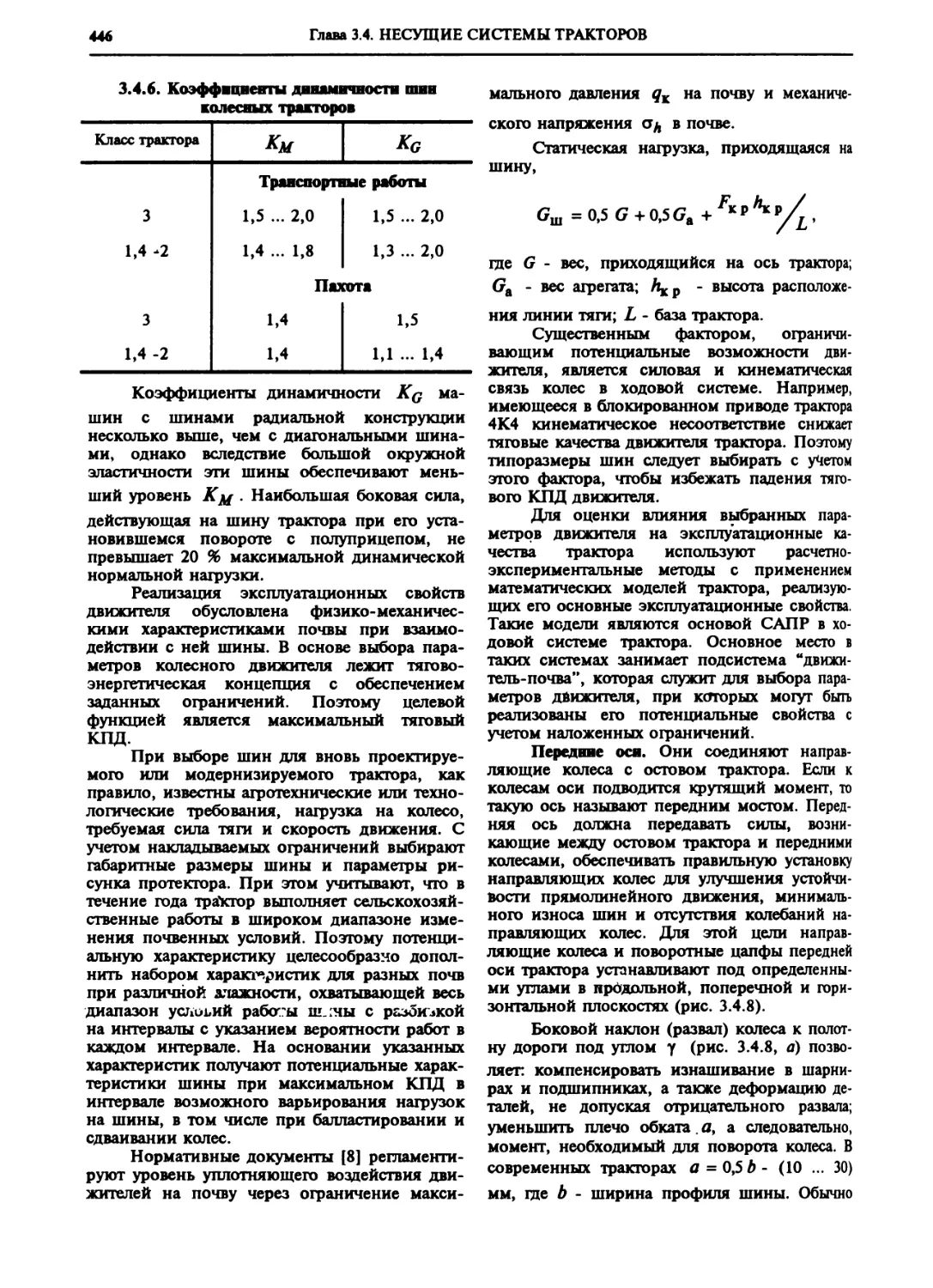
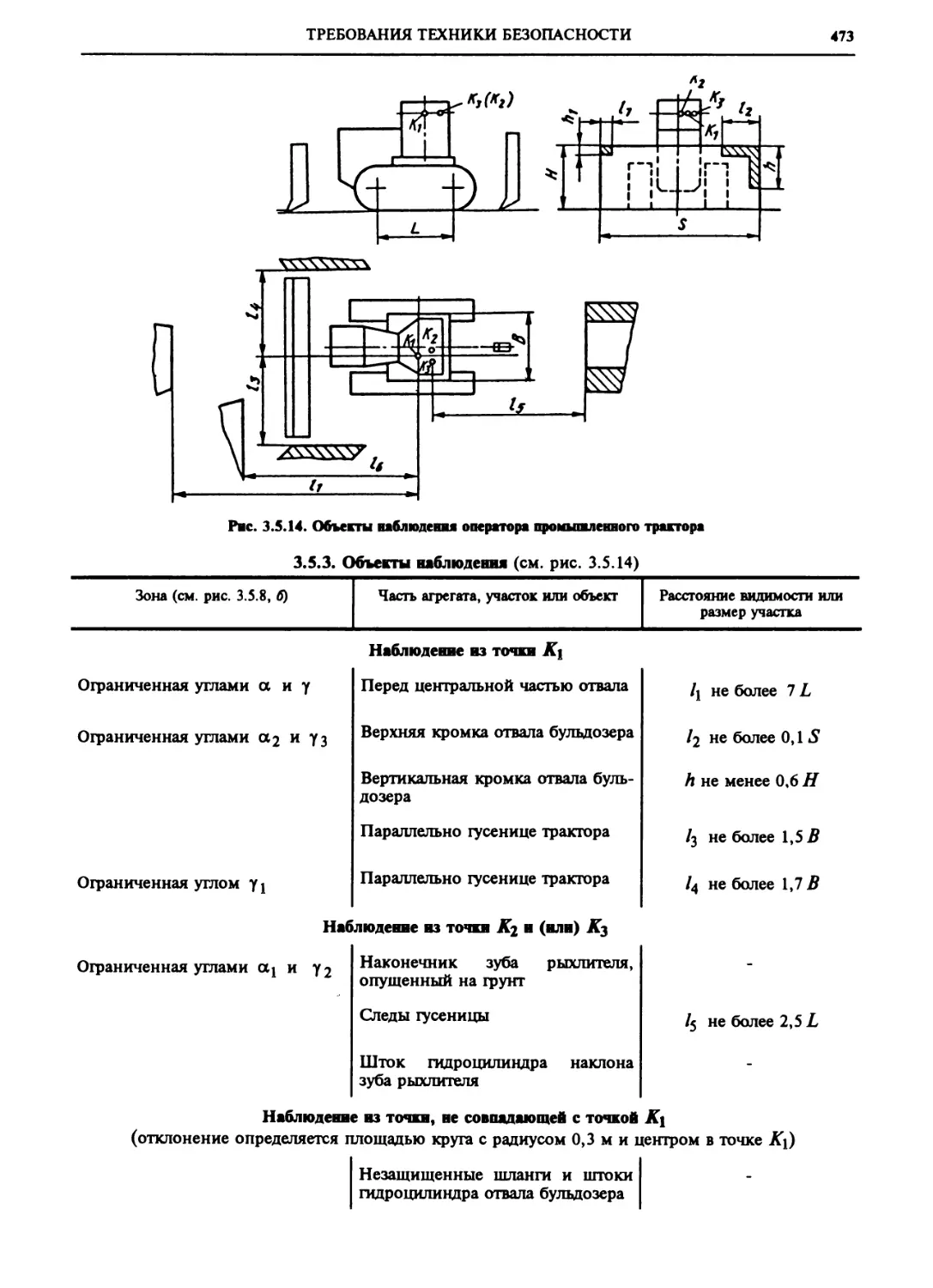
ТРУДА (И. И Ксенееич) 463^
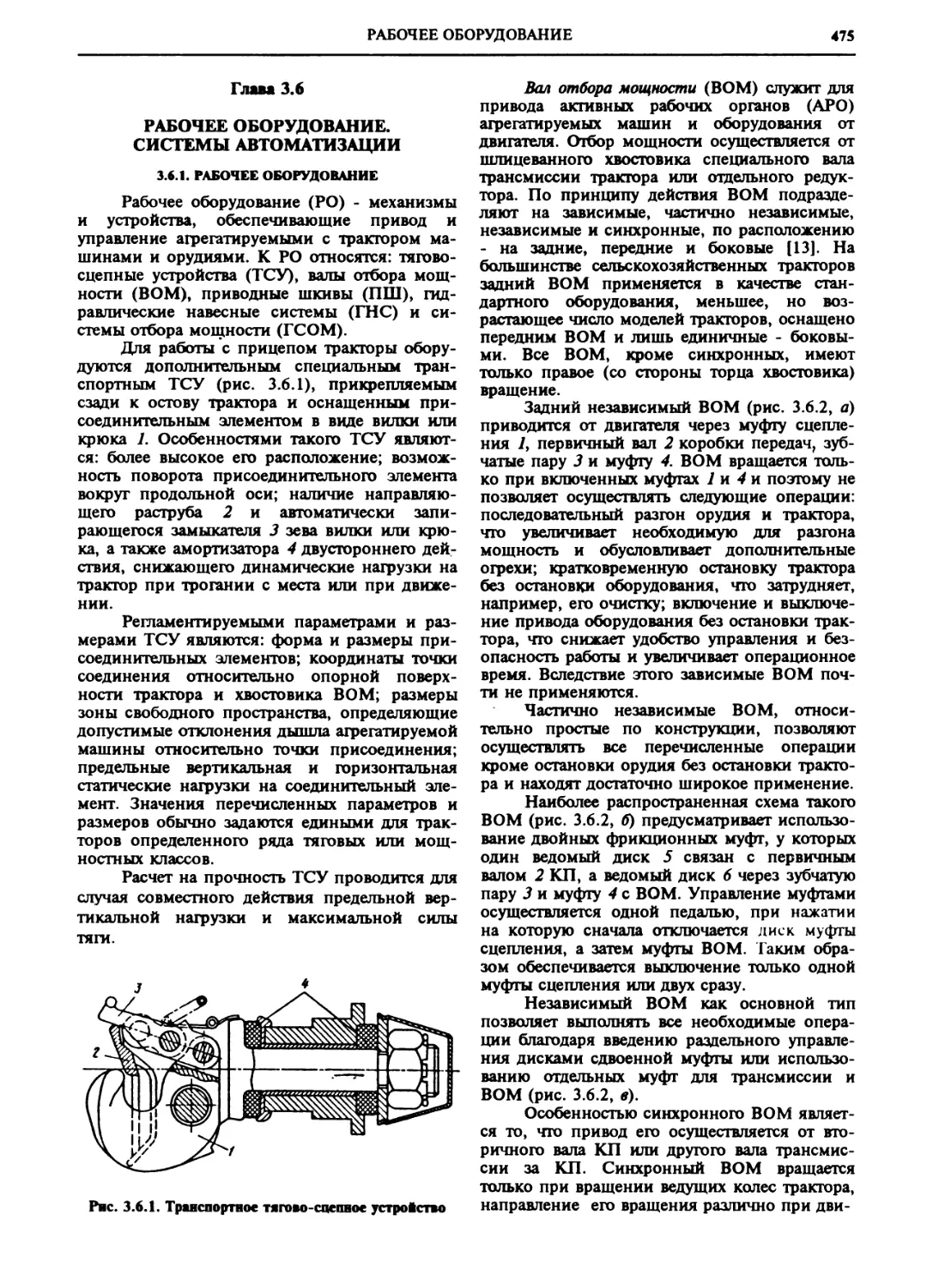
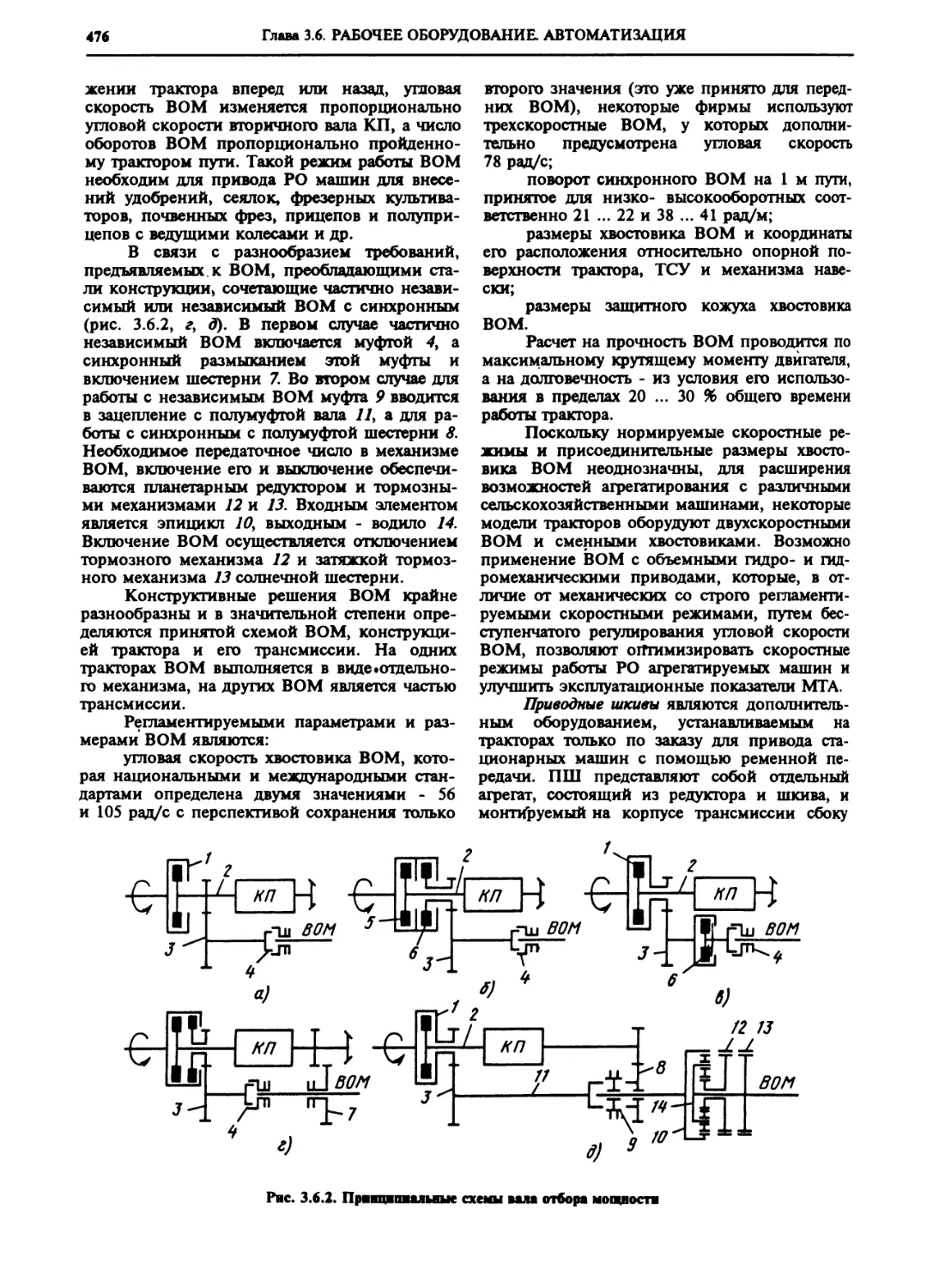
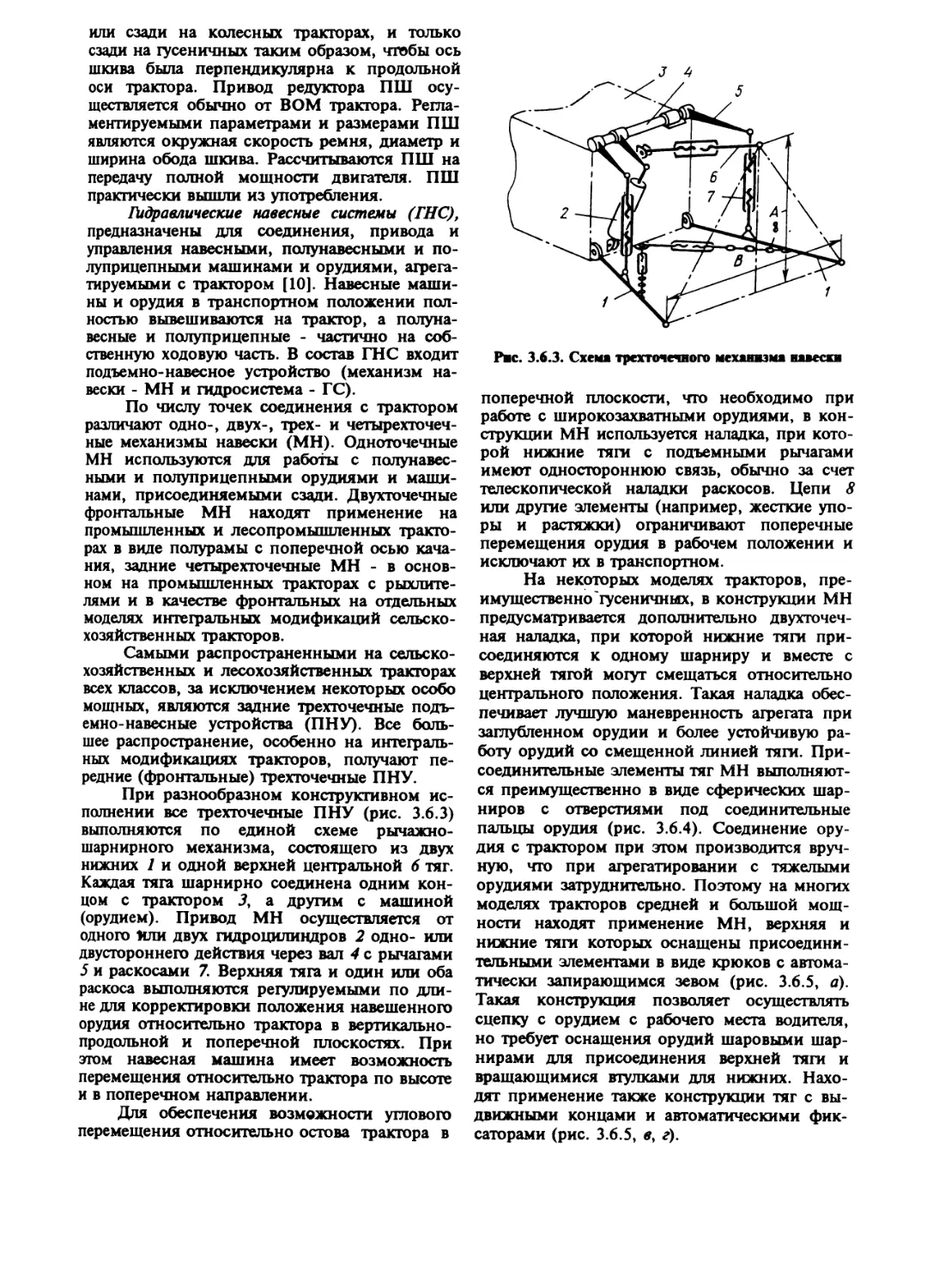
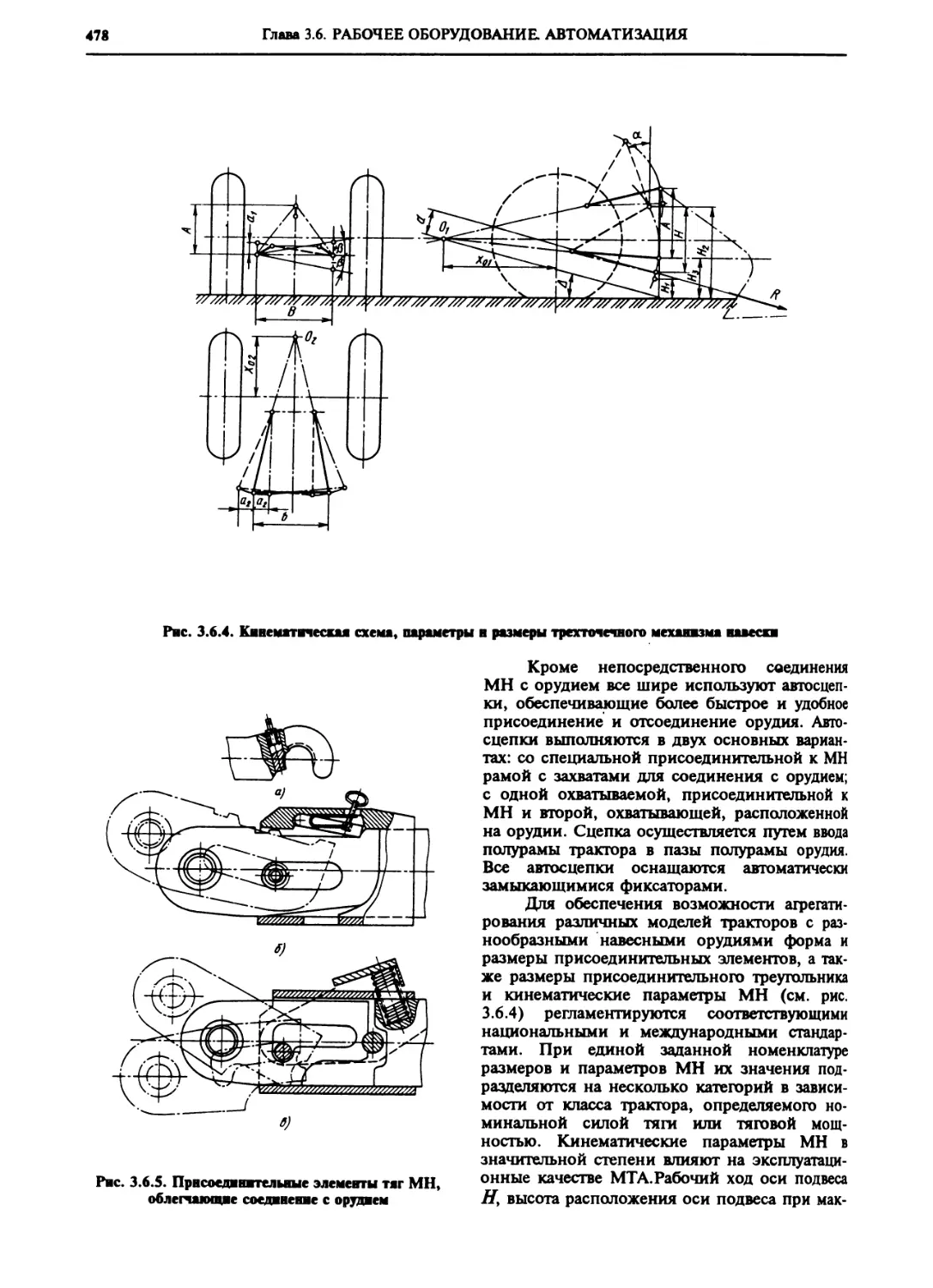
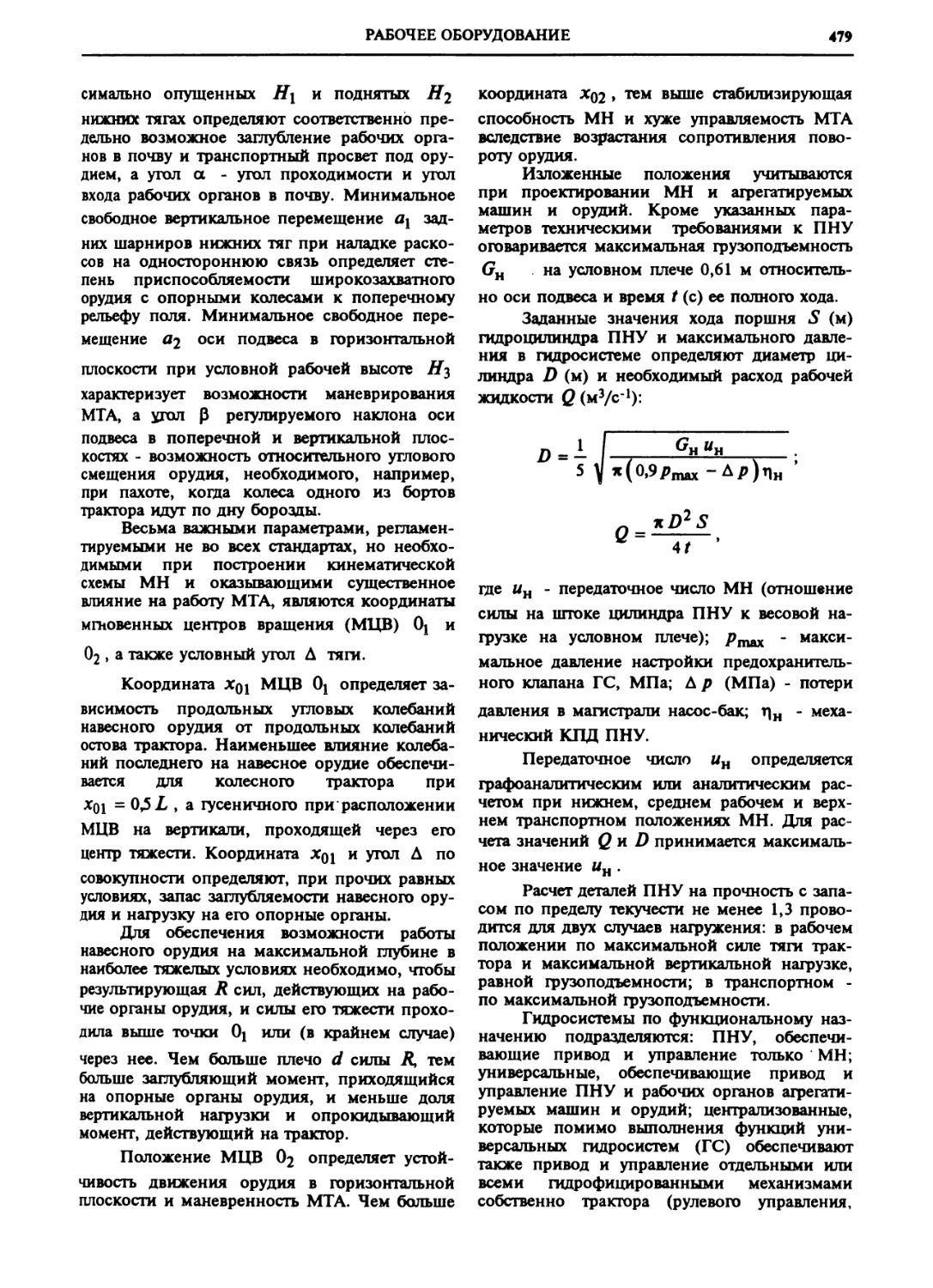
Глава 3.6. РАБОЧЕЕ
ОБОРУДОВАНИЕ. СИСТЕМЫ
АВТОМАТИЗАЦИИ 475
3.6.1. Рабочее оборудование
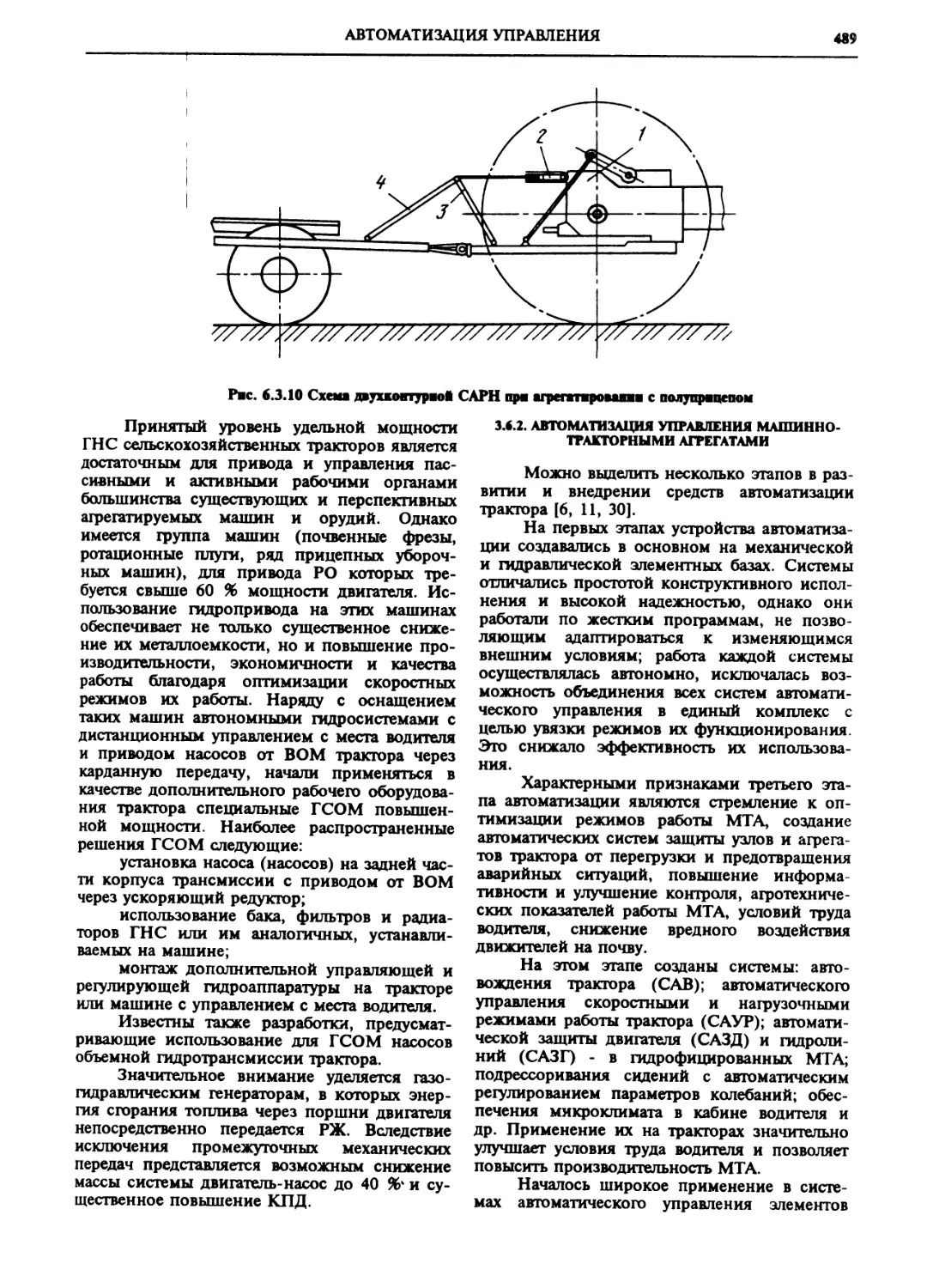
(Б. А. Любимое, Д. Е. Флеер) 475
3.6.2. Автоматизация
управления
машинно-тракторными агрегатами (И. П.
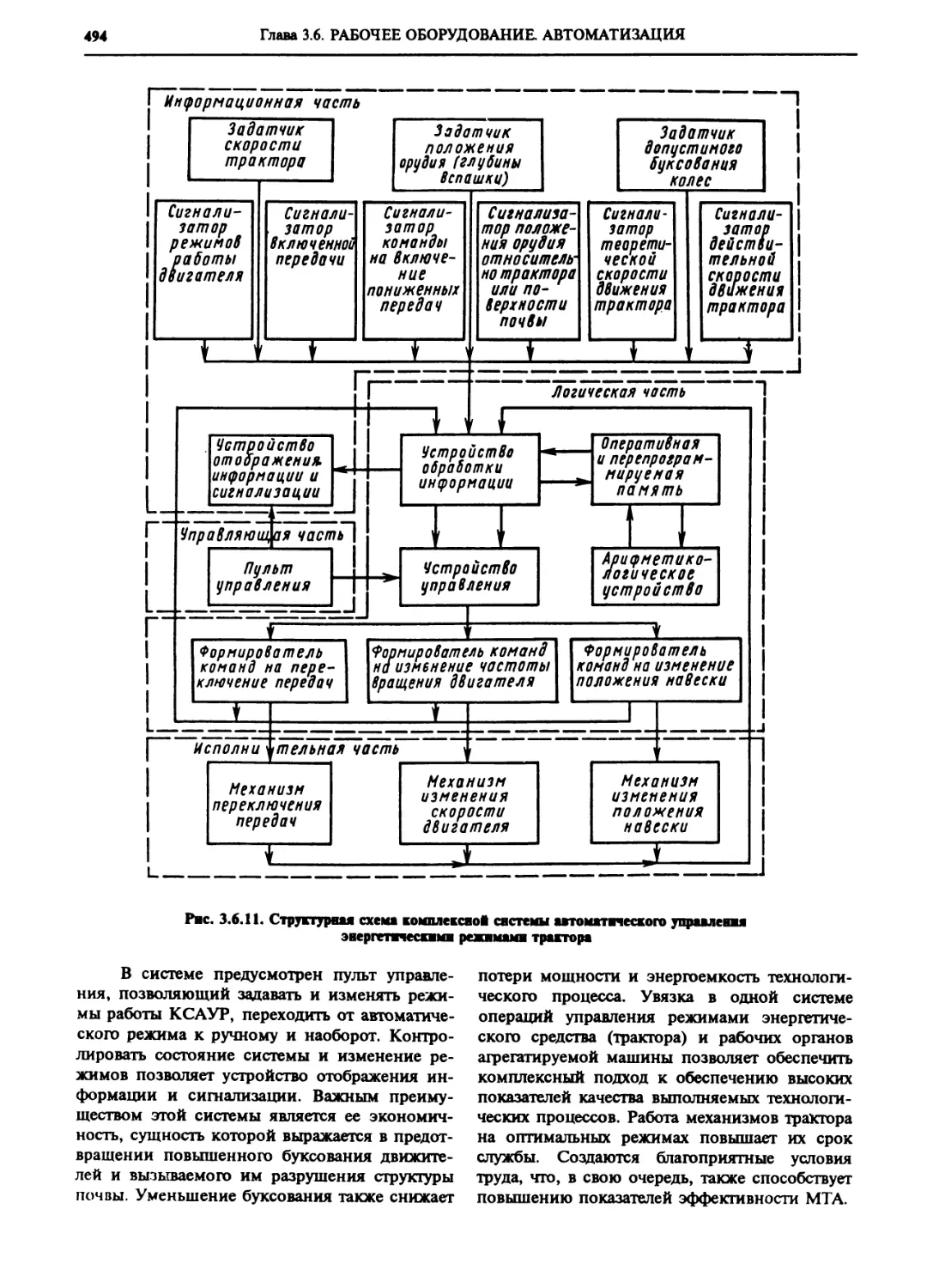
Ксенееич, В. П. Тарасик) 489
СПИСОК ЛИТЕРАТУРЫ 495
Раздел 4. ГУСЕНИЧНЫЕ ТРАНС-
ПОРТНО-ТЯГОВЫЕ
МАШИНЫ 497
Глава 4.1. ПРИНЦИПЫ
СОЗДАНИЯ И
ОБЩЕМАШИННЫЕ РЕШЕНИЯ
(В. Ф. Платонов) 497
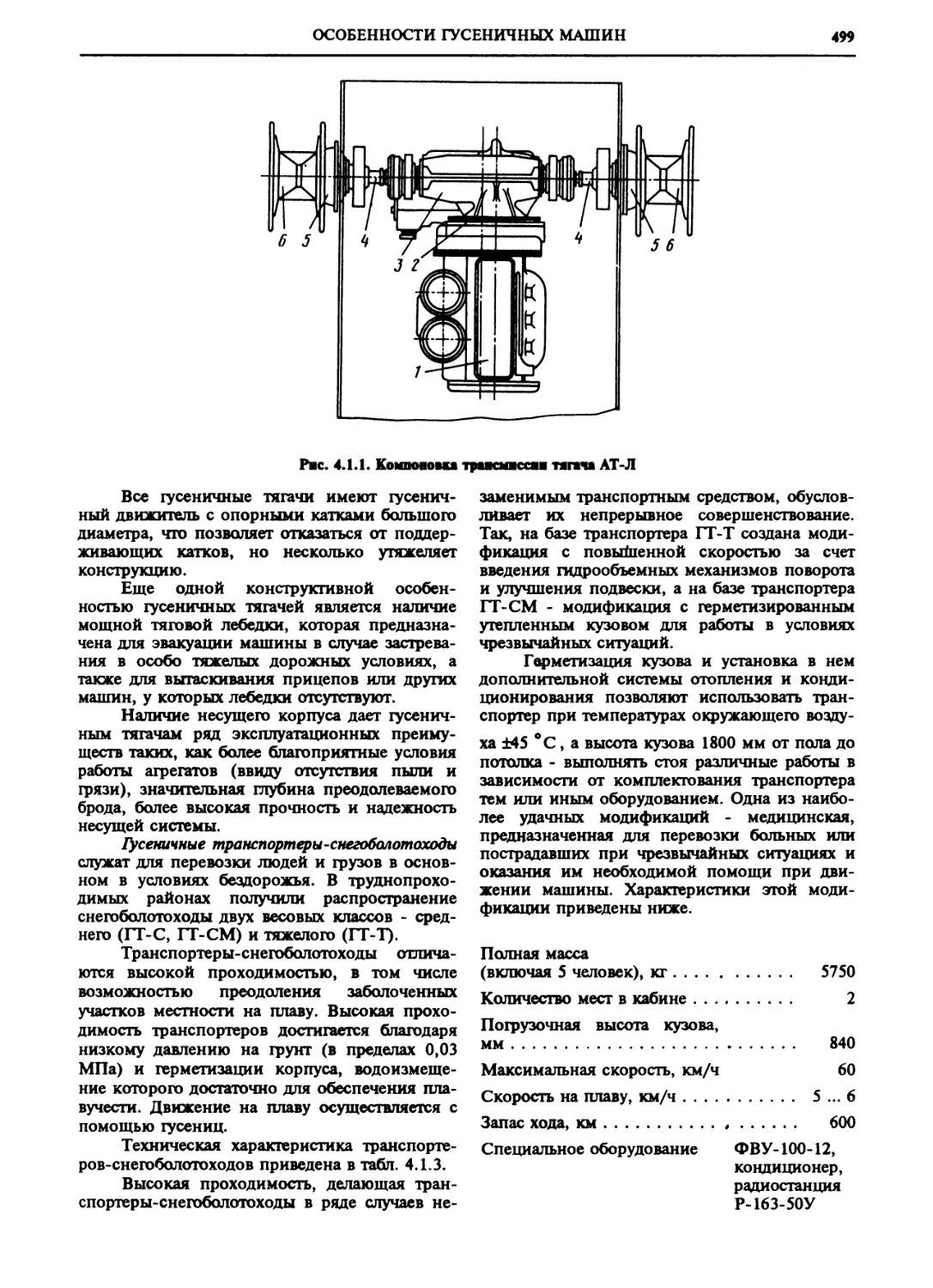
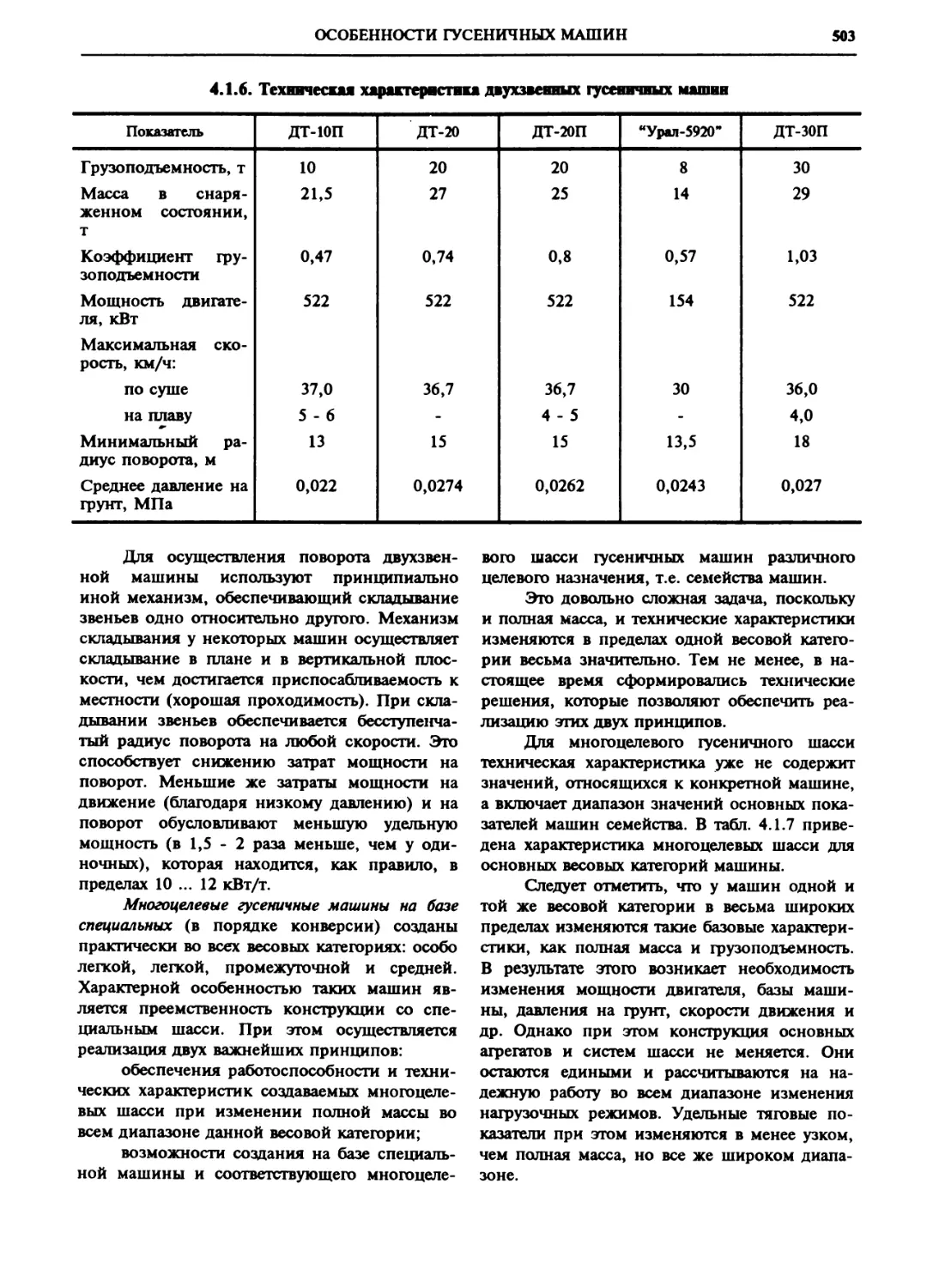
4.1.1. Особенности
гусеничных машин 497
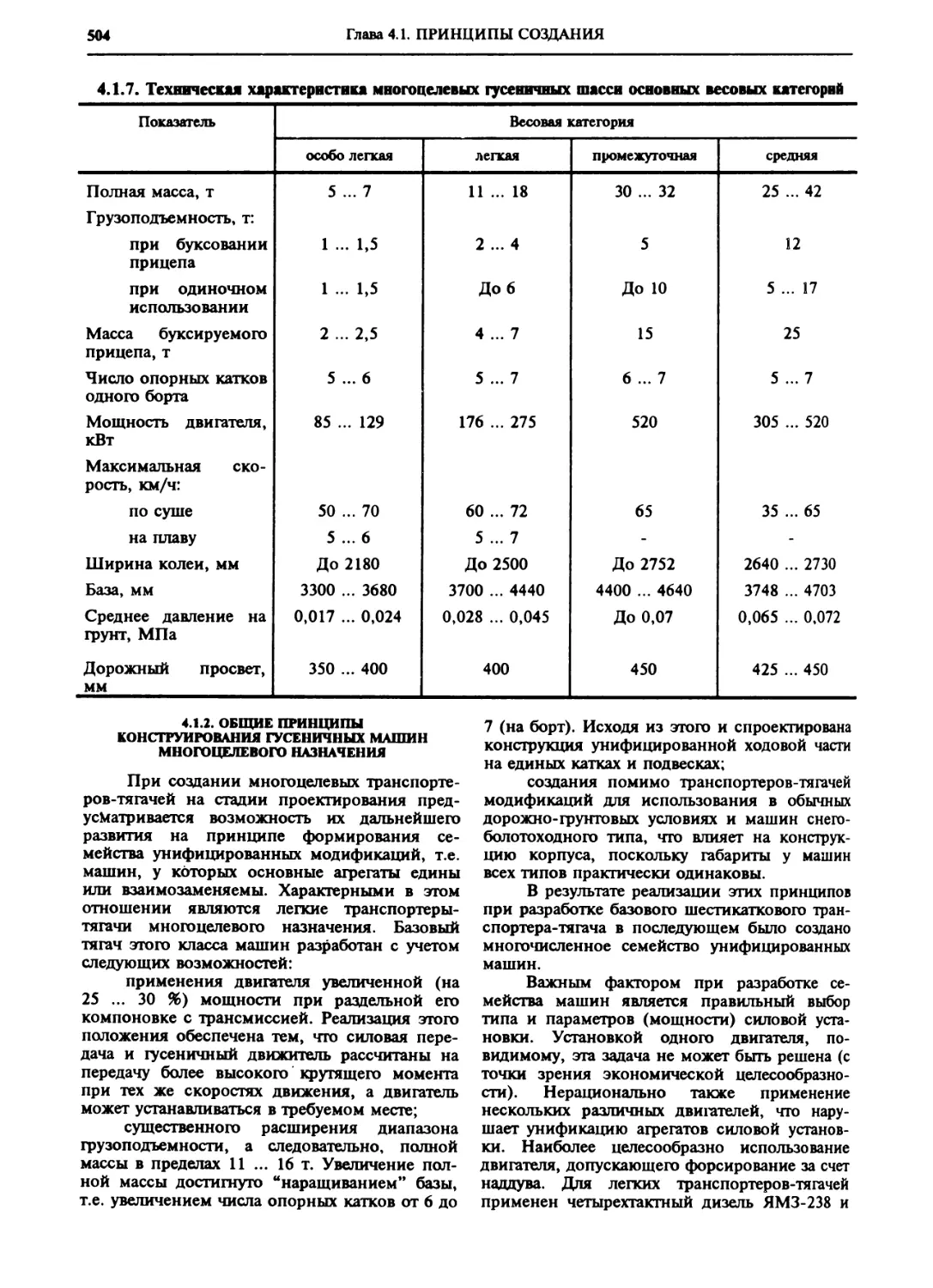
4.1.2. Общие принципы
конструирования
гусеничных машин многоцелевого
назначения 504
4.1.3. Основы разработки
многоцелевых гусеничных
шасси и машин на их базе 505
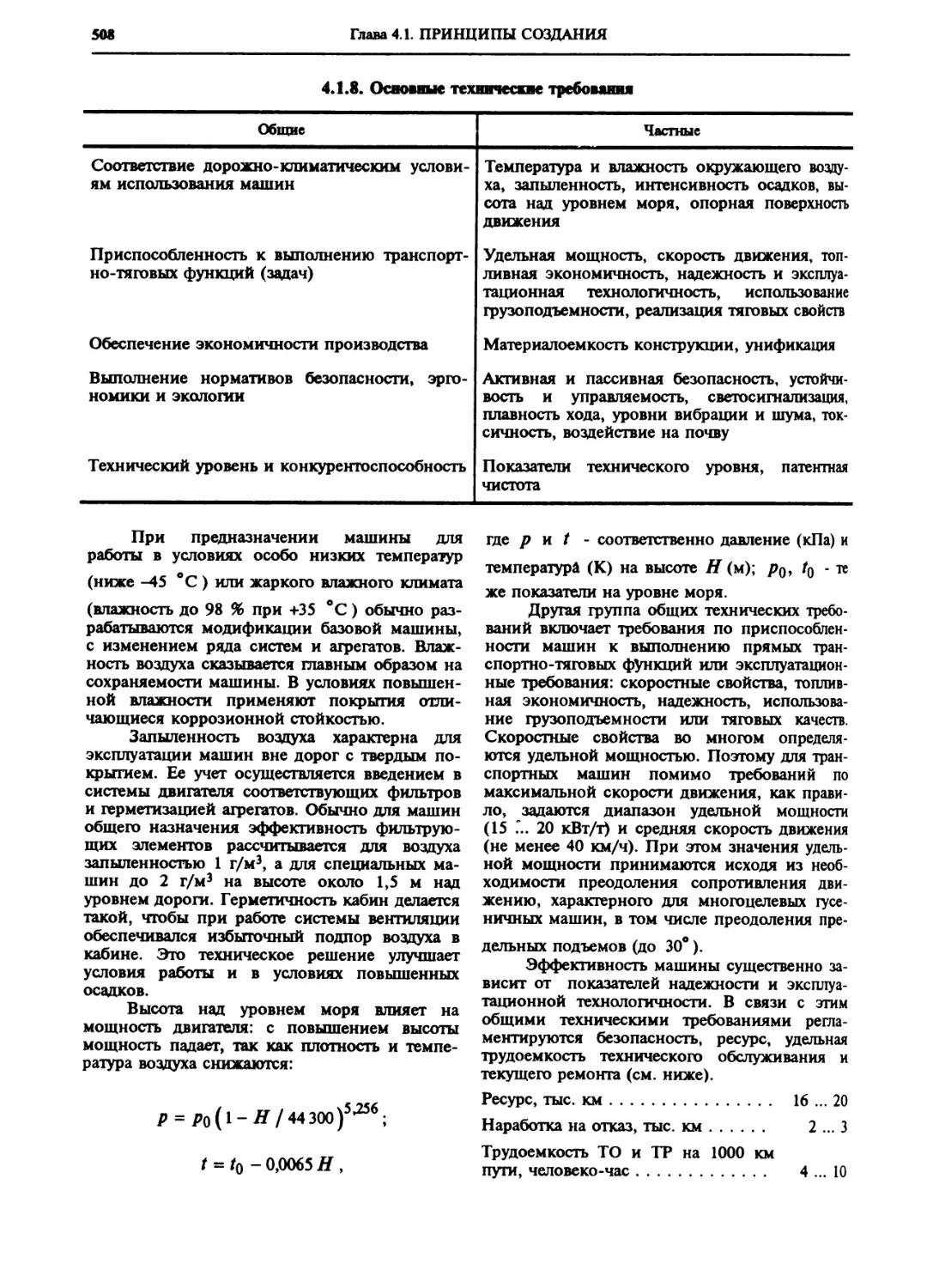
4.1.4. Технические
требования к конструкции 507
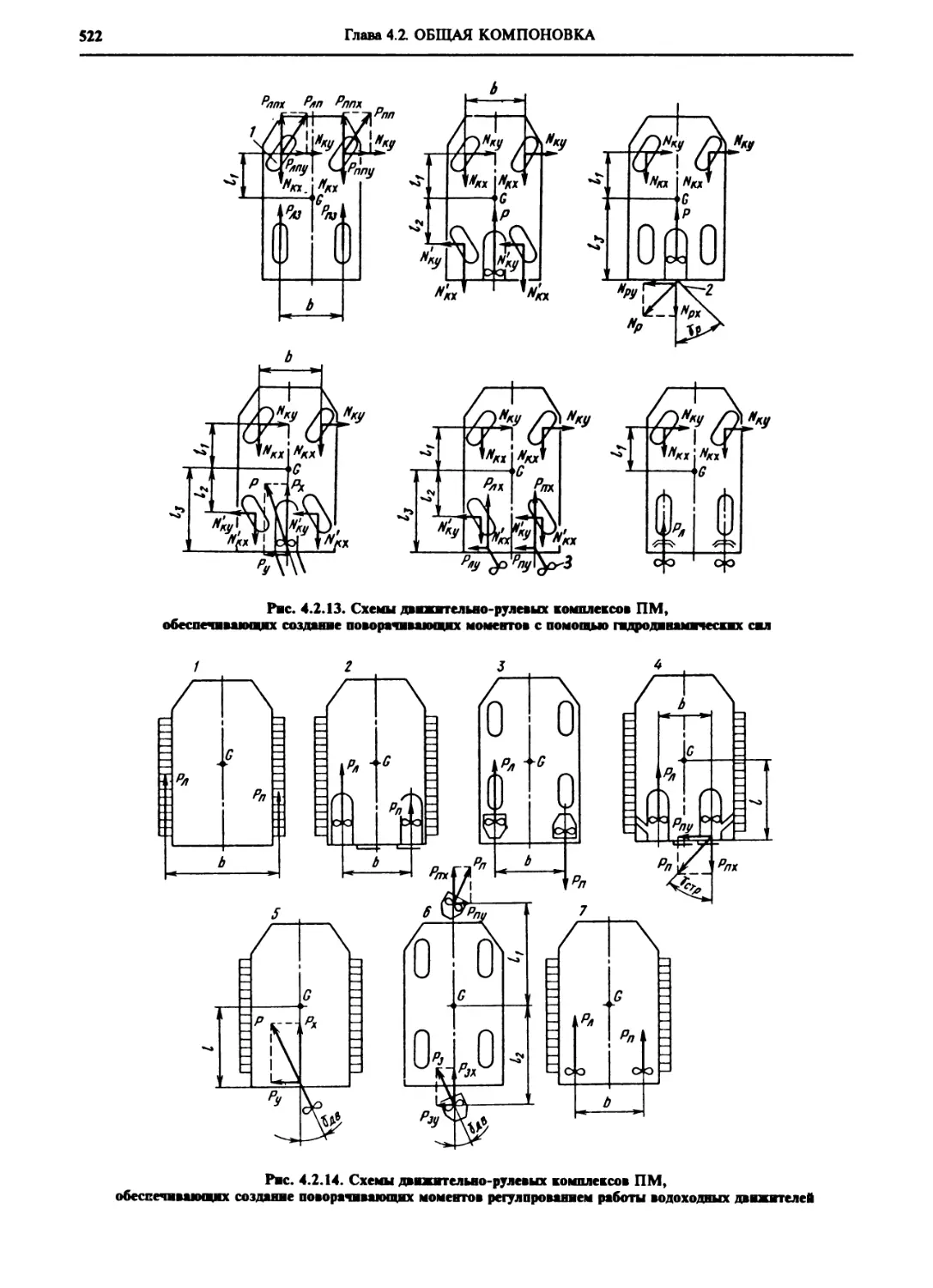
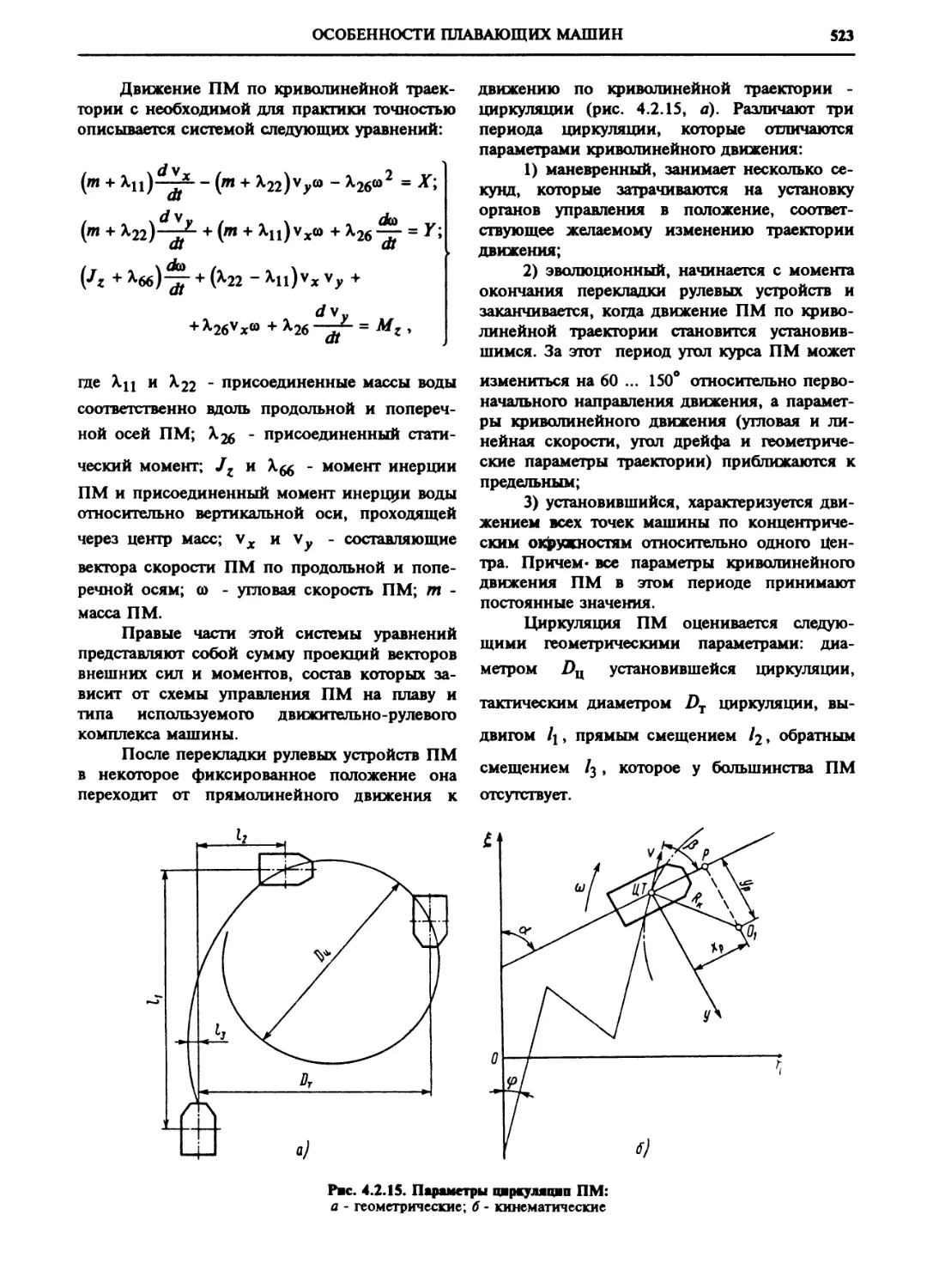
Глава 4.2. ОБЩАЯ
КОМПОНОВКА, КОРПУС,
СИЛОВАЯ УСТАНОВКА....... 510
4.2.1. Общая компоновка и
требования к ней (В. Ф.
Платонов) 510
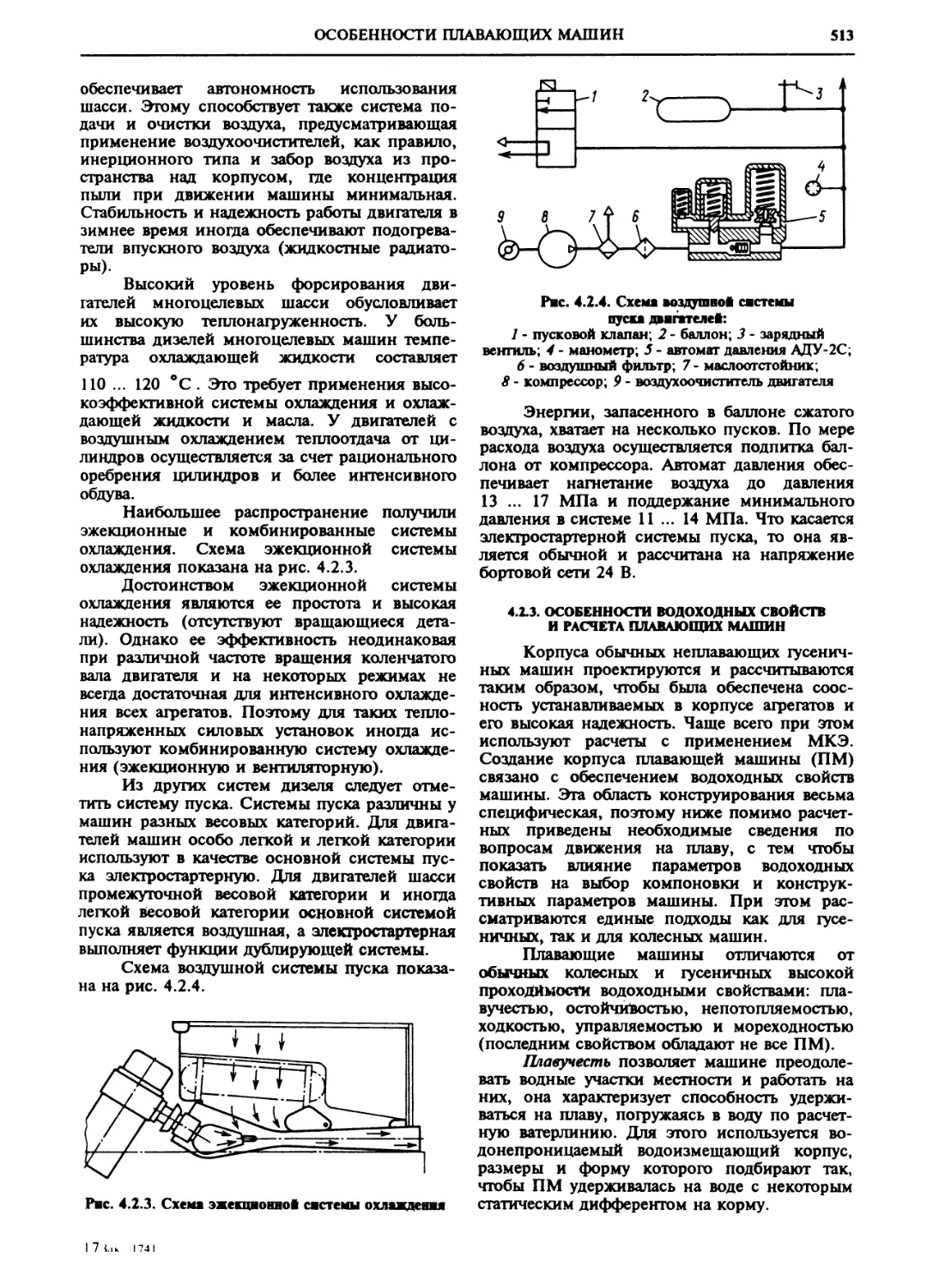
4.2.2. Силовые установки
(В. Ф. Платонов) 511
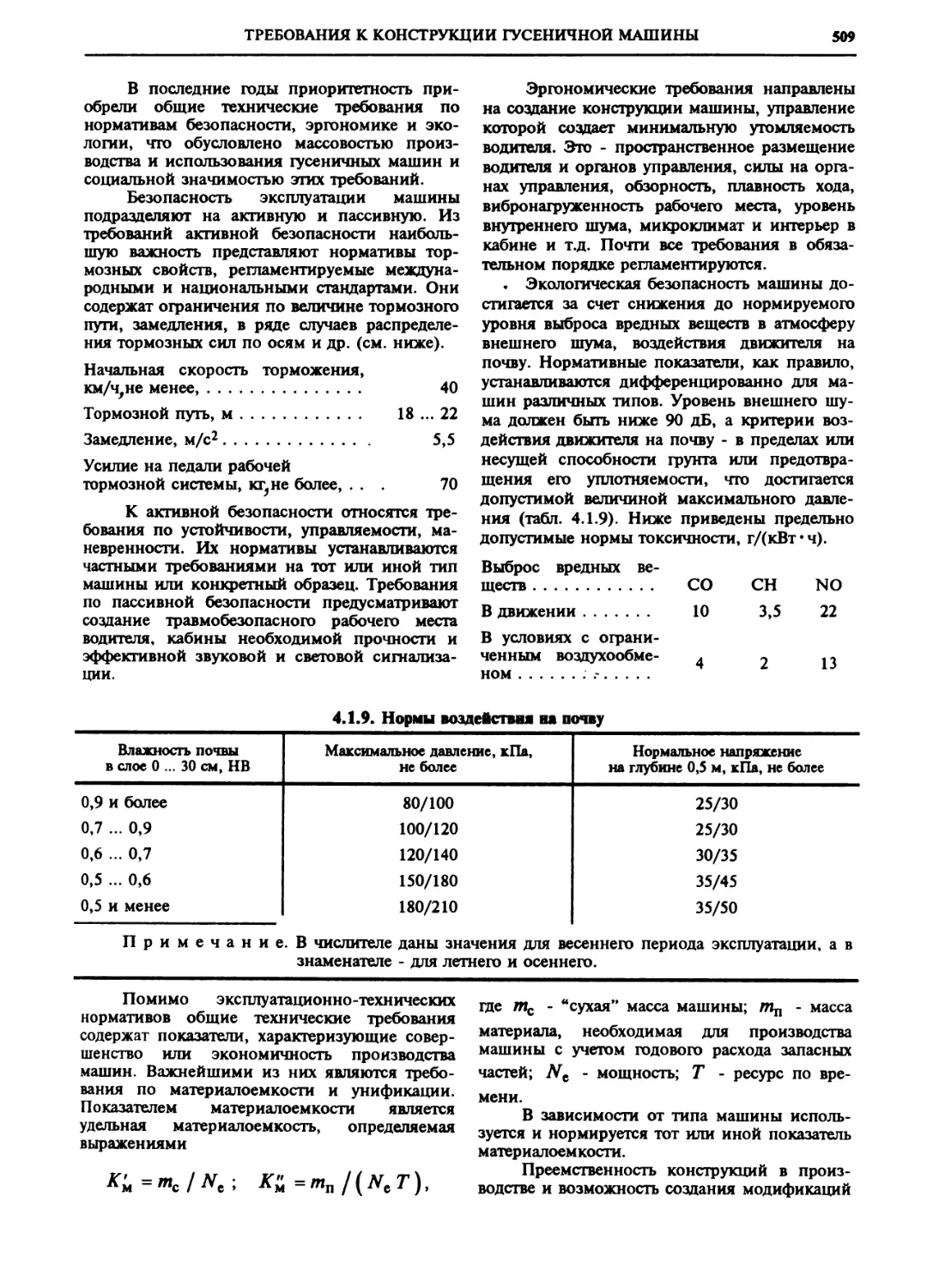
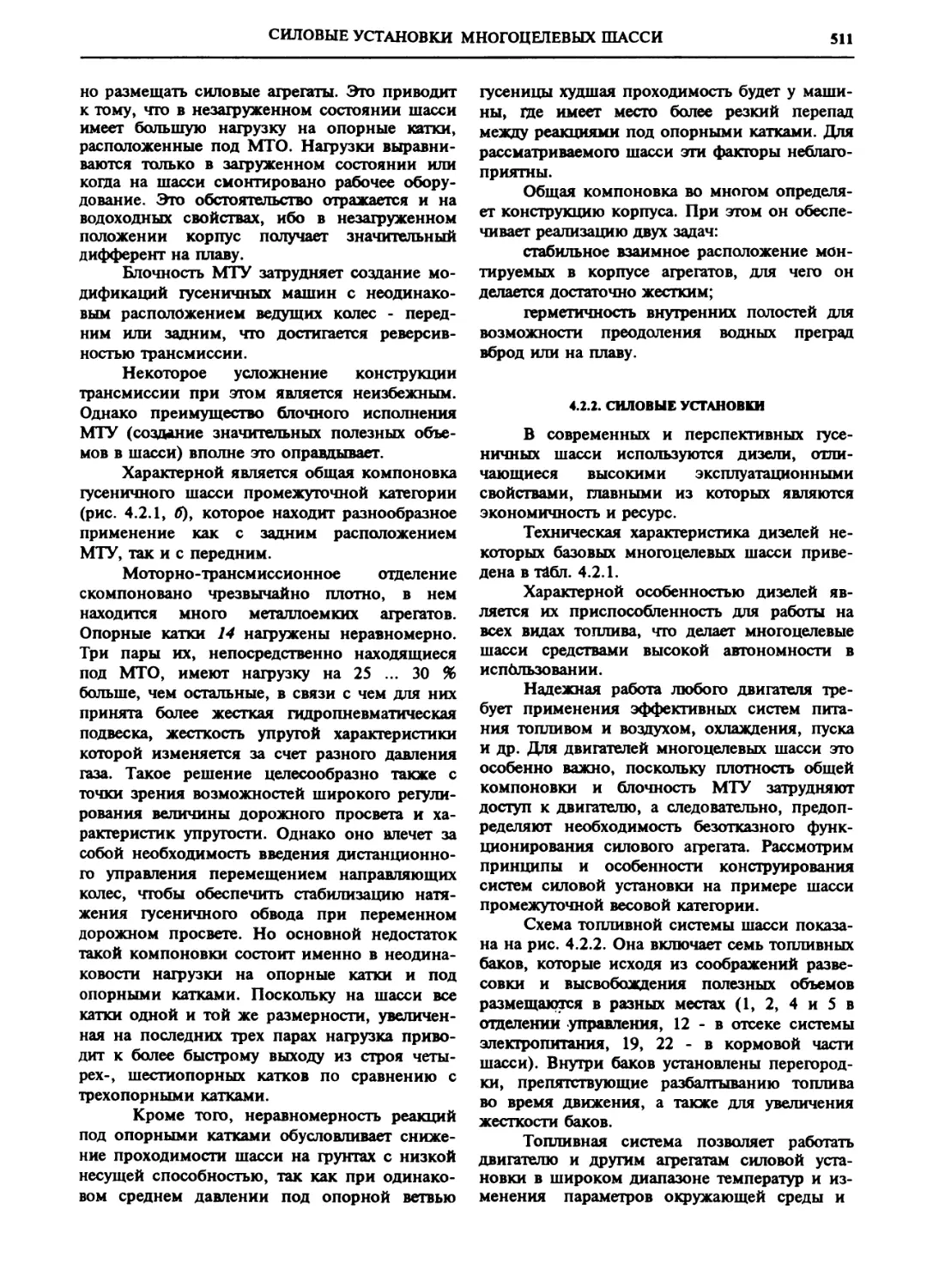
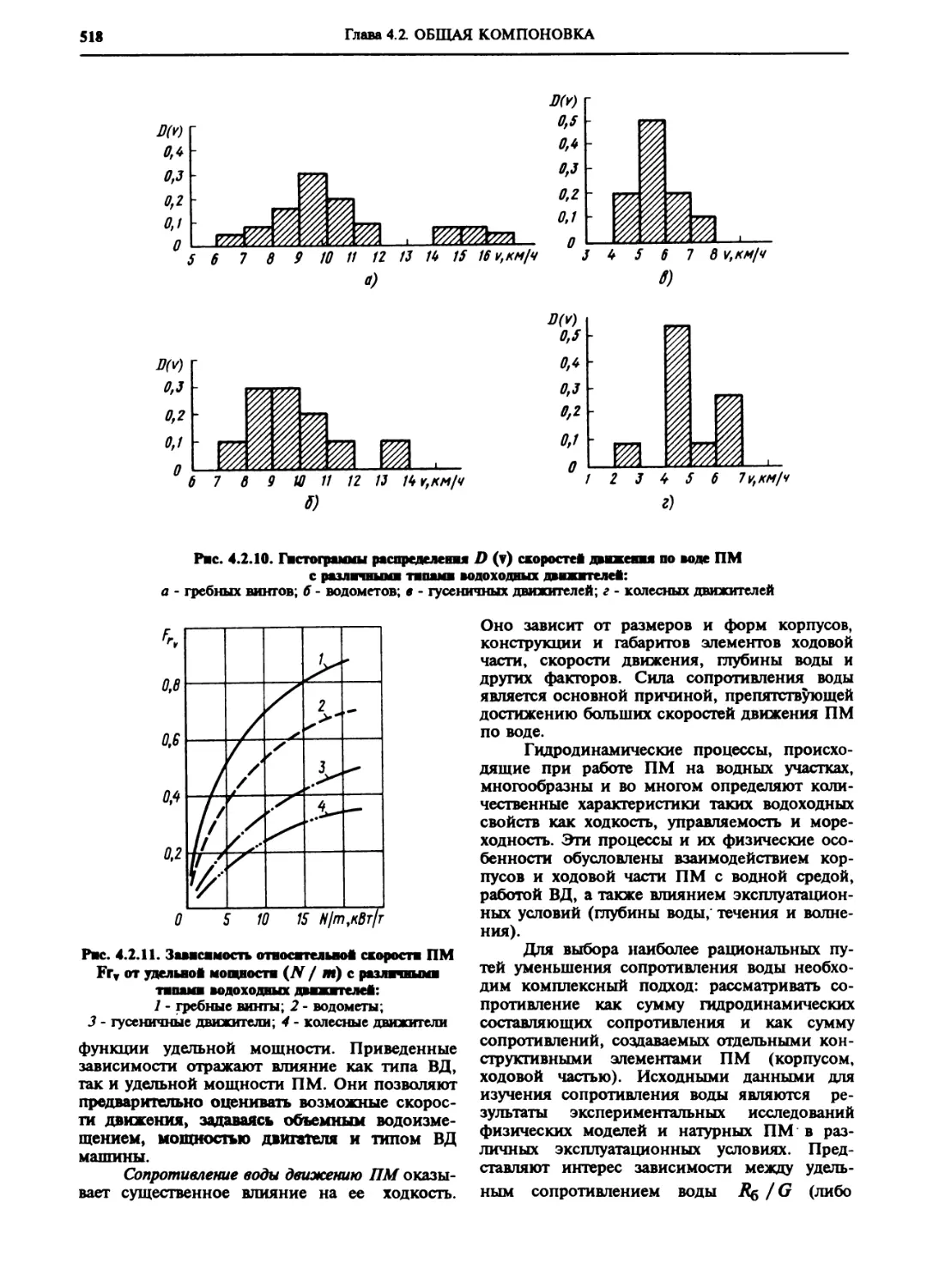
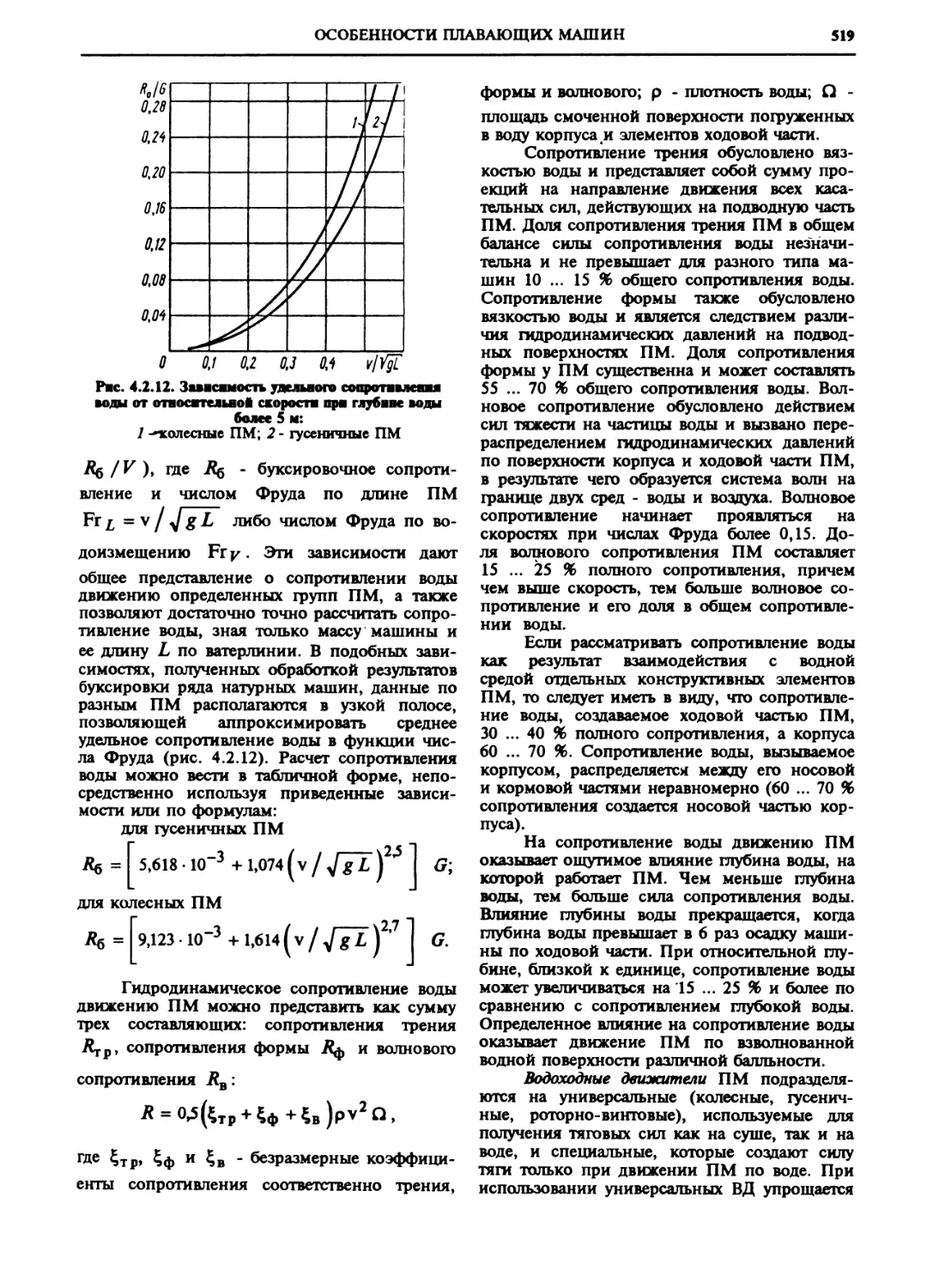
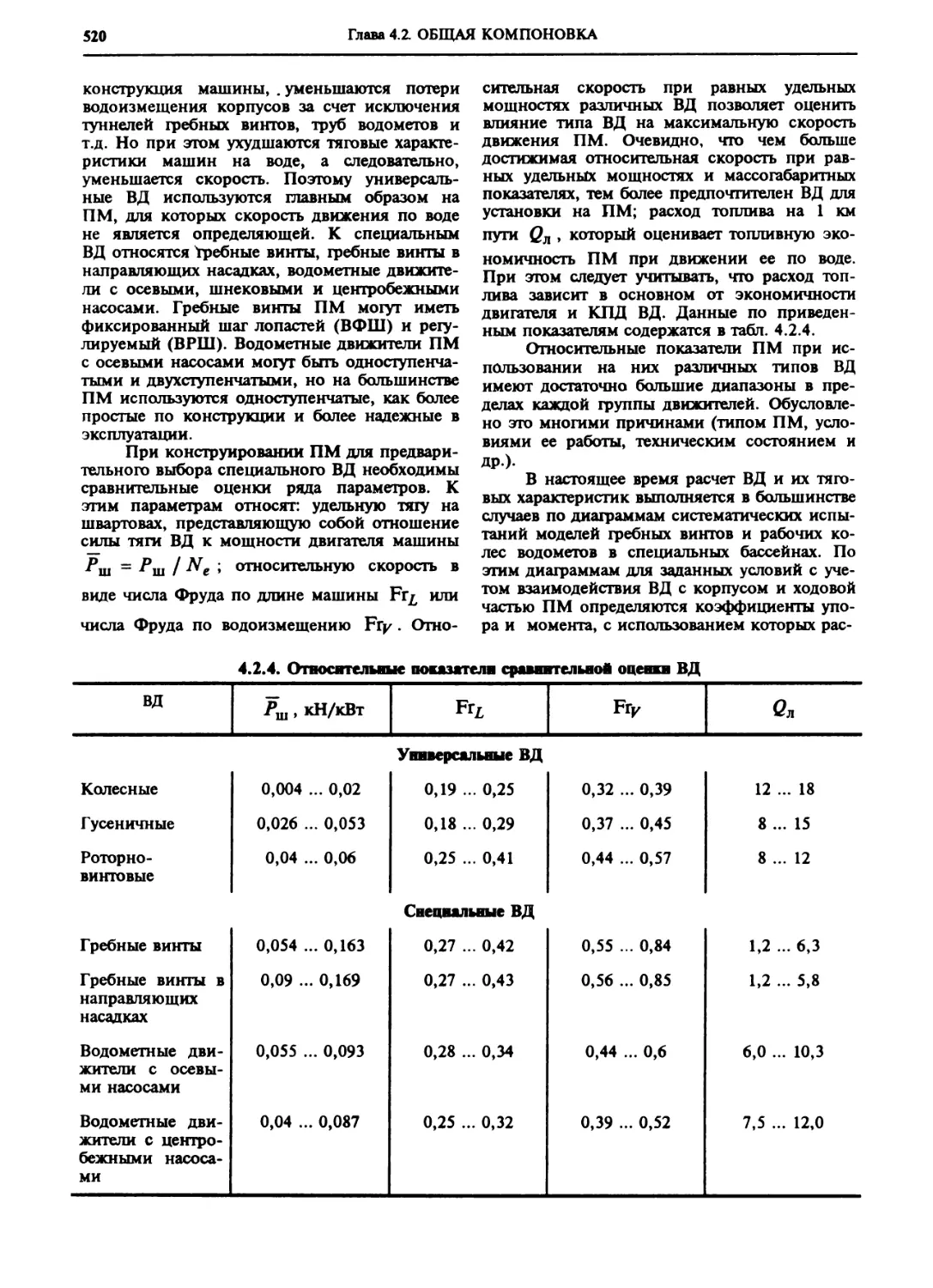
4.2.3. Особенности
водоходных свойств и расчета
плавающих машин (А. П.
Степанов) 513
4.2.4. Расчет корпуса и его
элементов (А. В. Вихров) 526
Глава 4.3. ВЫБОР СХЕМ И
ОБОСНОВАНИЕ
ОСНОВНЫХ ПАРАМЕТРОВ
ТРАНСМИССИЙ 530
4.3.1. Характеристики
механизмов, необходимые для
принятия схемных решений
по трансмиссиям (В. С.
Кожевников) 531
4.3.2. Тяговый расчет
транспортно-тяговой
гусеничной машины (В. С.
Кожевников) 533
4.3.3. Определение
параметров механизмов
трансмиссии (В. С. Кожевников,
В. М. Шарыпов) 539
4.3.4. Выбор типа
механизма поворота транспортно-
тяговой гусеничной
машины (В. Я. Наумов) 542
Глава 4.4. ХОДОВАЯ ЧАСТЬ 548
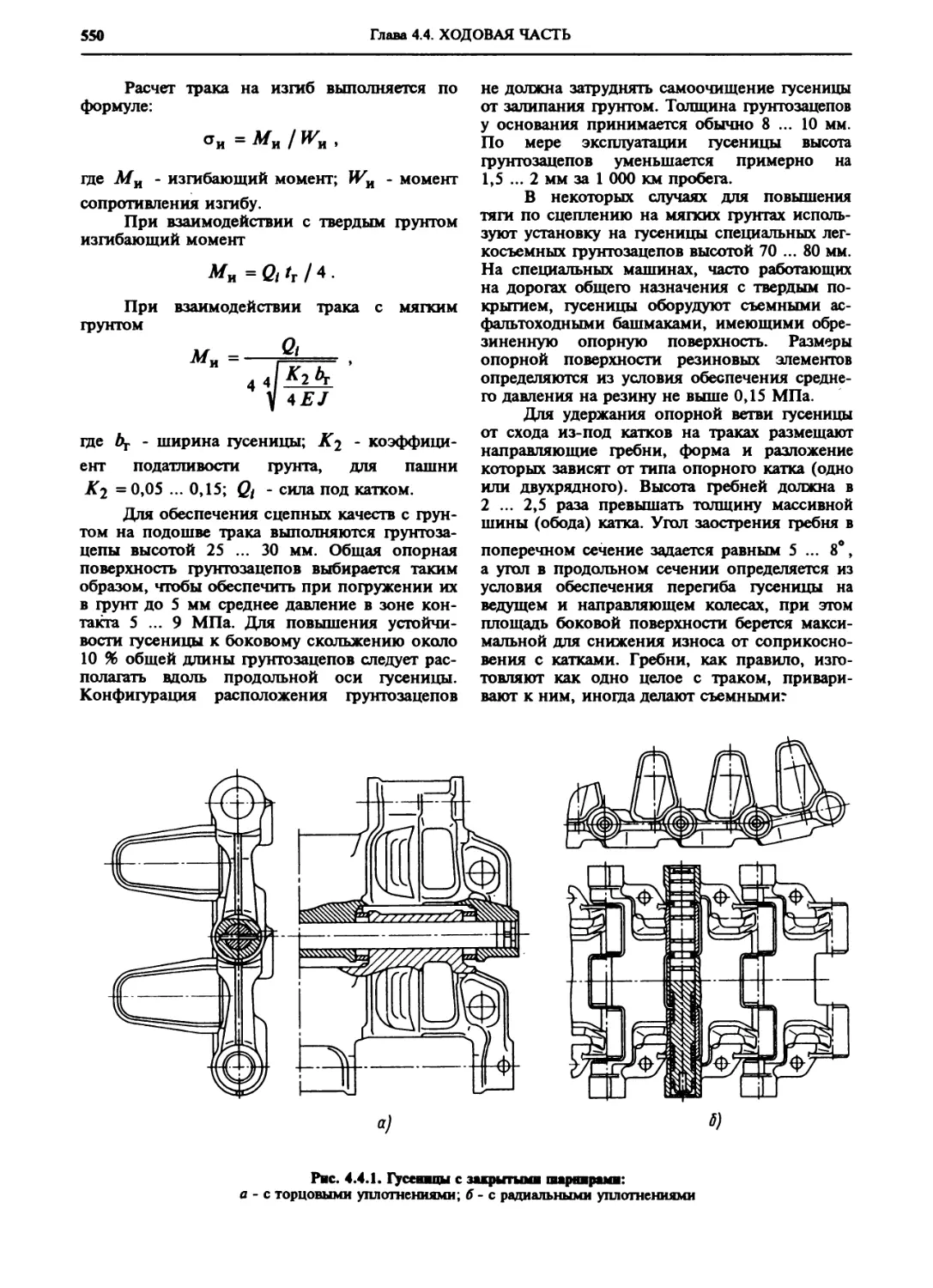
4.4.1. Гусеничный
движитель (В. С. Герасимов, В. Ф.
Платонов) 548
4.4.2. Опорные и
поддерживающие катки (В. С.
Герасимов) 558
4.4.3. Подвеска (В. Ф.
Платонов) 561
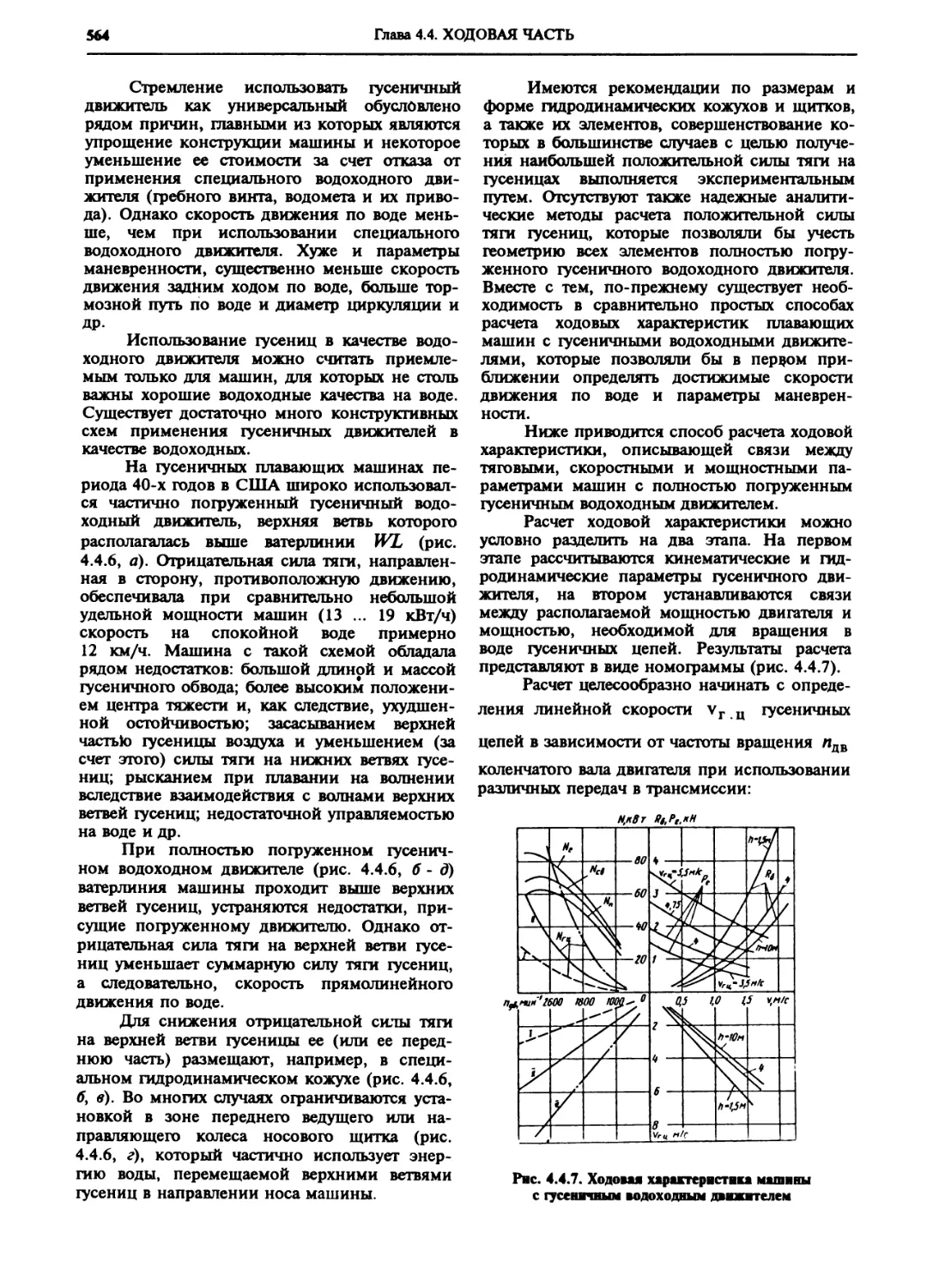
4.4.4. Расчет ходкости и
маневренности плавающих
машин с гусеничными
водоходными движителями
(А. И Степанов) 563
Глава 4.5. ДОПОЛНИТЕЛЬНОЕ
ОБОРУДОВАНИЕ 568
4.5.1. Системы подготовки
машины к движению при
низкой температуре (В. Ф.
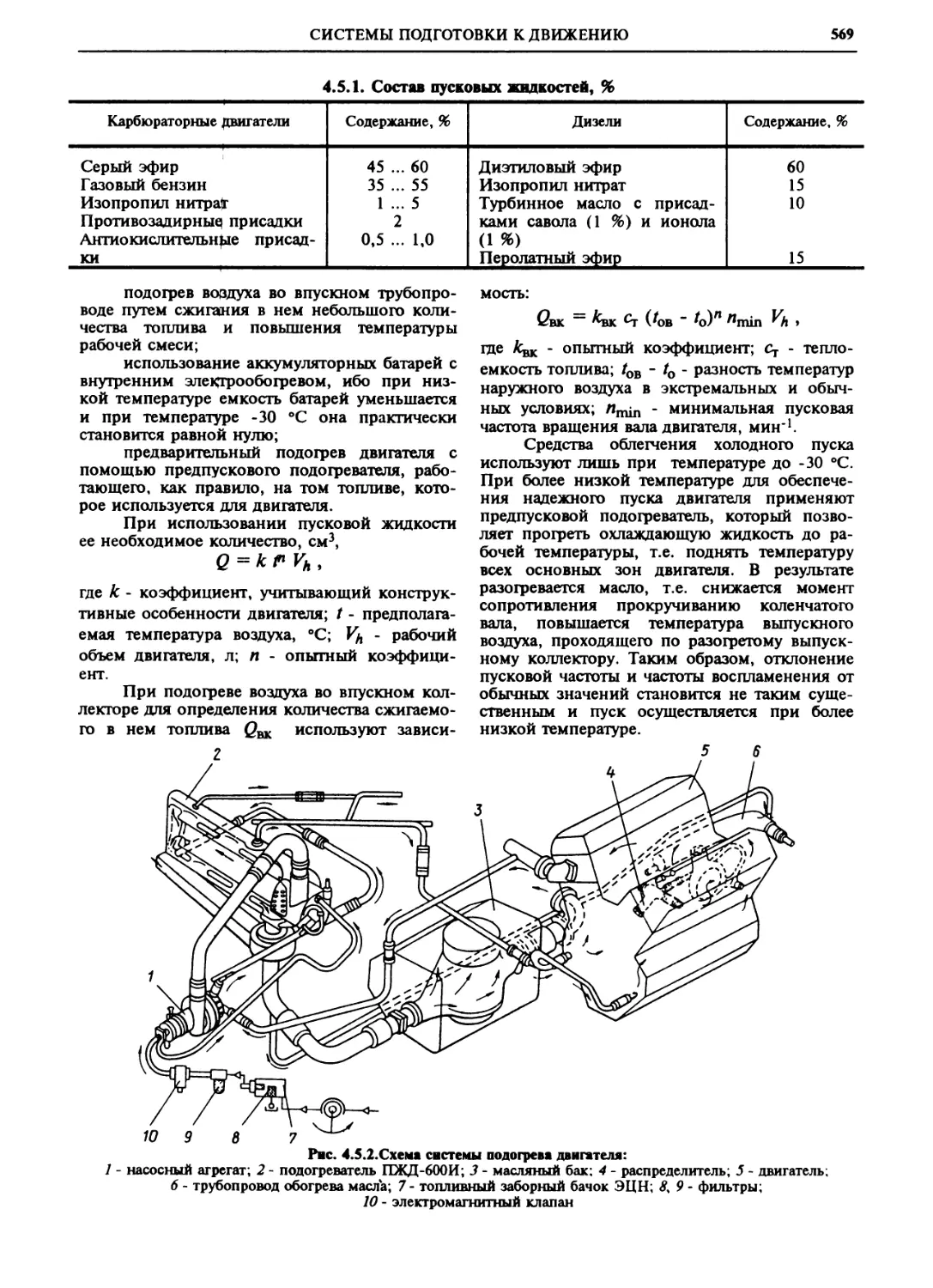
Платонов) 568
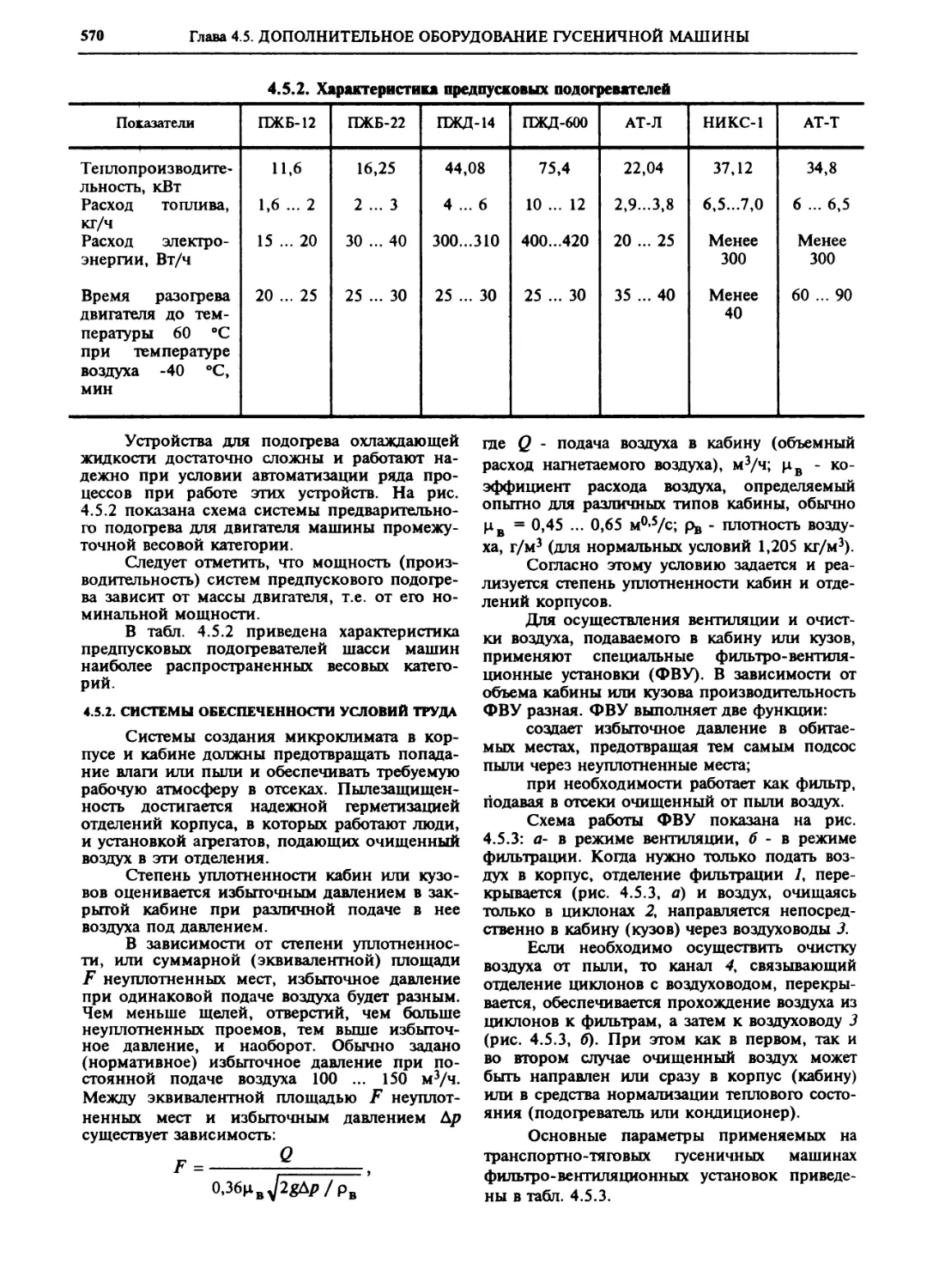
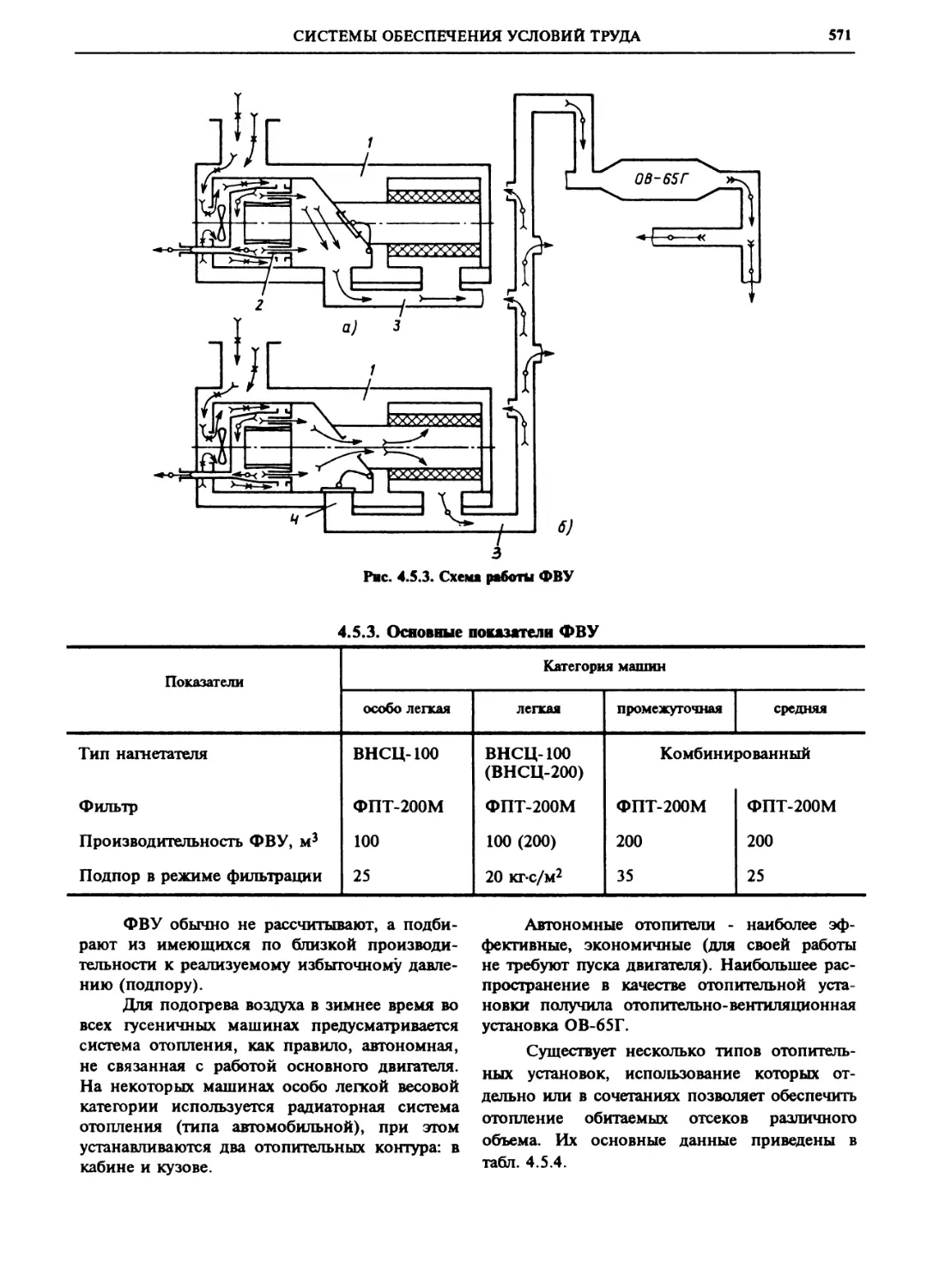
4.5.2. Системы обеспечения
условий труда (В. Ф.
Платонов) 570
4.5.3. Лебедки. Тягово-
сцепные устройства (В. Ф.
Платонов) 573
4.5.4. Системы автономного
электроснабжения (В. Ф.
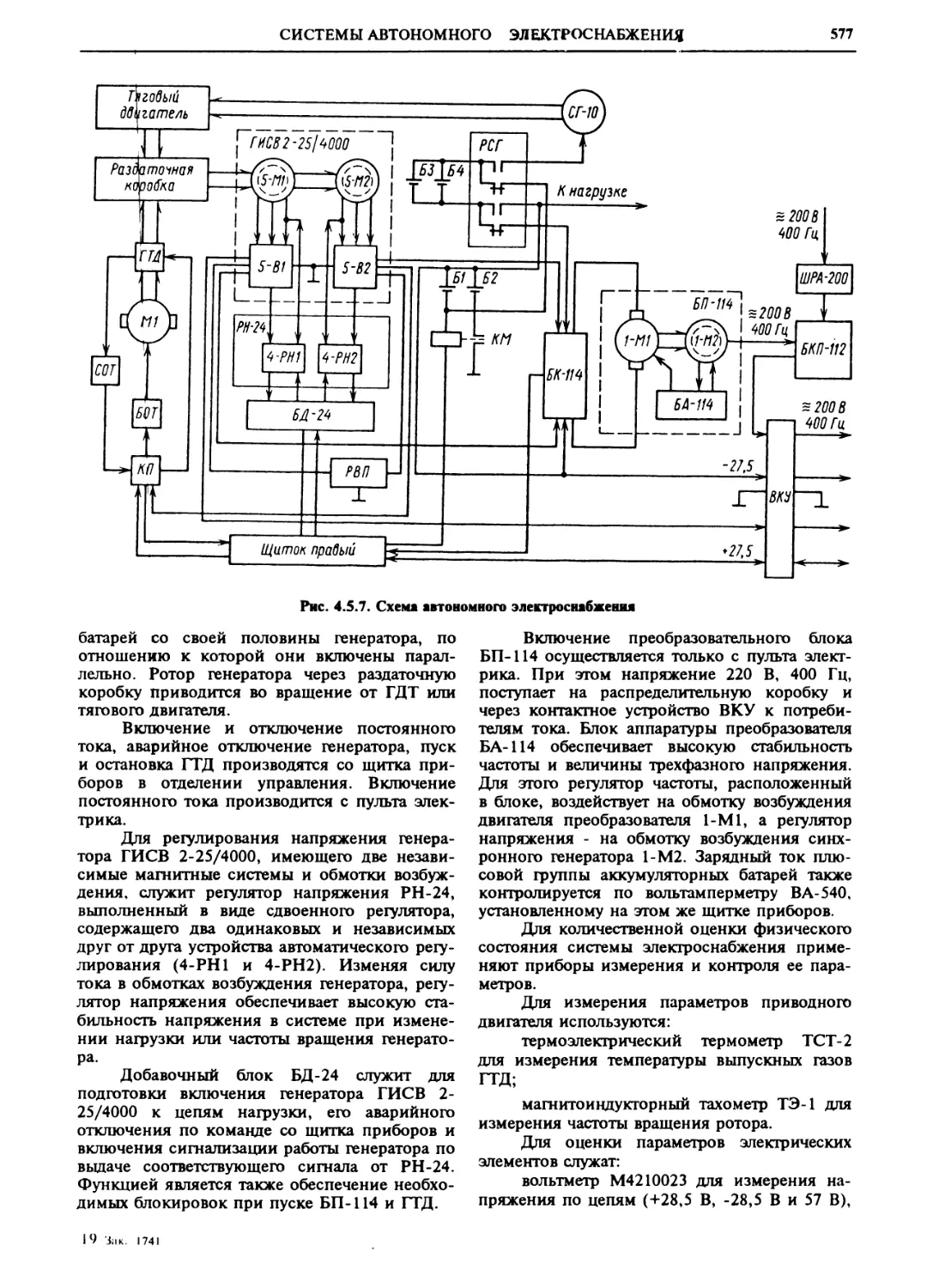
Платонов) 576
ОГЛАВЛЕНИЕ
9
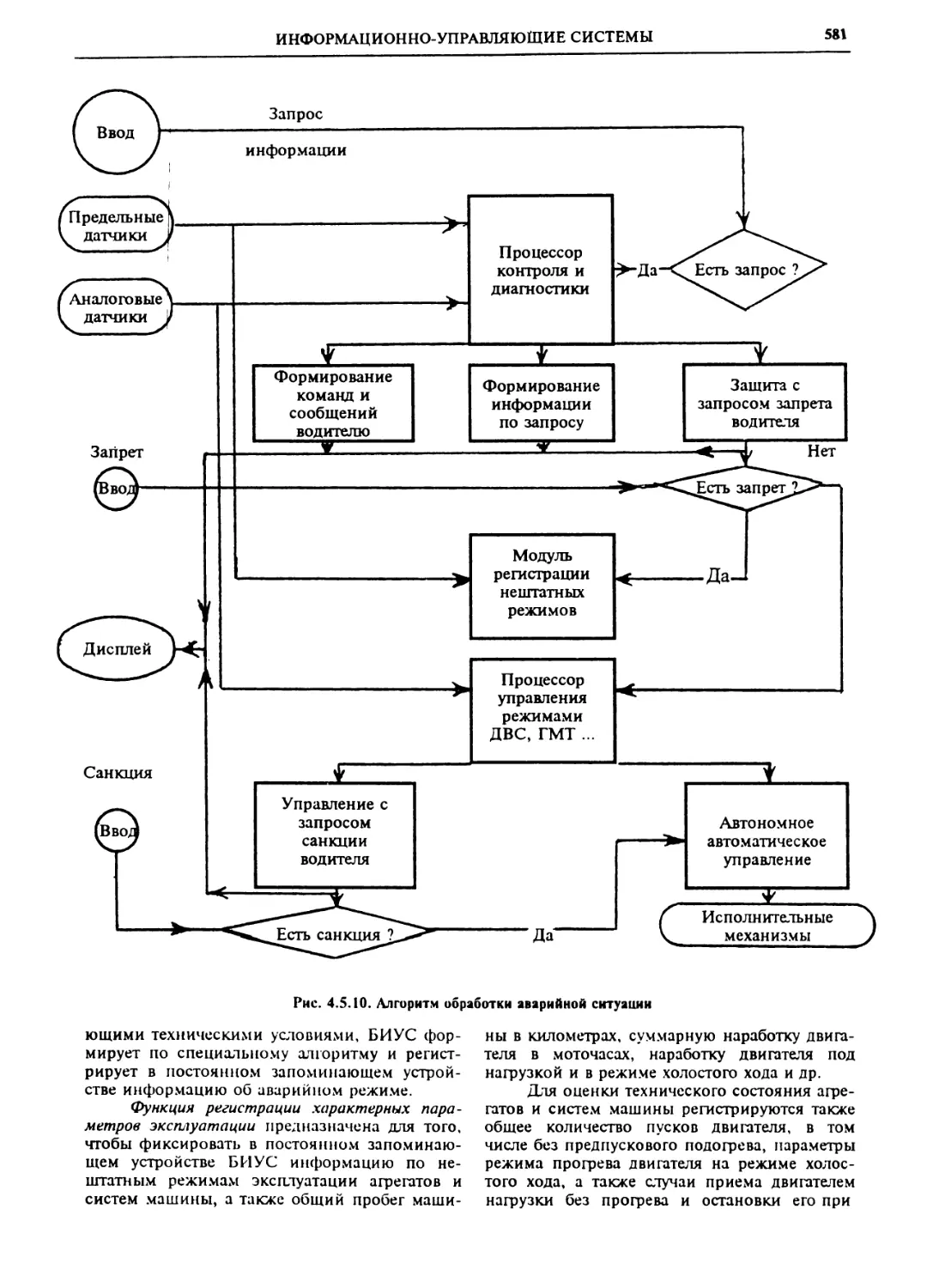
4.5.5. Бортовые
информационно-управляющие
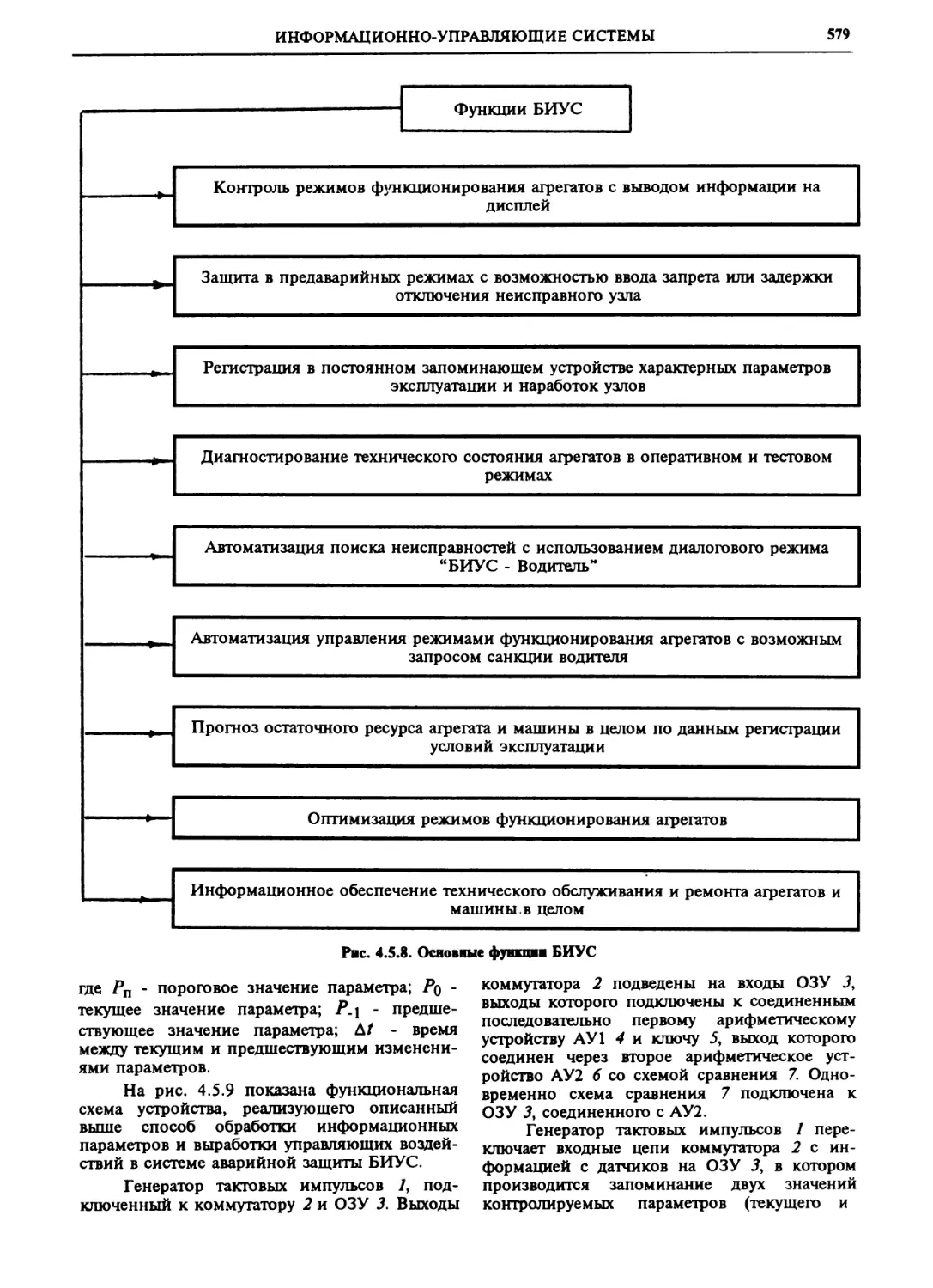
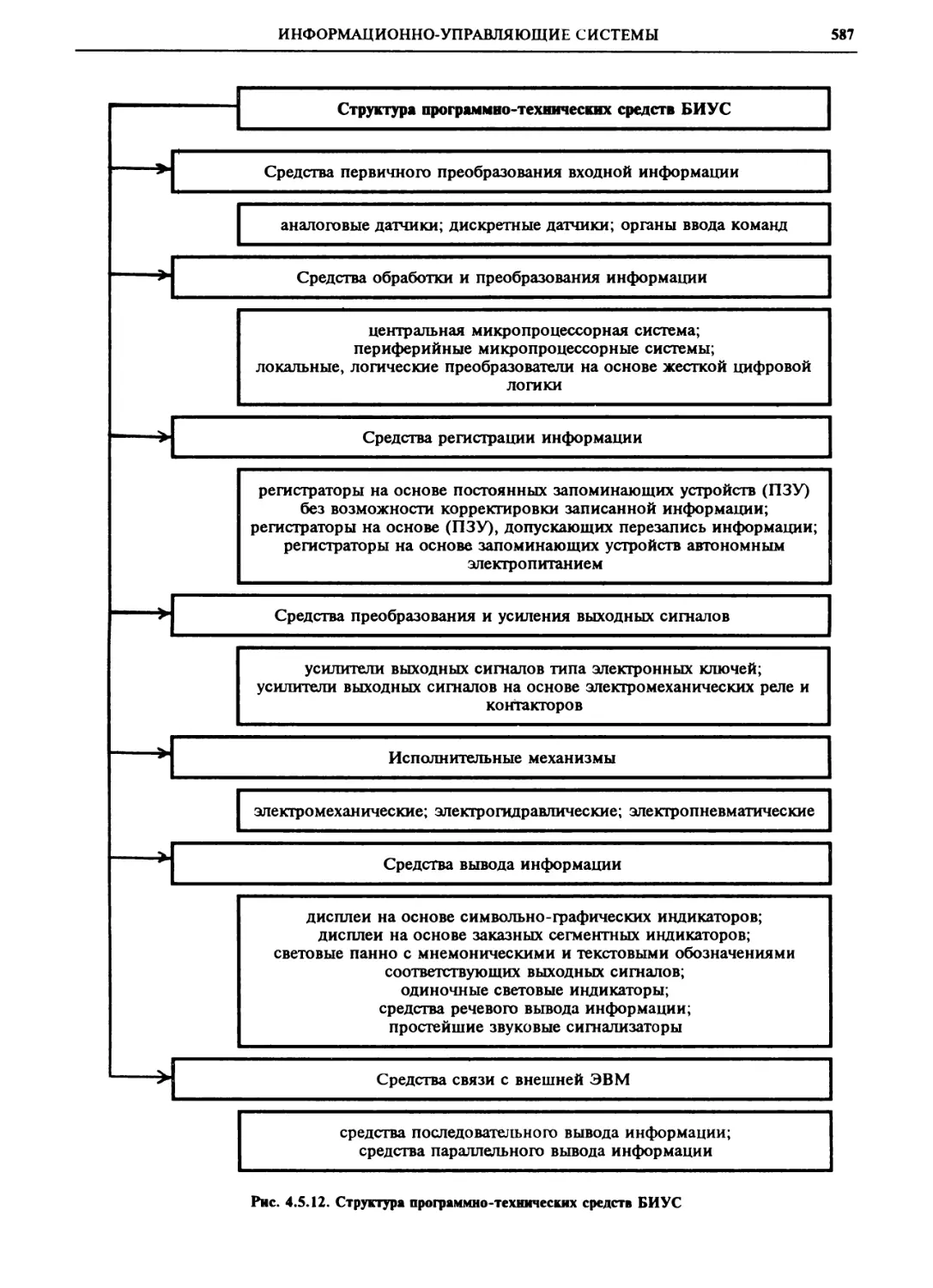
системы (А. Я. Вознесенский) ... 578
СПИСОК ЛИТЕРАТУРЫ 588
Раздел 5. АВТОМОБИЛЬНЫЕ И
ТРАКТОРНЫЕ
ПОЕЗДА.
СПЕЦИАЛИЗИРОВАННЫЕ
АВТОТРАНСПОРТНЫЕ СРЕДСТВА 590
Глава 5Ь КОМПОНОВКА
АВТОМОБИЛЬНЫХ
ПОЕЗДОВ (М. С. Высоцкий, Л. Е.
Гилелес, С. Г Херсонский) ... 590
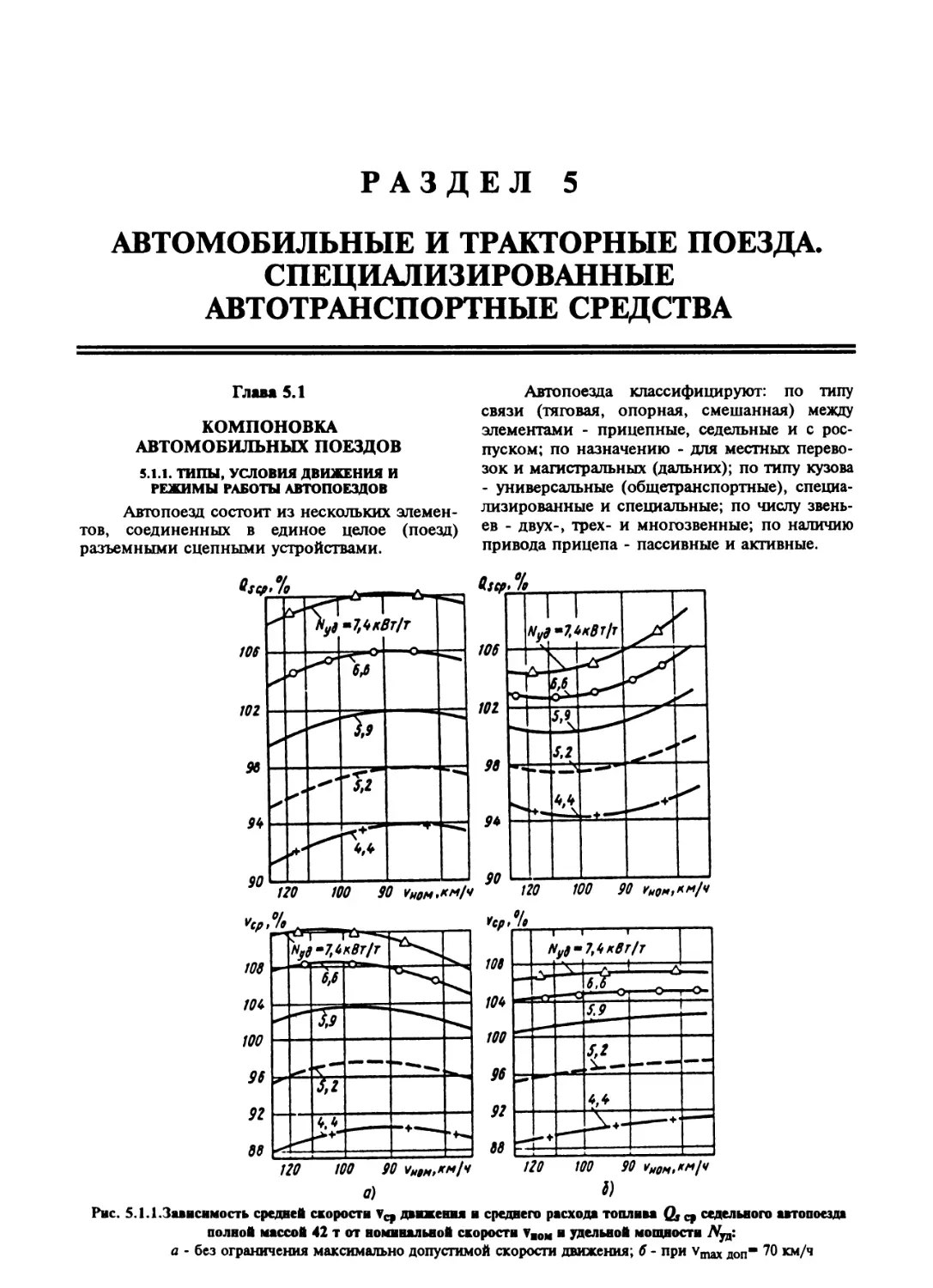
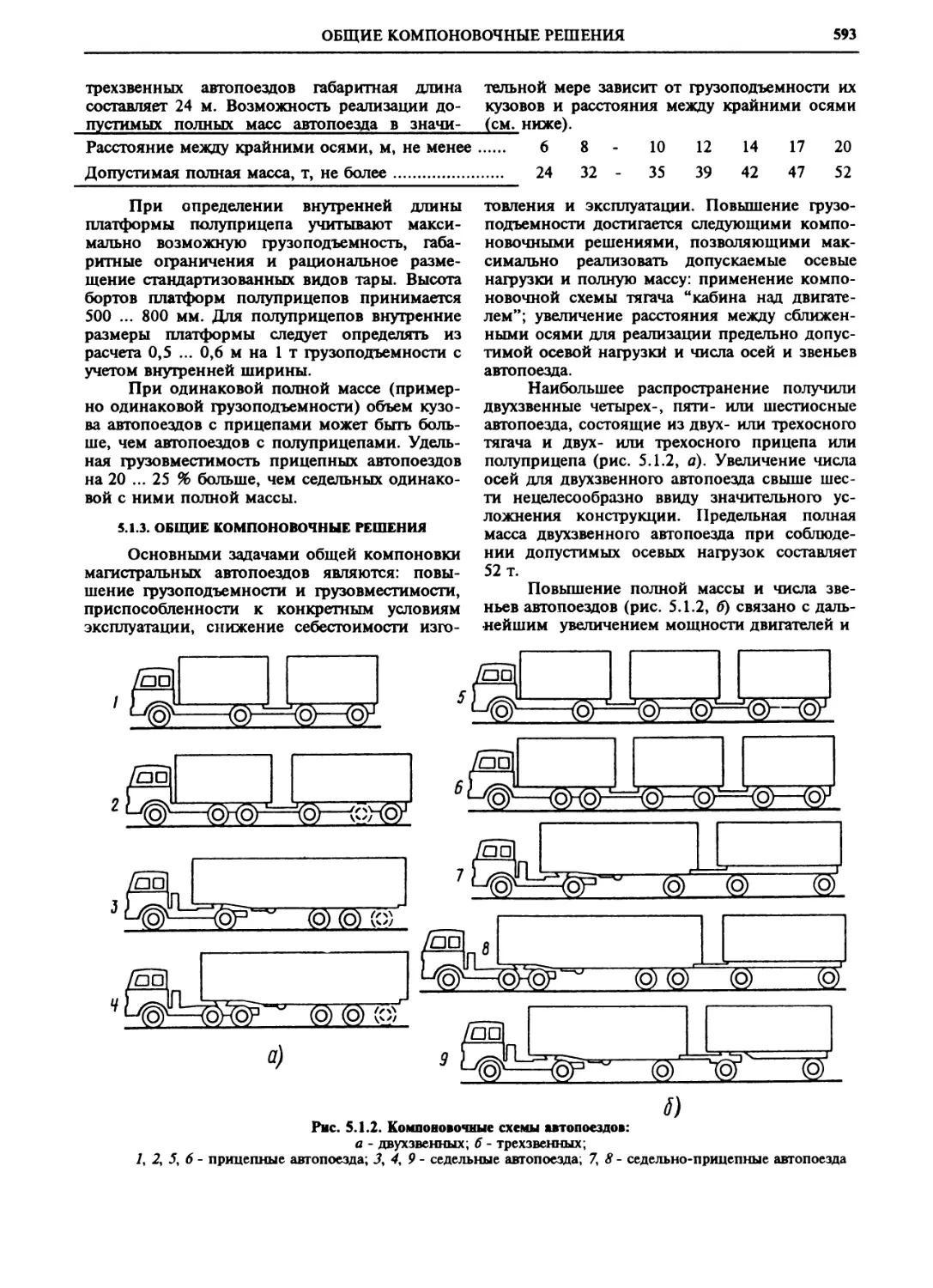
5.1.1. Типы, условия
движения и режимы работы
автопоездов 590
5.1.2. Параметры масс,
осевые нагрузки и габаритные
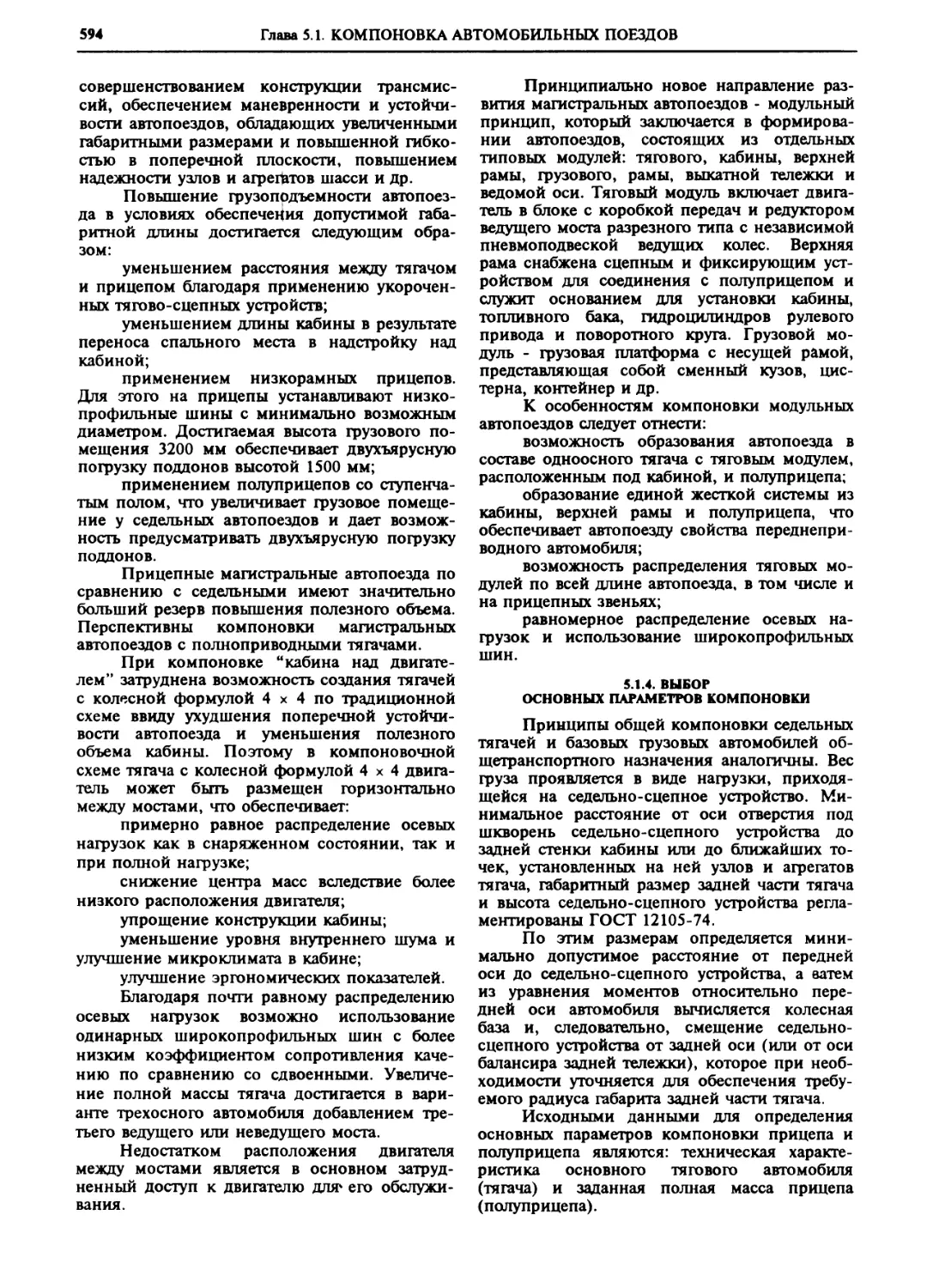
размеры 592
5.1.3. Общие
компоновочные решения 593
5.1.4. Выбор основных
параметров компоновки 594
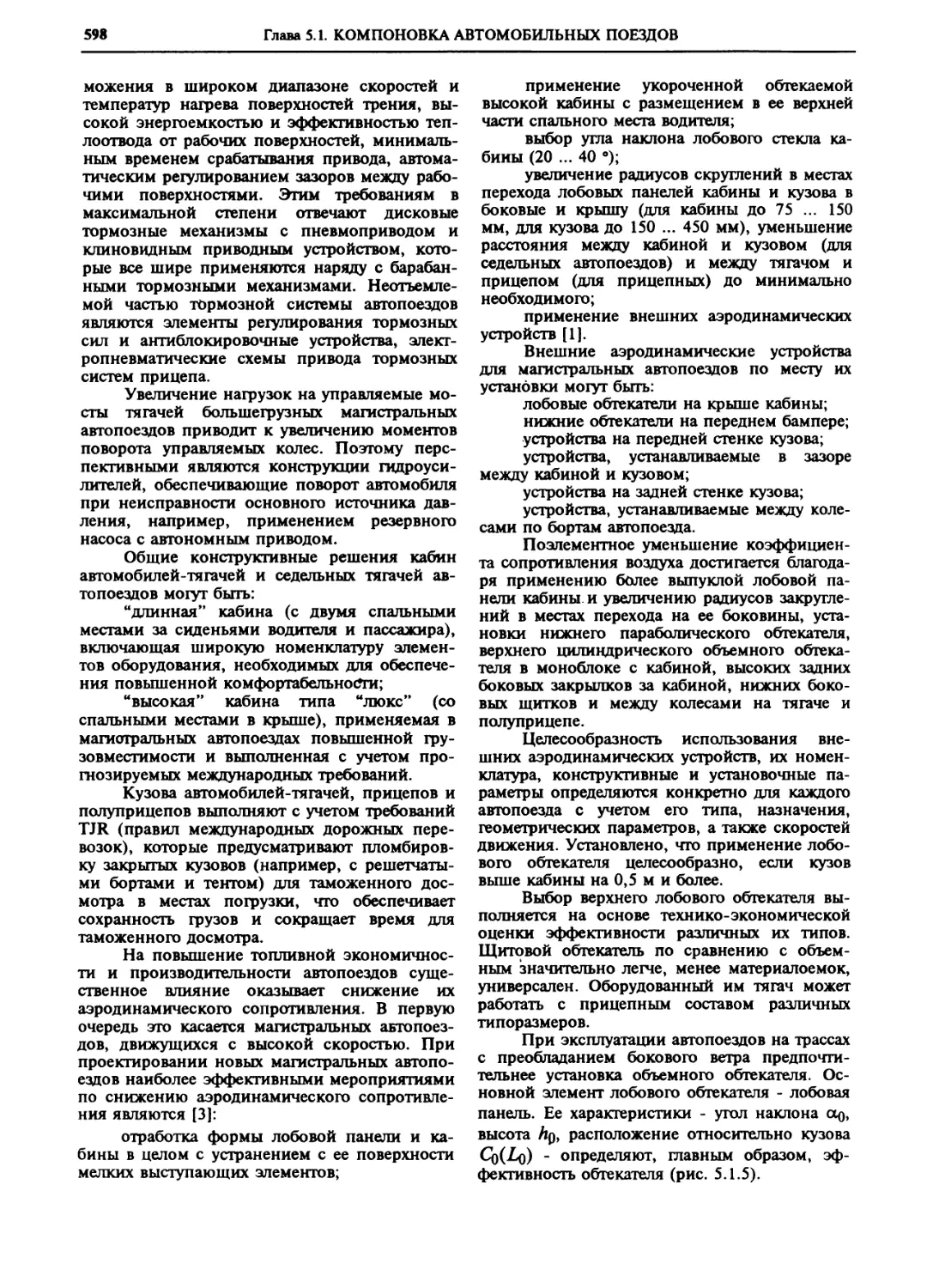
5.1.5. Основы
проектирования систем и агрегатов
автопоездов 596
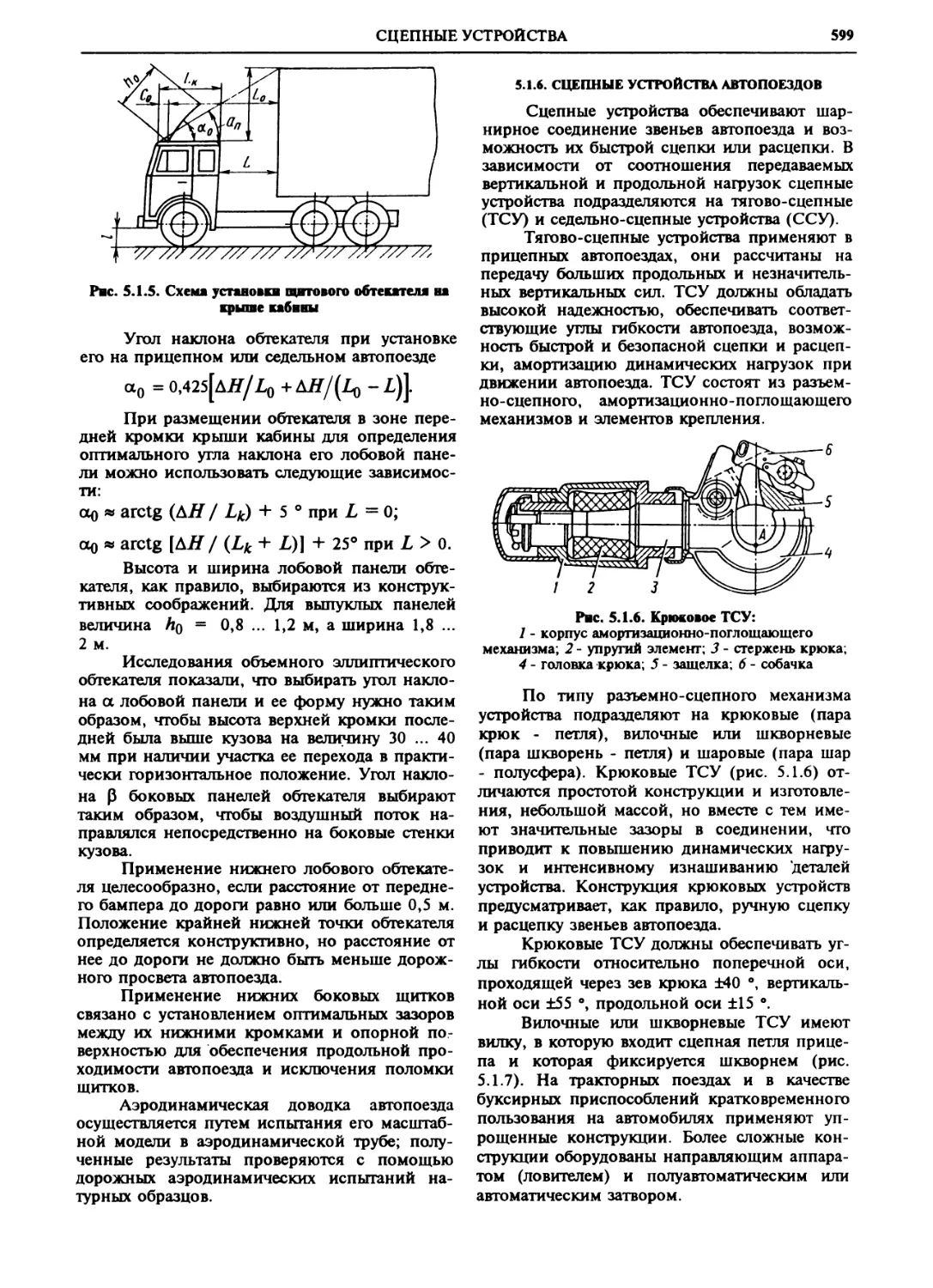
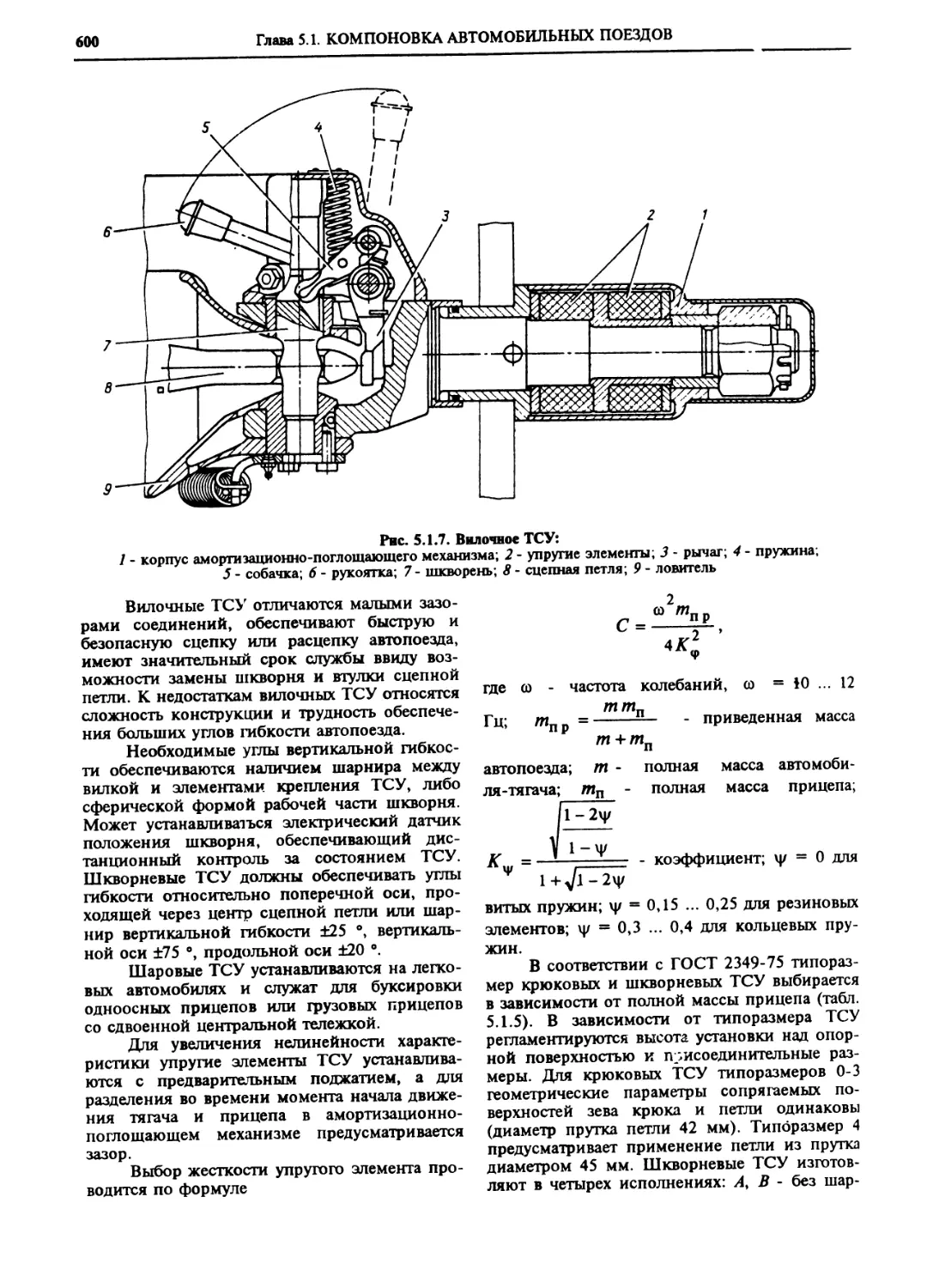
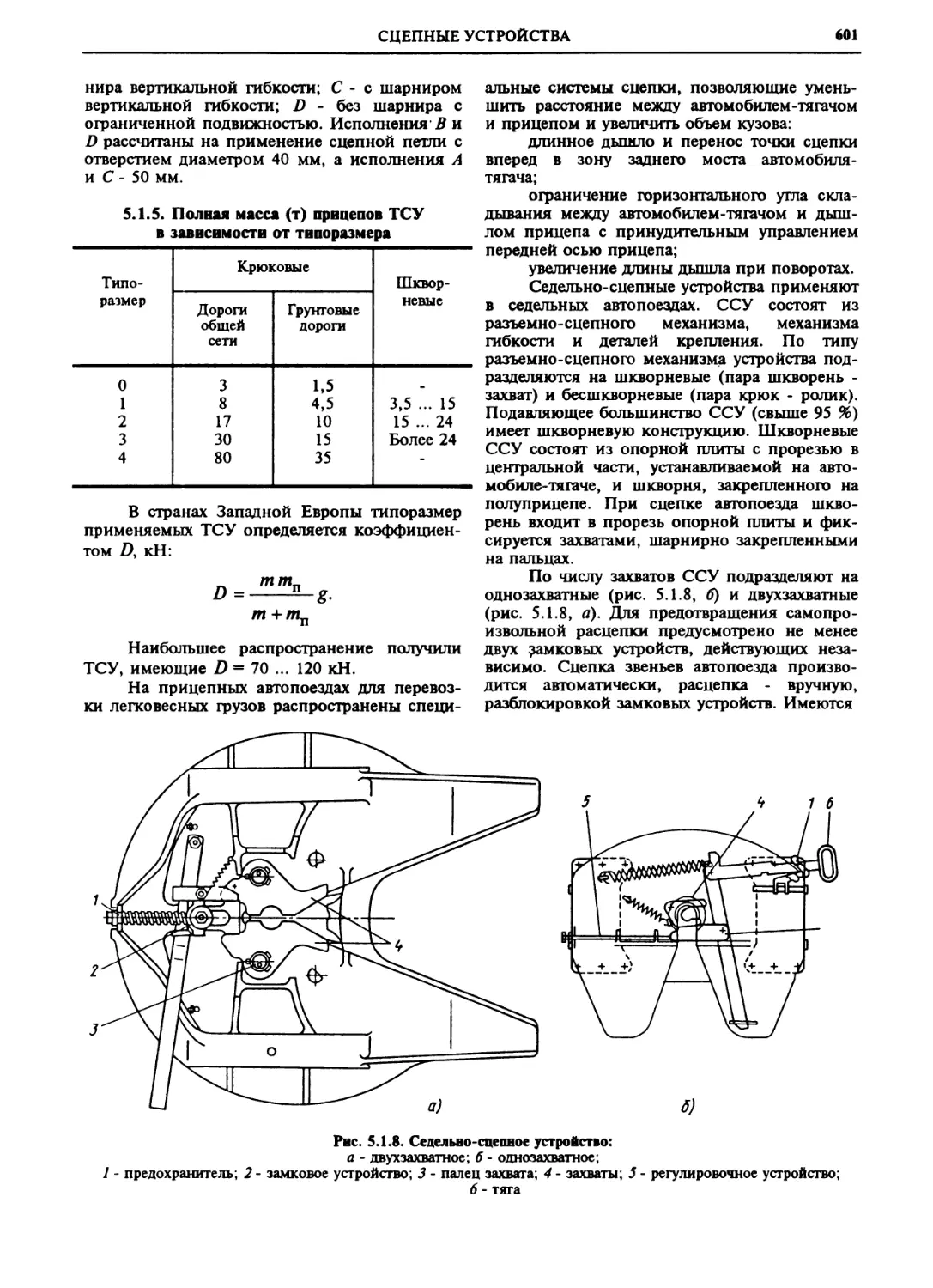
5.1.6. Сцепные устройства
автопоездов (А. М. Иванов) 599
5.1.7. Особенности
тракторных поездов (Л. И. Мир-
китанов, Ю. В. Перчатни-
ков) 602
Глава 5.2. АВТОМОБИЛЬНЫЕ И
ТРАКТОРНЫЕ
ПРИЦЕПЫ И ПОЛУПРИЦЕПЫ
(В. А. Павлов, В. И. Мирки-
танов, Ю. В. Перчатников) 603
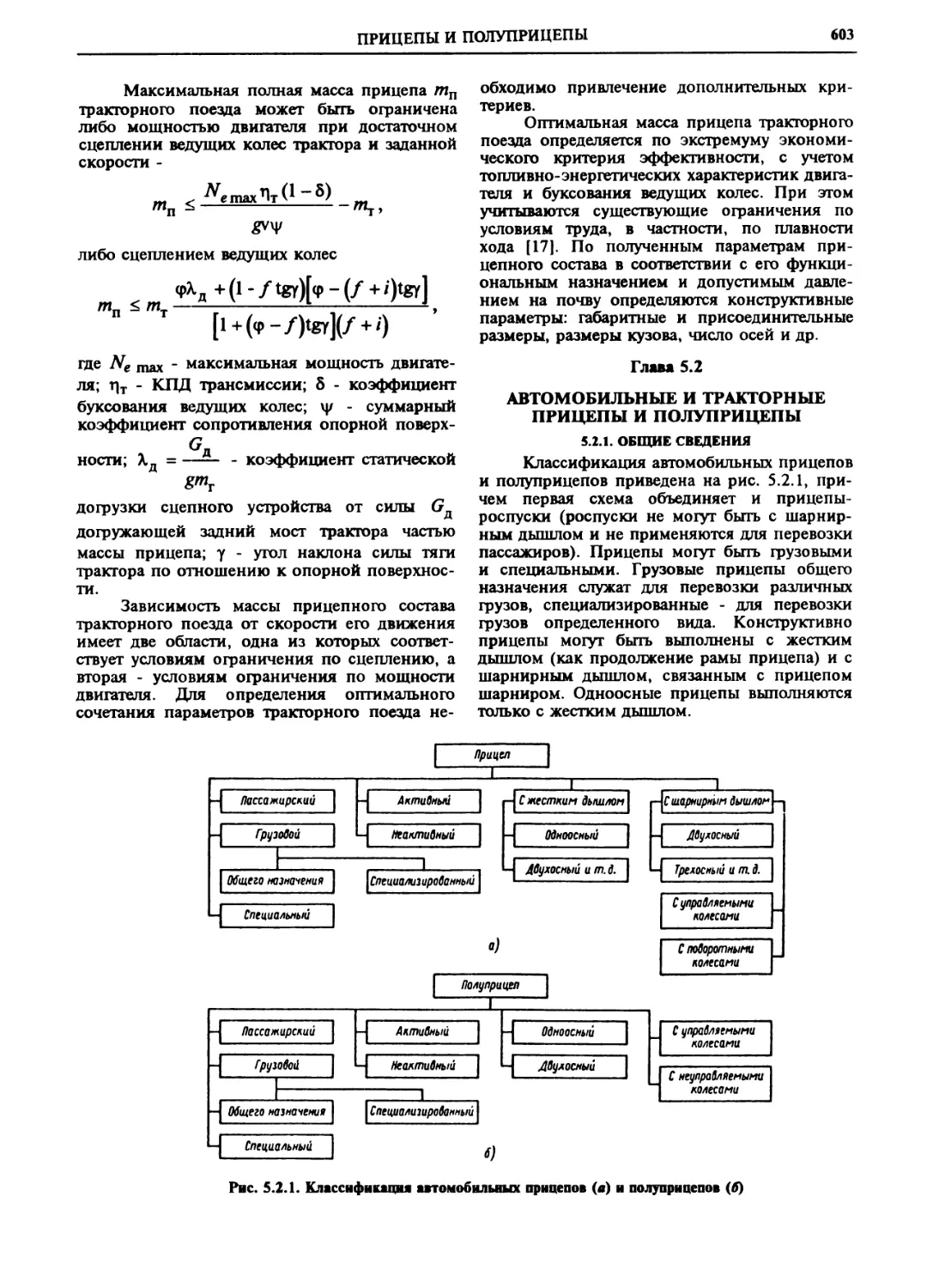
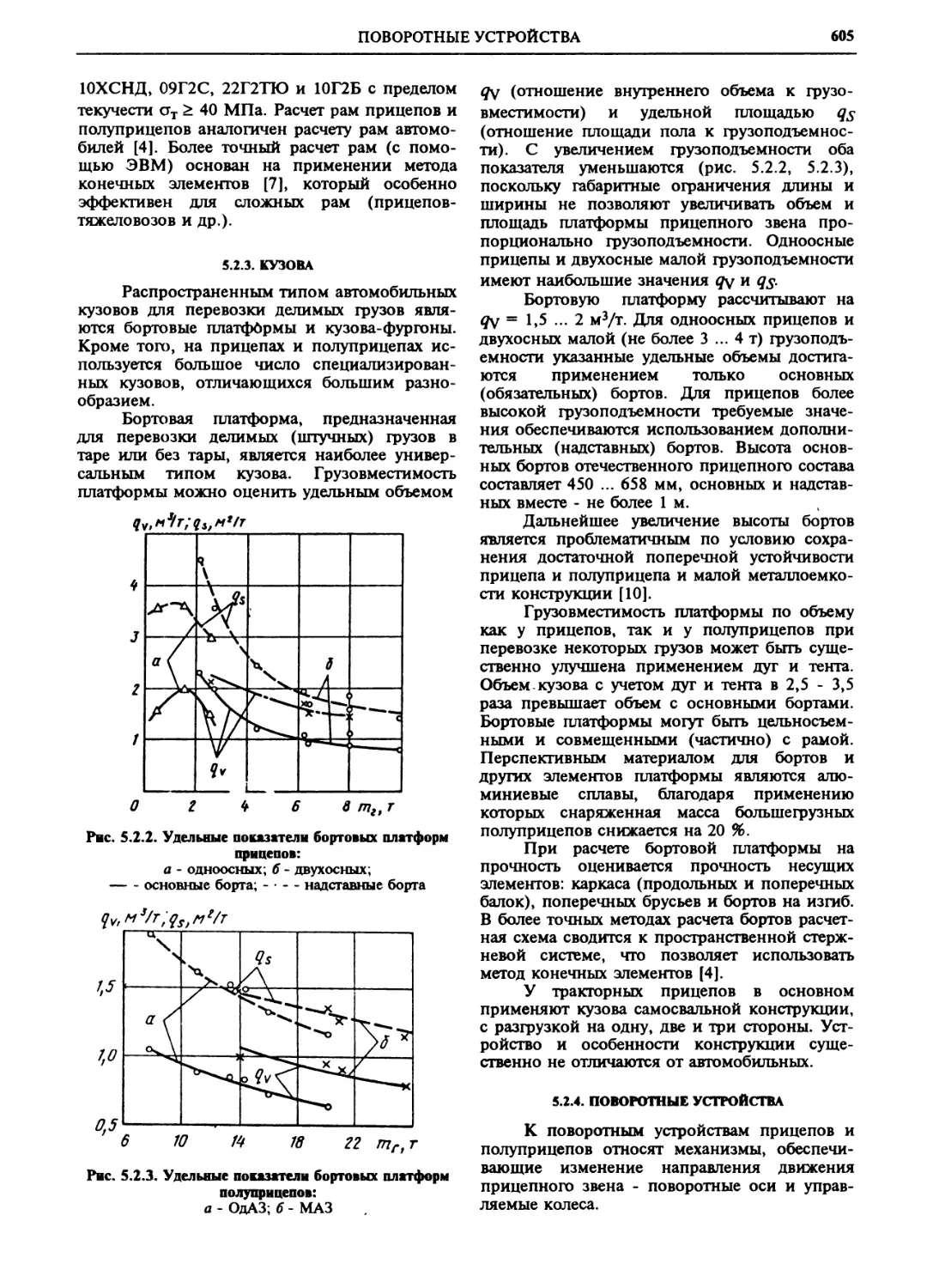
5.2.1. Общие сведения 603
5.2.2. Рамы 604
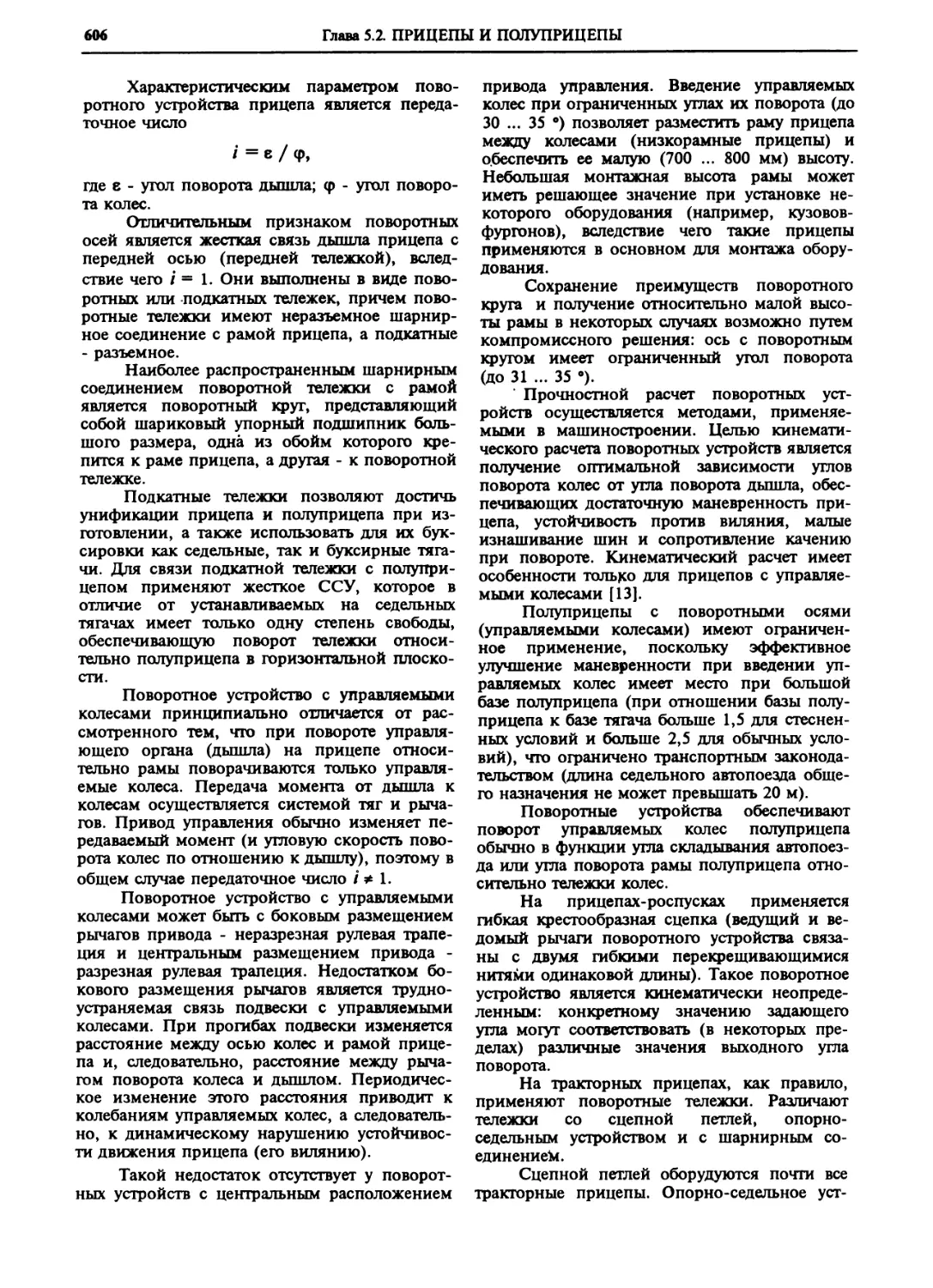
5.2.3. Кузова 605
5.2.4. Поворотные
устройства 605
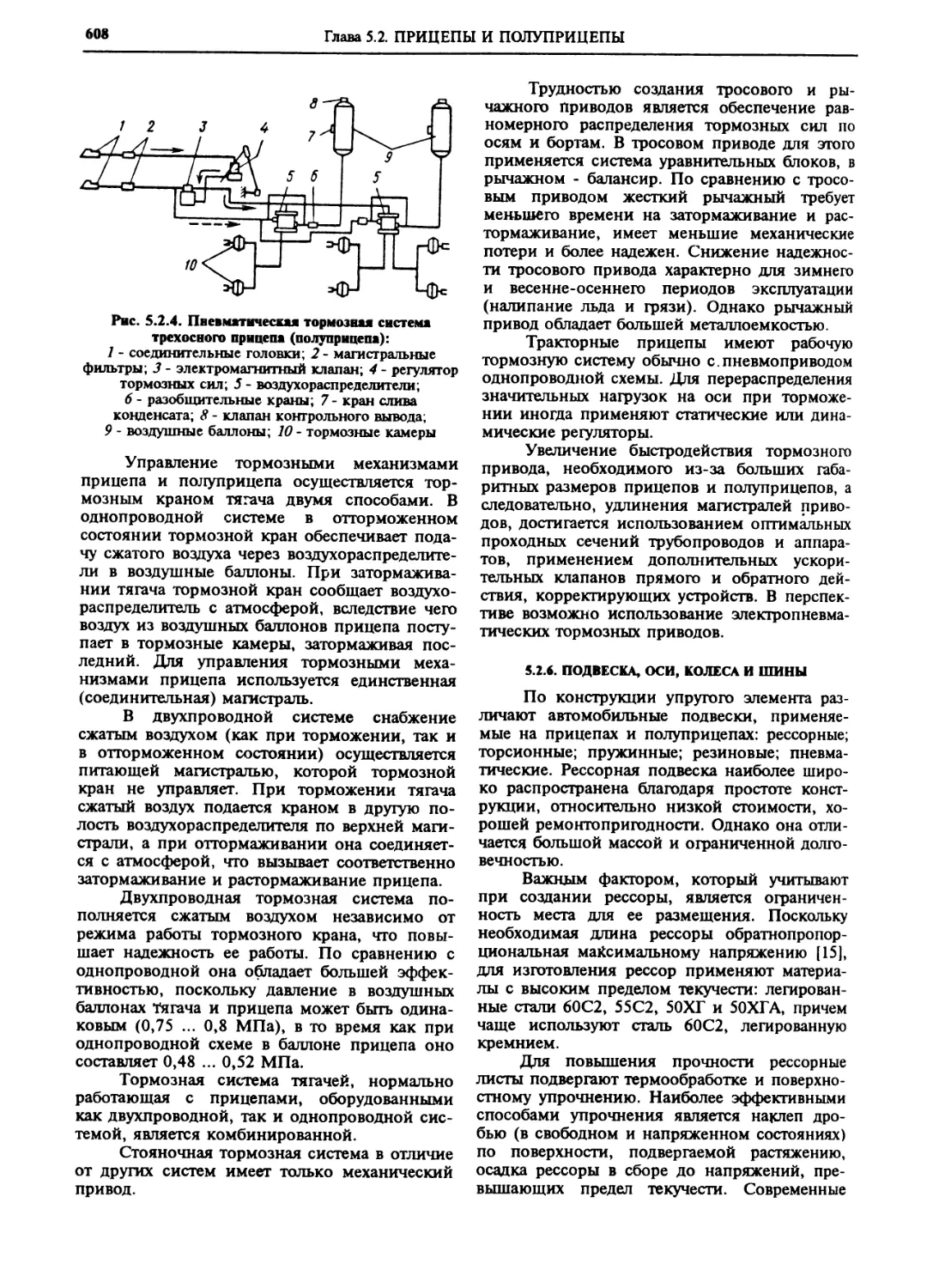
5.2.5. Тормозные системы 607
5.2.6. Подвеска, оси, колеса
и шины 608
Глава 5.3.
СПЕЦИАЛИЗИРОВАННЫЕ
АВТОТРАНСПОРТНЫЕ СРЕДСТВА 610
5.3.1. Автомобили и
автопоезда-самосвалы (Л. Е.
Гилелес, Я. Е. Фаробин) 610
5.3.2. Автомобильные
фургоны и рефрижераторы
(Я. Е. Фаробин) 616
5.3.3. Автомобили и
автопоезда-цистерны (В. Г.
Коваленко) 619
5.3.4. Автомобили и
автопоезда для перевозки
строительных грузов (М. И.
Грифф) 622
5.3.5. Тяжеловозы (В. И.
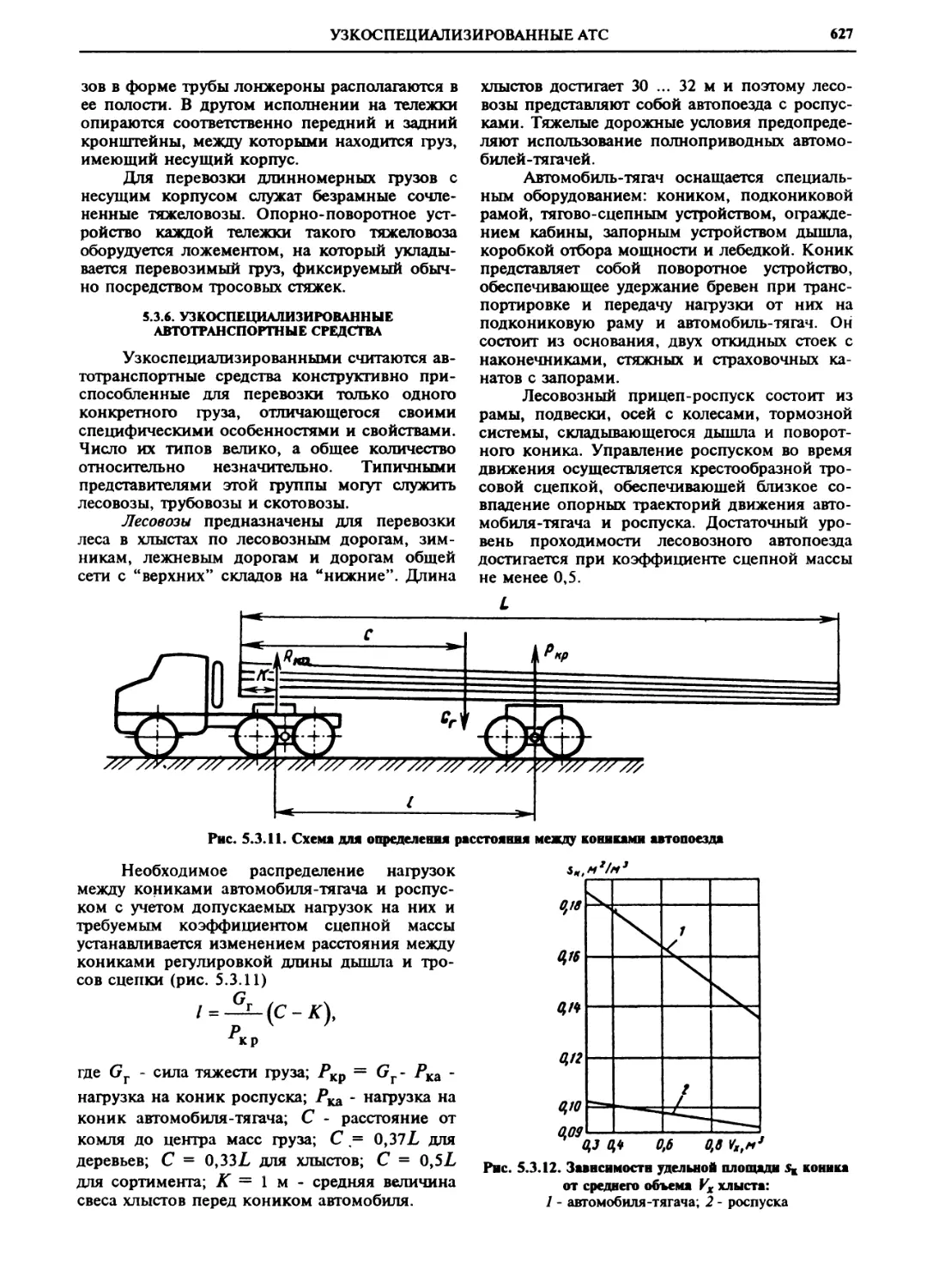
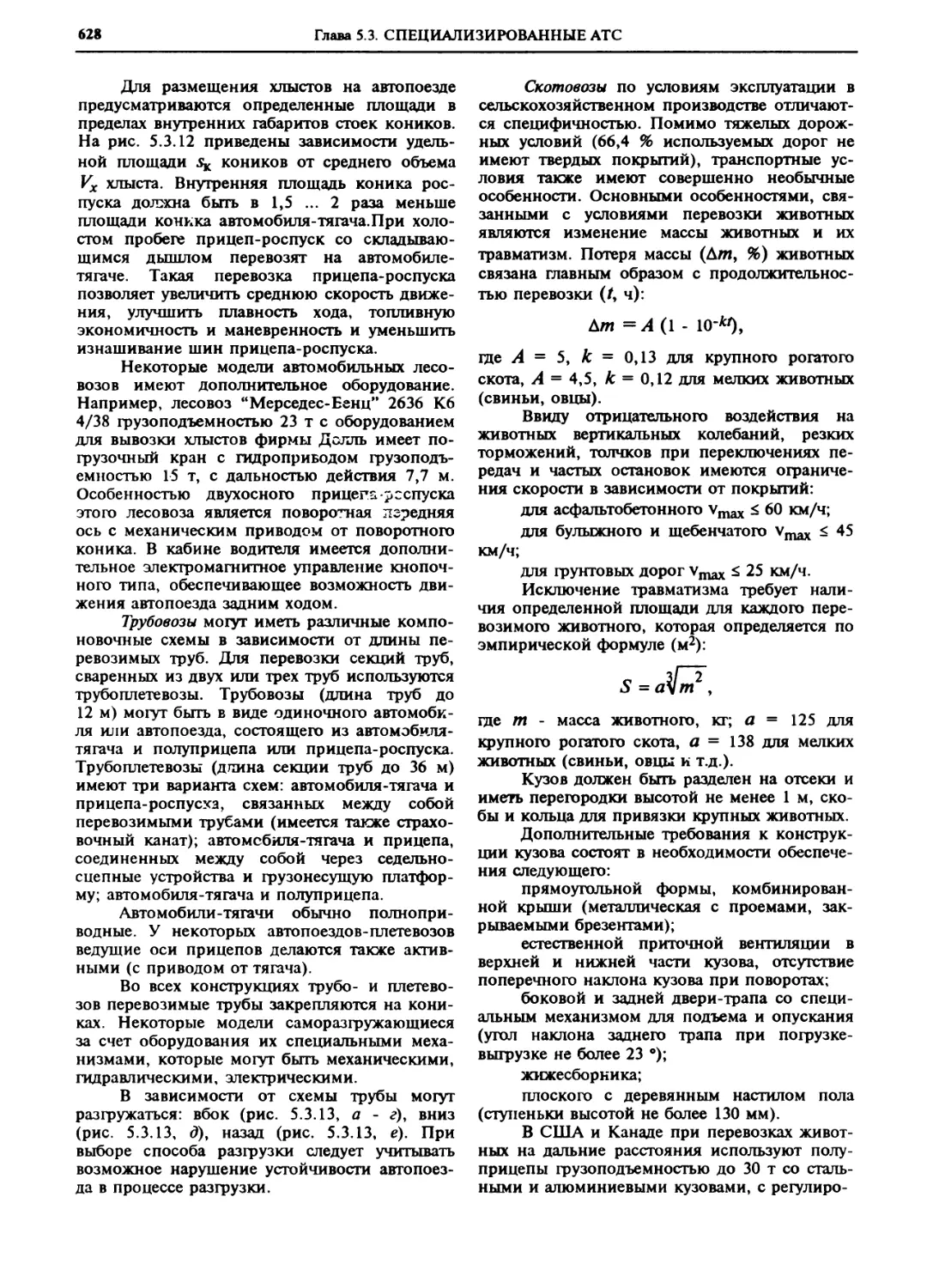
Соловьев, Г. Д. Цейтлин) 625
5.3.6.
Узкоспециализированные автотракторные
средства (Л. Е. Гилелес,
Я. Е. Фаробин) 627
СПИСОК ЛИТЕРАТУРЫ 629
Раздел 6. ЭКСПЛУАТАЦИОННЫЕ
МАТЕРИАЛЫ 631
Глава 6.1. ТОПЛИВА 631
6.1.1. Виды топлив.
Показатели эксплуатационных
свойств (Е. П. Серегин,
А. Ф. Горенков) ^| 631
6.1.2. Бензины (А. А. Гуре-
ев) 632
6.1.3. Дизельное топливо
(В. С Азев) 634
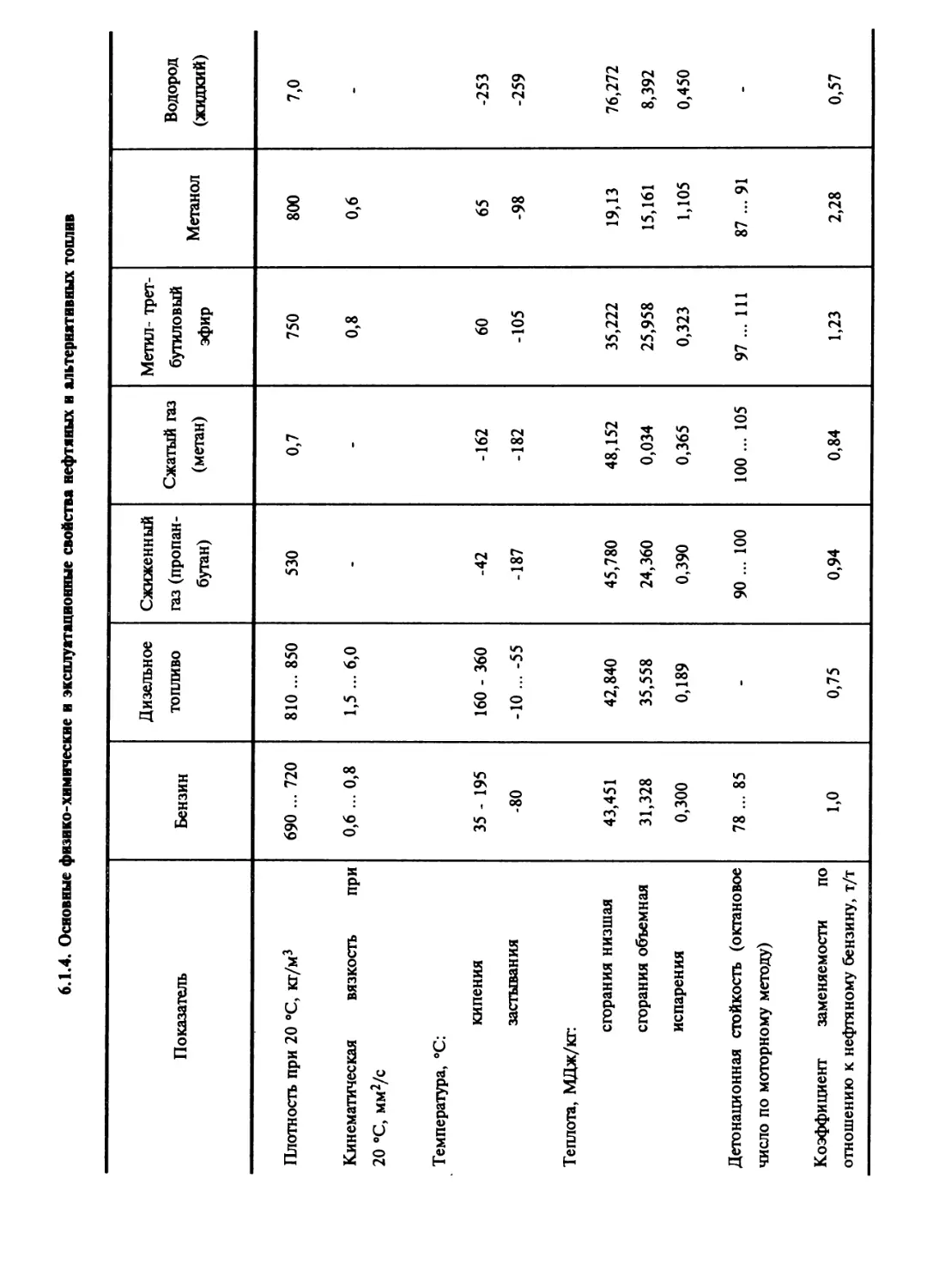
6.1.4. Газообразные и
альтернативные топлива
(Е. П. Серегин, С Р.
Лебедев) ^ 637
6.1.5. Присадки к топливам~
(В. С Азев) 639
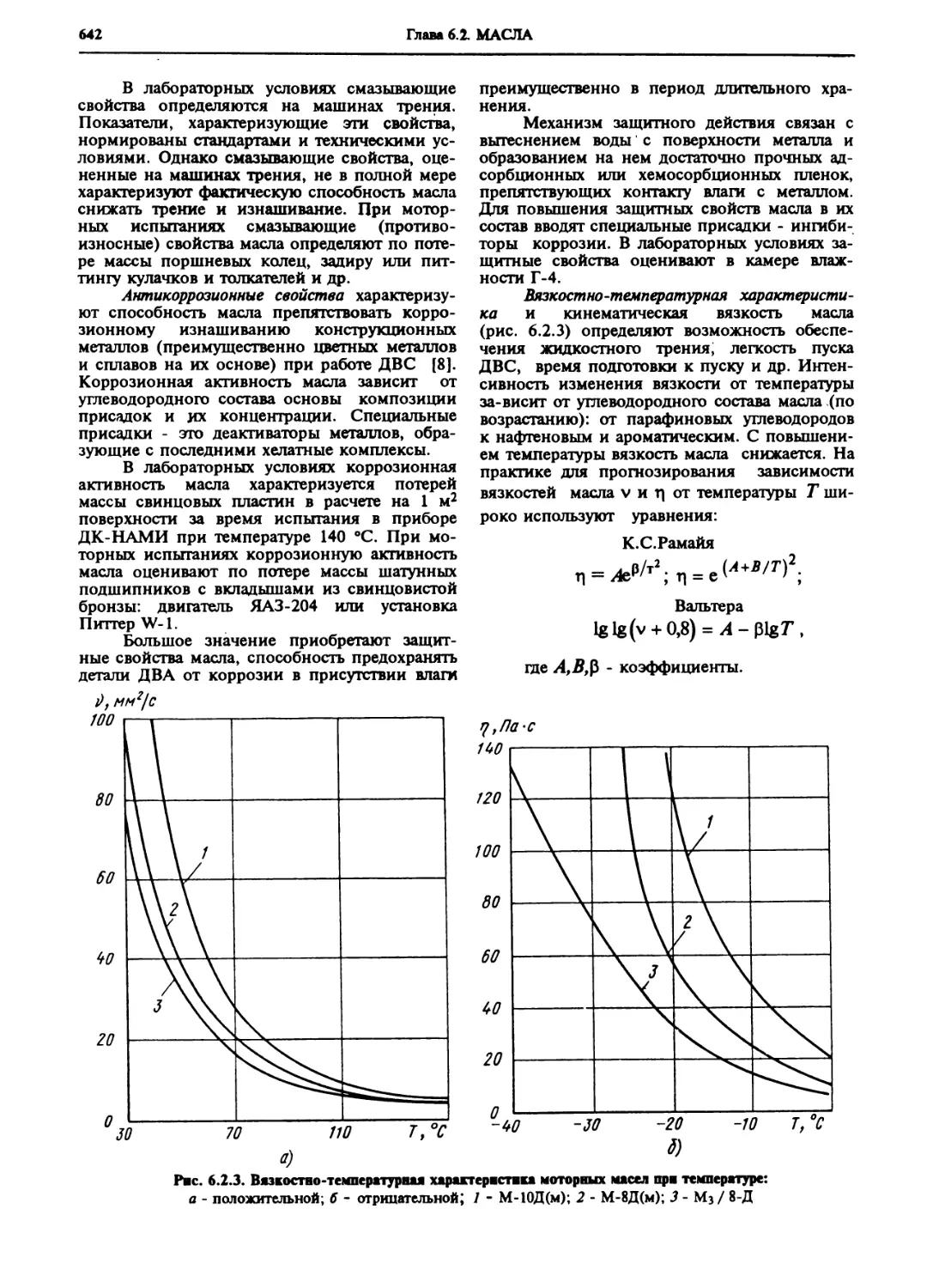
Глава 6.2. МАСЛА 640
6.2.1. Моторные масла
(В. Л. Лаиоци, С. Г Арабян,
Я. А. Кузнецов) 640
6.2.2. Трансмиссионные
масла (Я. А. Кузнецов) 650
6.2.3. Масла для
гидравлических систем (С. Г Арабян) 654
6.2.4. Единые масла (С. Г
Арабян) 657
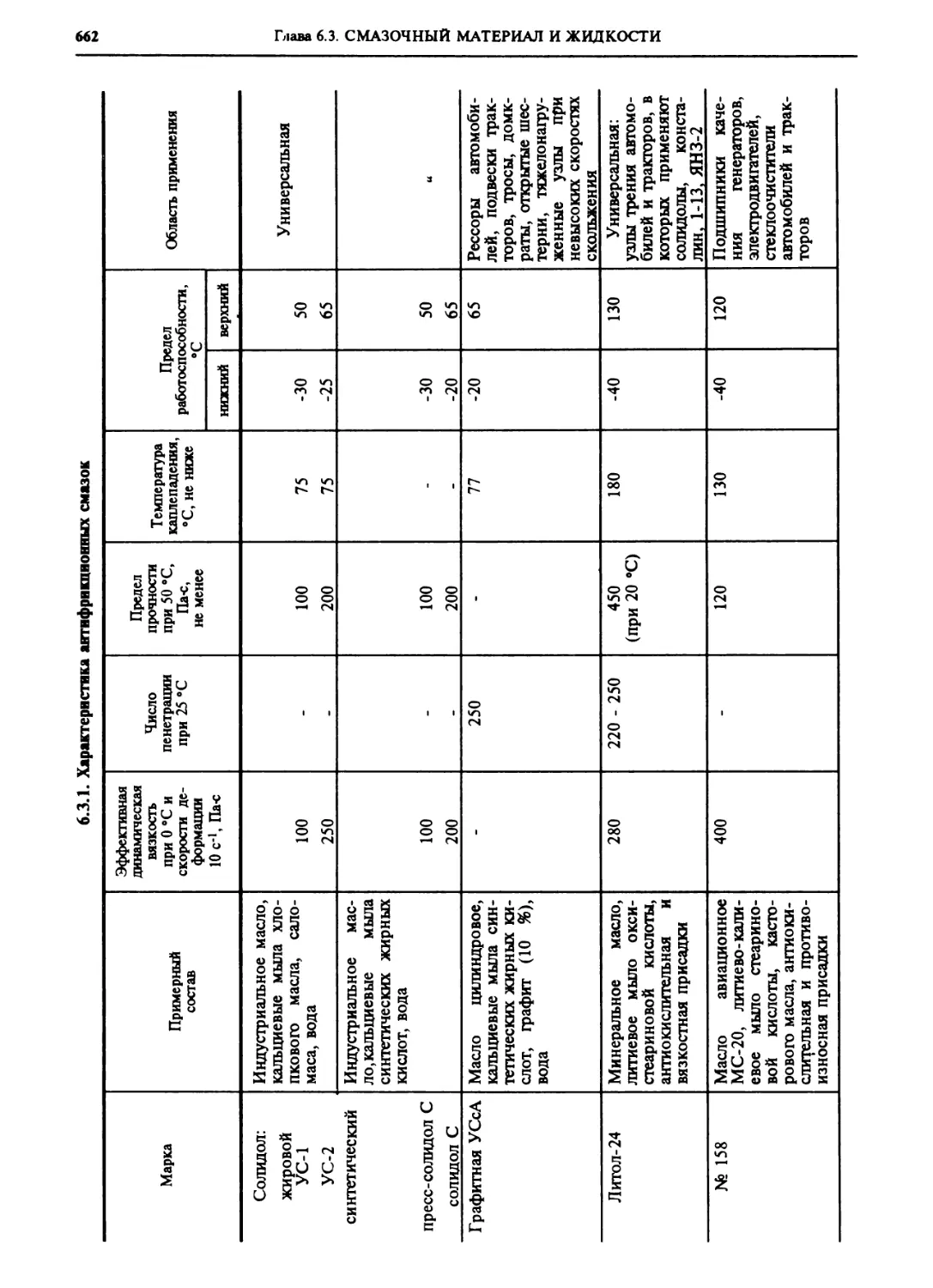
Глава 6.3. СМАЗОЧНЫЙ
МАТЕРИАЛ И ТЕХНИЧЕСКИЕ
ЖИДКОСТИ 658
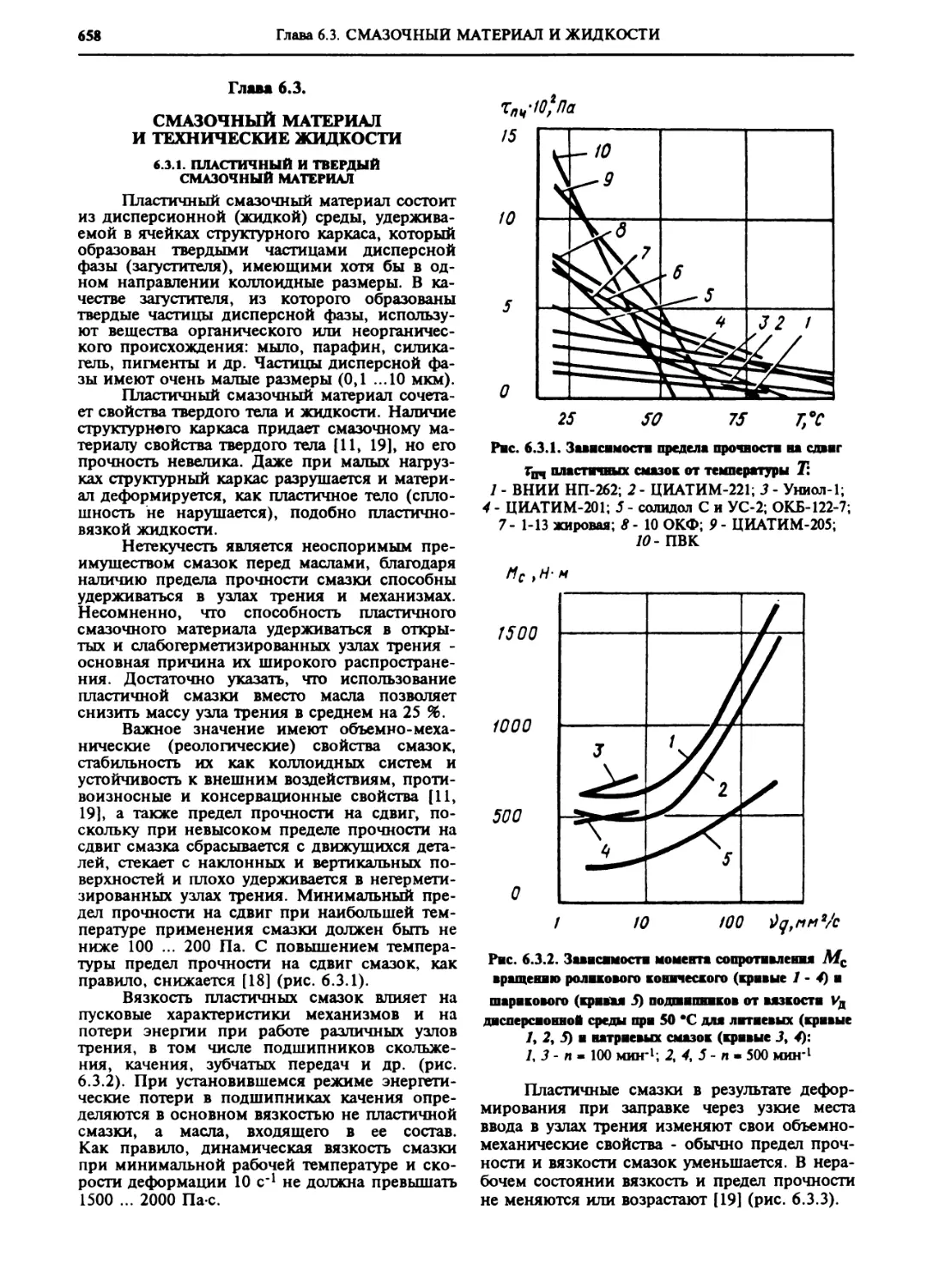
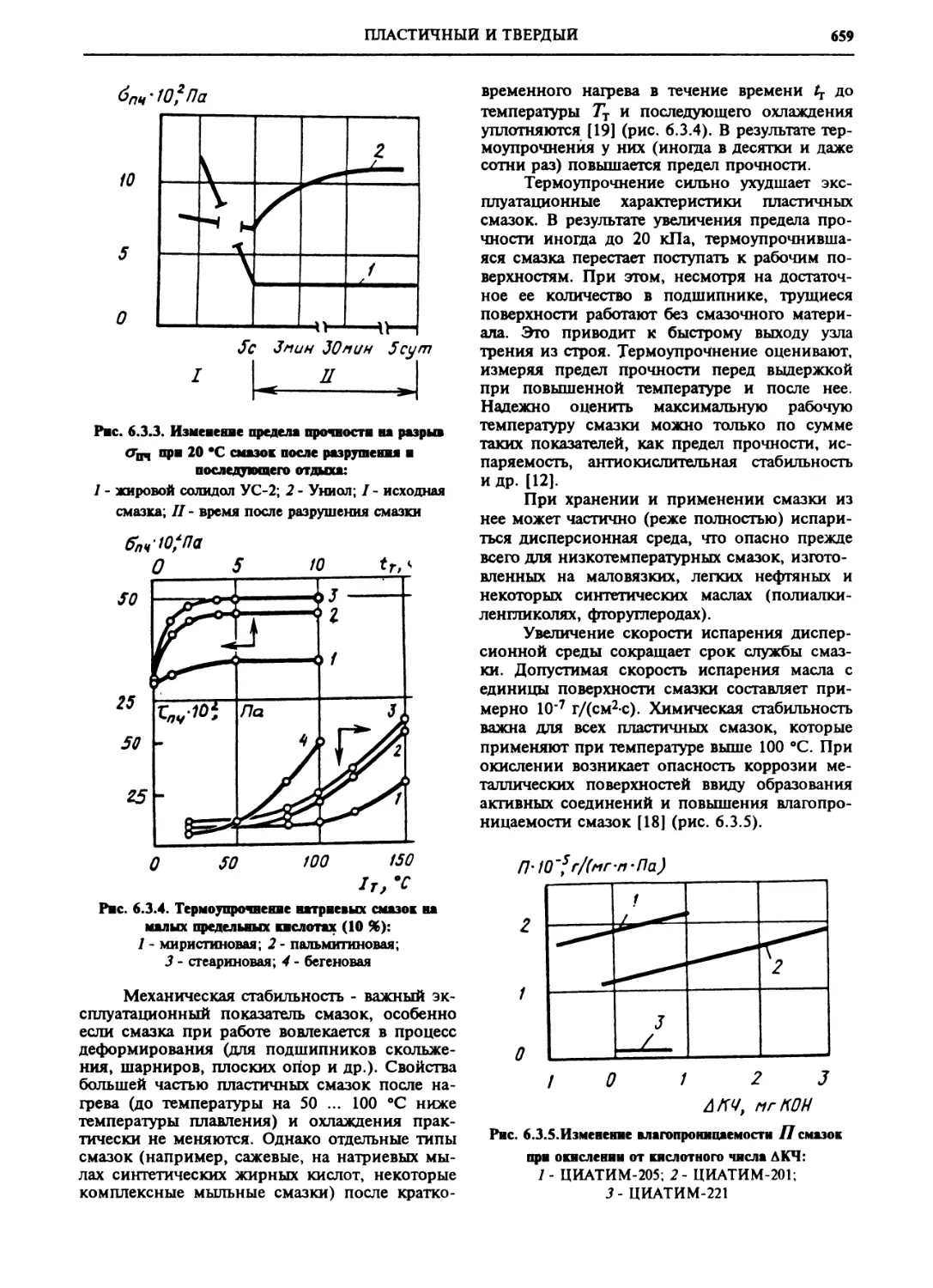
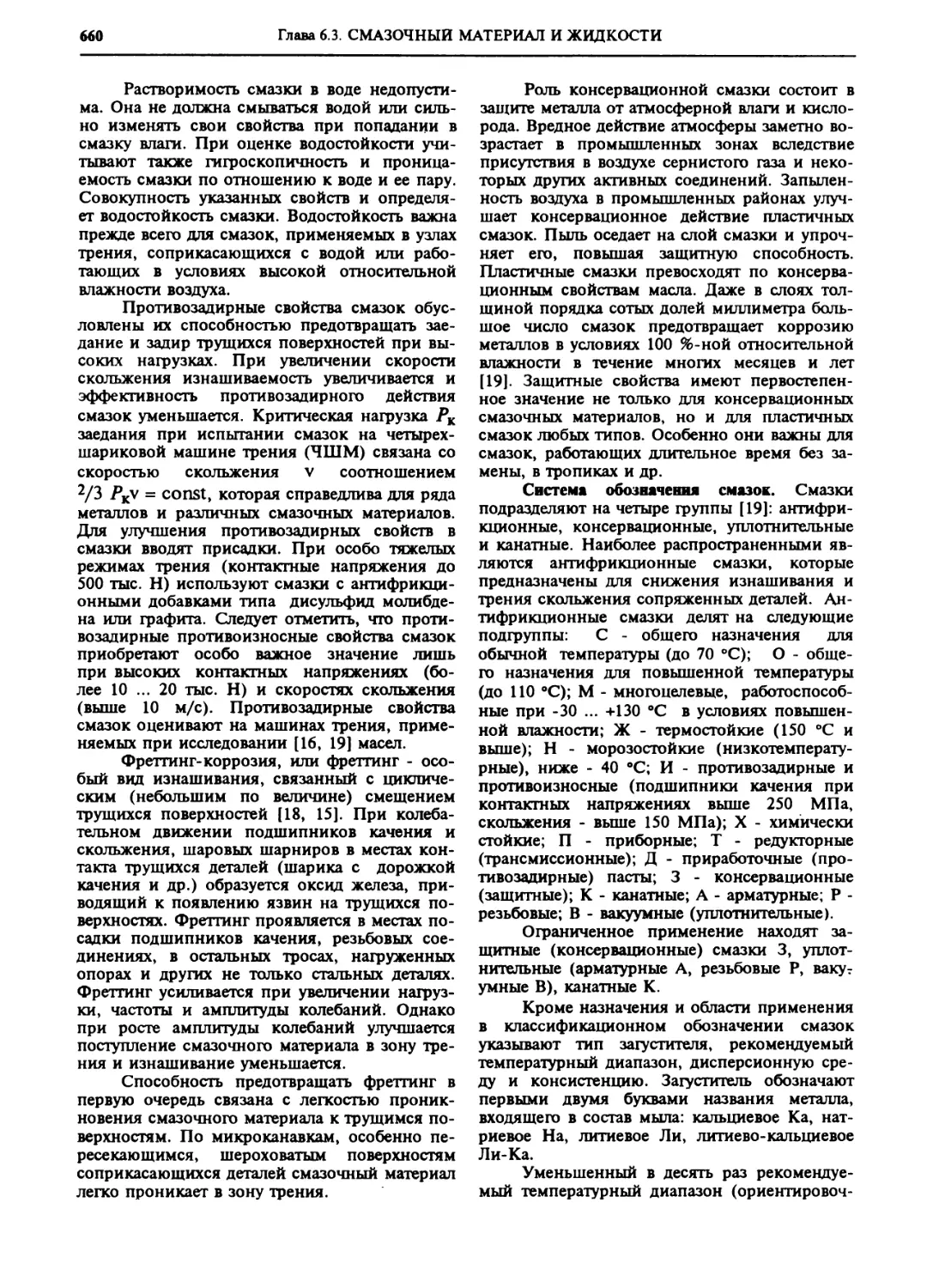
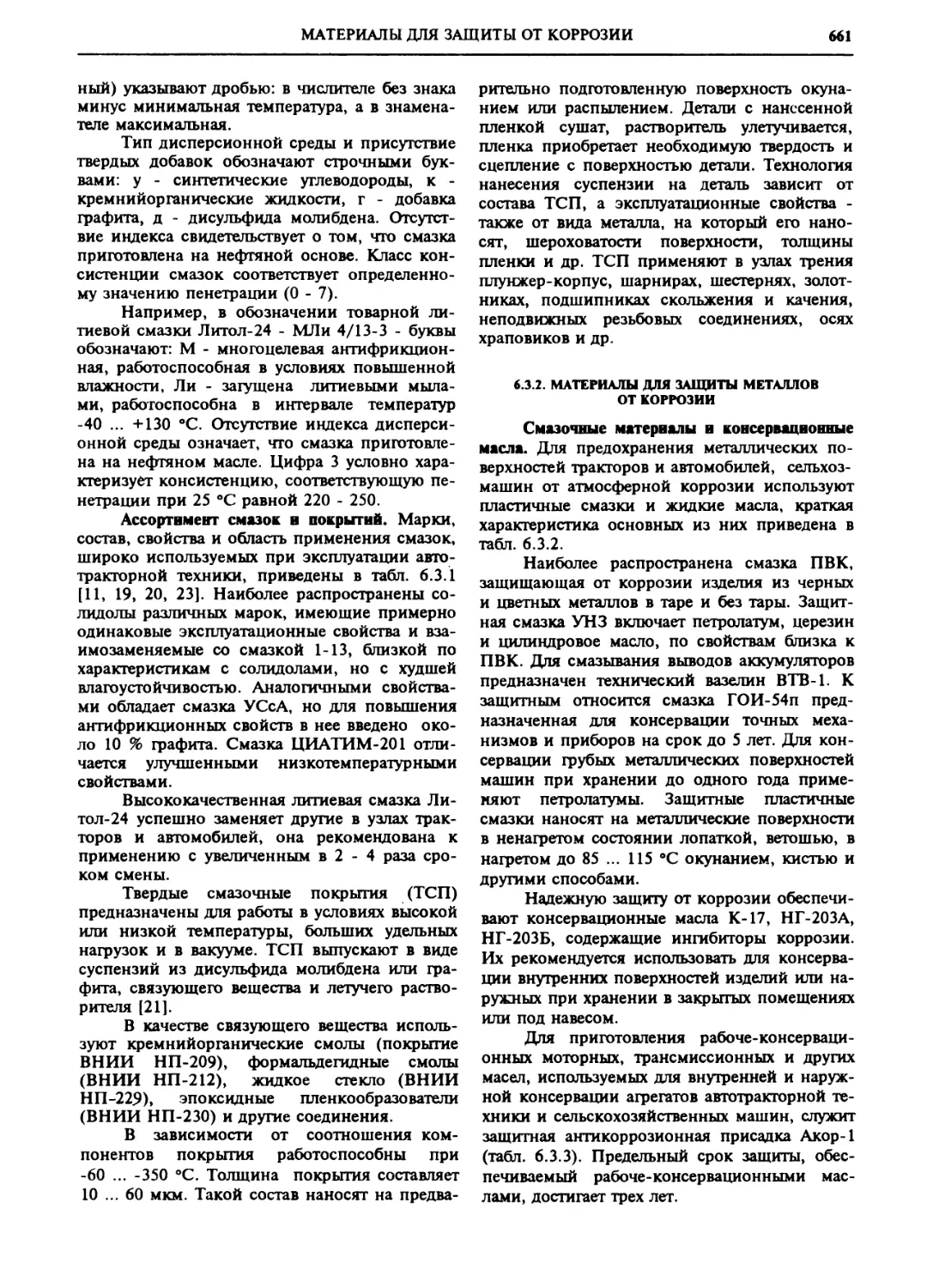
6.3.1. Пластичный и
твердый смазочный материал
(Я. Я. Гришин) 658
10
ОГЛАВЛЕНИЕ
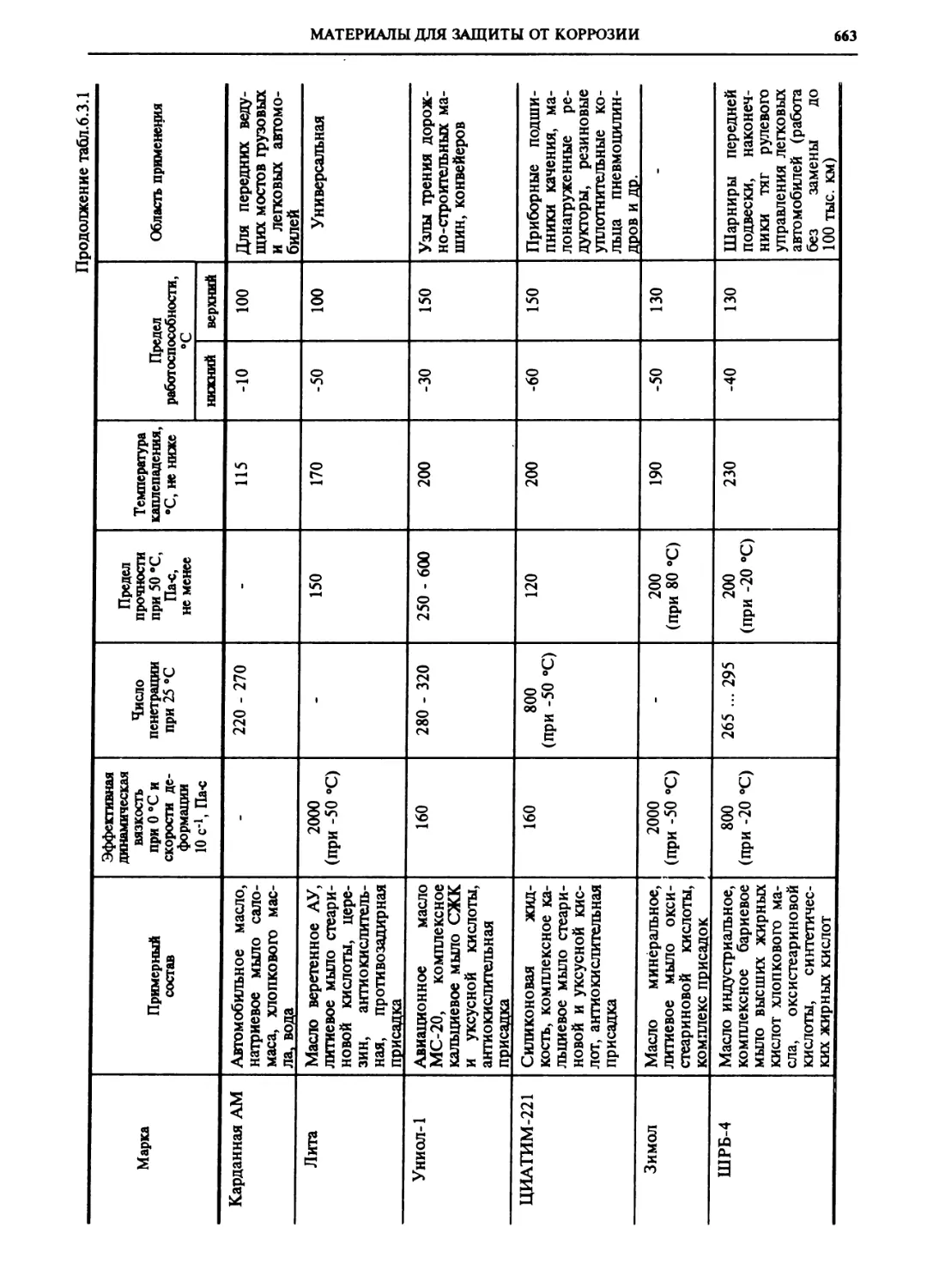
6.3.2. Материалы для
защиты металлов от коррозии
(Я. Я. Гришин) 661
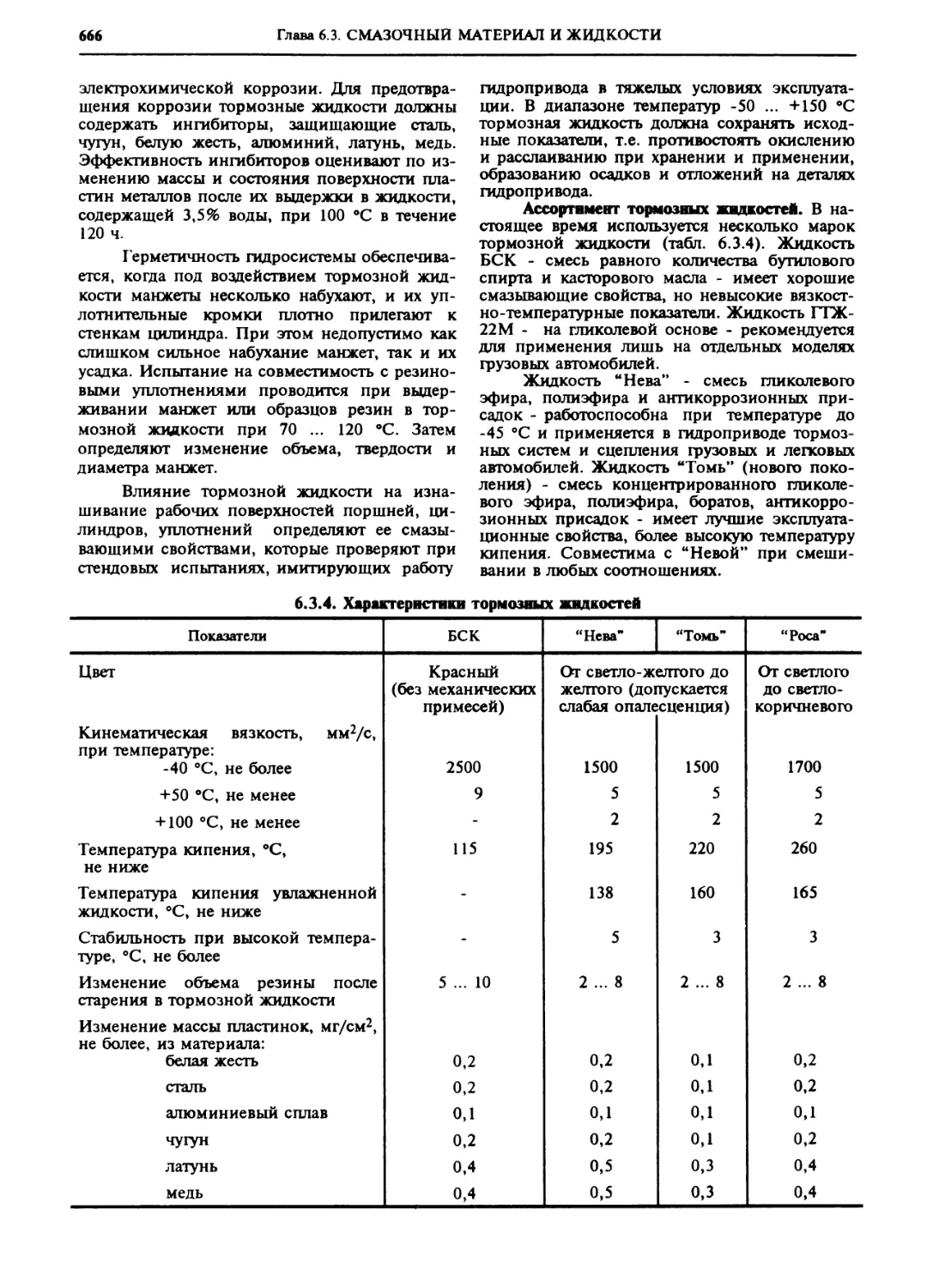
6.3.3. Тормозные жидкости
(Я. А. Кузнецов) 665
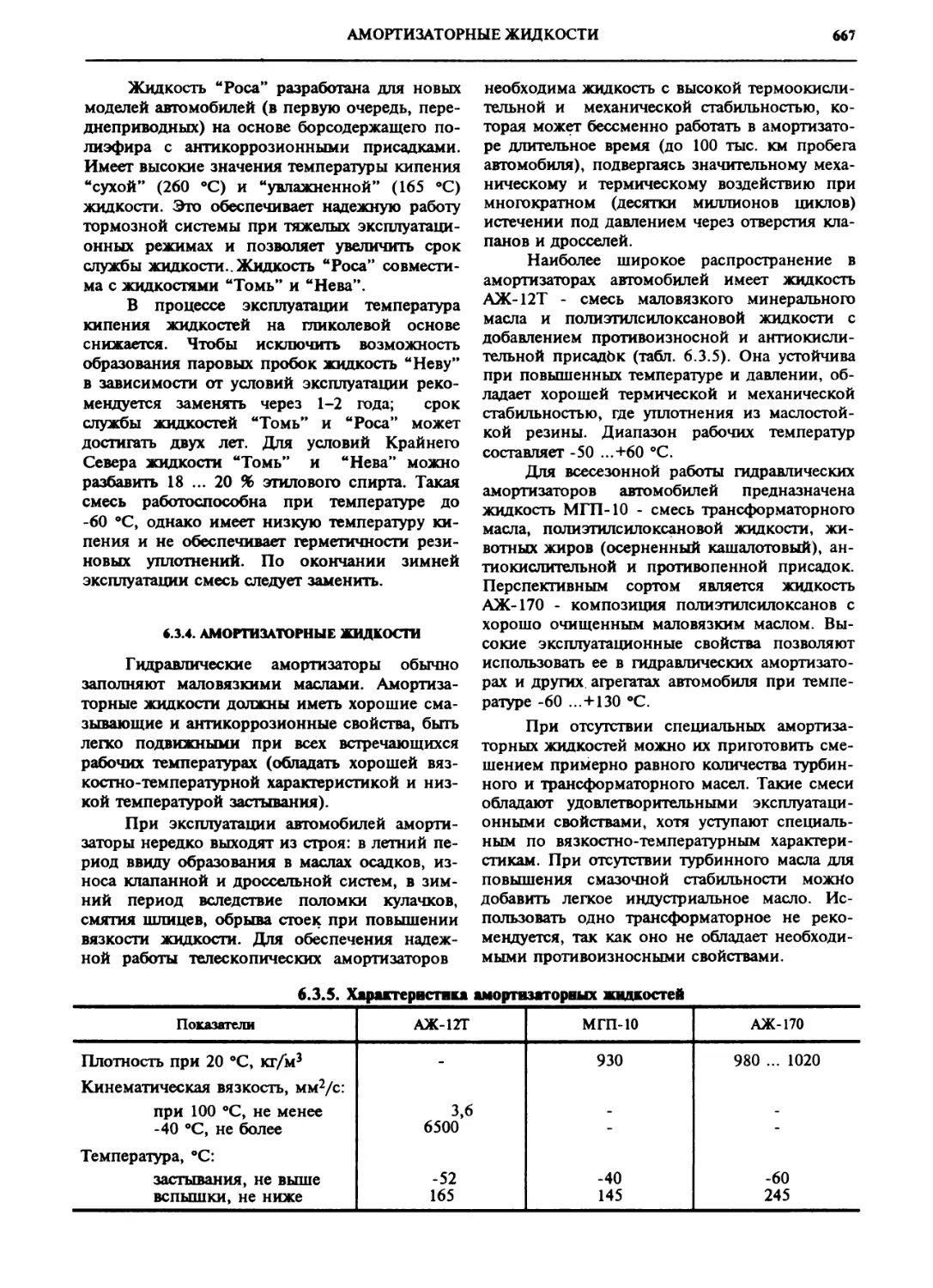
6.3.4. Амортизаторные
жидкости (Я. А. Кузнецов) 667
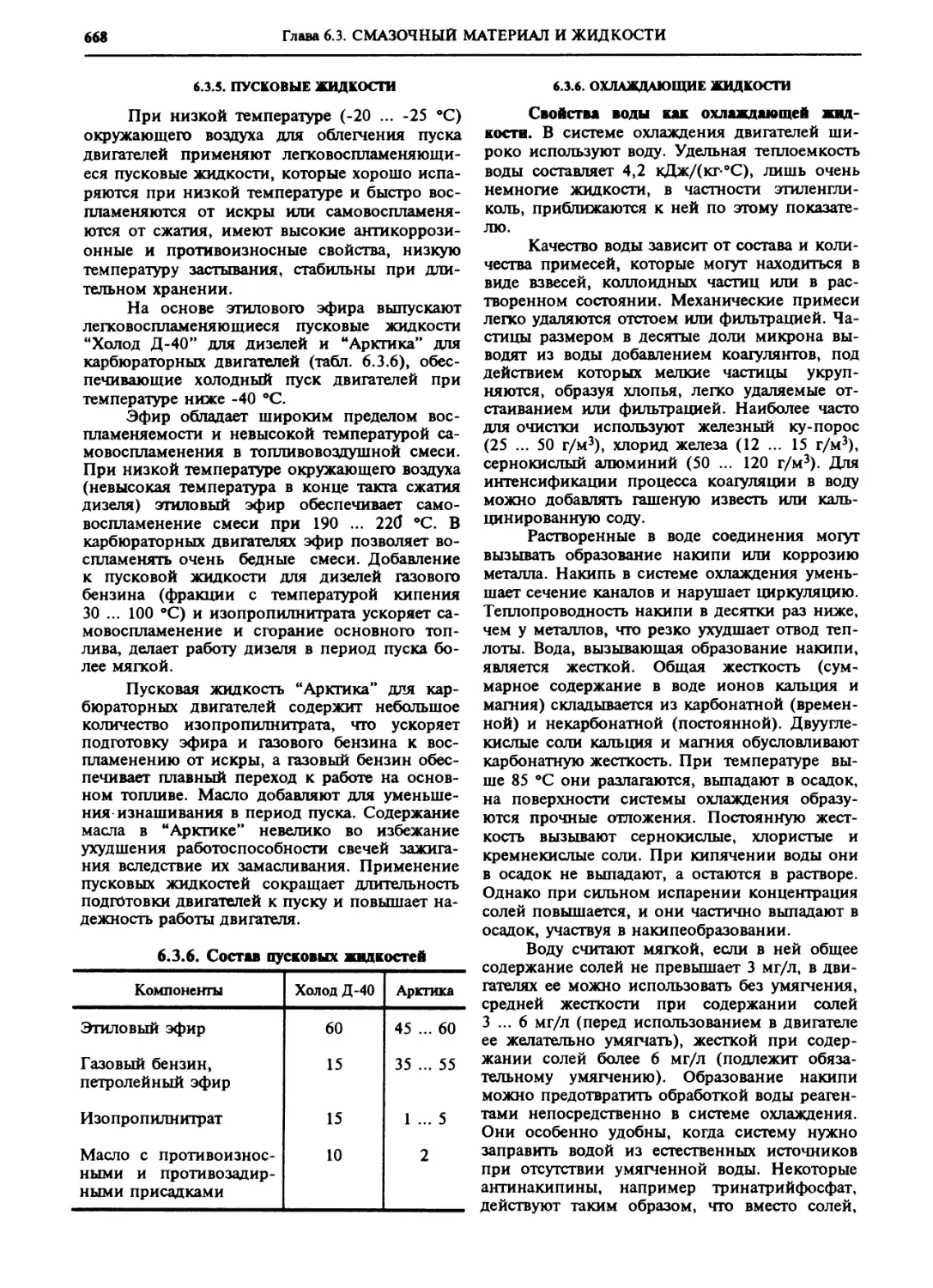
6.3.5. Пусковые жидкости
(В. В. Соколов) 668
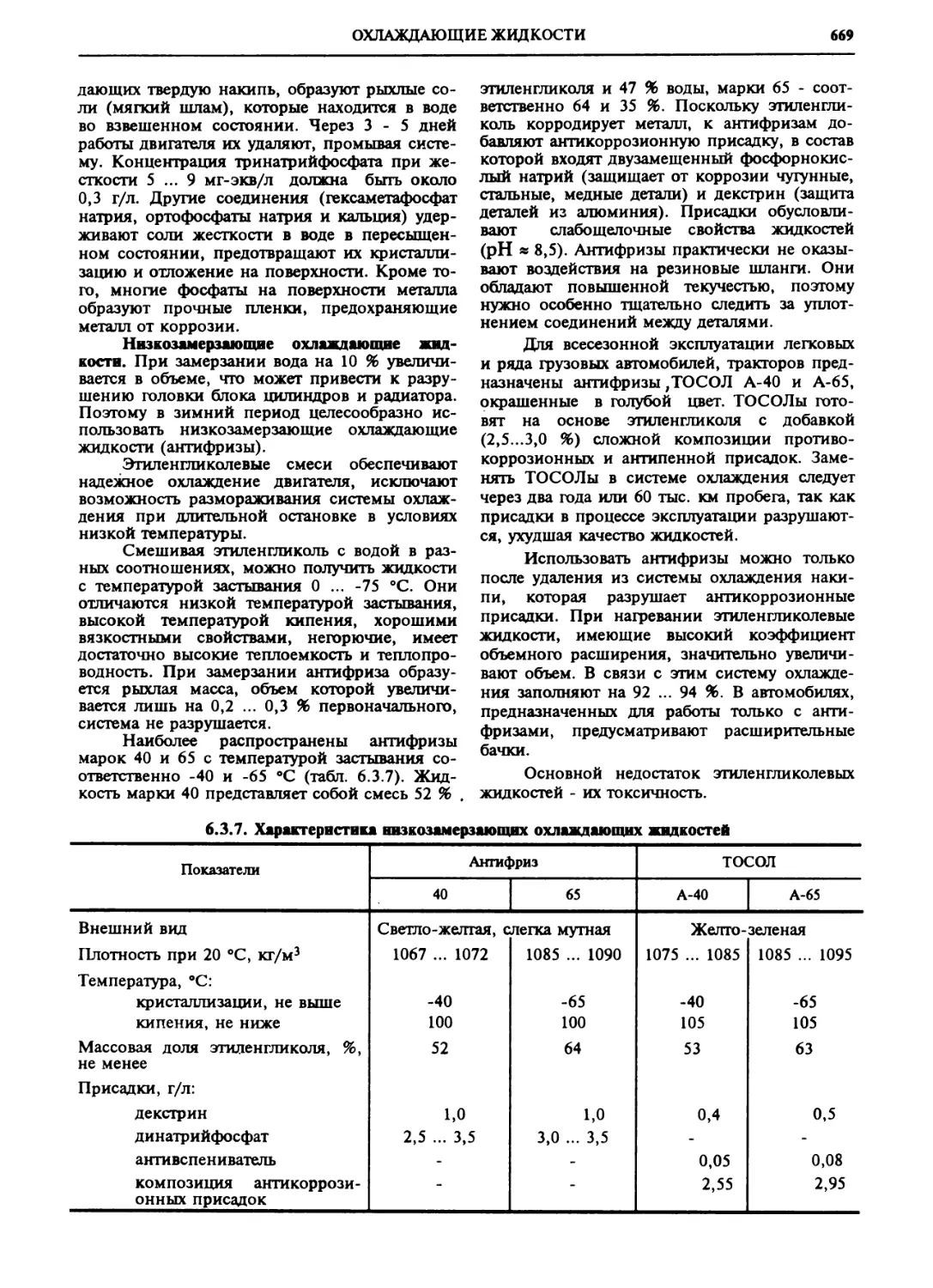
6.3.6. Охлаждающие
жидкости (В. В. Соколов) 668
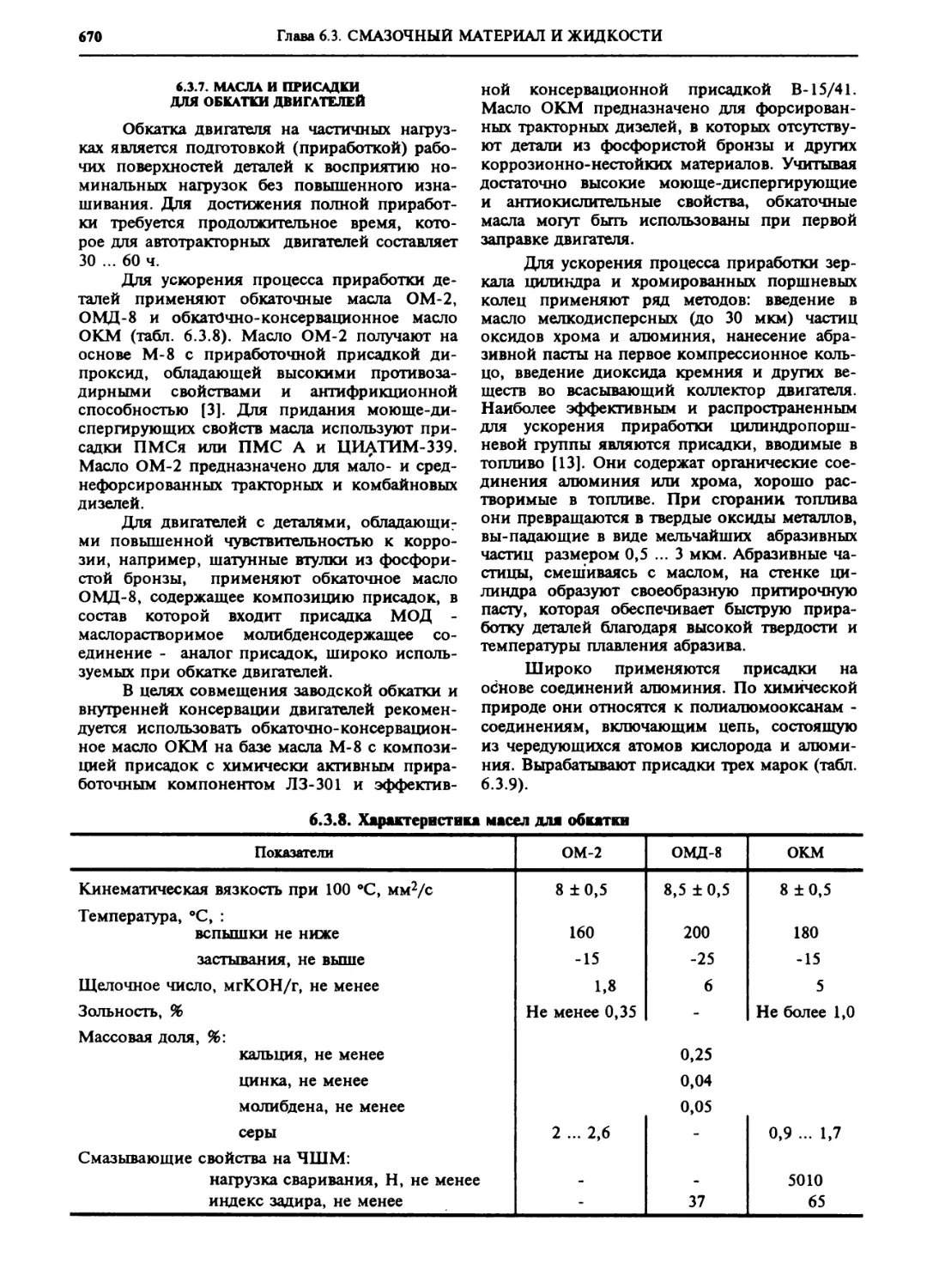
6.3.7. Масла и присадки
для обкатки двигателей
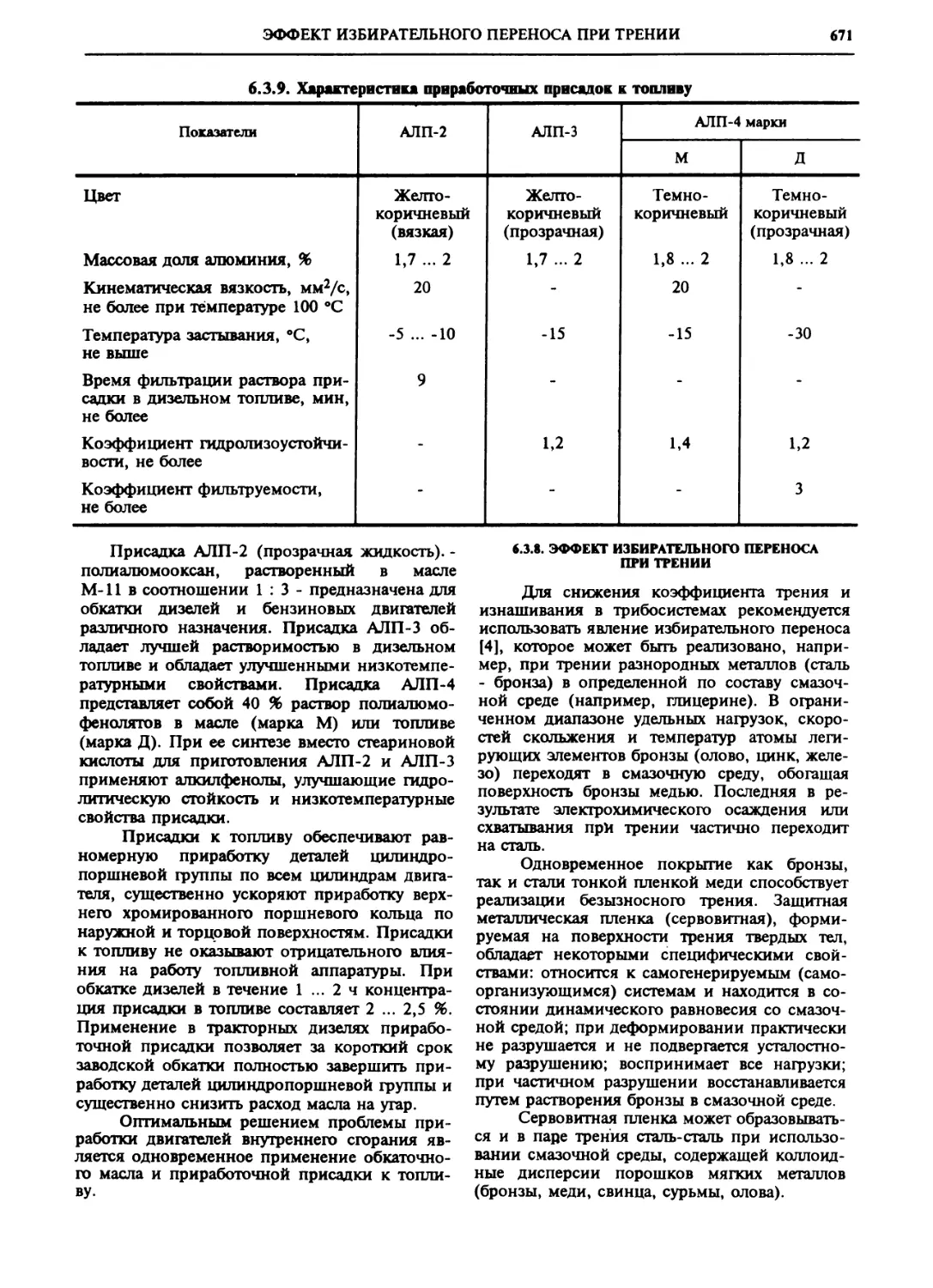
(С. Г. Арабян) 670
6.3.8. Эффект
избирательного переноса при трении
(С. Г. Арабян) 670
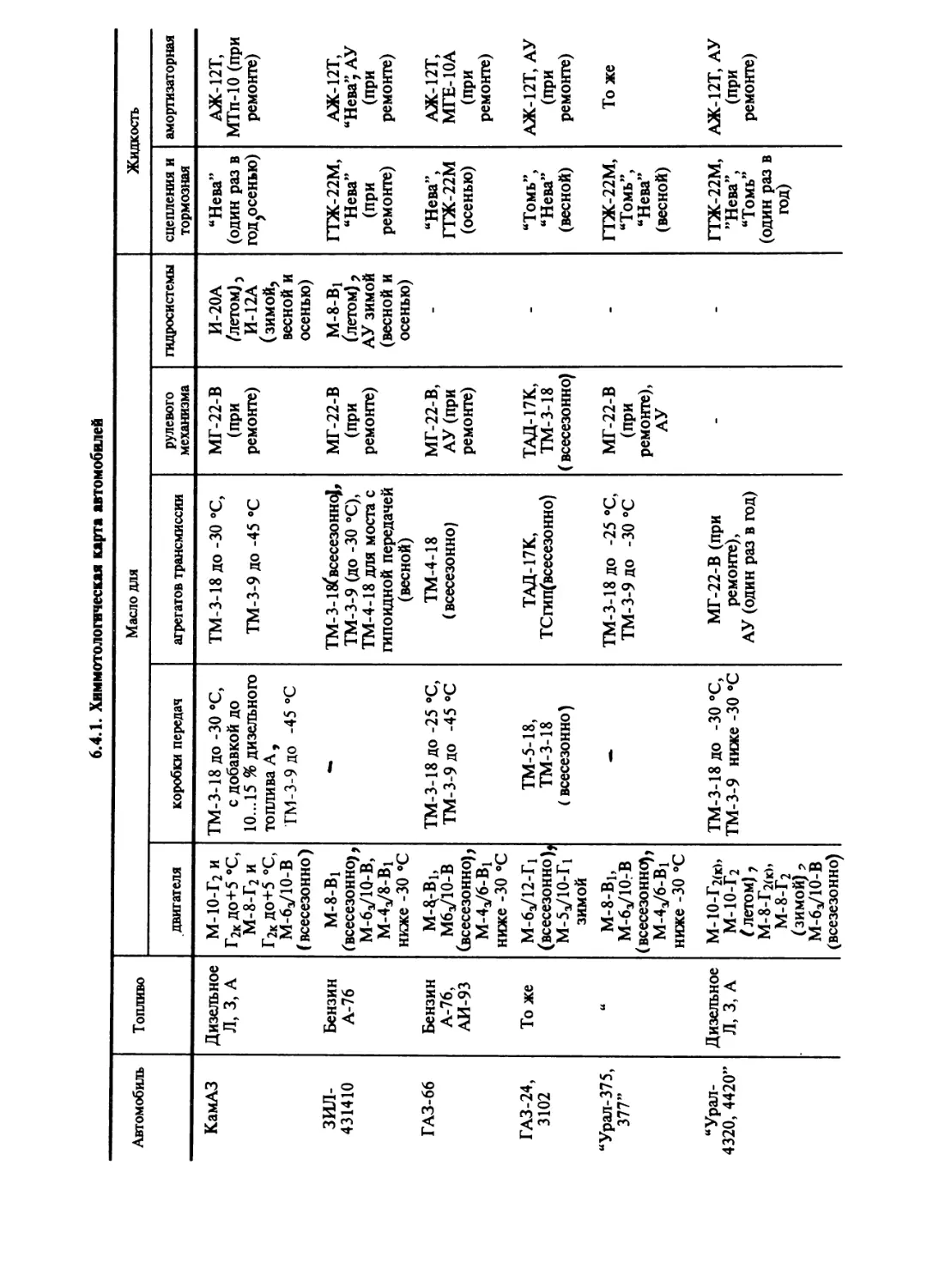
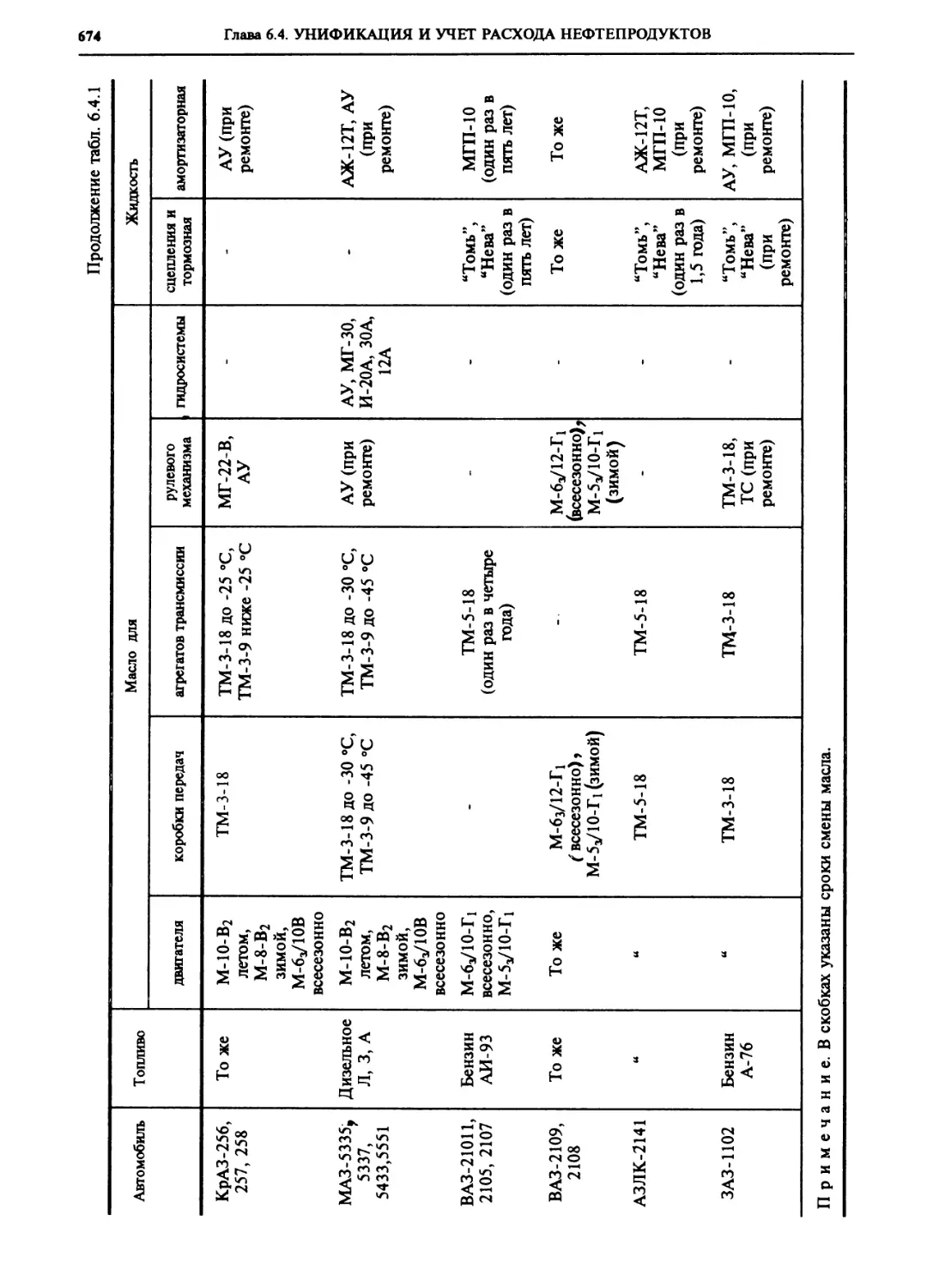
Глава 6.4. УНИФИКАЦИЯ И
УЧЕТ РАСХОДА
НЕФТЕПРОДУКТОВ 672
6.4.1. Ограничительные
перечни и порядок
назначения (С. Г. Арабян) 672
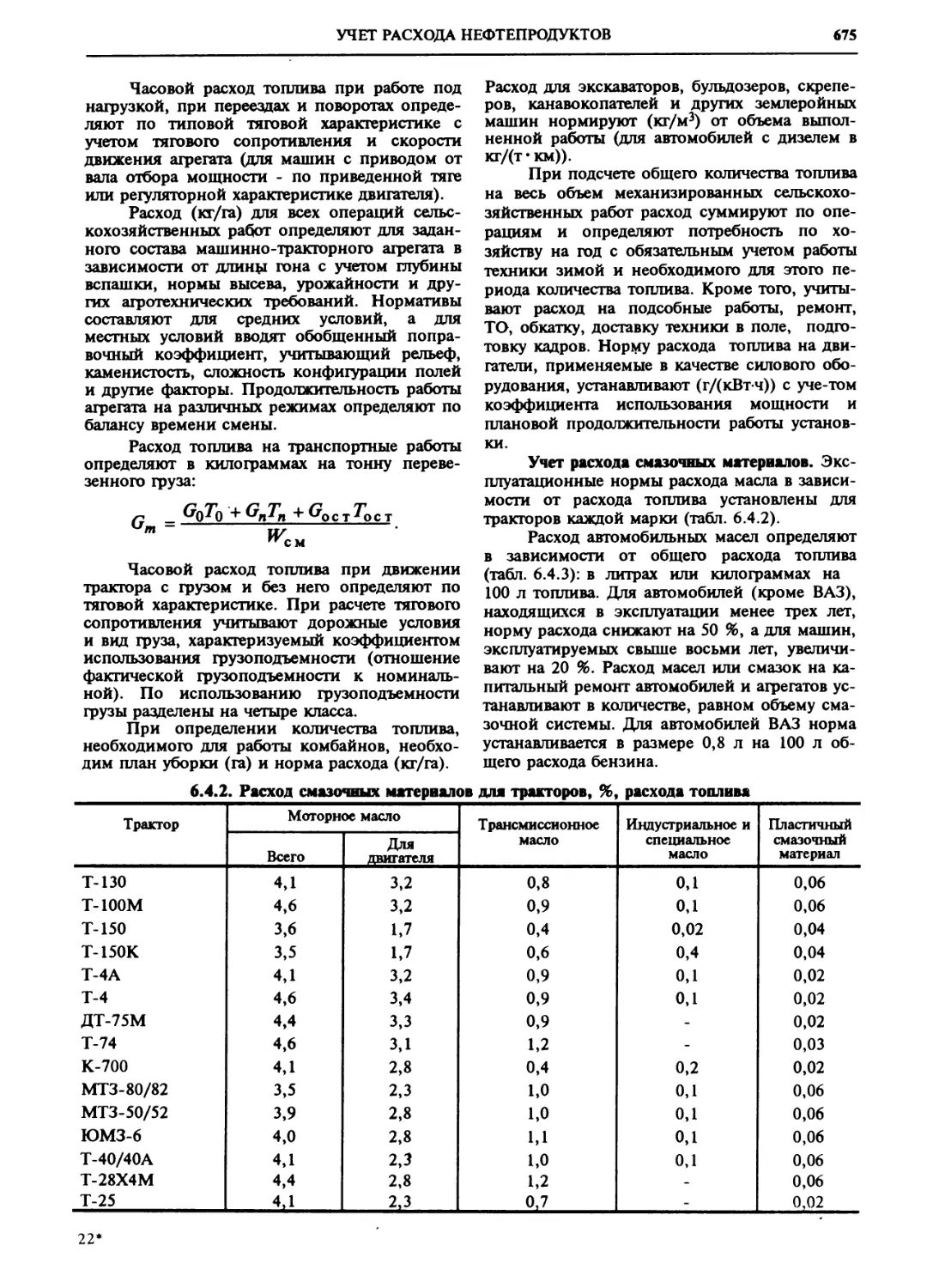
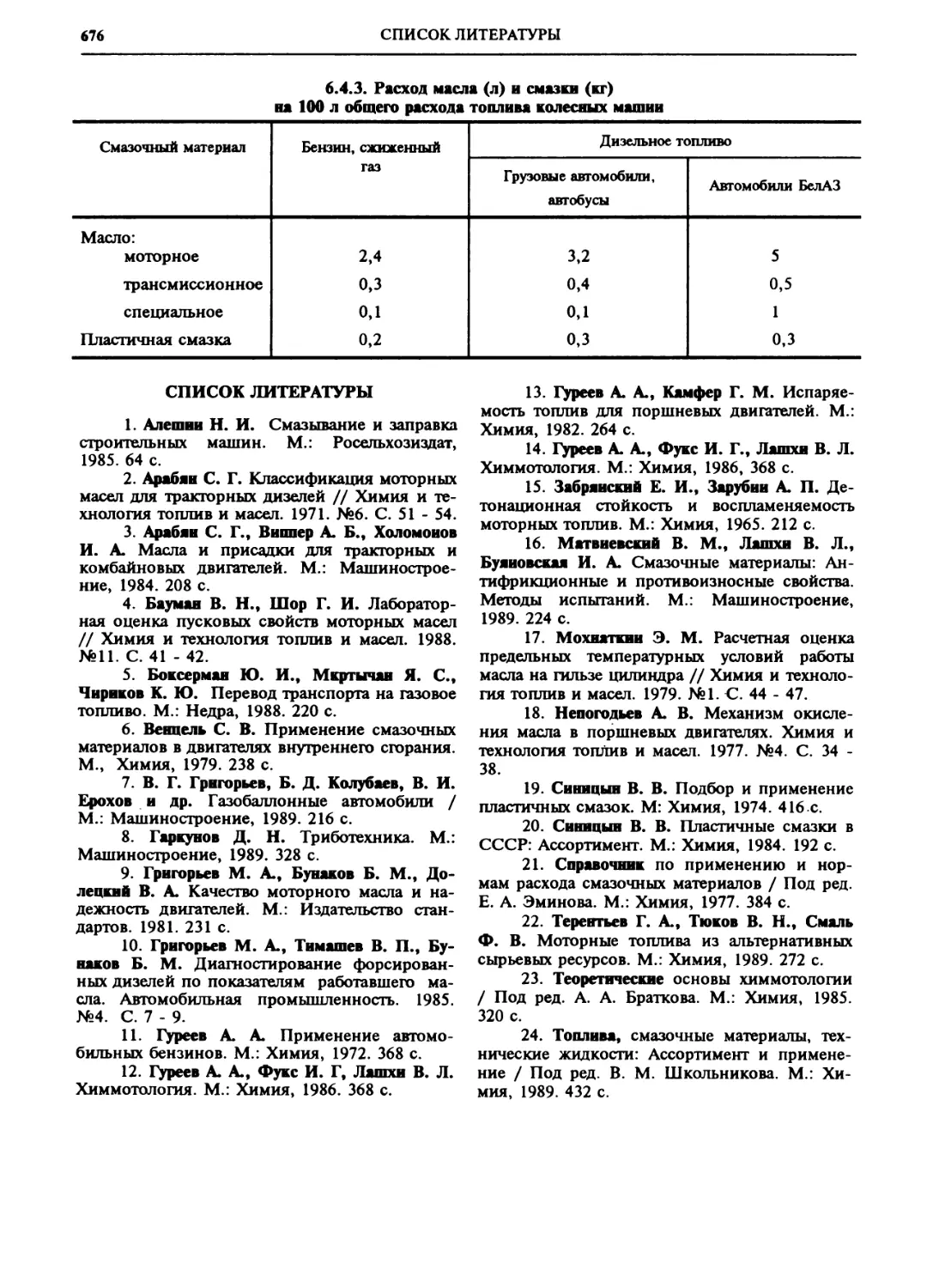
6.4.2. Учет расхода
нефтепродуктов (Я. А. Кузнецов) 676
, СПИСОК ЛИТЕРАТУРЫ 676
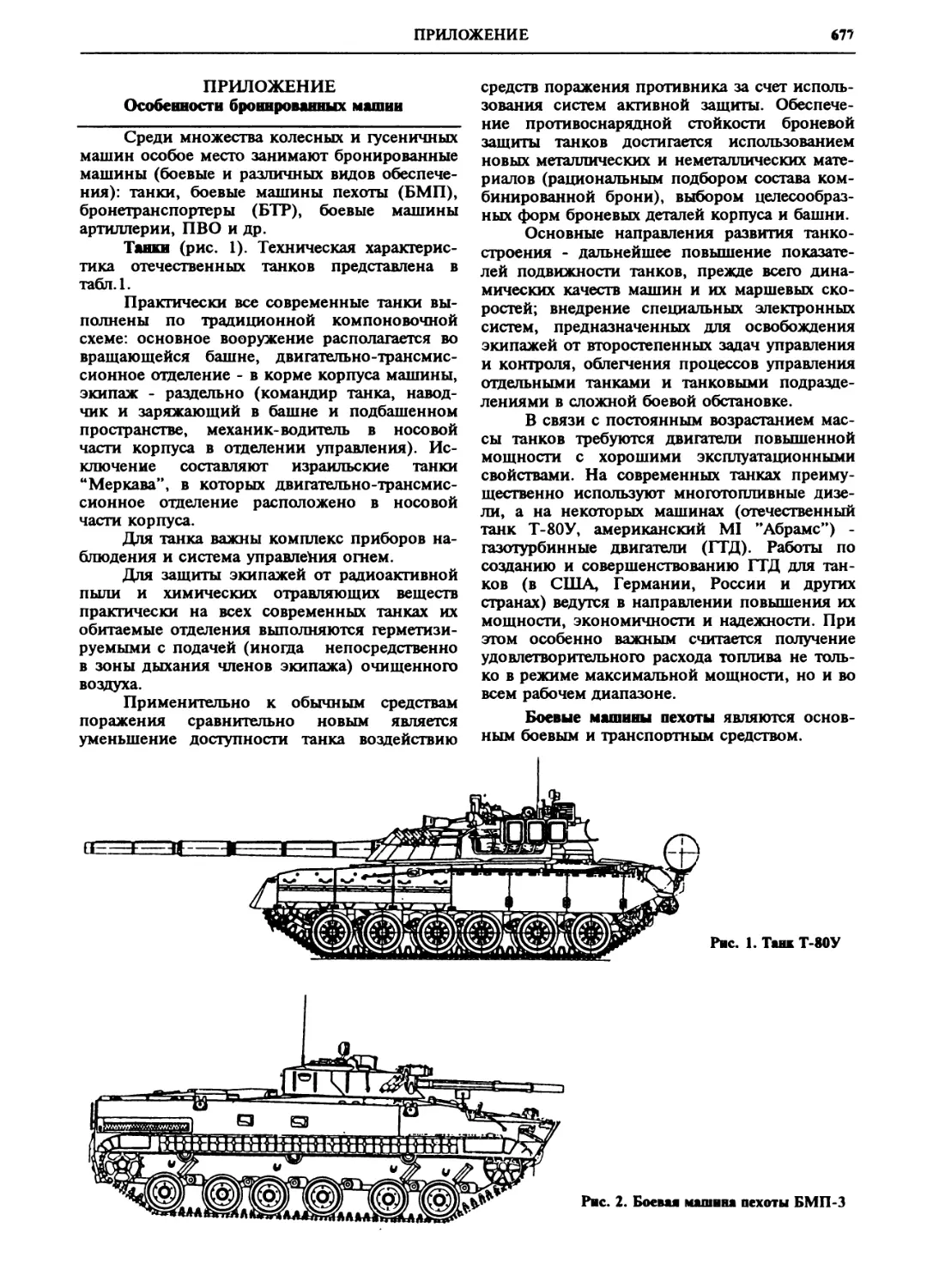
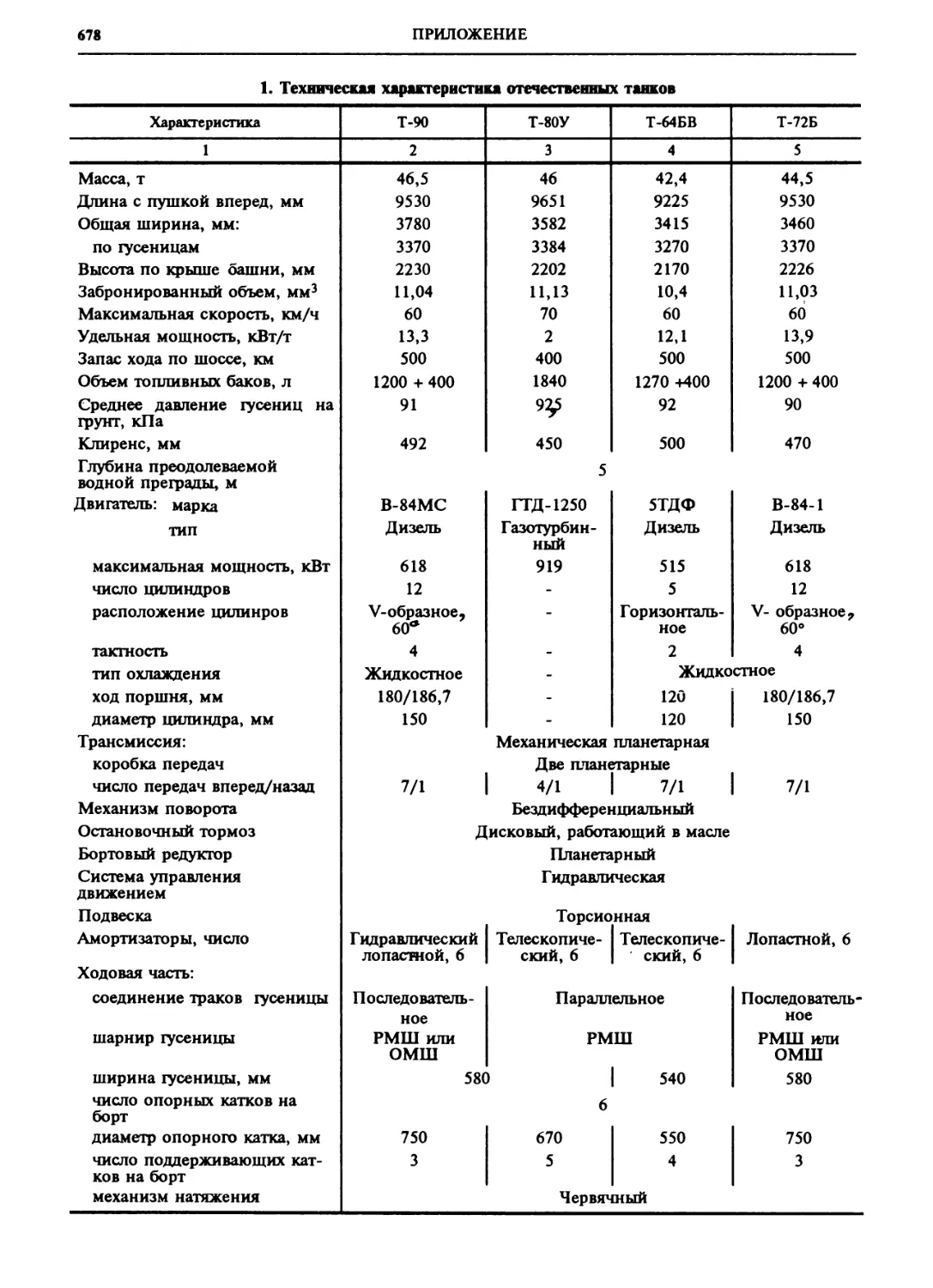
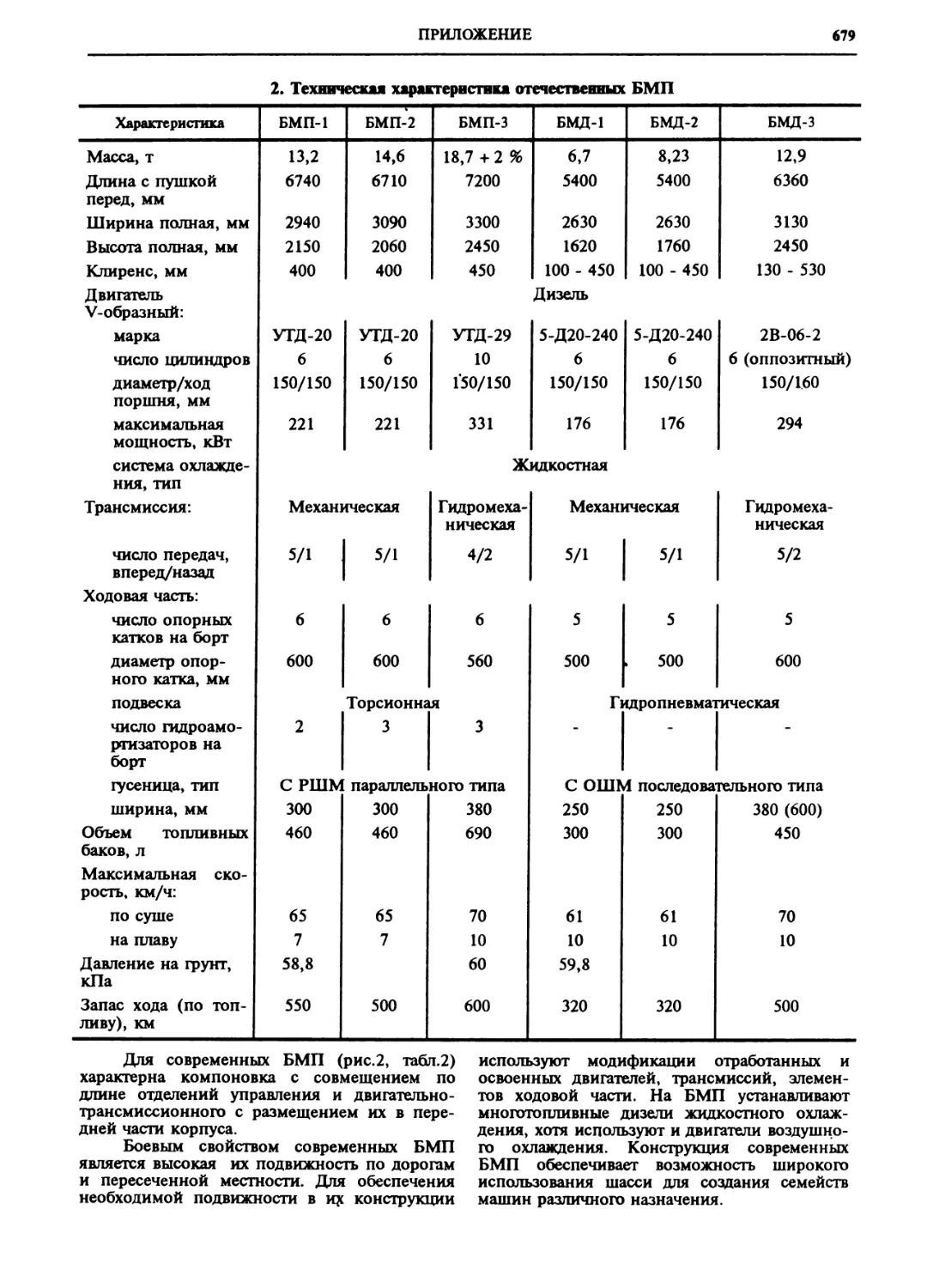
ПРИЛОЖЕНИЕ. Особенности
бронированных машин
677
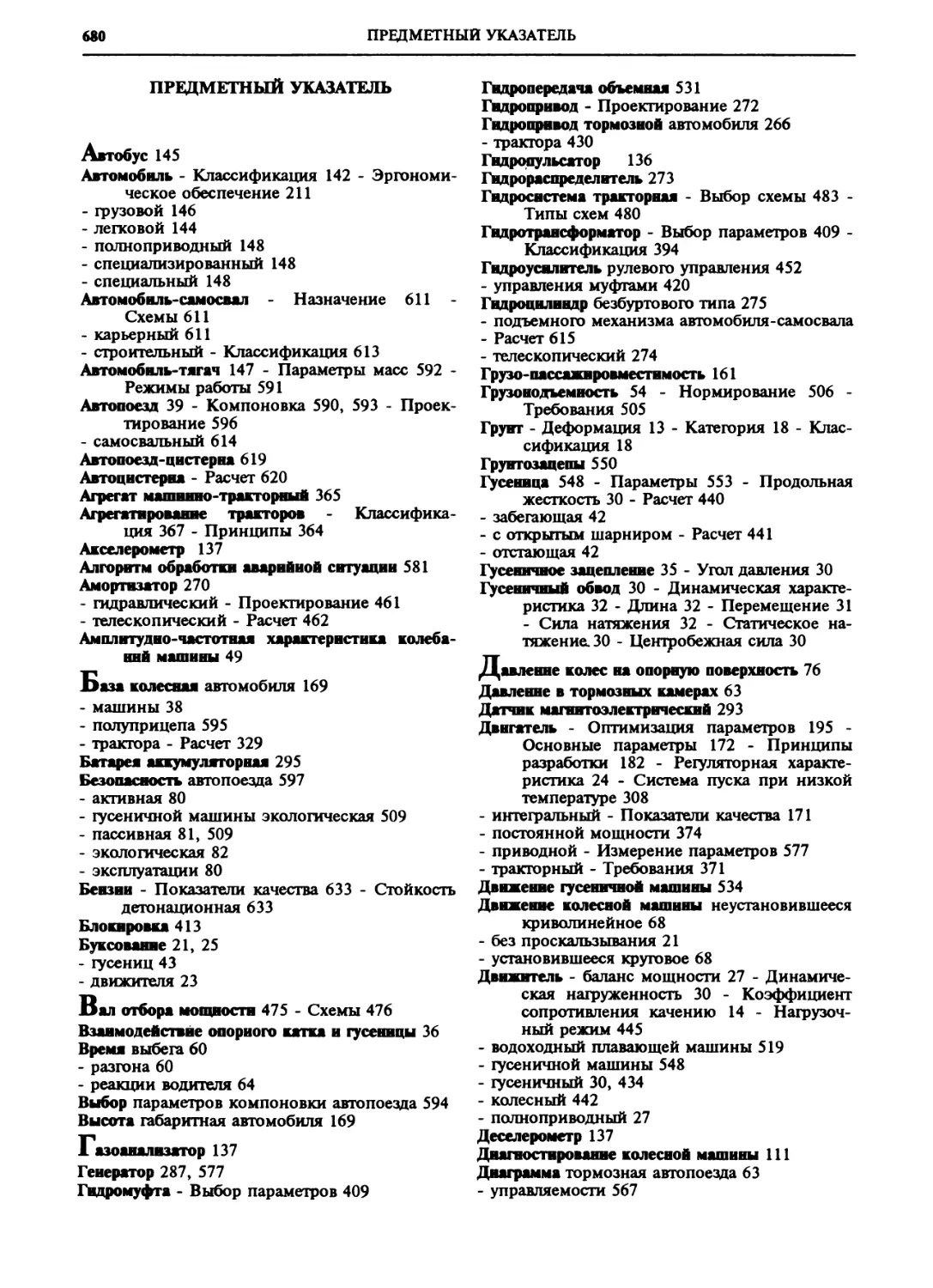
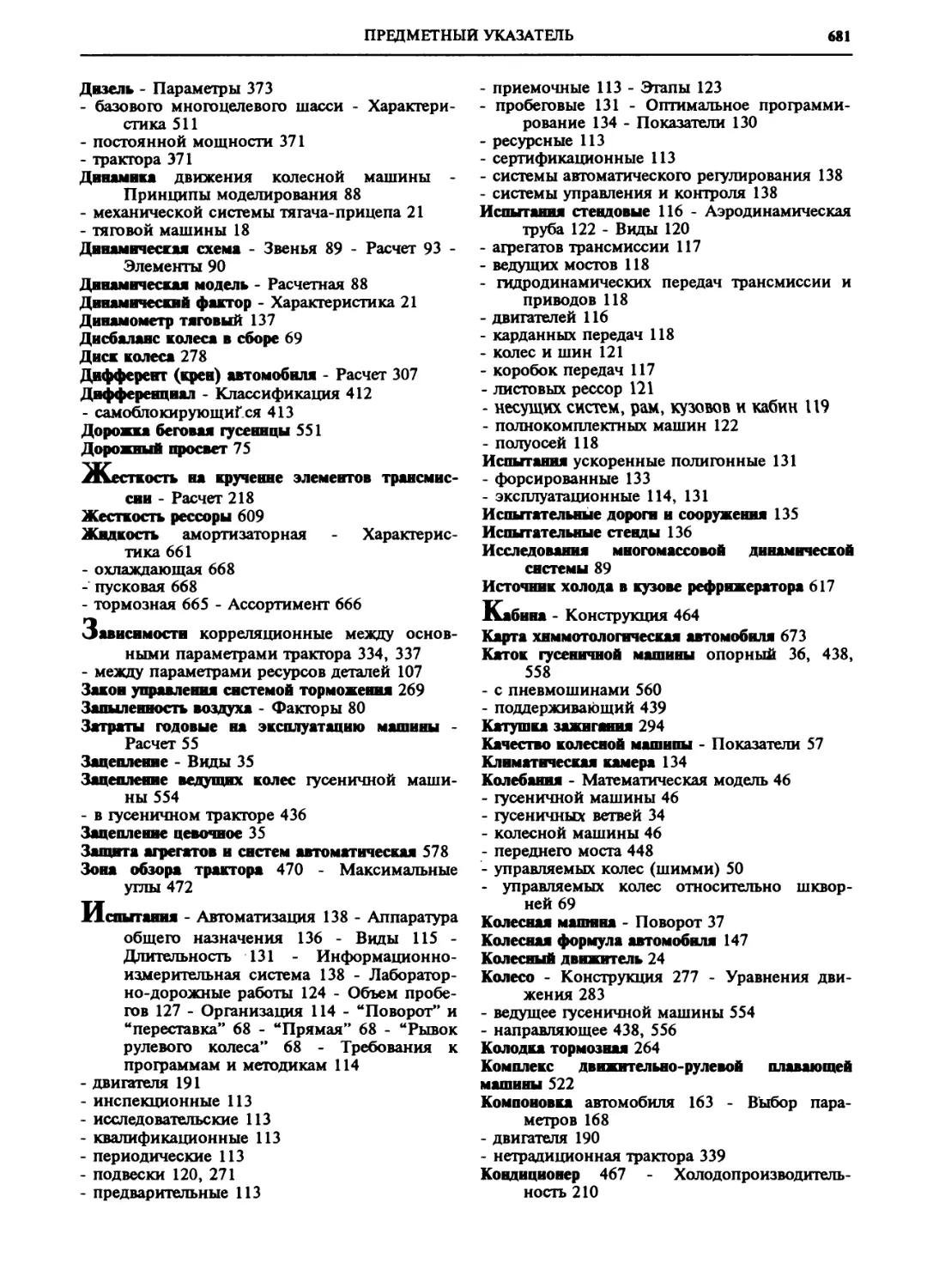
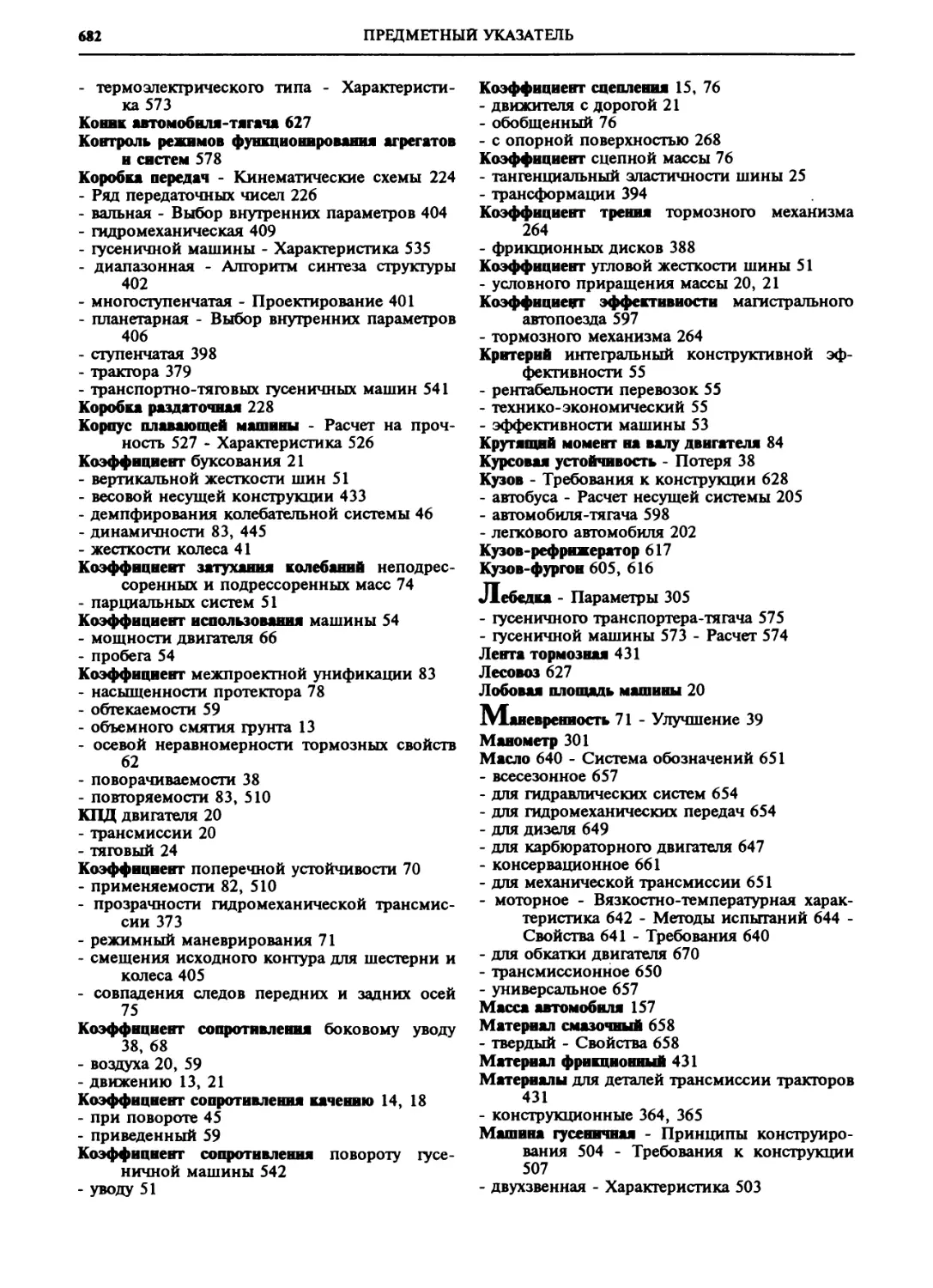
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ 680
100-летию Российского
автомобиле-, тракторостроения
Выпуск тома IV - 15 "Колесные и гусеничные машины" энциклопедии
"Машиностроение" посвящен 100-летию создания первых российских образцов
автомобилей и тракторов. Развитие авто- и тракторостроения, создание новых
типов колесных и гусеничных машин связаны с именами известных ученых -
академика Е. А. Чудакова и профессора М. К. Кристи.
Евгений Алексеевич Чудаков (1890 - 1953 гг.) по праву считается отцом русского
автомобилестроения. Им были организованы первая научная автомобильная
лаборатория, которая в 1921 г. была преобразована в НАМИ, а в 1925 г. - первый
отечественный ВТУЗ МАМИ им. М. В. Ломоносова с кафедрой "Автомобили".
В 1928 г. Е. А. Чудаков первой работой "Динамическое и экономическое
исследование автомобиля" положил начало теории автомобиля. В 1935 г. вышло
первое издание учебника Е. А. Чудакова "Теория автомобиля". С 1921 по 1930 гг.
Е. А. Чудаков - директор НАМИ, с 1936 г. и до конца жизни заведовал кафедрами
автомобилей в МВТУ им. Н. Э. Баумана и в МАМИ. В 1938 г. он организовал
институт "Машиноведения" и руководил им до 1952 г.
Михаил Константинович Кристи (1890 - 1965 гг.) - основатель научной школы
и кафедры по гусеничной технике в МВТУ им. Н. Э. Баумана. С начала 30-х годов
деятельность М. К. Кристи связана с развитием отечественного тракторо- и
танкостроения, подготовкой для него инженерных и научных кадров.
В работах ^М. К. Кристи, опубликованных в 1934 - 1938 гг., сформуЛТфованы
главные положения теории гусеничных машин; особенно следует отметить работы
по анализу поворота и влиянию движителя на работу трансмиссии. Выпущенные
под руководством М. К. Кристи книги "Танки. Основы теории и расчета" (1937 г.)
и "Теория танков" (1939 г.) во многом определили направления развития
отечественного танкостроения. В эти же годы по инициативе М. К. Кристи была
создана первая отечественная танковая лаборатория - центр экспериментальных*
исследований боевых машин.
Чудаков Евгений Алексеевич Кристи Михаил Константинович
ПРЕДИСЛОВИЕ
Колесные и гусеничные машины
многочисленны и разнообразны по типам и
назначению. Транспортные колесные машины
перевозят грузы массой 0,1... 100 т, тракторы
имеют силу тяги 0,2...75 кН, а транспортно-
тяговые машины наряду со значительной
грузоподъемностью (30 ... 40 т) обладают
способностью развивать силу тяги до 600 кН.
Очевидно, что такие диапазоны базовых
технических характеристик обусловливают
невозможность однозначности, а иногда и типизации
технических решений для машин даже одного
класса. Вместе с тем, общетехнические
принципы конструирования и производства
позволяют систематизирование) подходить к
проблемам создания колесных и гусеничных
машин, выбора рациональных путей их развития,
оптимизации структуры выпуска и
формирования парков машин. При этом теория их
движения и использования, методы расчета во
многом одинаковы.
Здесь рассмотрены наиболее массовые,
сформировавшиеся как многоцелевые, типы
колесных и гусеничных машин, имеющих
традиционно сложившуюся конструктивную
общность: автомобили и автопоезда, колесные
и гусеничные тракторы, быстроходные
гусеничные транспортно-тяговые машины.
Однако даже при таком подходе
невозможно отразить все многообразие
конструкций машин, методов их расчета или оценок,
способов рационального использования,
поскольку принципиальные структурные схемы
машин того или иного типа содержат тысячи
наименований базовых образцов и
модификаций.
Настоящий том построен таким образом,
чтобы общие научно-конструкторские вопросы
всех типов машин предшествовали анализу
конструкционных особенностей и методам
расчета отдельных групп колесно-гусеничной
техники. Исходя из этого в разделе 1
приведены сведения по теории, оценке
эффективности, расчетному обоснованию параметров
конструкций и методам наиболее
распространенных их испытаний.
Раздел 2 тома посвящен особенностям
конструирования и расчета автомобилей. В
нем даны основы новых подходов,
реализуемых в процессе создания современных
автомобилей различного назначения, что
обеспечивает прогрессивное проектирование и
создание более совершенных аналогов.
Раздел 3 содержит сложившиеся в
последние годы методы расчета и
конструирования колесных и гусеничных тракторов,
отработанные в процессе разработки наиболее
перспективных и соответствующих современным
требованиям моделей, при этом учитываются
области и сферы применения автомобилей и
тракторов, обусловленные многоукладностью
экономики России и потребностями рынка.
Раздел 4 содержит материал, редко
освещаемый в технической литературе. Здесь
изложены методы проектирования и принципы
расчета конструкций многоцелевых
гусеничных машин. В связи с конверсией оборонных
предприятий нашли отражение вопросы,
связанные со специальной техникой,
конструктивные особенности которой представляют
несомненный интерес для переноса их на
традиционные гусеничные многоцелевые
машины.
Раздел 5 дает информацию об
эффективности транспортного процесса при
использовании автомобильных поездов. Приведены
методы расчета параметров и выбора
конструкций современных автопоездов, прицепов
и полуприцепов.
В разделе 6 систематизированы сведения
по основным видамам топлив, масел, и
рабочих жидкостей, применяемых в машинах.
Содержание данного тома энциклопедии
написано известными в России и за рубежом
специалистами. Надеемся, что эта книга будет
способствовать углублению знаний
конструкторов, технологов, испытателей, экплуатаци-
онников. Реализация ее основных положений
в практике позволит вывести отечественную
автомобильную технику на передовые мировые
позиции.
РАЗДЕЛ 1
ОСНОВЫ ТЕОРИИ, КОНСТРУИРОВАНИЯ
И ПРОИЗВОДСТВА КОЛЕСНЫХ
И ГУСЕНИЧНЫХ МАШИН
Глава 1.1
ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
1.1.1. ОПОРНАЯ ПОВЕРХНОСТЬ
Эксплуатационные свойства колесных и
гусеничных машин, степень реализации их
основных выходных параметров таких, как
грузоподъемность, скорость, сила тяги на
крюке, маневренность, надежность и другие,
во многом зависят, а в ряде случаев
определяются характеристикой опорной поверхности,
по которой движется машина. Разнообразие
показателей, характеризующих опорную
поверхность и особенности взаимодействия с ней
движителей различных типов, обусловливает
множество подходов и оценок свойств
опорной поверхности [ 2, 10, 27, 32].
Количественную оценку обычно проводят по трем группам
показателей, отражающих
физико-механические, геометрические и структурные
свойства поверхности^цвижения.
Физико-механические свойства. Эти
свойства опорной поверхности влияют
главным образом на сопротивление движению
колесных и гусеничных машин и возможность
реализации их силы тяги. Для транспортно-
тяговых машин сопротивление движению на
горизонтальной поверхности принято
определять коэффициентом / сопротивления
качению, равным отношению силы сопротивления
качению к нормальной нагрузке на грунт со
стороны движителя. Связь между нормальным
давлением р (МПа) и величиной к (см)
деформирования грунта (глубина погружения)
выражается простой эмпирической
зависимостью [9]:
/>=10"2САЦ,
(1.1.1)
где С и ц - опытные коэффициенты,
характеризующие сопротивление грунта вдавливанию.
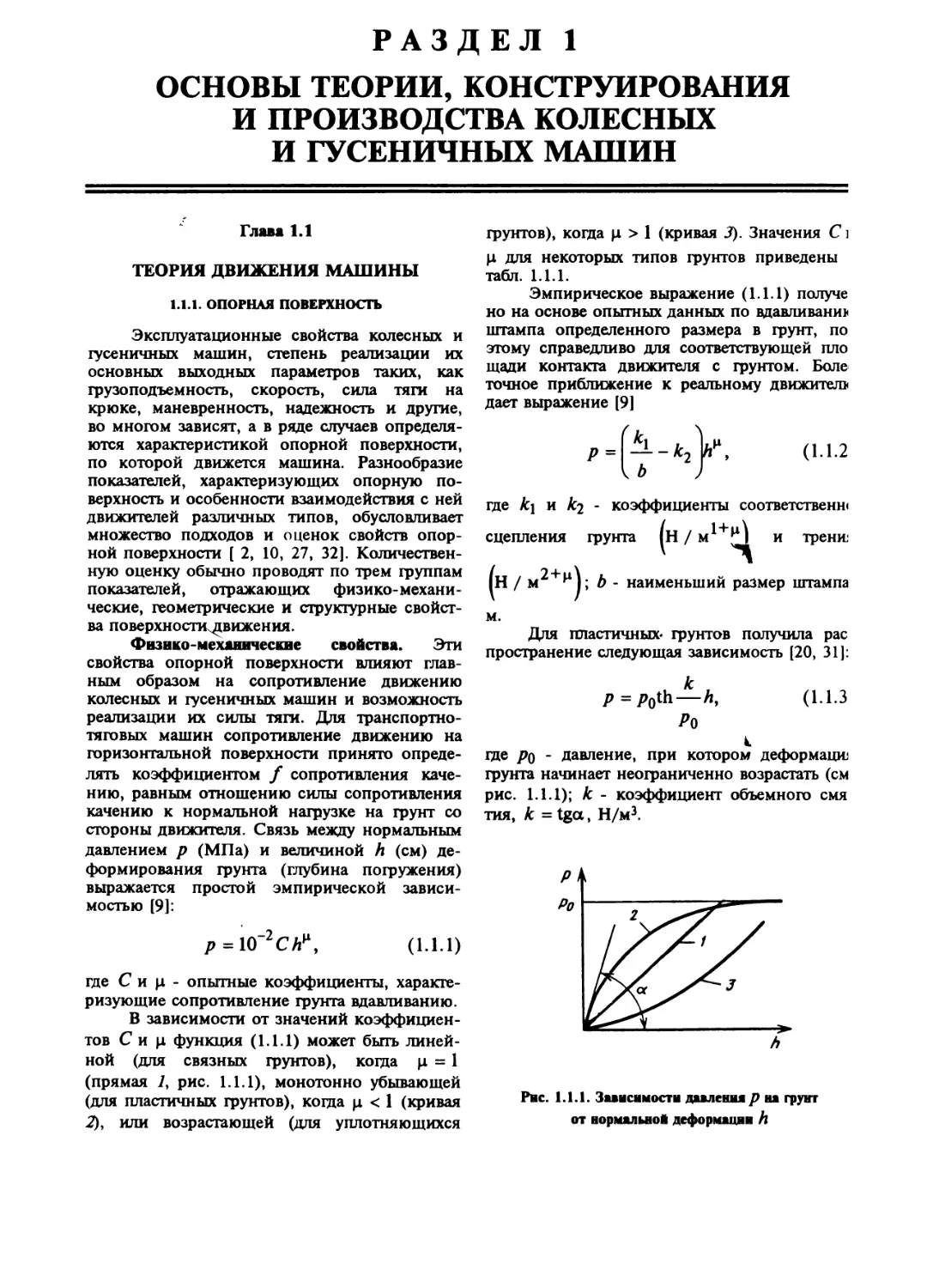
В зависимости от значений
коэффициентов С и ц функция (1.1.1) может быть
линейной (для связных грунтов), когда ц = 1
(прямая 7, рис. 1.1.1), монотонно убывающей
(для пластичных грунтов), когда ц < 1 (кривая
2)у или возрастающей (для уплотняющихся
грунтов), когда ц > 1 (кривая 3). Значения С ]
\х для некоторых типов грунтов приведены
табл. 1.1.1.
Эмпирическое выражение (1.1.1) получе
но на основе опытных данных по вдавливании
штампа определенного размера в грунт, по
этому справедливо для соответствующей пло
щади контакта движителя с грунтом. Боле
точное приближение к реальному движители
дает выражение [9]
Р =
Ч
-к,
(1.1.2
где к\ и &2 - коэффициенты соответственна
сцепления грунта |Н / м* ' ^| и трений
(н/м2^);
(н/м1-^ и
Ь - наименьший размер штампа
м.
Для пластичных- грунтов получила рас
пространение следующая зависимость [20, 31):
р=р01Ъ—Л,
Ро
(1.1.3
где ро - давление, при котором деформации
грунта начинает неограниченно возрастать (см
рис. 1.1.1); к - коэффициент объемного смя
тия, к = Х%а, Н/м3.
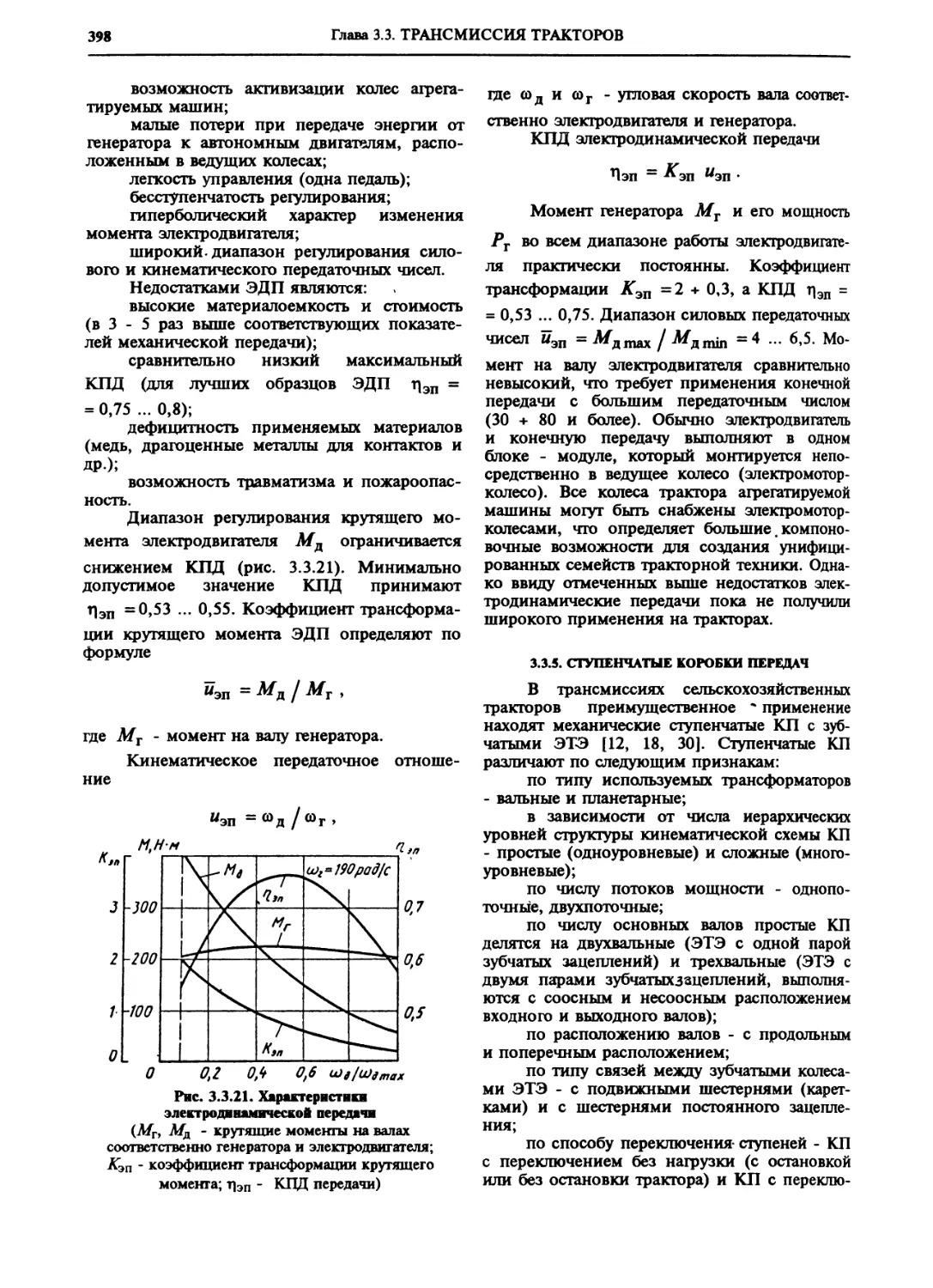
Рис. 1.1.1. Зависимости давления/? на грунт
I деформации А
Из выражений (1.1.1) - (1.1.3) можно
получить коэффициенты сопротивления качению
для различных .типов движителей. Так, при
использовании выражения (1.1.1) справедливы
зависимости:
для колесного движителя
/ = СЬ^Й
И+1
ных дорожно-грунтовых условиях с разными
движителями. Средние значения
коэффициента/для типовых условий эксплуатации
приведены в табл. 1.1.2.
Обработка многочисленных
экспериментальных данных показывает, что разброс
коэффициентов сопротивления качению
подчиняется закону Гаусса, т.е.
для гусеничного движителя
/ = 0,5к/Ь,
/(/о) =
1
а/у/7л
ехр
2сг г
где
соответственно нагрузка на
колесо и его ширина; Ь - база.
Однако в связи со значительным
влиянием конструктивных параметров движителя на
величину / предпочтительно использование
значений коэффициента сопротивления
качению, полученных экспериментально в различ-
В этом случае функция плотности
вероятности коэффициента / полностью
определяется средним квадратическим отклонением
оу-и математическим ожиданием т^ Для
автомобилей общетранспортного назначения их
значения приведены в табл. 1.1.3.
1.1.1. Коэффициент С сопротивления грунта вдавливанию для различных грунтов
Грунт
Песчаный
Супесчаный
Суглинистый
Глинистый
сухой
(влажность до 50%)
ц=1...2
1,5...5,0
10...15
10...15
15...25
Состояние грунта
пластичный
(влажность 50... 100%)
Ц= 0,5... 1,0
-
2...6
1...5 V
1...2
текучий
(влажность 100%)
^=0...0,5
-
0,5...1,0
0,5...1,0
0,5...1,0
1.1.2. Коэффициент/сопротивления качению
Дорожно-грунтовые
условия
Асфальтобетонная дорога
категории I
Асфальтобетонная
дорога категорий II III
Ровное булыжное шоссе
Разбитая булыжная дорога
Грунтовая дорога:
профилированная
сухая
разбитая
в период распутицы
Сухой песчаный грунт
Заснеженная укатанная
дорога
Снежная целина
Заболоченная
Колесный движитель при
номинальном
0,01...0,18
0,015...0,025
0,02...0,03
0,03...0,05
0,025...0,03
0,06...0,08
0,15...0,25
0,055...0,08
0,035...0,045
0,25...0,35
0,5...0,65
[при малых скоростях движения)
давлении воздуха в шинах
сниженном
0,03...0,04
0,03...0,04
0,035...0,045
0,04...0,06
0,04...0,05
0,05...0,075
0,08...0,15
0,04...0,06
0,03...0,05
0,18...0,25
0,3...0,45
Гусеничный
движитель
0,035...0,045
0,04...0,05
0,045...0,055
0,05...0,06
0,06...0,08
0,065...0,07
0,1...0,15
0,1...0,2
0,06...0,08
0,15...0,2
0,2...0,3
ОПОРНАЯ ПОВЕРХНОСТЬ
15
1.1.3. Характеристика функций распределения коэффициент» сопротивления качению
Дорожно-грунтоные условия
Дороги с твердым
покрытием
Щебеночное, гравийное
шоссе
Укатанная грунтовая
дорога
Разбитая грунтовая доро-
Бездорожье
Расчетная вероятность
возникновения
0,5
0,15
0,2
0,10
0,05
Математическое ожидание
т/
0,018...0,02
0,02...0,025
0,03...0,04
0,06...0,08
0,1...0,15
Среднее квадратн-
ческое отклонение
СТ/
0,005...0,006
0,006...0,008
0,008...0,01
0,01...0,02
0,02...0,025
I 17~\
\ А \ 1
/ У\ г
/15
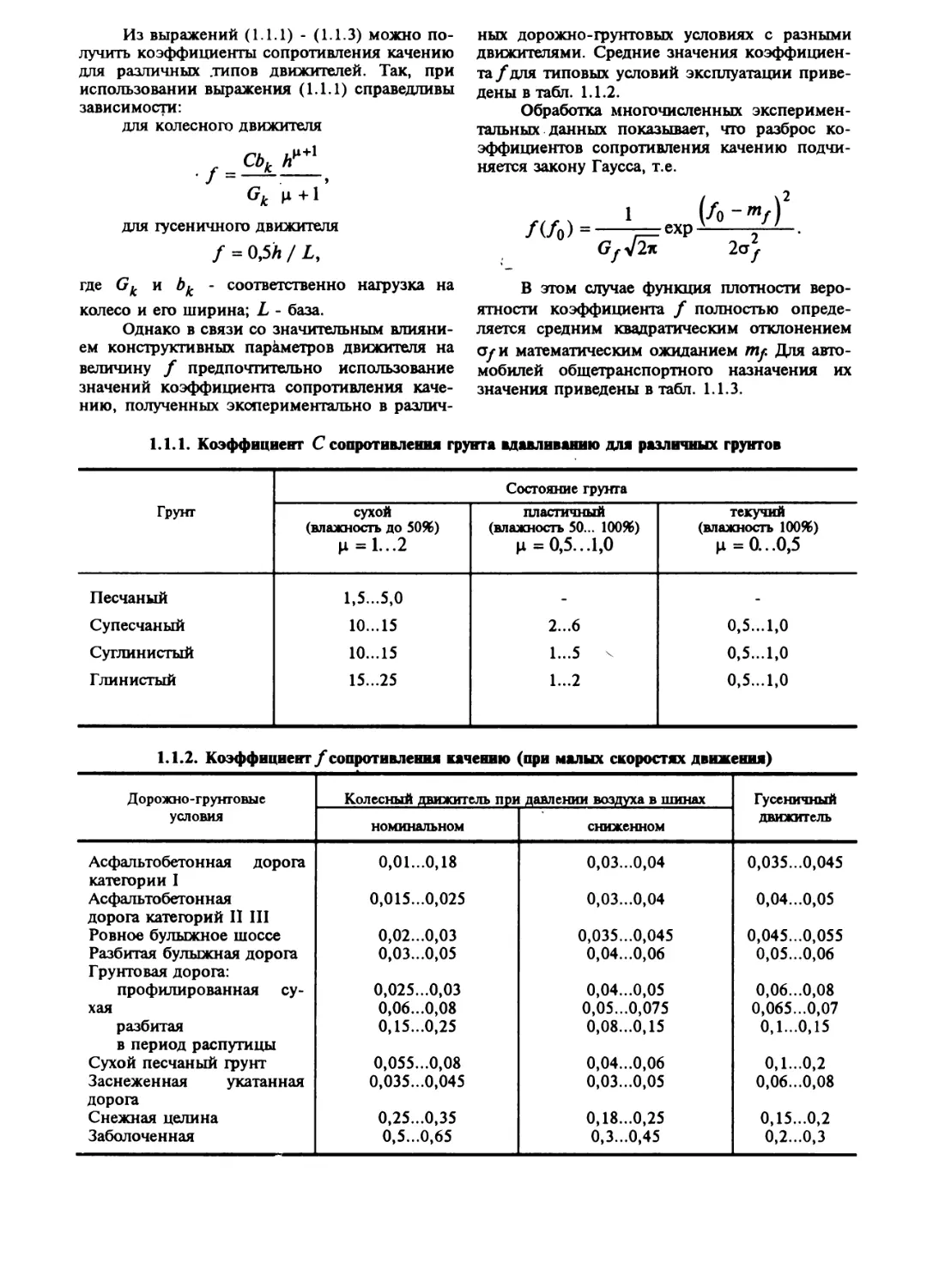
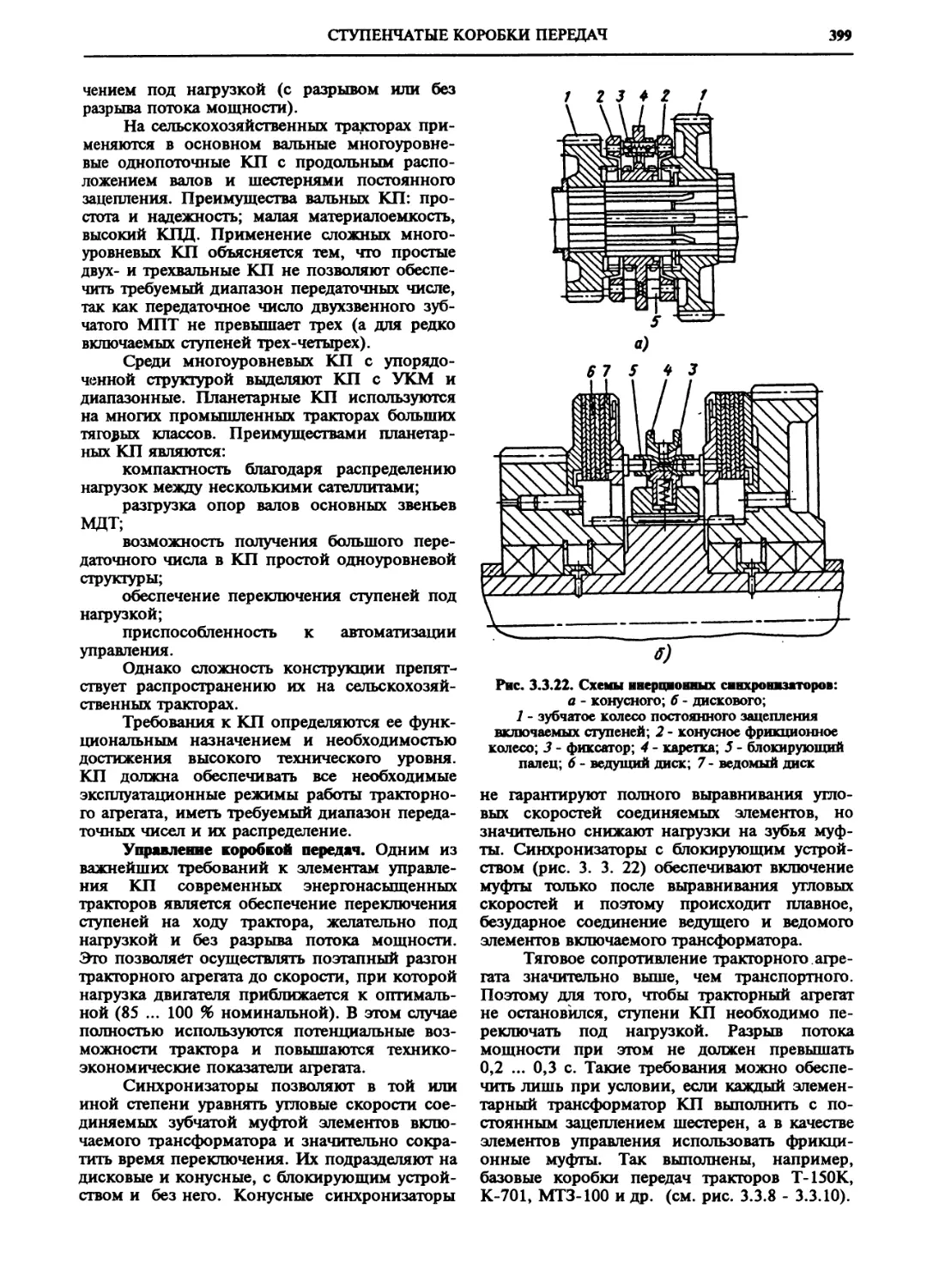
Рис. 1.1.2. Зависимое™ удельного сопротивления
грунта сдвигу т от его деформации Д*?
Возможность реализации усилий тяги
оценивается коэффициентом сцепления (р,
равным отношению предельно возможной
касательной реакции, которую реализует
движитель, к нормальной нагрузке движителя на
грунт.
При взаимодействии движителя с
деформируемой поверхностью коэффициент
сцепления зависит от удельного
сопротивления т грунта сдвигу. Причем удельное
сопротивление сдвигу определяется внутреннем
сцеплением » грунте:
(1.1.4)
* = />18Фо +х
0'
где ф0 и т0 - соответственно угол внутреннего
трения и удельная сила внутреннего сцепления
грунта.
Для разных грунтов значения т различны
и зависят от касательной деформации (сдвига)
Д.У грунта, нормальной нагрузки />, а также от
соотношения внутреннего трения и сцепления
в грунте. При этом наиболее типичными
являются две закономерности. У плотных
грунтов (глина, суглинок) с ненарушенной
структурой при возрастании сдвига (кривая 7, рис.
1.1.2) грунт сначала уплотняется и касательная
сила увеличивается до максимума (т-щад),
соответствующего определенному сдвигу Д50.
В этот момент достигают максимума силы
внутреннего сцепления грунта. Затем
происходит срыв грунта, т.е. преодоление сил
внутреннего сцепления, и касательная сила
снижается до значения, определяемого лишь
внутренним трением в грунте. У рыхлых,
несвязных и пластичных грунтов (сухой песок,
пахота) внутреннее сцепление почвы
отсутствует, поэтому с ростом*&формации сдвига
(кривая 2) касательная сила т постепенно
возрастает до значения, определяемого
внутренним трением тс .
Влияние вертикальной нагрузки
(давление р) сказывается двояко. Из (1.1.4)
следует, что с ростом р удельное
сопротивление т сдвигу увеличивается, что справедливо
для твердых грунтов. Однако при этом
возрастает и нормальная деформация А, т.е.
сопротивление качению, и уменьшается
коэффициент внутреннего трения, т.е. величина О).
Поэтому на сильнодеформируемых грунтах
повышение давления приводит к снижению т,
поскольку приращение первой составляющей
выражения (1.1.4) не компенсирует
увеличения второй и сила сцепления движителя с
грунтом уменьшается. Значения характеристик
сцепных свойств грунтов приведены в табл.
1.1.4.
1.1.4. Характеристик*
Грунт
Влажный суглинок
Суглинок средний
Сухой песок
Супесь
Торфяник
Снежная целина
1 сцепных свойств грунтов
*8Фо
0,025...0,25
0,7...0,8
0,4...0,7
0,8...0,9
0,7...0,9
0,03...0,3
т0, кПа
1...10
2...3
1...10
1...2
1...3
4...40
16 Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
1.1.5. Коэффициент сцепления
Дорожно-грунтовые условия
Дороги с твердым покрытием
Булыжное шоссе
Грунтовая дорога:
укатанная сухая
разбитая
в период распутицы
Укатанная заснеженная дорога
Обледенелая дорога
Сухой песок
Влажный песок
Снежная целина
Задерненный грунт
Болотистая местность
Колесный движитель
при давлении воздуха в шинах
номинальном
0,7...0,8
0,6...0,7
0,5...0,6
0,4...0,5
0,25...0,35
0,3...0,4
0,05...0,15
0,2...0,3
0,35...0,5
0,15...0,25
0,5...0,55
0,05...0,1
сниженном
0,75...0,8
0,65...0,75
0,5...0,7
0,45...0,55
0,3...0,4
0,35...0,4
0,1...0,2
0,3...0,35
0,4...0,5
0,2...0,4
0,5...0,6
0,1...0,25
Гусеничный
движитель
0,6...0,65
0,55...0,6
0,6...0,8
0,5...0,65
0,4...0,6
0,5...0,6
0,15...0,25
0,4...0,5
0,5...0,7
0,25...0,45
0,65...0,85
0,03...0,04
Из выражения (1.1.4) можно найти
коэффициент сцепления
Ф =т/7<7,
где Г - площадь контакта движителя с
грунтом.
Однако, как и для коэффициента / на
практике часто используют опытные значения
ф, так как величины х0 и ф0 существенно
зависят от конструктивных параметров
движителя и их значения не всегда известны.
Значения коэффициентов сцепления для
различных типов движителей приведены в
табл. 1.1.5.
Геометрические свойства. Из показателей
опорной поверхности на движение машины в
наибольшей степени влияют макро- и
микропрофиль. Макропрофиль учитывается как
дискретная составляющая часть сопротивления
движению на достаточно протяженном участке
пути или как угол бокового уклона при оценке
управляемости и устойчивости.
Микропрофиль, изменяющийся непрерывно в процессе
движения, рассматривается в большинстве
случаев как случайная функция пути.
Предельные значения продольных углов уклона
дорог нормируются, в условиях бездорожья
они соответствуют сложившейся практике
использования машин различного типа. Ниже
приведены предельные продольные уклоны
дорог.
Категория
дороги
Продольный
уклон, %
1-а
6
1-6, II
7
III
8
IV
9
V
10
длин .У и высот неровностей ^(х)
соответствует нормальному закону, ординаты
микропрофиля отсчитываются от среднего положения,
т.е. тд = 0. Среднее квадратическое
отклонение ординат в этом случае
°Я =
= Иш Ь'Чд2(х)Ох9 (1.1.5)
1-ио {
При статистическом описании микро-
профиля принимают, что функция
микропрофиля стационарна и эргодична, распределение
а статистическая характеристика опорной
поверхности - корреляционная функция
/
Яд(х)= Шп Г1 Г$(х)ф+*,)<&,
(1.1.6)
где Ь - протяженность пути.
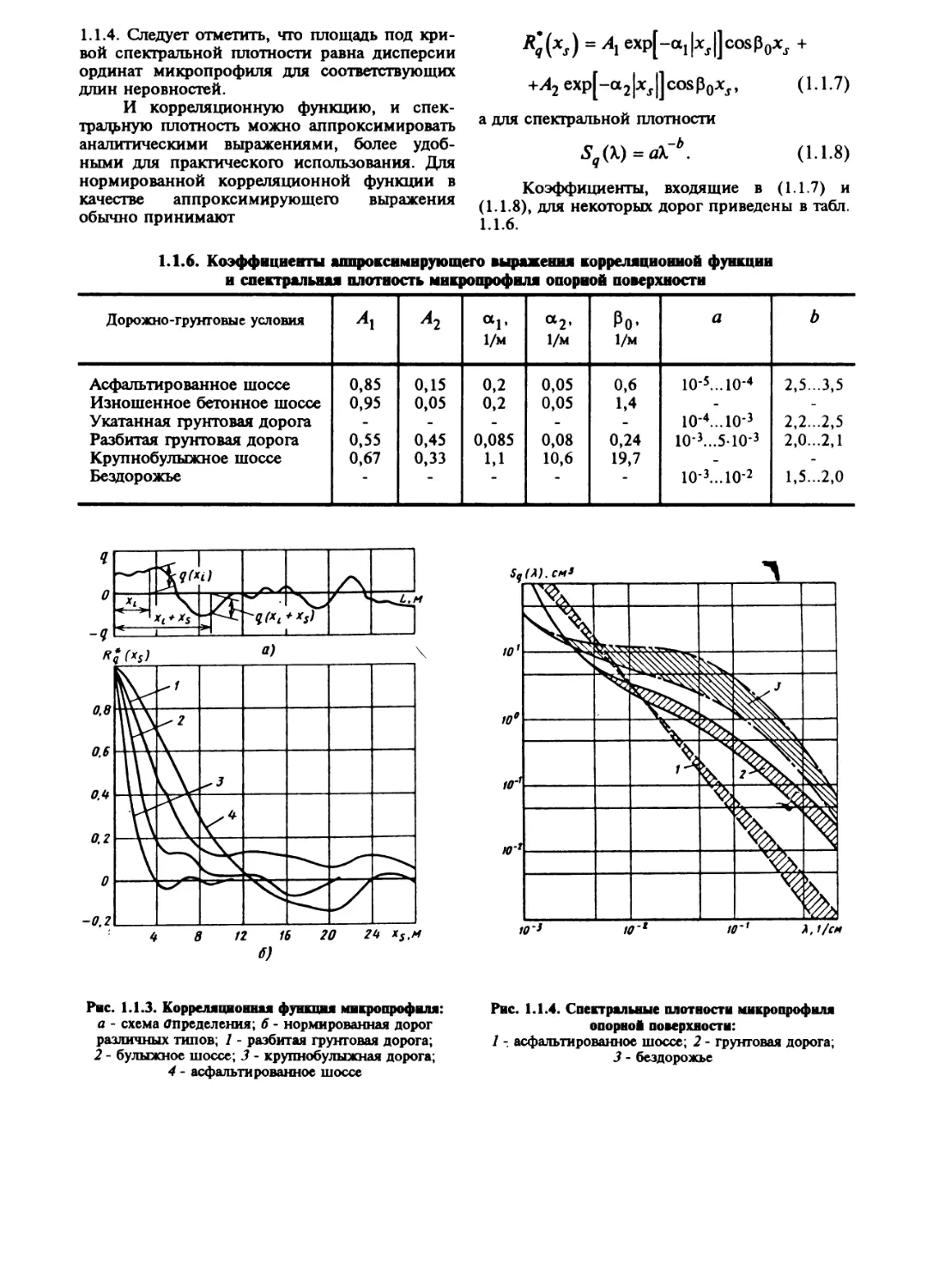
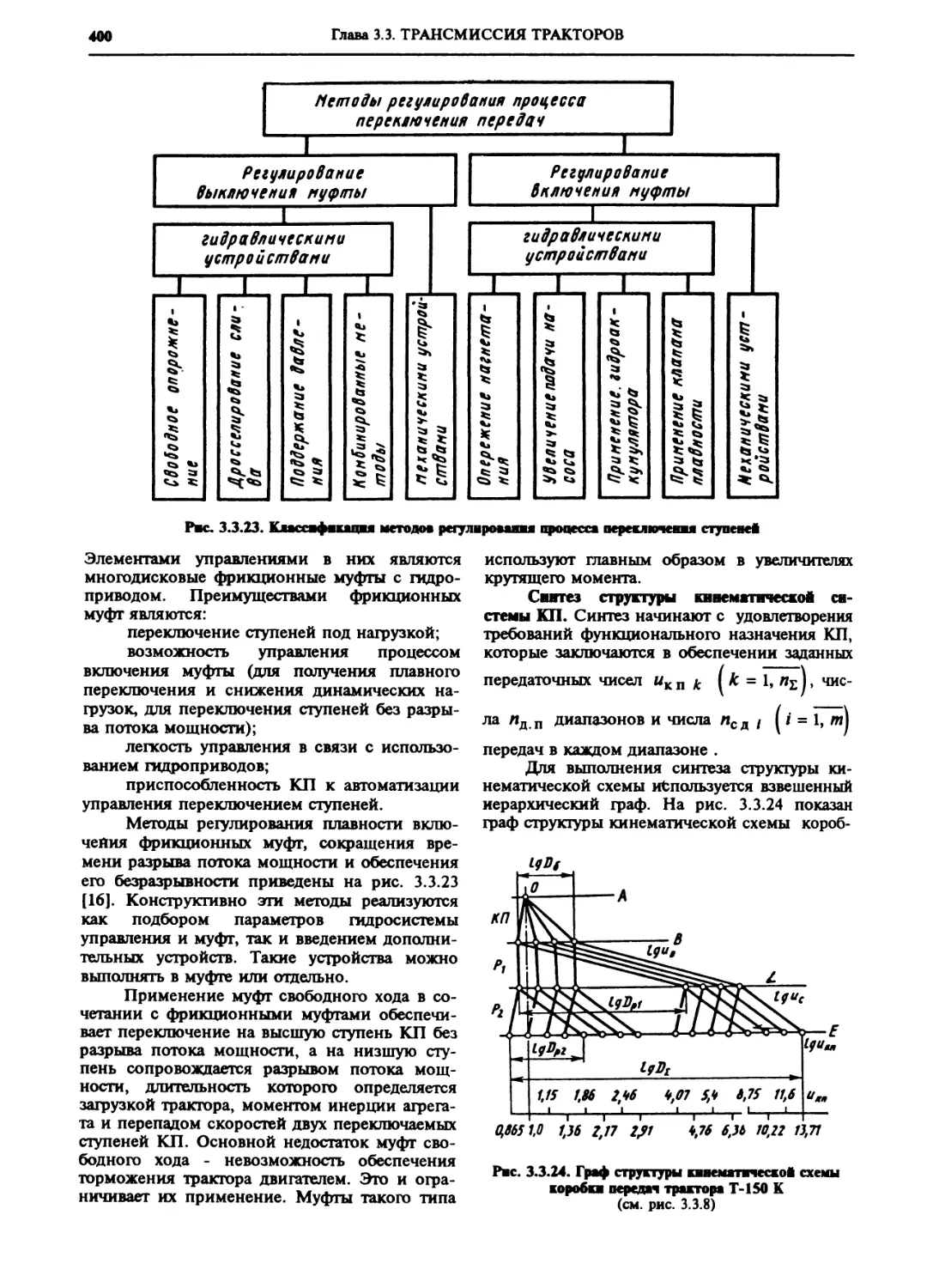
Нормированная корреляционная
функция
К*д(х) = Яя(х)/о2д.
Графически эта функция для типичных
дорог показана на рис. 1.1.3. Корреляционная
функция может быть преобразована в
спектральную плотность дисперсий ординат
5д (X), которая строится в функции линейной
(путевой) частоты X = 2п / 5 на основе
зависимостей
1 °°
5д(х)=-\Яд(х^Хх^;
о
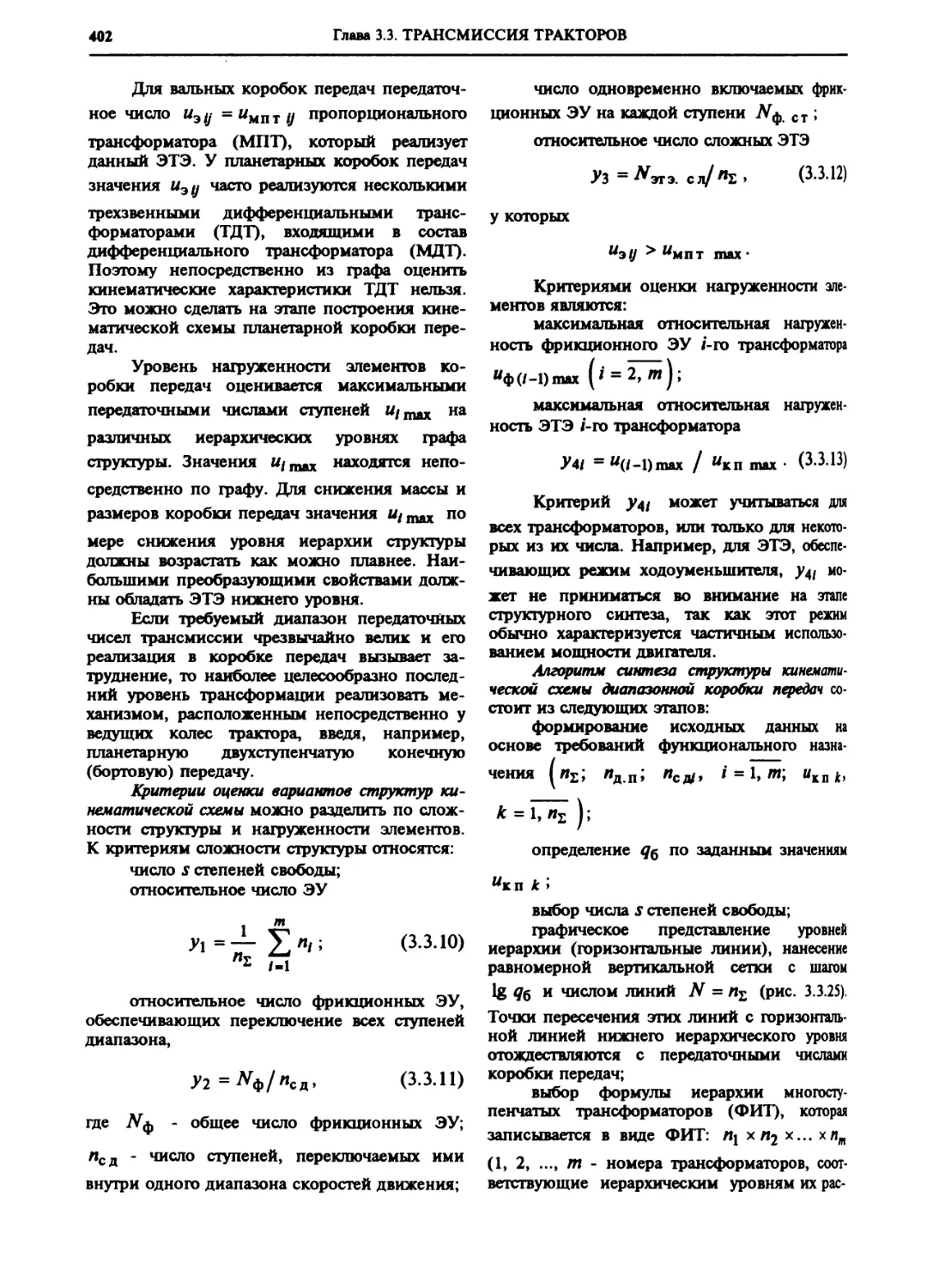
Спектральные плотности некоторых
типов опорных поверхностей показаны на рис.
К{**) = А1 еХР[-СХ11^ |] СО& р0ДС^ +
+А2 ехр^а^х^соаро*,, (1.1.7)
1.1.4. Следует отметить, что площадь под
кривой спектральной плотности равна дисперсии
ординат микропрофиля для соответствующих
длин неровностей.
И корреляционную функцию, и
спектральную плотность можно аппроксимировать а Д71Я спектральной плотности
аналитическими выражениями, более
удобными для практического использования. Для
нормированной корреляционной функции в
5а(Х)=аХ
-ь
(1.1.8)
Коэффициенты, входящие в (1.1.7) и
ГЬ^приГмРГИМИРУЮЩеГ0 ВЫРаЖеНИЯ а1б«).^™р™ дорог приведен^ в 4л.
1.1.6. Коэффвциенты аппроксимирующего выражения корреляционной функции
и спектральная плотность микропрофиля опорной поверхности
Дорожно-грунтовые условия
Асфальтированное шоссе
Изношенное бетонное шоссе
Укатанная грунтовая дорога
Разбитая грунтовая дорога
Крупнобулыжное шоссе
Бездорожье
^1
0,85
0,95
-
0,55
0,67
-
А2
0,15
0,05
-
0,45
0,33
-
а1«
1/м
0,2
0,2
-
0,085
1,1
а2,
1/м
0,05
0,05
-
0,08
10,6
-
1/м
0,6
1,4
0,24
19,7
-
а
ю-5...ю-4
-
ю-4...ю-3
10-3...5Ю-3
_
Ю-3...Ю-2
Ь
2,5...3,5
_
2,2...2,5
2,0...2,1
_
1,5...2,0
5д(Л).СМ*
Я!(х5)
0,8
0.6
ОМ
0.2
-0.2
г 1 \ \ \ \ \ \
^ \Х^3 11111
4 8 11 16 20 24 х5,м
б)
*,1/с*
Рис. 1.1.3. Корреляционная функция микропрофиля:
а - схема Определения; 6 - нормированная дорог
различных типов; 1 - разбитая грунтовая дорога;
2 - булыжное шоссе; 3 - крупнобулыжная дорога;
4 - асфальтированное шоссе
Рис. 1.1.4. Спектральные плотностн микропрофиля
опорной поверхности:
/ - асфальтированное шоссе; 2 - грунтовая дорога;
3 - бездорожье
18
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
Структурные свойства. Из структурных
свойств опорной поверхности основными
являются плотность грунта и степень его
абразивного воздействия на движитель. В реальных
условиях эксплуатации плотность изменяется в
широких пределах, а на обработанных под
сельскохозяйственные культуры составляет
1,0... 1,3 г/см3. Абразивное воздействие грунта
связано с наличием в его составе песчаных
фракций, особенно кварцевого песка. Для
оценки опорной поверхности по этому
показателю может быть использована
классификация грунтов по содержанию в них глинистых
частиц менее 0,005 мм (табл. 1.1.7),
характеризующая интенсивность изнашивания деталей
движителя, непосредственно соприкасающихся
с грунтом.
1.1.7. Категория грунта
Грунт
Глина
Суглинок
Супесь
Песок
Содержание
глинистых
частиц,
более 30
30...10
10...3
менее 3
%
Интенсивность
изнашивания
шарниров
гусениц,
мм/тыс. км
1,0...1,5
1,8...2,5
3,0...3,5
4,5...5,0
1.1.2. ТЯГОВАЯ ДИНАМИКА МАШИНЫ
Основой большинства расчетов колесных
и гусеничных машин является тяговая
динамика их рабочих режимов. Уравнения
движения машины можно получить несколькими
способами, из которых наибольшее
распространение получили три: с помощью
уравнений Лагранжа второго рода; на основе второго
закона Ньютона; с использованием принципа
Даламбера.
Уравнения Лагранжа второго рода имеют
вид
<*(дТЛ дТ дП дФ
ШКд^) дц{ д% дд( *'
/ = 1,2,...
где Т, П - соответственно кинетическая и
потенциальная энергия системы; Ф - функция
рассеяния энергии; Су - обобщенная сила,
соответствующая обобщенной координате ^;
I - степень свободы.
Второй закон Ньютона для движения
центра масс механической системы
т—Г--2Л»
* (*>
где т - масса системы; г(/) - радиус-вектор
центра масс; Рк - внешняя сила, действующая
на к-ю точку механической системы.
Уравнение принципа Даламбера для
механической системы может быть представлено
в виде
<*) (к) (к) Ш
где Гк - активная внешняя сила; Рк - сила
реакции связи; тк - масса к-й точки;
^(0 ' рздиус вектор к-& точки механической
системы.
Метод Лагранжа второго рода дает
преимущество при исследовании сложных систем
со многими степенями свободы, второй закон
Ньютона и принцип Даламбера используются
для анализа более простых систем.
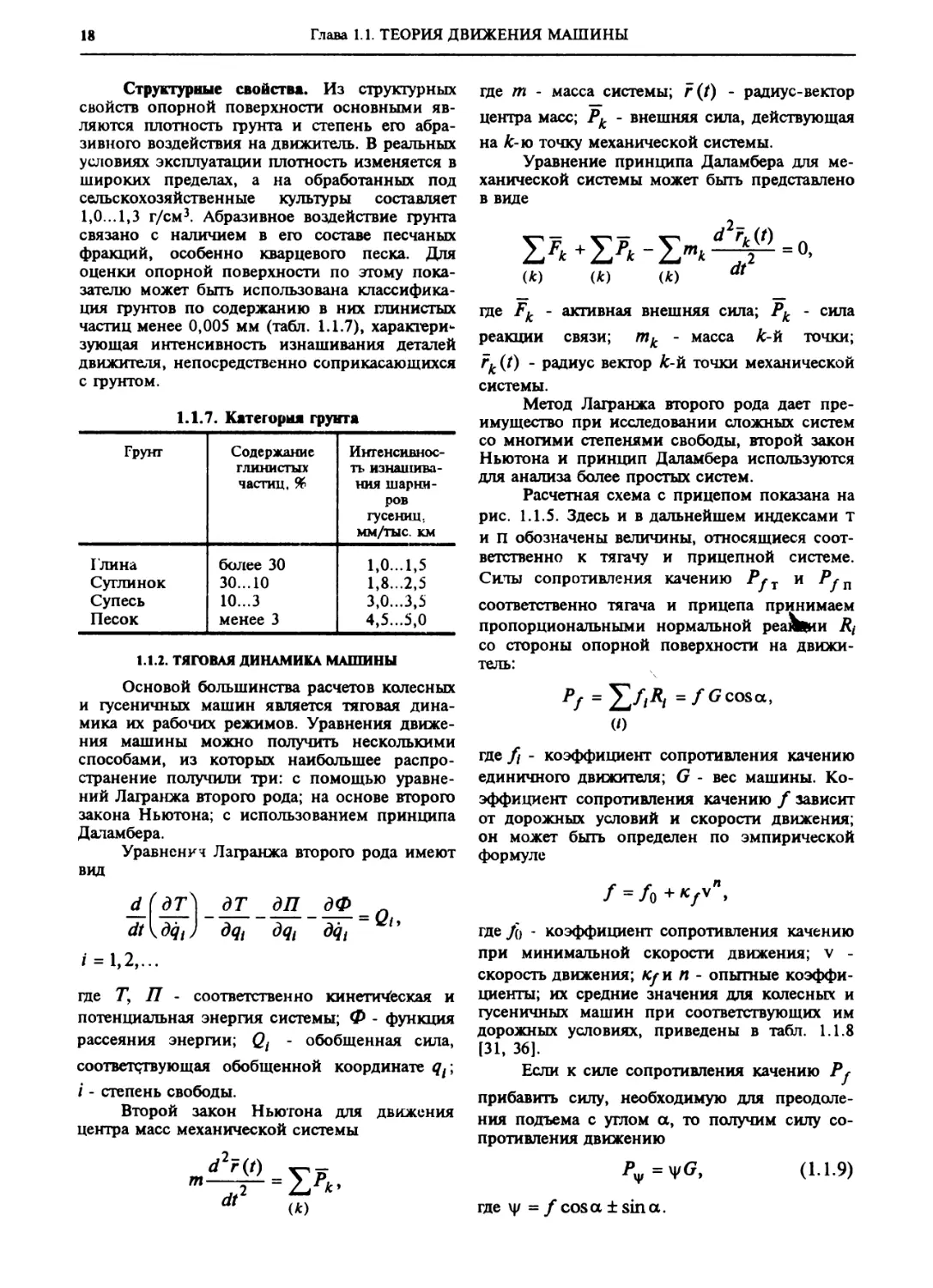
Расчетная схема с прицепом показана на
рис. 1.1.5. Здесь и в дальнейшем индексами т
и п обозначены величины, относящиеся
соответственно к тягачу и прицепной системе.
Снты сопротивления качению Р,Т и Р*п
соответственно тягача и прицепа принимаем
пропорциональными нормальной реалЦии /?/
со стороны опорной поверхности на
движитель:
Р/=^АЪ =/Ссо$а,
(/)
где /{ - коэффициент сопротивления качению
единичного движителя; О - вес машины.
Коэффициент сопротивления качению / зависит
от дорожных условий и скорости движения;
он может быть определен по эмпирической
формуле
/ = /о+*/уЛ'
где /о - коэффициент сопротивления качению
при минимальной скорости движения; V -
скорость движения; К/ и п - опытные
коэффициенты; их средние значения для колесных и
гусеничных машин при соответствующих им
дорожных условиях, приведены в табл. 1.1.8
[31, 36].
Если к силе сопротивления качению Р*
прибавить силу, необходимую для
преодоления подъема с углом а, то получим силу
сопротивления движению
Ру=ув, (1.1.9)
где \|/ = /соза ± $ша.
а)
Рис. 1.1.5. Схема сал, действующих на тягач а прицеп
1.1.8. Коэффициенты /§> к^л п для колесных и гусеничных
Тип машин
Легковые автомобили
Автомобили
общетранспортного назначения
Автомобили высокой
проходимости
Гусеничные транспортно-
тяговые машины
Колесные тракторы
Гусеничные тракторы
-/о
0,01...0,015
0,08...0,02
0,03...0,06
0,04...0,98
0,05. ..0,09
0,06...0,012
Ч
(6...8)10-6
(8...10) Ю-5
(2...2,5)10-4
(4...6)10-4
(8...10)10-5
(2...5И0"6
п
1,5...2,0
1,0...1,2
1,0...1,2
1,2...1,6
1,0...1,1
1,0
20
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
Сила лобового аэродинамического
сопротивления Р„ зависит от габаритных
размеров машины в поперечной плоскости,
коэффициентов к; кх, плотности воздуха р и
принимается пропорциональной квадрату
скорости движения:
РУ)=0,5кхРр\1 = к„Рч2,
где к^ - коэффициент сопротивления воздуха;
Г - лобовая площадь (наибольшая площадь
машины в поперечном сечении).
Значения коэффициента сопротивления
воздуха ку> приведены ниже, Н-с2/**4.
Мотоциклы без обтекателей . . . 0,3...0,45
Мотоциклы с обтекателями .... 0,2...0,3
Легковые автомобили 0,2...0,35
Грузовые транспортные автомо- 0,5...0,7
били
Полноприводные автомобили с 1,0... 1,2
кузовами фургонов
Автобусы 0,25...0,4
Автопоезда 0,6...0,95
Сила тяги Рт - продольная реакция на
гусеницы (ведущие колеса) со стороны грунта
(дороги). При движении с ускорением
двигатель должен затрачивать часть мощности на
преодоление сил инерции машины. Для учета
кинетической энергии вращающихся колес и
других деталей машины вводят эквивалентную
массу, которую определяют через
коэффициент условного приращения массы 5.
Коэффициент 5 вычисляют из равенства кинетических
энергий тела, совершающего движение без
вращения и с вращением:
0,55гду2 = 0,5/яу2 + 0,5/© 2 ,
где тп и / - соответственно масса и момент
инерции тела относительно оси его вращения.
При движении, например, колеса ради-
2
уса г без скольжения о = V / г, 0,5/со =
= 0,5А /г и коэффициент условного
приращения массы колеса
тг
Сила инерции машины в случае
прямолинейного движения
где % - ускорение свободного падения;
б^^-^уХ7''2; 01-Ю)
7{ - момент инерции /'-го колеса
(вращающейся детали) относительно его оси
вращения, гк = V© ; со - угловая скорость
колеса без скольжения; / - передаточное число
/-Й вращающейся детали.
Воспользовавшись принципом Даламбе-
ра и спроецировав все силы, действующие на
систему тягач - прицеп, на координатную ось
прямолинейного движения, получим
дифференциальное уравнение баланса сил:
Рт Р^т Руп Р;т
Р,п-
-Р - Р - Р - Р -О
рт =щвт +Ч/П<7П НКЛ +*^п^п)у +
(1.1.11)
4<?т ,5пО
Я
#
Уравнение (1.1.11) позволяет установить,
какой должна быть сила тяги для преодоления
внешних сопротивлений, выражаемых правой
частью уравнения и сообщения механической
системе тягач - прицеп ускорения йч/<Н.
Источником силы тяги является
двигатель. Мощность двигателя N & частично
расходуется на преодоление внутренних
сопротивлений в силовой установке (двигателе),
трансмиссии, движителе и подвеске. Первые
две составляющие обычно учитываются КПД
двигателя т|д и трансмиссии т|т , а силы
сопротивления в движителе />днж и подвеске
Рпод принято выражать через удельные силы
сопротивления: "-\
/.
двж
•'под
Сила тяги Р , подводимая от двигателя
через движитель к опорной поверхности
дороги, может быть представлена выражением
1тд у аши •'подует»
(1.1.12)
где У0' - теоретическая линейная скорость
машины (без учета проскальзыания движителя в
контакте с дорогой).
ТЯГОВАЯ ДИНАМИКА МАШИНЫ
21
Первое слагаемое правой части
уравнения (1.1.12) представляет окружную силу,
подводимую от двигателя к ведущим колесам:
Действительная скорость V (с учетом
проскальзывания) меньше теоретической
скорости Уо
у = у0(1-<т), (1.1.13)
где а - коэффициент буксования.
Коэффициент условного приращения
массы колеса при наличии буксования 5Т
определяется в зависимости от а и 8Т без
буксования по формуле:
5;=1+-^1. (1.1.14)
1-а
С учетом мощности двигателя и буксования
движителя уравнение баланса сил будет
следующим:
Лео = (/двж + /под) ^т + Ч/ТС7Т + \упСп +
+(к»т^т+Км,п^п)^2 +
ется безразмерная величина (динамический
фактор), равная отношению силы тяги,
подводимой от двигателя, за вычетом силы
сопротивления воздуха, к весу тягача.
Динамический фактор
Ч
К\9Т*Т +К*> 11*11
У]
(1.1.17)
Динамический фактор есть удельная сила тяги,
которая расходуется на преодоление
сопротивления движению и сообщение ускорения
механической системе:
2) = Ч/Т +
4>п*п +4
1+Ь.
1
1-а
+ §ттКп —
а9
111 аТ " 1
+11 1 +—
1-а
^т , *„<?„
Я Я
— •.(1-1*15)
Уравнения баланса сил (1.1.11) и (1.1.15)
обладают общностью, ими можно пользоваться для
колесных и гусеничных машин, для машин с
прицепом и без него.
Сила тяги не может быть больше
максимальной тангенциальной силы сцепления с
дорогой:
*ттах = "сцФ>
где Осц - нормальная реакция со стороны
дороги на активный движитель; (р -
максимальный коэффициент сцепления движителя с
дорогой.
Для движения должно выполняться
условие:
^ттах ^^сцФ-
Условие использования мощности двигателя
для движения без проскальзывания с дорогой
Ртд = Лсо "(/двж +/под)Ст *есцФ-
(1.1.16)
Для анализа динамики механической
системы тягач - прицеп в зависимости от
дорожных условий и мощности двигателя использу-
(1.1.18)
гдекп =Оп/От.
Величина В в (1.1.17) создается
двигателем, величина Б в (1.1.18) затрачивается на
осуществление движения. В любой момент
времени они равны между собой.
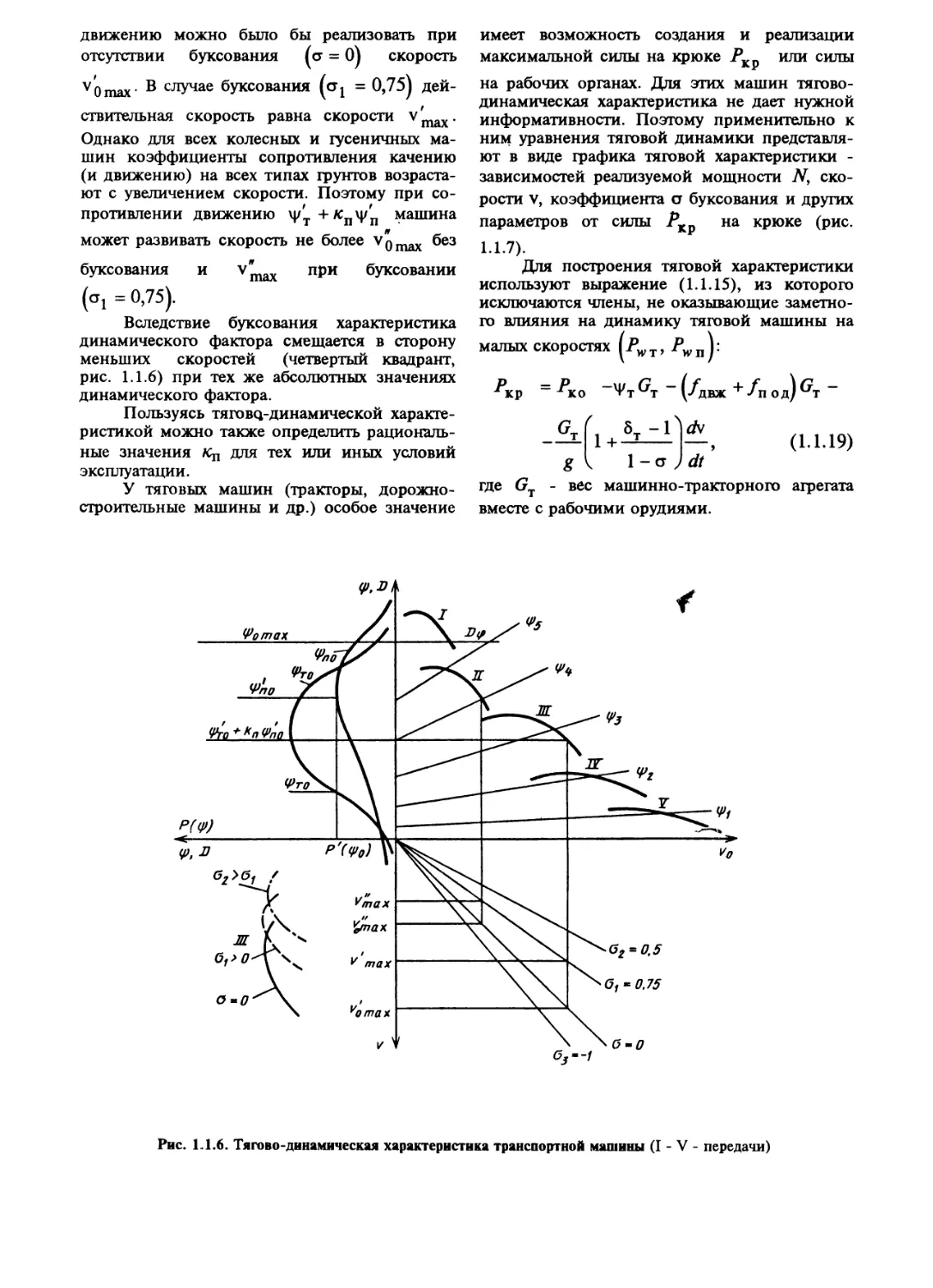
Графическая зависимость динамического
фактора от скорости является тягово-
динамической характеристикой - важнейшей
характеристикой машин. На рис. 1.1.6
показана тяговр-динамическая характеристика
транспортной машины со ступенчатой
трансмиссией. На графике тягово-динамической
характеристики наносят также значения
коэффициентов у/ сопротивления движению для
характерных дорожных условий и предельное значение
свободной удельной силы тяги по сцеплению
°9 = V Ф " ^т " Р*п ) / °т' Д™ Удобства в
левом верхнем квадранте в том же масштабе
строят кривые распределения коэффициентов
уто и уп0. Кроме того, для нахождения
действительной скорости V в правом нижнем
_ квадранте строят зависимость V от Уо при
разных коэффициентах а, поскольку значения В
рассчитываются-* функции скорости Уо-
Такая совмещенная характеристика
позволяет сразу определять предельные тяговые
возможности по условию У|/т +кпуп < В , а
также максимальную скорость по
вероятностным значениям уто и уП0. Так, при
вероятностном значении Р'(у$) и коэффициентах
\у'то и у'пс суммарное сопротивление
движению у'то + кпЧ/'П0- Если бы коэффициент
сопротивления качению, а следовательно,
движению не зависел от скорости, то при
таком суммарном коэффициенте сопротивления
движению можно было бы реализовать при
отсутствии буксования (а = 0) скорость
у0тах- ** случае буксования (о^ = 0,75)
действительная скорость равна скорости V 'тах.
Однако для всех колесных и гусеничных
машин коэффициенты сопротивления качению
(и движению) на всех типах грунтов
возрастают с увеличением скорости. Поэтому при
сопротивлении движению у'т + #ПЧ/'П маншна
может развивать скорость не более У0тах без
буксования и Л/Нтах п^и буксовании
(а1=0,75).
Вследствие буксования характеристика
динамического фактора смещается в сторону
меньших скоростей (четвертый квадрант,
рис. 1.1.6) при тех же абсолютных значениях
динамического фактора.
Пользуясь тяговой-динамической
характеристикой можно также определить
рациональные значения ^ для тех или иных условий
эксплуатации.
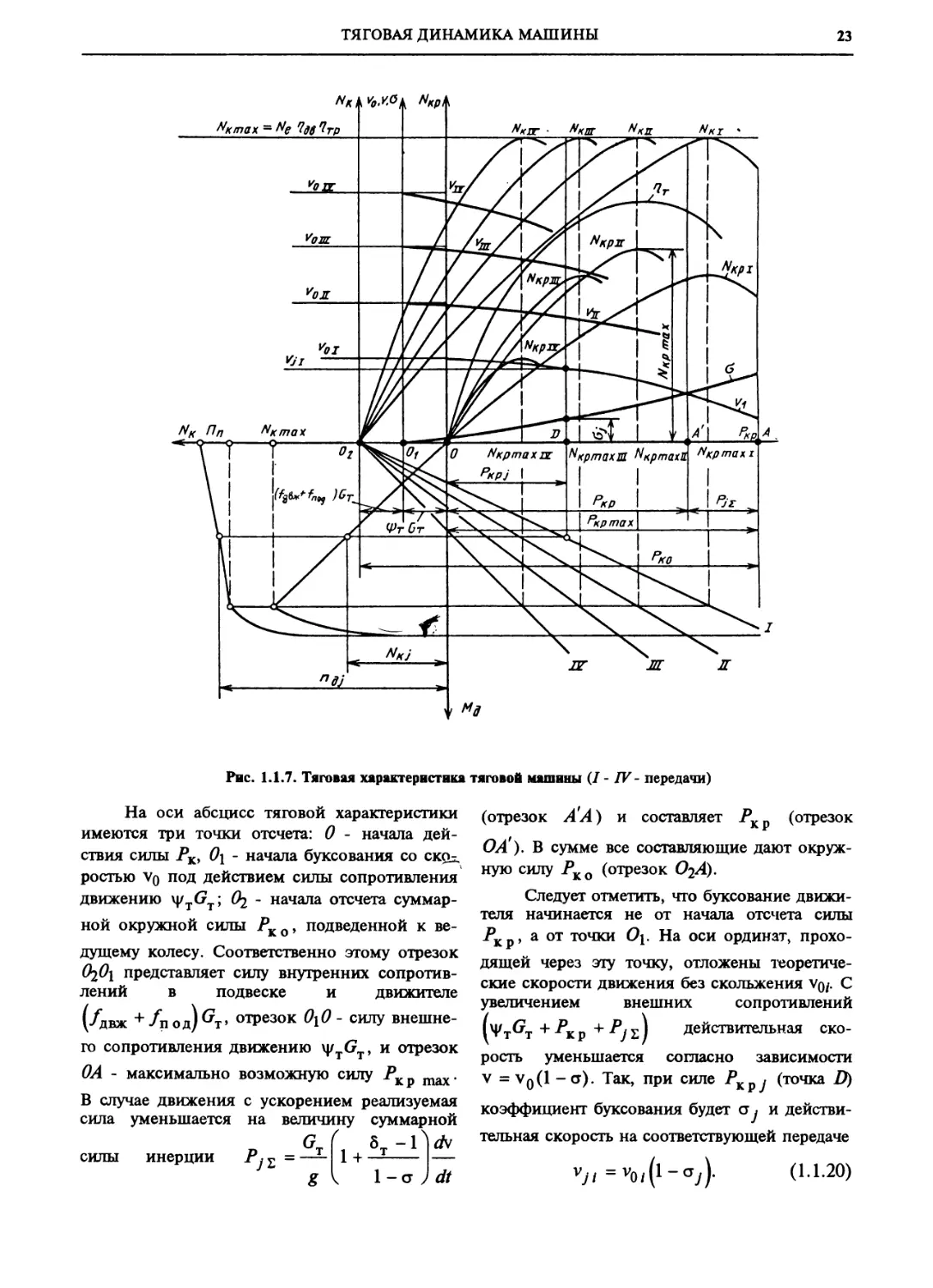
У тяговых машин (тракторы,
дорожностроительные машины и др.) особое значение
имеет возможность создания и реализации
максимальной силы на крюке Ркр или силы
на рабочих органах. Для этих машин тягово-
динамическая характеристика не дает нужной
информативности. Поэтому применительно к
ним уравнения тяговой динамики
представляют в виде графика тяговой характеристики -
зависимостей реализуемой мощности Щ
скорости V, коэффициента а буксования и других
параметров от силы Рхр на крюке (рис.
1.1.7).
Для построения тяговой характеристики
используют выражение (1.1.15), из которого
исключаются члены, не оказывающие
заметного влияния на динамику тяговой машины на
малых скоростях [РУ9Т> ^п):
кр
= Д
Я
■^т0т-(/двж+/под)ет-
1+^1^, (1.1.19)
1 - с ) Ш
где От - вес машинно-тракторного агрегата
вместе с рабочими орудиями.
6,-1
0-0
Рис. 1 1.6. Тягово-динамическая характеристика транспортной машины (I - V - передачи)
ТЯГОВАЯ ДИНАМИКА МАШИНЫ
23
Нкп: • Нкш Нка Ынт
Рис. 1.1.7. Тяговая характеристика тяговой машины (I - IV- передачи)
На оси абсцисс тяговой характеристики
имеются три точки отсчета: 0 - начала
действия силы Рк, 0\ - начала буксования со сксь,
ростью Уо под действием силы сопротивления
движению ч/т(/т; ^ ~ начала отсчета
суммарной окружной силы Рко, подведенной к
ведущему колесу. Соответственно этому отрезок
02#1 представляет силу внутренних
сопротивлений в подвеске и движителе
(/днж +/под)^т' отрезок 0\0 - силу
внешнего сопротивления движению ч/т(/т, и отрезок
ОА - максимально возможную силу Ркр тах.
В случае движения с ускорением реализуемая
сила уменьшается на величину суммарной
силы инерции
# V 1-сг
(отрезок А'А) и составляет Рк (отрезок
ОА'). В сумме все составляющие дают
окружную силу Рко (отрезок О2А).
Следует отметить, что буксование
движителя начинается не от начала отсчета силы
Ркр, а от точки 0\. На оси ординат,
проходящей через эту точку, отложены
теоретические скорости движения без скольжения Уд/. С
увеличением внешних сопротивлений
(Ут^т +РК р+ лР/е ) действительная
скорость уменьшается согласно зависимости
V = У0(1 - а). Так, при силе Ркр , (точка П)
коэффициент буксования будет а у и
действительная скорость на соответствующей передаче
уу/=У0/(1-а7). (1.1.20)
24
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
Для тяговых машин в зависимости от их
назначения наиболее важными
эксплуатационными показателями являются максимальная
сила тяги Ркртах на крюке или
максимальная мощность (иногда называется полезной
мощностью). Мощность на крюке
N.
кр
Лр*
= \р -\1/ О -
[_ КО УТ Т
\/двж "'"■Люд^т
1 + **^.}*
1 - а ) Л
к(1-а).
(1.1.21)
Для тракторов, дорожных, землеройных
и других машин подобного класса показателем
тяговых свойств служит тяговый КПД
N
кр
^еЛоЛт!
= 1
Р +Р +Р
м \ут ^ двж Т1под
(1-а).
(1.1.22)
Зависимости % от силы Ркр показаны
на графике тяговой характеристики (рис.
1.1.7). Как следует из выражения (1.1.22),
максимум тягового КПД соответствует максимуму
мощности на крюке. В случае наличия отбора
мощности А^ от двигателя на привод
рабочих органов в приведенные выше зависимости
(1.1.15) и (1.1.21) вводится дополнительное
сопротивление ^0 т б = ^о т ^у 0 • ПРИ этом
общие закономерности динамики движения
машины не меняются.
Чтобы определить показатели тягово-
сцепных свойств в зависимости от параметров
двигателя на графике тяговой характеристики
в левом квадранте строится регуляторная
характеристика двигателя (мощность Nк,
частота вращения п в функции крутящего момента
М ), а в четвертом квадранте - зависимость
М от Р
Лд и1 ^кр•
Из схемы внешних сил, действующих на
тягач и прицеп, рассматривая условия
равновесия, можно определить нормальные реакции
Кг1 и Яп1 на движители, а также смещение
центра давления х$ у гусеничной машины. От
величины и перераспределения по базе Ь?, Ь^
нормальных реакций зависят проходимость,
степень воздействия на почву, тормозные
свойства, устойчивость и др.
1.1.3. КОЛЕСНЫЙ ДВИЖИТЕЛЬ
Колесо в системе движителя колесной
машины может работать в следующих
режимах.
Ведущий режим: к колесу приложен
крутящий момент Мо и продольная сила Рк -
сила тяги колеса. Линейная скорость центра
колеса
ук=сокгк>
где сок - скорость колеса; гк - радиус качения
колеса.
Свободный режим: приложенный к колесу
крутящий момент Л/о равен моменту
сопротивления качению
сила Р = О;
1М$ = М * с I; продольная
где гкс - радиус качения колеса в свободном
режиме.
При движении |Йолеса в свободном
режиме суммарная реакция Я направлена
вертикально.
Ведомый режим: колесо движется под
воздействием силы, приложенной к колесу в
направлении его движения. Эта сила равна
силе сопротивления качению колеса в ведомом
режиме \РК = Р*Л:
ук0 =с°кгкО)
где ^к^ - радиус качения колеса в ведомом
режиме.
При движении колеса в ведомом режиме
суммарная реакция К направлена к центру
колеса.
Нейтральный режим: колесо движется под
действием крутящего момента и продольной,
толкающей колесо силы, совместными
действиями которых уравновешиваются моменты
сопротивления качению и внешних сил,
приложенных к колесу.
Тормозной режим: к колесу приложен
тормозной момент. Во всех случаях
поступательная скорость колеса также определяется
произведением угловой скорости на радиус гк
качения колеса.
Радиусом качения колеса называется
радиус такого фиктивного (воображаемого)
колеса', которое, имея такую же угловую скорость
центра как реальное колесо катится по
опорной поверхности без скольжения и буксова-
ния, т.е. радиус качения - расстояние от
мгновенного центра вращения до оси вращения
колеса. Радиус качения при приложении к
колесу крутящего момента (или продольной
силы) изменяется в зависимости от момента
(или силы), тангенциальной эластичности
шины и проскальзывания элементов шин по
опорной поверхности. Его величина может
изменяться от нуля (полное буксование) до
бесконечности (полное скольжение или "юз").
Величина буксования при этом
а = (гжс-'к)/'кс-
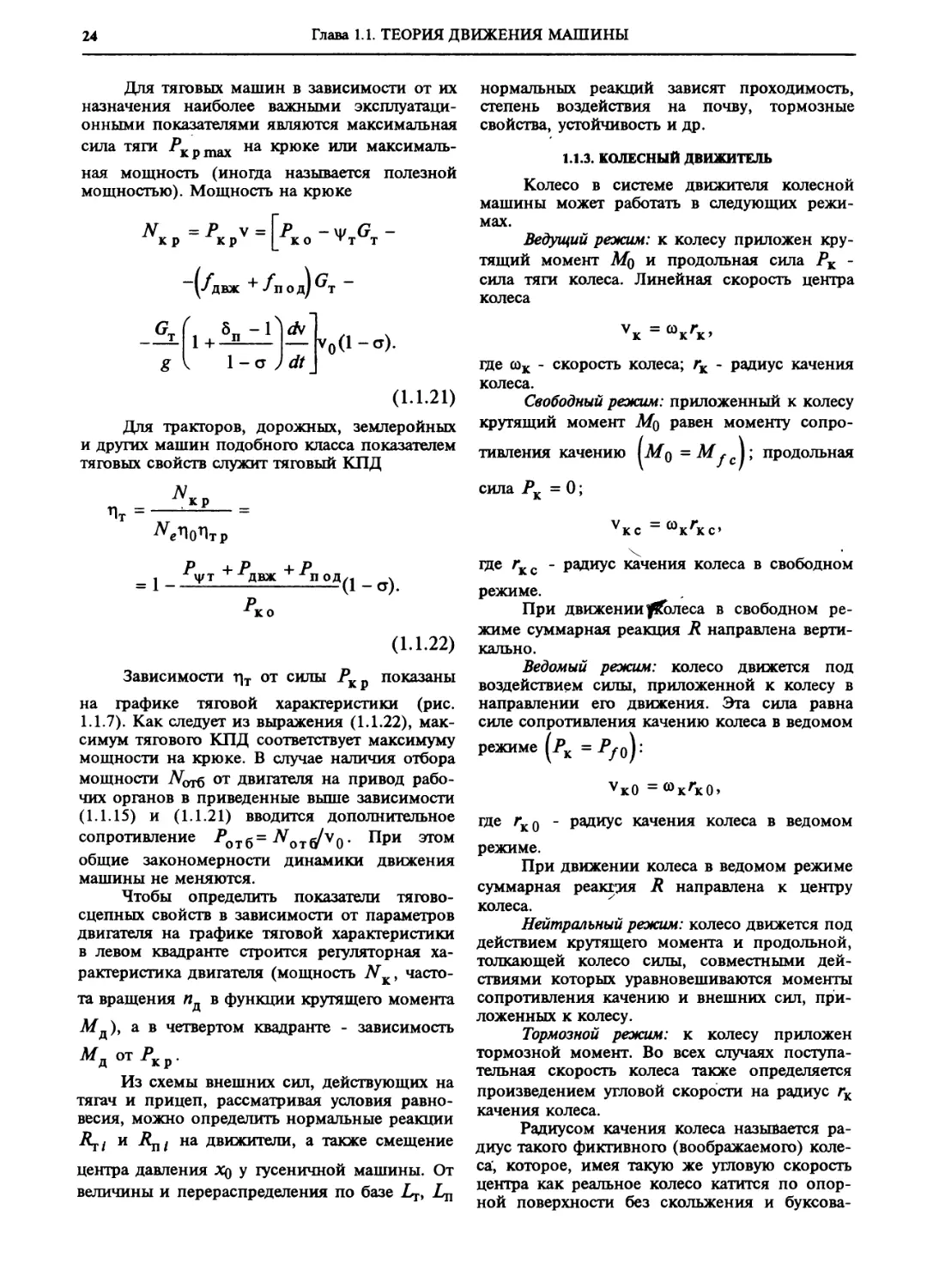
На рис 1.1.8. показан идеализированный
график изменения радиуса гк качения в
зависимости от крутящего момента Мх или
продольной силы Рх. Изменение радиуса качения
до точки А происходит по линии, близкой к
прямой. При этом в зоне контакта колеса с
дорогой имеет место лишь частичное
проскальзывание, т.е. в контакте существует хотя
бы одна неподвижная точка. После того, как
сила Рк станет равна силе тяги по сцеплению,
Р = (7кф начинается одновременная
пробуксовка всех элементов шины на поверхности
дороги.
Представленное на рис. 1.1.8 изменение
радиуса качения при действии силы или
момента, может иметь следующий вид
\ =/1СС ""^К^К
или гк =гкс -\КМХ, (1.1.23)
где ук и Х^ - коэффициенты тангенциальной
эластичности шины, мм/Н и мм/(Нм)
При этом коэффициент тангенциальной
эластичности шины принимается
приблизительно постоянным на участке зависимости до
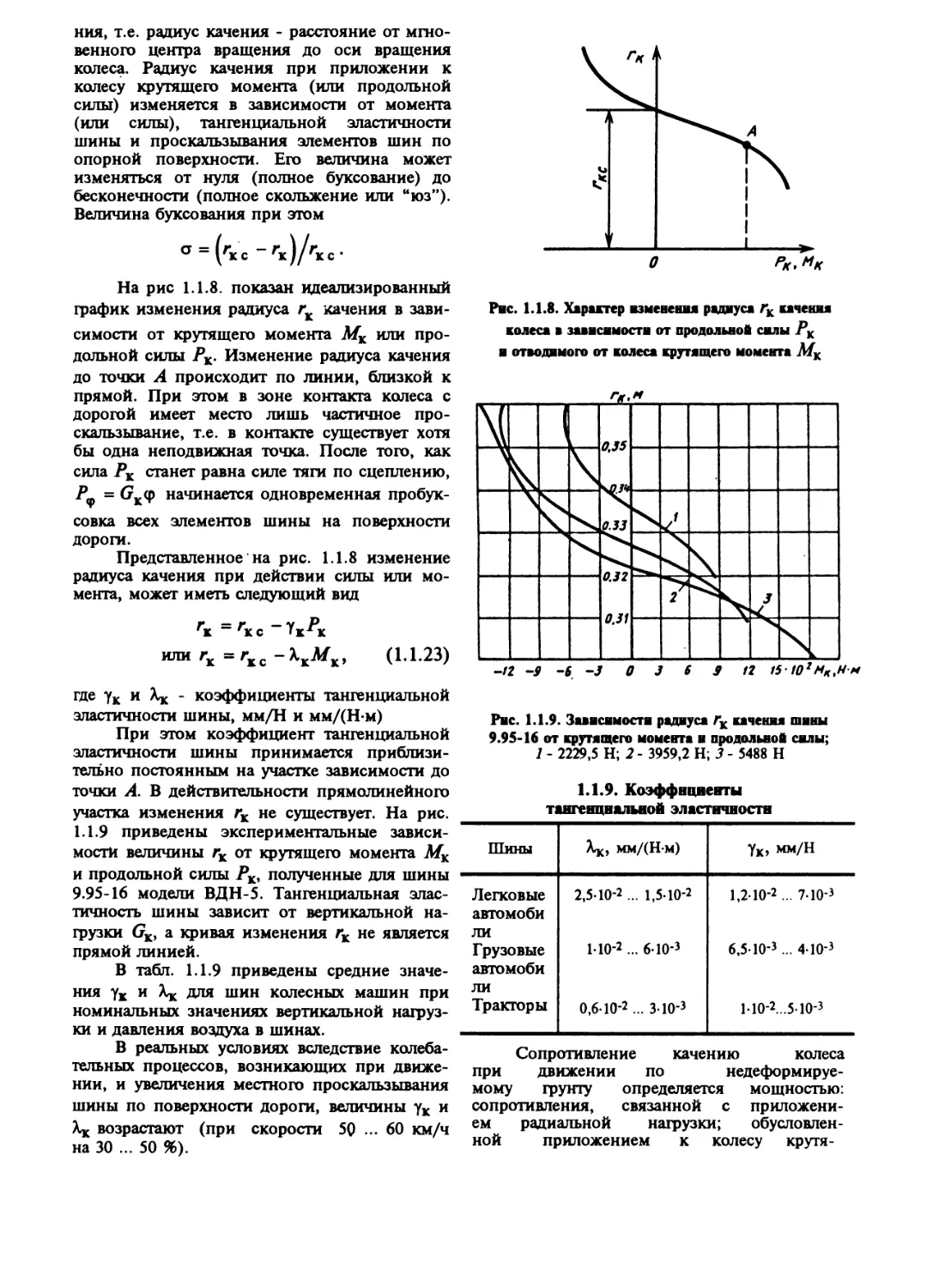
точки А. В действительности прямолинейного
участка изменения гк не существует. На рис.
1.1.9 приведены экспериментальные
зависимости величины гк от крутящего момента Мк
и продольной силы Рк, полученные для шины
9.95-16 модели ВДН-5. Тангенциальная
эластичность шины зависит от вертикальной
нагрузки (7К, а кривая изменения гк не является
прямой линией.
В табл. 1.1.9 приведены средние
значения ук и Хц для шин колесных машин при
номинальных значениях вертикальной
нагрузки и давления воздуха в шинах.
В реальных условиях вследствие
колебательных процессов, возникающих при
движении, и увеличения местного проскальзывания
шины по поверхности дороги, величины ук и
А^ возрастают (при скорости 50 ... 60 км/ч
на 30 ... 50 %).
рк*мк
Рис. 1.1.8. Хяражтер изменения радиуса Гк качения
колеса а зависимости от продольной силы Рк
и отводимого от колеса крутящего момента Мк
г«."
035
\Л]Ь
р.зз
0.32
\о.31
1
2
3
-/2 -9-6-3 0 3 6 9 12 15 102Мх,Нм
Рис. 1.1.9. Зависимости радиуса Гк качения
9.95-16 от крутящего момента и продольной
1 - 2229,5 Н; 2 - 3959,2 Н; 3 - 5488 Н
1.1.9. Коэффициенты
тангенциальной эластичности
Шины
Легковые
автомоби
ли
Грузовые
автомоби
ли
Тракторы
Х^у мм/(Н-м)
2,510-2 ... 1,510-2
110-2 ... 6-Ю-з
0,610-2... 310-3
Ук, мм/Н
1,210-2 ... 7-Ю-з
6,510-3 ... 4-Ю-з
Ы0-2...5-10-3
Сопротивление качению колеса
при движении по недеформируе-
мому грунту определяется мощностью:
сопротивления, связанной с
приложением радиальной нагрузки;
обусловленной приложением к колесу крутя-
26
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
щего момента или продольной силы. Первая
составляющая является мощностью
сопротивления качению в свободном режиме (ТУл),
затрачиваемой на деформацию шины в
радиальном направлении (гистерезисные потери) и
на преодоление неупругих сопротивлений.
Вторая составляющая (условно мощность
буксования) может быть найдена следующим
образом.
Работа постоянного крутящего момента
равна произведению этого момента на угол
поворота, значение которого зависит от
тангенциальной деформации и проскальзывания
шины. Работа продольной силы определяется
изменением пути, обусловленного
тангенциальной деформацией и проскальзыванием под
действием этой силы. Вследствие приложения
к колесу силы Рк или момента Мк путь за
один оборот изменяется на величину
27с(гкс -гк), а соответствующая этому
скорость колеса - от укс до Ук.Тогда мощность
сопротивления качению [28]:
^/к = ^/кс ^Л^кс -гк)Дкс
(1.1.24)
или
^/к=Л,/кс+^>К('кс-''к)-
(1.1.25)
С учетом выражения (1.1.23)
^/к =Л7кс+Хк<°к^к
или
**/* =Л7кс +Гк^к/>к2'
где слагаемые, пропорциональные Х^, ук,
характеризуют мощность буксования в
движителе, обусловленную тангенциальной
деформацией в движителе (шине) и ее
проскальзыванием по опорной поверхности.
Тогда мощностной баланс колеса имеет
вид:
^к =^/кс + ^>к(''кс "'к) + Лс»к'к-
(1.1.26)
Откуда
Мк = Мхс + РКГХС (1.1.27)
Используя выражения, полученные для
потерь мощности одиночного колеса, можно
построить математическую модель
определения сопротивления качению движителя
колесной машины. Если движитель имеет п осей, т
из которых являются ведомыми,
дифференциальную связь между ведущими мостами, а
компоновка колесной машины обеспечивает
приблизительно равное распределение массы
между мостами, то мощность сопротивления
качению
2(п-т)
^/=Л7с+ X ^/(гкс-гк) +
/=1
2т
+Е^/0/соО/(гкО/ -'хс)> (1Л'28)
/=1
где N\г с - суммарная мощность
сопротивления качению колес движителя в свободном
режиме; Р/ - сила тяги на 1-м колесе; Ру0/ ~
сила сопротивления качению /-го колеса в
ведомом режиме; со, - угловая скорость /-го
колеса; \с1>гк(Н и гк/ " радиусы качения
/-го колеса соответственно в свободном,
ведомом и ведущих режимах.
Используя формулы (1.1.23) и (1.1.28)
можно получить:
у у 2(л - т) 2т
(1.1.29)
где РТ - сила тяги; со - обобщенная
(приведенная) угловая скорость колес
движителя; у - приведенный коэффициент
тангенциальной эластичности колес движителя.
Обобщенная условная скорость ведущих
колес движителя 0)=0)д//тр. Тогда
обобщенный радиус качения движителя
гдв=у/со. (1.1.30)
Уравнения (1.1.28) и (1.1.29) позволяют
сравнивать качение полноприводных и непол-
ноприводных автомобилей. При включении
ведомых мостов (через дифференциальный
привод) уравнение (1.1.22) будет иметь вид
^/=ЛГ/с+ЁР/ш/(гкС-4 (11-31)
/=1
ча уравнение (1.1.30)
Л^ =Ы/С +0,5соу/>т2/"- (1.1.32)
Сравнивая уравнения (1.1.28) и (1.1.29) с
уравнениями (1.1.31) и (1.1.32) можно сделать
однозначный вывод: увеличение числа
ведущих мостов (при постоянном числе мостов)
снижает мощность сопротивления движению,
так как уменьшается мощность, затрачиваемая
на тангенциальное деформирование ведущих
колес движителя на величину
0,5усо(Р) тп I [п(п - /я)]. Это объясняется
квадратичной зависимостью мощности на
тангенциальную деформацию шины от про-
КОЛЕСНЫЙ ДВИЖИТЕЛЬ
27
дольной силы или силы крутящего момента на
колесе. Отсюда уменьшение подводимой к
движителю мощности при увеличении числа
ведущих мостов
ДЛГ=-
соу
м', °'И
2т
т
п(п - т)
(1.1.33)
Эта формула является приближенной,
так как основана на равенстве приведенных
угловых скоростей со для автомобилей с
различными схемами - привода, что (при
постоянстве скорости движения автомобиля) вносит
некоторую погрешность.
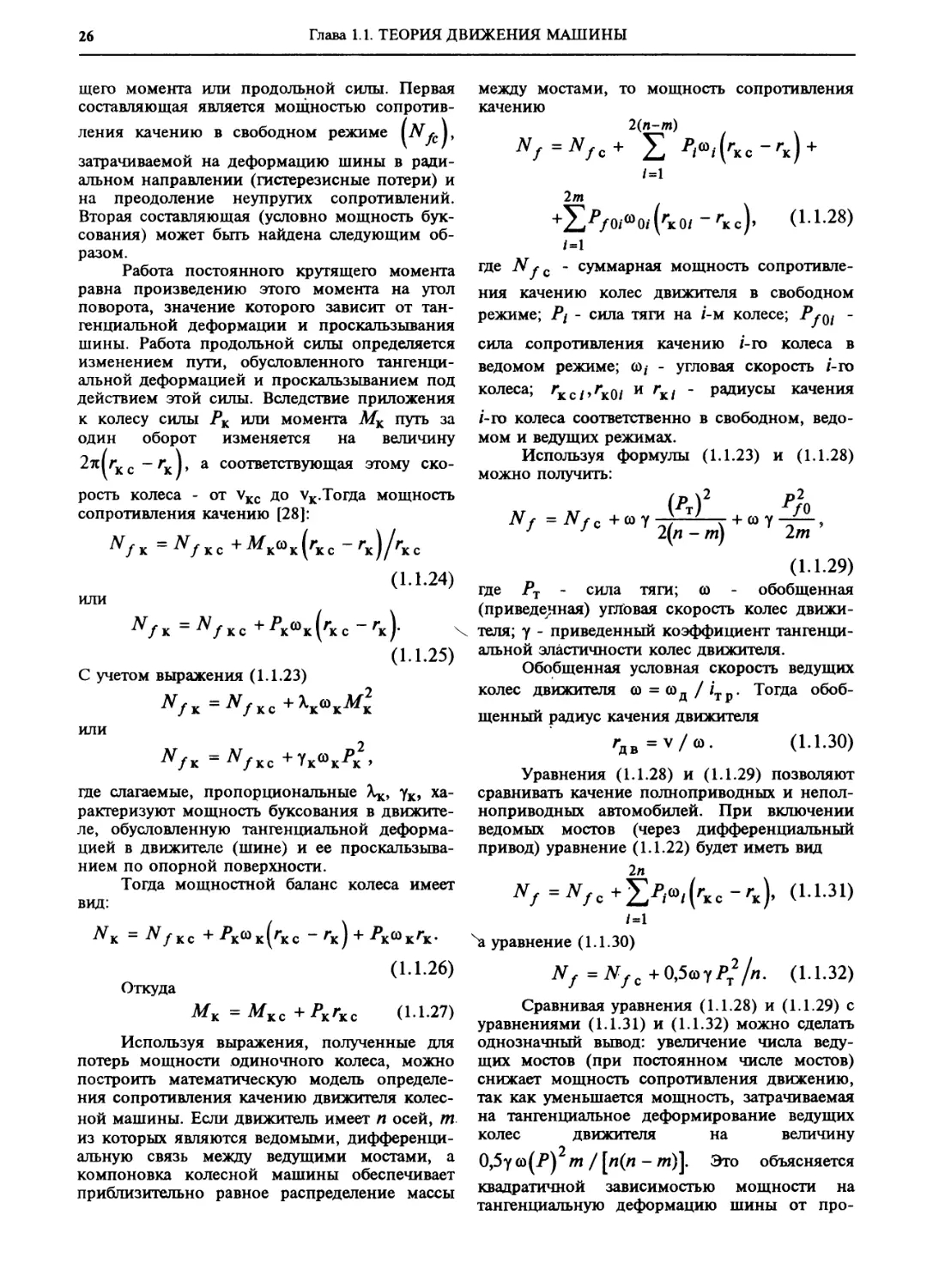
Для иллюстрации изменения
сопротивления колесного движителя и зависимости от
числа ведущих мостов на рис. 1.1.10 показано
изменение момента сопротивления качению
движителя трехосного автомобиля при разном
числе ведущих мостов.
М/а ' Ю~3, Им
2Ь МС'10~?Н'М
Рис. 1.1.10. Изменение момента сопротивления
качению движителя трехосного автомобиля;
1 - один мост; 2 - два моста; 3 - три моста
Для движителя, имеющего
блокированную связь между ведущими мостами при
различных начальных радиксах качения колес
мостов |/'см1, что практически всегда
неизбежно, мощность сопротивления качению
^ =0)
9 -П я л
М/о+ — ХХ(''м<с-',м/с)
(1.1.34)
что аналогично
М ^ = со
9 - , " л
'Ш,-1
Разность крутящих моментов при равных
значениях реализуемой силы тяги РТ для
автомобилей с блокированными и
дифференциальными приводами можно получить из
уравнения
^ = -11(^0 -'мус)2- (1-1-35)
В табл. 1.1.10 представлены балансы
мощности движителей, имеющих различную
связь между ведущими мостами.
Приведенные зависимости могут служить
основой для расчета, причем величину гм
следует рассматривать как случайную, зависящую
от совокупности конструкторских и
эксплуатационных факторов. Кроме того, на величину
гм влияет перераспределение вертикальных
реакций на колесах автомобиля в процессе
движения. Если распределение массы по
мостам колесного движителя неравномерно или
рассматривается процесс неравномерного
движения, при котором вертикальные реакции на
мостах изменяются, то это следует учитывать в
приведенных выше формулах.
Пример. Влияние неравномерного
распределения массы по мостам (неравенство
вертикальных реакций на мостах) можно
рассмотреть на примере автомобиля с колесной
формулой 4x4 и симметричным межосевым
дифференциалом.
Если нагрузка на передний мост меньше,
чем на задний, то подводимый к переднему
мосту момент больше момента сопротивления
качению (0,5М > М*МА> а момент на
заднем мосту меньше момента сопротивления
качению (0,5Л/ < М^М2)- в результате в
трансмиссии появляется дополнительная
внутренняя сила, действующая по направлению от
переднего моста и недостаточно
компенсирующая подводимый крутящий момент на
заднем мосту. Передний мост работает в
ведущем режиме, а задний в нейтральном.
Баланс мощности при этом
N = N/с+<о^у(0,5Р + Рь)2 +
+со2Г(0,5Р+Рд)2) (1.1.36)
может быть найдена из
уравнений силового баланса колеса (1.1.27).
Тогда крутящий момент на первом мосту
0^М = М/и1с+ (0,5Р + Рд) гм 1с,
на втором
0.5М = М/и2с+ (0,5Р + РА) гм2с.
Отсюда
0 ^/м2с - Л//м1с - №Р(Гм1с - гм2с)
/д = .
гм1с "" гм2с
где ^д
28
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
1.1.10. Баланс мощности колесных движителей при разной связи между мостами $
Тип связи между мечтами
Движитель с п мостами
(т ведомых мостов)
Движитель с колесной формулой 4x4
Дифференциальная;
полноприводной
движитель
Дифференциальная
между ведущими
мостами; неполнопривод-
ной движитель
Блокированная;
полноприводной движитель
/-1
2(л-ж)
(Р)
N = N/с+а>у±-^+Р<о^дв
4
N = N г +соу +
/-1
2т
/-1
+Е«/оТ/(*ло) +Р(йГ№
-ноу
М'
+ Р(йГп
N = (0
р п
М/с+-2/м/с +
П /«1
N = 1
"У/«1у«1
^/с+~(''м1с-',м2с) +
2
1
+ _(гм1с ~гм2с)
У
Наилучшим колесным движителем (с
точки зрения снижения сопротивления
качению) является такой полноприводной
движитель, связь между мостами которого
обеспечивает постоянное соответствие # подводимого к
ведущему мосту крутящего момента и
вертикальной нагрузки действующей на колесо.
При криволинейном движении колесной
машины между мостами при определенных
условиях могут возникать дополнительные
(внутренние) силы, вызывающие как
тангенциальную, так и боковую деформацию шин.
Дополнительная сила может быть разложена
на составляющие: касательную и нормальную
к траектории движения колес. Касательная
сила вызывает дополнительное тангенциальное
деформирование (и проскальзывание) шины, а
следовательно, увеличение сопротивление
качению. Нормальная сила приводит к
дополнительному уводу шин, что также повышает
сопротивление качению колесного движителя на
повороте. Значения и направления действия
этих сил зависят от типа привода,
характеристик шин, радиуса поворота и базы
автомобиля.
Мощность сопротивления качению
движителя автомобиля, движущего по
криволинейной траектории
тивления качению неуправляемого моста;
р - число управляемых мостов.
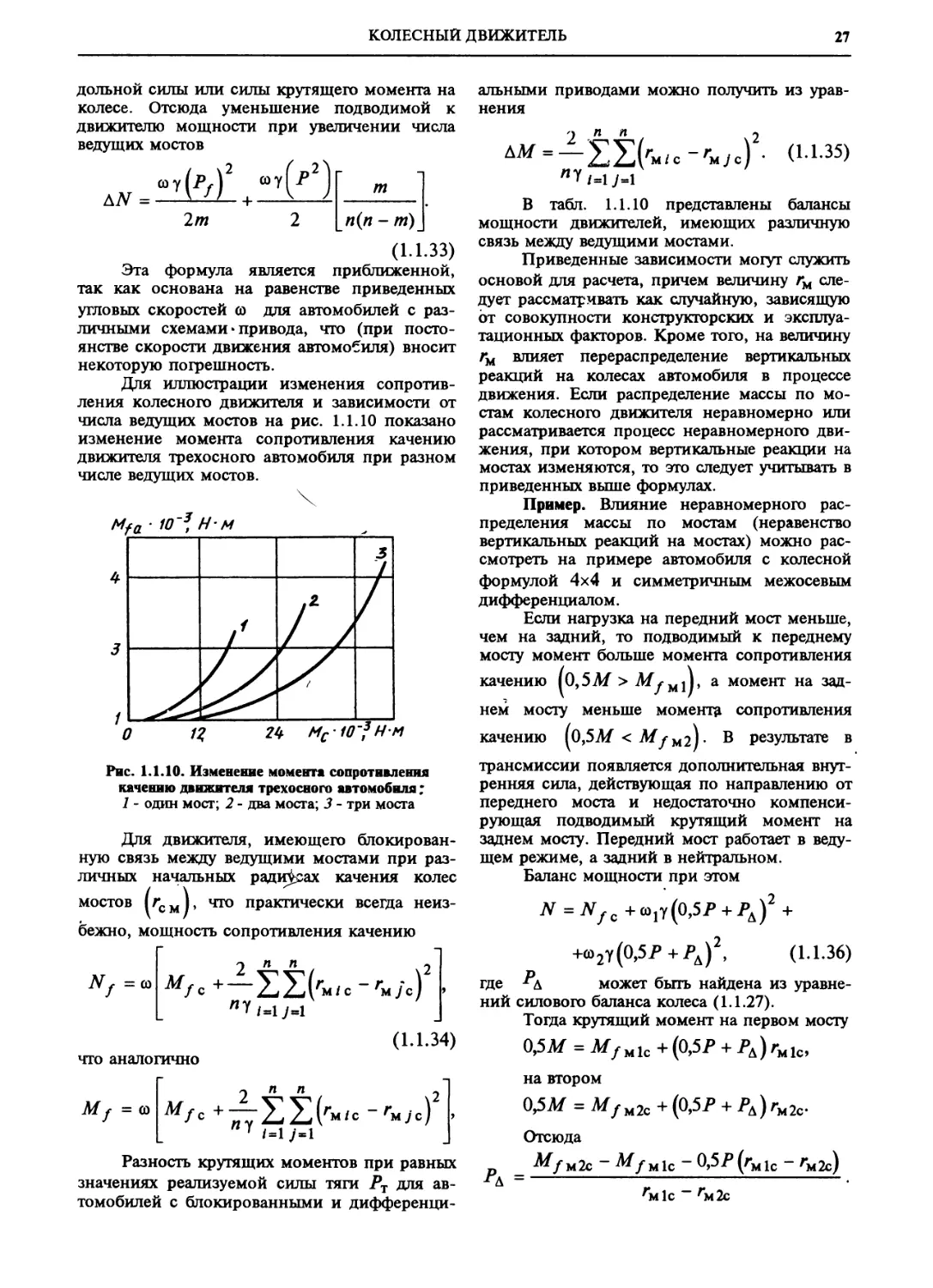
На рис. 1.1.11 представлена схема
поворота двухосного автомобиля под действием сил
при заднем и переднем ведущих мостах.
Суммарная мощность, необходимая для движения
на повороте автомобиля с колесной формулой
4x4 с приводом на задний мост может быть
найдена с использованием формул:
+13м1(р \
(Р/мю)
1б20О)м1Гм1 +
Уюм2
(^/мю) >
/-1
/-1
где Nум - мощность сопротивления качению
управляемого моста; Nум - мощность сопро-*
2СО80
(1.1.38)
где Р/м\о - сила сопротивления качению
ведомого (первого) моста; 0 - средний угол
поворота управляемых колес; Ку -
коэффициент сопротивления уводу шин, Н/рад, Н/ °.
Коэффициент может быть получен
экспериментально или по эмпирической формуле
Ку =5Вт(Вш+2Вш){Рт +1),
где Дц и Дц - соответственно ширина и
диаметр шины, см; рт - давление воздуха в шине.
КОЛЕСНЫЙ ДВИЖИТЕЛЬ
29
Рис. 1.1.11. Схема поворота двухосного автомобиля
с приводом на мост:
а - задний; б - передний
Сопротивление качению на
повороте'автомобиля с приводом на передний мост может
быть найдено по формуле, аналогичной
(1.1.37). Таким образом, при прочих равных
условиях (внешние условия, распределение
массы между мостами, углы поворота колес и
др.) мощности, затрачиваемые на движение на
повороте переднеприводного и заднепривод-
ного автомобиля, практически равны.
Приведенные зависимости справедливы
и для движителей трехосных автомобилей с
колесными формулами 6x4 и 6x6 (при
отключении переднего моста). Для движителей
автомобилей с колесной формулой 8x4, у
которых первые два моста управляемые, уравнение
баланса мощности может быть получено с
учетом формулы (1.1.37). Однако углы
поворота колес первого и второго мостов будут
различными, что необходимо учитывать при
использовании этих формул.
При движении по деформируемому
грунту сопротивление качению колеса
описывается зависимостью (1.1.24), но при этом
величину ^/кс следует определять как
функцию характеристик грунта, вертикальной
нагрузки на колесо и характеристик шины.
Значение гкс получают экспериментально, как
периметр колеса нагруженного только
вертикальной силой, деленный на 2я.
При выводе формулы для определения
величины Nукс можно принять следующие
допущения: грунт однороден и его упругостью
можно пренебречь; сопротивление
вдавливанию элементарного участка колеса в грунт
прямо пропорционально длин«|его
перемещения в грунте по циклоиде на глубину . В этом
отличие от закона деформации грунта (см.
рис. 1.1.1). Тогда зависимость для определения
величины N^•кс может быть получена из
уравнения, определяющего суммарную работу
всех элементарных сил, касательных к
траектории элементарного участка колеса при
перемещении его в грунте на соответствующем
участке за одни оборот колеса:
и+1
N
/КС
И+1 1
(Гх с) 2и+1(СД)^1
1 13 * 2
15 5
2ц+2
2ц+1
(1.1.39)
Несмотря на большое количество
экспериментальных данных величин С и \х в связи с
огромным многообразием грунтов и
климатических условий (в первую очередь влажности и
температуры воздуха) существует большая
нестабильность их значений даже для наиболее
характерных грунтов. Кроме того, величины С
и ц зависят и от физических характеристик, и
от геометрических размеров шин. В табл.
1.1.11 приведены ориентировочные значения
Си ц для наиболее распространенных типов
грунтовых поверхностей, в которых
эксплуатируются автомобили.
В общем случае движения суммарная
мощность сопротивления качению
многоосного движителя с числом мостов я, из которых
ведомых т, определяется уравнением
п т
М/ = X М/ м /с + X Р/ м|0» I(гшО - 'м/с) +
/=1
/=1
*(гм/с гм/)*
(1.1.40)
30
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
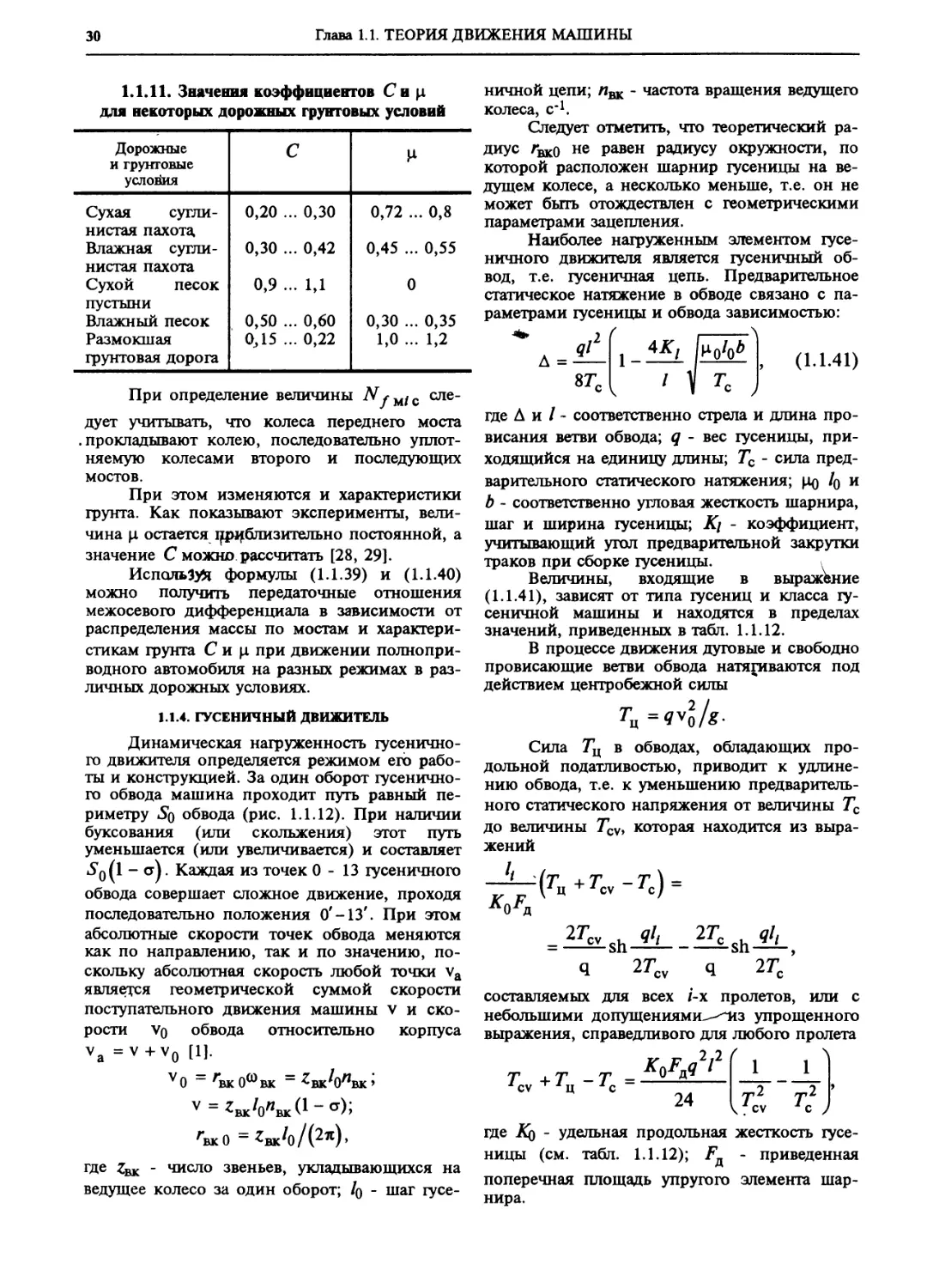
1.1.11. Значения коэффициентов Си ц
для некоторых дорожных грунтовых условий
Дорожные
и грунтовые
условия
Сухая
суглинистая пахота
Влажная
суглинистая пахота
Сухой песок
пустыни
Влажный песок
Размокшая
грунтовая дорога
0,20
0,30
0,9
0,50
0,15
С
... 0,30
... 0,42
... 1,1
... 0,60
... 0,22
Ц
0,72 ..
0,45 ...
0
0,30 ...
1,0 ...
.0,8
0,55
0,35
1,2
При определение величины ^/м/с
следует учитывать, что колеса переднего моста
.прокладывают колею, последовательно
уплотняемую колесами второго и последующих
мостов.
При этом изменяются и характеристики
грунта. Как показывают эксперименты,
величина ц остается приблизительно постоянной, а
значение С можно рассчитать [28, 29].
ИспольЗД формулы (1.1.39) и (1.1.40)
можно получить передаточные отношения
межосевого дифференциала в зависимости от
распределения массы по мостам и
характеристикам грунта Сиц при движении
полноприводного автомобиля на разных режимах в
различных дорожных условиях.
1.1.4. ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
Динамическая нагруженность
гусеничного движителя определяется режимом его
работы и конструкцией. За один оборот
гусеничного обвода машина проходит путь равный
периметру 5о обвода (рис. 1.1.12). При наличии
буксования (или скольжения) этот путь
уменьшается (или увеличивается) и составляет
50(1 - а). Каждая из точек 0-13 гусеничного
обвода совершает сложное движение, проходя
последовательно положения 0' —13'. При этом
абсолютные скорости точек обвода меняются
как по направлению, так и по значению,
поскольку абсолютная скорость любой точки Уа
является геометрической суммой скорости
поступательного движения машины V и
скорости Уо обвода относительно корпуса
уа =у+у0 [П-
у0 = гвк0С0вк = *ыЛлвк»
у = ^вк/олвк(1-ст>;
гвк0 =^вк/о/(27С)»
где ^вк - число звеньев, укладывающихся на
ведущее колесо за один оборот; /о - шаг
гусеничной цепи; Лнк - частота вращения ведущего
колеса, с1.
Следует отметить, что теоретический
радиус /дко не равен радиусу окружности, по
которой расположен шарнир гусеницы на
ведущем колесе, а несколько меньше, т.е. он не
может быть отождествлен с геометрическими
параметрами зацепления.
Наиболее нагруженным элементом
гусеничного движителя является гусеничный
обвод, т.е. гусеничная цепь. Предварительное
статическое натяжение в обводе связано с
параметрами гусеницы и обвода зависимостью:
Д =
87;
1-1^
1н!оь
А
(1.1.41)
где А и / - соответственно стрела и длина
провисания ветви обвода; ^ - вес гусеницы,
приходящийся на единицу длины; Тс - сила
предварительного статического натяжения; |Дф /о и
Ь - соответственно угловая жесткость шарнира,
шаг и ширина гусеницы; А/ - коэффициент,
учитывающий угол предварительной закрутки
траков при сборке гусеницы. у
Величины, входящие в выражение
(1.1.41), зависят от типа гусениц и класса
гусеничной машины и находятся в пределах
значений, приведенных в табл. 1.1.12.
В процессе движения дуговые и свободно
провисающие ветви обвода натягиваются под
действием центробежной силы
Тп =4*1/8.
Сила Гц в обводах, обладающих
продольной податливостью, приводит к
удлинению обвода, т.е. к уменьшению
предварительного статического напряжения от величины Тс
до величины ТСУ, которая находится из
выражений
'< :(Тп+Тсч-Тс) =
*0*д
^8Ь^
2Т
а 2Г
составляемых для всех /-х пролетов, или с
небольшими допущениями^-^Из упрощенного
выражения, справедливого для любого пролета
т +т -т =
СУ т Л Ц * С
ад?/
2,2 (
24
1
1
с У
где Ко - удельная продольная жесткость
гусеницы (см. табл. 1.1.12); РА - приведенная
поперечная площадь упругого элемента
шарнира.
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
31
Рис. 1.1.12. Перемещения и абсолютные скорости точек гусеничного обвода
1.1.12. Предварительное статическое натяжение и параметры гусеничного обвода
Категория
гусеничной
машины
по массе
Легкая
(8 - 18 т)
Средняя
(36 - 55 т)
Шарнир гусеницы,
соединение
МШ
РМШ, последовательное
РМШ, параллельное
ЗШ
МШ
РМШ, последовательное
РМШ, параллельное
Гс,кН
3 ...4
14 ... 15
19 ... 20
5 ... 6,5
12
32 ... 35
42 ... 45 .
кН/см*
298 ... 357
32.4 ... 39,6
27.5 ... 41,2
167
390 ... 745
60,1 ... 70,7
- 41 ... 42
^0'
Н-м/(см-рад)
2,6 ... 4,8
2,63 ... 5,26
20 ... 26,6
1,57 ... 2,1
3,7 ... 4,8
10,3 ...13,8
20,3 ... 22,2
я,
Н/м
247 ... 510
513 ... 5*6
520 ... 640
576 ... 660
1100 ... 1200
1000 ... 1310
ИЗО ... 1360
Примечание: МШ - металлический шарнир; ЗШ - закрытый шарнир; РМШ - рези-
нометаллический шарнир; К$ - удельная продольная жесткость
32
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
Силы рабочего натяжения 71 в рабочей
ветви / , находящейся под действием силы
тяги Рдк, и натяжения Тсв в свободной ветви
|'св = ^о"^оп"М связаны зависимостью
Т -Т =Р
2 р лсв л вк*
При этом
7 с в — * с (с у)+ ^ц 1 . /
1 т /г;
У'р
Для тихоходных машин и тракторов
Тц * °' а Гсу*Гс Тогда
71 = Т -
-* ев -"с
1 + 'су/'р
(1.1.42)
Это выражение справедливо и для
обводов, не обладающих упругой продольной
податливостью. При этом следует иметь в виду,
что в пределе Тс (с у) д^* 03?/с в- Натяжение
в ветвях обвода, как это следует из (1.1.42),
существенно зависит не только от силы тяги,
но и от соотношения 7С ^1- , т.е. от места
расположения ведущего колеса (рис. 1.1.13).
Представления о нагруженности обвода
постоянными силами натяжения дает
динамическая характеристика гусеничного обвода
(рис. 1.1.14). В верхней ее части строится
зависимость силы Рвк от скорости V, в нижней -
силы натяжения 7^ от центробежных сил Тц
и предварительного статического натяжения
Тс (также в функции скорости V). В результате
на каждом режиме могут быть определены
силы в рабочей и свободной ветвях.
Заштрихованные области характеризуют зону изменения
Тс и 7^ в зависимости от величины Р^.
Уменьшение предварительного
статического натяжения упругого обвода с ростом
скорости приводит к "всплытию" корпуса
машины, т.е. к некоторому увеличению
дорожного просвета под действием
восстанавливающих сил упругих элементов подвесок.
Приращение дорожного просвета находится по
разности ходов подвески - статического Лс/ и в
движении Лу/ - с учетом жесткости подвески
(рессор) Кр и сил в обводе, а также углов
наклона уп передней и уэ задней ветвей:
(
2л
2л
2Л/-5Х =2Гс(8шуп+8шу3)-
VI 1 )
-2Гсв8шуп-2Гр8шу3.
I 40 Рбк,кн
Рис. 1.1.13. Зависимости натяжения в ветвях обвода
от силы тяги и места расположения ведущего колеса:
1 - переднее колесо; 2 - заднее колесо
Переменные растягивающие нагрузки в
обводе возникают в результате изменения
геометрии (формы) обвода при колебаниях
корпуса машины, а также при продольных и
поперечных колебаниях свободно провисающих
участков гусеницы, ^ч
При колебаниях корпуса изменяется
общая длина обвода 5о, длины рабочей и
свободной ветвей вследствие изменения величины
провисания и упругой вытяжки ветвей:
1 ^4
1
1
ч
'д(св)
7р(св)
(Гд(р,св)-Г0), (1.1.43)
где 7о - сила, действующая при отсутствии
колебаний; 7д/р свч - сила, действующая в
рабочей (свободной) ветви при колебаниях.
Первый член правой части выражения
(1.1.43) представляет величину изменения
периметра обвода за счет изменения стрелы
провисания к свободно провисающих ветвей,
второй - упругое приращение длины обвода от
сил ^(р.св)- --
Динамические составляющие 7д/р св)
зависят от параметров колебательного
процесса. Согласно схеме (рис. 1.1.15) система
корпус - моторно-трансмиссионная установка в
случае плоского движения корпус имеет
четыре степени свободы х0, ^0, ср0 и ервк, а катки
- п степеней свободы (по их числу).
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
33
/&,""
Рбк,""
Тсб,"Н
Рис. 1.1.14. Динамические характеристики гусеничного обвода (С/т =20 т):
а - с РМШ; б - с ЗШ
2 За к. 1741
Рис. 1.1.15. Силы, действующие на корпус при колебаниях
34
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
Перемещения корпуса описываются
системой уравнений вместе с уравнением
(1.1.13), в котором V = х0:
0,5/пф0 +иХ[(*0 -*/)'*/ +Фо/я2/] +
1
+*рХ[(*о-А<Н+(Ро>/2]-
1
~-'двкЛ'<рнк + * дн ъГун к = ^>
0,5(С7Т -Он)*0 +цХ[(*0 -Аг)+Фо'5] +
1
к
+*рХ[(*о-^) + Ф<А]-
1
-Гдвх81пУвк+7,днк81пГ„к = 0;
?Гг -Г Ь _ -^гЯРвк ^трФвк .
^двк 7днк/ вк ~ "^ >
Пгд ЧТр
Фнкгнк=А5р±А5св.
(1.1.44)
Решение этой системы уравнений
позволяет найти дополнительные динамические
растягивающие силы 7^ под ведущим и
Т'днк П°Д направляющим колесами, т.е. в
рабочей и свободной ветвях. Для схемы с задним
расположением ведущих колес 71 = 7ДВК,
7С в = 7ДН к, а для схемы с передним ведущим
колесом - наоборот. При этом перемещения Л/
катков формируются микропрофилем опорной
поверхности.
Продольные колебания участков
гусеничных ветвей возникают в случае упругих
резинометаллических шарниров в гусеницах.
Так как число возмущающих воздействий,
приходящихся на звено гусеницы, равно числу
звеньев ветви (как правило, не более 10), то
при продольных колебаниях значительных
нагрузок не возникает. *
Наиболее неблагоприятное воздействие
на работу гусеничного движителя оказывает
поперечные колебания свободно провисающих
ветвей. Они являются причиной
возникновения не только значительных растягивающих
сил в обводе, ударного взаимодействия
гусеничной цепи с элементами гусеничного
движителя и машины, а также фактором
снижения устойчивости работы гусеничного обвода
и даже сбрасывания гусеницы при повороте
или перекосе корпуса. С достаточной
точностью оценить влияние поперечных
колебаний гусеницы можно, представив ветвь в
качестве упругой ленты. В этом случае
свободные колебания ее описываются выражением
д2у ±11 дУ^„2д4у д2у
+ 2\в — + а—-рл — = 0,
д1 д1 дх дх
К = 0,5ув# / д; ав = &010Ь/д;
А =*Гр(св)/*; (Ы.45)
где х, у продольная и поперечная координата
ветви; Ув - коэффициент вязкого
сопротивления, отнесенный к единице длины.
Одной из основных характеристик
поперечных колебаний является скорость
распространения поперечных волн
^->«.]!+ ~Йт- (1146)
Она определяет наиболее опасный
(резонансный) режим движения,
соответствующий скорости Ур = 2ув/ . Как следует
из выражения (1.1.46), для выведения
резонансной скорости за пределы рабочих
скоростей необходимо увеличивать натяжение
ветвей обвода.
Поперечные нагрузки на звенья
гусеницы зависят от характера ее взаимодействия с
элементами гусеничного движителя.
Наибольшие нагрузки возникают при взаимодействии
гусеницы с ведущим колесом (в зацеплении) и
опорными катками. Для цевочного
зацепления, типичного для гусениц с
последовательным шарниром, схема действия сил показана
на рис. 1.1.16. По мере продвижения по дуге
охвата силы изменяются в зависимости от
соотношения растягивающих сил в рабочей и
свободной ветвях, при этом справедливым
являются условия равенства:
силы ТН1 со стороны набегающего звена
на 1-м зубе растягивающей силе в рабочей
ветви, т.е. 7Н = Тр ;
силы 7сб/ со стороны сбегающего звена
на последнем я-м зубе растягивающей силе в
свободной ветви, т.е. 7С б п = 7С в .
Текущие значения сил на /-м зубе
определяются выражениями:
т г 1 ( 1 1 ,1
12 4^2 12 )
тсб1 =ТР—г + 8 —ГТ+_ТТ+"- + 1
ЛГ,=
Гр^+е
1 .+ '+... + !
О
/-1
О
/-2
81ПСС
а
81П9 + — С089
М„
СО80
" 81П9 + —С089
Ь
Т»< =
1 +-^+... + 1
а
1-2
-8ша
М„
81П9
81П 9 + — С08 9
Ь
0 8ш8 + —СО80
Ь
где
о = -
81П (а + 9) + — со8(а + 9)
Ь
а
81П9+ — С089
ь
м„
6 =-
А а
° 8ш(ач-9) + — со8(а+9)
Ъ
Важным параметром гусеничного
зацепления является угол давления 9. Для того
чтобы исключить скольжение цевок по профилю
зубьев ведущего колеса, а следовательно,
повышенный износ, угол давления должен
определяться выражением:
{ _ «та $ТС^Гр ± ц со8а ^Гс„/Гр - ц
1-(со8а±ц81па)^Гсч/7р
(1.1.47)
При выборе оптимального угла давления
учитывается вероятный режим работы машины
и конструктивные формы гусеничного
движителя. Для этого используют диаграмму
зацепления (рис. 1.1.17) - зависимости отношения
Тс д/Гр от угла 9 давления и силы Р^ тяги, а
также силы тяги от массы во всем диапазоне
значений коэффициента сопротивлению
движению (от /т = 0,04 до У|/т = 0,7).
Рис. 1.1.16. Силы, действующие
в I
Тсв/Тр
7&У?<*
е.кн
Рис. 1.1.17. Диаграмма зацепления:
1 - скольжение цевки к основанию зуба;
2 - скольжение к вершине; 3, 4 - движитель с
передним расположением ведущего колеса и Тс = 2 кН;
5 - движитель с задним расположением ведущего
колеса, Тс = 5 кН; — - без крюковой
нагрузки; с прицепом
Наиболее устойчивую работу и меньшее
скольжение контактирующих элементов
обеспечивает, так называемое, зацепление с
подпором, когда часть силы тяги Рвк^оп) помимо
зубьев передается опорными элементами
ведущего колеса:
36
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
Р =Т
'нк(оп) 1св
' а . а х
С08 Ц81П —
2 2
а а
С08— + Ц81П —
2 • 2/
-1
(1.1.48)
Из (1.1.48) следует, что сила тяги,
передаваемая опорными элементами, прямо
пропорциональна силе, действующей в свободной
ветви, т.е. эффективность подпора выше в
случае заднего расположения ведущего колеса
и снижается с ростом силы тяги.
Помимо нагрузок, обусловленных
передачей силы тяги, при входе каждого звена в
зацепление происходит удар вследствие
мгновенного изменения скорости заднего (по ходу
ветви) шарнира 'звена. Если продольная
составляющая скорости Упр = (йЯш со&0,5а ,
то поперечная скачком возрастает на величину
Ууд = соЛщ 8Ш 0,5а (Дц - радиус
расположения центров шарниров на ведущем колесе).
Ударная нагрузка Руд действует
перпендикулярно к оси звена:
у . а
Р =— 8Ш-
'о 2
к1 +
К-1)2
г\ы
- +
прт
,3 . 2
(1.1.49)
где / - момент инерции звена (трака)
относительно оси шарнира; Ку - коэффициент,
учитывающий поперечные перемещения траков,
входящих в зацепление; для тракторов
Ку = 1,7 + 1,9 для быстроходных машин
Ку = - 1,1 + 1,3; Кд - жесткость упругого
элемента ведущего колеса; /прт и ^прд -
приведенные моменты инерции
соответственно трака и зуба; Н3 - расстояние от точки
приложения силы удара до основания зуба.
Как следует из (1.1.49), введение
упругого (демпфирующего) элемента жесткостью К
существенно снижает ударные нагрузки. При
этом, чем меньше жесткость упругого
элемента, тем ниже ударные нагрузки.
Значительные нагрузки возникают и при
взаимодействии опорных катков с гусеничной
цепью. Схема сил, действующих на гусеницу и
каток, показана на рис. 1.1.18. Здесь тп\ -
масса наружного металлического бандажа (в
случае внутренней амортизации катка), Ш2 -
масса остальной части катка, К , Кк и ур, ук -
коэффициенты соответственно жесткости и
демпфирования подвески и резинового эле-
. мента катка. Для катков с наружной
амортизацией т^ = 0, а для катков без резиновой
амортизации Кк =^к =0. Нагрузка под
катком (сила Рс) представляет сумму весовой
нагрузки (без веса части опорной ветви
гусеницы), т.е.
Рс=/,с'+е1=рс' + е1+о2,
где 0\ и Сг1 - вес масс Ш\ и т^
Сила Р - динамическая составляющая
нагрузки, возникающая в результате
взаимодействия опорного катка и гусеницы. В
контакте с катком действует суммарная сила
Рс + Р . Остальные составляющие: Рт\, Рт2 -
силы инерции масс соответственно т\ и т%
Рр - сила от сжатия упругого элемента
подвески ^о ±ф(// ~УК +Ут> ^к -
восстанавливающая сила при деформации резинового
элемента катка (ут -ук)', Ру - сила вязкого
сопротивления резины; Р^ - сшга
сопротивления амортизатора.
Динамическая составляющая Рд
находится из решения уравнений динамического
равновесия масс Ш\ и тп2- В простейшем
случае, когда корпус не колеблется
(*0 =Фо=°)>
т2Ук+КрУк+Кк(Ут-Ук)-
-*к{Ут-Ук)+*рук = 0;
™\Ут + Кк(Ук - Ут) + ук (Ук " Ут) -Рд=0'
(1.1.50)
(
\Рс\0г \Рт\Рп\
уфу *
к \рР к
и \рд
Рис. 1.1.18. Схема сил, действующих на гусеницу
и опорный кяток
ПОВОРОТ КОЛЕСНОЙ МАШИНЫ
37
Из первого уравнения системы находится
ук по задаваемому значению ут> а из второго -
динамическая составляющая Р . При
периодически повторяющихся перемещениях катка,
когда перепад высоты беговой дорожки
гусеницы Ан, сила
3 2
Ра = -Ч; С08
'О 'О
у_А.7СУ . 2тсу/ К„к, 2яу/
*-** 81П +—*-^*-С08 +
2укАня у
пг210
КкИи] (2ю1 )
- * н со8 а
2т2 ) К /п )
1П~
2*уУ
/о )
+ А\{
2*уУ
к)
2\>КККН„т . (2ху1
+ —*—*-=— 8Ш а
/и2/0 V /о '
(1.1.51)
Как следует из (1.1.51) величину Р
определяют, главным образом, первый и
четвертый члены выражения. При этом первый
растет пропорционально квадрату скорости, а
четвертый достигает максимума при
резонансной скорости
2тс V пи
Для катков без внутренней амортизации,
т.е. имеющих наружный резиновый бандаж,
выражение для Р отличается от (1.1.51) тем,
что в нем отсутствует первый член.
Поскольку у быстроходных гусеничных
машин наибольшее распространение получили
катки с наружной резиновой амортизацией,
для них необходимо обеспечить такие режимы
работы и параметры демпфирования подвески,
при которых величина четвертого члена
выражения (1.1.51) минимальная. Для катков с
внутренней амортизацией или при ее
отсутствии (тракторы) желательно уменьшение
первого члена, что в основном достигается
ровностью беговой дорожки, т.е. уменьшением
величины Ан.
В некоторых случаях не удается
обеспечить непрерывность беговой дорожки, каток
перекатывается по ней с периодическими
отрывами и происходит соударение катка общей
массой тк с каждым траком опорной ветви
при скорости Ууд.
Сила удара
Р =\
УД УД 1
(1.1.52)
где К1п р - приведенная жесткость звена
гусеницы; /„ - коэффициент, учитывающий
перемещение катка при ударе; Ку - коэффициент,
учитывающий место удара и зависящий от
размеров трака. При установке амортизаторов
коэффициент /у, растет и сила удара
уменьшается.
Рассмотренные случаи хотя и не
исчерпывают всей совокупности динамических
нагрузок, возникающих в элементах гусеничного
движителя, но вместе с тем позволяют
получить достаточно объективную оценку того или
иного элемента и исходя из этого обоснованно
по^йти к выбору параметров движителя.
1.1.5. ПОВОРОТ КОЛЕСНОЙ МАШИНЫ
Независимо от типа схемы и компоновки
колесной машины ее поворот осуществляется
поворотом колес, осей или звеньев машины
(кинематический способ) или изменением
скоростей колес (силовой способ). В
некоторых машинах для поворота используют
одновременно оба способа (комбинированный
способ поворота).
Независимо от способа поворота любой
колесной машины в связи с боковым уводом
колес координаты мгновенного центра
поворота зависят не только от задающего
параметра системы управления, но и от
конструктивных и эксплуатационных факторов, т.е. не
могут быть постоянными величинами. Это
свойство колесных машин называется повора-
чиваемостью; она обычно ухудшает
управляемость, устойчивость движения и
маневренность колесной машины, но для разных
машин в различной степени.
В общем виде при неголономной связи
колес с дорогой кинематические уравнения
для мгновенного центра поворота можно
выразить двумя дифференциальными
уравнениями:
К =а-Ыс+сСК;
Р = с1-еС-/ I К-аС I К-сС2,
(1.1.53)
38
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
где К = 1 / Я - кривизна траектории: а, Ь, с,
(1, е, / - коэффициенты, зависящие от
задающего параметра, геометрических и весовых
параметров машины и параметров,
характеризующих условия движения.
При установившемся движении (К =
= С = V = 0) дифференциальные уравнения
превращаются в алгеброичческие:
к^ ь-сс с^ а-/ь/а
а е + Ь-/сI а
(1.1.54)
Знак коэффициента С определяет пово-
рачиваемость колесной машины. При С = 0
кривизна не зависит от скорости движения
машины - нейтральная поворачиваемость, при
С > 0 повышение скорости вызывает
увеличение кривизны - избыточная поворачиваемость,
при С < 0 кривизна е увеличением скорости
уменьшается - недостаточная
поворачиваемость.
Простейшей компоновочной схемой
машины с принудительным изменением
направления скоростей движения колес является
двухосная с передними управляемыми
колесами (рис. 1.1.19). Основным задающим
параметром этой машины является средний угол 8
поворота управляемых колес. При
установившемся повороте (0 = соп51, V = сопят) на
машину действуют следующие силы и
моменты, приведенные к точкам 1 и 2 (продольной
2 2
оси): Ру1 =0,5/я1у1; Ру2 =0,5т2У2 -
центробежные силы; Ру1 = Ку1ду'9 Ру2 = Ку2&2 "
боковые реакции колес ( Ку1; Ку2 -
коэффициенты сопротивления боковому уводу,
5р 52 - углы увода середины осей);
Ях1 = /С}; КХ2 = Рт/&2 ' касательные
реакции колес; Мс - момент сопротивления
повороту. При повороте машины на недеформи-
руемом грунте и при 0 < 15° в первом
приближении можно принять следующие
допущения: Ях = К2 = Я; \х =\2 = у; Мс = 0;
Ру1 = Яу2; Ру2 = Яу2; Ях1 = Ях2 * 0. При
этом уравнения (1.1.54) принимают
следующий вид:
* = (^2*пв)/е;С = тв2у2Ду2,
(1.1.55)
где ь - база машины; Кп в = —— — -
^у2 ^у1
коэффициент поворачиваемости.
Рис. 1.1.19. Схемж сил и моментов, действующих
нж двухосную колесную машину с управляемыми
колесами при установившемся повороте
Радиус поворота зависит не только от
задающего параметра 0, но и от скорости
движения V и коэффициента КТ1Ь. При Кп в > 0 с
повышением "V радиус Я уменьшится, угловая
скорость со = V / Я увеличивается, машина
обладает избыточной поворачиваемостью. При
Кпъ > 0 с ростом V Я увеличивается, ©
уменьшается, машина имеет недостаточную
поворачиваемость. При Кп в = 0 величины К,
Я, со не зависят от скорости, машина обладает
нейтральной поворачиваемостью.
Коэффициенты Ку^ и Ку2 , входящие
в выражение для Кпв> зависят от многих
факторов и режима движения машины, что
приводит к непрерывному изменению степени
поворачиваемости в процессе движения, а
также затрудняет управление машиной. При
скорости V ю = д/Х / Кпъ наступает потеря
курсовой устойчивости (уменьшение радиуса
поворота, под действием любого возмущения).
Этим свойством при V > ук обладают
только машины с избыточной
поворачиваемостью. Поэтому при проектировании
стремятся, чтобы машина обладала небольшой
недостаточной поворачиваемостью или по
крайней мере необходимо обеспечить, чтобы
V < V
у ткрш*
При повороте машины с невысокой
скоростью, но с большими значениями 0, что
соответствует условиям проявления
маневренности, при расчете поворота принимаются
другие допущения (у « 0; Ру1 -= Ру2 = 01.
При повороте на недеформируемом грунте
[Мс =0) Я = Ь/1§0; С = 0 и эти
показатели практически не зависят от других
конструктивных и эксплуатационных факторов.
ПОВОРОТ КОЛЕСНОЙ МАШИНЫ
39
На деформируемом грунте (Мс > 0\
величины Я и С зависят от сопротивления движению
(/*и Мс) и конструктивных особенностей
машины (в частности, от схемы трансмиссии).
Увеличение / ухудшает кинематические и
динамические параметры поворота, причем
последние ограничивают первые, поэтому
оценивать поворотливость машины только по
радиусу поворота Д полученному для условий
недеформируемого грунта, неправомерно, тем
более, что степень ухудшения
кинематических параметров с ростом / относительно
невелика (8 ... 10 %). В то же время поворот
машины для любых вариантов трансмиссии
сопровождается ростом сопротивления
движению на 25 ... 30 %. Различие в приводах к
колесам и внешних условий особенно
сказывается на условиях контакта ведущих колес с
дорогой, которые могут ограничивать радиус
поворота. Наихудшей маневренностью
обладает машина с блокированной связью колес,
наилучшей - с диф4>еренциальной связью.
Среди конструктивных параметров
наибольшее влияние на радиус поворота
оказывают угол 6 поворота управляемых колес и
база Ь. Зависимости Л = /(0) я Я = /(Ь) в
пределах их практически возможного
изменения имеют характер близкий к линейному,
однако интенсивность изменения Я от Ь
несколько больше. С другой стороны,
уменьшение Ь, хотя и увеличивает силы,
действующие в контактах колес с грунтом, но в гораздо
меньшей степени, чем увеличение 6. Поэтому,
если при проектировании возникает
необходимость уменьшения минимального радиуса
поворота, то целесообразнее уменьшать Ь чем
увеличивать 9.
Кроме того, маневренность может быть
улучшена следующим образом:
доворотом переднего забегающего колеса
(переход от рулевой трапеции к
параллелограмму), что эффективно только при
выключенном приводе к передним колесам (Я
уменьшается на 8 ... 10 %);
отключением привода к одному из
передних колес с дальнейшим его подтормажи-
ванием, что не приводит к существенному
изменению и значительно увеличивает силы,
действующие в контакте колес с грунтом при
повороте;
выполнение всех колес управляемыми.
При равенстве средних углов поворота
передних и задних колес и при Мс = 0 радиус
поворота сокращается в 2 раза
Л = 0,5 X / 1§Э; это наиболее эфо>ективный
способ улучшения маневренности. Однако при
использовании этого мероприятия следует
учитывать, что при входе в поворот на
высокой скорости движения нарушается
устойчивость, что исключается отключением привода
управления задних управляемых колес и
блокированием их в положении прямолинейного
движения.
Рис. 1.1.20. Схемж сил, действующих ш автопоезд
при установившемся повороте
Влияние прицепа на поворачиваемость
двухосной колесной машины с передними
управляемыми колесами выявляется при
рассмотрении схемы установившегося поворота
автопоезда, состоящего из автомобиля-тягача и
двухосного полуприцепа (рис. 1.1.20).
Действие прицепа на тягач при повороте
выражается в виде двух реакций Я^ у и Я у п,
приложенных у середине второй оси тягача
(возможным смещением седельно-сцепного
устройства пренебрегают). При принятых
выше допущениях (см. рис. 1.1.19) эти реакции
(при дополнительном упрощении
Лу1 =-** у2 = =^уЗ =у4 = -**у)
12К
/пАу р _р
*П*-*(2ХП-/П)' Л/п"'/"
Угол складывания, определяющий
направление действия этих реакций,
ссг = агс1в — у
Я
где Сп = — - смещение полюса
поворота прицепа.
Радиус поворота
I 21,,-/п )/
(1.1.56)
40
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
Рис. 1.1.21. Схема сил н моментов,
действующих на двухосную сочлененную
колесную машину при установившемся повороте
Сопоставление формул (1.1.55) и (1.1.56)
показывает, что наличие прицепа уменьшает
радиус поворота автопоезда по сравнению с
одиночным автомобилем-тягачом, а действие
его несколько увеличивает избыточную пово-
рачиваемость автопоезда и тем самым снижает
критическую скорость по курсовой
устойчивости Укро) т.е. оказывает неблагоприятное
влияние на управляемость и устойчивость.
На рис. 1.1.21 показана компоновочная
схема шарнирно-сочлененной машины с
принудительным изменением направления
скоростей двух звеньев. Машина состоит из дух
тележек, соединенных с помощью шарнира, и
поворачивающихся между собой в двух (трех)
плоскостях. Управляемый поворот
осуществляется в горизонтальной плоскости и
вызывает криволинейное движение машины.
Задающим параметром является угол 6 между
продольными осями тележек. Тележки могут
быть двухосными. На схеме показаны силы и
моменты, действующие на машину при
установившемся повороте, приведенные к
серединам осей. При принятии тех же допущений,
что и при анализе схемы рис. 1.1.19, формулы,
определяющие положение -центра поворота
аналогичны (1.1.56), с учетом того, что
Ьп = 1\ + /2 • Поскольку параметры 1\ и /2 не
входят в (1.1.56), можно утверждать, что
положение шарнира на продольной оси машины
не влияет на ее установившийся поворот, а
признаки поворачиваемости являются
аналогичными для обычной двухосной машины с
управляемыми колесами, так же как и
формула критической скорости Ук .
При неустановившемся повороте
сочлененной машины (при входе в поворот)
возникает неблагоприятное явление перемены
направления боковой силы на колесах задней
тележки (аналогично как у колесной машины
с задними управляемыми колесами), что
приводит к нарушению устойчивости движения и
ухудшению управляемости. Значимость этого
отрицательного явления зависит от положения
шарнира (от соотношения ^/(^ +М)> сни"
жается при уменьшении 1\> исключается при
/^ = 0, т.е. при расположении шарнира в
середине оси переней тележки.
Положение шарнира оказывает влияние
на показатели маневренности (V « 0,
9 = вдад). При поворотной ширине (Вп =
= Я13 - /?2о) симметричная схема (/1==/2)
наиболее целесообразна, однако на остальные
показатели положение шарнира влияет
незначительно. Столь же несущественно влияние
соотношения масс тележек (в пределах реально
возможного соотношения).
При складывании машины на месте
(расчетный режим системы управления)
момент складывания каждой тележки
определяется сопротивлением двух движений:
поворота вокруг полюса поворота и подкатывания
в направлении к шарниру (Ми 1 = Мс 1 +•
+1{Рг{1^в/ 2). При неравенстве моментов
расчетным является меньшее значение. При
этом одна из тележек не подкатывается, а
только поворачивается вокруг своего полюса
поворота. При равных массах подкатывается
тележка, у которой плечо //Меньше, а при
равных // - тележка с меньшей массой.
По нагрузке на двигатель при повороте
сочлененные машины при прочих равных
условиях равноценны обычным колесным
машинам с управляемыми колесами, поэтому
ограничение параметров поворота этих машин
располагаемой мощностью маловероятно. При
дифференциальной связи осей, обязательной
по условиям складывания, силы действующие
в контактах всех ведущих колес с грунтом
практически одинаковы. Общими
недостатками способа поворота колесных машин с
принудительным изменением направления
скоростей движения звеньев и особенно колес
являются:
трудность обеспечения малого радиуса
поворота;
относительная сложность привода
управления при числе управляемых колес больше
двух;
уменьшение полезного объема машины
для создания в корпусе машины ниш,
необходимых для размещения управляемых колес
при повороте.
Эти недостатки становятся особенно
существенными для колес большого размера (для
машин высокой проходимости). Поворот
машины с принудительным изменением скоро-
ПОВОРОТ КОЛЕСНОЙ МАШИНЫ
41
стей колес позволяет практически устранить
перечисленные выше недостатки.
Основным задающим параметром
системы управления машиной с неповортными
колесами является величина (1 - /)/(1 -I- /')
(/ - передаточное число механизма поворота,
равное отношению угловой скорости колес
отстающего борта к угловой скорости
забегающих). На рис. 1.1.22 приведена схема
двухосной машины с неповоротными колесами
(число осей может быть больше двух). В
рабочем (наиболее используемом) диапазоне
изменения кривизны (движение по дорогам общего
назначения) колесная машина с неповортными
колесами преодолевает криволинейные
участки дороги за счет использования
бокового увода колес. На рис. 1.1.22 показана схема
машины и действующие силы и моменты при
установившемся повороте (К = С = 0).
Координаты центра поворота определятся
следующими формулами:
^уп^ув
Аул 4- Ауд
+ В
'0
2В
г0 1 - /
с^ь—Ьи.
тч
^уп + ^ув ^ул + ^ув
(1.1.57)
где г§ - свободный радиус колеса; К^ -
коэффициент жесткости колеса.
Рис. 1.1.22. Схема сил ■ моментов, действующих
нж двухосную колесную машину с неповоротными
колесами при установившемся повороте
Смещение полюса поворота не зависит
от основного задающего параметра
регулирования (1 - /) / (1 + /'), что справедливо для
рассмотренных выше схем и способов
поворота. Наличие третьего члена в числителе первой
формулы (1.1.57) свидетельствует, что машина
с неповоротными колесами так же обладает
свойством поворачиваемости с теми же
признаками, что и машины предыдущих схем.
Совпадение признаков поворачиваемости
позволяет считать, что прямолинейное движение
машины с неповоротными колесами
устойчиво при любых скоростях, если машина
обладает недостаточной или нейтральной поворачи-
ваемостью, а при избыточной
поворачиваемости - до скорости равной критической
\Ь А'упА'ув + В ——^уп + Куъ)
' крсо
Х^в^уп -Шп^Гув)
Критическая скорость колесной машины
с неповоротными колесами всегда выше при
прочих равных условиях, чем у машин с
управляемыми колесами, и такая машина
более устойчива и управляема. Критическая
скорость колесной машины с неповоротными
колесами примерно совпадает с критической
скоростью обычной двухосной колесной
машиной, у которой база численно равна сумме
базы и ширины колеи машины с
неповоротными колесами.
При некотором определенном значении
задающего параметра (передаточного числа
механизма поворота) колеса машины
переходят в режим полного скольжения, причем
кол-ва забегающего борта буксуют, а колеса
отстающего борта имеют юз. Блокированная
связь колес одного борта обеспечивает
равенство их угловых скоростей, а следовательно,
окружных скоростей.
Координаты центра поворота машины
при этих условиях выражаются следующими
формулами:
I
Д=0,5Д—+-
С =
1-/ (вРп+ЪРи
Ь
1 + цГРпЛвРв'
(1.1.58)
где рп =
= агс&ш
0,51
1 + -
^о)
1 + АГ,
42
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
Рв =агс8ш^8трп; К0 =
т^
/я„
коэффициент развесовки; К^ = Ь / В -
коэффициент базы.
В формуле (1.1.58) действительного
радиуса поворота первое слагаемое совпадает с
известным выражением зависимости
теоретического радиуса поворота гусеничной машины
от передаточного числа механизма поворота, а
второе слагаемое отражает влияние
продольного скольжения колес на величину радиуса
поворота. Выражения (1.1.58) справедливы при
соблюдении неравенства
К1ъ±
[к1-1)/2К0
Если неравенство не выполняется, то
смещение полюса поворота отсутствует (С = 0) либо
оно равно базе машины (С = Ь).
Минимальный радиус поворота зависит
от передаточного числа коробки передач и
ограничен удельной мощностью машины:
Яп
= К
I
1
*вРп +*Р,
Яо/^1
N
0,2 — -/у.
ф Ка С08РП + С08рв
где ц% =0,5 * 3 2- - динами-
/
1+Кг.
ческий параметр; У, = Утах - на /-й передаче,
км/ч; Л^//Яд - удельная мощность машины
кВт/т.
Из анализа выведенных формул следует, что
уменьшение К^ и увеличение Кд
благоприятно влияют на показатели поворота, причем
увеличение Ас в значительно меньшей степе-
1.1.6. ПОВОРОТ ГУСЕНИЧНОЙ МАШИНЫ
Поворот гусеничной машины
осуществляется за счет разностей скоростей У2
забегающей и Ух отстающей гусениц (рис.
1.1.23). Под скоростью гусеницы будем
понимать скорость центра гусеничного обвода. В
зависимости от типа механизма возможны
случаи, определяемые скоростью Уп
прямолинейного движения до поворота:
!) упР =ус; 2) упр=у2; з) упр>у2.
Этим определяется величина /к
кинематического фактора поворота.
Угловая скорость поворота
(0=у1/Л1=у2/Л2=(у2-у1)/2?,
а радиус поворота
Л=ус/ш.
Для произвольной точки А справедливы
соотношения ух = ъВ\\\2 = ® гиуА ~ ®Яа »
т.е. при отсутствии скольжения и буксования
гусениц центры их поворота совпадают с
геометрическими центрами 0\ и 02 опорных
поверхностей, - полюсами поворота гусениц.
В реальных условиях всегда имеет место
скольжение или буксование гусениц, и
скорости забегающей и отстающей гусениц (рис.
1.1.24) определяются выражениями у'2 =
= у2(1 - а); у^ = ух(1 - а) . Это приводит к
увеличению радиуса поворота в 1,3 - 1,8 раза в
зависимости от коэффициента буксования а и
соотношения Ь / В.
Рис. 1.1.23. Кинематика идеального поворота
ПОВОРОТ ГУСЕНИЧНОЙ МАШИНЫ
43
Рис. 1.1.24. Схема скоростей
Угловая скорость поворота при
скольжении или буксовании гусениц
ф' = у'2/в:2=(у'2-у'1)/В.
Поскольку точки 02 и ^1 перемещают
со скоростями уабс=у2~у2 и
уаб с= у2 ~у2 ~у\> полюсы поворота
гусениц смещаются: на величину у^ У буксующей
гусеницы в сторону, противоположную центру
поворота, на величину у\ у скользящей
гусеницы в сторону центра поворота. При этом
У2&6с/У2 = у1а6с/У\1
у2 =ау2/ш'; ух =ау1/й'.
Следует заметить, что при больших
нагрузках на крюке внутренняя гусеница тоже
может буксовать и полюс поворота у нее
смещается не вовнутрь, а от центра поворота О',
но при этом У1аб с^ У2аб с-
При повороте происходит сложное
перемещение гусениц по грунту. Одновременно с
перекатыванием в направлении движения они
поворачиваются в горизонтальной плоскости
вокруг полюсов поворота. Спереди и сзади
полюсов поворота возникают поперечные
реакции грунта, направленные противоположно
перемещению, что связано с трением опорных
ветвей о грунт, срезом грунта грунтозацепами
траков и сдвигом срезанных слоев грунта в
сторону. Поперечные реакции грунта и
момент сопротивления повороту определдакЖ*
распределением давления д под опорными
ветвями гусениц и коэффициентом ц
пропорциональности между вертикальными и боко
выми нагрузками.
Для некоторых других слоев
симметричного относительно центра опорной поверх-
при повороте с буксованием
ности распределения давления по длине
опорной поверхности значения момента
сопротивления повороту приведены в табл. 1.1.13.
Значения коэффициента ц зависят от
свойств опорной поверхности (грунта) и
радиуса поворота. При минимальном радиусе
поворота коэффициент ц имеет максимальное
значение, с увеличением радиуса поворота он
уменьшается. Максимальные значения \лтах
при повороте с полностью заторможенной
гусеницей для различных грунтов приведены
ниже.
Снежная целина 0,6 ... 0,7
Сухая грунтовая дорога 0,7 ... 0,9
Сухой задрененный грунт
(&< 8 %) 0,8 ... 1
Сухой песок 0,8 ... 0,9
Болото (торфяник) 0,85 ... 0,9
Влажный суглинок (IV ^ 20 %) 0,3 ... 0,5
Для определения коэффициента ц на
других радиусах может быть рекомендована
формула [30, 40]
ц = !Ьй« . (1.1.59)
0,85+0,15Я2 /В
При действии на маши!гу внешних ^ил
или распределении' вертикальных давлений
несимметрично относительно центра опорной
поверхности полюсы поворота гусениц сме
щаются в продольном направлении на вели
чину х> называемую смещением полюса
поворота. Смещение происходит вследствие того,
что поперечные реакции распределяются а-
ким образом, что сумма всех боковых сил рл«
на нулю. Смещение полюса поворота приь*>
дит к изменению момента сопротивления *,,
вороту, который определяется выражением
Мс = цС> ЬА /4. (1.1 Щ
44
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
1.1.13. Момент сопротивления повороту
Эпюра давлений
|*г
«—й—а.
\0г
^г
[1ЩЩЩЭ
,^/г
Эпюра
касательных сил
1/2.
тпт^
- к
■^ >
[1111^
'ГТу! II у
*/?
щзззз
Ш^
//?
^Ч^* */1
Момент
сопротивления
повороту Мс
Ц^Х/4
ц6тЬ/6
Ц^/3
Поправочный коэффициент К зависит от
относительного смещения центра давления
х0 = 2х / Ь (х - абсолютное смещение центра
давления), относительного смещения полюса
поворота Хо = ^Х / Ь и отношения %оу =
= Рб Дц<7т п (Рб - боковая сила). В общем
случае соотношение между величинами Хо, Хо
и %оу определяется уравнением [11]
Зх0Х2 + 2*0 - 3*0 = 2Хоу, (1.1.61)
а поправочный коэффициент к моменту
сопротивления повороту - выражением
*=(1+Хо)(1+*0Хо)-4*оХо- (1-1-62)
В частном случае при отсутствии
смещения центра давления
* = 1+Хо=1+4Х2А2-
ц<7тХ/(4-6) Лср
Рис. 1.1.25. Схема поворота машины с прицепом
Относительное смещение центра
давления находится при рассмотрении конкретных
режимов движения машины. Наиболее общим
является случай движения гусеничной машины
при наличии силы тяги на крюке (прицепа)
Лг« (рис. 1.1.25). При действии нагрузки и на
крюке центр давления смещается в
продольном направлении на величину х,ав
поперечном на величину у:
х = Ркрсо8укр/(?т;
У=ЬкрЪр*ыукр/От.
Момент сопротивления повороту
преодолевается созданием соответствующих сил
тяги Р\ и 1*1- ПРИ этом с учетом преодоления
сил сопротивления качению Ру\ и Р^2
р-м° р ■
Р2=^-'-
(1.1.63)
Коэффициент сопротивления качению
при повороте больше, чем при
прямолинейном движении (на некоторых грунтах иногда в
2 раза), но тем не менее, как правило, на
подавляющем большинстве радиусов поворота
—*— »0,5/тС!т,
4В
где /'т - коэффициент сопротивления качению
при повороте.
Поэтому сила тяги на отстающей
гусенице отрицательная, т.е. является тормозной
силой. Сила тяги Р2 на забегающей гусенице
при повороте значительно больше, чем при
прямолинейном движении, и может достигать
предельного значения по сцеплению чаще, чем
при прямолинейном движении. В связи с
этим поворот машины происходит только
КОЛЕБАНИЯ МАШИНЫ
45
тогда, когда сила Р2 меньше силы сцепления
гусеницы с грунтом, т.е. выполняется условие
Р2 <0,5фС/т.
Используя выражение для силы Р2 и
полагая Р*ч = Р*2 = 0,5 /тОт из уравнения
(1.1.63), получаем
0,5/т'<7т +±-»втЬК < срт<7т.
Откуда
*1/2?<2(Фт-/т')/ц. (1.1.64)
Это условие определяет предельное
отношение по сцеплению при повороте. Если
отношение Ь / В больше полученного по
(1.1.64), то поворот машины невозможен.
Таким образом, отношение Ь / В определяет не
только момент сопротивления повороту* но и
возможность совершения поворота.
Вследствие того, что коэффициент \х
зависит от радиуса поворота, условия поворота
по сцеплению забегающей гусеницы с грунтом
также зависят от этого параметра. Чем меньше
коэффициент |л, т.е. чем больше радиус
поворота, тем при меньшем коэффициенте
сцепления ф обеспечивается поворот. Вот почему на
грунтах с малыми коэффициентами сцепления
гусеничные машины теряют проходимость при
крутых поворотах и преодолевают более
успешно трудно проходимые участки при
поворотах с большими радиусами. Наилучшая
проходимость обеспечивается при
прямолинейном движении. В этом случае ц = 0 и
необходимая сила тяги на забегающей гусенице
(она уже начинает двигаться с такой же
скоростью, так и отстающая) минимальная. При
повороте машины условие возможности
движения по сцеплению фт > |л//(22?) + /т', а
при прямолинейном движении
Фт > /т = /т • Прямолинейное движение
обеспечивается при значительно меньшем
коэффициенте сцепления ф, чем
криволинейное.
Смещение полюса поворота при
действии боковой силы приводит к
увеличению момента сопротивления повороту, а при
больших значениях % - к потере
управляемости. Обычно для быстроходных машин, у
которых возникают большие нагрузки от
центробежных сил (рис. 1.1.26)
Су2
Р„=^-В-. (1-1.65)
«Л
Рис. 1.1.26. Силы, действующие на машину
при повороте
Смещение полюса поворота при этом
(*0 ж°)
2\1вт %К 2\хв1 2\цК
Если смещение достигает значения
X = 0,5/, т.е. полюс поворота выходит за
пределы опорной поверхности, то устойчивость
движения теряется, так как полностью
реализуется сцепление гусеницы с грунтом.
Критическая скорость по заносу
Ужр=7Йё«. (1.1.66)
Значения ц в этом случае близки к
значениям коэффициента сцепления в
поперечной плоскости.
1.1.7. КОЛЕБАНИЯ МАШИНЫ
При движении по неровной опорной
поверхности происходят вынужденные колебания
подрессоренной и неподрессоренных частей
(масс) машины. В общем случае движение
подрессоренной части можно разложить по
трем координатным осям (и вращениям вокруг
них), т.е. подрессоренная часть имеет шесть
степеней свободы. Наиболее существенными и
определяющими плавность хода машины
являются вертикальные, продольные,
продольно-угловые, поперечные и поперечно-угловые
колебания подрессоренной массы, в результате
которых возникают вертикальные I ,
продольные х , и поперечные у виброускорения.
Неподрессоренные части (колеса, опорные
катки) перемещаются в основном в
вертикальном направлении. Перемещения по другим
направлениям незначительны.
46
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
!Ш
1
ш
ш
Тнкп(л)\
Рис. 1.1.27. Расчетная схема колебаний колесной машины в плоскости:
а - продольной; б - поперечной
^ф^'-Шж
"I жш—щ -т-Щ—2-ф—I 1-
-ТР'АЮЖ
0,5В
«—»■
-«—и
«
Рис. 1.1.28. Расчетная схема колебаний гусеничной машины в плоскости:
а - продольной;- б - поперечной;
Расчетные схемы колебаний колесной и При этом между перемещениями колес
гусеничной машин показаны на рис. 1.1.27 и левой и правой стороны при зависимой под-
1.1.28. веске колес существует связь
Характер и параметры колебаний
колесной машины определяются следующими де- гм =®МЯ(ц +^/п +^/л +^/л) =
формациями и их скоростями: ' '
упругих элементов подвесок колес
правой (Арп) и левой (Арл) сторон -
Арп (л)/ = §/ п (л) - * - 0// " °>5Ч/ПД;
шин Аш/П и Аш/Л -
Дш / п (л) = Я1 п (л) ~ ^/ п (л)-
В результате деформаций возникают си-
между подрессоренной массой и колеса-
КОЛЕБАНИЯ МАШИНЫ
47
р _ V /к _ ^ _ А/ _ л ^ш «V После подстановки выражений (1.1.67) -
^а/ "ла/\ь/ * *Н ^УцЛ), (1.1.69) в (1.1.9) получается система диффе-
между колесами и опорной поверх- ренциальных уравнений:
ностью
Р -С (а -IV Р -К (а -М тт1* + ^Къ№ + 2Ъ11-^1ъ -^1*) +
/-1
п
где С { - приведенная к колесу жесткость
упругого элемента подвески; Сш / - радиаль- 2^ Р'\ /~^/п""^/л^~ >
нал жесткость шины; К&1 - приведенный к
колесу коэффициент сопротивления амортиза- , йх^]?' /?* ЭА/ - ? -Г- \\
тора; Кш1 - коэффициент демпфирования У ^ а/\ ' /п /л/ '
1ш
шины; ^^ - функция, характеризующая
неровность дороги.
/-1
п
Для расчетной схемы, представленной на +2^ Р'\ + 26/, <;/п ъ/л)'/ ~ Ф
рис. 1.1.27, с обобщенными координатами 2, /-1
6, \|/п ^ и ^/, отсчитываемыми от положения л
статического равновесия, функции, подстав- /х\^п + 0,52? V КйА^п ~4/п ~"4/л) +
ляемые в уравнение Лагранжа, следующие: м
кинетическая энергия
Т=-(тУ + // + /ху* +/мум + чО,52?^СрДч/п2?Н,п + *,л) = 0;
2Ч /«1
2Л '"" ^ (1167) 0,5^,+2^,)^+^)^
/=1 /-1
потенциальная энергия
Ч2
+*ш/(0/п+0<л-4/п-4,л) +
я = 2ср/(5,-г-в/,-о^пл)2+ ;
'=1 +Сш/(?/п+0/л-$/п -^/л) +
+ЕСш/(9/-^)2; /П(Л) = М; +Ср,(2г+26/, -4,п-*,л) = 0, /=М;
(1.1.68*
"Г /ы|(«/п+МЛ"
функция рассеивания
п
Ф -Х|*.,(«, -*-6/, -0,5^^ + +*ш,(4,п -«,. -*|Б + *„)-
+*ш/(^-5/) 'п(л) = 1»л; V ' _
(1169) -М*п*+*'п+МИ /=1'я-
(1.1.70)
где 2Ттк, + У тм, + т = <?п /д, Сиетема <*•1Л0) вместе с Уравнениями
^—' к' ^ м / п п / -* > связи составляет пространственную математи-
**1 '=1 ческую модель колебаний колесной машины.
/ = 1,л. Анализ пространственной моделклредставляет
п(л) ' значительные трудности, особенно если
Обобщенные силы при выбранных об- учесть, что коэффициенты жесткости и демп-
общенных координатах вследствие динамиче- фирования нелинейные, а 9/ - случайная
ского равновесия подсистем равны нулю. функцИя. ца практике часто используют моде-
48
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
ли с рядом допущений, что обеспечивает
получение результатов для плоского движения,
приближающихся к действительным. Так, для
трехосной колесной машины с балансирной
задней тележкой математическая модель
колебаний в продольной плоскости имеет вид:
тпх. + 2#а1(г - 4, - 4в) + 2ср1(г - 5, - /хе) +
+2*а2[г - 0,5 (42 + §3) - 0,5 (/2 - /3)б] +
+2ср2[г - 0,5 (§2 + §3) - 0,5 (/2 - /3)в] = 0;
/,ё + 2ЛГв1/,[* - §! - 0,5(12 + /3)в] +
+2ср1/1[г-$1-0,5(/2+/з)е] +
+*а2 ('2 + /3 )[г " 0^ (42 + 43 ) " 04 (/2 - /3 )ё] +
+^р2 ('2 + 'з)[* - 0>5(42 + ^з) - 0^(/2 - /3)б] = 0;
1Як151 +21Г.1(г-§1-/16)-
-2ср1(г-§1-/1в) + 2сш1(§1-в1)=0;
0,5(тп2+т3)(42 +1з)~
-2(*а2 + *а3)[г - 0,56(/2 - /3) - 0,5 (42 + 4з)] -
+2ср2(3)[г-о,5(42 +43)-о,5е(/2 -/3)] +
сш2(3)(^2+^3-?2-?з)=0;
/бёб+0,5тк242(/3-/2) +
+0,5тк343(/3-/2) +
4<).5сш2(3)(52-?2)(/3-/2) +
^.5сш2(3)(43-?3)(/3-/2)=0,
(1.1.71)
где /б, 06 - соответственно момент инерции
и угол поворота балансирной подвески; /як/ -
масса моста с колесами.
Решение систем уравнений (1.1.70) и
(1.1.71) позволяет найти перемещения,
скорости и ускорения подрессоренной массы по
координатам у и I. При этом вертикальные и
поперечные перемещения, скорости и
ускорения зависят от угловых перемещений.
Для плавности хода автомобиля важное
значение имеют частоты свободных колебаний
подрессоренной и неподрессоренной масс.
В этом случае их приближенно
определяют из рассмотрения плоской колебательной
двухмассовой системы:
свободная частота подрессоренной массы
тп
<°п = ^р/™* = >/#/Лст>
неподрессоренной тип
йнп = |ср +сш)//инп = ^Я/НшКнп>
где Лст - статический ход подвески; Нш -
статический прогиб шины;
Кни = тни1тп * ОД •*• 0,2 .
Частотные характеристики соп и сонп
существенно влияют на показатели плавности
хода, поэтому при конструировании стремятся
обеспечить их оптимальные значения (соп =
0,8+ 1,5 Гц; сонп = 7 + 12 Гц).
Другой важной характеристикой
колебательной системы является коэффициент
демпфирования Ка> который определяет скорость
затухания колебаний. Достаточно быстрое
затухание колебаний происходит, когда
ОДЙГа/(/япсоп)> 0,2 + 0,25.
Колебания гусеничной машины (см. рис.
1.1.28) отлича^РСя от колесной тем, что
вертикальные или продольно-угловые колебания
подрессоренной массы неизбежно вызывают
перемещение машины по оси х. Это
происходит потому, что при вертикальных и
продольно-угловых колебаниях корпуса (остова)
меняются длины рабочей / и свободной /с6
ветвей гусениц, в результате чего ведущее
колесо получает угловое перемещение на
величину Фвк • ^ зависимости от соотношения
моментов инерции двигателя, гусеничного
движителя и сопротивления движению в
ветвях обвода возникают разные силы натяжения
и под действием их разности (7^ - Тн^
происходит перемещение машины по оси х.
КОЛЕБАНИЯ МАШИНЫ
49
Это обстоятельство следует учитывать
при определении кинетической энергии
колебательной системы. В итоге к системе
уравнений (1.1.71) за вычетом членов, относящихся к
перемещению мостов (т.е. содержащих
/им,/м) добавляются уравнения связей,
накладываемых гусеничным обводом:
-А1н
трФвк
"Твк ^нк^тр*
5пСп
При этом
^=2(77вк "^нкЬгя-
(1.1.72)
-п
-в
-ГО -5
/
У
Г'35°
#'Ч0°
<&
^37°
^
5 ГО 15 г, см
4
в
Разность сил (7^ - Тн Л определяется
выражением
Л
— [(^вк -^„х)/(^д)]+(^вк -Тнк)х
+А1„,см
Рис. 1.1.29. Зависимость изменения длины А/
наклонной ветви обвода от вертикального
перемещения I корпуса гусеничной машины
аг
*пЪо'>5«/9о;1п/до
2Л,
2г\тЛ
р'вк
5
8
гд+5п^п <
г д
2
'тр
сггта
-\1 +^фВК ±^фнк
:)в, (1.1.73)
г№*
/
. гп/до
Ь/и
20
<*0
60 си,раО/с
где Х^ - коэффициент пропорциональности
между вертикальным перемещением ^ и
удлинением А/н наклонных ветвей обвода
(М=А/н)-
Зависимость величины А/н от
перемещения I для некоторых обводов показана н«**
рис. 1.1.29. С достаточной точностью можно
считать Х1 = 1§у (у - угол наклонной ветви).
Решение системы уравнений связи
(1.1.72) и (1.1.73) вместе с уравнениями
(1.1.71) позволяет найти перемещения корпуса
по всем координатам с учетом влияния
гусениц.
Частотные и демпфирующие
характеристики гусеничной машины определяются
аналогично колесной.
Для анализа колебаний машины от
гармонического воздействия опорной
поверхности используют амплитудно-частотную
характеристику, представляющую собой
зависимости относительных амплитуд (амплитуд
7.п/д0 перемещения, ^к/?0 скорости, 1п/я0
ускорения, отнесенных к амплитуде ^о
заданного перемещения) от частоты со
возмущающего гармонического воздействия (рис.
1.1.30).
Рис. 1.1.30. Амплитудно-частотная характеристика
колебаний машины
В линейных системах, к которым в
большинстве случаев относятся системы под-
рессоривания транспортно-тяговых машин,
справедлива зависимость, согласно которой
спектральная плотность выходной функции
равна спектральной плотности входной,
умноженной на квадрат модуля передаточной
функции. Амплитудно-частотная
характеристика является такой передаточной функцией.
Следовательно, если воздействие опорной
поверхности будет не гармоническим, а
случайным, то, зная спектральную плотность
неровностей 5* (со), можно найти
спектральную плотность ускорений 5^ (со) или другого
параметра с помощью выражения
|2
*» =
%
-н
5». (1.1.74)
Таким образом, используя выражение
(1.1.74), можно определить^спектр ускорений
или скоростей для всего диапазона частот со,
т.е. найти распределение дисперсий этих
величин и оценить плавность хода при случайных
колебаниях.
50
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
1.1.8. КОЛЕБАНИЯ УПРАВЛЯЕМЫХ КОЛЕС
Шимми машины - это
автоколебательный процесс управляемых колес, совершаемый
одновременно по двум координатам: в одной
фазе в горизонтальной плоскости и в проти-
вофазе в вертикальной плоскости. Шимми
могут возникать без участия водителя (при
закрепленном рулевом колесе) при
равномерном прямолинейном движении машины по
ровной горизонтальной дороге с определенной
критической скоростью Укр . Сначала
происходит потеря устойчивости прямолинейного
качения колес, затем быстрое нарастание
амплитуд колебаний, в связи с чем в системе
(главным образом, в поневматиках и
гидравлических амортизаторах) проявляются
нелинейности и устанавливаются стационарные
колебания с постоянной амплитудой и
частотой - автоколебания. Все части колебательной
системы совершают колебания с одной
частотой, но с различными, постоянными во
времени, амплитудами. Подвод энергии в
колебательную систему для развития и поддержания
колебаний происходит от двигателя, который
обеспечивает движение автомобиля с
постоянной скоростью.
При возникновении шимми движение
автомобиля практически невозможно ввиду
сильного биения колес; водитель должен
снизить скорость, чтобы шимми прекратилось,
для продолжения пути. Поэтому главной
задачей является не оценка амплитуд и частот
автоколебаний, а выявление условий, т.е.
определение таких соотношений параметров
системы, при которых невозмущенное движение
всегда устойчивое, а возникающие колебания
затухающие. Если Укр меньше максимальной
скорости автомобиля, то характеристики
пневматиков и передней подвески подобраны
неверно.
Выбор модели и обобщенных координат.
Оценка устойчивости прямолинейного
движения управляемых колес и определения Укр
проводится на основе анализа
характеристического уравнения дифференциальных
уравнений колебательной системы, выбор которой
довольно важен. Простейшую модель
автоколебательной системы можно принять
состоящей из рулевого управления, подвески и
управляемых пневматиков и совершающей
колебания между опорной поверхностью и
корпусом автомобиля, движущимся без каких-
либо колебаний прямолинейно и равномерно.
Основанием для исключения корпуса
автомобиля из колебательной системы служит тот
факт, что частота его свободных колебаний на
рессорно-пружинной подвеске значительно
ниже частот свободных колебаний колес
относительно корпуса. Благодаря симметрии
характеристик относительно продольной оси
автомобиля колебания системы можно
характеризовать двумя координатами: углом 8 поворота
колес вокруг шкворней; углом у поворота
передней оси в вертикальной плоскости.
Третья координата I, характеризующая
плоскопараллельные синфазные колебания колес в
вертикальной плоскости, не вводится поскольку
колебания затухающие и для линеаризованной
системы не связаны с колебаниями по
координатам 0 и \|/. Предполагается, что в
элементах системы имеется сопротивление,
пропорциональное первой степени скорости,
отсутствуют сухое трение (без смазочного материала)
и зазоры.
Силы, действующие со стороны дороги на
нневматик. Связи между пневматиком и
опорной поверхностью принимаем голономными.
Для выражения реакций связей принимаем
уравнение динамики вращающегося колеса и
гипотезу увода, согласно которой силы,
действующие на пневматик со стороны опорной
поверхности в линейной постановке,
пропорциональны углам поворота обода колеса.
Рассматриваются отклонения сил от их значений
в невозмущенном движении. Система
распределенных сил, приведенная к центру 0К
пересечения вертикального диаметра серединной
окружности обода колеса с опорной
поверхностью, представляется тремя компонентами
силы Ху У, 2 и тремя компонентами момента
Мх> Муу Мг (рис. 1.1.31). Через углы
поворота 9 и \|/ находятся силы У, 2, моменты
М^ и Мх. Сила X определяется из уравнения
динамики катящегося колеса через изменения
угловой скорости и радиуса колеса,
обусловленные отклонениями координат 0 и \|/, а
момент Му как момент сопротивления
качению - через изменение вертикальной силы 2.
Отклонения 6 и у считаем малыми. Для
левого колеса
Гх=Квв + К^; 2 = -Свац,;
I « аЧ
Му1 =-5Свом/, (1.1.75)
где К$9 К - коэффициенты сопротивления
уводу 1К$ » К); С^ - коэффициент
вертикальной (радиальной) жесткости шины; а -
расстояние через которое находится изменение
радиуса колеса при изменении у, I = #у;
КОЛЕБАНИЯ УПРАВЛЯЕМЫХ КОЛЕС
51
/к - момент инерции колеса относительно ный коэффициент вязкого сопротивления,
собственной оси вращения; / - расстояние от пропорционального 0 ; /^ - момент инерции
центра масс колеса до оси шкворня; Во - ра- передней оси автомобиля с колесами и руле-
диус колеса при статической нагрузке; вой трапеции относительно координатной оси
V = соп&1 - скорость автомобиля;
ае> стш» °х " коэффициенты угловой
жесткости шины в горизонтальной и вертикальной
плоскостях; 5 - коэффициент сопротивления
качению.
Коэффициенты К^ К^у ае, а^, ох, 8
находят, как правило, экспериментально, для
рассматриваемой задачи - при радиальной
статической нагрузке на колесо.
Рис. 1.1.31. Схема расчета колеса:
а - перемещения; б - действия сил
Уравнения возмущенного движения.
Дифференциальные уравнения возмущенного
движения оси с управляемыми колесами
относительно корпуса автомобиля (невозмущенное
движение: 6 = соп&1 = 0, у = 0 = соп&1) с
учетом гироскопической связи можно записать
в следующем виде:
/0ё+лее + сре -г /ко\}/ = ме,
Л^ + \Ч> + С^ч/ - /кО в = Му,
(1.1.76)
где О = V / Ко - угловая скорость невозму-
щенного вращения колес; /д - момент
инерции двух колес и рулевой трапеции при
повороте колес вокруг шкворней; И§ -
приведения; Н - приведенный коэффициент вязкого
сопротивления (шины, рессоры,
амортизаторы), пропорциональный ц/; Ср и С -
угловые жесткости соответственно рулевого
управления и подвески; Мд и М - моменты сил
реакций дороги на колеса при изменении
координат 0 и у.
С учетом отсчета углов наклона
шкворней
мь =з/г1 +мг2 -(*, +х2)(1-ух0) -
-(У, + Г2)рЛо - (^1 - 22р = -2 (ос -
4-*врД0)е - 2^-/(/- гд0)ё - 2^г*у х
х(/ - уЛо)ч/ -г^рЛо + Оу - Свар/)ч/;
М^Мх1 +Мх2 + (Г, +Г2)А+(г1 -72)и =
= -2(<хя-*„Л + Сва2)у+2*вАе.
(1.1.77)
В окончательном виде уравнение (1.1.76)
в + е^в + ©ее + Д^У + СвЧ|Ч/ = 0;
(1.1.78)
Здесь
еее = Ав/Уе «е^ = Лу/^ ■ <1л-79>
удвоенные величины коэффициентов
затухания колебаний парциальных систем с
координатами 6 и \|/;
/е*=/в+2/к/(/-уЛ0)/л02- (1.1.80)
1ЫЙ момент инерции колес от
гй шкворней с учетом качения ]
= -^[Ср+2(ав+/ГврЯ0)];
приведенный момент инерции колес
относительно осей шкворней с учетом качения коле*,;
2
со = •
Сч,+2К +С>'
(1.1.81)
52
Глава 1.1. ТЕОРИЯ ДВИЖЕНИЯ МАШИНЫ
квадраты парциальных частот;
Д=- к
г
Дх =
1 +
*('-?*())
К
,2Ь
(1.1.82)
О
коэффициенты гироскопической свили, при
чем коэффициент Д выражает упругую связь,
обусловленную качением пневматика с
переменным радиусом;
'6
с -2К»Н
Че - —
(1.1.83)
коэффициенты упругой связи.
Анализ устойчивости невозмущенного
движения. Характеристическое уравнение для
определения показателя р частного решения
уравнений (1.1.78)
е = епе
/>'.
х|/ = у0е
р*
имеет четвертый порядок
а0р +ахр +а2р +а3р+а4 =0,
(1.1.84)
где
«о =1;
а1 _еев +6ча*/>
2 2
#2 = ^е +со
V +евёеч^ ~ДД\у >
<*3 =0)96^ +со^е^ +(СфвД+СвуД1)у;
2 2
(1.1.85)
Анализ коэффициентов уравнения
(1.1.84) показывает, что наиболее вероятным
является случай, когда уравнение имеет две
пары комплексно-сопряженных корней
Р1 2 =61/0^; />з 4 =г1±'й)2' в которых сс^ и
со 2 - частоты свободных колебаний системы.
Невочмущенное движение устойчиво,
если 8< 0 к т|> 0, а неустойчиво, когда хотя
бы один из коэффициентов положительный
(8 > 0 или г\ > 0). Если один из
коэффициентов (е или г|) равен нулю, а второй
отрицательный - движение происходит на границе
устойчивости.
Для уравнения четвертого порядка
(1.1.84) нельзя написать формулы по
определению коэффициентов е и г|, поэтому
используют критерии устойчивости, определяющие
условия, при которых все корни
характеристического уравнения имеют отрицательные
вещественные части. Для уравнений невысокого
порядка удобны критерии Рауса-Гурвица [13],
в частности (1.1.84):
я0 > 0, а{ > 0, а2 > 0, аъ > 0, а4 > 0;
2 2
А3 = Л\(^2аЪ ~~ °1 а* ~ аЪаЪ > ®'
(1.1.86)
Определяющим является вторбе условие
А3 > 0, причем если Д3 <0, то система
неустойчива, при А3 = 0 - система на границе
устойчивости. После подстановки в условие
А3 = 0 коэффициентов (1.1.85) получается
уравнение для определения Укр
До + ^у + 52у2 + Я3у3 = 0. (1.1.87)
Наименьшим положительным вещественным
корнем (1.1.87) будет Укр . Из анализа
(1.1.87) можно сделать вывод об определенном
влиянии на устойчивость только
коэффициентов сопротивления колебаниям е • и е • . С
увеличением е • и еип- возрастает критиче-
екая скорость. При е • = е^ = 0 движение
неустойчиво при любой скорости. Влияние
большинства параметров может быть оценено
только из анализа (1.1.87), когда значения всех
других величин известны.
Уравнения возмущенного движения при
наличии дисбаланса колес. Для устойчивости
невозмущенного движения управляемых колес
неблагоприятным фактором является наличие
у них дисбаланса. Рассматривается случай,
когда дисбалансы колес (тг) создают моменты
сил, стремящиеся повернуть колеса вокруг
шкворней в одном направлении. Уравнения
возмущенного движения можно получить из
(1.1.78), добавив в правые части внешние
гармонические силы, обусловленные дисбалансом
колес:
0 + 6^9 + сое0 + Дуу + С9ч,\|/ = РхС12 созО/;
Ч' + е^н/+со^ч/ + Д\у0 +С^в = Г2С22 созО/,
(1.1.88)
ЭФФЕКТИВНОСТЬ МАШИН
53
где
^1 = — {ЩГ\ + гп2г2) (/ - уЯ0);
р2 =—^т1г1+т2г2)а.
Если система при отсутствии дисбаланса
устойчива, то в ней возникнут вынужденные
гармонические колебания с частотой О и
амплитудами, которые можно вычислить по
формулам (1.1.87), приняв в них р = 1С1,
причем О = V / Я$:
е0 =Рв(р,у)Ш(р,у);
е0=Рв(р>ч)/О(р,у); (1.1.89)
где
Рв(р,\) = РхС22{р2 +ре^ +0)2,)-
-1?2П2(Дур + Свц,);
Ру(Р^) = Р2а2(р2 +р&ю + Ш?)-
-^(Дгур + С^);
0(Р,у) =
-(Д ур + Свч,)(Д1 у/> + С^е).
Малый дисбаланс не вызывает заметных
колебаний вследствие наличия в системе
значительного сопротивления, в том числе и
трения без смазочного материала. Однако
балансировку колес проводить всегда
целесообразно.
Если в системе при отсутствии
дисбаланса могут возникать автоколебания, то при
гармоническом воздействии на нее возможно
биение, когда О - ®А или С2 - со2| малы;
или синхронный колебательный режим с
частотой О изменения внешней силы [13].
Следует отметить, что, что по
имеющимся экспериментальным данным модель
отражает основные свойства колебательной
системы и дает возможность определить
критическую скорость Укр машины из условия
возникновения шимми. Расчетная скорость
получается, как правило, несколько меньше
экспериментальной. Объяснить это можно
наличием в системе трения без смазочного
материала которое в модели не учитывается, а
также тем, что корпус автомобиля в модели
принимается невозмущающимся.
При корректном определении
коэффициентов сил (1.1.75) и их моментов (1.1.76) с
учетом геометрической и кинематической
специфики подвески и рулевого управления
предложенная модель с двумя степенями
свободы может быть применена и при расчете
критической скорости (по шимми) колесного
трактора.
Глава 1.2
ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И
ЭФФЕКТИВНОСТЬ МАШИН
1.2.1. ЭФФЕКТИВНОСТЬ МАШИН
Эффективность какого-либо процесса
оценивается отношением полезного результата
к затратам на его получение. Эффективность
конструкции транспортно-технологических
машин (конструктивная эффективность)
рассматривается как возможность машины
определенным сочетанием ее технических
параметров обеспечить максимальную
эффективность транспортно-технологического процесса
в конкретных условиях эксплуатации при
соблюдении заданного уровня безопасности.
В зависимости от назначения машины
для оценки ее эффективности используют
различные критерии. Но при этом их
выбирают такими, чтобы количественная оценка
эффективности могла быть выполнена по кон
структивным параметрам или показателям
эксплуатационных свойств, зависящих от
конструктивных решений. По уровню сложности
критерии эффективности подразделяют на
единичные показатели отдельных свойств,
обобщенные, комплексные и интегральные.
Единичные оценочные показатели свойств
машины (максимальная скорость' движения,
контрольный расход топлива, максимальная
сила тяги, максимальный лррмозной путь и
т.д.) не могут быть рекомендованы для общей
оценки ее конструктивной эффективности.
Вместе с тем, простота и стабильность условий
определения этих показателей, значительный
объем накопленных данных позволяют
рекомендовать единичные критерии для
предварительной (прогнозной) оценки конструктивной
эффективности.
Обобщенным критерием конструктивной
эффективности является средняя скорость
движения на маршруте. Этот уровень
критериев позволяет учитывать конкретные
дорожные условия, а также показатели всех
эксплуатационных свойств, являющихся
ограничениями по тягово-скоростным свойствам
возможной скорости движения. В практике ис-
/
54 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
пользования колесных и гусеничных машин
различают следующие скорости:
1) среднюю чистого движения, равную
отношению пройденного пути у^»У| ко
времени движения 2_. 'дв / С33 исключением всех
потерь времени, которые имели место в пути),
Vс р = \\ $1 Г 2_. (цв / • Этот показатель
характеризует предельно возможные скоростные
свойства технически исправной машины;
2) среднюю техническую, равную
отношению пройденного пути /_^/ ко времени
движения (с учетом остановок по
техническим причинам на устранение различного
рода отказов и неисправностей / I отк / ,
Ут^Х^/(Х/дв/+Х'отк/);
3) среднюю оксплуатационную,
учитывающую потери времени, связанные с
технологией или с организацией тягово-транспорт-
Производительность тяговых машин
(тракторов), работающих, как правило, по
технологическим циклам определяется
выражениями:
за один цикл
^ц=бц/7'ц; (1-2.2)
за смену или эксплуатационный период
И'см (эк) = 0 см (эк) / ^см (эк) ; (1.2.3)
где О ц , 0 см (эк) " объем выполненной
работы (груза, пашни) за цикл, смену,
эксплуатационный период; Т ц , Т см (эк) - время
цикла или выполнения работы.
Часто производительность тракторов,
работающих по циклическому режиму, находят
по полезной работе А, совершаемой в единицу
времени цикла:
А =
^
кр
ного процесса
1 +
орг /
(1.2.4)
'р /
Уэ =Е^/(2/дв/+Х/отк/ +Х'°рг/)-
Критерием более высокого уровня
(комплексным) является производительность
машин. Производительность транспортных
машин ^рр определяют обычно по средней
технической скорости из выражения
и^,
тр-
Кттт1 $УгТРа
(1.2.1)
где щ и КТ - соответственно
грузоподъемность и коэффициент ее использования; / -
протяженность пути; р - коэффициент
использования пробега; 7', В - нормируемое
суточное время и число рабочих дней в
рассматриваемый период; а - плановый
коэффициент использования машины.
Поскольку в. выражении (1.2,1) нужно
подставлять значения коэффициента р ,
применимость такой оценки производительности
ограничена объемом имеющейся статической
информации по различным машинам. При
отсутствии достоверных данных по
коэффициенту оценка по (1.2.1) будет искаженной.
Поэтому часто в качестве производительности
транспортных средств используют объем
перевозимого груза. При сложившихся связях по
транспортному обслуживанию этот показатель
позволяет составить степень полезного
использования машины.
где ур , Ух х - скорости рабочего и
холостого хода; Т^ ' вРемя остановки в цикле;
^р - протяженность рабочего хода.
Выражение (1.2.4) позволяет* определить
наиболее целесообразные значения мощности
N^2 на крюке и рабочей скорости для
получения максимальной полезной работы А. Из
выражения (1.2.4) следует, что максимумы
Ту^р и А не совпадают (рис. 1.2.1). Для
обеспечения максимальной полезной работы
целесообразно, чтобы сила тяги была по
возможности больше, а рабочая скорость меньше
[34, 36],
Нлр, А, мВт чр> км/ч
40
6,°/о
80
60
ЬО
20
30
20\
/О
М*р
чч/'
б
-1
А
^1
У \
1 -1
-^ Н
20
40
60
80 Рнп, иН
Рис. 1.2.1. Мощность на крюке и
полезная работа А промышленного трактора
\Ые -Об,8 кВт)
ЭФФЕКТИВНОСТЬ МАШИН
55
И производительность, и полезная
работа характеризуют лишь один фактор
эффективного использования той или иной машины.
Другой фактор связан с величиной затрат при
ее использовании. Поэтому в качестве
интегрального критерия конструктивной
эффективности применяется технико-экономический
критерий, позволяющий учитывать как
результаты, так и затраты в едином стоимостном
выражении, причем определяться он должен
для конкретных условий эксплуатации.
В качестве интегрального критерия
конструктивной эффективности автомобиля
используется критерий рентабельности
перевозок:
К = Ц^-, (1.2.5)
где Пг - годовая прибыль автопредприятия от
эксплуатации конкретного автомобиля, руб.;
Зг - годовые затраты на эксплуатацию
конкретной машины, руб.
Годовая прибыль
ПГ=ДГ-3Г) (1.2.6)
где Дг - годовой доход.
В годовые затраты включаются все
эксплуатационные затраты автопредприятия на
данный автомобиль:
ог = от т ом -г оТОрт ош ~г
+33+Зн+Зам+НГ) (1.2.7)
где от, ом, оТОр оШ) о3> ^н> ^ам " ГОД0-
вые затраты на топливо, смазочные материалы,
техническое обслуживание, ремонт и запасные
части, шины, заработную плату водителя,
накладные расходы, амортизационные
отчисления, руб.; Нг - годовые налоги, связанные с
конструкцией АТС.
В ряде случаев затраты определяют по
всем этапам "жизненного цикла" машины -
конструирование, производство, эксплуатация,
ремонт, амортизация:
Уз, = 1г.+ %л+|я- +
^а ^а ^то
лср3ср + "кр Зкр Зв . .
где Зр - затраты на разработку, отнесенные к
одной машине; «Уа - амортизационный срок;
Зпр - оптовая цена машины при серийном
производстве; Зэк - эксплуатационные
затраты за цикл между ТО; 5то - интервал между
ТО; Лср, Лкр - число соответственно средних
и капитальных ремонтов за амортизационный
срок; Зср, Зкр - стоимость соответственно
среднего и капитального ремонта; Зв -
заработная плата водителя (тракториста); 5Г -
годовой пробег (наработка).
Соотношения между видами затрат для
транспортных и тяговых машин приведены в
табл. 1.2.1.
Интегральный критерий конструктивной
эффективности учитывает максимальное число
показателей свойств и технических
параметров, связанных с конструкцией машины,
которые приведены к общей единице
измерения. К числу таких показателей относятся:
масса /Лгр перевозимого груза, т; средняя
скорость V на маршруте, км/ч; расход Сг
топлива на 100 км пути, л; удельная трудоемкость
7т0р технического обслуживания и ремонта на
100 км пути, чел. х ч; ресурс Ь до списания
или капитального ремонта, км; соответственно
количество и ходимость Ыт , /^ шин, км;
продолжительность /пр процесса погрузки-
разгрузки за одну ездку (характеризует
приспособленность конструкции к погрузке-
выгрузке), ч; коэффициент а выпуска (связан
с надежностью машины и ее
приспособленностью к техническому обслуживанию и
ремонту); коэффициент р использования
пробега (может быть связан с
приспособленностью конструкции АТС к виду перевозимого
груза).
1.2.1. До^ затрат для транспортных
и тяговых машин; %
Виды затрат
Конструирование
Производство
Эксплуатационные
затраты
Стоимость ремонтов
Заработная плата
водителя
Автомобили
2 ... 3
8 ... 10
65 ... 70
12 ... 14
4 ... 5
Тракторы
3 ... 4
10 ... 15
60 ... 65
14 ... 16
3 ... 4
56 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
Зависимость интегрального критерия
конструктивной эффективности от
технических показателей и параметров имеет вид:
я = ^1^гр«РУ у
+ К,
\Г
+ Кп
к%
Ц1+^н)/(*з«*)-1
+ Ко
р/пру + л:10
■1,
(12.9)
где К\_ю - коэффициенты, зависящие от
экономических условий эксплуатации (цен,
тарифов и т.); Ец - норматив приведения
разновременных затрат и результатов.
Аналогичный вид имеет критерий
рентабельности технологического процесса для
интегральной оценки эффективности транспорт-
но-технологических машин.
Оценка эффективности по комплексным
и интегральным критериям проводится только
при соответствии ее конструкции требованиям
безопасности, которые определяются
показателями: предельных осевых нагрузок, размеров и
массы; тормозных свойств; управляемости и
устойчивости; пассивной безопасности;
вредных выбросов; уровней внешнего и
внутреннего шума; эргономических свойств рабочего
места водителя; внешней информативности;
влияния на других участников транспортного
потока. Нормы соответствующих показателей,
отражающие средний уровень развития
конструкции автомобиля на рассматриваемый
период, содержатся в национальных и
международных стандартах. В ряде случаев
дополнительные ограничения могут быть связаны с
транспортными условиями эксплуатации. Так,
при перевозке некоторых продовольственных
товаров ограничивается максимально
допустимое время доставки, которое в этом случае
включается в систему критериев, как
ограничение.
Существует тесная связь между
понятиями "конструктивная эффективность машины",
"качество" и "технический уровень". Под
качеством понимается совокупность всех
свойств, необходимых для всесторонней
оценки машины на соответствие назначению и
предъявленным требованиям, а технический
уровень (уровень качества) - относительная
характеристика качества машины, основанная
на сравнении ее показателей с нормативами
или показателями образцов, принятых за
эталон.
Свойства колесной машины
подразделяются на следующие группы:
классификационные (грузоподъемность, пассажировместимость
и т.д.); эксплуатационные, формирующие
характер движения (тягово-скоростные,
тормозные, управляемость и др.); потребительские,
не формирующие характер движения, но
влияющие на безопасное движение
(надежность, использование ресурсов, экологические
и др.); не оказывающие влияния на
безопасность движения (эстетические, унификации,
транспортабельности и др.).
Качество является более широкими
понятием, чем конструктивная эффективность.
Оно определяется конструктивной
эффективностью машины, связанной с
приспособленностью к выполнению
транспортно-технологических задач и привлекательностью для
покупателя машины как товара. Поскольку
оценка конструктивной эффективности и
качества существенно зависит от условий
эксплуатации, то и уровень качества (технический
уровень) одной и той же машины будет
различен в различных условиях эксплуатации. В
этом случае теряется смысл понятия
"номинальные параметры" конструкции, поскольку
в каждом конкретном случае использования
машины, требуемые наилучшие параметры
конструкции будут индивидуальны и могут
быть получены при увеличении числа
модификаций и применении принципа
разнообразной комплектации.
При таком подходе наилучшей
конструкцией машины будет конструкция,
обеспечивающая максимальную
приспособленность к конкретным условиям эксплуатации,
т.е. имеющая самую высокую эффективность в
заданных условиях. Главной группой свойств
из перечисленных являются
эксплуатационные, поскольку именно они определяют
производительность машины. Как известно [7, 14,
15, 21], характер движения машин)*
определяют восемь групп эксплуатационных свойств:
тягово-скоростные, тормозные, топливной
экономичности (условно), управляемости,
устойчивости, маневренности, плавности хода,
проходимости. Рассмотрим их применительно
к автотранспортным средства, для которых
оценка эксплуатационных свойств разработана
наиболее полно. Однако методика этой
оценки может быть перенесена на любые машины
с соответствующей коррекцией приводимых
формул, учитывающей особенности процесса
движения этих машин.
1.2.2. ТЯГОВО-СКОРОСТНЫЕ СВОЙСТВА
Тягово-скоростные свойства (ТСС)
определяют возможные по характеристикам двигателя
или сцепления движителя с грунтом
диапазоны изменения скоростей движения и
предельные интенсивности разгона при ее работе в
ТЯГОВО-СКОРОСТНЫЕ СВОЙСТВА
57
различных дорожных условиях. Оценка ТСС
проводится сопоставлением оценочных
показателей . с нормативными (рекомендуемыми)
значениями, или с соответствующими
показателями аналогов.
Единичными оценочными показателями
ТСС колесных и гусеничных машин являются:
1) максимальная скорость Утах движения;
2) время разгона тл на заданном пути;
3) время разгона ту до заданной скорости;
4) скоростная характеристика "разгон-выбег"
V = /(*$',/); 5) скоростная характеристика
разгона на высших передачах, \^ = /± (дУ,/);
6) скоростная характеристика на дороге с
переменным продольным профилем, Уср =
= /(удоп) (скоростная часть топливно-ско-
ростной характеристики по магистрально-
холмистой дороге); 7) минимально устойчивая
скорость Упцд ; 8) максимальный
преодолеваемый подъем /тах ; 9) установившаяся скорость
VуСГ а на затяжном подъеме; 10) ускорения при
разгоне } /тах; У/ср; 11) сила тяги Ркр на
крюке; 12) длина 5*а динамически
преодолеваемого подъема [5].
Для оценки тягово-скоростных свойств
тракторов при выполнении ими транспортных
работ используют, как правило, Утах, /„^х,
Ркр. При выполнении тяговых работ
определяющими являются тяговые свойства.
Обобщенным показателем ТСС является средняя
скорость движения.
Расчет показателей ТСС проводится
двумя методами. Первый основан на
графоаналитическом решении уравнения баланса сил
(1.1.11). Несмотря на наглядность и простоту
он неудобен при применении ЭВМ и, в том
числе, персональных компьютеров. Второй
метод - расчетно-аналитический - использует
уравнение баланса сил (1.1.11), представленное
в виде дифференциального уравнения
движения машины как материальной точки по
прямолинейному пути:
тЪь^ = Рт-^Р1. (1.2.10)
В табл. 1.2.2 представлены источники,
формулы, числовые значения параметров,
входящих в левую часть дифференциального
уравнения (1.2.10).
Полная сила тяги,
(учет потери мощности на вспомогательное и
дополнительное оборудование двигателя).
При расчетно-аналитическом решении
дифференциального уравнения величину РТ
следует представить в виде функции скорости.
Для этого необходимо использовать
зависимость в виде аппроксимированной* функции и
уравнение связи между скоростью движения
машины и частотой вращения вала двигателя:
V = 0,105лгк I ит1 .
Зависимость Мх = / (п) с высокой
точностью аппроксимируется уравнением
трехчлена второй степени
Мк = амп2 + Ьмп + см . (1.2.14)
При наличии графической зависимости
Мк = / (п) для расчета коэффициентов ам ,
Ьм , см можно использовать
интерполяционную формулу Лагранжа, в которую
подставляются координаты трех произвольных точек
зависимости Мк = / (п) [25, 43].
Если имеются лишь две точки
скоростной характеристики двигателя [Мктах; пм и
#етах;лдг), обычно приводимые в
технической характеристике, то, имея ввиду, что
Мк ^ = 9550Ые тах / Л/у , коэффициенты урав
нения (1.2.13) вычисляют по следующим
формулам:
2(^ктах --МкЛг)Лм
м ~ / \2 ;
см — ^ктах
С учетом формул (1.2.13), (1.2.14)
выражение для полной тяговой силы на /-й
передаче от скорости принимает вид
где
Рт =
Л^к^рЛт/ и?1
(1.2.13)
где Мх - крутящий момент двигателя, Н • м;
Кр - 0,94 ... 0,96 - коэффициент коррекции
РТ = А(ч2 + В{ы + С, ,
А{ = 90,7ам Кр лт «т/ / ('д 'к ) ;
В1 =%52ЬмКрцти^/ (гдгк);
с1 =См*РЛт"т//гд-
58 * Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
1.2.2. Величины, входящие в уравнение (1.2.10)
Параметры
Полная масса т, кг
Коэффициент учета вращающихся масс
на /-й передаче 5вр/
Момент инерции маховика двигателя и
деталей трансмиссии, связанных с ним,
/м , кг • м2
Момент инерции колеса с шиной /к , кг • м2
Передаточные числа на 1-й передаче ыт/-
КПД трансмиссии:
грузовые автомобили
Динамический радиус колеса
Статической радиус колеса
Диаметр обода */, м
Отношение высоты к ширине профиля шины
Относительное радиальное смятие Х.см
Радиус качения
Радиус качения в свободном (ведомом)
режиме
Коэффициент тангенциальной эластичности
шин
Источники, формулы для определения, значения
Техническая характеристика [16]
л ^м^/Лт+У^к
1 + ——;
гкгд/и
в первом приближении при отсутствии данных
1 + 0,02 и2 + 0,03
0,99 ... 4,61 для грузовых автомобилей;
8,57236 • 10"2 + 3,0455 • 10"2 (/Кл)2 для
бензиновых двигателей,
где IVщ , л - рабочий объем двигателя
92 - 0,473 гст + 0,000636 ГС2Т
Техническая характеристика [16]
В первом приближении:
0,92 ... 0,95
0,84 ... 0,9
В первом приближении гд = гст
гст=0,5</ + ДХсмД (1.2.11)
Обозначение шины
А = 1 для тороидных шин ^
А < 1 для низкопрофильных шин;
обозначение шины
0,85 ... 0,9
гк = гкв в первом приближении
гк = гкв - ХМ во втором приближении
гкв =(1,03... 1,06) гд (1.2.12)
X = 0,015 ... 0,025 для легковых автомобилей;
X = 0,006 ... 0,01 для грузовых автомобилей
ТЯГОВО-СКОРОСТНЫЕ СВОЙСТВА
59
1.2.3. Величины,
Параметры
Приведенный коэффициент
сопротивления качению машины/
Передаточное число трансмиссии на /й
передаче мт/
Сила тяжести (7, Н
Полная масса машины т, кг
Ускорение свободного падения & м/с2
Угол уклона а, °; уклон /, %
Коэффициент обтекаемости Къ , кг/м3
Коэффициент сопротивления воздуха Сх
Плотность воздуха р , кг/м3
Площадь лобового сопротивления Ру м2
Габаритная ширина ВТ , м; габаритная
высота НТ , м ; ширина колеи В, м
входящие в уравнение (1.2.15)
Источники, формулы для определения и
значения параметров
В первом приближении / = /о; при качении по
дороге с твердым покрытием
/ = /О + *ЛV + К/2У7 , где /о = 0,007 .0,015 ;
зависит от нагрузки и размеров шин
Для легковых автомобилей Ад - 0,
К/2 =(6 • 7)10"6.
Для грузовых автомобилей К^2 = 0;
Кл =(8.. 10) -10~5 .
Для ведущих колес во втором приближении
К1 ГКВ ГК
Техническая характеристика [16]
в = т&
Техническая характеристика [16]
9, 81
Дорожные условия
Кв = 0,5 Сх р; Къ = 03 • • • 1,55 ; меньшие значения
для легковых автомобилей, большие - для автопоездов
Экспериментальные данные
V
•
1,225 при 760 мм рт.ст. и / = 15 °С .
Р = 0,8 ВТНТ для легковых автомобилей
Р = В Нт для грузовых автомобилей
Техническая характеристика [16]
Сумма сил сопротивления в уравнении сопротивления подъему; Рв =КВР\ -сила
(1 -2.10) сопротивления воздуха.
В табл. 1.2.3 представлены источники,
(1.2.15) формулы, числовые значения параметров,
входящих в выражения Рт, Рк> Р1 и Рв.
где Рк=/(7со8а - сила сопротивления С учетом аппроксимирующих выражений
дифференциальное уравнение (1.2.10) прини-
качению машины; Р{ = О 81П а » О / - сила мает вид
]ГЛ=*ж+*/**в>
60 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
где
Я/ = А( -ОК^2 со$а - КЪР;
в( = 2?/ - С7.ЙГу со§а ;
С/ = С/ -О/о со8а - <7Д 8ша.
Решением этого уравнения при
стандартных условиях движения определяются
единичные показатели ТСС.
При максимальной скорости движения
а\ / (И - 0; а = 0, дифференциальное
уравнение превращается в алгебраическое и
поскольку для современных двигателей
/п = 1 ... 4 с. В первом приближении
ун2 =ук1> а ук2 =0Д05 П#ГК I ит2 и т.д.
. Разгон происходит на пути 5^ = 2000 м, затем
начинается выбег (движение машины
накатом).
Время разгона на /-й передаче (А/ > 0)
' К/
Т/ = ^5Вр/ |
а\
*н/
а,у1 + Ь,у + С/
тЪ
вр/
1п
2о/У + 6/ - ^/а7
2д/У + ^ + ^Х7
с, < 0;
2 в,
(1.2.18)
(1.2.17)
Пусть при разгоне на /-й передаче
где А/ = Ь{ - 4аI С/ - дискриминант алгеб- $1 - т^вр1 ^
\а\
раического уравнения.
У грузовых автомобилей и автопоездов
утах =85 И° км/ч; у легковых =
утах = 120 ... 145 км/ч; у автобусов Утах =
= 75 ... ПО км/ч.
Величины /у ; /у определяются из
скоростной характеристики "разгон-выбег" (рис.
1.2.2). Условия расчета: а=0; /=0; разгон
при полной подаче топлива начинается на
первой передаче; начальная скорость Ун \ = 0,
конечная ук1 = ОД05 /7дг гк / иТ\\
переключение на вторую передачу при
достижении п#. Время переключения передачи
а{41 + Ь(ы + С/
1
1*1
/я5вр/ 1п С/У + Ь{\ + с1
-Ах, .
(1.2.19)
При выбеге дифференциальное
уравнение движения
тКр^ = -?к-Рв-Ртр> . (1-2.20)
где Ртр = ^тро +Агтру - сила сопротивления
холостого хода трансмиссии; определяется
экспериментально на режиме выбега при
вывешенных ведущих колесах.
V, КМ/Н
60
40
20
20
60
80
700
ПО
ПО
I
760
_1
И»
780 200 Г, с
200 400 600 800 7000 7200 7400 7600 7800 5,м
Рис. 1.2.2. Скоростная характеристика разгон-выбег:
1 -у =/((); 2 -V = /(5)
ТЯГОВО-СКОРОСТНЫЕ СВОЙСТВА
61
Для отечественных автомобилей Ртро =
= 15 ... 120; Ктр = 3 ... 25 (меньшие значения
у легковых автомобилей, большие у грузовых).
Время выбега (А < 0)
2тпЪ
7-Д ^-А
(1.2.21)
Максимальный подъем преодолевается
на низшей передаче, Ф/ / <И = 0; Ръ = 0.
Можно принять / = /о • При этом
А\У2 + В\У + С\ - О /о со8а - <7о $ш а = 0,
откуда
Путь при выбеге определяется по
формуле пути при разгоне *5/ (1.2.19).
Время разгона на заданном пути т^ идо
заданной скорости ху определяются из
характеристики разгона. Время разгона
отечественных легковых автомобилей ту =13 ... 38с до
скорости 100 км/ч, а автобусов и грузовых
ту = 18 ... 90 с до скорости 60 км/ч.
Скоростная характеристика на высших
передачах рассчитывается по формулам /, и
Л,, но при Ун/ = Ут1п/ = - —1- - мини-
мально устойчивой скорости движения на /*-й
передаче и Ук/ = 0,95 \тах .
Скоростная характеристика на дороге с
переменным продольным профилем приведена
рис. 1.2.3. Дорога задана распределением / и
дополнительными условиями. При расчете она
разбивается на отдельные последовательные
участки, каждый из которых имеет
постоянных уклон и определенную длину. Для
каждого участка / определяется время движения по
формулам (1.2.18), (1.2.21). Исходными
величинами являются ун/ и Я/, а искомыми X/
Расчет проводится при различных
1
81ПССтах = —
в
4А\
(1.2.22)
уравнение решается методом
последовательного приближения.
Грузовые одиночные автомобили с
полной нагрузкой должны преодолевать подъем
1тах <> 25 %, автопоезда /тах < 18 %.
Установившаяся скорость на затяжных
подъемах рассчитывается при дч / <Н = 0 для
/-й передачи по формуле
-А - Уа
2*/
(1.2.23)
Грузовые автопоезда с полной нагрузкой
при движении по сухому твердому ровному
покрытию должны преодолевать подъем с
уклоном 3 % протяженностью не менее 3 км
при Уусг > 35 км/ч.
Ускорение при разгоне на 1-й передаче:
максимальное
1
'к/-
г ср
= 2>/2>-
Уср/ ~"
/тах/ —
среднее
1
тЪ
вр/
с,-^|; (1.2.24)
тЪ
вр/
у(ук/+Ук/уН1г+у^) +
Гер.""/1*
50
40
30
1
2
/
ио
50
60 \/д0п.к"1ч
Рис. 1.2.3. Скоростная характеристика на дороге
с переменным продольным профилем:
'• ^=/(Удоп);2-У0ср =/(Уд0П)
Максимальная сила тяги на крюке (на
низшей передаче /) при дч / (И = 0; Рв - 0;
К{\ = Ку2 =0; а = 0 получается из
уравнения Я/У2 + Ь{\ + с, - Рс =0:
^стах =с, -*/2/(4Д/),
и достигается при у = -Ь/ (2а,) .
Длина динамически преодолеваемого
подъема определяется по методике расчета
62 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
характеристики разгон-выбег при заданных
^н/ =^тах/ И Ук/ =Утах/ ИЛИ Ук/ =0.
Обобщенный показатель Уср
рассчитывается различными способами. Простейший
основан на корреляционной связи средней
и максимальной скоростей при
определенных условиях движения. Например, при
движении автопо'езда по магистрали Уср =
= (0,65 ... 0,76)Утах. Наиболее точный
способ расчета Уср основан на интегрировании
дифференциального уравнения движения по
участкам дорог с помощью ЭВМ. На среднюю
скорость движения машины существенно
влияют эксплуатационные и конструктивные
факторы. Среди эксплуатационных
определяющее влияние оказывают дорожные
условия, в том числе различные помехи
(например, в городе - число и режим работы
светофоров). К конструктивным факторам
относятся: удельная мощность, число передач,
обтекаемость машины, качество шин
(коэффициент сопротивления качению).
Следует учесть, что в реальных условиях
эксплуатации машины имеют технические
параметры более низкие, чем заявленные в
паспорте.
1.2.3. ТОРМОЗНЫЕ СВОЙСТВА
Тормозные свойства колесной машины -
совокупность свойств, определяющих
максимальное ее замедление при движении на
дорогах различных категорий в тормозном режиме,
предельные значения внешних сил, при
действии которых заторможенная машина
надежно удерживается на месте или имеет
необходимую минимальную установившуюся
скорость при движении под уклон. Тормозные
свойства регламентированы стандартами. В
нашей стране действуют два основных
стандарта: первый для новых (принимаемых к
производству) автомобилей; второй для
автомобилей, находящихся в эксплуатации.
Машины любого назначения должны иметь три
тормозные системы: рабочую (РТС), запасную
(ЗТС), стояночную (СТС). Автомобили с
полной массой свыше 12 т и работающие в
горных условиях должны быть снабжены еще и
вспомогательной тормозной системой (ВТС).
Оценочными показателями
эффективности рабочей и запасной тормозных систем
при дорожных испытаниях являются
установившееся замедление уусг и минимальный
тормозной путь »УТ. Для автопоездов
дополнительным оценочным показателем служит
время ее срабатывания тср . При стендовых
испытаниях оценочными показателями
являются суммарная сила торможения / Ртор
(тр) или общая удельная тормозная сила ут
и коэффициент Ки осевой неравномерности
тормозных сил. Оценочным показателем
стояночной тормозной системы служит сила
А«ор при определенных условиях, а
вспомогательной - установившаяся скорость на
спуске с указанными параметрами. Данные по
оценочным показателям тормозных систем
имеются в литературных источниках [8, 18].
Обобщенным показателем является степень
ограничения средней (технической) скорости
движения машины по тормозным свойствам
на заданном маршруте при обеспечении
полной безопасности движения.
Нормативные показатели назначаются в
зависимости от категории колесной машины.
Для РТС новых машин нормативные значения
^т и Уусг устанавливаются в соответствии с
данными испытаний трех типов: 0 -
температура, измеренная вблизи поверхности трения
тормозного барабана или диска, менее 100 ° С
(холодные тормозные механизмы); I -
тормозные механизмы разогреты по стандартной
методике (горячие тормозные механизмы);
II - торможение после движения на затяжных
спусках (перегретые тормоза).
Нормативные значения «Ут и уусг для
ЗТС новых машин, а также для РТС и ЗТС
машин, находящихся в эксплуатации,
соответствуют испытаниям типа 0. Сила,
прикладываемая к педали рабочей тормозной системы
при всех видах испытаний, в зависимости от
категорий колесной машины не должна
превышать определенных значений (490 и 687 Н),
а к тормозному рычагу - не более 392 Н.
Нормативные значения ууст для испытаний типа
0 новых машин и начальные скорости
торможения устанавливаются в зависимости от их
категорий: УуСТ =7 ... 5 м/с2, при У0 =80 ...
... 40 км/ч (для ЗТС Уусг =2,9 ... 2,2 м/с2).
Время срабатывания системы тср ^ 0,6 с. У
колесных машин, находящихся в эксплуатации
У0 =40 км/ч для всех категорий,
нормативные значения ууст уменьшены
приблизительно на 25 %, а соответственно тср
увеличено (для автопоездов в 2 раза). Имеются
также нормативные значения уусг для машин в
снаряженном состоянии.
ТОРМОЗНЫЕ СВОЙСТВА
63
Нормативные значения ^т определяются
по формуле *
^т =^У0+У§/(2бууст),
где А = 0,1 (0,11) ... 0,18 (0,24) в зависимости
от категории машины (в скобках приведены
значения для машин, находящихся в
эксплуатации). В зависимости от категории колесной
машины коэффициент Кп <, 0,09... 0,13.
Нормативные значения У^А-ор СТС
предусматривают удержание машины (при
полной массе) на уклоне определенного угла
в зависимости от ее категории: для новых
колесных машин 1тзл > 25 ... 18 %; для
находящихся в эксплуатации /тах ^ 16 %
(23 ... 31 % в снаряженном состоянии).
Вспомогательная тормозная система
должна обеспечить движение со скоростью
V = (30 ± 2) км/ч на уклоне 7 %
протяженностью 6 км, а находящейся в эксплуатации -
движение со скоростью V = (30 ± 5) км/ч
при /усг ^0,5 м/с2 при полной массе и
/усг > 0,8 м/с2 в снаряженном состоянии.
Расчет оценочных показателей
тормозных систем основан на анализе процесса
торможения колесной машины. При экстренном
торможении близком по условиям к
стандартным испытаниям рабочей и запасной систем,
пренебрегая силами сопротивления качению и
воздуха (относительно небольшими по
сравнению с тормозными силами) и коэффициентом
учета вращающихся масс (близким к единице
при отключении двигателя) дифференциальное
уравнение машины принимает вид
<Ь /Ж = -8ум,
(1.2.25)
гле Ум = У^тор/^м ~ Удельная тормозная
сила машины.
При расчете показателей тормозных
систем исходной является динамическая
характеристика тормозной системы (рис. 1.2.4).
Пользуясь формулами, связывающими тормозные
моменты, развиваемые тормозными
механизмами, с давлением в исполнительных органах
тормозной системы, строится
аппроксимированная тормозная диаграмма (рис. 1.2.5).
Начало координат соответствует моменту
нажатия на педаль рабочей тормозной системы
(начало торможения). На диаграмме обозначе-
р,Па
0,6
* \
\ I _^
3 у^Л^^ Г 1
о,г
ол
о,б
0,8
Рис. 1.2.4. Динамическая характеристика
тормозной системы автопоезда КамАЗ-5320+8350:
1 - 4 - давление в тормозных камерах
соответственно переднего моста автомобиля,
второго и третьего мостов автомобиля,
переднего моста прицепа, второго моста прицепа
к
^г<*
\Тс
\^\
Т2
Г".
Л*
г».
л*
/
/
2
/
Туст
^ Г!/гт
г5
»1
\
\
Те
\
г
-г'
Рис. 1.2.5. Тормозные диаграммы автопоезда:
1 - тягача; 2 - прицепа
тс - время запаздывания, зависящее от
типа тормозного привода и тормозных
механизмов, а также технологического
состояния тормозной системы. У технически
исправной тормозной системы с гидроприводом
и дисковыми тормозными механизмами
хс =0,05 ... 0,07 с, с барабанными
механизмами тс =0,15 ... 0,20 с, у системы с
пневмоприводом тс =0,2 ... 0,4 с;
тн- время нарастания замедления.
В зависимости от типа и состояния
водителя, состояния тормозной системы
величина тн = 0,05 ... 2 с. В расчетах
принимают тн = 0,05 ... 0,2 с для легковых
автомобилей; тн = 0,05 ... 0,4 с для грузовых
автомобилей с гидроприводом; тн =0,15 ... 1,5 с для
64 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
грузовых автомобилей с пневмоприводом;
тн =0,2 ... 1,3 для автобусов. Время
срабатывания тормозного привода тср = тс + тн ;
туст - время установившегося
замедления, зависящее от начальной скорости этого
этапа и удельной силы торможения;
тр - время растормаживания, при
экстренном торможении не влияет на оценочные
показатели.
Удельная ела торможения машины в
общем виде выражается следующей
зависимостью:
Ум = (1" ™)Ут + тЧп > (1.2.26)
где ут и уп - удельные силы торможения
С /
соответственно тягача и прицепа; т = "А-г *•
/ ^м
весовой коэффициент автопоезда.
На тормозной диаграмме выделяются
пять этапов,- продолжительность которых
определяется величинами тс, тн, хуст тягача
и прицепа.
Интегрированием дифференциального
уравнения (1.2.25) с учетом выражения (1.2.26)
определяются тормозные пути машины на всех
пяти этапах 5\ ... 5$ . Общий тормозной путь
автопоезда [44]
5Т = I?! + 52 + ^3 + ^4 + ^5 •
Установившееся замедление
У уст = Я [(1-»0 Ууст.т +"* Ууст.п]-
Для одиночного автомобиля
^т = ^0(тс +0,5тн) + 0,5у2/(уустя);
./ уст = У уст 8 •
При экстренном торможении машины,
особенно в неблагоприятных дорожных
условиях, иногда наступает потеря курсовой
устойчивости. Поэтому при экстренном
торможении требуется, чтобы машина оставалась в
полосе движения (3,5 м) и с помощью
рулевого управления не корректировалось
направление движения (при нарушении этого
испытания на тормозную эффективность считаются
недействительными).
Потеря курсовой устойчивости машины
при торможении вызывается следующим:
накатом прицепа на тягач; различием в процессе
работы тормозных механизмов колес одной
оси; самопроизвольным поворотом
управляемого колеса вместе или раздельно.
При накате прицепа на тягач,
происходящим из-за большого времени срабатывания
тср, происходит разворот тягача на угол у
(курсовой угол); в первом приближении
у=0,5у0е^\
где у о - начальный угол между продольными
осями тягача и прицепа; А = Рс (/к + />) / 1г ;
^с = Мгп-7х); а**=0т°/{вТ+вп)
приведенная сила тяжести автопоезда; /к -
расстояние от задней оси тягача до точки
сцепа; Ъ - расстояние от задней оси до центра
масс тягача; 3\ - момент инерции тягача
относительно вертикальной оси; тс - время
действия силы Рс .
Разворот одиночной машины при
действии поворачивающего момента,
возникающего при неравенстве тормозных сил
колес, происходит на угол (в первом
приближении)
Г=Мпт2/(2/г).
где М„ =0,52?(2>торпр^]ГРтор.л).
Разворот колесной машины при
самопроизвольном повороте управляемых колес
при торможении описывается значительно
более сложным управлением [43], но
основным фактором при этом, определяющим
курсовой угол после торможения, является угол
самоповорота правого (для грузовых
автомобилей) колеса, который вследствие упругости
рулевого привода и возможных зазоров в
шарнирах может достигать 1 - 2° , что достаточно
для выхода машины за полосу движения.
Эффективность торможения и
устойчивость движения при этом в значительной
степени зависят от возможности тормозной
системы машины обеспечить оптимальное
распределение сил торможения по колесам. При
наиболее целесообразном оптимальном
скольжении всех колес максимум коэффициента
сцепления (рх достигается^дно времен но. Это
возможно только при наличии у машины
антиблокировочной системы.
Тормозные свойства оказывают
ограничительное влияние на мгновенную скорость
движения колесной машины, а следовательно,
на скорости Уср. Допустимая по тормозным
свойствам скорость движения определяется из
условия
ТОПЛИВНАЯ ЭКОНОМИЧНОСТЬ
65
Яо+*б=^в> (1.2.27)
где 5*0 = «Ут + Уо трв - остановочный путь;
трв - время реакции водителя (при расчетах
принимается трв «0,8 с); «Уб - расстояние
безопасности, 5$ =5 — 10 м; ^в -
расстояние видимости водителем дороги до
встречного автомобиля или препятствия на пути.
Для светлого времени расстояние |УВ
определяется в зависимости от категории
дороги. В темное время суток при пользовании
фарами
^в =^осв "Ц^,
где ^осв " максимальная протяженность
участка дороги, освещенного фарами; для
дальнего света 80СВ = 50 м; ц = 1,8 -
коэффициент, учитывающий уменьшение
расстояния видимости от скорости движения.
При движении в тумане или при осадках
^=0,85^,
где «Ум - метеорологическая дальность
видимости.
После подстановки соответствующих
составляющих уравнение (1.2.27) приводится к
виду квадратного алгебраического уравнения
относительно V, решение которого определяет
допустимую скорость движения по тормозным
свойствам, которая учитывается как
ограничение скорости, определенной возможностями
машины.
1.2.4. ТОПЛИВНАЯ ЭКОНОМИЧНОСТЬ
Топливной экономичностью (ТЭ)
называют совокупность свойств, определяющих
расходы топлива при выполнении колесной и
гусеничной машиной транспортной работы в
различных условиях эксплуатации.
Единичными оценочными показателями
ТЭ служат [37, 41]: контрольный расход
топлива (КРТ); расход топлива в магистральном
ездовом цикле на дороге (РТМЦ); расход
топлива в городском ездовом цикле на дороге
(РТТЦд); расход топлива в городском цикле на
стенде (РТГЦ); топливная характеристика
установившегося движения (ТХ); топливно-
скоростная характеристика при движении по
магистрально-холмистой дороге (ТСХ).
Обобщенным показателем ТЭ является
средний расход топлива б^-ср на
определенном маршруте. Все оценочные показатели не
имеют нормативных значений. Их используют
как базовые при нормировании расхода
топлива в эксплуатации, а также при
сравнительной оценке уровня топливной экономичности
конкретных машин с их аналогами.
В автомобильной промышленности
существуют долгосрочные нормативные
показатели, необходимые для достижения более
высокого уровня показателей различных
эксплуатационных свойств, в том числе, топливной
экономичности.
Контрольный расход топлива
определяется для всех категорий колесных машин
при заданных значениях скорости при
движении по прямой горизонтальной дороге на
высшей передаче. Кроме того, КРТ широко
используется для косвенной оценки
технического состояния машины. РТМЦ измеряют
для колесных машин всех категорий, кроме
городских автобусов, пробегом по
измерительному участку с соблюдением режимов
движения, заданных определенной картой и схемой
цикла.
РТТЦц оценивают для колесных машин
всех категорий, кроме магистральных
автопоездов, междугородных и туристских автобусов
так же, как РТМЦ; отличием является только
характеристика операций по операционной
карте и схеме цикла. РТГЦ определяют только
для автомобилей, у которых т< 3,5 т,
испытанием на стенде с беговыми барабанами по
ездовому циклу в соответствии* с
операционной картой и схемой цикла.
ТХ - зависимость расхода топлива С^ от
скорости V установившегося движения на высшей
передаче по горизонтальной дороге (рис.
1.2.6); ее строят для всех категорий
колесных машин. ТСХ - зависимость расхода
топлива (Ту и скорости Уср от удоп при
движении по магистрально-холмистой дороге
с заданным продольным профилем (рис.
1.2.7). Этот показатель определяется для
магистральных автопоездов, междугородных и
туристских автобусов. В практике испытаний на
автополигоне получили распространение мето-
/
/
/
1
/
1
1
30 40 50 60 70 во 90 у,кн/ч
Рис. 1.2.6. Топливная характеристик*
установившегося движения
66 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
(Ц%,л/ГООнм
5г
50
08
06
К
\
ч.
V
\
\
О 40 50 60 70Ъь,**/г
оо{
50
60
70
Рис. 1.2.7. Топлнвно-скоростная характеристика
при движении по шигистрально-холмистой дороге
дики эксплуатационных расходов топлива
путем моделирования трех типичных
дорожных условий: магистральных, городских и
горных.
В зависимости от режимов движения
показатели топливной экономичности колесных
машин делят на две группы: 1) показатели
КРТ и ТХ, рассматриваемые при
установившемся движении; 2) все остальные,
рассматриваемые на режимах разгона,
торможения и остановки.
При наличии нагрузочной
характеристики двигателя (зависимости часового расхода
От (кг/ч) или удельного расхода &,, г/(кВт*ч),
топлива, от мощности двигателя при разной
частоте вращения (П\, П^, А*з, ... , Щ ) с
помощью интерполяционной формулы Лагранжа
определяются аппроксимированные
зависимости
^т/ = я<2/"/2 + ь0\п\ + с(2/ > (1.2.28)
при различных коэффициентах использования
мощности двигателя
(1.2.29)
При наличии нагрузочной
характеристики коэффициенты ад, Ьд, Сд определяются с
помощью аппроксимированных зависимостей
(1.2.28). При отсутствии данных для дизелей
(без наддува) можно принимать аи =0,36;
Ьи = 0,44; си =0,2.
Секундный расход топлива от скорости
движения на 1-й передаче (кг/с)
(?Сс/ = <*дЫУ2 + ^с/^ + с0с/, (1.2.30)
Ш • Н„ -
: 2 ' 42*'-
А(ч1 + В{У + С/
Как известно [5], отношения часового
расхода (7Т/ при неполной подаче (И<1) к
часовому расходу От$ при полной подаче
(И=1) в первом приближении зависят от
коэффициента использования мощности
двигателя И и не зависят от частоты вращения /1,
причем эта зависимость описывается
квадратным трехчленом
где апс1 = ад =■ 7
* * 0Д052 • 3600гк2
= Ьп ^ ; Сдс1 =с0/3600; ад,
* 0,105 • 3600гк * *' *
Ьд, Сд - коэффициенты зависимости (1.2.28)
при полной подаче топлива.
При заданной постоянной скорости
движения V^ на у-м участке дороги и времени
движения т ^5^ =у ^ тА расход топлива при
полной подаче в единицах измерения:,
кг
Суп =0ос/ту
или л на пути 5/ (м)
йгОпу =С;П/Р >
где р - плотность топлива, кг/л (р = 0,75 кг/л
для бензина; р = 0,82 кг/л для дизельного
топлива).
При неполной подаче топлива (И<1)
йгО; = Йг0п/^е-
Тогда расход топлива на у-м участке на
100 км пути (л)
&;=Ю5- СоуЛТ-
При движении на маршруте, состоящем
из у участков
&0 = ^^^0^ > $ = ^Г^ ;
е. = ю • е^оЛ-
(1.2.31)
УПРАВЛЯЕМОСТЬ
67
При разгоне как расход От, так и
скорость V непрерывно изменяются, поэтому для
расчета показателей топливной экономичности
используют дифференциальное уравнение
расхода топлива [1]
<«? = еос<*/у-
(1.2.32)
Входящие в правую часть величины бос
и ] могут быть представлены как функции
скорости.
Для расчета расхода топлива при разгоне
колесной машины в" формулу (1.2.32)
подставляют выражения секундного расхода топлива
(1.2.30), с допущением, что мгновенные
расходы топлива при неустановившихся и
установившихся режимах двигателя равны, и (1.2.16).
После соответствующих преобразований и
интегрирования получается формула расхода
топлива (кг) на участке разгона длиной 3^
при времени разгона Т/:
/
Су = <*(2стЬър
\г -Уг
2а1
х 1п
0]У1 + 6уУк + Су
а^ун+ь^Vн+с^
+т
с0с + а(2с
Ь) -2^0^
2а) ,
+ Ь(}С3].
(1.2.33)
За время переключения передач, а также
торможения или остановки т ^
Су =Схх.с*у>
ГДе Схх. с ~ секундный расход топлива на
режиме холостого хода двигателя, кг/с.
Поскольку разгон в циклах проводится
при полной подаче топлива, можно не
.корректировать полученный по формуле (1.2.33)
расход топлива. При расчете расхода топлива
на магистрально-холмистой дороге или при
определении среднего расхода на маршруте
(обобщенный показатель) на участках дороги с
переменной скоростью движения при
неполной подаче топлива используют формулу
(1.2.33), а затем результат корректируют по
формуле (1.2.29).
Средний расход топлива на заданном
маршруте складывают из топлива на всех
участках маршрута, а затем с помощью
формулы (1.2.31) переводят на расход на 100 км
пути. При достаточно большой длине маршрута
необходимо использовать ЭВМ.
Упрощенные способы расчета среднего
расхода» топлива на заданном маршруте, не
учитывающие неустановившихся режимов
движения, могут рассматриваться только как
приближенные.
На топливную экономичность оказывают
влияние различные конструктивные и
эксплуатационные факторы. Одним из основных
путей уменьшения расхода топлива
автомобильным транспортом является дизелизация.
Преимущества дизелей по топливной
экономичности определяются как более низкими
значениями удельного расхода топлива
#епип» так и меньшей зависимостью
%е = / (И) . У колесных машин с
карбюраторными двигателями топливная
экономичность улучшается при применении
электронной системы зажигания, установке
микропроцессоров для оптимизации регулирования
состава смеси и опережения зажигания.
Все большее распространение получают
дизели и карбюраторные двигатели с наддувом
и с охлаждением нагнетаемого воздуха.
Применение наддува при той же скорости
движения позволяет экономить до 10 % топлива.
Кроме того, увеличивается запас крутящего
момента двигателя, что также повышает его
топливную экономичность.
Расход топлива зависит от правильного
выбора удельной мощности колесной
машины, числа передач. Повышение полной массы
машины, а следовательно, полезной нагрузки
уменьшает удельный расход топлива, который
зависит также от массы машины и ее
аэродинамических свойств. Наибольшая экономия
топлива на единицу массы перевозимого груза
достигается при использовании автопоездов и
при умелом вождении машины. Для каждых
определенных условий эксплуатации
существует оптимальный по топливной экономичности
режим движения машины, который может
быть рассчитан на ЭВМ или задан с помощью
специальных бортовых приборов-эконометров.
1.2.5. УПРАВЛЯЕМОСТЬ
Управляемость - это совокупность
свойств, определяющих характеристики
кинематических и силовых реакций колесной
машины на управляющее воздействие (поворот
рулевого колеса) [4]. Для оценки
управляемости используется большое число оценочных
показателей и методик испытаний, но
общепризнанная система отсутствует.
На автополигоне действует разработанная
вместе с НАМИ методика испытаний и
оценки управляемости. Она предусматривает
получение характеристик рулевого управления,
характеристик при испытаниях "рывок рулево-
3*
68 Глава 1.1 ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
го колеса", "прямая", "поворот** и
"переставка**.
Характеристики рулевого управления
получают определением параметров процесса
самовозврата управляемых колес и рулевого
колеса в нейтральное положение (испытание
"стабилизация*') и усилий на рулевом колесе
на неподвижной машине и при ее движении с
заданной скоростью (испытание "усилие на
рулевом колесе'*).
Оценочными показателями свойства
стабилизации являются: средняя скорость
самовозврата рулевого колеса; остаточный угол
поворота рулевого колеса; величина заброса
угла поворота рулевого колеса; время
стабилизации. Усилия на рулевом колесе на стоящей
и находящейся в движении колесной
машине являются оценочными при повороте
рулевого колеса, соответствующем минимальному
радиусу ^тшп поворота машины, а для
грузового автомобиля - радиусу 1^ „^ = 12 м.
Испытание "рывок рулевого колеса"
заключается в резком его повороте (на угол
ар ^400 °/с) в заданное положение до
установившегося кругового движения машины, что
позволяет получить оценочные показатели
неустановившегося и установившегося
кругового движения машины. Испытания "прямая*'
проводятся в прямолинейном равномерном
движении колесной машины по размеченному
коридору без выхода его за границы с
определенной скоростью. Показателем
управляемости при этом является средняя скорость подру-
ливания (отношение суммарного угла
поворота-рулевого колеса к суммарному времени
заезда).
Испытания "поворот" и "переставка**
заключаются в выполнении заданных разметкой
маневров с различной, постепенно
увеличивающейся скоростью. Основным оценочным
показателем испытаний является предельная
скорость выполнения заданного маневра.
Следует иметь в виду, что по некоторым
характеристикам и показателям управляемости
существуют рекомендуемые значения.
Подавляющее большинство оценочных показателей
и характеристик связаны с неустановившимся
криволинейным движением колесной машины
(переменные скорости и кривизна
траектории). Их расчет возможен при использовании
достаточно сложной системы
дифференциальных уравнений, решаемых с помощью ЭВМ.
Поэтому в первом приближении оценка
управляемости колесной машины проводится
с помощью оценочных показателей
установившегося кругового движения: характеристик
поворачиваемости и дрейфа.
Характеристикой поворачиваемости
является зависимость кривизны поворота
Рис. 1.2.8. Схем* геометрических параметров поворота
двухосного автомобиля
К = В^ от угла ар поворота рулевого
колеса, построенная в диапазонах изменения
скорости движения до Уп^ и обеспечения
бокового ускорения при этом уу =1 ... 4,5 м/с2.
Углом дрейфа р для двухосной колесной
машины считается угол 52 увода середины
заднего моста, а характеристикой - зависимость
Р=/(уу).
На рис. 1.2.8 показана схема
геометрических параметров поворота двухосного
автомобиля. Возникающие при повороте боковые
силы (в данном случае силы инерции)
вызывают увод колес, что приводит к отклонению
направлений скоростей \д и V д на углы
увода соответственно 51 и 52 . Мгновенным
центром поворота автомобиля является точка
0П пересечения перпендикуляров к
направлениям скоростей \ д и У $. Кинематический
радиус поворота
Д = /,/(9 + 52 -50,
и смещение полюса поворота
С = ^52/(в + 52 -50,
где Ь - база колесной машины.
При отсутствии увода Лж = Ь / 6,
сж=о.
Углы увода
б! = щу2/(ку1я) ; 82 = т^2 / (ку2Л) ,
УСТОЙЧИВОСТЬ
69
где Ку\ и Ку2 - коэффициенты
сопротивления боковому уводу передней и задней осей
автомобиля.
Поэтому кинематический радиус
поворота
Я = Ь - У2(т2/Ку2 - щ/Ку1)/в;
(1.2.34)
угловая скорость поворота
1-уг{т2/Ку2-т1/Ку1)
Отношение со / 0 является показателем
чувствительности колесной машины к
управлению (при отсутствии увода сож = У 0 / X ).
Учитывая, что ар = 0 / 1/ру и р = 6 2 по
приведенным уравнениям рассчитываются обе
искомые характеристики, после сопоставления
которых с рекомендуемыми значениями
можно оценить управляемость колесной машины
при установившимся круговом движении.
У колесной машины более сложной
компоновочной схемы формулы для определения
кинематических параметров установившегося
поворота имеют аналогичные структуры, но
значительно сложнее [4, 10]. Однако для всех
колесных машин основными
конструктивными факторами, определяющими их
управляемость помимо различных параметров являются
нагрузки на колеса и коэффициенты
сопротивления боковому уводу колес. И те и другие
зависят от режима движения, что затрудняет
теоретическое описание процесса поворота
машины и расчет показателей управляемости.
На управляемость значительное
отрицательное влияние оказывают колебания
управляемых колес относительно шкворней.
Основными причинами возникновения колебаний
являются: неуравновешенность (дисбаланс)
управляемых колес; особенности
кинематического взаимодействия передней подвески и
рулевого управления; взаимодействие колес с
поверхностями опорной поверхности.
Возможны также незатухающие колебания
(автоколебания).
Предельный дисбаланс колеса в сборе у
легковых автомобилей не должен превышать
30 Н'см (после балансировки 5 Н*см),
у грузовых 115 Н*см (после балансировки
20... ЗОН-см).
При отклонении управляемых колес от
нейтрального положения автоматическое
возвращение их к нему обеспечивается системой
стабилизации управляемых колес, которая
основывается на использовании свойств
колеса, катящегося с уводом, и наклонного
расположения осей шкварней.
1.2.6. УСТОЙЧИВОСТЬ
Различают устойчивость движения и
устойчивость равновесия. Невозмущенное
движение (равновесие) колесной машины
устойчивое, если небольшие отклонения
движения (положения равновесия), вызванные
малыми внешними возмущениями, затухают и
по истечении некоторого времени машина
вернется к своему невозмущенному движению
(равновесию). Если при движении на
колесную машину действуют непрерывные внешние
возмущения, то устойчивостью называется
свойство колесной машины осуществлять
заданное движение при действии на нее
внешних возмущений.
Потеря устойчивости движения колесной
машины возникает, как правило, при
повышенных критических скоростях движения
Укр. Потеря устойчивости равновесия по
боковому опрокидыванию оценивается
критическим углом наклона косогора по
опрокидыванию Рхр.оп » а по боковому скольжению
критическим углом наклона косогора по
скольжению РКр<р-
Для • автомобиля существует несколько
форм потери устойчивости: равномерного
прямолинейного движения (потеря
устойчивости курса), оцениваемая величиной Укрсо;
по опрокидыванию установившегося
криволинейного движения по горизонтальной
плоскости с постоянным радиусом кривизны
траектории, оцениваемая Укроп; по боковому
скольжению установившегося движения по
горизонтальной плоскости с постоянным
радиусом кривизны траектории, оцениваемая
УКрф ; равномерного прямолинейного
движения (потеря устойчивости курса) автопоезда по
вилянию прицепа, оцениваемая Укр п ,
которая может быть определена экспериментально
без влияния на безопасность движения. На
автополигоне при испытании колесной
машины определяют также скорость начала
снижения устойчивости по опрокидыванию
укр.н.оп ПРИ Движении по траектории с
заданным радиусом кривизны [21].
Критическую скорость по курсовой
устойчивости для двухосного автомобиля
можно установить приближенно, без учета
момента сил инерции, воспользовавшись
формулой кинематического радиуса поворота
70 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
г кр.ю
т2 _ Щ^_ '
| ^у2 ^у1
(1.2.36)
Для четырехосного автопоезда
(двухосный автомобиль-тягач и двухосной
полуприцеп)
Ь-1
' к р.©
/#2 ТП\
(1.2.37)
^у2
Ч\
где / = 1П/(21^ - /п) ; /п - база тележки
полуприцепа; 1^ - база полуприцепа.
Из сопоставления формул (1.2.36) и
(1.2.37) следует, что наличие полуприцепа
обусловливает уменьшение критической
скорости по курсовой устойчивости автопоезда по
сравнению с одиночным автомобилем.
Критическую скорость колесной машины
по боковому скольжению VКрф в первом
приближении можно определить из условия
равенства ее центробежной силы инерции и
суммарной боковой реакции колес, причем
первыми начинают скользить колеса той оси,
у которой коэффициент продольной силы
^п/ = && I &г1 больше:
"кр<р
=^77?
К2
п/
где К - радиус кривизны траектории центра
масс автомобиля; % - ускорение свободного
падения; ф - коэффициент трения
скольжения шины о дорогу.
Критическая скорость по
опрокидыванию с учетом деформации рессор и шин
рассчитывается по формуле [31]:
ры; Кр - коэффициент увеличения жесткости
рессоры при скручивании; Сщ - радиальная
жесткость шины; С^ - боковая жесткость
шины; Нш - вертикальное расстояние от оси
до центра масс.
Критическую скорость по вилянию
прицепа приближенно можно определить по
формуле [31]:
'кр.
и=0*1т1Ху1<п/'1 +>"пЬ2
где 1ц - база прицепа; 1г - момент инерции
прицепа относительно вертикальной оси,
проходящей через центр масс; /я,, - масса
прицепа; Ь - расстояние от точки сцепки до
вертикальной оси, проходящей через центр масс
прицепа; Ку - коэффициент сопротивления
боковому уводу всех шин полуприцепа.
Нормативной (предельной) величиной
укр.п > ПРИ которой допускается движение,
называют установившуюся скорость
прямолинейного движения автопоезда, при которой
виляние прицепа в каждую сторону достигает
3 % его габаритной ширины.
Критический угол (тангенс угла)
косогора по боковому скольжению, как известно,
равен коэффициенту трения скольжения шин
о дорожную поверхность:
Ркр.Ф =агс18Фу.
Критический угол косогора по боковому
опрокидыванию с учетом жесткости рессор и
шин может быть найден из уравнения [31]
Ркр.оп =агс!е
0,5 В 5шркр.оп
к р. о п
и
у д
]
)+-
0,5 .ВЛ$
. °'*> ,
о*срв1кр
О'Нщ | а
о$сшв2 с,
шб
где В - ширина колеи; О - вес
подрессоренной массы машины; Лкр - плечо крена
подрессоренной массы; Лд - высота центра масс;
Вр - рессорная колея; Ср - жесткость рессо-
ЧрО'
О'К
\^СрВ\Кр 0,5 Сш В1 Сш6
(1.2.38)
С позиции безопасности колесной
машины желательно, чтобы при движении по
криволинейной траектории критическая
скорость по боковому скольжению была меньше
критической скорости по опрокидыванию,
или потеря равновесия на косогоре по
скольжению должна наступать раньше, чем потеря
равновесия по опрокидыванию, т.е.
.оп> Ркр.ф < Р:
■'кр.оп •
МАНЕВРЕННОСТЬ
71
Без учета деформации рессор и шин эти
неравенства будут выполняться при условии
В
Величину Лп д = 0,5 В / Ад называют
коэффициентом поперечной устойчивости
колесной машины при движении по
криволинейной траектории и положения равновесия
на косогоре.
Желательно, чтобы критическая скорость
курсового движения Укрю и критическая
скорость по вилянию прицепа были меньше
максимальной скорости, которую способна
развивать колесная машина. Машины с
недостаточной^ или нейтральной поворачивае-
мостью более устойчивы в движении по
сравнению с машинами, имеющими избыточную
поворачиваемость.
1.2.7. МАНЕВРЕННОСТЬ
Маневренностью называются свойства
колесной машины изменять заданным
образом свое положение на ограниченной площади
в условиях, требующих движения по
траекториям большой кривизны с резким
изменением направления, в том числе задним ходом.
При необходимости большого изменения
курсового угла и маневрирования на
ограниченной площади циклы поворота в качественном
отношении почти во всех случаях движения
идентичны. Изменение кривизны К = 1 / Я
во времени происходит почти непрерывно.
Кривые К = / (/) имеют, как правило, одну
точку максимума, или небольшую
площадку, где К = СОП51 и две точки К = 0,
абсциссы которых определяют цикл поворота.
Скорости маневрирования обычно невелики,
у=3 ... 25 км/г, а режимный коэффициент
*п = Сер/V =0,01... 1 [12].
Маневренность оценивают следующими
единичными показателями [12, 21]: 1)
минимальным радиусом Дпип поворота; 2)
внешним габаритным радиусом Вт аб щах
поворота; 3) внутренним габаритным радиусом
Лр аб шш поворота; 4) поворотной шириной
Вп по следу колес; 5) габаритной шириной
2?габ полосы движения; 6) удельной силой
тяги Фи , необходимой для совершения
поворота; 7) коэффициентами К^ использования
сцепной силы колес при повороте; 8) силой
Рр на рулевом колесе при повороте
управляемых колес на месте; 9) сложностью
осуществления управляемого движения задним
ходом.
В технико-экономических требованиях
к подвижному составу автомобильного
транспорта стран Восточной Европы
регламентируется минимальный радиус поворота
Впйп < 12 м. В отечественных стандартах
минимальный радиус поворота регламентирован
косвенно, через требования к легкости
управления (показатели силы на рулевом колесе
проверяются при переходе от прямолинейного
движения к криволинейному с Лщи, =12 м).
По весовым и габаритным ограничениям для
грузовых колесных машин регламентируется
внешний габаритный радиус поворота
^г аб шах - 12,5 м и внутренний габаритный
радиус поворота Ят аб щщ ^ 5,3 м, что
определяет допустимую габаритную ширину
полосы движения Вт аб^ 7,2 м. В Германии
допускается поворотная ширина Вп <> 5,5 м.
Маневренность не оказывает
существенного влияния на среднюю техническую
скорость движения колесной машины, поэтому
она характеризуется обобщенным показателем,
связанным со скоростью V. В теории и
практике наиболее информативным единичным
показателем обычно принимается габаритная
ширина полосы движения Вт а$ , которая
определяет возможность вписывания машины
в дорогу при крутом повороте.
Экспериментальная оценка
кинематических показателей маневренности колесных
машин и силы Рр проводится при
длительных контрольных испытаниях (РД 37.001.109-
89). Показатели Фп , К^ экспериментально
не определяются. Методика
экспериментального определения сложности осуществления
управляемого движения машиной задним
ходом изложена в литературных источниках
[12, 21].
Предельные значения единичных
оценочных показателей любой колесной машины
соответствуют круговому движению с
максимальными углами поворота управляемых
колес. Однако для автопоездов, особенно при
движении в городских .условиях,
определяющее значение для оценки уровня
маневренности имеют поворотная ширина, а также
габаритная ширина полосе движения при
повороте на курсовые углы 180° и 90°,
последний угол соответствует примерно
70 - 80 % всех поворотов при движении в
городе.
72 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИЙ
В большинстве случаев при расчете
оценочных показателей маневренности колесных
машин в связи с невысокими скоростями
движения можно не учитывать силы инерции,
а если автомобиль и прицеп имеют не более
одного неуправляемого моста каждый и
движение происходит на недеформируемом
грунте, то кинематические параметры
криволинейного движения можно рассматривать вне связи
с действующими силами и, следовательно, без
учета увода [4]. Так, для простейшей
компоновочной схемы (одиночный двухосный
автомобиль с передними управляемыми колесами)
Д^ =Х/(8тен1ШХ),
гле 6нтах - максимальный угол поворота
переднего наружного управляемого колеса.
Остальные кинематические оценочные
показатели маневренности рассчитывают по
элементарным формулам при наличии
геометрических размеров компоновочной схемы.
Для колесных машин, требующих учета
увода колес,, вначале выводят зависимости
определяющие, например, кинематические
радиусы автомобиля-тягача и полуприцепа
Яп , а также смещения .их полюсов поворота
С и Сп , действующие на колеса автопоезда
поперечные и продольные реакции, а затем
рассчитывают оценочные показатели
маневренности. Так, для седельного автопоезда,
состоящего из трехосного автомобиля-тягача и
двухосного прицепа,
Я, = 1 1 х
Ая\Ас -ВЯ\ВС
Г Вс Ку11? со8б + Ку212 ]
\^С вС
(1.2.39)
Яп = Ктсо&ат; (1.2.40)
— 1 —. А
Ас\Ак- Вс \ВЯ
Г Вс ЛГУ11? созв + Ку212 1
(1.2.41)
Ау4 Ь4 + Ау5 Ь$
где Ад = Ку1 8Ш0 + Рк181П0 - А + В ;
Ас = Куу СО80 + Ку2 + Куъ ;
Вс = Ку\ Хсо80 + Ку21;
Вя = ^у1Х81п0 + Рк1Х8и10-С + 2);
А = Рпусо8аг ; В = Рпх81паг ;
С=0,5/>пу/со8аг; В = 095Рпх1$тат;
Ку1 - коэффициент сопротивления боковому
уводу 1-й оси; 0 - средний угол поворота
управляемых колес; Ь - база автомобиля-
тягача; / - база тележки автомобиля-тягача;
аг - угол горизонтальной гибкости; Рк\ -
сила сопротивления качению управляемых
колес; РПх» ^пу " силы, действующие в
сцепном устройстве; Х4, Ь$ - расстояния от,
точки сцепки до осей полуприцепа.
С помощью параметров поворота
вычисляют все кинематические показатели
маневренности. Динамические показатели
маневренности пятиосного автопоезда
рассчитывают по формулам:
*п~(*х+/об2,э)/Ол1 (1-2.43)
1Г*=/я1Т#/фДа- 0-2.44)
Поворотная ширина и габаритная
ширина полосы движения автопоезда при
некруговом повороте на угол у вычисляются по
геометрическим параметрам автопоезда и
траекториям опорных точек (середины осей), а
последние определяются либо графически, либо
аналитически с помощью ЭВМ [12]. На рис.
1.2.9 приведена схема поворота простейшего
трехосного седельного автопоезда. При
заданном законе изменения 0 = / ( /) координаты
точек следующие:
точки 1
т
х\ = у2 Г(со8Т1 -фбмпу!) Л;
о
т
У\ = у2 [(^бсОЗу! +8ШУ!) Л\
О
ПЛАВНОСТЬ ХОДА
73
Рис. 1.2.9. Схема геометрических параметров поворота
седельного автопоезда
точки 2
х2 = х\ - А С08У1;
Уг = У\ -1л&туц
точки 3
хъ =х2 -Х2созу2;
УЗ =У2 -^28и1У2>
ВДе У1=-рГ^0^; у2 =т^" [8и1а *;
^ О 2 0
Основными конструктивными факторами,
определяющими показатели маневренности
колесной машины, являются параметры Ь и
0тах , изменение которых существенно влияет
на радиус Д и другие показатели: причем для
двухосного автомобиля при необходимости
уменьшения Вт^п более эффективно
уменьшить базу Д чем увеличить Втах .
Наиболее действенным конструктивным
мероприятием для уменьшения Лщш является
выполнение всех колес автомобиля
управляемыми. Однако при этом наряду с
усложнением конструкции затрудняется отъезд
автомобиля от стенки или бордюра тротуара, а также
ухудшается устойчивость движения при входе
автомобиля в поворот. Для трехосного
автомобиля с передними управляемыми колесами
существенное влияние на показатели
маневренности оказывает соотношение баз тележки
/и полной базы автомобиля Ь. Для
автомобиля общего назначения необходимо чтобы
//Ь<> 0,3.
Для седельных автопоездов с позиции
обеспечения достаточного уровня
маневренности важно согласование размеров длины
автомобиля-тягача и полуприцепа, что
позволяет наиболее полно использовать имеющийся
диапазон изменения угла 6 .
У прицепных автопоездов значительное
влияние на ВТ а$ оказывают ляины Ьа дышла
и Хп базы прицепа. Для улучшения
маневренности целесообразно уменьшение этих
параметров. Сравнение показателей
маневренности седельных и прицепных автопоездов,
аналогичных по грузоподъемности, показывает
преимущество вторых.
1.2.8. ПЛАВНОСТЬ ХОДА
Под плавностью хода понимается
совокупность свойств, обеспечивающих
ограничение в пределах установленных норм виброна-
груженности водителя, пассажиров, грузов,
элементов шасси и кузова колесной или
гусеничной машины [26]. Наиболее простым
оценочным показателем плавности хода для
людей, находящихся в машине, может
служить частота собственных, колебаний
кузова. Субъективное понятие худшей плавности
хода соответствует совпадению частот
собственных колебаний со средней частотой
шагов (60 - 90 мин) человека, что соответствует
1 ... 1,5 Гц.
При экспериментальной оценке
плавности хода основными показателями служат
уровни вибронагруженности, оценка которых
проводится по средним квадратическим
значениям виброускорений или виброскоростей
колебаний в вертикальном и горизонтальном
направлениях (продольном и поперечном).
Например, вибронагруженность
оценивают логарифмическим уровнем
виброскорости (дБ)
^=20 1^/(5-ИГ8),
где а^ - среднее квадратическое значение
виброскорости в октавной полосе, м/с;
5 10"8 - значение виброскорости, с которой
проводят сравнение.
Нормы допустимых виблоскоростей
различны для разных частот колебаний. Частоты
группируют в октавные полосы, а для более
74 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
точной оценки октавные полосы делят на 1/3-
октавные. Основным измерителем виброна-
груженности при оценке плавности хода
автомобиля служить среднее квадратическое
отклонение виброускорений, которое связано со
средним квадратическим значением скорости:
в первом приближении формулой
а^ = 2 7С а^ / Уо , где Уо - средняя
геометрическая частота октавных полос, Гц.
Виброускорения, действующие на
водителя) пассажиров и подрессоренную массу
грузового автомобиля измеряют в
определенных местах. Для оценки уровня вибрации
водителя и пассажиров используют
корректированные значения вертикальных и
горизонтальных виброускорений:
\ /=1
где а/ - среднее квадратическое
виброускорение в /-й октавной или 1/3-октавной полосе
частот; К[ - весовой коэффициент,
характеризующий чувствительность человека к
вибрации в /-й полосе частот; п - число
обобщаемых октавных полос частот.
Уровень вибрации подрессорной массы
грузового автомобиля или прицепа
(полуприцепа) оценивают по средним
квадратическим значениям вертикальных
виброускорений для полосы частот 0,7 ... 22,4 Гц.
Нормированные значения виброускорений
отнесены к определенным участкам специальных
дорог (I - цементобетонная
динамометрическая дорога с аг = 0,6 см; II - булыжная
мощеная дорога с а^ =1,1 см; III - булыжная
дорога с выбоинами с аг = 2,9 см) и
диапазоном скоростей движения.
Для предупреждения перемещений
незакрепленных грузов считается, что
вертикальные виброускорения пола грузовой
машины не должны превышать & что
соответствует с учетом необходимого запаса
а^ <(0Д5 ... 0,3)# . Большее значение
является границей при испытаниях с малой
скоростью с целью выбраковки.
При теоретическом рассмотрении и
оценке колебаний машины (см. п. 1.1.7), в
первом приближении можно считать, что как
подрессоренные, так и неподрессоренные
массы совершают сложные двухчастотные
колебания. Двухосный автомобиль имеет, например,
четыре собственные частоты вертикальных
колебаний - две низкие (Оо1 и О02) и Две
высокие (0К1 и 0К2) • Однако в реальных
машинах колебания слабо связанны, поэтому
используются формулы для собственных
частот колебаний сс^ и со2 подрессоренных и
неподрессоренных масс.
Точность расчета частоты
подрессоренной массы значительно увеличивается,
если использовать приведенную жесткость
Спр = сш ср I(сш + Ср) практически при
всех значениях Сш / Ср , характерных для
современных колесных машин.
Подвеску можно считать
удовлетворительной, если частота колебаний
подрессоренных масс для легковых автомобилей
составляет Оо =0,8 ... 1,3 Гц, для грузовых Оо =
= 1,2 ... 1,8 Гц, а частота колебаний
неподрессоренных масс для легковых
автомобилей Ок = 8 ... 12 Гц, для грузовых Ок =
= 6,5 ... 9 Гц.
При наличии в колебательной системе
сопротивлений, пропорциональных скорости
колебаний, отклонения учитывают по
геометрической прогрессии, имеющей знаменатель
Р = ехр2яц/о,
где \|/о - относительный коэффициент
затухания колебаний подрессоренной массы.
У современных колесных машин с
удовлетворительными гасящими свойствами
\|/0 =0,15 ... 0,25, а соответствующий
коэффициент неподрессоренных масс \|/к =
= 0,25 ... 0,45. При этом затухание колебаний
происходит достаточно быстро (например, при
у0 =0,2 амплитуда колебаний после каждого
колебания уменьшается в 3,56 раза), а влияние
Уо на частоты собственных колебаний
незначительно. При пневматических подвесках,
обеспечивающих снижение частот собственных
колебаний, применяют амортизаторы с
\|/0 =0,6... 0,4.
Характеристики вынужденных колебаний
определяются свойствами колебательной
системы и действием внешних вынуждающих
сил. При гармоническом возбуждении с
частотой V = 2 п УI /в (где /в - длина
синусоидальной неровности) относительная амплитуда
колебаний подрессоренной массы гу = I / %
(до - амплитуда неровности):
4н/оУ2+сол
*0=<°0 7 \* ;
]| (юо-^2) +41|/^у2
(1.2.45)
ПРОХОДИМОСТЬ
75
ПрИ V = СО о
г„ = (о,5л/4М/? + 1)/хио • (1-2.46)
Анализ выражений, описывающих
вынужденные колебания, позволяет сделать
вывод: установившиеся вынужденные колебания
происходят с частотой возбуждающей силы
независимо от имеющихся в системе
неупругих сопротивлений; при \|/0 =сош1
относительная амплитуда зависит от соотношения
частот собственных м вынужденных
колебаний; наибольшие значения амплитуды
достигают при значениях V, практически равных
©о (низкочастотный резонанс).
Виброскорости и виброускорения
определяются по формулам
* / Яо = ^со$(у/ + фу); (1.2.47)
11 Яо = ~1^2 зш(у + сру). (1.2.48)
Тем же законам подчиняются и
вынужденные колебания неподрессоренной массы
{%)■
Зависимости амплитуд
виброперемещений, скоростей и ускорений характеризует
амплитудно-частотная характеристика (см.
1.1.30), рассмотрением которой
устанавливаются два резонанса (низкочастотный и
высокочастотный) .
Связь длины волны /в неровности со
скоростью V позволяет построить график для
определения резонансных скоростей движения
(рис. 1.2.10), по нему установить значения
скоростей, ограничивающих движение
машины по плавности хода в различных условиях.
При случайных внешних возмущениях
вынужденные колебания машины могут быть
оценены методами теории вероятности, путем
Ы$КМ/Ч
о зр У* %& 12>ъ и'Ги>
Рис. 1.2.10. График для определения
резонансных скоростей движения
определения для каждой частоты спектральной
плотности виброускорений. Проведя расчет
1$^ (V) для всего рабочего диапазона частот
у^, можно получить распределение дисперсий
виброускорений кузова машины в заданном
диапазоне частот, с помощью которого можно
оценить плавность хода.
1.2.9. ПРОХОДИМОСТЬ
Проходимостью называется
эксплуатационное свойство, определяющее возможность
движения колесных машин в ухудшенных
дорожных условиях, по бездорожью и при
преодолевании различных препятствий.
Потеря проходимости может быть Полной или
частичной. Полной потерей проходимости
является застревание - прекращение движения.
Частичная потеря проходимости связана со
снижением скорости движения и с ростом
расхода топлива.
Проходимость может быть профильной и
опорной. Профильная проходимость
характеризует возможность преодолевать неровности
пути, препятствия и вписывается в требуемую
полосу движения. Опорная проходимость
определяет возможность движения в
ухудшенных дорожных условиях и по деформируемым
грунтам.
Большинство единичных показателей
профильной проходимости представляет собой
геометрические параметры машины. Оценка
профильной проходимости проводится по
следующим единичным показателям [13, 33]:
1) дорожному просвету Н\\ 2) переднему
свесу; 3) заднему свесу; 4) углу у2 переднего
свеса; 5) углу уз заднего свеса; 6)
продольному радиусу проходимости Д5 > 7)
наибольшему углу атах преодолевания подъема; 8)
наибольшему углу Рп^х преодолевания косогора.
У автопоездов дополнительно используют углы
гибкости [8]: 9) Рг вертикальный и 10) аг
горизонтальный. Кроме того, теоретическими
показателями являются: 11) поперечный
радиус Ки проходимости; 12) углы у перекоса
осей (угол поперечной гибкости); 13)
коэффициент совпадения следов колес передних и
задних осей [21, 42].
Для полноприводных автомобилей
основными показателями профильной
проходимости является ширина преодолеваемого в
поперечном направлении рва и высота
преодолеваемой вертикальной стенки (эскарпа)
[14]. Большинство показателей профильной
проходимости на уровне стандартов не
нормировано и они применяются для сравнительной
76 Глава 1.2. ЭКСПЛУАТАЦИОННЫЕ СВОЙСТВА И ЭФФЕКТИВНОСТЬ МАШИН
оценки, а при проектировании используются
рекомендуемые значения. По углам, гибкости
аг и Рг существуют четкие требования: для
прицепных автопоездов общетранспортного
назначения Рг > ± 40°, а многоцелевых
Рг > ± 62°; аг ^ ± 55° ; для седельных
тягачей рг > ±8°, осг ^ ±90°.
К оценочным показателям опорной
проходимости, относят 13 различных показателей
[21], наиболее информативным из которых
следует считать коэффициент сцепной массы
Кф . Распространенным показателем в теории
и на практике является давление колес «на
опорную поверхность рконт и рир:
отношение нормальной реакции к площади
контакта и среднее давление по выступам
протектора. Чем больше коэффициент К^, тем
меньше вероятность потери проходимости, из
условия движения машины К^ >(/ + /)/ ф^
(фх - коэффициент сцепления).
Рекомендуемые значения по К^ следующие [8]: для
грузовых автопоездов общетранспортного
назначения стран Восточной Европы К^ ^0,263,
Западной Европы К^ > 0,263 ... 0,33. Для
автомобилей рекомендуется />К($нТ ^0,6 МПа;
ри р < 0,85 МПа. Для полноприводных эти
значения должны быть значительно ниже.
" Для полноприводных автомобилей
основным показателем опорной проходимости
является тягово-скоростная характеристика на
заданном участке грунта; дополнительными -
зависимость мощности сопротивления
качению от V и критерий предельного уровня
проходимости - способность преодоления
труднопроходимых участков грунта и наибольшая
глубина снежной целены.
Для сравнительной оценки проходимости
колесной машины в определенных грунтовых
условиях используется обобщенный показатель
проходимости
п = ^Ф Фхср " /г - (1 " *<р) /ш >
(1.2.49)
гДе Ф*ср =ХЛ^вхтах/2^/вх " обоб~
щенный коэффициент сцепления; /г - часть
общего коэффициента сопротивления колеса,
характеризующая потери энергии на
деформацию грунта; /ш - то же, в шине.
Большинство единичных показателе:
профильной проходимости размерные вели
чины (1-4, 7-9) и их определяют измерение]
по методике, соответствующего стандарта.
Радиусы Я$ и ^п определяют графиче
ским методом по масштабной схеме машинь
Углы продольной и поперечной гибкости ]
перекоса осей измеряют непосредственно н
машине. Коэффициент совпадения следо
передних и задних колес оценивается поел
измерения ширины отпечатков колес. Наи
больший угол преодолевания подъема, ширин
преодолеваемого в поперечном направлени]
рва и высота преодолеваемой вертикально]
стенки определяются экспериментально.
Величину Кц устанавливают до начал;
пробеговых испытаний на основе эксперимен
тального установления полной массы и е<
распределения на дорогу через мосты.
Расчетным методом показатели про
фильной проходимости (1-4, 7-9), характери
зуемые размерными параметрами, могут был
определены по чертежам общей компоновка
колесной машины, а продольный и попереч
ный радиусы проходимости по следующие
формулам:
Япр = 0^[1л/(4И1ср) + Нт-2га];
КП=(В11+4Я?)/(8Н1Э),
где Ь[ - база; Н\с^ - дорожный просвет ]
средней части; гд - динамический радиус
колеса; Ввн - расстояние между
внутренними поверхностями шин колес; Н\3 -
дорожный просвет под задним мостом.
Наибольший угол преодолеваемого
подъема может быть ограничен: тяговым»
свойствами машины по возможностям
двигателя (1.2.22); сцеплением ведущих колес;
потерей управляемости (в предельном случае
отрывом передних управляемых колес).
Расчет наибольшего угла
преодолеваемого подъема автопоезда по сцеплению
ведущих колес проводится на основе рассмотрения
схемы (рис. 1.2.11) при следующих
допущениях:
<*/<*-0; Рв=0; / = /0;
%?атахф =
_(?(ф,д/1-/)-С,/(1-уЛ,/1)
ф-ф,Ад/Х) + <7п(1-ф;Лср Д) '
(1.2.50)
ПРОХОДИМОСТЬ
77
Рис. 1.2.11. Схема действия сил при равномерном движении автопоезда на подъем
Анализ формулы (1.2.50) позволяет
установить, что наиболее существенное влияние на
У1*"1 атахф оказывает коэффициент (рх и
отношение Оп / О.
Формула для определения предельного
угла подъема по отрыву передних колес
автомобиля-тягача от дороги выводится из
уравнения равновесия моментов, действующих
относительно точки 2 контакта задних ведущих
Максимальная высота преодолеваемой
стенки для полноприводного автомобиля с
колесной формулой 4x4 не превышает 1/2
радиуса колеса. Если колесо ведущее, то
Нс $гс
1-
1 ~ Аш / ^с
>/Ч^)2
16 «г
(1.2.51)
Для обычных грузовых автомобилей
Нс ^ 0,152 гс. Преодоление рва
автомобильным колесом аналогично преодолению стенки:
Наибольшее влияние на этот угол
оказывает сила тяжести О^ .
Яр=27дсйп-^>
Наибольший угол преодолеваемого косо- где ^ " глУбина Р3*-
гора рассчитывается по формуле (1.2.36).
Высота преодолеваемой стенки (эскарпа) зависит
от режима качения колеса,
взаимодействующего со стенкой. При ведущем колесе
Нс<гс
* " Аш / гс
1 +
(1.2.52)
где Аш - радиальная деформация шины в
точке касания со стенкой.
Для обычного колеса Вр < 0,7 гс .
При расчетном определении единичных
показателей опорной проходимости
коэффициент сцепной массы устанавливается из
исходных параметров технической
характеристики, а остальные по формулам п. 1.2.2.
Среднее давление колеса в контакте с
твердой опорной поверхностью
Асонт =*Нг[В/Н + 3#/ (22?) ] (рв + р0) х
Ч1-"г/В)/(2Впр), (1.2.53)
где кг - гс - гс т (при номинальных
значениях нагрузки и рь) - нормальный прогиб;
78
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
2?пр - ширина протектора; р$ -
составляющая давления, зависящая от жесткости
оболочки; В - ширина профиля шины; Н -
высота профиля.
Среднее давление колеса по выступам
протекгора
Рпр=Рконт/кн , (1.2.54)
ки = Рлр I Р^ - коэффициент насыщенности
протектора (отношение площади контакта по
выступам протектора к контурной площади
контакта).
Обобщенный показатель проходимости
рассчитывается по формуле (1.2.49).
Поскольку определяющее влияние на
проходимость оказывает коэффициент
сцепной массы Кц у основным конструктивным
фактором проходимости является колесная
формула машины. Наибольшие значения
Кц = 1 имеют полноприводные автомобили
(колесные формулы 4x4; 6x6; 8x8). Для
дорожных (неполноприводных) автомобилей
Ку =0,46 .,. 0,8. У негруженых легковых и
грузовых заднеприводных автомобилей
коэффициент сцепной массы меньше, чем у
нагруженных - проходимость у последних лучше, а
у переднеприводных легковых - хуже.
При прочих равных условиях автомобиль
с простым дифференциалом обладает худшей
проходимостью по сравнению с автомобилем с
блокируемым дифференциалом вследствие
уменьшения обобщенного коэффициента
сцепления ф0б . Увеличение диаметра шины
улучшает сцепные свойства, это же относится
к ширине профиля (снижается коэффициент
сопротивления качению). Снижение давления
в шине увеличивает площадь контакта шины с
грунтом, улучшает сцепные свойства, особенно
на грунтах с повышенным внутренним
сцеплением. Одновременно уменьшается
сопротивление грунта качению. Для каждого грунта
существует оптимальное внутреннее давление в
шине, что делает необходимым использование
систем регулирования давления в шинах на
машинах высокой проходимости.
Увеличение удельной мощности также
улучшает проходимость. Положительно влияет
и применение независимой подвески.
Наиболее эффективным средством повышения
сцепления колес с грунтом является применение
арочных шин с высокими грунтозацепами,
клещевых траковых цепей, мелкозвенных
цепей и браслетов. Для самовытаскивания
автомобилей используют лебедки и барабанные
самовытаскиватели.
Глава 1.3
МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И
КОНСТРУКЦИЙ
1.3.1. ОБЩИЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
К КОНСТРУКЦИИ
Независимо от типа и назначения
машины при ее конструировании обеспечивается
реализация общих технических требований с
тем, чтобы достигалась ее высокая
эффективность [17, 18] с учетом сложившейся и
перспективной системы организации
производства, структуры комплектования парков
машин в различных регионах, нормативных или
иных ограничений, действующих в сфере
эксплуатации. Установлено пять групп основных
общих технических требовании,
предъявляемых к конструкции проектируемой машины
(табл. 1.3.1).
Требования по дорожно -климатическим
условиям определяют предполагаемый их
диапазон, в которых использование машины не
приводит к снижению или ограничению ее
эксплуатационных показателей, т.е. машина
должна быть приспособлена к эксплуатации в
этих условиях. Из климатических факторов
обычно учитываются: температура
окружающего воздуха, влажность, запыленность,
высота над уровнем моря, интенсивность осадков.
Чем ниже температура, тем сложнее
обеспечить надежную работу машины.
Усложнение конструкции связано с необходимостью
введения ряда систем, обеспечивающих пуск
двигателя и работу агрегатов при низкой
температуре, а также соответствующие условия
работы водителей. Кроме того, требуются
специальные топливо, масло, резинотехнические
изделия, а при особо низких температурах и
хладостойкие металлы. Машины общего
назначения создаются для условий работы от
- 40 ... 45 до + 45 ... 50 °С . Такой диапазон
температур по принятой классификации соот-
ветствует, районам с умеренным и жарким
сухим макроклиматом, и создание машин для
этих районов не требует применения
нетрадиционных конструктивных решений, за
исключением систем холодного пуска двигателя.
Воздействие отрицательных температур
влияет на степень прогрева или остывания
агрегатов машины и уровня энергетических
затрат на движение. Ввиду интенсивного
охлаждения температурный режим работы
агрегатов ниже нормального и при
температуре воздуха / = -40° С температура в агрегатах
шасси отрицательная (табл. 1.3.2), при
остановке машины агрегаты охлаждаются с
интенсивностью 15 ... 20°С/ч. При этом потери
мощности в агрегатах возрастают, а
коэффициент /о сопротивления качению увеличи-
ОБЩИЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К КОНСТРУКЦИИ
1.3.1. Основные технические требования, предъявляемые к конструкции проектируемой мяшш
Общие
Соответствие дорожно-климатическим
условиям использования машин
Приспособленность к выполнению транспорт-
но-тяговых функций (эксплуатационные)
Обеспечение экономичности производства
Выполнение нормативов безопасности,
эргономики и экологии
Технический уровень и конкурентоспособность
Частные
Температура и влажность окружающего во
ха, запыленность, интенсивность осадков,
сота над уровнем моря, опорная поверхн
движения
Удельная мощность, скорость движения, '
ливная экономичность, надежность и эксп
тационная технологичность, использовг
грузоподъемности, реализация тяговых сво*
Материалоемкость конструкции, унификащ
Активная и пассивная безопасность, усто]
вость и управляемость, светосигнализа
плавность хода, уровни вибрации и шума,
сичность, воздействие на почву
Показатели технического уровня, патен
чистота
1.3.2. Средняя температура в агрегатах
автомобиля "Урал-4320" при
температуре воздуха
Агрегат
Радиатор
(охлаждающая жидкость):
на входе
на выходе
Двигатель (масло)
Коробка передач
Мост:
передний
средний
задний
- 35 ..
78 .
60 .
70 .
10 .
- 15 .
-5 .
- 10
40 °С
.. 85
..70
.. 85
.. 15
.. - 10
..-2
... -5
+ 35..
80
70 .
70 .
80 .
50 .
60 .
50 .
40 °С
..90
.. 83
..90
. 120
.. 80
.. 85
.. 80
вается в 1,4 - 1,8 раза (рис. 1.3.1). Учет
возможности работы машины в условиях низких
температур требует введения в конструкцию
систем подготовки машины к работе после
коротких остановок (перерывов) и
соответствующего повышения удельной мощности.
Для работы в условиях особо низких
температур (ниже - 45 °С) или влажного климата
(влажность до 98 % при + 35 °С) обычно
разрабатывают модификацию базовой машины,
специально приспособленную для работы в
этих экстремальных условиях, за счет
изменения ряда систем и агрегатов машины.
Влажность воздуха влияет, главным образом, на
сохраняемость машины. Поэтому для ма!
предназначенных для использования в уел*
ях повышенной влажности, применяют
крытия, отличающиеся коррозионной с
костью.
Запыленность воздуха проявляется тс
когда эксплуатация машин осуществляется
дорог с твердым покрытием. Учет этого <
тора осуществляется введением в сие]
двигателя соответствующих фильтров и ге]
газацией агрегатов. Машины общего назн
ния рассчитаны на запыленность воздух
г/м3, а специальные машины - на запы
ность до 2 г/м3 на высоте около 1,5 м
уровнем дороги. При этом герметичность
бин должна обеспечивать избыточный по;
воздуха в них при работе системы вентиля:
что является также необходимым при ра
машин в условиях повышенных осадков.
-чо -зо -го -го о ю*,9с
Рис: 1.3.1. Завиоимостн коэффициента /о
сопротивления качению от температуры Г :
1 - автомобиль с колесной формулой 6x6;
2 - гусеничная машина
80 Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
Эксплуатационные требования включают
требования, определяющие способность
машин выполнять прямые транспортно-тяговые
функции: по скоростным свойствам; по
топливной экономичности; по надежности и
использованию грузоподъемности или тяговых
качеств. Скоростные свойства во многом
определяются удельной мощностью двигателя.
Для транспортных машин помимо требований
по максимальной скорости движения, как
правило, задаются требования по удельной
мощности двигателя (табл. 1.3.3) и средней
скорости движения. При этом удельная
мощность принимается исходя из необходимости
преодоления сопротивления движению,
характерного для машин, в том числе преодоления
предельных подъемов (для гусеничных и
полноприводных колесных машин до 30°).
Как отмечено выше, эффективность
машины существенно зависит от показателей
надежности и эксплуатационной
технологичности. В связи с этим общими техническими
требованиями [1, 34, 48] регламентируются
безопасность, ресурс, удельная трудоемкость
технического обслуживания и текущего
ремонта (табл. 1.3.4).
Требования по нормативам безопасности,
эргономике и экологии связаны с массовостью
производства и использованием колесных и
гусеничных машин, т.е. социальной
значимостью. Безопасность эксплуатации машины
подразделяют на активную и пассивную. Из
требований активной безопасности
наибольшую значимость представляют нормативы
тормозных свойств [21, 35]. Они содержат
ограничения по тормозному пути,
замедлению, в ряде случаев, распределению
тормозных сил по осям и др. (табл. 1.3.5).
1.3.3. Регламентируемые значения удельной мощности двигателя
Машины
Легковые автомобили
Грузовые автомобили
Полноприводные колесные
машины
Автопоезда
Транспортные гусеничные
машины
Тракторы:
промышленные
сельскохозяйственные |
Удельная мощность
двигателя, кВт/т
50 ... 70
17 ... 25
12 ... 18
4,5 ... 6
15 ... 20
9 ... 12
12 ... 18
V, КМ/Ч
120 ... 160
90 ... ПО
85 ... 95
80 ... 90
60 г.. 70
4 ... 6
До 45 1
Угол подъема, °С
6 ... 8
8 ... 12
25 ... 30
5 ...6
30 ... 35
30 ... 35
20 ... 25
ДЫе, %
Рис. 1.3.2. Зависимости изменения мощности Nе
от высоты Н над уровнем моря
для различных двигателей:
1 - карбюраторных; 2 - дизелей;
3 - дизелей с наддувом
Высота Н над уровнем моря влияет на
мощность Ме двигателя: с подъемом на
высоту мощность падает (рис. 1.3.2), так как
плотность и температура воздуха при этом
снижаются:
/> = />0(1-#/44 3Ю)5'256;
/ = /0-0,0065#,
где />, / - давление (кПа) и температура (К) на
высоте Н (м); />о , /о - то же, на уровне моря.
Из группы дорожных условий
учитываются те, в которых использование машины
наиболее вероятное. Исходя из этого делается
выбор конструктивных схем и параметров
основных агрегатов, главным образом, шасси.
ОБЩИЕ ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К КОНСТРУКЦИИ
81
1.3.4. Общие технические требования по надежности и эксплуатационной
Показатели
Ресурс, тыс. км
(для тракторов тыс. ч)
Наработка на отказ, тыс. км
(для тракторов тыс. ч)
Трудоемкость ТО и текущего
ремонта, чел. ч. на 1000 км
пути (для тракторов на 1000
моточасов)
Автомобили
250 ... 350
6 ... 10
2 ... 7
Тракторы
10 ... 12
0,4 ... 0,5
35 ... 50*
технологичности
Транспортные
гусеничные машины
16 ... 20
2 ... 3
4 ... 10
* Для промышленных тракторов до 60 чел. ч.
1.3.5. Нормативы тормозных свойств
Машины
Автомобили
Автобусы
Автопоезда
Транспортные гусеничные
машины
Начальная
скорость
торможения,
км/ч
60 ... 80
60 ... 80
60 ... 80
Не менее 40
Тормозной путь,
м
36,7 ... 61,2
32,1 ... 43,2
33,9 ... 50,7
18 ... 22
Замедление,
м/с*
5,0
6,0 ... 7,Т)
5,8 ... 6,0
5,5
Усилие на педали
рабочей
тормозной системы,
кг
70
50 ... 70
50 ... 70
70
1.3.6. Предельно допустимые нормы токсичности, г/(кВт • ч)
Дизели
Для тракторов
То же, для условий с ограниченным
воздухообменом
Автомобилей
СО
10,0
4,0
9,5
сн
3,5
2,0
3,4
N0
22,0
13?0
18,35
Активная безопасность нормирована
также по устойчивости, управляемости и
маневренности частными требованиями на тот
или иной тип машины или конкретный
образец. Требования по пассивной безопасности
предусматривают создание травмобезопасного
рабочего места водителя, кабины необходимой
прочности и эффективной звуковой и
световой сигнализации.
Эргономические требования преследуют
цель создания конструкции машины, при
управлении которой утомляемость водителя
минимальная. Их спектр довольно широк:
пространственное размещение водителя и
органов управления; силы на органах
управления; обзорность с места водителя, плавность
хода машины, вибронагруженность рабочего
места; уровень внутреннего шума,
микроклимат и интерьер в кабине и т. д. Почти все
требования регламентированны [25].
Экологическая безопасность машины
достигается снижением до нормальною уровня
выбросов вредных веществ в атмосферу (табл.
1.3.6), уровня внешнего шума, воздействия
движителя на почву. Нормативы этих
показателей, как правило, дифференцированы для
машин различных типов. Уровень внешнего
шума не должен превышать 82 ... 90 дБ, а
критерии воздействия движителя на почву - в
пределах или несущей способности грунта,
82
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
1.3.7. Нормы воздействия на почву в различный период года (НВ)
Влажность почвы
в слое 0 ... 30 см
0,9 и более
0,7 ... 0,9
0,6 ... 0,7
0,5 ... 0,6
0,5 и менее
Максимальное давление, кПа, не более
80
100
120
150
180
100
120
140
180
210
Нормальное напряжение
на глубине 0,5 м, кПа, не более
Весна
25
25
30
35
35
Лето-осень
30
30
35
45
50
или предотвращения его уплотняемости, что
достигается допустимым значением
максимального давления (табл. 1.3.7) [17].
Технический уровень и
конкурентоспособность машин определяются совокупностью
многих показателей, в том числе
рассмотренными выше. Общими техническими
требованиями иногда установлена степень повышения
технического уровня в виде комплексных или
частных показателей по сравнению с
конкретным, а также обобщенным прототипом,
отражающим конструктивные решения или
параметры, реализованные в лучших образцах.
Экономичность производства машин
предполагает учет соответствующих нормативных
показателей, характеризующих их
совершенство. Важнейшими из них являются
требования по материалоемкости и унификации.
Показателем материалоемкости является удельная
материалоемкость, определяемая
выражениями:
Куа = тс/ Ме ;
где тпс - "сухая' масса машины; ш^ - масса
материала, необходимая для производства
машины с учетом годового расхода запасных
частей; Л^д - мощность двигателя; Т и 5кр -
соответственно ресурс по времени и пробег до
капитального ремонта.
В зависимости от типа машины
используется и нормируется тот или иной показатель
материалоемкости.
Преемственность конструкций в
производстве и возможность создания
модификаций, предназначенных для выполнения спеЪщ-
альных функций и в то же время
экономически целесообразных в производстве,
достигается за счет их унификации. Нормативами
унификации являются коэффициенты:
применяемости
^и р = \пт ~ пт.о) / пт >
повторяемости
кл ={пд ~пт)/пл;
межпроектной унификации
^м.у
(N N \ I (N
21*41 -21*4.0 I 21*41 ~пи
VI 1 У/ VI
где гц - число типоразмеров деталей (или
агрегатов); п^ 0 - число оригинальных
деталей; Яд - общее число деталей в конструкции;
N - число сравниваемых образцов машин;
^ттах ~ максимальное число типоразмеров
одного из N образцов.
В зависимости от типа машины и ее
назначения коэффициенты могут быть
следующими: #пр = 40 ... 95 %; Кп =2 ... 6;
Кму =30 ...75.
Широкая кооперация при организации
производства колесных и гусеничных машин и
их агрегатирование с прицепными системами
накладывают ряд ограничений на нормативы
показателей сопрягаемых систем или
агрегатов, поэтому в составе общих технических
требований задаются базовые параметры пнев-
мосистем - давление (0,6 ... 0,8 МПа),
гидросистем (20 ... 30 МПа), напряжения
электрооборудования (12,24 В), а также места и
значения отбираемой мощности на привод
монтируемых или агрегатируемых механизмов.
1.3.2. ФОРМИРОВАНИЕ НАГРУЗОЧНЫХ РЕЖИМОВ
Нагруженность - это состояние объекта,
обусловленное внешними воздействиями и
условиями его функционирования,
определяемая несколькими основными факторами (рис.
1.3.3), которые вызывают две составляющие
процесса нагружения - статическую и
динамическую. К статической составляющей
относятся медленно изменяющиеся случайные
процессы, не возбуждающие колебаний в
динамической упругоинерционной системе.
Причинами возникновения статической
составляющей являются: для трансмиссии силы
сопротивления движению; для несущей системы -
вес машины, механизмов и полезного груза.
Динамическая составляющая процесса
нагружения машины определяется случайным
воздействием со стороны микропрофиля опорной
поверхности, изменением тяговой нагрузки,
инерционными силами и давлением газа в
цилиндрах двигателя, а также
высокочастотными колебаниями узлов и агрегатов,
обусловленными кинематикой и погрешностями
изготовления, сборки и балансировки их
элементов.
Эти составляющие достаточно четко
разделены по частотам. К статической
составляющей относятся процессы с частотами
0,3 ... 0,5 Гц. Микропрофиль опорной
поверхности вызывает колебания с частотой
0,5 ... 22 Гц, а двигатель - с частотами
20 ... 250 Гц. Частотный спектр колебаний
элементов трансмиссии машин, связанный с
кинематикой и спецификой их работы,
составляет диапазон от 50 ... 70 Гц до 12 кГц и
выше (область акустических частот).
Высокочастотные составляющие
нагрузочного режима машины служат одной из
основных причин выхода из строя зубчатых
передач (питинг шестерен), подшипников
качения и деталей несущих систем.
В зависимости от режима движения и
нагружения динамические процессы
подразделяют на неустановившиеся и установившиеся
(стационарные). Неустановившиеся процессы
имеют место на режимах трогания и
переключения передач, переезда неровностей, а также
при работе с различным навесным
оборудованием. Как показывают экспериментальные
исследования, именно на этих режимах
возникают максимальные динамические нагрузки,
определяющие статическую прочность
элементов конструкции машин. Нагруженность в
данном случае принято оценивать
коэффициентом динамичности Кл , под которым
понимают отношение какого-либо максимального
динамического показателя нагруженности /7Д
(силы, момента, напряжения) к его
статическому значению /7СТ :
^д ~ Пд / П^ •
(1.3.1)
Воздействие водителя
(электронной системы)
на органы управления
Режим движения и работы,
определяемый
1
водителем и дорожной ситуацией
(установившийся, неустановившийся)
массой перевозимого груза и
силой тяги на крюке
типом агрсгатируемого оборудования
^
1
П о годно - юти матичес кие
условия
Нагрузочный
режим машины
А
М и кро профиль
Характеристика опорной
поверхности
Макропрофиль
Физико-
механическая
Конструктивные особенности и
динамические характеристики
1
Тип и характеристики движителя
(колесный, гусеничный)
Колесная формула
(4*2, 4x4, 6x4, 6x6, 8x8 и т.д.)
Тип и характеристика двигателя
Тип и характеристика трансмиссии
(механическая, гидравлическая и т.д.)
Тип и характеристика пол вески
(зависимая, независимая, с механическим
[ 1
Рис. 1.3.3. Факторы, влияющее ш
формирование нагрузочного режима машины
84
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
Для деталей трансмиссии колесных и
гусеничных машин Кд = 1,7 ... 4 в зависимости
от номера включенной передачи и частоты
вращения двигателя; для трансмиссий
мотоциклов Кд =3 ... 5; для несущих систем
грузовых автомобилей Кд =2 ... 2,5; для
автобусов Ад =1,5 ... 2; для легковых автомобилей
Кд =1,1 ... 1,5; для систем подрессоривания
машин Кд =2,5 ... 3.
Неустановившиеся режимы движения
несмотря на их небольшую протяженность в
общем пробеге (не более 5 ... 8 %) имеют
также существенное значение в накоплении
усталостных повреждений. Однако
определяющими, с точки зрения сопротивления
усталости, являются установившиеся процессы,
обусловленные воздействием микропрофиля
дороги и двигателя. Показатель накопления
усталостных повреждений
Я = Л?Р1у (1.3.2)
где П^ - характеристика нагруженности
детали (нагрузка, напряжение) /-го уровня; Р/ -
вероятность возникновения характеристики
нагруженности /-го уровня.
В общем случае характеристиками
(показателями) нагруженности могут быть:
нагрузка, напряжение, деформация,
длительность и число циклов нагружения,
коэффициент интенсивности напряжений и т.д. Однако
для различных элементов конструкции машин
принято использовать различные, наиболее
характерные для них, показатели. Наиболее
полно уровень нагруженности деталей и
агрегатов машины отражают следующие
показатели: максимальные динамические нагрузки,
определяющие статическую прочность деталей;
статические характеристики динамических
нагрузок, влияющие на сопротивление
усталости деталей; число циклов нагружения на
единицу пути; средние технические скорости
движения на передачах; пройденный путь и
время движения на каждой передаче; число
включений каждой передачи.
В таблицах 1.3.8 и 1.3.9 приведены
распределения пробега автомобилей и времени
работы с различным навесным оборудованием
промышленных тракторов по передачам [35,
36, 46]. Общепринятыми показателями
нагрузочного режима несущих систем машины
(рамы или несущего кузова) являются
напряжения изгиба в вертикальной плоскости под
действием симметричной системы сил,
кручения вокруг продольной оси при кососиммет-
ричном нагружении, напряжения изгиба в
горизонтальной плоскости.
Уровень нагруженности системы
подрессоривания оценивается с помощью
перемещений, скоростей и ускорений подрессоренных и
неподрессоренных масс при движении по
опорной поверхности заданного
микропрофиля. При расчетах узлов и агрегатов от
воздействия неровностей опорной поверхности
основной характеристикой возбуждающего
воздействия принято считать спектральную
плотность микропрофиля дороги:
ед(а) = О0(а>/а>0)ту (1.3.3)
где со - путевая частота, характеризующая
частоту повторения неровностей по длине
пути; ©о и (го - соответственно характерная
частота и уровень спектральной плотности при
этой частоте; т - показатель степени,
определяющий интенсивность изменения уровня
спектральной плотности по путевой частоте.
Параметры спектральных плотностей
микропрофилей основных автомобильных
дорог приведены в литературных источниках
[31, 49]. Типы дорог, наиболее характерных
для эксплуатации колесных и гусеничных
машин, а также распределение пробегов по
видам дорог приведены в таблицах 1.3.10 и
1.3.11.
Для расчетов параметров колебаний в
трансмиссии, возбуждаемых
неравномерностью работы двигателя, достаточной
характеристикой воздействия является спектральный
состав крутящего момента двигателя на
последней коренной шейке коленчатого вала.
Крутя л:й момент на валу двигателя
представляет собой периодическую функцию, которая
разложением в ряд Фурье может быть
представлена дискретным спектром [24].
Перечисленные условия формирования
нагрузочных режимов характеризуются очень
широким диапазоном изменения для реальной
эксплуатации машин. Для сопоставимости
результатов расчетных и экспериментальных
исследований на этапах проектирования,
доводки и эксплуатации проведена
систематизация этих условий с целью выделения наиболее
характерных для данного типа машин
типизированных циклов, пригодных для изучения
вопросов тяговой динамики, топливной
экономичности и динамической нагруженности
машин.
ФОРМИРОВАНИЕ НАГРУЗОЧНЫХ РЕЖИМОВ
85
1.3.8. Распределение пробега машин на передачах (%)
Автомобиль
Легковой:
^тах / /И< 80 Н • м/т
^тах / /Я > 80 Н • м/т
Грузовой,
Ме 1т< 7,6 кВт/т
Ые /т<\\ кВт/т
Самосвал
Передача
1
2
1
1
1
0,5
0,3
0,7
0,3
0,2
4
4
3
2
6
4
3
3
1,5
0,7
2
0,5
0,4
15
11
6
3
22
20
6
14
5
11,2
8,3
1
0,8
31
18
11
4
70
75
15
82
10
2,4
24
1,8
1,2
50
41
16
5
75
23
5,4
65
4,4
2,9
26
38
6
60
12
8
5
26
7
25
12
8
8
54
18
12
9
54
20
10
50
1.3.9. Доля времени (%) работы трактора.на передачах
при агрегатировании с бульдозером, рыхлителем и скрепером
Трансмиссия
Гидромеханическая
Механическая
Число
передач
Три
Четыре
Пять
Шесть
1
86,4
86,4
75
75
2
37,5
26,3
25
25
Передача
3
42,9
29,3
20,6
15,9
4
30,7
29,2
21,9
5
:
30,0
23,2
6
-
23,2
1.3.10. Распределение пробегов (% гарантийного)
по видам дорог для колесных транспортно-тяговых машин
Дорога
С усовершенствованным покрытием
(асфальтобетонная, цементобетонная)
Булыжная
Грунтовая в удовлетворительном состоянии
Грунтовая разбитая
Грунтовая размокшая, заснеженная, тяжелая
Общий
20
30
30
10
10
Без прицепа
8
12
12
4
4
С прицепом
12
18
18
6
6
86
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
1.3.11. Распределение пробегов (% общего пробега)
по видам дорог и бездорожью для гусеничных тягово-транспортных машин
Дорога
С твердым покрытием
Грунтовая в удовлетворительном
состоянии
Разбитая грунтовая
Грунтовая в период распутицы
Болото
Снежная целина (Лсн > 0,4 м)
Тягач
без
прицепа
-
10
10
10
-
-
с
прицепом
15
15
15
25
-
-
Снегоболотный
транспортер-тягач
без
прицепа
5
5
10
10
10
10
с
прицепом
-
10
10
20
5
5
Многоцелевой
транспортер-тягач
без
прицепа
5
15
20
10
-
-
с
прицепом
5
15
20
10
-
-
Типизированные циклы включают все
основные факторы, формирующие
нагрузочные режимы узлов и агрегатов машины:
различные типы дорог и распределение пробега
по ним; различные режимы движения; харак-
Фазы цикла Рабочий ход
(движение
вперед); остановка;
подъем отвала;
откатка назад;
остановка перед
началом нового
цикла
Длина цикла, м 50 ... 100
Продолжительность, с 60 ... 90
Число переключений
передач за 1 ч работы 80 ..,120
Число включений
рычагов поворота за 1 ч . . . 50 ... 150
Число включений
гидрораспределителя за 1 ч 500 ... 800
Скорость холостого хода,
км/ч 3 ... 7
Максимальная скорость,
ограниченная дорожными
условиями, км/ч, для
тракторов с подвеской:
с полужесткой 10 ... 12
с эластичной 12 ... 18
Средний коэффициент
сопротивления движению^ .... 0,15 ... 0,20
Среднее квадратическое
отклонение 0,05 ... 0,08
Время остановки трактора,
с, с трансмиссией:
механической 6,0
гидромеханической 3,0
теристики транспортного потока; тип
навесного оборудования для гусеничных и колесных
тракторов и т.д. Циклы составляются на
основании статической обработки данных
эксплуатации машин и полигонных испытаний. Ниже
приведена краткая характеристика
типизированного цикла бульдозера, на основании
которой разрабатывается цикл.
Типизированный цикл для
магистральных автопоездов приведен на рис. 1.3.4. Цикл,
представленный в виде изменения скорости
движения автопоезда в функции пройденного
пути, включает следующие режимы? движение
с постоянной скоростью на передаче; разгон с
переключением передач; торможение
двигателем - принудительный холостой ход (ПХХ);
торможение (Т). Аналогично, представленному
на рис. 1.3.4 магистральному циклу,
разработаны городской, карьерный (для автомобилей-
самосвалов), горный и сельскохозяйственный
(для автомобилей сельскохозяйственного
назначения и колесных тракторов) циклы.
Статические характеристики, необходимые для
разработки типизированных циклов
промышленных тракторов с различным навесным
оборудованием, приведены в литературных
источниках [19, 34, .36].
Применяются два способа определения
характеристик нагрузочного режима:
экспериментальный и расчетный. Первый способ
включает методы тензометрических, режимо-
метрических испытаний и дальнейшую
статическую обработку полученных результатов. Он
позволяет получить достоверный фактический
материал. Однако он обладает рядом
существенных недостатков, важнейшими из
которых являются: длительность получения
результатов, большие затраты на проведение
испытаний, а также возможность его применения
лишь на этапе доводки, когда конструкция
машины создана и реализована в металле с
рядом ошибок.
ФОРМИРОВАНИЕ НАГРУЗОЧНЫХ РЕЖИМОВ
87
98 НЮ км
Рис. 1.3.4. Типизированный расчетный цикл для магистральных автопоездов:
1-10- участки; /- транспортный поток; /7- подъем; ///- спуск;
IV- населенный пункт; V - поворот; VI- накат; VII- внезапная помеха
Разработка расчетной динамической схемы
Численное интегрирование системы
дифференциальных уравнений на ЭВМ
входные данные: геометрические,
кинематические, жесткостные и массовые параметры
динамической системы машины
выходные данные: значения обобщенных
координат соответствующих масс системы как
функций времени и их производных по
времени
плавности хода
Метод имитационного моделирования
Формирование режимов
нагружения
Формирование возмущающих воздействий со
стороны внешней среды как функций времени
с заданными статическими характеристиками
Статическая обработка
результатов расчета
входные данные
выходные данные:
статические показатели
нагрузочных режимов
Определение
показателей
нагрузочных
режимов
тягово-динамических. топливной
экономичности, эффективности
усталостной долговечности,
безотказности работы деталей и узлов
Рис. 1.3.5. Структурная схема метода имитационного моделирования
В основе второго способа лежат расчеты сроков экспериментальных исследований и
режимов движения и нагрузок на ЭВМ. доводочных работ.
Основная задача этого способа заключается в
проведении анализа динамической системы
машины на этапе проектирования на основе
математического моделирования на ЭВМ с
целью определения области оптимальных зна
Наиболее широкое распространение при
исследовании динамических процессов в
машинах получили методы статической
динамики и имитационного моделирования.
Метод статической динамики применяет-
чений параметров и сокращения объемов и ся для изучения частотных спектров линейных
88
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
динамических систем, а также систем с
несущественными нелинейностями, которые
поддаются статической линеаризации [24].
Указанный метод нашел широкое применение
при исследовании стационарных случайных
процессов нагружения деталей трансмиссии и
ходовой части машин при движении по дороге
случайного микропрофиля.
Метод имитационного моделирования
динамики движения машин лишен всех
перечисленных выше недостатков [24].
Имитационное моделирование включает процессы
построения модели динамической системы и
проведение численных экспериментов на ЭВМ
по этой модели. Алгоритм исследования
следующий: формируются случайные воздействия
с заданными характеристиками: проводятся
численное интегрирование системы
дифференциальных уравнений, статическая
обработка выходных переменных для расчета тягово-
динамических показателей, топливной
экономичности, плавности хода, эффективности,
усталостной долговечности и безотказности
работы основных деталей и узлов машин (рис.
1.3.5).
Метод имитационного моделирования
позволяет рассчитать любые нестационарные
режимы движения - трогание, разгон с
переключением передач, торможение двигателем
на передаче и т.д. Для этого математическая
модель транспортной машины должна быть
многоструктурной.
1.3.3. ПРИНЦИПЫ ПОСТРОЕНИЯ
РАСЧЕТНЫХ ДИНАМИЧЕСКИХ МОДЕЛЕЙ
Под математической моделью машины
подразумевают ее расчетную динамическую
схему и систему дифференциальных
уравнений, описывающую ее динамику.
Современное математическое моделирование динамики
движения машины основано на следующих
важнейших принципах (рис. 1.3.6).
Принцип модульности отражает
возможность и необходимость разработки отдельных
математических моделей (модулей) основных
подсистем машины: двигателя (силового
агрегата), трансмиссии, системы подрессоривания,
движителя.
Принцип взаимосвязанности используется
потому, что современная машина является
сложной динамической системой, работа
которой характеризуется переменным
интенсивным воздействием со стороны внешней среды
и водителя. Все подсистемы машины -
двигатель, трансмиссия, подвеска, движитель -
оказывают взаимное влияние как друг на друга,
так и на эксплуатационные качества машины,
совершенствование которых невозможно без
знания и математического описания
взаимосвязей, отражающих реальные условия
функционирования системы.
Принцип учета управляющих и
возбуждающих воздействий отражает необходимость
задания и математического описания
воздействий со стороны водителя (оператора) на
органы управления машины (подача топлива,
торможение, сцепление, переключение
передач), а также на динамическую систему
машины со стороны внешней среды. Как
показывает практика, важнейшими из них являются
макро- и микропрофиль дороги и
аэродинамическое сопротивление.
Перечисленные выше принципы
являются основными. Однако необходимо привести
также еще несколько принципов,
позволяющих на более высоком качественном уровне
реализовать основные принципы.
Принцип
взаимосвязанности
Математическое они
сание связи
основных подсистем
Принцип
модульности
Разработка отдельных
математических
моделей двигателя,
трансмиссии, подвески и др.
Принцип учета
возмущающих воздействий
Математическое описание
возмущающих воздействий на
динамическую систему со
стороны внешней системы
Расчетная
динамическая
модель машины
Принцип соответствия
частотных диапазонов
Рис. 1.3.6. Принципы построения расчетной динамической модели
ПРИНЦИПЫ ПОСТРОЕНИЯ РАСЧЕТНЫХ ДИНАМИЧЕСКИХ МОДЕЛЕЙ
89
Принцип учета нелинейных факторов
обусловлен наличием в динамической системе
машины элементов с нелинейной
характеристикой (двигатель, детали трансмиссии с
зазорами, демпферы колебаний, рессоры с
межлистовым без смазочного материала трением и
т.д.), существенно изменяющих как
качественно, так и количественно происходящие
процессы. Математическая модель должна
учитывать нелинейные характеристики машин для
повышения точности расчетов.
Принцип соответствия частотных
диапазонов отражает соответствие степени
детализации расчетной схемы, а значит спектра
собственных колебаний, с частотным диапазоном
важнейших (определяющих) возмущающих
факторов.
Принцип комплексности отражает
необходимость такого построения математической
модели, при котором задачи тяговой
динамики, топливной экономичности, плавности хода
решаются с учетом влияния характеристик
отдельных узлов и подсистем машины и
процессов, происходящих в динамической
системе.
Разработка математических моделей
важнейших узлов и агрегатов машины включает
разработку расчетной динамической схемы и
ее математическое описание. При это, прежде
всего, необходимо определить инерционные и
упругодемпфирующие характеристики,
учитывая, что машина в целом, как и ее основные
подсистемы, является системой с
распределенными параметрами. Однако такие подсистемы
как, например, трансмиссия и подвеска, могут
быть представлены в виде колебательных
систем с дискретными сосредоточенными
параметрами.
Основанием для дискретизации является
проверенное экспериментально утверждение,
что крутильные колебания в трансмиссии и
колебания в системе подрессоривания машины
имеют выраженный дискретный спектр
собственных частот в диапазоне до 200 Гц для
трансмиссии и до 90 Гц для подвески.
Поэтому дискретные колебательные системы
пригодны для рассмотрения процессов в этом
диапазоне частот. Дискретизация систем
проводится путем выделения элементов,
относящихся к сосредоточенным массам, и
элементов, обладающих только податливостью. К
сосредоточенным массам в трансмиссии
относятся маховик, диски сцепления, корпуса
агрегатов и т.д. Элементы, обладающие только
податливостью, в первую очередь имитируют
валы и специальные упругие детали. После
дискретизации машину представляют в виде
механической колебательной системы,
состоящей из множества сосредоточенных масс,
соединенных безынерционными упругими
звеньями. Необходимо отразить также все
кинематические связи, осуществляемые
передачами различных типов.
Степень детализации расчетной схемы
зависит от конкретной задачи исследования,
частотного диапазона рассматриваемых
процессов, требуемой точности расчетов. Следует
также отметить, что возможны изменения в
конструкции машины для улучшения ее
показателей. Необходимо разработать отдельные
математические модели таких подсистем
машины, как двигатель, сцепление, механическая
коробка передач, гидротрансформатор,
вариатор, дифференциальный и планетарный
механизм, движитель, система подрессоривания и
т.д., а также получить уравнения связи между
этими подсистемами. В этом случае можно
легко составить любую расчетную схему
машины и трансформировать ее.
Математические модели состоят из
типовых динамических элементов, а те, в свою
очередь, из звеньев, которые могут быть
динамические и кинематические (табл. 1.3.12).
Динамические звенья отражают инерционные,
упругие и диссипативные свойства, а
кинематические описывают связи, накладываемые на
перемещения звеньев. Основной
характеристикой кинематического звена является число
степеней свободы. Все разнообразие элементов
динамических схем можно свести к
следующим трем классам (табл. 1.3.13): 1)
передающие нагрузки (силы, моменты) на
неподвижное звено (реактивные элементы); 2)
передающие нагрузки другим подвижным
звеньям (цепные элементы); 3)
распределяющие нагрузки между несколькими звеньями
(разветвляющие или дифференциальные
механизмы) или собирающие нагрузки в узел
(узловые элементы).
Приведенные в таблицах 1.3.12 и 1.3.13
типовые динамические звенья и элементы
системы являются лишь частью всего их
многообразия. Синтез динамических схем системы
машины необходимо проводить на основе
принципа взаимосвязанности. В этом случае
выходное воздействие одного типового
элемента является входным воздействием на
другой типовой элемент. Входное воздействие на
типовые элементы может оказываться также со
стороны как двигателя, так и внешней среды.
При практических расчетах эквивалентную
динамическую систему машины упрощают,
сокращая число элементов в зависимости от
поставленной задачи.
Для математического описания
расчетных динамических схем машины используют
уравнение Лагранжа II рода. Для этого
необходимо выразить потенциальную и
кинетическую энергии динамической системы, дис-
сипативную функцию и обобщенные силы.
После преобразования получают систему
дифференциальных уравнений второго порядка,
90
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
которая в матричной форме запишется в
следующем виде:
где М - матрица инерционных элементов; С -
матрица жесткостей; В - матрица
коэффициентов демпфирования; {%} - координатная
матрица; Р - вектор-столбец возмущающих
факторов.
Размерность матриц М, В и С
определяется числом инерционных элементов (масс и
моментов инерции) и числом степеней
свободы динамической системы машины.
Следует отметить, что математические
модели агрегатов, формирующих (создающих)
входное возбуждающее воздействие на
колебательную систему машины, имеют ряд
особенностей: кроме определения инерционных и
упругодемпфирующих характеристик звеньев
исследуемого агрегата необходимо задать
возбуждающее воздействие в виде силовых
факторов. Например, математическая модель
двигателя внутреннего сгорания должна описывать
зависимость крутящего момента двигателя
Л/д от частоты вращения коленчатого вала и
положения органа подачи топлива.
Возбуждающее воздействие со стороны внешней
среды достаточно подробно описано в
литературных источниках [10, 32].
Исследования многомассовой
динамической системы целесообразно проводить в
несколько этапов, начиная с расчета
свободных и вынужденных колебаний по линейной
математической модели. При этом расчет
частот и форм свободных колебаний позволяет
выявить структуру, связи и основные
закономерности, присущие исследуемой системе,
проанализировать влияние основных
конструктивных параметров на частоты
колебаний, получить частотный диапазон
возбуждающих воздействий на машину и исключить
резонансные явления. Расчет вынужденных
колебаний дает возможность изучить влияние
инерционных, жесткостных и демпфирующих'
характеристик динамической системы на ее
амплитудно- и фазово-частотные
характеристики [7, 24]. На последующих этапах
исследования в расчетную схему вводят основные
нелинейные характеристики, а также
выбирают метод решения на ЭВМ системы
дифференциальных уравнений, описывающих
динамическую схему.
1.3.12. Типовые звенья динамических схем
Динамические
звенья
Инерционное
Упругое
Диссипа-
тивное
Кинематическое
с
различными
степенями
свободы
Обозначение динамических звеньев в системах
крутильной
' г/9'
линейной
X, Хг
Сгг
\ К и ^
?0
§ 1 А
к',—{*
У (ь. .1 V
(^$
Составляющие уравнения,
описывающие динамику системы,
уравнения кинематики
/У; МХ
Ъп{Ро,Хх-Х2)
Уравнения кинематики:
У = 0
У1--/У2-(1-0У3=0
п
или ^Гл, У/ =0
ПРИНЦИПЫ ПОСТРОЕНИЯ РАСЧЕТНЫХ ДИНАМИЧЕСКИХ МОДЕЛЕЙ 91
Типовые элементы
1
1.3.13. Типовые элементы динамических схем
Дифференциальные уравнения
2
«О
Мзх.УУ С,
Реактивные
/]у,+с,у1+л:1у1-л/1>х=о;
О *1 ' ' '
"*Л }_Ц *
ПА ! +
6| I 1
1
О к,
Омичк
6
'& +С1(У1 -У2)+ ^(^1 -У2)-^вх =0;
'гЪ -С,(У, -У2 )- КХ(У1 -У2) + Мвик = 0;
^2=^02/(^+02); к12 = к1К2/(к1+к2);
11У1+С1(У1-У2,)+К1(У1-У21)-МВХ=0;
/2У2-С1(У1-У2/)-^(у1-У2/) + АГвых=0;
С12 = ^ С2 В-ы 1у С{ + С2 Як |; Ка = Ку К2 Яц / (К\ + К2 Як |;
/1у1+с12(у,-лг/л^+л:,2(у1-а'/л4)-л/вх=о;
мл'-с12(у1-х/^)-а:п(у1-а'/лл) + р.ш-рсопр = о
О*» 16И
1 *' 6„,,
'шр
«: 1
_*_@1_
г
_г
М? - С (Л - Я) - Я(Н - Я) - 88п(,Ро, Л -^) = 0
Узловые
*9*
в) *6"Л';
Привод:
дифференциальный (а)
Ст = СА^з / (СХС2 + С^з + С2С3);
К\2з - К1К2К31 у КуК2 + КуК3 + К2К3);
м1шс1л[(1 + и)г1-г2-иг3]+кт[(1+и)г1-г2-иг3];
1Г=М3/М2; Л/2 =1/(1 + 1/)АГ,; Л/3 =^/(1 + #)Л/,;
/1У1+М1-Мт = 0; /2У2 -ЛГ2 +Л/вых2 =0;
13У3-М3+Мвых3=0
92 Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИИ
Продолжение табл. 1.3.13
б)
*)
блокированный (б, в)
С12-С1С2/(С1+С2); ЛГ}2-^1^2/(^1+^2);
С13=С1С3/(С1+С3); Ки-ЪЪ/^+Кз);
ЛГ1+СП(Г1-У2) + КП(У1-У2) +
+С13(У1-У3) + К13{У1-У3)-МВХ=0;
ЪЪ -С12(У, -У2)- *,2(у, -У2) + Л/вых2 =0;
*Л« /з^З-С1з(У1->з)-^1з(^->>з) + ^вь1хЗ=0;
0//#л /1Г1+С1(у1-Г3)+^(УР1-Уз)-^и1=0;
/2^+С2(г2-Уз)+^2(У2-У3)-Л/вх2=0;
/зУз-С^-Уз)-*,^,-^)-
-С2(^2->з)-^2(^->з) + ^вых=0
^д1 = ^1.~ %а -УаА'> 2а2 = ^2 - 2а + Уа В ;
^а11 = ^1 ~~ ^а ~ ^а А * %а2 = %2 ~ %а +Уа В;
Ма % а - С\ га\ ~ К\ %а\\ ~ ^2 %а2 ~ К2 % а2\ = ° 5 ■
/вУв-ЛС,^в1 -АКх2аП-*«ь{В^2а^ + ВСг2а>1 +
+ВК2 2а22 + з8п( /Ь, 2а22у= 0
В соответствии с принципами
построения расчетных динамических схем,
изложенными выше, разрабатываются
математические модели автомобилей и тракторов
различных типов как многомассовых
взаимосвязанных динамических систем. На рис. 1.3.7
приведены расчетные схемы автопоезда на базе
автомобиля-тягача с колесной формулой 4x4 и
гусеничного трактора.
Некоторые исходные данные для
расчетных исследований берутся из технического
задания на проектируемую машину, в котором
определены области применения, дорожные
условия и режимы эксплуатации, основные
эксплуатационные свойства машины
(мощность двигателя, максимальный крутящий
момент, максимальная скорость и другие
показатели), показатели массы и геометрических
размеров и др. Другие исходные данные, такие
как инерционные и упругодемпфирующие
параметры динамической схемы определяются
расчетно-экспериментальным путем по
специальным методикам [9]. При отсутствии
экспериментальных или расчетных данных можно
воспользоваться приведенными параметрами
динамических систем распространенных типов
машин, представленными в табл. 1.3.14. В
табл. 1.3.14 мощность двигателя Л^дв
выражена в кВт, моменты инерции в кг'М2, масса
транспортной машины в кг, крутильные
жесткости в Н • м/рад, линейные жесткости в Н/м.
При определении крутильной жесткости
деталей машины исходят из того, что
максимальный динамический момент на участке
трансмиссии Мтр = Кд Л/дВ /тр (где Кл -
коэффициент динамичности; Мдв -
максимальный момент двигателя; /Тр - передаточное
число трансмиссии от двигателя к валу)
закручивает отдельные участки на соответствующие
углы ф. Так, для валов коробок передач
Фтах Достигает 0,05 рад, для карданных валов
Фтах = М РаД> ДДЯ полуосей фтах =0,3 рад,
для диагональных шин фтах =0,2 рад, а для
вертикальных шин фтах = 0,05 рад.
ПРИНЦИПЫ ПОСТРОЕНИЯ РАСЧЕТНЫХ ДИНАМИЧЕСКИХ МОДЕЛЕЙ 93
Рис. 1.3.7. Расчетная динамическая схема:
а - автопоезда; б - гусеничного трактора
момент инерции относительно поперечной оси, проходящей через центр масс;
ТП - масса; С - жесткость; Д- дифференциал; / - передаточное число;
индексы: сц - сцепление; кп - коробка передач; кв - карданный вал;
р - рессора; ш - шина; к - колесо; п - прицеп)
Линейные вертикальные жесткости билей статическая деформация передних и
ш системы определяются на основании задних подвесок /р =0,1 -ь 0,2 м, а шин
гических прогибов /р подвесов и /ш шин /ш = 0,02 + 0,04 м, а для грузовых соответ-
I действием статической нагрузки (7, : ственно /р =0,07 ч- 0,15 м, а /ш =0,03 ч-
. ш = &\ I /р. ш • Так> ДДя легковых автомо- + °>06 м.
94
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
1.3.14. Приведенные
Параметры
по
рис. 1.3.7
'дЮ2/^ДВ
•'сц / ' д
•'кп/'^д
■'к / 3д
1 1 М
т\,2,Ъ 1 т
Фкп > рад
Фкв. рад
Фп ол»рад
Фш > рад
/ш
/р
5КП
§кв
"п ол
5Ш
_^р
параметры динамических систем
Автомобиль с колесной формулой
4x2
(0,4 ... 1,5 т)
0,4 + 1,0
0,14 + 0,18
0,5 + 3,0
3+10
1,4 + 1,6
0,05 + 0,07
Мене
0,02 + 0,04
0,1 +0,2
0,065 + 0,09
0,02 + 0,03
0,30 + 0,45
0,08 + 0,10
0,25 + 0,30
4x4
(2,5 ... 5,5 т)
1,0 + 2,0
0,05 + 0,16
0,3 + 2,0
10 + 20
2,2 + 2,5
0,07 + 0,09
6x4
(8... 12 т)
2,0 + 3,0
0,05 + 0,11
0,1 + 2,0
15 + 25
2,5 + 2,8
0,03 + 0,1
Менее 0,05
Менее 0,1
Менее 0,3
транспортных машин
Трактор
колесный
(30 кН)
1,0 + 2,0
0,01 + 0,05
0,1 + 3,0
10 + 35
1,4 + 1,6
0,10 + 0,15
е 0,2 диагональные; 0,05 радиальные
0,03 + 0,05
0,08 + 0,16
0,07 + 0,12
0,03 + 0,04
0,35 + 0,54
0,08 + 0,10
0,20 + 0,25
0,03 + 0,06
0,07 + 0,15
0,09 + 0,14
0,03 + 0,04
0,45 + 0,64
0,07 + 0,09
0,15 + 0,20
0,03 + 0,06
-
0,10 + 0,14
0,04 + 0,06
0,5 + 0,7
0,10 + 0,15
-
гусеничный
(30 кН)
1,0 + 4,0
0,05 + 0,08
1,0 + 8,0
-
4,0 + 5,0
-
-
-
-
0,01 + 0,03
0,10 + 0,14
0,04 + 0,06
0,5 + 0,7
-
0,15 + 0,20
Расчет коэффициентов демпфирования
по известным значениям логарифмического
коэффициента 8/ колебаний отдельных
деталей и узлов не представляет трудности и
подробно описан в литературных источниках
[9, 10, 30].
Следует отметить, что расчетная
динамическая модель машины должна позволять
рассчитывать и анализировать следующие случаи
движения: трогание и разгон с переключением
передач, торможение тормозами и двигателем,
установившееся движение по дороге заданного
микро- и макропрофиля. В этом случае,
разработанная математическая модель машины с
учетом перечисленных выше принципов
позволяет проводить расчетные исследования с
достаточной точностью тяговой динамики у
топливной экономичности, динамическое
нагруженности и долговечности деталей \
узлов транспортной машины, плавности ходг
и т.д.
1.3.4. ПРОГНОЗИРОВАНИЕ
ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ И РЕСУРСА
Общая схема прогнозирования
надежности. Процесс прогнозирования надежност*
колесных и гусеничных машин на стадии
проектирования может быть представлен в виде
ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ И РЕСУРСА
95
общей схемы (рис. 1.3.8). В качестве
информационной базы для прогнозных расчетов
используют сведения из проектно-конструк-
торской, технологической,
нормативно-справочной документации: параметры (размеры)
агрегатов, узлов и деталей проектируемой
конструкции; данные о материалах и выбранных
технологиях изготовления; информация о
предполагаемых режимах эксплуатации,
нагрузочных режимах и предельных состояниях;
стратегия поддержания машин в
работоспособном состоянии (система проведения ТО и
ремонтов, их периодичность и стоимость);
банк данных об эксплуатационной надежности
машин-аналогов; результаты испытаний
различного рода и т.д. [3].
Ввиду сложности прогнозирования
надежности колесных и гусеничных машин
целесообразно ограничить номенклатуру
рассчитываемых элементов группой деталей
"лимитирующих надежность" (ДЛН), табл. 1.3.15, а
под надежностью подразумевать два свойства -
безопасность и долговечность (ресурс).
Выявление ДЛН позволяет сократить
объемы вычислений и испытаний в 5 - 10 раз.
При прогнозировании преследуют две
основные цели: глобальную, состоящую в
предварительной оценке эффективности
проектируемой конструкции; локальную,
заключающуюся в оценке показателей долговечности
и безотказности агрегатов и основных деталей
(ДЛН).
Информационная база
Модели отказов Н*
Потоки отказов
Модель разрушения
Логическая модель
отказа детали
Критериальное
уравнение долговечности
Синтез прогнозов
Надежность деталей
Анализ зависимостей
между наработками
Детали
Логическая модель
отказа агрегата
Корректирование
потоков (замены)
Ресурс агрегатов
Затраты на эксплуатацию
Безотказность
агрегатов
По техническому
критерию
По экономическому
критерию
Синтез прогнозов
Надежность агрегатов
П
раф состояний машин в
эксплуатации
Комплексные
показатели надежности
Производительность
и стоимость
эксплуатации машины
Эффективность
машины
Надежность
машины
Рис. 1.3.8. Схема прогнозирования показателей надежности машин на этапе проектирования
96
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
1.3.15. Данные о деталях,
лимитирующих надежность (ДЛН)
Показатель
Число
наименований
Число деталей
Количество
(% списка) по
каталогу
Стоимость
(% общей
стоимости)
замененных
деталей
Грузоподъемность автомобиля, т
бортового
4
234
673
15,1
94,8
5
259
800
15,6
94,5
самосвала
4,5
209
485
12
93,3
7,5
280
617
13,3
98,5
14
252
598
11,9
92,6
ны наиболее характерные модели,
используемые при прогнозировании таких
характеристик надежности изделий, как вероятность Р
безотказной работы и функции /(/)
плотности распределения ресурса. Статические
модели распространены в практике расчетов
конструкции машин на статическую прочность
под названием "нагрузка - несущая
способность". Динамические модели используются
при расчетах на износ и усталость.
Реализация износа или накопленного
повреждения деталей представляются в виде
случайного нестационарного по
математическому ожиданию т5 (/) и дисперсии а2 (/)
процесса. Предельное состояние может быть
представлено величинами
(детерминированными, случайными) или процессами. Такие
модели известны под названием "случайный
процесс - поле допуска,\ Переход от
статической модели к динамической осуществляется
введением в расчетные функции
распределений Р3 (5) и Рд (8) параметров, зависящих
от времени (наработки) сс^. (/) и Рд. (/), а
также при расчетах на статическую прочность
с учетом дрейфа характеристик, отражающих
предельное состояние и нагрузочный режим.
Например, если характеристики
предельного состояния и нагрузки распределены
нормально
Г\ се, (/), Р, (/), X ] и /•[ ад ((), рА (/), Я ], то
Р(1) = (2ж)~1 |ехр(-0,5 12\сН;
-а
|(</р/<//)у-0,5(</Г/<//)р|
/(О = 1 1 1 х
х ехр I - 0,5 а2 ),
(1.3.4)
где а=р/у; р = тк (/) - /л, (/) ;
У=а$(/) + а?(0.
Классификация моделей позволяет
объединить различные подходы к расчету
характеристик надежности деталей и получить ряд
новых моделей, охватывающих большинство
практически возможных случаев.
Ключевым этапом прогнозирования
показателей надежности детали является
построение (определение и формализация)
модели отказа. Различают простые модели, в случае
преобладающего воздействия одного
разрушительного процесса, и сложные, вызванные
совокупным воздействием нескольких
разрушительных процессов (износ, усталость,
коррозия и пр.). В последнем случае модель
отказа может быть сформирована после
логического анализа вероятностных оценок
протекающих процессов, их взаимосвязи и
взаимного влияния. Для повышения точности и
достоверности прогнозируемых показателей
целесообразен синтез прогнозов, в основе которых
лежат различные модели или разная
информационная база [45].
Прогнозные значения ресурсов агрегатов
и автомобиля в целом устанавливают путем
минимизации эксплуатационных затрат,
вычисляемым по моделируемым потокам
отказов, либо путем максимизации прибыли от
эксплуатации автомобиля на основе
комплексных показателей надежности.
Модели прогнозирования ресурса деталей.
Используемые на практике вероятностные
модели расчета деталей на износ, усталость,
статическую прочность основаны на принципе
однократного достижения разрушительным
процессом (нагрузкой) предельного состояния
соответственно по геометрическим параметрам
(размерам), накопленным повреждениям и
несущей способности. В табл. 1.3.16 приведе-
ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЯЕЙ НАДЕЖНОСТИ И РЕСУРСА
97
1.3.16. Модели прогнозирования ресурса деталей
Модель
Зависимость
Расчетные формулы
1
1. Статическая:
с
фиксированным предельным
состоянием
с
распределенным предельным
состоянием
ЬЩ
г5(в)
1(5)
Г (Я)
Р = Г3(К) = \/Л5)*8
Р= //,№[1-^(5)]^
2. Динамическая:
с
фиксированным предельным
состоянием
с
распределенным предельным
состоянием
/(>) =
^К(')>рло,^]
<н
5-К
/(>) = \ /я(А)
^д[ад(/),Р,(/),5]
Л
ак
5=К
3. Общая
динамическая
е Г0 I '
ПК)
Э""
/(0= |Л К (О, МО, 5]ж
— 00
х [1-^[а,(/), р5(0, ^]]^
Примечание: / - время (наработка); Р - вероятность отказа; / (/) - функция
плотности распределения ресурса; сс^ (/), Р^ (/) - зависящие от времени (наработки) параметры
■ <№(.) I
распределения; Ря (К) - функция распределения при 5 = Л;
дифференцирования подставляется К
<Н
- вместо Л1 после
8=К
4 Зак. 1741
98
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
Расчет на износ. Реализации износа, табл. 1.3.16, получим распределение ресурса
представляющие собой случайный процесс "со
слабым перемешиванием", часто описываются
зависимостями
а Г
а-1
/(» = •
-^-(Дл-ЯоИ'11
5(О = ^0+^1>а>
(1.3.5)
где а - неслучайная величина; «У^ -
интенсивность изнашивания; ^ - начальный износ
(после периода приработки).
Значение коэффициента а для
уравнений износа деталей приведены ниже [22, 23].
Накладки тормозных механизмов и
дисков сцеплений 1,0
Валики пальцев и осей 1,4
Шлицы валов 1,1
Зубья шестерен по толщине 1,5
Посадочные гнезда корпусных деталей . .1,0
Кулачки распределительного вала по
высоте 1,1
Плунжерные пары ТНВД 1,1
хехр
' 2(с02+а?^)
(1.3.6)
Зависимость применима для
определения ресурса по износу большинства деталей
колесных и гусеничных машин. При
линейных реализациях износа (а = 1) она является
обобщением а - распределения В. Г.
Дружинина (сто =0) и дисперсионного распределе-
Радиальный зазор в подшипниках 1,5 ния С. И. Бернштейна.
Характеристики интенсивностей изнаши-
При постоянном предельном состоянии вания и значения предельных износов ряда
Яп , используя соответствующую модель из деталей приведены в табл. 1.3.17, 1.3.18.
1.3.17. Характеристики изнашивания деталей двигателей грузовых автомобилей
Деталь
Гильза цилиндра
Юбка поршня
Канавка под поршневое кольцо
Поршневое кольцо:
по высоте
по радиальной толщине
Шейки коленчатого вала:
коренные
шатунные
Вкладыши:
коренные (нижние)
шатунные (верхние)
Интенсивность изнашивания, мкм/тыс. км
*1
0,6
1,43
"082
0,71
1,03
1,66
0,82
4,2
0,27
0,25
0,18
0,2
0,3
0,2
0,42
<*1
0,21
0,52
033
0,22
0,22
0,3
0,35
2,2
0,05
0,08
0,04
0,06
0,08
0,05
0,1
Предельный износ Лп ,
мкм
170
350,400
ПО
140
70
70
200...400
70
40
-
—
ЗИЛ.
Примечание. В числителе даны значения для автомобилей КамАЗ, а в знаменателе
ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ И РЕСУРСА 99
1.3.18. Характеристики изнашивания деталей трансмиссии
Деталь
Шестерни коробки передач:
первой передачи и заднего хода
промежуточного вала
то же, ведомого вала
второй передачи ведомого вала
Шестерни главной передачи:
коническая ведущая
то же, ведомая
цилиндрическая ведущая
то же, ведомая
Ведущая шестерня колесной передачи
Шлицы:
ведущего вала коробки передач
под ступицу диска сцепления
под синхронизатор и шестерню
под фланец
Интенсивность изнашивания,
мкм/тыс. км
2,7
0,98
0,46
0,62
1,21
0,86
2,71
0,86
1,8 ... 3,2
0,55
0,22
0,26 ... 0,35
0,35
0,56
1
0,2
0,25
-
-
-
-
-
0,16
0,1
0,15 ... 0,18
ОД
Предельные значения Лп
износ, мкм
220
-
-
-
0,137 ... 0,23
0,08 ... 0,124
-
зазор,
5 ...7
5 ...7
6 ...7
14 ... 15
50 ... 55
-
-
ных амплитуд, активно участвующих в
накоплении повреждений.
Предполагается, что условные амплитуды
аУ, получаемые в результате схематизации
исходного нагрузочного режима детали,
соответствуют амплитудам, по которым построены
кривые усталости. Динамическая
вероятностная модель ГСП учитывает временной дрейф
параметров нагрузочного режима и кривой
усталости, а также случайность их изменения,
позволяя тем самым определять распределение
ресурса детали. При отсутствии дрейфа
параметров нагрузочного режима и кривой
усталости учитывается только их случайный характер
(рис. 1.3.9).
При прогнозировании ресурса деталей
по сопротивлению усталости возможны три
варианта расчета, определяемые величинами
*р и ^ [22, 45]: 1) ар =1; Я^ = ^;
2) Яр=1; ^тш=^^-1; *=0,4 ... 0,7;
3) "корректированный", в котором
Расчет на сопротивление усталости.
Согласно гипотезе суммирования повреждений
(ГСП) при непрерывном спектре нагрузки
средний радиус детали по сопротивлению
усталости вычисляется по формуле
I = —^- = ат
"та*
/О?)
й8
-1
(1.3.7)
где N^1 - суммарное число циклов
нагружения до разрушения детали; соц -
интенсивность цикла нагружения; ар - коэффициент,
зависящий от материала детали и условий
нагружения; /(/5) - плотность распределения
условных амплитуд нагрузки 5; N(5) -
кривая усталости; аУщ^, ^щах ~ область услов-
100 Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
Г(5)
Рис. 1.3.9. Вероятностная модель ГСП
12-1\к8_х
вр'(5п«-*^1)/1 '
с с
"шах '-'тах
где 1Х = $ /0У)АУ ; /2 = " / 5/(5)ЛУ ;
8_1 - предел вьшосливой детали.
Если ар <0,1, то рекомендуется
принимать ар =0,1. Характеристики кривых
усталости ряда деталей представлены в табл. 1.3.19 -
1.3.23. Рекомендации по расчету параметров
нагрузочного режима имеются в литературных
источниках [1, 2]. В табл. 1.3.24 приведены
результаты расчетов на сопротивление
усталости по трем вариантам гипотезы ряда* деталей.
При сопоставлении расчетных /,р и фактиче-
1.3.19. Характеристики кривых усталости деталей
Деталь
Нагрузочный режим
Кривая усталости
Значения параметров (средние)
Боковина
шины
Вертикальная
нагрузка, кН
8тЬ = С
т = 4,6; С = 151-105
Диск колеса
Изгибающий
момент, кН • м
5т N = 5Щ{ Щ
т= 4,1; N0 =6,8-1010;
3_х = 0,53 кН-м
Подшипник
Приведенная
нагрузка, кН
8тМ = С% N0
т =
для шарик ов ог о :
3,33 для роливог о;
ЛГ0=4,7-Ю«; Сд
грузоподъемность (кН)
динамическая
Шестерня
Контактные
напряжения
Амплитуда изгиб-
ных напряжений
Зт N = 5Ш\ Щ
т= 6; Л^0 = 1,2 • 108;
8__1 по табл. 1.3.21
т = 9; N0=4-106;
*У_! по табл. 1.3.22
Накладка
сцепления
Удельная работа
8т N = 30\ ЛГ0
^-1 =2,3;
1) ЛГ0 =700; т= 1,792;
2) Л^о = 1 50°; т = 3,276;
3) 7У0 =850; т= 1,51
ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ И РЕСУРСА 101
1.3.20. Пределы контактной выносливости шестерен
Стали
Центрируемые,
обработанные по типовым
технологическим процессам
Сложнолегированные
среднеуглеродистые
конструкционные (ЗОХГТ,
20Х2Н4А, 40ХНВА)
Высоколегированные
среднеуглеродистые
(40Х, 45ХН, 40ХНМА, и
55ПП)
Среднеуглеродистые
(40Х, ЗОХГТ)
Обработка
Цементация,
нитроцементация
Термическое
улучшение
Поверхностная
закалка ТВЧ
Термическое
улучшение без
упрочнения; азотирование,
цианирование
5_!, МПа
5_1 = 1095-Н2,41(9,4 НКСс-220)
■У^-г^цю нксп+зз)
^_1 =584+2,41(10 НКСп-400)
5^=657+2,41(10 НКСП-350)
МПа
27
14,5
22
14,5
Примечание: НКСП и НКСС - твердость соответственно поверхности и сердцевины
зубьев.
1.3.21. Пределы изгибной выносливости шестерен
Обработка зубьев
Контурная закалка ТВЧ; сквозная закалка,
пластическое деформирование переходной
поверхности
Поверхностная закалка ТВЧ; сквозная закалка
ТВЧ до впадин, шлифование по контуру после
пластического деформирования
Цементация, закалка, отпуск
Шлифование после химико-термической
обработки
Полирование впадин, цементация, закалка,
отпуск, шлифование без впадин, упрочнение
впадин дробью
5_{, МПа
5_! =568+2,55(9,4 НКСс-200)
^_1=384+1,36(9,4 НКСс-200)
5_1=504+1,18(9,4 НКСс-229)
^_1 = Ю9+10,2 НКСС
5_1=443+9,4НКСС
МПа
12,7
11,3
15,7
5,45
102
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
1.3.22. Характеристики кривых усталости полуосей
Материал и обработка
40Х, термообработка
45РП, поверхностная закалка
40ХГТР, дробеструйный наклеп
40ХГТР, термообработка
5Г, МПа
163
203,8
236,5
380
128
100
Параметры
N0
106
3,6-106
3,2-106
106
тг
4,25
3,84
3,24
6,7
2,61
4
Коэффициент
асимметрии г
-1
-0,5
0
0
0
-1
Примечание: 8Г - среднее значение предела выносливости при асимметричном
цикле разрушения.
1.3.23. Характеристики кривых усталости листовых рессор
Автомобили
ЗИЛ
ГАЗ-53
ГАЗ-24
КамАЗ
Ль МПа
86...105
70...80
80
100
Параметры
Щ
2106
(4,2...3,4)106
3,2-106
2106
т
2,3...2,7
2,6...2,3
2,8
2,5
Коэффициент
асимметрии г
0,57...0,5
0,74...0,66
0,74
1.3.24. Расчетные и фактические средние ресурсы деталей
Деталь
Накладка
сцепления
Шестерня
четвертой
передачи
коробки
передач
Шестерня
заднего
хода
Вид расчета
По
удельной работе
буксирования
Контактная
усталость
Изгиб
Автомобиль1
Самосвал 4,5т
То же
Автобус
среднего класса
То же
Самосвал 4,5т
Средний ресурс в
зависимости от варианта расчета,
тыс. км
I
52
2250
210
135
3140
II
52
802
152
ПО
1150
III
25
745
144
79
840
аР
0,48
0,33
0,68
0,58
0,27
Фактический
средний ресурс,
тыс. км
88
780*
290
150
950*
ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ И РЕСУРСА
103
Продолжение табл. 1.3.24
Подшипник
карданного
шарнира
Ведущая
цилиндрическая
шестерня
главной
передачи
Подшипник 76ТЗК
главной
передачи
Полуось
Рессора
задняя
Диск
переднего
колеса
Контактная
усталость
По
динамической
грузоподъемности
Контактная
усталость
То же
По
динамической
грузоподъемности
Кручение
Изгиб
Изгиб
То же
Грузовой
бортовой 8т
То же
Самосвал 4,5т
То же
Автобус
среднего класса
То же
Самосвал 4,5т
То же
113
170
182
304
2010
465
305
580
864
612
113
170
182
164
2010
246
80
182
180
612
44
53
87
118
626
93
64
185
164
282
0,38
0,31
0,48
0,39
0,31
0,2
0,21
0,32
0,19
0,56
60
60
210*
126
800*
240
100
190
120
1200*
1 Автомобили (автобусы) выпуска до 1970 г. (кроме бортового 8т).
* Фактический ресурс определен по результатам незавершенных испытаний.
ских Хф средних ресурсов наблюдается
соотношение Ь > Ь > Ь , т.е. первый и
третий варианты расчета являются граничными.
При ар>0,45 предпочтителен первый вариант
расчета, а при ар<0,40 - третий.
При независимости входящих в формулу
(1.3.7) параметров кривой усталости и
нагрузочного режима и нормальности их
распределения для кривой усталости степенного вида
N8 = 8_^§ сРеДнее значение Ь и
дисперсия а^ ресурса вычисляются по формулам
I =-
1к$ ,
та* г»"*
л ехр
^-^
№
Д.
(1.3.8)
дх\)
\2
2
\2
' *ь ч
да,
р )
д8„
дЬ
г (дЬ
2 (
(
'*«
дЬ
\2
дс
2
5 )
2
дЬ
Л2
д5
\)
ад
(1.3.9)
тах у
где т - параметр кривой усталости; Г] -
коэффициент использования пробега;
104
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
А =
сог(
п Г шах <-, Ж |
ВПкз" ехр1
^-5-
°8
№;
^ ехр
/ \2
ст5 ;
*-бГ(*-г-)ЧЧ
V2
( \
5
дЬ
1^-1;
Ы
ехр
•у--у»
°5 )
№У;
№;
дЬ А дЬ А
дМ0 М0В{ да а Вх
дЬ _ АВЪ дЬ
дт
дЬ
т
дЬ
дЬ
в; дс3 с3вх
1--А.
V Ф^
Фх
(*0-*т*1):
А51
в
-ехр
(- - Л2
д5
-1
«1 Н-1
хехр
/ - - Л2
Использование расчета на статическую
прочность. Расчет по статической модели с
детерминированным фиксированным
состоянием К (предел прочности или текучести)
позволяет при известном распределении
нагрузки вычислить вероятность разрушения Р.
Динамическая модель расчета при
независимых и нормально распределенных нагрузке и
предельном состоянии имеет вид
(
Р(*) = 1-Ф[
т-т
{1о2л®+о1(*))
(1.3.10)
где Ф(») - интеграл вероятностей; Л(/), *У(/)>
стд(0> стл(0 - математические ожидания и
дисперсии нагрузки и несущей способности
соответственно в виде функций от времени
(наработки); Р{() - вероятность неразрушения.
Логические модели отказа деталей. Если
деталь отказывает из-за одного дефекта,
наблюдающегося в одном из ее элементов
(сечений), то рассмотренные модели
позволяют оценить показатели ее надежности. Однако
для большинства деталей даже для одного
элемента имеют место несколько разрушительных
процессов, которые могут привести к отказу
детали.
В табл. 1.3.25 приведены дефекты
полуоси грузового автомобиля, наблюдавшиеся в
эксплуатации и при капитальном ремонте, и
указаны виды расчета, соответствующие этим
дефектам. Для формирования расчетной моде-^
ли ресурса полуоси необходимо описать шесть
процессов, три из которых связаны с
прочностью и жесткостью, два - с износом, один - с
усталостью. В то же время, если под отказом
понимать выбраковку полуоси, то число таких
процессов сокращается до трех.
Анализ результатов наблюдений за
отказами деталей в эксплуатации и дефектных карт
на капитальный ремонт показал, что в основу
логических моделей отказов деталей положены
три типа зависимостей между
разрушительными процессами детали.
1. В сечении или в нескольких сечениях
детали протекает N независимых
разрушительных процессов, каждый из которых может
привести к отказу детали с формированием
плотности распределения наработок У/( О-
Расчетная формула для плотности распределения
ресурса имеет вид
ТУ
ТУ
где Р1 (/) - функция распределения.
(1.3.11)
ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ И РЕСУРСА
105
1.3.25. Основные дефекты и виды расчета полуоси
Элемент полуоси
(сечение)
Для всей полуоси
(включая шлицы)
Фланец
Шлицевое соединение
Конусные отверстия во
фланце
Дефект
Сколы,
скручивание
Трещины
Погнутость
Погнутость
Износ шлицевых
зубьев по толщине
Износ
износ
_
+
+
Вид расчета
прочность
+
+
+
-
-
усталость
+
-
-
Заключение о
возможности
исправления
Браковка
и
Правка
Правка,
браковка при
толщине
меньше
допустимой
Наплавка
Заварка
В частности, для деталей отказы которых
происходят по двум независимым причинам -
усталости и износу - и подчиняются
соответственно распределению Вейбулла /\(Ь) с
параметрами т и Ь\ и нормальному ^(Х) с
параметрами Ь2 и ст2> плотность распределения
ресурса
тЬт~Х
/гЩ = ехр
к1о;
1-Ф-
(Ь-Ь2Л
где Ф*
хехр
ь-и
*2 ;.
■Ы2па2)
ь-ь2
ч ст2 ;
/ \
^^о;
2. В сечении детали протекают
разрушительные процессы Х{{Ь) и Х^Ь). Процесс
Х((Ь)У приводящий к отказу, начинается
только после достижения процессом Х^Ь)
предельного значения. Результирующая
зависимость формируется из двух или нескольких
моделей типа: износ - износ, износ -
усталость, усталость - прочность, износ-усталость-
прочность и др. Для определения ресурса
детали рассматривается сумма случайных
наработок до определенных состояний Ь^
формируемых процессами Х^Ь). При независимости
Ь( распределение ресурса детали /(Ь)
определяется композицией распределений наработок
/((Ь) до предельных состояний. Для
нормально распределенных наработок расчет ресурса
выполняется по формуле
/щ =
г ехр
У2 )
табулированный интеграл
2«2>?
1а
/=1
Ж
/=1
вероятностей.
Первое слагаемое в формуле определяет
долю отказов от усталостных поломок,
второе - от износа.
где Ь1 и о1 - соответственно средние
значения и дисперсии наработок до /-го
предельного состояния; к - число разрушительных
процессов в сечении детали.
106
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
1.3.26. Корреляционные уравнения долговечности деталей
Деталь
Накладки
сцепления
Нажимной
диск
сцепления
Карданный
шарнир
Шестерни
коробки
передач
Подшипники
коробки
передач
Рессора:
передняя и
задняя
Уравнение
<70 =1,007-0,4271е ЛГС
10
^Д 0,005ЛГД 0,15 7
кДж/(м2-кг,)
Яш =4,308 +
+ 2,12818ЛГШ,
МПа
Як = 7,6 + — у
Нм/мм
418
дп =1,76 +
ц5 =1,051 -0,1381пЛГр
-0Д81п1ж;
ц5 = 1,398-0,1621пЛГр
- 0,4061п5т
7 /Л
Формулы
для вычисления критериев
Л/Т
ЛГС=^«Л *
1, „1&и
д
1000 V ^
2яЛк
9к=-Х*'л/'
яп =—2-а/рпР/
п °'5 V с
5 - ' Уа'Г
,3я _ 2-1 1 т1'
2000
^Р =0'5/'Ха/Сйтах/
Конструктивные параметры и
характеристики
А, Т - толщина и
поверхность трения накладок; у -
износостойкость
материала; /1/, м>/ - интенсивность
включений и работа
трения
ш - масса диска
В - диаметр крестовины;
Гш - площадь
поверхности шипа; Л// -крутящий
момент; у - угол наклона
вала; щ - передаточное
число главной передачи;
/^ - радиус колеса
Ь - ширина венца; Л// -
момент
Сд - динамическая
грузоподъемность; Ри~1 -
приведенная нагрузка
аУ.1 - предел
выносливости; 8Ш1 - среднее
напряжение (статическое);
^тах/ " интенсивность
с2
нагружения; о у -
дисперсия процесса нагружения
Примечание:* а,- весовые коэффициенты режимов нагружения; Ь - пробег, тыс.
км.
ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ И РЕСУРСА
107
3. В том случае, если при протекании в
сечении детали нескольких разрушительных
процессов на некоторой наработке I < Ь
изменяется характер протекания одного из
процессов, для описания наработок до
предельных состояний используют условные
плотности распределения /х \х (/,Х). Функция
распределения ресурса детали находится по
формуле полной вероятности. Например, для двух
разрушительных процессов Х(Ь) и У(Ь)
ъш=]/М
\/гщаь
41 +
+ \рХ/У{Ь,1)/г{1)41,
где Х(Ь) - процесс изменяющий характер на
наработке / и завершающийся отказом детали;
У{Ь) - процесс, который по достижении
своего значения провоцирует изменение характера
протекания процесса Х(Ь).
Применение зависимостей третьего типа
характерно при расчетах на износ деталей,
имеющих упрочненный поверхностный слой.
Для расчетов необходимо предварительно
определить условное распределение ВХ / У (Ь,Г)
экспериментальным путем, либо
моделированием.
Корреляционные уравнения долговечности
(КУД). Метод КУД относится к
альтернативным способам прогнозирования ресурса
деталей, базирующимся на ретроспективной
информации. В основе метода лежит
формирование критерия, характеризующего
нагрузочный режим и установление корреляционной
связи этого критерия с фактическими
наработками детали до отказа [22, 23]. Параметры
модели КУД (табл. 1.3.26), как правило
нелинейной, находятся методом наименьших
квадратов с обязательной проверкой адекватности
и построением доверительных интервалов.
Комбинированный метод прогнозирования
ресурса. Комбинированный метод
прогнозирования ресурса позволяет объединить оценки
ресурса, полученные прямым и
альтернативными способами* (например, используя расчет
на усталость и КУД), повышая тем самым
достоверность прогноза. Метод включает
операции: выбора вариантов (методов) расчета,
вычисления характеристик распределения
ресурса, сравнения результатов и объединения
оценок, если они не являются
противоречивыми [22]. Результирующее распределение
ресурса представляется в виде композиций
частных распределений с весовыми
коэффициентами у/, установленными экспериментально,
1ибо назначенными пропорционально
ошибкам вариантов:
/Щ = /, (У11)*/2 (у2Ц*... */к (укЦ,
где индекс к - число непротиворечивых
вариантов; * - символ композиции.
Среднее значение и дисперсия ресурса
детали определяются по формулам:
к к
/=1
/=1
т 2
где Ь^ а^ - среднее значение и дисперсия
ресурса детали по /-му варианту расчета.
Зависимости между параметрами ресурсов
деталей. Установление зависимостей между
средними значениями и дисперсиями
наработок до отказов и между отказами
восстанавливаемых деталей и агрегатов необходимо для
прогнозирования потоков отказов. Как
показал анализ фактических данных [1, 2] в
большинстве случаев эти зависимости имеют
линейный характер (табл. 1.3.27).
Поток отказов агрегата. Поток отказов
агрегата определяется суммированием
расчетных потоков отказов составляющих его к
деталей <ь(Ь):
сор(1) = |]со/(1).
(1.3.12)
/=1
Для общего процесса восстановления при
условии подчинения распределений наработок
до первого отказа и между отказами
нормальному закону либо распределению Вейбулла
последовательность прогнозирования со(Х)
следующая.
1. Одним из перечисленных выше
методов, включая комбинированный, вычисляется
значение средней наработки до первого отказа
/-Й детали Ь{.
2
2. Если оценка дисперсии а{ наработки
до первого отказа не проводилась, то она
находится по _корреляционной зависимости
ст1 = а0 +а\^\ из таб*л- 1-3-27.
3. Устанавливается закон распределения
наработки до первого отказа по правилу:
нормальное распределение при
а1 < 0,33^;
распределение Вейбулла при
а1 > 0,33//!»
Если отказ вызван износом или
усталостью, то при а 2 » Ь^ следует принять
логарифмически нормальное распределение.
4. Для распределений, отличных от
нормального, по коэффициенту вариации
у\ ~ а1 /^1 вычисляются [1, 2] параметры
распределения наработок до первого отказа
МЫ
108
Глава 1.3. МЕТОДЫ РАСЧЕТА ПАРАМЕТРОВ И КОНСТРУКЦИЙ
1.3.27. Коэффициенты корреляционных зависимостей между параметрами ресурсов деталей
Агрегат,
система
Двигатель (кривошипно-
шатунный механизм)
Сцепление
Карданные шарниры
Тормозная система
а1 =*С
*о
12
0
21
0
+ *1А
а\
0,26
0,57
0,27
0,53
Кг=ь
Ьо
3
18
22
12
о НА
Ьх
0,43
0,29
0,24
0,85
а1,2 = С0
Со.
5
13
17
-2,5
+ Схк
Сх
0,31
0,26
0,2
0,84
Примечание: Х1?Х12 - среднее значение наработки соответственно до первого
отказа и между первым и вторым отказом; ст1,а1 2 - соответствующие средним значениям средние
квадратические отклонения наработок.
5. По корреляционным зависимостям из
табл. 1.3.27 вычисляются среднее Х1 2 и
среднее квадратическое значение а12 наработок
между отказами и по аналогии с пп.З и 4
находятся параметры распределения наработок
между отказами/^2(Х).
6. Распределение наработок до второго и
последующих отказов находится как
композиция распределений
/2(Х)=/1(1)*/и(Х),;
/3Щ =/2Щ*/1<2(1) и т.д.
7. Поток отказов определяется по
формуле
;-1
(1.3.13)
где У - номер отказа, АЬ - интервал наработки.
Аналогично получают потоки для
остальных к-\ деталей.
В формуле (1.3.13) ограничиваются
суммированием 5-7 слагаемых, что приводит к
усечению потока, но практически оправдано.
Корректирование потока по числу
учитываемых деталей. Если поток отказов
формировался только из деталей лимитирующих
надежность, то он должен быть откорректирован
коэффициентом сс(Х), зависящим от
наработки,
сок(Х) = о>р(Х)а(Х).
Рекомендуемое для расчетов среднее
значение коэффициента а =1,05... 1,5.
Учет множественности отказов. При
ремонте агрегата возможна замена от одной до
нескольких деталей сразу. Среднее число
замен за один ремонт составляет 1,3+1,6. Это
учитывается коэффициентом Х(Х),
корректирующим поток отказов по формуле
в-(Х)=»к(/.)/Х(Х).
При условии нормальности
распределений ресурсов До первого отказа и между
отказами и равенстве параметров этих
распределений, а также при условии замены всех
деталей, входящих в сборочную единицу при
отказе одной из них (комплектом), коэффициент
учета множественности отказов
X = пи. - у-Лп/м,
где п - число деталей в сборочной единице; V -
коэффициент вариаций ресурса.
Для экспоненциально распределенных
наработок до отказа Х=1.
Прогнозирование комплексных
показателей надежности. Для агрегатов с помощью
системы дифференциальных уравнений,
описывающих вероятности состояний, можно
рассчитать коэффициенты технической
готовности. При этом необходимо выделить
соответствующие вероятности состояний
нахождения машины в текущем ремонте, связанные с
отказами деталей конкретного агрегата.
Интенсивности переходов для агрегатов
рассчитываются по потокам отказов деталей.
Пример. Состояния автомобиля: Р\{Ь) -
исправен, работает; Р2Ш - проходит ТО-2;
Р^{Ь) - исправен, простаивает по
организационным причинам; Р^{Ь)... Ру(Ь) - находится
ПРОГНОЗИРОВАНИЕ ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ И РЕСУРСА
109
на текущем ремонте, связанным с ремонтом
двигателя, сцепления, коробки передач или
ведущего моста. Система уравнений имеет вид
аь
аь
аь
: -1С [х12 + х13 +х14 щ+х15 (Ь) +
+ Х16(Ь)+\17(Ь)]Р1(Ь)+»21Р2(Ь) +
+ ц31Р3 (Ь) + ц41Р4 (Ь) + ц51Р5 (Ь) +
+ 1х61Р6(Ь)+цпР7(Ь);
= 1с\пРг(Ь)-1121Р2Щ;
= /сХ17,Р1(1)-ц71Р7(^),
где Х12=0,1; Х13=0,8; Х14(1)=-0,374+0,016 Ь-
-4.4410-5 Ь1 при Х>30 тыс. км; А,150Ц=0,55-
-0,2/1; Хг6Щ = -0,021 + 0,00311 - 3,7-106Х2;
ХпЩ = - 0,036 + 0,00281, - 7,7-106!,2;
Ц2Ь---Ц71=1 (^ - отказы на тыс. км; ц -
восстановление в день; /с - среднесуточный
пробег; /с=0,25 тыс. км в день).
Коэффициент выпуска осв = Р^(Ь)\
коэффициент готовности машины
ктм=р,щ+ръщ.
Коэффициент готовности двигателя
Кта =КТМ+ Р5(Ь) + Р6(Ь) + Р7(Ь) =
= 1 - Р2(Ц
РГ(Х) и т. д. Очевидно,
кГ/ - коэффициент готовно-
лгм ^ лг;>
сти /-го агрегата.
При Х1 • = сопз!, Ц/1 = сопз! система
уравнений позволяет получить оценки
комплексных показателей надежности для
стационарного режима. В этом случае коэффициент
выпуска (для машины) рассчитывается по
формуле
-1
а вероятность нахождения в состоянии
Например, с учетом последних формул
коэффициент готовности двигателя
^гд _ ^с
1^31
45
Чб , *17
■+ —^+-
И51 Н\ ^71
При Х14 = 0,1; Х15 = 0,04; Х^ = 0,025; А,17 =
= 0,035 и тех же значениях остальных
параметров Ов = Р\ = 0,784; Кш = 0,941; Кта =
= 0,960; Ктс = 0,972; Кп = 0,974.
Оптимизация ресурса по экономическому
критерию. Оптимальным ресурсом К^ агрегата
считается такой, который обеспечивает
достижение минимума удельных затрат на
приобретение и поддержание его в работоспособном
состоянии
СУ =
1
Св +
]СЛЩ(И
-> гшп,
где Са - оптовая цена агрегата; СД(Х) -
дифференциальные затраты на текущий ремонт.
Переменные затраты включают стоимость
запасных частей, материалов, работы:
М
;=1
где к - коэффициент неучтенных затрат; М -
число деталей, лимитирующих надежность;
со :(Ь) - откорректированный параметр
потока отказа у-й детали; Су - оптовая цена у-и
детали.
Дальнейший расчет рассмотрим в виде
последовательности операций
1. Для М деталей агрегата, критических
по надежности, определяется средний ресурс
до первого отказа Ь* = —
М
м
ХЧ/> да Ч-
;=1
средний ресурс у-й детали.
2. По корреляционным зависимостям
(см. табл. 1.3.27) находятся о^, Ь^ 2 и о^ 2 в
функции Ьу
3. По оптовым ценам С) определяется
среднее значение С и среднее квадратическое
отклонение ас стоимости одной осредненной
детали агрегата.
4. С использованием известных
зависимостей для общего процесса восстановления
записываются формулы для ведущей функции
потока затрат агрегата
Ос(Х) = А + Р1,
и длины (абсциссы) переходного процесса
К = Ь\ +1\,2
Т2 -2^
ь\д + ст1
_2
а1,2
где
р = см/ь12,
А = СМ
А " ^1,2
4,2
-0,5
'1,2
-1
"1,2
5. Задается уравнение для суммарных
затрат на запасные части в виде степенной
зависимости СД(Ь) = уЬп. Коэффициенты у и
п определяются из решения системы двух
уравнений. Первое уравнение получается из
условия, что зависимость Са(Ь) проходит
через точку с координатами: Сд = А + рХл;
Ь = Ьп\ второе - из условия, что Сд(/,)
является касательной к Ос(Ь) в точке Ьп.
6. При подстановке СД(Х) и
соответствующих преобразований для определения
минимума, получается зависимость для
среднего ресурса
I <х*(-Д)
гдел=Р^/(А+р1л).
7. Для определения среднего квадрати-
ческого отклонения ресурса по
экономическому критерию ад используется ведущая
функция потока затрат, в которую вместо С
подставляется С = стс. После преобразований
>Я = *э
1
С+с
с )
1.3.5. ПОДДЕРЖАНИЕ НАДЕЖНОСТИ МАШИН
В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ
В процессе эксплуатации машин их
качества не остаются постоянными в результате
изменения показателей, обусловленного как
рабочими процессами так и временем
хранения. Поддержание технического состояния
машины на уровне, определенном
конструкторской документацией (техническими
условиями) обеспечивается проведением
регламентных работ, предусматриваемых планово-
предупредительной системой технического
обслуживания (ТО), которая включает виды
обслуживания, периодичность их проведения,
объем и трудоемкость выполнения работ.
Нормативы эксплуатационной
технологичности отражены в соответствующей документации
к машине [6, 18, 47].
Принципиальные положения этой
системы следующие:
выполнение в обязательном
(принудительном) порядке постоянного комплекса
работ по ТО через определенный период (в
километрах пробега или часах);
выполнение заправочных и
регулировочных работ, а также устранение
неисправностей, выявленных в процессе ТО или в
результате контрольных осмотров при
необходимости.
В зависимости от периодичности и
трудоемкости выполнения работ ТО машин
подразделяют на следующие виды: ежедневное
техническое обслуживание (ЕО); первое
техническое обслуживание (ТО-1), второе
техническое обслуживание (ТО-2), третье
техническое обслуживание (ТО-3) (для машин,
работающих в сельском хозяйстве) и сезонное
техническое обслуживание (СО). Периодичность ТО
приведена в табл. 1.3.28.
Основным значением СО, проводимого 2
раза в год, является подготовка машины к
эксплуатации в холодное и теплое время года,
а работ по ТО при хранении - защита машины
от коррозии и старения резинотехнических
изделий. Перечень работ по каждому виду ТО
конкретной марки машины содержится в ее
руководстве по эксплуатации.
Конструкция машины с точки зрения ее
приспособленности к производству работ по
ТО и ТР должна обеспечивать:
возможность выполнения моечных,
крепежных, регулировочных, смазочных,
контрольно-диагностических и ремонтных работ;
удобство доступа к любому агрегату, узлу
для снятия их с машины или частичной
разборке при замене отдельных деталей, при этом
не должно возникать необходимости в
разборке или демонтаже соседних агрегатов, узлов,
не требующих ремонта;
возможность разъединять фланцевые
детали, удалять стаканы из корпусов и т.д.;
удобство разборки узлов, приборов для
замены или ремонта детали, минимально
возможным набором ключей и приспособлений, а
демонтаж подшипников качения -
универсальными съемниками;
сборку узла только при определенном
положении отбалансированных деталей,
соответствующем заводской балансировке;
удобство снятия, транспортировки и
установки агрегатов массой более 30 кг
подъемными механизмами (должны быть
предусмотрены специальные устройства для зачаливания
тросов или захвата крюками);
взаимозаменяемость агрегатов, узлов без
предварительной подготовки.
ПОДДЕРЖАНИЕ НАДЕЖНОСТИ МАШИН В ЭКСПЛУАТАЦИИ
111
1.3.28. Периодичность технического обслуживания машин
Машина (пробег)
Автомобиль легковой, км
Автобус, км
Автомобиль грузовой, автобус на базе
грузового автомобиля или с использованием его
основных агрегатов, км
Трактор, мото-час
Автомобиль-самосвал внедорожный, км
Прицеп или полуприцеп, км
Автомобиль полноприводной, км
Гусеничный тягач и транспортер, км
ЕО
Один час в
рабочие сутки
независимо от
числа
работающих смен
ТО-1
5000
5000
4000
125
3000
4000
4000
1000
ТО-2
20 000
20 000
16 000
500
12 000
16 000
16 000
3000
ТО-3
_
-
-
1000
-
-
-
~
Примечания. 1. Указанная периодичность ТО не относится к периоду обкатки
новой машины и агрегата, для которых могут устанавливаться меньшие значения периодичности.
2. При использовании автомобилей в сельском хозяйстве допускается применять коэффициент
меньше единицы (не менее 0,7). 3. При круглосуточной работе трактора ежесменное
техническое обслуживание проводиться через 8 - 10 ч.
При конструировании в соответствии с
принципами планово-предупредительной
системы ТО и ремонта предусматривается
возможность диагностирования машины в объеме
комплексов контрольно-диагностических
работ Д-1 и Д-2, а для тракторов и Д-3:
Д-1 - комплекс по определению
технического состояния узлов, обеспечивающих
безопасность движения машин, выполняется
при ТО-1, после ТО-2 и по потребности после
текущего ремонта;
Д-2 и Д-3 - комплексы по определению
тягово-экономических показателей машин и
уточнению объемов работ ТО-2 и ТО-3 для
тракторов и предупредительных ремонтов,
выполняются, как правило, один-два дня до
ТО-2 и ТО-3 и при необходимости.
В современных конструкциях
используют, как правило, встроенные средства
диагностирования, изготовляемые на
микропроцессорной основе с максимально возможным
числом мест контроля и запрограммированной
выдачей рекомендаций по рациональному
устранению неисправностей и выбору режима
движения.
При расчете показателей
эксплуатационной технологичности определяют расход
запасных частей.
Ресурс Хщ шин автомобилей
ориентировочно определяется по формуле
Аи = (Дп " #цоп )/ ДД
где Нп - полная глубина рисунка протектора
новой шины, мм; Ндоп - предельно
допустимая глубина рисунка протектора, мм; АН -
средняя интенсивность изнашивания шин на
1000 км пути, мм.
Особую трудность составляет
нормирование и регулирование запасных агрегатов и
деталей, так как их номенклатура очень
большая. Наиболее приемлемым методом
нормирования следует считать такой, при котором
производственные запасы деталей узлов и
агрегатов определяются по каждому
наименованию номенклатуры с учетом прогноза
возникновения отказов и конкретных условий
эксплуатации. Процесс определения нормативов
потребности в запасных частях разделяется на
два этапа: определение номенклатуры
запасных частей; расчет нормативов согласно этой
номенклатуре. При этом, в основу
определения параметров принимаются: средние
ресурсы Л/ деталей, комплектов и сборочных
единиц, установленных для данной машины; их
средние квадратичные отклонения а,; полные
ресурсы Ьш (амортизационный пробег)
машин (агрегатов) до списания; средние сроки
службы Т машины (агрегата) до списания.
На основании имеющейся исходной
информации применяются различные расчетные
зависимости. Наиболее точно норма N расхода
запасных частей определяется по уравнению:
Т I Д,
+ 0,5
Ф
"**
\аЛ;
-0,5
где п - число одноименных элементов в од-
К. + 1
ной машине; К^ = Ит — > соп$1 -
112
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
коэффициент нестационарности потока замен;
I = 1, 2, ... , п - порядковый номер замены
детали за срок 2^,; Кг+\ и^- ресурс деталей
соответственно до последующей и
предшествующей замен; Ф - нормированная функция
Лапласа.
При использовании приведенного
уравнения следует иметь в виду, что возможны
случаи, когда средние или полные ресурсы
деталей равны или больше амортизационного
пробега Хам. Такое положение не исключает
полностью необходимости в запасных частях
этого наименования, так как в расчетные
уравнения входят средние ресурсы.
Распределение ресурсов деталей и амортизационного
пробега машины могут быть такими, что их
совмещение не исключит отказы деталей до
списания машины.
Рис. 1.3.10. Схема определения норматива запасных
частей
Качественная картина- определения
норматива расхода запасных частей приведена на
рис. 1.3.10.
Глава 1.4
ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ,
СИСТЕМ
1.4.1. ВИДЫ И ОРГАНИЗАЦИЯ ИСПЫТАНИЙ
К испытаниям машин предъявляются
следующие основные требования:
достоверность оценок эксплуатационных
и потребительских свойств для снижения
риска принятия ошибочного заключения о
качестве и техническом уровне продукции
массового производства, идентифицированной с
испытанными образцами;
оперативность получения результатов для
сокращения сроков постановки в производство
новой модели или устранения в процессе
массового производства ее недостатков,
выявленных при испытаниях или эксплуатации;
воспроизводимость условий для
обеспечения сопоставимости результатов испытаний,
проведенных на различных моделях и
модификациях в разное время;
объективность оценки качества и
технического уровня машин при анализе
результатов и сохранения их сопоставимости на этапах
обобщения и обработки;
сопоставимость результатов с данными
наблюдения в эксплуатации для исключения
затрат на разработку мероприятий по
устранению недостатков, не проявляемых в рядовой
эксплуатации при использовании по прямому
назначению.
В соответствии с этими требованиями
сложилась система испытаний колесных и
гусеничных машин (рис. 1.4.1). Испытания,
проводимые на этапах проектирования и
производства, как правило, носят характер
контрольных, так как предназначены для
определения соответствия машины нормативно-
технической документации. Испытания на
этапе эксплуатации относятся к категории
определительных в связи с тем, что их
результаты позволяют получить фактическую
характеристику машины для конкретных условий
эксплуатации.
В соответствии с требованиями
испытания колесных и гусеничных машин
классифицируют по следующим основным признакам:
этапы разработки, цель испытаний,
периодичность проведения, продолжительность и
степень интенсификации, место проведения и др.
Такая система испытаний позволяет сохранить
преемственность их видов для использования
результатов предыдущих испытаний в
последующих и их сопоставления, что позволяет
комплексно оценить изменение качества
машины по всем жизненным циклам в течение
всего периода выпуска. Все виды испытаний
проводятся по соответствующим программам и
методикам.
Исследовательские испытания
осуществляют на этапе проектирования с целью выбора
и обоснования оптимальных значений
показателей эксплуатационных и потребительских
свойств машины, а также для поэтапного
доведения конструкторской документации,
обеспечивающей производство изделия,
соответствующего требованиям технического задания
и другой нормативной документации.
Исследовательские испытания
подразделяют на поисковые, когда определяют
основное направление создания модели,
компоновочную схему и возможности достижения в
производстве определенного технического
уровня, и на доводочные, в ходе которых на
опытных образцах выявляются недостатки
конструкции, по которым проводится
доработка конструкторской документации и
проверяется ее эффективность. Исследовательские
испытания проводятся часто форсированными
методами в объеме запланированного ресурса.
Предварительным испытаниям подвергают
опытные образцы с целью проверки
готовности изделия к приемочным испытаниям, они
частично выполняют задачу доводочных
испытаний, так как по их результатам
осуществляют доводку конструкции. Предварительные
испытания проводятся по стандартизованной
типовой программе-методике, которая может
изменяться в зависимости от результатов
доводочных испытаний. Испытания проходят в
объеме ресурса с измерениями характеристик
эксплуатационных и потребительских свойств,
по которым в ходе доводочных испытаний
отмечались недостатки.
Приемочные испытания осуществляются
на опытных образцах с целью совместной
(разработчика, изготовителя и заказчика)
оценки соответствия выполненной разработки
техническому заданию, требованиям правил
стандартов (в том числе международных), для
принятия решения о постановке изделия в
серийное производство. При этом используют
стандартизованные программы-методики в
объеме гарантийного пробега с выполнением
большого объема работ по определению
эксплуатационно-потребительских свойств. При
пробеговых испытаниях применяют
нормальный режим - режим, имитирующий
эксплуатационные условия, для которых
предназначена разрабатываемая модель.
Квалификационные испытания на
серийных образцах первой установочной партии
предназначены для проверки готовности
производства к серийному выпуску в соответствии
с конструкторской документацией. В рабочей
программе испытаний отражены особенности
технологии изготовления, ее соответствие
требованиям конструкторской документации.
Квалификационные испытания могут быть
совмещены с эксплуатационными. По
результатам испытаний в технологию изготовления и
в конструкторскую документацию вносятся
необходимые изменения и уточнения.
Сертификационные испытания
осуществляются на серийных образцах для
окончательного принятия решения о выпуске
разработанной конструкции и получения разрешения
на реализацию изделия в продаже по
требованиям безопасности и экологии окружающей
среды. Испытания имеют особо официальный
статус и выявляют соответствия конструкции
требованиям, предъявляемым к машине при
ввозе ее в какую-либо страну (международные
требования), а также национальным
стандартам. При оценке продукции международным
требованиям используют международные
стандарты. По результатам испытаний и проверки
производства на сертифицированную модель
колесной или гусеничной машины выдается
сертификат, который является основой для
получения разрешения на эксплуатацию
машины.
Периодические испытания проводимые
ежеквартально, предназначены для контроля
за текущим производством путем оценки
соответствия выпускаемых машин техническим
условиям и требованиям стандартов по
основным эксплуатационным и потребительским
свойствам. Испытания проводятся
предприятием-изготовителем, их результаты могут
дополнять результаты других видов испытаний,
носящих контрольные функции, для
повышения их достоверности и снижения риска
ошибочных заключений о качестве серийно
выпускаемой продукции. Испытания проводятся
в объеме 5... 10 тыс. км пробега с
определением некоторых основных показателей
эксплуатационных и потребительских свойств.
Инспекционные испытания позволяют
оценить соответствие серийно выпускаемых
моделей машин техническим условиям,
отечественным и международным стандартам на
период гарантийных обязательств
предприятия-изготовителя. По результатам
инспекционных испытаний осуществляется
инспекционный контроль сертифицированной
продукции на ее соответствие выданному
сертификату. По результатам этих испытаний может
быть выдан сертификат, для чего в программу
испытаний вносят соответствующие изменения
и дополнения.
Испытания проводятся в объеме
гарантийного пробега по стандартным программам
и методам. В ходе лабораторно-дорожных
испытаний исследуют свыше 20 различных
эксплуатационных и потребительских свойств,
характеризуемых более чем 200-ми
показателями. Пробеговая часть испытаний
выполняется чаще всего в форсированном режиме с
приведением результатов к нормальным
эксплуатационным условиям в зависимости от
назначения машины.
Ресурсные испытания предназначены для
подтверждения заданного или объявленного
ресурса до капитального ремонта машины и ее
агрегатов, а также для определения
показателей безотказности, ремонтопригодности и
сохраняемости. В ходе пробеговых испытаний
выявляют изменения показателей основных
эксплуатационных и потребительских свойств,
проверяют их соответствие заданным
требованиям, уточняют номенклатуру запасных частей
114
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
и норм расхода эксплуатационных материалов
в зависимости от срока эксплуатации машины
и др.
Рабочие программы и методы испытаний
разработаны на основе стандартизованной
типовой программы-методики. Испытания
часто совмещаются с инспекционными. В
период серийного выпуска модели, ее
подвергают двух-, трехкратным испытаниям.
Эксплуатационные испытания проводят с
целью исследования соответствия машины
реальным условиям эксплуатации, которые
при испытаниях по специальным программам
лишь моделируются и, следовательно, не могут
воспроизвести их многообразие.
Эксплуатационные испытания могут включаться в
программы исследовательских и контрольных
испытаний в виде отдельных этапов. В первом
случае испытывают 10-30 машин в различных
климатических зонах при правильном их
использовании, обслуживании и ремонте, во
втором машины проходят полигонные
испытания.
Как вид эксплуатационных испытаний
следует рассматривать наблюдения без
вмешательства в процесс использования,
обслуживания и ремонта машины, сбор, обобщение и
анализ претензий по гарантии, различных
экспортных опросов потребителя, материалов
станций технического обслуживания,
ремонтных заводов, спроса на запасные части и др.
Материалы эксплуатационных
испытаний отражают реальную картину реализации
эксплуатационных и потребительских свойств
машин при функционировании в конкретных
условиях назначения, позволяют исключить
малозначительные факторы и выделить
основные, позволяют установить связь условий
эксплуатации с уровнем реализации свойств
машины и др.
Однако этот вид испытаний обладает
рядом недостатков, которые не позволяют им
выполнять конкретные оценки качества и
технического уровня машины. К ним относятся:
длительность; несопоставимость во времени;
подверженность влиянию факторов, не
характеризующих качество машины, но не
существенно влияющих на значения получаемых
показателей; невозможность изучения по их
результатам причины выявляемого недостатка
и др. Эксплуатационные испытания не могут
выполнять роль сертификационных.
Виды испытаний, представленные на
рис. 1.4.1, основаны на результатах
функциональных испытаний, к которым относятся
прежде всего стендовые испытания агрегатов и
полнокомплектных машин, лабораторно-
дорожные, полевые (полигонные) испытания в
заданных условиях на специальном
оборудовании и сооружениях с привлечением всех
средств извлечения возможно более полных и
достоверных данных о свойствах и
характеристиках объекта при сокращенных сроках на
обработку.
В организации испытаний выделяют
следующие этапы: планирование, проведение,
обработка результатов и выработка заключений
и рекомендаций. В программу испытаний, как
правило, включаются разделы со следующими
сведениями:
описанием объекта испытаний -
наименование машины, число испытуемых образцов
и пробег до начала испытаний, описание
конструктивных особенностей, влияющих на
измеряемые показатели, сведения об аналогах,
типаж объекта и др.;
целью испытаний с указанием
конкретных задач, которые должны быть решены как
в процессе проведения, так и по их
завершении при анализе результатов;
общими положениями с указанием
перечня документов на проведение испытаний,
места и сроков их проведения, сведениями о
ранее проведенных испытаниях (стендовых,
лабораторных и дорожных), организацией,
проводящей испытания, этапностью
испытаний и др.;
общими условиями проведения
испытаний, в которые включены сведения о
метеорологических условиях, нагрузке и применяемом
балласте, о смазочных материалах и рабочих
жидкостях, особенностях обслуживания и
ремонта, приборах и оборудовании, точности
измерений, технике безопасности и др.;
объемом испытаний с регламентацией
этапов испытаний, эксплуатационных и
потребительских свойств, подлежащих
определению и оценке, цикличности испытаний,
продолжительности пробега;
методами испытаний, в которых указаны
средства и условия испытаний, алгоритмы
выполнения операций по пунктам программы,
порядок и способы регистрации, обработки
анализа и оценки результатов испытаний,
формы представления данных, требования к
достоверности и точности получаемой
информации и др.;
отчетностью, включающей вид отчетного
документа и содержание разделов, порядок
согласования и утверждения, сроки
представления, адреса рассылки, приложения.
Общим требованием к программам и
методам испытаний является применение
наиболее прогрессивных, экономически
обоснованных методов их организации и проведения,
достоверных методов измерений с
использованием результатов теоретических и
экспериментальных работ по созданию машин,
ускоренных и форсированных методов, особенно для
тех видов испытаний, которые имеют большую
продолжительность. Характерные работы,
проводимые при различных испытаниях,
приведены на рис. 1.4.1.
ВИДЫ ИСПЫТАНИЙ МАШИН
Макетные и опытные образцы
Исследовательские
Поисковые
Образцы установочной партии
Предварительные
Приемочные
Доводочные
Квалификационные
Образцы серийного производства
Эксплуатационные
а.
Ресурсные
Приемосдаточные
Инспекционные
Сертификационные
1
1
Периоди- 1
ческие
1
>
Аттестационные
Рис. 1.4.1. Схема видов испытаний колесных и гусеничных машин
116
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
I
встроено б прибор
управления
■/-
У~^\ 1о"
■н
Мили
24 8
Рис. 1.4.2. Схема стенда для испытания двигателей
1.4.2. СТЕНДОВЫЕ ИСПЫТАНИЯ
Испытания на стендах отличаются
высокой стабильностью задаваемых и
поддерживаемых условий нагружения, температуры,
влажности, запыленности и других факторов,
влияющих на функционирование
конструкции, точностью регулирования, измерения и
регистрации, а также возможностью
наблюдения за рабочими процессами (в том числе в
труднодоступных частях).
Роль и место стендовых испытаний и
исследований колесных и гусеничных машин
определяются технико-экономическими
ограничениями. Но даже при наличии большого
числа стендов по объему получаемой
информации стендовые испытания не
конкурентоспособны с полигонными или полевыми
испытаниями, в которых можно исследовать
одновременно много машин, проверять
взаимодействие испытуемой машины с опорной
поверхностью сложного профиля, и воздействие
климатических, атмосферных и других
внешних факторов, что имитируется на стендах в
ограниченном объеме. Кроме того,
имитационные стенды для испытаний машин с
высоким ресурсом по надежности сами должны
располагать ресурсом работы и надежностью
во много раз большими, что требует
значительных расходов на изготовление,
использование высокопрочных материалов, больших
производственных площадей. Поэтому
стендовые испытания, как правило, сочетают с
полигонными (полевыми). Они превалируют на
стадии доводки конструкции, используются
для контроля номинальных характеристик
агрегатов и 'качества комплектующих изделий.
На стендах испытывают все основные агрегаты
машин.
Испытания двигателей. Стенды снабжены
тормозными установками: гидравлическими,
электрическими и индукторными. Испытания
на стендах с электрическим приводом
реверсивного действия выгодно отличаются, что
позволяют оценить работу двигателя и
механические потери в режиме принудительного
холостого хода, осуществлять пуск без стартера
и холостую приработку после сборки.
На рис. 1.4.2 приведена схема стенда для
испытания двигателей 2 с помощью
индукторного тормоза мощности 3. С помощью
прибора 4 управления на тормозе устанавливается
заданный режим испытаний. С помощью
регулятора управления 5 через исполнительный
механизм 1 осуществляется переход на другой
режим. Для испытаний двигателей в основном
используют стандартизованные режимы. Дли-
тельность испытаний (ч) автомобильных
двигателей на безотказность в зависимости от их
объема приведена ниже.
Рабочий объем двигателя, л:
легкового автомобиля:
менее 1 250
1 ... 2,5 300
более 2,5 350
грузового автомобиля с
бензиновым двигателем:
менее 2,5 350
2,5 ... 7 400...450
то же с дизелем:
менее 3 400
3 ... 7 600...1000
Испытания проводят циклами: 5 мин
холостой ход при (Лххлип+300 мин'1); 170 мин
дроссель полностью открыт при пном; 5 мин
холостой ход при (Лххтш+3°0 мин-1); 10 мин
остановка двигателя (не менее). Длительность
испытаний тракторных дизелей на
безотказность составляет 800 ч. Испытания циклами
осуществляют: 10 мин холостой ход при
лхх1шп> Ю мин максимальный крутящий
момент; 210 ч дроссель полностью открыт при
лном-
При стендовых испытаниях определяют:
технические характеристики при регулировках
и в комплектации, указанные предприятием
изготовителем; предельные показатели
мощности и момента (исключается влияние
несовершенства изготовления, регулировок приборов
систем зажигания, заводских допусков на
изготовление); детонационные характеристики;
надежность, включая безотказность и
долговечность; токсичность, включая пробы на
разных установившихся режимах и в работе по
циклу движения машины; дымность, и уровни
шума^вибрации и др.
Правила и методы испытаний двигателей
машин определяются стандартами и
техническими условиями.
Стендовые испытания и исследования
агрегатов трансмиссий. Они включают
определение статической прочности, жесткости,
долговечности, внутренних энергетических потерь,
уровней шума и вибрации, температурных
характеристик, специальных показателей
работы узлов и агрегатов. В большинстве случаев
испытания проводят на универсальных стендах
для оценки одновременно нескольких
показателей. Для испытаний отдельных узлов и
механизмов трансмиссии используются стенды
прямого нагружения (с разомкнутым потоком
мощности), с замкнутым контуром, с
динамической нагрузкой, с нагрузкой от маховых
масс.
Испытания сцеплений включают
определение момента трения, коэффициента
надежности при повышенных частотах вращения,
термостойкости фрикционных накладок,
исследования балансировки, характеристик
демпфера крутильных колебаний, надежности
механизмов включения, нажимных пружин,
износостойкости фрикционных накладок, их
намокаемости в воде и масле, некоторых
других свойств. Программы комплексных
испытаний включают циклическую повторяемость
процессов включения и выключения
сцепления с различными режимами.
Испытания механических коробок
передач регламентируются отраслевыми
стандартами (для автомобилей и колесных тягочей) или
техническими условиями и включают:
определение статической прочности (по нагрузкам,
разрушающим наиболее слабое звено);
установление величины и положения пятен
контактов зубьев шестерен всех передач под
нагрузкой; построение температурной
характеристики (по времени непрерывной работы в
режиме максимальной мощности двигателя);
оценки уровней вибрации и шума, качества
работы синхронизаторов и механизма
управления, КПД.
При испытаниях надежности коробок
передач и других агрегатов трансмиссии
определяют долговечность шестерен (по изгибной
и контактной усталости зубьев), подшипников
качения (по контактной усталости и износу),
подшипников скольжения, муфт
переключения передач (синхронизаторов, торцовых
поверхностей зубьев шестерен), сальников,
картеров, исследуют влияние различных
конструктивных и технологических факторов на
работу агрегатов и их механизмов или
элементов.
/ 2
// 70
Рис. 1.4.3. Схема стенда замкнутого типа
для испытания коробок передач на долговечность
Для испытания коробок передач на
долговечность в большинстве случаев
используют стенд с замкнутым контуром, на котором
легко осуществить ступенчатое нагружение и
нагружение по схеме случайного процесса
(рис. 1.4.3). Электродвигатель 1 через упругую
муфту 2 вращает редуктор 3, распределяющий
вращение на две параллельные ветви, которые
СТЕНДОВЫЕ ИСПЫТАНИЯ
119
а также соответствующие им угловые скорости
сов, сох и ®2- КДД ведущего моста г)^ находят
по формуле
= т1гпг1п =
2М2 (Мг-М2)<о
Мл
в/
Мъ*ъ
где г|гп и т|д - КПД соответственно главной
передачи и дифференциала; / - передаточное
число главной передачи.
Коэффициент блокировки
дифференциала определяют как отношение моментов
М\/М2 при условии, что (0\ < ©2-
Испытания несущих систем, рам, кузовов
и кабин. Эти испытания производят на стендах
статического и динамического нагружения
одновременно или отдельно (в различной
комплектации) на машине, установленной на
стенде. Целью статических испытаний
несущих систем является проверка их прочности и
жесткости. При этом определяют ослабленные
или перегруженные участки и соединения,
деформации под действием устанавливаемых
агрегатов и груза, а также при разных видах
внешнего нагружения. При статических
испытаниях используют преимущественно два
режима нагружения:
изгиб в вертикальном направлении под
действием сил и реакций, приложенных в
местах реального воздействия (опоры рессор,
двигателя, кузова и других агрегатов) с
перегрузкой, например, для легковых автомобилей
в 2 - 2,5, а для грузовых в 2,5 - 4 раза;
закручивание моментом,
соответствующим предельному перекосу при преодолении
экстремальных препятствий (например, для
автомобилей - при вывешивании одного из
колес).
При этих испытаниях напряжения в
любом сечении элементов не должны превышать
предела текучести материала, а деформации -
значений, необходимых для сохранения
зазоров между силовыми элементами в дверных и
оконных проемах, или других показателей
форм и допусков на геометрические размеры,
предусмотренные конструкторской
документацией.
Результаты статических стендовых
испытаний по изучению напряженного состояния
всех элементов несущей системы под
нагрузкой (например, тензометрирование во многих
точках нанесения хрупких покрытий) служат
основаниям существенного сокращения
объемов измерений в последующих динамических
испытаниях. Статические стендовые
испытания используются также в программах и
методиках оценки пассивной безопасности. Так,
вертикальное нагружение крыши кабины,
соответствующее двойному весу снаряженного
автомобиля, используется как норматив
стойкости при опрокидывании.
Стендовые испытания с динамическим
нагружением выполняют при тех же схемах
установки несущих систем, кабин и кузовов,
что и при статических испытаниях или на тех
же стендах, если в их конструкции
предусмотрено непрерывное изменение внешнего
воздействия.
На современных стендах с
гидропульсаторами'динамическое нагружение регулируется
в широких пределах и диапазонах частот,
причем одновременно на изгиб и кручение, что
приближает условия испытаний к условиям
эксплуатации (рис. 1.4.5). Испытуемая машина
1 всеми колесами устанавливается на
площадки гидроцилиндров 2. Статическое и
динамическое нагружение осуществляется
перемещением штоков гидроцилиндров по заданному
блок-программой режиму, имитирующему
перемещение пятна контакта шины с опорной
поверхностью. Блок управления 5 передает
сигнал, поступающий из банка данных 6У
содержащего сведения о формировании блок-
программы, на сумматор 4У в котором сигнал
динамического нагружения суммируется со
статической нагрузкой и передается на
исполнительный механизм 3 каждого
гидроцилиндра.
Рис. 1.4.5. Схема стенда для несущих систем, кузовов и кабин на долговечность
120
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
Сравнительная оценка усталостной
долговечности элемента несущей системы
определяется соотношением
Аэ = А)/Дс,
где Д) и Вс - уровни накопленных
усталостных повреждений соответственно в опытной
конструкции и серийной.
При блок-программном
многоступенчатом нагружении сравнительная оценка
долговечности определяется коэффициентом
где Ко и Яс - число испытанных образцов
соответственно опытных и серийных
конструкций; /> ^>о/> а1^с1 ' число блоков нагру-
жения при испытании соответственно
опытных и серийных конструкций.
Динамическое локальное нагружение на
отдельных участках конструкции с помощью
различных вибраторов направленного
воздействия позволяет оценить выносливость
отдельных деталей и сочленений, частоту
собственных колебаний (например, панелей кузовов),
формы частотных резонансов.
На стендах с динамическим нагружением
оценивают долговечность конструкций в целом
(рам, кузовов, кабин), их частей (лонжеронов
рамы) и отдельных узлов (сочленения
лонжерона и поперечины рамы). В этом случае
испытывают вырезку из конструкции при
тщательном согласовании вычленения и нагруже-
ния испытуемого элемента на основании
предварительного изучения его напряженного
состояния.
Динамические стендовые испытания
кузовов, кабин и комплектных машин являются
основным способом оценки пассивной
безопасности. При этом имитируются условия
опрокидывания, лобового столкновения,
наезда. Используются стенды для установки
машины, ее разгона и наезда с заданной
скоростью на массивное препятствие, а также стенды
с массивными маятниками для имитации
ударных нагрузок в определенные точки.
Например, удар спереди по верхнему углу
кабины моделирует падение машины с откоса, удар
по задней стенке - воздействие
незакрепленного груза при резкой остановке. Также испыты-
ваются силовые каркасы кабин, бамперы,
сиденья, ремни безопасности и др.
Стендовые испытания подвески. В
испытаниях определяются характеристики
упругости при вертикальных и поперечно-угловых
деформациях, демпфирующие свойства и
кинематику. Например, поперечно-угловая
характеристика подвески представляет собой
зависимость момента
Му вызывающего крен
рамы или несущего кузова, от угла крена ак в
поперечной плоскости (рис. 1.4.6).
Определяют характеристику по приведенной схеме.
Момент создается двумя равными грузами Р,
присоединенными к поперечной штанге,
которая закреплена на раме или кузове. Один
груз подвешен к штанге, а второй действует
через блок.
М
Рис. 1.4.6. Схема установки для определения
поперечной угловой жесткости подвески
Моменты, действующие на каждую
подвеску, определяют как произведение разности
показаний весов под правым и левым
колесами на размер колеи В:
М = (Ол-Оп)В.
Существуют также другие стенды и
способы определения угловой жесткости
подвески. Так, пневматические и
гидропневматические рессоры испытывают на стендах при
квазистатическом (медленном) сжатии с
различным давлением упругой среды и в режиме
динамического нагружения по
гармоническому закону с различной частотой приложения
нагрузки.
Амортизаторы исследуют на стендах для
определения зависимости развиваемой силы
сопротивления от скорости перемещения
поршня. При контрольных и приемочных
испытаниях амортизаторов определяют их
герметичность, уровень шума и плавность
работы. Проверяют также стабильность рабо-
СТЕНДОВЫЕ ИСПЫТАНИЯ
121
чей диаграммы и оценивают зависимость
поглощаемой энергии за цикл сжатия и отбоя от
температуры масла.
Стендовые испытания на долговечность,
как правило, проводят по элементам:
рессорам, амортизаторам, шарнирам и др. В
наиболее распространенных стендах для испытания
листовых рессор с вертикальной нагрузкой
(рис. 1.4.7) нагружение осуществляется
гидроцилиндром 1 с электрогидравлическим
клапаном 5, получающим командные сигналы от
устройства 4У которое сравнивает сигналы от
программного устройства 3 и силового
преобразователя 2
Рис. 1.4.7. Схема стенда для испытания
листовых рессор с вертикальной нагрузкой
Программой задается вертикальная
циклическая нагрузка, максимальная сила Ртах,
сжимающая рессору, и амплитудное значение
Рй. Разность значений Ртах - Ра принимается
равной статической нагрузке на рессору.
Амплитудное значение Ра измеряют в условиях
эксплуатации. В первом приближении Ра =
= (0,3...0,5) Ртах- Максимальную нагрузку
определяют по формуле
Р - атах^с^тт^
/ / /
где сгтах - максимальные напряжения в
коренном листе рессоры, 750 МПа; ^су^п^п -
суммарный момент инерции и момент
сопротивления изгибу коренного листа рессоры; Лк -
момент инерции площади поперечного
сечения коренного листа; Ьу 1\ и /2 - длина
соответственно рессоры,ее переднего и заднего
концов.
Амплитудное значение
'ЛЬ
где ок - амплитудное значение напряжения в
коренном листе рессоры; ок= 250 МПа.
Ход ползуна
*5п = 2Ра I Ср,
где Ср - жесткость рессоры.
Все большее распространение получают
стендовые испытания при одновременном
нагружении на изгиб и на кручение.
Испытания колес и шин. На стендах
определяют: геометрические параметры
(свободный радиус, статический и динамический
радиусы качения, площадь контакта шины с
опорной поверхностью и др.); характеристики
упругости, демпфирования при нагружении
бокового увода; сцепные свойства,
долговечность (в основном по износу протектора и
расслоению корда). Исследования упругости и
демпфирования проводят в режимах
квазистатического и динамического нагружения (в
последнем случае при возбуждении и
регистрации свободных колебаний опирающейся на
шину массы и невращающемся колесе или при
вынужденных колебаниях массы на катящем
колесе). Искомые характеристики получаются
после обработки зарегистрированных
параметров колебаний согласно теории малых
колебаний диссипативной системы, эквивалентной
стендовой установке, с учетом известных ее
параметров.
При испытаниях шин преобладают
режимы качения по внешним поверхностям
вращающихся опорных барабанов. Исследуют
также температурное состояние материала
шины, давление и другие показатели.
Колеса (катки) и ступицы на стендах
испытывают на прочность под действием
вертикальной и боковой сил (окружная нагрузка
обычно опускается). Под действием этих же
сил испытывают колеса и катки на
сопротивление усталости. При этом колеса и катки
монтируют на стендах неподвижно, что
позволяет наблюдать за зарождением трещин. Из
элементов гусеничного движителя наиболее
эффективны стендовые испытания траков
гусеничных цепей на прочность и их
сочленений на износ, особенно в разных абразивных
средах.
В рулевом управлении на стендах
определяют, главным образом, надежность рулевых
механизмов, а также насосов, гидроцилиндров
усилителей, оценивают износостойкость
шарниров и других деталей. При стендовых
испытаниях рулевых механизмов внешняя нагрузка
прикладывается к сошке и рулевому валу для
его возвратно-вращательного движения. Ре-
122
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
жим переменного нагружения устанавливается
по моменту, равному 40 ... 50 % его значения
для поворота управляемых колес на месте, и
по частоте 1 ... 2 с1. На стендах исследуются
также потери на трение, КПД рулевого
механизма, характеристики упругости рулевого
привода.
Стендовые испытания полнокомплектных
машин. Их проводят в исследовательских
целях, основываясь на обратимости движения в
системе движитель - опорная поверхность.
Автомобили испытывают на
вращающихся круглых катках (барабанах, роликах) под
колесами, тракторы транспортные гусеничные
машины - на замкнутых лентах 2 под опорной
поверхностью гусеничного движителя (рис.
1.4.8). Иногда испытания тяжелых тракторов и
тягачей проводятся на стендах со снятыми
гусеницами, при этом внешняя регулируемая
нагрузка прикладывается к валам ведущих
звездочек (безгусеничные стенды). На стендах
исследуют тягово-скоростные характеристики,
топливную экономичность машин,
температурные режимы отдельных узлов и агрегатов,
особенности взаимодействия колес
(гусеничных цепей) с опорной поверхностью и
другие рабочие процессы. При. установке в
приводах стендов инерционных масс
имитируются переходные неустановившиеся режимы
движения (разгон и накат). На роликовых
стендах серийного производства испытывают
тормозные механизмы и приводы, оценивают
суммарную тормозную силу, неравномерность
ее распределения по колесам, эффективность
стояночных тормозных систем.
На стендах для ходовых испытаний
полнокомплектных машин определяется
универсальная характеристика машины как
колебательной системы, реагирующей на воздействие
дорожных неровностей - передаточная
функция или амплитудно-частотная
характеристика. На барабанных стендах это достигается
установкой на рабочей поверхности накладок,
образующих по периметру синусоидальный
профиль. Вращением барабана с накладками
Рис. 1.4.8. Схема стенда для испытания
полнокомплектных тракторов:
1 и 3 - испытуемые тракторы; 2 - беговая лента;
4 - основание стенда
зона контакта, опирающегося на него колеса,
смещается в вертикальном направлении по
гармоническому закону, создавая
кинематическое возбуждающее колебание машины.
Частота возмущения зависит от скорости
вращения барабана, а амплитуда от толщины
накладок. Известны попытки проведения на
подобных стендах ресурсных испытаний
полнокомплектных машин. Так, на тракторном
полигоне на "рельсостенде" успешно
проводятся испытания гусеничных тракторов с
быстрым доведением до предельного состояния
рамы, кабины и деталей движителя.
Стендовые испытания
полнокомплектных машин с возбуждением свободных
колебаний Подрессоренных и неподрессоренных
масс подтягиванием и сбрасыванием дают
информацию о колебательных параметрах
колесных и гусеничных машин, включая дис-
сипативные свойства ходовой части.
Почти во всех стендовых испытаниях,
особенно динамических, обеспечение более
тесной корреляции нагружения на стенде с
нагружением в эксплуатации или
эквивалентности их повреждающего воздействия
отражено в задаваемых программах нагружения,
которые могут быть трех видов:
постоянная нагрузка или циклическая с
постоянной амплитудой при нулевом или
заданном постоянным средним значением;
переменная ступенчатая нагрузка или
циклическая со ступенчатым изменением
амплитуд в отдельных блоках;
случайная нагрузка, воспроизводящая
процесс нагружения в эксплуатации
(моделирование натурного нагружения).
Основанием разработки программы
служит: статический анализ нагрузочного режима
деталей и узлов, зарегистрированных в
полигонных испытаниях или в эксплуатационных
условиях; поломки в эксплуатации и теория
рабочих процессов в машине, а также теория
прочности и усталости деталей машин и
материалов.
Аэродинамическая труба. Это особый
класс стендов, представляющих собой целый
комплекс оборудования, приборов, систем,
размещаемых на большой площади.
Аэродинамическая труба (рис. 1.4.9) предназначена
для испытания всех моделей легковых и
грузовых автомобилей массой до 8 т и имеет
следующее оборудование: вентиляционный агрегат с
регулируемой частотой вращения и углами
поворота лопастей, мощностью привода 1500
кВт для создания воздушного потока
скоростью 200 км/ч; платформенные весы для
одновременного измерения шести составляющих
аэродинамических сил и моментов,
возбуждаемых набегающим потоком воздуха, с
точностью 0,02 %; платформу, поворачиваемую на
угол 182° к направлению воздушного потока;
координатно-измерительный механизм, выво-
СТЕНДОВЫЕ ИСПЫТАНИЯ
123
Рис. 1.4.9. Принципиальная схема аэродинамической трубы для испытания полноразмерных автомобилей:
1 - операторская; 2 - шестикомпонентные весы; 3 - рабочая часть; 4 - стенд с беговыми барабанами; 5 - камера
Эйфеля; 6 - выпуск нагретого воздуха; 7- отсек въезда; 8 - выпуск атмосферного воздуха; 9 - хонейкомб
дящий с точностью до 1 мм в любую заданную
точку объема рабочей части трубы
специальные датчики для измерения параметров
воздушного потока (скоростной напор,
температуру, давление воздуха и др.); стенд с
беговыми барабанами для имитации движения до
скорости 160 км/ч для легковых и 120 км/ч
для грузовых автомобилей, регулируемой
тормозным или крутящим моментом
электродвигателей привода беговых барабанов. Все
рабочие агрегаты управляются электронной
системой, выводящей их на заданный режим
испытаний с помощью ЭВМ.
Аэродинамическая труба обеспечивает
высокоточные испытания для определения
аэродинамических характеристик автомобиля,
их влияния на топливную экономичность,
скоростные свойства, устойчивость,
управляемость, эффективность систем вентиляции,
отопления, отвода отработанных газов, загряз-
няемость окружающей среды и др.
Стендовые испытания получают все
большее развитие, особенно на стадиях
доводки колесных и гусеничных машин.
1.4.3. ЛАБОРАТОРНО-ДОРОЖНЫЕ, ПРИЕМОЧНЫЕ
И ИНСПЕКЦИОННЫЕ ИСПЫТАНИЯ
Для определения эксплуатационных и
конструктивных показателей, заданных
техническим заданием проводят испытания
полнокомплектных машин в различных условиях.
Перед началом испытаний машины проходят
обкатку (колесные 500 км, гусеничные 300 км)
без загрузки с ограничениями скорости и ТО.
Лабораторно-дорожные испытания выполняют
в течение всего периода целевых испытаний,
однако существует определенный порядок их
проведения (табл. 1.4.1): габаритные и
массовые параметры определяют перед пробеговыми
испытаниями; тягово-динамические,
экономические и тормозные свойства - после
необходимой приработки агрегатов; оценку
проходимости, устойчивости, управляемости и
плавности хода - в середине испытаний, а
эргономические параметры, энергобаланс, уровни
радиопомех, экономические факторы - в конце
испытаний.
Объем пробегов автотранспортных
средств общего назначения приведен в табл.
1.4.2.
Основные этапы работ, выполняемых
при приемочных испытаниях многоцелевых
транспортно-тяговых машин, приведены ниже.
Все работы в процессе полномасштабных
приемочных испытаний транспортно-тяговых
машин подразделяют на пять групп.
I. Подготовительные работы:
1) отбор и приемка образцов на
испытания;
2) оценка соответствия качества образцов
утвержденной документации;
3) пробный (контрольный) и обкаточный
пробег с техническим обслуживанием;
4) загрузка до номинальной
грузоподъемности;
5) фотографирование (киносъемка)
общих видов образцов.
П. Лабораторные работы по определению:
1) основных габаритных размеров и
показателей массы;
2) времени заправки и заправочных
емкостей систем двигателя; несливаемых и невы-
работанных остатков;
3) распределения массы машины на
грунт и координат центра тяжести;
4) энергобаланса и уровня создаваемых
радиопомех электрооборудованием;
5) эффективности средств,
обеспечивающих подготовку образца к движению в зимних
условиях;
124
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
1.4.1. Лабораторно-дорожные работы, проводимые при различных испытаниях
Наименование параметров
и показателей
Эргономические
свойства
Основные наружные
размеры
Углы установки колес
Углы поворота
управляемых колес, радиусы
поворота
Параметры кинематики
осей
Заправочные объемы
систем охлаждения,
смазочной и др.
Вместимость топливного
бака
Погрешность
контрольно-измерительных
приборов и
сигнализаторов
Показатели массы
Скоростные свойства
Преодоление
максимального подъема
Топливная
экономичность и расход масла
двигателем
Тормозные свойства
Управляемость и
устойчивость
вательские
рительные
+
+
+
+
+
+
+
•
+
+
+
+
+
+
+
Приемочные
+
+
+ '
-
-
-
+
+
+
-
+
+
+
+
кационные
-
+
+
+
+
+
+
+
" +
+
+
+
+
+
кационные
-
-
-
-
-
~
-
* -
-
-
■
+
+
[
дические
-
-
-
+
-
■
-
+
+
-
+
+
_|
кционные
-
+
+
+
-
■
-
+
+
+
+
+
+
Ресурсные
-
+
-
•
-
~
-
+
+
+
-
+
+
ЛАБОРАТОРНО-ДОРОЖНЫЕ И ДРУГИЕ
125
Продолжение табл. 1.4.1
Проходимость
Качество уплотнений
агрегатов и узлов
Пусковые качества
двигателя
Баланс электроэнергии
Наружное и внутреннее
освещение, сигнализация
Напряженность поля
радиопомех
Аэродинамические
свойства
Внешний и внутренний
уровень шума
Содержание вредных
веществ и дымность в
отработавших газах
Концентрация вредных
веществ в кабине
водителя и пассажирском
салоне
Эффективность систем
отопления и вентиляции
кабины и салоне
Водопыленепроницае-
мость кабины, кузова и
пассажирского салона
Самозагрязняемость при
движении,
эффективность очистки стекол
Плавность хода, вибро-
нагруженность
Сила на органах
управления
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
-
+
+
+
+
+
-
+
+
+
+
+
+
+
+
+
+
+
+
+
+
-
+
+
+
+
+
+
+
+
-
-
-
-
+
+
-
+
+
+
-
-
-
+
-
-
-
-
-
-
-
-
+
-
+
-
-
-
+
+
-
-
+
-
+
+
+
+
+
-
-
-
-
-
-
-
-
-
-
+
+
+
+
-
-
126
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
Продолжение табл. 1.4.]
Наименование параметров
и показателей
Основные внутренние
размеры
Обзорность с места
водителя
щение контрольных
приборов и
сигнализаторов
Пассивная безопасность
Безотказность
- Долговечность
Эксплуатационная
технологичность и ремонто
пригодность
Приспособленность к
перевозкам
железнодорожным, воздушным,
водным транспортом
Исследо
вательс-
кие
рительные
+
+
+
+
+
+
+
+
Приемо
чные
+
+
+
+
+
-
+
~
кационные
+
+
+
+
+
+
+
~
Сертифи
кацион-
ные
+
+
+
+
-
-
"
"
дические
-
-
-
+
-
~
~
Инспе
кцион-
ные
+
-
- '
+
-
-
~
Ресурсные
-
-
-
+
+
+
■
6) эффективности характеристик
противопожарного оборудования (ППО);
7) качества электрической энергии
бортовой сети образца, в том числе автономной
станции электропитания;
8) характеристик средств связи;
9) характеристик защитных свойств
образца;
10) эргономических показателей.
III. Лабораторно-дорожные испытания по
оценке:
1) тягово-динамических, топливно-
экономических и тормозных свойств;
2) характеристик поворотливости,
плавности хода и управляемости;
3) транспортабельности;
4) водоходных свойств;
5) преодоления типовых препятствий;
6) эффективности и работоспособности
систем охлаждения двигателя и трансмиссии;
7) характеристик систем питания
двигателей воздухом;
8) устойчивости гусениц на ведущих и
направляющих колесах и под опорными
катками;
9) очищаемости элементов ходовой части
в движении;
10) характеристик встроенного
оборудования самоокапывания;
11) эвакоспособности и эвакопригоднос-
ти;
12) тягово-сцепных свойств и
проходимости по грунтам с различной несущей
способностью и снегу;
13) углов гибкости автопоезда;
14) лебедки.
IV. Пробеговые испытания в различных
дорожных условиях по оценке:
1) средних скоростей движения, расхода
топлива и масла;
2) надежности и износостойкости;
3) параметров эксплуатационной
технологичности;
Дорожно-
грунговые
условия
Дороги с усо-
вершествованны-
ми покрытиями:
магистральные
городские
горные
Дороги с
переходными
покрытиями,
булыжные ровные
Дороги
грунтовые:
удовлетворительного
состояния
разбитые
тяжелые
Легковые
автомобили
П
55
30
5
5
5
И
55
30
10
5
Р
72
12
5
2
2
Авт о
городские,
пригородные
П
35
50
5
10
-
И
40
50
10
-
Р
69
17
5
2
-
бусы
полноприводные
П
40
20
5
5
25
5
И
40
10
15
30
5
Р
64
12
3
3
3
Грузовые автомобили
неполноприводные
одиночные
П
35
10
5
25
25
И
40
10
25
25
Р
62
5
5
7,5
7,5
автопоезда
П
80
5
5
10
-
И
80
5
10
5
Р
89
2,5
2,5
2
1
полноприводные
одиночные
П
15
10
25
30
10
10
И
20
30
30
10
10
Р
40
20
29
8
3
автопоезда
П
30
20
35
10
5
И
35
10
20
25
5
5
Р
59
2,5
2,5
8
13
128
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
4) эффективности средств обеспечения
работы в экстремальных условиях;
5) эффективности и достаточности
средств отбора мощности;
6) изменения физико-химических
показателей применяемых масел и смазок;
7) запаса хода по топливу;
8) функциональной пригодности.
V. Работы по окончании испытаний по
определению:
1) основных эксплуатационных
показателей;
2) характеристик двигателя и основных
агрегатов (стендовые испытания);
3) технического состояния образца;
4) ремонтопригодности;
5) качества эксплуатационной
документации;
6) результатов испытаний (подготовка
акта, отчета).
В случае испытаний тяговых машин
состав работ несколько иной [10, 31].
Подавляющее большинство методик определения
параметров при лабораторно-дорожных
испытаниях стандартизировано, что обеспечивает
сопоставимость результатов испытаний [19,
32].
Несопоставимость результатов может
иметь место в основном при определении
тягово-динамических свойств вследствие
различия способов определения сил Р{
сопротивления качению и Рф сцепления.
Сопротивление качению может быть
определено одним из трех методов:
буксирования, свободного выбега и измерением
крутящих моментов на ведущих колесах. Метод
буксирования достаточно прост, относительно
точен (особенно если у буксируемой
машины отсоединена трансмиссия) и
позволяет получить экспериментальную зависимость
/у = /(у) , важную характеристику для тягово-
скоростных расчетов. Недостатком этого
метода является несоответствие режима работы
движителя реальному характеру качения.
Метод свободного выбега заключается в
определении пути 5^ остановки машины при
свободном качении от скорости Уо до нуля и
нахождении сопротивления качению по
зависимости
Рг= Ьтпу] / {28съ\
где 5 - коэффициент учета вращающихся масс.
Метод прост, но наименее точен, так как
основан на посылке, что коэффициент
сопротивления качению не зависит от скорости.
Метод записи крутящих моментов на ведущих
колесах наиболее точен, особенно если
известен КПД движителя: Ру = ЛдвЛж-
В табл. 1.4.3 приведены значения
коэффициента сопротивления качению,
определенные тремя способами, их которых следует, что
метод свободного выбега дает завышенные
результаты при большой начальной
скорости. Определение силы тяги по сцеплению
особенно важно для тяговых машин: Рф = =
Ркр+ /у Сила находится путем торможения
тяговой машины и создания определенного
буксования:
сг = (До - 5ф) / До,
где *$о - теоретический путь, рассчитанный по
угловой скорости ©о ведущих колес; 5ф -
фактический путь.
Силу РКр можно определить двумя
способами:
1) затормаживанием тяговой машины до
полного буксования (5=1);
2) определением кривой Ркр = / (а)
путем создания сил нескольких фиксированных
сил тяги на крюке.
На ряде грунтов (особенно не связанных)
эти способы дают разные результаты. Как
следует из рис. 1.4.10, первый способ позволяет
измерить силу Ркрф, которая на связанном
грунте (кривая Г) существенно меньше РКртах-
Поэтому для тяговых машин рекомендуется
только второй способ, согласно которому
РФ = Р1 + РЛ
кртах-
На сыпучем грунте
(кривая 2) обычно РКртах = ЛсрФ-
1.4.3. Коэффициент Уо сопротивления качению, полученный разными способами
Способ
определения
коэффициента
Буксирование
Свободный
выбег при Уо = 55
км/ч
Запись Мвк
Колесная машина массой 13,8 т
Бетон
0,012 ... 0, 018
0,02 ... 0, 022
0,011 ... 0,015
Грунт
0,025 ... 0, 03
0,028 ... 0, 035
0,022 ... 0,025
Гусеничная машина массой 13,2 т
Бетон
0,035 ... 0, 04
0,04 ... 0, 045
0,03 ... 0,032
Грунт
0,055 ... 0, 065
0,06 ... 0, 08
0,045 ... 0,05
ЛАБОРАТОРНО-ДОРОЖНЫЕ И ДРУГИЕ 12У
применим только второй способ.
Как уже отмечалось, большинство других
лабораторно-дорожных работ проводят по
стандартным методикам, которыми
регламентируются условия и режимы проведения
испытаний. Важнейшим этапом приемочных и
других видов испытаний являются пробеговые
(полевые) испытания, целью которых
являются определение соответствия машины
функциональному назначению в вероятных условиях
эксплуатации, оценка надежности и
эффективности ее применения. Транспортно-тяговые
машины испытывают на дорогах различного
класса [10, 36], а тяговые машины - при
выполнении всех характерных тяговых работ [31].
Соотношение пробегов в различных дорожных
условиях для автомобилей и транспортно-
тяговых машин приведено в табл. 1.4.4, а для
тракторов сельскохозяйственного назначения в
табл. 1.4.5. Это соотношение установлено
многолетней практикой и поддерживается при
испытаниях новых моделей машин.
1.4.4. Соотношение пробегов многоцелевых автомобилей и транспортно-тяговых машин
в различных дорожных условиях, %
Дороги
Дороги с
твердым
покрытием
Грунтовые
дороги,
позволяющие
двигаться со
скоростью
0>5 Утах
Грунтовые
дороги,
позволяющие
двигаться со
скоростью
до 0,25
утах
Булыжные
дороги
Грунтовые
дороги в
период
распутицы
Болото
Снежная
целина
глубиной
более 0,4м
Автомобили
неполно-
приводные
25/25
10 / 10
5/-
15/ 10
-
-
-
полно-
1 приводные
8/12
12/ 18
4/6
12/ 18
4/6
.
-
Колесное
шасси
20
30
10
30
10
_
-
Гусеничные
тягачи
-/15
10/ 15
10/ 15
_
10/25
_
-
Снегобо-
лотоходы
5/-
5/10
10/ 10
_
10/20
10/5
10/5
портеры
5/5
15/ 15
20/20
_
10/ 10
_
-
Гусеничное
шасси
10
30
40
_
20
_
-
Примечание. В числителе даны значения без прицепа, а в знаменателе - при
наличии прицепа.
5 За к 1741
Рис. 1.4.10. Зависимость силы тяги Ркр на крюке
от коэффициента буксирования а
Для трактора значения Рф не менее
существенны, чем функция ЛРкр), поскольку
последняя позволяет определять тяговый КПД.
Отсюда следует, что при тяговых испытаниях
130
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
1.4.5. Распределение объемов работ (%) при испытаниях тракторов (класса 1, 4)
Виды работ
Культивация
Междурядная обработка
Уборка сена
Уборка корнеплодов
Уборка зерновых культур
Транспортные работы
Внесение удобрений
Общее время
работы
6,6
7,5
14,0
5,3
5,3
53,8
7,5
Работа под
нагрузкой
73,0
83,0
51,0
70,0
65,0
34,0
48,0
Холостой ход
трактора
18,0
9,0
26,0
9,0
13,0
33,0
24,0
Холостой
режим работ
двигателя
9,0
8,0
23,0
21,0
22,0
30,0
25,0
В качестве основных оценочных
показателей эксплуатационных свойств машин по
результатам пробеговых (полевых) испытаний
используют среднюю скорость движения в
различных дорожных условиях,
эксплуатационный расход топлива, надежность.
Среднюю скорость чистого движения на-
п
ходят по общему времени \/дв/ и пути
1
п
/а 5[ движения без учета остановок машины:
уср.чд
Е*</Е'--
1
1
Среднюю техническую скорость
определяют с учетом вынужденных остановок по
техническим причинам (/осг./):
^ср.т - 2^'
1
п
^Д'дв/ +/ост/)
1
Время выполнения профилактических
(регламентируемых) работ показателем /ост/- не
учитывается.
Наиболее распространенным показателем
оценки надежности является наработка на
полный и частичный отказы или на отказ
определенной сложности [41]. Средняя наработка
на отказ
N
о п
по пути ^ср = (^ол)_1ХЁ^ ;
1 1
ЛГ0 п
1 _ ,
по времени /ср = (#0л)" Х^Л
где Ло - число машин, по которым проводят
оценку; п - число отказов; 8у и (у -
соответственно пробег и время между у-ми отказами
/-й машины.
В ряде случаев вместо наработки на отказ
используют параметр потока отказов
о)(5) =
. 1 1 ]
!(М0А5),
где /Яу - число выявленных отказов на
1-й машине; А^ - интервал пробега,
в котором оценивается безотказность;
Л^п
N0
1 1
У^?П:(5 +А5\;2_,т](8) ~ число всех отка-
1 1
зов за пробеги *У и (*$" + Д*5).
Важным показателем является также
интенсивность отказов
Х(5) = [п($) -п($ + Д5)]/[Д5л(5)],
где п(5) и п($ +А5) - число машин,
оставшихся работоспособными после пробегов
соответственно 5* и «У + Д&
Эксплуатационные испытания машин
проводят в виде: опытной эксплуатации,
осуществляемой специально подготовленным
персоналом; подконтрольной эксплуатации на
базе специально выделенных организаций;
рядовой эксплуатации у потребителя. В
зависимости от цели эксплуатации осуществляется
дифференцированный подход к полноте
учитываемых факторов, однако в любом случае
проводят определение коэффициента
технического использования
*т.и = Х>э/Е'э +Х>™ +2л)>
где У^э>5^то>5^*р " вРемя нахождения
машины соответственно в эксплуатации, на
техническом обслуживании и в ремонте.
УСКОРЕННЫЕ И ФОРСИРОВАННЫЕ
131
1.4.6. Относительная продолжительность испытаний
Этапы испытаний
Подготовительные работы
Лабораторные и лабораторно-дорожные работы
Пробеговые испытания с учетом переезда в
различные климатические зоны
Восстановление объектов испытаний
Работы по окончании испытаний
Оформление документации
Продолжительность этапов, смен
Приемочные
4,5 ...5,0
14,0 ... 16,0
50,0 ... 52,0
10,0 ... 12,0
13,0 ... 21,0
1,0 ... 2,0
Периодические
1,0 ... 8,0
16,0 ... 17,0
49,0 ... 51,0
11,0 ... 13,0
10,0 ...16,0
1^±1
Наиболее трудоемким продолжительным
этапом испытаний являются пробеговые,
особенно при приемочных испытаниях (около 50
% общего времени). Их планируют таким
образом, чтобы проверка надежности, основных
эксплуатационных свойств, эффективности
машин осуществлялась в типовых
эксплуатационных условиях, включая диапазон
температур (т. е. в зимнее и летнее время).
Относительная продолжительность этапов работ
приемочных и контрольных испытаний транспор-
тно-тяговых машин приведена в табл. 1.4.6.
1.4.4. УСКОРЕННЫЕ И ФОРСИРОВАННЫЕ
ИСПЫТАНИЯ
Длительность испытаний колесных и
гусеничных машин определяется отрезком
времени от начала, обеспеченного поставкой на
место проведения выделенных машин, до
момента, когда полученная информация
становится достаточной для выполнения целей и
задач, намеченных программой. Наибольшую
длительность имеют эксплуатационные
испытания в условиях рядового использования
машин. Близкими по содержанию, объему и
качеству информации к использованию в
рядовой эксплуатации, но существенно
ускоренными, являются полигонные испытания.
Ускоренные полигонные испытания
максимально эффективны при проведении
наиболее длительных ресурсных испытаниях.
Оборудование современных полигонов
предусматривает проведение стендовых, лабораторно-
дорожных и ходовых испытаний с
выполнением рабочих (технологических) функций. Для
ускорения полигонных испытаний
используется влияние всех перечисленных выше
факторов на длительность получения необходимой
информации. При лабораторно-дорожных
испытаниях на полигоне сокращение их
длительности достигается уплотнением
подготовительных и организационных работ,
стабильностью технологии и технической базы,
повышением производительности труда за счет
поточных методов их проведения.
Наиболее длительной частью полигонных
испытаний являются пробеговые (с
выполнением рабочих функций). Сокращение этой
части является определяющим направлением
ускорения испытаний машин в целом.
Реализация этого направления зависит от
оборудования полигона. Так, при наличии
автоматического погрузочно-разгрузочного бункерного
комплекса включение его в план пробега
сокращает испытания самосвалов за счет
объединения в общий процесс без холостых
простоев ходовые и функциональные испытания.
Точно также при наличии соответствующего
оборудования исключаются нерабочие
климатические периоды использования, неизбежные
в эксплуатационных испытаниях.
Выбор числа испытуемых образцов и
браковочного уровня (план испытаний) на
основе располагаемой информации о
полигонных испытаниях однотипных образцов не
только сокращает необходимый пробег, но и
повышает достоверность результатов.
Ускорения полигонных испытаний
добиваются при проведении пробегов на
специально обустроенных дорогах полигонов: во-
первых, на испытательных дорогах со
стабильным покрытием, вызывающим предельно
интенсивное и направленное на отдельные части
конструкции воздействие, уровень которого
соответствует малой части переменного нагру-
жения в рядовой эксплуатации, а иногда и
являющимся экстремальным. В этих условиях
увеличенного по размахам и частоте
переменного нагружения испытания становятся
форсированными; во-вторых, на дорогах с
покрытием, воспроизводящим дороги общего
пользования разных категорий.
Примером реализации первой
концепции является комплекс специальных дорог для
ускоренного испытания грузовых автомобилей
и тягачей многоцелевого назначения,
известный как комплексная испытательная трасса.
Ускорение испытаний на ней с
форсированием воздействий дороги наиболее эффективно,
прежде всего, для быстрой оценки допустимых
замен материалов, качества обработки,
технологий, качества ремонта и других экстренно
5*
132
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
проводимых конструкторско -технологических
мероприятий в производстве и восстановлении
машин.
Примером реализации второй концепции
является сооружение комплекса типовых дорог
(скоростная, булыжная, грунтовая). В этом
случае ускорение испытании достигается
кроме уплотнения календарного времени за счет
включения в общий пробег увеличенной доли
пробега на дорогах, на которых уровень
переменных нагрузок превышает пределы
выносливости несущих или напряженных деталей,
исключаются перерывы в возмущении
переменного нагружения. Ускорение испытаний
достигается включением форсированных
воздействий, для чего во второй очереди
полигона [49] созданы специальные дороги
направленных интенсивных нагрузок (треки с
искусственными неровностями, с крупным
булыжником, бельгийская мостовая и др.). С
применением этих сооружений в ресурсные
испытания включены два вида полигонных
испытаний: нормальные ускоренные (без
включения пробега на дорогах интенсивного
воздействия); ускоренные форсированные
(включая пробег на дорогах интенсивного
направленного воздействия).
В основе планирования нормальных (без
форсирования) полигонных испытаний лежат
исследование условий работы машины по
назначению, оценка и анализ режимов
нагружения агрегатов, узлов и деталей в эксплуатации.
Так как подавляющее большинство различных
типов колесных и гусеничных «машин имеют
широкий диапазон использования,
характеризующийся массой случайных режимов
нагружения и обстоятельств движения, для
воспроизведения их в ускоренных полигонных
испытаниях подбирают типизированные условия
эксплуатации. Например, для автомобилей
общетранспортного назначения выделяются
режимы при городских, магистральных и
горных перевозках.
Для отражения типизированных условий
на полигоне подбирается комплекс дорог,
соответствующих по характерным признакам
(ровности, сопротивлению качению,
распределению подъемов и спусков, поворотов по
протяженности). На составленных из них
маршрутах воспроизводятся режимы движения,
соответствующие типизированным условиям в
эксплуатации, по режимометрическим
характеристикам (по распределению по пути
расходов топлива, переключению передач,
движению на разных передачах, торможению,
частотам вращения коленчатого вала двигателя и
др.). Регулируются и уточняются режимы
движения на испытательном маршруте
дополнительными предписаниями по управлению
испытуемой машиной.
Таким образом, устанавливается
регламентированный пробег с нормативными
средними скоростями движения на каждой
испытательной дороге, распределением по ним
общего пробега в долях, чередованием
движений и остановок, продолжительности
перерывов (по санитарным нормам труда
испытателей). Отработка таких нормативов рядовых
полигонных испытаний создает предпосылки
для дальнейшего их ускорения на специальных
испытательных дорогах интенсивного и
направленного нагружения. Такое форсирование
основано на установленном факте
преимущественного повреждения машин на протяжении
нормированного ресурса от накопления
усталости в материале нагруженных деталей [49].
Так, по данным наблюдения на протяжении
ресурсного пробега, нормируемого по
кумулятивной стоимости, израсходованных запасных
частей (15 % стоимости), повреждения от
усталости достигают 70 % всех наблюдаемых
поломок.
При движении по испытательным
дорогам автополигона со стабильным покрытием, с
регламентированными скоростями,
управлением рабочими операциями переменные
повреждающие направления в деталях имеют
характер хотя и случайных, но стационарных
процессов. Эти процессы поддаются
циклической схематизации и систематизации так,
что для каждой детали и на каждой дороге
нагрузочный режим представляется в виде
распределения количества законченных циклов
изменения напряжения (или контактного
давления) с различными амплитудами.
Сопоставление нагрузочных режимов в
одной и той же детали, формируемых на
различных дорогах, производится по известной
или рассчитываемой характеристике усталости
в опасном сечении определением меры
повреждающего воздействия или сопоставимого
показателя накопления усталостного
повреждения за единицу пробега в виде:
^ = &<С (1-4-1)
где / - номер интервала амплитуд в
систематизированном процессе переменного
напряжения; г - число уровней амплитуд напряжений
в р>ассматриваемом режиме; ас/ - средняя
амплитуда цикла /-го интервала; щ - число циклов
с условно одинаковыми амплитудами
переменного напряжения; т - параметр
характеристики усталости детали.
Эквивалентность испытательных
пробегов по повреждаемости рассматриваемой
детали на сопоставляемых дорогах (условно типа 1
и 2) устанавливается в виде:
/.,/■, = ад, (1.4.2)
где Ь\ 9 1*2 - протяженность эквивалентных
пробегов.
УСКОРЕННЫЕ И ФОРСИРОВАННЫЕ
133
Из этого соотношения следует, что
Х2 А ~~^э21^>
(1.4.3)
где КЪ2\ - коэффициент эквивалентности
испытательных пробегов по сопоставляемым
дорогам.
Если нагрузочный режим на
испытательной дороге 2 отличается более высоким
значением амплитуд и (или) частотой циклов, чем
на испытательной дороге 1, то до наступления
одинакового усталостного повреждения
данной детали требуется пробег по дороге 2 в
КЭ2\ Р33 больший, чем на дороге 1.
Коэффициент эквивалентности имеет смысл
коэффициента ускорения испытаний.
Пробеги или рабочие операции с
форсированием нагрузочных режимов значительно
сокращают продолжительность испытаний до
исчерпания ресурса.
Форсирование режима нагружения
ограничивается по амплитудам циклов
переменного напряжения, так как при ходовых
испытаниях машин диапазоны возможных частот его
изменения, как правило, ниже порога влияния
на усталость. Максимально допустимые
амплитуды напряжений устанавливаются по
результатам анализа нагрузочных режимов в
эксплуатации или нормальных полигонных
испытаний, регистрируемых в эксперименте
или определенных расчетом конструкции. Как
максимальные амплитуды, так и спектр их в
нагрузочном режиме, регулируемые на
основании анализа, определяются необходимостью
сохранить процесс разрушения качественно в
том же виде, что и при рядовых испытаниях.
При форсированных испытаниях на
специальных дорогах остро направленного
интенсивного воздействия темпы накопления
повреждения в различных деталях и узлах
существенно различны. При произвольном выборе
протяженности пробега на различных дорогах
перегрузка одних элементов конструкции
вызывает быстрое исчерпание ресурса за
короткий пробег, в то время как недогрузка других
обусловливает значительное увеличение его по
сравнению с пробегом в нормальных рядовых
испытаниях. Оптимальным является такое
распределение пробега при ресурсных
испытаниях, при котором накопленное повреждение
в деталях сохраняется таким же, как в момент
окончания нормальных испытаний. Для
формализации этой связи выбирается
ограниченное число деталей наиболее нагруженных
узлов ходовой части и трансмиссии (базовые
элементы), по их нагрузочным режимам
определяются сопоставимые показатели
накопления усталости на каждой испытательной
дороге, обобщается соотношение (1.4.2) на весь
комплекс дорог в форсированных и
нормальных испытаниях и составляется
математическая модель пробега. В модели учитываются:
сеть испытательных дорог с
регламентированным режимом движения и
установленными рабочими операциями,
обозначаемых в программе рядовых (нормальных)
испытаний индексами V (у=1, 2, ..., /)> в
программе форсированных испытаний
индексами; (/' = !, 2, ..., л);
технологический процесс проведения
рядовых испытаний, характеризуемый
установленным общим объемом пробега До и
разбивкой его в долях Цу> по разным дорогам;
восприимчивость конструкции к
переменным нагрузкам, характеризуемая
сопоставимыми показателями накопления
повреждения каждой базовой детали с номером к {к =
= 1, 2, ..., р) на каждой дороге в нормальных
испытаниях Р&, в форсированных Рц.
Эквивалентность пробега форсированных
и рядовых испытаний выражается следующей
системой уравнений:
ад +ад+-"+ад+-»+ад. =
= |Уо2У^1у»
1
*21 А + р2212+-+р2]1]+-+р2пЬп =
I
= 4$оХц^2у;
1
(1А4)
**А1 + рк2Ь2+'"+рк]1]+-+ркп1п =
/
рр\1\ +рр2Ь2+-+рр]1]+-+ррп1п =
= 5оЁМ^;
Ь} >0; 0<цу<1.
Эта математическая модель пробега
машины в форсированных испытаниях имеет
следующие особенности. Число элементов
конструкции, в которых можно заранее
оценить сопоставимые показатели накопления
повреждения, ограничено, а число
специальных дорог и сооружений для возможно более
134
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
разностороннего и полного воспроизведения
эксплуатационных условий включается в
возможно более широкую номенклатуру так, что
как правило, р « п. При этом система (1.4.4)
имеет множество решений. Искомые пробеги
на разных ирпытательных дорогах
характеризуются не только протяженностью Ьр но и
при регламентированной средней скорости
движения уу, затрачиваемым на испытания
временем ^ = Ху / Уу. Кроме того, в
зависимости от дислокации испытательных дорог* время
на подъезд к ним оценивается удельным
показателем, как потерей на единицу
протяженности испытательного пробега /оу.
Поскольку основной целью
.форсированных испытаний является сокращение времени,
оптимальным из множества возможных
решений системы (14.4) является то, что дает
минимальные затраты времени. Тогда очевидна
следующая математическая формулировка
задачи форсированных испытаний: при
ограничениях, выраженных системой уравнений и
неравенств (1.4.4), нужно найти такие
значения протяженности пробега на каждой
испытательной дороге Ьр при которых
минимизируется целевая функция - длительность
форсированных пробеговых испытаний
У1 У2 V*
= ггип. (1.4.5)
Необходимый расчет оптимального
пробега приводится к решению стандартной
задачи линейного программирования.
Математическая модель (1.4.4), (1.4.5) может быть
обобщена на форсирование процессов не
только усталости, но и износа, коррозии,
старения, перетирания контактирующих
элементов и других повреждений. Например, если к
числу базовых деталей отнесены диски
сцепления, форсированный режим их нагружения
создается многократным включением при
троганиях на подъемах большой крутизны, а
сопоставимым показателем повреждающего
воздействия выбрана работа буксирования на
1 км пробега, то в математической модели
форсированных испытаний это отражается
дополнительными строкой и столбцом,
выражающими эквивалентность соответственно
суммарной работы буксирования и
дополнительной усталости всех базовых деталей от
перегрузок при резких троганиях в
форсированных и рядовых испытаниях.
Оптимальное программирование дает
существенное ускорение пробеговых
испытаний. Так, форсированные испытания
автомобилей общетранспортного назначения по
оптимальной программе для подтверждения
объявленного ресурса сокращаются по
времени в 3 - 5 раз по сравнению с рядовыми
испытаниями. В настоящее время практически
все плановые ресурсные испытания на
автополигоне проводятся по программам
форсированных. Эффективно используется
математическая модель пробега для форсированных
испытаний отдельных узлов или агрегатов
машин при минимизации повреждения
смежных элементов конструкции.
Значительное ускорение испытаний
достигается форсированием не только
воздействий от дороги, но и других внешних
факторов, особенно ускоряющих изнашивание и
коррозию. В первом случае широко
применяется введение в сочленения, зоны трения
деталей дозированного, но большего чем при
эксплуатации, количества абразива. Существенно
сокращаются при этом сроки испытаний на
износ двигателей, траков и их сочленений в
гусеничных цепях, подшипников,
гидроприводов рабочих органов и других узлов, в которых
износ является лимитирующим ресурс
дефектом. Правильное форсирование этого фактора
достигается оптимальным выбором вида,
дисперсности, влажности и количества вводимого
абразива. Оптимизируется форсирование по
критерию воспроизводимости повреждения
детали, наблюдаемого в эксплуатации.
Во втором случае для ускорения
испытаний эффективно используются климатические
камеры с регулируемыми температурой,
влажностью и насыщенностью агрессивными
компонентами атмосферы, водяные и, грязевые
ванны. Нормированная выдержка в них,
чередующаяся с пробегом на испытательных
дорогах, в котором происходит естественная
обдувка и сушка, приближает условия
форсированного воздействия к эксплуатационным.
Основой оптимизации форсирования служат
закономерности развития очагов коррозии в
эксплуатации и при испытаниях с использованием
искусственных сооружений.
Во всех способах ускорения и
форсирования испытаний общим требованием является
исключение повреждений, поломок, отказов,
не характерных для процессов эксплуатации
или рядовых полигонных испытаний с
воспроизведением типизированных условий.
Поэтому всякое ускорение испытаний основано
на исследованиях условий работы машины,
причин поломок и отказов, распределения их
по времени.
Перспективным в связи с этим
направлением ускорения испытаний, особенно
контрольных, является сокращение их
продолжительности благодаря прогнозу наработки при
известном законе ее статического
распределения. Это направление основано на
использовании методов цензурирования выборок и
априорной информации о повреждаемости
однотипных конструкций. Практическая его
ИСПЫТАТЕЛЬНЫЕ СООРУЖЕНИЯ И ОБОРУДОВАНИЕ
135
реализация требует статических данных о
повреждаемости, надежности колесных и
гусеничных машин, создания автоматизированных
информационно-расчетных систем.
1.4.5. ИСПЫТАТЕЛЬНЫЕ СООРУЖЕНИЯ
И ОБОРУДОВАНИЕ
Используемые при испытаниях
оборудование и сооружения выполняют две основные
функции: воспроизведение внешних
воздействий и положений машин, внешних условий
эксплуатации и определение показателей
рабочих процессов и состояний,
эксплуатационных и потребительских свойств колесных и
гусеничных машин. Испытательное
оборудование и сооружения необходимы для
получения стабильных, воспроизводимых,
сопоставимых условий испытаний и их результатов
для достоверной оценки эксплуатационных
свойств, технического уровня и качества
машин, углубленного анализа их рабочих
процессов и обоснованного совершенствования
конструкции.
Оборудование и сооружения
предназначены для динамических и статических, лабора-
торно-стендовых и ходовых испытаний. Для
выполнения первой из названных выше
функций наиболее эффективными,
дорогостоящими и долговременными являются капитальные
сооружения, воспроизводящие движение
машин в различных дорожно-климатических
условиях. К таким сооружениям относятся
треки с фиксированными по размерам и
взаимному расположению неровностями,
ограниченные грунтовые участки с искусственно
поддерживаемым в определенном состоянии
поверхностным слоем (грунтовым фоном),
комплексы треков и специальных испытательных
дорог. В наиболее развитой и законченной
форме комплекс испытательных сооружений
представлен в Центральных тракторном и
автомобильном полигонах и их филиалах и
опорных пунктах. Общая протяженность
специальных испытательных дорог составляет от
25 до 108 км. Конструкции их отражают
специфичность нормируемых воздействий и
типизацию их в эксплуатационных условиях,
использованную в качестве основы для
проектирования.
Испытательные дороги и сооружения
группируют по различным признакам: 1) по
оцениваемым эксплуатационным свойствам; 2)
по соответствию определенным типам дорог
общего пользования; 3) по степени
форсирования воздействия на машину в целом или на
ее отдельные узлы и агрегаты.
К первой группе относятся дороги с
ровным покрытием, микропрофиль которых
предполагает исключение
недетерминированных воздействий. Характерным представителем
этой группы являются ровные
динамометрические дороги, предназначенные для оценки
тягово-скоростных и тормозных свойств,
топливной экономичности, маневренности,
устойчивости и некоторых других.
Ко второй группе относятся дороги с
переменным микропрофилем, жестким
покрытием, воспроизводящим разнообразные
(детерминированные и случайные) дорожные
воздействия, характерные для различных
условий рядовой эксплуатации. Эту группу
наглядно представляют булыжная дорога
(недетерминированное воздействие), а также
волнистая с фиксированными высотой и
шагом.
Третья группа включает дороги и
сооружения, воспроизводящие наряду с силовыми
одновременно (или раздельно) воздействия
других повреждающих факторов внешней
среды (грязи, влаги, температуры, химического
воздействия и др.). В этой группе выделяют
сооружения двух типов: натурального
воспроизведения (нерегулируемого уровня, часто
зависящего от погодных и сезонных условий)
и искусственного воспроизведения
эксплуатационных воздействий (регулируемого, с
заданным уровнем).
При испытании тракторов, колесных и
гусеничных транспортно-тяговых машин
важное значение имеют типизированные и
постоянно используемые участки местности, на
которых при необходимости специальной
обработки (рыхление, полив, укатка и др.)
поддерживается определенное состояние грунта, а
также сооружения заполненные различными
грунтами (испытательные каналы) для оценки
сцепления, проходимости, тяги и некоторых
других свойств, предусмотренных назначением
машины или исследовательскими целями. В
этой группе испытательных сооружений
вызывает трудности объективная оценка состояния
опорной поверхности. Так, один из способов
определения состояния грунтовой дороги
состоит в предварительном (до испытаний
данной машины) режимометрировании движения
эталонной колесной или гусеничной машины
и составлении интегральной оценки,
включающей среднюю скорость, распределения
количества и длительности используемых передач,
частоты вращения коленчатого вала двигателя,
расхода топлива и других показателей.
Основное достоинство дорожных
сооружений для испытаний состоит в том, что
формирование воздействия их на машину
идентично тому, как это происходит в
эксплуатации при выполнении предусмотренных
транспортных или транспортно-тяговых задач и
условий. Но при всей возможной
направленности воздействий отдельных сооружений на
выявление различных свойств машины, их
группировании, исключении или ограничений
побочных влияний, формируемые воздействия
всегда включают множество составляющих, в
том числе и случайных, взаимосвязанных,
ИСПЫТАТЕЛЬНЫЕ СООРУЖЕНИЯ И ОБОРУДОВАНИЕ
137
Измерительное оборудование и
аппаратура специального назначения отражают
специфику и номенклатуру эксплуатационных и
потребительских свойств, оцениваемых при
испытаниях колесных и гусеничных машин.
При определении скоростных свойств
используют приборы с "пятым колесом",
монтируемым на испытуемой машине, для качения по
той же траектории движения без
проскальзывания, в комплекте с устройством
автоматического вычисления скорости поступательного
движения и регистрации ее совместно с
протяженностью пройденного пути и
затраченного времени. Путь в этих приборах
определяется по непрерывному или дискретному
измерению угла поворота "пятого колеса". Отсчеты
времени дискретны с интервалами до 0,001 с,
пути до 0,05 м. Автоматическая обработка
сигналов пути и времени в этих комплексах
обеспечивает непрерывную регистрацию
скорости до 200 км/ч с дискретностью отсчета
0,1 км/ч.
Для оценки тяговых свойств путем
измерения свободной силы тяги (буксировки
присоединяемого тормозящего прицепа) служат
тяговые динамометры с записывающими
устройствами и различными пределами
максимальных нагрузок. Эти же динамометры
применяют на этапе испытаний эффективности
рабочих тормозных систем (нормирование
силы тяги на крюке при включенных тормозах
для нагрева тормозных механизмов), а также
эффективности запасной, стояночной и
вспомогательной тормозных систем.
При определении экономичности
применяют мерные градуированные цилиндры,
устанавливаемые между топливным баком и
насосом. Цена деления в цилиндрах не
превышает 2,5 см3. Другой тип приборов - топли-
вомеры - предусматривает измерение расхода
топлива в топливоподающих магистралях
между топливным насосом и карбюратором (у
дизелей после подкачивающего насоса низкого
давления). Устройства топливомеров
разнообразны, они основаны на фиксации
определенных доз топлива, скорости течения топлива
(турбинные расходомеры), интенсивности
охлаждения потоком топлива помещаемой в
него детали. Наибольшее распространение
получили тошгивомеры первого типа с
высокой точностью дискретного отсчета расхода
малого объема топлива (0,1 см3), большим
диапазоном измерений расхода 0,5... 100 л/ч и
автоматическими вычислительными и цифро-
печатающими устройствами для регистрации
расхода либо нарастающим итогом, либо за
определенное время.
Серия таких топливомеров поршневого
типа НАМИ моделей ТЧП-2, ТЧП-3, СРТ
имеет погрешность измерения не
превышающую 1 %. Топливомеры используют совместно
с приборами путь, время, скорость*для оценки
текущих расходов на определенном пути (в л
на 100 км пути) или в ездовом цикле.
При исследовании тормозных свойств,
маневренности, управляемости и
устойчивости, если условиями предусмотрено
нормирование замедления или ускорения
поступательного движения, применяют деселерометры
(измерение замедления) и акселерометры
обычно инерционного типа с
демпфированием. Редко и преимущественно для
исследовательских испытаний используют жидкостные
деселерометры.
Для оценки усилий, необходимых для
управления машиной служат
динамометрические рулевые колеса, рычаги, педали,
монтируемые на месте штатных.
В испытаниях по плавности хода
акселерометры предназначены для одновременного
измерения вертикальных и горизонтальных
(продольных и поперечных) ускорений в
различных местах кабины и кузова. Обычно
акселерометры включаются в специальный
комплекс виброизмерительной и регистрирующей
аппаратуры (типа ВЧ-5М, ВЧ-6 и др.). Кроме
того, для отнесения результатов измерения к
определенному типу дороги в комплект
специального оборудования для оценки плавности
хода включают и различного типа профилог-
рафы, с помощью которых дается оценка
ровности (микропрофиля) опорной поверхности.
Для определения уровня шума
применяют шумомеры, приемным устройством в
которых являются микрофоны мембранного типа,
воспринимающие избыточное акустическое
давление, которое после, преобразования в
электрический сигнал после усиления
фиксируется на индикаторе стрелочного типа
(частотные характеристики шумомеров
стандартизированы) или подается на
записывающее устройство для последующего частотного
анализа.
В испытаниях токсичности отработавших
газов используют хроматографы или
быстродействующие газоанализаторы. В первом
случае проводится отбор проб в эластичную
камеру. Во втором случае отработавшие газы
поступают непрерывно. Для определения
концентрации оксида углерода и углекислого газа
применяют газоанализаторы недисперсного
инфракрасного типа (оптико-акустические).
Для установления суммарного количества всех
углеводородов служат газоанализаторы пла-
менно-анализного типа.
Для измерения и контроля температуры
при испытаниях в диапазоне 120... 150 °С
обычно используют аэротермометры, в
диапазоне до 300...350 °С - проволочные
(терморезисторы) или полупроводниковые
(термисторы), а выше 300...350 °С -
термопары.
К специальной аппаратуре для
комплексных испытаний относятся режимомеры, од-
138
Глава 1.4. ИСПЫТАНИЯ МАШИН, АГРЕГАТОВ, СИСТЕМ
новременно фиксирующие показатели
движения машин, положение органов управления,
число управляющих воздействий, длительность
различных состояний и обстоятельств
движения. В режимомерах объединены специальные
устройства с датчиками, фиксирующими
применение управляющих воздействий,
комплексом счетчиков, а иногда обрабатывающих
устройств, для получения в готовом виде таких
данных, как число включений передач, путь
пройденный на каждой из них, число
включений сцепления, торможений и других данных
на маршруте движения или на заданном
пробеге.
Перспективные направления развития
оборудования специального назначения для
испытаний колесных и гусеничных машин -
это комплексность и автоматизация
измерений, обработки, регистрации и наглядного
представления (в том числе и на дисплеях)
параметров оцениваемых эксплуатационных и
потребительских свойств, широкое
применение радио- и микроэлектроники, освоение
интегрированных датчиков и
преобразователей, внедрение микропроцессоров,
бесконтактных методов измерения.
1.4.6. АВТОМАТИЗАЦИЯ ИСПЫТАНИЙ
И ОБРАБОТКИ ИХ РЕЗУЛЬТАТОВ
Автоматизация испытаний включает
условно две задачи: автоматизацию управления,
контроля за ходом испытаний и
автоматизацию измерений и передачи информации.
В автоматическом устройстве (рис.
1.4.11) управляющий орган У, воспринимая
сигнал, поступивший от датчика Ду
являющегося измерительным органом, сопоставляет его
с заданным значением 3 величины и при
наличии отклонения воздействует на
исполнительный орган Иу который и восстанавливает
заданное значение регулируемого параметра
[39].
Автоматические системы управления и
контроля подразделяются на замкнутые и
разомкнутые. Рассмотренная система
автоматического регулирования является замкнутой.
На рис. 1.4.12 показаны разомкнутые
системы автоматики: управления и контроля. В
разомкнутой системе автоматического
управления на управляющий орган воздействует
\Машина
И
У
Машина
Д
И
' —1-
У
. 1-
а)
Машина
А
У
Ь2
Рис. 1.4.11. Схема системы
автоматического управления рабочими испытаниями
Рис. 1.4.12. Типовая схема
автоматической системы:
а - управления; б - контроля
человек или другая система автоматики,
такой системе измерительный орган отсутств
ет. В системе автоматического контроля фун
ция управления процессом отсутствует. Упра
ляющий орган определяет воздействие на во
производящий орган Д который отображае
сигнализирует или регистрирует значение ко;
тролируемого параметра.
Рассмотренные системы автоматическо
регулирования предназначены для поддерж
ния некоторых параметров в заданном диап
зоне или изменения их по определенно!
закону. Для выполнения более сложных зад
применяют экспериментальные и самонастр
ивающиеся системы, в которых управляющ!
орган соединен с вычислительным устро:
ством. Такие системы обеспечивают процесс
минимальной ошибкой регулирования, в]
полняют его оптимизацию, достижение ма
симального значения КПД.
В качестве элементов систем автомат
ческого управления служат реле, датчики ст
билизаторы, усилители, двигатели, распред
лители, а также, для вьшолнения более ело:
ных функций, модуляторы, логические эл
менты, фазочувствительные выпрямител
генераторы импульсов и др. Многие элемент
используемые в системах управления, прим
няют в системах измерения и передачи и]
формации.
Форсирование испытаний колесных и г
сеничных машин обусловило целенаправле]
ное развитие способов и средств измерени
автоматизации процессов их проведения,
результате информационно-измерительн
система (ИИС) оформлялась как компле]
устройств для получения, преобразования
представления необходимой измерительнс
информации. К ИИС применимы все закон
мерности и методы теории автоматическо
управления, поскольку в основу их работ
положен принцип слежения за изменение
измеряемого параметра. В зависимости <
поставленной задачи ИИС разрабатываются
фиксацией результатов в аналоговой или дис
АВТОМАТИЗАЦИЯ ИСПЫТАНИЙ И ОБРАБОТКИ ИХ РЕЗУЛЬТАТОВ
139
/!
Г
1
1
г
1
1
г
2
1 1
и
1 э
1
3
3
1 1
г
3
4
*-
5
9
>
»*
6
6
>
7
Л7
От2,3,5Д7
К2,3,5,б,7
Рис. 1.4.13. Структурная схема ИИС испытанна машин
кретной форме. При необходимости
обеспечивается возможность регистрации поступающей
информации в обеих формах.
В зависимости от конструкционного
исполнения ИИС могут иметь разное число
каналов измерений и выполнять различные
функции. Используемые при испытаниях машины
ИИС в основном работают по принципу
электрических измерений неэлектрических
величин. При этом измеряемые значения
физических величин преобразуются в электрические
сигналы. Это обеспечивает широкие
возможности дистанционных измерений в различных
узлах испытуемой машины и необходимых
функциональных преобразований в процессе
измерений. ИИС позволяют определять
среднее и суммарное значение измеряемого
параметра за нормированное время или за время
опыта, а также выдавать его мгновенное
значение, определять, вычислять и предоставлять
информации о значениях производных
величин и т.д. Результаты измерений могут
фиксироваться на указатель, импульсный счетчик,
цифровой индикатор, осциллограф, полярную
диаграмму, двухкоординатный график,
печатную таблицу или перфоленту, на магнитные
диски с последующей обработкой на ЭВМ и
т.д.
На рис. 1.4.13 представлена структурная
схема ИИС. Чувствительный элемент 1
воспринимает изменение измеряемого параметра
и передает соответствующий импульс на
датчик 2, который преобразует его в
электрический сигнал. В группу технических средств
входит весь набор первичных измерительных
преобразователей 3. Нормализованный сигнал
по линии связи 4 поступает в измеритель 5, а
затем на функциональный преобразователь 6
(умножение, интегрирование, вычисление
среднего и т.п.). Результат фиксируется
устройством 7 хранения и выдачи информации.
С пульта 8 управления системой управляет
оператор или эти функции выполняет ЭВМ:
включение и отключение системы, контроль ее
работы, изменение режимов и масштабов и
т.п. Напряжение и частота, необходимые для
функционирования системы обеспечиваются
блоком 9 электроснабжения. ИИС может
включать ряд дополнительных устройств: блок
10 тарировки и контроля, графопостроитель,
блок испытательных сигналов и др.
В отличие от измерительных приборов,
обладающих ограниченными
функциональными возможностями и выполняемыми ббычно
из небольшого числа измерительных
преобразователей, скомпонованных в одном блоке,
ИИС обеспечивает непосредственную связь с
испытуемой машиной, осуществляемую с
помощью централизованного автоматического
или автоматизированного управления,
многоканальное измерение различных физических
величин и обработку измерительной
информации. Результаты измерений позволяют
получить информацию об исследуемых свойствах
машин, выявить закономерности протекающих
процессов и т.д. В зависимости от
поставленных задач определяются способы обработки
результатов измерений.
Обработка результатов измерений
испытаний и исследований всегда включает в себя
операции над случайными величинами или
случайными процессами, выполняемые на
основе методов теории вероятности и
математической статистики. В соответствии с
программой испытаний при изучении рабочих
процессов колесных и гусеничных машин и их
агрегатов регистрируются случайно
изменяющиеся во времени значения скоростей, крутя-
140
СПИСОК ЛИТЕРАТУРЫ
щих моментов, рабочих нагрузок, температур
и т.д. При обработке результатов определяются
вероятностные характеристики:
математическое ожидание записанного параметра,
дисперсия как мера рассеяния процесса относительно
математического ожидания, среднее квадрати-
ческое отклонение, спектральная плотность
процесса и другие характеристики его
структуры. При изучении работы агрегатов на
режимах пуска, разгона, торможения используют
обычно характеристики переходных процессов.
На стадии первичной обработки
результатов, как правило, проводится проверка
принадлежности двух выборок к одной
генеральной совокупности, выполняется анализ с
целью исключения резко выделяющихся данных,
определяются числовые характеристики с
обязательной оценкой достоверности,
сравниваются средние дисперсии и коэффициенты
вариации по соответствующим критериям и
др.
Методам статистического анализа
результатов испытаний посвящено большое
количество работ. Элементы методики оценки
статистических характеристик включены в ряд
отраслевых и государственных стандартов.
СПИСОК ЛИТЕРАТУРЫ
1. Авдонькин Ф. Н. Теоретические
основы технической эксплуатации автомобилей.
Саратовск. университет: 1981. 288 с.
2. Агейкин Я. С. Проходимость
автомобиля. М.: Машиностроение, 1981. 160 с.
3. Альгин В. Б. Методика
прогнозирования надежности и функциональных размеров
сборочных единиц машин при
проектировании // Оперативно-информационные
материалы. Минск: ИНДМАШ АН БССР, 1989. Ч. 3.
Вып. 1. 46 с.
4. Антонов Д. А. Расчет устойчивости
движения многоосных автомобилей. М.:
Машиностроение, 1984. 168 с.
5. Болбас М. М. Основы эксплуатации и
ремонта машин. Минск: Вышейшэ школа,
1985. 284 с.
6. Болотин В. В. Ресурс машин и
конструкций. М.: Машиностроение, 1990. 448 с.
7. Бортницкий П. И., Задорожный В. И.
Тягово-скоростные качества автомобилей.
Киев: Выща школа, 1978. 175 с.
8. Говорущенко Н. Я. Техническая
эксплуатация автомобилей. Харьков: Выща школа,
1984. 312 с.
9. Гршпкеввч А. И. Автомобили: Теория.
Минск: Вышейша школа, 1986. 208 с.
10. Гусеничные транспортеры - тягачи /
В. Ф. Платонов, А. Ф. Белоусов, Н. Г.
Олейников, Г. И. Карцев. М.: Машиностроение,
1978. 351 с.
11. Забавников Н. А. Основы теории
транспортных гусеничных машин. М.:
Машиностроение, 1975. 448 с.
12. Закии Я. X. Маневренность
автомобиля и автопоезда. М.: Транспорт, 1986. 136 с.
13. Колесников К. С. Автоколебания
управляемых колес автомобиля. М.: Гостехиздат,
1955. 238 с.
14. Конструирование и расчет колесных
машин высокой проходимости / Под общ. ред.
Н. Ф. Бочарова, И. С. Цитовича. М.:
Машиностроение, 1983. 299 с.
15. Кошарный Н. Ф.
Технико-эксплуатационные свойства автомобилей высокой
проходимости. Киев: Выща школа, 1981. 178
с.
16. Краткий автомобильный справочник
НИИАТ. М.: Транспорт, 1984. 220 с.
17. Ксеневич И. П., Скотников В. А.,
Ляско М. И. Ходовая система - почва -
урожай. М.: Агропромиздат, 1985. 304 с.
18. Кузнецов Е. С. Управление
технической эксплуатацией автомобилей. М.:
Транспорт, 1991. 320 с.
19. Кутьков Г. М. Тяговая динамика
тракторов. М.: Машиностроение, 1980. 215 с.
20. Левин М. А., Фуфаев Н. А. Теория
качения деформированного колеса. М.: Наука,
1989. 269 с.
21. Литвинов А. С, Фаробин Я. Б.
Автомобиль: Теория эксплуатационных свойств.
М.: Машиностроение, 1989. 297 с.
22. Лукинсний В. С, Зайцев Е. И.
Прогнозирование надежности автомобилей. Л.:
Политехника, 1991. 224 с.
23. Лукинский В. С, Котиков Ю. Г.,
Зайцев Е. И. Долговечность деталей шасси
автомобиля. Л.: Машиностроение, 1984. 231 с.
24. Моделирование - перспективный
вариант проектирования автомобильной
техники / В. М. Семенов, В. В. Немцов, Е. Ф. Во-
лобуев // Автомобильная промышленность.
1987. N 9. С. 18 - 20.
25. Основы проектирования / Под ред.
М. С. Высоцкого. Минск: Вышейша школа,
1987. 1952 с.
26. Основы теории колебаний / Под ред.
В. В. Мигулина. М.: Наука, 1988. 392 с.
27. Передвижение по грунтам Луны и
планет / Под ред. А. Л. Кемурджиана. М.:
Машиностроение, 1986. 272 с.
28. Пирковский Ю. В. О развитии
теории качения колеса с упругой
пневматической шиной // Вестник машиностроения. 1987.
N2.
29. Пирковский Ю. В., Шухман С. Б.
Снижение сопротивления качению путем
оптимального распределения крутящего
момента и массы автомобиля по мостам // Труды
НАМИ, 1985. 160 с.
СПИСОК ЛИТЕРАТУРЫ
141
30. Платонов В. Ф. Динамика и
надежность гусеничного движителя. М.:
Машиностроение, 1973. 232 с.
31. Платонов В. Ф. Полноприводные
автомобили. М.: Машиностроение, 1989. 312 с.
32. Платонов В. Ф., Леиашвили Г. Р.
Гусеничные и колесные транспортно-тяговые
машины. М.: Машиностроение, 1987. 296 с.
33. Прогнозирование надежности
тракторов / В. Я. Анилович, А. С. Гринченко, В. Л.
Литвиненко, И. Ш. Чернявский; под общ. ред.
В. Я. Аниловича, М.: Машиностроение, 1986.
224 с.
34. Проектирование трансмиссий
автомобилей / Под общ. ред. А. И. Гришкевича, . М.:
Машиностроение, 1984. 272 с.
35. Промышленные тракторы / Ю. В.
Гинзбург, А. И. Швед, А. П. Парфенов. М.:
Машиностроение, 1986. 296 с.
36. Расчет эксплуатационных параметров
движения автомобиля и автопоезда / А. А.
Хачатуров, В. Л. Афанасьев, В. С. Васильев и
др. М.: Транспорт, 1982. 264 с.
37. Смирнов Г. А. Теория движения
колесных машин. М.: Машиностроение, 1990.
352 с.
38. Справочник по теории
автоматического управления. // Под ред. А. А. Красовского.
М.: Наука, 1987. 711 с.
39. Теория трактора / В. В. Гуськов,
Н. Н. Велев, Ю. Е. Атаманов и др.; под общ.
ред. В. В. Гуськова. М.: Машиностроение,
1988. 376 с.
40. Техническая эксплуатация
автомобилей. / Под ред. Г. В. Крамаренко. М.:
Транспорт, 1983. 488 с.
41.Тракторы. Теория. / Под общ. ред. В.
В. Гуськова. М.: Машиностроение, 1988. 264 с.
42 . Фаробин Я. Е. Теория поворота
транспортных машин. М.: Машиностроение,
1970. 176 с.
43.Фаробин Я. Ё., Овчаров В. А., Крав-
цева В. А. Теория движения специального
подвижного состава. Воронеж: Изд-во ВГУ,
1981. 160 с.
44.Хазов Б. Ф., Дидусев Б. А.
Справочник по расчету надежности машин на стадии
проектирования. М.: Машиностроение, 1986.
224 с.
45,Цитович И. С, Альгин В. Б.
Динамика автомобиля. Минск: Наука и техника, 1981.
191 с.
46.Шумик С. В. Основы технической
эксплуатации автомобилей. Минск: Вышейшая
школа, 1981. 286 с.
47, Эксплуатационная технологичность
контрукций тракторов / В. М. Михлин, К. И.
Диков, В. М. Стариков и др. М.:
Машиностроение, 1982. 256 с.
48,Яценко Н. Н. Форсированные
полигонные испытания грузовых автомобилей. М.:
Машиностроение, 1984. 328 с.
РАЗДЕЛ 2
АВТОМОБИЛИ
Глава 2.1
ТИПЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ
2.1.1. КЛАССИФИКАЦИЯ АВТОТРАНСПОРТНЫХ
СРЕДСТВ
В основу классификации и системы
обозначения отечественных автотранспортных
средств положены следующие признаки:
вид автотранспортного средства;
основной технический параметр (масса,
мощность или габаритные размеры);
тип кузова;
назначение;
колесная формула;
тип двигателя.
Автомобильный подвижной состав
подразделяют на пассажирский, грузовой и
специальный. К пассажирскому относятся
легковые автомобили, автобусы, пассажирские
прицепы и полуприцепы, к грузовому - грузовые
автомобили, автомобили-тягачи, грузовые
прицепы и полуприцепы с универсальными
или специализированными надстройками для
размещения груза, к специальному -
автомобили, прицепы и полуприцепы с
установленным специальным оборудованием, имеющие
технологическое или другое назначение и
выполняющие различные, преимущественно
транспортные, работы.
Пассажирские автомобили вместимостью
до восьми человек, включая водителя,
относятся к легковым, свыше восьми человек - к
автобусам. Легковые автомобили делят по
рабочему объему цилиндров двигателя (л) на
следующие пять классов:
особо малый (до 1,099);
малый (1,1 ... 1,799);
средний (1,8 ... 3,499);
большой (3,5 и более);
высший (не регламентируется).
На базе легковых выпускаются грузовые
и грузо-пассажирские автомобили (комби и
грузовой комби), у которых для увеличения
размеров площадки, предназначенной для
размещения в кузове груза, задние сиденья
делаются складывающимися, а задняя часть
кузова обеспечивает увеличенный внутренний
объем.
Автобусы подразделяются по габаритной
длине (м) на пять следующих классов:
особо малый (до 5);
малый (6 ... 7,5);
средний (8,5 ... 10);
большой (11 ... 12);
особо большой (16,5 ... 24).
Грузовые автомобилиу прицепы и
полуприцепы в зависимости от полной массы (т)
подразделяются на следующие основные классы
(без наименования): менее 1,2; 1,2 ... 2; 2 ... 8;
8 ... 14; 14 ... 20; 20 ... 40; свыше 40, а также
прицепы, полуприцепы, роспуски.
Общепринятая классификация по
грузоподъемности (номинальной полезной
нагрузке, на которую рассчитан данный тип
автомобиля для определенных условий эксплуатации)
отсутствует. Она может быть проведена
однозначно для автомобилей с одним (эталонным
или базовым) типом кузова при одинаковой
комплектации. Классификация грузовых
автомобилей с бортовой платформой по
грузоподъемности (т), удобная для выполнения
многих технико-экономических расчетов,
условно может быть проведена по следующим
основным классам:
особо малый (менее 1);
малый (1 ... 3);
средний (3 ... 8);
большой (8 ... 15);
особо большой (15 ... 26);
сверх особо большой (свыше 26).
Основная модель и все ее модификации
по типу кузова относятся к одной группе.
По полной массе (т) грузовые
автомобили делятся на три группы: менее 3,5; 3,5 ... 12;
свыше 12.
К специальным автотранспортным
средствам относятся пожарные автомобили, авто-
лавки, автомобили с компрессорными,
буровыми установками, автокраны, уборочные
автомобили, автомобили скорой медицинской
помощи.
Автомобили по общему числу колес и
ведущих колес условно обозначают формулой:
первая цифра - число колес автомобиля,
вторая - число ведущих колес. Каждое сдвоенное
ведущее колесо считается как одно целое.
Например, колесной формулой 4x2 обозначен
двухосный автомобиль с одной ведущей осью
(ЗИЛ-431410), 6x6- трехосный автомобиль
со всеми ведущими осями (ЗИЛ-131), 6x4-
трехосный автомобиль с двумя ведущими
осями (КамАЗ).
По роду потребляемого топлива и типу
двигателя автомобили подразделяются на
карбюраторные, дизельные, работающие на
альтернативных топливах (газогенераторные,
газобаллонные), электрические (электромобили),
паровые, газотурбинные, а также автомобили
с комбинированными силовыми установками,
например, двигатель внутреннего сгорания
(ДВС) - электрический двигатель.
Каждой новой модели автомобиля
(прицепа, полуприцепа) присваивается индекс,
состоящий из четырех цифр. Первые две
цифры - класс автомобиля (прицепа,
полуприцепа), по рабочему объему двигателя для
легковых автомобилей, по длине для автобусов и по
полной массе для грузовых автомобилей (табл.
2.1.1). В основу деления классов на виды
положен признак эксплуатационного назначения
автомобиля. Установлены следующие виды
автомобилей (прицепов, полуприцепов) по
второму знаку четырехзначного цифрового
индекса модели: 1 - легковые; 2 - автобусы; 3
- грузовые бортовые; 4 - седельные тягачи
(резерв); 5 - самосвалы; 6 - цистерны; 7 -
фургоны; 8 - резерв; 9 - специальные.
Вторые цифры относятся к модели. Для
обозначения модификации модели вводится
пятая цифра - порядковый номер
модификации. Перед цифровым индексом ставится
буквенное обозначение
предприятия-изготовителя. Например, легковой автомобиль с
рабочим объемом 1,3 л с правым
расположением органов управления, выпускаемый
АО "Волжский автомобильный завод",
обозначается ВАЗ-21036.
В зависимости от полной массы
прицепного состава для него установлены группы
индексов модели (третий и четвертый знаки
четырехзначного индекса модели прицепов,
полуприцепов и роспусков), приведенные в
табл. 2.1.2. Модификации модели имеют в
обозначении пятую цифру. Например,
полуприцеп-фургон Одесского автосборочного
завода с цельнометаллическим кузовом
специальный полной массой 29,2 т обозначается
ОдАЗ-;99871.
2.1.1. Цифровое обозначение класса автомобильного подвижного состава
Легковые
автомобили
Рабочий
объем
двигателя, л
Менее
1,099
1,1 ...
1,799
1,8 ...
3,499
3,5 и
более
Индекс
11
21
31
41
Автобусы
Габаритная
длина, м
Менее
5
6...7,5
8...10
11...12
16,5...24
Индекс
22
32
42
52
62
Полная
масса, т
Менее
1,2
1,2...2,0
2 ... 8,0
8 ... 14
14...20
20...40
40 и
более
С
бортовой
формой
13
23
33
43
53
63
73
Грузовые
автомобили
Седельные
тягачи
14
24
34
44
54
64
74
Самосвалы
15
25
35
45
55
65
75
Цистерны
16
26
36
46
56
66
16
Фургоны
17
27
37
47
57
67
77
Специальные
19
29
39
49
59
69
79
144
Глава 2.1. ТИПЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ
2.1.2. Цифровое обозначение прицепов, полуприцепов, роспусков
в зависимости от их полной массы
Группа
Г
2
3
4
5
Индекс
01 - 24
25-49
50- 69
70- 84
85 - 99
Полная
Прицепы и полуприцепы
Менее 4
4 ... 10
10 ... 16
16 ... 24
24 и более
масса, т
Роспуски
Менее 6
6 ... 10
10 ... 16
16 ... 24
24 и более
2.1.2. ЛЕГКОВЫЕ АВТОМОБИЛИ
В настоящее время в мире не существует
единой классификации легковых автомобилей,
и в разных странах или фирмах их
классифицируют по-разному. Каждый класс и группа
отечественных легковых автомобилей
характеризуется определенным комплексом
технических показателей, таких как габаритные
размеры, вместимость и уровень
комфортабельности, динамические и скоростные качества,
топливная экономичность, показатели
надежности.
К автомобилям особо малого класса
первой группы относятся автомобили длиной
3,2 ...3,5 м, шириной 1,4 ... 1,5 м. Как
правило, это четырехместные автомобили с двухобъ-
емным кузовом, с двух- или трехцилиндровым
двигателем. В основном это городские
автомобили, предназначенные для поездок на
небольшие расстояния; они имеют самые лучшие
показатели по топливной экономичности и
рассчитаны на небольшой ресурс. Наибольшее
распространение автомобили этого класса
получили в Японии. Автомобили особо малого
класса второй группы характеризуются
несколько большими габаритными размерами
(длиной 3,5 ... 3,8 м, шириной 1,5 ... 1,6 м) и
вместимостью до пяти человек. На них
устанавливают трех- и четырехцилиндровые
двигатели. Кузов двухобъемный трех- или
пятидверный.
Автомобили малого класса наиболее
распространены и являются самыми
многочисленными. Они отличаются достаточно
высокими потребительскими качествами и
наибольшей универсальностью в эксплуатации.
Сфера использования этих "семейных"
автомобилей и круг потребителей расширяются за
счет большого числа модификаций по
двигателям, типам кузовов, отделке интерьера,
большого набора дополнительного оборудования и
т.д.
Автомобили первой группы малого
класса имеют длину 3,9 ... 4,2 м, ширину 1,62 ...
1,66 м, второй группы - длину 4 ... 4,3 м,
ширину 1,64 ... 1,69 м, третьей группы - длину
4,2 ... 4,5 м, ширину 1,69 ... 1,71 м. На них
устанавливают четырехцилиндровые
бензиновые двигатели и дизели. В этом классе
автомобилей наибольшее распространение получили
пяти- и трехдверные двухобъемные кузова
типа хэтчбек, универсал, но появляются
трехобъемные кузова типа седан.
Автомобили среднего класса отличаются
повышенным уровнем комфортабельности,
лучшими динамическими и скоростными
качествами и большей надежностью. В
большинстве случаев это престижные автомобили с
трехобъемными кузовами, четырех-, пяти-,
шести- и восьмицилиндровыми бензиновыми
двигателями и дизелями. Габаритная длина
автомобилей среднего класса 4,6 ... 4,9 м,
ширина 1,74 ... 1,81 м.
Автомобили большого и высшего классов -
это представительские автомобили единичного
производства. Они отличаются высокими
комфортабельностью, скоростными
качествами, безопасностью и безотказностью в ущерб
показателям экономичности. Как правило, эти
автомобили имеют закрытый кузов типа седан
или лимузин, а также открытый типа фаэтон
или кабриолет, бензиновые двигатели с
большим объемом и запасом мощности.
По назначению легковые автомобили
делятся на автомобили общего пользования и
повышенной (высокой) проходимости.
Автомобили общего пользования предназначены
для движения по дорогам с
усовершенствованным покрытием. Легковые автомобили
повышенной проходимости рассчитаны на
движение по дорогам с любым покрытием или
бездорожью. Как правило, это полноприводные
автомобили (колесная формула 4 х 4) с
большим дорожным просветом (до 220 мм).
На базе автомобилей как общего
пользования, так и повышенной проходимости
создают грузопассажирские или грузовые
автомобили, предназначенные для перевозки
габаритных грузов различной массы в зависимости
от класса автомобиля. В них предусмотрено
ЛЕГКОВЫЕ АВТОМОБИЛИ
145
специальное помещение или платформа для
перевозки грузов, которые могут быть
отделены от кабины водителя стационарной
перегородкой. Основной тип кузова для
грузопассажирских автомобилей - фургон, а грузовой
отсек оборудован складывающимися или
легкосъемными сиденьями и допускает перевозку
людей. Грузовые модификации предназначены
только для перевозки грузов, основные типы
их кузова - пикап (с открытой платформой) и
фургон.
По компоновке (расположению
двигателя и ведущих колес) современные легковые
автомобили можно разделить на четыре
основных типа:
классический (двигатель расположен
продольно над передней осью, ведущие колеса
задние);
переднеприводной (двигатель
расположен продольно или поперечно над или перед
передней осью, ведущие колеса передние);
двигатель расположен продольно или
поперечно за задней осью, ведущие колеса
задние;
двигатель расположен продольно или
поперечно перед задней осью, ведущие колеса
задние.
Наибольшее распространение получили
легковые автомобили, выполненные по
переднеприводной схеме, позволяющей сделать
автомобиль компактнее, легче, улучшить его
потребительские качества. По такой схеме
выполнены практически все современные
легковые автомобили особо малого и малого
классов, растет доля переднеприводных
моделей в среднем классе. Классическая схема,
наиболее популярная до начала 70-х гг. -
продолжает сохраняться на части моделей
среднего и на всех моделях (за редким исключением)
большого и высшего классов. Заднемоторные
автомобили не получили достаточного
распространения, хотя некоторые зарубежные фирмы
традиционно сохраняют эту схему для
некоторых своих моделей. На автомобили с заднемо-
торной компоновкой, как правило,
устанавливают У-образные или оппозитные двигатели
воздушного охлаждения. Среднемоторная
компоновка характерна для спортивных
автомобилей, выпускающихся небольшими
сериями. Эти автомобили имеют два или четыре
посадочных места, два из которых неполно-
размерные (так называемые "детские").
Большинство полноприводных
автомобилей - автомобили повышенной
проходимости. Однако создаются полноприводные
модификации легковых автомобилей и общего
пользования. Дорожный просвет у таких
автомобилей на уровне базовой модели и они не
предназначены для движения по бездорожью.
Основное назначение полного привода в этом
случае - повышение качеств устойчивости и
управляемости на дорогах с низким
коэффициентом сцепления. Широкое
распространение автомобили такого типа получили с
начала 80-х гг., однако их выпуск не превышает
5 ... 10 % выпуска базовой модели с одной
ведущей осью.
2.1.3. АВТОБУСЫ
Наиболее приемлемой классификацией
автобусов по их назначению следует считать их
деление на три класса: I) городские; II)
междугородные; III) дальнего следования.
Для отечественных автобусов можно
выделить еще дополнительный класс
ведомственных автобусов, предназначенных для
доставки людей к месту работы.
К автобусам класса I относятся городские
автобусы, обладающие наибольшей
вместимостью (наличие большого числа стоячих мест) и
высокими параметрами пассажирообмена
(большие площадь пола, ширина дверей,
низкий уровень пола и др.), и максимально с
ними унифицированные пригородные
автобусы, предназначенные для пассажирского
сообщения города с ближним пригородом.
Автобусы класса II предназначены для
обеспечения междугородных перевозок
районного и областного масштаба, сообщения
городов с дальним пригородом, местных перевозок
в сельской местности. Они отличаются от
автобусов класса I большей долей числа мест для
сидения, наличием в основном четырехрядной
планировки, отсутствием накопительных
площадок с размещением стоящих пассажиров
только в проходе, уменьшенным числом
служебных дверей, повышенными параметрами
геометрической проходимости,
комфортабельностью для пассажиров и т.д.
Автобусы класса III предназначены для
перевозки только сидящих пассажиров в
условиях высокого комфорта на дальние
расстояния и в туристических или экскурсионных
целях. Они снабжены багажными отделениями
и рядом дополнительного оборудования:
радио-, магнито- и телеустановками, местом для
гида, гардеробом, баром, туалетом,
индивидуальными освещением и вентиляцией,
системой кондиционирования и т.д. Автобусы
класса III могут быть выполнены повышенной
этажности, с наклонно расположенным
салоном для улучшения обзорности и иметь
разнообразные компоновочные схемы.
Особо малые автобусы можно
классифицировать следующим образом. К классу I
могут быть отнесены особо малые автобусы,
выполняющие функции "маршрутных такси",
т.е. осуществляющие перевозки на
внутригородских коротких маршрутах, и способные
перевозить стоящих пассажиров. Характерным
для компоновки таких автобусов являются
повышенная высота салона, небольшое число
расположенных по периметру мест для силе-
146
Глава 2.1. ТИПЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ
ния, широкая боковая (реже задняя) дверь,
низкий уровень пола, пространство для
стоящих пассажиров (накопительная площадка),
поручни для стоящих пассажиров, т.е.
типичные конструктивные признаки городского
автобуса.
К классам II и III можно отнести
автобусы особо малой категории, предназначенные
для перевозки сидящих пассажиров, с
различной степенью комфортабельности,
определяемой планируемой продолжительностью
поездки.
Большинство выпускаемых в мире малых
автобусов относится к классам II и III.
Малыми автобусами класса II являются
отечественные ПАЗ-3205, имеющие в основном
четырехрядную планировку салона, одну или
две служебные двери и поручни для стоящих в
проходе пассажиров и предназначенные для
перевозок пассажиров на местных маршрутах.
Малые автобусы, в зависимости от класса
назначения, имеют полную вместимость 25 ... 50
пассажиров и полную массу в наиболее
характерных диапазонах 5,3 ... 6,5 и 8,2 ... 8,8 т.
Автобусы средней размерности, как
правило, унифицированы с большими
автобусами, чему в значительной мере способствует
приобретающая популярность модульная
конструкция кузова. Средние автобусы производят
многие европейские фирмы, но их выпуск
относительно невелик. В отечественной
промышленности средние автобусы классов II и
III представлены семейством ЛАЗ. Средние
автобусы имеют вместимость 55 ... 75
пассажиров и полную массу 9,5 ... 13,5 т.
Большие автобусы составляют
наибольшую долю в мировом производстве автобусов,
кроме особо малых. Эта размерность автобусов
характеризуется наибольшим разнообразием
конструкций и компоновочных схем.
Наибольшую часть выпуска составляют автобусы
класса I с различными вариантами планировок
салона. При наиболее типичных схемах
планировки автобусов для внутригородских
перевозок число пасссажиров можно определить
осредненно как произведение длины автобуса
(м) на 10, т.е. при длине 9,5 м - 95
пассажиров. Большое число планировок салона,
применяющихся ведущими автобусостроительны-
ми фирмами, приводит к определенному
стиранию граней между автобусами классов I и И.
Автобусы класса I и II имеют вместимость 80
... 120 пассажиров и полную массу 14 ... 18,5
т. Большие автобусы класса III конструктивно
представляют собой наиболее разнообразную
группу: их выполняют двух- и трехосными,
одно-, полутора- и двухэтажными, с большим
ассортиментом дополнительного
оборудования. Следует отметить, что европейская
классификация распространяется лишь на
одноэтажные автобусы.
Особо большие или сочлененные автобусы
производятся на тех же предприятиях, что и
большие автобусы, и максимально
унифицированы с ними. В подавляющем большинстве
они представляют собой автобусы класса I, за
исключением единичных моделей
сочлененных автобусов классов II и III. Особо большие
автобусы выпускаются с габаритной длиной
16,5 ... 18 м, имеют вместимость 145 ... 184
пассажиров и полную массу 24 .;. 28 т. Эти
автобусы предназначены для осуществления
перевозок на наиболее напряженных
городских реже пригородных и междугородных
маршрутах.
Троллейбусы выпускаются только
большой и особо большой размерности для
осуществления внутригородских перевозок большого
числа пассажиров. Определилась тенденция в
унификации троллейбусов с автобусами,
вплоть до применения полностью
унифицированных кузовов, комплектуемых либо дизелем,
либо тяговым электродвигателем в комплекте с
управляющим и токопередающим
электрооборудованием. В последнем случае троллейбус
может дополнительно оснащаться дизелем для
обеспечения автономного движения.
Описанная классификация автобусов
предполагает возможность дальнейшего ее
расширения по размерности и более мелкого
деления по назначению, например, категорией
"сверхбольших" автобусов (троллейбусов),
выполненных в виде трехсекционных
сочлененных автобусов, таких, как автобусы Х237
(Франция), 280Н (Германия), или типа омни-
бус-бан.
2.1.4. ГРУЗОВЫЕ АВТОМОБИЛИ
Грузовые автомобили классифицируют
по назначению, полной массе
(грузоподъемности), колесной формуле, условиям
эксплуатации, компоновке, типу привода ведущих
колес и другим признакам. С точки зрения
назначения грузовые автомобили могут быть
подразделены на автомобили общего
назначения, специализированные и специальные.
Грузовой автомобиль общего назначения
может быть оборудован бортовой или
безбортовой открытой или закрытой платформой,
платформой с тентом, кузовом,
приспособленным для международных перевозок,
кузовом-фургоном без внутреннего оборудования.
К специализированным относятся грузовые
автомобили, предназначенные для перевозки
конкретных видов однотипных (однородных)
грузов, к которым с учетом их физико-
механических, химических, весовых,
геометрических и других свойств и параметров
приспособлены их платформы, надстройки или
кузова. Эти автомобили могут быть снабжены
средствами самопогрузки и разгрузки. В
качестве примера можно привести автомобили-
самосвалы, приспособленные для перевозки
строительных или сельскохозяйственных
грузов, автомобили-рефрижераторы с кузовами-
фургонами для пищевых продуктов,
автоцистерны для воды или нефтепродуктов и др. К
специальным относятся грузовые автомобили,
предназначенные для размещения,
транспортировки и эксплуатации различного, в том
числе технологического, оборудования и
выполнения других функций, не связанных с
перевозкой народнохозяйственных грузов
(коммунальные, пожарные, медицинские
автомобили, автокраны и др.). К каждой из
указанных групп могут .относиться грузовые
автомобили, предназначенные для одиночного
использования, и автомобили-тягачи.
Автомобиль-тягач приспособлен для
буксировки прицепных транспортных средств -
прицепов и полуприцепов, в сцепке с
которыми образуется автопоезд. Тягач,
предназначенный для буксировки прицепных транспортных
средств (прицепов), не оказывающих или
оказывающих на него малое гравитационное
воздействие, при необходимости может быть
использован и как одиночный автомобиль.
Седельный тягач - тягач оборудованный седель-
но-сцепным устройством для сцепки с
прицепным средством (полуприцепом),
оказывающим на него гравитационное воздействие.
Балластный тягач - специальный тягач,
нагруженный балластом и предназначенный только
для буксировки прицепных транспортных
средств (прицепов), не оказывающих или
оказывающих на него малое гравитационное
воздействие. Как седельные, так и балластные
тягачи не приспособлены для перевозки грузов
на себе.
В зависимости от назначения и нагрузок,
приходящихся на колесную ось грузового
автомобиля (автопоезда), его можно отнести к
группе дорожных или внедорожных
автотранспортных средств. Первые предназначены для
движения по дорогам общего пользования,
вторые - для движения по специальным
дорогам или на местности. В нашей стране,
различают две основные группы автомобилей,
отличающихся осевой нагрузкой (с максимальной
нагрузкой на ось): 1) 60 кН; 2) 100 кН. Эти
группы грузовых автомобилей соответствуют
несущей способности двух основных типов
дорог общей сети. Ограничен выпуск грузовых
автомобилей с нагрузкой на ось 80 кН. Все
автомобили с осевой нагрузкой более 100 кН
относятся к группе внедорожных.
Одной из важнейших характеристик
грузового автомобиля является его колесная
формула. В мировом автостроении
применяют дорожные автомобили с колесной
формулой 4 х 2, 6 х 2, 6 х 4, 8 х 4, 4 х 4, 6 х 6,
8x8. Колесную формулу 3x2 имеют лишь
особо легкие грузовые автомобили в
странах Западной Европы и в Японии. Наиболее
распространены дорожные грузовые
автомобили с колесной формулой 4x2 (полная
масса 1,5 ... 19 т), 6x2 и 6x4 (полная
масса 15 ... 26,5 т), используемые как
одиночные, так и в качестве тягачей. Автомобили с
колесной формулой 8x4 достаточно широко
применяются в странах Западной Европы и в
Японии в виде самосвалов и шасси под
специализированные и специальные надстройки.
Автомобили со всеми ведущими колесами
(полноприводные) с колесной формулой 4x4,
6 х 6 и 8 х 8 до недавнего времени
предназначались в основном для условий эксплуатации,
в которых основным требованием является
высокая проходимость на местности, а также в
качестве балластных тягачей. В последние годы
проявилась тенденция применения
автомобилей типа 4 х 4 в качестве дорожных
автомобилей-тягачей с повышенными тяговыми
качествами.
В современном автостроении получили
распространение три основных типа
компоновочных схем расположения кабины грузовых
автомобилей: за двигателем (капотная схема);
за двигателем, но со значительной
"надвижкой" ее на двигатель (полукапотная
схема); над двигателем (схема с передней
кабиной). Последняя схема в свою очередь имеет
три варианта расположения силового агрегата
и передней оси: с силовым агрегатом перед
осью, над ней и за ней. Два последних типа
компоновочных схем обладают рядом
бесспорных преимуществ, состоящих в
следующем:- хорошей обзорности с места водителя;
отсутствии некоторой части деталей капота;
сокращении колесной базы, а следовательно,
габаритных размеров, либо (при заданной базе
и габаритных размерах) в увеличении
полезной площади; повышенной грузоподъемности
при заданной максимальной нагрузке на ось;
хорошей маневренности.
Однако они отличаются повышенной
загрузкой передней оси автомобиля (37% по
сравнению с 22 ... 28 %, характерными для
капотной схемы). Поэтому эти типы
компоновки грузовых автомобилей наиболее
распространены в странах и районах с разветвленной
сетью качественных твердых дорог и при
использовании в черте города, когда очень
важно сокращение площади, занимаемой
автомобилем.
При создании универсального грузового
автомобиля, пригодного для работы в черте
города, на магистральных дорогах, а также в
сельской местности и иногда (в сухое время
года) вне дорог, предпочтение отдают более
консервативной капотной компоновке
грузового автомобиля либо применяют
полноприводную схему.
Компоновку грузового автомобиля
характеризуют также следующие параметры:
148
Глава 2.1. ТИПЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ
отношение внутренней длины
платформы к колесной базе (расстоянию между осями)
или габаритной длине автомобиля;
отношение площади (объема) грузовой
платформы к грузоподъемности;
отношение грузоподъемности к
снаряженной массе автомобиля при заданной его
долговечности (ресурсе).
С целью максимальной
приспособленности грузового автомобиля для вьшолнения
конкретной транспортной работы в
определенных условиях выпускаются его различные
модификации, отличающиеся следующим:
величиной колесной базы, что позволяет
устанавливать платформы различной
грузовместимости для наиболее полного использования
грузоподъемности автомобиля при перевозке
грузов с различной объемной массой;
типом и мощностью двигателя, типом
привода (к передним или задним колесам),
передаточным числом главной передачи, что
позволяет получить наименьший расход
топлива в конкретных условиях эксплуатации;
типом шин, что обеспечивает
проходимость автомобиля в различных дорожных
условиях при минимальном расходе топлива.
Грузовые автомобили могут быть
-приспособлены для эксплуатации в различных
климатических условиях.
2.1.5. СПЕЦИАЛИЗИРОВАННЫЕ И СПЕЦИАЛЬНЫЕ
АВТОМОБИЛИ
Специализированные автомобили. Эти
автотранспортные средства (автомобиль,
автомобильный прицеп или полуприцеп)
предназначены для перевозки грузов конкретного вида с
учетом их физико-механических, химических,
биологических свойств, массовых и
геометрических параметров и обеспечивают
предотвращение или уменьшение отрицательных
внешних воздействий на перевозимый груз, его
максимальную сохранность, а также удобство
проведения погрузочно-разгрузочных работ.
Насыщенность автотранспортного парка
специализированным автомобильным
транспортом определяет уровень развития ее
хозяйственного механизма.
Специализированные автомобили
создаются, как правило, на основе базовых моделей
общетранспортного назначения, поэтому
основные параметры базовой модели -
максимально допустимая полная масса, мощность
двигателя, допустимые нагрузки на оси,
колесная формула, число осей - являются
определяющими для специализированного
автотранспортного средства. Полная масса и
нагрузка на оси специализированного
автотранспортного средства не должны превышать
соответствующих значений базовой модели, а
максимальная масса перевозимого груза при этом
может отличаться на величину разности
снаряженных масс специализированного
автотранспортного средства и базовой модели.
Верхний предел допустимой полной массы для
всех последующих технических
усовершенствованных модификаций должен
соответствовать полной массе базовой модели. Такая
регламентация основных параметров
специализированного автотранспортного средства
обеспечивает соответствие его тягово-динамических
качеств аналогичным качествам, заложенным в
базовой модели автомобиля.
Для обеспечения сохранности
перевозимого груза, удобства погрузки и разгрузки
специализированные автотранспортные
средства оборудуют отопительно-вентиляцион-
ными или холодильными установками, погру-
зочно-разгрузочными устройствами
(гидрокранами, гидроманипуляторами,
лебедками, грузоподъемными бортами) и другим
специальным и вспомогательным
оборудованием.
В нашей стране применяются:
самосвалы для строительных и
сельскохозяйственных грузов;
фургоны для перевозки промышленных
и продовольственных товаров, хлебобулочных
изделий, мебели, почты, бумаги, скота,
инкубационных яиц, .птицы;
изотермические фургоны и
рефрижераторы для скоропортящихся грузов;
цистерны для нефтепродуктов, битума,
цемента, технической воды и воды для
пастбищ, сахара, муки, зерна;
контейнеровозы;
лесовозы;
металловозы для длинномерного проката;
тяжеловозы для неделимых
крупногабаритных грузов и т.д.
Специальные автомобили. Они
предназначены для размещения, транспортировки и
эксплуатации различного специального, в том
числе технологического оборудования и
выполнения других задач и функций.
Специальные автомобили создаются на базе как
автотранспортных средств общетранспортного
назначения, так и специализированных
автотранспортных средств, их деталей и узлов.
Основные параметры специальных
автомобилей (полная масса, допустимые нагрузки
на оси) должны быть такими же, как у их
базовых моделей.
Специальные автотранспортные средства
могут иметь следующие отличные от базовых
моделей эксплуатационные параметры:
максимальную скорость транспортирования,
габаритные размеры, устойчивость, маневренность
и др.
2.1.6. ПОЛНОПРИВОДНЫЕ АВТОМОБИЛИ
Автомобили, у которых крутящий
момент двигателя через трансмиссию подводится
ко всем колесам, называют полноприводными
(табл. 2.1.3).
2.1.3. Полнопрнводные автомобили
Характерный
признак
Число осей
Колесная формула
Проходимость:
профильная
опорная
Тип шин
Рисунок протектора
Насыщенность
рисунка протектора, %
Рядность
расположения шин на мостах:
управляемых
неуправляемых
Ограниченной
проходимости
(повышенной тяги)
Повышенной
проходимости
(общетранспортные)
Высокой проходимости
Многоцелевые
Двух-, трех- и четырехосные, со всеми ведущими колесами
4x4, 6x6, 8x8
Минимальная
"
Тороидные, высокого
давления
Дорожный или
универсальный
Более 55
Сдвоенное
4x4, 6x6, 8x8
Умеренная
"
Тороидные,
нерегулируемого давления
4x4, 6x6, 8x8
Умеренная
Высокая
Специальные колесные
шасси
Многоосные
4x4, 6x6, 8x8,
10x10, 12x12 и др.
Умеренная и
высокая
Высокая
Тороидные, регулируемого давления и
широкопрофильные
Повышенной проходимости
40 ... 60
1, Менее 45
Однорядное
Однорядное
Прочие, со
специальными
движителями,
поисковые конструкции
Не
регламентировано
-
Зависит от
назначения
Высокая
-
-
_
-
Продолжение табл 2.1.3
Характерный
признак
Условное среднее
давление на грунт,
кПа
Отношение массы
прицепа к массе
тягача:
на дорогах
в бездорожье
Уровень
конструктивной и
технологической
преемственности с массовым
автомобильным
производством
Типичные модели
Ограниченной
проходимости
(повышенной тяги)
Более 50 (до 90)
1,3 ... 4,3
Не более 0,32
Максимальный.
МАЗ-501, 509;
М35, 54 (США)
Повышенной
проходимости
(общетранспортные)
Высокой проходимости
Многоцелевые
Более 50 (при массе менее 20 т)* и более 55
(при массе более 20 т)*
1,0 ... 1,6
0,4 ... 0,8
Высокий
ВАЗ-2121; УАЗ-3151
0,8 ... 1,4
0,33 ...0,5
Высокий или
умеренный
ЗИЛ-131;
"Урал-4320";
"Стар-266" (Польша);
М939.А2 (США)
Специальные колесные
шасси
Определяется
0,8 ... 1,4
0,33 ...0,6
Прочие, со
специальными
движителями,
поисковые конструкции
назначением
-
-
Ограниченный или минимальный
МАЗ-7310;
М561 (США);
ФВ622
(Великобритания)
"Урал-5920,,;
"Роллигон",
"Фор мост"
* Для автомобилей с шинами нерегулируемого давления величина нсболее 40 кПа.
Классификация полноприводных
автомобилей по проходимости основана на
Дифференцировании их в основном по опорно -
сцепной проходимости, что определяет
функциональное назначение автомобиля.
Различные транспортные средства поисковых
конструкций с различными специальными типами
движителей (гусеничными, роторно-вин-
товыми, колесно-гусеничными, лыжно-гусе-
ничными, Катковыми, катко во-гусеничными,
шагающими, колесно-шагающими, на
крупногабаритных шинах и др.) составляют
отдельную группу, не относящуюся к
полноприводным автомобилям.
Полноприводность автомобиля позволяет
реализовать комплекс показателей, не
достижимых для автомобилей других
компоновочных схем. Новый тип легкового
полноприводного автомобиля благодаря распределению
тягового усилия на все колеса обеспечивает
ему при неблагоприятных условиях движения
(дорожных) высокую способность к
преодолению подъемов, повышенные маневренность и
безопасность. Такие легковые полноприводные
автомобили для преимущественной
эксплуатации на шоссейных дорогах имеют показатели
профильной проходимости такие же, как у
обычных неполноприводных автомобилей.
Уровень проходимости всех
полноприводных автомобилей характеризуется
совокупностью следующих, в значительной степени
взаимосвязанных, признаков (см. табл. 2.1.3).
1. Числом ведущих осей или колесной
формулой - двухосные (4 х 4), трехосные
(6 х 6), четырехосные (8 х 8) и многоосные
(10 х 10, 12 х 12 и т.д.) автомобили и
автопоезда с активными полуприцепами.
2. Условному среднему давлению на
грунт (кПа), создаваемому движителями
автомобиля с полной нагрузкой, равному
отношению полной нагрузки со стороны колес
автомобиля к площади проекции габаритных
размеров всех шин на опорную поверхность.
3. Равномерным распределением полной
массы т по осям, которое для автомобилей
повышенной и высокой проходимости близко
к оптимальному, так как при этом
обеспечивается меньшее колееобразование и снижение
сопротивления движению. Для автомобилей
ограниченной проходимости со сдвоенным
расположением шин на неуправляемых осях
неравномерность распределения полной массы
наиболее значительна и обусловлена
стремлением максимально использовать
грузоподъемность каждой шины.
4. Типом шин, их расположением,
рисунком и насыщенностью протектора, в
значительной степени определяющими опорную
проходимость автомобиля.
Опорную проходимость автомобилей
можно характеризовать так же такими
показателями, как удельная мощность,
сопротивление движению, удельная сила тяги на крюке и
другими, которые* в меньшей степени
относятся к классификационным.
5. Показателями, характеризующими
профильную (или геометрическую)
проходимость - углами переднего и заднего свеса,
поперечным и продольным радиусами
проходимости, минимальными дорожным просветом и
радиусом поворота, наибольшими углами
преодолеваемого подъема и косогора, положением
центра тяжести, размещением осей в пределах
базы (расстояние между крайними осями)
автомобиля и др. Многие из этих показателей
в равной степени могут быть отнесены к
показателям как профильной, так и опорной
проходимости. Так, соотношение расстояний
между осями и положение центра тяжести
автомобиля определяют не только ширину
преодолеваемого рва, но и распределение
нагрузок по осям, размещение управляемых
колес, маневренность автомобиля, а также
влияют на выбор компоновочной схемы, типа и
схемы привода.
6. Типом привода ведущих колес -
мостовым, бортовым и комбинированным. По
типу распределения потоков мощности
приводы могут быть дифференциальные,
блокированные и дифференциально-блокированные,
при этом можно выделить приводы с
несколькими двигателями. Дифференциалы в приводе
могут выполняться не блокируемыми,
принудительно блокируемыми и
самоблокирующимися с различной степенью блокировки.
Степень блокировки дифференциала определяется
коэффициентом блокировки, равным
отношению момента, передаваемого на отстающую
полуось, к моменту, передаваемому на
забегающую полуось.
Дифференциалы в приводе различают по
их положению в схеме разветвления потока
мощности от двигателя к колесам: основной
(или главный), промежуточные и
межколесные. Основной дифференциал находится в
первом узле разветвления потока мощности,
межколесные дифференциалы - в последних
узлах разветвления потока мощности и всегда
связывают два ведущих колеса,
промежуточные - между основным и межколесными
дифференциалами.
В блокированном приводе группа колес
или мостов связаны между собой жесткой
кинематической связью, что обеспечивает
автомобилю лучшую прохбдимость по
бездорожью благодаря уменьшению буксования колес
и максимальному использованию сцепной
массы для создания силы тяги. Однако при
движении автомобиля по недеформируемым
поверхностям в блокированном приводе
возникают дополнительные нагрузки,
увеличивающие износ шин, деталей трансмиссии,
снижающие управляемость автомобиля, топлив-
ную экономичность -и запас прочности ряда
деталей. Для исключения этих недостатков в
трансмиссиях устанавливают дифференциалы,
которые приводят к снижению тягово-сцепных
качеств. Привод, сочетающий
дифференциальные и блокированные разветвления
потоков мощности одновременно, называют
дифференциально-блокированным.
Выбор схемы привода автомобиля не
однозначен, это компромисс в решении
нескольких задач: назначения, уровня
проходимости, степени конструктивной и
технологической преемственности с серийным
производством базовой неполноприводной модели и
т.д. Наибольшее распространение в мире
нашли мостовые схемы трансмиссий
автомобилей с колесными формулами 4х4и6х6и
комбинированным приводом (межколесные
дифференциалы и блокированный привод
мостов) с возможностью принудительного
(реже автоматического) отключения привода
управляемых мостов. Этот тип привода в
наибольшей степени сохраняет преемственность
производства с неполноприводными
автомобилями. Более совершенным является
дифференциальный привод с самоблокирующимися
или принудительно блокирующимися
дифференциалами. Большое распространение и
«лучили конструкции с принудительно
блокируемыми межколесными дифференциалами и
более перспективные межколесные
дифференциалы повышенного трения. Основные и
промежуточные дифференциалы практически
всегда принудительно блокируются. На
полноприводных автомобилях малого класса
грузоподъемности с колесной формулой 4x4
вместо отключаемого привода одного из
мостов или основного дифференциала на раде
последних моделей используют вязкостную
муфту.
7. Относительной массой прицепа,
равной отношению полной массы тпр прицепа к
полной массе т тягача, для автомобилей
разного уровня проходимости она различная. Для
снижения сопротивления движению
автопоездов рекомендуется, чтобы колея и рядность
шин на тягаче и прицепе совпадали.
Исследованиями и многолетней практикой
эксплуатации полноприводных тягачей подтверждено,
что для обеспечения надежной работы тягача с
прицепом на плохих дорогах и бездорожье
тп$ / та ^ 0,5, а для ряда автомобилей-
тягачей /япр / т = 0,32. В последнем случае
относительная масса прицепа значительно
больше для тягачей в разгруженном
состоянии, при этом снижаются тягово-сцепные
качества и проходимость автопоезда на
бездорожье.
При работе полноприводного автомобиля
с прицепом на дорогах с покрытиями верхний
предел относительной массы прицепа редко
превышает 0,5 и ограничивается
требованиями, обеспечивающими безопасную
эксплуатацию автопоезда. Указанные рекомендации
практически одинаковы для автомобилей
различного уровня проходимости и выполнение
их обеспечивает достаточно уверенную
эксплуатацию автопоезда в условиях, характерных
для работы автомобиля без прицепа.
Классификация полноприводных
автомобилей по уровню проходимости,
приведенная в табл. 2.1.3, позволяет выделить наиболее
характерные признаки для автомобилей трех
уровней проходимости.
2.1.7. АВТОМОБИЛИ, РАБОТАЮЩИЕ НА
АЛЬТЕРНАТИВНЫХ ТОПЛИВАХ
К альтернативным топливам (АТ)
относятся:
сжиженный нефтяной (или
углеводородный) газ (СНГ);
сжатый или компримированный
природный газ (КПГ);
сжиженный природный газ (СПГ);
спиртовые топлива (СТ);
бензоспиртовые (БС) смеси, эфиры (Э) и
водород (В).
Применение АТ требует оснащения
транспортных средств специальными
системами питания, а в некоторых случаях и
специальными модификациями двигателей.
В зависимости от вида АТ, типа
двигателя, условий эксплуатации применяют
автомобили с однотопливной или двухтопливной
системой питания с независимым питанием
двигателя одним из топлив и с одновременной
подачей двух топлив. Однотопливная система
питания автомобиля рассчитана на работу
двигателя только на одном АТ. Специальные
модификации двигателей с конструктивными
элементами обеспечивают наиболее
эффективное использование АТ как в чистом виде
(например, природный метан), так и в виде
добавок к моторным топливам нефтяного
происхождения (МТНП), например БС смеси.
Автомобили могут оснащаться
дополнительной (резервной) системой питания,
допускающей кратковременную работу двигателя на
бензине при пуске холодного двигателя, на
режиме холостого хода и при малых нагрузках
в случае израсходования запаса основного
топлива или в особых условиях движения.
Двухтопливная система питания с
независимой подачей к двигателю одного из
топлив допускает полноценную работу двигателя
как на АТ, так и на МТНП. Автомобили с
одновременной подачей двух топлив
оборудуют системой раздельного хранения топлив. В
двигатель одновременно подается АТ и МТНП
в пропорции, зависящей от режима работы
двигателя, физико-химических свойств топлив,
конструктивных параметров двигателя. Пре-
АВТОМОБИЛИ НА АЛЬТЕРНАТИВНЫХ ТОПЛИВАХ
15
дусматривается возможность отключения
подачи АТ и полноценной работы на МТНП.
Автомобили с двигателями с искровым
зажиганием, работающие на СНГ. Система
питания включает газовый баллон с
заправочной, расходной и
контрольно-предохранительной арматурой, магистральный
электромагнитный клапан (или вентиль), фильтр,
испаритель газа, редуктор газовый и газовый
смеситель. Автомобили с двухтопливной
системой питания имеют в бензиновой системе
питания электромагнитный клапан,
отключающий подачу бензина при работе на газовом
топливе, и переключатель вида топлива.
Дозирование газового топлива
осуществляется тремя способами:
дозирующим устройством, в котором
имеются шайбы (жиклеры) с калиброванными
отверстиями, устанавливаемыми в газовом
редукторе;
дозирующим устройством с
регулировочными винтами или дозирующими шайбами с
калиброванными отверстиями,
устанавливаемым в газовой магистрали низкого давления
между редуктором и газовым смесителем;
дозирующими элементами,
устанавливаемыми в газовом смесителе.
На автомобилях с однотопливной
системой питания используют газовые смесители,
имеющие, как правило, несколько
дозирующих систем - главные, холостого хода,
переходных режимов, экономайзер (эконостат),
обогатительную, используемую при пуске и
разгоне. На автомобилях с двухтопливной
системой питания применяют упрощенные
газовые смесители, которые имеют:
главные дозирующие системы;
главные дозирующие системы и систему
холостого хода;
главную дозирующую систему, систему
холостого хода и переходные системы.
Рассмотренные смесители могут
использоваться с экономайзерным устройством
пневматического типа.
Смесители двухтопливных систем
выполняют в виде приставок к основному
бензиновому карбюратору, их устанавливают:
на верхнюю горловину карбюратора, в
полость за воздушным фильтром;
в разъем между корпусом поплавковой
камеры и корпусом дроссельных заслонок
карбюратора;
между впускным трубопроводом и
карбюратором.
В последнем случае дозатор газа имеет
регулятор для изменения проходного сечения
в зависимости от положения органа
регулирования количества поступающего в двигатель
воздуха.
Автомобили с двигателями с искровым
зажиганием, работающие на природном газе.
Система питания автомобиля, работающего на
сжатом природном газе, включает газовы
баллоны высокого давления с запорными вен
тилями (если баллонов несколько, то на часп
баллонов устанавливаются проходные венти
ли), заправочное устройство с заправочньп»
вентилем, подогреватель газа, редуктор высо
кого давления, газовый фильтр, магистраль
ный вентиль (электромагнитный клапан), ре
дуктор низкого давления и газовый смеситель
На автомобилях с двухтопливной системой ]
бензиновой системе питания между топлив
ным насосом и карбюратором установлен бен
зиновый электромагнитный клапан.
Одно из направлений повышения техни
ко-экономических показателей газобаллонньс
автомобилей - применение сжиженного при
родного газа. Сжижение природного газа уве
личивает концентрацию энергии в газе в 60(
раз и снижает давление газа в установке в 20
30 раз, что позволяет существенно снизил
массу системы хранения газа и увеличить про
бег автомобиля на одной заправке до величи
ны, близкой к показателям базовой бензино
вой модели автомобиля. Хранение природной
газа в жидком виде осуществляется в изотер
мических сосудах при температуре ниже
150 ... ПО К. Криогенный автомобильный ба>
имеет арматуру для поддержания заправка
газом, отбора жидкой и паровой фаз топлива
поддержания давления газа в баке на
определенном уровне.
Автомобили с газодизельным двигателем,
работающие на сжатом природном газе.
Применение сжатого природного газа в
газодизельном автомобиле позволяет сохранить тяго-
во-скоростные показатели, запас хода на
уровне базовой дизельной модели. Система
питания включает газовые баллоны высокого
давления с вентилями и заправочным
устройством, газовый редуктор-подогреватель,
электромагнитный газовый клапан-фильтр, газовый
смеситель, систему подачи и взаимосвязанного
управления рейкой топливного насоса
высокого давления и дозатор газа. В воздушный тракт
двигателя поступает обедненная газовоздушная
смесь, которая поджигается в камере сгорания
небольшой "запальной" дозой дизельного
топлива, впрыскиваемого через форсунки
основной системы топливоподачи.
Автомобили с двигателями с искровым
зажиганием, работающие на спиртовых топли-
вах. Метанол, как топливо для автомобилей,
обладает следующими положительными
свойствами: высокой детонационной стойкостью,
меньшим, чем бензин содержанием токсичных
веществ в отработавших газах, высокой
удельной теплотой сгорания. Но вместе с тем
метанол обладает следующими недостатками:
высокой коррозионной агрессивностью, низкой
массовой теплотой сгорания (в 2 раза меньше,
чем у бензина); высокой теплотой испарения.
Метанол может быть использован как в
чистом виде, так и в виде добавок к бензину.
154
Глава 2.1. ТИПЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ
Автомобиль с однотопливной системой
питания, использующий метанол, оснащают
топливным баком с увеличенным в 1,5 - 2 раза
объемом; он имеет расширенные проходные
сечения дозирующих элементов, измененную
характеристику автоматов угла опережения
зажигания, модифицированный двигатель с
повышенной степенью сжатия, усиленным
подогревом впускного тракта, свечи зажигания
с калильным числом не менее 225, устройства
для облегчения пуска холодного двигателя при
низкой температуре. Автомобили с
двухтопливной системой питания с одновременной
подачей двух топлив имеют системы подачи
метанола и низкооктанового бензина.
Для упрощения конструкции
автомобиля и расширения использования
нефтепродуктов, в частности низкооктановых бензинов,
используют БС смеси с содержанием метанола
5 ... 30 %, с добавкой спиртов-стабилизаторов
(изобутилена, изопропилена и др.) менее 10 %
общего объема смеси.
Система питания автомобиля,
работающего на БС смесях при содержании спиртов
до 5 %, не отличается от системы питания
базового автомобиля. При более высоком
содержании спиртов изменяют проходные
сечения дозирующих элементов, вводятся средства
облегчения пуска двигателя при низкой
температуре, системы предотвращения
образования паровых пробок в топливопроводе.
Автомобили, использующие спиртовые
топлива, имеют лучшие на 5 ... 7 % тягово-
динамические и скоростные показатели по
сравнению с базовыми бензиновыми
моделями, меньшее на 10 ... 20 % содержание
вредных веществ в отработавших газах, лучшую
экономичность двигателей, но увеличенный
объемный расход топлива (на чистом метаноле
в 1,8 - 1,9 раза).
Автомобвли с двигателями с искровым
зажиганием, работающие на водороде и бензине
с добавлением водорода. Водород может быть
использован в качестве топлива как в
автомобилях с однотопливной системой питания,
работающих на чистом водороде, так и при
одновременной подаче водорода и бензина в
соотношениях, зависящих от режима работы
двигателя и октанового числа бензина.
Система питания автомобиля, с двигателем,
работающим на водородном топливе, включает
системы хранения водорода, редуцирования
давления и фильтрации, подачи и дозирования.
Важнейшей проблемой применения
водорода в автомобилях является создание
надежной, безопасной и энергоемкой системы
его хранения. Возможны следующие варианты
хранения водорода:
в баллонах при высоком давлении;
в металлогидридных аккумуляторах;
в криогенных баках в жидком виде;
в устройствах на основе химической
реакции магниевых сплавов с водой.
Возможно получение водорода на борту
автомобиля из метанола (с использованием
каталитических реакторов).
Важной особенностью водорода, как
моторного топлива, является возможность его
воспламенения и сгорания в смеси с воздухом
в широком диапазоне составов топливовоз-
душной смеси; в продуктах его сгорания
практически полностью отсутствуют вредные
компоненты (кроме окислов азота). Однако на
пути создания двигателя, работающего на
чистом водороде, имеется и ряд трудностей:
1) сгорание водородовоздушных смесей в
двигателе сопровождается на некоторых
режимах детонацией и преждевременным
самовоспламенением;
2) ввиду низкой плотности водорода
снижается наполнение цилиндров свежим
зарядом, что сопровождается потерей
мощности на 15 ... 20 %.
Проблемы решаются при
совершенствовании формы камеры сгорания, применении
внутреннего смесеобразования, выборе новых
материалов.
Рассмотренные недостатки сводятся к
минимуму при одновременной подаче
водорода и бензина. На режиме холостого хода
двигатель работает на водороде, с увеличением
нагрузки доля водорода снижается, и подача
водорода прекращается на режимах полных
нагрузок.
2.1.8. ЭЛЕКТРОМОБИЛИ
В электромобиле (ЭМ) для привода
ведущих колес используется электрическая
энергия, вырабатываемая автономным
химическим источником энергии в виде тяговой
аккумуляторной батареи (ТАБ) или
электрохимического генератора (ЭХГ). Применение
ЭМ обусловлено их нетоксичностью и
энергетической эффективностью, связанной с эко-*
номией жидкого топлива, т.е. повышением
уровня использования первичных
энергоресурсов.
Аккумуляторные ЭМ уже
эксплуатируются несколько десятилетий (табл. 2.1.4).
Расширение их применения сдерживается
ограниченным запасом хода, обусловленным
сравнительно небольшой удельной энергоемкостью
современных ТАБ. Масса ТАБ обычно
составляет 29 ... 37 % полной массы ЭМ. Работы по
ЭМ с ЭХГ не вышли из стадии создания
экспериментальных образцов. Трудности связаны
с обеспечением безопасной эксплуатации ЭХГ
и их ограниченной мощностью, что вынуждает
использовать их в сочетании с ТАБ.
ЭЛЕКТРОМОБИЛИ
155
2.1.4. Перспективный типаж ЭМ с ТАБ
Электромобиль
Грузовой:
фургон
особо
малой
подъемности
фургон
или
бортовой
Микроэлект*.
робус
(маршрутное такси)
Легковой
для
внутригородских
поездок
Полезная
нагрузка, т
(число
пассажиров)
0,3...0,5
0,8...1,0
(8 + 10)
(2 + 4)
Полная
масса, т
1,5...2,0
2,5...3,0
2,8...3,5
1,2...2,0
Запас
хода, км
40...80
40...80
70...90
70...100
Проектирование ЭМ возможно на основе
базовой конструкции серийного автомобиля
аналогичного назначения и близкого по
полезной нагрузке или разработки
принципиально новой конструкции. Большинство
современных ЭМ создается на базе серийных
автомобилей, при этом снижается масса
различных конструктивных элементов и
агрегатов. Предпосылкой для создания специальных
кузовов и шасси для ЭМ современного
технического уровня должен быть ощутимый
прогресс в области аккумуляторостроения,
представляющий технико-экономическую основу
серийного производства ЭМ. Основными
направлениями по снижению снаряженной
массы и улучшению свойств ЭМ специальной
конструкции является:
использование ТАБ с высокой удельной
энергоемкостью (не ниже 45...50 Втч/кг),
современных экономичных систем тягового
электропривода с электронными системами
регулирования и быстроходными
электродвигателями, легких сплавов и пластмасс в
конструкции шасси и кузова, стекол меньшей
толщины, шин с пониженным сопротивлением
качению;
улучшение аэродинамических свойств
кузова;
рациональная компоновка ТАБ и
тягового электрооборудования на ЭМ.
Компоновка ТАБ на ЭМ может быть в
одном или двух блоках. В первом случае
возможно поперечное размещение блока ТАБ в
базе ЭМ или продольное центральное
("хребтовое") расположение ТАБ с установкой
со стороны хвостовой части ЭМ.
Два блока ТАБ могут быть размещены: в
переднем и заднем свесе; в базе и заднем
свесе; в базе по левому и правому борту ЭМ.
Иногда ТАБ устанавливают на специальном
прицепе. Выбор способа размещения ТАБ на
ЭМ различных типов определяется их
назначением, компоновкой и требованиями к
конструкции ЭМ данного типа. В любом случае
должен быть обеспечен удобный доступ к ТАБ
для ее обслуживания.
В табл. 2.1.5 приведены некоторые
усредненные параметры аккумуляторов.
В основном на всех современных
электромобилях применяются свинцово-кислотные
аккумуляторы с панцирным положительным
электродом, обеспечивающие запас хода на
одну зарядку в пределах 40 ... 80 км в
городских условиях движения.
2.1.5. Усредненные параметры аккумуляторов ТАБ
Аккумулятор
(состояние отработки)
Свинцово-кислотный с
положительным
электродом панцирного типа
(промышленный
выпуск)
Никель-железный с
отрицательным
электродом:
ламельного типа
таблеточного типа
спеченного типа
(промышленный
выпуск)
Удельная энергоемкость
(достигнутая) при
одночасовом разряде, ВТ'Ч/кг
18 ... 23
23 ... 25
40 ... 45
50 ... 53
Удельная мощность
(пиковая), Втч
70 ... 100
Менее 100
Срок службы,
число циклов
800 ... 1000
700
800
1000
156
Глава 2.1. ТИПЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ
Продолжение табл. 2.1.5
Аккумулятор
(состояние отработки)
Никель-цинковый
(опытное производство)
Никель-кадмиевый
(промышленный
выпуск)
Высокотемпературные
системы (опытные
образцы):
натрий-сера
натрий-хлорид
железа
литий-алюминий-
хлорид железа
Удельная энергоемкость
(достигнутая) при
одночасовом разряде, Вт-ч/кг
45 ... 55
25 ... 30
70 ... 120
Более 100
70 ... 100
Удельная мощность
(пиковая), Вт-ч
100 ... 150
Менее 100
130 ... 180
100 ... 120
90 ... 100
Срок службы,
число циклов
100 ... 150
1000 ... 2000
800
1000
750
На ЭМ обычно применяют однодвига-
тельный тяговый электропривод постоянного
тока (ТЭП), но в последние годы начали
устанавливать тяговый асинхронный привод
переменного тока (ТАЛ). В ТЭП используется
тиристорно (транзисторно)-импульсные
системы регулирования в силовом контуре ТАБ -
цепь якоря тягового электродвигателя (ТЭД).
В последнее время отдается предпочтение ТЭД
независимого возбуждения. В# этом случае
возможны две системы регулирования ТЭП:
1) автоматическая с силовым
тиристорно-импульсным регулятором в цепи якоря
ТЭД и транзисторным регулятором в цепи
возбуждения;
2) полуавтоматическая с транзисторным
регулятором в цепи возбуждения и
переключением групп ТАБ с параллельного на
последовательное соединение.
Автоматическая система обеспечивает
плавное регулирование ТЭП в режимах тяги и
рекуперативного торможения, но имеет
высокую стоимость. Полуавтоматическая система
проще, обеспечивает пониженные потери
энергии в ТАБ и ТЭП.
В ТАП используется простой и
надежный тяговый асинхронный двигатель (ТАД),
однако для регулирования необходим тирис-
торный инвертор, имеющий сложную систему
управления и пока еще недостаточно
надежный в эксплуатации. Масса всего
оборудования готового ТАП, отнесенная к полной массе
ЭМ, в 1,5 - 2 раза превышает аналогичный
показатель для ТЭП. Вал ТЭД (ТАД)
соединяется с ведущим мостом (задним или
передним) посредством механической передачи
автомобильного типа (обычно без коробки
передач). Требования к ТЭП и ТАД
заключаются в экономичном расходовании
электроэнергии, запасенной в ТАБ, снижении массы
системы регулирования и повышении ее
надежности путем использования
микроэлектроники и микропроцессорной техники.
Электромобили могут эффективно
использоваться для выполнения транспортных
работ, не требующих больших среднесуточных
пробегов. Установка соответствующих ТАБ
обеспечит энергоснабжение ЭМ. Следующий
этап развития ЭМ связан с созданием новых
более энергоемких источников энергии.
2.1.9. АВТОМОБИЛИ С КОМБИНИРОВАННЫМИ
ЭНЕРГЕТИЧЕСКИМИ УСТАНОВКАМИ
Комбинированная энергетическая
установка (КЭУ) состоит из двух источников
энергии, один из которых рассчитан на
длительное энергоснабжение относительно
невысокой мощности, а второй - на
кратковременное более мощное. В качестве второго
источника энергии обычно используется ТАБ, а
первый источник служит для пополнения
запаса энергии ТАБ в процессе эксплуатации.
Известны КЭУ следующих типов:
солнечная батарея - ТАБ, топливный элемент -
ТАБ, ДВС - ТАБ. Наиболее отработанными
являются КЭУ типа ДВС - ТАБ с двумя
способами передачи энергии от ДВС к ведущим
колесам автомобиля. При первом
последовательном способе ДВС не имеет
кинематической связи с ведущими колесами. Вследствие
этого на автомобиле предусматриваются две
электрические машины: тяговый
электрический генератор (ТЭГ) и тяговый
электродвигатель (ТЭД). Механическая энергия вала ДВС
преобразуется в ТЭГ в электрическую,
которая передается к ТЭД и, в определенные
периоды'цикла движения, к ТАБ. При разгоне
машины и на больших подъемах ТАБ,
включенная параллельно ТЭГ, осуществляет
энергоснабжение ТЭД. Заряд ТАБ производит-
АВТОМОБИЛИ С КОМБИНИРОВАННЫМИ ЭНЕРГОУСТАНОВКАМИ
157
ся в те же периоды движения, когда ТЭД
потребляет небольшое количество энергии.
Смена режимов разряда и заряда ТАБ происходит
автоматически.
При втором параллельном способе
передачи энергии ДВС имеет кинематическую
связь с ведущими колесами. Вал ДВС связан с
валом тяговой электрической машины (ТЭМ),
обычно машины постоянного тока, а затем
посредством механической передачи
автомобильного типа с ведущими колесами. Разгон
автомобиля до некоторой скорости
осуществляется за счет энергии ТАБ, которая работает в
режиме двигателя. Затем в работу включается
ДВС, механическая энергия вала которого
передается на ведущие колеса. По мере
повышения скорости автомобиля уменьшается
мощность, реализуемая на ВК, вследствие чего
ТЭМ переходит в режим генератора с
приводом от ДВС и осуществляет заряд ТАБ.
В обоих случаях при выбеге,
механическом торможении и на стоянках происходит
заряд ТАБ от ДВС. Применяется
рекуперативное торможение, когда заряд ТАБ
производится за счет кинетической энергии автомобиля.
В последовательной КЭУ, благодаря
отсутствию кинематической связи ДВС с ведущими
колесами, имеются предпосылки для
снижения удельного расхода топлива и токсичности
отработавших газов благодаря стабилизации
режимов работы ДВС по мощности и частоте
вращения при минимальном удельном расходе
топлива. Однако в этом случае необходимы
две тяговые электрические машины, каждая из
которых должна быть рассчитана на полную
мощность, передаваемую на ведущие колеса,
что обусловливает увеличение массы
оборудования КЭУ и ТЭД, а также двойное
преобразование энергии ДВС.
В параллельной КЭУ используется одна
ТЭМ, рассчитанная на преобразование только
той части энергии ДВС, которая ранее была
передана ТАБ, а также энергии, полученной
ТАБ от внешней электрической сети. Это
позволяет уменьшить массу оборудования КЭУ и
ТЭП и снизить суммарные потери энергии в
этих системах. Однако отсутствует
возможность стабилизации скоростных режимов ДВС,
поскольку частота вращения его коленчатого
вала непосредственно зависит от скорости
автомобиля. Вместе с тем, при автоматическом
управлении КЭУ работа ДВС при переменных
скоростных режимах может осуществляться по
определенной характеристике, близкой к
экономической. Это будет способствовать
улучшению энергетических свойств КЭУ.
Существует несколько структурных вариантов
параллельной КЭУ.
Основная цель применения КЭУ вместо
обычной силовой установки автомобиля
заключается в возможности использовать ДВС
меньшей мощности (на 25 ... 50 %, в
зависимости от параметров ТАБ), обеспечить
высокий коэффициент ее использования, работу в
наиболее экономичных режимах при всех
значениях мощности, причем свободная энергия,
которая не может быть реализована на
ведущих колесах, запасается в ТАБ для
последующего использования при разгоне или на
больших подъемах.
В состав КЭУ входят агрегаты, нашедшие
широкое применение на транспортных
машинах различного типа и назначения. Наиболее
важной особенностью функционирования
агрегатов в составе КЭУ является то, что
рабочие режимы отдельных источников и
преобразователей энергии взаимосвязаны, а их
свойства дополняют друг друга в процессе
обеспечения энергетики движения автомобиля.
Глава 2.2
ОБЩАЯ КОМПОНОВКА
И ОСНОВНЫЕ ПАРАМЕТРЫ
2.2.1. НОРМАТИВНЫЕ ОГРАНИЧЕНИЯ,
ЭКСПЛУАТАЦИОННО ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ
И ПАРАМЕТРЫ
Международные, государственные
(национальные) и отраслевые стандарты
регламентируют общие технические требования к
автомобилям, требования к их свойствам,
конструкции систем, агрегатов и узлов. С
соблюдением нормативных документов
разрабатываются технические задания, технические и
рабочие проекты, технические условия,
принимаются решения о постановке новых
автомобилей на производство.
Массовые параметры. Масса
незаряженного автомобиля (укомплектованного
всеми узлами и агрегатами, без массы
снаряжения, дополнительного оборудования, заправки
топливом, охлаждающей жидкостью, жидкими
маслами) характеризует материалоемкость
узлов и агрегатов, необходимых для
обеспечения движения автомобиля после его заправки.
Она принята в качестве классификационного
параметра легковых автомобилей.
Масса снаряженного автомобиля
(доукомплектованного, заправленного, но без
груза, пассажиров, багажа, водителя и
обслуживающего персонала) является
характеристикой общей материалоемкости автомобиля и
обусловливает возможность расширения
областей его использования, повышение
комфортабельности, безопасности, проходимости и др.
Масса снаряженного шасси автомобиля -
масса снаряженного автомобиля без кузова или
специальной надстройки.
Полная масса автомобиля - масса
снаряженного автомобиля вместе с массой водителя,
обслуживающего персонала и груза (или
пассажиров и багажа).
158
Глава 2.2 ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
Полная масса грузового автомобиля
является главным классификационным
параметром. В связи с широким развитием
производства специализированных автомобилей, т.е.
большим разнообразием кузовов или других
надстроек разной массы, устанавливаемых на
шасси одного и того же базового автомобиля,
наряду с грузоподъемностью автомобиля
(наибольшая масса перевозимого груза)
используется грузоподъемность шасси (разность
между полной массой автомобиля и массой
снаряженного шасси с водителем и
обслуживающим персоналом).
Для предварительного определения
массы грузового автомобиля можно использовать
зависимости 1 между массой тсш
снаряженного шасси, 2 грузоподъемностью тш шасси и
полной массой т автомобиля (рис. 2.2.1).
Полная масса двухосных автомобилей
ограничена значениями, вытекающими из суммы
предельных осевых нагрузок. Полная масса
трехосных автомобилей "не должна превышать
24 т при расстоянии между крайними осями
не менее 6 м.
та,т
1,25
Ь°
0,15
0,5
0,25
§Ё
ш
2^
30
<&*
ш
^2
^>~
Л^ч
41^
$н
10
")
/п,т
Мсш,#1ш, Т"
го
г ^
1
*шШ
ШУ/
15
10
5 10 15 20 15 30 т,т
Рис. 2.2.1. Зависимости массы /Иод снаряженного
шасси и грузоподъемности тш от полной массы т
грузового автомобиля
Диапазон значений масс основных
агрегатов грузовых автомобилей приведен на рис.
2.2.2. Снаряженная масса полноприводного
автомобиля на 20 ... 25 % больше массы
базового.
Рис. 2.2.2.Зависимости масс иц основных агрегатов от полной массы т грузового автомобиля:
1 - силовой агрегат; 2 - задний мост; 3 - рама; 4 - передний мост; 5 - платформа; 6 - кабина
Удельная масса основных агрегатов
легковых автомобилей (%) к массе
незаряженного автомобиля приведена ниже:
Двигатель в сборе, без
электрооборудования
Трансмиссия
Передняя подвеска
Задняя подвеска
Колеса и шины
Кузов в сборе с сиденьями, без
электрооборудования
10...12
4...6
6...7
5...6
6...7
50...55
При расчете полной массы автомобиля
масса водителя и обслуживающего персонала
принимается равной 75 кг, пассажира 68 кг,
багажа на каждого пассажира (с учетом ручной
клади) 3 кг для пригородных автобусов, 13 кг
для автобусов местного сообщения и 23 кг для
междугородных и туристских автобусов, 10 кг
для легковых автомобилей, а для автомобилей
высокой проходимости масса каждого
человека 100 кг.
Оценка степени конструктивного
совершенства и рационального использования
массы грузового автомобиля производится по
показателю удельной массы шасси. Удельная
масса шасси ту определяется для
конструктивной грузоподъемности шасси, представля-
НОРМАТИВНЫЕ ОГРАНИЧЕНИЯ
159
ющей собой разность между полной
конструктивной массой автомобиля и массой
снаряженного шасси, и установленного ресурса до
капитального ремонта:
ту =
('"па -тсш)Р
где тсш - масса снаряженного шасси, т; тзс -
масса заправки и снаряжения, т; /япа - полная
конструктивная масса автомобиля, т; Р - уста-
Расстояние между мостами,
м
Предельная осевая
нагрузка, кН, не более
новленныи ресурс до капитального ремонта,
млн. км.
При сравнительной оценке
материалоемкости по данному показателю различных
автомобилей они должны быть приведены к
единой комплектации.
Осевые нагрузки. Предельные осевые
нагрузки, передаваемые на опорную
поверхность наиболее нагруженными мостами
автомобиля, в зависимости от расстояния между
смежными мостами не должны превышать
значений, приведенных ниже.
1...1Д
57,5
1,1...1,2
65
1,2...1,3 1,З..Л,39 1,39.-2 Свыше 2
72,5 80 90 100
Допускается увеличение предельной
осевой нагрузки у городских и пригородных
автобусов до 115 кН при расстоянии между
осями свыше 2 м. Для внедорожных автомобилей
ограничения по осевым нагрузкам
отсутствуют.
Для обеспечения удовлетворительных
тягово-сцепных свойств грузовых автомобилей
первой группы передняя осевая нагрузка не
должна превышать значений (% полной
массы), приведенных ниже (в скобках даны
значения, полученные от массы снаряженного
автомобиля).
Автомобиль с колесной
формулой: 4x2 24...30* (49)
6x4 28 (47)
* Для автомобилей полной массы менее 5 т.
Осевые нагрузки у грузовых автомобилей
второй группы распределяются следующим
образом:
передняя практически равна допустимой
нагрузке на шины переднего моста;
задняя равна максимально допустимой
нагрузке на дорогуф в обоснованных случаях
принимается меньше.
Осевые нагрузки, приходящиеся на
мосты полноприводных автомобилей, примерно
равны между собой. Рекомендуемые значения
распределения осевых нагрузок грузовых и
легковых автомобилей приведены в табл. 2.2.1
и 2.2.2.
2.2.1. Распределение осевых нагрузок у грузовых автомобилей, %
Группа автомобиля
Первая
Вторая с осевой нагрузкой, кН:
80
100
Полноприводный
Колесная
формула
4x2
6x4
4x2
6x4
4x2
6x4
4x4
6x6
8x8
Передняя
24...30/45...49
25...28/42...47
26...31/46...53
22...24/38...44
33...38/51...58
23...29/41...47
46...49/56...62
30...33/46...49
48,5*/-
Задняя.
70...76/51...55
72...75/53...58
69...75/47...54
76...78/56...62
62...67/42.-49
71...77/53...59
51...54/38...44
67...70/51...54
51,5/-
* Нагрузка на переднюю тележку.
Примечание. В числителе даны значения для автомобиля полной массы, а в знаменателе
без груза.
160
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
2.2.2. Распределение осевых нагрузок у легковых автомобилей,
Загрузка
автомобиля
Без нагрузки
Два человека, сидящих на передних
сиденьях
Полная нагрузка
Расположение двигателя
перед задней
осью
53...54/47...48
52...53/47...48
43.. .48/52.. .57
над (перед)
передней осью
60...62/38...40
59...60/40...41
49...52/48...51
за задней
осью
39...41/59...61
41...43/57...59
40...41/60...61
Примечание. В числителе приведены значения для передней осевой нагрузки, а в
знаменателе - для задней.
Правильно выбранное распределение
осевых нагрузок у автомобиля имеет большое
значение для обеспечения его
удовлетворительной курсовой устойчивости и
проходимости, особенно при движении по скользкой
дороге. При переднеприводной компоновке
легковых автомобилей стремятся, чтобы
относительное разгружение передних колес при
полной нагрузке было минимальным. Осевые
нагрузки у автобусов распределяются таким
образом, чтобы обеспечивалась равномерная
загрузка шин переднего и заднего мостов.
Габаритные размеры автомобиля.
Предельная габаритная длина автомобилей
установлена 12 м, а габаритная высота - не более
4 м. При высоте автомобилей более 3,8 м
предусматривается возможность временного
уменьшения ее до пределов, обеспечивающих
перевозку по железной дороге (применение
разборных дуг тента платформы, снижение
давления воздуха в шинах). Наибольшая
габаритная ширина общетранспортных
автомобилей принята 2,5 м. В нее должно вписываться
полностью все оборудование за исключением
боковых зеркал заднего вида, которые могут
выступать за пределы наибольшего габарита,
при условии установки их на откидных
кронштейнах, а также эластичные (мягкие)
элементы, например, брызговики. Для некоторых
полноприводных автомобилей допускается
увеличение ширины до 2,75 м.
Общие эксплуатационно-технические
требования. Их основу составляют нормативные
документы, которые обеспечивают единство
подхода к созданию различных
автотранспортных средств, удобство их использования и
эффективность. При проектировании
автомобилей, как правило, эти требования
реализуются следующим образом.
Автомобили, без дополнительных
устройств, рассчитываются на эксплуатацию при -
температуре воздуха -45 ... +50 °С, влажности
до 98 % при температуре +25 °С, при
скорости ветра 20 м/с, высоте до 4500 м над уровнем
моря.
Максимальная скорость грузового
автомобиля общетранспортного назначения на
горизонтальном участке с сухим ровным
покрытием при полной массе не более 3,5 т
обеспечивается 85 ... 100 км/ч.
Максимальный подъем, преодолеваемый
грузовым одиночным автомобилем с полной
массой при движении по сухому твердому
ровному покрытию не менее 25 %,
автопоездом 18 %, а троганье с места при полной
массе одиночного автомобиля обеспечивается на
подъеме не менее 20 %.
Наружный радиус поворота автомобиля,
измеренный по наибольшему габариту,
выдерживается не более 12 м.
Дорожный просвет (клиренс) грузовых
автомобилей принимается более 200 мм при
грузоподъемности 1,5 т, 240 мм при 3 т, 260
мм при 5 т, 270 мм при 8 и 12 т. Для
автомобилей высокой проходимости дорожный
просвет увеличивается не менее чем на 100 мм и
может достигать 450 ... 500 мм.
Погрузочная высота общетранспортных
грузовых автомобилей выбирается не более
1150 мм при грузоподъемности 1,5 т; 1200 мм
при 3 и 5 т; 1400 мм при 8 и 12 т.
Внутренние размеры бортовых платформ
обеспечивают рациональное размещение
контейнеров и тары. На автомобилях,
предназначенных для международных перевозок,
бортовые платформы оборудуются дугами, тентами,
средствами их установки, крепления и
пломбирования в соответствии с правилами
международных перевозок.
Максимально допустимая сила (Н) для
приведения в действие органов управления
автомобиля принимается следующей.
На педали рабочей тормозной
системы 686
На педали сцепления:
при наличии усилителя 147
без усилителя 245
НОРМАТИВНЫЕ ОГРАНИЧЕНИЯ
161
На рычаге коробки передач 147
На рычаге стояночной тормозной
системы 392
На рулевом колесе при переходе от
прямолинейного движения к движению
по окружности радиусом 12 м при
скорости 10 км/ч на горизонтальном
участке с сухим твердым ровным
покрытием:
для рулевого управления без
усилителя на пути более 17 м 245
для рулевого управления с
усилителем на пути не более 11 м 118
в случае прекращения действия
усилителя на пути 490
Запас хода по контрольному расходу
топлива у автомобилей грузоподъемностью
менее 5 т принимается не менее 650 км, более
5 т у полноприводных автомобилей с
бензиновым двигателем - не менее 800 км, с дизелем -
не менее 1000 км.
Автомобили оборудуются сзади
стандартным тягово-сцепным устройством, а
предназначенные только для одиночного
использования - устройствами для вытаскивания
застрявшего автомобиля и местом для установки
тягово-сцепного устройства. В передней части
автомобиля предусматриваются устройства,
обеспечивающие его длительное и надежное
буксирование на жесткой сцепке.
Создаются места для надежного
крепления автомобилей при их транспортировке,
погрузке и разгрузке. Полноприводные
автомобили выполняют так, чтобы они
вписывались в железнодорожный габарит.
Предусматривается возможность
удобного проведения монтажных и "ремонтных работ,
применения диагностических установок и
приборов, устранения неисправности или
отказа без разборки узла или с минимальной
разборкой смежных узлов и агрегатов.
К специфическим требованиям для
автомобилей высокой проходимости относятся
(технические требования в полном объеме на
конкретные модели автомобилей
устанавливают в техническом задании) следующие:
возможность эксплуатации на дорогах с
твердым покрытием, грунтовых дорогах
различного состояния и местности, преодоления
бродов;
возможность отбора мощности (до 40 %
номинальной мощности на стоянке и до 10 %
при движении);
возможность установки тяговых лебедок
для самовытаскивания с рабочей длиной троса
не менее 60 м и места для размещения
полиспаста на автомобилях грузоподъемностью 1,5
т и более;
оборудование раздаточных коробок, как
правило, межосевыми дифференциалами
между управляемыми и неуправляемыми мостами,
блокируемыми с места водителя и имеющими
сигнальное устройство в кабине водителя;
установка межколесных дифференциалов
задних ведущих мостов самоблокирующегося
типа или использование механизма
принудительной блокировки, приводимого в действие
с рабочего места водителя;
применение на автомобилях
грузоподъемностью 1,5 т и более шин регулируемого
давления при управлении и контроле с места
водителя.
Перспективные требования к
техническому уровню и качеству автомобилей
(удельной массе, удельному контрольному расходу
топлива, показателям надежности) также
определяются стандартами.
Для автомобилей первой группы
минимальный коэффициент сцепного веса
получается для движения автомобиля в трудных
дорожных условиях (коэффициент
сопротивления качению/= 0,02 ... 0,03, уклон /' = 0,06,
коэффициент сцепления шин с дорогой
Ф=0,2):
Для автомобилей второй группы
удовлетворительные тягово-сцепные свойства
обеспечиваются при значительно меньших
коэффициентах сцепного веса, что обусловлено
эксплуатацией их на дорогах, создающих меньшее
сопротивление качению и имеющих меньшие
продольные уклоны.
Коэффициенты сцепного веса одиночных
отечественных грузовых автомобилей
приведены в табл. 2.2.3.
Грузо- и пассажировместимость*Для
перевозимых грузов, значительно отличающихся
по плотности (0,3 ... 3,25 т/м3), для
повышения коэффициента использования
грузоподъемности наряду со стандартными бортовыми
платформами применяют удлиненные и
укороченные платформы. Внутренние размеры
бортовых платформ грузовых автомобилей,
предназначенных для перевозки грузов в
стандартизованной таре и контейнерах,
рекомендуется принимать согласно данным табл. 2.2.4.
6 Зак 1741
162
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
2.2.3. Коэффициент сцепного веса отечественных одиночных грузовых автомобилей
Группа
автомобиля
Первая
Вторая
Колесная
формула
4x2
6x4
4x2
6x4
4x2
6x4
Нагрузка на
ведущие колеса, кН
60
110
80
140
100
180
Полная масса
автомобиля, т
8
15
12
18,5
16
24
Коэффициент
сцепного веса
0,750/0,55
0,733/0,545
0,667/0,472
0,760/0,570
0,620/0,407
0,750/0,350
Примечание. В числителе даны значения для автомобиля с полной массой, а в
знаменателе - без груза.
2.2.4. Внутренние размеры бортовых платформ грузовых автомобилей (м)
Грузоподъемность, т
0,5 ... 1
1 ... 2
2 ... 4,5
6 ... 8
8 ... 10
10 ... 12
12 ... 14
14 ... 15
Внутренняя
ширина,
не менее
1,64
2,10
2,10
2,42
2,42
2,42
2,42
2,42
Внутренняя длина, не менее
короткой
1,83
2,44
3,05
4,35
5,22
6,10
6,96
7,83
нормальной
2,44
3,05
3,66
5,22
6,10
6,96
7,83
8,70
удлиненной
3,05
3,66
4,22
6,10
6,96
7,83
8,70
~
Внутренняя
высота
основных
бортов,
не менее
0,4
0,4
0,55
0,6
0,6
0,6
0,6
0,6
Применение грузовых платформ
различной длины требует создания модификаций
автомобилей с различной базой.
Пассажировместимость (вместимость)
определяется числом пассажиров, которое
может одновременно перевозиться в автобусе
или легковом автомобиле и зависит от
полезной площади салона. Полезную площадь
салона автобуса составляет площадь, занятая
пассажирскими сиденьями, и площадь,
предназначенная для стоящих пассажиров. Полную
вместимость автобусов определяют исходя из
полезной площади салона и норм площади
пола, отводимой для пассажиров. Установлены
следующие нормы площади для пассажиров
городских и пригородных автобусов: на одного
сидящего пассажира не менее 0,315 м2; на
одного стоящего пассажира городского
автобуса 0,125 м2 и пригородного 0,15 м2.
На полную вместимость городских и
пригородных автобусов оказывает
существенное влияние характер планировки
пассажирского помещения, определяемый
коэффициентом мест для сидения,
Кс = пс I п,
где пс - число мест для сидения; п - общее
число мест.
Вместимость автобусов основных типов
приведена в табл. 2.2.5.
ОБЩАЯ КОМПОНОВКА АВТОМОБИЛЕЙ
163
2.2.5. Вместимость автобусов основных типов
Класс
автобуса
Особо малый
Малый
Средний
Большой
Особо большой'
(сочлененный)
Назначение
Общего назначения
Местного сообщения
Городской
Пригородный
Городской
Междугородный
Городской
Число мест для
сидения
9- 14
19-25
22. 25
31 -32
25 - 30
42-45
35 -45
Полная
вместимость
9 - 14
35 -41
90-95
63-65
100 - 120
42-45
160 - 180
Коэффициент
Ас
1
0,46 - 0,72
0,23 - 0,28
0,48 - 0,51
0,21 - 0,3
1
0,19 - 0,28
Легковые автомобили в зависимости от
их класса имеют следующее число пассажиров:
Особо малого 4 (для некоторых
моделей 5)
Малого и среднего 5
Большого 7
2.2.2. ОБЩАЯ КОМПОНОВКА АВТОМОБИЛЕЙ
Общая компоновка заключается в
определении рационального взаимного размещения
основных узлов и агрегатов автомобиля,
кабины и платформы грузового автомобиля или
кузова легкового автомобиля и автобуса,
обеспечивающего выполнение автомобилем его
функционального назначения с наибольшей
эффективностью в заданных условиях
эксплуатации и технологичность в производстве.
*;
Рис. 2.2.3. Взаимное расположение двигателя и
кабины грузового автомобиля
Компоновочные схемы. Схемы грузовых
автомобилей общего назначения определяются
взаимным расположением двигателя и кабины.
В автомобилестроении наиболее
распространены три основные схемы компоновки
автомобилей (рис. 2.2.3) с кабиной,
расположенной: а) за двигателем; б) над двигателем; в)
перед двигателем. Расположение кабины за
двигателем обеспечивает простоту конструкции
привода сцепления и коробки передач и
расположение сидений водителя и пассажиров в
зоне пониженной вибронагруженности, но
приводит к увеличению колесной базы и
габаритной длины автомобиля, а также к
ограничению передней обзорности.
Компоновка с кабиной, расположенной
над двигателем, по сравнению с предыдущей
имеет следующие преимущества:
возможность продвижения кабины
вперед (на 0,8 ... 1 м) с одновременным
удлинением грузовой платформы на ту же
величину при сохранении габаритной длины
автомобиля, а также сокращения колесной базы на
400 ... 500 мм, что улучшает маневренность
автомобиля;
облегченную загрузку мостов автомобиля
до максимально допустимых значений, что
обеспечивает наибольшее использование
грузоподъемности автомобиля;
улучшенную переднюю обзорность в
связи с отсутствием выступающего капота,
крыльев и возможностью понижения нижней
кромки ветрового окна кабины.
Это позволяет значительно повысить
эксплуатационные показатели автомобиля, чем
объясняется широкое применение такой схемы
как в нашей стране, так и за рубежом.
Недостатком данной схемы является
необходимость опрокидывания кабины для
обеспечения доступа к двигателю, его
системам и другим агрегатам, а также усложнение
конструкции приводов управления.
На двухосных автомобилях первой
группы преимущественно применяют схему
компоновки а. Обусловлено это тем, что при
компоновке по схеме б увеличивается передняя
осевая нагрузка, снижается коэффициент
сцепного веса, а следовательно, проходимость
автомобиля.
6*
164
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
Компоновка по схеме, показанной на
рис. 2.2.3, ву применяется в основном на
полноприводных многоосных автомобилях,
поскольку позволяет получить равномерное
распределение осевых нагрузок на дорогу,
меньший габарит по высоте при хорошей
обзорности с места водителя. Недостатками такой
схемы являются уменьшение длины грузовой
платформы и ухудшение доступа к двигателю
и к коробке передач.
Общая компоновка полноприводных
автомобилей во многом определяется схемой
ходовой части, расстановкой управляемых и
неуправляемых колес по длине машины (табл.
2.2.6). На двухосных полноприводных
автомобилях с осевой формулой 1-1 применяется
схема компоновки б (см. рис. 2.2.3), так как
компоновка по схеме а не позволяет получить
равномерное распределение осевых нагрузок
и, следовательно, полное использование тяго-
во-сцепных свойств автомобиля.
2.2.6. Схемы компоновок ходовой части полноприводных автомобилей
Схема
Осевая формула
& ^6:
1 - 1
>1< >»
М ФШ
1 -2
Щ-,
&
2 - 1
М-Ф—Ш
1 ■ !« ' .1
1-1-1
1т, I . I,
ш
шш
2 - 2
I
>*- >
#- 0- Ф--&
I
< >
*—-—И
1-1-1-1
_Ж_^Ф$__А
1-2-1
ОБЩАЯ КОМПОНОВКА АВТОМОБИЛЕЙ 165
У трехосных автомобилей наибольшее
распространение получила схема с осевой
формулой 1-2, характеризуемая двумя
параметрами: расчетной базой автомобиля Ьа
(нормативная база автомобиля - расстояние
между всеми смежными мостами) и базой
тележки /рз- Такая схема ходовой части
позволяет использовать схемы компоновки а и б
(рис. 2.2.3) и 2 (табл. 2.2.6), поскольку в обоих
случаях можно получить равномерное
распределение осевых нагрузок. Преимуществами
схемы с осевой формулой 1-2 являются:
возможность создания полноприводных
автомобилей на базе неполноприводных, лучшая
плавность хода, удовлетворительная
маневренность с одним управляемым мостом, удобство
выполнения компоновки.
При применении схем с осевыми
формулами 2-1 или 1-1-1 могут быть
использованы схемы компоновки б или в (рис. 2.2.3),
позволяющие добиться равномерного
распределения осевых нагрузок, лучшей
проходимости при преодолении канав, рвов и других
препятствий, а также лучшая маневренность
автомобиля (при схеме 1-1-1). Недостатками
этих схем являются: необходимость создания
оригинальных конструкций, применения двух
управляемых мостов и др.
У четырехосных автомобилей
преимущественное распространение получила схема с
осевой формулой 2-2. Применение схемы
с осевой формулой 1-1-1-1 может быть
вызвано особенностями общей компоновки и
необходимостью равномерного распределения
осевых нагрузок. Схема с осевой формулой 1 -
2-1, хотя и позволяет обеспечить высокую
маневренность, применяется редко, так как
при преодолении препятствий нагрузки между
мостами распределяются неравномерно. Кроме
того, ухудшается устойчивость движения и
создаются неудобства при компоновке.
При всех схемах ходовой части
четырехосных автомобилей используется схема
компоновки в (рис. 2.2.3).
Компоновочная схема легкового
автомобиля в основном зависит от выбранной схемы
расположения силового агрегата и ведущего
моста (рис. 2.2.4). Все более широкое
распространение за рубежом получает схема с
передним расположением силового агрегата и
двумя ведущими мостами. На автомобилях
спортивного типа применяется компоновка
двигателя "в базе" с приводом на задние или
все колеса.
Достоинствами схемы а являются:
хорошая доступность к двигателю для его
обслуживания и ремонта, возможность получения
просторного багажного отделения, создания на
базе основных моделей автомобилей-
фургонов, пикапов. К недостаткам этой схемы
следует отнести: относительно большую габа-
Рис. 2.2.4. Схемы компоновки легковых автомобилей
при расположении силового агрегата:
а - спереди, ведущий мост задний; б - спереди,
ведущий мост передний; в- сзади, ведущий мост
задний
ритную длину, наличие туннеля в полу салона
для карданного вала, что ухудшает условия
размещения. пассажиров на заднем сиденье, а
также их вход в автомобиль и выход из него.
Такая компоновка находит применение в
автомобилях среднего, большого и высшего
класса.
Основными достоинствами схемы б
являются:
обеспечение высоких показателей по
устойчивости и управляемости;
минимальная габаритная длина
автомобиля при оптимальном по длине
пассажирском салоне;
уменьшение неснаряженной массы
автомобиля примерно на 8 % по сравнению с
предыдущей компоновочной схемой;
отсутствие туннеля в полу салона и
возможность создания полноценных
модификаций кузовов типа универсал и фургон.
Недостатком схемы, особенно при
поперечном расположении двигателя, является
затрудненный доступ к двигателю для его
обслуживания и ремонта. Такая компоновочная
схема применяется практически на всех
автомобилях особо малого и малого класса и в
настоящее время получила преимущественное
использование и в среднем классе.
Возможная область применения схемы в
- автомобили особо малого класса с
двигателями небольшого рабочего объема, имеющие
низкую максимальную скорость.
166
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
Рис. 2.2.5. Основные схемы компоновки двигателя I
трансмиссии автобусов
Компоновочная схема автобуса
определяется расположением двигателя и трансмиссии.
Применяются следующие основные схемы:
гзигатель расположен впереди переднего
моста (рхс. 2.2.5, а);
над передним мостом (рис. 2.2.5, б);
под полом в пределах базы (рис. 2.2.5, в)\
сзади с продольным расположением
двигателя (рис. 2.2.5, г);
со смещением его к левому борту (рис.
2.2.5, д);
сзади с поперечным расположением
двигателя.
Наиболее приемлемым для городских,
междугородных и туристских автобусов
является заднее расположение двигателя. К его
преимуществам относятся: возможность
рациональной планировки салона; изоляция
двигателя от салона; минимальная вибрация;
хорошее распределение нагрузок, возможность
понижения уровня пола, что важно для
городских автобусов; возможность создания емких
багажных отделений под полом по всей
ширине автобуса и хорошая доступность к
двигателю вне салона.
К недостаткам можно отнести
затрудненность управления силовым агрегатом и
размещения радиатора системы охлаждения
двигателя.
с ^
-^
! 1а
-4-^
* яйг
1 Л
1.а
э»Ч
—^4
э^-]
^
8 I
|
т
|Г^З
1| 1
ф| 1—■ йЕр
11 *" II
К* к' \1
. «< ,
I
П
11
рЩР
Гтт1
Оа
Рис. 2.2.6. Схемы размерных параметров грузового автомобиля при компоновке:
а - кабины над двигателем; б - кабины за двигателем
2.2.7. Основные размерные параметры компоновки грузовых автомобилей
Схема по
рис. 2.2.6
а
б
в
Полная масса
автомобиля, т
Менее 6,5
6,5 ... 12
12 ... 16
Свыше 16
Менее 6,5
6,5 ... 12
12 ... 16
Свыше 16
12 ... 30-
Свыше 30
с,
мм
850... 1100
1050 ... 1250
1200 ... 1450
850 ... 1250
1150 ... 1400
1250 ... 1450
1350 ... 1500
1800 ... 2400
2400 ... 2800
/к,
мм
1350 ... 1600
1550 ... 1800
400 ... 900
240 ... 650*
200 ... 500*
0
1*/Ь
1,0 ... 1,1
1,3 ... 1,5
1,0 ... 1,1**
К'
1600 ... 1800
1700 ... 1950
1800 ... 2050
1600 ... 1800
1700 ... 1950
1800 ... 2050
1800 .
2150 .
Г
1400 ... 1700
1600 ... 1850
1700 ... 1900
1400 ... 1700
1600 ... 1850
1700 ... 1900
.2150
.2400
Лп
160 ... 195
195 ... 245
245 ... 300
160 ... 195
195 ... 245
245 ... 300
300 ... 400
350 ... 450
При наличии стационарного спального места за сиденьями водителя и пассажира размер /к может быть увеличен до 850 мм.
* За базу принято расстояние от переднего моста до середины задней тележки.
168 Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
Выбор основных параметров компоновки.
Габаритная длина Ьа грузового автомобиля
(рис. 2.2.6, а) включает длину кабины Ь^у
определяемую ее планировкой и
конструкцией, длину платформы 1^, которую выбирают
с учетом грузоподъемности и вида
перевозимых грузов; а также зазор А между кабиной и
платформой, А = 75 ... 100 мм.
При компоновке "кабины за двигателем"
в длину кабины входит длина капотной части
(рис. 2.2.6, б). Расстояние /к от задней стенки
кабины до оси переднего моста является
определяющим параметром при решении вопроса
о взаимном размещении кабины, двигателя и
переднего моста. Чтобы компоновка по такой
схеме была наиболее рациональной кабину
стремятся продвинуть вперед, т.е. расстояние
/к сделать по возможности минимальным. Это
позволяет увеличить длину платформы и
уменьшить колесную базу Ь. Вместе с тем,
чрезмерное продвижение кабины вперед
может привести к росту передней осевой
нагрузки и ухудшить проходимость автомобиля.
Рекомендуемые значения приведены в табл.
2.2.7.
Передний свес (рис. 2.2.6, б) является
исходным параметром при размещении
кабины над двигателем. Рекомендуемые значения
переднего свеса (см. табл. 2.2.7) обеспечивают
получение необходимой передней осевой
нагрузки, организацию удовлетворительного
входа и выхода из кабины и др.
Габаритная ширина Ва автомобиля
определяется либо как расстояние между
внешними поверхностями шин наружных колес
заднего моста (или тележки), либо как наружная
ширина платформы. Внутренняя ширина
2.2.8. Размеры, определяющие габаритную ширину автомобиля
Размеры
по рис. 2.2.7
Ьру не более
Ту не менее
С
Е
5> не менее
■^ш
АГш
220 (7,50)
870
13
13
65
56
260
216
Обозначение ширины профиля шины,
240 (8,25)
870
13
13
75
56
284
235
260 (9,00)
870
13
13
75
59
310
255
280 (10,00)
870
13
16
90
59
330
277
мм (дюйм)
300 (11,00)
840
16
16
90
59
350
296
320 (12,00)
770
16
16
90
59
370
313
платформы обеспечивает выполнение
требований к предельно допустимой габаритной
ширине автомобиля. Расстояние между
внешними поверхностями шин наружных колес
заднего моста определяется суммой значений
следующих параметров (рис. 2.2.7): ширины К"
колеи задних колес, расстояния Хц, между
серединами шин сдвоенных колес и ширины
Кш профиля шин. Это расстояние также не
должно превышать допустимой габаритной
ширины автомобиля.
\т
щ
ш
■ Ч 1 1 щ*
У *
у^
—р—
/V/
^
■^\
Л4/-
с
^
_3|
П*~ г*""
■!'ЦЧ1 1 11
—Ж
■ »
*н
М11
Рис. 2.2.7. Размеры, определяющие габаритную
ширину автомобиля
В табл. 2.2.8 приведены размеры,
определяющие габаритную ширину автомобиля.
При осевой нагрузке менее 100 кН
габаритная ширина обеспечивается в пределах
установленного ограничения без особых
затруднений. На большегрузных автомобилях,
чтобы не превышать допустимую габаритную
ширину, раму обычно сужают до 770 мм в
зоне заднего моста (тележки).
Ширина колеи К' передних колес при
выбранном размере шин и ширине рамы
определяется в основном условиями обеспечения
необходимых углов поворота управляемых
колес и размещением деталей рулевого
привода между колесом и лонжероном рамы (см.
рис. 2.2.6).
Рис. 2.2.8. Схема расположения верхней плоскости
рамы относительно дороги
Габаритная высота Н автомобиля
определяется положением верхней плоскости рамы
над опорной плоскостью шин, а также
габаритами по высоте кабины, платформы (с дугами
и тентом) или другой надстройки
относительно рамы. Расстояние Н\ от верхней плоскости
рамы до опорной плоскости шин в зоне
переднего моста для неснаряженного автомобиля
определяется суммой расстояния Н\ от верхней
плоскости рамы до центра колеса (рис. 2.2.8) и
статическим радиусом колеса гст:
Нх = 0,5 (4 + Б) + В+ Г-Д
где А и Б - расположения концов активной
части рессоры от верхней плоскости рамы; В -
стрела прогиба рессоры; Г - толщина пакета
листов; Д - вертикальное расстояние от
рессорной площадки до центра колеса
определяется конструкцией передней оси с учетом угла
развала колес.
В зоне заднего моста (тележки)
расстояние Н\ находится аналогично. При этом
учитывается размер стрелы прогиба В основной
рессоры. Погрузочная высота автомобиля
определяется суммой расстояния от верхней
полки лонжерона рамы до опорной плоскости
шин в зоне заднего моста (тележки) и высоты
пола платформы относительно рамы.
Рис. 2.2.9. Расчетная схема определения колесной
базы
Колесную базу Ь автомобиля можно
рассчитать следующим образом. Исходными
данными являются (рис. 2.2.9): полная и
снаряженная массы автомобиля; координаты центра
тяжести агрегатов //; вес каждого агрегата (7/ и
распределение осевых нагрузок 0\Т и 6^
груженого автомобиля.
Из условия равенства нулю суммы
моментов относительно переднего моста
Ь = (2(7/// + СггрХгр) / б^г,
где (7гр и 1/гр - соответственно вес и
координата центра тяжести груза.
Зная колесную базу, можно определить
переднюю 0\с и заднюю фс осевые нагрузки
снаряженного автомобиля:
Ох = 2(7/// / Ц 0\с = <7/ - Сг2с,
где Ос - вес снаряженного автомобиля.
При необходимости создания
модификации автомобиля с измененными осевыми
нагрузками требуется изменить либо
расположение агрегатов, либо колесную базу. Второй
путь предпочтительней.
Приведенные выше выражения
справедливы также для трехосных автомобилей, если
базу автомобиля принимать по оси балансира
задней тележки.
Габаритные размеры легкового автомобиля
не ограничиваются нормативными
документами и в основном определяются его
принадлежностью к соответствующему классу и
группе, т.е. степенью комфортабельности, а также
зависят от принятой схемы компоновки и
внешней формы автомобиля. Анализ
конструкций современных легковых автомобилей
отечественного и зарубежного производства
позволяет рекомендовать следующие
максимальные значения размерных параметров
компоновки для перспективных легковых
автомобилей различных классов и групп (рис. 2.2.10,
табл. 2.2.9).
170
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
Рис. 2.2.10. Схема размерных параметров легкового автомобиля
2.2.9. Основные размерные параметры компоновки легковых автомобилей
Класс
автомобиля
Особо
малый
Малый
Средний
Группа
1
2
1
2
1
Длина, м,
не более
3,4
3,7
4,1
4,5
4,8
Ширина В,
м, не более
1,5
1,55
1,67
1,7
1.8
Высота,
м, не
более
1,43
1,47
1,47
1,47
1,47
База, м,
не
более
2,25
2,32
2,48
2,58
2,80
Ширина
колеи К'/К",
м, не более
1,25/1,24
1,38/1,35
1,395/1,385
1,44/1,43
1,495/1,490
Дорожный
просвет,
мм,
не более
160
160
160
160
160
шн
_5$2 4*~\~*\ т^т
Рис. 2.2.11. Схема размерных параметров автобуса
2.2.10. Основные размерные параметры компоновки автобусов
Класс
автобуса
Особо
малый
Малый
Средний
Большой
Особо
большой
(сочленен-
ные)
Назначение
Общего
назначения
Местного
сообщения
Городской
Городской
Междугородный
Городской
Длина,
м, не
более
5
7,5
10
12
12
18
Ширина, м,
не
более
2,2
2,5
2,5
2,5
2,5
2,5
Высота,
м, не
более
2
3,05
3,1
3,1
4,0
3,1
База,
м,
не
более
2,7
3,7
4,4
5,85
6,3
5,4+
+6,2
Ширина
колеи
К'/К", м
1,475/1,42
1,94/1,7
2,1/1,88
2,05/1,865
2,1/1,85
2/1,85/2
Дорожный
просвет, мм,
не более
175...220
265
240...300
180...300
310...370
310...370
Габаритные размеры автобусов в основ- автобусов, а также планировкой салона. Ос-
ном определяются их принадлежностью к со- новные размерные параметры автобусов и их
ответствующему классу, определяемому дли- значения приведены на рис. 2.2.11 и в табл.
ной, ограничениями на габаритные размеры 2.2.10.
СИЛОВЫЕ УСТАНОВКИ АВТОМОБИЛЕЙ
171
2.2.3. СИЛОВЫЕ УСТАНОВКИ
Силовой установкой автомобиля служит
двигатель внутреннего сгорания (ДВС) с его
системами, являющийся наиболее
распространенным источником механической энергии.
Тип и параметры двигателя в значительной
степени определяют эксплуатационные
свойства автомобиля, его скоростные и
динамические качества, производительность, топливную
экономичность, экологичность,
металлоемкость, надежность, возможность работы на
различных сортах топлива и
конкурентоспособность.
На автомобилях применяются, как
правило, четырехтактные поршневые двигатели с
кривошипно-шатунным механизмом с рядным
и У-образным расположением цилиндров. Все
большая часть двигателей переводится на
альтернативные виды топлива (сжатый
природный газ, сжиженный нефтяной природный
газ, спирт, синтетическое топливо из
каменного угля, биогаз, растительное масло, водород и
др.). Выпускаются газодизели КамАЗ-7409,
ЯМЗ-236Ю и ЯМЗ-238Ю. Ведутся работы по
применению других альтернативных видов
топлива, включая водород.
За рубежом, особенно в Западной Европе
и Японии (почти на всех грузовых и почти на
40 % легковых автомобилей) используются
дизели, как наиболее экономичные (по
расходу топлива) и экологичные по сравнению с
бензиновыми двигателями.
Не исключено расширение применения
двухтактных двигателей на легковых и
грузовых автомобилях, а также газотурбинных
двигателей высокой мощности, например на
большегрузных карьерных автомобилях-
самосвалах. Отмечена возможность появления
более плотных компоновок поршневых
двигателей, например с ЛУ-образным
расположением цилиндров (двигатель Ауди Авус), с
У-образным расположением овальных
цилиндров (двигатель Хонда N11), или даже
аксиальных двигателей с регулируемым рабочим
объемом и траверсных двигателей с
регулируемой степенью сжатия.
В табл. 2.2.11 приведены основные
параметры отечественных автомобильных
двигателей.
Качество двигателя и его интегральный
показатель. К автомобильным двигателям
предъявляются определенные требования.
Основные из них сводятся к следующему:
высокий технический уровень,
достаточная мощность и запас крутящего момента при
малой массе и габаритах, хорошая и
стабильная эксплуатационная экологичность и
топливная экономичность на номинальных и
частичных режимах, т.е. в широком диапазоне
эксплуатационных режимов, малый расход
масла на угар и замены;
допускаемые уровни дымности и
токсичности отработавших газов, шума и вибрации;
высокая надежность, характеризующаяся
достаточным моторесурсом и безотказностью в
разнообразных климатических и
эксплуатационных условиях (с дифференциацией ресурса в
зависимости от назначения) при минимальных
затратах сил и средств на обслуживание и
ремонт, ресурс двигателя должен быть не ниже
ресурса до капитального ремонта автомобиля,
должна быть обеспечена кратность
технического обслуживания двигателя и автомобиля;
хорошие пусковые качества при
широком диапазоне изменений температуры
окружающей среды, минимальное время для
приведения двигателя в рабочее состояние;
работа на не дефицитных топливно-
смазочных материалах и охлаждающих
жидкостях; возможность работы на различных сортах
топлив, включая альтернативные; обеспечение
многотопливности дизелей;
легкость управления и автоматизация
работы;
максимальная унификация как семейства
выпускаемых моделей и модификаций, так и
близких по характеристикам моделей других
семейств двигателей;
высокая технологичность изготовления,
удовлетворяющая условиям крупносерийного
и массового производства, минимальное
использование уникального оборудования и
дефицитных материалов;
возможность дальнейшей форсировки
двигателя, в частности с помощью
газотурбинного наддува, охлаждения наддувочного
воздуха и др.;
возможность развития конструкции
семейства двигателей в течение 10— 15-ти
летнего срока без коренной перестройки
автоматизированного и специального оборудования;
максимальная приспособленность для
транспортировки на всех видах транспорта.
Все эти требования представляют только
качественную характеристику двигателя.
Для количественной оценки двигателя,
его систем, узлов и деталей служат их
параметры, основные из которых сводятся в
характеристику двигателя и служат как бы
показателями их эффективности. При этом под
эффективностью понимается способность
вырабатывать заданную механическую энергию при
минимальных материальных и трудовых
затратах, связанных с производством и
эксплуатацией, а также при наименьшем отрицательном
воздействии на окружающую среду. Чтобы
уменьшить влияние субъективных факторов
при оценке степени удовлетворения
конструкции двигателя различным требованиям
применяют некоторые комплексные (групповые)
показатели, например, удельную массу,
учитывающую как металлоемкость конструкции, так
и степень форсирования рабочего процесса.
172 Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
2.2.11. Основные параметры автомобильных
Модели
двигателей
Тип
Расположение
и число
цилиндров
Диаметр
цилиндра х
х ход
поршня, мм
Рабочий
объем, л
Степень
сжатия
Номинальная
мощность,кВт
Двигатели с искровым зажиганием
МеМЗ-966Г
МеМЗ-968Н
МеМЗ-969А
МеМЗ-245
ВАЗ-1111
ВАЗ-2101
ВАЗ-2105
ВАЗ-2103
ВАЗ-2106
ВАЗ-2108
ВАЗ-21081
ВАЗ-21083
408Э
412
331
414
4146
4149*
4178-4179
417
ЗМЗ-24-01
ЗМЗ-24Д
ЗШ-402.10
ЗМЗ-4021.10
ЗМЗ-4024.10
ЗМЗ-406.10
ЗМЗ-505.10
ЗМЗ-53-11
ЗМЗ-672-11
ЗМЗ-66-06
ЗМЗ-511.10
ЗМЗ-522.10
ЗМЗ-523.10
ЗМЗ-53-27*
ГАЗ-5204
ГАЗ-5207*
ЗИЛ-508.10
ЗИЛ-5085.10*
ЗИЛ-5086.10*
ЗИЛ-509.10
ЗИЛ-114 |
БВ
БВ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ
БЖ |
У4
У4
Р4
Р2
Р4
Р4
Р4
Р4
Р4
Р4
Р4
Р4
Р4
Р4
Р4
Р4
Р4
Р4
Р4*
Р4
Р4
Р4
Р4
Р4
Р4
У8
У8
У8
У8
У8
У8
У8
У8
Р6 1
Р6
У8
У8
У8
У8
У8 1
76 х 54
76 х 66
•72 х 67
76 х 71
76 х 66
79 х 66
76 х 80
79 х 80
76 х71
76 х 60,6
82 х 71
76x75
82 х75
82 х75
92 х92
92 х92
92 х92
92x92
92 х92
92x92
92x92
92 х92
92x92
92 х92
92x86
100 х 88
92 х 80
92 х 80
92 х 80
92 х 80
92 х 80
92 х 80
92 х 80
82 х ПО
82 х 110
100 х 95
100 х 95
100 х 95
108 х 95
108 х 95 1
0,887
1,197
1,093
0,65
1,197
1,3
1,451
1,568
1,288
1Д
1,5
1,36
1,5
1,5
2,445
2,445
2,445
2,445
2,445
2,445
2,445
2,445
2,445
2,445
2,3
5,53
4,25
4,25
4,25
4,25
4,25
4,25
4,25
3,48
3,48
6,0
6,0
6,0
7,0
7,0 1
6,5
7,2
9,0
9,9
8,5
8,5
8,5
8,5
9,9
9,0
9,9
7,0
8,9
9,2
6,7
7,2
8,5
7,0
8,3
6,7
8,2
8,0
6,7
8,2
9,9
8,5
7,0
6,7
7,2
7,2
7,1
8,0
7,1
7,3
9,3 |
22 (30)
30,9 (42)
31,5
22
48,0
50,7
56,5
58,8
46,8
40
54
36,8
5,5
53
56,7
66
61,8
66,0
75,8
60,7
68,0
72,1
66,2
81
ПО
143
88,3
88,3
92
96
70
55
54
ПО
ПО
88
132
202,3
Номинальная частота
вращения,
мин-1
Максимальный
крутящий
момент,
Нм
Частота
вращения
при
максимальном
крутящем
моменте,
МИН"1
Минимальный
удельный расход
топлива,
г/(кВт-ч)
Минимальный
удельный расход
топлива,
г/кВт
Масса
двигателя,
кг
Топливо
Завод-
изготовитель
4400
4400
5500
5600
5600
5600
5600
5600
5600
5600
5600
4750
5800
5800
4000
4000
4000
4000
4000
4500
4500
4500
4500
4500
5400
4000
3200
3200
3200
3200
2800
2800
3200
3200
3200
3200
4000
52,0 (5,3)
74,5 (7,6)
78,5
87,3
94,1
105,9
121,6
95
78,5
106
91,2
107,9
167
13
169,5
171,6
190,2
166,6
180,4
180,4
172,6
196
210
397
284,4
284,2
292
314
240
206
196
402
383
294
466
559
\2400...2600
2700...2900
3400
3400
3400
3400
3400
3000
3400
3400
3600
2790...3200
3000...3800
2200...2500
2500
2200...2500
2200...2500
2200...2500
2500
2500
2400...2600
2400...2600
2400...2600
4750
2000...2500
2000...2500
2200
2000...2500
2000...2500
2000...2500
1400...1600
1600...1800
1800...2000
1800...2000
1800...2000
1800...2000
2700...2900
347 (255)
324 (238)
260 (191)
270
270
270
270
260
260
260
327
270
306
260
272
279
295
295
260
260
279
250
279
300
292
279
279
333
364,5
292
0,18
м3/(кВт-ч)
0,45
м3/(кВтч)
299
292,4
283
306
299
299
306
283
283
283
280
283
292,4
292,4
292
.
88
100
100
66
114
114
116
117
95
92
97
151
144
144
163
163
163
163
166
180
180
180
180
180
165
265
262
242
254
254
306
306
490
530
525
505
265
А-76
А-76
АИ-93
АИ-93
АИ-93
АИ-93
АИ-93
АИ-93
АИ-93
АИ-93
АИ-93
А-76
АИ-93
АИ-93
А-76
А-76
СНГ
А-76
АИ-93
А-76
АИ-93
АИ-93
А-76
АИ-93
АИ-93
АИ-93
А-76
А-76
А-76
А-76
спг
А-76
СНГ
А-76
СНГ
спг
А-76
АИ-95
"Экстра"
МеМЗ
МеМЗ
МеМЗ
ВАЗ
ВАЗ
ВАЗ
ВАЗ
ВАЗ
ВАЗ
ВАЗ
ВАЗ
АЗЛК
УЗАМ
УЗАМ
УМЗ
УМЗ
УМЗ
УМЗ
УМЗ
змз
змз
змз
змз
змз
змз
змз
змз
змз
змз
змз
змз
змз
змз
ГАЗ
ГАЗ
ЗИЛ
ЗИЛ
ЗИЛ
ЗИЛ
ЗИЛ
174 Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
Модели
двигателей
ЗИЛ-4104
ЗИЛ-157Д-
157КД
Тип
БЖ
БЖ
Расположение
и число
цилиндров
У8
Р6
Диаметр
цилиндра ж
х ход
поршня, мм
108 х 105
100x114,3
Рабочий
объем, л
7,7
5,38
Степень
сжатия
9,3
6,5
Номинальная
мощность,кВт
232
81
ГАЗ-542
ГАЗ-542
ЗИЛ-645
ЯМЗ-КАЗ-642
ЯМЗ-КАЗ-
642.10-01
ЯМЗ-КАЗ-
6241
КамАЗ-740.10
КамАЗ-
74007.10
КамАЗ-740.10-
20
КамАЗ-
74007.10-20
КамАЗ-
7408.10
КамАЗ-
74087.10
КамАЗ-
7403.10
КамАЗ-
74037.10
КамАЗ-7409
ЯМЗ-236М2
ЯМЗ-238М2
дж
ДЖТ
дж
дж
дж
ДЖТ
дж
дж
дж
ДЖТ
дж
ДЖ
дж
Р4
Р4
У8
У6
У6
У6
У8
У8
У8
У8
У8
У6
У8
105 х 120
105 х 120
ПО х 115
120 х 120
120 х 120
120 х 120
120 х 120
120 х 120
120 х 120
120 х 120
120 х 120
130 х 140
130 х 140
4,15
4,15
8,74
8,14
8,14
8,14
10,85
10,85
10,85
10,85
10,85
11,15
14,86
18
17
18,5
18,5
16,5
16,5
16,5
16,5
17,0
16,0
16,5
16,5
63
79
136
117
114
147
154 (210)
162 (220)
144 (195)
191 (260)
147
132,4
176,5
СИЛОВЫЕ УСТАНОВКИ АВТОМОБИЛЕЙ
175
Продолжение табл. 2.2.11
Номинальная частота
вращения,
мин-1
4400...4600
2800
Максимальный
крутящий
момент,
Нм
608
343,2
Частота
вращения
при
максимальном
крутящем
моменте,
мин-1
2500...2700
1100...1400
Минимальный
удельный расход
топлива,
г/(кВт-ч)
285,6
333
Минимальный
удельный расход
топлива,
г/кВт
'
~
Масса
двигателя,
кг
300
465
Топливо
АИ-95
"Экстра'*
А-72
Завод-
изготовитель
ЗИЛ
ЗИЛ
2800
2400
2800
2600
2600
2300
2600
2600
2200
2600
2550
2100
2100
235
322
509
480
470 (48)
744
637 (65)
667 (68)
687 (70)
785 (80)
637
694
918
1600
1600
1400... 1600
1400... 1600
1600... 1800
1300...1500
1600...1800
1600...1800
1400... 1500
1600...1800
1300...1800
1250...1450
1250...1450
224
216
217
220
220
205
217,6 (160)
217,6 (160)
217,6 (160)
217,6 (160)
0,26
м3/(кВтч)
газа
213,5
213,5
242
226
_
234
230
220
0,28
м3/(кВтч)
газа +
0,04...0,85
г/(кВтч)
дизельного топлива
226
0,24
м3/(кВтч)
газа + 0,04
г/(кВтч)
дизельного топлива
380
450
650
590
590
620
750
750
730
780
740
890
1075
Дизельное
топливо
То же
и
и
СПГ+
дизельное
топливо
ГАЗ
ГАЗ
ЗИЛ
КАЗ
КамАЗ
КамАЗ
КамАЗ
КамАЗ
ЯМЗ
ЯМЗ
176
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
Модели
двигателей
ЯМЗ-236Ю
ЯМЗ-238Ю
ЯМЗ-238Б
ЯМЗ-238Д
ЯМЗ-8424.10
ЯМЗ-8421.10
ЯМЗ-240М2
ЯМЗ-240ПМ2
ЯМЗ-240НМ2
ЯМЗ-84-1. 10-
01
ЯМЗ-8401.10
Д12А
6ДМ-21А
6ДМ-21АФ
6ДМ-21А
8ДМ-21Э
12ДМ-21А
Тип
ДЖ
ДЖ
джт
джт
джто
джт
ДЖ
джт
джт
джто
джто
ДЖ
ДЖТ
ДЖТ
ДЖТ
ДЖТ
ДЖТ
Расположение
и число
цилиндров
У8
У8
У8
У8
У8
У8
У12
У12
У12
У12
У12
У12
У6
У6
У8
У8
У12
Диаметр
цилиндра ж
х ход
поршня, мм
130 х 140
130 х 140
130 х 140
130 х 140
140 х 140
140 х 140
130 х 140
130 х 140
130 х 140
140 х 140
140 х 140
150 х 180
210 х 210
210 х 210
210x210
210 х 210
210 х 210
Рабочий
объем, л
11,15
14,86
14,86
14,86
17,24
17,24
22,3
22,3
22,3
25,86
25,86
38,8
Степень
сжатия
15,2
15,2
15,2
15,2
16,5
15,2
15,2
14,0
14,0
14 - 15
772
956
956
1176
1765
Номинальная
мошность,кВт
133
177
224
244,7
312,5
265
265
308,8
367,7
441
478
200 (300)
ВАЗ-341
НАМИ-УМЗ-
440
ЯМЗ-752
ТМЗ-770
ДЖ
джто
джто
Р4
Р4
Р6
У6
76 х 80
92 х92
130 х 152
140 х 140
1,45
2,45
12,10
12,92
23
22
15,2
15,2
Он
[ытные образцы
40
51
265
184
Примечание: Б- бензиновый двигатель; Д
образное, а Р - рядное расположение цилиндров; СПГ
* Конвертированный для работы на газе.
дизель; В - воздушное охлаждение; Ж -
сжатый природный газ; СНГ - сжижен-
СИЛОВЫЕ УСТАНОВКИ АВТОМОБИЛЕЙ 177
Продолжение табл. 2.2.11
Номинальная частота
вращения,
МИН"1
2100
2100
2100
2100
2100
2100
2100
2100
2100
2100
2100
1500
Максимальный
крутящий
момент,
Нм
666
884
1224
1377
1687
1511
1326
1551
1887
2158
2237
1475(150)
Частота
вращения
при
максимальном
крутящем
моменте,
мин-1
1100...1300
1000...1400
1200...1400
1200... 1400
1300...1400
1300... 1400
1500... 1600
1500... 1600
1500... 1600
1400... 1600
1400... 1600
1100...1200
Минимальный
удельный расход
топлива,
г/(кВтч)
222
222
204
204
197
201
214,9
210,8
210,8
211
211
Минимальный
удельный расход
топлива,
г/кВт
0,24
м3/(кВтч)
газа + 0,04
г/(кВтч)
дизельного топлива
233
244
224
220
224
228
224
224
220
220
1500
1500
1500
1500
1500
Масса
двигателя,
кг
ИЗО
1129,4
1379
1350
1670
1712
1790
1870
1870
4647
4647
, 5545
5551
8472
Топливо
СПГ+
дизель
ное
тошш
во
«
Дизельное
тошш
во
То же
«
«
и
и
и
Завод-
изготовитель
ЯМЗ
ЯМЗ
ЯМЗ
ЯМЗ
ТМЗ
ТМЗ
ЯМЗ
ЯМЗ
ЯМЗ
ЯМЗ
ЯМЗ
4800
4000
2100
1900
94
147
1570
1225
3200
2400
1250
900... 1300
262
250
194
197
298
310
212
218
125
230
1000
«
«
«
ВАЗ
НАМИ
УМЗ
ЯМЗ
ТМЗ
жидкостное охлаждение; Т - турбонаддув; ТО - турбонаддув с промежуточным охлаждением; V-
ный нефтяной газ.
Технические требования в комплексе с
установленными числовыми значениями
приведенных показателей используются как для
характеристики заданного технического уровня
эффективности существующих моделей
двигателей, так и для разработки технического
задания на проектируемое изделие. Поэтому очень
важно правильно определить требуемые
значения показателей, учитывая при этом
технические возможности их реализации и принимая
во внимание их взаимное влияние. Часто
улучшение одного свойства двигателя может
привести к ухудшению других его свойств.
Так, значительное увеличение мощности или
уменьшение массы двигателя может привести
к снижению его безотказности и
долговечности (ресурса). Поэтому основной задачей
разработки технических требований, показателей
технического уровня двигателя является
определение оптимальных параметров
эффективности с учетом его назначения, условий
эксплуатации, технических возможностей
изготовления, ремонта и обслуживания, требований к
экологичности и др. Эта задача может быть
решена объективно только в результате
глубоких научно-исследовательских и опытно-
конструкторских проработок.
В первом приближении показатели
технического уровня двигателей, олизкие к
оптимальным, можно выбрать исходя из анализа
достигнутого уровня в мировом двигателестро-
ении, главным образом по двигателям-
аналогам. Удобно воспользоваться при этом
удельными или относительными
показателями, характеризующими техническое
совершенство двигателей (табл. 2.2.12).
В настоящее время все транспортные
средства и их составные части, в том числе
автомобильные двигатели и их составные части
(агрегаты, отдельные детали и запасные части)
должны подвергаться сертификации. Имеется
два вида сертификации: обязательная и
добровольная. Обязательная сертификация
проводится с целью реализации продукции на
территории РФ только при условии соответствия
установленных требований безопасности для
жизни, здоровья и имущества граждан и
охраны окружающей среды. Добровольная
сертификация осуществляется по инициативе
изготовителя как потребителя продукции по
остальным требованиям как независимая
объективная оценка потребительских свойств
продукции. Если для обязательной сертификации
в основном достаточно соответствие
двигателей и их составных частей государственным и
отраслевым стандартам, то добровольная
соответствует Правилам Европейской
экономической комиссии ООН (далее Правилами ЕЭК
ООН).
Правила ЕЭК ООН, ГОСТы и ОСТы
регламентируют например нормы, методы
измерения и испытания:
дымность отработавших газов - Правила
N 24 ЕЭК ООН, ГОСТ 17.2.2ЛИ-84 (табл.
2.2.13);
выбросы вредных веществ с
отработавшими газами (токсичность ОГ) - Правила
ЕЭК ООН N 49 и N 83, ГОСТ 17.2.2.03-87,
ОСТы;
шумность двигателей - ОСТы;
пусковые качества двигателей - ОСТы.
Совокупность выходных свойств
двигателя, обслуживающая пригодность для
использования по назначению в соответствии с ГОСТ
15467-79 определяется его качеством. Качество
двигателя является комплексным свойством,
которое закладывается в процессе его
разработки, обеспечивается при изготовлении и
реализуется в эксплуатации. В условиях
конкурентных рыночных взаимоотношений
качество двигателя как и любого изделия,
количественно проявляется в стихийно
складывающейся на рынке его цены. При этом для
производителя качество двигателя, заложенное
при его проектировании и обеспеченное в
процессе изготовления, является важнейшим
условием успешной реализацией двигателя в
конкретной борьбе за сбыт на рынке. Для
покупателя двигателя определяющие факторы -
его техническая характеристика, цена, ресурс,
расходы на эксплуатацию, включающие
расходы на обслуживающий персонал,
эксплуатационные материалы, подготовку двигателя к
выходу на рабочий режим, на поддержание
работоспособности в эксплуатации и др.
Важное значение для потребителя имеют
и такие показатели, как число отказов
(наработка на отказ) и стоимость
восстановления работоспособного состояния, количество
и стоимость элементов изделия, сменяемость в
эксплуатации, периодичность,
продолжительность и расходы на плановые ТО и ремонт.
В настоящее время около 90 % дизелей
грузовых автомобилей имеют турбонаддув и
значительная часть имеет тенденцию
расширения охлаждаемого и наддувочного воздуха, что
в совокупности существенно повьпиает не
только форсировку двигателя, но и его
экологические и технико-экономические
показатели. Применение дополнительной силовой
турбины (дизель фирмы Скания) еще больше
улучшает все эти показатели.
При совершенствовании и модернизации
выпускаемых двигателей, а также создании
новых моделей большое значение имеет
система оценочных показателей их качества. При
этом качество продукции характеризуется
совокупностью основных
технико-экономических показателей, определяющих степень
совершенствования модели, ее технический
уровень, надежность и экологичность.
Применяемые обычно единичные показатели по
отдельным параметрам не позволяют даже в
совокупности однозначно охарактеризовать
Показатели
Частота вращения, мин"1:
номинальная
при максимальном крутящем
моменте
Отношение хода поршня к диаметру
Литровая мощность, кВт/л
Поршневая мощность, кВт/10 мг
Среднее эффективное давление, МПа:
номинальное
максимальное
Минимальный удельный расход
топлива по скоростной характеристике,
г/(кВт-ч)
Удельная габаритная мощность гкВт/м3
Удельная масса:
кг/кВт
кг/л
Запас крутящего момента, %
Средняя скорость поршня, м/с
Произведение среднего эффективного
давления на среднюю скорость поршня,
МПам/с
Относительный расход масла на угар, %
Ресурс до капитального ремонта:
тыс. км
тыс. ч
Наработка на отказ:
тыс. км
тыс. ч
Бензиновые двигатели автомобилей
легковых
без наддува
4500 ... 6500
2100 ... 4500
0,9 ... 1,2
38 ... 57
0,28 ... 0,45
0,8 ... 1,06
0,9 ... 1,18
245 ... 300
300 ... 480
1,2 ... 2,5
50 ... 70
10 ... 30
13 ... 20
10 ... 18
0,25 ... 0,4
125 ... 250
-
20 ... 80
-
с наддувом1
4000 ... 6000
2000 ... 4000
0,9 ... 1,2
50 ... 67
0,35 ...0,54
0,95 ... 1,10
1,1 ... 1,4
250 ... 310
390 .., 500
1,1 ... 2,0
55 ... 80
15 ... 35
12 ... 18
12 ... 24
0,25 ... 0,4
125 ... 200
_
20 ... 75
-
грузовых
без наддува
3000...3600/
2800...3200*
-
0,85 ... 1,15
18 ... 30
0,16 ... 0,20
0,75 ... 0,85
0,86 ... 0,96
280 ... 320
150 ... 260
2,2 ... 3,5
65 ... 90
10 ... 30
9 ... 14
7 ... 10
0,3 ... 0,4
250 ... 450
-
20 ... 60
-
Дизели автомобилей
легковых
без наддува
4000 .
1800.
0,96 .
21 .
0,20.
0,7.
0,8 .
220 .
200 .
2,2.
60 .
10 .
11 .
9..
0,25
150 .
40 ..
.. 5200
.. 2800
. 1,36
. 30
..0,25
.0,8
. 1,0
.250
. 300
.4,0
.90
. 30
. 16
12
..0,4
. 300
100
с наддувом1
4000 ... 4800
1600 ... 2400
0,96 ... 1,36
25 ... 43
0,30 ...0,40
0,85 ... 1,2
1,05 ... 1,5
210 ... 240
240 ... 380
2,0 ... 3,0
65 ... 100
10 ... 30
10 ... 16
12 ... 17
0,25 ... 0,4
150 ... 400
-
30 ... 90
-
грузовых
без наддува
1850 ... 2800
1200 ... 1800
1,0 ... 1,27
13 ... 25
0,16 ...0,34
0,65 ... 0,80
0,80 ... 1,0
200 ... 230
160 ... 280
3,4 ... 6,0
50 ... ПО
5 ... 30
9... 11
7 ... 12
0,25 ... 0,4
400 ... 800
8 ... 20
•
40 ... 100
0,8 ... 2,0
с наддувом1
1800 ... 2400
1000 ... 1500
1,0 ... 1,36
16 ... 34(37)
0,24 ...0,40
0,90 ... 1,68
1,05 ... 1,94
186 ... 210
200 ... 380
2,1 ... 5,3
55 ... 140
10 ... 35
8,7 ... 10,9
9 ... 20
0,25 ... 0,4
400 ... 800
8 ... 20
40 ... 100
0,8 ... 2,0
1 Без охлаждения и с охлаждением наддувочного воздуха.
* В знаменателе с наддувом. ^^
2.2.13. Нормативные требования по токсичности отработавших газов автомобилей
Нормируемое
вредное
вещество
СО
сн
мох
Твердые
частицы
1993
14,3-27*
2,72*2
4,7-6,9*
0,97*2
0,97*2
0,14*3
Легковые
1996
г/км
2,2
0,25
0,25
0,10
Правила ЕЭК ООН
2000*4
1,9
0,1
0,125
0,05
1993
4,5
1,1
8,0
0,36
Грузовые1
1996
г/(кВт-ч)
4,0
1,1
7,0
0,15
2000*4
2,0
0,5
4,5
0,10
1993
2,1
0,25
0,25
0,10
Федеральные нормы США и прогноз
Легковые
1996
2000'4
г/км
2,1
0,15
0,20
0,10
2,0
0,075 •
0,125
0,05
1993
21,0
1,8
6,8
0,14
Грузовые1
1996
г/(кВт-ч)
15,0
1,8
6,8
0,14
2000*4
2,0
1,0
5,0
0,05
* Для автомобилей массой более 2,5 т или работающих на этилированном бензине.
*2 Для автомобилей массой менее 2,5 т и работающих на неэтилированном бензине.
*3 Для автомобилей массой менее 2,5 т и работающих на дизельном топливе.
*4 Прогноз.
1 Для автомобилей массой более 3,5 т с дизелями.
качество продукции в комплексе. Для
комплексной оценки качества нужен интегральный
показатель качества, наиболее полно
характеризующий технико-экономическую
эффективность продукции, который определяется
отношением полезного эффекта от потребления
продукции к суммарным затратам на ее
создание и эксплуатацию.
Применительно к двигателю
интегральный показатель качества за полный
амортизационный срок службы можно представить в
виде (кВтч/руб.):
к-*,
(2.2.1)
где А - работа, произведенная двигателем,
кВт-ч; Р - коэффициент снижения полезной
работы двигателя за счет его массы; Се -
суммарные расходы на создание, изготовление,
эксплуатацию и ремонт двигателя, руб.
Раскрывая значения членов в уравнении
(2.2.1), получаем
*-*н#*1р
/=л
о
/Сдв+ДСтр +
+ст +см +сто +стр +ср +сп +сэ +
+с.
ост >
(2.2.2)
где ТУн - номинальная мощность двигателя,
кВт; д - средний коэффициент использования
номинальной мощности; Т\р - ресурс
двигателя до первого капитального ремонта, ч; щ -
отношение ресурса двигателя после очередного
/-го капитального ремонта к ресурсу до
первого капитального ремонта; п - число
капитальных ремонтов двигателя; Сда - затраты
(приведенные) на создание и изготовление
двигателя, руб.; АС^-р - изменение расходов на
создание и изготовление трансмиссии
автомобиля при использовании данного двигателя по
сравнению с эталонным одинаковой мощности
(например, применение дизеля вместо
карбюраторного двигателя), руб.; С^ и С^ - расходы
соответственно на топливо и масло, руб.; Сго>
Сгр и Ср - расходы соответственно на ТО,
текущие (устранение отказов) и капитальные
ремонты двигателя, связанные с простоем
автомобиля при проведении соответственно
технического обслуживания, текущего и
капитального ремонта, руб.; С^ - расходы,
связанные с подготовкой двигателя к пуску и выходу
на рабочий режим, руб.; Сэк - экологические
расходы, условно эквивалентные вредному
воздействию на водителя и окружающую среду
дымности и токсичности отработавших газов,
шума и вибрации; Сост - остальные
(неучтенные) расходы, руб.
Уравнение (2.2.2) включает практически
все основные показатели качества и
технического уровня двигателя: себестоимость,
технологичность, энергетические, топливно-
экономические, экологические, пусковые,
надежность (ресурс, безотказность,
ремонтопригодность), массу. При этом, безусловно, чем
свободнее рынок, тем объективнее значения
отдельных членов уравнения и интегральный
показатель качества двигателя в целом.
Наиболее трудно на практике определять
составляющую Сэк. В первом приближении
экологические расходы предлагается
приравнивать к расходам на дополнительные
устройства к двигателю для обеспечения
законодательных норм по токсичности отработавших
газов и уровню шума, например, за счет
применения дополнительных нейтрализаторов-
глушителей, сажевых фильтров, капотирования
двигателя и др.
Члены уравнения интегрального
показателя качества, как правило взаимосвязаны. От
расходов на создание и изготовление двигателя
зависят в той или иной степени почти все
другие члены уравнения. От надежности
двигателя в прямой зависимости находятся ресурс
до капитального ремонта и между
капитальными ремонтами; от затрат на текущие и
капитальные ремонты косвенно зависят
практически все остальные показатели, включая
затраты на топливо, масло, пуск двигателя, его
экологические свойства. Уменьшение расходов
на ТО (включая диагностирование
технического состояния двигателя) и текущий ремонт
обычно приводит к увеличению расходов на
топливо и масло, повышению токсичности
отработавших газов и уровня шума, снижению
ресурса двигателя до капитального ремонта.
Вместе с тем, объем ТО двигателя в
эксплуатации должен быть оптимальным, вплоть до
исключения его по отдельным узлам и
агрегатам при одновременном сохранении или даже
повышении безотказности и долговечности
этих узлов, агрегатов и двигателя в целом за
счет введения специальных конструктивных
усовершенствований и применения
эксплуатационных материалов повышенного качества.
Известны также взаимосвязь между
энергетическими, топливно-экономическими,
пусковыми и экологическими показателями.
Поэтому при определении технико-
экономической эффективности двигателя
через интегральный показатель качества,
например от проведенной его модернизации,
необходимо учитывать возможные изменения всех
членов уравнения, так как значения одних
членов могут повышаться, а других снижаться.
Так, при определении изменения интегрально-
182
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
го показателя качества от модернизации
двигателей ВАЗ установлено „ что интегральный
показатель качества повышен: по
четырехцилиндровым двигателям на 16,7 %, по
восьмицилиндровым - на 17,1 %.
Определение интегрального показателя
качества существенно упрощается при наличии
соответствующего банка данных и
использования ЭВМ. Кроме того, возможна оценка
влияния изменения отдельных показателей или
вводимых конструкторских, технологических и
других мероприятий на интегральный
показатель качества.
Из уравнения (2.2.2) интегрального
показателя качества очевидны основные пути
повышения технико-экономической
эффективности двигателей:
увеличение мощности и коэффициента
ее использования;
снижение массы двигателя;
увеличение первичного и межремонтных
ресурсов;
снижение расходов на создание и
изготовление двигателя;
увеличение приспособляемости двигателя
к автомобилю (например, к трансмиссии);
снижение расходов на топливо и масло;
улучшение пусковых свойств двигателя и
его способности быстро выходить на рабочие
режимы;
уменьшение дымности и токсичности
выбросов;
снижение уровней шума и вибрации;
повышение надежности двигателя
(снижение расходов на поддержание
работоспособности двигателя в эксплуатации, а также
расходов, связанных с вынужденным простоем
автомобиля вследствие отказа двигателя,
уменьшения степени ухудшения
экологических, топливно-экономических, энергетических
и других показателей двигателя за весь период
его эксплуатации).
Ввиду большого количества сложных и
взаимозависимых проблем повышения
качества на предприятиях-изготовителях
двигателей необходима комплексная научная система
управления качеством, охватывающая вопросы
разработки конструкции, промышленного
производства, эксплуатации и ремонта. Эта
система должна значительно ускорять создание
новых и модернизацию выпускаемых моделей
двигателей за счет, например, лучшей
организации работ, человеческого фактора, широкого
применения ЭВМ, цехов малых серий и пр.
Принципы разработки двигателей и
особенности методик испытаний. Разработка
конструкций и организация массового
производства современных силовых установок -
сложный и чрезвычайно трудоемкий процесс,
связанный с решением многих задач как
производственного, так и эксплуатационного
характера. Переход к выпуску новой массовой
модели двигателя, как правило, сопровождается
переоснащением производственной базы,
вызывает необходимость перестройки
эксплуатационных и ремонтных предприятий в
организации выпуска запасных частей, а иногда и
эксплуатационных материалов.
Создание каждого нового образца
двигателя, производство которого требует больших
материальных затрат, по существу, определяет
технический уровень в данном классе машин
на 15 - 20 лет вперед, нуждается в системном
подходе, научном прогнозировании и быстром
внедрении конструкции в практику. При
конструировании и расчете автомобильных
двигателей следует исходить из комплекса связей,
существующих между экономическими,
энергетическими, массовыми и габаритными
показателями, параметрами надежности,
совершенством тепловых процессов, выносливостью
ответственных деталей, методами упрочнения
и технологией производства и т.д.
Высокая надежность двигателей при
пробеге автомобилей (до 1 млн. км с дизелями и
до 400 тыс. км с карбюраторными
двигателями) определяется запасами прочности и
максимальными напряжениями, возникающими в
блок-картере, головке цилиндров, прокладке
газового стыка, коленчатом вале, шатуне,
поршневом пальце, поршне, кольцах и деталях
механизма газораспределения. Большое
значение имеет также структурная жесткость,
зависящая от выбранной силовой схемы,
конструктивных форм, рационального распределения
металла по объему, размеров и расположения
крепящих деталей, силовых связей.
Стабильность теплового состояния
двигателя при различных нагрузочных и скоростных
режимах работы обеспечивается:
герметизированной регулируемой
системой охлаждения со всесезонной жидкостью,
исключающей образование накипи и коррозии
деталей из алюминиевых сплавов;
эффективной защитой двигателя, его пар
трения и поверхностей деталей от
механических частиц загрязнений воздуха, масла и
топлива, а также технологических загрязнений в
процессе производства;
использованием масла и топлив с
повышенными эксплуатационными свойствами;
повышением уровня технической
эксплуатации.
Тенденция развития грузовых и легковых
автомобилей выражается в непрерывном
возрастании максимальных и средних скоростей
движения, повышении приемистости,
увеличении грузоподъемности и снижении
собственной массы автомобиля. Высокие средние
технические скорости движения,
обеспечивающие эффективное использование грузового
транспорта, достигаются при мощности,
отнесенной к полной массе автомобиля, 8 ... 11
кВт/т. В этом случае автомобиль может дви-
СИЛОВЫЕ УСТАНОВКИ АВТОМОБИЛЕЙ
183
гаться по пересеченной местности с высокой
скоростью, с малым числом переключений
передач и при продолжительных режимах
работы на неполных нагрузках, что обеспечивает
высокую эксплуатационную экономичность
автомобиля, если на нем установлен дизель, и
большую долговечность.
Номинальную мощность определяют из
условия обеспечения требуемых скоростей
движения при заданной полной массе
автомобиля, а число и расположение цилиндров
выбирают с учетом достижения оптимальных
показателей по массе двигателей, их
габаритных размеров и компоновки отсека двигателя.
Широкое использование дизелей
мощностью 750 ... 1800 кВт (ведутся работы по
созданию дизелей мощностью до 2000 кВт и
выше) почти на всех грузовых автомобилях и
расширение их применения на легковых
автомобилях обосновано следующим:
высокой топливной экономичностью
присущей рабочему циклу и стабильным
протеканием экономических характеристик в
рабочем диапазоне скоростных и нагрузочных
режимов, обеспечивающих снижение
эксплуатационных расходов топлива на 25 ... 40 % по
сравнению с бензиновыми двигателями;
сближением энергетических, габаритных
и массовых показателей дизелей и
карбюраторных двигателей вследствие форсирования
дизелей по среднему эффективному давлению
за счет использования турбонаддува и
охлаждения наддувочного воздуха, дополнительной
силовой турбины, усовершенствования
процесса газообмена, более эффективного
использования воздуха при смесеобразовании и
сгорании, уменьшения внутренних потерь,
использования электроники и т.д.;
приближением стоимости производства
дизелей к карбюраторным двигателям;
высоким моторесурсом дизелей
(1 млн км пробега автомобиля);
меньшей токсичностью отработавших
газов.
Стоимость изготовления дизелей на 20 ...
25 % выше , чем карбюраторных двигателей
ввиду большей металлоемкости (на 10...20 %),
применения легированных сталей для
ответственных деталей, большей трудоемкости
изготовления, меньшего масштаба производства и
относительно высокой стоимости топливной
аппаратуры. Затраты на ТО и ремонт дизелей в
эксплуатации в среднем выше примерно на
5 %. Вместе с тем, более высокая стоимость
дизелей нивелируется в связи с неизбежным
переводом бензиновых и других двигателей с
искровым зажиганием на адаптивные
многоточечные системы электронного впрыскивания
топлива в сочетании с некоторыми затратами
на снижение токсичности отработавших газов.
Выбор расположения и числа цилиндров,
а также силовой схемы блок-картера при
проектировании нового двигателя определяется
следующим:
требованиями, предъявляемыми к вновь
создаваемой конструкции в отношении
расположения двигателя на автомобиле или
тракторе, получения минимальных габаритных
размеров;
доступности к основным механизмам и
агрегатам;
стремлением получить конструкцию
минимальной массы с повышенной жесткостью
блок-картера, от которой зависит
долговечность гильз, поршневой группы и коленчатого
вала с подшипниками;
уравновешенностью сил инерции
вращающихся и поступательно движущихся масс и
моментов от них и равномерностью крутящего
момента;
типом системы охлаждения;
материалами, применяемыми для
изготовления блок-картера, головки цилиндров,
прокладки газового стыка и деталей цилиндро-
поршневой группы.
Число цилиндров выбирают исходя из
значений номинальной мощности, частоты
вращения, сил инерции поступательно
движущихся и вращающихся масс, действующих на
детали и подшипники кривошипно-шатунного
механизма, и равномерности крутящего
момента. От последнего зависят равномерность
хода, масса маховика, размах цикла
напряжений в элементах коленчатого вала и деталях
трансмиссии, нагрузки на упругие элементы
подвесок, вибрации двигателя и кузова
автомобиля. В автомобильных двигателях
расположение цилиндров в основном однорядное
(далее рядное), двухрядное и V-образное. При
этом те и другие имеют свои преимущества и
недостатки.
В мировой практике на легковых
автомобилях 85 % моделей имеют рядные
четырехцилиндровые двигатели с верхним
расположением клапанов. Остальные 15 %
составляют двух- и четырехцилиндровые опозитные,
двух-, трех-, пяти-, шестицилиндровые
рядные; четырех-, шести-, восьми- и
двенадцатицилиндровые У-образные двигатели. На
грузовых автомобилях малой грузоподъемности
применяют рядные четырех- и
шестицилиндровые двигатели ^ на автомобилях средней
грузоподъемности - рядные шестицилиндровые и
У-образные шести-, восьми- и
десятицилиндровые, на автомобилях большой
грузоподъемности - У-образные двенадцатицилиндровые
двигатели. Все двигатели грузовых и легковых
автомобилей, как правило, максимально
унифицированы по деталям массового
производства, а также используемому технологическому
оборудованию.
Наименьший габаритный объем при угле
развала цилиндров 90° У-образные двигатели,
как правило, более короткие и имеют мень-
184
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
шую массу по сравнению с рядными той же
мощности, числа и рабочего объема
цилиндров. В среднем у У-образного двигателя длина
меньше примерно на 25 %, а масса - на 20 %,
поскольку блок-картер и коленчатый вал
короче, чем у-однорядного двигателя. На каждые
два цилиндра, расположенные в одном отсеке
У-образного двигателя, приходится лишь один
участок картера, который неизбежно
удлиняется в конструкциях с последовательным
размещением шатунов на одной шейке вала. В
случае использования центральных шатунов
(главного и прицепного или вильчатого и
внутреннего), когда оси обоих цилиндров
одного отсека будут расположены в одной
плоскости, масса блок-картера уменьшается.
Рост цилиндровой мощности двигателей
за счет форсирования, главным образом по
среднему эффективному давлению, приводит к
тому, что рядные двигатели при той же
мощности становятся короче (при равных
размерах), переходят в разряд более высоких
мощностей. Причем рядные двигатели рабочим
объемом одного цилиндра около 1 л имеют
меньшую стоимость, чем У-образные двигатели.
Четырехцилиндровые дизельные и
бензиновые рядные двигатели массового
производства могут выполняться без механизмов для
уравновешивания сил инерции второго
порядка при простой конструкции подвески
силового агрегата и высоких комфортабельности и
эргономических качествах автомобиля. Вместе
с тем, в некоторых случаях, например на
дизелях Камминс, устанавливают
уравновешивающий механизм.
В диапазоне мощностей 75 ... 365 кВт,
как следует из анализа ведущих зарубежных
фирм-производителей дизелей для грузовых
автомобилей и автобусов, подавляющую часть
(около 70 %) составляют рядные
шестицилиндровые дизели. Остальные двигатели
У-образные шести-, восьми-, десяти- и
двенадцатицилиндровые. По количеству моделей
рядные шестицилиндровые двигатели в 2 раза
превышают все У-образные-. Объясняется это
рядом преимуществ этой модели:
Во-первых, в ней уравновешены силы и
моменты инерции первого и последующих
порядков. В результате отсутствия
высокочастотных вибраций существенно меньше уровень
шума, выше надежность работы как двигателя,
так и трансмиссии, проще подвеска силового
агрегата (без подрессоривания кабины),
значительно улучшены условия работы водителя,
особенно магистральных автопоездов и
автобусов. Существенно снижен уровень шума
работы шестицилиндрового двигателя благодаря
отсутствию источника генерирования
акустических колебаний, связанных с
неуравновешенностью кривошипно-шатунного
механизма.
Во-вторых, рядная компоновка
цилиндров позволяет, с одной стороны, повысить
жесткость блока цилиндров при
использовании отдельного корпуса коренных
подшипников, что дополнительно снижает уровень шума
и надежность работы двигателя. С другой
стороны, двухрядная блочная конструкция лучше
компонуется с различными агрегатами и
перспективными функциональными системами.
В случае использования рядного
двигателя вследствие разгрузки передней оси
улучшается проходимость, уменьшается радиус
поворота машины из-за большой подвижности
передних колес*.
В У-образных двигателях наиболее
распространены восьмицилиндровые компоновки
с углом развала 90° и с пространственным
валом. При этом моменты центробежных сил
инерции вращающихся масс и сил инерции
первого порядка поступательно движущихся
масс уравновешиваются противовесами на
щеках вала и дисбалансными массами
маховика, шкива привода вентилятора или отдельно
расположенной массой на переднем конце
вала. Применяются также четырехтактные
шестицилиндровые двигатели, как правило,
с развалом угла 60° и 90°. При угле развала 90°
и расположении трехколенчатого вала
(спаренные шатунные шейки) под углом 120°
неуравновешенным является момент сил инерции
второго порядка поступательно движущихся
масс. Момент сил инерции первого порядка
уравновешивается вместе с неуравновешенным
моментом от центробежных сил
противовесами. При угле развала 60е и расположении
кривошипов под углом 60° силы инерции первого
порядка уравновешиваются центробежными
противовесами, размещенными на щеках
коленчатого вала, а силы инерции второго -
противовесами балансирного валика,
вращающегося с удвоенной частотой вращения. При
этой схеме достигается высокая равномерность
крутящего момента.
Четырехтактные двигатели большей
мощности изготовляют
двенадцатицилиндровыми, например, с углом развала 75°. При угле
смещения кривошипов 120° уравновешиваются
силы инерции поступательно движущихся и
вращающихся масс при любом угле развала
цилиндров: наибольшая равномерность хода
этих двигателей достигается в случае угла
развала 60°.
Для создания семейства двигателей с
более плотным мощностным рядом можно
применять У-образные конструкции с числом
цилиндров десять и с углом смещения
кривошипов коленчатого вала 72°. При угле развала
между осями цилиндров 90°
неуравновешенные моменты сил инерции первого порядка и
центробежных сил уравновешиваются также
противовесами на щеках вала или выносными,
СИЛОВЫЕ УСТАНОВКИ АВТОМОБИЛЯЕЙ
185
а момент сил инерции второго порядка - ба-
лансирным валиком, вращающимся с
удвоенной частотой вращения.
При необходимости уменьшения высоты
двигателя целесообразно применять
конструкции с горизонтальным расположением
цилиндров или короткоходные У-образные. Однако
установка короткоходных У-образных
двигателей с относительно большой шириной связана
с трудностями размещения опор (особенно
задних), выпускных трубопроводов, рулевого
механизма, стартера, масляных фильтров,
может существенно ухудшить токсичность
выпускных газов и топливная экономичность, а
также повысить уровень шума при
необходимости повышения частоты вращения.
Двигатели с горизонтальным
расположением цилиндров могут применяться на
грузовых автомобилях, автобусах и колесно-
гусеничных машинах специального
назначения, так как кабину можно расположить
непосредственно над двигателем, увеличить
полезную площадь платформы, улучшить
обзорность с места водителя и управляемость
автомобиля. В автобусе при горизонтальном
расположении цилиндров двигатель обычно
размещают под кузовом (в средней части шасси).
В этом случае улучшается проходимость
вследствие разгрузки передней оси и уменьшается
радиус поворота машины.
Конструктивная компактность двигателей
характеризуется габаритной мощностью,
кВт/м3:
*т=Ън/УТ9 (2.2.3)
где Л^ен - номинальная мощность; Ут -
габаритный объем двигателя, м3.
Габаритная мощность Л^ бензиновых
двигателей легковых автомобилей в 1,3 - 1,6
раза меньше, чем дизельных ив 1,0 - 1,25 раза
меньше, чем грузовых автомобилей.
С увеличением числа цилиндров ^
заметно возрастает, например у
двенадцатицилиндровых двигателей жидкостного
охлаждения А^г больше в 1,2 раза, чем у
шестицилиндровых. У шестицилиндровых рядных
двигателей А^г в 1,13 раза больше, чем у
четырехцилиндровых.
Выбор отношения (\у = 8 / В) хода
поршня 51 к диаметру цилиндра В дает
возможность влиять на габаритные размеры и
массу двигателя, топливную экономичность и
экологические качества. Увеличение
отношения 8 / Б определяется исходя из повышения
экологичности и топливной экономичности. У
бензиновых двигателей у = 0,85 + 1,2, а у
дизелей у = 0,96 + 1,36; у большинства
дизелей \|/ = 1,0 + 1,2 при средних, скоростях
поршней 9.. * 11 м/с. Если двигатель имеет
у < 1,0, то его называют короткоходным, при
\|/ = 1,0 - квадратным, при \|/ > 1,0 - длинно-
ходным. Как правило, увеличение 8 / И в
определенных пределах улучшает экологич-
ность и топливную экономичность двигателя.
Выбор отношения у имеет
многокритериальный характер. Значение у должно быть
оптимальным и выбираться для конкретной
модели двигателя. Это все хорошо видно из
рис. 2.2.12, построенного для дизелей.
^
Г
V/ /■ ч \и—■
\МГ/<^\
•
ь 1
11
1м
11
500 1000 1500 2000 500 1000 1500 2000
п.мин'1 Х1 п,мин~*
О) 6)
Рис. 2.2.12. Влияние отношения 8/В и Л на КПД т\е:
а - </кс//) = 0,55; б - </кс//) - 0,75;
/-4-5у/>-0,8;1,2; 1,6; 2
(^кс - диаметр камеры сгорания)
К преимуществам короткоходных
двигателей относятся:
возможность повышения частоты
вращения вала без повышения средней скорости
поршня, а следовательно, без увеличения
среднего давления внутренних потерь, прямо
пропорциональных скорости поршня;
повышение срока службы деталей
поршневой группы при работе с умеренными
средними скоростями поршня;
повышение коэффициента наполнения
цилиндров двигателя в результате меньших
скоростей впуска, прямо пропорциональных
скорости поршня;
понижение тепловых потерь в
охлаждающую жидкость за процесс сгорания
вследствие уменьшения отношения поверхности
охлаждения к объему цилиндра при
увеличении его диаметра.
Вместе с тем, однорядные
короткоходные двигатели обычно имеют большую массу,
чем длинноходные, так как их длина
определяется длиной блока цилиндров. Габаритные
размеры при у < 1 увеличиваются в длину и
ширину. Масса двигателя возрастает
вследствие увеличения не только массы блок-
картера, но в значительной мере и масс
головки цилиндров и коленчатого вала. Длина V-
образного двигателя (с коренными
подшипниками скольжения) зависит главным образом от
длины коленчатого вала. Длину блока в этом
случае удается приблизить к минимально
возможной длине коленчатого вала и, тем самым,
снизить массу двигателя.
В результате значительного перекрытия
шатунных и коренных шеек в случае малых
186
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
отношений 5* /Д а также применения более
узких вкладышей для коренных шеек с
большими диаметрами можно получить более
жесткий коленчатый вал с относительно тонкими
щеками и сократить при этом общую длину
вала.
Одной из причин, ограничивающих
минимальное отношение 5* /Д является
прохождение противовесов под кромкой поршня при
его положении в НМТ. У дизелей с
непосредственным впрыскиванием отношение 5* /И
лимитируется также формой камеры сгорания
и конечным объемом над кольцевым
вытеснителем днища поршня.
В автомобильных карбюраторных
двигателях минимальное отношение аУ /И < 0,60
при средней скорости поршня 12 ... 15 м/с.
В факторных дизелях, имеющих
сравнительно низкие средние скорости поршня (около
7,5 ... 9 м/с), отношение \у = 0,9 + 1,2.
Большинство автомобильных дизелей имеет
\|/ = 0,9 + 1,05 при средних скоростях поршня
около 9 ... 11 м/с.
Показатели дизелей с воздушным и
жидкостным охлаждением в настоящее время
незначительно различаются между собой.
Литровая и поршневая мощности, удельная и
литровая массы у обоих типов двигателей почти
одинаковы, у наддувных дизелей при
воздушном охлаждении несколько ниже. Среднее
эффективное давление дизелей с воздушным
охлаждением примерно на 10 % ниже, что
объясняется несколько меньшим
коэффициентом наполнения. У двигателей с воздушным
охлаждением несколько большие габаритные
размеры, если сравнивать двигатели обоих
типов примерно одинаковой мощности. Длина
двигателя в первую очередь зависит от
расстояния между осями цилиндров Ь: в
двигателях с воздушным охлаждением Ь = 1,4 Д
а в двигателях с жидкостным охлаждением
Ь = 1,2/). Увеличение межосевого расстояния
вызвано применением конструкции с
отдельными цилиндрами и развитой поверхностью
охлаждающих ребер.
У V-образных дизелей с воздушным
охлаждением в среднем длина больше на 21 %,
ширина - на 24 % и высота - на 3,5 %.
Габаритная мощность у дизеля с воздушным
охлаждением меньше, чем у дизеля с
жидкостным охлаждением (на 40 ... 50 %).
Глубина радиатора однорядных
двигателей жидкостного охлаждения составляет 8 ...
12 % их длины. Поэтому, если сравнивать
габаритные размеры силовых установок с
учетом размеров радиатора, то длина силовой
установки двигателя с воздушным
охлаждением превышает длину силовой установки
двигателя с жидкостным охлаждением только на
13 ... 17 %.
Ширина однорядного двигателя с
воздушным охлаждением вследствие
значительной ширины цилиндра и вынесенного в
сторону вентилятора при одностороннем подводе
охлаждающего воздуха примерно на 5 ... 10 %
больше. При V-образном расположении
цилиндров вентилятор обычно удается вписать в
габаритные размеры двигателя. Высота
двигателей с воздушным и жидкостным
охлаждением при верхнем расположении клапанов
примерно одинаковая.
Дизели с воздушным охлаждением
являются перспективными для южных и северных
районов страны. Время прогревания двигателя
в температурных условиях крайнего севера
заметно сокращается. В южных районах при
использовании водяного охлаждения
значительные отложения накипи на омываемой
поверхности вызывают местный перегрев,
трещины в блоках и головках,
преждевременный выход из строя радиаторов, коррозию
деталей из алюминиевых сплавов.
Порядок разработки и постановки на
производство новых изделий регламентирован
ГОСТ 15.001-88. Отраслевые стандарты
определяют организацию подготовки к выпуску
изделий автомобильной промышленности.
Применительно к двигателям система
стандартов предусматривает разработку:
технического задания (ОСТ 37.001.508-
73), которое на основе достижений
отечественной и зарубежной техники определяет
назначение, условия использования,
технические характеристики и основные показатели
двигателя;
технического предложения (ГОСТ 2.118-
73), состоящего в предварительной
конструкторской проработке и анализе вариантов с
целью уточнения требований, характеристик и
показателей, указанных в техническом
задании;
эскизного проекта (ГОСТ 2.119-73),
устанавливающего принципиальные
конструктивные решения, позволяющие реализовать
техническое задание;
технического проекта (ГОСТ 2.120-73),
выявляющего окончательные конструктивные
решения, дающие полное представление о
конструкции;
рабочей конструкторской документации,
включающей рабочие чертежи деталей,
ведомость покупных изделий, проект инструкции
по эксплуатации.
Изготовленные опытные образцы
двигателя проходят заводские, а затем приемочные
испытания, при положительных результатах
которых принимается решение к его
производству. Типовая схема организации
разработки двигателей приведена на рис. 2.2.13.
Проектирование новых моделей
двигателей является многокритериальным и
многовариантным и обеспечивается широким приме-
СИЛОВЫЕ УСТАНОВКИ АВТОМОБИЛЕЙ
187
Типаж
силовых
установок
Научно-технический
Оптимизация параметров и конструктивных
• особенностей
Опре^иие^^применения
3 С
Разработка вариантов компоновки
Экспертиза и утверждение
Выбор формы и материала деталей
Планирование доводочных
исследований
Расчет деталей на прочность,
жесткость и износ
Назначение допусков и посадок,
увязка размерных цепей
Отработка конфигурации деталей с
точки зрения технологичности
Разработка и выдача технической
документации на изготовление
опытных образцов
Разработка уточненной
документации на основании
испытаний опытных образцов
Доработка рабочей документации
С
Экспертиза и утверждение варианта
Р
Технический проект
Расчет основных деталей —
Разработка рабочих чертежей
вариантов для экспериментальной |—|
проверки
Разработка требований к изделиям
смежного производства
:
Р
Г
Изготовление макетных образцов
деталей
Стендовые испытания образцов
деталей и узлов
Исследование и доводка рабочего
процесса на одноцилиндровой
установке
Изготовление и испытание макетных
образцов
Разработка технического проекта
выбранного варианта
Экспертиза и утверждение проекта
х
Рабочий проект
I
I
Уточнение параметров рабочего
процесса на стендах и развернутых
изделиях
Изготовление и испытание опытных
. образцов
Изготовление опытных образцов для
контрольных испытаний
Контрольные заводские испытания
опытных образцов
Изготовление образцов для
межведомственных и государственных
испытаний
] | Прогнозирование надежности установки |
| Межведомственные и государственные
приемочные испытания образцов
Исследования по результатам
межведомственных и государственных
испытаний
Экспертиза, согласование и
утверждение рабочей документации
п:
Выдача технической документации
для подготовки производства
Рис. 2.2.13. Схема организации разработки силовых установок
188
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
нением ЭВМ и компьютерной техники,
использованием прогрессивных методов расчетов
(например» с помощью конечных элементов),
измерении и испытаний. На каждом этапе
разработки производится исследование
показателей двигателя и его деталей, вносятся
соответствующие коррективы с целью
оптимизации конструкции. Частными задачами
проектирования можно считать:
выбор и обоснование основных
параметров и конструктивных особенностей двигателя;
математическое моделирование рабочего
процесса;
компоновку двигателя и
прогнозирование его надежности;
испытание образцов двигателей.
Основным условием создания
оптимальной конструкции двигателя является четкое
научно-обоснованное определение главных
технических требований, что является
конкретно выраженной целью проектирования и
отражается в техническом задании. Последнее
составляется в соответствии с ОСТ 37.001.508-
73 и содержит следующие данные:
назначение двигателя;
энергетические показатели;
основные параметры и важнейшие
конструктивные особенности; условия
применения (сорта топливно-смазочных материалов,
температуру, давление и запыленность
окружающего воздуха, крены и др.).
Эти данные устанавливаются с учетом
требований, обусловленных назначением
машин, для которых предназначен создаваемый
двигатель. Их выбирают на основе результатов
предварительных научных исследований,
имеющегося задела конструкторско-эксперимен-
тальных разработок научного прогнозирования
и анализа передовых достижений
отечественной и зарубежной техники, мирового двигате-
лестроения. При этом производится
обоснованный выбор:
номинальной мощности;
вида и сорта применяемого топлива,
которое не должно быть дефицитным в
перспективе;
способа воспламенения (искровым
зажиганием или от сжатия);
способа смесеобразований, типа камеры
сгорания и топливной аппаратуры;
типа системы охлаждения;
наличия наддува и типа нагнетателя.
С учетом положительного и
отрицательного влияния изменения каждого
перечисленного параметра выбираются наивыгоднейшие
значения:
номинальной частоты вращения
коленчатого вала пн;
степени сжатия е;
числа / и расположения цилиндров;
отношения хода поршня к диаметру
цилиндра \|/ = 5 / В.
Кроме того, в техническом задании
намечаются основные конструктивные
особенности, которые имеют принципиальное значение
для достижения заданных показателей
(наличие автоматических регулирующих устройств,
применяемые материалы, пусковые
приспособления, некоторые нетиповые
конструктивные элементы).
Главным показателем при
проектировании двигателя является его номинальная
мощность Л^н, которая определяется из удельной
мощности автомобиля Л/уа:
#ен = ^уа Щ ^уа = Кн / "*>
где т - масса загруженного автомобиля
(вместе с двигателем).
Удельная мощность главным образом
определяет скоростные и динамические
свойства автомобиля и его класс и должна
составлять 6 ... 11 кВт/т для современных грузовых
автомобилей. Для легковых автомобилей
диапазон удельных мощностей 37 ... 125 кВт/т.
При этом примерно для половины всех
моделей автомобилей Щ& = 75 + 92 кВт. В
настоящее время существуют достаточно точные
методы расчета удельной мощности автомобилей
различных типов, основанные на
вероятностных условиях и\ эксплуатации. Однако, при
проектировании мощность двигателя обычно
определяют технико-экономическим расчетом
в зависимости от класса автомобиля,
требований унификации, возможностей
производственной базы с учетом выявленных
преимуществ и недостатков прототипов.
Базой для дальнейшего проектирования
является отношение ^ //) (размерность
двигателя), которое в первом приближении может
быть определено следующим образом. На
основании анализа статистических данных
двигателей-аналогов выбираются значения среднего
номинального эффективного давления /?ен.
Рассчитывается требуемый рабочий
Объем двигателя, л,
IV - ЗШен
1Ун >
Л>нлн
где / - число цилиндров; У^ - рабочий объем
цилиндра, л; 2 - тактность; пи - номинальная
частота вращения, мин-1.
Определяется размерность двигателя
Л = 100з—*-; 5 = у/).
СИЛОВЫЕ УСТАНОВКИ АВТОМОБИЛЕЙ
18<
Найденное значение В сравнивается с
принятыми в перспективном типаже, и при
необходимости корректируется. Следует
учитывать, что для бензиновых двигателей
установлен предпочтительный ряд диаметров 76,
82, 88, 92, 100 108 мм, а для дизелей - 92, 105,
ПО, 120, 130, 140, 150 мм.
Если расчетная размерность двигателя
подвергалась корректировке, то по новому
значению /> следует определить:
Ун =0,25 10"6тс/)25;
N.
зог
Полученное значение мощности не
должно отличаться от требуемого более, чем
на 3 ... 4 %. При этом предпочтительным
является ее повышенное значение по сравнению
с заданным.
После уточнения размерности
определяются с помощью экспериментов и расчетов
остальные параметры технического задания и
следующие дополнительные.
Крутящий момент, Нм,
Рв - показание измерительного устройства
тормоза, Н; 1^ - плечо весового устройства, м.
Эффективное давление, МПа,
/>е="
0,003142Я/„
IV,
а эффективная мощность, кВт,
9570
Индикаторная мощность, кВт,
К = ЛГе + ЛГМ)
где 7УМ - мощность механических потерь, кВт;
эпределяется экспериментально по
специальной методике прокруткой двигателя или пос-
тедовательного выключения цилиндров.
Удельные эффективный и индикаторный
эасходы топлива, г/(кВтч) или мкг/Дж:
10006,
N.
#/ =
100061
К
0Т - расход топлива, кг/ч.
Эффективный индикаторный и механи-
геский КПД следующие:
23,4 23,4
Ле =— и Л/ = ;
N.
Лм = Ле/Л/ =
N.
N.
^е+*м
где & и & в мкг/Дж.
Коэффициент избытка воздуха
14,356.
где 6В - расход воздуха, кг/ч.
Мощности двигателя определяются И2
выражений:
литровая мощность, кВт/л,
поршневая мощность, кВт/м2,
п г '
габаритная мощность, кВт/м3, из (2.2.3),
где Гп - плрщадь поршня, м2; Ут - габаритный
объем двигателя, м3.
Средняя^скорость поршня •> м/с,
уп = 2-10-2ДЛн/6.
Номинальный и корректорный
коэффициенты запаса крутящего момента, %:
М -М
цн= КтаХ КН 100
^к ="
^ктах -"^к
100,
М„
где Мктах, Мкл и Мк - крутящий момент,
соответственно максимальный, при
номинальной и максимальной мощности.
Внутриотраслевая унификация
предусматривает создание типоразмерных рядов
двигателя, состоящих из семейства
конструктивно-унифицированных между собой
моделей. Наиболее рациональным принципом
создания рядов двигателей является
варьирование числом цилиндров (например 6 - 8 - 12)
при сохранении размерности всех моделей,
например дизелей ЯМЗ.
Значение рги уточняется на стадии
эскизного проектирования и по возможности
190
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
его реализации. Для этого необходимы
расчеты рабочего процесса двигателя и его
параметров с использованием методов
математического моделирования. Математическая модель
рабочего процесса двигателя - это замкнутая
система уравнений, устанавливающая с
известной степенью приближения количественные
связи между входными параметрами,
управляющими процессом, и выходными свойствами
процесса.
К таким входным параметрам прежде
всего относятся параметры, определяющие
режим и условия работы двигателя (подача
топлива, нагрузка, регулировочные условия и
параметры окружающей среды), а также
характеризующие многие конструктивные
особенности двигателя, его механизмов и систем.
В качестве выходной характеристики
рабочего процесса обычно принимаются
параметры состояния рабочего тела в различные
моменты времени (или по углу поворота
коленчатого вала): текущее давление р, объем V
и температура Т. Кроме того, определяются
обобщающие показатели, характеризующие
эффективность рабочего процесса - среднее
индикаторное давление />/ и индикаторный
КПД л/.
Математическая модель позволяет
производить многовариантные расчеты на ЭВМ, по
результатам которых можно определить
область оптимальных параметров,
обусловливающих энергетические показатели цикла.
Однако окончательные значения параметров и
характеристик цикла должны определяться по
результатам дополнительно проведенных
экспериментов. Вместе с тем на практике,
например на ЯМЗ, получены довольно точные
совпадения расчетных и экспериментальных
зависимостей выходных параметров рабочего
процесса от конструкций и условий работы
двигателя.
Компоновка двигателя выполняется на
этапе эскизного проектирования и постоянно
уточняется по мере конструкторской
проработки узлов и деталей. Она заключается в
выборе оптимальной структурной схемы
механизмов и систем, а также в установлении и
увязке основных размеров деталей, исходя,
главным образом, из необходимости
обеспечения их сборки и требуемой кинематики. При
этом учитываются требования надежности,
минимальной металлоемкости и габаритов,
производственной и эксплуатационной
технологичности. Компоновка двигателя обычно
выполняется расчетно-графическими
методами, в результате чего отрабатываются схемы,
являющиеся основой для последующего
выполнения сборочных и деталировочных
чертежей. Основными исходными данными для
компоновки являются рабочий объем
цилиндра У^у его диаметр О и ход поршня *$*,
выбранные по результатам предварительного
расчета и опробирования рабочего процесса.
Для исключения значительных ошибок и
необходимости корректирования
первоначальных решений, исходные размеры
определяются с учетом опыта конструирования подобных
двигателей, хорошо зарекомендовавших себя в
эксплуатации. Для этого обычно используют
относительные размеры / и */ деталей
базового двигателя, представляющие собой
отношения
/ = /б/Дб; 4=</б/Дб.
где /б и ^б - соответственно линейный размер
и диаметр деталей базового двигателя, мм; Д>
- номинальный диаметр цилиндра базового
двигателя, мм.
Любой аналогичный размер
проектируемой детали может быть найден из выражения
д. = АИ или / = //>. При этом, компоновка,
как правило, не требует кардинального
корректирования. Однако она должна
осуществляться в нескольких вариантах. Для
оптимизации компоновочных решений необходимо
рассмотреть и оценить влияние ряда факторов,
которые могут существенно изменить
показатели двигателя и прежде всего следующие:
расположение цилиндров; параметры 5 / И и
К I Ь ; форму, число опор и размеры шеек
коленчатого вала; число и расположение
распределительных валов; схему, расположение и
конфигурацию клапанов, впускных -и
выпускных патрубков; форму и расположение
навесных агрегатов и деталей. В этом случае
компоновочное решение представляется в виде
целевой функции, которая минимизируется
математическими методами.
Изложенные принципиальные
положения позволяют выполнить компоновочную
схему, но не исчерпывают необходимого
объема конструкторской проработки. После
выбора размеров и конфигурации деталей
необходимо оценить их надежность. Такое
прогнозирование на стадии проектирования очень
важно для уменьшения объема и времени
последующих работ и заключается в оценке
удельных нагрузок (давления) в сопряжениях,
расчете деталей на жесткость, прочность
(главным образом усталостную) и
износостойкость по методикам, приведенным в
специальной литературе. Затем при необходимости
корректируются компоновочные размеры и
выполняются рабочие чертежи. При этом
увязываются размерные цепи, выбираются
посадки и допуски на размеры и геометрические
отклонения, а также устанавливаются
оптимальные параметры шероховатости
сопрягаемых поверхностей и отрабатывается
технологичность деталей.
СИЛОВЫЕ УСТАНОВКИ АВТОМОБИЛЕЙ
191
Несмотря на большое значение этапов
исследования и разработки двигателя базовой
информацией для обобщений, выводов и
практических рекомендаций могут быть только
результаты исследований, которые могут быть
натурными на двигателях или (с целью
снижения трудоемкости и исключения влияния
некоторых второстепенных факторов) в ряде
случаев на моделях.
Проведение натурных испытаний
непосредственно на двигателе носит характер
проверки его основных показателей при
различных искусственно создаваемых условиях и
режимах работы и в зависимости от
поставленных целей (исследовательские, доводочные,
проверочные, учебные, сертификационные).
По условиям проведения испытаний
двигателей они делятся на эксплуатационные,
осуществляемые т непосредственно на объекте, и
стендовые. Для сокращения трудоемкости,
материальных затрат и времени проведения, а
также более четкого определения отдельных
функциональных свойств на современном
этапе развития техники предпочтительнее
стендовые испытания двигателей. Объем и
условия проведения поверочных стендовых
испытаний автомобильных двигателей
регламентированы ГОСТ 14846-81. Программы и
условия остальных видов испытаний
разрабатываются в каждом конкретном случае в
зависимости от целей. ГОСТ 14846-81 определяет
виды поверочных испытаний автомобильных
двигателей, устанавливает комплектность
стендов и требуемую точность измерительной
аппаратуры, условия подготовки и проведения
испытаний, методику подсчета результатов. В
соответствии с ним могут проводиться
следующие испытания:
контрольные, устанавливающие
соответствие серийной продукции требованиям
технических условий;
приемочные, устанавливающие
возможность постановки модели двигателя на
производство;
на безотказность.
Кроме того, предусматриваются
испытания на токсичность и дымность отработавших
газов, шумность и др.
Во всех случаях испытаниям подвергают
технически исправные двигатели, прошедшие
обкатку до 60 ч, с установленным на них
воздухоочистителем, генератором и водяным
насосом, но без вентилятора, глушителя и
компрессора. Поэтому действительная мощность,
которую можно использовать для приведения
в движение машины, на 8 ... 10 % меньше
ТУен, определенной по ГОСТ 14846-81.
Стандарт устанавливает также нормальные условия
проведения испытаний или приведения к ним
полученных результатов по мощности,
крутящему моменту и удельному расходу топлива.
Для создания необходимых условий
испытаний и режимов работы двигатель
устанавливают на специальном стенде, оборудованном
тормозным устройством и обеспечивающим
работу двигателя системами питания,
охлаждения, смазки, электрооборудования, выпуска
отработавших газов. Для достижения
однозначности и достоверности получаемых
результатов испытание чаще всего строится по
принципу однофакторного эксперимента,
который сводится к испытаниям двигателя на
режимах определенных характеристик -
скоростной, нагрузочной, регулировочных и т.п.
Наиболее часто используются программы
поверочных испытаний. Так, программой
контрольных испытаний по ГОСТ 14846-81
предусматривается определение:
скоростных характеристик (рис. 2.2.14)
при полностью открытом дросселе или при
полной подаче топлива, а также их
регулировочных частей;
Не, кВт
100
90
60
40
1^*^
Мк,нм Мг.кВт
400
300
От,**/*
40
150
130
ПО
20 90
99,*И*6тч)
450 70
350
1000 1600 2600 п,ми*-'
Зтн
Нк%Нц
650
550
*т,кг/ч
40
20
9*,*КкВ*пч)
240
220
1000 1400 1900 2200п$ним'9
Рис. 2.2.14. Скоростные характеристики двигателя при полностью открытом длосселе (а) и
при полной подаче топлива (0)
192
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
9е,г/(кВ<пч)
460
Ь20
360
ЗЬО
А
У
Г
/"
25
20
15
10
0,2 0,3 0,4 0,5 0,6 0,7ре,МПа
Рис. 2.2.15. Нагрузочные характеристики двигателя
нагрузочных характеристик (рис. 2.2.15)
не менее, чем на трех различных частотах
вращения;
скоростной характеристике условных
внутренних потерь (методом прокручивания);
характеристик холостого хода;
равномерности работы цилиндров;
массы двигателя;
дымности и токсичности отработавших
газов (для дизелей).
При проведении приемочных испытаний
дополнительно определяются частичные
скоростные характеристики, минимальная частота
вращения холостого хода и габаритные
размеры двигателя. Испытания двигателей для
проверки качества изготовления и сборки, а также
их безотказности (ГОСТ 14846-81) проводятся
в течение 250 ... 1000 ч в зависимости от
рабочего объема двигателя и состоят из
повторяющихся циклов (3 ч): пуска, работы на холостом
ходу, работы при полной подаче топлива на
номинальном скоростном режиме. Между
циклами предусматривается остановка
двигателя на 10 мин.
Кроме стендовых испытаний по ГОСТ
14846-81 оценка безотказности автомобильных
двигателей может производиться также по
методикам РД 37. 001. 059-87, РД 37. 001, 086-
88 и РД 37. 001. 161-90, оценка
износостойкости - по методике РТМ 37. 001. 013-75.
Традиционные программы, построенные
по однофактурному принципу, обеспечивают
однозначность полученных результатов, но
требуют проведения большого числа опытов.
Кроме того, для повышения достоверности
результатов каждый опыт необходимо
повторить 2 — 3 раза. Все это чрезвычайно повышает
сроки и стоимость эксперимента. Поэтому в
последнее время широкое распространение
получили многофактурные эксперименты,
осуществляемые методом математического
планирования. Использование такого метода
позволяет существенно сократить число
опытов без снижения достоверности результатов.
Применение математического планирования
эксперимента особенно целесообразно при
доводочных работах и может сократить их
продолжительность до 10 раз.
Параметры, определяемые при
обязательной сертификации двигателей и
необходимых нормативных документов,
устанавливающие требования и методы испытаний,
приведены в табл. 2.2.14.
2.2.14. Параметры, определяемые при обязательной сертификации двигателей
Параметры
Скоростной внешней
характеристики:
максимальный
крутящий момент
(брутто или нетто)
номинальные
моменты (брутто или нетто)
частота вращения
коленчатого вала,
соответствующая
определенным параметрам
минимальный
удельный расход топлива
расход масла на угар
Нормативные документы, устанавливающие
технические
требования
ГОСТ 23465-79
методы
испытаний
ГОСТ 14846-81,
правила N 85
РД 37. 001. 642
Назначение
двигателя
Автомобили
массой более 3,5 т
(категории М2,
МЗ, N2, N3)
ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ДВИГАТЕЛЯ
193
Продолжение табл. 2.2.14
Расход топлива по циклу
Уровень шума
Пусковые
Выбросов вредных
веществ с искровым
зажиганием:
содержание СО, СН
и ЫОх на заданных
режимах
содержание СО, СН
на холостом ходу
содержание СО, СН
и ЫОх при
испытании по циклу
содержание СО, СН
на холостом ходу
Выбросов вредных
веществ дизелей:
содержание СО, СН
и гТОх при
испытании по циклу
содержание СО, СН
и ЫОх и твердых
частиц при испытании
по циклу
содержание СО, СН
и г40х при
испытании по циклу
Дымность дизелей:
на режимах
скоростной внешней
характеристики и
свободного ускорения
на установившихся
режимах при полной
нагрузке и на режиме
свободного ускорения
ОСТ 37. 001.266
ОСТ 37. 001.032 или
ОСТ 37. 001.052
ОСТ 37. 001.070
ГОСТ 17. 2. 2. 03-87
ОСТ 37. 001.054
ГОСТ 17. 2. 2. 03-87
ОСТ 37. 001.234 или
правила N 49
Правила N 83
ГОСТ 17. 2. 2. 01-84
Правила N 24
ГОСТ 20306-90,
правила N 84
ОСТ 37. 001.266
РД 37. 001.021 или
ОСТ 37. 001.066
ОСТ 37. 001.070
ГОСТ 17.2.2. 03-87
ОСТ 37. 001.054
ГОСТ 17.2.2. 03-87,
правила N 83
ОСТ 37. 001.234
или правила N 49
Правила N 83
ГОСТ 17. 2. 2. 01-
84
Правила N 24
Автомобили
массой до 3,5 т
(категории М1,
N1)
В составе АТС
Автомобили
массой более 3,5 т
(категории М2,
N2, N3)
Автомобили
массой до 3,5 т
(категории М1,
М2, N1)
Дизели
автомобилей массой более
3,5 т (категории
М2, N1, N3)
Дизели
автомобилей массой до 3,5
т (категории М1,
N1)
Дизели всех
автомобилей
(категории М1, М2, МЗ,
N1, N2, N3)
2.2.4. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ДВИГАТЕЛЯ И
ТРАНСМИССИИ
Принципы моделирования процесса
движения автомобиля. Принятые при общей
компоновке параметры автомобиля могут быть
реализованы с максимальной эффективностью
только при правильном выборе характеристик
двигателя и трансмиссии. Раздельное их
исследование и выбор на этой основе параметров
двигателя и трансмиссии не дает желаемых
результатов, так как средняя скорость
движения и соответствующие расходы топлива
взаимосвязаны. Согласование характеристик
двигателя и трансмиссии осуществляется способом
комплексной оценки скоростных и топливных
факторов. Для решения задач по оптимизации
параметров при проектировании автомобилей
применяют методы математического
моделирования процесса движения автомобиля.
7 Зак. 1741
194
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
Автомобиль
Переключение
ступеней
Разгон
Торможение
Установившееся
движение
Водитель
Регистрация
Рис. 2.2.16. Принципиальная схема моделирования системы водитель - автомобиль - дорога
Принципиальная схема моделирования
(рис. 2.2.16) включает систему водитель -
автомобиль - дорога и определяет взаимосвязь
между ее составляющими подсистемами. В
общем виде дорожные условия
характеризуются макропрофилем опорной поверхности,
коэффициентом сопротивления качению,
шириной проезжей части дороги, интенсивностью
движения и ограничениями скоростей,
обусловленными регулированием движения и
наличием на дорогах помех различного рода.
С точки зрения влияния этих условий на
режим движения автомобиля рассматриваются
два процесса, описывающие изменение
коэффициента у суммарного дорожного
сопротивления и максимально допустимой скорости
удоп движения в функции пути. Подсистема
"дорога" предназначена для моделирования
этих процессов. Модель автомобильной дороги
представляет собой функциональную
зависимость коэффициента суммарного дорожного
сопротивления и допустимых скоростей
движения от координат трассы. Наиболее часто
расчет параметров движения проводят на
цифровых вычислительных машинах с
использованием детерминированной модели дороги,
при построении которой используют
экспериментальные данные, полученные для типовой
дороги, или рассчитанные по технической
документации. В этом случае модель дороги
представляют в виде таблицы координат
трассы, в которых происходит изменение
коэффициента суммарного дорожного сопротивления
и допустимой скорости движения. Данные
таблицы заносятся в память вычислительной
машины. Коэффициенты суммарного
дорожного сопротивления передаются в подсистему
моделирования динамики автомобиля и
действий водителя, а ограничения скорости - в
подсистему моделирования действий водителя.
В подсистеме моделирования динамики
автомобиля на каждом цикле по известным из
теории автомобиля соотношениям
определяются следующие параметры:
1. Ускорение
Ьт
где Гк - окружная сила на ведущих колесах;
/*2 - суммарное сопротивление движению
автомобиля; 5 - коэффициент учета
вращающихся масс; т - полная масса автомобиля.
2. Текущая скорость и пройденный
автомобилем путь за шаг интегрирования
где У0 - начальная скорость, полученная в
результате предыдущего цикла расчета.
3. Средняя мощность, подводимая к
ведущим колесам на участке пути А 5/
где у/ - коэффициент суммарного дорожного
сопротивления на участке Д*5/; О - вес
автомобиля; Кв - коэффициент сопротивления
воздуха; Ав - лобовая площадь.
4. Расход топлива при проезде участка
АД/
С, =2,8 10
РЧт/*су/
где %г1 - удельный расход топлива; р -
плотность топлива; %/ - КПД трансмиссии;
Кс = 0,85 ... 0,9 (коэффициент, зависящий от
типа двигателя).
Пройденный автомобилем за шаг
интегрирования путь А 5/ передается в подсистему
моделирования дороги, где определяется
координата пути и соответствующий ей
коэффициент суммарного дорожного сопротивления для
ОПТИМИЗАЦИЯ ПАРАМЕТРОВ ДВИГАТЕЛЯ
195
последующего шага интегрирования. Текущие
значения скорости и ускорения автомобиля
передаются в подсистему моделирования
действий водителя для сравнения текущей
скорости автомобиля с допустимой. По результатам
сравнения путем логических операций для
последующего шага интегрирования
определяются:
режим работы автомобиля;
сохраняется или изменяется подача
топлива;
происходит ли переключение ступеней в
коробке передач;
возникает . необходимость изменения
скорости автомобиля торможением.
Конечными результатами моделирования
являются параметры, характеризующие
производительность автомобиля и его топливную
экономичность, - средняя скорость и средний
расход топлива.
Расход топлива при проезде всего
маршрута
е = !><?/,
/=1
где п - число участков (шагов
интегрирования), на которые разделен весь маршрут.
Средний расход топлива на 100 км пути
(л) на маршруте:
Су =105ОДУ,
где 5* - длина маршрута, м.
Основы оптимизации параметров. Для
оптимизации параметров двигателя и
трансмиссии на стадии проектирования используется
комплексный показатель - коэффициент
эффективности автомобиля -ЙГэф,
характеризующий эффективность его транспортной работы
с учетом средней скорости Уср движения и
соответствующего ей среднего расхода Сср
топлива на 100 км пути и определяемый как
отношение часовой производительности к
расходу топлива на 100 км пути:
Аэф = тт уср / Сер, (2.2.4)
где тпт - грузоподъемность, т.
Исходными данными для проведения
расчетов по оптимизации мощности двигателя
и передаточного числа главной передачи
являются:
полная масса автомобиля, форма кривых
крутящего момента и удельного расхода
топлива внешней скоростной характеристики
двигателя;
расчетный радиус колеса;
коэффициент обтекаемости;
характеристика коробки передач и
коэффициент суммарного дорожного
сопротивления.
При этом предполагается:
характеристики двигателей определенной
модели геометрически подобны;
имеют общую характеристику удельного
расхода топлива;
во всех случаях имеется один и тот же
ряд передаточных чисел коробки передач;
различные скорости автомобилей
формируются за счет изменения передаточного
числа главной передачи.
Из всего комплекса параметров двигателя
и трансмиссии выделяют два основных:
максимальную мощность двигателя и
передаточное число главной передачи. Для большей
общности исследования в дальнейшем полная
масса автомобиля и мощность двигателя
заменяются удельной мощностью автомобиля
(отношение мощности к полной массе
автомобиля).
Задача выбора оптимальных значений
удельной мощности Руц и передаточного числа
главной передачи щ сводится к тому, чтобы
путем варьирования в определенном
диапазоне значениями Руд и щ найти оптимальные
сочетания Уср и Сер» которые обеспечивают
максимальное значение коэффициента
эффективности. Критериями оптимизации являются
уср и Сер» получаемые в результате
математического моделирования движения автомобиля
по дороге с рельефным профилем.
Диапазоны варьирования Руд и щ
выбираются из следующих соображений. Нижний
уровень Руд и верхний ц> определяют из
условия вьшолнения нормативных требований к
нижнему пределу максимальной скорости
автомобиля.
С помощью уравнения мощностного
баланса, подставляя значение нижнего предела
максимальной скорости, находят
соответствующую мощность двигателя. Отношение
полученной мощности двигателя к полной массе
автомобиля - нижний уровень Руд. Верхний
уровень
Ц0= 0,377/1стахГ°, (2.2.5)
и V
ив тах
где летах - частота вращения коленчатого
вала, соответствующая максимальной
мощности двигателя, мин"1; г§ - радиус качения
колеса, м; иъ - передаточное число высшей
передачи в коробке передач; Ущ^ - нормативный
нижний предел максимальной скорости.
Верхний уровень Руд и нижний уровень
щ принимаются с учетом достигнутых значе-
196
Глава 2.2. ОБЩАЯ КОМПОНОВКА И ПАРАМЕТРЫ
ний Руд и максимальной кинематической
скорости Укщах на аналогичных моделях
отечественных и зарубежных автомобилей и
тенденций их развития. Подставляя в формулу
(2.2.5) значение Ущ,^, находим нижний
предел щ.
Понятно, что определить одно
оптимальное сочетание значений удельной
мощности автомобиля и передаточного числа главной
передачи для разных условий эксплуатации
практически невозможно. Поэтому выбор
типичного маршрута характерных условий
эксплуатации автомобиля является весьма
ответственным моментом. В зависимости от
назначения автомобиля может оказаться несколько
характерных условий эксплуатации с
соответствующими типичными маршрутами. В этих
случаях, учитывая назначение проектируемого
автомобиля, устанавливают наиболее
характерные условия эксплуатации и для них находят
типичный маршрут. Найденное на таком
типичном маршруте методом математического
моделирования работы автомобиля в реальных
условиях оптимальное сочетание удельной
мощности и передаточного числа главной
передачи может быть принято в качестве
основного варианта. Для других условий
эксплуатации данного автомобиля также определяют
типичные маршруты и тем же методом
находят сочетания мощности и передаточного
числа главной передачи.
При близких сочетаниях удельной
мощности и передаточного числа главной
передачи, .например, для горно-холмистой местности
и городских условий эксплуатации, возможен
компромиссный выбор одного сочетания
величин вместо двух. В общем случае различные
варианты сочетаний удельной мощности и
передаточного числа главной передачи
автомобиля могут быть достигнуты за счет различной
степени форсирования двигателя основного
варианта или ограничения его мощности, а
также наличия соответствующей номенклатуры
ведущих мостов.
Вопрос рационального согласования
параметров двигателя и трансмиссии можно
решать тем же методом вариацией только
передаточного числа щ главной передачи и
определением, таким образом, соответствующей
номенклатуры ведущих мостов с рядом
передаточных чисел для разных характерных
условий эксплуатации.
Расчет по оптимизации удельной
мощности и передаточного числа главной передачи
методом математического моделирования
процесса движения автомобиля проводится по
специально разработанным программам и в
общем случае сводится к определению Уср и
ССр в зависимости от Руд и щ. Для каждого
сочетания значений Руд и и$ в выбранном
диапазоне ЭЦВМ выдает информационные
данные, позволяющие получить две основные
зависимости:
^ср =/СРуд> "о) и Сер =/СРуд> "о)-
Затем могут быть получены зависимости
оптимальных значений щ по критерию
максимальной средней скорости и критерию
минимального расхода топлива от Руд.
Однако раздельная оценка по средней
скорости и среднему расходу топлива не дает,
как упоминалось выше, однозначного ответа
по оптимизации Руд и щ. Эти зависимости
могут быть использованы в тех случаях, когда
исходной задачей является обеспечение или
наибольшей производительности, или
максимальной экономии топлива. Поэтому
дальнейший расчет становится
технико-экономическим с обращением к методам комплексной
оценки с использованием коэффициента
эффективности. В конструкторской практике
имеют место следующие варианты
оптимизации:
определение оптимального сочетания
удельной мощности и передаточного числа
главной передачи для проектируемого
автомобиля;
определение оптимального
передаточного числа главной передачи при заданной
удельной мощности.
Оптимальные значения Руд и и$. по пеР_
вому варианту определяется с использованием
зависимостей Уср = / (Руд, щ) и (?ср =
= / (Руд, #о) и формулы (2.2.4). Полученные
результаты расчета позволяют определить
такое сочетание Руд и #о, при котором
коэффициент эффективности будет наибольшим.
Для решения задачи оптимизации по второму
варианту за счет вариации только щ строятся
графики зависимости Уср = / (щ) и Оср =
= / (ио), а затем график основной
оптимизационной зависимости А^ф = /(ио). На основе
этой зависимости можно получить
передаточное число главной передачи автомобиля, при
котором автомобиль имеет максимальный
коэффициент эффективности (оптимум
передаточного числа соответствует максимуму
кривой К^ = / (Ц))). Полученные результаты
расчета проверяются на соответствие
нормативным требованиям к тягово-скоростным
свойствам автомобиля.
Окончательная технико-экономическая
оценка автомобиля проводится на основе
результатов его испытаний.
РАМЫ ГРУЗОВЫХ АВТОМОБИЛЕЙ
197
Глава 2.3
НЕСУЩИЕ СИСТЕМЫ И КУЗОВА
2.3.1. РАМЫ ГРУЗОВЫХ АВТОМОБИЛЕЙ
Рама грузового автомобиля является
основной его несущей системы [1 - 5]. По
силовой схеме рамы могут быть хребтового и
лестничного типов. Рамы хребтового типа имеют
ограниченное применение ввиду возникающих
сложностей по компоновке агрегатов, а также
нетехнологичности и высокой трудоемкости
изготовления. Конструкция рам этого типа
состоит из центральной (хребтовой) балки
замкнутого сечения, с которой жестко
соединены поперечные балки.
Наиболее распространены рамы
лестничного типа, состоящие из двух продольных
балок (лонжеронов) и нескольких поперечных
(поперечин), соединенных между собой.
Лонжероны и поперечины являются
тонкостенными стержнями. Характерные сечения
применяемых в автомобильных рамах профилей и
формулы для определения их геометрических
характеристик приведены в табл. 2.3.1.
Основные конструктивные различия рам
лестничного типа определяются формулой и
назначением автомобиля.
2.3.1. Расчетные формулы для определения геометрических характеристик профилей,
применяемых в рамах грузовых автомобилей
Сечение
д1-
Ц
6 1 Г" ■
У
. )
1 ■- ~-| "
ь'
1 в
_| а |
1
\\ °Ц.И
А—
1
ьн
1 '
|1
V
1
2
— 1
Й' '
-—1
ь
I
..1
!
Расчетная формула
ь1 ъь1
Р = Ь(И + 2Ь)\ с = ; а= —;
И + 2Ь И + бЬ
/=**!(*+ б*); \Уув**1(* + б*);
■12 6#
ьн3 2И + ь „, ън2 гн + ъ
1г = —; ууг = -;
3 к + 2Ь 3 И + Ь
^р=у«(*+24); ТУкр=—(И+2Ь);
6Й2*3 (2Л+ЗЛ)
12 к+бЬ
ЬН(И + ЪЬ) ЪЬ2к
2(Н + 6Ь) 2(к + 6Ь)
Г = к&1 +2*5-55!; с = 0;
к2 к2
1у =—(к5г +6*5); IV' = (А5, +6*5);
'12 6ЯУ '
6 3 3 5тах
ънгьъ ьн
7о> = 5 С01,4 = -®2,3 =
24 4
198
Глава 2.3. НЕСУЩИЕ СИСТЕМЫ И КУЗОВА
Продолжение табл. 2.3.1
Сечение
Расчетная формула
V
<5^
V
Ь
N
V ау/\
К ^
2
V
1
._.
Ь
н
Р = Ъ(И + 2Ь); с = 0; / =
Н+2Ь
2
/ =^_(А + б*); IV = — (Н + 6Ь);
7 12 6Я
/, =— ГвЛ2 +Л82\ Ж, = —
12 ^ ^ 12
8Й+-82
12 А+24
НЬ(Н + *)
*2А
со1 =0)а = ■ > ю? = ©ч =
2(Л + *) 2(Л + 2*)
1§2а =
Ш2А
Л3 +6к2Ь-ЪЬЪ -ИЬ1
> ^М,У ~ "
1
(',+/*):
л-7*
со§2а
Ц.И
-1.. 1
I
_ь
1к-
/7 = б(А + 2А + 2^); с= ^ * ^ ;
И + 2Ь + 2к1
^ГзА2(^ + 2А1)-8Л131
; ^в=-
А2(А + 6* + бА1)+4А12(ЗА + 2А1) с+ 0,56
862 Ь(Ь + 2Н) + 2Н1(2Ь^ЗН) 1у
У 3 И + 2Ь + 2Н{ ' УН а-с + 0,581
/^ = — [~А2 (Л + 6Д + 6/^) + 4/^(3/1 + 2/^)1;
_ 5Л2(Л + 6^ + 6Л1) 4И?(Зк + 2к1)
ТУ = "т* »
6 А + 2/^
А + 2/^
/кр = —53(А + 2А + 2Л1); И^р = — ^ + 24 + 2/^);
2
/в = — [~2*3 - бЬ2а + (А + 64)а21 +
+ ^[зА2(* - а)2 - 6А(У - а2^ +4^(4 + *)2];
со2 =-(05 = (^~Д)' ^З = "~й)4 =~"л
РАМЫ ГРУЗОВЫХ АВТОМОБИЛЕЙ
199
Продолжение табл. 2.3.1
у Ч
г
!= г}
7,
1
1
ь
в '
II
Г = 2Ь(к + Ь)\ с = 0;1у= (Ь+ЗЬ); 1Уу = (И+ЗЬ);
6 ЗН
гьь2и2
1г = (Ь+Зк); ЦТ = {Ь+Ък); I =
6 ЪВ ' * Ь+к
•; % =гььк
„ л г *^36 ™ *0»
^ = яД5; с = 0; /у ; \Уу = ;
' 8 ' 4(0 + 8)
я^8 _ я#38 „ яД36
г ~ ~ ' "г ~
я/>28
8
4(^+5);/кР= 4 ;ЖкР= 2
Для рам массовых двух- и трехосных
автомобилей применяют лонжероны в виде
открытых тонкостенных профилей. Наиболее
распространенная и рациональная форма
сечения лонжерона - швеллерная, с постоянной
по сечению толщиной. Лонжероны с сечением
такой формы способны воспринимать
действующие нагрузки, при этом обеспечивается
удобство компоновки подвески и других
агрегатов.
Ограниченное применение, в основном в
мелкосерийном и единичном- производстве;
находят лонжероны с сечением I- и 2-
образной формы. Для сварных рам
большегрузных карьерных самосвалов и других
специальных автомобилей используются
лонжероны с закрытым профилем прямоугольного и
сложного сечения.
Лонжероны могут иметь постоянную или
переменную высоту сечения по длине. На
автомобилях массового производства, как
правило, устанавливают рамы с штампованными
лонжеронами переменной высоты, с
максимальными размерами сечения в наиболее
нагруженной части. Таким образом
обеспечивается более рациональное распределение и
использование металла. У автомобилей
единичного и мелкосерийного производства
лонжероны чаще всего изготовляют из
горячекатаного проката или гнутого профиля с постоянной
высотой сечения. Лонжероны могут иметь
изменяемую геометрию в плане, что вызвано
компоновочными соображениями, например,
необходимостью увеличения ширины в месте
установки двигателя, соблюдения размера
колеи и т.д.
Для увеличения местной и общей
прочности и жесткости лонжеронов, по
необходимости, в них вводят усилители пластинчатого,
уголкового или швеллерного сечения, которые
при помощи заклепок, болтов или сварки
соединяют с лонжеронами. В некоторых
случаях лонжероны усиливают диафрагмой,
устанавливаемой от стенки лонжерона на
расстоянии не более 2/3 ширины полки.
Целесообразность применения местного усилителя
оправдана, если его общая длина не меньше 4-5
длин перекрываемой опасной зоны лонжерона
и* при этом происходит плавное изменение
момента инерции сечения относительно
горизонтальной оси.
Поперечины рамы обеспечивают
необходимую ее геометрию в плане, а их тип, число
и способ соединения с лонжеронами в
основном определяют угловую и поперечную
жесткость рамы. Кроме того, некоторые
поперечины выполняют дополнительные функции опор
различных агрегатов, например, двигателя,
кабины, гидроподъемника платформы,
реактивных штанг, буксирного устройства и др.
Поперечины открытого, полузакрытого и
закрытого типов изготовляют методом холодной
штамповки, а чаще из проката или гнутого
профиля.
Поперечины открытого и полузакрытого
типа обладают сравнительно небольшой
крутильной и поперечной жесткостью, поэтому
их крепят к полкам лонжеронов. При этом
нагруженность узловых соединений
оказывается достаточно высокой и приходится
применять ряд мер для увеличения запаса прочности
узлов, например использовать более
высокопрочные стали. Поперечины закрытого типа
при сравнительно небольших размерах
поперечных сечений обладают высокой жесткостью
и крепятся только к стенкам лонжеронов.
Нагруженность узловых соединений сильно
зависит от интенсивности изменения момента
инерции поперечин в зоне их соединения с
лонжеронами, поэтому поперечины обычно
имеют плавно изменяющееся по длине
сечение. Для снижения нагруженности поперечин
и лонжеронов предпочтение отдают более
равномерному расположению поперечин.
В зависимости от вида соединения
лонжеронов с поперечинами конструкции рам
200
Глава 2.3. НЕСУЩИЕ СИСТЕМЫ И КУЗОВА
делятся на клепаные, болтовые и сварные. В
клепаных и болтовых рамах поперечины
крепятся к полкам или стенкам лонжеронов
непосредственно или через косынки. Для
заклепочных соединений внахлестку рекомендуемое
отношение диаметра й заклепки к толщине
металла должно быть не менее 2 - 2,5. При
однорядном расположении заклепок
расстояние между соседними заклепками должно
быть не менее Ъй, а при двухрядном
шахматном расположений - не менее 4*/, расстояние
от оси отверстий до края полки лонжерона -
не менее (2,5 - 3){/, до края приклепываемой
поперечины или косынки - не менее (1,5-2)*/.
В сварных рамах для снижения
концентрации напряжений соединение лонжеронов с
поперечинами осуществляется только через
косынки. При комбинированном типе
соединений косынка соединяется с поперечиной,
например сваркой, а с лонжероном - при
помощи заклепок или болтов. Наиболее
эффективными сварными соединениями поперечин
и лонжеронов с косынками являются
кольцевые швы, выполненные электродуговой
сваркой в среде углекислого газа, и рельефното-
чечные, полученные на специальной
сварочной машине. Рекомендуемый диаметр
отверстий В в косынках под кольцевые швы - не
менее 30 ... 35 мм, расстояние между осями -
не менее (3 - 3,5)Д а от осей отверстий до
кромок сварных элементов - не менее 1,5 А
В табл. 2.3.2 приведены данные по
механическим свойствам сталей, применяемых для
изготовления автомобильных рам.
2.3.2. Стали, применяемые для изготовления элементов рам грузовых автомобилей
Сталь
08кп, 08пс, 08Фкп
15кп, 15, 15пс
20кп, 20
25кп, 25, 25пс
20Л
25Л
ЗОЛ
35Л
09Г2
12ГС
10ХСНД
15ХСНД
19ХГС
зот
15ГЮТ
12Г2АФ
17Г2АФ
20ГЮТ
16Г2САФ
35
12ГНЗМФАЮДР
°т
не мене
200
230
250
280
220
240
260
280
310
320
400
350
390
320
340
400
500
450
480
320
700
ав
,е, МПа
330
380
420
460
420
450
480
500
450
470
540
500
560
450
480
500
600
550
610
540
820
5,%
33
27
25
23
22
19
17
15
21
26
19
21
18 - 20
17
17
22- 23
20
17
26-28
20
12 - 14
Рекомендуемые для изготовления элементы
рам, примечания
П сложной формы, ХШ, ХС
П сложной формы, ХШ, ХС
П, У, К, ХШ, ХС
Л, П, УШ, ХС
Кронштейны, ХС
Кронштейны, УС
Кронштейны, УС
Кронштейны, УС
П, У, К, УШ, ХС
П, У, К, ХШ, ХС
Л, П, У, К, УШ, ХС
Л, П, У, К, УШ, ХС
Л, ПШ, УС, горячая штамповка
Л, УШ, ХС
Л, УШ, ХС
П, УШ, ХС
Л, П, УШ, ХС
Л, У, УШ, УС
Л, П, УШ, УС
Трубчатые П
Л, П, К, У сварных рам карьерных само-
свалов
Примечание: Л- лонжероны; П - поперечины; У - усилители; К - косынки; ХШ -
хорошая штампуемость; УШ - удовлетворительная штампуемость; ПШ - плохая штампуемость; ХС -
хорошая свариваемость, без ограничений; УС - удовлетворительная свариваемость.
Для повышения прочности и снижения
массы рамы лонжероны и отдельные высоко-
нагруженные элементы поперечин могут быть
изготовлены по специальным технологиям
термоупрочненными с пределом текучести до
77 МПа. Долговечность термоупрочненных
элементов рамы повышает механический
наклеп дробью. В особых случаях при строгих
ограничениях массы автомобиля элементы
рамы могут быть изготовлены из легких
высокопрочных термообработанных сплавов и
неметаллических композитных материалов. Так,
применение высокопрочного алюминиевого
сплава с пределом текучести 320 ... 460 МПа
при обеспечении прочности и жесткости
стальной рамы позволяет снизить ее массу на
21 %.
Проектирование и доводка рам
осуществляются поэтапно. При эскизной
компоновке автомобиля определяются размеры
основных сечений лонжеронов, конфигурация и
размеры поперечин, их соединения с лонже-
РАМЫ ГРУЗОВЫХ АВТОМОБИЛЕЙ
201
ронами, места крепления агрегатов. Размеры
основных сечений лонжеронов рассчитывают
для случая симметричного нагружения рамы
вертикальной системой сил, сведения о
которых берутся из массовой спецификации
автомобиля. Приближенные методы, построенные
по теории сопротивления материалов,
учитывают следующее условие прочности для этого
случая нагружения:
°сх* Л ч. (2-3.1)
где аст - нормальные напряжения в сечении
лонжерона; ат - предел текучести материала;
К - коэффициент безопасности, для рам
грузовых автомобилей принимается К= 1,3 - 1,8;
Ка - коэффициент динамичности,
принимается Кд = 2 - 3.
При заданной толщине стенки
лонжерона, определенной по критериям устойчивости
профиля, рекомендуемое отношение высоты
сечения к ширине полки 3 - 3,5.
Поверочные и оптимизационные расчеты
рамы ввиду их высокой трудоемкости
проводятся с применением ЭВМ достаточно
большой вычислительной мощности. При этом
используются различные расчетные схемы,
базирующиеся на применении известных
методов сопротивления материалов,
строительной механики, теории тонкостенных
стержней. Наиболее эффективно применение
методов конечных элементов, которые являются
универсальными и обеспечивают сколь угодно
подробное изучение
напряженно-деформированного состояния рамы при любых видах
статического и динамического нагружения.
Модели рам строятся с использованием
различных конечных элементов, например,
стержневого и оболочечного типов. Уточненные
расчеты рам на прочность и жесткость
проводятся для трех основных случаев, достаточно
полно отражающих условия нагружения рамы
при движении автомобиля по дорогам и
бездорожью: изгиб в вертикальной плоскости;
кручение; изгиб в горизонтальной плоскости;
Для первого случая условие прочности
(2.3.1). Для второго и третьего случаев условие
прочности может быть одинаковым, так как
общие деформации кручения рамы и ее изгиба
в горизонтальной плоскости достаточно тесно
коррелированы:
где акр и аг - нормальные напряжения в
элементе рамы, возникающие соответственно при
кручении и при изгибе в горизонтальной
плоскости.
Общее условие прочности для* указанных
случаев
стст "*" ак ~*~ аг - ат / К-
Кроме расчетов рамы для рассмотренных
видов нагружения проводятся расчеты
отдельных элементов от местных нагрузок,
например: лонжерона в зонах крепления топливного
бака, запасного колеса, буксирной поперечины
от действия продольных нагрузок со стороны
прицепа и др. [1, 2, 6 - 9].
После изготовления опытных образцов
осуществляются всесторонние испытания рам
и отдельных их элементов. Испытания
проводятся на натуральных образцах. Для
исследования крупногабаритных конструкций,
например рам большегрузных карьерных
самосвалов, испытания проводятся на масштабных
моделях. Испытания на специальных стендах
включают:
многоканальные статические тензометри-
ческие исследования
напряженно-деформированного состояния комплектной рамы при
различных видах нагружения. При этих
испытаниях определяются такие характеристики
рамы, как линейная и угловая жесткость и
распределение ее по длине, деформации и
напряжения в элементах рамы;
испытания на сопротивление усталости
комплектных рам и отдельных наиболее
ответственных и нагруженных элементов.
Испытания проводятся при режимах с постоянной
амплитудой нагружения и по специальным
программам, позволяют выявить слабые места
конструкции, оценить долговечность и
прогнозируемый ресурс рамы, параметры,
характеризующие живучесть конструкции.
По результатам испытаний
корректируется техническая документация на раму, при
необходимости проводятся повторные
стендовые испытания.
Заключительным этапом в создании и
проверке конструкции рамы являются ее
испытания в составе комплектного автомобиля
на специальных стендах и на дорогах
автополигона, они включают [1, 10 - 12]:
статические испытания автомобиля на
стенде с имитацией симметричного и косо-
симметричного вертикального нагружения.
При этих испытаниях оценивается жесткость и
прочность несущей системы с учетом
установленных на раме узлов и агрегатов;
динамические испытания автомобиля на
стенде в широком диапазоне амплитуд и
частот нагружения, в том числе при задании
случайных процессов нагружения. При этих
испытаниях оцениваются динамические
напряжения в наиболее нагруженных зонах и
статистические параметры их распределений,
определяются амплитудно-частотные и фазочастот-
ные характеристики по измеряемым
параметрам (прогибы, углы закручивания,
напряжения, ускорения), формы колебаний рамы при
202
Глава 2.3. НЕСУЩИЕ СИСТЕМЫ И КУЗОВА
различных частотах, взаимное влияние
агрегатов;
дорожные режимометрические
испытания автомобиля на дорогах автополигона и в
реальных условиях эксплуатации. При этих
испытаниях измеряются параметры,
характеризующие нагруженность рамы, результаты
этих испытаний используются для расчетной
оценки долговечности рамы и составления
программ стендовых испытаний на
сопротивление усталости, которые могут проводиться и
в дальнейших работах по доводке и
совершенствованию конструкции рамы;
испытания автомобиля на треке со
сменными неровностями с окончательной
проверкой прочности и работоспособности рамы.
2.3.2. КУЗОВА ЛЕГКОВЫХ АВТОМОБИЛЕЙ
По форме и размещению пассажиров
кузова могут быть следующих типов:
седан двух- или четырехдверный,
четырех- или пятиместный;
универсал (с резко заканчивающейся
задней частью) трех- или пятидверный;
купе двухместный, с дополнительными
стесненными местами сзади;
лимузин (высококомфортабельный) со
стеклянной перегородкой, отделяющей
водителя от пассажиров, трех- и пятиместный, с
дополнительными откидными сиденьями.
Другие варианты кузовов отличаются
различными конструктивными особенностями:
со складывающимися или убирающимися
крышами, опускающимися стойками,
открытые и т.д.
По внутренней и наружной отделке
кузова могут быть обычного исполнения и
"люкс", отличающиеся улучшенной отделкой
лакокрасочного покрытия и интерьера,
обеспечивающими более высокую
комфортабельность автомобиля.
По конструктивным особенностям
(принимаемым технологическим решениям,
материалам, объемам производства) кузова делятся
на каркасные и несущие. В условиях
массового производства применяются в основном
несущие конструкции кузовов, изготовленные
из листовой стали. Каркасный кузов
представляет собой пространственную стержневую
несущую систему, выполненную в основном из
замкнутых тонкостенных профилей, к
которым тем или иным способом прикреплены
наружные и внутренние панели, не
являющиеся несущими элементами конструкции. В
несущих кузовах несущая система образована в
результате жесткого соединения каркаса (в
основном электроконтактной сваркой) с
внутренними и наружными панелями и
различными усилителями в единое целое. Несущие
кузова обеспечивают наибольшие прочностные
показатели при хорошей технологичности в
условиях массового производства, меньшей
металлоемкости и рациональном расходе
металла.
Основным материалом, применяемым
для изготовления корпусов кузовов, является
низкоуглеродистая качественная сталь с
содержанием углерода 0,08 %, имеющая
хорошую штампуемость и свариваемость,
толщиной 0,6 ... 1,5 мм.
Для изготовления ручек дверей,
декоративных деталей, облицовок радиаторов и фар
применяют литые цинковые и алюминиевые
сплавы. Широкое использование в отделке
кузова, панелей приборов, систем отопления и
вентиляции находят различные пластмассы,
отличающиеся высоким качеством,
декоративностью и малой материалоемкостью. Общая
масса пластмассы, используемой при
производстве одного кузова, достигает 40 ... 60 кг.
Для снижения уровня шума в салоне и
создания хорошей теплоизоляции применяют
различные шумо- и теплоизоляционные
материалы в виде плит, матов, представляющих
собой различные слоистые конструкции из
естественных и синтетических ват и листов на
битумной основе. Для отделки интерьера
служат синтетические ткани и пленки различной
фактуры, жесткие и мягкие полиуретаны,
мастики.
Особенность проектирования кузовов
состоит в умелом объединении в одно целое
сведений и требований из многих отраслей
знаний. Круг вопросов, которые необходимо
решить в начальной стадии проектирования,
охватывает эргономику, эстетику,
аэродинамику, механику, технологию, экономику.
Компоновка кузова тщательно оценивается на
натурном посадочном макете, одновременно
формулируется основная конструктивная
концепция будущего кузова, отрабатывается
технологическая возможность его производства и
проводится экономический расчет с широким
применением ЭВМ. Заложенные в память
машины основные нормативные требования и
результаты анализа других конструкций
кузовов позволяют уже на ранней стадии
проектирования просмотреть различные варианты
компоновок и конструктивных решений,
оптимальных для разрабатываемого кузова.
К основным нормативным требованиям,
учитываемым при проектировании кузова,
относятся требования к пассивной
безопасности конструкции (уменьшению для водителя и
пассажиров тяжести последствий при
дорожных происшествиях): ремням безопасности,
жесткости кузова, безопасности интерьера,
рулевого колеса, щитка приборов, дверным
замкам, обзорности с рабочего места водителя
и др.
Дальнейшие этапы работы по созданию
формы воплощаются в эскизах, масштабных и
натурных макетах. Тщательная проработка
формы и особенно ее деталей, определяющих
особенность формы, является особенно
важной.
Точное воспроизведение поверхности
кузова на макете автомобиля необходимо для
проведения прочностных и аэродинамических
расчетов, разработки штамповой и
инструментальной оснастки. Работа эта облегчается с
помощью комплекса ЭВМ и измерительных
машин. Применение ЭВМ позволяет
исключить трудоемкий процесс изготовления
масштабных и натурных макетов кузова, так как
полученные с помощью ЭВМ поверхности
могут быть использованы для прочностных
расчетов методом конечных элементов и
выведены на графопостроитель для разработки
конструкции кузова, а также на станки с
программным управлением.
Поверхности кузова позволяют
разработать конструкцию корпуса, представляющую
собой совокупность несущих элементов,
обеспечивающих жесткость пространственной
системы автомобиля.
Современный кузов легкового
автомобиля имеет около 400 штампуемых деталей: 5 %
крупногабаритных, 10 % крупных, 25 %
средних и 60 % малых. Штамповкой практически
можно получить детали любой формы. В
процессе проектирования рассматриваются
вопросы формообразования деталей кузова и способ
их соединения. Основным способом
соединения деталей является контактная сварка.
Необходимо предусмотреть возможность
выполнения швов сварочным инструментом. При
сварке кузова насчитывается 6-10 тыс. точек
сварки. Легкость выполнения соединений
зависит от группирования деталей кузова в
сборочные единицы. Технологичность сборочных
единиц основана на подборе соответствующих
сечений деталей и правильных монтажных баз.
Интерьер кузова должен создавать
комфортабельные условия для водителя и
пассажиров. К важнейшим узлам интерьера
относятся панель приборов и сиденья. Удобство
считывания показаний приборов, размещения
рычагов и различных переключателей в
значительной степени влияет на безопасность
движения. Правильное решение этого вопроса
возможно только при обеспечении требований
эргономики.
Конструкция сидений должна отвечать
требованиям эргономики и безопасности:
иметь различные регулировки по длине и углу
наклона подушки и спинки, подголовники,
исключающие травму шейных позвонков при
ударе сзади. Каркас сиденья выполняется
металлическим, эластичный элемент подушки и
спинки может быть или пружинным, или
выполненным из синтетических эластичных
материалов. Обивочный материал сидений
отведет соответствующим санитарным и
эксплуатационным требованиям.
Вопросы безопасности выдвигают весьма
жесткие специальные технические требования
к кузовной арматуре, замкам, петлям, ручкам
дверей. Современные кузовные замки
являются сложными и трудоемкими в изготовлении.
Их производство связано со значительными
расходами и наличием специального
оборудования.
2.3.3. КУЗОВА АВТОБУСОВ
Характеристика. Автобусный кузов
состоит из стержневого каркаса и листовой
обшивки. Работающие элементы обшивки
обычно соединены с элементами каркаса, образуя
ряд панелей, которые при этом могут быть
плоскими или изогнутыми. Продольные
элементы основания кузова называют
лонжеронами, а поперечные элементы -
поперечинами. Продольные элементы каркаса бортов
кузова называют поясами, при этом у
автобусов выделяют пояса подоконный, надоконный
и нижний обвязочный. Продольные элементы
каркаса бортов обычно продолжаются на
передних и задних частях кузова (передка и задка).
Вертикальные элементы каркаса бортов
кузова, передка и задка называют стойками.
На участке расположения окна вертикальный
элемент называют оконной стойкой.
Продольные элементы каркаса крыши - это пояса
крыши, а поперечные элементы, которые
обычно бывают изогнутыми, - дуги крыши.
Замкнутая система, состоящая из поперечины
основания, стойки борта и дуги крыши,
является шпангоутной рамкой (шпангоутом).
Корпус, или несущая система кузова
автобуса, классифицируется по способу
восприятия статических (изгибных) нагрузок. Можно
выделить три основных типа несущих систем
кузовов: рамный, у которого статическая
нагрузка и реакции подвески воспринимаются
преимущественно рамой, эластично связанной
с кузовом (рис. 2.3.1, а); с несущим
основанием, у которого статическая нагрузка и реакции
воспринимаются преимущественно
основанием, жестко связанным с кузовом (рис. 2.3.1, б);
несущий, у которого полная статическая
нагрузка распределяется по всем его элементам
(рис. 2.3.1, в).
Масса кузова с оборудованием составляет
47 ... 53 % снаряженной массы автобуса,
собственно кузова - более 23 % снаряженной
массы автобуса для рамной конструкции кузова
без учета рамы и 34 % для несущего кузова, а
масса кузова с несущим основанием - 30 %
снаряженной массы автобуса.
Основным преимуществом рамной
конструкции является то, что она допускает
унификацию шасси автобуса с грузовым
автомобилем или с широкой гаммой автобусов
различного назначения. Недостатками ее
являются большая собственная масса и трудность ис-
204
Глава 2.3. НЕСУЩИЕ СИСТЕМЫ И КУЗОВА
юпооп
Рис. 2.3.1. Кузова автобусов:
- рамный; б - с несущим основанием; в - несущий
пользования подпольного пространства для
размещения агрегатов автобуса. Переход от
рамной конструкции к кузову с несущим
основанием (с сохранением обычных
штампованных лонжеронов) обеспечивает уменьшение
массы большого автобуса на 400 ... 600 кг, а к
полностью несущему кузову - на 1000 ... 1400
кг.
Боковая панель - основной элемент,
образующий боковину кузова. В безрамной
конструкции она выполняет функцию балки,
обеспечивающей прочность и жесткость кузова
и передающей нагрузки от верхней части
кузова на нижние элементы. Боковина состоит из
каркаса в виде стоек и продольных стержней -
усилителей, опор для пола и наружной и
внутренней панелей. Панели соединяют с
каркасом следующими способами.
1. Заклепками (обычными или
потайными); при этом процесс сборки трудно
поддается а"втоматизации и характеризуется тяжелыми
условиями труда ввиду высоких уровней шума
и вибрации. Обычные заклепки вытесняются
специальными типа Ауёе1ок (безударная
клепка), при использовании которых соединение
осуществляется путем обжима кольца заклепки
пневматическим инструментом. Способ,
сочетающий использование эпоксидного
структурного клея и заклепок, позволяет увеличить
работоспособность соединения при работе на
сдвиг.
2. Точечной сваркой; при этом
сохраняются преимущества монококовой
конструкции, но появляются проблемы деформации
крупногабаритных панелей в процессе сварки
и (в дальнейшем) коррозии. Сварочный
процесс, как правило, автоматизирован
(применяют роботы), а для снижения коррозии
используют цинковое защитное покрытие. Сварка
панелей и элементов каркаса осуществляется
либо при обычной температуре, либо с
нагревом с последующим охлаждением панелей.
При закреплении панелей к каркасу
вытягиваются оба конца панели, либо один
конец крепится к каркасу, а другой вытягивается
к предыдущей части боковины. При сварке с
нагревом необходимы электрические
нагреватели и вентиляторы. В местах соединения
панелей часто используется уретановое
герметизирующее вещество.
3. Применением армированных панелей
внутри конструкций; наружные поверхности
соединяются сваркой и швы покрываются
декоративными накладками.
4. Изготовлением рам сваркой из
стальных труб прямоугольного сечения,
составляющих каркасные конструкции - опору для
панелей.
Облицовку боковин изготовляют обычно
из стали толщиной 0,8 мм или дюраля. Для
боковых стоек применяют элементы открытых
2- или П-образного сечения или закрытого
прямоугольного сечения, более прочного по
сравнению с открытыми профилями. Точки
пересечения стоек и балок могут быть усилены
угольниками и косынками. Нижние части
боковин (ниже уровня пола) обычно имеют
люки для багажных отделений и доступа к
агрегатам. В продольном направлении
наружные панели перекрывают друг друга на
расстоянии двух пролетов оконной стойки в случае
применения стандартных стальных листов
размерами 0,9 х 1,8 и 1,2 х 2,4 м.
Каркасы боковин, крыши, передка и
задка сваривают обычно из прямоугольных
профилей.
Несущие основания выполняют в виде
лонжеронов и поперечин из прямоугольного
профиля либо швеллерного профиля чаще
всего сваркой. В несущем кузове элементами
основания, воспринимающими нагрузку,
являются подрамники и поперечные балки.
Масса кузова передается на оси через элементы
подвески. Сборка подрамников и поперечных
балок осуществляется клепкой и сваркой.
Клепка может производиться при обычной
температуре с помощью гидравлического
обжимного пресса, улучшающего условия труда.
Ветровое стекло очень больших размеров
некоторых автобусов, улучшающее обзорность,
вставляется непосредственно в направляющие
оконного проема. В большинстве случаев для
КУЗОВА АВТОБУСОВ
205
фиксации оконных стекол применяют
уплотняющие резиновые прокладки (Н- и
клинообразные), поглощающие вибрацию кузова и
облегчающие снятие и установку стекла, но не
обеспечивающие соответствующей
герметизации и не предотвращающие возможность
выпадения стекла. Для герметизации стекла
применяют изобутилен-изопреновый или
бутиловый полиуретановый каучук; надежность
крепления стекла обеспечивается силиконовым
каучуком. Увеличение жесткости кузова
приводит к снижению вибрации и улучшению
звукоизоляции.
В боковые окна вставляют стандартные
стекла с алюминиевой оконной рамой
непосредственно на кузов с последующей
герметизацией. Силиконовый каучук, как герметик,
применяется в виде раствора и заполняет все
пространство между кузовом и стеклом.
Герметизирующие клеи используют при наличии
ячеистой или пористой конструкции.
Получают распространение боковые клееные стекла,
приклеиваемые на поверхности стоек. Стыки
стекол закрываются декоративными
накладками. Для снижения массы кузова устанавливают
сэндвич-панели с использованием слоистых
материалов.
Тенденцией автобусного кузовостроения
является широкое использование в качестве
конструкционных материалов алюминиевых
сплавов и пластиков. Так, силовой каркас и
панели кузова изготовляют из алюминиевых
сплавов с содержанием магния, кремния,
меди, цинка, марганца, хрома, титана, свинца.
Такие сплавы помимо низкой массы, высокой
коррозионной стойкости и отделочных
свойств обеспечивают полную утилизацию
изделия после окончания срока службы
автобуса. Профили для таких кузовов получают
методом экструзии, а сборку осуществляют с
помощью стяжных и закладных элементов
болтовыми соединениями с предварительным
нанесением двухкомпонентного клея (метод
ко-болт).
Широкое распространение получают
слоистые материалы или сэндвич-панели,
заменяющие сталь. Их применению
способствует широкое использование склеивания как
метода конструкционного соединения.
Сэндвич-панель состоит из двух параллельных
пластин из стали, дюралюминия, пластиков и
расположенного между ними среднего слоя-
заполнителя из древесины, пропитанной и
формованной бумаги, пенопласта, поперечных
сот фольги, соединяемых чаще всего
склеиванием.
Наиболее перспективным можно считать
создание модульных конструкций кузовов
автобусов, которая обеспечивает:
стандартизацию и унификацию узлов
кузовов и шасси;
стандартизацию сборочных
приспособлений;
применение новых материалов
(алюминиевых сплавов, композитных
материалов и клеев) с меньшей удельной массой по
сравнению со сталью.
Основные преимущества таких
конструкций:
меньшая масса элементов кузова (в 2 - 3
раза), что приводит к снижению расхода
топлива;
уменьшение трудозатрат и стоимости при
налаженном производстве;
высокие термоизоляционные и шумоизо-
ляционные качества;
возможность получения гладких, не
требующих окрашивания поверхностей;
стойкость к коррозионным
воздействиям.
Кузова такого типа собирают из
крупногабаритных панелей, поставляемых
предприятием-изготовителем в законченном виде для
автобусов любой длины, т.е. для всего
семейства автобусов.
Расчет несущей системы кузова автобуса.
На несущую систему автобуса действуют
прежде всего статические нагрузки (вес агрегатов,
собственный вес несущей системы, полезная
нагрузка и реакции рессор), а также различные
динамические нагрузки, возникающие при
движении от неровностей дороги, при разгоне
и торможении-, на поворотах, вибронагрузки,
вызванные работой двигателя и других
агрегатов.
Вертикальную нагрузку принято
представлять в виде двух составляющих:
симметричной относительно продольной
вертикальной плоскости, проходящей по оси автобуса и
кососимметричной относительно этой
плоскости. Если конструкция симметрична
относительно продольной вертикальной плоскости,
то симметричная нагрузка вызывает
симметричную деформацию - изгиб кузова. Косо-
симметричная нагрузка вызывает кососиммет-
ричную деформацию - кручение кузова.
Необходимо отметить, что изгиб и
кручение кузова в известной мере условны и
характеризуют только деформацию кузова в
целом. Отдельные элементы кузова при этом
могут работать в условиях растяжения-сжатия,
изгиба или кручения, в зависимости от
характера приходящейся на этот элемент нагрузки и
способа его соединения с другими элементами
кузова. По аналогии с вертикальными
нагрузками можно рассмотреть также продольные и
поперечные нагрузки и свести их действия к
горизонтальному изгибу, сдвигу и др.
Статическая нагрузка действует на кузов
при всех условиях эксплуатации. Статическую
нагрузку обычно относят к разряду
симметричных, вызывающих изгиб кузова.
Имеющаяся несимметрия нагрузок обычно создает не-
большую разницу в загрузке левой и правой
сторон, влиянием которой пренебрегают.
Аналогично поступают и в случае
несимметрии конструкции кузова. У кузовов
автобусов симметрия кузова обычно нарушается
дверными проемами. Сложность расчета
несимметричных кузовов приводит к
необходимости упрощения и замены реальной системы
приближенной ей соответствующей
симметричной расчетной схемой.
Основной причиной возникновения
симметричных нагрузок являются силы
инерции подрессоренных масс, действующие на
кузов при колебаниях автомобиля на рессорах
и шинах. Если в какой-либо точке кузова
действует статическая нагрузка Р^ и
вертикальное ускорение у'/, то динамическая нагрузка
может быть получена умножением массы,
соответствующей данной статической нагрузке,
на величину ускорения
Коэффициентом динамической нагрузки
Ла/ = Л/ / Рст1 =Л / &
Коэффициент КД1 в отдельных точках
кузова имеет разные значения, однако для
упрощения расчетов его обычно принимают
одинаковым для всех точек кузова -
наибольшее значение, что повышает запас прочности
кузова. Коэффициент динамической нагрузки
определяют экспериментально путем
измерения вертикальных ускорений в различных
точках подрессоренных масс автобуса.
С учетом имеющегося в настоящее время
опыта проектирования и испытаний кузовов
автобусов принимаются следующие
оптимальные значения коэффициента динамической
нагрузки в зависимости от типа автобуса: для
городских автобусов 2,0 + 2,5; для
междугородных автобусов 1,5 + 2,0.
Суммарный перекос передних и задних
колес на дороге ад вызывает угловую
деформацию передней и задней подвесок
автомобиля на угол а„ и закручивание кузова на угол
Ок, причем
Оп + Ок = ссд.
Соответствующие углы можно выразить
через крутящий момент и угловые жесткости
подвески О, и кузова С^:
М„
МУ
ап =
——• а =
Крутящий момент
Мх
спск
При жесткости кузова больше жесткости
подвески угол закручивания невелик. Потеря
контакта с дорогой одним из колес (колесо
передней оси) является предельным случаем,
определяющим величину крутящего момента.
При ширине передней колеи оси В\ и
нагрузке на ось 0\ предельный крутящий момент
Для несущих кузовов, обладающих
высокой жесткостью, предлагаемая формула может
служить для определения расчетного режима
нагружения при кручении.
Прочность несущей системы должна
обеспечиваться при минимальной нассе
конструкции. Жесткость несущей системы тесно
связана с ее прочностью. При оценке
конструкции несущей системы условия работы
отдельных агрегатов и узлов могут существенно
зависеть от жесткости несущей системы.
Деформация несущей системы может обусловить
необходимость применения, например,
упругих опор при креплении агрегатов и узлов
автомобиля.
Механические характеристики
материалов, применяемых в конструкциях автобусных
кузовов, приведены в табл. 2.3.3.
2.3.3. Характеристики материалов, применяемых в конструкциях автобусных кузовов
Материал
Ст0,8
20
10Г2
Д-16АТ
АВТ-1
08ГСЮТ
09Г2
16ГС
Временное
сопротивление ов,
МПа
300
400
430
415
280
510
450
500
Предел
текучести а1,
МПа
180
240
250
275
210
360
310
330
Относительное
удлинение, %
31
24
22
10
10
22
21
21
Модуль
упругости 2?-Ю-5,
МПа
2,1
2,1
2,1
7,2
7,2
2,1
2,1
2,1
Модуль
сдвига (МО-4,
МПа
8
6
8
2,7
2,7
8
8
8
СИСТЕМА. ОБЕСПЕЧЕНИЯ МИКРОКЛИМАТА АВТОМОБИЛЯ
207
Оценку прочности элементов кузова
производят по допускаемым напряжениям,
вычисленным исходя из предела текучести
материала кузова. При одноосном растяжении
или сжатии коэффициент безопасности
принимают 1,5.
В тех деталях кузова, испытывающих
сложное напряженное состояние,
характеризующееся нормальным а и касательным
напряжением х, при оценке прочности
используют эквивалентное напряжение, вычисляемое
на основании энергетической теории
прочности по формуле
-Л*7з7.
Эквивалентное напряжение затем
сравнивают с допускаемым напряжением стдоп, т.е.
В частном случае, когда действуют одни
касательные напряжения, условие прочности
будет иметь вид
х^стдоп/^3.
В общем случае при наличии
нормальных напряжений а* и су и касательного
напряжения т эквивалентное напряжение в
соответствии с энергетической теорией прочности
можно вычислить по формуле
4
ах+^-ст;са, +3*2'
Создание несущих систем автобусов
осуществляется параллельно-последовательным
выполнением конструкторских, расчетных и
экспериментальных работ. Сначала выбирают
тип несущей системы кузова и профили
основных элементов каркаса. Составляют
весовую характеристику автобуса. Первоначальный
расчет проводится приближенными методами.
После разработки эскизного проекта
выполняются поверочные расчеты каркаса кузова, а
затем оптимизационные расчеты несущей
системы кузова с обшивкой и полом. Эти расчеты
с применением метода конечных элементов
весьма трудоемки и требуют ЭВМ высокой
мощности. После получения чертежной
документации изготавливают опытные образцы
кузовов автобусов различной комплектации,
которые подвергаются стендовым тензометри-
ческим испытаниям с целью определения
напряженно-деформированного состояния
кузова. Определяются угловая жесткость кузова,
прогибы основания по длине автобуса и
напряжения в наиболее важных элементах
кузова. При наличии слабых мест конструкции
они усиливаются и проводятся повторные
статические тензоиспытания с последующей
корректировкой технической документации.
На стадии проектирования может быть
проведена оптимизация конструкции по
металлоемкости и прочности.
Заключительным этапом являются
дорожные режимометрические испытания
автобуса на дорогах автополигона и в реальных
условиях эксплуатации.
2.3.4. СИСТЕМА ОБЕСПЕЧЕНИЯ МИКРОКЛИМАТА
АВТОМОБИЛЯ
Для обеспечения безопасности движения
и достижения необходимых параметров по
температуре, влажности и скорости потока
воздуха в зоне размещения водителя и
пассажиров автомобиль оборудуют системой
обеспечения микроклимата (СОМА).
Классификация СОМА представлена на рис. 2.3.2.
Для выбора типа СОМА проводят
тепловой расчет кузова. Необходимое количество
подводимой теплоты (при отоплении),
отводимой (при охлаждении) и воздуха (при
вентиляции) СОМА принимается по тепловому
балансу кабины, салона или кузова [1].
Тепловые потоки С через поверхности и за счет
воздухообмена обитаемого объема кузова
определяются на основании заданных по
нормативным документам [2, 3] параметров
микроклимата и условий внешней среды,
принимаемых по справочным материалам.
Для установившегося теплообмена
системы кузов - внешняя среда тепловой баланс
выражается в виде:
Со = кср V + (УрЫ 13,6) + ?ср + дл
<7о>
где
*/ =
теплопередачи
1 ^5,
- средний коэффици-
1
кузова,
Т-1
Вт/(м2-°С);
1_ан
- коэффициент
/ «вн.1
теплопередачи элементов ограждения кузова,
Вт/(м2-°С); 0&Н и Овл - соответственно
наружный и внутренний коэффициенты теплоотдачи
ограждений кузова, Вт/(м2-°С); 8/ и X/ -
соответственно толщина (м) и коэффициент
теплопроводности [Вт/(м°С)] отдельных
однородных слоев ограждений кузова;
Р$ = ^. 1 - общая площадь внутренней
поверхности кузова, включающая площади Р1
отдельных поверхностей ограждений, м2;
А/ = ±/вн ± /н + А/^ - перепад температур
внутри (/Ы1) и снаружи (/н) кузова,
принимаемых по нормативной документации [2, 3];
208
Глава 2.3. НЕСУЩИЕ СИСТЕМЫ И КУЗОВА
Отопление
Зависимое от
двигателя
автомобиля
/
\
Жидкостное, за счет теплоты
охлаждающей системы
двигателя
Жидкостное, за счет теплоты
смазочной системы
двигателя
Жидкостное и воздушное,
за счет теплоты выпускных
газов
Независимое от
двигателя
автомобиля
V
\
Воздушное, от сгорания
топлива
Жидкостное, от сгорания
топлива
Система
обеспечения
микроклимата
автомобилей
Вентиляция
^^^^
^^
Естественная, через
открытые проемы кузова
(люки, форточки, окна,
двери)
Принудительная, от работы
электровентиляторов
Кондиционирование (охлаждение)
воздуха за счет работы фреонового
компрессора с приводом от
основного или вспомогательного
двигателя
/
\
Объемное, равномерное
охлаждение воздуха в объеме
кузова
Частичное, локальное
(местное) охлаждение
воздуха в зоне головы,
туловища человека
Интегральное, объемный
кондиционер совмещен с
зависимым жидкостным
отопителем
Рис. 2.3.2. Классификация систем обеспечения микроклимата автомобиля
2.3.4. Данные расчета необходимой холодопроизводительности кондиционеров колесных машин (стационарный режим)
Параметры
Перепад температур, °С, А/ = Гн - /вн
Теплоприток через ограждение кузова, Вт,
& = КР0(М + Д/э)
Общая площадь поверхности ограждения Р0у м
Теплоприток от солнечной радиации через
остекление, Вт, 02 = Рс1с + Рт>1х>
Общая площадь поверхности остекления, м
Теплоприток с наружным воздухом, Вт,
бз = УрЫ
Подача наружного воздуха К, м/ч
Теплоприток от людей, Вт, б*
Число мест в автомобиле
Общий тепловой поток, Вт,
& = а + а + а + &
Необходимая холодопроизводителъность
кондиционера, кВт
Класс
легкового автомобиля
малый
22
1603
12
394
3
891
100
580
5
3468
3,5
средний
22
2005
15
660
4
929
120
596
6
5290
5,5
высший
22
2807
21
1041
5,3
2250
140
812
7
6910
7
Число мест
в кабине грузового автомобиля
одно
10
786
7
244
1,45
137
20
116
1
1283
1,5
два
10
1128
10
255
1,5
274
40
232
2
1889
2
три
10
1349
12
522
2,5
411
60
396
3
2678
3
три и
одно
спальное
22
2799
15
522
2,5
964
60
396
3
4681
5
Тип автобуса
микроавтобус
17
2691
24
1009
5
2424
220
1276
11
7400
7,5
городний
10
4605
85
1392
11
6125
450
5220
45
17342
17,5
городской
7
2366
91
4338
22
15159
2200
12760
100
34623
35
Примечание: А/э- эквивалентный перепад температур; Рс и Гв - площади поверхностей, находящихся под действием прямой и
рассеянной солнечной радиации; /с и /0 - потоки соответственно прямой и рассеянной солнечной радиации; А/ = /н - /вн - расчетная разность
энтальпий наружного и внутреннего воздуха; р - давление воздуха
210
Глава 2.3. НЕСУЩИЕ СИСТЕМЫ И КУЗОВА
Д^ = 1К I ссн - дополнительный перепад
температур, действующий на ограждение
кузова с коэффициентом поглощения К от потока
солнечной радиации У, Вт/м2 [4]; для зимы
^вн > 0, /н < 0 и А// = 0; для лета при
кондиционировании /^ > 0, /н > 0, /н > /вн, А// > 0
и при вентиляции Гт > 0, 1нор > 0, 1ви> /нор»
А^ > 0; V - расход наружного воздуха (м3/ч)
плотностью р (кг/м3); А/ = /н " 'вн " разность
теплосодержаний наружного и внутреннего
воздуха, определяемых по I - й диаграмме [5]
по принятым для расчета значениям
температур /н и /вл, кДж/кг; при отоплении
принимают А/ = 1,0068Д/; дср = Т^//// -
теплоприток с солнечной радиацией, Вт; при
отоплении принимают дср = 0; дл = ^в + ^пя -
теплоприток от людей, Вт; дв - теплоприток от
водителя [5]; дп - теплоприток от пассажиров
[5]; п - число пассажиров; д0 - теплоприток от
оборудования, находящегося внутри
автомобиля.
Для учета динамики прогрева
(охлаждения) воздуха в кузове при расчете
мощности СОМА необходимо учитывать
тепловую инерцию кузова, определяемую массой
кузова и внутреннего оборудования.
Ориентировочно количество теплоты может быть опре-
делено по формуле, кДж,
т + \
где 2^т1с1 " сУмма произведений масс
кузова и оборудования на удельную теплоемкость
частей кузова и оборудования; т - время
прогрева (охлаждения), ч; т - экспериментальный
коэффициент, принимаемый по данным
испытаний аналогичных по теплоизоляции
кузова автомобилей.
Примеры расчета теплопритоков для
СОМА при кондиционировании воздуха даны
в табл. 2.3.4 для стационарного режима (без
Учета &п)-
После определения необходимой
мощности СОМА выбирают или проектируют новые
отопители и кондиционеры, или их составные
элементы: радиаторы отопителей, испарители
и электровентиляторы. В табл. 2.3.5 приведены
параметры независимых воздушных
отопителей и жидкостных отопителей-подогревателей
автоматического действия, которые могут
включаться в заданное время от механического
или электронного таймера, помещенных
внутри автомобиля, а также от радиокоманд
коротковолнового передатчика, находящегося на
расстоянии до 1 км от места стоянки
автомобиля.
2.3.5. Характеристика независимых отопителей
Модель
отопителя
015
030
968-8106
112.8106
Расход
топливо-
носителя,
мЗ/ч
75
130
150
Мощность, кВт
Масса,
кг
Напряжение, В
Длина х
ж ширина х
х высота,
мм
Бензиновые воздушные отопители
2,0
3,5
5,5
7,1
12
12
398x122x218
504x142x247
Воздушные отопители на дизельном топливе
3,5
7,1
12/24
504x192x215
Потребляемая
мощность,
Вт
36
42
Примечание
Спецкузова
техпомощи,
санитарные
автомобили
ЗАЗ-968М,
ЛуАЗ-969,
санитарные
автомобили,
спецкузова
техпомощи
ГАЗ-4509,
"Урал-4320",
спецкузова
техпомощи
ЭРГОНОМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
211
Продолжение табл. 2.3.5
ОВ65
ОВ95
250
350
7,6
11,0
23,0
19,5
12/24
24
719x278x332
693x278x332
132
132
Краз-260,
спецкузова
техпомощи
ЛАЗ-699,
спецкузова
техпомощи
Жидкостные отопители-подогреватели на дизельном топливе
15.8106.01
14.8106
14.8106.01
1600
л/мин
5200
5200
11,6
23,3
30
15
25
25
12/24
24
24
584x205x228
680x240x279
680x240x279
85
194
234
МАЗ-6422
ЛАЗ-4202
ЛиАЗ-5256
Поскольку компактности и степени
комфортабельности в автомобилях в последние
годы придают все большее внимание,
возникли более сложные автоматические
интегральные кондиционеры, включающие в одном
блоке отопитель и охладитель (испаритель
фреона) с применением электронного блока
автоматики, обеспечивающей регулирование
заданной температуры в зависимости от
показаний датчиков снаружи и внутри автомобиля.
Схема интегральной установки
кондиционирования воздуха представлена на рис. 2.3.3.
Ш
1 Ш
Ш
ш
Рис. 2.3.3. Схема интегрального кондиционера:
1 - электровенгилятор; 2 - испаритель;
3 - радиатор отопителя;
/ - воздух из кабины; II - наружный воздух;
III - к обогревателю стекла;
IV и VI- к боковой решетке;
V - к серединной решетке; VII - к отопителю
Для кузовов-фургонов применяют
независимые отопители, работающие на топливе,
которое, как правило, используется для
двигателя автомобиля. Для очистки воздуха от пыли
в кузовах-фургонах служат
фильтро-вентиляционные установки. Одновременно с
очисткой воздуха от пыли фильтро-вентиляционная
установка предназначена для создания
избыточного давления в кабине или кузове.
Избыточное давление предотвращает засасывание
воздуха в кабину через различные щели и
неплотности. Избыточное давление Ар зависит
от производительности фильтро-
вентиляционной установки и степени
уплотненности, или суммарной (эквивалентной)
площади Гэ неуплотненных мест. Между ними
существует зависимость
я =
0,36цв>/2$Д/>/рв '
где С - подача воздуха в кабину (объемный
расход нагнетаемого воздуха), м3/ч; Цд -
коэффициент расхода воздуха, определяемый
эмпирически для различных типов автомобилей;
для обычных уплотнений кабины щ = (0,55 ...
0,65), м^/с; Ар - перепад давлений; рв -
плотность воздуха, кг/м3; для обычных
условий рв = 1,205 кг/м3.
Используя приведенную зависимость
выбирают производительность С
фильтро-вентиляционной установки или принимают меры к
уменьшению эквивалентной площади Гэ
исходя из необходимости обеспечения требуемого
избыточного давления. Опытно установлено,
что оно должно быть в пределах 25 ... 30 мм
водяного столба.
Для охлаждения воздуха в жаркое время
применяют кондиционеры фреонового типа.
Перспективным озонобезопасным фреоном
для транспортных систем кондиционирования
признан К-134а.
2.3.5. ЭРГОНОМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СОЗДАНИЯ
АВТОМОБИЛЯ
Эргономическое обеспечение (ЭО)
является обязательным элементом процесса
разработки новой конструкции автомобиля. ЭО
конструкции направлено на повышение
эффективности, безопасности и удобства
эксплуатации автомобиля и предусматривает
оптимизацию следующего:
распределения функций между водителем
и техническими средствами;
физической, физиологической и
психологической нагрузок на водителя;
условий его труда.
Основными элементами процесса
создания ЭО являются:
212
Глава 2.3. НЕСУЩИЕ СИСТЕМЫ И КУЗОВА
определение влияния особенностей
конструкции разных моделей автомобилей на
функциональное состояние, заболеваемость,
травматизм, эффективность работы водителя и
на другие негативные стороны;
разработка эргономических требований к
перспективным моделям и типовых
технологий реализации эргономических требований в
конструкциях;
психо-физические,
санитарно-гигиенические, биофизические, циклографические,
экономико-статистические исследования
трудовой деятельности водителей;
опросы водителей и экспертные оценки;
измерения геометрических параметров
рабочих мест водителей и мест пассажиров,
параметров микроклимата, уровней шума и
вибрации, содержания вредных веществ в
воздухе кабины и салона в условиях эксплуатации
и др.;
стендовое, натуральное и математическое
моделирование работы водителя;
нормативные требования и способы
реализации этих требований в конструкциях.
Основные эргономические требования к
автомобилю приведены в табл. 2.3.6.
Значительная часть эргономических требований,
учитывающих функциональную специфику
различных типов автотранспортных средств, в
настоящее время в нормативных документах
отсутствует и определяется эмпирически в
процессе конкретной модели автомобиля.
2.3.6. Эргономические требования к автомобилю
Номенклатура требований
Характеристика, определяющая требование
Пространство для входа,
прохода, выхода, выполнения
вспомогательных рабочих операций
Поза тела при движении
автомобиля
Досягаемость органов
управления и регулирования
Обзорность
Отображение информации
Освещение и сигнализация
Быстродействие выполнения
основных рабочих операций
Быстродействие выполнения
вспомогательных рабочих
операций
Число пользователей с разными антропометрическими
данными, статическая и динамическая поза которых при входе,
проходе, выполнении вспомогательных рабочих операций в
автомобиле, выходе находится в диапазоне требуемых
(физиологически оптимальных или допустимых) величин
Число пользователей с разными антропометрическими
данными, статическая и динамическая поза которых при
управлении (поездке в качестве пассажира) должна находиться в
диапазоне физиологически оптимальных или допустимых
величин
Состав рабочих операций, реализуемых водителем при
движении автомобиля, которые должны выполняться без
изменения положения туловища и головы
Зона обзорности, свободная от помех (очищаемая,
обогреваемая, обдуваемая, свободная от сгоек) и совпадающая с
зоной расположения значимой информации в реальных
условиях эксплуатации автомобиля
Состав и характеристика эргонометрических параметров
зеркал заднего вида, средств отображения информации,
определяющих время (при заданной надежности) восприятия
информации
Состав и характеристика эргонометрических параметров
средств освещения и сигнализации, определяющих время
(при заданной надежности) восприятия информации
Время выполнения рабочих операций (группы рабочих
операций) по заданному алгоритму деятельности при
управлении автомобилем (при заданной надежности)
Время выполнения рабочих операций (группы рабочих
операций) по заданному алгоритму деятельности при
подготовке к движению, регулированию, обслуживанию (при
заданной надежности)
ЭРГОНОМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
213
Продолжение табл. 2.3.6
Распределение функций между
водителем и техническими
средствами
Силы на органах управления
Температура воздуха на рабочем
месте
Токсические вещества в воздухе
рабочей зоны
Вибрация на рабочем месте
Шум на рабочем месте
Состав и эффективность (выраженная в показателях
быстродействия при заданной надежности) средств автоматизации
управления регулирования и информационного обеспечения
Оптимальные силы воздействия на органы управления и
регулирования
Параметры микроклимата на рабочем месте (месте
пассажира) в разные сезоны года в реальных условиях эксплуатации
Концентрация токсических веществ в воздухе рабочей зоны
водителя и места пассажира для реальных условий
эксплуатации
Уровни вибрации на рабочем месте водителя и месте
пассажира для реальных условий эксплуатации
Уровни шума на рабочем месте водителя и месте пассажира
для реальных условий эксплуатации
Оценка эргономического уровня
автомобиля должна осуществляться на этапах
заводских, приемочных (государственных) и дорож-
но-контрольных испытаний.
Одним из основных эргономических
требований к автомобилю является требование к
обзорности с места водителя. Передняя
обзорность определяется размерами и
расположением зон А, Д С ветрового цикла, степенью их
очистки, размерами непросматриваемых зон и
зоной боковой обзорности вниз (рис. 2.3.4).
Значения углов, определяющих размеры и
расположение зон А, Д С, углы
непросматриваемых зон, обусловлены типом и
функциональными особенностями моделей автомоби-
^1
лей. Через зоны А и В не допускается
попадание в поле зрения водителя непрозрачных
элементов, за исключением средней и боковых
раздельных стоек переднего окна (при
составном ветровом стекле), рулевого колеса, деталей
стеклоочистителя, зеркал заднего вида,
наружных радиоантенн.
Для определения соответствия
показателей передней обзорности используются
координаты контрольных мест автомобиля и
контрольной точки посадки относительно системы
координат, применяемой при проектировании
автомобилей.
Другим важным требованием является
требование досягаемости. Все органы ручного
управления и приборы внутреннего оборудо-
ЗонаС
Рис. 2.3.4.Расположение нормативных зон
при формировании требований к передней обзорности:
1 - световой проем переднего окна;
2 - зона стеклоочистителя
Рис. 2.3.5. Положение координатной сетки,
используемой при определении параметров
досягаемости элементов рабочих мест водителей:
1 - базовая плоскость ЯЛ;
2 - координатная горизонтальная плоскость
214
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
вания автомобиля, которыми пользуются во
время движения автомобиля, должны быть
расположены в зоне досягаемости рук
водителей всех уровней репрезентативности (5 - 95),
прикрепленных ремнями безопасности.
Изменение рабочей позы не допускается. Зоны
досягаемости (рис. 2.3.5) являются двумя
трехмерными поверхностями, указывающими
границы зон размещения органов ручного
управления и приборов внутреннего
оборудования.
Координаты трехмерных поверхностей
зон досягаемости определяются табличными
значениями. Выбор зоны досягаемости
проводится с учетом расчетного значения
коэффициента компоновки и данными о
количественном составе среди мужчин и женщин,
управляющих данным транспортным
средством.
Требования к взаимному расположению
основных элементов рабочего места водителя
(сиденья, рулевого колеса и педалей) должны
обеспечивать лицам от 5 до 95 уровней
репрезентативности: рациональную рабочую позу;
обзорность с места водителя; досягаемость
органов управления и регулирования.
Рис. 2.3.6. Некоторые параметры, используемые при
компоновке рабочих мест водителей автомобилей
На рис. 2.3.6 представлены некоторые
параметры, характеризующие взаимное
расположение основных элементов рабочего места
водителя, которые определяются относительно
координат контрольных точек автомобиля и
контрольных точек посадки манекена (Я> А,
В).
Глава 2.4
ТРАНСМИССИИ
2.4.1. ТИПЫ ТРАНСМИССИЙ. РАСЧЕТНЫЕ СХЕМЫ
Трансмиссии по конструктивным схемам
различают (рис. 2.4.1): классические -
двигатель, коробка передач (силовой агрегат)
расположены спереди, ведущие задние колеса;
переднеприводные - силовой агрегат и главная
передача объединены в один блок,
расположенный спереди, ведущие передние колеса;
заднеприводные - силовой агрегат и главная
передача, объединенные в один блок, или
только силовой агрегат, расположены сзади,
ведущие задние колеса; расчлененные -
двигатель расположен спереди, коробка передач в
базе или сзади в едином блоке с ведущим
мостом, ведущие задние колеса; разветвленные -
силовой агрегат расположен спереди, все
колеса ведущие.
Трансмиссия как колебательная система.
При анализе динамических процессов
трансмиссии рассматриваются как колебательные
системы с сосредоченными массами,
соединенными упругими связями и
воспринимающими действие крутящих моментов.
Сосредоточенные массы характеризуются моментами
инерции, упругие связи - жесткостями на
кручение. Трансмиссии относятся к нелинейным
диссипативным колебательным системам.
Расчетные схемы (динамические модели)
трансмиссий для упрощения анализа происходящих
в них динамических процессов строят обычно
с некоторыми допущениями, например: с
ограничением сосредоточенных масс; без учета
некоторых нелинейностей и диссипатии в
системах; с регламентацией закона изменения
возмущающих сил и др.
Рис. 2.4.1. Конструктивные схемы трансмиссий:
а - классическая; б - переднеприводная; в - расчлененная; г - разветвленная;
двигатель с коробкой передач; 2 - карданная передача; 3 - ведущий мост; 4 - двигатель с коробкой передач
и ведущим мостом; 5 - двигатель; 6 - коробка передач; 7- раздаточная коробка
РАСЧЕТНЫЕ СХЕМЫ
215
Ф пА/ %^ о^ О* Vе Р О о 7*' Згп ^л
НткН 1с Л-с 1 сг ^ с,
6 °9 ° / 7 7 / 7 ° О
? ^ 9 ^ о Спв 9 ^ V
6л> 6л. ^ Ал, Л,
О о
О о о о О3*
а)
зАв
о
о
6
^+л«
•% 777'Сйо
6)
о
о*»
о
О.
ПА1
Сг
о
«;
6
г)
Рис. 2.4.2. Расчетные схемы трансмиссий:
а - линейная колебательная система; б - колебательная система с реактивными связями;
в - колебательная система, учитывающая основные формы колебаний трансмиссий;
г - разветвленная колебательная система полноприводного автомобиля;
■ момент инерции; С - жесткость на кручение; К - коэффициент диссипации; М- крутящий момент;
индексы: дв - двигатель; е - муфта сцепления; кп - коробка передач; кв - карданная передача;
пв - ведущие полуоси; ш - шины; к - ведущие колеса; т - трансмиссия; а - автомобиль;
Р {рк) - раздаточная коробка; ро - реактивный контур; гп - главная передача
Динамические модели трансмиссий с
ведущими задними или передними колесами
представляют колебательными системами с
линейным расположением сосредоточенных
масс (рис. 2.4.2, а). Такие расчетные схемы
часто используют для анализа стационарных
(установившихся) колебаний. При анализе
переходных (неустановившихся) процессов в
трансмиссиях (трогание, торможение и др.) в
динамических моделях следует учитывать
реактивные связи - наличие подвесок ведущих
колес, силового агрегата, оказывающих
существенное влияние на основные частоты и
формы свободных колебаний систем (рис. 2.4.2,
б). Если исследуемые в трансмиссиях
динамические процессы по частотному спектру
характеризуются основными частотами свободных
колебаний систем, то в этом случае
целесообразно принимать расчетные схемы двух- и
трехмассовых систем (рис. 2.4.2, в).
Динамические модели разветвленных трансмиссий со
всеми ведущими колесами представляют собой
разветвленные колебательные системы
(полноприводные автомобили с колесной
формулой 4 х 4, 6 х 6 и др.), в которых
учитываются массы и жесткости приводов (рис.
2.4.2, г).
Отдельные агрегаты трансмиссий
(коробка передач, карданные передачи,
ведущие мосты) представляют собой парциальные
колебательные системы. Структура расчетных
схем отдельных агрегатов зависит от
особенностей их конструкций.
Колебания в трансмиссиях обусловлены:
216
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
энергии в системе.
Подстановкой Т, П, Р в уравнение
(2.4.1) получают систему уравнений второго
порядка, интегрированием которой
определяется траектория движения динамической
модели:
11ф1 +а1(ф1 -Ф2) + С1(ф1 -ф2) = 3/1;
/л_1Фл_1-ал_1(фл_1-фл)-
-Сл_1(фл_1-Фл) = Мл_1,
где а/ - коэффициенты, оценивающие дисси-
пативные силы, определяемые обычно
экспериментально.
Параметры динамических моделей -
моменты инерции // и жесткости С/ на кручение
упругих связей определяются либо расчетом,
либо экспериментально; М\ - обобщенное
силовое воздействие - крутящий момент.
В табл. 2.4.1 - 2.4.4 приведены моменты
инерции основных вращающих масс:
серийных двигателей - 7^^ коленчатого вала с
учетом прицепных масс и шкивов вентилятора,
/мах маховика, /Кож кожуха сцепления в
сборе, /вд.сц его ведомого диска;
гидротрансформаторов - /кр крышки, /н или /н ф насосного
колеса (без фланца или с фланцем), /т
турбинного колеса, /р колеса реактора в сборе с
ведущими элементами муфты свободного хода,
/ц приводного диска; /к колес автомобиля
(обода и диска) в сборе с шиной.
2.4.1. Моменты инерции вращающихся деталей двигателей, кг-м2
Двигатель
МеМЗ-966
МеМЗ-968, 969
ВАЗ-2101, 2103, 2106, 2121
"Москвич-412"
ГАЗ-451, ЗМЗ-451, 977
ГАЗ-24
ГАЗ-13
ГАЗ-14
ЗМЗ-53, 672
ЗИЛ-ВОЯ
ЗИЛ-375
КамАЗ-740
КамАЗ-7401
ЯМЗ-238
«мсвд
0,0090
0,0200
0,0200
0,0315
0,0670
0,0460
0,0994
0,123
0,086
0,141
0,147
0,330
0,330
0,880
Л* ах
0,0600
0,0770
0,0743
0,0936
0,1930
0,0210
0,3900 (ГДТ)
0,338 (ГДТ)
-
0,605
0,910
0,960
0,660 (ГДТ)
2,320
наличием крутящего момента
четырехтактного двигателя (постоянная и переменная
составляющие);
кинематическими свойствами карданных
шарниров и зубчатых зацеплений;
неуравновешенностью карданных
передач и ведущих колес.
Число независимых величин
(обобщенных координат), необходимое для
определения положения динамической модели
- это число ее степеней свободы. Движение
многомассовой динамической модели может
быть описано уравнением Лагранжа второго
рода в системе обобщенных координат с
учетом кинетической Т и потенциальной П
энергии системы:
д1 ЭР г, ,.
+ = С/, /=1,2,...,л,
дд{ дд{
(2А1)
где Ь = П - Т - функция Лагранжа; С/ -
( 2 2
обобщенная сила; Т = 0,5\ 1*<р* + 1~ц~+...+
+1 ф ; 7/ - момент инерции
сосредоточенных масс; ^/ - обобщенная координата -
перемещения сосредоточенных масс;
Я = 0,5 ^Нс^Фз-ф!) +С2(ф3-ф2) +•••+
+Сп{ч>п -Фл-О Г' 6 - жесткость на
кручение упругих связей; / - число степеней
свободы; (1, 2, 3, ... , л); Р - диссипативная
функция, определяющая интенсивность диссипации
РАСЧЕТНЫЕ СХЕМЫ
217
2.4.2. Моменты инерции вращающихся элементов сцеплений
Автомобиль
ЗАЗ-965
ЗАЗ-968
ВАЗ-2101, 2121
"Москвич-412ИЭ"
УАЗ-451М
ГАЗ-24
ГАЗ-53
ЗИЛ-431410
"Урал-375"
(двухдисковые)
КамАЗ-5320
(двухдисковые)
МАЗ-5335
(двухдисковые)
«'кож
0,021
0,024
0,040
0,039
0,105
0,059
-
0,265
0,715
0,824
1,474
Размеры ведомого диска, мм
170 - 120 - 3,5
190 - 130 - 3,5
200 - 142 - 3,3
204 - 146 - 3,3
254 - 150 - 3,5
225 - 150 - 3,5
300 - 164 - 4,0
342 - 186 - 4,0
342 - 186 - 4,0
350 - 200 - 4,5
400 - 220 - 4,2
*'ап.сц> КГ'М
0,0015
0,0026
0,0033
0,0036
0,0120
0,0060
0,0230
0,0450
0,0450
0,0500
0,0900
2.4.3. Моменты инерции элементов автомобильных гидротрансформаторов,
Гидротрансформатор
СМ 3-ОНУ (США)
УВМВ (Чехия)
НАМИ-230
Форд С-3 (США)
НАМИ-240
ВОКС ЛУА1ШЕК 65
(Великобритания)
Аиёи (Германия)
ОМ 3-ОНУ (США)
ГАЗ-21
НАМИ-280
ГАЗ-14
ЗИЛ-114
Л Г-340
Л Г-370
Р1СНТЕЬ 5АСН5
(Германия)
НАМИ-400
Прага (Чехия)
Активный
диаметр
Д^, М
0,229
0,230
0,230
0,235
0,240
0,241
0,244
0,254
0,280
0,280
0,316
0,328
0,340
0,370
0,400
0,400
0,400
Крышка
Лв
0,0180
0,0530
0,0530
0,0300
0,0360
0,0940
0,0300
0,0245
0,0980
-
0,1270
0,0862
0,4650
0,2760
0,7300
-
-
Насосное
колесо
/н
0,0210
0,0270
0,0330
0,0250
0,0370
0,0250
0,0320
0,0325
0,0760
0,0790
0,1300
0,1070
0,1600
0,2330
0,4420
0,6800
0,6850
Турбинное
колесо
Л
0,0085
0,0087
0,0088
0,0093
0,0101
0,0101
0,0110
0,0130
0,0236
0,0222
0,0392
0,0520
0,0605
0,0955
0,1730
0,1600
0,1400
Колесо
реактора
/о
0,0020
0,0056
0,0020
0,0020
0,0023
0,0023
0,0025
0,0024
0,0045
0,0048
0,0118
0,0120
0,0126
0,0278
0,0315
0,0260
0,0240
кгм2
Приводной
диск
Л
0,026
0,023
0,023
0,023
0,023
0,018
0,047
0,026
0,04
-
0,013
0,067
0,260
0,090
0,030
-
-
Определение жесткости на кручение
элементов трансмиссий. Жесткость (кНм/рад)
цилиндрического участка вала длиной /, м,
наружным диаметром И и внутренним й, м,
определяются по формуле:
,2 I
С = О /к / /, где 1К =
я2)
32
1д
Жесткости на кручение валов, имеющих
неодинаковые сечения по длине ч(шлицы,
конус, шпонки и др.), а также тангенциальные
жесткости шин, определяют по
характеристикам упругости (зависимости крутящего
момента от углового перемещения), получаемым
экспериментально на стендах.
В табл. 2.4.5 - 2.4.7 представлены
жесткости на кручение коленчатых валов
двигателей, демпферов сцеплений, валов, коробок
передач, раздаточных коробок, карданных
валов, полуосей трансмиссий легковых и
грузовых автомобилей, автобусов базовых
моделей.
218 Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
2.4.4. Характеристики шин и колес
Обозначение шины
165-13
185-15
130-330 (5,20-13)
(5,90-13)
155-330 (6,00-13)
155-330 (6,15-13)
175-330(6,45-13)
160-330 (6,40-13)
165-330(6,45-13)
170-330 (6,70-15)
(6,95-13)
(7,00-15)
185-355 (7,35-14)
210-380 (8,20-15)
215-380 (8,40-15)
235-380 (9,35-15)
(6,95-16)
200-508Р
240-508Р
240-508Р
260-508Р (9,00-20р)
1100-400-533
280-508Р(10,00-20р)
320-467 (12,00-18)
320-508Р
320-508 (12,00-20)
370-508 (14,00-20)
220-508 (7,50-20)
240-508 (8,25-20)
260-508 (9,00-20)
10,00-18
280-508 (10,00-20)
300-508 (11,00-20)
300-508Р
380-508 (15,00-20)
Модель шины
ИЯ-170
М-166
Я-288
В-67Б
ИВ-167
Н-107
И-151
М-145
М-100
М-100
И-194
М-154
И-89
ИД-195
Я-201
И-Л95
Я-192
Я-245
И-126
-
И-32
К-37А
К-55А
МИ-151А
И-Н142Б
0-47А
0,73А
К-70
И-109Б
М-93
ОИ-25
М-126А
МИ-173
ИЯ-112
К-ПА
МИ-20А
МИ-155
К-66
К-65
ЯИ-213
В-195А
-
-
Статический
радиус гст, мм
276 ±3
«
320 ±3
283 ±3
292 ±3
289 ±3
278 ±3
285 ±3
303 ±3
303 ±3
335 ±3
282 ±3
348 ±5
310 ±3
348 ±3
354 ±3
370 ±3
364 ±3
400 ±5
350 ±3
440 ±4
456 ±4
457 ±5
472 ±4
476 ±5
560 ±5
483 ±5
505 ±5
525 ±5
530 ±5
600 ±5
442 ±4
445 ±4
440 ±4
465 ±5
457 ±5
488 ±5
488 ±5
465 ±5
470 ±5
506 ±5
510 ±5
505 ±5
600 ±5
Момент инерции
колеса
относительно оси
вращения /к, кг-м2
0,50*
0,47
1,20*
0,48
0,72
0,60*
0,52
0,70
0,93
0,93
1,82
0,75
2,2*
1Д5
2,2*
2,3*
2,80
2,70*
4,60
2,3
7,0
8,5
8,5
11,0
12,0
25,0
12,5
15,8
20,5
20,7
32
7,5
7,8
7,0
10*
9,53
12,6
13,0
10*
10,7*
15,8
17,0
18,4
45,4
Тангенциальная
жесткость шины
Ст% кНм / рад
_
-
-
15
45
-
31,5
30
40
40
59
32
-
48
-
-
27
-
-
-
72
62
-
-
95
89
-
120
125
130
77-115
-
83
-
-
82
105
-
-
-
130
132
120
-
* Определены аналитически.
2.4.5. Тангенциальная жесткость коленчатых валов двигателей, кНм/рад
ГАЗ-24
ГАЗ-13
ЗИЛ-114
ЗИЛ-130
ЗИЛ-375
ЯМЗ-238
Двигатель
Вал
118
172
111
180
167
418
Участки вала (колен) приведенной длины
481-486 - 481 -440
782 - 466 - 782 - 890
310 - 591 - 556 - 645 - 1265
705 - 550 - 705 - 1120
670 - 500 - 670 - 1000
4350 - 2650 - 2650 - 2650 - 1980 - 1910
2.4.6. Тангенциальная жесткость элементов трансмиссий легковых автомобилей, кН-м/рад
Элементы трансмиссии
Демпфер сцепления
Коробка передач:
первичный вал
на первой передаче
на второй передаче
на третьей передаче
на четвертой передаче
Карданная передача привода
заднего моста
Две ведущие полуоси
ЗАЗ-968А
(4x2)
1.59
3,5
0,0827*
0,253*
0,418*
0,569*
-
6,88
ВАЗ-2105
(4x2)
1,78
13,7
0,0247*2
0,0658*2
0Д56*2
0,345*2
1,28
9,08
" Москвич -
2140" (4 х 2)
1,80
11,1
0,047*2
0,138*2
0,323*2
0,667*2
8,3
11,4
ГАЗ-24
(4x2)
2,24
18,5
0,0617*2
0,148*2
0,361*2
0,750*2
7,87
24,6
ВАЗ-2121
(4x4)
1,78
13,7
0,91*
1,98*
3,10*
6,37*
5,73
6,50*3
9,08
8,9*3
* Валы коробки передач приведены к первичному валу.
*2 Валы коробки передач, карданный вал, полуоси.
*3 Переднего ведущего моста.
2.4.7. Тангенциальная жесткость элементов трансмиссий грузовых автомобилей, кН-м/рад
Элемент
трансмиссий
Демпфер сцепления
Коробка передач:
первичный вал
на первой передаче
на второй передаче
на третьей передаче
на четвертой передаче
на пятой передаче
Карданная передача
привода заднего моста
Две ведущие полуоси
заднего моста
ГАЗ-51
(4x2)
_
58,87
2,40*
11,3*
12,3*
22,6*
-
22,0
51,3
ГАЗ-53А
(4x2)
5,16
57,87
'3,77*
6,59*
8,08*
16,9*
-
18,0
61,1
ЗИЛ-
431420
(4x2)
8,9
58,8
0,0346*
0,113*
0,36*
0,865*
1,85*
15,7
90
МАЗ-500А
(4x2)
15,74
127,86
6,25*
11,5*
23,0*
45,1*
42,2*
75,8
53,40
ГАЗ-66
(4x4)
5,16
57,8
3,77*
6,59*
8,08*
16,9*
-
40,3
41,4*2
69,3*3
51,3
61,6*2
"Урал-375Ди
(6x6)
8,9
66,7
6,25*
11,50*
23,0*
45,1*
42,2*
31,88
28,27*2
63,97*3
46,77*4
19,34
27,68*2
19,34*4
* Валы коробки передач приведены к первичному валу.
*2 Переднего ведущего моста.
*3 Раздаточной коробки.
*4 Среднего ведущего моста.
220
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
Аппроксимация моментов инерции
(кг-м2) типовых деталей представлена ниже:
Л.д.сц = -0,0333 + 0,486/) - 2,5772)2 +5,3292)3;
Д1! - 0,0006 ф = 0,17 + 0,4 м);
Лвп = 0,055 - 0,465- 10-Ше + 0,163Ю-5Л/е2;
Д1! - 0,07 (Ме = 50 + 883 Н-м);
Л|ах =* -0,059 + 0,237-10"2^ - 0,842-Ю-5Ме2 +
+ 0Л67Л0-7Ме3; $1 - 0,02 (Ме = 50 + 466 Н-м);
Лож = -0,0384 + 0,384-10-Ше + 0,732-10-бЛ/е2;
51 - 0,02 (Ме = 50 + 402 Н-м);
Лож = 0,0737 - 1,2222) + 5,216т)2; ^ - 0,005 .
(/) = 0,17 + 0,342 м);
Л.ф = 0,217 - 2Д74Д, + 5,97/)с2; ^ - 0,005;
/н = 0,185 + 1,814Д, + 4,803/)с2; ^ - 0,003,
/т = 0,217 + 1,84/)д + 4,073/)д2; ^ - 0,002,
/р = 0,0364 - 0,317/)о + 0,737/)о2; ^ - 0,006
(2)й = 0,22 + 0,4 м);
/к = 9,196 - 0,074гст + 0,154-Ю"3 гст2;
$1 - 0,08 (гст = 271 + 400 мм),
где ^-средняя квадратическая погрешность
аппроксимации.
2.4.2. СЦЕПЛЕНИЯ
Сцеплению, соединяющему двигатель и
трансмиссию для передачи крутящего момента
и позволяющему по желанию водителя или в
автоматическом режиме с помощью привода
их разъединять, предъявляют ряд требований:
плавность включения;
полное (чистое) выключение;
возможность передачи без пробуксовки
крутящего момента от двигателя при
движении автомобиля;
обеспечение минимально возможного
момента инерции ведомых элементов,
нормального теплового режима работы;
предохранение трансмиссии от пиковых
динамических нагрузок;
легкость и удобство управления.
По способу передачи крутящего момента
могут быть сцепления:
фрикционные (механические), в которых
используются силы сухого трения;
гидравлические, в которых используется
кинетическая энергия жидкости;
электропорошковые с использованием
сил трения, возникающих при движении
порошкового железа в магнитном поле;
комбинированные (гидромеханические).
На автомобилях в большинстве случаев
применяют фрикционные (сухие) дисковые
постоянно замкнутые сцепления с пружинным
нажимным устройством, воздействующим на
ведущий диск, и демпфером крутильных
колебаний, расположенным в ведомом диске,
зажатом между маховиком двигателя и
нажимным диском.
Фрикционные сцепления различают по
ряду признаков:
по способу действия - неавтоматические
и автоматические. Автоматическим может быть
или само сцепление (по принципу его
работы), или система управления, обеспечивающая
работу неавтоматического сцепления;
по способу создания давления на
нажимной диск - пружинные,
электромагнитные, полуцентробежные и центробежные;
по числу ведомых дисков - однодиско-
вые, двухдисковые и многодисковые;
по расположению нажимных пружин -
периферийные и центральные. По периферии
устанавливают ряд цилиндрических пружин, а
в центре - одну коническую, диафрагменную
или цилиндрические;
по способу перемещения нажимного
диска - рычажные (с помощью рычажков),
диафрагменные (с помощью диафрагменной
пружины);
по типу привода - механические и
гидравлические.
Для облегчения управления автомобилем
в привод может быть включен следящий
усилитель (гидравлический, пневматический или
вакуумный).
Требования к конструкциям сцеплений
(обеспечить надежность работы при
повышении мощностей и частот вращения двигателей)
привели к распространению диафрагменных
сцеплений, заменивших многие конструкции
рычажных с цилиндрическими пружинами.
Принципиальной особенностью диафрагмен-
ного сцепления является применение в нем
тарельчатой пружины (диафрагмы)
специальной формы, с лепестками, объединившими в
себе функции нажимных цилиндрических
пружин и рычажков, используемых в
рычажных сцеплениях. Такое сцепление имеет
нелинейную характеристику упругости,
обеспечивающую увеличение нажимной силы с
износом фрикционных накладок, в отличие от
цилиндрических пружин, имеющих линейную
характеристику упругости, при которой
нажимная сила уменьшается с износом
фрикционных накладок.
Диафрагменные сцепления по сравнению
с рычажными компактны и проще по
конструкции, позволяют увеличить ресурс,
уменьшить себестоимость изготовления, габаритные
размеры конструкции и номенклатуру деталей.
На рис. 2.4.3 показано однодисковое диафраг-
менное сцепление при включенном а и
выключенном б состояниях.
СЦЕПЛЕНИЯ
221
Рис. 2.4.3. Одноднсковое диафржгменное сцепление:
■ включено; б - выключено; 1 - ведомый диск; 2 - ведущий диск; 3 - выжимной подшипник
- 7°
«1 5
1
I
в
1
к
/
/
а
~1
1
л_
1° 15
)
■о
•150-Ю° -5°
1
1 1
1 1
у
1
1_\
у
/
\
ц
{
1 |
'
1
>1|
5° 10° 15°20°Г
21
5)
Рис. 2.4.^Характеристика упругости демпфера ведомого диска сцепления:
а - двухступенчатая; б - трехступенчатая
Применяемые в ведомых дисках
сцеплений упругофрикционные демпферы колебаний
для снижения уровней шума и вибраций
трансмиссий имеют нелинейную
характеристику упругости (рис. 2.4.4), содержащую не
менее двух ступеней для карбюраторных
двигателей при максимальных угловых
перемещениях не менее 6° и не менее трех ступеней для
дизелей при максимальных угловых
перемещениях не менее 10°.
Для повышения долговечности муфт
выключения сцеплений и уменьшения трения
при выключении вместо подшипников
скольжения и радиально-упорных шариковых все
больше применяют самоцентрирующиеся
шариковые.
Работоспособность сцеплений во многом
определяют материалы (асбестовые и
безасбестовые композиции) фрикционных накладок
ведомых дисков, обладающие коэффициентом
трения 0,3. Они должны соответствовать
требованиям ГОСТ 1786-88 и могут быть
изготовлены формованными, прессованными,
ткаными, эллипснонавитыми, спиральнонавитыми.
Последние два исполнения используются в
накладках из безасбестовых композиций. В
табл. 2.4.8 представлены геометрические
параметры фрикционных накладок, применяемых
в сцеплениях отечественных автомобилей.
222
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
2.4.8. Геометрические параметры фрикционных накладок
Размеры накладок, мм 1
160*, 110, 3,3
170, 120, 3,5
180*, 125, 3,5
190*, 130, 3,5
130, 3,5
200*,
140/142, 3,3
204*, 146, 3,3
225, 150, 3,5
254, 150, 3,5
280, 164, 3,5
300, 164, 4,5
340, 186, 4,0
350, 200, 4,5
380*, 220, 4,5
400, 200, 4,0
420, 240, 4,3
Крутящий момент
двигателя, Нм,
не более 2
78,5
54
88
93
142
142
196
201
255
353
402
490 / 930
490 / 800
465 / 685
465 / 1420
Частота
вращения, мин-1,
не более
9000
5000
8000
5000
8000
8000
6000
5000
4500
4500
4000
4000
3500
3000
3000
Автомобиль
ВАЗ-1111
ЗАЗ-966В
ЗАЗ-1102
ВАЗ-2108, ЗАЗ-968
АЗЛК-2141
ВАЗ-2105, 06, 07, ВАЗ 2121
ИЖ-21251, АЗЛК-412
ГАЗ-2410, ГАЗ-3102
ГАЗ-21, УАЗ-469
ГАЗ-52
ГАЗ-53, ГАЗ-66
ЗИЛ-4314Ю, 131, "Урал-375"
КамАЗ-5320, ГАЗ-4301, КАЗ-
4540, "Урал-4320"
ЗИЛ-4331
МАЗ-5335, КрАЗ-257
МАЗ-6422, МАЗ-5432, КрАЗ-260
1 Наружный диаметр, внутренний диаметр, толщина.
2 В числителе даны значения для однодискового сцепления, а в знаменателе - для
двухдискового.
* Накладки применяются в диафрагменных сцеплениях. Накладки сцеплений, использующиеся
с карбюраторными двигателями, можно применять с дизелями, имеющими крутящий момент
меньше на 25 %.
Ведущие элементы сцеплений (кожух с дисков сцеплений легковых автомобилей не
нажимным диском) для снижения вибрации в должен превышать 50 % значений, приведен-
автомобилях балансируют. Дисбаланс ведомых ных ниже:
Масса нажимного диска с кожухом, кг 3 ... 12 12 ... 30 30 ... 60
Допустимый дисбаланс при статической балансировке,
гмм, не более 50 1500 2000
СЦЕПЛЕНИЯ
223
Ведомые диски сцеплений грузовых
автомобилей не балансируются.
Основные параметры фрикционного
сцепления определяются из условия передачи
максимального крутящего момента Мтак от
двигателя. Для нормальной работы автомобиля
без значительной пробуксовки сцепления при
его включении статический момент трения
сцепления Мс должен превышать
максимальный момент двигателя Мс > Мтах.
Коэффициент запаса сцепления:
р = Мс I Мпы.
Выбор коэффициента запаса имеет важное
значение. Если коэффициент Р мал, то при
включении сцепления работа буксования будет
большой, что может привести к перегреву и
ускоренному износу пар трения. При высоких
значениях р возрастают силы, действующие на
выжимной подшипник, педаль, а также
дополнительные динамические нагрузки в
трансмиссии. Кроме того, при предельно
изношенных накладках сцепления коэффициент
р должен иметь значение, при котором
обеспечивается нормальная его работа.
Значения Р выбирают с учетом
уменьшения коэффициента трения ц накладок в
процессе эксплуатации (целесообразно принять
ц = 0,3), размеров фрикционных накладок,
передаваемого крутящего момента, износа
накладок, числа пар трения, усадки нажимных
пружин, наличия регулировки нажимного
усилия. Среднее значение р для автомобилей
приведены ниже:
Легковые автомобили 1,2 ...1,75
Грузовые автомобили 1,5 ... 2,2
Автомобили повышенной и
высокой проходимости 1,8 ... 3,0
При применении диафрагменной
нажимной пружины значения Р можно
принимать меньше, так как при износе накладок
сила нажатия диафрагменной пружины
увеличивается. Рекомендуемые значения р в этом
случае приведены в табл. 2.4.9.
2.4.9. Рекомендуемые значения р в случае
применения диафрагменной нажимной пружины
Д], мм
180 ... 250
280 ... 350
380 ... 450
Мпах. Нм
100 ... 280
390 ... 680
960 ... 2000
Р
1,3 ... 1,5
1,45 ... 1,6
1,5 ... 1,65
Сила нажатия пружин находится из
выражения:
р . Мс _ Р^тах >
•Яср^д Яср^д'
где Х>ср - средний диаметр трения, м; /)ср *
« 0,5(2>н + .Рв) ; гд - число ведомых дисков;
Х^ и /)в - диаметр накладки соответственно
наружный и внутренний.
Давление, действующее на фрикционную
накладку, площадь одной стороны которой
равна 5н, МПа,
5Н *(/>>-0В2)
Фрикционная накладка является
наиболее изнашиваемой деталью сцепления.
Скорость изнашивания фрикционной накладки
определяется: давлением на фрикционную
накладку, удельной работой буксования
сцепления и повышением температуры деталей
сцепления, имеющих относительно меньшую
массу (нажимного диска в однодисковом
сцеплении, среднего диска в двухдисковом
сцеплении), при буксовании при единичном
включении сцепления. Давление д выбирается
в зависимости от материала фрикционного
кольца и его наружного диаметра и находится
д- 0,14 ... 0,30 МПа. Для большегрузных
автомобилей при наружном диаметре
фрикционной накладки Ц^ Ъ 300 мм рекомендуется
д - 0,2 МПа, для безасбестовых фрикционных
накладок можно принять д = 0,25 МПа.
Давление, действующее на накладку из
порошкового материала, можно принять 1,5...2,0 МПа.
Число ведомых дисков сцепления
г ЗР^мах ^
Д 106 *ц«(Лн+Дв)2(2)н-Дв)'
где Л&уд - удельная работа буксования,
Дж/см2; Лб.уд = А$ / (25н 1Д); А& - работа
буксования сцепления, Дж.
Удельная работа буксования при
единичном включении сцепления не должна
превышать следующих значений:
для однодискового сцепления А$уЛ =
= 196 ... 245 Дж/см2;
для двухдискового сцепления А^уд =
= 147 ... 167 Дж/см2. •
Для расчета работы буксования может
быть применена формула:
^ЗМ^-Сг^+Ъа)]'
224
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
где гк - статический радиус колеса, м; пр -
расчетная частота вращения коленчатого
вала двигателя (для бензинового двигателя
пр = 3,3 • 10"3 п$ + 15, для дизеля пр = 7,5 х
х 10'3 А1дг, п^ - частота вращения коленчатого
вала двигателя при максимальной мощности,
мин1); /р - общее передаточное число
трансмиссии на включенной передаче; / -
коэффициент сопротивления качению; а - угол
подъема дороги; 54,88 - передаточный
коэффициент.
Нагрев (°С) деталей сцепления за одно
включение определяют по формуле:
А/ =
УЛ>
стд
где у - коэффициент, учитывающий часть
работы буксования, превращаемой в теплоту; у =
= 0,5 для однодискового сцепления; у = 0,25
для нажимного и у = 0,5 для среднего диска
двухдискового сцепления; с = 482 Дж/(кг°С) -
удельная теплоемкость нагреваемых деталей
(сталь, чугун); тд - масса нагреваемых дисков,
кг.
Допустимое повышение температуры за
одно включение сцепления принимают А/ =
= 10 °С для одиночного автомобиля и А/ =
= 20 °С для автомобиля с прицепом или
автопоезда.
2.4.3. КОРОБКИ ПЕРЕДАЧ
Кинематические схемы. Механические
коробки передач могут выполняться по
различным кинематическим схемам, наибольшее
распространение из которых получили:
классическая трехзальная (рис. 2.4.5, 2.4.6);
/ '23 4 5.
Рис. 2.4.5. Кинематическая схема четырехступенчатой
коробки передач:
1 - первичный вал; 2 - синхронизатор третьей и
четвертой передач; 3 - вторичный вал;
4 - синхронизатор первой и второй передач;
5 - промежуточный вал
Рис. 2.4.6. Кинематическая схема пятиступенчатой
коробки передач:
1 - первичный вал; 2 - синхронизатор третьей и
четвертой передач; 3 - синхронизатор пятой передачи;
4 - вторичный вал; 5 - синхронизатор первой и
второй передач; б - промежуточный вал
с двумя приводными зубчатыми парами или
передним делителем (рис. 2.4.7);
Рис. 2.4.7. Кинематическая схема восьмиступенчатой
коробки передач с передним встроенным делителем:
1 - первичный вал; 2 - синхронизатор делителя;
3 - синхронизатор третьей и четвертой передач;
4 - вторичный вал; 5 - синхронизатор первой и
второй передач; 6 - промежуточный вал
комбинированная (рис. 2.4.8, 2.4.9).
Коробка передач, выполненная по
классической трехвальной схеме, включает
первичный вал 7, промежуточный вал 5 и
вторичный вал 3 (рис. 2.4.5). Первичный вал
непосредственно воспринимает крутящий момент от
двигателя и передает его на вторичный вал,
что исключает какие-либо кинематические
преобразования момента двигателя и
обеспечивает включение прямой передачи. По
классической трехвальной схеме выполняют
коробки передач с числом передач 4-6 для
легковых автомобилей, автобусов и грузовых
автомобилей малой и средней грузоподъемности.
КОРОБКИ ПЕРЕДАЧ
225
Рис. 2.4.8. Кинематическая схема девятиступенчатой
коробки передач:
1 - первичный вал; 2 - синхронизатор четвертой и
пятой передач; 3 - вторичный вал;
4 - синхронизатор второй и третьей передач;
5 - синхронизатор первой передачи
и передачи заднего хода; 6 - планетарный
демультипликатор; 7 - синхронизатор планетарного
демультипликатора; 8 - промежуточный вал
Рис. 2.4.9. Кинематическая схема
шестнадцатиступенчатой коробки передач:
1 - первичный вал; 2 - синхронизатор делителя;
3 - синхронизатор третьей и четвертой
передач; 4 - вторичный вал;
5 - синхронизатор первой и второй передач;
6 - муфта включения передачи заднего хода;
7 - планетарный демультипликатор;
8 - синхронизатор планетарного демультипликатора;
9 - промежуточный вал
Двухвальная кинематическая схема
коробки передач является частным случаем трех-
вальной и получила достаточно широкое
применение на легковых автомобилях с приводом
на переднюю ось. Отсутствие приводных пар в
коробке передач исключает первичный вал, а
следовательно, прямую передачу, что является
определенным недостатком этой схемы.
В кинематической схеме с двумя парами
зубчатых колес крутящий момент от
первичного вала передается на промежуточный вал, что
позволяет с помощью только одной
дополнительной пары привода удвоить число ступеней
в коробке передач, выполненной по трехваль-
ной классической схеме.
При наличии встроенного делителя
можно получить коробку передач с восьмью
ступенями при том же числе зубчатых колес,
осевых габаритных размерах, массовых
показателях, что и у пятиступенчатой коробки
передач, выполненной по классической схеме.
Коробки передач, выполненные по схеме с
передним делителем, имеют число передач 8 -
10, а диапазон их передаточных чисел 9-10.
Отличительной особенностью коробок
передач, выполненных по комбинированной
схеме, является наличие основного редуктора
и планетарного двухступенчатого
демультипликатора 7 (рис. 2.4.9), установленного за
основным редуктором коробки передач. По
такой схеме выполняют коробки передач
автомобилей большой и особо большой
грузоподъемности с числом передач 8 - 16 и
широким диапазоном передаточных чисел. При
наличии основного редуктора трехзальной
классической схемы число передач составляет
8 - 10, а схемы со встроенным делителем
число передач 14 - 16*. Диапазон передаточных
чисел при обычной схеме основного редуктора
11 - 13,5, а при наличии делителя 13,5 - 17.
Диапазон передаточных чисел основного
редуктора 3,5 - 4,5.
Коробки передач, выполненные по
комбинированной схеме, обладают рядом
существенных преимуществ, особенно ценных для
высоконагруженных коробок передач с
входным крутящим моментом 1000 ... 2500 Нм:
возможностью выполнения полностью
синхронизированной коробки передач, что
обусловлено малыми приведенными
инерционными массами (малыми передаточными
числами синхронизируемых передач основного
редуктора и демультипликатора), а также
отключением значительной доли инерционных
масс благодаря обособленной синхронизации
как в основном редукторе, так и в
демультипликаторе;
наличием высокой несущей способности
основного редуктора, определяемой малым
диапазоном передаточных редуктора и
возможностью обеспечения высокой жесткости
валов без применения дополнительных опор и
демультипликатора за счет его многопоточнос-
ти, так как число сателлитов применяемых
планетарных рядов равно 4 ... 5, что позволяет
обеспечить ресурс коробок передач такого
типа 600 тыс. - 1 млн. км;
легкой переключаемостью передач,
определяемой малыми как передаточными
числами, так и интервалами ступеней передаточных
чисел;
обеспечением высокого КПД коробки
передач вследствие ее работы в основном на
заблокированном планетарном
демультипликаторе;
8 ъ»
226
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
наилучшим использованием мощности
двигателя, что сказывается на повышении
тяговых, разгонных и топливно-экономических
показателей автомобилей и автопоездов, ввиду
широкого диапазона передаточных чисел и
малых интервалов ступеней и высокого КПД
коробки передач.
Диапазон и плотность ряда передаточных
чисел. Основными кинематическими
параметрами коробки передач, в значительной
степени определяющими тяговые, разгонные и
топливно-экономические показатели
автомобилей, являются диапазон и плотность ряда
передаточных чисел. Диапазон передаточных
чисел определяется по формуле
* = ^ = 26,5-^, (2.4.2)
/в Мпц
где /н и /в - передаточные числа
соответственно низшей и высшей передач; у - суммарный
коэффициент сопротивления движению; для
легковых и грузовых автомобилей у = 0,25 ...
0,45, для автомобилей высокой проходимости
в пределах \|/ = 0,6 ... 0,8; V - максимальная
скорость автомобиля, км/ч; т - полная масса
автомобиля (автопоезда), кг; М -
максимальный крутящий момент двигателя, Нм; п -
частота вращения коленчатого вала двигателя,
соответствующая его максимальной мощности,
мин1; г| - КПД, учитывающий потери в
трансмиссии на низшей передаче; для
легковых автомобилей г| = 0,92 ... 0,94, для
грузовых автомобилей г| = 0,88 ... 0,92, для
автомобилей высокой проходимости Г| = 0,8 ... 0,85.
Для коробок передач легковых
автомобилей и основных редукторов коробок передач,
выполненных по комбинированной схеме,
диапазон передаточных чисел находится в
пределах 3,5 ... 4,5, при этом первое значение
ближе к четырехступенчатым коробкам
передач, а второе - к пятиступенчатым. Для
грузовых автомобилей средней грузоподъемности
диапазон передаточных чисел составляет 7... 10,
а коробка передач выполняется по
классической трехвальной схеме или с передним
делителем. Для автомобилей и автопоездов
большой и особо большой грузоподъемности
диапазон должен находиться в интервале 12 ... 17.
В данном случае коробки передач должны
выполняться по комбинированной схеме.
Если диапазон й характеризует
предельные тяговые и скоростные качества
автомобиля, то интервал ступеней определяет среднюю
скорость движения, а динамические качества
автомобиля на всем диапазоне коробки
передач определяются отношением передаточных
чисел смежных передач.
В коробках передач с передним
делителем ряд передаточных чисел, как и в коробках
передач, выполненных по комбинированной
схеме, чаще всего выполняется по
геометрической прогрессии, в соответствии с чем
интервал чисел передаточных ступеней
определяется по формуле
я = п-Уа, (2.4.3)
где п - число передач.
Для автомобилей и автопоездов большой
и особо большой грузоподъемности удельной
мощностью двигателя 7,4 кВт/т и менее
интервал передаточных чисел ступеней должен
быть 1,2 - 1,35, что обеспечит им высокие
топливно-экономические и скоростные
показатели.
Конструктирование коробок передач
требует проведения следующих основных видов
расчетов по известным в общем
машиностроении методикам, определяющих их
эксплуатационные качества:
геометрических параметров зубчатых пар,
определяющих кинематику коробок передач;
зубчатых колес на долговечность по из-
гибным и контактным напряжениям при
заданном ресурсе;
на перегрузку низших передач с учетом
предельно допустимого момента,
пропускаемого сцеплением;
валов на жесткость с определением
допустимых прогибов и перекосов валов при
заданных расчетных номинальных нагрузках;
подшипников на долговечность.
Синхронизаторы. Для уравнивания
угловых скоростей ведущих и ведомых элементов в
коробках передач используются
синхронизаторы.
Применение в автомобильных коробках
передач инерционных синхронизаторов
обусловлено наличием специальных блокирующих
элементов, которые не позволяют войти в
зацепление зубчатой муфте до полного
уравнивания угловых скоростей синхронизируемых
элементов независимо от прикладываемой
силы.
Инерционный синхронизатор (рис.
2.4.10) включает в себя ступицу 7, по
наружной поверхности которой на шлицах может
перемещаться в осевом направлении муфта 2,
в пазах которой находятся фиксаторы,
состоящие из сухарей 3, сферических пальцев 4 и
пружин 5. В ступице% размещаются
блокирующие кольца 6у конические поверхности
которых входят в соприкосновение с коническими
фрикционными поверхностями зубчатых
венцов 7, которые жестко связаны с шестернями
8.
КОРОБКИ ПЕРЕДАЧ
227
Рис. 2.4.10. Инерционный синхронизатор
При приложении силы синхронизации
Рс муфта через фиксаторы и сухари
прижимает блокирующие кольца к фрикционным
конусным поверхностям, на которых для
увеличения коэффициента трения выполнены
специальные спиральные канавки, что
обеспечивает поворот блокирующего кольца, скосы на
зубьях шлицев которого упираются в
соответствующие скосы шлицев муфты и, тем самым,
позволяют переместиться в муфте в осевом
направлении только после полного
уравнивания угловых скоростей синхронизируемых
элементов, и войти в зацепление с зубчатым
венцом шестерни.
Угол блокировки синхронизатора,
гарантированно обеспечивающий полную
синхронизацию при заданных геометрических
параметрах синхронизатора, определяется
формулой (рис. 2.4.10):
Ф = агс1#
и
'с+'б
гб
1-4
1 рс)
\ р ^
ч
Гс)
ша
§ша
(2.4.4)
где /$ - коэффициент трения скольжения
конусов трения на начальном этапе блокировки
синхронизации, /ъ =0,06 ... 0,07; гс - средний
радиус конусов трения, м; г§ - средний радиус
скосов блокирующих зубьев, м; Рф - сила,
создаваемая фиксаторами синхронизаторов,
Н; Рс - сила, создающая
синхронизирующий момент, Н; а - угол наклона конусов
трения, °.
Время синхронизации, являющееся
одним из основных расчетных параметров
процесса синхронизации, определяет технический
уровень как кинематической схемы, так и
конструкции коробки передач и определяется
при заданной силе синхронизации Рс
формулой
К =•
— Лпв//кп^к(1+5)|
1-
>1
Я)
*к п'оЧ
т р
РоА
^*г»итг^
Ч8Ша
'ол
тр
+тг.
!М
ы
±»,
5Ша
:п(л/тр^л/в)]
(2.4.5)
где ппь - частота вращения первичного вала в
момент начала синхронизации, мин1; / -
момент инерции ведущих частей коробки
передач, приведенный к первичному валу, Н-м-с2;
гк - радиус качения колеса, м; /щ, -
передаточное число включаемой передачи; т - масса
автомобиля, кг; ^ - коэффициент,
учитывающий инерцию вращающихся масс
деталей трансмиссии и ходовой части, ^ = 0,04;
^ - интервал ступеней переключаемых передач;
Я > 1» 8 - ускорение свободного падения, м/с2;
/о - передаточное число главной передачи,
%р - механический КПД трансмиссии; гм -
средний радиус трения на муфте
синхронизатора, м; у - коэффициент сопротивления
движению, у = /к со8 р ± 8Ш Р; /к -
коэффициент трения качения колеса; Р - угол наклона
профиля дороги; МТр и Мв - момент
соответственно трения и ведения сцепления,
приведенный к первичному валу коробки передач,
Нм.
Верхний знак (Т) используется при
расчете с переключением на высшую передачу, а
нижний - на низшую.
После расчета этапа синхронизации
необходимо провести расчет этапа десинхрони-
зации или разблокирования синхронизации.
Он заключается в определении необходимой
для поворота включаемой шестерни вместе с
промежуточным и первичным валами и
связанным с ним диском сцепления на угол 5 ,
при котором блокирующие скосы фасок
шлицев полностью развернутся и позволят войти в
зацепление друг с другом. Сила, необходимая
для разблокирования синхронизатора,
определяется для случая включения низшей
синхронизированной передачи на остановленном
автомобиле при заданных предельно
допустимых значениях МТр тах,
тах и *р» Так как
этот случай является наиболее тяжелым по
8*
228
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
сравнению с разблокированием
синхронизатора при переключении как с низшей на
высшую, так и с высшей на низшую передачу.
Сила разблокирования на муфте
синхронизатора определяется формулой
1+/р*Ф
«8<Р-'о/р
7ь[л1+тлг\<^
[ "' '
+ 'н (^тр тах + ^втах )] + Л^в У,
(2.4.6)
где 5 - перекрытие фасок скосов блокирующих
элементов; /н - передаточное число низшей
синхронизируемой передачи; /р -
коэффициент трения скольжения на этапе
разблокирования; /р = 0,08 ... 0,12; /яд - масса
поступательно движущихся деталей привода
управления коробкой передач, кг; г\) - средний
радиус опорной поверхности шестерни
включаемой передачи, м; /р - задаваемое время
разблокирования; 1р - 0,08 ... 0,15 с; Мтр щ^ и
Мв щах - предельно допустимые моменты
соответственно трения и ведения сцепления,
приведенные к первичному валу коробки
передач при минимально низких рабочих
температурах коробки передач, Нм; Рф - сила
предварительно поджатой пружины фиксатора, Н;
п - число пружин фиксаторов; у - угол лунки
фиксаторов.
Расчетная сила разблокирования
синхронизатора на рукоятке рычага при включении
передачи с учетом передаточного отношения
механизма привода Рр < 50 Н для легковых
автомобилей и Рр ^ 150 Н для грузовых
автомобилей, т.е.
р = -^_
^пр^пр
где /пр - передаточное число привода; для
легковых автомобилей /пр = 4 - 6, для
грузовых автомобилей /пр = 6 ... 8; т|пр - КПД
привода; в зависимости от конструкции привода
Лпр = 0,9 ... 0,97.
Коробки передач подвергают следующим
основным видам стендовых испытаний:
на статическую прочность с целью
проверки прочности картерных деталей, шестерен
и валов;
шестерен на изгибную и контактную
долговечность, а также контактную
долговечность подшипников;
синхронизаторов по отработке основных
его геометрических и силовых параметров;
на долговечность синхронизаторов,
определяемую началом пробоя синхронизатора,
когда в связи с износом спиральных канавок
фрикционных поверхностей происходит
падение коэффициента трения ниже допустимой
величины.
2.4.4. РАЗДАТОЧНЫЕ КОРОБКИ
Раздаточные коробки, устанавливаемые
за коробкой передач отдельно или в одном
блоке с ней, предназначены для распределения
крутящего момента между ведущими мостами
или группами ведущих колес в трансмиссиях с
бортовым приводим многоприводных
автомобилей. Основные функции раздаточных
коробок:
предотвращение циркуляции мощности в
приводе между ведущими мостами и
раздаточной коробкой путем использования
дифференциального привода или отключения части
ведущих мостов на дорогах с твердым
покрытием;
обеспечение направления вращения
ведомых валов и их расположения,
определяемых конструкцией и взаимным
расположением коробки передач, ведущих мостов,
карданных валов и других агрегатов автомобиля;
обеспечение возможности отбора
мощности, привода спидометра при двухступенчатом
исполнении.
Кроме того, .для увеличения силы тяги на
ведущих колесах и получения возможности
движения с минимальными скоростями 2,5 ...
5 км/ч раздаточные коробки позволяют
увеличивать общее передаточное число
трансмиссии, а также число ступеней передаточных
чисел при включении дополнительной
коробки передач (как правило, двухступенчатой),
повышать проходимость автомобиля путем
блокировки межосевого дифференциала (при
необходимости).
Классификация раздаточных коробок
может быть произведена по следующим
признакам:
1) по наличию или отсутствию
дифференциала в приводе ведущих мостов (включая
смешанный привод, кинематически жесткий
или .с применением муфты свободного хода, а
также периодически включаемый привод);
2) по числу выходных валов;
3) по взаимному расположению
выходных валов;
4) по числу осей в раздаточной коробке;
5) по числу ступеней передаточных
чисел.
Для повышения проходимости
автомобилей в раздаточных коробках с
дифференциальным .приводом, как правило, имеется
принудительно управляемый блокирующий
механизм, а в бездифференциальных
осуществляется подключение переднего моста в тяжелых
условиях. Для повышения проходимости уве-
РАЗДАТОЧНЫЕ КОРОБКИ
229
личивается число ступеней передаточных
чисел (обычно до двух), что связано с
недостаточностью диапазона установленной коробки
передач.
2.4.10. Типовые схемы трансмиссий
многоприводных автомобилей
Схема
~^Ёё^Г
О-А-О
4 х 4, с раздельным приводом ведущих мостов
1 2 _3_ 4
4 х 4, с раздаточной коробкой в блоке с
редуктором
6 х 4, с раздельным приводом мостов задней
тележки
6 х 6, с раздельным приводом ведущих мостов
6 х 6, с проходным средним мостом
1 2 3 4
0_1_0 о-^-О
8 х 8, с раздельным приводом ведущих мостов
через раздаточные коробки
1 2 3 4
8 х 8, с проходными мостами
о х 6, с бортовым приводом и центральной
раздаточной коробкой
_1 ?_ з б
8 х 8, с бортовым приводом и двумя двигате-
лями
Примечание: 1- двигатель; 2 -
сцепление; 3 - коробка передач; 4 - раздаточная ко-
робка; 5 - бортовой редуктор
Число выходных валов обычно два, но
встречаются конструкции с тремя выходными
валами при раздельном приводе мостов задней
тележки трехосных автомобилей, а также с
четырьмя выходными валами при раздельном
приводе мостов передней и задней тележек
четырехосного автомобиля (табл. 2.4.10). В
смешанном приводе два из трех выходных
валов имеют дифференциальный привод, а
третий вал кинематически жестко связан с
ведущим валом и может быть отключен от
него. Взаимное расположение и число осей в
основном определяются по условиям
компоновки (например, необходимостью
расположить выходной вал ниже коробки передач, для
чего вводится дополнительная промежуточная
ось). Выходные валы в большинстве случаев
соосны, хотя несоосное положение позволяет
располагать один их выходных валов соосно с
входным и проводить прямую передачу
крутящего момента от коробки передач к одному
из ведущих мостов.
По основным кинематическим
признакам наиболее распространенными являются
следующие группы раздаточных коробок;
1) дифференциальные с двумя соосными
выходными йалами, с .постоянно
включенными передним мостом и блокировкой
дифференциала (рис. 2.4.11);
2) бездифференциальные с несоосными
выходными валами, один из которых соосен с
входным валом, с периодически включаемым
передним мостом (рис. 2.4.12);
3) бездифференциальные с соосными
выходными валами и периодически включаемым
передним мостом (рис. 2.4.13).
Раздаточные коробки первой группы
благодаря дифференциалу позволяют иметь
постоянно включенный передний мост без
какой-либо циркуляции мощности и дают
возможность полностью использовать
допустимые осевые нагрузки. Повышение
проходимости обеспечивается блокировкой межосевого
дифференциала при движении по дорогам
низкого качества и в бездорожье. На дорогах с
твердым покрытием дифференциал включается
в обязательном порядке с целью исключения
циркуляции мощности.
В коробках, предназначенных для
автомобилей с колесной формулой 6x4,
дифференциальный привод задних мостов, а пере-
230
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
1 )
"т
■щ^
л
I4]
\п№
м[
к
*
1т "-^
г)
3)
V
тФ
131
сАЫ
Л
Щ
щ
Ш
&
Л*чТнШ
г.
ж)
Рис. 2.4.11. Кинематические схемы дифференциальных раздаточных коробок с двумя соосными выходными
валами, с постоянно включенным передним мостом и блокировкой дифференциала:
а - одноступенчатая КАЗ-4540; 0 - двухступенчатая ВАЗ-2121; в - "Урал-375"; г - КамАЗ; д - УО-275, 380 800;
е - КрАЗ-256; ж - КрАЗ-255
дний мост привода не имеет. Симметричный
конический дифференциал блокируется
зубчатой муфтой с электропневматическим
приводом, а передачи включаются синхронизатором
с механическим приводом. Смазка
осуществляется разбрызгиванием.
Раздаточные коробки второй группы
имеют возможность жесткого соединения
входного вала с соосным выходным, т.е.
прямую передачу крутящего момента от коробки
передач к ведущему мосту при отключенном
переднем мосте. Это повышает КПД передачи
на наиболее распространенных режимах
движения. Полноприводность обеспечивается
включением с помощью зубчатой муфты
переднего моста. Такой привод является жестким и
на дорогах с твердым покрытием в нем
возникает циркуляция мощности, что приводит к
перегрузке контура колеса - детали ведущих
мостов - карданные передачи - детали
раздаточной коробки. Упомянутая перегрузка
вызывает преждевременный износ, а в некоторых
случаях поломку из-за превышения
допустимых нагрузок. Поэтому включение переднего
ведущего моста при отсутствии межосевого
дифференциала допустимо только на дорогах с
низкой несущей способностью.
КАРДАННЫЕ ПЕРЕДАЧИ
231
-дат
ггд_
*-ф ж-~
ш
Ш
\
гол
I 1
о
3
г: >
м--" а.
*).. . # •
Рис. 2.4.12. Кинематические схемы
бездифференциальных раздаточных коробок с
несоосными выходными валами, один из которых
осев с выходным валом, с периодически включенным
передним мостом:
а - УАЗ-469; ГАЗ-66-11; б- ЗИЛ-131
а) 5)
Рис. 2.4.13. Кинематические схемы
бездифференциальных раздаточных коробок с
соосными выходными валами и
периодически включаемым передним мостом:
а - ЗИЛ-157КД; б- "Татра"
2.4.5. КАРДАННЫЕ ПЕРЕДАЧИ
Карданная передача передает крутящий
момент между несоосными валами,
обеспечивает угловую, осевую компенсацию при
изменении расстояния между ними. Карданные
передачи, включающие карданные шарниры,
валы, подвижные соединения, изменяющие их
длину, могут быть плоскими, если ведущий,
карданный и ведомый валы лежат в одной
плоскости, пространственными, если это
условие не соблюдается, одно- и
многошарнирными (при трех и более шарнирах с
промежуточными опорами).
Карданные шарниры различают
неравной (асинхронные) и равной (синхронные)
угловой скорости. Простые асинхронные
шарниры (рис. 2.4.14, б) обеспечивают только
угловые перемещения, универсальные (рис.
2.4.14, а) - угловые и осевые. Два карданных
шарнира неравной угловой скорости с
делительным механизмом или с опорами ведущего
и ведомого валов составляют основу
конструкций синхронных сдвоенных карданных
шарниров (рис. 2.4.14, в).
Синхронные шарниры (как простые, так
и универсальные) различают по типу рабочих
элементов: сдвоенные карданные шарниры с
крестовинами и игольчатыми подшипниками;
шариковые с шестью (рис. 2.4.15, а)у пятью и
четырьмя (рис. 2.4.15, б) шариками; трехши-
повые с роликами (рис. 2.4.15, в), дисковые
(рис. 2.4.15, г).
Типоразмерные ряды и параметры
основных асинхронных и синхронных шарниров
представлены в табл. 2.4.11 и 2.4.12.
Передаточное отношение асинхронных карданных
шарниров, имеющих некоторые углы у/,
переменное, зависящее от угла поворота а, а для
синхронных шарниров равно единице.
Рис. 2.4.14. Карданные шарниры:
а - универсальный; б - простой; в - сдвоенный; 1 - ведущая вилка; 2 - ведомая вилка; 3 - крестовина;
4 - игольчатый подшипник; 5 - подвижное шлицевое соединение
232
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
2.4.11. Карданные шарниры неравных угловых скоростей (типоразмерный ряд)
Максимальный
крутящий
момент, М^ кН-м
0,3 ... 1
1 ... 3
3 ... 5
5 ... 13
Размеры крестовины,
мм
В
61,2
71,2
82
88,2
98
118
135
155
173
С
23,8
28
28
30
35
38
50
50
62
Размерный
фактор
ВР • 10-5 мЗ
0,3222
0,283
0,682
1Д9
1,46
2,52; 3,6
4,3
6,56
Автомобиль
ВАЗ-2105, 2107
ВАЗ-2121
АЗЛК-2141, КСК-100 (самоходный
кран), К-700А, 702 (трактор)
ГАЗ-24-10, УАЗ
ГАЗ-53, КАВЗ-685, ПАЗ-672, ГАЗ-66,
404ЗМ (автопогрузчик)
ЗИЛ-431410, ГАЗ-4301, ЛиАЗ-677,
4008М, 4045ЛМ, 4065 (автопогрузчик),
МАЗ-520, КамАЗ-5320
КрАЗ-260, МАЗ-5335
БелАЗ-540, К-700А, 701 (трактор)
Примечание: ВР = гРН.
2.4.12. Карданные шарниры равных угловых скоростей (типоразмерный ряд)
Максимальный
крутящий момент, кНм
0,8 ... 1,2
6 ... 10
10 ... 15
Т^п шарнира
(рисунок)
Трехшиповой (2.4.15,*)
Шестишариковый
с сепаратором
(2.4.15, а)
Четырех-, пятишарико-
вый, с центрирующим
шариком (2.4.15,6)
Сдвоенный карданный
(2.4.14, (?)
Дисковый (2.4.15, г)
Наружный
диаметр, мм
76*
80
87, 82*
95, 89*
ПО
142
156
155 х 50*2
122
160
Автомобиль
ЗАЗ-1Ш2
ВАЗ-1111
ВАЗ-2108, 2109
ВАЗ-2121, АЗЛК-2141
УАЗ-469
ГАЗ-66, ПАЗ-3201
ЗИЛ-131
МАЗ-502, 509
аУрал-4320"
КрАЗ-2556
* Шарнир расположен у силового агрегата.
*2 Расстояние по торцам подшипников х наружный диаметр подшипников, мм.
КАРДАННЫЕ ПЕРЕДАЧИ
233
Рис. 2.4.15. Синхронные шарниры:
а - с шестью шариками; б - с пятью и четырьмя шариками; в - трехшиловые с роликами; г - дисковые;
1 - корпус; 2 - сепаратор; 3 - обойма; 4 - шарик; 5 - трехшиповая крестовина; 6 - ролик; 7 - игла; 8 - чашка;
9 - шип; 10 - центрирующее устройство; И - вилка; 12 - диск
234
Глава 2.4. ТРАЦСМИССИИ АВТОМОБИЛЕЙ
В асинхронных шарнирах переменное
передаточное отношение обусловлено
Периодическим изменением угловой скорости ©1
ведомой вилки от максимума со / со8у до
минимума сосо8у дважды за один оборот
шарнира по отношению к постоянной угловоц
скорости со ведущей вилки (рис. 2.4.16).
Переменное передаточное отношение
асинхронных шарниров приводит к
возникновению в трансмиссиях параметрических
крутильных колебаний особенно при высоких
угловых скоростях карданных передач.
Снижение амплитуд параметрических колебаний, в
плоских карданных передачах (рис. 2.4.17, а)
осуществляют выбором углов у установки
шарниров и соотношений жесткостей С на
кручение валов по уравнениям
2_^2_^2, _^2 л
1
У\
2
+У2
/1 +
-1
1 1 1
— + — + —
-л+1 )
|/1 +
( \
1 1 1 1 1
— +—+— +...+
2 4 5
±й
1 1
— +— +...+■
л+1 )
\
±...±
-л+1 )
1Л+ —/2
допускается
2>?=АУ*2,5-.
Рис. 2.4.16. Характеристика переменного
передаточного отношения карданной передачи
Рис. 2.4.17. Схемы карданных передач как колебательных систем трансмиссий:
а - плоской; б - пространственной
В уравнениях перед у у знак "+" при
фазовом угле 0 ° и "-" при угле 90 ° между
ведущей вилкой 1-го шарнира и ведущей вилкой
первого шарнира.
В пространственных карданных
передачах снижение колебаний может быть
достигнуто разворотом вилок карданного вала на угол
0? рассчитываемый по уравнению
со$6 = -
со8у3
аду1 $1пу2
Если знак "+" угла 0, то разворот
ведущей вилкой второго шарнира производится по
направлению вращения вала (или ведомой
вилки первого шарнира против направления
вращения), а если знак "-", то разворот
ведущей вилки второго шарнира осуществляется
против направления вращения вала (или
ведомой вилки первого шарнира по вращению).
Аналитические зависимости для расчета
основных параметров шарниров и валов
приведены в табл. 2.4.13. При расчете
долговечности карданного шарнира ориентируются на
экспериментальные данные о долговечности
шарниров при определенных режимах их
работы, иногда используются данные расчетов.
Долговечность шарниров (базовая) при
заданных для определенных их типоразмеров
длительно действующих крутящих моментов М^
составляет Ь^ = 1500 ч при угле у = 3°,
частоте вращения Л/, = 100 мин1 синхронных
шестишариковых шарниров с сепараторами и
X/, = 3000 ч при угле у = 3 ° и частоте
вращения Л/, = 1000 мин1 асинхронных шарниров с
крестовинами и игольчатыми подшипниками.
2.4.13. Зависимости для расчета параметров и долговечности карданных шарнид
Параметр
Максимальный угол установки
асинхронных шарниров у/,
определяемый по \%(0,5у^), °
Критическая частота вращения
карданного вала /1ко, мин1
Максимальный крутящий
момент передаваемый шарниром,
Нм:
асинхронным с крестовиной
синхронным шариковым с
четырьмя и пятью шариками
синхронным с шестью
шариками и сепаратором
синхронным трехшиповым
Зависимость
4,777 (0Д25Л/
лтах V ^к
где птах - максимальная частота
вращения вала в трансмиссии,
мин-1; М - крутящий момент на
валу, Н м; /к - момент инерции
вала относительно оси
вращения, кгм2
29626 (Я/^
* 1 р '
где Ь - длина карданного вала
по центрам карданных
шарниров, м; </с„ - средний диаметр
трубы, м
М0 = 1ъВГр
2ВГрсо&у
2ВТр
2Ь/р&тра> где ра - угол давления
1,5(соау+1) ВРр
где 2э - число рабочих
элементов (шариков, роликов и др.)
Допустимые
значения
Не более 3
4
8
-
-
юв и валов
Условия
применения
На легковых
автомобилях
На грузовых
автомобилях
и автобусах
На
автомобилях высокой
проходимости
-
Мо при у=0
Му при у*0
1 _ . ,
234
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
Продолжение табл. 2.14.13
Параметр
Давление р (среднее) в
зоне контакта рабочих
элементов:
синхронных шарниров при
твердости. рабочих
поверхностей не менее 60НКС,, МПа
асинхронных с крестовинами
Долговечность Ьх синхронных
шарниров с шестью шариками
с сепаратором:
при лх< 1000 мин"1:
простых
универсальных
при/!*> 1000 мин-1:
простых
универсальных
Угловой фактор:
Ах
4<0
Безразмерный параметр
сравнительной оценки
несущей способности х
Зависимость
Г
Эк
0,53 Е
V вр
г\4ЖМ\А1
539803/^^0
Мхпх
396580м1а1
Мхпх
10028003/^x0
3 '
Мхпх
где М^ и Мх - крутящий
момент при определении
соответственно базовой долговечности
и при условиях расчета Ьх
(1 - 8Ш у) со$ у
^1-(58ту/2)3
М0/(*3/р) = 1эВГ/с13,
" V )
где й - наружный диаметр
шарнира
Допустимые
значения
1000...2100
2200...3200
2800...3500
Не менее
125 тыс.
км
-
Условия
применения
Длительное
действие
крутящего
момента (на
высшей
передаче)
Кратковременное
действие
крутящего
момента (на
низшей
передаче)
При А/о
На
переднеприводных
легковых
автомобилях
ВАЗ-2108,
ЗАЗ-1102,
ВАЗ-1111
-
КАРДАННЫЕ ПЕРЕДАЧИ
237
м
50
ио
30
20
10
5,0 \
н
СЮ* Н-м
\ /
Г X
\ /
/
/
/
—-1 1 1 1 ^ - 1 1
(1)
Ш
Рис. 2.4
300 300 ЮООЦ
5000 Ю0001х,
18. Зависимости для оценки долговечности I*
20 30 НО 60
150 300 500
ЮО 200
10002000
При изменении частоты вращения П&
действующего крутящего момента Мх и углов
у в шарнирах долговечность Ьх шестишарико-
вых синхронных шарниров с сепаратором
может быть рассчитана по зависимостям табл.
2.4.13, а асинхронных с крестовинами и
игольчатыми подшипниками по рис. 2.4.18 с
учетом поправочных коэффициентов А/,, Куу
Ах, зависящих от частоты вращения, угла,
базовой долговечности.
Трубы карданных валов - электросварные
холоднодеформированные тонкостенные из
низкоуглеродистых сталей (Ст08; 15; 20) с
высокими требованиями к точности геометрии
(ГОСТ 5005-82). Существенное уменьшение (в
5 раз) массы и повышение
виброизоляционных качеств труб валов карданных передач
может быть получено при изготовлении их из
анизотропных полимерных композиционных
материалов путем соответствующего расчета
структуры полимерной композиции. В табл.
2.4.14 представлены параметры стальных труб
автомобильных карданных передач.
Подвижные соединения могут быть с
трением качения (рис. 2.4.19, а). В этом случае
их рабочие элементы - шарики, ролики с
цилиндрической или сферической
поверхностями перемещаются в пазах определенного
профиля. Наиболее часто в конструкциях
применяют подвижные соединения с трением
скольжения (рис. 2.4.19, б). В этом случае
рабочими элементами являются шлицы с
эвольвентным или прямоугольным профилем,
причем для уменьшения сил трения (осевых
сил) и повышения износостойкости
применяют покрытия шлиц вала или втулки
антифрикционными полимерными композициями.
2.4.14. Параметры труб карданных передач
Внутренний диаметр
Аш. мм
45
66
71
82
94
101
Толщина стенки
5", мм
2,5
2,0
1,6
1,8
2,1
3,0
3,5
4,04
5,0
Модель автомобиля
ГАЗ-21, УАЗ-469
ВАЗ-2105, 07, ВАЗ-2121
ГАЗ-24-10, БАЗ-3727, РАФ-2203
ИЖ-21251
ГАЗ-66-10
ЗИЛ-431410, ЛиАЗ-677
КрАЗ-255, "Урал-375м
КамАЗ-4331, МАЗ-5335, МАЗ-5551
БелАЗ-540
238
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
Промежуточная опора карданной
передачи (рис. 2.4.20) - шариковый подшипник,
расположенный на валу и через упругий
резиновый элемент соединенный с кузовом,
воспринимает при работе нагрузки от изгибных
колебаний карданных валов и действий осевых
сил, возникающих в подвижных шлицевых
соединениях. По структуре она представляет
собой одномассовую колебательную систему,
характеризуемую собственной частотой
колебаний V = ^С I т (т- масса карданной
передачи, приходящаяся на промежуточную опору,
С - жесткость упругого элемента), а как
виброизолятор оценивается величиной силы,
передаваемой кузову.
карданной передачи:
1 - упругий элемент; 2 - опорный шарикоподшипник;
3 - защитное уплотнение
Предельные величины динамических
сил, передаваемых промежуточными опорами
на раму, кузов не должны превышать в
легковых автомобилях 36 Н, грузовых малой
грузоподъемности - 68 Н, средней - 113 Н,
большой - 340 Н.
Надежность герметизации - условие
безотказности и долговечности промежуточных
опор, обеспечивается подшипниками
закрытого типа с одноразовой смазкой и пыле-
грязезащитными кольцами-лабиринтами опор.
Испытания карданных передач в сборе
проводят на стендах и в трансмиссиях при
движении машин в реальных условиях. От
дельные элементы-шарниры, подвижные шли-
цевые соединения испытывают на стендах на
статическую прочность закручиванием под
действием крутящего момента до разрушения,
на усталостную прочность и износостойкость
под нагрузкой (крутящим моментом) и
изменением параметров (углов в шарнирах, ходов в
подвижных соединениях).
2.4.6. ВЕДУЩИЕ МОСТЫ
Ведущий мост воспринимает все силы,
действующие между опорной поверхностью и
рамой или кузовом автомобиля, в том числе
силы тяги и торможения.
Ведущий мост обычно включает несущий
картер моста и механическую передачу,
связывающую карданный вал трансмиссии с
ведущими колесами. Передача ведущего моста
состоит из главной передачи, привода колес,
промежуточной передачи, дифференциала.
Ведущие мосты можно разделить на
управляемые и неуправляемые. Если ведущий мост
управляемый, то его передача включает
карданные шарниры, обеспечивающие
возможность привода колес при изменяющемся угле
между валами передачи. На рис. 2.4.21
показан передний управляемый ведущий мост
грузового автомобиля.
Характеристика ведущих мостов. По
взаимному расположению на автомобиле мосты
могут быть передними, задними,
промежуточными (средними в случае трехосного
автомобиля). Ведущие мосты могут быть как одно-,
так и многоступенчатыми, чаще
двухступенчатыми. В зависимости от числа передач
ведущий мост может иметь любое число
скоростей, чаще две.
Важнейшим кинематическим параметром
трансмиссии является передаточное
отношение моста, выбираемое из условий
удовлетворения тяговых и скоростных требований к
автомобилю при движении в хороших
дорожных условиях на последней (прямой) передаче
в коробке передач. Для легковых автомобилей,
обладающих значительным запасом мощности
двигателя, а также для междугородних
автобусов, имеющих высокую максимальную
скорость, передаточное отношение может быть
приблизительно рассчитано по формуле
/0 = 0,377 еатх ,
V
шах
где гк - радиус качения колеса, м; пы
частота вращения коленчатого вала при
максимальной мощности, мин1; Ущ^х -
максимальная скорость движения, км/ч.
ВЕДУЩИЕ МОСТЫ
239
РГрГТ^ЙЗ
Рис. 2.4.21. Управляемый передний ведущий мост автомобиля:
1 - главная передача; 2 - дифференциал; 3 - картер моста; 4 - синхронный шарнир
240
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
Для прочих автомобилей передаточное
отношение /о выбирается на 10 ... 20 %
больше, чем по приведенной выше формуле, чтобы
создать достаточный запас силы тяги за счет
некоторого снижения максимальной скорости.
Наибольшее распространение имеют
одноступенчатые ведущие мосты вследствие
сравнительной простоты конструкции. Такие
мосты применяются для легковых
автомобилей, междугородных и пригородных автобусов,
грузовых автомобилей малой и средней
грузоподъемности, тягачей магистральных
автопоездов, предназначенных для эксплуатации на
равнинных дорогах с усовершенствованным
покрытием.
Передаточное отношение
одноступенчатых ведущих мостов 3 - 6,5. В таких мостах
используются конические или гипоидные
зубчатые пары. Конические зубчатые пары имеют
криволинейные зубья, выполненные по дуге
окружности (типа "глисон"), по дуге элоиды
(типа "эрликон") либо реже по дуге
эвольвенты (типа "клингельнберг"). К преимуществу
таких передач относятся: наличие
локализованного пятна контакта, что делает зацепление
менее чувствительным к неточностям
взаимного расположения колес, а также возможность
обработки зубьев с использованием
высокопроизводительного оборудования.
Гипоидные передачи занимают
промежуточное положение между коническими
передачами с криволинейными зубьями и
червячными и отличаются от конических наличием
гипоидного смещения шестерни относительно
оси ведомого зубчатого колеса. Гипоидное
смещение обычно составляет не более 0,12
диаметра делительной окружности ведомого
колеса для грузовых автомобилей и 0,2
диаметра делительной окружности ведомого
колеса для легковых автомобилей.
Гипоидные шестерни, также как
конические, имеют форму зуба в виде дуги
окружности, дуги элоиды или эвольвенты. В
автомобильных главных передачах обычно
применяют гипоидные зубчатые пары с нижним
направлением смещения и левым направлением
зуба. По сравнению с коническими
передачами, при одинаковой прочности, гипоидные
передачи обладают меньшим размером,
создают меньший уровень' шума, позволяют
уменьшить вертикальный размер тоннеля в салоне
легкового автомобиля, служащего для
размещения карданного вала.
Гипоидные передачи обусловливают
несколько большие потери мощности вследствие
продольного скольжения профилей зубьев,
требуют использования специальных
смазочных материалов с антизадирными присадками.
Вместе с тем, снижение наружного диаметра
ведомого колеса связано с уменьшением
потерь на разбрызгивание смазочного материала,
которые составляют значительную долю общих
потерь в передаче ведущего моста.
Основным размерным показателем
одноступенчатого ведущего моста является диаметр
йе делительной окружности ведомого
конического или гипоидного колеса. Он характеризует
прочность передачи, а также такие важные
показатели, как дорожный просвет,
собственную массу моста. Нагруженность передачи
ведущего моста на автомобиле определяется
силой тяги на колесах, которая тем выше, чем
больше масса тдж транспортного средства,
движимая одним мостом. На рис. 2.4.22
представлен график ёе от /Яда, построенный на
основании изучения отечественного и
зарубежного опыта использования гипоидных
передач на тягачах магистральных автопоездов и
автопоездов универсального назначения. В
табл. 2.4.15 приведен пример типоразмерного
ряда одноступенчатых гипоидных передач
грузовых автомобилей и автобусов.
# *5 35 V т^,т
Рис. 2.4.22. Зависимость диаметра делительной
окружности Л€ ведомого гипоидного колеса
одноступенчатой главной передачи
грузовых автомобилей от движимой массы Шд,:
1 и 2 - расчетные кривые, соединяющие точки,
соответствующие главным передачам с одинаковыми
контактными напряжениями зубьев зубчатых колес
для автомобилей, эксплуатируемых в США
(/ соответствует передачам тягачей магистральных
автопоездов); 3 - линия, соединяющая точки,
соответствующие передачам мостов, предназначенных для
эксплуатации в Европе; 4 - линия, соединяющая
точки, соответствующие передачам ведущих мостов
отечественных автомобилей поколения конца 80-х гг.;
расчетная кривая, соединяющая точки,
соответствующие передачам с одинаковыми
контактными напряжениями зубьев гипоидных
колес; 5 - расчетная кривая равных контактных
напряжений, проходящая через одну из точек линии 3
ВЕДУЩИЕ МОСТЫ
241
2.4.15. Пример типоразмерного ряда одноступенчатых гипоидных передач
грузовых автомобилей и автобусов
Ведущий мост
Одиночный
и
Мост
тележки
Одиночный
Мост
тележки
Одиночный
и
Номинальная
нагрузка на
мост Сы, кН
26
60
55
80
90
100
100
Движимая
масса Шдх,
т
5,5
15,5
23,5/26*
27,0
37,0
Диаметр ведомого
зубчатого колеса йе
(ориентировочно),
мм
240
365
426
440
480
Назначение
Грузовые автомобили
грузоподъемностью 1,5 и 2,0 т
Грузовые автомобили
грузоподъемностью 4,5 т, с колесной
формулой 4x2, грузоподъемностью 8
т, с колесной формулой 6x4,
автобусы 7 м
Грузовые автомобили
грузоподъемностью 6 т, с колесной
формулой 4x2, тягачи автопоездов
грузоподъемностью 30 т, с
колесной формулой 6x4, автобусы
пригородные, междугородные,
туристские длиной 10 ... 11 м
Седельный тягач автопоезда
грузоподъемностью 16 т, с колесной
формулой 4x2
Седельный тягач автопоезда
грузоподъемностью 24 т, с колесной
формулой 4x2
* Для равнинных дорог с усовершенствованным покрытием.
Рис. 2.4.23. Схемы двухступенчатых главных передач:
а - с поперечным валом и установленной спереди конической или гипоидной шестерней; б - с промежуточным
валом и установленной сверху конической или гипоидной передачей; в - с первой ступенью в виде пары
цилиндрических шестерен; г - со второй ступенью в виде планетарной передачи; 1 - конические или
гипоидные зубчатые колеса; 2 - промежуточный вал; 3 - вал первой ступени; 4 - планетарная передача
242
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
Если к транспортным средствам
предъявляются специальные требования, например,
увеличения дорожного просвета, снижения
высоты пола кузова грузовою автомобиля-
фургона или пола салона городского автобуса,
увеличения нагрузочной способности при
работе в составе тяжелых автопоездов на
специализированных дорогах, используются
конструкции /1-ступенчатых (чаще двухступенчатых)
ведущих мостов, позволяющие обеспечить
высокое передаточное отношение (6,5 - 11), а
также снизить максимальный вертикальный
размер в зоне расположения главной передачи
Двухступенчатые главные передачи могу!
быть выполнены по одной из четырех схем,
показанных на рис. 2.4.23, конструкция
ведущего моста с двухступенчатой главной
передачей показана на рис. 2.4.24.
1 ,Г^^Л^ 3
Рис. 2.4.24. Задний ведущий мост
с двухступенчатой главной передачей:
ведущий вал; 2 - ведомое колесо первой ступени,
3 - шестерня второй ступени;
4 - ведомое колесо второй ступени
Редуцирование момента в л-ступенчатых
ведущих мостах может осуществляться как в
главной передаче, так и в колесных и
бортовых передачах. Наибольшими возможностями
(по условиям реализации значительных
нагрузок в передаче) располагают ведущие мосты,
имеющие привод колес, однако они
отличаются сложностью конструкции и изготовления. В
таких мостах одноступенчатая главная
коническая или гипоидная передача располагается
в средней части, а дополнительные передачи
(привод колес) - вблизи ведущих колес или
внутри них.
Привод колес может осуществляться
посредством непланетарных передач с зубчатыми
колесами внешнего или внутреннего
зацепления, колесной планетарной передачи,
выполненной по одной из четырех кинематических
схем (рис. 2.4.25) Конструкция с планетарной
колесной передачей представлена на рис.
2.4.26. Двухскоростные ведущие мосты
выполняют с планетарной или непланетарной
передачей, обеспечивающей ступенчатое изменение
передаточного отношения главной передачи,
включающей планетарный редуктор,
приведена на рис. 2.4.27.
Передаточное отношение двухскоростной
передачи подбирается таким образом, чтобы
передаточные числа трансмиссии образовали
ряд близкий к геометрической прогрессии.
При этом высшее передаточное отношение /ов
главной передачи выбирается как для одно
скоростной главной передачи,.а низшее
= /п
*у1я,
где д
сии.
знаменатель геометрической нрогрес-
Рнс. 2.4.25. Кинематические схемы колесных планетарных передач:
а - / = 1 + с/а\ 0-1 = 1 + а/с; в -;' = с/а; г - г = 2
ВЕДУЩИЕ МОСТЫ
243
^Ш^а
Рис. 2.4.26. Планетарная колесная передача:
/ - коронная шестерня; 2 - солнечная шестерня; 3 - сателлит; 4 - водило; 5 - полуось
Т'
№ра-
т|Мдр
Рис. 2.4.27. Кинематическая схема
двух скоростной передачи
Применение двухскороСгных мостов
хьма ограничено, особенно после распрост-
шения многоступенчатых коробок передач с
ироким диапазоном передаточных чисел.
Подвод мощности к колесам ведущих
остов с обеспечением независимой частоты
>ащения этих колес осуществляется с помо-
ью системы дифференциальных механизмов
ифференциалов).
*; д)
Рис. 2.4.23. Кинематические схемы шестеренчатых
дифференциалов:
а - конический симметричный;
б - г - несимметричный; д - цилиндрический;
У - к промежуточному мосту; 2 - к заднему мосту;
3 - к переднему мосту
244
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
По назначению дифференциалы
.подразделяются на межколесные и межосевые. По
конструкции дифференциалы могут быть
шестеренчатыми (с коническими или
цилиндрическими зубчатыми колесами), червячными,
кулачковыми, а по характеру распределения
момента - симметричными (/дф = 1) и
несимметричными (/Дф = 1). Кинематические схемы
шестеренчатых дифференциалов приведены на
рис. 2.4.28.
Максимальный тяговый момент на
ведущем колесе автомобиля определяется суммой
тягового момента на колесе, находящемся в
наихудших условиях сцепления с дорогой, и
момента внутреннего трения дифференциала,
приведенного к колесу.
Повышение тяговых свойств автомобилей
обеспечивается применением блокируемых и
блокирующихся дифференциалов. Для
предотвращения относительного вращения ведомых
звеньев в блокируемый дифференциал
устанавливают жесткую связь (например, зубчатую
муфту) одного из выходных звеньев и корпуса,
либо выходных звеньев между собой.
Конструкция блокируемого межколесного
дифференциала показана на рис. 2.4.29.
В блокирующемся дифференциале,
устройство, препятствующее относительному
вращению ведомых звеньев, действует
автоматически. К таким механизмам относится
обширная группа дифференциалов,
повышенного внутреннего трения: червячных;
кулачковых; дисковых со встроенными
фрикционными дисковыми муфтами; с гидравлическим
сопротивлением; с муфтами вязкого трения, в
которых используется силиконовая жидкость.
Перераспределение моментов на
выходных звеньях обеспечивается путем
искусственного повышения внутреннего трения,
которое характеризуется коэффициентом
блокировки К§ - максимальным отношением
моментов на отстающем и опережающем
звеньях. Для шестеренчатых дифференциалов
А5 = 1,1 + 1,3, для дифференциалов с
повышенным внутренним трением А$ = 2,0 + 15,
при блокированном дифференциале К$ = оо.
Рис. 2.4.29. Одноступенчатая гипоидная главная передача с блокируемым дифференциалом:
1 - пневмоцилиндр включения блокировки; 2 - направляющий палец; 3 - блокирующее зубчатое колесо;
4 - полуосевая шестерня с наружными шлицами блокировки
ВЕДУЩИЕ МОСТЫ
245
К блокирующимся дифференциалам
могут быть отнесены также дифференциалы с
переменным передаточным числом, у которых
устройство, препятствующее относительному
вращению звеньев, действует по принципу
изменения передаточного числа при
относительном вращении звеньев. Реализация такого
дифференциала в конструкции может быть
осуществлена, в частности, с помощью
эллиптических зубчатых пар.
В специальных транспортных средствах
повышенной проходимости используют
отключающие дифференциалы, функции
которых выполняют двухсторонние зубчатые
муфты, обеспечивающие отключение
опережающего ведомого звена при повороте автомобиля.
Расчет основных элементов ведущих
мостов. Методика определения напряжений в зубьях
конических, гипоидных и цилиндрических
зубчатых колес общепринятая. Специфика
расчета передач мостов состоит в выборе
расчетного режима и оценке полученных
результатов.
Зубчатые колеса передач ведущих мостов
рассчитывают: на сопротивление усталости по
напряжениям изгиба и по контактным
напряжениям; на долговечность по усталостному
изгибу и поверхностному выкрашиванию; на
перегрузку по усталостному изгибу.
Расчет зубчатых колес на сопротивление
усталости - основной расчет для передач
ведущих мостов, ему подлежат все зубчатые
колеса за исключением зубчатых колес
дифференциала, которые имеют несоизмеримо
меньшее (чем другие зубчатые колеса передач
мостов) число циклов нагружения зубьев.
Достоверность расчета в значительной степени
определяется правильностью выбора режима и
соответствующего допускаемого напряжения.
Допускаемые напряжения (МПа),
соответствующие пределу усталости, представлены
ниже (в числителе изгибные, а в знаменателе
контактные) для разных передач.
Коническая и гипоидная 210 / 1750
Цилиндрическая:
прямозубая 260 / 1200
косозубая 180 / 1200
Согласно рекомендациям фирмы Глисон
для обеспечения необходимого сопротивления
усталости зубчатых колес передачи ведущего
моста необходимо, чтобы нагрузка (момент
М)у соответствующая пределу усталости
(Муст), отсекала не более 0,001 площади под
кривой распределения (рис. 2.4.30).
Многообразие режимов эксплуатации
автомобилей может быть охарактеризовано
некоторой определяемой опытно величиной
условного подъема дороги, на котором в элементах
передачи возникают напряжения, равные пре-
Ршс. 2.4.30. Кривая распределения нагрузок Р
в трансмиссии автомобиля по пробегу
(Р - вероятность возникновения момента
величиной М, МуСТ - момент, обусловливающий
возникновение напряжений в зубьях передачи,
равных пределу усталости; 5'- площадь под кривой
распределения на участке величины нагрузок,
превышающих Муст)
делу усталости. При этом вероятность
превышения такого режима должна быть не более
0,001. Момент Муст на входном валу ведущего
моста, соответствующий напряжению, равному
пределу усталости, подсчитывают с учетом
условного подъема, для сочетания типа
автомобиля и условий эксплуатации по формуле
^уст =^джгк(а+/+®)/(т1вм'вм)>
где /Ида - масса, движимая ведущим мостом,
кг; а - угол условного подъема, %, см. ниже;
/- коэффициент сопротивления движению, %,
табл. 2.4.16; ае - фактор энергообеспечения
автомобиля; Г]^ - КПД ведущего моста, %,
см. ниже; /щ^ - передаточное отношение
ведущего моста.
Ниже приведены значения угла а
условного подъема, %.
Легковые автомобили 8
Грузовые автомобили на дорогах с
усовершенствованным покрытием ... 3,5 ... 9
Городские автобусы 5 ... 9
Междугородные автобусы 6 ... 10
Внедорожные автомобили 9 ... 30
Ниже приведены суммарные значения
а = а + /, рассчитанные по распределению
крутящего момента, измеренного на полуосях
при режимометрировании, %, для дорожных
условий различных категорий.
246
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
Загородное асфальтовое шоссе (I) 6,8
Загородная булыжная дорога (III) 9,4
Улица большого города (III) 12
Горная дорога (III), грунтовая дорога
(IV) 12,37
Фактор энергообеспеченности
автомобиля может быть рассчитан по следующей
эмпирической зависимости:
ав= 16-0,195 О / М^
где С - вес автомобиля; Мп
максимальный
момент двигателя. Величина ае = 0 при О /
Мпах^82 и ае > 0 при С / Л/Гтах<82. Фактор
энерговооруженности ае >0 только для
легковых автомобилей высшего класса или мощных
спортивных автомобилей. Для всех остальных
легковых автомобилей, а также для всех
автобусов и грузовых автомобилей ае = 0.
Ниже приведены значения КПД т]^ (%)
ведущего моста (в числителе для гипоидной
первой ступени, а в знаменателе для
спирально-конической).
Одноступенчатый ...-. 85 ... 90 / 95
Двухступенчатый или двухско-
ростной 80 ... 85 / 90
Меньшие значения берутся для передач с
передаточным отношением больше 6.
2.4.16. Коэффициент сопротивления движению/ %,
для различных дорожных условий (категорий условий эксплуатации)
Категория дорожных условий
I.Бетон, кирпич (клинкер), асфальтовый
брусок, асфальтовый щит, гранитный брусок,
песчаный асфальт, асфальтобетон, щебенка
(высокого качества) битуминизированная,
деревянный брусок (торцовка)
II. Щебенка битуминизированная (низкого
качества)
III.Песчано-глинистое покрытие, гравий,
булыжное покрытие
IV. Земля, песок
V. Пахота
Состояние опорной поверхности
Хорошее
1,0
1,2
1,5
2,0
-
Удовлетворительное
1,1
1,6
2,0
2,5
-
Плохое
1,2
2,0
2,5
3,5
Менее 20
Достоверный расчет передач ведущих
мостов на долговечность может быть проведен
только на базе достоверных кривых
распределения нагрузок по пробегу. Они должны быть
построены по результатам измерений нагрузок
в трансмиссии для условий эксплуатации
автомобиля. При этом важно получить данные
именно для зоны нагрузок, превышающих
Муст (Рис- 2.4.31). При наличии таких данных
может быть принят следующий порядок
расчета на долговечность.
Р \
Определяется эквивалентный
участка кривой Мъ. Муст:
\М„
Мэ = ю|
|л/т/(л/ул/,
'уст ''3 Мтах М
Рис. 2.4.31. Кривая распределения в зоне высоких
нагрузок Р
(Мпах - максимально возможный момент;
Мэ - эквивалентный момент)
I М „
где Л/щах - максимально возможный момент,
используемый при расчете на перегрузку.
Определяется эквивалентный пробег:
Ьэ = Ц I (Мэ / Л/уст)"
где Ь§ - пробег, соответствующий базовому
числу циклов Л%; для конических и
гипоидных колес И$ = 6-Ю6; для цилиндрических
колес при расчете на усталостный изгиб Л^ =
107; для цилиндрических колес при расчете на
усталостное выкрашивание Л/^ - 5-Ю7; т -
показатель степени усталостной кривой; т - 6
при расчете на усталостный изгиб; т — 3 при
расчете на усталостное поверхностное
выкрашивание.
ВЕДУЩИЕ МОСТЫ
247
Общий расчетный пробег
Расчет на перегрузку проводят для всех
зубчатых колес, включая дифференциал, на
максимально-возможный крутящий момент,
возникающий при резком броске сцепления.
На основании результатов исследований [2, 4],
максимальный крутящий момент при броске
сцепления целесообразно считать в 2 раза
больше момента, соответствующего
максимальному моменту двигателя.
С учетом этого момент, принимаемый
при расчете на перегрузку,
Мтах =2Л/дв/кпЛкп/ркЛРкС»
где /кп **- передаточное отношение коробки
передач на первой передаче; г|кп - КПД
коробки передач на первой передаче; /р к -
передаточное число раздаточной коробки; Г|рК -
КПД раздаточной коробки; С = (1 + /д)~* для
автомобиля с межосевым дифференциалом.
Напряжения изгиба зубьев не должны
превышать предела текучести материала
зубчатых колес с учетом их термической обработки
с коэффициентом запаса 1,15.
При расчете картеров ведущих мостов
оценивают: перегрузку от изгибающих
моментов под действием вертикальных боковых и
тормозных сил; сопротивление усталости; жес
ткость. Вертикальная сила, действующая на
мост со стороны кузова,
Рв = 0,5 ОКаКП,
где КД - коэффициент динамичности, см.
ниже; КП - коэффициент перераспределения
нагрузки; определяется из уравнения
движения автомобиля.
Ниже приведены коэффициенты
динамичности КД для различных условий
движения.
Асфальтовое шоссе (I) 1,5
Грунтовая дорога, булыжное
шоссе (III) 1,7 ... 2,5
Бездорожье (IV) Менее 4,2
Боковая сила, возникающая, например
при заносе автомобиля,
Ра = 0,5 О ф,
где ф - коэффициент сцепления колеса с
дорогой.
Тормозная сила, действующая на одно
колесо,
РТ = 0,5 О Кп ф.
ЩМ////Ш^Л
ж
РггА Рт1
ш
Рис. 2.4.32. Схема приложения внешних сил к картеру
моста и эпюры их моментов от вертикальной силы Рш,
боковой Рш и тормозных сил Рт
На рис. 2.4.32 показаны схема действия
внешних сил на картер моста и эпюры их
моментов.
Расчет картера на перегрузку ведется для
наиболее нагруженного сечения в зоне
крепления рессоры. Результирующее напряжение
не должно превышать предела текучести
материала с запасом прочности 1,12 ... 1,5
(большее значение относится к автомобилям,
предназначенным для наиболее тяжелых
условий эксплуатации).
Расчет картеров мостов на сопротивление
усталости можно проводить по напряжению
изгиба, возникающего от действия
номинальных вертикальных сил (рис. 2.4.33). При этом
надежная работа картера обеспечивается, если
расчетные напряжения не превышают
допускаемых значений приведенных ниже (МПа).
Рис. 2.4.33. Расчетная схема для определения
напряжений в косыночных швах
248
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
Закаленная катаная углеродистая
низколегированная сталь (269НВ) 130
Отожженная катаная сталь, холодная
штамповка без последующей закалки
(менее 180НВ) 80*
Нормализованная катаная сталь, после
горячей штамповки 100
* И по сварному шву приварки цапфы.
В практике конструирования картеров
мостов широкое распространение нашла
штампосварная конструкция с вваренными в
центральной части картера косынками 7,
обеспечивающая значительную экономию
листового проката. При неправильном выборе
размеров и угла Ок косынки имеет место
усталостное разрушение косыночного шва. Проверка
напряженности косыночного шва может быть
проведена по нормальному напряжению ан в
направлении, перпендикулярном к оси шва
ан = 0,5(7/ А8и12ак,
где ]х - момент инерции сечения хх
относительно горизонтальной оси х.
Относительный провар при
автоматической сварке без разделки кромок 5 = А / / =
= 0,5 ... 0,6.
По экспериментальным данным
достаточное сопротивление усталости шва
обеспечивается, если напряжения, определенные по
формуле, не превышают 36 МПа. Низкое
значение допускаемых напряжений является
следствием высокой концентрации напряжений в
случае, если относительная величина 5
превышает приведенные выше значения.
Рекомендуемый угол а* = 15 ... 17 °.
Расчет картеров мостов на жесткость
ввиду сложности конфигурации наиболее
целесообразно выполнять с помощью МКЭ.
Картер можно считать достаточно жестким,
если при нагружении удвоенной номинальной
нагрузкой О по схеме, представленной на рис.
2.4.33, прогиб измеренный под
подрессоренной площадкой, не превышает 1,5 мм на 1 м
колеи.
2.4.7. ЭЛЕКТРОМОТОР-КОЛЕСА
Преимущества применения
электромотор-колес (ЭМК) на автомобилях
определенных типов заключаются в следующем:
на карьерных автосамосвалах в
возможности реализации одним колесом большой
мощности, что позволяет повысить
грузоподъемность автомобиля без увеличения числа
ведущих колес; в улучшении компоновки
автомобиля и получении желаемого
распределения массы по осям благодаря возможности
варьировать базой автомобиля; в сокращении
числа деталей и узлов механической передачи,
подверженных интенсивному изнашиванию; в
высокой эффективности и надежности
электрического торможения;
на автомобилях (автопоездах) высокой
проходимости в свободном выборе числа
ведущих осей и звеньев автомобиля (автопоезда);
в увеличении полной массы автомобиля
(автопоезда) без превышения установленной
нагрузки на ось; в свободной компоновке
шасси; в простоте механической части
электропривода по сравнению с агрегатами
гидромеханического привода; в существенном
повышении проходимости автомобиля; в
обеспечении широкого диапазона силы тяги при
бесступенчатом регулировании;
на городских автобусах в возможности
создания автобусов большой и особо большой
вместимости с высокими тягово-сцепными
показателями; в улучшении планировки
пассажирского салона; в возможности
значительного снижения уровня пола, что улучшает
условия входа и выхода пассажиров, сокращает
время стоянки на остановках; в повышении
безопасности движения вследствие
применения дополнительного электрического тормоза;
в повышении комфортабельности автобуса, а
также плавного разгона и торможения.
В зависимости от режима работы
системы электропривода ЭМК, применяемые для
активизации полуприцепов, могут быть
постоянного и периодического действия. Первую
группу составляют ЭМК с ограниченными
диапазонами регулирования момента и
частоты вращения, определяемыми
характеристиками односкоростного электродвигателя (одно-
скоростные ЭМК), и ЭМК с расширенными
диапазонами регулирования момента и
частоты вращения, реализуемыми благодаря
специальной конструкции электродвигателя или
двухскоростного редуктора (двухскоростные
ЭМК).
ЭМК представляет собой агрегат,
включающий следующие элементы: тяговый
электродвигатель постоянного тока (ТЭД) или
тяговый асинхронный двигатель (ТАД), редуктор с
деталями механической передачи, колесо с
опорными подшипниками, механический
тормоз, уплотнения полости редуктора и
опорных подшипников колеса, детали
механизмов подвески и поворота. ЭМК
конструктивно и функционально объединяет
электродвигатель и колесный движитель. Поэтому
параметры ЭМК определяют свойства опорной
проходимости и тягово-скоростные показатели
автомобиля, а следовательно, его основные
эксплуатационные свойства и требуемые
параметры остальных агрегатов электропривода.
Основным недостатком электропривода
является относительно большая масса его агрега-
ЭЛЕКТРОМОТОР - КОЛЕСА
249
тов, в том числе ЭМК. Способами снижения
массы ЭМК являются рациональная
компоновка агрегата, уменьшение массы
электродвигателя при повышении частоты вращения,
применение переключаемого редуктора и др.
Компоновка ЭМК оказывает большое
влияние на его конструктивные и
эксплуатационные свойства. Ее определяют два
признака: последовательность расположения
электродвигателя и редуктора в монтажном объеме
внутри обода и выбор опоры внутренних
обойм подшипников колеса.
Основные параметры ЭМК определяются
исходя из базовых параметров автомобиля.
Базовые параметры автомобиля делятся на
основные, характеризующие свойства только
автомобиля, и производные, характеризующие
свойства как автомобиля, так и
электропривода Основными параметрами являются:
номинальная нагрузка на шину Ок, Н;
максимальная скорость Ушах, км/ч; максимальный
динамический фактор Дпах! удельная расчетная
мощность автомобиля А^, кВт/кН; средняя
эксплуатационная удельная сила тяги /экс,
которая для автомобилей трех приведенных
групп составляет соответственно: 0,118; 0,157;
0,093 [1]. Производные базовые параметры -
это коэффициент энерговоруженности ЭМК
^4, кВт/кН; коэффициент допустимой
перегрузки ТЭД (ТАД) к& коэффициенты
относительной жесткости механической
характеристики ТЭД XI и Х2> отношение максимальной и
длительной частот напряжения ТАД
•Чтах / -Моо-
Коэффициент кд для неполноприводных
машин
. КТ, бРвспЛргЧгЛсЛдЛр
для полноприводных
кЛ =^вРвспЛргЛгПсПдПр,
где О - вес автомобиля, Н; рвсп < 1 -
коэффициент, учитывающий затраты мощности на
привод вспомогательного оборудования; г|рг,
Лг> Лс> Лд> Лр - КПД соответственно
редуктора генератора, генератора, статического
преобразователя, ТЭД (ТАД) и редуктора ЭМК; /д -
число ЭМК на автомобиле.
Коэффициент
кР =Л/дтах/Л/доо>
где Л/дтах и Л/доо - соответственно
наибольший реализуемый момент и момент
длительного режима ТЭД или ТАД. Рекомендуемые
значения кр для трех групп автомобилей
следующие: 1,86 + 2,20; 2,50 + 2,70; 3,0 [1].
Параметр формы механической
характеристики Л/д(/2д), где Л/ц и /1д - соответственно
момент и частота вращения ТЭД, выражается
как х = (-Яд / ^/д )г^д / ^лд ) • Используют
два значения X : XI соответствует части
характеристики, для которой Л/д > Л/доо; Х2
соответствует части характеристики, для которой
Мл < 3/доо. Для ТАД /1тах //1л * * Утах /
V» = ку. Практическое значение имеют
зависимости ку(ка)у справедливые и для ТЭД, если
понимать под ку = Ушах I у*>, где V» -
скорость, соответствующая длительному режиму
ТЭД.
Основные параметры ЭМК включают
основные параметры ТЭД (ТАД) и редуктора.
Первые необходимы для расчета
электромагнитных и конструктивных параметров ТЭД
(ТАД) [2], вторые - для расчета редуктора на
прочность и выбора рационального варианта
по геометрическим размерам [3]. Основные
параметры ТЭД (ТАД): параметры длительного
режима (мощность Рд», момент Л/д», частота
вращения /1доо, частота /\*> для ТАД);
коэффициент кц = = 1/дщах I #цоо( #дтах и С/д» -
соответственно максимальное напряжение и
напряжение длительного режима) для ТЭД;
диаметр Ва и длина 1а стального пакета якоря
для ТЭД, внутренний диаметр Д. и длина 15
стального пакета статора для ТАД; масса /яд
ТЭД (ТАД).
Основными параметрами редуктора
являются: передаточное число /р; минимальная
суммарная ширина зубчатых венцов шестерен
п п
всех рядов ^Я/пш, Функции ^В^к^) для
/«1 /=1
п
двухрядных редукторов и 2_. ^/ (к2) при ^1 =
/«1
= ^1тах ДЛЯ трехрядных редукторов (^ и ^ -
конструктивные параметры первого и второго
рядов, п - число рядов), а также "активный"
объем редуктора.
Расчетные формулы для определения
основных параметров ЭМК приведены ниже:
длительная мощность ТЭД (ТАД), кВт,
Л*= <7к^/Оо3лР);
длительный момент ТЭД (ТАД), Нм,
Апах утах / (0,377 Лдтах кГЦр);
длительная частота вращения ТЭД (ТАД),
МИН"1,
250
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
ТЭЦ,
Яд,» 3,6 Лдпгах /Сд кр / ^^тпах ^тах)»
длительная частота напряжения ТАД, Гц,
/1<в = 0,06 кл кг /1дс рд / (/)тах Ущах);
коэффициент ретулирования напряжения
кц= {К I *ф)( V» / Ю е);
*ф=фд/фд;
= (^м(ША)1г,й][/х2;
Х2=1ё[зМ^/(/)тахУ'тах)]:
:М«*А/(^ш)|;
длина стального пакета якоря ТЭД, м,
/а = [0,091 / (о»вт«х4в.Лаю2>в)] х
х[Ск^тахутах/(^Пр)];
длина стального пакета статора ТАД, м,
2,36 к,
/(..
д тах ^оо-^воо С08
фА2)
х[(7к^тахутах/(Мр%)}
масса ТЭД (ТАД), кг,
тд =кС1)аи)1а{5)'>
передаточное число редуктора,
'р ^кАпах'р /(^доо^Лр);
суммарная ширина зубчатых венцов
шестерен всех рядов редуктора, см,
п
/=1
ширина зубцов (см) солнечной шестерни
первого ряда 2К- Н:
по напряжениям изгиба:
при к\ < 3
Вг = 265,3 ^""^"^Р х
^"д тах^Лр
;;Р,*,*12(*1-*2К1.
по контактным напряжениям:
при к\ > 3
#! = 503,5
^7к*Лпахутах^р
2/
при ^ < 3
при /^1 > 3
Д, = 530,5
^к^тахутах^р ^и^и^1дг1
^"дтахМр М^р!^
2?1 = 265,3 С'Д"™У""*РХ
^М^дтах^^р
•* »
[СДвр1Фк
"активный" объем редуктора, см3
л
/=1
В этих формулах /1Д щад - максимальная
частота вращения ТЭД (ТАД); /1ДС -
синхронная частота вращения ТАД; рл - число пар
полюсов ТАД; Утак - наибольшая скорость,
реализуемая повышением напряжения ТЭД,
отнесенная к гиперболе; ГК\ = соп$1; ГК -
сила тяги ЭМК; Ущ^х - наибольшая скорость
при напряжении 1/цсо и силе тяги,
соответствующей скорости Ушах, Фд и Ф* -
магнитный поток ТЭД соответственно до ослабления
и после ослабления поля; а - коэффициент
полюсного перекрытия ТЭД; Уа тах -
максимальная окружная скорость якоря ТЭД; Ас -
линейная нагрузка ТЭД (ТАД) при длительном
токе; Вь*> - индукция в воздушном зазоре ТЭД
(ТАД); кЕ = 0,973; 0,968; 0,962 при рц
соответственно 2; 3; 4; созср» - коэффициент
мощности в длительном режиме; Кд -
коэффициент, определяемый с использованием
параметров выполненных электродвигателей
аналогичного класса; гр - рабочее значение радиуса
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
251
колеса; ^р = (0,8 + 1,5) - коэффициент,
зависящий от уровня нагрузок и условий работы
редуктора; йъ\ - диаметр коронной шестерни
первого ряда; Ки - коэффициент
концентрации напряжений при изгибе; [а]\ -
допустимое напряжение по изгибу для шестерен
первого ряда, Па; 0„ - коэффициент
неравномерности нагрузки при изгибе; аг\ - число
зубьев солнечной шестерни; ар\ - число
сателлитов первого ряда; У - коэффициент формы
зуба; Кк - коэффициент нагрузки; [Ск]\ -
допускаемое контактное напряжение, Па; Ок -
коэффициент неравномерности нагрузки при
определении контактных напряжений; фк -
коэффициент, учитывающий коррекцию
зубьев. Отметим, что вычисление ширины зубцов
второго (и третьего) ряда редуктора
производится по формулам для В\ при условии
введения в числитель формул множителя,
учитывающего изменения момента на входном звене
ряда, замене к\ на к^ и уточнении значений
[а],[СУ,^иаг
Для двухскоростных ЭМК справедливы
соотношения между базовыми параметрами
автомобиля и основными параметрами
электродвигателя и редуктора, полученные для од-
носкоростных ЭМК, при условии замены
величины Дпах на АпахИ (максимальный
динамический фактор на второй передаче), причем
А-П- Ь«97 |Д~*'Мп
у(утах*перП1)
где г\\ и г}и - КПД редуктора
соответственно на первой и второй передачах; А^,ер -
коэффициент переключения, принимается
1 ^ ^пер ^ к р. Отношение передаточных чисел
на первой и второй передачах /[ / /ц и базовые
параметры автомобиля связаны соотношением
I (*аМ0
При испытаниях ЭМК определяют
электромеханические характеристики ТЭД и ТАД,
отнесенные к колесу, предельные и частичные
тяговые характеристики ЭМК, исследуют
тепловые режимы основных элементов ЭМК и
эффективность системы охлаждения, а также
выявляют другие параметры ЭМК (момент
инерции, остаточные потери на трение во
фрикционных механизмах и др.). Испытания
ЭМК проводятся на специальных нагрузочных
стендах, позволяющих имитировать
эксплуатационные режимы движения автомобилей с
ЭМК.
В условиях эксплуатации обслуживается
щеточно-коллекторный узел ТЭД,
контролируется состояние уплотнений и наличие
смазочного материала в полости редуктора,
степень загрязнения отдельных участков
воздуховода ЭМК, а также износ поверхности
фрикционных элементов механического тормоза.
2.4.8. АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
СТУПЕНЧАТЫМИ МЕХАНИЧЕСКИМИ
ТРАНСМИССИЯМИ
Регулировка скорости движения
автомобиля осуществляется путем изменения топли-
воподачи двигателя и передаточного
отношения трансмиссии. При этом в зависимости от
конструкции трансмиссии ее передаточное
отношение изменяется плавно или ступенчато.
В большинстве моделей автомобилей, а также
автобусов преимущественно применяют
механические трансмиссии со ступенчатой
коробкой передач и муфтой сцепления.
Передаточное отношение их изменяется переключением
коробки передач, воздействием на сцепление и
на устройство подачи топлива.
Автомобильные ступенчатые
трансмиссии по типу системы управления могут быть
разделены на три основные группы:
1) с неавтоматическим управлением, при
котором переключение передач, регулирование
момента, передаваемого сцеплением, и топли-
воподачи двигателя выполняются
непосредственным воздействием водителя на органы
управления. Такой тип управления является
наиболее распространенным в автомобилях
общего назначения;
2) полуавтоматические трансмиссии, у
которых хотя бы один из агрегатов (сцепление
или коробка передач) выполнены с
автоматическим управлением или сер во переключением.
В систему управления трансмиссией могут
входить командное и исполнительное
устройства автоматического управления топливопо-
дачей двигателя в процессе переключения
передач;
3) автоматизированная трансмиссия,
имеющая автоматически управляемое
сцепление, автоматически переключаемую
ступенчатую коробку передач и устройство
автоматического регулирования топливоподачи
двигателя в процессе переключения передач.
Полуавтоматические трансмиссии.
Автоматически действующее сцепление, входящее в
состав полуавтоматической трансмиссии,
реализует следующие режимы управления:
при частотах вращения пх коленчатого
вала двигателя, соответствующих режиму его
холостого хода, сцепление полностью
выключается, вследствие чего прерывается связь
между двигателем и коробкой передач;
в диапазоне частот вращения от пх до
± 2500 мин-1 (карбюраторные двигатели), от пх
252
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
до ± 1400 мин"1 (дизели) происходит
постепенное включение сцепления с полной его
блокировкой при достижении указанных
частот вращения коленчатого вала двигателя.
Дальнейшее увеличение частоты
вращения коленчатого вала двигателя не оказывает
влияния на работу сцепления, которое
остается заблокированным до тех пор, пока частота
вращения вала двигателя не снизится до
заданного значения, составляющего (1,1 + 1У2)пх.
Такие режимы включения могут быть
обеспечены как при использовании
фрикционного сцепления обычного типа, так и в
случае оборудования автомобиля сцеплением
специальной конструкции.
Независимо от типа и конструкции
автоматически действующего сцепления
основной его характеристикой является зависимость
момента МСУ передаваемого сцеплением, от
выбранного параметра управления у. В
качестве такого параметра обычно выбираются
частота вращения п вала двигателя либо
положение а (угол) педали подачи топлива в
двигатель, а иногда и скорость движения V. При
этом для требуемого согласования режимов
совместной работы двигателя и автоматически
действующего сцепления необходимо, чтобы в
характеристике Мс = / (у) увеличение
значения у приводило к возрастанию момента Мс.
В зависимости от типа и конструкции
сцепления транспортного средства для
получения требуемой характеристики *МС = / (у)
применяют системы автоматического
управления сцеплением как с использованием в них
элементов обратной связи, оценивающих
величину МСУ так и без таких элементов. В
частности, при оборудовании автомобиля
электромагнитным фрикционным или
электромагнитным порошковым сцеплением, у которых
величина Мс является функцией силы тока
1ЭМ в обмотке сцепления, отпадает
надобность введения элементов обратной связи в
состав системы управления. В ее задачу входит
лишь формирование требуемой зависимости
/эм=/(У)
Возможно создание и гидравлической
системы автоматического управления
фрикционным сцеплением без использования
элементов обратной связи при условии, что
гидронасос системы создает в ней давление, величина
которого является функцией выбранного
параметра управления у.
Применение элементов обратной* хвязи
оказывается необходимым в наиболее часто
встречающихся системах автоматического
управления фрикционным сцеплением с
использованием в них пневматических
исполнительных устройств его привода. При этом в
качестве параметра обратной связи используется
либо давление р в приводе, либо величин
перемещения / устройства привода сцепления.
Наряду с математическими методам]
расчета зависимостей Мс = / (у) могут был
применены и чисто графические методы, ос
нованные на использовании известных
характеристик отдельных элементов системы
автоматического управления сцеплением.
На рис. 2.4.34 для системы управления,
не содержащей элементов обратной связи,
представлен графический метод расчета
зависимости силы тяги Рэм электромагнита (или
силы притяжения между элементами
электромагнитного сцепления) от частоты вращения п
вала двигателя, являющейся параметром
управления. При этом предполагается, что
являются известными формируемая системой
управления зависимость силы тока /эм в
обмотке электромагнита от частоты вращения
л, а также характеристики электромагнита
Рэм =/(/Эм)» изображенные соответственно в
квадрантах Ли Б.
Рзм
6
Рлгт
'
Р„-Г(л)\
в
т
| ч
>
/
—*-
^
-
т
л
А
1
1Л-ГГл)
Та
\1
У
1 Л
т
[, |
/
у
.. а
/
Г/т]
Рис. 2.4.34. Графический метод расчета зависимости
силы тяги РЭм Электромагнита от частоты вращения л
N
Шггм
А.!.
XI
N
6
4=
ч У
№*ш ^Ц
1
\
_Ы
ГТ
*\
г>
1 т
11
д_>1/
1
Тч
.Г1
А
Ъм-Г(п)
гк
1 [
1 1
^
~п\
ГчЯ"^1
Гкп
Рис. 2.4.35. Графический метод расчета зависимости
Мс ш /(л) для системы с использованием в ней
элемента обратной связи по величине перемещения /
механизма привода фрикционного сцепления
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
253
Графический метод расчета зависимости
М; = / (п) Д71* системы с использованием в
ней элемента обратной связи по величине
перемещения / механизма привода
фрикционного сцепления представлен на рис. 2.4.35. В
этой системе элементом обратной связи
является пружинное устройство, сила Р^ которого
является линейной функцией перемещения /
(квадрант Б).
Управляющим устройством системы
является электромагнит, характеристика
которого Рэм = / (/) соответствует данным квадранта
Б на рис. 2.4.34. Она изображена в квадранте
А на рис. 2.4.35. В квадранте В рис. 2.4.35
представлена зависимость момента Мс от
величины Дав квадранте Г - искомая
зависимость Мс =/(/!).
Сервопереключенне коробок передач (с
автоматизацией управлением сцепления и без
нее). В этих системах преимущественно
используются электропневматические
устройства, в которых команды управления
пневматическим исполнительным механизмом
вырабатываются электрическими аппаратами с
дистанционным управлением. Применение
силового пневмопривода обусловлено простотой
конструкции его узлов, небольшими
габаритными размерами составных элементов при
обеспечении требуемой мощности, мягкостью
в работе, достаточно высоким
быстродействием. Электрическое дистанционное управление
позволяет решить проблемы, связанные со
значительным удалением исполнительных и
командных элементов. Такое управление
обладает большой гибкостью и универсальностью,
что, в частности, упрощает решение ряда
вопросов, связанных с применением
автоматических систем переключения передач.
Сервопереключенне механических ступенчатых
коробок передач достигается без изменения
конструкции коробок передач (или с
минимальными изменениями) благодаря использованию
комплекса навесных элементов. С помощью
электропневматического управления могут
быть реализованы следующие режимы работы
трансмиссии:
командное дистанционное преселектор-
ное управление, при котором водитель с
помощью командного устройства (контроллера)
производит выбор необходимой передачи, а ее
включение осуществляется после нажатия на
педаль сцепления;
простейшее полуавтоматическое
управление, характеризующееся тем, что водитель с
помощью контроллера вырабатывает команду
включения той или иной передачи, после чего
их переключение происходит без дальнейшего
участия водителя, в том числе на период
переключения автоматически выключается
сцепление;
полуавтоматическое управление, при
котором водитель с помощью контроллера
вырабатывает команду переключения передач, а
процесс переключения передач, в том числе,
включение и выключение сцепления
происходит без его участия. Кроме того,
автоматизируется действие сцепления в режиме трогания
автомобиля с места, а в некоторых случаях
предусматривается и автоматизация
управления топливоподачей двигателя в период
переключения передач.
Для управления пневматическими
исполнительными элементами в современных
системах управления почти исключительное
применение получили пневматические
клапаны с электроприводом (электромагнитные
клапаны).
В качестве командных устройств
переключения передач (контроллеров управления)
наибольшее распространение получили:
контроллер шагового типа, который при
перемещении органа управления из
нейтрального положения в одну сторону вырабатывает
команды включения последующей высшей
передачи, а в другую - последующей низшей
передачи;
контроллер с Н-образной (или Ж-образ-
ной) разверткой, позволяющий водителю
переключать передачи в любой
последовательности.
Автоматизированная трансмиссия. В нее
входят элементы, присущие
полуавтоматической трансмиссии, а также исполнительное и
командное устройства принудительного
управления топливоподачей двигателя в процессе
переключения передач, командное устройство,
вырабатывающее управляющие сигналы, в
соответствии с которыми должно
осуществляться переключение передач.
В автоматизированной трансмиссии
переключение передач происходит при
выключенном сцеплении, т.е. при снятии нагрузки с
двигателя. Чтобы в процессе переключения
передач предотвратить недопустимое
повышение частоты вращения вала двигателя,
устройство принудительного управления
топливоподачей двигателя должно действовать таким
образом, чтобы устанавливать эту частоту в
заданных пределах. После завершения
процесса переключения передач принудительное
управление 'топливоподачей должно быть
прекращено.
Для решения этих задач в
автоматизированных трансмиссиях реализуется одно из
следующих технических решений:
в тракте подачи топлива последовательно
с основными заслонками монтируются
дополнительные заслонки с дистанционным
(обычно электромагнитным или
электродвигательным) приводом. Привод включается
только на период переключения передач, обеспе-
254
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
чивая при этом независимо от положения
педали подачи топлива такой ее уровень,
который необходим для поддержания частоты
вращения вала двигателя в заданных пределах;
механический привод от педали подачи
топлива к органу топливоподачи оборудуется
специальным устройством с
электромагнитным или электродвигательным приводом,
которое при включении привода обеспечивает во
время переключения передач требуемый
уровень топливоподачи двигателя независимо от
положения педали топливоподачи;
для управления органом топливоподачи
вместо механического привода используется
дистанционный электромагнитный или злект-
родвигательный привод, который в течение
всего-времени за исключением периодов
переключения передач управляется от датчика,
связанного с педалью подачи топлива. В
период переключения передач электрическая связь
между датчиком и приводным устройством
топливоподачи прерывается, а действием
устройства управляет система регулирования,
обеспечивающая поддержание частоты
вращения вала двигателя на заданном уровне.
В состав современной системы
управления, вырабатывающей команды переключения
передач, входит электронный блок, к которому
подводятся сигналы, вырабатываемые
датчиком контроля скорости движения автомобиля
и датчиком положения педали топливоподачи.
В современных микропроцессорных
системах автоматического управления
трансмиссий, помимо указанных параметров (скорости
движения и положения педали подачи
топлива) для выработки команд переключения
используются и такие дополнительные данные,
как масса автомобиля, температура тех или
иных узлов трансмиссии, отклонение
характеристик двигателя от заданных величин. В
последнем случае система управления приобретает
свойство адаптивности, т.е. приспособления к
изменяющимся условиям эксплуатации
автомобиля.
2.4.9. АВТОМАТИЧЕСКИЕ ТРАНСМИССИИ
В современном автомобилестроении для
обеспечения максимального комфорта
преимущественное применение получили
автоматические трансмиссии с гидравлическим
преобразователем крутящего момента
(гидротрансформатором). Выпускаются автомобили,
оборудованные автоматической трансмиссией,
имеющей в своем составе фрикционный
вариатор. Основными преимуществами данных
трансмиссий является плавное изменение их
передаточного отношения и работа
практически без разрыва силового потока от двигателя к
колесам при переключении ступеней
механического редуктора трансмиссии. Последнее
достигается благодаря переключению ступеней
редуктора с помощью тормозов планетарн!
механизмов или групп фрикционных сцепл
ний (фрикционов), находящихся в одном ко
пусе с редуктором и работающих с маслянк
смазочным материалом.
Гидромеханические передачи (ГМП). 0<
новными узлами ГМП являются:
гидротрансформатор (ГДТ) с фрикцио
ном его блокировки;
механический редуктор с переключаю
щими фрикционами или тормозными устрой
ствами при планетарной схеме редуктора;
система маслопитания;
система автоматического управления
переключающими устройствами редуктора.
В дополнение к этому в состав ГМП
могут входить следующие узлы и агрегаты:
гидрозамедлитель (городские автобусы и
карьерные самосвалы);
главная передача (переднеприводные
автомобили);
межосевой дифференциал
(полноприводные автомобили).
Гидротрансформаторы, применяемые в
ГМП автомобилей и автобусов, сочетают
свойства гидротрансформатора и гидромуфты.
ГМП по конструкции механического
редуктора подразделяют на два типа: планетарные и
вальные. Важным параметром комплексных
ГДТ является его "прозрачность" (/7), которая
характеризует, в какой мере изменяется
момент на валу насоса при изменении момента
(нагрузки) на валу турбины.
Если независимо от нагрузки момент на
валу насоса остается постоянным, то ГДТ
"непрозрачный", а в случае изменения
момента на валу насоса - "прозрачный". ГДТ с
"прямой прозрачностью", характеризующейся
увеличением момента на валу насоса при воз-
' растании момента нагрузки, применяют
обычно в ГМП легковых автомобилей.
"Непрозрачные" ГДТ преимущественно
используют в грузовых автомобилях и
автопоездах.
К числу основных характеристик ГДТ
относятся зависимости К =/(/), Л = /(/) и
X =/(/) (рис. 2.4.36), определяющие его
преобразующие и нагружающие свойства.
Коэффициент трансо>ормации крутящего момента
ГДТ
К = МТ/МИ,
где М1 и Мн - крутящий момент
соответственно на выходном (турбинном) и входном
(насосном) валу, Нм.
Передаточное отношение в ГДТ
' = "г / л„,
где Лр и /1н - частота вращения соответственно
выходного и входного вала, мин"1.
АВТОМАТИЧЕСКИЕ ТРАНСМИССИИ
255
д,%;/<
! к
^
А
1_
/
И
я,
/
~ч
]—'
г
■1'
\,
^^^
^^
N
О 0,1 0,4 0,6 0,8 С
Рнс. 2.4.36. Хжряжтернстнкж X ■>/(/)
гидротрансформатора ■
основные оценочные параметры:
1 - прозрачного; 2 - непрозрачного
КПД Л = К I.
Коэффициент входного момента ГДТ
Х = Л/н/(со^в5р),
где сон - угловая скорость входного вала ГДТ,
с1; 7)а - активный диаметр ГДТ, м; р -
плотность рабочей жидкости, кг/м3.
Для оценки показателей ГДТ
используются также следующие параметры:
коэффициент Ао трансформации крутящего момента
ГДТ при передаточном отношении / = 0;
максимальный КПД Лтах на режиме
трансформации крутящего момента; передаточное
отношение 1ц соответствующее Лтах^ передаточное
отношение /м соответствующее переходу на
режим гидромуфты; минимальное значение
Ар, соответствующее т| = 80 %; передаточное
отношение /р гидротрансформатора,
соответствующее г| = 80%.
У ГМП легковых автомобилей ГДТ в
основном имеют неразборную конструкцию со
штампованными насосным и турбинным
колесами и литым колесом реактора. Основные
параметры ГДТ легковых автомобилей
следующие:
Ао = 1,6 + 2,6; причем меньшие
значения Ко относятся, как правило, к ГМП с
числом передач 4 - 5, а большие значения к
трехступенчатым ГМП;
Лтах = °>84 + °»9; меньшие значения
относятся к ГДТ с малым активным диаметром и
уменьшенным по осевым габаритам кругом
циркуляции;
коэффициент прозрачности 77 ^ 1,7
при /)а= 230 ... 330 мм.
Для современных конструкций ГМП
характерно применение встроенного фрикциона
блокировки ГДТ, с помощью которого
насосное колесо жестко связано с турбинным
колесом. При этом для уменьшения крутильных
колебаний на режиме блокировки ГДТ
применяется демпфер. Блокировка ГДТ позволяет
повысить КПД трансмиссии и снизить расход
топлива. В ГМП легковых автомобилей режим
блокировки ГДТ в основном применяется на
двух высших передачах, однако в настоящее
время появляются ГМП, в которых
блокировка ГДТ осуществляется на всех передачах.
Таким образом, использовав все преимущества
гидротрансформатора в процессе трогания
автомобиля с места и в первый период
разгона, ГДТ блокируется, и разгон производится
при более высоких КПД трансмиссии.
В ГМП городских автобусов
применяются гидротрансформаторы, как со всеми
литыми колесами, так и со штампованными
турбинным и насосным колесами. Режим
блокировки ГДТ в ряде моделей ГМП городских
автобусов используется на всех передачах.
Для ГМП городских автобусов
характерны непрозрачные ГДТ или с небольшой
степенью прозрачности, т.е. с 77 =1,0 + 1,4 при
Ао = 2,2 + 3 и Лтах = °>84 + 0.86. В ГМП
грузовых автомобилей с активным диаметром
7)а = 340 ... 400 мм применяются такие же
конструкции ГДТ, как и в автобусных ГМП, а
при 7)а ^ 400 мм - литые колеса.
Силовой диапазон ГДТ является
недостаточным для обеспечения требуемых тягово-
динамических качеств и топливной
экономичности автомобилей, поэтому ГДТ сочетают с
механическим редуктором вального или
планетарного типа с несколькими передачами
переднего хода и передачей заднего хода.
Наиболее распространенными системами
управления ГМП являются:
гидромеханическая и электрогидравлическая. Для всех систем
управления характерно наличие насоса
подпитки (обычно шестеренного типа),
создающего в системе необходимое рабочее давление
(р= 0,5 + 2 МПа), и клапанной
гидравлической системы, обеспечивающей подачу и
регулирование давления к включаемым
фрикционам. Гидравлическую систему ГМП снабжают
теплообменником. В автоматических ГМП
системы управления имеются клапаны,
обеспечивающие выбор включаемой передачи в
зависимости от скорости движения и нагрузки
на двигатель.
В ГМП легковых автомобилей, как
правило, применяют планетарные трех-,
четырехступенчатые редукторы. Схемы редукторов
отличаются большим разнообразием, однако в
основном используются редукторы с
ускоряющей передачей на входе и выходе основного
редуктора. Переключение передач осуществля-
256
Глава 2.4. ТРАНСМИССИИ АВТОМОБИЛЕЙ
ется с помощью фрикционных элементов
(фрикционных муфт и тормозов), а также с
помощью муфты свободного хода,
обеспечивающих автоматическое отключение ранее
включенного фрикционного элемента при
включении фрикционного элемента
следующей передачи.
Муфты свободного хода снабжают
дополнительными блокирующими
фрикционными элементами для обеспечения режима
торможения двигателем. В современных
планетарных четырехступенчатых ГМП
применяют до трех муфт и до семи фрикционных
элементов.
Силовой диапазон передаточных
отношений механического редуктора ГМП обычно
2,5 - 4, что соответствует полному силовому
диапазону ГМП 6,5 - 8.
Наличие в ГМП гидравлической системы
с насосом подпитки и теплообменником
создает условия для использования в ней
гидрозамедлителя. Режим работы гидрозамедлителя
обычно предусматривается в ГМП,
рассчитанных на передачу значительных мощностей
(городские автобусы, грузовые автомобили).
По способу получения такого режима ГМП
подразделяются: со встроенным замедлителем;
с замедлителем, режим которого является
одним из особых режимов работы
гидротрансформатора.
Автоматическая система управления
ГМП. Благодаря все большему
распространению программируемых микропроцессорных
(МП) систем управления, наметилась
тенденция увеличения числа параметров управления
ГМП, поскольку это позволяет улучшить
технико-экономические показатели автомобилей.
В некоторых серийно выпускаемых ГМП с
МП системой управления реализуются
многопрограммные алгоритмы, сформированные из
условия обеспечения оптимальных
динамических показателей автомобилей или наилучшей
их топливной экономичности. Система
управления ГМП наряду с выработкой команд
переключения ступеней механического редуктора
осуществляет регулирование плавности
процесса переключения при одновременном
сохранении передачи силы тяги от двигателя к
ведущим колесам в период, пока происходит
переключение передач. Это достигается с
помощью "перекрытия" выключения и
включения фрикционов ранее включенной и вновь
включаемой передач.
В результате предотвращается
недопустимое увеличение частоты вращения вала
двигателя, а плавность процесса переключения
автоматически регулируется изменением темпа
включения и выключения фрикционов.
Бесступенчатые фрикционные передачи
(БСТ). Она представляет собой агрегат,
обеспечивающий плавное изменение передаточно
го отношения между ведущим и ведомым ва
лами в зависимости от выбранных параметре»!
управления. При этом передача момента чере:
БСТ происходит с высоким КПД,
максимальное значение которого составляет примерно
90 % в довольно широком диапазоне
передаточных отношений. Наибольшее
распространение среди бесступенчатых фрикционных
передач получили вариаторы с гибкой
(ременной) связью между ведущим и
ведомыми валами. В состав такой передачи помимо
вариатора входит механизм реверса,
управляемый с помощью зубчатых или фрикционных
муфт, а также сцепление, используемое при
трогании автомобиля с места. В качестве
пускового сцепления находят применение
центробежные, фрикционные управляемые или
электромагнитные сцепления. Известны также
технические решения, базирующиеся на
применении взамен сцеплений
гидротрансформатора.
Характеристики БСТ, в том числе КПД
передачи, зависят от значения передаваемого
ей момента Л/, а также от реализуемого
диапазона изменения передаточного отношения /,.,
определяемого отношением диаметров
ведущего и ведомого раздвигающихся шкивов (рис.
2.4.37).
П ст
Рис. 2.4.37. Изменение КПД л бесступенчатой
передачи в зависимости от передаточного числа *,
В современных БСТ применяют гибкие
элементы, представляющие собой набор из 10
- 14 стальных полос толщиной 0,2 мм,
свернутых в кольца. На эти полосы с обеих боковых
сторон надеваются трапецеидальные блоки,
имеющие в поперечном сечении форму клина.
Особенностью конструкции является передача
усилия от ведущего к ведомому элементу
сжатия ремня. Передача заднего хода БСТ
включается с помощью одного планетарного ряда.
Для силового воздействия (раздвижения
шкивов) используются гидравлические устройства.
Передаточное отношение БСТ составляет 5 -
6. Известна конструкция БСТ с гибким
элементом, представляющим собой цепь,
работающую боковыми поверхностями осей звеньев
по коническим поверхностям шкивов.
РУЛЕВОЕ УПРАВЛЕНИЕ
257
Глава 2.5
ХОДОВАЯ ЧАСТЬ
2.5.1. РУЛЕВОЕ УПРАВЛЕНИЕ
Рулевое управление предназначено для
поворота управляемых колес автомобиля при
воздействии водителя на рулевое колесо и
состоит, в общем случае, из рулевой колонки,
рулевого механизма, рулевого привода и
рулевого усилителя.
Наиболее широко используются
одноступенчатые передачи типов глобоидальный
червяк - ролик (одно-, двух- или трехгребне-
вый) и шестерня-рейка (реечные рулевые
механизмы, рис. 2.5.1) и двухступенчатая
передача типа винт - шариковая гайка, рейка -
зубчатый сектор. Реже применяются
одноступенчатые передачи типов червяк - плоская
шестерня, винт - кривошип и двухступенчатая
передача типа винт - гайка, рейка - зубчатый
сектор. Несущая способность (соответственно
геометрические размеры и масса) механизма
характеризуется в основном нагрузкой на
управляемые колеса автомобиля, для которого
этот рулевой механизм предназначен. Нагрузка
/ 2
является определяющим параметром при
построении типоразмерных рядов рулевых
механизмов (табл. 2.5.1). Показателем несущей
способности рулевых механизмов без
усилителя и полуинтегральных рулевых механизмов
является диаметр вала сошки (выходного вала)
или диаметр рейки (штока на выходе реечного
рулевого механизма), а интегральных рулевых
механизмов (наряду с диаметром вала сошки
или диаметром штока) - максимальный
поворачивающий момент на валу сошки Мс „до (у
механизмов с вращательным движением
ведомого звена рулевой передачи) или усиление на
штоке (у реечных механизмов).
Важнейшим показателем механизмов
всех типов, является передаточное число / -
отношение приращения угла поворота
рулевого вала к соответствующему приращению угла
поворота вала сошки (для механизмов с валом
сошки на выходе из рулевого механизма) или
отношение приращения угла поворота
рулевого вала к приращению хода штока (для
реечных механизмов).С целью обеспечения
воздействия на рулевое колесо в приемлемых
пределах или с целью изменения
чувствительности автомобиля к изменению поворота руле-
Рнс. 2.5.1. Реечное рулевое управление:
1 - рулевые тяги; 2 - рейка; 3 - входной вал
2.5.1. Тнпоразмервый ряд интегральных рулевых механизмов пяти
Параметры
Допустимая нагрузка на управляемые
колеса, кН
Передаточное число /
Угол поворота вала сошки из края в край, °
Максимальный момент на валу сошки при
максимальном давлении в системе, даН м
Максимальное давление в системе
усилителя, МПа
Расход рабочей жидкости, дм3/мин
Масса агрегата, кг
I
до 20
17,1
90
100
(150)
9(14)
6
13
II
40
18,8
90
300
14
10
22
III
50
20,2
90
400
14
12
28
моделей
IV
65
21,2
96
500
14
16
35
V
80
24,2
96
600
14
16
45
258
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
У
^
У,
У
у
у/
Мета
-2
У
&
У
у
'
1
вого колеса передаточное число делают
переменным по углу поворота рулевого вала.
Границы статистических зависимостей
максимального момента на валу сошки Мс „щ
и передаточного числа / современных
интегральных механизмов (с валами сошки) от
допустимой нагрузки Р на управляемые колеса
приведены на рис. 2.5.2. Эти зависимости
позволяют ориентировочно задаться
величинами Мс щах и / с тем, чтобы спроектировать
механизм или выбрать из выпускаемого типо-
размерного ряда.
Метал, 9аН-м
500
Ш
300
200
юо*- КХ1 1 1—I 1 -И-и '*
го
а 14
10 10 30 40 50 60 70 РуН
Рис. 2.5.2. Зависимости передаточного числа / и
максимальных моментов Мс иях на валу сошки
интегральных рулевых механизмов от нагрузки Р на
управляемую ось
При проектировании или выборе
механизма без усилителя, а также
полуинтегрального механизма и применяемого в комплекте с
ним исполнительного механизма рулевого
усилителя возникает необходимость расчета
момента сопротивления Мк повороту
управляемых колес автомобиля. Сила Р,
прикладываемая водителем к рулевому колесу при
повороте управляемых колес автомобиля,
неподвижно стоящего на сухой асфальтобетонной
поверхности, у легковых автомобилей без
рулевого усилителя по статистическим данным
не превышает значений Р = 15 + 20 даН, а у
грузовых Р = 25 + 30 даН.
При наличии рулевого усилителя Р =
= 3 + 4 даН у легковых автомобилей и? =
= 8+10 даН у грузовых. Расчет момента
сопротивления повороту управляемых колес
можно вьшолнить по одной из эмпирических
формул, действительных для оси с двумя
управляемыми колесами, имеющими
односкатные шины:
или
Мк = (0,70 + 0,75)
И°кУ5"
■тр
где Ок - нагрузка на одно управляемое колесо;
/?ш - давление в шине; А - эмпирический
коэффициент; А = 2,1 для диагональных шин;
ц - коэффициент трения при
поворачивании шины относительно опорной
поверхности; ц= 0,7 ... 0,9 для сухого асфальтобетонного
покрытия; т|тр - коэффициент, учитывающий
трение в шкворневых узлах и шаровых
шарнирах рулевого привода; г|тр = 0,90 ... 0,93; Р0 -
площадь отпечатка шины на опорной
поверхности.
Сила, прикладываемая к рулевому
колесу,
Р =
2М„
"рп'Чрм
где / - передаточное число рулевого
механизма; /рп - передаточное число рулевого
привода; г - средний радиус обода рулевого колеса;
т|рм - КПД рулевого механизма; т|рм = 0,7 ...
0,9 в зависимости от конструкции рулевой
передачи.
Рулевой привод передает управляющее
воздействие от рулевого механизма на
управляемые колеса через рычаги и тяги, часть
которых образуют рулевую трапецию.
Тяги, рычаги, сошка соединены между
собой шаровыми шарнирами, защищенными
от попадания грязи. Корпус шарового
шарнира может быть выполнен как одно целое с
тягой или в виде наконечника, соединенного с
тягой, как правило, с помощью резьбового и
клеммового соединений. Прогрессивной
является конструкция шарнира, не требующего
добавления смазочного материала в процессе
эксплуатации. Несущая способность шарнира
определяется диаметром его сферы, которая
выбирается в зависимости от нагрузки на
управляемые колеса автомобиля. Длина
поперечной тяги рулевой трапеции в большинстве
конструкций регулируется, что используется
для регулировки угла схождения управляемых
колес.
Рулевой усилитель создает
дополнительное силовое воздействие, способствующее
повороту управляемых колес, и состоит из
исполнительного механизма, распределителя и
его привода, источника энергии и линий связи
(например, шлангов и трубопроводов в
гидравлическом усилителе). Наибольшее
распространение получили гидравлические усилители
(с гидравлическим насосом в качестве
источника энергии), редко применяются пневмати-
РУЛЕВОЕ УПРАВЛЕНИЕ
259
ческие усилители, перспективны
электрические усилители, в которых источником энергии
является аккумуляторная батарея, заряжаемая
генератором, а исполнительный механизм
представляет собой высокомоментный
электродвигатель постоянного тока. Электронный
блок переработки сигналов электронного
датчика крутящего момента на рулевом валу и
сам датчик являются аналогами
распределителя и элемента центрирования золотника
гидравлического рулевого усилителя.
Применяются два типа гидросистем,
обеспечивающих работу гидроусилителя: с
постоянным расходом (система с "открытым
центром") и с постоянным давлением (система
с аккумулятором давления (с "закрытым
центром"). Системы с закрытым центром
используются редко и только, если на автомобиле
есть несколько потребителей.
Схема системы с открытым центром
показана на рис. 2.5.3: интегральный рулевой
механизм 1 и распределитель роторного типа
2. Насос 4 обычно скомпонован вместе с
бачком 3 для резерва жидкости и клапаном 5
ограничения расхода. Поршень 6
гидроцилиндра интегрального рулевого механизма в
большинстве конструкций выполняется как
одно целое с рейкой рулевой передачи. Кроме
клапана ограничителя расхода в системе
обычно имеются: клапан 7 ограничения давления
рабочей жидкости в напорной магистрали
(встраивается в насос или в распределитель);
обратный клапан 8 (встраивается в
распределитель); клапаны концевых выключателей
(применяются в интегральных механизмах,
9*
Рис. 2.5.3. Схемж рулевого механизм* с усилителем
260
Глава 15. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
встраиваются в распределитель, приводятся от
перемещения поршня силового цилиндра);
клапаны автоматической прокачки
гидравлической системы (применяются в интегральных
механизмах, встраиваются в распределитель).
В качестве распределителя применяют, в
основном, золотниковые механизмы (осевые и
тангенциальные роторного типа), реже
клапанные. Вероятно более широкое
распространение клапанных распределителей в связи с
тем, что они позволяют снизить зону
нечувствительности распределителя.
Важнейшим качеством рулевого
управления является реактивное свойство,
характеризующееся отношением момента, необходимого
для поворота управляемых колес, к моменту,
который прикладывает водитель к рулевому
колесу для осуществления этого поворота. В
рулевом управлении с усилителем необходимы
специальные конструктивные решения,
обеспечивающие необходимый уровень
'реактивного свойства. Реактивное свойство рулевого
управления с гидравлическим усилителем в
значительной мере определяется реактивным
свойством распределителя, которое оценивает-
зд -эа&жжмосгью давления рабочей жидкости
на входе в распределитель от момента на
рулевом валу. На эту зависимость можно влиять
варьированием жесткостных параметров
распределителя, или заданием различного закона
изменения давления в дросселирующей щели
распределителя по углу поворота рулевого
вала. Жесткосные параметры распределителя
определяются жесткостью упругого элемента
центрирования золотника распределителя, а
также наличием реактивных камер и их
активной площадью. Закон дросселирования при
заданной подаче насоса определяется формой
и взаимным расположением рабочих
(дросселирующих) кромок распределителя.
Мр, да Нм
Ршс. 2.5.4. Харажтсрнсташ распределителя рулевого
гидроусилителя с регулируемым по скорости движения
реактивным свойством
До последнего времени внимание было
сосредоточено на оптимизации реактивного
свойства распределителя и зоны его
нечувствительности по углу поворота рулевого вала, а
также на снижении потерь на трение в
приводе распределителя. Оптимизация измерителей
этих качеств не ставилась в зависимость от
режимов и условий движения. В последние
годы появились системы рулевого управления
с прогрессивной характеристикой реактивного
свойства, т.е. системы, в которых одна
неизменная характеристика распределителя
(например, зависимость давления р жидкости
в напорной магистрали от момента Л/р на
рулевом валу) заменяется полем характеристик
(рис. 2.5.4), которые реализуются
автоматически в функции скорости движения автомобиля
с помощью электронных датчиков и блоков,
перерабатывающих сигналы датчиков и
подающих их на исполнительный механизм
(например, на электромагнитный клапан
регулирования расхода жидкости в системе
гидравлического усилителя).
С НЕРАЗРЕЗНОЙ ПЕРЕДНЕЙ БАЛКОЙ
Управляемые неведущие оси с
неразрезной передней балкой в настоящее время
применяются в качестве передних мостов на
большинстве современных грузовых
автомобилей и автобусов средней и большой
вместимости. На легковых автомобилях и автомобилях,
созданных на их базе (микроавтобусы,
грузопассажирские) передние мосты разрезные и
имеют независимую подвеску передних колес.
Типичная управляемая неведущая ось с
неразрезной балкой и тормозами в сборе
изображена на рис. 2.5.5. Она состоит и^
балки 6, поворотных кулаков 2 (правый и левый),
шкворней 4 поворотных кулаков, ступиц У,
рычагов 5 рулевой трапеции (правый и левый),
рычагов продольной тяги 7 трапеции <?,
опорных . подшипников поворотных кулаков,
втулок шкворней (верхних и нижних), крышек
шкворней, деталей грязезащиты (уплотнитель-
ных и крепежных) и колесных тормозных
механизмов 3 с тормозными барабанами 9.
Балка передней оси обычно имеет
двутавровое сечение с расширением одной из
полок для опор упругих элементов (рессор,
пневмобаллонов и т.п.) подвески автомобиля.
Основные параметры балок неведущих
управляемых осей некоторых автомобилей
приведены в табл. 2.5.2.
УПРАВЛЯЕМЫЕ НЕВЕДУЩИЕ ОСИ
261
Рис. 2.5.5.. Управляемая неведущая передняя ось грузового автомобиля с колесным тормозом в сборе
Поворотные кулаки (правый и левый) с
наружной стороны имеют цапфы с шейками
для двух подшипников качения ступиц, с
внутренней представляют собой вилки с
отверстиями под шкворни, соединяющие их с
балкой. В отверстия вилки запрессованы втулки
из антифрикционного материала или
игольчатые подшипники, через которые
осуществляется подвижное соединение поворотного
кулака со шкворнем. Шкворни поворотных
кулаков закреплены неподвижно в отверстиях
балки оси с помощью клиновых пальцев.
Рычаги рулевой трапеции и продольной
рулевой тяги крепятся к поворотным кулакам
с помощью конического соединения или
болтов к внутренней поверхности фланца.
Свободные концы рычагов имеют конические
отверстия для крепления шаровых пальцев
наконечников тяг трапеции и продольной
тяги. Форма рычагов трапеции (в плане)
назначается такой, чтобы обеспечить с помощью
рулевой трапеции качение на повороте
внутреннего и наружного колес без скольжения.
Тяга рулевой трапеции соединяет рычаги
трапеции и обеспечивает связь между
поворотами правого и левого поворотных кулаков, а
соответственно, между углами поворотов
правого и левого управляемых колес. Средняя
часть тяги - обычно толстостенная труба, на
концы которой навернуты (или в концы трубы
ввернуты) наконечники поперечной Тяги со
встроенными в них шаровыми шарнирами.
Направление резьбы с правой и левой сторон
разное, что позволяет изменять длину тяги -
расстояние между пальцами шарниров,
поворачивая трубу тяги при закрепленных шаровых
пальцах. Таким способом осуществляется
регулировка схождения управляемых колес.
Втулки шкворней, изготовленные из
материалов на основе бронзы, обеспечивают
ходимость узла до ремонта 100 ... 150 тыс. км.
Требуемый ресурс в 4 - 5 раз больше. В связи
с этим в эксплуатации, втулки и шкворни
приходится неоднократно менять. Зарубежные
фирмы используют втулки из пористых
материалов, втулки с внутренним
антифрикционным слоем из полимерного материала,
применяют игольчатые подшипники. Во всех
случаях стремятся изолировать узел от грязи
полностью.
262
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
2.5.2. Основные параметры балок передних осей отечественных грузовых автомобилей и автобусов
Параметры
Нагрузка на
переднюю ось
максимальная,
кН
Колея передних
колес, мм
Расстояние
между
шкворнями, мм
Рессорная
колея, мм
Размеры балки в
среднем сечении
И х />*, ММ
Диаметр
шкворня, мм
Поперечный
угол наклона
шкворня, °
Материал балки
(сталь)
МАЗ-
64221
КраЗ-
6505
7
2005
1750
870
110x85
50
5
40Х
КамАЗ-
740
4,375
2026
1793
875
105x84
45
8
45
ЗИЛ-4331
4
1930
1715
796
105x80
45
8
40Х
ГАЗ-4301
2,3
1710
1550
806
75x64
35
8
35Х
ЛиАЗ-
5256
7
2051
1727
970
110x120
50
10
40Х
ЛАЗ-4221
6
2100
1726
1300
142x95
50
8
40Х
ПАЗ-3205
2,9
1940
1782
1015
86x66
38
8
35Х
* к - высота профиля в среднем сечении; Ь - ширина полки в среднем сечении.
Передняя ось проектируется таким
образом, чтобы при установке на автомобиль
обеспечивались: стабилизация управляемых колес
(их свойство возвращаться в положение
прямолинейного движения после возмущений и
поворотов), минимальные трение шин в
контакте с опорной поверхностью и их
изнашивание; оптимальные силы в рулевом приводе,
чтобы при переезде препятствий не
создавались неприятные ощущения у водителя и не
изнашивался рулевой привод; разность
тормозных сил на передних колесах не
вызывающая поворота колес. Эти свойства зависят от
выбранных углов наклона шкворней, углов
установки колес, расстояния от плоскости
колес до оси шкворня.
Поперечный угол наклона шкворня в
основном определяет стабилизирующий момент
при повороте на месте и при движении с
малой скоростью, а также уменьшает расстояние
между точкой контакта колеса с опорной
поверхностью и осью шкворня, что в свою
очередь уменьшает нагрузки в рулевом
управлении при торможении. Этот угол устанавливают
в пределах 0 + 10 ° (положительное значение,
если верхний конец шкворня смещен внутрь
автомобиля). Продольный угол наклона
шкворня - угол между проекцией оси шкворня
на вертикальную продольную плоскость и
вертикалью, определяет стабилизирующий
момент при движении автомобиля,
назначается обычно в пределах 0 + 8 ° (положительное
ТОРМОЗНЫЕ СИСТЕМЫ
263
значение, если верхний конец шкворня
смещен назад). Развал колес - отклонение
плоскости колес наружу, служит для компенсации
зазоров при изнашивании передней оси. Угол
развала - угол между вертикальной
продольной плоскостью и плоскостью колес,
устанавливают в пределах 0,5 + 1 °. Схождение колес -
поворот плоскости колес относительно
вертикальной оси в сторону уменьшения
расстояния между ними спереди, составляет 15...20 %
развала. Схождение выбирается
экспериментально из условия минимального износа шин
и зависит от их конструкции.
2.5.3. ТОРМОЗНЫЕ СИСТЕМЫ
В зависимости от назначения различают
рабочую, запасную, стояночную и
вспомогательную тормозные системы. Рабочая
тормозная система действует на все колеса
автомобиля с целью управления его скоростью и
остановки с регулируемой водителем
эффективностью. Запасная тормозная система
предназначена для уменьшения скорости и остановки
автомобиля при отказе рабочей тормозной
системы. Стояночная тормозная система
предназначена для удержания автомобиля в
неподвижном состоянии, в том числе при
отсоединенной от двигателя силовой передаче и при
отсутствии водителя на рабочем месте.
Тормозная система состоит из тормозного
механизма, воздействующего на вращающуюся
часть шасси, производя торможение
автомобиля, и тормозного привода, служащего для
приведения в действие тормозного механизма при
помощи соответствующего органа управления
и источника энергии. В зависимости от места
расположения тормозного механизма на шасси
автомобиля различают колесные тормозные
механизмы и трансмиссионные.
Тормозные приводы подразделяют на
механические, гидравлические,
пневматические, вакуумные, электрические и смешанные.
По способу реализации энергии,
затрачиваемой на торможение, тормозные приводы
могут быть простые, с усилителем и с серводей-
ствием. В простых тормозных приводах
необходимую для торможения силу прикладывает
водитель. В тормозных приводах с усилителем
сила, создаваемая водителем, увеличивается с
помощью разрежения во всасывающей трубе
двигателя, давления в пневматической системе
или электроусилителем. В тормозных
приводах с серводействием вся необходимая для
торможения энергия передается от
специального источника энергии (давления сжатого
воздуха, жидкости, электроэнергии,
пружинного энергоаккумулятора и др.), а водитель
регулирует ее подачу к тормозной системе. В
этом случае тормозной привод включает
приводимый от двигателя агрегат (вакуум-насос,
компрессор, гидравлический насос).
Тормозные механизмы. Они состоят из
следующих основных составных частей:
вращающихся вместе с колесом и жестко
связанных с ним тормозных элементов;
невращающихся с колесом фрикционных
элементов, которые прижимаясь к тормозным
элементам, создают на их рабочих
поверхностях силы трения, противодействующие
вращению колеса;
жестко связанных с шасси автомобиля
направляющим элементом (суппортом),
удерживающим фрикционные элементы и
воспринимающим при торможении реактивные силы
и моменты;
приводного устройства, преобразующего
силу исполнительного органа тормозного
привода в силу прижатия тел трения;
устройства для регулирования зазора
между телами трения в исходном (оттормо-
женном) состоянии.
Тормозные механизмы
классифицируются следующим образом:
по геометрической форме рабочих
поверхностей тел трения - на барабанные,
конические и дисковые;
по типу фрикционных элементов - на
колодочные и ленточные;
по расположению фрикционных
элементов относительно тормозных - на внутренние
(с внутренним разжимом) и наружные (с
наружным охватом);
по типу приводных устройств - на
механические, электрические, гидравлические и
др.;
по степени самоусиления - на
механизмы без самоусиления и с самоусилением;
по направлению действия -
одностороннего и двухстороннего действия;
по типу устройства регулирования зазора
между рабочими поверхностями тормозных и
фрикционных элементов - с ручной и
автоматической регулировкой зазора.
Наиболее широко применяются
барабанные и дисковые колодочные тормозные
механизмы, отличающиеся компактностью,
высокой и стабильной эффективностью действия.
Барабанный тормозной механизм (рис.
2.5.6) вращающийся вместе с колесом и
закрепленный на ступице колеса, или
изготовленный как одно целое с ней тормозной
барабан, имеющий на периферийной части
внутреннюю рабочую поверхность, к которой при
264 Глава 15. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
Рис. 2.5.6. Схема сил, действующих на барабанный
тормозной механизм
торможении под действием приводного
устройства прижимаются разжимаемые изнутри
тормозные колодки, установленные с одной
или двумя степенями свободы на опорном
щите (суппорте), жестко связанном с балкой
моста.
Внутри, барабана установдени ториозшю
колодки 1 и 3, каждая из которых состоит из
ребра и обода с прикрепленной к нему
накладкой из фрикционного материала. Каждая
колодка контактирует одним концом ребра с
приводным (разжимным) устройством 2, а
другим - с опорой 4, закрепленной на щите
(суппорте). При приложении к каждой
колодке приводной силы Г\2 фрикционная
накладка прижимается к рабочей поверхности
барабана с силой Рм,2- При этом в контакте
возникает сила трения ^р1,2 ~ ^N1,2 Ц (где Ц -
коэффициент трения). У колодки 1 сила
трения /урь действующая по ходу вращения
барабана, прижимает ее к опоре 4У вызывая
появление реактивной силы Р\у которая еще
больше прижимает колодку 1 к барабану, а
следовательно увеличивает силу трения ^р1. У
колодки 2 сила трения ^р2 отжимает колодку
2 от опоры, уменьшая реактивную силу Р^ а
следовательно, сила Р^ ^ -^тр1- Колодка 7,
обладающая эффектом самоусиления,
называется ведущей (прижимной, захватываемой,
активной), а колодка 2 - ведомой (отжимной,
пассивной).
Отношения Р^ / Р\ — К\\ ^р2 / ^2 =
= А^ - коэффициенты эффективности
колодок, а сумма К^ = К\ + Кг - коэффициент
эффективности тормозного механизма
(тормозной фактор). У тормозного механизма
рассмотренного типа коэффициент
эффективности ведущей колодки составляет 60 ... 70 %
эффективности всего механизма, а у ведомой
30 ... 40 %. Это тормозные механизмы типа
"симплекс".
* г а) 5)
Рис. 2.5.7. Схема тормозного механизма:
а - с двумя ведущими колодками;
б - с двойным самоусилением
Для повышения эффективности
торможения применяются барабанные тормозные
механизмы с двумя ведущими колодками
(типа "дуплекс0) и с двойным самоусилением
(типа "дуо-серво"). В тормозном механизме с
двумя ведущими колодками 7, 3 (рис. 2.5.7, а)
имеется два приводных устройства 2 (для
каждой колоша^ и саотаелсташю до опори 4
колодок. При изменении направления
вращения барабана обе колодки тормозного
механизма становятся ведомыми. В тормозном
механизме с двойным самоусилением (рис.
2.5.7, б) активная колодка 1 воздействует через
распорную планку 6 регулируемой длины на
другую колодку 2, которая воспринимает
также приводное усилие от механизма разжима
колодок и опирается на опору 5. Таким
образом, сила трения, создаваемая колодкой ],
увеличивает прижатие к барабану колодки 2,
обеспечивая эффект самоусиления.
Зависимости коэффициентов А^ф
эффективности тормозных механизмов различных
типов от коэффициента \х трения между
фрикционными элементами приведены на
рис. 2.5.8. Наиболее чувствительными к
изменению коэффициента трения являются бара-
0 0,1 0,2 0,3 0,4 0,5 /I
Рис. 2.5.8. Зависимости коэффициентов К^
эффективности от коэффициента ц трения тормозных
механизмов различных типов:
7 - барабанного "симплекс";
2 - барабанного "дуплекс";
3 - барабанного "дуо-серво"; 4 - дискового
ТОРМОЗНЫЕ СИСТЕМЫ
265
банные тормозные механизмы с
самоусилением, что обусловливает их нестабильность в
широком диапазоне условий эксплуатации и
приводит к необходимости более широкого
применения на легковых и грузовых
автомобилях дисковых тормозных механизмов.
Дисковые тормозные механизмы содержат
вращающийся вместе с колесом и
закрепленный на ступице колеса тормозной диск, к
торцовым поверхностям которого
прижимаются с противоположных сторон тормозные
колодки, установленные на направляющих
элементах неподвижного суппорта, закрепленного
на деталях шасси автомобиля. При
приложении к колодкам 1 силы Р> прижимающей их к
диску 2 (рис. 2.5.9), на последний действует
окружная сила трения Ртр = 2\хР.
Коэффициент эффективности дискового тормозного
механизма Аэф = 2 ц.
а - действия сил; б - с плавающей скобой;
в - с неподвижной скобой; г - с поворотной скобой;
д - с плавающей скобой, охватывающей диск изнутри
Механизм воздействия на колодки 1
выполнен в виде П-образной скобы 3>
охватывающей периферию диска 2 и колодки, с
приводными устройствами колодок в виде
гидроцилиндров, или механических приводных
устройств. Скоба может быть неподвижной,
выполненной как одно целое с суппортом, или
плавающей (перемещающейся относительно
суппорта). В последнем случае достаточно
иметь приводное устройство лишь с одной
стороны диска, которое будет воздействовать
на одну колодку, а на противоположную
колодку будет воздействовать непосредственно
скоба.
Дисковые тормозные механизмы
характеризуются отсутствием эффекта
самоусиления, лучшей стабильностью при изменении
температуры (так как нагрев не приводит к
увеличению радиуса трения, как в барабанных
тормозных механизмах, и не увеличивает ход
колодок).
Показатели работы тормозных
механизмов. При проектировании или выборе
тормозных механизмов проводится расчетный анализ
их эффективности и энергонагруженности.
Эффективность действия тормозного
механизма определяется коэффициентом К^
эффективности.
Коэффициент эффективности зависит в
основном от конструктивных параметров
тормозного механизма и фрикционных
характеристик материалов тел трения. Момент сил
трения (тормозной момент) относительно оси
вращения колеса
Мг^РКэфЯп, (2.5.1)
где Ятр - приведенный (средний) радиус
поверхности трения.
Исходным для расчета принимается
нормативное линейное замедление уа автомобиля
при заданной максимально допустимой силе
на тормозной педали Рп. Сила Рп
преобразуется в силу прижатия колодок Р.
Р = Р„>, (2.5.2)
где / - общее силовое передаточное число
тормозного привода и приводного устройства
тормозного механизма.
Линейное замедление связано с
тормозным моментом соотношением:
^й г~>
где Ок - вертикальная динамическая нагрузка
на колесо; Кл - динамический радиус колеса.
Учитывая выражения (2.5.1) и (2.5.2),
получим формулу для коэффициента
эффективности тормозного механизма:
К = Мх5±. .(2.5.3)
Энергонагруженность тормозного
механизма характеризуется приведенными ниже
параметрами. Удельная работа трения при
торможении с максимальной скоростью Утах
до полной остановки автомобиля
где & - суммарная площадь контактной
поверхности трения.
Величина Ь^ не должна превышать
значений, приведенных ниже, кДж/см2.
266
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
Барабанные тормозные механизмы
автомобилей:
легковых 0,4 ... 1,5
грузовых 0,3 ... 0,7
Дисковые тормозные механизмы 1,5 ... 2
Средняя удельная мощность сил трения
( \
Р V
дг хт*тах
т р
25^
Она не должна превышать следующих
значений (кВт/см2) для тормозных механизмов: 0,36
для барабанных; 1,8 для дисковых.
Повышение температуры барабана
(диска) тормозного механизма за одно полное
торможение без учета теплоотдачи
О у2
д, = ^кушах ^
Чет,
где с - удельная теплоемкость барабана
(диска); тТ - масса барабана (диска).
Этот показатель не нормируется,
расчетное значение сравнивается с аналогичным
существующих конструкций. Для барабанных
тормозных механизмов А/ = 150 + 250 °С, для
дисковых А/ = 250 + 500 °С.
Давление в контакте рабочих
поверхностей тел трения при торможении с
максимальной эффективностью
Я =
**тр*тр
где X - доля суммарного коэффициента
эффективности тормозного механизма,
приходящаяся на соответствующую колодку; X = 1,0
для дисковых тормозных механизмов; X = 0,5
для барабанных тормозных механизмов с
двумя прижимными колодками (дуплекс); X - 0,7
для активной (прижимной) колодки
тормозного механизма типа симплекс (с одной
прижимной и одной отжимной колодками) и для
тормозного механизма с двойным
самоусилением (дуо-серво); 5,-р - площадь поверхности
трения.
Допустимые значения ц й 2 МПа для
барабанных тормозных механизмов и ц <> 5 МПа
- для дисковых.
Тормозной гидропривод (рис. 2.5.10).
Различают гидростатический и
гидродинамический тормозной привод (тормозной привод с
серводействием). В гидростатическом
тормозном приводе давление жидкости создается при
нажатии на педаль рабочей тормозной
системы. Гидропривод должен иметь не менее двух
независимых контуров.
Разделение привода на контуры
осуществляется установкой двухполостного главного
тормозного цилиндра 3, каждая рабочая
полость которого имеет независимый резервуар
для тормозной жидкости. Применяются
главные цилиндры с последовательным
расположением полостей (типа "тандем") и с
параллельным (обычно по два однополостных
цилиндра, штоки которых связаны коромыслом).
Основные преимущества первого варианта -
обеспечение большего давления в приводе при
одной и той же силе на педали, более простой
привод, меньший габаритный размер в
поперечном направлении, а второго варианта -
возможность задавать определенное
соотношение давлений по контурам, меньшие осевой
размер и "провал" педали при выходе из строя
одного из контуров гидропривода.
Гидропривод может быть без усилителя,
с вакуумным усилителем и с гидравлическим
усилителем.
Управление тормозной системой
автомобиля облегчается при использовании
усилителя с одновременным созданием разрежения во
впускном трубопроводе карбюраторного
двигателя или с дополнительным вакуумным насо-
Ог-€>
&\
<э-Чз
»)
О
€>
Э-1©
*;
_0тг€>
I I
Рис. 2.5.10. Типовая схема тормозного гидропривода и варианты разделения контуров для легковых автомобвлей:
а - передних и задних тормозных механизмов; б - диагональное; в - передних и одного из задних тормозных
механизмов; г - передних и задних и только передних тормозных механизмов;
д - тормозных механизмов всех колес
сом на дизеле. В вакуумном усилителе
следящее действие осуществляется в зависимости от
силы, действующей на его шток, он
устанавливается перед главным цилиндром. В
гидровакуумном усилителе следящее действие
происходит по давлению жидкости на входе, он
устанавливается после главного тормозного
цилиндра.
Для регулирования тормозных сил по
осям автомобиля применяют регуляторы
тормозных сил. По характеру регулирования
различают клапаны-ограничители давления,
регуляторы с постоянной характеристикой и с
характеристикой, изменяющейся в
зависимости от веса автомобиля. Последние, как
правило, имеют упругую связь с подвеской
автомобиля. Гидропривод должен быть оборудован
системой сигнализации о выходе из строя
одного из контуров: по уровню тормозной
жидкости в резервуаре главного цилиндра или
по разности давлений жидкости в контурах
при торможении.
Тормозной пневмопривод. Он широко
применяется в рабочей, запасной и
стояночной тормозных системах грузовых
автомобилей, прицепов к ним, автобусов. Широкое
распространение привода этого типа
обусловлено его преимуществами: использованием в
качестве рабочего тела воздуха; простотой
управления тормозами прицепа; малой
трудоемкостью обслуживания. К недостаткам его
можно отнести сравнительно малое рабочее
давление (0,65 ... 0,8 МПа), вследствие чего он
имеет большую массу и размеры, а также
относительно большое время срабатывания.
К аппаратам подготовки сжатого воздуха
относятся компрессор, регулятор давления и
предохранитель против замерзания,
обеспечивающие параметры сжатого воздуха,
необходимые для работоспособности привода. В
качестве защитной аппаратуры применяются
одинарный, двойной и тройной защитные
клапаны, изолирующие контуры
пневмопривода один от другого и подпитывающие
неповрежденные контуры до давления,
определяемого требованиями нормативных
документов.
Основой привода рабочей тормозной
системы является двухсекционный тормозной
кран, управляющий работой двух контуров,
действующих на часть колесных тормозных
механизмов через тормозные камеры. Для
корректировки давлений в тормозных камерах
в контуре передней оси установлен клапан
ограничения давления, который статически
уменьшает давление воздуха при частичных
торможениях, а в контуре задней оси -
автоматический регулятор тормозных сил, который
динамически корректирует давление сжатого
воздуха, поступающего к тормозным камерам
тадней оси в зависимости от нагрузки
автомобиля и интенсивности торможения. Для этого
он кинематически связан с неподрессоренны-
ми массами автомобиля через упругий
элемент.
Привод стояночной тормозной системы
основан на применении пружинных
энергоаккумуляторов, управляемых краном ручным
тормозным через ускорительный клапан. Для
аварийного растормаживания
энергоаккумуляторов предусмотрен специальный контур,
органом управления которого является
пневматический кран.
Запасной тормозной системой может
служить любой контур рабочей тормозной
системы и контур стояночной тормозной
системы. Для управления тормозами прицепа
применяются клапаны управления тормозами
прицепа по двухпроводному и однопроводно-
му приводу.
Одинарный защитный клапан
устанавливается для защиты пневмосистемы в случае
повреждения соединительных магистралей,
соединяющих тягач с прицепом. В качестве
вспомогательной тормозной системы
используется моторный тормоз, который управляется
пневматическим краном и пневмоцилиндрами.
Для сигнализации и контроля состояния
пневмосистемы. применяются пневмоэлектри-
ческие датчики, а также клапаны контрольного
вывода.
Антиблокировочная система (АБС).
Совокупность устройств, служащих для
автоматического регулирования степени скольжения
одного или нескольких колес
автотранспортного средства в направлении их вращения,
состоит из следующих основных элементов:
датчика, регулятора, модулятора. Датчик
получает информацию об условиях вращения
колеса или динамических условиях движения
автотранспортного средства. Регулятор в
соответствии с некоторым законом (алгоритмом)
управления осуществляет преобразование
информации, получаемой от датчика, в команды,
передаваемые модулятору. Модулятор
изменяет силу торможения в зависимости от команд
регулятора.
АБС по типу регулятора подразделяются
на механические и электронные, по типу
модулятора - на гидравлические и
пневматические. Механические АБС осуществляют
непосредственную механическую связь колес с
тормозной системой автомобиля. Они бывают
только гидравлическими и ввиду невысокого
качества регулирования имеют ограниченное
применение, в основном на легковых
автомобилях малого класса.
Функциональная схема канала
электронной АБС приведена на рис. 2.5.11. Под
каналом АБС понимается часть системы,
управляющая одним колесом. В качестве датчика
электронной АБС применяется обычно
индукторный генератор, выполненный в виде
катушки индуктивности с магнитным сердечни-
268
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
Рве. 2.5.11. Принципиальная схема электронной АБС:
1 - тормозной кран; 2 - тормозная камера;'
3 - тормозной механизм; 4 - модулятор;
5 - клапан сброса давления; б - электромагнит;
7 - клапан отсечки модулятора; 8 - ротор датчика
частоты вращения колеса; 9 - датчик;
10 - электронный блок управления;
11 - контрольная лампа
ком. Амплитуда сигнала зависит от угловой
скорости колеса и величины воздушного
зазора между датчиком и ротором тормозного
барабана. Конструкция датчика
предусматривает возможность регулировки зазора в
процессе эксплуатации. Электрический сигнал от
датчика передается регулятору, который
выполнен в виде электронного блока управления
(БУ).
Конструкция БУ представляет собой, как
правило, печатную плату с расположенными
на ней электронными компонентами.
Соединение БУ с остальными элементами АБС
осуществляется через электрический разъем. БУ
располагается либо в салоне (кабине)
автомобиля, либо снаружи непосредственно вблизи
от управляемых колес (на грузовых
автомобилях).
В случае управления АБС обеспечивается
продольное скольжение колеса в зоне близкой
к его критическому значению (рис. 2.5.12).
При этом обеспечивается максимум тормозной
эффективности и достаточная
сопротивляемость колеса к боковым возмущениям.
Модуляторы представляют собой
релейные устройства, дискретно (с помощью
клапанов) управляющие давлением в тормозных
камерах или цилиндрах. Различают двух- и
трехпозиционные модуляторы. Двухпозицион-
Ух,^у
о о,г о,* о,б о,8 $
Рве. 2.5.12. Зависимости коэффициента <р сцепления
колеса с опорной поверхностью от коэффициента 5
продольного скольжения (фх, <ру - продольная и
поперечная составляющие коэффициента сцепления):
1, 2 - сухой и мокрый асфальтобетон; 3 - лед
ный модулятор обеспечивает в зависимости от
входных сигналов фазу нарастания давления,
или сброса давления в тормозной камере.
Трехпозиционный модулятор, помимо этих
двух фаз, обеспечивает фазу запоминания
(выдержки) давления. Наличие фазы
выдержки способствует уменьшению расхода рабочего
тела при работе АБС.
Схема пневматического модулятора
приведена на рис. 2.5.13. Гидравлические
модуляторы работают аналогично.
Й // 11
Рис. 2.5.13. Схема АБС:
1 - датчик; 2 - блок управления; 3 - модулятор;
4 - тормозной кран
По принципу обработки информации БУ
могут быть аналоговыми, цифровыми,
микропроцессорными. Аналоговые БУ оперируют с
непрерывными электрическими сигналами,
которые являются аналогом физических
величин. Основной элемент - операционный
усилитель. Цифровые БУ оперируют с двоичными
цифровыми кодами, соответствующими
физическим величинам. Основные элементы -
цифровые счетчики, регистры, арифметико-
логические устройства. Микропроцессорные
БУ - разновидность цифровых. Основной
элемент - микропроцессор, представляющий
собой многофункциональное цифровое
устройство, функция которого задается внешней
ПОДВЕСКА
269
программой. Для аналоговых БУ характерна
невысокая сложность и точность вычислений,
хорошая помехоустойчивость, для цифровых -
высокая точность вычислений, но большая
чувствительность к помехам.
Микропроцессорные БУ позволяют менять закон
управления без изменения конструкции и
комплектации.
Различают следующие основные типы
законов управления:
по замедлению, осуществляется путем
сравнения текущего значения замедления
колеса с некоторым, заданным заранее,
пороговым значением, которое может
корректироваться, например в зависимости от скорости
автомобиля, определяемой косвенно по
максимальным значениям скорости колеса (путем
сравнения текущего значения скорости колеса
с заданным). При таком управлении заданное
значение скорости обязательно должно
корректироваться по мере уменьшения скорости
автомобиля. В адаптивных системах заданное
значение скорости корректируется в
зависимости от условий сцепления колеса с опорной
поверхностью;
комбинированное, является сочетанием
управления по скорости колеса и его
замедлению.
От надежности АБС зависит активная
безопасность автотранспортного средства. Для ее
обеспечения БУ содержит узел контроля,
осуществляющий постоянную проверку
электрических коммуникаций системы и
работоспособность БУ и связанный с сигнализатором
исправности АБС (контрольной лампой),
размещаемым на приборном щитке водителя.
Развитием АБС является система
предотвращения буксования колес в тяговом режиме.
2.5.4. ПОДВЕСКА
Подвеска предназначена для снижения
воздействий от дорожных неровностей при
движении автомобиля, что достигается
нежесткой связью между колесами и кузовом.
Подвеска состоит из направляющего аппарата,
обеспечивающего кинематическую связь
колеса и кузова, упругих элементов и гасителя
колебаний - амортизатора (демпфера).
Подвеска характеризуется следующими
параметрами:
жесткостью;
прогибом и линейностью характеристики
упругого элемента, в том числе статическим
прогибом;
ходом подвески;
демпфированием;
частотой собственных колебаний;
трением;
неподрессоренной массой;
кинематическими характеристиками,
которые во взаимодействии определяют
эффективность подвески.
В зависимости от конструктивных
особенностей подвески могут быть
систематизированы следующим образом:
по типу направляющего аппарата -
зависимые (в которых колеса связаны общей осью)
и независимые;
по типу упругого элемента - рессорные,
пружинные, торсионные, пневматические,
гидропневматические;
по регулированию - нерегулируемые и
регулируемые.
Подвески с более простым аппаратом -
зависимые, применяются преимущественно на
грузовых автомобилях (передние и задние
подвески), на легковых автомобилях
классической компоновки (подвески неразрезных
задних мостов). В качестве передних подвесок
легковых автомобилей используют
независимые подвески различных типов,
обеспечивающие устойчивость и управляемость автомобиля
и большую комфортабельность благодаря
меньшей неподрессоренной массы.
Среди передних подвесок широко
распространена подвеска типа "макферсон",
среди задних (для переднеприводных
автомобилей) - подвеска с упругим направляющим
аппаратом. В направляющем аппарате подвески
применяют шарниры, наиболее типичными из
которых являются резинометаллические сай-
лент-блоки. Наиболее .распространенным
упругим элементом является листовая рессора.
Основным преимуществом рессоры можно
считать ее простоту и
многофункциональность, как упругого элемента, направляющего
аппарата, так и гасителя колебаний,
рассеивающего энергию колебаний в результате
межлистового трения. В настоящее время широко
применяют рессоры с листами переменного
сечения, что позволяет снизить ее массу на
25 ... 30 %. Дальнейшее снижение массы
рессоры (до 40 %) достигается применением
новых более легких композиционных материалов
(стеклопластика из стеклоровинга и
эпоксидной смолы).
Обеспечение нелинейной
(прогрессивной) характеристики рессоры достигается
благодаря использованию подрессорников -
специальных дополнительных рессор,
вступающих в работу при значительном увеличении
нагрузки на рессору. В балансирных подвесках
такая рессора является упругим элементом
сразу для двух мостов.
Вторым по степени распространенности
типом упругого элемента является стальная
витая пружина, которая характеризуется
свободной длиной, длиной в сжатом состоянии,
диаметрами пружины и прутка, числом витков
и их конфигурацией на опорных торцах,
жесткостью. Среди современных конструкций
270
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
пружин следует отметить пружины с
переменным шагом из прутка переменного сечения,
обеспечивающие нелинейную характеристику
и минимальную высоту в сжатом состоянии. В
качестве упругих элементов подвески находят
применение так же стальные торсионы, как
круглого сечения, так и наборные из листов
прямоугольного сечения. Торсионы являются
также стабилизаторами поперечной
устойчивости, они повышают угловую жесткость
подвески и улучшают управляемость автомобиля, так
как перераспределение вертикальных реакций
по колесам влияет на увод шин.
В подвесках автобусов, легковых
автомобилей (реже грузовых) находят применение
пневматические упругие элементы баллонного
и рукавного типов. В подвесках легковых и*
большегрузных автомобилей применяют также
гидропневматические упругие элементы. В
состав упругих элементов подвески следует
включить буфера-ограничители хода подвески.
Это подушки различной формы пенистого
пенополиуретана, прогрессивность
характеристики сжатия которых обеспечивается благодаря
не только формы, но и деформации
(закрытия) микропор в самом материале. Очень
широкое распространение получили буфера
значительной длины, играющие роль постоянно
работающего упругого элемента, который
обеспечивает нелинейную характеристику
подвески.
Функции гасящего (демпфирующего)
элемента подвески выполняют гидравлические
телескопические амортизаторы двухтрубного
или однотрубного типа. Особенностью
однотрубного амортизатора является то, что
компенсационная камера расположена в нижней
части рабочего цилиндра, соосно с основным
объемом жидкости, и отделена от жидкости
разделительным поршнем. Газ в
компенсационной камере находится под избыточным
давлением (2,5 МПа), чем достигается антикави-
тационная устойчивость рабочего процесса
амортизатора. Однотрубные амортизаторы
более эффективны, имеют меньшую массу, но
все их детали требуют прецизионного
изготовления.
В регулируемых подвесках, к числу
которых относятся подвески с пневматическими, а
часто и с гидропневматическими упругими
элементами, регулятор высоты кузова
обеспечивает обратную связь по регулируемому
параметру.
Принципиальное улучшение всех
параметров подвески достигается применением для
ее регулирования микропроцессора,
позволяющего изменять характеристики подвески (не
менее двух - "жесткой" и "мягкой") в
соответствующих дорожных условиях. Кроме того,
алгоритм управления предусматривает выбор
оптимальной высоты кузова - нормальной для
обычных условий, пониженной для
скоростного движения, повышенной для плохой дороги.
Реализация алгоритма управления в
микропроцессоре обеспечивается получением
информации о состоянии автомобиля от ряда
датчиков (высота кузова, скорость и ускорение
автомобиля, скорость поворота рулевого
колеса и открытия дроссельной заслонки и др.),
обработкой этих сигналов, а также команд
водителя с пульта управления и индикации, и
выработкой управляющих сигналов для
системы.
Расчеты подвески основаны на решении
уравнений вынужденных колебаний (на
дорожном профиле) многомассовой системы, к
которой приводится автомобиль.
Практика проектирования и испытания
подвесок, а также расчеты плавности хода,
определяющие воздействие на человека
виброускорений в различных диапазонах
частот, выработали определенные рекомендации
по выбору параметров подвески. Так,
собственная частота колебаний кузова обычно
© = 0,83 + 1,66 Гц для легковых и
со = 1,66 + 3,33 Гц для грузовых автомобилей.
При снижении со плавность хода повышается,
но ниже 0,6 Гц, понижение частоты
нецелесообразно ввиду опасности морской болезни
пассажиров и водителя.
Коэффициент апериодичности \|/=Л/со =
= 0,2 + 0,3 (где к - коэффициент
относительного сопротивления амортизатора). Меньшее
его значение соответствует несколько лучшей
плавности хода, но большим амплитудам
колебаний (раскачивание автомобиля). Большее
значение у соответствует меньшему ходу
подвески (динамическому) и целесообразно при
применении мягких подвесок. При учете
колебаний неподрессоренных масс (колес), что
весьма важно с точки зрения надежного
контакта шин и дороги и, связанной с этим,
безопасностью движения, следует рассматривать
колебательную систему неподрессоренной
массы, на которую амортизатор также
оказывает воздействие. Эффективное подавление
колебаний колеса достигается значительным
ростом сопротивления амортизатора, которое
для колебаний кузова будет соответствовать
апериодичности у = 0,55 + 0,65, ведущей к
сильному снижению плавности хода.
Удовлетворение этих противоречивых требований
может быть обеспечено только при
применении управляемых амортизаторов.
Расчеты на долговечность элементов
подвески преимущественно касаются стальных
упругих элементов (в частности рессор) и
проводятся с учетом того, что случайная функция
динамических напряжений в упругом элементе
является узкополосной с явно выраженной
спектральной плотностью А при частоте со,
когда производная дисперсия йъ »со^)5. Ос-
ПНЕВМО- И ГИДРОСИСТЕМЫ
271
новываясь на гипотезе линейного
суммирования повреждений в материале, для которого
известны параметры кривой Велера (предел
выносливости 611, показатель кривой
выносливости т и число циклов в точке перегиба
Щу получим долговечность упругого
элемента, км (пробега),
ь 2*ЛГоХтУ
©\|/(/п + 2)р(х ; т + 2 ]зб00
ще У|/(/и + 2) = 2 /2Г 0,5(/п + 2) -
нормировочная постоянная распределения Пирсона;
Г 0,5 (/я+ 2) - полная гамма-функция;
/ЧХ ;л1+2] - функция х2 распределения
Пирсона; % - ^-1/л/^5 " распределение.
Испытания подвесок касаются, во-
первых, оценки их влияния на свойства
автомобиля (плавность хода, устойчивость и
управляемость), а, во-вторых, получения
выходных характеристик надежности.
Испытания автомобиля на плавность
хода проводят с использованием аппаратуры,
регистрирующей ускорения в кузове
автомобиля (преимущественно на сиденьи водителя)
и обеспечивающей статистическую обработку
этой информации. Оценка эффективности
систем подвески осуществляется в
соответствии с нормами, имеющимися в стандартах.
Все большую роль получают испытания
на гидропульсаторных стендах, которые
воспроизводят дорожное воздействие на подвеску
автомобиля с помощью гидроцилиндров и
позволяют как решать задачи исследования
функциональных свойств подвески, так и
проводить форсированные испытания на
надежность и долговечность. Программы,
обеспечивающие работу гидропульсаторного стенда в
этом режиме, основаны на принципах
уплотнения магнитограмм дорожных воздействий
путем изъятая из них участков с малым
уровнем воздействия.
Для испытаний отдельных агрегатов
подвески в части их функциональных
характеристик используется ряд специфических стендов.
Упругие элементы испытывают на стендах,
позволяющих определять связь между силой и
перемещением. Функциональные свойства
пружин проверяют с помощью устройств,
определяющих эксцентриситет силы
относительно площади опорного витка пружины. В
испытаниях амортизаторов фиксируют связь
между силой и скоростью перемещения. Для
проведения испытаний на надежность
используют вибраторы, особенностью которых
является наличие системы охлаждения, так как при
испытаниях выделяется значительное
количество энергии.
При эксплуатации автомобилей подвески
нуждаются в определенном контроле и
обслуживании. Это обслуживание в первую очередь
касается контроля и регулировки углов
установки колес в независимых подвесках.
Потребность в этой регулировке связана с
деформациями направляющего аппарата, шарниров,
а также точек крепления на раме или кузове
автомобиля. Такие стенды имеют в основном
оптико-механические или электронные
контрольные системы и позволяют определить
углы установки колес (положение плоскостей
вращения колес) с точностью до 1 °.
Применение в эксплуатации находят также стенды
для диагностирования состояния
амортизаторов без снятия их с автомобиля. Принципы
работы стендов могут быть основаны на
оценке амплитуды колебаний неподрессоренной
массы автомобиля на собственной частоте при
внешнем возбуждении переменной частоты.
Стенд такого типа позволяет качественно
оценить состояние амортизаторов на автомобиле.
Количественный контроль требует снятия
амортизаторов и проверки их на стенде,
определяющем силу по скорости.
Подвески в целом и их упругие элементы
являются агрегатами со значительным
ресурсом, соизмеримым с ресурсом всего
автомобиля, однако амортизаторы и шарниры подвески
имеют меньший ресурс и должны заменяться в
течение срока службы автомобиля.
2.5.5. ПНЕВМО- И ГИДРОСИСТЕМЫ
Благодаря компактности и малой
металлоемкости гидропривод нашел широкое
применение в погрузочно-разгрузочных
механизмах специализированных автомобилей таких,
как опрокидывающие механизмы самосвалов,
механизмы съема и установки платформ <лша
"мультилифт" и "мультибен"), коьпл *ые
краны-манипуляторы, грузоподъемнки борта и
т.д. Кроме того, гидропривод применяется во
вспомогательных устройствах, облегчающих
обслуживание автомобиля: мехаки .»ъ . ■; п -
кидывания кабин (для обслуживание; д■■•.-*г ог
лей грузовых автомобилей, когда кл(:.л*л р*>
положена над двигателем); подъема-о пускай и
запасного колеса, открывания ^1;^;;..п^
бортов самосвальных платформ и др
Отбор мощности для функционирование
гидросистемы осуществляется от трансмиссии
автомобиля: от коробки передач или раздать
ной коробки. При этом насос в большинстве
случаев агрегатируется с коробкой отбора
мощности или устанавливается
непосредственно на элементе трансмиссии. В отдельных
случаях для привода вспомогательных
устройств применяются ручные гидравлические
насосы. Для дистанционного управления ме-
272
Глава 15. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
низмом используется пневмопривод, или
комбинация электро- и пневмопривода.
Наиболее важным параметром,
определяющим материалоемкость гидросистемы,
является максимальное рабочее давление р в
ней. Большое влияние давление оказывает на
гидроцилиндры (особенно телескопические).
Максимальное давление в гидросистеме с
поршневыми гидроцилиндрами принимают
р = 30 + 35 МПа, в гидросистеме с
телескопическими гидроцилиндрами р = 20 + 25 МПа.
При более высоком давлении необходимо
применять высокопрочные материалы.
Как правило, максимальное давление в
гидросистеме должно превышать расчетное,
соответствующее номинальной нагрузке
исполнительного механизма, на 20 ... 30 %, а в
некоторых случаях до 50 % (например, в
системе мультилифг). Это связано с потерями
напора в гидролиниях, с возможной
перегрузкой гидроцилиндров, со смещением центра
тяжести внешней, нагрузки (например, для
самосвалов). На рис. 2.5.14 приведены
типовые диаграммы давления р и осевых сил Г
некоторых гидросистем.
р,МЛа Р,кН
20
10
V 40
V 20
V о
-Г0 ^-20
р,ППа /;*//
к~
Ьч
^
А
Ршт
20 40 60 а/
20
15
10
80
V 60
V 40
5\- 20
р
V
Ртах\
1
^'п
При проектировании гидропривода
возвратно-поступательного действия важно
определить кинематическое положение
гидроцилиндра. Основными критериями при его
выборе являются наиболее полное и равномерное
использование принятого для привода уровня
рабочего давления в процессе всего рабочего
хода штока (плунжера). При выборе давления
большие значения относят к механизмам с
кратковременным режимом работы под
нагрузкой, меньшие - к механизмам с
напряженным характером работы и значительным
требуемым ресурсом.
Рабочие диаметры цилиндров, штоков,
плунжеров (для одноступенчатых
гидроцилиндров), выдвижных звеньев (для
телескопических гидроцилиндров) выбираются
стандартными с учетом принятого для данного класса
автомобиля унифицированного ряда рабочих
диаметров гидроцилиндров. Обычно
прорабатываются и анализируются несколько
вариантов расположения гидроцилиндров, после чего
выбирается оптимальный, обеспечивающий
минимальные массу, размеры и рабочий
объем. Часто задача сводится к размещению
уже имеющегося в производстве или
примененного на других машинах гидроцилиндра.
Решение о применении нового типоразмера
принимается в случае явного преимущества
этого варианта по основным оцениваемым
параметрам. При этом определяется число
гидроцилиндров, используемых в механизме, а
в случае применения телескопического
гидроцилиндра - число выдвижных звеньев (обычно
2-5). При проработке вариантов
целесообразно использовать расчетную схему,
показанную на рис. 2.5.15.
После выбора' кинематической схемы
расположения гидроцилиндра
(гидроцилиндров), его типа и основных геометрических
параметров, определенных в соответствии со
значениями расчетного (номинального) и
максимального (регулировка предохранительного
10
20 30
б)
40 ос/
[ и. Ь^г _
0,1
]п^М
1
777ТТ
и*—
1?
1
Г
■ \
1 /
. ».
1 о
V'
Рис. 2.5.14. Диаграммы осевых сил на гадроцилиндре I
давления р в некоторых гидроприводах механизмов
а - кабины грузовых автомобилей;
б - самосвальной платформы
Рис. 2.5.15. Схема расчета на ЭВМ основных
параметров опрокидывающего механизма самосвала
(О,. - центр тяжести груженой платформы, грузовой
стрелы; Ощ - ось поворота)
ПНЕВМО- И ГИДРОСИСТЕМЫ
273
клапана) давления, дальнейшее
проектирование гидропривода включает следующие этапы:
разработку принципиальной схемы
гидропривода;
выбор насоса. В первую очередь
определяется требуемая подача Сн из условия
обеспечения необходимой скорости срабатывания
гидроцилиндров:
ен = 2>г/(тпк).
где У1Ут ' СУ***** рабочих объемов
одновременно работающих гидроцилиндров; Т -
время срабатывания (рабочего хода)
гидроцилиндра; г\у - объемный КПД насоса;
расчет мощности и крутящего момента
на ведущем валу насоса;
разработку устройства отбора мощности;
расчет заправочного объема рабочей
жидкости, исходя из объемов гидроцилиндров
и условий теплового баланса гидропривода в
процессе работы;
определение геометрических размеров
гидробака;
В гидроприводах автомобилей
применяют гидрораспределители с непосредственным
(ручным) и дистанционным управлением.
Гидрораспределители с непосредственным
управлением устанавливаются под полом
кабины или в непосредственной близости от нее
таким образом, что рукоятки управления
находятся в кабине водителя. Они надежны в
эксплуатации, имеют хорошую
ремонтопригодность. Для лучшей обзорности при
функционировании механизмов
гидрораспределитель устанавливают иногда на шасси
автомобиля с управлением их работой
осуществляемым вне кабины. При этом характерно при-
определение сечений всасывающих,
напорных и сливных трубопроводов с учетом
допустимых потерь напора;
рабочее проектирование гидропривода и
его элементов с расчетом на прочность;
динамический расчет гидропривода (в
случае необходимости).
В специализированных гидроприводах
автомобилей в основном применяются
шестеренные насосы. Они наиболее просты в
изготовлении и эксплуатации, компактны, имеют
малую массу, высокий объемный КПД
благодаря устройству компенсации торцовых
зазоров, могут развивать давление до 25 МПа.
Основные характеристики шестеренных
насосов приведены в табл. 2.5.3. Ведущие
зарубежные фирмы наряду с шестеренными
насосами применяют насосы других типов и, в
первую очередь, аксиально-поршневые,
которые в отличие от шестеренных позволяют
регулировать рабочий объем, имеют больший
ресурс, стабильный КПД, давление до 35 МПа
и более, однако они более высокой стоимости
и требуют высокой культуры обслуживания. В
нашей стране такие насосы получили
распространение в дорожно-строительных машинах.
менение нескольких гидродвигателей
(гидроцилиндров), например, на автомобилях-
самосвалах с предварительным подъемом
платформы, на автомобилях-самопогрузчиках
с кранами-манипуляторами и др.
Гидрораспределители с дистанционным
управлением применяются на автомобилях с
откидывающейся кабиной, при большом числе
потребителей, а, следовательно,
подсоединяемых трубопроводов. Их размещают в наиболее
удобном месте на шасси автомобиля, а в
кабине устанавливают органы дистанционного
переключения: пневмораспределитель
(пневматическое дистанционное управление) или
2.5.3. Характеристики шестеренных
Параметры
Рабочий объем, см3
Частота вращения, мин-1:
номинальная
максимальная
минимальная
Номинальная подача, л/мин
Давление на выходе, МПа:
номинальное
максимальное
Номинальная потребляемая
мощность, кВт
КПД, не менее
Масса, кг
10 Е-3.
ЮВ-З
10
2400
3000
960
21
16
20
7,5
0,83
2,5
насосов типа НШ, применяемых
32А-3
31,5
1920
2400
960
55,6
20
25
42
0,83
6,87
32У-3
31,7
2400
3000
600
70
16
21
26
0,82
5,6
50А-3
48,8
1920
2400
960
86,2
20
25
68
0,83
7,47
в гидроприводах
50У-3
50,0
2400
3000
600
110,4
16
21
42
0,82
6,1
100-3
98,8
0,885
1500
2000
960
139,3
20
25
100
0,85...0,885
17,6
Примечание. Насосы выпускаются правого и левого вращения.
274
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
электропереключатели (тумблеры или
клавишные переключатели). Дистанционное
управление облегчает компоновку гидропривода на
автомобиле, улучшает условия работы водителя
и эргономику интерьера кабины, однако при
этом снижается надежность и
ремонтопригодность, связанные с возможными дополнитель-
Корпуса гидрораспределителей в
большинстве случаев выполняются литыми из
серого или высокопрочного чугуна, иногда из
стальных поковок. В корпусах из чугуна седла
клапанов изготовляют отдельно из термообра-
ботанной стали и запрессовывают в корпус.
Золотники и клапаны выполняют из
углеродистой или легированной стали, подвергают
термообработке и шлифовке рабочих
поверхностей. Золотники, как правило, селекционно
подбираются по соответствующим отверстиям
корпусов или выполняются с большой
точностью для обеспечения заданных норм утечек.
Клапаны притираются к седлам до
образования тонкой непрерывной линии контакта на
седле. Крышки и другие детали, постоянно
сообщающиеся со сливом, выполняют из
легких сплавов.
Наибольшее распространение в
гидроприводах автомобилей-самосвалов получили
телескопические гидроцилиндры
одностороннего действия, при этом складывание
гидроцилиндра происходит под действием
сжимающей осевой силы на гидроцилиндре от массы
порожней платформы. В карьерных
самосвалах (типа БелАЗ) с ковшовой платформой
вследствие большого угла опрокидывания
ными отказами деталей и узлов
дистанционных систем (электропривода, пневмопривода).
В гидроприводах автомобилей
используются гидрораспределители золотникового и
клапанного типов со встроенными
предохранительными клапанами (табл. 2.5.4).
платформы применяют телескопические
гидроцилиндры двустороннего действия (как
правило, с одним возвратным звеном). После
принудительного опускания платформы (в
результате срабатывания одного возвратного
звена) дальнейшее ее опускание происходит
как на обычных самосвалах, т.е. вытеснением
жидкости из гидроцилиндра под действием
веса порожней платформы.
Телескопические гидроцилиндры
одностороннего действия можно разделить на два
типа: буртовые и безбуртовые. Гидроцилиндры
буртового типа характеризуются наличием на
внутренних и наружных поверхностях
плунжеров буртов, составляющих одно целое с
плунжерами. Вследствие этого деталь плунжера
получается точением из трубы, толщина
стенки которой составляет сумму толщин стенки
плунжера и его буртов. Значительный расход
металла на изготовление трубных деталей,
большой объем механической обработки,
неприспособленность конструкции к
использованию современных малоотходных
технологических процессов ограничивают их
применение в основном в гидросистемах низкого
давления (10 ... 14 МПа) с использованием в
качестве уплотнительного элемента плунжеров
колец круглого сечения.
2.5.4. Характеристика гидрораспределителей
Обозначение
53Б-8607010
555-8607010
6505-8607010
5511-8607010
503-8607010-
22
Р80 2/1-22
Р80 2/-222
4509-8607010
182.8107005
Тип
Клапанный
Клапан но-
золотнико-
вый
Золотниковый
Клапаниь^й
Клапанный
Золотниковый
Золотнико
вый
Клапанно-
золотнико-
вый
Клапанный
Число
секций/позиций
1/2
1/2
1/3
1/3
1/2
2/4
3/4
2/3
1/3
Управление
Ручное
Дистанционное,
пневматическое
м
Ручное
Дистанцион*
ное,
пневматическое
Наибольшее
давление,
МПа
10
14
20
20
15
17,5
17,5
20
20
Условный
проход,
мм
12
16
20
16
16
16
16
16
16
Масса,
кг
1,8
2,7
3,2
8,26
3,3
10,124
15,5
5,9
10,98
ПНЕВМО- И ГИДРОСИСТЕМЫ
275
Рве. 2.5.16. Унифицированный гидроцилнндр
безбуртового типа:
1 - корпус; 2 - выдвижные плунжеры; 3 - нижние
направляющие полукольца; 4 - упорные пружинные
кольца; 5 - днище; 6 - шаровая опора;
7- грязесьемники; 8 - верхние направляющие втулки
Гидроцилиндр безбуртового типа новой
конструкции (рис. 2.5.16) создает давление в
гидросистемах самосвалов р = 20 + 21 МПа,
отличается улучшенной компактностью,
меньшим диаметром при несколько
увеличенных толщинах стенок плунжеров, что
позволяет разместить упорные и направляющие
элементы в специальных канавках, выполненных
в стенке плунжера и, тем самым, избавиться от
буртов. Это обусловило снижение
материалоемкости конструкции, повышение примерно в
1,5 раза коэффициента использования металла
даже при применении традиционной
технологии изготовления плунжеров. Такая
конструкция позволяет применить в массовом
производстве прогрессивную малоотходную
технологию холодной перетяжки труб
(деформирующее дорнование и др.). Характеристики
телескопических гидроцилиндров
одностороннего и двухстороннего действия приведены в
табл. 2.5.5. Телескопические гидроцилиндры
двустороннего действия нашли ограниченное
применение (на карьерных самосвалах
большой грузоподъемности).
Поршневые гидроцилиндры, (табл. 2.5.6)
нашли применение в таких механизмах, как
краны-манипуляторы, грузоподъемные борта,
опрокидыватель кабины, привод бортов
самосвальных'платформ и т.д.
2.5.5. Характеристика гидроцилиндров одностороннего и двустороннего действия
Обозначение
Длина
(монтажная),
мм
Число
звеньев
Суммарный
ход звеньев,
мм
Рабочие
диаметры
плунжеров,
мм
Наибольшее
давление,
МПа
Масса,
кг
3507-С1-8603010
4509-8603010
4504-8603010
4516-8603010
771-8603010А
887-8603010
55102-8603010-
10
5511-8603010
55112-8603010-
02
145. 8603023
155. 8603023
Гид|
468
425
512
475
675
642
543
1557
548
617
617
ЮЦИЛИНДрЬ!
4
3
4
4
2
3
3
3
3
3
3
односторонне
695
695
1026
815
850
1329
882
3400
958
1350
1339
го действия
65-82-100-118
56-75-95
75-90-105-120
75-90-105-120
60-75
85-100-115
56-75-95
56-75-95
75-95-117
56-75-95
75-95-117
11,5...12,0
20 ... 21
14
14
10
10
20 ... 21
20 ... 21
20 ... 21
20 ... 21
20 ... 21
31
23,5
41
39,1
24,6
37,1
46,9
100
45
38,9
51
540А-8603010
548А-8603010-10
549-8603010
7519-8603010
7521-86003010
Гид
_
-
-
-
-
РОЦИЛИНДР!
3
4
4
3
3
л двустороннее
1268
1693
2097
2375
2225
о действия
125-143-169
125-145-170-
200
125-175-200-
235
170-200-235
240-275-320
11
11
11
16
16
114
175
240
340
500
276
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
2.5.6. Характеристика поршневых гидроцилиндров
Параметры
Наибольшее давление,
МПа
Диаметр, мм:
поршня
штока
Ход, мм
5557-8524200-01
20
45
20
200
181.5003010
25
45
20
320
53423-4613010
16
80
28
320
54423-4634010
16
80, 100, 125
56, 53, 80
430, 630, 450
При изготовлении трубных деталей
поршневых и телескопических гидроцилиндров
используются горячекатанные трубы из стали
35 ... 45 с пределом текучести 320 ... 360 МПа.
Ведущие зарубежные фирмы при
изготовлении трубных деталей используют стали с
пределом текучести 450 ... 480 МПа.
2.5.6. ШИНЫ И КОЛЕСА
Конструкции шин. По исполнению шины
делятся на камерные и бескамерные. В
камерной шине (пневматической), воздушная
область образована герметизирующей камерой. В
бескамерной шине (пневматической)
воздушная полость находится между покрышкой и
ободом колеса. В общем случае шина состоит
из покрышки, ездовой камеры с вентилем (для
камерной шины) и ободной ленты (для
камерных шин грузовых автомобилей,
автопоездов, автобусов).
Покрышка пневматической шины,
представляющая собой торообразную оболочку,
непосредственно воспринимает действие сил
со стороны как опорной поверхности, так и
обода колеса, включая внутреннее давление.
Ездовая камера - герметичная торообразная
эластичная трубка, заполняемая газом или
воздухом. Ободная лента - профилированное
эластичное кольцо, располагаемое в
пневматической шине между бортами покрышки,
камерой и ободом колеса, предназначена для
защиты камеры от перетирания и защемления.
Элементами покрышки пневматической
шины являются (рис. 2.5.17):
протектор - наружная резиновая часть
(как правило, с рельефным рисунком),
обеспечивающая сцепление с дорогой и
предохраняющая каркас от повреждений;
беговая дорожка протектора -
поверхность, контактирующая с дорогой;
рисунок протектора - рельефная часть,
состоящая из совокупности выступов и
выемок или канавок;
подканавочный слой протектора - часть
между брекером или каркасом и
поверхностью, образованной основанием выступов
протектора и дном канавок;
плечевая зона протектора - часть между
беговой дорожкой протектора и боковиной;
13 13
Рис. 2.5.17. Основные конструктивные параметры!
элементы покрышки:
I - каркас; 2 - подушечный слой (брекер);
3 - протектор; 4 - боковина; 5 - борт;
6 - носок борта; 7 - основание борта; 8 - пятка борта;
9 - бортовая лента; 10 - бортовое кольцо;
II - обертка; 12 - наполнительный шнур;
13 - нить корда; / - корона; II - сухарь (плечевая);
III ~ зона изгиба (боковины); IV- зона усиления;
Н - высота профиля шины; Н\ - расстояние от
основания борта до горизонтальной осевой линии
профиля; Нг - расстояние от горизонтальной оси до
экватора; В - ширина профиля покрышки;
В$ - ширина беговой дорожки протектора по хорде
(корона); К - радиус кривизны протектора;
В - наружный диаметр шины; й - внутренний
(посадочный) диаметр шины; к - стрела дуги
протектора; С - ширина раствора бортов;
а - ширина борта
боковая стенка - часть покрышки,
расположенная между плечевой зоной протектора и
бортом;
борт - жесткая часть, обеспечивающая
крепление покрышки на ободе колеса;
'бортовые крылья - часть борта,
состоящая из бортового кольца, наполнительного
шнура, оберточной и крыльевой ленты;
основание борта - часть, прилегающая к
полке обода колеса;
ШИНЫ И КОЛЕСА
277
пятка борта - наружная часть основания,
прилегающая к закраине обода;
носок борта - внутренняя часть
основания.
Индикаторы износа протектора -
указатели, являющиеся сигналом к прекращению
эксплуатации шины в результате износа
протектора. Они выполняются в виде выступов по
дну канавок или цветных элементов в массиве
выступов. Рисунок протектора шин может
быть дорожный, универсальный, повышенной
проходимости, карьерный и зимний.
Конструктивные параметры шины.
Основными конструктивными параметрами шины
являются: ширина В и высота Н профиля
шины, ее наружный диаметр И и посадочный
По конструкции шины делятся на
радиальные, диагональные и диагонально-
опоясанные. Радиальные шины
характеризуются меридиональным расположением нитей
корда в каркасе и наличием жесткого брекер-
ного пояса, препятствующего раздуванию
каркасных слоев. У диагональных шин нити
корда в каркасе находятся под углом к меридиану
шины, а брекер практически отсутствует или
очень небольшой. Если в радиальных шинах
брекер обеспечивает форму профиля шины и
несет такую же функциональную нагрузку, как
каркас, то у диагональных шин он служит
лишь для защиты каркасных слоев.
Диагонально-опоясанные шины - это совмещение
конструкции диагональных и радиальных шин.
Они имеют каркас как у диагональных шин и
мощный брекер подобно радиальным. Диаго-
нально-опоясанные шины выпускаются
шинными фирмами США.
В настоящее время радиальные шины все
в большей степени вытесняют диагональные
типы шин, так как имеют большую ходимость,
меньшее сопротивление качению, лучшие
характеристики по управляемости,
устойчивости и сцеплению. Благодаря наличию брекерно-
го пояса радиальным шинам можно задавать
различные конфигурации профиля с разным
отношением Н / В = 80, 75, 70, 60, 55, 50 %
(серии). Шины низкого профиля требуют
более совершенной подвески и эксплуатации в
лучших дорожных покрытиях. Шины наиболее
низких серий (меньше 50) применяются
только на спортивных автомобилях.
Для обеспечения взаимозаменяемости
шин их основные размеры и характеристики
(грузоподъемность, скорость и др.) строго
регламентированы международными и
отечественными стандартами, введено единое
обозначение шин. Кроме того, на боковинах шин
наносится дополнительная информация,
позволяющая выбрать шину для заданных
условий эксплуатации. В обозначении шины
первая цифра - ширина профиля (в мм или '*),
дробь с чертой - серия (отношение высоты
профиля к ширине, %); буква К - радиальная
конструкция каркаса, а тире (вместо буквы К)
- диагональная конструкция, следующая
цифра - посадочный диаметр (мм или "). В
обозначение шины специального назначения (с
уширенным профилем) вводится значение
условного наружного диаметра шины (перед
обозначением шины). Завершают обозначение
число - индекс нагрузки (максимально
допустимая одинарная и сдвоенная для грузовых
автомобилей) и латинская буква - скоростная
категория (максимально допустимая скорость).
На боковину шины могут наноситься
буквы Е и ДОТ соответствия требованиям
отечественных стандартов, европейским и
американским нормам безопасности, число и
материал слоев в каркасе и брекере, модель
шины, название фирмы, даты и др.
В обозначении камеры указывается
обозначение шины или специальное обозначение
для универсальных камер.
Конструкции колес. В
автомобилестроении принято колесом называть
конструктивный узел, на котором монтируется шина,
состоящий из диска и обода. Под ободом
понимается часть колеса, на которую монтируется и
опирается шина. Диск (фланец) - часть колеса,
являющаяся соединительным элементом
между ступицей и ободом.
Рис. 2.5.18. Конструктивные схемы колес:
а - одинарного; б - сдвоенного; в - д - с вылетом
диска соответственно нулевым, положительным и
отрицательным; е - бездисковое колесо;
1 - вертикальная ось колеса; 2 - обод; 3 - диск;
4 - крепежное отверстие диска;
5 - центральное отверстие диска;
6- элементы крепления; 7- ступица
278
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
Расположение диска относительно
центральной плоскости, проходящей по середине
обода, характеризуется величиной вылета (рис.
2.5.18). Колесо с нулевым вылетом диска -
колесо, у которого привалочная плоскость
диска (прилегающая к ступице) совпадает с
центральной плоскостью, с положительным -
колесо, у которого центральная плоскость
обода смещена относительно привалочной
плоскости дисков в сторону продольной оси
автомобиля, а с отрицательным - колесо со
смещением этой плоскости в сторону от
продольной оси автомобиля.
Обод имеет (рис. 2.5.19):
основание - часть, служащую для
установки съемных деталей;
бортовую закраину - часть, образующую
боковой упор для шины;
посадочную полку - часть,
предназначенную для установки основания борта шины;
замочную часть - часть основания,
предназначенную для замыкающих съемных
деталей (замочные и бортовые кольца);
ручей - часть, расположенную между
посадочными полками и представляющую собой
углубление для монтажа-демонтажа шины.
У обода с обратной стороны может быть
предусмотрен посадочный конус (коническая
поверхность) для посадки бездисковых колес
на ступицу.
Диск колеса включает:
центральную часть, примыкающую к
привалочной плоскости и содержащую
отверстия для крепления колеса к ступице;
периферийную часть (сферическую и
коническую поверхность), расположенную между
центральной частью и ободом колеса, обычно
с отверстиями;
вентиляционные отверстия в
периферийной части диска, предназначенные для
снижения массы конструкции, улучшения
вентиляции тормозных механизмов и облегчения
доступа к вентилю шины;
спицы (участок периферийной части
диска), расположенные между соседними
вентиляционными отверстиями.
В зависимости от назначения ободья
подразделяют на разъемные и неразъемные. В
табл. 2.5.7 приведена характеристика
профилей ободьев различных типов.
Для повышения надежности посадки
борта бескамерных шин легковых автомобилей
на посадочных местах обода
предусматривается радиусный или цилиндрический выступ
("хампа"), обозначаемый соответственно
буквой Н или РНА (табл. 2.5.8). Обозначение
обода включает: ширину, посадочный диаметр
("), форму профиля закраин, тип посадочной
полки.
У^> > Г •^рЭ
Рис. 2.5.19. Основные тины ободьев:
а - неразъемный (глубокий) симметричный; б - разъемный посередине;
в - сегментный (разъемный по радиусу, типа "трилекс");
г - ж - разъемный соответственно двух-, трех-, четырех- и пятиэлементный;
/ - основание обода; 2 - соединительный элемент; 3 - разрезное бортовое кольцо; 4 - съемное бортовое кольцо;
5 - пружинное замочное кольцо; 6 - посадочное кольцо; 7 - уплотнитель под бескамерную шину
ШИНЫ И КОЛЕСА
279
2.5.7. Характеристика профилей ободьев
Профиль
Обозначение
бортовой закраины профиля обода
Тип
Применение
Плоский
Плоский, 5 °
Полуглубокий
Разъемный
посередине
Разъемные по
бортам шин
Р, К, 5, Т, \У, V
-
Р, К, 5, Т
Е, Р, О, Н, I, N
А, Б, В, Г
С, Б, Е, Р, Р, К,
8, Т
-
Разъемные ободья
5,00 8 - 20
8,0 - 20
440 - 533
5,00 - 12
11,25 - 24
14,00 -25/15
5,00Е - 165ДС
254Г-508
2,45 - 8
2,50С - 4
4,00Е - 12
1140 - 700
Двух-, трех- или
четырехэлемент-
ный и
сегментный
То же
Трех-, четырех-
элементный
Трех-, четырех -,
пятиалементный
Двух-, трех-,
четырехэлемен-
тный
В большинстве
случаев
исполняется как часть
разъемного
колеса
То же
Разъемный для
арочных шин
Легковые и
грузовые
автомобили, автобусы,
прицепы,
полуприцепы,
строительно-
дорожные
машины,
электрокары, мотокары
и погрузчики
То же
Электрокары,
мотокары и
погрузчики
Строительно-
дорожные
машины и
грузовые автомобили
большой
грузоподъемности
Грузовые
автомобили малой
грузоподъемности, тракторные
и автомобильные
прицепы
Грузовые
автомобили
повышенной
проходимости
Мотороллеры,
сельскохозяйственные машины,
тележки
Электрокары,
мотокары,
погрузчики,
ручные тележки,
сельскохозяйственные машины
Грузовые
автомобили,
прицепы
280
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
Продолжение табл. 2.5.7
Профиль
Обозначение
бортовой закраины
профиля обода
Тип
Применение
Глубокий
Глубокий с
основным
исполнением профиля
обода
Глубокий с
допустимым
исполнением
профиля обода Н2
или Н1
Глубокий с
допустимым
исполнением
профиля обода РНА
Глубокий с
допустимым
исполнением
профиля обода СН
-
А, В, С, Б, Е, Р
I, К, Ь, 1К, П
I, К, и 1К, П
I, к, и пс, п
I, к, и 1к, п
Неразъемные ободья
2,50 х 12
4,50Р х 16
4 1/2 /х 14-5
5К х 15
5/х 15Н2-8
5 1/2/х 14Н1
5 1/2 / х 14РНА
4 1/2 / х 15СН
Симметричный
То же
-
Асимметричный
Симметричный с
допустимым
профилем
посадочной части Н
с двух сторон
обода (Н2)
Асимметричный
с допустимым
профилем
посадочной части Н
с внешней
стороны обода
С профилем
посадочной
ласти РНА с
внешней стороны
обода
С допустимым
профилем
посадочной части
РНА с внешней
стороны обода и
Н с внутренней
стороны
Легковые
автомобили малого
класса,
мотороллеры
Легковые
автомобили,
тракторы, прицепы,
самоходные и
подвесные
скохозяйственные машины
То же
Легковые
автомобили
То же
и
ШИНЫ И КОЛЕСА
281
Продолжение табл 2.5.7
Профиль
Глубокий с
допустимым
исполнением
профиля обода 8Ь
Глубокий с
допустимым
исполнением
профиля обода СР
Глубокий с
формами
бортовых закраин-
плоских ободьев
Глубокий
Глубокий,
широкий
Особо глубокий
Глубокий 15°
Глубокий 15°,
широкий
Обозначение
I, К, Ь, 1К, П
I, К, и 1К, П
8, Т
-
4 1/2 х 138Ь
4 /х 13СР1
5 1/2 / х 15СР2
5,50 - 20ДС
8,00Т - 24 ДС
ЛУ8 - 32
9,00 - 15
БЛУ14 - 30
5,25 х 19,5
13,00 - 22,5
Тип
С допустимым
профилем
посадочной части 8Ь
с внешней
стороны обода
Симметричный
и
несимметричный
Симметричный
Симметричный
и
асимметричный
Несимметричный,
допускается
симметричный
То же
Симметричный
и
несимметричный
Несимметричный
Применение
Легковые
автомобили
То же
Грузовые
автомобили,
тракторы
Тракторы,
самоходные
сельскохозяйственные
машины
(комбайны)
Прицепы,
самоходные
подвесные
сельскохозяйственные
машины
То же
Грузовые
автомобили,
автобусы, прицепы
Грузовые
автомобили,
прицепы
282 Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
2.5.8. Типы посадочных полок ободьев
Посадочная полка
Цилиндрическая
Г
-\1
Коническая с углом наклона 5 ° *+
^Г=\
^п!
Коническая с углом наклона 15 °
^й
-*та
Коническая с радиусным выступом в начале полки
_ /ц
Т^т
Тороидальная
, . ^Г
Г1] ^
Коническая с цилиндрическим выступом в начале полки
-—/^
т^та
Комбинация конической и цилиндрической полок
—с^
'—Г5
Комбинация двух конических полок, состыкованных по
меньшему диаметру
-XX
гтй
Обозначение
-
5°
15°
Н
-
РНА
5Ь
СР
ШИНЫ И КОЛЕСА 283
Поперечно-разборный обод ("трилекс")
состоит из нескольких (обычно из трех)
складывающихся секторов, обеспечивающих
возможность монтажа и демонтажа шины и
обода.
В комплект колеса может входить
распорное кольцо - деталь кольцевой формы,
устанавливаемая на ободе между бортами
шины и служащая для плотного прижатия бортов
шины с регулируемым давлением к закраинам
обода, и проставочное кольцо - кольцевая
деталь, устанавливаемая между сдвоенными
бездисковыми колесами.
Обод бездискового колеса
устанавливается непосредственно на ступицу и фиксируется
прижимами с помощью гаек. Центрирование
бездисковых колес осуществляется по
конической поверхности с общепринятым в
международной практике углом конуса 28 ° (реже
18 °) на периферийной части спицевых
ступиц.
Сдвоенные колеса фиксируют
наружными прижимами с клиновой поверхностью. От
проворота колеса удерживаются силами трения
и выполненными на ободе выступами-
ограничителями, расположенными между
спицами ступицы. Колеса с поперечно-разборным
ободом устанавливают на ступицу, имеющую
две конические поверхности 18 и 75 °.
Благодаря радиальной податливости обода его
установка происходит сразу по двум коническим
поверхностям, что обеспечивает минимальное
биение колеса. Поверхность обода "трилекс",
прилегающая к прижиму, выполнена с углом
конуса 55 °, что ограничивает дальнейшее
разжатие обода после входа в контакт
поверхностей с углом конуса 75 °.
Вевггили, золотники и удлинители. Для
камерных шин постоянного давления
применяют вентили с обрезиненным корпусом типа
Л К (для легковых автомобилей), водовоздуш-
ные типа ТК (для тракторов) и с
обрезиненным основанием корпуса типа ГК (для
грузовых автомобилей, автобусов и прицепов).
Для бескамерных шин применяют
металлические вентили типов УБ и КГ (с
увеличенной пропускной способностью) и вставные
резинометаллические вентили типа ЛБ (для
легковых автомобилей). Пневматические
камерные шины с регулируемым давлением
воздуха комплектуются вентилями типов РК-5 и
РК-5А с обрезиненным основанием корпусов,
которые не имеют золотниковой камеры и
золотников.
К вентилям и золотникам предъявляются
следующие основные технические требования:
вентили должны быть работоспособны
при эксплуатации транспортного средства во
всех климатических зонах при температуре
окружающего воздуха -60 ... +55 °С;
золотники должны обеспечивать
герметичность вентилей в интервале температур
-60 ... +100 °С, и кратковременно ( в течение
60 мин) до +150 °С при внутреннем давлении
воздуха 0,049 ... 1,47 МПа;
площадь проходного сечения золотников
для вентилей ЛК, ТК, ГК, УБ и ЛБ при
полностью открытом клапане должна быть не
менее 3 мм2;
осевое перемещение стержня золотника,
необходимое для максимального открытия
клапана, должно быть не менее 2 мм;
головка стержня золотника относительно
торца корпуса вентиля не должна выступать
более, чем на 0,25 мм, а утопать не более 0,9
мм.
Для обеспечения возможности установки
манометра при контроле внутреннего давления
воздуха в шине и подкачивания шин воздухом
в процессе эксплуатации и техническом
обслуживании грузовых автомобилей, автобусов
со сдвоенными колесами используют
удлинители вентилей пневматических шин.
Уравнения движения колеся. Схема сил и
моментов, действующих на колесо в общем
случае его прямолинейного качения по
твердой или мягкой опорной поверхности,
показана на рис. 2.5.20. Параметрами при расчете
колеса являются:
нормальная нагрузка С на колесо -
равнодействующая всех сил, приложенных к
колесу со стороны автомобиля,
перпендикулярная к опорной плоскости (в недеформируемом
состоянии);
продольная сила Рх - равнодействующая
сил, приложенных к колесу со стороны
автомобиля;
момент Л/о, приложенный к колесу со
стороны автомобиля;
нормальная реакция К% опорной
поверхности - равнодействующая горизонтальных
проекций всех сил, действующих на колесо со
стороны опорной поверхности;
Рис. 2.5.20. Схем* расчета прямолинейного качения
колеся по твердой опорной поверхности
284
Глава 2.5. ХОДОВАЯ ЧАСТЬ АВТОМОБИЛЕЙ
продольная реакция Я#
сила Р] и момент М^ действующие на
колесо в его продольной плоскости при
неустановившемся качении колеса;
аэродинамические сила Р„ и момент М^
центробежная сила РДу представляющая
собой приведенную равнодействующую
массовой неуравновешенности колеса;
линейная V и угловая со скорость колеса;
свободный радиус Го шины (колеса);
динамический радиус гд колеса -
расстояние от оси колеса до опорной поверхности
или плечо приложения силы Р&
угол ф между направлением действия
силы Гц и осью х\
плечо а сопротивления качению.
Общие уравнения прямолинейного
качения колеса по твердой ровной поверхности
следующие:
тл
"к
.2
4 х
кл2
= в-я.
л
"V
= Ях-Рх-Р^
\ -^«яф;
'к =
4 ф 4т
= /к — = М-М„ -Я^а-Я.
41
41
хг&'
V = СОГ^
(2.5.4)
где тК и 1К - соответственно масса и момент
инерции колеса относительно оси у, гк -
радиус качения колеса.
При качении колеса по криволинейной
траектории к системе (2.5.6) добавляются
уравнения равновесия сил и моментов,
действующих в направлении оси у и относительно
оси I:
'«-
/я,
«21
л2
л2
= МП-Мд+Куе;
= Ру-Яу+Ру
ну»
(2.5.5)
V = Г СОСО80,
где /г - момент инерции колеса относительно
оси I; Мп - поворачивающий момент,
приложенный к колесу со стороны автомобиля; Л/д
- дисбалансный момент, приведенный к
срединной плоскости колеса; Яу - боковая
реакция опорной поверхности; е - снос боковой
реакции; Ру - боковая сила, действующая на
колесо со стороны автомобиля; Р^ -
аэродинамическая сила, действующая на колесо в
направлении оси у; 0 - угол бокового увода
колеса - угол между направлением вектора
скорости и средней плоскостью колеса.
Следует иметь в виду, что в данном
общем случае рассматривается поворот колеса
относительно оси I, а не относительно оси
шкворня, как обычно принято для
управляемых колес автомобиля.
Иногда момент Яуе называют
стабилизирующим моментом колеса.
При наклоне колеса приведенные
уравнения несколько усложнятся в связи с
необходимостью введения в них гироскопических
моментов.
Из общего случая прямолинейного
движения колеса можно выделить несколько
частных случаев равномерного качения
уравновешенного колеса, часто используемых в теории
автомобиля.
Ниже приведены уравнения качения
колеса для разных режимов:
ведущий режим - режим, при котором
колесо нагружено силой тяги и приводится во
вращение крутящим моментом,
Ах ~ Ах ' ?ш = °;
М0- М^-Я^-Я^ = 0;
V = согк;
свободный режим - режим, при котором
колесо приводится во вращение крутящим
моментом, а продольная суммарная сила равна
нулю,
Лис " Ах = 0;
М0 - Муу - Я^а - ЯхГд = 0;
V = согк;
нейтральный режим - режим, при
котором колесо приводится во вращение
одновременно крутящим моментом и толкающей
силой,
Ас+ Ас"Л«х=0;
М0- М^,- Я7а-Яхгл= 0;
V = согк;
ведомый режим - режим, при котором
колесо приводится во вращение толкающей
силой, а крутящий момент равен нулю,
Ах + Ах ~ Люс = 0;
М^у + V *Л = 0;
V = ©гк;
тормозной режим - режим, при котором
колесо нагружено крутящим моментом, вектор
которого противоположен вектору угловой
скорости, и приводится во вращение
толкающей силой,
ШИНЫ И КОЛЕСА
285
М0 + Л/^ + В^а - ЯхГц = 0;
V = ©гк.
Основные характеристики шин.
Характеристики шин оказывают существенное
влияние на эксплуатационные свойства
автотранспортных средств. К основным показателям
шин, которые берутся за основу при их
выборе и широко используются при расчетах,
относятся следующие:
грузоподъемность шины - максимальная
нагрузка, при которой шина заданного
размера и давления воздуха в ней может продолжать
работать при определенных скоростных
условиях без заметного снижения своего расчетно-.
го ресурса;
габаритные размеры шины (наружный
диаметр, ширина профиля и посадочный
диаметр);
максимально допустимая скорость
качения при заданных размерах шины и ее
грузоподъемности;
давление воздуха, обеспечивающее шине
заданную по условиям сохранения
необходимого ресурса величину радиальной
деформации (обычно 10 ... 15 % высоты профиля
шины);
статический радиус, который меньше
свободного радиуса на величину ее
деформации; при изменении нагрузки на колесо
давление воздуха корректируется так, чтобы
статический радиус оставался неизменным;
радиус качения - кинематическая
характеристика, определяемая отношением
поступательной скорости качения к угловой скорости
вращения колеса;
коэффициент Сг радиальной жесткости -
первая производная нормальной нагрузки
колеса по нормальному прогибу (деформации)
шины в заданной точке нормальной нагрузки;
коэффициент Су боковой жесткости -
первая производная боковой силы колеса по
боковой деформации шины в пятне контакта;
коэффициент Ср крутильной жесткости -
первая производная крутящего момента колеса
по углу закрутки шины. Средние значения
жесткостей шин приведены в табл. 2.5.9;
2.5.9. Средние значения коэффициентов жесткости при номинальном давлении воздуха в шине
Шины
5,60-15
6,00-13
6,15-13
6,40-13
6,45-13
8,40-15
165/80Р13
175/80Р13
165/80Р14
165/70Р13
175/70Р13
7,50-20
8,25-20
8,25-20Р
9,00-20
9,00-20Р
10,00-20
11,00-20
12,00-20
12,00-20
14,00-20
1000 х 600
1140x600
1140 х 700
1300 х 750
Радиальной, Н/мм
Боковой, Н/мм
Легковые автомобили
239
198
151
261
196
472
174
180
180
169
157
120
115
76
157
89
169
80
94
74
78
75
Грузовые автомобили
537
743
610
746
645
755
971
837
259
380
226
420
265
270
-
380
Шины с регулируемым давлением
612
617
333
285
Арочные шины
618
697
516
684
-423
367
390
485
Крутильной, Нм / °
568
475
340
688
585
1001
263
304
207
269
245
1656
1820
1440
2360
1600
1980
-
2330
1840
2500
2464
2440
2448
3370
286
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
коэффициент Се угловой жесткости -
первая производная поворачивающего
момента колеса по его угловой деформации
относительно оси I;
коэффициент/сопротивления качению -
отношение силы сопротивления качению
колеса к его нормальной нагрузке. Для ведомого
режима сила сопротивления качению равна
продольной силе, приложенной к оси колеса.
Для других режимов качения сила
сопротивления качению носит условный характер и
вычисляется через мощность потерь,
затраченную на качение колеса и деленную на
скорость движения его центра;
коэффициент сцепления колеса -
отношение результирующей горизонтальной
реакции в опорной плоскости к соответствующему
значению нормальной реакции;
коэффициент .У продольного скольжения
колеса - отношение скорости Уу продольного
скольжения контакта колеса с опорной
поверхностью к поступательной скорости V его
центра. Если V < 0 (т.е. направлено в сторону,
противоположную направлению скорости
перемещения центра колеса), то коэффициент 5
соответствует режиму буксования колеса; если
\у > 0, - то режиму скольжения ("юза");
среднее давление рк колеса в контакте -
отношение нормальной реакции опорной
поверхности к контурной площади контакта;
среднее давление колеса по выступам
рисунка протектора - отношение нормальной
реакции опорной поверхности к площади
контакта по выступам рисунка протектора;
коэффициент насыщенности рисунка
протектора - отношение площади выступов
рисунка беговой дорожки протектора к ее
общей площади;
ресурс шины (ходимость, км) - пробег
Глава 2.6
ЭЛЕКТРООБОРУДОВАНИЕ КОЛЕСНЫХ И
ГУСЕНИЧНЫХ МАШИН
2.6.1. ПРИНЦИПИАЛЬНЫЕ ЭЛЕКТРИЧЕСКИЕ СХЕМЫ
Система электрооборудования колесных
и гусеничных машин формируется на основе
отдельных функциональных систем. Она
представляет собой сложный электромеханический
комплекс, состоящий из многих десятков
изделий, в том числе электронных, и в общем
случае включающий следующие
функциональные системы: электроснабжения; электричес-
шины в км, определяемый сопротивлением
усталости каркаса шины и износом рисунка ее
протектора.
К параметрам, характеризующим
неоднородность шины, относятся:
статический и динамический дисбалансы,
характеризующие неуравновешенность шины
(колеса);
радиальное и боковое биение -
максимальное изменение соответственно ее
наружного радиуса и ширины профиля по длине
окружности;
силовая неоднородность, включающая
изменение радиальной, боковой, крутильной и
угловой жесткости за оборот колеса.
Выбор типоразмера шины для
автомобиля осуществляется по максимальной нагрузке,
приходящейся на самое загруженное колесо
автотранспортного средства, с учетом
максимальной скорости автомобиля в соответствии с
его техническими характеристиками и
специфическими условиями работы
автотранспортного средства (дорожными и климатическими,
режимами движения и пр.). Несколько
сложнее выбор крупногабаритных шин для
колесных шасси особо большой грузоподъемности,
так как такие шины работают в
неустановившемся тепловом режиме. Для обеспечения
наиболее эффективной работоспособности
шин этого типа необходимо также задавать
суточный режим их работы с учетом плеча
ездки, средних скоростей движения и пр. В
зарубежной практике наибольшее
распространение получил метод ТКВЧ.
Специфичен выбор шин для городских
автобусов при режиме их движения с
небольшими максимальными скоростями и частыми
остановками. В случае превышения
допустимой нагрузки, приходящейся на шину,
необходимо снизить максимальную скорость
движения (см. ниже).
50 40 30 20 8
115 125 135 150 175
кого пуска двигателя; управления двигателем,
в том числе топливоподачей; освещения;
световой и звуковой сигнализации; ин4юрмации,
контроля и диагностирования; отопления и
вентиляции; стеклоочистки; управления
движением, в том числе трансмиссией, подвеской,
тормозными системами и др.;
радиооборудования; вспомогательного оборудования.
При построении принципиальных схем
электрооборудования учитываются:
мощность потребителей;
длительность их работы;
режим включения (при работающем или
выключенном двигателе);
Скорость, км/ч 60
Повышение нагрузки, %, к нагрузке при
максимальной скорости цо
ГЕНЕРАТОРЫ
287
место размещения (на двигателе, в отсеке
двигателя, в кабине и др.), а также другие
факторы, влияющие на электромагнитную
совместимость, уровень радиопомех, электрические
потери в цепях и т.д.
Номинальное напряжение
аккумуляторной батареи I/ = 6, 12 или 24 В. Выбор
напряжения зависит от мощности потребителей
и, в первую очередь, стартера. Мощность
стартера определяется рабочим объемом и типом
двигателя: Рс = 0,5 + 11 кВт и выше. Низкое
напряжение I/ системы обусловливает
большую силу стартерного тока (несколько сотен
ампер). Мощность генератора в меньшей мере
влияет на выбор напряжения, но сила
максимального тока ограничена мощностью
встроенных в генератор диодов.
Номинальное напряжение системы
соответствует напряжению на аккумуляторной
батарее, но при работающем двигателе
(генераторе) для обеспечения ее подзарядки
напряжение генератора выше ЭДС батареи. В
противном случае ток будет разрядным. Требуемое
значение регулируемого напряжения
обеспечивается настройкой реле напряжения при
изготовлении в умеренном или тропическом
исполнении (табл. 2.6.1).
2.6.1. Рекомендуемые значения регулируемого напряжения, В
Климатическая
зона
Холодная
Умеренная
Жаркая и теплая влажная
Время
года
Зима
Лето
Круглый год
То же
Установка батареи
наружная
14,5 ... 15,5
13,8 ... 14,8
13,8 ... 14,8
13,2 ... 14,0
подкапотная
14,2 ... 15,0
13,2 ... 14,2
13,2 ... 14,2
13,0 ... 14,0
* В схемах автотракторного
электрооборудования применяется однопроводная система,
при которой общим обратным проводом
служит масса двигателя и шасси.
на всех отечественных автомобилях с
карбюраторными двигателями (напряжением 12 В) и
дизелями (напряжением 24 В).
2.6.2. ГЕНЕРАТОРЫ
Главным источником электроснабжения
на автомобиле является синхронный генератор
в сочетании с выпрямителем тока (рис. 2.6.1).
Особенностью таких генераторов является
выполнение индуктора (ротора) в виде
системы явно выраженных полюсов двух
полярностей, объединенных двумя полюсными
наконечниками с полюсами 7 клювообразной (или
пальцеобразной) формы с одной обмоткой 6
возбуждения, расположенной между
полюсными наконечниками. Такая конструкция
экономична и выгодно отличается от
коллекторных генераторов (постоянного тока):
примерно в 2 раза меньше масса, в 3 раза меньше
расход меди и существенно улучшены
зарядные (для аккумуляторной батареи) свойства
благодаря более раннему началу отдачи
зарядного тока 1Т (рис. 2.6.2): почти с частоты
вращения на режиме холостого хода двигателя.
Одной из важных предпосылок
распространения генераторов переменного тока на
автомобилях является разработка и освоение
выпрямительных блоков типов ВБГ и БПВ,
выполненных по трехфазной мостовой схеме
выпрямления Ларионова с использованием
кремниевых полупроводниковых вентилей.
Такие генераторы используются практически
Рис. 2.6.1. Автомобильный генератор
переменного тока с полюсами
клювообразной формы:
1 - трехфазная катушечная обмотка статера;
2, 8 - крышки; 3 - шкив; 4 - крыльчатка;
■ выпрямительный блок; 6 - обмотка возбуждения;
- клювообразные полюса; 9 - контактные кольца;
10 - щеткодержатель; 11 - втулка
288
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
м
Рис. 2.6.2. Токоскоростные характеристики
генераторов:
1 - постоянного тока; 2 - переменного тока
Бесконтактные тракторные генераторы
индукторного типа (рис. 2.6.3) в отличии от
автомобильных синхронных имеют
неподвижную обмотку 5 возбуждения, закрепленную в
стальной крышке со стороны привода.
Крышки не имеют вентиляционных окон и
охлаждение осуществляется потоком воздуха от
осевого вентилятора со стороны привода вдоль
наружной поверхности корпуса генератора. В
остальном конструкции тракторных и
автомобильных генераторов аналогичны.
Рис. 2.6.3. Тракторный генератор Г 306:
1 - вал; 2, 3 - пакеты; 4 - обмотка якоря;
5 - катушка возбуждения; 6 - корпус выпрямителя;
7 - шкив; 8, 11 - крышки; 9 - передвижная лапа
Расчет генераторов проводится по
известным методикам. Техническая характеристика
автомобильных и тракторных генераторов
приведена в табл. 2.6.2.
Тип
Т221-А
Г222
37.3701
16.3701
161.3701,
162.3701
Г273В
Г287
Г287-А,
Г287-Б
Г287-К,
Г287-Л
66.3701
65.3701
32.3701
Напряжение, В
14
14
14
14
14
28
14
14
14
14
28
14
2.6.2.
Сила
тока, А
42
50
55
65
65
28
90
90
80
60
90
60
Мощность,
Вт
588
700
770
910
910
784
1260
1260
1120
840
2520
840
Частота
вращения
ротора без
нагрузки,
мин-1
1200
1250
1100
1100
1100
-
950
950
750
1150
1200
1050
Масса, кг
4,85
4,74
4,84
6,7
6,1
6
11
11
10
5
9,6
5
Применение
ВАЗ-2121
ЗАЗ-1102
ВАЗ-2108, 2109
ГАЗ-24-10, РАФ-2203
ГАЗ-53
КамАЗ-740
ГАЗ-66
ГАЗ-71, ЗИЛ-131
ЛАЗ-696М, КАВЗ-
3270, ЛиАЗ-677М
ПАЗ-672М, 3201
ЛАЗ-42021, ЛиАЗ-5256
ЗИЛ-431410
РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ
289
ступенчатые, контактно-транзисторные и
бесконтактные транзисторные, в том числе и
малогабаритные, встроенные в узел
щеткодержателя генератора, бесконтактные, выполненные
по гибридно-интегральной (толстопленочной)
технологии. Их общей чертой является
отсутствие реле обратного тока, функции которого
выполняет выпрямительный блок генератора,
и реле ограничителя тока.
Массогабаритные электронные
изоляторы, выполняемые по гибридно-интегральной
технологии (бескорпусные радиоэлементы и
толстопленочная технология) позволили
исключить ошибки в регулировании
напряжения, обусловленные потерями в
соединительных проводах. Такие регуляторы, встроенные в
щеткодержатель генераторов, применяются
практически на всех отечественных
автомобилях и тракторах. Основные параметры
диапазона стабилизации регуляторов приведены в
табл. 2.6.3.
2.6.3. Основные параметры диапазона стабилизации регуляторов напряжения
Тип
регулятора
121.3702
201.3702
22.3702
221.3702
13.3702
РР132-А
111.3702
Я112-А1
17.3702
21.3702
РР310-Б,
В
Тип
генератора
Г221-
А
Г250-
И1,
Е2,
Н2
Г284
32.3701
Г250-
вз,
Г2,
Д2
Г286
16.3701
Г287
Г288
17.3701
37.3701
Г263
Г502-
А
Г,
А
14
14
35
20
14
40
20
36
18
14 .
18
60
10
При (25 ± 10) °С
"'
мин-1
3500
3000
3000
2000
3000
3000
3000
3500
3500
3500
4000
3500
4300
йГв
13,8...14,4
13,8...14,5
13,8...14,5
13,8...14,5
14,0...14,7
13,3...14,1
13,8...14,5
14,35...15
26,8...28,2
28,3...29,7
13,9...14,6
13,9...14,3
26,5...28
13,8...14,8
При изменении температуры /,
Л А
5...28
5...28
5...40
5...55
5...28
5...60
5...40
5...60
5...30
5...24
0,3...
36
10...
ПО
3...20
щения п и нагрузки
л,
мин-1
3000...
10500
200...
10500
2500...
8000
2500...
8000
200...
12000
3000...
8000
2500...
7000
2500...
7000
2200...
10000
2500...
6000
2500...
6500
>, °с
-40...+80
-55...+70
25 ±10
-40...+70
-20...+80
-50...+70
-50...+70
-25...+70
-20...+85
25 ± 10
+25...+70
частоты вра-
V в
13,4...14,6
13,6...14,9
13,9...14,8
12,8...15,2
13,4...14,7
13.85...152
26...30,5
13,5...14,8
13,5...14,6
26...28,5
13...15,3
Масса,
кг
0,12
0,45
-
0,45
1,1
1Д
0,055
0,065
1,3
0,4
2.6.3. РЕГУЛЯТОРЫ НАПРЯЖЕНИЯ
Генераторы переменного тока
гусеничных и колесных машин не имеют
номинальных скоростного и нагрузочного режимов.
Частота вращения ротора постоянного тока
изменяется в зависимости от частоты
вращения коленчатого вала, а сила тока нагрузки,
зависимая от подключаемых потребителей,
изменяется от 3 до 50 А.
Поскольку обмотка возбуждения
генератора подключена к выводам генератора,
важной задачей является регулирование
(стабилизация) напряжения генераторной установки и
сети электроснабжения, если не на
постоянном уровне, то хотя бы в достаточно узком
диапазоне, обеспечивающем качественный
заряд аккумуляторной батареи и надежную
работу потребителей.
Для генераторов переменного тока
применяются регуляторы напряжения:
вибрационные одноступенчатые, вибрационные двух-
10 Ч;1к. 1741
290
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
Приклеенный к медному основанию
защитный пластмассовый кожух, и твердая
заливка на основе вспененной эпоксидной
смолы всей схемы практически исключают не
только подстройку или ремонт, но и простой
визуальный осмотр схемы регулятора в
эксплуатации вне специальных лабораторных
условий.
2.6.4. СТАРТЕРЫ
Схема электростартерного пуска
включает аккумуляторную батарею, стартер,
коммутационную аппаратуру управления пуском и
средства облегчения пуска. Стартер состоит из
коллекторного сериесного электродвигателя
(для уменьшения частоты вращения в режиме
холостого хода малогабаритные стартеры
иногда выполняются со смешанным
возбуждением), тягового соленоидного реле, приводного
механизма с муфтой свободного хода,
обеспечивающей одностороннюю передачу момента
вращения (от стартера к двигателю
внутреннего сгорания).
Характеристики стартерного
электродвигателя Мст = /(/) и яст = .Д7) являются
характеристиками обычного сериесного двигателя,
снятыми от режима холостого хода до полного
затормаживания якоря (рис. 2.6.4). В отличие
от стационарных электродвигателей
напряжение, подводимое к стартеру, снижается с
увеличением силы тока вследствие падения
напряжения в аккумуляторной батарее.
Максимальный момент стартера соответствует
полному торможению; это начальный или
пусковой момент. Под максимальной мощностью
стартера (в том числе и номинальной)
подразумевается мощность, соответствующая
наивысшей точке кривой мощности Рст.
В настоящее время начинают широко
применяться стартеры с торцовым
коллектором с редуктором со стороны привода,
возбуждением от постоянных магнитов (рис.
2.6.5).
рст,МСт,Пст,И6
Рис. 2.6.4. Характеристики стартерного пуска
при +20 ... -15 °С
15 /* и /г п ю з в 7
Рис. 2.6.5. Стартер с планетарным редуктором а
возбуждением от постоянных магнитоа:
7 - передняя крышка; 2 - приводной рычаг;
3 - якорь тягового реле; 4 - тяговое реле;
5 - коллектор электродвигателя;
6 - корпус подшипника; 7 - щетка;
8 - постоянные магниты; 9 - якорь;
10 - первичный вал и шестерня редуктора;
11 - зубчатое колесо - сателлит; 12 - водило;
13 - неподвижное центральное зубчатое колесо с
внутренним зацеплением; 14 - муфта свободного
хода; 15 - шестерня привода
Основное их преимущество - снижение массы
и расхода активных материалов и прежде всего
профильной обмоточной и коллекторной
меди.
Представителем массовых стартеров для
дизелей является стартер СТ-142,
устанавливаемый на автомобилях КамАЗ.
Принципиальными конструктивными отличиями его
являются: герметичное исполнение (кроме полости
привода, герметичность которой
обеспечивается двигателем) и храповичный привод. Все
стыки (между отдельными деталями, узлами
стартера, выводные болты и т.п.) уплотнены
торцовыми и радиальными резиновыми
уплотнениями.
Защита внутренних полостей стартера от
пыли и воды существенно повышает его
надежность в тяжелых условиях эксплуатации.
Привод стартера фирмы "Бендикс"
(США) имеет храповую муфту свободного
хода, передающую момент от стартера к
маховику двигателя (рис. 2.6.6). Если двигатель
"подхватывает", частота вращения шестерни
привода увеличивается и при заданном ее
значении сухари привода, действуя как
центробежный регулятор, с помощью конической
втулки раздвигают храповые полумуфты,
защищая якорь стартера от "разноса". Если
двигатель не пустился, то вследствие падения
частоты вращения полумуфты вновь
соединятся и стартер продолжает вращать вал
двигателя. Применение храповичного привода
позволило снизить допустимую температуру пуска
дизеля до — 17 °С.
2.6.4.Характеристика автомобильных электростартеров на различных режимах
Тип
СТ368
26.3708;
40.3708
СТ4-А1
СТ221
29.3708;
35.3708
42.3708
421.3708
СТ2-А
СТ130-АЗ
СТ230-А1;
СТ230-Б1;
СТ230-БЗ
СТ230-И;
СТ230-К1
СТ230-Д
СТ230-Е;
СТ230-Л
СТ402;
СТ402-А;
СТ402-Б
СП42-Б1
30.3708
25.3708
25.3708-01
16.3708
Номиналь
ная
емкость
аккумуляторной
батареи,
Ач
55
55
55
55
55
75
55
90
90
75
90
90
75
75
190
110
182
182
190
Мощность
^сг.Вт
0,87
1,13
0,59
1,3
1,3
1,65
1,65
1,8
1,8
1,5
1,6
1,6
1,52
1,21
8,3
7,3
8,0
8,2
12
Номинальной мощности
Крутящий
момент на
валу
стартера Мег,
Нм
4,3
6,1
з,з
8
7,6
9,4
9,4
12,5
12,5
10,8
12,5
12,5
10,8
10,2
53,5
53,1
68,3
62,2
12,7
Частота
вращения
вала
стартера лст,
мин-1
1980
1800
1745
1570
1650
1700
1700
1400
1400
1350
1250
1250
1370
1160
1510
1340
1140
1280
920
Сила тока
/,А
180
240
140
270
280
315
315
370
370
295
320
320
295
135
835
830
800
900
1600
Напряжение 1/, В
12
12
12
11,5
11,5
12
12
12
12
12
12
12
12
24
24
24
24
24
24
Холостого хода
/,А
70
70
55
35
75
75
75
80
90
80
85
75
75
35
130
130
110
ПО
160
лст, мин1,
не менее*
5000
5000
4000
50001500
5000+500
5000'800
5000
3400
3400
4000
4000
4000
4000
4000
7000
7000
5000
5000
2600
Полного торможения
А/Ст, Нм
6,7
6,7
9
14
14
16
16
22,5
22,5
22,4
22,4
22,4
22,4
23
50
50
60
60
65
/,А
260
260
295
500
500
520
520
700
700
550
550
550
550
265
800
800
825
900
950
ЦВ,
не более
7
7
8,5
6,5
7
7
7
8
8
7
7
7
7
19,5
8
ее
7
7
7,5
Рис. 2.6.6. Приводной механизм с храповой муфтой
свободного хода:
/ - вкладыш; 2 - шестерня; 3 - сегмент (сухарик);
4 - направляющий штифт; 5, 15 - замковые кольца;
6 - ведомый храповик; 7 - коническая втулка;
8 - ведущий храповик; 9, 13 - шайбы; 10 - пружина;
И - корпус; 12 - направляющая втулка;
14 - буферное резиновое кольцо
Расчет стартерных электродвигателей
проводится по известным методикам.
Основные данные по стартерам
приведены в табл. 2.6.4.
2.6.5. СИСТЕМЫ ЗАЖИГАНИЯ
В электрооборудовании колесных и
гусеничных машин распространены системы
зажигания от магнето (магнетная) и от батареи с
искрой высокого напряжения (рис. 2.6.7).
Источником тока высокого напряжения
является индукционная катушка зажигания, в
магнетной системе объединенная с
магнитоэлектрическим генератором, а в батарейной -
соединенная с аккумуляторной батареей (при
пуске двигателя), а затем от общей сети
машины. Батарейная и магнетная системы
зажигания имеют общие принципы действия.
Массовые батарейные системы зажигания
можно подразделить на следующие типы:
контактные или классические;
контактно-транзисторные;
бесконтактные;
микропроцессорные.
Приборы зажигания подразделяются на
электромеханические, электрические и
электронные (аккумуляторные батареи и свечи
зажигания рассмотрены отдельно).
К электромеханическим приборам
зажигания относятся:
прерыватели-распределители контактных
и контактно-транзисторных систем;
датчики-распределители бесконтактных
(магнитоэлектрических, тиристорных; на
эффекте Холла; на эффекте Виганда и др.)
систем;
8)
Рис. 2.6.7. Электрические схемы системы зажвгшш:
а - магнетной; 6 - батарейной;
МП - магнитопровод; Р - распределитель;
С - конденсатор первичной цепи; КО - добавочный
резистор; *Р7, \У2 - обмотки, соответственно
первичная и вторичная
датчики момента искрообразования
бесконтактных и мини-компьютерных систем с
низковольтным (стационарным)
распределением энергии высокого напряжения;
распределители мини-компьютерных и
микропроцессорных систем (в том числе
управления двигателем) при нечетном числе
цилиндров двигателя.
К электрическим приборам относятся:
индукционные катушки зажигания
различного конструктивного исполнения;
добавочные резисторы, входящие в
контактно-транзисторные системы.
К электронным приборам относятся:
транзисторные коммутаторы контактно-
транзисторных, бесконтактных и других
систем;
блоки управления и контроллеры
микропроцессорных систем управления двигателем
(в том числе зажиганием).
СИСТЕМЫ ЗАЖИГАНИЯ
293
Рис. 2.6.8. Принципиальная схема
магнитоэлектрического датчика с вращающимся
магнитом для четырехцилнндрового двигателя;
магнитный поток Ф и напряжение обмотки Цщщ. ■
зависимости от угла а поворота магнитного ротора:
1 - магнит ротора; 2 - статор; 3 - обмотка
Принципиальное отличие
датчиков-распределителей бесконтактных систем от
распределителей-прерывателей классических и
контактно-транзисторных систем заключается
лишь в замене узла прерывателя и
воздействующего на него граненого кулачка
бесконтактным узлом, формирующим электрические
импульсы синхронно с вращением
распределительного вала и числом импульсов на
оборот по числу цилиндров двигателя.
Наибольшее распространение получили
магнитозлектрические (рис. 2.6.8), датчики -
синхронный генератор с зубчатым статором и
обмоткой якоря и вращающимся зубчатым
магнитом (число зубцов по числу цилиндров)
- индуктором; на основе микропереключателя
с активным элементом на эффекте Холла (рис.
2.6.9). Магнитный поток между постоянным
магнитом и активным элементом на эффекте
Холла прерывается стальной шторкой с
вырезами по числу цилиндров двигателя, а сигнал
формируется и усиливается специальной мик
росхемой, выполненной на одном кристалле с
Рис. 2.6.9. Принцип размещения микровыключателя на
эффекте Холла и зависимости напряжения
чувствительного элемента Холла ех и напряжения 1/а
на выходе датчика Холла от угла а поворота ротора:
/ - магнитоулравляемая интегральная схема;
2 - ротор; 3 - экран; 4 - валик распределителя;
5 - магнит; $ - корпус микропереключателя
активным элементом. В остальном такие
датчики конструктивно аналогичны
распределителям-прерывателям.
Датчики момента ценообразования
отличаются от датчиков-распределителей
отсутствием высоковольтной крышки с выводами
под высоковольтные провода и бегунка-
разносчика высокого напряжения. Если
система управления зажиганием основана на
однокристальной ЭВМ, в датчике момента
ценообразования отсутствует центробежный
автомат, характеристика которого
запрограммирована в памяти ЭВМ. В отдельных случаях
используются распределители, содержащие
только высоковольтную крышку и бегунок,
например, в микропроцессорных системах с
большим или нечетным числом цилиндров,
когда применение многовыводных катушек
нецелесообразно.
В низковольтную цепь большинства
катушек включен добавочный резистор (спираль
в керамических изоляторах), закорачиваемый
при пуске двигателя для повышения энергии
искры. Такие катушки применяются во всех
классических (контактных), контактно-
транзисторных и бесконтактных
магнитоэлектрических системах зажигания, имеющих
ненормированные, кроме уровня вторичного
294
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
напряжения (коэффициента запаса),
параметры искрового разряда. В бесконтактной
системе автомобиля ВАЗ-2108, 2109 используется
катушка 27.3705 в комплекте с электронным
коммутатором 3620.3734.
Индукционные катушки зажигания
являются импульсными трансформаторами.
Наиболее распространены катушки маслона-
полненные с разо.мкнугым магнитопроводом
(рис. 2.6.10). В связи со значительно большей
энергией (более 50 МДж) такая катушка имеет
противовзрывной клапан, защищающий ее от
взрыва при перегрузках и аварийных режимах.
С микропроцессорными системами
управления двигателем используются "сухие"
опрессованные с разомкнутым (29.3705) или
замкнутым (30.3705) магнитопроводом и
запитые компаундом двухвыводные катушки
зажигания, обеспечивающие безопасность при
высоких энергиях и параметрах искрового
разряда. Катушки полностью неразборны и
неремонтопригодны.
В табл. 2.6.5 приведены основные
данные по комплектности систем зажигания.
2.6.5. Комплектность систем зажигания автомобилей
Автомобили
Распределитель или
датчик-
распределитель
Катушка
зажигания
Контактно-транзисторные системы
ГАЗ-53А
ЗИЛ-495850, 157КД
ЗИЛ-131НА, 431410
ЗИЛ-131НВ, 431917
ЗИЛ-431917, 131Н
ЗИЛ-431410, 131НА,
ЛАЗ, ЛиАЗ
"Урал-375ДМ"
ПАЗ, КАвЗ
ПЗЗили
Р133-Б
27.3706
46.3706
49.3706
Р351
Р137
Р351
Р133-Б
Б114-Б
Б114-Б
Б114-Б
Б118
Б118
Б114-Б
Б118
Б114-Б
Электронный
коммутатор
1 зажигания
ТК102 или ТК102-А
ТК102-А
ТК102 или ТК102-А
ТК102 или ТК102-А
ТК200-01
ТК200-01
ТК102 или ТК102-А
ТК200-01
ТК102 или ТК102-А
Добавочный
резистор
СЭ107
СЭ107
СЭ107
СЭ326
СЭ326
СЭ107
СЭ326
СЭ107
Бесконтактные аналоговые системы зажигания
ГАЗ-66-11, 33015
ГАЗ-24-10
ГАЗ-53-12, 66-11
ГАЗ-102, УАЗ-31511
КрАЗ-762В, РАФ-2203-01
ВАЗ-2106, 2107, 2121
ВАЗ-2108, 2109
ВАЗ-1111
АЗЛК-2141
АЗЛК-21412
ЗАЗ-1102
Р352
19.3706
24.3706
33.3706
19.3706
38.3706
40.3706
55.3706
38.3706
54.3706
53.3706
Б118
Б116
Б116
Б116
Б116
27.3705
27.3706
29.3705
27.3705
27.3705
27.3705
13.3734-01
13.3734-01
13.3734-01
13.3734-01
13.3734-01
36.3734-20
36.3734-20
36.3734-20
36.3734-20
36.3734-20
36.3734-20
Бесконтактные цифровые системы зажигания
ЗИЛ-431410
ВАЗ-21083-02,
АЗЛК-2141
ЗАЗ-968М
21093-02,
МС2713-01
МС2713-03
73.3761
29.3705
29.3705
29.3705
42.3734
42.3734
42.3734
_
-
-
СИСТЕМЫ ЗАЖИГАНИЯ
295
6 7
1 - наконечник
Рис. 2.6.10. Катушка зажигания:
г^х^ечник высоковольтного провода; 2 - крышка; 3 - низковольтный вывод; 4 - пружина; 5 - прокладка;
6 - первичная обмотка; 7 - вторичная обмотка; 8, 13 - изоляторы; 9 - сердечник; 10 - корпус катушки;
11 - наружный магнитопровод; 12 - добавочный резистор; 14 - трансформаторное масло;
15 - контактная пластина высокого напряжения; 16 - низковольтные выводы ВК, ВК-Б;
17 - вывод высокого напряжения
2.6.6. АККУМУЛЯТОРНЫЕ БАТАРЕИ
В колесных и гусеничных машинах
применяются стартерные свинцовые
аккумуляторные батареи. Аккумуляторную батарею
составляют аккумуляторы, объединенные в единой
конструкции (рис. 2.6.11). Особенностью
свинцовой батареи является снижение
плотности электролита по мере разряда, так как в
электролит выделяется вода. При заряде
происходят обратные реакции на электродах, и
плотность электролита благодаря образованию
молекул серной кислоты повышается. По
плотности электролита можно определить
заряженносгь каждого аккумулятора и батареи
(табл. 2.6.6).
-К
Рис. 2.6.11. Стартерная аккумуляторная батарея:
1,4- отрицательные электроды; 2 - положительный электрод; 3 - сепаратор; 5 - полублок отрицательных
электродов; 6 - полублок положительных электродов; 7 - общий блок электродов; 8 - опорная призма;
9 - корпус-моноблок; 10 - борн; И - предохранительный щиток; 12 - мостик; 13 - крышка;
14 - вентиляционная пробка; 15 - межэлементное соединение; 16 - полюсный вывод
296
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
2.6.6. Определение разряженности по плотности
электролита1 при 25 °С, г/см3
Батарея
полностью
заряжена
1,30
1,28
1,26
1,24
1,22
Батарея разряжена
на 25 % (зимой)
1,26
1,24
1,22
1,20
1,18
на 50 % (летом)
1,22
1,20
1,18
1,16
1,14
Тамлерату-
ра, °С
25
0
-18
Требуемая от
стартера
100
155
230
Отдаваемая батареей
полностью
заряженной
100
65
40
заряженной
на 50%
46
32
21
Плотность электролита полностью
заряженной батареи должна соответствовать
климатическому району эксплуатации машины
(табл. 2.6.7).
2.6.7. Плотность электролита
в различных климатических районах
1 Плотность электролита изменяется на 7104
г/см3 при изменении температуры на 1 °С.
Стартерные аккумуляторные батареи не
следует подвергать в эксплуатации полному
разряду, так как при этом может возникать
переполюсовка заряда "отстающего'*
аккумулятора разрядным током остальных
аккумуляторов батареи. При этом "отстающий"
аккумулятор выходит из строя. Кроме того, низкая
плотность электролита при глубоких разрядах
сопряжена зимой с опасностью замерзания
электролита.
Плотность электролита (приведенная к
25 °С), г/см3 1,09
Температура замерзания, °С -7
Режим стартерного разряда. Для стартер-
ного разряда существенна зависимость
напряжения на полюсных выводах батареи от силы
тока - вольтамперная характеристика (ВАХ),
которая определяет мощность, отдаваемую
батареей стартеру. Внутреннее сопротивление
батареи нелинейно возрастает, а отдаваемая
емкость снижается при понижении
температуры, что не отвечает необходимости повысить
мощность электростартера, поскольку растет
момент сопротивления ДВС ввиду
значительной вязкости масла. В зимних условиях
батарея не должна быть разряжена более, чем на
25 %, так как при 50 % разряженности
отдаваемая мощность снижается' в 2 раза (табл.
2.6.8).
2.6.8. Уменьшение относительной мощности, %,
отдаваемой батареей,
в зависимости от ее зараженности
Район (средняя
температура воздуха в январе, °С)
Холодный:
очень холодный
(-50 ... .-30)
холодный
(-30 ... -15)
Умеренный:
умеренный
(-15 ... -8)
теплый влажный
(0 ... 4)
жаркий сухой
И5 - 4>
Время
года
Зима
Лето
Круглый
год
То же
_"_
_"_
Плотность
электролига
при +25 °С,
г/см3
1,30
1,26
1,28
1,26
1,22
1,24
Зависимость температуры замерзания
электролита от его плотности приведена ниже:
1,12
-10
1,16
-18
1,20
-28
1,22
-40
1,24
-50
1,26
-58
1,29
-68
При температуре -35 °С и ниже батарея
практически не может обеспечить надежного
пуска ДВС электростартером. В этих условиях
требуется подогрев батареи.
Режим заряда. Заряд стартерной
аккумуляторной батареи на автомобиле (тракторе)
осуществляется от генератора в режиме, когда
напряжение в бортовой электрической сети
поддерживается в узких пределах с помощью
регулятора напряжения. При этом сила тока
заряда батареи зависит от степени ее
заряженности. Непосредственно после прокрутки
электростартером и пуска ДВС сила зарядного
тока составляет 10 ... 30 А, через 10 ... 15 мин
быстро снижается. Однако при длительном
движении автомобиля (трактора) сила тока
заряда батареи полностью не прекращается, а
составляет единицы или доли ампер, в
зависимости от уровня зарядного напряжения и
температуры батареи. При низкой температуре
электролита сила тока заряда существенно
ограничивается (батарея "не принимает заряд"
при температуре ниже -25 °С). Характеристика
аккумуляторных батарей представлена в табл.
2.6.9.
СВЕТОВЫЕ ПРИБОРЫ
297
Тип
батареи
2.6.9. Основные данные по стартерным аккумуляторным батареям
Емкость
С2о, Ач
Масса, кг
Стартерный разряд (-18 вС)
Сила
тока,
А
Напряжение, В
(время, с)
Удельная
мощность,
Вт/кг
Габаритные
размеры, мм
Объем
электро
лита, А
ЗСТ-155ЭМ
ЗСТ-215А
6СТ-50А
6СТ-55ЭМ
6СТ-60ЭМ
6СТ-75ЭМ
6СТ-90ЭМ
6СТ-132ЭМ
6СТ-182ЭМ
6СТ-190А
155
215
50
55
60
75
90
132
182
190
Батареи обычного типа
6СТ-36А
6СТ-44А
6СТ-55А
6СТ-66А
6СТ-77А
6СТ-88А
6СТ-110А
♦ При - 30 °С.
36
44
55
66
77
88
но
29,8
34,8
16,3
21,1
26,0
30,5
35,7
51,0
70,7
60,0
11,5
13,5
16,0
19,0
22,1
26,8
32,5
480
675
200
255
180
225
270
396
546
570
3,9 (30)
3,9 (30)
8,0 (30)
8,0 (30)
8,4 (5)
8,4 (5)
8,4 (5)
8,4 (5)
8,4(5)
7,81(30)
62
76
98
97
58
62
64
65
65
74
Необслуживаемые батареи
175
210
255
300
350
395
470
9,0 (30)
9,0 (30)
9,0 (30)
9,0 (30)
9,0 (30)
9,0 (30)
9,0 (30)
137
140
143
142
143
133
130
326x176x241
427x171x242
231x175x224
262x174x226
283x182x237
358x177x240
421x186x240
514x211x244
522x282x243
525x239x243
196x175x200
206x175x210
242x175x210
301x175x210
340x175x210
378x175x210
331x215x230
5,3
7,1
5,6
6,8
5,1
5,3
5,8
7,9
11,6
11,8
2,5
3,5
3,8
4,5
5,5
6,0
7,3
2.6.7. СВЕТОВЫЕ ПРИБОРЫ
Основной проблемой совершенствования
автомобильных световых приборов является
хорошее освещение дороги на достаточно
большом расстоянии без ослепления водителей
встречных автомобилей. Существуют
отечественные и международные регламентации
наличия, расположения и характеристик
автомобильных световых приборов с точки зрения
их влияния на безопасность движения.
В соответствии с требованиями
существующих правил автомобиль должен быть
обязательно оснащен следующими световыми
приборами (рис. 2.6.12): фарами дальнего
света (ДС); фарами ближнего света (БС); фарами
передними противотуманными 7; передними и
задними габаритными фонарями 3\ передними
и задними указателями поворотов (по 2);
задними сигналами торможения 4\
дополнительным сигналом торможения 6\ фонарями
освещения заднего номерного знака 5; задними
противотуманными фонарями (1 -2);
фонарями заднего хода (1 - 2); задними
световозвращателями 1.
Фары и передние габаритные огни
должны излучать, как правило, белый свет, для фар
допускается селективный желтый, в последнем
случае передние габаритные огни также
должны излучать желтый селективный свет.
Указатели поворотов должны излучать оранжевый
свет, а все задние световые приборы -
красный.
ЬООтах
$08 т1п
400 та/
Рис. 2.6.12. Размещение обязательного комплекта
световых приборов на передней и задней частях
автомобиля:
/ - световозвращатели; 2 - указатели поворота;
3 - габаритные огни; 4 - сигнал торможения;
5 - фонарь освещения номерного знака;
6 - сигнал торможения; 7- противотуманная фара
298
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
Установка некоторых световых приборов
обязательна только для крупногабаритных и
специальных автомобилей. К ним относятся
контурные фонари, боковые повторители
указателей поворотов, опознавательные знаки
автопоезда, боковые световозвращатели,
фонари преимущественного проезда. Широкое
применение получили необязательные
световые приборы, применение которых повышает
уровень безопасности движения в некоторых
дорожно-транспортных ситуациях. Это
стояночные и боковые габаритные фонари (огни)
и др.
Эффективность световых приборов
зависит от того, в какой мере их светотехнические
параметры расширяют визуальную
информацию, получаемую водителем. Обнаружение и
различение водителем элементов дорожной
обстановки представляет собой процесс
передачи и приема световых сигналов при
определенном уровне шума. Такой подход позволяет
использовать идеи и результаты исследований
К. Шеннона для широкого класса задач
передачи сообщений. Для определения диапазона
значений критических освещенностей
предлагаются следующие формулы:
Я|ср.тш » 0,2 + 0,01;
кр.тах
= 10
<Чсх-^
170
где »зост - остановочный путь автомобиля -
минимальное расстояние различения объекта,
требуемое для своевременной остановки
автомобиля из условия безопасности движения.
Ориентировочное значение силы света
фар (в режиме дальнего света)
Л: = ^кр^ост*
Приведенные экспериментальные данные
позволяют проводить нормирование силы
света, автомобильных светосигнальных
фонарей с учетом размеров их светящей
поверхности. Расчетная зависимость для проверки
фонарей "на дискомфорт" может быть выражена
аппроксимирующей функцией вида:
/ = 65 + 0,8 (/*- 10) или Р = 1,25 (/- 55),
где /и Р - соответственно сила света, вд, и
площадь (см2) светящей поверхности фонаря.
Нормативы к светосигнальным огням
приведены в табл. 2.6.10.
2.6.10. Европейские нормы
Сигнальные огни
Передний габаритный
Задний габаритный
Сигнал торможения:
однорежимный
двухрежимный:
днем
ночью
Дополнительный сигнал торможения
Указатели поворота:
передние:
категория 1
категория 1 а
категория 1 б
задние:
категория 2 а
(однорежимный)
категория 2 б
(двухрежимный):
днем
ночью
передние боковые:
категория 3
вперед
назад
категория 4
вперед
назад
дополнительные боковые:
категория 5
категория 6
сигнальных огней (сила светя, Кд>
По оси отсчета
Апш
4
4
40
130
30
25
175
250
400
50
175
40
175
50
175
0,6
0,6
50
Апах
60
12
185
520
80
80
700
800
860
350
700
120
700
200
700
200
200
200
В любой точке
поля видимости
Ашп
0,05
0,05
0,3
0,3
0,07
-
0,3
0,3
0,7
0,3
0,3
0,07
0,3
"
0,3
"
-
-
СВЕТОВЫЕ ПРИБОРЫ
299
Правила 38 ЕЭК ООН устанавливают быть/^ 150 и/^ 300 кд.
нормы для задних противотуманных огней, Основные отечественные и зарубежные
согласно которым сила света вдоль гори- нормативные документы, в которых приведе-
зонтальной оси в пределах ± 10 ° и вдоль ны светотехнические параметры световых при-
вертикальной оси в пределах ± 5 ° должна боров, приведены в табл. 2.6.11, 2.6.12.
2.6.11. Стандарты, относящиеся к автомобильным осветительным и светосигнальным приборам
Стандарт
Объект стандартизации
ГОСТ 3544-75
ОСТ 37.003.077-86
ГОСТ 6964-72
ГОСТ 7742-77
ГОСТ 8769-75
ГОСТ 10984-74
ГОСТ 20961-75
ГОСТ 3940-84
ОСТ 37.003.038-81
ОСТ 37.003.051-81
Фары дальнего и ближнего света
Фонари грузовых автомобилей. Габаритные и присоединительные размеры
Фонари внешние сигнальные и осветительные автомобилей, тракторов и
т.д. Технические требования
Фары рабочего освещения трактора и сельхозмашин
Установка и размещение световых приборов на автомобилях, автобусах,
троллейбусах, тракторах и прицепах
Приборы внешние световые и сигнальные автомобилей, тракторов и
прицепов. Световые и цветовые характеристики
Световозвращатели автомобилей, автобусов, троллейбусов, тракторов и
прицепов. Технические условия
Электрооборудование автотранспортное. Общие технические условия
Фонари задние противотуманные
Фары противотуманные. Технические условия
2.6.12. Правила ЕЭК ООН,
относящиеся к автомобильным осветительным и
светосигнальным приборам
№ 1
Правила
1
3
4
5
7
6
8
19
20
23
27
31
37
38
48
50
53
•57
56
65
Объект стандартизации
Фары головного света
Световозвращатели
Приспособление для освещения заднего номерного знака
Лампы - фары
Габаритные фонари и сигналы торможения
Указатели поворота
Фары с галогенными лампами Н1, Н2,. НЗ
Противотуманные фары
Фары головного света с лампой Н4
Фонари заднего хода
Предупредительный треугольник
Лампы-фары с галогенной лампой Н4
Лампы накаливания для фонарей и фар
Задние противотуманные огни
Установка и размещение приборов освещения и сигнализации
Светосигнальные фонари для мотоциклов и мопедов
1 Установка устройств освещения и сигнализации на мотоциклы
Фары для мотоциклов
Фары для мопедов
Специальные предупреждающие огни
Год
утверждения
1960
1963
1964
1967
1967
1967
1967
1971
1971
1971
1975
1977
1978
1982
1982
1983
1983
1983
1986
300
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
2.6.13. Основные типы Автотранспортных световых приборов и их применяемость
Тип изделия
Тип лампы
Размер светового
отверстия, мм, форма
Масса, кг
Транспортное средство
ФГ-122
ФГ-150
ФГ-140
ФГ-145
35.3711
(Блок-фара)
34.3711
ФГ-152
11.3743
17.3711
20.3711 |
ПФ 130
ПФ 140 |
Фвры основного (ближнего н дальнего) света
А12-45+40;
(А24-55+50)
То же
А12-45+50
А12-45+40
АКГ12-60+55;
А12-21-3; А12-4
АКТ-12-60+55;
А12-4
0 170
0 170
0 170
0 136
143 х 300
154 х 252
Фары противотуманные
АКГ24-70
(АКГ12-55)
АКГ12-55-1
АКГ12-55
(АКГ24-70)
АКГ24-70
А12-21-3; А12-5
А12-21+5 |
160 х 80
160 х 85
Фары-прожекторы
0 136
160 х 80 |
Фонари передние
Круглая
Прямоугольная
1,6
1,3 (1,5)
! и
0,84
2,4
2,0
1,0
0,7
0,9
1,0
0,27'
0,25 |
ГАЗ, ЗИЛ, МАЗ,
ГАЗ-24 и др.
КамАЗ, автобусы
ВАЗ-2101, ВАЗ-2102
ВАЗ-2103, ВАЗ-2106
и модификации
ВАЗ-2108 и
модификации
ГАЗ-3102 "Волга" и
некоторые
автомобили МАЗ
Грузовые и легковые
автомобили
Легковые
автомобили
Грузовые автомобили
То же
"
Ваз-2101, 2102
Фонари задние, световозвращатели
ФП130
111.3716
28.3716
ФП 310
А12-21-3; А12-5
(А2421-3, А24-5)
А2-21-3; А12-5
А12-21-3
(свевозвращатель)
Прямоугольная
и
и
Круглая
0,8
0,72
0,26
0,06
Грузовые
автомобили, прицепы,
тракторы
аМосквич-2140" и
модификации
ВАЗ
Грузовые
автомобили, тракторы,
сельхозмашины
Рис. 2.6.13. ОптачесЕие схемы перспектииых фар:
а - прожекторной; б - проекторной;
7 - отражатель; 2 - рассеиватель; 3 - экран; 4 - линза
Основные пути создания световых
приборов колесных и гусеничных машин состоят:
во внедрении новых технических
решений, предполагающих применение
оригинальных светооптических схем - безотражательных
и отражательных: эллипсоидных и со
сплошной поверхностью отражателя (рис. 2.6.13);
в использовании новых перспективных
материалов (пластмасс, стекла), новых
источников света (маломощных галогенных,
газоразрядных ламп, светодиодов, электролюми-
нисцентных панелей, в применении печатных
плат вместо проводов).
2.6.8. Контрольно-измерительные приборы
Контрольно-измерительные приборы
разделяются на две группы: указывающие и
сигнализирующие. Указывающие приборы со
КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ
301
шкалой и стрелкой позволяют определить
значение измеряемой величины.
Сигнализирующие приборы (сигнализаторы) реагируют
на одно, как правило, критическое значение
измеряемого параметра и информируют
водителя световым или звуковым сигналом.
Контрольно-измерительные приборы
устанавливаются на приборной панели. Место каждого
прибора и сигнализатора определяется
степенью важности передаваемой информации и
частотой обращения водителя к этой
информации. Контрольно-измерительные приборы
по принципу действия разделяются на
электрические и механические. Электрические
приборы работают от бортовой электрической
сети автомобиля. Механические приборы
используют энергию измеряемой среды.
По назначению
контрольно-измерительные приборы разделяют на следующие группы:
измерения температуры - термометры;
измерения давления - манометры; измерения
уровня топлива; измерения расхода топлива -
эконометры; контроля зарядного режима и
зарядного состояния аккумуляторной батареи;
измерения скорости автомобиля и
пройденного пути - спидометры; измерения частоты
вращения - тахометры. К контрольно-
измерительным приборам относятся также
тахографы и автомобильные часы.
Особенности конструкции
автотракторных приборов зависят от специфики
требований, предъявляемых к ним в эксплуатации.
Наиболее важными факторами окружающей
среды, воздействующими на приборы,
являются вибрация, температура, влажность,
запыленность воздуха, атмосферное давление,
электрические и магнитные поля, колебания
напряжения бортсети и т.д. Как правило,
комплексное воздействие этих факторов
значительно выше, чем у приборов, работающих в
стационарных условиях. Конкретные требования
к условиям работы автотракторных приборов
определены в соответствующих нормативных
документах. Кроме того, к приборам
предъявляют требования, обусловленные
особенностями их применения в колесных и гусеничных
машинах. К таким требованиям относят
следующие:
автомобильные приборы не должны
излучать в окружающее пространство помехи,
мешающие радио- и телепередачам;
показания стрелочных приборов должны
быть удобочитаемыми, чтобы водитель мог
оценить показание прибора, не задерживая
долго внимание на нем;
сигнализаторы в выключенном
состоянии должны быть малозаметными, а при
включении немедленно привлекать внимание
водителя;
расположение всех приборов в поле
зрения водителя должно подчиняться
определенным рекомендациям инженерной психологии
Рис. 2.6.14. Схема логометричесжого термометра:
1 - терморезистор; 2 - катушка логометра;
3 - термокомленсационныи резистор
и соответствовать эстетическому оформлению
приборной панели автомобиля;
комплект контрольно-измерительных
приборов должен быть простым в
изготовлении и обслуживании;
срок службы приборов в эксплуатации
при сохранении заданной точности показаний
должен быть не менее срока службы
автомобиля до капитального ремонта.
На автомобилях, находящихся в
настоящее время в эксплуатации, применяют
большое число различных типов унифицированных
контрольно-измерительных приборов, их
модификаций, а так же основанных на новых
принципах действия.
Термометры. Наибольшее
распространение имеют логометрические указатели
температуры с терморезисторными датчиками (рис.
2.6.14). Сопротивление терморезистора
датчика значительно уменьшается при увеличении
температуры, что приводит к возрастанию
силы тока, проходящего через измерительные
катушки логометрического указателя.
Манометры. Предназначены для
измерения давления масла в смазочной системе
двигателя, в коробке гидромеханической
передачи, в пневматической тормозной системе и др.
В механических манометрах чувствительный
элемент и указатель представляют собой
единую конструкцию. По трубопроводу давление
контролируемой среды подводится к
чувствительному элементу, выполненному в виде
трубчатой пружины или мембранного узла.
Деформация чувствительного элемента с
помощью передаточно-множительного
механизма приводит к перемещению стрелки
указателя.
Электрические манометры состоят из
датчика и показывающего прибора.
Наибольшее распространение получили датчики
реостатного типа. Наиболее часто используются
магнито-электрические приборы
логометрического типа (рис. 2.6.15).
302
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
Рис. 2.6.15. Схема логометрического манометра:
1 - реостат датчика; 2 - катушка логометра;
3 - термокомпенсационный резистор;
4 - вывод манометра
Указатели уровня топлива. Используются
электрические указатели уровня топлива с
реостатным датчиком, устанавливаемым в
топливном баке, и показывающим
магнитоэлектрическим прибором логометрического
типа. Принцип работы указателя уровня
топлива аналогичен принципу работы
электрического манометра.
В термометрах, манометрах и указателях
уровня топлива в качестве показывающих
приборов наряду с логометрами используются
также указатели электротеплового типа, в
которых в качестве преобразующего устройства
используется биметаллическая пластина с
проволочным нагревателем.
Указатели биметаллического типа
используются со стабилизаторами напряжения в
основном термобиметаллического типа. К
особенностям электротепловых приборов
следует отнести их значительную инерционность.
В случае применения электротеплового
прибора в качестве указателя уровня топлива
исключаются колебания стрелки показывающего
прибора при колебаниях уровня топлива,
вызванных вибрацией при движении автомобиля.
^2г^ %
Рис. 2.6.16. Амперметр с неподвижным магнитом:
1 - зажим; 2 - стрелка; 3 - магнитный шунт;
4 - постоянный магнит; 5 - основание; 6 - якорь;
7 - опора-подпятник; 8 - ось
Приборы контроля зарядного режима
аккумуляторной батареи. Для контроля зарядно-
разрядного режима и состояния
аккумуляторной батареи, а также определения исправности
генератора и реле-регулятора в колесных и
гусеничных машинах применяют амперметры
и вольтметры. Амперметры включаются между
генератором и аккумуляторной батареей и
измеряют силу зарядного или разрядного тока.
Принцип работы магнитоэлектрического
амперметра (рис. 2.6.16) основан на
взаимодействии магнитного поля, создаваемого
измеряемым током в неподвижной шине 3, с
сердечником 6 из ферромагнитного материала
(постоянного магнита), помещенным в этом
поле.
Спидометры и тахометры. Для измерения
скорости движения и частоты вращения вала
двигателя применяются спидометры и
тахометры: механические, электрические и
электронные. Спидометры, как правило, имеют
узел отсчета пройденного пути, а тахометры -
счетчики работы двигателя. Привод
механических спидометров и тахометров
осуществляется с помощью гибкого вала, соединенного
соответственно с коробкой передач или
коленчатым валом двигателя.
Рус. 2.6.17. Скоростной узел мапштонндукцнонного
спидометра:
7 - магнит; 2 - приводной валик; 3 - картушка;
4 - экран; 5 - пружина-волосок; 6 - ось; 7 - шкала;
8 - стрелка; 9 - компенсатор
Принцип действия скоростных узлов
спидометров и тахометров основан на
взаимодействии вращающегося постоянного магнита
1 с металлической немагнитной картушкой 3,
выполненной в виде диска или чашечки (рис.
2.6.17). Счетчики пройденного пути
спидометров и счетчики моточасов тахометров
представляют собой конструкцию, состоящую из
оцифрованных барабанчиков (рис. 2.6.18).
Привод счетчиков осуществляется через
червячные или зубчатые передачи от того же вала,
на котором расположен магнит скоростного
узла.
АВТОМОБИЛЬНАЯ ЭЛЕКТРОНИКА
303
Рис. 2.6.18. Счетный узел:
/ - барабанчик; 2 - зуб; 3 - двузубка
Электрические спидометры и тахометры
применяются в тех случаях, когда
использование механических невозможно ввиду
необходимости применения гибких валов большой
длины (более 3 м) или сложности прокладки
трассы гибкого вала. В этих случаях вместо
гибкого вала используется электропривод,
состоящий из датчика и синхронного
трехфазного двигателя, выполняемого в одном
корпусе с показывающим прибором механического
типа. Для измерения частоты вращения
коленчатого вала ДВС используют электронные
тахометры.
2.6.9. АВТОМОБИЛЬНАЯ ЭЛЕКТРОНИКА
Автомобильная электроника (мехатрони-
ка) - комплексное научно-техническое
направление, связанное с разработкой,
производством и эксплуатацией электронных и
микропроцессорных систем управления (МПСУ)
агрегатами и автомобилем.
Основные термины. КМОП-структура -
комплементарная (взаимно дополняющая)
МОП-структура. Базовым элементом является
пара МОП-транзисторов, один из которых р-
канальный, а другой - п-канальный.
Особенности - низкая потребляемая мощность,
широкий диапазон напряжений, возможность
функционирования в широком диапазоне
температур, высокая помехоустойчивость.
Однокристальная микроЭВМ - на одном
кристалле большой интегральной схемы (БИС)
содержится центральный процессор (ЦП),
постоянное и оперативное запоминающее
устройства (ПЗУ) и (ОЗУ), а также порты
ввода и вывода. В настоящее время выпускаются
четырех-, восьми- и шестнадцатиразрядные
однокристальные микроЭВМ.
Аналого-цифровой преобразователь
(АЦП) - интегральная схема (ИС),
используемая для преобразования аналоговых сигналов в
цифровые. ИС, выполняющая обратную
функцию, является цифровым преобразователем
(ЦАП).
БИС - ИС, на кремниевом кристалле
которой содержится свыше 1000 элементов типа
транзисторов. ИС классифицируют по степени
интеграции на одном кристалле:
до 100 элементов - МИС (малые ИС);
100 + 1000 элементов - СИС (средние
ИС);
1000 + 10 000 элементов - БИС (большие
ИС);
свыше 10 тыс. элементов - СБИС
(сверхбольшие ИС).
Управление силовым агрегатом - система
управления двигателем и трансмиссией.
Существует раздельное и комплексное управление
двигателем.
Электронная система управления
впрыскиванием топлива определяет количество
всасываемого воздуха, температуру охлаждающей
жидкости двигателя, частоту вращения
коленчатого вала двигателя и управляет
впрыскиванием топлива через электромагнитную
форсунку.
Центральный впрыск - система с одной
или двумя форсунками для впрыскивания
топлива, бензинового двигателя,
размещенными вблизи дроссельной заслонки (или
дроссельное впрыскивание).
Распределенный впрыск - система, в
которой форсунки для впрыскивания топлива
размещаются у каждого цилиндра бензинового
двигателя. Обычно впрыск топлива
осуществляется в зону впускного клапана.
Электронная система зажигания -
система, обеспечивающая регулирование
продолжительности тока через катушку зажигания и
момент зажигания; реализует оптимальный
закон управления с учетом частоты вращения
У-образного двигателя.
Комплексная система управления
двигателем (КСУД) - система управления составом
горючей смеси, углом опережения зажигания,
частотой вращения коленчатого вала
бензинового двигателя, с системой рециркуляции
отработавших газов.
Электронная система управления дизелем
(ЭСУД) - система управления топливным
насосом высокого давления (ТНВД).
Управление трансмиссией - система
автоматизации управления коробкой передач,
как механической, так и гидромеханической
передачей (ГМП) и сцеплением.
Управление движением автомобиля -
системы управления агрегатами шасси
(тормозными механизмами, подвеской,
рулевым механизмом и др.); системы, связанные с
управлением движения автомобиля
(поддержание скорости движения, локационные и
навигационные системы и др.).
Управление торможением (АБС) -
система предотвращения блокировки колес при
экстренном торможении (за счет уменьшения
304
Глава 2.6. ЭЛЕКТРООБОРУДОВАНИЕ
или увеличения давления рабочего тела в
тормозном приводе).
Управление подвеской - система
управления плавностью хода автомобиля
регулированием сопротивления амортизаторов,
изменением жесткости рессор и поддержанием
высоты кузова независимо от внешних
условий движения.
Управление движением с постоянной
скоростью - система замкнутого
регулирования, позволяющая водителю двигаться с
постоянной скоростью без нажатия на педаль
управления дроссельной заслонкой.
Использование этой системы в течение длительного
времени при движении на скоростной
магистрали снижает утомляемость водителя.
Управление силой рулевого механизма -
система, предназначенная для уменьшения
силы, необходимой для поворота рулевого
колеса, базирующаяся на прогрессе в области
электронной техники и развивающаяся по
двум направлениям - управление,
реагирующее на скорость движения автомобиля, и
управление, реагирующее на частоту вращения
коленчатого вала двигателя.
Управление микроклиматом в салоне -
системы создания комфортных условий в
салоне путем подогрева или охлаждения воздуха
и удаления из него влаги. Существует большое
количество таких систем, отличающихся по
структурной схеме и конструкции.
Электронные информационные системы
- системы^ осуществляющие вычисления и
обработку информации о скорости движения
автомобиля, частоте вращения коленчатого
вала двигателя, расходе топлива с
отображением этой информации для водителя в цифровом
виде. В них используются люминесцентные
индикаторы, светодиоды, индикаторы на
жидких кристаллах, а при отображении большого
числа данных на едином устройстве
индикации - электронно-лучевые трубки (ЭЛТ) и др.
Навигационная система - система,
показывающая направление движения автомобиля,
расположение пункта назначения и его
достижимость, использующая датчики азимута и
пройденного пути.
Система обнаружения обрыва нитей
ламп - система, постоянно- контролирующая
состояние ламп задних и передних габаритных
огней, ламп стоп-сигнала и, в случае их
перегорания, извещающая об этом водителя
включением контрольных ламп.
Управление стеклоочистителем - система,
предназначенная для создания двух режимов
работы (высокая и низкая скорости) и
прерывистого действия (часто в комбинации с омы-
вателем стекла) и изменяющая
продолжительность паузы между ходами щеток в
зависимости от скорости автомобиля и количества
осадков.
Управление освещением - система,
автоматически включающая и выключающая
лампы задних и передних огней в соответствии с
условиями.
Управление блокированием дверей -
система блокирования дверей при превышении
определенной скорости движения:
одновременно приводятся в действие электромагниты
и двери блокируются.
Система обнаружения препятствий сзади
автомобиля - система, предназначенная для
распределения препятствий, находящихся
сзади автомобиля, при движении назад и
оповещения водителя о расстоянии до препятствия
и примерном его расположении с помощью
использования ультразвуковых,
электромагнитных сил или световых волн.
Однопроводная мультиплексная сисдша
связи - система, используемая для передачи
нескольких сигналов по одному сигнальному
проводу, которая наряду с уменьшением
объема жгутов проводов делает более простым
совместное использование датчиков и др.
Мультиплексная система, фактически, связывает в
единое целое локальные электронные и
электрические системы автомобиля.
Классификация автомобильных
электронных систем.
Управление силовым агрегатом для
легковых автомобилей заключается в управлении
бензиновым двигателем (впрыскиванием и
зажиганием) и трансмиссией (механической
или ГМП), а для грузовых автомобилей и
автобусов - в управлении дизелем (ТНВД или
насос-форсункой) и трансмиссией
(многоступенчатой механической
трансмиссией или ГМП).
Управление движением автомобиля
(управление агрегатами шасси, системы
управления движением) включает системы
управления: торможением; подвеской; рулевым
механизмом; поддержания скорости; локационные,
навигационные и др.
Информационные,
контрольно-диагностические системы и системы комфорта
включают:
комбинацию приборов (электронный
щиток приборов, электронно-механическая
комбинация приборов, отображение
информации на лобовом стекле автомобиля,
телевизионная установка заднего обзора и др.);
бортовую систему контроля (БСК);
систему встроенных датчиков и
контрольных точек (СВД и КТ);
кондиционер воздуха;
управление микроклиматом салона
(кабины) автомобиля;
системы персонализации (электропривод
управления сидением водителя, зеркалами,
спойлерами и др.).
Современный этап развития АЭ
характеризуется созданием и использованием
комплексных МП СУ, которые обеспечивают
наиболее высокий уровень оптимизации
управления автомобилем и его агрегатами.
ЛЕБЕДКИ. СИСТЕМЫ ГЕРМЕТИЗАЦИИ
305
Глав* 2.7
СПЕЦИАЛЬНОЕ ОБОРУДОВАНИЕ
МНОГОЦЕЛЕВЫХ АВТОМОБИЛЕЙ И
СПЕЦИАЛЬНЫХ КОЛЕСНЫХ ШАССИ
2.7.1. ЛЕБЕДКИ.
СИСТЕМЫ ГЕРМЕТИЗАЦИИ АГРЕГАТОВ
Многоцелевые автомобили - тягово-
транспортные средства, предназначенные для
перевозки грузов, монтажа различного
технологического оборудования с
преимущественным использованием в тяжелых дорожно-
климатических условиях. Поэтому их
оборудуют специальными системами и агрегатами
многоцелевого назначения, позволяющими
эффективно работать в таких условиях и,
главным образом, обладать высокой
проходимостью и готовностью к немедленному
использованию.
На подавляющем большинстве полно-
приводных автомобилей многоцелевого
назначения устанавливаются тяговые лебедки,
предназначенные для эвакуации застрявших
автомобилей, самоэвакуации, извлечения
различных машин из канав, труднодоступных
участков местности, погрузки техники на
железнодорожные платформы, оказания помощи
технически неисправным автомобилям и др.
Лебедка может быть установлена в
передней части автомобиля (автомобили ГАЗ-66,
ЗИЛ-131), в средней (автомобиль КамАЗ-4310)
или задней части (автомобили "Урал-4320",
КрАЗ-260). Выдача троса осуществляется или в
одну сторону или в обе, т.е. как вперед, так и
назад. При этом угол отклонения троса от
продольной оси автомобиля составляет не
более 15°. Привод лебедки осуществляется
карданной передачей от специальной коробки
отбора мощности, устанавливаемой или на
коробке передач или на раздаточной коробке.
В коробках отбора мощности
предусматриваются дополнительные насосы для смазывания
трущихся элементов. Коробка отбора
мощности рассчитывается на передачу до 40 ... 60 %
максимальной мощности двигателя.
Конструкции лебедок в основном
однотипны, они отличаются лишь размерами и
параметрами, основные из которых приведены
в табл. 2.7.1.
2.7.1. Основные параметры лебедок многоцелевых автомобилей
Параметры
Максимальная сила тяги, кН
Длина троса, м
Передаточное число
червячного редуктора
ГАЗ-66
39
50
24
ЗИЛ-131
49
72
31
КамАЗ-4310
50
50
31
"Урал-4320"
68,5
65
31
КрАЗ-260
117,5
50
30
з г
Рис. 2.7.1. Тяговая лебедка автомобиля "Урал-4320"
306
Глава 2.7. СПЕЦИАЛЬНОЕ ОБОРУДОВАНИЕ АВТОМОБИЛЕЙ
Типичная конструкция лебедки показана
на рис. 2.7.1. К ее основным элементам
относятся: понижающий червячный редуктор,
барабан с тросом, тросоукладчик. Червячное
колесо 2 редуктора прикреплено к ступице,
которая подвижной муфтой 3 может быть
соединена с барабаном 1 лебедки. Барабан
закреплен на валу шлицами. На валу червяка
имеется автоматический ленточный тормоз,
останавливающий барабан в случае среза
предохранительного штифта на карданном валу
привода лебедки (при силе на тросе свыше
68,5 кН) или выключении сцепления
автомобиля.
Для равномерной укладки троса на
барабане лебедка оснащена тросоукладчиком
обычной конструкции, т.е. с ходовым винтом
и кареткой с правой и левой нарезками, шаг
которых равен диаметру троса. Каретка с
роликами, направляющими трос, перемещается
вдоль барабана таким образом, что на один
поворот барабана ходовой винт также
поворачивается на один оборот, в результате чего
каретка с направляющими роликами
сдвигается на толщину троса. Такое устройство
предотвращает запутывание троса при его выдаче.
При использовании роликовых блоков или
полиспастов сила тяги может быть, увеличена в
2 раза (при соответствующем, конечно,
уменьшении активной длины троса).
Выбор параметров лебедок обычно
осуществляется с ориентацией на прототипы,
расчет их элементов не отличается от
общеизвестных расчетов редукгорных механизмов, с
той лишь разницей, что запас прочности для
валов и шестерен берется несколько меньше (в
1,25 - 1,5 раза), поскольку за
амортизационный срок службы лебедка работает
значительно меньше, чем остальные агрегаты. При
частом использовании лебедки она может
перегреваться. Во избежание перегрева
рекомендуется следить за температурой лебедки и при
необходимости делать соответствующие
перерывы в ее работе.
Расчет лебедок сводится в основном к
определению допустимого времени
непрерывной работы по формуле:
ст + стм <2
тд =-^—* ^-^-1п ,
^охл С-^охИ'д
где ср и с^ - теплоемкость
соответственно материала редуктора лебедки и масла,
кДж / (кг • °С); /яр и т^ - масса
соответственно редуктора и масла, кг; к -
коэффициент теплоотдачи от редуктора к воздуху,
кДж / (м2 • ч • °С); Гохл - площадь
поверхности охлаждения, м2; ^ - количество
выделяемой теплоты, кДж / ч; Д/д - допустимый
перегрев редуктора, °С.
Количество выделяемой теплоты
0=^1Р(1-Пр),
427 У ;
где Ртр9УТр - сила на тросе и скорость его
наматывания; г)р -КПД редуктора.
Обычно принимают к = 29,4 ... 42
кДж / (м2 • ч • °С); ср = 0,5 ... 0,63
кДж / (кг • °С); с^ = 1,7 ... 2,1 кДж / (кг • °С);
Г|р = 0,65 ... 0,7.
Допустимая температура нагрева зависит
от температуры воздуха /0 и предельной
температуры нагрева редуктора /пр= 105 ... ПО °С:
Д'д = >пр - 'о-
Для повышения проходимости в
условиях бездорожья многоцелевые автомобили
приспособлены для преодоления бродов глубиной
до 1,7 м, а отдельные из них - для
преодоления водных участков на плаву. Чтобы при
преодолении обводненных или заболоченных
участков местности вброд в агрегаты ходовой
части и в другие узлы, которые располагаются
ниже поверхности воды, не попала влага,
картеры их герметизируются, а полости картеров
(сцепления, мостов, коробок передач и
раздаточной, лебедки, тормозных кранов,
топливных баков и т.д.) соединяются системой
трубопроводов с выводом их над поверхностью
воды. Вследствие этого при входе автомобиля
в воду вследствие охлаждения агрегатов в их
полостях не снижается давление воздуха (нет
разряжения) и вода не засасывается внутрь.
Если автомобиль предназначен для
преодоления водных преград на плаву, то все его
агрегаты размещаются внутри
герметизированного корпуса, снабженного для надежности
плава системой водооткачивания. Движение на
плаву может осуществляться вращением колес,
винтов или водометных движителей. Для
плавающих автомобилей проводят
соответствующие расчеты, обеспечивающие следующее:
поддержание автомобиля на плаву
(создание необходимого водоизмещения и
запаса плавучести);
предотвращение заливания воды в
корпус и кабину при входе в воду и выходе на
сушу при заданных углах входа и выхода;
сохранение устойчивости на воде при
качке и различных вынужденных боковых
возмущениях;
создание силы тяги на плаву для
преодоления сопротивления движению
соответственно заданной скорости.
Условие плавучести автомобиля:
где ув - удельный вес воды; Уп -
водоизмещение (объем погруженной в воду части
автомобиля).
ЛЕБЕДКИ. СИСТЕМЫ ГЕРМЕТИЗАЦИИ
307
Водоизмещение определяется или
расчетом водоизмещающих объемов Уп =
= У^'Рц/ или по приближенной формуле
'п = *ъ ^ъ **в -"в»
где Къ - коэффициент полноты
водоизмещения; Ьъ, Въ, Нъ - размеры соответственно по
длине, ширине и глубине подводной части
автомобиля.
Выталкивающая сила
С точки зрения надежности плава
существенное значение имеет запас плавучести, т.е.
избыточное водоизмещение,
дк=[Кн/(Кн+ кп)Цоо%,
где Ун - объем надводной герметизированной
части (корпуса) автомобиля.
Для оценки дифферента или крена
автомобиля необходимо знать координаты точки
приложения выталкивающей силы, центра
величины Ху ууу 1у Они определяются по
объемам и координатам /-х водоизмещающих
объемов Уи(.
Условие движения определяется из
уравнения моментов относительно начала
координат (точки контакта задних колес с грунтом):
ОНп т8ша + 012 со$а - 0В^ &та -
/-*
-Св'с? С°8а - Рв*в - 5>к/ - Ъг1 = °'
/-1
1шк
В момент всплытия Яг =0, 2_. М^ -► 0.
/=1
При малой скорости сопротивление воды
Рв - 0. Поэтому предельный угол входа а
будет определяться выражением
^а = (ев/0-С?/2)/(бйцт-0вЛ0).
1 /-л
*у=—1Ушх1>
! /«л
Уп /-1
, /-л
При правильном выборе параметров
координаты центра величины должны совпадать
с координатами центра тяжести, который
иногда несколько смещается вперед, чтобы
был дифферент на корму и автомобиль на
плаву "не заныривал". При входе в воду и
выходе из воды автомобиль не только не
должен терять плавучесть, но должен иметь
достаточные сцепные свойства для обеспечения
движения. Схема сил, действующих на
автомобиль при входе в воду (или выходе),
рассматривается для случая предельно допуЛтшо-
го затопления соответствующей части корпуса
(точка А, рис. 2.7.2). Эта схема справедлива и
для случаев преодоления брода.
Предельный угол выхода из воды
находится аналогичным образом из уравнения
ф((7 - Св)со$а = (/соаа +$ш а)(<7 - (?„)•
Сложность приведенных уравнений для
определения угла а заключается в том, что в
момент входа или выхода из воды текущие
значения водоизмещения 0В, а,
следовательно, сила тяги изменяются. Поэтому задачу
решают, как правило, графоаналитически с
последовательным определением значений (?в
при изменении угла а.
Для предотвращения крена автомобиля,
при котором возможно его затопление,
необходимо обеспечить его хорошую остойчивость,
т.е. восстанавливающий момент Мв = 0В /с
Рис. 2.7.2. Силы, действующие на автомобиль при входе в воду
308
Глава 2.7. СПЕЦИАЛЬНОЕ ОБОРУДОВАНИЕ АВТОМОБИЛЕЙ
(/с - плечо статической остойчивости> должен
быть больше возмущающего. Условием
движения на плаву с определенной скоростью
является равенство сил сопротивления воды Ръ и
тяги на воде Рт. Сила Ръ сопротивления
включает несколько составляющих: вязкого
трения, волнового сопротивления,
сопротивления формы. Обычно считают
где къ - эмпирический коэффициент
гидродинамического сопротивления; Гп -
поперечная площадь подводной части автомобиля;
к - показатель степени, зависящий от
скорости, к - 2 ... 3.
Если автомобиль движется под действием
силы тяги, создаваемой колесным движителем,
то ее значение зависит от частоты вращения и
размеров колес, формы надколесных шин.
Приближенно
где ^г, /я - опытные коэффициенты; Н> /) -
соответственно ширина и диаметр колеса; Лн -
минимальный зазор между колесом и надко-
лесной нишей.
Предельная скорость движения на плаву
определяется из условия
/-л
2.7.2. УСТРОЙСТВА ДЛЯ ПОДОГРЕВА И
ПУСКА ДВИГАТЕЛЕЙ ПРИ НИЗКИХ ТЕМПЕРАТУРАХ
Многоцелевые автомобили,
предназначенные для эксплуатации при температуре
воздуха -45 ... + 50 °С оборудованы
специальными системами пуска двигателей,
позволяющими в течение 20 ... 30 мин выйти
автомобилям в рейс. К их числу относятся:
системы подогрева воздуха во впускном
коллекторе (такая же как и у обычных
дизелей), позволяющие осуществлять пуск при
температуре -20 ... -25 °С. Только в отличие от
обычных систем облегчения пуска у некоторых
многоцелевых автомобилей и шасси высокой
грузоподъемности для повышения
эффективности данного способа предусматривается ввод
масла в цилиндры для повышения степени
сжатия;
использование аккумуляторных батарей с
внутренним электроподогревом. Известно, что
при снижении температуры аккумулятора его
емкость уменьшается и при температуре около
-30 °С практически становится равной нулю.
Внутренний самоподогрев стабилизирует
тепловой режим аккумуляторной батареи,
способствует тому, что при низкой температуре она
может обеспечить прокручивание вала
двигателя;
устройства для вспрыскивания в
цилиндры специальных жидкостей,
воспламеняющихся при очень низких температурах. Эти
устройства используют в крайних случаях, как
средство экстренного пуска в аварийных
ситуациях, поскольку это обусловливает резкое
снижение ресурса двигателя;
коллективные (групповые) средства
предварительного подогрева двигателей теплым
воздухом или горячей водой, если стоянка
автомобилей групповая и пункт стоянки
оборудован подобными устройствами;
индивидуальные устройства
предпускового подогрева двигателей. Это наиболее
надежный эффективный способ предварительного
прогрева двигателя, он используется на всех
автомобилях многоцелевого назначения,
колесных шасси и тягачах, как обязательным
штатный агрегат;
система воздушного пуска (от баллонов
со сжатым воздухом), применяемая на
автомобилях особо большой грузоподъемности с
дизелями, у которых силы тока аккумуляторных
батарей недостаточно для прокручивания
коленчатого вала двигателя.
Оценку эффективности того или иного
способа пуска двигателя при низкой
температуре позволяет дать диаграмма энергетического
баланса при холодном пуске (рис. 2.7.3),
представляющая собой зависимость подводимой
для пуска и необходимой мощности N от
температуры окружающего воздуха /. Точки
пересечения кривых 1, 1' и 1* подводимой
мощности (соответственно от обыкновенной
батареи, от батареи с внутренним
электроподогревом и от системы сжатого воздуха) и кривых 2,
2' и 2я необходимой мощности на
прокручивание двигателя (соответственно без
использования средств облегчения пуска, с подогревом
впускного воздуха и с предварительным
подогревом двигателя) дают значения предельных
температур, при которых возможен пуск. Из
сопоставления различных способов пуска
предельная температура пуска двигателя может
изменяться от -45 до -50 °С.
Рве. 2.7.3. Энергетический баланс при холодном пуске
двигателя:
1 - обычная батарея; Г - батарея с
электроподогревом; /" - пуск сжатым воздухом;
2 - без использования средств облегчения пуска;
2' - с использованием подогрева впускного воздуха;
2 " - с предпусковым подогревателем
УСТРОЙСТВА ДЛЯ ПУСКА ДВИГАТЕЛЕЙ
309
Для обеспечения пуска двигателя при
низких температурах наиболее универсальным
и эффективным средством является
предпусковой подогрев двигателя с помощью
индивидуальных жидкостных предпусковых
подогревателей, включаемых в систему охлаждения.
Подогреватели работают на том же топливе,
что и двигатель. Их теплопроизводительность
рассчитывается исходя из массы двигателя и
объема охлаждающей жидкости. На
многоцелевых автомобилях используются в основном
четыре типа предпусковых подогревателя,
основные параметры которых приведены в табл.
2.7.2.
2.7.2. Основные параметры предпусковых подогревателей
Показатели
ПЖБ-12
ПЖБ-22
(П-100)
ПЖД-44
ПЖД-600
Вид топлива
Максимальная
теплопроизводительность, кВт
Удельный расход топлива, кг/ч
Удельный расход электроэнергии,
ВТ/ч
Время разогрева двигателя до
температуры 60 °С (при температуре
воздуха -40 °С), мин
Бензин
11,6
1,6 ... 2
15 ... 20
20 ... 25
Дизельное
16,24
2 ... 3
30 ... 40
25 ... 30
44,08
4 ...6
До 300
Менее 30
75,4
10 ... 12
До 400
Менее 30
Рис. 2.7.4. Схема системы предпускового подогрева автомобилей 1
1 - фильтр; 2 - тошшвоподхачивающий насос; 3, 13, 14 - трубопровод
>ги/*гпат.' 7_ чаллотитй вг» л л
Рис. 2.7.4. Схема системы предпускового подогрева автомобилей КамАЗ-4310 и "Урал-4320":
1 - фильтр; 2 - топливоподкачивающий насос; 3, 13, 14 - трубопроводы; 4 - водяной насос; 5 - бачок;
6 - топливная магистраль; 7- насосный агрегат; 8 - воздуховод; 9 - поддон картера; 10 - выпускная труба;
11 - клапан; 12 - котел
310
Глава 2.7. СПЕЦИАЛЬНОЕ ОБОРУДОВАНИЕ АВТОМОБИЛЕЙ
Основными элементами системы или
устройства предпускового подогрева являются
котел подогревателя и насосный агрегат. Котел
предназначен для разогрева подводимой к
нему охлаждающей жидкости от системы
охлаждения двигателя, а насосный агрегат - для
прокачивания жидкости и подачи
отработавших в котле горячих газов к картеру двигателя.
Котлы подогревателей могут включаться в
систему охлаждения следующим образом:
направление циркуляции жидкости в
системе подогрева совпадает с направлением ее
циркуляции в системе охлаждения двигателя;
направление циркуляции жидкости в
системе подогрева противоположно направлению
циркуляции в системе охлаждения.
Последний вариант применяется редко.
Котел подогревателя представляет собой
теплообменный аппарат, в котором
происходит сгорание топлива, а в газоходах -
теплопередача от горячих газов к протекающей через
котел охлаждающей жидкости. Дозирование
подводимого к котлу топлива осуществляется
электромагнитным клапаном, а воспламенение
топлива, поступающего через форсунку, -
искровой свечей. Интенсивность теплообмена
повышается благодаря турбулизации потока
воздуха, подводимого в камеру сгорания котла
вентилятором насосного агрегата.
У подогревателей двигателей подача
топлива к котлу от электромагнитного клапана
происходит самотеком или под давлением.
Распыливание топлива в камере может быть
механическим (специальным вращающимся
распылителем), пневматическим (созданием
разрежения у распылителя топливной
форсунки), гидравлическим (подачей топлива через
форсунку под давлением 3 ... 4 МПа).
На рис. 2.7.4 показана типичная схема
системы предпускового подогрева дизельного
автомобиля КамАЗ-4310 и "Урал-4320".
При температуре воздуха около -40 °С
предпусковой подогреватель обеспечивает
разогрев двигателя до открытия термостата за
20 ... 25 мин. Следует отметить, что и
подобный достаточно эффективный способ
предпускового подогрева не оптимально решает
проблему двигателя. Подогреватель
обеспечивает в основном лишь разогрев охлаждающей
жидкости и частично масла в картере, т.е.
условие для воспламенения топлива в камере
сгорания создается нормальное, поскольку
рубашка блока цилиндров прогревается до
60 ... 80 °С. Подшипники коленчатого вала,
трение в которых составляет главное
сопротивление прокручиванию двигателя,
практически не разогреваются, и потребная
мощность на пуск остается значительной (рис.
2.7.5). Поэтому в последнее время в новых
конструкциях двигателей стремятся сделать
непосредственный подвод разогреваемого
масла к крутящим узлам.
*9Ъ
во
60
ио
20
о
'20
Рис. 2.7.5. Температуря при предпусковом подогреве
автомобиля "Урал-4320":
7, 2 - соответственно в левом и правом блоке;
3 - масла картера
/,
/
У
!>——
' Ь
\ и
? н
1
^2
I
<
> ГуМанл
""Т"
Рис. 2.7.6. Схема управления предварительным подогревом:
1 - переключатель режимов работы; 2 - контактор электродвигателя; 3 - реле электронагревателя
топлива; 4 - тепловой элемент; 5 - электродвигатель насосного агрегата; 6 - электромагнитный
топливный клапан; 7 - коммутатор; 8 - искровая свеча
РЕГУЛИРОВАНИЕ ДАВЛЕНИЯ В ШИНАХ
311
Управление предпусковым подогревом
осуществляется с помощью переключателя 1 в
такой последовательности (рис. 2.7.6):
О - все отключено;
/ (розжиг) - включены запальные свечи,
насосный агрегат, топливный клапан;
// (работа) - включены насосный агрегат
и топливный клапан;
/// (продувка и предпусковой разогрев
топлива) - включены насосный агрегат и
электронагреватель топлива.
У автомобилей большой мощности и
грузоподъемности, на которых устанавливаются
двигатели типа В-2, система предпускового
подогрева и управления им существенно
сложнее, но принцип аналогичен
приведенному.
На ряде автомобилей, требования к
готовности которым предъявляются особо
высокими, система предпускового подогрева
работает постоянно во время стоянки автомобиля.
Для этого в систему вводят специальные
устройства, обеспечивающие автоматическое
включение и отключение подогревателя,
элементы контроля температуры агрегата и
нормального функционирования системы.
Вследствие этого пуск двигателя осуществляется
сразу по необходимости.
Следует отметить устройство воздушного
пуска, применяемое вместо электростартерно-
го на автомобилях большой грузоподъемности.
Оно состоит из баллона сжатого воздуха
давлением до 15 МПа, редуктора, подводящих
трубопроводов и элементов подачи воздуха в
цилиндры с дросселями.
2.7.3. СИСТЕМА РЕГУЛИРОВАНИЯ
ДАВЛЕНИЯ ВОЗДУХА В ШИНАХ
Регулирование давления воздуха в шинах
способствует повышению проходимости
колесных машин в тяжелых дорожных условиях
(при понижении давления до 0,5 ... 1,0 МПа),
повышению плавности хода на различных
дорогах (при понижении давления до 1,5 ...
2,0 МПа) и поддержанию требуемого давления
при проколах и легких повреждениях шин.
Условно сила сопротивления качению Р;
является суммой двух составляющих сил -
сопротивления Рш вследствие деформирования
шины и сопротивления Ргр, обусловленного
деформированием грунта:
РГ Рш + Л?-
С понижением давления воздуха в шине
сопротивление от деформирования шины
монотонно возрастает (рис. 2.7.7), а
сопротивление качению, обусловленное
деформированием грунта, уменьшается. В результате
суммарная сила сопротивления качению имеет
минимум (Р/пип) ПРИ определенном давлении
воздуха в шинах. Поэтому стремятся довести
давление воздуха в шинах на слабых грунтах
именно до оптимальных значений,
соответствующих максимальной величине свободной
силы на оси колеса.
0 Ц05 0,1 Ц15 0ЯРш,МЛа
Рис. 2.7.7. Влияние давления воздуха в шине на
сопротивление качению
(песок, шина 14.00-18, Рт - 15 кН)
Система регулирования давления воздуха
в шинах обычно включает: источник сжатого
воздуха, устройства для управления системой,
очистки воздуха от влаги и масла, подвода
сжатого воздуха к шинам колес и контроля
давления воздуха в них, а также для
отключения каждой шины колес от системы,
воздухопроводы.
Схема наиболее распространенной
системы регулирования давления воздуха в шинах
показана на рис. 2.7.8.
Клапан, встроенный в кран управления
давлением, ограничивает снижение давления в
пневмосистеме ниже 0,54 МПа, что
необходимо для обеспечения надежной работы
тормозной системы. Автоматические устройства для
поддержания заданного давления воздуха в
шинах используют в основном на многоосных
шасси с затрудненной ручной регулировкой
давления.
Для сохранения ресурса шин при
пониженном давлении движение осуществляется с
меньшими скоростями, а после преодоления
труднопроходимого участка давление воздуха в
шинах сразу восстанавливается до
номинального. Следует отметить, что время снижения
давления от номинального до минимального
(или наоборот) в зависимости от вместимости
шин и их числа может быть довольно
значительным (обычно 10 ... 30 мин).
Регламентируемое минимальное давление
воздуха в шинах и скорости движения для
некоторых автомобилей приведены в табл.
2.7.3.
312
Глава 2.7. СПЕЦИАЛЬНОЕ ОБОРУДОВАНИЕ АВТОМОБИЛЕЙ
й
1 и и—"
В атмосферу
,[_»
Ь
7
I
Рис. 2.7.8. Схема системы регулирования давления воздуха в шинах автомобиля:
/ - кран управления; 2 - тяга; 3 - рукоятка; 4 - трубопроводы; 5 - головка подвода воздуха; 6 - защитный кожух
2.7.3. Регламентируемые параметры шин полноприводных
Параметры
Шина
Статическая нагрузка на шину,
кН
Номинальное давление воздуха в
шине, МПа
Допустимое минимальное
давление воздуха в шине, МПа
Предельная скорость движения
(км/ч) при давлении в шине:
номинальном
минимальном
! УАЗ-
469
215-
380
7,65
0,25
0,25
100
100
ГАЗ-66
320-
475
18,1
0,29
0,05
80
10
Г зил-
131
320-
508
18,1
0,34
0,05
80
10
КамАЗ
-4310
1220х
х400х
х533
25,6
0,31
0,08
85
10
автомобилей
"Урал-
4320"
14x20
24,5
0,31
0,05
85
10
КрАЗ-
260
1300х
х530х
х533
39,2
0,39
0,07
75
20
МАЗ-
543
1500х
хбООх
х635
61,1
0,44
0,1
65
20
Системы регулирования давления в
шинах автомобиля должны удовлетворять
следующим требованиям:
обеспечивать контроль устанавливаемого
давления воздуха в шинах с точностью 20 кПа,
а также надежную работу при открытых
колесных кранах при движении по дорогам любой
категории при различных температурах
внешней среды в соответствии с техническими
условиями на данный автомобиль;
иметь устройства со шкалой с указанием
максимально и минимально допустимых
давлений воздуха в шинах колес;
должны быть снабжены таблицей,
указывающей диапазоны давлений воздуха в шинах
колес для разных дорожных условий и
соответствующие им скорости движения (в кабине
водителя);
герметичность системы регулирования
давления воздуха в шинах колес должна быть
оценена по допустимому падению давления
воздуха в системе в статическом положении
автомобиля при номинальном давлении
воздуха в шинах и при открытых колесных кранах.
Падение давления в шинах колес допускается
не более 50 кПа для автомобилей с числом
осей не более трех за 10 ч и с числом осей
четыре и более за 6 ч;
время повышения давления воздуха в
шинах колес от минимально допустимого до
удвоенного значения этого давления не
должно превышать 4 мин для автомобилей
грузоподъемностью до 5 т и 8 мин для автомобилей
грузоподъемностью 5 т и выше;
время снижения давления воздуха в
шинах колес от номинального допустимого
значения не должно превышать 10 мин.
СПИСОК ЛИТЕРАТУРЫ
313
СПИСОК ЛИТЕРАТУРЫ
1. Автомобили. Конструкция,
конструирование и расчет. Системы управления и
ходовая часть / Под ред. А. И. Гришкевича.
Минск: Вышэйша школа, 1985. 450 с.
2. Автомобили. Основы проектирования /
М. С. Высоцкий, А. Г. Выгонный, Л. X. Гиле-
лес, С. Г. Херсонский. Минск: Вышэйша
школа, 1987. 152 с.
3. Автомобиль. Основы
конструирования / Н. Н. Вишняков, В. К. Вахламов,
А. Н. Нарбут и др. М.: Машиностроение,
1986. 360 с.
4. Автомобиль "Запорожец":
Специальные агрегаты и оборудование / Д. Г. Поляк,
Ю. К. Есеновский-Лашков, В. М. Мосягин, Б.
Н. Пятко. М.: Транспорт, 1981. 540 с.
5. Акимов А. Г., Закс М.Н., Мелик-
Саркисьянц А. С. Саморазгружающийся
автотранспорт. М.: Машиностроение, 1965. 230 с.
6. Баженов П. И. Расчетное определение
моментов инерции гидротрансформаторов
легковых автомобилей // НИИНавтопром.
Конструкции автомобилей. 1981. N9 8. С. 27 -
29.
7. Баженов П. И., Трусов С. М.
Совершенствование конструкции лопастных колес
гидротрансформатора для городских
автобусов // Автомобильная промышленность. 1982.
№ 5. С. 18 - 19.
8. Балабин И. В. Автотракторные колеса.
М.: Машиностроение, 1985. 272 с.
9. Бахмугский М. М., Каплин В. И.
Тенденции развития автомобильных рулевых
механизмов с гидравлическим усилителем //
Обзорная информация. НИИавтопром, 1986.
44 с.
10. Бидерман В. Л. Автомобильные
шины. М.: Госхимиздат, 1963. 383 с.
11. Вишняков Н. Н. Как работают
следящие приводы автомобилей. М.: Транспорт,
1971. 248 с.
12. Вольмир А. С, Куранов Б. А, Турба-
ивский А. Т. Статика и динамика сложных
структур. М.: Машиностроение, 1989. 248 с.
13. Вопросы динамики торможения и
теория рабочих процессов тормозных систем
автомобилей / Под ред. Б. Б. Генбома. Львов:
Вища школа, 1974. 234 с.
14. Галкин Ю. А. Автотракторное
электрооборудование. М.: Машиностроение, 1987.
248 с.
15. Гапоян Д. Т., Гаронин Л. С.
Моторные тормоза-замедлители автотранспортных
средств. М.: НИИНавтопром, 1979. 69 с.
16. Гапоян Д. Т., Дьячков Н. К.
Автомобильные лопастные гидрозамедлители. М.:
НИИНавтопром, 1968. 82 с.
17. Гапоян Д. Т., Илиев П. Б.
Автомобильные электродинамические % тормоза-
замедлители. М.: НИИНавтопром, 1972. 92 с.
18. Гируцкий О. И.,
Есеновский-Лашков Ю. К., Фисенко И. А Автоматические
коробки передач современных легковых
автомобилей. М.: НИИНавтопром, 1981. 48 с.
19. Гируцкий О. И., Раскин В. Е.,
Есеновский-Лашков Ю. К. Бесступенчатые
фрикционные трансмиссии автомобилей. М.:
НИИНстандарт, 1990. 48 с.
20. Гришкевич А. И. Теория автомобиля.
Минск: Вышэйша школа, 1986. 206 с.
21. Гуревнч Л. В. Современные методы
дорожных испытаний автомобильных АБС.
М.: НИИНавтопром, 1978. 98 с.
22. Гуревнч Л. В., Меламуд Р. А.
Пневматический тормозной привод
автотранспортных средств. М.: Транспорт, 1988. 224 с.
23. Гуревнч Л. В., Меламуд Р. А
Тормозное управление автомобиля. М.:
Транспорт, 1978. 152 с.
24. Дмитриевский А. В., Тюфяков А. С.
Бензиновые двигатели. М.: Машиностроение,
1986. 360 с.
25. Есеновский-Лашков Ю. К., Поляк
Д. Г., Миронов В. А Автоматика органов
управления сцеплением // Автомобильная
промышленность. 1986. № 2. С. 14 - 18.
26. Зельцер Е. А. Снижение нагруженно-
сти трансмиссии транспортной машины путем
уменьшения хоэффициента динамичности //
Вестник машиностроения. 1988. № 1. С. 7 -
10.
27. Зельцер Е. А, Малашков И. И.,
Бочаров Н. Ф. О динамической модели
трансмиссии грузового автомобиля при расчете
максимальных нагрузок // Тр. НАМИ. 1987.
С. 104 - 117.
28. Иванов С. Н., Кочешков Н. П.
Конструкции элементов трансмиссий
переднеприводных легковых автомобилей. М.:
НИИНавтопром, 1984. 56 с.
29. Кнороз В. И. Работа автомобильной
шины. М.: Транспорт, 1976. 237 с.
30. Коган И. И. Прикладная теория
информации. М.: Радио и связь, 1981. 216 с.
31. Кондиционирование воздуха на
автомобилях / Е. А. Малинин, М. А. Цимбалюк,
Г. Е. Москалева, Г. В. Аверин // Тр. НАМИ.
1983. С. 100 - 121.
32. Конструирование и расчет колесных
машин высокой проходимости / В. Ф.
Бочаров, И. С. Цитович, А. А. Полунгян и др. М.:
Машиностроение, 1983. 360 с.
33. Купеев Ю. А Автомобильные
генераторы. М.: Машиностроение, 1988. 360 с.
34. Левитин К. М. Безопасность
движения автомобилей в условиях ограниченной
видимости. М.: Транспорт, 1986. 166 с.
35. Левитин К. М. Противотуманные
фары и безопасность движения автомобилей, М.:
Транспорт, 1974. 72 с.
36. Луизов А. В. Глаз и свет. Л.: Энерго-
атомиздат, 1983, 139 с.
314
СПИСОК ЛИТЕРАТУРЫ
37. Лукин П. П., Гаспарянц Г. А., Радио-
нов В. Ф. Конструирование и расчет
автомобиля. М.: Машиностроение, 1984. 248 с.
38. Лысов М. И. Рулевые управления
автомобилей. М.: Транспорт, 1972. 344 с.
39. Недялков А. П., Бомбешко А. П., Ку-
цеволов В. А. Механизм автоматизированного
переключения передач // Автомобильная
промышленность. 1987. № 11. С. 12 - 14.
40. Нефедьев Я. Н. Конструкции и
характеристики электронных АБС зарубежных
фирм. М.: НИИНавтопром, 1979. 60 с.
41. Никитина С. Н. Коробки передач,
раздаточные коробки, коробки отбора
мощности. М.: ЦНИИТЭИавтопром, 1988. 126 с.
42. Платонов В. Ф. Полно приводные
автомобили. М.: Машиностроение, 1989. 312 с.
43. Проектирование трансмиссий
автомобилей / Под общ. ред. А. И. Гришкевича. М.:
Машиностроение, 1984. 272 с.
44. Раймпель И. Шасси автомобиля.
Рулевое управление. М.: Машиностроение, 1987.
228 с.
45. Расчеты машиностроительных
конструкций методом конечных элементов. М.:
Машиностроение, 1989. 520 с.
46. Ревин А. А. Тормозные свойства
автомобилей с АБС при движении на повороте
// Автомобильная промышленность. 1983.
№ 1. С. 13- 15.
47. Родионов В. Ф., Фиттерман Б. М.
Проектирование легковых автомобилей. М:
Машиностроение, 1980. 478 с.
48. Теория и расчет тягового привода
электромобилей / Под ред. И. С. Ефремова.
М.: Высшая школа, 1984. 180 с.
49. Трехступенчатая гидромеханическая
передача автобуса / В. В. Баранов, О. И. Ги-
руцкий, М. И. Дзядык и др. М.: Транспорт,
1980. 150 с.
50. Чайковский И. П., Саломатин П. А
Рулевые управления автомобилей. М.:
Транспорт, 1987. 176 с.
51. Цитович И. С, Альгин В. Б.
Динамика автомобилей. Минск: Наука и техника,
1981. 187 с.
52. Чижков Ю. П. Электрооборудование
автомобилей. М.: Транспорт, 1993. 223 с.
53. Яковлев А. И. Конструкция и расчет
электромотор-колес. М.: Машиностроение,
1981. 198 с.
54. Яскевич 3. Ведущие колеса. М.:
Машиностроение, 1985. 595 с.
РАЗДЕЛ 3
ТРАКТОРЫ
Глава 3.1
КЛАССИФИКАЦИЯ И НАЗНАЧЕНИЕ
Трактор - колесная или гусеничная
самоходная машина, которая в агрегате с
прицепными, навесными, полунавесными и
стационарными машинами (орудиями) выполняет
сельскохозяйственные дорожно-строительные,
землеройные, транспортные и другие работы.
Тракторы классифицируют по назначению,
силе тяги, типам ходовых систем и
компоновок. По назначению - сельскохозяйственные,
промышленные, лесопромышленные и лесохо-
зяйственные. Сельскохозяйственные тракторы
могут быть общего назначения, пропашные,
универсально-пропашные,
специализированные по видам культур (виноградниковые,
рисоводческие, овощеводческие и др.),
специализированные по условиям эксплуатации
(горные, болотоходные, тепличные),
животноводческие (по обслуживанию ферм),
малогабаритные, мотоблоки [15, 29].
Промышленные тракторы - это
тракторы общего назначения, специализированные
по видам работ и условиям эксплуатации
(погрузочные, трубоукладочные,
болотоходные, подземные, подводные, земноводные
малогабаритные) [7]. Лесопромышленные
тракторы - трелевочные, лесовозные, лесосбо-
рочные, специализированные по назначению
и видам работ (в агрегате с однооперационны-
ми и многооперационными машинами -
процессоры и комбайны, и специализированные
по условиям эксплуатации - плавающие,
болотоходные). Лесохозяйственные тракторы могут
быть общего назначения, специализированные
по видам работ и условиям эксплуатации
(болотоходные, лесопожарные).
В зависимости от силы тяги тракторы
делят на классы. Сельскохозяйственные
тракторы образуют типаж из тяговых классов
0,2; 0,6; 1,4; 2; 3; 4;'5; 6; 8, промышленные -
классов 1,4; 2; 3; 4; 5; 6; 8; 10; 15; 25; 35; 50;
75; 100.
По типу ходовых систем тракторы
делятся на колесные, гусеничные, полугусеничные,
колесно-гусеничные, шагающие, плавающие,
на воздушной подушке и др.
Типоразмерный ряд сельскохозяйственных
и лесохозяйственных тракторов (табл. 3.1.1).
Номинальная сила тяги трактора [21]
Ги = К щ,
где /Из - эксплуатационная масса трактора с
балластом, кг, рекомендуемая предприятием-
изготовителем (допускается принимать
1,15 т^ для колесных тракторов и 1,08 т^ для
гусеничных тракторов, где т^ -
конструкционная масса с основным оборудованием, кг);
К - коэффициент; К = 3,24 • КГ3; 3,73 • 10~3;
3,92 • 10~3; 4,9 • 10~3 кН/кг соответственно для
колесных тракторов с щ <, 2600 кг, с
колесной формулой 4К2 и ЗК2 с щ > 2600 кг, с
колесной формулой 4К4 с тэ > 2600 кг и
гусеничных тракторов.
Различие номинальных сил тяги между
смежными по ряду тракторами равно
некоторому среднему сопротивлению силы тяги,
кратному сопротивлению, оказываемому
одним (0,5 ... 0,6 кН) или несколькими
стандартными корпусами плуга. Три первых типа
трактора (классов 0,2; 0,6; 0,9) на пахоте, как
правило, не применяются. Поэтому различие
сил тяги между ними выбрано на основе
рационального их использования с другими
сельскохозяйственными машинами и
прицепами.
3.1.1. Тяговые классы сельскохозяйственных
и лесохозяйственных тракторов
Тяговый
класс
0,2
0,6
0,9
1,4
. 2>°
Диапазон
номинальной
силы тяги, кН
1,8 ... 5,4
5,4 ... 8,1
8,1 ... 12,6
12,6 ... 18
18 ... 27
Тяговый
класс
3
4
5
6
8
Диапазон
номинальной
силы тяги,
кН
27 ... 36
36 ... 45
45 ... 54
54 ... 72
72 ... 108
ТРАКТОРЫ
317
инструмента и дополнительного оборудования
(защитного устройства, кабины,
кондиционера, огнетушителя и др.), двух гидроцилиндров,
расположенных спереди (для гусеничного
трактора).
При экспериментальном методе за
номинальную силу тяги трактора принимают ее
максимальное значение при полном
буксовании по тяговой характеристике на глинистом
треке, т.е. Рк р н = Рх р тах . Аналогично для
колесного промышленного трактора,
испытанного без оборудования, /^рн =0,9/гкртах.
Для колесного промышленного трактора,
испытанного в агрегате с фронтальным
ковшовым погрузчиком, /крн= 0,65 Гкрщ^ .
Малогабаритные тракторы.
Установленные типы малогабаритных тракторов (МГТ)
одноосных (мотоблоков) и двухосных, а также
их основные параметры приведены в табл.
3.1.2. Стандартами не устанавливается верхняя
граница по массе двухосных МГТ, но
ограничивается их мощность (менее 16 кВт).
Сферой применения МГТ являются
небольшие по размеру участки в сельском
хозяйстве и других областях деятельности,
например: садоводство, огородничество,
виноградарство, хлопководство, личные
подсобные хозяйства; семеноводство, лесные,
овощеводческие и садоводческие питомники;
теплицы; коммунальная, туристическая, спортивная
области (очистка и уход за тротуарами и
дорогами, игровыми и спортивными площадками),
парковое хозяйство и озеленение городов;
сельскохозяйственные работы в
специфических условиях (горные, болотистые и другие
труднодоступные участки, "неудобья");
возделывание конкретных трудно поддающихся
механизации видов культур (чая, риса, табака,
декоративных растений, лекарственных трав и
других); внутризаводской транспорт. Для
комплексной механизации сельскохозяйственного
производства России эффективно применение
тракторов двух модификаций в классе 0,2
мощностью 7,4 ... 8, 8 кВт; универсального и
селекционного.
Универсальный трактор предназначен
для механизации работ на небольших участках,
склонах до 20° , на фермах, в садах и
виноградниках, на пришкольных участках, в
цитрусовых и молодых чайных плантациях, в
теплицах, парниках, питомниках и коммунальном
хозяйстве.
Селекционный трактор предназначен для
селекционных работ на селекционно-опытных
делянках, равнинных участках и склонах до
20° . Основные виды работ: сплошная и
междурядная культивация, боронование, внесение
удобрений, опрыскивание, посев, посадка и
уборка зерновых, зернобобовых, крупяных,
огородных, технических культур и трав,
транспортные и др
3.1.2. Классификация и
Параметры
Конструкционная масса ( + 15 %), кг
Номинальная мощность двигателя, кВт
Максимальная скорость, км/ч:
рабочая
транспортная
Ширина колеи, мм, не более
Агротехнический просвет, мм, не более
параметры малогабаритных тракторов
Легкие
Менее 70/500
Менее 3/10
6/6
15715
700/800
130/300
Средние
Менее 100/650
Менее 5/14
6/6
15*/25
700/800
150/300
Тяжелые
Более 100/650
Более 5/14 ... 16
6/6
15725
700/1200
300/300
* В агрегате с прицепом.
Примечания. 1. В числителе даны значения для одноосных МГТ, а в знаменателе -
для двухосных .
2. При необходимости может быть установлен тяговый класс МГТ.
3. Масса дана для основной комплектации; для двухосных МГТ - без
учета массы кабины или защитного каркаса.
316
Глава 3.1. КЛАССИФИКАЦИЯ И НАЗНАЧЕНИЕ
Экспериментальную проверку Рп
проводят тяговыми испытаниями трактора по
методике ГОСТ 7057-81 на стерне колосовых при
твердости почвы 1 ... 1,5 МПа и ее влажности
8 ... 22 %. Масса трактора должна
соответствовать эксплуатационной пц. Если расчетное
значение Гн находится в переделах
экспериментальных значений ^кр, ограничивающих
зону максимального значения тягового КПД
трактора, то его принимают за фактическое
значение номинальной силы тяги. В
противном случае фактическое значение Рн
соответствует предельной силе буксования
трактора. Границы зоны максимального тягового
КПД трактора на тяговой характеристике-
определяются значениями Гкр: нижняя -
максимум КПД, верхняя - предельное буксование
движителей (18 % для тракторов с колесной
формулой 4К2 и ЗК2; 16 % для тракторов с
колесной формулой 4К4 и 5 % для гусеничных
тракторов).
За рубежом классификация колесных
сельскохозяйственных тракторов проводится
по максимальной тяговой мощности,
полученной при испытаниях на гладкой
горизонтальной и сухой бетонированной поверхности
или на горизонтальной поверхности,
покрытой скошенной или нескошенной травой. В
соответствии со значением тяговой мощности
тракторы имеют четыре категории,
приведенные ниже.
Категория мощности Тяговая мощность
*кртах » кВт
1 Менее 35
2 30 ... 75
3 70 ... 135
4 135 ... 300
Обе системы классификации - по силе
тяги и по тяговой мощности - могут быть
соотнесены между собой, как показано ниже.
Тяговый класс трактора Категория трактора
Ниже 0,6 1
0,6; 0,9 1
0,9; 1,4; 2 2
2,3; 4 3
5; 6; 8 4
Совершенствование конструкции
сельскохозяйственного трактора идет по пути
улучшения его тягово-сцепных качеств и в
направлении развития функции мобильного
энергоносителя. Перспективы все
расширяющегося применения сельскохозяйственного
трактора в качестве мобильного источника
энергии и эволюционного перехода от тяговой
к тягово-энергетической концепции трактора
лучше отражает двухлараметрическая система
классификации - по силе тяги Рн и
эксплуатационной мощности Рс двигателя.
Типаж тракторов - это совокупность всех
моделей (основных и модификаций),
составленная на основе оптимизационных технико-
экономических расчетов и изучения спроса
потребителей, исходя из необходимости
выполнения всего комплекса тракторных работ.
Основу типажа составляет типоразмерный ряд.
Базовая модель трактора - это наиболее
распространенная и универсальная машина в
одном или нескольких тяговых классах,
конструкция которой наиболее полно отвечает
требованиям создания ряда или модификаций
различного назначения.
Разработка или выбор базовой
конструкции изделия определяется необходимостью
проведения работ по унификации
конструкций однотипных машин на основе единого
конструктивного решения, обеспечивающего
максимальное заполнение диапазона заданных
параметров проектируемого ряда
(модификаций).
Модификация создается на основе
базовой модели, имеет то же значение главного
параметра и различия в конструкции,
изменяющие область применения трактора или
специализирующие его назначение.
Номинальная сила тяги промышленных
трАкторов. Методика определения
номинальной силы тяги не регламентирована [7].
Расчетный метод для гусеничного
промышленного трактора общего назначения, агрегатируе-
мого с бульдозером, предполагает
использование следующей зависимости для определения
номинальной силы тяги, кН:
*крн =9,8 Ю-3 /я.
Для колесного промышленного трактора,
агрегатируемого с погрузчиком,
/крн =6,5 10"3 /я.
Расчетный метод может быть достаточно
объективным, однако его использование
связано с двумя трудностями, обусловленными
переменной массой оборудования и
различными свойствами грунта. Выход из положения
находят испытаниями трактора без
оборудования, в основной комплектации, или для
колесного трактора - с фиксированным
оборудованием на укатанном глинистом треке.
Эксплуатационная масса промышленного трактора
при этом включает массы: его собственную,
водителя, полной заправки топлива, масла,
охлаждающей и рабочей жидкости, запасного
318
Глава 3.1 КОМПОНОВКА И ПАРАМЕТРЫ
Из особенностей конструкции МГТ
отметим следующие. Двигатели одно-, двух-,
трехцилиндровые. Трансмиссии (в
стандартном исполнении трактора) - механические,
ступенчатые, число передач переднего хода до
девяти, заднего до трех. По требованию МГТ
оснащают гидрообъемными полнопоточными
трансмиссиями, с максимальной скоростью до
6 м/с. Тормоза - сухие колодочные или
дисковые. Тракторы такого типа выпускаются, как
правило, в двух вариантах: с колесной
формулой 4К2 и 4К4.
Тракторы оснащаются задней
трехточечной гидронавесной системой, редко
автоматически регулируемой, прицепным устройством,
валами отбора мощности, иногда передним и
боковым. В стандартном исполнении вместо
кабины устанавливается защитная рама или
тент, сиденье, как правило, подрессоренное,
комфортабельное. На отдельных моделях
тракторов ведущих зарубежных фирм по заказу
может применяться защитная кабина.
Глава 3.2
КОМПОНОВКА И
ОСНОВНЫЕ ПАРАМЕТРЫ
3.2.1. ТРЕБОВАНИЯ К КОНСТРУКЦИИ
Сельскохозяйственные тракторы [13]. Они
должны обладать проходимостью, в том числе
агротехнической; высокоэффективной агрега-
тируемостью с машинами и орудиями;
статической и динамической устойчивостью при
навешивании сельскохозяйственных машин;
возможностью передачи мощности к рабочим
органам сельскохозяйственных машин и
орудий как в процессе движения, так и в
стационарном режиме, определенными тягово-
сцепными качествами при работе в различных
условиях как с колесными, так и с
гусеничными движителями; маневренностью;
управляемостью; комфортабельностью; надежностью
работы и технологичностью
(производственной,, эксплуатационной и ремонтной).
Рисоводческие тракторы,
предназначенные для работы в чеках, заполненных водой,
отличаются широкими шинами с высокими
грунтозацепами и рисунком протектора,
которые обеспечивают самоочищаемость и
увеличенный (до 0,8 м) клиренс, повышенной
герметичностью силовой передачи и
полноприводной колесной схемой 4К4. Использование
гусеничного движителя не рекомендуется.
Садоводческие тракторы имеют
ограниченную ширину для возможности прохода в
зоне междурядий сада и ягодных кустарников
и минимальную высоту. Они работают как в
симметричном агрегате, так и с боковым
смещением машин от продольной оси трактора
для обработки части междурядий и
приствольных полос. Трактор снабжен веткоотводами и
обтекателями, универсальной гидросистемой с
гидроотбором мощности и дополнительной
системой навески машин.
Чаеводческие тракторы с
агротехническим просветом 1,1 м или парталом,
регулируемой колеей работают с пониженной
скоростью с машинами фронтальной, межосевой
и задней навески.
Агротехнический просвет
хлопководческого трактора 0,8 м, минимальный радиус
поворота не более 3,5 м, колея 1,8 м для
междурядий 0,9 м и 2,4 м для междурядий 0,6 м.
Такой трактор отличается ограниченными
рабочими скоростями, возможностями
изменения колесной схемы ЗК2 в схему 4К2 для
работы на транспорте, навески уборочных
машин, а также надежной защитой- радиатора
от волокон хлопка.
Тракторы, работающие на склонах и в
горных условиях, должны иметь: повышенную
статическую и динамическую устойчивость,
обеспечивающую безопасную работу на
поперечном склоне крутизной не ниже 20°;
навесную систему с автоматическим
копированием рабочими органами профиля
обрабатываемой поверхности независимо от крутизны
склона; устойчивость курсового движения,
обеспечивающую допускаемое сползание
трактора и машинно-тракторного агрегата на
поперечном склоне; условия труда не хуже, чем
при работе на равнинной местности;
минимальные потери мощности двигателя от
высоты расположения над уровнем моря;
тормозную систему, обеспечивающую
сблокированное торможение всех колес и удержание
трактора и агрегата на склоне 25 ... 30е;
автоматическую стабилизацию остова трактора в
вертикальном положении или рабочее место, обес7
печивающее вертикальную посадку
тракториста; защитные устройства от опрокидывания;
сигнализацию предельного по условиям
устойчивости угла склона и креномер.
Промышленные тракторы. Тракторы
приспособлены для эффективной работы в
условиях циклически изменяющихся нагрузок в
сложных природно-климатических условиях
[13]. Агрегатируется в основном бульдозером,
рыхлителем и скрепером. От вида
оборудования зависит эксплуатационная масса трактора:
1,05 конструкционной массы гусеничного
трактора с прицепным грейдером, уплотни-
тельным катком и скрепером; 1,3 с
бульдозером; до. 1,5 с бульдозером и рыхлителем.
ТРЕБОВАНИЯ К КОНСТРУКЦИИ ТРАКТОРОВ
319
Трактор должен создавать равномерное
распределение нагрузки на грунт;
незначительно изменяющейся от установки
различного оборудования; пост управления должен
находиться в безопасной зоне при хорошей
обзорности рабочих органов, фронта работ и
движителей. Для обеспечения работ с
бульдозером центр масс гусеничного трактора
смещен назад относительно центра опорной
поверхности гусениц и передняя часть трактора
значительно выступает за габариты
гусеничного обвода, при этом полностью используется
масса агрегата для заглубления и выглубления
рабочего оборудования.
Рабочая скорость трактора 0,7 ... 0,84 м/с
изменяется бесступенчато в зависимости от
внешних нагрузок на рабочее оборудование.
Ходовая система рассчитана на высокие
динамические нагрузки. Тракторы надежно
работают на пересеченном рельефе, имеют
защиту двигателя и агрегатов, гидросистему с
возможностью отбора мощности в пределах
40 ... 60 % мощности двигателя.
Тракторные погрузчики имеют
компоновку, обеспечивающую смещение центра масс
назад, хорошую обзорность фронта работ.
Передний мост колесного погрузчика
установлен жестко, задний имеет балансирную
подвеску.
Тракторы-трубоукладчики оборудованы'
боковым грузоподъемным оборудованием,
отличаются высокой устойчивостью в
поперечном направлении, пониженными
скоростями при работе в колонне. Гусеничная
ходовая система с жесткой или балансированной
подвеской обеспечивает восприятие нагрузки
на один борт. При использовании тракторов в
труднопроходимых условиях должны
обеспечиваться высокая сила тяти, отбор мощности
для привода грузоподъемного оборудования,
реверсирование движения и хорошая
обзорность с рабочего места тракториста.
Ходовая система быстроходных
промышленных тракторов должна сохранять покров
при выполнении землеройной и
мелиоративных работ на грунтах с низкой несущей
способностью. Мелиоративные тракторы
создают равномерную эпюру давлений по длине
гусеницы независимо от вида агрегатируемого
оборудования и условий работы.
При компоновке подземных тракторов
учитываются ограниченные габариты по
высоте, высокая очистка выпускных газов,
исключающая загрязнение окружающей среды.
Земноводные и подводные тракторы, работающие
на глубине, имеют герметизированные узлы и
агрегаты, устройства забора атмосферного
воздуха для подачи в систему питания дизеля и
электроэнергии для электроснабжения
двигателя, дистанционное или радиоуправление
трактором.
Малогабаритные промышленные
тракторы отличаются короткой базой и
компоновкой, обеспечивающей их высокую
маневренность.
Лесопромышленные и лесохозяйственные
тракторы. Общими требованиями к
конструкции лесопромышленных и лесохозяйственных
тракторов независимо от их назначения
являются [29]: обеспечение высокой проходимости
и маневренности, надежности и устойчивости
во всех условиях эксплуатации при
выполнении всех видов работ. Компоновка трактора
обеспечивает равномерное распределение
нагрузки на поверхность, незначительно
изменяющееся при установке различного
оборудования, хорошую обзорность. Ходовая система
обладает грузоподъемностью, необходимой для
установки технологического оборудования и
восприятия части веса транспортируемого
груза, приходящегося на трактор (не менее
75 ... 100 % эксплуатационного веса трактора),
и обеспечивает работу трактора при высоких
динамических нагрузках. Центр масс
гусеничного трактора при работе с бульдозером
смещен назад относительно центра опорных
поверхностей гусеницы. Движители тракторов
должны минимально повреждать оставшиеся
после рубок растущие деревья, их корневую
систему и почвенный покров. Все узлы
трактора надежно защищены от повреждений при
работе по бездорожью, наличии пней, камней,
поваленных деревьев и других предметов.
Кабина выдерживает опрокидывание трактора,
падение деревьев на нее, герметична (при
опрокидывании в нее не попадают
посторонние предметы) и обеспечивает
комфортабельные условия работы независимо от условий
эксплуатации. Оборудование, узлы, агрегаты и
системы тракторов (в том числе трансмиссия)
могут быть автоматизированы.
Управление трактором и
технологическим оборудованием должно быть легким и
плавным, тракторы, оборудованные
гидроманипуляторами, должны иметь
пропорциональное управление ими. Энергонасыщенность
тракторов определяется с учетом гидроотбора
мощности (до 100 %) для привода
технологического оборудования.
Конструкция лесохозяйственных
тракторов должна обеспечивать установку и
нетрудоемкий демонтаж фронтального и заднего
навесных устройств необходимой
грузоподъемности и самосвальной платформы с
роликовой рамкой и лебедкой для работы в
качестве трелевочной машины, ходоуменьшителя
для получения низких технологических
скоростей.
320
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
3.2.2. СИСТЕМА УПРАВЛЕНИЯ
КАЧЕСТВОМ ТРАКТОРОВ
В международной практике управление
качеством выпускаемой продукции
осуществляется на основе международных
стандартов серии 9000 "Управление качеством
продукции" {ИСО 9000 - ИСО 9004). В них
отражен международный опыт по управлению
качеством продукции на предприятиях. Серия
стандартов 9000 утверждена и введена в
действие в нашей стране (ГОСТ 40.9001-88 -
ГОСТ 40.9003-88).
На предприятиях и объединениях
отрасли автомобильного и сельскохозяйственного
машиностроения разработаны и введены
рекомендации, устанавливающие основные
положения, требования к системам качества
продукции, цели, задачи, основные направления,
этапы жизненного цикла, структуру, политику
предприятий в области качества, порядок
проверки системы качества применительно к
автомобилям, тракторам, их узлам, агрегатам и
системам. Система качества - совокупность
организационной структуры, ответственности,
процедур, процессов и ресурсов,
обеспечивающая осуществление общего руководства
качеством.
Жизненный цикл продукции в
международном стандарте ИСО 9004 рассматривается в
виде 11 этапов, объединенных в "петлю
качества".
Сертификация тракторов. Эта процедура
связана с удостоверением посредством
сертификата соответствия трактора или его
агрегатов и устройств определенным стандартом.
Системы сертификации могут
действовать на национальном, региональном и
международном уровнях. Наиболее
представительными международными организациями,
проводящими сертификацию тракторной техники,
являются: Международная организация по
экономическому сотрудничеству и развитию
(ОЕСД); Европейское сообщество стран
Европейской Ассоциации свободной торговли
(ЕАСТ); Европейская экономическая
комиссия (ЕЭК ООН).
Оценка качества тракторной техники в
системе ОЕСД проводится по принятым
стандартизованным правилам проведения
официальных испытаний (кодам). Основная цель
испытаний - облегчение продажи путем
предоставления стране-импортеру возможности
получить результаты испытании в другой
стране. Результаты испытаний официально
одобряются только при условии аккредитации
испытательных центров в установленном ОЕСД
порядке.
Каждый код предусматривает оценку
определенных характеристик тракторов и
устанавливает форму отчета (протокола) по
результатам испытаний. Так, согласно коду 1
(правила проведения официальных испытаний
тракторов) определяются показатели:
гидронавесной системы, тяговой
характеристики, габаритного и наименьшего диаметра
поворота, центра тяжести, тормозной системы
и уровня внешнего шума двигателя для
колесных тракторов (обязательно);
двигателя, шкива, показатели работы в
условиях тропического климата и пусковых
качеств при низкой температуре
(факультативно).
Код 2 (ограниченные правила
проведения официальных испытаний тракторов)
предусматривает проведение части изложенных
выше испытаний, код 3 соответствует
динамическим испытаниям защитных конструкций
тракторов, а код 4 - статическим испытаниям.
Сертификация трактора в рамках ЕС
является по существу обязательной по
достаточно широкой номенклатуре показателей
безопасности и охраны окружающей среды,
содержащейся в директивах ЕЭС. Согласно
методике одобрения типа трактора каждый
трактор может быть проверен на соответствие
установленным требованиям основной
директивы 74/150 и специализированных директив
(защитные свойства, шум, рулевое управление,
тормозные системы, дымность и т.д.).
Трактор, имеющий свидетельство об утверждении
типа (сертификат соответствия),
рассматривается во всех странах ЕС как согласующийся
с их национальными правовыми актами и не
может быть подвергнут запрету на продажу и
ввод в эксплуатацию.
Одобрение типа трактора
предусматривает три вида документов: информационный
(бланк описания), прилагаемый изготовителем
к заявке на проведение сертификационных
испытаний. Содержит спецификацию образца,
его техническое описание, конструктивные
особенности, оборудование, включая схемы,
фотографии, эскизы, всего около 100
наименований данных;
свидетельство об утверждении
(сертификат соответствия) - правовой документ,
устанавливает, что данный тип трактора
соответствует требованиям директивы 74/150 и других
специализированных директив;
удостоверение, в котором изготовитель
или его уполномоченный подтверждает, что
конкретный трактор (марка, тип, серийный
номер) соответствует одобренному типу,
имеющему соответствующие свидетельство
утверждения и информационный документ.
Процедура испытаний и официального
утверждения по правилам ЕЭК ООН подобна
процедуре, принятой в ОЕСД.
Сертификация трактора в рамках
отечественной системы проводится по
отечественной нормативно-технической документации,
СИСТЕМА УПРАВЛЕНИЯ КАЧЕСТВОМ ТРАКТОРОВ
321
которая приведена в соответствие с
международными стандартами ИСО, кодами ОЕСД,
правилами ЕЭК ООН. Обязательной является
экспертиза экспортируемой в стране ЕС
тракторной техники на ее соответствие
директивам. Вместе с заказчиками и потребителями
тракторной техники определен перечень
показателей, подлежащих оценке при
сертификации. В него вошли показатели, принятые для
оценки тракторной техники в системах
сертификации, а также ряд специфических
показателей, присущих отечественной практике
оценки качества машин (воздействие
движителей на почву, угол поперечной статической
устойчивости, освещенность рабочих зон,
микроклимат в кабине, уровни вибрации на
органах управления). Типовые формы
отчетности по сертификации также максимально
приближены к предусмотренным в
международных системах. В основу их положен
полный перечень сертификационных показателей
(обязательных и рекомендуемых), несмотря на
то, что согласованной с заказчиком
программой испытаний расширенный перечень может
быть сокращен.
Госстандартом России в 1994 г.
установлен порядок проведения сертификации
продукции на территории Российской Федерации.
Номенклатуру товаров, подлежащих
обязательной сертификации, определяет
Госстандарт России. При сертификации проверяют
характеристики или показатели продукции,
позволяющие провести идентификацию
продукции, соответствие ее технической
документации, а также требованиям безопасности для
жизни и здоровья граждан, окружающей
среды. Регламентировано восемь схем
сертификации, связанных с испытаниями одного
типового образца продукции или партии образцов,
которые приняты в международной практике
и квалифицированы Международной
организацией по стандартизации ИСО.
3.2.3. ПРОГНОЗИРОВАНИЕ
ОСНОВНЫХ ПАРАМЕТРОВ
Номенклатура прогнозируемых
показателей технического уровня и параметров
тракторов содержит параметрические, вербальные и
непараметрические показатели. При научно-
техническом прогнозировании параметров
тракторов используют исследовательский и
нормативный прогнозы. В зависимости от
времени упреждения различают
краткосрочный (5 - 10 лет), среднесрочный (10 - 15 лет)
и долгосрочный (15 - 25 лет) прогнозы [29].
Для прогнозирования параметрических
показателей тракторов целесообразно
применять методы экстраполяции
исследовательского прогноза при наличии достаточного банка
статистических данных и предполагаемом
сохранении технологии использования и
принципов работы машин. В случае
прогнозируемого перехода на новую технологию и когда
старая технология использования тракторов не
может служить базой для экстраполяции
применяют экспертные методы прогнозирования.
Опыт составления краткосрочных и
среднесрочных прогнозов показывает, что
одни параметры трактора характеризуются
более или менее динамичным развитием, а
другие практически не меняются в течение
длительного периода времени. К первым
относятся:
параметры, определяющие
энергетические и экономические показатели тракторов,
влияющие на их производительность
(эксплуатационная мощность двигателя, удельная
конструкционная масса, удельный расход топлива
двигателем, максимальная транспортная
скорость, число передач переднего хода);
параметры, определяющие
производительность навесной системы
(грузоподъемность, максимальное давление в
гидросистеме);
эргономические показатели (уровни
шума на рабочем месте и внешнего).
Ко вторым относятся:
линейные параметры, связанные с
агротехникой (база, колея, минимальный радиус
поворота, дорожный просвет);
компоновочные и тягово-динамические
параметры (коэффициент статического
распределения массы по осям колесного трактора,
условный тяговый КПД, удельная
конструкционная масса).
Между параметрами трактора существуют
определенные связи, которые могут быть как
детерминированными, так и вероятностными.
При анализе зависимостей между параметрами
целесообразно использовать методы теории
вероятности и математической статистики. К
вероятностным зависимостям можно отнести,
например, зависимость между массой трактора
и его колесной базой, колеей, удельной
конструкционной массой.
При сборе и систематизации данных в
качестве исходной информации используются
статистические данные. Объем необходимых
данных для составления прогноза зависит от
глубины прогнозирования и времени
ретроспекции. Для составления достоверного
прогноза рекомендуют выбирать необходимое
время ретроспекции из условия
'р=(2 + 3)/ц,
где /ц - время упреждения прогноза.
I I Члк. 1741
3.2.1. Математические модели, устанавливающие связь
эксплуатационных и конструктивных показателей сельскохозяйственных тракторов
Показатель
Удельная
конструкционная
масса /Пуд,
кг/кВт
Колесная база
Ц м
Колея, м:
минимальная
максимальная Ими
Колесные 4К2
84,17-0,226 ЛГэ
при
75 кВт < ЛГЭ <; 140 кВт; (1, 2)
(с кабиной)
112,9-0,9 #э
при
18 кВт * ЛГэ й 75 кВт, (3)
(с кабиной)
0,209 + 1,392 ущ
при 1,4/и <> щ й 9т (1)
1343 + 0,035 /яэ; (1)
и9 + 2Д8/Лэ; (1)
при 1,4/л ^/Из <, 9т
Колесные 4К4а
109,1-0,408 ЛГЭ
при
80 кВт < ЛГЭ * 150 кВт, (1, 2)
(спаренные задние колеса)
116,4-0,91 ЛГЭ
при
20 кВт й ЛГЭ <; 75 кВт; (3)
(одинарные задние колеса)
0Д5 +1,4 >$щ
при 13/я^/Иэ й9т (1,2)
1,5; (1, 2)
1,28 +0,22 ль; (1)
1,63 +0,088/Л, (2)
при 2тйтэ 183/я
Колесные 4К46
111,64-0,234 ЛГЭ
при
140 кВт * ЛГЭ * 300 кВт, (1,3)
0Д91 + 0ДЗЗ ъ^Щ
при 8,3/я^/Яэ ^163/я (1)
1^6 + 0,035 /яэ; (1,3)
2Д1 + 0,09/Яэ (1,3)
при 4т <, /Пэ ^ 163/я
Гусеничные
108,6-0,109 ЛГЭ
при
50 кВт й ЛГЭ <; 230 кВт; (1, 2)
103,6-0,33 ЛГЭ
при
52 кВт й ЛГЭ * 125 кВт; (3)
0,017 У^~
при \т<,тэ <>\9т
Для виноградниковых
2? = 0л(з^зу^"-1);(1,2, 3)
для горных
2? = 0,62(о,72У^+1) (1,2)
при \}т<>тъ ^43т;
для тракторов общего
назначения
В = 0,05з(нУ^"+ 1) (1, 2, 3)
при 2т ^ /Пэ ^ 19т
Продолжение табл. 3.2.1
Минимальный
радиус поворо-
. Минимальный
дорожный про
светЛщш, м
Коэффициент
статического
распределения
массы по осям
трактора Хст
Максимальный
условный
тяговый КПД на
твердом
искусственном
покрытии Лтушах
Среднее
условное давление
на твердое
основание д, кПа
2Л + 039/Яэ (1,2,3)
при \$т 5 щ ^5/я;
4м
при 5тйщ<>9т
0,23 + 0,082 щ (1,2)
при 1,3/л ^ тэ й5т;
0,63 м
при 5т<> щ й 9 т
0376 + 0,028 /Яд (1,2,3)
при \}т<>тъ ^5,6/я;
0,74
при 5,6т * Шэ ^ 9т (1,2, 3)
0,81 (1,2)
при 1^/я^/Яз ^ 9т;
-
2Д1 + 0^1/Яэ (1)
при \}т<>тъ ^5,4/я;
4,9 м
при 5,4т йщ ^83/я;
3 + 0,57/Яэ (2)
при 23/я <> тэ <> 5,4/я
(без подтормаживания)
0,05 +ОД/Яэ (1,2)
при 2/я^/яэ ^3,9/я;
0,44 м
при 3,9/я ^ /яэ ^ 8,3/я
0,62 (1,2,3)
при \}т<>тъ ^8,3/я;
0,8 (1,2)
при 13/я ^ /Яд ^ 83/я ;
-
6,1м (1,2,3)
при 11/я^/яэ ^143/я;
(спаренные колеса)
7,1м (1,2,3)
при 123/я ^ л*э ^ 163/я
(спаренные колеса)
-
0,43 (1,2)
при 4/я <> п^ <, 163/я ;
0,82 (1,2,3)
при 4/я ^ /Яд ^ 163/я ;
-
1Д9У/ЙГ-1
0,33 У/Яэ~
при 1/я ^ /яэ й 19/я (2, 3)
0Д61 +0,049/Яэ (1,2,3)
при 1 /я ^ /яэ ^ 33 т;
0,337 м
при 33/я ^/яэ ^19/я
-
0,79 (1, 2, 3)
при 33/я ^ /яэ ^19/я;
135 У^Г- *
0,02 У/яГ
при 1/я ^ /яэ ^ 1,9/я (1, 2, 3)
Примечание. Данные следующие: 1 - Северная Америка; 2 - Западная Европа; 3 - отечественные.
324
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
На основании полученной информации
о тенденциях изменения основных
показателей строят поля парных корреляций
(зависимостей). По характеру полей корреляции
устанавливают вид функций связей, наиболее
приемлемых для математического расчета
корреляционных моделей. Рекомендуется метод
наименьших квадратов, который обеспечивает
выбор наиболее вероятной траектории
изменения показателя и минимизирует сумму
квадратов отклонений статистических
значений показателей от расчетных. При
необходимости могут быть использованы также другие
методы определения показателей функции
связей.
Краткосрочный прогноз показателей
колесных и гусеничных сельскохозяйственных
тракторов различных тяговых классов,
полученный по результатам сертификатных
испытаний отечественных тракторов на полигоне,
и их зарубежных аналогов отражает
наметившиеся в последние годы тенденции:
замедления роста или даже некоторого снижения
единичной мощности тракторов различных
тяговых классов; колебания средней удель-.
ной конструкционной массы у колесных
тракторов и ее снижение у гусеничных
тракторов; снижение удельного расхода топлива и
уровня шума на рабочем месте тракториста и
уровня внешнего шума, создаваемого
трактором. Для прогнозирования параметров
целесообразно использовать статистические
зависимости [29].
В табл. 3.2.1 приведены математические
модели; устанавливающие связь с
конструкционной массой т трактора и эксплуатационной
мощностью Лэ двигателя таких
эксплуатационных и конструктивных показателей
колесных и гусеничных сельскохозяйственных
тракторов, которые не претерпевают существенных
изменений в течение длительного периода
времени, поскольку характеризуют
компоновочные и тягово-динамические параметры,
определяемые требованиями технологии и
агротехники возделывания
сельскохозяйственных культур.
Математические модели построены на
основании статистических исследований
параметров более 500 моделей колесных и
гусеничных тракторов, выпущенных в нашей
стране и за рубежом. Они могут быть
использованы для расчета параметров проектируемых
сельскохозяйственных тракторов различного
назначения, для математического обеспечения
САПР. Однако они не могут заменить
технико-экономических расчетов по оптимизации
параметров [35] тракторов, целесообразность в
которых определяется в каждом конкретном
случае.
3.2.4. КОМПОНОВКА ТРАКТОРОВ
Основные параметры, характеризующие
компоновку трактора: база, колея, клиренс,
радиус поворота, размеры движителей,
нагрузка на ось, расположение кабины и органов
управления, координаты центра масс с учетом
агрегатируемых машин и рабочего
оборудования [19, 20]. В процессе выполнения
компоновки трактора решаются следующие задачи,
связанные с подчинением компоновки
функциональному назначению трактора:
конструктивная увязка габарита по
ширине движителей и по внешним их кромкам с
агрегатируемыми машинами с учетом
назначения трактора;
обеспечение высоких тяговых
показателей при хорошей управляемости и
устойчивости вследствие рационального
распределения нагрузки на опоры ходовой части, в том
числе с учетом ее перераспределения от
действия сопротивления силе тяги и веса
агрегатируемых машин, и необходимой навесоспо-
собности;
управления, удобной посадки
тракториста, хорошей обзорности пути, рабочих машин
и оборудования;
маневрирования на разворотной полосе
и высокой курсовой устойчивости;
сокращения затрат труда при соединении
трактора с машинами, орудиями и
возможность составления машинно-тракторного
агрегата и управления им одним трактористом;
удобного обслуживания в процессе
эксплуатации, разборки и сборки при ремонте;
высокой технологичности изготовления,
эксплуатации и ремонта трактора;
возможности использования съемного и
сменного оборудования (сменные и сдвоенные
колеса, сменная гусеница, навесное и
прицепное устройство);
Возможность создания модификаций
максимально унифицированных с базовой
моделью.
К остову трактора крепятся все
механизмы, рабочее и дополнительное оборудование.
Он должен обладать необходимой жесткостью
для исключения деформаций, нарушающих
взаимное расположение механизмов силовой
передачи, и обеспечивать компактное
размещение узлов и механизмов трактора, простоту
их монтажа, демонтажа, удобство проведения
ТО и ремонта, а также навешивания машин и
орудий.
В зависимости от конструкции остовы
трактора разделяются на безрамные,
полурамные и рамные.
Безрамный остов образуется
соединением с помощью болтов блок-картера двигателя с
корпусами 'механизмов силовой передачи. Из
отечественных тракторов безрамный остов
имеет сельскохозяйственный трактор ДТ-20 и
зарубежный фирмы ЗАМЕ мод. 150.
КОМПОНОВКА ТРАКТОРОВ
325
Полурамный остов получил широкое
распространение на сельскохозяйственных
тракторах, как в нашей стране, так и за
рубежом. Он состоит из полурамы, на которой
крепится двигатель, и корпусов силовой
передачи, соединенных при помощи болтов или
сваркой. Такой остов имеют отечественные
тракторы Т-25А, МТЗ-80 (колесные) и Т-70С
(гусеничные).
Полурамный остов обеспечивает
достаточную жесткость конструкции, облегчает
боковую навеску орудий, позволяет выполнять и
демонтаж двигателя без разборки остова.
Рамный остов - стальная рама,
обеспечивающая высокую жесткость конструкции и
относительную легкость разборки, что
упрощает ремонт, модернизацию трактора,
создание на его базе модификаций, так как
отдельные механизмы могут быть заменены при
унификации мест их крепления. Такие остовы
имеют большинство сельскохозяйственных и
промышленных тракторов (отечественных и
зарубежных), гусеничных, а также колесных с
шарнирной рамой, состоящей из двух полурам
(Т-150, Т-74, Т-150К, К-700/К-701/К-701М,
Т- 130).
Сельскохозяйственные тракторы.
Пропашные тракторы имеют наиболее
распространенную традиционную моноблочную
(классическую) компоновку, особенностью которой
является переднее расположение двигателя и
заднее (над задней осью) расположение
кабины, и управляемые передние колеса меньше
[19, 20, 29] задних (рис. 3.2.1). Трансмиссия
трактора выполнена в одном блоке
(сцепление, коробка передач и задний мост) и жестко
соединена с двигателем. Примером машин,
выполненных по такой компоновке, могут
служить все отечественные тракторы класса
0,6 - 2,0 с колесным и гусеничным
движителем (Т-25А, МТЗ-80, МТЗ-82, Т- 54В, Т-70С
и др.). Гусеничные тракторы созданы на базе
колесных машин и значительно с ними
унифицированы.
(базовая модель) колесного пропашного трактора:
/, 8 - навесная система; 2 - трансмиссия; 3 - кабина;
4 - двигатель; 5 - воздухоочиститель; 6 - радиатор;
7 - вентилятор; 9 - редуктор переднего ведущего
моста; 10 - карданный вал
Колесные сельскохозяйственные
тракторы общего назначения имеют раздельно-
агрегатную компоновку, переднее
расположение двигателя, кабина расположена за
двигателем (ближе к середине колесной базы),
передние и задние колеса одинакового размера и
грузоподъемности (рис. 3.2.2). Сцепление и
коробка передач жестко соединены с
двигателем, передний и задний мосты приводятся с
помощью карданных передач. По такой
компоновке выполнены тракторы класса 3 и 5
(типа Т-150К и К-700). Поворот трактора
осуществляется с помощью шарнирной рамы.
Гусеничные сельскохозяйственные
тракторы общего назначения (рис. 3.2.3) имеют
компоновку такого же типа: переднее
расположение двигателя, кабина находится над
ведущими колесами сзади, на раме с помощью
шарниров в трех точках прикреплен двигатель
и силовая передача, которые соединены между
собой карданным валом (тракторы ДТ-175С,
Т-74, ДТ-75). Гусеничный трактор Т-150
унифицирован с колесным Т-150К.
Отличительными особенностями его компоновки
являются: переднее расположение двигателя, жесткое
крепление к нему сцепления и коробки
передач, карданные приводы к центральным
передачам ведущих колес, кабина сдвинута вперед
и находится примерно в центре машины.
Совершенствование конструкции
сельскохозяйственных пропашных тракторов
отразилось в применении четырех ведущих колес
на базе тракторов, выполненных по схеме 4К2
с передними управляемыми колесами
меньшего размера, а также полноприводных машин
с колесами одинакового размера и спаренных
колес. Тракторы 4К4 с колесами одинакового
размера создаются на базе тракторов
классической схемы или путем разработки
специальных машин. При этом используются две
схемы расположения кабины: за двигателем;
над двигателем. В обоих случаях управление
осуществляется поворотом только передних
или всех колес.
Стремление сократить число проходов по
полю и снизить интенсивность воздействия
рабочих органов на почву обусловило
появление комбинированных сельскохозяйственных
машин, выполняющих несколько операций за
один проход. Интегральные тракторы имеют
массу более десяти тонн, технологические
емкости расположены на машине, выполняются
прицепными и оборудуются дополнительными
колесами для транспортирования. Для
размещения технологической емкости
предусмотрена специальная площадка за кабиной трактора.
Навесоспособность трактора определяет
возможность составления агрегата. Так, к
конструкции трактора класса 2 мощностью
ПО кВт при эксплуатационной массе
5600 ... 5800 кг определено требование:
максимально допускаемая масса в агрегате с на-
326
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
1-
Рис. 3.2.2. Компоновка колесного трактора общего ш
радиатор; 2 - воздухоочиститель; 3 - двигатель; 4 - выпускная труба; 5 - сцепление; б - коробка передач;
7 - раздаточная коробка; 8 - карданные валы; 9 - редуктор вала отбора мощности;
10, 11 - редукторы ведущих мостов
Рис. 3.2.3. Компоновка гусеничного трактора общего назначения раздельно-агрегатной схемы:
/ - радиатор; 2 - выпускная труба; 3 - двигатель; 4 - воздухозаборник; 5 - сцепление; 6 - карданны
7- коробка передач; 8 - задний мост; 9 - кабина; 10 - навесная система
карданный вал;
весными машинами и заполненными
технологическими емкостями на шинах основной
комплектации 10 т, а на сдвоенных шинах 12 т
(в том числе технологические емкости
объемом 1,6 м3). В зависимости от вида
наполнителя технологической емкости (семена,
удобрения или пестициды) в рабочем положении
агрегата суммарная нагрузка на оси трактора
(без учета воздействия навесных машин)
составит 78 ... 83 кН, а давление движителей на
почву достигает 149 кПа при допускаемом
105 кПа. Размещение технологической
емкости на тракторе приводит к увеличению
вертикальной координаты центра масс и
снижает поперечную устойчивость агрегата.
В качестве интегрального может быть
использован трактор традиционной компоновки
с задним приближением кабины, при этом
технологические емкости располагаются в
межколесном пространстве с боков трактора,
КОМПОНОВКА ТРАКТОРОВ
327
что исключает проблему поперечной
устойчивости и улучшает доступ к заправочным
горловинам. Обеспечение допускаемого давления
на почву остается по-прежнему проблемой,
так как независимо от места расположения
технологических емкостей нагрузка на
движители возрастает. Трудоемкость составления и
расформирования такого агрегата также
увеличивается: требуются подъемные средства для
монтажа и демонтажа технологической
емкости; затрудняется заправка при
расположении ее на площадке трактора.
Следует отметить, что несмотря на
значительные изменения технико-экономических
характеристик тракторов, усовершенствование
их конструкции проводилось без
принципиальных изменений общей компоновки. Такое
положение можно объяснить следующим: во-
первых, консервативностью технологий
возделывания сельскохозяйственных культур и
сохранением размера междурядий пропашных
культур; во-вторых, условиями сложившегося
производства; в-третьих, возможностью
повышения производительности
машинно-тракторных агрегатов (МТА) за счет автоматизации,
что в сложившихся условиях является
наиболее эффективным.
Общей тенденцией развития компоновки
трактора является увеличение их базы с ростом
мощности. Это обусловлено необходимостью
агрегатирования тракторов с орудиями и
машинами высокой производительности,
имеющими, как правило, большую
эксплуатационную массу. Увеличение массы при
неизменной базе трактора может привести к
нарушению продольной устойчивости, ухудшению
управляемости и даже его "дыблению" при
движении с поднятым навесным орудием. Эти
явления устраняют удлинением базы трактора,
применением сельскохозяйственных машин,
максимально приближенных к задней оси
трактора, одновременной навеской машин
спереди и сзади, а также балластированием
передней оси трактора. Применение передней
навесной системы позволяет более
рационально перераспределить эксплуатационные
нагрузки между передними и задними колесами
и в отдельных случаях исключить
необходимость применения балластных грузов.
Балластирование трактора,
обеспечивающее его продольную устойчивость,
повышает тяговые показатели при работе с
сельскохозяйственными машинами, имеющими
пассивные рабочие органы (плуги, культиваторы
и др.).
На поперечную устойчивость трактора
(кроме расположения центра масс) влияет
размер колеи. Однако при определении колеи
универсально-пропашного трактора решающее
значение имеет его проходимость в
междурядье возделываемых пропашных культур.
Габаритный размер трактора общего
назначения по ширине внешних кромок гусениц
[2] (рис. 3.2.4) при движении по полю (пахота)
определяется по формуле
вт=кть%пх-г(!ъ-1с),
где КТ - коэффициент смещения линии тяги,
Кт = 1 + 1/3 лк ; бк и /!к - ширина захвата
одного корпуса и число корпусов плуга; /к -
расстояние от края борозды до кромки
гусеницы, зависит от скорости движения, тяги и
характеристики почвы; /с - смещение точки
прицепа с оси симметрии трактора (вправо),
/с * 0,06 м.
Ширина гусеничных пропашных и вино-
градниковых тракторов по кромкам гусениц
Вш =Ь(п + \)-2ЬЗУ
где п - число рядков растений, пропускаемых
под трактором; Ьэ - размер защитной зоны.
Г
С^ГШ
Упг
ш
! ГТ
в \
Вщ
Э
-Ьт.
Рис. 3.2.4. Осаомые размеры гусеягпюго трактора
328
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
Применяемые междурядия и
рекомендуемые защитные зоны для различных культур
приведены в табл. 3.2.2, [29].
3.2.2. Размеры междуряднЁ н
рекомендуемых защитных зон, м
Культура
Кукуруза на
зерно
Кукуруза на
Подсолнечник
Свекла
сахарная:
неполивная
поливная
Картофель
Хлопчатник
Овощные
культуры
Мезду-
рядия
0,7; 0,90
0,7
0,7;
0,90
0,45
0,60
0,60;
0,70;
0,90 |
0,60;
0,80;
0,90
0,45;
0,60;
0,70;
1,40;
1,80 1
Рекомендуемая
защитная зона
(для колес трактора
при обработке
пропашных)
0,20
0,20
0,20
0,12
0,15
0,20
0,20
0,12; 0,15
Ширина гусеницы
^=2^^/(1 + *,),
где Кт - коэффициент, Кт =0,2 ... 0,25 для
пропашных и узкогабаритных тракторов;
Кт =0,27 ... 0,30 для тракторов общего
назначения; Кт =0,34 ... 0,44 для болотоходных
тракторов.
Опорная длина гусеницы определяется из
условия удовлетворения допускаемого
давления на почву:
где О - вес трактора.
Площадь контакта гусеницы с почвой
Ат = /г от А з,
где /г - приведенная к условиям работы на
почвенном основании длина опорной
поверхности гусениц /г = /у + /г ; /у - условная
длина участка гусеницы, находящаяся в
контакте с основанием; /г - шаг гусеницы; Аз -
коэффициент заполнения проекции контакта
гусеницы с почвой; Х3 = Ат л / (Ар Лщ /г);
Ат „ - площадь проекции участка гусеницы,
включающего п полных ее шагов, на опорную
площадь, м2; /1щ ^ 3 - число полных шагов на
учетном участке гусеницы.
Величина Ат проверяется:
на удельную тяговую нагрузку
^ = *крн/Л.п ^250кПа;
на отсутствие отрыва от опорной
поверхности переднего катка от действия
номинальной силы тяги Гх р н
на обеспечение поворотливости трактора
А7ЛШ *2>
высота расположения крюка.
где НК1
Минимальные значения дорожного
просвета и радиуса поворота тракторов
регламентируются стандартами. Агротехнический
просвет Ндп = 0,64 ... 0,8 м в зависимости от
обрабатываемых растений или их
возделывания (большие значения соответствуют
обработке хлопчатника и овощных культур при их
возделывании на гребнях^.
Расстояние между гусеницей и
крылом выбирается из условия исключения
заклинивания гусеницы налипшей грязью,
Ноп =0,12 ... 0,18 м.
Размеры колес (гусеницы) должны
обеспечивать рекомендуемые защитные зоны при
работе в междурядьях [13]. При определении
ширины шины необходимо учитывать угол
поворота колеса для обеспечения заданного
курса'движения, я также высоту растений на
период проведения работ:
1
со$Е
(йр-^-гл^Рп |%~ГТ
где рп - угол поворота колеса в
горизонтальной плоскости, ° ; Ьр и Ь3 - соответственно
ширина междурядья и размер защитной зоны,
м (табл. 3.2.2); Лр - высота растений; В -
диаметр управляемого колеса.
КОМПОНОВКА ТРАКТОРОВ
329
Для неуправляемых колес Ь = />р - 2 Ь3 .
Угол поворота управляемых колес для
поддержания заданного курса Рп = 1,27 ... 1,38, а
время движения с отклоненными колесами
при движении в междурядьях 0,73 ... 1,03 с.
Увеличение диаметра переднего
управляемого колеса ограничено шириной остова
(рамы, полурамы, корпусных и других деталей
образующих остов), размером минимальной
колеи и углом поворота для получения
минимального размера поворота. Минимальный
размер колеи определяется шириной
междурядья. 1,2 м (междурядья 0,6 м) и 1, 4 м
(междурядья 0,7 м) для отечественных
универсально-пропашных тракторов. Минимальная
ширина остова трактора в зоне расположения
управляемых колес составляет примерно 0,5 м,
угол поворота управляемых колес 45 ... 50 е ,
предельная ширина шины 0,275 м для
междурядья 0,6 м. Отношение диаметра колес
передних и задних 2)п / Д, = 0>62; />п / 2)3 =
= 0,70 ... 0,75 для зарубежных тракторов,
выполненных по традиционной схеме (4К4а);
Ои/ /)3 = 0»8 для некоторых моделей.
Увеличение диаметра управляемых колес
приводит к необходимости применения
одного из следующих способов поворота машины:
поворота всех колес, поворота с помощью
шарнирной рамы, включением и торможением
одного борта. Способ поворота с помощью
шарнирной рамы неприемлем для работы
трактора в междурядьях, так как при этом
происходит значительное подрезание
культурных растений рабочими органами
сельскохозяйственной машины. Поворот всех колес
усложняет конструкцию рулевого привода,
требует применения электронной
автоматической системы согласования поворота колес,
что связано с технико-экономическим
обоснованием.
Использование тракторов с четырьмя
ведущими колесами позволяет повысить тягово-
сцепные показатели за счет использования его
веса в качестве сцепного. Полуприводные
тракторы 4К4 различаются по размерам колес,
способу поворота. При установке колес
одинакового размера и грузоподъемности трактора
относят к типу 4К46, а при установке
передних колес меньшего размера к типу 4К4а. В
зависимости от типа трактора изменяется
способ поворота и распределение X массы по
осям. Для тракторов 4К4а на переднюю ось
приходится 0,38 + 0,45 общей массы трактора,
а для тракторов 4К46 - 0,5 + 0,6 общей массы.
При расчете нагрузки на колеса
необходимо учитывать не только часть веса трактора,
но и ее изменение в процессе работы от
действия силы на крюке и веса навесной машины.
Выбранная из условия поворота колесная
база трактора уточняется (без подтормажива-
ния) с заданным радиусом Лтш:
^ = Дтт*8<Хср>
где ас р - средний угол поворота; ас р =
= 30... 35°.
Полученное значение проверяется на
условия обеспечения продольной
устойчивости и управляемости с учетом навесных
сельскохозяйственных машин, создающих
опрокидывающий момент Моп, который
зависит от веса машины (орудия) и удаления
центра массы ее от ближайшей оси трактора.
Минимальная колесная база трактора,
выполненного с передними управляемыми
колесами и всеми управляемыми колесами,
должна удовлетворять неравенству:
где / - коэффициент сопротивления качению;
гк - радиус колеса.
В практике конструирования принимают
Ь = 1Д Ь„^п . Высота расположения нижней
кромки рамы (полурамы) в зоне балки
переднего моста определяется по формуле (рис.
3.2.5):
Лрам = Ндп + ^б + 0,5 Ьрвм 1бРб,
где Нт - дорожный или агротехнический
просвет; <% - диаметр балансира; Ьрш -
ширина рамы (полурамы); Рб - угол качения
балансира, Рб = Ю ... 12 ° .
Для колесных тракторов общего
назначения применяется схема поворота с шарнирной
рамой, все колеса одного размера и
грузоподъемности с межколесным расположением
кабины (за двигателем). Шарнирная рама имеет
части, которые поворачиваются вокруг
вертикального шарнира примерно на 30 ° и вокруг
горизонтального примерно на 18°. Колея
трактора изменяется перестановкой колес
относительно диска.
Колесная база трактора определяется и
корректируется, исходя из формулы (при
расположении шарнира рамы на середине базы)
где ^шл - минимальный радиус поворота;
ап - угол поворота вокруг вертикального
шарнира, осп =30 ... 40°.
330
Глава 3.1 КОМПОНОВКА И ПАРАМЕТРЫ
иран\
I
34
'*&№
-е±
-е-
^
Ш^
3
ЦМ'
Э^
Рис. 3.2.5. Основные размеры колесного трактора
Колесная база должна обеспечивать зазор пересечения которых является центром масс.
между колесами одного борта при повороте При графоаналитическом методе находят ко-
(примерно 0,2 м)
и перераспределение нагрузок между осями не
более 0,3 О
ординаты центра масс каждой сборочной
единицы и общие координаты центра масс:
'тР =
х^ю
№-'4
где 0& - вес сборочной единицы.
Положение центра масс гусеничного
трактора
где /к - расстояние от оси ведущего колеса до
края опорной поверхности гусеницы; Кр -
где Ддс - наружный диаметр колеса; Ак -
зазор между колесами.
Положение центра масс (ЦМ) трактора
определяется координатами: /тр
горизонтальной; /*гр вертикальной; и /^р смещением от
оси симметрии. При навешивании
сельскохозяйственной машины, которая может нахо- коэффициент вероятной силы тяги, Кр =
диться в двух положениях (транспортном и _ _.
рабочем), координаты центра масс агрегата — 1»э ... 1,/э.
ь а Для колесного трактора 4К2
распределена > "а > "а - ние нагрузки по осям определяется для веду-
Координаты центра масс проектируемых щих (задних) колес по формуле:
машин находят графически или
графоаналитически. На контуры сборочных единиц и от- 1-1 Гк ^крн.Лттах
дельных деталей наносятся векторы их веса, ^2 -*хт + ~^ ^ »
приложенные к центрам масс этих единиц.
При графическом методе строят многоуголь- ще Хст=02/0 - коэффициент нагрузки
ники и находят вертикальную и горизонталь- и ^'
ную равнодействующие суммы весов, точка ведущих колес в статическом положении; 02 -
КОМПОНОВКА ТРАКТОРОВ
331
нагрузка на ведущую ось; Лтшах " тяговый г\ и /^ -радиусы соответственно переднего и
КПД (максимальный) трактора на стерне. заднего колеса.
Для передних (направляющих) колес Для трактора 4К46
^ /^ 7ТР гк^крн Лтшах Ф2*Ф1 и /2 * /г;
*.1-Ъ/вш—-т ,
где С?! - нагрузка на передние колеса. ^1 иР" + Кг Ь *
При А,1 =0,35 ... 0,4 обеспечивается
хорошая управляемость трактора, при Х\ =0,2 2 =^-^ь ЛР = 1,5 ... 2.
радиус поворота увеличивается в 2 - 3 раза: Универсально-пропашные тракторы, вы-
т полненные по схеме 4К4 с колесами одинако-
Л — г! ? вого и разного размера, должны обеспечивать
*8 (аср"~^1) + *8 §2 ' требование по вписываемости в междурядья
' ' при регламентированном давлении на почву.
тгпа ^ -П*/« и-«\« иг* г™™ Исходя из определенной ширины шины колес
где аср-ир рн +ав;, ан и ав - угол (4К4а) и их диаметра, обеспечивающего необ-
поворота соответственно наружного и внут- ходимый угол поворота для получения мини-
реннего колеса; 5Х и 52 - углы бокового мального радиуса поворота, находят допус-
увода шин соответственно передних и задних каемую нагрузку (гщщ и &2Шп по стандарту
колес. на размеры шин.
При работе трактора в агрегате с маши- Статическая нагрузка на переднюю ось с
ной нагрузки на переднюю ось не должны учетом перераспределения нагрузки от дей-
бьпъ ниже 0,2 Оа. ствия навески машин и ^крн
Компоновка трактора должна
проводиться из расчета получения Х2 =0,6 ... 0,65 в _ ^1Шп
статическом положении и Ху =0,75 ... 0,8 при -, , [по^, г ^кр |
с1Шп + 0*^2 Шп -^крн-1—
тяговом режиме. V Ь )
При распределении нагрузки по осям
трактора 4К4 необходимо учитывать исполне- при- у _ у = / • он = 0,8 фэ
ние (4К4а и 4К46 с равными и разновеликими '
колесами): г _/ЛосаЛо\г
и Гхр\ = (0,25 +0,3) Лсрн >
^крн = ^кр1 + ^кр2 =
(0,25 + 0,3)+(0,8ф2-/)/1Кр/Х *крн
= (ф1-/1)^1сц + (ф2-/2)^2сц» * 0,8ф2~/ О '
где Фх и ф2 - коэффициент сцепления пе- рациональное значение Х\ = 0,4 ... 0,45.
редних и задних колес; Л и /2 - коэффици- Статический радиус поворота трактора:
1 ^ со всеми поворачиваемыми колесами
ент сопротивления качения передних и задних
колес; 0\с ц и С^с ц - нагрузка на передние и д _ ___^ ±1
задние колеса с учетом ее перераспределения
от действия Р^\
е1сц = 01-Л<7; 02си = в2+Ьв; Д 4/сова + /2
С1! и (% - нагрузка соответственно на перед- *# (а ""^1) + *# $2
нюю и заднюю ось в статическом положении;
где /} и /2 - расстояние от оси колес до шар-
разгрузка перед- нира соответственно передних и задних колес.
Центр давления гусеничного трактора
ней оси; Му - момент сопротивления каче- под действием опрокидывающих моментов
ы - г г г смещается относительно центра масс в етати-
нию трактора; М у ■— /\ Ь\СцГ\ + /2СцГ2 » ческом положении на горизонтальной поверх-
8^п(аср1-81) + 8^п(аср2-52),
с шарнирной рамой
д(?>»*р+"/^
332
Глава 3.2 КОМПОНОВКА И ПАРАМЕТРЫ
ности на величину, которая определяется по
формуле
-м, + 1иеи
д Осо&а
где а - угол подъема (уклона); /ув - силы
инерции агрегата; Му = /Огх - момент
сопротивления качению; гк - радиус ведущего
колеса; /н -■ расстояние от оси ведущего
колеса до оси опорного катка навесного
агрегата (орудия); Он - нагрузка (вертикальная
реакция почвы) на опорном колесе орудия;
Он = 0,3 ... 0,5 Са, Ой - вес агрегата.
Радиус поворота (по центру трактора)
Л = 0,5ЛУг(1-5г>+У'(1-Ч
у2(1-82)-у1(1-61)*
где VI и У2 - теоретические скорости
соответственно забегающей и отстающей гусениц;
5} и 82 - буксование забегающей и
отстающей гусениц.
Статическая устойчивость трактора
характеризуется углами продольного и
поперечного уклонов, превышение которых приводит
к его опрокидыванию. Предельный
статический угол подъема, на котором трактор может
стоять не опрокидываясь, определяется по
формуле
^аИт=(/т1
*%
<*1ш1 =39 + 48*
Предельный статический угол наклона
^Илп находится из формулы
*8а<р = 18 + 20° на стерне. Критический угол
подъема зависит от касательной силы тяги,
которую может развить трактор по условию
сцепления:
Рх =ф(7сцсо8ак.
Критический угол подъема ак при
установившейся работе трактора с нагрузкой
/кр на крюке:
*8<*к =^а1ш1
*-ф*гр/ *тр
1-Лгр/ ^гр
Угол подъема, на который может
подняться трактор по условию ограничения
мощности (заглохание) двигателя,
атсхд =^ктах/<?-
Машина начинает опрокидываться при
поперечном угле уклона ^„^ и начинает
сползать при угле Рф. У гусеничных тракторов
осью опрокидывания является наружная
боковая кромка гусеницы и
*8РШп =
0,5(ДГ+*Г)
; Рцщ = 32 + 52°
У колесных тракторов опрокидывание
возможно вокруг боковой и проходящей через
центры отпечатков на грунте переднего и
заднего колес. Предельный статический угол
поперечного уклона определяется из уравнения
*гРшп
0,5 Д2 -*тр№<*п
СОЗССт, = -
п " ъ9
"тр
^Ьт=(Х-^±/-){р;аи=52 + 62-. ще ^ ^(В2 -В^ . ^
- плечо
Наибольшие углы подъема и уклона, на
которых заторможенный трактор может стоять
не сползая, аф и аф, находят из уравнений
^ *тр
*8с*Ф =Фт г~
ь-и
тр
фЛц
Угол начала сползания 18<*ф = Ф .
При установке тормозных механизмов на
задние колеса на подъеме 1^аф = 29 + 31° и
устойчивости (плечо оси опрокидывания
относительно следа центра масс трактора); осп -
угол,наклона оси опрокидывания к
продольной оси трактора; В\ и В2 - колея
соответственно задних и передних колес.
При разной колее передних и задних
колес
2?^ + (2?2-2?1)(Х-/тр)
пу = / 2— '
^1?+(в2-Вх)
при повороте трактора с шарнирной рамой:
6пу = 0,52?со8а/2 -/8ша/2
КОМПОНОВКА ТРАКТОРОВ
333
при 1\ = 1г и /3 = Ц (/з и Ц - расстояние
от центра масс соответственно до передней и
задней оси);
при /1^/2 ^п у находят графически.
Предельный статический угол
поперечного уклона определяется из уравнения
где фг - коэффициент сцепления движителей
с поверхностью в боковом направлении;
Фг =0,8<р.
При повороте трактора на склоне с углом
Р максимальная скорость по опрокидыванию
не должна превышать значения,
определенного по формуле
= дЛ
Я
*еР1ш1 *§Р
Минимальный радиус поворота трактора на
склоне при Уцдо определяется из выражения
В = утах
Ттах 1-^Рйт *8Р
Я *8<*11т -*«Р '
а при наличии автоматической стабилизации
остова трактора
■'чшп
_ утах
Я ^Ршп-^Р С08РС
где Рс - угол стабилизации остова трактора.
При наличии балансирной передней оси
(у пропашных тракторов) плечо устойчивости
определяется с учетом угла качения оси Р$ и
соответствующего смещения центра масс
^пу = 0^^-Лгр8трб.
Оценка компоновки на соответствие
требованиям устойчивости проводится отдельно
для трактора и МТА, т.е. с учетом
перераспределения нагрузок при движении в
транспортном и рабочем положении при номинальной
силе тяги. При транспортном положении
устойчивость МТА оценивают с наиболее
тяжелой машиной и (при наличии) заполненных
технологических емкостях. Определяются
критические скорости при повороте для широкой
и узкой колеи, радиусы поворота для узкой
колеи на высших передачах, предельные углы
подъема, уклона и поперечного угла склона в
статическом положении. Нормы воздействия
движителей сельскохозяйственного трактора на
почву, методы определения воздействия
регламентированы соответствующими
стандартами.
Промышленные тракторы.
Промышленные гусеничные тракторы общего назначения
характеризуются передним расположением
двигателя, к которому жестко крепится
сцепление или гадротрансформатор, задний мост с
конечными передачами, механизмами
поворота, тормозными механизмами и коробка
передач, соединяемые между собой жестко или с
помощью карданной передачи [7]. Все
сборочные блоки установлены на раме, к
передней части которой прикреплена ось шарнира
балансировкой балки или рессоры, концами
опирающейся на рамы гусеничных тележек.
Возможность качания этих элементов вокруг
оси ведущих колес или специальной оси,
расположенной впереди ведущих колес, позволяет
снизить напряженность конечной передачи и
улучшить технологичность конструкции при
монтаже и демонтаже.
В передней части рамы расположен
силовой капот с гидроцилиндрами бульдозерного
оборудования. Рыхлительное оборудование
крепят к заднему мосту. Тракторы с такой
компоновкой выпускаются в двух вариантах: с
кабиной КОР8 и РОРЗ и с каркасами,
защищающими водителя соответственно при
опрокидывании трактора и от падающих
предметов. Кабины и каркасы располагаются, как
правило, над задним мостом.
Увеличение тягового класса трактора в
отдельных случаях сопровождается
изменением его компоновки: оптимальным смещением
кабины в сторону двигателя и расположением
за ней ряда сборочных единиц (масляные
радиаторы двигателя, трансмиссии и
гидросистемы, привод вентилятора которых
осуществляется от гидрообъемного мотора).
Расположение ведущего колеса над
гусеничной тележкой с вьшолнением треугольного
обвода гусеницы позволяет применить блочно-
модульный принцип построения сборочных
единиц, снизить трудоемкость их
обслуживания, монтажа и демонтажа. Такая компоновка
применена фирмой Катерпиллер на тракторах
тц ть и то.
Тракторы общего назначения с
колесными движителями создаются на основе
тракторов-погрузчиков и имеют аналогичные
компоновки.
Промышленные тракторы на базе
сельскохозяйственных имеют аналогичную
компоновку и отличаются увеличенной прочностью
конструкций ряда деталей ходовой части и
трансмиссии. Эксплуатационная масса
трактора определяется по заданной номинальной
силе тяги Гх р н: для гусеничного трактора
тэ = 10 ^крн/9>8, для колесного трактора
334
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
тэ = 10 Гк р н 16,5 . Масса бульдозерного и
бульдозерно-рыхлительного агрегата - сумма
масс трактора и оборудования, а при
неизменной массе оборудования рекомендуется
применять /я2 = 1,45 т; та = 1,25 т . Для
колесных тракторов масса бульдозерного и
погрузочного агрегата т% = 1Д5/Я; та = 135 т.
Для определения основных параметров
вновь создаваемых тракторов можно
использовать корреляционные зависимости между
основными параметрами и массой трактора:
промышленных тракторов общего назначения
(табл. 3.2.3), тракторов-погрузчиков (табл.
3.2.4) и сельскохозяйственных тракторов.
3.2.3. Корреляционные зависимости между основными параметрами и
массой т промышленного трактора общего назначения [7]
Параметр
Мощность двигателя Р,
кВт
База Ьу м
Колея В\у м:
гусениц
передних колес
задних колес
Ширина Ьу м
гусениц
передних колес
задних колес
Радиус поворота по
середине колеи Д м
Подача насосов
гидросистемы ^> л/мин
Высота грунтозацепа Лг,
мм
Наружный диаметр
колес Д м:
передних
задних
Гусеничный
(0,019 ±0,0025)/я0'95
(1±0,1 )(о,0775^/"/я -1)
0,014 }[т
( 0,41 ± 0,04 ) (о,145 }[т + 1^
(0,02 ±0,002) }[т
-
( 250 ± 50 ) (о,076 ^т - \\
(1 ± ОД ] (2,632 + 0,0004 ^[1п\^[т
-
Колесный (модификация
сельскохозяйственного)
(0,0597 ±0,01) /Я0'85
( 1 ± 0,05 ) (1,14 + 0,068 }[т\
(1 ± 0,05 ) (о,445 + 0,0718 }[т\
( 0,105 ± 0,01) ^т
( 0,0135 ± 0,0025) }[т
(0,031 ±0,005) }[т
(±0,08 ) (1,66 + 0,145 }[т\
-
-
( 1 ± 0,08 ) (о,2 + 0,045 ^~т\
(1 ± ОД ) (о,35 + 0,08 ^~т\
Примечание. Масса гусеничного трактора (5 ... 75) 103 кг,
а колесного (10 ... 64) 102 кг
КОМПОНОВКА ТРАКТОРОВ
335
3.2.4. Корреляционные зависимости между основными параметрами
и массой /яа тракторов-погрузчиков [7]
Параметр
Мощность двигателя Р,
кВт
Максимальная мощность
гидросистемы
оборудования Рго, кВт
Максимальная мощность
гидросистемы поворота
База X, м
Колея В\> м
Ширина колеса,
гусеницы Ъ> м
Наружный диаметр
ведущего колеса Д м
Радиус поворота
по середине колеи Д м
Эксплуатационная
грузоподъемность тЭУ кг
Объем основного ковша
КмЗ
Максимальная высота
подъема ковша Н> м
Колесный
(^ 1 ± 0,12 ) (о,112/я]?'75 -24)
( 0,00426 ± 0,0007) /яа
( 0,0022 ± 0,0007) тл
( 0,12 ±0,01) ^т7
(1 ± 0,05 ) (о,67 + 0,057 %тЛ
( 0,022 ± 0,0025) $Щ
( 1 ± 0,07 ) (о,25 + 0,0525 ^щ)
( 0,193 ± 0,03) фщ
( 03 ± 0,045) тй
(0Д36±0,03)/Яа -10"3
( 1 ± 0,09 ) (о,7 + 0,13 $щ[\
Гусеничный
(0,00938 ±0,0011)/Па'96
( 0,0036 ± 0,00066) та
-
( 0,1 ± 0,007) ЗГтГ
( 0,072 ± 0,004) ЗГ/Й7
(0,017 ±0,001) $~щ
-
-
(0,235 ±0,04) /яа
(0,107 ±0,014) та -10"3
( 1 ± 0,08 ) (о,92 + 0,11 }[т^\
Примечание. Масса колесного трактора (6 ... 80) 103 кг,
а гусеничного (2 ... 42) 103 кг
*>от = ( 0,88...1,12 )(13,2 + 0,ЗЗ^т)Ут.
Отвалы бульдозера целесообразно
применять минимизированные по ширине и
максимальные по высоте. Высота отвала может
быть определена из выражения Специальные промышленные тракторы.
Тракторы-погрузчики с гусеничным движите-
Аот = ( 0,82... 1Д8 )(41,88 + 0,37 2^ №, лем отличаются от тракторов общего назначе-
от \ /V * / ния увеличенной базой в связи с установкой
дополнительного опорного катка и заменой
а ширина рессоры жесткой или балансирной балкой [7].
336
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
Рама выполнена как одно целое с порталом
погрузочного оборудования. Смещение центра
давления происходит под влиянием сил
сопротивления при заполнении ковша и массы
груза при перемещении его в поднятом
положении. Давление на почву и углы
устойчивости необходимо определять с учетом этих
факторов по зависимостям, приведенным
выше. Координаты центра масс также находят
для трактора-погрузчика с порожним и
заполненным ковшом (в транспортном положении
и в момент отрыва).
Тракторы-погрузчики с колесным
движителем с управляемыми колесами
применяются для малых тяговых классов, имеют колеса
одинакового или разного размера. Управление
поворотом осуществляется с помощью
передних или задних колес, а также поворотом всех
колес.
Соединение полурам осуществляется с
помощью вертикального шарнира, поворот
происходит за счет относительного
перемещения полурам в горизонтальной плоскости.
Двигатель, коробка передач с раздаточной
коробкой устанавливается на задней полураме,
портал - на передней полураме. Кабина может
располагаться как на передней, так и на
задней полураме.
Болотоходные тракторы, созданные на
базе тракторов общего назначения, тракторов-
погрузчиков или сельскохозяйственных
тракторов, отличаются движителями,
оснащенными уширенными звеньями, и длиной опорной
поверхности гусеницы. Площадь опорной
поверхности выбирается исходя из
проходимости по болоту, т.е. давление на почву
должно быть снижено до допускаемых значений
[14].
В отечественном тракторостроении
первый болотоходный трактор ДТ-55 был создан
на базе сельскохозяйственного трактора ДТ-54.
Увеличение опорной поверхности гусениц
было достигнуто за счет увеличения ширины
консольной части звеньев и опускания
натяжного колеса трактора на грунт при некотором
увеличении длины гусеницы. Однако
одностороннее увеличение ширины консольной части
звеньев гусеницы при работе на твердых
грунтах ведет к их перекосу и ускоренному
изнашиванию. В конструкции трактора ДТ-75
учтены требования, обеспечивающие
разработку болотоходной модификации с
симметричным увеличением ширины звеньев (ДТ-75Б).
Одновременно стала больше длина опорной
поверхности гусениц за счет выдвижения
вперед и опускания на грунт натяжного колеса. В
результате площадь опорной поверхности
возросла в 2,62 раза по сравнению с опорной
поверхностью - ДТ-75, а масса движителей
увеличилась в 1,77 раза, возросла масса
конечных передач, рамы. В результате среднее
расчетное давление на грунт трактора ДТ-75Б
снизилось в 1,9 раза (от 44 до 23 кПа) по
сравнению с базовой моделью. Как
отмечалось, рост массы приводит к
пропорциональному увеличению силы тяги и снижению
надежности деталей трансмиссии и ходовой
части, а также повышенным изгибным нагрузкам.
Подземные тракторы, предназначенные
для работы в стесненных условиях горных
разработок в шахтах и на строительстве
тоннелей, кроме ограниченных размеров не должны
загрязнять окружающую среды отработанными
газами. Ограничение габарита по высоте
обусловило отсутствие кабины, вынос двигателя за
пределы передней колесной базы.
Особенностью компоновки МГТ
является отсутствие кабины, гидрофикации
управления и применение гидрообъемной
трансмиссии.
Лесопромышленные тракторы. В
отечественном тракторостроении гусеничные и
лесопромышленные тракторы создаются как
самостоятельные модели [19, 30]. Колесные
тракторы,выполненные по схеме 4К4, 6К6 или
8К8, для лесопромышленности производятся
на базе сельскохозяйственных машин, в
конструкцию которых вносятся изменения,
направленные на обеспечение надежности их
работы, безопасных условий их эксплуатации,
повышения проходимости, маневренности и
агрегатирования с различным технологическим
оборудованием. Такие машины имеют
технологическую площадку/ за кабиной (типа Т-
150К). Опыт эксплуатации тракторов показал,
что они не обладают достаточной
проходимостью и отличаются высокой трудоемкостью
технического обслуживания.
Снижение давления на лесные почвы и
растительный покров имеет важное значение,
однако следует учитывать, что создание
многоосных машин требует применения сложных
подвесок, тормозных систем и привода на все
колеса и это существенно усложняет машину,
ведет к росту ее стоимости.
Проходимость машины определяется
параметрами трактора, характеристикой
поверхности (почва, снег, болото, растительный
покров и др.) и условиями труда водителя и его
квалификацией. Требования к последней во
многом зависят от конструкции машины.
Колесные тракторы с шарнирным соединением
полурам обеспечивают преодоление
препятствий без потери контакта смежных колес с
опорной поверхностью. Корреляционная
зависимость между параметрами трехосных
тракторов приведена в табл. 3.2.5.
КОМПОНОВКА ТРАКТОРОВ
337
3.2.5. Корреляционные зависимости между основными параметрами и
массой лесопромышленных тракторов (трехосные) [7]
Параметр трактора и
технологического оборудования
Уравнение
Примечание
Мощность двигателя Ру кВт
Колея трактора Д м
База трактора Ьу м
База задней тележки X?, м
Навесоспособность трактора
Ян,т
Грузовой момент
гидроманипулятора Мт
Вылет стрелы
гидроманипулятора ЬСУ м
Масса технологического
оборудования (агрегатов) та, т
Ширина задней платформы
а»пл> м
Длина задней платформы
1пл, м
1325,7 - 335,9тп + 29,4 т2 - 0,81 /я3
Ц57 + 0Д72/Я- 0,059 тп1
6,25-033/и + 0,0189т2
2,67 + 0,96 т - 0,074 т2 + 0,0019т3
(45,60 - 6,406 т + 0,286 т2 ) 103
( 0,892+0,483 т) 103
61,49 - 14,0т +1,137т2 - 0,029т3
( 0,471 + 0,064 т - 0,0068 т2 ) 103
6,087 - 1,108 т + 0,104 т2 - 0,0029т3
46,65 - 11,0 т + 0,93 т2 - 0,025 т3
Масса трактора
т = (5,5 + 19Д) 103 кг
без транспортируемого
груза и
щ = (103 + 30,5) 103 кг
с транспортируемым
грузом
Тип и конструкция технологического
оборудования определяются назначением и
технологией выполнения работ в
лесозаготовительном производстве. Технологическое
оборудование подразделяется на рабочее и
дополнительное, т.е. устанавливаемое на период
выполнения конкретного вида работ в
различных местах трактора. Общим требованием к
расположению оборудования является
обеспечение устойчивости трактора и минимальное
влияние на показатели проходимости, так как
масса трактора с установкой оборудования
увеличивается до 60 %, а допускаемая
суммарная масса технологического оборудования и
груза (или его части, эксплуатационной массы
трактора без технологического оборудования)
составляет 75 % (в перспективе 100 %).
Увеличение координат центра масс при
расположении оборудования над кабиной
приводит к снижению углов поперечной и
продольной устойчивости, к смещению центра
давления, которые следует определять с учетом
транспортируемого материала (пачки деревьев
и др.). Причем при нагруженном и холостом
ходе трактора углы устойчивости должны
соответствовать заданным.
Необходимость удовлетворения
требования по агрегатированию гусеничного трактора
с машинами привела к созданию большой
площадки для размещения технологического
оборудования. Двигатель расположен в
передней части трактора, кабина смещена вперед
влево по ходу машины, и частично находится
над двигателем и гусеницей.
Такая компоновка позволяет
расположить переднюю часть пачки леса близко к
центру опорной поверхности движителей
(гусеницы), практически не смещая центр
давления. Центр масс смещен незначительно
вперед относительно центра давления, что
позволяет устанавливать челюсный погрузчик.
Наличие технологической площадки сзади и
сборка кабины позволяет протягивать дерево
при обрезке сучьев.
Трактор имеет рамную конструкцию, на
которой крепятся сборочные единицы и
детали, а также технологическое оборудование.
Отечественные гусеничные лесопромышлен-
338
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
ные тракторы имеют балансирно-рычажные
подвески ходовой части. У трактора ТТ-4М
подресорена только передняя каретка
подвески, а задняя установлена жестко, что
позволяет практически сохранить клиренс трактора
при догрузке его технологическим
оборудованием и пачкой леса, но увеличивает
динамические нагрузки на ходовую часть и другие
детали, снижает скорость движения.
Дорожный просвет трактора выбирается из условия
обеспечения движения по неподготовленным
склонам с пнями высотой до 0,5 м и
снижения сопротивления движению по глубокому
снежному покрову. Параметры движителей
выбираются из условия обеспечения
проходимости по местности, обеспечению
минимальных потерь мощности и заданной надежности
его работы. При определении конструктивных
параметров лесопромышленных тракторов
следует исходить из наиболее тяжелых условий
их работы. Сопротивление движению
определяется средним пиковым давлением под
опорной поверхностью гусеницы и коэффициентом
перегрузки. Допускаемое максимальное
пиковое давление для трактора при движении по
снежному покрову не должно превышать
0,06 МПа, что соответствует среднему
давлению 0,02 МПа.
Потерей проходимости
лесопромышленного трактора по снежному покрову следует
считать невозможность его движения при
касании днища поверхности пути. При этом
сила тяги меньше или равна силе
сопротивления Гк ^ /у + Гк р . Дорожный просвет
выбирается из условия Ад ^ Н^, где Н^ -
глубина колеи. В практике конструирования
тракторов дорожный просвет Ад = 0,575 ... 0,675 м
для гусеничных и Ад = 0,585 м для колесных
4К4 и других полноприводных.
К параметрам, изменяющим давление
движителей на опорную поверхность,
относятся длина и ширина гусеницы, число
опорных катков и их радиус. Изменение ширины
гусеницы незначительно влияет на
сопротивление движению. Например, для снижения
сопротивления в 2 раза ширину гусеницы
необходимо увеличить в 8 раз. Изменение
базы трактора (ее увеличение) без увеличения
числа катков п^ не приводит к изменению
пикового давления под ними, а значит, к
уменьшению сопротивления качению. Если
ПкХ^к = Як 2^2» го такие две схемы ходовой
части эквивалентны по сопротивлению
движению трактора. При постоянном пиковом
давлении снижение сопротивления движению
можно достичь только уменьшением ширины
гусеничного движителя при одновременном
увеличении длины активной опорной
поверхности. Ограничивающим условием при этом
является поворачиваемость машины, т.е.
длина гусеничного движителя должна быть
максимальной по условиям поворота
^=(^...1,8)^.
Колея трактора Д. выбирается из условия
обеспечения поворачиваемости. Отношение
базы к колее трактора 1^ / Вт изменяется в
зависимости от массы трактора: при массе
/я =6 т Ьг/Вт=1>31> а при /и = 1,2
1^ I Вт = 1,46. Увеличение отношения базы к
колее приводит к ухудшению маневренности,
но обеспечивает неизменным давление на
почву с увеличением массы трактора [30].
При выборе энергооснащенности
необходимо руководствоваться назначением
трактора. Так как рост этого показателя в
различной степени влияет на увеличение
производительности при выполнении технологических
операций и негативно отражается на
надежности работы машины. Так, увеличение
энергонасыщенности ведет к росту
производительности на трелевке леса до определенного
предела. Например, для трактора ТБ-1М
увеличение энергонасыщенности в 1,5 раза (от 7,4 до
11 кВт*ч) приводит к росту
производительности на 4 %, а наработка на отказ по второй
группе сложности снижается на 39 %, а по
третьей - на 16 %.
Лесохозяйственные тракторы.
Разнообразие выполняемых работ обусловило
специфические требования к их компоновке и
сочетанию в ней качеств лесопромышленного и ле-
сохозяйственного тракторов. Наиболее
целесообразно использование гусеничных тракторов
[19, 30].
Трактор агрегатируется с лесными
плугами и культиваторами, лесопосадочными
машинами, покровосдирателями и фрезами,
навесными машинами с активными рабочими
органами, машинами для расчистки полос и
может использоваться в зимних условиях как
трелевочный.
На тракторе могут быть смонтированы
корчевальная машина или каток-осветлитель.
Эффективное использование трактора в ряде
случаев достигается совмещением работ за
один проход. Для чего трактор оборудуется
передним и задним навесными устройствами
необходимой грузоподъемности и
самосвальной платформой и лебедкой. Работа трактора с
рассадо-посадочной машиной, фрезами и
другими агрегатами осуществляется на низких
технологических скоростях, для получения
которых устанавливаются ходоуменьшители.
Расширение универсальности и увеличение
занятости трактора в течение года достигается
переоборудованием его в трелевочную
модификацию. С этой целью с трактора снимаются
заднее навесное устройство, кузов и
устанавливается погрузочное устройство.
КОМПОНОВКА ТРАКТОРОВ
339
Компоновка лесохозяйственного
трактора практически не отличается от
лесопромышленного гусеничного трактора и
характеризуется передним расположением двигателя и
кабины, наличием большой технологической
площадки для установки кузова или
трелевочного оборудования, задним расположением
ведущего колеса (звездочки). Компоновка
позволяет получать различные модификации,
в том числе работающие на грунтах с низкой
несущей способностью. Одной из таких
модификаций является болотоходный трактор,
предназначенный для производства работ по
механизации основных лесохозяйственных и
лесомелиоративных работ и используемый в
качестве базовой конструкции при создании
специальных машин лесохозяйственного и
частичного выполнения операций
лесопромышленного назначения.
Трактор отличается измененной ходовой
системой: увеличенной площадью опорной
поверхности движителя благодаря
применению уширенных гусениц до 0,64 м и
опущенного ведущего колеса, выполняющего при
работе на грунтах с низкой несущей
способностью роль дополнительного опорного катка.
В результате среднее давление на грунт
уменьшено от 0,053 до 0,026 МПа, что
позволяет использовать трактор на
переувлажненных грунтах, предварительно осушенных
болотах, а также на снежной целине с глубиной
снега более 1 м. Колея трактора 1,85 м, база
3,3 м, дорожный просвет 0,583 м (у базовой
модели соответственно 1,69; 2,31 и 0,55 м).
В ряде случаев тракторы
выпускаются с двумя сменными комплектами
гусениц различной ширины. У новых тяжелых
тракторов ширина гусеницы увеличена до
0,550 ... 0,560 м, у легкого класса появились
сменные комплекты гусениц.
Для лесосплавных работ предназначен
плавающий трактор, оборудованный лебедкой,
бревнотолкателем или бульдозером с
гидрозахватом грузоподъемностью до 15 кН.
На воде перемещение трактора
осуществляется посредством гребного винта; а на
суше - от гусеничного движителя. Среднее
давление на грунт не превышает 41 кПа и
может быть снижено до 27 кПа (при установке
новых гусениц).
Сельскохозяйственные тракторы
нетрадиционных компоновок. К тракторам
нетрадиционных компоновок относят [19] интегральные
двухосные колесные тракторы, тракторы-
шасси со свободным обзором,
специализированные многоосные тракторы для сеноуборки
и транспортных работ на склоне, мощные и
сверхмощные колесные тракторы.
Тракторы 1КЕКАС новой серии 6
мощностью 72 ... ПО кВт агрегатируются не только
с шлейфом машин принципиально новой
конструкции, но и с существующим шлейфом
машин, что позволяет снизить начальные
затраты на приобретение орудий.
Особенностями компоновки тракторов
1КГКАС и Е1ЖО ТКАС являются:
полное подчинение компоновки
требованиям агрегатирования; имеются три
свободные зоны для навешивания технологического
оборудования: сзади, спереди, емкостей на
раме за кабиной;
обеспечение хорошей обзорности фронта
работ, машин, орудий, рядков растений с
поста управления, для чего кабина размещена
либо впереди, либо в средней части, двигатель
помещен под кабиной в межбазовом
пространстве трактора;
подчинение компоновки требованиям
эргономики благодаря размещению кабины с
круговым обзором в зоне наименьших
вибраций; для облегчения технического
обслуживания или устранения неисправностей двигателя
и других узлов, находящихся в передней части
трактора, кабина может откидываться вперед с
помощью ручного гидроподъемника;
обеспечение высоких тягово-сцепных
качеств вследствие оптимального распределения
массы по осям и наличия привода 4К4; у
тракторов Е1ЖО ТКАС на переднюю часть
рамы устанавливается металлический балласт,
масса которого для различных моделей
составляет 12 ... 21 % конструкционной массы
трактора; перемещением груза вдоль оси трактора
можно бесступенчато изменять развесовку по
осям от 60 ... 40 % (передний мост к заднему)
до 40 ... 60 %; при необходимости груз
снимают с помощью гидроцилиндра на
специальную подставку;
обеспечение высоких агротехнических
качеств: малый радиус поворота за счет
большого угла поворота передних колес (до 50°);
большой дорожный просвет (до 700 мм);
высокие транспортные качества (максимальная
скорость до 40 км/ч); реверсируемые пост
управления и трансмиссия (Е1ЖО ТКАС).
Тракторы со свободным обзором
сочетают преимущества трактора традиционной
компоновки и самоходного шасси и не имеют
некоторых их недостатков. Основными
преимуществами компоновки являются:
удобство агрегатирования и повышение
тягово-сцепных свойств; перераспределение
массы на заднюю ось (до 70 %),
способствующее увеличению тягово-сцепных качеств и
грузоподъемности фронтальной навесной
системы. Компоновка трактора со свободным
обзором не только облегчает совмещение
операций, но и улучшает функциональные
качества трактора при агрегатировании с
некоторыми однооперационными машинами. Это
достигается разделением комплекта машин к
трактору на группы переднего и заднего
расположения, причем для междурядной обра-
340
Глава 3.2 КОМПОНОВКА И ПАРАМЕТРЫ
ботки преимущественно используют
полноценную фронтальную навеску, а на пахоте и
других работах общего назначения сохраняют
традиционное заднее размещение машин.
Двигатель с горизонтальным расположением
цилиндров находится снизу под полом
кабины, что освобождает зону спереди для обзора
фронта работ и рабочих органов машин,
навешиваемых на фронтальную навесную
систему. Трактор оборудован стандартной задней
навесной системой. При необходимости
свободное пространство спереди может быть
использовано для установки технологических
емкостей. Свободный обзор спереди создает
условия для агрегатирования трактора с
погрузчиком в отличие от специализированных .
погрузчиков, у которых требуется
перекомпоновка трактора для работы на реверсе;
хорошая обзорность спереди и сзади.
Для улучшения обзорности не требуется
перемещать кабину вперед в межосевую зону, как у
интегральных тракторов;
создание известных агротехнических
качеств - более легкий поворот с малым
радиусом, увеличенный до 700 мм дорожный
просвет для проведения химической защиты,
внесения удобрений и междурядной обработки
подросших растений благодаря увеличенному
диаметру и повороту вниз конечной передачи.
С увеличением диаметра колес и уменьшением
их ширины, улучшается проходимость
трактора в междурядиях.
Известна конструкция трактора ВЮ КОУ
с шарнирно сочлененной рамой и четырьмя
ведущими мостами (Канада). Дизель
мощностью 441 кВт расположен на задней
полураме, на передней полураме установлена
комфортабельная кабина и топливный бак
объемом 2 300 л. Для наблюдения за работой
задних орудий установлена телевизионная
система. Масса трактора 23 т. Сочлененная
конструкция трактора в сочетании с колесной
схемой 8К8 должны обеспечить меньшее
воздействие на почву, чем у трактора 4К4
аналогичной массы.
На двухосном тракторе ЬЕЬУ-МШЛТ
Ро^ег-420, состоящим из двух полурам,
соединенных вертикальным шарниром,
установлены последовательно два двигателя
мощностью 154 кВт: один приводит передний
мост, другой - задний. Трансмиссия между
мостами отсутствует. На легких и
транспортных работах один двигатель может быть
отключен. Строенные колеса при массе трактора
15 т снижают воздействие на почву.
Ряд западно-европейских фирм
выпускает многоосные тракторы
специализированного назначения, например, для возделывания
виноградников на склонах.
Трактор мощностью 162 кВт оборудован
ходовой системой 6К6, двумя системами
поворота: передними управляемыми колесами и
поворот всем бортом. Другие особенности
компоновки: низкое расположение центра
масс и увеличенная колея, что в сочетании с
шестью ведущими колесами обеспечивает
высокую устойчивость на склоне, как против
опрокидывания, так и против сползания.
Математическая модель колесного
трактора моноблочной компоновки. При
составлении математической модели осуществляют
декомпозицию общей структуры трактора на
подсистемы. Составив функциональные
математические модели для каждой подсистемы,
их объединяют с учетом топологии системы и
получают полную математическую модель.
Особенностью колесных и гусеничных
тракторов является наличие неголономньгх связей,
осуществляемых элементами движителей
между динамическими системами трактора и
опорной поверхностью. Построение моделей
трактора производится с выделением
неголономньгх связей в отдельную подсистему (или
подсистемы).
Для получения математической модели
системы необходимо использовать уравнения с
множителями Лагранжа:
Л
( дЕх "| дЕ
V ддт ) дд
дЕ„ дЕп дФ
дЯт дЯп
(3.2.0)
.г
где Ек и Еп - соответственно кинетическая
и потенциальная энергии системы; Ф - дис-
сипативная функция Рэлея; дт - обобщенная
координата; дт - обобщенная скорость; Ст -
обобщенная сила; Ху - неопределенный
множитель Лагранжа; Аут, Ау - коэффициенты
неголономньгх связей; 5 - число обобщенных
координат; а - число неголономньгх связей.
При определении обобщенных сил 0,т
принимают во внимание, что рассматриваемые
динамические системы неконсервативны, и
используют соотношение
/-1 /
где 5 И^' - работа 1-й силы на возможном
перемещении системы; Ьдт\ - вариация
обобщенной координаты.
&г
ф-
Прибод переднего
моста
1
г_Т
сю
с»
"*' г-—'
I
__3и ]
Рис. 3.2.6. Схема динамической модели подсистемы
двигатель-трансмиссня-всдущие колеси
трактора моноблочной компоновки
(при замкнутом сцеплении Ф\ приведенный момент
инерции масс двигателя /ц = /м + /ф1; Фбд -
фрикционная муфта блокировки дифференциала)
Применяя принцип декомпозиции
системы по неголономным связям и вынося него-
лономные связи в отдельную подсистему,
выделим и рассмотрим две подсистемы машины:
двигатель-трансмиссия-ведущие колеса; остов-
подвеска-мосты-шины [30]. Для определения
кинетической и потенциальной энергий
системы, числа степеней свободы и выбора
обобщенных координат рассмотрим расчетные
схемы подсистем. Схема динамической
подсистемы двигатель-трансмиссия-ведущие
колеса представлена на рис. 3.2.6. С целью
упрощения элементы привода передних колес
на ней не показаны. Число упругих элементов
при моделировании данной подсистемы
принято равным пяти. Один из них жесткостью
СД1 расположен между маховиком двигателя и
узлом деления потока мощности (УДМ) по
мостам и колесам, а остальные с жесткостями
Спу - между УДМ и ведущими колесами (для
передних колес 1=1, задних /=2, левых
/ = 1, правых ] =2). При замкнутых
сцеплениях Ф] и Фг рассматриваемая подсистема
машины с колесной формулой 4К4 имеет
шесть степеней свободы. Обобщенными
координатами могут быть выбраны угловые
координаты фд, ф1, <рК0 поворота маховиков с
моментами инерции /д, 1\, 1^ .
Кинетическая и потенциальная энергии системы
определяются по известным из теоретической
механики формулам.
Расчетная схема второй динамической
подсистемы остов-подвеска-мосты-шины
приведена на рис. 3.2.7. Для определения
положения машины в пространстве введем три
взаимно перпендикулярные плоскости.
Горизонтальная плоскость Ну от которой отсчитывают-
Рнс. 3.2.7. Схема динамической модели подсистемы
остов-подвеска-мосты-шины колесного трактора
моноблочной компоновки
ся ординаты высот микропрофилей, и
продольная вертикальная плоскость Г считаются
неподвижными, а поперечная вертикальная
плоскость Д проходящая через центр масс
остова машины перпендикулярно к
плоскостям Н и Гу движется относительно их со
скоростью, равной проекции на ось Ох
скорости центра масс остова машины У^ = хс .
Плоскости Я, Г и Я на рис. 3.2.7 не
изображены.
Приняты следующие системы координат:
1) неподвижная система координат Охуъ
ось Ох которой совпадает с линией
пересечения плоскостей Ни Гу л ось 01 лежит в
плоскости Г; 2) подвижная система координат
Сходно > движущаяся поступательно
относительно неподвижной системы координат Оху1
так, что соответствующие оси остаются
параллельными друг другу; началом координат
системы служит точка С центра масс остова
машины; 3) подвижная система координат
С^цС, у неподвижно связанная с остовом
машины; начало этой системы находится в
центре масс остова, а оси совпадают с главными
осями инерции остова; 4) вспомогательные
неподвижные системы координат,
совпадающие с главными или главными
центральными осями инерции соответствующих
элементов системы (например, колес 5/у> Л//> С/у »
мостов ^ьЛьСО в исходном положении
равновесия системы.
342
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
В математической модели системы,
используемой для тягово-динамического расчета
и проектирования на его основе машины,
предполагается, что траектория движения
центра масс описывается стационарной случайной
функцией. Движение считается устойчивым, и
центр масс постоянно стремится к плоскости
Гу т.е. ус -> 0 и М\ ус] = ьу У где 8^ -
величина, близкая к нулю. Такое движение будем
считать в среднем прямолинейным.
Подсистема остов-подвеска-мосты-шины
имеет девять степеней свободы. Обобщенными
координатами выберем: Хс, Ус и %С -
продольную, поперечную и вертикальную
координаты центра масс остова в неподвижной
системе координат Оху% а, р, у - углы
поворота остова соответственно относительно осей
Сх$, Суо и Сф подвижной системы
координат Схо^о^о ; Р1 - угловое качание балансир-
ной балки переднего моста в поперечной
плоскости машины; Си и Сп ~ вертикальные
перемещения осей вращения передних колес
машины.
При разработке математической модели
машины приняты следующие допущения:
остов машины - твердое тело, имеющее
продольную плоскость симметрии; центр масс
остова в процессе движения может
отклоняться от продольной неподвижной плоскости
только вследствие боковой деформащш шин
(боковое скольжение шин учитываем лишь
при определении потерь мощности); рыскание
остова определяется только боковой
деформацией шин; продольным скольжением и
продольной деформацией шин ведомых колес
неполноприводной машины пренебрегаем;
уравнения связей между угловыми и
линейными отклонениями точек остова и мостов
машины при колебаниях линейны; силы
трения в элементах шины, трансмиссии и
различных сопряжениях элементов системы
пропорциональны относительным скоростям, а
силы трения без смазочного материала в
подвеске пропорциональны нормальным
нагрузкам в опорах.
С учетом этих допущений уравнения
позиционных связей системы имеют вид:
С1 = *с - к <*; 51=^с-^а;
§0 =хс-(Н1а±02Ву);
Сгу =*С +/2а±0,5ЯР;
хп р = ХС - Нп ра ; Т.и р = 1с + ^п ра 5
Лр1у =?1у ~*С +/1аТ0,5Лрь
где Сь §1 - вертикальная и горизонтальная
координаты оси шарнира балансирной балки
переднего моста; т»с - вертикальная
координата центра масс остова, отсчитываемая от точки
Со, соответствующей его положению в
исходном состоянии статического равновесия
трактора; 1\9 ?2 - продольные расстояния от осей
переднего и заднего мостов до центра масс
остова; С/у Д/у - координаты вертикальных и
горизонтальных перемещений осей колес; В -
колея трактора; хлр> 1ир - координаты
горизонтального и вертикального перемещений
точки сцепного устройства; /пр - продольная
координата точки сцепного устройства
трактора относительно центра масс остова; Арц -
деформации упругих элементов подвески
передних колес.
При определении кинетической энергии
сложной механической системы целесообразно
выделять ее инерционные элементы
дифференцированно, с учетом их возможных
относительных движений в принятых обобщенных
координатах. Так, при вращательном
движении подсистемы трактора остов-подвеска-
мосты-шины относительно оси Суц
рассмотрим ее как одно твердое тело; относительно
оси Схо выделим два твердых тела: массу
остова с задними колесами, вращающуюся
относительно оси СхоУ и массу балансирной балки
переднего моста, вращающуюся относительно
оси ^1 • Поворотом подрессоренных колес
относительно оси Схо пренебрегаем. В
поступательном движении относительно оси 01
рассмотрим три твердых тела. Одно из них
включает массу остова и балки переднего
моста, а два других представляют собой передние
колеса трактора.
Кинетическая энергия агрегата при
полноприводном тракторе с колесной формулой
4К4 в обобщенных координатах имеет вид
Ек = 0,5|/я(л:2 +у1 +р1у2} +
+(т0+тг) (*2 + р2а2) + /ИоР*Р2 -
-2/^Ру +/Я1РМ1Р12 +^/лк1уС12у +/дФд +
У
+ Л + ^2 /»кп + *Ъ /("хп"*))2 Ф? +
КОМПОНОВКА ТРАКТОРОВ
343
/ = 1,2; У = 1,2, (3.2.1)
где /я, Л1о, /Их, /я^у - массы соответственно
трактора, его остова, балансирно
подвешенного переднего моста (без учета массы колес) и
переднего подрессоренного колеса (со всеми
присоединенными к нему деталями);
/д, 1\у /2, /з> 3*1} ~ приведенные моменты
инерции масс соответственно двигателя,
элементов трансмиссии и колес; /^ -
центробежный момент инерции остова относительно
осей Сдсо и С^о при их совпадении с осями
СЕ, и СС,; рх - радиус инерции остова
трактора относительно оси Сх$; р^ - радиус
инерции остова и балки переднего моста
относительно оси Су о ; р^ - радиус инерции
трактора относительно оси С^о; рМ1 - радиус
инерции балансирной балки переднего моста
относительно оси подвеса; икп и и$ -
передаточные числа соответственно коробки
передач и главной передачи; 2^ м - кинетическая
энергия агрегатируемой машины.
При составлении выражения (3.2.1)
учтено, что 1Х у = /у^ = 0 в соответствии с
допущением, что остов машины имеет
продольную плоскость симметрии.
При определении потенциальной энергии
системы будем рассматривать такое ее
возможное перемещение, при котором все
относительные перемещения элементов системы
малы, а характеристики упругих' элементов на
этих перемещениях линейны. Это допущение
после составления дифференциальных
уравнений будет снято путем введения нелинейных
характеристик упругих элементов.
Потенциальная энергия рассматриваемой
динамической системы в обобщенных координатах
^п =0>5|сд1(фд-Ф1)2 +
+ ХЕСп(/ [ф1/(икп«о)-Фк/уИк] +
+ 2/р1./(^ -^С+^аТадлР!) +
+ ЕслЛ*и-су)2 +
^
+ Спр(хс-ИПр-Хсм) \+ЕПЛЛ,
(3.2.2)
где сД1, сПу, ср1у - приведенные жесткости
соответственно трансмиссии и рессор
подвески передних колес; сгц, сг2у - радиальная
жесткость шин соответственно передних и
задних колес; спр - жесткость сцепного
устройства; ик - передаточное число колесной
передачи; НП р - высота расположения точки
крепления сцепного устройства на машине;
хс м - координата центра масс агрегатируемой
машины; Цц - случайные функции,
характеризующие микропрофиль дороги или грунта
под каждым колесом машины при точечном
контакте или сглаженный шиной
микропрофиль (при учете размеров пятна контакта);
ЕПм ' потенциальная энергия
агрегатируемой машины.
Выражения для определения
кинетической и потенциальной энергий
агрегатируемой машины составляют с учетом
особенностей ее динамической системы.
Чтобы определить диссипативную
функцию Рэлея Ф, в формулу (3.2.2) вместо
обобщенных координат подставляют
обобщенные скорости, а вместо коэффициентов
жесткости - коэффициенты неупругого
сопротивления к с теми же индексами.
При использовании декомпозиции
системы по неголономным связям на
подсистемы и выделении этих связей в отдельную
подсистему работу реакций неголономных
связей на возможных перемещениях не
вычисляют. Необходимо лишь учесть работу
внешних сил, приложенных к каждой из
подсистем, внутренних реакций неидеальных
связей подсистем (сил трения), крутящего
момента двигателя и тормозных моментов. Кроме
того, учитывают работы реактивных моментов
подсистемы двигатель-трансмиссия-ведущие
колеса, осуществляющих поворот агрегатов
344
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
системы относительно остова вследствие
эластичности подвески, а также поворот самого
остова в продольной и поперечной
плоскостях.
Общее выражение для определения работы
силы на возможном перемещении имеет вид
8^=^,8?,,
где Р - вектор силы; 8 /) - вариация
радиуса-вектора точки приложения силы.
Работа сил и моментов, действующих в
подсистеме двигатель-трансмиссия-ведущие
колеса рассматриваемой машины моноблочной
компоновки, на возможных перемещениях
системы определяется следующими
выражениями:
работа двигателя
5Жд=Л/д8Фд;
работа сил трения в трансмиссии
работа тормозных механизмов
5^т.м = ~^^МтУ 5Фк/у •
/ У
где АГД - крутящий момент на валу двигателя;
Муу - моменты в упругих элементах
трансмиссии; 5 фд , 5 ср1, 8 срК0 - вариации
угловых координат соответствующих масс
(двигателя, трансмиссии, ведущих колес);
т|тР - КПД трансмиссии; Мту - моменты
тормозных механизмов, приведенные к осям
вращения колес трактора.
Реактивные моменты в данной
подсистеме работы не выполняют, так как в машине
моноблочной компоновки все узлы
прикреплены к остову неподвижно.
Работу сил и моментов, приложенных к
подсистеме остов-подвеска-мосты-шины со
стороны внешней среды и подсистемы
двигатель-трансмиссия-ведущие колеса (реактивные
моменты), определяют по формулам:
работа моментов сопротивления качению
ведомых колес с учетом преодоления
микронеровностей профиля дороги
' У
х (8хс -#/8а*0,5Д8у);
работа моментов сопротивления качению
ведущих колес с учетом преодоления
микронеровностей профиля дороги
' У
+«ср{/(5*С - #/8<* * 0>5Я8у)];
работа силы тяжести машины при
преодолении подъемов-спусков, определяемых
макропрофилем дороги, а также работа,
обусловленная наличием боковых уклонов (углы
подъемов-спусков и боковых уклонов считаются
малыми);
8*Р>в = -/я#(ам8хс +рм8д>с);
работа силы сопротивления воздуха Р^
(учитывается только для быстроходных
тракторов при движении с прицепами)
5»Ъ =-Р„Ьхс;
работа сил трения ^.тр без смазочного
материала в элементах подвески
5^с.тр = -Х/с.тР1у8бпДр17 х
У
х(с^1у -8*с +'1 5« ^0,5^!);
работа реактивного момента в
продольной плоскости
ЫУ^ =-Ма{итр-\)цтр5а;
работа реактивного момента в
поперечной плоскости
8Жрр = МД (икп и0 - 1) лкп Ло 5Р ,
где 2^ц - нормальные реакции дороги; /у -
коэффициенты сопротивления качению;
аср« - угол наклона аппроксимирующей
площадки контакта колеса с опорной
поверхностью в продольной плоскости; г$у - радиус
качения свободного ведущего колеса
(при условии, что касательная реакция
дороги Х^щ = 0); тп - масса машины:
т = щ + п%1 + ^ т^х] ; ам - угол подъе-
У
ма-спуска макропрофиля опорной
поверхности, являющийся случайной функцией
перемещения; Рм - угол поперечного уклона
КОМПОНОВКА ТРАКТОРОВ
345
опорной поверхности; итр - передаточное
число трансмиссии; Лтр> Лкп» Ло ~ КПД
соответственно трансмиссии, коробки передач
и главной передачи; бдс^, 5а, 5у, бф,^,
5р, Ьус, 5С1у> ^Р1 " ваРиаЦии
соответствующих обобщенных координат; Арху -
относительные скорости элементов трения подвески:
АР1У = Су-*С+'1**<^ЛР1-
Значения аср^ определяют по формуле
,2 т*</
12у
*ср/у
ср
А
3
|?/у (*-т)тА,
гае Уср - средняя скорость поступательного
движения машины за некоторый конечный
промежуток времени, в течение которого
скорость машины можно считать постоянной;
/к/у - длина пятна контакта шины с опорной
поверхностью (определяется по формулам,
приводимым в теории трактора); х - время,
отсчитываемое от момента начала контакта
точки протектора шины с опорной
поверхностью; тку - полное время длительности
контакта: тку =/К(//уср > 1 ~ аргумент
функции микропрофиля опорной поверхности
(время).
При определении силы тягового
сопротивления почвообрабатывающего орудия
используется формула акад. В. П. Горячкина.
Работу сил, приложенных к прицепу,
находят по формулам, аналогичным
приведенным выше для трактора.
Выражение обобщенных сил для
полноприводной машины
СФд=Мд;
*Ф1
Мчн&т М„
"кп"0
0*.=-
*хс
V / У
0Ус = -/я#Рм ;
0гс =Х^с.тР1у8бп Ар1У ;
У
Са = Х2Я' 2*У асР(/ "
' )
-ЛГд(«тр-1)Лтр-^Х^.тр18вП Ар1у ;
)
2Р =3/д(«/кп«о-1)лкпЛо;
бу =0,5^^^(±гк(/аср/у);
СР1 = 0,5 2?]Г(±^тр1у8№Ар1,);
0^1У =-^с. тр1у8«П Ар17;
для неполноприводной машины с
задними ведущими колесами иначе определяются
лишь силы Сяс, 0а и Су :
Охг.--
**с
Х^к1уЛу +
V У
+ ХХгк/уаср/у+'"$СХм +^
-Мд (итр - 1) лтр - ^Рсярцфь Ар1у ;
СУ = 0,5 Я
Е(±^жу/У)-
+ ХЕ(±^к/Уаср/у)
При вычислении коэффициентов Аут
используют уравнения неголономных связей.
При этом индекс V соответствует
порядковому номеру неголономной связи, а т -
обобщенной координате.
Уравнение неголономной связи любого
ведущего колеса машины, осуществляемой в
продольной его плоскости, в общем случае
движения имеет вид
346
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
Х/у + хс + (У + «к/^С - #/у« * (°>5 ^У)у ±
±//ак/у +аср/у ^/у -
-(''к/у -^Л/у "^(/(Фк/у =0, (3.2.3)
где Х/у - продольная упругая деформация
элементов шины; ак/ - угол поворота
управляемых колес (принимается положительным
для передних и задних колес при повороте их
влево); Ну, // - вертикальная и продольная
координаты оси вращения колеса
относительно центра масс машины; X/ - коэффициент
продольной эластичности шины; Хку -
касательная реакция дороги; Гщ - свободный
радиус колеса; Ьу - коэффициент внешнего
скольжения шины относительно опорной
поверхности дороги (для ведущего колеса -
коэффициент буксования).
Значение Хк вычисляют исходя из
условия уравновешивания этой реакции силой
продольной упругой и неупругой деформаций
беговой дорожки шины:
Хк=схХ + *хх, (3.2.4)
где с% - коэффициент продольной жесткости
шины; к% - коэффициент неупругого
продольного сопротивления шины.
Для задних колес трактора моноблочной
компоновки \у не являются обобщенными
координатами, поэтому при использовании
уравнения (3.2.3) значения ^/у выражают
посредством уравнений позиционных связей
через другие координаты.
Уравнение неголономной связи,
осуществляемой в поперечной плоскости колеса,
имеет вид
У/у +[(^к/у/^у/у)(1+5л)-^-а^]^С +
+ус ±{оу5 В [(ГКу/Ку у)-аК>]-1,}у=0,
(3.2.5)
где \Цу - поперечная деформация шины;
Уху - боковая реакция дороги; Ку у -
коэффициент сопротивления уводу; 5^ -
коэффициент внешнего бокового скольжения шины
относительно опорной поверхности дороги.
Значения Ук вычисляют по формуле
Ук = Суу + куу,
где Су - коэффициент боковой жесткости
шины; ку - коэффициент бокового
неупругого сопротивления шины.
При составлении дифференциальных
уравнений движения системы с
использованием множителей Лагранжа необходимо
определить значения коэффициентов Аут и Ау из
(3.2.0), используя уравнения неголономных
связей (3.2.3) и (3.2.5) передних и задних
колес в их продольных плоскостях:
для передних колес
А - -гс • 1
ЛуФк0 " гк1у>
'Аухс = Ь
чУс = У + акЬ
^уа = -Н\1 I
Ауу =?095В±1хак1;
А =Х1у +(^А1У +г0151у)Фк1у;
V = 1, 2; ]
для задних колес
АУХс = 1;
Ачус =У +<*к2;
^1с = аср2у5
Луа = /2аср2у ~ Н2'у Г
А^ =±0,5Баср2у;
Ауу = ТО,52?±/2ак2;
А\> = Х2] + (*2^к2у + ''0252у)Фк2у;
V = 3, 4. ]
Значения коэффициентов Аут и Ау,
уравнений (3.2.5) неголономных связей для
передних и задних колес в их поперечных
плоскостях, необходимые для использования
их в выражениях с множителями Лагранжа
(3.2.0)
КОМПОНОВКА ТРАКТОРОВ
347
аухс =-(у +ак/);
А^ =±(7/ +0у5Вак1);
Ау = 4>/у +(Гк/у/*у/у)*С ±
±0,5В(гку/Куу)у;
у = 5, ..., 8.
Для колесного трактора Ху при V =
= 1, ... , 4 равны соответствующим
касательным реакциям опорной поверхности на колеса
Хку > а Ху при V =5, ... , 8 - боковым
реакциям Уху .
Подставляя значения функций Ек , Еп ,
Ф, С/л> коэффициентов Аут и множитель
Ху в уравнения (3.2.0), получим
функциональную математическую модель трактора.
Функциональная математическая модель
полноприводного трактора моноблочной
компоновки с балансирной подвеской переднего моста
и упругими элементами передней подвески
имеет вид системы обыкновенных
дифференциальных уравнений:
Удфд = Мд - МудХ - МДД1;
Л +^2/"кп + ^3/ ("кпИо) (ф1 =
= Щ.дХ +^д.д1 -("кп«о) *
' У
^кУ/Фк/у =(^у/у + ^д/у)ик -
~(^к/у +^Гк/у/(/)гк(/ ~ Мч1] I
™*С =2ХКК/У ~^к/уаср/у -
' У
' У
(/я0 + т^^с = 2Д^у.Р1у + ^д.Р1у +
У
+^с .тр1У ^ Др1у + ^к2У - ^к2У + ^кгу аср2У) 5
(/и0 ч-т^руа = #Пр(^у.пр+^д.пр)-
"Е^КрХУ +/ДР1У +^с.т*у*епАр1,)-
-'2 (^к2у ^ ^к2у + ^к2у аср 2у )] "
"22^ '(^к/У "^к/уаср/у)~
' У
-Мц\итр- 1)лтр^
/По р^р = 0,5 В х
Х 2 И ^2у - ^к2у + Хъ1) аср 2у ) ] +
+ Л/д («кп*<0 " 1) ЛкпЧО + Л* У ;
/пр^у =0,52?]Г ХН^к/уаСр/у "^к/у )] +
' У
+ Гк/у(//+0,52?ак/)]|;
^1Рм1Р1 = 0,5Дх
Х X [ ± КрУ + ^Д Р1У +^' .тр1у ^Ар1у)|;
пЧ\^\] = ^к1у - ^к1у - ^у.р1У "
-^д.р1у -^с.тр1у8бПДр1у \
I = 1, 2; у = 1, 2,
(3.2.6)
где Му Д1, Л/у(/ - моменты в упругих
элементах на участках маховик-УДМ, УДМ-
соответствующее ведущее колесо; ^д.д1 >
ЛГД^ - моменты в диссипативных элементах
вязкого трения на «тех же участках
трансмиссии; 2уПр> ^у.р1у " силы в упругих
элементах соответственно сцепки с агрегатируемой
348
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
машиной и рессор подвески передних
колес; ^д.пр>^д.р1у - диссипативные силы в
тех же элементах; Гс тр1у - сила трения в
подвеске переднего колеса; Оку -
статические нагрузки на колеса.
Дополнив эту систему уравнений
уравнениями (3.2.3) и (3.2.5), а также уравнением
всережимного регулятора двигателя, получим
полную математическую модель трактора.
Момент двигателя Мд в уравнениях (3.2.6)
представляем функцией угловой скорости фд и
отклонения рейки топливного насоса ЛрД, для
определения которого используется уравнение
регулятора. В простейшем случае оно имеет
вид
'ЯрЛд + ^рд^рд + ^в = Кл ( Фд/ Ирд) >
где /Ярд - приведенная к муфте масса
движущихся частей регулятора и топливного насоса;
^рД - координата муфты регулятора,
связанная с отклонением рейки топливного насоса
отношением ЛрД = к^ %рц (здесь к^ -
коэффициент передачи); црд - коэффициент
вязкого трения; Ръ - восстанавливающая сила,
равная приведенной к муфте силе пружины
регулятора; Кп - коэффициент
поддерживающей силы, которая обусловлена
центробежной силой грузов регулятора; ирд -
передаточное число привода вала регулятора.
Агрегатируемая машина при
несимметричности результирующего тягового
сопротивления относительно вертикальной оси
трактора С$1ц создает разворачивающий момент
Мр , что учтено в соответствующем уравнении
системы (3.2.6).
Для неполноприводной машины
исключаются уравнения относительно фк« для
неприводных колес, а также уравнения неголо-
номных связей в продольной плоскости этих
колес. Одновременно в уравнениях
относительно Хс, ос и у сумма \\ ^у. 1у
заменяется на — 2_. 2к 1 ]/\ у •
Упругие моменты трансмиссии при
блокированном межколесном дифференциале того
или иного моста
Щц =
сп/у{ф1/(«кп"о)-фк(/«к-
-0^Дп/у8бп[ф1/(икп«0)-
-Фк/у"к]} ПРИ
|ф1/(«кп"о)"Фк/у«к|^О^Ап(/;
О в противном случае,
а при неблокированном
(3.2.7)
муУ 4
^п|ф1/(«кп«о)-0,5^фк/у1/к/
-0,5ДП(/88П
У
Ф1/(иКпИо)-°>5х
► при
Ф1
/("кпИо)-
-0,5^Фк/у"к/
У
^0»5АП(/;
О в противном случае,
(3.2.8)
где сп у и Ап у - приведенные к оси колес
жесткость и суммарный зазор участка
трансмиссии от УДМ до соответствующих ведущих
колес; сп = 2Псп/у /^сп(/ •
При блокированном приводе всех колес
полноприводного трактора используют
формулу (3.-2.7), в которой операции X и П
выполняют по индексу /. При установке в
приводе переднего моста муфты
свободного хода в выражениях (3.2.7) и (3.2.8)
Ф1 умножают на коэффициент
кинематического рассогласования ак, функцию 8^п не
используют, а граничное условие изменяют на
|*кФ1/("кп%)-фк/у"к|*0-
На участке трансмиссии^ маховик-УДМ
моменты упругого и неупругого
сопротивлений определяют по формулам:
КОМПОНОВКА ТРАКТОРОВ
349
^у.д1=Сд1(фд-ф1);
Л*д.д1 =^д1(Фд-Ф1)-
Если сцепление трансмиссии снабжено
демпфером крутильных колебаний,
необходимо также моделировать его работу, учитывая
при этом силу сухого трения демпфера и
используя коэффициент трения |ЛД1.
Упругая сила сцепного устройства
сп р[хС ~ хс м ~ Нп $*• ~
-0,5Д3.с8бп(хс-хсм-#пра)];
ГУ п р ~
при \хс -хсм-Нпра\^0у5Азс;
О в противном случае,
ВДе спр " жесткость сцепки; Д3.с - зазор в
сцепке.
Нормальные реакции дороги
^к1у = | +*т1Д01; -С1у) при 7^1у ^ 0;
0 при 2^1у < 0;
&*2] = Ск2у +сг2у х
Х(^2У"^С -/2«±0,5Бр) +
- к 2; = | +*г 2у (?2у - «с - ^а * 0,5 Лр)
при Кь2] ^0;
0 при К^ 2] < 0,
ВДе сг1у> сг2у " радиальные жесткости шин
(могут быть приняты нелинейными
функциями деформации на основе экспериментальных
исследований); кгу> к^ - коэффициенты
радиального демпфирования шин.
Усилия упругого и диссипативного
элементов подвески передних колес трактора
Гу.9Ч = СР1У (С1у " *С + к* * 0,5^) ;
*д.Р1У = *Р1У («1У " *С + АЛ Т 0,5^) ,
где Ср1/ и ^р1у - соответственно
приведенные жесткость и коэффициент демпфирования
подвески (при условном расположении
элементов подвески в продольной плоскости
колес).
Коэффициенты жесткостей шин сгу и
упругих элементов подвески срху являются
нелинейными функциями деформации. При
расчетах с помощью ЭВМ используют
кусочно-линейную их аппроксимацию или задают
их в форме таблиц. В последнем случае
применяют интерполяционную формулу Лагран-
жа. Как показывает опыт, при исследовании
тяговой динамики машины сгу можно
считать постоянным, а изменение ср\^ в
функции деформации упругого элемента подвески
необходимо учитывать. Если отсутствуют
амортизаторы, то крц можно также считать
постоянным.
Характеристики двигателя представляют
уравнениями регрессий вида
^д = ЯдО + вд1© д + ад2(» д + ДдзЛрД +
+ад4®д%д +Яд5^>Д;
Яе = «,0 + «*1* д + «*2® д + «*3 V +
+а^4а>д*рд +^5Лрд»
где ЛГд - крутящий момент двигателя, Н • м;
#е - удельный расход топлива, г/кДж; сод -
угловая скорость коленчатого вала двигателя,
рад/с; Лрд - отклонение рейки топливного
насоса, мм.
Математическая модель колесного
трактора раздельно-агрегатной компоновки.
Уравнения неголономных связей те же, что и выше
[30]. В них могут быть учтены дополнительно
геометрические особенности подвески
ведущих мостов, т.е. введена зависимость
Н,=г{т.с,%у).
Схема подсистемы
двигатель-трансмиссия-ведущие колеса приведена на рис. 3.2.8.
Математическая модель трактора с
механической трансмиссией будет частным случаем
модели, построенной на основе схемы,
приведенной на рис. 3.2.8. Массы с моментами
инерции /н и /т , учитывают инерционные
350
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
Рис. 3.2.8. Схем* динамической модели подсистемы двигатель-трансмиссия-ведущие колеса трактора
раздельно-агрегатной компоновки
Рис. 3.2.9. Схема динамической модели подсистемы остов-подвеска-мосты-шины колесного трактора
раздельно-агрегатной компоновки
свойства насосного и турбинного колес гидро- тракторных коробках передач переключаются
динамической передачи и присоединенных к под нагрузкой или даже без разрыва потока
ним других деталей трансмиссии. Для блоки- мощности с помощью многодисковых фрик-
ровки гидропередачи предусмотрена фрикци- ционных муфт и тормозов. Количество одно-
онная муфга Ф бгг- Ступени в современных временно включаемых фрикционных алемен-
КОМПОНОВКА ТРАКТОРОВ
351
тов управления определяется числом степеней
свободы коробки передач.
В рассматриваемой схеме предусмотрено
использование двух фрикционных муфт Фд и
Ф2, однако это не сужает применимость
полученной математической модели, так как ее
легко трансформировать к любой более
сложной схеме трансмиссии введением
дополнительных уравнений. Показанные на схеме
массы с моментами инерции /х и 1у
принадлежат второй подсистеме и используются для
наглядности и облегчения составления
уравнений.
Схема подсистемы остов-подвеска-
мосты-шины представлена на рис. 3.2.9.
Последовательность составления
дифференциальных уравнений движения и
принимаемые при этом допущения аналогичны
описанным выше. Поэтому опустим этапы состав- _ . .
ления и преобразования исходных зависимо- ~7,^кл/1 У +акя)
стей и приведем в окончательном виде
системы дифференциальных уравнений
движения динамической системы трактора
раздельно-агрегатной компоновки:
-*"д.дн ^*у. кп.р ^д.кп.р»
(Лгр/+'Ям/*м))фм.р/ =("к-1)х
)
-(«О -1)(<^у23/ +^д23/);
т +
ЕЕ'^/М2
*с =
=1
X Х*У -"^^к/у/# ""2-»^кл/асрл/ -
1У-пр
-*д.пр -"#<*м -К +
/дфд = Л/д - Мут - Мддн ;
/нфн = Мут + Мддн -Мн-Мфб;
/тфт = МнК + Мф б - Мфх;
/!Ф! = Мф1иТ! - Мф2/ «12 ;
/2ф2 = Мф2 - 2^ ( ^у23/ + ^/д23/ ) 5
I
/3/фз/ = Щ ( Му2Ъ1 + Мд2Ц ) -
Лс(/Фк(/ =( Щц + ^д/у ) "к -
(/д.р+»1д^)фд.р =
= 3/д -Л/у д р -Мд д р;
(•Лсп.р +ткп\п )фкп.р =
= 2 (^у23/ + ^д23/ ) - ^у.дн "
2«-»^1.+ЕЕ(^^//гжс*)
«;
"Ус =Х
у ь <
Х*к</(?+ак/)-
-"Е^кО-М Т + «к/) + 2Гк"./
-л»«Рм;
= ЕХ (^УРЛ/ +^Д.рл/ +^ся'рл/8811Дрлу);
'ИоРу+Х'"м''(Я" +Руп) +
+ЕЕ^#/(|,"#)2
' У
= #пр(^у.пр + ^д.пр) +
+ 2^ Нп 2*п/асрп1 -2^н{хку-
352
Глава 3.2 КОМПОНОВКА И ПАРАМЕТРЫ
*с;
2[±7" (^у.рл/ + *д.рлу +^з.трлу8бПАрлут-
"2(^У-М-Р' +Л/ДМ.р/) +
/
л /у
ЩР2ХР = 0,5^Х [±(/ТУ.Рп/ + *д.рл/ +
п У
трл/ 8№дрлу
+ ^д.д.р + ^у.кп.р + ^д.кп.р + *хгУ »
^0Рг+Х/Ямл(р1|+/л)
ответствующих
Г =
= 0,5*Х
Х^кл/асрлу "Х^ку +
V /1
/я*.
У л
^0,25 + (Рхп/^рл)2]сл7 =
= ^кл/ "^кл/ "^у.рлу "^д.рлу "
-^с.трл/ 8БпДрл/ + ^кл/аср!/ -
/"мл
0,25 "(р^/^)2
масс трансмиссии; уд р,
моменты инерции агрегатов
•'кп.р» •'м.р/
(двигателя, коробки передач и мостов)
относительно одной из главных осей инерции,
проходящей примерно параллельно оси поворота
соответствующего агрегата под действием
реактивного момента; Му ЛН9 Мугъ\> Муу -
моменты в упругих элементах трансмиссии;
Л/у д р, 3/у.кп .р, Л/у.м.р/ - реактивные
моменты, создаваемые силами упругости
элементов подвески двигателя, коробки передач и
ведущих мостов; Мдт дн, Мл 23 /> Ма. п р >
^д.д.р>^д.кп.р>^д.м.р/ - моменты дис-
сипативных сил, пропорциональные
относительным скоростям (индексы "у" относятся к
упругим элементам, "д" - диссипативным,
ар" - реактивным; "д" - двигателю; ан" -
насосному колесу гидротрансформатора; "т" -
турбинному колесу; акп" - коробке передач;
ам" - мосту, сложные индексы отображают их
сочетание); щ, т - подрессоренная и полная
(
массы трактора
т
= Щ +2^тмп > Щап
С л, у±Ь
(3.2.9)
где фд, фн и фт - угловые координаты валов
двигателя, насосного и турбинного колес
гидротрансформатора; Ф1,Ф2>-Фз/ - угловые
координаты соответственно промежуточного и
выходного валов коробки передач и корпусов
дифференциалов ведущих мостов; фд.р>
Фкп.р» Фм.р/ " угловые координаты
соответственно корпусов (картеров) двигателя,
коробки передач и ведущих мостов;
*^н> ^т> «^Ь ^2> ^Ъ1 ~ моменты инерции со-
неподрессоренная масса моста I; /яд, т^ п -
массы двигателя и коробки передач; Ьд , Ь^ п,
Ьм! - расстояния между главными осями
инерции и осями поворота на упругих
элементах подвески двигателя, коробки передач и
мостов; А/н, МТ - моменты на валах
насосного и турбинного колес
гидротрансформатора; К - коэффициент трансформации
гидротрансформатора; Мф1, Мф2, Мф б -
моменты трения фрикционных муфт Фц и Ф2
коробки передачи и Фб г т блокировки
гидротрансформатора; иТ1> Ыу1 - передаточные
числа между соответствующими валами
коробки передач, обеспечиваемые включением
фрикционных муо>г Ф^ и Ф2; рт - радиусы
инерции мостов относительно
соответствующих главных осей инерции; Врп - расстояние
между осями приведенных упругих элементов
подвески соответствующего моста.
Индексы /I, у соответствуют номерам
элементов матрицы параметров и
характеристик колес, а индексы /', у и /,} - номерам
КОМПОНОВКА ТРАКТОРОВ
353
элементов подматриц, относящихся
соответственно к ведущим и ведомым колесам и
составляющих упомянутые матрицы, причем
/! = /+/. Машина при этом может иметь
любое число мостов и любую колесную
формулу. При выборе знака (±) в приведенных
уравнениях мосты, находящиеся впереди
центра масс кузова, считаются передними, а
остальные - задними.
Моменты в упругих элементах
трансмиссии и подвески агрегатов
^у.дн =сдн (фд -Фн ) ;
Му2Ъ1 =^23/ [ф2-ФЗ/И0+Фм.р/(И0-1)];
Му1] =
= с.
п/У
Ф3/+("к "1)Фм.р/ -0>5*/к][]фк/у
^
(3.2.10)
^у.д.р =Сд.Р (Фд.р-Р);
м,
у. к п .р
= сКп.р (Фкп.р -Р);
Му.м.р1 = см.р/ (фм.р/ +«)•
(3.2.11)
В формулах (3.2.10) можно учесть зазоры
в элементах трансмиссии аналогично
формулам (3.2.7) и (3.2.8), а в формулах (3.2.11) -
ограничения ходов подвесок.
Упругие и диссипативные
характеристики подвески мостов машины могут быть
подвергнуты кусочно-линейной аппроксимации.
Тогда на каждом к-м отрезке характеристик
Ру.*Цк = ср1к [С/у ±//<х-гс ±(0,5Др/р)^;
*д.рук = кЦк [С/у ±//а-гС ±(о,5 2*р/р)^ .
На крайних участках упругих
характеристик, когда вступают в работу ограничители
хода подвески, жесткость ср# можно
принять на 2-3 порядка большей, чем в
предыдущих.
При выводе всех формул принято, что
положительное направление углов поворота
масс двигателя и трансмиссии совпадает с
направлением угловых скоростей вращения их
валов, а реактивных масс агрегатов -
противоположное. Для углов поворота а, р, у
подрессоренной массы т0 положительным при- кальных перемещений опорных катков С,у,
нято направление против часовой стрелки,
если смотреть против направления
соответствующих осей.
Статистический тягово-динамический
расчет при проектировании машины
выполняют, предполагая, что все фрикционные
муфты коробки передач замкнуты, или же
передачи переключаются мгновенно ( переходный
процесс не учитывается). При этом третье
уравнение принимает вид
(/н + /т + /х/ит2! + /2/^п) фт =
= ^*у.дн + ^д.дн "~
-4X1% +^д23/)"
/
-[^1 (Ит1-1)/И?1 +
+ ^(«кп -1)/"кп] Фкп.р»
а второе, четвертое и пятое уравнения
превращаются в уравнения связей:
Фн =фт;
Ф1 =Фт/Ит1 + (Ит1-0 Фкп.р/ «т1;
Ф2 =Фт/«кп + ("кп "О Фкп.р/ «кп-
Дополнив дифференциальные уравнения
(3.2.9) уравнениями неголономных связей, а
также уравнением регулятора двигателя,
получим математическую модель трактора
раздельно-агрегатной компоновки с подрессоренными
мостами, ориентированную на исследование
тягово-динамических характеристик, расчет и
оптимизацию основных его параметров, а
также параметров подсистем.
Математическая модель гусеничного
трактора. Компоновка гусеничного трактора может
быть как раздельно-агрегатной, так и
моноблочной [30]. Особенности математических
моделей подсистемы двигатель-трансмиссия-
ведущие колеса тракторов различных
компоновок рассмотрены выше. Подсистема остов-
подвеска-движитель у различных гусеничных
тракторов в основном отличается
конструктивными особенностями подвески.
На рис. 3.2.10 показана схема
динамической модели подсистемы остов-подвеска-
движитель с индивидуальной системой под-
рессоривания. Обобщенными координатами
подсистемы выбраны координаты линейных
ХС> УС у %С перемещений центра масс С,
угловых а, р, у перемещений остова и верти-
12 Зак. 1741
354
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
Рис. 3.2.10. Схем» динамической модели подсистемы остов-подвеска-двнжитель гусеничного трактора
/ = 1, N; у = 172, где N - число опорных Рх> Ру ~ радиусы инерции остова относитель-
катков одного борта трактора. но осей с0х0 и С0у0 ; /~ - центробежный
Составим выражение для кинетической и *.
потенциальной энергий трактора. Примем те момент инерции трактора относительно осей
же допущения, что и для колесных тракторов. С$х§ и Со^о ПРИ и* совпадении с соответ-
Для подсистемы двигатель-трансмиссия- ствующими главными осями инерции остова;
ведущие колеса выражения кинетической и ~
потенциальной энергий запишем лишь в об- Е* тр - кинетическая энергия подвижных
щем виде, поскольку они определяются кон- частей трансмиссии в их относительном дви-
кретным конструктивным выполнением ее женин (относительно своих корпусов или ос-
элементов и могут быть составлены на основе това машины); Е . кинетическая энергия
изложенного выше. * м
Кинетическая энергия гусеничного
трактора в обобщенных координатах
Ек = 0,5
т(*с+Ус+р1у2) +
+ щ \х?с + р \ а2 + р I р2 ) - 2 /^ р у +
+ Х2токС/у+Х/кв.пРуФквУ+'дФд +
"*"^к тр + Як м ,
где ту /Яо, /яок - соответственно массы
трактора, остова и опорного катка; рг - радиус
агрегатируемой машины; фкву - угловая
скорость ведущего колеса; /Кв.пру ■
приведенный момент инерции гусеничного движителя:
•*к в. п ру = •*к в ) + «*к н ^гк в/ гк н I +
+ АГ/ок(гксв/гок) +
+ ^ПрЛ1р(''кв/'пр) + »*■('«) ,
/кв у, /кн , /ок, /пр - моменты инерции
ведущего и направляющего колес, опорного
катка и поддерживающего ролика
относительно своих осей вращения; ^кн > гок> 'пр "
радиусы направляющего колеса, опорного
инерции трактора относительно оси С^о; катка и поддерживающего ролика; #п р -
КОМПОНОВКА ТРАКТОРОВ
355
число поддерживающих роликов одного борта
трактора; г%в - радиус свободного ведущего
колеса (при Мк в = О, где Мк в - момент на
ведущем колесе); щ - масса гусеницы.
Потенциальная энергия динамической
системы гусеничного трактора
+ХХсг(*тР/у-С/у)2 +
+ ХСгсв[(^С-^на±0»5 2?Р-С1у)х
У
х8тун -гксва] +
+11сго[(^-С/+и)/(/^-/|+и)]2 +
У
+ сщ(*С -^п^-^см) Г + ^п.тр + ^пл»
где Ср/у - приведенная жесткость упругого
элемента подвески; сг - приведенная
радиальная жесткость опорного катка с учетом
упругих свойств шарнирных элементов траков
и грунта; ст СВрст 0 - продольные жесткости
соответственно свободной и опорной ветвей
гусеницы; сп - жесткость полуоси
трансмиссии; спр - жесткость сцепного устройства;
ик - передаточное число бортовой передачи;
ФО - угловая координата массы трансмиссии,
примыкающей к полуоси; ФКву - угловая
координата ведущего колеса; 1у , /кн -
продольные координаты осей соответственно
опорных катков и направляющего колеса
относительно центра масс машины; ун - угол
наклона свободной наклонной ветви
гусеничного движителя; ^п.тр>^п.м -
потенциальные энергии упругих элементов трансмиссии и
агрегатируемой машины.
Координату аппроксимированной
опорной поверхности 0тр у для каждого опорного
катка определяют с учетом нивелирования
траками гусеничной цепи микропрофиля
грунта и выражают через среднюю высоту
трака дСр у и угол его наклона аср у .
Работа сил и моментов, действующих в
подсистеме остов-подвеска-гусеничный
движитель, на возможных перемещениях
определяется приведенными ниже выражениями.
Работа сил трения в зацеплениях
ведущих колес с гусеницами и в бортовых
передачах
8ЖКВ =
= "XI1 " Ли)'квакву ^^квуБфкву»
У
где Т|к в - КПД, зацепления ведущего колеса с
гусеницей с учетом потерь в бортовой
передаче.
Работа сил трения в шарнирах траков,
обусловленная их относительными поворотами
в процессе перемотки гусеничной цепи,
8й^тр.ш =-2^тр.шуЭД1Л/Тр.шу5Фкву>
У
где Мтр ш^ - момент сил трения,
приведенный к ведущему колесу;
хж Ишгш^кв'з
^тр.шу = х
хМГсвУ + Туъ] | ^сву ( ^сву +7У»У 1.
V 2ГкВ гкн гок )
цш - коэффициент трения в шарнире; гш -
радиус пальца шарнира; 1КВ - число зубьев
ведущего колеса; /3 - шаг звена гусеницы;
^сву> ^рву " сила соответственно в
свободной и рабочей ветвях гусеничного обвода;
^сву = Т'свОу + д^сву ;
^рву = ^сву + -*кву »
12*
356
Глава 3.2 КОМПОНОВКА И ПАРАМЕТРЫ
^свОу - сила статического натяжения гусе- гусеницы; с% - коэффициент продольной
ничной цепи, АТСВ^ - изменение натяжения жесткости рабочей ветви гусеницы; хкн,
при движении трактора; ^к н " координаты оси направляющего колеса
Д77 у =У Д7* и+Т 1\ относительно положения статического равно-
св' *-* св^ ц•', весия, обусловленные конструктивными
особенностями и жесткостью упругого элемента
А Тсву - изменение натяжения, обус- механизма натяжения гусеничной цепи; Ц. -
ловленное колебаниями остова трактора; длина гусеничной цепи.
Работа моментов сопротивления качению
А7Тсв1/=^гсв[(^С-/Кн/С*±0^Ф-С1/)х опорных катков с учетом углов наклона траков
^ ' ас р у, обусловленных микронеровностями
уС- „ .с „1, профиля опорной поверхности,
X ашун 'кв0*]"*"
+сх[(гС+/кву«±0^^-С^)х < )
хапГрв+г«ва], ^ХС-Н^0,5В5),
где / - коэффициент сопротивления качению
АГсв2у - изменение натяжения из-за опорного „„. 2^ /у . нормальная реак-
деформации рабочей ветви гусеницы под дей- }ЩЯ беК)ВОЙ дорожки гусеницы на опорный
ствием силы Г к в } ; каток;
д7св2у =~ст свХу;
АТсвз^ - изменение натяжения, обус- ^ок » =
ловленное укладкой опорной ветви гусеницы
на неровности поверхности грунта;
Д^свЗу =
2ош1] = сг (?тр/у -С/у) +
+*г (9тр/у "С/у) + С!ок/у
приЛоК(/ ^0;
0 приток/у <0,
=сг с. 2(с* -с»+1. у )/('<> - Ы у); 0ок' "на1рузка на опорный ™то,с в исход"
/ ном положении статического равновесия
трактора.
д^св4у - изменение натяжения при Работа силы сопротивления движению
- гусеничного трактора, обусловленная затратой
колебаниях направляющего колеса относи- ^ на ^/млт^ ^у^ в проРцессе
тельно остова машины; коле^бразо!^
А77св4у = сг св[хкн(1 + со8Ун) + гкн вшТв]; Ъцгр^ = -^Гск у (5хс + у 5>>с ).
Тц^- изменение натяжения из-за дей-
]
~ _, Формулы для определения Лк / даны
ствия центробежных сил в гусеничном обводе; с* у
в теории трактора.
(. 2 / Работа силы периодического натяжения
гквФкву) /А- » гусеницы Ръ г у , возникающей из-за звенча-
тости гусеничной цепи,
/кв/ - продольная координата оси ведущего ' 1Ж, хг т? с с
бИ'з г = -Х^з г у гкв 5 Фкву •
колеса относительно центра масс машины;
С,]у - вертикальное перемещение заднего
)
Сила Р3 т ^ определяется по формуле
опорного катка; ун, урв - углы наклона
соответственно направляющей и рабочей ветвей ^з г у = с% дз г у 8и1Ккв Фкву О»
КОМПОНОВКА ТРАКТОРОВ
357
ще А3 г у - амплитуда деформации гусенич- ^ю7, пеРвым шести Уравнениям системы
ной цепи, обусловленная ее звенчатостью:
"[*кву +(1 " Лкв)^кв; ^бП^кву + ^з.гу^кв "
Азгу =(0,5/3/л) ^1-л(*кв/*)2 -
-(°21э *кв/ л ) агссо§ |(*кв/ я) - Л ];
Л = 81п(*/гкв). ~ ^/г /г \
Работа сил сухого трения Рс.тру в ^
элементах подвески ХЧ,ХЧ,7' //*.!.« .Л
- ^^^ок/у ^/ +ссср«/; -
5^с.тр = ХЕ ^.тр/у ^Ар1ух ' ^
~~ ^у. П р "" -*Д.11 Р ~~ "№м ~~ ^И> »
У
' У
-^[^квуЯПТв+^у.сву +^д.сву)^Тн];
ще А р1у - относительная скорость элементов
трения подвески.
Работы двигателя 5 Жц, сил трения в
трансмиссии ЫУтр, тормозных механизмов +РС тр^ 8§пАр/у|
поворота 5^тм, сил тяжести на подъемах-
спусках Ь\Ур , силы сопротивления воздуха
в ^
ЫУру на возможных перемещениях динами- __г .
ческой системы гусеничного трактора опреде- /я0 Руа - ~~2^2^ [ V \ У-рУ Д-р?
ляются по тем же формулам, что и для колес- ' )
ного трактора. _
При вычислениях 5^тр и ЪЖти сум- +^стр/у 88пДр/у)1 + /кн 8шун х
мирование производится только по индексу у, , .
а индекс / при всех переменных опускается. х 2^ [Ру. с ву + ^д.с ву) +
Необходимо также учитывать работу ре- у
активных моментов (см. выше). Ведущий мост
гусеничного трактора включает главную пере- +У^*^ (/*+а \к -
дачу, механизм поворота, тормоза и конечные АшлА^ ыЩу еру) у
(бортовые) передачи и крепится жестко к ос- 'У
тову трактора. Учитывая эту особенность, , ч
можно отметить, что реактивный момент ве- ~1гкв + ^ох + V 8и1Ув) Т^^кву ""
дущего моста действует в продольной верти- ' '
кальной плоскости трактора и определяется
так же, как для колесного трактора моноблоч- _ *, ( _ Л .
ной компоновки. мД ГТР ЧПт»>
Используя приведенные формулы для
вычисления Ек, Еп работы сил на
возможных перемещениях системы бй^, получаем . { ,
систему дифференциальных уравнений движе- ,1
ния. Для трактора раздельно-агрегатной ком- +^с.тр# ^ё^^ру) |~
поновки она имеет следующий вид [уравнения *
движения элементов подсистемы двигатель-
трансмиссия опущены, так как они соответ-
;
Щ РхР = °»5 & \
ХХ[±Кр/У+*др/У +
"Е И^У сву + *д.сву )]8ШУ„ -
358
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
+ Л^д.д.р + Л^у.кп.р + Л^д.кп.р + ^«7 ;
трг2у = о,5В 2 ^ (±[гоку (/ +аср/; )]) -
-^д.р1у -^с.тр1у8впАр1у +
+(^у.сву +^д.сву)^ун;
"*окС/у = ^ок/у -^ок(/ ""^у.р/у "
"^д.р/у -^стр/у 8№Ар/у ;
' = 2, # - 1;
"<окСл0 =^окД/ -^окЛ/ "^у.рЛ/ -
-^д.рЛр -^с.трЛ[/8бпАрД/ + ^'кву8*пУв»
(3.2.12)
где А/у у, А/ду - моменты упругого и дисси-
пативного элементов ведущего моста трактора;
^у.пр> ^д.пр ~ силы упругого и диссипа-
тивного элементов сцепного устройства;
Ру. р (/> ^д.р (/ " усилия упругого и диссипа-
тивного элементов подвески; ^у.св у>
/д сву - силы упругого и диссипативного
элементов свободной ветви гусеничного
обвода.
Значения Муу, Гу р /у, Русъ у
находят по формулам:
^уу =^п(фО-"кФкву);
^УР/У =ср/у(С/у-гС±/(/а*0,5Др);
^у.сву=сг свх
х[(^с-^кна±0^2?р-С1у)8шун-гксва].
Уравнение неголономной связи
гусеничного движителя в его продольной плоскости
имеет вид
Ху + *С + УУС -81пувгс-
-(^в+/^&1пув+Л0К)аТ
*(о,5 2? 8шувр)^т(0,5 2? у)у +япувС^-
-[(1-5у)^Св-^^кву]фкву =0,
(3.2.13)
где Ху - продольная упругая деформация
рабочей ветви гусеницы; г^в - радиус
свободного ведущего колеса (при Мк в =0, где Мк в -
момент на ведущем колесе); 1# - продольная
координата заднего опорного катка
относительно центра масс машины; Сл/ ~ скорость
его вертикального перемещения; А01С -
вертикальная координата осей опорных катков
относительно центра масс машины; ув - угол
наклона относительно горизонтали линии,
проведенной через оси вращения ведущего
колеса и заднего опорного катка в статическом
состоянии равновесия машины; В - колея;
5 у - коэффициент буксования гусеничного
движителя; ^ву - сила тяги рабочей ветви
гусеницы [определяется аналогично Х^ по
формуле (3.2.3), в которой сх и кг в этом
случае коэффициенты жесткости и
неупругого сопротивления рабочей ветви);
Х = Хрв-Х3гкв/(2я); Хрв -
коэффициент продольной эластичности рабочей ветви
гусеничного обвода; Х3 ~ то же> одного звена
гусеничной цепи; 1КВ - число зубьев
ведущего колеса; фкву - угловая скорость ведущего
колеса.
ТЕХНОЛОГИЧНОСТЬ И УНИФИКАЦИЯ ТРАКТОРОВ
359
Значение г^в определяют по формуле
'кв^кв'з/^*),
где /3 - шаг звена гусеницы.
При проектировочных расчетах часто
используют более простые математические
модели, не учитывающие упругие свойства
гусеничной цепи и влияние на ее деформацию
колебаний остова трактора, звенчатости
гусеничной цепи и других факторов. Для
сравнения получаемых результатов на рис. 3.2.11
показано изменение силы тяги Ркв для трех
различных математических моделей
гусеничной машины с гидромеханической
трансмиссией. Сплошная линия - график Ркв ,
полученный с использованием модели (3.2.12);
штрихпунктирная - график РЦв , полученный
на основе модели, не учитывающей упругие
свойства гусеничного обвода и звенчатости
гусеницы; а штриховая - график Р±в °®3
моделирования упругих свойств движителя, но
с учетом звенчатости гусеницы.
Очевидно существенное различие в
протекании кривых Ркв и Р±в . Падение силы
Ркв в начальной стадии разгона обусловлено
приседанием остова трактора при трогании и
ослаблением вследствие этого натяжения
рабочих ветвей гусеничного движителя. Кроме
того, при вычислении Р±в не учитываются
инерционные потери на разгон гусеничного
движителя. Аналогичные результаты
получаются при переезде трактором неровностей, когда
возникают большие амплитуды колебаний
остова и опорных катков.
Сравним сначала Р^в и Р±в • Различия
между ними объясняются высокочастотными
Рис. 3.2.11. Изменение крутящего момента Мжл на
ведущем колесе н тягового усилия /*„ рабочей ветви
гусеницы при разгоне гусеничного трактора на
горизонтальной грунтовой дороге
колебаниями продольной деформации
элементов рабочей ветви гусеницы, которые
учитываются в уравнении неголономной связи
(3.2.13). Кроме того, на величину ^кв
оказывают влияние колебания задних опорных
катков и продольные угловые колебания остова,
имеющие место даже при установившемся
движении по ровной поверхности и
вызываемые колебаниями крутящего момента
Мк в. Кривая Р%в существенно отличается
от кривой /кв и не может быть использована
даже для приближенной оценки нагружен-
ности элементов ходовой части.
При установившемся движении по
неровностям гармонического профиля
максимальные значения Ркв в 4 ... 5 раз
превышают Р^в .
3.2.5. ТЕХНОЛОГИЧНОСТЬ И ОЦЕНКА ПОКАЗАТЕЛЕЙ
УНИФИКАЦИИ ТРАКТОРОВ
Технологичность - это совокупность
свойств конструкции изделия, определяющих
ее приспособленность к достижению
определенных затрат на производстве, при
эксплуатации и ремонте при заданных показателях
качества, объеме выпуска и условиях
выполнения работ. В соответствии с этим различают
производственную, эксплуатационную и
ремонтную технологичность конструкции [30]. В
процессе отработки конструкции трактора на
технологичность в нее необходимо заложить
свойства, обеспечивающие высококачественное
изготовление и рациональное использование
ресурсов. Это требует установления
соответствия между конструкцией трактора и
производственными условиями его изготовления,
обоснованного применения материалов и
рациональной преемственности конструктивно-
технологических решений. Технологичность
конструкции - важнейшая характеристика
совершенства изделия, так как она в
значительной мере определяет уровень технико-
экономических показателей производства [30].
Производственная технологичность
конструкции трактора. Конструкцию трактора
отрабатывают на технологичность комплексно:
на уровне деталей, сборочных единиц и
трактора в целом. Непременным условием
обеспечения технологичности конструкции изделия и
входящих в него сборочных единиц и деталей
является выполнение ряда общих требований:
рациональность членения трактора и его
составных частей;
широкое использование принципов
конструктивной и технологической
преемственности, унификации, стандартизации и сим-
плификации;
360
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
рациональное ограничение количества
марок и сортаментов применяемых
материалов;
широкое использование недефицитных
материалов и материалов, обработка которых
не вызывает трудностей;
рациональное назначение допусков и
параметров шероховатости обрабатываемых
поверхностей;
целесообразная простановка размеров с
учетом особенностей обработки деталей на
определенных видах технологического
оборудования;
обеспечение удобства базирования
деталей при их обработке и достижение
достаточной жесткости конструкции;
соблюдение условий взаимозаменяемости
деталей, упрощения, сборочных работ и
возможности их механизации и автоматизации;
создание деталей таких конструктивных
форм, которые позволяют применять
производительные методы механической обработки и
использовать высокопроизводительное
оборудование;
обеспечение условий врезания и выхода
режущего инструмента, а также хорошего
доступа для обработки и измерений детали;
уменьшение многообразия видов
обрабатываемых поверхностей и геометрических
размеров однотипных элементов конструкции
детали;
максимально возможное упрощение
конструкции сборочных единиц и деталей;
удобство технического обслуживания,
ремонта в процессе эксплуатации, что может
потребовать внесения в конструкцию
определенных элементов.
Эти требования конкретизируются и
уточняются с учетом особенностей конкретных
видов работ (штамповки, литья, механической
обработки, сборки и т.д.).
Необходимость обеспечения
высококачественной сборки определяет специальные
требования к конструкции трактора. Последний
надо разделять на составные части
(предпочтительно с учетом их
функционального назначения), так чтобы можно было
проводить одновременно сборку многих из них.
Необходимо учитывать принцип
взаимозаменяемости, совмещать технологические и
измерительные базы, обеспечивать удобство
подходов к соединениям, чтобы использовать
различные средства малой механизации.
Конструкция должна обеспечивать
возможность применения несложных
приспособлений и стандартного инструмента,
возможность проведения параллельной сборки
сборочных единиц. Объем механических работ
при сборке трактора должен быть
минимальным. При сборке должна обеспечиваться
взаимная фиксация собираемых деталей и
сборочных единиц с помощью выступов и пазов,
шпонок, штифтов. Точность сборочных
соединений обеспечивается методами подгонки,
регулировки, групповой взаимозаменяемости.
Примером может служить спаривание
конических шестерен трансмиссии.
При расчленении сложной сборочной
единицы на более простые элементы
необходимо выполнять ряд требований:
сборочные единицы должны быть
рассчитаны на минимальное число различных
видов технологических процессов сборки
(соединение болтами, клепкой, сваркой,
пайкой и др.). Они должны быть по возможности
простыми, представлять собой законченное
изделие и иметь минимально возможное число
сочленений;
расчленение сложной сборочной
единицы на простые должно осуществляться с
учетом производственной структуры
предприятия-изготовителя и предусматривать
соединение простых сборочных единиц в
определенной последовательности таким образом, чтобы
одна сборочная операция не мешала
выполнению других;
расчленение сложной сборочной
единицы должно быть сделано с учетом
возможности замены любой простой сборочной
единицы без нарушения других соединений
простых сборочных единиц;
конструкция сборочной единицы должна
обеспечивать возможность проведения
регулировочных и контрольных операций. При этом
частные регулировки не должны нарушать
регулировки сложной сборочной единицы.
Существенное место при отработке
конструкции деталей на технологичность
отводится уменьшению материалоемкости изделий,
которое обеспечивается комплексным
решением ряда взаимосвязанных задач. Мероприятия
по сокращению расхода материалов можно
разделить на две группы:
1) конструктивные, связанные с
совершенствованием методов расчета и
использованием новых принципов конструирования, с
обеспечением равнопрочности деталей во всех
ее сечениях, а также с применением новых,
недефицитных материалов малой стоимости (в
том числе пластмасс). К этой группе относятся
также мероприятия по применению
рациональных видов заготовок для изготовления
деталей;
2) технологические, которые
заключаются в разработке более совершенной технологии
создания новых конструкционных материалов;
в изменении технологии создания
существующих конструкционных материалов, а также во
введении дополнительных контрольных
операций для повышения их качественных
характеристик; во внедрении технологических
методов упрочнения материалов; в расширении
номенклатуры выпускаемых видов проката, а
также в уменьшении поля допусков на его
ТЕХНОЛОГИЧНОСТЬ И УНИФИКАЦИЯ ТРАКТОРОВ
361
геометрические размеры; в применении более
совершенных технологических процессов и
оборудования в рамках определенного вида
производства (например, в литейном
производстве использование более совершенных
способов литья, в механообрабатывающем
производстве - станков с ЧПУ, многоцелевых
станков и др.).
Применение рациональных видов
заготовок должно быть обосновано технико-
экономическими расчетами. При этом
учитывают материал, габаритные размеры и массу
детали, серийность производства, точность
размеров и припуски на обработку, а также
специфические условия эксплуатации. Вид
применяемой заготовки может накладывать
определенные ограничения на конфигурацию
детали и предъявляемые к ней требования с
точки зрения технологичности.
Эксплуатационная технологичность
трактора. Эксплуатационная технологичность
тракторов является функцией конструктивных и
эксплуатационных факторов [38].
К конструктивным факторам относятся
контролепригодность, доступность, легкосъем-
ность, взаимозаменяемость, стандартность и
унифицированность, восстанавливаемость,
преемственность, монтажепригодность, эрго-
номичность, транспортабельность,
сохраняемость и гигиеничность трактора, его составных
частей и сборочных единиц.
Контролепригодность характеризуется:
наличием встроенных средств контроля
технического состояния и режимов работы
тракторов, сборочных единиц, устройств,
обеспечивающих подключение внешних
средств контроля серийной диагностической
аппаратуры;
возможностью диагностирования
параметров без демонтажа составных частей и
сборочных единиц;
минимальным числом определяемых
параметров, позволяющих обеспечить полноту и
достоверность оценки технического состояния.
К эксплуатационным факторам относят:
организацию проведения технического
обслуживания;
квалификацию исполнителей;
организацию хранения и заправки топ-
ливно-смазочными материалами;
организацию хранения машин;
полноту, качество эксплуатационной
документации.
Нормируемые показатели отражаются в
техническом задании и технических условиях
на изготовление и приемку, программах и
методиках испытаний, картах технического
уровня и качества. Различают экономические
показатели, отражающие продолжительность,
трудоемкость и стоимость видов технического
обслуживания; организационно-технические,
которые характеризуют периодичность,
кратность и повторяемость видов технического
обслуживания.
Эксплуатационные факторы задаются в
технической документации. Существуют две
группы оценочных показателей: основные
(нормируемые) и дополнительные. Основные
показатели обеспечиваются и контролируются
на всех стадиях проектирования, производства
и эксплуатации, дополнительные
используются при анализе конструкции для выявления
способов обеспечения заданных значений
основных показателей и при сравнительной
оценке тракторов или вариантов их
конструктивного исполнения по уровню
эксплуатационной технологичности и задания
дополнительных требований к ней.
При диагностировании технического
состояния трактора различают структурные и
диагностические параметры.
К первым относятся параметры,
непосредственно характеризующие
работоспособность составных частей тракторов: зазоры в
сопряжениях гильза - поршень, подшипник -
шейка вала, износ сопряжений гнездо -
клапан, игла - корпус распылителя форсунки,
фрикционных накладок, шестерен, шлицев
валов и сопряженных с ним деталей и др.
Диагностические параметры (температура, уровни
шума, вибрации, давление, расход масла,
топлива и др.), как правило, косвенно
характеризуют состояние и работоспособность
составных частей. Например, снижение давления в
смазочной системе двигателя может быть
вызвано увеличением зазора в парах трения
ввиду их изнашивания или рядом других причин
(снижение подачи смазывающей жидкости
насосом, зависание клапана и др.), что, в свою
очередь, приводит к повышенному
изнашиванию сопряжения деталей. Измерение
диагностических параметров должно
осуществляться с определенной точностью, которая
является результатом оптимизации минимума
удельных материальных затрат и максимума
безотказности работы машины и др.
Средства диагностирования могут быть
внешними и встроенными. При
использовании внешних средств (приборов и датчиков)
необходимо устанавливать определенный
режим работы (нагрузку, частоту вращения ко-
362
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
ленчатого вала, температуру охлаждающей и
смазочной жидкости).
Ремонтная технологичность конструкции
трактора предполагает отработку конструкции
с точки зрения снижения затрат труда,
средств, материалов при обеспечении
необходимого качества ремонта [38]. Уменьшение
числа текущих и капитальных ремонтов без
сокращения срока службы обеспечивается при
разработке составных частей и сборочных
единиц с высокими показателями надежности, а
снижение трудоемкости и стоимости
ремонтов, потребности в ремонтно-технологическом
оборудовании - технологичностью
конструкции.
Компоновка сборочных единиц должна
обеспечивать общую сборку трактора без
промежуточной разборки и последующих сборок
составных частей. Средние ресурсы составных
частей и сборочных единиц трактора должны
быть кратными между собой или близкими к
ним. Точность расположения составных частей
и сборочных единиц трактора должна быть
обоснована и взаимосвязана с точностью их
изготовления, конструкции составных частей
должны предусматривать центрирующие,
ориентирующие, компенсирующие устройства,
обеспечивающие снижение затрат труда при
разборке и сборке.
Требования к конструкции деталей, с
точки зрения их приспособленности к
ремонту, те же, что и к производственной
технологичности.
Унификация при обеспечении
технологичности конструкции. Различают конструктивную
и технологическую унификацию. Для
конструктивной унификации можно отметить
следующие основные направления работ [17,
30]:
создание или выбор базовых
конструкций тракторов на основе передового опыта их
разработки и их различных модификаций;
создание конструкций тракторов на
основе унифицированных блочно-модульных
конструкций;
соблюдение преемственности
технических решений путем заимствования составных
частей трактора из других конструкций или
предшествующих разработок (одна из которых
может быть базовой), или из других
одновременно создаваемых. Чаще всего эти два
направления заимствования используются
одновременно; степень использования первого
заимствования определяется коэффициентом
применяемости, а второго- коэффициентом
проектной преемственности;
ограничение номенклатуры применяемых
изделий и материалов.
Конструкторская унификация имеет не
только преимущества, но и недостатки,
которые необходимо учитывать, особенно при
заимствовании составных частей из изделий-
предшественников - возможное увеличение
массы создаваемой машины и
консервативность отдельных характеристик. Устранению
этих недостатков способствует оптимизация
уровня унификации по экономическим
критериям. Максимизация уровня унификации не
является показателем совершенства
конструкции трактора.
Конструктивная унификация связана с
технологической и зависит от уровня
преемственности технологических процессов и
оснастки. Увеличение числа заимствованных
составных частей в конструкции трактора
позволяет:
улучшить преемственность оборудования,
оснастки и технологических процессов и
сократить затраты на подготовку
производственной базы для выпуска новых тракторов;
создать типовую, универсальную,
переналаживаемую и сборочную технологическую
оснастку и применить принципы
стандартизации при ее разработке, что приводит к
уменьшению объектов работы, затрат трудовых,
материальных, стоимостных и временных
ресурсов;
применить типовые технологические
процессы (внедрить групповые формы
организации труда, сократить сроки и затраты на
разработку необходимой документации в про-
• цессе технологической подготовки
производства трактора).
Типизация предполагает разработку
типовых конструкций или технологических
процессов на основе общих для ряда изделий
(процессов) технических характеристик и
является одним из методов стандартизации..
Показатели унификации трактора делят
на основные и дополнительные (табл. 3.2.6).
Основными показателями унификации
являются коэффициенты применяемости ^пр и
повторяемости Кп . Коэффициент Кпр
характеризует уровень общей конструктивной
преемственности составных частей в
разрабатываемом тракторе. Коэффициент
повторяемости Кп характеризует внутрипроектную
унификацию трактора, т.е. насыщенность
трактора повторяющимися составными
частями.
ТЕХНОЛОГИЧНОСТЬ И УНИФИКАЦИЯ ТРАКТОРОВ
363
3.2.6. Показатели
трактора [30]
Показатель
Расчетная формула
Величины
Коэффициент
применяемости (коэффициент
унификации)
Коэффициент
мости
повторяе-
Коэффициент
применяемости:
стандартных обще-
машиностроительных составных
частей
покупных
стандартных
общемашиностроительных
составных частей
стандартных
отраслевых составных
частей
покупных
стандартных отраслевых
составных частей
Основные показатели
^пр-
П
= ^-100%
п
*п =
N -п
N
100%
Дополнительные показатели
Кс =-^-100%
п
Ксп =^109%
Кн =-^-100%
н п
*™ = ^100%
п - общее число типоразмеров
деталей в изделии (Л);
Ло - число типоразмеров
оригинальных деталей (О);
Пу = пс + п^ + п3 - число
типоразмеров унифицированных
деталей (У)\ N - общее число
деталей
лс = /!гп + лг
- число типо-
с ~~ '*сп т ''ее
размеров стандартных
общемашиностроительных деталей (С);
псп - число типоразмеров
покупных стандартных
общемашиностроительных деталей (С^);
псс - число типоразмеров
стандартных
общемашиностроительных деталей собственного
изготовления (Сс)
^н =йнп + лнс " число
типоразмеров стандартных
отраслевых деталей (Н); пнс - число
типоразмеров стандартных
отраслевых деталей собственного
изготовления (Яс)
/1НП- число типоразмеров
покупных стандартных отраслевых
деталей (Ян)
364
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
Продолжение табл. 3.2.6
Показатель
Расчетная формула
Величины
Коэффициент
заимствования:
общий
заводской
Коэффициент
заимствования:
сторонний
покупных составных
частей
Коэффициент общей
применяемости покупных
составных частей
ЛГ.=^-100»
*эз = —100%
33 п
п
п~
число типоразмеров заим-
п
V _
Лпок~
лсп+янп"
1100%
ствованных деталей (3)
/133 - число типоразмеров
деталей, заимствованных из изделий
того же завода (33)
псз = /13п + Лзсс - число
типоразмеров деталей,
заимствованных из (для) изделий сторонних
заводов (Зс); пзсс - количество
типоразмеров деталей,
заимствованных из деталей
собственного изготовления (3^)
пзп - число типоразмеров
покупных деталей, заимствованных
из (для) изделий сторонних
заводов (Зп)
3.2.6. КОНСТРУКЦИОННЫЕ МАТЕРИАЛЫ
Для изготовления тракторов
используются металлические и неметаллические
конструкционные материалы (рис. 3.2.12) [30].
Снижение материалоемкости связано со
следующим: применением стандартных
профилей, заменой стальных литых деталей на
сварные, получением заготовок с помощью
горячей или холодной штамповки; обработкой
металлов давлением в холодном состоянии или
с местным нагревом и др.
Конструкционные материалы тракторов в
исполнении ХЛ и УХЛ должны обеспечивать
их работоспособность при температуре
окружающего воздуха до - 50 °С под нагрузкой и
до - 60 °С в режиме поддержания теплового
состояния агрегатов и систем с учетом
воздействия климатических и грунтовых факторов
внешней среды холодного
микроклиматического района.
Материалы (марки стали и режимы
термической обработки) деталей, неразогре-
вающихся при подготовке трактора к работе
под нагрузкой, должны обладать температурой
перехода в хрупкое состояние не выше
предельной отрицательной рабочей температуры.
Исключается применение в конструкции
промышленных тракторов в исполнении ХЛ и
УХЛ кипящей и полуспокойной стали для
деталей, работающих под нагрузкой. Не
рекомендуется применение горячекатаных
углеродистых, низколегированных и легированных
сталей без термоулучшения.
3.2.7. ПРИНЦИПЫ И СХЕМЫ АГРЕГАТИРОВАНИЯ
СЕЛЬСКОХОЗЯЙСТВЕННЫХ ТРАКТОРОВ
Классификация МТА производится по
ряду признаков (рис. 3.2.13) [15]:
по назначению (виду выполняемых
производственных операции и процессов) -
технологические (пахотные, посевные, для ухода
за растениями, уборочные, транспортные),
транспортно-технологические (внесение
удобрений, кормораздатчики), погрузочно-разгру-
зочные;
по способу производства работ - мобиль-
стационарно-передвижные,
стационарные,
ные;
ром
по способу соединения машин с тракто-
- прицепные, полуприцепные, навесные;
АГРЕГАТИРОВАНИЕ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ТРАКТОРОВ
365
| Конструкционные потерями |
Прокат
черны*
металлов
Наделил %
дальнейшей
яерераВоткя
12,2
I I Стальяые
Отли$км
Виз не
легированная
\ сталь
1,021
V
Гнутые
яроряяя
1,2
1,* 1
ЯишроВанмая
сталь
1,55
V
Стальяые
трубы
Вглеродястая
сталь
",*
",*
Порошковые
материалы и
техяичесяая
вероника
0,065
0,*2
Полимерные я
яопяозицяенные у
материалы
22,8
Легированная
Сталь
*'* 1
7»* 1
1
Углеродистая
сталь
18,9
15,8 \
1 Чугунное
ОМАНА**
23,2
21,07
1 Высоко-
яро чяы я
| чугун
0,07
3,9
Ковки я
чугун
0,11
0,32
Серый
. *9*9*
22,6
15,2
ЦВетиие
отякял*
1,3 1
3,2 |
1
1 Алю пина -
еВый
ел. а 6
1,17 |
2,95 \
Полиэтилен
X
Пропилен I 0,1
Полистирол
Конструкционные
пластпассы
\ С текло-
\ мастики
12
1 Прочие
\ Виды
60
Рис. 3.2.12. Схема применения материалов для производства тракторов (цифры - удельный вес материала, %,
в общей массе; числитель - достигнутое значение, знаменатель - возможное)
а)
6)
#е
я
Рис. 3.2.13. Схемы машинно-тракторных агрегатов:
а - трактора традиционной компоновки; б - мобильного энергетического средства (МЭС);
в - транспортно-технологического модуля (ТТМ); 1 - пахотный (трактор и четырехкорпусный навесной плуг);
2 - по уходу за растениями (трактор, культиватор-растениепитатель: подкормщик и сеялка); 3 - для внесения
удобрений (трактор, машина внесения жидких удобрений типа РЖТ-8); 4 - для внесения удобрений (трактор,
машин - полуприцеп типа ПРТ-10); 5 - транслорный (трактор, одноосный полуприцеп типа 1ПТС-9);
6 - уборочный (трактор, кормоуборочный комбайн); 7- пахотный (МЭС и шестикорпусный ллуг с емкостью
для технологических материалов на ТТМ); 8 - для подготовки почвы (МЭС, тяжелая дисковая борона с
емкостью для технологических материалов на ТТМ); 9 - по уходу за растениями (МЭС, культиватор-
растениепитатель, культиватор на передней навесной системе, емкость для технологических материалов на
ТТМ); 10 - для внесения пылевидных удобрений (МЭС, машина типа РУП-10); 11 - для внесения
органических удобрений (МЭС, машина для внесения органических удобрений); 12 - транспортный (МЭС, седельный
полуприцеп на ТТМ); 13 - по уходу за растениями пропашных культур (МЭС, три культиватора-
растениепитателя); 14 - посевной (МЭС, три навесные сеялки для кукурузы); 15 - уборочный (МЭС, три
навесных жатки); 16 - МТА на базе МЭС в транспортном положении
366
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
по способу привода машин (орудий) -
тяговые, тягово-приводные, приводные;
по числу машин (орудий) в агрегате -
одномашинные, многомашинные;
по числу одновременно выполняемых
операций - простые, сложные,
комбинированные;
по размещению машин по отношению к
трактору и его продольной оси - переднее,
среднее, заднее, боковое, смещенное,
симметричное и асимметричное расположение.
Сельскохозяйственный трактор
предусматривается агрегатировать с десятками и
даже сотнями сельскохозяйственных машин, а
также в качестве энергетической установки в
самоходных машинах. Рассмотрим
классификацию машинно-тракторных агрегатов на
основе принципа возможности высвобождения
их основных частей для использования в
других агрегатах (рис. 3.2.14): стационарные и
мобильные. Агрегаты позиционного действия
относятся к обеим группам в зависимости от
наличия в них собственного движителя.
Широкое внедрение в
сельскохозяйственное производство и относительно низкая
занятость в году самоходных машин
предопределили поиск путей повышения их
универсальности или высвобождения энергетической
части для агрегатирования с другими
машинами. При этом энергетическая часть должна
обладать рядом новых качеств.
Двигатель Д, рабочий орган РО и
движитель Дж агрегата могут быть выполнены в виде
отдельных законченных в функциональном и
монтажном отношении частей, соединяемых в
более крупные блоки или в единый блок, что
и определяет степень их универсальности.
1. МТА состоит из двигателя, движителя
и рабочих органов, выполненных в виде
единого блока, из которого практически сложно
выделить одну из названных частей для
использования в другом агрегате. Примером
агрегата такого рода могут служить почти все
самоходные сельскохозяйственные машины.
2. Агрегат состоит из двигателя и
движителя, выполненных как единый блок-модуль,
и временно присоединяемого к нему блока с
рабочими органами. При этом блок двигатель-
движитель может быть использован в других
агрегатах так же, как блок рабочих органов
может быть использован с другими блоками
двигатель-движитель. Машинно-тракторный
агрегат, состоящий из трактора и
сельскохозяйственной машины, - самый типичный
пример такого агрегата. Трактор представляет
собой энергетический модуль, а машина -
блок рабочих органов.
3 и 4. Агрегаты состоят из блоков
двигатель-движитель-рабочие органы или из блоков
движитель и двигатель-рабочие органы. Обе
схемы по характеру построения аналогичны
схеме 2. Примером агрегата схемы 3 может
служить свеклоуборочный комбайн. Его
энергетический блок представляет собой трактор со
снятыми колесами, который может быть
использован в составе других агрегатов, как блок
двигатель и как блок двигатель-движитель при
постановке на него колес. По схеме 4
выполнены позиционные агрегаты, перемещаемые с
места на место на высвобождаемой платформе.
5. Агрегат состоит из двигателя,
движителя и рабочих органов, каждый из которых
выполнен в виде отдельного блока и может
быть использован для образования из них
МТА.
6 и 7. Стационарные МТА с агрегатами
этих схем встречаются повсеместно и широко
распространены.
В приведенной классификации МТА
трансмиссия агрегата не выделяется в
отдельный блок как передаточное звено.
Эта классификация может быть развита,
например, выделением в самостоятельные
части поста управления, агрегата-кабины или
сцепных устройств, а также вариантами
агрегатов с двумя двигателями и др. Однако для
рассмотрения вопросов агрегатирования она
представляется достаточной. Классификация и
взаимосвязь проблем агрегатирования
показаны на рис. 3.2.15.
Стацион
л \
РО
з_
Виды соединений основных частей трактора
и сельхозмашины в агрегатъ
'арные МТА
г
Д
I
РО
п_
Мобш
Дж
Д
РО
\Т
Дж
д
Р0Л
т
/
тьные МТА 1
Дж
\л
РО
а_
Д*}
Д
РО
т
д«л\
1 А
РО \
"Г
Рис. 3.2.14. Виды соединений основных частей трактор! в машинно-тракторные агрегаты
АГРЕГАТИРОВАНИЕ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ТРАКТОРОВ
367
\ЛподготоВка почвы
Функциональное
назначение
агрегата
посев
сель скохозяйственных
культур
и4у/0# за растениями
Н транспортировка
Качественное
Ц Выполнение рабочего
процесса
I Обеспечение эффективности агрегатов ]
X
Анализ и оценка Вариантов
Г Сбор данных о показателях агрегатов |
I
Выбор и обоснование
|—| критериев оценки МТА
Е
Анализ данных и расчет
критериев, рекомендация Вариантов
Разработка вариантов
Расположение
технологической
части относительно
энергетической
-Х-
Основные параметры
агрегата
Масса
ш
-Г-
Скорость Выполнения
технологического
процесса
Энергопотребность
не Выше
энерговозможности
Кинематика
частей
X
Стабильность
работы
рабочих
органов
х
Сохранение
качества
обрабатываемого
материала
X
Маневренность
а
проходимость
[ Минимизация затрат |
1 '
1 | труда 1 |
энергии
|
| материалов \
финансовых средству
Мощность
-Г_
Перевод агрегата
в транспортное
положение
1 Е=
Агрегат
со
сценкой
| Ширина захвата \
[Перестроение]
н8колонну '
X
бесцепочные
агрегаты
без
перестроения
без поВорото\
сцепки
с поворотом
сцепки
стационар-
1 ные
Склады-
Воние
вверх
назад-
Вперед
комбинированные
Виды МТА
Ь
мобильные
\стоционорно-\\
передвижные
Соединение частеВМЩ
I
неподвижное
подвиж-
ное
[навесная система}
прицепное звено
седло
Рнс. 3.2.15. Классификация и взаимосвязь проблем агрегатирования
Вопросы агрегатирования при создании
нового трактора или его модификации (когда
он должен работать с уже существующими
машинами), создание сельскохозяйственной
машины (когда она должна работать с уже
созданным трактором) или комбинацию этих
вариантов условно отнесем к первому уровню.
Проблемы агрегатирования второго уровня
характерны в общем для создания техники, т.е.
когда агрегат должен проектироваться как
единое целое (система). Решение задач
агрегатирования первого уровня (работоспособность
агрегата) заключается: 1) в удовлетворении
требованиям соединения частей МТА между
собой; 2) в обеспечении качественного
выполнения агрегатом рабочего процесса при
заданных показателях производительности. Для
первого этапа характерны задачи
нормализации и стандартизации мест и устройств
присоединения частей (блоков агрегата) друг к
другу и зон свободного пространства,
обеспечивающих соответствующий безопасности
доступ к этим местам и устройствам, из каких
бы частей-блоков ни составлялся агрегат и
какое бы положение относительно друг друга
ни занимали эти части. Для машинно-
тракторных агрегатов на этом этапе (с точки
зрения проектирования) решаются задачи
механического соединения одной
сельскохозяйственной машины с тракторами разных
типоразмеров и одного трактора с разными по
значению и типоразмерам машинами.
Для второго этапа число требований,
которые надо выполнить, возрастает. К ним
относятся:
соответствие энергетических
потребностей агрегата и энергетических возможностей
двигателя, которое должно выполняться на
режимах работы агрегата, позволяющих
качественно выполнять технологический процесс в
заданных условиях и обеспечивать
максимальную эффективность использования агрегата
при минимальных энергозатратах;
обеспечение кинематики агрегата, в
результате чего его части и рабочие органы
согласованно перемещаются относительно друг
друга и относительно материала, выполняя
технологический процесс;
обеспечение стабильности выполнения
рабочими органами агрегата технологического
процесса (стабильности его перемещения как
на длине гона за счет сохранения заданного
направления движения, так и в продольной и
поперечной плоскостях, демпфирования
внутренних вибрации и возмущений);
соблюдение требований по допустимой
величине повреждения агрегатом в целом (не
только рабочими органами) культурных
растений или другого обрабатываемого
сельскохозяйственного материала; решаются задачи впи-
сываемости движителя в междурядьях,
обеспечения просветов в зоне растений и
допустимых воздействий на почву, управляемости и
маневренности агрегата при выполнении
технологического процесса и др.;
368
Глава 3.2. КОМПОНОВКА И ПАРАМЕТРЫ
обеспечение маневренности и
проходимости агрегата при поворотах и ходовых
переездах, перевода агрегата из рабочего в
транспортное положение, его складывания для
движения по дорогам общего назначения.
Выполнение требований этого этапа
завершает перечень проблем агрегатирования
первого уровня.
Проблемы агрегатирования второго
уровня, заключающиеся в выборе и
обосновании конструкции и параметров наиболее
эффективных агрегатов, делятся на два этапа:
1) разработка вариантов агрегатов; 2) анализ и
оценка эффективности каждого из отобранных
вариантов.
Для первого этапа характерно прежде
всего то, что примеры выполнения частей и
блоков агрегата не являются окончательными
и могут быть развиты практически в любом
направлении. Важно выполнить
критериальную оценку и установить количественные
показатели вариантов.
В матрицу вариантов, которые в той или
иной степени должны учитываться при
разработке конструкции МТА, включены:
виды соединения основных частей
агрегата в отдельные блоки, характеризующие, как
отмечалось, возможность высвобождения
основных частей из его состава для
использования в других агрегатах;
типы движителей. Так как большинство
МТА являются мобильными,
перемещающимися относительно обрабатываемого
материала, то выбор варианта движителя
является одним из основных при создании
агрегата. Включим в матрицу следующие варианты
типов движителей для перемещения по
поверхности почвы: гусеничный, колесный,
шнековый, комбинированный из первых трех
(для этих агрегатов следует учитывать
возможность частичного снятия нагрузки на почву за
счет воздушной подушки), движители
(воздушный винт, реактивная тяга и др.),
обеспечивающие перемещение МТА над
поверхностью почвы, способные работать в агрегатах,
которые легче или тяжелее воздуха (в том
числе на воздушной подушке);
типы силовых передач - трансмиссий:
механическая, гидравлическая, электрическая,
комбинированная. Эти варианты также могут
быть развиты детализацией структуры передач
внутри каждого типа (карданные, с
гидроцилиндром и др.);
варианты соединения частей и блоков
агрегатов между собой (подвижное-прицепное,
навесное, седельного типа и др.,
неподвижное);
варианты расположения основных частей
и блоков агрегата относительно друг друга.
Например, расположение технологической
части агрегата относительно энергетической
(сзади, спереди, сбоку, сверху, снизу или
кругом, когда двигатель встроен во внутрь
машины);
варианты складывания-раскладывания
агрегатов как сцепочных, так и бесцепочных
при переводе их в транспортное положение и
обратно (транспортируемые без перестроения,
сложенные для транспортирования, назад, в
том числе перестроенные цугом, повернутые
на 90°);
варианты основных параметров агрегата
(массы, мощности двигателя, ширины захвата
технологической части, скорости движения
агрегата).
Известно, что допустимые агротехникой
режимы движения рабочих органов при
обработке предоставляют возможность двигаться
агрегату в некотором диапазоне скоростей. С
другой стороны, каждая операция может
выполняться с разной шириной захвата
технологической части. Это обусловливает, в свою
очередь, необходимость изменения мощности
двигателя и массы агрегата, обеспечивающей
его необходимые тяговые свойства.
Изменяя любые два, три или все четыре
основных параметра можно определить их
оптимальные значения по одному из
приведенных критериев - минимуму затрат труда,
энергии (топлива), материалов. Следует
учитывать, что оптимальные параметры МТА и их
конструкции зависят, с одной стороны, от
совокупности почвенно-климатических
условий, в которых работают агрегаты, а с другой
стороны - от универсальности его основных
частей, особенно энергетической, чаще всего
выполняемой конструктивно в виде трактора.
Так как трактор может использоваться с
сельхозмашинами разного, назначения, то
мощность его двигателя и масса зависят от
энергоемкости операций.
Рассмотренные схемы МТА составлены
на основе трактора тяговой концепции.
Анализ технологических, агротехнических и
других факторов, определяющих концепцию
развития трактора, показывает, что их требования
противоречивы, поэтому стремление повысить
одни свойства приводит к ухудшению других.
Так, требования повышения
производительности МТА, энерговооруженности
механизаторов и сокращения их числа реализуются
путем увеличения мощности двигателя и силы
тяги, т.е. массы трактора.
Противоречие требований агротехники и
развития функциональных свойств тракторов
создает объективные трудности в дальнейшем
совершенствовании их параметров, так как
нельзя поступиться одними требованиями в
пользу других. Для пропашных тракторов это
противоречие критическое. Предельная
суммарная грузоподъемность четырех шин,
вписывающихся в междурядья соответствует
примерно 60 ... 70 кН при агротехнически допу-
тенкещцш ^ътатая т?ькхо?оъ
ню
стимом давлении в них 0,01 МПа, а
эксплуатационная масса универсально-пропашного
трактора мощностью двигателя ПО кВт из
условий обеспечения надежности составляет
4 ... 5 т. Масса сельскохозяйственных машин и
емкостей с технологическим материалом для
эффективного использования такого трактора
также 4 ... 5 т, а суммарная масса навесного
комбинированного агрегата 8 ... 10 т.
Следовательно, грузоподъемность колес трактора ниже
требуемой.
Агротехнические свойства тракторов и их
влияние на окружающую среду проявляются
наиболее заметно через воздействие их
движителей на почву. Это негативное свойство МТА
нарастает, так как стремление повысить
производительность машинно-тракторных
агрегатов сопровождается неизбежным увеличением
их массы. На уборочных операциях проблема
снижения массы агрегата может быть решена,
например, переносом на стационар части
технологических операций, выполняемых на
ходу. Тогда уборочный агрегат может быть
облегчен снятием с него части механизмов.
Возможными способами снижения
вредного воздействия машинно-тракторных
агрегатов на почву могут быть: минимальное
число проходов по полю; создание агрегатов
переменной массы и переменного тягового
класса; сокращение площади вытаптывания
относительно ширины захвата.
Техническими путями реализации этих
направлений являются:
создание комбинированных агрегатов
(машин, рабочих органов, выполняющих
несколько операций за один проход);
использование тракторов высокой
энергонасыщенности с орудиями, имеющими
активные рабочие органы;
создание агрегатов с возможностью
изменения их исходя из требований обеспечения
необходимой силы тяги;
применение активных колес вместо
пассивных и технологической части агрегата с
целью использования их для создания силы
тяги (масса трактора может быть меньше и
определяется только требованиями
надежности).
Требованиям к трактору (второго
поколения) удовлетворительно отвечает модульная
схема его построения. Она заключается в том,
что энергетические функции трактора
конструктивно отделены от технологических. В
качестве энергетического модуля используется
трактор высокой энергонасыщенности (выше
25 кВт/т), а технологические модули
представляют собой тележки, снабженные
устройствами для соединения с орудиями, емкостями для
технологического материала, активными
колесами с приводом от энергетического модуля.
При модульном построении устраняется
требование соответствия между массой
энергетического модуля и мощностью двигателя,
свойственное тяговой концепции трактора.
Каждая из частей трактора (технологическая и
энергетическая) может развиваться в
соответствии с предъявляемыми к ней
требованиями, не вступая в противоречие с другой и не
ухудшая, а улучшая общие показатели
трактора и МТА. Теоретически можно
неограниченно повышать массу технологической части
трактора (агрегата) и снижать массу
энергетической части при одновременном повышении
мощности. В создании силы тяги может
участвовать масса всего агрегата, включая
технологическую часть с приводом колес от
"легкого", но мощного энергетического
модуля.
Трактор в таком МТА рассматривается
как мобильное энергетическое средство
(МЭС).
3.2.8. ТЕНДЕНЦИИ РАЗВИТИЯ
КОНСТРУКЦИЙ ТРАКТОРОВ
Сельскохозяйственные н лесохозяйствен-
ные тракторы. Основным типом трактора по-
прежнему остается колесный трактор
традиционной компоновки или улучшенной
традиционной компоновки (с передними колесами
несколько меньшего диаметра, чем задними,
воспринимающими около 0,6 массы трактора,
с задним расположением кабины) [20, 33, 34].
При этом отмечается тенденция к смещению
границы мощности тракторов улучшенной
традиционной компоновки в сторону больших
значений.
Трактор сохраняет функции
преимущественно тяговой машины в сочетании с
мобильным источником энергии для привода
машин от ВОМ, который может передавать до
90 % мощности двигателя. Сфера применения
тракторов шарнирно-сочлененной схемы со
всеми ведущими колесами одинакового
размера в сельском хозяйстве сужается, а
требования к универсализации возрастают.
Гусеничные тракторы используются
преимущественно для энергоемких работ (пахота
тяжелых почв, глубокое рыхление),
специальных работ или работ в особых
производственных условиях (например, горных). Отдельные
попытки создания гусеничных тракторов -
конкурентов колесных - предприняты в
последние годы фирмами САТЕКР1ЫАК (США)
и ТКАСК МАК5НАЫ, (Великобритания),
которые начали вьшуск тракторов мощностью
190 ... 242 кВт с резиноармированными
гусеницами, предназначенных для работ в
сельском хозяйстве.
Тракторы традиционных компоновок
сохраняют ограниченное распространение,
однако номенклатура их расширяется, прежде всего
за счет появления новых тракторов
интегрального типа и тракторов со свободным обзором.
СИЛОВЫЕ УСТАНОВКИ
371
Развитие модульного принципа
компоновки узлов промышленных тракторов
позволяет достичь следующих весьма важных
потребительских качеств: возможности замены узлов
трактора в случае их износа или выхода из
строя при невысокой трудоемкости
выполнения монтажно-демонтажных операций;
снижение трудоемкости ремонта и проведение его
агрегатными методами; возможность обкатки
готовых узлов до сборки на конвейерах.
Повышение уровня условий и
безопасности труда оператора достигается улучшением
микроклимата в кабине, снижением
интенсивности управляющего воздействия на рычаги
управления, уровня шума, улучшения
обзорности, оснащением тракторов защитными
каркасами КОР8 и РОР8.
Повышение универсальности
промышленных тракторов общего назначения
обусловлено оснащением их разнообразным
землеройным оборудованием, которое в свою
очередь отличается высоким уровнем развития и
совершенством.
Рост ресурса и эксплуатационной
надежности промышленных тракторов и агрегатов
на их базе связан с совершенствованием
конструкции, применением высококачественных
материалов и передовыми технологиями
производства и сборки тракторов и агрегатов на
их базе.
В развитии конструкций агрегатов и
систем промышленных тракторов можно
отметить следующие тенденции.
Улучшение топливной экономичности
сочетается с широким применением турбонад-
дува дизелей и дизелей с площадкой
постоянной мощности.
Преобладающее распространение
получили на промышленных тракторах
гидромеханические трансмиссии, позволяющие
повысить производительность трактора на бульдо-
зерно-рыхлительных работах на 10 ... 20 % при
одновременном увеличении ресурса силовой
передачи в 1,5 раза. Такая трансмиссия часто
сочетается с планетарной коробкой передач.
Фирма Катерпиллер на мощных гусеничных
тракторах предлагает бесступенчатый механизм
поворота, обеспечивающий снижение нагрузок
и плавность в процессе поворота.
В развитии ходовых систем
промышленных тракторов следует отметить применение
фирмой Катерпиллер треугольного обвода на
последних сериях тракторов в сочетании с
упругой балансирной подвеской. Вместе с тем
наибольшее распространение на
промышленных тракторах получили полужесткие
трехточечные подвески, обеспечивающие
удовлетворительную плавность хода при скоростях
движения до 12 км/ч. Тракторы ведущих фирм
оборудуются сменными гусеницами с
повыше} ной шириной башмаков с целью
снижения давления на грунт.
Расширяется применение
автоматизированных систем контроля и управления
трактором и агрегатом на его базе. Особое внимание
уделяется контролю жизнеобеспечивающих
показателей (давление масла в двигателе,
системах управления трансмиссии, температура
охлаждающей жидкости, запыленность
фильтров). Фирма Комацу поставляет по заказу
тракторы, оснащенные системой
дистанционного радиоуправления.
Приспособленность промышленных
тракторов к условиям перевозки обусловлена
увеличением максимального типоразмера
трактора и проявляется в подчинении
конструкции определенным правилам демонтажа
и монтажа отдельных агрегатов и систем в
уплотнении компоновки машин, особенно
больших типоразмеров.
Глава 3.3 ТРАНСМИССИЯ
3.3.1. СИЛОВЫЕ УСТАНОВКИ
В качестве силовых установок на
сельскохозяйственных и промышленных тракторах
применяются преимущественно традиционные
дизели и разработанные на их основе дизели
постоянной мощности (ДПМ) [5]. Их
созданию способствовало широкое внедрение на
дизелях турбонаддува.
На тракторах применяют
преимущественно рядные или У-образные дизели.
По способу смесеобразования дизели
могут быть с неразделенными камерами
сгорания (с непосредственным впрыскиванием
топлива), и с разделенными камерами (вихрека-
мерные или предкамерные).
На тракторах используются в основном
дизели с непосредственным впрыскиванием
топлива, с турбонаддувом, в том числе с
охлаждением наддувочного воздуха.
Тракторный двигатель значительную
часть времени должен работать под нагрузкой
близкой к полной. Поэтому для обеспечения
высокой долговечности максимальная
мощность его назначается несколько ниже чем для
автомобильного или комбайнового двигателя.
В технических требованиях к
современным тракторным двигателям указываются
следующие параметры:
максимальная мощность, развиваемая
двигателем при номинальной частоте
вращения;
максимальный крутящий момент,
который, как правило, имеет место при частоте
вращения 60 ... 70 % номинальной;
коэффициент запаса крутящего
момента - отношение максимального крутящего
момента к моменту при максимальной
(номинальной) мощности - для тракторных
372
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
двигателей он составляет 1,12 + 1,15. На
тракторах общего назначения применяют
•двигатели с высоким коэффициентом запаса
крутящего момента (1,3 и более);
удельный расход топлива на режиме
максимальной мощности или на режиме
максимального крутящего момента;
расход масла (общий, с учетом смены
масла, и на угар);
масса двигателя, габаритные размеры;
предельные углы наклона, при которых
двигатель должен сохранять
работоспособность;
параметры пуска;
экологические параметры - ограничения
по шуму, вибрации, выбросу вредных веществ
с отработавшими газами (сажи, оксидов
углерода, азота, углеводородов), а также другим
выделениям (картерным газам, подтеканию
топлива, масла и др.);
параметры надежности - ресурс,
ремонтопригодность, трудоемкость обслуживания.
Основными направлениями развития
тракторных двигателей являются:
повышение топливной экономичности и
надежности, упрощение обслуживания;
расширение применения газотурбинного
наддува и охлаждения наддувочного воздуха;
для особо малых двигателей - применение
нагнетателей с механическим приводом;
внедрение электроники для управления
работой двигателя (подачей топлива,
газообменом) при диагностировании;
использование композитов, керамики
для повышения износостойкости, уменьшения
тепловых потерь ("адиабатизация" двигателя),
уменьшения движущихся масс (колеса газовых
турбин турбокомпрессоров);
распространение схем с утилизацией
теплоты двигателя (турбокомпаундирование);
усовершенствование характеристик
двигателя для работы в режиме постоянной
мощности;
использование альтернативных топлив -
газа (природный газ, сжиженный, биогаз и
др.), спирта (метанол, этанол), растительных
масел (рапсовое масло и др.);
применение систем уменьшения и
нейтрализации вредного воздействия двигателей
(уровеней шума, вибрации, вредных выбросов
и др.) на экологию.
Согласование параметров двигателя и
трансмиссии. Энергетические и тягово-
экономические характеристики,
приспособляемость трактора к переменным нагрузкам,
топливная экономичность, надежность его
работы и трудоемкость управления
определяются главным образом свойствами моторно-
трансмиссионной установки (МТУ) [5].
Решающее значение при этом имеет соответствие
параметров двигателя и трансмиссии трактора
его назначению и условиям эксплуатации.
Для традиционных тракторных дизелей
свойственен сравнительно низкий
коэффициент запаса крутящего момента
(коэффициенты приспособляемости) [1, 15], узкие
области высоких значений мощности на
корректорном участке характеристики, причем
максимальная мощность, как правило,
приходится на режим номинальной частоты
вращения вала двигателя и не совпадает с режимом
минимального удельного расхода топлива.
В отличие от традиционных дизелей
ДПМ обеспечивают высокий коэффициент
запаса крутящего момента (25 ... 40 % и
более), приблизительное постоянство
максимальной мощности в значительных интервалах
частот вращения коленчатого вала,
совмещение области максимальной мощности с
наиболее экономичными режимами двигателя.
В зависимости от условий применения
ДПМ уровень максимальной (постоянной)
мощности может варьироваться в пределах
20 ... 30 % при соответствующем выборе
коэффициента запаса крутящего момента. В
табл. 3.3.1 приведены значения максимальной
мощности М€Л при номинальной частоте
вращения и коэффициента Км запаса
крутящего момента, интервалы рабочих частот
вращения коленчатого вала пе на корректорном
участке характеристики ДПМ отечественных и
зарубежных тракторов.
Отмеченные отличия в свойствах
традиционных дизелей и ДПМ требуют и
различного подхода при согласовании их параметров с
параметрами как механической ступенчатой
трансмиссии (МСТ), так и гидромеханической
трансмиссии (ГМТ), широко применяемых на
сельскохозяйственных и промышленных
тракторах.
Согласование параметров дизеля и транс
миссии заключается в обеспечении условий для
высокого использования мощности дизеля
[4, 5]:
при МСТ
Хеср*[Хен-ВЬи]^Хетах-> (3-3.1)
при ГМТ
шах >
(3.3.2)
где NеСр> Мт - соответственно средняя
реализуемая, номинальная мощность дизеля,
кВт; В - постоянный коэффициент, кВт;
СИЛОВЫЕ УСТАНОВКИ
373
Трактор
ДТ-75Д
ДТ-75НБ
ДТ-75Т
4^елленджер-65
^елленджер-75
"Катерпиллер"
Т-90П
В6Н
вт
В9Ы,
"Катерпиллер"
РЕ>-50
"Фиат-Аллис",
"Камминс"
856
876
"Форд ЫН"
КР-1325,
"Кейс"
4955
8560,
"Джон Дир"
3.3.1. Параметры ДПМ отечественных и зарубежных тракторов
Двигатель
Число
цилиндров
объем, л
кВт
мин-1
%
Гусеничные сельскохозяйственные тракторы
Д-440
СМД-18Н
Д-440
3306 Б1ТА
3175 ТА
4Р/7,4
4Р/6.3
4Р/7,4
6Р/10,5
6Р/10,3
70
60
67
191
242
1750...1250
1800...1350
1750...1250
2100... 1400
2100... 1400
Не менее 35
35
Не менее 35
31
30
Гусеничные промышленные тракторы
Д-440
ПОАМЗ
3306БГТ
3306БГТ
3408Б1ТА
УТ-1710С
4Р/7,4
6Р/10,5
6Р/10,5
8У/18
12У/18,9
70
123
160
276
392
1750...1250
1800...1300
2100...1450
1900...1400
2100... 1450
Не менее 35
25
31
30
41
Колесные сельскохозяйственные тракторы
ЬТА-10
ЬТА-10
"Камминс'1
ЭТА-855А 1
"Камминс'1
6466А
6466А
6Р/10
6Р/10
6Р/14
6Р/7,6
6Р/7,6
186
208
242
150
175
2100...1500
2100...1550
2100...1500
2200... 1560
2100...1560
35
30
•зз
38
30
пе~пен
при удельном
расходе
топлива
8е ^ 8ен »
МИН"1
1200...1750
1200... 1800
1200...1750
1200...2100
1200...2100
1200... 1750
1100... 1800
1200...2100
1200...1900
1300...2100
1300...2100
1300...2100
1200...2100
1400...22<)0
1300...2100
Трансмиссия,
тип
МТ
МТ
МТ
МТ
МТ
МТ
ГМТ
ГМТ
ГМТ
гмт/п
НХ
МТ
МТ
МТ
МТ
МТ
Примечание. Р, У- рядный и У-образный двигатели; Т - ДПМ с турбонаддувом;
ТА и А - ДПМ с турбонаддувом и охлаждением наддувочного воздуха; Индекс ен - режим
номинальной частоты вращения вала ДПМ, а ем - максимального крутящего момента ДПМ;
МТ - механическая трансмиссия; ГМТ - гидромеханическая трансмиссия.
А и - интервал передаточных чисел смежных ПгмТ - коэффициент прозрачности ГМТ,
ступеней МСТ; Аи ="""""-> =(1-а„); ™Р°Ч>ансформатора (ГГ>; Пгмт^ 1.
ип Графическая интерпретация условий
ип - передаточное число /1-й ступени МСТ; (ЗЗЛ> и (3'32> дана на рис- ЗЗЛ; скорост"
п * ' ные характеристики тракторных дизелей с
ап - коэффициент снижения угловой скорое- турбонаддувом с коэффициентами запаса
крутящего момента около 15 % и зоны рацио-
ти (частоты вращения) вала дизеля; ап < 1; нального их использования при работе с МСТ
374
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
70 90ше(а„),%
а)
70 90ш,(аа);/.
Рис. 3.3.1. Согласование параметров дизеля с малым
запасом крутящего момента и трансмиссии:
а - дизеля и МСТ; б - дизеля и ГМТ;
для смежной (низшей) передачи;
- - - параболы нагружения ГМТ
(рис. 3.3.1, а) и ГМТ (рис. 3.3.1, б)у
определяемые соответственно интервалом А(/ и
параболами нагружения ГГ.
Для рабочих смежных передач МСТ
сельскохозяйственных тракторов интервалы
А и = 10 ... 15 % обеспечивают включение в
работу дизеля при угловых скоростях
коленчатого вала ®е = 87 ... 102 % сош (рис. 3.3.1, а).
При этом средние значения используемой
мощности дизеля Ме = (0,93 ... 0,97) Мт .
Меньшие значения соответствуют режимам
работы дизеля на регуляторном участке
характеристики (в частности при значительных
изменениях или колебаниях нагрузки). Для
реализации условия (3.3.1) требуется, чтобы при
определении числа рабочих передач м в МСТ
интервал А и =0,10 ... 0,15:
т = 1 +
1п Ау
1п (1 + Ди) '
где А V - диапазон рабочих (технологических)
скоростей движения сельскохозяйственного
трактора общего назначения.
В свою очередь, для обеспечения
высокого использования дизеля с малыми запасами
крутящего момента на тракторах с ГМТ (ГТ)
параболы нагружения ГТ не должны выходить
за пределы указанного выше интервала А и
при пересечении ими кривой крутящего
момента двигателя Ме (рис. 3.3.1, б). Это
возможно при применении ГТ (ГМТ) с
малопрозрачной характеристикой, коэффициент
прозрачности которого должен отвечать
следующему условию:
—1 —3
апЪ ^ Пгмт<Я/1(Ъ
где ап$ - коэффициент снижения частоты
вращения (угловой скорости) вала двигателя,
соответствующий крайней левой параболы
нагружения ГМТ (рис. 3.3.1, б).
Рассмотренные согласования параметров
двигателя и трансмиссий, позволяя обеспечить
высокое использование мощности дизеля с
малым запасом крутящего момента,
практически исключают возможность реализации
наиболее экономичных режимов его работы, в том
числе при МСТ вследствие невысокой
надежности работы дизеля на этих режимах, при
ГМТ ввиду малого коэффициента
прозрачности. Вместе с тем применение таких ГМТ на
промышленных тракторах, для которых
характерны частые переходные процессы,
затрудняет управление МТА из-за негибкости связей в
системе оператор-дизель-агрегат, поскольку
дизель практически не реагирует на изменение
загрузки агрегата и управляющие воздействия
оператора на органы рабочего оборудования.
Для двигателя постоянной мощности
(ДПМ) характерен значительный диапазон
регулирования крутящего момента в области
максимальных значений мощности и низких
удельных расходов топлива [29]. Степень
использования этой области характеристики, а
следовательно, эффективность применения
ДПМ на тракторе, зависит от уровня его
постоянной (максимальной) мощности и
коэффициента запаса крутящего момента, от
характеристики и параметров трансмиссии,
определяющих ее согласующие и регулирующие
свойства. На выбор этих характеристик и
параметров в основном влияют следующие
факторы: регулирующие и энергетические
возможности ДПМ, нагружающие и
преобразующие свойства трансмиссии, назначение и
условия работы трактора.
Для реализации характеристики ДПМ
требуются трансмиссии с высокими
нагружающими свойствами. Повышение
нагружающих свойств тракторных ГМТ обусловлено,
как правило, определенными изменениями
свойств гидротрансформатора. Нагружающие
свойства ГТ зависят от ряда факторов, связь
между которыми выражается следующим
образом:
Мн = рХ„сон/>*
или
Мн =Р*ноПгтсон/)а> (3.3.3)
где Мн - крутящий момент на валу
насосного колеса ГТ, Н • м; р - плотность рабочей
жидкости ГТ, кг/м3; Хн - коэффициент момента
насосного колеса ГТ, характеризующий
энергоемкость ГТ; Хно - минимальный
коэффициент Хн в рабочей (экономичной) зоне ГТ;
СИЛОВЫЕ УСТАНОВКИ
375
сон - угловая скорость насосного колеса
ГТ, с-1; /)а - активный диаметр ГТ, м; Пг т -
коэффициент прозрачности характеристики
ГТ(ГМТ); Пгт=Хнтах/Хн0.
Из выражения (3.3.3) следует, что
коэффициент прозрачности оказывает основное
влияние на величину и диапазон изменения
Мн , от которого зависит полнота
использования характеристики двигателя.
Необходимо отметить, что ГТ с
высокими коэффициентами прозрачности присущи
сравнительно низкие коэффициенты
трансформации Ккт (преобразующие свойства).
Об этом, в частности, свидетельствуют
приведенные на рис. 3.3.2 зависимости между
коэффициентами Пгт прозрачности и Ккт
трансформации, полученные на основании
статистических исследований безразмерных
характеристик одноступенчатых ГТ
современных транспортных средств (в том числе ГТ
зарубежных тракторов). Реализуемый
коэффициент запаса крутящего момента ДПМ тем
больше, чем выше коэффициент прозрачности
ГТ и ниже его коэффициент трансформации.
В связи с этим при согласовании параметров
ДПМ и ГТ (ГМТ) в качестве одного из
критериев целесообразно использовать
произведение коэффициентов запаса крутящего момента
(коэффициента приспособляемости) ДПМ и
трансформации ГТ (Км, Кт т ) ,
определяющие преобразующие свойства МТУ.
Для тракторов с МСТ нагружающие
свойства трансмиссии зависят от выбора числа
и распределения рабочих передач. При этом
решающее значение имеет согласование
режимов загрузки ДПМ и трактора, в основу
которого целесообразно положить вероятностное
распределение средних значений нагрузок
трактора.
Пг
П
ъ.
ГТ
г
\
' 1
^^ч
5
*
3 Кгт
2 3 Ч Кгт
V
Рис. 3.3.2. Зависимости между коэффициентами
прозрачности Пп и трансформации К„
одноступенчатых ГТ (линейно коррелированные):
а - для зоны экономичных режимов ГТ (/7гт.э> ^гг.э);
б - при максимальном коэффициенте трансформации
ГТ (Агт щах, /рг = 0)
Согласование параметров ДПМ и ГМТ
(ГТ) следует проводить с учетом того, что
тракторные ГМТ отличаются по характеру
использования режима ГТ. На промышленных
тракторах ГТ предназначен (за редким
исключением) для постоянного функционирования,
на сельскохозяйственных тракторах режим ГТ,
как правило, используется эпизодически -
ГМТ работает в основном при
заблокированном ГТ. В связи с этим ГМТ
сельскохозяйственных тракторов не должны отличаться
распределением передач от МСТ тракторов
такого же назначения. Рациональным для
тракторных МТУ является согласование
характеристик, приведенное на рис. 3.3.3. Благодаря
такому согласованию, во-первых, реализуется
зона постоянной (максимальной) мощности
М'е\ ... М'е2 (рис. 3.3.3, а) и экономичных
режимов ДПМ %'г\ ... %'е2, во-вторых,
реализация этих режимов ДПМ осуществляется на
экономичных режимах ГТ в зоне Хн\ ... ХН2
(рис. 3.3.3, б).
Реализуемый коэффициент запаса.
крутящего момента ДПМ Км = Ме\/ Ме2 ■ Из
уравнения совместной работы дизеля и ГТ
Ме=сМн [2], т.е. Км = МеХ I Ме2 =
= Мн1/Мн2. На
(3.3.3) и рис. 3.3.3
основании выражения
V _ ш н1 _ п
лм ~ . у — Х1гт.э
*"н2<°„2
-^- = П а
2 11гт.э"/
Пг т э = Ки/ ап * Км ,
(3.3.4)
где Пг т э - коэффициент прозрачности ГТ в
зоне экономичных режимов.
Зависимость (3.3.4), определяющая связь
между параметрами ДПМ и коэффициентом
прозрачности ГТ, является необходимым
условием реализации характеристики ДПМ и
рациональной совместной работы ДПМ и ГТ.
м:
1,0
1,
0,9
ш
«I
?1
V-
ГТ
1
1
К
ь
ТГ
/_
1/*
Т^
г I
Л*/
I
-*7Г-
^,
К
""%
д
И
|
^.
КА I
П1 1
Пгт
0,8
0,6
о,**
0,1
0,7
О)
1,0 ь;
о,з
0,6
(Г)
0,9 игт
Рис. 3.3.3. Согласование характеристик ДПМ и ГТ:
а - характеристика ДПМ и параболы нагружения ГТ
^н1 и ^н21 о"- безразмерная характеристика ГТ
376
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
Силовой диапазон непрерывного
регулирования МТУ зависит от произведения
коэффициентов запаса крутящего момента
ДПМ и трансформации ГГ. Учитывая, что
повышение коэффициента прозрачности ГТ
сопровождается понижением его
коэффициента трансформации (см. рис. 3.3.2), но
способствует реализации высокого коэффициента
запаса крутящего момента ДПМ, при
согласовании параметров ДПМ и ГТ (ГМТ)
необходимо также обеспечить выполнения условия
^м Дгтэ^тах-
Таким образом, выбор и согласование
параметров ДПМ и ГТ должно обеспечить
реализацию двух основных условий:
Г 10
\АПТТЭХн0(оенап
[для Км = 1;
2) Км , Кт т э -» тах
для ПГТЭ = Хн1/Хн2 (рис. 3.3.3, б)у
где А- постоянный коэффициент; А = р/>а .
Такое согласование параметров ДПМ и
ГТ требуется прежде всего при постоянном
использовании режима ГТ, что имеет место в
ГМТ промышленных тракторов.
Рациональным согласование является и для ДПМ и ГТ
сельскохозяйственных тракторов.
Выбор мощности ДПМ и распределения
передач в ГМТ при постоянном
функционировании ГТ практически не должен отличаться
от выбора соответствующих параметров дизеля
и ГМТ с непрозрачной характеристикой. Для
промышленных тракторов с частыми
переходными процессами выбор мощности и
предельных скоростей движения МТА определяется в
основном конструкцией и характером
использования рабочего оборудования,
психофизиологическими возможностями тракториста. В
частности, энергонасыщенность современных
промышленных тракторов с дизелем и ГМТ, а
также с ДПМ и ГМТ составляет, как правило,
8 ... 9 кВт на 1 т конструкционной массы [7],
общее число передач равно трем, интервалы
между ними А и = 65 ... 80 %.
Таким образом, рассмотренное
согласование параметров ДПМ и ГМТ обеспечивает
реализацию максимальной мощности при
минимальных расходах топлива и на
экономичных режимах работы ГТ, гибкость связей в
системе оператор-двигатель-агрегат (трактор),
при которой управляющие воздействия и
изменения загрузки трактора вызывают
соответствующие изменения режима работы
двигателя, воспринимаемые оператором на слух и
облегчающие управление агрегатом [5].
Согласование параметров ДПМ и МСТ
сельскохозяйственных тракторов и их
промышленных модификаций заключается в
выборе максимальной (постоянной) мощности и
коэффициента запаса крутящего момента
двигателя, числа и распределения рабочих
передач в МСТ. При этом определяющими
являются условия работы трактора, а для
сельскохозяйственного трактора общего
назначения - условия его работы на энергоемких
операциях. Выбор и оценку параметров ДПМ и
МСТ целесообразно осуществлять на
основании и с учетом следующих характеристик:
обобщенной или частной вероятностной
распределения средних нагрузок трактора на
энергоемких сельскохозяйственных работах;
предельных технологических
скоростей движения МТА на этих работах
^тах ~~ утш) >
ограничений, связанных с
агрегатированием трактора с сельскохозяйственными
машинами с активными рабочими органами.
Графическая интерпретация согласования
характеристики ДПМ с характеристикой
плотности распределения приведенных к его валу
средних моментов сопротивлений Мс (рис.
3.3.4) - часть согласования, которая
соответствует высшей рабочей передаче МСТ. Зона
корректорного участка характеристики ДПМ
Мт ... Метах совмещена с частью области
плотности распределения Мс, определяемой
2ам (где ам - среднее квадратическое от-
Рис. 3.3.4. Согласование характеристики Ме(<йе) и
вероятностной характеристики
средних моментов сопротивления МС(Р^
СХЕМЫ ТРАНСМИССИЙ
377
клонение Мс). В соответствии с графиком
согласования максимальная (постоянная)
мощность ДПМ рассчитывается по формуле:
^ен = {Мс "<*м )<»ен = Мс (1 - Ум )соен,
где Мс и ум - соответственно
математическое ожидание и коэффициент вариации
плотности распределения Мс; со^ - угловая
скорость вала ДПМ на номинальном режиме,
связанная с технологической скоростью
движения МТА зависимостью
_ "тр
00 ен - утах »
гк
где итр - передаточное число трансмиссии;
гк - радиус ведущего колеса трактора, м.
По обобщенной плотности
распределения Мс определяют число рабочих передач.
Для чего, учитывая низкочастотные колебания
текущих значений тяговой нагрузки,
редуцируемой к валу двигателя, целесообразно
выбрать расчетный силовой интервал ДПМ
М'е - Мт (заштрихованная зона). Причем
крутящий момент ДПМ
где ук - коэффициент вариации плотности
распределения текущих значений Мс .
Число рабочих передач
где И - диапазон средних значений моментов
сопротивлений Мс;
Полученный ряд рабочих передач может
быть уточнен на основании частных
вероятностных характеристик распределения средних
нагрузок, в том числе свойственных для
определенных сельскохозяйственных районов
(района) или для некоторых энергоемких
операций [2].
Следует учитывать, что рабочие передачи
используются также при агрегатировании
трактора общего назначения с
сельскохозяйственными машинами, требующими
фиксированных частот вращения (угловых скоростей)
ВОМ: 540 или 1000 мин"1. Для
этого'необходимо, чтобы двигатель работал на регулятор-
ном участке характеристики при минимальном
отклонении угловых скоростей от
номинального значения. Эффективность работы МТА
на этих режимах двигателя зависит от
интервалов А и между передаточными числами
смежных ступеней. Для обеспечения в этих
условиях высокого использования мощности
двигателя и высоких средних скоростей движения
не рекомендуется выбирать интервалы
А и > 25 % [2].
Рассмотренное согласование параметров
ДПМ и МСТ приемлемо и для
сельскохозяйственных тракторов общего назначения с ДПМ
и ГМТ, работающих в основном при
заблокированном ГТ.
Задачами дальнейшего развития ДПМ
являются совершенствование параметров и
расширение их функциональных
возможностей:
совершенствование рабочих процессов
ДПМ, в том числе путем применения
прогрессивных материалов, электронных регуляторов
подачи топлива;
повышение коэффициента запаса
крутящего момента и расширение области высокой
топливной экономичности;
создание ДПМ с регулируемыми
уровнями постоянной мощности,
обеспечивающими оперативное их изменение в
соответствии с видом работ и внешними
условиями.
3.3.2. СХЕМЫ ТРАНСМИССИЙ ТРАКТОРОВ
Назначение н классификация.
Трансмиссия передает энергию двигателя движителям
трактора, рабочим органам агрегатируемых
рабочих машин и приводам управления ими,
распределяет мощность между ними,
регулирует скорость движения трактора и
развиваемую им силу тяги путем изменения угловых
скоростей и крутящих моментов ведущих
колес движителей. Трансформация энергии
двигателя в трансмиссиях осуществляется
механическими, гидравлическими, электрическими
способами [3, 13, 24, 30].
Различают следующие типы
трансмиссий: механические (МТ), гидромеханические
(ГМТ), гидрообъемномеханические (ГОМТ),
электромеханические (ЭМТ). Три последних
типа трансмиссий являются
комбинированными, включающими наряду с гидравлическими
или электрическими механические
трансформаторы энергии (зубчатые Передачи), которые
отличаются высокими КПД и позволяют
снизить уровень потерь в трансмиссии. Находят
также применение гидрообъемные
трансмиссии (ГОТ), использующие высокомоментные
гидравлические двигатели, устанавливаемые
непосредственно в ведущих колесах без
механических редукторов.
378
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
В общем случае в механическую
трансмиссию входят: сцепление, коробка передач,
раздаточная коробка, карданная передача,
главная передача, дифференциал у колесных и
механизм поворота у гусеничных тракторов,
конечные передачи, приводы вала отбора
мощности (ВОМ) и гидравлических насосов
управления рабочим оборудованием.
Коробка передач в механической
трансмиссии ступенчатая механическая, а в ГМТ
состоит из гидродинамической передачи
(гидротрансформатора или гидромуфты) и
ступенчатой механической передачи,
сцепление при этом обычно не используется. Все
остальные агрегаты ГМТ и МТ обычно
одинаковы. В некоторых случаях на тракторах с
ГМТ между двигателем и
гидротрансформатором устанавливают модулирующее сцепление,
позволяющее отсоединять двигатель от
трансмиссии и обеспечивать трогание тракторного
агрегата с места в тяжелых условиях.
Функции коробки передач в ГОМТ
выполняет гидрообъемная передача, состоящая
из жидкостного насоса и одного или более
гидромоторов, а в ЭМТ -
электродинамическая передача, содержащая электрический
генератор, приводимый от ДВС, и один или
несколько электрических моторов. ГОМТ и
ЭМТ обеспечивают бесступенчатое изменение
скорости и силы тяги трактора, а ГМТ -
ступенчато-непрерывное. Бесступенчатое
регулирование позволяет значительно повысить
технический уровень и показатели
эффективности трактора, однако при этом усложняется
его конструкция, возрастает масса и
увеличивается стоимость, снижается КПД и
повышается удельный расход топлива на единицу
выполненной работы.
Схемы ГОМТ и ЭМТ отличаются
широким разнообразием, а состав их агрегатов
может значительно отличаться от МТ. Наиболее
простой получается конструктивная схема
трансмиссии с мотор-колесами. Мотор-колесо
выполняется в виде отдельного модуля,
содержащего гидравлический или электрический
мотор, планетарный редуктор и ведущее
колесо.
Модульность приводов ведущих колес
позволяет создавать множество различных
модификаций тракторов, а также обеспечить
привод опорных колес агрегатируемых машин
благодаря чему повышаются тягово-сцепные
качества тракторного агрегата. Однако для
тракторов с гидрообъемными передачами часто
приходится отступать от модульного
исполнения вследствие больших потерь при передаче
энергии потоками жидкости, прокачиваемой
через трубопроводы, связывающие насос с
гидромоторами. Поэтому большее
распространение получило моноблочное исполнение
гидрообъемной передачи, при котором насос и
мотор выполнены в едином моноблоке,
позволяющем значительно снизить потери и
повысить КПД гидрообъемной передачи.
Компоновка трактора с ГОМТ в этом случае мало
отличается от компоновки трактора с МТ:
вместо сцепления, коробки передач и
раздаточной коробки в нем используется
гидрообъемная передача, а все остальные агрегаты
трансмиссии неизменны. Аналогичное
решение иногда используют также при применении
электропривода в трансмиссии, например на
тракторе ДЭТ-250М, с целью сохранения
традиционной компоновочной схемы и
конструктивных элементов трансмиссии.
Требования к трансмиссии. Трансмиссия
должна обеспечивать все заданные
эксплуатационные режимы трактора согласно его
назначению, иметь необходимый диапазон
передаточных чисел, обеспечивая безопасные и
комфортные условия работы водителя. Она
должна быть оснащена системой приводов отбора
мощности для внешних потребителей,
механизмами отключения двигателя и приводов
отбора мощности. Технический уровень
трансмиссии определяется прежде всего ее
КПД, удельной материалоемкостью и
надежностью.
Трансмиссии сельскохозяйственных
тракторов. На сельскохозяйственных тракторах
наибольшее распространение получили
механические трансмиссии, отличающиеся
простотой и компактностью конструкции, небольшой
удельной материалоемкостью, высокими КПД,
показателями надежности.
Практическая реализация
конструктивных схем современных механических
тракторных трансмиссий опровергает сложившееся
традиционное представление о недостатках
ступенчатого регулирования. Применение
диапазонных многоступенчатых коробок передач
с плотным рядом передаточных чисел и
переключением ступеней внутри диапазона
посредством индивидуальных фрикционных
элементов управления (муфт, тормозных
механизмов), автоматизация переключения передач
позволяют обеспечить более высокие тягово-
скоростные качества тракторов и снижение
расхода топлива по сравнению с
бесступенчатыми передачами. Это обусловлено тем, что
КПД бесступенчатых передач значительно
ниже КПД механических.
СХЕМЫ ТРАНСМИССИЙ
379
Для эффективного выполнения
агротехнических требований сельскохозяйственным
трактором предусматривается не менее трех-
четырех диапазонов скоростей движения:
рабочий, один-два дополнительных (диапазоны
пониженных скоростей), транспортный.
Скорости движения трактора в этих диапазонах
регламентируются действующими стандартами
и зависят от типа ходовой системы трактора
(колесный или гусеничный). У
сельскохозяйственных тракторов число ступеней достигает
20 + 30 и наблюдается тенденция дальнейшего
их увеличения. Для получения ползучих
(менее 1 км/ч) скоростей применяют ходо-
уменьшитель с большим передаточным
числом. Число ступеней заднего хода также
велико и достигает на многих тракторах 1/2 числа
ступеней переднего хода. Привод рабочих
агрегатов агрегатируемых рабочих машин
осуществляется от независимого двухскоростного
ВОМ или от синхронного. Частота вращения
независимого ВОМ при номинальной угловой
скорости коленчатого вала двигателя должна
составлять 540 или 1000 мин'1. Вывод
приводов ВОМ обеспечивается назад или в сторону.
Предусматривается также установка
приводного шкива, поставляемого обычно по заказу.
Схемы механических трансмиссий
сельскохозяйственных тракторов построены на
базе типовых элементов трансформации
энергии - зубчатых передач. Однако
конструктивное исполнение их весьма разнообразно.
Основные отличительные особенности
обусловлены применяемыми схемами коробок
передач и приводами ведущих колес.
В зависимости от применяемых
механических элементов трансформации энергии
(ЭТЭ) различают коробки передач (КП) с
неподвижными осями валов (или вальные) и с
подвижными осями (планетарные). На
отечественных сельскохозяйственных тракторах и
большинстве зарубежных применяют вальные
КП, что обусловлено простотой их
конструкции и меньшей стоимостью по сравнению с
планетарными. Вальные КП выполняют с
продольным или поперечным расположением
валов. Поперечное расположение валов
используется в реверсивных КП (отечественные
тракторы Т-16М, Т-25А, Т-40М, Т-40АМ).
Кинематическая схема трансмиссии трактора
Т-25А показана на рис. 3.3.5. Ниже приведены
номера зубчатых колес, участвующих в
передаче энергии на соответствующих ступенях КП и
при включении ходоуменьшителя МХУ.
Л1*Л
Рис. 3.3.5. Кинематическая схема трансмиссии трактора Т-25А (С - сцепление)
380
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
Ступени
КП
I
II
III
Зубчатые колеса
IV
VI
МХУ
I
II
2 13
115
2-4-
1-3-
2 13
115
2-4
1-3-
2-12-
114
2 12
•1С
•9
10
9-
•8
7
8-
7-
10
9
•8
1-14-7
18 • 20 • 13 •
17 • 19 • 16 •
18-20-13-
•6
•5
6
5
•6
•5
6
5
6
5
6
•5
10-6
9-5
8-6
17 • 19 • 16 • 7 • 5
Механизм реверса МР выполнен в виде
конических шестерен и расположен перед кП.
Главная передача фактически отсутствует. Ее
роль выполняют две зубчатые пары КП 7, 8 и
9, 10, обеспечивающие удвоение числа
ступеней в КП. Вторичный вал КП выполнен как
одно целое с корпусом межколесного
дифференциала МД. Бортовая передача БП
представляет собой цилиндрическую прямозубую пару
внешнего зацепления. Такую схему КП
применяют также на самоходных шасси для со-
щ
29
пп «
I *Г
11 »1 3
* Тт^
:5и
+ п-
, КП 7 .
I
^
крашения длины трансмиссии. Недостатком ее
является более высокая материалоемкость по
сравнению с коробками передач, имеющими
продольные валы.
При сравнительно небольшом числе
ступеней в КП (до семи) применяют трех-
вальные схемы. Передача энергии
осуществляется двумя парами зубчатых
зацеплений, а максимальное передаточное число
коробки передач при этом не превышает семи.
Схема трансмиссии с такой КП применена на
тракторе МТЗ-80 (рис. 3.3.6) и на всех его
модификациях. КП выполнена по трехвальной
схеме с продольным расположением валов и
соосными первичным и вторичным валами.
Для получения пониженных скоростей (первая
и вторая ступени) и заднего хода используется
дополнительный промежуточный вал, а число
зубчатых зацеплений возрастает соответственно
до четырех и пяти. Диапазон передаточных
чисел трансмиссии 13,3, число ступеней
переднего хода девять, заднего хода два.
Трансмиссия снабжена двухскоростным
независимым и синхронным ВОМ, переключение
которых осуществляется механизмом МП^и-
Кроме того предусмотрен механизм выключения
ВОМ без остановки трактора МВ^и,
выполненный в виде планетарного редуктора с
двумя тормозными механизмами 7\ и 7^. Две
ступени скорости независимого ВОМ
обеспечиваются редуктором ДРЯвоу. Предусмотрена
установка гидромеханического ходоуменьши-
теля ГМХУу обеспечивающего бесступенчатое
изменение скорости трактора. Номера
зубчатых колес ступеней передач приведены ниже.
ЬгЧхуЬг
26 22 ±и ц Г^т-л °
. IV К О
вон
<о
7,1,
СХЕМЫ ТРАНСМИССИЙ
3811
Ступени КП
I
II
III
IV
V
VI
VII
VIII
IX
3X1
IX ТТ
Зубчатые колеса
6
5
6
5-
8-
5
б-
• 12 • 4 • 7 • 18 • 20
•11-14-8-17-19
• 12 • 4 • 9 • 18 • 20
1Ы4 10 17 19
13-7 18-20
5-8-17-19
4.7.18-20
38-17-19
2 • 7 .18 • 20
18-17-19
13-9-18-20
5 • 10 • 17 • 19
4 • 9 • 18 • 20
3.10-17-19
2 • 9 • 18 • 20
Ь 10-17-19
18-20
17-19
12 • 16 • 7 • 18 • 20
11.14-8.17-19
12 • 16 • 9 • 18 • 20
5-11 • 14-10-17-19
КП с продольными валами позволяет
сократить поперечные размеры трансмиссии,
сузить остов трактора, уменьшить колею.
Масса трансмиссии меньше, чем у варианта с
поперечным расположением валов при прочих
равных условиях.
Необходимость получения нескольких
диапазонов скоростей трактора и
обусловленное этим увеличение числа ступеней привели
к созданию КП сложной иерархической
структуры: последовательное сочетание нескольких
многоступенчатых редукторов и базовой
коробки передач. Редукторы являются
умножителями числа ступеней базовой коробки
передач и позволяют смещать ряд ее передаточных
чисел в нужном направлении, обеспечивая
требуемые диапазоны скоростей трактора. Они
могут устанавливаться как перед базовой
коробкой передач, так и после нее. В первом
случае редуктор выполняет роль делителя,
дробя передаточные числа базовой коробки
передач. Умножитель на входе в базовую
коробку передач применять нецелесообразно.
Делитель с переключением передач под
нагрузкой является увеличителем крутящего
момента (УКМ).
Редукторы, устанавливаемые после
базовой коробки передач, как правило, являются
умножителями (мультипликаторами),
обеспечивающими путем смещения ее передаточных
чисел требуемые диапазоны скоростей
трактора. Во многих случаях конструктивно они
представляют собой раздаточные коробки и
ходоуменыпители.
При многоуровневой иерархии
структуры КП каждый из ее отдельных
трансформаторов (базовая коробка передач, УКМ,
мультипликатор) имеет простую схему с высоким
КПД. Так, если трансформаторы выполнены
на базе вальных зубчатых передач, то
принимают двухзальные схемы с одной парой
зацеплений. В планетарных передачах используют
зубчатые трехзвенные дифференциальные
трансформаторы (ТДТ). КП, содержащие
базовую коробку передач и один или несколько
мультипликаторов, представляют собой
диапазонные КП.
КП с УКМ содержит базовую коробку
передач, на входе которой устанавливается
двух- или трехступенчатый УКМ. Ступени
УКМ переключаются под нагрузкой
посредством фрикционных муфт и тормозных
механизмов или муфт свободного хода. Ступени
КП, как правило, переключаются простыми
механизмами типа подвижных кареток или
зубчатых муфт, а их переключение
осуществляется при остановленном тракторе.
-ГЦ
[Ц
^н
=Н*
«г^п:
Рис. 3.3.7. Кинематическая схема трансмиссии трактора ДТ-75
382
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
В диапазонной КП базовая коробка
передач выполняется с механизмами,
обеспечивающими переключение ступеней под
нагрузкой (фрикционные муфты, тормозные
механизмы, муфты свободного хода) или без
нагрузки на ходу трактора (синхронизаторы), а
ступени мультипликаторов переключаются
зубчатыми муфтами или каретками (как
правило, при остановленном тракторе).
Коробки передач сложной структуры. КП
с УКМ применяют на отечественных тракторах
ДТ-75. На рис. 3.3.7 приведена схема
трансмиссии трактора ДТ-75. УКМ выполнен на
основе ТДТ с двухвенцовым сателлитом и
внешними зацеплениями зубчатых колес.
УКМ обеспечивает две ступени: прямую и
понижающую. Базовая коробка передач имеет
семь ступеней переднего хода и одну заднего.
На первых четырех ступенях она двухвальная,
а на высших - четырехвальная. УКМ удваивает
число ступеней. Ниже приведены номера
зубчатых колес ступеней передач.
Ступени
КП
I
II
III
Зубчатые колеса
12
11
14
13
8
7
IV
V
VI
VII
3. X
УКМ
К)
9
6-20-8
5
6
5
6
5
6-
20
•6
20
•6-
19
10
18
•16
17
6-12
5 15
2-4
13
Наиболее перспективными с точки
зрения удовлетворения требований
функционального назначения являются диапазонные
КП: отечественных тракторов К-701, Т-150,
Т-150К, МТЗ-100, МТЗ-102, "цанрадфабрик".
На рис. 3.3.8 показана кинематическая
схема трансмиссии трактора Т-150К. В нее
входят сцепление С, коробка передач КП,
раздаточная коробка РКУ ходоуменынитель МХУ,
главные передачи /771 и ГП2 переднего и
заднего ведущих мостов, конечные (бортовые)
передачи БП> независимый ВОМ> привод
насосов гидронавесной системы НГНС,
трансмиссионный тормозной механизм ТТ,
карданные передачи. Ниже приведены номера
зубчатых колес ступеней передач.
ЛУ7
^ЧТ /Ъ\НГНС
7 яцсри
ТЩ1Ж] 1ЫЩ^1н
ЧЯЮ1
г
15"
РК
18
. Е
У*
БП 22
оЙрЮ
I
вом
Рис. 3.3.8. Кинематическая схемя трансмиссии трактора Т-150 К
СХЕМЫ ТРАНСМИССИЙ
383
Ход
Передний
Ступени КП Зубчатые колеса
II
Задний
Передний с
ходоумень-
шителем
III
IV
VI
VII
VIII
II
III
Г/
II
III
Г/
VI
VII
VIII
4
3
6
5
8
7
2
1-
4
3
6
5
8
7
2
1-
•18
17
18
17
18
17
18
17
16
15
16
15
16
15
16
15
4 10 -13 -15 16
39-10-14 15
6 10-13-15 16
5-9-10-14-15
8 10 13-15-16
7 • 9 • 10 • 14 • 15
2 10-13 15-16
1 - 9-10-14 15
4 -10 -12 • 18
3-9-11 17
6-10-12-18
5-9-11 17
8-10-12-18
7-9-11 17
2-10-12-8
1-9-11-17
4 -10 ♦ 12 -16
3-9-И 15
6 -10 -12 • 16
5 -9-11-15
8 • 10 -12 -16
7-9-11-15
2 • 10 -12 -16
1-9-11-15
Трансмиссия трактора К-701 аналогична
рассмотренной, но в ней отсутствует
сцепление, а фрикционные муфты коробки передач
расположены на первичном валу.
Оригинально выполнена схема
трансмиссии гусеничного трактора Т-150 (рис. 3.3.9).
Привод левого и правого ведущих колес
гусеничного движителя осуществляется
посредством двух автономных главных передач, а КП
содержит два выходных вала (один вал не
показан), на каждом из которых установлено по
четыре многодисковых фрикционных муфт
Ф\ ... Ф4 с гидроприводом управления,
обеспечивающих переключение ступеней под
нагрузкой в пределах каждого из трех
диапазонов. КП выполняет одновременно функции
механизма поворота. Включением различных
ступеней на левом и правом вторичных валах
КП можно получить несколько
фиксированных радиусов поворота, а выключением всех
фрикционных муфт одного из валов и
затормаживанием этого вала - поворот с радиусом,
равным ширине колеи. Ниже приведены
номера зубчатых колес ступеней передач.
Ход
Передний
Задний
Ступени КП Зубчатые колеса
9-3-4-13-20
I
II
III
IV
VI
VII
VIII
IX
XI
XII
II
III
IV
7-10-5-4-21
9-3-4-14-20
7-10-5-б-21
9-3-4-15-20
7-10-5-8-21
9-3-4-12-20
7-10-5-2-21
2-13-20
1-4-21
2-14-20
1-6-21
2-15-20
1-8-21
2-12-20
1-2-21
4-13-20
5-4-21
4-14-20
5-6-21
4-15-20
5-8-21
4-12-20
5-2-21
9-2-13-20
7-11-4-21
9-2-14-20
7-11-6-21
9-2-15-20
7-11-8-21
9-2-12-20
7-11-2-21
384
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
-1_Г
вом
клг\Ф$^\$\
тт
Рис. 3.3.9. Кинематическая схема трансмиссии гусеничного трактора Т-150
Рис. 3.3.10. Кинематическая схема коробки передач трактора МТЗ-100
(РУ - рулевое управление)
КП МТЗ-100 (рис. 3.3.10) шестидиапа-
зонная, обеспечивающая 24 ступени скоростей
переднего хода и восемь ступеней заднего.
Предусмотрена установка гидромеханического
ходоуменынителя, позволяющего
бесступенчато изменять скорости движения. Привод
переднего ведущего моста встроен в КП. Другие
виды трансмиссий, кроме механической, пока
не находят широкого применения на
сельскохозяйственных тракторах. На
энергонасыщенных тракторах третьего класса (например
ДТ-175С) применяется ГМТ с
гидротрансформатором, обеспечивающим разгон тракторного
агрегата без переключения ступеней и
снижение динамических нагрузок при трогании и в
процессе .разгона. На установившихся режимах
гидротрансформатор блокируется, применение
гидротрансформатора позволяв * упростить
схему коробки передач и уменьшить число ее
ступеней.
Приводы ведущих колес. Значительное
влияние на структуру кинематической схемы
трактора оказывает привод ведущих колес
колесного трактора, осуществляемый через
дифференциал (в большинстве случаев) или с
помощью механизма свободного хода (трактор
К-701), а также механизм поворота
гусеничного трактора. Для повышения проходимости
предусматривается блокировка межколесного
дифференциала с ручным или автоматизиро-
СХЕМЫ ТРАНСМИССИЙ
385
ванным управлением или применяют
дифференциал повышеного трения. Управление
блокировкой может быть связано с рулевым
управлением. При соответствующем повороте
рулевого колеса дифференциал
разблокируется, что исключает циркуляцию мощности на
поворотах трактора. У полноприводных
колесных тракторов для привода переднего моста
используется предохранительная фрикционная
муфта или муфта свободного хода, которая
позволяет снизить циркулирующую мощность
при повороте. Межосевой дифференциал на
тракторах обычно не применяется, так как он
значительно снижает проходимость. На
тракторах с шарнирной рамой циркуляция
мощности между мостами при движении по грунту
отсутствует, поэтому привод переднего моста
осуществляют через зубчатую муфту,
выключаемую при движении по дороге с твердым
покрытием.
Главные передачи тракторов обычно
выполняют одинарными в виде пары конических
зубчатых колес. Для получения необходимого
передаточного числа в приводе ведущих колес
располагают вальные или планетарные
конечные (бортовые) передачи, одновременно
повышающие клиренс трактора и
обеспечивающие его агротехническую проходимость.
Планетарные конечные передачи более
компактны, имеют меньшую
материалоемкость, разгружают подшипники ведущих
колес, позволяют получить большие
передаточные числа. На тракторах больших классов
применяют двухрядные планетарные передачи.
Планетарная бортовая передача может быть
выполнена двухступенчатой, что расширяет
диапазон регулирования без дополнительной
нагрузки других элементов трансмиссии.
Трансмиссии промышленных тракторов.
Отличительными особенностями трансмиссий
промышленных тракторов являются [7, 30]:
преимущественное использование ГМТ;
уменьшенное число ступеней коробки передач
(три-четыре для ГМТ, четыре-шесть для МТ);
более сложные конечные передачи,
обеспечивающие реализацию больших передаточных
чисел; быстродействующий реверсивный
механизм; гидрофицированный привод управления
переключением ступеней, механизмами
реверса, поворота и тормозными механизмами;
независимый отбор мощности для привода
насосов управления механизмами трактора и
рабочим оборудованием; модульное
построение агрегатов трансмиссии; привод обоих
мостов - для колесных тракторов.
В качестве гидродинамической передачи
в ГМТ обычно используют одноступенчатый
трех- или четырехколесный
гидротрансформатор. Семейство одноступенчатых комплексных
блокируемых гидротрансформаторов,
рассчитанных на работу с двигателями мощностью
74 .. 400 кВт, включает гидротрансформаторы
пяти размеров с активными диаметрами 344,
375, 400, 440 и 475 мм. Для снижения потерь
мощности в гидротрансформаторе, КПД
которого гораздо ниже КПД зубчатой передачи,
мощность двигателя передают через коробку
передач двумя потоками (через
гидротрансформатор и механическую передачу), для чего
используют трехзвенный дифференциальный
трансформатор (ТДТ).
вом
•^
Т Ъ «* <Ъ Т4+ *Н
вомл
■*
1
Гит-! ЩП *7^ | Л I К
вом
■^
77777 /А07> . Д г*1
;=ю сН=
1 ГГГП -=-Г7П
Ъ ЯтХ; 77777- Ц
\
")ЧЬЬ.
Рис. 3.3.11. Кинематическая схема ГМТ промышленного трактора Т-330
386
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
ПГШ
4.
"1_П
■ф^Н^-ф-ф-
1ШЛ
4
СНН
«
тА\
а1
(И
-ф-ф-т—*-
+-Ф-
I
4—*—I
+Ч\Ы
Рис. 3.3.12. Кинематическая схема электромеханической трансмиссии
гусеничного промышленного трактора ДЭТ-250М
На тяжелых промышленных тракторах
находит также применение схема с
разделением потоков мощности к ведущим колесам в
коробке передач. На рис. 3.3.11 показана
схема трансмиссии отечественного трактора
Т-330. Механизмы реверса установлены в
кинематической цепи после коробки передач,
т.е. на ее выходных валах, поэтому
используются два механизма. При расположении
реверса на входе в КП (трактор "Кейс 450"),
трансмиссия значительно упрощается и
снижается ее материалоемкость и габаритные
размеры. Преимуществом расположения реверса
на выходе КП является возможность разворота
трактора на месте. Механизмы реверса
трактора Т-330 планетарные. Управление
механизмами осуществляется фрикционными муфтами
04 и Фв> включазмыми при движении вперед,
и тормозными механизмами Т\ и 72,
включаемыми при движении назад.
На некоторых тракторах большой
мощности устанавливают по две
гидромеханические реверсивные коробки передач, каждая из
которых передает мощность через отдельную
главную передачу на бортовую передачу и
ведущее колесо. Такая схема позволяет
использовать агрегаты (коробку передач, главную
передачу и др.) тракторов меньшей мощности,
имеющих обычную схему трансмиссии с
разделением потоков мощности после коробки
передач. Примером является трактор Д-455 с
двигателем мощностью 440 кВт.
Отечественный трактор ДЭТ-250М выполнен с ЭМТ,
схема которой приведена на рис. 3.3.12.
3.3.3. СЦЕПЛЕНИЯ
Сцепление предназначено для
разъединения двигателя и трансмиссии, плавного
изменения скоростей и нагрузок элементов
двигателя, трансмиссии и ходовой части трактора
при трогании и переключении ступеней [3, 28,
30]. Основными элементами сцепления
являются ведущая и ведомая полумуфты,
нажимное устройство и привод управления. По виду
связи между ведущей и ведомой полумуфтами
различают сцепления: фрикционные,
гидравлические и электромагнитные. На тракторах
применяют преимущественно фрикционные
сцепления, передающие крутящий момент
между полумуфтами за счет сил трения.
Фрикционные сцепления классифицируют по
следующим признакам:
по форме фрикционных элементов -
дисковые и конусные; дисковые подразделяются
на одно-, двух- и многодисковые;
по способу создания сил давления на
поверхностях трения - пружинные, рычажные,
полуцентробежные, центробежные,
гидравлические (с гидрообъемным приводом
нажимного устройства - поршня), электромагнитные;
по конструкции нажимного механизма -
постоянно замкнутые и непостоянно
замкнутые;
СЦЕПЛЕНИЯ
387
по роду трения - сухие (трение без
смазочного материала) и жидкостные (при работе
фрикционных элементов в масле);
по распределению передаваемой
мощности - однопоточные и двухпоточные
(управляют двумя потоками мощности - к коробке
передач и независимому валу отбора
мощности).
Сцепление должно обеспечивать:
передачу максимального момента
двигателя без пробуксовки;
быстрое и полное выключение;
плавное включение - для уменьшения
динамических нагрузок, плавного трогания и
движения тракторного агрегата;
малые моменты инерции ведомой (а в
некоторых случаях и ведущей) полумуфты;
постоянство момента трения при вклю-
ченом сцеплении;
эффективный отвод теплоты от
поверхностей трения при буксовании;
возможность автоматизации управления;
высокую надежность функционирования;
низкую стоимость изготовления и
трудоемкость технического обслуживания;
малые габаритные размеры и массу.
Схемы сцеплений тракторных
трансмиссий. Большое разнообразие конструктивных
схем трансмиссий тракторов обусловливает
множество различных схем сцеплений.
Сцепление в МТ и в ГМТ, коробки передач
которых не обеспечивают переключения под
нагрузкой (см. рис. 3.3.5 - 3.3.10), обеспечивает
процессы трогания с места и переключения
ступеней в КП.
На тракторах МТЗ-100, Т-150, Т-150К,
снабженных КП с переключением под
нагрузкой, сцепление предназначено для трогания
тракторного агрегата в тяжелых условиях, а
ступени КП переключают посредством
автономных многодисковых фрикционных муфт.
В трансмиссиях тракторов МТЗ-100, Т-150 и
Т-150К используются два типа сцеплений:
главное (или центральное), расположенное
между двигателем и коробкой передач, и
автономные, расположенные в базовой коробке
передач. Каждый элемент трансформации
энергии базовой коробки передач снабжен
своим фрикционным элементом управления -
автономным сцеплением. Эти
сцепления-принято называть фрикционными муфтами
коробки передач.
На тракторах применяют только
дисковые сцепления. Абсолютное большинство
главных сцеплений сухие, постоянно
замкнутые, с пружинным нажимным механизмом и
механическим приводом. В зависимости от
тягового класса и передаваемых нагрузок
применяют однодисковые и двухдисковые
сцепления. Сухое сцепление имеет меньшие
размеры, чем жидкостное, обеспечивает более
чистое выключение.
Фрикционные муфты и тормозные
механизмы коробок передач выполняют
многодисковыми с гидравлическим нажимным
механизмом, диски работают в масле. Муфты
жидкостного трения имеют более плавное
включение, стабильный коэффициент трения (хотя и
значительно меньший, чем сухие), допускают
более высокое давление и повышенную
удельную работу буксования.
Определение параметров фрикционных
сцеплений. Расчеты сцеплений и
многодисковых муфт имеют много общего [30].
Целесообразно рассмотреть определение параметров
многодисковых фрикционных муфт с
гидроприводом управления и отметить особенности
расчета сухого сцепления с пружинным
нажимным механизмом.
Основными параметрами фрикционных
муфт и тормозных механизмов являются:
геометрические размеры фрикционных
дисков - внутренний гв и наружный гн
радиусы поверхностей трения, толщины Ьст ,
Ьмк сопрягаемых дисков;
коэффициент \|/ взаимного перекрытия;
характеризующий уменьшение площади
поверхности трения за счет маслосгонных
канавок;
число I пар трения;
зазоры к между дисками;
размеры гидравлического
исполнительного цилиндра, сжимающего диски при
включении, внутренний гпв и наружный гпн
радиусы поршня, полный ход поршня /„ ;
характеристики возвратных пружин
поршня - начальная сила -/^о и жесткость
^вп •
Выходные параметры фрикционных
муфт и тормозных механизмов:
расчетный момент трения Мтр;
коэффициент р запаса момента трения;
габаритные размеры Вф, Хф (диаметр и
длина);
время /п включения исполнительного
цилиндра;
расчетное статическое давление рс
управления исполнительным гидроцилиндром
или давление рн настройки переливного
клапана;
расход Сф масла на смазывание и
охлаждение поверхностей трения.
Момент трения Мтр многодисковой
фрикционной муфты (или тормозного
механизма) определяется по формуле
388
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
где \х - динамический коэффициент трения
фрикционных дисков; Рсж - сила сжатия
дисков; гэ - радиус действия силы трения,
эквивалентной действию всех элементарных
сил трения на площади контакта
фрикционной пары.
Коэффициент трения ц зависит от
материалов сопрягаемых поверхностей пары
трения, конструктивного исполнения
фрикционных дисков, условий охлаждения и режима
работы муфты. В многодисковых муфтах и
тормозных механизмах один комплект дисков
изготовлен из высокоуглеродистой пружинной
стали (65Г и др.), а комплект сопряженных
дисков имеет стальную основу, облицованную
фрикционным порошковым материалом на
медной или стальной основе, графитизиро-
ванными бумажными композициями,
пластмассовым материалом и др. На поверхностях
из порошкового материала и пластмассовых
накладок нанесены маслосгонные канавки,
0.П
0,08
0,04
О 10 20 Улг,н/с
Рве. 3.3.13. Зависимость коэффициента трения ц
от относительной скорости скольжения дисков Уот
Р5=
С^
К.
""—1 I
3
—*"*
различных фрикцно
1 - бумажная композиция;
2 - графитизированная бумажная композиция;
3 - графитизированная пластмасса;
4 - порошковый материал на медной основе
М
0,5
ОЛ
предназначенные для быстрого удаления слоя
масла с поверхностей трения в процессе
включения муфты и прокачивания масла между
дисками для их охлаждения в выключенном
состоянии, в процессе буксования и после
замыкания муфты.
форма канавок оказывает существенное
влияние на коэффициент трения. На рис.
3.3.13 приведены зависимости \х от
относительной скорости скольжения дисков уот для
некоторых фрикционных материалов,
работающих в масле в паре со стальными дисками,
а на рис. 3.3.14 - для асбестовых дисков в
зависимости от удельного давления ц и
температуры Т.
Расчетная схема фрикционной муфты с
гидроприводом управления показана на рис.
3.3.15. Сила сжатия дисков Гсж
обеспечивается исполнительным гидроцилиндром, а ее
максимальное значение определяется исходя
из допускаемого среднего давления [<7ср] на
поверхностях трения. Для накладок из
порошкового материала [дСр] = 4• 10* Па, из
пластмассовых композиций [^ср] =(2 ... 3) 106 Па,
а из бумажных композиций [<7Ср] =
= (1,5 ... 2) 106 Па. Коэффициент взаимного
перекрытия принимается у = 0,6 ... 0,7.
При сжатии пакета в процессе
включения муфты на диски действует момент трения,
они прижимаются опорными поверхностями к
направляющим барабанов муфты. На этих
поверхностях возникают силы трения,
препятствующие передаче силы 7ГСЖ на все диски
пакета. Вследствие этого сила сжатия всех
последующих пар трения постепенно
уменьшается, что приводит к снижению момента
трения передаваемого муфтой, это учитывается
коэффициентом
Т=90*С
3
д=0,25МЛа
\\ 1
Р^
0,1
0,1 0,3 д,МПа 50
100
150Т,°С
Рис 3.3.14. Зависимости коэффициента трения ц от давления д и температуры Г при трении
без смазочного материала для накладок из асбестовых фрикционных материалов:
1 - НСФ-2; 2 -НСФ-4; 3 - НСФ-6
СЦЕПЛЕНИЯ
389
Рис. 3.3.15. Расчетам схема многодисковой фрикционной муфты с гидравлическим приводом управления:
1 - внутренний барабан; 2 - ведущий диск; 3 - ведомый диск; 4 - наружный барабан; 5 - поршень
(1 + А\ Г1 - (АВ)®^*2 1 сухих сцеплений размеры гн и гв стандарти-
X = 1= -I 9 зированы.
1 I ц- ц ц1 гэ I г§ н) (1 - АВ) I 9 Момент трения фрикционной муфты
^ ' (тормоза) должен превышать подводимый к
где щ - коэффициент трения между опорны- ней крутящий момент нагрузки Мк как при
ми поверхностями дисков и барабанов; буксовании муфты в процессе включения, так
\1Х =0,11 ... 0,15; 12 - четный номер пары и после включения, т.е.
трения; АГтр = Р Мк, (3.3.6)
А = ^ 1 ~ \х щ гэ I Гб ^ I у 1 + ц \х\ гэ I Гб в^ ; где Р - коэффициент запаса момента трения.
Я = (1-цщгэ/гбн) /(1 + цщГэ /гбн) ^ Значение Мк зависит от расположения
фрикционной муфты в кинематической схеме.
гб в > ''б н - средние радиусы опорных по- д^ вальной коробки передач
верхностей дисков соответственно на внутрен- л/ - Л/ и с\ ч 7^
нем и наружном барабанах. т* ~м* и1*' К^^-П
Опорные поверхности выполняются в м крутящий момент на входном валу
виде шлицев или пазов. *
Принимая во внимание различия в зави- коробки передач, соответствующий номиналь-
симостях гэ от гн и гв и вводя обозначение номУ моменту двигателя Мн ; и\к - переда-
« = 'в/ 'н > получены следующие расчетные точное ч™™ от входного вала до &-Й
фрикционной муфты.
Если муфта включается при различных
значениях щ^, то Мк определяется при
зависимости:
для металлической пары трения
Мтр = 0,5*цу^ (1 -а)(1 + а)2[дср ]*/*} ;
для смешанной пары трения
Мтр = 0,667иц\|/^ (1 -а3)[?ср \гг1.
иишах- Д7131 главного сцепления трактора
АГК = Мли.
Крутящий момент нагрузки фрикцион-
птт« Лтт«ЛМпЛ„„„ ~ „„„ .« «™ н°го тормозного механизма зависит лишь от
Для определения а используется эмпи- г »
** * 3 передаточного числа включаемой им ступени
рическая зависимость планетарной коробки передачи.
а = ал + К г (3.3.5) Коэффициент р запаса момента трения
имеет большое значение для надежной работы
Для металлической пары трения муфты, двд уменьшения времени и работы
ао =0,69; Ка =0,71, для смешанной буксования, объемной температуры фрикци-
а0 =0,845; Ка = 1,68. Формула (3.3.5) при- онных этементов коэффициент р должен
быть как можно больше, а для уменьшения
менима для гн =0,05 ... 0,2 м. Для накладок температуры поверхности дисков и динамиче-
390
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
ских нагрузок в трансмиссии, наоборот, как
можно меньше. При расчете фрикционных
муфт тракторных коробок передач по
усредненному коэффициенту трения принимают
р = 1,4 ... 1,8, в зависимости от стабильности
динамического коэффициента трения, для
главных сцеплений Р = 2,5 ... 3,5.
Для металлических пар статический
коэффициент трения цк «2ц, поэтому' после
замыкания муфты запас ее момента трения
обычно существенно выше требуемого
значения.
С учетом (3.3.6) и (3.3.7) выражение для
определения наружного радиуса фрикционных
дисков с накладкой из порошкового материала
принимает вид:
Н | *цч>АГг(1-а)(1 + а)2иср]г '
Для определения гн необходимо
задаться числом I пар трения. При выборе I
принимают во внимание следующие факторы. В
вальных коробках передач с фрикционными
муфтами межосевые расстояния часто
определяются радиальными размерами муфт.
Поэтому для уменьшения габаритных размеров и
массы коробки передач следует стремиться к
уменьшению наружного радиуса дисков гн , а
требуемый момент трения обеспечивать за счет
увеличения числа 7. пар трения. Вместе с тем,
рост I приводит к снижению коэффициента
Кг силы сжатия, в результате уменьшается
эффективность использования фрикционных
дисков. Кроме того, ухудшаются
равномерность распределения зазоров между дисками и
подача масла на их охлаждение. С ростом
массы пакета дисков увеличиваются потери на
трение в разомкнутых фрикционных муфтах,
снижается их надежность. Следовательно,
число пар трения нецелесообразно как
увеличивать, так и делать слишком малым.
Рекомендуется принимать I = 10 + 16.
В планетарных коробках передач радиус
гн выбирается в соответствии с принятыми
размерами трехзвенных дифференциальных
трансформаторов (ТДТ). Тормозные
механизмы обычно располагают над ТДТ, что
сокращает длину коробки передач, обеспечивает
высокую плотность компоновки. При выборе
параметров фрикционных тормозных
механизмов решается обратная задача: по
выбранным размерам гн и гв определяется
число 7. пар трения.
Толщина фрикционных дисков оказывает
непосредственное влияние на их
термоустойчивость против коробления при
неравномерном нагреве, обусловливает прочность дисков
на разрыв и на смятие поверхностей шлицев.
Она зависит от момента М^ и наружного
диаметра дисков гн. Для предварительного
выбора толщины (мм) стальных дисков
многодисковой фрикционной муфты (или тормоза)
можно воспользоваться регрессионной
зависимостью, полученной на. основе
статистических данных для существующих конструкций
коробок передач:
/>ст = 0,8+ 0,01 гн.
Толщина />ст 0 стальной основы дисков с
фрикционными накладками обычно несколько
больше, чем Ьст (примерно на 25 ... 40 %).
Поскольку твердость стальной основы
меньше, чем стальных дисков, то диски, с
накладками устанавливают обычно на
внутренний барабан и выполняют с
внутренними эвольвентными шлицами.
Большая толщина этих дисков позволяет
уменьшить давление на шлицы барабана и
увеличить их долговечность. Накладки из
порошкового материала прикрепляют к стальной
основе методом спекания. Их толщина
составляет 1 ... 1,5 мм, а общая толщина диска
Ьмк = #ст 0 + (2 + 3) мм. Канавки,
выполняемые на накладке, имеют глубину 0,5 ... 0,8 мм.
Требуемая сила Гсж сжатия дисков
обеспечивается нажимной силой Ги
исполнительного цилиндра муфты, развиваемой на его
поршне вследствие действия на него давления
рабочей жидкости. Зависимость ^сж от Ги
устанавливается выражением
Л?ж = -| -М1 ~ -чел ~" *тр]Ирм »
где ^вд - сила возвратных пружин поршня в
конце его лода; Рт = Гт0 + Ст /п ; ^впО -
значение Гвп в исходном положении
поршня; Сил - суммарная жесткость возвратных
пружин; /п - ход поршня; Гтр - сила трения
в уплотнительных устройствах поршня; ирм -
передаточное число рычажного механизма,
передающего действие нажимной силы от
цилиндра к пакету дисков (при его отсутствии
«рм = !)•
СЦЕПЛЕНИЯ
391
Исполнительные цилиндры
фрикционных тормозных механизмов неподвижны
относительно корпуса коробки передач, поэтому
на их поршни действует лишь статическое
давление жидкости рс. Фрикционные муфты
устанавливают на вращающихся валах,
следовательно, цилиндры их вращаются. При этом
на поршень кроме статического действует
давление от центробежных сил в жидкости. Тоща
Первое слагаемое этой формулы - сила
Гп с статического давления жидкости на
поршень, а второе -. сила Гп ц центробежного дав.
ления вращающейся жидкости. Для
тракторных КП принимают рс = рн = 0,8 ... 2 МПа.
Сила возвратных пружин определяется
из условия
]?т0 ^0Л5р(о1тахАпх
х (гпн+гпв"2г0 ) + ^тр>
гДе ©птах ~ максимально возможная угловая
скорость фрикционной муфты при ее
выключении; Ап - площадь поршня.
Если в качестве уплотнений
исполнительного цилиндра использованы чугунные
или фторопластовые кольца, то силу трения
Гтр можно не учитывать. Для резиновых
колец различного профиля (круглого,
эллиптического, прямоугольного) принимают Гтр «
* (0,1 + 0,2) Вп (чем больше гп н, тем меньше
коэффициент при Рп ).
В сцеплениях с пружинным нажимным
механизмом применяют цилиндрические,
конические и тарельчатые пружины.
В тракторных сцеплениях в основном
применяют цилиндрические пружины. Расчет
их проводят в следующем порядке. Задаются
числом пружин (не менее трех и кратное
числу отжимных рычагов) и определяют
нагрузку на одну пружину ^пр, исходя из
требуемой силы сжатия Рсж. Задавшись средним
диаметром пружины Д) по условию
размещения на нажимном диске и допустимым
рабочим напряжениям [ т ] = 500 ... 600 МПа,
определяют диаметр проволоки
</=^пра,*/(Ф1Ь
где к - коэффициент кривизны витка;
к = 1,25 ... 1,3.
Задавшись зазором между
поверхностями трения в выключенном состоянии
к = (0,35 ... 1,0) 10"3 м (больший зазор
принимают при большом диаметре дисков),
определяют из условия увеличения силы
пружины выключенной муфты до
^пр. в =(1Д — 1*2) ^пр число рабочих
витков пружины
. Ос<1Ак1
8 А) ^11 р. В
где Ос - модуль сдвига, принимают равным
8 • Ю4 МПа.
Длина пружины в свободном состоянии
'ев =(/в+1Д)*+У(Л+0Д) + *р +Л*>
где у - минимальный зазор между витками в
выключенном состоянии; у =(0,1 ... 0,5) Ю-3,
м.
Деформация пружины в рабочем
состоянии
Хр=8Л02/в^пр/(<7с</4).
При износе поверхностей трения на
величину А сила пружин снижается и
коэффициент р запаса уменьшается до значения
'■-НУ
Силу на педали сцепления определяют,
используя размерную схему рычажного
механизма л^ивода. При этом принимают для
передачи КДЦ =0,7 ... 0,8, учитывая сухое и
полусухое трение в шарнирах. Если сила
превышает принятые нормы, применяют
сервомеханизмы (пневматические или гидравлические
следящего действия или пружинный).
Определение подачи насоса системы
управления фрикционными муфтами и
тормозными механизмами КП. Подача насоса ^н
определяют на основе баланса расходов
жидкости [30]
0н = *е(ец+0ф+есм+евм)>
392
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
ще *Кд - коэффициент запаса подачи,
учитывающий дополнительный расход жидкости на
восполнение возрастающих в процессе
эксплуатации утечек и снижение подачи
масляного насоса, принимают Кд =1,2; Сц -
расход жидкости на включение
исполнительных цилиндров муфт и тормозных
механизмов; (?ф - расход на охлаждение
фрикционных дисков; Сем - расход на смазывание
подшипников коробки передач; принимают
бсм=(2 ... 3) Ю-5 м3/с на один подшипник;
Свм - расход на привод вспомогательных
механизмов коробки передач и других
механизмов трактора, базирующихся на коробке
передач.
Расход масла на охлаждение
фрикционных дисков
бф = Суд Л& I Лф,
где Суд - удельный расход масла; для
тракторных коробок передач принимают Суд =
= (2,1 ... 4,0) 10"4 м3/(м2-с); Лф - число
фрикционных муфт в коробке передач; А$ -
площадь поверхности пары трения.
Расход Сц определяется заполняемыми
объемами и временем /п включения
исполнительного цилиндра :
'п /«1
где /!оф - число одновременно включаемых
фрикционных муфт; Кц0/ - начальный объем
цилиндра в исходном положении поршня;
принимается Кцо, = (1 ... 2) -10*3 Ап /, м3;
Аи I - площадь поршня 1-й муфты; /п / - ход
поршня; Кк/ - объем магистрали подвода
жидкости от распределителя к /-у
исполнительному цилиндру; принимается Кк/ =
= (0,15 ...0,20) Ап11п!.
Ход поршня (м)
/п =(Л + Ди)гирм,
где И - номинальные зазоры между
фрикционными дисками, для фрикционных муфт
Р&ср'Ю'и'л/м2
о 20 *о во н^-ю-'м*
Рис 3.3.16. Зависимости допустимой удельной
мощности буксования Руд. ^ от удельной работы
трения Иуд для различных фрикционных материло!
(обозначения 1 - 4 см. рис. 3.3.13)
принимают Л = 0,3 ... 0,5 мм, а для тормозных
механизмов Л =0,5 ... 1,0 мм; Аи -
допускаемая величина износа пары трения;
определяется глубиной маслосгонных канавок;
Аи =0,5 Н.
Время включения исполнительных
цилиндров выбирают из условия предотвращения
остановки трактора при переключении передач
вследствие разрыва потока мощности,
подводимой от двигателя к ведущим колесам;
/п ^ 0,15 ... 0,2 с. При больших размерах
цилиндров и длинных магистралях подвода к
ним жидкости не всеща удается получить
приемлемые значения /п . В таких случаях для
снижения 0Н применяют гидравлический
аккумулятор.
Для определения работоспособности
сцепления или фрикционной муфты находят
температуру нагрева дисков и удельную
мощность буксования. На рис. 3.3.16 приведены
некоторые данные по допустимым значениям
удельной мощности буксования, которые
могут бьггь использованы при предварительной
оценке теплонапряженности фрикционных
элементов.
3.3.4. КОРОБКИ ПЕРЕДАЧ.
ЭЛЕМЕНТЫ ТРАНСФОРМАЦИИ ЭНЕРГИИ
Коробка передач предназначена для
изменения (регулирования) силы тяги на
ведущих колесах, скорости и направления
движения, а также для остановки и длительной
стоянки трактора при работающем двигателе.
Для оценки преобразующих свойств КП
используются кинематическое икп и силовое
икп передаточные числа. Первое
определяется отношением угловых скоростей со^
входного (первичного) и о>ных выходного
(вторичного) валов - икп = еою /(овых ; а
второе - отношением крутящих моментов
Мвых выходного и Мш входного валов -
Основными элементами,
обеспечивающими выполнение функционального
назначения КП, являются: элементы
трансформации энергии (ЭТЭ) - зубчатые передачи,
гидротрансформаторы, гидрообъемные передачи и
др.; элементы передачи энергии без
диссипации (ЭПЭ) - валы, соединительные муфты,
фланцы; элементы передачи энергии с
диссипацией (ЭПЭД) - трубопроводы у
гидрообъемных передач, электрические кабели у
электродинамических передач; элементы
управления потоками энергии (ЭУ) - каретки,
зубчатые муфты, синхронизаторы, фрикционные
муфты и тормозные механизмы, муфты
свободного хода, регуляторы рабочего объема
насоса и гидродвигателя и др.; элементы
передачи реактивных нагрузок на корпус (ЭПР) -
подшипники; корпусные обводы (КО) [30, 32].
КП классифицируют по следующим
признакам:
по характеру изменения преобразующих
свойств - ступенчатые, бесступенчатые и
комбинированные;
по физической природе применяемых
элементов трансформации энергии (ЭТЭ) -
механические, гидравлические, электрические,
комбинированные;
по способу управления преобразующими
свойствами - автоматические,
неавтоматические.
Основные свойства и характеристики КП
определяются используемыми элементами
трансформации энергии.
Механические ЭТЭ бывают трех типов:
зубчатые, фрикционные, импульсные. В
тракторных трансмиссиях применяются только
зубчатые ЭТЭ, отличающиеся высоким КПД,
надежностью и простотой конструкции.
Механическая КП с дискретным рядом
передаточных чисел обеспечивает ступенчатое
регулирование. Все ЭТЭ снабжены индивидуальными
ЭУ, обеспечивающими переключение ступеней
в КП. Схемы простейших зубчатых ЭТЭ
приведены на рис. 3.3.17. В механическом
пропорциональном трансформаторе (МПТ) связь
между двумя основными звеньями 1 и 2 про»
порциональная и однозначная. Коробки
передач, состоящие из МПТ, имеют неподвижные
оси валов и называются вальными.
Механический дифференциальный трансформатор
(МДТ) характеризуется более сложными
г
Рис. 3.3.17. Схемы простейших зубчатых ЭТЭ:
а -МПТ; б- МДТ
связями между его звеньями. Накладывая
возможные внешние связи на его звенья, можно
получить различные передаточные числа
трансформатора. Основными звеньями его
являются центральные зубчатые колеса а и Ь и
водило И. Оси вращения этих звеньев
неподвижны. Ось звена # (сателлита) перемещается
в пространстве, а сателлит совершает
планетарное движение. Простейший МДТ,
содержащий три основных звена, называют трех-
звенным дифференциальным
трансформатором (ТДТ). Коробка передач, состоящая из
совокупности МДТ, называется планетарной.
Гидравлические ЭТЭ подразделяются на
гидродинамические (ГДТ) и гидрообъемные
(ГОТ) трансформаторы. Гидродинамический
трансформатор представляет собой
гидродинамическую передачу (ГДП). Основными
элементами ГДП являются: насосное колесо
(центробежное) - генератор энергии рабочей
жидкости, турбинное колесо (обычно
центростремительное или осевое) - гидравлический
двигатель. В состав ГДП могут входить
направляющие аппараты (реакторы), устройства
питания и ограничения давления. Режимы
работы ГДП изменяются автоматически, в
зависимости от нагрузки на турбинном колесе,
что является ее значительным преимуществом,
так как исключается необходимость в системе
управления ГДП. В зависимости от
способности изменять крутящий момент ГДП
подразделяются на гидромуфты (ГМ) и
гидротрансформаторы (ГТ).
Гидромуфта (рис. 3.3.18, а) содержит
только два рабочих колеса - насосное Н и
турбинное Т. При передаче мощности через
ГМ режим ее работы характеризуется
кинематическим передаточным отношением
ытн = а>т/юн ,
где сот, ©н - угловые скорости
соответственно турбинного и насосного колес.
При этом сот * сон , т.е. ГМ работает со
скольжением, характеризуемым величиной
^ = 1-сот/о)н =1- ытн, которая опреде-
394
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
ж- -*
МА ШИ Мн у Мт 0)т Ме
Ши
б)
Рис. 3.3.18. Схемы гндроднн
а - гидромуфта; б - простой одноступенчатый ГТ с последовательностью расположения колес НТА;
в - то же, но с последовательностью НАТ; г - комплексный блокируемый ГТ;
д - комплексный (полимерический) ГТ; е - двухступенчатый ГТ
ляется нагрузкой и изменяется автоматически
и бесступенчато, увеличиваясь с ее
возрастанием. Крутящие моменты на обоих колесах при
этом остаются практически одинаковыми, т.е.
Мт »Мн, следовательно, ГМ не обладает
свойством преобразования крутящего момента
и является по существу гидравлическим
сцеплением. Преимуществами ГМ являются:
автоматическое бесступенчатое регулирование
передаточного отношения итн; высокая
энергоемкость и надежность; простота
конструкции; невысокая стоимость; способность
снижения динамических нагрузок на двигатель и
трансмиссию, уменьшения буксования
сцепления и ведущих колес трактора, вследствие
чего обеспечиваются облегчение трогания с
места и разгона, улучшение проходимости по
слабым грунтам. К недостаткам следует
отнести: отсутствие свойства преобразования
крутящего момента, резкое снижение КПД при
отклонении режима работы от расчетного;
КПД равен кинематическому передаточному
отношению, т.е. Лгм=^тн (Рис- 3.3.19, а).
ГМ находят применение на тракторах больших
тяговых классов и позволяют снизить
динамические нагрузки и повысить срок службы.
Гидротрансформатор (см. рис. 3.3.18, б -
г) в отличие от гидромуфты имеет
неподвижное лопастное колесо направляющего аппарата
А, что позволяет изменять крутящий момент
Мт турбины по отношению к моменту Мн
насосного колеса. Таким образом, ГТ наряду с
автоматическим бесступенчатым изменением
передаточного отношения итн обладает
свойством преобразования крутящего момента,
оцениваемым коэффициентом трансформации
КТТ=МТ /Ми .
ГТ, применяемые на тракторах,
классифицируют по следующим признакам:
по типу турбинного колеса - с
центростремительным или осевым колесом турбины
(ГТ с центробежной турбиной, в тракторных
трансмиссиях они не применяются);
по направлению вращения насосного и
турбинного колес - прямого и обратного хода;
по числу турбинных колес -
одноступенчатые (с одним колесом турбины) и
многоступенчатые (с двумя и более колесами турбины);
в зависимости от установки колес
направляющего аппарата - простые и
комплексные.
Тип турбины оказывает значительное
влияние на преобразующие свойства ГТ и
определяет его конструктивную схему.
Свойства ГТ зависят от последовательности
расположения колес в круге циркуляции. Для
достижения большого коэффициента
трансформации колесо направляющего аппарата
располагают на выходе потока жидкости из
насосного колеса (схема НАТ> см. рис. 3.3.18,
в) у однако при этом максимальный КПД его
ниже, чем у ГТ по схеме НТА (рис.
КОРОБКИ ПЕРВДАЧ
395
3.3.18, б). Схема НАТ позволяет получить ГТ
обратного хода. Многоступенчатые ГТ
обладают более высокими преобразующими
свойствами, чем одноступенчатые, но
максимальный КПД их обычно ниже. Турбинные
колеса многоступенчатых ГТ обычно жестко
связаны между собой, а после каждого из них
расположено колесо направляющего аппарата,
(см. рис. 3.3.18, ё). Конструкция
многоступенчатых ГТ более сложная, чем одноступенчатых,
что ограничивает их использование.
Гидротрансформатор имеет более
широкую область итн (по сравнению с
гидромуфтой), в которой возможна его длительная
работа при достаточно высоких КПД (см. рис.
3.3.19). Но диапазон регулирования крутящего
момента в этой области все же недостаточен
для обеспечения эксплуатационных режимов
трактора и не превышает 2 - 2,5, поэтому ГТ
не может полностью заменить ступенчатую
коробку передач трактора, а применяется в
комплексе с ней, образуя гидродинамическую
передачу. У простого ГТ снижение КПД Т|тн
по отношению к максимальному значению
Лтнтах происходит не только при
уменьшении итн, как у гидромуфты, но и при
увеличении ити после достижения Лтнтах (см
рис. 3.3.19, б). Этот недостаток ГТ легко
устраняется установкой колеса направляющего
аппарата на муфту свободного хода (рис.
3.3.18, г). ГТ в этом случае оказывается
комплексным и имеет два режима работы: режим
трансформации при итн < ит м, на котором
Ктт> 1; гидромуфты при итн > игм, на
котором Ктт*1. Крутящие моменты,
действующие на колеса ГТ, на всех режимах
взаимно уравновешиваются, т.е.
Ми + Мт + Ма = 0 .
На режиме трансформации момента на
колеса направляющего аппарата действует
момент, направленный противоположно
вращению насосного колеса, вследствие чего
муфта свободного хода блокируется, и колесо
направляющего аппарата неподвижно. При
итн> иты направление момента изменяется и
муфта свободного хода разблокируется, позво-
Рис. 3.3.19. Безразмерные характеристике гидродинамических передач:
а - гидромуфты; б - простого одноступенчатого гидротрансформатора;
в - комплексного ГТ; г- Полимерического ГТ
396
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
ляя колесу направляющего аппарата свободно
вращаться в потоке жидкости в направлении
вращения остальных колес ГТ. В результате
ГТ переходит на режим гидромуфты и его
КПД повышается (рис. 3.3.19, в). Повышения
КПД при низких значениях итн можно
добиться, если направляющий аппарат
выполнить в виде двух раздельных колес А\ и А^
(см. рис. 3.3.18, д), каждое из которых
установлено на своей муфте свободного хода. Эти
муфты разблокируются последовательно с
увеличением итн. Такой ГТ обладает
одновременно характеристиками двух разных
гидротрансформаторов (полимерический ГТ) и
гидромуфты, что позволяет значительно
расширить область высоких значений КПД (см. рис.
3.3.19, г). В комплексных ГТ применяют
фрикционную муфту Ф§ (см- Рис- 3.3.18, г),
позволяющую блокировать насосные и
турбинные колеса и получать прямую передачу.
Блокировка ГТ осуществляется на режиме
гидромуфты, когда преобразующими
свойствами он не обладает. При этом существенно
повышается КПД (на 10 ... 12 %) и скорость
движения тракторного агрегата.
Гидрообъемный трансформатор (ГОТ)
состоит из двух гидромашин (гидронасоса и
гидродвигателя) и является основным
элементом гидрообъемной передачи (ГОП). В состав
ГОП кроме того входят трубопроводы
(ЭПЭД), регуляторы рабочих объемов
гидромашин (ЭУ), насос подпитки, создающий во
всасывающей гидролинии избыточное
давление 1 ... 1,2 МПа, регулирующие и
предохранительные клапаны. В отличие от ГДТ в
ГОП реализуется гидростатический напор
вытесняемого насосом объема рабочей жидкости.
В качестве насоса и гидродвигателя
используются поршневые и роторные гидромашины.
ГОП обеспечивает бесступенчатое
регулирование, однако не обладает внутренней
автоматичностью и поэтому требует наличия системы
управления.
Передаточное отношение ГОП
Игоп=<°д/°>н = РнЛонЛод/Рд > 0.3.8)
где ©н и ©д - угловая скорость вала
соответственно насоса и гидродвигателя; Кн и
Кд - рабочие объемы этих гидромашин; Лон»
т|од - их объемные КПД, учитывающие
внутренние утечки жидкости в гидромашинах.
Рабочий объем гидромашины -
теоретическая подача насоса или расход рабочей
жидкости гидродвигателем за одни оборот вала.
Гидрообъемная передача в общем случае
может содержать несколько параллельных
гидродвигателей, работающих с одним насосом.
Тогда значение Кд должно учитывать
суммарный объем всех гидродвигателей.
Мощность Рн , необходима для привода
насоса, и мощность на валу гидродвигателя
Рц вычисляют по формулам:
Рн =Мн(он =30©нКн/>н/(яЧмн),
/д =^дЮд=30юдКдРдГ|мд/*>
где Мн и Мд - крутящий момент на валу
соответственно насоса и двигателя4, г|мн,
Лмд - т механические КПД, учитывающие
совокупность всех внутренних энергетических
потерь; рн и рд - разности давлений в
напорной и возвратной гидравлических
магистралях на входах и выходах соответствующих
гидромашин.
Коэффициент трансформации ГОП
^гоп=^д I Мн =
= Рд Рд Лмд Лмн 1{УнРн)>
а КПД ГОП
Лг оп= ^г оп ит оп >
Для существующих конструкций
гидромашин Лон*Лод=°»94 ... 0,98; Лмн*
ж Лмд =0,92 ... 0,96; а КПД ГОП без учета
потерь в гидравлических магистралях
Лгоп=0>74"°>88'
При вычислении Кт оп можно в первом
приближении принять рц = рн , тогда
Кт оп= ^д Лмд Лмн / Рн • Применяя
одинаковое гидромашины, т.е. Кн = Кд , получают
передачу с постоянным значением Ктоп*1,
с некоторой величиной скольжения
•у = Лмн Лмд- Л71* изменения передаточного
отношения игоп и коэффициента
трансмиссии Кт оп необходимо использовать
гидромашины с регулируемыми рабочими объемами
Рн и Рд • Возможны три варианта
исполнения ГОП.
КОРОБКИ ПЕРЕДАЧ
397
1. Регулирование рабочего объема насоса:
'н = ен *н шах »
*№ ^нтах ~ максимальный конструктивный
объем насоса; ен - параметр регулирования.
При постоянной мощности насоса в этом
случае должно выполняться условие
Ун рн = сош! , т.е. уменьшение Кн вызывает
увеличение давления ри (рис. 3.3.20). При
достижении максимального давления в
напорной магистрали рщах автоматически
включается предохранительный клапан, предотвращая
его дальнейшее увеличение и защищая детали
ГОП от повреждений. Минимальное давление
ртт получается при максимальном значении
Кн. Диапазон регулирования определяется
значениями р^ и рт[п :
**т оп= -"^дтах / ^*д тт * Ртах/ Ртт •
Регулирование ГОП путем изменения
Кн широко используется в трансмиссиях тя-
гово-транспортных машин благодаря
следующим преимуществам: плавное регулирование
©д от нуля до максимума; гиперболическое
изменение крутящего момента гидродвигателя
Л/д; возможность реверсирования ГОП;
возможность торможения машины; сравнительное
простое конструктивное осуществление
управления изменением Кн .
р,Р*9Ш4,Мё
О 0,25 0,5 0,75Уи^мювк
Рнс. 3.3.20. Характеристики гндрообъемной передачи
с регулируемым насосом
СРН - мощность на валу насоса;
Л/д - крутящий момент на валу гидродвигателя;
о)д - угловая скорость вала гидродвигателя)
2. Регулирование рабочего объема
гидродвигателя Кд. Из формулы (3.3.8) следует, что
при ©д = соп$1 значение ©д не может быть
снижено до нуля, поэтому для обеспечения
трогания с места и остановки трактора
необходимо либо вводить систему дроссельного
регулирования, либо применять фрикционную
муфту для отключения привода насоса. В этой
связи данный способ регулирования не
применяется.
3. Регулирование Кн и Кд. Способ
имеет все преимущества регулирования Кн,
но значительно расширяет диапазон ВТ оп, но
ввиду конструктивной сложности применяется
сравнительно редко.
К преимуществам ГОП относятся:
широкий диапазон изменения
силового и кинематического передаточных чисел
(2>гоп=5... 10);
удобство компоновки приводов ведущих
колес трактора;
возможность активизации колес агрега-
тируемых машин;
удобство и легкость управления (одна
рукоятка для изменения скорости,
направления движения и торможения);
приспособленность к автоматизации
управления:
Недостатками ГОП являются:
высокие требования к качеству
материалов, рабочей жидкости, обработке деталей и
сборки;
сравнительно низкий КПД;
большие потери при передаче энергии
насоса к автономным гидродвигателям,
зависящие от длины и конфигурации
трубопроводов;
необходимость прогрева рабочей
жидкости перед началом работы;
высокая материалоемкость (7,... 17 кг/кВт
вместо 5,5... 10 кг/кВт для механических
передач).
Электрические ЭТЭ. Основными
элементами электродинамической передачи (ЭДП)
являются генератор и электродвигатель. В
состав ЭДП входят также электрические кабели
(ЭПЭД) и устройства системы управления
(ЭУ). Электрические машины, используемые в
ЭДП, могут быть постоянного или
переменного тока. Последние более компактны и менее
материалоемки. Однако сложность
регулирования машин переменного тока затрудняет
практическое применение их на тягово-
транспортных машинах. Поэтому в основном
применяются ЭДП на постоянном токе. К
преимуществам ЭДП относятся:
удобство компоновки приводов ведущих
колес;
398
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
возможность активизации колес агрега-
тируемых машин;
малые потери при передаче энергии от
генератора к автономным двигателям,
расположенным в ведущих колесах;
легкость управления (одна педаль);
бесступенчатость регулирования;
гиперболический характер изменения
момента электродвигателя;
широкий, диапазон регулирования
силового и кинематического передаточных чисел.
Недостатками ЭДП являются:
высокие материалоемкость и стоимость
(в 3 - 5 раз выше соответствующих
показателей механической передачи);
сравнительно низкий максимальный
КПД (для лучших образцов ЭДП Лэп =
= 0,75 ... 0,8);
дефицитность применяемых материалов
(медь, драгоценные металлы для контактов и
др);
возможность травматизма и пожароопас-
ность.
Диапазон регулирования крутящего
момента электродвигателя Мд ограничивается
снижением КПД (рис. 3.3.21). Минимально
допустимое значение КПД принимают
г|эп =0,53 ... 0,55. Коэффициент
трансформации крутящего момента ЭДП определяют по
формуле
и.
эп
= м„
/мт
где Мт - момент на валу генератора.
Кинематическое передаточное отноше-
и™ = ©
/<°г>
Л'.лГ
М,Нм
>п
3
2
1
о\
-300
-200
-100
^Мй
ДЗП
"г
/
Кщ
шг=190рад1с
0.7
0,6
0,5
0 0,2 0,Ь 0,6 и)д/шдтах
Рис. 3.3.21. Характеристики
электродинамической передачи
(Мг> Л/ц - крутящие моменты на валах
соответственно генератора и электродвигателя;
А"эп - коэффициент трансформации крутящего
момента; т|эп - КПД передачи)
чисел иэп = Мдтах / М}
где ©д и со г - угловая скорость вала
соответственно электродвигателя и генератора.
КПД электродинамической передачи
Лэп = -**эп иэп •
Момент генератора МТ и его мощность
Рт во всем диапазоне работы
электродвигателя практически постоянны. Коэффициент
трансформации Кэп =2 + 0,3, а КПД г)эп =
= 0,53 ... 0,75. Диапазон силовых передаточных
Д1шп =4 ••• 6»5-
Момент на валу электродвигателя сравнительно
невысокий, что требует применения конечной
передачи с большим передаточным числом
(30 + 80 и более). Обычно электродвигатель
и конечную передачу выполняют в одном
блоке - модуле, который монтируется
непосредственно в ведущее колесо (электромотор-
колесо). Все колеса трактора агрегатируемой
машины могут быть снабжены электромотор-
колесами, что определяет большие.
компоновочные возможности для создания
унифицированных семейств тракторной техники.
Однако ввиду отмеченных выше недостатков
электродинамические передачи пока не получили
широкого применения на тракторах.
3.3.5. СТУПЕНЧАТЫЕ КОРОБКИ ПЕРЕДАЧ
В трансмиссиях сельскохозяйственных
тракторов преимущественное "* применение
находят механические ступенчатые КП с
зубчатыми ЭТЭ [12, 18, 30]. Ступенчатые КП
различают по следующим признакам:
по типу используемых трансформаторов
- вальные и планетарные;
в зависимости от числа иерархических
уровней структуры кинематической схемы КП
- простые (одноуровневые) и сложные
(многоуровневые);
по числу потоков мощности - однопо-
точные, двухпоточные;
по числу основных валов простые КП
делятся на двухвальные (ЭТЭ с одной парой
зубчатых зацеплений) и трехвальные (ЭТЭ с
двумя парами зубчатыхзацеплений,
выполняются с соосным и несоосным расположением
входного и выходного валов);
по расположению валов - с продольным
и поперечным расположением;
по типу связей между зубчатыми
колесами ЭТЭ - с подвижными шестернями
(каретками) и с шестернями постоянного
зацепления;
по способу переключения- ступеней - КП
с переключением без нагрузки (с остановкой
или без остановки трактора) и КП с переклю-
СТУПЕНЧАТЫЕ КОРОБКИ ПЕРЕДАЧ
399
чением под нагрузкой (с разрывом или без
разрыва потока мощности).
На сельскохозяйственных тракторах
применяются в основном вальные
многоуровневые однопоточные КП с продольным
расположением валов и шестернями постоянного
зацепления. Преимущества вальных КП:
простота и надежность; малая материалоемкость,
высокий КПД. Применение сложных
многоуровневых КП объясняется тем, что простые
двух- и трехвальные КП не позволяют
обеспечить требуемый диапазон передаточных числе,
так как передаточное число двухзвенного
зубчатого МПТ не превышает трех (а для редко
включаемых ступеней трех-четырех).
Среди многоуровневых КП с
упорядоченной структурой выделяют КП с УКМ и
диапазонные. Планетарные КП используются
на многих промышленных тракторах больших
тяговых классов. Преимуществами
планетарных КП являются:
компактность благодаря распределению
нагрузок между несколькими сателлитами;
разгрузка опор валов основных звеньев
МДТ;
возможность получения большого
передаточного числа в КП простой одноуровневой
структуры;
обеспечение переключения ступеней под
нагрузкой;
приспособленность к автоматизации
управления.
Однако сложность конструкции
препятствует распространению их на
сельскохозяйственных тракторах.
Требования к КП определяются ее
функциональным назначением и необходимостью
достижения высокого технического уровня.
КП должна обеспечивать все необходимые
эксплуатационные режимы работы
тракторного агрегата, иметь требуемый диапазон
передаточных чисел и их распределение.
Управление коробкой передач. Одним из
важнейших требований к элементам
управления КП современных энергонасыщенных
тракторов является обеспечение переключения
ступеней на ходу трактора, желательно под
нагрузкой и без разрыва потока мощности.
Это позволяет осуществлять поэтапный разгон
тракторного агрегата до скорости, при которой
нагрузка двигателя приближается к
оптимальной (85 ... 100 % номинальной). В этом случае
полностью используются потенциальные
возможности трактора и повышаются технико-
экономические показатели агрегата.
Синхронизаторы позволяют в той или
иной степени уравнять угловые скорости
соединяемых зубчатой муфтой элементов
включаемого трансформатора и значительно
сократить время переключения. Их подразделяют на
дисковые и конусные, с блокирующим
устройством и без него. Конусные синхронизаторы
Рас. 3.3.22. Схемы внерцвонвых свнхронвзаторов:
а - конусного; б - дискового;
1 - зубчатое колесо постоянного зацепления
включаемых ступеней; 2 - конусное фрикционное
колесо; 3 - фиксатор; 4 - каретка; 5 - блокирующий
палец; 6 - ведущий диск; 7 - ведомый диск
не гарантируют полного выравнивания
угловых скоростей соединяемых элементов, но
значительно снижают нагрузки на зубья
муфты. Синхронизаторы с блокирующим
устройством (рис. 3. 3. 22) обеспечивают включение
муфты только после выравнивания угловых
скоростей и поэтому происходит плавное,
безударное соединение ведущего и ведомого
элементов включаемого трансформатора.
Тяговое сопротивление
тракторного.агрегата значительно выше, чем транспортного.
Поэтому для того, чтобы тракторный агрегат
не остановился, ступени КП необходимо
переключать под нагрузкой. Разрыв потока
мощности при этом не должен превышать
0,2 ... 0,3 с. Такие требования можно
обеспечить лишь при условии, если каждый
элементарный трансформатор КП выполнить с
постоянным зацеплением шестерен, а в качестве
элементов управления использовать
фрикционные муфты. Так выполнены, например,
базовые коробки передач тракторов Т-150К,
К-701, МТЗ-100 и др. (см. рис. 3.3.8 - 3.3.10).
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
Пет оды регулирования процесса
переключения передач
т
Регулирование
1 выключения муфты \
1
гидравлическими 1
устройствами
1 1 1
*> 1
^ 1
ъ 1
е опор
** 1
^ 1
^ 1
с» ч»|
Са ^ 1
1 1 1
а
1 *» 1
1 ^ 1
1 ^ 1
1 ** 1
1 ^
1 ^ 1
1 ^ 1
1 ** 1
1 *» 1
1 *■» 1
1 ^М
И**Ч
1 • 1
1 *> 1
1^ 1
1 *ь 1
1 *» 1
1 ^ 1
1 ^ 1
1 * 1
1 ^ 51 1
1 ^ ^1
1
1 ' 1
1 *> 1
1 *"* 1
1 ** 1
1 **=» 1
1 ^ 1
1 ^ 1
1 1
1 5 *Ч
Ьс ^
Г^ 1
1 *=> 1
1 ^ 1
1 ^ 1
1 * 1
1 ^ 1
1 ч» 1
1 >* 1
1 ^3 53 1
2 *
1 * ^ 1
1^1
Регулирование
\ Включения муфты \
1
1 гидравлическими 1
устройствами 1
1
1
ч»
^
ч»
*
ч*
чГ«*
^ ^
^ ^
1 1 1
• 1
^ 1
> 1
1
*> 1
^ 1
ч» 1
>> 1
^ 1
ч> (I 1
5> с* 1
^» ч» 1
1 • 1
1 * 1
1 ** 1
1 ^ 1
1 г^ 1
1 "* 1
1 ^ 1
1 ** 1
1ч
1 ^ § 1
1 *» ^ 1
$5М
1 ^ *= 1
1 ^^1
1*1
1 *» 1
1 ^ 1
1 *з I
1 ^ 1
1§ 1
1 *» <л 1
1 ^ ^ 1
1 ** *5 1
1 5> *» 1
1^? 1
1 1
1 ' 1
1 ** 1
1 ^» 1
1 ^ 1
И?
1 ^^ 1
1 ^ ^
1 *»Л*
1 ■« ^ 1
1 ч> <ь
1 ^ *ч
Рис 3.3.23.
методов регулвромятя процесса переклн
Элементами управлениями в них являются
многодисковые фрикционные муфты с
гидроприводом. Преимуществами фрикционных
муфт являются:
переключение ступеней под нагрузкой;
возможность управления процессом
включения муфты (для получения плавного
переключения и снижения динамических
нагрузок, для переключения ступеней без
разрыва потока мощности);
легкость управления в связи с
использованием гидроприводов;
приспособленность КП к автоматизации
управления переключением ступеней.
Методы регулирования плавности
включения фрикционных муфт, сокращения
времени разрыва потока мощности и обеспечения
его безразрывности приведены на рис. 3.3.23
[16]. Конструктивно эти методы реализуются
как подбором параметров гидросистемы
управления и муфт, так и введением
дополнительных устройств. Такие устройства можно
выполнять в муфте или отдельно.
Применение муфт свободного хода в
сочетании с фрикционными муфтами
обеспечивает переключение на высшую ступень КП без
разрыва потока мощности, а на низшую
ступень сопровождается разрывом потока
мощности, длительность которого определяется
загрузкой трактора, моментом инерции
агрегата и перепадом скоростей двух переключаемых
ступеней КП. Основной недостаток муфт
свободного хода - невозможность обеспечения
торможения трактора двигателем. Это и
ограничивает их применение. Муфты такого типа
используют главным образом в увеличителях
крутящего момента.
Снитез структуры кивемвтячесжой
системы КП. Синтез начинают с удовлетворения
требований функционального назначения КП,
которые заключаются в обеспечении заданных
передаточных чисел икп к I к = 1, лЕ),
числа /1д п диапазонов и числа лсд / I / = 1, т\
передач в каждом диапазоне .
Для выполнения синтеза структуры
кинематической схемы используется взвешенный
иерархический граф. На рис. 3.3.24 показан
граф структуры кинематической схемы короб-
/Г/7
Л
р> Л
/
}9°*.
\0
ЛчЧ
II
Т^ГгГ
1 1.15 1,8$
| ' | '
-А
в
л»* 1пЩ^1'и<
ьъ
2,46 4,01 5,4 6,75 11,6
л 5
ЧЧшт
"**
0,8651,0 1,)6 2,17 2?1 4,76 6,36 10,22 13,71
Рве. 3.3.24. Граф структуры квнематвчесжой схемы
передач трвжторв Т-150 К
(см. рис. 3.3.8)
СТУПЕНЧАТЫЕ КОРОБКИ ПЕРЕДАЧ
401
ки передач трактора Т-150К, на котором
отражены иерархические уровни В> Ь, Е,
диапазоны передаточных чисел базовой коробки
передач Э^, редукторов-умножителей /)р1,
/)р2 и диапазонной коробки передач в целом
/>2, а также ее передаточные числа ики .
Первым шагом синтеза является
обоснование и выбор параметров ряда передаточных
чисел базовой коробки передач: числа п$
ступеней; диапазона 0$ передаточных чисел;
знаменателя д§ геометрической прогрессии
ряда передаточных чисел. Значение д$
выбирают из условия достижения высокого уровня
нагрузки двигателя, обеспечивающего
использование потенциальных возможностей
трактора. Чем больше коэффициент % загрузки
двигателя, тем выше производительность
тракторного агрегата и меньше расход топлива на
единицу выполненной работы. Однако
ступенчатая трансмиссия практически не позволяет
обеспечить 100 % загрузку двигателя (% = 0-
Это возможно лишь при очень большом числе
ступеней (теоретически при п% -> оо).
Значение ф5 определяют по формуле:
где ус - коэффициент возможной перегрузки
двигателя, определяемый видом выполняемой
работы; х* и Хк-1 " коэффициенты загрузки
двигателя соответственно на А:-й и (#-1)-й
ступени коробки передач; Л*> Л*-1 - КПД
коробки передач на этих ступенях.
Принимая ус=1,3 ... 1,4; %к =°»9;
Х*_1 = 1,0 и полагая г|* = г\к-\, находим,
что д§ = М7 ••• 1,26. Средние значения
знаменателей д§ ср ДОЯ отечественных тракторов
приведены ниже.
Трактор . . . Т-150К МТЗ-100 К-700
<7б.ср 1,П 1,23 1,21
Регламентируемые стандартами
требования к диапазонам скоростей
сельскохозяйственных тракторов могут быть обеспечены
при числе ступеней базовой КП п$ = 4 ... 5.
Большинство современных тракторов имеет
Лб =4.
При проектировании многоступенчатой
коробки передач по диапазонной схеме
возникает множество вариантов структуры
кинематической схемы, что приводит к
необходимости выбора оптимального решения. Возможное
число вариантов определяется из выражения
* = («!)2 / *т!, (3.3.9)
где т - число многоступенчатых
трансформаторов в составе коробки передач; 5Т - число
трансформаторов с одинаковым количеством
ступеней.
Для анализа и сравнительной оценки
получаемых в процессе синтеза кинематических
схем необходимо выбрать схемы ЭТЭ,
входящих в составляющие КП многоступенчатые
трансформаторы. При этом принимаются во
внимание следующие ограничения:
минимальное число зубьев шестерни -
*1шп = 12 ... 14 по условию отсутствия
подрезания ножки зуба, ^пуп =16 ... 18 по
условиям ее размещения на шлицах вала.
Передаточное число двухзвенного
пропорционального трансформатора должно
находиться в переделах 0,7 ^ \имп т ^ 3;
минимальное число зубьев внутреннего
центрального колеса дифференциального
трансформатора 1атт =20, а сателлита
^дтт — 16»
кинематический параметр трехзвенного
дифференциального трансформатора должен
находиться в пределах 1,4 ^ | К | ^ 4 .
Передаточные числа ЭТЭ
многоступенчатых трансформаторов можно определить по
взвешенному графу структуры кинематической
схемы с помощью выражения
\&иэу =/Я(18М)М8а/у,
где иэу - передаточное число у-го ЭТЭ /-го
многоступенчатого трансформатора; Щ^ц) ~
масштаб логарифмов передаточных чисел,
1/мм; 6/ - база /-го иерархического уровня
графа (расстояние, мм, между линиями
вершин (/-1)-го и /-го уровней); <Ху - угол
наклона ветви графа (относительно
вертикали), отождествляющий у-й ЭТЭ /-го
трансформатора.
402
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
Для вальных коробок передач
передаточное число иэу = иМпт у пропорционального
трансформатора (МПТ), который реализует
данный ЭТЭ. У планетарных коробок передач
значения иэу часто реализуются несколькими
трехзвенными дифференциальными
трансформаторами (ТДТ), входящими в состав
дифференциального трансформатора (МДТ).
Поэтому непосредственно из графа оценить
кинематические характеристики ТДТ нельзя.
Это можно сделать на этапе построения
кинематической схемы планетарной коробки
передач.
Уровень нагруженности элементов
коробки передач оценивается максимальными
передаточными числами ступеней и/тлх на
различных иерархических уровнях графа
структуры. Значения н/тах находятся
непосредственно по графу. Для снижения массы и
размеров коробки передач значения щ „щ по
мере снижения уровня иерархии структуры
должны возрастать как можно плавнее.
Наибольшими преобразующими свойствами
должны обладать ЭТЭ нижнего уровня.
Если требуемый диапазон передаточных
чисел трансмиссии чрезвычайно велик и его
реализация в коробке передач вызывает
затруднение, то наиболее целесообразно
последний уровень трансформации реализовать
механизмом, расположенным непосредственно у
ведущих колес трактора, введя, например,
планетарную двухступенчатую конечную
(бортовую) передачу.
Критерии оценки вариантов структур
кинематической схемы можно разделить по
сложности структуры и нагруженности элементов.
К критериям сложности структуры относятся:
число 5" степеней свободы;
относительное число ЭУ
относительное число фрикционных ЭУ,
обеспечивающих переключение всех ступеней
диапазона,
У2=^ф/пса, (3.3.11)
где Мф - общее число фрикционных ЭУ;
лсд - число ступеней, переключаемых ими
внутри одного диапазона скоростей движения;
число одновременно включаемых
фрикционных ЭУ на каждой ступени Л'ф ст ;
относительное число сложных ЭТЭ
Уъ =^3. с л/"2» (1312)
у которых
иъЦ > "мпт шах-
Критериями оценки нагруженности
элементов являются:
максимальная относительная нагружен-
ность фрикционного ЭУ 1-го трансформатора
Иф(/-1)тах (/ = 2, т|;
максимальная относительная нагружен-
ность ЭТЭ 1-го трансформатора
УМ = "(/-1)тах / «кп гш • 0-3.13)
Критерий У41 может учитываться дня
всех трансформаторов, или только для
некоторых из их числа. Например, для ЭТЭ,
обеспечивающих режим ходоуменьшителя, у^
может не приниматься во внимание на этапе
структурного синтеза, так как этот режим
обычно характеризуется частичным
использованием мощности двигателя.
Алгоритм синтеза структуры
кинематической схемы диапазонной коробки передач
состоит из следующих этапов:
формирование исходных данных на
основе требований функционального
назначения уп^'у Яд.п; лСд*> /=1> Щ НпЬ
* = 1, я2 );
определение <7б по заданным значениям
"жп к у
выбор числа 5 степеней свободы;
графическое представление уровней
иерархии (горизонтальные линии), нанесение
равномерной вертикальной сетки с шагом
\& ^б и числом линий N = л2 (рис. 3.3.25).
Точки пересечения этих линий с
горизонтальной линией нижнего иерархического уровня
отождествляются с передаточными числами
коробки передач;
выбор формулы иерархии
многоступенчатых трансформаторов (ФИТ), которая
записывается в виде ФИТ: П\ х п2 х... хпт
(1, 2, ..., т - номера трансформаторов,
соответствующие иерархическим уровням их рас-
СТУПЕНЧАТЫЕ КОРОБКИ ПЕРЕДАЧ
403
О
б)
V"! "" Т I ^в 1 1 Т^
1шЖГ
Пчк 1кУ ГТкШч! Г^Щ]
г)
о-+—о-ч—о
^^ д)
щщйш Шо
у)
<•)
м)
Рве. 3.3.25. Варвввты графов пвемвтшчесжжх схем двапазовной КП с четырьмя ступевямв свободы прв
вспользоваввв ФИТ при разных формулах посдидователыюсти управлевня травсформаторамв ФПУ:
а - е - ФИТ: 4 х 2 к 2; ж - м - ФИТ: 2 х 4 х 2; в, ж - ФПУ: XI -► х2 -> х3;
д, л- ФПУ: дез -+ *1 -► хг\ е, м - ФПУ: Хз -► х2 -> XI
404
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
положения в кинематической схеме; /!/ -
число ступеней 1-го трансформатора);
выбор формулы последовательности
управления (ФПУ) трансформаторами,
записываемой в виде ФПУ: ха -> X/, ->...-► Х\
(х{ - характеристика /-го трансформатора,
редуктора или базовой коробки передач,
определяемая числом ступеней ряда передаточных
чисел коробки передач, реализуемых
последовательно на одной ступени данного
трансформатора);
определение характеристик
трансформаторов по формуле */ = 1в0т//1&0б (/ = <*,
Ьу ..., / ; <7т / ~ знаменатель геометрической
прогрессии ряда передаточных чисел 1-го
трансформатора). При непрерывном
геометрическом ряде передаточных чисел коробки
передач X/ =Л/_1Х/_1 (Л/_1 - число ступеней
(/ - 1) -го трансформатора, перебор которых
осуществляется до перебора ступеней 1-го
трансформатора; х{_± - характеристика
(/ - 1) -го трансформатора);
построение взвешенного иерархического
графа варианта структуры кинематической
схемы. При этом принимается для всех
трансформаторов И/пйп =1. В дальнейшем при
кинематическом анализе значение Щщт
уточняется;
выбор типов ЭУ всех трансформаторов
из условия обеспечения переключения
ступеней внутри каждого диапазона под нагрузкой
(фрикционными элементами);
количественная оценка критериев
качества структуры кинематической схемы;
сравнительная оценка и отбраковка
вариантов структур. При этом критерии ^ , Nф с т
и "ф(/-1)тах относят к ограничениям, а на
основе остальных критериев (3.3.10) - (3.3.13)
формируют аддитивную целевую функцию
Рс. В результате первые становятся
критериями выбраковки вариантов структур:
•У ^Шп ; ^ф.ст^^ф.ст Шп»
"ф(/-1)тах ^ Иф Ит •
(3.3.14)
Построение графов структур выполняют
только для 5 <> 5^т . Варианты,
удовлетворяющие условиям (3.3.14), сравниваются
между собой на основе целевой функции
где с^ - весовые коэфииценты частных
критериев У1, определяемых по формулами
(3.3.10) - (3.3.14).
В связи с тем, что при синтезе структуры
принято Щ пип = 1, / = 1,/Я, ^б = соп&*«
величины иэ /у, и(/. 1)ши и иф(/. 1)ш
определяются непосредственно по графу:
«э /у = ?б ехр (А Щ;
И(/-1)шах = ^бехр(А^/.1),
где А Щ - число интервалов, перекрываемых
У-м элементом трансформации энергии /-го и
трансформатора с передаточным числом иэу;
Л/. 1 - число интервалов, перекрываемых (/-
1)-м трансформатором.
После перебора всех возможных
вариантов, число которых определяется формулой
(3.3.9), выбирают несколько наилучших, у
которых функции Рс имеют наименьшее
значение. Эти варианты используют на
последующих этапах разработки кинематической
схемы коробки передач.
Варианты синтеза структуры кинемати-
чекой схемы диапазонной коробки передач с
четырьмя степенями свободы (см. рис. 3.3.25)
получен с использованием ФИТ; 4 х 2 х 2 и
ФИТ: 2x4x2 при различных формулах
последовательности управления
трансформаторами ФПУ. Схемы с использованием ФИТ: 2
х 2 х 4 на рис. 3.3.26 не показаны, так как
среди них нет приемлемых вариантов.
Согласно формуле (3.3.9) для принятой структуры
трансформаторов возможное число вариантов
схем равно 18.
Выбор внутренних параметров н анализ
мльных КП. Числа зубьев шестерни *ш и
колеса ^ для каждого у-го двухзвенного МПТ
определяют из системы уравнений:
Суммарное число зубьев двухзвенного
МПТ 1-го трансформатора
1я =2а^со8р//яи,
(3.3.15)
где а^ - межосезое расстояние 1-го
многоступенчатого трансформатора (всех его ЭТЭ),
мм; тп - нормальный модуль, мм; Р - угол
наклона линии зуба МПТ; Р = 18 ... 28^, для
СТУПЕНЧАТЫЕ КОРОБКИ ПЕРЕДАЧ
405
прямозубых передач, Р = 0 для тракторных
трансмиссий.
Полученное по формуле (3.3.15)
значение 3:/ округляют до ближайшего целого числа
и уточняют угол Р по формуле:
Р = агссоз (0,5 тп ^ / а^).
Главными размерными параметрами
МПТ являются межосевое расстояние а„ и
нормальный модуль тп (мм).
Ориентировочные их значения определяют по формулам:
^=^(^1)?^^; (3.3.16)
Ъ-Х.1?1***'^*. (3.3.17)
где Ка , Кт - вспомогательные
коэффициенты; для прямозубых передач Ка =495,
Кт = 14; для косозубых Ка =430,
Кт = 11,2 при 8р > 1 и Кт = 12,5 при
8р ^ 1; 8р - коэффициент осевого
перекрытия; М\д и М\р - вращающие моменты
на шестерне, принимаемые при расчетах
соответственно на контактную и изгибную
выносливость, Н*м; А^р, Крр - коэффициенты,
учитывающие неравномерность нагрузки по
длине контактных линий; Сдр и а рр\ -
допускаемые соответственно контактные и из-
гибные напряжения, МПа; Ур^ -
коэффициент, учитывающий форму зуба и
концентрацию напряжений; у^/, Ч'Ьа ' параметры;
Уьа = Ь» / <**\; Уьа = ^ / а» ; <**\ -
диаметр начальной окружности шестерни, мм;
Ди, - рабочая ширина венца, мм;
Ьщ *(0Д8 ... 0,24)0^.
Параметры ц/^ и \|/^д связаны
зависимостью
УЬё =0^м/^(и + 1).
Величины, входящие в формулы (3.3.16)
и (3.3.17) определяют в соответствии с
рекомендациями действующих стандартов на
зубчатые зацепления. В диапазонных коробках
передач с фрикционными муфтами
управления межосевое расстояние часто определяется
диаметральными размерами муфт, так как а„
при этом оказывается гораздо больше
определяемого по формуле (3.3.16).
Для уменьшения относительного
скольжения и снижения напряжений зубчатые
колеса могут подвергаться корректированию.
Коэффициенты смещений исходного контура для
шестерни и колеса обозначают соответственно
хш и хк. Несмещенная (хш =хк =0) и
равносмещенная (хш + хк =0) зубчатые
передачи имеют коэффициент суммы смещений
х% =0. Если принять для у-го двухзвенного
МПТ, входящего в /-й трансформатор,
*Е(/ < *Е/» гДе *Е/ " значение, определяемое
по формуле (3.3.15), то для данного МПТ
получим зубчатую передачу с положительным
коэффициентом суммы смещений х% > 0. Это
позволяет корректировать передаточные числа
МПТ иу, приближая их к расчетным и
обеспечивая минимальные отклонения
передаточных чисел икп* коробки передач от
заданных.
При использовании фрикционных муфт
в качестве ЭУ для управления ЭТЭ определяют
относительные угловые скорости дисков у'-й
включенной муфты по формуле
где о}| - угловая скорость входного вала
коробки передач; Щу - передаточное число от
входного вала до у-и разомкнутой муфты
управления /-го многоступенчатого
трансформатора коробки передач; 14% - передаточное
число включенного МПТ /-го трансформатора;
иу - передаточное число МПТ,
обеспечиваемое включением у-го элемента управления
того же грансформатора (значения Ыу и
и# подставляются со своими знаками).
По формуле (3.3.18) определяется
относительная угловая скорость подшипников
свободно установленного на валу зубчатого колеса
у-го МПТ, а также элементов ее управления
любого типа.
Относительная скорость дисков
фрикционной муфты является важным показателем ее
надежности и определяет потери мощности в
выключенной муфте. Для муфт с одинаковым
направлением вращения ведущих и ведомых
406
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
дисков (при одинаковых знаках у 14у и 14%)
рекомендуется принимать <ооту ^ 0,25 (й\, а
при противоположных направлениях
соот7 *2<ог.
Выбор внутренних параметров н анализ
планетарных К31. Диапазонная планетарная
коробка передач, также как и вальная, состоит
из совокупности последовательно
расположенных в кинематической цепи планетарных
коробок передач с двумя степенями свободы.
Каждая их них подвергается анализу
автономно, поэтому ниже приводятся основы анализа
планетарных коробок передач только с двумя
степенями свободы.
Каждый ЭТЭ иерархического графа
структуры в планетарной коробке передач
реализуется в виде механического
дифференциального трансформатора (МДТ),
содержащего один или более простых трехзвенных
дифференциальных трансформаторов (ТДТ).
Управление МДТ осуществляется тормозным
устройством, соединяющим одно из его
звеньев с корпусом коробки передач. При этом
МДТ обеспечивает фиксированное
передаточное число. Если МДТ состоит из нескольких
ТДТ, то согласно условию связности, каждый
из ТДТ должен быть соединен двумя звеньями
с другими ТДТ.
При числе ступеней п проектируемого
планетарного трансформатора, передаточные
числа которых не равны единице, число
звеньев должно быть /1+2. Из них формируются
возможные варианты ТДТ. Так как любые три
звена могут образовать ТДТ, то число
вариантов этих механизмов определяется числом
сочетаний из п + 2 звеньев по три:
^ТдТ=Сл3+2=(/1 + 2)(/1 + 1)/1/(12.3).
Возможные варианты ТДТ
отбраковываются по ограничениям кинематических
параметров, определяемых в процессе
кинематического анализа. Для проведения
кинематического анализа используется известное
уравнение кинематики трехзвенного диоЭДеренци-
ального механизма
сод-Ка>а=(1-*)а>л, (3.3.19)
где соа , сод - угловые скорости центральных
зубчатых колес; Ю/, - угловая скорость водила;
К - кинематический параметр ТДТ.
Кинематический параметр К
представляет собой передаточное число между
центральными колесами а и Ь при остановленном
водиле А (см. рис. 3.3.17), т.е. является
внутренним передаточным числом механизма;
К = (юв/а>*)|вАш0.
Для каждого МДТ, передающего энергию
на рассматриваемой к-й ступени коробки
передач, на основе (3.3.19) формируется система
уравнений:
у = 17^ (3.3.20)
где т - число ТДТ, входящих в состав МДТ.
После выбора ведущего и ведомого
звеньев КП, а также тормозного звена на
данной ступени и подстановки их угловых
скоростей (соответственно С0д^, ©„*, ©т*,
причем, о>т* =0) в уравнения (3.3.20)
получается система нелинейных алгебраических
уравнений в неявном виде относительно
искомых значений К) :
"кп* =/*(Ку> 7 = 17»*), к=~п
(3.3.21)
гае икп /с = сод* /<йпк ~ передаточное
число &-й ступени; п - число ступеней в КП.
Система уравнений (3.3.21) позволяет по
заданным передаточным числам икп *
коробки передач определить кинематические
параметры К ) всех ТДТ, а затем число зубьев
их колес.
В табл. 3.3.2 приведены Зюрмулы,
связывающие К с числами зубьев их колес, для
трехзвенных дицэференциальных
трансформаторов. При подборе чисел зубьев необходимо
обеспечить выполнение условий соосности,
размещения и сборки.
Относительная угловая скорость дисков
У-го разомкнутого ффикционного тормозного
механизма озот ту включения
соответствующей ступени коробки передач равна угловой
скорости оту затормаживаемого им звена.
Поскольку значение оту зависит от номера к
к к
включенной ступени, то ©отту=(от^.
Относительная угловая скорость дисков
разомкнутой фрикционной муо>гы прямой
передачи соот ф зависит еще от ее расположения в
кинематической схеме. Это обусловлено тем,
что для блокировки всех ТДТ коробки передач
достаточно блокировать два любых звена,
которые могут относиться как одному ТДТ, так и
разным.
СТУПЕНЧАТЫЕ КОРОБКИ ПЕРЕДАЧ
407
3.3.2. Формулы для определения параметра К трехзяетых двффереияиалышх трансформаторов,
используемых в планетарных коробках передач [30, 36]
Тиб
А
В
С
Б
Е
Схема
9—
а*
а-
9 |
Г
\-ь
у*ь
Г
4№
»"Ун
и
Сателлиты
Одновенцовые
Двухвенцовые
(блочные)
Двухвенцовые
Одновенцовые
парные
То же
Одновенцовые
Зацепления
Разноименные
»
Одноименные
два внешних или
два внутренних
Разноименные
центральных колес
Одноименные
центральных колес
Конические
зубчатые колеса
Параметр К
*а
*а 1/
1а
1а
^а
Величины со от. ту и соот.ф находятся
из решения полной системы уравнений,
составленной на основе (3.3.19).
Относительная угловая скорость
сателлита
©от.с =±(<»в-аЛ)*в/^ =
В этой формуле верхние знаки
соответствуют внутреннему зацеплению, а нижние -
внешнему.
Крутящие моменты, передаваемые
фрикционными тормозными механизмами и
блокировочной муфтой планетарной КП,
Мтк =3/д(мкп *-1);
408
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
где ©"т. ф " относительная угловая скорость
дисков муфты при остановленном выходном
вале, т.е. при ©п =0.
Оценка потерь мощности и КПД коробки
передач
Лк„=1-|2Л. |/Л|=1-*пЕ-
где Рд - мощность двигателя, подводимая к
входному валу КП; ^\ ^п ~ мощность
суммарных потерь в КП; Кп % - коэффициент
суммарных потерь мощности; ^„^ ~
= &п>т + Кп ф + Ап н ; лп т, ^п.ф»
^п.н " коэффициенты потерь мощности
соответственно в ЭТЭ, фрикционных ЭУ и на
привод насосов системы управления.
КПД трансформаторов многоступенчатой
диапазонной КП на к-к ступени
т
Лт* =Р|ЛтЛ »
/«1
где т|т/^ - КПД зубчатых зацеплений А:-го
ЭТЭ /-го многоступенчатого трансформатора
КП, передающего энергию на к-й ступени; у
передач с внешним зацеплением для одной
пары шестерен принимают Г|т# =0,98.
КПД зубчатых зацеплений планетарной
КП можно определить по методу М. А. Крей-
неса с помощью соотношения между
кинематическим «кп и силовым йкп
передаточными числами:
Лт* =йкп к /"кп к •
Кинематическое передаточное число
согласно (3.3.21) является определенной
функцией кинематических параметров К) ,
у = 1, т трехзвенных дифференциальных
механизмов, составляющих МДТ. Выражение
для йкп ^ отличается от выражения (3.3.21)
тем, что при каждом значении К]
добавляется множитель ( Лу ) • Верхний знак при
показателе ступени берется, если выражение
Км дихп %
——1 —— > 0 и нижний, если оно отри-
цагельно. Тогда механический КПД
дифференциального трансформатора
^т* = ттт—:—=л— '
/гк\К)> У =1» »)
где Т|у - КПД у-го ТДТ при относительном
движении (остановлено водило); т - число
ТДТ, составляющих дифференциальный
трансформатор к-й ступени коробки передач.
КПД
Л у - Л1у Л2у»
где П\у г%1 - число соответственно внешних и
внутренних зацеплений в ТДТ.
При этом для внешнего зацепления
гц = 0,98, а для внутреннего Т|2 = 0,99.
При оценке механических потерь в
элементах трансформации энергии необходимо
учесть продолжительность работы коробки
передач на каждой ступени и КПД % *:
*п.т =1-^ЪткУк>
к-\
где у* - коэффициент продолжительности
работы на к-Я ступени, определяемый из
условия 2_, Ук~1-
к-\
Значительная часть мощности теряется в
разомкнутых фрикционных элементах
управления КП. Она может достигать 15 ... 20 %
общих потерь в КП. Для ее определения
используются опытные данные или
эмпирические зависимости, полученные для
фрикционных элементов, близких по размерам и
конструктивному исполнению к проектируемым.
Затраты мощности на привод насосов
достигают 20 ... 25 % общих потерь в КП и
зависят от подачи 0Н и давления рабочей
жидкости рн :
?н =С?н/>н/(лм ЛоЛг)>
где Лм> Ло> Лг " соответственно
механический, объемный и гидравлический КПД
насоса.
ГИДРОМЕХАНИЧЕСКИЕ КОРОБКИ ПЕРЕДАЧ
409
В первом приближении можно принять
общий КПД насоса равным 0,8 ... 0,85.
После выбора основных параметров КП
и ее элементов проводятся компоновка и
последующие расчеты на прочность, жесткость,
долговечность по стандартным методикам.
3.3.6 ГИДРОМЕХАНИЧЕСКИЕ КОРОБКИ ПЕРВДАЧ
Гидромеханическая коробка передач
(ГМКП) является комбинированной и состоит
из гидродинамической передачи (гидромуфты
или гидротрансформатора) и механической
зубчатой передачи. Основные свойства
гидромуфты и гидротрансформатора определяются
их безразмерными характеристиками:
коэффициентом Хн момента насосного колеса,
характеризующего энергоемоксть или
нагрузочную способность; коэффициентом К
трансформации момента (силовое
передаточное число); кинематическим передаточным
отношением итн (величина, обратная
передаточному числу); КПД г|тн (см. рис. 3.3.19).
Характеристика Хн = /( итн ) позволяет
получить нагрузочные характеристики ГДП
Ми =/(сон ], которые представляют собой
квадратичные параболы:
Л/н=рХна>2 2>*, (3.3.22)
где р - плотность рабочей жидкости (для
минерального масла р = 850 ... 870 кг/м3); Оа -
активный диаметр - наибольший диаметр
рабочей полости; сон - угловая скорость
насосного колеса.
В связи с резким отличием
характеристик ДВС А/д = /I ©д 1 и нагрузочных
характеристик ГДП I Мн = /(сон )
возникает проблема их рационального согласования,
позволяющего обеспечить высокие тяговые и
топливно-экономические качества трактора.
Выбор параметров гидромуфты. При
использовании гидромуфты в трансмиссии
трактора ее характеристику Хн = /(итн)
выбирают из числа существующих (конструкций
или моделей) и определяют Оа. При выборе
характеристики ^н=/(итн) (см- Рис-
3.3.19, а) исходят из следующего: на режиме
номинальной мощности двигателя скольжение
ГМ не должно превышать 2 ... 3 % (мтн =
= 0,97 ... 0,98); значение Хнтах должно бьпъ
таким, чтобы предотвращалась перегрузка
двигателя и исключалась возможность его
остановки. Эти требования могут бьпъ
выполнены, если парабола нагружения Ми при
Хнс проходит через точку номинального
момента двигателя Мд н , а парабола
нагружения при Хн тах - через точку Мл,
определяющую минимально возможную угловую
скорость коленчатого вала двигателя, при
которой еще обеспечивается его устойчивая
работа. Выбор характеристики ГМ
осуществляется совмещением в одних координатах
графиков Л/д =/(шд) и Ми =/(©н)-
Значение Д, находят из формулы
(3.3.22), полагая в ней ^н/=^д/ и
©н/=Шд/ в выбранной точке характеристик
совместной работы ДВС и ГМ при
соответствующем значении Хн /.
Выбор параметров гидротрансформатора.
На тракторах в основном используются
одноступенчатые комплексные трех- или
четырехколесные ГТ с центробежным насосным
колесом, центростремительной турбиной и
осевыми направляющими аппаратами.
Максимальный КПД таких ГТ достигает 85 ... 90 % на
режиме трансформации момента и 0,95 ... 0,97
на режиме гидромуфты, а область режимов
работы ограничена минимальным значением
КПД ЛтнШп =0»75 ••• 0,80. При этом
диапазон изменения силового передаточного числа
составляет 2 ... 2,2, а кинематического -
2,4 ... 2,7. При выборе модели
гидротрансформатора прежде всего обращается внимание
на его характеристики по КПД. Чем выше
Лтн шах и шире область регулирования мтн,
ограничиваемая Лтн Шп» тем лучше
характеристики ГТ. Значение КГТо нежелательно
иметь чрезмерно большое, так как при
этом увеличиваются расчетные нагрузки на
элементы трансмиссии и растут их масса и
размеры. Приемлемыми являются значения
КГТв=2,0...3,5.
Важной характеристикой ГТ является его
прозрачность, оцениваемая коэффициентом
прозрачности
™ = ^нтах / ^нм>
гае Хнм - значение Хн в точке перехода от
режима трансформации момента к режиму
гидромуфты (при итм , см. рис. 3.3.19, е).
410
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
В зависимости от значения Л
гидротрансформаторы разделяют на
прозрачные, малопрозрачные и непрозрачные. У
прозрачных П > 1,5, у малопрозрачных
77 = 1,3 ... 1,5, у непрозрачных 77 = 1 ... 1,2.
У последнего изменение нагрузки и частоты
вращения турбины практически не влияет на
режим работы двигателя и связанного с ним
насосного колеса. Непрозрачные и
малопрозрачные ГТ применяют в трансмиссиях
тракторов, на которых используют двигатели с
малым коэффициентом приспособляемости по
крутящему моменту, Хм = 1.12 ... 1,2. На
тракторах с двигателями постоянной
мощности, у которых Хм = 1»3 ••• 1,6,
целесообразно использовать прозрачные или
малопрозрачные ГТ.
Совмещение характеристик двигателя
[^д=/(«д)] и ГТ [Л/Н=/(ШН)]
проводят таким образом, чтобы получить
наибольшие средние значения мощности на
турбинном колесе и реализуемый КПД ГТ на
характерных эксплуатационных режимах
трактора. Это достигается многовариантными
расчетами тяговых характеристик трактора. В
качестве исходного при совмещении Ми с
точкой характеристики двигателя Ма н
можно принять значение Хн при итн, близком к
переходу на режим гидромуфты. Определив
далее по формуле (3.3.22) величину 7>д,
используют ее для построения на основе теории
подобия нового ГТ для создаваемого трактора.
3.3.7 ГЛАВНЫЕ ПЕРЕДАЧИ
Главная передача (ГП) предназначена для
согласования кинематических характеристик
трактора и двигателя, снижения нагружен-
ности агрегатов трансмиссии (коробки
передач, раздаточной коробки, карданных передач)
и рационального решения проблем
компоновки трактора [30]. По числу пар зубчатых
зацеплений различают ГП одинарные и
двойные, по типу зацеплений - цилиндрические,
конические и комбинированные. Конические
зубчатые передачи применяют с прямыми
зубьями, круговыми и с нулевым углом
наклона зубьев. ГП должна отвечать следующим
требованиям: иметь высокий КПД на всех
эксплуатационных режимах работы жесткость
конструкции, обеспечивающую нормальное
зацепление зубьев при изменении нагрузки;
отличаться бесшумностью работы и простотой
технического обслуживания.
Схемы главных передач. Наибольшее
распространение получили одинарные
конические ГП со спиральными зубьями. В колесных
тракторах ГП обычно размещают в корпусе
ведущего моста перед механизмами
распределения мощности между колесами. У тракторов
моноблочной компоновки с колесной
формулой 4К2 шестерню устанавливают на конце
вторичного вала коробки передач, а зубчатое
колесо - на корпусе дифференциала ведущего
колеса (см. рис. 3.3.6). У тракторов раздельной
агрегатной компоновки ГП располагают в
корпусах ведущих мостов (см. рис. 3.3.8).
Аналогично выполняют ГП ведущего моста,
снабженного подвеской, трактора моноблочной
компоновки с колесной формулой 4К4
(например, переднего моста трактора МТЗ-82).
При поперечном расположении двигателя или
использовании коробки передач с поперечным
расположением валов шестерни ГП
прямозубые (тракторы малых классов и самоходные
шасси).
У гусеничных тракторов компоновка ГП
определяется способом их поворота. При
использовании различных механизмов поворота
(фрикционных, планетарных,
дифференциальных), находящихся в центральном отсеке
ведущего моста. ГП располагают между
коробкой передач и механизмом поворота (см. рис.
3.3.7). Если функции механизма поворота
выполняет коробка передач (см. рис. 3.3.8 и
3.3.11) и передача мощности к ведущим
колесам осуществляется двумя потоками, то
используются две главные передачи. В этом
случае применяется ГП, предназначенная для
тракторов малых классов, благодаря чему
можно создавать унифицированные ряды
агрегатов трансмиссии и осуществлять блочно-
модульное проектирование. Следует
учитывать, что для поворота с минимальным
радиусом мощность подводится лишь к одному
борту, поэтому расчет зубчатой пары ГП на
прочность проводят по полному крутящему
моменту, а на ресурс - с учетом разделения
потоков мощности.
При работе конических пар возникают
большие осевые силы, поэтому валы, на
которых закреплены шестерни ГП, устанавливают
на конических роликовых подшипниках (реже
на шариковых в сочетании с
цилиндрическими роликовыми), которые регулируют
прокладками или болтами на стаканах.
Аналогично регулируют зацепление конических
зубчатых пар. Правильность регулировки проверяют
по установочному расстоянию зубчатых колес
и отпечатку на зубьях. Для разгрузки
конических подшипников от осевых сил и
повышения жесткости КП создают предварительный
натяг подшипников 0,03 ... 0,05 мм,
контролируя момент сопротивления проворачиванию
вала 2 ... 4 Н °м.
Выбор параметров. Параметры главных
передач определяют приближенными метода-
ГЛАВНЫЕ ПЕРЕДАЧИ
411
ми расчета. Нормальный модель щ
выбирается по наибольшему расчетному крутящему
моменту на ведущей конической шестерне при
работе на низшей ступени КП рабочего
диапазона скоростей:
Л/тах =0,7/нГк/(1/гп1/б),
ще Ги - номинальная сила тяги трактора;
гк - радиус ведущего колеса; итп -
передаточное число главной передачи; и$ -
передаточное число конечной (бортовой) передачи.
2000
1000
0,05 0,1 0,15 0,2 1,н
Рис. 3.3.26. Загасамостъ дм нахождеяш дпшы Ь
образующей конических зубчатых пар
По величине Мтах выбирают длину
Ь образующей начального конуса шестерни
(рис. 3.3.26). Нормальный модуль по
большому конусу для внешнего конусного расстояния
Ь вычисляют по формуле
тп =2Хсоврт/^*12+*2 ,
где Рт - угол наклона линии зуба; 1\ - число
зубьев шестерни; ^ = *1 ит п - число зубьев
колеса.
Полученный результат округляют до
большего целого числа. Длину зубьев
выбирают из соотношения ^=(0,25 ... 0,35) Ь.
Для предотвращения вибрации и поломки
зубьев принимают наибольшую толщину диска
колеса по впадине зуба Нд > 0,5 % щ.
Минимальное число зубьев шестерни главной
передачи принимают в соответствии с
рекомендациями табл. 3.3.3. Здесь же даны формулы для
определения радиуса начальной окружности и
сил, действующих й передаче, отмечены
преимущества и недостатки различных
зацеплений зубчатых пар ГП. Для конических пар со
спиральным зубом допускаемые напряжения
на изгиб обычно ан <> 350 МПа, а на сжатие
сгс * 1100 МПа.
Параметр
Минимальное число
зубьев ^щш
Радиус начальной
окружности гт
Силы:
окружная Рг
осевая Ра
радиальная Рг
3.3.3. Данные для
Прямозубой
12
Ъ^ПЫ
М^/гт
РгХ%ап^тЪщХ
р1\&апсо&Ь„х
выбора параметров коинчесвжх ГП
С круговыми зубьями
6 (при Рм=40 ... 42е)
8 (при Ря=35 ... 40е)
10 (при Рт=30 ... 35е)
0^щ,11со&Ъу,
Мк/гм
С08Рт
С08рт
С нулевым углом
наклона зуба
12
02Щ1
М*/гт
Г, ^аязшб^
Рг \%ап совб^
412
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
Продолжение табл. 3.3.3
Параметр
Прямозубой
С круговыми зубьями
С нулевым углом
наклона зуба
Преимущества
Недостатки
Простота
изготовления и
регулирования
Небольшие
требования к
точности
изготовления и
жесткости узла
Большие
габаритные
размеры;
недостаточная
долговечность
Малые габаритные размеры
Высокая долговечность
Большая осевая сила;
высокие требования к точности
изготовления и регулирования;
необходимость обеспечения большой
жесткости валов и корпуса
Высокая
долговечность; по
точности изготовле
ния,
регулирования и жесткости
узла требования
более жесткие,
чем для
шестерен с
круговыми зубьями
Меньшая
долговечность, чем у
пары с
круговыми зубьями;
Большие
габаритные размеры
Примечания: 1. Радиальная сила колеса Рг% = Ра\, осевая Ра2 = Рг\. 2. Силы
Ра\ и Рг\ спиральной шестерни даны для.случая, когда направления спирали, сил Ра\ и Рг\
совпадают с направлением вращения вала. 3. Обозначения в формулах: ап - угол профиля зуба
по торцу; а - угол профиля исходного контура; 5 ц, - угол начального конуса; Мх - крутящий
момент, принимаемый для расчета на контактную выносливость.
3.3.8 ДИФФЕРЕНЦИАЛЫ
Дифференциал распределяет крутящий
момент между полуосями ведущих колес и
обеспечивает вращения колес с
различающимися угловыми скоростями на поворотах и
при движении по неровностям.
Дифференциалы классифицируют по следующим признакам
[30]:
по типу применяемого механизма -
шестеренные (конические и цилиндрические),
червячные, кулачковые и свободного хода;
по месту установки в трансмиссии -
межколесные и межосевые;
по способу деления передаваемых
нагрузок - симметричные и несимметричные;
по способу блокировки - простые с
принудительной блокировкой (с ручным или
автоматическим управлением блокировкой) и
автоматически действующие
(самоблокирующиеся).
Межосевые дифференциалы на тракторах
обычно не применяются, межколесные
дифференциалы располагают в ведущих мостах
колесных тракторов.
Требования, предъявляемые к
дифференциалам, следующие: высокий КПД на всех
режимах; рациональное использование
сцепных свойств ведущих колес соответствующим
регулированием коэффициента блокировки;
бесшумность; надежность.
На большинстве колесных тракторов
применяют простые симметричные
конические дифференциалы. Они состоят из корпуса,
сателлитов, крестовины и полуосевых
шестерен (см. рис. 3.3.5). У простого
дифференциала полусумма угловых скоростей сол левой и
<оп правой полуосевых зубчатых колес равна
угловой скорости Од корпуса
дифференциала:
0,5 (<ол +й>п)=юд.
Кроме того, при любых соотношениях
угловых скоростей ©л и ©„ простой
дифференциал делит подведенный к его корпусу
крутящий момент А/д между полуосями,
причем:
МЛ~МП> Мл+Мп=Мд. (3.3.23)
Для полного использования сцепных
свойств ведущих колес распределение
крутящего момента между полуосями ведущего
моста должно соответствовать нормальным
нагрузкам на колеса гк/ и коэффициентам
сцепления колес с опорной поверхностью (р/:
ДИФФЕРЕНЦИАЛЫ
413
Мл/ Ми = *кПФл/(*кпФп)-
Этому требованию отвечают далеко не
все дифференциалы. Сила тяги трактора с
простым коническим дифференциалом,
согласно (3.3.23), определяется колесом,
находящимся в наихудших сцепных условиях.
Поэтому такой дифференциал значительно
ухудшает тяговые качества трактора. Так как 1К / и
ф/ для левого и правого колес постоянно
изменяются, то возникает необходимость
регулирования распределения моментов Мл и
Мп , которое оценивается коэффициентом
блокировки
кб=(м0-м3)/м0,
где М0 - крутящий момент на полуоси
отстающего колеса; М3 - крутящий момент на
полуоси забегающего (буксующего) колеса.
При этом МА = М0 + М3 . В результате
для симметричного дифференциала: М0 =
= 0,5Мд(1 + *б); М3=0,5Мц(1-Кб).
У простых конических дифференциалов
К§ =0,05 ... 0,15, поэтому М0 и М3
отличаются незначительно, что является основным
их недостатком, снижающим проходимость
трактора. Для устранения этого недостатка
применяют механизмы принудительной
блокировки, обеспечивающие К$ = 1, когда
момент Мл может быть реализован одним
колесом. Блокировка осуществляется кулачковой
или штифтовой муфтой, замыкающей корпус
дифференциала с полуосью или две полуоси
между собой. Для того чтобы при этом не
нарушилась управляемость трактора,
принудительная блокировка осуществляется лишь при
нажатии на педаль или рычаг управления. При
освобождении органа управления
блокировочная муфта автоматически выключается под
действием пружин.
Дифференциалы с принудительной
ручной блокировкой получили широкое
распространение на тракторах, что обусловлено их
простотой. К недостаткам следует отнести:
возможность включения блокировки только
при остановленном тракторе (после потери им
скорости) и необходимость своевременного
включения и выключения. При
автоматическом управлении блокировкой,
осуществляемой с помощью фрикционной
многодисковой муфты с гидроприводом
управления (см. рис. 3.3.6), при повороте рулевого
колеса на определенный угол муфта
выключается, дифференциал разблокируется и не
препятствует вращению колес с разными
угловыми скоростями.
Самоблокирующиеся дифференциалы по
принципу действия делятся на дифференциалы
повышенного трения, с переменным
передаточным числом и свободного хода.
Большинство самоблокирующихся дифференциалов
работают по принципу возникновения
повышенного момента трения Мтр при
нарушении равенства угловых скоростей вращения
полуосей, когда ©3>(0о- Момент трения
Мтр определяет коэффициент блокировки:
Мтр = М0 - Мъ = К§ Ма .
Дифференциалы повышенного трения
выполняются на основе шестеренных,
червячных и кулачковых механизмов. В шестеренных
дифференциалах момент трения увеличивают
установкой на полуосевых шестернях
фрикционных муфт. Крестовина сателлитов
выполняется составной. При этом оси сателлитов
могут смещаться в корпусе дифференциала,
повышая давление на полуосевые шестерни и
увеличивая силу сжатия дисков муфгы. При
отставании одной из полуосей создается
момент трения, пропорциональный
передаваемому моменту:
ы _ И * гср.с .,
где ц - коэффициент трения дисков муфгы;
ц =0,06 ... 0,10; I - число поверхностей
трения муфты; гср м - средний радиус диска
муфгы; гср с - средний радиус поверхности
скоса; р - угол скоса оси сателлитов.
Такой дифференциал применяют в
передних мостах тракторов МТЗ. Момент трения
можно повысить также применением
увеличенного угла зацепления зубьев конических
пар дифференциала (у трактора Т-150К он
составляет 45°). Соотношения между
моментами на полуосях в зависимости от К§
показаны на рис. 3.3.27.
У червячных дифференциалов
коэффициент блокировки определяется углом подъема
витков червяка, К§ =0,6 ... 0,8. Для
устранения возможности самоторможения этот угол
должен быть не менее 30°. В связи со
сложностью конструкции червячные
дифференциалы применяют редко. Кулачковые
дифференциалы выполняют с осевым и радиальным
расположением кулачков. Первые отличаются
414
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
7
/Мо
"з
О 0,2 0,4 0,6 0,6 К$
Рмс. 3.3.27. Зависимость относительного изменения
момента М^ действующего на отстающей полуоси,
от коэффициента Кь блокирован дифференциала
при М3 - 1
большими осевыми силами, действующими на
профильные шайбы полуосей со стороны
кулачков, что вызывает повышенное
изнашивание их рабочих поверхностей. Такой
недостаток отсутствует у дифференциалов с
радиальными кулачками. Дифференциалы
повышенного трения не обеспечивают необходимого
распределения крутящих моментов
соответственно условиям сцепления ведущих колес с
опорной поверхностью и не обладают
способностью полной блокировки, и в то же время
ухудшают маневренность трактора,
дополнительно нагружают двигатель при повороте,
вызывают повышенное изнашивание шин.
При прямолинейном движении трактора в
дифференциале не происходит потерь
мощности, а при повороте часть мощности
двигателя теряется на трение. Потери мощности
оцениваются КПД:
Пд = 1-—— ЛГб,
где В - колея трактора; гп - радиус поворота,
определяемый для точки середины ведущего
моста.
Дифференциалы свободного хода могут
быть с роликовым, кулачковым и храповым
механизмами свободного хода. Механизмы
свободного хода должны быть реверсивными
для обеспечения движения передним и задним
ходом. Недостатком этих дифференциалов
является то, что при повороте трактора
крутящий момент подводится лишь к отстающему
колесу, поэтому они не получили широкого
распространения. Кулачковый механизм
свободного хода применяется на тракторах К-701.
Роликовые механизмы не используются
вследствие больших контактных напряжений
(достигающих 1200 МПа), что требует
применения специальных материалов и усложняет
технологию изготовления.
3.3.9. КОНЕЧНЫЕ ПЕРЕДАЧИ
Конечная передача позволяет увеличить
общее передаточное число трансмиссии и
обеспечить необходимый дорожный просвет
(клиренс). Шестеренные и цепные конечные
передачи отличаются легкостью обеспечения
большого дорожного просвета. На
большинстве тракторов используют шестеренные
конечные передачи, которые классифицируют
по следующим признакам [30]:
по типу зубчатых механизмов - с
неподвижными осями валов - вальные
(цилиндрические и конические), с подвижными осями
валов (планетарные) и комбинированные;
по числу используемых элементов
трансформации энергии - одинарные и двойные;
по числу ступеней передаточных чисел -
одноступенчатые и двухступенчатые.
Требования к конечным передачам
вытекают из особо тяжелых условий их работы.
Конечная передача передает большой
крутящий момент ведущему колесу, ее корпус и
полуоси нагружены силами тяги и
торможения, нормальными и боковыми реакциями
опорной поверхности на колеса (или силами
натяжения гусеницы и ударов ведущего колеса
о грунт - у гусеничных тракторов). Близость
почвы требует создания особо надежных
уплотнителей, а большие нагрузки -
стабильного смазывания и хорошего теплоотвода.
Конечные передачи должны иметь высокий
КПД, обеспечивать большое передаточное
число (для разгрузки элементов трансмиссии),
обладать высокой надежностью и простотой
технического обслуживания.
На современных тракторах в основном
применяют одинарные вальные и планетарные
схемы конечных передач. Вальные передачи
позволяют повысить дорожный просвет и
поэтому используются в основном на
сельскохозяйственных колесных
универсально-пропашных тракторах, а также на гусеничных
тракторах (см. рис. 3.3.5 - 3.3.7). На тракторах
больших тяговых классов чаще применяют
планетарные конечные передачи, позволяющие
получить большое передаточное число при
высоком КПД, разгрузить полуоси и обеспечить
компактность конструкции. Чаще всего
устанавливают трехзвенный дифференциальный
трансформатор, ведущее звено которого -
центральное колесо внешнего зацепления, а
ведомое - водило (см. рис. 3.3.8 - 3.3.9). Для
обеспечения равномерности распределения
нагрузок на сателлиты вводят плавающие
звенья (обычно центральные зубчатые колеса):
центральное колесо внешнего зацепления
устанавливают без подшипниковой опоры
(опорой являются зубья сателлитов), а колесо
внутреннего зацепления соединяют с
неподвижной опорой (балкой ведущего моста)
шлицевым соединением, допускающим его
радиальное смещение и самоцентрирование.
МЕХАНИЗМЫ ПОВОРОТА ГУСЕНИЧНЫХ ТРАКТОРОВ
415
На промышленных тракторах требуемое
передаточное число конечной передачи
приходится обеспечивать применением двойной
зубчатой передачи (см. рис. 3.3.11 и 3.3.12).
Весьма перспективно использование
двухступенчатых конечных передач, что позволяет
значительно разгрузить коробку передач,
главную передачу, дифференциал, механизмы
поворота и другие элементы трансмиссии и
получить при этом требуемый диапазон
передаточных чисел путем комбинирования набора
ступеней передаточных чисел коробки передач
и конечной передачи. Двухступенчатая
конечная передача при этом удваивает число
ступеней передаточных чисел трансмиссии.
Полуоси конечной передачи по
характеру нагрузки подразделяют на неразгруженные,
полуразгруженные и полностью разгруженные.
Неразгруженная полуось (рис. 3.3.28, а)
испытывает напряжения кручения и изгиба от всех
видов реакций опорной поверхности грунта на
колесо (нормальной, касательной, боковой) и
от сил, действующих на зубья шестерни
конечной передачи (используется на тракторах
малых тяговых классов Т-25, Т-40 и др.).
Полуразгруженная полуось (рис. 3.3.29, б)
кроме напряжений кручения испытывает
напряжения изгиба от составляющих реакций
опорной поверхности. От сил на зубьях
шестерни конечной передачи полуось разгружена.
Такая схема использована на тракторах
МТЗ-80, МТЗ-100 и на многих зарубежных
образцах.
Полностью разгруженная полуось (рис.
3.3.29, в и г) теоретически передает лишь
крутящий момент, подводимый к ведущему коле-
Рис 3.3.28. Схемы полуосей ведущих колес:
а - неразгруженная; б - полузагруженная;
в, г - разгруженная; 1 - полуось; 2 - ведущее колесо;
3 - конечная передача
су или к конечной передаче. Однако ввиду
неточностей изготовления и деформаций
элементов несущей конструкции испытывает
также изгибные напряжения, достигающие
15 ... 20 % напряжений кручения.
Разгруженные полуоси применяют на тракторах
больших тяговых классов (Т-150, К-701 и др.).
Уплотнениями конечных передач
являются самоподвижные радиальные и торцовые
уплотнения с лабиринтной, пыльниковой или
смешанной защитой от прямого попадания
абразивной среды.
3.3.10. МЕХАНИЗМЫ ПОВОРОТА
ГУСЕНИЧНЫХ ТРАКТОРОВ
Основными требованиями,
предъявляемыми к механизмам поворота, размещаемым в
силовой передаче и служащим для изменения
скоростей вращения ведущих колес
забегающего и отстающего бортов гусеничного
трактора, являются [31, 3]:
плавный и быстрый переход от
прямолинейного движения к криволинейному.
Наиболее полно этому требованию отвечают
бесступенчатые механизмы;
минимальная нагрузка двигателя при
повороте радиусом Д которая оценивается
отношением
*пов^ Упов^ , уД] , Мт<ьт
*пр упр V К ) ^уп/
где Кпоъ и А\,р - коэффициент загрузки
двигателя соответственно при криволинейном
и прямолинейном движении; упов и Упр -
скорость движения центра масс трактора
соответственно при повороте и при
прямолинейном движении; V = М^ Пр^В) - параметр
поворота; М% - результирующий момент
сопротивления повороту; Р^ - касательная
силы тяги; В - колея трактора; Мт и сот -
момент и угловая скорость скольжения в
тормозном механизме (при повороте с
фиксированным радиусом Мт сот =0);
устойчивость прямолинейного движения;
достаточный поворачивающий момент
мп=о*в(г0-г3),
где Р0 и Р3 - касательные силы тяги на
отстающих и забегающих гусеницах.
На гусеничных тракторах применяются
механизмы поворота с фрикционными
муфтами, одноступенчатые или двухступенчатые
планетарные механизмы. Фрикционные муфты
416
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
поворота, как правило, являются
многодисковыми, сухими, постоянно замкнутыми. Сила
при включении муфты обычно направлена к
главной передаче для разгрузки ее крепления
на валу. Ведущие диски изготавливают
стальными, ведомые имеют накладки из
фрикционного материала.
Муфты поворота работают в двух
режимах нагрузки, характеризующихся различными
крутящими моментами.
1. Момент, передаваемый при
прямолинейном движении на низшей рабочей
передаче и номинальной мощности двигателя,
Мф1 =02Мникпитпх)ф,
где Мн - номинальный момент двигателя;
икп и итп ' передаточные числа
соответственно коробки передач и главной передачи;
г|ф - механический КПД передачи от
двигателя к муфте поворота.
2. Момент, передаваемый максимальной
силой сцепления на забегающей гусенице при
повороте трактора в гору на косогоре с углом
наклона 30°,
Л/ф2 =0,65ф<7
"к Лк Лд
где ик и т|к - соответственно передаточное
число и КПД конечной передачи; лд - КПД
гусеничного движителя.
Момент Мф2 проверяется по
максимальному моменту двигателя Мцтах при
условии, что он целиком передается через
один фрикцион: М$2 = ^/д шах ик п ит пЛф •
Выбирается меньшее значение Мф2 .
При расчете для первого режима
принимают коэффициент запаса муфты 3,5 ... 5, для
второго 2,5 ... 4, и дальнейший расчет ведется
по большему моменту ( Мф\ или Мф2 ).
Для выключения муфты поворота
необходимо сжать пружины, приложив силу
-**вык = -"с -М1 Лвык >
где Кс = С8 /(ЮГ) + \ - коэффициент
увеличения нагрузки пружин при сжатии; С -
суммарная жесткость пружин; 5* - ход
выключения муфты; Рп - суммарная сила пружин в
рабочем положении; ^ - КПД механизма
выключения.
Момент Мт торможения стояночной
тормозной системы рассчитывается по силе
тяги на отстающей гусенице в наиболее
тяжелых условиях (при повороте трактора на
спуске с углом уклона 30° ):
Л/ _^огк ЛкЛгп/ _
Мт " / «к "
_ (0,47... 0,54) Гклкпгп(?/
Из условия реализации максимального
тормозного момента по сцеплению при
полном торможении трактора на горизонтальном
участке
Мт =
0,5ф<7гкт1к лгп
За расчетное принимают большее
значение момента Мт.
Одноступенчатые планетарные
механизмы поворота (ПМП) имеют ряд преимуществ
перед муфтами поворота: высокую
износостойкость, позволяющую обеспечить работу
механизма в течение 6 тыс. ч без разборки;
наличие дополнительного передаточного числа
при прямолинейном движении,
разгружающего центральную передачу и коробку
передач; меньшую силу на рычагах управления;
меньшие габаритные размеры при передаче
той же мощности. Схемы механизмов такого
рода представлены на рис. 3.3.29. В них
прямолинейное движение трактора фиксируется
включением обоих тормозных механизмов
Тф ; тормозной механизм Т0 отпущен. Для
поворота выключается соответствующий
тормозной механизм 7ф отстающей гусеницы.
Планетарный механизм получает при этом
вторую степень свободы и мощность не
передается на отстающую гусеницу. При затягива-
Рис. 3.3.29. Схемы одноступенчатых
МЕХАНИЗМЫ ПОВОРОТА ГУСЕНИЧНЫХ ТРАКТОРОВ
417
нии остановочного тормозного механизма Т0
отстающего борта тормозится отстающая
гусеница и происходит поворот с минимальным
радиусом. По свойствам рассматриваемый
механизм поворота полностью идентичен
бортовым фрикционам. Момент остановочного
тормоза определяется по тем же зависимостям.
Одноступенчатый ПМП отличается моментом
на тормозном механизме поворота, чем
бортовой фрикцион. Величина его, вычисляемая
при тех же исходных условиях, зависит от
схемы механизма. При выборе схемы следует
учитывать следующее. Как известно, моменты
на звеньях (1, 2, 3) трехзвенного
дифференциала эпициклического типа связаны между
собой зависимостью
М3=М2^- = М1(к + 1),
где к - параметр планетарного ряда.
Минимальный крутящий момент - всегда
на солнечной шестерне, а максимальный - на
водиле. Если по условиям конструирования
и компоновки трансмиссии требуется
обеспечить минимальную нагруженность коробки
передач при заданном ик или минимальное
передаточное число ик при заданном общем
передаточном числе трансмиссии, то лучше
принять схему, показанную на рис. 3.3.29, а.
В случае необходимости обеспечения
минимального момента в тормозном механизме
поворота применяется схема, показанная на
рис. 3.3.29, б. Нецелесообразно использовать
схему, в которой водило связано с коробкой
передач, ввиду значительной ее перенагружен-
ности и необходимости увеличения ик, а
также схему, в которой водило служит
управляемым звеном.
Момент в тормозном механизме
поворота для одноступенчатого ПМП определяется
по формуле
Мтп =0,659(7 —*—I—,
ик Лк Лг п
где ит - передаточное число от конечной
передачи к тормозному механизму.
Момент Мт п может быть определен по
максимальному моменту двигателя:
^т.п = ^дтах"кп Лф "к т Лк т »
где ик т и т|к т - соответственно
передаточное число и КПД передачи от коробки
передач к тормозному механизму поворота.
Для схемы на рис. 3.3.29, ау
к
ит = -; ик т ==-*;
#с + 1
для схемы на рис. 3.3.29, б
1 1
ит = Г; "к т = •
к + \ к
За расчетное принимается меньшее
значение А/т „ .
Работоспособность тормозных
механизмов поворота по теплонапряженности
необходимо оценивать по максимальным скоростям
скольжения в них, имеющим место при
выходе из поворота с минимальным радиусом.
Для бортового фрикциона эти скорости
соответствуют частоте вращения п^ вторичного
вала коробки передач. Для одноступенчатого
ПМП я,. = /^ / мк т . В схеме, показанной на
рис. 3.3.29, б, скоростной режим менее
благоприятен.
Двухступенчатые планетарные механизмы
поворота сохраняют кинематическую связь
между гусеницами при повороте трактора и
улучшают его управляемость благодаря
введению второго (кроме минимального
фиксированного) радиуса поворота. Возможные
принципиальные схемы двухступенчатых ПМП
показаны на рис. 3.3.30. В них при
прямолинейном движении на обоих бортах включены
фрикционные муфты Фп или тормозные
механизмы Тф. При плавном повороте на
отстающем борту выключается Ф„ или Тф и
включается тормозной механизм Тп . На
забегающем борту все время остаются
включенными Фл или Тф . При полностью включенном
Т0 получают фиксированный минимальный
радиус поворота, при полностью включенном
Тп поворот трактора происходит со вторым
расчетным радиусом. При одновременном
включении тормозных механизмов на обоих
бортах обеспечивается прямолинейное
движение с замедленной скоростью. Поворот в этом
режиме осуществляется с помощью
остановочного тормозного механизма Т0 .
Схемы, показанные на рис. 3.3.30, а - г,
построены на эпициклическом планетарном
механизме и имеют одинаковые связи с
бортовой передачей, коробкой передач и
тормозными механизмами Тп . Двухступенчатые ПМП
при включении Тп на отстающем борту дают
понижающую передачу. Рассматриваемый
механизм может обеспечить только три переда-
I 4 {..к. 1741
418
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
БП
Т„ То_
ГП /Г/7
То Тп_
1
Т0 7/7 Тп Т0
БП
I "Г рЬ [ЩИ* на щЩ\
I ^г 111 \бп бп\ |Т I >Л I Т| [*#
Тр Тп Тр Тр
||тТГ»Л«ТЫ1
БП
Тр Тп | 7/7 Те
</
7^ 7> 7^ 7]р 7/у . То
То Тф Тр
Тп ТфТо
д) 1 г е)
То т%
11
БП
Ч>„
шщ
1й.1г.
И
«7
БП
Ж)
Рис. 3.3.30. Схемы двухступенчатых механизмов поворота
точных числа (больше единицы) при
различном сочетании связей его звеньев с бортовой
передачей, коробкой передач и Тп :
2 ,3 1 к+1
Параметр к планетарного ряда
1
наименьший момент Л/ф блокировки
фрикциона в первом варианте:
1
Л*ф1 = М*
1 + к
к =
ии
-1
гае им п - передаточное число механизма
поворота.
Схемы, показанные на рис. 3.3.30, а, б,
отличаются только компоновкой. В первой вал
коробки передач расположен внутри
тормозного механизма, оба опираются друг на друга
через подшипники. При остановленном
барабане тормозного механизма Т0 они
вращаются в противоположные стороны и имеют очень
большие относительные скорости вращений.
Этот недостаток устранен во второй схеме.
Схема, показанная на рис. 3.3.31, ву
отличается от схем а, бу г способом блокировки
механизма. Из возможных связей звеньев
планетарного ряда при блокировке (1-2; 1-3; 2-3)
Для второго варианта
^ф2 = ^к —
В третьем варианте валы коробки
передач и бортовой передачи соединены
напрямую:
^фЗ = ^к •
В схемах, показанных на рис. 3.3.30, а> б,
г, использован второй вариант блокировки (по
моменту блокирующего фрикциона хуже
первого). Он применяется чаще, так как при
первом варианте, когда трактору необходимо
выходить из крутого поворота с радиусом,
близким к минимальному, барабаны фрикциона
вращаются в разные стороны. При включении
такого фрикциона скорости скольжения
дисков очень большие.
Схема, показанная на рис. 3.3.30, г, -
вариант центральной компоновки механизма,
когда нецелесообразно разнесение его по бор-
СИСТЕМЫ УПРАВЛЕНИЯ ГУСЕНИЧНЫМИ ТРАКТОРАМИ
419
там. В схеме, показанной на рис. 3.3.30, д,
блокирующий фрикцион заменен на
планетарный рядом 1 и тормозным механизмом
Тф. Основной планетарный ряд обозначен
цифрой 2. При включении Тп на отстающем
борту ып = 1 + #2. На забегающем борту
остается включенным Тф . При этом
1 + к2 , к\к2
им = *—; им п = 1 + 1 1 .
1 , *1 К2 *1 + 1
• К\ + 1
Схемы, показанные на рис. 3.3.30, е> ж,
выполнены на гипоциклических планетарных
механизмах. По этим схемам можно получить
более широкий диапазон изменения второго
расчетного радиуса поворота, однако
конструктивно они сложнее рассмотренных и
компоновка их более громоздка.
Момент торможения Мт
двухступенчатого ПМП определяется как для
рассмотренных механизмов поворота. Момент в
тормозном механизме поворота для схем, показанных
на рис. 3.3.30, а, б, в и ж,
%ж (0,47+ 0,54) ° гк
мт. п = ^7^ Лк Л31 Лг п »
где Г|з1 - КПД планетарного ряда.
При повороте с замедленной скоростью
момент тормозного механизмам по сцеплению
гусеницы с почвой
ы 0,65Ф 0гк
Мт п = .
1+* "к^З^т
Момент блокирующего фрикциона
определяется по сцеплению гусеницы с почвой или
максимальному моменту двигателя:
хж 0,65 Ф °гк
Ф * "к^гп
ипик1
М№ = ^тах ^ Чп Лк1 >
где ип и Т1п - соответственно передаточное
число и КПД передачи от двигателя к
механизму поворота.
Расчетный момент на зубчатых колесах
планетарного механизма имеет максимальное
значение при блокированном его состоянии на
забегающем борту:
., 0,65 Ф ° гк
М\ = .
* "к^к^гп
Для двухступенчатых ПМП,
выполняемых по другим схемам, расчетные величины
устанавливаются аналогично, но с учетом
кинематических и силовых соотношений в их
планетарных механизмах.
3.3.11. СИСТЕМЫ УПРАВЛЕНИЯ
ГУСЕНИЧНЫМИ ТРАКТОРАМИ
Система управления (в простейшем
случае приводы управления) гусеничного
трактора приводят в действие механизмы силовой
передачи трактора при управлении им. По
обеспечению нормального режима работы
управляемого агрегата, системы управления
можно разделить на две группы [23, 31]:
1) работающие только в двух фиксированных
положениях "включен-выключен" (команда о
переключении передач может подаваться с
помощью кнопок или клавишей); 2)
работающие при любом положении органа
воздействия в пределах рабочего хода (механизмы
управления поворотом, тормозными
механизмами, сцеплением и др.). Сила,
прикладываемая к органам управления систем второй
группы, имеет большое значение. На рычагах
и педалях предусмотрены ограниченные силы,
чтобы поддерживалось "чувство машины",
помогающее водителю уверенно управлять
агрегатами. Характеристика работы на входе
для большинства систем управлений второй
группы представляет собой кривую с
непрерывно увеличивающейся ординатой по мере
роста рабочего хода.
Системы управления классифицируются
по следующим признакам: по источнику
энергии - приводы непосредственного
действия и системы управления с усилителями;
по способу выполнения операций - простые,
полуавтоматические и автоматические; по виду
энергии - механические, гидравлические,
пневматические, электрические, вакуумные и
комбинированные.
В приводах непосредственного действия
работа совершается за счет энергии водителя.
В полуавтоматических системах водитель
подает лишь командный импульс, а различные
операции в строгой последовательности
выполняются устройством. В автоматических
системах управления все операции
выполняются также механизмом, командные импульсы
в соответствующие моменты вырабатываются
датчиками этих систем.
Силы, прикладываемые к часто
используемым рычагам управления механизмами
трансмиссии, не должны превышать 60 Н, к
педалям - не более 120 Н. Силы,
прикладываемые к редко используемым рычагам и
педалям (не более пяти раз в смену), могут
достигать 200 Н, а при экстренном торможении
- более 400 Н. Полный ход педалей не должен
превышать 150 мм, а рычагов - 350 мм. Если
необходимые для управления параметры
превышают указанные нормы, то необходимо
использовать усилители.
420
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
Приводы ■еоосредствешюго действия. В
зависимости от способа подачи энергии
различают механические и гидравлические
приводы. Механические приводы
характеризуются простотой конструкции и технологии
изготовления, малой стоимостью и
безотказностью в работе.
В гидроприводах педаль управления
воздействует на шток, перемещающий поршень
внутри гидроцилиндра. Жидкость,
вытесняемая из гидроцилиндра, по трубопроводу
поступает в рабочий цилиндр и перемещает его
поршень. Давление в системе, создаваемое
поршнем цилиндра,
к В2
где Рп - сила на педали или рычаге
управления; ип - передаточное число педали или
рычага управления; В - диаметр поршня
цилиндра.
Объем жидкости, вытесняемой из
гидроцилиндра при рабочем ходе и одновременной
работе нескольких рабочих цилиндров:
У_*В*8Т _
4
где «Уг - ход поршня гидроцилиндра;
йх, ё2 > ..., йп ; ^1»^2 » •••» $п - диаметры и
ход поршней соответствующих рабочих
цилиндров; г)0 - коэффициент, учитывающий
увеличение объема системы.
Задаваясь ходом педали <?п (или рычага)
и зная передаточное число ип , находят ход
поршня в гидроцилиндре: *УГ = п'■/
/ **п
Обычно 5Г «(0,8 + 1,2) А
Приводы с усилителями. Приводы с
усилителями разделяют: по виду используемой
энергии - энергии пружин, двигателя,
кинематической энергии трактора; по конструкции -
механические, гидравлические,
пневматические, электрические и др. Приводы с
усилителями, использующими энергию пружин,
имеют ограниченное применение при
управлении механизмами, включающими сжатые
или растянутые пружины (муфты сцепления,
поворота, некоторые конструкции тормозных
механизмов) [1]. Пружинный усилитель
снижает только максимальное воздействие, не
уменьшая работы управления.
Для управления поворотом
фрикционным или планетарным механизмами водитель
должен воздействовать на два органа:
фрикционный механизм или тормозной механизм для
получения плавного поворота и остановочный
тормозной механизм для получения крутого
поворота. Чтобы сократить число органов
управления, в некоторых конструкциях
механизмов поворота и тормозном управляют
одним рычагом для каждой стороны.
Основными недостатками объединенного
привода управления являются: сложность
регулирования (нужно обеспечить полное
выключение муфты перед затяжкой тормозного
механизма), снижающая его надежность;
увеличенная сила, прикладываемая к рычагу, что
связано с введением сервопривода.
Механизм поворота обычно приводится в
действие 120 - 180 раз на 1 км пути.
Для уменьшения утомляемости водителя
работа, затрачиваемая на одно воздействие,
Луп <> 5 Дж, а максимальная сила не должна
превышать 60 Н. В действительности для
управления муфтой поворота совершается
работа 35 ... 50 Дж, а для включения
тормозного планетарного механизма - до 30,0 Дж.
При этом максимальная сила на рычаге
достигает 250 ..*. 300 Н.
Гидроусилитель. Для его действия
используется энергия работающего двигателя. В
простом усилителе^ для выключения муфт
поворота (трактор Т-130) подается шестеренным
насосом, вращаемым от шестерни
распределения двигателя (рис. 3.3.31).
Диаметр поршня гидроусилителя [2]
Рис. 3.3.31. Гидроусилитель управления
муфтами поворота:
1 - корпус делителя потока; 2 - пробка канала
золотника; 3 - поворотный рычаг; 4 - поршень;
5 - пружина; 6 - толкатель
СИСТЕМЫ УПРАВЛЕНИЯ ГУСЕНИЧНЫМИ ТРАКТОРАМИ 421
ще Л/р - нормальная сила на рычаге (для
муфт поворота суммарная сила пружин в
конце выключателя); г\п - КПД передачи;
лп =0,8 ... 0,85 с запасом по силе
выключения; рм - давление масла, соответствующее
срабатыванию предохранительного клапана;
рм = 3,5 ... 6 МПа.
Ход поршня, см,
$п =5рЬ/а,
где «Ур - ход рабочего конца рычага; для муфт
поворота 5р =0,55 ъ т. - число поверхностей
трения муфты.
Система управления следящего действия
применяется в том случае, когда необходимо
получить точное соответствие в перемещениях
рычага управления и поршня гидроцилиндра,
независимо от характера протекания полезной
нагрузки на штоке поршня (рис. 3.3.32).
Особенностью системы является наличие
жесткой обратной связи, соединяющей
выходной элемент 2 (шток поршня) с плунжером 1
золотника.
Перемещения поршня и плунжера
золотника связаны определенной зависимостью,
которая находится из соотношения плеч
рычагов. Например, при неподвижной точке С
перемещение плунжера
Н-8 71;3
где ^п - ход поршня гидроцилиндра; 1\> /2,
/3, /4 - длины соответствующих рычагов.
Системы управления следящего действия
широко применяются в приводах управления
1
44в
I
НЦйЦ
да
3"
ШЕ
т
и-
и 1
Р*РЬ
трансмиссией: для переключения передач,
управления поворотом, регулирования
передаточного отношения в гидрообъемных,
фрикционных передачах и др. Объем в
гидроцилиндре находится как произведение площади
основания Гц цилиндра на полный ход 5П ;
Рц = ^ц ^п •
Время х перемещения поршня на
величину полного хода зависит от сил,
действующих на поршень, и инерционных масс
поршня и связанных с ним деталей, приведенных к
поршню. Время х может быть определено из
управления движения поршня [3]:
-/
2т5лх
Рве. 3.3.32. Схема системы
следящего действия
/>н^ц ~ Рс
где т - масса поршня и связанных с ним
деталей, приведенных к поршню, кг, ри -
давление в полости гидроцилиндра, Па; Рс -
суммарное сопротивление движению поршня, Н;
Л; ^пр+Лр + Ли; Л]р " СИла сжатия
уплотнениях поршня; Рш - сила трения в
шлицевых соединениях дисков.
Учет влияния водителя ш систему
управления трактора. Имеются многочисленные
попытки использовать методы теории
автоматического управления для описания поведения
человека - оператора как динамического звена
системы управления. Поиск обшей
передаточной функции человека - оператора не
закончен. В настоящее время предложено несколько
десятков типов передаточных функций.
Наиболее успешные попытки поиска относятся к
ручному слежению при простейших по
динамическим свойствам объектов (например, при
управлении тракторным агрегатом в борозде).
В таких задачах для линейной модели
наиболее часто рассматриваются передаточные
функции вида
где к - коэффициент усиления оператора; т -
время запаздывания оператора; N (р) , М (р) -
полиномы.
Полином М (р) имеет порядок от
нулевого до второго; он отражает способность
оператора к учету первой и второй производных
сигнала. Полином N (р) имеет порядок от
нулевого до четвертого; он отражает
характеристики нервно-мышечной системы человека,
422
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
свойство фильтрации высокочастотных
составляющих, установку на функционирование и
др. Такое описание не учитывает изменений в
работе водителя, обусловленных его
утомляемостью, изменением рабочей обстановки и
другими причинами.
Методика определения оптимальных
параметров системы управления трактора при
случайных внешних возмущениях
представлена в литературных источниках [4].
3.3.12. ТОРМОЗНЫЕ МЕХАНИЗМЫ
Тормозные системы позволяют
уменьшать поступательную скорость или экстренно
останавливать трактор, удерживать трактор на
уклоне или подъеме и обеспечивать его
поворот. Тормозные механизмы по назначению
делятся на остановочные и стояночные.
Остановочный тормозной механизм
характеризуется путем торможения, проходимым трактором
от начальной скорости до полной остановки.
Остановочный тормозной механизм трактора
вместе с тормозной системой тракторного
агрегата, поезда должен обеспечивать на
ровном горизонтальном участке замедленное
движение не менее, чем на 3,5 м/с2, а также
остановку агрегата на сухом горизонтальном
участке дороги, при этом тормозной путь
регламентируется ГОСТ 12.2.019-86. Стояночный
тормозной механизм характеризуется
предельным углом подъема, на котором может стоять
заторможенный трактор. Колесный трактор в
состоянии покоя на сухой дороге с твердым
покрытием должен удерживаться при уклоне
до 20° , гусеничный - при уклоне до 30е, а
прицеп - при уклоне 12е .
По форме трущихся поверхностей
тормозные механизмы разделяют на ленточные,
колодочные и дисковые, по типу привода - с
механическим, гидравлическим и
пневматическим приводом.
Тормозные механизмы должны отвечать
следующим основным, требованиям: развивать
высокий тормозной момент при малых
габаритах и осуществлять плавное торможение;
быть уравновешенным от действия радиальных
сил; обладать хорошей теплоотдачей и
допустимой силой по управлению; обладать
требуемой долговечностью; быть удобными и
простыми в обслуживании. Для преодоления
крутых поворотов механизм управления
тормозными механизмами должен воздействовать
на механизмы каждой стороны, на обе
стороны сразу и фиксировать тормозной механизм
при остановке.
Нагрузочные режимы. Для колесного
трактора без тяги на крюке тормозные
моменты на передней и задней осях находят из
условия распределения вертикальных нагрузок на
осях при сохранении устойчивости. Чтобы
удовлетворить последнему требованию, задняя
ось должна затормаживаться раньше передней.
Максимальный тормозной момент
Мт
Фтах гд р\%2 Лк
I ит
где Фтах " максимальный коэффициент
сцепления шины с опорной поверхностью;
гд - динамический радиус; Р\ и Т^ -
максимально возможные тормозные силы,
действующие соответственно на передние и
задние колеса; 7. - число одновременно
работающих тормозных механизмов; ит -
передаточное число от тормозного механизма к
ведущему колесу.
Силы
Р\=<р\\0\\ /2=Ф^2^2»
где Х\ и \2 ~ коэффициенты
перераспределения веса; 0\ и б^ - вес, приходящийся
соответственно на передние и задние колеса в
статическом состоянии на горизонтальном
участке.
Коэффициенты
\\ = со& а + —й—
Ра*
___, Х2=С08а__^,
где а - угол подъема или уклона; Ра = /я— -
ш
сила торможения, зависящая от интенсивности
торможения; м - масса трактора; Л - высота
центра масс; Ь - расстояние от задней оси до
центра масс; V - скорость замедления.
Тормозной момент, требуемый для
остановки гусеничного трактора на
горизонтальной поверхности без тяги на крюке,
пренебрегая сопротивлением перекатывания,
определяют по формуле:
Мт =
е /д О лк лд
где б - замедление от торможения; е =
= 1,5 ... 2 м/с2.
Поскольку гтплх = Фтах # , то
максимальный тормозной момент
Мт
Фтах гд ° Лк Лд
1Щ
Для удержания трактора на
максимальном уклоне тормозной момент, развиваемый
ТОРМОЗНЫЕ МЕХАНИЗМЫ
423
одним тормозным механизмом, определяется
по выражению
Гд О , V
где ащдх - максимальный угол уклона; / -
коэффициент сопротивления перекатыванию
трактора.
Для обеспечения крутого поворота
колесного трактора следует принимать
тормозной момент на отстающем колесе
0,5 В иТ ит
где С?2 " вес> приходящийся на заднюю ось,
включая'догрузку от агрегатируемого орудия.
Расчетные схемы ■ алгоритм расчета. При
расчете ленточных тормозных механизмов
принимаются следующие допущения (рис.
3.3.33): тормозной барабан рассматривается
как абсолютно жесткое тело; поперечные
сечения ленты остаются плоскими и не
искажаются после деформации; на всем протяжении
прилегания ленты обеспечивается плотный
контакт; вес ленты и смещение силы трения
(18х относительно направления силы ее
натяжения 8Х не принимаются во внимание.
Сила натяжения по формуле Эйлера:
8х=8е^у
где 5* - заданная сила натяжения ленты; |Л -
коэффициент трения; а - угол обхвата
барабана.
Для сил, действующих на концы
тормозной ленты, справедливо выражение
Рас 3.3.33. Схема расчета
ленточных тормозных мехаввзмоа
Мт={5х-52)г .
При толщине ленты до 4 мм ее
жесткость можно не учитывать. Сила 82 на с6е~
гающем конце определяется из выражения:
52=АГт/[(е»--1)г].
Перемещение сбегающего конца ленты
где 8 - радиальный зазор между лентой и
барабаном в начале затяжки.
Сила, необходимая для полной затяжки,
%МТЪ а
р _ *
3 (е»"-1)г180
Ширина тормозного элемента
ь Мтс*"
где [ д ] - допустимое давление.
Давление в ленточном тормозе
4 гЬУ 282гъУ
где Е - модуль упругости первого рода; / -
момент инерции поперечного сечения ленты.
Минимальное давление при а = 0
82( % Е1ь)
г Ь\ 282Г )
Для абсолютно гибкой ленты ( Е1 = 0)
?яУп ' г Ь' Япиа~ гЬ '
т*8г=гзуа.
Необходимо отметить, что давления
дх *соп$1 по длине ленты, поскольку сила
натяжения Рх в разных точках ленты
различная.
Под коэффициентом
неуравновешенности тормозного механизма понимается
отношение радиальной силы, действующей на
ось барабана, к тормозной силе на окружности
барабана:
424
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
У =■
где 5} - сила на набегающем конце ленты.
Эффективность действия тормозного
механизма определяется тормозными моментами
при прямом и обратном вращении барабана:
м р>г1
К-Ф
„,...д^_^
/
цМ*
Расчетные формулы для определения
параметров тормозных механизмов приведены в
табл. 3.3.4. Для всех рассмотренных ленточных
тормозных механизмов отношение
Чтал / Ятот = 48 и коэффициент
неуравновешенности у=1.
Сила затяжки плавающего тормозного
механизма незначительна, так как сила трения
совпадает по направлению с силой затяжки
ленты. Следовательно, тормоз обладает серво-
действием при любом направлении вращения
барабана. В тормозном механизме без серво-
действия сила затяжки при обратном
направлении вращения барабана значительно больше,
чем при прямом. При й\ — &2 в*10 < 0
наступает явление самоторможения.
Минимальное усилие на рычаге
управления при работе в обоих направлениях создает
плавающий ленточный тормоз.
При расчете колодочных тормозных
механизмов с внутренним расположением
колодок делаются следующие допущения: при
торможении деформируется лишь тормозная
накладка колодки; тормозная накладка колодки
точно прилегает к рабочей поверхности
тормозного барабана (табл. 3.3.5).
Колодки тормозного механизма с
симметричным расположением затягиваются с
помощью клина, имеющего, жесткую
направляющую. При фо =0 погрешность не
превышает 1 ... 2 % и 0*2 =180°-ах.
Результирующее нормальное давление направлено по
оси у и составляющая сила трения Ру = 0. На
обе колодки действуют одинаковые окружные
силы.
Тормозные механизмы 1-4 (табл. 3.3.5)
действуют одинаково эффективно независимо
от направления вращения барабана.
Уравновешенными от радиальных сил является
тормозной механизм 1, а неуравновешенным -
тормозной механизм 4.
В тормозном механизме 5 при
шарнирном закреплении колодки равнодействующая
Р нормального давления N и силы трения Т
должны проходить через ось вращения
колодки для соблюдения условия равновесия.
Учитывая, что у угол трения, т.е. (& у = р ,
-'(
СО$Р# +— 81ПРту
г*
)•
где ё - расстояние от оси барабана до точки
приложения результирующей силы трения Г;
Рдг - угол, определяющий положение
результирующего нормального давления.
Из условий равновесия тормозного
барабана
АТ - М1 . Т - М*
л * Л *
\ха а
где Мт - момент трения, приходящийся на
одну колодку.
Тормозной механизм обеспечивает
одинаковую эффективность действия независимо
от направления и вращения барабана и
уравновешен от радиальных сил.
Все четыре колодки тормозного
механизма 6, уравновешенного от радиальных сил,
устанавливаются симметрично осям подвески,
что обеспечивает одинаковую эффективность
действия независимо от направления
вращения барабана.
Лучшим, с точки зрения получения
минимальных сил на рычаге управления,
является колодочный тормозной механизм с серво-
действием обеих колодок.
Расчет дисковых тормозных механизмов.
Дисковый тормозной механизм с серводей-
ствием состоит из двух дисков трения,
которые свободно насажены на три выступа (рис.
3.3.34). Тормозной барабан имеет внутри две
плоскости трения. Клиновой привод при
торможении поворачивает диски трения один
относительно другого в разных направлениях.
Рас 3.3.34. Схема расчета
днскоаыж тормозных механизмов
3.3.4. Формулы для расчета ленточных тормозных механизмов [31]
Ленточный
тормозной
механизм
Схема
Сила, необходимая для
полной затяжки, Г3
Мч. п
МТ
Плавающий с
Двусторонним
серводействием
Без серводей-
ствия
С
односторонним серводей-
ствием
Без серводей-
ствия
^а
А
(^ш>вй
и 5 ай Мт
Ш/л/е*1" -1)
яба^е^ -</2)^т
180/Я
(•--)
180/
я 5 а */АГт
*8о(</1е"а+</2)^т
180/
л(е"°-1)
ам^
/Л29(е»"-1)
(ё1^а-42)мт^а
1К2Ч(*Г -\)
4МТ<Г
/Л2?(е^-1)
(^е"0 +</2)л/те',в
/^«(е"0-!)
ЯК1
(*"-)
/,Л/
е*" -1
Р3Я1
К-)
ДЛ/
е""-1
а\еМ<" + ^2
ИЦ^..)
КА1
е""-1
ахь^ -а2
Р3Я1
(*--•)
/•„я/
е>1П-1
</2е»и+</1
3.3.5. Формулы для расчета колодочных тормозных механизмов [31]
Колодочный
тормозной
механизм
Схема
Окружная сила,
действующая на колодку
Максимальное давление
?1гаах и ?2тах
Нормальное давление
Л^ и N2
Условие
самоторможения
Коэффициента
неуравновешенности тормоза
У
1. Без серво-
действия с сим
метричным
расположением
0,5 Мт /г
Мт
Г8Ш
<*0
4цг2*81п^
2
Мт /(2цг)
4ц
аа0
(для левой
колодки)
->1
2. С серводей-
ствием одной
накладки
2К
осп
аа0 ±4цг$1П -У-
аа0
Мт
4цг2*$1п^-
4ЦГ81П -У-
1±- 2_
аа0
2мг
( \
4цг$ш —■
1±
4Г81Г1
а0
То же
аа0
а а0
3. С серводей-
ствием обеих
колодок
0*МТ /г
Л/т
Г81П
<*0
4цг2*81П^-
2
Л/т /(2ц г)
4ц
аа0
->1
(для любой
колодки)
Продолжение табл. 3.3.5
4. С полным
серводейсгвием
(Л-д)ар
4ц8Ш
а0
Тг
Мт
г(/>-д)а0
. а0
81П -г-
(к-а)а0 Тг
• ао
4и8ш —
2
Л/т
г1 Ь(к-а)а0
Мг
——х
(6-д)а0
4Ц51П —
2
(Лг-Д)а0
2и$т°^-
Тг
4ЦГ81П^-
1
(Л-а)а0
->1
2_,
(Л-а)а0 '
(для обеих
колодок)
4
х ^1 + Цх
5. С двумя шар-]
нирно-
подвешенными
колодками
*т
4иг2*8т —
2
2ц/
|ьмГ2
I совр^ + итр^ 1
. г • а0
4 --&1П —-
/ 2
а0-
-<хр — &ш ар
-&ша0
Продолжение табл. 3.3.5
Колодочный
тормозной
механизм
Схема
Окружная сила,
действующая на колодку
Максимальное давление
?1тах и ?2тах
Нормальное давление
Условие
самоторможения
Коэффициента
неуравновешенности тормоза
У
6. С четырьмя
подвешенными
колодками
Мт
8ЦГ2*81П^
4ц/
1 + ц^х
[^собРдг + итРдг 1
/
4 -&1П -**--
/ 4
2
2 2
-8Ш
2 /
Примечание. Верхний знак для первой величины, а нижний - для второй (при двух знаках).
ТОРМОЗНЫЕ МЕХАНИЗМЫ
429
При этом опорные шарики 2 заставляют
раздвигаться диски в осевом направлении.
Выступ на одном диске трения упирается в
выступ кронштейна 1, а другой диск свободно
проворачивается и выбирает зазоры между
поверхностями трения.
Сила затяжки тормозного механизма
(сила, действующая на диски со стороны
клина 3)
* И гср гк р
где ц - коэффициент трения между дисками
и барабаном; щ - коэффициент трения между
выступом диска и кронштейном; гср -
средний радиус трения; гкр - радиус
расположения выступа кронштейна; а - угол наклона
поверхности, по которой перемещаются
шарики.
Сила затяжки тормозного механизма
где I - число дисков трения; 5 - зазор между
диском и барабаном.
Нормальные силы давления Л^ и Л^
на диски трения определяются по формуле
Расчет дискового тормозного механизма
без серводействия ничем принципиально не
отличается от расчета фрикционных муфт
сцепления.
Привода тормозов. Работа привода
характеризуется:
силовым передаточным числом
_1*
ис =
(где Р - сила, приложенная к
тормозному механизму; Рп - сила,
приложенная к педали (рычагу управления);
кинематическим передаточным числом
ик = —^-, где 5г - рабочий ход педали
(рычаг управления); ^ - суммарное
перемещение точек приложения силы Р);
У Г 8* и
коэффициентом жесткости к^ =
™\ 7 = —
' 2Ц/ср
1±ЦИ
'ср
Гкр
^п.д
(где 51,, т - теоретический ход педали;
«?п д - действительный ход педали,
увеличивающийся в результате упругих деформаций
педалей);
временем срабатывания тс = Т2 -1\
(где Т| - момент нажатия на педаль; т2 -
момент начала работы тормозного механизма);
Условие самоторможения для этого
тормозного механизма являются обычно
а = 35 ... 40° . Осевая сила в тормозном
механизме Р$ = \Х\ Мт I гкр .
Степень неуравновешенности дискового
тормозного механизма
у = щ 1,2гср/ гкр .
Давление на правый и левый диски
коэффициентом силы Кус =
Л+Я
Ч\ч 2 =
Мт
Лингва
гкр
Отношение максимального давления к
минимальному:
1 + ^1-^-
'кр
1-ЦЩ
'ср
Г*Р
(где Р^ - сила, передаваемая приводу
водителем; Ру - сила, передаваемая приводу от
специального усилителя (пружинного,
инерционного, вакуумного, пневматического).
По роду связующего звена приводы
подразделяют на механические, гидравлические и
пневматические. Преимуществом
механического привода является простота устройства.
Управление осуществляется двумя педалями
для каждой стороны отдельно. Для
торможения обеих сторон, что необходимо при
транспортных работах, тормозные механизмы
блокируются замком, соединяющим обе педали,
или третьей педалью, действующей
одновременно на оба тормозных механизма. К третьей
педали может быть присоединен привод
тормозного механизма прицепа. При стоянке
одна из педалей закрепляется в
заторможенном состоянии защелкой.
430
Глава 3.3. ТРАНСМИССИЯ ТРАКТОРОВ
Кинематическое передаточное число
находится из соотношения проекций плеч или
сил при КПД равным единице:
где а и Ь - плечи педали.
Силовое передаточное число
«с = "к Лш >
где г|ш - КПД одного шарнира; г)ш =0,85;
I - число шарниров.
К преимуществам гидропривода
относятся: высокий КПД (Лпр=0»85 ••• °»9);
равномерное распределение сил по управляемым
механизмам; удобство привода
труднодоступных или перемещающихся при работе
механизмов.
Диаметр рабочего цилиндра определяют
по тормозной силе:
<*ц «V 1>28 Г/дж ,
где дж - давление жидкости в цилиндре;
?ж = 4 ... 6 МПа.
Обычно размеры тракторных цилиндров
унифицированы с размерами автомобильных;
для автомобилей ГАЗ */ц =3,0; 3,2; 3,5 и 3,8.
Объем (см3) жидкости, поступившей в
рабочий цилиндр,
V = 0,785 й\ 5 ,
где 51 - ход обоих рабочих поршней (или
одного поршня при однопоршневом
цилиндре), для колодочных тормозных механизмов
5" =0,2 ... 0,3 см.
Диаметр главного цилиндра, питающего
т рабочих цилиндров, можно определить,
приняв ход поршня 5*т = (0,8 ... 1,2). Тогда
диаметр поршня
п " V 0,8 + 1,2 '
где т| - коэффициент увеличения объема
системы в результате деформации трубок,
Ла-1,05... 1,1.
Размеры главного цилиндра такие, как у
автомобильных цилиндров. Сила на поршне
главного цилиндра
ГТ=Р4п/<1п .
Силовое передаточное число педали
определяют, задавшись предельной силой на
педали Рп =120 Н (для резкого торможения
допустимо увеличение до Гп = 200 Н).
Полный ход педали
где 5 - зазор между штоком и поршнем
главного цилиндра; 5 = 1,5 ... 2,5 мм.
На некоторых тракторах в гидропривод
ставят кран, позволяющий включать
управление левым или правым тормозным
механизмом для крутого поворота или обоими
тормозными механизмами для транспортной
работы.
На тяжелых тракторах, работающих с
повышенными скоростями, для облегчения
управления принимают гидропривод с
усилителем, который можно питать от отдельного
насоса и от насоса гидроусилителя рулевого
управления или основной гидросистемы через
делитель потока. Целесообразна установка
гидроаккумулятора, заряжаемого до давления
5 ... 7 МПа объемом, обеспечивающем 15 ... 20
торможений. Необходимая для регулирования
интенсивности торможения
пропорциональность между силой натяжения на педаль и
силой торможения достигается применением
следующего устройства. Стояночный
тормозной механизм должен иметь механический
привод с защелкой.
К преимуществам пневмопривода
относятся: снижение силы на педаль^ так как для
привода используется энергия сжатого при
работе двигателя воздуха; легкость привода
тормозного прицепа; возможность
использования сжатого воздуха для других целей
(накачивания шин, привода
стеклоочистителя). Пневмопривод применяют на колесных
тракторах общего назначения. Обычно
заимствуют агрегаты пневмопривода от грузовых
автомобилей. Чтобы исключить "складывание"
поезда, торможение прицепа должно
начинаться раньше торможения трактора.
В качестве фрикционных элементов в
тормозных механизмах могут быть
использованы металлические, порошковые и
асбестовые материалы. Характеристики некоторых из
них приведены в табл. 3.3.6. Из металлических
материалов наибольшее распространение
получили чугуны марок СЧ 15-32, МФ, ЧНМХ.
Коэффициент трения чугунов по сталям 60Г и
65Г зависит в основном от скорости ус
скольжения. Так, при давлении 0,2 ... 0,8 МПа
|Л=0,4 при Ус ^4 м/с; ц = 0,3 при
Ус ^ 8 м/с и Ц = 0,18 ... 0,2 при Ус й 16 м/с.
МАТЕРИАЛЫ ДЕТАЛЕЙ
431
З.З.б. Характеристики некоторых
Материал трущейся пары
Сталь по чугуну:
без смазочного материала
в масле
Медно-асбестовая плетеная лента
Прессованная накладка
Порошковый материал по стали:
без смазочного материала
в масле
Коэффициент
трения \х
0,15 ...0,18
0,10 ...0,12
0,3 ... 0,35
0,3 ... 0,35
0,35 ... 0,40
0,06 ... 0,08
фракционных материалов
Давление , МПа
0,8 ... 1
(8 ... 10)
2 ... 2,5
(20 ... 25)
0,4 ... 0,8
(4 ... 8)
0,4 ... 0.8
(4 ... 6)
1 ... 1,2
(10 ... 12)
2,5 ... 3
(25 ... 30)
Допустимая температура в
конце торможения /к , С
300
150
180
230
350
150
Примечание. Для колодочных и дисковых тормозных механизмов допустимое
давление может быть увеличено до 40 %.
Наименьшим изнашиванием обладает
чугун марки ЧНМХ, что объясняется
повышенным содержанием углерода. Высокую
износостойкость имеет чугун марки МФ.
Увеличение скорости скольжения до Ус =60 м/с не
вызывает существенного изменения
коэффициента трения при коэффициенте
стабильности около единицы.
Тормозные ленты обычно делают с
накладками толщиной 4 ... 8 мм. Накладками
служат плетенные из медных и асбестовых
нитей ленты, плитки из порошкового
материала и прессованные из асбеста с резиной.
Предварительно изогнутые накладки
приклепывают или приклеивают к ленте.
Рабочие поверхности тормозных
механизмов проверяют на работоспособность по
удельной работе трения и температуре нагрева:
А = Ятах пел/30,
где п - частота вращения тормозного
барабана в начале торможения, мин'1.
Температура тормозного барабана в
конце торможения
жМтпх
12810с щ
где /м - начальная температура тормозного
барабана, /м =50 ... 70 еС; т - время
торможения; т =2 ... 5 с; с - теплоемкость чугуна;
щ - масса тормозного барабана.
без
Для тормозного механизма, работающего
смазочного материала, разность
работе
-/м ^80°С,
С.
Порошковые
а при
в масле
/к - /м <> 100
и асбестовые материалы,
используемые в тормозных механизмах, ничем
принципиально не отличаются от материалов,
применяемых в сцеплениях.
3.3.13. МАТЕРИАЛЫ
ОСНОВНЫХ ДЕТАЛЕЙ ТРАНСМИССИИ
Зубчатые колеса трансмиссий тракторов
изготавливаются из сталей 20ХНЗА, 20ХГНР,
18ХГТ, 25ХГТ и 25ХНТЦ с последующей
цементацией или нитроцементацией и закалкой
или из сталей 40, 45Х с дальнейшей объемной
и поверхностной закалкой и упрочнением
рабочих поверхностей зубьев [30, 32].
Минимальная глубина цементированного
или нитроцементированного слоя на зубьях не
должна быть менее 0,15 нормального модуля и
не более 2,1 мм. Разность между верхним и
нижним нределами глубины
цементированного или нитроцементированного слоя - не более
0,5 мм для нешлифованных и не более 0,8 мм
для шлифованных зубьев. Твердость
цементированных и нитроцементированных
поверхностей 56 ... 63 НКСЭ для зубьев зубчатых
колес; НКСЭ ^ 50 для шлицев подвижных шли-
цевых соединений; НКСЭ ^ 35 для шлицев
неподвижных шлицевых соединений;
НКСЭ ^ 45 для посадочных поверхностей под
432
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
подшипники качения и поверхностей под
рабочую кромку манжет уплотнений.
Твердость поверхностей, подвергаемых
поверхностной закалке: НКСЭ ^ 50 для зубьев
зубчатых колес, шлицев подвижных шлицевых
соединений, посадочных поверхностей под
подшипники качения и поверхностей под
рабочую кромку манжет уплотнений; НКСЭ ^ 35
для шлицев неподвижных шлицевых
соединений.
Валы изготавливают из сталей 40Х, 45Х,
35Г2, 45Г2, ЗОХГТ, ЗЗХС, 38ХС с объемной
закалкой на твердость 255 ... 302 НВ. Шлицы
обычно закаливают ТВЧ на твердость
НКСЭ ^ 50. Валы, выполненные как одно
целое с шестерней, изготавливают из тех же
марок сталей и подвергают той же
термической обработке, что и зубчатые колеса.
Глава 3.4
НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
3.4.1. ОСОБЕННОСТИ И МЕТОДЫ РАСЧЕТОВ
Несущая система является основным
элементом конструкции трактора, который
воспринимает нагрузки, возникающие при
выполнении всех видов работ. Основными
требованиями, предъявляемыми к несущим
системам, являются: обеспечение
рационального размещения агрегатов; простота их
монтажа, демонтажа и обслуживания; достаточная
жесткость и прочность, исключающее
возникновение остаточной деформации и нарушение
работоспособности узлов, установленных на
ней механизмов.
Конструктивные особенности. По
конструктивному исполнению несущие системы
разделяются на безрамные, полурамные и
рамные [30, 37]. Безрамная несущая система
выполняется в виде моноблочной отливки,
отсеки которой являются картерами
механизмов трансмиссии. Она обеспечивает высокую
жесткость и соосность валов в процессе
эксплуатации, но ввиду технологических
трудностей при изготовлении имеет ограниченное
распространение (мотоблок МТЗ-0,5).
Полурамная несущая система состоит из
литых корпусов силовой передачи и
прикрепленной к ним полурамы. Полурамный остов
обеспечивает достаточную жесткость
конструкции, удобство компоновки агрегатов, их
обслуживания и демонтажа для ремонта.
Конструкции полурамных несущих систем
получили широкое распространение на
сельскохозяйственных тракторах и применяются на
тракторах семейства МТЗ.
Рамная несущая система представляет
собой отдельную раму, на которую
устанавливаются все узлы трактора. По сравнению с
предыдущими обладают меньшей жесткостью,
но проще в изготовлении, обеспечивают
снижение металлоемкости картеров трансмиссии,
позволяют легко разбирать трактора при
ремонте, а также собирать на одной несущей
системе несколько модификаций.
На мощных колесных тракторах
применяют шарнирно-сочлененную (из двух полу-
рам) рамную несущую систему (тракторы Т-
150К, Т-151К, К-700, К-701 и К-710). Из
гусеничных тракторов рамную конструкцию
несущей системы имеют трактора Т-150, Т-
153, ДТ-175С, ДТ.-75М и др.
Методы расчетов несущей системы. Опыт
эксплуатации и анализ экспериментальных
исследований показывают, что динамическая
нагруженность несущей системы полурамной
конструкции характеризуется внутренним (от
работы элементов трансмиссии) и внешним
(от колебаний навесных сельскохозяйственных
машин вследствие неровностей микропрофиля
опорной поверхности) воздействиями [2, 37].
Поэтому задача оценки динамической нагру-
женности несущей системы должна решаться
совместно с исследованиями трансмиссии и
навесных сельскохозяйственных машин.
Условия работы отдельных агрегатов и
узлов трансмиссии существенно зависят от
изгибных деформаций несущей системы, для
определения которых целесообразно
использовать расчет в динамической постановке. При
таком подходе особое внимание необходимо
уделить выбору нагрузочных режимов,
которые могут привести к возникновению
недопустимых деформаций (поломок) несущей
системы. Такими режимами являются: работа
трактора с навесными тяжелыми
сельхозмашинами; движение по разбитым грунтовым
дорогам; движение по стерне поперек борозд
и др.
Исследования
напряженно-деформированного состояния сложных динамических
систем показывают, что наиболее
предпочтительным методом расчета несущих систем
является МКЭ [3]. Цдиная матричная форма
записи для решения дифференциальных
уравнений, описывающих динамику конструкции
в целом, позволяет учесть свойство
симметрии, рассматривать различные виды колебаний
отдельно, проводить многовариантные
динамические расчеты. Погрешность зависит от
степени дискретизации.
Уравнение движения упругой системы с
п степенями свободы имеет вид:
[М]{в} + [С]{8}+[К]{8}«{Г(0>.
Оно может быть уравнением
динамического равновесия в момент времени / . Для
определения динамической реакции остова
ОСОБЕННОСТИ И МЕТОДЫ РАСЧЕТОВ
433
при вынужденных колебаниях целесообразно
использовать метод разложения по
собственным формам колебаний в сочетании с
методом одновременной интеграции по
подпространству, который позволяет достаточно
быстро определить нижний спектр собственных
частот и форм колебаний. Определив
собственные векторы, можно решить уравнение
методом разложения по собственным формам
колебаний для случая, когда матрица
демпфирования [С] пропорциональна матрице масс
[м].
При расчете несущей системы с шарнир-
но-сочлененной рамой [4] в качестве
расчетных выбирают следующие режимы работы:
вывешивание, т.е. отрыв от грунта колес под-
моторного моста при работе трактора с
погрузчиком или при езде с поднятым плугом.
Этот режим определяет прочность рамы в
вертикальной плоскости; поворот на месте,
определяет прочность рамы в горизонтальной
плоскости.
Пахота является наиболее характерным
режимом работы трактора, при котором
реализуется максимальная сила тяги. Расчет
проводится МКЭ в перемещениях. Исходной
информацией являются данные о структуре
системы, жесткостные характеристики,
координаты узлов системы, граничные условия, места
приложения и величины нагрузок. Результаты
- перемещения каждого узла и силы,
действующие во всех элементах системы.
Характерной особенностью конструкций
рамных несущих систем гусеничных тракторов
является наличие двух более или менее
развитых лонжеронов, соединенных между собой
дискретными связями - поперечинами.
Дискретные связи могут быть заменены
непрерывными, что достигается установкой на
полки лонжеронов горизонтального листа по
длине несущей системы, выполняющего функцию
днища. В этом случае конструкция является
корпусной. Корпусами снабжаются машины с
гусеничным и реже колесным движителем,
предназначенные для эксплуатации в условиях
бездорожья, распутицы, болотистой или
заснеженной местности.
В процессе эксплуатации несущая
система трактора испытывает сложные напряжения,
однако ввиду отсутствия достаточно
обобщенных данных и методов расчета расчет проводят
по весу агрегатов и моментам, возникающими
при повороте и преодолении препятствий.
На рис. 3.4.1 представлена схема
действия сил в раме гусеничного трактора с ба-
лансирной подвеской: касательных Р\ и ^
тяги, отнесенных к осям ведущих колес (на
забегающей и отстающей гусеницах); двойной
касательной 2 Р\ тяги, действующей на ось
Рве. 3.4.1. Схема действы евл в рамс гусеничного
трактора с балаясарной подвеской
натяжного колеса при повороте (отстающая
гусеница); веса 0[ неподрессоренных частей
трактора; веса С\9 О^ &$ и 0+ агрегатов,
смонтированных на раме; реакции 6^/4
почвы на оси тележек; сопротивления
ц 0\ I 4 повороту; сопротивления / 0\
качению трактора.
Рама рассчитывается по элементам.
Независимо от конфигурации и искривлений
отдельных элементов раму рассматривают как
плоскую систему, а каждый элемент - как
изолированную балку. Для обеспечения
достаточного запаса прочности на изгиб при
динамических нагрузках принимают допустимые
напряжения с двух - трехкратным запасом по
пределу текучести [3].
Освещенные в литературных источниках
[8] задачи статики, динамики и усталостной
надежности несущих конструкций
автомобилей, тракторов и ряда специальных
транспортных машин не охватывают громадного
разнообразия конструктивных модификаций
несущих элементов транспортных машин. При
анализе рам с раскрытым контуром
поперечного сечения, пространственных рам и
сложных корпусных и кузовных конструкций
наиболее перспективным методом является МКЭ,
который позволяет анализировать сложные
многократно статически неопределимые
строительные и машиностроительные
конструкции [8].
Весовой коэффициент несущей
конструкции - отношение веса Он несущей
конструкции к общему весу Ос снаряженной
машины с учетом полезной нагрузки [8]:
434
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
р = _^100%.
Для колесных машин отечественного
производства весовой коэффициент р =
= 4,2 ... 11,0, для корпусных конструкций
р = 12 ... 16 %.
В задачу прочностного анализа входит [8]
определение внешних внутренних сил,
обоснование допускаемых напряжений.
Анализу микропрофиля дорог и
местности при определении внешних сил
посвящен целый ряд исследований [13]. Следует
отметить, что использовать эти исследования
необходимо при условии, что имеется
информация о микропрофиле как левой, так и
правой колеи, по которым осуществляется
движение машины.
Метод расчетно-экспериментальной
оценки долговечности несущих систем [27]
может быть рекомендован для оценки
долговечности сложных базовых деталей
транспортных машин по результатам усталостных
испытаний локальных моделей: узлов рам,
регистрации нагруженности опасных зон и
типовых условиях эксплуатации и расчета
циклической долговечности с учетом снижения
сопротивления усталости. При случайном
процессе изменения внешнего воздействия
наиболее общей количественной характеристикой
нагруженности элементов конструкции
является спектральная плотность или энергетический
спектр напряжений 5а р в различных
сечениях. Связь между энергетическим спектром
напряжения и энергетическим спектром
случайного возмущения дороги определяется
выражением [27]:
^Р0>) = Др|и7('»|2^(р),
где Жу (/ р) - передаточная функция
элемента конструкции; Ар - коэффициент
пропорциональности, определяемый параметрами
элемента конструкции.
В связи со сложностью конфигурации
несущей системы часто действительные нагру-
жения находят экспериментальными методами
с помощью устанавливаемых на ней
проволочных тензодатчиков с последующей их
тарировкой и регистрацией показаний на
осциллографе. По данным действительных
повреждений в эксплуатации определяют наиболее
нагруженные элементы системы и места
повышенных напряжений.
Сборка конструкций осуществляется при
помощи как клепки, так и сварки. Так, рамы
автомобилей общего назначения средней
грузоподъемности относятся в подавляющем
большинстве к клепаным конструкциям, рамы
многоосных большегрузных автомобилей
выполняются как клепаными, так и сварными, а
рамы отечественных тракторов, прицепов и
полуприцепов - сварными. Корпусные
конструкции как колесных, так и гусеничных
машин выполняются с помощью сварки.
В качестве материалов для изготовления
несущих конструкции используются
углеродистые и низколегированные стали.
3.4.2. ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
Движитель служит для преобразования, в
процессе взаимодействия с опорной средой,
приведенного от двигателя крутящего момента
силу тяги, движущую трактор. К движителю
предъявляются требования: обеспечение
высоких тягово-сцепных качеств и проходимости
по различным грунтам, высокий КПД, малая
масса и габаритные размеры при высокой
надежности, простота и технологичность
конструкции, удобство обслуживания и ремонта.
В соответствии со стандартами для
мобильной сельскохозяйственной техники нормы
воздействия движителей трактора на почву
(ГОСТ 26955-86) определяются максимальным
давлением на почву движителя и нормальным
напряжением в почве на глубине 0,5 м.
Рис. 3.4.2. Расчетная схема гусеничного движителя
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
435
3.4.1. Дшшые для
размеров обвода, мм
Размер
Шаг гусеницы /г
Клиренс трактора
Расстояние между осями:
соседних опорных катков
крайнего заднего катка и
ведущего колеса /3
крайнего переднего катка и
направляющего колеса /п
Радиус:
по шарнирам
направляющего катка
опорного катка Д,,,
Углы наклона ветвей:
передней \|/п
задней у3
Подвеска
полужесткая
150 ... 200
400 ... 500
2/?оП + (40... 80)
(2,5 ... 3,0) /г
(2,5 ... 3,5) *т
(0,7 ...0,9) До
(0,7 ... 1,1) /г
5..,8°
2,5 ...6е
эластичная
150 ... 200
350 ... 500
2ДоП + (60... 140)
(2,5 ... 3,0) >г
(3,0 ... 4,5) /г
(0,8 ... 0,9) До
(1,1 ... 1,6) /г
13 ...25е
8... 12°
Силы, действующие в гусеничном обводе.
Гусеничная цепь, замкнутая по контуру,
образованному элементами движителя, составляет
гусеничный обвод, длина которого (рис. 3.4.2):
А> ='р +/Св+^>
где /р - рабочая ветвь - участок обвода от
грунта до ведущего колеса, передающий силу
тяги; /св - свободная -ветвь - участок обвода
от ведущего колеса до грунта под передним
опорным катком, не нагруженный силой тяги.
Зависимости для определения основных
размеров гусеничного обвода приведены в
табл. 3.4.1 [1].
В табл. 3.4.2 приведены формулы для
расчета сил, действующих в гусеничном
обводе.
У быстроходных гусеничных машин при
переднем расположении ведущего колеса
'св/*р =0,08 ... 0,14, а при заднем /св//р =
= 7 ... 12. Для сельскохозяйственных тракторов
при заднем расположении ведущего колеса
/ = (0,03 ... 0,06) /.
Ведущее колесо н профилирование
зацепления. На гусеничных тракторах находят
применение три типа зацепления ведущих колес с
гусеницами: цевочное, гребневое и зубовое.
Основным типом зацепления является
цевочное. Оно отличается простотой, лучшей
плавностью в работе [1, 31]. Положение ведущего
колеса определяют затраты мощности на
трение в шарнирах, на вращение направляющего
колеса и на укладку звена передним катком. В
табл. 3.4.3 приведены формулы для расчета
потерь мощности.
436
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
3.4.2. Формулы расчета сел в обводе
Силы, действующие в
гусеничном обводе
Предварительного
натяжения гусеницы Тс
Предварительного
натяжения по провисанию
[4]
Натяжения в свободной
ветви при действии тяги
Т
1 ев
Натяжения от
центробежных сил Тц
В свободных рабочих
ветвях в движении:
Т
1 ев V
^
Открытый металлический шарнир
(ОМШ)
т9
Ы2
8/
Р
Т * вк
'р
ЗгУр
*с в + * ц
+ Уц=Усу+ Хру
+ тп
Резинометаллический шарнир (РМШ)
,Ят12
^ 8ГС
(-^Ж
р
Т вк
'Р
?ГУо
Р
•«ев / ^ л ц
'р
^сву + ":вк
Примечание:^ - вес гусеницы длиной 1м;/- длина провисающего участка
гусеницы;/- стрела провисания; Кэ = 1,5 ... 2 - опытный коэффициент (большее значение
принимается для длинных ветвей); С0 =0,2 ... 0,4 Н*м/(м*рад) - относительная угловая жесткость
шарнира; *г - шаг гусеницы; В - ширина гусеницы;' Рвк - сила тяги ведущего колеса; у0 -
относительная скорость перематывания обвода.
Для построения цевочного зацепления с
поверхностным контактом цевок звеньев и
зубьев колес [1, 31] описывается окружность
начального расположения центров шарниров,
радиус которой До = 0,5 /г/ 8ш0,5а . Эта
окружность разбивается на число частей,
равное числу зубьев колеса; намечаются центры
шарниров и проводятся соединяющие их
осевые линии. Определяется угол <р3 между
касательной и профильной кривой и радиусом-
вектором, проходящим через центр шарнира:
Угол
ф3 = 6 + 0,5 а .
зацепления
принимается
6 = 24 ... 28е для ведущих колес с числом
зубьев *к=12 ... 14 и 0=19 ...25° для
колес с числом зубьев 1К =10 ... 11. Радиус
центровой дуги
Дко =До/ ЗШф3.
Тогда радиус профильной дуги
окружности зуба и цевки
Яп = ^ко ~гц>
где Гц - радиус дуги, проведенной из центра
шарнира касательно к профильной дуге цевки.
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
437
3.4.3. Формулы для расчета потерь мощности
Потери по
участкам обвода
При заднем ведущем колесе
При переднем ведущем колесе
На трение в
шарнирах Ртр
ц=4*
На вращение
направляющего
колеса Ры
На укладку звена
гусеницы под
передним катком
. ч 75^- г)тп
(*>+р)—аТ™*
+(ч'„+Ч'э+Р+Рп)(7,св+7,ц)1
2(ГС. + Га )(/„+Ц„-^
2У21Т
ц =
'г
(>Ь+Р+Р„)—^* +
+ (Ч'П+Ч'э+Р + Рп)(7'св+Гс)
^•■.♦^Х'--*.
^Лоп(1-со8Ч'п)
{°тКп°<рп + 4 У
Примерно О
где Д 5" = /г 1 - Кп +
-71 + ^-2^псо8ч/п )
Примечание, ц = 0,2 ... 0,3 - коэффициент трения в шарнирах и зацеплениях; */п -
диаметр пальца; /0 - коэффициент трения качения обвода колеса по гусенице, /0 =
= 0,01 ... 0,02; цп и гп - соответственно коэффициент и радиус трения в подшипниках; От и
Он - вес звена гусеницы и направляющего колеса; ТСВУ - сила натяжения гусеницы; Кп 0 -
число звеньев в ветви от заднего поддерживающего ролика до переднего опорного катка; Л 5 -
удлинение передней ветви гусеницы при укладке звена передним катком; Кп - число звеньев
передней наклонной ветви.
Радиус вспомогательной окружности, на
которой расположены центры профильных
ДУГ,
Дс = До С18 Фз •
После определения размеров Ак0, Ас и
Кп из центров шарниров радиусом В%0
проводятся засечки, а из намеченных центров
радиусов Кп - профильные дуги. Исходя из
прочности и необходимых запасов на износ,
выбирается толщина зуба. Радиус окружности
впадин колеса
^в = Ло ~ гц о »
ше Гц 0 - радиус дуги основания цевки.
Исходя из допустимого (максимального)
шага цепи при износе шарниров определяется
радиус окружности выступов Л,..
Разработана методика расчета и
построения зацепления с применением
автоматизированного рабочего места [1].
438
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
Расчет на прочность зубьев проводят по
напряжениям изгиба и контактным
напряжениям. Расчетная сила находится из условия
максимального сцепления гусеницы с грунтом
и передачи силы одним зубом:
Р = <рАО = 1,2 0,8 6 *С7,
где ф - коэффициент сцепления; А = 0,8 -
коэффициент, учитывающий
перераспределение веса при работе на уклоне.
Сила Р принимается приложенным к
вершине зуба и направленным по касательной
к окружности К? . Напряжения от изгиба зуба
в опасном сечении, находящемся в его
основании, определяют по формуле
аи =
Мл
_ -""н _
ОРИ
IV,
п з3а
у ^400 ... 500 МПа,
где Л - высота зуба; 53 - толщина зуба; а -
размер опасного сечения у основания зуба.
Контактные напряжения в месте
контакта цевки с зубом
а -042 I Р **Ы*п^З;
К ' ^ 5С086 (Ех + Е2) Ви Гц
<, 1 000 ... 2 000 МПа,
где Э - угол давления; Е\9 Е2 - модуль
упругости соответственно материала цевки и
зуба; знак плюс берется для зуба с выпуклым
профилем, минус - с вогнутым профилем.
Направляющие колеса ■ натяжные
механизмы. Направляющее колесо обеспечивает
направление движения замкнутой гусеницы
вместе с механизмом натяжения и
регулирования ее натяжения. Натяжные механизмы с
механическим приводом выполняются двух
типов: винтовые с поступательным
перемещением оси направляющего колеса,
используемые на промышленных тракторах с
полужесткой подвеской; кривошипные с перемещением
оси направляющего колеса по дуге
окружности, устанавливаемые при балансирной или
индивидуальной подвесках [30].
На ось направляющего колеса действует
сила натяжения двух ветвей гусеницы
Р = 2ТН со8у/2,
где у - угол между ветвями гусеницы.
При переднем расположении
направляющего колеса и с учетом максимальной
силы тяги по сцеплению при движении
задним ходом на уклоне и силе предварительного
натяжения Тс в у гусеницы имеем
Обод колеса, кривошип и его опоры, а
также винтовой механизм натяжения
рассчитывают на прочность по приведенным
формулам.
Радиус кривошипа механизма натяжения
определяют из условия обеспечения
необходимого перемещения направляющего колеса
при выборе допустимого удлинения гусеницы
Д/ вследствие изнашивания шарниров [3, 30]
г^
А/
48т(ао /2 ) со$(у /2 ) '
где а о - угол между крайними положениями
кривошипа.
Необходимо конструктивно обеспечить
перемещение направляющего колеса не менее
чем на 0,5 /г. При общем износе гусеницы на
длину шага 1Т можно удалить одно звено и
вернуть колесо в исходное положение. Для
гусениц с ОМШ А / = /г , для гусениц с РМШ
Д/*(0,3... 0,4)(г2 -П)/Явт . где г\
-радиус внутреннего слоя резиной втулки; ^ -
внутренний радиус проушин звеньев; тп^ -
число шарниров.
Направляющие колеса часто выполняют
с амортизирующим устройством. Силу Р
предварительного натяжения пружины
амортизирующего устройства выбирают так, чтобы
оно не срабатывало при движении трактора
задним ходом и резком торможении; обычно
Рпр = (1,0 ... 1,2)(7. Для существующих
конструкций упругий ход при деформации
составляет 60 ... 130 мм.
Подшипники направляющих колес (при
переднем расположении) принято
рассчитывать не для самого тяжелого режима (режимы
заднего хода кратко временны), а по силе
предварительного натяжения гусениц. Частоту
вращения колеса при этом определяют по
максимальной скорости движения трактора.
При заднем расположении направляющих
колес подшипники рассчитывают по
эквивалентной нагрузке при работе на разных
передачах.
Опорные катки. Опорные катки
современных гусеничных машин можно разделить
на следующие три типа: с наружной резиновой
шиной; с внутренней амортизацией; жесткие
цельнометаллические. Резиновые шины
снижают динамические нагрузки на гусеницу и
подшипники катка, повышая, их срок службы,
а также предохраняя от разрушения каток.
Резина в катках с внутренней амортизацией
находится в более легких условиях: нагружена
главным образом силами сдвига, причем рабо-
гусеничный движитель
439
тающая поверхность значительно больше, чем
в наружных шинах.
Диаметр опорного катка Воп
определяют согласно допустимым контактным
напряжениям в металлическом обводе катка и
гусенице по формуле Беляева-Герца:
V то^оДоп
где Ост " статическая нагрузка на каток;
Епр = 2Е\Е1(Е\ + Е2 ); т0 - число
оболов катка.
Откуда
д >2* 0'35бсг^пр
Поп*2«°п-то[ак]Ьо>
где ак - допустимое контактное напряжение;
для стального термически необработанного
литья [ стк 1 = * 500 МПа; для термически
обработанного [ ак ] = 2 000 МПа; Ь0 =
= 0,06 ... 0,08 м - ширина обода.
Подшипники опорного катка
рассчитывают по статической нагрузке 0СТ при
частоте вращения, определяемой по средней ско-
V /
рости трактора Уср , п = 2,65 су п • Осе-
вая нагрузка, возникающая при повороте и
движении трактора с креном, действует
незначительное время, и ее влияние учитывают
коэффициентом Рк =0,1 ... 0,12, т.е. осевая
нагрузка Р0 = РКССТ. Приведенная нагрузка
для подшипника, воспринимающего нагрузку:
радиальную и осевую
^про = ( Ра К к + т ?о ) ^д у
радиальную
*прЬ =*Ь *к Ад ,
где Ра и Р& - радиальные нагрузки по
подшипники; Кк =1,35 - кинематический
коэффициент, учитывающий характер работы
подшипников при вращающемся наружном
кольце; т = 1,5 - коэффициент, учитывающий
влияние осевой силы; Кд - динамический
коэффициент; для цельнометаллических
опорных катков Ка = 3, для катков с резиновой
шиной Кц = 2, для катков с внутренней
амортизацией Кл =2,5.
Коэффициенты работоспособности
подшипников при требуемой долговечности Н
Са,Ь =Рцра%Ь (лпрл) ^д^к •
Температуру внутри резиновой шины
можно приближенно подсчитать по
следующему выражению (при установившемся
режиме):
г^2утрУсрСст1 ПГх
ат АЯоп у Яоп
где \|/тр - коэффициент внутреннего трения
шины; Н/тр=0,5 при пятипроцентной и
\утр =0,25 ... 0,3 при десятипроцентной
относительной деформации; (?ст1 - нагрузка на
одну шину; ат =8 ... 10 - коэффициент
теплообмена шины с окружающей средой; А -
площадь боковой поверхности шины; Н -
толщина шины; 6щ - ширина шины; Ер -
модуль упругости резины; Т0 - температура
окружающей среды.
Допустимые температуры для
длительного тяжелого режимаТ ^ 100 ... 120 °С .
Поддерживающие катки.
Поддерживающие катки уменьшают провисание верхней
ветви гусеницы и снижают ее колебания.
Радиус поддерживающего катка определяют из
условия обеспечения его вращения силой
трения опирающейся на каток ветви гусеницы
( 2 + /Яп ) /г
Л. = А/ V , >
Сг^(Ик-Л)
где Мп к - момент сопротивления
проворачиванию поддерживающего катка; для
самоподвижных сальников Мпк= 1,5 ... 2,0 Н *м,
для уплотнения из притертых металлических
колец МПК = 2У5 ... 5,5 Н*м; т^ - число
поддерживающих катков на гусеничном
обводе; цк =0,15 ... 0,20 - коэффициент трения
440
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
гусеницы по ободу катка; /к - коэффициент
сопротивления вращения катка, зависящий в
основном от вязкости масла; для катка на
подшипниках качения при летних условиях
эксплуатации /к =0,01 ... 0,02, зимних /к =
= 0,4 ... 0,08.
Расчет поддерживающих катков
сельскохозяйственных тракторов на прочность
выполняют по утроенной силе от давления
гусеницы. При расчете оси катка прибавляют 1,5 кН
дополнительно вертикальной нагрузки
(тяжесть двух человек, которые могут встать на
гусеницу одновременно при смене трака).
Силу прикладывают к внешнему ободу.
Гусеничные целя. Гусеница передает
нагрузку от трактора на опорную поверхность и
обеспечивает сцепные качества при малом
давлении на грунт при реализации силы тяги.
Гусеницы делятся по конструкции - с
составными звеньями и с цельнолитыми звеньями,
по материалу - металлические, резинометалли-
ческие и резиновые. На промышленных
тракторах с полужесткой подвеской применяются
составные гусеницы. Звено состоит из
штампованных рельсов, к которым привертывается
опорная плита с почвозацепами. Шарнирное
соединение звеньев осуществляется с
помощью запрессованных в рельсы пальцев и
втулок.
На сельскохозяйственных тракторах
нашли применение гусеницы с ОМШ. Получили
распространение гусеницы с РМШ.
Бесшумность работы, высокий КПД и
износостойкость при работе с большим содержанием
абразивного материала, смягчение ударов,
передаваемых на трансмиссию со стороны
ходовой части, делают эти гусеницы весьма
перспективными. Гусеницы с РМШ
обеспечивают работоспособность до 5 000 ... 8 000
часов.
Расчет гусеницы с ОМШ. В связи со
сложностью формы звена, неопределенностью
величины и характера действующих сил
применяемые способы расчета гусеницы являются
приближенными. Рассчитываются проушины
звеньев и пальцы на растягивающие силы и
звено на изгиб относительно продольной и
поперечной осей.
Суммарная длина проушин с обеих
сторон звена для их равнопрочности должна быть
одинаковой:
Х^ =]►>/'=0,5*,
/-1 /-1
где л, А/ и п'у Ь\ - соответственно число и
длина проушин охватываемой и охватывающей
сторон звена.
Для обеспечения требуемой
износостойкости определяют диаметр пальца
где Р = (рАО - максимальная сила тяги на
гусенице при наличии бокового крена
трактора; дп - давление в проушинах звеньев.
Число проушин охватываемой стороны
Р
п = =~,
0,5тср*</п
где хср = 80 МПа - напряжение среза.
Для равнопрочности и равной
износостойкости проушины охватываемой стороны
желательно выполнять одинаковый длины:
С этой целью крайние проушины
охватывающего звена делаются в т раз короче
средних, т = 1,5 ... 2. Тогда для
охватывающего звена длина средних проушин
Ь{ =0,5/>/( /! + — + М ,
крайних
14 = 4*1 =ЬЦт.
Наружный радиус проушины выбирают
из средних напряжений разрыва аср =60
МПа:
^ = -^- + 0,5^.
*стср
После конструктивной проработки
звеньев гусеницы необходимо произвести расчет
звена и пальца с учетом зазоров между
проушинами. Величину зазора (рис. 3.4.3)
принимают 5=0,5 ... 2 мм. Силу, нагружающую
проушину звена, находят из выражений для
сторон:
охватываемой
Р!+Р2 + ...+/>„=/>;
РХ:Р2: ... :РП =
1.1. 1
1,5^ +.У ° 1,5/>2 +•* 1$ЬП +5*
охватывающей
2Р{:2Р{: ... : 2Р^Х =
1.1. 1
~ 1,5 Ь{ + 5 ' 1,5 ЬЬ + 5 1,5 />;+] + 5 '
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
441
ы
Л5Р/ ШР2 ШРг
Ь'г
ШРз \0,5Рз
ЛяшвЩ^
Для расчета звена на изгиб используют
формулу
Рис.3.4.3. Расчетнаи схема гусеницу
с открытым шарниром
Соотношения получены из условия, что
распределение сил, приложенных к гусенице,
между проушинами прямо пропорционально
модулю жесткости изгиба пальца в точках
действительного приложения сил в проушинах.
Подставляя известные величины Ь{у х и
Р и, решая уравнения, находим силы Р1,
действующие на каждую проушину. Расчет
проушин на разрыв, причем для охватывающей
стороны, кроме самой нагруженной,
рассчитывают и крайние проушины, проводится по
зависимости
а, =
2(Я-г)Ь1 '
где К и г - соответственно наружный и
внутренний радиус проушины.
Рекомендуемый запас прочности на
разрыв п3 = 2,5 ... 3.
Расчет пальца на срез выполняют для
наиболее нагруженной проушины:
Т, =КП
4^ = 0,85А
2п<ц
где #сп =4/3 - коэффициент, учитывающий
сложнонапряженное состояние пальца при
совместном действии изгиба и среза.
Запас прочности п5 = 2,5 ... 3.
Давление в проушинах
<7п =^/(*/*п)*[*п]>
гДе [ Яп 1 = 50 ••• 200 МПа-
ам =
1УШ
где Ми - изгибающий момент; Ц^и -
момент сопротивления изгибу.
Для твердого неровного грунта звено
рассчитывают как балку длиной Ь на двух
опорах, тогда Мц = 0К /г / 4 . Для мягкого
грунта звено рассчитывают как плиту на упругом
основании:
Мя 4В' * \ 4Е/'
где К\ - податливость грунта; для наиболее
опасного случая (поле, подготовленное под
посев) К\ =0,05 ... 0,15 МПа; / - момент
инерции сечения звена.
Запас прочности звена при изгибе
л, = 15 ... 20.
Расчет гусеницы с РМШ. Широкое
распространение получил метод расчета пальцев
(арматуры) как балок, лежащих на упругом
основании (метод Развалова-Вавилова). Расчет
напряженно-деформированного состояния
пальцев осуществляется с использованием
метода начальных параметров. Палец
рассматривается как нарезная многоопорная балка
постоянного (или переменного) сечения,
лежащая на упругом основании (резиновых
элементах шарниров). Алгоритм расчета
напряженно-деформированного состояния пальцев
представляет, по своей сути, произведение
однотипных матриц.
Угол закручивания резиновых втулок при
относительном повороте звеньев определяют,
исходя из минимального размера колес
направляющего и ведущего или опорного катка с
Агап» те-
в = 2агс*8 [>г/2(Дтш+Л)].
Для уменьшения максимальных
касательных напряжений при сборке гусеницы
применяют предварительный взаимный
поворот звеньев на угол а„ =0,5 0 в сторону
рабочего угла поворота. В результате деформация
резины происходит не на угол 6} - ап , а на
угол ±0,5 9. Рабочий угол закручивания с
учетом угла предварительного поворота зве-
442
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
ньев осп и при сборке гусениц равен
0,5(б1-ап); ап=5 ... 10е.
Касательное напряжение в резиновой
втулке
2 Л °у
тах
(е1 "ап )°>5 * °»6 МПа,
где О^ = 0,8 ... 1,0 МПа - модуль сдвига
резины; г\ и Г2 - радиусы внутреннего и
наружного слоя резиновой втулки.
Напряжение смятия в РМШ определяют
по максимальной растягивающей силе:
<рАО + Тсъ у
сгсм = = ^
21 X Ъ
[<*см]>
/«1
где 2^ Ь - общая длина всех резиновых
/=1
втулок, охватываемых проушин; асм =30 ...
40 МПа.
Температура резины шарнира при
установившемся движении может быть определена
по формуле
т>=-г
+ г0
Р/ Чаа4>*
где С = 0Д4цтррсрфпз^2 ^оп" +
0М*СхЬру1пг\т 2г? г22
Р, -коэффициент неравномерности прогрева;
сса - коэффициент теплоотдачи звена;
Аохл - площадь поверхности охлаждения;
цТр - коэффициент трения; рср - среднее
давление в шарнире; фпэ - угол поворота
звеньев; п - число циклов в минуту; Ьоп -
суммарная ширина опорных элементов; Ох -
модуль сдвига резины; Ьр - суммарная
ширина упругих элементов шарнира; <рр - угол
формирования (скручивания) резины; г|в -
коэффициент потери энергии.
Более точный расчет напряженно-
деформированного состояния резиновых
элементов при известной геометрии проводится
на базе нелинейной теории упругости с
использованием ЭВМ.
При расчете резиновых элементов
шарниров на долговечность основным является
выбор критерия. Принимают критерий,
базирующийся на энергетическом подходе. Для его
получения необходимы данные по
циклическим гистерезисным потерям, которые могут
быть получены достаточно просто.
В последнее время широкое
распространение находит разработанный в НПО НАТИ
метод расчета ресурса РМШ с использованием
линейной гипотезы суммирования
повреждений на основе данных лабораторных
испытаний РМШ.
3.4.3. КОЛЕСНЫЙ ДВИЖИТЕЛЬ.
СИСТЕМА УПРАВЛЕНИЯ
Колесный движитель. Колесный
движитель - основной узел ходовой системы,
представляет собой взаимодействующий с грунтом
или поверхностью дороги механизм,
преобразующий энергию двигателя в движение
трактора и управление им (рис. 3.4.4).
м
И с
4 1 Ч_4л* г
■>! т Ш
С* Х&?
у . 1^»8%%
§
щ
Щ
[-<—
—»ч
1У|-—1
С1Г'
%Ш\ в',
ип
1Н
11
П 1
—*н
Рве 3.4.4.
/ - ступица; 2 - обоД; 3 - шина
Шины
1
По назначению и условиям
эксплуатации
всесезонные
Н для тракторов
для прицепов и
транспортно-
технологических
агрегатов
По конструктивным
особенностям колес
для самоходных
машин
(комбайнов и пр.)
для прицепных
есных мат
и орудий
По конструктивному исполнению
ведущих
Каркас
направляющих
диагональные
технологических
бескаркасные
Протектор
литые пластиковые
из реэиноволок-
нистого композита
сплошные
Рис 3.4.5.
повышенной проходи^
мости - "косая елка'
направляющие ребра
универсальный
дорожный
камерная 1_|
бескамерная
регулируемо
го давления
атмосферно
Профиль
Габариты
нормальный
широкопрофильный
арочный I I
СГШ
МГШ
пневмо-
катковый
специальный
ниэкопро-
фильный
Ц-I высота грунтозацепов
уровень
коэффициента насыщенности
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
3.4.4. Типы колес ■ ободьев тракторов
Колесо
Обод
Тип, назначение
Сечение профиля
Дисковые с профилированным
неразъемным ободом и
постоянным вылетом диска
Дисковые с разъемным ободом
Дисковые с профилированным
неразъемным ободом,
позволяющие изменять ступенчато
вылет и колею машины
Бездисковые с
профилированным неразъемным ободом
\У, ведущие колеса
ЛУ, ведомые колеса
N
2"тахт
\5*2тах\
У
у~
>\\ асимметричное исполнение
ВУ/, ведущие колеса,
асимметричное исполнение
аналогично типу ^
■ч
! / . _ /'
°тах\Е
Колесный движитель может быть
оборудован полугусеничным ходом, как устройством
для повышения проходимости и снижения
давления на почву. Наиболее перспективной
схемой ходовой системы колесного трактора
является полноприводная.
Классификация шин приведена на рис.
3.4.5.
Одним из основных элементов колесного
движителя является шина, непосредственно
взаимодействующая с опорной поверхностью.
Для сельскохозяйственных шин выпускаются
металлические колеса четырех типов и
различных конфигураций (табл. 3.4.4) [13].
Вследствие значительных трудностей
монтажа крупногабаритных
сельскохозяйственных шин для них создаются конструкции
колес со съемной закраиной обода,
аналогично автомобильным. Пневматические
сельскохозяйственные шины имеют типовую
конструкцию (рис. 3.4.6).
Типоразмерный ряд посадочных
диаметров </п и ширины В профилей шин
сельскохозяйственных машин приведен в табл.
3.4.5.
К движителям (в частности к шинам)
предъявляют комплекс требований, которые
основываются совокупностью
эксплуатационных свойств с соответствующими оценочными
по'казателями: соответствие конструкции
трактора условиям эксплуатации; малая
материалоемкость при сохранении габаритных
размерах. 3.4.6. Покрышка пневматической
типовой конструкции:
1 - брекер; 2 - протектор; 3 - боковина;
4 - каркас; 5 - бортовое кольцо
КОЛЕСНЫЙ ДВИЖИТЕЛЬ. УПРАВЛЕНИЕ
445
3.4.5. Типоразмерный
ряд посадочных диаметров </„ и ширины В профилей
сельскохозяйственных шин
Шины колес
Ведущих
Управляемых
Несущих
Параметры
<*п
В
*и
В
*п
В
Типоразмерный ряд (условное обозначение в дюймах)
10 - 12 - 16 - 20 - 24 - 26 - 28 - 30 - 32 - 34 - 36 - 38 - 40 -
42 - 44 - 48
4 - 5,5 - 7,2 - 8,3 - 9,5 - 11,2 - 12,4 - 13,6 - 14,9 - 15,5 - 16,9 -
18,4 - 20,8 - 21,3 - 23,1 - 24,5 - 28,1 - 30,5 - 33 - 35,5
10-12-15-16- 19- 20
4,0 - 4,5 - 5,0 - 5,5 - 6,0 - 6,5 - 7,5 - 9,0 - 10,0 - 11,0 - 12,0
4 - 6 - 8 - 10 - 12 - 14 - 15 - 16 - 17,5 - 18 - 20 - 22 - 22,5
3,0 - 3,5 - 4,0 - 4,5? 5,0 - 5,5 - 6,8 - 6,5; 7,0 - 7,5, 9,0 - 10,0;
10,5 - 11,0; 11,5 - 12,0/ 13,0 - 14,0,' 15,5 - 16,0,' 16,5 - 17,0,*
20,0 - 22,0
ров и обеспечении грузоподъемности и
надежности; высокие тягово-сцепные качества и
проходимость; минимальные потери при
качении колеса; допустимый уровень
уплотняющего воздействия на почву; вписываемость в
междурядья пропашных культур (для
пропашных тракторов); обеспечение заданных
параметров плавности хода. Для эффективного
использования тракторов в различных
условиях эксплуатации шины должны быть
универсальными. Однако с той же целью
разрабатывают требования по созданию шин
специального назначения (шины для горных,
рисоводческих тракторов и др.).
Установление нагрузочного режима
движителя связано в основном с определением
величин нормальных, тангенциальных и
боковых нагрузок, а также моментов по колесам
трактора, которые представляют в виде
гистограмм их изменения, а также нагрузки на
крюке и скорости движения от доли годовой
загрузки трактора по основным
технологическим операциям с учетом динамических
нагрузок (рис. 3.4.7).
Окг,*н
*\
76
г?
6*1
♦
2
*"
ПилЬн
5 Ю5,тыс.жт О 5 10$,ты
Рис.3.4.7. Гистограммы изменения нагрузок на крюке
н скорости движения трактора МТЗ-80
В процессе эксплуатации шины
тракторов испытывают динамические нагрузки,
максимальные значения которых достигаются на
двух видах операций: пахота, где реализуются
максимальная силы тяги и транспортные
работы, для которых характерна максимальная
скорость и догрузка шин трактора
полуприцепом.
Коэффициенты динамичности
нормальных нагрузок К а и крутящих моментов Ку
определяются из формул:
'«-'Ч.5Е-
где
2о_ °м
Ок Мк
- коэффициенты вариации
нагрузок; <!<;, А/ ~ статистическая оценка
среднего квадратического отклонения
нагрузки; О %, М% - статическая нагрузка с учетом
перераспределения реакции почвы под
действием сил сопротивления движению трактора;
Ха - аргумент функции нормального
распределения.
Коэффициенты динамичности
устанавливаются расчетным (исследованием на
математических моделях) или
экспериментальными методами. Некоторые их значения
приведены в табл. 3.4.6 [23].
446
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
3.4.6. Коэффициенты динамичности
колесных тракторов
Класс трактора
3
1,4 ^2
3
1,4-2
Км
Ко
Транспортные работы
1,5 ... 2,0
1,4 ... 1,8
1,5 ... 2,0
1,3 ... 2,0
Пахота
1,4
1,4
1,5
1,1 ... 1,4
мального давления 47к на почву и
механического напряжения ад в почве.
Статическая нагрузка, приходящаяся на
шину,
где О - вес, приходящийся на ось трактора;
Ой - вес агрегата; Н^р - высота
расположения линии тяги; Ь - база трактора.
Существенным фактором,
ограничивающим потенциальные возможности
движителя, является силовая и кинематическая
связь колес в ходовой системе. Например,
имеющееся в блокированном приводе трактора
4К4 кинематическое несоответствие снижает
тяговые качества движителя трактора. Поэтому
типоразмеры шин следует выбирать с учетом
этого фактора, чтобы избежать падения
тягового КПД движителя.
Для оценки влияния выбранных
параметров движителя на эксплуатационные
качества трактора используют расчетно-
экспериментальные методы с применением
математических моделей трактора,
реализующих его основные эксплуатационные свойства.
Такие модели являются основой САПР в
ходовой системе трактора. Основное место в
таких системах занимает подсистема
"движитель-почва", которая служит для выбора
параметров движителя, при которых могут быть
реализованы его потенциальные свойства с
учетом наложенных ограничений.
Передние оси. Они соединяют
направляющие колеса с остовом трактора. Если к
колесам оси подводится крутящий момент, то
такую ось называют передним мостом.
Передняя ось должна передавать силы,
возникающие между остовом трактора и передними
колесами, обеспечивать правильную установку
направляющих колес для улучшения
устойчивости прямолинейного движения,
минимального износа шин и отсутствия колебаний
направляющих колес. Для этой цели
направляющие колеса и поворотные цапфы передней
оси трактора устанавливают под
определенными углами в продольной, поперечной и
горизонтальной плоскостях (рис. 3.4.8).
Боковой наклон (развал) колеса к
полотну дороги под углом у (рис. 3.4.8, а)
позволяет: компенсировать изнашивание в
шарнирах и подшипниках, а также деформацию
деталей, не допуская отрицательного развала;
уменьшить плечо обката. ау а следовательно,
момент, необходимый для поворота колеса. В
современных тракторах а = 0,5Ь- (10 ... 30)
мм, где Ь - ширина профиля шины. Обычно
Коэффициенты динамичности Кд
машин с шинами радиальной конструкции
несколько выше, чем с диагональными
шинами, однако вследствие большой окружной
эластичности эти шины обеспечивают
меньший уровень Км . Наибольшая боковая сила,
действующая на шину трактора при его
установившемся повороте с полуприцепом, не
превышает 20 % максимальной динамической
нормальной нагрузки.
Реализация эксплуатационных свойств
движителя обусловлена
физико-механическими характеристиками почвы при
взаимодействии с ней шины. В основе выбора
параметров колесного движителя лежит тягово-
энергетическая концепция с обеспечением
заданных ограничений. Поэтому целевой
функцией является максимальный тяговый
КПД.
При выборе шин для вновь
проектируемого или модернизируемого трактора, как
правило, известны агротехнические или
технологические требования, нагрузка на колесо,
требуемая сила тяги и скорость движения. С
учетом накладываемых ограничений выбирают
габаритные размеры шины и параметры
рисунка протектора. При этом учитывают, что в
течение года тра'ктор выполняет
сельскохозяйственные работы в широком диапазоне
изменения почвенных условий. Поэтому
потенциальную характеристику целесообразно
дополнить набором характеристик для разных почв
при различной влажности, охватывающей весь
диапазон условий работы ш :чы с разбивкой
на интервалы с указанием вероятности работ в
каждом интервале. На основании указанных
характеристик получают потенциальные
характеристики шины при максимальном КПД в
интервале возможного варьирования нагрузок
на шины, в том числе при балластировании и
сдваивании колес.
Нормативные документы [8]
регламентируют уровень уплотняющего воздействия
движителей на почву через ограничение макси-
колесный движитель, управление
447
угол у = 1,5 ... 4°. Наклон колеса вызывает
боковую силу, которая прижимает колесо к
подшипникам, и неравномерную деформацию
шин по ширине. Колесо при этом стремится
повернуться в сторону наклона, что вызывает
проскальзывание и изнашивание шины.
Для устранения этого явления вводят
сходимость колес - разность расстояний В^ - В\ =
= 2 ... 8 мм (рис. 3.4.8, б). Однако некоторое
проскальзывание шин остается, причем тем
больше, чем шире шина. Поэтому для
широких шин следует брать минимальный угол
развала.
Рас. 3.4.8. Схемы установи колес
Боковой наклон шкворня поворотной
цапфы под углом 0 (см. рис. 3.4.8, а) делают
для того, чтобы получить стабилизирующий
момент, возвращающий колесо в продольную
плоскость при отклонении (за счет подъема
передней части трактора при обкатывании
колеса вокруг наклонного шкворня), и
уменьшить плечо а обкатки, что улучшает
устойчивость прямолинейного движения и уменьшает
момент, необходимый для поворота колеса.
Наклон шкворня в продольной
плоскости под углом а (рис. 3.4.8, в) необходим
для получения стабилизирующего момента от
боковых реакций почвы, улучшающего
устойчивость прямолинейного движения. При этом
несколько увеличивается сопротивление на
рулевом колесе при повороте трактора.
Углы а, р и у обеспечиваются
конструкцией передней оси и в условиях
эксплуатации не регулируются. Регулируется лишь
сходимость колес изменением длины
поперечных рулевых тяг.
При движении трактора могут возникать
колебания передних колес. Они нарушают
управляемость, создавая угрозу безопасному
движению на повышенных скоростях,
увеличивают изнашивание шарниров передней оси
и рулевого управления, вызывают
неустойчивость движения остова трактора и создают
извилистый ход навесных орудий (что
особенно вредно при посеве и междурядной
обработке). Колебания могут происходить вокруг
вертикальных осей АЛ шкворней поворотных
цапф и горизонтальной оси ББ балансира
моста (рис. 3.4.9).
448
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
Для подрессоренного переднего моста
колебания возникают вокруг мгновенной
горизонтальной оси вращения системы,
соответствующей условной оси ББ. Их интенсивность
возрастает при увеличении зазоров в шарнирах
переднего моста и рулевого управления.
Колебания вокруг шкворней поворотных цапф
могут происходить при движении как по
неровностям, так и по ровному пути. Колебания
при переезде через неровность высотой Л,
приводящую к наклону переднего моста в
поперечной плоскости на угол <р,
определяемый выражением 8Ш <р = к / В , могут быть
обусловлены: кинематическим несоответствием
траектории переднего шарнира продольной
рулевой тяги и пальца рычага поворотной
цапфы или возникновением гироскопического
момента.
Кинематическое несоответствие
появляется в результате перемещения переднего
шарнира (при качании левой тяги в
продольной плоскости) на величину 5, что вызывает
поворот колеса. Гироскопический момент
Мт , возникающий при повороте колеса на
угол <р, стремится повернуть колеса вокруг
шкворня:
Мт = /ксоксо0,
где /к - полярный момент инерции колеса;
со к = V / В - угловая скорость колеса; V -
скорость движения трактора; В - диаметр
колеса; (0о - угловая скорость перемещения
горизонтальной оси колеса в вертикальной
плоскости, проходящей перпендикулярно к
плоскости колеса; со 0 = 1,75 . ;
В^Пк-к1
к - высота подъема колеса (высота
препятствия); В - ширина колеи передних колес.
При отклонении колеса расстояние от
осевой плоскости трактора до точки контакта
колеса с почвой изменяется на величину Л В .
Поскольку колесо, перекатываясь через
препятствие, удерживается от поперечного
смещения силой трения, смещаться будет остов
трактора, появится виляние. Смещение при
данной высоте к увеличивается с
уменьшением колеи В и увеличением высоты Н оси
качания.
Колебания при движении по гладкому
ровному пути связаны с разным
сопротивлением перекатыванию правого и левого колес,
их неуравновешенностью. Если одно из колес
встретит на пути дополнительное
сопротивление, появится поворачивающий момент
^п=(^/2-*л)*,
где Р{2 и Р/\ - силы сопротивления
перекатыванию колес; а - плечо до шкворня
поворотной цапфы.
Если колесо не уравновешено, возникает
неуравновешенная сила инерции
Ги = Мцсо*/# ,
где Л/ц - момент неуравновешенных масс
относительно оси вращения колеса.
Вертикальная составляющая
неуравновешенной силы Рь = Ги 8шап (ап - угол
между радиус-вектором неуравновешенной
силы и направлением движения) в сочетании с
весовой нагрузкой колеса вызывает его
вертикальные колебания - подпрыгивание в
результате упругости шин. Период вертикальных
колебаний равен времени оборота колеса:
/в=*/)/у .
Период собственных колебаний балансирной
передней оси на пневматических шинах в
вертикальной плоскости
'с =2* V /"к /Сш ,
где т^ - масса колеса; Сш =0 / кг -
жесткость шины; О - нагрузка на колесо; кг -
прогиб шины под нагрузкой.
Совпадение периода колебаний
неуравновешенной силы с периодом собственных
колебаний передней оси /в = /с (резонанс)
может привести к отрыву колеса от почвы.
Горизонтальная составляющая РТ = Рп со§ан
силы РИ вызывает поворачивающий момент
Мц = а Рт, приводящий к вилянию колес с
периодом, указанным выше.
При движении трактора на переднюю
ось действует вес передней части трактора
О и толкающая сила / (О + 00 ) , где О0 -
вес передней оси, масса которой составляет
8 ... 10 % конструктивной массы трактора;
/ - коэффициент сопротивления качению.
Кроме толкающей силы, возникает момент
м0=/(в + е0).
КОЛЕСНЫЙ ДВИЖИТЕЛЬ. УПРАВЛЕНИЕ
449
Расчет элементов передней осн.
Отечественные колесные тракторы классов 6-14
имеют передние оси с балками,
составленными из телескопически сопряженных труб,
позволяющих изменять ширину колеи, и
Г-образные поворотные цапфы,
обеспечивающие необходимый дорожный просвет под
передней осью (МТЗ-80). В других
конструкциях предусматривается возможность
изменения дорожного просвета (Т-40).
Расчет передней оси на прочность
следует проводить для трех случаев нагружения:
1) занос трактора; поперечная сила
достигает максимального значения, продольная
сила отсутствует; коэффициент сцепления при
боковом скольжении Фб = *♦
2) движение по неровностям;
вертикальная сила достигает максимального значения;
поперечные и продольные силы отсутствуют;
коэффициент динамичности Кл =2 ... 2,5;
3) передние колеса трактора встречают
непреодолимое препятствие; продольная
толкающая сила достигает максимального
значения, определяемого сцеплением ведущих колес
с почвой. Поперечная сила отсутствует.
Балансир (балку) передней оси без
распорной штанги рассчитывают на прочность
для этих трех случаев нагружения (рис. 3.4.10).
В первом случае максимальный расчетный
изгибающий момент определяют по одной из
следующих формул для левого и правого колес
(рис. 3.4.10, а)
Ми=0*2иВ-Г1лк;
М1п=0221пВ-У1пк.
Входящие в эти формулы реакции
21л = 0*СЛ 1 +
Ф
В
2^=0,56^1-^^-0*;
У1л=0,5ф(ф + ^):
где 0\ - нагрузка, приходящаяся на
переднюю ось; 0К - вес одного колеса со ступицей.
Рве. 3.4.10. Схемы расчета балансира передней осл
без распорной штанги
Расчет на прочность балки выполняют по
максимальному изгибающему моменту.
Напряжение изгиба
ои =
35 ... 50 МПа для литых
стальных балок;
80 ... 120 МПа для
кованых и
сварных балок.
Во втором случае нагружения в расчете
принимаются только вертикальные силы.
Максимальный изгибающий момент у оси
качания
Ми =0^КлОхВ.
В третьем случае нагружения балансир
рассчитывают на изгиб в вертикальной и
горизонтальной плоскостях в сечении у оси
качания и на скручивающий момент.
Изгибающий момент в плоскости:
вертикальной
3/и.в =0,5^2?;
15 За к. 1741
450
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
горизонтальной
Крутящий момент
Мкр =Хх(к-гх),
где 2\ = 0,5 0\ - Ох ; Л^ = 0,5 ф (?2» &1 и
02 - нагрузка, приходящаяся на передние и
задние колеса; С7К - вес переднего колеса;
ф - коэффициент сцепления с почвой.
Напряжения изгиба и кручения:
_ Л^и.в _ Мнт
СТив" \УЪ ; аиг" 1УТ ;
где \УЪ, Жг и 1УК р - моменты
сопротивления опасного сечения на изгиб и кручение.
Шип поворотной цапфы </ц
рассчитывают на изгиб. Максимальный изгибающий
момент (при заносе трактора влево или
вправо) для трех случаев нагружения:
первого
Мкр=71С + Г,гк;
второго
Мн =0$КаС61;
третьего
Ми =С^12+*12 ,
где С - расстояние от средней плоскости
колеса до корня шипа (рис. 3.4.10, б).
Напряжение изгиба в каждом случае
аи=Л/и/Ж = А/и/о,1^.
Шкворень поворотной цапфы
рассчитывают на изгиб и срез. Для втулок шкворня
определяют давление. Расчет проводят для
первого и третьего случаев нагружения
(рис. 3.4.10, в). В первом случае на шкворень
действуют моменты в вертикальной и
горизонтальной плоскостях, которые складываются
или вычитаются в зависимости от стороны
цапфы и направления заноса. Наибольшая
результирующая сила (на нижней втулке):
для Г-образной цапфы:
5,=[тг1+Г1(гк+Л + 0,5/)]// ;
для вильчатой цапфы с о*0,5/
5=[тг,+У1(гк+0,5/)]// .
Напряжения смятия втулки шкворня
Системы управления колесных тракторов.
Для обеспечения движения трактора на
повороте без бокового скольжения колес оси всех
колес должны пересекаться в одной точке О,
называемой центром поворота (рис. 3.4.11, а).
Для выполнения этого условия существует две
схемы поворота: с двумя передними
управляемыми колесами и с шарнирно-сочлененной
рамой. По первой схеме производится поворот
универсально-пропашных тракторов, а также
тракторов общего назначения.
Передние колеса меньшего диаметра, чем
задние, установленные на поворотных цапфах
и шарнирно соединенные с неповорачи-
вающейся передней осью трактора,
поворачиваются одновременно.
Качение ведущих колес по разным
радиусам относительно центра поворота без
скольжения и буксования обеспечивается
дифференциальным механизмом ведущего
моста. Передние управляемые колеса
необходимо поворачивать на разные углы:
внутреннее колесо (по отношению к центру поворота)
должно быть повернуто на большой угол,
наружное - на меньший (рис. 3.4.11, а).
Соблюдение требуемого соотношения
между углами аир достигается путем
применения для поворота цапф управляемых
колес специального шарнирного четырехзвенно-
го механизма - рулевой трапеции.
Установившийся радиус поворота
Л = 0^Х(с1^а + с18Р),
где Ь - база трактора.
На мощных колесных тракторах со всеми
ведущими колесами одинакового диаметра
применяется вторая схема поворота (рис.
3.4.11, б). Поворот трактора осуществляется
путем относительного перемещения полурам 1
и 2 в горизонтальной плоскости вместе с
осями колес с помощью гидроцилиндров 3.
Радиус поворота по этой схеме
Я = асХ%а ,
где а - расстояние от середины заднего моста
до оси поворота полурам.
КОЛЕСНЫЙ ДВИЖИТЕЛЬ. УПРАВЛЕНИЕ
451
Жк1—
Рис. 3.4.11. Схемы поворота трактора:
а - с двумя передними управляемыми колесами; б - с шарнирно-сочлененной рамой
В рулевых механизмах применяются пе- стоянке М2 »0Д4&фГк> при движении
редачи с шестеренной, винтовой,
кривошипной и червячной парами. Наибольшее распро- М2 = 2 А' 5 / ; ф - коэффициент сцеп-
странение получили пара глобоидальных
червяк - ролик для машин малой и средней гру- ления с почвой; гк - динамический радиус
зоподъемности и комбинированный механизм „ ^^
из двух пар: винт - гайка с циркулирующими направляющего колеса; К^ - коэффициент
шариками и рейка - сектор для машин сред- _
ней^уэопод^мности. сопротивления шины уводу; 8 у, - угол увода;
Расчет рулевого управления. Для
получения чистого качения направляющих колес при 5.
повороте без скольжения внутреннее и наруж-
ув
4е; /,
ув
плечо увода; можно
ное колесо нужно поворачивать на разные принять / «0,25 длины эллипса площади
отпечатка
шины,
тогда
'у.-о.**;
углы аир, связанные зависимостью
с1«р-с<в««Л/Л. М3 = в1{а + гку)(у 8йЮ4(а + Р) +
гае А - расстояние между центрами шкворней + , сов0^(а + р)) . стабилизирующий мо-
поворотных цапф. ' >~ \ г/ / *-*
При известных параметрах Ли Ьу зада- мент от поперечного у и продольного у'
ваясь одним из углов (а или р ), находят наклона (рад) шкворня; лпо - КПД привода
значение второго угла. Тогда угол установки ,
поворотных рычагов (угол между положением (поворотных цапф и трапеции),
рычага и продольной осью машины) можно ПРИ Движении по неровностям возника-
рассчитывать по формуле
189 = 2
81Паг
"(С08РГ
-зшр;
гоах
-со$аг
7'
ют толчки, дополнительно нагружающие
рулевой механизм. Наиболее опасным является
выезд одного колеса из борозды глубиной А,
вызывающий толчок силой
Р = 0>5О1
УС(2-С)
1-С
где С = А / гк .
Общее силовое передаточное число
и =
Мп
^р ^р Лр
где атах и Рщах - максимальные углы
поворота направляющих колес.
Момент сопротивления повороту
направляющих колес [6]
Л/п=(М1+Л/2+3/з)/лпр.
где М\ =0\?\й - момент сопротивления
направляющих колес перекатыванию; 0\ -
радиальная нагрузка на направляющие колеса; /р ^ 100 Н; Лр - радиус рулевого колеса
/ - коэффициент сопротивления перекатыва- (штурвала); Лр . КПД рулевого механизма
нию; а - плечо обкатки колеса; Му - момент ,„„„ „л#%л„0„л „ГТПГ ^ «„„лвл^ ^л„^« ~ ™„
* * * (при передаче силы от рулевого колеса к сош-
сопротивления колес поворачиванию; при ке).
где К
Р - сила на рулевом колесе; при наличии
усилителя Рр ^ 130 Н, без усилителя
15*
452
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
Сила на рулевом колесе
р , М* -_ М„1С
Ярыг\р 1р Яр иа> Лр
где /с и /р - длина соответственно рулевой
сошки и поворотного рычага;
мш=Дфр/Дсо - угловое передаточное
число; Афр и Лео - углы поворота
соответственно рулевого колеса и вала сошки.
Диаметр вала рулевого колеса, см
а = I -*ртах Др
V 0Дхкр
Допустимое напряжение ткр ^60 МПа.
Натяжение смятия в шлицевых соединениях
вала тсм = 50 ... 60 МПа.
Рулевую сошку рассчитывают на изгиб и
кручение от максимальной силы К
Напряжение изгиба
Р I
аи = —$- = 150 ... 200 МПа,
"и
где 1УИ - момент сопротивления изгибу.
Напряжение кручения
ГС
ткр =——=60... 80 МПа,
где 1УК р - момент сопротивления кручению
К основным преимуществам
гидроусилителей относятся: бесшумность в работе,
меньшие размеры и масса ввиду использования в
гидросистемах больших (6 ... 10 МПа)
давлений, значительно меньшее время
срабатывания (0,05 с) по сравнению с пневмоусилите-
лями (0,3 ... 0,4 с); плавное включение.
Для сокращения времени поворота,
облегчения работы водителя, уменьшения
средней силы на рулевом колесе до 30 Н
проектируемые колесные тракторы, начиная от класса
0,9, снабжают усилителями рулевого
управления. На ряде пропашных тракторов рулевое
колесо регулируется по вертикали (подгонка
под тракториста) и откидывается вперед по
ходу трактора для удобства входа и выхода из
кабины (тракторы МТЗ-80, МТЗ-100). Для
универсально-пропашных тракторов
характерным является рулевое управление с
объединенными в одном блоке рулевым механизмом
червячного типа с гидроусилителем (Т-
40М/АМ, МТЗ-80, МТЗ-100). Однако в
последнее время получает распространение
гидрообъемное рулевое управление (ГОРУ) для
сельскохозяйственных тракторов класса 2.0
Для тракторов с шарнирно-сочлененной рамой
характерно рулевое управление типа трактора
Т-150К.
Расчет усилителя рулевого управления
Для получения минимального радиуса
поворота при движении на повышенной скорости
требуется увеличение угловой скорости
рулевого колеса. Мощность, затрачиваемая водителем
на вращение рулевого колеса,
Рр=Мпа/чпр = 1У/Гп>
где © - угловая скорость рулевого колеса; IV-
работа; (и - время поворота, с.
Время поворота рулевого колеса до упора
при работе на скорости V = 2 ... 3 м/с не
должно превышать /„ =2,5 с, иначе
значительно увеличится ширина поворотной
полосы.
Сила на рулевом колесе, при которой
включается усилитель,
А = *3*2 = 20 ... 30 Н,
"141
где Г3 - сила предварительной затяжки
центрирующих пружин, 2, - сумма
сопротивлений перемещению . золотника; обычно
2 * 0; и\ - передаточное число от золотника
к рулевому колесу; х\\ - КПД передачи.
Угол холостого поворота рулевого колеса
до начала действия усилителя
/о=^«1=Г-...-]=3...4в,
УУ Др * ^60 45 )
где Л' - ход золотника до начала перекрытия
сливного канала.
Полный свободный поворот рулевого
колеса при выключении усилителя должен быть
не более
где Л - радиальный зазор, равный половине
хода золотника из одного крайнего положения
в другое.
Максимальная сопротивляемость
обратной включающей силе от направляющих колес
г р + 2
гт = ,
"2 42
ПОДВЕСКИ
453
где «2 и Л 2 " соответственно обратное
передаточное число и обратный КПД от рулевой
тяги до золотника.
Для повышения устойчивости движения
«2 < 1. Желательно золотник помещать
возможно ближе к рулевому колесу, а
гидроцилиндр - к направляющим колесам.
3.4.4. ПОДВЕСКИ КОЛЕСНЫХ И
ГУСЕНИЧНЫХ ТРАКТОРОВ
Классификация. Требования. Защиту
тракторов от чрезмерно больших
динамических воздействий опорной поверхности и
снижение параметров колебаний и вибрации к
допустимым уровням осуществляет система
подрессоривания - подвеска, шины, упругие
элементы сиденья.
К специфическим особенностям систем
подрессоривания тракторов относятся:
различие схем для колесных и гусеничных
тракторов, отсутствие у колесных тракторов в
большинстве случаев упругих элементов в задних
подвесках (при этом снижение динамических
воздействии на заднюю часть трактора
осуществляется лишь вследствие упругости шин);
многоопорность гусеничных тракторов;
смещение у большинства тракторов центра
тяжести относительно центра упругости, при
этом угловые колебания остова связаны с
вертикальными колебаниями центра масс. Особое
влияние на колебания остова трактора
оказывают прицепные и навесные машины и
орудия.
Подвеска включает детали, размещенные
между остовом трактора, и опорные элементы
(колеса, катки). Она передает вес трактора на
оси опорных элементов, обеспечивает
плавность хода трактора по неровностям опорной
поверхности, передачу всех сил и моментов,
действующих между движителем и остовом.
Подвеска трактора в общем случае состоит из
трех устройств: упругого, гасящего и
направляющего. Упругое устройство служит для
уменьшения динамических нагрузок,
обусловленных главным образом действием
вертикальных составляющих сил, гасящие - для
затухания колебаний остова, а направляющие -
для передачи продольных и поперечных
составляющих сил, а также моментов этих сил.
Функции этих устройств подвески могут
выполнять одни и те же или различные
элементы.
Конструкции подвесок весьма
разнообразны. По типу упругого устройства различают
жесткие, полужесткие и упругие подвески
(табл. 3.4.7).
В жесткой подвеске оси опорных
элементов непосредственно или при помощи
кронштейнов жестко крепятся к остову
трактора. Жесткая подвеска гусеничных тракторов
позволяет получить на мягкой почве близкое к
равномерному распределение нагрузки по
каткам, в результате чего улучшается
сцепление гусениц с почвой. Однако ввиду большой
неподрессоренной массы при движении на
плотных и неровных грунтах при повышенных
скоростях колесных и гусеничных тракторов
вследствие ударов возникают значительные
динамические нагрузки, передаваемые на
остов трактора.
В полужесткой подвеске гусеничных
тракторов оси опорных катков жестко
крепятся к рамам гусеничных тележек, каждая из
которых соединена с остовом трактора: сзади
жестким шарниром, спереди упругим
элементом или с обеих сторон упругими элементами.
Ось качания рамы тележки может совпадать с
осью ведущего колеса или не совпадать с ней.
В последнем случае при качении тележки
происходит динамическое натяжение
гусеничной цепи. Остов с тележками крепится в трех
или четырех точках. В полужесткой подвеске
колесных тракторов передняя часть
соединяется с мостом упругим элементом, задняя часть
трактора - не подрессорена.
В упругой подвеске опорные элементы
соединяются с остовом трактора таким
образом, что могут перемещаться один
относительно другого и относительно остова в
вертикальной плоскости. Упругие подвески
гусеничных тракторов могут быть балансирные и
индивидуальные. В балансирной подвеске оси
опорных катков группами или по два и более
системой рычагов (балансиров) объединены в
каретки, которые шарнирно соединены с
остовом трактора. В систему балансиров кареток
или в соединение осей балансиров с остовом
трактора вводят упругие элементы.
В индивидуальной подвеске каждая ось
опорного элемента через упругий элемент
независимо от других осей соединена с
остовом трактора.
Упругие подвески обеспечивают
наилучшие показатели плавности хода трактора.
Однако применение подвесок этого типа в
гусеничных тракторах приводит к неравномерному
распределению давления по длине опорной
поверхности.
К основным требованиям, которым
должна удовлетворять подвеска, следует
отнести:
рациональность упругой характеристики,
обеспечивающей необходимую плавность хода
трактора на рабочих и транспортных скоростях
и допустимые значения продольных и боковых
кренов остова;
заданную характеристику затухания
колебаний остова трактора;
удобство размещения в ходовой системе;
надежность передачи силы от движителя
на остов трактора, обеспечивающую постоян-
454
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
3.4.7. Схемы подвесок тракторов
Тип подвески
Тракторы
гусеничные
колесные
Назначение
Жесткая:
четырехточечная
трехточечная
^^^Е5>ав«1
и^уф -и»'
^>л
Полужесткая:
трехточечная;
у гусеничных
тракторов ось
качания тележки
совпадает с осью
ведущего колеса
тележка
подрессорена спереди и
сзади (упругий
элемент - торсион)
Упругая:
балансирная
независимая
ИкА ^>А
Щ)Я*=*Ш
к&д-?й>
Тихоходные
машины, у которых
движение не является
рабочим
(экскаваторы, погрузчики)
Тихоходные
землеройные машины
(бульдозеры,
канавокопатели и др.),
колесные
самоходные шасси,
хлопководческие тракторы
Тихоходные
землеройные машины,
колесные тракторы
общего назначения
Сельскохозяйственные гусеничные
тракторы с
повышенными
скоростями движения
Сельскохозяйственные и
промышленные гусеничные
тракторы,
работающие на
повышенных скоростях,
неровной местности с
плотным грунтом
Тяжелые
гусеничные тракторы и
колесные
универсально-пропашные тра^
торы (для подрес-
соривания
передних колес)
ное сцепление движителя грунтом всех
категорий эксплуатации;
достаточную надежность деталей,
минимальную массу, особенно подрессоренной
части.
В колесных тракторах кинематическая
схема механизма направляющих рычагов
должны обеспечивать качение колес без
скольжения, стабилизацию управляемых колес.
В гусеничных тракторах направляющие
устройства не должны допускать ударов опорных
катков о ведущие и направляющие колеса, а
также спадания гусениц.
Элементы подвесок. Определение основных
параметров подвески заключается в расчете
сил, действующих на элементы, и жесткости
упругих элементов [22, 25, 26, 30]. При
движении трактор испытывает вертикальные,
угловые и боковые колебания,
происходящие с различной частотой и виброускоре-
ПОДВЕСКИ
455
ниями, которые являются нежелательными и
даже опасными для водителя. Собственная
частота колебаний человека при его движении
2 ... 5 Гц, наиболее благоприятными являются
вертикальные колебания с периодом Тг =
= 1 ... 1,5 с, характерные для ненагруженного
трактора. С навешенными механизмами в
транспортном положении Тг =3 ... 3,5 с. При
различной жесткости упругих элементов
период вертикальных колебаний
Гг=2* I тп / I 2^п,Ср, I ,
где тЩу - масса подрессоренных частей
трактора; П(- - число упругих элементов, имеющих
одинаковую жесткость на одной стороне;
ср1 - жесткость одного упругого элемента.
Суммарная жесткость гэдвески,
обеспечивающая допустимые для человека колебания
Срп = 2х /и,, / Тг .
Жесткость подвески определяет ее
статический прогиб
Динамический ход /д опорного
элемента выбирается из конструктивных
соображений: подъем ограничен упором элементов
подвески в остов трактора или
максимальными напряжениями в упругом элементе.
Отношение полного хода опорного
элементах статическому называется коэффициентом
динамичности кд. В удовлетворительно
работающих подвесках тракторов без навешенного
рабочего оборудования ка = 3 + 4, с
навешенным плугом в транспортном положении
кл = 2,5 + 4,5 .
Упругие элементы, применяемые в
подвесках колесных и гусеничных тракторов,
могут быть металлические и неметаллические
(резиновые). К металлическим относятся
листовые рессоры, пружины и торсионы
различной конструкции (стержневые, пластинчатые,
пучковые). Металлические элементы
позволяют получить линейную характеристику
подвески: зависимость между вертикальным
перемещением оси опорного элемента и
действующей на него вертикальной нагрузкой.
Комбинацией металлических элементов
различной жесткости может быть достигнута
нелинейная характеристика. Стальные упругие
элементы разрабатываются для конкретного
трактора с учетом его конструктивных
особенностей и свойств.
Применение в подвеске резиновых
упругих элементов (на основе каучука или
синтетических материалов) позволяет получить
упругую характеристику с переменной
жесткостью при одновременном выполнении ими
функции гасящего устройства, а также снизить
число мест смазывания. Недостатком
резиновых элементов является наличие в них
остаточной деформации при действии
продолжительной нагрузки и чувствительность к низким
температурам. Резиновые элементы подвески
могут работать на сжатие, сдвиг и кручение.
Среди стальных упругих элементов
листовая рессора имеет широкое применение. Ее
преимуществом является способность
воспринимать не только силы, действующие в
различных направлениях, но и реактивные
моменты при трогании трактора с места и
торможении. К основным недостаткам
многолистовой рессоры относятся: высокое,
меняющееся с течением времени, трение между
листами; снижение долговечности, вызываемое
изнашиванием (появление концентраторов
напряжений). Оба эти недостатка можно
полностью устранить, применив пластмассовые
прокладки между листами, которые
укладываются или по всей длине листа или по
концам и в середине.
Трение между листами, зависящее
главным образом от числа трущихся поверхностей,
является нежелательным демпфирующим
фактором. Поэтому листовая рессора должна
иметь по возможности минимальное число
листов.
На современных тракторах в основном
применяют полуэллиптические рессоры, так
как они лучше, чем рессоры других типов,
выполняют функцию направляющего
устройства подвески и рассредоточивает нагрузку
по раме трактора.
Методика расчета несимметричной
рессоры (рис. 3.4.12) является более общей [22].
Суммарный момент инерции площади
поперечного сечения рессоры, обеспечивающий
требуемую ее жесткость,
/р=арСр/,2/22/(з^/),
где ар = 1,2 ... 1,46 - коэффициент формы
рессоры; Ср - жесткость рессоры.
Степень несимметричности рессоры
определяется из компоновочных соображений
и оценивается коэффициентом
несимметричности к = 1\ 11. По величине /р подбирают
число листов рессоры, их толщину и ширину.
При этом учитывают следующее:
456
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
к " : Н
// ^ 12
~ *е .- ■ 1
!ю И И /X
I Ц'1 1 Ни I
3/
1и-0,5с[с
'а
1а-о.5ас
7з
11.3-М*с
Ън\
Рнс 3.4.12. Схемы расчета
Чп
алгебраическая сумма моментов инерции
сечений всех листов рессоры должна равняться
суммарному моменту инерции /р ;
число листов рессоры обычно 6 + 14, в
отдельных случаях 20;
отношение ширины листа к толщине у
большинства рессор 6 + 10;
толщина листов рассчитывается из
условия, что при максимальных прогибах
напряжение в листах рессоры не должно превышать
допустимого значения.
Условная средняя толщина листов может
быть определена из уравнения
_2ар(^-дл/с)(/2-0^^с)адж>И1|
где Ж0
суммарный момент
сопротивления сечения рессоры изгибу; а щах =
= 900 ... 1 000 МПа - максимальное
напряжение; /п - полный прогиб рессоры.
Особое внимание должно быть уделено
выбору профиля сечений листов рессоры.
Применение несимметричных профилей
может дать заметную экономию материала и
некоторое повышение долговечности рессоры.
Совершенство профиля листа оценивается
показателем
д = /Ир / Лтах ,
где /яр - масса рессоры; АтвХ = 0,5 Ср /п -
максимально возможная работа деформации
рессоры, ограниченная величиной
допускаемых напряжений изгиба.
Чем меньше показатель ду тем
совершеннее рессора.
Метод определения длин листов рессоры
основан на выборе оптимальной эпюры
распределения напряжений в листах. В качестве
оценочного параметра распределения
напряжений используется коэффициент
Ур = ай / а1 » рекомендуемые значения
которого представлены в табл. 3.4.8.
3.4.8. Рекомендуемые значения
коэффициента ур
Листы
рессоры
Все разной
длины
Второй и
коренной
одинаковый длины
Лист
коренной
0,6+0,8
0,6+0,8
второй
0,7+0,9
0,6+0,8
третий
0,9+1
0,7+0,9
остальные
1
1
Длина листа рессоры с листами разной
длины
Ч = //-1 - Ур(/-1) а/-1 ^/-1 / р1-\ ;
(ЗА1)
где / = 2,3, ...,лр.
При двух верхних листах рессоры
одинаковой длины длины остальных листов
определяются по выражениям
/з=/1-Гр^1^1(^1+^2)/(^Лр21);
и =/э-Урз<*зИ'э/*з;
ПОДВЕСКИ
457
*3 =
/&(/3-0,5</с)
^=2>с/»'// 2(«в1^|/^).
/-1
/-1
где Ар1 и Лр2 - соответственно толщины
первого и второго листов. Длины остальных
листов определяются по формуле (3.4.1),
принимая / =5, 6, ...,лр.
Напряжение от внешней нагрузки в
сечении последнего листа, расположенного в
плоскости осей стремянки,
о„=[оп^(/1-^с)гс]//р,
(3.4.2)
где ссп =1,2 ... 1,25 - коэффициент
деформации последнего листа рессоры; *с = /р/ }Ур =
= [«(/! -0,5^с)(/2-0^(/с)атах]/(3^/п)-
расстояние от нейтральной оси сечения листа
рессоры до крайнего волокна, работающего на
растяжение.
Напряжение от внешней нагрузки в
среднем сечении остальных листов
<*/ =
«*е/[*1('1 -°&с )-«„ «"и ]/(/р -/и ),
(3.4.3)
где /п и Жп - моменты соответственно
инерции и сопротивления последнего листа
рессоры.
Для построения эпюры распределения
напряжений по длине каждого листа следует
найти силы на концах листов по формуле
(3.4.1). Нагрузка на ушко рессоры Р\
определяется при статической нагрузке на рессору,
максимальном прогибе рессоры (упоре в
ограничитель) и одновременном действии
вертикальной нагрузки и крутящего или тормозного
момента.
При использовании выражений (3.4.2) и
(3.4.3) следует иметь в виду, что суммарный
момент инерции сечения листов рессоры /р
должен быть определен с возможно большей
точностью. Использование упрощенных
формул для определения /р в этом случае
недопустимо.
После стягивания листов рессоры
центровым болтом ее радиус кривизны К$ в
средней части будет
(3.4.4)
где лр - число листов рессоры; Л/ - радиус
кривизны каждого листа в свободном
состоянии.
Напряжение затяжки в средней части
1-го листа рессоры
""-хтМ*-**- (ЗА5)
Зная эпюру распределения напряжений
затяжки вдоль коренного листа, можно
определить стрелу прогиба /о рессоры в
свободном состоянии, предполагая, что в коренном
листе эпюра напряжений затяжки имеет
треугольную форму
/2
(3.4.6)
Л = тъ—
8 4 12 Е1с1
Рессоры изготовляют из сталей 55ГС,
55С2, 60С2, 50ХГА, 50С2ХА и 45ХМФА.
После термической обработки рессоры подвергают
поверхностному упрочнению, что резко
повышает их сопротивление усталости. Для
увеличения долговечности рессор их концы
заделывают в резиновые подушки.
Спиральная пружина вследствие простоты
конструкции и высокой удельной
энергоемкости является одним из распространенных
упругих элементов в подвесках. Удельной
энергоемкостью подвески называют
отношение работы Ау затрачиваемой на полную
деформацию всех упругих элементов, к
подрессоренной массе тп: X = А / тп . Ниже
приведены значения удельной энергоемкости
(кН * м/кг) для различных типов упругих
элементов (данные 8АЕ).
Листовая рессора 7,6 ... 11,5
Спиральная буферная пружина 12,7 ... 25,4
Цилиндрическая пружина .... 17,8 ... 28,0
Торсион 25,4 ... 38,0
Резина, работающая на сдвиг 50,8 ... 101,6
Удельная энергоемкость зависит только
от трех факторов: максимального напряжения,
количества материала (для различных
напряжений) и модуля упругости материала.
Повышение удельной энергоемкости подвески
является бесспорным преимуществом, поскольку
снижается масса упругого элемента, а
следовательно, масса подвески.
458
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
Особенность расчета спиральной
пружины связана с тем, что в процессе работы она в
большинстве случаев деформируется под
действием осевой силы сжатия, боковой силы,
изгиба и момента, вследствие чего в пружине
возникает большая неравномерность
напряжений как в отдельных витках пружины, так и
по длине каждого витка. Поэтому при
конструировании подвески со спиральной
пружиной особое внимание должно быть уделено
устранению неравномерности распределения
напряжений в пружине.
Для предварительной оценки размеров
подвески используется положение, согласно
которому энергоемкость спиральной пружины
должна быть равна работе деформации
подвески, если пренебречь трением в ее шарнирах.
Учитывая также, что при этом максимальные
напряжения в пружине не должны превышать
допустимого значения, а жесткость подвески
должна соответствовать выбранному значению,
можно определить основные размеры
спиральной пружины и передаточное число
рычагов направляющего устройства подвески.
Возможны четыре варианта расчета, которые
встречаются при проектировании подвески.
1. Выбраны диаметр прутка </пр и
отношение РПр = А1р/<*пр ^е />пр -
средний диаметр пружины). Требуется определить
число 1п р рабочих витков пружины и
передаточное число подвески:
^пр —"
0,81 С Сп^дцц
[*]2А,р^р
"л
_ ^п =ЦЗЯЗ[х]^д
<*/пр сп*пАтр
(3.4.7)
где /пр - деформация пружины; О - модуль
упругости второго рода.
2. Выбраны передаточное число подвески
ип и отношение Рпр. Требуется найти
диаметр */„ р проволоки и число 1и р ее витков:
'пр = ^
м
Число витков 1пр определяется по формуле
(3.4.7).
3. Выбраны число 1П р витков пружины
и отношение Рпр. Требуется определить
диаметр </Пр проволоки и передаточное число
ип подвески:
^пр = ,
М2РпР*п,
сп 5п Рп р
4. Выбраны число 1пр витков пружины
и передаточное число ип подвески. Требуется
рассчитать диаметр </п р проволоки и средний
диаметр Д, р пружины:
апр=<
2у0бОс*5птахип
И3*"!
в 0,393 [х]</пр
С„ 5,
п °птах «*п
Жесткость спиральной цилиндрической
пружины
г _ 401рпр
где ^р.пр " полярный момент инерции
сечения проволоки пружины.
После того как определены основные
размеры упругого элемента и передаточное
число направляющего устройства подвески,
можно выполнить ее предварительную
компоновку, а затем провести поверочный расчет.
Проектирование торсионных подвесок.
Торсионная подвеска имеет ряд преимуществ:
меньшую массу по сравнению с листовыми
рессорами (при равной энергоемкости);
лучшие компоновочные возможности по
сравнению с пружинной подвеской [30].
ПОДВЕСКИ
459
3.4.9. Значения допускаемых напряжений [ х ]
в торсионе и модуля упругости (7, МПа
Обработка
Закалка, обработка
дробью и предварительное
обжатие
То же, без
предварительного обжатия
Закалка без обработки
дробью и небольшого
предварительного
обжатия
[ т ] • Ю-*
1 ... 0,5
, 0,15 ... ОД
0,8
<?• ю-4
7,4
| 1,8
7,8
При проектировании торсионной
подвески, выбрав ее упругую характеристику,
необходимо определить основные параметры
подвески (размеры торсиона и передаточное
число направляющего устройства), с одной
стороны, обеспечив требуемую жесткость подвески,
а с другой - не превысив допустимых
напряжений в торсионах (табл. 3.4.9), от которых
зависит их долговечность и прочность.
Размеры торсиона (длина и поперечное сечение)
должны быть определены с учетом
рациональной компоновки подвески. Наиболее
распространенные сечения торсионов приведены на
рис. 3.4.13. В зависимости от выбранной
схемы подвески могут быть ограничены
некоторые размеры упругого элемента или рычагов
подвески.
1. Ограничена длина /т торсиона,
требуемые качества подвески обеспечиваются
правильным выбором ее передаточного числа
и площади поперечного сечения торсиона
(при поперечном расположении торсиона,
когда длина его ограничена габаритным
размером в поперечном направлении).
Площадь поперечного сечения торсиона
определяется, исходя из равенства работы
деформации подвески и потенциальной энергии
деформации
4®к.
ш^Фт
Л="
2сп^
Мт1 'т
где с„ - жесткость подвески; ^Птах " мак"
симальная деформация подвески, измеряемая
по вертикальному перемещению опорного
элемента; кг - коэффициент,
характеризующий рациональность использования материала
при деформациях кручения; /т - активная
длина торсиона.
Коэффициент кг зависит от формы
сечения торсиона. Для кольцевого сечения
кг = 1 + \\ (где Хт = йъ 14И ; йъ и </„ -
диаметр соответственно внутреннего и
внешнего сечений). Для круглого сечения кг = 1,
так как йъ =0. Для прямоугольного сечения
коэффициент кг зависит от отношения Ь/Н
(где Ь и Н - соответственно ширина и высота
сечения).
Значения кг для некоторых
соотношений Ь/Н приведены ниже
Ь/Н Кг
1 0,618
1,5 0,540
2 0,529
3 0,542
4 0,567
6 0,598
8 0,614
10 0,626
Зная площадь поперечного сечения
торсиона, определяют линейные размеры сечения.
Расчетные формулы в зависимости от типа
сечения торсиона имеют вид:
круглого
*т =
№
трубчатого
1»59 $п щах
</-,=
с„0
м
(Г4)Г
Рве. 3.5.13. Формы I
состоящего из набора прямоугольных
пластин
460
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
Лг =
М
V ***к<*т/т
где ат = Ь? I Л,. - отношение сторон
прямоугольного сечения; /ц. - меньшая сторона
прямоугольника; гк - число прямоугольных
пластин в стержне торсиона.
Условное передаточное число
торсионной подвески определяется из условия
непревышения допустимого напряжения в упругом
элементе:
Ит=Ы^т/Лп
где Рп
- максимальная нагрузка,
действующая на подвеску; Iрт - полярный
момент инерции поперечного сечения торсиона.
Для определения параметров
характеристики обратного хода амортизатора реальная
характеристика подвески заменяется условной
линейной, совпадающей с действительной в
двух точках с координатами Рп „до, Н^ и
Л] ст> ^ст (Рис- 3.4.14). Условная линейная
подвеска характеризуется модулем Шу
жесткости, условным статическим Н с т у и полным
г п у ходами: т^
-(*
Вещах -мест
"ст.у = -М1ст/"*у » ^п у = "ст.у +"д
личина' РПтах может быть определена, если
известна упругая характеристика подвески.
Приближенно Рп „до = сп 5П щ^ . Для одно-
рычажной торсионной подвески величина
ыТ =гт8Шфт,
где гт - длина рычага подвески; фт - угол
между осью рычага подвески и вертикалью.
20
14,
I- *<Т9
^
л
^
0 /(7
и лт
| ^Л
*0 Л,с« I
* * I
«
Определение условного передаточного
числа торсионной подвески других видов
проводится аналогично с учетом схемы подвески.
2. Ограничено условное передаточное
число подвески ит. Требуется найти длину /т
и площадь А^ поперечного сечения стержня.
Исходя из значения ит и максимальной
деформации подвески 5П „щ, определяется
(графическим или аналитическим методом)
максимальный угол закручивания торсиона
®ттах •
Размеры торсиона можно рассчитать в
зависимости от типа сечения:
круглого
С л2 в2
^п ^птах °птах
М
& &ттах
трубчатого
/т = 0,86
^п эп тах ип тах
т? (|-4)м •
,;.2Ч'1;
& 0ттах
состоящего из набора прямоугольных
пластин
/ _1^-^_ I п ^птах ^ттах
'" ['IV чь°Л*) '
^ вттах
3. Ограничен размер поперечного
сечения торсиона. Требуется рассчитать длину
торсиона /т и передаточное число ит
подвески (при использовании в качестве упругих
элементов стандартных прокатных профилей).
Длина торсиона
Рис. 3.4.14. Характеристика торсионной подвески:
1 - действительная; 2 - условная
'т =
1С к2 О
*• ^п ^п шах *•*
*г[т]2 А,
ПОДВЕСКИ
461
Условное передаточное число подвески
определяется по формулам, приведенным в п. 1.
Наибольшее распространение получили
круглые торсионы. Ниже рассмотрены
особенности выбора размеров их конструктивных
элементов (рис. 3.4.15). Согласно
отечественным рекомендациям /ш =(0,6 + 1,3)</т, по
данным 5АЕ йш =(1,2 + 1,3) </т; /ш =
= (0,48 + 0,52) </т . Для удобства сборки
допускается шлицевые концы изготовлять разного
диаметра. Угол конуса переходной части
= 15°.
/„ =
= 0,5 ( йш -ёт )/ 1&ап , радиус галтели гг =
-<1,3 + 1,5)«*т.
Наибольшее распространение получило
шлицевое крепление торсиона в рычаге и
остове трактора, причем надежными считаются
треугольные шлицы с углом между гранями
90° (рис. 3.4.15, б). При меньших углах
наблюдается неравномерное распределение
нагрузки по длине шлицев, при больших -
возникает опасность разрыва охватывающей
детали. Наибольшее распространение получили
треугольные шлицы с углом 50 ... 60° . Высота
шлицев /1=4 мм, шаг / = 3,92 мм по
делительной окружности, радиус скругления
впадин шлицев г = 0,75 мм. Из других способов
крепления торсиона следует отметить
крепление клином (рис. 3.4.15, в) и с сечением в
виде многоугольника (рис. 3.4.15, г).
Длина цилиндрической части торсиона
определяется в зависимости от активной
длины:
'о='т--1п
Рис 3.4.15. Концы торсяонд:
а - круглого: б - с треугольными шлицами;
в - при креплении торсиона клином;
г - в виде многоугольника
Обычно для возможности регулировки на
левом и правом концах торсиона нарезают
разное число шлицев, т.е. 1\ * 12- Обычно
^1 — ^2 =1 + 5, при этом минимальный угол
перестановки балансира и точность выставки
установочного угла
После выбора размеров элементов
торсионного вала необходимо провести поверочный
расчет шлицев головок торсиона на смятие:
<*С 11 = '
^ш 'ш ^
8Мттах
I
мшн мшв
\ I 1с
где Мттах - максимальный момент,
действующий на торсион; 1Ш и /ш -
соответственно число и рабочая длина шлицев;
X = 0,75 - коэффициент, учитывающий число
одновременно работающих шлицев.
Допускаемые напряжения смятия при
максимальном моменте на торсионе
Г а 1 =300 МПа.
I 1см
Остальные детали подвески (балансир и
опоры балансира) рассчитывают на прочность
обычными методами для определения
напряжений и запасов прочности в опасных
сечениях при расчетных статических нагрузках (запас
прочности 8 + 10).
Проектирование гидравлических
амортизаторов. Для обеспечения интенсивного
гашения колебаний остовов в подвесках
быстроходных тракторов устанавливают
демпфирующие элементы - гидравлические амортизаторы
(как правило, двухстороннего действия) [18].
Различают гидравлические . амортизаторы
поршневого типа (телескопические, рычажно-
поршневые) и лопастные (собственно
лопастные и рычажно-лопастные). Телескопические
амортизаторы отличают достаточно стабильные
характеристики. Если гусеничный движитель
имеет опорные катки больших размеров,
короткие балансиры и малые расстояния между
катком и остовом, то затрудняется компоновка
ходовой части гусеничного трактора.
Рычажно-поршневые амортизаторы
удобно размещаются на остове трактора и
внутри балансира. Их основной недостаток -
большие контактные напряжения в паре
кулак-поршень и, следовательно, повышенное
изнашивание. В лопастных амортизаторах
сложнее обеспечивать стабильность
характеристики в связи с трудностями надежного
уплотнения лопастной системы.
462
Глава 3.4. НЕСУЩИЕ СИСТЕМЫ ТРАКТОРОВ
Проектирование и компоновку
амортизатора проводят после выбора параметров
подвески и ее конструктивной проработки.
Исходными данными являются: параметры
кинематической схемы подвески и ее компоновочные
данные: параметры условной линейной
характеристики подвески; максимальная сила
сопротивления амортизатора на прямом ходу,
приведенная к опорному элементу Л* п р щах
при ук пр (назначается по условию
плавности хода).
Из возможности компоновки выбирается
тип амортизатора и предварительная
кинематическая схема его связи с опорным
элементом и остовом. Затем строится характеристика
амортизатора, приведенная к опорному
элементу - зависимость силы сопротивления /^
амортизатора от скорости ук перемещения
рабочего органа (рис. 3.4.16, а).
По выбранному среднему передаточному
числу ип кинематической схемы определяют
параметры и строят исходную характеристику
амортизатора (рис. 3.4.16, б): при прямом ходе
^п р = Ик п р *п > -*М1 р шах = **к п р шах ии »
при обратном ходе цоб = цк об и\ ;
^бтах=^об1ш "п (где \х -
коэффициент сопротивления амортизатора).
*пртак
м
(О) .. 1-тЩЧ Зк\ I
Яобтах
*ппр "под "п
б)
"картах
*кобтах
*кпр
^пртах
*об<
тах
{
У
\1
__^^
ъ&/
У
"пар ЩоВЪ
Рис. 3.4.16. Расчетная схема ■
характеристика телескопического амортизатора:
а - приведенная к опорному элементу;
б - исходная; 9 - расчетная;
г - с учетом работы предохранительного клапана
При выборе ип следует иметь в виду,
что его увеличение приводит к возрастанию
габаритных размеров амортизатора, а
уменьшение - к большим рабочим ходам, что
затрудняет компоновку амортизатора.
Рекомендуемые значения ии приведены ниже для
амортизаторов различных типов.
Телескопический 1 ... 1,5
Рычажно-поршневой 2 ... 4
Рычажно-лопастной 0,5 ... 1
Лопастной 1
Максимальный перепад давлений в
рабочих полостях амортизатора Рщдх =15 ... 25
МПа выбирается из условия получения
приемлемых его габаритов и теплопроводности.
Определение основных параметров
амортизатора, приведенных к опорному
элементу. Коэффициент Ик Пр сопротивления
амортизатора на прямом ходу определяют по
Дк пр тах :
^к пр=^к пр тах / ук пр-
При обратном ходе из условия
независания опорного элемента при движении
трактора по неровностям
Икоб = 'яу7'/1п(лпу/Лст.у)>
где Г=0,2 с ■ время опускания опорного
элемента от положения "на упоре" до
статического; ту , Лпу, Лет.у - параметры условной
подвески с линейной характеристикой.
Максимальная сила сопротивления
амортизатора на опорном элементе при обратном
ходе определяется характеристикой подвески;
принимается В^ об щах = ^к тах • °на
Достигается при скорости опускания
ук об = ук об тах = ^к об тах/ ^к об •
Характеристику амортизатора,
приведенную к опорному элементу, строят по заданным
величинам % Пр тах » укпри -*чс о б тах»
V* об тах •
Расчет телескопического амортизатора.
Определяются основные конструктивные
размеры амортизатора. Ход поршня
*п =Лп/"п +Д.У,
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ
463
где А 5 = 10 + 20 мм - запас хода для
предотвращения касания поршнем дна цилиндра
амортизатора.
При Д™ шах ^ Аоб шах максимальное
давление рабочей жидкости достигается при
прямом ходе и приходится на площадь
4,р=Длр тах/Ртах- Диаметр поршня
/)п = 1ДЗ «Мпр » его значение округляется
до ближайшего стандартного размера и
уточняется значение Ллр. Диаметр штока
Ат = //>„ , здесь / =0,3 ... 0,45.
При ЛпР щах < ^об шах задаются
величиной /, тогда 4>б = /?об тах IРтах \
/>п =1,13 ^4>б/(1-Г2).
Суммарная площадь отверстий
обеспечивает характеристику амортизатора при прямом
( А\ ) и обратном ( А} ) ходах.
При прямом ходе
А1 = -Ае- ^0^РАпрВ„р~, (3.4.8)
^прГ1
где р - плотность рабочей жидкости.
Площадь А\ состоит из площадей
отверстий 1, 2, 4 (см. рис. 3.4.16),
перепускающих жидкость из камеры прямого хода в
камеру обратного хода и в компенсационную
камеру. Чтобы в компенсационную камеру
при прямом ходе перетекал только объем
жидкости, вытесняемый штоком, площадь
отверстий в компенсационную камеру при
прямом ходе должна составлять
^к п р = ^1 ^шт / ^п р»
где Аип - площадь штока.
При обратном ходе
А2 = -^- ^рЛобЛобтах (3.4.9)
При проектном расчете входящие в
(3.4.8) и (3.4.9) коэффициенты у\ и у2 ПРИ
соотношении длины /0 и диаметра */0
отверстий /0 / А0 > 3 можно принимать
равными, у! =у2 =0,6 ... 0,7.
Площадь отверстий 3 (см. рис. 3.4.16)
для прохода жидкости из компенсационной
камеры в камеру прямого хода при обратном
ходе
А Ащг Л>б тах ГГа~Г~
НобУЗ
где уз =0,2 ... 0,4; Ар =0,03 ... 0,04 МПа -
разряжение, допускаемое в цилиндре.
Число и диаметры калиброванных
отверстий определяют по найденным площадям
во время конструктивной проработки
амортизатора. При расчете характеристики
амортизатора давление в его полостях рассчитывают по
формулам:
прямой ход
я _ ЛпрУдР
обратный ход
2А2 У2
По заданной скорости поршня уп и
найденным давлениям можно определить
силы сопротивления амортизатора при
прямом и обратном ходах: ДпР = РпрАпр*
Доб=/>обЛ)б- Используя результаты
расчетов, строят уточненную характеристику
амортизатора (рис. 3.4.16, в). Затем рассчитывают
детали амортизатора на прочность: шток (на
разрыв и устойчивость); резьбовые соединения
штока (на срез); сварные соединения (на
разрыв). Расчеты проводят при максимальной
силе сопротивления амортизатора, запас
прочности л, ^ 3.
При компоновке амортизатора в ходовой
части трактора находят такие точки крепления
амортизатора к деталям подвески и остову,
чтобы была возможна работа амортизатора и
передаточное число при динамическом ходе
опорного элемента было близко к принятому
при расчете (отличие от заданного не более,
чем на 10 %).
Глава 3.5
РАБОЧЕЕ МЕСТО ОПЕРАТОРА.
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ
И ОХРАНЫ ТРУДА
Требования к условиям труда оператора.
Эргономические показатели трактора
регламентируются комплексом нормативных
требований, характеризуют степень удобства и
эффективности выполнения операторских
функций и разделяются на четыре группы (рис.
Глава 3.5. РАБОЧЕЕ МЕСТО ОПЕРАТОРА
Эргономические показатели трактора
Г
Гигиенические
ш
Уровень звука нерабочем месте оператора
в кабине (ГОСТ 12. /. 005- 83)
Концентрация пыли 8 кабине 8
зависимости от содержания $10г и оксида,
углерода (ГОСТ 12.2.120-88)
Параметры Вибрации В Вертикальном
направлении на сиденье оператора
(ГОСТ12.2.120-88)
Параметры вибрации 8 горизонтально*
направлении на сиденье оператора
[ГОСТ12.2.120- 88)
Параметры вибрации на органах
оправления тракторов (ГОСТ 12.1.120-&в )
Микроклимат в кабине: температура,
влажность, скорость движения воздуха в
зоне дыхания оператора (ГОСТ 12.2 120-88)
Перепад температур В кабине
(точки измерения по ГОСТ 122.002-81)
Освещенность участков поля и дороги
(ГОС Г 12.2.120 - 88)
т
т
Антропометрические
X
Физиологические
Зоны досигаемости
моторного поля оператора,
определенного
антропометрическими данными
(ГОСТ 12.2.0*9-80)
Ш
Внутренние размеры кабины
трактора (ГОСТ12.2.120-86)
Расположение органов
ипра в лени я: рулевого колеса,
рычагов механизмов
поворота, опорных площадок,
часто ьхполъ зиемых педалей
и др. (ГОСТ 12.2.120-88)
Расположение вспомогатель
ных органов управления,
рукояток,
кнопок,тумблеров, выключателей и т.п.
X
1
Психологические
Сивы сопротивления
перемещению органов
управления (ГОСТ 12.2.120-88)
т
Размеры рукояток и других
ручных органов управления
(ГОСТ 21153-16)
Полный ход педалей и рыча
гов и средства приведения
в действие основных
органов управления
Наличие средств
автоматизации управления
X
Средства отображения
информации
(ГОСТ 12.2.120-88)
Кодирование средств
отображения инфорпа-
ии(ГОСТ 21829-76)
^строение мнемосхем]
76)
Обзорность с рабочего
места оператора вря
бочем положении сидя
(ГОСТ 12.2.120-88)
и:
Аварийно-предупредительная сигнализация
Размере и расположение
сиденья (ГОСТ20062-81)
Рас. 3.5.1. Эргономические показатели трактора
3.5.1) [30]. Комплекс факторов, действующих
на трактор, режим работы узлов и систем,
повышение рабочих скоростей и рост числа
агрегатируемых машин повышают
напряженность труда. В этих условиях особое место в
решении проблемы обеспечения требований
по условиям труда и техники безопасности
занимает кабина трактора. Установка
защитных кабин, оснащение их средствами
нормализации микроклимата и оборудованием,
улучшающим условия работы и повышающим
безопасность труда, снижение уровня шума за
счет шумоизоляции кабин привели к
значительному росту их массы. Масса кабины
достигает 10 % массы трактора.
,/
/
\яо
Я20т
т\
250
• \
\
%
' 1
|
Рис. 3.5.2. Размеры зоны ограничения деформации ■ ее
расположение для сельскохозяйственных тракторов
Колесные сельскохозяйственные и
гусеничные виноградниковые тракторы снабжают
защитными кабинами, которые должны
обеспечивать при опрокидывании трактора
сохранение внутри кабины зоны свободного
пространства относительно сиденья,
расположенного в крайних заднем и верхнем
положениях при наклонной назад спинке (рис. 3.5.2).
При двухместной кабине аналогичная зона
должна сохраняться и для второго рабочего
места.
Конструкция кабин ■ защитных устройств.
Кабина должна обладать податливостью,
обеспечивающей снижение инерционных нагрузок,
действующих при опрокидывании трактора в
момент удара кабины о поверхность почвы
(грунта) [9]. Вид аварийной ситуации во
многом определяет их конструктивное
исполнение. Рассмотрим наиболее характерные
аварийные ситуации для тракторов различного
назначения. Так, для колесных
сельскохозяйственных и лесохозяйственных тракторов
классической компоновки наиболее часты случаи
опрокидывания набок, на передний стык и
назад; при опрокидывании трактор может
совершить несколько оборотов. Для
промышленных тракторов характерны боковое
опрокидывание с переворачиваем через крышу
кабины и падение тяжелых предметов
(камней, мерзлой земли и др.) на крышу, для
лесопромышленных тракторов - падение на
кабину, капот двигателя и на крышу деревьев,
веток и сучьев.
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ
465
Рис. 3.5.3. Классификация кабин по использованию
устройства защиты оператора трактора:
а - кабины сельскохозяйственных тракторов
(1,П,Ш, - соответственно с четырех-, шести- и
двухстоечным каркасом,); б - кабины промышленных
тракторов с каркасом арочного типа (IV - каркасы
КОРЗ и РОР5 встроены в констукцию кабины;
V - раздельное исполнение кабины и защитного
каркаса КОРЗ); в - кабины лесохозяйственных и
лесопромышленных тракторов (IV - каркасы арочного
типа ЕОРЗ и КОРЗ встроены в конструкцию кабин ;
VII - каркасы КОРЗ и ЕОРЗ со всеми несущими
стрйками; VIII - защитный каркас арочного типа
расположен снаружи кабины)
Различают кабины с двухстоечными
(арочного типа) и многостоечными (четыре-
шесть) каркасами (рис. 3.5.3). Условия
эксплуатации и характерные виды аварийных
ситуаций обусловили применение для кабин
сельскохозяйственных тракторов четырех-
шестистоечных каркасов. В отдельных случаях
на этих тракторах устанавливают двухстоечные
каркасы с усиленной передней частью крыши
и передней стойкой кабины. На
промышленных тракторах устанавливают двух- или шес-
тистоечный каркас с защитной аркой,
встроенной в конструкцию кабины или
расположенной снаружи ее.
Защитные каркасы КОРЗ и РОРЗ
защищают водителя, соответственно, при
опрокидывании трактора и от падающих предметов.
Кабины лесохозяйственных и
лесопромышленных тракторов по конструкции аналогичны
кабинам сельскохозяйственных тракторов, но
имеют дополнительное устройство (ОРЗ) для
защиты от падающих предметов и от
проникновения деревьев в кабину при их
транспортировании и выполнении технологических
операций. Для защиты оператора
промышленных и лесопромышленных тракторов от
падающих предметов козырек или крышу
кабины выполняют из металлического листа,
рассчитанного на энергию удара, равную
11,6 кДж.
Размеры рабочего места оператора.
Размеры кабины зависят, прежде всего, от
антропометрических данных оператора; размеров
зон размещения органов управления,
контрольно-измерительных приборов,
индикаторов и систем нормализации микроклимата,
теплоизоляции, средств огнетушения и др. В
кабине должно быть место для одежды,
количество которой и объем определяются
индивидуальными особенностями человека и
периодом года. Технические условия на конкретные
модели тракторов могут содержать требования
по оборудованию кабины дополнительным
сиденьем,
Антропометрические данные оператора
можно выбрать из ИСО 3411-82 или
антропометрического атласа. В стандарте ИСО
приведены данные операторов низкого и высокого
роста в положениях сидя и стоя. Операторы
низкого роста составляют 5%-ную группу,
операторы высокого роста - 95%-ную группу.
Рас. 3.5.4. Рабочее пространство для оператора
сельскохозяйственного трактора, рассчитанного на
работу садя (В - расстояние от наруашой поверхности
кабаны а других органов управления, за исключением
установленных на рулевой колонке)
466
Глава 3.5. РАБОЧЕЕ МЕСТО ОПЕРАТОРА
кьоо
400 , 500
КЮ50
Рас 3.5.5. Рабочее пространство
дм оператора промышленного трактора,
рассчитанное на работу садя в спецодежде
Внутренние размеры кабины задаются от
контрольной точки сиденья (КТС) по
ГОСТ 27715-88. Минимальные размеры
одноместной кабины и кабины с дополнительным
сиденьем, рассчитанные на работу сидя, для
сельскохозяйственных и лесохозяйственных
тракторов приведены на рис. 3.5.4 и
регламентируются ГОСТ 12.2.120-88, а для
промышленных тракторов на рис. 3.5.5
(ГОСТ 12.2.121-88).
Число рабочих мест в кабине трактора
определяется его техническими условиями.
Управление агрегатами, составленными
на базе трактора, не требует присутствия
второго оператора. В перспективе, благодаря
расширению применения автоматических
систем регулирования, управления и контроля
работы трактора и агрегатируемой машины,
отпадает необходимость в таких
специальностях, как сеяльщик, подсобные рабочие для
перевода машин в транспортное положение
при переезде с поля на стан. На тракторах
будут преобладать одноместные кабины с
дополнительным сиденьем, устанавливаемым по
заказу. Так как минимальный внутренний
размер кабины по ширине определяется
межлоктевым размером оператора среднего
роста, ниже в этой зоне слева и справа от
оператора могут быть размещены и основные
органы управления. Для универсально-
пропашных тракторов максимальная ширина
на уровне пола определяется расстоянием
между колесами, установленными на
минимальную колею, а минимальная ширина на
уровне 265 ... 485 мм - размерами сиденья
оператора. Различие между этими размерами -
свободная зона для размещения органов
управления. Таким образом, размеры сиденья
и колеи объективно обусловили наличие зоны
расположения органов управления, но для
различных машин она разная. Рассмотрим
требуемые размеры посадочного места.
Анализ действующих нормативов
посадочных мест отечественных и зарубежных
сидений показал, что ширина подушки сиденья
450 ... 560 мм, а ее глубина 320 ... 520 мм,
ширина подушки спинки 320 ... 470 мм,
высота спинки ПО ... 550 мм, что объясняется, во-
первых, отсутствием единых эргономических
рекомендаций по выбору их параметров и, во-
вторых, широким диапазоном
антропометрических данных человека. Отечественными
стандартами установлено, что ширина
подушки сиденья должна быть не менее 450 мм,
при установке подлокотников шириной
50 ... 100 мм общая ширина сиденья
600 ... 700 мм, глубина 400 мм, а с учетом
наклона спинки сиденья назад на угол до 20°
(высота спинки 350 ... 400 мм) без учета
регулировки сиденья по длине и высоте общая его
длина 500 мм.
Для управления машиной водителями
различных антропометрических групп сиденья
должны быть регулируемыми по горизонтали
от среднего положения на ± 75 мм и по
вертикали - на ± 40 мм. Удобство использования
органами управления машиной зависит от их
расположения относительно сиденья;
выбранные оптимальные зоны стандартизованы
как государственными, так и международными
стандартами (рис. 3.5.6).
Размеры по горизонтали и вертикали
(Н и 5) между центром КТС и центром руле-
Чв5±50
Рнс. 3.5.6. Взаимное расположение сиденья,
педалей сцепления, томозной подачи топлива
и рулевого колеса:
/ - рулевое колесо; 2 - педаль сцепления; 3 - педаль
рабочей томозной системы; 4 - педаль подачи топлива
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ
467
вого колеса выбирают с учетом назначения
машины следующими.
Я (±20), мм.. 435 455 475 495 515 535
$(±20), мм.. 715 695 685 665 645 625
Увеличение размера Н приводит к
уменьшению размера 8> и наоборот, что
вызвано необходимостью обеспечения удобной
посадки водителя.
Положение рулевой колонки в
продольной плоскости должно регулироваться по углу
установки бесступенчато с фиксацией не менее
чем в четырех положениях и по высоте (вдоль
оси колонки) на 100 ± 20 мм и ступенчато с
фиксацией не менее чем в пяти положениях.
Возможности компоновки органов
управления тракторов в значительной степени
зависят от типа привода. Наибольшее
распространение в настоящее время получили
механический, гидравлический, электрический,
пневматический и различное сочетание из
последних трех типов приводов. В
зависимости от применения указанных типов привода
различают конструктивное исполнение
органов управления (рычажное, кнопочное и
комбинированное), размеры и способ
перемещения (пальцами, кистью, кистью с
предплечьем, рукой, двумя руками). Органы
управления (рукоятки, кнопки, тумблеры,
выключатели и др.) должны находиться в пределах зон
досягаемости моторного поля оператора,
определяемого антропометрическими данными
(ГОСТ 12.2.049 - 80) в рабочем положении
сидя.
Расстояние от рукояток рычагов (во всех
положениях) до элементов рабочего места и
между рукоятками должно быть не менее
50 мм для приводимых в движение кистью и
не менее 25 мм для приводимых в движение
пальцами. Минимальная длина свободной
части рычага вместе с рукояткой в любом его
положении должна быть 50 мм для захвата
пальцами и 150 мм для захвата всей кистью.
Опорные площадки основных педалей
должны иметь длину и ширину не менее
60 мм. Расстояние между кромками площадок
рядом расположенных неблокируемых педалей
50 ... 100 мм, блокируемых 5 ... 20 мм. Угол
разворота опорных площадок педали,
приводимых в действие стопой ноги от продольной
плоскости оси машины, не должен превышать
15°.
Для прохода на рабочее место в кабине
должно быть обеспечено свободное
пространство шириной не менее 300 мм между
кромкой проема двери и подушкой сиденья,
находящегося в среднем положении по
регулировкам. Кабина трактора должна иметь не менее
трех аварийных выходов, которыми могут
служить двери, окна, люки, причем каждый
выход следует размещать на противоположных
сторонах кабины. Выполнение этого
требования важно для повышения безопасности, так
как тракторы часто работают в отдаленных от
населенных пунктов местах и заклинивание
двери может привести к тяжелым
последствиям, когда человек окажется заключенным
внутри кабины. Минимальные размеры
аварийных люков должны быть такими, чтобы в
их поперечное сечение вписывался эллипс с
главными осями 640 и 440 мм. Аварийные
выходы должны открываться без помощи
инструмента.
Действующими стандартами
предусмотрено оборудование кабин тракторов
медицинской аптечкой, инструментальным ящиком,
огнетушителем, пепельницей, термосом для
питьевой воды объемом 3 л, плафоном
внутреннего освещения, стеклоочистителем с
электрическим (переднее стекло) и (допускается) с
механическим (заднее стекло) приводом, омы-
вателем стекол. При наличии реверсного поста
управления трактором и заднее стекло должно
иметь электрический привод
стеклоочистителя. По заказу потребителя кабина может
оборудоваться радиоприемником, для чего
необходимо предусмотреть место установки его и
антенны. При температуре окружающего
воздуха до 15 °С кабина должна оборудоваться
системой, устраняющей запотевание и
обледенение передних стекол в зонах, очищенных
стеклоочистителями. Для обеспечения
требований по микроклимату в летний и зимний
периоды в кабине устанавливают отопитель-
кондиционер или охладитель, которые могут
выполняться в едином блоке, так и раздельно.
При раздельном исполнении отопитель
целесообразно располагать внутри кабины внизу
либо воздух подавать снизу и на переднее
стекло кабины.
Транспортные кондиционеры автономны
и, как правило, устанавливаются в передней
части крыши кабины (рис. 3.5.7). В теплый
период года температура воздуха в кабине не
должна превышать для всех зон +28 °С
при относительной влажности 40 ... 60 %,
в холодный период должна быть не ниже
+14 °С при температуре наружного воздуха
-(20 ± 1) °С . Относительная влажность
воздуха в кабине трактора не должна превышать
60 %, допускается ее увеличение на 10 % в
районах с повышенной влажностью. Перепад
температур воздуха в кабине трактора между
точками измерения на уровне головы и ног в
теплый и холодный периоды года не должен
превышать 4 °С . Температура воздуха в
кабине в теплый период в зависимости от зон и
средней температуры наружного воздуха в 13 ч
дня должна быть +28 °С для зоны с
температурой наружного воздуха +25 °С; 31 °С
для зоны с температурой наружного воздуха
468
Глава 3.5. РАБОЧЕЕ МЕСТО ОПЕРАТОРА
Рис. 3.5.7. Схема расяределеяжя воздуха
в кабанах тракторов серий 55 ■ 85
фирмы Интернейшнл Характер:
1 - выпускные отверстия; 2 - вентилятор;
3 - испаритель с терморегулирующим вентилем;
4 - отопите ль; 5 - воздушный фильтр ( с обеих
сторон); б - забор наружного воздуха; 7- отверстия
подачи воздуха в зону ног оператора;
8 - компрессор; 9 - конденсатор; 10 - ресивер
+25 ... 30 °С и +33 °С для самого жаркого
месяца при температуре наружного воздуха
более +30 °С. Система вентиляции должна
обеспечить в закрытой кабине избыточное
давление не ниже 10 Па и 20-кратный обмен
воздуха в течение 1 ч. Избыточное давление
характеризует степень герметичности кабины и
исключает попадание пыли в ее зону, а
заданная кратность обмена позволяет обеспечить
температуру воздуха в заданных пределах.
Заданный уровень звука на рабочем
месте оператора (ГОСТ 12.1.003 - 83) достигается
созданием замкнутой кабины, отделенной
упругими элементами от остова трактора,
обеспечением ее герметичности, устранением
10 вибрации панелей и деталей, использованием
звукопоглощающих материалов для
внутренней обивки панелей, двухслойным
ограждением их с воздушным зазором; установкой
двигателя на виброизоляторы и применением
эффективных глушителей шума при впуске и
выпуске.
Обзорность с рабочего места оператор!.
Обзорность с рабочего места оператора
относится к числу основных эргономических
показателей и регламентируется ГОСТ 12.2.120 - 88.
В качестве основного оценочного показателя
принят угол обзора функциональных зон и
объектов наблюдения, соизмеримый с
психофизиологическим показателем - углом зрения
оператора.
Расположение точки К отсчета
параметров обзорности относительно КТС сиденья
установлено стандартом и для
сельскохозяйственных тракторов имеет координаты: 670 мм
вверх и 10 мм вперед. Значения параметров
обзорности приведены в табл. 3.5.1.
Система отсчета нормативных
показателей обзорности для сельскохозяйственных и
лесохозяйственных тракторов дана на рис.
3.5.8. С рабочего места оператора на универ-
8)
Рас 3.5.8. Система отсчета параметров обзорности для тракторов:
а - сельскохозяйственных; б - промышленных
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ
469
3.5.1. Значения углов обзора (°) сельсжохозяйственных тракторов (рис. 3.5.8, а) [30]
Зона обзора; угол
Передняя:
«1
р;2
02
Боковая:
Уь Уз
У2> У4
Дополнительная боковая 1у$ 1
Задняя:
а2
рз
р;4
Передняя (через часть лобового стекла,
очищаемую стеклоочистителем):
«3
Р5
Рб
Трактор
колесный* тягового класса
0,6 ... 2
60
12
35
10
35
45
30
11
30
20
8
20
свыше 2
60
8
35
5
25
-
30
8
30
20
5
20
гусеничный
60
5
35
5
30
-
30
8
30
20
3
20
Для тракторов классов 5 и выше со смещенным вправо сиденьем ад = 60° влево;
а 2 = 25е вправо; Рг = 35е ; у 4 = 20° •
*2 Для машин, выполняющих транспортные работы на дорогах общей сети.
*3 При наличии стекол в нижней части дверей кабины.
*4 Допускается для тракторных самоходных шасси с расположением двигателя сзади
кабины уменьшение угла до 20° .
сально-пропашных тракторах должна быть
обеспечена видимость точек 1 и 2 (рис. 3.5.9),
а для колесных тракторов 4К46 классов 3-5
необходимо обеспечить обзор участка А
площадки перед передним колесо (рис. 3.5.10). На
гусеничных тракторах классов 2-5 должен
быть обеспечен обзор передней части гусениц
(точка I) и участка А\9 площадки перед
гусеницей (рис. 3.5.11). Если видимость гусениц
по каким-либо причинам исключена,
например, закрыта крылом, то допускается
обеспечение видимости точек крыла или другого
элемента конструкции (визира),
соответствующих точке 1.
470
Глава 3.5. РАБОЧЕЕ МЕСТО ОПЕРАТОРА
К - точка отсчета
параметров обзорности
относительно КТС
(контрольная точка
сиденья);
1 и 2 - точки
видимости
Рис. 3.5.9. К определению
универсально-
обзора передних колес
тракторов
Рис. 3.5.10. Зона обзора участка А
перед передним правым колесом тракторов 4К46 классов 3 и 5
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ
471
Рве 3.5.11. Зова обзора часта гтееявцы тражтороа классов 2-5
При использовании тракторов на
транспортных работах на дорогах общего
назначения на них распространяются правила ЕЭК,
ООН, согласно которым в пределах каждого
сектора (7, 2, 3) вне круга площадки (рис.
3.5.12) допускается не более двух невидимых
участков. Ширина В невидимых участков в
секторе 1 не должна превышать 700 мм, а в
секторах 2 и 3 - 1 200 мм; в каждом из
секторов 2 и 3 допускается увеличение ширины В
одного из невидимых участков до 1500 мм,
при этом ширина другого участка не должна
быть больше 700 мм. Наличие таких
требований по обзорности предопределяет ширину
элементов кабины или каркаса. Точка К\
отсчета обзорности передней зоны для
промышленных тракторов имеет координаты: (663 ± 5)
мм выше КТС и 60 мм вперед по ходу
трактора (рис. 3.5.13). Учитывая характер
работы оператора на промышленных тракторах,
зона обзора определяется от точек А^ и Аз
счета обзорности задней зоны, расположенных
на расстоянии 200 мм слева и справа от точки
X
V
<
1
(ктс)
V.
\Г
°\
Р1
1м> ♦
Рве. 3.5.13. Распопов
точек отсчета обзорности
КТС
Рве. 3.5.12. Вертикальная проекция передней зоны
обзора (для колесных тракторов класса 5 в выше
К « 17 000 мм)
Передняя зона ограничена углами
а>У»а2>?1 и УЗ с вершиной в точке К\
(см. рис. 3.5.8, 0), а задняя - углами ^ и У2
с вершинами в точках А2 и Ку В передней
зоне обзора, ограниченной углами а2 и уз ,
один из лучей которых проходит через точку
К\ и точку /, расположенную на верхней
части обвода гусеницы (см. рис. 3.5.8, б),
оператор должен видеть гусеницы площадью не
менее ЬЬу =0Д1 ОД/* (где Ь - база трак-
472
Глава 3.5. РАБОЧЕЕ МЕСТО ОПЕРАТОРА
тора, Ь - ширина гусеницы), а в зоне,
ограниченной углом у \, - наружную кромку
гусеницы длиной 0,1 Ь. Минимальные значения
углов, ограничивающих зоны обзора с рабочего
места оператора промышленного трактора,
приведены в табл. 3.5.2. При работе на
промышленном тракторе оператор должен видеть
поверхности и объекты, указанные в табл.
3.5.3. Методика определения обзорности
графоаналитическим методом разработана в
НАТИ.
Площадь остекления кабины наряду с
улучшением обзорности с рабочего места
оператора существенно влияет на температуру
воздуха в кабине как в теплый, так и
холодный период года. Это, в свою очередь,
отражается на затратах энергии для создания
комфортных условий труда оператора. Количество
теплоты, вырабатываемой человеческим
организмом, зависит от возраста, пола,
интенсивности мышечной работы, состояния нервного
возбуждения и температуры окружающей
среды. Интенсивность мышечной работы
определяется, в первую очередь, силой
сопротивления перемещению органов управления (табл.
3.5.4) и частотой пользования ими. Сила
сопротивления зависит от типа привода.
Например, для управления распределителем
гидросистем при механическом приводе допускается
сила сопротивления 100 Н, а при
гидравлическом 25 Н, т.е. в 4 раза ниже. Очевидно, что
при прочих равных условиях работа на их
перемещение будет отличаться во столько же
раз. Поэтому недопустим формальный подход
к выполнению требований стандартов.
Конструктору необходимо учитывать влияние
различных факторов на теплоту, выделяемую
человеком, в том числе тяжесть физического
труда. Организм оператора мощного трактора
вырабатывает за 1 ч до 1600 кДж теплоты, а
среднего - до 630 кДж, что соответствует
средней и легкой степени тяжести работы.
Нормальное протекание биохимических процессов
в организме человека происходит при
обеспечении постоянства температуры внутренних
органов и тканей в пределах (37 ± 0,5) °С.
Терморегуляция осуществляется с помощью
гипоталамуса мозга.
3.5.2. Максимальные углы (°) зон обзора промышленных трактороа (см. рис. 3.5.8, б)
Зона обзора; угол
Передняя:
а
У
Передняя со стороны наблюдения:
дополнительного, у\
преимущественного:
Гз
а2
Задняя:
*
а1
Уз
6; 10; 15
9
9
20
20
35
50
40
Грактор тягового класса
25; 35; 50
8
9
32
32
32
45"
30
75
7
9
30
30
30
43
30
В направлении на зуб рыхлителя.
** Кроме трактора с передним расположением
кабины.
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ
473
т
±ш
"> I,
Рас. 3.5.14. Объекты наблюдены оператора промышленного трактора
3.5.3. Объекты наблюдения (см. рис. 3.5.14)
Зона (см. рис. 3.5.8, 6)
Часть агрегата, участок или объект
Расстояние видимости или
размер участка
Ограниченная углами а и у
Ограниченная углами а 2 и уз
Ограниченная углом у^
Наблюдение из точжи К\
Перед центральной частью отвала
Верхняя кромка отвала бульдозера
Вертикальная кромка отвала
бульдозера
Параллельно гусенице трактора
Параллельно гусенице трактора
/^ не более 7 Ь
/2 не более 0,15
Л не менее 0,6 Н
/3 не более 1,5 2?
/4 не более 1,7 2?
Наблюдение из точки К\ и (или) Ку
Ограниченная углами а. и у2 [Наконечник зуба рыхлителя,
1 опущенный на грунт
Следы гусеницы
Шток гидроцилиндра наклона
зуба рыхлителя
/5 не более 2,5 Ь
Наблюдение из точки, не совпадающей с точкой К\
(отклонение определяется площадью круга с радиусом 0,3 м и центром в точке К\)
Незащищенные шланги и штоки
гидроцилиндра отвала бульдозера
474 Глава 3.5. РАБОЧЕЕ МЕСТО ОПЕРА1ОГА
Продолжение табл. 3.5.3
Зона (см. рис. 3.5.8, б)
Часть агрегата, участок или объект
Перед отвалом бульдозера
Тыльная часть отвала бульдозера
Расстояние видимости или
размер участка
/$ не более 3 Ь
1у • 1\ не менее
0,05 $• 0,1 Н
3.5.4. Силы (//) сопротивления перемещению органов управления
Орган управления
Сцепление:
с усилителем
без усилителя
Коробка передач:
переключение на ходу
переключение при остановке машины
Механизм поворота:
без гидроусилителя
с гидроусилителем
с гидрообъемным приводом
при аварийной ситуации
Рабочий тормоз
Стояночный тормоз
Регулятор частоты вращения двигателя
Распределитель гидросистемы с приводом:
механическим
электрогидравлическим
гидравлическим
Вал отбора мощности
Остальные органы
Управление
ножное
120/150
120/250
-
-
-
-
-
-
200/250
-
60/-
-
-
-
-/250
-/250
ручное
60/-
-
60/-
160/-
50/100
50/60
-/50
-/600
160/200
200/350
30/80
60/100
5/-
5/25
160/200
-/150
Примечание. В числителе указано оптимальное значение силы сопротивления, в
знаменателе - максимальное.
РАБОЧЕЕ ОБОРУДОВАНИЕ
475
Глава 3.6
РАБОЧЕЕ ОБОРУДОВАНИЕ.
СИСТЕМЫ АВТОМАТИЗАЦИИ
3.6.1. РАБОЧЕЕ ОБОРУДОВАНИЕ
Рабочее оборудование (РО) - механизмы
и устройства, обеспечивающие привод и
управление агрегатируемыми с трактором
машинами и орудиями. К РО относятся: тягово-
сцепные устройства (ТСУ), валы отбора
мощности (ВОМ), приводные шкивы (ПШ),
гидравлические навесные системы (ГНС) и
системы отбора мощности (ГСОМ).
Для работы с прицепом тракторы
оборудуются дополнительным специальным
транспортным ТСУ (рис. 3.6.1), прикрепляемым
сзади к остову трактора и оснащенным
присоединительным элементом в виде вилки или
крюка /. Особенностями такого ТСУ
являются: более высокое его расположение;
возможность поворота присоединительного элемента
вокруг продольной оси; наличие
направляющего раструба 2 и автоматически
запирающегося замыкателя 3 зева вилки или
крюка, а также амортизатора 4 двустороннего
действия, снижающего динамические нагрузки на
трактор при трогании с места или при
движении.
Регламентируемыми параметрами и
размерами ТСУ являются: форма и размеры
присоединительных элементов; координаты точки
соединения относительно опорной
поверхности трактора и хвостовика ВОМ; размеры
зоны свободного пространства, определяющие
допустимые отклонения дышла агрегатируемой
машины относительно точки присоединения;
предельные вертикальная и горизонтальная
статические нагрузки на соединительный
элемент. Значения перечисленных параметров и
размеров обычно задаются едиными для
тракторов определенного ряда тяговых или мощ-
ностных классов.
Расчет на прочность ТСУ проводится для
случая совместного действия предельной
вертикальной нагрузки и максимальной силы
тяги.
Рис. 3.6.1. Транспортное тягово-сцепное устройство
Вал отбора мощности (ВОМ) служит для
привода активных рабочих органов (АРО)
агрегатируемых машин и оборудования от
двигателя. Отбор мощности осуществляется от
шлицеванного хвостовика специального вала
трансмиссии трактора или отдельного
редуктора. По принципу действия ВОМ
подразделяют на зависимые, частично независимые,
независимые и синхронные, по расположению
- на задние, передние и боковые [13]. На
большинстве сельскохозяйственных тракторов
задний ВОМ применяется в качестве
стандартного оборудования, меньшее, но
возрастающее число моделей тракторов, оснащено
передним ВОМ и лишь единичные -
боковыми. Все ВОМ, кроме синхронных, имеют
только правое (со стороны торца хвостовика)
вращение.
Задний независимый ВОМ (рис. 3.6.2, а)
приводится от двигателя через муфту
сцепления 7, первичный вал 2 коробки передач,
зубчатые пару 3 и муфту 4. ВОМ вращается
только при включенных муфтах 1 и 4 и поэтому не
позволяет осуществлять следующие операции:
последовательный разгон орудия и трактора,
что увеличивает необходимую для разгона
мощность и обусловливает дополнительные
огрехи; кратковременную остановку трактора
без остановки оборудования, что затрудняет,
например, его очистку; включение и
выключение привода оборудования без остановки
трактора, что снижает удобство управления и
безопасность работы и увеличивает операционное
время. Вследствие этого зависимые ВОМ
почти не применяются.
Частично независимые ВОМ,
относительно простые по конструкции, позволяют
осуществлять все перечисленные операции
кроме остановки орудия без остановки
трактора и находят достаточно широкое применение.
Наиболее распространенная схема такого
ВОМ (рис. 3.6.2, б) предусматривает
использование двойных фрикционных муфт, у которых
один ведомый диск 5 связан с первичным
валом 2 КП, а ведомый диск 6 через зубчатую
пару 3 и муфту 4 с ВОМ. Управление муфтами
осуществляется одной педалью, при нажатии
на которую сначала отключается лис к муфты
сцепления, а затем муфты ВОМ. Таким
образом обеспечивается выключение только одной
муфты сцепления или двух сразу.
Независимый ВОМ как основной тип
позволяет выполнять все необходимые
операции благодаря введению раздельного
управления дисками сдвоенной муфты или
использованию отдельных муфт для трансмиссии и
ВОМ (рис. 3.6.2, в).
Особенностью синхронного ВОМ
является то, что привод его осуществляется от
вторичного вала КП или другого вала
трансмиссии за КП. Синхронный ВОМ вращается
только при вращении ведущих колес трактора,
направление его вращения различно при дви-
476
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
жении трактора вперед или назад, угловая
скорость ВОМ изменяется пропорционально
угловой скорости вторичного вала КП, а число
оборотов ВОМ пропорционально
пройденному трактором пути. Такой режим работы ВОМ
необходим для привода РО машин для
внесений удобрений, сеялок, фрезерных
культиваторов, почвенных фрез, прицепов и
полуприцепов с ведущими колесами и др.
В связи с разнообразием требований,
предъявляемых к ВОМ, преобладающими
стали конструкции^ сочетающие частично
независимый или независимый ВОМ с синхронным
(рис. 3.6.2, г, д). В первом случае частично
независимый ВОМ включается муфтой 4, а
синхронный размыканием этой муфты и
включением шестерни 7. Во втором случае для
работы с независимым ВОМ муфта 9 вводится
в зацепление с полумуфтой вала 77, а для
работы с синхронным с полумуфтой шестерни 8.
Необходимое передаточное число в механизме
ВОМ, включение его и выключение
обеспечиваются планетарным редуктором и
тормозными механизмами 12 и 13. Входным элементом
является эпицикл 10, выходным - водило 14.
Включение ВОМ осуществляется отключением
тормозного механизма 12 и затяжкой
тормозного механизма 13 солнечной шестерни.
Конструктивные решения ВОМ крайне
разнообразны и в значительной степени
определяются принятой схемой ВОМ,
конструкцией трактора и его трансмиссии. На одних
тракторах ВОМ выполняется в виде
•отдельного механизма, на других ВОМ является частью
трансмиссии.
Регламентируемыми параметрами и
размерами ВОМ являются:
угловая скорость хвостовика ВОМ,
которая национальными и международными
стандартами определена двумя значениями - 56
и 105 рад/с с перспективой сохранения только
второго значения (это уже принято для
передних ВОМ), некоторые фирмы используют
трехскоростные ВОМ, у которых
дополнительно предусмотрена угловая скорость
78 рад/с;
поворот синхронного ВОМ на 1 м пути,
принятое для низко- высокооборотных
соответственно 21 ... 22 и 38 ... 41 рад/м;
размеры хвостовика ВОМ и координаты
его расположения относительно опорной
поверхности трактора, ТСУ и механизма
навески;
размеры защитного кожуха хвостовика
ВОМ.
Расчет на прочность ВОМ проводится по
максимальному крутящему моменту двигателя,
а на долговечность - из условия его
использования в пределах 20 ... 30 % общего времени
работы трактора.
Поскольку нормируемые скоростные
режимы и присоединительные размеры
хвостовика ВОМ неоднозначны, для расширения
возможностей агрегатирования с различными
сельскохозяйственными машинами, некоторые
модели тракторов оборудуют двухскоростными
ВОМ и сменными хвостовиками. Возможно
применение ВОМ с объемными гидро- и
гидромеханическими приводами, которые, в
отличие от механических со строго
регламентируемыми скоростными режимами, путем
бесступенчатого регулирования угловой скорости
ВОМ, позволяют оптимизировать скоростные
режимы работы РО агрегатируемых машин и
улучшить эксплуатационные показатели МТА.
Приводные шкивы являются
дополнительным оборудованием, устанавливаемым на
тракторах только по заказу для привода
стационарных машин с помощью ременной
передачи. ПШ представляют собой отдельный
агрегат, состоящий из редуктора и шкива, и
монтируемый на корпусе трансмиссии сбоку
^ет фЬ^ ЛфЕВ
Ш I гТл ВОМ *-ШШ] \ г-ш ВОМ Ш Т [■? Пи ВО
/2 13
ВОМ
Рис. 3.6.2. Пришпигаа яымс схемы вала отбора мощности
или сзади на колесных тракторах, и только
сзади на гусеничных таким образом, чтобы ось
шкива была перпендикулярна к продольной
оси трактора. Привод редуктора ПШ
осуществляется обычно от ВОМ трактора.
Регламентируемыми параметрами и размерами ПШ
являются окружная скорость ремня, диаметр и
ширина обода шкива. Рассчитываются ПШ на
передачу полной мощности двигателя. ПШ
практически вышли из употребления.
Гидравлические навесные системы (ГНС),
предназначены для соединения, привода и
управления навесными, полунавесными и
полуприцепными машинами и орудиями, агрега-
тируемыми с трактором [10]. Навесные
машины и орудия в транспортном положении
полностью вывешиваются на трактор, а
полунавесные и полуприцепные - частично на
собственную ходовую часть. В состав ГНС входит
подъемно-навесное устройство (механизм
навески - МН и гидросистема - ГС).
По числу точек соединения с трактором
различают одно-, двух-, трех- и
четырехточечные механизмы навески (МН). Одноточечные
МН используются для работы с
полунавесными и полуприцепными орудиями и
машинами, присоединяемыми сзади. Двухточечные
фронтальные МН находят применение на
промышленных и лесопромышленных
тракторах в виде полурамы с поперечной осью
качания, задние четырехточечные МН - в
основном на промышленных тракторах с
рыхлителями и в качестве фронтальных на отдельных
моделях интегральных модификаций
сельскохозяйственных тракторов.
Самыми распространенными на
сельскохозяйственных и лесохозяйсгвенных тракторах
всех классов, за исключением некоторых особо
мощных, являются задние трехточечные
подъемно-навесные устройства (ПНУ). Все
большее распространение, особенно на
интегральных модификациях тракторов, получают
передние (фронтальные) трехточечные ПНУ.
При разнообразном конструктивном
исполнении все трехточечные ПНУ (рис. 3.6.3)
выполняются по единой схеме рычажно-
шарнирного механизма, состоящего из двух
нижних 1 и одной верхней центральной 6 тяг.
Каждая тяга шарнирно соединена одним
концом с трактором 3, а другим с машиной
(орудием). Привод МН осуществляется от
одного или двух гидроцилиндров 2 одно- или
двустороннего действия через вал 4 с рычагами
5 и раскосами 7. Верхняя тяга и один или оба
раскоса выполняются регулируемыми по
длине для корректировки положения навешенного
орудия относительно трактора в вертикально-
продольной и поперечной плоскостях. При
этом навесная машина имеет возможность
перемещения относительно трактора по высоте
и в поперечном направлении.
Для обеспечения возможности углового
перемещения относительно остова трактора в
Ршс. 3.6.3. Схема трехточечного механизма навески
поперечной плоскости, что необходимо при
работе с широкозахватными орудиями, в
конструкции МН используется наладка, при
которой нижние тяги с подъемными рычагами
имеют одностороннюю связь, обычно за счет
телескопической наладки раскосов. Цепи 8
или другие элементы (например, жесткие
упоры и растяжки) ограничивают поперечные
перемещения орудия в рабочем положении и
исключают их в транспортном.
На некоторых моделях тракторов,
преимущественно гусеничных, в конструкции МН
предусматривается дополнительно
двухточечная наладка, при которой нижние тяги
присоединяются к одному шарниру и вместе с
верхней тягой могут смещаться относительно
центрального положения. Такая наладка
обеспечивает лучшую маневренность агрегата при
заглубленном орудии и более устойчивую
работу орудий со смещенной линией тяги.
Присоединительные элементы тяг МН
выполняются преимущественно в виде сферических
шарниров с отверстиями под соединительные
пальцы орудия (рис. 3.6.4). Соединение
орудия с трактором при этом производится
вручную, что при агрегатировании с тяжелыми
орудиями затруднительно. Поэтому на многих
моделях тракторов средней и большой
мощности находят применение МН, верхняя и
нижние тяги которых оснащены
присоединительными элементами в виде крюков с
автоматически запирающимся зевом (рис. 3.6.5, а).
Такая конструкция позволяет осуществлять
сцепку с орудием с рабочего места водителя,
но требует оснащения орудий шаровыми
шарнирами для присоединения верхней тяги и
вращающимися втулками для нижних.
Находят применение также конструкции тяг с
выдвижными концами и автоматическими
фиксаторами (рис. 3.6.5, в, г).
478
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
ГГ\
ЪГР/
(Ъ
м//;////////////;////?/////^
Рнс. 3.6.4. Кинематическая схема, параметры и размеры трехточечного I
Рис. 3.6.5
облегчанмцие
элементы тяг МН,
1е с орудием
Кроме непосредственного соединения
МН с орудием все шире используют
автосцепки, обеспечивающие более быстрое и удобное
присоединение и отсоединение орудия.
Автосцепки выполняются в двух основных
вариантах: со специальной присоединительной к МН
рамой с захватами для соединения с орудием;
с одной охватываемой, присоединительной к
МН и второй, охватывающей, расположенной
на орудии. Сцепка осуществляется путем ввода
полурамы трактора в пазы полурамы орудия.
Все автосцепки оснащаются автоматически
замыкающимися фиксаторами.
Для обеспечения возможности
агрегатирования различных моделей тракторов с
разнообразными навесными орудиями форма и
размеры присоединительных элементов, а
также размеры присоединительного треугольника
и кинематические параметры МН (см. рис.
3.6.4) регламентируются соответствующими
национальными и международными
стандартами. При единой заданной номенклатуре
размеров и параметров МН их значения
подразделяются на несколько категорий в
зависимости от класса трактора, определяемого
номинальной силой тяги или тяговой
мощностью. Кинематические параметры МН в
значительной степени влияют на
эксплуатационные качестве МТА. Рабочий ход оси подвеса
Ну высота расположения оси подвеса при мак-
РАБОЧЕЕ ОБОРУДОВАНИЕ
479
симально опущенных Н\ и поднятых Н^
нижних тягах определяют соответственно
предельно возможное заглубление рабочих
органов в почву и транспортный просвет под
орудием, а угол а - угол проходимости и угол
входа рабочих органов в почву. Минимальное
свободное вертикальное перемещение а\
задних шарниров нижних тяг при наладке
раскосов на одностороннюю связь определяет
степень приспособляемости широкозахватного
орудия с опорными колесами к поперечному
рельефу поля. Минимальное свободное
перемещение #2 оси подвеса в горизонтальной
плоскости при условной рабочей высоте Н^
характеризует возможности маневрирования
МТА, а угол р регулируемого наклона оси
подвеса в поперечной и вертикальной
плоскостях - возможность относительного углового
смещения орудия, необходимого, например,
при пахоте, когда колеса одного из бортов
трактора идут по дну борозды.
Весьма важными параметрами,
регламентируемыми не во всех стандартах, но
необходимыми при построении кинематической
схемы МН и оказывающими существенное
влияние на работу МТА, являются координаты
мгновенных центров вращения (МЦВ) 0^ и
О2 , а также условный угол А тяги.
Координата дс01 МЦВ 0! определяет
зависимость продольных угловых колебаний
навесного орудия от продольных колебаний
остова трактора. Наименьшее влияние
колебаний последнего на навесное орудие
обеспечивается для колесного трактора при
*01 = 0,51,, а гусеничного при расположении
МЦВ на вертикали, проходящей через его
центр тяжести. Координата Хщ и угол Д по
совокупности определяют, при прочих равных
условиях, запас заглубляемости навесного
орудия и нагрузку на его опорные органы.
Для обеспечения возможности работы
навесного орудия на максимальной глубине в
наиболее тяжелых условиях необходимо, чтобы
результирующая Я сил, действующих на
рабочие органы орудия, и силы его тяжести
проходила выше точки 0} или (в крайнем случае)
через нее. Чем больше плечо Л силы Д тем
больше заглубляющий момент, приходящийся
на опорные органы орудия, и меньше доля
вертикальной нагрузки и опрокидывающий
момент, действующий на трактор.
Положение МЦВ (>2 определяет
устойчивость движения орудия в горизонтальной
плоскости и маневренность МТА. Чем больше
координата *02 > тем выше стабилизирующая
способность МН и хуже управляемость МТА
вследствие возрастания сопротивления
повороту орудия.
Изложенные положения учитываются
при проектировании МН и агрегатируемых
машин и орудий. Кроме указанных
параметров техническими требованиями к ПНУ
оговаривается максимальная грузоподъемность
Сн на условном плече 0,61 м
относительно оси подвеса и время I (с) ее полного хода.
Заданные значения хода поршня 5 (м)
гидроцилиндра ПНУ и максимального
давления в гидросистеме определяют диаметр
цилиндра V (м) и необходимый расход рабочей
жидкости 0 (м*/с1):
2)=1 ^н "н .
5 ^(0,9/)тах-Ар)л„ '
4/
где ин - передаточное число МН (отношение
силы на штоке цилиндра ПНУ к весовой
нагрузке на условном плече); Рт^ -
максимальное давление настройки
предохранительного клапана ГС, МПа; Ар (МПа) - потери
давления в магистрали насос-бак; г|н -
механический КПД ПНУ.
Передаточное число ин определяется
графоаналитическим или аналитическим
расчетом при нижнем, среднем рабочем и
верхнем транспортном положениях МН. Для
расчета значений 0 и /) принимается
максимальное значение ин .
Расчет деталей ПНУ на прочность с
запасом по пределу текучести не менее 1,3
проводится для двух случаев нагружения: в рабочем
положении по максимальной силе тяги
трактора и максимальной вертикальной нагрузке,
равной грузоподъемности; в транспортном -
по максимальной грузоподъемности.
Гидросистемы по функциональному
назначению подразделяются: ПНУ,
обеспечивающие привод и управление только МН;
универсальные, обеспечивающие привод и
управление ПНУ и рабочих органов
агрегатируемых машин и орудий; централизованные,
которые помимо выполнения функций
универсальных гидросистем (ГС) обеспечивают
также привод и управление отдельными или
всеми гидрофицированными механизмами
собственно трактора (рулевого управления,
480
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
тормозов, дифференциалов, передних ведущих
мостов и др.).
Гидросистемы ПНУ применяются только
на тракторах малой мощности, остальные их
типы - на тракторах средней и большой
мощности. Как и большинство гидроприводов
различного назначения тракторные
гидросистемы в общем случае включают насосную
установку, распределительно-регулирующую
аппаратуру, исполнительные механизмы
(гидроцилиндры, гидромоторы), систему с рабочей
жидкостью, фильтры, охладители, гидролинии
с концевой и промежуточной арматурой.
В зависимости от компоновки
составляющих элементов подразделяют три группы
ГС: единоагрегатные или моноблочные, в
которых все элементы смонтированы в единый
блок; полураздельноагрегатные,
комплектуемые группами агрегатов или группами и
отдельными агрегатами; раздельноагрегатные, в
которых все составляющие элементы
выполнены в виде отдельных агрегатов, располагаемых
в местах наиболее рациональных по общей
компоновке трактора, удобству управления и
обслуживания ГС.
Единоагрегатные ГС вследствие
ограниченности функций, специфичности
конструкции, основанной на использовании
оригинальных элементов и жесткой привязки их к
конкретной конструкции трактора, в
последнее время не применяются.
Полураздельноагрегатные ГС достаточно широко используются
на тракторах малой и средней мощности в
двух основных вариантах исполнения:
подъемный механизм (цилиндр, вал с подъемными
рычагами) и гидроаппаратура в едином блоке,
а остальные элементы в раздельном
исполнении или в моноблочном исполнении только
подъемный механизм. Раздельноагрегатные ГС
получают все большее распространение,
поскольку помимо указанных преимуществ они
дают возможность комплектования ГС
гидроагрегатами специализированного производства.
По источникам питания и способам
регулирования режимов их работы ГС
подразделяют на следующие типы: постоянного расхода
(СПР) на базе насоса с постоянным рабочим
объемом (рис. 3.6.6, а); с суммированием
расходов (ССПР) насосов с постоянными
рабочими объемами (рис. 3.6.6, б); постоянного
давления (СПД) на базе насоса с
регулируемым рабочим объемом (рис. 3.6.6, в)\
чувствительной к нагрузке (СЧНП) на базе насоса с
постоянным рабочим объемом (рис. 3.6.6, ?);
чувствительной к нагрузке (СЧНР) на базе
насоса с регулируемым рабочим объемом (рис.
3.6.6, д).
Распределитель
а)
Регулятор
расхода
Сумматор \~^\
шГ?
Распределитель
СЧН
Ф
V
Распределителе
СПР
Ф <$$ Ф
1>
1 II-*
т\
Н
{Распределитель 1
1 счн 1
А Е
Йёк„
ЦЛЖ Ш ЩТТ* ШН_Р
*)
0)
Рве. 3.6.6. Схемы основных типов гидросистем
РАБОЧЕЕ ОБОРУДОВАНИЕ
481
Гидросистемы постоянного расхода
наиболее просты по конструкции, используются на
многих тракторах различных назначений и
мощности. Они обеспечивают раздельное
управление потребителями при питании от
одного, в большинстве случаев шестеренного
насоса. Число раздельно управляемых
потребителей определяется числом управляющих
секций распределителя. Недостатками СПР
являются потери мощности при неполном
использовании расхода и
неприспособленность к одновременному управлению
несколькими потребителями, что частично
устраняется, но с дополнительными потерями
мощности, при использовании делителей потока.
Дополнительные потери мощности в
СПР, обусловленные недоиспользованием
расхода и разностью нагрузки потребителей,
определяются выражением:
ДЛГ = *
Он-Е°'д К
/«1
/Д
/-1
где к - коэффициент размерности; 0Н -
подача насоса; С/д - расходы на выводах
делителя; п - число потребителей с независимыми
режимами работы; рптах - давление
наиболее нагруженного потребителя; />/п -
давление, определяемое загрузкой 1-го потребителя.
Гидросистема с суммированием расходов
представляет собой СПР, оснащенную
дополнительными насосами постоянного рабочего
объема и специальным распределителем-
сумматором, обеспечивающим подключение
насосов к выводам для привода внешних
потребителей в различных сочетаниях, при
приоритетном использовании расхода насоса ГНС
для привода ПНУ. ССПР обеспечивает
независимый привод в непрерывном режиме со
ступенчатым регулированием расхода двух или
двух групп гидрофицированных рабочих
органов агрегатируемых машин, потребляемая
мощность которых превышает мощность
насоса ГНС. Если расходы на внешних выводах
соответствуют требуемым потребителем, то
ССПР весьма экономична. При
необходимости регулирования расхода в пределах расхода
одного из подключенных к потребителю
насосов в систему вводится соответствующий
регулятор расхода. В этом случае, как и в СПР,
возникают дополнительные потери мощности,
определяемые разностью расходов, *
подводимых к регулятору и потребителю. Потери
такого рода могут быть исключены при
применении в приводе РО регулируемого гидромотора,
но вследствие усложнения системы подобное
решение практически не реализуется.
Значительно шире принцип
суммирования потоков используется для обеспечения
двухрежимной работы потребителя, когда в
основных рабочих режимах потребитель
использует меньший расход, чем требуется
кратковременно. Например, на некоторых
промышленных тракторах привод управления
бульдозером осуществляется от двух насосов:
одного для подъема и опускания отвала, а
второго для его наклона и перекоса. В режиме
планирования каждый насос используется по
своему прямому назначению, а для быстрого
подъема отвала в транспортное положение
потоки обоих насосов с помощью
специального клапана объединяются. Аналогичным
образом принцип суммирования используется в
объемных гидроприводах рулевого управления
мощных тракторов, в гидросистемах
управления погрузчиком и др. Этим обеспечивается
возможность применения насосов меньшей
установочной мощности и соответствующее
снижение расхода энергии на их привод.
В гидросистемах постоянного давления для
отдельных моделей сельскохозяйственных
тракторов и погрузчиков используются только
аксильно- или радиальноплунжерные насосы.
Особенностью СПД является то, что в системе
с помощью специального регулятора
постоянно поддерживается заданное максимальное
давление. При отключенных потребителях
насос работает с минимальным расходом,
необходимым лишь для компенсации утечек и
поэтому потребляет незначительную
мощность. При подключении потребителя
вследствие первоначального падения давления в
напорной линии регулятор насоса увеличивает
расход до заданного распределителем, при
котором давление нагнетания достигает
максимального значения, установленного
регулятором. При уменьшении потребляемого
расхода, например при отключении одного из
потребителей, давление в системе начинает
возрастать и насос уменьшает расход до тех пор,
пока не установится—прежнее максимальное
давление.
Таким образом СПД может обеспечивать
одновременное питание любого числа
потребителей независимо от их нагрузки, не
превышающей заданного в системе
максимального давления и при суммарном потребляемом
расходе не более максимального расхода
насоса. Система компактна и хорошо компонуется
на тракторе. Вследствие того, что в системе
всегда поддерживается высокое давление, она
обладает достаточно высоким
быстродействием. Однако она недостаточно экономична при
работе с недогрузкой по давлению.
16 'Злк. П41
482
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
Потери мощности в этом случае
определяются выражением:
п
А^ = *Х(/>нтах-Ап)0/п>
/-1
где Рн тах " максимальное давление в
напорной линии насоса.
Она применяется крайне ограниченно,
лишь на отдельных моделях тракторов, где
используется в качестве централизованной,
обслуживающей потребителей
кратковременного действия или с большой нагрузкой по
давлению.
Гидросистемы типа СЧН более
экономичны и благодаря этому получают все
большее распространение. Особенностью этих
систем является то, что, обеспечивая
независимый привод потребителей с разной нагрузкой
по давлению при разных скоростных режимах,
система питания работает при давлении,
соответствующем давлению максимально
нагруженного потребителя. В этих ГС применяются
насосы как с постоянным (СЧНП), так и
регулируемым (СЧНР) рабочими объемами.
Расход рабочей жидкости, подводимый к каждому
потребителю, как и в СПД, регулируется
соответствующей секцией распределителя, общий в
СЧНП - автоматически, во взаимодействии с
распределителями секций регулируемым
переливным клапаном, а в СЧНР - регулятором
расхода насоса.
В регуляторах поддерживается
постоянный управляющий перепад давления, который
в значительной степени определяется
требованием к быстродействию системы: чем выше
быстродействие, тем больше давление
управления: в СЧНП 0,5 ... 1,4 МПа, а в СЧНР
0,7 ... 2,0 МПа. Соответственно изменяются
дополнительные потери давления в системе.
Изыскание решений по снижению
давления управления - одно из направлений
совершенствования гидросистем типа СЧН
(рис. 3.6.7). Каждый потребитель 7, 2
обслуживается одной секцией распределителя с
трех- или четырехпозиционным золотником
(3 или 4), клапаном-ограничителем 5 потока,
обратным клапаном 6, регулируемым
дросселем 7 и двумя логическими элементами 8 и 9
с функциями клапанов "или".
В рабочих позициях золотника рабочая
жидкость через элементы 5 - 7 и золотник
поступает к потребителю, а через элементы 8 и
9-в линию управления ЧН регулятором
расхода насоса СЧНР или блоком ]0 клапанов
СЧНП. Настройка на требуемый
максимальный расход к отдельным потребителям
осуществляется дросселями 7, а оперативное
регулирование расхода (в пределах установленного
:-"И.
г
Ь
ш
■+л
Ж
тт
;ЭЕ1
I
I
з ! I
г
7 г-т 5
г~П
I
[Ж
тт
III
•8
«
ш
7 ■—I*
\}н Г7 Д. ~[ 1~
Рве. 3.6.7. Пр
шалыш гидравлическая схеш
гидросистем типа СЧН с
регулируемым рабочим объемом
максимального) - золотником. При этом
давление в линии управления ЧН соответствует
давлению максимально нагруженного
потребителя.
При отключенных потребителях в
системе СЧНР поддерживается давление,
необходимое для управления расходом насоса, а в
СЧНП - давление, требуемое для
переключения насоса с режима свободного перепуска на
рабочий.
Потери мощности в СЧНП,
обусловленные недоиспользованием расхода и разной
нагрузкой потребителей, определяются
выражением:
ДЛГ = *
0н-|>
/-1
/>П1
п
+ 2 О* (/'птах "Л)
/-1
РАБОЧЕЕ ОБОРУДОВАНИЕ
483
Наиболее экономичной и поэтому
предпочтительней других является гидросистема
СЧНР, постепенно внедряемая на тракторах
различного назначения мощностью свыше
75 кВт. СЧНР особенно эффективны при
высокой загрузке по времени и относительно
равномерной нагрузке потребителей по
давлению. Дополнительные потери мощности в
этой системе при одновременной работе
нескольких потребителей зависят только от
разности их нагрузки по давлению и
характеризуются выражением:
п
ДЛГ = *Х йп(Рптах-Лп).
/-1
Выбор схемы гидросистемы при
проектировании проводится на основе анализа
требуемых функциональных качеств,
энергетических показателей, режимов работы и
взаимодействия входных звеньев
гидроприводов (гидроцилиндров и гидромоторов) гидро-
фицированных машин и оборудования,
планируемых к использованию с новым
трактором. В результате качественного анализа
определяются альтернативные варианты схем
гидросистем, проводится расчет их
параметров и ожидаемой экономической
эффективности Э с учетом производственных и
эксплуатационных затрат 3 согласно целевой
функции Цф = Э / 3 -> шах .
Основными параметрами,
определяющими технический уровень тракторных
гидросистем, их энергетические возможности,
габаритные размеры и массовые показатели, а
также надежность являются: удельная
мощность, максимальное давление, тонкость
фильтрации, объем резервуаров рабочей жидкости,
ресурс и безотказность. Учитывая важность
этих показателей, в ряде стран они
регламентируются национальными стандартами.
В связи с увеличением числа
потребителей гидравлической энергии, а также
мощности двигателей тракторов возрастает
мощность гидросистем, в значительной степени за
счет повышения давления. Относительная
мощность гидросистем относительно
мощности двигателей у сельскохозяйственных
тракторов примерно обратно пропорциональна
мощности двигателей и находится в пределах
0,1 ... 0,35, у лесопромышленных тракторов в
зависимости от состава гидрофицированного
оборудования в пределах 0,25 ... 0,45,
промышленных, в агрегате с бульдозером и
рыхлителем примерно 0,4, а с погрузчиком
примерно 0,6.
Диапазон максимального давления
довольно широк (14,5 ... 23,0 МПа), но
постепенно сужается в результате повышения
нижнего значения, и для основной массы
тракторов составляет 16 ... 20 МПа.
Применяемые в ГНС гидроагрегаты
являются объектами специализированного
производства. При весьма большом разнообразии
конструкций гидроагрегатов определенного
функционального назначения выбор
необходимых для комплектования ГНС при их
проектировании в значительной степени
облегчается тем, что основные параметры и размеры
гидроагрегатов регламентированы. Основные
параметры, как правило, соответствуют
нормальному ряду чисел. В состав нормируемых
параметров входят: номинальное давление,
рабочие объемы насосов, размеры условных
проходов гидроаппаратуры, диаметры
поршней, плунжеров и штоков гидроцилиндров и
др. К числу регламентируемых размеров
относятся: размеры хвостовика приводного вала и
присоединительного фланца насосов; резьбы
присоединительных элементов гидроарматуры;
форма и размеры элементов крепления
отдельных типовых гидроцилиндров и др.
В качестве источников питания в ГС
используются насосы различных типов. Среди
насосов с постоянным рабочим объемом
преобладают шестеренные с торцовой, а в
некоторых конструкциях и радиальной компенсацией
зазоров. Насосы с регулируемым рабочим
объемом легкой серии в основном плунжерные с
наклонной шайбой. Значительно реже
применяют радиально-поршневые насосы. Привод
насосов, как правило, независимый от других
механизмов трансмиссий, выключаемый или
невыключаемый.
Для упрощения конструкций,
сокращения размеров, снижения массы источников
питания ГНС и расхода рабочей жидкости все
шире осуществляется секционирование
насосов различного назначения, а на
сельскохозяйственных тракторах - объединение емкостей и
систем кондиционирования рабочей жидкости.
В большинстве гидросистем насосы высокого
давления работают с самовсасыванием,
имеются примеры использования в объединенных
ГС в качестве подпитывающих насосов
низкого давления системы управления
трансмиссией.
Обеспечение ГНС необходимым объемом
рабочей жидкости (РЖ) решается на тракторах
различным образом. На промышленных и
лесопромышленных тракторах резервуарами
РЖ служат отдельные баки. На
сельскохозяйственных тракторах более распространены
объединенные баки для ГНС и ОГРУ, а также
объединенные емкости трансмиссий и ГНС. В
тех случаях, когда емкость картера
трансмиссии недостаточна для отдачи РЖ внешним
потребителям, на тракторы устанавливается
дополнительный бак. Объем применяемых
баков весьма различен и составляет 20 ... 60 %
16*
484
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
и даже 100 % минутного расхода источников
питания. Наблюдается тенденция к снижению
объемов до минимально необходимого для
нормального функционирования ГС при
отдаче части РЖ внешним потребителям.
Требуемый температурный режим (не
более 353 К) в связи с ростом мощности ГС и
интенсивностью их использования все чаще
обеспечивается благодаря радиаторам с
принудительным охлаждением. Возрастающие
требования по обеспечению высокой надежности
ГС обусловливают повышение требований к
чистоте РЖ. Очистка РЖ в процессе
эксплуатации ГС в большинстве случаев
осуществляется металлическими сетчатыми
фильтрами с тонкостью фильтрации примерно 80
мкм, устанавливаемыми во всасывающей
магистрали насосов, и фильтрами тонкой
очистки со сменными бумажными элементами в
сливной гидролинии ГС. Тонкость очистки
фильтроэлементами в ГС с шестеренными
насосами 10 ... 40 мкм, с плунжерными
10 ... 25 мкм.
В объединенных ГС (трансмиссия и
ГНС) с насосами высокого и низкого
давлений (последний выполняет дополнительно
функции насоса подпитки), фильтры тонкой
очистки устанавливаются на входной
магистрали насоса высокого давления, что
существенно эффективнее. Для улучшения условий
работы насосов ГНС при установке фильтров
тонкой очистки в сливной магистрали
используется принцип полузамкнутого контура, когда
основной поток во всасывающую гидролинию
насоса поступает непосредственно из сливной.
Фильтры тонкой очистки оснащаются
предохранительными клапанами и индикаторами
загрязненности, показания которых на многих
тракторах выводятся на приборную панель
кабины, в некоторых дублируются (при
предельной степени загрязненности), звуковым
сигналом.
Защита ГС от внешних загрязнений
обеспечивается установкой воздушных
фильтров с тонкостью фильтрации 20 ... 25 мкм в
баках; гидравлическими замками; заправкой
баков через специальные фильтры. Для
удаления из РЖ растворенного воздуха
предусматриваются специальные "успокоительные"
отсеки, а на сливной линии - специальные
эффективные устройства.
В ПНУ раздельно-агрегатных ГНС
используются только поршневые гидроцилиндры
двухстороннего действия или плунжерные с
приваренными задними крышками.
Крепление передних крышек резьбовое, фланцевое
или стопорным кольцом. Присоединительные
элементы цилиндров и штоков вильчатые с
проушинами или со сферическими
шарнирами. Цапфовое крепление гидроцилиндров
характерно только для промышленных
тракторов.
Уплотнение неподвижных соединений
обеспечивается резиновыми кольцами
круглого сечения. Уплотняющие и направляющие
элементы подвижных соединений поршней,
плунжеров и штоков, а также элементы для
очистки штоков выполняются в виде набора
специальных колец из упругой резины и
полимерных материалов с антифрикционными,
противоизносными присадками и с
использованием гидравлического поджима со стороны
рабочих полостей.
В ГС применяют стандартные
гидроарматуру и рукава высокого давления (РВД).
Разборные соединения гидролиний являются
.преимущественно резьбовыми с
уплотняющими элементами типа "сфера-конус", а в ГС
с большими расходами также фланцевые.
Соединение арматуры со стальными
цельнотянутыми трубами сварное или паяное и лишь на
отдельных моделях тракторов разборное -
посредством муфт с врезными или
специальными уплотняющими кольцами. Основной тип
РВД - резиновые, армированные с металло-
оплеткой или спиральной стальной навивкой.
РВД с оплеткой из синтетических материалов,
а также пластмассовые пока не получили
широкого применения. Концевая арматура РВД в
основном неразборная, обжимная. Разборная с
коническим ниппелем и резьбовой муфтой
или с цанговым зажимом применяется
значительно реже.
Для подключения к внешним
потребителям используются быстросоединяемые (БСМ)
или разрывные муфты (БСРМ), охватывающая
часть которых обычно устанавливается на
тракторах. БСРМ монтируются на тракторе в
сферических шарнирах, исключающих
боковые нагрузки на заделки РВД, и предохраняют
рукава от разрыва при случайном
отсоединении орудия путем автоматического
разъединения полумуфт под действием возникающей
осевой силы (300 ... 1000 Н). Число парных
выводов, оснащенных полумуфтами, на
большинстве тракторов стандартного исполнения
не превышает двух. Зона расположения
выводов, а также присоединительные размеры муфт
стандартизованы.
Размеры гидроарматуры выбираются с
расчетом обеспечения оптимальных скоростей
потоков РЖ при заданном расходе. Для
напорных гидролиний рекомендуемая расчетная
скорость 4,5 ... 8 м/с, сливных до 3 м/с и
всасывающих 0,6 ... 1,3 м/с.
РВД выбираются не только по расходу,
но и по прочности (с четырехкратным запасом
относительно максимального давления).
Испытания на долговечность при циклической
нагрузке проводятся по методике ИСО.
Лучшие образцы РВД выдерживают до 10* циклов
натр ужения.
РАБОЧЕЕ ОБОРУДОВАНИЕ
485
Применяемые в ГС тракторов
распределители весьма разнообразны по конструкции,
но достаточно сходны по функциональным
качествам применительно к ГС определенного
типа. Большинство распределителей
моноблочного или секционного исполнения
представляют собой комплексный клапанно-
золотниковый агрегат, обеспечивающий
распределение потоков рабочей жидкости к
потребителям, регулирование расхода,
ограничение максимального давления и разгрузку ГС.
Распределители четырехлинейные, с закрытым
или открытым (применяемым только в ГС
типов СПР и ССПР) центром, с четырех- или
трехпозиционными золотниками,
соответственно с позициями "подъем",
"нейтральная", "опускание", "плавающая" или без
позиции "плавающая". Нейтральное положение
золотников обеспечивается центрирующей
пружиной. Управление ручное, гидравлическое
или электрогидравлическое.
Наиболее типичными для ГС
сельскохозяйственных и лесохозяйственных тракторов
являются двух-, трехзолотниковые
распределители с закрытым центром, четырехпозицион-
ные с фиксацией золотников в рабочих
позициях и автоматическим возвратом в
нейтральную позицию из позиций подъема и
опускания при достижении в системе заданного
максимального давления. В таких распределителях
используются все виды управления, но
преобладающим является ручное при заметном
расширении применения электрогидравлического.
Регулирование расхода релейное или
пропорциональное. При повышенных требованиях к
герметичности напорных гидролиний
распределители дополнительно комплектуются
гидрозамками, устанавливаемыми в одной или
обеих выходных гидролиниях.
В ГС лесопромышленных и
промышленных тракторов применяются преимущественно
распределители секционные трехпозиционные
с закрытым центром без фиксации золотников
в рабочих позициях с пропорциональным
ручным или электрогидравлическим управлением,
находящим все более широкое применение.
Четырехпозиционный распределитель с
фиксацией золотника в плавающей позиции
используется только для управления подъемом и
опусканием бульдозера.
Для большинства секций, входящих в
состав распределителей, характерно
пропорциональное управление не только при встречных,
но и попутных нагрузках, а также
оснащенность противоударными и противовакуумны-
ми клапанами, а для погрузчиков еще и
дополнительными вторичными
предохранительными клапанами в выходных линиях к
цилиндру поворота ковша.
Распределители с электрогидравлическим
управлением преимущественно двухкаскадные.
Распределитель первого каскада золотникового
(пилотного) или клапанного типа с
пропорциональными магнитами обеспечивает
гидравлическое пропорциональное управление
основным золотником второго каскада путем
дозированной подачи рабочей жидкости в
торцовые камеры золотника. Прекращение
подачи, а следовательно, перемещение золотника в
положение, соответствующее заданному
расходу, обеспечивается, например подачей сигнала
от его индуктивного датчика перемещений на
электромагнит распределителя первого
каскада. Управление распределителем первого
каскада осуществляется отдельным электронным
пультом с ручным управлением, подающим к
электромагнитам распределителя ток, сила
которого пропорциональна перемещению
рукоятки.
В зависимости от числа раздельно
управляемых секций распределителя используются
различные модификации пультов,
обеспечивающих раздельное управление одной
рукояткой от одной до четырех секций. Число
секций распределителя определяет число
раздельно управляемых гидравлических приводов
рабочих органов агрегатируемого рабочего
оборудования.
Дистанционное управление на
промышленных тракторах с помощью кабельной или
радиосвязи используется при работе тракторов
в особо опасных для человека условиях.
Автоматическое управление с нивелировочными
измерителями или лазерными датчиками
применяется на тракторах с бульдозерами или
планировочных работах и существенно
повышает производительность, агрегата, снижает
расход топлива и облегчает условия работы
водителя.
Аналогично осуществляется
автоматическое регулирование глубины обработки
рыхлителями. При сравнительно ограниченном
применении систем автоматического
регулирования режимами работы гидросистем на
промышленных тракторах они находят
широкое применение на сельскохозяйственных.
Системы автоматического регулирования
ПНУ (САРН) входят в состав ГНС
большинства сельскохозяйственных тракторов
малой и средней мощности в качестве
стандартного оборудования и устанавливаемого по
заказу на мощных тракторах. Они
предназначены для регулирования положения агрегати-
руемых с трактором машин и орудий и
силового воздействия их на трактор. Поддерживая
заданный режим работы орудий, САРН
облегчает управление ими с места водителя,
повышает производительность и экономичность
МТА благодаря улучшению тягово-сцепных
свойств трактора, снижению тягового
сопротивления орудий и динамических нагрузок.
В зависимости от вида МТА, почвенных
условий и агротехнических требований в
САРН применяют различные виды
регулирования: силовое, позиционное,
комбинированное (смешанное), высотное с коррекцией
вертикальных нагрузок.
486
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
У*0 С0
Ршс. 3.6.8. Схема сил, действующих на тражтор со стороны орудм при силовом ■ высотном регулн|
При силовом способе непосредственно
регулируемым параметром является (рис.
3.6.8) одна из горизонтальных составляющих
сил Гв и Гн, действующих на передние
шарниры верхней и нижней тяг,
обусловленных воздействием на МН результирующей
силы Ло от веса 00 орудия и реактивных сил
Яр0 почвы, зависящих от глубины обработки
и почвенных условий. Результирующая сила
измеряется по деформации датчика (в виде
спиральной или плоской пружины, рессоры,
торсиона, тензометрического соединительного
пальца). Датчики почти на всех тракторах, за
некоторым исключением тракторов малой
мощности, приспособлены для измерения сил,
действующих на шарниры нижних тяг.
Регулятор по сигналам датчика поддерживает с
заданной точностью силу, необходимую для
соответствующей глубины обработки.
Вследствие непосредственного
воздействия на трактор силы Д> его сцепной вес
увеличивается, тяговое сопротивление орудия,
за счет уменьшения сил трения опорной части
его рабочих органов снижается,
производительность и экономичность МТА возрастают.
Догрузка ведущих колес трактора при этом
определяется выражением
где е - плечо силы ^ относительно центра
О2 опоры передних колес трактора; Ь - база
трактора.
Несмотря на высокую эффективность
силового регулирования, его применение
ограничено требованиями по равномерности
глубины обработки. Поэтому оно используется
только при обработке почв с относительно
постоянным удельным сопротивлением.
Позиционный способ регулирования
обеспечивает установку и поддержание
заданного положения МН по высоте и используется
при агрегатировании с машинами и орудиями,
требующими определенного фиксированного
положения точки прицепа или рабочих
органов относительно трактора. Регулируемым
параметром является перемещение одного из
элементов ПНУ (штока гидроцилиндра,
поворотного рычага и др.), соответствующее
перемещению по высоте оси подвеса МН. На
большинстве тракторов перемещение оси
подвеса определяется по эксцентриситету кулачка
или рычажка, устанавливаемого на валу
рычагов ПНУ, т.е. по углу поворота вала. В
качестве измерителя эксцентриситета
используются механические, гидравлические и
индуктивные датчики. Преимуществами
позиционного регулирования являются удобство
управления, а также возможность повышения
положительного силового воздействия на трактор
полунавесных и прицепных орудий путем
корректировки положения их точки прицепа.
При высотном способе регулирования
орудие снабжается опорным колесом 7,
ручной регулировкой положения которого
относительно рамы орудия обеспечивается
заданная глубина обработки. По сравнению с
силовым регулированием энергетические качества
МТА в этом случае ухудшаются вследствие
уменьшения догрузки трактора и увеличения
тягового сопротивления орудия за счет силы
Хко сопротивления качению опорного
колеса.
Догрузка ведущих колес трактора в этом
случае определяется выражением
АГ
где <1 и % - плечи сил соответственно Хк 0 и
Уко относительно МЦВ 0] механизма наве-
РАБОЧЕЕ ОБОРУДОВАНИЕ
487
ски; / - коэффициент сопротивления качению
опорного колеса.
Повышение положительного воздействия
орудия на трактор благодаря уменьшению
реакции Ук 0 на опорное колесо до пределов,
достаточных для сохранения его контакта с
почвой, обеспечивается корректором
вертикальных нагрузок (КВН), с помощью которого
орудие частично вывешивается на тракторе за
счет создания в запертом объеме
гидроцилиндре ПНУ необходимого давления. При
изменении установленного давления свыше
заданного по чувствительности КВН происходит
подкачка или выпуск РЖ из цилиндра до
достижения прежнего давления.
Если упругость контура цилиндро-
опорного колеса невелика, то для исключения
срабатывания КВН в ГС вводится
дополнительно пневмо- или механогидравлический
аккумулятор.
При использовании КВН догрузка
ведущих колес трактора определяется выражением:
е --
8 + /<1
'-?)
ще /^ - подъемная сила по раскосам; а и Ь -
плечи сил соответственно Вц и Г^
относительно МЦВ 0) .
В КВН применяют датчики давления
различных типов: гидравлические,
гидромеханические, электронные или индуктивные.
На тракторах малой мощности
корректировку вертикальных нагрузок иногда
осуществляют более простым, но менее
совершенным способом, изменяя положение МЦВ
путем перестановки точки крепления верхней
тяги по высоте.
Комбинированное регулирование
осуществляется путем одновременного
использования силового и позиционного способов или
силового и высотного. При достаточно
высокой эффективности первый вид регулирования
обеспечивает удовлетворительную
равномерность глубины обработки на полях с плавным
рельефом и переменным удельным
сопротивлением почвы, а второй - на менее ровном
рельефе, но с более стабильным удельным
сопротивлением почвы. Среди систем с
комбинированным силовым и позиционным
регулированием особенно широко распространены
системы с изменяемой пропорцией смешения
сигналов.
Применяемые на тракторах САРН
помимо схемного и конструктивного исполнения
отличаются по видам применяемых способов
регулирования: только силовое или
позиционное; силовое и позиционное; позиционное и
смешанное; высотное с КВН и все виды
регулирования (универсальные САРН). На
тракторах .мощностью свыше 60 кВт все большее
распространение получают универсальные
САРН.
Для СПД и СЧНР
Источник
питания
Распределитель-
регулятор
Механизм
настройки и
преобразования
сигналов
Механизм
управления
Исполнительный
механизм
Датчик давления
Датчик усилия рЧ
Позиционный
датчик
Механизм
навески
Орудие
Рис. 3.6.9. Обобщенная схема САРН
488
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
Обобщенная схема САРН представлена
на рис. 3.6.9. В качестве источника питания
САРН используется насосная установка ГНС.
Распределитель-регулятор преимущественно
золотникового типа непосредственно
управляет цилиндром ПНУ, осуществляя
регулирование подачи и выпуска РЖ, а также запирание
объема в цилиндре в соответствии с
поступающим сигналом рассогласования. С
помощью механизма настройки и
преобразования сигналов осуществляется выбор вида
регулирования, пропорции смешения (при
комбинированном способе), настройка на заданный
режим работы, преобразование и подача
сигнала обратной связи от датчиков к
распределителю-регулятору. Обратная связь
выполняется механической, гидравлической или
электронно-электрической.
Посредством механизма управления
рычажного типа в механических и
гидравлических системах и кнопочного в злектронно-
злектрических золотник распределителя-
регулятора устанавливается в положение
"подъем" или "опускание" и возвращается в
нейтральное положение автоматически при
получении от механизма преобразования
сигнала о согласовании достигнутого режима с
заданным. При отклонении регулируемого
параметра от заданного значения (за пределы
чувствительности системы) по сигналу
рассогласования от датчика золотник перемещается
в позицию "подъем" или "опускание" и
возвращается в нейтральное после получения
сигнала согласования.
По виду скоростной характеристики
САРН подразделяются на релейные и
пропорциональные, которые преобладают.
Расширяется применение
электронно-электрогидравлических САРН. Они удобнее в управлении и
настройке, компактнее и легче, лучше
компонуются на тракторе и приспособлены к
автоматическому управлению и настройке, что
позволяет оптимизировать режимы работы
САРН и повысить эксплуатационную
эффективность МТА.
Электронногидравлическая система
силового регулирования дополнительно оснащена
радарным датчиком, измеряющим
действительную скорость движения трактора, и
электронным блоком, с помощью которого в
результате сравнения действительной скорости с
теоретической, рассчитанной, по угловой
скорости коленчатого вала двигателя,
определяется величина буксования. При буксовании,
превышающем заданное значение,
электронный блок выдает сигнал по корректировке
настройки силового регулятора до режима,
обеспечивающего снижение буксования до
установленного.
Как показали испытания, такая система
дает повышение производительности МТА при
пахоте на 4 ... 13 % при экономии топлива на
19 ... 25 % и снижении заданной глубины
обработки на 4 ... 6 %.
При выборе схемы и расчете параметров
САРН исходят из анализа состава агрегатируе-
мых машин и орудий, условий работы, общей
конструкции трактора. За исходные параметры
для расчета САРН применяют диапазон и
точность регулирования. При силовом
регулировании рассматривается диапазон сил тяги
трактора, при позиционном - полный ход оси
подвеса, КВН - 0,1 ... 0,8 максимального
рабочего давления. Исходя из агротехнических
требований коэффициент вариации глубины
вспашки допускается не более 10 %. Рабочий
диапазон частот в пределах 0,3 ... 1,5 Гц,
гистерезис силового контура 0,02 ... 0,09,
позиционного 0,03 ... 0,04 и КВН - 0,04 ... 0,06
максимального значения регулируемого
параметра. Предпочтительными пропорциями
смешения силового и позиционного сигналов,
при запасе устойчивости 1,8 ... 2 считают
0,85 ... 0,7 и 0,9 ... 0,6.
В результате расчетов на ЭВМ
определяются расходные характеристики, передаточные
отношения обратных связей, пропорции
смешения при комбинированном регулировании,
чувствительность и устойчивость работы
системы.
Наибольшее влияние на динамические
свойства систем регулирования оказывают:
гистерезис, скорость подъема и время
запаздывания. При достижении крайних значений
указанных параметров система теряет
устойчивость и возникают автоколебания. Для
обеспечения необходимой устойчивости
параметры системы корректируются: снижением
потерь в системе датчиков и исполнительных
механизмов; введением дополнительных
элементов воздействия по производной от
регулируемого параметра; введением фильтров
случайных воздействий и др. При доводке
систем часто используют аналого-вычисли-
тельные машины.
Наряду с совершенствованием
одноконтурных САРН начинают находить применение
двухконтурные (рис. 3.6.10). Двухконтурные
САРН состоят из основного контура 7,
управляющего ПНУ различными способами
регулирования и вспомогательного независимого
контура, который с помощью гидроцилиндра
2 в верхней тяге, работающего в режиме КВН,
через шарнирную стойку 3 и тягу 4
обеспечивает дополнительную догрузку трактора при
работе с полуприцепными и прицепными
орудиями и транспортными средствами, частично
вывешивая их на тракторы. Это обеспечивает
эффект, аналогичный достигаемому при
работе ГНС с навесными орудиями в режиме
высотного регулирования с КВН.
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ 489
V/////у///;//////// //77//у/7"///////л
Рис. 6.3.10 Схема двухжонтурноЁ САРН при агрепггаромшш с полуприцепом
Принятый уровень удельной мощности
ГНС сельскохозяйственных тракторов является
достаточным для привода и управления
пассивными и активными рабочими органами
большинства существующих и перспективных
агрегатируемых машин и орудий. Однако
имеется группа машин (почвенные фрезы,
ротационные плуги, ряд прицепных
уборочных машин), для привода РО которых
требуется свыше 60 % мощности двигателя.
Использование гидропривода на этих машинах
обеспечивает не только существенное
снижение их металлоемкости, но и повышение
производительности, экономичности и качества
работы благодаря оптимизации скоростных
режимов их работы. Наряду с оснащением
таких машин автономными гидросистемами с
дистанционным управлением с места водителя
и приводом насосов от ВОМ трактора через
карданную передачу, начали применяться в
качестве дополнительного рабочего
оборудования трактора специальные ГСОМ
повышенной мощности. Наиболее распространенные
решения ГСОМ следующие:
установка насоса (насосов) на задней
части корпуса трансмиссии с приводом от ВОМ
через ускоряющий редуктор;
использование бака, фильтров и
радиаторов ГНС или им аналогичных,
устанавливаемых на машине;
монтаж дополнительной управляющей и
регулирующей гидроаппаратуры на тракторе
или машине с управлением с места водителя.
Известны также разработки,
предусматривающие использование для ГСОМ насосов
объемной гидротрансмиссии трактора.
Значительное внимание уделяется газо-
гидравлическим генераторам, в которых
энергия сгорания топлива через поршни двигателя
непосредственно передается РЖ. Вследствие
исключения промежуточных механических
передач представляется возможным снижение
массы системы двигатель-насос до 40 %к и
существенное повышение КПД.
3.6.2. АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ МАШИННО-
ТРАКТОРНЫМИ АГРЕГАТАМИ
Можно выделить несколько этапов в
развитии и внедрении средств автоматизации
трактора [6, 11, 30].
На первых этапах устройства
автоматизации создавались в основном на механической
и гидравлической элементных базах. Системы
отличались простотой конструктивного
исполнения и высокой надежностью, однако они
работали по жестким программам, не
позволяющим адаптироваться к изменяющимся
внешним условиям; работа каждой системы
осуществлялась автономно, исключалась
возможность объединения всех систем
автоматического управления в единый комплекс с
целью увязки режимов их функционирования.
Это снижало эффективность их
использования.
Характерными признаками третьего
этапа автоматизации являются стремление к
оптимизации режимов работы МТА, создание
автоматических систем защиты узлов и
агрегатов трактора от перегрузки и предотвращения
аварийных ситуаций, повышение
информативности и улучшение контроля,
агротехнических показателей работы МТА, условий труда
водителя, снижение вредного воздействия
движителей на почву.
На этом этапе созданы системы:
автовождения трактора (САВ); автоматического
управления скоростными и нагрузочными
режимами работы трактора (САУР);
автоматической защиты двигателя (САЗД) и
гидролиний (САЗГ) - в гидрофицированных МТА;
подрессоривания сидений с автоматическим
регулированием параметров колебаний;
обеспечения микроклимата в кабине водителя и
др. Применение их на тракторах значительно
улучшает условия труда водителя и позволяет
повысить производительность МТА.
Началось широкое применение в
системах автоматического управления элементов
490
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
электроники. Технической базой
автоматизации тракторов и МТА являются электронные
средства обработки информации - процессоры
и микроЭВМ. Электронные средства
позволяют осуществить контроль механических
функций и автоматизировать управление.
Микропроцессоры и микроЭВМ
используются на ряде мощных тракторов для
управления режимами работы и защиты узлов
(двигатель, трансмиссия). Из числа
зарубежных тракторов можно назвать тракторы
"Пантера 1000м и серии 88 с приводом на
четыре колеса. В качестве дополнительного
оборудования автоматическая трансмиссия
устанавливается на тракторах фирмы Джон
Дир. Микропроцессоры системы управления
трехточечной навеской устанавливаются в
качестве дополнительного оборудования на
тракторах 4800, 4840, 4880 и 4900 фирмы Мэсси-
Ферпосон.
На тракторах серии 90 фирмы Кайс
управляющая система включает в себя
бортовой микропроцессор серии 8048 фирмы
Интел, полупроводниковые датчики
управления колесами, датчик положения подъемного
рычага трехточечной навески,
электрогидравлический клапан управления задними
колесами и индикатор, на котором с помощью
девяти светоизлучающих диодов указывается
положение колес. Система объединяет
регуляторы силы тяги и чувствительности настройки,
подсистему обратной связи, которая
анализирует сигналы настройки и обратной связи и
подает соответствующую команду на солино-
ид, управляющий распределителем
трехточечной навески.
Микропроцессорное управление
коробкой передач позволяет отказаться от
некоторых гидравлических контуров, а также
оптимизировать процесс переключения передач и
улучшить динамические характеристики
трактора.
Получают распространение
микропроцессорные системы впрыскивания топлива и
турбонаддува для дизелей, надежно
работающие во всем диапазоне частоты вращения.
Электронное управление этими процессами на
тракторах фирмы Форд не только повысило
топливную экономичность дизеля, но и
снизило уровень шума его работы. Большая часть
зарубежных тракторов с двигателями
мощностью свыше 74 кВт оборудуется
стандартными системами электронного управления
гидромеханизмами подъема навески.
Все полноприводные тракторы
снабжаются электронными системами управления
поворотом колес и подключения второго
ведущего моста, почти все - электронными
системами контроля. По заказу тракторы
оборудуются системами с радарными датчиками
действительной скорости движения,
информирующими оператора о производительности
машинно-тракторного агрегата, величине
буксования ведущих колес и работе агрегатируе-
мых с ними машин и орудий.
Все системы осуществляют контроль
текущих и интегральных величин,
характеризующих работу орудий и агрегатов, и
управления ими путем сравнения измеряемого
параметра с заданным значением.
Подобные системы автоматического
регулирования локальные, каждая из них
выполняет определенную задачу регулирования и
содержит набор датчиков, электронный
микропроцессорный блок обработки,
исполнительные устройства. По функционированию
микропроцессорные блоки обработки в
локальных системах принципиально не
отличаются от применявшихся ранее аналоговых
блоков. Электронные блоки, используемые для
построения логической части САУ,
значительно упрощают задачи оптимизации режимов
управления и позволяют целенаправленно
увязать режимы функционирования всех
автоматических систем для достижения наилучших
показателей работы МТА с учетом
изменяющихся внешних условий. Учитывая наличие
развитой системы гидрофикации современных
тракторов, исполнительные части САУ
целесообразно строить на основе гидравлических
элементов. Таким образом, вместо
разнородных систем на первых этапах
автоматизации в настоящее время вводится единая
элементная база. При этом должны быть
предъявлены единые требования к сбору информации,
ее передаче на обработку в электронный блок
(бортовой микропроцессор), усилению
выходных сигналов и передаче команд на
управление, реализуемых гидравлической
исполнительной частью.
Многие из созданных в нашей стране
локальных САУ построены на этих
принципах.. К их числу можно отнести
радионавигационную САВ для безмаркерного
автовождения МТА, САУР, САР навесной системы
трактора, электронную систему регулирования
топливоподачи дизеля и др.
Завершение всего комплекса разработок
по созданию и доводке локальных систем
автоматического регулирования и управления
рабочими процессами МТА на единых
энергетической и информационной базах позволит
перейти к следующему этапу - разработке
интегрированной системы автоматического
управления и к созданию
автоматизированного агрегата - робота, управляемого единой
бортовой ЭВМ.
При решении задач автоматизации МТА
определяется номенклатура управляемых
параметров, диапазоны их изменения и
требуемая точность измерения. В табл. 3.6.1
приведены данные, характеризующие параметры
технологических процессов растениеводства и
рабочих процессов МТА [16].
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
491
3.6.1. Характеристика управляемых параметров [30
Величина
Диапазон измерений
Допускаемая погрешность
измерения, %
Характер используемых
сигналов
Воспринимаемые величины технологического процесса
Глубина обработки
почвы, м
Подача семян в
борозду, шт/м
Глубина заделки семян
в почву, м
Наличие растений в
фазе роста, шт/м
Внесение удобрений,
кг/га
Наличие растений и
корнеплодов в фазе
спелости, шт/м
Уровень материала в
бункере, % (по
объему)
0,04 ... 0,6
6 ... 50
Менее 200
Менее 4
0,02 ... 0,08
3 ... 5 (пропашные
культуры)
15 ... 20 (рядный
посев)
100 ... 150 (травы)
30 ... 2 000
50 ... 300
15 ... 20 (картофель)
3 ... 5 (свекла
10 ... 100
±5
±1
при пунктирном
посеве
± 5 ... ± 10
при рядном посеве
±1
при посадке
картофеля
±5
±3... ±5
±5
±5
+10 ... 20 (объема
бункера для посевных
агрегатов) 0,5;
0,7 и 1 (объема
бункера комбайнов)
Непрерывный
Дискретный
Непрерывный с
достоверностью 80 %
(соответствует глубине
хода)
Дискретный
Дискретный для
гранулированных
удобрений
Непрерывный для
гербицидов
Дискретный
»
Параметры, характеризукипие работу агрегата,
в том числе энергетической установки и технологической части агрегата
Перемещения
Линейные и угловые
скорости рабочих
органов технологических
машин, рад/с
0,03 ... 0,05
Менее 300
5 ... 10
Непрерывный или
дискретный
492
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
Продолжение табл. 3.6.1
Величина
Положение рабочих
органов, м
Расположение
агрегата, °
Действительная
скорость поступательного
Давление в гидр оси-1
стеме, МПа
Температура, °С:
в системе
охлаждения дизеля
в гидросистеме
машин
Величина буксования
движителей, %
Напряжение в
электрической сети, В
Диапазон измерений
0,1 ... 1,8
0 ... 25
0 ... 12
Менее 40
70 ... 95
| 70 ... 110
3... 30
5,4 ... 30
Допускаемая погрешность
измерения, %
10
Не более 10
±3
±2 ... ±3
±2 ... ±3
±5
±3
Характер используемых
сигналов
Непрерывный
Аналоговый
Непрерывный
»
»
*
»
Для применения систем автоматического
управления технические объекты МТА
(тракторы и агрегатируемая машина) должны
быть приспособлены к автоматизации.
Отдельные агрегаты трактора обладают
внутренним автоматизмом (дифференциалы
повышенного трения, самоблокирующиеся
дифференциалы, муфты свободного хода,
гидротрансформаторы и др.). Функционирование их
происходит автономно, независимо друг от
друга, а также от применяемых на МТА
средств автоматизации. В этой связи возникает
проблема целесообразности перевода этих
агрегатов на управление от единого бортового
микропроцессора с целью оптимизации
выходных параметров агрегата. Если
автономность таких систем не приводит к
конфликтности, то использование агрегатов с
внутренней автоматичностью, отличающихся
простотой конструктивного исполнения и
надежностью, следует считать предпочтительным.
Интегрированная (комплексная) система
автоматизации включает в себя комплекс
локальных систем различного назначения,
функционирование которых подчинено единой
цели. В такой системе отказ одной или
нескольких подсистем не должен приводить к
отказу всей системы. При этом возможно
лишь некоторое снижение эффективности
объектов автоматизации.
Надежность локальных систем
автоматизации должна закладываться при их
проектировании, реализовываться в процессе
производства и поддерживаться в эксплуатации.
Показатели надежности АСУ определяются с
учетом уровня надежности объекта
автоматизации и их функциональным значением.
Общим критерием, определяющим правильность
их выбора, служит эффективность
использования сельскохозяйственной техники,
оснащенной АСУ. Наибольшей надежностью должны
обладать системы защиты наиболее
ответственных узлов и агрегатов трактора и машин:
двигателя (САЗД), гидросистемы (САЗГ),
трансмиссии, управления машиной (рулевое
управление, тормозные системы и др.). Выход
из строя этих систем определяет безопасность
эксплуатации техники, вызывает большие
затраты на восстановление ее работоспособности
и ведет к загрязнению экологической среды.
Отказы этих систем не допускаются в течение
всего срока службы машины. На втором месте
по требованиям надежности работы находятся
системы автоматического контроля (САК)
параметров машин и технологического
процесса, выполняемого ими. Надежность таких
систем закладывается на порядок выше
надежности работы контролируемых ими машин, а
регулирующих и управляющих автоматических
систем - в 2-3 раза выше показателей
надежности МТА.
АВТОМАТИЗАЦИЯ УПРАВЛЕНИЯ
493
Изложенные принципы положены в
основу созданных систем автоматизации МТА.
Система автоматического контроля (САК)
обеспечивает контроль 32 параметров:
давления, температуры, частоты вращения,
загрязнения фильтров двигателя, трансмиссии,
гидравлической навесной системы,
пневматической системы, наличия воды в топливе,
уровней масла в смазочной системе всех
агрегатов трактора и в гидравлической навесной
системе, жидкости в системе охлаждения
двигателя и др. САК включает следующее:
первичные преобразователи контролируемых
параметров; средства обработки информации,
поступающей с первичных преобразователей,
осуществляемой по заданным алгоритмам;
средства отображения информации;
исполнительный механизм аварийной остановки
двигателя; электрические кабели системы связи.
Питание САК осуществляется от
бортовой системы электрооборудования трактора.
При включении источника электроснабжения
САК осуществляется проверка
работоспособности индикаторов с последующим
автоматическими переходом в режим предпускового
контроля параметров трактора. Вывод
параметра на цифровой индикатор осуществляется
одновременно с индикацией адреса параметра.
Система автоматического вождения
(САВ) агрегата должна сводить к минимуму
негативное влияние всех действующих
факторов и обеспечивать максимальную
прямолинейность проходов агрегата, исключая огрехи
при заданной величине перекрытия.
Радионавигационная САВ предназначена для
безмаркерного автовождения МТА любого типа и
назначения и может обеспечить работу в
любых условиях эксплуатации, в том числе в
любое время суток. Для определения
координат МТА используются радионавигационные
маяки. Значения текущих координат
сравниваются с заданной программой движения.
Получаемые сигналы рассогласования
используются для формирования управляющих
сигналов, которые реализуются в виде сигналов
управляющих воздействий, поступающих на
исполнительные механизмы трактора. Одна
станция-передатчик (ведущая станция)
расположена на МТА, а по краям поля установлены
два ретранслятора (ведомые станции),
принимающие и передающие радиосигналы, которые
подвергаются обработке бортовым
микропроцессором. На основе получаемой информации
формируются сигналы управления.
Находят применение различные
специализированные САВ. Например, на агрегатах
для возделывания пропашных культур и при
отвальной пахоте применяют САВ с
механическими копирующими устройствами.
Значительный эффект дает
автоматизация гидравлической навесной системы
трактора. В зависимости от тягового класса трактора
применение системы автоматического
регулирования навесной системы (САРН)
обеспечивает повышение производительности на
6 ... 15 % и снижение расхода топлива на
6 ... 10 % по сравнению с гидромеханическим
регулятором. При этом существенно
облегчаются условия труда водителя. САРН включает
систему датчиков (силы, давления,
положения), блок с электромагнитами управления
распределителем, электронный блок, основной
пульт управления и выносной пульт.
В зависимости от выбранного вида
регулирования (силовой, позиционный или
смешанный) в электронный блок поступает
сигнал от датчика регулируемого параметра и
после преобразования (демодуляция,
фильтрация, усиление, коррекция, смешение)
сравнивается с заданным сигналом. При превышении
заданной величины нечувствительности
формируются команды управления, реализуемые
электромагнитами. Электронный блок
включает устройства, обеспечивающие
электроснабжение системы датчиков, преобразование их
сигналов, сравнение сигнала датчика с
заданным значением и формирование команд
управления электромагнитами.
Наибольшая эффективность ожидается от
применения интегрируемых САУ. Такие
системы позволяют согласовать процессы
управления несколькими важнейшими агрегатами и
механизмами трактора и машины и
целенаправленно повысить реализацию его
потенциальных возможностей.
На рис. 3.6.11 приведена структурная
схема комплексной системы автоматического
управления энергетическими режимами
трактора (КСАУР), которая состоит из четырех
основных частей: 1) информационной, 2)
логической, 3) исполнительной, 4)
управляющей.
В информационную часть входят датчики
(сигнализаторы) для сбора информации о
режимах работы механизмов и систем
тракторного агрегата и задающие устройства,
позволяющие задавать режимы агрегата. Задается
скорость агрегата, допустимое буксование
движителей и положение рабочих органов
агрегатируемой машины. На основе
получаемой от датчиков информации о скоростном и
нагрузочном режимах двигателя, номере
включаемой передачи, действительной и
теоретической скоростях движения, положении
рабочих органов машин логическая часть
анализирует режимы работы агрегата, оценивает их
отклонение от оптимальных областей и
формирует команды на изменение скоростного
режима двигателя, переключение передач,
изменение положения элементов навесной
системы трактора. Сигналы сформированных
команд реализуются механизмами
исполнительной части в виде управляющих
воздействий на органы управления трактором.
494
Глава 3.6. РАБОЧЕЕ ОБОРУДОВАНИЕ АВТОМАТИЗАЦИЯ
Г7л
информационная часть
Задатчик
скорости
трактора
Сигнализатор
режимоб
работы
двигателя
Задатчик
положения
орудия (глубины
Вспашки)
Сигнали-]
затор
Включенное
передачи
Сигнализатор
команды
на
Включение
пониженных
передач
Ц
Устройство
отображения
информации и
сигнализации
Управляющая частГ\
Пульт
управления
Задатчик
допустимого
буксования
колес
Сигнализа-\
тор
положения орудия
относитсльА
но трактора]
или
поверхности
почвы
Сигнали
затор
теорети-\
ческой '
скорости
движения
трактора
Сигнализатор
действительной
скорости
движения
трактора
т
Логическая часть
Устройство
обработки
информации
Оперативная
и
перепрограммируемая
память
Устройство
управления
Формирователь
команд на
переключение передач
Арифметико-
логическое
устройство
Формирователь команд
на изменение частоты
вращения двигателя
Формирователь
команд на изменение
положения навески
| Исполнительная часть
Механизм
переключения
передач
т
Механизм
изменения
скорости
двигателя
3
Механизм
изменения
положения
навески
Т1
Рис. 3.6.11. Структурам схема комплексной системы автоматического управления
энергетическими режимами трактора
В системе предусмотрен пульт
управления, позволяющий задавать и изменять
режимы работы КСАУР, переходить от
автоматического режима к ручному и наоборот.
Контролировать состояние системы и изменение
режимов позволяет устройство отображения
информации и сигнализации. Важным
преимуществом этой системы является ее
экономичность, сущность которой выражается в
предотвращении повышенного буксования
движителей и вызываемого им разрушения структуры
почвы. Уменьшение буксования также снижает
потери мощности и энергоемкость
технологического процесса. Увязка в одной системе
операций управления режимами
энергетического средства (трактора) и рабочих органов
агрегатируемой машины позволяет обеспечить
комплексный подход к обеспечению высоких
показателей качества выполняемых
технологических процессов. Работа механизмов трактора
на оптимальных режимах повышает их срок
службы. Создаются благоприятные условия
труда, что, в свою очередь, также способствует
повышению показателей эффективности МТА.
СПИСОК ЛИТЕРАТУРЫ
495
СПИСОК ЛИТЕРАТУРЫ
1. Автоматизированный метод построения
схемы зацепления гусеницы с ведущим
колесом трактора / О. А. Полетаева, Н. В.
Безрукова, С. А. Пацеля, М. П. Скуратовский
// Тракторы и сельхозмашины. 1987. № 7.
С. 11 - 12.
2. Анвлович В. Я., Водолажченко Ю. Т.
Конструирование и расчет
сельскохозяйственных тракторов. М.: Машиностроение, 1976.
456 с.
3. Барский И. Б. Конструирование и
расчет тракторов. М.: Машиностроение, 1980.
380 с.
4. Бородин И. Ф., Недилысо Н. М.
Автоматизация технологических процессов. М.:
Агропромиздат, 1986. 360 с.
5. Влияние, параметров МТУ на
эффективность использования промышленных
тракторов / С. И. Дорменев, В. А. Доброхлебов,
О. Б. Котиев и др. // Тракторы и
сельскохозяйственные машины. 1989. № 9. С. 34 - 38.
6. Гельфенбейи С. П., Волчанов В. Л.
Электроника и автоматика в мобильных
сельхозмашинах. М.: Агропромиздат, 1986. 248 с.
7. Гинзбург Ю. В., Швед А. И.,
Парфенов А. П. Промышленные тракторы. М.:
Машиностроение, 1986. 296 с.
8. Дмитриченко С. С, Завьялов Ю. А.,
Артемов В. А. Оценка нагруженности ходовой
системы колесного трактора // Тракторы и
сельхозмашины. 1985, № 12. С. 9 - 12.
9. Илинич И. М., Никонов В. В., Каль-
ченко Б. И. Расчет, проектирование и
испытание кабин тракторов. М.: Агропромиздат,
1989. 340 с.
10. Кальбус Г. Л. Гидропривод и
навесные устройства тракторов. Киев: Урожай. 1990.
248 с.
11. Кокс С. У. Р. Микроэлектроника в
сельском хозяйстве. М.: Агропромиздат, 1986.
360 с.
12. Краснеиьков В. И., Вашец А. Д.
Проектирование планетарных механизмов
транспортных машин. М.: Машиностроение, 1986.
272 с.
13. Ксеневич И. П., Орлов Н. М.
Проблемы агрегатирования сельскохозяйственной
техники // Тракторы и сельхозмашины. 1985.
№ 11. С. 12 - 13.
14. Ксеневич И. П., Скотников В. А.,
Ляско М. И. Ходовая система почва - урожай.
М.: Агропромиздат, 1985. 304 с.
15. Ксеневич И. П., Солонский А. С,
Войчинский С. М. Проектирование
универсально-пропашных тракторов. Минск: Наука и
техника, 1980. 320 с.
16. Ксеневич И. П., Тараснк В. П.
Системы автоматического управления
ступенчатыми трансмиссиями тракторов. М.:
Машиностроение, 1979. 280 с.
17. Коноиенко В. Г., Кушнаренко С. Г.,
Прялин М. А. Оценка технологичности и
унификации машины. М.: Машиностроение, 1986.
268 с.
18. Куп" Л. Н., Пономаренко В. М.,
Уткин-Любовцев О. Л. Индивидуальные
системы подрессоривания гусеничных
тракторов. М.: ЦНИИТЭИтракторосельхозмаш, 1980.
42 с.
19. Либцис С. Е. Классификация
компоновочных схем. М.:
ЦНИИТЭИтракторосельхозмаш, 1982. Вып. 2. С. 24 - 26.
20. Либцис С. Ем Свирковнч В. Э.,
Шаповалов Ю. С. Тенденции развития
компоновочных схем сельскохозяйственных тракторов
за рубежом. М.:
ЦНИИТЭИтракторосельхозмаш, 1983. 240 с.
21. Парфенов А. П. Развитие системы
классификации сельскохозяйственных
тракторов // Тракторы и сельхозмашины. 1985.
N9 10. С. 9 - 13.
22. Пархиловский И. Г. Матомобильные
листовые рессоры. М.: Машиностроение, 1978.
228 с.
23. Платонов В. Ф., Леиашвили Г. Р.
Гусеничные и колесные транспортно-тяговые
машины. М.: Машиностроение, 1986. 248 с.
24. Проектирование трансмиссий
автомобилей / Под ред. А. И. Гришкевича. М.:
Машиностроение, 1984. 272 с.
25. Ранмпель И. Шасси автомобиля:
Элементы подвески. М.: Машиностроение,
1987. 248 с.
26. Ракицкий А. А., Бернадкий А. К.
Обеспечение ресурса рессорных подвесок.
Минск: Наука и техника, 1988. 168 с.
27. Расчетно-экспернментальная оценка
долговечности несущих систем / В. И. Мирки-
танов, А. И. Журавель, Е. К. Почтенный и др.
// Тракторы и сельскохозяйственные машины.
1988. N9 7. С. 44 - 45.
28. Сцепления транспортных и тяговых
машин / И. Б. Барский и др. М.:
Машиностроение, 1989. 344 с.
29. Тракторнне моторно-трансмиссион-
ные установки с двигателями постоянной
мощности / С. И. Дорменев, А. П. Банник,
И. К. Коваль и др. М.: Машиностроение.
1987. 184 с.
30. Тракторы. Проектирование,
конструирование и расчет / Под ред. И. П. Ксе-
невича. М.: Машиностроение, 1992. 544 с.
31. Тракторы. Теория / Под ред.
В. В. Гуськова. М.: Машиностроение, 1988.
376 с.
32. Трансмиссии тракторов / К. Я.
Львовский, Ф. А. Черпак, И. Н- Серебряков,
Н. А. Щельцын. М.: Машиностроение, 1976.
280 с.
496
СПИСОК ЛИТЕРАТУРЫ
33. Тенденции развития
лесопромышленных тракторов / А. И. Швед, Н. Т. Итабулин,
Э. К. Стрельцов и др. М: ЦНИИТЭИтракто-
росельхозмаш, 1987. Вып. 4. С. 20 - 22.
34. Тенденции развития современных
многоосных лесных тракторов / В. Д.
Ковригин, Э. К. Стрельцов, Ю. И. Проворотов,
Э. Л. Транкина. М.: ЦНИИТЭИтракторсель-
хозмаш, 1984. Вып. 9. С. 23 - 25.
35. Уайлд Д. Оптимальное
проектирование. М.: Мир, 1981. 272 с.
36. Цитович И. С, Альгин В. Б., Грицке-
ып В. В. Анализ и синтез планетарных
коробок передач автомобилей и тракторов. Минск:
Наука и техника, 1987. 224 с.
37. Шувалов Е. А., Добряков Б. А, Пан-
тюхин М. Г. Теория и расчет трактора
"Кировец". Л.: Машиностроение, 1980. 208 с.
38. Эксплуатационная технологичность
конструкций тракторов / Под общ. ред.
Н. Ф. Чухчина и В. М. Старикова. М.:
Машиностроение, 1982. 248 с.
РАЗДЕЛ 4
ГУСЕНИЧНЫЕ
ТРАНСПОРТНО-ТЯГОВЫЕ МАШИНЫ
Гусеничные транспортно-тяговые
машины - относительно новый вид техники,
предназначенной для выполнения транспортных и
тяговых функций в условиях трудно
проходимой местности и слабо развитой дорожной
сети. В отличие от тракторов они имеют
лучшие скоростные свойства и в некоторой
степени подобны полноприводным автомобилям,
но более высокой проходимости. Их развитие
связано с освоением природных ресурсов на
Севере, в Сибири и на Дальнем Востоке, где
автомобили и тракторы или не могли
использоваться по дорожно-климатическим
условиям, или не имели необходимой
эффективности, а затем с процессами конверсии.
Значительная часть военных гусеничных машин
стала переоборудоваться под различные
подвижные технологические установки и
машины специального назначения в малообжитых
районах или на отдаленных объектах
производства: экстренной медицинской помощи,
пожарные, машины-комплексы,
предназначенные для ликвидации последствий
чрезвычайных, аварийных ситуаций и др.
Глава 4.1
ПРИНЦИПЫ СОЗДАНИЯ И
ОБЩЕМАШИННЫЕ РЕШЕНИЯ
4.1.1. ОСОБЕННОСТИ ГУСЕНИЧНЫХ МАШИН
Многоцелевые гусеничные машины
классифицируются по типам, определяемым их
назначением: быстроходные тягачи;
транспортеры- снегоболотоходы; транспортеры-тягачи
многоцелевого назначения; транспортно-
технологические машины на базе специальной
(целевой) техники; сочлененные (двухзвенные)
транспортеры особо высокой проходимости.
Каждый тип машин подразделяется или
по тяге (тягачи), или по грузоподъемности
(транспортеры), или по полной массе
(специальные машины). Так, быстроходные
гусеничные тягачи делят на легкие, с тягой на
крюке менее 60 кН (АТ-Л), средние, с тягой
менее 140 кН (АТС-59), тяжелые, с тягой
менее 250 кН (АТ-Т).
Наиболее распространенным критерием
классификации многоцелевой техники в
настоящее время является полная масса,
согласно которой машины подразделяются на
категории: особо легкую, полной массой менее 8
г, легкую, полной массой менее 18 т;
промежуточную, полной массой менее 35 т;
среднюю, полной массой менее 42 т; тяжелую,
полной массой менее 60 т.
Гусеничные быстроходные тягачи - первые
массовые транспортно-тяговые машины (табл.
4.1.1). Следует отметить одну особенность,
которая отличает тягачи от других транспорт-
но-тяговых машин - их относительно малую
удельную грузоподъемность при высоких
значениях прицепной нагрузки.
В табл. 4.1.2 приведены удельные
показатели гусеничных тягачей и полноприводных
автомобилей. Если у полноприводных
автомобилей при сопоставимой массе и удельной
мощности коэффициент прицепной нагрузки
(отношение массы прицепа к массе машины)
составляет в среднем 0,4 - 0,45, то у
гусеничных тягачей он в 2 раза больше, а
коэффициент грузоподъемности (отношение массы
перевозимого груза к массе машины) у них,
наоборот, в 1,5 - 2 раза меньше.
Важная принципиальная особенность
гусеничных тягачей - переднее расположение
двигателя и агрегатов трансмиссии для
обеспечения удобства буксировки прицепов. Другой
принципиальной особенностью тягачей
является наличие агрегата, предназначенного для
изменения скорости движения и
осуществления поворота с фиксированным радиусом [12].
Так, у тягача АТ-Л изменение скорости
движения и радиуса поворота производится с
помощью единого агрегата - механизма
передач и поворота (МПП) 3, который включает
главную передачу (коническую зубчатую пару),
коробку передач и механизм поворота с
разделением потока мощности (рис. 4.1.1). МПП
располагается непосредственно у главного
фрикциона 2 двигателя 1 в передней части
машины. Выходные валы МПП передают
крутящий момент к бортовым передачам 5 через
короткие соединительные валы 4. Ведущие
колеса 6 установлены непосредственно на
выходных валах бортовых передач 5.
498
Глава 4.1. ПРИНЦИПЫ СОЗДАНИЯ
4.1.1. Техническая характеристика быстроходных гусеничных тягачей
Показатель
Масса, т:
снаряженного
тягача
полная
буксируемого
прицепа
Грузоподъемность, т
Число мест в кабине
Размеры тягача, мм
(длина ж ширина ж
ж высота)
Колея, мм
Дорожный просвет, мм
Ширина гусениц, мм
Двигатель
Мощность, кВт
Максимальная
скорость, км/ч
Удельная мощность,
кВт/т
Коэффициент
грузоподъемности
Коэффициент
прицепной нагрузки
Среднее давление на
грунт, МПа
Легкие
АТ-Л
6,3
8,3
6
2
3
5313 ж 2214 ж
ж 2200
1900
350
300
ЯАЗ-206
96
42
11,5
0,32
0,73
0,045
Средние
АТС-59
13
16
14
3
3
6280 ж 2780 ж
ж 2500
2200
425
400
В-2
220
39
13,7
0,23
0,88
0,052
АТС-59г
13,5
16,5
14
3
6
6280 ж 2780 ж
ж 2500
2260
425
400
В-2
220
39
13,4
0,22
0,87
0,053
Тяжелые
АТ-Т
20
25
25
5
3
6990 ж 3140 х
ж 2845
2640
425
500
В-2
305
35
12,2
0,25
1
0,068
4.1.2. Удельные показатели гусеничных тягачей и полноприводных автомобилей
Тягач
Полная масса
тягача, т
Удельная
мощность, кВтД
Коэффициент
грузоподъемности
прицепной нагрузки
АТ-Л
АТС-59
АТ-Т
8,3
16,0
25,0
1>сеш
11,5
13,8
12,2
0,32
0,23
0,25
Полнопряводные автомобили
0,73
0,88
1,0
ЗИЛ-131
"Урал-4320"
КрАЗ-260
10,5
13,8
22,1
10,1
11,2
10,0
0,52
0,59
0,71
0,4
0,41
0,45
ОСОБЕННОСТИ ГУСЕНИЧНЫХ МАШИН
499
Рис. 4.1.1. Кошюномя
Все гусеничные тягачи имеют
гусеничный движитель с опорными катками большого
диаметра, что позволяет отказаться от
поддерживающих катков, но несколько утяжеляет
конструкцию.
Еще одной конструктивной
особенностью гусеничных тягачей является наличие
мощной тяговой лебедки, которая
предназначена для эвакуации машины в случае
застревания в особо тяжелых дорожных условиях, а
также для вытаскивания прицепов или других
машин, у которых лебедки отсутствуют.
Наличие несущего корпуса дает
гусеничным тягачам ряд эксплуатационных
преимуществ таких, как более благоприятные условия
работы агрегатов (ввиду отсутствия пыли и
грязи), значительная глубина преодолеваемого
брода, более высокая прочность и надежность
несущей системы.
Гусеничные транспортеры-снегобалотоходы
служат для перевозки людей и грузов в
основном в условиях бездорожья. В
труднопроходимых районах получили распространение
снегоболотоходы двух весовых классов -
среднего (ГТ-С, ГТ-СМ) и тяжелого (ГТ-Т).
Транспортеры-снегоболотоходы
отличаются высокой проходимостью, в том числе
возможностью преодоления заболоченных
участков местности на плаву. Высокая
проходимость транспортеров достигается благодаря
низкому давлению на грунт (в пределах 0,03
МПа) и герметизации корпуса,
водоизмещение которого достаточно для обеспечения
плавучести. Движение на плаву осуществляется с
помощью гусениц.
Техническая характеристика
транспортеров- снегоболотоходов приведена в табл. 4.1*3.
Высокая проходимость, делающая
транспортеры-снегоболотоходы в ряде случаев не-
АТ-Л
заменимым транспортным средством,
обусловливает их непрерывное совершенствование.
Так, на базе транспортера ГТ-Т создана
модификация с повышенной скоростью за счет
введения гидрообъемных механизмов поворота
и улучшения подвески, а на базе транспортера
ГТ-СМ - модификация с герметизированным
утепленным кузовом для работы в условиях
чрезвычайных ситуаций.
Герметизация кузова и установка в нем
дополнительной системы отопления и
кондиционирования позволяют использовать
транспортер при температурах окружающего
воздуха ±45 °С, а высота кузова 1800 мм от пола до
потолка - выполнять стоя различные работы в
зависимости от комплектования транспортера
тем или иным оборудованием. Одна из
наиболее удачных модификаций - медицинская,
предназначенная для перевозки больных или
пострадавших при чрезвычайных ситуациях и
оказания им необходимой помощи при
движении машины. Характеристики этой
модификации приведены ниже.
Полная масса
(включая 5 человек), кг 5750
Количество мест в кабине 2
Погрузочная высота кузова,
мм 840
Максимальная скорость, км/ч 60
Скорость на плаву, км/ч 5 ... 6
Запас хода, км 600
Специальное оборудование ФВУ-100-12,
кондиционер,
радиостанция
Р-163-50У
500
Глава 4.1. ПРИНЦИПЫ СОЗДАНИЯ
4.1.3. Техническая характеристик* транспортеров-снегоболотоходов
Показатели
Мощность двигателя,
кВт
Масса транспортера, т
Грузоподъемность, т
Число мест:
в кабине
на платформе
Размеры: мм
ширина колеи
база
дорожный
просвет
габаритные
размеры (длина ж ширина
ж высота)
Среднее давление на
грунт, МПа
ГТ-С
51,4
3,65
1
2
9
2050
3350
400
4900 ж 2435 ж 1960
0,02
ГТ-СМ
86,1
3,75
1
2
10
2180
3630
380
5365 ж 2585 ж 1740
0,017
ГТ-Т
147
8,2
2
4
21
2600
3914
450
6340 ж 3140 ж 2160
0,024
Гусеничные многоцелевые транспортеры-
тягачи совмещают одновременно функции и
тяговых средств (тягачей), и средств
транспортирования грузов. Эта сложная задача решена
путем реализации следующих основных
положений:
резкого увеличения грузоподъемности по
сравнению с гусеничными тягачами при
одновременном сохранении на одинаковом уровне
с тягачами тяговых возможностей;
увеличения максимальных и средних
скоростей движения как одиночных машин,
так и машин с прицепами;
значительного увеличения полезного
объема кузова (корпуса) с целью повышения
грузовместимости и возможности провоза
большего количества пассажиров и грузов;
обеспечения в весовых категориях
машин, соответствующих транспортерам-
снегоболотоходам такой же высокой
проходимости, в том числе и плавучести;
приспособленности для многоцелевого
использования.
Транспортеры-тягачи по своим
возможностям и назначению значительно отличаются
от гусеничных тягачей и гусеничных
транспортеров-снегоболотоходов. Их создание было
значительным шагом вперед по пути
совершенствования транспортно-тяговой техники.
Благодаря их созданию возможно решение
более широкого круга задач меньшим числом
машин.
Реализация изложенных требований при
создании транспортеров-тягачей потребовала
новых подходов как при их конструировании,
так и при производстве. Как известно, задача
совмещения требований широкой
универсальности в эксплуатации и экономичности в
производстве в определенной мере противоречива.
С точки зрения эксплуатации желательно
иметь машину, которая работает в широком
диапазоне тяговой загрузки и выполняет
функции быстроходной транспортной
машины, удовлетворяет требованиям тягача и
транспортера. Отличие назначений обусловливает
различие конструкций.
Создание универсальной машины с
экономической точки зрения нецелесообразно,
так как это ведет к ее усложнению и
удорожанию производства. При этом не исключено,
что универсальная машина по ряду
эксплуатационных качеств не сможет достичь уровня,
присущего специализированным машинам.
Решение было найдено в реализации
принципов унификации и функциональной
комплектации, т.е. в создании таких машин,
частичное изменение конструкций которых в
сочетании с комплектованием унифицирован-
ОСОБЕННОСТИ ГУСЕНИЧНЫХ МАШИН
501
ными системами давало возможность получать
машины различного целевого назначения. При
этом у базовых машин в зависимости от
тягового или транспортного предназначения
несколько изменялась или грузоподъемность,
или прицепная нагрузка. В этом случае
достигается примерно равная нагруженность и
ресурс машин.
Характерными транспортерами-тягачами
в своих весовых категориях являются ГТ-Му,
МТ-Л (МТ-ЛБ), МТ-С и МТ-Т. Их
техническая характеристика приведена в табл. 4.1.4.
4.1.4. Техническая характеристики транспортеров-тягачей различных категорий
Показатели
Масса: т
в снаряженном
состоянии
буксируемого
прицепа
Грузоподъемность,
т:
при
буксировании прицепа
при перевозке
груза на
платформе
Число мест:
в кабине
на платформе
(в кузове)
Размеры: мм
длина х
ширина х высота
ширина колеи
база
дорожный
просвет
Среднее давление на
грунт, МПа
Мощность
двигателя, кВт
Максимальная
скорость движения,
км/ч
Максимальная сила
тяги лебедки, кН
Малый
ГТ-Му
4,8
2
1,2
1,2
2
10
5146 х
х 2470 х
х 1700
2080
3330
350
0,0223
85
55
4
МТ-Л
8,5
7
2,5
4,25
8
10
6364 х
х 2850 х
х2013
2500
3700
400
0,0428
176,5
61
70
Легкий
МТ-ЛБ
9,7
2
2,5
2,5
1
12
6454 х
х 2850 х
х 1865
2500
3700
400
0,044
176,5
61
70
МТ-ЛБу
11,5
-
-
4
1
7
7210 х
х 2850 х
х 1905
2500
4445
400
0,0485
220
61
-
Средний
МТ-С
23,5
-
-
10,2
4
-
7800 х
х 3340 х
х 1846
2752
4660
445
0,074
522
65
-
Тяжелый
МТ-Т
25
25
12
12
5
18
8630 х
х 3420 х
х2990
2730
4703
425
0,072
522
65
250
502
Глава 4.1. ПРИНЦИПЫ СОЗДАНИЯ
4.1.5. Сравнительная характеристика транспортно-тяговых возможностей
разных типов в классе легкой категории
Показатель
Масса с грузом щ, т
Грузоподъемность, т
Масса буксируемого
прицепа, т
Отношение массы
прицепа к полной массе
тягача
'"г = уср ЦрЧ _/яг )
АТ-Л
8,3
2
6
0,72
7,2
ГТ-Т
10,2
2
4
0,39
5,6
МТ-ЛБ
13 (10,5)
2,5
7
0,54
15,4 (7)
"Урал-4320"
13,5
5
5
0,37
15,6
Примечание. В скобках даны значения при буксировке прицепа.
Характерно, что транспортер-тягач по
тяговым функциям практически не уступает
тягачу, а при выполнении транспортных задач
существенно превосходит его (в
соответствующих весовых категориях), а по
производительности приближается к полноприводному
автомобилю соответствующего класса (табл. 4.1.5).
Сочлененные (двухзвенные) гусеничные
машины по назначению аналогичны
многоцелевым транспортерам-тягачам, однако
конструктивно отличаются от них значительно.
Создание двухзвенных гусеничных
машин было обусловлено необходимостью
выполнения тягово-транспортных работ в
условиях полного бездорожья по снежной целине
и заболоченной местности. Достаточную
проходимость в этих условиях можно обеспечить
при среднем давлении на грунт не выше 0,02
... 0,03 МПа, а на участках с малой несущей
способностью - не более 0,005 ... 0,01 МПа.
Одиночную машину с таким давлением под
опорной поверхностью гусениц создать
практически невозможно, поскольку при
существующих габаритных ограничениях по
ширине ее пришлось бы делать с очень
длинным гусеничным движителем (базой), что
чревато потерей управляемости из-за большого
сопротивления повороту.
Среднее давление на грунт у одиночной
машины
Рср =°т 1{1Ыои)у
где От - полный вес транспортера-тягача; Ь -
ширина гусеницы; Ьоп - длина опорной
ветви.
Максимальная ширина гусеницы не
может быть больше значения Вт - а , • причем
габарит Вт и межгусеничное пространство
ограничены в определенных пределах, а по
условию поворачиваемости Ьопй1,7Вт.
Поэтому у одиночных машин низкое давление на
грунт может быть достигнуто только за счет
уменьшения полного веса (грузоподъемности).
Как правило, у снегоболотоходных машин она
выше 1,5 ... 2 т.
У двухзвенных машин при тех же
ограничениях по габаритной ширине и
поворачиваемости среднее давление рср =
= (7т/(4М,оп), т.е. при одинаковом
давлении полный вес машины вдвое больше. Таким
образом, при сохранении высокой
проходимости грузоподъемность сочлененных машин
гораздо выше, чем одиночных. В этом их
основное преимущество. Техническая
характеристика некоторых из них приведена в табл.
4.1.6.
Характерной особенностью двухзвенных
гусеничных машин является применение
ленточных гусениц, в ряде случаев шириной до
1,4 м. Это обусловлено тем, что установка
обычных металлических гусениц подобной
ширины привела бы к чрезмерному
увеличению массы ходовой части, т.е. к снижению
грузоподъемности и большим затратам
мощности на перематывание гусениц.
ОСОБЕННОСТИ ГУСЕНИЧНЫХ МАШИН
503
4.1.6. Техническая характернстнжя двухзвенных гусеничных I
Показатель
Грузоподъемность, т
Масса в
снаряженном состоянии,
т
зоподъемности
Мощность
двигателя, кВт
Максимальная
скорость, км/ч:
по суше
на плаву
Минимальный
радиус поворота, м
Среднее давление на
грунт, МПа
ДТ-10П
10
21,5
0,47
522
37,0
5-6
13
0,022
ДТ-20
20
27
0,74
522
36,7
-
15
0,0274
ДТ-20П
20
25
0,8
522
36,7
4- 5
15
0,0262
"Урал-5920"
8
14
0,57
154
30
-
13,5
0,0243
ДТ-ЗОП
30
29
1,03
522
36,0
4,0
18
0,027
Для осуществления поворота двухзвен-
ной машины используют принципиально
иной механизм, обеспечивающий складывание
звеньев одно относительно другого. Механизм
складывания у некоторых машин осуществляет
складывание в плане и в вертикальной
плоскости, чем достигается приспосабливаемость к
местности (хорошая проходимость). При
складывании звеньев обеспечивается
бесступенчатый радиус поворота на любой скорости. Это
способствует снижению затрат мощности на
поворот. Меньшие же затраты мощности на
движение (благодаря низкому давлению) и на
поворот обусловливают меньшую удельную
мощность (в 1,5 - 2 раза меньше, чем у
одиночных), которая находится, как правило, в
пределах 10 ... 12 кВт/т.
Многоцелевые гусеничные машины на базе
специальных (в порядке конверсии) созданы
практически во всех весовых категориях: особо
легкой, легкой, промежуточной и средней.
Характерной особенностью таких машин
является преемственность конструкции со
специальным шасси. При этом осуществляется
реализация двух важнейших принципов:
обеспечения работоспособности и
технических характеристик создаваемых
многоцелевых шасси при изменении полной массы во
всем диапазоне данной весовой категории;
возможности создания на базе
специальной машины и соответствующего
многоцелевого шасси гусеничных машин различного
целевого назначения, т.е. семейства машин.
Это довольно сложная задача, поскольку
и полная масса, и технические характеристики
изменяются в пределах одной весовой
категории весьма значительно. Тем не менее, в
настоящее время сформировались технические
решения, которые позволяют обеспечить
реализацию этих двух принципов.
Для многоцелевого гусеничного шасси
техническая характеристика уже не содержит
значений, относящихся к конкретной машине,
а включает диапазон значений основных
показателей машин семейства. В табл. 4.1.7
приведена характеристика многоцелевых шасси для
основных весовых категорий машины.
Следует отметить, что у машин одной и
той же весовой категории в весьма широких
пределах изменяются такие базовые
характеристики, как полная масса и грузоподъемность.
В результате этого возникает необходимость
изменения мощности двигателя, базы
машины, давления на грунт, скорости движения и
др. Однако при этом конструкция основных
агрегатов и систем шасси не меняется. Они
остаются едиными и рассчитываются на
надежную работу во всем диапазоне изменения
нагрузочных режимов. Удельные тяговые
показатели при этом изменяются в менее узком,
чем полная масса, но все же широком
диапазоне.
504
Глава 4.1. ПРИНЦИПЫ СОЗДАНИЯ
4.1.7. Техническая характеристика многоцелевых гусеничных шасси основных весовых категорий
Показатель
Полная масса, т
Грузоподъемность, т:
при буксовании
прицепа
при одиночном
использовании
Масса буксируемого
прицепа, т
Число опорных катков
одного борта
Мощность двигателя,
кВт
Максимальная
скорость, км/ч:
по суше
на плаву
Ширина колеи, мм
База, мм
Среднее давление на
грунт, МПа
Дорожный просвет,
мм
особо легкая
5 ...7
1 ... 1,5
1 ... 1,5
2 ... 2,5
5 ...6
85 ... 129
50 ... 70
5 ...6
До 2180
3300 ... 3680
0,017 ... 0,024
350 ... 400
Весовая категория
легкая
И ... 18
2... 4
До 6
4 ...7
5 ... 7
176 ... 275
60 ... 72
5 ...7
До 2500
3700 ... 4440
0,028 ... 0,045
400
промежуточная
30 ... 32
5
До 10
15
6 ...7
520
65
-
До 2752
4400 ... 4640
До 0,07
450
средняя
25 ... 42
12
5 ... 17
25
5 ...7
305 ... 520
35 ... 65
-
2640 ... 2730
3748 ... 4703
0,065 ... 0,072
425 ... 450
4.1.2. ОБЩИЕ ПРИНЦИПЫ
КОНСТРУИРОВАНИЯ ГУСЕНИЧНЫХ МАШИН
МНОГОЦЕЛЕВОГО НАЗНАЧЕНИЯ
При создании многоцелевых
транспортеров-тягачей на стадии проектирования
предусматривается возможность их дальнейшего
развития на принципе формирования
семейства унифицированных модификаций, т.е.
машин, у которых основные агрегаты едины
или взаимозаменяемы. Характерными в этом
отношении являются легкие транспортеры-
тягачи многоцелевого назначения. Базовый
тягач этого класса машин разработан с учетом
следующих возможностей:
применения двигателя увеличенной (на
25 ... 30 %) мощности при раздельной его
компоновке с трансмиссией. Реализация этого
положения обеспечена тем, что силовая
передача и гусеничный движитель рассчитаны на
передачу более высокого крутящего момента
при тех же скоростях движения, а двигатель
может устанавливаться в требуемом месте;
существенного расширения диапазона
грузоподъемности, а следовательно, полной
массы в пределах 11 ... 16 т. Увеличение
полной массы достигнуто "наращиванием" базы,
т.е. увеличением числа опорных катков от 6 до
7 (на борт). Исходя из этого и спроектирована
конструкция унифицированной ходовой части
на единых катках и подвесках;
создания помимо транспортеров-тягачей
модификаций для использования в обычных
дорожно-грунтовых условиях и машин снего-
болотоходного типа, что влияет на
конструкцию корпуса, поскольку габариты у машин
всех типов практически одинаковы.
В результате реализации этих принципов
при разработке базового шестикаткового
транспортера-тягача в последуюшем было создано
многочисленное семейство унифицированных
машин.
Важным фактором при разработке
семейства машин является правильный выбор
типа и параметров (мощности) силовой
установки. Установкой одного двигателя, по-
видимому, эта задача не может быть решена (с
точки зрения экономической
целесообразности). Нерационально также применение
нескольких различных двигателей, что
нарушает унификацию агрегатов силовой
установки. Наиболее целесообразно использование
двигателя, допускающего форсирование за счет
наддува. Для легких транспортеров-тягачей
применен четырехтактный дизель ЯМЗ-238 и
МНОГОЦЕЛЕВЫЕ ГУСЕНИЧНЫЕ ШАССИ
505
его модификации, для машин промежуточной
весовой категории - дизель типа В2
мощностью 350 ... 700 кВт. В результате такого
решения обеспечиваются достаточные тяговые
и скоростные показатели базовых шасси и их
модификаций при значительном изменении
общей массы.
Требование касающееся возможности
увеличения грузоподъемности, а
следовательно, полной массы (если исключить переход на
иные, более легкие материалы, что ведет к
производственной обособленности, т.е.
неприемлемости по экономическим соображениям)
может быть осуществлено одним из трех
вариантов:
1) применением на базовом шасси
переразмеренных опорных катков и подвесок,
допускающих увеличение нагрузки у
модификаций без снижения ресурса ходовой части;
2) применением на базовой машине и на
модификациях разных по несущей
способности опорных катков и подвесок;
3) увеличением числа опорных катков.
Первый вариант обеспечивает высокую
унификацию машин по корпусу и ходовой
части. Но при этом материалоемкость базовой
машины существенно увеличивается, а
плавность хода ухудшается, т.е. характеристики
подвески в этом случае являются
оптимальными для модификаций увеличенной массы, а
для базового транспортера-тягача они
практически неудовлетворительные. Что касается
грузовместимости, то у модификаций
повышенной грузоподъемности она будет хуже, так
как полезный объем кузова или площадь
грузовой платформы у всех машин почти
одинаковая.
При втором варианте могут быть
обеспечены хорошие показатели материалоемкости и
плавности хода, однако унификацию при этом
реализовать невозможно (вариант не для
развития семейства).
Третий вариант - наиболее
целесообразный: достигается высокий уровень
унификации у базовой машины и модификаций;
обеспечивается требуемая плавность хода у всех
машин семейства и за счет увеличения базы
грузовместимость машин повышенной
грузоподъемности не ухудшается, а в ряде случаев
даже улучшается.
При создании или выборе базовой
машины важен также учет требований по
обеспечению создания снегоболотоходных
модификаций, реализуемый в трех вариантах:
установке уширителей на базовую гусеницу; установка
снаружи дополнительных опорных катков и
боковых траков, соединяемых с основным
общим пальцем; применение уширенных
несимметричных гусениц на тех же катках.
Первый вариант недостаточно надежен. Как
первый, так и второй приводят к увеличению
габаритного размера по ширине и
невозможности в скомплектованном виде перевозить
снегоболотоходные модификации
железнодорожным транспортом. Второй вариант
позволяет получить довольно низкие удельные
нагрузки на грунт (хорошую проходимость),
однако масса ходовой части при этом
возрастает. Третий вариант связан с
необходимостью уменьшения ширины корпуса базовой
машины. Поэтому при установке обычных
гусениц между ними и корпусом образуется
зазор - разность внутреннего уширения
гусениц.
4.1.3. ОСНОВЫ РАЗРАБОТКИ МНОГОЦЕЛЕВЫХ
ГУСЕНИЧНЫХ ШАССИ И МАШИН НА ИХ БАЗЕ
Гусеничные шасси должны быть
приспособлены к созданию на их базе машин разного
назначения. Использование многоцелевого
шасси для того или иного типа машины
только тогда оправданно, когда технические
характеристики машины существенно не
ухудшаются по сравнению со случаем создания
оригинального шасси именно под данную машину.
По отдельным показателям или
эксплуатационным свойствам машина на базе
многоцелевого шасси может несколько уступать машине
на оригинальном шасси, но не по требуемой
эффективности машины, особенно
производительности, экономичности, надежности,
приспособленности к условиям эксплуатации и
др.
В одном весовом классе машин не
исключена возможность создания не одного, а
двух или нескольких многоцелевых шасси,
если это оправдано экономически или
особенностями функционального использования
машин. Если в данном весовом классе
необходимо иметь десятки машин разного
назначения, то создать их все на одном шасси
практически невозможно.
Важнейшей особенностью многоцелевого
гусеничного шасси является
многофункциональность единых агрегатов, т.е. тех агрегатов,
которые составляют основу шасси и
используются во всех машинах. При этом реализуются
следующие требования к их конструкции:
возможность изменения мощности
силовой установки в диапазоне, определяемом
диапазоном полной массы машин той. или
иной весовой категории. Изменение мощности
силовой установки позволяет обеспечить
примерно одинаковую удельную мощность у
машин разной массы, а следовательно,
одинаковые технические и эксплуатационные
характеристики. Как правило, у многоцелевых шасси
необходимое изменение мощности силовой
установки достигает 40 ... 50 %. Это
достигается за счет того, что для многоцелевого шасси
используется не один двигатель, а семейство
унифицированных двигателей, у которых
мощность изменяется за счет конструкции и
506
Глава 4.1. ПРИНЦИПЫ СОЗДАНИЯ
параметров агрегатов наддува, системы
топливо подачи, применения промежуточного
охлаждения наддувочного воздуха и т.п. При
обеспечении необходимой удельной мощности
сохраняется высокая степень унификации
силовых установок в весовом классе машин;
приспособленность единых агрегатов к
использованию во всех машинах
унифицированного семейства. Данное требование
существенно расширяет возможности агрегатов, но
его реализация сопряжена иногда с
необходимостью введения в конструкцию некоторых
дополнительных элементов. Так, требование
обратимости двигательно -трансмиссионной
установки, т.е. возможности ее применения
как на машинах с передним расположением
ведущих колес, так и с задним, обусловливает
необходимость введения в конструкцию
трансмиссии механизма реверса (изменения
направления вращения выходного вала).
Возможность отбора мощности на привод
функционального оборудования обеспечивается за
счет наличия системы отбора мощности
двигателя. Блокирование подвески при работе ряда
машин предопределяет необходимость
введения (или возможности) в подвеску
специальных блокирующих устройств, хотя у других
машин эти устройства не используются. Объем
специфических требований определяется
составом и типом машин в унифицированном
семействе;
равная надежность единых агрегатов и их
оптимальные функциональные свойства во
всем диапазоне изменения нагрузок и
режимов работы машин семейства. Это достигается
или некоторым запасом допустимых значений
отдельных параметров, или возможностью
введения в конструкцию агрегата элементов с
измененными параметрами (например,
передаточным числом) или применением таких
конструкций, которые допускают
регулирование основных параметров агрегата (например,
зарядного давления в гидропневматической
подвеске).
В конструкциях многоцелевых
гусеничных шасси реализуются многие принципы,
опробированные при создании гусеничных
транспортеров-тягачей многоцелевого
назначения и получившие дальнейшее развитие.
Так, если при создании транспортеров-тягачей
были реализованы две схемы ходовой части - с
шестью и семью опорными катками, то при
создании многоцелевых гусеничных шасси еще
и с пятью опорными катками, что
существенно расширяет диапазон грузоподъемности в
весовом классе.
Нормирование грузоподъемности или
полной массы, т.е. формирование типораз-
мерных рядов многоцелевых шасси,
представляет сложную задачу, не имеющую единого
подхода, поскольку в ряде случаев
необходимость создания машины диктуется частными
требованиями, которые определяют базовые
параметры, а развитие семейства может
происходить уже на основе сложившейся
конструкции машины. Иногда типоразмерный ряд
формируется на принципе преемственности
конструкций или важнейших технических
решений. Тем не менее при разработке новых
многоцелевых гусеничных шасси стремятся
реализовать два следующих основных
принципа.
Первый заключается в том, чтобы
диапазоны грузоподъемности смежных семейств
машин не имели значительных разрывов, т.е.
удовлетворялись бы потребности в монтаже
технологического оборудования практически
любой массы и при этом использовалось бы
непереразмеренное шасси. Особенно это
важно для машин массового производства, где
использование переутяжеленной базы ведет к
значительным расходам в производстве и в
эксплуатации. Следует иметь в виду, что в
составе унифицированного семейства с
достаточно широким диапазоном изменения
полной массы неизбежно применение ряда
переразмеренных агрегатов, как правило, в
машинах меньшей массы. Поэтому в случае
большого разрыва в грузоподъемности между
смежными семействами будет "двойное
переутяжеление" шасси (рис. 4.1.2).
Зависимость полной массы шасси /Ищ
от грузоподъемности щ для двух смежных
семейств машин охватывает диапазоны грузо-
подъемностей 1\ и />2, соответственно от
т^1 до т%1 и от т^2 до т%2 •
Использование унифицированных агрегатов шасси,
рассчитываемых, как правило, для модификаций
наиболее нагруженных, т.е. более тяжелых,
обусловливает завышенную массу по
сравнению с оптимальной у легких модификаций на
величину А/Ящ1 и Д/я,^, что оправдано
Рве. 4.1.2. Схемж построения состава семейства I
ТРЕБОВАНИЯ К КОНСТРУКЦИИ ГУСЕНИЧНОЙ МАШИНЫ
507
преимуществами унификации. Если между
диапазонами грузоподъемности будет большой
разрыв (А /)) , то в случае необходимости
монтажа оборудования массой т^
вынуждены использовать шасси массой /я^. При
этом прирост грузоподъемности на величину
Атгх фактически приведет к увеличению
массы шасси на величину А тх ф вместо
прироста А/лхн для новой машины, или Ашхо
при отсутствии разрыва между диапазонами
грузоподъемностей 1\ и />2 (штриховая
линия).
Второй принцип формирует диапазон
грузоподъемности унифицированного
семейства и состоит в обеспечении одинаковой
несущей способности опорных катков. Как
следует из рис. 4.1.3, на опорные катки
каждого борта машины в местах их контакта с
гусеницей действует сила
Е*«,«
= 02ОТ-Ооп + Тр&тур +7Тсв8шусв,
где От и 0оп - вес соответственно машины и
опорной ветви гусеницы; Тр и Тсв -
натяжение соответственно в рабочей и свободной
ветвях.
При равномерном распределении
нагрузок на опорные катки в зоне контакта каждого
из них будет действовать сила
Рк =
= (0,5С?т-С7оп + Гр8шур+Гсв8шусв)/л.
При разработке гусеничных машин на
базе шасси с пятью-семью опорными катками
на борт, полная масса машин
/Яу =
= 2(пРк+воа-Тр$тур -Тсв$мусъ) / е ,
п = 5, 6, 7.
-Х«г
Ш
Кг
ш*
Рис. 4.1.3. Схем* ншрузок на опорные ката
4.1.4. ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ К КОНСТРУКЦИИ
Независимо от типа и назначения
машины при ее конструировании обеспечивается
реализация основных технических требований
с тем, чтобы достигалась ее высокая
эффективность с учетом сложившейся и
перспективной системы организации производства,
структуры комплектования парков машин в
различных регионах» нормативных или иных
ограничении, действующих в сфере
эксплуатации. Установлено пять групп основных
технических требований, предъявляемых к
конструкции проектируемой машины (табл. 4.1.8).
Требования по дорожно-климатическим
условиям определяют их предполагаемый
диапазон, в которых использование машины не
приводит к снижению или ограничению ее
эксплуатационных показателей. Из
климатических факторов обычно учитываются:
температура окружающего воздуха, влажность,
запыленность, высота над уровнем моря,
интенсивность осадков. Температура изменяется в
очень широких пределах (-60 ... +50 °С). Чем
ниже температура, тем сложнее обеспечить
надежную работу машины. Это связано с
необходимостью введения ряда систем,
обеспечивающих пуск двигателя и соответствующие
условия труда водителей. Кроме того,
требуется применение специальных топлив, масел,
резинотехнических изделий, а при особо
низких температурах и хладостойких металлов. По
экономическим соображениям машины
общего назначения создают для условий работы
-40 ... +50 °С. Этот температурный диапазон
по принятой классификации соответствует
районам с умеренным и жарким сухим
макроклиматом, и не требует применения
нетрадиционных конструктивных решений, за
исключением систем холодного пуска двигателя.
Воздействие отрицательных температур
сказывается на степени прогрева или
остывания агрегатов машины и уровня
энергетических затрат на движение. Из-за интенсивного
охлаждения температурный режим работы
агрегатов ниже нормального, при
температуре воздуха -40 °С температура в агрегатах
шасси отрицательная, а при остановке
машины агрегаты охлаждаются с интенсивностью
15 ... 20 °С/ч. При низкой температуре в
агрегатах потери мощности возрастают, при
этом коэффициент сопротивления качению
увеличивается в 1,4 - 1,8 раза. Для
возможности работы машины в условиях низких
температур требуется система подготовки к работе
после коротких остановок (перерывов) и
соответствующего повышения удельной мощности.
508
Глава 4.1. ПРИНЦИПЫ СОЗДАНИЯ
4.1.8. Основные техннчесжне требования
Общие
Соответствие дорожно-климатическим
условиям использования машин
Приспособленность к выполнению транспорт-
но-тяговых функций (задач)
Обеспечение экономичности производства
Выполнение нормативов безопасности,
эргономики и экологии
Технический уровень и конкурентоспособность
Частные
Температура и влажность окружающего
воздуха, запыленность, интенсивность осадков,
высота над уровнем моря, опорная поверхность
движения
Удельная мощность, скорость движения,
топливная экономичность, надежность и
эксплуатационная технологичность, использование
грузоподъемности, реализация тяговых свойств
Материалоемкость конструкции, унификация
Активная и пассивная безопасность,
устойчивость и управляемость, светосигнализация,
плавность хода, уровни вибрации и шума,
токсичность, воздействие на почву
Показатели технического уровня, патентная
чистота
При предназначении машины для
работы в условиях особо низких температур
(ниже -45 °С ) или жаркого влажного климата
(влажность до 98 % при +35 °С) обычно
разрабатываются модификации базовой машины,
с изменением ряда систем и агрегатов.
Влажность воздуха сказывается главным образом на
сохраняемости машины. В условиях
повышенной влажности применяют покрытия
отличающиеся коррозионной стойкостью.
Запыленность воздуха характерна для
эксплуатации машин вне дорог с твердым
покрытием. Ее учет осуществляется введением в
системы двигателя соответствующих фильтров
и герметизацией агрегатов. Обычно для машин
общего назначения эффективность
фильтрующих элементов рассчитывается для воздуха
запыленностью 1 г/м3, а для специальных
машин до 2 г/м3 на высоте около 1,5 м над
уровнем дороги. Герметичность кабин делается
такой, чтобы при работе системы вентиляции
обеспечивался избыточный подпор воздуха в
кабине. Это техническое решение улучшает
условия работы и в условиях повышенных
осадков.
Высота над уровнем моря влияет на
мощность двигателя: с повышением высоты
мощность падает, так как плотность и
температура воздуха снижаются:
^ = р0(1-Я/44300)5Д56;
/ = /0-0,0О65#,
где р и / - соответственно давление (кПа) и
температура (К) на высоте Н (м); р$, ^ - те
же показатели на уровне моря.
Другая группа общих технических
требований включает требования по
приспособленности машин к выполнению прямых тран-
спортно-тяговых функций или
эксплуатационные требования: скоростные свойства,
топливная экономичность, надежность,
использование грузоподъемности или тяговых качеств.
Скоростные свойства во многом
определяются удельной мощностью. Поэтому для
транспортных машин помимо требований по
максимальной скорости движения, как
правило, задаются диапазон удельной мощности
(15 Г.. 20 кВт/т) и средняя скорость движения
(не менее 40 км/ч). При этом значения
удельной мощности принимаются исходя из
необходимости преодоления сопротивления
движению, характерного для многоцелевых
гусеничных машин, в том числе преодоления
предельных подъемов (до 30°).
Эффективность машины существенно
зависит от показателей надежности и
эксплуатационной технологичности. В связи с этим
общими техническими требованиями
регламентируются безопасность, ресурс, удельная
трудоемкость технического обслуживания и
текущего ремонта (см. ниже).
Ресурс, тыс. км 16 ... 20
Наработка на отказ, тыс. км 2 ... 3
Трудоемкость ТО и ТР на 1000 км
пути, человеко-час 4 ... 10
ТРЕБОВАНИЯ К КОНСТРУКЦИИ ГУСЕНИЧНОЙ МАШИНЫ
509
В последние годы приоритетность
приобрели общие технические требования по
нормативам безопасности, эргономике и
экологии, что обусловлено массовостью
производства и использования гусеничных машин и
социальной значимостью этих требований.
Безопасность эксплуатации машины
подразделяют на активную и пассивную. Из
требований активной безопасности
наибольшую важность представляют нормативы
тормозных свойств, регламентируемые
международными и национальными стандартами. Они
содержат ограничения по величине тормозного
пути, замедления, в ряде случаев
распределения тормозных сил по осям и др. (см. ниже).
Начальная скорость торможения,
км/ч,не менее, 40
Тормозной путь, м 18 ... 22
Замедление, м/с2 5,5
Усилие на педали рабочей
тормозной системы, кг^не более, ... 70
К активной безопасности относятся
требования по устойчивости, управляемости,
маневренности. Их нормативы устанавливаются
частными требованиями на тот или иной тип
машины или конкретный образец. Требования
по пассивной безопасности предусматривают
создание травмобезопасного рабочего места
водителя, кабины необходимой прочности и
эффективной звуковой и световой
сигнализации.
Помимо эксплуатационно-технических
нормативов общие технические требования
содержат показатели, характеризующие
совершенство или экономичность производства
машин. Важнейшими из них являются
требования по материалоемкости и унификации.
Показателем материалоемкости является
удельная материалоемкость, определяемая
выражениями
Эргономические требования направлены
на создание конструкции машины, управление
которой создает минимальную утомляемость
водителя. Это - пространственное размещение
водителя и органов управления, силы на
органах управления, обзорность, плавность хода,
вибронагруженность рабочего места, уровень
внутреннего шума, микроклимат и интерьер в
кабине и т.д. Почти все требования в
обязательном порядке регламентируются.
. Экологическая безопасность машины
достигается за счет снижения до нормируемого
уровня выброса вредных веществ в атмосферу
внешнего шума, воздействия движителя на
почву. Нормативные показатели, как правило,
устанавливаются дифференцированно для
машин различных типов. Уровень внешнего
шума должен быть ниже 90 дБ, а критерии
воздействия движителя на почву - в пределах или
несущей способности грунта или
предотвращения его уплотняемости, что достигается
допустимой величиной максимального
давления (табл. 4.1.9). Ниже приведены предельно
допустимые нормы токсичности, г/(кВт * ч).
Выброс вредных
веществ СО СН N0
В движении 10 3,5 22
В условиях с
ограниченным воздухообме- * у п
ном : .-
где тс - "сухая" масса машины; т^ - масса
материала, необходимая для производства
машины с учетом годового расхода запасных
частей; Мс - мощность; Т - ресурс по
времени.
В зависимости от типа машины
используется и нормируется тот или иной показатель
материалоемкости.
Преемственность конструкций в
производстве и возможность создания модификаций
4.1.9. Нормы воздействия на почву
Влажность почвы
в слое 0 ... 30 см, НВ
0,9 и более
0,7 ... 0,9
0,6 ... 0,7
0,5 ... 0,6
0,5 и менее
Максимальное давление, кПа,
не более
80/100
100/120
120/140
150/180
180/210
Нормальное напряжение
на глубине 0,5 м, кПа, не более
25/30
25/30
30/35
35/45
35/50
Примечание.В числителе даны значения для весеннего периода эксплуатации, а в
знаменателе - для летнего и осеннего.
510
Глава 4.2. ОБЩАЯ КОМПОНОВКА
машин, приспособленных для выполнения
специализированных функций по назначению
и в то же время экономически целесообразных
в производстве, определяется унификацией
конструкций. Нормативами унификации
являются коэффициенты:
применяемости
^пр=(лт _Лт.о )/"т ;
повторяемости
^п =(Лд -Лг )/Лд 5
межпроектной унификации
X11" "я"
где л,. - число типоразмеров деталей (или
агрегатов); л,. 0 - число оригинальных
деталей; /!д - общее число деталей в конструкции;
N - число сравниваемых образцов машин;
'Ч-тах " максимальное число типоразмеров
одного из образцов.
В зависимости от типа машины и ее
назначения коэффициенты могут находиться в
пределах: Кпр=40 ... 95 %; Кп =2 ... 6;
^м.у =30 - 75.
Широкая кооперация при организации
производства колесных и гусеничных машин и
их агрегатирование с прицепными системами
накладывают ряд ограничений на нормативы
показателей сопрягаемых систем или
агрегатов, поэтому в составе общих технических
требований задаются базовые параметры пнев-
мосистем (0,6 ... 0,8 МПа), гидросистем
(20 ... 30 МПа), напряжения
электрооборудования (12, 24 В), а также места и величина
отбора мощности на привод монтируемых или
агрегатируемых механизмов.
В последние годы получили развитие
специальные бронированные гусеничные
машины (танки и боевые машины),
характеристика которых приведена в приложении.
ГЛАВА 4.2
ОБЩАЯ КОМПОНОВКА, КОРПУС,
СИЛОВАЯ УСТАНОВКА
4.2.1. ОБЩАЯ КОМПОНОВКА И ТРЕБОВАНИЯ К НЕЙ
Общая компоновка многоцелевых тран-
спортно-тяговых машин, как правило,
отличается компактным размещением основных и
вспомогательных агрегатов. Если у первых
гусеничных тягачей и транспортеров-тягачей
двигатель и трансмиссия располагались
отдельно и при этом даже предполагалось его
размещение на различном расстоянии от
трансмиссии (например, у некоторых
модификаций МТ-ЛБ, то для транспортно-тяговых
машин последних лет характерно блочное
расположение двигателя и трансмиссии: в мотор-
но-трансмиссионной установке (МТУ).
На рис. 4.2.1,а показана компоновка
многоцелевого гусеничного шасси легкой
категории.
Моторно-трансмиссионное отделение
(МТО) скомпоновано чрезвычайно плотно. В
случае установки каких-либо других
автономных агрегатов используется пространство
грузового отсека. Тяговую лебедку 13 для тяговых
модификаций выполняют в этом случае или
блочно или выносят в грузовой отсек.
Плотность компоновки МТО и блочное
исполнение МТУ уже не позволяют разобщен-
* 5
6 7 6 9
^шшшшшч:'
ю
Рве. 4.2.1. Компоновка гусеничного I
разной массовой категори:
а - легкой; б - промежуточной;
/ - пульт управления; 2 - кабина; 3 - сиденье;
4 - корпус; 5 - грузовой отсек; 6 - моторно-
транспортное отделение; 7 - МТУ; 8 - ведущие
колеса; 9 - бортовая передача; 10 - агрегаты привода
движителей; И - привод водоходных движителей;
12 - трансмиссия; 13 - тяговая лебедка; 14 - опорные
катки; 15 - гусеницы; 16 - редуктор отбора мощности;
17 - дополнительный двигатель; 18 - раздаточная
коробка; 19 - генератор постоянного тока;
20 - направляющие катки
СИЛОВЫЕ УСТАНОВКИ МНОГОЦЕЛЕВЫХ ШАССИ
511
но размещать силовые агрегаты. Это приводит
к тому, что в незагруженном состоянии шасси
имеет большую нагрузку на опорные катки,
расположенные под МТО. Нагрузки
выравниваются только в загруженном состоянии или
когда на шасси смонтировано рабочее
оборудование. Это обстоятельство отражается и на
водоходных свойствах, ибо в незагруженном
положении корпус получает значительный
дифферент на плаву.
Блочность МТУ затрудняет создание
модификаций гусеничных машин с
неодинаковым расположением ведущих колес -
передним или задним, что достигается
реверсивностью трансмиссии.
Некоторое усложнение конструкции
трансмиссии при этом является неизбежным.
Однако преимущество блочного исполнения
МТУ (создание значительных полезных
объемов в шасси) вполне это оправдывает.
Характерной является общая компоновка
гусеничного шасси промежуточной категории
(рис. 4.2.1, б), которое находит разнообразное
применение как с задним расположением
МТУ, так и с передним.
Моторно-трансмиссионное отделение
скомпоновано чрезвычайно плотно, в нем
находится много металлоемких агрегатов.
Опорные катки 14 нагружены неравномерно.
Три пары их, непосредственно находящиеся
под МТО, имеют нагрузку на 25 ... 30 %
больше, чем остальные, в связи с чем для них
принята более жесткая гидропневматическая
подвеска, жесткость упругой характеристики
которой изменяется за счет разного давления
газа. Такое решение целесообразно также с
точки зрения возможностей широкого
регулирования величины дорожного просвета и
характеристик упругости. Однако оно влечет за
собой необходимость введения
дистанционного управления перемещением направляющих
колес, чтобы обеспечить стабилизацию
натяжения гусеничного обвода при переменном
дорожном просвете. Но основной недостаток
такой компоновки состоит именно в
неодинаковости нагрузки на опорные катки и под
опорными катками. Поскольку на шасси все
катки одной и той же размерности,
увеличенная на последних трех парах нагрузка
приводит к более быстрому выходу из строя
четырех-, шестиопорных катков по сравнению с
трехопорными катками.
Кроме того, неравномерность реакций
под опорными катками обусловливает
снижение проходимости шасси на грунтах с низкой
несущей способностью, так как при
одинаковом среднем давлении под опорной ветвью
гусеницы худшая проходимость будет у
машины, где имеет место более резкий перепад
между реакциями под опорными катками. Для
рассматриваемого шасси эти факторы
неблагоприятны.
Общая компоновка во многом
определяет конструкцию корпуса. При этом он
обеспечивает реализацию двух задач:
стабильное взаимное расположение
монтируемых в корпусе агрегатов, для чего он
делается достаточно жестким;
герметичность внутренних полостей для
возможности преодоления водных преград
вброд или на плаву.
4.2.2. СИЛОВЫЕ УСТАНОВКИ
В современных и перспективных
гусеничных шасси используются дизели,
отличающиеся высокими эксплуатационными
свойствами, главными из которых являются
экономичность и ресурс.
Техническая характеристика дизелей
некоторых базовых многоцелевых шасси
приведена в табл. 4.2.1.
Характерной особенностью дизелей
является их приспособленность для работы на
всех видах топлива, что делает многоцелевые
шасси средствами высокой автономности в
использовании.
Надежная работа любого двигателя
требует применения эффективных систем
питания топливом и воздухом, охлаждения, пуска
и др. Для двигателей многоцелевых шасси это
особенно важно, поскольку плотность общей
компоновки и блочность МТУ затрудняют
доступ к двигателю, а следовательно,
предопределяют необходимость безотказного
функционирования силового агрегата. Рассмотрим
принципы и особенности конструирования
систем силовой установки на примере шасси
промежуточной весовой категории.
Схема топливной системы шасси
показана на рис. 4.2.2. Она включает семь топливных
баков, которые исходя из соображений разве-
совки и высвобождения полезных объемов
размещаются в разных местах (1, 2, 4 и 5 в
отделении управления, 12 - в отсеке системы
электропитания, 19, 22 - в кормовой части
шасси). Внутри баков установлены
перегородки, препятствующие разбалтыванию топлива
во время движения, а также для увеличения
жесткости баков.
Топливная система позволяет работать
двигателю и другим агрегатам силовой
установки в широком диапазоне температур и
изменения параметров окружающей среды и
512 Глава 4.2. ОБЩАЯ КОМПОНОВКА
4.2.1. Техническая характеристика дизелей базовых многоцелевых шасси
Показатели
Тип охлаждения
Система наддува
Число цилиндров,
расположение
Рабочий объем, дм3
Диаметр/ход поршня,
мм
Мощность, кВт
Мощность в условиях
объекта, кВт
Частота вращения,
МИН"1
-*« к р шах » Н • м
Удельный расход
топлива, г/(кВт • ч)
Литровая мощность,
кВт/л
Масса, кг
Удельная масса,
кг/кВт
Габаритная мощность,
кВт/м3
ГАЗ 5423.10
Воздушное
ПС
6, рядное
6,23
105/120
138
126
2600
579
230
22,13
560
4,06
165,42
2В-06-2С
В-46-2С1
Жидкостное
ТКх2
6, опозитное
16,96
150/160
375
331
2000
1906
224
22,10
885
2,36
465,23
пцн
12, У-образное
38,17
150/180
522
475
2000
2795
224
13,60
992
1,9
450,24
Рис. 4.2.2. Топливная система шасси промежуточной массовой категории:
1, 2,4,5- топливные баки передней группы; 3 - трубопровод; 6, 13, 20 - заливные горловины;
7, 16, 28 - топливные краны; 8, 21, 30 - топливные бачки; 9 - кран выпуска воздуха из топливного заборного
бачка; 10 - клапан-дроссель; 11, 14, 27 - топливные фильтры; 12, 19, 22 - топливные баки задней группы;
15 - топливоподкачивающий насос; 17 - рукав, предназначенный для консервации; 18 - ГТД;
23 - насосный агрегат (нагнетатель); 24 - подогреватель; 25, 29 - электроклапаны; 26 - отопитель ОВ-65Г
ОСОБЕННОСТИ ПЛАВАЮЩИХ МАШИН
513
обеспечивает автономность использования
шасси. Этому способствует также система
подачи и очистки воздуха, предусматривающая
применение воздухоочистителей, как правило,
инерционного типа и забор воздуха из
пространства над корпусом, где концентрация
пыли при движении машины минимальная.
Стабильность и надежность работы двигателя в
зимнее время иногда обеспечивают
подогреватели впускного воздуха (жидкостные
радиаторы).
Высокий уровень форсирования
двигателей многоцелевых шасси обусловливает
их высокую теплонагруженность. У
большинства дизелей многоцелевых машин
температура охлаждающей жидкости составляет
ПО ... 120 °С. Это требует применения
высокоэффективной системы охлаждения и
охлаждающей жидкости и масла. У двигателей с
воздушным охлаждением теплоотдача от
цилиндров осуществляется за счет рационального
оребрения цилиндров и более интенсивного
обдува.
Наибольшее распространение получили
эжекционные и комбинированные системы
охлаждения. Схема эжекционной системы
охлаждения показана на рис. 4.2.3.
Достоинством эжекционной системы
охлаждения являются ее простота и высокая
надежность (отсутствуют вращающиеся
детали). Однако ее эффективность неодинаковая
при различной частоте вращения коленчатого
вала двигателя и на некоторых режимах не
всегда достаточная для интенсивного
охлаждения всех агрегатов. Поэтому для таких тепло-
напряженных силовых установок иногда
используют комбинированную систему
охлаждения (эжекционную и вентиляторную).
Из других систем дизеля следует
отметить систему пуска. Системы пуска различны у
машин разных весовых категорий. Для
двигателей машин особо легкой и легкой категории
используют в качестве основной системы
пуска электростартерную. Для двигателей шасси
промежуточной весовой категории и иногда
легкой весовой категории основной системой
пуска является воздушная, а электростартерная
выполняет функции дублирующей системы.
Схема воздушной системы пуска
показана на рис. 4.2.4.
Рве. 4.2.3. Схем» эжекционной системы охлаждения
Рис. 4.2.4. Схема воздушной системы
пуска двигателей:
1 - пусковой клапан; 2 - баллон; 3 - зарядный
вентиль; 4 - манометр; 5 - автомат давления АДУ-2С;
6 - воздушный фильтр; 7- маслоотстойник;
8 - компрессор; 9 - воздухоочиститель двигателя
Энергии, запасенного в баллоне сжатого
воздуха, хватает на несколько пусков. По мере
расхода воздуха осуществляется подпитка
баллона от компрессора. Автомат давления
обеспечивает нагнетание воздуха до давления
13 ... 17 МПа и поддержание минимального
давления в системе 11 ... 14 МПа. Что касается
электростартерной системы пуска, то она
является обычной и рассчитана на напряжение
бортовой сети 24 В.
4.2.3. ОСОБЕННОСТИ ВОДОХОДНЫХ СВОЙСТВ
И РАСЧЕТА ПЛАВАЮЩИХ МАШИН
Корпуса обычных неплавающих
гусеничных машин проектируются и рассчитываются
таким образом, чтобы была обеспечена
соосность устанавливаемых в корпусе агрегатов и
его высокая надежность. Чаще всего при этом
используют расчеты с применением МКЭ.
Создание корпуса плавающей машины (ПМ)
связано с обеспечением водоходных свойств
машины. Эта область конструирования весьма
специфическая, поэтому ниже помимо
расчетных приведены необходимые сведения по
вопросам движения на плаву, с тем чтобы
показать влияние параметров водоходных
свойств на выбор компоновки и
конструктивных параметров машины. При этом
рассматриваются единые подходы как для
гусеничных, так и для колесных машин.
Плавающие машины отличаются от
обычных колесных и гусеничных высокой
проходимости водоходными свойствами:
плавучестью, остойчивостью, непотопляемостью,
ходкостью, управляемостью и мореходностью
(последним свойством обладают не все ПМ).
Плавучесть позволяет машине
преодолевать водные участки местности и работать на
них, она характеризует способность
удерживаться на плаву, погружаясь в воду по
расчетную ватерлинию. Для этого используется
водонепроницаемый водоизмещающий корпус,
размеры и форму которого подбирают так,
чтобы ПМ удерживалась на воде с некоторым
статическим дифферентом на корму.
I 7Ч:.,
514
Глава 4.2. ОБЩАЯ КОМПОНОВКА
IV с
-<Е = >
— Г
*^ ЬЦТ
^
^0
)Л/
щп
1-
н 1ЦВ
ЭЭЕЕЗ
Ей
т^
Рмс. 4.2.5. Статическое положение ПМ на шишу.
Ь - длина ПМ по ватерлинии; В - ширина ПМ по ватерлинии;
Тн - углубление корпуса носом; Тк - углубление кормой; Тл - углубление корпуса левым бортом;
Тп - углубление корпуса правым бортом; Т0 - осадка ПМ
ТипПМ
Легкие
Средние
Тяжелые
Масса,
т
1,5
15
150
Дм
2,7 ... 3,8
5,5 ... 8,7
12 ... 18
4.2.2. Параметры плавучести ПМ
Дм
1,2 ... 1,4
2,2 ... 3,2
7... 9
■*ср ' **
0,3 ... 0,4
0,7 ... 0,9
1,4 ... 2,0
То ,м
0,5 ... 0,7
1,2 ... 1,5
1,8 ... 3,5
е,°
0 ... 30'
0...30'
0 ... 30'
ч/,°
1 ...2
1 ... 3
0... 2
V
ГСЗП '
м3
0,7 ... 1,0
3... 5
55 ... 100
Примечание. Тс$ - среднее углубление корпуса.
В состоянии статического равновесия на
ПМ действует только сила тяжести (?,
приложенная в центре тяжести ЦТУ и сила
плавучести /)п , приложенная в центре тяжести
вытесненного машиной объема воды,
называемого центром величины ЦБ (рис. 4.2.5).
Эти две силы, равные друг другу, но
направленные в противоположные стороны,
определяют положение ПМ на плаву и расположение
уровня спокойной воды относительно днища
корпуса - ватерлинии \УЬ. Мерой плавучести
ПМ служит ее объемное водоизмещение, а
расположенный выше ватерлинии
водонепроницаемый объем корпуса определяет
статический запас плавучести (^СЗп)- При расчетах
параметров плавучести используется уравнение
плавучести
С = Х>„=Тв(^+^Ч).
где ув - удельный вес воды, Н/м3; Ук и
Ух ч - объем воды соответственно
вытесняемой корпусом и элементами ходовой части
ПМ, м3.
Некоторые данные по параметрам
плавучести приведены в табл. 4.2.2.
Остойчивость - способность ПМ,
наклоняясь под действием внешних сил, не
опрокидываться и возвращаться к своему
первоначальному положению равновесия после
прекращения действия этих сил. Если ПМ теряет
остойчивость, то она опрокидывается и тонет.
В зависимости от плоскости наклонения
различают поперечную и продольную
остойчивость, а в зависимости от углов
наклонения - остойчивость при малых равнообъемных
наклонениях и остойчивость при больших
углах наклонения (рис. 4.2.6). Точка М>
определяемая пересечением линии действия силы
плавучести с вертикальной осью ПМ при
очень малых наклонениях, называется
метацентром (поперечным или продольным
соответственно при наклонениях в поперечной и
продольной плоскостях).
Взаимное положение точек ЦТ и М
определяет условия остойчивости ПМ. При
расположении точки М выше ЦТ
восстанавливающий момент положителен, а ПМ
остойчива. Во всех других случаях взаимного
расположения точек М и ЦТ машина
неостойчива. Расстояние между точками М и
ЦТ машины при нахождении ее в положении
первоначального статического равновесия
(рис. 4.2.7) называется метацентрической
высотой (поперечной к$ или продольной Н§ в
зависимости от плоскости наклонения).
Расстояние между точкой М и ЦВ машины назы-
ОСОБЕННОСТИ ПЛАВАЮЩИХ МАШИН
515
"/1пг>0
"бос'О
Рас. 4.2.6. Возможные случая взаимного расположеяня центра тяжести н метацентра ПМ:
а - остойчивое положение; б - неостойчивое положение; в - положение безразличного равновесия
мЬ
1
щ=Ы и^ 1_-А иг\—ВЬы
^^ц-Ч-Н—V—
Ряс. 4.2.7. Метацентрнчесжне высоты н радиусы
вается метацентрическим радиусом
(поперечным Го и продольным В$). Метацентри-
ческие высоты в случае возвышения ЦТ
машины над ее ЦБ на расстояние а равны:
Ло = ^-а и Щ = Яо-а .
Если ЦТ располагается ниже ЦВ> то
Ло = г + а и Но = Яо+а .
Метацентрические радиусы определяются
соответственно как
г0=/х/У и Во=/у/У,
где /х и 1у - моменты инерции площади
ватерлинии при наклонениях соответственно в
поперечной и продольной плоскости, м; V -
полное водоизмещение ПМ, м3.
Моменты инерции площади ватерлинии
рассчитывают по формулам:
1Х=ЬВ3 /п и 1у =В1? /\2.
Значения метацентрических высот и
радиусов, а также коэффициентов остойчивости
(цх=(УЛо и Цу=С7//о)» по которым
удобно сравнивать остойчивость различных
ПМ даны в табл. 4.2.3.
ТилПМ
Легкие
Средние
Тяжелые
г0,м
0,69 ... 0,85
0,7 ... 1,05
1,22 ... 5,15
4.2.3. Параметры остойчивости ПМ
Ло.м
0,55 ... 0,68
0,6 ... 0,95
0,69 ... 5,7
Ло.м
2,1 ... 5,9
3,7 ... 6,2
13,5 ... 22,9
#0,м
1,97 ... 5,75
3,5 ... 5,8
13,1 ... 24,3
\ХХ , кН • м
3,4 ... 9,2
34,0 ... 111
183 ... 7700
\1у ,КН*М
8,3 ... 78,0
300 ... 618
3452 ...
32670
17*
516
Глава 4.2. ОБЩАЯ КОМПОНОВКА
Восстанавливающий момент Мвос
определяется как произведение силы тяжести
на плечо остойчивости /: Мвос = 01. При
равнообъемных малых наклонениях объем
входящей в воду части корпуса равен объему
выходящей из воды части корпуса. В этих
условиях восстанавливающий момент Мвос
определяется по выражению:
Мъос = Око&тВ и Мвос = ОН0&т\у,
(4.2.1)
где \|/ - угол наклонения ПМ в продольной
плоскости.
При больших углах наклонения нельзя
использовать метацентрические формулы
остойчивости (4.2.1). Для определения плеч
остойчивости, а следовательно,
восстанавливающих моментов необходимо применять
методы, разработанные в теории корабля или в
специальных курсах по амфибийным
машинам.
Остойчивость рассматривают как
статическую или динамическую (рис. 4.2.8).
Статическая остойчивость характеризуется очень
медленными (без видимой угловой скорости)
наклонениями. Для динамической
остойчивости характерно наличие видимой угловой
скорости. Поэтому динамическая остойчивость
определяется работой А восстанавливающего
момента, стремящегося вернуть ПМ в
положение начального статического равновесия.
Для решения практических задач
остойчивости, связанных с наклонениями ПМ под
воздействием внешних сил и моментов,
используются диаграммы статической и
динамической остойчивости в поперечной и
продольной плоскостях. Диаграмма статической
остойчивости (рис. 4.2.8, а) представляет
собой зависимость восстанавливающего момента
\*и6остах
Озал втах . #эа* &
03а/т ^таж, 0зак 0
Ршс. 4.2.8. Диаграммы остоШчвшосга:
а - статической; б - динамической
Мвос или плеча статической остойчивости /
от угла 6 наклонения машины. Диаграмма
динамической остойчивости (рис. 4.2.8, 6) -
зависимость между работой
восстанавливающего момента или плеча динамической
остойчивости и углами наклонения машины.
На диаграммах отмечают: углы бщ^ ( Утах) >
которые соответствуют максимальному
восстанавливающему моменту; углы 6эак(н/эак)
заката диаграммы, при которых ПМ
полностью теряет остойчивость вследствие нулевого
значения восстанавливающего момента; углы
заливаемости Взал(н/зал)> ПРИ достижении
которых в корпус начинает поступать
забортная вода, если верхняя часть корпуса
негерметична. При наложении на диаграммы
значений внешних кренящих (дифферентующих)
моментов можно оценивать предельные углы
наклонений ПМ с позиций остойчивости при
их работе на воде.
Непотопляемость - возможность ПМ, в
корпус которой вследствие каких-либо причин
поступает забортная вода, продолжения
движения и достижения берега за счет
поддержания необходимых параметров плавучести,
остойчивости и ходкости. Пока ПМ сохраняет
плавучесть и остойчивость, а следовательно,
способность продолжать движение хотя бы с
ограниченной скоростью, она обладает
свойством непотопляемости. Непотопляемость ПМ
обеспечивается необходимыми запасами
плавучести, остойчивости и прочности,
использованием водоотливных средств с большой
подачей, разделением, если это возможно,
корпусов на водонепроницаемые отсеки и другими
конструктивными мерами.
Для оценки возможности движения ПМ
с поврежденными корпусами через водные
участки местности и их непотопляемость
можно использовать два уравнения: одно из
условий сохранения плавучести, а другое из
условий сохранения необходимой остойчивости.
Вводя некоторые допущения первое из этих
уравнений можно представить" в следующем
виде:
Л«/ Л«/
1 1
ГДО ^з.пд " динамический запас
плавучести, м3; т - время работы водоотливных
средств, с; #Сн/ " подача единичного
водоотливного средства, м3/с; Ц\ - расход воды,
поступающей в корпус через единичное повреж-
ОСОБЕННОСТИ ПЛАВАЮЩИХ МАШИН
517
дение, м3/с; /п - время, в течение которого
через повреждения в корпус поступает
забортная вода, с.
Второе уравнение непотопляемости из
условий сохранения необходимой
остойчивости имеет вид
л-/
\
1
5^0 ^ > (4.2.3)
/
где 4 0 " безразмерный коэффициент,
регламентирующий предельно допустимое
количество воды в корпусе по условиям сохранения
необходимой остойчивости; определяется
расчетным или опытным путем.
Время
* = 'п = 'р +
*в-*р
гср
где /р и 5р ■ соответственно время и путь
разгона ПМ до максимально возможной
скорости; Вв - ширина водного участка.
Тогда, разрешая уравнения (4.2.2) и
(4.2.3) относительно интересующих
параметров, можно произвести оценку
непотопляемости ПМ с позиций плавучести и
остойчивости.
Ходкостью ПМ - ее способность,
расходуя определенную мощность двигателя,
развивать заданную скорость движения по воде в
конкретных условиях плавания. Это свойство
определяет время преодоления водного участка
местности, способность работать на реках с
большими скоростями течения и при
волнении, а также количество перевозимого в
единицу времени груза.
Ходкость ПМ обусловливается
сопротивлением воды и воздуха, эффективностью
водоходного движителя (ВД) и мощностью
установленного на машине двигателя. В общем
случае прямолинейного движения по
спокойной воде на ПМ действуют следующие силы
(рис. 4.2.9): сила тяжести С, приложенная в
ЦТ машины; сила плавучести /)п ,
приложенная в ЦВ\ сила сопротивления воды
Рве. 4.2.9. Силы, действующие ш ПМ ш общем случае
^вод> Равная горизонтальной составляющей
главного вектора гидродинамических сил Я и
являющаяся результатом взаимодействия воды
с подводной частью машины; сила
гидродинамического поддержания Кг, равная
вертикальной составляющей силы К (сила Кг при
неблагоприятном обтекании носовой части
корпуса может становиться топящей силой,
направленной вниз); сила сопротивления
воздуха Явоз, приложенная в центре парусности
надводной части корпуса ПМ (несмотря на
малость ввиду небольших площадей
парусности и скорости движения она оказывает
большое влияние на курсовую устойчивость,
вызывая при сравнительно небольшом
силовом воздействии отклонение ПМ от заданного
курса и боковой дрейф); сила инерции Яи ,
приложенная в ЦТ машины в случае ее
разгона или торможения (сила инерции Яи тем
больше, чем больше масса машины,
присоединенная масса воды и ускорение); сила тяги
на гаке ЯТ, приложенная в точке крепления
буксирного троса и равная сумме сил
сопротивления движению буксируемого прицепа
или другого плавучего средства; сила тяги
(упора) водоходного движителя Рвд .
В общем случае движения сила тяги ВД
равна сумме всех сил сопротивления
движению: Рвд =ЛВод + Лвоз +/*и + Ят. Эта
система сил обусловливает создание
суммарного дифферентующего момента 3/ДИф,
который уравновешивается восстанавливающим
моментом Мвос. Воздействие этих моментов
определяет знак и значение динамического
дифферента ПМ, которые чаще всего имеют
динамический дифферент на корму.
На рис. 4.2.10 приведены гистограммы
распределения 1)(у) скоростей движения по
воде ПМ с различными типами ВД. У
большинства ПМ с гребными винтами и
водометами скорость движения на плаву 8 ... 10 км/ч.
Для ПМ с гусеничными и колесными ВД
наиболее характерна скорость движения
4 ... 6 км/ч. На рис. 4.2.11 представлены
зависимости относительной скорости ПМ,
выраженной в числах Фруда по водоизмещению
(где V - скорость
движения, м/с; К- полное водоизмещение ПМ, м3),
от удельной мощности N / т (кВт/т) ПМ.
Кривые ограничивают верхнюю границу
достигнутой ПМ относительной скорости в
518
Глава 4.2. ОБЩАЯ КОМПОНОВКА
5 6 7 8 9
10 11 12 13 1Ь 15 16 V, км/ч
6 9 V 11 12 13 Му,км/ч
б)
0,5 V
оЛ
0,3[
о А
0,1
О
2 3 4 5 6
г)
7 у, км/ч
Рис. 4.2.10. Гистограммы распределения /> (?) скоростей движеши по воде ПМ
с различными типами водоходных движителей:
а - гребных винтов; б - водометов; в - гусеничных движителей; г - колесных движителей
/
№
г
/
/
г
1^
>
1
4^.
0,8
0,0
0,4
0,2
5 10 15 Н/т,кВт/т
Рис. 4.2.11. Зависимость относительной ежорости ПМ
Ргт от удельной мощности (ЛГ / т) с различными
типами водоходных движителей:
1 - гребные винты; 2 - водометы;
3 - гусеничные движители; 4 - колесные движители
функции удельной мощности. Приведенные
зависимости отражают влияние как типа ВД,
так и удельной мощности ПМ. Они позволяют
предварительно оценивать возможные
скорости движения, задаваясь объемным
водоизмещением, мощностью двигателя и типом ВД
машины.
Сопротивление воды движению ПМ
оказывает существенное влияние на ее ходкость.
Оно зависит от размеров и форм корпусов,
конструкции и габаритов элементов ходовой
части, скорости движения, глубины воды и
других факторов. Сила сопротивления воды
является основной причиной, препятствующей
достижению больших скоростей движения ПМ
по воде.
Гидродинамические процессы,
происходящие при работе ПМ на водных участках,
многообразны и во многом определяют
количественные характеристики таких водоходных
свойств как ходкость, управляемость и
мореходность. Эти процессы и их физические
особенности обусловлены взаимодействием
корпусов и ходовой части ПМ с водной средой,
работой ВД, а также влиянием
эксплуатационных условий (глубины воды, течения и
волнения).
Для выбора наиболее рациональных
путей уменьшения сопротивления воды
необходим комплексный подход: рассматривать
сопротивление как сумму гидродинамических
составляющих сопротивления и как сумму
сопротивлений, создаваемых отдельными
конструктивными элементами ПМ (корпусом,
ходовой частью). Исходными данными для
изучения сопротивления воды являются
результаты экспериментальных исследований
физических моделей и натурных ПМ в
различных эксплуатационных условиях.
Представляют интерес зависимости между
удельным сопротивлением воды В& /О (либо
ОСОБЕННОСТИ ПЛАВАЮЩИХ МАШИН
519
0,28
0,2*
0,20
0,16
0,12
0,08
0,0*
1я
1
У
/
г
О 0,1 0,2 0,3 Щ у/УдГ
Рис. 4.2.12. Зависимость удельного сопротивления
■оды от относительной сжороста при глубине воды
более 5 м:
/ -колесные ПМ; 2 - гусеничные ПМ
К§/V )у где В$ - буксировочное
сопротивление и числом Фруда по длине ПМ
^т Ь =у I V 8^ либо числом Фруда по
водоизмещению Ргр. Эти зависимости дают
общее представление о сопротивлении воды
движению определенных групп ПМ, а также
позволяют достаточно точно рассчитать
сопротивление воды, зная только массу машины и
ее длину Ь по ватерлинии. В подобных
зависимостях, полученных обработкой результатов
буксировки ряда натурных машин, данные по
разным ПМ располагаются в узкой полосе,
позволяющей аппроксимировать среднее
удельное сопротивление воды в функции
числа Фруда (рис. 4.2.12). Расчет сопротивления
воды можно вести в табличной форме,
непосредственно используя приведенные
зависимости или по формулам:
для гусеничных ПМ
для колес
*б = к:
618 • 10"3 + 1,074
для колесных ПМ
123 • 10 "3 + 1,614
('/Л1)"]
в;
Гидродинамическое сопротивление воды
движению ПМ можно представить как сумму
трех составляющих: сопротивления трения
Л,.р, сопротивления формы Дф и волнового
сопротивления Къ\
Л = 0^тр + 5ф+5в)рУ2О,
гле 4тр> 4ф и 4 в " безразмерные
коэффициенты сопротивления соответственно трения,
формы и волнового; р - плотность воды; О -
площадь смоченной поверхности погруженных
в воду корпуса и элементов ходовой части.
Сопротивление трения обусловлено
вязкостью воды и представляет собой сумму
проекций на направление движения всех
касательных сил, действующих на подводную часть
ПМ. Доля сопротивления трения ПМ в общем
балансе силы сопротивления воды
незначительна и не превышает для разного типа
машин 10 ... 15 % общего сопротивления воды.
Сопротивление формы также обусловлено
вязкостью воды и является следствием
различия гидродинамических давлений на
подводных поверхностях ПМ. Доля сопротивления
формы у ПМ существенна и может составлять
55 ... 70 % общего сопротивления воды.
Волновое сопротивление обусловлено действием
сил тяжести на частицы воды и вызвано
перераспределением гидродинамических давлений
по поверхности корпуса и ходовой части ПМ,
в результате чего образуется система волн на
границе двух сред - воды и воздуха. Волновое
сопротивление начинает проявляться на
скоростях при числах Фруда более 0,15.
Доля волнового сопротивления ПМ составляет
15 ... 25 % полного сопротивления, причем
чем выше скорость, тем больше волновое
сопротивление и его доля в общем
сопротивлении воды.
Если рассматривать сопротивление воды
как результат взаимодействия с водной
средой отдельных конструктивных элементов
ПМ, то следует иметь в виду, что
сопротивление воды, создаваемое ходовой частью ПМ,
30 ... 40 % полного сопротивления, а корпуса
60 ... 70 %. Сопротивление воды, вызываемое
корпусом, распределяется между его носовой
и кормовой частями неравномерно (60 ... 70 %
сопротивления создается носовой частью
корпуса).
На сопротивление воды движению ПМ
оказывает ощутимое влияние глубина воды, на
которой работает ПМ. Чем меньше глубина
воды, тем больше сила сопротивления воды.
Влияние глубины воды прекращается, когда
глубина воды превышает в 6 раз осадку
машины по ходовой части. При относительной
глубине, близкой к единице, сопротивление воды
может увеличиваться на 15 ... 25 % и более по
сравнению с сопротивлением глубокой воды.
Определенное влияние на сопротивление воды
оказывает движение ПМ по взволнованной
водной поверхности различной балльности.
Водоходные движители ПМ
подразделяются на универсальные (колесные,
гусеничные, роторно-винтовые), используемые для
получения тяговых сил как на суше, так и на
воде, и специальные, которые создают силу
тяги только при движении ПМ по воде. При
использовании универсальных ВД упрощается
520
Глава 4.2. ОБЩАЯ КОМПОНОВКА
конструкция машины, . уменьшаются потери
водоизмещения корпусов за счет исключения
туннелей гребных винтов, труб водометов и
т.д. Но при этом ухудшаются тяговые
характеристики машин на воде, а следовательно,
уменьшается скорость. Поэтому
универсальные ВД используются главным образом на
ПМ, для которых скорость движения по воде
не является определяющей. К специальным
ВД относятся гребные винты, гребные винты в
направляющих насадках, водометные
движители с осевыми, шнековыми и центробежными
насосами. Гребные винты ПМ могут иметь
фиксированный шаг лопастей (ВФШ) и
регулируемый (ВРШ). Водометные движители ПМ
с осевыми насосами могут быть
одноступенчатыми и двухступенчатыми, но на большинстве
ПМ используются одноступенчатые, как более
простые по конструкции и более надежные в
эксплуатации.
При конструировании ПМ для
предварительного выбора специального ВД необходимы
сравнительные оценки ряда параметров. К
этим параметрам относят: удельную тягу на
швартовах, представляющую собой отношение
силы тяги ВД к мощности двигателя машины
Рт = Рш I Ые ; относительную скорость в
виде числа Фруда по длине машины Рг^ или
числа Фруда по водоизмещению Ргр.
Относительная скорость при равных удельных
мощностях различных ВД позволяет оценить
влияние типа ВД на максимальную скорость
движения ПМ. Очевидно, что чем больше
достижимая относительная скорость при
равных удельных мощностях и массогабаритных
показателях, тем более предпочтителен ВД для
установки на ПМ; расход топлива на 1 км
пути Сл , который оценивает топливную
экономичность ПМ при движении ее по воде.
При этом следует учитывать, что расход
топлива зависит в основном от экономичности
двигателя и КПД ВД. Данные по
приведенным показателям содержатся в табл. 4.2.4.
Относительные показатели ПМ при
использовании на них различных типов ВД
имеют достаточно большие диапазоны в
пределах каждой группы движителей.
Обусловлено это многими причинами (типом ПМ,
условиями ее работы, техническим состоянием и
ДР)-
В настоящее время расчет ВД и их
тяговых характеристик выполняется в большинстве
случаев по диаграммам систематических
испытаний моделей гребных винтов и рабочих
колес водометов в специальных бассейнах. По
этим диаграммам для заданных условий с
учетом взаимодействия ВД с корпусом и ходовой
частью ПМ определяются коэффициенты
упора и момента, с использованием которых рас-
4.2.4. Относительные показатели сравнительной оце
ВД
ВД
Рш, кН/кВт
Рг,
Рг*
Колесные
Гусеничные
Роторно-
винтовые
0,004 ... 0,02
0,026 ... 0,053
0,04 ... 0,06
ВД
0,19 ... 0,25
0,18 ... 0,29
0,25 ... 0,41
Специальные ВД
0,32 ... 0,39
0,37 ... 0,45
0,44 ... 0,57
12 ... 18
8 ... 15
8 ... 12
Гребные винты
Гребные винты в
направляющих
насадках
Водометные
движители с
осевыми насосами
Водометные
движители с
центробежными
насосами
0,054 .
0,09 ..
0,055 .
0,04 ..
.. 0,163
. 0,169
.. 0,093
. 0,087
0,27 .
0,27 .
0,28.
0,25 .
.. 0,42
.0,43
.0,34
.0,32
0,55 .
0,56.
0,44 .
0,39.
.0,84
.0,85
..0,6
.0,52
1,2.
1,2 .
6,0..
7,5..
..6,3
.. 5,8
. 10,3
. 12,0
ОСОБЕННОСТИ ПЛАВАЮЩИХ МАШИН
521
считывается упор Р гребного винта и
вращающий момент М:
Р = К1рп204; М = К2рп20\
где К\ и К2 - коэффициенты
соответственно упора и момента; р - плотность воды; п -
частота вращения гребного винта; В - диаметр
гребного винта.
Для расчета рабочих колес и тяговых
характеристик водометов используются
универсальные характеристики насосов и
рассчитанные значения коэффициентов напора Кн и
подачи Кд:
^н=я/(лр2к^1С);
*е=<2н/(лркЯр*).
где Ни 0Н - соответственно напор и подача
насоса водомета; /?рк - частота вращения
рабочего колеса водомета; /)р1С - диаметр
рабочего колеса.
В практике проектирования ПМ
используются несколько схем расчета ходкости
машины. По одной из них задается
максимальная скорость движения ПМ на воде
определенной глубины, устанавливается из
компоновочных соображений число ВД, их
расположение и предельно возможный диаметр гребного
винта или рабочего колеса водомета,
коэффициенты взаимодействия ВД с корпусом и
ходовой частью ПМ, кинематическая схема
привода на ВД и возможные потери мощности в
приводе. В результате расчета кроме
конструктивных параметров ВД находится мощность
двигателя ПМ. По другой схеме задаются
мощностью двигателя ПМ, выбранной,
например, из условия движения по суше, а
рассчитывают конструктивные параметры ВД и
возможную максимальную скорость движения
ПМ при полном использовании мощности
двигателя. В том и другом случае
проектирование заканчивается расчетом и построением
ходовой характеристики ПМ. Параметры
специальных ПМ приведены в табл. 4.2.5.
Управляемость (общее понятие
поворотливости машины и ее устойчивости движения
на курсе) - совокупность качеств,
обеспечивающих при низком уровне психомоторных
затрат, во-первых, легкое и быстрое изменение
направления движения ПМ и, во-вторых,
практически устойчивое, без значительных
отклонений от заданного курса,
прямолинейное движение.
4.2.5. Параметры специальных ВД
Параметры
Число ВД
Диаметр
гребного винта Д
рабочего колеса во
помета />рк, м
Шаговое
отношение Н 1И
Дисковое
отношение 6
Относительная
длина водовода,
Коэффициент
поджатия струи
Рс = *вых/ м>к
Гребные винты
1 ...2
0,3 ... 1,2
0,6 ... 1,5
0,48 ... 0,9
-
Водометы
1 ... 2
0,2 ... 0,75
-
-
1,5 ... 7,0
0,46 ... 1,0
Примечание. /^ и Ррк -
площадь соответственно выходного отверстия
водомета и ометаемая рабочим колесом
водомета.
Управляемость ПМ на воде может
обеспечиваться различными способами в
зависимости от типа машины, ее назначения и
условий эксплуатации: поворотом колес 1 (рис.
4.2.13), винтов Зу заслонки 2 водомета, а также
в результате создания различных сил тяги на
гусеницах (рис. 4.2.14). В этих способах
управление обеспечивается либо за счет создания на
элементах рулевых устройств
гидродинамических сил (рис. 4.2.13), либо за счет изменения
величины и направления вектора силы тяги
ВД Рл и РП (рис. 4.2.14). Возможны схемы,
в которых используются как
гидродинамические силы, так и изменения векторов тяги ВД.
К первой группе относят ПМ с гребными
винтами и водометами, в струе которых
располагаются гидродинамические рули, а также
колесные ПМ, управляемые колеса которых
используются для получения боковых
гидродинамических сил. Ко второй группе относят
ПМ с поворотными гребными винтами и
водометами, а также водометные движители с
дефлекторными устройствами, заслонками и
каналами заднего хода.
522
Глава 4.2. ОБЩАЯ КОМПОНОВКА
Р/7ПХ Р/1П РПЛХ
Рпп
4*? й,4
4 4
4*.
к
I/7
%Р
ш
"ру\
т^Ш'
"ку
ШЩ" ш^4
№ I
С
ни Ф
"р»
Рнс. 4.2.13. Схемы данжнтелыю-рулевых комплексов ПМ,
обеспечивающих создание поворачивающих моментов с помощыо гидроднн
\Рл
Ш4к„ ЩЯ
в|1/. \Рпж
Рнс. 4.2.14. Схемы данжнтелыю-рулевых комплексов ПМ,
обеспечивающих создание поворачивающих моментов регулированием работы водоходных движителей
ОСОБЕННОСТИ ПЛАВАЮЩИХ МАШИН
523
Движение ПМ по криволинейной
траектории с необходимой для практики точностью
описывается системой следующих уравнений:
(т + Хп)-^-" (т + Х22)уу<° " Чб<°2 = Х\
(т + Х22)~^ + {»* + *и) ^ю + Х26 ^- = У;
(^ + Х<*)~^ + (*22 - *пК У у +
+ Х26ух© + Х26 -^- = А/г ,
где Хц и А, 22 - присоединенные массы воды
соответственно вдоль продольной и
поперечной осей ПМ; А.26 " присоединенный
статический момент; /^ и А.де - м°мент инерции
ПМ и присоединенный момент инерции воды
относительно вертикальной оси, проходящей
через центр масс; \х и \у - составляющие
вектора скорости ПМ по продольной и
поперечной осям; ю - угловая скорость ПМ; т -
масса ПМ.
Правые части этой системы уравнений
представляют собой сумму проекций векторов
внешних сил и моментов, состав которых
зависит от схемы управления ПМ на плаву и
типа используемого движительно-рулевого
комплекса машины.
После перекладки рулевых устройств ПМ
в некоторое фиксированное положение она
переходит от прямолинейного движения к
движению по криволинейной траектории -
циркуляции (рис. 4.2.15, а). Различают три
периода циркуляции, которые отличаются
параметрами криволинейного движения:
1) маневренный, занимает несколько
секунд, которые затрачиваются на установку
органов управления в положение,
соответствующее желаемому изменению траектории
движения;
2) эволюционный, начинается с момента
окончания перекладки рулевых устройств и
заканчивается, когда движение ПМ по
криволинейной траектории становится
установившимся. За этот период угол курса ПМ может
измениться на 60 ... 150° относительно
первоначального направления движения, а
параметры криволинейного движения (угловая и
линейная скорости, угол дрейфа и
геометрические параметры траектории) приближаются к
предельным;
3) установившийся, характеризуется
движением всех точек машины по
концентрическим окружностям относительно одного
Центра. Причем* все параметры криволинейного
движения ПМ в этом периоде принимают
постоянные значения.
Циркуляция ПМ оценивается
следующими геометрическими параметрами:
диаметром /)ц установившейся циркуляции,
тактическим диаметром От циркуляции, вы-
двигом /|, прямым смещением 1^, обратным
смещением /3 , которое у большинства ПМ
отсутствует.
Ршс. 4.2.15. Параметры цнреуляцмм ПМ:
а - геометрические; б - кинематические
524
Глава 4.2. ОБЩАЯ КОМПОНОВКА
Кинематические параметры циркуляции
ПМ (рис. 4.2.15, б)> позволяющие определять
положение ПМ на водной поверхности в
любой момент времени, будут известны, если
известны координаты центра тяжести ЦТ в
неподвижной системе отсчета ^ 0 ц , курсовой
угол а и угол дрейфа р . Кроме этих
параметров при изучении криволинейного
движения ПМ используются и другие параметры, в
частности: угол скорости <р, угловая скорость
со вращения ПМ, радиус кривизны
циркуляции Я^. Выражение <ь=\/Я%-<1$/(И
определяет связь между поступательным и
вращательным движениями ПМ. Оно
связывает угловую скорость с мгновенными
значениями скорости ЦТ, радиуса кривизны
циркуляции и скорости изменения угла дрейфа. При
криволинейном движении существует точка Р
полюса поворота, в котором р = 0. Эта точка
располагается на диаметральной плоскости
ПМ или на ее продолжении за пределами
корпуса. В полюсе поворота поперечная
составляющая вектора скорости отсутствует и
вращательное движение ПМ на циркуляции
происходит относительно этого полюса.
Схема сил, действующих на гусеничную
ПМ при криволинейном движении, показана
на рис. 4.2.16. Боковое перемещение и
вращение корпуса ПМ изменяет картину обтекания
водой машины. Гидродинамическая сила Д
действующая при прямолинейном движении в
диаметральной плоскости, смещается и линия
ее действия проходит под некоторым углом к
диаметральной плоскости. Причем по мере
вхождения ПМ в циркуляцию точка
приложения этой силы перемещается из носовой части
в кормовую. Силу Я можно разложить на две
составляющие: боковую Яу, направленную
перпендикулярно к диаметральной плоскости;
продольную ЯХУ совпадающую с
диаметральной плоскостью. Сила Яу направлена в сто-
Рис. 4.2.16.Свлы, действующие ш ПМ
рону, противоположную боковому смещению,
и создает гидродинамический момент
сопротивления, который в начальные периоды
циркуляции при расположении силы Яу впереди
ЦТ способствует вращению машины. Сила
Ях представляет собой силу сопротивления
воды продольному перемещению ПМ.
У ПМ при движении по криволинейной
траектории возникают ускорения: нормальное
(центростремительное), направленное по
радиусу к центру кривизны траектории;
касательное, которое возникает лишь при
изменении скорости. Появившиеся при этом силы
инерции пропорциональны ускорениям, а по
направлению действия противоположны им.
Центробежная сила инерции О также создает
две составляющие йх и ^уу с которыми
суммируются составляющие силы инерции
Ск у обусловленной касательным ускорением.
Вектор тяги Р ВД можно разложить на
две составляющие: поперечную Ру и
продольную Рх. Сила Ру вызывает боковое
смещение ПМ и создает поворачивающий
момент, действующий в горизонтальной
плоскости. Поворот вектора тяги ВД на угол ут
происходит после перекладки рулевых
устройств на угол у . При этом у многих ВД
величина упора уменьшается.
Некоторые геометрические и
кинематические параметры процесса циркуляции ПМ
приведены ниже (часть представлена в
относительной форме).
Относительный диаметр
циркуляции />ц / Ь, м,
менее 2
Тактический диаметр
циркуляции /)т (0,87 ... 1,5) /)ц
Выдвиг. 1\ (0,6 ... 1,3)/>ц
Прямое смещение 1^ • • . (0,2 ... 0,6)/)ц
Обратное смещение /3 (0,0 ... 0,15) Оц
Линейная скорость на
циркуляции по
сравнению со скоростью
прямолинейного движения .... (0,4 ... 0,75) У^^
Угловая скорость, рад/с 0,09 ... 0,35
Период установившейся
циркуляции, с 20 ... 60
ОСОБЕННОСТИ ПЛАВАЮЩИХ МАШИН
525
Угол дрейфа, рад 0,1 ... 0,52
Угол крена на
циркуляции, рад 0,034 ... 0,069
Мореходность ПМ - ее способность к
безопасному плаванию в условиях морского и
озерного волнения и ветра. Плавание в таких
условиях сопровождается различными
колебательными движениями ПМ относительно
поверхности воды, совокупность которых
называется качкой. Чем качка умереннее, тем
лучше приспособлена ПМ к работе в условиях
волнения в прибрежной части моря, озера.
Различают три основных вида качки
(поперечную, продольную и вертикальную),
которые могут в зависимости от направления
движения ПМ относительно фронта
распространения волн проявляться в совокупности
либо как отдельный вид качки. Качка в
зависимости от типа волнения может быть
регулярной или нерегулярной. Для ПМ выделяют
еще качку в прибойной зоне при входе машин
в воду и выходе из нее на берег.
На спокойной воде выведенная из
положения статического равновесия ПМ совершает
свободные затухающие колебания, которые
описываются линейными однородными
дифференциальными уравнениями с постоянными
коэффициентами. Общие решения этих
уравнений с учетом начальных условий,
специфики качки ПМ и некоторых упрощений имеют
вид, например для поперечных колебаний:
0(/) = е"Цв/восо8/1е/,
где цв - относительный коэффициент
демпфирования при поперечной качке; 9Ц -
частота свободных колебаний без учета
демпфирования.
Выведенная из положения равновесия
ПМ совершает в поперечной плоскости
затухающие гармонические колебания с
постоянным периодом
Ге = 2ж/ле = 2к}1(/х+А/х)/(увУИ0)
Аналогично периоды свободных
колебаний продольной и вертикальной качки
Ту = 2*1 Пу = 2ж1](/у+А/у)/(уъУН0);
Здесь 1Х и 1у - моменты инерции
массы ПМ относительно продольной и
поперечной осей, проходящих через ЦТ; Д/х и
А/у - присоединенные моменты инерции
воды относительно тех же осей; А тг -
присоединенная масса воды в направлении
вертикальной оси; 5" - площадь действующей
ватерлинии.
Периоды свободных колебаний ПМ
могут определяться расчетным или опытным
путями. Значения этих периодов для ПМ
представлены ниже.
Период свободных
колебаний в
поперечной плоскости 2,5 ... 3,4
Период свободных
колебаний в
продольной плоскости 2,3 ... 2,75
Период свободных
колебаний в
вертикальной плоскости 2,2 ... 2,8
При плавании в условиях регулярного
волнения на ПМ, кроме восстанавливающих и
демпфирующих сил и моментов, действуют
силы и моменты от волнения, изменяющиеся
периодически во времени и вызывающие
качку.
Дифференциальные уравнения всех трех
основных видов качки имеют вид:
поперечной
(/х+д/х)е + лгвё + Гвк/!ое =
= Ув^<*оХесо8ст/;
продольной
(^+Д/у)^ + ЛГч,н/+увРЯ0н/ =
= УъУН0а0ХуСО&а1;
вертикальной
= Ув^0Х§8ша/,
а о - амплитуда волнового склона; а -
частота качки; 7Уе, ТУ^,, N^ - коэффициенты
демпфирования соответственно поперечной,
продольной и вертикальной качки;
Хе> Хцм Х\ - редукционные коэффициенты
соответственно поперечной, продольной и
вертикальной качки.
526
Глава 4.2. ОБЩАЯ КОМПОНОВКА
Наиболее неблагоприятный характер
качка ПМ принимает в тех случаях, когда
периоды свободных собственных колебаний
машин становятся близкими к периоду волн. В
этих условиях может наблюдаться резонансная
качка, сопровождающаяся существенным
увеличением амплитуд качки, ускорений и других
ее параметров. Для оценки поведения ПМ при
волнении и выбора благоприятных сочетаний
курсовых углов относительно фронта
распространения волн и скорости движения могут
использоваться диаграммы качки различного
типа. Следует учитывать, что для каждого типа
ПМ существует предельная балльность
волнения, на которой этот тип ПМ может надежно
эксплуатироваться. Для большинства ПМ
предельной балльностью волнения является
трехбалльное.
4.2.4. РАСЧЕТ КОРПУСА И ЕГО ЭЛЕМЕНТОВ
К корпусу гусеничной транспортной
тяговой машины крепятся все основные узлы и
агрегаты. Кроме того, корпус воспринимает
все нагрузки, действующие на машину. В
общем случае он должен быть достаточно
прочным, жестким и коррозионно-стойким при
наименьшей массе и стоимости; обладать
высокой надежностью, долговечностью,
ремонтопригодностью и технологичностью в
производстве; способствовать повышению
проходимости машины; позволять наиболее удобно и
экономно разместить и закрепить все
монтируемые на нем агрегаты и узлы;
способствовать понижению центра тяжести машины,
допускать значительные ходы подвески.
Характеристики корпусов. Корпуса могут
быть открытыми и закрытыми. У открытых
корпусов профиль поперечного сечения
открытый (корытообразный), у закрытых -
замкнутый. По конструктивной схеме корпуса
можно условно разбить на два типа: каркасные
и бескаркасные. Бескаркасные корпуса
применяют там, где обшивка обеспечивает
необходимые прочность и жесткость. Такие корпуса
представляют собой жесткие коробки.
Корпус каркасного типа включает
пространственный стержневой каркас и тонкую
листовую обшивку. Каркас состоит из
продольных и поперечных балок, а также из
вертикальных и наклонных стоек, раскосов и т.д.
Элементы каркаса выполняются из прокатных
профилей или, что более эффективно, из
тонкостенных гнутых профилей и труб круглого
или прямоугольного сечения. Листы обшивки
привариваются снаружи к элементам каркаса,
обеспечивая корпусу герметичность и
необходимое водоизмещение (у плавающих машин).
Для увеличения жесткости обшивочные листы
могут иметь зиги (выштампы).
Чаще всего для корпуса используют
углеродистые стали обыкновенного качества и
высококачественные.
Нередки случаи, когда в конструкции
корпуса используются как стальные элементы
(они воспринимают основную часть нагрузки),
так и детали, выполненные из легких сплавов
или пластмасс. Если стальные элементы
находятся в контакте с деталями, сделанными из
легких сплавов, то для предотвращения
электрохимической коррозии между ними
необходимо устанавливать прокладки из
диэлектриков. Практика показывает, что во время
эксплуатации машины эти прокладки нередко
разрушаются, что приводит к быстрому
нарушению соединения. Для предотвращения
электрохимической коррозии на границе
разнородных металлов в последнее время все
шире используется их соединение с помощью
сварки взрывом.
Перспективным материалом для
бескаркасных корпусов являются трехслойные
панели типа "сандвича". Внешние слои таких
панелей образованы из тонких листов достаточно
плотного материала (обычно применяются
алюминиевые сплавы или стеклопластик);
внутренний более широкий слой сделан из
материала с малой плотностью
(пенополиуретана). Если наружные слои трехслойной
панели выполнены из стали или
алюминиевого сплава, то они соединяются между собой
дополнительно с помощью проставки,
сделанной из листового материала. Корпус,
выполненный из панелей типа "сандвич", обладает
малой массой в сочетании с высокой
прочностью и жесткостью, способен эффективно
уменьшать вибрацию и шум, обеспечивает
машине хорошую живучесть и надежную
изоляцию агрегатов от внешних воздействий.
Недостатком корпуса из панелей типа "сандвич"
является высокая стоимость технологического
процесса производства панелей.
Защита корпуса от коррозии решается
разнообразными способами: использованием
различных лакокрасочных покрытий;
применением высоколегированных сталей, легких
сплавов и пластмасс; исключением из
конструкции мест, в которых может скапливаться
влага; фосфатированием стальных элементов;
применением оцинкованных стальных листов
и т.д.
Прочность корпуса. Во время движения
машины на ее корпус действуют
разнообразные внешние нагрузки, а напряжения в нем
распределяются крайне неравномерно. Их
различают как общие и местные. Для расчета
корпусов на общую прочность наиболее часто
используют следующие методы: начальных
параметров (МНП), сил (МС) и конечных
элементов (МКЭ). МНП дает
удовлетворительные результаты для корпусов, которые в
расчетной схеме можно представить в виде
тонкостенного упругого стержня со
следующими параметрами:
РАСЧЕТ КОРПУСА И ЕГО ЭЛЕМЕНТОВ ГУСЕНИЧНОЙ МАШИНЫ
527
Ь/ ВИЗ и Ь/В <> 0,02,
где Ь - длина корпуса; В - ширина корпуса;
5 - средняя толщина обшивки.
МС применяется для расчета плоских и
пространственных статически неопределимых
конструкций. При использовании этого метода
без привлечения ЭВМ удается рассчитать лишь
весьма простые конструкции, имеющие
степень статической неопределимости не более 6.
МКЭ является наиболее совершенным
универсальным методом. С его помощью можно
рассчитывать разнообразные конструкции
корпусов при их произвольном нагружении.
Использование ЭВМ обязательно. Для расчетов
общей прочности корпусов возможно
применение методов суперэлементов (МСЭ) и
граничных элементов (МГЭ).
При расчете на общую прочность в
качестве расчетных рассматриваются наиболее
характерные и "тяжелые" (с точки зрения
прочности корпуса) режимы движения
машины. Среди "тяжелых" режимов можно
выделить следующие: переезд через ров под
прямым углом и косым курсом; переезд через
валик под прямым углом к нему; преодоление
стенки, эскарпа или контрэскарпа. Для
плавающих машин характерным режимом
является также движение по воде.
Суммарная внешняя нагрузка,
действующая на корпус, складывается в основном
из следующих: от масс корпуса, механизмов и
оборудования машины и перевозимого груза;
сил и моментов, передаваемых на корпус от
гусеничного движителя; инерционных
нагрузок. На корпус плавающей машины при ее
движении по воде действуют также силы
плавучести и от работающего водоходного
движителя, гидродинамические и волновые
нагрузки. Распределение сил от массы корпуса
может быть самым различным в зависимости от
конкретной конструкции. В первом
приближении можно считать, что масса корпуса
распределена по его длине равномерно с одной
интенсивностью.
По влиянию, которое оказывают
механизмы и различное оборудование на
напряженно-деформированное состояние ее
корпуса, их можно условно разбить на основные и
дополнительные. К основным относятся
наиболее тяжелые механизмы: двигатель, коробка
передач и др., к дополнительным - все
остальные механизмы и оборудование машины.
Значения, направления и точки
приложения сил от масс основных механизмов легко
определить, зная положение их центров
тяжести и способы крепления к корпусу.
Суммарная масса дополнительных механизмов
определяется по формуле:
где Щс - собственная масса машины; т^ -
масса корпуса; т0 - масса основных
механизмов.
Распределение массы тл по длине
машины может иметь различный вид. Часто
считают, что эта масса распределена равномерно с
одной интенсивностью по длине корпуса.
Силы от массы перевозимого груза приложены к
элементам грузового отделения машины. При
расчете на общую прочность надо
рассматривать максимальную силу тяжести груза,
которую можно учитывать как сосредоточенную,
так и распределенную.
Силы, передаваемые на корпус от
гусеничного движителя, зависят от режима
движения машины. Их обычно делят на
симметричные и кососимметричные. Симметричные
силы вызывают сжатие и изгиб корпуса, косо-
симметричные - его кручение. У гусеничных
машин с торсионной подвеской кроме
нормальных реактивных сил, действующих со
стороны грунта на опорные элементы
движителя, на корпус в местах защемления торсио-
нов приложены изгибающие моменты,
вызванные смещением оси опорного катка
относительно оси торсиона:
Мя=Кау
где К - реактивная сила, действующая на
опорный каток; а - расстояние от оси
опорного катка до поперечной вертикальной
плоскости, в которой расположена ось торсиона.
На плавающую машину, движущуюся по
воде, вместо реактивных сил от гусеничного
движителя действует сила плавучести.
При приближенном расчете корпуса на
изгиб он представляется в виде составного
бруса, собранного только из длинных
продольных связей и обшивки, работающих на
изгиб в продольной вертикальной плоскости.
Поперечные связи, короткие продольные
связи, стойки и раскосы не учитываются.
Расчет проводится в такой
последовательности. На вычерченный в масштабе контур
корпуса машины наносятся все
сосредоточенные и распределенные силы, действующие на
него. Пример расчетной схемы для
гусеничного транспортера, {переезжающего через валик
(машина опирается на четыре средних катка),
показана на рис. 4.2.17. Определяются
реактивные силы. Строятся эпюры
перерезывающих сил С л изгибающих моментов МИ .
Для наиболее опасных с точки зрения общей
прочности корпуса сечений (в них
перерезывающая сила и изгибающий момент
принимают максимальные значения) определяются
геометрические характеристики: площадь,
528
Глава 4.2 ОБЩАЯ КОМПОНОВКА
Рве. 4.2.17. Расчетная схема корпуса:
а - нагрузки; б - перерезывающие силы й
в - изгибающие моменты
статический момент, моменты инерции и
сопротивления (два последних параметра -
относительно нейтральной оси изгиба).
В опасных сечениях вычисляются
касательные т и нормальные а напряжения по
формулам:
ч=0/Р; о = Мп1/1у;
ашах = Мт *тах / *у = Мп / ^у »
где Р - площадь поперечного сечения
корпуса (сумма площадей поперечных сечений
продольных элементов); 1у - момент инерции
поперечного сечения корпуса относительно
нейтральной оси изгиба; 7. - расстояние от
нейтральной оси изгиба до рассматриваемого
волокна продольной связи корпуса; ^щах ~
расстояние от нейтральной оси изгиба до
наиболее удаленного волокна продольной связи;
\Уу - момент сопротивления поперечного
сечения корпуса.
Полученные напряжения сравниваются с
допускаемыми.
Для статических и квазистатических
задач допускаемые напряжения определяются,
исходя из предела текучести материала
корпуса по формулам:
г 1 ат г 1 °»4ат
где [а I и 1x1 - допускаемые соответственно
нормальные и касательные напряжения; ат -
предел текучести материала; п - запас
прочности; п = 1,5; ка - коэффициент
динамичности; кл = а I # ; а - вертикальное
ускорение корпуса в рассматриваемом поперечном
сечении.
При проектировочных расчетах по
результатам сравнения допускаемых и расчетных
напряжений можно принимать решение об
изменении конструкции корпуса - его
поперечного сечения. Во время приближенного
расчета на кручение корпус представляется в
виде тонкостенного упругого стержня (рис.
4.2.18, а), усиленного только поперечными
связями (продольные балочные силовые связи
и другие элементы не учитываются). На него
действует крутящий момент 3/кр = РЬ. При
кручении поперечные связи создают в корпусе
силовые факторы, статически эквивалентные
бимоментам Вт\9 Вт2> •••> Д»5 • °ни в Р*0'
четной схеме считаются внешними нагрузками
(рис. 4.2.18, б). Дифференциальное уравнение
стесненного кручения тонкостенного стержня
имеет вид
Е/т& = "Ьс р»
где Е - модуль упругости первого рода; /ш -
главный секториальный момент поперечного
сечения стержня; 0 - четвертая производная
угла закручивания стержня; тп^^ -
распределенный по длине стержня внешний крутящий
момент.
Рис. 4.2.18. Расчетная схема при крученая
корпуса («, б) ■ эпюра бимомевтов (в)
РАСЧЕТ КОРПУСА И ЕГО ЭЛЕМЕНТОВ ГУСЕНИЧНОЙ МАШИНЫ
529
Это уравнение решается методом
начальных параметров. В результате получают
значения первых производных угла закручивания
корпуса для тех сечений, в которых
расположены поперечные связи. Через них
определяют бимоменты в этих же сечениях и строят
эпюру бимомента для корпуса (рис. 4.2.18, в).
Нормальные напряжения от стесненного
кручения вычисляют по формуле
а а = Вт © / /ю ,
где со - секториальная координата
рассматриваемой точки поперечного сечения.
Суммарные нормальные напряжения в
корпусе складываются из напряжений от
изгиба и стесненного кручения.
Описанные выше приближенные методы
прочностных расчетов часто дают
неудовлетворительные результаты. При расчете с помощью
МКЭ реальный корпус аппроксимируется
совокупностью конечных элементов (КЭ). В
качестве КЭ чаще всего выступают стержни,
тонкостенные стержни-оболочки и пластины
(треугольные и прямоугольные). Бескаркасный
корпус можно представить только пластинами.
При исследовании каркасного корпуса, у
которого основным силовым элементом является
пространственный балочный каркас, а тонкая
листовая обшивка не влияет значительно на
общую прочность и жесткость, в расчетную
схему могут быть включены лишь стержневые
КЭ. Такая расчетная схема основания
каркасного корпуса представлена на рис. 4.2.19.
Внешние нагрузки (силы, моменты),
действующие на рассчитываемую
конструкцию, довольно просто приводятся к узлам
идеализации. Расчет конструкции по МКЭ
проводится на ЭВМ с помощью специальной
программы. Основной информацией,
закладываемой в качестве исходных данных в ЭВМ,
являются сведения о топологии конструкции,
координатах узловых точек (местах соединения
КЭ), геометрических и жесткостных
параметрах КЭ и внешних узловых нагрузках.
В процессе обработки исходной
информации в памяти ЭВМ формируется система
линейных уравнений
[К]«-Л
где [К] - общая матрица жесткости
конструкции; 0 - вектор неизвестных узловых
перемещений; Р - вектор внешних сил.
Общая матрица жесткости [ К ]
образуется из матриц жесткости отдельных КЭ,
которые в свою очередь вычисляются по
известным алгоритмам (при этом используются
значения геометрических и жесткостных
параметров КЭ). Основные неизвестные (значения
элементов вектора д ) вычисляются в ЭВМ с
помощью формулы
* = [к]
-'р,
где [ К 1 - матрица, обратная матрице [ К ].
Обращение матрицы [ К1
осуществляется в ЭВМ обычно по методу Гаусса.
^87
Рис. 4.2.19. Коиечноэлементная идеализация основания корпуса
530
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИИ
По вычисленным значениям узловых
перемещений с помощью известных
зависимостей в ЭВМ определяются также узловые
внутренние силовые факторы (силы, моменты,
бимоменты) и напряжения (нормальные и
касательные). Перемещения используются для
построения упругих линий прогибов в
элементах корпуса, а также кривых углов
закручивания корпуса и его элементов. Значения
прогибов и углов закручивания дают возможность
оценить как изгибную, так и крутильную
жесткости рассчитываемой системы. По
расчетным значениям внутренних напряжений
оценивается общая прочность корпуса и
отдельных его элементов.
Использование МКЭ создает
предпосылки для оптимизации корпуса по прочности и
жесткости.
Расчету на местную прочность
подвергаются обычно обшивка, шпангоутные
(поперечные) рамы, стрингеры (продольные силовые
элементы), торсионные балки. Местная
прочность того или иного элемента корпуса
оценивается с использованием известных методов
строительной механики. Статически
неопределимые конструкции, например шпангоутные
рамы каркасных корпусов, рассчитывают
обычно с помощью МС. Для получения более
точных результатов или для сложных
элементов следует использовать МКЭ. Расчет
обшивки в большинстве случаев сводится к
рассмотрению изгибной пластины, жестко заделанной
на прямоугольном контуре. Внешними
силами, действующими на обшивку, могут быть
ударные сосредоточенные силы,
гидростатическое или гидродинамическое давление воды
(для плавающих машин).
Экспериментальные исследования по
определению напряжений в элементах корпуса
гусеничной машины являются неотъемлемой
частью ее проектирования и доводки. Цель
экспериментальных исследований - определение
степени достоверности расчетных данных и
оценка действительного напряженного
состояния корпуса. Напряжения обычно
определяются в элементах натурного образца корпуса,
но могут использоваться масштабные
физические модели.
Основной метод экспериментального
определения прочности - метод тензометриро-
вания. Для выявления зон максимальных
напряжений и получения качественной картины
напряженного состояния может
использоваться метод хрупких покрытий. Перед началом
экспериментальных исследований в
определенных точках корпуса приклеиваются тензо-
резисторы. Градуировка тензорезисторов -
косвенная, с использованием эталонных бало-
чек (например, балочки равного
сопротивления изгибу). Компенсационные тензорезисто-
ры приклеиваются к ненагруженным
элементам корпуса или стальным пластинам. Рабочий
и компенсационный тензорезисторы
соединяются между собой в полумост и включаются в
измерительную цепь, которая состоит из
усиливающей (многоканальные тензоусилители) и
регистрирующей (микроамперметры для
статических испытаний или шлейфовые
осциллографы для динамических испытаний)
аппаратуры.
Необходимо учитывать, что определить
действительные напряжения в корпусе
невозможно, так как нельзя измерить напряжения,
создаваемые силой тяжести самого корпуса.
Напряженное состояние корпуса можно
оценить лишь относительно, измеряя приращения
напряжений, вызванные тем или иным
внешним усилием. При экспериментальном
исследовании могут возникнуть также трудности,
связанные с ограничением или
невозможностью доступа к некоторым точкам
конструкции для установки в них тензодатчиков.
Глава 4.3
ВЫБОР СХЕМ И
ОБОСНОВАНИЕ ОСНОВНЫХ
ПАРАМЕТРОВ ТРАНСМИССИЙ
Основанием для выбора схемы
трансмиссии транспортно-тяговой гусеничной машины
с заданными показателями (полной массой т
машины или тягача и полной массой щ^
прицепа) является тяговый расчет и выбор
типа механизма поворота. Тип трансмиссии
и ее структура определяются в результате
системного анализа: тяговый расчет -
концепция - способность выполнения многообразных
функций прямолинейного движения и
поворота - эргономичность - экономичность (по
топливу) - экологичность - эксплуатация -
надежность - компоновка - объемно-массовые
показатели - возможность создания базового
шасси семейства машин - производственно-
технологическая готовность предприятия-
изготовителя и предприятий-соисполнителей.
Анализ выполняется для всех типов
трансмиссий. Аналогично системно определяются
конструктивные показатели ходовой части
гусеничной машины: гусеничного движителя
(радиус ведущего колеса /^, продольная Ь и
поперечная В базы и др.) и системы подрессо-
ривания (проходная высота Л„р неровностей
и др.).
Выбор схемы трансмиссии гусеничной
машины выполняется в два этапа. На первом
этапе определяются структурные схемы
трансмиссии в части прямолинейного движения и в
части поворота, а на втором - составляется
общая кинематическая схема трансмиссии.
ХАРАКТЕРИСТИКИ МЕХАНИЗМОВ ГУСЕНИЧНОЙ МАШИНЫ
531
4.3.1. ХАРАКТЕРИСТИКИ МЕХАНИЗМОВ,
НЕОБХОДИМЫЕ ДЛЯ ПРИНЯТИЯ
СХЕМНЫХ РЕШЕНИЙ ПО ТРАНСМИССИЯМ
Передачи. Зубчатая передача
характеризуется кинематическим передаточным
числом (простая зубчатая передача от звена 1 к
звену 2), которое определяется отношением
и\2 = ю 1 / ю 2 » тае направление вычисления
этого параметра и принадлежность угловых
скоростей ш звеньев передачи обозначено
соответствующими индексами. КПД пары
конических колес т| =0,975, а
цилиндрических г| =0,985.
Кинематическими передаточными
числами планетарных передач являются
внутренние передаточные числа Щ/ , /^', /^'
(направление вычисления внутреннего
передаточного числа обозначено нижними индексами, а
остановленное звено - верхним). КПД
планетарной передачи принимается л = 0,99.
Силовое передаточное отношение
зависит от направления силового потока,
проходящего через передачу. Если направление,
принятое при определении кинематического
передаточного числа, совпадает с
направлением силового потока, то силовое передаточное
отношение ~й\2 = иц Л • Если же не совпадает,
то ип = ип I Л •
Гидродинамическая передача имеет
насосное колесо, турбину и один или несколько
реактивных аппаратов с автологами или без
них. Крутящие моменты на насосе МИ и на
турбине МТ можно определить из основных
уравнений гидродинамической передачи,
которые в соответствии с законом подобия
имеют вид:
^н=уЬн"н^;
где п^ - частота вращения насоса; /)а -
активный диаметр гидропередачи; Кт -
коэффициент трансформации (силовое
передаточное число); у Хн - коэффициент первичного
момента гидропередачи.
Для определения нужных соотношений
используется безразмерная характеристика
гидропередачи (рис. 4.3.1) - совокупность
зависимостей у Хн , Кт и КПД от
кинематического передаточного числа /. Кинематическим
передаточным числом гидродинамической
О 0,2 0А 0,6 0,6 1Г
Рас. 4.3.1. Безразмерные жарантераствжв
гвдротравсформатора (комплексаов гвдропередгш)
передачи принято называть отношение
I = ©т /сон . По безразмерной характеристике
определяем 1\, при котором л имеет
максимальное значение (л =0,8) и передаточное
число /*2 на режиме максимального КПД.
Отсюда можно получить скоростной
</кт = /*2 / /*1 и диловой */ст = Кт (/'1)
диапазоны гидродинамической передачи.
Объемные гидропередачи (ОГП),
применяемые в трансмиссиях гусеничных машин,
состоят из двух взаимообратимых
гидромашин, соединенных между собой магистралями
высокого давления и являются составной
частью трансмиссионного объемного
гидропривода. Каждая машина имеет два механических
звена - ротор и статор. Непрерывное
регулирование скорости на выходе ОГП достигается
изменением эксцентриситета (люльки)
относительно ротора в одной или двух
гидромашинах. ОГП имеет механический и
гидравлический силовые потоки.
Силовым фактором действующего
механического потока является крутящий момент
^г.кр» приложенный к ротору машины, а
скоростным - угловая скорость ротора со .
Силовым фактором гидравлического потока
принимается массовый расход рабочей
жидкости <2, а скоростным - гидростатический
напор
И'ш(р-Ар)/{цр),
где А р = рв - рн - перепад давлений в
магистрали высокого (рв) и низкого (рн )
давлений.
532
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИЙ
Кинематической характеристикой
гидромашины является объемный расход жидкости
за один оборот ротора С :
(?' = 0,5$со /к,
где ^ - объем жидкости, проходящий через
машину за один оборот ротора при отсутствии
утечки.
Эта характеристика устанавливает связь
между объемным расходом и угловой
скоростью ротора: 0 = %рО'.
Теоретическая скоростная характеристика
ОГП - теоретическое передаточное число,
устанавливающее кинематическую связь между
гидромашинами при отсутствии утечек,
/*21 = со 2 / со I = Я\ / Я2 • Объемный КПД
ОГП, равный произведению соответствующих
КПД гидромашин 1 и 2 ( Ло = Ло1 Ло2 )» и
ее механический КПД, равный
произведению соответствующих КПД тех же машин
( Лм = Лм1 Лм2 )» определяются опытным
путем или по трехпараметровой таблице КПД
однотипных гидромашин (параметры:
теоретическое передаточное число /, давление р
жидкости в гидромашине и частота п вращения
ведущей гидромашины).
Характеристики объемной
гидропередачи - действительные передаточные числа -
кинематическое 1 и силовое I определяются
по формулам /21 = /21 По и *21 = '21 Л~У *
зависимости от расположения ОГП в силовом
потоке. Если принятое направление
передаточного числа (/*21, 2 -► 1) и направление
силового потока совпадают, то V = 1, иначе
у = -1.
Силовой фактор механического потока
момент Мх р определяется по формуле:
Мкр =0,5(/>-Д/>)?/*.
Соединение передач в трансмиссиях*
Зубчатые, гидродинамическая,
объемно-гидравлическая передачи могут соединяться в
трансмиссиях последовательно и параллельно.
При последовательном соединении передач
они располагаются в силовом потоке двигателя
и являются полнопоточными. Передаточное
число равно произведению передаточных
чисел в соответствии с принятыми
определениями (и\2 - зубчатые передачи, /'21 -
гидродинамическая и объемно-гидравлическая
передачи). Общий КПД соединения можно получить
перемножением КПД отдельных передач, в
состав которого они входят.
При параллельном соединении передан в
трансмиссии с помощью планетарных передач
образуется один или несколько замкнутых
контуров передач (ЗКП, рис. 4.3.2). Основной
характеристикой ЗКП является круговое
передаточное число ик р , вычисленное
(направление указано стрелкой) по формуле
"кР ="ов^)/|/Дв»
где индексы ов - основная ветвь; дв -
дополнительная ветвь.
Знак ик р определяет энергетическое
состояние ЗКП. Если 8&П1/кр = +1, то в ЗКП
имеет место циркуляция, если $&пыкр = -1,
то в ЗКП происходит разветвление мощности.
Величина икр определяет направление
потока энергии (мощности). Коэффициент
нагрузки ЛГу в разветвляющей узловой точке /
относительно суммарного при циркуляции
К у = 1/к р , а при разветвлении мощности
*/=(1-«кр)_1-
Кинематическое передаточное число
ЗКП определяется По формуле
"зкп »»пр/(1-«кр).
где |/пр =м0в/>х - проходное передаточное
число.
Силовое передаточное число ЗКП
- ип р Лп р
"зкп -" " - •
А-^крПкр
Направления силовых потоков,
проходящих через передачи ЗКП, изменяют
значения КПД:
о
**>-
Рве 43.2. Структурна* схема замкнутого контура
ТЯГОВЫЙ РАСЧЕТ ГУСЕНИЧНОЙ МАШИНЫ
533
Лкр =
(а
ЛовЛдв Лпп
овЛпп
Лдв
при циркуляции;
при разветвлении
мощности.
КПДЗКП Лзкп =йзкп/«зкп
4.3.2. ТЯГОВЫЙ РАСЧЕТ ТРАНСПОРТНО-ТЯГОВОЙ
ГУСЕНИЧНОЙ МАШИНЫ
Задачей тягового расчета транспортно-
тяговой гусеничной машины является подбор
в процессе проектирования основных
параметров силовой установки и трансмиссии,
обеспечивающих машине заданные тяговые и
скоростные свойства. Требования к тяговым и
скоростным свойствам транспортно-тяговой
гусеничной машине обычно включают
максимальную скорость Утах на хорошей ровной
горизонтальной бетонной дороге (\|/ = 0,02 ) и
некоторые другие данные, определяемые
условиями эксплуатации (например,
производительность самоокапывания Сс 0)-
Определение характеристик силовой
установки. При заданной Уп^ требуемая
мощность двигателя определяется по формуле
/дтш ^/Утах
*е=- 7 Г"
ЛсуЛт Лг д1утах /'и
В этом выражении минимальное значение
удельной силы тяги по двигателю
Д „^ = у = 0,02 определяется для движения
тягача с колесным или гусеничным прицепом
со скоростью Утах по соответствующей
дороге-
КПД силовой установки предварительно
принимается Г)су = 0>9 ••• °»93, КПД
трансмиссии любого типа предварительно
принимается т|т =0,9, а КПД гусеничного
движителя т|гд для тех же условий определяется при
скорости Упад. По мощности 7Уе
выбирается готовый двигатель.
Для выполнения последующих расчетов
все его параметры и характеристики известны:
максимальная эффективная мощность
Nетаx = 7Уе и соответствующая частота
вращения Лдг; максимальный крутящий момент
Метах и соответствующая частота вращения
/!д/; минимальный удельный расход топлива
#етш и соответствующая частота вращения
п%. Выбор типа, двигателя является задачей
системного анализа, одно из решений
которого в рамках тягового расчета показано на рис.
4.3.3.
ПОРШНЕВЫЕ ДВИГАТЕЛИ
Дизель
с всережимным
регулятором
Механическая
коробка передач
Дизель
постоянной
мощности
Гидромеханическая
коробка передач
1^
Дизель с двухрежим-
ным регулятором,
карбюраторный
С объемными
гидропередачами
Газотурбинный
двигатель
С электрическими
передачами
Рис. 4.3.3. Применение двигателя с коробкой передач
534
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИЙ
Для поршневых двигателей и ГТД
принимается, что внешняя характеристика -
зависимость крутящего момента Ме двигателя от
частоты его вращения я на интервале
(яд/, Пц\ -линейная:
Ме(п) =
= МеN
(^.-1)(Длв-й/йдг)
Ддв-1
где АдВ = Му / Мц - коэффициент
приспособляемости двигателя; Ддв = п^ / Пу -
скоростной диапазон устойчивой работы
двигателя.
Основные характеристики трансмиссии. К
этим характеристикам относятся
кинематический и силовой диапазоны. Кинематический
диапазон Дк трансмиссии - это отношение
утах к утт ПРИ условии, что частота
вращения двигателя Лдг. Дк можно выразить
через удельные силы тяги, которые
необходимо иметь для движения машины с этими
скоростями в соответствующих условиях:
Дк =
/дтах Лгдуутах )
/д тт Лг д
Удельная сила тяги Дпип определяется при
движении одиночной машины с заданной
скоростью Упад на ровной горизонтальной
бетонной дороге.
КПД гусеничного движителя на малых
скоростях принимается Лгд = 0>94. Удельная
сила тяги /ДП1ах определяется при движении
одиночных машин на подъеме дороги с
Ф =0,7 ... 0,8 и /гр = 0,08 ... 0,1. Предельный
угол наклона дороги а = агс1&( Ф - /г р) =
= 32 ... 35°, а удельная сила тяги при этом
/да =0,65.
Длительное движение одиночной гусеничной
машины с механической трансмиссией на
подъеме должна обеспечивать трансмиссия и
двигатель, который работает по внешней
характеристике и развивает частоту вращения
я = 03Л/у . Крутящий момент двигателя при
этом можно определить по формуле внешней
характеристики М(п). Тогда скорость
движения машины на подъеме:
Л/(л)/!Г|СуТ|гГ|Тд
Минимальная скорость машины для
определения диапазона трансмиссии
рассчитывается при условии, что удельная сила тяги
Ми г
/дтах = А/(я) да,Т°таа
_ ^етах Лс у Лт Лг д
/дтах "
Длительное движение одиночной гусеничной
машины с гидромеханической трансмиссией на
подъеме должно обеспечиваться трансмиссией,
включающей гидротрансформатор ГП и
двигателем. При этом двигатель должен работать по
внешней характеристике, а
гидротрансформатор в таком режиме, при котором его КПД
Лгд = 0>8- Частота вращения двигателя я,
соответствующая данному режиму
гидротрансформатора, может быть определена в
результате совместного решения уравнений
Мн = М(я)ивп цвп ;
Скорость \а движения машины на
подъеме
М(п)пит Л.ДД КТпх]суг{'Тг]ТД
Удельная сила тяги, необходимая для
определения диапазона трансмиссии,
А
дтах
(тМа
1^
А
-(*)'•
Основные характеристики входной
передачи н бортового редуктора. Входная передача
(ВП) и бортовые редукторы (БР) являются
механизмами трансмиссии, которые не
определяют непосредственно ее диапазоны Дк и
Д. Структурные схемы ВП любых типов
трансмиссий одинаковые. Кинематические
схемы ВП определяются в зависимости от
функций выполняемых в машине. ВП
механических трансмиссий гусеничных машин, как
правило, предназначена для решения
компоновочных задач. Это может быть одинарная
ТЯГОВЫЙ РАСЧЕТ ГУСЕНИЧНОЙ МАШИНЫ
535
коническая или цилиндрическая передача или
двойная передача, состоящая из
последовательно соединенных конической и
цилиндрической зубчатых передач с передаточным
числом ивп = 1 - 1,5. Например, входная
передача транспортера-тягача МТ-ЛБ - коническая.
ВП может быть выполнена в виде одного
агрегата, если ось двигателя параллельная оси
коробки передач.
В ВП гидромеханических трансмиссий
(гидротрансформатор с заданным активным
диаметром /)а располагается последовательно
с другими передачами в силовом потоке) тран-
спортно-тяговых гусеничных машин, если в
ней есть необходимость, совмещены
характеристики двигателя и гидротрансформатора.
Передаточное число ВП ит рассчитывается
из условия пересечения параболы крутящего
момента насосного колеса Мн при (у X )2 с
внешней характеристикой двигателя,
приведенной к насосу в точке максимальной
мощности по формуле (см. рис. 4.3.1):
| ЧсцЧвп -*"дн
где п^ - частота вращения вала двигателя при
максимальной мощности (на номинальном
режиме); г^ =0,97 ... 0,975 - КПД ВП.
ВП гидрообъемномеханической
трансмиссии решает задачу компоновки, а также
обеспечивает заданный скоростной режим
ЗКП. Передаточное число ВП определяется в
процессе расчета передаточных чисел зубчатых
механизмов этой непрерывно-ступенчатой
передачи. Проектные и поверочные расчеты
зубчатых колес, валов и подшипников ВП
выполняются аналогично, как и элементов
трансмиссии автомобиля и трактора.
Структурные схемы БП (зубчатый
механизм) так же, как и структурные схемы ВП,
одинаковы для любых типов трансмиссий.
Назначение, общие требования,
классификация, конструирование и расчет БП аналогичны
конечным передачам гусеничных тракторов.
Передаточное число БП выбирается из
условия обеспечения нормальной работы
подшипников. Поэтому частота вращения ведущего
вала БП яб п=4 000 ... 4 500 мин1. Формула
для расчета и§ п имеет вид:
0,377 лбпгвк
"бп= •
утах
Полученное значение щ п может
корректироваться при расчете характеристик
механизма поворота машины. В современных
гусеничных машинах применяют планетарные
БП. БП рассчитывают как обычную зубчатую
передачу. Особенность состоит лишь в
определении расчетного момента. Поскольку БП
расположена за механизмом поворота, то через
нее передается не только момент двигателя, но
и рекуперативный момент. За расчетный
момент принимается максимальный момент,
возникающий при наибольшей силе тяги по
сцеплению на забегающей гусенице при
повороте машины в гору на максимальном крене:
А/р =0,65С7гыс/|/бп .
Допускаемые напряжения для зубчатых
колес и валов БП рекомендуется принимать
равными нижним пределам напряжений.
Основные характеристики коробок
передач механических и гидромеханических
трансмиссий. К ним относятся: скоростной
диапазон Дкп , число ступеней, передаточные
числа передач на ступенях и КПД. Схема КП
механической (гидромеханической)
трансмиссии в общем виде - схема шестеренчатого
механизма, в котором при наложении
определенных связей образуется передача (ряд
передач). Через них может проходить весь силовой
поток от двигателя к ведущим колесам
машины.
Коробка передач гусеничной машины
может быть выполнена в виде отдельного
агрегата или в составе механизма передач и
поворота. В последнем случае на машине
могут устанавливаться две одинаковые в силовой
части коробки передач, расположенные по
бортам, образуя бортовую трансмиссию
машины. В гусеничных транспортно-тяговых
машинах могут применяться двухпоточные КП, в
которых при наложении соответствующих
связей силовой поток от входа КП
разветвляется по двум направлениям, суммируясь
на выходе. С объединением КП с механизмом
поворота гусеничной машины в одном
агрегате МПП появляется возможность увеличения
диапазона коробки передач.
КП механической или
гидромеханической трансмиссии - многоступенчатый
механизм. Передаточное число высшей А:-й
ступени определяется из условия достижения
машинной максимальной скорости ^ ^^ по
формуле:
0,377лдг/г2гвк
ик п к = •
утах ивп "б р
При этом в гидромеханических
трансмиссиях как правило осуществляется
блокировка гидротрансформатора (/г 2 = 0 •
Передаточное число низшей ступени КП опреде-
536
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИЙ
ляется движением машины со скоростью
утш в предельных по тяговым свойствам
условиях:
"кп/ =
0,377/1АГ1гдгвк
У1ШП ИВП Иб р
Скоростной диапазон КП
Дкп =Ихп//«кп*-
Разбивка скоростного диапазона КП
(выбор передаточных чисел передач
промежуточных ступеней КП) выполняется из условия
использования заданного диапазона двигателя
или гидротрансформатора (динамической
гидропередачи) по закону геометрической
прогрессии. Число передач определяется по
формуле
-■№♦')
+ 2,
где Д = Д^ - для механических трансмиссий;
Д = Дг - для гидромеханических
трансмиссий; е(...+1) - обозначает целое число,
округленное в большую сторону.
Передаточные числа передач КП на
ступенях определяются выражением
«*-7="1С1,**(*"Л. У = 1, (*"2).
При этом знаменатель прогрессии
Основные характеристики коробок
передач гндрообъемномехАиических трансмиссий
(ГОМТ). В этих трансмиссиях кроме зубчатых
передач применяются объемные
гидропередачи. Механические связи в ГОМТ могут
образовывать в них передачи (диапазоны)
различной структуры. По числу внутренних силовых
потоков на выходе агрегата трансмиссии, в
котором формируются диапазоны, могут быть
полнопоточными, с последовательным
расположением всех передач в силовом потоке, или
двухпоточными.
Устройства с объемными
гидропередачами, выполняющие известные функции
коробок передач в трансмиссиях, гидрообъемноме-
ханические коробки передач (ГОМКП).
ГОМКП обеспечивают получение почти
прогрессивной тягово-динамической
характеристики машины при постоянной мощности
двигателя. В ГОМКП первый (низший)
диапазон, как правило, полнопоточный, а
остальные - двухпоточные. Для образования
диапазонов в ГОМКП применяется четырехзвенник
- базовый механизм. Базовый механизм
состоит из двух трехзвенных механизмов, которые
являются оконечными, суммирующими
механизмами для соответствующих ЗКП (рис.
4.3.4). Элементы этих механизмов соединены
так, чтобы в ЗКП смежных диапазонов
получались разные знаки круговых передаточных
чисел. При этом передаточные числа зубчатых
передач ЗКП смежных диапазонов выбираются
так, чтобы при одном и том же заданном
положений органа управления объемной
гидропередачи могли быть получены одинаковые
передаточные числа ЗКП, одностороннее
непрерывное изменение которых "внутри"
диапазонов выполняется регулированием
объемной гидропередачи в разные стороны.
В многодиапазонных ГОМКП
двухпоточные диапазоны могут образовываться ЗКП
со своими оконечными трехзвенными
механизмами при обязательном выполнении
условия совмещения смежных диапазонов. В
состав многодиапазонной ГОМКП входят
зубчатые передачи, базовый механизм или
оконечные трехзвенные механизмы и объемная
гидропередача. На рис. 4.3.5 показана структура
ГОМКП.
Рас. 4.3.4. Стружтурим ■ I
бязевого механизма ГОМКП
/4
/5,4, 10
ВМ
"$~§-_н
ВП
/7/7
Ш
17
±16
12,11,5,6,10
СП
Ршс. 4.3.5. Структура ГОМКП:
МП - механизм передач; БМ - базовый механизм;
/7 - регулируемая гидромашина; Г2 - нерегулируемая
гидромашина; ПГ1 - привод регулируемой
гидромашины; ПГ2 - привод нерегулируемой
гидромашины; ВП - входная передача;
СМ - стопорный механизм;
Ш - шундирующий золотник
ТЯГОВЫЙ РАСЧЕТ ГУСЕНИЧНОЙ МАШИНЫ
537
Характеристиками ГОМКП являются
рабочий скоростной и силовой диапазоны.
Рабочий скоростной диапазон ГОМКП
определяется по формуле:
^р. кп — ушах
Лп ,
где У12 - скорость машины, при которой
происходит переключение низшего
(полнопоточного) диапазона.
Диапазон Др кп ГОМКП с любым
базовым механизмом можно определить
используя формулы кинематики ЗКП. При этом
диапазоны совмещаются снизу вверх (в сторону
увеличения скорости машины) и в момент
совмещения их объемный КПД объемной
гидропередачи имеет одинаковую величину
г|0 • Тогда
Др.
р. кп
=1+^#и
п
2Ъ «жу®
-1
и №
где п - число диапазонов ГОМКП (в том
числе полнопоточный); /~3 - внутреннее
передаточное число трехзвенного механизма; I -
звено механизма, расположенное в
дополнительной ветви ЗКП; у - звено механизма,
расположенное в основной ветви ЗКП; х - звено
механизма на выходе ЗКП; например, для
базового механизма, показанного на рис.
4 14 ;О0 - /00 :(У) - ;(*> • и , пепела-
*•■*•*» 'гх1 - 1тх » 'яс2 О* » их}
передаточные числа зубчатых передач
дополнительной ветви ЗКП; еп - передаточное число
ГОП, при котором должен происходить
переход с низшего диапазона на высший
(соседний); Т|0 - объемный КПД ГОП в
момент перехода; А - перекрытие передаточных
чисел ГОП соседних диапазонов.
Если принять, что Vтаx достигается при
наибольшем передаточном числе объемной
гидропередачи (е = 1) и объемные КПД при
е = 1 и е = еп имеют одинаковые величины,
то
Для ГОМКП, имеющих не меняющуюся
дополнительную ветвь ( и% у = и^ ) формула
для определения рабочего скоростного
диапазона имеет вид:
для двухдиалазонной
Др.кп=1+(2+Д)С;
для трехдиапазонной
Др.кп =3 + 2С + Д;
для четырехдиапазонной
Др.кп=3 + (4 + Д)С;
для пятидиапазонной
Др. кп =5 + 4С + Д,
где С - отношение внутреннего передаточного
числа *1х1 = ^ + * планетарной передачи,
образующей ЗКП четных диапазонов к
внутреннему передаточному числу / ~у = -к
планетарной передачи, расположенной на
выходе 1, полнопоточного диапазона, т.е.
_1 + *
Силовой диапазон ГОМКП Дкп
определяется максимальным крутящим моментом
на выходе ГОМКП при включенном
полнопоточном диапазоне М\ = Л// „^^ и крутящим
моментом Л/2 при наименьшем
передаточном числе ГОМКП также на выходе ГОМКП
(на высшем диапазоне), когда на ее входе
действует свободный крутящий момент М% N > а
передаточное число объемной гидропередачи
е = 1: __
Дхп=М1/М2.
Максимальный крутящий момент
гм Рттах —
М\ =— ЯигхШ>
2*
где />Гтах " максимальное давление в
гидролиниях объемной гидропередачи; йТХ -
силовое передаточное число передач
полнопоточного диапазона ГОМКП, расположенных за
объемной гидропередачей.
Максимальный крутящий момент М^
Мг = М^н
и
пр
(\-и^еI х\му
где
"пр
- передаточное число
(\-икре/ лм)
ГОМКП на высшем диапазоне; е = 1 и г)^ -
538
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИИ
передаточное число и гидромеханический
КПД объемной гидропередачи.
Определение передаточных чисел зубчатых
передач ГОМКП. Перед определением
передаточных чисел зубчатых передач ГОМКП
должна быть выбрана структура этого механизма
(составлены общая и подиапазонно
структурные схемы), а также структура силовой
установки и трансмиссии в целом, включая
двигатель ГОМКП (с объемной гидропередачей) и
другие механизмы трансмиссии (исходя из
типа гусеничной машины и ее компоновки).
При этом известны параметры и
характеристики двигателя, ГОМКП (число диапазонов,
рабочий скоростной и силовой диапазоны) и
других механизмов трансмиссии и ходовой
части.
Расчет передаточных чисел зубчатых
передач ГОМКП, выбранной структурной схемы
выполняется в такой последовательности.
1. Определение передаточного числа
иВй привода регулируемой гидромашины
(насоса) объемной гидропередачи:
"ва =Лр.д /Лр.г >
где лр д и /1р г - расчетная частота вращения
соответственно двигателя и регулируемой
гидромашины объемной гидропередачи.
2. Определение передаточного и;
привода нерегулируемой гидромашины:
ива '&
где ип - передаточное число дополнительной
ветви ЗКП; ип = лр д Дркп еп ц0 / п^ ;
/-^ _—щи— _ частота вращения на вы-
^ых 0,377 Гщ,
ходе ГОМКП; и - передаточное число
механизмов силовой цепи трансмиссии от
двигателя до ведущих колес, например и = и§ р
3. Определение передаточных чисел ив *
зубчатых передач основной ветви ЗКП
подиапазонно:
*/пСу
^(у^Нс + хКло'
где V = ( - \у ; ) = 2, 3, ... - номер
диапазона.
4. Проверка частоты вращения
сателлитов планетарных передач (ПП-1 и ПП-2)
базового механизма. Если число диапазонов т
четное, то под нагрузкой оказываются
сателлиты второй планетарной передачи (ПП-2) и их
частота вращения
2 ("лр.гПо , Лр.д1
Частота вращения сателлитов свободно
вращающейся планетарной передачи (ПП-1)
лст1 =С/1ст2.
Если число диапазонов т ГОМКП
нечетное, то под нагрузкой вращаются сателлиты
первой планетарной передачи (ПП-1) с
частотой вращения
2* ("лр.гЛо , "р.д!
В то же время частота вращения
сателлитов свободна вращающейся
планетарной передачи (ПП-2) пс т 2 = пс т \ / С.
Обычно частота вращения сателлитов без
нагрузки при хорошей организации подвода
смазочного материала к их опорам
допускается до 10 000 мин1. Под нагрузкой частота
вращения сателлитов определяется
технологией изготовления планетарных передач
(3 000 ... 5 000 мин1).
Тягово-динамическая характеристика
машины - зависимость удельной силы тяги
(динамического фактора) от скорости машины
при работе двигателя в режимах,
определяемых полной подачей топлива. Для машин,
имеющих ступенчатые коробки передач в
механических и гидромеханических
трансмиссиях эта характеристика строится по передачам.
При этом для механической трансмиссии
принимается, что на входе в КП действует
свободный крутящий момент,
соответствующий внешней характеристике двигателя, а для
гидромеханической трансмиссии - крутящий
момент, зависящий от частоты вращения
турбины гидротрансформатора.
Для построения тягово-динамической
характеристики гусеничной машины с
механической или гидромеханической трансмиссией
можно использовать формулы:
п гвк
У у = 0,377 — ;
Ивп"кп/у и6 р
М Ык п у «б п
/>- "' бР-/гд(Уу),
ГВК **
ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ МЕХАНИЗМОВ
539
где для механической трансмиссии
М = Ме (/I/) т|с уиш ; п=п% I ит ;
для гидромеханической трансмиссии
М = Мт{п1т)\ п=п{т .
Тягово-динамическая характеристика
гусеничной машины с трансмиссией с ГОМКП -
зависимость удельной силы тяги на
диапазонах при работе двигателя в режиме
максимальной мощности Мц / п# от скорости
машины:
где содвн - угловая скорость коленчатого вала
двигателя на номинальном режиме, рад/с;
М
двн
У у = 0,377
и*пуиб р
/у
МеN^\суиxI^ уибр г , ч
= :—тк Лд(уу ь
ГъьО
где / = 1, 2, ... ; 7=1, 2, ... - номер
диапазона.
4.3.3. ОПРВДЕЛЕНИЕ ПАРАМЕТРОВ
МЕХАНИЗМОВ ТРАНСМИССИИ
Главный фрикцион (ГФ). Назначение,
общие требования, классификация и
конструкции ГФ аналогичны сцеплениям
автомобилей и тракторов. Размеры ГФ определяют
исходя из возможности передачи крутящего
момента:
А/т = Р Мдъ „ад,
где 3/дв щдх - максимальный крутящий
момент двигателя; Р = 1,5 - 2,5 - коэффициент
запаса ГФ.
Для определения осевой силы на
поверхности трения и числа пар трения принимают
коэффициент трения покоя / = 0,23 - 0,27.
Допускаемое давление на поверхности трения
для асбофрикционных и безасбестовых
полимерных накладок [^]=0,15 ... 0,25 МПа, а
для накладок из порошкового материала
[?] =0,4 ...0,6 МПа.
Долговечность фрикциона зависит от
работы буксования при трогании машины с
места. При ее расчете сначала определяется время
включения /^ для частного случая разгона
машины, при котором время буксования ГФ
равно времени его включения:
'м =
2рсо
двн
М„
V 'дв
з , Р-*
номинальный крутящий момент
двигателя, Н • м; К3 - коэффициент загрузки
двигателя; К - коэффициент
приспособляемости двигателя; /дв, /п - момент инерции
вращающихся масс соответственно двигателя и
трансмиссии вместе с поступательно
движущейся машиной, приведенные к валу ГФ,
КГ'М2.
Если время /^ больше времени
включения ГФ /м при трогании машины
(/м =1 ... 1,5 с), то время буксования ГФ
определяется по формуле:
(р-ЛГз)4,+(Р+*з)'м
6 " 2р
а работа буксования ГФ Ь (Дж) - по формуле
1 =
^пшдвнюб *з^двн°>двн
З'б-'м -'„+■
'м-'о
1-
Если Си < 1М при тех же условиях, то
время буксования ГФ определяется по
формуле
, _(Р~*з)У'м Па +'з'м
б= р
а работа буксования ГФ Ь (Дж) - по формуле
1 =
2
где ©б =содвн
*о -
(4>6->о),
-1
кл~-^-
м„
'* (р-*)
Л(Р-^з)^
- - коэффициент
Р '"двн
загрузки двигателя (Мс - момент
сопротивления движению гусеничной машины,
приведенный к валу ГФ).
540
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИЙ
Вычисленная таким образом работа
буксования ГФ определяет максимальную
температуру на поверхностях трения:
Ттал = Ту + Т ,
где Ту - объемная установившаяся
температура деталей ГФ; Т - средняя
температура поверхности трения; [7*1 - допустимая
максимальная температура на поверхности
трения (для асбофрикционных и
асбестовых полимерных накладок [ Г 1=200 °С, а
для накладок из порошкового материала
[Г] = 350 ...450 °С).
Температура Ту определяется по
формуле:
Ту = Т} +
(1-<*т.п )ЬКЦ
а 'ох Лв
где Ту = 50 ... 80 °С - температура воздуха
внутри кожуха ГФ; а - коэффициент
внешней теплоотдачи (Вт/(м2 • °С); для
нажимного диска а
-*•*■№
для
средних ведущих дисков многодисковых ГФ
/ -> \ 0,67
а = 0,0794 -^
(0
двн
; Ав и ув
коэффициенты соответственно
теплопроводности и кинематической вязкости воздуха при
7 = 7?; Хв =2,83-10-2 Дж/(м-°С), ув =
= 17,95 • Ю-6 м2/с; Я - средний радиус среднего
ведущего диска, м; Лъ - площадь поверхности
металлического диска, охлаждаемая воздухом
при включенном ГФ, м2; 10Х - интервал
времени между двумя последовательными
включениями ГФ, с; определяется при разгоне
машины с места в тяжелых дорожных условиях;
/ох =3 600/г; I =30 ... 35 - число
включений ГФ в 1 ч; атп- коэффициент
распределения тепловых потоков в паре трения;
определяется по формуле Ф. Шаррона;
1-атп =
УтпЦМ
С,
X - соответственно плотность, удельная
теплоемкость и теплопроводность материала
трения; индекс "1" - для металлического
контртела; индекс "2" - для фрикционной накладки;
Кц - коэффициент, учитывающий долю
работы буксования на нагрев детали ГФ;
Кц =0,5 в однодисковых ГФ; Кц =0,25
нажимного диска и маховика двигателя;
Кц =0,5 ведущего диска в двухдисковом
ГФ.
Температура Т* определяется по форму-
г =
У7 Ь КI
Л'б^П^*! +у1у2С2Ь2) '
где XI - коэффициент, учитывающий долю
работы буксования ГФ на нагрев пары трения;
К^ =0,5 в однодисковых ГФ и К^ =0,25 в
двухдисковых ГФ; А^ - номинальная площадь
поверхности трения металлического диска.
При проектировании ГФ необходимо
обеспечить работоспособность фрикционных
накладок в зоне температур, при которых они
обладают максимальной износостойкостью,
что обеспечивается выбором необходимого
значения Аъ по формуле:
л-
(*1-«ти)^Л^
([7к]-7?)а/ох'
где [ Ту ]= [ Т ]- Т* - допустимая объемная
установившаяся температура в деталях ГФ.
Износостойкость фрикционных накладок
характеризуется энергетической
интенсивностью изнашивания у, определяемой
максимальной температурой Тпшх. Величина и
характер изменения у существенно зависят от
фрикционного материала накладок (рис.
4.3.6). Например, для фрикционного материа-
0. Ттах
Рис. 4.3.6. Зависимость/' »/(Т^а):
1 - асбофрикционные и беэасбестовые полимерные
накладки; 2 - накладки из порошкового материала
ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ МЕХАНИЗМОВ
541
ней свободы ПКЛ равно числу наложенных
связей плюс единица. Если для включения
заданной передачи необходимо затянуть один
тормоз или включить один фрикцион, т.е.
наложить одну связь, то такая ПКП имеет две
степени свободы. В ПКП с тремя степенями
свободы для включения передачи нужно
наложить две связи, т.е. затянуть два тормоза или
тормоз и включить фрикцион или включить
два фрикциона. В ПКП с четырьмя степенями
свободы для включения передачи нужно
наложить три связи.
В ПКП в зависимости от числа степеней
свободы одновременно включается различное
число элементов управления (тормозов и
фрикционов). В ПКП с двумя степенями
свободы при заданном числе элементов т
управления можно получить столько передач,
сколько элементов управления:
*тах(2) =Ст =т-
В ПКП с тремя степенями свободы
максимальное число передач определяется числом
сочетаний элементов управления из т по 2:
*тах (3) ~ ^т - I •
В ПКП с четырьмя степенями свободы
_гз _ т(т-1)(т-2)
*тах(4) *" ^т ~ ~,
В табл. 4.Э.1 приведено минимально
необходимое число элементов управления для
получения заданного числа передач.
4.3.1. Число элементов управления в ПКП
для получения заданного числа передач
ла 56 допустимая максимальная температура
[7,]=120 °С.
Долговечность фрикционных накладок
ГФ оценивается ресурсом, который
определяется выражением:
А_ ньньа
п~ п
/~1
где Н - допустимый износ фрикционной
накладки, мм; ]1 - энергетическая
интенсивность изнашивания фрикционной накладки на
/-м режиме нагружения; Ц - работа
буксования ГФ на 1-м режиме нагружения; 1^ -
наработка транспортно-тяговой гусеничной
машины за год, час; N^1 - число включений в
год на /-м режиме нагружения; п - число
режимов нагружения.
Коробки передач (КП). Требования,
предъявляемые к КП транспортно-тяговых
гусеничных машин и их классификация
аналогичны КП автомобилей и тракторов. В
отличие от автомобилей и тракторов здесь широкое
распространение получили планетарные КП
(ПКП), представляющие собой соединение
нескольких планетарных рядов, различное
сочетание которых обеспечивает получение
необходимого диапазона передаточных чисел и
числа передач.
Преимущества ПКП по сравнению с КП
неподвижными осями валов следующие:
увеличение средней скорости машины
благодаря сокращению времени на
переключение передач;
малые габаритные размеры и более
высокий КПД за счет передачи части энергии в
переносном движении без потерь;
разгрузка центральных звеньев
планетарных рядов от усилий, что облегчает работу
подшипников.
Недостатками ПКП являются:
сложность проектирования и
изготовления;
более высокая стоимость;
склонность к возбуждению крутильных
колебаний из-за больших вращающихся масс;
сложность обеспечения работы в
условиях низких температур.
ПКП классифицируются по числу
степеней свободы в выключенном положении: с
двумя, тремя и четырьмя степенями свободы.
Для получения вполне определенного
передаточного числа необходимо иметь только одну
степень свободы. Все остальные должны быть
сняты путем наложения связей. Число степе-
Число
степеней
свободы
ПКП
Две
Три
Четыре
4
4
4
4
5
5
4
5
Число передач
6
6
4
5
7
7
5
5
8
8
5
5
9
9
5
5
10
10
5
5
11
11
6
6
12
12
6
6
ПКП с двумя степенями свободы более
перспективны при числе передач I ^ 4: при
одинаковом числе элементов управления
обеспечивается более простая конструкция
механизма управления ПКП. При числе передач
I ^ 5 ПКП с тремя степенями свободы
являются более приемлемыми, так как позволяют
использовать минимальное число
фрикционных элементов при допустимом усложнении
системы управления.
542
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИИ
Передаточные числа ПКП задаются на
основании тягового расчета машины. Они
могут быть реализованы большим
разнообразием схем ПКП.
4.3.4. ВЫБОР ТИПА МЕХАНИЗМА ПОВОРОТА
ТРАНСПОРТНО-ТЯГОВОЙ ГУСЕНИЧНОЙ МАШИНЫ
Выбор типа механизма поворота (МП)
проектируемой транспортно-тяговой
гусеничной машины выполняется на основе анализа
параметров, получаемых в результате
взаимодействия кинематических связей двигателя с
ведущими колесами машины во время
поворота. Рассматривая различные связи для
конкретной машины с заданными параметрами
трансмиссии для прямолинейного движения,
выбирают рациональный вариант. Параметры
МП принимаются в качестве исходной
информации для разработки кинематической
схемы МП одним из методов синтеза.
При выборе типа МП принимаются
основные допущения: поворот гусеничной
машины - установившейся, выполняется на
ровной горизонтальной дороге без
проскальзывания гусениц относительно недеформируе-
мого грунта (поэтому переносные и
относительные скорости гусениц в плоскости их
контакта с опорной поверхностью равны);
единица измерения линейных величин 0,5 В,
центробежная сила не учитывается.
Показателя поворота гусеничной машины.
На рис. 4.3.7 показана схема сил,
действующих на гусеничную машину при повороте, а
также план скоростей поворота.
Равнодействующие сил тяги Рд и сил сопротивления
повороту Р создают поворачивающий момент
и момент сопротивления повороту на плечах
соответственно /д и /г . Относительное плечо
равнодействующей силы Р
а) 6)
Рас. 4.3.7. Схема свл (а) в плав скоростей (б)
поворота гусеничной машины
Чт 0$ В Р2+Р
Отсюда
Р2=0^Р(дт^1) и Рх = 0^Р(дт-\).
На основании принятых допущений для
одиночной машины эти силы равны:
«-?(/-!*)•
где (2 - суммарная нормальная реакция грунта,
числено равная силе тяжести машины; /и ц -
коэффициент сопротивления соответственно
прямолинейному движению и повороту.
Коэффициент сопротивления повороту
ц, зависящий от конструкции гусеничного
движителя и радиуса поворота, определяется
по эмпирической формуле:
2а+(1-а)(р + 1)'
где Цщах " коэффициент сопротивления
повороту при относительном радиусе р = 1; а -
коэффициент конструкции гусеничного
движителя; обычно а = 0,85.
Сила сопротивления Р\ положительна,
пока выполняется неравенство / > *-— . При
этом
0^ Птах*- 1-Д
Р /(\-а)В 1 + а'
Критический радиус поворота
определяется по формуле
40<7гтах-37
где Яттлх ' относительное плечо
равнодействующей силы при повороте машины с
радиусом р = 1 на дороге с заданными/ и Цп^ .
При установившемся повороте с
радиусами р<ркр необходимо тормозить
отстающую гусеницу.
Относительное плечо равнодействующей
силы тяги Р„ по двигателю
ВЫБОР МЕХАНИЗМА ПОВОРОТА ГУСЕНИЧНОЙ МАШИНЫ
543
дд={Р2-Рх)/Рл
Этот параметр определяет относительное
(относительно 0,5 В) смещение вектора
скорости прямолинейного движения от середины
опорной поверхности гусеничной машины в
режиме поворота и является кинематическим
параметром поворота.
Из схемы сил и плана скоростей с учетом
величин дт и да можно определить
энергетические показатели поворота: скорость V,
силу /д и мощность N для точек "корпуса",
показанных на рис. 4.3.7, полагая при этом,
что коленчатый вал двигателя при повороте
машины и при прямолинейном ее движении
развивает одинаковую угловую скорость.
Формулы для расчета этих показателей приведены
в табл. 4.3.2. Относительный радиус поворота
здесь
у2 + у1
У2-У!
Если поворот гусеничной машины
выполняется только за счет кинематических
связей при отсутствии потерь мощности во
фрикционных элементах (тормозах и фрикционов)
механизма поворота, то относительный радиус
поворота р равен относительному расчетному
Мощность внешних сопротивлений
повороту гусеничной машины определяется
разностью мощностей ^ и Л^1:
*с=*р
Ят+Р
Яд+Р
Мощность Л/д двигателя, требуемая для
поворота, определяется по этой же формуле
при Nл=Nс и р = рр.
При поворотах машины с радиусами,
отличными от расчетных, мощность двигателя
больше мощности внешних сопротивлений на
величину тормозных потерь.
При р = рр и дл = дт мощность
внешних сопротивлений повороту и, следовательно,
мощность двигателя равны мощности,
затрачиваемой на прямолинейное движение.
Повороты с р = рКр при дД = 1, а также с
40?гтах-37<7п
Р = -
3*л
при д > 1
неуправляемые и траектория движения машины зависит
от дорожных условий. Поворот гусеничной
машины считается также неуправляемым по
условию "заноса" под действием
центробежной силы тогда, когда продольное смещение
радиусу поворота рр.
4.3.2. Энергетические пошшггели поворота гусеничной машины (расчетные формулы)
Точка по
рис. 4.3.7
Р
С
2
1
/
/
Скорость У
У|>
Рр
ус =ур —
Р + Яд
р + 1
у2=ур —
Р + ?д
Р + Ят
Р + Яд
Р + Ят
у/=ур-^——
7 РР + *д
р-рр
у/=ур Е-
Р + ?д
Сила Р, Т
Р - Р
-
Р7=02Г(дт+1)
Р1=0^Р(дт-1)
Р,=Р
т =г Чт-Чл
9Д-Рр
Мощность N
#Р = *прг
-
ЛГр(р + 1)(9г+1)
2 (Р + «Д)
^(р-ои-о
2 (Р + «Д)
7 Р Р + 9д
Р (р + 9д)(?Д+Рр)
544
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИЙ
полюсов поворота гусениц одиночной тран-
спортно-тяговой гусеничной машины
Х =
В2»8Р 2 *
Здесь ц определяется при а =0,85.
В результате соответствующих
подстановок может быть получено выражение
= 1 ЗДЦтах^р + Зд)2
Ур ^ 0,15 р(р +12,33)
Оно позволяет определить зависимость
относительного радиуса, при котором происходит
занос (р3 =р) от скорости Ур в начале
поворота.
Если' МП обеспечивает связь между
ведущими колесами при повороте машины, то
энергия, сообщаемая отстающей гусенице при
поступательном движении, частично
передается (рекуперируется) на забегающую гусеницу,
уменьшая требуемую для поворота мощность
двигателя. Эту мощность без учета потерь в
цепи звеньев механизмов, расположенных
между гусеницами, можно определить по
одной из формул:
ЛГрек = ЛГ2-ЛГд =
= лг„
Цял+р) ?д+Рр
N.
рек '
N
<7д+Р
(?г-1)(р-1) (дт-да)(р-Рр)
2 Яц+Рр
В МП с параметрами ^д = 0 и дА = 1
рекуперация возможна лишь при условии,
если тормоз (фрикционная муфта) соединен с
отстающим ведущим колесом через
промежуточные звенья, что позволяет этому ведущему
колесу вращаться при полном включении
тормоза. Очевидно, при такой кинематической
связи относительный расчетный радиус
поворота рр > 1. В МП с параметром дД > 1
рекуперация возможна и в том случае, когда
тормоз жестко соединен с отстающей гусеницей.
Определение параметров механизмов
поворота гусеничных машин. Трансмиссия
гусеничной машины в режиме поворота может
рассматриваться как трехзвенный механизм с
двумя степенями свободы ("черный ящик").
Звеньями этого механизма являются: ведущий
вал трансмиссии, ведущее колесо 2 со стороны
забегающей гусеницы и ведущее колесо 1 со
стороны отстающей. Кинематическая связь
между этими звеньями, без принудительного
замедления ведущих колес описывается
однородным линейным уравнением, в котором
сумма некоторых постоянных коэффициентов
До, 01 и а2 равна нулю:
Д0®0 + Д1<&1 +02© 2 = ^'
где со о» а>1 и ©2 - угловые скорости
соответственно двигателя и ведущих валов 2 и 1
трансмиссии; #2 =(0о/а)2 и а\ =(0о/й)1 ~
передаточные числа от двигателя до ведущего
колеса соответственно 2 и 1; а$ -
коэффициент, зависящий от включенной передачи КП,
равный передаточному числу от ведущего
звена МП до двигателя при прямолинейном
движении.
Условное передаточное число между
двигателем и ведущими колесами
а0 \ аг +ах р)
где «пр=-(^2 ~М\)1 Мл .
Связь между угловыми скоростями
ведущих колес и двигателем следующая:
— <*0 =(?д +1)»2 ~{яД -0*1-
ипр
По этому уравнению, используя методы
синтеза, можно построить структурную, а
затем кинематическую схемы МП,
обеспечивающего поворот транспортно-тяговой
гусеничной машины без принудительного
замедления одной или обеих гусениц тормозными
устройствами. Если ^д > 0, то в тяжелых
дорожных условиях при дт > <7Д машина не
сможет поворачиваться без увеличения
подводимой к МП мощности, так как при Рц = Г
поворачивающий момент Мп=0$РДдлВ
меньше момента сопротивления повороту
Мс = 0$Р дт В . В легких дорожных
условиях, когда дт < дл, скорость машины,
несмотря на избыток мощности двигателя, будет
ВЫБОР МЕХАНИЗМА ПОВОРОТА ГУСЕНИЧНОЙ МАШИНЫ
545
уменьшаться в зависимости от относительного
радиуса поворота.
С изменением характеристик грунта и
кривизны траектории движения величина дт
изменяется в широких пределах. Выбирать
параметр да , ориентируясь на верхний предел
возможных значений величины дг нельзя, так
как это приведет к значительному снижению
скорости машины в режиме поворота и
последующий переход к прямолинейному
движению без увеличения передаточного числа
трансмиссии будет невозможен (двигатель
остановится). При оптимальных значениях
параметра дД наименьшие радиусы поворота,
реализуемые без воздействия на угловые
скорости ведущих колес через тормоза или
блокировочные фрикционы, ограничены
значениями, которые соответствуют дД = дт и
да > 0. Для более крутых поворотов требуется
дополнительное (некинематическое)
торможение отстающей гусеницы.
Если дл = 0, то МП не может создавать
никакого поворачивающего момента. При
наличии такого дифференциального МП
машина может поворачиваться только в том
случае, если принудительно изменить угловые
скорости ведущих колес воздействием на
тормозные механизмы МП. Следовательно, в
рациональной трансмиссии ведущие колеса
машины должны быть кинематически связаны
не только с валом двигателя, но и со
звеньями, на которые непосредственно воздействуют
тормозные механизмы МП.
Не нарушая полученных кинематических
связей можно привести уравнение,
отражающее влияние угловой скорости сот звена,
непосредственно связанного с тормозом:
Со ©о + С\ ©1 + С2 ©2 + С$ ©т = 0 ,
где С0, С1? С2 и С3 - некоторые постоянные
коэффициенты.
Исключив из уравнения угловую
скорость входа трансмиссии ©о, получим
©т = Ьу ©2 + ^в>1»
где &1 и \\ - постоянные коэффициенты,
зависящие от кинематических связей тормоза
с ведущими колесами; определяются при
©т = 0. При этом
Откуда
^ =0,5*(рр+1); *2=0>5/>(рр-1);
-©т =(рр +1)©!-(рр -1)©2>
где Ь= ©т/©пр - передаточное число
между звеном, непосредственно связанным с
тормозом и ведущими колесами машины в
режиме ее прямолинейного движения.
Относительный расчетный радиус
поворота гусеничной машины можно выразить
через передаточное число МП от выхода его со
стороны забегающей гусеницы к выходу со
стороны отстающей. Полагая это передаточное
со у #1
число «21 = — = » имеем
©1 а2
Из плана скоростей (см. рис. 4.3.7, б)
можно определить кинематический фактор
поворота <7Д , а затем выразить его через
передаточные числа ип р , ау и «21 •
Получим
д„ = 1 = 1 .
^2
Такая связь показателей поворота рр и
дл гусеничной машины с кинематическими
показателями механизма поворота позволяет
составить структурную схему этого механизма.
Структурная схема МП может быть
получена из обобщенной структурной схемы МП
(рис. 4.3.8). Ее составляют два (II и I)
совмещенных по основной ветви (ОВ) ЗКП.
Обобщенными узловыми точками являются: в ОВ
КП (коробка передач); в дополнительных
ветвях (ДВ) Д#2 и ДВ\ со стороны забегающей 2
и отстающей 1 гусениц, а также 2 и 1 (выходы
МП), Р (механизм двойного подвода силового
потока от входа трансмиссии к ОВ и ДВ) и В
(механизм двойного подвода силового потока
от точки КП к точкам 2 и 1). Механизмы,
которым соответствуют узловые точки
обобщенной структурной схемы, могут выполнять
различные функции, изменяющие
кинематические и силовые связи.
546
Глава 4.3. ВЫБОР СХЕМ И ПАРАМЕТРОВ ТРАНСМИССИЙ
Рис. 4.3.8. Обобщенная структурам схема н
схема силового потока МП:
а - разветвленного при прямолинейном движении
гусеничной машины; 6 - циркулирующего;
в - разветвленного в ЗКП I и ЗКП II при повороте
гусеничной машины; г - циркулирующего в ЗКП I и
ЗКП II; д - разветвленного в ЗКП I и
циркулирующего в ЗКП II
Из обобщенной структурной схемы могут
быть получены частные схемы с
последовательным и параллельным соединением КП и
МП. Знаки передаточных чисел механизмов,
расположенных в трансмиссии, определяют
явления (разветвление или циркуляция),
имеющие место в ЗКП в режиме поворота
машины. На рис. 4.3.8, а> б показаны схемы
силовых потоков в МП при прямолинейном
движении машины, а на рис. 4.3.8, *, г, д при
повороте.
По формулам, приведенным выше для
каждого ЗКП, можно вычислить ыкр, 1/экп,
коэффициенты нагрузки в точке Р, построить
схему силового потока трансмиссии, а также
вычислить силовые передаточные числа икр
и и3 к п , определить КПД г).
Анализ показателей поворота транспорт-
но-тяговой гусеничной машины. Выбор типа
МП транспортно-тяговой гусеничной машины
выполняется на основе анализа относительных
(по отношению к мощности сопротивлений
прямолинейному движению) мощностей при
повороте, определяемыми кинематическими
( 0Д, рр ) и эксплуатационными ( р, $гтах )
параметрами:
внешних сопротивлений повороту
N шЛм..
с ЛГр'
потребной двигателя
дв ЛГр '
потребной тормозной
рекуперации
Относительная мощность внешних
сопротивлении повороту 7УС возрастает по мере
увеличения кривизны траектории движения
машины, что объясняется увеличением
коэффициента сопротивления повороту ц. Она
зависит также от кинематического параметра
фд, который определяет смещение вектора
скорости прямолинейного движения от
середины опорной поверхности при повороте
машины. Так при <7Д < 4Д вектор скорости
прямолинейного движения смещается к середине
опорной поверхности (см. рис. 4.3.8, б). В
результате при неизменных дорожных
условиях и кривизне траектории движения
усиливается скорость У'р точки приложения
равнодействующей Р и, следовательно, возрастает
мощность внешних сопротивлений повороту
Кинематические качества МП особенно
сильно влияют на Мс при повороте машины
с малым радиусом. С увеличением радиуса р
различие мощностей внешнего сопротивления
повороту и прямолинейному движению
становятся менее заметными. С уменьшением р
в связи с изменением дорожных условий или
конструктивных параметров машины
относительная мощность Л^с уменьшается, причем
тем значительнее, чем больше кривизна
траектории.
ВЫБОР МЕХАНИЗМА ПОВОРОТА ГУСЕНИЧНОЙ МАШИНЫ
547
Изменение потребностей мощности для
поворота машины определяется изменением
мощности внешних сопротивлений повороту
гусеничной машины в зависимости от жс-
плуатационных факторов р и <7гтах и
кинематического параметра дЛ .
Вместе с тем на величину ^дв
существенное влияние оказывает расчетный радиус
поворота рр машины. В заданных дорожных
условиях с одним и тем же радиусом
мощность <ЛГДВ определяется только параметрами
Яд и Рр • При неизменной частоте вращения
коленчатого вала двигателя наибольшая
мощность для поворота требуется, если дЛ = 0, а
рр =1. С увеличением дЛ при том же рр
мощность Л^дв уменьшается, что объясняется
снижением скорости центра масс Ус, так как
параметр дД представляет собой смещение
вектора неизменной по условию скорости
прямолинейного движения от середины
опорной поверхности машины.
Если какие-либо два МП обладают
разными, но постоянными параметрами д'Л и
<7д и обеспечивают одинаковый рр, то
соотношение между значениями мощности
двигателя, требуемой для поворота машины в
заданных дорожных условиях с произвольным
относительным радиусом р постоянно и
определяется по формуле:
^дв = 9д+Рр
*дв *д+Рр
При одном и том же значении параметра
дл мощность, потребная для поворота,
уменьшается с увеличением рр. Из рис.
4.3.13, а видно, что параметр рр определяет
расстояние от середины опорной поверхности
машины до условной точки приложения
результирующей силы Т воздействия тормоза на
гусеницы. Чем больше рр, тем больший
поворачивающий момент создает сила Т и
поэтому от двигателя требуется меньший
крутящий момент для преодоления заданного
сопротивления повороту. Возможны два пути
уменьшения потребной для поворота
мощности двигателя: во-первых, увеличение отно-
18*
сительного плеча равнодействующей сил тяги
гусениц, реализуемых МП для
принудительного замедления ведущего колеса со стороны
отстающей гусеницы; во-вторых, увеличение
относительного расчетного радиуса поворота
Рр-
В простых трансмиссиях с
последовательным расположением КП и МП
возможности увеличения рр ограничены
требованиями свободного маневрирования
гусеничной машины в стесненных условиях.
Возможности увеличения параметра дЛ также
ограничены. При наличии МП с параметром
дл ^ 1 кинематическая энергия,
высвобождаемая вследствие уменьшения скорости
ус центра масс, облегчает вход машины в
поворот, однако при выходе из поворота
требуется повышенная мощность двигателя,
чтобы увеличить кинематическую энергию до
начального уровня и сообщить машине
прежнюю скорость движения. Чем больше
параметр фд, тем труднее вывести машину из
поворота без увеличения передаточного числа
КП.
Тормозная мощность ЛГТ зависит только
от параметров МП дл и рр в
установившемся движении гусеничной машины по
траектории заданной кривизны на грунте с
неизменными характеристиками. При
одинаковых условиях непроизвольные затраты
мощности достигают наибольшего значения у МП
с дл = 0. Это объясняется тем, что в таких
МП кинематическая связь двигателя с
ведущими колесами не позволяет создавать
поворачивающий момент без воздействия на
тормоз КП, вследствие чего мощность двигателя
затрачивается не только на образование
требуемой тормозной силы на отстающей
гусенице, но и на "нейтрализацию" цепи звеньев
трансмиссии со стороны убегающей гусеницы.
При дл = 0 потери мощности
существуют при любом радиусе поворота, не равном
расчетному, даже при р = рк р , когда усилие
на отстающей гусенице равно нулю. С
увеличением параметра дл при одном и том же
значении рр относительная тормозная
мощность увеличивается в связи с тем, что при
дл = 1 цепь звеньев трансмиссии со стороны
отстающей гусеницы "нейтрализуется" уже
при включенном МП, а при дД > 1 она еще
548
Глава 4.4. ХОДОВАЯ ЧАСТЬ
тормозится вследствие внутренних
кинематических связей.
Для любого МП 7УТ в области значений
р < рк р имеют примерно одинаковый вид.
Во всех случаях ^т = 0 при р = р0 и
достигает максимального значения при
относительном радиусе:
■(*).
(1-Кд)Рр^1-Кд)2р1 +
"У [{1~КЯ )(?д+Рр)+^?дРр]
х[1+А^(,д+Рр)]'
где Ка =
37 Яа
40Яттях
У МП с параметром 0Д = 0 радиус,
соответствующий максимуму тормозной
мощности, не зависит от характеристик грунта и
определяется только величиной* (при этом
*, =о)
ш
= Рп +
рр-
/ 2 37
урр+урр-
Рекуперация невозможна в МП с
параметрами 9д=0и ^д = 1, если тормоза
поворота установлены непосредственно на ведомых
валах трансмиссии. При этом машина
поворачивается вокруг центра опорной поверхности
отстающей гусеницы с рр = 1, а
относительная мощность рекуперации определяется по
формуле
^ (9д+0(?д-1)(р-1)
Р 2(дД+1)(дя+р)
Из этого выражения следует, что если
^д =1, то N2 =0 при любом значении
реализуемого относительного радиуса поворота.
Если ^д =0, то числитель формулы равен
нулю при р = 1 и имеет отрицательное
значений при р > 1. Это свидетельствует о
невозможности рекуперации и необходимости
дополнительных затрат мощности двигателя.
Глава 4.4
ХОДОВАЯ ЧАСТЬ
4.4.1. ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
Гусеничный движитель (ГД)
обеспечивает несущую способность и подвижность
машине на местности.
ГД включает гусеницы, ведущие колеса,
опорные и поддерживающие катки,
направляющие колеса с механизмом натяжения
гусениц. По конструктивному исполнению ГД
классифицируются:
с передним или задним расположением
ведущего колеса (ВК);
с приподнятым над грунтом или
несущим (опорным) направляющим колесом (НК);
с одно или двухрядными опорными
катками (ОК);
с различными типами гусениц по
конструкции шарнирных соединений и размерам
опорной поверхности.
Выбор схемы ГД, параметры и
технические решения составных частей связаны с
компоновкой машины и предъявляемыми к
ней требованиями. Принятые технические
решения и размеры опорных
поверхностей ГД определяют среднее давление на
грунт, максимальную силу тяги по
сцеплению, потери в ходовой части и другие
эксплуатационные качества машины. Для
большинства гусеничных машин среднее давление
на грунт дср=0,04 ... 0,06 МПа, а для
тяжелых машин, масса которых превышает 30 т,
4ср=0>08 ••• °>09 МПа ГД машин высокой
проходимости. (снегоболотоходные) должен
обеспечивать фср^0,03 МПа. Тягово-сцепные
качества машин зависят от коэффициента
сцепления, максимальное значение которого
на мягких грунтах достигает 0,7.
Для обеспечения высокой проходимости
при проектировании ГД стремятся выполнить
максимально возможный дорожный просвет в
пределах 300 ... 400 мм и углы наклонных
ветвей гусеничного обвода равными спереди
30 ... 45е, сзади 20 ... 25° при приподнятом
НК и заднем расположении ВК.
Гусеницы. Различают два вида гусениц -
ленточные (бесшарнирные) и звенчатые,
состоящие из отдельных звеньев (траков),
соединенных между собой шарнирными
соединениями. Наибольшее распространение
получили звенчатые гусеницы, которые
классифицируют по трем признакам: по конструкции
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
549
шарниров; по способу изготовления и
конструкции траков; по способу зацепления с ВК.
По конструкции шарниров различают
следующие типы гусениц: с открытым
металлическим шарниром (ОМШ); с закрытым
металлическим шарниром (ЗШ), имеющие
резиновые уплотнения; с резинометаллическим
шарниром (РМШ); с шарнирами других типов
(игольчатыми, гибкими резинотканевыми
элементами и др.).
Сравнительная оценка гусениц
производится по ресурсу; погонной массе;
относительной массе 8 = (/я,- //я)100% (где щ -
масса обеих гусениц; т - масса машины),
5=6 ... 8 %; обобщенному коэффициенту
совершенства кс = ( (7Г / Р )дср 100% (где Р -
сила разрыва гусеницы); звенчатости
(отношению шага гусеницы к ее ширине, для мелко-
звенчатой !г / Ь ^ 0,5); ажурности траков
ка = (*У0 / *У ) 100% (где аУо - суммарная
площадь всех отверстий; 5* - общая площадь
опорной поверхности трака), ка =25 ... 30 %.
Гусеницы с ОМШ наиболее просты в
изготовлении, имеют наименьшую массу,
легко собираются и разбираются.
Соединение траков в гусенице осуществляется
металлическим пальцем, имеющим для фиксации
с одной стороны головку, а с другой -
пружинное кольцо или расклепанный конец. К
основным недостаткам гусениц с ОМШ
следует отнести их низкую работоспособность
(1 500 ... 3 000 км пробега) ввиду абразивного
изнашивания шарнирных соединении и
большие потери мощности на трение в шарнирах
при высоких скоростях движения.
Для обеспечения износостойкости для
траков и пальцев применяют специальные
марганцовистые легированные стали типа
ЛГ13Л и КДЛВТ для литых и 35ХГ2 и ТВМ
для штампованных траков, работающих с
пальцами из кремнистых сталей типа 37ХСА,
40СА. Иногда используют запрессовку
высокопрочных втулок из сталей типа 45ХНМФА,
сормайта, порошкового материала. Некоторое
повышение работоспособности шарниров
конструктивно достигается также за счет
уменьшения зазоров между пальцами и
проушинами, торцовых зазоров между проушинами
смежных траков, увеличения длины проушин
за счет сокращения их числа, снижения
давления в контактных парах.
К числу технологических способов
увеличения износостойкости шарнирных
соединений на 30 ... 40 % относят: повышение
твердости контактных пар методом наклепа
(калибровки) проушин до твердости 40 НКСэ,
цементирования на глубину 0,8 ... 1,2 мм
пальцев с последующей закалкой до
35-55 НКСэ, борированием трущихся
поверхностей на глубину 0,12 ... 0,25 мм.
Интенсивность изнашивания ОМШ
гусениц зависит от абразивного состава грунта и
находится в пределах 3,6 ... 9,1 мм/тыс. км.
Расчет гусениц сводится к выбору
наиболее рациональной конструкции шарнира и
определению основных размеров деталей
гусеницы. Поверочный расчет заключается в
общей оценке прочности и износостойкости
основных элементов гусеницы. Так, в
поверочный расчет входят расчеты пальца на срез,
проушины на разрыв и трака на изгиб. При
этом принимается запас прочности элементов
равный 2,5 ... 3. Согласно расчетной схеме
гусеницы с ОМШ при незакрепленном пальце,
напряжение среза пальца определяется по
формуле:
Л Р Р
х = Кх Ц- = 0,85-4- ^ [х 1 = 70 ••• 80 МПа
где К\ = — - коэффициент, учитывающий
3
концентрацию напряжений; Р( - сила среза;
<1 - диаметр пальца.
Напряжение разрыва проушины
р
а = , „ / ч , <, \ а 1 = 50 ... 60 МПа,
2(Д.-г)*/ 1 ]
где Я и г - соответственно наружный и
внутренний радиус проушины; Ь'{ - ширина
проушины.
Среднее давление пальца на проушину
(р<> 15 ... 35 МПа)
/> = Р//(<//>,),
где й - диаметр пальца.
При проектировании гусеницы исходят
прежде всего из условия обеспечения равно-
прочности всех проушин, суммарная длина
которых одной стороны трака должна
соответствовать суммарной длине проушин смежного
трака, а сумма длин должна соответствовать
заданной ширине гусеницы:
я-/ л+1
Х^2>-0,5(*»-2115),
1 1
где п - число проушин охватываемой стороны
трака; ^ - боковой зазор между проушинами,
5* = 0,5 ... 2,5 мм в зависимости от класса
машины.
Остальные параметры (диаметр пальца,
наружный радиус проушины) определяют как
обратную задачу из уравнений расчета на
прочность.
550
Глава 4.4. ХОДОВАЯ ЧАСТЬ
Расчет трака на изгиб выполняется по
формуле:
аи=Ми/Жи>
где Ми - изгибающий момент; 1УН - момент
сопротивления изгибу.
При взаимодействии с твердым грунтом
изгибающий момент
3/и =0,^/4.
При взаимодействии трака с мягким
грунтом
а
мя=-
где Лр - ширина гусеницы; К*1 -
коэффициент податливости грунта, для пашни
К*1 =0,05 ... 0,15; О/ - сила под катком.
Для обеспечения сцепных качеств с
грунтом на подошве трака выполняются грунтоза-
цепы высотой 25 ... 30 мм. Общая опорная
поверхность грунтозацепов выбирается таким
образом, чтобы обеспечить при погружении их
в грунт до 5 мм среднее давление в зоне
контакта 5 ... 9 МПа. Для повышения
устойчивости гусеницы к боковому скольжению около
10 % общей длины грунтозацепов следует
располагать вдоль продольной оси гусеницы.
Конфигурация расположения грунтозацепов
не должна затруднять самоочищение гусеницы
от залипания грунтом. Толщина грунтозацепов
у основания принимается обычно 8 ... 10 мм.
По мере эксплуатации гусеницы высота
грунтозацепов уменьшается примерно на
1,5 ... 2 мм за 1 000 км пробега.
В некоторых случаях для повышения
тяги по сцеплению на мягких грунтах
используют установку на гусеницы специальных
легкосъемных грунтозацепов высотой 70 ... 80 мм.
На специальных машинах, часто работающих
на дорогах общего назначения с твердым
покрытием, гусеницы оборудуют съемными ас-
фальтоходными башмаками, имеющими обре-
зиненную опорную поверхность. Размеры
опорной поверхности резиновых элементов
определяются из условия обеспечения
среднего давления на резину не выше 0,15 МПа.
Для удержания опорной ветви гусеницы
от схода из-под катков на траках размещают
направляющие гребни, форма и разложение
которых зависят от типа опорного катка (одно
или двухрядного). Высота гребней должна в
2 ... 2,5 раза превышать толщину массивной
шины (обода) катка. Угол заострения гребня в
поперечном сечение задается равным 5 ... 8°,
а угол в продольном сечении определяется из
условия обеспечения перегиба гусеницы на
ведущем и направляющем колесах, при этом
площадь боковой поверхности берется
максимальной для снижения износа от
соприкосновения с катками. Гребни, как правило,
изготовляют как одно целое с траком,
приваривают к ним, иногда делают съемными:
Рис. 4.4.1. Гусеницы с закрытыми шарнирами:
а - с торцовыми уплотнениями; б - с радиальными уплотнениями
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
551
Требования к беговой дорожке гусеницы
сводятся к созданию наиболее благоприятных
условий при качении по ней опорных катков.
С этой целью при проектировании стремятся
выполнить наименьшие зазоры между
смежными траками, скруглить краевые кромки
траков, обеспечить защиту беговой дорожки от
нагребания грунта. Для снижения нагружен-
ности резинового обода катка на
быстроходных машинах иногда выполняют обрезинива-
ние беговой дорожки. Поскольку обрезинен-
ная беговая дорожка обладает хорошей само-
очитаемостью от намерзания наледи, такие
гусеницы применяют на снегоболотоходных
машинах типа ГТ-СМ.
Для защиты металлических шарниров от
абразивного изнашивания применяют
торцовые и радиальные уплотнения резиновыми
элементами (рис. 4.4.1). Такие гусеницы
называют с закрытыми шарнирами (ЗШ).
Гусеницы с торцовыми уплотнениями довольно
просты по конструкции, однако трудоемки в
изготовлении и особенно в эксплуатации при
замене траков, когда при выбивании пальца
срезаются две стопорные заклепки, а при
сборке необходимо применение смазочного
материала и комплекта уплотнителей и
стопорных деталей.
Лучшими по надежности являются
гусеницы с герметичным радиальным
уплотнением, выполненным по типу сайлент-блочных
резиновых колец, запрессованных в проушины
траков с натягом. Такую конструкцию ЗЫГ
называют также с полузагруженным резиноме-
таллическим шарниром. Конструктивно
гусеницы с ЗШ выполняют с втулками или с
моноблочным пальцем ступенчатой формы.
Втулки запрессовывают в проушины трака,
они имеют шестигранные внутренние
отверстия, в которые входит соединительный
шестигранный палец. Стягивание шарнирного
соединения осуществляется гайкой на конце
пальца. Отличительная особенность гусениц с
ЗШ - увеличенный размер отверстия
проушины, обусловленный необходимостью
обеспечения допустимых касательных напряжений в
запрессованных резиновых кольцах,
гарантирующих надежную работоспособность этих
колец на весь период ресурса гусениц.
Увеличенный размер шарниров
приводит к некоторому повышению массы
гусеницы и потере мощности в ГД при высоких
скоростях движения. Для снижения потерь на
трение и удлинения срока службы гусениц
(до 10 ... 12 тыс. км пробега) в шарнирах
применяют пластмассовые покрытия или
консистентный смазочный материал при сборке.
Долговечность гусениц с ЗШ
определяется долговечностью резиновых уплотнений, а
для втулочных конструкций также плотностью
соединения втулок шестигранным пальцем.
Комплекс вопросов, связанный с отработкой
уплотнений, включает: выбор оптимальной
формы и размеров колец, рецептур резины;
выявления лучшего способа крепления
резины; определение оптимальной угловой
жесткости и величины запрессовки резиновых
колец; оценку воздействия смазки на
долговечность уплотнений и другие вопросы.
Установлено, что предпочтительной
формой резиновых колец является трапеци-
видная [13], радиальный относительный натяг
целесообразней принимать равным 30 ... 32 %,
угловая жесткость резины не должна
превышать 2,2 ... 2,8 кН/рад, иначе возможно
прокручивание колец в проушине. Для лучшего
крепления резиновых колец к пальцу (втулке)
следует принять или латунирование, или под-
слойку лейконата. Определение необходимой
силы стягивания соединительным пальцем
закрытого шарнира втулочного типа
выполняют из условия, при котором напряжение от
изгиба пальца под действием продольной силы
в гусенице не будет превышать напряжения
сжатия стыков втулок, созданного при сборке
шарнира.
Напряжения изгиба пальца гусеницы с
ЗШ лучше определять пол формуле
_А/^_*/п 16 Е40ЬГ
где А^ - опытный коэффициент
монолитности; на рабочей длине гусеницы к^ =
= 0,06 ... 0,08; на заплечиках к^ =
= 0,16 ... 0,18; Ьг - радиальный зазор между
пальцем и втулкой; Ьш - общая длина
втулок; &„ - длина несущей поверхности; й§ -
диаметр вписанной окружности профиля
пальца; Ох - наружный диаметр моноблока в
рассматриваемом сечении; Мх и IVх -
соответственно изгибающий момент и момент
сопротивления в данном сечении.
Основным препятствием для широкого
распространения гусениц с закрытым
моноблочным шарниром является сложность
сборки и разборки в полевых условиях. При
сборке должны обеспечиваться: чистота деталей, их
смазывание, создание соосности проушин,
чтобы не срезать резиновые кольца,
минимально возможный размер стыка между
проушинами (менее 3 мм) в зависимости от
класса машины. При разборке гусеницы требуется
большая сила выпрессовки пальца, зависящая
от срока эксплуатации. В среднем сила
выпрессовки достигает 20 ... 50 кН. Для
операции сборки-разборки применяют пресс.
552
Глава 4.4. ХОДОВАЯ ЧАСТЬ
Наибольшую популярность в
современном машиностроении транспортеров-тягачей
получили гусеницы с РМШ, в которых
относительные перемещения пальца и трака в
точках перегиба обвода осуществляются за счет
упругой деформации кручения массивных
резиновых элементов в проушинах. Гусеницы
с РМШ имеют большую массу, чем гусеницы с
ОМШ, и более трудоемки в изготовлении,
однако долговечнее (более чем в 4 раза),
отличаются минимальными потерями мощности в
шарнирах, сглаживанием динамических
явлений в шарнирах, влияющих на нагруженность
в трансмиссии, простотой обслуживания.
Гусеницы с РМШ могут быть с
последовательным расположением упругих элементов в
шарнире и параллельным.
Резиновые кольца обычно привулкани-
зируют к пальцу (втулке) и запрессовывают с
натягом около 40 % для предохранения от
проворачивания. Предварительный расчет
резиновых элементов включает определение
касательного напряжения
2 г$ Сп г ,
*тах = 2 2 ^ * [Т™* ] =0,3 ... 0,5МПа,
г2 -гх
где 1\ и Г2 - внутренний и наружный
радиусы резинового кольца; Ор «0,8 ... 1,0 МПа -
модуль сдвига резины; \|/ - угол скручивания
шарнира.
Среднее напряжение смятия
а =
2г,5>
-^[а]«20... 30 МПа.
По экспериментальным данным
А. Н. Малиновского срок службы РМШ
быстроходных машин может быть
ориентировочно рассчитан с помощью выражения
196
(ЮТтах-3)2
-2
•1<Р
где п - число циклов до разрушения.
Пробег, км,
С =
1000 /я
где
1Т - число траков в гусеничном обводе;
ш - число точек перегиба в обводе.
Существенный недостаток гусениц с
РМШ - динамическое изменение размера ее
шага в зависимости от продольной
растягивающей силы. При различных режимах
движения увеличение шага гусеницы достигает
4 ... 5 мм, а общее удлинение рабочей ветви
обвода при переднем расположении ВК
составляет 300 ... 400 мм, что приводит к сбросу
гусениц и нарушениям в зацеплении ведущих
колес. Для устранения этих явлений
применяют повышенный предварительный натяг
гусениц (50 кН по сравнению 5 кН для гусениц с
ОМШ), сложные механизмы натяжения
гусениц, автоматически поддерживающие
заданную его величину.
Изменение шага /г гусениц с
шарнирами различных типов приведено на рис. 4.4.2
в зависимости от пробега аУ. Упругие
характеристики РМШ существенно зависят от
температуры окружающей среды. Так, при
понижении температуры ниже - 30 °С
сопротивление качению машины с гусеницами с
РМШ возрастает в 3 раза. При температуре
+ 40 ... 45°С происходит значительная
вытяжка рабочих ветвей обвода, что вызывает
нарушение работы ведущих колес в виде "захвата"
зубьями цевок гусеницы.
К специальному классу относят
гусеницы, используемые на снегоболотоходных
машинах (с увеличенным размером по ширине
симметричной конструкции). Это прежде
всего ленточные гусеницы. Они состоят из
двух и более резиновых армированных
стальными тросами или синтетическими тканями
лент, к которым болтами или заклепками
прикреплены металлические поперечены
специальной формы, обеспечивающие стабилизацию
гусениц под катками и имеющие элементы
зацепления с ВК. Ленточные гусеницы
обладают малой жесткостью, что снижает их
устойчивость в обводе. Они имеют большое
количество деталей крепления. В случае попадания
твердых предметов или наезда на камни, пни
резиновые ленты гусениц повреждаются.
Использование ленточных гусениц сопряжено с
разработкой специальной ходовой части и
корпуса машины.
Ю 5, тыс. км
Рис. 4.4.2. Изменение шага гусениц Ц
с шарнирами различных типоа:
1 - открытым; 2 - закрытым; 3 - РМШ
гусеничный движитель
553
Проектировочный расчет ленточных
гусениц включает: определение общих
параметров гусениц; расчет лент; поперечин;
оценку жесткости ленточных гусениц.
К общим параметрам гусениц
относят расчет необходимой их ширины из
условия обеспечения среднего давления
0,017 ... 0,02 МПа. Шаг гусеницы с учетом
диаметра используемого опорного пневмокат-
ка(Ас)
*г=/яа+с = /як+а,
где та - ширина по беговой дорожке; с -
промежуток между поперечинами по беговой
дорожке; с = кк /)к ; рекомендуется к^ <> 0,12;
т^ - ширина крыла поперечины; выбирают
из условия обеспечения крепления к ней лент;
а - ширина гибкого участка ленты; а ^ 0,5 /г .
Расчет резинотканевых лент, как
наиболее перспективных, включает определение
числа слоев ткани и толщины ленты.
Число слоев ткани
~ кнк1ЬКил'
где п - коэффициент запаса прочности;
п = 12 ... 13; ТТ - продольная сила в
гусенице; кн - коэффициент неравномерности
распределения нагрузки между слоями ткани;
к^ = 1 - 0,03 /; кг - удельная прочность
ткани на разрыв; для тканей на полиамидной
основе кг =3 кН/см; ЬК - ширина ленты;
ил - число лент в гусенице.
Толщина ленты
Я = /5/ +25р,
где 5/ - толщина слоя обрезиненной ткани;
5/ =1,1 ... 1,4 мм; - количество слоев ткани;
5р - толщина слоя обкладочной резины;
5р =3 ... 4 мм.
Проверку рассчитанной ленты проводят
по максимальным нормальным и касательным
напряжениям:
<*тах = <*р + <*и * [ сттах ] = 50 ... 70 МПа;
*тах = ~( 1 " И )*ртах * [ *тах ] = 8 МПа,
где
_ *гтах _ "к ^р
Р = *„'•»,** : СТи=2(1-ц2)л„ :
<Тр - напряжение от растяжения; аи -
напряжение от изгиба; Ер - модуль упругости;
Ер =680 ... 840 МПа; ц =0,35 %; ЯИ -
радиус изгиба ленты, см.
Если полученные максимальные
значения о щах и ттах превышают допустимые, то
необходимо изменять диаметр опорных
катков, ширину ленты или число тканей в ленте.
Расчет поперечин на прочность
проводится по формуле:
0Р =0ст^д/1п »
где 0СТ - статическая сила под катком; кд -
коэффициент динамичности, кл=2 ... 3,5;
/|„ - коэффициент запаса прочности, п^ =
= 2,5 ... 3,5.
Поверочный расчет включает
определение жесткости лент при изгибе на дуговых
ветвях в плане и при скручивании
относительно продольной оси. Жесткость при изгибе на
дуговых ветвях оценивается коэффициентом
угловой жесткости
12а(1-ц2)Ди
где ЕИ - модуль упругости при изгибе,
ЕИ = 340 ... 530 МПа; а - центральный угол
изгиба, рад. Рекомендуемое значение
ц0 ^0,8кН/рад.
Жесткость при изгибе в плане
оценивается коэффициентом жесткости
ку =0,0175^иу2л/а,
гДе Угл " суммарный момент инерции
всех лент в гусенице; а - длина гибкого
участка ленты. Рекомендуемое значение
ку > 35 кН • см/рад.
При скручивании гусеницы вдоль
продольной оси оценивается угловая жесткость
*в=а0175екру*кбк«л/'г.
где Сгкр - модуль жесткости при кручении,
^кр -О ••• 8) • 103 МПа; у - коэффициент,
учитывающий соотношения размеров ленты
(каркаса); у = 0,333; /г - длина свободного
участка гусеницы, см.
554
Глава 4.4. ХОДОВАЯ ЧАСТЬ
Для надежной работы гусеницы
необходимо, чтобы &е ^ 2,5 кН • с/град.
Поскольку увеличение ширины у
симметричной гусеницы сопряжено с
необходимостью изменения конструкции ходовой
части, корпуса и габаритных размеров машины, в
отечественном машиностроении разработаны
снегоболотоходные гусеницы несимметричной
конструкции, уширенные только во внешнюю
сторону, гусеницы со съемными уширителями,
которые работают только при погружении
траков в мягких грунтах. Несмотря на то, что в
последних конструкциях уширители
соединены с траками через упругие элементы, на
деформируемых грунтах возникают перекосы,
которые приводят к ускоренному
изнашиванию шарниров и катков.
Равновесие несимметричного звена на
податливых грунтах зависит от соотношения
площадей опорных плиц и их расположения
относительно оси беговой дорожки, глубины
погружения каждой плицы и свойств грунта:
Ск1Г(Ь1+Ь0) = СН2Р7(Ь2+Ь0),
где С - коэффициент упругости грунта; Р -
площадь плиц; к - глубина погружения.
Располагая на определенной высоте
крайние плиты, можно добиться
уравновешивания несимметричных звеньев. Внутреннюю
(меньшую по площади) плицу должны
располагать ниже наружней, но вместе с тем, как
наружная, так и внутренняя плица должна
быть несколько выше центральной
симметричной части звена. В этом случае
конструкция других элементов звеньев не отличается от
обычных и отвечает общим требованиям.
Гусеницы такой конструкции лучше гусениц со
съемными уширителями: уменьшаются потери
в шарнирах из-за отсутствия перекосов;
появляется возможность применения шарниров
любого типа, при этом под шарнир может
быть использована вся ширина звена.
Выбор основных параметров
несимметричной гусеницы определяется приведенными
расчетными уравнениями и оценивается
сопоставлением с данными существующих машин:
ширина центральной плицы
несимметричного звена Ь§ при односкатном катке
составляет (0,4 ... 0,5) Ьс ширины симметричной
штатной гусеницы; при двухскатном катке это
соотношение Ь$ = (0,7 ... 0,8) Ьс ;
предельная ширина внутренней плицы
Ьу =(0,3... 0,25) Ьс;
ширина наружной плицы
Ь2 = (0,5 ... 0,6) Ьс .
Тогда соотношение ширины
несимметричной к симметричной гусеницы Ь / Ьс =
= 1,6 ... 2, что обеспечивает среднее давление
?ср =0,2МПа.
Несимметричные гусеницы разработаны
для машин легкой категории типа МТ-Л
девяти и десятипроушинной конструкции.
Сравнительные испытания машин с обычными и
уширенными несимметричными гусеницами
выявили ряд преимуществ последних при
движении на слабых грунтах по расходу
топлива, величине тяговой силы, ресурсу и
одинаковые характеристики при движении по
недеформируемым грунтам. Длительная
эксплуатация транспортеров-тягачей показывает,
что перекосы опорной ветви обвода вследствие
несимметричности гусеницы практически
отсутствуют.
Ведущие колеса (ВК). Их устанавливают
на выходных валах трансмиссии (бортовых
передачах), они обеспечивают преобразование
крутящего момента в силу тяги на гусеницах.
ВК должны обладать надежным зацеплением с
гусеницей во всех режимах движения, высокой
износостойкостью и самоочисткой от грязи и
снега. Их обычно выполняют разъемными - из
ступицы и двух (реже одного) зубчатых
венцов. Для венцов используют стали ЛГ13Л,
У12Г и др. Рабочие поверхности зубьев
подвергают термообработке до 50 ... 60 НКСЭ или
наплавке твердыми сплавами типа сормайт.
Конструкция элементов зацепления ВК
должна обеспечивать: безударную передачу
сил, свободный вход и выход из зацепления
траков гусеницы, минимальное относительное
скольжение контактных пар, невысокие
контактные напряжения.
В машиностроительной практике
известны следующие типы зацепления ВК:
гребневое, в котором ведущим элементом
служит ролик, а в зацепление с ним входят
гребни траков. К его недостаткам относят
крупнозвенчатость гусениц, низкую
надежность роликов, повышенную неравномерность
работы, наличие выворачивающего момента. В
настоящее время такое зацепление применяют
в ГД с ленточными гусеницами;
зубовое, при котором зубья колеса
взаимодействуют с гребнями траков. Этот тип
зацепления имеет повышенную
изнашиваемость и низкую надежность работы из-за
забивания впадин между зубьями, применяется,
как правило, только на тракторах;
цевочное, в котором сила тяги от зубьев
колеса передается на специальные цевки
траков. Этот тип зацепления получил наибольшее
распространение, особенно на быстроходных
транспортерах-тягачах. По соотношению
размеров шага гусеницы /г к шагу зубьев ВК /^
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
555
цевочное зацепление подразделяют на
специальное и нормальное.
При специальном виде /г < /^ . В этой
конструкции сила передается в основном
одним зубом ВК на выходе траков из
зацепления, что вызывает неравномерность работы
передачи и повышенное изнашивание зубьев.
Кроме того, при переходе из ведущего в
тормозной режим работы в зацеплении возникают
ударные явления и происходит нежелательное
выпучивание гусеницы на ВК.
Распространение данный вид зацепления не получил.
При нормальном зацеплении /г < ^
(где /вд - шаг ВК по начальной
окружности). Такое соотношение шагов
принимается при проектировании гусеничного
зацепления. В этом случае цевки гусеницы
размещаются во впадинах зубьев по начальной
окружности, радиус которой определяется из
выражения:
Я - 'г
2&т к /1
где I - число зубьев ВК.
По мере изнашивания шарниров
гусеницы ее шаг увеличивается и соотношение к
шагу ВК становится другим. При
соотношении шагов /г > ^ цевочное гусеничное
зацепление работает в период эксплуатации,
как правило, наибольшую часть времени.
Увеличение шага гусениц приводит к тому, что
при входе в зацепление с ВК цевки звеньев
начинают располагаться не по впадинам, а на
рабочих наклонных поверхностях зубьев.
Равновесное состояние цевки на рабочей
поверхности зуба в этом случае зависит от тягового
режима работы передачи, определяющего
соотношение растягивающих сил в смежных
траках Тс$/Тн$ = 0 ... 1 (ветвях обвода у ВК
Тсв/Тр). Здесь 7^5 и Тсв - силы в
сбегающем звене и свободной ветви обвода, а
Гн 6 и Тр - силы в набегающем звене и
рабочей ветви.
Диапазон тягового режима, при котором
зацепление работает без скольжения цевок,
определяется выражением:
ехр(Сгк ) <; Тсв/Тр *ехр(С'гк),
С' = 1п-
&ш80 +цсоз80
где
С = 1п
81П0О -ЦСО8б0
$ш(б0 +а)-цсо$(в0 +а)
I—,—-т— г т- г- - пока-
$1п(90 +а) + цсо8(60 +а)
затели степени; 60 - угол давления между
продольной осью звена и нормалью к
поверхности зуба; определяет профиль зуба; а -
центральный угол; а = 2% /1; ц -
коэффициент трения в контактной паре; 1К - число
зубьев в зацеплении.
При передаче предельной силы тяги,
когда соотношение Тсв/Ттйехр(С*к )
снижается до минимума, работа зацепления
сопровождается скольжением цевок в сторону
вершин зубьев, и происходят "проскоки"
цевок через зубья. При снижении силы тяги
ниже уровня граничного предела, когда
Тсъ/Т9> ехр ( С" гк ), возникает
скольжение цевок в сторону впадин с последующим
перемещением их перед выходом из
зацепления к тыльной стороне зуба.
Нормальная сила в контактной паре
цевка-зуб рассчитывается по формуле:
#п = ГнбГоо80о -|^сс*(ео +о)1.
При проектировании гусеничного
зацепления число зубьев ВК определяется из
условия обеспечения заданной максимальной
скорости машины:
I =
' тпах
0,06 Пв
/г
где Листах " число оборотов ВК при
максимальной скорости машины ( Vтаx ).
Угол наклона зубьев (угол давления)
определяется исходя из условия обеспечения
надежности передачи максимальной силы
тяги:
^е0 =
81ПСХ «^Гс/Г,
ртах
1-(со8а-ц8та)^7Тсв/Гртах
-песка ^Гсв/Гртах - ц
Высота зубьев звездочки выбирается
такой, чтобы обеспечивалось зацепление с
гусеницей, шаг которой в процессе эксплуатации
может увеличиться на 10 ... 12 %
номинального.
Расчет на прочность зубьев выполняют
по напряжению изгиба и контактным напря-
556
Глава 4.4. ХОДОВАЯ ЧАСТЬ
жениям смятия. Напряжение изгиба для
опасного сечения зуба, принятого у его основания,
определяется по выражению:
где Мн - изгибающий момент от нагрузки,
приложенной на высоте /&, от сечения;
Мп = 0,6 Р№ щах Лз ; Лж шах -
максимальная окружная сила на ВК, ^вкшах =
= 0,65фсц(7; 1Уи - момент сопротивления
сечения, определяемый шириной зуба а и
суммарной толщиной кЬ, \У^ = — кЬ\ к -
число венцов на ВК.
Напряжения смятия в зацеплении при
криволинейных поверхностях контактных пар
и однородном их материале рассчитывается по
формуле:
где Л, и Гц - радиусы кривизны,
соответственно, зуба и цевки в месте контакта.
Необходимая сила затяжки болтов
крепления ведущих звездочек у двухвенцовой
конструкции ВК определяется из выражения:
Р > 05 Р ^в*
* вктах ^ "»-> -'актах _ п »
где Лц* и В$ - радиусы ВК и окружности
расположения болтов; щ - число болтов.
Диаметр болта находят по формуле:
где ат - предел текучести материала болта.
Для снижения контактных напряжений в
гусеничном зацеплении и повышения срока
его службы при конструировании стремятся
развить площадь контакта гусеницы с ВК.
Наиболее простой способ - это замена
контакта по линии круглых цевок на контакт по
тыощади путем изготовления места контакта
цевки плоским, а профиль зубьев - прямым.
Вводятся дополнительные места контактов на
ВК в виде подпорных элементов
взаимодействующих в плицами траков.
Для гусениц с РМШ параллельного типа
подпоры выполняют более сложной
конфигурации, в виде дополнительной звездочки.
Такие гусеничные зацепления иногда называют
"двухшаговыми" или "многошаговыми".
Введение дополнительных элементов контакта
позволяет поднять срок службы ведущих колес
до 8 тыс. км.
На работоспособность цевочного
зацепления большое влияние оказывает
расположение звеньев в гусенице: цевкой вперед (по
ходу движения на ВК) или цевкой сзади. При
укладке траков и сходе их с ВК происходит
относительный поворот двух смежных траков,
он сопровождается проскальзыванием цевок
на зубе или при входе в зацепление, когда
трак движется цевкой вперед (тянущий
способ), или при выходе из зацепления, когда
трак движется цевкой сзади (толкающий
способ). Поскольку контактная нагрузка в
зацеплении на входе траков выше, чем на выходе,
то следует, что при тянущем способе
зацепления возникают большие потери на трение и
происходит повышенное изнашивание зубьев.
Предпочтение отдается толкающему способу
зацепления.
Направляющие колеса ■ механизмы
натяжения гусениц. Направляющее колесо (НК)
вместе с механизмом натяжения гусеницы
создает необходимую силу натяжения и
обеспечивает устойчивую работу обвода в
движителе. В зависимости от конструкции гусеницы
НК могут быть одно или двухдисковыми, с
металлическим или обрезиненным ободом,
меньшего или равного опорного катка. В
последнем случае НК и ОК выполняют
взаимозаменяемыми.
Направляющие колеса должны обладать
хорошей самоочисткой и способствовать
удалению наледи и грязи с беговой дорожки
гусеницы. В значительной степени этим
требованиям отвечает конструкция стального
двухдискового НК транспортера-тягача МТ-Л. Для
обеспечения износостойкости дисков НК
применяют сталь 40Х или 38ХС с закалкой
285 ... 321 НВ.
На всех современных машинах НК
выполняют в сочетании с механизмом натяжения
гусениц, перемещающим НК в обводе. По
способу перемещения оси НК механизмы
натяжения делят на телескопические
(салазочные) с линейным перемещением и
кривошипные с перемещением по дуге.
Механизмы натяжения могут иметь
ручной, механический или гидравлический
приводы. Наибольшее распространение получили
механические приводы винтовой конструкции
и с червячной парой. Фиксация положения
НК при натяжении гусеницы достигается за
счет самотормозящих свойств винтовых
(червячных) элементов. В то же время, в
зависимости от конструктивного решения, винтовые
(червячные) пары могут быть выполнены
разгруженными от динамических сил, возни-
ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ
557
кающих в обводе. Примером разгруженной
конструкции является механизм натяжения
тягача АТ-Т.
По способу регулирования натяжения
гусениц механизмы натяжения разделяют: на
предварительно задаваемое в статике и
автоматически поддерживаемое (компенсирующее) в
процессе движения независимо от его режима.
Использование механизмов натяжения,
автоматически поддерживающих заданную силу,
продиктовано стремлением снизить величину
предварительного натяжения гусениц до
оптимального значения, что позволяет уменьшить
нагруженность узлов ГД и потери в нем.
При расчете механизма натяжения
необходимый ход перемещения НК определяют из
условия обеспечения соединения гусеницы на
машине после удаления из нее одного-двух
траков, а также создания требуемой силы
предварительного натяжения гусеницы Т0.
Для кривошипного механизма натяжения
необходимый радиус кривошипа находят из
выражения:
2 2
где А/ = /г...2/г.
Из условия возможности натяжения
гусеницы одним человеком определяют
передаточное число механизма:
2Г0гкрсоД
Л>У ^Р ^м
где Рру = 15 ... 25 кг - сила на рычаге
рукоятки радиусом Др; т|м - КПД механизма
натяжения.
Выбор и расчет элементов гидропривода,
включающего рабочий цилиндр с запорным
устройством и нагнетательный насос, проводят
по известным методикам расчета гидравлики с
обеспечением необходимой силы натяжения
гусеницы и величины перемещения НК.
Ориентировочно рабочая длина и диаметр
гидроцилиндра могут быть определены с помощью
выражений:
А/ 2
где р - давление в цилиндре.
Контроль задаваемой силы натяжения
гусеницы проводится по величине давления,
развиваемого в гидроцилиндре, по манометру.
При механическом и ручном приводе
механизма натяжения сила статического
натяжения обвода с гусеницами с ОМШ задается и
контролируется по стреле провисания
свободных ветвей:
7 8Г0'
где 0Г - погонный вес гусеницы; / - длина
провисающего участка;/- стрела провисания.
Для гусениц с РМШ, обладающих
продольной податливостью, стрела провисания
для заданного Т0 определяется из выражения:
7 в?; I / V т0 у
где С0 - угловая жесткость шарнира,
отнесенная к единице его длины; С0 =2 ... 4 кН/рад;
к - опытный коэффициент, к = 1,5 ... 2.
Расчет на прочность деталей НК и
механизма натяжения проводят из
условия действия максимальной силы ^тах т
*1,3<7со80,5р.
Механизмы автоматического натяжения
(МАН) гусениц наибольшее распространение
получили в ГД с задним расположением ВК.
Работа двухступенчатых МАН для этой
компоновки ГД заключается в повышении силы
натяжения при повороте машины в отстающей
гусенице при сохранении заданной силы в
забегающей. По экспериментальным данным
сила на оси НК отстающего борта при входе в
поворот достигает (0,54 ... 0,84) О за время
0,53 ... 0,77 с. Для обеспечения
быстродействия МАН в его системе используются
аккумуляторы энергии.
При расчете МАН за исходные данные
принимают:
необходимую максимальную силу на оси
НК
Оман ^2ТркПУ
где кц - коэффициент динамической
перегрузки; кп = 1,2 ... 1,3;
среднюю силу предварительного
натяжения гусеницы Т0;
силу повышенного натяжения гусеницы
У»;
полный ход НК
■*НК=Л<5о+Л'Ув+0.5>г.
558
Глава 4.4. ХОДОВАЯ ЧАСТЬ
где Д|У0 и Д«УВ - перемещения НК,
необходимые для создания сил соответственно
Т0 и Тв; А$0 - определяется
графоаналитическим методом; Д »УВ * ( Тв - Т0 ) / С0$ в;
С0б е ~ приведенная жесткость обвода;
С0бв=(1/С0+1/Св)"1.
Недостатком двухступенчатых МАН
является повышенное натяжение гусениц. ' К
более прогрессивным конструкциям относят
механизмы натяжении с гидрообъемными
передачами, давление жидкости в которых
задается пропорционально сопротивлению
повороту машины, т.е. происходит непрерывное
бесступенчатое регулирование натяжения
отстающей гусеницы. Такой механизм
натяжения, по опытным данным, позволяет на 50 %
снизить нагруженность обвода. Для расчета
МАН с бесступенчатым регулированием
используется необходимый закон регулирования
силы, полученной по результатам
экспериментов. Для ГД с передним расположением ВК
механизмы автоматического натяжения
гусениц имеют более сложную систему
регулирования и в отечественной практике
распространения пока не получили.
4.4.2. ОПОРНЫЕ И ПОДДЕРЖИВАЮЩИЕ КАТКИ
Отличительной особенностью опорных
катков быстроходных транспортных машин
является наличие у них амортизирующих
элементов. Лучшим типом такого катка считают
каток с наружной массивной резиновой
шиной, снижающей динамические нагрузки на
каток и гусеницу, а также уменьшающей
уровень шума. Конструктивно катки с наружной
шиной бывают обычно однорядные и
двухрядные. Однорядные катки с массивной
шиной, как правило, применяют на легких
машинах, типа МТ-Л. Для повышения несущей
способности катка, определяемой допустимой
нагруженностью резинового массива,
применяют конструкции с двумя шинами
(двухрядные катки). К преимуществу двухрядных
катков относят более равномерное распределение
нагрузки от катка на гусеницу.
В зависимости от диаметра опорные
катки подразделяют на катки: малого диаметра
(500 ... 600 мм) и большого (700 ... 800 мм).
Однорядные катки выполняют обычно
полыми, состоящими из двух штампованных
дисков, приваренных к ступице и ободу. Диски
изготовляют из высокопрочного алюминиевого
сплава или стали типа 38ХС. У сдвоенного
опорного катка с наружной шиной ступицы с
дисками из двух половин штампуются или
отливаются из стали типа 35Л. Затем обе части
сваривают и после механической обработки
подвергают нормализации. В некоторых
конструкциях обе половинки скрепляют болтами.
Известны также конструкции двухрядных
катков со съемными дисками, прикрепляемыми к
единой ступице болтами.
Крепление массивных шин к ободу катка
осуществляется обычно клеем "лейконат" или
через эбонитовую прослойку в процессе
вулканизации в специальных пресс-формах при
температуре 150 °С. Для повышения
прочности крепления резины поверхность обода
выполняют не гладкой, а с кольцевыми
проточками с сечением разного профиля. Для
предохранения места приклейки шины от
повреждения гребнями гусеницы по краю
оболов устанавливают из высокопрочной стали,
подвергнутой объемной закалке.
Под действием на каток части веса
машины в процессе движения в резиновом
массиве шины возникают три основных вида
напряжений: нормальное смятия в радиальном
направлении; нормальное разрыва в
тангенциальном направлении а^ и касательное х,
достигающее максимума под осью катка. Два
последних, наиболее опасных напряжения
растут с уменьшением диаметра катка Ок и
ширины шины Ьу а нормальное увеличивается
с уменьшением толщины шины Н. При
превышении допустимых пределов т разрушение
происходит на некоторой глубине шины по
концентрической окружности. При
чрезмерных значениях сг^ разрушение начинается от
обвода в виде радиальных разрывов. Расчеты
шины на прочность могут быть проведены
решением задачи теории упругости о
напряженном состоянии полуплоскости.
Ориентировочно оценка механической
прочности шины при статическом нагружении
катка под силой Ск может быть выполнена
по условному удельному давлению под шиной:
1* = „ „Ар * [*к Н,1в ... 0,22 МПа,
где С - вес машины; п - число катков одного
борта; пш - число шин одного катка; Ь и
К^ - соответственно ширина и наружный
радиус шины.
Сопротивление усталости оценивается
коэффициентом напряженности работы,
равным произведению дк на скорость: V фк.
Коэффициент ^к = 7 ... 9 МПа • км/ч.
Нагрев шины вследствие выделения
теплоты от внутреннего трения при деформации
резины зависит от ее размеров, физических
ОПОРНЫЕ И ПОДДЕРЖИВАЮЩИЕ КАТКИ
559
свойств резины, характера крепления к
бандажу и напряженности ее работы. Для
определения температуры нагрева шины обычно
используют одну из эмпирических зависимостей:
^\. С. Антонова:
где <7Ш - среднее давление на шину в
плоскости контакта с металлической беговой
-^
дорожкой гусеницы; дш
к - коэффициент, определяющий
геометрические параметры шины;
к = =- х
0,5--
2ЛА
В = 1-
(1 + ЛУ
гн
1-Я2
2е#
А = 1-
коэффициент,
характеризующий положение очага нагрева; е «0,555;
А. Г. Козлова:
Г = Г0 + А Г =
ппшаР \ 2Ер \ Лк 1 ]
= Т0 +
= 100 ... 120 °С ;
где Т и А Г - соответственно температура
окружающей среды и ее повышение в
резине; а - коэффициент теплоотдачи от
шины; а «38 ... 63 кВт/(м2-°С); Р -
полная площадь теплоотвода от шины;
Р = 2х(ПК -#)(# + />).
Превышение рекомендуемого значения
нагрева шины приводит к ее разрушению и
отслаиванию от бандажа.
Выбор геометрических параметров шин
существенным образом определяет тепловую и
усталостную стойкость резины. При этом
обнаруживается некоторое противоречие: чем
толще шина, тем меньше сжимающие
напряжения, но тем больше тепловыделение в ней.
Поэтому подход к выбору оптимальной
толщины шины должен исходить из обеспечения
наибольшей работоспособности катка.
Значительного снижения нагруженности
шины добиваются обрезиниванием беговой
дорожки гусеницы: в 1,2 ... 1,5 раза снижается
тепловая напряженность, более чем в 2 раза
повышается ее теплостойкость. Гусеница с
обрезиненной беговой дорожкой позволяет на
10 ... 18 % повысить несущую способность
катка. Оптимальные размеры - толщины
резинового слоя беговой дорожки и шины катка -
выбирают экспериментальным путем. Если
нагрузка на каток приводит к
переразмеренным параметрам катка с резиновыми шинами,
прибегают к использованию катков с
внутренней амортизацией. Наиболее рациональная
конструкция катка с внутренней амортизацией
включает ступицу с дисками, два резиновых
кольца и ободья с внутренними дисками.
Резиновые кольца к дискам привулканизируются
или приклеиваются. Каток собирается под
мощным прессом с осевой сжимающей силой
до 20 т и скрепляется болтами. Резина в этих
катках работает в более легких условиях из-за
большего ее объема, воспринимающего
нагрузку на сдвиг. Жесткость катка с внутренней
амортизацией зависит от объема резиновых
колец и силы их предварительного сжатия.
При этом, чем большую нагрузку
рассчитывают на каток, тем больше сила
предварительного сжатия резины для обеспечения
долговечности катка и тем ближе каток по
жесткости к цельнометаллическому катку.
При расчете сопротивление усталости
резиновых колец этих катков оценивается
примерно величиной касательных напряжений:
х =
4/Х,
лк*(/>2-</2)
^[т]=0,1 ... 0,2 МПа,
где /1к - число резиновых колец в катке; О и
й - соответственно наружный и внутренний
диаметры кольца.
Тепловая напряженность резиновых колец
определяется по выражению:
Т = Т0 + А Т =
= т°+16>7Ь1Ы*[т]=т'с'
где Ьр - толщина деформированного
резинового кольца; Р - площадь сечения
деформированного кольца; Р = — I В - д. ).
Жесткость катка вычисляется по формуле:
с =Я.=^1^р.
где Ор - модуль упругости резины второго
рода.
Свободная толщина Ь0 и площадь
кольца Р0 до сжатия силой 5 определяется из
560
Глава 4.4. ХОДОВАЯ ЧАСТЬ
уравнения деформации / =
Ьп5
ЕрЕ0+3
формулам:
Ч-ж)
Прочность и долговечность
металлических ободьев катков оцениваются по
напряжениям смятия:
а' = 0'42/3^*[а']*200МПа'
где Е - модуль упругости первого рода стали;
Я=2,1-105МПа,
Ориентировочная ширина обода
Я* ^ Ас
где к - поправочный коэффициент; к = 5 ... 8.
Для ленточных гусениц, имеющих
металлические поперечины, из-за большой прерыв-
чатости беговой дорожки применяют катки с
пневмошинами. К недостаткам таких катков
относят повышенный износ боковин шин в
связи с трением их о поперечины, низкую
надежность из-за возможных повреждений
(проколов шин), увеличенную трудоемкость
при обслуживании во время эксплуатации.
Расчет шин катков выполняют по аналогии с
расчетом автомобильных шин, уделяя особое
внимание расчету на нагрев.
Выбор и расчет подшипников опорных
катков производится с учетом опыта
эксплуатации гусеничных машин. Для легких машин
опорные катки устанавливают, как правило, на
двух шарикоподшипниках, а для остальных -
на одном шариковом и одном роликовом
подшипниках.
С целью облегчения монтажно-демон-
тажных работ подшипники в ступице катка
устанавливают неподвижно, а на оси балансира -
с зазором. Повышенные требования
предъявляют к уплотнению подшипникового узла,
которое включает лабиринтный участок
шириной не менее 10 мм и не менее двух
самоподжимных манжет, чаще двухкромочных, в
зависимости от масла.
Расчет подшипников производят по
приведенным значениям радиальной силы:
для шарикоподшипника
^пра =(бш*к+'"Л)*8;
для роликового подшипника
■М1 р в — Ур к* к$ ♦
где (?ш и 0р радиальная сила;
0ш(0р) = 0к т> т - коэффициент,
учитывающий влияние осевой силы; т = 1,5;
а у Ь - размеры посадки подшипника; к^ -
кинематический коэффициент, к^ =1,35;
къ - динамический коэффициент; для
цельнометаллических катков к§ =3; с
массивными шинами А:§ =2; с внутренней
амортизацией к§ =2,5; А - осевая сила;
Л = (0,1... 0,12) 0К.
Долговечность подшипника
-!..р:.
где Л/
частота вращения катка; щ -
= 0,377 —-; V - средняя скорость движения
Я*
машины; С - каталожный коэффициент
работоспособности подшипника.
Поддерживающие катки (ролики) на
транспортерах служат для улучшения условий
работы верхней ветви гусеницы, снижения
уровня динамических нагрузок и исключения
колебаний (биения) при движении на высоких
скоростях. Для выполнения своего назначения
поддерживающие катки должны
устанавливаться с помощью долговечных подшипников
на прочных кронштейнах борта в связи с тем,
что масса поддерживаемой ветви гусеницами
достигает 500 ... 700 кг, а динамическая нагру-
женность, вызванная вертикальными
колебаниями, может быть во много раз больше.
Ввиду меньших размеров диаметра
поддерживающих катков по сравнению с
опорными скорость их вращения значительно
выше, что обусловливает необходимость
применения высокооборотных подшипников
качения. Поддерживающие катки чаще всего
устанавливают на съемных кронштейнах. Катки
могут быть металлическими или обрезинен-
ными, как с одним, так и с двумя скатами.
Расчет поддерживающих катков начинается с
определения размеров оси, кронштейна и
деталей крепления к борту с учетом больших
динамических нагрузок.
ПОДВЕСКА ГУСЕНИЧНОЙ МАШИНЫ
56*
4.4.3. ПОДВЕСКА
Важнейшим узлом ходовой части
является система подрессоривания. От ее
совершенства зависят плавность хода шасси и
скоростные свойства. Система подрессоривания
современных шасси обязательно содержит
упругий и демпфирующий элементы. В
качестве упругих элементов используются тор-
сионы и гидропневматические рессоры, в
качестве демпфирующих - гидравлические
амортизаторы. Ограничители хода катков -
резиновые или пружинные буферы.
Торсионы выполняются, как правило,
на всю ширину машины. В результате их
закручивания при работе подвески
обеспечивается значительный ход опорных катков
(до 350 ... 450 мм), поэтому у шасси с
большими ходами опорных катков устанавливают
амортизаторы со значительной
энергоемкостью. Для надежной работы в течение всего
срока службы шасси торсионы подвергают
предварительному "заневоливанию", что
делает левые и правые торсионы
невзаимозаменяемыми.
У гидропневматических рессор упругая
характеристика нелинейная и приближается к
оптимальной. Кроме того, эти рессоры
позволяют довольно просто изменять дорожный
просвет и осуществлять блокировку подвески,
что необходимо для многих специальных
шасси.
Конструкция гидропневматической
рессоры показана на рис. 4.4.3.
В случае использования в подвеске
гидропневматических рессор в конструкцию
шасси вводится система регулирования
положением корпуса.
Гидравлическая система регулирования
положения корпуса (СРПК) предназначается
для изменения дорожного просвета, придания
корпусу дифферента, натяжения и ослабления
гусениц.
Принципиальная гидравлическая схема
СРПК шасси с шестью опорными катками
представлена на рис. 4.4.4.
При конструировании подвески наиболее
важным является выбор параметров упругого
элемента (его жесткости Ср), от чего во
многом зависит плавность хода машины. В случае
независимой торсионной подвески жесткость
Ср = соп$1 примерно на всей длине хода
катка, т.е.
Сп =
гн/
/с/ '
где РН1 - нагрузка на 1-й каток в статическом
положении; /с/ - статический ход катка.
При радиусе балансира В$ и диаметре
торсиона с1т длиной /т
'"32/,/гГ
где С0 - модуль упругости второго рода для
материала торсиона.
В зависимости от жесткости и хода катка
в торсионе будут возникать различные
касательные напряжения тт, которые и являются
критерием работоспособности торсиона:
<7о(/с/+/д/)<*
2/т*б
где /д/ " динамический ход катка; обычно в
1,3 -1,7 раза больше статического.
Рис. 4.4.3. Гндропневмятнчесыя рессора:
1 - устройство для смазывания; 2, 4 - шаровые опоры; 3 - шток; 5 - поршень;
6 - гидроцилиндр; 7- амортизационный узел; 8 - диафрагма; 9 - газовая камера
562
Глава 4.4. ХОДОВАЯ ЧАСТЬ
-агХБ)
-ЗГХВ
Рис. 4.4.4. Система регулирования положения корпуса (принципиальная схема):
7, 11, 12 - предохранительные клапаны; 2 - магистральный фильтр; 3 - обратный клапан;
4 - гидромотор с приводом; 5 - бак;б - сливной фильтр; 7- ручной гидронасос; 8 - манометр;
9 - распределитель; 10 - дроссель-корректор; 13 - регулятор дорожного просвета;
14 - механизм натяжения гусеницы; 15 - гидромеханическая рессора; 16 - гидрозамки
Принимая при конструировании тот или
иной материал или технологию обработки
торсиона, т.е. задаваясь допустимым
значением хтдоп , получаем
ттдоп V «т
По диаметру торсиона подбирается
радиус балансира
Дб =
Со (/с<+/д/Ц
2т
тдоп
/т
где хтдоп = 800 ... 1 400 МПа.
В случае пневмогидравлической подвески
для расчета ее параметров используют
уравнение политропы для закрытой полости газа
А, Уу)
где р0 и К0 - соответственно давление и
объем газа в пневмокамере; р и V - текущее
значение соответственно давления и объема;
п - коэффициент политропы, зависящий от
скорости протекания процесса.
Рис. 4.4.5. Схема гндропневмпнческой подвески с
противодавлением
РАСЧЕТ ПЛАВАЮЩИХ МАШИН
563
В общем случае подвески с
противодавлением, кроме основного цилиндра 1
имеется цилиндр 2 противодавления (рис. 4.4.5).
При отсутствие противодавления цилиндр 2
отсутствует, а вводится устройство,
обеспечивающее протекание жидкости из подпоршне-
вого пространства цилиндра 7, в надпоршне-
вое.
Начальный объем У0 можно выразить
через площадь 1\ поршня, на которую
действует жидкость основной полости 1 и
приведенную высоту Н01 столба, газа: У0\ = Р\Л0^,
а текущий объем У\ полости газа 1 - через
начальный объем У0 и приращение
АУ\ = Р\ АН0\. Тогда уравнение политропы
Р\ 1 = 1
Ро\ (1-ДК1/Ко1)л (1-АЛо1/А0)Л'
Для полости 2 противодавления
Рг 1
Ро2 (1ч-ДК2/Ко2),I,
гДе Ро2 и Р1 " соответственно начальное и
текущее давление в полости 2, К02 и АГ] -
соответственно начальный объем полости 2 и
его изменение при изменении поршня на
величину А Л^ , т.е.
Ро2 V Ло2 /
где Ц = Ко2/^/Ко2^-Ло1/Ао2; Но2 -
приведенная высота столба газа в полости 2.
Очевидно, что сила на штоке подвески
Лс = Р\ р\ ~ Р2 р2 =
_ Ро\Г\
Ро2р2
В статическом положении сила на штоке
используется как исходная для выбора
параметров гидропневматической подвески. При
анализе возможности гидропневматической
подвески удобнее использовать безразмерную
характеристику, представляющую собой
отношение сил Рк / Рок и справедливую для
подвесок с любыми размерами:
Ь-^ТА
1 + И
Ло2
Л* 1-Т
где у = Гг Ро21{Р\ Ро\)-
Выбор значений р0\ и />о2
осуществляют исходя из того, что максимальное
давление при полном ходе подвески (или отбое)
не превышало 35 ... 40 МПа.
При применении гидропневматической
подвески без противодавления приведенные
выше зависимости упрощаются, поскольку
А>2 = 0-
4.4.4. РАСЧЕТ ХОДКОСТИ И
МАНЕВРЕННОСТИ ПЛАВАЮЩИХ МАШИН С
ГУСЕНИЧНЫМИ ВОДОХОДНЫМИ ДВИЖИТЕЛЯМИ
Во многих странах разрабатываются и
выпускаются плавающие машины (амфибии),
гусеничный движитель которых используется
как универсальный, т.е. создает силу тяги при
движении как по суше, так и по воде (рис.
4.4.6).
Ж± й
"-^^^ ^~± ГлГ^-.. Л± Ца
Рис. 4.4.6. Схемы гусеничных водоходных дмжвтеле! погруженных:
а - частично; б, в, г, д - полностью
564
Глава 4.4. ХОДОВАЯ ЧАСТЬ
Стремление использовать гусеничный
движитель как универсальный обусловлено
рядом причин, главными из которых являются
упрощение конструкции машины и некоторое
уменьшение ее стоимости за счет отказа от
применения специального водоходного
движителя (гребного винта, водомета и их
привода). Однако скорость движения по воде
меньше, чем при использовании специального
водоходного движителя. Хуже и параметры
маневренности, существенно меньше скорость
движения задним ходом по воде, больше
тормозной путь по воде и диаметр циркуляции и
др.
Использование гусениц в качестве
водоходного движителя можно считать
приемлемым только для машин, для которых не столь
важны хорошие водоходные качества на воде.
Существует достаточно много конструктивных
схем применения гусеничных движителей в
качестве водоходных.
На гусеничных плавающих машинах
периода 40-х годов в США широко
использовался частично погруженный гусеничный
водоходный движитель, верхняя ветвь которого
располагалась выше ватерлинии 1УЬ (рис.
4.4.6, а). Отрицательная сила тяги,
направленная в сторону, противоположную движению,
обеспечивала при сравнительно небольшой
удельной мощности машин (13 ... 19 кВт/ч)
скорость на спокойной воде примерно
12 км/ч. Машина с такой схемой обладала
рядом недостатков: большой длиной и массой
гусеничного обвода; более высоким
положением центра тяжести и, как следствие,
ухудшенной остойчивостью; засасыванием верхней
частью гусеницы воздуха и уменьшением (за
счет этого) силы тяги на нижних ветвях
гусениц; рысканием при плавании на волнении
вследствие взаимодействия с волнами верхних
ветвей гусениц; недостаточной управляемостью
на воде и др.
При полностью погруженном
гусеничном водоходном движителе (рис. 4.4.6, б - д)
ватерлиния машины проходит выше верхних
ветвей гусениц, устраняются недостатки,
присущие погруженному движителю. Однако
отрицательная сила тяги на верхней ветви
гусениц уменьшает суммарную силу тяги гусениц,
а следовательно, скорость прямолинейного
движения по воде.
Для снижения отрицательной силы тяги
на верхней ветви гусеницы ее (или ее
переднюю часть) размещают, например, в
специальном гидродинамическом кожухе (рис. 4.4.6,
б> в). Во многих случаях ограничиваются
установкой в зоне переднего ведущего или
направляющего колеса носового щитка (рис.
4.4.6, г), который частично использует
энергию воды, перемещаемой верхними ветвями
гусениц в направлении носа машины.
Имеются рекомендации по размерам и
форме гидродинамических кожухов и щитков,
а также их элементов, совершенствование
которых в большинстве случаев с целью
получения наибольшей положительной силы тяги на
гусеницах выполняется экспериментальным
путем. Отсутствуют также надежные
аналитические методы расчета положительной силы
тяги гусениц, которые позволяли бы учесть
геометрию всех элементов полностью
погруженного гусеничного водоходного движителя.
Вместе с тем, по-прежнему существует
необходимость в сравнительно простых способах
расчета ходовых характеристик плавающих
машин с гусеничными водоходными
движителями, которые позволяли бы в первом
приближении определять достижимые скорости
движения по воде и параметры
маневренности.
Ниже приводится способ расчета ходовой
характеристики, описывающей связи между
тяговыми, скоростными и мощностными
параметрами машин с полностью погруженным
гусеничным водоходным движителем.
Расчет ходовой характеристики можно
условно разделить на два этапа. На первом
этапе рассчитываются кинематические и
гидродинамические параметры гусеничного
движителя, на втором устанавливаются связи
между располагаемой мощностью двигателя и
мощностью, необходимой для вращения в
воде гусеничных цепей. Результаты расчета
представляют в виде номограммы (рис. 4.4.7).
Расчет целесообразно начинать с
определения линейной скорости Уг ц гусеничных
цепей в зависимости от частоты вращения ядв
коленчатого вала двигателя при использовании
различных передач в трансмиссии:
Ы,к8т 8§,Р,.кН
Рис. 4.4.7. Ходовая характеристика машины
с гусеничным водоходным движителем
РАСЧЕТ ПЛАВАЮЩИХ МАШИН
565
уг.ц =гвк'глдв /(б0/тр/), (4.4.1)
где ^^ - число зубьев ведущего колеса; /г -
шаг гусеничной цепи; /тр/ - передаточное
число трансмиссии при использовании 1-й
передачи в коробке передач; лдв - частота
вращения коленчатого вала двигателя.
Полученные по формуле (4.4.1)
зависимости для разных передач (I - III)
представляют в нижнем левом квадранте номограммы
(рис. 4.4.7) и используют при расчете
достижимой скорости V движения и мощности N
двигателя^ необходимой для вращения гусениц
с заданной линейной скоростью.
Затем необходимо определить
достижимую скорость движения машины на
спокойной воде фиксированной глубины, учитывая,
что при движении с постоянной скоростью за
счет вращения гусениц их полезный упор Ре
равен буксировочному сопротивлению воды
«в-
Полезный упор гусеничного движителя
можно рассчитать по формуле
Ре=2СРер*-г.„(уг.ц-у)2, (4.4.2)
где Сре - коэффициент полезного упора
движителя; р - плотность воды; Рт ц - условная
площадь гусеничной цепи, равная
произведению ширины трака на длину вытянутой
гусеницы; V - скорость машины.
Коэффициент полезного упора
целесообразно определять, используя
экспериментальные зависимости тяги на швартовах амфибии-
прототипа, по выражению
где Рш - сила тяги на швартовах (полезная
тяга движителя).
Коэффициент полезного упора можно
рассчитать по формулам, которые более точно
соответствуют конкретным конструктивным
схемам. Например, при схемах движителя,
показанных на рис. 4.4.6, бу в, рекомендуется
формула
СРе = 0,0241 - 0,0245 X - 0,045 X2 ,
где X - коэффициент относительной поступи
гусеницы, Х = \/\т ц .
Буксировочное сопротивление воды
можно определить с помощью разных формул,
но лучше использовать такие, в которых
можно учитывать влияние глубины водоема на
сопротивление воды, например:
*б=КНрГч2 , (4.4.3)
где К^ - коэффициент, учитывающий
влияние глубины воды, конструктивных элементов
корпуса и ходовой части на сопротивление
воды; Р - площадь погруженного в воду
поперечного сечения корпуса и ходовой части.
Р = ВцгТср +2^(Г0-Гср),
ТСр - среднее углубление корпуса; То -
осадка амфибии по гусеничному движителю; Ьт -
ширина гусеницы.
Коэффициент Ад может быть рассчитан
по формуле
Кн = Г 0,41еГ0//* - 0,032е"Г0/* 1п(Л / Т0 )) х
х 8ш(а±н/ст(д)),
где А - глубина воды; а - острый угол
наклона нижнего лобового листа корпуса
относительно горизонтали; М/ст(д) ~ Угол
статического (динамического) дифферента амфибии
(**+" при дифференте на корму, "-" при
дифференте на нос); динамический дифферент
используется, если известна его зависимость от
скорости.
Для определения достижимой скорости
движения амфибии за счет вращения
гусеничных цепей в воде следует приравнять
выражения (4.4.2) и (4.4.3) и разрешить это равенство
относительно скорости движения:
Ре = Лб или
2СРеР/г.ц(угц-у)2=^л/'у2.
Тогда
V = V^.ц/(1 + V"^Т/7). (4А4)
где р = 2СреРт ц .
Из выражения (4.4.4) следует также, что
коэффициент относительной поступи гусениц
* = */угц =1/(1 + ^^777).
566
Глава 4.4. ХОДОВАЯ ЧАСТЬ
Рассчитанные по выражению (4.4.4)
скорости движения машины отображаются в
нижнем правом квадранте номограммы (рис.
4.4.7). Если расчеты выполнены для
нескольких глубин к воды, то проводятся несколько
зависимостей V от Уг ц .
В правом верхнем квадранте
номограммы строятся графические зависимости
полезного упора Ре гусеничного движителя в
функции скорости при различных частотах
вращения двигателя и кривая буксировочного
сопротивления воды Р^. Возможно
отображение нескольких кривых сопротивления
воды, каждая из которых соответствует
определенной фиксированной глубине воды.
Точки пересечения линий Ре и В$ -
искомые скорости движения машины, которые
должны при правильном выполнении расчетов
соответствовать значениям скоростей,
приведенным в правом нижнем квадранте.
На этом заканчивается расчет и
построение основных элементов ходовой
характеристики амфибии.
В левом верхнем квадранте номограммы
ходовой характеристики приводятся
зависимости мощности Nп двигателя в функции
частоты лдв его вращения, которая может
быть подведена к гусеницам амфибии, и
зависимости мощности Мт ц , потребной для
вращения гусениц в возможном диапазоне ее
линейных скоростей при использовании
различных передач в трансмиссии.
Для расчета эффективной Лге ,
свободной N(.11 и подводимой к гусеницам N^^
мощностей можно использовать различные
формулы. В частности, если известна
максимальная эффективная мощность Nетаx
двигателя и соответствующая ей частота вращения
/1дг вала двигателя, то зависимость
эффективной мощности Ме от частоты вращения
/1 вала двигателя может быть получена по
известной формуле:
для карбюраторных двигателей
Nе =
шах
для четырехтактных дизелей без
корректора
™е = ™етах х
х\023п/п„ +1^б(/|//1лг)2-1,09(/|/ллг)31.
При выполнении мощностных расчетов
необходимо учитывать, что часть мощности
затрачивается на работу дополнительного и
навесного оборудования двигателя. Известно,
что эти затраты в зависимости от типа системы
охлаждения могут достигать 20 ... 30 %
мощности двигателя. Расчет мощности двигателя,
затрачиваемой суммарно на работу
дополнительного и навесного оборудования, можно
выполнять по формулам:
при использовании эжекционных систем
охлаждения
^м.у = СЛГетах (/1/Л*) ;
при использовании вентиляторных
систем охлаждения
^м.у =СЫет2Х[п1пн) ,
где С - коэффициент для вентиляторных
систем охлаждения С = 0,15 ... 0,30, для
эжекционных систем охлаждения С = 0,13 ... 0,25.
Тогда свободная мощность двигателя,
которая может быть направлена потребителям,
После определения свободной мощности
двигателя при разных его частотах вращения,
зная кинематическую схему трансмиссии,
можно известными способами найти КПД
трансмиссии г)тр на различных передачах в
коробке передач и вычислить мощность,
непосредственно подводимую к гусеницам:
-*^п = ^свЛтр-
Для расчета затрачиваемой на вращение в
воде гусениц мощности можно использовать
формулу
#г.ц =2С^р/г.ц(уг.ц-у) ,
где Су - коэффициент мощности.
При этом следует учитывать, что
мощность ^г.ц расходуется на преодоление всех
видов потерь (механических и
гидравлических), которые сопровождают работу гусениц в
жидкой среде, а также на выполнение
полезной работы - создание силы тяги.
Если опытные данные по затратам
мощности на вращение гусениц в воде отсутствуют,
то коэффициент мощности можно
ориентировочно найти из выражения
РАСЧЕТ ПЛАВАЮЩИХ МАШИН
567
С# = 0,142 - 0,087 X - 0,034 \2 ,
которое дает вполне удовлетворительные
результаты при расчетах коэффициентов
мощности гусеничного движителя с
гидродинамическими кожухами.
! Сопоставление (в левом верхнем
квадранте рис. 4.4.7) располагаемой мощности
ЛГЛ и потребной ^гц позволяет оценить
правильность использования мощности
двигателя на той или иной передаче в коробке
передач, предельную частоту работы двигателя на
разных передачах и целесообразность
изменения передаточного числа трансмиссии, если
располагаемая мощность двигателя полностью
не используется, и за счет этого несколько
увеличить скорость движения плавающей
машины по воде.
Кроме ходовой характеристики для
оценки способности машины работать на воде
необходимо рассчитать и построить диаграмму
управляемости, с помощью которой можно
определить диаметр поворота и угловую
скорость на установившейся циркуляции. Для
этого можно использовать безразмерную
диаграмму управляемости, представленную на
рис. 4.4.8. По оси абсцисс даются значения
безразмерного поворачивающего момента
Миов в виде отношения поворачивающего
момента, создаваемого рулевыми
устройствами, к произведению веса машины на ее длину
по ватерлинии. По оси ординат в верхней
части графика даются значения
относительного диаметра циркуляции Б на
установившейся циркуляции в виде отношения
диаметра циркуляции к длине машины по
ватерлинии, а в нижней - относительной угловой
скорости Ш поворота в виде отношения
произведения угловой скорости на длину машины
по ватерлинии к ее скорости прямолинейного
движения перед входом в поворот.
Каждая зависимость в верхней и нижней
частях диаграммы соответствует
определенному числу Фруда Рг = уп /^%Ь , где уп -
скорость прямолинейного движения перед
входом в поворот; Ь - длина машины по
ватерлинии; % - ускорение свободного падения.
Для использования безразмерной
диаграммы управляемости необходимо
предварительно рассчитать поворачивающий момент,
создаваемый рулевыми устройствами амфибии.
У большинства машин с гусеничным
водоходным движителем поворачивающий момент
создается за счет изменения скорости
перематывания одной из гусениц. Если одна из
гусениц полностью отключается от двигателя, то
поворачивающий момент Мп ов= 0,5 Ре Вк ,
где Ре - упор одной гусеницы при заданной
линейной скорости или частоте вращения;
Вк - ширина колеи машины. Если
механизмы поворота амфибии обеспечивают разные
линейные скорости гусениц, то
поворачивающий момент Мп ов= 0,5 ( Рл - Рп ) Вк , где
Рл и Рп упоры соответственно левой и
правой гусениц перед входом в поворот.
Затем определяются значения
относительного поворачивающего момента и
отмечаются на горизонтальной оси диаграммы (рис.
4.4.8); от них восстанавливаются
перпендикуляры до пересечения с линиями
относительных диаметров и угловых скоростей поворота,
соответствующих предварительно
рассчитанным числам Фруда.
Располагая значениями относительных
диаметров поворота и угловых скоростей
можно построить диаграмму управляемости в
размерном виде (рис. 4.4.9): ^ = /(/1дв) и
<йу =Г(у). С помощью безразмерной
диаграммы управляемости можно решать
обратные задачи. Например, рассчитать требуемый
относительный поворачивающий момент по
Рис. 4.4.9. Диаграмма управляемости
568 Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
заданному диаметру циркуляции. Затем
получить требуемый суммарный поворачивающий
момент рулевых устройств и под него
разработать рулевые устройства.
Следует отметить, что предлагаемая
методика расчета параметров установившейся
циркуляции плавающих машин является новой
и требует проверки ее достоверности, в том
числе на новых образцах машин. Возможно по
мере накопления опытных данных
безразмерная диаграмма управляемости потребует
уточнений. На диаграмме штриховыми линиями
показаны некоторые зависимости,
рассчитанные с использованием ограниченного
экспериментального материала.
Диаграмму управляемости целесообразно
дополнить графическими зависимостями,
характеризующими разгон, свободный выбег и
процесс торможения амфибии, а также
диаграммами остойчивости. Совокупность
перечисленных зависимостей в сочетании с
ходовой характеристикой и диаграммой
управляемости позволяет оценить способность
амфибии работать на водном участке местности при
заданных его параметрах.
Глава 4.5
ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ
4.5.1. СИСТЕМЫ ПОДГОТОВКИ МАШИНЫ
К ДВИЖЕНИЮ ПРИ НИЗКОЙ ТЕМПЕРАТУРЕ
Эксплуатация гусеничных транспортно-
тяговых машин в экспериментальных условиях
и особенно при низкой температуре
окружающего воздуха сопряжена с определенными
сложностями. Прежде всего затруднен пуск
двигателя, а продолжительность подготовки
машины к движению увеличивается.
Вследствие охлаждения и загустевания смазочного
материала резко повышаются потери
мощности в агрегатах и возрастает сопротивление
движению. При низкой температуре
ухудшаются эксплуатационные свойства топлива,
рабочих жидкостей и смазочных материалов,
резинотехнических изделий и ряда
конструкторских материалов, что приводит к снижению
надежности машины и показателей ее
эффективности.
Наибольшую сложность в эксплуатации
представляет пуск двигателя, поскольку
многоцелевые машины хранятся, как правило, в
неотапливаемых помещениях или на открытых
площадках.
При низкой температуре воздуха пуск
двигателя ухудшается по следующим
причинам. Вследствие поступления в цилиндры
холодного воздуха в конце такта сжатия воздух
(или рабочая смесь) нагревается меньше.
Чтобы довести температуру смеси до
воспламенения, необходимо увеличить минимальную
пусковую частоту вращения /1,^ (кривая 7,
рис. 4.5.1) по сравнению с условиями,
характерными для теплого времени года.
Фактическая частота вращения, обеспечиваемая
пусковой системой, с понижением температуры,
наоборот, падает (кривая 2)> что объясняется
увеличением момента сопротивления
прокручиванию из-за загустевания смазочного
материала и падения емкости аккумуляторной
батареи (или снижения давления воздуха в
пневматической системе пуска). Поэтому пуск
двигателя возможен только при температуре
воздуха не ниже 1\, т.е. когда фактически
реализуемая частота вращения больше
минимально необходимой для пуска.
-и -зо -и -ю о и°с
Рнс. 4.5.1. Характеристик* условий пуска двигателя
Для дизелей температура холодного
пуска обычно не превышает -10 °С, для
карбюраторных - несколько ниже (-25 °С). Дизели с
наддувом надежно пускаются лишь при
положительной температуре. Это обусловлено тем,
что степень сжатия у них ниже и условия для
самовоспламенения создаются при
повышенных частотах вращения.
Чтобы улучшить пусковые свойства
двигателя, прибегают к реализации мер,
направленных, с одной стороны, на снижение
момента сопротивления прокручиванию
применением загущенных моторных масел (кривая
2\ рис. 4.5.1), обладающих хорошими
вязкостно-температурными характеристиками (у
которых вязкость с падением температуры
повышается менее интенсивно, чем у обычных
масел), а с другой, - на улучшение условий
воспламеняемости топлива. Последнее
достигается применением сортов топлива с
наличием в их составе легких фракций,
воспламеняющихся при более низкой температуре
(кривая /', рис. 4.5.1).
Для улучшения пусковых свойств
двигателей в конструкциях гусеничных машин
используют в основном технические решения,
обеспечивающие:
хорошее воспламенение рабочей смеси
путем добавок в начальный момент в топливо
специальных пусковых жидкостей (табл. 4.5.1).
Этот способ применяется лишь для
экстренного пуска в аварийных ситуациях, поскольку
прокручивание ^холодного двигателя
увеличивает износ трущихся пар;
СИСТЕМЫ ПОДГОТОВКИ К ДВИЖЕНИЮ
569
4.5.1. Состав пусковых жидкостей, %
Карбюраторные двигатели
Серый эфир
Газовый бензин
Изопропил нитра|г
Противозадирные присадки
АнтиокислительнЦе
присадки
Содержание, %
45 ... 60
35 ... 55
1 ... 5
2
0,5 ... 1,0
Дизели
Диэтиловый эфир
Изопропил нитрат
Турбинное масло с
присадками савола (1 %) и ионола
(1%)
Перолатный эфир
Содержание, %
60
15
10
15
подогрев воздуха во впускном
трубопроводе путем сжигания в нем небольшого
количества топлива и повышения температуры
рабочей смеси;
использование аккумуляторных батарей с
внутренним электрообогревом, ибо при
низкой температуре емкость батарей уменьшается
и при температуре -30 °С она практически
становится равной нулю;
предварительный подогрев двигателя с
помощью предпускового подогревателя,
работающего, как правило, на том топливе,
которое используется для двигателя.
При использовании пусковой жидкости
ее необходимое количество, см3,
С = к Р Ук ,
где к - коэффициент, учитывающий
конструктивные особенности двигателя; / -
предполагаемая температура воздуха, °С; Р/, - рабочий
объем двигателя, л; п - опытный
коэффициент.
При подогреве воздуха во впускном
коллекторе для определения количества
сжигаемого в нем топлива ^^а^ используют зависи-
2
мосты
Увк — *вк *т (*ов ~ 'о/ птш *к »
где кж - опытный коэффициент; с,. -
теплоемкость топлива; /ов - /0 - разность температур
наружного воздуха в экстремальных и
обычных условиях; /1щш - минимальная пусковая
частота вращения вала двигателя, мин '
Средства облегчения холодного пуска
используют лишь при температуре до -30 °С.
При более низкой температуре для
обеспечения надежного пуска двигателя применяют
предпусковой подогреватель, который
позволяет прогреть охлаждающую жидкость до
рабочей температуры, т.е. поднять температуру
всех основных зон двигателя. В результате
разогревается масло, т.е. снижается момент
сопротивления прокручиванию коленчатого
вала, повышается температура выпускного
воздуха, проходящего по разогретому
выпускному коллектору. Таким образом, отклонение
пусковой частоты и частоты воспламенения от
обычных значений становится не таким
существенным и пуск осуществляется при более
низкой температуре.
5 6
10 9 8 7 Ч^->
Рис. 4.5.2.Схема системы подогрева двигателя:
1 - насосный агрегат; 2 - подогреватель ПЖД-600И; з - масляный бак; 4 - распределитель; 5 - двигатель;
6 - трубопровод обогрева масла; 7- топливный заборный бачок ЭЦН; 8, 9 - фильтры;
10 - электромагнитный клапан
570 Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
4.5.2. Характеристик* предпусковых подогревателей
Показатели
Теплопроизводите-
льность, кВт
кг/ч
Расход
электроэнергии, Вт/ч
Время разогрева
двигателя до
температуры 60 °С
при температуре
воздуха -40 °С,
мин
ПЖБ-12
11,6
1,6 ... 2
15 ... 20
20 ... 25
ПЖБ-22
16,25
2 ... 3
30 ... 40
25 ... 30
ПЖД-14
44,08
4 ... 6
300...310
25 ... 30
ПЖД-600
75,4
10 ... 12
400...420
25 ... 30
АТ-Л
22,04
2,9...3,8
20 ... 25
35 ... 40
НИКС-1
37,12
6,5...7,0
Менее
300
Менее
40
АТ-Т
34,8
6 ... 6,5
Менее
300
60 ... 90
Устройства для подогрева охлаждающей
жидкости достаточно сложны и работают
надежно при условии автоматизации ряда
процессов при работе этих устройств. На рис.
4.5.2 показана схема системы
предварительного подогрева для двигателя машины
промежуточной весовой категории.
Следует отметить, что мощность
(производительность) систем предпускового
подогрева зависит от массы двигателя, т.е. от его
номинальной мощности.
В табл. 4.5.2 приведена характеристика
предпусковых подогревателей шасси машин
наиболее распространенных весовых
категорий.
4.5.2. СИСТЕМЫ ОБЕСПЕЧЕННОСТИ УСЛОВИЙ ТРУДА
Системы создания микроклимата в
корпусе и кабине должны предотвращать
попадание влаги или пыли и обеспечивать требуемую
рабочую атмосферу в отсеках. Пылезащищен-
ность достигается надежной герметизацией
отделений корпуса, в которых работают люди,
и установкой агрегатов, подающих очищенный
воздух в эти отделения.
Степень уплотненности кабин или
кузовов оценивается избыточным давлением в
закрытой кабине при различной подаче в нее
воздуха под давлением.
В зависимости от степени
уплотненности, или суммарной (эквивалентной) площади
Р неуплотненных мест, избыточное давление
при одинаковой подаче воздуха будет разным.
Чем меньше щелей, отверстий, чем больше
неуплотненных проемов, тем выше
избыточное давление, и наоборот. Обычно задано
(нормативное) избыточное давление при
постоянной подаче воздуха 100 ... 150 м3/ч.
Между эквивалентной площадью Г
неуплотненных мест и избыточным давлением Ар
существует зависимость:
6
0,36цв>/2$Д/>/рв '
где ^ - подача воздуха в кабину (объемный
расход нагнетаемого воздуха), м3/ч; цв -
коэффициент расхода воздуха, определяемый
опытно для различных типов кабины, обычно
цв = 0,45 ... 0,65 м°«5/с; рв - плотность
воздуха, г/м3 (для нормальных условий 1,205 кг/м3).
Согласно этому условию задается и
реализуется степень уплотненности кабин и
отделений корпусов.
Для осуществления вентиляции и
очистки воздуха, подаваемого в кабину или кузов,
применяют специальные фильтро-
вентиляционные установки (ФВУ). В зависимости от
объема кабины или кузова производительность
ФВУ разная. ФВУ выполняет две функции:
создает избыточное давление в
обитаемых местах, предотвращая тем самым подсос
пыли через неуплотненные места;
при необходимости работает как фильтр,
подавая в отсеки очищенный от пыли воздух.
Схема работы ФВУ показана на рис.
4.5.3: а- в режиме вентиляции, б - в режиме
фильтрации. Когда нужно только подать
воздух в корпус, отделение фильтрации 7,
перекрывается (рис. 4.5.3, а) и воздух, очищаясь
только в циклонах 2, направляется
непосредственно в кабину (кузов) через воздуховоды 3.
Если необходимо осуществить очистку
воздуха от пыли, то канал 4, связывающий
отделение циклонов с воздуховодом,
перекрывается» обеспечивается прохождение воздуха из
циклонов к фильтрам, а затем к воздуховоду 3
(рис. 4.5.3, б). При этом как в первом, так и
во втором случае очищенный воздух может
быть направлен или сразу в корпус (кабину)
или в средства нормализации теплового
состояния (подогреватель или кондиционер).
Основные параметры применяемых на
транспортно-тяговых гусеничных машинах
фильтро-вентиляционных установок
приведены в табл. 4.5.3.
СИСТЕМЫ ОБЕСПЕЧЕНИЯ УСЛОВИЙ ТРУДА
571
Рис. 4.5.3. Схема работы ФВУ
4.5.3. Основные показатели ФВУ
Показатели
Тип нагнетателя
Фильтр
Производительность ФВУ, м3
Подпор в режиме фильтрации
особо легкая
ВНСЦ-100
ФПТ-200М
100
25
Категория машин
легкая
ВНСЦ-100
(ВНСЦ-200)
ФПТ-200М
100 (200)
20 кгс/м2
промежуточная
средняя
Комбинированный
ФПТ-200М
200
35
ФПТ-200М
200
25
ФВУ обычно не рассчитывают, а
подбирают из имеющихся по близкой
производительности к реализуемому избыточному
давлению (подпору).
Для подогрева воздуха в зимнее время во
всех гусеничных машинах предусматривается
система отопления, как правило, автономная,
не связанная с работой основного двигателя.
На некоторых машинах особо легкой весовой
категории используется радиаторная система
отопления (типа автомобильной), при этом
устанавливаются два отопительных контура: в
кабине и кузове.
Автономные отопители - наиболее
эффективные, экономичные (для своей работы
не требуют пуска двигателя). Наибольшее
распространение в качестве отопительной
установки получила отопительно-вентиляционная
установка ОВ-65Г.
Существует несколько типов
отопительных установок, использование которых
отдельно или в сочетаниях позволяет обеспечить
отопление обитаемых отсеков различного
объема. Их основные данные приведены в
табл. 4.5.4.
572 Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
4.5.4. Основные
Показатель
Теплопроизводительность,
кВт, не менее, на режиме:
полном
частичном
Нагрев воздуха, °С
Количество подогреваемого
воздуха, м3/ч, на режиме:
полном
частичном
Применяемое топливо при
температуре воздуха, °С:
выше 0
0 ... -30
ниже -30
! показатели отонительно-вентиляционных установок
015
1500
-
80
75
-
озо
2590
-
80
120
-
Автомобильный бензин
То же
и
ОВ65-Г
5600
3440
95
220
150
ОВ95
8100
5180
65
500
300
Дизельное летнее
Дизельное зимнее
Дизельное арктическое или
керосин
Для нормализации температуры в летнее
время применяют кондиционеры. Наибольшее
распространение получили кондиционеры
компрессионного типа, работающие на
различных хладагентах (фреоне, хладоне). Однако
объем кабины или корпуса охлаждается только
за счет циркуляции охлажденного в
кондиционере воздуха, а рабочий персонал обдувается
холодным воздухом под значительным
напором, что способствует возникновению
простудных заболеваний, несмотря на общую
высокую температуру.
Более перспективным является
кондиционер термоэлектрического типа (рис. 4.5.4).
Основой его служит термоэлектрический
генератор 2, который в зависимости от полярности
источника питания может вырабатывать или
теплоту, или холод. К генератору подключены
три жидкостных контура: основной контур
радиационного теплообмена, состоящий из
насоса 1 и панелей 4 и 3 радиационного
теплообмена; контур конвективного теплообмена
с насосом 10 и радиаторами 7 и 9,
обдуваемыми вентиляторами; вспомогательный контур с
насосом 8 и теплообменниками 5 и б,
предназначенный для отвода теплоты от генератора
2. Преимуществом кондиционера
термоэлектрического типа является то, что основная часть
его холодопроизводительности приходится на
контур радиационного теплообмена, а контур
конвективного теплообмена служит лишь для
постоянного "освещения" воздуха. В итоге
достигаются лучшие микроклиматические
условия работы людей.
Техническая характеристика некоторых
термоэлектрических кондиционеров приведена
в табл. 4.5.5.
Характеристика подтверждается при
температуре окружающей среды -50 ... +50 °С и
относительной влажности 50 %. В качестве
хладагента используется антифриз (вода), срок
службы кондиционеров 15-20 лет.
Расчет кондиционера любого типа, в том
числе термоэлектрического, базируется на
тепловом балансе объема, который подлежит
термостабилизации. Уравнение теплового
баланса в общем виде
Хб/=о,
Рис. 4.5.4. Принципиальная схема кондиционера
термоэлектрического типа
где @у - количество подводимой или
отводимой теплоты.
ЛЕБЕДКИ. ТЯГОВО-СЦЕПНЫЕ УСТРОЙСТВА
573
4.5.5. Техническая характеристика термоэлектрических кондиционеров типа ТЭК
Параметры
Холодопроизводительность, кВт
Теплопроизводительность, не менее,
кВт
Расход воздуха вспомогательного
контура, м3/ч
Расход воздуха рабочего контура, м3/ч
Расход теплоносителя рабочего контура,
л/ч
Расход теплоносителя вспомогательного
контура, л/ч
Размеры сердцевины радиатора
рабочего контура, м1
Размеры сердцевины радиатора
вспомогательного контура, м1
Напряжение, В
Потребляемая мощность, кВт
Масса, кг
1
3
3
5000
1400
4500
4500
0,16 х0,4 х0,07
0,3 х 1,0 х 0,04
12; 24 (220)
4000
120
2
6
6
5000
1500
5000
5000
0,24 х 0,6 х 0,07
0,35 х 1,0 х 0,07
12; 24 (220)
8000
180
3
9
9
6000
2000
6000
6000
0,32 х0,6 х0,18
0,4 х 1,0 х0,13
12; 24 (220)
12000
230
1 Высота х ширина х глубина
Тепловой баланс кабины определяется
количеством теплоты, выделяемой от людей в
кабине ^ч^ количеством теплоты,
поступающей через прозрачные ограждения Спо (от
солнечной радиации) и непрозрачные
ограждения Снп.о; тепловыделениями от двигателя
Одв> трансмиссии 0пл и находящихся в
кабине узлов гидрооборудования Огдр и
электрооборудования Оэл> а также количеством теп-
лопоступающей вместе с воздухом Свнт>
подаваемым вентилятором. Очевидно, что условие
теплового баланса выполняется в том случае,
если тепловые потоки, поступающие в кабину,
равны потокам, выводимым из нее, главным
образом через кондиционер 0К.
Таким образом,
Хб/ = & + бп.о + Си™ + бдв + е™ +
+ Сгдр + Сэл + Свнт + йс
Следует отметить, что слагаемые
теплового баланса учитываются алгебраически, т.е. с
положительным знаком при выделении
теплоты в кабину и с отрицательным - при отводе
теплоты из нее наружу.
Приведенное уравнение теплового
баланса позволяет определить
холодопроизводительность Ск кондиционера и по этой
величине рассчитать параметры кондиционера.
4.5.3. ЛЕБЕДКИ. ТЯГОВО-СЦЕПНЫЕ УСТРОЙСТВА
Транспортно-тяговые гусеничные
машины, как правило, имеют тяговые лебедки,
предназначенные для самовытаскивания
машины, подтягивания различных грузов и
техники, а также для преодоления
труднопроходимых участков местности при движении с
прицепами. Наличие лебедки позволяет
получить силу на тросе, значительно
превосходящую силу на крюке по условию сцепления с
грунтом. В зависимости* от весовой категории
на многоцелевых гусеничных машинах
устанавливают лебедки двух типов:
с тяговыми барабанами, обычно на
машинах с общей массой до 18 т;
с тяговыми роликами, на машинах,
предназначенных для выполнения тяговых
работ с силой более 100 кН.
Как, правило, на лебедку передается вся
мощность двигателя. Поэтому привод к ней
делается или непосредственно от двигателя,
или от трансмиссии через коробку отбора
мощности.
Кинематическая схема привода и лебедки
легкого транспортера-тягача (типичная для
транспортно-гусеничных машин этого класса)
с тяговыми барабаном показана на рис. 4.5.5.
Основными узлами лебедки являются
червячный редуктор 8 с барабаном 9, реверсионный
редуктор 3 и предохранительное устройство,
состоящее из датчика перегрузок 10,
механически связанного системой тяг и рычагов с
включателем магнитной муфты 4. Привод
лебедки осуществляется от промежуточного
редуктора 1. В приводе имеется автоматический
тормоз 5, срабатывающий в аварийных
случаях. Узлы лебедки соединяются друг с другом
карданными валами 2, 7 и упругой муфтой 6.
574 Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
11 12
Рис. 4.5.5. Кинематическая схема лебедки МТ-ЛБ
Наличие самоустанавливающихся вывод- Максимальная потребляемая мощность
ных направляющих роликов 11 позволяет для привода лебедки
осуществить эвакуационные и другие работы
при значительных углах отклонения троса 12
^Чтах ^*бп
от продольной оси транспортера-тягача (в Поскольку вьщача троса осуществляется под
горизонтальной и вертикальной плоскостях).
Исходной для расчета лебедок является
задаваемая максимальная сила тяги на тросе
углом, то его расчет проводят по формуле
<те = ар + аи ,
Рт щах. Обычно
Лтах = (0,8+1,2)(7Т,
где О т - вес транспортера-тягача без груза.
Средняя скорость наматывания троса
определяется по формуле
*ср
- я Лб />Ср >
где «6 - частота вращения тягового барабана;
обычно /1б = (0,01 + 0,014) мин*1; /)ср -
средний диаметр барабана с намотанным тросом.
Расчетное число подтягиваний лебедки
принимают 100 - 150, расчет ведут на макси-
где (Те, ар, аи - напряжения соответственно
суммарные, растяжения и изгиба.
При этом
Р
■ нр*
аи=СЕ-
Лшп+'т
где Р - площадь поперечного сечения троса; С
- коэффициент Баха, С = 3/8; Е - модуль
мальную силу тяги. Максимальный крутящий упругости, Е = 2 • 105 МПа; Л - диаметр про-
момент на валу барабана лебедки
Р Б
\м _ л ттах^тах
^бтах " >
2Л„Р
где Дпах - максимальный диаметр
наматывания троса на барабан; г|нр - КПД
направляющих роликов; Т|н = 0,95 ... 0,97.
волоки троса; И
минимальный диаметр
барабана (без троса); с^ - диаметр троса.
Запас прочности Кт троса определяется
как отношение
Кт = ар / ах >
где ар - напряжение в тросе при разрыве.
Основные параметры лебедок приведены
в табл. 4.5.6.
ЛЕБЕДКИ. ТЯГОВО-СЦЕПНЫЕ УСТРОЙСТВА
575
4.5.6. Основные параметры лебедок гусеничных транспортеров-тягачей
Параметры
Тип лебедки
Сила тяги на тросе, кН
Тип привода
Скорость наматываний (в числителе)
и выдачи троса (в знаменателе),
м/мин
Рабочая длина троса, м
Диаметр троса, мм
Ограничитель силы на тросе
Тросоукладчик
Тип редукторов
Привод к сборному барабану
АТ-ЛА
МТ-Л
С вертикальным
расположением тягового барабана
и червячным редуктором
65 1 70
1
Червячный глобоидальный
10
10
50
14
Муфта
шарикового
типа с
томатическим
отключением при
перегрузке
-
Глобоидальный
червячный,
цилиндрический и
конический
реверс
15
15
50
17
Торсионный вал с
датчиком и
злектромаг-
' нитная
отключающая
муфта
-
Глобоидальный
червячный с /=
=40,
конический
реверс с /=
=2,5; с /=
=0,97
АТС-59
АТ-Т
С горизонтальным
расположением тяговых
роликов, зубчатым редуктором
и укладочным барабаном
150 1 200 ... 250
1
Зубчатый
1ш
15,07
100
20,5
Муфта
шарикового
типа с
томатическим
отключением
лебедки при
перегрузке
1Л
23,1
100
28
Пружина с
рычагом и
электромеханическим
отключением лебедки
при
перегрузке
Винтовой с замкнутой
резьбой
С
коническими
колесами
реверса,
цилиндрическим и
планетарным
зубчатыми
рядами
Однодиско-
вый
фрикцион
Конический
с / = 1; 2,78
и
двухступенчатый
понижающий с / =
= 13,2
Однодиско-
вый
фрикцион
Тягово-сцепные устройства у гусеничных
машин такие же, как у полноприводных
автомобилей. Их выбор производится
применительно к общей массе машины. К основным
деталям тягово-сцепного устройства относятся
тяговый крюк 1 (рис. 4.5.6), накидная скоба 2
с защелкой 3> обойма 4 пружины, пружина 5,
упор б, амортизатор 7, упорная шайба 8 и
гайка 9. Накидная скоба с защелкой
обеспечивают замыкание сцепной петли буксируемого
прицепа. Амортизирующими элементами
служат остальная цилиндрическая пружина 5 и
резиновый амортизатор 7, состоящий из
набора резиновых и металлических шайб.
При буксировке прицепа, когда
действует нагрузка, .пружина работает на протяжении
полного рабочего хода тягового крюка, а
резиновый элемент вступает в действие через
25 мм хода крюка. При накате прицепа оба
амортизирующих элемента вступают в
действие одновременно. Рабочий подрессоренный
ход тягового крюка вперед при накате, равный
30 мм, ограничен скобой 70, жестко
прикрепленной к кормовой балке корпуса. Ход назад
(при буксировке прицепа) равен 55 мм.
Наличие комбинированной системы
амортизации обеспечивает снижение
динамических нагрузок в сцепке и повышение изно-
576 Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
у"'ууу'///'^';'у>;''гг*
Рис. 4.5.6. Тягово-сцепное устройство
состойкости пары крюк - петля. Для защиты
от попадания воды в корпус транспортера
через тягово-сцепное устройство имеются два
войлочных сальника, вложенных в кольцевые
канавки кронштейна рамы и в обойму
пружины. Для смазывания, тягово-сцепного
устройства служит масленка.
4.5.4. СИСТЕМЫ
АВТОНОМНОГО ЭЛЕКТРОСНАБЖЕНИЯ
На транспортно-тяговых машинах может
монтироваться различное оборудование,
работу которого необходимо обеспечивать
автономной (собственной) системой
электроснабжения как постоянного, так и переменного
тока промышленной частоты.
Использование основного (тягового)
двигателя машины в качестве привода
генераторов в этих случаях технически и
экономически нецелесообразно.
Это привело бы к неоправданному
расходу моторесурса основного двигателя и
большим эксплуатационным расходам.
В качестве силовых установок систем
автономного электроснабжения в зависимости от
предъявляемых к ним требований, применяют
малогабаритные карбюраторные, дизельные
или газотурбинные двигатели.- Последние
используют для сравнительно мощных (50 ... 100
кВт) систем и размещают внутри грузовых
отделений (корпусов) машин. Менее мощные
силовые установки (до 20 кВт) размещают
снаружи машин, обычно в кормовой части
кузова (ранцевым способом). Они не
занимают полезного объема кузова и значительно
снижают уровень шума внутри обитаемых
отделений.
Для повышения надежности работы
систем энергоснабжения в особо ответственных
случаях предусмотрено дублирование приводов
источников электроэнергии, например, двумя
автономными приводами: основным
газотурбинным, обеспечивающим работу всех
потребителей на ходу и на стоянке, а также отбор
мощности на тот же генератор от тягового
двигателя через редуктор привода; резервным
(дублирующим) при работе на стоянке
машины.
Электрическая схема машины
предусматривает возможность работы аппаратуры от
внешнего источника.
Ниже рассмотрен вариант системы
автономного электроснабжения постоянного тока с
преобразованием части электрической энергии
в переменный ток стабилизированного
напряжения и частоты (рис. 4.5.7). В качестве
источника постоянного тока предусматривается
установка сдвоенного индукционного
генератора ГИСВ 2-25/4000 со встроенными
выпрямительными устройствами в комплекте с
аппаратурой автоматического регулирования
напряжения, устройством ограничения
токовой нагрузки, отдаваемой генератором при
работе потребителей в пиковых режимах и
защиты генератора от токов короткого
замыкания, конструктивно выполненных в блоке
регулятора напряжения.
Источник электроэнергии постоянного
тока - генератор ГИСВ 2-25/4000 - состоит из
двух индукторных, снабженных
выпрямительными устройствами 5-В1 и 5-В2, генератором
5-М1 и 5-М2, включенных последовательно и
конструктивно выполненных в одном блоке.
Исполнение генератора со средней точкой,
соединенной с корпусом, дает возможность
получения постоянного тока напряжением
28,2 и 57 В.
Две группы аккумуляторных батарей Б1-
Б2 и БЗ-Б4 соединены последовательно,
средняя точка которых выведена на корпус
машины. Такое соединение обеспечивает
раздельный заряд каждой группы аккумуляторных
СИСТЕМЫ АВТОНОМНОГО ЭЛЕКТРОСНАБЖЕНИЯ
577
Тяговый
двигатель
ГИСВ7-25)'4000
"И
Раздаточная
коробка
СОТ
Б0Т\
К(1
И5-/01) Д15-/ГД)
5-В1
РН-24
Т У Т Т
477//
\БЗ\В4
1Л-
5-В2
I I
РСГ
Г""
"V
4-РН2
БД-24
РВП
\В1\В2
Щиток правый
ГП-рКМ
К нагрузке
-200 В
400 Гц
ШРА-200
ЕК-М
-200 В 1
400 Гц
6КМ12
*27,5
= 200 В
400 Га
Рис. 4.5.7. Схема автономного электроснабжения
батарей со своей половины генератора, по
отношению к которой они включены
параллельно. Ротор генератора через раздаточную
коробку приводится во вращение от ГДТ или
тягового двигателя.
Включение и отключение постоянного
тока, аварийное отключение генератора, пуск
и остановка ГТД производятся со щитка
приборов в отделении управления. Включение
постоянного тока производится с пульта
электрика.
Для регулирования напряжения
генератора ГИСВ 2-25/4000, имеющего две
независимые магнитные системы и обмотки
возбуждения, служит регулятор напряжения РН-24,
выполненный в виде сдвоенного регулятора,
содержащего два одинаковых и независимых
друг от друга устройства автоматического
регулирования (4-РН1 и 4-РН2). Изменяя силу
тока в обмотках возбуждения генератора,
регулятор напряжения обеспечивает высокую
стабильность напряжения в системе при
изменении нагрузки или частоты вращения
генератора.
Добавочный блок БД-24 служит для
подготовки включения генератора ГИСВ 2-
25/4000 к цепям нагрузки, его аварийного
отключения по команде со щитка приборов и
включения сигнализации работы генератора по
выдаче соответствующего сигнала от РН-24.
Функцией является также обеспечение
необходимых блокировок при пуске БП-114 и ГТД.
Включение преобразовательного блока
БП-114 осуществляется только с пульта
электрика. При этом напряжение 220 В, 400 Гц,
поступает на распределительную коробку и
через контактное устройство ВКУ к
потребителям тока. Блок аппаратуры преобразователя
БА-114 обеспечивает высокую стабильность
частоты и величины трехфазного напряжения.
Для этого регулятор частоты, расположенный
в блоке, воздействует на обмотку возбуждения
двигателя преобразователя 1-М1, а регулятор
напряжения - на обмотку возбуждения
синхронного генератора 1-М2. Зарядный ток
плюсовой группы аккумуляторных батарей также
контролируется по вольтамперметру В А-540,
установленному на этом же щитке приборов.
Для количественной оценки физического
состояния системы электроснабжения
применяют приборы измерения и контроля ее
параметров.
Для измерения параметров приводного
двигателя используются:
термоэлектрический термометр ТСТ-2
для измерения температуры выпускных газов
ГТД;
магнитоиндукторный тахометр ТЭ-1 для
измерения частоты вращения ротора.
Для оценки параметров электрических
элементов служат:
вольтметр М4210023 для измерения
напряжения по цепям (+28,5 В, -28,5 В и 57 В),
19 Злк. 1741
578
Глава
4.5. ДС}]
ПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
а также для контроля заряда аккумуляторных
батарей;
счетчик моточасов 228-11 для учета
времени работы преобразователя БП-114.
Приборы контроля установлены на щитке приборов.
В состав коммутационной аппаратуры
подготовки к включению входит контактор
массы (для соединения средней точки групп
аккумуляторных батарей при включении). В
состав коммутационной | аппаратуры
управления приводом открывания и закрывания
заслонок ГДТ и блока охлаждения входят:
электромагниты ЭМ-45 (для управления
золотниками насосной станции привода
заслонок ГТД);
конечные выключатели ПС-35 для
определения конечного положения заслонок ГТД и
обеспечения работы схемы.
Сигнализация предупредительных,
нормальных и аварийных ситуаций
осуществляется при помощи ламп накаливания с
соответствующими, вызванным ситуацией,
светофильтрами, которые установлены на щитке
приборов.
4.5.5. БОРТОВЫЕ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ
СИСТЕМЫ
Бортовые информационно-управляющие
системы (БИУС) предназначены для
выполнения следующих функций (рис. 4.5.8). [1].
Задана контроля режимов
функционирования агрегатов и систем заключается в том,
чтобы предоставить водителю исчерпывающую
информацию о текущих параметрах режима
агрегатов и систем машины при минимальном
отвлечении его внимания от основных
операций управления движением. Оптимальным
вариантом устройства является символьно-
графический дисплей, на экран которого
любая информация выводится по запросу
водителя в удобной для восприятия форме и
приемлемый для просмотра момент.
Процедура запроса текущей информации
в системе водитель- БИУС - машина состоит в
следующем. В условиях штатного протекания
функциональных процессов водитель может
вызвать информацию о текущих параметрах
режима путем нажатия на кнопку "Ввод",
которая в данном случае воспринимается
БИУС в качестве органа ввода запроса текущих
параметров.
Все параметры сгруппированы
отдельными кадрами по функциональному принципу
и выводятся по желанию водителя в цифровой
или аналоговой форме. Выбранный водителем
информационный кадр сохраняется на экране
дисплея до тех пор, пока он не будет заменен
по команде водителя другим кадром, или пока
у БИУС не появится необходимость вывести
на экран дисплея команду или сообщение.
Цифровая форма вывода информации
уместна при необходимости проследить
одновременное изменение относительно большого
количества параметров и при условии, что
водитель может сосредоточить внимание на
экране дисплея.
Во время управления движением или
при других подобных условиях, когда водитель
может только мельком или боковым зрением
отслеживать изменение одного, от силы двух
текущих параметров (обычно это скорость
движения машины и частота вращения
двигателя), приемлема только аналоговая форма
вывода информации.
Следует отметить, что правильно
разработанная бортовая
информационно-управляющая система исключает необходимость
отслеживания водителем параметров машины,
а выводит в необходимых случаях на экране
дисплея лаконичную и однозначно
воспринимаемую рекомендацию или команду. При этом
любое сообщение, рекомендация или команда
на экране дисплея дублируются специальными
цветовыми сигнализаторами, располагаемыми
в поле зрения водителя. Весьма эффективно
речевое дублирование команд.
Автоматическая защита агрегатов и
систем транспортной машины используется с
целью предотвращения аварийных режимов
эксплуатации, а следовательно, для
исключения отказов. Например, автоматическая
защита двигательно-трансмиссионной установки
осуществляется при обнаружении аварийного
режима путем остановки двигателя или
перевода его в режим холостого хода (когда
остановка двигателя может привести к еще более
серьезному отказу). Другие агрегаты и системы
в аварийных режимах, как правило,
блокируются. Системы автоматической защиты,
срабатывающие при превышении выбранных
параметров работы агрегатов над заданными
предельными значениями, просты по реализации,
но не эффективны в эксплуатации.
Эффективность системы автоматической
защиты связана с возможностью оперативного
прогнозирования приближения аварийного
режима. Времени от момента получения такой
информации до наступления аварийного
режима должно быть достаточно для выполнения
полного комплекса противоаварийных
действий. Оперативное прогнозирование
аварийных режимов основано на оценке скорости
изменения соответствующих характеристик
информационных параметров. Время /р/
достижения параметром Р/ заданного порогового
значения для данного информационного
параметра Р/ п определяется следующей
зависимостью:
'р< =
А(,
(4.5.1)
ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ СИСТЕМЫ
579
Функции БИУС
Контроль режимов функционирования агрегатов с выводом информации на
дисплей
Защита в предаварийных режимах с возможностью ввода запрета или задержки
отключения неисправного узла
Регистрация в постоянном запоминающем устройстве характерных параметров
эксплуатации и наработок узлов
Диагностирование технического состояния агрегатов в оперативном и тестовом
режимах
Автоматизация поиска неисправностей с использованием диалогового режима
"БИУС - Водитель"
Автоматизация управления режимами функционирования агрегатов с возможным
запросом санкции водителя
Прогноз остаточного ресурса агрегата и машины в целом по данным регистрации
условий эксплуатации
■*—| Оптимизация режимов функционирования агрегатов
Информационное обеспечение технического обслуживания и ремонта агрегатов и
машины.в целом
Рис. 4.5.8. Основные фунжцн БИУС
где Рп - пороговое значение параметра; Рц -
текущее значение параметра; Рт\ -
предшествующее значение параметра; Д/ - время
между текущим и предшествующим
изменениями параметров.
На рис. 4.5.9 показана функциональная
схема устройства, реализующего описанный
выше способ обработки информационных
параметров и выработки управляющих
воздействий в системе аварийной защиты БИУС.
Генератор тактовых импульсов 7,
подключенный к коммутатору 2 и ОЗУ 3. Выходы
коммутатора 2 подведены на входы ОЗУ Зу
выходы которого подключены к соединенным
последовательно первому арифметическому
устройству АУ1 4 и ключу 5, выход которого
соединен через второе арифметическое
устройство АУ2 6 со схемой сравнения 7.
Одновременно схема сравнения 7 подключена к
ОЗУ Зу соединенного с АУ2.
Генератор тактовых импульсов 1
переключает входные цепи коммутатора 2 с
информацией с датчиков на ОЗУ 3, в котором
производится запоминание двух значений
контролируемых параметров (текущего и
580 Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
Рис. 4.5.9. Функциональная схема устройства обработки информационных параметров
предшествующего) />/ 0 и Р/ _ 1 . Значения этих
параметров затем подаются на АУ1 4, в
котором определяется направление изменения
параметров.
При положительном результате значение
параметра приближается к своему пороговому
значению, сигнал с выхода АУ1 4 открывает
ключ 5 и пропускает измеренные значения
параметров на АУ2 6> в котором происходит
вычисление расчетного времени ^ достижения
контролируемых параметров своего порогового
значения Р{ п по формуле (4.5.1). Полученное
расчетное время 1\ сравнивается с предельным
временем /п 1 для соответствующего параметра
на схеме сравнения 7. В случае, если расчетное
время 1\ какого-либо параметра больше
соответствующего предельного времени /п \у схема
сравнения 7 не подает управляющий сигнал на
исполнительные механизмы. В противном
случае, т.е. при ?1 3 /п ь управляющий сигнал
подается на исполнительный механизм для
вывода системы из предаварийной ситуации.
Общий алгоритм обработки аварийной
ситуации состоит из следующих операций
(рис. 4.5.10).
По мере приближения условного
характерного информационного параметра Р к
заданному пороговому значению Рп время /р,
вычисленное по формуле (4.5.1), уменьшается
до величины /п 1 включения режима
предаварийной обработки; водитель получает на
экране дисплея конкретную рекомендацию,
позволяющую избежать наступления аварийного
режима (информация на дисплее дублируется
цветовым сигналом); величина /п 1 должна
быть достаточно большой, что обеспечивает
водителю возможность принятия решения и
реализацию выданных БИУС рекомендаций;
при этом текст сообщения на экране дисплея
(см. рис. 79) сопровождается таймером,
показывающем время, оставшееся у водителя для
принятия решения и выполнения
рекомендации.
Когда время, вычисленное по формуле
(4.5.1), достигает второй характерной
величину 'п 2 включения автоматической аварийной
обработки, водитель получает предупреждение
о тех действиях, которые БИУС выполнит в
режиме аварийной защиты; предупреждение
сопровождается таймером и дублируется
цветовым сигнализатором; в этой ситуации
предусматриваются три варианта реакции
водителя (см. рис.. 4.5.10):
подготовиться к выполнению
БИУС его автоматической функции
защиты, имея ввиду возможное
исключение нежелательных
последствий, связанных с дорожной
обстановкой;
путем нажатия кнопки "Ввод",
которая воспринимается в этом
случае БИУС как команда водителя
"Запрет", приостановить
выполнение процедуры автоматической
аварийной защиты на все время
удержания кнопки "Ввод" во
включенном состоянии (в случае
неблагоприятной для остановки машины
дорожной ситуации);
включить режим "Отмена
защиты".
В любом из перечисленных трех случаев
и если параметры агрегатов и систем машины
выходят за пределы, заданные соответству-
ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ СИСТЕМЫ
581
Запрос
информации
( ПредельныеЛ
V датчики ]1
!
I АналоговыеД-
V датчики у
Запрет
Дисплей
Санкция
Формирование
команд и
сообщений
водителю
у :
Управление с
запросом
санкции
водителя
Процессор
контроля и
диагностики
^-Да—С Есть запрос ?
Формирование
информации
по запросу
Зашита с
запросом запрета
водителя
Модуль
регистрации
нештатных
режимов
Процессор
управления
режимами
ДВС, ГМТ ...
Автономное
автоматическое
управление
С
Исполнительные
механизмы
3
Рис. 4.5.10. Алгоритм обработки аварийной ситуации
ющими техническими условиями, БИУС
формирует по специальному алгоритму и
регистрирует в постоянном запоминающем
устройстве информацию об аварийном режиме.
Функция регистрации характерных
параметров эксплуатации предназначена для того,
чтобы фиксировать в постоянном
запоминающем устройстве БИУС информацию по
нештатным режимам эксплуатации агрегатов и
систем машины, а также общий пробег
машины в километрах, суммарную наработку
двигателя в моточасах, наработку двигателя под
нагрузкой и в режиме холостого хода и др.
Для оценки технического состояния
агрегатов и систем машины регистрируются также
общее количество пусков двигателя, в том
числе без предпускового подогрева, параметры
режима прогрева двигателя на режиме
холостого хода, а также случаи приема двигателем
нагрузки без прогрева и остановки его при
582 Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
1
высокой температуре в системе охлаждения.
Могут регистрироваться и другие характерные
параметры эксплуатации, и не только
применительно к режимам двигателя.
Функция диагностирования технического
состояния машины применительно к БИУС
состоит в системе действий, позволяющих
выявлять скрытые для прямого контроля
неисправности агрегатов и систем, устанавливать
первопричины и вырабатывать рекомендации
по устранению этих неисправностей [2].
Диагностирование машины можно условно
подразделить на оперативное и тестовое.
Наибольшую ценность представляет
динамическое изменение информационных
параметров в процессе штатного управления
(автоматического или ручного)
функциональными процессами машины. Вместе с тем, во
время движения машины водитель не имеет
возможности воспринимать оперативную
информацию, ее необходимо заносить в
оперативную память, а на экран дисплея выводить
команды и рекомендации по устранению
нештатных режимов работы агрегатов.
Возникновение нештатной ситуации во
время движения требует, как правило,
остановки машины, а такая команда обязательно
сопровождается цветовым, обычно красного
цвета, и звуковым сигналом (автоматическая
защита). Поэтому от водителя не требуется
постоянного наблюдения за сообщениями на
экране дисплея, тем более во время
управления движением машины.
После остановки машины может
потребоваться уточнение случившейся нештатной
ситуации, что удается обеспечить за счет
тестового режима функционирования
неисправного агрегата, для которого известны
выходные информационные параметры. Результаты
тестового диагностирования являются
окончательными и при необходимости
регистрируются в постоянной памяти.
Функция автоматизации поиска
неисправностей с использованием диалогового режима
БИУС - водитель - один из режимов
диагностирования, но проводимый по инициативе
водителя. В качестве примера приведем
порядок поиска неисправностей в электроцепях
транспортной машины. При включении
напряжения бортсети машины выполняется
контроль исправности электроцепей,
подключенных к БИУС, в той мере, в которой это
возможно без специального включения
электропотребителей. При этом на экране дисплея
высвечивается информация о неисправных
электрических цепях бортсети машины.
Водитель может пренебречь полученной
информацией, если неисправные
электропотребители не задействованы в предстоящей
работе машины. В этом случае
диагностическая информация запоминается в памяти
БИУС и при попытке включения неисправного
электропотребителя позволяет блокировать
некорректные действия водителя.
Иначе при включении водителем режима
поиска неисправностей запускается
специальная программа, позволяющая выполнить
исчерпывающее диагностирование электроцепей.
При этом на экране дисплея высвечивается
подробная информация по каждой
неисправной цепи, рекомендация по оптимальному
способу ее устранения, которая может
сопровождаться схематичным рисунком.
Автоматизация управления режимами
функционирования агрегатов является основной
целью большинства разработок в области
бортовых информационно-управляющих систем.
В настоящее время накоплен опыт
автоматизации переключения передач и управления
гидротрансформатором гидромеханических
трансмиссий, предпусковой подготовки и
пуска двигателя в холодное время года и др.
Многие годы с разным успехом
разрабатываются различные локальные
автоматические системы - антиблокировочные для
тормозной системы, электронного управления
зажиганием, управления впрыскиванием
топлива во впускной коллектор двигателя и т.д.
Приемлемых для реализации результатов
удается добиться только при условии, когда
системы автоматического управления удачно
совмещены с ручным и, частично,
автоматизированным управлением, а также когда они
органично дополняются системой
диагностирования элементов машины, совмещенных с
автоматическим управлением.
Применительно к транспортным
машинам в алгоритм автоматического управления
необходимо частично встраивать ручные
операции, которые должен выполнять водитель.
Кроме того, в определенные моменты
выполнения автоматической процедуры, например,
перед подачей автоматического управляющего
сигнала на электростартер двигателя, из
соображений техники безопасности следует
запрашивать разрешение (санкцию) водителя. Как
видно по рис. 4.5.10, ответом на запрос о
санкции может служить сигнал с кнопки "Ввод",
что делает эту основную кнопку
многофункциональным органом управления БИУС.
Прогноз остаточного ресурса агрегатов и
машины - конечная цель диагностирования.
Основными исходными данными для
прогноза остаточного ресурса являются:
информация о нарушении технических
условий эксплуатации агрегатов;
статистические данные об уровнях и
количественной оценке цикличности нагрузок;
темп изменения характерных
информационных параметров, зависящих от износа
трущихся деталей, в функции от моточасов
работы агрегата.
Накопление такой информации в
процессе эксплуатации машинами средствами
ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ СИСТЕМЫ 583
БИУС - важнейшее условие постепенного
решения проблемы прогноза остаточного
ресурса. Частично эта задача решается на основе
ограниченней информации о нарушении
условий эксплуатации агрегатов с помощью
регистратора нештатных режимов [1].
Оптимизация режимов функционирования
агрегатов транспортных машин является делом
будущего. Хотя частично такая задача решается
при автоматизации того или иного агрегата
машины. Простейшим примером оптимизации
может служить прогрев или охлаждение
двигателя в режиме холостого хода под управлением
БИУС, который включается сразу после пуска
двигателя или снятия с него нагрузки, если это
необходимо.
В основе метода оптимизации
использовано свойство смазочного материала и
охлаждающей жидкости двигателя разогреваться или
охлаждаться при разных частотах вращения
вала двигателя:
при низкой частоте скорость остывания
смазочного материала выше скорости
остывания охлаждающей жидкости;
при относительно высокой частоте
скорость остывания охлаждающей жидкости
повышается при снижении скорости остывания
смазочного материала двигателя.
Информационный кадр на экране
дисплея позволяет водителю выбрать частоту
вращения вала двигателя в режиме прогрева или
охлаждения, которые обеспечивают
минимальные затраты времени (расчетное время,
выводимое на экран, принимается по
максимальному значению из двух вычисляемых на
данном режиме).
Информационное обеспечение технического
20
21
22
23
24
12
13
17
обслуживания и ремонта агрегатов и машины в
целом осуществляется включением в составе
средств БИУС матричного дисплея с
достаточным информационным полем и необходимым
объемом ПЗУ.
На рис. 4.5.11 показана функциональная
схема устройства, позволяющего реализовать
полный набор функций БИУС,
представленных на рис. 4.5.8.
Устройство [4] состоит из датчиков /
частоты вращения коленчатого вала двигателя и
выходного вала трансмиссии, 2 давления
жидкостей, 3 температуры узлов и блоков ТС, 4
уровня жидкостей, которые вместе
подключены ко входу первого преобразователя 5.
Датчики 6 пороговых значений электрических
параметров работы машины, в данном случае,
напряжения с концевых выключателей
управляющих и технологических механизмов и 7
предельных значений измеряемых параметров,
электрического напряжения контрольных
точек электроцепей, соединены со входом
второго преобразователя 8. Блок принятия решения
9 соединен со входом третьего преобразователя
10.
Преобразователи 5, 8, 10 соединены с
процессорным модулем 77, с дисплеем 72,
программатором ПЗУ 13, блоком
регистраторов 14, блок регистраторов 14 через блок
усилителей 15 - с исполнительными механизмами
16, а программатор 13 - с ПЗУ регистратора
17.
Блок принятия решения 9 содержит
первый 18 и второй 19 кнопочные переключатели.
Первый преобразователь 5 содержит:
хронометр 20, выполненный по известной схеме
генераторов - схема совпадения - генератор
15
21
Щ I
26
30
28
29
16
10
Рис. 4.5.11. Функцно
I схема устройства, позволяющего реализовать полный набор функций БИУС
584
Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
импульсов (на схеме не показано),
предназначенный для преобразования значений
интервалов времени с двигателя в дискретную
форму: три АЦП 21,. 22, 23, с восьмью входами
каждый, что обеспечивает работу в качестве
коммутатора, подключенных, соответственно,
к датчикам давления 2, температуры 3 и
уровня 4; дешифратор адреса 24, второй
преобразователь 8 включает дв* АЦП 25, 26,
подключенных соответственно I к датчику 6 пороговых
значений электрически^ сигналов и датчику 7
значений электрическрго напряжения, и
дешифратор адреса 27. третий преобразователь
10 содержит формирователи 28, 29,
подключенные к кнопочным Переключателям 18 и 19
блока принятия решений 9, и дешифратор
адреса 30. Дешифраторы адреса 24, 27, 30 в
каждом преобразователе 5, 8, 10 соединены
соответственно с хронометром 20, с блоками
АЦП 21, 22, 23 и 25, 26, и формирователями
28, 29, а их выходы являются выходами этих
преобразователей 5, 8, 10.
Устройство работает следующим образом.
При включении бортовой сети
процессорный модуль 11 путем посылки импульсов с
интервалом в 0,1 с опрашивает
последовательно все датчики (2-7) параметров работы
машины и хронометры 20 датчиков частоты 1, а
также опрашивает состояние переключателей
18, 19, запоминает полученную информацию в
оперативном запоминающем устройстве
процессорного модуля 11, а часть информации,
предназначенную для долговременного
использования, записывает в дискретной форме
в регистратор 17 ПЗУ.
На вывод информации устройство
работает в двух режимах:
основном, автоматическом, когда
процессорный модуль отрабатывает одну или
несколько запрограммированных функций,
заданных водителем, и при этом есть
необходимость вывода запросов, предупреждений или
команд водителю; в этом случае на экране
дисплея 12 автоматически высвечивается
соответствующая информация, содержащая, в том
числе, необходимые для принятия решения
текущие параметры технического состояния
машины. Перевод устройства в
автоматический режим управления машиной по одной из
нескольких запрограммированных функций
осуществляется водителем после нажатия
кнопки переключателя 19 блока принятия
решения 9. При этом на экране дисплея
высвечивается "меню", содержащее одну или
несколько доступных для ввода команд;
последовательно нажимая кнопку переключателя 18,
водитель с помощью маркера на экране
дисплея выделяет нужную команду, которую
вводит кнопкой 19;
вспомогательном, ручном, когда нет
необходимости вывода запросов,
предупреждений или команд водителю. В этом случае
первоначальный вызов и последующая смена на
экране дисплея 12 текущей информации о
техническом состоянии машины,
сгруппированной по кадрам (блокам), осуществляется
после нажатия водителем кнопки
переключателя 18; при этом предыдущая информация
стирается с экрана дисплея 12 и высвечивается
следующая. Такой опрос информации имеет
для водителя чисто справочное назначение и
может производиться как на этапе
предварительной оценки технического состояния
машины, т.е. в момент ожидания команд
водителя на пуск одного из запрограммированных
автоматических рабочих режимов, так и в
рабочем режиме, при котором различные узлы,
блоки и агрегаты машины работают либо
автономно под контролем устройства управления,
либо под его автоматическим управлением
(каждый в своем режиме) и испытывают
различные нагрузки и напряжения.
Вся информация с датчиков в аналоговой
форме преобразуется посредством АЦП 21, 22,
23, 25у 26 в дискретную форму, за
исключением информации о частоте вращения вала
двигателя и коробки передач, которая снимается с
хронометров 20 и уже представлена в
дискретной форме. Дешифраторы адреса 24, 27, 30 в
каждом преобразователе 5, 8, 10 по команде с
процессорного модуля 11 вырабатывают
адресный сигнал в каждый момент времени для
опроса и считывания информации с
определенного датчика. Этим обеспечивается четкое
и последовательное считывание информации с
каждого датчика и хронометра:
с хронометров 20 - частот вращения
коленчатого вала двигателя и выходного вала
трансмиссии;
с АЦП 21 - давлений смазочного
материала двигателя (на входе и выходе),
трансмиссии, воздуха в пневмосистеме и разрежения в
системе воздухоочистки на входе в двигатель;
с АЦП 22 - температур ОЖ и масла
двигателя, трансмиссии, окружающей среды,
выпускных газов и ОЖ на выходе из
предпускового подогревателя двигателя;
с АЦП 23 - уровней масла двигателя,
трансмиссии, ОЖ и топлива;
с АЦП 25 - положений концевых
выключателей положения тормозов, жалюзи над
радиаторами системы охлаждения, передач
трансмиссии;
с АЦП 26 - напряжений в контрольных
точках электрических цепей ТС.
Вся информация запоминается во
внутренней оперативной памяти процессорного
модуля 11. В регистраторе ПЗУ 17
производится запись информации по определенным
адресам. Программатор 13 предназначен для
формирования всех необходимых сигналов и
импульсов при программировании ПЗУ в
режиме записи и считывания уже записанной
информации в ПМ 11.
ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ СИСТЕМЫ
585
На начальном этапе работы машины
полученная информация путем сравнения
текущих значений параметров работы с
оптимальными анализируется с целью определения
исправности узлов, блоков, агрегатов,
электрических цепей и готовности машины к началу
эксплуатации. При положительном результате
на экран дисплея выводится надпись "К
работе готов", в противном случае указывается
вышАдший из строя узел, блок, агрегат, вид
неисправности и порядок ее устранения.
В процессе работы машины устройство
осуществляет следующие функции.
[Информационную, при которой вывод
текущей оперативной информации о работе
узлов! блоков и агрегатов осуществляется
последовательным нажатием кнопки
переключателя /<?, формируя импульс в блоке 28 для
инициирования пуска процессорного модуля
11 на вывод информации, полученной в
результате опроса всех датчиков, расположенных
в контролируемых узлах, блоках и агрегатах
машины. Например, первый кадр - параметры
работц двигателя, второй кадр - параметры
работы; трансмиссии и т.д. Это осуществляется
посылкой импульса опроса с процессорного
модуля, 11 на все дешифраторы адреса 24, 27,
30, открывающие преобразованную в АЦП и
хронометрах информацию, относящуюся к
контро^руемому блоку. Так при контроле
работы двигателя выводится информация с
датчико|в о давлении смазочного материала на
входе и выходе из двигателя, степени
разрежения в системе воздухоочистки на входе в
двигатель, Температуры ОЖ и масла в двигателе,
ОЖ в предпусковом подогревателе двигателя.
Очередное нажатие кнопки
переключателя 18 вызывает стирание текущих значений
работы двигателя на экране дисплея 12 и
появление параметров второго кадра и т.д.
Поочередно последовательно водителю
демонстрируется вся информация о работе узлов,
блоков и агрегатов ТС,
Контрольную, при которой производится
наблюдение за измеряемыми параметрами
работы агрегатов машины по отношению к
заданным пороговым значениям. Например,
пороговое значение уровня топлива
(предполагаемое количество топлива,
необходимое для преодоления расстояния до пункта
заправки); пороговое значение уровня масла
двигателя (количество масла, ниже которого
работа двигателя не рекомендуется);
температура ОЖ имеет несколько пороговых
значений, связанных с режимами работы машины:
7о1 - температура, ниже которой пуск
двигателя без предварительного подогрева
запрещен; 7о2 - температура, ниже которой работа
двигателя под нагрузкой не рекомендуется;
7оз - температура, при которой не
рекомендуется движение на высших передачах; 7о4 -
температура, выше которой запрещен останов
двигателя. Достижение параметром порогового
значения сопровождается выводом на экран
дисплея соответствующего предупредительного
сообщения.
Эта операция осуществляется путем
периодического опроса датчиков уровня 4,
сравнения полученных значений с заданными в
процессорном модуле 11 и в случае их
превышения формирование информационного
сообщения о данном событии и на экране
дисплея 12 водителю.
Защитную, при которой происходит
определение предаварийной ситуации, ее
изменение и предотвращение аварии. Аварийная
защита машины от перегрева по температуре
Тож охлаждающей жидкости двигателя
осуществляется с помощью предлагаемого способа
следующим образом.
Определяется изменение температуры
охлаждающей жидкости двигателя А Тож, масла
двигателя А Тм и масла трансмиссии А Тт. Если
изменение Тож имеет тенденцию к
увеличению, определяется расчетное время /
достижения температурой Тож заданного порогового
7()5 = +115 °С с использованием формулы
(4.5.1). Если /с < 2 мин, то подается команда
на исполнительные механизмы (в
автоматическом режиме) или водителю по выводу
машины из предаварийной ситуации:
не замкнут концевой выключатель
"жалюзи над радиаторами системы
охлаждения открыты" - сигнал на открытие жалюзи,
или водителю команда "Открой жалюзи";
замкнут концевой выключатель одной из
высших передач - переход на пониженную
передачу, или команда водителю "Включи
пониженную передачу";
замкнут концевой выключатель низшей
передачи - остановка машины, или команда
водителю "Останови машину";
двигатель работает в режиме холостого
хода - остановка двигателя, или команда
водителю "Глуши двигатель";
в момент аварийной остановки двигателя
Тож > +85 °С - команда водителю "Включи
вентпомпу" или "Включена вентпомпа", что
сопровождается автоматической подачей
управляющего сигнала ПМ 11 через блоки
регистраторов 14, усилителей 15 на исполнительный
механизм включения вентпомпы.
В трех последних случаях производится
запоминание А7^ж, А Тм и А Тт, вычисленных
по формуле (5.4.1), в оперативной памяти до
окончания пробега машины для последующею
учета при диагностировании его технического
состояния.
Если расчетное время /3 < 0,5 мин и
далее уменьшается, то указанные выше команды
на исполнительные механизмы или водителю
586 Глава 4.5. ДОПОЛНИТЕЛЬНОЕ ОБОРУДОВАНИЕ ГУСЕНИЧНОЙ МАШИНЫ
сменяются аварийным предупреждением о
последующем автоматическом включении
соответствующего исполнительного механизма
защиты, которое сопровождается выводом
текущего значения расчётного времени /. В
момент, когда X — 0 либо выдается сигнал на
включение автоматической защиты, если
режим автоматической защиты не отменен
водителем, либо, в случае отмены, происходит
запоминание информации о перегреве Тож в
ПЗУ регистратора 77, а водителю выводится
сообщение "Аварийный перегрев" с текущим
значением Тож на экране дисплея 12.
Аналогичным образом осуществляется
аварийная защита двигателя по изменению
температур масла АТМ и трансмиссии АТт
охлаждающей жидкости на выходе из
подогревателя А ТПУ газов в выпускном трубопроводе
двигателя А Тт> а также системы по изменению
давлений воздуха в системе воздухоочистки на
входе в двигатель Д/>в и в пневмосистеме Д/>п.
Аналогичные функции аварийной
защиты двигателя и трансмиссии по
перечисленным выше информационным параметрам
отличаются только величинами /с и /3
соответственно для давления масла двигателя и
трансмиссии и их уровней, уровня
охлаждающей жидкости двигателя, а также частоты
вращения коленчатого вала двигателя, в связи с
большей динамичностью процессов, /с = 10 с,
Т3 = 5 с и для уровня топлива в топливных
баках в связи с меньшей динамичностью
процессов /с = 30 мин, /3 = Ю мин.
Дефектологическую, при которой
происходит выявление неисправностей, причин их
появления и сообщение водителю приемов
(действий) по их устранению. Каждый раз
после снятия нагрузки двигателя (остановка
машины после окончания пробега, аварийная
остановка и т.п.) определяются изменения
температур охлаждающей жидкости двигателя
А Тож> масла двигателя А Тм и масла
трансмиссии А Тт по формуле (4.5.1), а также расчетное
время снижения каждой из температур на 5
°С.
Если расчетное время остывания
охлаждающей жидкости /ож > 30 с, то подается
сигнал на жалюзи или выводится одно из
диагностических сообщений водителю:
не замкнут концевой выключатель
"жалюзи над радиаторами системы
охлаждения открыты" - команда "Открой жалюзи";
/м > 30 с - команда "Очистить фронт
радиаторов";
двигатель работает с низкой частотой
вращения вала на режиме холостого хода -
сигнал на увеличение частоты или команда
"Установи повышенные обороты";
Тож в режиме холостого хода двигателя
не понижается или продолжает повышаться -
сообщение "Отказ системы прокачки
охлаждающей жидкости двигателя", что
сопровождается автоматическим включением вентпомпы.
Аналогичным образом происходит
выявление неисправностей и причин их появления
в смазочных системах двигателя по изменению
Тм и трансмиссии по изменению Тт.
На рис. 4.5.12 показана общая структура
программно-технических средств БИУС.
Неотъемлемой частью БИУС являются
средства первичного преобразования входной
информации, а также исполнительные
механизмы любых типов. В настоящее время
существует весьма широкий выбор датчиков и
исполнительных механизмов [3].
Суть системного подхода - выбор
логически законченного состава функции БИУС,
который возможен только при рассмотрении
взаимодействия в замкнутой системе
водитель - БИУС - машина.
При рассмотрении функции аварийной
защиты установлено, что эффективная
реализация возможна только при наличии
следующих важнейших средств:
оперативного прогнозирования
аварийных режимов работы агрегатов и систем
машины; оперативное прогнозирование
аварийного режима основано на динамическом
анализе выражения (4.5.1) характерных
параметров, измеряемых с помощью аналоговых
датчиков, поэтому замена аналоговых датчиков в
системе контроля на дискретные является
ошибочной тенденцией;
предупреждения водителя о
приближении аварийного режима; эффективная система
вывода информации водителю содержит
символьно-графический дисплей, сообщения и
команды которого дублируются цветовым
сигнализатором и речевым выводом;
автоматической оптимальной обработки
аварийной ситуации, предусматривающие
наличие исполнительных механизмов,
управляемых командами БИУС; при этом водителю
должна предоставляться возможность ввода
запрета или задержки выполнения функции
автоматического отключения или
блокирования неисправного агрегата;
регистрации основных характерных
параметров протекания аварийных режимов,
необходимых в тех случаях, когда устранение
аварийного режима оказалось невозможным;
накопленная в постоянном запоминающем
устройстве информация позволяет получить
объективную оценку технического состояния
машины.
При формировании структуры
программно-технических средств БИУС важен
выбор элементной базы центральной и
локальных микропроцессорных систем.
ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЕ СИСТЕМЫ
587
Структура программно-технических средств БИУС
Средства первичного преобразования входной информации
аналоговые датчики; дискретные датчики; органы ввода команд
Средства обработки и преобразования информации
центральная микропроцессорная система;
периферийные микропроцессорные системы;
локальные, логические преобразователи на основе жесткой цифровой
логики
Средства регистрации информации
регистраторы на основе постоянных запоминающих устройств (ПЗУ)
без возможности корректировки записанной информации;
регистраторы на основе (ПЗУ), допускающих перезапись информации;
регистраторы на основе запоминающих устройств автономным
электропитанием
Средства преобразования и усиления выходных сигналов
усилители выходных сигналов типа электронных ключей;
усилители выходных сигналов на основе электромеханических реле и
контакторов
Исполнительные механизмы
электромеханические; электрогидравлические; электропневматические
Средства вывода информации
<
дисплеи на основе символьно-графических индикаторов;
дисплеи на основе заказных сегментных индикаторов;
световые панно с мнемоническими и текстовыми обозначениями
соответствующих выходных сигналов;
одиночные световые индикаторы;
средства речевого вывода информации;
простейшие звуковые сигнализаторы
Средства связи с внешней ЭВМ
средства последовательного вывода информации;
средства параллельного вывода информации
Рис. 4.5.12. Структура программно-технических средств БИУС
588
СПИСОК ЛИТЕРАТУРЫ
Большим недостатком многих
разработанных бортовых систем является отсутствие
встроенных диагностических средств и
дублирующих информационных каналов, а также
неудачное совмещение автоматики с
дублирующим полуавтоматическим и ручным
управлением. В результате сложилось превратное
представление о то^, что бортовые
микропроцессорные системы снижают надежность
транспортной машины. Между тем,
оптимальная бортовая информационно-управляющая
система кроме принципиального улучшения
эргономических качеств управления машиной,
позволяет повысить ресурс транспортных
машин на 25 ... 40 %. БИУС обеспечивает
полную выработку ресурса агрегатов и узлов,
заложенного в их конструкцию, исключая в
максимальной степени отрицательное влияние
возможных нарушений условий эксплуатации.
Автоматизация поиска неисправностей и
информационное обеспечение технического
обслуживания и ремонта машин, оснащенных
БИУС, снижает трудоемкость технического
обслуживания и ремонта в 2,5 - 3 раза по
сравнению со штатными аналогичными
системами.
Следует отметить, что аналогии с
эволюцией IВ М-совместимых персональных
компьютеров, принятие стандарта на архитектуру
бортовых информационно-управляющих
систем обеспечит полную программную и
аппаратную совместимость разрабатываемых
БИУС, что будет способствовать развитию
программного обеспечения (по мере накопления
научно-технического задела в области
диагностики и управления агрегатами) и активному
совершенствованию аппаратных средств БИУС
(в связи с известной сменой поколений
элементной базы микроэлектроники). В
результате можно ожидать многократного снижения
себестоимости и повышения надежности
каждого отдельного бортового компьютера в
соотношении аналогичных характеристик 1ВМ-
совместимых персональных ЭВМ и
вычислительных машин серии ЕС, которыми
относительно недавно оснащались вычислительные
центры предприятий.
СПИСОК ЛИТЕРАТУРЫ
1. Аврамов В. П., Калейчев Н. Б.
Динамика гусеничной транспортной машины при
установившемся движении по неровностям.
Харьков: Выща школа, 1989. 112 с.
2. Армейские гусеничные машины.
Конструкция и расчет / А. С. Антонов, В. И. Бе-
локосков, Л. В. Григоренко и др. М.: Воениз-
дат, 1974. 436 с.
3. Балдин В. А. Теория и конструкция
танков. М.: Минобороны, 1975. 443 с.
4. Дифференциалы колесных машин /
А. Ф. Андреев, В. В. Ванцевич, А. X. Лефаров;
Под общ. ред. А. X. Лефарова. М.:
Машиностроение, 1987. 176 с.
5. Конструирование и расчет колесных
машин высокой проходимости. Общие
вопросы конструирования / Н. Ф. Бочаров, Л. Ф.
Жеглов, В. Н. Зузов и др. М.:
Машиностроение, 1992. 352 с.
6. Конструирование и расчет колесных
машин высокой проходимости. Расчет
агрегатов и систем / Н. Ф. Бочаров, Л. Ф. Жеглов,
В. Н. Зузов и др. М.: Машиностроение, 1994.
404 с.
7. Красненькое В. И., Ващец А. Д.
Проектирование планетарных механизмов
транспортных машин. М.: Машиностроение, 1986.
272 с.
8. Легкий многоцелевой гусеничный
транспортер-тягач. Техническое описание и
инструкция по эксплуатации. М.: Воениздат,
1976. 488 с.
9. Михайлов М. В., Гусева С. В.
Микроклимат в кабинах мобильных машин. М.:
Машиностроение, 1977. 230 с.
10. Платонов В. Ф. Полноприводные
автомобили. М.: Машиностроение, 1989. 312 с.
11. Платонов В. Ф., Леиашвили Г. Р.
Гусеничные и колесные транспортно-тяговые
машины. М.: Машиностроение, 1986. 296 с.
12. Платонов В. Ф. Гусеничные
транспортеры тягачи. М.: Машиностроение, 1978.
352 с.
13. Платонов В. Ф. Динамика и
надежность гусеничного движителя. М.:
Машиностроение, 1973. 232 с.
14. Савочкин В. А., Дмитриев А. А.
Статистическая динамика транспортных и тяговых
гусеничных машин. М.: Машиностроение,
1993. 320 с.
15. Степанов А. П., Давыдов Н. Г.
Эксплуатация и безопасность движения плавающих
машин. М.: Транспорт, 1988. 319 с.
16. Стренг Г., Фикс Дж. Теория метода
конечных элементов: Пер. с англ. М.: Мир,
1977. 348 с.
17. Сцепления транспортных и тяговых
машин / И. Б. Барский, С. Г. Борисов,
В. А. Галягин и др. М.: Машиностроение,
1989. 344 с.
18. Теория движения боевых колесных
машин. М.: Изд-во Академии бронетанковых
войск, 1993. 386 с.
19. Теория и конструкция танка. Основы
системы управления развитием военных
гусеничных машин. М.: Машиностроение, 1982.
212 с.
20. Теория и конструкция танка.
Вопросы проектирования танковых силовых
установок. М.: Машиностроение, 1984. 348 с.
21. Теория и конструкция танка.
Трансмиссии военных гусеничных машин. М.:
Машиностроение, 1985. 367 с.
СПИСОК ЛИТЕРАТУРЫ
589
22. Теория и конструкция танка.
Вопросы проектирования ходовой части военных
гусеничных машин. М.: Машиностроение,
1985. 244 с.
23. Ходовые системы тракторов.
Устройство, эксплуатация, ремонт /В. М. Забродс-
кий, А. М. Файнлейб, Л. Н. Кутин, О. Л.
Уткин-Л юбовцов. М.: Агропромиздат, 1986.
271 с.
24. Энергонагруженность и надежность
дифференциальных механизмов транспортно-
тяговых машин. Минск: Навука 1 тэхниса,
1991. 240 с.
РАЗДЕЛ 5
АВТОМОБИЛЬНЫЕ И ТРАКТОРНЫЕ ПОЕЗДА.
СПЕЦИАЛИЗИРОВАННЫЕ
АВТОТРАНСПОРТНЫЕ СРЕДСТВА
Глава 5.1
КОМПОНОВКА
АВТОМОБИЛЬНЫХ ПОЕЗДОВ
5.1.1. ТИПЫ, УСЛОВИЯ ДВИЖЕНИЯ И
РЕЖИМЫ РАБОТЫ АВТОПОЕЗДОВ
Автопоезд состоит из нескольких
элементов, соединенных в единое целое (поезд)
разъемными сцепными устройствами.
Автопоезда классифицируют: по типу
связи (тяговая, опорная, смешанная) между
элементами - прицепные, седельные и с
роспуском; по назначению - для местных
перевозок и магистральных (дальних); по типу кузова
- универсальные (общетранспортные),
специализированные и специальные; по числу
звеньев - двух-, трех- и многозвенные; по наличию
привода прицепа - пассивные и активные.
ЬсрЛ
120 100 90 Уюм**м/ч МО 100 90 Гно»**»/"
*ср * /в^11 Ш11 *ср, /о
—1—1 1
Ыу9т 7,* к&'1/г
^
— ♦
ч
а ^
й=%
69
«,*
«^*-
г—О—|
_
г-о-
120 100 90 Ум**,**/* *М МО 90 *моМ,**/«
а) ё)
Рис. 5.1.1.Зависимость средней скорости ▼«, движения и среднего расхода топлива й«, седельного автопоезда
полной массой 42 т от номинальной скорости у10|| и удельной мощности N^1
а - без ограничения максимально допустимой скорости движения; б - при у^ доп- 70 км/ч
ТИПЫ, УСЛОВИЯ ДВИЖЕНИЯ И РЕЖИМЫ РАБОТЫ
591
В качестве автомобилей-тягачей для
автопоездов, предназначенных для местных
перевозок, используют базовые и
модифицированные модели грузовых автомобилей.
Магистральные автопоезда, предназначенные для
междугородных перевозок грузов на дальние
расстояния, выделяют в особую группу
автотранспортных средств. Условия эксплуатации
магистральных автопоездов относят в
основном к категориям I и И.
На среднюю скорость движения и
средний расход топлива магистральных
автопоездов решающее влияние оказывает удельная
мощность 7УуД, независимо от ограничения
скорости движения в различных дорожных
условиях (рис. 5.1.1).Скоростные режимы
движения автопоездов для местных
перевозок и магистральных различные. Так, в
городских условиях средняя скорость Уср
существенно ниже, чем на магистралях, что
объясняется влиянием ситуационных
факторов (остановки у светофоров, снижение
скорости на перекрестках и др.) и большим
ограничением скорости (Ушах доп = 60 км/ч).
Неустановившийся режим движения в этих условиях
способствует частому переключению передач и
обусловливает более высокую нагруженность
трансмиссии.
Режимы работы основных агрегатов
автомобиля-тягача автопоезда для местных
перевозок в зависимости от категории условий
эксплуатации приведены в табл. 5.1.1 (за
единицу приняты значения, соответствующие
наиболее легким условиям движения) [8]. В
табл. 5.1.2 показана зависимость ресурса
автомобиля-тягача от состава автопоезда и
категории условий эксплуатации [1, 8].
5.1.1. Режимы работы агрегатов автомобиля-тягача автопоезда для местных перевозок
в зависимости от категорий условий эксплуатации
Агрегат
Двигатель
Сцепление
Коробка передач
Ведущий мост
Показатель режимов
работы
Число оборотов
коленчатого вала на 1 км
пути, об/км
Среднее число
включений на 100 км пути
Число переключений
на 100 км пути
Положительный
средний крутящий момент
на ведущем колесе
Отрицательный
средний крутящий момент
на ведущем колесе
автомобиля
I
1,0
1,0
1,0
1,0
1,0
Категория условий эксплуатации
II
1,08
1,5
1,5
1,26
1,0
III
1,56
6,85
6,85
1,65
1,43
IV
1,95
2,58
2,58
2,75
1,43
V
3,11
2,29
2,29
2,56
1,1
5.1.2. Зависимость ресурса автомобиля-тягача от состава автопоезда
и категории условий эксплуатации
Состав
автопоезда
Базовый автомобиль
Седельный тягач
Автомобиль с одним прицепом
Автомобиль с двумя прицепами
Категория условий эксплуатации
I
1,0
0,95
0,90
0,85
II
0,9
0,855
0,81
0,765
III
0,8
0,76
0,72
0,68
ГУ
0,7
0,665
0,63
0,595
V
0,6
0,57
0,54
0,510
592
Глава 5.1. КОМПОНОВКА АВТОМОБИЛЬНЫХ ПОЕЗДОВ
5.1.2. ПАРАМЕТРЫ МАСС, ОСЕВЫЕ НАГРУЗКИ
И ГАБАРИТНЫЕ РАЗМЕРЫ
Характеристики параметров масс
автомобилей-тягачей и одиночных грузовых
автомобилей аналогичны. При этом следует
учитывать, что в характеристике полной массы
седельного тягача принимается нагрузка,
передаваемая на седельное устройство тягача от
находящегося в сцепке с ним груженого
полуприцепа. Масса снаряженного прицепа
(полуприцепа), дополненная массами кузова и
оборудования, необходимого для
эксплуатации, включает собственную массу конструкции
и массу всего необходимого для эксплуатации
оборудования.
Полная масса прицепа (полуприцепа) -
масса снаряженного прицепа (полуприцепа) и
масса груза. Полная масса автопоезда в составе
автомобиля-тягача и прицепа равна сумме их
полных масс. Полная масса седельного
автопоезда равна сумме снаряженной массы
седельного тягача и полной массы полуприцепа.
Полная масса автопоезда, а также его
грузоподъемность могут быть нормативными
(устанавливаемыми на основе действующих
предписаний или стандартов по эксплуатации
автомобильного транспорта) и
конструктивными (устанавливаемыми для определенных
условий эксплуатации).
При проектировании для
предварительного определения масс прицепов
(полуприцепов) общего назначения используются
статистические зависимости между массой
снаряженного прицепа (полуприцепа), его
грузоподъемностью и полной массой прицепа.
Оценка степени конструктивного
совершенства прицепа (полуприцепа) и
рационального использования его массы производится
по удельной массе шасси прицепа:
ту. пр = (/Ясн. шпр " тсн. пр) / \тир "
тсн. шпр) *ь
где тси щлр - масса снаряженного шасси;
^сн. пр - масса снаряженного прицепа
(полуприцепа); шпр - полная конструктивная
масса прицепа (полуприцепа); К -
установленный ресурс до капитального ремонта, млн. км.
При оценке конструктивного
совершенства автомобиля-тягача учитывается полная
масса автопоезда. В этом случае удельная
масса шасси тягача
ту. т = (^сн. шт " тз) I (шат " ^сн. ил) к Я,
где тсн ШТ - масса снаряженного шасси
автомобиля-тягача; гп3 - масса заправки и
снаряжения автомобиля-тягача; /яат - полная
конструктивная масса автомобиля-тягача; к -
коэффициент коррекции показателей для
автомобилей-тягачей, предназначенных для работы в
составе автопоезда; к = тт / тт\ /Лад, -
полная масса автопоезда.
Предельно допустимые осевые нагрузки,
передаваемые на дорогу наиболее
нагруженными осями тягачей, прицепов и
полуприцепов, зависят от расстояния между смежными
осями.
Промежуточные значения параметров
определяются методом линейного
интерполирования.
Автомобили-тягачи, прицепы и
полуприцепы делятся на две группы в зависимости
от создаваемых осевых нагрузок на дорогу так
же, как и грузовые автомобили. Осевая
нагрузка и нагрузки на тележку
автотранспортного средства в зависимости от расстояния /
между крайними осями не должны превышать
значений, приведенных ниже (кН).
Одиночная ведущая ось 115
Одиночная неведущая ось 100
Двухосная тележка прицепа или
полуприцепа при расстоянии между осями /,
м:
1 </* 1,3 160
1,3 */< 1,8 180
1,8*/ 200
Трехосная тележка прицепа или
полуприцепа при расстоянии / между осями,
м:
1*/* 1,3 210
1,3*/* 1,8 240
Возможность реализации допустимых
полных масс автопоезда ограничена тягово-
с цепными свойствами автомобиля-тягача.
Поэтому колесная формула автомобиля-тягача
определяется с учетом назначения автопоезда
и условий его эксплуатации. Она зависит от
нагрузки на ведущий мост (тележку) и полной
массы автопоезда. Рекомендуются следующие
коэффициенты А^ сцепного веса в
зависимости от дорожных условий эксплуатации
автопоезда: 0,26 ... 0,31 при магистральных
перевозках на дорогах категорий I и II; 0,4 ... 0,45 при
перевозках на дорогах с твердым покрытием
других категорий. Для работы в тяжелых
дорожных условиях используются автомобили-
тягачи повышенной проходимости с
колесными формулами 4 х 4 и 6 х 6. Коэффициенты
сцепного веса отечественных автопоездов
находятся в пределах 0,43 ... 0,77.
Ограничения автопоездов по габаритным
ширине и высоте такие же, как для одиночных
автомобилей - соответственно 2, 5 и 4 м.
Габаритная длина автопоезда не должна превышать
16 м с полуприцепом и 18 м с прицепом. Для
ОБЩИЕ КОМПОНОВОЧНЫЕ РЕШЕНИЯ
593
трехзвенных автопоездов габаритная длина
составляет 24 м. Возможность реализации до-
пустимых полных масс автопоезда в значи-
Расстояние между крайними осями, м, не менее
Допустимая полная масса, т, не более
тельной мере зависит от грузоподъемности их
кузовов и расстояния между крайними осями
(см. ниже).
6 8 - 10 12 14 17 20
24 32 -
35 39 42 47 52
При определении внутренней длины
платформы полуприцепа учитывают
максимально возможную грузоподъемность,
габаритные ограничения и рациональное
размещение стандартизованных видов тары. Высота
бортов платформ полуприцепов принимается
500 ... 800 мм. Для полуприцепов внутренние
размеры платформы следует определять из
расчета 0,5 ... 0,6 м на 1 т грузоподъемности с
учетом внутренней ширины.
При одинаковой полной массе
(примерно одинаковой грузоподъемности) объем
кузова автопоездов с прицепами может быть
больше, чем автопоездов с полуприцепами.
Удельная грузовместимость прицепных автопоездов
на 20 ... 25 % больше, чем седельных
одинаковой с ними полной массы.
5.1.3. ОБЩИЕ КОМПОНОВОЧНЫЕ РЕШЕНИЯ
Основными задачами общей компоновки
магистральных автопоездов являются:
повышение грузоподъемности и грузовместимости,
приспособленности к конкретным условиям
эксплуатации, снижение себестоимости
изготовления и эксплуатации. Повышение
грузоподъемности достигается следующими
компоновочными решениями, позволяющими
максимально реализовать допускаемые осевые
нагрузки и полную массу: применение
компоновочной схемы тягача "кабина над
двигателем"; увеличение расстояния между
сближенными осями для реализации предельно
допустимой осевой нагрузки и числа осей и звеньев
автопоезда.
Наибольшее распространение получили
двухзвенные четырех-, пяти- или шестиосные
автопоезда, состоящие из двух- или трехосного
тягача и двух- или трехосного прицепа или
полуприцепа (рис. 5.1.2, а). Увеличение числа
осей для двухзвенного автопоезда свыше
шести нецелесообразно ввиду значительного
усложнения конструкции. Предельная полная
масса двухзвенного автопоезда при
соблюдении допустимых осевых нагрузок составляет
52 т.
Повышение полной массы и числа
звеньев автопоездов (рис. 5.1.2, 6) связано с
дальнейшим увеличением мощности двигателей и
т
<оу=(о)—(о
5Ш
о)^=^о)-^о)==Чо)--<р
т—<оХоУ==т-^^оУ
т
5СЙ
®^оХо>^о>чоУ=чо>—(оУ
т—@р^ (ош
/по
■ чер^вр-" @> @
@&
Ч@Нг®@'~~ © © Со)
"' ®
!Ж
-СГ=юИор^ (о) (о) (о)
"^
5)
Рис. 5.1.2. Компоновочные схемы автопоездов:
а - двухзвенных; б - трехзвенных;
/, 2, 5, 6 - прицепные автопоезда; 3, 4, 9 - седельные автопоезда; 7, 8 - седельно-прицепные автопоезда
594
Глава 5.1. КОМПОНОВКА АВТОМОБИЛЬНЫХ ПОЕЗДОВ
совершенствованием конструкции
трансмиссий, обеспечением маневренности и
устойчивости автопоездов, обладающих увеличенными
габаритными размерами и повышенной
гибкостью в поперечной плоскости, повышением
надежности узлов и агрегатов шасси и др.
Повышение грузоподъемности
автопоезда в условиях обеспечения допустимой
габаритной длины достигается следующим
образом:
уменьшением расстояния между тягачом
и прицепом благодаря применению
укороченных тягово-сцепных устройств;
уменьшением длины кабины в результате
переноса спального места в надстройку над
кабиной;
применением низкорамных прицепов.
Для этого на прицепы устанавливают
низкопрофильные шины с минимально возможным
диаметром. Достигаемая высота грузового
помещения 3200 мм обеспечивает двухъярусную
погрузку поддонов высотой 1500 мм;
применением полуприцепов со
ступенчатым полом, что увеличивает грузовое
помещение у седельных автопоездов и дает
возможность предусматривать двухъярусную погрузку
поддонов.
Прицепные магистральные автопоезда по
сравнению с седельными имеют значительно
больший резерв повышения полезного объема.
Перспективны компоновки магистральных
автопоездов с полноприводными тягачами.
При компоновке "кабина над
двигателем" затруднена возможность создания тягачей
с колесной формулой 4 х 4 по традиционной
схеме ввиду ухудшения поперечной
устойчивости автопоезда и уменьшения полезного
объема кабины. Поэтому в компоновочной
схеме тягача с колесной формулой 4x4
двигатель может быть размещен горизонтально
между мостами, что обеспечивает:
примерно равное распределение осевых
нагрузок как в снаряженном состоянии, так и
при полной нагрузке;
снижение центра масс вследствие более
низкого расположения двигателя;
упрощение конструкции кабины;
уменьшение уровня внутреннего шума и
улучшение микроклимата в кабине;
улучшение эргономических показателей.
Благодаря почти равному распределению
осевых нагрузок возможно использование
одинарных широкопрофильных шин с более
низким коэффициентом сопротивления
качению по сравнению со сдвоенными.
Увеличение полной массы тягача достигается в
варианте трехосного автомобиля добавлением
третьего ведущего или неведущего моста.
Недостатком расположения двигателя
между мостами является в основном
затрудненный доступ к двигателю для* его
обслуживания.
Принципиально новое направление
развития магистральных автопоездов - модульный
принцип, который заключается в
формировании автопоездов, состоящих из отдельных
типовых модулей: тягового, кабины, верхней
рамы, грузового, рамы, выкатной тележки и
ведомой оси. Тяговый модуль включает
двигатель в блоке с коробкой передач и редуктором
ведущего моста разрезного типа с независимой
пневмоподвеской ведущих колес. Верхняя
рама снабжена сцепным и фиксирующим
устройством для соединения с полуприцепом и
служит основанием для установки кабины,
топливного бака, гидроцилиндров рулевого
привода и поворотного круга. Грузовой
модуль - грузовая платформа с несущей рамой,
представляющая собой сменный кузов,
цистерна, контейнер и др.
К особенностям компоновки модульных
автопоездов следует отнести:
возможность образования автопоезда в
составе одноосного тягача с тяговым модулем,
расположенным под кабиной, и полуприцепа;
образование единой жесткой системы из
кабины, верхней рамы и полуприцепа, что
обеспечивает автопоезду свойства
переднеприводного автомобиля;
возможность распределения тяговых
модулей по всей длине автопоезда, в том числе и
на прицепных звеньях;
равномерное распределение осевых
нагрузок и использование широкопрофильных
шин.
5.1.4. ВЫБОР
ОСНОВНЫХ ПАРАМЕТРОВ КОМПОНОВКИ
Принципы общей компоновки седельных
тягачей и базовых грузовых автомобилей
общетранспортного назначения аналогичны. Вес
груза проявляется в виде нагрузки,
приходящейся на седельно-сцепное устройство.
Минимальное расстояние от оси отверстия под
шкворень седельно-сцепного устройства до
задней стенки кабины или до ближайших
точек, установленных на ней узлов и агрегатов
тягача, габаритный размер задней части тягача
и высота седельно-сцепного устройства
регламентированы ГОСТ 12105-74.
По этим размерам определяется
минимально допустимое расстояние от передней
оси до седельно-сцепного устройства, а ватем
из уравнения моментов относительно
передней оси автомобиля вычисляется колесная
база и, следовательно, смещение седельно-
сцепного устройства от задней оси (или от оси
балансира задней тележки), которое при
необходимости уточняется для обеспечения
требуемого радиуса габарита задней части тягача.
Исходными данными для определения
основных параметров компоновки прицепа и
полуприцепа являются: техническая
характеристика основного тягового автомобиля
(тягача) и заданная полная масса прицепа
(полуприцепа).
ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ КОМПОНОВКИ
595
Вп
г"
<& л-~
ОС
111—3
*?
-^г-
-г-Ц, А
Р1
—^тл
1
^1
N
1 ^
\
А
Ф
В
\М
Л 1)
П
чц1ц
к!
1 }
> 1
-* »-4 П
5)
Рис. 5.1.3. Схемы бортового прицепа (а) ш полуприцепа (0)
Габаритные размеры прицепа (рис. 5.1.3,
а) и полуприцепа (рис. 5.1.3, б) ограничены
как для автомобиля: высота Нп ^ 4 м, ширина
Вп ^ 2,5 м. База прицепа Ь находится из
условия равномерного нагружения колес осей.
При этом передний свес определяется
компоновочным решением по установке передней
поворотной тележки. Минимальная база
должна обеспечить необходимую продольную
устойчивость прицепа на ходу (отсутствие
галопирования и виляния при движении
поезда). Для прицепов грузоподъемностью свыше 5
т база 1^3м.
Длина дышла / должна быть
минимальной для уменьшения общей длины автопоезда
и смещения колеи прицепа к центру поворота.
Нижний предел длины дышла определяется из
условия обеспечения зазора между
автомобилем и прицепом не менее 50 мм при повороте
автопоезда с минимальным заданным
радиусом поворота.
База полуприцепа Ь (рис. 5.1.3, б)
определяется из условия обеспечения допускаемых
нагрузок на седельно-сцепное устройство по
формуле
1< = автр/60,
где (7гр - вес груза с платформой; 00 -
нагрузка на ось.
596
Глава 5.1. КОМПОНОВКА АВТОМОБИЛЬНЫХ ПОЕЗДОВ
Размер а (расположение центра тяжести
груза по длине платформы полуприцепа)
определяется по внутренней длине в зависимости
от конфигурации платформы.
Колея передних и задних колес для
прицепов (полуприцепов) должна быть
одинаковой и возможно большей для получения
наибольшей устойчивости прицепа. При
прямолинейном движении автопоезда след колес
прицепа не должен выходить (внутрь или
наружу) за габариты следа колес тягача, при
двускатных колесах колею прицепа
целесообразно унифицировать с колеей задних колес
авто мобиля-тягача.
Погрузочную высоту Н\ прицепа и
полуприцепа, от которой зависит удобство
выполнения погрузочно-разгрузочных работ,
рекомендуется принимать не более 1400 мм
для прицепов и 1450 для полуприцепов, при
этом зазор между колесом и близлежащей
частью прицепа (полуприцепа) должен быть не
менее 75 мм при одновременном упоре оси в
ограничители хода подвески.
Дорожный просвет Нп должен быть для
5.1.5. ОСНОВЫ ПРОЕКТИРОВАНИЯ
СИСТЕМ И АГРЕГАТОВ АВТОПОЕЗДОВ
Выбор и оптимизация параметров
двигателя и трансмиссии автопоездов для местных
перевозок и грузовых автомобилей
аналогичны. Особенность оптимизации параметров
двигателя и трансмиссии магистральных
автопоездов обусловлена специфическими
условиями их эксплуатации [1, 2).
Поскольку скорость движения
магистральных автопоездов близка к максимально
допустимой (ПО ... 130 км/ч) по дорожным
условиям, а основное движение происходит на
высшей передаче, передаточное число главной
прицепа и полуприцепа не меньше, чем у
автомобиля-тягача. Из параметров установки
тягово-сцепного устройства автомобилей-
тягачей и прицепов регламентируется (ГОСТ
2349-75) высота к расположения продольной
оси тягового крюка на автомобиле и сцепной
петли дышла, а также углы перемещения их
между собой.
Регламентируемыми размерами (ГОСТ
12105-74) полуприцепа, обеспечивающими
гарантированные зазоры между кабиной тягача
и передней стенкой полуприцепа и между
задней частью тягача и близлежащей частью
полуприцепа с учетом перемещения
относительно сцепного шкворня, являются:
радиус Гз габарита передней части
полуприцепа;
расстояние г^ от шкворня до ближайшей
части механизма опорного устройства
полуприцепа.
Основные размеры компоновки прицепа
и полуприцепа приведены в табл. 5.1.3 и 5.1.4
(Ь\ и /12 - расстояния между осями).
передачи определяет диапазон частот
вращения коленчатого вала двигателя. Рабочему
диапазону скоростей автопоезда должна
соответствовать работа двигателя в наиболее
экономичном диапазоне частот вращения
коленчатого вала.
Приняв за наиболее характерную
скорость движения 70 км/ч (максимально
допустимую по условиям безопасности), находят
передаточное число /о главной передачи. По
передаточному числу /о и номинальной
частоте вращения вала определяют максимальную
скорость автопоезда.
5.1.3. Основные размеры компоновки прицепов (см. рис. 5.1.3, а), м
Полная масса
прицепа, т
3,5 ... 4,5
4,5 ... 6,5
6,5 ... 8
8 ... 12
12 ... 14
Ь
2,4 ... 2,5
2,5 ... 3
3 ... 3,5
3,5 ... 4,3
4,3 ... 4,5
К
1,6 ... 1,8
1,8 ...2
1,8 ... 1,9
1,8 ... 1,05
1,85 ... 1,95
#1
1,16 ... 1,2
1,2 ... 1,25
1,2 ... 1,25
1,25 ... 1,4
1,35 ... 1,4
Лп
0,3 ... 0,4
0,35 ... 0,4
0,35 ... 0,4
0,35 ... 0,4
0,4 ... 0,45
5.1.4. Основные размеры компоновки полуприцепа (см. рис. 5.1.3, б), м
Полная масса
полуприцепа, т
10 ... 18
19 ... 28
Более 28
Число
осей
1
2
3
Ь
5,4...6
6,15...6,5
6,2...6,5
Ь\
1,32...2,5
1,32...1,54
Ьг
1,32...1,54
К
1,8...1,85
1,85...1,9
1,9...2
#1
1,4...1,45
1,4...1,45
1,45
Лп
0,32...0,4
0,26.. .0,32
0,3...0,32
ОСНОВЫ ПРОЕКТИРОВАНИЯ СИСТЕМ И АГРЕГАТОВ
597
Такой подход к определению
передаточного числа главной передачи обеспечивает
максимально возможную производительность
автопоезда при работе двигателя на
экономичном режиме.
Удельная мощность Щл, в наибольшей
степени соответствующая найденному /о,
определяется методом математического
моделирования процесса движения при вариации
только Л^д с помощью коэффициента
эффективности АГэф - Уф / иг ср- В качестве
расчетных принимаются два профиля дороги,
наиболее характерные для маршрутов движения
магистральных автопоездов: равнинный (с
подъемом не более 3 %) и холмистый (с
подъемом до 6 %). По результатам расчетов
строится зависимость К^ от 7Ууд при
найденном выше /0 (рис. 5.1..4).
28
27\
20
1Л* 1
♦ 5 В И^.кВф « 5 6 Н^.кВф.
о)
О
Рис. 5.1.4. Зависимости коэффициента эффективности
Аэф магистрального автопоезда полной массой 42 т от
удельной мощности N^д при передаточном числе
главной передачи 4, = 4,3 при движении по дороге:
а - равнинной; б - холмистой
Учитывая тенденцию к увеличению Щл
и получаемые при этом преимущества
(повышение надежности двигателя,
безопасности движения, снижение уровня шума от
двигателя), рекомендуется принимать величину
Л/уд для холмистой дороги или близкой к ней.
При таком выборе Л/уД при эксплуатации
автопоезда на равнинной дороге в летний
период можно увеличить его полную, массу выше
номинальной применением прицепного
состава повышенной грузоподъемности или
формированием многозвенного автопоезда. Опыт
эксплуатации магистральных автопоездов
показывает, что оптимальное значение Л/уД =7 ...
8 кВт/т [2].
С целью повышения избирательности
трансмиссии для обеспечения более высоких
средних скоростей движения на современных
магистральных автопоездах в основном
применяют коробки передач с числом ступеней
более десяти. При этом наибольшее
распространение получили тринадцати-, шестнадцати -
ступенчатые коробки передач. Высшая
передача чаще всего является прямой, что
объясняется стремлением повысить КПД трансмиссии
на наиболее используемой передаче при
движении автопоезда.
Многоступенчатые коробки передач
магистральных автопоездов имеют обычно ряд
передаточных чисел, отличный от
геометрического, с несколько уплотненными
значениями на высших передачах в результате
расширения интервалов между низшими ступенями.
Для полной реализации преимущества
многоступенчатой коробки передач, осуществления
"экономического" алгоритма переключения
передач (переключение передач в зоне малых
частот вращения коленчатого вала с
наименьшими удельными расходами топлива), все
шире применяют автоматизированные
системы управления коробкой передач на базе
современной микроэлектроники.
Тип редукторов главной передачи
ведущих мостов тягачей, предназначенных для
магистральных перевозок, зависит от полной
массы автопоезда и колесной формулы тягача.
При полной массе автопоезда менее 34 т и
тягача с колесной формулой 4 х 2, а также
тележек ведущих мостов тягачей с колесной
формулой 6 х 4 с такой же или большей
полной массой целесообразно применение
одноступенчатых редукторов главной передачи.
На двухосных тягачах, используемых в
составе автопоездов полной массой более 34 т,
для обеспечения необходимой долговечности
ведущих мостов рекомендуется применять
двухступенчатые главные передачи с
одинарным центральным и колесными планетарными
редукторами.
На большегрузных магистральных
автопоездах большое распространение получают
низкопрофильные шины бескамерного типа,
которые по сравнению с камерными имеют
меньшую массу при одинаковой несущей
способности, а также пониженные внутренние
потери. На колесах прицепного состава
расширяется применение широкопрофильных
шин,, что позволяет снизить потери на
сопротивление качению, применяя для них
односкатные колеса вместо двухскатных.
Требования к плавности хода и
снижению материалоемкости, возможности
регулирования высоты над опорной поверхностью и
обеспечения сохранности грузов вызвали
широкое использование на магистральных
автопоездах подвески пневматического типа.
Перспективным является использование такой
подвески в сочетании с электронной системой
автоматического регулирования по нагрузке и
условиям движения.
На автопоездах, работающих в более
тяжелых условиях сохраняются традиционные
подвески с упругими элементами в виде
металлических рессор, особенно малолистовых, в
сочетании с гидравлическими амортизаторами
и со стабилизаторами поперечной
устойчивости.
Безопасность магистральных автопоездов
связана со стабильной эффективностью тор-
598
Глава 5.1. КОМПОНОВКА АВТОМОБИЛЬНЫХ ПОЕЗДОВ
можения в широком диапазоне скоростей и
температур нагрева поверхностей трения,
высокой энергоемкостью и эффективностью теп-
лоотвода от рабочих поверхностей,
минимальным временем срабатывания привода,
автоматическим регулированием зазоров между
рабочими поверхностями. Этим требованиям в
максимальной степени отвечают дисковые
тормозные механизмы с пневмоприводом и
клиновидным приводным устройством,
которые все шире применяются наряду с
барабанными тормозными механизмами.
Неотъемлемой частью тормозной системы автопоездов
являются элементы регулирования тормозных
сил и антиблокировочные устройства,
электропневматические схемы привода тормозных
систем прицепа.
Увеличение нагрузок на управляемые
мосты тягачей большегрузных магистральных
автопоездов приводит к увеличению моментов
поворота управляемых колес. Поэтому
перспективными являются конструкции
гидроусилителей, обеспечивающие поворот автомобиля
при неисправности основного источника
давления, например, применением резервного
насоса с автономным приводом.
Общие конструктивные решения кабин
автомобилей-тягачей и седельных тягачей
автопоездов могут быть:
"длинная" кабина (с двумя спальными
местами за сиденьями водителя и пассажира),
включающая широкую номенклатуру
элементов оборудования, необходимых для
обеспечения повышенной комфортабельности;
"высокая" кабина типа "люкс" (со
спальными местами в крыше), применяемая в
магистральных автопоездах повышенной
грузовместимости и выполненная с учетом
прогнозируемых международных требований.
Кузова автомобилей-тягачей, прицепов и
полуприцепов выполняют с учетом требований
ПК (правил международных дорожных
перевозок), которые предусматривают
пломбировку закрытых кузовов (например, с
решетчатыми бортами и тентом) для таможенного
досмотра в местах погрузки, что обеспечивает
сохранность грузов и сокращает время для
таможенного досмотра.
На повышение топливной
экономичности и производительности автопоездов
существенное влияние оказывает снижение их
аэродинамического сопротивления. В первую
очередь это касается магистральных
автопоездов, движущихся с высокой скоростью. При
проектировании новых магистральных
автопоездов наиболее эффективными мероприятиями
по снижению аэродинамического
сопротивления являются [3]:
отработка формы лобовой панели и
кабины в целом с устранением с ее поверхности
мелких выступающих элементов;
применение укороченной обтекаемой
высокой кабины с размещением в ее верхней
части спального места водителя;
выбор угла наклона лобового стекла
кабины (20 ... 40 °);
увеличение радиусов скруглений в местах
перехода лобовых панелей кабины и кузова в
боковые и крышу (для кабины до 75 ... 150
мм, для кузова до 150 ... 450 мм), уменьшение
расстояния между кабиной и кузовом (для
седельных автопоездов) и между тягачом и
прицепом (для прицепных) до минимально
необходимого;
применение внешних аэродинамических
устройств [1].
Внешние аэродинамические устройства
для магистральных автопоездов по месту их
установки могут быть:
лобовые обтекатели на крыше кабины;
нижние обтекатели на переднем бампере;
устройства на передней стенке кузова;
устройства, устанавливаемые в зазоре
между кабиной и кузовом;
устройства на задней стенке кузова;
устройства, устанавливаемые между
колесами по бортам автопоезда.
Поэлементное уменьшение
коэффициента сопротивления воздуха достигается
благодаря применению более выпуклой лобовой
панели кабины и увеличению радиусов
закруглений в местах перехода на ее боковины,
установки нижнего параболического обтекателя,
верхнего цилиндрического объемного
обтекателя в моноблоке с кабиной, высоких задних
боковых закрылков за кабиной, нижних
боковых щитков и между колесами на тягаче и
полуприцепе.
Целесообразность использования
внешних аэродинамических устройств, их
номенклатура, конструктивные и установочные
параметры определяются конкретно для каждого
автопоезда с учетом его типа, назначения,
геометрических параметров, а также скоростей
движения. Установлено, что применение
лобового обтекателя целесообразно, если кузов
выше кабины на 0,5 м и более.
Выбор верхнего лобового обтекателя
выполняется на основе технико-экономической
оценки эффективности различных их типов.
Щитовой обтекатель по сравнению с
объемным значительно легче, менее материалоемок,
универсален. Оборудованный им тягач может
работать с прицепным составом различных
типоразмеров.
При эксплуатации автопоездов на трассах
с преобладанием бокового ветра
предпочтительнее установка объемного обтекателя.
Основной элемент лобового обтекателя - лобовая
панель. Ее характеристики - угол наклона сц),
высота Лр, расположение относительно кузова
Со(Ц)) - определяют, главным образом,
эффективность обтекателя (рис. 5.1.5).
СЦЕПНЫЕ УСТРОЙСТВА
599
Рис. 5.1.5. Схема установка щитового обтекателя на
крыше кабины
Угол наклона обтекателя при установке
его на прицепном или седельном автопоезде
а0 = 0,425[д#/^0 + ДЯД/ф - Ь)\
При размещении обтекателя в зоне
передней кромки крыши кабины для определения
оптимального угла наклона его лобовой
панели можно использовать следующие
зависимости:
осо * агс1е (Д#/ Ьк) + 5 ° при 1=0;
ао * агс1е [Д#/ (Ьк + Ь)\ + 25° при Ь > 0.
Высота и ширина лобовой панели
обтекателя, как правило, выбираются из
конструктивных соображений. Для выпуклых панелей
величина /?о = 0,8 ... 1,2 м, а ширина 1,8 ...
2 м.
Исследования объемного эллиптического
обтекателя показали, что выбирать угол
наклона а лобовой панели и ее форму нужно таким
образом, чтобы высота верхней кромки
последней была выше кузова на величину 30 ... 40
мм при наличии участка ее перехода в
практически горизонтальное положение. Угол
наклона р боковых панелей обтекателя выбирают
таким образом, чтобы воздушный поток
направлялся непосредственно на боковые стенки
кузова.
Применение нижнего лобового
обтекателя целесообразно, если расстояние от
переднего бампера до дороги равно или больше 0,5 м.
Положение крайней нижней точки обтекателя
определяется конструктивно, но расстояние от
нее до дороги не должно быть меньше
дорожного просвета автопоезда.
Применение нижних боковых щитков
связано с установлением оптимальных зазоров
между их нижними кромками и опорной
поверхностью для обеспечения продольной
проходимости автопоезда и исключения поломки
щитков.
Аэродинамическая доводка автопоезда
осуществляется путем испытания его
масштабной модели в аэродинамической трубе;
полученные результаты проверяются с помощью
дорожных аэродинамических испытаний
натурных образцов.
5.1.6. СЦЕПНЫЕ УСТРОЙСТВА АВТОПОЕЗДОВ
Сцепные устройства обеспечивают
шарнирное соединение звеньев автопоезда и
возможность их быстрой сцепки или расцепки. В
зависимости от соотношения передаваемых
вертикальной и продольной нагрузок сцепные
устройства подразделяются на тягово-сцепные
(ТСУ) и седельно-сцепные устройства (ССУ).
Тягово-сцепные устройства применяют в
прицепных автопоездах, они рассчитаны на
передачу больших продольных и
незначительных вертикальных сил. ТСУ должны обладать
высокой надежностью, обеспечивать
соответствующие углы гибкости автопоезда,
возможность быстрой и безопасной сцепки и
расцепки, амортизацию динамических нагрузок при
движении автопоезда. ТСУ состоят из разъем -
но-сцепного, амортизацион но-поглощающего
механизмов и элементов крепления.
/ - корпус амортизационно-поглощающего
механизма; 2 - упругий элемент; 3 - стержень крюка;
4 - головка крюка; 5 - защелка; 6 - собачка
По типу разъемно-сцепного механизма
устройства подразделяют на крюковые (пара
крюк - петля), вилочные или шкворневые
(пара шкворень - петля) и шаровые (пара шар
- полусфера). Крюковые ТСУ (рис. 5.1.6)
отличаются простотой конструкции и
изготовления, небольшой массой, но вместе с тем
имеют значительные зазоры в соединении, что
приводит к повышению динамических
нагрузок и интенсивному изнашиванию деталей
устройства. Конструкция крюковых устройств
предусматривает, как правило, ручную сцепку
и расцепку звеньев автопоезда.
Крюковые ТСУ должны обеспечивать
углы гибкости относительно поперечной оси,
проходящей через зев крюка ±40 °,
вертикальной оси ±55 °, продольной оси ±15 °.
Вилочные или шкворневые ТСУ имеют
вилку, в которую входит сцепная петля
прицепа и которая фиксируется шкворнем (рис.
5.1.7). На тракторных поездах и в качестве
буксирных приспособлений кратковременного
пользования на автомобилях применяют
упрощенные конструкции. Более сложные
конструкции оборудованы направляющим
аппаратом (ловителем) и полуавтоматическим или
автоматическим затвором.
600
Глава 5.1. КОМПОНОВКА АВТОМОБИЛЬНЫХ ПОЕЗДОВ
Рис. 5.1.7. Вилочное ТСУ:
1 - корпус амортизационно-поглощающего механизма; 2 - упругие элементы; 3 - рычаг; 4 -
5 - собачка; 6 - рукоятка; 7- шкворень; 8 - сцепная петля; 9 - ловитель
пружина;
Вилочные ТСУ отличаются малыми
зазорами соединений, обеспечивают быструю и
безопасную сцепку или расцепку автопоезда,
имеют значительный срок службы ввиду
возможности замены шкворня и втулки сцепной
петли. К недостаткам вилочных ТСУ относятся
сложность конструкции и трудность
обеспечения больших углов гибкости автопоезда.
Необходимые углы вертикальной
гибкости обеспечиваются наличием шарнира между
вилкой и элементами крепления ТСУ, либо
сферической формой рабочей части шкворня.
Может устанавливачъся электрический датчик
положения шкворня, обеспечивающий
дистанционный контроль за состоянием ТСУ.
Шкворневые ТСУ должны обеспечивать углы
гибкости относительно поперечной оси,
проходящей через центр сцепной петли или
шарнир вертикальной гибкости ±25 °,
вертикальной оси ±75 °, продольной оси ±20 °.
Шаровые ТСУ устанавливаются на
легковых автомобилях и служат для буксировки
одноосных прицепов или грузовых прицепов
со сдвоенной центральной тележкой.
Для увеличения нелинейности
характеристики упругие элементы ТСУ
устанавливаются с предварительным поджатием, а для
разделения во времени момента начала
движения тягача и прицепа в амортизационно-
поглощающем механизме предусматривается
зазор.
Выбор жесткости упругого элемента
проводится по формуле
2
С = 1*.
4%
где со - частота колебаний, со = 10 ... 12
— - приведенная масса
Гц;
тпр =■
т + т,
п
автопоезда; т - полная масса
автомобиля-тягача; ти - полная масса прицепа;
коэффициент; \|/ = 0 для
КУ "" I
1+^/1-2^
витых пружин; у = 0,15 ... 0,25 для резиновых
элементов; \|/ = 0,3 ... 0,4 для кольцевых
пружин.
В соответствии с ГОСТ 2349-75
типоразмер крюковых и шкворневых ТСУ выбирается
в зависимости от полной массы прицепа (табл.
5.1.5). В зависимости от типоразмера ТСУ
регламентируются высота установки над
опорной поверхностью и присоединительные
размеры. Для крюковых ТСУ типоразмеров 0-3
геометрические параметры сопрягаемых
поверхностей зева крюка и петли одинаковы
(диаметр прутка петли 42 мм). Типоразмер 4
предусматривает применение петли из прутка
диаметром 45 мм. Шкворневые ТСУ
изготовляют в четырех исполнениях: А, В - без шар-
СЦЕПНЫЕ УСТРОЙСТВА
601
нира вертикальной гибкости; С - с шарниром
вертикальной гибкости; В - без шарнира с
ограниченной подвижностью. Исполнения В и
В рассчитаны на применение сцепной петли с
отверстием диаметром 40 мм, а исполнения А
и С - 50 мм.
5.1.5. Полвая масса (т) прицепов ТСУ
в зависимости от типоразмера
Типоразмер
0
1
2
3
4
Крюковые
Дороги
общей
сети
3
8
17
30
80
Грунтовые
дороги
1,5
4,5
10
15
35
Шкворневые
3,5 ... 15
15 ... 24
Более 24
-
В странах Западной Европы типоразмер
применяемых ТСУ определяется
коэффициентом Д кН:
Р= тт*
8-
Наибольшее распространение получили
ТСУ, имеющие О = 70 ... 120 кН.
На прицепных автопоездах для
перевозки легковесных грузов распространены
специальные системы сцепки, позволяющие
уменьшить расстояние между автомобилем-тягачом
и прицепом и увеличить объем кузова:
длинное дышло и перенос точки сцепки
вперед в зону заднего моста автомобиля-
тягача;
ограничение горизонтального угла
складывания между автомобилем-тягачом и
дышлом прицепа с принудительным управлением
передней осью прицепа;
увеличение длины дышла при поворотах.
Седельно-сцепные устройства применяют
в седельных автопоездах. ССУ состоят из
разъемно-сцепного механизма, механизма
гибкости и деталей крепления. По типу
разъемно-сцепного механизма устройства
подразделяются на шкворневые (пара шкворень -
захват) и бесшкворневые (пара крюк - ролик).
Подавляющее большинство ССУ (свыше 95 %)
имеет шкворневую конструкцию. Шкворневые
ССУ состоят из опорной плиты с прорезью в
центральной части, устанавливаемой на
автомобиле-тягаче, и шкворня, закрепленного на
полуприцепе. При сцепке автопоезда
шкворень входит в прорезь опорной плиты и
фиксируется захватами, шарнирно закрепленными
на пальцах.
По числу захватов ССУ подразделяют на
однозахватные (рис. 5.1.8, 6) и двухзахватные
(рис. 5.1.8, а). Для предотвращения
самопроизвольной расцепки предусмотрено не менее
двух замковых устройств, действующих
независимо. Сцепка звеньев автопоезда
производится автоматически, расцепка - вручную,
разблокировкой замковых устройств. Имеются
Рис. 5.1.8. Седельно-сцепное устройство:
а - двухзахватное; б - однозахватное;
1 - предохранитель; 2 - замковое устройство; 3 - палец захвата; 4 - захваты; 5 - регулировочное устройство;
6 - тяга
602
Глава 5.1. КОМПОНОВКА АВТОМОБИЛЬНЫХ ПОЕЗДОВ
конструкции ССУ с пневматическими
устройствами для автоматической расцепки и
электрическим датчиком для дистанционного
контроля за состоянием ССУ, могут быть
предусмотрены устройства для автоматического или
ручного выбора зазора в соединении.
ССУ должны обеспечивать следующие
углы гибкости: относительно вертикальной
оси, совпадающей с осью шкворня, не менее
±90 °, относительно продольной оси не менее
±12 °, относительно поперечной оси не более
±3°.
Опорная плита при этом должна быть
связана с рамой автомобиля-тягача шарнирно
с помощью поперечной, а в ряде конструкций
и продольной осей качания. Имеются ССУ с
креплением опорной плиты к раме с помощью
резиновых подушек, деформация которых
определяет требуемые углы гибкости.
На раме автомобиля-тягача ССУ
закреплена жестко или допускает возможное
продольное перемещение для изменения разве-
совки автопоезда. Автомобили-тягачи,
работающие со сменными полуприцепами,
оборудуют ССУ с гидравлическим подъемным
устройством, что ускоряет процесс сцепки -
расцепки.
Выбор двух типов (50 или 90) зависит от
полной массы автопоезда, полуприцепа и
вертикальной нагрузки на седло (табл. 5.1.6).
5.1.6. Типы седельно-сцепных устройств
Тип
50
90
Нагрузка
на ССУ,
кН,
не более
65
110
150
200
320
Полная масса, т,
не более
Седельного
автопоезда
24
38
48
65
130
Полуприцепа
18,5
31
39
55
ПО
Наиболее напряженные элементы ССУ -
шкворень, захваты седла и заклепочные
соединения шкворня. Шкворень проверяется
расчетом на изгиб (опасное сечение находится
в плоскости соединения с опорным листом) и
на срез. При расчетной силе РКр „ж = щ % и
выполнении шкворня из сталей 40 и 45
напряжение изгиба а„= 50 ... 140 МПа, а среза
тср = 26 ... 71 МПа.
Условие прочности заклепочного
соединения, подвергаемого растяжению и срезу
следующее:
стэ=^+4тср-
В существующих конструкциях [а] =
= 69 ... 186 МПа. Опорные пальцы захватов
проверяются на срез, опорные площадки - на
смятие. В выполненных конструкциях [тср] =
= 25 ... 75 МПа, [асм] = 50 ... 80 МПа.
5.1.7. ОСОБЕННОСТИ ТРАКТОРНЫХ ПОЕЗДОВ
Тракторные поезда представляют собой
блочно-модульные конструкции: колесный
трактор (универсальный энергетический
модуль), прицеп (транспортный модуль)
соединены разъемно-сцепным устройством. По
возможности догрузки задних ведущих колес
трактора различают полуприцепы, прицепы и
полунавесные прицепы. При наличии прицепа
догрузка колес трактора отсутствует.
Полуприцеп и полунавесной прицеп (объединяет
свойства прицепа и полуприцепа) догружают
частью своей массы задние ведущие колеса
трактора.
Прицепы, а следовательно, тракторные
поезда могут быть общего назначения
(универсальные) и специализированные
(большей частью самосвальные). Транспортный
модуль может иметь съемное технологическое
оборудование для грузов различных видов
(навалочно-насыпных, легковесных, жидких,
неделимых). Разъемно-сцепные устройства
отличаются механическим, гидромеханическим
или комбинированным способом догрузки и
могут быть шарнирными с тремя или одной
степенью свободы.
Во всех вариантах груз размещается
только на транспортном модуле.
Тракторные поезда применяются во всех
трех видах перевозок: внутриусадебных (до 3
км), внутрихозяйственных (3 ... 20 км), внехо-
зяйственных (до 100 км).
Внутрихозяйственные перевозки являются основными и
составляют до 70 % объема и до 30 % грузооборота.
Дорожные условия весьма разнообразны:
от асфальтобетонного покрытия до пашни и
снежной целины с коэффициентами
сопротивления качению 0,015 ... 0,25 и
коэффициентами сцепления 0,8 ... 0,1.
Высота седла для ССУ типа 50 не должна
превышать 200 мм, а типа 90 - 315 мм.
В странах Западной Европы тип
применяемых ССУ определяется коэффициентом П:
в 0увтти
т+ти -тс
где тс - масса, передаваемая полуприцепом на
ССУ тягача.
ССУ автопоездов, предназначенных для
эксплуатации на дорогах общей сети, имеют
коэффициент Э ^ 162 кН.
ПРИЦЕПЫ И ПОЛУПРИЦЕПЫ
603
тп йтТ
Максимальная полная масса прицепа тп
тракторного поезда может быть ограничена
либо мощностью двигателя при достаточном
сцеплении ведущих колес трактора и заданной
скорости -
т ^етахПт(1-8)
либо сцеплением ведущих колес
ФХд-ь(1-/^у)[ф-(/-н/)1еу]
[1+(ф-/Н(/ + 0
где ЛГе щах - максимальная мощность
двигателя; т|т - КПД трансмиссии; 5 - коэффициент
буксования ведущих колес; \|/ - суммарный
коэффициент сопротивления опорной поверх-
ности; Хд = —— - коэффициент статической
догрузки сцепного устройства от силы О
догружающей задний мост трактора частью
массы прицепа; у - угол наклона силы тяги
трактора по отношению к опорной
поверхности.
Зависимость массы прицепного состава
тракторного поезда от скорости его движения
имеет две области, одна из которых
соответствует условиям ограничения по сцеплению, а
вторая - условиям ограничения по мощности
двигателя. Для определения оптимального
сочетания параметров тракторного поезда
необходимо привлечение дополнительных
критериев.
Оптимальная масса прицепа тракторного
поезда определяется по экстремуму
экономического критерия эффективности, с учетом
топливно-энергетических характеристик
двигателя и буксования ведущих колес. При этом
учитываются существующие ограничения по
условиям труда, в частности, по плавности
хода [17]. По полученным параметрам
прицепного состава в соответствии с его
функциональным назначением и допустимым
давлением на почву определяются конструктивные
параметры: габаритные и присоединительные
размеры, размеры кузова, число осей и др.
Глава 5.2
АВТОМОБИЛЬНЫЕ И ТРАКТОРНЫЕ
ПРИЦЕПЫ И ПОЛУПРИЦЕПЫ
5.2.1. ОБЩИЕ СВЕДЕНИЯ
Классификация автомобильных прицепов
и полуприцепов приведена на рис. 5.2.1,
причем первая схема объединяет и прицепы-
роспуски (роспуски не могут быть с
шарнирным дышлом и не применяются для перевозки
пассажиров). Прицепы могут быть грузовыми
и специальными. Грузовые прицепы общего
назначения служат для перевозки различных
грузов, специализированные - для перевозки
грузов определенного вида. Конструктивно
прицепы могут быть выполнены с жестким
дышлом (как продолжение рамы прицепа) и с
шарнирным дышлом, связанным с прицепом
шарниром. Одноосные прицепы выполняются
только с жестким дышлом.
Прицел
(—I Пассажирский
И Грузовой
Активный
Неактивный
Общего назначения I {специализированный
1-1С жестким дышлом
гАСшарнирннм дышлом\-л
|-| Одноосный I |~Г Двухосный |
Двухосный и т.д. | Ц Трехосный и т.д.
М Специальный
М Пассажирский
Грузовой
Полуприцеп
г
\-\ Активный
Неактивный
|"-| Общего I
Двулосмый
п_
Специализированный
•—| Специальный
С управляемыми
колесами
С поворотными N
колесами
Одноосный I И С управляемыми
1 П колесами
С неуправляемыми
колесами
Рис. 5.2.1. Классификация автомобильных прицепов (а) и полуприцепов (б)
604
Глава 5.2. ПРИЦЕПЫ И ПОЛУПРИЦЕПЫ
Активным называется прицеп или
полуприцеп с ведущими колесами, а неактивным -
с неведущими колесами. Прицепы с
шарнирным дышлом должны иметь устройства для
поворота колес (поворотные устройства). В
зависимости от типа поворотного устройства
прицепы могут быть с управляемыми колесами
или с поворотными осями. Полуприцепы
могут иметь управляемые и неуправляемые
колеса.
Прицепы широко применяются для
размещения на них подвижных электростанций,
сварочных агрегатов, насосных установок,
временного жилья и отдыха людей и пр.
Применение прицепа обеспечивает автопоезду
большую грузовместимость, чем при
использовании полуприцепа, поскольку суммарные
площадь (а также полезный объем) кузова и
полезная длина рамы у прицепного автопоезда
больше, чем у седельного. Однако прицепы
менее устойчивы в движении (виляние),
главным образом, из-за наличия у автопоезда двух
шарниров горизонтальной гибкости, и
затрудняют маневрирование автопоезда задним
ходом [14].
Применение полуприцепов обеспечивает
автопоезду большие компактность (меньшую
длину), устойчивость и маневренность.
Полуприцепы предпочтительны при перевозке
любых неделимых, а также длинномерных
делимых грузов. Для перевозки длинномерных
грузов применяют прицепы-роспуски с
регулируемой длиной дышла, которые по
сравнению с полуприцепами имеют меньшую массу,
но специализированы на перевозке
длинномерных грузов.
Принципы классификации тракторных
прицепов и полуприцепов аналогичны
автомобильным, однако их состав отличается
меньшим разнообразием по сравнению с
автомобильным [12].
5.2.2. РАМЫ
Рама состоит из главных продольных
балок (лонжеронов) и более легких поперечин,
соединенных в единую жесткую систему. Для
рам прицепов характерна прямоугольная
конфигурация, для рам одноосных прицепов -
треугольная. Треугольная рама по сравнению с
прямоугольной легче и прочнее. Однако
вследствие ограниченной площади для
монтажа оборудования потребителя такие рамы
большого распространения не получили.
У тракторных прицепов используются
также хребтовые рамы (однобалочные),
которые получаются приваркой к продольной
балке поперечин. Такая конструкция
характеризуется высокой жесткостью в отношении
перекосов и наиболее приемлема для прицепов с
независимой подвеской колес.
Рамы полуприцепов (двухосных
прицепов с поворотными осями) имеют лонжероны
с неодинаковой высотой полок (в передней
части меньше), что связано с необходимостью
размещения под рамой (без увеличения ее
монтажной высоты) ССУ тягача (для
полуприцепов) или поворотной тележки (для
прицепа). Сужение лонжерона в передней части
полуприцепа компенсируется обычно
опорным листом (плитой наката) в зоне сцепного
шкворня. Переход от суженной части к
основной усиливается, как правило, приваркой
накладок.
У полуприцепов к полноприводным
тягачам, которые вследствие однорядной
установки колес и большого радиуса шин, а также
необходимости обеспечить большие углы
вертикальной гибкости, имеют ССУ и раму
ступенчатой формы. Переходная часть также
усиливается приваркой накладок.
Лонжероны имеют швеллерное,
двутавровое, реже коробчатое сечение. Двутавровый
профиль при повышенных нагрузках
отличается большим запасом прочности на изгиб и
поэтому характерен для прицепов и
полуприцепов большой грузоподъемности, в том числе
и тракторных. Лонжероны и поперечины
могут изготовляться из готового проката
(профильного или листового с последующей
гибкой), а также путем штамповки и сварки.
Катаные лонжероны менее трудоемки, но
наиболее массивные. Минимальная
металлоемкость у сварных лонжеронов. Катаные и
штампованные лонжероны применяют в
основном на прицепах малой и средней
грузоподъемности.
Соединение лонжеронов с поперечинами
осуществляется клепкой или сваркой [4].
Клепаные рамы прочнее, хорошо противостоят
воздействию переменных и ударных нагрузок,
обладают хорошей ремонтопригодностью,
применяются на прицепах, работающих в
тяжелых дорожных условиях. Недостаток
клепаных рам - большая металлоемкость.
В качестве поперечин используют
элементы швеллерного и двутаврового профиля.
В тракторных рамах применяют так же
трубчатые поперечины. Двутавровые поперечины
устанавливают в наиболее нагруженных местах
рамы, они имеют переменное сечение
горизонтальных полок. Для усиления рамы
используют опорный лист, а также наружные
раскосы и дополнительные лонжероны
обвязки, что обеспечивает также удобство
размещения и крепления кузова, поскольку рама
является одновременно основанием.
Дополнительные лонжероны широко применяют также в
рамах тяжеловозов. Повышение прочности
рамы достигается приваркой листов настила к
раме сверху (обычно в качестве пола).
Для сварных рам используют в основном
низколегированные хорошо свариваемые стали
ПОВОРОТНЫЕ УСТРОЙСТВА
605
10ХСНД, 09Г2С, 22Г2ТЮ и 10Г2Б с пределом
текучести ат > 40 МПа. Расчет рам прицепов и
полуприцепов аналогичен расчету рам
автомобилей [4]. Более точный расчет рам (с
помощью ЭВМ) основан на применении метода
конечных элементов [7], который особенно
эффективен для сложных рам (прицепов-
тяжеловозов и др.).
5.2.3. КУЗОВА
Распространенным типом автомобильных
кузовов для перевозки делимых грузов
являются бортовые платформы и кузова-фургоны.
Кроме того, на прицепах и полуприцепах
используется большое число
специализированных кузовов, отличающихся большим
разнообразием.
Бортовая платформа, предназначенная
для перевозки делимых (штучных) грузов в
таре или без тары, является наиболее
универсальным типом кузова. Грузовместимость
платформы можно оценить удельным объемом
Чч."1т;ч*,"9п
в тг,т
Рис. 5.2.2. Удельные показатели бортовых платформ
прицепов:
а - одноосных; б - двухосных;
основные борта; - • - - надставные борта
ду,м3/т;д$,мг/т
22 тппт
Рис. 5.2.3. Удельные показатели бортовых платформ
полуприцепов:
а - ОдАЗ; б - МАЗ
0у (отношение внутреннего объема к
грузовместимости) и удельной площадью ^у
(отношение площади пола к
грузоподъемности). С увеличением грузоподъемности оба
показателя уменьшаются (рис. 5.2.2, 5.2.3),
поскольку габаритные ограничения длины и
ширины не позволяют увеличивать объем и
площадь платформы прицепного звена
пропорционально грузоподъемности. Одноосные
прицепы и двухосные малой грузоподъемности
имеют наибольшие значения ду и Я8-
Бортовую платформу рассчитывают на
д\г = 1»5 ... 2 м3/т. Для одноосных прицепов и
двухосных малой (не более 3 ... 4 т)
грузоподъемности указанные удельные объемы
достигаются применением только основных
(обязательных) бортов. Для прицепов более
высокой грузоподъемности требуемые
значения обеспечиваются использованием
дополнительных (надставных) бортов. Высота
основных бортов отечественного прицепного состава
составляет 450 ... 658 мм, основных и
надставных вместе - не более 1м.
Дальнейшее увеличение высоты бортов
является проблематичным по условию
сохранения достаточной поперечной устойчивости
прицепа и полуприцепа и малой
металлоемкости конструкции [10].
Грузовместимость платформы по объему
как у прицепов, так и у полуприцепов при
перевозке некоторых грузов может быть
существенно улучшена применением дуг и тента.
Объем кузова с учетом дуг и тента в 2,5 - 3,5
раза превышает объем с основными бортами.
Бортовые платформы могут быть цельносъем-
ными и совмещенными (частично) с рамой.
Перспективным материалом для бортов и
других элементов платформы являются
алюминиевые сплавы, благодаря применению
которых снаряженная масса большегрузных
полуприцепов снижается на 20 %.
При расчете бортовой платформы на
прочность оценивается прочность несущих
элементов: каркаса (продольных и поперечных
балок), поперечных брусьев и бортов на изгиб.
В более точных методах расчета бортов
расчетная схема сводится к пространственной
стержневой системе, что позволяет использовать
метод конечных элементов [4].
У тракторных прицепов в основном
применяют кузова самосвальной конструкции,
с разгрузкой на одну, две и три стороны.
Устройство и особенности конструкции
существенно не отличаются от автомобильных.
5.2.4. ПОВОРОТНЫЕ УСТРОЙСТВА
К поворотным устройствам прицепов и
полуприцепов относят механизмы,
обеспечивающие изменение направления движения
прицепного звена - поворотные оси и
управляемые колеса.
606
Глава 5.2. ПРИЦЕПЫ И ПОЛУПРИЦЕПЫ
Характеристическим параметром
поворотного устройства прицепа является
передаточное число
/ = е / ф,
где е - угол поворота дышла; ф - угол
поворота колес.
Отличительным признаком поворотных
осей является жесткая связь дышла прицепа с
передней осью (передней тележкой),
вследствие чего / = 1. Они выполнены в виде
поворотных или подкатных тележек, причем
поворотные тележки имеют неразъемное
шарнирное соединение с рамой прицепа, а подкатные
- разъемное.
Наиболее распространенным шарнирным
соединением поворотной тележки с рамой
является поворотный круг, представляющий
собой шариковый упорный подшипник
большого размера, одна из обойм которого
крепится к раме прицепа, а другая - к поворотной
тележке.
Подкатные тележки позволяют достичь
унификации прицепа и полуприцепа при
изготовлении, а также использовать для их
буксировки как седельные, так и буксирные
тягачи. Для связи подкатной тележки с
полуприцепом применяют жесткое ССУ, которое в
отличие от устанавливаемых на седельных
тягачах имеет только одну степень свободы,
обеспечивающую поворот тележки
относительно полуприцепа в горизонтальной
плоскости.
Поворотное устройство с управляемыми
колесами принципиально отличается от
рассмотренного тем, что при повороте
управляющего органа (дышла) на прицепе
относительно рамы поворачиваются только
управляемые колеса. Передача момента от дышла к
колесам осуществляется системой тяг и
рычагов. Привод управления обычно изменяет
передаваемый момент (и угловую скорость
поворота колес по отношению к дышлу), поэтому в
общем случае передаточное число 1*1.
Поворотное устройство с управляемыми
колесами может быть с боковым размещением
рычагов привода - неразрезная рулевая
трапеция и центральным размещением привода -
разрезная рулевая трапеция. Недостатком
бокового размещения рычагов является трудно-
устраняемая связь подвески с управляемыми
колесами. При прогибах подвески изменяется
расстояние между осью колес и рамой
прицепа и, следовательно, расстояние между
рычагом поворота колеса и дышлом.
Периодическое изменение этого расстояния приводит к
колебаниям управляемых колес, а
следовательно, к динамическому нарушению
устойчивости движения прицепа (его вилянию).
Такой недостаток отсутствует у
поворотных устройств с центральным расположением
привода управления. Введение управляемых
колес при ограниченных углах их поворота (до
30 ... 35 °) позволяет разместить раму прицепа
между колесами (низкорамные прицепы) и
обеспечить ее малую (700 ... 800 мм) высоту.
Небольшая монтажная высота рамы может
иметь решающее значение при установке
некоторого оборудования (например, кузовов-
фургонов), вследствие чего такие прицепы
применяются в основном для монтажа
оборудования.
Сохранение преимуществ поворотного
круга и получение относительно малой
высоты рамы в некоторых случаях возможно путем
компромиссного решения: ось с поворотным
кругом имеет ограниченный угол поворота
(до 31 ... 35 •).
Прочностной расчет поворотных
устройств осуществляется методами,
применяемыми в машиностроении. Целью
кинематического расчета поворотных устройств является
получение оптимальной зависимости углов
поворота колес от угла поворота дышла,
обеспечивающих достаточную маневренность
прицепа, устойчивость против виляния, малые
изнашивание шин и сопротивление качению
при повороте. Кинематический расчет имеет
особенности только для прицепов с
управляемыми колесами [13].
Полуприцепы с поворотными осями
(управляемыми колесами) имеют
ограниченное применение, поскольку эффективное
улучшение маневренности при введении
управляемых колес имеет место при большой
базе полуприцепа (при отношении базы
полуприцепа к базе тягача больше 1,5 для
стесненных условий и больше 2,5 для обычных
условий), что ограничено транспортным
законодательством (длина седельного автопоезда
общего назначения не может превышать 20 м).
Поворотные устройства обеспечивают
поворот управляемых колес полуприцепа
обычно в функции угла складывания
автопоезда или угла поворота рамы полуприцепа
относительно тележки колес.
На прицепах-роспусках применяется
гибкая крестообразная сцепка (ведущий и
ведомый рычаги поворотного устройства
связаны с двумя гибкими перекрещивающимися
нитями одинаковой длины). Такое поворотное
устройство является кинематически
неопределенным: конкретному значению задающего
угла могут соответствовать (в некоторых
пределах) различные значения выходного угла
поворота.
На тракторных прицепах, как правило,
применяют поворотные тележки. Различают
тележки со сцепной петлей, опорно-
седельным устройством и с шарнирным
соединением.
Сцепной петлей оборудуются почти все
тракторные прицепы. Опорно-седельное уст-
ТОРМОЗНЫЕ СИСТЕМЫ
607
ройство используется для транспортировки
автомобильных прицепов тракторами тягового
класса 3 ... 5 кН, шарнирное соединение
позволяет устранить биение без смазки в
соединении буксирный крюк - сцепная петля,
улучшить проходимость и управляемость
тракторного поезда, а в ряде случаев снизить массу
прицепа при увеличении его
грузоподъемности.
Дышла тракторных прицепов могут быть
жестко заделаны на раме (для полуприцепов)
и закреплены на раме шарнирно. Конструкция
дышел однотипна: сварная из гнутого
профиля. Дышло может быть соединено с рамой
через упругий элемент (набор тарельчатых
пружин). Типоразмеры тягового крюка зависят
от полной массы прицепа.
5.2.5. ТОРМОЗНЫЕ СИСТЕМЫ
Тормозные системы автомобильных
прицепов и полуприцепов базируются на
конструктивных решениях, применяемых в
автомобилях, однако в отличие от последних не
имеют собственных источников энергии и
могут отделяться от тягача (использоваться с
разными тягачами). Тормозные системы
прицепного состава должны обеспечивать
быстродействие тормозных механизмов, усиление
воздействия водителя на орган управления,
пропорциональность сил на органе управления
и колесах. Специфическими требованиями
тормозных систем являются фиксированное
распределение тормозных сил между тягачом и
прицепом и автономность систем (сохранение
ограниченной работоспособности при
расцепке автопоезда), которые являются
обязательными, по крайней мере, для рабочей и
стояночной тормозных систем прицепа и
полуприцепа.
Схемные решения для привода
тормозных механизмов зависят от их типов,
применяемых на тягаче. При использовании на
тягаче гидропривода возникает необходимость
разъединения гидросистемы при расцепке
тягача с прицепом, что связано с попаданием
в систему воздуха, приводящего к отказу
тормозной системы. В связи с этим в автопоездах
непосредственное соединение гидросистем
тягача и прицепа или полуприцепа не
применяется. На практике возможны варианты:
1) с тягачом используется прицеп без
рабочей тормозной системы;
2) тягач и прицеп оборудуются пневмо-
системой;
3) прицеп снабжается автономной
тормозной системой, не зависящей от тормозных
систем тягача.
Применение варианта 1 допустимо
только для прицепов категории О1 и только в
случае их использования с тягачами, имеющими
полную массу, превышающую полную массу
прицепа в 2 раза и более, и недопустимо с
тягачами категории М^.
Недостатком системы, выполненной по
второму варианту, является отсутствие
унификации тормозных аппаратов тягача и прицепа.
Использование системы предпочтительно при
наличии других потребителей сжатого воздуха
(централизованная подкачка шин).
Пневматическая тормозная система прицепа
выполняется так же, как на тягаче.
В качестве тормозной системы по
варианту 3 (автономной) применяется обычно
инерционная (тормоза наката). Такие системы
можно использовать с тягачами любого типа,
они являются, как правило, менее материало-
емкими.
Гидравлический тормоз наката по
сравнению с механическим обеспечивает более
плавное и равномерное распределение
тормозных сил на колеса, но сложнее по
конструкции и в эксплуатации. Инерционный
тормоз наката срабатывает только при
относительном перемещении тягача и прицепа: тягач
нужно хотя бы частично затормозить. Такая
тормозная система автопоезда является
несинхронной, что снижает ее эффективность и,
кроме того, может быть причиной потери
устойчивости автопоезда при торможении.
Инерционная тормозная система должна
быть достаточно чувствительной (развивать
нормированную эффективность при осевой
силе в сцепке, не превышающей 6 % полного
веса прицепа). Вследствие этого и указанной
несинхронности перемещения тягача и
прицепа, работа инерционных тормозных систем
сопровождается толчками и ударами. Такую
систему можно применять только на
относительно легких прицепах (категорий ©1 и Ог)
при условии, что полная масса автопоезда
составляет не менее 1,33 полной массы
прицепа.
Пневматическая тормозная система
является наиболее распространенной, применяется
на прицепах и полуприцепах средней и
большой грузоподъемности, по сравнению с
гидросистемой проще аккумулирует необходимый
запас энергии на прицепе, создает
значительное усиление управляющего сигнала,
обеспечивает делимость пневмопривода. В то же
время она более металлоемкая, особенно на
прицепах и полуприцепах малой
грузоподъемности.
Принципиальная схема пневматической
тормозной системы показана на рис. 5.2.4.
608
Глава 5.2. ПРИЦЕПЫ И ПОЛУПРИЦЕПЫ
Рис. 5.2.4. Пневматическая тормозная система
трехосного прицепа (полуприцепа):
7 - соединительные головки; 2 - магистральные
фильтры; 3 - электромагнитный клапан; 4 - регулятор
тормозных сил; 5 - воздухораспределители;
6 - разобщительные краны; 7- кран слива
конденсата; 8 - клапан контрольного вывода;
9 - воздушные баллоны; 10 - тормозные камеры
Управление тормозными механизмами
прицепа и полуприцепа осуществляется
тормозным краном тягача двумя способами. В
однопроводнои системе в отгорможенном
состоянии тормозной кран обеспечивает
подачу сжатого воздуха через
воздухораспределители в воздушные баллоны. При
затормаживании тягача тормозной кран сообщает
воздухораспределитель с атмосферой, вследствие чего
воздух из воздушных баллонов прицепа
поступает в тормозные камеры, затормаживая
последний. Для управления тормозными
механизмами прицепа используется единственная
(соединительная) магистраль.
В двухпроводной системе снабжение
сжатым воздухом (как при торможении, так и
в отгорможенном состоянии) осуществляется
питающей магистралью, которой тормозной
кран не управляет. При торможении тягача
сжатый воздух подается краном в другую
полость воздухораспределителя по верхней
магистрали, а при оттормаживании она
соединяется с атмосферой, что вызывает соответственно
затормаживание и растормаживание прицепа.
Двухпроводная тормозная система
пополняется сжатым воздухом независимо от
режима работы тормозного крана, что
повышает надежность ее работы. По сравнению с
однопроводнои она обладает большей
эффективностью, поскольку давление в воздушных
баллонах тягача и прицепа может быть
одинаковым (0,75 ... 0,8 МПа), в то время как при
однопроводнои схеме в баллоне прицепа оно
составляет 0,48 ... 0,52 МПа.
Тормозная система тягачей, нормально
работающая с прицепами, оборудованными
как двухпроводной, так и однопроводнои
системой, является комбинированной.
Стояночная тормозная система в отличие
от других систем имеет только механический
привод.
Трудностью создания тросового и
рычажного Приводов является обеспечение
равномерного распределения тормозных сил по
осям и бортам. В тросовом приводе для этого
применяется система уравнительных блоков, в
рычажном - балансир. По сравнению с
тросовым приводом жесткий рычажный требует
меньшего времени на затормаживание и
растормаживание, имеет меньшие механические
потери и более надежен. Снижение
надежности тросового привода характерно для зимнего
и весенне-осеннего периодов эксплуатации
(налипание льда и грязи). Однако рычажный
привод обладает большей металлоемкостью.
Тракторные прицепы имеют рабочую
тормозную систему обычно с.пневмоприводом
однопроводнои схемы. Для перераспределения
значительных нагрузок на оси при
торможении иногда применяют статические или
динамические регуляторы.
Увеличение быстродействия тормозного
привода, необходимого из-за больших
габаритных размеров прицепов и полуприцепов, а
следовательно, удлинения магистралей
приводов, достигается использованием оптимальных
проходных сечений трубопроводов и
аппаратов, применением дополнительных
ускорительных клапанов прямого и обратного
действия, корректирующих устройств. В
перспективе возможно использование
электропневматических тормозных приводов.
5.2.6. ПОДВЕСКА, ОСИ, КОЛЕСА И ШИНЫ
По конструкции упругого элемента
различают автомобильные подвески,
применяемые на прицепах и полуприцепах: рессорные;
торсионные; пружинные; резиновые;
пневматические. Рессорная подвеска наиболее
широко распространена благодаря простоте
конструкции, относительно низкой стоимости,
хорошей ремонтопригодности. Однако она
отличается большой массой и ограниченной
долговечностью.
Важным фактором, который учитывают
при создании рессоры, является
ограниченность места для ее размещения. Поскольку
необходимая длина рессоры обратнопропор-
циональная максимальному напряжению [15],
для изготовления рессор применяют
материалы с высоким пределом текучести:
легированные стали 60С2, 55С2, 50ХГ и 50ХГА, причем
чаще используют сталь 60С2, легированную
кремнием.
Для повышения прочности рессорные
листы подвергают термообработке и
поверхностному упрочнению. Наиболее эффективными
способами упрочнения является наклеп
дробью (в свободном и напряженном состояниях)
по поверхности, подвергаемой растяжению,
осадка рессоры в сборе до напряжений,
превышающих предел текучести. Современные
ПОДВЕСКА, ОСИ, КОЛЕСА И ШИНЫ
609
рессорные стали после термообработки имеют
предел прочности ав = 1400 ... 1600 МПа,
предел текучести ат = 1200 ... 1400 МПа.
Повышение прочности рессоры и
снижение ее массы (на 10 %) достигают выбором
рационального профиля листов. Для
автомобильных рессор применяют четыре вида
профилей горячекатаного проката (рис. 5.2.5).
Рис. 5.2.5. Профиль рессорных листов:
а - прямоугольный; б - трапециевидный;
в - Т-образный; г - трапециевидно-ступенчатый
Преимущества несимметричных
профилей связаны со снижением наиболее опасных
напряжений растяжения за счет некоторого
увеличения напряжения сжатия. Однако
некоторые операции изготовления рессор
несимметричного профиля требуют более сложной
технологии, а углы сечения профиля могут
быть концентраторами напряжений. Вместо
таких профилей рекомендуется применять
прямоугольный профиль с закруглением
кромок.
Жесткость рессоры должна обеспечивать
требуемые прогибы - статический /с и
динамический /д. Для прицепов и полуприцепов
считается достаточным /с = /д = 70 ... 100 мм.
Прочность и долговечность рессор
подтверждаются испытаниями.
Конструкция подвески, а часто и вид
применяемой рессоры, зависят от принятого
способа соединения рессоры с рамой:
1) передний конец - с загнутым ушком
коренного листа (шарнирно), задний - с
помощью серьги;
2) передний конец - с накладным ушком
(шарнирно), задний - скользящий;
3) передний и задний концы - с
резиновыми подушками;
4) с помощью реактивных штанг (оба
конца рессор скользящие).
Первый способ ввиду недостаточной
прочности рессор при работе на кручение в
настоящее время применяется редко; второй,
упрощающий технологию изготовления рессор
и увеличивающий срок службы коренного
листа, получил распространение на двухосных
прицепах малой и средней грузоподъемности
(прицепы СМЗ, ГКБ по прицепам, МАЗ);
третий большого распространения не получил,
хотя уменьшает скручивание рессор и износ
листов в местах крепления, не требующих
смазывания, поскольку жесткость опорных
узлов при таком способе заделки изменяется
по мере изнашивания резины и ее старения;
четвертый применяется для двухосных и
трехосных полуприцепов, обеспечивая
равномерное распределение вертикальных нагрузок по
осям.
Для двухосных полуприцепов с
ограниченными нагрузками на ось (до 60 кН), а
также работающих в трудных дорожных условиях
применяют балансирную двухрессорную
подвеску (по одной рессоре с каждого борта,
выполняющей функцию балансира). Для
полуприцепов с большими нагрузками на ось для
получения максимальной грузоподъемности
(путем увеличения расстояния между осями)
применяют четырехрессорную подвеску,
которая хуже приспособлена к неровностям
опорной поверхности, однако лучше распределяет
вертикальные нагрузки по длине рамы.
Передача тормозных сил и сил тяги осуществляется
реактивными штангами.
На некоторых полуприцепах применяют
независимые рессорные подвески (рычажную,
с поперечным расположением рычагов
подвеска полуприцепа МАЗ-938). Применение
амортизаторов характерно для прицепов
(одноосных и двухосных), предназначенных
для трудных дорожных условий эксплуатации.
Амортизаторы существенно снижают
динамические нагрузки в ходовой части. На
двухосных прицепах амортизаторы ставятся на обеих
осях.
Торсионные и пружинные упругие
элементы обладают большей удельной
энергоемкостью, чем листовые рессоры и большей
долговечностью, а также меньшим трением в
упругих элементах. Схемы этих подвесок
обеспечивают независимое подрессоривание
20 3;1к 1741
610
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
колес и хорошую приспособляемость к
неровностям грунта. Однако в отличие от рессор для
пружин и торсионов необходим специальный
направляющий аппарат, что увеличивает массу
подвески.
Торсионные подвески применяются на
некоторых специальных прицепах МАЗ,
предназначенных для трудных дорог. Пружинная
и пневматические подвески на отечественных
прицепах не применяются.
Резиновая подвеска способна
воспринимать большое давление на упругий элемент,
является нелинейной и потому, как правило,
компактной. Недостатком подвески является
ограниченный ход и нестабильность
характеристики в процессе эксплуатации.
Применяется на прицепах-тяжеловозах и полуприцепах-
тяжеловозах.
Оси автомобильных прицепов и
полуприцепов для неуправляемых колес работают в
основном на изгиб в аналогичных нагрузочных
режимах, могут быть двух типов: А для
одинарных колес (с колеей 1440 ... 2000 мм); Б
для сдвоенных колес (с колеей 1800 ... 1850
мм). Цельные оси прицепов и полуприцепов
изготовляют из трубного проката сталей 40,
40Х, 18ХГТ (концы осей оттягивают ковкой
для получения посадочных поверхностей под
подшипники ступицы). Составные оси
получают из балки и цапфы, которая
впрессовывается в балку или приваривается к ней.
Для снижения сопротивления качению и
изнашивания шин, а также обеспечения
высокой динамической устойчивости (против
виляний) управляемые колеса передней оси
устанавливают со схождением, развалом,
продольным и поперечным наклоном шкворня.
Оси прицепов и полуприцепов
рассчитывают на изгиб и кручение. За расчетные
режимы принимают статическое нагружение
вертикальной нагрузкой, занос оси и торможение.
Запас прочности при оценке статического
нагруЖения принимают достаточно большим
(4 - 5) с тем, чтобы учесть увеличение
напряжений в оси и при динамических нагрузках.
Ступицы, колеса и шины, применяемые
на прицепах и полуприцепах, по конструкции
не отличаются от аналогичных узлов
автомобилей. На полуприцепах по условиям
приближенного равенства в автопоезде осевых
нагрузок применяют ступицы, колеса и шины,
унифицированные с теми же узлами тягача.
Унификация аналогичных узлов тягача и
прицепа достижима также в автопоездах общего
назначения (в обычных дорожных условиях).
Наиболее широко применяют
стандартизованные камерные шины постоянного
давления, дисковые колеса (к ступице крепится
диск колеса), а также бездисковые (к ступице
крепится обод колеса) с разборным ободом.
Оба типа колес имеют одинаковые посадочные
размеры ободьев и выполняются с
коническими полками уклоном в 50 °. Из трех
посадочных диаметров обода на прицепах и
полуприцепах применяются два (381 и 508 мм),
причем первый значительно реже, номинальная
ширина обода колес шести типоразмеров
152 ... 216 мм.
Наибольшее распространение на
прицепах и полуприцепах находят диагональные
шины постоянного давления, широко
применяемые на грузовых автомобилях обычной
проходимости. На полуприцепах большой
грузоподъемности устанавливают радиальные
шины, которые имеют меньшие тепловую
нагруженность, износ и сопротивление
качению. Они на 2 ... 7 % легче диагональных,
имеют больший ресурс: гарантийная наработка
для радиальных шин с металл о кордным бреке-
ром на 32 ... 35 % (для тех же шин с тексиль-
ным брекером на 13 ... 14 %) установлена
большей, чем у диагональных шин.
Недостатком радиальных шин является меньшая
боковая жесткость.
У тракторных прицепов в качестве
упругих элементов применяются продольно
расположенные полуэллиптические рессоры. В ба-
лансирных подвесках используются
реактивные штанги. Оси имеют неразрезные балки.
Оси, соединенные между собой упругими и
направляющими элементами подвески,
образуют тележки прицепных звеньев.
Сечения осей делятся на четыре типа:
квадратного или прямоугольного;
трубчатые с приварными заготовками
кованых цапф;
трубчатые с обжатыми концами по
размерам цапф;
двутавровые.
По прочности и высоким показателям
наиболее предпочтительны полые оси третьего
типа. Типоразмерный ряд грузоподъемности
осей предусмотрен в составе 1, 3, 4 и 6 т.
Для тракторных прицепов характерно
применение одинарных колес с
широкопрофильными шинами. В последнее время
используются сверхнизкопрофилъные шины с
отношением высоты профиля к ширине менее
0,5.
Глава 5.3
СПЕЦИАЛИЗИРОВАННЫЕ
АВТОТРАНСПОРТНЫЕ СРЕДСТВА
5.3.1. АВТОМОБИЛИ И АВТОПОЕЗДА-САМОСВАЛЫ
Автомобилем или
автопоездом-самосвалом называется специализированное
автотранспортное средство (САТС), оборудованное
саморазгружающимся кузовом (платформой).
Самосвалы представляют самую значительную
группу в парке грузовых машин.
АВТОМОБИЛИ И АВТОПОЕЗДА-САМОСВАЛЫ
611
По назначению самосвалы могут быть:
карьерные,
строительные,
сельскохозяйственные,
узкоспециализированные (керамзитово-
зы, бетоновозы, хлопковозы и др.) [3].
Разгрузка кузова осуществляется:
назад;
на боковые стороны;
на три еторокы;
назад или на боковые стороны с
предварительным подъемом вверх;
через люк в днище и бункер.
По типу используемого шасси самосвалы
могут быть:
одиночными автомобилями-самосвалами;
прицепами или
полуприцепами-самосвалами, которые в сцепе с автомобилем-тягачом
образуют автопоезда-самосвалы (самосваль-
ные-автопоезда).
По проходимости самосвалы бывают:
дорожные,
внедорожные,
повышенной проходимости.
Основными конструктивными отличиями
автомобилей-самосвалов от автомобилей
общетранспортного назначения являются
специальные кузова, в большинстве случаев в виде
плоских платформ со сравнительно низкими
бортами, и наличие подъемных механизмов.
На компоновке автомобиля-самосвала в
наибольшей мере отражается тип и направление
разгрузки кузова, расположение подъемного
механизма.
Основные принципиальные схемы
автомобилей-самосвалов показаны на рис. 5.3.1.
Наибольшее распространение имеет схема с
задней разгрузкой кугова (рис. 5.3.1, а):
гидроцилиндр находится под кузовом и
непосредственно воздействует на неге. При компоновке
по схеме, показанной на рис. 5.3.1, б,
гидроцилиндр воздействует на передний борт
кузова, что исключает сосредоточенную нагрузку
на несущую систему кузова, уменьшает силу
гидроцилиндра, облегчает доступ к нему для
обслуживания, но приводит к увеличению его
длины и числа выдвижных звеньев.
На рис. 5.3.1, в показана схема с
трехсторонней разгрузкой кузова и расположением
цилиндра под ним. Такая компоновочная
схема обеспечивает возможность работы
автомобиля в составе самосвального автопоезда. По
аналогичной схеме возможна компоновка
автомобиля-самосвала только с боковой
разгрузкой кузова (рис. 5.3.1, г), при этом кузов
получается более простой и жесткий.
Для снижения сосредоточенной нагрузки
на кузов применяется компоновка
автомобиля-самосвала с двусторонней разгрузкой (рис.
5.3.1, д)у при которой гидроцилиндры
размещаются у переднего и заднего борта. Такая
схема особенно целесообразна при
затруднении размещения гидроподъемника на шасси в
пределах базы автомобиля. На рис. 5.3.1, е
показана схема с рычажной системой подъема
кузова и поршневым гидроцилиндром для
опрокидывания назад. Сила гидроцилиндра
передается на кузов через систему рычагов, что
препятствует боковому смещению кузова при
опрокидывании его назад, однако увеличивает
металлоемкость опрокидывающего механизма.
Менее распространены самосвалы с
саморазгрузкой.
Автомобиль, предназначенный для
работы в составе самосвального автопоезда,
оборудуется тягово-сцепным устройством, а также
системами управления тормозами,
электрооборудованием и гидрооборудованием
прицепа. Соответствующими системами оснащены и
самосвальные прицепы.
Карьерные самосвалы используются на
открытых горных разработках в качестве одного
из основных звеньев комплексного
технологического процесса выемки породы и добычи
полезных ископаемых в горнорудной
промышленности, при транспортировке породы в
отвалы, а полезные ископаемые к местам их
переработки или накопления (плотность груза
1 ... 3 т/м3). Они применяются также для
перевозки грунта на вскрышных работах, при
строительстве насыпей, дамб и других
сооружений. Карьерные самосвалы являются
внедорожными, так как из-за больших нагрузок на
ось движение их по дорогам общей сети
недопустимо.
Дороги для карьерных самосвалов
отличаются относительно небольшой
протяженностью. Они бывают постоянными и
временными. Продольные уклоны постоянных дорог
составляют 7 ... 8 %, на соединительных
дорогах 9 ... 10 %, на временных дорогах 12... 14 %.
При затяжных подъемах на дорогах
предусматриваются участки с уклоном не более
2 %, длиной 80 ... 100 м через каждые 500 ...
600 м длины дороги.
Карьерные автомобили-самосвалы
Белорусского автомобильного завода, несмотря на
широкий диапазон грузоподъемности
выполнены по одной компоновочной схеме и имеют
общие конструктивные особенности:
колесную формулу 4 х 2 с большой
сцепной массой (68 ... 72 % полной массы);
относительно высокие удельные
мощности (не менее 5 кВт/т);
автоматические трансмиссии
(гидравлические и электрические);
короткие базы, обеспечивающие Лт1Л=
= 10 м;
одно или двухместные кабины с
высокими эргономическими свойствами;
гидропневматические подвески,
обеспечивающие высокую плавность хода;
кузова ковшевого типа (без заднего
борта);
двигатели -дизели.
20*
612
Глава 5.3. СПЕЦИАЛИЗИЮВАННЫЕ АТС
л Рис; 5.3.1. Основные принципиальные схемы автомобилей-самосвалов
АВТОМОБИЛИ И АВТОПОЕЗДА-САМОСВАЛЫ
613
Строительные автомобили-самосвалы и
самосвальные автопоезда предназначены для
перевозки строительных навалочных,
насыпных и жидких грузов и являются наиболее
распространенной группой среди
специализированных автотранспортных средств.
Основные дороги, пролегающие от карьеров к
дробильным или щебеночным заводам относятся
к категориям III и IV. Техническое состояние
забойных дорог, пролегающих в карьерах от
основных дорог к погрузочным средствам, а
также отвальных дорог, соединяющих отвалы
земли или породы с местами вскрышки,
соответствует дорогам категорий IV и V.
Протяженность маршрутов для строительных
автомобилей-самосвалов составляет 2,5 ... 30 км,
причем в городах они приближаются к
условиям эксплуатации грузовых автомобилей
общего назначения.
По условиям эксплуатации,
конструктивным особенностям и эксплуатационным
свойствам строительные самосвалы делятся на
четыре группы [16].
1. Средней грузоподъемности (4 ... 6 т) с
разгрузкой кузова назад, работающие без
прицепа. По конструкции они являются
модификациями дорожных автомобилей
общетранспортного назначения с колесной формулой
4x2. Бензиновые двигатели обеспечивают
удельную мощность 10,1 ... 11,2 кВт/т.
Весовые параметры автомобилей-самосвалов
позволяют их эксплуатировать по всем дорогам.
Основные грузы: грунт, песок, глина, щебень,
гравий, асфальт, бетон, строительные
растворы, строительный мусор и др. Плотность
грузов 1,4 ... 1,6 т/м3. Работа на стесненных
строительных площадках требует высокой
маневренности. Поэтому эти самосвалы не
рассчитаны на работу с прицепом и имеют
укороченную базу по сравнению с базовыми
моделями, что ухудшает их устойчивость движения
на скользких дорогах. Типичными
представителями этой группы являются ЗИЛ-ММЗ.
2. Средней грузоподъемности (9 ... 10 т),
работающие в составе автопоезда. По осевым
нагрузкам они могли бы работать на всех
дорогах общей сети, но из-за пониженной
проходимости (малая сцепная масса при работе с
прицепом) они предназначены для массовых
перевозок по установившимся маршрутам на
строительные объекты инертных грузов с
причалов, железнодорожных баз, в основном, в
больших городах. Перевозки осуществляются
по хорошим дорогам, без больших уклонов;
подготовленные пункты погрузки и разгрузки
снижают требования по маневренности.
Погрузка производится стационарными
средствами, разгрузка - на боковые стороны.
3. Большой грузоподъемности,
рассчитанные для работы без прицепов.
Грузоподъемность 8 ... 16 т, разгрузка кузова назад.
Основное применение эти автомобили находят
при массовых перевозках насыпных и
навалочных грузов на крупных строительных
объектах и карьерных разработках. При
использовании на дорогах общей сети они
рассчитаны на осевую массу 10 т, но большую
часть времени эксплуатируются вне дорог в
сложных дорожных условиях. Статистический
анализ этих условий показал, что типичный
маршрут может быть представлен в виде трех
участков: 1) непосредственно в карьере; 2)
выезд из карьера; 3) от карьера до места
разгрузки с характерными параметрами (длин и
уклона). Типичные маршруты характеризуются
средним коэффициентом дорожного
сопротивления ц/с. Плотность распределения
среднего коэффициента суммарного дорожного
сопротивления ,Дус) для маршрутов
эксплуатации строительных автомобилей-самосвалов
показана на рис. 5.3.2 [2].
Между средней скоростью самосвала V,
средним путевым расходом топлива ^^ и
средним суммарным дорожным
сопротивлением \|/с существует тесная корреляционная связь
(рис. 5.3.3). Это дает возможность выбора
параметров двигателя и трансмиссии автомобиля
0,15
0,10
0,05
0,02 Ц04 0,06 0,08 у
Рис 5.3.2. Плотность распределения коэффициента
среднего суммарного дорожного сопротивления для
маршрутов эксплуатации строительных
автомобилей-самосвалов
У,км/ч Д$, /т/100 км
I 1 1 ГЧ I
0}02 0,04 0,06 0,08 фс
Рис. 5.3.3. Зависимости средней скорости У и среднего
путевого расхода 0$ топлива от среднего суммарного
дорожного сопротивления цдс
614
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
в процессе его проектирования, позволяет
оценивать тягово-скоростные свойства и
топливную экономичность варьируя различными
сочетаниями указанных параметров при
моделировании движения автомобиля с помощью
ЭВМ в разнообразных дорожных условиях,
численно характеризуемых средним
коэффициентом суммарного дорожного
сопротивления. При оптимизации технических
параметров используется комплексный показатель -
условная удельная производительность
(коэффициент эффективности), учитывающий
среднюю скорость и средний расход топлива,
или интегральный (экономический) критерий.
4. Большегрузные самосвальные
автопоезда, сформированные на базе выпускаемых
автомобилей-самосвалов третьей группы.
Самосвальные автопоезда особенно
целесообразны при использовании их на массовых
стабильных перевозках инертных грузов по
стационарным городским и пригородным марш-
ругам, по дорогам, допускающим осевую
нагрузку 100 кН. В этих случаях пункты
погрузки и разгрузки обычно имеют площади,
достаточные для необходимого маневрирования.
Расстояние перевозок 15 ... 20 км. Условия
эксплуатации аналогичны условиям второй
группы. В связи с практическим отсутствием
промышленного выпуска таких автопоездов
автотранспортные предприятия
самостоятельно проектируют и изготовляют прицепы-
самосвалы, переоборудуют автомобили-
самосвалы на боковую разгрузку и формируют
двухзвенные, а иногда и трехзвенные
большегрузные самосвальные автопоезда, применение
которых дает большой экономический эффект.
Сельскохозяйственные автомобили и
самосвальные автопоезда, агрегатируемые с
комбайнами при уборке, развозят удобрения,
выполняют хозяйственные и строительные
работы. Основными грузами являются навалочные
и насыпные: зерно, корнеплоды, удобрения и
др. Плотность грузов 0,2 ... 1,7 т/м3. Около
70 % перевозок производится по дорогам, не
имеющим твердых покрытий. При участии в
технологических процессах пробег вне дорог
составляет менее 50 %. Среднее расстояние
перевозок следующее: внехозяйственных 42,7
км, внутрихозяйственных 7,8 км,
технологических 5,7 км.
Для самосвалов желательно иметь
трехстороннюю разгрузку и небольшую высоту
погрузки и сбрасывания. При
внехозяйственных перевозках (вывоз зерна на элеваторы,
подвоз удобрений со складов и заводов и т.п.)
движение производится по автомобильным
дорогам и целесообразным становится
использование самосвальных автопоездов, в том
числе и трехзвенных (многозвенных).
Внутрихозяйственные перевозки осуществляются в
тяжелых дорожных условиях на одиночных
автомобилях. Разнообразие грузов, условий
погрузки и выгрузки определяют специфические
требования к кузовам: прямоугольная форма с
отбрасывающимися бортами на нижних
шарнирах; различная комплектация надставных
бортов; надежные уплотнения; тенты для
укрытия.
Узкоспециализированные автомобили и
автопоезда-самосвалы создаются для каждого
конкретного случая применения. Примером
может служить автопоезд-керамзитовоз,
предназначенный для перевозки сыпучего
керамзита плотностью 0,4 т/м3. Он отличается
большим объемом кузовов автомобиля и прицепа и
наличием подъемного механизма с боковой
разгрузкой.
Компоновка шасси автомобилей-
самосвалов (за исключением карьерных)
незначительно отличается от компоновки
общетранспортных грузовых автомобилей.
Габаритные ограничения, допускаемые нагрузки на
мосты и распределение осевых нагрузок у
автомобилей-самосвалов, кроме карьерных,
соответствуют требованиям к этим параметрам
для грузовых автомобилей и автопоездов
общетранспортного назначения. К автомобилям-
самосвалам предъявляют повышенные
требования по боковой устойчивости; угол
поперечной устойчивости при поднятом груженом
кузове должен быть не менее 8 °. Повышению
поперечной устойчивости способствует
установка в задней подвеске стабилизатора
поперечной устойчивости.
Конструкция кузова определяется
назначением автомобиля-самосвала. Универсальные
кузова, применяемые для строительных и
сельскохозяйственных самосвалов, имеют
прямоугольную форму, наиболее
приспособлены для загрузки массовыми сыпучими,
сельскохозяйственными и полужидкими грузами.
С учетом назначения автомобиля у кузовов
бывают опрокидывающиеся задние, боковые
или одновременно задние и боковые борта, а
управление бортами автоматическое или
ручное.
В большинстве выполненных
конструкций кузовов борта открываются относительно
шарниров, расположенных в верхней части. У
некоторых кузовов при боковой разгрузке
борта открываются относительно нижних
шарниров и становятся продолжением его
пола. Это позволяет удалять ссыпаемый груз
от колес, облегчая выезд самосвала с места
разгрузки.
У автомобилей-самосвалов для
преимущественной работы в карьерах применяют
кузова ковшового типа (без заднего борта).
Самосвалы с принудительным подъемом
кузова в подавляющем большинстве оборудованы
гидравлическим подъемным механизмом,
основными частями которого являются: коробка
отбора мощности, масляный насос, агрегаты
управления, гидроцилиндры и трубопроводы.
АВТОМОБИЛИ И АВТОПОЕЗДА-САМОСВАЛЫ
615
Подъемные механизмы классифицируют:
по числу гидравлических цилиндров -
одно и двухцилиндровые;
по расположению гидроцилиндров - под
платформой, перед платформой, с двух сторон
платформы;
по начальному положению
гидроцилиндров - горизонтальному, вертикальному,
наклонному;
по конструкции гидроцилиндров -
простые (поршневые), телескопические;
по системе воздействия на платформу - с
качающимся гидроцилиндром и шарнирным
креплением к платформе, с рычажно-балан-
сирным механизмом.
Телескопические цилиндры подъемных
механизмов выполняются с количеством
ступеней до пяти, суммарным ходом до 7 м.
Поршневые цилиндры имеют ход 0,6 ... 0,7 м,
а подъем кузова на заданную высоту
обеспечивается применением дополнительного
рычажного механизма.
♦ ^
г'х
А)
<:
■ *уС
ь *
*с Н
1
Рис. 5.3.4. Расчетам схема подъемного механизма
телескопического типа автомобиля-самосвала
Управление подъемным механизмом
автомобиля-самосвала с гидроцилиндром
телескопического типа (рис. 5.3.4) осуществляется
с помощью крана, рукоятка которого
расположена в кабине [2].
Необходимая сила гидроцилиндра
^рассчитывается по формуле:
/яг#[(а + Ь) со8 ф - (Н + Л) 8ш ф]
Ьсо&(у - ф) +Л$ш(у - ф)
где тт - масса груженного кузова.
Ход штока гидроцилиндра определяется
из выражения
$ = *// +р -2^схб(ф+а+т)-24эсов(а+т),
где р=\с +</ ; 1%1 = к/Ь; 1&х = ^/с;
1 = №Л.
Угол наклона гидроцилиндра у =
2 2 .2
х +р -/
= 90 ° - (со + а), где созсо = .
2хр
Давление масла в цилиндре
гидроподъемника поршневого типа определяется по
формуле р = Г I Лц, где Ац - внутренняя
площадь цилиндра. В цилиндрах
телескопического гидроподъемника />/ = Ги / А^ где Л/
- внутренняя площадь /-го цилиндра.
Диаметр гидроцилиндров для поршневых
гидроцилиндров
В =
4Г
1*-Л,
где О - внутренний диаметр гидроцилиндра,
см; Рн - сила на штоке в начале подъема
кузова» Н; Ртах - максимальное давление рабочей
жидкости в гидросистеме, МПа.
Толщина стенки гидроцилиндра
/ =
2[о] '
где [а] - допускаемое напряжение в стенках
гидроцилиндра; [а] = ат / п\ п =3.
Диаметры выдвижных звеньев
телескопических гидроцилиндров
д*/-1
где /} - сила на /-м звене; />/ - давление на 1-е
р.
звено; К = 1 + ——; Ь - междутрубный ради-
М
альный зазор, рекомендуется Ь = 0,35 см;
п - число звеньев гидроцилиндра.
616
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
Толщина стенки /-го звена
телескопического гидроподъемника
' %]'
Внутренний диаметр /-го звена ф =
= 0(.\ + 2Ь. Деформация стенок
гидроцилиндров А*/, возникающая от действия
внутреннего давления рабочей жидкости:
Д</= — ат,
Е
где Е - модуль упругости.
Допустимая деформация ограничивается
радиальным зазором между сопрягаемыми
поверхностями цилиндров по выбранной
посадке сопряжения.
5.3.2. АВТОМОБИЛЬНЫЕ ФУРГОНЫ И
РЕФРИЖЕРАТОРЫ
Автомобильный фургон -
специализированное автотранспортное средство,
оборудованное закрытым жестким кузовом,
приспособленным для перевозки грузов, требующих
защиты от внешней среды. По назначению
автомобильные фургоны могут быть:
универсальные (общего назначения);
узкоспециализированные; изотермические и
рефрижераторы. Универсальные автомобильные фургоны
служат для перевозки продовольственных и
промышленных товаров, как в упаковке, так и
без нее, узкоспециализированные - для
перевозки хлеба, мебели, почты и др.,
изотермические и рефрижераторы - для перевозки
скоропортящихся грузов.
Кузова-фургоны, устанавливаемые на
шасси автомобилей, прицепов и
полуприцепов, получили соответствующие названия:
автомобиль-фургон, прицеп-фургон,
полуприцеп-фургон. По условиям эксплуатации
автомобильные фургоны делятся на городские и
междугородные, по грузоподъемности - на
малотоннажные (до 2 т), среднетоннажные (2
... 4,5 т), крупнотоннажные (большегрузные,
до 26 т). В малотоннажных выделяется группа
особо малотоннажных, выполненных на базе
легковых автомобилей.
По компоновочной схеме автомобили-
фургоны могут быть капотные, полукалотные,
вагонные, с отдельной кабиной. По
расположению дверей имеются кузова-фургоны с
дверями на заднем, правом или левом борту и
многодверные. По конструкции крыши
кузова-фургоны бывают: с глухой крышей, с
раздвижной крышей, с шарнирно-подъемной
крышей. Кузова-фургоны могут быть с
деревянным или металлическим каркасом, с
фанерной, стальной, алюминиевой или
пластмассовой облицовкой.
К конструкциям всех видов
автомобильных фургонов предъявляют следующие
требования: соответствие характеристике и парти-
онности груза; высокой прочности и
долговечности; наименьшей массы, соответствию
грузоподъемности площади пола и объему;
минимально возможных габаритных размеров;
постоянство погрузочной высоты,
согласованной с погрузочной площадкой (установлены
следующие стандартные размеры: на
автомобилях 0,7; 0,9; 1,1; 1,25; 1,3 м, на прицепах
1,3; 1,35 м, на полуприцепах 1,3; 1,45 м);
ровности пола; удобства погрузки и разгрузки;
размещению и числу дверей с фиксацией
положения и возможностью пломбирования;
соответствия нормативным показателям по
освещенности, вентиляции, технике
безопасности; наибольшей унификации.
Наибольшее распространение имеют
универсальные и узкоспециализированные
автомобильные фургоны. Обычно их кузова
цельнометаллические, реже деревянные,
обшитые металлическим листом, несущей
конструкции, прямоугольной формы с ровным
(иногда ступенчатым) полом. Двери -
двухстворчатые на заднем борту с широким
проемом в свету (более 2 м). Иногда
устанавливаются боковые двери, подъемные или сдвижные
боковые стенки и сдвижные, съемные или
подъемные крыши, что обеспечивает
возможность механизированной погрузки-разгрузки.
Некоторые фургоны оборудуются *
грузоподъемными бортами.
Изотермические кузова-фургоны
обеспечивают сохранение определенного
температурного режима внутри грузового помещения.
Рефрижераторные кузова-фургоны
обеспечивают поддержание определенной температуры
внутри термоизолированного кузова.
Использование автомобильных фургонов
вместо общетранспортных автомобилей
связано с увеличением себестоимости перевозок.
Но, учитывая снижение расходов на тару и
повышение степени сохранности грузов,
общая экономическая эффективность
автомобильных фургонов оказывается весьма
значительной.
Особомалотоннажные
автомобили-фургоны используются для перевозки в городе
мелкопартионных торговых грузов.
Малотоннажные автомобили-фургоны
являются развозными автомобилями и
используются для городских перевозок
продовольственных и промышленных товаров. Кузова
этой группы выполняются по капотной, полу-
калотной и вагонной компоновочным схемам
из штампованных панелей и, в большинстве
случаев, имеют задние двухстворчатые и
боковые двери. Появилась модификация
автомобилей с увеличенной высотой кузова за счет ус-
АВТОМОБИЛЬНЫЕ ФУРГОНЫ И РЕФРИЖЕРАТОРЫ
617
тановки объемной штампованной крыши. Это
позволяет увеличить объем кузова на 17,..20 %.
Пока наиболее распространены схемы с
передним расположением двигателя (около 70 %) и
задним ведущим мостом. Однако, все больше
появляется переднеприводных автомобилей-
фургонов.
Кузова среднетоннажных автомобилей-
фургонов обычно деревянно-металлические,
каркасного типа или цельнометаллические.
Узкоспециализированные автомобили-
фургоны отличаются от фургонов общего
назначения конструкцией кузова, обусловленной
свойствами конкретных грузов. Например,
хлеб перевозится в лотках и поэтому кузов
хлебовоза имеет секции с направляющими
полозками и боковыми дверями. Кузова-
фургоны для мебели имеют увеличенный
объем и ровный пол.
Автомобильные изотермические фургоны
и рефрижераторы отличаются от других
специальными изотермическими кузовами и
холодильными установками.
Термоизоляция кузова осуществляется
тремя способами: напылением изоляционного
материала снаружи и изнутри кузова, сборкой
кузова из частей, изготовленных из
изоляционных материалов и заполнением полости
между облицовками пенообразующим
раствором изоляционного материала.
Изоляционные материалы должны
обладать определенными свойствами: малой
теплопроводностью и плотностью,
незначительной гигроскопичностью, значительной
влагостойкостью, отсутствием запаха,
долговечностью и прочностью, технологичностью,
термостойкостью, огнестойкостью и пожаробезопас-
ностью.
В отечественном автомобилестроении для
термоизоляции наибольшее распространение
получил пенопласт ПС-4, отвечающий
большинству вышеприведенных требований.
Толщина пенопласта колеблется в пределах 50 ...
120 мм и зависит от размеров и конструкции
кузова, требуемого коэффициента
теплопередачи.
Внутреннее охлаждение кузовов-
рефрижераторов обеспечивается работой
источников холода, которые могут быть
временными и постоянными.
Временные источники холода
поддерживают требуемую температуру внутри кузова
ограниченный срок. К этой группе относятся
устройства, использующие переход некоторых
веществ (сухого льда, эвтектических и
сжиженных газов) из одного состояния в другое
(из твердого или жидкого в газовое) с
поглощением теплоты из окружающей среды и тем
самым охлаждающие ее.
Сухой лед (твердая углекислота)
помещается внутри кузова в верхней его части либо в
бачках, либо в специальных отсеках между
внутренней и внешней обшивками.
Достоинствами устройства с сухим льдом являются:
возможность поддержания внутри кузова
низкой температуры (переход углекислоты из
твердого состояния в газовое происходит при
температуре -78 °С) и чистоты, а недостатком
- относительно высокая стоимость
углекислоты. Эвтектические растворы представляют
собой водные растворы минеральных или
металлических солей и органических
соединений. Наиболее эффективным холодоносителем
является дихлорметан (фреон 30).
Использование оттаивания
замороженных эвтектических растворов для охлаждения
кузова производится с помощью зероторов.
Зероторы (специальные сосуды) с
эвтектическим раствором вначале замораживаются в
стационарных холодильниках, а затем
помещаются внутри кузова рефрижератора. Температура
в кузове поддерживается -2 ... -9 °С. Время
действия 12 ... 15 ч. Зероторы используются
для охлаждения неоднократно, но требуют
наличия холодильных станций для
предварительного их замораживания, а также затрат
рабочего времени на их замену и
обслуживание.
При использовании временных
источников холода целесообразно применять
предварительное охлаждение внутреннего
пространства кузова, которого может оказаться
достаточным при перевозке грузов на небольшое
расстояние. Для предварительного охлаждения
кузова используется жидкая углекислота и
азот. Углекислота может подаваться из
внешнего резервуара непосредственно в кузов и
при испарении быстро охлаждать внутреннее
пространство кузова. Углекислота и азот также
могут быть в баллонах. В этом случае
охлаждение может производиться периодически и
автоматически с помощью терморегулирую-
щих устройств.
Применение азота отличают: большая
скорость понижения температуры в кузове
(примерно 10 ... 15 м против 5 ... 6 ч, при
временном охлаждении); создание инертной
атмосферы в кузове, предохраняющей
продукты от порчи; отсутствие обледенения.
Недостатком является относительно большая
стоимость азота.
Постоянные источники холода
обеспечивают поддержание заданной температуры в
кузове. Преимущественное распространение
имеют компрессорные холодильные установки
с приводом от двигателя автомобиля-тягача
или от специального автономного двигателя.
Недостатком первой схемы привода по
сравнению со второй является необходимость
постоянной работы основного двигателя
автомобиля, в том числе и на стоянках.
На рис. 5.3.5 показана типичная схема
компрессорной холодильной установки.
Компрессор 1 подает сжатый до давления конден-
618
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
сации парообразный хладагент (фреон 12 или
22) в змеевик конденсатора 4У где он передает
теплоту (конденсатор помещен в кожух и
обдувается вентилятором). Затем фреон в
жидком состоянии подается в змеевик испарителя
11у где он переходит в газообразное состояние,
поглощая теплоту из окружающей среды (от
воздуха, прокачиваемого вентилятором через
кожух испарителя). После этого газообразный
фреон засасывается компрессором 1.
"71
Рис. 5.3.5. Схема компрессорной холодильной
установи:
1 - компрессор; 2 - баллон; 3 - вентили;
4 - конденсатор; 5 - распределительный кран;
6 - термоизолированный трубопровод;
7 - соленоидный вентиль; 8 - патрон;
9, 10 и 12- коллекторы; 11 - испаритель;
13 - расширительный клапан;
14 - влагомаслоотделитель; 15 - аккумулятор;
16 - теплообменник; 17 - клапан;
18 - нагнетательный клапан
Температура в кузове поддерживается
постоянной с помощью термостата. При
достижении заданной температуры компрессор
останавливается, при превышении заданной -
автоматически включается. Холодильная
компрессорная установка обратима, т. е. может
быть использована для обогрева кузова и
снятия снеговой "шубы".
Теплотехнический расчет
изотермического кузова состоит из оценки
теплоизоляционного качества (расчетного коэффициента
теплопередачи кр) и расчета хладопроизводитель-
ности Со [16]. При зональном методе расчета
теплоизоляции поверхность грузового
помещения (стены, крыша, пол) делится на зоны с
одинаковой конструкцией.
Коэффициент теплопередачи /-й зоны
рассчитывается по формуле, Вт / (м2К):
*/ =
V1
1/а„+2^//Х/+1/ав
где ан = 4,9 + 15 л[у - коэффициент
теплопередачи от окружающего воздуха к наружной
поверхности грузового помещения (для
гладкой и ровной поверхности); Ь( - толщина
однородного слоя конструкции; X/ -
коэффициент теплопроводности слоя; о^ = 5,3 + 3,6 Уц-
коэффициент теплопередачи от внутренней
стенки слоя к воздуху внутри кузова; уц -
скорость воздуха внутри кузова; уц = 0,1 ... 0,3
м/с при естественной циркуляции; уц = 0,5 ...
0,8 м/с при принудительной циркуляции.
Средний коэффициент теплопередачи
для кузова фургона
1
т
где А = У^Л/ - расчетная площадь теплопе-
1
редающей поверхности кузова фургона;
^/ = ('^н/у^в/) " расчетная площадь тепло-
передающей поверхности в /-й зоне; Лн1 и
Аъ1 - площадь соответственно наружной и
внутренней поверхности в /-и зоне.
Действительный коэффициент
теплопередачи А^= (1,1 ... \>У)к учитывает "тепловые
мостики" (продольные и поперечные
элементы жесткости кузова). Расчетный коэффициент
теплопередачи Лр= (1 + 0,04 тэк)А:д отражает
увеличение теплопередачи при старении
кузова (хэк - срок эксплуатации фургона до
капитального ремонта).
Расчетный коэффициент теплопередачи
сравнивается с требуемым к^\
кр<к,у
где к^ — 0,3 ...0,4 Вт / (м2К) в зависимости от
типа термоизоляции, требуемой температуры и
температуры окружающего воздуха.
Для определения хладопроизводительно-
сти холодильной установки производится
расчет теплопритоков в наиболее тяжелых
условиях перевозок:
С = й)(24 / тх),
где Со - тепловой поток, отводимый
холодильной установкой, Вт; тх - ттродолжитель-
ность эффективной работы холодильной
установки, ч.
Тепловой поток
где С/ - теплопритоки в грузовое помещение
за счет различия наружной и внутренней
температур воздуха, прохода воздуха через
неплотности, воздействия солнечной радиации,
работы двигателя и вентиляторов и др.
АВТОМОБИЛИ И АВТОПОЕЗДА-ЦИСТЕРНЫ
619
5.3.3. АВТОМОБИЛИ И АВТОПОЕЗДА-ЦИСТЕРНЫ
Автомобиль или автопоезд-цистерна
смонтирован на модели базового автомобиля,
автомобильного полуприцепа или прицепа и
предназначен для транспортирования жидких,
сыпучих и газообразных грузов. По
конструктивному исполнению могут быть автоцистерны
(АЦ), полуприцепы-цистерны (ППЦ) и
прицепы-цистерны (ПЦ), классификация которых
приведена на рис. 5.3.6.
| Бензин
1 о
| Дизельное топлив
1 к
1 *
г
Иг
-И
Г*1
[ Вода
| Вино
| Кислота
1 у \
1 сэ 1
1 ^ 1
1 «1 1
| Мазут
| Битум
| Бетон
1 о 1
1 о 1
1 о 1
г
1 «4 1
1 о 1
1 * 1
§
и
| Мука
| Сухое молоко
| Цемент
| Гипс
| Натриевая сода
сода у
1 **
| Соль
| Сахар
| Полиэтилен
[ Графит
| Пропан
1 * 1
1 сэ 1
г
| Метин
| Кислород
| Этан
1 в
ИМ
1 о 1
1 ^
1 э
1 * 1
1 *> 1
| Азот
[ Водород
Ряс. 5.3.6. Классификация автоцистерн по видам перевозимых грузов;
Ж- жидкие; С - сыпучие; Г- газообразные; В - вязкие; П- пылевидные; Гр - гранулированные;
Сж - сжиженные; О - ожиженные; ЖТ - жидкое топливо; ПП - пищевые продукты;
ХВ - химические вещества; НП- нефтепродукты; СМ- стройматериалы; НГ- нефтяные газы;
ПГ - природные газы; / - вид груза; // - физическое состояние; /// - тип вещества; IV - наименование
Рис. 5.3.7. Схема технологического оборудования автоцистерны-запрощика:
1 - базовый автомобиль; 2 - резервуар; 3 - дыхательный клапан; 4 - наливная горловина; 5 - волнорезы;
6 - уровнемер; 7 - ^>граничитель налива; 8, 9, 10, 15, 16, 19, 20, 29 - запорные вентили; 11 - фильтр;
12- манометр; 13 - счетчик жидкости; 14, 17- предохранительные клапаны; 18- мановакуумметр;
21 - барабан; 22, 24 - раздаточные рукава; 23, 25 - раздаточные краны; 26 - приемный рукав;
27- приемный штуцер; 28 - насос; 30 - разъем
620
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
Для перевозки нефтепродуктов
используются: транспортные и топливозаправочные
автоцистерны (рис. 5.3.7). Жидкие и сыпучие
грузы транспортируются только
транспортными автоцистернами, а сжиженные, ожиженные
и сжатые газы - транспортными и
заправочными.
Особенностью автомобильной цистерны,
наряду с расположением (цистерны)
резервуара на раме базового автомобиля, является
применение в полуприцепах-цистернах
несущего резервуара (безрамные цистерны). По
отношению к раме базового автомобиля или
автомобильного полуприцепа (прицепа)
резервуар располагается наклонно, горизонтально и
вертикально. Горизонтальное расположение
резервуара применяется преимущественно в
конструкциях автомобильных цистерн для
транспортирования жидких грузов, сжатых и
сжиженных газов. Наклонное и вертикальное
расположение резервуаров используется в
конструкциях автомобильных цистерн для
перевозки сыпучих грузов.
Полуприцепы- и прицепы-цистерны
состоят из автомобильного полуприцепа или
автоприцепа, на коюрых смонтированы
резервуар с технологическим оборудованием,
включающим сливно-наливные трубопроводы,
рукава, указатели уровня жидкости в резервуаре,
ручной насос. Полуприцепы-цистерны
вместимостью 10 ... 15 м3 и более имеют насос с
приводом от автономного двигателя, фильтр
тонкой очистки, счетчики, раздаточные рукава
и краны. Они используются не только для
транспортировки нефтепродуктов, но и для
заправки автотранспортных средств.
Автоцистерны для перевозки жидких
пищевых продуктов (молока, воды, кваса,
пива и др.) от транспортных и заправочных
автоцистерн отличаются как технологической
схемой, так и выбором конструкционных 'и
термоизоляционных материалов.
Технологическое оборудование, например, автоцистерны
АЦПТ-6,2 для перевозки молока состоит из
двух отдельных резервуаров, изготовленных из
пищевого листового алюминия, заключенных
в общий стальной кожух с
термоизоляционным материалом из пенопласта ФРП-1.
Наверху каждого резервуара расположена
герметически закрывающаяся горловина
диаметром 500 мм, через которую производится
внутренний осмотр и мойка внутренней
поверхности резервуара. Мойка и санитарная
обработка внутренней поверхности резервуара
осуществляются одновременно при помощи
переносных или смонтированных в
резервуарах шприц-аппаратов (фюрсунок), на которые
растворы, обеспечивающие вращающиеся или
качающиеся струи веера, подаются под
давлением 1,3 МПа. В качестве растворов для
промывки внутренней поверхности резервуаров
используется пищевая сода или мыльная
горячая вода, затем ее промывают чистой водой и
сушат острым паром.
Внизу резервуаров имеется пробковый
кран, предназначенный для наполнения и
слива молока через трубопроводы. Кран
снабжен ручкой, расположенной в верхней части
резервуара, закрыт термоизоляцией от
замерзания зимой и нагрева летом.
Конструкция автоцистерн- и
автопоездов-цистерн для перевозки сыпучих грузов
определяется свойствами перевозимых грузов.
Вместимость и форма резервуара для
транспортирования сыпучих грузов определяются:
грузоподъемностью, видом и свойствами груза,
разгрузочным устройством, действующими
массовыми и габаритными ограничениями,
технологией изготовления и материалом, из
которого изготовляется резервуар.
Полуприцепы-цистерны для перевозки,
например, цемента имеют вертикальное и
наклонное расположение резервуара и
оснащены аэрацион но-пневматической системой
разгрузки. За кабиной тягача монтируется
компрессор, который приводится в действие
либо от коробки отбора мощности автомобиля
через карданную и клиноременную передачи
или от трехфазного электродвигателя,
подключаемого к городской электросети. Загрузка
цемента осуществляется через горловину,
установленную в верхней части резервуара.
Выгрузка цемента производится при помощи
сжатого воздуха, подаваемого от компрессора к
воздухораспределителю через влагомаслоотде-
литель и гибкий рукав, затем по трубопроводу
к аэроднищу, откосам и по трубопроводу к
форсунке разгрузочного патрубка.
Для транспортирования сжиженных и
ожиженных газов используются автомобили-
цистерны, прицепы- и полуприцепы-цистерны
различной вместимости, резервуар и
оборудование которых размещаются на базовых
моделях различных автомобилей, автомобильных
полуприцепов и прицепов, в последних
изделиях используется безрамная (несущая)
конструкция резервуара с подкатными тележками и
плитами наката под сцепные устройства с
различными моделями седельных тягачей.
Резервуары автоцистерн для сжиженных
и ожиженных газов относятся к категории
резервуаров, работающих под рабочим
давлением свыше 0,07 МПа.
При проектировании автомобильных
цистерн для жидких грузов исходными данными
являются: время загрузки и выгрузки
перевозимых грузов; объем перевозимых грузов и их
характеристики [9].
Выбор базовой модели автомобиля
осуществляется в зависимости от
эксплуатационной вместимости резервуара, его массы и
массы технологического оборудования
проектируемого изделия.
АВТОМОБИЛИ И АВТОПОЕЗДА-ЦИСТЕРНЫ
621
Расчетная толщина стенки резервуара 5р
определяется по формуле:
5р= *'Д» +С,
где рв - суммарное давление, возникающее
внутри резервуара и учитывающее давление
паров транспортируемого груза,
гидростатическое давление столба жидкости при
максимальной высоте жидкости в резервуаре и
динамическое давление, возникающее при
движении автоцистерны; Дю - внутренний
диаметр резервуара; Е^ - допустимое напряжение
конструкционного материала; ср -
коэффициент сварного шва; <р =0,8 ... 1; С - поправка на
коррозию и неточность изготовления
листового проката, для углеродистых сталей
принимается С = 0,3 мм на каждый год эксплуатации
резервуара.
Днище резервуара рассчитывают в
зависимости от его поперечного сечения (круглое,
эллиптическое, прямоугольное с
округленными углами).
Толщина стенки эллиптического днища
резервуара
. Ръ^эУэ , п
5э = +С,
где Вэ - эквивалентный диаметр
эллиптического (прямоугольного) днища; уэ -
коэффициент перенапряжения днища, уэ = 1,1 ... 1,2.
Толщина стенки резервуара для
перевозки сжиженных нефтяных газов определяется
по формуле:
5Г= Р^вн +С + С0+СР
где /?р - расчетное давление в резервуаре,
складывающееся из давления насыщенных
паров пропана при температуре +50 °С;
рп= 0,18 МПа и дополнительного давления
Рлопу возникающего при резком торможении
автоцистерны и гидравлического удара жидкой
фазы газа о днище, рр = рп + />доп; Г] -
поправочный коэффициент к номинальному
допускаемому напряжению, Т| = 0,75 ... 1,0;
О) - прибавка на округление толщины
стандартного листового проката; Со = 0,2 ... 0,5
мм; С\ - прибавка, назначаемая в соответствии
с технологическими и монтажными
соображениями, С\ = 0,3 ... 0,5 мм.
Дополнительное давление рдои
рассчитывается по формуле:
Рдо„ = ^1<Л
где рп - плотность жидкого пропана при
расчетной температуре +40 °С; Ьр - расчетная
длина автоцистерны (автопоезда); V - скорость
движения автоцистерны; V = 35 км/ч; г,. -
время торможения автоцистерны (автопоезда).
Толщина эллиптического днища
5дн=-7 — - + С + С0+СР
2Ь[4ЯгчК<р2 - рр)
где Л - внутренняя высота выпуклой части
днища; К - конструктивный коэффициент
равный 0,95; 7, - коэффициент
неукрепленного отверстия определяется по формуле
Явн
<?0 - диаметр неукрепленного отверстия в
днище.
Нагрузки на задние мосты автоцистерны,
расположение центра тяжести резервуара Нщ
и устойчивость автоцистерны (автопоезда)
определяются из следующих соображений.
Резервуар от собственной массы /яр, массы
технологического оборудования щ и массы
груза в нем тт испытывает общий изгиб.
Поскольку резервуар крепится, как правило, к
раме автомобиля (полуприцепа) на двух
опорах, нагруженную равномерно распределенной
нагрузкой <7> можно представить в виде:
Я = гпр^гпт^тт I Ьг
Тогда максимальный изгибающий мо-
мент Мтах = д2р / 8, а напряжение изгиба
аи = Мтах IIV. Момент сопротивления
резервуара:
цилиндрической формы
^ц=—(«р-с);
4
эллиптической формы
32Я4 Ч '
622
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
где большая полуось эллипса <2\ определяется
из соотношения а\ = а + (5р - С), а малая
Ь\ = Ь + (5р - О.
Характерными случаями нарушения
устойчивости автоцистерны при движении
является поперечное опрокидывание или
скольжение передних колес. Угол устойчивости а
определяется по формуле:
\%ъ = -
В
Яцт
где В - колея задних колес; Нц т - положение
центра тяжести по высоте автоцистерны в
загруженном состоянии.
Опасность опрокидывания возможна в
случае, когда угол наклона колес а\
становится равным или больше угла устойчивости а.
При а > СЦ устойчивость полностью
обеспечивается.
Угол наклона СЦ определяется по
формуле:
зшо^ = кк/В,
где //к - высота подъема одной стороны
колес относительно линии движения другой;
Нк <, 0,7 м.
При повороте на горизонтальном участке
возникает опрокидывающий момент Моп. Для
обеспечения устойчивости автоцистерны на
поворотах необходимо, чтобы
восстанавливающий момент Мв > Моп.
При этом
Мъ =0,5Д#(етр + Щ +/Я,,);
К
Запас устойчивости п = Мв / Моп ^ 3 ... 4.
Опасность опрокидывания возникает при
Моп = Мъ. В этом случае максимальная
скорость
I 2#цт
где Ят^п - минимальный радиус поворота
автоцистерны, определяемый по внешнему
(относительно центра тяжести) переднему
колесу автомобиля.
5.3.4. АВТОМОБИЛИ И АВТОПОЕЗДА ДЛЯ ПЕРЕВОЗКИ
СТРОИТЕЛЬНЫХ ГРУЗОВ
Средняя дальность перевозок
строительных грузов автомобильным транспортом
составляет 20 ... 30 км, а в сельском
строительстве до 70 км. Наибольшую сложность
представляет доставка сборных железобетонных
конструкций, так как они весьма
чувствительны к динамическим нагрузкам. Большинство
из них выдерживают вертикальные ускорения
только до 0,8& что приводит к ограничению
скорости движения, а следовательно, к
потерям производительности.
Номенклатура и количество
типоразмеров строительных конструкций в настоящее
время исчисляется тысячами. Однако
большинство из них имеют сходные показатели,
что позволяет обеспечить перевозку
строительных конструкций относительно
небольшим количеством специализированного
автотранспорта. Основными показателями
транспортабельности изделий являются:
габаритные размеры в транспортном
положении;
масса;
необходимость транспортировки в
определенном положении;
расположение центра масс;
места и характер опирания и крепления;
восприимчивость к динамическим
нагрузкам;
особенности погрузки и разгрузки
изделий.
Основным классификационным
признаком специализированных автотранспортных
средств для перевозки строительных грузов
является вид перевозимого груза, который
определяет прежде всего конструктивное
решение кузова грузонесущей части рамы, при
этом необходимо стремиться к максимальной
унификации.
В типоразмер ном ряду
специализированных автотранспортных средств для перевозки
сборных железобетонных конструкций
предусмотрено лишь пять типов полуприцепов:
панелевозы для стеновых и
перегородочных панелей;
фермовозы для ферм;
площадки для плит, балок, колонн, свай,
опор ЛЭП и т.д.;
блоковозы для объемных блоков;
сантехкабиновозы для санитарно-техни-
ческих кабин и блоков шахт лифта.
При разработке типоразмерного ряда
принимались следующие основные
предпосылки:
преимущественное применение
автопоездов;
предпочтительное применение тягачей с
дизелем;
работа в тяжелых условиях строительных
площадок;
АТС ДЛЯ ПЕРЕВОЗКИ СТРОИТЕЛЬНЫХ ГРУЗОВ
623
проведение межтиповой и внутритипо-
вой унификации по ходовым частям;
создание средств саморазгрузки и
самопогрузки.
По типу базовых тягачей
специализированные автотранспортные средства могут быть
седельными или прицепными автопоездами.
По конструкции рам полуприцепов -
кассетные, хребтовые, платформенные, роспуски.
По числу осей полуприцепов - одноосные,
двухосные, многоосные. По конструкции
поворотного устройства - с поворотными
колесами, осями или тележками. По форме рамы -
низкорамные, полунизкорамные или высоко -
рамные. По регулируемости параметров - с
регулируемыми размерами по длине или
ширине.
Специализированные автотранспортные
средства для перевозки строительных
конструкций при конструировании должны
обеспечивать:
сохранность строительных конструкций;
высокие тягово-скоростные свойства;
безопасность погрузки и разгрузки;
надежность применения строительных
конструкций;
максимальное снижение погрузочной
высоты;
максимальную маневренность;
высокую унификацию по агрегатам и
механизмам с базовым автомобилем;
возможность перевозки максимальной
номенклатуры строительных конструкций.
Наиболее массовыми строительными
специализированными автотранспортными
средствами являются панелевозы.
По конструкции панелевозы делятся на
хребтовые, кассетные и платформенные (рис.
5.3.8). Кассетные панелевозы являются
наиболее перспективными, так как позволяют
перевозить панели в рабочем положении (без
наклона), большую номенклатуру других грузов.
Создание панелевозов с разрезной кассетой
позволило значительно уменьшить высоту
погрузки.
«)
*)
0)
Рис. 5.3.8. Типы панелевозов:
а - хребтовый; б - кассетный; в - платформенный
Типоразмерными рядами предусмотрены
панелевозы грузоподъемностью 12; 16; 20 и
25 т.
Учитывая большие массогабаритные
характеристики ферм, их доставка на
строительные объекты является сложной задачей.
Применяемые для этого фермовозы
преимущественно имеют конструкцию кассетного типа и
в большинстве случаев являются
низкорамными полуприцепами. Всю номенклатуру
строительных ферм можно перевезти лишь двумя
типами фермовозов.
Эксплуатируемые площадки обычно
высокорамного типа имеют раздвижные коники
и предназначены для перевозки строительных
конструкций длиной более 2,5 м. Типоразмер-
ный ряд предусматривает создание площадок
грузоподъемностью 9; 12; 16; 21; 26 и 31 т.
Специализированный автотранспорт для
перевозки объемных элементов имеет
ограниченное применение, в основном для перевозки
объемных блоков, санитарно-техкабин и шахт
лифтов. Типоразмерным рядом предусмотрены
лишь три типоразмера грузоподъемностью 12;
16 и 25 т.
Анализ работы подвижного состава
автомобильного транспорта в строительстве
показывает, что существующий резерв увеличения
его производительности - это сокращение
времени простоя при погрузочно-разгрузоч-
ных работах.
Автотранспортные средства,
оборудованные устройствами погрузки-разгрузки
разделяются на следующие группы:
с устройствами кранового типа (с шар-
нирно-сочлененной стрелой, с портальной
стрелой, с балочной стрелой, с двумя
выдвижными или шарнирно-сочлененными
стрелами);
с устройствами бескранового типа (с
поперечным перемещением груза, с продольным
перемещением груза).
624
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
Устройства для саморазгрузки
устанавливаются на платформе автомобиля, на раме
седельного тягача и на платформе
полуприцепа. Привод большинства крановых устройств
гидравлический от двигателя базового
автомобиля. Для обеспечения поперечной
устойчивости и снижения нагрузок на ходовую часть
базового шасси при работе кранового
устройства средства оборудуют выносными опорами.
При внедрении в практику строительства
такого спецподвижного состава могут быть
На рис. 5.3.9 приведены типичные
гистограммы воздействий, передаваемых на
строительную конструкцию в процессе движения
автопоезда по грунтовой дороге и дорогам с
асфальтобетонным и булыжным покрытиями.
На графиках на оси абсцисс отложены
величины отношений динамических значений
реакции передней опоры конструкции к
статическому значению (п = Кд / /^г), а по оси
ординат - частота Кп появления определенных
величин динамических реакций. Вероятность
появления максимальных транспортных
перегрузок гораздо меньше, чем минимальных.
В самых неблагоприятных случаях до
90 % циклов динамических нагружений
конструкции характеризуется нагрузками в 1,5 раза
превышающими нагрузку от действия соб-
сокращены в 2 - 3 раза простои в ожидании и
непосредственно при погрузочно-разгрузочных
работах, а следовательно, уменьшено число
автотранспортных средств, занятых при
перевозках, сокращена в 2,5 - 3,5 раза численность
водителей и вспомогательных рабочих,
привлеченных для выполнения погрузочно-
разгрузочных операций, повышена четкость и
ритмичность доставки грузов и сокращена в
1,5 раза площадь приобъектных складов.
ственной массы. Нагрузки в 65 % циклов на-
гружения меньше чем в 1,3 раза превышают
указанную нагрузку.
Эти Нагрузки учитывают при расчете
металлоконструкций рам специализированных
полуприцепов. При расчете рамы
полуприцепов представляют как длинные балочные
конструкции-стержни, у которых длина во много
раз превосходит поперечные размеры. Расчет
подобных систем известен из теории
сопротивления материалов. Однако при наличии
большого количества элементов возникают
трудности вычислительного характера из-за
многократной статически неопределимости
системы. Последняя приводит к
необходимости решать систему алгебраических уравнений
высокого порядка, что целесообразно делать
на персональных компьютерах.
Рис. 5.3.9. Характерное распределение амплитуд транспортных нагрузок при дорожных испытаниях
железобетонной фермы ФДК-24-В46:
а - изношенная грунтовая дорога; V * 10 км/ч, -АГщах" 1,59;
б - дорога с асфальтобетонным покрытием хорошего состояния; V = 10 км/ч, Ктах = 1,38;
в - дорога с булыжным покрытием удовлетворительного состояния; V * 25 км/ч, Кт^ = 1,67
ТЯЖЕЛОВОЗЫ
625
5.3.5. ТЯЖЕЛОВОЗЫ
Тяжеловозы предназначены для
перевозки различных неделимых крупногабаритных и
тяжеловесных грузов. Неделимые грузы массой
до 30 т при сравнительно небольших размерах,
как правило, перевозятся автопоездами,
основные эксплуатационные параметры которых
(полная масса, габаритные размеры, число
осей, скорость движения) характеризуются
значениями, установленными
законодательством для транспортных средств общего
назначения. Отличительной особенностью такого
автопоезда является лишь конструкция при-
Тяжеловозы, особенно многоосные,
оснащаются шинами повышенной нормы слой-
ности, имеющими высокую несущую
способность, но допускающими движение только с
пониженными скоростями из-за опасности
выхода шин из строя по тепловому режиму.
Полная масса тяжеловоза назначается исходя
из максимальной несущей способности шин.
Поскольку подвески обычного типа при
движении по неровным дорогам не исключают
опасности перегрузки отдельных колес,
многоосные тяжеловозы оборудуются, как
правило, гидробалансирной подвеской,
объединяющей все колеса в три или четыре группы, в
пределах каждой из которых достигается
равномерное распределение вертикальной
нагрузки. Такая подвеска обеспечивает
регулирование высоты расположения груза и величины
дорожного просвета в процессе перевозки.
Кроме того, гидравлические устройства
обеспечивают подъем груза, подлежащего
перевозке, и установку его на место после перевозки
без применения грузоподъемного
оборудования.
Габариты тяжеловоза, определяемые
главным образом размерами груза, часто дос-
шгают весьма больших значений (перевозятся
химические колонны длиной более 100 м, суда
шириной более Юм, высокие трансформато-
цепного звена - прицепа- или полуприцепа-
тяжеловоза и, в первую очередь, его грузоне-
сущей рамы.
Для перевозки грузов большей массы
требуются тяжеловозы, имеющие большее
число осей (например 30) и множество колес
(например 240). При этом масса»
приходящаяся на каждую ось тяжеловоза (более 40 т),
существенно превосходит значения,
допустимые для дорожных транспортных средств.
Классификация тяжеловозов по
конструктивным признакам представлена на рис.
5.3.10.
ры электростанций и другие крупногабаритные
грузы). Движение многоосного тяжеловоза при
сохранении горизонтального положения груза
возможно лишь по дороге, неровности
которой на всей площади, занимаемой
тяжеловозом, не превышают величины вертикального
хода подвески (обычно 600 ... 700 мм).
Несмотря на выполнение большинства или всех
колес многоосного тяжеловоза управляемыми,
габаритная полоса его движения значительно
расширяется при повороте, что ухудшает
условия движения по дорогам как самого
тяжеловоза, так и автопоезда, в состав которого
входит прицеп- или полуприцеп-тяжеловоз.
Улучшение дорожной проходимости и
маневренности достигается выполнением
тяжеловоза в виде не единого, а сочлененного
транспортного средства, грузонесущая рама
которого шарнирно присоединена к передней
и задней тележкам через опорно-поворотные
устройства, обеспечивающие в общем случае
три степени свободы. При таком исполнении
неизбежно увеличиваются габаритные размеры
тяжеловоза в целом, однако каждая его
тележка имеет сравнительно небольшие длину и
ширину.
Большинство современных тяжеловозов
выполняются в виде прицепа или
полуприцепа.
Г
Единые
Г
Самоходные
Л
Прицепы
Модульные
С рамой над колесами
Тяжеловозы
Т
Прицепные
Полуприцепы
1
Цельные
Низкорамные
Прицепные
Прицепы
т
п
Сочлененные
I
1
Полуприцепы
С грузонесущей рамой
1
Самоходные
Безрамные
Рис. 5.3.10. Классвфнкжция тяжеловозов
626
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
Специфическим видом автопоезда-
тяжеловоза является комбинация
транспортных средств, содержащая полуприцеп-
тяжеловоз и одну или несколько
промежуточных тележек, воспринимающих вертикальную
нагрузку от шкворня полуприцепа и
выполняемых в виде прицепного или полуприцепного
звена. Полупрйцепные тележки обеспечивают
снижение вертикальной нагрузки на седло
тягача, а прицепные преобразуют полуприцеп-
тяжеловоз в прицеп.
Количество тягачей, необходимых для
буксирования прицепного тяжеловоза, зависит
от их тяговых возможностей, массы груза и
конкретных дорожных условий перевозки.
Тягачи могут располагаться как впереди, так и
позади тяжеловоза, т.е. использоваться в
качестве толкачей, а на спусках - в качестве
тормозных звеньев.
Однако наличие нескольких тягачей
существенно увеличивает габаритные размеры
автопоезда. При этом сложным становится
согласование действий водителей, несмотря на
наличие радиотелефонной связи между ними
и оператором, управляющим прицепным
звеном, в частности, при трогании автопоезда с
места, особенно на подъеме и в зимних
условиях, когда возможно примерзание шин к
поверхности дороги, а часто и накладок
тормозных колодок к барабанам. Кроме того, в
отдельных случаях, например, при
технологических перевозках на территориях
металлургических и судостроительных предприятий -
движение громоздкого автопоезда тяжеловоза
практически невозможно.
Отмеченные обстоятельства обусловили
применение самоходных тяжеловозов,
имеющих собственную силовую установку и
оборудованных механической или гидрообъемной
трансмиссией. При выполнении всех колес
управляемыми и оснащении тяжеловоза
системой рулевого управления, содержащей
электронную командную часть и индивидуальные
приводы поворота колес, достигается высокая
маневренность тяжеловоза, что делает
возможным его применение как для движения по
дорогам, так и для технологи"еских перевозок
на территориях промышленных предприятий.
В связи с тем, что грузы особо большой
массы (свыше 150 т) транспортируются лишь
эпизодически, рациональным является
применение для их перевозки не цельных, а
модульных тяжеловозов. В последнем исполнении
тяжеловоз содержит унифицированные
модули, каждый из которых может использоваться
отдельно в качестве тяжеловоза меньшей
грузоподъемности. Конструкция модулей
обеспечивает их жесткое соединение между собой
боковыми и торцовыми сторонами.
Модульное исполнение характерно для
единых самоходных тяжеловозов и прицепов,
а также для тележек сочлененных тяжеловозов.
Полуприцепы-тяжеловозы, отнесенные к
категории единых, выполняются только цельными.
Тяжеловозы существенно разнятся по
конструкции устройств для размещения
перевозимого груза. Наиболее универсальным
является исполнение с рамой над колесами, при
котором тяжеловоз - цельный или модульный
- имеет ровную платформу, обеспечивающую
установку практически любого груза.
Преимуществами такого исполнения являются
наиболее простая (по сравнению с другими видами)
конструкция тяжеловоза и наименьшие его
размеры, которые во многих случаях
практически не превышают размеров перевозимого
груза. При этом, если неделимый груз не
требует опирания по всей площади, для
перевозки возможно применение нескольких
тяжеловозов (модулей), размещаемых в любом
требуемом положении под основанием груза.
Согласованное действие тормозных систем и
рулевых управлений модулей, составляющих в
этом случае единый тяжеловоз, обеспечивается
посредством соответственно пневматических,
электрических, гидростатических или
электронных приводов. Для буксирования такого
тяжеловоза используется дышло (одно или
несколько), съемно устанавливаемое
непосредственно на элементах груза или на отдельных
модулях.
При перевозке грузов большой высоты
возникает опасность опрокидывания
тяжеловоза и затрудняется его движение под
мостами, виадуками, городскими контактными
сетями и в других подобных условиях. Для
уменьшения габаритной высоты
транспортируемого груза и снижения центра его массы
применяются низкорамные тяжеловозы, гру-
зонесущая часть рамы которых располагается
ближе к поверхности дороги, а концевые части
опираются на переднюю и заднюю тележки.
Большим преимуществом низкорамных
тяжеловозов является возможность выполнения
рамы разъемной и опускания ее грузонесущей
части на опорную поверхность при
проведении погрузо-разгрузочных операций.
Снижение центра масс перевозимого
груза особенно важно для сочлененных
тяжеловозов, грузонесущие рамы которых практически
никогда не выполняются в виде ровных
платформ, расположенных над шарнирами
тележек. Тяжеловозы, имеющие грузонесущую
раму, выполняются либо низкорамными, либо
имеют специальную раму, обеспечивающую
предельно низкое расположение перевозимого
груза. Такая рама выполняется, например, в
виде двух лонжеронов, опирающихся концами
на поперечины, помещенные на тележках
тяжеловоза. Груз располагается между
лонжеронами, опирается на их верхние поверхности
посредством специальных кронштейнов либо
устанавливается на несколько поперечин,
подвешенных к лонжеронам. При перевозке гру-
УЗКОСПЕЦИАЛИЗИРОВАННЫЕ АТС
627
зов в форме трубы лонжероны располагаются в
ее полости. В другом исполнении на тележки
опираются соответственно передний и задний
кронштейны, между которыми находится груз,
имеющий несущий корпус.
Для перевозки длинномерных грузов с
несущим корпусом служат безрамные
сочлененные тяжеловозы. Опорно-поворотное
устройство каждой тележки такого тяжеловоза
оборудуется ложементом, на который
укладывается перевозимый груз, фиксируемый
обычно посредством тросовых стяжек.
5.3.6. УЗКОСПЕЦИАЛИЗИРОВАННЫЕ
АВТОТРАНСПОРТНЫЕ СРЕДСТВА
Узкоспециализированными считаются
автотранспортные средства конструктивно
приспособленные для перевозки только одного
конкретного груза, отличающегося своими
специфическими особенностями и свойствами.
Число их типов велико, а общее количество
относительно незначительно. Типичными
представителями этой группы могут служить
лесовозы, трубовозы и скотовозы.
Лесовозы предназначены для перевозки
леса в хлыстах по лесовозным дорогам,
зимникам, лежневым дорогам и дорогам общей
сети с "верхних" складов на "нижние". Длина
хлыстов достигает 30 ... 32 м и поэтому
лесовозы представляют собой автопоезда с
роспусками. Тяжелые дорожные условия
предопределяют использование полноприводных
автомобилей-тягачей.
Автомобиль-тягач оснащается
специальным оборудованием: коником, подкониковой
рамой, тягово-сцепным устройством,
ограждением кабины, запорным устройством дышла,
коробкой отбора мощности и лебедкой. Коник
представляет собой поворотное устройство,
обеспечивающее удержание бревен при
транспортировке и передачу нагрузки от них на
подкониковую раму и автомобиль-тягач. Он
состоит из основания, двух откидных стоек с
наконечниками, стяжных и страховочных
канатов с запорами.
Лесовозный прицеп-роспуск состоит из
рамы, подвески, осей с колесами, тормозной
системы, складывающегося дышла и
поворотного коника. Управление роспуском во время
движения осуществляется крестообразной
тросовой сцепкой, обеспечивающей близкое
совпадение опорных траекторий движения
автомобиля-тягача и роспуска. Достаточный
уровень проходимости лесовозного автопоезда
достигается при коэффициенте сцепной массы
не менее 0,5.
Рис. 5.3.11. Схемж для определения расстояния между кониками автопоезда
Необходимое распределение нагрузок
между кониками автомобиля-тягача и
роспуском с учетом допускаемых нагрузок на них и
требуемым коэффициентом сцепной массы
устанавливается изменением расстояния между
кониками регулировкой длины дышла и
тросов сцепки (рис. 5.3.11)
/ =
кр
(С-К),
где Ст - сила тяжести груза; Ркр = Ст- Рка -
нагрузка на коник роспуска; Р^ - нагрузка на
коник автомобиля-тягача; С - расстояние от
комля до центра масс груза; С = 0,371, для
деревьев; С = 0,33/, для хлыстов; С = 0,51,
для сортимента; К = 1 м - средняя величина
свеса хлыстов перед коником автомобиля.
К
ц
\
<
г
0.18
0,16
0,14
0,12
0,10
0,09
0,3 0,4 0,6 0,8 Чя,м*
Рис. 5.3.12. Зависимости удельной площади ^ коника
от среднего объема Ух хлыста:
1 - автомобиля-тягача; 2 - роспуска
628
Глава 5.3. СПЕЦИАЛИЗИРОВАННЫЕ АТС
Для размещения хлыстов на автопоезде
предусматриваются определенные площади в
пределах внутренних габаритов стоек коников.
На рис. 5.3.12 приведены зависимости
удельной площади 5^ коников от среднего объема
Ух хлыста. Внутренняя площадь коника
роспуска должна быть в 1,5 ... 2 раза меньше
площади конкка автомобиля-тягача. При
холостом пробеге прицеп-роспуск со
складывающимся дышлом перевозят на автомобиле-
тягаче. Такая перевозка прицепа-роспуска
позволяет увеличить среднюю скорость
движения, улучшить плавность хода, топливную
экономичность и маневренность и уменьшить
изнашивание шин прицепа-роспуска.
Некоторые модели автомобильных
лесовозов имеют дополнительное оборудование.
Например, лесовоз "Мерседес-Еенц" 2636 Кб
4/38 грузоподъемностью 23 т с оборудованием
для вывозки хлыстов фирмы Долль имеет
погрузочный кран с гидроприводом
грузоподъемностью 15 т, с дальностью действия 7,7 м.
Особенностью двухосного прицепа р с спуска
этого лесовоза является поворотная передняя
ось с механическим приводом от поворотного
коника. В кабине водителя имеется
дополнительное электромагнитное управление
кнопочного типа, обеспечивающее возможность
движения автопоезда задним ходом.
Трубовозы могут иметь различные
компоновочные схемы в зависимости от длины
перевозимых труб. Для перевозки секций труб,
сваренных из двух или трех труб используются
трубоплетевозы. Трубовозы (длина труб до
12 м) могут быть в виде одиночного
автомобиля или автопоезда, состоящего из автомобиля-
тягача и полуприцепа или прицепа-роспуска.
Трубоплетевозы (длина секции труб до 36 м)
имеют три варианта схем: автомобиля-тягача и
прицепа-роспусха, связанных между собой
перевозимыми трубами (имеется также
страховочный канат); автомсбиля-тягача и прицепа,
соединенных между собой через седельно-
сцепные устройства и грузонесущую
платформу; автомобиля-тягача и полуприцепа.
Автомобили-тягачи обычно
полноприводные. У некоторых автопоездов-плетевозов
ведущие оси прицепов делаются также
активными (с приводом от тягача).
Во всех конструкциях трубо- и
плетевозов перевозимые трубы закрепляются на
кониках. Некоторые модели саморазгружающиеся
за счет оборудования их специальными
механизмами, которые могут быть механическими,
гидравлическими, электрическими.
В зависимости от схемы трубы могут
разгружаться: вбок (рис. 5.3.13, а - г), вниз
(рис. 5.3.13, д), назад (рис. 5.3.13, ё). При
выборе способа разгрузки следует учитывать
возможное нарушение устойчивости
автопоезда в процессе разгрузки.
Скотовозы по условиям эксплуатации в
сельскохозяйственном производстве
отличаются специфичностью. Помимо тяжелых
дорожных условий (66,4 % используемых дорог не
имеют твердых покрытий), транспортные
условия также имеют совершенно необычные
особенности. Основными особенностями,
связанными с условиями перевозки животных
являются изменение массы животных и их
травматизм. Потеря массы (А/я, %) животных
связана главным образом с
продолжительностью перевозки (/, ч):
А/я = А (1 - 1О-*0,
где А = 5, к = 0,13 для крупного рогатого
скота, А = 4,5, к — 0,12 для мелких животных
(свиньи, овцы).
Ввиду отрицательного воздействия на
животных вертикальных колебаний, резких
торможений, толчков при переключениях
передач и частых остановок имеются
ограничения скорости в зависимости от покрытий:
для асфальтобетонного Утах < 60 км/ч;
для булыжного и щебенчатого Ущ^х - 45
км/ч;
для грунтовых дорог Ушах ^ 25 км/ч.
Исключение травматизма требует
наличия определенной площади для каждого
перевозимого животного, которая определяется по
эмпирической формуле (м2):
где т - масса животного, кг; а = 125 для
крупного рогатого скота, а = 138 для мелких
животных (свиньи, овцы и т.д.).
Кузов должен быть разделен на отсеки и
иметь перегородки высотой не менее 1 м,
скобы и кольца для привязки крупных животных.
Дополнительные требования к
конструкции кузова состоят в необходимости
обеспечения следующего:
прямоугольной формы,
комбинированной крыши (металлическая с проемами,
закрываемыми брезентами);
естественной приточной вентиляции в
верхней и нижней части кузова, отсутствие
поперечного наклона кузова при поворотах;
боковой и задней двери-трапа со
специальным механизмом для подъема и опускания
(угол наклона заднего трапа при погрузке-
выгрузке не более 23 °);
жижесборника;
плоского с деревянным настилом пола
(ступеньки высотой не более 130 мм).
В США и Канаде при перевозках
животных на дальние расстояния используют
полуприцепы грузоподъемностью до 30 т со
стальными и алюминиевыми кузовами, с регулиро-
СПИСОК ЛИТЕРАТУРЫ
629
ьш
#
*=§
и
Рис. 5.3.13. Способы разгрузки труб
ванием температуры внутри кузова и
механизмами уборки навоза. Внутренняя высота
кузова достигает 3 м, что позволяет осуществить
загрузку животных в 2 - 3 яруса (30 - 50 голов
крупного рогатого скота, 170 - 220 свиней).
Для местных перевозок используют крытые
полуприцепы и прицепы малой вместимости
(3-5 голов крупного рогатого скота).
СПИСОК ЛИТЕРАТУРЫ
1. Автомобили: Основы проектирования /
М. С. Высоцкий, А. Г. Выгонный, Л. X. Гиле-
лес и др. Минск: Вышейша школа, 1987. 152
2. Автомобили: Специализированный
подвижной состав / М. С. Высоцкий, А. И.
Гришкевич, Л. X. Гилелес и др. Минск:
Вышейша школа, 1989. 240 с.
3. Автомобили-самосвалы / В. И.
Белокуров, С. В. Гладков, А. А. Захаров, А. С. Ме-
лик-Саркисьянц. М.: Машиностроение, 1987.
216 с.
4. Баловнев Г. Г. Сварные рамные
конструкции сельскохозяйственных транспортных
машин. М.: ЦНИИТЭИтракторосельхозмаш,
1974. 64 с.
5. Гельфгат Д. Б., Ошноков В. А. Рамы
грузовых автомобилей. М.: Машгиз, 1959. 148
630
СПИСОК ЛИТЕРАТУРЫ
6. Грузовые автомобили / М. С.
Высоцкий, Ю. Ю. Беленкий, Л. X. Гилелес и др. М:
Машиностроение, 1979. 384 с.
7. Иванов А. А. Особенности построения
алгоритма расчета рам полуприцепов по
методу конечных элементов // Автомобильная
промышленность. 1974. № 8. С. 40 - 42.
8. Индикт Е. А. Условия эксплуатации и
надежность работы агрегатов грузовых
автомобилей. М.: НИИНавтопром, 1986. 53 с.
9. Коваленко В. Г., Кантор Ф. М.,
Хабаров С. Р. Системы обеспечения
нефтепродуктами. М.: Недра, 1982. 237 с.
10. Лавреиченко В. Н., Малинин М. Ю.,
Бнкчурин Р. Н. Выбор оптимального борта
грузовой платформы // Автомобильная
промышленность. 1985. № 9. С. 45 - 47.
11. Литвинов А. С, Фаробин Я. Е.
Автомобиль: Теория эксплуатационных свойств.
М.: Машиностроение, 1989. 240 с.
12. Миркитанов В. И., Андреев В. А.
Эксплуатация и ремонт тракторных прицепов.
М: Агропромиздат, 1985. 224 с.
13. Павлов В. А. Выбор параметров
разрезной рулевой трапеции // Автомобильная
промышленность. 1980. № 2. С. 21 - 25.
14. Павлов В. А., Муханов С. А.
Транспортные прицепы и полуприцепы. М.:
Воениздат, 1981. 268 с.
15. Пархиловский И. Г. Автомобильные
листовые рессоры. М.: Машиностроение, 1978.
248 с.
16. Специализированный подвижной
состав / Я. Е. Фаробин, В. А. Кравцева,- В. Г.
Коваленко, А. М. Иванов. М.: МАДИ, 1989.
108 с.
17. Тракторные поезда / П. П. Артемьев,
Ю. Е. Атаманов, Н. В. Богдан и др. М.:
Машиностроение, 1982. 184 с.
18. Трехзвенные автопоезда / Я. Е.
Фаробин, А. М. Якобашвили, А. М. Иванов и др.
М.: Машиностроение, 1992. 286 с.
19. Якобашвили А. М., Олитский В. С,
Цеханович А. Л. Специализированный
подвижной состав для грузовых автомобильных
перевозок. М.: Транспорт, 1988. 228 с.
РАЗДЕЛ 6
ЭКСПЛУАТАЦИОННЫЕ МАТЕРИАЛЫ
Одной из важнейших предпосылок для*
обеспечения надежной и экономичной
эксплуатации колесных и гусеничных машин в
различных климатических зонах является
решение проблем химмотологии - применения то-
плив, смазочных материалов и технических
жидкостей соответствующего качества.
Рост нагрузочных, скоростных и
температурных режимов роботы деталей и узлов
машин, а также расширение диапазона условий
их эксплуатации, особенно в зонах с
холодным климатом, существенно повысили
требования к качеству этих эксплуатационных
материалов.
К смазочным материалам, применяемым
в агрегатах и системах колесных и гусеничных
машин, в зависимости от их назначения и
условий эксплуатации предъявляются различные
по функциональным свойствам требования.
Однако некоторые из них являются общими
как для моторных, так и для трансмиссионных
и гидравлических масел, например, требове-
ния к антиизносным, антикоррозионным
свойствам, вязкостно-температурной
характеристике и др.
В последние годы развернуты
исследования по унификации и сокращения
ассортимента масел посредством создания и
применения высокоэффективных
универсальных (для различных видов двигателей) и
единых (для всех агрегатов и систем) всесезонных
нефтепродуктов.
Для обеспечения надежной эксплуатации
наземной техники целесообразным является
обеспечение некоторого запаса качества
эксплуатационных материалов, однако
экономически не оправдано применение
нефтепродуктов с более высоким запасом качества, чем это
требуется по условиям эксплуатации машин.
Глава 6.1
ТОПЛИВА
6.1.1. ВИДЫ ТОПЛИВ.
ПОКАЗАТЕЛИ ЭКСПЛУАТАЦИОННЫХ СВОЙСТВ
Для колесных и гусеничных машин
наибольшее распространение получило жидкое
нефтяное топливо, подразделяющееся на
группы (бензин и дизельное топливо), марки и
виды. На колесных машинах применяют также
сжиженный нефтяной газ (СНГ), состоящий
из смеси пропана и бутана, и сжатый
природный газ (СПГ), в основном метан.
Свойства топлива определяются
строением и молекулярной массой углеводородов и
других соединений, входящих в состав
основных компонентов, видом и концентрацией
присадок, улучшающих свойства топлива (не
превышают долей процента), и
неуглеводородными примесями (серо-, азото-и кислосодер-
жащими соединениями).
В качестве основных компонентов
топлива используют дистиллятные продукты
прямой перегонки нефти (бензиновые,
керосиновые и более тяжелые фракции), деструктивных
вторичных процессов переработки
(каталитического и термического крекинга,
гидрокрекинга, риформинга, алкилирования,
изомеризации, гидрирования).
Присадки (органические и метадлоорга-
нические вещества) являются главным образом
продуктами нефтехимического синтеза.
Топлива, близкие по составу и свойствам
к нефтяным топливам, могут быть получены
переработкой природных битумов, горючих
сланцев, каменного и бурого углей.
Топливо должно отвечать следующим
требованиям: хорошо прокачиваться по
топливной системе вовсем диапазоне
эксплуатационных температур; своевременно и
полностью испаряться во впускной системе двигателя
или в камере сгорания; воспламеняться в
широких пределах состава топливовоздушной
632
Глава 6.1. ТОПЛИВА
смеси; обладать высокой теплотой сгорания и
обеспечивать устойчивое и быстрое горение
топливовоздушной смеси; не содержать
значительного количества зольных элементов, не
образовывать нагара и других высоко- и
низкотемпературных отложений в камере
сгорания, топливной системе и газовоздушном
тракте двигателя; быть некоррозионно-активным
по отношению к металлам, применяемым в
двигателестроении, обеспечивать их защиту от
Эксплуатационные
Прокачиваемость
Испаряемость
Горючесть
Склонность к образованию отложений
Совместимость с материалами
Противоизносные
Защитные
Охлаждающие
Токсичность
Пожароопасность
Сохраняемость
Скорость и результаты процессов,
протекающих при применении топлив
(перекачивание, испарение, горение и др.), а также
воспроизводимых в строго определенных
(стандартных) условиях (в лабораторных
устройствах, испытательных и натурных двигателях и
агрегатах), характеризуют уровень качества
топлива как совокупность экспуатационных
свойств.
Химмотология выделяет более десяти
эксплуатационных свойств топлив (табл. 6.1.1 )
каждое из которых определяется несколькими
более простыми физико-химическими
свойствами [14, 24]. Различные группы моторных
топлив отличаются пределами кипения и
специфическими требованиями, которые обычно
отражаются в маркировке топлива: для
бензина - детонационная стойкость (октановое
число) и испаряемость (летний и зимний вид);
для дизельного топлива - прокачиваемость
(летнее, зимнее, арктическое) и
пожароопасность (температура вспышки в закрытом
тигле). По уровню других эксплуатационных
свойств топлива приблизительно одинаковы.
а коррозии под действием коррозионно-актив-
е ных компонентов окружающей среды; хорошо
совмещается с неметаллическими материалами
е (резиной, герметиками, пластмассами,
красками и лаками); обеспечить минимальное
изнашивание деталей; быть малотоксичным, не
загрязнять окружающую среду; иметь высокую
а стабильность в условиях длительного (не менее
в пяти лет) хранения, транспортирования и при-
г менения.
Физико-химические
Степень чистоты, вязкость, фильтруемость, по-
верхностная активность :
Фракционный состав, давление насыщенных
паров, потеря от испарения
Теплота сгорания, детонационная стойкость, Це ^
тановое число, нагарообразующая способность
Термоокислительная стабильность, наличие
смол и нестабильных веществ
Коррозионная активность, воздействие на ре-
зину и герметики
Степень изнашивания трущихся пар металлов
Коррозия при наличии воды
Теплоемкость
Предельно допустимая концентрация
Воспламеняемость, электризуемость, темпера-
тура вспышки
Стабильность качества при хранении
Ввиду некоторых эксплуатационных
свойств бензин и дизельное топливо имеют
специфические области применения в
поршневых двигателях (с искровым зажиганием, с
воспламенением от сжатия) и в обычных
условиях невзаимозаменяемы между собой.
При необходимости взаимозаменяемость
топлив может быть обеспечена
конструктивными изменениями двигателя, применением
вспомогательных компонентов или присадок к
топливам. В газотурбинных двигателях,
используемых в колесных и гусеничных
машинах, применяют дизельное топливо, более
тяжелое по фракционному составу дистиллятное
газотурбинное топливо, а также авиационные
керосины.
6.1.2. БЕНЗИНЫ
Бензины применяют в ДВС с искровым
зажигание (карбюраторных и
непосредственным вспрыскиванием), а также с
воспламенением от сжатия (в многотопливных дизелях).
Эксплуатационные свойства бензинов характе-
6.1.1. Свойства моторных топлив
БЕНЗИНЫ
633
ризуются физико-химическими показателями,
регламентированными в стандартах (табл.
6.1.2).
Детонационная стойкость - свойство
бензина, характеризующее способность сгорания
рабочей, топливовоздушной смеси в
цилиндрах двигателя плавно, без детонации. При
детонационном (взрывном) сгорании скорость
распространения фронта пламени в камере
сгорания, достигая сверхзвуковых скоростей,
приводит к образованию ударных волн,
резкому увеличению температуры и давления в
цилиндрах, падению мощности двигателя,
росту дымности отработавших газов, быстрому
изнашиванию деталей цилиндропоршневой
группы и даже разрушению поршней и
коренных подшипников. Причиной детонационного
сгорания бензина в двигателе является
образование в последних порциях рабочей смеси, в
конце такта сжатия большого количества пере-
кисных соединений, что зависит от
углеводородного состава применяемого бензина [12].
6.1.2. Основные показатели качества бензина марок
Показатели
Октановое число, не менее:
по моторному методу
по исследовательскому методу
Фракционный состав:
температура начала перегонки у летнего вида, °С,
не менее,
10% перегоняется при температуре, °С, не выше
50% перегоняется при температуре, °С, не выше
90 % перегоняется при температуре, °С, не выше
температура конца кипения, °С, не выше
Давление насыщенных паров при 38 °С, КПа,
не более
Содержание свинца, г на I дм3,не более, в бензине;
неэтилированном
этилированном
Кислотность, мг КОН на 100 см3 бензина, не более
Содержание фактических смол, мг на 100 см3
бензина, не более, на месте:
производства
применения
Массовая доля серы, % , не более
Индукционный период на месте производства, мин,
не менее
Цвет этилированного бензина
А-76
76
35
70
55
115
100
180
160
195
185
66,7
66,7 ... 93,3
0,013
0,17
3,0
5,0 (3,0)*
10,0
0,10
900(1200)*
Желтый
АИ-93
85
93
35
70
55
115
100
180
160
195 (205*)
185
66,7
66,7 ... 93,3
0,013
0,37
3,0
5,0 (отс*.)
7,0 (2,0*)
0,10
900(1200)*
Оранжево-
красный
АИ-95
89
95
30
75
55
120
105
180
160
205
195
66,7
66,7 ... 93,3
0,013
'2,0
5,0
0,10
900
-
* Для неэтилированного бензина.
Примечание. В числителе даны значения для летнего вида топлива, а в
знаменателе - для зимнего.
634
Глава 6.1. ТОПЛИВА
Показателями детонационной стойкости
бензина является его октановое число (ОЧ),
чувствительность, а для авиационного бензина
также сортность [15].
ОЧ бензина численно равно
процентному содержанию изооктана в эталонной смеси с
гептаном, которая по детонационной
стойкости в условиях испытания на стандартном
одноцилиндровом двигателе с переменной
степенью сжатия эквивалентна испытуемому
бензину. Определение ОЧ бензина проводят на
одноцилиндровой установке УИТ - 65 на двух
режимах. Метод определения ОЧ в более
жестком режиме (при частоте вращения
коленчатого вала двигателя установки 900 мин"1
и температуре топливовоздушной смеси
149 °С) принято называть моторным (ОЧМ), а
в более мягком режиме (при 600 мин"1 и без
подогрева) - исследовательским (ОЧИ): ОЧИ
бензина обычно выше ОЧМ. Разность
значений ОЧИ и ОЧМ бензина (чувствительность)
возрастает при увеличении содержания в
бензине ароматических углеводородов.
Наибольшую чувствительность (1:2 ОЧИ - ОЧМ)
имеют бензины прямой перегонки, состоящие
в основном из парафиновых углеводородов.
6Н на 1000 т -км, кг
120
80
ио
^| / _
55
65
75
04
Рис. 6.1.1. Зависмости удельного расхода Ои
сырой нефти на 1000 т • км работы автомобиля
от ОЧ бензина, применяемого на карбюраторных
грузовых автомобилях:
1 - неитилированного; 2 - этилированного
Детонационная стойкость бензина
определяет не только мощность, топливную
экономичность и надежность работы двигателя,
но и расход нефти (рис. 6.1.1), а также
энергетические затраты при получении бензина с
различным ОЧ. Поэтому на практике
особенно важно соблюдать соответствие между
детонационной стойкостью применяемого бензина
и требованиями двигателя, которые в
основном определяются степенью сжатия. Ниже
приведены данные, характеризующие
взаимосвязь детонационной стойкости бензина с
характеристиками двигателя и относительным
расходом нефтяных фракций на получение
бензина.
Детонационная
стойкость бензина, ОЧИ 60 70 80 90
Степень сжатия
двигателя 5,2 6 6,8 7,7
Литровая мощность
двигателя, кВт/л .... 26 29 30 31
Топливная
экономичность автомобиля
на 100 км пути, л ... 28 25 22 20
Относительный
расход нефтяных
бензиновых фракций на
получение бензина,
кг/кг 1 1,14 1,25 1,48
Испаряемость бензина определяется
показателями его фракционного состава и
давлением насыщенных паров. Температура начала
перегонки 10 % определяют возможность
холодного пуска двигателя, склонность бензина
к образованию паровых пробок в системе
питания двигателя при высокой температуре.
Температура перегонки 50 % бензина
характеризует скорость прогрева двигателя, динамику
разгона автомобиля, устойчивость работы
двигателя на режиме холостого хода.
Перегонка 90 % бензина влияет на равномерность
распределения состава топливовоздушной
смеси по цилиндрам двигателя, на степень
смывания бензином масляной пленки со стенок
цилиндра и скорость изнашивания * деталей
двигателя [14].
Если бензин по какому-либо из
показателей фракционного состава не соответствует
условиям эксплуатации автомобиля, то
затруднения при пуске, продолжительность времени
прогрева двигателя, его неустойчивая работа
на режиме холостого хода в целом могут
увеличить эксплуатационный расход бензина на
20 - 40 % и значительно снизить надежность
работы двигателя.
Надежность работы двигателя и его
топливная экономичность во многом
определяются склонностью применяемых бензинов к
образованию отложений во впускной системе,
характеризуемой таким показателем, как
концентрация фактических смол. Повышенное на-
гарообразование на деталях камеры сгорания
двигателя зависит от концентрации в бензине
этиловой жидкости, сернистых и смолистых
соединений, а также ароматических и
непредельных углеводородов.
Обеспечение качества бензина при
хранении, в основном регламентируется
показателями его химической стабильности:
индукционным периодом и концентрацией
фактических смол.
ДИЗЕЛЬНОЕ ТОПЛИВО
635
6.1.3 ДИЗЕЛЬНОЕ ТОПЛИВО
В двигателях с воспламенением от
сжатия (дизелях) используют нефтяные фракции
прямой разгонки, а также дистилляты
глубокой переработки нефти, кипящие при
150 ... 410 °С. Основные показатели качества
дизельного топлива приведены в табл. 6.1.3.
Испаряемость дизельного топлива
оказывает существенное влияние на процесс
образования топливовоздушной горючей смеси в
цилиндрах двигателя за очень короткий
(тысячные и сотые доли секунды) промежуток
времени. Она зависит от фракционного
состава: температуры выкипания 50, 90 и 96 %.
Воспламеняемость и горючесть
определяют эффективность процесса- сгорания
топлива в двигателе. Воспламеняемость
характеризует условия осуществления начальной
стадии этого процесса - воспламенения;
горючесть - особенности протекания и
завершения процесса сгорания. Воспламеняемость
дизельного топлива оценивают цетановым
числом (ЦЧ), которое определяют на
специальной одноцилиндровой моторной установке
путем сравнения испытуемого топлива со
смесями эталонных топлив; цетана (ЦЧ = 100)
и а-метилнафталина (ЦЧ = 0). Содержание
цетана (%) в смеси, эквивалентной по
воспламеняемости испытуемому топливу, является
его ЦЧ. Оптимальное ЦЧ — 40+50. При
меньших значениях ЦЧ возрастает жесткость
работы двигателя, при больших - уменьшается
полнота сгорания, увеличиваются удельный
рас-ход топлива и дымность отработавших
газов (рис. 6.1.2). Стандартными показателями
горючести дизельного топлива являются
плотность при 20 °С и удельная теплота
сгорания. Цетановое число и удельная теплота
сгорания зависят от углеводородного состава
топлива, в основном от содержания
ароматических и нормальных парафиновых
углеводородов. Плотность топлива для быстроходных
двигателей 800 ... 860 кг/м3, удельная теплота
сгорания 42,7 ... 43,3 МДж/кг.
Прокачиваемость топлива обеспечивает
его подачу к форсункам в широком диапазоне
климатических условий эксплуатации
двигателя. Прокачиваемость зависит от
низкотемпературных свойств: температуры (Тп)
помутнения, температуры (Тз) застывания и
предельной температуры (Тф) фильтруемости,
кинематической вязкости, содержания различных
механических загрязнений.
К дизельному топливу предъявляют
высокие требования по чистоте (содержанию
механических примесей, воды, смолистых
продуктов окисления), которая оценивается
коэффициентом фильтруемости.
и: япквт.ч)
к
\
Л
•у\
г
20 30 ЬО 50 60 ЦЧ
Рис 6.1.2. Влияние ЦЧ топлива
на характеристику его сгорания
и экономичность двигателя:
/ - удельный расход топлива &
2 - период задержки воспламенения /в (угол поворота
коленчатого вала двигателя)
Склонность к образованию отложений
влияет на надежность работы форсунок
(коксование сопловых отверстий, подвижность
запорной иглы), в которых топливо нагревается
до 150 ... 180 °С и выше, а также на
образование нагара в камере сгорания. Это свойство
дизельного топлива зависит от химической и
термической стабильности (склонности к
окислению при обычной и повышенной
температуре), фракционного состава (более тяжелые
топлива образуют больше отложений),
содержания серы, коксуемости и зольности. С
ростом трех последних показателей склонность
топлива к отложениям на деталях форсунок и
в камере сгорания возрастает.
Совместимость дизельного топлива с
конструкционными материалами узлов
топливной системы, средств транспортирования и
хранения определяется коррозионной
активностью и защитными свойствами.
Корродировать детали топливной аппаратуры могут
активные сернистые соединения меркаптаны и
сероводород (рис. 6.1.3), а также случайно
попавшие в топливо водорастворимые кислоты и
щелочи. Способность топлива защищать
детали топливной аппаратуры от
электрохимической атмосферной коррозии зависит от
содержания поверхностно-активных соединений,
способных вытеснять воду с поверхности
деталей топливной аппаратуры. Такими
соединениями являются нейтральные нефтяные
серосодержащие (сульфиды, тиофены),
кислородсодержащие (нафтеновые кислоты, смолы), а
также специально вводимые защитные
присадки. Коррозия деталей цилиндропоршневой
группы и выпускного тракта двигателя
возрастает с увеличением общего содержания
серы в топливе, при сгорании которой
образуются агрессивные оксиды серы.
636 Глава 6.1. ТОПЛИВА
6.1.3. Основные показатели качества дизельного топлива для быстроходных дизелей
Показатели
Цетановое число, не менее
Фракционный состав:
50 % перегоняется
при температуре, °С,
не выше
96 % перегоняется
при температуре, °С,
не выше
Кинематическая вязкость
при 20 °С, мм2/с
Температура °С:
помутнения, не выше
застывания, не выше
вспышки, не ниже
Массовая доля серы, %,
не более
Массовая доля меркапта-
новой серы, %, не более
Кислотность, мг КОН/100
мл, не более
Зольность, %, не более
Коксуемость 10 % остатка,
%. не более
Коэффициент фильтруе-
мости, не более
Плотность при 20 °С,
кг/м3, не более
Л
(летнее)
45
280
360
3 ...6
-5
-10
40
0,5
0,01
5
0,01
0,30
3
860
Марок
3
(зимнее)
45
280
340
1,8 ... 5
-25
(-35Г
-35
(-45)*
35
0,5
0,01
5
0,01
0.30
3
840
А
(арктическое)
45
255
330
1,5 ... 4
-55
30
0,4
0,01
5
0,01
0,30
3
830
1
Фракционного состава
Утяжелен
ного (УФС)
45
290
360
(90%)
3 ... 6,5
5
0
40
0.5
0,01
5
0,01
0,30
3
860
Расширен
ного (УФС)
45
Не ниже
150 (10%)
290
360
(90%)
3... 6
20
0,5
0,01
5
0,01
0,30
3
860
* Для холодной климатической зоны.
ГАЗООБРАЗНЫЕ И АЛЬТЕРНАТИВНЫЕ ТОПЛИВА
637
в 10 12 П 16 18 {»,9
Рис. 6.1.3. Влияние содержания меркаптанов в
топливе на коррозионное изнашивание плунжерных пар А п
топливного насоса высокого давления:
1 - топливо, содержащее 0,18 % общей серы и 0,005 %
меркалтановой серы; 2 - сернистое топливо,
содержащее 1 % общей серы (0,009 % меркалтановой
серы); 3 - то же (0,025 % меркалтановой серы)
Противоизносные свойства дизельного
топлива обеспечивают долговечность
прецизионных подвижных деталей топливной
аппаратуры и зависят от вязкости, содержания
поверхностно- и коррозионно-активных веществ.
Противоизносные свойства дизельного
топлива улучшаются при увеличении кислотности и
уменьшении содержания меркалтановой серы.
Экологические свойства топлива
определяют условия безопасного обращения с
ним и вредное воздействие на окружающую
среду при применении. Дизельное топливо
является легковоспламеняющимся
(арктическое и зимнее), температура
самовоспламенения 300 ... 330 °С, пределы воспламенения
57 ... 119 °С. Дизельное топливо относится к
малотоксичным веществам четвертого класса
опасности. Предельно допустимая
концентрация паров топлива в воздухе 300 мг/мл При
сгорании дизельного топлива в двигателях
образуются токсичные оксиды серы,
концентрация которых в отработавших газах зависит
от содержания серы в топливе.
В мировой практике наблюдается
тенденция к снижению содержания серы в
дизельном топливе до 0,01 %.
Топливо марки Л (летнее) рекомендуется
применять при минимальной температуре
окружающего воздуха не ниже -5 °С, топливо
марки 3 с Тп = -25 и -35 °С при
минимальной температуре окружающего воздуха,
соответственно не ниже -25 и -35 °С,
топливо марки А (арктическое) - при
минимальной температуре окружающего воздуха ниже
-35 °С.
Для расширения ресурса в
высокооборотных дизелях возможно применение летнего
топлива "утяжеленного" фракционного состава
"УФС" с температурой перегонки 50 % не
выше 290 °С и 90 % не выше 360 °С, с
температурой застывания не выше 0 °С. Выработка
топлива УФС вместо топлива Л позволяет
увеличить выход топлива на 2 ... 5 % в пересчете
на перерабатываемую нефть. С этой же целью
разработано топливо расширенного
фракционного состава (РФС), представляющего собой
смесь топлива УФС с 10 ... 20 % бензиновых
фракций. Такое топливо обладает лучшими
низкотемпературными свойствами по
сравнению с топливом УФС, но более
пожароопасно, так как имеет температуру вспышки 20 °С.
Использование топлива РФС позволяет
расширить ресурсы дизельного топлива по
сравнению с топливом марки Л на 15 ... 25 %.
6.1.4. ГАЗООБРАЗНЫЕ И АЛЬТЕРНАТИВНЫЕ ТОПЛИВА
К газообразным топливом относятся
сжиженный нефтяной газ (СНГ),
компремированный (сжатый) и сжиженный природный газ
(КПГ и СПГ), водород. Основные
компоненты СНГ (%): пропан-бутан (75 ... 85), метан,
этан, этилен (4 ...6), жидкие углеводороды
(1 ... 2). Основные компоненты КПГ и СНГ
(%): метан (85 ... 98), этан, пропан, бутан
(2 ... 11). СНГ является попутным продуктом
переработки нефти и природного газа. КПГ и
СНГ - природные газы, а также метановая
фракция попутного газа коксохимического,
нефтеперерабатывающего и металлургического
производства. Газообразный водород в
промышленных масштабах в основном получают
каталитической конверсией углеводородов и
оксида углерода, а также выделением из газов
нефтепереработки.
Применение в ДВС газообразных топ-
лив, которые характеризуются высокой
теплотой сгорания, обеспечивает высокую
гомогенность топливовоздушной смеси, полноту и
равномерность процесса сгорания, большой срок
службы двигателя вследствие снижения
загрязнения моторного масла продуктами сгорания,
большой срок смены масла, отсутствие нагара
на поршнях, клапанах и свечах зажигания,
меньшее содержание токсичных компонентов
в отработавших газах [5]. Главным недостатком
газообразных топлив является их высокий
удельный расход. Природный газ (ПГ) и
водород используют в сжатом и сжиженном виде.
При этом значительно усложняется
конструкция системы питания автомобилей,
технических средств транспортирования, хранения и
заправки, соответственно возрастает их
стоимость [9]. ПГ хранится на борту автомобиля в
баллонах под большим давлением или в
жидком состоянии в криогенных баках.
Альтернативные топлива,
вырабатываемые из нефтяного сырья и применяемые на
транспорте с целью сокращения потребления
нефти, можно разделить на три группы, в
зависимости от необходимой степени
модернизации двигателей и силовых установок,
систем питания и топливоподачи транспортных
средств, сложившейся структуры топливного
комплекса (производства, транспортирования,
хранения, распределения топлива по
потребностям) [22].
6.1.4. Основные физико-химические и эксплуатационные свойства нефтяных и альтернативных топлив
Показатель
Плотность при 20 °С, кг/м3
Кинематическая вязкость при
20 °С, мм2/с
Температура, °С:
кипения
застывания
Теплота, МДж/кп
сгорания низшая
сгорания объемная
испарения
Детонационная стойкость (октановое
число по моторному методу)
Коэффициент заменяемости по
отношению к нефтяному бензину, т/т
Бензин
690 ... 720
0,6 ... 0,8
35 - 195
-80
43,451
31,328
0,300
78 ... 85
1,0
Дизельное
топливо
810 ... 850
1,5 ... 6,0
160 - 360
-10 ... -55
42,840
35,558
0,189
_
0,75
Сжиженный
газ (пропан-
бутан)
530
-
-42
-187
45,780
24,360
0,390
90 ... 100
0,94
Сжатый газ
(метан)
0,7
-
-162
-182
48,152
0,034
0,365
100 ... 105
0,84
Метил- трет-
бутиловый
эфир
750
0,8
60
-105
35,222
25,958
0,323
97 ... 111
1,23
Метанол
800
0,6
65
-98
19,13
15,161
1,105
87 ... 91
2,28
Водород
(жидкий)
7,0
-
-253
-259
76,272
8,392
0,450
_
0,57
ПРИСАДКИ К ТОПЛИВАМ
639
К первой группе относятся смеси
нефтяных топлив с синтетическими компонентами
типа низших и высших спиртов, а также эфи-
ров. По физико-химическим и
эксплуатационным свойствам "гибридные" не требуют
значительной модернизации двигателей,
транспортных средств и топливного комплекса.
Ко второй относятся топлива из спирта,
а также аналогии нефтяных топлив,
получаемые переработкой угля, сланца битума,
растительной массы и др. Применение таких
топлив не требует больших конструктивных
изменений двигателей, хотя необходима
замена некоторых конструкционных материалов
топливных систем, но требует развития новых
отраслей топливного производства.
Газообразные топлива третьей группы
(нефтяной и природный газ, водород и др.)
значительно отличаются от нефтяных физико-
химическими свойствами (табл. 6.1.4). Для их
практического применения необходимо
создание новых систем питания и топливоподачи
автомобилей, средств хранения,
транспортирования и заправки.
6.1.5. ПРИСАДКИ К ТОПЛИВАМ
Для улучшения эксплуатационных
свойств бензинов и дизельных топлив
применяют присадки различного функционального
назначения (менее 1 %).
Присадки, улучшающие воспламенение и
горение топлив. Для повышения
детонационной стойкости бензинов широкое применение
получили свинцовистые антидетонаторы -
тетраэтил свинец (ТЭС) и тетралметилсвинец
(ТМС).- в виде композиций с алкилбромида-
ми и алкилхромидами.
Этиловая жидкость Р-9 (54 % ТЭС, 33 5
этилбромид, 6,8 % монохлорнафгалин, 6,2 %
красящее вещество и наполнитель - бензин)
добавляется к автомобильным бензинам из
расчета содержания Рв не более 0,17 ... 0,35 г
на 1 л, при этом ОЧ базового автомобильного
бензина возрастает на 4 - 6 единиц. Ввиду
высокой токсичности этилированных бензинов
их производство уменьшается.
Для улучшения воспламеняемости ДТ
(повышения ЦЧ) используют алкилнитраты,
алкилнитриты, арилнитраты, пероксиды
и др. (например, изопропилнитрат
СНз-СН(СНз)(ЖС>2, циклогексилнитрат
С6НпЖ>з).
Для уменьшения содержания в
отработавших газах дизелей сажистых частиц (дыма)
могут применяться противодымные присадки,
в состав которых входят барий, кальций,
марганец, железо и др. Наиболее эффективные
бариевые присадки, например ИХП -706. При
концентрации присадки 0,5 % дымность
отработавших газов при средних и номинальных
нагрузках снижается на 50 ... 70 %.
Присадки, повышающие химическую и
термическую стабильность топлив. Для
торможения окисления углеводородов топлив при
хранении и применении в двигателях
используются антиокислители (от тысячных до
десятых долей процента). Для стабилизации
автомобильных бензинов широко применяют
антиокислители фенольного типа (смеси и
индивидуальные алкилфенолы); древесносмоляной
(ДСА), ФЧ - 16 и ионол (0,05 ... 0,1 % на
нестабильные компоненты).
Дизельные топлива, содержащие
незначительное количество нестабильных
компонентов вторичных процессов, не нуждаются в
стабилизации присадками. За рубежом в
дизельные топлива с высоким содержанием
продуктов каталитического крекинга добавляют
амины (0,002 ... 0,005 %).
Присадки, улучшающие
низкотемпературные свойства (депрессорные). Зимние и
арктические ДТ получают в основном за счет
облегчения фракционного состав, удаления
хвостовых высококипящих фракций 330 ... 370 °С,
содержащие нормальные парафиновые
углеводороды с высокой температурой плавления.
Чтобы летние дизельные топлива были
пригодны для применения при низких
температурах, используют депрессорные присадки,
которые изменяют структуру кристаллов
парафинов и приостанавливают их агрегатирование
в крупные комплексы, забивающие поры
топливных фильтров.
Практическое применение нашли
депрессорные присадки на основе сополимеров
с винилацетаном - отечественные ПДП, поли-
прен, зарубежные "Парадин-20, 25", ЕСА-
5920 и др. При введении таких присадок
(0,03 %) в топливо типа Л температура
застывания понижается на 18 ... 22 °С, а предельная
температура фильтруемости - на 9 ... 12 °С.
Топливо Л с депрессорной присадкой можно
применять при температуре окружающего
воздуха до -15 °С.
Присадки, улучшающие защитные
свойства. Для улучшения защитных свойств ДТ,
полученных гидроочисткой и лишенных
значительной части природных поверхностно-
активных соединении, иногда применяют
защитные присадки (0,005 ... 0,01 %): амины,
жирные и нафтеновые кислоты, их эфиры и
соли.
Кроме того, в топлива могут добавлять
также диспергирующие (для уменьшения
осадкообразования), противоизносные,
антистатические и биоцидные (для предотвращения
биоповреждений) присадки.
640
Глава 6.2. МАСЛА
Глав* 6.2
МАСЛА
6.2.1. МОТОРНЫЕ МАСЛА
Общие требования и оценочные
показатели. Моторные масла используют для
смазывания узлов и деталей двигателей, обеспечения
их надежной работы. Основными функциями
моторных масел являются: разделение
трущихся поверхностей и уменьшение трения,
возникающего между сопряженными
деталями; снижение изнашивания и предотвращение
задира контактируемых деталей; отвод теплоты
от трущихся деталей и удаление продуктов
износа из зоны трения; уплотнение зазоров в
сопряженных деталях и, в первую очередь, в
зоне циллиндропоршневой группы.
В зависимости от условий работы
двигателя к маслу предъявляются ряд определенных
требований:
не должна образовывать различного рода
отложений как на нагретых металлических
поверхностях, так и в объеме масла;
не должна вызывать коррозии деталей
двигателя;
обеспечивать легкое прокручивание
коленчатого вала двигателя при низкой
температуре окружающего воздуха;
иметь оптимальный фракционный
состав, обеспечивающий минимальный расход
на угар;
иметь низкую склонность к пенообразо-
ванию.
Диапазон температур применения масла
определяется наиболее низкой температурой
окружающего воздуха (-40 ... -50 °С),
характерной в момент пуска ДВС и наибольшей
рабочей температурой масла в картере,
достигающей в раде случаев 100 ... 120 °С. Заданные
свойства масла обеспечиваются путем выбора
масляной основы и композиции присадок
различного функционального назначения. В
качестве основы преимущественно используют
масла нефтяного происхождения, однако
перспективно применение и синтетических
продуктов. Ниже рассмотрены наиболее важные
свойства масла любого назначения независимо
от условий применения.
Моюще-диспергирующие свойства (МДС)
тем выше, чем большее количество
нерастворимых продуктов старения может
удерживаться в работающем масле без выпадения в
осадок. Меньше лака и нагара образуется на
горячих деталях. Моющие свойства
характеризуют в основном, способность масла
препятствовать образованию отложений на нагретых
поверхностях.
Необходимый уровень МДС масла
достигается сочетанием металлсодержащих
(зольных) моющих и не содержащих металла
(беззольных) диспергирующих присадок. К числу
наиболее распространенных моющих присадок
(детергентов) относятся сульфонаты, алкилса-
лицилаты, алкилфеноляты и фосфонаты бария,
кальция, беззольные присадки- сукцинимиды.
Действие моюще-диспергирующих присадок
заключается в создании двойного
электрического слоя на нагретых металлических
поверхностях, препятствующего образованию
углеродистых отложений, и одновременной
стабилизации в объеме масла твердых продуктов,
склонных к седиментации (осаждению).
Металлосодержащие моюще-диспергиру-
ющие присадки, как правило, характеризуются
способностью нейтрализовать кислые
продукты сгорания топлива и окисления масла. Они
обуславливают щелочное число, по величине
которого можно оценить концентрацию
присадок.
При их введении повышается зольность
масла, что при определенных условиях может
привести к нежелательным явлениям:
образованию зольных отложений в камере сгорания,
преждевременному воспламенению рабочей
смеси или детонации, абразивному
изнашиванию. Поэтому зольность ограничивают
верхним пределом, который зависит от марки
масла и композиции присадок.
В лабораторных условиях моющие
свойства масла определяют на модельной установке
ПЗВ (малоразмерном одноцилиндровом
двигателе). Критерием является загрязненность 3
поршня, оцениваемая по шестибалльной
системе (чистый поршень - ноль баллов). В
стендовых условиях проводят испытания на
одноцилиндровых моторных установках или
полноразмерных двигателях по степени
загрязнения поршней.
Требования,к уровню моющих средств
обусловлены напряженностью условий их
работы в двигателе. Обобщенные показатели
связывают напряженность работы ДВС с
уровнем эксплуатационных (моющих) свойств
используемого масла. Наиболее приемлемым для
автотракторных дизелей является условный
показатель [1].
С N
Л — т е V V V V V •
Пп1ъ ' ' " ' Тг
А = А'КаК^КпК5К1У
где От - часовой расход топлива, кг/ч ; Р -
суммарная площадь рабочих поверхностей
зеркала цилиндра, днища поршня, головки
цилиндра, м2; / - число цилиндров; п - частота
вращения коленчатого вала двигателя, мин"1;
ЛГе - эффективная мощность двигателя, кВт;
Ом - масса масла в смазочной системе, кг;
КаУКууКп,К5УК1 - коэффициенты,
учитывающие соответственно давление наддува,
способ охлаждения ДВС, периодичность смены
масла, содержание серы в топливе,
техническое состояние ДВС.
С ростом показателя А возрастают
требования к уровню моющих свойств масла,
поскольку возрастает склонность к образованию
отложений (рис. 6.2.1) [2].
МОТОРНЫЕ МАСЛА
641
3, баллы
30
20
1 \^ I
^ I г
10
40 60 80 100 ПО 140 А -10°
Рис. 6.2.1. Зависимости загрязненности 3
поршневой группы от параметр* А'
для двигателей с охлаждением:
1 - воздушным; 2 - водяным*
Антиокислительные свойства моторных
масел в двигателе связаны с конструкцией. «В
общем случае в ДВС выделяют четыре зоны,
существенно отличающиеся по условиям,
влияющим на окисление масла: картер, зона
между юбкой поршня и гильзой цилиндра,
зона поршневых колец, а также пленка масла,
которая остается на стенке гильзы цилиндра и
контактирует в такте расширения с горячими
газами. Вследствие контакта с горячими
газами интенсивность окисления масла в
последней зоне наиболее высокая; она на 4 - 8
порядков выше, чем в картере и на 2 -5
порядков выше, чем в зоне поршневых колец [18].
Интенсивность окисления масла в
дизелях зависит от их конструктивных
особенностей. Для характеристики степени окисления
масла можно использовать критерий А^к,
рассчитываемый по формуле [6]:
_ 0,0175$,^ (а + 1)
ок " ДЯ
где бе - удельный расход топлива, г/(кВч); 7Уе
- эффективная мощность двигателя, кВт; а -
коэффициент избытка воздуха; Э - диаметр
цилиндра, м2; »У - ход поршня, м2.
Для определения предельных условий
работы масла в наиболее напряженной зоне (ци-
линдропоршневой группы) весьма
перспективным является метод оценки мгновенных
значений температуры масляной пленки на
деталях, связывающий параметры рабочего
процесса ДВС и мгновенные значения
толщины масляной пленки под поршневым кольцом
[17].
Для оценки влияния серы, содержащейся
в топливе, на окисление масла предлагается
критерий [4]
к _ #сЛГер
* 60яДО7 '
где Р - массовая доля серы в топливе.
На скорость и глубину окисления
значительно влияют площадь нагретой
металлической поверхности, частицы металла и
неорганических загрязнений, которые попадают в
масло в результате износа или коррозии
деталей ДВС, а также с воздухом, поступающим
для горения топлива. Многие из них
каталитически ускоряют окисление углеводородов
масла.
Стойкость масла к окислению
повышают, используя антиокислительные присадки
различного типа, отличающиеся механизмом
действия. Наиболее распространены диалкил-
и диариддитиофосфаты цинка, реже других
металлов. Действие антиокислительных
присадок основано на их способности разлагать ги-
дропероксиды, деактивировать свободные
радикалы и катализаторы окисления,
пассивировать металлические поверхности.
В стандартах и технических условиях на
маслостойкость к окислению косвенно
характеризуют индукционным периодом
осадкообразования в приборе ДК-НАМИ и
термоокислительной стабильностью по методу Папок.
При моторных испытаниях
антиокислительные свойства масла оценивают по увеличению
вязкости на установках ИКМ или
Питтер ^У-1.
Смазывающие свойства - способности
масла уменьшать трение и интенсивность
изнашивания трущихся деталей - зависят от
химического состава базового масла, наличия и
эффективности действия присадок. Важное
значение имеют также реологические свойства:
вязкость, вязкостно-температурная
характеристика, зависимость вязкости от градиента
скорости сдвига и давления (рис. 6.2.2) [2]. При
работе на топливе с высоким содержанием
серы предотвращение коррозионного
изнашивания поршневых колец и цилиндров в
значительной степени. определяется
нейтрализующей способностью масла - щелочным числом.
Как правило, наличие в масле щелочных
моющих присадок и присадок типа дитиофосфа-
тов цинка оказывается достаточным для
предотвращения коррозионно-механического
изнашивания, задиров и усталостного
выкрашивания.
Рис. 6.2.2. Зависимость износа ц поршневых колец
дизеля при высоких рабочих температурах
от кинематической вязкости одо масла
21 Злк. 1741
642
Глава 6.2. МАСЛА
В лабораторных условиях смазывающие
свойства определяются на машинах трения.
Показатели, характеризующие эти свойства,
нормированы стандартами и техническими
условиями. Однако смазывающие свойства,
оцененные на машинах трения, не в полной мере
характеризуют фактическую способность масла
снижать трение и изнашивание. При
моторных испытаниях смазывающие (противо-
износные) свойства масла определяют по
потере массы поршневых колец, задиру или пит-
тингу кулачков и толкателей и др.
Антикоррозионные свойства
характеризуют способность масла препятствовать
коррозионному изнашиванию конструкционных
металлов (преимущественно цветных металлов
и сплавов на их основе) при работе ДВС [8].
Коррозионная активность масла зависит от
углеводородного состава основы композиции
присадок и их концентрации. Специальные
присадки - это деактиваторы металлов,
образующие с последними хелатные комплексы.
В лабораторных условиях коррозионная
активность масла характеризуется потерей
массы свинцовых пластин в расчете на 1 м2
поверхности за время испытания в приборе
ДК-НАМИ при температуре 140 °С. При
моторных испытаниях коррозионную активность
масла оценивают по потере массы шатунных
подшипников с вкладышами из свинцовистой
бронзы: двигатель ЯАЗ-204 или установка
Питгер^-1.
Большое значение приобретают
защитные свойства масла, способность предохранять
детали ДВА от коррозии в присутствии влаги
1>, Мм'1'/С
100
80
60
ЬО
го
\\ \ /
\\ V
\\А
3 \\Л
30
70
110
Т,°С
преимущественно в период длительного
хранения.
Механизм защитного действия связан с
вытеснением воды с поверхности металла и
образованием на нем достаточно прочных
адсорбционных или хемосорбционных пленок,
препятствующих контакту влаги с металлом.
Для повышения защитных свойств масла в их
состав вводят специальные присадки -
ингибиторы коррозии. В лабораторных условиях
защитные свойства оценивают в камере
влажности Г-4.
Вязкостно-температурная
характеристика и кинематическая вязкость масла
(рис. 6.2.3) определяют возможность
обеспечения жидкостного трения, легкость пуска
ДВС, время подготовки к пуску и др.
Интенсивность изменения вязкости от температуры
за-висит от углеводородного состава масла (по
возрастанию): от парафиновых углеводородов
к нафтеновым и ароматическим. С
повышением температуры вязкость масла снижается. На
практике для прогнозирования зависимости
вязкостей масла V и т| от температуры Т
широко используют уравнения:
К.С.Рамайя
л = /4еР/т'.п = е(^/Г)2.
Вальтера
1*1^+ 0,8) = А- Р1я7\
где А,В,$ - коэффициенты.
у,Ла-с
1Ь0
120
100
80
60
ЬО
20
\ \
\з
\ /
/ \
^^
-ьо
-30
ф
-20
-10
т,°с
Рис. 6.2.3. Вязкостно-температурная характеристика моторных масел при температуре:
а - положительной; б - отрицательной; / - М-ЮД(м); 2 - М-8Д(м); 3 - Мз / 8-Д
МОТОРНЫЕ МАСЛА
643
Вязкостно-температурную
характеристику оценивают индексом вязкости ИВ
(относительная безразмерная величина),
показывающим степень изменения вязкости в
зависимости от температуры. Его рассчитывают или
определяют по таблицам, по известным
значениям кинематической вязкости при 40 и 100 °С.
Кроме того, вязкостные характеристики
оценивают кинематической вязкостью при низкой
температуре (0 ... 18 °С), а также
динамической вязкостью
л=ур,
где р - плотность масла.
При низкой температуре масло оказывает
сопротивление прокручиванию коленчатого
вала двигателя, что определяет пусковые
параметры ДВС, характеризуемые пусковыми
свойствами масла, под которыми понимают
сопротивление к перемещению трущихся
поверхностей, разделенных слоем масла. Не
менее важной является бесперебойная подача
масла к узлам трения - прокачиваемость по
масляной магистрали.
При пуске холодного ДВС наиболее
высокие градиенты скорости, равные 104...106 с1
реализуются в подшипниковых узлах и цил-
линдропоршневой группе ДВС. Наименьшие
скорости сдвига масло имеет при
протекании через сетчатый фильтр маслоприемника
(0,5 ... 1 с1) и через маслозаборную трубку
(10 с1). Пусковые свойства масла
целесообразно оценивать при высоких градиентах
скорости сдвига, а прокачиваемость - при
низких.
В первом приближении при прочих
равных условиях возможность обеспечения
холодного пуска ДВС без средств его облегчения
связана с динамической вязкостью масла,
определенной при высоких градиентах скоростей
сдвига соотношением [4]:
где Т\у Тч - температура холодного пуска
одного и того же двигателя на различных
маслах, °С; Т|ЬЛ2 " динамическая вязкость масла
при температуре пуска, МПа • с; п -
коэффициент, зависящий от конструкции двигателя.
Для облегчения пуска двигателя масло
должно иметь минимальную вязкость, однако
на установившемся режиме работы двигателя
снижение изнашиваемости и испаряемости
достигается использованием масла с достаточно
высокой вязкостью. Минимально
допустимая кинематическая вязкость, при которой
обеспечивается работоспособность
нагруженных подшипников коленчатого вала,
составляет 4 ... 5 мм2/с Тогда надежная работа
подшипников наиболее распространенных
быстроходных дизелей в летний период на
маслах вязкостью 10 мм2/с при 100 °С
обеспечивается до температуры масляного слоя
150 ... 155 °С. Разность температур масла в
картере и наиболее нагруженной зоной
шатунных подшипников из условий
требуемой интенсивности теплоотвода составляет
30 ... 40 °С.
Обычно моторные масла имеют
недостаточно хорошие вязкостнотемпературные
свойства, если обеспечивается надежная работа при
высокой установившейся температуре, то
трудно пустить двигатель в холодное время и
наоборот. Для улучшения
вязкостно-температурных характеристик используют
вязкостные (загущающие) присадки. Это полимерные
соединения (полиметакрилаты, полиизобуги-
лены, сополимеры), которые относительно
мало изменяют вязкость масла при низкой
температуре и значительно (в 1,5 - 2 раза)
повышают ее при высокой. Такие масла являются
загущенными зимними или всесезонными в
зависимости от диапазона охватываемых
классов.
С низкотемпературными
характеристиками связана температура застывания масла -
это температура, при которой масло теряет
подвижность: при наклоне пробирки под
углом 45 °С уровень жидкости не меняется в
течение 1 мин. Температура застывания
определяется в основном содержанием в масле
парафиновых углеводородов и их
молекулярной массой. Масла с температурой застывания
до -10 ... -15 °С получают удалением
парафинов в процессе производства. Для
получения зимних масел с температурой
застывания -25 ... -30 °С и ниже используют
присадки - депрессоры.
При охлаждении из масла выделяются
кристаллы парафина, образующие каркас,
внутри которого находится жидкое масло.
Депрессоры на поверхности парафина
образуют пленки, препятствующие формированию
каркаса. Поэтому масло сохраняет текучесть до
более низкой температуры. Эффективные
депрессоры в концентрации 1 ... 1,5 способны
понижать температуру застывания масла
на 20 ... 25 °С.
Качество работающего масла и его
пригодность для дальнейшей эксплуатации
контролируют рядом показателей: вязкостью,
щелочным и кислотным числами, водородным
показателем, наличием в масле воды, топлива,
металлов и др. В зависимости от типа
двигателя и условий его эксплуатации предложена
номенклатура показателей, наиболее
объективно характеризующих состояние масла, и их
предельно допустимые (браковочные)
значения. Их достижение свидетельствует о
необходимости смены масла, поскольку дальнейшая
эксплуатация может привести к снижению
надежности двигателя.
21*
644
Глава 6.2. МАСЛА
ИПС
0,5
0,4
0,3
0,2
О,'
О
и
1
/
/
,,'
1
2.
*~3
4^,
5
100
300
500 {,1.
Рис. 6.2.4. Изменение значения ИПС для
различных масел, работающих а двигателях
разной напряженности:
1 - М-ЮД(м) (ЯМЗ-240 Н);
2- М-ЮД(м) (6РА-4-185); 3- М-10 -Г2(к)
(КамАЗ, магистральные автомобили);
4- М-10-Г2(к) (КамАЗ, автосамосвал);
5- М-14-Вг (ВДМ-21А)
Наряду с единичными показателями
используют более информативные комплексные,
или интегральные, показатели. К их числу, в
частности, относится интегральный показатель
старения масла (ИПС), определяемый
выражением
я/7С=у/-ур Що-Щ< зл,
где Уо, уг - кинематическая вязкость
соответственно свежего масла и после его
использования в течение / часов, мм2/с; Що, Щ( - при
тех же условиях, мгКОН/г; 3/7/ - содержание
в масле загрязняющих примесей после / часов
работы двигателя, %; ДС/ - диспергирующая
способность работающего масла.
Увеличение ИПС свидетельствует об
ухудшении качества масла. Значение ИПС
зависит от напряженности ДВС, его наработки
и исходного уровня эксплуатационных свойств
масла (рис. 6.2.4) [8]. Система формирования
как единичных, так и комплексных
показателей состояния масла непрерывно
совершенствуется, поскольку от их правильного выбора
существенно зависят вопросы рационального и
экономного применения масел в условиях
эксплуатации .
Система обозначений и методы моторных
испытаний. Обозначение моторных масел
состоит из групп знаков, первая из которых
обозначается буквой М (моторное), вторая -
цифрами, характеризующими класс
кинематической вязкости, третья - прописными буквами
и обозначает принадлежность к группе по
эксплуатационным свойствам.
Масла делят на классы в зависимости от
кинематической вязкости (табл. 6.2.1). По
вязкости при температуре -18 °С масло
соответствует классу, указанному в числителе, а по
вязкости при 100 °С - классу, указанному в
знаменателе дроби.
В зависимости от уровня
эксплуатационных свойств и области применения масла
делят на группы (табл. 6.2.2): индекс 1 -
карбюраторные двигатели; 2 - дизели.
Универсальные масла, предназначенные для
использования как в дизелях, так и карбюраторных
двигателях одного уровня форсирования, индекса
не имеют. Универсальные масла,
принадлежащие к разным группам, должны иметь
двойное обозначение, в котором первое
характеризует количество масла как дизельного, а второе
как карбюраторного. После основного
обозначения в скобках может быть указано
дополнительное (отличительные признаки масла),
например: РК - рабоче-консервационное; ЦЛ -
для циркуляционных смазочных систем; 20 -
щелочное число и т.д.
Так, М-8-В] - это моторное масло,
класса вязкости 8, предназначенное для средне-
форсированных карбюраторных двигателей
(В\); М-6з/Ю-В - это моторное масло класса
вязкости 6з/10, универсальное группы В для
карбюраторных двигателей и дизелей; М-4з/8-
В2Г1 - моторное масло класса вязкости 4з/8,
предназначенное для использования в средне-
форсированных дизелях (В2) и
высокофорсированных карбюраторных двигателях (Г}).
При необходимости выбора
отечественных масел для импортируемой техники или
зарубежных масел для экспортируемой следует
иметь в виду, что все обозначения масла
независимо от классификации в том или ином
виде содержат указания на класс вязкости по
системе БАЕ и на уровень эксплуатационных
свойств по системе АР1 (см. табл. 6.2.1. и
6.2.2). Особенностью всех классификаций и
систем обозначения является то, что уровень
эксплуатационных свойств (группу)
определяют на основании результатов моторных
испытаний в одноцилиндровых установках или
полноразмерных двигателях (табл. 6.2.3).
В отечественной практике наиболее
информативные методы оценки качества масел
сгруппированы в комплексе методов
квалифицированной оценки. Комплексы включают
исследования как лабораторные, так и в
одноцилиндровых и многоцилиндровых
установках и предназначены для наиболее
оперативной и объективной оценки. По результатам
испытания масла в объеме комплекса методов
квалификационной оценки образец может
быть допущен или не допущен к применению,
либо выявлена необходимость проведения
стендовых испытаний в полноразмерных
двигателях.
6.2.1. Классы вязкости моторных масел
Класс вязкости
4.
Зз
4з
5з
6з
6
8
10
12
14
16
20
Кинематическая вязкость, мм2/с,
при температуре, °С
100
3,8
4,1
5,6
5,6
5,6 ... 7,0
7,0 ... 9,5
9,5... 11,5
11.5 ... 13,0
13,0 ... 15,0
15,0 ... 18,0
18,0 ... 23,0
-18 (не более)
1250
2600
6000
10400
-
-
-
-
-
-
Класс вязкости по
ЗЛЕ
5>У
ЮЛУ
15ЛУ
20\У
20\У
20
30
30
40
40
50
Класс вязкости
Зз/8
43/6
4з/8
41/Ю
5з/10
5з/12
53/14
63/10
63/14
6з/16
Кинематическая вязкость, мм2/с,
при температуре, °С
100
7,0 ... 9,5
5,6 ... 7,0
7,0 ...9,5
9,5... 11,5
9,5... 11,5
11,5 ... 13,0
13.0 ... 15,0
9,5 ... 11,5
13,0 ... 15,0
15,0 ... 18,0
-18 (не более)
1250
2600
2600
2600
6000
6000
6000
10400
10400
10400
Класс вязкости по
5АЕ
5АУ/20
ЮЧУ/20
10>У/20
ЮЛУ/30
15ЛУ/30
15ЛУ/30
15ЛУ/40
20\У/30
20ЛУ/40
20ЛУ/40
6.2.2. Группы моторных масел по эксплуатационным свойствам
Группа
Рекомендуемая область применения
Соответствующая
группа по АР1
А
Б1
Б2
В1
В2
Г1
Г2
д
Нефорсированные карбюраторные двигатели и дизели
Малофорсированные карбюраторные двигатели, работающие в условиях, которые способствуют образованию
высокотемпературных отложений и коррозии подшипников
Малофорсированные дизели
Среднефорсированные карбюраторные двигатели, работающие в условиях, которые способствуют окислению масла
и образованию отложений всех видов
Среднефорсированные дизели, предъявляющие повышенные требования к антикоррозионным, противоизносным
свойствам масел и способности предотвращать образование высокотемпературных отложений
Высокофорсированные карбюраторные двигатели, работающие в тяжелых эксплуатационных условиях,
способствующих окислению масла, образованию всех видов отложений и коррозии
Высокофорсированные дизели без наддува или с умеренным наддувом, работающие в эксплуатационных условиях,
способствующих образованию высокотемпературных отложений
Высокофорсированные дизели с наддувом, работающие в тяжелых эксплуатационных условиях или когда
применяемое топливо требует использования масел с высокой нейтрализующей способностью, антикоррозионным и про-
тивоизносными свойствами, малой склонностью к образованию всех видов отложений
5В
8С
СА
5Э
СВ
5Е
СС
СО
6.2.3. Методы моторных испытаний масел
Группа масла
ВьГ,
в2
Г2,Д
Оцениваемый показатель
Склонность к образованию
отложений: при температуре:
при высокой
низкой
Антиокислительные свойства
Моющие свойства
Антиокислительные свойства
Антикоррозионные свойства
Склонность к образованию
отложений при низких темпе-
ратурах
Моющие свойства
Антикоррозионные свойства
Склонность к образованию
отложений при низких
температурах
Антиокислительные свойства
Установка
НАМИ-1М
ИКМ
Питтер Л^-1
Дизели Д-240, 245
УИМ-6-НАТИ,
ОД-9*, ИМ-1,
ИКМ
Питтер >^-1
Дизель Д-245
ИКМ или
Питтер >У-1
НАМИ-1М
УИМ-6-НА-1 или Д-245,
ОД-9* ИМ-1
Дизель ЯМЗ-238НБ
Д-245 или ЯАЗ-204 или
ИКМ и Питтер \У-1
НАМИ-1М
ИКМ или
Питтер ЛУ-1
Длительность испытания,ч
120
120
10
36
120
100
960
40
36
125
36
120
120
100
960
125
36
120
40
36
Оценочный параметр
Загрязненность поршня
высокотемпературными отложениями
Количество отложений в роторе
центрифуги
Изменение вязкости масла
Тоже
Загрязненность поршня
высокотемпературными отложениями
Тоже
Изменение вязкости масла
Тоже
Потеря массы комплекта
шатунных вкладышей
Тоже
Количество отложений в роторе
центрифуги
Загрязненность поршня
высокотемпературными отложениями
То же
Потеря массы комплекта
шатунных вкладышей
Количество отложений в роторе
центрифуги
Изменение вязкости масла
То же
* Одновременно оценивается износ деталей цилиндропоршневой группы.
МОТОРНЫЕ МАСЛА
647
В настоящее время оценка
эксплуатационных свойств масел для поршневых ДВС
базируется на семи комплексах методов
квалификационной оценки: для авиационных
двигателей, для автомобильных
карбюраторных двигателей, для автомобильных и
тракторных дизелей, для четырех- и двухтактных
форсированных транспортных двигателей, для
судовых и тепловозных дизелей, а также для
промывки смазочных систем судовых и
тепловозных дизелей. На моторных установках
оценивают преимущественно моющие, включая
склонность к образованию отложений при
высокой и низкой температуре,
антиокислительные и антикоррозионные свойства.
Моющие свойства определяют по
загрязненности поршня. При этом учитывают
подвижность колец, толщину и характер
отложений в канавках и внутри поршня. Наиболее
часто для этого используют стендовые
одноцилиндровые установки и дизели Д-240 и 245.
Установка НАМИ-1М представляет собой
одноцилиндровый отсек карбюраторного
двигателя ЗИЛ-431410, УИМ-6-НАТИ -
тракторного дизеля Д-75, ОД-9 - дизеля типа В-2.
Установки ИМ-1 и ОД-9 позволяют определять
также противоизносные свойства (по износу
комплекта поршневых колец), а установки
ИМ-1 - антикоррозионные (износ вкладышей)
свойства масел. В ряде случаев проводят
длительные (960 ч) испытания в полноразмерных
двигателях.
Для карбюраторных двигателей и
дизелей, работающих на переменных
температурных режимах, важна склонность масла к
образованию низкотемпературных отложений. Этот
показатель определяют на установке НАМИ-1
по количеству осадков, образующихся в роторе
центрифуги.
Антиокислительные свойства выявляют
при испытаниях на установке ИКМ -
одноцилиндровый бензиновый двигатель УД-1
воздушного охлаждения. Антикоррозионные
свойства оценивают при исследованиях масла
в полноразмерном двигателе ЯАЗ-204 или
Д-245: за 125 ч потеря массы шатунных
вкладышей не должна превышать 0,2 г и не
должны наблюдаться видимая коррозия и
механические повреждения.
Масла для карбюраторных двигателей.
Масла от группы А до группы П отличаются
по уровню эксплуатационных свойств
(табл. 6.2.4). Выбор марки масла обусловлен
уровнем форсирования и условиями
эксплуатации двигателя.
К группе А относится масло М-12ТП для
двухтактных карбюраторных двигателей. Его
получают компаундированием дистиллятного
и остаточного компонентов, а также присадок.
Специфическим показателем масла, в
значительной степени определяющим его
эксплуатационные свойства, является предельная
температура прокачиваемости то
пливно-масляной смеси, которая должна быть не выше
-40 °С.
В группу В] входят масла, в которые
введены композиции достаточно эффективных
присадок, обеспечивающих надежную работу
двигателей среднего уровня форсирования.
Масло М-4з /6-В] получено на базе
веретенного масла АУ с композицией присадок.
Введение в состав масла полиметакрилата
обеспечивает высокий уровень
вязкостно-температурных свойств. Масло используют в
двигателях, работающих на бензине А-76, как
зимнее для средней климатической зоны и
всесезонное для северной. Температура
холодного пуска до -30 °С.
Масло М-8-В - смесь дистиллятного и
остаточного компонентов с композицией
присадок - является всесезонным для среднефор-
сированных двигателей легковых и грузовых
автомобилей, эксплуатируемых в умеренной и
жаркой зонах.
Масло М-6з/10-В получают на базе
высококачественных основ АСВ-5 или АСВ-6
(разный уровень вязкости и температуры
застывания) с эффективной композицией
присадок. Масло является универсальным
всесезонным для среднефорсированных
карбюраторных двигателей, работающих на бензине
А-76, и среднефорсированных дизелей всех
типов. Используют его с увеличенным сроком
смены.
Масла группы Г] содержат
высокоэффективные композиции присадок и
предназначены для использования в форсированных
двигателях, главным образом, легковых
автомобилей, работающих на бензине АИ-93.
Масло М-5з/Ю-Г1 получено на базе
индустриального И-12А с пакетом
моюще-диспергирующих, антиокислительной,
загущающей (повышенной термической и
механической стабильности) присадок. Оно является
преимущественно зимним для умеренной
климатической зоны и всесезонным для северных
районов. Масло М-63/12-Г1 получено на базе
смеси мало-, средне- и высоковязкого
компонентов с композицией присадок,
обеспечивающей повышенные антиизносные свойства,
исключающей питгинг толкателей распредвала.
Для умеренной зоны страны масло является
всесезонным. Тщательно сбалансированная
композиция присадок в обоих маслах
позволяет использовать их в двигателях легковых
автомобилей с увеличенным до 15 тыс. км
пробега сроком смены.
648
Глава 6.2. МАСЛА
Марка
6.2.4. Характеристика моторных масел
Кинематическая
вязкость, мм2/с*
Индекс
вязкости
Щелочное
число,
мгКОН/г
Зольность,
(сульфатная),
%
Температура, °С
в открытом
тигле
застывания
М-12ТП
М-43/6-В1
М-8-В!
М-63/Ю-В1
М-53/10-Г!
М-63/12-Г1
М-12-П
М-12-ГКи)
М-8-ГКи)
М-16-А(т)
М-8-Б2(мт)
М-63/Ю-Б2
М-16-Б2(т)
11,5 ±0,5
12 ±0,5
12 ±0,5
8 ±0,5
15,5 ... 16,5
8 ...9
9,5 ... 10,5
15,5 ... 16,5
М-10-В2(с)
М-14-В2
М-8-В2
М-10-В2
М-16-В2
(М-16ИХП-3)
М-8-Г2
М-10-Г2
М-8-Г2(к)
М-10-Г2(к)
11 ... 12
13,5 ... 14,5
8+0,5
11 ±0,5
15,5 ... 16,5
8,5 ±0,5
11,5 ±0,5
8+0,5
11 ±0,5
83
85
85
85
90
85
85
90 ... 95
85 ... 95
85
125
85
115
120
115
95
98
98
85
90
125
85
Группы А, В)
2
5,5
5,5
Группа Г]
5
8,5
3
3
Группы А, Бг
0,9
2
3,5
4
Группа В2
3,5
4,8
3,5
3,5
4
Группа Г2
6,0
6
6
6
0,3
1,3
0,95 ... 1,3
1,3
0,9
1,3
1,3
0,55
0,55
0,25 ... 0,55
0,4 ... 0,75
Не более
1,15
0,6 ... 1
1
1,2
1,3
1,3
1,25
1,65
1,65
1,15
1,15
210
210
200
205
225
200
205
200 ... 210
205 ... 220
200
165
200
190
200
210
220
220
210
230
180
165
210
М-8-Д(м)
М-Ю-Д(м)
8 ... 8,5
Не менее 11
102
90
Г
руппаД
8,5
8,2
1,5
1,5
195
210
-30
-15
В числителе даны значения при 100 °С, а в знаменателе - при -18 °С.
МОТОРНЫЕ МАСЛА
649
Летние масла М-12-П и М-8-Г1(и)
(последнее с композицией присадок фирмы Луб-
ризол) используют как обкаточные для
автомобилей ВАЗ и для первой заправки
автомобилей.
Рабоче-консервационное масло М-8-Г(рк)
используется для смазывания карбюраторных
двигателей и дизелей и при длительном (до
10 лет) их хранении с введением ее в
эксплуатацию без расконсервации.
Масла для дизелей. Основой дизельных
масел являются дистиллятные, остаточные,
чаще компаундированные базовые масла
селективной очистки, получаемые из
малосернистых нефтей. Все дизельные масла содержат
присадки или композиции соединений
различного функционального назначения.
К маслам группы А относится масло
М-16-А(т), предназначенное для смазывания
транспортных безнаддувных дизелей типа В-2,
двигателей некоторых дорожных и
строительных машин. Масло получают из сернистых
нефтей с добавлением многофункциональной
присадки ЦИАТИМ-339 и депрессора
АзНИИ-ЦАИТИМ-1.
Масла группы Б2 вырабатывают из
сернистых нефтей с композицией присадок.
Применяют их в транспортных и
стационарных дизелях малого уровня форсирования.
Масло М-8-Б2(мт), полученное
компаундированием дистиллятного и остаточного
компонентов с композицией присадок,
предназначено для смазывания двигателей и трансмиссий
транспортных машин при зимней
эксплуатации. Масло М-63/Ю-Б2, изготовленное на
основе маловязкого масляного дистиллята с
нормированным фракционным составом путем
загущения полимерной вязкостной присадкой
и введения композиции присадок, применяют
в транспортных дизелях преимущественно для
зимней эксплуатации, а в северных районах
всесезонно.
Масло М-16-Б2(т) из малосернистых
нефтей, содержащее присадки ПМС "А" и
МНИИП-22К, а также депрессорную и проти-
воизносную, используют для смазывания
дизелей типа В-2.
Масла группы В2 вырабатывают из
сернистых и малосернистых нефтей с
композицией присадок. Их применяют в автотракторных
дизелях без наддува, транспортных
двигателях среднего уровня форсирования. Масло
М -10-В2(с) состоит из смеси дистиллятного и
остаточного компонентов, получаемых из
сернистых и малосернистых нефтей, и
композиции присадок. Его используют для
эксплуатации автотракторных малофорсированных
дизелей, а также дизель-генераторов.
Масло М-14-В2 - смесь дистиллятного и
остаточного компонентов, выработанное из
сернистых нефтей, с композицией присадок -
используют для эксплуатации дизелей типа
ЧН 21/21 автомобилей БелАЗ. Масла М-8-В2 и
М-10-В2, полученные смешением
дистиллятного и остаточного компонентов из сернистых
нефтей с композицией присадок - это
наиболее массовые масла группы Вг, которые
предназначены для смазывания автотракторных
среднефорсированных дизелей без наддува при
эксплуатации летом (М-Ю-В2) и зимой
(М-8-В2).
Масло М-16-В2 производят из смеси
дистиллятного и остаточного компонентов,
выработанных из сернистых нефтей, и композиции
присадок. Его используют для смазывания
форсированных транспортных дизелей с
наддувом.
Масла группы Г2 из сернистых и
малосернистых нефтей с композицией присадок
применяют в автотракторных дизелях
повышенного уровня форсирования, работающих без
наддува или с умеренным наддувом. Требуемое
для масел группы Гг повышение
температурных пределов работоспособности,
моюще-диспергирующих, антиокислителъных,
нейтрализующих и противоизносных свойств
достигается использованием в их составе более
эффективных присадок в большем количестве. Масла
М-8-Г2 и М-10-Г2 получаемые смешением
дистиллятного и остаточного компонентов из
сернистых нефтей с композицией присадок,
предназначены для автотракторных дизелей
типов Д-240, СМД-60/62, ЯМЗ-240Н, ЯМЗ-
238НБ зимой (М-8-Г2) и летом (М-10-Г2).
Масла М-8-Г2(к) и М-10-Г2(к), аналогичные
маслам М-8-Г2 и М-10-Г2, но с более
Эффективными присадками, используют
соответственно зимой и летом для дизелей автомобилей
КамАЗ, тракторов К-700. импортной техники
(Магирус-Дойц, Икарус и др.), а также во всех
автотракторных дизелях, для которых
рекомендованы масла группы Гг..
Масла группы Д вырабатывают из
сернистых нефтей с добавлением эффективных
присадок (большой концентрации) для
обеспечения длительной работоспособности наиболее
форсированных дизелей в особо тяжелых
условиях эксплуатации. Масла М-8-Д(м) и
М-Ю-Д(м) состоят из смеси дистиллятного,
остаточного компонентов, выработанных из
смеси сернистых нефтей, и композиции
эффективных присадок, в состав которой входят
алкилсалицилат, нейтральный сульфонат, ди-
тиофосфат цинка и другие соединения. Масла
предназначены для эксплуатации
автотракторных дизелей с наддувом, имеющую высокую
степень форсирования: большегрузные
карьерные самосвалы, промышленные тракторы
большой мощности и т.д. Эти масла можно
также использовать в двигателях импортных
бульдозеров, автопогрузчиков,
трубоукладчиков, автомобилей с дизельными двигателями.
Перспективными являются зимние масла
М-43/8Г2, М-43/8-Д и всесезонное М-43/10-Д,
650
Глава 6.2. МАСЛА
применение которых обеспечивает легкость
пуска двигателя и снижение расхода топлива
при низкой температуре окружающего воздуха.
При их использовании возможен пуск без
применения средств подогрева до -25... -30 °С.
6.2.2. ТРАНСМИССИОННЫЕ МАСЛА
Общие требования и оценочные
показатели. Трансмиссионные масла используются в
узлах трения агрегатов трансмиссии и зубчатых
передачах в широком диапазоне температур:
от -50 ... -60 °С (температура холодного пуска
в районах Крайнего Севера) до 140 ... 150 °С
(рабочая температура в объеме масла) и
200 ... 250 °С в зоне контакта зубьев зубчатых
колес.
Способность масла выполнять и
длительное время сохранять стабильные
показатели определяется его эксплуатационными
свойствами. Основными функциями масла
являются: снижение изнашиваемости трущихся
поверхностей (высокие смазывающие свойства);
уменьшение потерь на трение; отвод теплоты
из зоны трения; снижение уровней шума и
вибрации контактирующих тел (шестерен),
смягчение ударных нагрузок; удаление из зоны
трения продуктов износа и механических
примесей.
Вместе с тем в зависимости от условий
работы масло должно: обладать стойкостью
против окисления; предотвращать коррозию
различных деталей; длительное время
сохранять свои свойства; обеспечивать трогание с
места машины или пуск механизма при
низкой температуре окружающего воздуха;
препятствовать ценообразованию.
Специфическим требованиям,
предъявляемым к маслу для гидромеханических
коробок передач и ведущих мостов с
дифференциалами ограниченного проскальзывания,
является требование высоких фрикционных
свойств.
Для узлов и агрегатов трансмиссии
характерны нормальное изнашивание, задиры и
питгинги. При прочих равных условиях на все
виды изнашивания значительное влияние
оказывает вязкость масла и наличие в нем
высокоэффективных противоизносных и противо-
задирных присадок, а также содержание в
масле воды, воздуха и др.
Улучшение противоизносных свойств
масла, особенно в граничном режиме
смазывания, достигается введением специальных
присадок.
Окисление масла приводит к изменению
его вязкостно-температурных характеристик,
накоплению коррозионно-агрессивных
продуктов. Снижение коррозионной
агрессивности достигается добавлением в композицию
деактиватора или пассиватора. Для
трансмиссионного масла, как и для моторных,
важными свойствами являются защитные,
проявляющиеся преимущественно в период
хранения техники.
Помимо вязкостно-температурной
зависимости трансмиссионных масел,
определяемой аналогично, как для моторных, большое
значение имеет зависимость вязкости от
давления. Ввиду высоких контактных нагрузок,
возникающих в слое масла, разделяющем
поверхности трения, вязкость масла в нем
значительно отличается от вязкости в объеме.
Прогнозирование повышения вязкости масла г)р
при избыточном давлении р возможно с
использованием формул:
Лр=ЛоаР или Лр=Л0е(ХР»
где Г)о - динамическая вязкость при
атмосферном давлении, МПа; а - пьезокоэффици-
ент вязкости.
Оценку качества масла осуществляют с
помощью разных приборов и установок. Те из
них, которые дают наиболее полное и
объективное представление об оцениваемом
свойстве, включены в два комплекса методов
квалификационных испытаний масла для
трансмиссий гусеничных и автотракторных машин.
В соответствии с ними предусматривается
оценка противоизносных и противозадирных
свойств на шестеренном стенде и четырехша-
риковой машине трения, термоокислительной
стабильности в приборе ДК-2НАМИ,
физической стабильности центрифигурованием и
др.
Система обозначений. Система буквенных
и цифровых знаков характеризует
принадлежность трансмиссионного масла к
определенному по свойствам классу и группе вязкости. В
зависимости от вязкости трансмиссионные
масла делят на четыре класса (табл. 6.2.5). Для
каждого класса ограничены допустимая
отрицательная температура, при которой
динамическая вязкость не должна превышать
150 Па • с. В зависимости от
эксплуатационных свойств трансмиссионные масла отнесены
к пяти группам (табл. 6.2.6).
В обозначении масла ТМ -
трансмиссионное масло, з - загущенное. Так,
трансмиссионное масло пятой группы (с
высокоэффективными противозадирной и противоизносной
присадками или эффективным
многофункциональным пакетом присадок) класса
вязкости 9, содержащее вязкостную присадку,
обозначается ТМ-5-93.
ТРАНСМИССИОННЫЕ МАСЛА
651
6.2.5. Классы вязкости трансмиссионных масел
Параметры
Кинематическая вязкость
при 100 °С, мм2/с
Температура, при которой
динамическая вязкость не
превышает 150 Па • с, °С, не более
9
(75^, 80)
6 ... 10,99
-45
12
(80^/85)
11 ... 13,99
-35
18
(90)
14 ... 24, 99
-18
34
(140)
25 ... 41
-
Примечание. В скобках даны классы вязкости по ЗАЕ.
6.2.6. Группы трансмиссионных масел
Труппа
масла
1
2
3
4
5
Присадки
Без присадок
Противоизносные
Противозадирные умеренной
эффективности
Противозадирные высокой
эффективности
Противозадирные и
противоизносные высокой эффективности и
многофункционального действия,
а также универсальные масла
Область применения
Прямозубые, конические и червячные передачи в
условиях нагрузок до 1600 МПа и температуре
масла в объеме до 90 °С
То же, при контактных напряжениях до 2100 МПа и
температуре масла в объеме до 130 °С
Прямозубые, конические, спирально-конические и
гипоидные передачи, работающие при контактных
напряжениях до 2500 МПа и температуре масла в
объеме до 150 °С
То же, при контактных напряжениях до 3000 МПа и
температуре масла в объеме до 150 °С
Гипоидные передачи, работающие с ударными
нагрузками при контактных напряжениях и
температуре масла в объеме до 150 °С.
При решении вопросов
взаимозаменяемости отечественных и зарубежных
трансмиссионных масел следует иметь в виду, что в
индексации марок зарубежных продуктов, как
правило, используют численные обозначения,
характеризующие класс вязкости по
классификации БАЕ, а также уровень
эксплуатационных свойств по классификации АР1, в
которой масла групп СЬ-1, СЬ-2, СЬ-3, СЬ-4,
СЬ-5 ориентировочно соответствуют по
свойствам отечественным группам 1, 2, 3, 4, 5.
Масла для механических трансмиссий.
Для механических коробок передач
используют масла различных классов вязкости. К числу
маловязких низкозасгывающих,
обеспечивающих нормальную работу агрегатов трансмис-
652
Глава 6.2. МАСЛА
сий мобильной техники до -40 ... -45 °С,
относятся масла класса вязкости 9 (табл. 6.2.7).
Масло ТМ-3-9 представляет собой смесь
обессмоленного и деасфальтизированного
высоковязкого и низкозастывающего
маловязкого компонентов, получаемых из
малосернистых нефтей. Масло содержит
высокоэффективную противозадирную присадку типа ОТП,
а также депрессор для понижения температуры
застывания. Масло используют для
смазывания прямозубых, спирально-конических и
червячных передач, работающих при контактных
напряжениях до 2000 МПа и температуре
масла в объеме до ПО °С. В Северных районах
масло используют всесезонно, в условиях
средней климатической зоны - как зимнее.
Масло ТМ-3-9 имеет такую же основу,
что и ТМ-2-9 с присадкой типа ОТП. В
качестве противоизносной используют присадку
типа ЭФО, которая обладает также
некоторыми антиокислительными свойствами. Для
понижения температуры застывания используют
депрессор. Масло, предназначенное для
трансмиссий различных тракторов,
эксплуатируемых в северных районах, работающих при
контактных нагрузках до 1500 МПа и
температуре в объеме до 100 °С.
Масло ТМ-3-9з представляет собой глу-
бокоочищенную маловязкую низкозастываю-
щую нефтяную основу, загущенную стойкой к
термомеханической деструкции вязкостной
присадкой. В масла вводят противозадирную,
антиокислительную и антипенную присадки.
Оно предназначено для агрегатов трансмиссий
с планетарными редукторами, коробок передач
и некоторых систем гидроуправления
транспортной техники.
Масло ТМ-4-9з - смесь высоковязкого и
маловязкого глубокоочищенных нефтяных
масел, загущенная полимерной вязкостной
присадкой, стойкой к деструкции. В состав
входят противозадирная, антиокислительная,
антикоррозионная, депрессорная и
антипенная присадки. Масло работоспособно при
-50 ... +120 °С в различных автомобильных
трансмиссиях, включая гипоидные.
Наиболее распространенными при
эксплуатации автотракторной техники являются
масла средней вязкости (класса 18).
Масло ТМ-2-18 вырабатывается на базе
ароматизированных остаточных продуктов и
дистиллятных масел. Функциональные
свойства улучшены благодаря введению
противоизносной присадки и депрессора. Рабочий
диапазон температур -20 ... +100 °С. Используется
в качестве всесезонного для тракторов,
эксплуатируемых в районах с умеренным
климатом.
Масло ТМ-3-18 является, в основном,
остаточным продуктом с небольшой добавкой
дистиллятного компонента. Содержит
композицию присадок, улучшающих противозадир-
ные, противоизносные, низкотемпературные и
антипенные свойства, и используется для
коробки передач и главной передачи
(двухступенчатый редуктор с цилиндрическими и
спирально-коническими шестернями)
автомобилей КамАЗ при температуре -20 ... +130 °С.
Это перспективный унифицированный сорт
масла для передач всех типов (кроме
гипоидных).
Масло ТМ-3-18 - смесь высоко вязко го
ароматизированного продукта с дистиллятным
маслом и композицией присадок,
улучшающих противозадирные свойства и
понижающих температуру застывания. Это всесезонное
масло можно использовать во всех типах
передач (кроме гипоидных) автотракторной
техники, в которых контактные напряжения
достигают 2000 МПа при температуре масла
+ 130 °С.
Масло ТМ-4-18 получается на основе
базового ТС-14,5 с композицией
противоизносной, моющей и антипенной присадок.
Противозадирные свойства обеспечиваются
присадкой хлореф - 40. Масло предназначено для
гипоидных передач грузовых автомобилей
(семейства ГАЗ) и специальных машин в качестве
всесезонного для умеренной климатической
зоны при температуре - 25 ... + 130 °С.
Масло ТМ-5-18 - минеральное с хорошо
сбалансированным пакетом серо-,
фосфорсодержащих проти во зад ирных, противоизносных
присадок, обладает антиокислительными,
антикоррозионными и противопенными
свойствами. Работоспособно до -25 °С, верхний
предел работоспособности -140 °С.
Предназначено для смазывания гипоидных передач
легковых автомобилей. Перспективный сорт
масла для всех видов гипоидных передач.
К высоковязким относятся масла класса
вязкости 34.
Масла ТМ-2-34 и ТМ-4-34 готовят на
базе осерненных продуктов или с добавкой осер-
ненного растительного масла. Для осернения
элементарной серой при 160 ... 220 °С
применяют либо вязкие нефтяные остатки с
высоким содержанием углеводородов, либо
экстракты селективной очистки масел (фенолом,
нитробензолом). В качестве дистиллятного-
компонента, улучшающего
низкотемпературные характеристики масел, как правило,
используют маловязкие низкозастывающие масла
типа И-12А. Масло ТМ-2-34 применяют в
коробках передач и рулевом управлении
легковых автомобилей (кроме ВАЗ). Масло
ТМ-4-34 используется в прямозубых,
спирально-конических, червячных и гипоидных
передачах, в которых контактные напряжения
превышают 2000 МПа, а температура масла в
объеме достигает 120 ... 130 °С.
Показатели
Вязкость
кинематическая при
100 °С, мм2/с, не
менее
Вязкость
динамическая, Пас,
не более1
Индекс вязкости,
не менее
Температура, °С,
застывания:
не более
вспышки,
не менее
Массовая доля
активных элементов
присадок, %,
не менее:
фосфора
цинка
серы
хлора
кальция
Смазывающие
свойства на ЧШМ:
индекс задира,
не менее
показатель износа
(392Н, 20 °С, 1 ч),
мм, не более
нагрузка
сваривания, Н, не менее
критическая наг-
рузка, Н, не менее
ТМ-3-9
10,0
3000
(-35°С)
90
-40
128
-
1,6
-
48
0,80
_
_
ТМ-2-9
10,0
300
(-35°С)
95
-40
130
0,07
0,05
-
36
0,40
_
_
ТМ-3-9з
7,5-8,5
140
-50
170
0,08
0,7
-
40
0,50
2820
840
6.2.7. Характеристика
ТМ-4-9}
9,0
150
(-45°С)
140
-50
160
-
2,8
-
58
0,90
3350
1260
ТМ-2-18
15,0 ± 1
20
(-15°С)
_
-18
185
0,06
-
Не
более 3
-
-
0,55
_
_
ТМ-3-18
16,0
75
(-15°С)
90
-25
185
-
-
55
0,50
3479
_
трансмиссионных масел
ТМ-3-18
15,0 ± 1
180
(-15°С)
_
-20
185
-
1,2 (ОТП)
1,9(ЛЗ-23К)
-
50
ТМ-4-18
14,0
80
(-20°С)
85
-25
215
-
0,5
-
60
Не нормируется,
определение
обязательно
3283
_
3920
,
ТМ-5-18
17,5
100
-25
200
0,1
-
2,7 ...
3,0
-
58
0,40
3687
_
ТМ-4-34
ТМ-2-34
20,5 ...
32,4
_
-20
_
-
1,5 ...
1,2
-
-
_
А
_
-40
175
0,08
0,16
-
_
- 1 -
Р
_
-45
163
0,08
0,16
-
_
_
МГТ
6 ...7
40
175
-55
160
-
-
40
0,5
_
_
МТ-8п
8...9
90
-30
180
-
-
35
_
_
1 В скобках указана температура, °С.
654
Глава 6.2. МАСЛА
Млела для гидромеханических передач.
Наиболее важное значение имеют
фрикционные характеристики масел - коэффициенты
статического и динамического трения, от
которых зависит эффективность работы
фрикционных дисков сцепления. При плохих
фрикционных свойствах масла в момент
переключения скоростей может происходить
проскальзывание, поэтому необходим контакт дисков с
относительно высоким коэффициентом
трения, что связано со значительными потерями
энергии на преодоление трения в других узлах.
Несмотря на определенный
антиокислительный потенциал, создаваемый присадками, в
масле под влиянием повышенной температуры
со временем накапливаются
высокомолекулярные продукты окисления, которые могут
"засаливать" фрикционные диски сцепления.
Во избежание этого во многие масла для
гидромеханических коробок передач вводят
моющие присадки.
Для гидромеханических передач
применяют три марки масла (см. табл. 6.2.7): А для
гидротрансформаторов и автоматических
коробок передач; Р для системы гидроусилителя
руля и гидрообъемных передач; МГТ
широкого назначения (в первую очередь для
промышленных тракторов и специальной техники).
Эти масла вырабатывают на базе маловязких
фракций сернистых нефтей парафинового
основания (полученных селективной очисткой и
глубокой депарафинизацией), загущенных по-
лиизобутиленом, полиметакрилатом, с
комплексом функциональных присадок.
Масло МТ-8п (селективной очистки из
сернистых нефтей), содержащее
многофункциональную присадку с комплексом противоиз-
носных, антикоррозионных,
антиокислительных и моющих средств, а также депрессорную
и антипенную присадки, используют как
трансмиссионное для планетарных коробок
передач, планетарных бортовых передач и систем
управления гусеничных машин.
С учетом работы гидромуфты и
гидротрансформатора, наличия высоких скоростей
потоков масла (до 100 м/с), необходимости
повышения КПД, передачи и обеспечения
надежной работы при низкой температуре
требуется применение масла минимальной
вязкости. При этом возникает необходимость
улучшения конструкции и эффективности
работы сальниковых и других уплотнителей.
Кроме того, использование маловязких масел
приводит к повышению уровня шума в
гидромеханических коробках передач, ведущих
мостах с блокировкой дифференциала.
Такие противоречивые требования
удается выполнять применением маловязких низко-
застывающих хорошо очищенных нефтяных и
синтетических базовых масел и комплексом
функциональных присадок, среди которых
особое место занимают фрикционная и проти-
воизноснал.
6.2.3. МАСЛА ДЛЯ ГИДРАВЛИЧЕСКИХ СИСТЕМ
Основной функцией масел для
гидравлических систем является передача механической
энергии от ее источника к месту
использования с обеспечением по мере необходимости
изменения направления приложенной силы.
Для обеспечения долговечной эксплуатации
гидравлических систем масла должны обладать
следующими качествами: иметь оптимальный
уровень вязкости и хорошие
вязкостно-температурные характеристики в широком
диапазоне температуры (высокий индекс
вязкости); обладать высокой антиокислительной
стабильностью, стойкостью к термическим и
химическим воздействиям, обеспечивающим
длительную бессменную работу жидкости в
гидравлической системе; эффектно защищать
детали от коррозии; иметь высокую
смазывающую способность, необходимые противоиз-
носные и противозадирные свойства; обладать
хорошей фильтр у емостью; иметь хорошие
деаэрирующие, деэмульгирующие и антипенные
свойства; быть совместимыми с материалами
уплотнений.
Масла, содержащие загущающие
полимерные присадки, должны обладать высокой
стойкостью к механической деструкции.
Большинство масел вырабатывают на
основе хорошо очищенных базовых
компонентов, получаемых из рядовых нефтяных
фракций с использованием современных
технологических процессов - экстракционных и
гидрокаталитических. В некоторых случаях низко-
застывающие маловязкие масла вырабатывают
глубокой сернокислотной очисткой (деарома-
тизацией) легких фракций уникальных
малопарафиновых нефтей нафтенового основания.
Улучшение физико-химических и
эксплуатационных свойств масел достигается
введением в них функциональных присадок -
антиокислительных, антикоррозионных, проти-
воизносных, противозадирных, противопен-
ных и др. Наибольшее распространение в
качестве антиокислительной и противоизносной
присадки для массовых сортов масел получили
диалкилдитиофосфаты металлов (цинка) или
их беззольные варианты (аминные соли и др.).
Система обозначений. В зависимости от
уровня эксплуатационных свойств масла для
гидросистем подразделяют на группы:
А - миниральные масла (МИМ) без
присадок, применяемые в малонагруженных гид-
МАСЛА ДЛЯ ГИДРАВЛИЧЕСКИХ СИСТЕМ
655
росистемах с шестеренными и поршневыми
насосами, работающими при давлении до
15 МПа и максимальной температурой масла в
объеме до 80 °С;
Б - МИМ с антиокислительными и
антикоррозионными присадками,
предназначенные для гидросистем с насосами всех типов,
работающих при давлении до 25 МПа и
температур масла в объеме выше 80 °С;
В - МИМ с антиокислительными,
антикоррозионными и противоизносными
присадками, предназначенные для использования в
гидросистемах с насосами всех типов,
работающие при давлении выше 25 МПа и
температуре масла в объеме выше 90 °С.
Ко всем трем группам относятся масла с
загущающими и антипенными присадками.
Масла делят на десять классов вязкости в
зависимости от кинематической вязкости при
40 °С (табл. 6.2.8).
6.2.8. Классы вязкости масел для
гидравлических систем
Класс вязкости
5
7
10
15
22
32
46
68
100
150
Кинематическая вязкость
при 40 °С, мм2/с
4,14 ... 5,06
6,12 ... 7,48
9,00 ... 11,0
13,50 ... 16,50
19,80 ... 24,20
28,80 ... 35,20
41,40 ... 50,60
61,20 ... 74,80
90 ... ПО
135 ... 165
садкой, содержит ингибиторы окисления и
коррозии. Отличается хорошими
низкотемпературными свойствами, обеспечивает
надежную работу гидросистем в особо холодных
условиях эксплуатации.
По показателям масло МГ-5-Б близко
маслу для гидросистем МГ-5-В, которое
получается вторичной перегонкой очищенной
керосиновой фракции низкозастывающей нефти
нафтенового основания с добавлением
загущающей и антиокислительной присадок. Его
используют для гидросистем автоматического
управления, что обеспечивает быстрый пуск при
температуре до -65°С.
Масло МГ-15-6, вырабатываемое на
основе глубоко деароматизированной
низкозастывающей маловязкой фракции,
содержащее загущающую, антиокислительную,
антикоррозионную и противоизносную
присадки, предназначено для гидросистем машин
и механизмов, работающих при
температуре -60 ... +75 С°.
Масло МГ-15-Б вырабатывают на основе
глубоко деароматизированных низкозастыва-
ющих керосино-легроиновых нефтяных
фракций, состоящих, в основном, из нафтеновых и
изопарафиновых углеводородов. В состав
масла входят загущающая, атиокислительная
присадки и органический краситель. Используют
масло для гидравлических устройств, главным
образом, авиационной техники, а также
некоторых видов специальной наземной техники,
эксплуатируемой при температуре
окружающей среды до -60 °С.
Масло МГ-7-В - глубокоочищенная ди-
стиллятная фракция низкозастывающей нефти
парафинового основания. Содержит
антиокислительную присадку. В отличие от масел
МГ-5-Б и МГ-5-В не содержит вязкостной
присадки и обладает менее пологой вязкостно-
температурной кривой. Работоспособно при
температуре окружающей среды до -40 °С
(гидросистемы автоматического управления).
-Масло МГ-Ю-Б вырабатывают из
малосернистых нефгей нафтенового основания. По
фракционному составу, температуре вспышки,
застывания, вязкостным свойствам основа
масла такая же, как у МГ-7-Б. Однако в отличие
от него содержит вязкостную загущающую
присадку.
Масло МГ-15-В представляет собой глу-
бокоочищенную маловязкую низкозастываю-
щую нефтяную основу, загущенную
вязкостной присадкой. Функциональные свойства
масла улучшены также противоизносной,
антиокислительной, антикоррозионной,
антипенной и депрессорной присадками. Масло
предназначено для систем гидропривода и
гидроуправления строительно-дорожных,
лесозаготовительных, подъемно-транспортных и
других машин, эксплуатируемых на открытом
воздухе при температуре окружающего воздуха
до -50 ... -55 °С. Для условий Крайнего Севера
масло рекомендуется как всесезонное, для
средней полосы - как зимнее.
Пример обозначения: МГ-15-Б - масло
гидравлическое, класса вязкости 15
(кинематическая вязкость 13,50 ... 16,50 мм2/с при
40 °С), группы Б, содержит
антиокислительную и антикоррозионную присадки. Следует
иметь в виду, что принятые в новой системе
обозначений классы вязкости полностью
соответствуют классификации 150.
Установлено также соответствие групп
отечественных масел по эксплуатационным
свойствам классификационным группам 180:
А и НН; Б и НЬ; В и НМ; загущенным
маслам группы В соответствуют масла группы
НУ по 180.
Ассортимент масел для гидравлических
систем. К числу маловязких масел для
мобильной техники относятся масла классов
вязкости 5, 7, 10, 15 (табл. 6.2.9).
Масло МГ-5-Б представляет собой глу-
бокоочищенную легкую фракцию малопарафи-
нистой нефти, загущенную вязкостной при-
6.2.9. Характеристика масел для гидравлических систем
Показатели
Кинематическая вязкость,
мм2/с:
при 50 °С, не менее
при -50 °С (-40 °С), не
более
Температура вспышки
в открытом тигле, °С,
не ниже
Температура застывания,
°С, не выше
Кислотное число,
мгКОН/г
Содержание осадка в
окисленном масле, %
Изменение массы резины
марки УИМ-1 в масле, %,
в пределах
Зольность, %
МГ-5-Б
3,6
300
94
-70
0,4 ... 0,7
Отсу!
3,0 ... 7,0
-
МГ-15-В
10,0
1500
96
-70
0,4 ... 0,7
хггвие
5,5 ... 7,5
-
МГ-15-Б
10,0
1250
93
-70
Не более
0,03
.
-
МГ-7-Б
3,8 ... 4,2
350
125
-60
0,02
0,05
.
о;оо5
МГ-10-Б
Не менее
8,3
915
125
-60
0,02
0,05
.
0,005
МГ-15-В
10
1500
135
-60
0,05
0,05
0,2
МГ-22-А
12 ... 14
14000
(13000)
163 (165)
-45
0,07 (0,05)
-
.
0,005
МГ-22-Б
16 ... 20
145
-45
0,45 ... 1
-
МГ-32-А
18,5 ...20,5
160; 135*
-50; -45**
ОД
-
.
-
МГ-46-В
25
41,4 ...50,6
190
-30
0,7 ... 1,5
-
_
-
Примечание. В скобках даны значения для масел, получаемых из сернистых нефтей.
* Марок "А" и "3".
♦♦Марки "3м.
ЕДИНЫЕ МАСЛА
657
К средневязким относятся масла классов
вязкости 22, 32, 46.
Довольно широкое распространение
нашли веретенные масла МГ-22-А, которые
получают сернокислотной очисткой из
малосернистых нефтей нафтенового основания без де-
парафинизации или из малосернистых и сер
нистых нефтей глубокой селективной
очисткой фенолом и депарафинизацией. Различное
исходное сырье благодаря технологическим
процессам очистки не оказывает
существенного влияния на основные физико-химические
показатели. Масла в гидросистемах
обеспечивают работоспособность гидроприводов при
температуре -30 ... +100 °С (кратковременно
до +125 °С).
Масло для гидросистем высоконагру-
женных механизмов (шагающих экскаваторов
и др.) представляет собой хорошо очищенную
и глубоко депарафинированную основу, в
состав которой введены загущающая и деп-
рессорная присадки. Оно работоспособно
при давлении до 15 МПа и температуре
-45 ... +100 °С
Масло МГ-32-А для механизмов наклона
кузовов вагонов-самосвалов является дистил-
лятным сернокислотной очистки
малопарафиновой нефти нафтенового основания,
загущенным вязкостной присадкой. В гидросистемах
транспортных машин применяют арктическое
А (до -50 °С), зимнее 3 (до -40 °).
Масло МГ-46-В для гидрообьемных
передач готовят на базе индустриального масла
селективной очистки с антиокислительной,
противоизносной, депрессорной и антипенной
присадками. Предназначено для
гидростатических трансмиссий сельскохозяйственной
техники, работающих при давлении до 40 МПа.
Масло характеризуется высокой стабильностью
вязкостных свойств, имеет хорошие противо-
износные свойства, длительно
работоспособно до 80 °С, обеспечивает пуск агрегатов
до -15 °С. В гидроприводах с
аксиально-поршневыми насосами работоспособно до 2000 ч
без замены.
Для гидросистем навесного оборудования
сельскохозяйственной техники используют
моторные масла М-10-В2 и М-8-Вг, а также
масло МГ-8-А.
6.2.4. ЕДИНЫЕ МАСЛА
Наряду с универсальными маслами,
удовлетворяющими требованиям бензиновых
двигателей и дизелей, важное значение имеют
всесезонные масла, обеспечивающие надежную
и экономичную эксплуатацию всех агрегатов,
узлов и систем подвижной техники (табл.
6.2.10).
Для отечественных промышленных
тракторов, эксплуатируемых в труднодоступных
северных зонах разработано всесезонное мотор-
но-трансмиссионно- гидравлическое масло на
синтетической основе с комплексом присадок.
Для промышленных тракторов, работающих в
умеренной и жаркой климатических зонах,
создано единое масло на минеральной основе.
6.2.10. Характеристика единых масел
Показатели
Кинематическая вязкость, мм2/с:
при 100 °С
при -18°С, не более
Динамическая вязкость, Па, при -40 °С, не более
Щелочное число, мгКОН/г, не менее
Зольность (сульфатная), %, не более
Температура, °С:
застывания, не выше
вспышки, не ниже
Коррозионность на пластинках из свинца, г/м2,
не более
Стабильность по индукционному периоду
осадкообразования (ИПО),ч
Смазывающие свойства:
нагрузка сваривания, Н, не менее
критическая нагрузка, Н, не менее
диаметр пятна износа, мм, не более
индекс задира, не менее
МТ-4з/8ДС
7,5 ... 8.5
2600
220
7,0
1,65
-55
200
10
25
1700
800
0,4
-
МТ-5з/10Д
9,5 ... 10,5
6000
-
9,0
1,65
-40
190
10
25
2300
900
0,35
35
658
Глава 6.3. СМАЗОЧНЫЙ МАТЕРИАЛ И ЖИДКОСТИ
Глава 6.3.
СМАЗОЧНЫЙ МАТЕРИАЛ
И ТЕХНИЧЕСКИЕ ЖИДКОСТИ
6.3.1. ПЛАСТИЧНЫЙ И ТВЕРДЫЙ
СМАЗОЧНЫЙ МАТЕРИАЛ
Пластичный смазочный материал состоит
из дисперсионной (жидкой) среды,
удерживаемой в ячейках структурного каркаса, который
образован твердыми частицами дисперсной
фазы (загустителя), имеющими хотя бы в
одном направлении коллоидные размеры. В
качестве загустителя, из которого образованы
твердые частицы дисперсной фазы,
используют вещества органического или
неорганического происхождения: мыло, парафин, силика-
гель, пигменты и др. Частицы дисперсной
фазы имеют очень малые размеры (0,1 ...10 мкм).
Пластичный смазочный материал
сочетает свойства твердого тела и жидкости. Наличие
структурного каркаса придает смазочному
материалу свойства твердого тела [11, 19], но его
прочность невелика. Даже при малых
нагрузках структурный каркас разрушается и
материал деформируется, как пластичное тело
(сплошность не нарушается), подобно пластично-
вязкой жидкости.
Нетекучесть является неоспоримым
преимуществом смазок перед маслами, благодаря
наличию предела прочности смазки способны
удерживаться в узлах трения и механизмах.
Несомненно, что способность пластичного
смазочного материала удерживаться в
открытых и слабогерметизированных узлах трения -
основная причина их широкого
распространения. Достаточно указать, что использование
пластичной смазки вместо масла позволяет
снизить массу узла трения в среднем на 25 %.
Важное значение имеют
объемно-механические (реологические) свойства смазок,
стабильность их как коллоидных систем и
устойчивость к внешним воздействиям, проти-
воизносные и консервационные свойства [11,
19], а также предел прочности на сдвиг,
поскольку при невысоком пределе прочности на
сдвиг смазка сбрасывается с движущихся
деталей, стекает с наклонных и вертикальных
поверхностей и плохо удерживается в негермети-
зированных узлах трения. Минимальный
предел прочности на сдвиг при наибольшей
температуре применения смазки должен быть не
ниже 100 ... 200 Па. С повышением
температуры предел прочности на сдвиг смазок, как
правило, снижается [18] (рис. 6.3.1).
Вязкость пластичных смазок влияет на
пусковые характеристики механизмов и на
потери энергии при работе различных узлов
трения, в том числе подшипников
скольжения, качения, зубчатых передач и др. (рис.
6.3.2). При установившемся режиме
энергетические потери в подшипниках качения
определяются в основном вязкостью не пластичной
смазки, а масла, входящего в ее состав.
Как правило, динамическая вязкость смазки
при минимальной рабочей температуре и
скорости деформации 10 с-1 не должна превышать
1500 ... 2000 Пас.
Тпн-Н,Па
15
10
Рис. 6.3.1. Зависимости предела прочности на сдвиг
Гпч пластичных смазок от температуры Т:
1 - ВНИИ НП-262; 2 - ЦИАТИМ-221; 3 - Униол-1;
4 - ЦИАТИМ-201; 5 - солидол С и УС-2; ОКБ-122-7;
7-1-13 жировая; 8- 10 ОКФ; 9- ЦИАТИМ-205;
/0-ПВК
1500
1
**>
"^ 5
1000
500
1 10 100 ))д,пм2/с
Рис. 6.3.2. Зависимости момента сопротивления Мс
вращению роликового конического (кривые / - 4) и
шарикового (кривая 5) подшипников от вязкости Ул
дисперсионной среды при 50 *С для литиевых (кривые
/, 2, 5) и натриевых смазок (кривые 3% 4):
7, 3 - п - 100 мин"1; 2, 4, 5 - л - 500 мюг1
Пластичные смазки в результате
деформирования при заправке через узкие места
ввода в узлах трения изменяют свои объемно-
механические свойства - обычно предел
прочности и вязкости смазок уменьшается. В
нерабочем состоянии вязкость и предел прочности
не меняются или возрастают [19] (рис. 6.3.3).
пластичный и твердый
659
бпчЧО?Па
10
ы
1
\
У
т^ттт^
__^
р^*^
-чь-
' г
1 ''пин! 1
И
Л Зпин ЗОпин 5сут
и
Рис. 6.3.3. Изменение предела прочности на разрыв
СГт при 20 *С смазок после разрушения и
последующего отдыха:
1 - жировой солидол УС-2; 2 - Униол; / - исходная
смазка; // - время после разрушения смазки
О 5
«Г,*
150
Рис. 6.3.4. Термоупрочненне натриевых смазок на
малых предельных кислотах (10 %):
1 - миристиновая; 2 - пальмитиновая;
3 - стеариновая; 4 - бегеновая
Механическая стабильность - важный
эксплуатационный показатель смазок, особенно
если смазка при работе вовлекается в процесс
деформирования (для подшипников
скольжения, шарниров, плоских опор и др.). Свойства
большей частью пластичных смазок после
нагрева (до температуры на 50 ... 100 °С ниже
температуры плавления) и охлаждения
практически не меняются. Однако отдельные типы
смазок (например, сажевые, на натриевых
мылах синтетических жирных кислот, некоторые
комплексные мыльные смазки) после
кратковременного нагрева в течение времени ^ до
температуры Тт и последующего охлаждения
уплотняются [19] (рис. 6.3.4). В результате
термоупрочнения у них (иногда в десятки и даже
сотни раз) повышается предел прочности.
Термоупрочнение сильно ухудшает
эксплуатационные характеристики пластичных
смазок. В результате увеличения предела
прочности иногда до 20 кПа, термоупрочнивша-
яся смазка перестает поступать к рабочим
поверхностям. При этом, несмотря на
достаточное ее количество в подшипнике, трущиеся
поверхности работают без смазочного
материала. Это приводит к быстрому выходу узла
трения из строя. Термоупрочнение оценивают,
измеряя предел прочности перед выдержкой
при повышенной температуре и после нее.
Надежно оценить максимальную рабочую
температуру смазки можно только по сумме
таких показателей, как предел прочности,
испаряемость, антиокислительная стабильность
и др. [12].
При хранении и применении смазки из
нее может частично (реже полностью)
испариться дисперсионная среда, что опасно прежде
всего для низкотемпературных смазок,
изготовленных на маловязких, легких нефтяных и
некоторых синтетических маслах (полиалки-
ленгликолях, фторуглеродах).
Увеличение скорости испарения
дисперсионной среды сокращает срок службы
смазки. Допустимая скорость испарения масла с
единицы поверхности смазки составляет
примерно 10"7 г/(см2с). Химическая стабильность
важна для всех пластичных смазок, которые
применяют при температуре выше 100 °С. При
окислении возникает опасность коррозии
металлических поверхностей ввиду образования
активных соединений и повышения влагопро-
ницаемости смазок [18] (рис. 6.3.5).
ПЧ0'?г/(мг-п-Па)
1
3
2
10 12 3
ДЛУ, мгШ
Рис. 6.3.5.Изменение влагопроницаемостн П смазок
при окислении от кислотного числа ДКЧ:
/ - ЦИАТИМ-205; 2- ЦИАТИМ-201;
3 - ЦИАТИМ-221
660
Глава 6.3. СМАЗОЧНЫЙ МАТЕРИАЛ И ЖИДКОСТИ
Растворимость смазки в воде
недопустима. Она не должна смываться водой или
сильно изменять свои свойства при попадании в
смазку влаги. При оценке водостойкости
учитывают также гигроскопичность и
проницаемость смазки по отношению к воде и ее пару.
Совокупность указанных свойств и
определяет водостойкость смазки. Водостойкость важна
прежде всего для смазок, применяемых в узлах
трения, соприкасающихся с водой или
работающих в условиях высокой относительной
влажности воздуха.
Противозадирные свойства смазок
обусловлены их способностью предотвращать
заедание и задир трущихся поверхностей при
высоких нагрузках. При увеличении скорости
скольжения изнашиваемость увеличивается и
эффективность противозадирного действия
смазок уменьшается. Критическая нагрузка Рк
заедания при испытании смазок на четырех-
шариковой машине трения (ЧШМ) связана со
скоростью скольжения V соотношением
2/3 Рку = соп$1, которая справедлива для ряда
металлов и различных смазочных материалов.
Для улучшения противозадирных свойств в
смазки вводят присадки. При особо тяжелых
режимах трения (контактные напряжения до
500 тыс. Н) используют смазки с
антифрикционными добавками типа дисульфид
молибдена или графита. Следует отметить, что
противозадирные противоизносные свойства смазок
приобретают особо важное значение лишь
при высоких контактных напряжениях
(более 10 ... 20 тыс. Н) и скоростях скольжения
(выше 10 м/с). Противозадирные свойства
смазок оценивают на машинах трения,
применяемых при исследовании [16, 19] масел.
Фреттинг-коррозия, или фреттинг -
особый вид изнашивания, связанный с
циклическим (небольшим по величине) смещением
трущихся поверхностей [18, 15]. При
колебательном движении подшипников качения и
скольжения, шаровых шарниров в местах
контакта трущихся деталей (шарика с дорожкой
качения и др.) образуется оксид железа,
приводящий к появлению язвин на трущихся
поверхностях. Фреттинг проявляется в местах
посадки подшипников качения, резьбовых
соединениях, в остальных тросах, нагруженных
опорах и других не только стальных деталях.
Фреттинг усиливается при увеличении
нагрузки, частоты и амплитуды колебаний. Однако
при росте амплитуды колебаний улучшается
поступление смазочного материала в зону
трения и изнашивание уменьшается.
Способность предотвращать фреттинг в
первую очередь связана с легкостью
проникновения смазочного материала к трущимся
поверхностям. По микроканавкам, особенно
пересекающимся, шероховатым поверхностям
соприкасающихся деталей смазочный материал
легко проникает в зону трения.
Роль консервационной смазки состоит в
защите металла от атмосферной влаги и
кислорода. Вредное действие атмосферы заметно
возрастает в промышленных зонах вследствие
присутствия в воздухе сернистого газа и
некоторых других активных соединений.
Запыленность воздуха в промышленных районах
улучшает консервационное действие пластичных
смазок. Пыль оседает на слой смазки и
упрочняет его, повышая защитную способность.
Пластичные смазки превосходят по консерва-
ционным свойствам масла. Даже в слоях
толщиной порядка сотых долей миллиметра
большое число смазок предотвращает коррозию
металлов в условиях 100 %-ной относительной
влажности в течение многих месяцев и лет
[19]. Защитные свойства имеют
первостепенное значение не только для консервационных
смазочных материалов, но и для пластичных
смазок любых типов. Особенно они важны для
смазок, работающих длительное время без
замены, в тропиках и др.
Система обозначения смазок. Смазки
подразделяют на четыре группы [19]:
антифрикционные, консервационные, уплотнительные
и канатные. Наиболее распространенными
являются антифрикционные смазки, которые
предназначены для снижения изнашивания и
трения скольжения сопряженных деталей.
Антифрикционные смазки делят на следующие
подгруппы: С - общего назначения для
обычной температуры (до 70 °С); О -
общего назначения для повышенной температуры
(до ПО °С); М - многоцелевые,
работоспособные при -30 ... +130 °С в условиях
повышенной влажности; Ж - термостойкие (150 °С и
выше); Н - морозостойкие
(низкотемпературные), ниже - 40 °С; И - противозадирные и
противоизносные (подшипники качения при
контактных напряжениях выше 250 МПа,
скольжения - выше 150 МПа); X - химически
стойкие; П - приборные; Т - редукторные
(трансмиссионные); Д - приработочные
(противозадирные) пасты; 3 - консервационные
(защитные); К - канатные; А - арматурные; Р -
резьбовые; В - вакуумные (уплотнительные).
Ограниченное применение находят
защитные (консервационные) смазки 3,
уплотнительные (арматурные А, резьбовые Р, вакут
умные В), канатные К.
Кроме назначения и области применения
в классификационном обозначении смазок
указывают тип загустителя, рекомендуемый
температурный диапазон, дисперсионную
среду и консистенцию. Загуститель обозначают
первыми двумя буквами названия металла,
входящего в состав мыла: кальциевое Ка,
натриевое На, литиевое Ли, литиево-кальциевое
Ли-Ка.
Уменьшенный в десять раз
рекомендуемый температурный диапазон (ориентировоч-
МАТЕРИАЛЫ ДЛЯ ЗАЩИТЫ ОТ КОРРОЗИИ
661
ный) указывают дробью: в числителе без знака
минус минимальная температура, а в
знаменателе максимальная.
Тип дисперсионной среды и присутствие
твердых добавок обозначают строчными
буквами: у - синтетические углеводороды, к -
кремнийорганические жидкости, г - добавка
графита, д - дисульфида молибдена.
Отсутствие индекса свидетельствует о том, что смазка
приготовлена на нефтяной основе. Класс
консистенции смазок соответствует
определенному значению пенетрации (0 - 7).
Например, в обозначении товарной
литиевой смазки Литол-24 - МЛи 4/13-3 - буквы
обозначают: М - многоцелевая
антифрикционная, работоспособная в условиях повышенной
влажности, Ли - загущена литиевыми
мылами, работоспособна в интервале температур
-40 ... +130 °С. Отсутствие индекса
дисперсионной среды означает, что смазка
приготовлена на нефтяном масле. Цифра 3 условно
характеризует консистенцию, соответствующую
пенетрации при 25 °С равной 220 - 250.
Ассортимент смазок и покрытий. Марки,
состав, свойства и область применения смазок,
широко используемых при эксплуатации
автотракторной техники, приведены в табл. 6.3.1
[11, 19, 20, 23]. Наиболее распространены со-
лидолы различных марок, имеющие примерно
одинаковые эксплуатационные свойства и
взаимозаменяемые со смазкой 1-13, близкой по
характеристикам с солидолами, но с худшей
влагоустойчивостью. Аналогичными
свойствами обладает смазка УСсА, но для повышения
антифрикционных свойств в нее введено
около 10 % графита. Смазка ЦИАТИМ-201
отличается улучшенными низкотемпературными
свойствами.
Высококачественная литиевая смазка
Литол-24 успешно заменяет другие в узлах
тракторов и автомобилей, она рекомендована к
применению с увеличенным в 2 - 4 раза
сроком смены.
Твердые смазочные покрытия (ТСП)
предназначены для работы в условиях высокой
или низкой температуры, больших удельных
нагрузок и в вакууме. ТСП выпускают в виде
суспензий из дисульфида молибдена или
графита, связующего вещества и летучего
растворителя [21].
В качестве связующего вещества
используют кремнийорганические смолы (покрытие
ВНИИ НП-209), формальдегидные смолы
(ВНИИ НП-212), жидкое стекло (ВНИИ
НП-229), эпоксидные пленкообразователи
(ВНИИ НП-230) и другие соединения.
В зависимости от соотношения
компонентов покрытия работоспособны при
-60 ... -350 °С. Толщина покрытия составляет
10 ... 60 мкм. Такой состав наносят на
предварительно подготовленную поверхность
окунанием или распылением. Детали с нанесенной
пленкой сушат, растворитель улетучивается,
пленка приобретает необходимую твердость и
сцепление с поверхностью детали. Технология
нанесения суспензии на деталь зависит от
состава ТСП, а эксплуатационные свойства -
также от вида металла, на который его
наносят, шероховатости поверхности, толщины
пленки и др. ТСП применяют в узлах трения
плунжер-корпус, шарнирах, шестернях,
золотниках, подшипниках скольжения и качения,
неподвижных резьбовых соединениях, осях
храповиков и др.
6.3.2. МАТЕРИАЛЫ ДЛЯ ЗАЩИТЫ МЕТАЛЛОВ
ОТ КОРРОЗИИ
Смазочные материалы и консервационные
масла. Для предохранения металлических
поверхностей тракторов и автомобилей,
сельхозмашин от атмосферной коррозии используют
пластичные смазки и жидкие масла, краткая
характеристика основных из них приведена в
табл. 6.3.2.
Наиболее распространена смазка ПВК,
защищающая от коррозии изделия из черных
и цветных металлов в таре и без тары.
Защитная смазка УНЗ включает петролатум, церезин
и цилиндровое масло, по свойствам близка к
ПВК. Для смазывания выводов аккумуляторов
предназначен технический вазелин ВТВ-1. К
защитным относится смазка ГОИ-54п
предназначенная для консервации точных
механизмов и приборов на срок до 5 лет. Для
консервации грубых металлических поверхностей
машин при хранении до одного года
применяют петролатумы. Защитные пластичные
смазки наносят на металлические поверхности
в ненагретом состоянии лопаткой, ветошью, в
нагретом до 85 ... 115 °С окунанием, кистью и
другими способами.
Надежную защиту от коррозии
обеспечивают консервационные масла К-17, НГ-203А,
НТ-203Б, содержащие ингибиторы коррозии.
Их рекомендуется использовать для
консервации внутренних поверхностей изделий или
наружных при хранении в закрытых помещениях
или под навесом.
Для приготовления рабоче-консерваци-
онных моторных, трансмиссионных и других
масел, используемых для внутренней и
наружной консервации агрегатов автотракторной
техники и сельскохозяйственных машин, служит
защитная антикоррозионная присадка Акор-1
(табл. 6.3.3). Предельный срок защиты,
обеспечиваемый рабоче-консервационными
маслами, достигает трех лет.
6.3.1. Характеристика антифрикционных смазок
Марка
Солидол:
жировой
УС-1
УС-2
синтетический
пресс-солидол С
солидол С
Графитная УСсА
Литол-24
№ 158
Примерный
состав
Индустриальное масло,
кальциевые мыла
хлопкового масла,
саломаса, вода
Индустриальное
масло, кальциевые мыла
синтетических жирных
кислот, вода
Масло цилиндровое,
кальциевые мыла
синтетических жирных
кислот, графит (10 %),
вода
Минеральное масло,
литиевое мыло окси-
стеариновой кислоты,
антиокислительная и
вязкостная присадки
Масло авиационное
МС-20, литиево-кали-
евое мыло
стеариновой кислоты,
касторового масла,
антиокислительная и противо-
износная присадки
динамическая
вязкость
при 0 °С и
скорости
деформации
Юс*1, Па-с
100
250
100
200
280
400
Число
пенетрации
при 25 °С
-
.
250
220 - 250
Предел
прочности
при 50 °С,
Па-с,
не менее
100
200
100
200
450
(при 20 °С)
120
Температура
каплепадения,
•С, не ниже
75
75
-
77
180
130
Предел
работоспособности,
°С
нижний
-30
-25
-30
-20
-20
-40
-40
верхний
50
65
50
65
65
130
120
Область применения
Универсальная
«
Рессоры
автомобилей, подвески
тракторов, тросы,
домкраты, открытые
шестерни, тяжелонагру-
женные узлы при
невысоких скоростях
скольжения
Универсальная:
узлы трения
автомобилей и тракторов, в
которых применяют
солидолы, конста-
лин, 1-13, ЯНЗ-2
Подшипники
качения генераторов,
электродвигателей,
стеклоочистители
автомобилей и
тракторов
Продолжение табл.6.3.1
Марка
Карданная АМ
Лита
Униол-1
ЦИАТИМ-221
Зимол
ШРБ-4
_^^^_^^_^_^^____,
Примерный
состав
Автомобильное масло,
натриевое мыло
саломаса, хлопкового
масла, вода
Масло веретенное АУ,
литиевое мыло
стеариновой кислоты,
церезин,
антиокислительная, противозадирная
присадка
Авиационное масло
МС-20, комплексное
кальциевое мыло СЖК
и уксусной кислоты,
антиокислительная
присадка
Силиконовая
жидкость, комплексное
кальциевое мыло
стеариновой и уксусной
кислот, антиокислительная
присадка
Масло минеральное,
литиевое мыло окси-
стеариновой кислоты,
комплекс присадок
Масло индустриальное,
комплексное бариевое
мыло высших жирных
кислот хлопкового
масла, оксистеариновой
кислоты, синтетичес-
ких жирных кислот
Эффективная
динамическая
вязкость
при 0 °С и
скорости
деформации
10 с"1, Па-с
2000
(при -50 °С)
160
160
2000
(при -50 °С)
800
(при -20 °С)
Число
при 25 °С
220 - 270
280 - 320
800
(при -50 °С)
~
265 ... 295
Предел
прочности
при 50 вС,
Па-с,
не менее
*
150
250 - 600
120
200
(при 80 °С)
200
(при -20 °С)
Температура
каплепадения,
•С, не ниже
115
170
200
200
190
230
Предел
работоспособности,
•С |
нижний
-10
-50
-30
-60
-50
-40
верхний
100 1
100
150
150
130
130
Область применения
Для передних
ведущих мостов грузовых
и легковых
автомобилей
Универсальная
Узлы трения дорож-
но-строительных
машин, конвейеров
Приборные
подшипники качения, ма-
лонагруженные
редукторы, резиновые
уплотнительные
кольца пневмоцилин-
дров и др.
"
Шарниры передней
подвески,
наконечники тяг рулевого
управления легковых
автомобилей (работа
без замены до
1 100 тыс. км)
I ^
664
Глава 6.3. СМАЗОЧНЫЙ МАТЕРИАЛ И ЖИДКОСТИ
6.3.2. Характеристика защитных (консервационных) материалов
Наименование
Состав
Температура, °С,
не ниже:
сползания
вспышки
Кинематическая
вязкость при 100 °С,
мм2/с
Назначение
Пушечная ПВК
Минеральные масла,
загущенные твердыми
углеводородами (церезин,
петролатум), присадки,
улучшающие защитные
свойства
54
48
-
-
Консервация наружных
и внутренних
поверхностей деталей, механизмов
при длительном
хранении при температуре до
-45 °С.
Срок защиты - до трех
лет
К-17
Трансформаторное и
индустриальное
масла, гидрат оксида
лития, каучук,
присадки ЦИАТИМ-339,
ПМС, дефениламин
-
-
-
15 ... 22
Консервация
изделий, хранящихся без
непосредственного
воздействия
климатических факторов
НГ-203А
Концентрат сульфоната
кальция в
индустриальном масле, окисленный
петролатум
-
-
180
25 ... 50
Защита наружных
поверхностей от
коррозии при отсутствии
непосредственного
атмосферного воздействия:
двигатели,
сельхозмашины.
Срок защиты - не
менее двух лет
6.3.3. Рекомендуемая концентрация (%) присадки Акор-1
Консервируемые машины
Двигатели, агрегаты
трансмиссии, редукторы
Агрегаты тракторов, комбайнов,
сельхозмашин
Агрегаты посевных машин,
машин для внесения удобрений
Вид
консервации
Внутренняя
Наружная
(1
Отапливаемое
помещение
5
5 - 10
15
Неотапливаемое
помещение
5
5 - 10
15 - 30
Открытый
воздух
5
15
30
Для приготовления рабоче-консерваци-
онного масла присадку нагревают до 70 °С и
при перемешивании добавляют в рабочее
масло. Все агрегаты, законсервированные с
использованием присадки Акор-1, вводят в
эксплуатацию без расконсервации и замены масла
в картере. Если во время эксплуатации рабоче-
консервационное масло не меняли, то при
повторной постановке техники на хранение
его не сливают, а только дозаправляют до
нормального уровня.
Эффективную защиту от коррозии
наружных и внутренних поверхностей
сельскохозяйственных машин и запасных частей
обеспечивает Кормин, представляющий собой
раствор ингибиторов, окисленного петролатума,
церезина в минеральном масле.
Защитные пленочные покрытия.
Защитные пленочные покрытия или
пленкообразующие ингибированные нефтяные составы
(ПИНС) представляют собой растворенные
композиции, которые после нанесения на
металл и испарения растворителя образуют
пленки, выполняющие функции защитных
материалов.
На основе продуктов переработки нефти,
загустителей, маслорастворимого ингибитора
коррозии и растворителей изготовляют
защитное пленочное покрытие НГ-216. После
нанесения на детали распылением, окунанием
ТОРМОЗНЫЕ ЖИДКОСТИ
665
или кистью растворители испаряются, а на
поверхности образуется воскообразная пленка
толщиной 100 ... 500 мкм. Смесью присадки
Акор-1, синтетических жирных кислот,
окисленного петролатума, церезина, синтетической
смолы и олифы является брикетообразный
концентрат ВЗМ-МЛ-1. После смешивания с
растворителем ("Мовиль") его используют для
защиты от коррозии скрытых сечений
автомобилей на СТОА. Наносят автоконсервант
распыливанием под давлением около 0,3 МПа.
Характеристика автоконсерванта "Мовиль"
(светло-коричневой прозрачной жидкости без
подтеков и нарушения сплошности) приведена
ниже.
Плотность при 20 °С, кг/м3... 840 ... 860
Массовая доля нелетучих
веществ, -%> не менее 43
Растекаемость по стали 10, мм,
не менее 30
Требования к пленке:
время высыхания, мин,
не более 25
эффективность защиты
влажной поверхности (электролит
№С 1, 48 ч) Выдерживает
защитные свойства -
коррозионное поражение (морская
вода, 300 ч), %, не более 1,0
термостойкость при 70 °С . . . Выдерживает
Для защиты от атмосферной коррозии
изделий сельскохозяйственной техники в
различных климатических зонах предназначен
состав Ингибит-С: раствор битума, окисленного
петролатума, сульфоната кальция.
Перспективными средствами консервации являются
защитные составы на основе
микрокристаллических восков, которые надежно защищают
металл на срок до одного года. К их числу
относятся микровосковой состав ПЭВ-74 и
защитная водно-восковая дисперсия ЗВВД-13.
6.3.3. ТОРМОЗНЫЕ ЖИДКОСТИ
Тормозная жидкость (прозрачная
однородная, без осадка) служит для передачи
энергии к исполнительным механизмам в
гидроприводе тормозных систем автомобиля,
обеспечивает надежную работу гидропривода при
различных эксплуатационных режимах.
Рабочее давление в гидроприводе достигает 1000 Н.
При экстренных торможениях температура
тормозных колодок может достигать 600 °С, а
тормозная жидкость нагреваться до 150 °С, ее
старение может отрицательно влиять на
резиновые манжетные уплотнения тормозных
цилиндров, вызывать коррозию металлических
деталей.
Наибольшую опасность для работы
тормозных систем представляют пузырьки газа и
пара, образующиеся при высокой температуре
в результате кипения жидкости и при наличии
в ней воды. При нажатии на педаль рабочей
тормозной системы пузырьки газа сжимаются,
и даже сильное нажатие на педаль не
приводит к росту тормозного давления.
К важнейшим показателям качества
тормозной жидкости относятся следующие.
Температура кипения определяет предельно
допустимую рабочую температуру гидропривода.
Температура кипения в процессе эксплуатации
снижается вследствие попадания воды,
главным образом, конденсирующейся из воздуха.
Поэтому наряду с температурой кипения
"сухой" жидкости определяют температуру
кипения "увлажненной" тормозной жидкости,
содержащей 3,5 % воды (соответствует
температуре, при которой жидкость будет закипать
через 1,5-2 года ее работы в тормозной
системе).
В легковых автомобилях с дисковыми
тормозными механизмами температура
жидкости при движении по автострадам составляет
60 ... 70 °С, в городских условиях 80 ... 100 °С,
на горных дорогах 100 ... 120 °С, а при
высоких скоростях достигает 150 °С. Образование
паровой фазы при нагреве, а следовательно,
возможность появления паровых пробок в
гидроприводе начинается при температуре на
20 ... 25 °С ниже температуры кипения
тормозной жидкости.
Согласно требованиям международных
стандартов температура кипения "сухой" и
"увлажненной" тормозной жидкости должна
быть не менее соответственно 205 и 140 °С для
обычных условий эксплуатации и не менее
230 и 155 °С при движении с повышенными
скоростями, частыми и интенсивными
торможениями.
В процессе торможения необходимо,
чтобы сила, прилагаемая водителем к педали
рабочей тормозной системы, с помощью
тормозной жидкости быстро передавалась на
тормозные механизмы колес. Это условие
обеспечивается высокой текучестью жидкости и
определяется ее максимально допустимой
кинематической вязкостью при температуре
-40 °С: не более 1500 мм2/с для тормозной
жидкости общего назначения, 1800 мм2/с для
высокоте-мпературной жидкости и не более
1500 мм2/с при -55 °С.
В гидроприводе тормозных систем
детали из различных металлов контактируют
между собой, что создает условия для протекания
ббб
Глава 6.3. СМАЗОЧНЫЙ МАТЕРИАЛ И ЖИДКОСТИ
электрохимической коррозии. Для
предотвращения коррозии тормозные жидкости должны
содержать ингибиторы, защищающие сталь,
чугун, белую жесть, алюминий, латунь, медь.
Эффективность ингибиторов оценивают по
изменению массы и состояния поверхности
пластин металлов после их выдержки в жидкости,
содержащей 3,5% воды, при 100 °С в течение
120 ч.
Герметичность гидросистемы
обеспечивается, когда под воздействием тормозной
жидкости манжеты несколько набухают, и их уп-
лотнительные кромки плотно прилегают к
стенкам цилиндра. При этом недопустимо как
слишком сильное набухание манжет, так и их
усадка. Испытание на совместимость с
резиновыми уплотнениями проводится при
выдерживании манжет или образцов резин в
тормозной жидкости при 70 ... 120 °С. Затем
определяют изменение объема, твердости и
диаметра манжет.
Влияние тормозной жидкости на
изнашивание рабочих поверхностей поршней,
цилиндров, уплотнений определяют ее
смазывающими свойствами, которые проверяют при
стендовых испытаниях, имитирующих работу
гидропривода в тяжелых условиях
эксплуатации. В диапазоне температур -50 ... +150 °С
тормозная жидкость должна сохранять
исходные показатели, т.е. противостоять окислению
и расслаиванию при хранении и применении,
образованию осадков и отложений на деталях
гидропривода.
Ассортимент тормозных жидкостей. В
настоящее время используется несколько марок
тормозной жидкости (табл. 6.3.4). Жидкость
БСК - смесь равного количества бутилового
спирта и касторового масла - имеет хорошие
смазывающие свойства, но невысокие
вязкостно-температурные показатели. Жидкость ГТЖ-
22 М - на гликоле вой основе - рекомендуется
для применения лишь на отдельных моделях
грузовых автомобилей.
Жидкость "Нева" - смесь гликоле во го
эфира, полиэфира и антикоррозионных
присадок - работоспособна при температуре до
-45 °С и применяется в гидроприводе
тормозных систем и сцепления грузовых и легковых
автомобилей. Жидкость "Томь" (нового
поколения) - смесь концентрированного гликоле-
вого эфира, полиэфира, боратов,
антикоррозионных присадок - имеет лучшие
эксплуатационные свойства, более высокую температуру
кипения. Совместима с "Невой" при
смешивании в любых соотношениях.
6.3.4. Характеристики тормозных жидкостей
Показатели
Цвет
Кинематическая вязкость, мм2/с,
при температуре:
-40 °С, не более
+50 °С, не менее
+ 100 °С, не менее
Температура кипения, °С,
не ниже
Температура кипения увлажненной
жидкости, °С, не ниже
Стабильность при высокой
температуре, °С, не более
Изменение объема резины после
старения в тормозной жидкости
Изменение массы пластинок, мг/см2,
не более, из материала:
белая жесть
сталь
алюминиевый сплав
чугун
латунь
медь
БСК
Красный
(без механических
примесей)
2500
9
-
115
-
-
5 ... 10
0,2
0,2
0,1
0,2
0,4
0,4
"Нева"
"Томь"
От светло-желтого до
желтого (допускается
слабая опалесценция)
1500
5
2
195
138
5
2 ... 8
0,2
0,2
0,1
0,2
0,5
0,5
1500
5
2
220
160
3
2 ... 8
0,1
0,1
0,1
0,1
0,3
0,3
"Роса"
От светлого
до светло-
коричневого
1700
5
2
260
165
3
2 ... 8
0,2
0,2
0,1
0,2
0,4
0,4
АМОРТИЗАТОРНЫЕ ЖИДКОСТИ
667
Жидкость "Роса" разработана для новых
моделей автомобилей (в первую очередь,
переднеприводных) на основе борсодержащего
полиэфира с антикоррозионными присадками.
Имеет высокие значения температуры кипения
"сухой" (260 °С) и "увлажненной" (165 °С)
жидкости. Это обеспечивает надежную работу
тормозной системы при тяжелых
эксплуатационных режимах и позволяет увеличить срок
службы жидкости.. Жидкость "Роса"
совместима с жидкостями "Томь" и "Нева".
В процессе эксплуатации температура
кипения жидкостей на гликолевой основе
снижается. Чтобы исключить возможность
образования паровых пробок жидкость "Неву"
в зависимости от условий эксплуатации
рекомендуется заменять через 1-2 года; срок
службы жидкостей "Томь" и "Роса" может
достигать двух лет. Для условий Крайнего
Севера жидкости "Томь" и "Нева" можно
разбавить 18 ... 20 % этилового спирта. Такая
смесь работоспособна при температуре до
-60 °С, однако имеет низкую температуру
кипения и не обеспечивает герметичности
резиновых уплотнений. По окончании зимней
эксплуатации смесь следует заменить.
6.3.4. АМОРТИЗАТОРНЫЕ ЖИДКОСТИ
Гидравлические амортизаторы обычно
заполняют маловязкими маслами. Амортиза-
торные жидкости должны иметь хорошие
смазывающие и антикоррозионные свойства, быть
легко подвижными при всех встречающихся
рабочих температурах (обладать хорошей
вязкостно-температурной характеристикой и
низкой температурой застывания).
При эксплуатации автомобилей
амортизаторы нередко выходят из строя: в летний
период ввиду образования в маслах осадков,
износа клапанной и дроссельной систем, в
зимний период вследствие поломки кулачков,
смятия шлицев, обрыва стоек при повышении
вязкости жидкости. Для обеспечения
надежной работы телескопических амортизаторов
необходима жидкость с высокой
термоокислительной и механической стабильностью,
которая может бессменно работать в
амортизаторе длительное время (до 100 тыс. км пробега
автомобиля), подвергаясь значительному
механическому и термическому воздействию при
многократном (десятки миллионов циклов)
истечении под давлением через отверстия
клапанов и дросселей.
Наиболее широкое распространение в
амортизаторах автомобилей имеет жидкость
АЖ-12Т - смесь мало вязкого минерального
масла и полиэтилсилоксановой жидкости с
добавлением противоизносной и
антиокислительной присадок (табл. 6.3.5). Она устойчива
при повышенных температуре и давлении,
обладает хорошей термической и механической
стабильностью, где уплотнения из маслостой-
кой резины. Диапазон рабочих температур
составляет -50 ...+60 °С.
Для всесезонной работы гидравлических
амортизаторов автомобилей предназначена
жидкость МГП-10 - смесь трансформаторного
масла, полиэтилсилоксановой жидкости,
животных жиров (осерненный кашалотовый),
антиокислительной и противопенной присадок.
Перспективным сортом является жидкость
АЖ-170 - композиция полиэтилсилоксанов с
хорошо очищенным мало вязким маслом.
Высокие эксплуатационные свойства позволяют
использовать ее в гидравлических
амортизаторах и других агрегатах автомобиля при
температуре -60 ...+130 °С.
При отсутствии специальных амортиза-
торных жидкостей можно их приготовить
смешением примерно равного количества
турбинного и трансформаторного масел. Такие смеси
обладают удовлетворительными
эксплуатационными свойствами, хотя уступают
специальным по вязкостно-температурным
характеристикам. При отсутствии турбинного масла для
повышения смазочной стабильности можно
добавить легкое индустриальное масло.
Использовать одно трансформаторное не
рекомендуется, так как оно не обладает
необходимыми противоизносными свойствами.
6.3.5. Хжрамтервстика амортизаторвых жидкостей
Показатели
Плотность при 20 °С, кг/м3
Кинематическая вязкость, мм2/с:
при 100 °С, не менее
-40 °С, не более
Температура, °С:
застывания, не выше
вспышки, не ниже
АЖ-12Т
-
3,6
6500
-52
165
МГП-10
930
-
-40
145
АЖ-170
980 ... 1020
-
-60
245
668
Глава 6.3. СМАЗОЧНЫЙ МАТЕРИАЛ И ЖИДКОСТИ
6.3.5. ПУСКОВЫЕ ЖИДКОСТИ
При низкой температуре (-20 ... -25 °С)
окружающего воздуха для облегчения пуска
двигателей применяют
легковоспламеняющиеся пусковые жидкости, которые хорошо
испаряются при низкой температуре и быстро
воспламеняются от искры или
самовоспламеняются от сжатия, имеют высокие
антикоррозионные и противоизносные свойства, низкую
температуру застывания, стабильны при
длительном хранении.
На основе этилового эфира выпускают
легковоспламеняющиеся пусковые жидкости
"Холод Д-40" для дизелей и "Арктика" для
карбюраторных двигателей (табл. 6.3.6),
обеспечивающие холодный пуск двигателей при
температуре ниже -40 °С.
Эфир обладает широким пределом
воспламеняемости и невысокой температурой
самовоспламенения в топливовоздушной смеси.
При низкой температуре окружающего воздуха
(невысокая температура в конце такта сжатия
дизеля) этиловый эфир обеспечивает
самовоспламенение смеси при 190 ... 220 °С. В
карбюраторных двигателях эфир позволяет
воспламенять очень бедные смеси. Добавление
к пусковой жидкости для дизелей газового
бензина (фракции с температурой кипения
30 ... 100 °С) и изопропилнитрата ускоряет
самовоспламенение и сгорание основного
топлива, делает работу дизеля в период пуска
более мягкой.
Пусковая жидкость "Арктика" для
карбюраторных двигателей содержит небольшое
количество изопропилнитрата, что ускоряет
подготовку эфира и газового бензина к
воспламенению от искры, а газовый бензин
обеспечивает плавный переход к работе на
основном топливе. Масло добавляют для
уменьшения изнашивания в период пуска. Содержание
масла в "Арктике" невелико во избежание
ухудшения работоспособности свечей
зажигания вследствие их замасливания. Применение
пусковых жидкостей сокращает длительность
подготовки двигателей к пуску и повышает
надежность работы двигателя.
6.3.6. Состав пусковых жидкостей
Компоненты
Этиловый эфир
Газовый бензин,
петролейный эфир
Изопропилнитрат
Масло с противоизнос-
ными и противозадир-
ными присадками
Холод Д-40
60
15
15
10
Арктика
45 ... 60
35 ... 55
1 ... 5
2
6.3.6. ОХЛАЖДАЮЩИЕ ЖИДКОСТИ
Свойства воды как охлаждающей
жидкости. В системе охлаждения двигателей
широко используют воду. Удельная теплоемкость
воды составляет 4,2 кДж/(кг°С), лишь очень
немногие жидкости, в частности этиленгли-
коль, приближаются к ней по этому
показателю.
Качество воды зависит от состава и
количества примесей, которые могут находиться в
виде взвесей, коллоидных частиц или в
растворенном состоянии. Механические примеси
легко удаляются отстоем или фильтрацией.
Частицы размером в десятые доли микрона
выводят из воды добавлением коагулянтов, под
действием которых мелкие частицы
укрупняются, образуя хлопья, легко удаляемые
отстаиванием или фильтрацией. Наиболее часто
для очистки используют железный ку-порос
(25 ... 50 г/м3), хлорид железа (12 ... 15 г/м3),
сернокислый алюминий (50 ... 120 г/м3). Для
интенсификации процесса коагуляции в воду
можно добавлять гашеную известь или
кальцинированную соду.
Растворенные в воде соединения могут
вызывать образование накипи или коррозию
металла. Накипь в системе охлаждения
уменьшает сечение каналов и нарушает циркуляцию.
Теплопроводность накипи в десятки раз ниже,
чем у металлов, что резко ухудшает отвод
теплоты. Вода, вызывающая образование накипи,
является жесткой. Общая жесткость
(суммарное содержание в воде ионов кальция и
магния) складывается из карбонатной
(временной) и некарбонатной (постоянной).
Двууглекислые соли кальция и магния обусловливают
карбонатную жесткость. При температуре
выше 85 °С они разлагаются, выпадают в осадок,
на поверхности системы охлаждения
образуются прочные отложения. Постоянную
жесткость вызывают сернокислые, хлористые и
кремнекислые соли. При кипячении воды они
в осадок не выпадают, а остаются в растворе.
Однако при сильном испарении концентрация
солей повышается, и они частично выпадают в
осадок, участвуя в накипеобразовании.
Воду считают мягкой, если в ней общее
содержание солей не превышает 3 мг/л, в
двигателях ее можно использовать без умягчения,
средней жесткости при содержании солей
3 ... 6 мг/л (перед использованием в двигателе
ее желательно умягчать), жесткой при
содержании солей более 6 мг/л (подлежит
обязательному умягчению). Образование накипи
можно предотвратить обработкой воды
реагентами непосредственно в системе охлаждения.
Они особенно удобны, когда систему нужно
заправить водой из естественных источников
при отсутствии умягченной воды. Некоторые
антинакипины, например тринатрийфосфат,
действуют таким образом, что вместо солей,
ОХЛАЖДАЮЩИЕ ЖИДКОСТИ
669
дающих твердую накипь, образуют рыхлые
соли (мягкий шлам), которые находится в воде
во взвешенном состоянии. Через 3-5 дней
работы двигателя их удаляют, промывая
систему. Концентрация тринатрийфосфата при
жесткости 5 ... 9 мг-экв/л должна быть около
0,3 г/л. Другие соединения (гексаметафосфат
натрия, ортофосфаты натрия и кальция)
удерживают соли жесткости в воде в
пересыщенном состоянии, предотвращают их
кристаллизацию и отложение на поверхности. Кроме
того, многие фосфаты на поверхности металла
образуют прочные пленки, предохраняющие
металл от коррозии.
Низкозамерзающие охлаждающие
жидкости. При замерзании вода на 10 %
увеличивается в объеме, что может привести к
разрушению головки блока цилиндров и радиатора.
Поэтому в зимний период целесообразно
использовать низкозамерзающне охлаждающие
жидкости (антифризы).
Этиленгликолевые смеси обеспечивают
надежное охлаждение двигателя, исключают
возможность размораживания системы
охлаждения при длительной остановке в условиях
низкой температуры.
Смешивая этиленгликоль с водой в
разных соотношениях, можно получить жидкости
с температурой застывания 0 ... -75 °С. Они
отличаются низкой температурой застывания,
высокой температурой кипения, хорошими
вязкостными свойствами, негорючие, имеет
достаточно высокие теплоемкость и
теплопроводность. При замерзании антифриза
образуется рыхлая масса, объем которой
увеличивается лишь на 0,2 ... 0,3 % первоначального,
система не разрушается.
Наиболее распространены антифризы
марок 40 и 65 с температурой застывания
соответственно -40 и -65 °С (табл. 6.3.7).
Жидкость марки 40 представляет собой смесь 52 % .
этиленгликоля и 47 % воды, марки 65 -
соответственно 64 и 35 %. Поскольку
этиленгликоль корродирует металл, к антифризам
добавляют антикоррозионную присадку, в состав
которой входят двузамещенный
фосфорнокислый натрий (защищает от коррозии чугунные,
стальные, медные детали) и декстрин (защита
деталей из алюминия). Присадки
обусловливают слабощелочные свойства жидкостей
(рН «8,5). Антифризы практически не
оказывают воздействия на резиновые шланги. Они
обладают повышенной текучестью, поэтому
нужно особенно тщательно следить за
уплотнением соединений между деталями.
Для всесезонной эксплуатации легковых
и ряда грузовых автомобилей, тракторов
предназначены антифризы ,ТОСОЛ А-40 и А-65,
окрашенные в голубой цвет. ТОСОЛы
готовят на основе этиленгликоля с добавкой
(2,5...3,0 %) сложной композиции
противокоррозионных и антипенной присадок.
Заменять ТОСОЛы в системе охлаждения следует
через два года или 60 тыс. км пробега, так как
присадки в процессе эксплуатации
разрушаются, ухудшая качество жидкостей.
Использовать антифризы можно только
после удаления из системы охлаждения
накипи, которая разрушает антикоррозионные
присадки. При нагревании этиленгликолевые
жидкости, имеющие высокий коэффициент
объемного расширения, значительно
увеличивают объем. В связи с этим систему
охлаждения заполняют на 92 ... 94 %. В автомобилях,
предназначенных для работы только с
антифризами, предусматривают расширительные
бачки.
Основной недостаток этиленгликолевых
жидкостей - их токсичность.
6.3.7. Характеристика низкозамерзающих охлаждающих жидкостей
Показатели
Внешний вид
Плотность при 20 °С, кг/м3
Температура, °С:
кристаллизации, не выше
кипения, не ниже
Массовая доля этиленгликоля, %,
не менее
Присадки, г/л:
декстрин
динатрийфосфат
антивспениватель
композиция
антикоррозионных присадок
Антифриз
40
Светло-желтая, с
1067 ... 1072
-40
100
52
1,0
2,5 ... 3,5
-
65
легка мутная
1085 ... 1090
-65
100
64
1,0
3,0 ... 3,5
-
ТОСОЛ
А-40
Желто-
1075 ... 1085
-40
105
53
0,4
0,05
2,55
А-65
зеленая
1085 ... 1095
-65
105
63
0,5
0,08
2,95
670
Глава 6.3. СМАЗОЧНЫЙ МАТЕРИАЛ И ЖИДКОСТИ
6.3.7. МАСЛА И ПРИСАДКИ
ДЛЯ ОБКАТКИ ДВИГАТЕЛЕЙ
Обкатка двигателя на частичных
нагрузках является подготовкой (приработкой)
рабочих поверхностей деталей к восприятию
номинальных нагрузок без повышенного
изнашивания. Для достижения полной
приработки требуется продолжительное время,
которое для автотракторных двигателей составляет
30 ... 60 ч.
Для ускорения процесса приработки
деталей применяют обкаточные масла ОМ-2,
ОМД-8 и обкатбчно-консервационное масло
ОКМ (табл. 6.3.8). Масло ОМ-2 получают на
основе М-8 с приработочной присадкой ди-
п роке ид, обладающей высокими противоза-
дирными свойствами и антифрикционной
способностью [3]. Для придания моюще-ди-
спергирующих свойств масла используют
присадки ПМСя или ПМС А и ЦИАТИМ-339.
Масло ОМ-2 предназначено для мало- и сред-
нефорсированных тракторных и комбайновых
дизелей.
Для двигателей с деталями,
обладающими повышенной чувствительностью к
коррозии, например, шатунные втулки из
фосфористой бронзы, применяют обкаточное масло
ОМД-8, содержащее композицию присадок, в
состав которой входит присадка МОД -
маслорастворимое молибденсодержащее
соединение - аналог присадок, широко
используемых при обкатке двигателей.
В целях совмещения заводской обкатки и
внутренней консервации двигателей
рекомендуется использовать обкаточно-консервацион-
ное масло ОКМ на базе масла М-8 с
композицией присадок с химически активным прира-
боточным компонентом ЛЗ-301 и
эффективной консервационной присадкой В-15/41.
Масло ОКМ предназначено для
форсированных тракторных дизелей, в которых
отсутствуют детали из фосфористой бронзы и других
коррозионно-нестойких материалов. Учитывая
достаточно высокие моюще-диспергирующие
и антиокислительные свойства, обкаточные
масла могут быть использованы при первой
заправке двигателя.
Для ускорения процесса приработки
зеркала цилиндра и хромированных поршневых
колец применяют рад методов: введение в
масло мелкодисперсных (до 30 мкм) частиц
оксидов хрома и алюминия, нанесение
абразивной пасты на первое компрессионное
кольцо, введение диоксида кремния и других
веществ во всасывающий коллектор двигателя.
Наиболее эффективным и распространенным
для ускорения приработки цилиндропорш-
невой группы являются присадки, вводимые в
топливо [13]. Они содержат органические
соединения алюминия или хрома, хорошо
растворимые в топливе. При сгорании топлива
они превращаются в твердые оксиды металлов,
вы-падающие в виде мельчайших абразивных
частиц размером 0,5 ... 3 мкм. Абразивные
частицы, смешиваясь с маслом, на стенке
цилиндра образуют своеобразную притирочную
пасту, которая обеспечивает быструю
приработку деталей благодаря высокой твердости и
температуры плавления абразива.
Широко применяются присадки на
основе соединении алюминия. По химической
природе они относятся к полиалюмооксанам -
соединениям, включающим цепь, состоящую
из чередующихся атомов кислорода и
алюминия. Вырабатывают присадки трех марок (табл.
6.3.9).
6.3.8. Характеристика масел для обкатки
Показатели
Кинематическая вязкость при 100 °С, мм2/с
Температура, °С, :
вспышки не ниже
застывания, не выше
Щелочное число, мгКОН/г, не менее
Зольность, %
Массовая доля, %:
кальция, не менее
цинка, не менее
молибдена, не менее
серы
Смазывающие свойства на ЧШМ:
нагрузка сваривания, Н, не менее
индекс задира, не менее
ОМ-2
8 ±0,5
160
-15
1,8
Не менее 0,35
2 ... 2,6
-
-
ОМД-8
8,5 ±0,5
200
-25
6
-
0,25
0,04
0,05
-
-
37
ОКМ
8 ±0,5
180
-15
5
Не более 1,0
0,9 ... 1,7
5010
65
ЭФФЕКТ ИЗБИРАТЕЛЬНОГО ПЕРЕНОСА ПРИ ТРЕНИИ
671
Показатели
Цвет
Массовая доля алюминия, %
Кинематическая вязкость, мм2/с,
не более при температуре 100 °С
Температура застывания, °С,
не выше
Время фильтрации раствора
присадки в дизельном топливе, мин,
не более
Коэффициент гидролизоустойчи-
вости, не более
Коэффициент фильтр у емости,
не более
АЛП-2
Желто -
коричневый
(вязкая)
1,7 ... 2
20
-5 ... -10
9
-
-
АЛП-3
Желто-
коричневый
(прозрачная)
1,7 ... 2
-
-15
~
1,2
-
к топливу
АЛП-4
м
Темно-
коричневый
1,8 ...2
20
-15
~
1,4
-
марки
д
Темно-
коричневый
(прозрачная)
1,8 ... 2
-
-30
■
1,2
3
Присадка АЛП-2 (прозрачная жидкость). -
полиалю мо океан, растворенный в масле
М-11 в соотношении 1:3- предназначена для
обкатки дизелей и бензиновых двигателей
различного назначения. Присадка АЛП-3
обладает лучшей растворимостью в дизельном
топливе и обладает улучшенными
низкотемпературными свойствами. Присадка АЛП-4
представляет собой 40 % раствор полиалюмо-
фенолятов в масле (марка М) или топливе
(марка Д). При ее синтезе вместо стеариновой
кислоты для приготовления АЛП-2 и АЛП-3
применяют алкилфенолы, улучшающие
гидролитическую стойкость и низкотемпературные
свойства присадки.
Присадки к топливу обеспечивают
равномерную приработку деталей цилиндро-
поршневой группы по всем цилиндрам
двигателя, существенно ускоряют приработку
верхнего хромированного поршневого кольца по
наружной и торцовой поверхностям. Присадки
к топливу не оказывают отрицательного
влияния на работу топливной аппаратуры. При
обкатке дизелей в течение 1 ... 2 ч
концентрация присадки в топливе составляет 2 ... 2,5 %.
Применение в тракторных дизелях
приработочной присадки позволяет за короткий срок
заводской обкатки полностью завершить
приработку деталей цилицдропоршневой группы и
существенно снизить расход масла на угар.
Оптимальным решением проблемы
приработки двигателей внутреннего сгорания
является одновременное применение
обкаточного масла и приработочной присадки к
топливу.
6.3.8. ЭФФЕКТ ИЗБИРАТЕЛЬНОГО ПЕРЕНОСА
ПРИ ТРЕНИИ
Для снижения коэффициента трения и
изнашивания в трибосистемах рекомендуется
использовать явление избирательного переноса
[4], которое может быть реализовано,
например, при трении разнородных металлов (сталь
- бронза) в определенной по составу
смазочной среде (например, глицерине). В
ограниченном диапазоне удельных нагрузок,
скоростей скольжения и температур атомы
легирующих элементов бронзы (олово, цинк,
железо) переходят в смазочную среду, обогащая
поверхность бронзы медью. Последняя в
результате электрохимического осаждения или
схватывания при трении частично переходит
на сталь.
Одновременное покрытие как бронзы,
так и стали тонкой пленкой меди способствует
реализации безызносного трения. Защитная
металлическая пленка (сервовитная),
формируемая на поверхности трения твердых тел,
обладает некоторыми специфическими
свойствами: относится к самогенерируемым
(самоорганизующимся) системам и находится в
состоянии динамического равновесия со
смазочной средой; при деформировании практически
не разрушается и не подвергается
усталостному разрушению; воспринимает все нагрузки;
при частичном разрушении восстанавливается
путем растворения бронзы в смазочной среде.
Сервовитная пленка может
образовываться и в паре трения сталь-сталь при
использовании смазочной среды, содержащей
коллоидные дисперсии порошков мягких металлов
(бронзы, меди, свинца, сурьмы, олова).
672
Глава 6.4. УНИФИКАЦИЯ И УЧЕТ РАСХОДА НЕФТЕПРОДУКТОВ
Следует отметить, что область
реализации эффекта избирательного переноса
ограничена. Так, в паре бронза-сталь указанный
эффект имеет место лишь до температуры 65 °С,
выше которой он не реализуется [7]. Кроме
того, химический состав моторных и
трансмиссионных масел, а также температурные
условия их работы и тип используемых в
машиностроении конструкционных материалов
существенно ограничивает область
распространения избирательного переноса.
Глав* 6.4
УНИФИКАЦИЯ И УЧЕТ
РАСХОДА НЕФТЕПРОДУКТОВ
6.4.1. ОГРАНИЧИТЕЛЬНЫЕ ПЕРЕЧНИ
И ПОРЯДОК НАЗНАЧЕНИЯ
С учетом стандартов на стадии
разработки проекта проводится выбор основных и
дублирующих сортов топлива, смазочных
материалов, технических жидкостей для данной
марки колесной или гусеничной машины.
Ассортимент используемых нефтепродуктов
уточняют в процессе проведения заводских,
ведомственных, государственных или других
видов испытаний. В результате определяются
сроки смены смазочных материалов,
технических жидкостей и другие показатели, которые
позволяют установить их расход в процессе
эксплуатации.
Данные по применению топлив,
смазочных материалов и технических жидкостей,
срокам их смены, нормам сбора отработавших
нефтепродуктов сводятся в химмотологи-
ческую карту (табл. 6.4.1).
6.4.2. УЧЕТ РАСХОДА НЕФТЕПРОДУКТОВ
Учет расхода топлив Автомобилей с
карбюраторными двигателями. Расход топлива на
работу колесных и гусеничных машин
нормируют исходя из нормы на 100 км пробега. Для
грузовых бортовых автомобилей и автопоездов,
работу которых учитывают в
тонно-километрах, норма расхода складывается из нормы на
100 км и на произведенную транспортную
работу из расчета 2 л на каждые 100 т • км.
Ниже приведены данные по расходу топлива
для некоторых машин на 100 км пути, л;
ЗИЛ-431410 25
ГАЗ-66 29
ЗИЛ-131 42
"Урал-375" 61
ГАЗ-САЗ-3502, 53Б 29
ГАЗ-93 23
ЗИЛ-ММЗ-585, КАЗ-600 36
УАЗ-452 18
РАФ-977 15
ПАЗ-651 26
ПАЗ-652 28
ЛиАЗ-677 54
КавЗ-685 30
УАЗ-469 16
ЗАЗ-1102 8
АЗЛК-2141 10
ВАЗ-1111 7
ВАЗ-2121 12
Для грузовых автомобилей, работающих
с прицепами или полуприцепами в составе
автопоездов, норма на каждые 100 т • км пробега
автопоезда увеличивается на каждую тонну
собственной массы прицепа на 2 л. Расход
топлива легковыми автомобилями и автобусами
нормируют только с учетом общего пробега.
Дорожно-климатические условия
учитываются соответствующими коэффициентами,
устанавливаемыми (в %) к основной норме,
которые приведены ниже.
Зимний период эксплуатации
(в зависимости от зоны) 5 ... 20
Распутица и снежные заносы (не
более одного месяца) 35
Горная местность (в зависимости от
высоты над уровнем моря) 5 ... 20
Дороги со сложным планом 10
Полевые условия (технологический
транспорт) 20
Учебная езда 20
Капитально отремонтированные
двигатели (на 100, км пробега) 5
При необходимости одновременного
применения нескольких надбавок норму расхода
устанавливают с учетом их суммы.
На основании индивидуальных норм по
маркам автомобилей с учетом транспортной
работы и технико-экономических показателей
использования подвижного состава
разрабатывают групповые (плановые) нормы.
При учете расхода топлива
электросварочными агрегатами и другими двигателями
определяют суммарную мощность всех
установок с учетом коэффициента использования и
умножают норму расхода (г/(кВт • ч)).
Учет расхода дизельного топлива. При
эксплуатации тракторов и комбайнов расход
дизельного топлива определяют в килограммах
на единицу выполненной работы (гектар,
центнер и др.). Норму расхода определяют по
формуле:
- ^0^0 + <?п ов^п ов+ ^п Тп +0остТост
0 = *Ги '
где О0 и Т0 ,<5П0В и Гпов, Оп и Тп ,
^ости ^ост" соответственно часовой
расход топлива (кг/ч) и продолжительность
работы агрегата в течение смены (ч) при рабочем
ходе (под нагрузкой), на поворотах, переездах,
остановках; И/см - сменная норма выработки.
6.4.1. Химмотологическая карта автомобилей
Автомобиль
КамАЗ
ЗИЛ-
431410
ГАЗ-66
ГАЗ-24,
3102
"Урал-375,
377"
"Урал-
4320, 4420"
Топливо
Дизельное
Л, 3, А
Бензин
А-76
Бензин
А-76,
АИ-93
То же
Дизельное
Л, 3,А
двигателя
М-10-Г2 и
Г2кДР+5°С,
М-8-Г2 и
Г2кДО+50С,
М-6з/10-В
(всесезонно)
М-8-В1
(всесезонно),
М-бз/10-В,
М-4з/8-В1
ниже -30 °С
М-^-Вь
М6з/10-В
(всесезонно).
М-4з/6-В1
ниже -30 °С
М-6з/12-Г1
(всесезонно)*
М-5з/10-Г1
зимой
М-8-Вь
М-6з/10гВ
(всесезонно),
М-4з/6-В1
ниже -30 °С
М-10-Г2(К),
М-10-Г2
Слетом) 7
М-8-Г2(К)>
М-8-Г2
(зимой) 7
М-6з/10-В
(всезезонно)
коробки передач
ТМ-3-18до-30°С,
с добавкой до
10...15 % дизельного
топлива А,
ТМ-3-9 до -45 °С
ТМ-3-18до-25°С,
ТМ-3-9 до -45 °С
ТМ-5-18,
ТМ-3-18
(всесезонно)
ТМ-3-18 до -30 °С,
ТМ-3-9 ниже -30 °С
Масло для
агрегатов трансмиссии
ТМ-3-18 до-30 °С,
ТМ-3-9 до -45 °С
ТМ- 3-18Свсесезонно|,
ТМ-3-9 (до -30 °С),
ТМ-4-18 для моста с
гипоидной передачей
(весной)
ТМ-4-18
(всесезонно)
ТАД-17К,
ТСгип(всесезонно)
ТМ-3-18 до -25 °С,
ТМ-3-9 до -30 °С
МГ-22-В (при
ремонте),
АУ (один раз в год)
рулевого
механизма
МГ-22-В
(при
ремонте)
МГ-22-В
(при
ремонте)
МГ-22-В,
АУ (при
ремонте)
ТАД-17К,
ТМ-3-18
( всесезонно)
МГ-22-В
(при
ремонте),
АУ
гидросистемы
И-20А
/'летом) ^
И-12А
(зимой,
весной и
осенью)
М-8-В1
(летом) у
АУ зимой
(весной и
осенью)
Жидкость
сцепления и
тормозная
"Нева"
(один раз в
год .осенью)
ГТЖ-22М,
"Нева"
(при
ремонте)
"Нева",
ГТЖ-22М
(осенью)
"Томь",
"Нева"
(весной)
ГТЖ-22М,
"Томь",
"Нева"
(весной)
ГТЖ-22М,
"Нева",
"Томь"
(один раз в
год)
амортизаторная
АЖ-12Т,
МТп-10 (при
ремонте)
АЖ-12Т,
"Нева*; АУ
(при
ремонте)
АЖ-12Т,
МГЕ-10А
(при
ремонте)
АЖ-12Т, АУ
(при
ремонте)
То же
АЖ-12Т, АУ
(при
ремонте)
Продолжение табл. 6.4.1
Автомобиль
КрАЗ-256,
257, 258
МАЗ-5335,
5337,
5433,5551
ВАЗ-21011,
2105, 2107
ВАЗ-2109,
2108
АЗЛК-2141
ЗАЗ-1102
Топливо
То же
Дизельное
Л, 3, А
Бензин
АИ-93
То же
и
Бензин
А-76
двигателя
М-10-В2
летом,
М-8-В2
зимой,
М-бз/ЮВ
всесезонно
М-10-В2
летом,
М-8-В2
зимой,
М-6з/10В
всесезонно
М-бз/10-Г!
всесезонно,
М-5з/Ю-Г1
То же
и
и
коробки передач
ТМ-3-18
ТМ-3-18 до -30 °С,
ТМ-3-9 до -45 °С
М-63/12-Г1
( всесезонно) ?
М-5з/10-Г! (зимой)
ТМ-5-18
ТМ-3-18
Масло для
агрегатов трансмиссии
ТМ-3-18 до-25 °С,
ТМ-3-9 ниже -25 °С
ТМ-3-18 до-30 °С,
ТМ-3-9 до -45 °С
ТМ-5-18
(один раз в четыре
года)
ТМ-5-18
ТМ-3-18
рулевого
механизма
МГ-22-В,
АУ
АУ (при
ремонте)
М-6з/12-Г1
(всесезонно);
М-5з/10-Г1
(зимой)
ТМ-3-18,
ТС (при
ремонте)
, гидросистемы
АУ, МГ-30,
И-20А, ЗОА,
12А
Жидкость
сцепления и
тормозная
"Томь",
"Нева"
(один раз в
пять лет)
Тоже
"Томь",
"Нева"
(один раз в
1,5 года)
"Томь",
"Нева"
(при
ремонте)
амортизаторная
АУ (при
ремонте)
АЖ-12Т, АУ
(при
ремонте)
МГП-10
(один раз в
пять лет)
То же
АЖ-12Т,
МГП-10
(при
ремонте)
АУ, МГП-10,
(при
ремонте)
Примечание.В скобках указаны сроки смены масла.
УЧЕТ РАСХОДА НЕФТЕПРОДУКТОВ
675
Часовой расход топлива при работе под
нагрузкой, при переездах и поворотах
определяют по типовой тяговой характеристике с
учетом тягового сопротивления и скорости
движения агрегата (для машин с приводом от
вала отбора мощности - по приведенной тяге
или регуляторной характеристике двигателя).
Расход (кг/га) для всех операций
сельскохозяйственных работ определяют для
заданного состава машинно-тракторного агрегата в
зависимости от длины гона с учетом глубины
вспашки, нормы высева, урожайности и
других агротехнических требований. Нормативы
составляют для средних условий, а для
местных условий вводят обобщенный
поправочный коэффициент, учитывающий рельеф,
каменистость, сложность конфигурации полей
и другие факторы. Продолжительность работы
агрегата на различных режимах определяют по
балансу времени смены.
Расход топлива на транспортные работы
определяют в килограммах на тонну
перевезенного груза:
а - ^0^0 '+ °пТп + ^ост^ос т
"см
Часовой расход топлива при движении
трактора с грузом и без него определяют по
тяговой характеристике. При расчете тягового
сопротивления учитывают дорожные условия
и вид груза, характеризуемый коэффициентом
использования грузоподъемности (отношение
фактической грузоподъемности к
номинальной). По использованию грузоподъемности
грузы разделены на четыре класса.
При определении количества топлива,
необходимого для работы комбайнов,
необходим план уборки (га) и норма расхода (кг/га).
Расход для экскаваторов, бульдозеров,
скреперов, канавокопателей и других землеройных
машин нормируют (кг/м3) от объема
выполненной работы (для автомобилей с дизелем в
кг/(т#км)).
При подсчете общего количества топлива
на весь объем механизированных
сельскохозяйственных работ расход суммируют по
операциям и определяют потребность по
хозяйству на год с обязательным учетом работы
техники зимой и необходимого для этого
периода количества топлива. Кроме того,
учитывают расход на подсобные работы, ремонт,
ТО, обкатку, доставку техники в поле,
подготовку кадров. Норму расхода топлива на
двигатели, применяемые в качестве силового
оборудования, устанавливают (г/(кВтч)) с уче-том
коэффициента использования мощности и
плановой продолжительности работы
установки.
Учет расхода смазочных материалов.
Эксплуатационные нормы расхода масла в
зависимости от расхода топлива установлены для
тракторов каждой марки (табл. 6.4.2).
Расход автомобильных масел определяют
в зависимости от общего расхода топлива
(табл. 6.4.3): в литрах или килограммах на
100 л топлива. Для автомобилей (кроме ВАЗ),
находящихся в эксплуатации менее трех лет,
норму расхода снижают на 50 %, а для машин,
эксплуатируемых свыше восьми лет,
увеличивают на 20 %. Расход масел или смазок на
капитальный ремонт автомобилей и агрегатов
устанавливают в количестве, равном объему
смазочной системы. Для автомобилей ВАЗ норма
устанавливается в размере 0,8 л на 100 л
общего расхода бензина.
6.4.2. Расход смазочных материалов для тракторов, %, расхода топлива
Трактор
Т-130
Т-100М
Т-150
Т-150К
Т-4А
Т-4
ДТ-75М
Т-74
К-700
МТЗ-80/82
МТЗ-50/52
ЮМЗ-6
Т-40/40А
Т-28Х4М
Т-25
Моторное масло
Всего
4,1
4,6
3,6
3,5
4,1
4,6
4,4
4,6
4,1
3,5
3,9
4,0
4,1
4,4
V
Для
двигателя
Тг
3,2
1,7
1,7
3,2
3,4
3,3
3,1
2,8
2,3
2,8
2,8
2,3
2,8
Ук |
Трансмиссионное
масло
0,8
0,9
0,4
0,6
0,9
0,9
0,9
1,2
0,4
1,0
1,0
1,1
1,0
1,2
0> 1
Индустриальное и
специальное
масло
0,1
0,1
0,02
0,4
0,1
0,1
-
-
0,2
0,1
0,1
0,1
0,1
-
:
Пластичный
смазочный
материал
0,06
0,06
0,04
0,04
0,02
0,02
0,02
0,03
0,02
0,06
0,06
0,06
0,06
0,06
0,02
22*
676
СПИСОК ЛИТЕРАТУРЫ
6.4.3. Расход масла (л) и смазки (кг)
100 л общего расхода топлива колесных машин
Смазочный материал
Масло:
моторное
трансмиссионное
специальное
Пластичная смазка
Бензин, сжиженный
газ
2,4
0,3
0,1
0,2
Дизельное топливо
Грузовые автомобили,
автобусы
3,2
0,4
0,1
0,3
Автомобили БелАЗ
5
0,5
1
0,3
СПИСОК ЛИТЕРАТУРЫ
1. Алешин Н. И. Смазывание и заправка
строительных машин. М.: Росельхозиздат,
1985. 64 с.
2. Арабян С. Г. Классификация моторных
масел для тракторных дизелей // Химия и
технология топлив и масел. 1971. №6. С. 51 - 54.
3. Арабян С. Г., Виппер А. Б., Холомонов
И. А. Масла и присадки для тракторных и
комбайновых двигателей. М.:
Машиностроение, 1984. 208 с.
4. Бауман В. Н., Шор Г. И.
Лабораторная оценка пусковых свойств моторных масел
// Химия и технология топлив и масел. 1988.
№11. С. 41 -42.
5. Боксерман Ю. И., Мкртычан Я. С,
Чириков К. Ю. Перевод транспорта на газовое
топливо. М.: Недра, 1988. 220 с.
6. Венцель С. В. Применение смазочных
материалов в двигателях внутреннего сгорания.
М., Химия, 1979. 238 с.
7. В. Г. Григорьев, Б. Д. Колубаев, В. И.
Ерохов и др. Газобаллонные автомобили /
М.: Машиностроение, 1989. 216 с.
8. Гаркунов Д. Н. Триботехника. М.:
Машиностроение, 1989. 328 с.
9. Григорьев М. А, Бунаков Б. М., До-
лецкий В. А. Качество моторного масла и
надежность двигателей. М.: Издательство
стандартов. 1981. 231 с.
10. Григорьев М. А., Тимашев В. П.,
Бунаков Б. М. Диагностирование
форсированных дизелей по показателям работавшего
масла. Автомобильная промышленность. 1985.
№4. С. 7 - 9.
11. Гуреев А. А. Применение
автомобильных бензинов. М.: Химия, 1972. 368 с.
12. Гуреев А. А., Фукс И. Г, Лашхи В. Л.
Химмотология. М.: Химия, 1986. 368 с.
13. Гуреев А. А., Камфер Г. М.
Испаряемость топлив для поршневых двигателей. М.:
Химия, 1982. 264 с.
14. 1>реев А. А., Фукс И. Г., Лашхи В. Л.
Химмотология. М.: Химия, 1986, 368 с.
15. Забрянский Е. И., Зарубин А. П.
Детонационная стойкость и воспламеняемость
моторных топлив. М.: Химия, 1965. 212 с.
16. Матвиевский В. М., Лашхи В. Л.,
Буяновская И. А. Смазочные материалы:
Антифрикционные и противоизносные свойства.
Методы испытаний. М.: Машиностроение,
1989. 224 с.
17. Мохнаткин Э. М. Расчетная оценка
предельных температурных условий работы
масла на гильзе цилиндра // Химия и
технология топлив и масел. 1979. №1. С. 44 - 47.
18. Непогодьев А. В. Механизм
окисления масла в поршневых двигателях. Химия и
технология топлив и масел. 1977. №4. С. 34 -
38.
19. Синицын В. В. Подбор и применение
пластичных смазок. М: Химия, 1974. 416.с.
20. Синицын В. В. Пластичные смазки в
СССР: Ассортимент. М.: Химия, 1984. 192 с.
21. Справочник по применению и
нормам расхода смазочных материалов / Под ред.
Е. А. Эминова. М.: Химия, 1977. 384 с.
22. Терентьев Г. А., Тюков В. Н., Смаль
Ф. В. Моторные топлива из альтернативных
сырьевых ресурсов. М.: Химия, 1989. 272 с.
23. Теоретические основы химмотологии
/ Под ред. А. А. Браткова. М.: Химия, 1985.
320 с.
24. Топлива, смазочные материалы,
технические жидкости: Ассортимент и
применение / Под ред. В. М. Школьникова. М.:
Химия, 1989. 432 с.
ПРИЛОЖЕНИЕ
677
ПРИЛОЖЕНИЕ
Особенности I
Среди множества колесных и гусеничных
машин особое место занимают бронированные
машины (боевые и различных видов
обеспечения): танки, боевые машины пехоты (БМП),
бронетранспортеры (БТР), боевые машины
артиллерии, ПВО и др.
Танки (рис. 1). Техническая
характеристика отечественных танков представлена в
табл.1.
Практически все современные танки
выполнены по традиционной компоновочной
схеме: основное вооружение располагается во
вращающейся башне, двигательно-трансмис-
сионное отделение - в корме корпуса машины,
экипаж - раздельно (командир танка,
наводчик и заряжающий в башне и подбашенном
пространстве, механик-водитель в носовой
части корпуса в отделении управления).
Исключение составляют израильские танки
"Меркава", в которых двигательно-трансмис-
сионное отделение расположено в носовой
части корпуса.
Для танка важны комплекс приборов
наблюдения и система управления огнем.
Для защиты экипажей от радиоактивной
пыли и химических отравляющих веществ
практически на всех современных танках их
обитаемые отделения выполняются
герметизируемыми с подачей (иногда непосредственно
в зоны дыхания членов экипажа) очищенного
воздуха.
Применительно к обычным средствам
поражения сравнительно новым является
уменьшение доступности танка воздействию
средств поражения противника за счет
использования систем активной защиты.
Обеспечение противоснарядной стойкости броневой
защиты танков достигается использованием
новых металлических и неметаллических
материалов (рациональным подбором состава
комбинированной брони), выбором
целесообразных форм броневых деталей корпуса и башни.
Основные направления развития
танкостроения - дальнейшее повышение
показателей подвижности танков, прежде всего
динамических качеств машин и их маршевых
скоростей; внедрение специальных электронных
систем, предназначенных для освобождения
экипажей от второстепенных задач управления
и контроля, облегчения процессов управления
отдельными танками и танковыми
подразделениями в сложной боевой обстановке.
В связи с постоянным возрастанием
массы танков требуются двигатели повышенной
мощности с хорошими эксплуатационными
свойствами. На современных танках
преимущественно используют многотопливные
дизели, а на некоторых машинах (отечественный
танк Т-80У, американский М1 "Абраме") -
газотурбинные двигатели (ГТД). Работы по
созданию и совершенствованию ГТД для
танков (в США, Германии, России и других
странах) ведутся в направлении повышения их
мощности, экономичности и надежности. При
этом особенно важным считается получение
удовлетворительного расхода топлива не
только в режиме максимальной мощности, но и во
всем рабочем диапазоне.
Боевые машины пехоты являются
основным боевым и транспортным средством.
Рис. 1. Танк Т-80У
Рис. 2. Боевая машина пехоты БМП-3
678
ПРИЛОЖЕНИЕ
1. Техническая характеристика отечественных танков
Характеристика
I
Масса, т
Длина с пушкой вперед, мм
Общая ширина, мм:
по гусеницам
Высота по крыше башни, мм
Забронированный объем, мм3
Максимальная скорость, км/ч
Удельная мощность, кВт/т
Запас хода по шоссе, км
Объем топливных баков, л
Среднее давление гусениц на
грунт, кПа
Клиренс, мм
Глубина преодолеваемой
водной преграды, м
Двигатель: марка
тип
максимальная мощность, кВт
число цилиндров
расположение цилинров
тактность
тип охлаждения
ход поршня, мм
диаметр цилиндра, мм
Трансмиссия:
коробка передач
число передач вперед/назад
Механизм поворота
Остановочный тормоз
Бортовый редуктор
Система управления
движением
Подвеска
Амортизаторы, число
Ходовая часть:
соединение траков гусеницы
шарнир гусеницы
ширина гусеницы, мм
число опорных катков на
борт
диаметр опорного катка, мм
число поддерживающих
катков на борт
механизм натяжения
Т-90
2
46,5
9530
3780
3370
2230
11,04
60
13,3
500
1200 + 400
91
492
В-84МС
Дизель
618
12
У-образное-
60*
4
Жидкостное
180/186,7
150
7/1
Т-80У
3
46
9651
3582
3384
2202
11,13
70
2
400
1840
9^?
450
Т-64БВ
4
42,4
9225
3415
3270
2170
10,4
60
12,1
500
1270 +400
92
500
5
ГТД-1250
Газотурбинный
919
-
-
-
-
-
-
5ТДФ
Дизель
515
5
Горизонтальное
2
Т-72Б
5
44,5
9530
3460
3370
2226
11,03
60
13,9
500
1200 + 400
90
470
В-84-1
Дизель
618
12
V- образное 7
60°
4
Жидкостное
120
120
Механическая планетарная
Две планетарные
4/1 I 7/1
Бездифференциальный
Дисковый, работающий в масле
Гидравлический
лопастной, 6
Последовательное
РМШили
ОМШ
58(
750
3
Планетарный
Гидравлическая
Торсионная
Телескопический, 6
Телескопический, 6
Параллельное
РМШ
) | 540
6
670
5
550
4
Червячный
180/186,7
150
7/1
Лопастной, 6
Последовательное
РМШ или
ОМШ
580
750
3
ПРИЛОЖЕНИЕ
679
Характеристика
Масса, т
Длина с пушкой
перед, мм
Ширина полная, мм
Высота полная, мм
Клиренс, мм
Двигатель
У-образный:
марка
число цилиндров
диаметр/ход
поршня, мм
максимальная
мощность, кВт
система
охлаждения, тип
Трансмиссия:
число передач,
вперед/назад
Ходовая часть:
число опорных
катков на борт
диаметр
опорного катка, мм
подвеска
число
гидроамортизаторов на
борт
гусеница, тип
ширина, мм
Объем топливных
баков, л
Максимальная
скорость, км/ч:
по суше
на плаву
Давление на грунт,
кПа
Запас хода (по
топливу), км
2. Техническая характеристики отечественных БМП
1 БМП-1
1 Ш
6740
2940
2150
400
1 БМП-2
1 14^6
6710
3090
2060
| 400
] БМП-3
1 18,7 + 2 %
7200
3300
2450
| 450
УТД-20
6
150/150
221
УТД-20
6
150/150
221
УТД-29
10
150/150
331
БМД-1
6/7
5400
2630
1620
100 - 450
1 БМД-2
8^23
5400
2630
1760
1 100 - 450
Дизель
5-Д20-240
6
150/150
176
5-Д20-240
6
150/150
176
Жидкостная
Механическая
5/1 1 5/1
1
Гидромеханическая
4/2
6
600
6
600
6
560
Торсионная
2 1
3
3
С РШМ параллельного типа 1
300
460
65
7
58,8
550
300
460
65
7
500
380
690
70
10
60
600
Механическая
5/1 1 5/1
1
5
500
5
. 500
Гидропневма]
-
-
БМД-3
12^9
6360
3130
2450
130 - 530
2В-06-2
6 (оппозитный)
150/160
294
Гидромеханическая
5/2
5
600
-ическая
-
С ОШМ последовательного типа
250 1
300
61
10
59,8
320
250
300
61
10
320
380 (600)
450
70
10
500
Для современных БМП (рис.2, табл.2)
характерна компоновка с совмещением по
длине отделений управления и двигательно-
трансмиссионного с размещением их в
передней части корпуса.
Боевым свойством современных БМП
является высокая их подвижность по дорогам
и пересеченной местности. Для обеспечения
необходимой подвижности в их конструкции
используют модификации отработанных и
освоенных двигателей, трансмиссий,
элементов ходовой части. На БМП устанавливают
многотопливные дизели жидкостного
охлаждения, хотя используют и двигатели
воздушного охлаждения. Конструкция современных
БМП обеспечивает возможность широкого
использования шасси для создания семейств
машин различного назначения.
680
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автобус 145
Автомобиль - Классификация 142 -
Эргономическое обеспечение 211
- грузовой 146
- легковой 144
- полноприводный 148
- специализированный 148
- специальный 148
Автомобиль-самосвал - Назначение 611
Схемы 611
- карьерный 611
- строительный - Классификация 613
Автомобиль-тягач 147 - Параметры масс 592 -
Режимы работы 591
Автопоезд 39 - Компоновка 590, 593 -
Проектирование 596
- самосвальный 614
Автопоезд-цистерна 619
Автоцистерна - Расчет 620
Агрегат машинно-тракторный 365
Агрегатирование тракторов
Классификация 367 - Принципы 364
Акселерометр 137
Алгоритм обработки аварийной ситуации 581
Амортизатор 270
- гидравлический - Проектирование 461
- телескопический - Расчет 462
Амплитудно-частотная характеристика колеба-
1>аза колесная автомобиля 169
- машины 38
- полуприцепа 595
- трактора - Расчет 329
Батарея аккумуляторная 295
Безопасность автопоезда 597
- активная 80
- гусеничной машины экологическая 509
- пассивная 81, 509
- экологическая 82
- эксплуатации 80
Бензин - Показатели качества 633 - Стойкость
детонационная 633
Блокировка 413
Буксование 21, 25
- гусениц 43
- движителя 23
Нал отбора мощности 475 - Схемы 476
Взаимодействие опорного катка н гусеницы 36
Время выбега 60
- разгона 60
- реакции водителя 64
Выбор параметров компоновки автопоезда 594
Высота габаритная автомобиля 169
1 азоанализатор 137
Генератор 287, 577
Гидромуфта - Выбор параметров 409
Гидропередача объемная 531
Гидропривод - Проектирование 272
Гидропривод тормозной автомобиля 266
- трактора 430
Гндропульсатор 136
Гидрораспределитель 273
Гидросистема тракторная - Выбор схемы 483 -
Типы схем 480
Гидротрансформатор - Выбор параметров 409 -
Классификация 394
Гидроусилитель рулевого управления 452
- управления муфтами 420
Гидроцилиндр безбуртового типа 275
- подъемного механизма автомобиля-самосвала
- Расчет 615
- телескопический 274
Грузо-пассажировместимость 161
Грузоподъемность 54 - Нормирование 506 -
Требования 505
Грунт - Деформация 13 - Категория 18 -
Классификация 18
Грунтозацепы 550
Гусеница 548 - Параметры 553 - Продольная
жесткость 30 - Расчет 440
- забегающая 42
- с открытым шарниром - Расчет 441
- отстающая 42
Гусеничное зацепление 35 - Угол давления 30
Гусеничный обвод 30 - Динамическая
характеристика 32 - Длина 32 - Перемещение 31
- Сила натяжения 32 - Статическое
натяжение. 30 - Центробежная сила 30
^Давление колес на опорную поверхность 76
Давление в тормозных камерах 63
Датчик магнитоэлектрический 293
Двигатель - Оптимизация параметров 195 -
Основные параметры 172 - Принципы
разработки 182 - Регуляторная
характеристика 24 - Система пуска при низкой
температуре 308
- интегральный - Показатели качества 171
- постоянной мощности 374
- приводной - Измерение параметров 577
- тракторный - Требования 371
Движение гусеничной машины 534
Движение колесной машины неустановившееся
криволинейное 68
- без проскальзывания 21
- установившееся круговое 68
Движитель - баланс мощности 27 -
Динамическая нагруженность 30 - Коэффициент
сопротивления качению 14 -
Нагрузочный режим 445
- водоходный плавающей машины 519
- гусеничной машины 548
- гусеничный 30, 434
- колесный 442
- полноприводный 27
Деселерометр 137
Диагностирование колесной машины 111
Диаграмма тормозная автопоезда 63
- управляемости 567
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
681
Дизель - Параметры 373
- базового многоцелевого шасси -
Характеристика 511
- постоянной мощности 371
- трактора 371
Динамика движения колесной машины -
Принципы моделирования 88
- механической системы тягача-прицепа 21
- тяговой машины 18
Динамическая схема - Звенья 89 - Расчет 93 -
Элементы 90
Динамическая модель - Расчетная 88
Динамический фактор - Характеристика 21
Динамометр тяговый 137
Дисбаланс колеса в сборе 69
Диск колеса 278
Дифферент (крен) автомобиля - Расчет 307
Дифференциал - Классификация 412
- самоблокирующиГся 413
Дорожка беговая гусеницы 551
Дорожный просвет 75
ЛЧесткость на кручение элементов
трансмиссии - Расчет 218
Жесткость рессоры 609
Жидкость амортизаторная -
Характеристика 661
- охлаждающая 668
- пусковая 668
- тормозная 665 - Ассортимент 666
Зависимости корреляционные между
основными параметрами трактора 334, 337
- между параметрами ресурсов деталей 107
Закон управления системой торможения 269
Запыленность воздуха - Факторы 80
Затраты годовые на эксплуатацию машины -
Расчет 55
Зацепление - Виды 35
Зацепление ведущих колес гусеничной
машины 554
- в гусеничном тракторе 436
Зацепление цевочное 35
Защита агрегатов и систем автоматическая 578
Зона обзора трактора 470 - Максимальные
углы 472
- Автоматизация 138 - Аппаратура
общего назначения 136 - Виды 115 -
Длительность 131 - Информационно -
измерительная система 138 - Лаборатор-
но-дорожные работы 124 - Объем
пробегов 127 - Организация 114 - "Поворот" и
"переставка" 68 - "Прямая" 68 - "Рывок
рулевого колеса" 68 - Требования к
программам и методикам 114
- двигателя 191
- инспекционные 113
- исследовательские 113
- квалификационные 113
- периодические 113
- подвески 120, 271
- предварительные 113
- приемочные 113 - Этапы 123
- пробеговые 131 - Оптимальное
программирование 134 - Показатели 130
- ресурсные 113
- сертификационные 113
- системы автоматического регулирования 138
- системы управления и контроля 138
Испытания стендовые 116 - Аэродинамическая
труба 122 - Виды 120
- агрегатов трансмиссии 117
- ведущих мостов 118
- гидродинамических передач трансмиссии и
приводов 118
- двигателей 116
- карданных передач 118
- колес и шин 121
- коробок передач 117
- листовых рессор 121
- несущих систем, рам, кузовов и кабин 119
- полнокомплектных машин 122
- полуосей 118
Испытания ускоренные полигонные 131
- форсированные 133
- эксплуатационные 114, 131
Испытательные дороги и сооружения 135
Испытательные стенды 136
Исследования многомассовой динамической
системы 89
Источник холода в кузове рефрижератора 617
Кабина - Конструкция 464
Карта химмотологическая автомобиля 673
Каток гусеничной машины опорный 36, 438,
558
- с пневмошинами 560
- поддерживающий 439
Катушка зажигания 294
Качество колесной машины - Показатели 57
Климатическая камера 134
Колебания - Математическая модель 46
- гусеничной машины 46
- гусеничных ветвей 34
- колесной машины 46
- переднего моста 448
- управляемых колес (шимми) 50
- управляемых колес относительно
шкворней 69
Колесная машина - Поворот 37
Колесная формула автомобиля 147
Колесный движитель 24
Колесо - Конструкция 277 - Уравнения
движения 283
- ведущее гусеничной машины 554
- направляющее 438, 556
Колодка тормозная 264
Комплекс движительно-рулевой плавающей
машины 522
Компоновка автомобиля 163 - Выбор
параметров 168
- двигателя 190
- нетрадиционная трактора 339
Кондиционер 467 - Холодопроизводитель-
ность 210
682
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
- термоэлектрического типа -
Характеристика 573
Коник автомобиля-тягача 627
Контроль режимов функционирования агрегатов
и систем 578
Коробка передач - Кинематические схемы 224
- Ряд передаточных чисел 226
- вальная - Выбор внутренних параметров 404
- гидромеханическая 409
- гусеничной машины - Характеристика 535
- диапазонная - Алгоритм синтеза структуры
402
- многоступенчатая - Проектирование 401
- планетарная - Выбор внутренних параметров
406
- ступенчатая 398
- трактора 379
- транспортно-тяговых гусеничных машин 541
Коробка раздаточная 228
Корпус плавающей машины - Расчет на
прочность 527 - Характеристика 526
Коэффициент буксования 21
- вертикальной жесткости шин 51
- весовой несущей конструкции 433
- демпфирования колебательной системы 46
- динамичности 83, 445
- жесткости колеса 41
Коэффициент затухания колебаний неподрес-
соренных и подрессоренных масс 74
- парциальных систем 51
Коэффициент использования машины 54
- мощности двигателя 66
- пробега 54
Коэффициент межпроектной унификации 83
- насыщенности протектора 78
- обтекаемости 59
- объемного смятия грунта 13
- осевой неравномерности тормозных свойств
62
- поворачиваемости 38
- повторяемости 83, 510
КПД двигателя 20
- трансмиссии 20
- тяговый 24
Коэффициент поперечной устойчивости 70
- применяемости 82, 510
- прозрачности гидромеханической
трансмиссии 373
- режимный маневрирования 71
- смещения исходного контура для шестерни и
колеса 405
- совпадения следов передних и задних осей
75
Коэффициент сопротивления боковому уводу
38, 68
- воздуха 20, 59
- движению 13, 21
Коэффициент сопротивления качению 14, 18
- при повороте 45
- приведенный 59
Коэффициент сопротивления повороту
гусеничной машины 542
-уводу 51
Коэффициент сцепления 15, 76
- движителя с дорогой 21
- обобщенный 76
- с опорной поверхностью 268
Коэффициент сцепной массы 76
- тангенциальный эластичности шины 25
- трансформации 394
Коэффициент трения тормозного механизма
264
- фрикционных дисков 388
Коэффициент угловой жесткости шины 51
- условного приращения массы 20, 21
Коэффициент эффективности магистрального
автопоезда 597
- тормозного механизма 264
Критерий интегральный конструктивной
эффективности 55
- рентабельности перевозок 55
- технико-экономический 55
- эффективности машины 53
Крутящий момент на валу двигателя 84
Курсовая устойчивость - Потеря 38
Кузов - Требования к конструкции 628
- автобуса - Расчет несущей системы 205
- автомобиля-тягача 598
- легкового автомобиля 202
Кузов-рефрижератор 617
Кузов-фургон 605, 616
Лебедка - Параметры 305
- гусеничного транспортера-тягача 575
- гусеничной машины 573 - Расчет 574
Лента тормозная 431
Лесовоз 627
Лобовая площадь машины 20
.Маневренность 71 - Улучшение 39
Манометр 301
Масло 640 - Система обозначений 651
- всесезонное 657
- для гидравлических систем 654
- для гидромеханических передач 654
- для дизеля 649
- для карбюраторного двигателя 647
- консервационное 661
- для механической трансмиссии 651
- моторное - Вязкостно-температурная
характеристика 642 - Методы испытаний 644 -
Свойства 641 - Требования 640
- для обкатки двигателя 670
- трансмиссионное 650
- универсальное 657
Масса автомобиля 157
Материал смазочный 658
- твердый - Свойства 658
Материал фрикционный 431
Материалы для деталей трансмиссии тракторов
431
- конструкционные 364, 365
Машина гусеничная - Принципы
конструирования 504 - Требования к конструкции
507
- двухзвенная - Характеристика 503
предметный указатель
683
- многоцелевая 497, 503
- сочлененная 502
- транспортно-тяговая 497
Машина колесная 38, 40
- тяговая - Эксплуатационные показатели 24
Место рабочего оператора - Требования 463
Метод имитационного моделирования 87
- регулирования переключения ступеней
передач 400
- прогнозирования ресурса 107
Методы расчета тягово-скоростных свойств 57
- статической динамики 87
Методика испытаний оценки управляемости 67
Механизм автоматического натяжения гусениц
557
- навески трехточечный 477
- натяжения гусениц 556
- натяжной 438
- планетарной 416
Механизмы поворота - Требования 415
- гусеничной машины - Выбор типа 542 -
Определение параметров 544
Механизм подъемный автомобиля-самосвала
615
- рулевой 259
Механизм тормозной 263 - Работоспособность
431
- барабанный 263
- дисковый 265 - Расчет 424
- ленточный - Расчет 423
- трактора 422
Моделирование процесса движения автомобиля
193
Модель автоколебательной системы машины 50
Модель математическая гусеничного трактора
353
- колесного трактора 340, 347, 349
Модель отказа деталей логическая 104
Момент в механизме поворота 417
- тормозной гусеничного трактора 422
Мореходность плавающей машины 525
Мост ведущий - Расчет элементов 245 -
Характеристика 238
Моторно-траясмиссионная установка трактора -
Характеристика 372
Мощность двигателя 20
- коробки передач - Оценка потерь 408
- на крюке 24, 54
- торможения при повороте гусеничной
машины 547
Муфта поворота 416
- фрикционная 389, 405
Нагружение - Процессы 83
Нагруженность 83
Нагрузка осевая автомобиля 159
Нагрузочный режим - Способы определения
характеристик 86
Насос системы управления фрикционными
муфтами - Определение подачи 391
- шестеренный - Характеристика 273
Непотопляемость плавающей машины 516
Нормальная реакция на движитель 24
- со стороны дороги 21
Нормирование и регулирование запасных частей
111
Нормы воздействия на почву 82
- токсичности 81
Обвод гусеничный - Силы 435
Обеспечение информационное технического
обслуживания и ремонта 583
Обод колеса 278 - Профили 279
Обзорность с рабочего места оператора 468 -
Параметры 469
Оборудование рабочее 475
Обтекатель лобовой автопоезда 598
Объекты наблюдения оператора промышленного
трактора 473
Огни сигнальные - Европейские нормы 298
Опорная поверхность - Геометрические
свойства 16 - Корреляционная функция
микропрофиля 17 - Микропрофиль 16 -
Спектральная плотность микропрофиля
16 - Статическая характеристика 16 -
Структурные свойства 18 Физико-
механические свойства 13 -
Характеристика 13
Опорный каток 36
Опрокидывание боковое 69
Оптимизация режимов функционирования
агрегатов 583
- ресурса по экономическому критерию 109
Оси прицепа и полуприцепа 610
Остановочный путь 65
Ось неведущая 260
- передняя 446 - Расчет элементов 449
Отказы - Интенсивность 130 - Наработка на
отказ 130 - Параметры потока 130
Отопитель независимый 209
Остойчивость плавающей машины 514
Отделение моторно-трансмиссионное 511
Панелевоз 623
Параметры управляемые - Характеристика 491
Перевозка строительных грузов - Показатели
транспортабельности 622
Передача гидродинамическая 394 -
Характеристика 395
- гидромеханическая 254
- гидрообъемная - Характеристика 397
- главная - Выбор параметров 410 - Схемы 410
- гусеничной машины входная -
Характеристика 534
- зубчатая - Определение передаточных чисел
538
- карданная 231
- конечная - Классификация 413
Передача фрикционная 256
- электродинамическая 397 -
Характеристика 398
Плавность хода 49, 73 - Вибронагружен-
ность 73
- при случайных колебаниях 49
Плавучесть плавающей машины 513
684
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Платформа боковая 605
Плотность топлива 66
Пневмопривод тормозной системы 267
- трактора 430
Поворачиваемость - Коэффициент 38
- избыточная 38
- колесной машины 37, 38, 41
- недостаточная 38
- нейтральная 38
Поворот с буксованием 43
Поворот гусеничной машины 42 - Анализ
показателей 546 - Энергетические
показатели 543
- двухосного автомобиля 28
- идеальный 42
Поворот колесной машины 37 - Координаты
центра 41 - Недостатки способа,
связанного с изменением направления
скоростей движения звеньев 40
- неустановившийся 40
- с принудительным изменением скоростей
колес 40
- установившийся 40
Поворот машины с прицепом 45
- трактора 451
Подвеска - Определение параметров 454 -
Параметры 269 - Расчет на
долговечность 270 - Элементы 454
- гусеничной машины 561
Подвеска рессорная 608
- торсионная 610 - Проектирование 458 -
Характеристика 460
- трактора - Схемы 454
Поддержание надежности машин в
эксплуатации ПО
Подогреватель предпусковой 309 -
Характеристика 570
Подшипники опорного катка - Выбор 560
Подъем, преодолеваемый машиной 61
Поезд тракторный - Характеристика 602
Показатели маневренности динамические 72
- кинематические 71
Показатели материалоемкости 82
- нагрузочного режима 84
- опорной поверхности 76
- оценки надежности 130
- плавности хода 73
- поворота гусеничной машины 542
- проходимости профильной 76
- стабилизации оценочные 67
- топливной экономичности колесных
машин 66
- тормозных систем 63
- тягово-сцепных свойств 24, 57
- тяговых свойств 24
Показатель единичный оценочный тягово-
скоростных свойств 57
- накопления усталостных повреждений 84
- проходимости обобщенный 76
- работы тормозного механизма 265
- чувствительности колесной машины к
управлению 69
Покрытие защитное пленочное 664
- смазочное - Ассортимент 661
Покрышка - Элементы 276
- пневматической шины 444
Полуприцеп тракторного автопоезда -
Классификация 603
Полуприцепы для перевозки строительных
грузов - Типы 622
Полуось 415
Полюс поворота гусеничной машины 45
Потеря управляемости при повороте гусеничной
машины 45
Потеря устойчивости движения 69
- курсовой при торможении 64
- равновесия 69
- формы 69
Поток отказа агрегатов 107 -
Корректирование 108
Пределы выносливости изгибной 101
- контактной 101
Преемственность конструкций 509
Приборы контрольно-измерительные 300
Привод ведущих колес трактора 384
- непосредственного действия 419
- рулевой 258
- тормозов 429
- с усилителями 420
Присадки к топливам 631, 639
Прицеп автопоезда бортовой 595
- тракторный 602 - Классификация 603
Прицеп-роспуск 606, 627
Прогноз остаточного ресурса агрегатов и
машины 582
Прогнозирование параметров трактора 321
Прогнозирование показателей надежности 94
- комплексных 108
Производительность машин 54
Проскальзывание шины 25
Профилограф 137
Проходимость 75 - Потеря полная 76 - Потеря
частичная 75
- опорная 75
- профильная 75 - Показатели 75
Пружина буферная 457
х ассадно-посадочная машина 338
Работа полезная 54
Рабочее место оператора - Размеры 465
Радиус качения колеса 24
- обощенный движителя 26
Радиус поворота автопоезда 39
- проходимости поперечный и продольный 75
Разворот машины 64
Рама грузового автомобиля 197
- прицепа 604
- шарнирная трактора 329
Расстояние безопасности 64
- видимости водителем дороги 65
Расход масла для колесных машин 676
- смазочных материалов для тракторов 675
- топлива 65
Расчет балки на прочность 449
- гусеницы с ОМШ 444
- кондиционера 572
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
685
- на общую прочность 527
- поверочный гусеницы 553
- подсистем трактора 344
- нав статичнескую прочность 104
- усилителя рулевого управления 452
- элементов передней оси 449
Реверс трактора 386
Реверсирование гидрообъемной передачи
трактора 397
Регулирование положения корпуса гусеничной
Регулятор напряжения - Параметры 289
Редуктор бортовой - Характеристика 534
Режим движения неустановившийся 84
- нагружения - Форсирование 133
- нагрузочный трактора 422
- трансформации 395
Режимометр 137
Режимы колесного движителя 24
- полного скольжения машины 41
Рекуперация в механизме поворота -
Условия 548
Рессора гидропневматическая 561
- несимметричная - Методика расчета 455
Ресурсы деталей 102
Ряд плавнетарный механизма поворота
трактора 418
- типоразмерный автотранспортных средств
622
С/вес - Виды 75
Свойства водоходные плавающих машин 513
- колесной машины 56
- тягово-скоростные 56
- эксплуатационные 56
Сертификация тракторов 320
Сила инерции машины 20
- на крюке 21, 61
- лобового аэродинамического
сопротивления 20
- окружная, подводимая от двигателя к
ведущим колесам 21
- прикладываемая к рулевому колесу
автомобиля 258
- сцепления гусеницы с грунтом 45
Сила торможения 63
- тяги 20, 57
Силовая установка 20
Силы - Баланс 20
- действующие со стороны дороги на пневма-
тик 50
Силы сопротивления воздуха 57
- в движителе 20
- качению 57
- подъему 57
Синтез структуры коробки передач 400
Синхронизатор 226, 399
Система автоматического регулирования
трактора - Способы 485
- антиблокировочная 267
- бортовая информационно-управляющая 578
- зажигания 292
- комплексная автоматическая управлением
энергетическими режимами трактора 493
- навесная гидравлическая 477
Система несущая - Методы оценки
долговечности 434 - Особенности расчета 432
- рамная 432
Система обеспечения микроклимата
автомобиля 207
- подогрева двигателя 569
- распределенных сил 50
силового регулирования электронно-
гидравлическая 488
- стабилизации управляемых колес 69
Система тормозная прицепа и полуприцепа 607
Система управления гусеничного трактора -
Классификация 419
- дизелем электронная 303
- трактором - Учет влияния водителя 421
- следящего действия 421
Система электронная - Классификация 304
Складывание сочлененной машины 40
Скоростная характеристика разгон-выбег 60
Скоростные свойства 80
Скорость ведущих колес движителя
условная 26
- движения автомобиля на плаву 308
- действительная 21, 22
- критическая 70
- маневрирования 71
- минимально-устойчивая на 1-й передаче 61
- обвода относительно корпуса 30
- средняяя 54, 57, 68
- теоретическая линейная 20
Согласование параметров двигателя постоянной
мощности и трансмиссии 375, 376
- двигателя и трансмиссии трактора 372
- дизеля и трансмиссии трактора 372
Согласование характеристик трактора 376
Соединение передач в трансмиссии 532
Сопротивление буксировочное воды 565
- грунта - Виды 13 - 15, 21
- качению 18, 29
- перемещению органов управления
тракторов 474
- воды буксировочное 565
- повороту - Моменты 44
- тяговое тракторного агрегата 399
Спектральная плотность микропрофиля дороги
84
Спидометр 302
Способы соединения рессоры с рамой 609
Средства облегчения пуска 569
Стартер 290 - Характеристика 291
Схема действия сил на автопоезд 39
- на гусеницы и опорный каток 46
- на колесную машину 41
- в раме гусеничного трактора 433
- на тягач и прицеп 19
Схема имитационного моделирования 87
Схема поворота двухосного автомобиля 68
- седельного автопоезда 72
Сцепление - Требования 220 - При
повороте 45
686
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
- трактора - Классификация 386
- фрикционное - Определение параметров 387
Счетчик пройденного пути 302
Тахометр 302
Тенденции развития тракторов 369
Термометр 301
Технический уровень и конкурентноспособность
машин 82
Техническое обслуживание - Виды,
периодичность ПО, 111
Технологичность трактора производственная
359
- ремонтная 362
- эксплуатационная 361
Типаж тракторов 316
Токсичность отработавших газов автомобиля
180
Топливо - Виды 631 - Присадки 639 -
Требования 631 - Экологические свойства 637
- альтернативное 152, 637
- газообразное 637
- дизельное - Показатели качества 635
- моторное - Свойство 632
Топливомер 137
Тормоз гидравлический наката 607
Тормозной путь автопоезда 64
Тормозные свойства - Показатели 62
Торсион 561
Трактор - Классификация 315 -
Компоновка 324 - Требования 318 - Тяговые
классы 316
- болотоходный 336
- колесный - Определение размеров 330
- лесопромышленный 336
- лесохозяйственный 338
- малогабаритный 317
- подземный 319
- промышленный 315 - Компоновка 333 -
Номинальная сила тяги 316
- сельскохозяйственный - Компоновка 325 -
Типоразмерный ряд 315
- трубоукладчик 319
- универсально-пропашной 331
Транспортер-снегоболотоход - Характеристика
499
Транспортер-тягач гусеничный 500 -
Характеристика 501
Транспортно-тяговая гусеничная машина -
Тяговый расчет 533
Трансформатор гидрообъемный - Передаточное
отношение 396
- трехзвенный дифференциальный - Расчетные
формулы 407
Трансмиссия 531 - Автоматизация управления
251 - Расчетные схемы 215 - Типловые
схемы 229
- автоматизированная 253
- автоматическая 254
- гусеничной машины 530 - Характеристика
534
- механическая - Схемы 379
- полуавтоматическая 251
- трактора - Классификация 377
Трансмиссия трактора - Требования 378
Требования по нормативам безопасности,
эргономики и экологии 80
- эксплуатационно-технические автомобиля
160
- эксплуатационные 80
Треки 136
Тросоукладчик 306
Трубовоз 628
Тягач быстроходный 497
- гусеничный - Компоновка 499 -
Характеристика 498
Тяжеловоз - Классификация 525
Увод колес 68
Угловая скорость поворота 42, 69
Угол гибкости автопоезда 75
- дрейфа двухосной колесной машины 68
- критический косогора 68, 70
- начала сползания трактора 332
- опережения зажигания 303
- перекоса осей 75
- поворота управляемых колес 28, 39
- преодолеваемого подъема наибольший 76
- складывания автопоезда 39
- увода середины заднего моста колесной
машины 68
Узел счетный 303
Указатель уровня топлива 302
- биметаллический 302
Уклон дорог 19
Унификация трактора 362 - Показатели 363
Упор - Коэффициент 565
- гусеничного движителя - Расчет 565
Управление агрегатом автоматическое 493
- колесных тракторов 450
Управление коробкой передач 399
- микропроцессорное 490
Управление машинно-тракторным агрегатом -
Автоматизация 489
- режимами функционирования агрегатов 582
- рулевое 257
- силовым агрегатом 303
- силой в рулевом механизме 304
- стеклоочистителем 304
- трактором - Требования 319
- тормозными механизмами прицепа и
полуприцепа 608
Управляемость колесной машины 67
- плавающей машины 521
Уравнения баланса сил 21, 57
- возмущенного движения 51
- движения машины 18
- кинематические для мгновенного центра
поворота 37
- корреляционные долговечности деталей 106
- перемещения ккорпуса гусеничной машины
34
- тяговой динамики 22
Уровень вибрации подрессорной массы
автомобиля 74
- нагруженности деталей и агрегатов 84
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
687
Усилитель рулевого управления - Расчет 452
- рулевой 258
Условия пуска двигателя гусеничной машины -
Характеристика 568
Установка колес - Схемы 447
Установка компрессорная 617
- для определения поперечной угловой
жесткости пордвески 120
- отопительная 571
Установка силовая 171 - Определение
характеристик 533
Устойчивость движения 69
- поперечная трактора 327
- равновесная 69
- трактора статическая 332
Устройства аэродинамические автопоезда 598
- защиты оператора 465
- погрузки-разгрузки 623
Устройство поворотное - Параметры 600
- прицепа и полуприцепа 605
- с управляемыми кколесами 606
Устройство саморазгрузки 624
- седельно-сцепное 599, 601
Устройство тягово-сцепное 475, 567
- автопоезда 599
Учет расхода дизельного топлива 672
- топлива 672
Фактор кинематический поворота 42
Факторы конструктивные 361
- эксплуатационные 361
Фары автомобиля 297, 300
Фильтро-вентиляциоииая установка -
Показатели 570
Фиксация положения направляющего колеса
556
Фонари автомобиля 297, 300
Формирователь команд 494
Фрикцион главный 539 - Проектиролвание 540
Фруда числа 519
Функция автоматического поиска
неисправностей 582
- диагностирования технического состояния
машины 582
- диссипативная Рэлея 343
Функция регистрации характерных параметров
581
Фургон 616
Характеристика амплитудно-частотная
грузового автомобиля 75
- динамическая тормозной системы 63
- изнашивания деталей 100
- нагрузочная двигателя 60
- рулевого управления 67
- топливно-скоростная 65
- тяговая 22
- ходовая плавающей машины - Расчет 564
Ходкость плавающей машины 517
Хроматограф 137
Цапфа 610
Центр поворота автомобиля мгновенный 68
Цепь гусеничная 440
Цикл типизированный 84
Цилиндр главный - Размеры 430
- телескопический подъемного механизма -
Расчет 615
Циркуляция плавающей машины - Параметры
523
Цистерна-полуприцеп и прицеп 620
Шарнир гусеницы 31, 555
- карданный 232 - Расчет параметров 235
- сочлененной машины 40
- шаровой 477
Шариирно-сочлеиеиная машина 40
Шасси гусеничное 503 - Компоновка 510
- многоцелевое 505
Шимми (см. Колебания управляемых колес)
Шина 28 - Выбор параметров 559 -
Классификация 443 - Конструкция 276 - Оценка
прочности 558 - Параметры 277 -
Регулирование давления воздуха 311 -
Характеристика 285
- диагональная прицепа 610
- камерная 283, 610
Ширина гусеницы - Расчет 328
- плицы 554
- полосы габаритная 71
Шкворень 599
- поворотная цапфы 447 - Расчет на изгиб 450
Шкив приводной 476
Шлейф машины 339
Шумомер 137
ч7кономичность производства машин 82
- топливная 65
Электромобиль 154
Электромотор-колесо 248
Электроснабжение автономное 576
Элемент трансформации энергии 379
- коробки передач 392
Элемент упругий подвески 455
Энергетическая установка комбинированная 156
Энергетический баланс при холодном пуске
двигателя 308
Энергия кинетическая агрегатов 342
- потенциальная 343
Энергоемкости подвески 457
Энергонасыщенность трактора 319
Эргономические требования машин 81
Эффективность гусеничной машины 508
- конструкции 57
Эффективность пуска двигателя - Оценка 308
- световых приборов 298
- тормозных систем 62
СПРАВОЧНОЕ ИЗДАНИЕ
Платонов Владимир Федорович, Азев Валерий Степанович,
Александров Евгений Борисович и др.
МАШИНОСТРОЕНИЕ. ЭНЦИКЛОПЕДИЯ
Том IV -15
Колесные и гусеничные машины
ИБ№7318
Лицензия ЛР № 080003 от 12.09.96 г.
Редактор 3. М. Рябкова
Оформление художника Т. Н. Погореловой
Художественный редактор Т. Н. Галицына
Технический редактор Е. П. Смирнова
Корректоры: А. П. Сизова, Л. А. Ягупьева
Инженеры по компьютерному макетированию: М. А. Евсейчева, Е. А. Елизарова, С. И. Крючков,
М. Н. Рыжкова
Сдано в набор 12.07.96. Подписано в печать 10.01.97.
Формат 70x100 1/16. Бумага офсетная. Гарнитура Т1те$ ЕТ.
Печать офсетная. Усл. печ. л. 55,9. Усл. л. кр.-отт. 55.9.
Уч.-изд. л. 75, 25. Тираж 1500 экз. Заказ 174-1.
Издательство "Машиностроение"
107076, Москва, Б-76, Стромынский пер., 4
Оригинал-макет подготовлен в издательско-полиграфическом центре
Тамбовского государственного технического университета
392032, г. Тамбов, Мичуринская, 112, корп. Б
Отпечатано в АООТ "Политех-4"
129110, Москва, ул. Б. Переяславская, 46.
телефоны: 280-93-33
280-02-07